






































































































































































































































































































































































































































































































































































































































































































































































Автор: Туманов А.В. Зеленцов В.В. Щеглов Г.А. Павлов Н.Л.
Теги: авиация и космонавтика летательные аппараты ракетная техника космическая техника междупланетные соединения (междупланетные полеты) космонавтика (аэронавтика) пилотирование космонавтика
ISBN: 978-5-7038-5134-0
Год: 2020



ППТ ВООРУЖЕНИЕ
DD I И ВОЕННАЯ ТЕХНИКА
Редколлегия
А. А. Александров (председатель, научный редактор серии),
академик РАРАН, д-р техн, наук, профессор
В. Т. Калугин (зам. председателя), д-р техн, наук, профессор
И.В. Бармин, чл.-корр. РАН, заслуженный деятель науки РФ,
д-р техн, наук, профессор
А.Б. Борзов, чл.-корр. РАРАН, д-р техн, наук, профессор
В.В. Зеленцов, чл.-корр. РАРАН, канд. техн, наук, доцент
В.Н. Зимин, д-р техн, наук, ст. науч, сотрудник
В.М. Кашин, чл.-корр. РАН, академик РАРАН, д-р техн, наук,
профессор
С.В. Коршунов, канд. техн, наук, доцент
Г.0. Когпиев, заслуженный деятель науки РФ, д-р техн, наук,
профессор
Г.А. Кувыркин, д-р техн, наук, профессор
А.Г. Леонов, чл.-корр. РАРАН, д-р техн, наук
А.Г. Лесков, д-р техн, наук, ст. науч, сотрудник
В.Н. Наумов, заслуженный деятель науки РФ, д-р техн, наук,
профессор
С.Н. Резник, д-р техн, наук, профессор
В.В. Селиванов, академик РАРАН, заслуженный деятель
науки РФ, д-р техн, наук, профессор
В.А. Тарасов, чл.-корр. РАРАН, д-р техн, наук, профессор
С.В. Ладов (отв. секретарь), канд. техн, наук, доцент
основы компоновки
БОРТОВОГО ОБОРУДОВАНИЯ
ПИЛОТИРУЕМЫХ КОСМИЧЕСКИХ
АППАРАТОВ
Под редакцией Г.А. Щеглова
Допущено Федеральным учебно-методическим объединением в системе
высшего образования по укрупненной группе специальностей и направле-
ний подготовки 24.00.00 «Авиационная и ракетно-космическая техника» в
качестве учебного пособия для лиц (студентов, аспирантов, адъюнктов),
обучающихся по основным образовательным программам высшего обра-
зования по специальности 24.05.01 «Проектирование, производство и экс-
плуатация ракет и ракетно-космических комплексов», по специализациям
«Аэрокосмические ракетные системы» и «Пилотируемые и автоматические
космические аппараты»
МОСКВА
ИЗДАТЕЛЬСТВО
МГТУ им. Н.Э. БАУМАНА
2020
УДК 629.786.2
ББК 39.62я7
0-75
Авторы:
А. В. Туманову В.В. Зеленцову Н.Л. Павлову Г. А. Щеглов
Рецензенты'.
кафедры «Космические системы и ракетостроение» (зав. кафедрой чл.-корр. РАН,
д-р техн, наук, проф. О.М. Алифанов) и «Системы обеспечения жизнедеятельности
и защиты ракетно-космических комплексов» (зав. кафедрой канд. техн, науку
доцент В.С. Пичулин) Московского авиационного института (национального
исследовательского университета);
советник президента ПАО РКК «Энергия» имени С.П. Королёва,
канд. техн, наук, доцент А.П. Александров
Основы компоновки бортового оборудования пилотируемых кос-
0-75 мических аппаратов : учебное пособие / [А. В. Туманов и др.] ; под ред.
Г. А. Щеглова. — Москва: Издательство МГТУ им. Н. Э. Баумана, 2020. —
755, [5] с.: ил. — (Серия «Вооружение и военная техника»).
ISBN 978-5-7038-5134-0
Приведены основные сведения и изложены исходные данные, необхо-
димые для проведения компоновки бортового оборудования пилотируемых
космических аппаратов. Большое внимание уделено вопросам простран-
ственной организации пилотируемых аппаратов в контексте человеческой
культуры, приведены основные сведения о компоновке транспортных ко-
раблей и орбитальных станций. Указаны критерии внешней и внутренней
компоновки бортового оборудования, необходимого для осуществления
космического полета. Приведены основные критерии качества выполнен-
ной компоновки и обширный справочный материал по целевому оборудо-
ванию и обеспечивающим системам.
Содержание учебного пособия соответствует учебной программе и курсу
лекций, которые авторы читают в МГТУ им. Н.Э. Баумана.
Для студентов высших учебных заведений, обучающихся по направле-
нию подготовки 24.05.01 «Проектирование, производство и эксплуатация
ракет и ракетно-космических комплексов».
УДК 629.786.2
ББК 39.62я7
ISBN 978-5-7038-5134-0
© Оформление. Издательство
МГТУ им. Н.Э. Баумана, 2020
ПРЕДИСЛОВИЕ
Развитие пилотируемой космонавтики ставит перед вузами задачу подготовки
специалистов, обладающих комплексом универсальных компетенций по ком-
поновке космических аппаратов с человеком на борту. До настоящего времени эти
вопросы освещались в отдельных изданиях, посвященных, как правило, разработке
той или иной системы. Данное учебное пособие подгтовлено как комплексное
для обеспечения учебных курсов «Проектирование орбитальных станций» и
«Проектирование двухсредных летательных аппаратов», читаемых на кафедре
«Аэрокосмические системы» МГТУ им. Н.Э. Баумана, основанной Генеральным
конструктором ракетно-космической техники, академиком В.Н. Челомеем —
создателем уникальных систем вооружения и военной техники, в том числе
пилотируемой орбитальной станции «Алмаз». Созданная для решения военных
задач, эта станция стала основой для отечественных пилотируемых научных
орбитальных станций «Салют» и «Мир», а также Международной космической
станции.
Цель, которую должен достичь студент после изучения этого учебного
пособия, — освоение общих принципов, основных положений и базовых методов
формирования внешнего вида пилотируемого космического аппарата, а также
базовых критериев и принципов, применяемых при создании компоновки бортового
оборудования, предназначенного специально для аппаратов такого класса.
Задача учебного пособия — предоставить студенту учебный материал,
способствующий овладению:
• базовыми знаниями об особенностях жизни и деятельности челове-
ка в условиях космического полета, о гуманитарных аспектах организации
обитаемого пространства, существующих и перспективных компоновочных
решениях, об основах устройства и технических характеристиках элементов
бортового оборудования;
• методами сбора информации, необходимой для выполнения компо-
новки, из различных источников с использованием современных компьютер-
ных информационно-телекоммуникационных технологий, а также методами
анализа компоновочных решений по приведенным в пособии критериям;
• начальным уровнем практических навыков выполнения различных
видов компоновки пилотируемых космических аппаратов и комплексов.
Компоновка космического аппарата — не формализуемый процесс. Здесь
велика роль творческих идей, которые воплощаются в проектные решения.
В процессе изучения основ компоновки, как и других творческих дисциплин,
очень важно и полезно рассматривать различные примеры.
6
Предисловие
Для помощи студентам при курсовом и дипломном проектировании в издании
представлено достаточно много различных проектов пилотируемых космических
аппаратов. Причем приведены не только успешно реализованные и реализуемые в
настоящее время проекты космических апаратов, но и нереализованные концепции
и идеи. Это сделано намеренно, поскольку многие идеи, «отлежавшись»,
оказываются актуальными или служат основой для новых проектов. Кроме того,
такие примеры будут способствовать развитию у студента умения анализировать
и оценивать собственные разработки.
Для того чтобы у обучающихся возникла потребность в генерации новых
идей, авторы при изложении материала воздерживаются от прямой критики
проектов (для этого имеется специальная литература) и не делают акцент ни на
положительных, ни на отрицательных сторонах представляемых компоновок.
Также намеренно не приведены методики расчетов, поскольку пособие
должно служить отправной точкой для формализации компоновочных задач.
Основное внимание уделено графическому материалу, который позволяет более
наглядно передать компоновочную информацию, чем текстовое описание. Для
экономии объема книги текстовое описание, дублирующее схемы, в большинстве
примеров опущено. Предполагается, что студент будет самостоятельно или с
помощью руководителя внимательно изучать предложенные схемы, приобретая
опыт аналитической работы.
Для проведения детальных расчетов могут быть использованы существующие
специализированные пособия, ссылки на которые даны в тексте. Работа
с источниками информации — важная часть процесса проектирования, и
студент должен освоить ее в процессе работы над проектами. Самостоятельный
поиск информации, даже при наличии Интернета, имеющего «бесконечную
емкость», оказывается затруднителен для студента, у которого не сформировано
семантическое ядро — ему неясно, какие слова надо задавать поисковой машине.
Чтобы помочь студентам начать поиск нужной информации, каждая глава пособия
снабжена библиографией, содержащей ссылки на публикации и электронные
ресурсы, использованные в процессе подготовки пособия. С помощью ссылок
студенты смогут найти более подробную информацию по заинтересовавшей их
теме и начать собственный поиск в информационно-телекоммуникационной сети.
Собранные в книге примеры показывают, что компоновка пилотируемого
космического аппарата значительно сложнее компоновки автоматического
космического аппарата. Центральным объектом здесь является человек, в связи
с чем студентам потребуется знание технических дисциплин, а также придется
разбираться в вопросах, относящихся к биологии, медицине, психологии,
эргономике, архитектуре, искусству, философии. Поэтому книга открывается
введением, где раскрываются причины, побуждающие человека стремиться в
космос, а также представлены существующие проекты космических объектов
различных масштабов.
Материал книги разделен на три части, каждая из которых соответствует
модулю учебного плана дисциплины «Основы компоновки орбитальных станций»
и этапу компоновочных работ: сбор исходных данных, определение облика
пилотируемого космического аппарата, компоновка специфических для него
элементов бортового оборудования и систем. Предполагается, что для компоновки
бортового оборудования пилотируемого космического аппарата, общего с
Предисловие
7
автоматическими космическими аппаратами (системы управления движением,
энергетические системы и пр.), студенты будут использовать и другие пособия
по основам компоновки бортового оборудования космических аппаратов, список
которых приведен в конце издания.
В первой части содержатся исходные данные, необходимые для выполнения
компоновки на основе заданной программы космического полета. В главе 1
приведены юридические аспекты космической деятельности, а также общие
сведения о построении космической программы и космической логистике.
В главе 2 рассмотрены физиологические и биологические данные о человеке и
воздействующих на него факторах во время космического полета. Принципы
организации пространства в аппарате и фундаментальные основы архитектуры
изложены в главе 3.
Во второй части даны примеры формирования общей компоновки пило-
тируемого космического аппарата. В главе 4 рассматривается блочно-модуль-
ный подход к его компоновке, в главе 5 приведены особенности компоновочных
решений отдельных модулей, в главе 6 собраны примеры компоновок космических
комплексов. Глава 7 посвящена проектам пилотируемых космических аппаратов
с искусственной силой тяжести.
В третьей части приведена информация, полезная для выполнения компоновки
элементов бортового оборудования. В главе 8 представлены способы зонирования
пространства и оформления интерьера кабины пилотируемого космического
аппарата.
В главе 9 рассказывается о внекорабельной деятельности, дается описание
конструкции скафандров, шлюзовых камер различных пилотируемых космических
аппаратов, способов перемещения и фиксации космонавта во время внекорабельной
деятельности, а также рабочих инструментов и приспособлений, используемых
космонавтами. Приведены примеры размещения научной аппаратуры на поверхности
российского и американского модулей Международной космической станции.
В главе 10 изложены эргономические требования к компоновке рабочего
места космонавта и пультов управления. В главе 11 собраны данные о схемах и
компоновочных элементах системы обеспечения жизнедеятельности российского
и американского сегментов Международной космической станции. В главе 12
рассмотрены вопросы компоновки систем обеспечения безопасности и надежности,
а также приведены способы защиты экипажа пилотируемого космического корабля
от различных факторов.
Авторы выражают благодарность рецензентам: летчику-космонавту СССР,
советнику президента ПАО РКК «Энергия» имени С.П. Королёва, кандидату
технических наук А.П. Александрову и сотрудникам Московского авиационного
института (национального исследовательского университета) — заведующему
кафедрой «Космические системы и ракетостроение» члену-корреспонденту РАН,
доктору технических наук профессору О.М. Алифанову заведующему кафедрой
«Системы обеспечения жизнедеятельности и защиты ракетно-космических
комплексов», кандидату технических наук В.С. Пигулину за ценные замечания.
Предлагаемая вниманию читателя книга относится к числу учебных изданий,
входящих в серию «Вооружение и военная техника», ориентированную на изложение
теоретических основ и прикладных задач базовых дисциплин, преподаваемых на
кафедрах факультета специального машиностроения МГТУ им. Н.Э. Баумана.
ПРИНЯТЫЕ СОКРАЩЕНИЯ
АС МКС - БА - американский сегмент МКС бортовая автоматика
БВК - бортовой вычислительный комплекс
БВС - бортовая вычислительная система
БКАУ - бортовой комплекс автоматического управления
БНО - баллистико-навигационное обеспечение
БО - бытовой отсек
ВА - возвращаемый аппарат
вкд - внекорабельная деятельность
ВНП - вероятность непробоя
ВОО - высокая околоземная орбита
ГК - грузовой корабль
гки - галактическое космическое излучение
ГОГУ - главная оперативная группа управления
ДУ - двигательная установка
ИГА - искусственная газовая атмосфера
ИМО - информационно-медицинское обеспечение
иодэ - информационное обеспечение деятельности экипажа
ипт - инженерно-психологические требования
исз - искусственный спутник Земли
ист - искусственная сила тяжести
ИТО - информационно-телеметрическое обеспечение
КА - космический аппарат
кдо - контрольно-диагностическое обеспечение
кик - командно-измерительный комплекс
кпо - командно-программное обеспечение
кэс - космическая эргономическая система
мим - малый исследовательский модуль
мкс - Международная космическая станция
млм - многофункциональный лабораторный модуль
МТКА - многоразовый транспортный космический аппарат
НА - научная аппаратура
НКУ - наземный комплекс управления
Принятые сокращения
9
НОО — низкая околоземная орбита НУР — нормативный уровень радиации
НшС - ОГБ - ОДЭ - нештатная ситуация отделяемый головной блок ошибки, допущенные экипажем
оип - объекты искусственного происхождения
ок - орбитальный комплекс
опс - орбитальная пилотируемая станция
ОС - орбитальная станция
ПКА - пилотируемый космический аппарат
ПК - пилотируемый корабль
пкс - пилотируемая космическая станция
пн - полезная нагрузка
ПОН - программа обеспечения надежности
ПРМ - переносное рабочее место
ПУ - пульт управления
PH - ракета-носитель
РПЗ - радиационный пояс Земли
PC мкс - российский сегмент МКС
РСУ - ручная система управления
РТК - радиотехнический комплекс
РТО - радиационный теплообменник
СА - спускаемый аппарат
САС - система аварийного спасения
СБ - солнечные батареи
сжо - система жизнеобеспечения
сио - система исполнительных органов
ски - солнечное космическое излучение
СКРО - система контроля радиационной обстановки
см - служебный модуль
со - стыковочный отсек
СОБР - система обеспечения радиационной безопасности
сов - система подачи питьевой, санитарно-гигиенической
и бытовой воды и удаления жидких отходов
core - система обеспечения газового состава
сои - система отображения информации
соп - система обеспечения продуктами питания и удаления
твердых отходов
СОТР - система обеспечения теплового режима
СПО - система поддержки оператора
СПС - солнечное протонное событие
СПУ - система полуавтоматического управления
10
Принятые сокращения
сс — система связи
ССКУ — спутниковая система контроля и управления
сти — система телеметрической информации
СТР — система терморегулирования
СУ — система управления
СУБ К — система управления бортовым комплексом
СУД — система управления движением
сэп — система энергопитания
тк — транспортный корабль
ТКА — транспортный космический аппарат
ткс — транспортный корабль снабжения
УРМ — универсальное рабочее место
ФГБ — функционально-грузовой блок
ФЭП — фотоэлектрические преобразователи
шк — шлюзовая камера
ЦКР — центрифуга короткого радиуса
цнс — центральная нервная система
ЦУП — центр управления полетом
ВВЕДЕНИЕ
Цели и задачи освоения человеком космического пространства
Человечество не останется вечно на Земле,
но, в погоне за светом и пространством,
сначала робко проникнет за пределы атмосферы,
а затем завоюет себе все околосолнечное пространство.
КЗ. Циолковский. Исследование мировых
пространств реактивными приборами
Пилотируемая космонавтика — область науки, техники и технологии,
направленная на освоение человеком новой среды обитания — космического
пространства. Цели и задачи проектов пилотируемой космонавтики опреде-
ляются комплексом философских и гуманитарных проблем, сопровождаю-
щих эволюцию цивилизации. Основоположник практической космонавтики
К.Э. Циолковский в своих трудах сформулировал три группы побудитель-
ных причин выхода человечества в космос, связанных с его стремлением к
новым ресурсам, к прогрессу, а также с желаением иметь средство спасения
от глобальных катастроф [1—5].
Стремление к новым ресурсам обусловлено возрастанием материаль-
ных потребностей человечества и увеличением мощности промышленно-
сти. Доступ к внеземным ресурсам позволяет избежать угрозы исчерпания
материальных ресурсов Земли, что представляется главным сдерживающим
фактором прогресса. При этом возникают следующие основные задачи [6]:
• овладеть запасами вещества, находящегося в космосе в виде планет,
астероидов и пр.;
• получить доступ к источникам энергии, содержащимся в космосе в
виде энергоносителей (углеводороды, гелий-3 и т. п.) и в виде энергии из-
лучения Солнца;
• овладеть новыми пространствами для жизни людей, к которым следует
отнести как поверхности небесных тел, так и межпланетное пространство.
Особенно ценным пространством представляется пространство в обитаемых
зонах звездных систем, где условия на поверхности планет близки к земным
условиям, в частности существует вода в жидкой фазе;
• использовать для научных исследований и создания новых матери-
алов и технологий специфические условия межпланетного пространства,
12
Введение
труднодоступные в земных условиях, таких как микрогравитация, вакуум,
стерильность среды и т. п.
К.Э. Циолковский особенно отмечал, что «главная цель и первые до-
стижения относятся к распространению человека в эфире, использованию
солнечной энергии и повсюду рассеянных масс». Приближение поселений
человека к новым ресурсам в форме колонизации планет или организации
космических поселений более эффективно при освоении ресурсов, рассеян-
ных в пространстве, чем доставка их на Землю.
Стремление к прогрессу связано с увеличением темпов развития челове-
чества благодаря овладению новыми знаниями и средствами производства.
Уже сейчас наука стала важной производственной силой, поскольку прогресс
в науке ведет к прогрессу в производстве. Выход в космос и космические
исследования дают множество новой информации, овладение которой спо-
собствует развитию цивилизации. Доставка научных инструментов в косми-
ческое пространство открывает новые возможности для прогресса познания.
Освоение космоса предполагает международное участие и может служить
сильным стимулирующим фактором сплочения народов.
Также следует отметить лежащие в основе прогресса гуманитарные пси-
хологические и социальные ценности людей, такие как жажда познания
нового, тяга к путешествиям, стремление к простору и красоте и, в итоге, —
осознание человеком своего места во Вселенной [6]. Немаловажной побу-
дительной причиной выхода человечества в космос стал поиск любых форм
жизни на других планетах.
Господствующая в настоящее время геоцентрическая точка зрения на
прогресс, предполагающая, что он происходит на Земле, а космические
исследования помогают ему развиваться, постепенно будет превращаться в
космическую точку зрения, когда прогресс будет характеризоваться полнотой
освоения человеком космоса.
Стремление человечества иметь средство спасения от глобальных ка-
тастроф обусловлено осознанием угроз планетарного и космического мас-
штаба, таких как необратимое изменение климата, уничтожение природы,
столкновение Земли с крупными астероидами, потеря Землей магнитного
поля, катастрофические изменения на Солнце. Для спасения от подобных
катастроф, как отмечал К.Э. Циолковский, человечеству необходимо «иметь
в запасе пространство хотя бы Солнечной системы».
Фундаментальной программой по освоению человечеством космо-
са можно считать «План завоевания человеком космоса», составленный
К.Э. Циолковским в 1926 г. [2]. Текст документа ниже приведен полностью,
чтобы можно было оценить, насколько стадии развития пилотируемой кос-
монавтики соответствуют пунктам данного плана, а также для того, чтобы
показать, какие идеи до сих пор остаются нереализованными и актуальными
и какие факторы не были учтены.
«1. Устраивается ракетный самолет с крыльями и обыкновенными органами
управления. Но бензиновый мотор заменен взрывной трубой, куда слабосиль-
ным двигателем накачиваются взрывчатые вещества. Воздушного винта нет.
Есть запас взрывчатых материалов и остается помещение для пилота, закрытое
чем-нибудь прозрачным для защиты от встречного ветра, так как скорость такого
Введение
13
аппарата больше аэропланной. Этот прибор от реактивного действия взрывания
покатится на полозьях по смазанным рельсам (ввиду небольшой скорости могут
остаться и колеса). Затем поднимется на воздух, достигнет максимума скорости,
потеряет весь запас взрывчатых веществ и облегченный начнет планировать как
обыкновенный или безмоторный аэроплан, чтобы безопасно спуститься на сушу.
Количество взрывчатых веществ и силу взрывания надо понемногу увеличивать,
также максимальную скорость, дальность, а главное — высоту полета. Ввиду про-
ницаемости для воздуха человеческого помещения в самолете высота, конечно, не
может быть больше известной рекордной высоты. Достаточно и 5 км. Цель этих
опытов — умение управлять аэропланом (при значительной скорости движения),
взрывной трубой и планированием.
2. Крылья последующих самолетов надо понемногу уменьшать, силу мотора
и скорость увеличивать. Придется прибегнуть к получению предварительной, до
взрывания, скорости с помощью описанных ранее средств.
3. Корпус дальнейших аэропланов следует делать непроницаемым для газов и
наполненным кислородом, с приборами, поглощающими углекислый газ, амми-
ак и другие продукты выделения человека. Цель — достигать любого разрежения
воздуха. Высота может много превосходить 12 км. В силу большой скорости при
спуске для безопасности его можно делать на воду. Непроницаемость корпуса не
даст ракете потонуть.
4. Применяются описанные мною рули, действующие отлично в пустоте и в
очень разреженном воздухе, куда залетает ракета. Пускается в ход бескрылый аэ-
роплан, сдвоенный или строенный, надутый кислородом, герметически закрытый,
хорошо планирующий. Он требует для поднятия на воздух большой предваритель-
ной скорости и, стало быть, усовершенствования приспособлений для разбега.
Прибавочная скорость даст ему возможность подниматься все выше и выше. Цен-
тробежная сила может уже проявить свое действие и уменьшить работу движения.
5. Скорость достигает 8 км/с, центробежная сила вполне уничтожает тяжесть,
и ракета впервые заходит за пределы атмосферы. Полетав там, насколько хватает
кислорода и пищи, она спирально возвращается на Землю, тормозя себя воздухом
и планируя без взрывания.
6. После этого можно употреблять корпус простой, не сдвоенный. Полеты
за атмосферу повторяются. Реактивные приборы все более и более удаляются от
воздушной оболочки Земли и пребывают в эфире все дольше и дольше. Все же
они возвращаются, так как имеют ограниченный запас пищи и кислорода.
7. Делаются попытки избавиться от углекислого газа и других человеческих
выделений с помощью подобранных мелкорослых растений, дающих в то же
время питательные вещества. Над этим много, много работают — и медленно,
но все же достигают успеха.
8. Устраиваются эфирные скафандры (одежды) для безопасного выхода из
ракеты в эфир.
9. Для получения кислорода, пищи и очищения ракетного воздуха приду-
мывают особые помещения для растений. Все это в сложенном виде уносится
ракетами в эфир и там раскладывается и соединяется. Человек достигает боль-
шой независимости от Земли, так как добывает средства жизни самостоятельно.
10. Вокруг Земли устраиваются обширные поселения.
11. Используют солнечную энергию не только для питания и удобств жизни
(комфорта), но и для перемещения по всей Солнечной системе.
12. Основывают колонии в поясе астероидов и других местах Солнечной си-
стемы, где только находят небольшие небесные тела.
14
Введение
13. Развивается промышленность и размножаются невообразимо колонии.
14. Достигается индивидуальное (личности отдельного человека) и обще-
ственное (социалистическое) совершенство.
15. Население Солнечной системы делается в сто тысяч миллионов раз больше
теперешнего земного. Достигается предел, после которого неизбежно расселение
по всему Млечному Пути.
16. Начинается угасание Солнца. Оставшееся население Солнечной системы
удаляется от нее к другим Солнцам, к ранее улетевшим братьям».
Как видно, некоторые из пунктов уже стали пройденным этапом. В на-
стоящее время начата реализация п. 9. Целями полетов человека в космос
являются накопление знаний и поиск способов противодействия негативным
условиям космического полета. Научно-промышленное освоение космоса
на этом этапе эффективнее всего проводится дистанционно с помощью ав-
томатических инструментов. Указанная в плане «большая независимость от
Земли» космических поселений пока еще не достигнута в силу возникших
значительных медико-биологических, технических и экономических проблем.
Как показали исследования, космическое пространство является исключи-
тельно неблагоприятной средой для пребывания человека.
Приведенные выше пп. 9—15 плана завоевания человеком космоса
К.Э. Циолковский сформулировал в начале XX в., естественно, в общем
виде. Они задают лишь цели и общий вектор развития пилотируемой кос-
монавтики, объясняют причины, по которым использование автоматических
космических аппаратов — необходимое, но недостаточное средство для ис-
следования космоса.
Опыт, получаемый при проектировании и выполнении пилотируемых
программ, а также результаты научных исследований, проведенных с уча-
стием человека в космосе, необходимы для детализации и коррекции пути
экспансии человечества в космосе. Такие программы требуют больших затрат,
но создают значительные конкурентные преимущества реализующим их го-
сударствам. С середины XX в. исследования и технические разработки для
космоса служат одним из важнейших стимулов развития науки и технологий.
Основное направление развития пилотируемой космонавтики предпо-
лагает расширение зоны обитания и влияния. Выделяют две формы кос-
мической экспансии: организация поселений на поверхности космических
тел и их создание непосредственно в межпланетном пространстве. В первом
случае речь идет о построении поселений-баз на планетах и астероидах, во
втором — подразумевается создание искусственных космических поселений.
К критериям оценки эффективности космической экспансии относят:
полноту использования внеземных ресурсов;
решение задачи непрерывного прогресса человечества;
создание наиболее благоприятных условий для жизнедеятельности людей.
Колонизация планет представляется наиболее естественным путем,
подобным уже пройденному этапу великих географических открытий. Как
некогда люди переплывали недружелюбный океан и основывали колонии на
новых богатых ресурсами землях, так и при колонизации планет космическое
пространство представляется средой, которую надо «переплыть», выдержав
неблагоприятные условия перелета.
Введение
15
Преимущества такой формы освоения пространства:
• возможность поселения людей в привычном поле силы тяжести при
организации базы на достаточно массивном объекте;
• близость к материальным ресурсам, которые можно добывать и пере-
рабатывать на месте без космической транспортировки;
• возможность естественной защиты людей от вредных излучений, если
планета обладает магнитным полем и атмосферой.
Однако колонизация космических тел, аналогичная земной колониза-
ции, где пространство космоса — «небесный океан», а планеты — «острова
и материки», недостаточно эффективна. К.Э. Циолковский писал: «Многие
воображают себе небесные корабли с людьми, путешествующими с планеты
на планету, постепенное заселение планет и извлечение отсюда выгод, какие
дают земные обыкновенные колонии. Дело пойдет далеко не так, о спуске на
крупные небесные тела нельзя теперь и мечтать — так он труден» [4]. Здесь
имеются в виду следующие трудности.
Во-первых, построение базы на небесном теле, где условия отличаются
от земных, имеет те же трудности по жизнеобеспечению, что и создание ис-
кусственного поселения в межпланетном пространстве. В Солнечной системе
не существует небесных тел кроме Земли, где человек мог бы обходиться без
сложных систем жизнеобеспечения: искусственной атмосферы, а также за-
щиты от радиации и метеоритов. В настоящее время астрономы обнаружили
первые планеты около других звезд, и активно совершенствуются методики
поиска пригодных для жизни планет в других звездных системах. Однако
имеющиеся данные пока не позволяют достоверно указать ни одной плане-
ты, подобной Земле, в других звездных системах.
Во-вторых, целесообразно колонизировать объекты, находящиеся в зоне
обитаемости, для обеспечения поселений достаточной энергетикой. В Сол-
нечной системе это Луна, Марс и астероиды, поскольку условия на Венере
крайне неблагоприятны даже для работы автоматических зондов. Таким
образом, в результате колонизации жизненное пространство увеличивается
только в несколько раз по сравнению с поверхностью Земли.
В-третьих, для организации грузопотока между планетами с силой тяже-
сти, близкой к земной, требуются существенные энергетические затраты на
разгон при взлете и торможение при посадке транспортных средств. Мини-
мальными эти затраты будут только в случае организации базы на астероиде,
где сила тяжести соответствует уровню микрогравитации — (0,1...0,001) g и
менее. Причем построение базы на астероиде требует тех же затрат, что и
построение полностью искусственного космического поселения, однако по
сравнению с ним здесь имеются ограничения по параметрам орбиты, векто-
ру угловой скорости вращения вокруг центра масс, условиям освещенности,
рельефу поверхности, геологическому составу и пр. В результате количество
удобных для колонизации астероидов оказывается весьма ограниченным.
Идея, которую первым в мире сформулировал К.Э. Циолковский, состоит
в том, что основной формой экспансии человека в космос является созда-
ние полностью искусственных космических поселений — эфирных городов.
Такой город — это комплекс искусственных сооружений для жизнедеятель-
ности человека, вращающихся вокруг Солнца на различных удалениях и
16
Введение
в разных плоскостях в зависимости от их назначения и форм использования
внеземных ресурсов. Создание этих комплексов позволит удовлетворить всем
критериям эффективности заселения пространства:
• освоить значительную область пространства в обитаемой зоне Солнеч-
ной системы путем построения множества поселений;
• выбрать для каждого поселения наиболее рациональную орбиту и па-
раметры движения вокруг центра масс;
• обеспечить наилучшие условия для организации транспортных потоков
и снабжения поселений материальными и энергетическими ресурсами; при
этом базы на планетах и астероидах будут служить источниками ресурсов,
которые можно добывать автоматически или с минимальным участием людей;
• рационально сочетать условия невесомости и искусственную силу тя-
жести, получаемую за счет вращения поселения.
Критические технологии пилотируемой космонавтики
Развитие пилотируемой космонавтики в соответствии с планом К.Э. Циол-
ковского сдерживают несколько критических технологий.
Сюда относится, прежде всего, технология создания замкнутой искусствен-
ной среды обитания. Естественная среда обитания человека — планета Земля,
единственная из известных на сегодняшний день планет обладающая биос-
ферой — глобальной экологической системой, обеспечивающей возникнове-
ние и воспроизводство жизни, поддерживаемой потоком солнечной энергии
и биологическим круговоротом. Человек также является частью биосферы,
его деятельность оказывает значительное влияние на многие природные про-
цессы. В искусственной биосфере, создаваемой на обитаемом космическом
сооружении, требуется сформировать динамическую равновесную систему,
регулируемую жизнью [7]. Обеспечить устойчивые режимы работы искус-
ственной биосферы — сложнейшая задача.
Эксперименты по созданию искусственной замкнутой экосистемы в раз-
ных масштабах проводились и проводятся в настоящее время [8], например,
эксперименты БИОС-1, БИОС-2, БИОС-3, «Биосфера-2» [9, 10]. Однако
все эти работы далеки от достижения главной цели — создания полностью
замкнутой самодостаточной и самоорганизующейся системы, в которой люди
могли бы жить, работать, развиваться и увеличивать свою численность для
следующей волны экспансии.
С технологией создания искусственной биосферы связана технология ее
защиты от космической радиации. Отсутствие эффективных средств радиаци-
онной защиты космических поселений — сейчас основной сдерживающий
фактор развития пилотируемой космонавтики.
Другой важной технологией, требующей развития, является космическая
энергетика. Крупнейшее на сегодняшний день космическое сооружение —
Международная космическая станция (МКС) обладает солнечной энерго-
установкой мощностью 0,00011 ГВт. Для сравнения: обычный энергоблок
АЭС на Земле дает около 1 ГВт энергии, а крупнейшая в мире АЭС, японская
Введение
17
Kashiwazaki Kariva, имеет мощность 8,2 ГВт. Суммарная мощность всех элек-
тростанций мира превышает 3500 ГВт, а выработка электроэнергии — более
15 трлн кВт-ч в год. В настоящее время планируется создание космических
ядерных энергоустановок только мегаваттного класса (0,001 ГВт). Таким
образом, для поддержания жизнедеятельности космических поселений и
создания эффективной транспортной инфраструктуры требуется увеличение
единичной мощности энергоустановок как минимум на четыре порядка. При
этом основной проблемой разработки технологий космической энергетики
оказываются не вопросы получения энергии, а вопросы избавления от из-
лишнего тепла. Поскольку передача тепла от орбитальной станции (ОС) в
космическое пространство возможна только излучением, необходимы про-
рывные технологии создания высокопроизводительных холодильников-из-
лучателей. Одним из таких проектов являются капельные холодильники [11].
Еще одна важная технология — это технология создания крупногабаритных
космических конструкций размерами 1 км и более. В настоящее время наиболь-
шая конструкция в космосе — МКС, имеющая длину 109 м, ширину (с фермами)
73,2 м и высоту 27,4 м. Для сравнения: длина самого большого в мире судна, тан-
кера Knock Nevis, составляет 458,5 м, ширина — 68,9 м.Самое большое отдельно
стоящее здание — многофункциональный комплекс The New Century Global
Center в городе Чэнду (Китай) имеет длину 500 м, ширину 400 м, высоту 100 м.
Самое высокое здание на Земле — башня Burjkhalifa имеет высоту 828 м.
Основной проблемой сооружения крупногабаритных конструкций в космо-
се будут огромные энергетические затраты на доставку необходимых строи-
тельных материалов. Неразвитость космической энергетики останавливает
«космическое производство» материалов. Однако основные проблемы — не
технические. Для того чтобы началась настоящая космическая экспансия,
необходимо, чтобы жизнь в космическом поселении стала привлекательной
для людей. Должен возникнуть мощный стимул, побуждающий человека к
жизни вне Земли. Споры за лидерство в космических гонках среди наций,
возможно, сменятся конкуренцией среди элитных групп за право жить в кос-
мическом поселении. В настоящее время такие процессы уже проявляются
в виде нового направления пилотируемых полетов — космического туризма.
Развитие устойчивого сообщества в искусственном космическом посе-
лении — фундаментальная гуманитарная проблема, решение которой может
оказаться гораздо сложнее, чем создание искусственной биосферы и реше-
ние технических задач. Согласно В.И. Вернадскому, «в биосфере существует
великая геологическая, быть может, космическая сила, планетное действие
которой обычно не принимается во внимание в представлениях о космосе...
Эта сила есть разум человека, устремленная и организованная воля его как
существа общественного» [12]. Существование большого сообщества людей
в космическом поселении требует развития технологий создания глобальной
устойчивой системы взаимодействия природы и общества — искусственной
ноосферы.
Таким образом, из-за имеющихся ограничений создать полноцен-
ные космические поселения пока невозможно. Однако первые полвека
космической эры продемонстрировали фундаментальное значение плана
К.Э. Циолковского для развития космической техники. Логически первый
18
Введение
шаг уже сделан — на низкой околоземной орбите сейчас успешно функцио-
нируют пилотируемые орбитальные станции: постоянно обитаемая МКС и
посещаемая китайская орбитальная станция «Тянь-Гун». В космосе постоянно
находится экипаж из 6 человек, а максимальное число его членов составило
на сегодняшний день 13 человек.
Следующий прогнозируемый этап — создание транспортной инфраструк-
туры для перелетов к Луне, Марсу и астероидам, построение лунной базы и
пилотируемые полеты к астероидам и Марсу. Это потребует развертывания
на околоземной орбите промышленной инфраструктуры по сборке, испы-
таниям и обслуживанию транспортных систем. В сочетании с увеличиваю-
щимся объемом научных исследований и организацией в космосе опытного
производства в условиях высокого вакуума и микрогравитации необходимо
будет увеличить численность людей, одновременно присутствующих на ор-
бите. На этом этапе будет стоять задача создания нескольких коллективов,
каждый из которых будет объединен направлением своей деятельности, а все
они вместе — общей целью. Создание космических кораблей и орбитальных
станций нового поколения, рассчитанных на большие экипажи, потребует
новых компоновочных решений.
Обитаемые космические сооружения
Существующие проекты обитаемых космических сооружений по мас-
штабу можно разделить на три группы: космические станции, космические
поселения и астроинженерные сооружения. Конечно, проекты космических
поселений, тем более астроинженерных сооружений, являются утопиче-
скими и относятся пока в большей степени к области научной фантастики.
Однако их нужно рассматривать как логически развивающийся ряд гипотез
в истории проектов пилотируемой космической техники. Перед созданием
новой техники важно ознакомиться с уже имеющимися проектами и идея-
ми, чтобы заметить, как ценные идеи, заложенные в самых ранних проектах,
не теряются, а постепенно находят путь к реализации. Поэтому ниже будут
представлены некоторые ранние проекты космических сооружений.
Космические станции — сооружения, обслуживаемые и обеспечиваемые
за счет ресурсов Земли с помощью космических транспортных систем. Со-
гласно плану завоевания космоса, на этом этапе «все сооружения, скафандры,
орудия, оранжереи или жилища — все должно быть сделано и испытано за-
ранее на Земле. Вся работа в эфире, на первое время, ограничивается лишь
сборкой готовых частей. Первые колонии должны основываться за счет своей
планеты, тем более, что и материалов поблизости Земли, вероятно, никаких
нет (можно только захватывать составные части разреженной атмосферы, но
этого недостаточно). Хорошо, если колонии на первых порах не будут хотя
бы нуждаться в кислороде и пище» [2].
Первый технически проработанный проект космической станции-колонии,
предложенный К.Э. Циолковским в 1918 г., показан на рис. В1 [13]. Станция
представляет собой комплекс, составленный из отдельных цилиндрических
Введение
19
в
Рис. В1. Схема космической станции-колонии, предложенной К.Э. Циол-
ковским в 1918 г. (размеры указаны в метрах):
а — общий вид станции; б — компоновка жилых помещений модуля; в — поперечное
сечение модуля; 1 — модуль станции; 2 — прозрачная стенка; 3 — оболочка; 4 — ил-
люминатор; 5 — разделительная стенка; 6 — центральная труба с почвой оранжереи;
7 — коммуникации; 8 — защитный экран в сложенном состоянии; 9 — защитный
экран в развернутом состоянии; 10 — общий зал; 11 — зал собраний (6 шт.); 12 —
каюта (200 шт.); 13 — производственные и гигиенические помещения; 14— растения
20
Введение
модулей в виде звезды и других фигур (рис. В1, а). Рабочая орбита станции —
геостационарная. Станция ориентирована на Солнце и стабилизирована
вращением. Модуль станции (рис. В1, б) имеет диаметр 10 м и длину 1000 м.
Схема компоновки жилых помещений показана на рис. В1, в. Станция рас-
считана на экипаж от 100 до 400 человек.
Жилое пространство совмещено с оранжереей, что позволяет, по мнению
автора, построить замкнутую биосферу. Растения размещаются в искусственной
почве, расположенной в центральной трубе, проходящей через ось станции.
Терморегулирование станции обеспечивается применением разворачиваемых
экранов и циркуляцией жидкости по трубам вдоль оси станции. Создаваемая
за счет вращения станции искусственная сила тяжести меньше земной, но на
концах модулей она превышает силу поверхностного натяжения и позволяет
воде течь и заполнять сосуды с образованием свободной поверхности.
Искусственная тяжесть в помещениях на концах станции используется
для производственных нужд и гигиены. Экипаж станции в основном живет
в условиях невесомости. Архитектура станции предусматривала разделение
ее пространства на двести отдельных кают, шесть залов для собраний и один
общий зал. Перегородки внутри станции предусмотрены негерметичными,
они сделаны из сетки, покрытой вьющимися растениями. Таким образом,
сформирована естественная биологическая система контроля газового состава
атмосферы станции.
На рис. В2 приведен проект космической станции, построенной по схеме
тросовой системы, предложенный Г. Обертом в 1923 г. [14, 15]. Станция со-
бирается на орбите в виде комплекса из нескольких ракет (по расчетам пред-
стояло построить небольшой флот ракет массой 300...400 т). В околоземном
пространстве ракеты связываются металлическим канатом длиной в несколь-
ко километров и приводятся во вращение для создания искусственной силы
тяжести. В проекте жилые помещения станции находились на концах труб,
связанных с осью вращения тросами, вдоль которых располагались лифты,
предназначенные для перемещения членов экипажа станции из жилых по-
мещений в рабочий отсек и обратно. На специальных фермах размещены
Рис. В2. Обитаемая космическая станция
по проекту Г. Оберта (1923):
1 — проволоки для крепления «сторожевых»
бомб; 2 — жилые помещения; 3 — помещения
особого назначения; 4 — труба для связи; 5 —
кабины лифта; 6 — отделение для хранения
мусора; 7 — натяжные тросы; 8 — сборочные
помещения; 9 — отражатель солнечных лучей;
10 — хранилища запасов; 11 — хранилища му-
сора; 12 — воздушный тамбур; 13 — телескопы;
14 — плечо сооружения
Введение
21
подсобные помещения, средства связи, специальные лаборатории и крупнога-
баритный телескоп. В центре рабочего отсека предусмотрен шлюз для выхода
в открытый космос. Вокруг станции был предусмотрен легкий проволочный
каркас с защитными поражающими средствами против метеорной опасности.
На рис. ВЗ показана космическая станция Г. Нордунга, предложенная в
1928 г. [16]. Рабочая орбита станции — круговая высотой 35 900 км. В про-
екте рассматривалась рассчитанная на экипаж из нескольких десятков че-
ловек «станция-облако», которая должна была состоять из трех отдельных
космических аппаратов, соединенных друг с другом воздушными шлангами
и электрическими кабелями.
Составными частями станции были жилой модуль, электростанция и
обсерватория (рис. ВЗ, а). Компоновочная схема жилого модуля (рис. ВЗ, б)
с искусственной силой тяжести, создаваемой вращением, представляла собой
тор диаметром около 30 м с овальным поперечным сечением.
В проекте были учтены эффекты, связанные с действием ускорения
Кориолиса, возникающим при перемещении членов экипажа в такой стан-
ции, в частности, была предложена конструкция спиральных лестниц для
перемещения к центру станции, где располагалась ступица «жилого колеса»,
вращающаяся в противоположном направлении и выполняющая функцию
воздушной камеры.
В проекте были детально проработаны многие узлы станции. Тепловой
режим жилого модуля поддерживался за счет теплоцентрали, состоящей из
солнечных концентраторов и радиаторов-излучателей, расположенных в те-
невой зоне за зеркалом. Модуль обсерватории (рис. ВЗ, в) «в форме котла с
внутренним избыточным давлением в одну атмосферу» можно считать про-
образом современных европейских и американских модулей МКС. В проекте
была также достаточно подробно разработана солнечная тепловая электро-
станция, выделенная в отдельный модуль (рис. ВЗ, г).
Несколько вариантов орбитальной станции военно-научного назначения,
разработкой которой в 1940-1950-е гг. занимался В. фон Браун, показаны на
рис. В4 [17]. В компоновке этого проекта продолжены идеи жилого колеса
Г. Нордунга — жилой модуль-тороид диаметром 50 м, составленный из 20
цилиндрических секций, каждая диаметром около 3 м и длиной 8 м (рис.
В4, а). В центре тороида размещался энергетический модуль диаметром 8 м
с солнечной тепловой электростанцией. Энергетический модуль соединялся
с жилым модулем тросами-спицами. Для снабжения станции предусматрива-
лись стыковочные узлы на энергетическом модуле. Для перемещения экипажа
между жилым и энергетическим модулями предусмотрены узкие радиальные
герметичные каналы. В проекте S-1 (1952) диаметр станции был увеличен до
75 м. Численность экипажа достигала 80 человек (рис. В4, б). Жилой модуль,
имевший форму тора объемом 18 400 м3, был составлен из надувных отсеков
из армированной резины.
Архитектура жилого пространства предусматривает три уровня в на-
правлении радиуса. Внешний уровень занят коммуникациями, а два других
предназначены для жизни и работы экипажа. Для перемещения членов эки-
пажа между центральным энергетическим и причальным модулями, подъема
22
Введение
б
в
Рис. ВЗ. Орбитальная станция по проекту Г. Нордунга (1928):
а — общий вид «станции-облака»; б — компоновочная схема жилого модуля с искусственной
силой тяжести; в — модуль обсерватории; г — модуль электростанции (7 — парогенератор;
2 — воздушный шлюз; 3 — радиатор-холодильник; 4 — модуль с машинными преобразо-
вателями энергии; 5 — фокусирующее зеркало концентратора)
Введение
23
Рис. В4. Орбитальная станция по проекту
В. фон Брауна:
а — проект 1946 г.; б — проект 1952 г.; в — проект
1953 г. с солнечной электростанцией, использу-
ющей кольцевой параболический концентратор
высоты орбиты, а также для обслуживания станции и сборки межпланетных
космических аппаратов рядом со станцией предусмотрены малые аппара-
ты-буксиры. Для защиты от метеоритов предназначен металлический экран.
Чтобы станция была постоянно освещена Солнцем, ее орбита была вы-
брана псевдосолнечно-синхронной круговой высотой 1730 км (проект 1953 г.).
Это давало возможность использовать кольцевой параболический концен-
тратор солнечной энергии (рис. В4, в), в фокусе которого по приемнику из-
лучения циркулировала ртуть, нагреваемая до 700 °C под давлением 5 МПа.
Мощность электростанции оценивалась в 1,660 ГВт тепловой энергии, что
позволяло получать 0,5 ГВт электрической энергии.
Сравнение ранних проектов с реализованными на практике конструк-
циями трех поколений орбитальных станций показывает, что все они, как
и предсказывал К.Э. Циолковский, имеют линейную или звездообразную
компоновку и были составлены из жестко соединенных цилиндрических
модулей (рис. В5). Кольцевая компоновка модулей, проекты тросовой систе-
мы и «станции-облака» пока остаются нереализованными, хотя постоянно
развиваются.
24
Введение
Рис. В5. Реализованные проекты космических станций:
7 — «Мир»; 2 — «Салют-1»; 3 — Skylab; 4 — «Тянь-Гун-1»; 5 — «Салют-7«; 6 — Международ-
ная космическая станция; 7 — SpaceLab на базе Space Shuttle
Эволюция реализованных отечественных проектов орбитальных станций
показана в табл. В1 [18]. Эксплуатируемая в настоящее время МКС имеет
массу около 500 т и размер около 100 м. Максимальная численность членов
экипажа, одновременно работавших на станции, составила 13 человек. Су-
ществующие космические программы предполагают создание космических
станций не только на околоземной орбите, но и на орбите искусственного
спутника Луны, а также в точках либрации системы Земля — Луна. При этом
численность экипажа станций будет увеличиваться.
Космические поселения — это такие сооружения, которые предлагается ис-
пользовать для автономного существования сообщества людей численностью
от десятков тысяч до десятков миллионов человек. Размеры космического
поселения близки к размеру малого космического тела. В различных проектах
они составляют от 1 км до 100 км. Космическое поселение снабжается вне-
земными ресурсами, добытыми на небесных телах. Энергетическое снабжение
обеспечивается за счет энергии Солнца. Космические поселения обслужи-
ваются с помощью транспортной инфраструктуры, развернутой в пределах
Солнечной системы. Первые утопические проекты космических поселений
принадлежат К.Э. Циолковскому, Д.Д. Берналу, Дж. О’Нейлу, Д. Ромику.
Один из создателей науковедения и концепции научно-технической ре-
волюции, английский физик и социолог науки Д.Д. Бернал в 1929 г., прак-
тически дословно повторяя на английском языке идеи К.Э. Циолковского
о неизбежности расселения человечества в межпланетном пространстве,
предложил проект космического поселения в виде полой сферы диаметром
около 16 км (10 миль), в которой в условиях невесомости обитают 20 000,
30 000 жителей [19]. Построенная из материала астероида, многослойная
оболочка сферы толщиной около 400 м служит для защиты от метеоритов.
Таблица Bl
Примеры развития орбитальных станций
Наименование, даты полета, обший вид Масса, т Объем, м3 Энерго- снаб- жение, кВт Числен- ность экипажа, чел Грузо- гюток, т/г. Особенности технического обслуживания и ремонта
«Салют Ь (19.04.1971-11.10.1971) п— 1«Салют3. (25.06.1974-21.01.1975) “—**' 1«Салют 4» (26.12,1974—03.02.1977) «Салют 5» (22.06.1976-08.08.1977) 25 100 3 2-3 0 Все средства жизнеобеспечения экипажа, ресурсное оборудование и расходуемые материалы научных исследований доставлялись в составе ОС
Skylab (14.05.1973-11,07,1979) ( 77 330 30 3 0 Расходуемые материалы жизнеобеспечения доставлены на орбиту в составе станции. Полу- чен опыт внекорабельной деятельности экипажа по ремонту оборудования бортовых систем
«Салют 6» (29.09.1977-29.07.1982) «Сал юг 7» (19.04.1982-07.02.1991) 32 106 4 3 2-3 Предусмотрены два стыковочных порта: для пи- лотируемых и для грузовых транспортных кораб- лей. Осуществлялись доставка грузов и доза- правка топливом, коррекции орбиты средствами корабля «Прогресс». Выполнены масштабные рс мог iTiTO - восстаг ювитслы гыс работы
«Мир» (26.02.1986-23.03.2001) осУ Па НО 400 10 3 R—10 Организовано постоянное транспортно-техни- ческое обеспечение. Широко использованы технологии замены оборудования, исчерпавшего ресурс. Использованы специальные манипуля- торы для монтажа станции.Применено механи- зированное средство «Стрела» для перемещения 1рузов и экипажа
408 1173 ПО
25-40
Международная космическая
станиия (20. 11, 1998 - наст, вр.)
Внедрены комплексная система инвентариза-
ции и хранения грузов, а также система
у и нфипироваг 1 пых констру кти вов, устройся в
крепления оборудования и соединения
коммуникаций для заменяемого оборудования.
Широко применяются роботизированные
и механизированные средства сборки
и технического обслуживания станции
26
Введение
Окна
Рис. В6. Различные варианты компоновки
эфирного города К.Э. Циолковского:
а — компоновочная схема оранжереи (рисунок
К.Э. Циолковского); б — компоновочная схема
оранжерей и жилого модуля (рисунок К.Э. Ци-
олковского); в — поздняя компоновочная схема
эфирного города с кольцевой жилой зоной
Введение
27
В ней размещаются запасы необходимых веществ, газов и жидкостей, колонии
водорослей, требующихся для производства кислорода, системы переработки
отходов. В качестве источника энергии планировалось использовать энергию
Солнца. По мнению автора проекта, такая сфера по своему полезному жиз-
ненному пространству будет эквивалентна поверхности площадью 384 км2
со слоем воздуха высотой 15 м.
Эфирный город-облако, предложенный К.Э. Циолковским в 1933 г.,
представляет собой комплекс, состоящий из оранжерей и жилых модулей —
«приютов для людей» (рис. В6) [20]. Оранжереями (рис. В6, а) являются тела
вращения большого удлинения. В них вращением вокруг оси тела создается
искусственная сила тяжести и обеспечиваются наилучшие условия, необхо-
димые для развития растений. Один торец оранжереи, имеющий наибольшее
поперечное сечение, оснащен прозрачным куполом и ориентирован на Солн-
це. Жилые модули могут быть как вращающимися, так и невращающимися.
В них поддерживается температурный режим, наиболее подходящий для
жизни людей. Оранжереи и жилые модули соединены трубопроводами, чтобы
создать циркуляцию искусственной атмосферы (рис. В6, б).
Другой вариант одномодульной компоновки (рис. В6, в) представляет
собой цилиндр диаметром 100 м и длиной 1000 м, вращающийся вокруг оси
для создания искусственной силы тяжести. На внутренней поверхности ци-
линдра размещены жители и постройки. Один торец цилиндра ориентирован
на Солнце и воспринимает энергию. Ближе к центру расположены оранжерея
и вспомогательные системы, менее чувствительные к воздействию ускорения
Кориолиса. Противоположный торец — зона размещения промышленных
установок. На рисунке также представлены кольцевое лабораторное помеще-
ние вокруг зоны с растительностью, тоннели сообщения с отсеком команды
и шлюзовая камера со стыковочным устройством.
Проект создания в космосе города с населением 20 000 человек амери-
канского инженера Д. Ромика (1956) приведен на рис. В7. Основные жилые
помещения предложено разместить в ободе колеса, вращающегося для соз-
дания искусственной силы тяжести. Здесь же должны располагаться школы,
Рис. В7. Эфирный город по проекту Д. Ромика:
1 — окончательный размер (финальная очередь расширения);
2 — стыковочная платформа; 3 — шлюз; 4 — люк шлюза; 5 —
корпуса ракет, образующие центральное ядро (49 шт.); 6 — пер-
вая очередь расширения; 7 — начальные модули строительства;
8 — вращающееся колесо
28
Введение
больницы, театр, кино, спортивные площадки и магазины. Основные научные
лаборатории и вспомогательное оборудование предусматривалось разместить
в невращающемся цилиндре диаметром 300 м и длиной около 1 км. Особен-
ностью проекта являлся подробный план развертывания поселения [21].
Ряд проектов космических поселений-«островов», размещаемых в точке
либрации, предложен Д. О’Нейлом в 1975 г. [22]. Проект «Остров один» (рис. В8)
предусматривал переработку проекта сферы Д.Д. Бернала. Рассматривается
сфера диаметром 512 м с населением до 1000 человек. Сферическое жилое
пространство должно вращаться вокруг оси для создания искусственной силы
тяжести. Население размещалось в экваториальной области, а на полюсах
находились прозрачные области, куда через зеркала направлялся солнечный
свет. Сферическое поселение дополняли агрокультурные модули в виде торов,
энергетические установки, промышленные модули, холодильники-излучатели
и прочая необходимая инфраструктура.
Проект «Остров два» был развитием предыдущего проекта. Здесь пред-
полагался диаметр сферы 1800 м. Благоприятная для жизни экваториальная
окружность в 6,5 км (4 мили) может быть комфортабельным домом прибли-
зительно для 140 тыс. человек. Такие размеры поселения были продиктованы
Рис. В8. Проект космических
поселений в варианте «Остров
один» Д. О’Нейла (1975):
а — общий вид (/ — заводы и доки;
2 — зеркала; 3 — радиатор; 4 — внеш-
ние торовые модули с оранжереями;
5 — жилой модуль); б — компоно-
вочная схема солнечного освещения;
в — схема поселения
Введение
29
экономическими соображениями: среда обитания должна была быть относи-
тельно небольшой для снижения транспортных расходов и времени на дви-
жение, но в то же время достаточных размеров, чтобы эффективно содержать
необходимую промышленную базу.
Проект «Остров три» О’Нейла (1975) представляет собой два боль-
ших цилиндра, вращающихся в противоположных направлениях (рис. В9).
В табл. В2 приведены параметры различных вариантов поселений такого типа.
Рис. В9. Проект космического поселения типа «Остров три» Д. О’Нейла
(1975):
7 — ось вращения комплекса; 2 — жилой модуль, вращающийся вокруг продольной
оси; 3 — зеркало; 4 — сельскохозяйственные модули; 5 — энергетический модуль
Таблица В2
Основные проектные параметры космических поселений типа «Остров три»
Вариант Длина, км Радиус, м Период вращения, с Население, чел.
1 1 200 21 10 тыс.
2 3,2 640 36 100—200 тыс.
3 10 2000 63 0,2—2 млн
4 32 3200 114 0,2—20 млн
Каждый цилиндр разделен продольно на шесть равных секторов: на три
окна («соляриса») и на три жилых участка («долины»), которые чередуются
друг с другом. С внешней стороны окон располагаются прямоугольные зер-
кала, и свет, отражаясь от них попадает внутрь «острова». Положением зеркал
управляет компьютер, который регулирует климат и продолжительность дня
и ночи. На одном конце цилиндрического сооружения имеется солнечная
электростанция с большим параболическим зеркалом. Оно фокусирует сол-
нечное излучение на паровой котел с рабочим веществом, используемым для
30
Введение
привода турбогенераторов. На другом конце устроены причалы для транс-
портных кораблей. Каждый цилиндр окружен внешним кольцом из сель-
скохозяйственных модулей.
В 1975 г. во время работы летней школы, организованной совмест-
но НАСА и Стэндфордским университетом, идеи космических поселений
были исследованы 28 учеными, инженерами, социологами и экономистами.
В результате были сформулированы общие предложения о геометрических
формах космических поселений (рис. В10) [23].
Рис. В10. Основные формы космических поселений:
а — гантель; б — тор; в — ожерелье; г — массив гантелей; д — сфера;
е — цилиндр; ж — массив ожерелий; з — стопка торов
Другим результатом проведенной школой работы стал проект «Стэнд-
фордский тор» (рис. Bl 1). Поселение для независимого проживания 10 тыс.
человек включает в свой состав жилой тороидальный модуль диаметром
1,8 км, вращающийся с угловой скоростью 1 об/мин для создания искус-
ственной силы тяжести (0,9—1,0) g. Он снабжен зеркалами для освещения.
В центре тора расположена ступица с неподвижным зеркалом, которое от-
ражает солнечный свет на вращающееся вокруг центра кольцо из вторичных
зеркал. Эти зеркала в свою очередь отражают свет в кольцевые прорези окон
шириной 30,5 м для освещения сельскохозяйственных помещений.
В «ступице колеса» размещаются коммуникационное оборудование и
причалы для прибывающих космических кораблей и буксиров. Имеется
также прямоугольный радиатор для сброса в пространство избыточного тепла.
По оси «колеса» вынесено на стержне автоматизированное промышленное
предприятие по переработке лунной руды в условиях невесомости с исполь-
зованием солнечной энергии. Для защиты жителей от космической радиации
до уровня стандарта США для гражданского населения (менее 0,5 бэр в год)
предлагалось использовать 10 млн т экранирующих материалов (в основном
отходы переработки руд).
Введение
31
Рис. В11. Проект космического поселения
«Стэндфордский тор» (1975):
1 — гелиоконцентратор солнечной печи; 2 —
транспортный трубопровод (10 км); 3 — централь-
ная втулка (хаб); 4 — панели солнечных батарей
жилого модуля; 5 — жилой модуль («Стэндфорд-
ский тор»); 6 — стыковочный модуль; 7 — солнеч-
ный свет; 8 — ось вращения; 9 — главное зеркало
(не вращающееся); 10 — вторичные зеркала;
11 — радиатор жилого модуля (не вращающийся);
12 — технологические установки; 13 — панели
солнечных батарей
Астроинженерные сооружения — это гипотетические обитаемые кон-
струкции, имеющие размеры, сравнимые с радиусом орбиты планеты. Такие
фантастические объекты приведены здесь в качестве предельного случая
космических поселений. Ученые предполагают, что развитая цивилизация
может использовать подобное сооружение для полной утилизации энергии
центральной звезды и/или для решения проблемы жизненного пространства.
К астроинженерным сооружениям относятся кольца и сфера Циолковского
(рис. В12, а, б). Циолковский предлагал соединять свои эфирные города-ци-
линдры в ожерелья вокруг Солнца. В разных плоскостях может быть много
колец, которые в итоге сольются в сферу.
Американский ученый Ф.Д. Дайсон предположил, что в предельном слу-
чае космическое поселение может размещаться на замкнутой непрерывной
вращающейся сферической оболочке, построенной вокруг звезды из вещества
всех планет звездной системы (рис. В12, в). Однако проект был подвергнут
справедливой критике из-за неустойчивости подобной сферы. Развити-
ем проекта сферы Дайсона стал проект, предложенный советским ученым
Г.И. Покровским, — раковина Покровского, представляющая собой набор
колец, вращающихся вокруг звезды (рис. В12, г) [24]. Плоскости вращения
колец устанавливают так, чтобы вместе они перехватывали практически весь
поток излучения звезды.
Рис. В12. Основные типы космических поселений вокруг звезд:
а — кольца Циолковского; б — сфера Циолковского; в — сфера Дайсона; г — раковина
Покровского
32
Введение
Обзор проектов обитаемых космических сооружений показывает, что в
каждом из них возникают и решаются специальные вопросы организации
используемого экипажем пространства, которые в земных условиях решают
архитекторы при проектировании зданий. Необходимость проектирования
космических сооружений, предназначенных для долговременной продуктив-
ной жизни и деятельности человека, потребовала создания нового раздела
архитектуры — космической архитектуры.
Декларативные и чисто формальные построения, построения на уровне
первичных, самых общих функциональных схем описанных выше совершенно
фантастических поселений можно считать начальными шагами в построении
их будущей пространственной организации, начальными эвристическиими
подходами к созданию и развитию будущей космической архитектуры и кос-
мического градостроительства.
Первые работы в области космической архитектуры были выполнены в
СССР в РКК «Энергия» при проектировании интерьеров КА «Союз» [25].
Архитекторов привлекали для создания интерьеров ОС «Салют» и «Мир»,
пилотируемого транспортного корабля нового поколения «Федерация».
В США архитекторов привлекали к созданию ОС Skylab и разработке мо-
дульной архитектуры станции Freedom.
Космическая архитектура как научное направление в настоящее время
активно развивается. В США под эгидой американского института аэро-
навтики и астронавтики (AIAA) создан технический комитет по космиче-
ской архитектуре (SATC), с 2002 г. регулярно проводящий международные
симпозиумы по данной тематике и выпускающей учебные пособия [26, 27].
Активную работу в области космической архитектуры проводит организация
Sasakawa International Centr for Space Architecture (SICSA) [28]. Европейское
космическое агентство (ESA) также привлекает архитектурные бюро к соз-
данию космической техники [29]. Вопросы космической архитектуры регу-
лярно докладываются на Академических чтениях по космонавтике, ежегодно
проводящихся в МГТУ им. Н.Э. Баумана.
Однако задача космической архитектуры гораздо шире — это не просто
дизайнерское оформление интерьеров, это организация жилого, рабочего и
общественного пространства. В целом — выработка стратегических направ-
лений построения космических комплексов исходя из психологических, со-
циальных и культурных законов развития человека и общества [30]. Переход
от земной архитектуры к космической — один из этапов эволюционного
процесса развития земной цивилизации. В этом процессе каждый этап ста-
новления новых технологий позволял представить в новом качестве фун-
даментальные культурные ценности, накопленные человечеством. По мере
совершенствования космической техники ее специфические проблемы при
создании космических поселений постепенно утратят главенствующую роль
и уступят место архитектурным проблемам — проблемам пространственной
организации полноценной жизнедеятельности человека. Уже сейчас техни-
чески осуществимо создание ОС из множества модулей, однако архитектура
построенных из этого «конструктора» перспективных ОС с экипажем из 10 —
50 человек пока недостаточно проработана.
Введение
33
Цели и задачи компоновки
различных пилотируемых космических аппаратаов
Компоновка — один из важнейших этапов создания нового КА, в ходе
которого целевое оборудование, элементы конструкции, агрегаты и узлы объ-
единяются в единую систему, предназначенную для выполнения в течение
заданного времени функциональных задач КА, определяемых его назначени-
ем. По функциональному назначению пилотируемые космические аппараты
(ПКА) можно разделить на три группы.
Транспортные космические аппараты (ТКА) предназначены для выпол-
нения динамических операций: доставки в космос и возвращения на Землю
экипажа и грузов, выполнения межорбитальных перелетов, обслуживания
космических объектов, краткосрочных автономных полетов. ТКА могут
быть пилотируемыми или беспилотными. Например, ТКА «Союз» является
пилотируемым, а грузовые ТКА «Прогресс», ATV, HTV, Dragon совершают
полет без экипажа, но посещаются людьми при разгрузке/погрузке в составе
орбитальной станции. ТКА могут быть по своей конструкции одноразовыми
(«Союз», Apollo), частично многоразовыми (Dragon, «Федерация») или пол-
ностью многоразовыми («Буран»).
Орбитальные станции предназначены для обеспечения длительной работы
экипажа на орбите (околоземной, орбите вокруг Луны или Марса и пр.). Они
могут быть постоянно обитаемыми, как «Мир» или МКС, или посещаемыми,
как советские «Салют», «Алмаз», американская Skylab, китайская космиче-
ская лаборатория «Тянь-Гун-1» и проектируемая российская технологическая
лаборатория ОКА-Т.
Пилотируемые экспедиционные КА предназначены для доставки людей к
другим небесным телам (Луне, планетам и астероидам), посадки на их по-
верхность, выполнения целевых задач, взлета с поверхности небесных тел
и возвращения экипажа на Землю. Сюда следует отнести не только такие
ТКА, как «Аполлон», но и долговременные базы, размещаемые на орбитах
и поверхности небесных тел.
Основные задачи компоновки ПКА различают в зависимости от их функ-
ционального назначения:
• определение общей пространственной структуры КА с учетом его пер-
спективного развертывания;
• обеспечение жестких требований по безопасности полета;
• внутренняя компоновка пространства обитаемых отсеков исходя из
медико-биологических, эргономических и психологических требований;
• компоновка бортовых систем и обитаемых отсеков с учетом взаимо-
влияния оборудования и деятельности экипажа;
• компоновка оборудования систем жизнеобеспечения;
• внешняя компоновка КА с учетом возможности осуществления вне-
корабельной деятельности;
• компоновка бортового оборудования с учетом возможности обслужи-
вания его экипажем.
34
Литература к Введению
Литература к Введению
1. Циолковский К.Э. Монизм вселенной. Калуга: 1-я Государственная типолито-
графия, 1925, 33 с.
2. Циолковский К.Э. Исследование мировых пространств реактивными прибора-
ми. Калуга, 1926.
3. Циолковский К.Э. Будущее Земли и человечества. Калуга: Гублит, 1928. 28 с.
4. Циолковский К.Э. Цели звездоплавания. Калуга: Типография ОСНХ, 1929. 40 с.
5. Циолковский К.Э. Растение будущего и животное космоса. Калуга, 1929. 32 с.
6. Улубеков А. Т. Богатства внеземных ресурсов. М.: Знание, 1984. 256 с.
7. Вернадский В.И. Химическое строение биосферы Земли и ее окружения. М.:
Наука, 2001. 376 с.
8. Яздовский В.И. Искусственная биосфера. М.: Наука, 1976. 221 с.
9. Аллен Дж., Нельсон М. Космические биосферы. М.: Прогресс, 1991. 128с.
10. Международный центр замкнутых экологических систем. URL: http://www.ibp.ru/
labs/mc.php
11. Конюхов Г.В., Коротеев А.А. Капельные холодильники-излучатели космических
энергетических установок нового поколения. URL: http://knts.tsniimash.ru/ru/src/mat/
kaplia3.pdf
12. Вернадский В.И. Несколько слов о ноосфере // Успехи современной биологии.
1944. № 18. Вып. 2. С. 113-120.
13. Циолковский К.Э. Вне земли // Природа и люди. 1918. № 2—12.
14. Oberth Н. Die Rakete zu den Planeten raumen. Munchen. 1 Auflage, 1923.
15. Oberth H. Wege zur Raumschiffahrt. Munchen, 1929.
16. Noordnung H. Das Problem der Befahrung des Weltraums. Leipzig, 1929.
17. von Braun W. Across the Space Frontier (with J. Kaplan et. al.) ed. E. Ryan. New
York: Viking Press, 1952. 147 p.
18. Радченко Э.Т., Пугаченко C.E. Орбитальные станции: использование опыта
проектирования и эксплуатации при математическом моделировании перспективных
космических систем // Научно-технические разработки ОКБ-23-КБ «Салют». М.:
Воздушный транспорт, 2006. С. 85-105.
19. Bernal J.D. The World, the Flesh & the Devil: An Enquiry into the Future of the
Three Enemies of the Rational Soul. 1929.
20. Циолковский К.Э. Альбом космических путешествий. 1933. Архив РАН. Опись 1.
Док. 84. URL: http://www.RAS.RU./ktsiolkovskyarchive/l.aspx (дата обращения 7.04.2019).
21. Johansen Н.О. Now they’re planning a City in Space // Popular Science. 1956.
Vol. 168. No. 5. P. 92-100.
22. O'Neill G.K. The High Frontier: Human Colonies in Space. New York: William
Morrow & Company, 1977.
23. Space Settlements: A Design Study, NASA, SP-413, Scientific and Technical. Eds.
R.D. Johnson, C. Holbrow. 1975. URL: http://settlement.arc.nasa.gOv/75SummerStudy/s.s.doc.html
24. Покровский Г.И. Два возможных объекта поисков высокоразвитых цивили-
заций // Природа. 1973. № 6. С. 97-98.
25. Кафтанов А. Архитектор Галина Балашова — Акварели для космоса // Поект
Россия. 2000. № 15. С. 13-24.
26. SATC. URL: http://www.spacearchitect.org
27. Out of This World: the new field of space architecture. Eds. S. Howe, B. Sherwood.
AIAA, 2009, September 30.
28. SICSA. URL: http://www.uh.edu/sicsa
29. Umbilical Design. URL: http://www.umbilicaldesign.se
30. Голованов Я.К. Архитектура невесомости. Приглашение к размышлению.
2-е изд. М.: Машиностроение, 1985. 144 с.
Часть I
ИСХОДНЫЕ ДАННЫЕ ДЛЯ КОМПОНОВКИ
ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО
АППАРАТА
ГЛАВА 1. ОРГАНИЗАЦИЯ ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО
ПОЛЕТА
1.1. Юридические аспекты космической деятельности
В настоящее время использование космического пространства оговорено
в пяти действующих базовых договорах ООН по космосу, которые заложили
правовую основу, обеспечивающую исследование космического пространства
и отвечают интересам государств, использующих результаты космической
деятельности.
Космическую деятельность в Российской Федерации регламентируют
следующие документы:
• «Основные положения Основ государственной политики Российской
Федерации в области космической деятельности на период до 2030 года и
дальнейшую перспективу» (утв. Президентом РФ от 19.04.2013 № Пр-906);
• «Основные положения государственной политики в области исполь-
зования результатов космической деятельности в интересах модернизации
экономики Российской Федерации и развития ее регионов на период до 2030
года» (утв. Президентом РФ 14.01.2014 № Пр-51);
• «Государственная программа Российской Федерации «Космическая
деятельность России на 2013—2020 годы», а также
• другие документы, составляющие комплексное нормативно-правовое
обеспечение, которое охватывает основные аспекты данной деятельности на
национальном и межгосударственном (международном) уровнях.
В Законе РФ от 20 августа 1993 г. № 5663-1 «О космической деятельности»,
Разделе VI. Международное сотрудничество, сформулированы права и обязан-
ности Российской Федерации по отношению к иностранным космонавтам.
Статья 27. Правовой режим иностранных организаций и граждан
1. Иностранные организации и граждане, осуществляющие космическую
деятельность под юрисдикцией Российской Федерации, пользуются правовым
режимом, установленным для организаций и граждан Российской Федерации,
в той мере, в какой такой режим предоставляется соответствующим государ-
ством организациям и гражданам Российской Федерации.
2. Российская Федерация обеспечивает правовую охрану технологий и
коммерческих тайн иностранных организаций и граждан, осуществляющих
космическую деятельность под юрисдикцией Российской Федерации, в со-
ответствии с законодательством Российской Федерации.
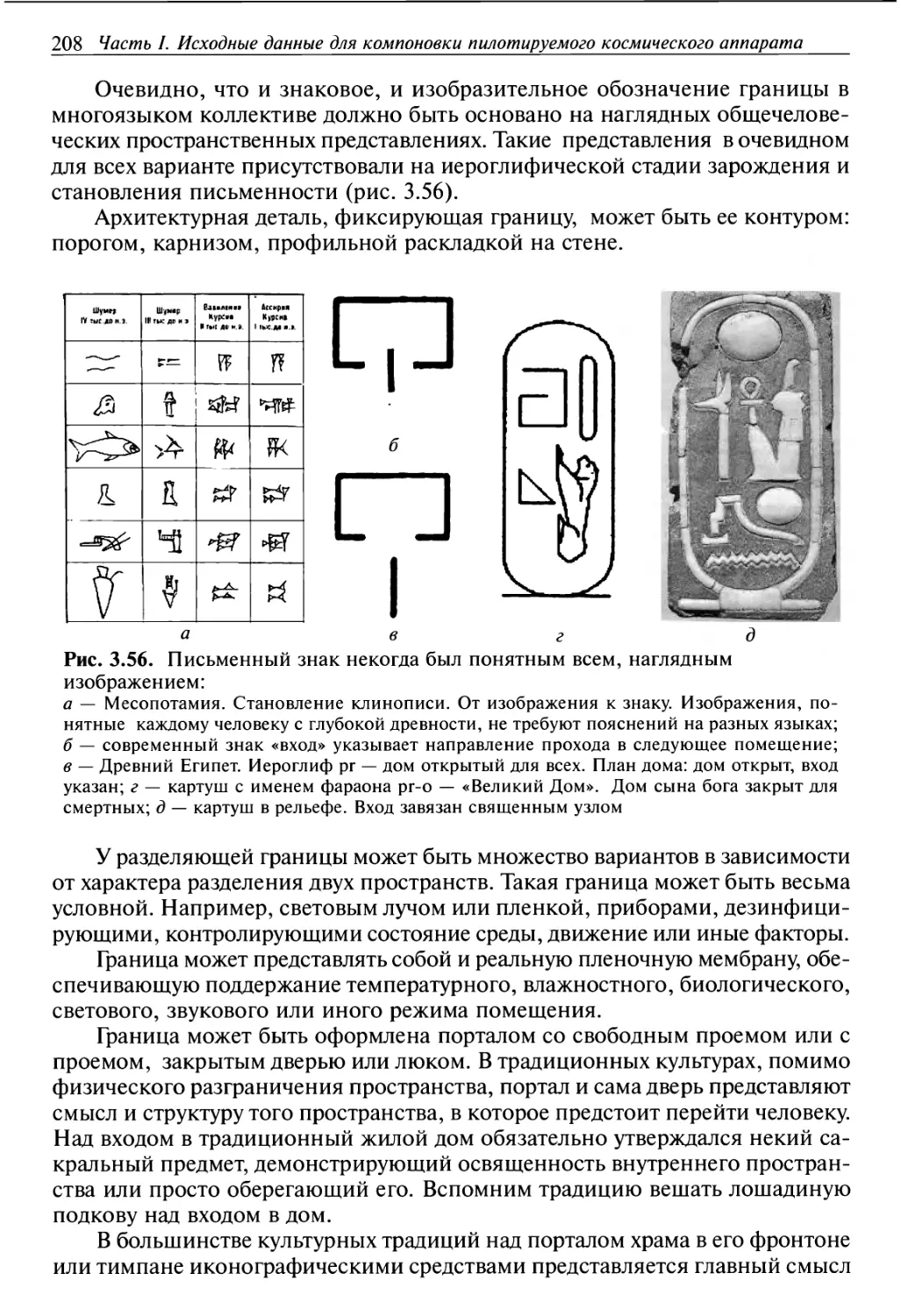
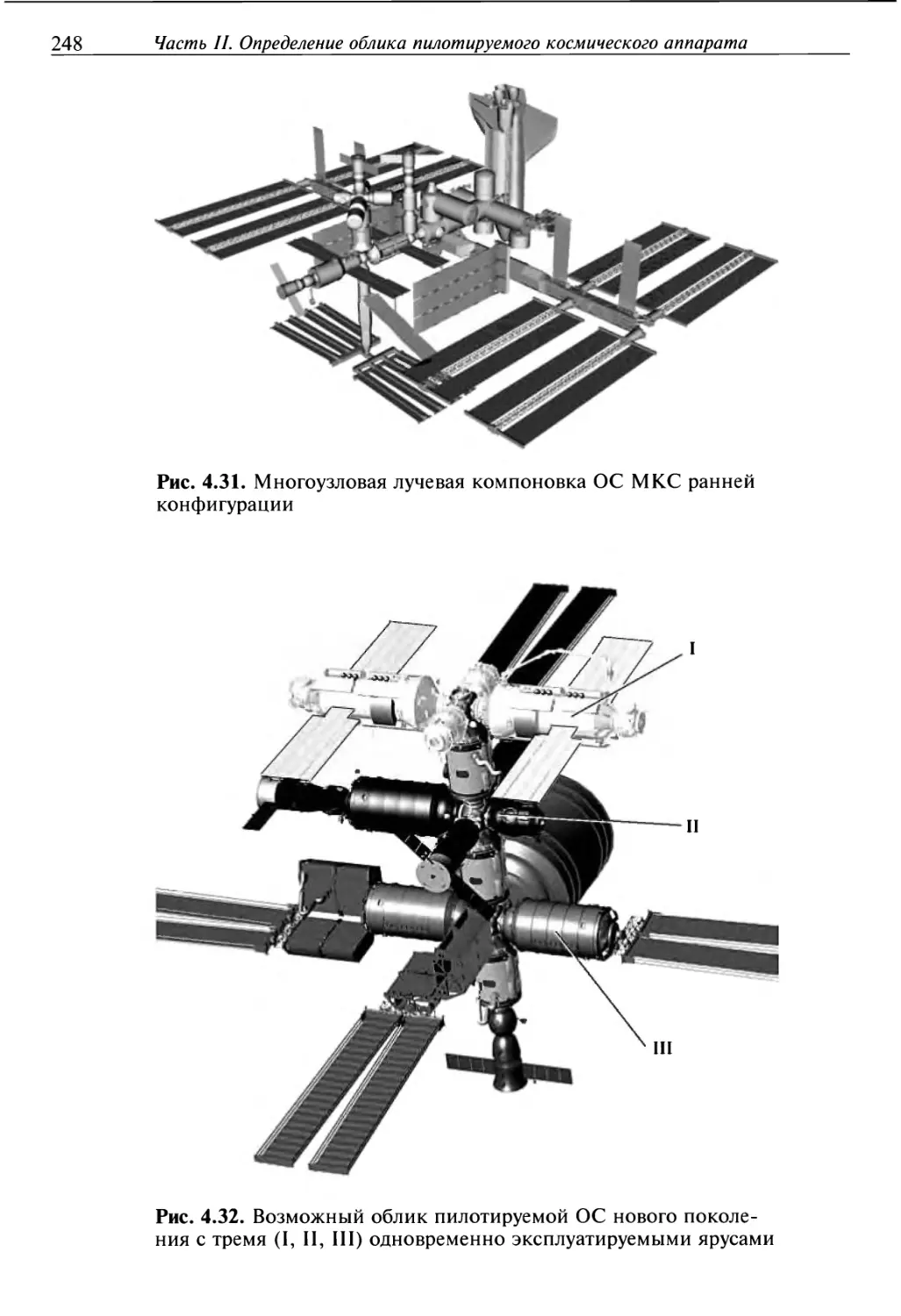
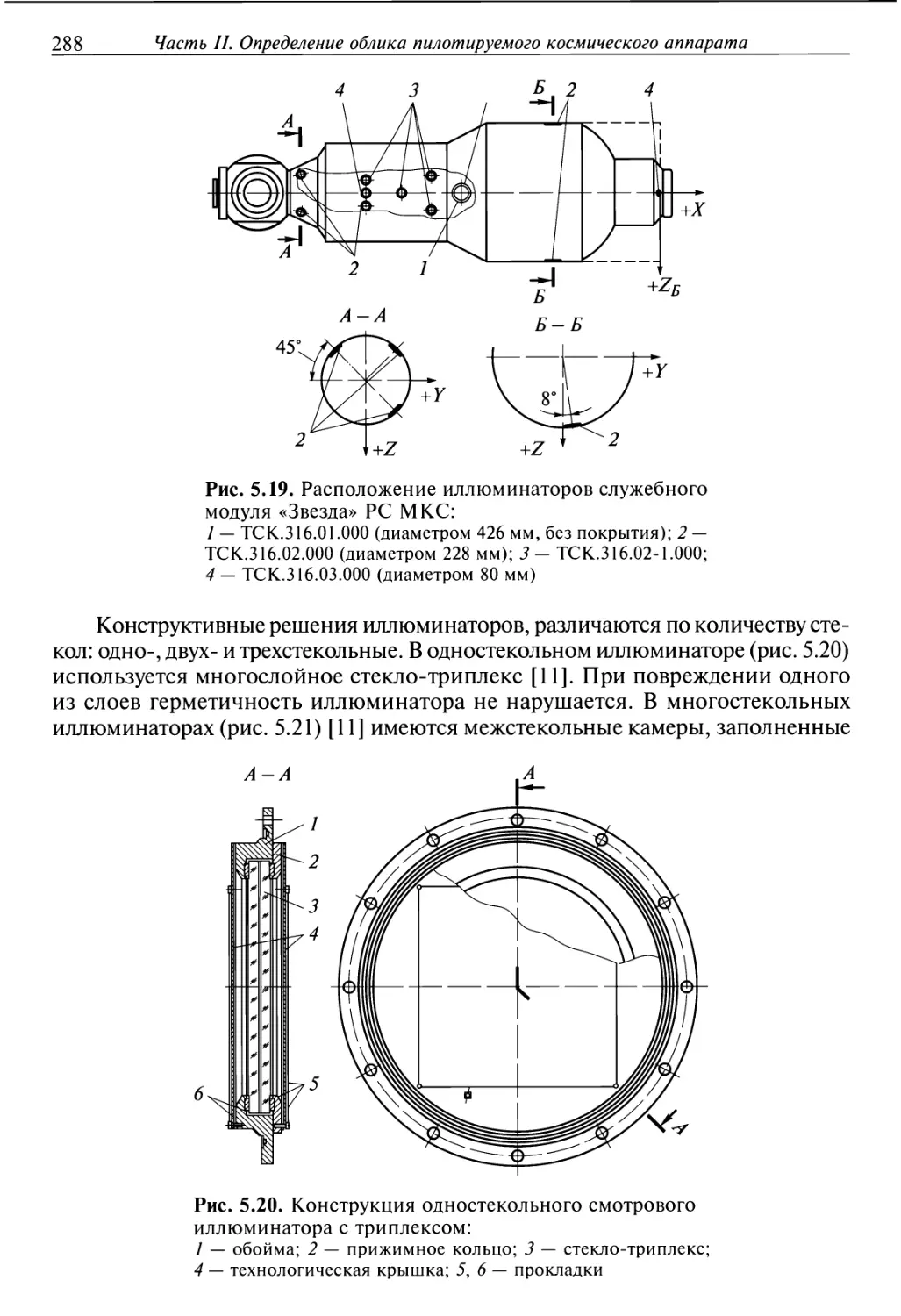
38 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Иная необходимая охрана технологий и коммерческих тайн иностранных
организаций и граждан, осуществляющих космическую деятельность под
юрисдикцией Российской Федерации, обеспечивается на взаимной основе.
3. Иностранные организации и граждане, осуществляющие космическую
деятельность под юрисдикцией Российской Федерации, производят страхо-
вание космической техники, а также рисков, связанных с космической де-
ятельностью, в порядке, установленном Гражданским кодексом Российской
Федерации и настоящим Законом (в ред. Федерального закона от 29.11.1996
ред. от 13.07.2015 № 5663-1).
Статья 28. Правовое регулирование международного сотрудничества
1. Организации и граждане Российской Федерации, принимающие уча-
стие в осуществлении международных проектов в области космической дея-
тельности, заключают договоры с иностранными организациями и гражда-
нами в соответствии с законодательством Российской Федерации, если иное
не предусмотрено этими договорами.
2. В случае коллизии норм законодательства Российской Федерации и
законодательства иностранного государства, применимых к космической
деятельности с участием организаций и граждан Российской Федерации,
действует законодательство Российской Федерации, если иное не предусмо-
трено международными договорами Российской Федерации».
1.2. Целевое назначение пилотируемых космических аппаратов
Облик пилотируемого космического аппарата — это комплексная характе-
ристика, отражающая общие количественные и качественные признаки его
компоновки. Цель формирования облика — выбор и обоснование основ-
ных параметров компоновки и определение их количественных значений.
Исходными данными для формирования облика служат результаты анализа
предполагаемых условий работы ПКА. В ходе анализа рассматриваются це-
левое предназначение ПКА, современные и перспективные требования к
эксплуатационным свойствам ПКА рассматриваемого класса, конструктивные
решения возможных прототипов и основные тенденции развития пилотиру-
емой космической техники.
Если целевым предназначением ПКА является достижение человеком не-
которого положения в космическом пространстве, например, границы космоса
в суборбитальном полете, выход на околоземную орбиту и возвращение на
Землю, экспедиция к другим небесным телам или операция по обслуживанию
других КА, то требуется сформировать облик транспортного ПКА. Если же це-
левое предназначение ПКА — освоение человеком пространства в окрестностях
точки, движущейся по некоторой орбите, например, на околоземной орбите,
на орбите искусственного спутника небесного тела либо на орбите искусствен-
ной планеты солнечной системы, то нужно создать облик орбитального ПКА.
Основное требование, которое предъявляется к облику транспортного
ПКА, — эффективное и безопасное перемещение экипажа и грузов из пунк-
та отправления в пункт назначения. В соответствии с ним транспортный
Глава 1. Организация пилотируемого космического полета 39
ПКА предназначен для выполнения таких динамических операций, как старт
с небесного тела, посадка на небесное тело, маневрирование, сближение
и стыковка с другими КА. В общей массовой сводке ПКА большую долю
занимают агрегаты и системы управления движением центра масс. Эффек-
тивность транспортного ПКА определяется минимальным расходом энергии
на совершение этих операций, что устанавливает требование минимизации
инерционно-массовых характеристик и компактности, а также максимальной
плотности компоновки. Эти требования следует учитывать при компоновке
как бортовых систем, так и обитаемых объемов и систем жизнеобеспечения.
Основное требование, предъявляемое к облику орбитального ПКА в про-
цессе длительного функционирования, — предоставить возможность экипажу
эффективно осваивать и контролировать выбранную область космического
пространства. При этом освоение заключается в формировании такой области
космического пространства, внутри которой деятельность экипажа является
безопасной, и которая подразделяется на зоны деятельности:
• герметичные, где обеспечены все условия для жизнедеятельности;
• негерметичные, где безопасно вести деятельность в открытом космосе;
• безопасного движения элементов транспортных систем;
• приема и передачи излучений (прием солнечной энергии, сброс теп-
лового излучения, прием электромагнитных волн при работе систем связи и
научной аппаратуры) и т. п.
Эффективность освоения пространства экипажем ПКА определяется
максимальной производительностью труда. Для ее достижения могут по-
требоваться элементы конструкций значительных габаритов, например для
получения требуемого количества солнечной энергии. Длительный жизнен-
ный цикл орбитального ПКА порождает требования к гибкости компоновки,
возможности расширения и трансформации структуры и архитектуры ПКА
в соответствии с изменяющимися задачами.
Требования к транспортному и к орбитальному ПКА могут сочетаться в
одной компоновке. Например, к орбитальной станции на низкой околоземной
орбите предъявляются требования и как к обитаемому КА, и как к транспорт-
ному, поскольку необходимо постоянно совершать динамические операции по
коррекции высоты полета, уменьшающейся под влиянием разреженных газов
в термосфере Земли. Для такого ПКА возникает компоновочное требование
минимизации площади миделевого сечения для уменьшения энергетических
затрат на удержание орбитальной станции (ОС) на заданной орбите, которое
противоречит требованию увеличения рабочего пространства.
При постановке и решении целевых задач, стоящих перед ПКА, прово-
дятся выбор и обоснование направлений космической деятельности, обос-
нование инвестиционных проектов в области коммерциализации, оценка
капитализации бизнеса, а также организация и стимулирование инноваци-
онной деятельности.
Космическая деятельность — одно из основных направлений развития
мировой экономики. Количество патентов в области космической техники
и технологии, полученное за последние 15 лет, возросло в 4 раза.
Пилотируемые КА предоставляют широкие возможности для выполнения
научных и технологических программ, требующих нестандартных подходов
40 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
и творческого участия человека в процессе их реализации. С.П. Королев
сформулировал эти задачи следующим образом: «...Одной из самых главных
задач является осуществление полета человека в космос с исследователь-
скими целями. Как бы ни были совершенны приборы и аппаратура на ав-
томатических станциях, все же ничто не может заменить разум пытливого
исследователя...» [1].
Направления работ на ПКА включают дистанционные исследования
Земли и ее атмосферы, внеатмосферную астрономию, исследования кос-
мического пространства и других планет, поведения человека в длительном
космическом полете, а также выполнение ряда биологических и технологи-
ческих экспериментов, связанных с выращиванием на борту космического
корабля сельскохозяйственных культур, получением медицинских препа-
ратов и созданием сверхчистых материалов в отсутствие гравитационного
воздействия. Орбитальные станции предоставляют широкие возможности
для отработки новой аппаратуры, а также служат базой для тестирования и
запуска малых КА.
Научные исследования в PC МКС проводятся в соответствии с «Долго-
срочной программой научно-прикладных исследований и экспериментов,
планируемых на PC МКС». Например, в 2012 г. здесь были проведены 211
экспериментов, в том числе по следующим направлениям [2]:
• человек в космосе — 37;
• космическая биология и биотехнология — 39;
• физико-химические процессы и материалы в условиях космоса — 19;
• исследование Земли и космоса — 56;
• технологии освоения космического пространства — 45;
• образование и популяризация космических исследований —15.
В настоящее время российский сегмент МКС за счет космического
туризма, выполнения в рамках международных контрактов коммерческих
транспортных операций «Земля — МКС — Земля» и сдачи в аренду зару-
бежным потребителям части ресурсов российского сегмента также позволяет
получить коммерческую выгоду. Несмотря на то что коммерческий эффект с
учетом его роста оценивается примерно в 1,5...2,5 млрд долл, в год, можно с
уверенностью ожидать гораздо больший эффект от использования ресурсов
МКС по следующим направлениям:
• дистанционное зондирование Земли в интересах экологического мо-
ниторинга, сельского и лесного хозяйства, рыбного хозяйства, картографии
и геодезии, МЧС, природопользования и др.;
• навигация, геоинформационное картографирование;
• сдача в аренду ресурсов МКС;
• выполнение научных исследований и экспериментов в интересах от-
дельных стран и потребителей;
• проведение и коммерческая реализация результатов медико-биологи-
ческих экспериментов в интересах медицины и фармакологии и др.
Развитие научных и экспериментальных работ на борту ПКА зависит от
следующих факторов:
• объема и площади в герметичных отсеках, выделяемых для проведения
научно-технологических работ;
Глава 1. Организация пилотируемого космического полета 41
• наличия площадок для размещения научной аппаратуры вне герме-
тичных отсеков;
• необходимого объема электроэнергии;
• возможности использования некоторых элементов бортовой аппара-
туры;
• регулярности доставки расходных материалов для проведения науч-
но-технологических работ;
• наличия квалифицированного персонала, проводящего эксперименты.
Для размещения целевой аппаратуры на ПКА необходимо иметь рабочие
места, под которые в герметичных отсеках и на внешней поверхности ПКА
должны быть выделены требуемые объемы. В зависимости от программы
научных исследований эта задача решается двумя путями.
В первом случае научная программа организована последовательно: после
завершения каждого из экспериментов проводится следующий. Поскольку
здесь не требуется большого числа рабочих мест, программа может быть вы-
полнена на серии ПКА, реализующих ее в течение нескольких полетов или на
долговременной ОС с универсальными рабочими местами, последовательно
оснащаемыми требуемой аппаратурой.
Во втором случае программа организована параллельно: в течение полета
одновременно ведутся несколько длительных экспериментов, которые нельзя
прерывать. Здесь может быть использована только такая ОС, смена экипа-
жей на которой позволит выполнить эксперименты. Размещение целевой
аппаратуры при параллельном проведении экспериментов требует увеличения
числа рабочих мест, например, за счет дооснащения ОС специализированными
модулями. Примером подобной компоновки может служить ОС «Мир». На
рис. 1.1 приведено распределение массы научной аппаратуры на борту ОС
«Мир» по направлениям научных исследований, проведенных на этой ОС [3].
За время полета на ОС «Мир» были выполнены 55 научных программ, пред-
ставленных различными странами: Россией — 28, США — 7, Францией — 6,
Казахстаном — 3, Германией — 2, Сирией, Болгарией, Афганистаном, Велико-
британией, Японией, Австрией, Словакией — 7, ЕКА (Европейское космическое
агентство) — 2. На рис. 1.2 показано распределение массы научного оборудования
по странам-участникам экспериментов. Суммарная масса грузов с результатами
экспериментов, возвращенных с ОС «Мир», превысила 4700 кг [3].
Цель развертывания ОС, расширения возможностей бортовой служебной
и исследовательской аппаратуры, включающая разработку, запуск и стыковку
новых исследовательских модулей, — создание мощного инновационного
орбитального центра по разработке новых технологий для целого спектра
отраслей национальной экономики.
На рис. 1.3 представлена примерная схема создания инновационного по-
тенциала в космической отрасли [4]. Одна из центральных проблем иннова-
ционной деятельности, определяющая пути ее успешного развития, состоит
в том, что прежде чем организовать затратное внедрение, необходимо иметь
подтвержденную предварительными исследованиями новацию (новшество),
прошедшую стадию научно-исследовательской и опытно-конструкторской
разработки (НИОКР).
42 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Рис. 1.1. Распределение массы научной аппаратуры по направлениям научных
исследований на орбитальной станции «Мир»
Рис. 1.2. Распределение массы научной аппаратуры по странам-участникам экс-
периментов на орбитальной станции «Мир»
Глава 1. Организация пилотируемого космического полета
43
Рис. 1.3. Схема создания инновационного потенциала
Зарождение новаций зависит от
имеющегося научно-технического по-
тенциала и наличия финансирования
НИОКР. На рис. 1.4 представлена ди-
аграмма расходов в 2010 г. на НИОКР
в странах, ведущих разработку косми-
ческой техники [4].
Развитие российского сегмента
МКС дает возможность резкого увели-
чения объемов и номенклатуры науч-
ных и экспериментальных работ в инте-
ресах отдельных стран, отраслей, фирм
и корпораций. Оценки коммерческого
потенциала МКС в целом и отдельных
сегментов стран-участниц проекта (в
основном сегментов РФ и США) можно
найти, например, в работе [4].
Рис. 1.4. Расходы на НИОКР косми-
ческой техники ведущих стран мира
в 2010 г.
1.3. Космическая программа пилотируемых полетов
Целевое предназначение ПКА и программа работ, выполняемых в про-
цессе полета, являются составной частью космической программы, которая
формируется для достижения целей и задач государственного или междуна-
родного масштаба. Космическая программа определяет количество и дли-
тельность полетов, задачи отдельных экспедиций, состав экипажей, основные
динамические операции каждого полета (стыковки, маневры и пр.). Первые
космические программы были направлены на выход в космос и достижение
Луны, последующие — на освоение космического пространства на низкой
околоземной орбите. Международные программы предполагают кооперацию
и координацию усилий нескольких государств. В настоящее время формиру-
ются космические программы полета к Луне, Марсу и астероидам. Построение
космической программы требует проведения многоуровневого планирования.
44 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Планирование — составная часть (этап) циклического процесса управ-
ления полетом космического аппарата. На этапе проектирования начинает-
ся разработка плана, который представляет собой основу процесса полета.
В планировании можно выделить следующие уровни, которым соответствуют
общие виды плановых документов (рис. 1.5) [5]:
• общий (стратегический или долговременный) план полета;
• детальный (тактический) план полета, составляемый на один год;
• номинальный план полета, составляемый на шесть месяцев;
• циклограмма выполнения полетных операций на неделю—сутки.
Например, при проектировании ОС разрабатывается долгосрочная
программа проведения научных исследований и экспериментов, на осно-
ве которой строится годовая программа научно-прикладных исследований
и экспериментов. Годовой план научных работ используется для создания
программы реализации научно-прикладных исследований в период основ-
ных пилотируемых экспедиций. Далее строится номинальный план полета
(в части полезной нагрузки) на две экспедиции. На его основе формирует-
ся общий план сопровождения научных работ на одну неделю и детальный
план полета [6].
Рис. 1.5. Этапы планирования полета пилотируемого космического аппарата
Глава 1. Организация пилотируемого космического полета
45
Необходимость многоуровневого планирования объясняется тем, что не-
которые процессы, заложенные при стратегическом планировании, оказыва-
ются сложными в управлении. Для них разрабатываются резервные варианты.
В процессе полета могут изменяться условия, проводятся новые эксперименты
и пр., и все это учитывается при разработке циклограммы полета.
Примером стратегического планирования краткосрочной космической
экспедиции может служить экспериментальный полет ТКА «Союз — Апол-
лон», выполненный по международной программе экспериментального полета
«Аполлон — Союз» (ЭПАС). На рис. 1.6 приведен пример оформления схемы
этого полета, содержащей ключевые этапы миссии, показанные на графике
зависимости высоты полета ТКА от времени [7].
Детальный план полета, разрабатываемый на сутки, представляет собой
развернутую во времени циклограмму деятельности экипажа, работы борто-
вых систем, обмена информацией между космическим аппаратом и Центром
управления полетом. Циклограмма выполнения полетной операции содержит
перечень действий по контролю режима работы бортовых систем, а также
указания по изменению циклограммы деятельности при возникновении не-
штатных ситуаций.
Планирование является средством повышения эффективности работы
системы экипаж — космический аппарат. Оптимизация профессиональной
деятельности экипажа должна проводиться также с учетом многообразия
эргономических факторов, влияющих на поддержание работоспособности
и роста профессиональной продуктивности. Один из таких факторов — су-
точный распорядок, обеспечивающий организацию режима труда и отдыха,
который является элементом общего плана полета, и в его разработке участ-
вует экипаж.
Режим труда и отдыха космонавта в полете регламентируется специально
разработанным в России «Положением» и ГОСТ Р 50804—95 «Среда обитания
космонавта в пилотируемом космическом аппарате», определяющим требо-
вания к содержанию, планированию и контролю режима труда и отдыха.
В соответствии с «Положением», основными элементами суточного распоряд-
ка жизнедеятельности космонавта являются рабочая и бытовая зоны, а также
зона ночного отдыха (сна). В табл. 1.1 приведена типовая схема распределе-
ния ресурса времени суток между этими элементами на борту космического
корабля, из которой следует, что космонавт в полете основную массу времени
(8,5 ч) уделяет деятельности в рабочей зоне.
В качестве примера в табл. 1.2 приведен перечень работ, выполняе-
мых космонавтами в полете (среднестатистические данные в экспедициях
№ 5—9 МКС), и затраченное на это время [8]. На рис. 1.7 нарастающим
итогом по времени приведены затраты рабочего времени экипажа на экс-
плуатацию функционально-грузового блока (ФГБ) «Заря» МКС. который
является центральным блоком станции. Ниже приведен перечень работ, про-
водимых при его эксплуатации [9]:
• расконсервация ФГБ «Заря» после выведения на орбиту;
• ремонтно-восстановительные работы по замене оборудования;
Рис. 1.6. Схема экспериментального полета «Аполлон—Союз»:
1 — старт и выведение корабля «Союз»; 2 — маневр формирования орбиты; 3 — старт и выведение корабля «Аполлон»; 4 — перестроение
отсеков корабля «Аполлон»; 5 — переход на круговую орбиту; 6 — момент формирования монтажной орбиты; 7 — фазирование и коррекция
орбиты; 8 — переход на коэллиптическую орбиту; 9 — торможение, снижение и стыковка корабля «Аполлон»; 10—13 — первый, второй, тре-
тий, четвертый переходы экипажей; 14 — первая расстыковка; 15 — тестовая стыковка; 16 — окончательная расстыковка; 17 — сход с орбиты
корабля «Союз»; 18 — посадка корабля «Союз»; 19 — расстыковка корабля «Аполлон» со служебным модулем; 20 — сход с орбиты корабля
«Аполлон»; 21 — посадка корабля «Аполлон»; 22 — сон экипажа корабля «Союз»; 23 — полетное время; 24 — московское время
Глава 1. Организация пилотируемого космического полета
47
Таблица 1.1
Типовая схема распределения времени суток между основными элементами режима труда и
отдыха космонавтов в полете
Суточный распорядок Затраты времени
В рабочей зоне Ежедневные операции по осмотру ОС, техническому обслужива- нию, связи, визуальным наблюдениям, подготовке суточного рациона и пр.; 3 ч 45 мин
Основные операции, включая подготовительные работы, экспе- рименты, работы с экспедициями посещения, вне корабельную деятельность, разгрузку транспортных кораблей «Прогресс» ремонт, маневрирование и пр. Общее время 4 ч 45 мин 8 ч 30 мин
В бытовой зоне Утренний туалет 30 мин
Прием пищи 2 ч 00 мин
Физические тренировки 2 ч 30 мин
Личное время Общее время 1 ч 30 мин 6 ч 30 мин
Ночной отдых (сон) 9 ч
Итого 24 ч
Таблица 1.2
Распределение рабочего времени по видам деятельности
Вид деятельности Время, затраченное за месяц полета, чел.-ч/мес.
Техническое обслуживание, ремонт систем и оборудова- ния, перегрузка программного оборудования, дооснаще- ние станции, инвентаризация 140
Связь с Землей 10
Работы, связанные с совместными операциями станции и кораблей «Союз», «Прогресс», Space Shuttle и модулей МКС 50
Подготовка к выполнению ВКД 40
Научные эксперименты и исследования 65
Документирование полета, кинофотосъемка, ТВ-репорта- жи о полете, связь с общественностью 20
Управление полетом станции 30
Медицинское обслуживание и профилактические проверки членов экипажа численностью п человек 15,5 п
Подготовка к предстоящим ответственным работам и опе- рациям, действиям в анормальных ситуациях, тренировка 5 п
Ежедневная подготовка к работе, разработка отчета, ознакомление с планом полета 32,5 п
48 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Рис. 1.7. Затраты рабочего времени экипажа МКС на эксплуатацию блока
ФГБ «Заря» по годам
Таблица 1.3.
Режим дня космонавтов, работающих на разных ОС
Название ОС Сон Гигиена Прием пищи Работа Упражнения и отдых
Apollo 4 ч, прерыви- стый 1 ч в день 1 ч в день 18 ч на лунной поверхности Нагрузки в течение полета
«Салют 1-3» 8 ч, плановый 1 ч в день 1,5-2 ч в день 8 ч Упражнения и отдых 2 ч ежедневно
«Салют 6-7» 9 ч, плановый 1 ч в день 4,5 ч в день Эксперименты 8,5 ч, из них 1-1,5 ч в контакте с Землей Упражнения и отдых 2 ч ежедневно
Skylab 9 ч 1 ч в день 2 ч в день 7 ч 2 ч упражне- ний ежедневно, 2 ч отдыха
Space Shuttle 8 ч 1 ч в день 3 раза по 1 ч в день(по графику) 10 ч Упражнения 30 мин еже- дневно, 1 ч отдыха
«Мир» 9 ч по графику 1 ч в день 3 раза 8,5 ч 2 ч упражне- ний ежедневно и отдых
МКС 8,5 ч Утром и вечером 3 раза 6,5 ч 1,5 ч 2,5 ч упражне- НИЯ и отдых
Глава 1. Организация пилотируемого космического полета
49
• осмотр внутренних объемов модуля с целью оценки состояния его
конструкции, отбор проб микробиологической обстановки и обработка по-
верхностей конструкций бактерицидным раствором;
• дооснащение приборной зоны для создания дополнительных хранилищ
оборудования и грузов, снижения уровня шумов и проведения других работ.
Суточный режим космонавта во время полета на орбитальной станции
практически не отличается от режима работы на Земле, он строится таким
образом, чтобы сохранялся 24-часовой цикл. Однако ему свойственны особен-
ности, обусловленные пребыванием человека в космическом пространстве, —
сон, личная гигиена, работа, прием пищи, упражнения и отдых проходят по
графику, и они строго регламентированы по времени, поскольку на борту
станции могут проходить эксперименты, требующие непрерывного участия
космонавта, т. е. один из членов экипажа должен находиться на рабочем
месте. В табл. 1.3 для сравнения приведен распорядок дня на различных
российских и американских ОС.
На рис. 1.8 представлена подробная циклограмма работы экипажа орби-
тальной станции Skylab [10].
Время (по Гринвичу)
Часы 11.00 12.00 13.00 14.00 15.00 16.00 17.00 18.00 19.00 20.00 21.00 22.00 23.00
Командир ЛГ । ПП ПЭ 1 ОЭ 1,5 1 1 ПЭ 1 1 ПЭ лг 1 ПЭ
Второй пилот лг ПП ПЭ Я1п| ПЭ ОЭ 1,5 ПЭ лг ПЭ
Врач- космонавт ЛГ 0,5 ПП 1,0 ПЭ ПЭ 0,5 лг ПЭ
Часы 23.00 24.00 01.00 02.00 03.00 04.00 05.00 07.00 08.00 09.00 10.00 11.00
___________J______________I____________________I______I______I_______I______I______I______I______
Командир ЛГ с по лг С Сон
Второй пилот лг ф с 'ПО\ лг ф с Сон
Врач- космонавт ЛГ1,0 ф с ;св^ лг 0,5 ф с Сон 8,0
Рис. 1.8. Типичный распорядок дня членов экипажа ОС Skylab:
ЛГ — личная гигиена; ПП — прием пищи; ПЭ — проведение экспериментов; ОЭ — опе-
рации по эксплуатации станции; СВ — свободное время; ПО — планирование операций;
— одновременно принимают пищу только два члена экипажа; [ • ' • ] — в операции занят
только один человек, чтобы увеличить время для астрономических наблюдений
Параметры космической программы существенно влияют на компонов-
ку ПКА, в частности, длительность полета определяет величину потребных
объемов отсеков для жизнедеятельности космонавтов, а также потребность
в ТКА для снабжении с Земли.
50 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
1.4. Логистика космической программы пилотируемых полетов
1.4.1. Организация снабжения пилотируемого космического
аппарата
Логистика — наука о планировании, управлении и контроле движения
материальных, информационных и финансовых ресурсов в различных си-
стемах. Логистика направлена на оптимизацию издержек и рационализацию
процессов производства, сбыта и сопутствующего сервиса в рамках как одного
предприятия, так и их группы. Логистику можно рассматривать как стратеги-
ческое управление материальными потоками в процессе снабжения (закупки,
перевозки, продажи и хранения материалов, деталей и готовых продуктов).
На практике логистикой часто называют некое объединение складских и
транспортных операций, управление которыми сводится к управлению:
• складскими сооружениями;
• запасами (объемом, местом нахождения);
• транспортировкой (вид транспорта, сроки, вид тары и т. д.);
• комплектацией и упаковкой;
• связью (возможностью получения как конечной, так и промежуточной
информации в процессе движения материалов).
Компоновка ПКА связана с решением задач логистики, поскольку
определение необходимых объемов для хранения запасов, схемы размеще-
ния складских зон, параметров тары, а также проектирование безопасных
и эффективных путей движения различных грузов определяются на основе
расчета грузопотоков и параметров элементов транспортной инфраструктуры.
Если при кратковременных полетах (несколько недель) жизнедеятель-
ность экипажа можно поддерживать за счет запасов, находящихся на борту
ПКА, то обеспечить длительный полет с использованием запасов, доставля-
емых с экипажем, практически невозможно по двум причинам:
во-первых, пищевые продукты и вода имеют ограниченный срок хране-
ния; даже если использовать специальные методы консервации, потребная
масса продуктов и воды для длительного полета может превысить возмож-
ности средств выведения;
во-вторых, для выполнения программы полета требуются топливо для
системы стабилизации и ориентации ОС и расходные материалы. В состав
бортового оборудования входят как незаменяемые, так и заменяемые прибо-
ры и блоки оборудования, которые необходимо менять по мере выполнения
экспериментов. В ряде случаев целесообразно проводить эксперименты на
научной аппаратуре, размещаемой на грузовом корабле, а не на станции.
Проектирование и выбор незаменяемого оборудования проводятся ис-
ходя из сроков существования ОС с учетом располагаемого рабочего ресур-
са, прогноза о расходовании ресурса в результате эксплуатации, а также об
изменении условий эксплуатации, статистических данных, полученных в
результате эксплуатации ОС (прототипов).
Ремонт элементов незаменяемого оборудования и частей конструк-
ции проводится в исключительных случаях (при нештатных ситуациях).
Глава 1. Организация пилотируемого космического полета
51
Оборудование заменяется в двух случаях: во-первых, при его отказе, когда
необходимо перейти на резервное оборудование, во-вторых, при оконча-
нии срока его эксплуатации или при выработке ресурса. Как правило, это
критичные элементы: поглотительные фильтры СЖО, датчики и др. Для их
замены необходима регулярная доставка подобных расходных материалов
на борт ОС. Восстановление обслуживающих систем в соответствии с гра-
фиком регламентных работ следует проводить достаточно часто. Увеличение
времени безотказного функционирования требует повышения надежности
обслуживающих систем, но это приводит к увеличению их массы (например,
вследствие резервирования), что возможно только путем уменьшения массы
целевого оборудования.
Таким образом, при продолжительных полетах возникает задача снабже-
ния ПКА. Например, в течение первых трех основных экспедиций на стан-
цию «Салют-6» было доставлено около 12 т грузов, из них 25 % — жидкости
и газы, размещенные в специальных баках и баллонах, из которых они были
перекачаны в емкости станции, а 75 % — сухие грузы, которые были достав-
лены в герметичных отсеках грузовых ТКА, а затем перенесены в отсеки
станции. Масса доставленного оборудования по принадлежности к системам
распределялась в таком соотношении: система управления бортовым ком-
плексом (СУБК) — 0,39 %; система управления движением (СУД), система
исполнительных органов (СИО), двигательная установка (ДУ), система сты-
ковки — 0,57 %; радиотехнический комплекс (РТК), система телеметриче-
ской информации (СТИ) — 1,37 %; система энергопитания (СЭП) — 1,97 %;
система терморегулирования (СТР), система жизнеобеспечения (СЖО), ме-
дицинская аппаратура и бытовые принадлежности — 95,7 %. В настоящее
время на МКС за год доставляется свыше 13 т. Всего среднее по годам коли-
чество расходуемого топлива для станции составляет 7...8 т в год.
Масса (в тоннах) составляющих грузопотока в год приведена ниже [11].
Топливо двигательной установки....................4,0
Ресурсное оборудование............................1,4
Научное оборудование..............................0,5
Газ атмосферы.....................................0,3
Вода..............................................2,2
Продукты питания..................................2,4
Средства личной гигиены, одежда и пр..............2,6
Средства внекорабельной деятельности..............0,22
Итого.............................................13,6
Следует отметить, что масса и объем сухих грузов значительно превы-
шают массу и объем жидкостей и газов, а в будущем эта разница, видимо,
будет увеличиваться. Поэтому грузовые корабли должны иметь достаточно
большие объемы для сухих грузов, а их габариты и суммарные объемы для
сухих грузов в свою очередь накладывают существенные ограничения на си-
стемы и конфигурацию станции.
С целью экономии объемов в ряде случаев целесообразно доставлять
жидкости и газы в специальных емкостях, размещаемых вне герметичных
отсеков грузовых кораблей, с перекачкой их затем в емкости станции, даже
если это приведет к увеличению массы станции и грузового корабля.
52 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
На борту ПКА выделяются объемы, чтобы организовать склады для хра-
нения грузов. На базовом модуле МКС — ФГБ «Заря» впервые в практике
эксплуатации ОС была реализована программа по демонтажу неиспользуемого
оборудования и созданию объемов для хранения грузов, доставляемых ТКА.
Характеристики модуля ФГБ в начале работы приведены ниже.
Масса модуля на орбите, кг.......................20 040
Длина без обтекателя и промежуточного отсека, м .12,62
Максимальный диаметр, м..........................4,35
Объем, м3:
внутренний с оборудованием....................75
внутренний для обитания экипажа................46,7
начальный для хранения грузов.................6,7
На рис. 1.9 показано изменение с течением времени объемов, использу-
емых для хранения грузов на ФГБ [9]. Видно, что объем, предназначенный
для хранения грузов, увеличился более чем в 2 раза.
Политика управления запасами на ОС зависит от плана полета, в кото-
ром сформулировано, какие грузы доставлять, когда, в каких объемах и на
каких транспортных системах. Именно от плана полета зависит выбор модели
управления запасами.
Рис. 1.9. Изменение с течением времени внутреннего объема зон хранения грузов
в модуле ФГБ
Глава 1. Организация пилотируемого космического полета 53
Плановая модель предполагает доставку необходимых расходных мате-
риалов и оборудования по определенному графику в соответствии с планом
полета.
«Реактивная» модель позволяет строить управление запасами как реакцию
на проведение конкретных работ, выполняемых на ОС. Иными словами, это
модель «вытягивания» запасов из текущих нужд.
Контроль за состоянием запасов — техническое средство реализации
политики управления материальными запасами. В процедуру контроля за-
пасов входят учет запасов и регулярное отслеживание приходов и расходов.
Эти операции могут особенно эффективно выполняться с использованием
автоматизированных информационных систем управления производствен-
ными и материальными запасами (ERP-систем).
Например, ФГБ «Заря» за время существования (до 2008 г.) принял и
выдал 12 т топлива. Запасы топлива ФГБ обеспечивают потребности МКС в
топливе, необходимом для управления движением, в том числе при нештатных
ситуациях, вызванных задержкой его доставки. На рис. 1.10 приведен график
изменения во времени топлива в баках ФГБ начиная с момента вывода на
орбиту до апреля 2008 г. [9].
Функционирование складов подчиняется законам складской логистики,
обеспечивающей оптимизацию процессов приемки, обработки и хранения
грузов. Складская логистика определяет правила организации складского хо-
зяйства, процедуры работы с грузом и соответствующие им процессы управ-
ления ресурсами по следующим наиболее распространенным методикам:
01.11.1998 31.10.2000 31.10.2002 30.10.2004 30.10.2006
01Л1Л999 31.10.2001 31.10.2003 30.10.2005 30.10.2007
Рис. 1.10. Изменение запасов топлива в баках ФГБ с 01.11.1998 по 01.04.2008
54 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
• FIFO-очередь («первый пришел — первый ушел») — методика осно-
вана на допущении, что запасы поступают на производственный процесс
или реализуются в том порядке, в котором они прибыли на предприятие,
т. е. они должны использоваться в хронологическом порядке их поступления;
• LIFO-стек («последний пришел — первый ушел») — методика, в со-
ответствии с которой запасы, поставленные последними, используются
первыми;
• FPFO — в случае использования данного метода при ротации грузов
на складе учитывается дата выпуска продукции, более старая применяется
в первую очередь;
• BBD — при данном методе в процессе ротации грузов на складе учи-
тывается рекомендуемый срок хранения груза (не путать со сроком годности
груза), указанный в обозначении груза.
Склад обрабатывает материальные потоки трех видов: входной, выходной,
внутренний. Операции входного потока — разгрузка транспорта и проверка
груза. На борт ОС доставляется большой ассортимент грузов, которые требу-
ют размещения в определенных местах на борту станции. Каждый из грузов
должен иметь машиночитаемый код, например штрих-код, выполненный в
соответствии с ГОСТ 14192—96 «Маркировка грузов», с помощью которого
определяются характеристики груза и способ складирования. Операции вы-
ходного потока — разделение грузов на возвращаемые на Землю и на ути-
лизируемые, погрузка с обеспечением заданной центровки ТКА. Операции
внутреннего потока — перемещение груза внутри ОС для использования.
Информационно-техническую поддержку описанных операций обеспе-
чивают автоматизированные системы управлением складскими запасами.
Задачу снабжения МКС материалами, необходимыми для ее существования,
успешно решают РКК «Энергия» и НПК «Разумные решения», создавшая
«Мультиагентную систему интерактивного построения программы полета,
грузопотока и расчета ресурсов российского сегмента Международной кос-
мической станции» [12].
1.4.2. Тара и размещение грузов
При перемещении и складировании грузов необходимо соблюдать опре-
деленные правила. Чтобы грузы стали компактнее и было удобнее работать с
ними, следует использовать тару, которая обеспечивает сохранность продук-
ции в процессе ее транспортировки и хранения. Тара в переводе (итал. tara
от араб, «тарха») означает «то, что отброшено» — она не используется при
функционировании изделия и должна быть утилизирована или возвраще-
на для повторного применения. Как и все элементы космической техники,
тара должна выполнять предназначенные ей функции при минимальном
весе. Укладка грузов в таре должна быть рациональной, чтобы она имела
минимально необходимый объем. Утилизация тары не должна приводить к
значительным затратам ресурсов.
Важным аспектом является обеспечение чистоты доставляемых грузов и
тары, для того чтобы исключить загрязнение элементов ПКА. Важно, чтобы
Глава 1. Организация пилотируемого космического полета
55
на доставляемых грузе и таре отсутствовали микробиологические загрязнения,
для чего они проходят процедуру санитарной обработки.
Размещение и крепление грузов в отсеке ТКА должны обеспечивать:
• заданную центровку и инерционно-массовые характеристики грузовых
отсеков;
• универсальность конструктивной схемы размещения и крепления,
позволяющей в широком диапазоне изменять номенклатуру и количество
доставляемых грузов;
• возможность крепления в грузовом корабле отработанного оборудова-
ния в процессе или после разгрузки корабля;
• минимальную трудоемкость погрузочно-разгрузочных работ.
Грузовые корабли желательно оборудовать холодильными или моро-
зильными установками для хранения
доставляемых скоропортящихся про-
дуктов и биологических материалов.
Грузы в отсеках российских ТКА
компонуются с обеспечением требо-
ваний и ограничений корабля и самих
грузов, что отражается в проектной до-
кументации по кораблю. На рис. 1.11
приведен чертеж грузового отсека ТКА
«Прогресс» с указанием зон размеще-
ния грузов [2].
Установка грузов на борт корабля
проводится по чертежно-конструктор-
ской и эксплуатационной докумен-
тации РКК «Энергия» при наличии
сертификатов на транспортировку и
эксплуатацию и отражается в бортовой
документации по кораблю. Все грузы
должны иметь маркировку в соответ-
ствии с ГОСТ 14192—96.
Для того чтобы определить, можно
ли размещать грузы на борту ТКА «Прог-
ресс», к ним должны быть приложены:
• габаритно-установочный чертеж;
• пакет данных по безопасности
на транспортировку;
• сопроводительная документа-
ция.
Габаритно-установочный чертеж
груза — это его чертеж в транспортном
положении, где должны быть приведе-
ны следующие данные:
• наименование;
• чертежный номер;
• масса;
Рис. 1.11. Грузовой отсек транспортно-
го корабля «Прогресс»:
1 — технологический люк; 2 — стыковочный
агрегат; 3 — зона отметания крышки стыко-
вочного агрегата; 4 — контейнеры полезного
груза; 5 — загрузочный люк
56 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
• координаты центра масс (с допусками);
• моменты инерции (с допусками);
• чертеж-облик блока;
• габариты (с допусками) груза с указанием размеров всех выступающих
элементов;
• указания мест расположения разъемов, панелей управления или кон-
троля, тумблеров;
• координаты мест крепления блока и размеры отверстий под крепеж
(для грузов массой более 8... 10 кг);
• указание об ориентации блока при транспортировке на корабле отно-
сительно направления полета и перегрузки (если такое ограничение имеется);
• указание о возможности доставки блока в контейнере корабля или
размещения по месту;
• специальные требования по условиям транспортировки на корабле,
если это необходимо;
• такелажные точки (для грузов массой более 20 кг);
• место расположения штрих-кода.
Если при транспортировке на корабле груз находится в упаковке или на
нем имеются защитные технологические элементы (кожухи), то габаритно-
установочный чертеж должен быть выдан для груза в упаковке или с защит-
ными кожухами.
Габаритно-установочные чертежи грузов согласовываются со специали-
стами по кораблю. При повторной или многократной доставке груза, ранее
уже доставлявшегося на корабле того же типа, не требуется согласования
габаритно-установочного чертежа.
Работы по интеграции грузов на борту ТК «Прогресс» проводятся в три
этапа:
• рассмотрение и согласование пакета документов на грузы;
• инженерный анализ и разработка компоновочной схемы размещения
грузов в отсеке с обеспечением требуемых массовых, центровочных, инер-
ционных характеристик корабля и условий доставки груза (закрепление,
ориентация в полете и т. д.);
• физическая интеграция — формирование укладок, размещение и фик-
сация грузов в отсеке корабля.
Все операции по обслуживанию и подготовке доставляемых грузов на
техническом комплексе проводятся только при наличии соответствующих
инструкций, согласованных с РКК «Энергия», и под контролем ее ответ-
ственных представителей [2]. Владелец (куратор) груза должен учитывать, что
к доставляемому на станцию грузу после укладки в корабль не будет доступа
до разгрузки его на станции. Длительность указанного периода зависит от
условий размещения и установки грузов на корабле.
Доставляемые грузы размещаются в предусмотренных для них кон-
тейнерах и свободных зонах грузового отсека. Зоны размещения грузов на
ТКА «Прогресс» и чертежи контейнеров приведены на рис. 1.12 [2]. При
отсутствии специальных требований по транспортировке грузы массой до
8... 10 кг укладываются в контейнеры корабля. Грузы массой свыше 10 кг
устанавливаются на специальных транспортировочных рамах, для чего на
Глава 1. Организация пилотируемого космического полета
57
доставляемом блоке должны быть предусмотрены элементы его крепления.
В этом случае при заключении договоров и контрактов отдельно оговарива-
ется необходимость разработки специальной тары для амортизации, тепло-
и влагоизоляции груза. На рис 1.13 приведены схема размещения грузов
и чертеж контейнера для размещения грузов в бытовом отсеке транспорт-
ного космического аппарата (ТКА) «Союз-ТМА» [2]. Грузы массой до 5 кг
укладываются в контейнеры ТКА, а свыше 5 кг устанавливаются на специ-
альных транспортировочных рамах.
Возвращаемые грузы в спускаемом
аппарате размещаются в контейнере,
расположенном под средним креслом,
в случае двухместного варианта ТКА —
в специальном контейнере, который
устанавливается на правое кресло. Воз-
вращаемые грузы должны свободно
проходить через крышку контейнера
размерами 170 х 470 мм [2].
Для доставки грузов на МКС в США
были разработаны унифицированные
ящики, которые можно использовать
на любом ТКА, кроме ТК «Прогресс».
Поскольку грузы имеют различные габа-
риты и массу, разработан ряд типоразме-
ров ящиков: половинный, одиночный,
двойной. Каждый из ящиков имеет за-
стежку и съемную сетку, удерживающую
груз. На рис. 1.14 приведены габариты
ящиков, а в табл. 1.4 даны их характе-
ристики [13].
Рис. 1.14. Ящики для упаковки грузов
(размеры указаны в дюймах)
Таблица 1.4
Тара (США) для доставки грузов на МКС
Обозначе- ние тары Число в стойке Объем, дюйм2 Габариты, дюймы Масса груза, кг (фунт)
S-10 2 0,98 5,2 х 16,5 х 8,75 6,76 (14,9)
S-17 3 2,52 5,2 х 16,5 х 15,7 13,8 (30,4)
S-30 1 1,5 5,2 х 16,5 х 28,7 11,62 (25,6)
S-34 1 1,7 5,2 х 16,5 х 32,7 23,7 (52,2)
D-10 2 2,00 10,5 х 16,5 х 8,75 35,73 (78,7)
D-17 1 1,72 10,5 х 16,5 х 15,7 20,66 (45,5)
D-30 2 6,11 10,5 х 16,5 х 28,7 42,09 (92,7)
D-34 1 3,46 10,5 х 16,5 х 32,7 63,51 (139,9)
Т-17 1 2,6 15,7 х 16,5 х 15,7 23,47 (51,7)
Т-30 2 4,64 15,7 х 16,5x28,7 47,76 (105,2 )
Т-34 2 10,52 15,7 х 16,5x32,7 72,02 (158,7)
Всего 17 37,47 — 361(795,5)
Рис. 1.12. Размещение контейнеров в грузовом отсеке транспортного корабля «Прогресс»:
а — схема размещения грузов; б — контейнеры ярусов I, II и III для грузов
Контейнеры яруса III Контейнеры яруса II
(№ Ш-I, Ш-2, Ш-3, Ш-4) (№ П-1, П-2, П-3)
б
Рис. 1.13. Размещение грузов в БО корабля «Союз-ТМА»:
а — контейнер и места размещения грузов в (контейнерах № 1, 5, 7, 9 доставляемый груз размещается в дополнение к штат-
ному оборудованию); б — чертеж контейнера
60 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Рис. 1.15 Модульный шкаф (размеры
в дюймах):
1 — крышка; 2 — замок; 3 — шарнир
с трением
Для транспортировки аппарату-
ры был спроектирован специальный
модульный шкаф (рис. 1.15), внутри
выложенный специальной амортизи-
рующей пеной, предохраняющей груз
от вибраций и перегрузок на участке
выведения ТК на орбиту. Плотность
укладки в модульном шкафу — от 30
до 10 фунт/дюйм3. Его внутренний
объем — 2 фут3. В табл. 1.5 приведены
типоразмеры модульных шкафов [13].
Крышка шкафа может открываться
на 90°, что в некоторых случаях облегча-
ет выгрузку содержимого. Если необхо-
димо, она может быть открыта на 180°.
Крышка снабжена петлями с трением,
что облегчает эксплуатацию в условиях
Таблица 1.5
Характеристики модульных шкафов (США)
Тип модуля Максимальная масса груза, кг (фунт) Внутренний объем, м3 (фут3) Размеры, м (дюймы) Эквивалент грузовой емкости
М01 136,2 (300) 0,368 (13) 0,87 x 0,52 x 0,81 (34,25 х 20,5 х 31,78) 6
М02 90,8 (200) 0,227 (8) 0,87 x 0,52 x 0,5 (34,25 х 20,5 х 19,5) 4
невесомости, а также магнитной защелкой для временного закрытия крышки.
В модуль можно установить одну большую емкость или две средних размеров.
Тара размещается в складских стойках, имеющих такой же корпус, как
у стандартной стойки американского сегмента МКС, в который вставлен
каркас с установленными на него ящиками с грузом. В корпусе есть двери, в
закрытом состоянии фиксирующие ящики с грузом. На рис. 1.16 представлена
А-А
Рис. 1.16. Размещение
грузов в транспортиро-
вочной стойке (размеры
в дюймах)
Глава 1. Организация пилотируемого космического полета
61
схема сборки стойки с грузом [13]. Одна стойка может вместить груз объемом
1,062 м3 (37,5 фут3) и массой 297,8 кг (656 фунтов). Ящики устанавливаются в
транспортировочную стойку, и содержимое легко выгружается в соответству-
ющий модуль ОС, если стойка используется только в транспортных целях.
Упаковка и замок двери на рис. 1.16 не показаны.
При погрузочно-разгрузочных работах складская стойка может быть це-
ликом перенесена к месту хранения. На АС МКС габариты люков допускают
перемещение стандартных стоек. Для того чтобы перемещать пустую стойку
через люки меньшего размера, предусмотрен разборный и складной каркас
(рис. 1.17), проходящий в отсек ОС через люк любой величины [13].
Для транспортировки грузов, которые не требуют перемещения стой-
ки, а перегружаются индивидуально, используется платформа снабжения,
показанная на рис. 1.18 [13]. Здесь каркас для тары крепится на раме непо-
средственно к корпусу отсека. В этом случае масса груза может достигать
227 кг (500 фунтов), включая массу емкостей и крепления. Максимальная
масса конструкции платформы составляет 80,8 кг (178 фунтов).
а
Рис. 1.17. Разборная стойка для грузов, которую
можно переносить через люки российского сег-
мента МКС
Рис. 1.18. Платформа снаб-
жения, укомплектованная
для полета
Стойки и платформы снабжены маркировкой, на ящиках имеются на-
клейки, информирующие о хранящихся в них грузах. В дверях платформы
сделаны вырезы для просмотра и контроля содержимого.
При хранении в условиях невесомости грузы укладываются в специальные
стойки, представляющие собой легкие конструкции из складного каркаса и
тканевых вставок. Стойки отделяются от других конструкций двумя щитами
толщиной 1,3 см (0,5 дюйма), сделанными из вспененного материала. Собствен-
ная масса стойки — 11,35 кг (25 фунтов). На ней допустимо размещать грузы
объемом 1,21 м3 (42,8 футов3), без ограничений по массе. В оболочку можно вста-
вить емкости четырех типоразмеров. Оболочка стойки приобретает свою форму
после установки на МКС. Характеристики вставок приведены в табл. 1.6 [13].
62 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Таблица 1.6
Емкости (США) для доставки грузов на МКС
Тип емкости Вместимость Подразделение Количество и тип емкостей с грузом
Тип А 1 объем 4x0,125 объема 2x0,25 объема 10 одиночных и 10 половинных ем- костей (вмещаются любые емкости (кроме 34-дюймовых)
Тип В 1 объем 1 объем, разде- ленный внизу 12 одиночных и 12 половинных ем- костей (кроме 34-дюймовых)
Тип С 0,5 объема 6x0,083 объема 6 одиночных и 6 половинных емко- стей (кроме 34-дюймовых)
Тип D 0,5 объема 1x0,5 объема Груз в виде больших предметов
Загряз- ненный элемент 0,5 объема 0,25 объема (контейнеры для пищевых продуктов), большие мешки для мусо- ра, твердые контейнеры для мусора и бывшей в употреблении одежды
Хотя такие стойки не предназначены для перевозки грузов при запуске и при
посадке, они способны выдерживать нагрузки, равные их весу
1.4.3. Транспортные космические системы
Для снабжения пилотируемого космического аппарата (ПКА) исполь-
зуется одна или несколько транспортных космических систем, с помощью
которых организуются входной и выходной материальные потоки. Транспорт
(от лат. trans — через и portare — нести) — совокупность средств, объектов
транспортировки, а также окружающей среды, обеспечивающих процесс пе-
ремещения людей и грузов различного назначения из одного места в другое.
Средства космической транспортной системы:
• транспортные КА различных классов;
• ракеты-носители или иные средства выведения с соответствующей
наземной инфраструктурой;
• места базирования ТКА на обслуживаемом ПКА;
• комплекс средств приземления для возвращаемых ТКА.
Космические транспортные средства могут быть одноразовыми, а также
частично или полностью многоразовыми.
В зависимости от объектов транспортировки транспортные системы под-
разделяются на пилотируемые, перевозящие экипаж и груз, и беспилотные,
перевозящие только грузы. Также объектами транспортировки считаются
модули дооснащения и другие элементы конструкций обслуживаемого ПКА.
К грузам относятся и удаляемые материалы: отходы жизнедеятельности, ко-
торые не пошли в переработку, отработавшие свой срок заменяемые блоки
приборов и оборудования, модули ОС после завершения их эксплуатации и др.
По характеру работы с окружающей средой транспортная космическая
система может быть аэрокосмической, транспортные средства которой
Глава 1. Организация пилотируемого космического полета 63
совершают полет в атмосфере, межорбитальной, транспортные средства
которой совершают перелеты в околоземном космическом пространстве, и
межпланетной, обеспечивающей перелеты в системе Земля — Луна или в
Солнечной системе.
Для примера рассмотрим характеристики транспортных систем, обеспе-
чивающих работу МКС.
Российская транспортная система среднего класса — старейшая и наибо-
лее надежная из эксплуатируемых систем: с 1967 г. выполнено 128 пилотиру-
емых полетов (из них две катастрофы и два аварийных пуска) и 140 полетов
для доставки грузов (из них три аварийных).
Средства российской транспортной системы — модификации одноразовых
пилотируемого и грузового ТКА, построенные на платформе ТКА «Союз»,
которая регулярно модернизируется. На рис. 1.19 представлена компоновка
аппарата «Союз-ТМА-М» [14], а ниже дана его техническая характеристика.
Рис. 1.19. Транспортный корабль «Союз-ТМА-М»:
1 — стыковочный агрегат; 2 — спускаемый аппарат; 3 — переходный отсек; 4 — приборный
отсек; 5 — агрегатный отсек; 6 — оптический визир пилота; 7 — посадочный люк; 8 — бы-
товой отсек
Характеристика ТКА «Союз-ТМА-М»
Максимальная масса, кг............................ 7220
Экипаж, чел.....................................3
Масса груза, кг:
доставляемого.................................100
возвращаемого.................................60
Диаметр жилых отсеков, м..........................2,2
Максимальный диаметр, м ..........................2,72
Размах панелей солнечных батарей, м ...........10,7
Общий герметизированный объем, м3..............10,3
Время существования на орбите (в составе ОС), сут.200
Длина, м..........................................6,98
64 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
В настоящее время в качестве пилотируемого ТКА используется моди-
фикация «Союз-МС», отличающаяся наличием нескольких модернизиро-
ванных систем.
Компоновочная схема грузового ТКА «Прогресс» показана на рис. 1.20 [15].
Для снабжения МКС использовались две модификации: «Прогресс М-М» —
для доставки большего количества грузов в герметичном отсеке и «Прог-
ресс М1» — для доставки большего количества топлива. Ниже приведены
сравнительные характеристики этих модификаций ТКА.
Рис. 1.20. Компоновочная схема транспортного космического корабля «Прогресс»:
1 — стыковочный узел; 2 — антенны системы «Курс»; 3 — антенна приема команд; 4 — сол-
нечная батарея; 5 — двигательная установка; 6 — сканирующая антенна; 7 — УКВ-антенна;
8 — антенна «Курс»; 9 — стыковочный адаптер PH; 10 — двигатели ориентации; 11 — герме-
тичный приборный отсек; 12 — бак с водой; 13 — модуль дозаправки; 14 — грузовой модуль
Характеристики
«Прогресс М-М» «Прогресс М1»
Масса, кг:
стартовая ............................
без груза..........................
Максимальная масса полезной нагрузки, кг
Максимальна масса сухих грузов, кг...
Максимальная масса топлива, кг.......
Масса удаляемых отходов, кг..........
Длина, м.............................
Максимальный диаметр, м..............
Максимальный герметичный объем, м3...
Максимальное время полета, сут.......
..7450 7150
.5050 4740
.2500 2350
.. 1800 1800
.. 1200 1950
.. 1000-1600 1000-1600
..7,23 7,2
..2,72 2,72
.. 6,6 6,6
.. 180 180
Глава 1. Организация пилотируемого космического полета
65
В настоящее время в качестве грузового ТКА используется модификация
«Прогресс-МС». Средством выведения служит ракета-носитель (PH) типа
«Союз» среднего класса грузоподъемности. Запуск производится с космодро-
ма Байконур.
Место базирования — четыре стыковочных узла PC МКС, оснащенных
системой типа «Курс», позволяющей выполнять стыковку в автоматическом,
ручном и телеоператорном режиме.
Средство возвращения грузов — спускаемый аппарат капсульного типа в
составе пилотируемого ТКА «Союз», который совершает посадку в штатном
варианте на сушу на парашюте. Если потребуется, можно увеличить объем
возвращаемого груза за счет уменьшения числа членов экипажа (вплоть до
беспилотного варианта с массой возвращаемого груза 550 кг).
Способ утилизации грузов — после разгрузки ТКА «Прогресс» запол-
няется отходами, которые вместе с ним при завершении полета сгорают в
плотных слоях атмосферы.
Объекты транспортировки — сменные экипажи МКС (антропометри-
ческие параметры членов экипажа начиная с модификации «Союз-ТМА»
приведены далее), компоненты топлива, грузы в герметичном отсеке, грузы в
специально доработанном негерметичном отсеке (вместо топлива), а также малые
модули дооснащения ОС при использовании модификации «Прогресс ГТК».
Транспортные космические аппараты данной системы способны нести науч-
ное оборудование, и их можно использовать как автономные исследователь-
ские модули, а также как платформу для запуска малых КА.
Антропометрические параметры членов экипажа кораблей «Союз»
Рост, см:
в положении стоя min/max .................150/190
в положении сидя max ..................99
Обхват груди, см.........................Не ограничивается
Масса тела min/max, кг ..................50/95
Максимальная длина ступни, см ...........29,5
Российская транспортная система тяжелого класса построена на базе
пилотируемой космической системы орбитальная пилотируемая станция —
транспортный корабль снабжения (ОПС — ТКС), разработанной по про-
грамме «Алмаз».
Средства транспортной системы — ТКА «Транспортный корабль снабже-
ния» (ТКС), автономно совершивший в 1976—1985 гг. четыре успешных полета
в беспилотном режиме, в том числе к ОС «Салют-6» и «Салют-7». В частности,
ТКС-3 — «Космос-1443» — в 1983 г. доставил 2700 кг грузов (в том числе до-
полнительные солнечные батареи) и 3800 кг топлива на станцию «Салют-7»,
где проработал 6,5 мес. как модуль дооснащения ОС. Его спускаемый ап-
парат совершил мягкую посадку, доставив на Землю около 350 кг грузов и
результатов экспериментов. Общий вид ТКС различных модификаций будет
подробно представлен в гл. 4, а характеристики ТКА ТКС приведены ниже.
66 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Характеристика ТКА «Транспортный корабль снабжения»
Состав экипажа, чел.............................До 3
Стартовая масса, кг ............................21 620
Масса, кг:
груза, доставляемого на ОПС................... 5200
доставляемого топлива......................... 3800
Длина, м........................................13,2
Объем внутренних отсеков, м3 .................49,88
Длительность полета в составе ОПС, сут .........90
Глубоко переработанная модификация модуля ОПС используется на МКС
в качестве модуля «Звезда», а модификации транспортного корабля снабжения
ТКС в виде модулей ФГБ «Заря» и многофункционального лабораторного
модуля (МЛМ) «Наука».
Средства выведения — PH типа «Протон» тяжелого класса грузоподъем-
ности. Запуск осуществляется с космодрома Байконур.
Элементы транспортной системы, являются базовыми модулями МКС.
Средства возвращения грузов — пилотируемый ТКС имел в своем составе
многоразовый возвращаемый аппарат капсульного типа, осуществлявший в
штатном режиме посадку на сушу.
Объекты транспортировки — тяжелые модули дооснащения ОС.
Американская многоразовая транспортная система Space Shuttle в тече-
ние 30 лет служила основой пилотируемых космических программ в США.
С 1981 по 2011 гг. были выполнены 135 пилотируемых полетов (из них два
закончились катастрофой). В настоящее время она выведена из эксплуатации
из-за нерентабельности и низкой надежности.
Средства транспортной системы — ее основой были пять многоразовых
транспортных орбитальных ракетопланов — космических челноков (МТКА);
максимальное число полетов одного МТКА составило 39. Общий вид такого
МТКА показан на рис. 1.21 [16], а его характеристика МТКА приведена ниже.
Характеристика МТКА Space Shuttle
Состав экипажа, чел............................ 2—8
Максимальная масса, кг:
полезного груза, доставляемого к МКС........ 16 050
груза, возвращаемого с орбиты................ До 14 400
Объем кабины экипажа, м3....................... 71,5
Максимальный объем грузового отсека, м3 ....... 300,2
Длина, м ...................................... 37,2
Размах крыльев, м.............................. 23,8
Высота, м...................................... 17,3
Размеры грузового отсека
(длина х ширина х высота), м .................. 18,3x4,6x4,8
Для выведения МТКА на орбиту были использованы два многоразовых
твердотопливных ускорителя и одноразовый подвесной топливный бак. За-
пуск осуществлялся с космодрома на мысе Канаверал.
Для стыковки МТКА на АС МКС были предназначены два стыковочных
адаптера РМА (англ. Pressurized Mating Adapter).
Глава 1. Организация пилотируемого космического полета
67
Рис. 1.21. МТКА Space Shuttle (размеры в м)
Средства возвращения грузов — МТКА, выполняющий горизонтальную
посадку, мог возвращать значительные по массе грузы как в грузовом отсеке,
так и в кабине экипажа.
Объекты транспортировки — экипаж максимальной численностью во-
семь человек и КА различного назначения. В рамках программы SpaceLab в
грузовом отсеке МТКА был помещен герметичный лабораторный модуль, по
программе МКС доставлялись сменные экипажи и широкая номенклатура
грузов, размещаемых на негерметичных платформах и в герметичных модулях
снабжения, модули дооснащения МКС и научные инструменты.
В грузовом отсеке Space Shuttle доставлялся модуль космический логисти-
ки STS MPLM, который стыковался с МКС. После разгрузки с помощью ма-
нипулятора модуль устанавливался в грузовой отсек и возвращался на Землю.
Модули логистики грузов классифицируются как активный или пассивный
в зависимости от укладки грузов. Активный модуль имеет встроенный холо-
дильник/морозильник, активную систему терморегулирования и телеметрию
грузовых стоек. В пассивном модуле нет системы терморегулирования гру-
зовых стоек. В модуль логистики можно установить 16 транспортировочных
стоек (табл. 1.7) [13]. Каждая стойка (с учетом конструкции) имела массу 804
кг (1773 фунта). Максимальная масса доставляемых и возвращаемых грузов
составляла 9072 кг (20 000 фунтов).
Для доставки грузов употребляется герметичный двойной логистиче-
ский модуль (LDM), который способен перевозить до 4086 кг (9000 фунтов)
груза. Он пригоден для перевозки всех видов груза как в герметичном, так и
68 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Таблица. 1.7
Характеристики грузов транспортного корабля Space Shuttle
Места укладки груза Размещение груза Грузы Модуль
RSR (стойки для хранения пополняемых запасов) Емкости Расходные материалы, оборудование, материа- лы для экспериментов, средства гигиены Пассивный
RSP (платформа в модуле MPLM Raffaello для хранения пополняемых запасов) Емкости Возвращаемое оборудо- вание Пассивный
IS PR (международная стандартная стойка для полезных грузов) — — Активный (пассивный в MPLM)
К/А-стойки — Стойки с продуктами, принадлежностями Активные
Melfi (морозильники) — Научное оборудование, образцы Активный (пассивный в MPLM)
Система стоек Лотки Научное оборудование Активный
ISPR Лотки — Активный (пассивный в MPLM)
Express-стойка Стойка с ящиками Научная аппаратура Активный (пассивный в MPLM)
в негерметичном исполнении. Грузы также могут быть закреплены на плос-
кой крышке модуля. Кроме того, в модуль допустимо устанавливать одно- и
двухместные стойки, ящики, мягкие стойки укладки, мягкие сумки.
На рис. 1.22 приведен модуль со стандартной укладкой [13].
Рис. 1.22. Герметичный двой-
ной логистический модуль
Глава 1. Организация пилотируемого космического полета
69
Европейская транспортная система — экспериментальная, она разрабо-
тана для снабжения МКС европейским космическим агентством при участии
РКК «Энергия». С 2008 по 2015 гг. были выполнены пять полетов ТКА.
Средства транспортной системы. Автоматический беспилотный ТКА ATV
имеет модульную структуру (рис. 1.23) [17]; он состоит из герметичного мо-
дуля для сухих грузов и негерметичного агрегатного отсека, где размещаются
наряду с прочим емкости для доставляемых на МКС воды и газа. Характе-
ристики ATV приведены ниже.
Рис. 1.23. Общий вид (а) автоматического транспортного корабля ATV и его ком-
поновочная схема (б):
1,3 — топливные баки; 2 — бак наддува; 4 — шкафы с грузом; 5 — стыковочный узел; 6 —
экран противометеоритной защиты; 7 — газовые и водяные баки; 8 — система автоматики;
9 — солнечная батарея; 10 — блок двигателей стабилизации; // — двигатели
а
70 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Характеристика транспортного корабля ATV
Масса, кг:
стартовая ........................................ 20 750
доставляемого воздуха........................... 100
доставляемой воды...............................855
доставляемого топлива...........................860
Максимальная масса, кг:
доставляемых сухих грузов...................... 5500
удаляемых отходов .............................. 6500
Длина, м........................................... 10,2
Максимальный диаметр, м...........................4,48
Максимальный полезный герметичный объем, м3.......45,0
Время полета в составе МКС, сут...................До 190
Средства выведения — PH типа «Ариан-5» тяжелого класса грузоподъ-
емности. Запуск производится с космодромов Байконур и Куру.
Стыковка осуществлялась к кормовому узлу модуля «Звезда» PC МКС.
ТКА ATV после разгрузки заполняется отходами, которые вместе с ним
при завершении полета сгорают в плотных слоях атмосферы.
Объекты транспортировки — грузовые стойки МКС, вода, газы, компо-
ненты топлива.
Японская транспортная система используется для снабжения японского
сегмента МКС. С 2009 г. выполнены пять полетов ТКА. До 2020 г. заплани-
ровано девять полетов.
Средства транспортной системы. Автоматический беспилотный ТКА
HTV Kounotori («Белый аист») [18] предназначен для доставки на японский
сегмент МКС грузов и для удаления отработавшего оборудования и отходов
(рис. 1.24). Его характеристика приведена ниже.
Рис. 1.24. Транспортный корабль HTV Kounotori:
/ — герметичный отсек; 2 — негерметичный отсек; 3 — модуль
системы управления; 4 — двигательный модуль; 5 — достав-
ляемый блок
Глава 1. Организация пилотируемого космического полета
71
Характеристика транспортного корабля HTV Kounotori
Стартовая масса, кг ............................... 16 500
Максимальная масса, кг:
доставляемых грузов............................. 6000
доставляемых грузов, в герметичном отсеке ....... 5200
доставляемых грузов, в негерметичном отсеке ..... 1500
удаляемых отходов ............................... 6000
Длина, м ..........................................9,8
Максимальный диаметр, м ...........................4,4
Максимальный полезный объем, м3:
герметичный .................................... 14,0
негерметичный ................................... 15
Время полета в составе МКС, сут ...................45
Средства выведения — PH типа Н-П тяжелого класса грузоподъемности.
Запуск производится с космодрома космического центра Танэгасима.
Место базирования — ТКА не имеет автономной системы стыковки и
швартуется к узловому модулю АС МКС с помощью дистанционной управ-
ляемого манипулятора.
После разгрузки ТКА Kounotori заполняется отходами, которые вместе с
ним при завершении полета сгорают в плотных слоях атмосферы.
Доставляемая аппаратура на ТКА HTV может размещаться в герметич-
ном отсеке в складских стойках и в негерметичном отсеке на специальных
платформах. Компоновка грузовых отсеков показана на рис. 1.25 [18]. Вид
платформы с негерметичными грузами приведен на рис. 1.26 [19], а узлы кре-
пления контейнеров с негерметичными грузами представлены на рис. 1.27 [19].
Коммерческая транспортная система SpaceX— частично многоразовая,
среднего класса грузоподъемности, разработана коммерческой фирмой SpaceX
Рис. 1.25. Размещение грузов в отсе-
ке для полезного груза транспортного
корабля HTV:
/ — герметичный отсек (8 шкафов + перед-
няя упаковка); 2 — негерметичный сегмент
(два погрузочных места)
Рис. 1.26. Схема установки контейнеров
на платформе негерметичного отсека
HTV:
/ — модуль полезной нагрузки; 2 — узел за-
хвата манипулятором; 3 — блок интерфейса с
полезной нагрузкой; 4 — узел крепления груза
72 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Рис. 1.27. Конфигурация и размеры контейнера с негерметичными грузами для япон-
ского модуля МКС JEM-EF (а) и активный узел крепления груза (б):
1 — узел захвата манипулятором; 2 — контейнер; 3 — узел крепления груза; 4 — стыковочный узел
для снабжения американского сегмента МКС после прекращения полетов
системы Space Shuttle. С 2010 г. осуществлены 11 полетов ТКА (из них одна
авария), до 2020 г. запланировано 22 полета.
Средства транспортной системы — автоматический беспилотный ТКА
Dragon [20], состоящий из многоразового возвращаемого аппарата капсульного
типа, оснащенного двигательной установкой, и одноразового негерметичного
грузового контейнера (рис. 1.28) [21]. Его характеристика приведена ниже.
Характеристика транспортного корабля Dragon
Длина, м.................................................. 6,1
Стартовая масса, кг....................................... 7510
Максимальная масса доставляемых грузов
(распределяется в любой пропорции между
негерметичным и герметичным отсеками), кг................ 3310
Максимальная масса возвращаемых грузов, кг.............. 2500
Максимальный диаметр, м................................... 3,7
Максимальный полезный герметичный объем, м3 .............. 11,0
Полезный негерметичный объем (два варианта), м3.......... 14,0; 34,0
Время полета в составе МКС, сут ..........................До 730
В настоящее время проектируется пилотируемый вариант ТКА DragonV2.
Средства выведения — PH типа Falcon-9 среднего класса грузоподъемно-
сти. Запуск производится с космодрома на мысе Канаверал. Первая ступень
носителя спроектирована многоразовой, она проходит летные испытания.
Место базирования — ТКА не имеет автономной системы стыковки и
швартуется к узловому модулю американского сегмента МКС с помощью
дистанционно управляемого манипулятора.
Глава 1. Организация пилотируемого космического полета
73
Рис. 1.28. Транспортный корабль Dragon:
/ — пассивный стыковочный узел; 2 — крышка люка; 3 — солнеч-
ные батареи; 4 — антенны; 5 — негерметичный отсек; 6 — радиатор;
7 — герметичный отсек
Средства возвращения грузов — многоразовый возвращаемый аппарат
ТКА Dragon в штатном варианте, он совершает посадку на воду на парашюте.
Предназначен для доставки на МКС расходных материалов и инструментов
для научных исследований, элементов дооснащения в негерметичном отсеке
(рис. 1.29) [22], а также для доставки на Землю результатов научных исследова-
ний, полученных на МКС.
Коммерческая транспортная система OrbitalАТК— частично многоразовая,
среднего класса грузоподъемности, разработана коммерческой фирмой Orbital
Sciences Corporation (с 2015 г. — Orbital АТК) для снабжения американского
сегмента МКС после прекращения полетов системы Space Shuttle. С 2013 г.
совершено шесть полетов ТКА (из них — одна авария). До 2019 г. заплани-
ровано И полетов.
Средства транспортной системы — автоматический беспилотный ТКА
Cygnus [23] предназначен для доставки на американский сегмент МКС гру-
зов и для удаления отработавшего оборудования и отходов (рис. 1.30) [24].
Используются две модификации ТКА: стандартная и расширенная, их ха-
рактеристики приведены ниже.
Характеристики транспортного космического корабля Cygnus
Стандартная модификация Расширенная модификация
Стартовая масса, кг 3500 5300
Максимальная масса, кг
доставляемых грузов 2000 3500
удаляемых отходов 1200 2000
Длина, м 5,14 6,25
Максимальный диаметр, м.... 3,07 3,07
Максимальный полезный
герметичный объем, м3 18,9 27,0
Время полета в составе МКС , сут....730 730
74 Часть L Исходные^ данные^ для компоновки^ пилотируемого космического аппарата
Рис. 1.30. Транспортный корабль Cygnus:
1 — герметичный грузовой модуль; 2 — слу-
жебный модуль; 3 — панели солнечных батарей
2
3
4
5
Рис. 1.29. Компоновка и габариты
отсеков ТКА Dragon (размеры в м):
1 — верхний люк; 2 — герметичный
отсек; 3 — агрегатный отсек; 4 — слу-
жебный отсек; 5 — негерметичный отсек
Средства выведения — PH типа Antares
или AtlasV среднего класса грузоподъем-
ности. Запуск производится с коммерче-
ского космодрома Mid-Atlantic Regional
Spaceport или космодрома на мысе Кана-
верал соответственно.
ТКА не имеет автономной системы
стыковки и швартуется к узловому мо-
дулю американского сегмента МКС с
помощью дистанционного управляемого
манипулятора.
Средства утилизации грузов — ТКА
после разгрузки заполняется отходами,
которые при завершении полета вместе с
ним сгорают в плотных слоях атмосферы.
Объекты транспортировки — грузы и расходные материалы в таре АС
МКС.
Перспективные пилотируемые транспортные космические системы нового
поколения активно разрабатывают в России и США. Ведутся работы по соз-
данию систем, имеющих возможность размещать увеличенное число членов
экипажа и совершать полеты за пределы низкой околоземной орбиты — к
астероидам и Луне.
Общая концепция таких ТКА повторяет идеи, реализованные в транспорт-
ном корабле ТКС: многоразовый возвращаемый аппарат капсульного типа и
одноразовый агрегатный отсек. Многие технические решения этих систем еще
находятся в стадии проработки.
Ниже приведены основные характеристики (по состоянию на 2016 г.) двух
систем, разрабатываемых национальными космическими агентствами, —
российского ПТК НП «Федерация» и американского многоцелевого пилоти-
руемого ПКА MPCV Orion, создаваемого при участии ЕКА.
Глава 1. Организация пилотируемого космического полета
75
Внешняя компоновка ТКА «Федерация» показана на рис. 1.31 [25],
а внешняя компоновка ТКА MPCV Orion — на рис. 1.32 [26].
Характеристики перспективных ТКА
ПТК НП «Федерация»
Состав экипажа, чел......................До 6
Стартовая масса
(орбита МКС/орбита Луны), т.............. 12,0/16,5
Масса доставляемых грузов, кг:
на МКС пилотируемый......................500
на МКС беспилотный..................... 2000
к Луне................................. 100
Масса возвращаемых с МКС грузов
(в пилотируемом варианте), кг............500
Длина, м ................................6,1
Максимальный диаметр, м..................4,5
Объем герметичного отсека, м3............ 18,0
Объем жилого пространства, м3............8,0
Число циклов использования
возвращаемого аппарата.................. 10
Время полета, сут:
в составе МКС............................365
автономного............................30
MPCV Orion
4-6
15/25,8
500
100
8,0
5,03
19,56
9,0
10
730
21
Рис. 1.31. Общий вид транспортного космического аппарата
«Федерация»:
1 — пассивный стыковочный узел; 2 — солнечные батареи; 3 — агрегат-
ный отсек; 4 — парашютный контейнер; 5 — многоразовый возвраща-
емый аппарат
76 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Рис. 1.32. MPCVOroin:
/ — многоразовый возвращаемый аппарат
(отсек для экипажа); 2 — служебный модуль
(разработанный ЕКА); 3— панели солнечных
батарей; 4 — стыковочный узел
В настоящее время имеется
также большое количество проектов
коммерческих пилотируемых ТКА
для доставки экипажей численно-
стью до семи человек на низкую
околоземную орбиту, находящихся на
различных этапах реализации:
CTS100 Starliner фирмы Boeing,
Dragon V2 фирмы SpaceX,
DreamChaser фирмы SpaceDev.
Насколько востребованы и кон-
курентоспособны окажутся указан-
ные системы, покажет время.
7.4.4. Планирование транспортных операций
От параметров грузопотока существенно зависят объем и масса грузов,
хранящихся на складе ПКА. Планирование транспортных операций на ОС
определяется числом и грузоподъемностью имеющихся в распоряжении ТКА
(рис. 1.33). Количество полетов и длительность нахождения ТКА в составе
ОС рассчитываются с учетом числа доступных стыковочных узлов. На рис.
1.34 показано расположение шести стыковочных узлов для ТКА различных
транспортных систем.
Рис. 1.33. Факторы, влияющие на количество ТКА, необходимых для
обеспечения снабжения орбитальной станции
Глава 1. Организация пилотируемого космического полета
77
Союз ТМА-20
Рис. 1.34. Расположение стыковочных узлов различных транспортных
систем на МКС (конфигурация МКС 26.02.2011)
Типовой план снабжения МКС, разработанный в 2000 г., предусматри-
вал 14 полетов, выполняемых четырьмя транспортными системами. Со-
гласно этому графику, на ОС в течение года планировались два полета ТКА
«Союз», четыре полета ТКА «Прогресс», пять полетов МТКА Space Shuttle,
а также один-два полета ATV и HTV в год. Как видно из графика полетов,
различные ТКА снабжают МКС с разными интервалами. Корабли «Союз»
(два полета в год) и Space Shuttle (пять полетов в год) доставляют на станцию
сменные экипажи и экспедиции посещения, Space Shuttle также доставля-
ет крупногабаритные тяжелые грузы. Корабль «Прогресс» (четыре полета в
год) и ATV (один полет в год) доставляют расходные материалы и топливо,
Таблица 1.8
График полетов ТКА к МКС в 2014 г.
ТКА Янв. Фев. Март Апр. Май Июнь Июль Авг. Сен. Окт. Ноябрь Дек.
«Союз» О О О О О О О
«Союз» О О О О О О О
«Союз» О О О 0>
«Союз» О 0>
«Прогресс» О О О
«Прогресс» О О О О О
«Прогресс» О О О О О
«Прогресс» О О 0>
Dragon О О
Dragon О О
ATV О О О О О 0>
Cygnus О О
Cygnus О О
Cygnus * — аварийны] л залу ск; О - - время полек i; > — I полет пр одолже] -I в еле; 1ующе О* М ГОД)
Высота орбиты
Рис. 1.35. Циклограмма снабжения ОС с учетом снижения ее орбиты:
В КД — внекорабельная деятельность; ПК — пилотируемый корабль; ГК — грузовой корабль; Гци — время целевого исследования;
/тор — время технического обслуживания и ремонта (ТОР); Тг — время восстановления
Глава 1. Организация пилотируемого космического полета 79
а также поднимают орбиту МКС, корабли HTV (два полета за год) доставляют
расходные материалы и негерметичное оборудование.
С прекращением полетов Space Shuttle основная нагрузка по доставке
экипажей легла на корабли «Союз», число полетов которых увеличилось в 2
раза. Для доставки грузов были введены в эксплуатацию две новые американ-
ские коммерческие транспортные системы. При этом общее число полетов
в год сохранилось на уровне 14—15. График полетов ТКА к МКС в 2014 г.
представлен в табл. 1.8.
Наряду с доставкой грузов ТК выполняют коррекцию параметров орби-
ты ОС. Доставляемое на ОС топливо тратится на приращение импульса ОС.
Значит, можно считать, что ТКА снабжают низкоорбитальные ОС прираще-
нием импульса, необходимым для преодоления сопротивления атмосферы.
При планировании операций снабжения низкоорбитальных ОС требуется
соотносить период снижения орбиты ОС под действием аэродинамического
торможения с периодом транспортных операций. Пример графика снабжения
ОС с учетом высоты ее орбиты приведен на рис. 1.35 [27].
При планировании транспортных операций следует учитывать нештатные
ситуации, связанные с авариями ТКА. Как показывает практика, эксплуа-
тации МКС в течение года могут возникнуть одна-две подобные ситуации.
В этом случае запасов жизненно необходимых ресурсов должно хватать для
преодоления возникшего перерыва в снабжении. Использование нескольких
транспортных систем позволяет надежно резервировать средства доставки.
Контрольные вопросы к главе 1
I. Назовите факторы, влияющие на перспективы использования орбитальных
станций.
2. Какими международными и российскими документами регламентируется кос-
мическая деятельность?
3. Что представляет собой космическая программа?
4. Расскажите о структуре логистики орбитальной станции.
5. В чем заключается различие размещения грузов в отсеках транспортных ко-
раблей «Союз-ТМА» и «Прогресс»?
6. Что представляет собой космическая транспортная система?
Литература к главе 1
I. Творческое наследие Сергея Павловича Королёва. Избранные труды и доку-
менты. М.: Наука, 1980. 591 с.
2. Российский сегмент МКС. Справочник пользователя. URL: http://knts.tsniimash.
ru/ru/src/Center!nfRes/iss_rs_guide.pdf (дата обращения l7.0l.20l9).
3. Пилотируемая орбитальная станция «Мир». URL: http://ursa-tm.ru/forum/index.
php?/topic/4300-pilotiruemaia-orbitalnaia-stantciia-mir/ (дата обращения 17.01.2019).
80 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
4. Корунов С.С., Белова Г.Н., Гудкова Г.И. Проблемы и перспективы коммерциа-
лизации российского сегмента международной космической станции (МКС) // Труды
МАИ. 2011. № 43. 11 с. URL: http://trudymai.ru/published.php?ID=24738 (дата обраще-
ния 17.01.2019).
5. Соловьев В.А., Любинский В.Е., Жук Е.И. Текущее состояние и перспективы
развития системы управления полетами космических аппаратов // Пилотируемые
полеты в космос. 2011. №1 (1). С. 27—37.
6. Соловьев В.А. Проведение научных исследований на космических кораблях и
орбитальных станциях. URL: http://mfk.msu.ru/attachment/! 14/lection7.pdf (дата обра-
щения 17.01.2019).
7. Безопасность космических полетов / Г.Т Береговой, А.А. Тищенко, Г.Д. Ши-
банов, В.Я. Ярополов. М.: Машиностроение, 1977. 263 с.
8. Соловьев В. А., Лысенко Л.Н., Любинский В.Е. Управление космическими поле-
тами: учебное пособие. Ч. 1. М.: Из-во МГТУ им. Н.Э. Баумана, 2009. 476 с.
9. Обеспечение заданных характеристик и совершенствование конструкции
функционально-грузового блока «Заря» в процессе полета в составе Международной
космической станции / А.Ф. Вагонов, А.А. Горбань и др. // Научно-технические раз-
работки КБ «Салют». М.: Машиностроение, 2010. 398 с.
10. Принципиальные черты программы «Скайлэб». URL: http://epizodsspace.no-ip.org/
bibl/skylab/03.html (дата обращения 17.01.2019).
11. Пугаченко СЕ. Проектирование орбитальных станций: учебное пособие. М.:
Изд-во МГТУ им. Н.Э. Баумана, 2012. 93 с.
12. Практические результаты внедрения интерактивной мультиагентной системы
построения программы полета, грузопотока и расчета ресурсов Российского сегмента
МКС / А.Г. Бидеев, Н.В. Горбова, В.В. Кузьмин, Г.Н. Капорцева и др. //Космическая
техника и технологии. 2016. № 2 (13) С. 5—13.
13. International Space Station Evolution Data Book. Vol. I. Rev. 1 / Editor C.A.
Jorgensen NASA/SP-2000-6109. URL: http://citeseerx.ist.psu.edu/viewdoc/download?doi=
10.1.1.32.4499&rep=repl&type=pdf (дата обращения 17.01.2019).
14. Транспортный пилотируемый корабль новой серии «Союз ТМА-М». Общие
сведения. URL: http://www.energia.ru/ru/iss/soyuz-tma-m/soyuz-tma-m.html (дата обра-
щения 17.01.2019).
15. Reference guide to the space station ISS. Utilization edition 2015. URL: http://www.
nasa.gov/sites/default/files/atoms/files/np-2015-05-022-jsc_iss_utilization_guide_2015-508c.pdf
(дата обращения 17.01.2019).
16. Baker D. NASA Space Shuttle Owners’ Workshop Manual. Minneapolis: Zenith
Press, 2011. 160 p.
17. Automated Transfer Vehicle. URL: http://spaceflightl01.com/spacecraft/atv/ (дата
обращения 17.01.2019).
18. HTV-1 Mission Press Kit. URL: http://www.nasa.gov/pdf/384523main_htv_press_kit.pdf
(дата обращения 17.01.2019).
19. Kibo Exposed Facility User Handbook. URL: http://iss.jaxa.jp/kibo/library/fact/
data/JFE_HDBK_all_E.pdf (дата обращения 17.01.2019).
20. Новые космические корабли США и России. URL: http://pahapct.livejournaL
com/20096.html (дата обращения 17.01.2019).
21. Компания SpaceX осуществляет успешный запуск ракеты Falcon 9 и выводит
на орбиту космический корабль Dragon // Военное обозрение. URL: https://topwar.ru
(дата обращения 17.01.2019).
22. Dragon. SpaceX. URL: http://www.spacex.com/dragon (дата обращения
17.01.2019).
Глава 1. Организация пилотируемого космического полета
23. Orbital АТК. URL: http://www.orbitalatk.com/space-systems/human-space-
advanced-systems/commercial-resupply-services/ (дата обращения 17.01.2019).
24. New Private Space Freighter Has Solid Backing. URL: http://www.space.com/
8046-private-space-freighter-solid-backing.html
25. Карпенко А.В. Перспективный пилотируемый космический корабль «Федера-
ция» («Русь») // ВТС «Невский бастион». URL: http://nevskii-bastion.ru/rus-ka/ (дата
обращения 17.01.2019).
26. Orion spacecraft. URL: http://www.lockheedmartin.com/us/ssc/orion-eftl.html
(дата обращения 17.01.2019).
27. Радченко Э.Т., Пугаченко С.Е. Орбитальные станции: использование опыта
проектирования и эксплуатации при математическом моделировании перспективных
космических систем // Научно-технические разработки ОКБ-23 - КБ - «Салют». М.:
Воздушный транспорт, 2006. 720 с.
ГЛАВА 2. ЧЕЛОВЕК В КОСМИЧЕСКОМ ПОЛЕТЕ
2.1. Геометрия тела человека
2.1.1. Антропометрические характеристики человека
Для успешного освоения космического пространства необходимо создать
подходящие условия для жизни человека в экстремальных условиях космоса.
Конструкция обитаемого отсека должна обеспечить длительную и продук-
тивную работу Поэтому космическое жилище должно не только защищать
человека и оборудование, но и быть многоцелевой системой, рабочим местом,
где люди могли бы удовлетворять свои психологические и физиологические
потребности.
При проектировании помещений и машин, предназначенных для работы в
них человека, следует руководствоваться ГОСТ Р ЕН 547-3—2009 «Безопасность
машин. Размеры тела человека. Часть 3. Антропометрические данные». Этот
стандарт был разработан в соответствии с европейским стандартом ЕН 547-3:1996
и основными требованиями безопасности Директив Европейского Союза и
связанными с ними нормами Европейской организации свободной торговли
(EFTA).
Ниже приведены среднестатистические антропометрические данные
человека, полученные на основе европейских исследований (размеры в мм).
Высота тела человека (рост) (Р95)*.................... 1881
Высота тела человека (рост) (Р99) .......................1944
Высота лодыжки (щиколотки) ..............................96
Ширина тела в локтях (Р95) .............................545
Ширина тела в локтях (Р99) .............................576
Ширина кисти с большим пальцем (Р95) ...................120
Ширина кисти без большого пальца (Р95)...................97
Диаметр указательного пальца (Р95) ......................23
Ширина стопы (Р95) ......................................113
Толщина тела человека (Р95).............................342
Размах рук перед рабочим по оси захвата (Р5) ...........615
Размах рук перед рабочим по оси захвата (Р95)............820
Размах рук перед рабочим по оси захвата (Р99)............845
Толщина кисти в ладони (Р95) ............................30
Толщина кисти у большого пальца (Р95) ...................35
Длина бедра (Р95).......................................687
Длина бедра (Р99).......................................725
Глава 2. Человек в космическом полете
83
Длина стопы (Р5) .........................................211
Длина стопы (Р95).........................................285
Длина стопы (Р99).........................................295
Длина головы от затылка до кончика носа (Р95).............240
Диаметр верхней части руки (выше локтя) (Р95) ............121
Диаметр нижней части руки (до локтя) (Р95) ...............120
Диаметр кулака (Р95) ......................................120
Расстояние досягаемости для всей руки
(функциональная длина руки) (Р5)..........................340
Расстояние досягаемости для руки до локтя (Р5) ...........170
Расстояние досягаемости руки в сторону (Р5) ..............495
Длина кисти (Р5) .........................................152
Длина кисти до большого пальца (Р5)........................88
Длина указательного пальца (Р5) ...........................59
*Р — процентиль, т. е. процентная доля индивидов из выборки стантартизации, первичный
результат которых ниже данного первичного показателя.
В зависимости от этих размеров следует проектировать рабочие места и
жилые отсеки ПКА.
2.1.2. Антропометрические характеристики человека
в условиях невесомости
В полете космонавт испытывает перегрузки, изменяющиеся от значитель-
ных во время старта и приземления до невесомости в орбитальном полете.
Кратковременное воздействие невесомости вызывает тошноту, возникающую
вследствие нарушения работы вестибулярной системы. Длительное воздей-
ствие вызывает многочисленные проблемы со здоровьем, и одна из наиболее
серьезных — потеря костной и мышечной массы (костной до 1,5 % в месяц
и мышечной до 20 % за 5—10 дней пребывания в условиях невесомости). Не-
весомость также приводит к перераспределению жидкости. Тело человека на
60 % состоит из воды, большая часть которой сосредоточена в кровеносной
и клеточной частях организма. В табл. 2.1 приведены антропометрические
изменения, вызываемые невесомостью [1]. На рис. 2.1 показана схема пере-
распределения жидкости в теле и соответствующее изменение фигуры чело-
века, находящегося в условиях невесомости [2].
Под влиянием микрогравитации в организме человека происходят сдвиги,
представляющие собой сочетание специфических изменений, обусловленных
физической природой микро гравитации и вторичных проявлений, связанных
с развитием приспособительных реакций.
Исходя из физической сущности невесомости, основным триггерным
фактором (причинным компонентом) в механизмах ее влияния на физиоло-
гические системы организма является устранение веса тела и, как следствие,
гравитационно-зависимых деформаций и механического напряжения структур
тела, в том числе ведущих гравирецепторов. Изменения в деятельности ука-
занных структур приводят к атонии антигравитационных мышц и нарушениям
84 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Таблица 2.1
Антропометрические изменения фигуры человека
Параметр Полет короткий (1-14 дней) Полет длительный
во время полета после приземления
Рост Легкое увеличение во время первой недели (1,3 см). Рост возвраща- ется в норму после приземления. Увеличе- ние вызвано удлинением позвоночника Увеличение во время первых двух недель, затем стабилизация на уровне примерно 3% от предполет- ного уровня Возвращение к норме в первый день прилета
Окруж- ность Изменения окружности грудной клетки, пояса и конечностей, обусловленные в основном сдвигом жидкости
Масса Потеря веса после полета составляет в среднем 3-4 %; около 2/3 этих потерь обусловлено поте- рей воды, остальное — потерями массы мышц и жира. Центр масс сдвига- ется к голове примерно на 3-4 см Потеря веса составляет в среднем 3—4 % за первые пять дней. Во время дальней- шего полета вес постепенно уменьшается. Его первоначальное уменьшение обусловлено выведением жидкости, потом потери являются метаболическими Быстрый набор веса в течение первых пяти дней после полета главным образом за счет восстановления жидкости; замедление этого процесса наблюдается на вторы- е-третьи сутки после посадки или в течение трех недель
Объем конечно- стей Во время первых дней после полета объем ноги уменьшается экспонен- циально, затем скорость уменьшается и достигает плато через три-пять дней. Сразу после полета объем ноги снижен на 1 %, а после посадки он быстро увеличивается в течение первых дней, а затем медленно возвра- щается к предполетному уровню В начале полета изменения анало- гичны изменениям в коротком полете. Объем ноги может и дальше снижать- ся. Объем руки снижается незна- чительно. Быстрый рост объема ноги после приземле- ния, далее он медлен- но возвращается к предполетному значению
Положе- ние тела Быстрый переход в нейтральное положение тела при отсутствии силы тяжести Быстрый переход в нейтральное поло- жение тела при отсутствии силы тяжести Быстрый возврат к предполетной позе
Глава 2. Человек в космическом полете
85
Рис. 2.1. Перераспределения жидкости при воздействии
микрогравитации:
а — на Земле при g = 9,8 м/с; б — в начале космического полета;
в — после адаптации к условиям полета; г — после возвращения на Землю
Рис. 2.2. Причинно-следственные связи при воздействии невесомости
на организм человека
86 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
в деятельности других механизмов и систем, вызывающих потерю отоскопи-
ческой устойчивости, перераспределение жидких сред в организме и др. На
рис. 2.2 показаны доминирующие причинно-следственные связи в развитии
реакции организма на невесомость [3].
В условиях невесомости тело человека занимает особое нейтральное поло-
жение, которое возникает в результате перехода мышц и суставов в состояние
минимальных затрат энергии. Чтобы принять другое положение, необходимо
приложить усилие. Если другое положение сохраняется в течение длительного
времени, это вызывает утомление и приводит к дискомфорту, поэтому для
любого рабочего места важно выбрать правильную позу (рис. 2.3).
Изменение позы человека под действием невесомости необходимо учи-
тывать при проектировании рабочих мест космонавтов:
• фиксаторы ног должны быть наклонными и находиться перед тулови-
щем, а также иметь возможность регулировки угла наклона;
Рис. 2.3. Фигура человека:
а — на Земле; б — в условиях невесомости нейтральное положение тела при действии мик-
рогравитации: 7 — вертикальная ось; 2 — горизонтальная ось; 3 — линия зрения на Земле;
4 — линия зрения под действием невесомости
Глава 2. Человек в космическом полете
87
• рабочие поверхности должны быть выше, чем при 1 g, так как эффек-
тивная высота космонавта находится между высотой в положении сидя и
высотой стоя на Земле, а плечи и руки должны быть изогнуты сильнее, чем
на Земле;
• главные дисплеи и приборные панели должны располагаться ниже, чем
на Земле, поскольку голова сдвинута вперед и вниз, что занижает направле-
ние взгляда.
2.2. Функционирование человека в космическом полете
2.2.1. Ограничения подвижности
Для нормального функционирования организма человека необходи-
ма достаточная активность скелетных мышц. Работа мышечного аппарата
способствует развитию и установлению межцентральных и межсенсорных
взаимосвязей. Двигательная деятельность повышает энергопродукцию и
образование тепла, улучшает работу дыхательной, сердечно-сосудистой и
других систем организма.
В условиях длительного космического полета на опорно-двигательный
аппарат космонавта действует не только невесомость — существенное влияние
оказывает и необходимость находиться в ограниченном замкнутом объеме, что
приводит к снижению естественной двигательной активности, а длительное
поддержание неудобной статической позы вызывает после возвращения на
Землю появление особых состояний — гипокинезии* и гиподинамии**. Об-
следование показало, что после 1,5 месяцев пребывания в замкнутом объеме
сила мышц туловища и конечностей уменьшилась на 20...40 % от исходной,
а после 4 месяцев — на 40...50 %. Наблюдались и другие нарушения.
Отсутствие мышечной нагрузки снижает интенсивность энергетического
обмена, что отрицательно сказывается на скелетных и сердечной мышцах.
Кроме того, малое количество нервных импульсов, идущих от работающих
мышц, снижает тонус нервной системы, утрачиваются приобретенные ранее
навыки и не образуются новые. Все это самым отрицательным образом
сказывается на здоровье, но особенно сильно от неподвижности или малой
подвижности конечностей страдают суставы.
Характер движения в суставе определен его строением. В коленном су-
ставе ногу можно только сгибать и разгибать, а в тазобедренном суставе дви-
жения могут совершаться во всех направлениях. Однако амплитуда движений
* Гипокинезия — пониженная двигательная активность. Она может быть связана с физио-
логической незрелостью организма, с особыми условиями работы в ограниченном пространстве,
с некоторыми заболеваниями и другими причинами. В отдельных случаях (гипсовая повязка,
постельный режим) может иметь место полное отсутствие движений, или акинезия, переноси-
мая организмом еще тяжелее.
**Гиподинамия — уменьшение мышечных усилий, когда движения осуществляются, но при
крайне малых нагрузках на мышечный аппарат. При этом скелетные мышцы нагружены ми-
нимально. Возникает огромный дефицит биологической потребности в движениях, что резко
снижает функциональное состояние и работоспособность организма.
88 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
зависит от тренировки. При недостаточной подвижности связки теряют
эластичность. В полость сустава при движении выделяется недостаточное
количество суставной жидкости, играющей роль смазки, что затрудняет ра-
боту сустава. Недостаточная нагрузка влияет и на кровообращение в суставе.
В результате питание костной ткани нарушается, формирование суставного
хряща, покрывающего головку и суставную впадину сочленяющихся костей,
да и самой кости идет неправильно, что вызывает различные заболевания. На-
рушение кровообращения может приводить к неравномерному росту костной
ткани, вследствие чего возникает разрыхление одних участков и уплотнение
других. Форма костей в результате этого может стать неправильной, а сустав
потерять подвижность.
Эффективным средством борьбы с явлениями гипокинезии и гиподина-
мии является физкультура, но тренировочный эффект будет проявляться не
всегда. Слишком малая нагрузка не вызовет такого распада веществ, который
смог бы стимулировать синтез новых, а слишком напряженная работа может
привести к преобладанию распада над синтезом и к дальнейшему истощению
организма. Тренировочный эффект дает лишь та нагрузка, при которой син-
тез белков обгоняет их распад. Вот почему для успешной тренировки важно
рассчитывать затрачиваемые усилия — они должны быть достаточными, но
не чрезмерными. Другое важное правило состоит в том, что после работы
нужно обязательно отдохнуть.
2.2.2. Питание космонавтов во время полета
Условия жизнедеятельности на борту космического объекта (состояние
невесомости, эмоционально-психическое напряжение, ограниченный объем
кабины корабля) требуют особого подхода к рациону питания космонавтов.
Обязательные требования космического питания:
• сбалансированность рациона по основным незаменимым факторам в
соответствии с теорией рационального питания;
• высокая норма энергетической ценности при минимальных массе и
объеме;
• стойкость к климатическим и механическим воздействиям;
• сохранение доброкачественности в течение длительного срока.
К особенностям организации питания космонавтов следует отнести:
• вследствие перегрузок повышенные требования к прочности тары и
упаковки продуктов;
• невозможность применения в условиях невесомости традиционной
посуды (тарелок, чашек, стаканов);
• ограничение содержания в продуктах жидкой фазы (при этом продук-
ты не должны быть только сухими, брикетированными или виде таблеток);
• максимальное приближение по свойствам к продуктам, потребляемым
в земных условиях;
• особые требования к продуктам, которые крошатся, поскольку они
опасны для здоровья космонавтов (например, попадание крошек в горло в
условиях невесомости, загрязнение кабины и др.);
Глава 2. Человек в космическом полете
89
• длительность сроков хранения, полноценность продуктов по составу,
ограничение по массе и объему, отсутствие несъедобной части [4].
Перечисленные факторы рациона должны быть основными при подборе
продуктов для космонавтов. Рацион питания космонавта и требования к его
составу зависят от времени пребывания человека в космосе.
Основные требования к системе питания космонавта при кратковремен-
ных полетах можно сформулировать следующим образом:
• рацион питания должен быть адекватен энергозатратам космонавтов
и полноценен по составу пищевых веществ, необходимых для обеспечения
обменных процессов в организме на оптимальном уровне;
• продукты, из которых состоит рацион, должны обладать соответству-
ющими пищевыми качествами;
• рацион должен комплектоваться из продуктов, готовых к употреблению
без дополнительной обработки, нарезки и, по возможности, без подогрева в
полете;
• неусвояемые вещества должны содержаться в продуктах в незначи-
тельных количествах;
• объем и вес продуктов должны быть минимальными;
• пища должна оставаться доброкачественной на протяжении всего
полета;
• удобство приема пищи в условиях невесомости должно быть обеспечено.
Система питания на кораблях для непродолжительных полетов включала
следующие элементы:
• набор продуктов на полет или набор суточных рационов питания;
• контейнер для хранения продуктов;
• приспособления, облегчающие прием пищи;
• контейнер для сбора и хранения пищевых остатков и освободившейся
упаковки.
Очевидно, что такая система питания при продолжительных полетах
имеет ряд недостатков, прежде всего касающихся ограниченных сроков хра-
нения (5—6 дней в охлажденном виде) на Земле, при транспортировке и в
полете без холодильников. Для длительных полетов требовался совершенно
другой рацион.
Были разработаны биотехнология системы питания экипажа космиче-
ского корабля при продолжительности полета 30 сут и более, включающая
организацию и технологию питания с применением продуктов, консервиро-
ванных тепловым способом и сублимированием, биотехнология пищевого
и питьевого водообеспечения на основе консервированной воды, а также
бортовая инструкция по питанию и водообеспечению космонавтов в поле-
те и методика оценки системы питания и водообеспечения космонавтов в
полете [4].
Для обеспечения качественного питания космонавтов в длительном
полете целесообразно комплектовать кабину ПКА холодильниками и
СВЧ-печками.
90 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
223. Метаболизм
Человек в процессе дыхания и питания потребляет из окружающей среды
некоторые компоненты и выделяет отходы жизнедеятельности через специа-
лизированные органы с мочой, калом, потом и т. п. Количественная характе-
ристика обмена зависит от пола, возраста, размеров и массы тела, энергозатрат,
микроклиматических условий окружающей среды и т. д. Поэтому для оценки
массообмена используют параметры условного человека в возрасте 20...30 лет:
для мужчин — рост 170 см, масса 70 кг, уровень энергозатрат 145 Вт. Всего в
установившемся режиме человек потребляет из окружающей среды 4 кг ве-
щества в сутки и примерно столько же выделяет в окружающую среду [5, 6].
Основной газообмен происходит через легкие (98...99 %), незначительный —
через кожу и желудочно-кишечный тракт. В общей сложности, человек вы-
деляет в окружающую среду около 400 наименований веществ, некоторые из
которых приведены в табл. 2.2 [5]. Основным (по массе) является углекислый
газ. В атмосферу поступают летучие вещества пота, мочи, кала и т. д.
Таблица 2.2
Вещества, выделяемые человеком в атмосферу
Вещество Выделение, мг/сут/чел. Вещество Выделение, мг/сут/чел.
Ацетальдегид 0,08 Индол 35
Ацетон 0,13 Метиловый спирт 1,4
Аммиак 250 Метан 600
Бутиловый спирт 1,3 Метил меркантан 0,8
Окись углерода 33 Пронилмеркантан 0,8
Каприловая кислота 0,2 Пронилмеркантановая кислота 210
Этиловый спирт 4 Скатол 25
Этилмеркантан 0,8 Валериановый альдегид 0,8
Водород 59 Валериановая кислота 0,8
Сероводород 0,08 Двуокись углерода 1 180 999 (макс.) 990 000 (норма) 910 000 (мин.)
Космонавты потребляют воду в виде питьевой воды или напитков (0,8... 1,2 л),
а также в продуктах питания. Выделяемое количество воды превышает ее
потребленное количество примерно на 0,4 л. Эта избыточная вода обра-
зуется (наряду с углекислым газом) как продукт окисления компонентов
пищи и называется метаболической. Из общего количества выделившейся
воды в окружающую среду поступает в виде пара 1,5 л и в виде жидкости
1,4 л. Причем примерно 0,4 л пара выделяется при дыхании, а 0,9 л испа-
ряется с поверхности тела. Вода в жидкой фазе выводится с мочой (1,25 л)
и с плотными отходами.
Моча содержит 95 % воды и 5 % растворенных в ней минеральных и
органических соединений (в общем перечне 180 наименований). Среди
Глава 2. Человек в космическом полете
91
минеральных соединений основную массу (до 18 г/л) составляет соль NaCl.
Органическое соединение — мочевина CO(NH2)2 — выделяется в количестве
35 г/л.
Основную массу плотных отходов составляют сухой кал и сухой остаток
мочи в виде указанных выше солей минеральных соединений и органики.
В незначительных количествах удаляются волосы лица, головы и тела, ногти
и т. д. Часть выделений удаляется с бельем и при санитарно-гигиенических
процедурах.
Помимо непосредственного массообмена, следует учитывать массу сопут-
ствующих компонентов, которые в том или ином количестве может исполь-
зовать экипаж. В первую очередь это санитарно-гигиеническая вода. Расход
воды для умывания и мытья рук — около 3 л/сут. Душевая процедура может
быть запланирована 1 раз в неделю. Продолжительность душевой процедуры
3...10 мин, соответствующий расход воды составляет 3...10 л. Использованная
санитарно-гигиеническая вода будет содержать механическую и растворенную
примеси. Бихроматная окисляемость такой воды доходит до 5000 мг О2/л.
В ней находятся моющее вещество 250... 1000 мг/л, микроорганизмы 106... 108 л-1
и много других примесей. Пищевые отходы будут складываться из упаков-
ки и остатков содержавшейся в ней пищи, масса которой составляет 2...3 %
массы рациона. В табл. 2.3 приведен номинальный баланс обмена веществ
у одного члена экипажа при деятельности внутри космического корабля [5].
Таблица 2.3
Номинальный баланс обмена веществ одного члена экипажа при деятельности внутри корабля
Вещество Потребление Выделения**
Вид Количество кг/чел- день* Вид Количество кг/чел-день*
Твердое Пища 0,62 Отходы Моча Фекалии Пот 0,11 0 0,03 0,02
Жидкое (вода) Питье с готовой пищей в полу- фабрикате 1,61 0,76 1,15 Моча Пот и дыхание Вода с фекалиями 1,5 2,27 0,06
Газ Кислород 0,83 Углекислый газ 1
*Среднее максимальное значение метоболизма человека — 2700 кал/день, дыхательный ко- эффициент 0,87. ** При окислении пищи, потребляемой одним членом экипажа, выделяется 0,347 кг/день метаболической воды и 1 кг/день углекислого газа.
Здесь показаны потребляемые и выделяемые человеком количества
твердых продуктов, жидкостей и газов. Отклонения от номинального уров-
ня могут иметь место при изменении уровня нагрузок и содержания воды в
продуктах питания.
92 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
2.2.4. Заболевания экипажа
Существующая система отбора, контроль здоровья, а также комплекс про-
филактических тренировок и мероприятий призваны гарантировать здоровье
и высокую степень резистентности по отношению к космическим условиям.
Однако по отношению к некоторым категориям особо ценных специалистов
приходится снижать жесткие рамки отбора по здоровью.
В связи с этим возникает опасность возникновения в ходе космического
полета функциональных и соматических расстройств, связанных с невыяв-
ленными отклонениями в исходном уровне здоровья, а также трансформации
под влиянием неблагоприятных факторов космических условий частичной
недостаточности здоровья в патологические состояния.
У космонавта могут появиться утомление, раздражительность, эмоцио-
нальная лабильность, нарушения сна, снижение работоспособности, а также
возможно развитие вегетососудистых нарушений. В табл. 2.4 и 2.5 приведен
перечень заболеваний, зафиксированных у космонавтов, работавших на ОС
«Мир» и американских космических кораблях [7].
Таблица 2.4
Заболевания и повреждения у космонавтов, работавших на ОС «Мир»
Заболевание или повреждение Число случаев
Нарушение сна или усталость 7
Утомление и боли в мышцах после внекарабельной деятельности 6
Нарушения сердечного ритма 5
Тяжесть в голове, головные боли 5
Мелкие повреждения кожи 3
Конъюктивная экзема глаз при ультрафиолетовом облучении 3
Растяжение мышц 1
Поверхностный ожог 1
Изменение микрофлоры желудочно-кишечного тракта 1
Изменение конечной части желудочкового комплекса ЭКГ 1
Кариозная полость зуба 1
Катаральный ларингит 1
Таблица 2.5
Заболевания членов экипажей американских космических кораблей
Заболевание Число случаев
Высотные боли 2
Заболевание верхних дыхательных путей 8
Вирусная кишечно-желудочная инфекция 3
Раздражение слизистой оболочки глаз и кожи стекловолокном 3
Кожная инфекция 2
Травма 1
Глава 2. Человек в космическом полете
93
Окончание табл. 2.5
Заболевание Число случаев
Инфекция мочевого тракта 1
Контактный дерматит 2
Аритмия (в полете) 2
Аритмия (после полета) 2
Серозный отит 1
Повреждения глаз и пальцев 1
Ячмень 1
Нарыв 1
Растяжение мышц спины 1
Сыпь 1
Переутомление 3
Токсическая пневмония 3
Анализ данных, приведенных в табл. 2.4 и 2.5, показывает, что основные
виды недомогания космонавтов — переутомление и усталость (13 — у эки-
пажей ОС «Мир», 3 — у космонавтов США). Как будет показано ниже, это
стало следствием нарушения режима труда и отдыха (см. 12.3.2). Остальные
заболевания имели единичный характер и не были вызваны условиями кос-
мического полета. Большое количество заболеваний верхних дыхательных
путей у астронавтов США, очевидно, объясняется недостаточным контролем
состояния их здоровья перед полетом.
2.2.5. Физическая нагрузка
В космическом полете на космонавта действуют разнообразные физиче-
ские нагрузки. Так, на участке выведения это будут перегрузка, вибрация и
акустические нагрузки. После выхода на орбиту они не оказывают существен-
ного влияния на организм космонавта, но возникает другое воздействие —
невесомость.
Известно, что первые космонавты, находившиеся длительное время
в невесомости, после возвращения на Землю не могли не только ходить, но и
стоять. Объясняется это тем, что нервно-мышечный аппарат, обеспечивающий
вертикальное положение тела и двигательную активность, не имел на протяже-
нии длительного времени достаточной физической нагрузки, в связи с чем утра-
тил свои функции. Тоже самое происходит и с другими органами и системами —
отсутствие достаточной физической нагрузки приводит к сбоям в работе ор-
ганизма, что проявляется в виде различных болезней. Гиподинамия в первую
очередь сказывается на работе сердечно-сосудистой и дыхательной систем,
что приводит к нарушению обмена веществ в организме, а это в свою очередь
становится причиной многих заболеваний. Кроме того, снижается иммунитет,
94 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
а значит, увеличивается риск простудных и инфекционных заболеваний, ко-
торые уменьшают и без того малую физическую активность, стимулирующую
деятельность всех систем организма.
Активность космонавта в длительных (около 1 года) полетах для основ-
ных видов ПКА определяется в общем случае среднесуточными энерготра-
тами (11,304 + 0,419) МДж/сут/чел. или (2700 + 100) ккал/сут/чел. без учета
работы космонавта в скафандре. При расчете расхода энергии космонавтом
за сутки следует учитывать интенсивность энерготрат при выполнении работ
различной категории тяжести (табл. 2.6) [8, 9].
Таблица. 2.6
Интенсивность затрат при выполнении работы
Вид деятельности Интенсивность энерготрат, МДж/ч (ккал/ч)
Диапазон Среднее значение
Покой 0,324-0,378 (77,4-90,3) 0,346 (82,5)
Легкая работа 0,432-0,626 (103-149,6) 0,522 (124,7)
Работа средней тяжести 0,630-1,044 (150,5-249,3) 0,828 (197,8)
Тяжелая работа 1,044-1,872 (249,3-447,0) 1,512 (361)
Работа в скафандре во время внекорабельной деятельности 1,089+0,586 (260+140) —
Физическая тренировка* 1,465-2,428 (350-580) —
*Энергетическая стоимость одного занятия — 250—300 ккал за 45 мин занятия и 15 мин под- готовки.
В процессе внекорабельной деятельности на космонавта наряду с нагруз-
ками, связанными с выполнением какой-либо работы, действуют значитель-
ные радиационные нагрузки. Было отмечено, что интенсивность радиаци-
онных нагрузок на различные участки тела космонавта при его ориентации,
например, лицом на запад и лицом на восток различна.
2.2.6. Психологические и социальные аспекты нахождения человека
в космическом пространстве
В отличие от многих других профессий, деятельность космонавтов про-
текает в условиях достаточно высокой степени риска погибнуть в результате
аварий, катастроф и несчастных случаев. В основе определения степени риска
лежит допущение, что каждый вид человеческой деятельности влечет за собой
какую-то вероятность аварий и катастроф. Чем ближе к старту космического
Глава 2. Человек в космическом полете
95
корабля, тем сильнее психическое напряжение космонавтов. Сразу же после
старта эмоциональное напряжение начинает спадать.
На психологию космонавта в космическом полете в основном влияют
следующие факторы: изоляция и стресс, вызванный возможностью возник-
новения аварийной ситуации.
Изоляция — обособление человека или группы людей (групповая изо-
ляция) от привычных условий жизни и общения с другими людьми в усло-
виях космического полета [10, И]. В рамках подготовки космонавтов были
проведены эксперименты со «строгой» изоляцией («выключение» зрения,
слуха, осязания с помощью специальных технических приемов или путем
погружения в иммерсионную среду) и изоляцией в замкнутых кабинах малого
объема. Они выявили такие изменения в состоянии человека, как склонность
к дремоте, апатия, потеря представлений о времени, расстройства памяти,
неспособность к продуктивному мышлению и даже к решению простых
задач. В подобных ситуациях наблюдались повышенная раздражительность,
иллюзии восприятия и галлюцинации. В результате этих исследований было
предложено понятие «сенсорный голод», означающее недостаточность при-
тока внешних воздействий. Изоляцию стали обозначать также терминами
«сенсорная депривация», «сенсорная изоляция». С проблемой изоляции
тесно связана проблема гипокинезии (ограниченной подвижности) в каби-
нах малого объема.
Анализ экспериментальных данных, изучение опыта полетов человека в
самолетах и космических кораблях позволили разработать ряд мероприятий
по восполнению дефицита во внешних воздействиях и в профилактике реак-
тивных нервно-психических состояний (например, клаустрофобии — боязни
замкнутого пространства). Изоляция нескольких людей (членов экипажа)
изучается в таком разделе психологии, как социальная психология групп.
При изучении взаимодействия человека с окружающей средой необходимо
учитывать всю систему его сенсорных входов и всю систему как внешних,
так и внутренних воздействий.
В условиях частичной изоляции особенно сильно начинает проявляться
влияние так называемых сверхслабых или неспецифических раздражителей.
Задача изучения и влияния сенсорной изоляции сводится к оценке состояния
организма как функции величины потока информации в случае уменьшения
этого потока до минимального значения. Наиболее эффективными средства-
ми борьбы с сенсорной изоляцией являются нормирование потока инфор-
мации, воздействующего на космонавта, и поддержание его на постоянном
уровне по тем каналам, которые не могут быть изолированными, а также
обеспечение контроля параметров среды.
Для того чтобы сформулировать условия сенсорной изоляции, требуется
оценить количество поступающей информации (с учетом всех возможных
каналов восприятия) как до изоляции, так и во время изоляции еще на этапе
подготовки экипажей, и только тогда можно будет судить о степени готов-
ности космонавтов к полету.
Длительная изоляция — основной этнологический фактор психических
нарушений. Степень выраженности психических нарушений и характер
их клинической картины определяются главным образом личностными
96 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
особенностями испытуемых, что важно учитывать при отборе лиц для работы
в условиях длительного космического полета.
Стресс — состояние психического напряжения, возникающее у челове-
ка при деятельности в трудных условиях как в повседневной жизни, так и в
специфических обстоятельствах, например во время космического полета. На
психику космонавта существенное влияние оказывают как этап подготовки
и ожидания полета, так и сам полет. В период подготовки к полету космо-
навту требуется интенсивная теоретическая, практическая (на тренажерах)
и физическая подготовка. Одновременно с этим на него действует фактор
конкурентной борьбы за место в экипаже, поскольку проводится жесткий
отбор по целому ряду критериев [12]. Как правило, до определенного време-
ни кандидат не знает, на какой из полетов его включат в состав экипажа, не
возникнут ли непреодолимые препятствия, например проблемы со здоровьем,
из-за которых могут пропасть несколько лет подготовки.
После включения в состав экипажа на космонавта начинают действовать
оба вида стресса. Успех операции выведения КА на орбиту целиком зависит
от работы ракеты-носителя, ее систем, двигателей, автоматики. Чем меньше
времени остается до старта космического корабля, тем сильнее нарастает
психическое напряжение космонавтов, вызываемое осознанием того, что
ракета-носитель представляет собой источник опасности.
На участке орбитального полета наступает другой период: проведение на-
учных исследований и экспериментов, обслуживание КА, ремонтно-профилак-
тические работы. Но и при этом космонавта не покидает чувство опасности,
например, ему кажется, что тонкая оболочка корабля может быть пробита ме-
теоритом или фрагментом разрушившегося спутника (космическим мусором)
или может возникнуть нештатная ситуация, вызванная отказом одной из систем
ПКА. Длительное пребывание в замкнутом ограниченном пространстве с ис-
кусственными атмосферой и освещением, температурой и влажностью, пита-
нием, гигиеной, необычная смена дня и ночи и т. п. также приводят к стрессу.
Существенным отрицательным фактором может оказаться и психологическая
несовместимость членов экипажа, но это исключительно редкий случай: дан-
ному вопросу уделяется большое внимание в период формирования экипажа.
Экстремальным психическим воздействием следует считать выход в
открытый космос. Сложная процедура подготовки к выходу и облачение в
скафандр, стесняющий движения, — все эти действия требуют концентрации
внимания, поскольку ошибки недопустимы. Кроме того, необходимо стра-
ховать себя при перемещении по станции, перенося инструменты и обору-
дование, необходимые для выполнения работы. При всем этом необычная
обстановка («наедине со звездами»), ощущение слабой защищенности от
внешней агрессивной среды (практически абсолютный вакуум) и различных
опасных ситуаций, осознание того, что безопасность во многом зависит только
от самого себя, естественно, увеличивают нагрузку на психику космонавта.
Спуск экипажа с орбиты на Землю — сложная, экстремальная операция.
Психологическое состояние космонавтов здесь зависит от их личных качеств,
от степени доверия к системам корабля, а также от того, насколько успешно
выполняются этапы этой операции.
Таблица. 2.7
Стресс и его воздействие на человека
Причины стресса Контрмеры против стресса Характеристики деградации Контрмеры против ошибок Опасность
Ошибки в планиро- вании, перегрузка одного из членов экипажа Ct Плановая ротация экипажа пресс, вызванный удаленное Ошибки планирования тью от Земли Ежедневное планирова- ние, встречи с экипажем Отсутствие координации в выполнении работ, недоразумения
Семейные проблемы Взаимодействие в семье Анормальное поведение, депрессия Дисциплина, консульта- ции психолога Преднамеренный кон- фликт, неспособность работать
Разногласия с Землей, контроль Автономия от Земли Противоречие Изменения в миссии Нарушение безопасности полета
Ограниченная территория Доступность/ недоступность Конфликты между членами экипажа Переговоры, консульта- ции психолога Неправильные действия экипажа
Несовместимость Подбор экипажа Несовместимость Групповое обучение, консультации психолога Отсутствие сотрудниче- ства
Недостаточность объема кабины Ct Рациональная организация использования объема станции, оформление пресс, вызванный условиями Клаустрофобия г обитаемости Защита или эвакуация Раздражительность; паранойя
Вибрация Выявление источ- ников вибрации и их устранение Нарушения сна, ухудшение взаимоотно- шений Наушники, гарнитуры, коммуникации устройства Невыполнение задания, нарушения координации
Уборка помещения Обучение процеду- рам уборки и обеспечение техникой Ухудшение качества среды обитания Распределение обязан- ностей, составление графика дежурства, работа в команде Нарушения в работе системы жизнеобеспече- ния
Продолжение табл. 2.7
Причины стресса Контрмеры против стресса Характеристики деградации Контрмеры против ошибок Опасность
Гигиена Обучение Дискомфорт, болезнь Группы и стандарты Заболевание, неспособность выполнить задачи
Тепловые нагрузки, влажность, замкну- тая атмосфера Управление окружающей средой Дискомфорт, раздражительность Вентиляция, регулировка газового состава, управле- ние температурой и влажностью, их контроль Повышенная тревож- ность; снижение работо- способности
Длительная изоляция Переговоры с семьей и друзьями, экспеди- ции посещения, информация о происходящих событиях, отдых, организация пространства Одиночество, угнетен- ное состояние, ухудшение восприятия, стресс, клаустрофобия Подбор экипажа, меро- приятия по обеспечению информацией, хобби, учет персональных интересов, цвет помещений, освещение Срывы в поведении, ошибки в работе, ослаб- ленное восприятие информации, ошибочные действия, паранойя
Искусственное освещение Дизайн освещения, создание «естест- вен н го света» Усталость, раздражительность, затуманенное зрение Разработка специального назначения освещения Ошибочное восприятие информации
Проблемы в произ- водственной среде Стрес Совершенствование конструкции станции :с, вызванный выполнением i Усталостные факторы работы на орбите Соответствующие дизайн рабочего места и интерьера станции Ошибки в работе
Слабые руководство и организация работы Совершенствование руководства, обучение, поиск консенсуса Конфликты с руководством Разрешение конфликтов Противоречивые действия
Назначение на выполнение задач Выбор задач Однообразие Ротация выполняемых работ Отсутствие внимания
Физические недостатки Выбор экипажа, физическое воспитание Недостаточная выносли- вость, слабость Обязательные физические упражнения, режим дня Физическая невозмож- ность выполнять постав- ленные задачи
Ошибки в планиро- вании и координа- ции работы, кон- фликты Мероприятия и встречи для измене- ния положения Низкая мораль и мотивация Проверки и ротация экипажа Отсутствие эффективных действий, а также взаимодействия
Космические болезни, газовые пузырьки в воде Cmpei Проверка и регули- ровка системы водоснабжения ~с, вызванный нетрудоспоса Падение производитель- ности, страдания бностью экипажа Лечение, улучшение системы водообеспечения Недостаточное реагирова- ние экипажа
Болезнь Обследование, профилактика болезней Кратковременная потеря трудоспособности Лечение Инфекция
Травма Обеспечение травматической безопасности Долговременная потеря трудоспособности Возвращение на Землю, стабилизация на орбите Отвлечение других членов экипажа
Эмоциональные или психические проблемы Подбор и обучение экипажа Отсутствие доверия и сотрудничества Освобождение от работы Ненормальное поведение, вредоносные действия
Система поддержки в трудной жизнен- ной ситуации Размещение в общем модуле Повышение вероятности получения травмы при работе Замена на другого члена экипажа Отстранение от ответ- ственной работы
Смерть члена экипажа, члена семьи или одного из друзей Консультации психолога Травма члена экипажа, срыв работы в команде Консультация психолога Неспособность работать
Окончание табл. 2.7
Причины стресса Контрмеры против стресса Характеристики деградации Контрмеры против ошибок Опасность
Непревычные кухня, режим питания, диета, (необходимость привыкать к другому столу) С Общее жилье, индивидуальное питание, учет предпо- чтений членов экипажа тресс, вызванный особенное Раздражение, депрессия тью личности Обучение Запахи, дегазация
Индивидуальное имущество (ограни- чения) Учет индивидуаль- ных интересов при комплектации экипажа Персональная автономия, низкий моральный дух Мониторинг и контроль Потеря работоспособно- сти, конфликты
Скука, однообразие Развлечения, подбор экипажа, разнообразие деятельности Отсутствие бдительности Проведение мероприятий, планирование, примене- ние скрытой фотокамеры Отвлечение, несчастные случаи
Одежда Учет предпочтений в одежде, прачечная Дискомфорт, ограниче- ние личной свободы Чистая и удобная одежда Загрязнение, пожар
Глава 2. Человек в космическом полете
101
Положительным фактором, конечно, будет осознание того, что это за-
вершающий этап полета и скоро предстоит возвращение к земной жизни.
Специалисты США, провели анализ возможных ситуаций, вызывающих
стресс, предложили меры по его предупреждению, рассмотрели последствия
стресса, порекомендовали контрмеры по его снижению и выявили его по-
следствия (табл. 2.7) [13]. Источники стрессовой ситуации были разделены
на группы:
1 — удаленность от Земли;
2 — условия обитаемости;
3 — проблемы во время работы;
4 — трудоспособность экипажа;
5 — особенности личности.
Согласно информационной теории эмоций, разработанной П.В. Симо-
новым, отрицательные переживания возникают в условиях дефицита инфор-
мации. Знак эмоции изменяется, когда объем поступающей информации на-
чинает превышать прогностически необходимый. При преодолении барьера,
отделяющего обычные условия жизни от экстремальных, человек оказывается
избыточно информированным, что и вызывает положительное эмоциональ-
ное состояние. Однако эмоцию нельзя объяснить только информационными
процессами, не учитывая физиологического механизма.
2.3. Воздействие космической среды на человека
во время полета
2.3.1. Воздействие внешней среды
Газовая среда кабины должна быть приближена к газовой среде Земли,
состоящей из трех основных газов: кислорода (О2) — 21 %, углекислого газа
(СО2) — 0,03 % и азота (N2) — 78 %. Они определяют основные свойства
атмосферы: газообмен, конвективный теплообмен, теплопередачу, частоту
звуковых колебаний, т. е. восприятие человеком аудиоинформации. Но самое
главное — это наличие кислорода в атмосфере, который дает возможность
человеку существовать на Земле [14].
Давление сухого воздуха на уровне моря по стандартной атмосфере при-
нято считать равным 101,3 кПа (760 мм рт. ст.). Максимальное давление,
при котором может существовать человек, — 250 кПа (1900 мм рт. ст.), ли-
митирующим условием является парциальное давление кислорода, которое
становится равным 50,5 кПа (400 мм рт. ст.). За пределами этого значения
проявляются его токсические свойства. Нижняя граница давления для трени-
рованного человека — 54 кПа (720 мм рт. ст.), что соответствует высоте 5 км,
для нетренированного человека — 79 кПа (737 мм рт. ст.), что соответствует
высоте 2 км. Летальный исход может наступить при давлении ниже 36,6 кПа
(275 мм рт. ст.), что соответствует высоте 7,8 км.
При длительных космических полетах рекомендуется применять азотно-кис-
лородную газовую смесь под давлением 101,3 ± 13,3 кПа (760 ± 100 мм рт. ст.),
с парциальным давлением кислорода= 18,7...26,7 кПа (140...200 мм рт. ст.)
102 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
и парциальным давлением углекислого газарСо2 не более 0,79 кПа (6 мм рт. ст.).
На орбитальном комплексе «Мир» нормальным считалось парциальное дав-
ление углекислого газа рСо2 = 0,5 кПа (3,7 мм рт. ст.).
В космических скафандрах, предназначенных для длительной работы (до
7 ч) в открытом космосе, газовая среда — чистый кислород или азотно-кис-
лородная смесь под давлением не выше 54,9 кПа (400 мм рт. ст.).
Важным фактором является и ионационный состав атмосферы. На ионы
диссоциируют молекулы кислорода и воды, а полярность молекул воды
приводит к образованию гидратированных комплексов. Коэффициент уни-
полярности, характеризующий соотношение положительно и отрицательно
заряженных ионов, рекомендуется поддерживать в отсеке на уровне менее 1.
В газовой среде он может изменяться в пределах 0,6...5. Повышение его
значения приводит к ухудшению самочувствия и бактериологической загряз-
ненности атмосферы отсека.
При проектировании систем жизнеобеспечения (СЖО) необходимо
учитывать диапазоны физиологически допустимых отклонений давления и
состава газовой среды от номинальных:
• при парциальном давлении кислорода 21,3 кПа (160 мм рт. ст.)
общее давление в КА может изменяться в пределах 40,9... 133,3 кПа (300,7...
1000 мм рт. ст.);
• снижение парциального давления кислорода до 16 кПа (120 мм рт. ст.)
возможно на один период не более суток; повторное снижение парциального
давления кислорода до 16 кПа допустимо только после двух суток пребывания
в атмосфере с нормальным (21,3 кПа) парциальным давлением кислорода;
• недопустим длительный рост парциального давления кислорода выше
46,7 кПа (350 мм рт. ст.), повышение парциального давления углекислого газа
до 3,3 кПа (25 мм рт. ст.) допустимо не более 4 ч за каждые сутки полета и
до 2 кПа (15 мм рт. ст.) допустимо не более 12 ч.
В газовой среде отсека выявлено около 400 наименований различных при-
месей, поступающих туда как отходы жизнедеятельности человека, а также в
результате сублимации клея, красок и различных синтетических материалов
из облицовки и бортовой аппаратуры. Необходимо защитить экипаж от не-
благоприятных химических воздействий, ухудшающих здоровье, самочувствие
и работоспособность экипажа на всех этапах космического полета.
Состав газовой среды кабины накладывает жесткие ограничения на ме-
тоды и стратегию защиты экипажа:
• приборное обеспечение, предназначенное для определения вредных
примесей, должно иметь минимальные габариты, массу и энергоемкость;
• средства спасения и медицинского обеспечения должны иметь мини-
мальную массу и занимать ограниченное пространство;
• при микрогравитации отсутствуют условия для сидементации (осажде-
ния) крупных частиц, что требует их искусственного удаления;
• высокий уровень радиации вдали от Земли может повлиять на хими-
ческий состав воздуха в кабине, вызвав образование более токсичных форм.
Каждый из этих факторов должен быть учтен при проектировании гер-
мокабины космического аппарата.
Глава 2. Человек в космическом полете
103
Микроклимат — это комплекс метеорологических условий в помещении:
температуры, относительной влажности, количества аэроионов, воздухообме-
на, скорости движения воздуха, содержания в воздухе твердых частиц (пыли),
наличия приятных запахов (ароматерапия) и др. [15].
Тепловое состояние человека складывается под воздействием внешних
и внутренних факторов. К внешним относятся температура окружающей
среды, относительная влажность, подвижность окружающей газовой среды,
температура конструкции и лучистый поток, попадающий через иллюмина-
торы в отсек. К внутренним факторам относятся теплопродукция организма
человека, зависящая от физической нагрузки, и тепло, выделяемое при работе
бортовой аппаратуры.
Главную роль в тепловом балансе организма играет интенсивность тепло-
продукции. Для удобства ее принято разделять на интенсивность основного
метаболизма, необходимого для поддержания минимума активности орга-
низма, и интенсивность активного метаболизма, обеспечивающего энергию
сверх основного уровня вплоть до уровня максимума аэробной работы.
Для поддержания теплового баланса организма необходимо, чтобы ко-
личество продуцируемого тепла было сбалансировано с теплоотдачей и тем
самым была достигнута средняя температура тела, которая будет комфортной
или переносимой. Механизмы потери тепла или его поступления из окружа-
ющей среды — конвекция, излучение, теплопроводность и испарение.
Особенностью человеческого организма является способность адапти-
роваться к температуре окружающей среды. Когда человек подвергается
воздействию жары или холода в течение нескольких дней или недель, то
его система терморегулирования претерпевает изменения, приводящие к
изменению производительности. Акклиматизация в жаркой среде приводит
к обильному потоотделению при заданной температуре тела. Выполнение
физической работы, даже в термонейтральной среде, значительно увеличи-
вает метаболическую теплопродукцию в организме. Более сложно выглядит
адаптация человека к холоду, как правило, такое воздействие исключается
поведенческим терморегулированием, которое включает в себя сознательные
действия человека, направленные на максимальное сохранение тепла. Оно
заключается в принятии различных поз, уменьшающих или увеличивающих
площадь поверхности теплоотдачи в окружающую среду, или в разработке
способов повышения температуры.
Особенности космического полета, в частности невесомость, приводят
к изменениям в тепловом балансе организма. При невесомости отсутствует
свободная, или естественная, конвекция, что приводит к изменению физи-
ческих механизмов терморегуляции. Естественная конвекция представляет
собой движение воздуха, обусловленное различием влияния гравитации на
плотный холодный и менее плотный теплый газ. В замкнутом объеме она
происходит тогда, когда в нем имеются поверхности или объекты с различ-
ными температурами. Особенность космического корабля — неравномерный
нагрев поверхности аппарата, поскольку он с циклической последователь-
ностью входит и выходит из теневой зоны, что приводит к изменению тем-
пературы корпуса.
104 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Для обеспечения комфортных условий в замкнутом объеме используют
принудительную конвекцию, которая преобладает над естественной при
скоростях движения среды 4,5...9,0 м/мин, а при скоростях менее 4,5 м/мин
преобладать будет естественная конвекция.
Отсутствие гравитации влияет также на потоотделение, являющееся
одним из механизмов терморегуляции организма в жаркой среде. В обычных
условиях выделяемый пот либо испаряется, либо собирается в области пото-
вых желез. В условиях невесомости пот накапливается на поверхности тела в
виде сплошных пленок, что создает дискомфорт и ухудшает потоотделение.
Термические характеристики газа-разбавителя в атмосфере космического
корабля также влияют на тепловой баланс. В настоящее время используются
два состава атмосферы: 100%-ный кислород или смесь кислорода с азотом, а
в качестве разбавителя можно применять гелий, неон или аргон. Наибольшее
влияние на тепловой баланс оказывает гелий, который существенно повышает
конвективную теплопередачу.
Геометрические размеры космического аппарата и его собственная те-
плоемкость также влияют на тепловой баланс. У небольших космических
аппаратов («Восток», «Меркурий», Gemini) температура стенки варьирует
от одного участка к другому и существенно зависит от положения аппарата
на орбите. Температура внутри этих кораблей не бывает стабильной и одно-
родной, и они должны иметь систему терморегулирования, действующую в
широких пределах.
Теплоемкость космических кораблей и орбитальных станций, имеющих
значительные размеры, способствует стабильному поддержанию температу-
ры. В этом случае большое значение имеют количество и схема размещения
средств, предназначенных для охлаждения электрических, электронных и
механических систем. Системы, продуцирующие значительное количество
теплоты, следует охлаждать локально, чтобы они не отдавали теплоту в оби-
таемый объем.
Большое значение имеет размещение датчиков температуры внутри от-
секов. Схема их установки отрабатывается на тепловом макете космического
корабля или орбитальной станции.
За сутки средняя расчетная мощность выделения теплоты организмом
космонавта составляет 145 Вт. Она выделяется в окружающую среду путем
излучения, конвекции и испарения.
Предел тепловой выносливости организма человека ограничен вследствие
нарушения равновесия биохимических реакций и биофизических процессов,
происходящих в организме. При температуре 42...43 °C возможен летальный
исход. Предельно допустимыми считаются внешние регистрируемые пока-
затели теплового состояния организма: ректальная температура 38...39 °C и
частота пульса 140... 170 уд./мин.
Повышение температуры приводит к интенсивному потоотделению, при
котором из организма с водой выводятся соли, что приводит к нарушению
водно-соляного обмена, замедляющему реакцию и повышающему вероят-
ность принятия ошибочного решения при работе с приборами, уменьшающе-
му переносимость перегрузок и т. п., а также возможен даже летальный исход.
Глава 2. Человек в космическом полете
105
Тепловое состояние человека в условиях низких температур регулируется
за счет теплоизолирующих свойств одежды. Физиологически нейтральными
считаются условия, при которых температура газовой среды находится в диа-
пазоне 18...23 °C, относительная влажность воздуха — 40...60 %, подвижность
газовой среды — 0,05...0,13 м/с, а температура окружающей среды отличается
от температуры газовой среды не более чем на 3 °C.
2.3.2. Внешние силовые воздействия
Воздействие невесомости и микрогравитации. Невесомость — состояние,
при котором отсутствует сила взаимодействия тела с опорой (вес тела), воз-
никающая под действием гравитационного притяжения и других массовых
сил, в частности силы инерции, вызванной ускоренным движением тела.
Невесомость оказывает наиболее сильное влияние на организм космо-
навта, приводя к снятию силовых напряжений с антигравитационной му-
скулатуры, деформации опорно-двигательного аппарата, а также к измене-
ниям гидростатического давления в жидких средах организма. Невесомость
проявляется сразу же после выключения двигательной установки последней
ступени ракеты-носителя и воздействует на экипаж практически в течение
всего космического полета вплоть до входа СА в плотные слои атмосферы
при его спуске с орбиты.
Воздействие невесомости на космонавта весьма разнообразно:
• болезнь движения — космонавты связывают ее появление с резкими
движениями головы и перемещениями, однако по мере пребывания в усло-
виях невесомости организм адаптируется к этому состоянию, как показывает
практика, на седьмые—десятые сутки неприятные ощущения исчезают;
• появление пространственных иллюзий, выражающихся в неспособно-
сти космонавта ориентировать свое тело в пространстве, что сказывается на
работоспособности и перемещениях в кабине;
• чувство прилива крови к голове, явление, которое возникает в начале
полета, а затем проходит, однако иногда оно сохраняется на протяжении
всего полета, но существенного влияния на работоспособность не оказывает;
• нарушение координации движения наблюдаются в первые часы и сутки
полета, особенно при движениях, не требующих визуального контроля, ко-
ординация восстанавливается на вторые-третьи сутки полета;
• изменения в сердечнососудистой системе — снижение нагрузки в связи
с уменьшением потребления кислорода, а также артериального давления,
падение тонуса сосудов большого круга кровообращения, накопление крови
в венозном русле, повышение внутричерепного давления, увеличение вну-
тригрудного объема крови.
Также невесомость сказывается на состоянии анализаторных систем ор-
ганизма, например ухудшаются функции зрительного анализатора.
Микрогравитация оказывает наиболее существенное влияние на организм
человека в условиях невесомости на орбитальных станциях больших размеров,
имеющих атмосферу, близкую к земной, что показали исследования, прове-
денные в космических полетах. Под микрогравитацией понимают состояние,
106 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
в котором ускорение, вызванное гравитацией, крайне незначительно, а сама
сила гравитации не изменяется. Например, на МКС все тела находятся в
состоянии микрогравитации, потому что неоднородность гравитационного
поля Земли и другие явления создают ускорения, достигающие 10-3... 10-1 g.
Состояния чистой невесомости, когда вес тела (при отсутствии перегруз-
ки) равен нулю, трудно достигнуть, потому что сложно компенсировать такие
явления, как удары микрометеоритов, перемещения воздуха и топлива внутри
космического корабля, неоднородное притяжение самого корабля, работу
бортовых систем. На рис. 2.4. приведены внешние и внутренние факторы,
вызывающие микрогравитацию [16].
Значения постоянно действующей микрогравитации зависит от кон-
фигурации станции, высоты орбиты, угла наклонения Солнца, состояния
атмосферы Земли (геомагнитного индекса) и других факторов. На орбитах
высотой до 1000 км основные постоянные источники ускорений:
• гравитационный градиент;
• маневры корабля при движении по орбите, например при ориентации
в орбитальной системе координат;
Рис. 2.4. Микродинамические воздействия на космический аппарат
Глава 2. Человек в космическом полете
107
• аэродинамическое торможение;
• низкочастотные колебания относительно центра масс.
На ПКА значительных размеров микрогравитация зависит от его местопо-
ложения. На рис. 2.5 приведены зоны микрогравитации орбитальной станции.
Рис. 2.5. Зоны микрогравитации орбитальной станции
К квазистационарным возмущениям относятся возмущения, не менее
95 % мощности которых приходится на частоты ниже 0,01 Гц. На рис. 2.6
приведен профиль микро гравитации вибрационных источников возмущений,
действующих на МКС [17]. Определены восемь основных бортовых источ-
ников возмущений. К ним относятся вентиляторы служебного модуля (СМ)
(значение pg около 0,0026), вентилятор СО2 лабораторного модуля США
(pg = 0,031), трение вращения в механизмах разворота солнечных батарей
(СБ) и радиаторов, пусковой режим вращения бегущей дорожки, плазменный
прерыватель, перемещения космонавтов.
Микрогравитация порождается деятельностью экипажа и оборудова-
ния. Вибрирующую окружающую среду и остаточные ускорения следует
принимать во внимание при работе с инструментами во время наблюдений,
особенно тогда, когда собственные частоты аппаратуры близки к частотам
микрогравитации.
Под влиянием микрогравитации в организме человека происходят сдвиги,
представляющие собой сочетание специфических изменений, обусловленных
физической природой микрогравитации, и вторичных проявлений, связанных
с развитием приспособительных реакций.
Воздействие сил инерции. Стартовая тяга двигателей ракеты-носителя
превышает вес ракеты примерно на 50 %, поэтому вертикальное ускорение
на старте составляет приблизительно половину ускорения свободного па-
дения. Вследствие работы двигателей и связанного с этим расхода топлива
масса ракеты уменьшается и к моменту выгорания топлива в первой ступени
составляет примерно 26 % стартовой. Ускорение по мере выгорания топлива
увеличивается до 5 g. Затем следует короткий период свободного полета, когда
отделяется первая ступень, после чего включаются двигатели второй ступени
108 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Рис. 2.6. Профили микрогравитации
и процесс повторяется. Общая продолжительность действия перегрузок при
выводе ПКА на орбиту составляет примерно 6... 10 мин.
При возникновении аварийных ситуаций на участке выведения значи-
тельные перегрузки возникают при срабатывании системы аварийного спа-
сения (САС), они могут достигать значений до 8 g. При спуске по крутым
траекориям (аварийном спуске) значения перегрузок доходят до (20...25) g.
Перегрузка — отношение абсолютной величины линейного ускорения,
вызванного негравитационными силами, к ускорению свободного падения
на поверхность Земли, поэтому она является безразмерной величиной [17].
Перегрузки, действующие на космонавта на участке выведения косми-
ческого корабля на орбиту, могут вызывать нарушение координации, уве-
личивать время реакции на сенсорные раздражители, снижать восприятие
зрительной информации. По механическому воздействию на организм кос-
монавта различают длительно действующие и ударные перегрузки. Длительно
действующие перегрузки приводят к нарушению функционирования систе-
мы кровообращения и дыхания, а ударные при определенных значениях —
к механическому разрушению тканей (переломам). По характеру переме-
щения тела в пространстве под действием перегрузок различают перегрузки
линейные и вращательные.
Глава 2. Человек в космическом полете
109
Основным фактором, влияю-
щим на предельные значения ли-
нейных перегрузок, является их
направление относительно системы
координат, связанной с человеком
(рис. 2.7). Главные оси головы и
тела, определенные какх,у, г, опи-
сывают декартову систему коорди-
нат. Линейные ускорения: +az —
вверх; -az — вниз; —ау — вправо;
+ау - влево; +ах — вперед; -ах —
назад; 7 - рыскание (повороты
вправо-влево); 2 — крен (наклоны
туловища в бок); 3 — тангаж (на-
клоны вперед-назад).
Степень опасности длительно
действующих поперечных перегру-
зок зависит от их продолжительно-
сти и угла приложения (рис. 2.8) [5].
Опасными являются продоль-
ные перегрузки, воздействующие
на систему кровообращения. При
Рис. 2.7. Система координат, связанная
с телом человека
положительной продольной перегрузке происходит отлив крови от головы,
что приводит к нарушению снабжения головного мозга кислородом. Можно
повысить ее переносимость, задержав отлив крови от головы, механически
пережимая кровеносные сосуды, по которым происходит отлив крови. Это
реализуется благодаря специальным противоперегрузочным костюмам или
жилетам, которые применяются в авиации.
Продольные отрицательные перегрузки, приводящие к приливу крови
к голове, являются наиболее опасными. Предел их переносимости нельзя
Рис. 2.8. Переносимость длительно действующей перегрузки п
110 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
повысить никакими механическими способами. При |+aj = 2g человек может
потерять зрение, при |+aj = 4g он теряет сознание, а перегрузка |+aj = 5-6g
приводит к летальному исходу [18].
Более высокий уровень перегрузки космонавт выдерживает в попереч-
ном направлении. Человека, сидящего в кресле, положительная перегрузка
«вдавливает» в него, при этом становится трудно дышать, происходит отлив
крови, что приводит к появлению серой пелены перед глазами и временной
потере зрения.
Для повышения переносимости длительно действующих перегрузок их
воздействие перераспределяют между системами дыхания и кровообращения.
Наилучшая переносимость перегрузки достигается тогда, когда направление
между позвоночником и направлением веса тела составляет 75°...78°, что не-
обходимо учитывать при размещении кресла космонавта в кабине на участке
выведения и в спускаемом аппарате.
Ударные перегрузки возникают, если скорость деформации тканей будет
меньше или близка к скорости распространения возмущений, возникающих
под действием поверхностных сил, т. е. от производной dn/dT (п — перегруз-
ка; т — время). Скорость распространения деформации примерно равна
скорости звука. В результате могут возникнуть механические разрушения
костной ткани. Внутренние органы тела человека (печень, легкие и др.) можно
рассматривать как коллоидные системы, заключенные в оболочку, поэтому
при dn/dT > 2000 с-1 и определенных значениях перегрузки возможен их
разрыв.
Вращательные перегрузки бывают двух видов: при вращении тела отно-
сительно осей, проходящих через тело (рис. 2.9, а), и при вращении относи-
тельно оси, находящейся вне тела (рис. 2.9, б) [5]. В первом случае при рав-
номерном вращении возникают центростремительные ускорения, а при
ускорении и их замедлении на тело действуют тангенциальные ускорения.
Вращение вокруг оси z с угловой скоростью сог = Зя с-1 приводит к голово-
кружению и тошноте, а при скорости ок =5,5л с-1 через 10... 12 с человек
теряет сознание. Аналогичный результат получается при вращении относи-
тельно оси у.
Оу Ь-гМ а б Рис. 2.9. Схема возникновения пере- грузок при вращении: а — оси вращения проходят через тело че- ловека; б — ось вращения расположена вне тела человека При вращении относительно оси, находящейся вне тела, возникает цен- тробежная сила Fn, действующая на него, уравновешенная реакцией опоры, которую создает центростремительное ускорение: Fn =та„, где т — масса тела; ап — центростре- мительное ускорение. Центростремительное ускорение можно записать в следующем виде: V2 со2/?2 2 а= — = = аг л, R R
Глава 2. Человек в космическом полете
111
где v — линейная скорость; R — радиус вращения; о — угловая скорость
вращения.
Тогда
тап со2 Л
п ——- =-----.
mg g
Перегрузка п = 0,3 считается минимально допустимой для жизни чело-
века вне Земли. Угловая скорость вращения ограничивается возникающим
при перемещении головы ускорением Кориолиса, которое, воздействуя на
вестибулярный аппарат человека, вызовет эффект укачивания или движения.
Рекомендуемая угловая скорость вращения содоп =0,2 с-1, следовательно,
радиус вращения составляет не менее 75 м.
Воздействие вибраций. При выведении ПКА на орбиту по корпусу раке-
ты-носителя от двигателей распространяется интенсивная вибрация, которая
передается отсеку с экипажем. Аэродинамические нагрузки, возникающие
при прохождении атмосферы, быстрое движение масс жидкого топлива, а
также функционирование системы управления вызывают низкочастотные
колебания. По мере расходования топлива значения вибраций изменяются.
Вибрации можно рассматривать как механические колебания, сотрясе-
ния и толчки, передающиеся космонавту через кресло или пол. При этом
происходят резкие смещения тела, аналогичные возникающим при ударных
перегрузках, что приводит к смещениям как всего тела, так и отдельных его
частей. Требования по защите космонавта от воздействия вибраций сфор-
мулированы в ГОСТ 12.1.012. ССБТ «Вибрационная безопасность. Общие
требования».
С точки зрения механики тело человека
можно представить в виде совокупности
масс, соединенных упругими связями и
демпферами (рис. 2.10), каждая из которых
имеет собственную частоту колебаний.
Кроме того и само тело, и все его части
имеют частоты вынужденных колебаний, что
сказывается на работоспособности космо-
навта (табл. 2.8) [18].
Совпадение внешних частот с резо-
нансной частотой всего тела или его частей
Рис. 2.10. Механическая модель человека
(сидящего или стоящего) и собственные ча-
стоты разных частей его тела:
1 — глазные яблоки (30...90 Гц); 2 — голова, вдоль
оси (25 Гц); 3 — плечевой пояс (4...5 Гц); 4 — груд-
ная клетка (60 Гц); 5 — полость легких (4...6 Гц);
6 — позвоночник вдоль оси (10... 12 Гц); 7 — брюш-
ная полость (4...8 Гц); 8 — ноги при согнутых ко-
ленях (от 2 Гц), при напряженной позе (до 20 Гц);
9 — точка приложения вибрации в положении стоя;
10 — точка приложения вибрации в положении сидя
112 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Таблица. 2.8
Частоты колебаний частей человеческого тела
Реакция Действие* Частота, Гц Амплитуда, мм
Управление дыханием 3,5-6,0 19
— 4,0-8,0 3,5-15
Дрожание тела + 40,0 1,6
+ 70,0 0,75
Дрожание рук + 20,0 0,37-0,8
+ 25,0 0,8-1,3
+ 30-300 0,5-5,0
+ 1000 0,02
Прицельные движения 15 1,8-3,0
— 25 0,37-0,8
— 35 0,3-0,7
Координация движений рук — 2,5-3,5 12
Постоянство давления ступни — 2,5-3,5 12
Время реакции кисти + 2,5-3,5 12
Острота зрения — 1,0-24,0 0,6-1,5
— 35,0 0,75-1,2
— 40,0 1,6
— 70,0 0,8
— 2,5-3,5 12
Слежение — 1,0-50,0 1,25-4,5
— 2,5-3,5 12
Внимание — 2,5-3,5 12
* «+» — возрастание (улучшение); < :< — » — уменьш 30-300 ение (ухудшение). 0,5-5,0
приводит к возникновению их колебаний с амплитудой большей, чем у ви-
брирующей опоры и у других, не вошедших в резонанс частей тела.
Существуют две важные для проектантов границы. Частота менее 1 Гц
воспринимается как качка, т. е. тело перемещается в пространстве как целое.
Частота более 90 Гц не вызывает колебаний всего тела.
Длительное воздействие вибрации приводит к серьезным нарушениям в
организме человека (рис. 2.11) [19].
Механизм воздействия вибраций на космонавта заключается в том, что
изменяются значение и направление как скорости движения, так и ускорения,
вызванного реакцией опоры, т. е. действуют обычные перегрузки. Однако
эти перегрузки непрерывно меняют направление, что приводит к внутрен-
ним болезненным ощущениям и нарушениям в работе отдельных органов и
Глава 2. Человек в космическом полете
113
систем организма. При наличии вибраций у космонавтов могут возникать
нарушение функции дыхания, сердечно-сосудистой системы, пищеварения,
а также опорно-двигательного аппарата. Основные симптомы — появление
дискомфорта, тошноты, страха, усиление раздражительности. При опреде-
ленных значениях частоты и амплитуды колебаний опоры могут наступить
глухота, потеря зрения, изменение артериального давления и т. д.
Колебания с наиболее значительной амплитудой возникают на участке
выведения КА на орбиту, но они находятся в области низких частот. При вы-
ведении космического корабля «Аполлон» в момент запуска ракеты-носителя
«Сатурн-5» частота колебаний составляла 4,5 Гц, после отделения первой сту-
пени — 6 Гц, второй — 9 Гц. Во время орбитального полета вибрации возника-
ют при включении и в процессе работы различного бортового оборудования.
Общий характер воздействия вибраций на организм космонавта зависит
от частоты и амплитуды колебаний (рис. 2.12) [6].
Акустическое воздействие. Кроме появления перегрузок и вибраций уча-
сток выведения сопровождается сильным акустическим воздействием. Бес-
порядочное сочетание звуков различных частот называется шумом.
Рис. 2.11. Влияние вибраций на организм человека
114 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Рис. 2.12. Характер воздействия —
амплитуды А и частоты f вибрации
на организм космонавта:
1 — не ощущается; 2 — ощущается; 3 —
беспокоит; 4 — вызывает боль
Энергетическими показателями зву-
ковой волны являются интенсивность
звуков и звуковое давление. Интен-
сивность звука характеризует энергию,
переносимую в единицу времени через
единицу поверхности, расположенной
нормально направлению распростране-
ния звуковой волны (/, Вт/м2). Звуковое
давление характеризует разность давле-
ний в возмущенной и в невозмущенной
среде (р, Па). На практике применяют
единицу, равную логарифму относитель-
ной интенсивности звука, Дб:
£z=101g(7/70)
или
pf = 101g(p/p0),
где Iwp — текущие значения интенсив-
ности звука и звукового давления; /0 =
= 1000 Гц ир0 = 210-5 — пороговые зна-
чения интенсивности звука и звукового
давления.
Акустическое воздействие окружающей среды на человека является
обязательным условием его существования. Он привык жить в мире звуков,
создаваемых природой, и абсолютная тишина действует на него угнетающе.
Различают природные и искусственные источники шума. Природные создают
звуковые колебания с частотой около 1000 Гц и невысокой интенсивностью.
В этом же диапазоне частот находятся звуки, издаваемые человеком, и разго-
ворная речь на расстоянии 1 м от источника звука (70 дБ). Шум работающего
реактивного двигателя создает звуковые колебания частотой 140... 160 дБ.
При взлете ракеты шум, создаваемый реактивной струей, отражается от
Земли и воздействует на внешнюю оболочку космического аппарата, вызывая
интенсивную вибрацию конструкций. В результате генерируется шум такого
уровня, при котором звуковое давление быстро достигает больших значений (на
образование акустического поля затрачивается до 1 % кинетической энергии
струи реактивного двигателя). Зависимость уровня шумов от высоты и времени
полета (с момента запуска) на этапе выведения ПКА на орбиту приведена на
рис. 2.13 и 2.14 [18].
Шум в кабину космонавтов передается как воздушным путем, так и через
элементы конструкции. Потери при передаче значительные — от 150 дБ
до 120... 125 дБ. Звуковой уровень, достигающий уха космонавта, составляет
120 дБ на низких частотах и до 90 дБ на частотах выше 2000 Гц. По мере уда-
ления от Земли уровень шума двигателя уменьшается, а аэродинамического
шума увеличивается.
Глава 2. Человек в космическом полете
115
Рис. 2.13. Зависимость уровня шума
от времени после запуска двигателя
для различных зон ПКА:
1 — снаружи ПКА; 2 — внутри кабины
ПКА; 3 — на уровне уха космонавта
140 -
150 Общий уровень на внешней
оболочке,_____________
Внешний шум^------
130 -
120
90
3
ПО -
100 -
Полетные
данные
Общий уровень
Внутри
корабля
Частота середины октавной полосы, Гц
Рис. 2.14. График изменения уровня
шума в кабине экипажа корабля Space
Shuttle
В кабине корабля Apollo уровень шумов достигал 120... 125 дБ. Защи-
тить экипаж от них на этом участке полета можно только с помощью шлема
космического скафандра специальной конструкции. По мере удаления от
поверхности Земли шум двигателей снижается, но повышается аэродина-
мический шум, который через 60 с после старта достигает уровня 120 дБ.
После 110 с полета уровень шума уменьшается до сравнительно низкого (ниже
100 дБ), и при этом преобладают шумы бортовых систем.
В орбитальной фазе полета шумовая среда в кабине корабля создается
бортовыми системами жизнеобеспечения (работающими научными прибо-
рами, вентиляционными системами, двигательными установками системы
жизнеобеспечения, двигателями ориентации и др.), уровень шума которых
равен 50...70 дБ, что недопустимо при длительных полетах. Чтобы снизить
уровень шума, периодически выключают наиболее шумные системы.
Амплитудно-частотная характе-
ристика шумов от бортовых систем
показана на рис. 2.15 [18].
Для снижения интенсивности
шума проводят комплексное аку-
стическое проектирование систем,
содержащих подвижные элементы, а
также осуществляют общее или ло-
кальное подавление шума. Общее по-
давление основано на использовании
звукопоглощающих материалов. Доля
поглощенной энергии является по-
казателем их качества. Резонансные
или акустические поглотители осно-
ваны на интерференции акустических
Рис. 2.15. Уровень Л и частотный спектр
f шумов от бортовых систем в орбиталь-
ной фазе полета
116 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
волн. В таких глушителях шума отражатели звука направляют звуковые волны
обратно к источнику в противофазе.
Локальные методы защиты основаны на персональной защите оператора
от шумового воздействия, с помощью, например, наушников, однако при
общем уровне шума 120... 130 дБ они неэффективны, поскольку существует
костная проводимость звука. В этом случае применяют шумопоглощающие
шлемы.
Шумы большой интенсивности и длительности (на участке выведения)
приводят к нарушению функционального состояния центральной нервной
системы, прежде всего, слухового аппарата.
Воздействие инфразвука. Наряду с шумом в кабине ПКА генерируются
низкочастотные звуковые колебания (инфразвук) — звуковые волны, имею-
щие частоту ниже частот, воспринимаемых человеческим ухом. Верхняя гра-
ница инфразвука равна 16 Гц, нижняя — 0,001 Гц. Инфразвук характеризуется:
• гораздо большими амплитудами колебаний, чем равномощный слы-
шимый человеком звук;
• большей дальностью распространения в воздухе, поскольку поглощение
инфразвука атмосферой незначительно;
• явлением дифракции, вследствие чего инфразвук легко проникает в
помещения и огибает преграды, задерживающие слышимые звуки;
• резонансной вибрацией крупных объектов.
Источниками инфразвука на борту ПКА являются турбулентные потоки
жидкости и газа, ударное возбуждение конструкций, вентиляторы СЖО, ви-
броплощадки (беговая дорожка), реактивные двигатели и др. Человеческий
организм высокочувствителен к инфразвуку, который воздействует не только
через слуховой анализатор, но и через механорецепторы кожи. Возникающие
при этом нервные импульсы нарушают согласованную работу различных от-
делов нервной системы, что может проявляться головокружением, болями
в животе, тошнотой, затрудненным дыханием, чувством страха, а при более
интенсивном и продолжительном воздействии — кашлем, удушьем, наруше-
нием психики. Инфразвуковые колебания даже небольшой интенсивности
вызывают тошноту и звон в ушах, уменьшают остроту зрения.
Наиболее эффективное и практически единственное средством борь-
бы с инфразвуком — снижение его в источнике. При выборе конструкций
предпочтение следует отдавать малогабаритным машинам большой жестко-
сти, так как в конструкциях с плоскими поверхностями большой площади
и малой жесткости создаются условия для генерации инфразвука. Борьбу с
ним в источнике возникновения необходимо вести путем изменения режима
работы технологического оборудования — увеличения его быстроходности
(например, повышения скорости вращения вентиляторов, снижения скорости
потоков жидкости и газа в трубопроводах, чтобы основная частота следова-
ния силовых импульсов лежала за пределами инфразвукового диапазона).
В борьбе с инфразвуком на путях его распространения, обычно при
наличии дискретных составляющих в спектре инфразвука, определенный
эффект оказывают глушители интерференционного типа. Выполненное
в последнее время теоретическое обоснование течения нелинейных процессов
Глава 2. Человек в космическом полете
117
в поглотителях резонансного типа открывает возможности конструирования
звукопоглощающих панелей и кожухов, эффективных в области низких частот.
В качестве индивидуальных средств защиты рекомендуется применять
наушники, вкладыши, защищающие ухо от неблагоприятного воздействия
сопутствующего шума. К мерам профилактики организационного плана сле-
дует отнести соблюдение режима труда и отдыха, запрещение сверхурочных
работ. При контакте с инфразвуком в течение более 50 % рабочего времени
рекомендуются перерывы продолжительностью 15 мин после каждых 1,5 ч ра-
боты. Значительный эффект дает комплекс физиотерапевтических процедур.
2.3.3. Воздействие электромагнитных полей
Электромагнитное излучение. Диапазон частот электромагнитных излуче-
ний в космическом пространстве можно разделить на ряд областей (табл. 2.9).
Излучения с частотой колебаний (0...3)1012 Гц являются неионизирую-
щими, свыше указанного диапазона частот — ионизирующими.
Таблица 2.9
Диапазоны электромагнитных излучений
Диапазон Длина волны,X | Частоты, v Источники
Радиоволны*: сверхдлинные длинные средние короткие ультракороткие Более 10 км 10 км—1 км 1 км—100 м 100 м—10 м 10 м—1 мм Менее 30 кГц 30-300 кГц 300 кГц- 3 МГц 3-30 МГц 30 МГЦ - 300 ГГц Атмосферные явления; переменные токи в проводниках и электронных потоках (колебательные контуры)
Излучение: инфракрасное видимое оптическое ультрафиолетовое рентгеновское гамма-излучение * Ультракороткие радиовол! миллиметровые и субмиллр принято называть микрово 1 мм—780 нм 789 мм—380 мм 380 нм—10 нм 10 нм—5 пм Менее 5 пм зы принято разделять 1метровые (микромет •лнами, или волнами 300— 420 ГГц 429- 750 ГГц 7,5-1014 — ЗЮ16 Гц 31016- 61019 Гц Более 6-1019 Гц > на метровые, децш ровые). Волны дли} сверхвысоких част< Излучения молекул и атомов при тепловых и электрических воздействиях Излучения атомов под воздействием уско- ренных электронов Атомные процессы при воздействии уско- ренных заряженных частиц Ядерные и космиче- ские процессы, радиоактивный распад летровые, сантиметровые, зой X < 1 м (v > 300 МГц) эт (СВЧ).
118 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Электромагнитное поле характеризуется плотностью потока энергии (Вт/м2).
Воздействие электромагнитного поля на организм человека зависит от его
параметров и времени облучения. Оно может вызывать морфологические и
функциональные изменения. Энергия электромагнитного поля поглощается
тканями организма, что приводит к нагреву органов и тканей. Показатель
удельного поглощения (Вт/кг) зависит от частоты излучения (например,
морфологическое изменение — катаракта глаз — возникает при облучении
от источника поля с длиной волны 1 ...20 см). Функциональные изменения
возникают при малых плотностях потока энергии излучения. Возможно по-
явление головной боли, слабости, повышенной утомляемости, неврастении.
Защита от электромагнитного излучения выполняется экранированием,
максимальным удалением источников излучения и сокращением времени
пребывания человека в зоне электромагнитного излучения.
Ионизирующее излучение включает как электромагнитное излучение,
так и корпускулярное излучение заряженных или нейтральных частиц, вы-
зывающих ионизацию среды, с которой взаимодействует излучение. Мерой
интенсивности фотонного излучения, оценивающей его ионизирующую
способность, является экспозиционная доза, которая показывает, какой ио-
низационный заряд образуется в воздухе.
Еще одной характеристикой может быть поглощенная доза — энергия,
переданная излучением единице массы вещества при его облучении, изме-
ряемая в греях, 1 Гр = 1 Дж/кг или 1 Гр = 100 рад. Энергия, поглощенная
веществом при его облучении, зависит от времени облучения и состава об-
лучающего вещества. С увеличением продолжительности облучения погло-
щаемая доза растет.
Эквивалентная доза излучения смешанного вида определяется как сумма
доз каждого из п видов излучения (рентгеновского — у-, P-излучения, протонов,
нейтронов и ос-излучения). Обладающие значительной энергией ос-частицы (ядра
гелия) из-за большой ионизирующей способности быстро теряют свою энергию.
Это означает, что они обладают малой проницательной способностью. Немного
большей проницательной способностью обладают Р-частицы (электроны), они
наиболее высокоэнергетические и могут пробивать пластину алюминия толщи-
ной до 5 мм. Нейтроны обладают наибольшей проникающей способностью.
Основу галактического космического излучения составляет корпускуляр-
ное излучение плотностью 2,5 част/(см2 • с). Основное количество в потоке
составляют протоны (85 %) и ос-частицы (13 %), а остальная доля приходится
на ядра тяжелых элементов.
Солнечное космическое излучение можно представить как постоянный
поток (солнечный ветер) протонов в районе Земли плотностью 2 част/(см2 • с),
а энергия этих частиц равна 100 кэВ.
Вспышки на Солнце приводят к локальному выбросу плазмы в околосол-
нечное пространство. Плотность потока может доходить до 2-106 1/(см2 • с),
а энергия частиц составляет 1...50 ГэВ, а скорость распространения потока
достигает 1000 км/с. Около Земли плотность потока достигает 109 1/(см2 • с),
а энергия протонов — 10...500 МэВ. Поглощенная доза в момент вспышки
на Солнце смертельна для живого организма.
Глава 2. Человек в космическом полете
119
Система радиационной безопасности космических кораблей на около-
земных орбитах достаточно надежна, она гарантирует космонавту защиту от
воздействия ионизирующего излучения. Нарушение радиационной защиты
и возникновение нештатных ситуаций могут сопровождаться развитием ра-
диационных поражений различной степени тяжести.
Видимый свет. Свет (видимое излучение) — единственный раздражи-
тель глаз, вызывающий зрительные ощущения, обеспечивающие зрительное
восприятия мира. Видимый свет оказывает также влияние на иммунные и
аллергические реакции и на различные показатели обмена, изменяет уровень
аскорбиновой кислоты в крови, надпочечных железах и мозге. Он действует
и на сердечно-сосудистую систему.
Освещение для человека выполняет две функции: обеспечение воспри-
ятия зрительной обстановки и фотобиологическую, вызывающую прямую и
косвенную физиологическую и биологическую реакции.
В космическом полете в кабине ПКА есть как естественное освещение
(солнечный свет, проходящий через иллюминаторы), так и искусственное.
В связи с этим человек подвергается воздействию естественных и искусствен-
ных источников лучистой энергии с различной спектральной характеристикой
и чрезвычайно обширным диапазоном интенсивности.
Исследования искусственного освещения показали, что для человека
полезно соответствие внутреннего искусственного освещения естественному.
Также было выявлено, что физическая работоспособность и поддержание
психофизиологического состояния, зрительная бдительность, комфортная
обстановка для глаз и меньшая степень их утомления достигаются тогда,
когда источник искусственного света продуцирует весь диапазон спектра ви-
димого и сбалансированного ультрафиолетового излучения Солнца. У людей,
не получающих ультрафиолета в достаточном объеме, снижается утилизация
кальция в организме, что может привести к деминерализации костей в ус-
ловиях длительного космического полета. Используя искусственное освеще-
ние, эквивалентное солнечному излучению в диапазоне волн 270... 1500 мм, с
минимальной интенсивностью около 2600 лк, в космическом полете можно
воздействовать на эти физиологические и биологические реакции организма.
Тепловое излучение. Космический аппарат, находящийся на орбите ИСЗ,
подвергается сложному тепловому нагружению. С одной стороны орбиты,
освещенной Солнцем, он интенсивно нагревается, с другой, обращенной в
космос, — охлаждается. Если солнечные батареи не имеют механизма разворо-
та, это вынуждает ориентировать КА перпендикулярно солнечным лучам, что
приводит к нагреву практически одной стороны аппарата [20]. На рис. 2.16.
представлена схема радиационных тепловых потоков, действующих на КА
в полете.
В космическом пространстве теплообмен КА с окружающим простран-
ством в основном происходит путем излучения. Главная составляющая внеш-
него теплоподвода — солнечное излучение, плотность которого (солнечная
постоянная) обратно пропорциональна расстоянию до Солнца. Отраженное
от Земли солнечное излучение не превышает 20 % излучения Солнца. Соб-
ственное излучение Земли составляет около 15 % излучения Солнца (для
околоземных орбит высотой 200...300 км). Равновесная температура тела
120 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Рис. 2.16. Схема тепловых потоков, дей-
ствующих на КА на околоземной орбите:
1 — Земля; 2 — космический аппарат на кру-
говой околоземной орбите (с теневой зоной);
3 — теневая зона орбиты; 4 — солнечная орбита;
Qc — солнечное излучение; Qu — собственное из-
лучение Земли; Qo — отраженное от Земли солнеч-
ное излучение; Qlt — тепловой поток, излучаемый
поверхностью космического аппарата
в космическом пространстве зависит от свойств поверхности и удаленности от
Солнца (сфера из полированного алюминия имеет температуру 150 °C (423 К),
для той же сферы, окрашенной белой краской, она составит 89 °C (184 К)).
При нарушении функционирования системы обеспечения теплового
режима (СОТР) возможно воздействие на космонавта высоких или низких
температур. Небольшое снижение температуры в сочетании с повышен-
ной влажностью вызывает ощущение дискомфорта. В космическом полете,
когда ограничена мышечная активность, эти ощущения бывают достаточно
выраженными.
Охлаждение отдельных участков тела (вентилятором) способно приве-
сти к возникновению простудных заболеваний, воспалительных процессов
периферической нервной системы в мышцах.
Значительное повышение температуры в кабине влечет за собой общий
перегрев, а контактное взаимодействие высоких температур, связанное с
нарушениями правил техники безопасности при ремонтных работах, при
выполнении технологических операций или в случае возникновения пожара,
может сопровождаться термическим поражением различной тяжести.
23.4. Потоки частиц
Микрометеоры. Спорадические метеорные тела и частицы при опреде-
ленных условиях представляют для ПКА серьезную угрозу. При соударении с
поверхностью КА кинетическая энергия относительного движения переходит
в основном в энергию разрушения материала оболочки корабля. Результат
взаимодействия с метеорной частицей зависит от скорости ее движения,
массы и плотности вещества [21].Твердые метеорные частицы с поперечным
размером менее 1 мм воздействуют на ПКА практически непрерывно, и их
Глава 2. Человек в космическом полете
121
воздействие на КА определяется плот-
ностью потока.
Число метеорных частиц, сталкива-
ющихся с поверхностью ПКА, зависит
от того, в какой области космическо-
го пространства находится ПКА. Для
аппарата, вращающегося на геоцен-
трической орбите, среднее число спо-
радических частиц массой т, г, стал-
кивающихся с 1 м2 поверхности за 1 с,
N, 1/(м2 • с) определяется по формуле
N = 1014ш12.
Сравнение экспериментальных дан-
ных и теоретически рассчитанной плот-
ности частиц показано на рис. 2.17 [21].
При полете на низких орбитах сказы-
вается экранирующее влияние Земли,
поэтому количество метеоров значи-
тельно уменьшается.
Коэффициент экранирования рас-
считывается по формуле
Рис. 2.17. Зависимость плотности по-
тока N метеорных частиц от их массы
т (заштрихованная область экспери-
ментальные и расчетные данных)
где R — средний радиус Земли; h — высота полета.
Плотность вещества метеорных частиц, имеющих каменную или желез-
ную природу образования, колеблется в диапазоне (2...8) 103 кг/м3.
Космический мусор. Выделяют четыре вида техногенного засорения кос-
мического пространства: механическое, химическое, радиоактивное и элек-
тронное (табл. 2.10) [22—24].
Механический космический мусор — это отработавшие свой срок КА,
отделившиеся и отстреленные от них элементы конструкций, крупные и
мелкие осколки, образовавшиеся в результате разрушений или взрывов
космических аппаратов и т. п. (рис. 2.18). В их число входят также упаков-
ки, пищевые и другие отходы, частицы металла и даже тонкие слои краски.
В настоящее время в ближнем космосе, а точнее, в околоземном простран-
стве находятся сотни тысяч объектов искусственного происхождения разной
величины, которые подпадают под категорию космического мусора. Общая
масса космического мусора составляет приблизительно 3000...3500 т.
Различают наблюдаемый и ненаблюдаемый космический мусор. Наблюда-
емый контролируется различными методами. Контроль, проводимый в рамках
дистанционного зондирования космического мусора, в целом подразделяются
на две категории: радиолокационный и оптический. Первый, как правило,
используются относительно низкой околоземной орбиты (НОО), а второй —
высокой околоземной орбиты (ВОО).
122 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Таблица 2.10
Классификация космического мусора
Тип загрязнения Источники Последствия
Механическое Фрагменты КА и ракет, частицы покрытий КА, твердые частицы выхлопа реактивных двигателей на твердом топливе Повреждения КА, помехи астрономическим наблюде- ниям
Химическое Ракетные двигатели, электрора- кетные двигатели, наземные источники Ионосферные дыры, нару- шение радиосвязи, разруше- ние озонового слоя
Радиоактивное Бортовые ядерные энергетиче- ские устройства Опасность загрязнения атмосферы и поверхности Земли при разрушении ядер- ной энергетической установ- ки (ЯЭУ)
Электронное Бортовые передатчики, назем- ные высоко- и низкочастотные передатчики Возмущения атмосферы и ионосферы, высыпание заряженных частиц, помехи радиосвязи
Фрагменты
взрывного
разрушения
Спутники
активные
Спутники
пассивные
(12%)
Рис. 2.18. Состав каталогизированных
объектов на низких околоземных орбитах
Количество запускаемых космиче-
ских аппаратов непрерывно растет, что
сопровождается увеличением косми-
ческого мусора. На рис 2.19 показана
динамика нарастания объема косми-
ческого мусора с классификацией его
происхождения [24]. Мусор нерав-
номерно распределяется по высоте,
что объясняется существованием об-
ластей, которые интенсивно исполь-
зуются для построения космических
систем и запуска научных спутников.
На рис. 2.20 приведен график
распределения количества фрагмен-
тов космического мусора по высоте
орбиты. Как видно из графика, мак-
симальная плотность мусора сосредо-
точена в интервале высот 200...5000 км,
т. е. в той области, где работают большинство КА. Вторая зона — это район,
в котором работают геостационарные спутники.
Ситуация усугубляется так называемым эффектом Кесслера, названного
в честь консультанта Национального управления по воздухоплаванию и ис-
следованию космического пространства США (НАСА) Дональда Кесслера,
впервые описавшего эту проблему как «эффект домино»: столкновения объ-
ектов космического мусора с мусором порождают новые фрагменты, которые
также сталкиваются и порождают фрагменты фрагментов. Так, уничтожение
Глава 2. Человек в космическом полете
123
Годы
Рис. 2.19. Динамика нарастания по годам количества каталогизированных
орбитальных объектов с классификацией по способу образования:
----— общее число;--— фрагменты;------— космические аппараты;----— опе-
рационный мусор;----— ракеты
2012
Высота, км
Рис. 2.20. Пространственная плотность распределения наблюдаемых
объектов в околоземном космическом пространстве
124 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
китайского спутника «Фень-юнь» привело к появлению более 2000 новых
фрагментов, а степень засоренности космоса возросла сразу на 22 %. По
подсчетам исследователей из Космического центра им. Линдона Джонсона
в Хьюстоне, к 2055 г. объем размножившегося столкновением мусора будет
превышать объем мусора, падающего и сгорающего в атмосфере.
В НАСА считают, что наиболее сложная ситуация сложилась в диапазо-
не высот 900... 1000 км. Именно там происходят 60 % всех столкновений и
именно там базируются спутники связи и навигации. По мнению доктора
Цзер-Чи Лю из Космического центра им. Линдона Джонсона, появление
новых обломков не предотвратит даже прекращение запуска КА. Уже имею-
щегося их количества вполне достаточно для того, чтобы реакция приобрела
необратимый характер и стала цепной.
При существующем темпе запусков космических объектов количество
космического мусора на орбитах, наблюдаемых наземными средствами сле-
жения, увеличивается в среднем на 5 % в год. Неконтролируемый рост косми-
ческого мусора вызывает серьезную озабоченность за будущую безопасность
космических станций и пилотируемых полетов. Растущее засорение космоса
может значительно ограничить возможности космической деятельности и
даже вообще затруднить доступ человека в космос.
На рис. 2.21 приведено распределение фрагментов космического мусора
по высотам и углам наклонении плоскости орбиты.
Вероятность столкновения ПКА с объектами искусственного происхож-
дения (ОИП)
PA = \-e~FA^ -£Дд/<0,1,
где F — поток ОИП, приходящийся на единицу площади космического про-
странства; As — миделевое сечение ПКА; А/ — отрезок времени.
Средние значения скорости столкновения и угла встречи ПКА и
ОИП как функций высоты орбиты h и угла ее наклонения / приведены на
рис. 2.22 и 2.23 [21].
Рис. 2.21. Зависимость величины потока
фрагментов объектов искусственного про-
исхождения F от высоты орбиты Н и угла
ее наклонения I:
1 —i = 0°; 2 — i = 45°; 3- i = 90°; 4- i = 135°
Глава 2. Человек в космическом полете
125
Среднее значение относительной скорости соударения составляет 11 км/с,
а на более низких и экваториальных орбитах она равна 8... 10 км/с. Среднее
значение угла встречи 0 = 90°, что указывает на тенденцию встречи в попе-
речном направлении.
Рис. 2.22. Зависимость вероятной
скорости VR соударения КА с микро-
частицей от угла наклона i плоскости
орбиты и высоты полета Н\
1 —I = 0°; 2 - i = 45°; 3 - i = 90°; 4 -
i= 135°
Рис. 2.23. Зависимость среднего
значения угла встречи 0 ПКА и
ОНП от высоты орбиты Н и угла ее
наклонения /:
/ —/ = 0°; 2 - / = 45°; 3 - i = 90°; 4 -
i = 135°
Заряженные частицы и атомы. Радиационная опасность космических
полетов связана с возможностью поражения экипажа, повреждения аппара-
туры и элементов конструкции КА при облучении корпускулярным и элек-
тромагнитным излучением. Во время космического полета с человеком на
борту рассматривают три основных источника корпускулярного излучения,
влияющего на биологические объекты (человека) и на бортовую аппарату-
ру: радиационный пояс Земли (РПЗ), галактическое космическое излучение
(ГКИ) и солнечное космическое излучение (СКИ).
Земля имеет три радиационных пояса:
• внутренний, который охватывает земной шар вдоль геомагнитного
экватора. Этот пояс, как и порождающее его магнитное поле, расположен
несимметрично: в западном полушарии его нижняя граница находится на
высоте 600 км, в восточном — 1600 км;
• внешний пояс радиации, расположенный на высоте в диапазоне
9000...45 000 км, распространяется относительно экватора на 50° к северу и
на 50° к югу;
• пояс радиации проходит на высоте от 45 000 до 80 000 км.
Радиационный пояс Земли состоит в основном из электронов и протонов.
Уровни доз, создаваемые излучением РПЗ, зависят от времени и траектории
полета КА через пояс и толщины защиты. Поглощенные дозы от излучения
внутреннего РПЗ в основном обусловлены протонами высоких энергий.
126 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Рекомендуемый коэффициент качества Кк, учитывающий относительную
биологическую эффективность излучения по сравнению с биологической
эффективностью стандартного рентгеновского излучения, которая условно
принята равной единице, составляет Кк = 1,0...1,4. В табл. 2.11 приведены
значения эквивалента дозы протонов внутреннего РПЗ для круговых орбит
при эффективной толщине защиты КА 1 г/см2.
Таблица 2.11
Мощность эквивалентной дозы протонов для круговых орбит, бэр/сут
Высота орбиты, км Угол наклона плоскости орбиты
0° 30° 60°
445 — 1,4 0,8
2780 800 390 195
5550 125 55 28
8350 20 8,3 4,2
И 100 0,41 0,14 0,08
В центральной зоне внутреннего РПЗ мощность эквивалента дозы исклю-
чительно высока, и полет ПКА в ней без специальной защиты невозможен.
Допускается кратковременное пересечение РПЗ, если траектория полета КА
минует его центральную зону или если экипаж в момент пересечения РПЗ
будет находиться в более защищенном отсеке. При снижении высоты кру-
говой орбиты до 445 км мощность эквивалента дозы резко уменьшается и
допустимая продолжительность полетов пилотируемых КА без специальной
защиты соответственно увеличивается. Дальнейшее уменьшение высоты до
200...300 км приводит к снижению мощности эквивалента дозы протонов
почти на порядок.
В состав галактического космического излучения входят протоны и ядра
химических элементов. Оно действует постоянно в течение всего полета, и
его биологический эффект определяется максимальной поглощенной дозой.
Присутствие тяжелых ядер в составе ГКИ заметно увеличивает относи-
тельную биологическую эффективность этого излучения. Рекомендуемый
коэффициент качества излучения Кк = 4...7. В результате взаимодействия ядер
ГКИ с веществом защиты образуются вторичные частицы, вклад которых в
суммарную поглощенную дозу может достигать 50... 100 %. Распределение
поглощенной дозы ГКИ в теле принято считать равномерным.
Дозы ГКИ вблизи Земли значительно меньше, чем в свободном простран-
стве, что обусловлено влиянием магнитного поля (уменьшает плотность потока
ГКИ в 3-10 раз) и экранирующим влиянием («тенью») Земли (снижает плот-
ность потока ГКИ примерно в 2 раза). Доза ГКИ на сравнительно небольшой
высоте, зависит от наклонения орбиты. Например, при высоте 200...600 км
на экваториальной орбите она будет примерно в 5 раз ниже, чем на поляр-
ной, причем с увеличением высоты эта разница постепенно уменьшается. По
данным измерений на КА среднесуточная доза на орбитах высотой до 350 км
с наклонением 65° за защитой (3 г/см2) весьма постоянна — она составляет
9 мрад ± 1 мрад.
Глава 2. Человек в космическом полете
127
Солнечное космическое излучение, состоящее из протонов и ионов хи-
мических элементов, сопровождающее отдельные солнечные вспышки, может
представлять значительную радиационную опасность при полетах человека в
свободном космическом пространстве. Рекомендуется выбирать коэффици-
ент качества такого излучения Кк = 1,0. Вследствие экранирующего действия
самой Земли и ее магнитного поля поглощенные дозы излучения солнечных
вспышек на околоземных орбитах значительно меньше, чем в свободном про-
странстве. Они зависят от наклонения орбиты и геомагнитной обстановки:
с увеличением наклонения орбиты, а также при возникновении магнитных
возмущений экранирующий эффект геомагнитного поля уменьшается, что
приводит к соответствующему увеличению доз.
На рис. 2.24 приведены энергетические спектры частиц различных излу-
чений для геостационарной и для низкой круговой орбиты.
Рис. 2.24. Пример энергетических спектров частиц на орбитах КК:
а — геостационарная орбита высотой 36 000 км с наклонением 0°, 10 лет полета; б — круговая
орбита высотой 800 км, с наклонением 98°, 10 лет полета;-протоны ГКИ;---------
протоны СКИ;--------— протоны РПЗ;--------— электроны РПЗ
Вследствие влияния радиации на технические системы возникают ради-
ационные аномалии, источниками которых являются терморегулирующие,
полимерные, оптические покрытия, солнечные элементы и изделия микро- и
оптоэлектроники. Радиационные эффекты возникают в результате передачи
кинетической энергии от налетающих частиц вещества (первичный процесс).
Эффекты, вызванные взаимодействием материалов и электронной техники
с потоками заряженных частиц, показаны на рис. 2.25.
Радиационные условия на борту КА зависят от траектории (орбиты) и
времени полета, а также от формы конструкции, которая служит естественной
защитой космонавтов и технических средств от радиационного облучения.
Наряду с прямым воздействием радиационного излучения существует и
вторичное (ионизационное) излучение. Оно образуется в результате взаимо-
действия частиц первичного космического излучения с ядрами нуклидов, вхо-
дящих в состав воздуха, и состоит практически из всех известных в настоящее
время элементарных частиц (протонов, нейтронов, электронов, фотонов и др.).
128 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Ионизационные эффекты
Структурные нарушения
Неравновесные электроны и дырки Разорванные атомные связи Вакансии и междоузлия Разупорядоченные области
Эффекты термостабилизации и электронейтрализации (релаксационные процессы)
Рекомбинация Образование объемного заряда Радио- люминисценция Генерация тока Латентные треки Свободные химические радикалы Рекомбинация Уход на стоки (примесные дефекты) Объединение в комплексы (собственные дефекты) Образование объемных дефектов (кластеры)
Рис. 2.25. Эффекты, вызванные взаимодействием материалов с потоками
заряженных частиц
Вторичное излучение подразделяется два вида:
• наведенная радиоактивность — многие стабильные атомы в результате
облучения и соответствующей индуцированной ядерной реакции превраща-
ются в нестабильные изотопы. Вследствие этого стабильное вещество стано-
вится радиоактивным, причем тип вторичного ионизирующего излучения
будет отличаться от типа первоначального облучения. Наиболее ярко такой
эффект проявляется после нейтронного облучения;
• цепочка ядерных превращений, когда в процессе ядерного распада или
синтеза возникают новые нуклиды, которые также могут быть нестабильны, в
связи с чем появляется цепочка ядерных превращений. Каждое превращение
имеет свою вероятность и свой набор ионизирующих излучений. В результате
интенсивность и характер излучений радиоактивного источника со временем
могут значительно изменяться.
Ионизационное излучение обладает следующими свойствами:
• при взаимодействии излучения с веществом возникают потоки заря-
женных частиц и косвенно-ионизирующее излучение (потоки нейтральных
элементарных частиц — фотонов и нейтронов);
• энергия частиц ионизирующего излучения лежит в диапазоне от не-
скольких сотен электрон-вольт (рентгеновское излучение, P-излучение не-
которых радионуклидов) до 10,5...2020 эВ и выше (протоны космического
излучения, для которых не обнаружено верхнего предела по энергии).
Ионизационное излучение оказывает сильное влияние на конструкци-
онные материалы, приводя к изменению их механических и физических
характеристик. Особенно чувствительны к облучению полупроводники, у
которых серьезно изменяются рабочие характеристики.
Глава 2. Человек в космическом полете
129
Контрольные вопросы к главе 2
1. Как изменяются антропометрические характеристики человека в процессе
космического полета?
2. Что такое метаболизм и каковы его проявления в космическом полете?
3. Какие психологические факторы влияют на работоспособность космонавта
в полете?
4. Укажите параметры газового состава искусственной атмосферы ПКА.
5. Как микроклимат кабины влияет на работоспособность космонавта?
6. Что такое микрогравитация и как она влияет на космонавта?
7. Какие перегрузки действуют на космонавта в полете?
Литература к главе 2
1. Пернер КД., Лендгок В.А. Планировка и оформление обитаемых помещений //
Космическая биология и медицина: в 5 т. Т 2. Обитаемость космических летательных
аппаратов. М.: Наука, 1994. С. 208-238.
2. When Space Makes You Dizzy. NASA. URL: http://science.nasa.gov/headlines/
y2002/25mar_dizzy.htm (дата обращения 15.01.2019).
3. Оганнов B.C., Шнайдер В.С. Микрогравитационные механизмы и модели //
Космическая биология и медицина: в 5 т. Т. 3. Кн.1. Человек в космическом полете.
М.: Наука, 1997. С. 421-459.
4. Попов И.Г., Бычков В.Б. Питание космонавтов // Космическая биология и
медицина: в 5 т. Т. 2. Обитаемость космических летательных аппаратов. М.: Наука,
1994. С. 313-336.
5. Рожнов В.Ф. Космические системы жизнеобеспечения: учебное пособие. М.:
Изд-во МАИ-ПРИНТ, 2009. 344 с.
6. Джеймс Дж.Т., Коулман М.Е. Токсическое действие газообразных примесей
и аэрозолей // Космическая биология и медицина: в 5 т. Т. 2. Обитаемость космиче-
ских летательных аппаратов. М.: Наука, 1994. С. 66—99.
7. Гончаров И.Б., Ковачевич И.В., Жернавков А.Ф. Анализ заболеваемости в кос-
мическом полете // Космическая биология и медицина: в 5 т. Т. 4. Здоровье, работо-
способность, безопасность космических экипажей. М.: Наука, 2001. С. 145—164.
8. Григорьев А.И., Козловская И.Б., Дитлайн Л.Ф., Соуин Ч.Ф. Профилактические
мероприятия в кратковременных и длительных полетах // Космическая биология и
медицина: в 5 т. Т. 4. Здоровье, работоспособность, безопасность космических эки-
пажей. М.: Наука, 2001. С. 252-309.
9. Гузенберг А.С., Романов С.Ю., Телегин А.А., ЮргинА.В. Разработка международ-
ного стандарта по системам обеспечения жизнедеятельности в космическом полете
// Космическая техника и технология. 2013. № 1. С. 68—80.
10. Мир психологии. Изоляция. URL: http://www.persev.ru/izolyaciya (дата обра-
щения 15.01.2019).
11. Мир психологии. Космическая психология. URL: http://www.persev.ru/
kosmicheskaya-psihologiya (дата обращения 15.01.2019).
12. Соловьёв В.А. Психологическое воздействие факторов космического полета
на деятельность космонавта и руководителя полета // Новости космонавтики. 2013.
№ 1 (360). С. 14-18.
130 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
13. Мир психологии. Стресс. URL: http://www.persev.ru/stress (дата обращения
15.01.2019).
14. Малкин В.Б. Барометрическое давление, газовый состав // Космическая
биология и медицина: в 5 т. Т. 2. Обитаемость космических летательных аппаратов.
М.: Наука, 1994. С. 9-65.
15. Валигора Дж. Тепловой баланс человека в космическом полете // Космическая
биология и медицина: в 5 т. Т. 2. Обитаемость космических летательных аппаратов.
М.: Наука, 1994. С. 100-126.
16. Пугаченко С.Б. Развитие технологии материалов в условиях космоса // Науч-
но-технические разработки ОКБ-23 — КБ «Салют». М.: Воздушный транспорт, 2006.
С. 105-113.
17. Решке М.Ф., Корнилова Л.Н., Харм Д.Л., Блумберг Дж.Дж., Элоски В.Х. Ней-
росенсорные и сенсомоторные функции // Космическая биология и медицина: в 5 т.
Т. 3. Кн. 1. Человек в космическом полете. М.: Наука, 1997. С. 233—327.
18. Видрайт Ч.Д., Ленгл Р.К. мл., Корос А.С. Шум, Вибрация, освещенность //
Космическая биология и медицина: в 5 т. Т. 2. Обитаемость космических летательных
аппаратов. М.: Наука, 1994. С. 152—184.
19. Вибрационные воздействия и их влияние на человека // Вибрации в техни-
ке / под ред. К.В. Фролова. М.: Машиностроение, 1981. Т. 6. 456 с.
20. Гузенберг А.С. Обеспечение теплового режима // Космическая биология и
медицина: в 5 т. Т. 2. Обитаемость космических летательных аппаратов. М.: Наука,
1994. С. 296-312.
21. Справочник по безопасности космических полетов / Г.Т. Береговой,
В.Я. Ярополов, И.И. Баранецкий, и др. М.: Машиностроение, 1989. 336 с.
22. Новиков Л.С. Основы экологии околоземного космического пространства:
учебное пособие. М.: Университетская книга, 2006. 84 с.
23. Смирнов Н.Н. Эволюция «космического мусора» в околоземном космическом
пространстве // Успехи механики. 2002. Т. 1. № 2. С. 37—104.
24. Космический мусор. Кн. 1: Методы наблюдения и модели космического
мусора / под ред. Г.Г. Райкунова. М.: ФИЗМАТЛИТ, 2014. 244 с.
ГЛАВА 3. КУЛЬТУРНЫЕ ОСНОВАНИЯ ПРОСТРАНСТВЕННОЙ
ОРГАНИЗАЦИИ ПИЛОТИРУЕМЫХ КОСМИЧЕСКИХ АППАРАТОВ
3.1. Процесс освоения космоса
в контексте развития мировой культуры
Цель настоящей главы ввести будущего проектировщика ПКА в контекст
не только давно признанных, но и малоизвестных основ общечеловеческой
культуры и показать те природные и культурные основания, из которых ис-
ходит построение пространства жизнедеятельности человека и общества, будь
то на Земле или в космосе*.
Человек осваивал земное пространство в силу двух, как правило неосоз-
нанных, психологических установок.
1. Человек — естественная, органичная часть природы. Такая установка
присуща человеку изначально, иначе он как вид просто не выжил бы в зем-
ных условиях.
2. Человек — особая часть природы — субъект, неосознанно или созна-
тельно проектирующий себя в пространство природы. Такую установку можно
с достаточной степенью условности назвать антропогенной, т. е. исходящей
из природной особенности, из специфики устройства и функционирования
самого человека.
И эта, вторая установка особенно важна для тех, кто проектирует и об-
устраивает пространство жизнедеятельности человека, будь то на Земле или
в космосе.
Задачи настоящей главы — предоставить возможность студентам, из-
бравшим своей профессией проектирование пилотируемых космических
аппаратов, принципиально расширить знание:
• о мировых культурных традициях организации пространства;
• о лежащих в их основе природных закономерностях;
• о принципах и приемах организации пространства жизнедеятельности,
которые выработал человек на протяжении всей своей истории — от глубокой
архаики до новейшего времени.
Освоение космоса с самого начала воспринимается человеком как про-
никновение в неизвестное, как освоение и осмысление неизвестного.
* О природном и культурном аспекте будущего освоения космоса с самого начала говори-
ли основоположники космонавтики К.Э. Циолковский и Г. Оберт. Академик Б.В. Раушенбах
писал о Германе Оберте: «Он держался того мнения, что если человек помещается в совершен-
но непривычные для него условия, то задачей инженерного знания и техники является созда-
ние искусственных условий, которые максимально соответствовали бы естественной натуре
человека» [1].
132 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Казалось бы, для такого нетрадиционного процесса освоения все подходы
и атрибуты должны быть нетрадиционными, чем-то в духе современного по-
стмодернизма, где все неопределенно, деконструктивно, нарочито запутано,
обесценено и нетрадиционно.
Но на самом деле именно в освоении космоса все процессы и атрибуты
должны быть строго определенными и достаточно четко детерминированны-
ми, вплоть до предсказательности.
В культурном контексте такое соотнесение двух позиций можно опреде-
лить как нетрадиционный и традиционный подход. Казалось бы, освоение
космоса в истории человечества является нетрадиционной процедурой и для
ее проведения необходим некий нетрадиционный подход.
На самом деле освоение космоса началось как его осмысление много
тысяч лет назад. Подавляющее большинство открытий, теорий и конструкций,
которые сегодня разрабатываются на строгой научной основе, многие тысячи
лет фигурируют в человеческой культуре в качестве донаучных представле-
ний, выраженных в самых различных видах пространственных построений,
конструкций, изображений или вербальных образов.
В человеческой культуре всякое новаторство становится по-настоящему
актуальным только тогда, когда оно по-новому, в новых условиях и с помо-
щью новых технологий представляет некие глубинные, часто давно забытые,
общечеловеческие ценности и представления о мире.
Осваивая землю, создавая свое особое пространство жизнедеятельности,
человек проектировал себя, свой собственный смысл в окружающее про-
странство природы.
Осваивая космос, человек в принципе занимается тем же самым. Подхо-
ды, построения и технологии, которые на первый взгляд кажутся абсолютно
новыми и нетрадиционными, на самом деле рождаются и развиваются в лоне
человеческой культуры. Именно при освоении космоса, как нигде, необходи-
ма опора на традицию. И эта опора присутствует постоянно, хотя чаще всего
неосознанно. Можно без особого труда привести тому десятки примеров.
Наша задача — сделать опору на общечеловеческую традиционную куль-
туру не только неосознанной, интуитивной или случайной, но осмысленной и
системной.
В любом активном пространственном действии человека присутствуют
две компоненты: освоение и осмысление. В разных ситуациях они выступают
в разных сочетаниях и в разной последовательности. Иногда, как в случае с
открытием Америки Колумбом, освоение предшествует осмыслению. Иногда,
как в случае с космосом, осмысление предшествует освоению.
Освоение человеком пространства, и тем более созидательное освоение, можно
рассматривать как своеобразную проекцию человека в пространство природы.
В свою очередь, проекцию человека в пространство природы можно
рассматривать по целому ряду аспектов. Великий русский ученый Павел
Флоренский ввел термин «Органопроекция» [2]. Этим термином можно
определить практически все технологическое развитие человечества. Палка —
это всего лишь удлинение руки и увеличение силы удара. Микроскоп и
телескоп — «удлинение» глаза, расширение его возможностей. Автомо-
биль —«удлинение» ног, увеличение скорости передвижения и т. д. Компьютер —
Глава 3. Культурные основания пространственной организации ПКА
133
попытка расширить и визуально предъявить отдельные оперативные воз-
можности человеческого мозга. Человек проектирует вовне свои органы,
увеличивает их мощность, расширяет их возможности. Этот фактор предстает
перед нами как антропогенный аспект развития технологий.
Есть и другой антропогенный аспект — проектирование пространства
жизнедеятельности. Это уже не просто проекция какого-либо органа в виде
конкретного технического устройства. Проектирование пространства предус-
матривает множество его назначений, размещение в нем множества функций
и множества технологий. Однако, проектирование пространства жизнедея-
тельности должно предусматривать не только его утилитарное использование.
Главным здесь выступает смысловое построение и смысловое восприятие
создаваемого пространства.
Можно сказать, что почти до XVIII века наука развивалась преимуще-
ственно как натурфилософия, т. е. как эмпирический опыт в сочетании с
обобщенным осмыслением всей реальности. С появлением в XVII веке слож-
ных научных приборов развитие науки постепенно, все более и более стало
определяться развитием технологий.
Сегодня, в начале XXI века, технологии заняли в науке господствующее
положение. Большинство современных научных открытий прямо определя-
ется развитием так называемых высоких технологий, взять хотя бы адронный
коллайдер или космический телескоп «Хаббл».
Обобщение и осмысление отступили на задний план. Открытий ждут уже
не столько от самих ученых, сколько от новейших технологий, которые они
используют. Даже в такой, казалось бы абстрактной, науке, как математика,
развитие самой науки сегодня в значительной мере определяется развитием ком-
пьютерной технологии сложнейших расчетов и моделирования. Возможность
проведения ранее невозможных, колоссальных по объему компьютерных расче-
тов породила не только реальные достижения, но и великое множество матема-
тических спекуляций, осмысление которых оказалось весьма затруднительным.
Таким образом, помимо множества технических решений, необходимых
для создания технологии, необходимо еще множество решений, относящихся
к самым разным областям знания. В таком аспекте организация пространства
жизнедеятельности оказывается задачей на несколько порядков более слож-
ной, чем создание специализированного технического устройства.
Проекция человека в окружающее пространство оказывается многофак-
торной и далеко не однозначной. Именно в этой области находятся наши
сегодняшние интересы. Нам важно понять закономерности такой проекции
и постараться найти способы их продуктивного применения при проектиро-
вании нового поколения пилотируемых космических аппаратов.
Сегодня наша цивилизация вышла на очередной виток развития, на
очередной виток исторической спирали. Этот новый этап принципиально
отличен от всех предыдущих тем, что сфера реального освоения пространства
даже на уровне околоземных орбит расширилась как минимум на порядок.
Продуктивное освоение космического пространства, хотя бы на орби-
тальном уровне, требует осмысления всего предыдущего общечеловеческо-
го опыта освоения земного пространства и опыта построения пространства
жизнедеятельности человека, общества и всей общечеловеческой культуры.
134 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
А для этого нужен выход на высокий, общекультурный уровень обобщения.
И в этом отношении особенно важно, что современные ПКА проек-
тируются уже не как локальные образования, запущенные в космос, а как
развертывающиеся в пространстве сложные самоорганизующиеся системы.
На каждом витке развития науки, в том числе и на современном научном
уровне, человек-исследователь неизменно убеждается, что все фундамен-
тальные установления человеческой культуры так или иначе имеют своим
источником и основанием фундаментальные законы природы. Для этого
принципа не являются исключением ни организация пространства, ни фор-
мообразование материальных предметов. На всех этапах развития культуры
человек наделял результаты проявления этого принципа своим собственным,
так или иначе одухотворенным и нередко сакральным смыслом.
Простой пример. Всем известно, что самой устойчивой конструкцией
является конструкция с тремя опорами. Тренога оказывается и каркасом
простейшего укрытия и простейшей конструкцией для подвески котелка над
костром. В другом варианте устойчивость радиомачты, стоящей на одной
точке опоры, обеспечивается тремя растяжками. В третьем варианте: веревка,
трос, женская коса сплетается именно из трех волокон. Так обеспечивается и
реальное, и смысловое, но неизменно устойчивое закрепление любого пред-
мета по всем трем координатам в нашем трехмерном мире.
Осознавая природную неизбежность этого закона, человек определил его
как судьбу. И эта судьба с самого рождения человека персонифицировалась
в виде трех божественных существ. По Платону, человеческая судьба спле-
тается с помощью веретена тремя пряхами — богинями судьбы, мойрами.
У римлян они известны как парки, у германцев как вёльвы, у славян как три
девы, наделяющие новорожденного той или иной судьбой. Обращение к судь-
бе, попытка проникнуть в будущее, определить устойчивость личной жизни,
семьи, государства, этого мира в целом в большинстве традиций неизменно
связаны с самой устойчивой конструктивной структурой — с гадательным
треножником (рис. 3.1).
Рис. 3.1. Три опоры — самая устойчивая конструкция:
а — каркас простейшего укрытия; б — древнеегипетский иероглиф «рождение» — фронтальная
развертка защитной схемы трех опор; в — современный защитный знак «ребенок машине» —
фронтальная развертка схемы трех опор; г — судьбу человека определяют на гадательном тре-
ножнике; д — судьба плетется из трех прядок, как коса русской девушки
Глава 3. Культурные основания пространственной организации ПКА 135
Подобным образом можно проявить культурный, психологический, ре-
лигиозный и иные аспекты смысла, придаваемого человеком большинству
природных законов, а также оптимальных конструкций и схем, соотнося-
щихся с различными аспектами мироустройства.
При выходе в принципиально новую среду, каковой для человека на се-
годня выступает космическое пространство, необходимо определить исход-
ные позиции. Такие позиции на первый взгляд можно определить техноло-
гическими возможностями и, конечно, физиологическими возможностями
самого человека.
Но это только поверхностный слой, который в условиях техногенной
цивилизации выглядит как доминирующий.
На самом деле для полноценного построения пространства ПКА необ-
ходимо знакомство с более глубокими пластами знания, которые коренятся
и в законах природы, и в человеческой культуре.
Сегодня мы часто забываем о том, что человеческая культура во всех
ее вариантах является и результатом реализации все тех же законов приро-
ды применительно к человеку и человеческому сообществу и в то же время
воплощением системы представлений об устройстве мира.
С такой точки зрения и естественный язык человечества во всех его раз-
новидностях, и любая творческая созидательная деятельность человека ока-
зываются результатом прямой реализации самих законов нашего мира, нашей
Вселенной и одновременно многообразной системой ее моделей, созданных
человеком. Одним из таких средств описания и моделирования мира высту-
пает и математика, которая на данном этапе развития человеческой культуры
оказывается приоритетным языком для такого описания и моделирования.
Здесь нам важно представить внешнюю по отношению к техническим
дисциплинам, гуманитарную точку зрения. Хотя назвать ее внешней было
бы некорректно. Ибо там, где присутствует человек лично или в виде своего
продолжения созданного его интеллектом и его руками, гуманитарная со-
ставляющая присутствует изначально, по определению.
Любой проект, будь то проект жилого дома или космической станции,
является результатом обобщения множества самых различных функциональ-
ных, технических и человеческих — гуманитарных факторов.
Поэтому, обращаясь к историческому опыту организации пространства
жизнедеятельности человека и общества, вполне естественно прибегнуть к
одному из основополагающих средств построения науки, которое В.И. Вер-
надский определил как «эмпирическое обобщение»: «Значение этого обоб-
щения и вообще значение эмпирических обобщений в науке часто упускается из
виду, и под влиянием рутины и философских построений эмпирические обобщения
отождествляются с научными гипотезами. Имея дело с явлениями жизни, осо-
бенно необходимо избегать такой укоренившейся вредной привычки» [3, с. 50].
С нашей точки зрения, природные истоки этого научного средства коре-
нятся в природе человеческого мышления, в его древнейшей, все еще малоиз-
ученной функции правого полушария головного мозга, которая соотносится с
пространственным мышлением и с творческим актом. С такой точки зрения
архитектор и любой проектировщик обладает определенным гносеологиче-
ским преимуществом. Профессиональная пропедевтика для архитектора и
136 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
любого проектанта, создающего пространственный и предметный мир че-
ловека, — это профессиональное развитие пространственного мышления.
С другой стороны, любое произведение архитектуры как таковое, осо-
бенно если это значительное произведение культовой архитектуры, создается
как модель мироздания. Такая архитектурная модель в законченном, мате-
риализованном, наглядном виде часто представляет не только мироздание в
целом, но и целый ряд присущих ему схем и законов [4]. Многие схемы и
математические фигуры, формализованные в современной науке или только
исследуемые ею как гипотезы, в результате эмпирического обобщения были
интуитивно предвидены, по-своему осмыслены в традиционной культуре и
представлены в архитектуре. Один из крупнейших отечественных архитекто-
ров середины XX столетия говорил, что «архитектурный проект есть результат
обобщения всего сущего».
При таком подходе к проблеме само проектирование в любом его ва-
рианте и, в частности, в нашем случае выступает как творческий акт, акт
преобразования всего имеющегося знания и умения в проект некоей новой
пространственной структуры, наделенной своим собственным смыслом и
своей собственной пространственной организацией (рис. 3.2) [5].
Основным средством проектировщика сложных структур, работающего
в любой области, будь то город или космическая система, выступает эм-
пирическое обобщение всего множества самых разнообразных факторов,
определяющих принципы и приемы построения такой сложной структуры.
Рис. 3.2. Универсальная схема преобразования в традиционной архитектуре и
в современной науке:
а — Громовыми с карниза храма Покрова, что на рву, известного как собор Василия Блаженного;
б — Преображение Христа. Георгиевский собор в Юрьеве-Польском; в — ваджра. Божественное
оружие Индры, способное уничтожить старый неправедный мир и мгновенно развернуться в
новый праведный мир; г — конусы Г. Минковского. Схема преобразования прошлого в будущее;
д — флоп-перестройка с разрывом единого пространства и возникновением центра
Глава 3. Культурные основания пространственной организации ПКА
137
При достаточно высоком уровне обобщения применительно к проблеме
организации пространства жизнедеятельности человека и общества можно
утверждать, что такое пространство строится по принципам зарождения,
становления и развертывания самоорганизующихся систем.
Большинством таких принципов пронизаны и традиционная общече-
ловеческая культура, и выросшая из нее современная наука, и порожденные
этой наукой технологии.
Такие принципы, лежащие в основе построения общечеловеческой куль-
туры, чаще всего бывают представлены именно в конструировании простран-
ства жизнедеятельности самого разного уровня — от простейшего помещения
до города — и в конструировании самых различных предметов жизненного
обихода человека и общества, в том числе при конструировании приборов и
технологических установок.
Поэтому прежде чем приступить к проектированию ПКА, в том числе
орбитальных станций нового поколения, нам необходимо выявить и опре-
делить хотя бы некоторые из этих ключевых принципов.
В этой главе представлен мировой общечеловеческий опыт организации
пространства жизнедеятельности человека и общества на всех его уровнях —
от простейшего жилища до глобальной инфраструктуры. Этот опыт основан
на исследовании многотысячелетнего процесса, в течении которого происхо-
дило развитие понимания, использования и интерпретации законов природы.
При проектировании ПКА ряд таких законов можно прямо использовать
как руководство к действию. Некоторая часть этих законов применялась осоз-
нанно. Другие ощущались человеком на бессознательном уровне и реализо-
вывались в построении пространства и формы. Ряд приведенных примеров
можно использовать не прямо, а только как идею, как импульс для самосто-
ятельного, принципиально нового проектного решения, принимаемого для
новых, космических условий на новом этапе развития науки и технологий.
Основоположник отечественной и мировой космонавтики К.Э. Ци-
олковский известен большинству людей как изобретатель металлических
дирижаблей и ракет. На самом деле изобретательство было лишь частью его
огромной научной работы.
К.Э. Циолковский был мыслитель. Предвидя ближайшие технические
достижения человечества, он, как и все великие мыслители человечества
начиная с глубокой древности, в новых научных и технических условиях
осмысливал сам космос и место человечества в нем. «Мы живем жизнью кос-
моса более, чем жизнью Земли, так как космос бесконечно значительнее Земли
по своему объему, массе и времени» [6].
Эта глава дает не только ряд рекомендаций по проектированию ПКА.
Она представляет очередной шаг на пути вступления человека в космос.
И этот очередной шаг человека и человечества должен быть сделан вместе с
осмысливаемым им опытом земного бытия и общечеловеческой культуры,
вместе с содержащимися в этом опыте примерами осмысления и наглядного
представления отношений человека и космоса.
138 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
3.2. Современный этап освоения космоса.
Смена целевых установок при организации пространства КА
Прежде чем приступить к рассмотрению научных оснований, принципов
и приемов, необходимых при проектировании пространственной организации
больших космических станций нового поколения, важно определить целевую
установку для такого проектирования на современном этапе ее развития.
Применительно к проблеме организации пространства ПКА можно вы-
делить три предшествующие и четвертую, современную стадию освоения
космоса.
1. Кратковременный орбитальный полет.
2. Непродолжительный орбитальный полет (недели).
3. Длительное пребывание на орбите небольшой группы людей.
4. Постоянное функционирование большой орбитальной станции со
значительным по численности коллективом.
На каждой последующей стадии изменяется состав экипажа ПКА и уро-
вень подготовки космонавтов.
1. Специально отобранные и особо тренированные люди: летчики-испыта-
тели.
2. Специально отобранные и особо тренированные люди: летчики-ис-
пытатели, бортинженеры и космонавты исследователи.
3. Специально отобранные и особо тренированные люди: летчики-испы-
татели, бортинженеры и космонавты-исследователи. Исследователи-ученые,
прошедшие курс специальной тренировки.
4. Специально отобранные и особо тренированные люди: летчики-испы-
татели, бортинженеры и космонавты-исследователи. Исследователи-ученые,
прошедшие курс тренировки. Туристы, прошедшие минимально допустимый
курс тренировки.
На новом этапе экипаж, на который прямо возлагаются функции управ-
ления аппаратом КС, составляет меньшинство. Основной контингент стан-
ции составляют исследователи-ученые, специализирующиеся в различных
областях знания.
Для нас особенно важно зафиксировать на каждой стадии изменение
главного смысла целевой установки организации пространства ПКА.
1. Обеспечение выживания человека.
2. Обеспечение краткосрочной (дни, недели) работоспособности человека.
3. Обеспечение длительной работоспособности человека и обустройство
минимально необходимого комфорта.
4. Обеспечение полноценной жизнедеятельности человека и продуктив-
ной творческой деятельности всего коллектива пилотируемой космической
станции (ПКС).
По мере перехода от одной стадии к другой в соответствии с изменением
целевой установки изменялась — принципиально расширялась — преиму-
щественная область принятия решений и соответственно вид параметров,
определяющих принципы организации пространства ПКА.
1. Основные решения на стадии 1 — технические параметры.
2. Основные решения на стадии 2 — технические и биологические пара-
метры.
Глава 3. Культурные основания пространственной организации ПКА 139
3. Основные решения на стадии 3 — технические, биологические, эрго-
номические, психологические параметры.
4. Основные решения на новой стадии вытекают из нового класса задач
по пространственной организации ПКС, связанных с обновлением целевой
установки.
В упрощенном виде можно сказать, что от эргономики, определяющей
рациональную организацию рабочего места (греч. ergon — работа и nomos —
закон), мы переходим к многофакторному пониманию организации про-
странства жизнедеятельности, к его архитектуре.
Новый класс задач связан с пространственной организацией сложной
структуры, предназначенной для постоянного пребывания в космосе значи-
тельной группы людей, ведущих интенсивную исследовательскую деятель-
ность. Эта сложная структура определяется уже не как космический аппарат,
а как космическая станция.
Соответственно, принципиально расширяется сфера исследования и
моделирования, необходимая при проектировании больших ПКС нового
поколения. Иными словами, принципиально расширяется необходимая для
проектирования научная база.
На современной стадии, помимо технических, биологических, эргоно-
мических, психологических параметров, вступает в силу целый ряд параме-
тров, которые ранее не играли существенной роли. Необходимая научная
база расширяется, развиваясь в сторону сферы естественных и гуманитарных
наук, исследующих закономерности пространственного строения и развития
самого человека, человеческого общества, человеческой культуры.
Создавая большую космическую станцию, предназначенную для по-
стоянного пребывания значительного по численности коллектива, человек
в принципиально новых условиях по существу создает и свое «личное про-
странство», и свой новый «космический дом», и «космическое поселение».
Иными словами, человек проектирует в космос и самого себя, и человеческое
сообщество, и свою культурную традицию.
Человек должен проектировать ПКС с применением всего исторического
опыта организации пространства для полноценной жизнедеятельности чело-
века, общества, общечеловеческой культуры.
И здесь, как всегда при проектировании пространства, создаваемого че-
ловеком для человека, необходимо не упустить два главных аспекта такого
проектирования.
Первый аспект — закономерности становления и развертывания тради-
ционного пространства человеческой культуры, в том числе закономерности
освоения человеком пространства природы на планете Земля и закономерно-
сти построения человеком в пространстве природы собственного культурного
пространства.
Второй аспект — закономерности восприятия и осмысления человеком
и обществом окружающего природного и созданного человеком культурного
пространства.
Иными словами, при проектировании ПКС, предназначенных для пол-
ноценной, созидательной жизнедеятельности некоего человеческого сообще-
ства, необходимо выйти на обобщение: рассмотреть, осмыслить, освоить и
140 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
создать оптимальное сочетание основных положений морфологии природы
и морфологии культуры.
Термин «проектирование» происходит от латинского projectio — бросание
вперед. Каждый проектировщик видит мир через призму своей профессии.
Создавая здание, часы, каравеллу или космический корабль, он привлекает
весь свой профессиональный опыт, все творческие способности, всю инту-
ицию и проектирует целый мир.
В последовательности своего развития человек проектировал весь этот
мир сначала в пространство и на стены пещеры, затем в пространство и в
конструкции: на стены, потолок и пол своего жилища, а затем и других зданий
и сооружений. Для плавания по реке или в океане, по воде и под водой он
проектировал на воду и под воду. Изобретая летательные аппараты, человек
проектировал их в воздушное пространство. В таком аспекте, абсолютизируя
само понятие «проектирование», мы можем сказать, что сегодня мы проек-
тируем себя и свой мир в космос, в принципиально новую среду.
Содержание этой проекции и ее конечный результат — пространственную
организацию ИКС определяют:
• некоторые закономерности строения земной природы;
• некоторые закономерности строения самого человека;
• некоторые закономерности возникновения, становления и разверты-
вания пространства жизнедеятельности человека и общества;
• и, наконец, некоторые закономерности восприятия самим человеком
этого пространства и своего бытия в нем.
Различные аспекты этих закономерностей мы рассмотрим применительно
к задаче проектирования больших пилотируемых космических станций.
3.3. Морфология человека и некоторые особенности построения
пространства жизнедеятельности человека и общества
3.3.1. Особенности морфологии человека.
Человек — существо ортогональное
Когда мы начинаем проектировать какой-либо объект: будь то город,
жилой дом, автомобиль, прибор или космический аппарат, мы прежде всего
разбиваем три ортогональные декартовы оси, необходимые для простран-
ственного построения будущего объекта.
Сегодня при определенном допущении можно сказать, что мы проек-
тируем в космос весь опыт человечества, человеческую культуру и самого
человека. При таком проектировании для начала важно понять, какова про-
странственная структура самого человека как биологического вида и в целом
как феномена природы.
Начиная проектирование ПКА с разбивки осей, интересно узнать, по
каким осям построен тот, для активной жизнедеятельности которого пред-
назначен ПКА, т. е. сам человек.
Глава 3. Культурные основания пространственной организации ПКА
141
В окружающей нас природе на поверхности Земли мы ежедневно неосоз-
нанно или целенаправленно выделяем четыре основных направления, опре-
деляющих ориентацию по четырем сторонам света: восток и запад — восход
и заход солнца, юг и север — полуденное солнце и неподвижная Полярная
звезда на ночном небе. Кроме того, в природном пространстве существует
еще одна координатная ось, определяемая направлениями верх и низ.
Такой отсчет главных направлений каждый человек естественно, нео-
сознанно производит от себя, от человека. В других случаях это происходит
вполне осознанно. В научных или проектных целях человек сначала задает
некую исходную точку — условный центр координат, от которой строит две
или три ортогональные оси.
Но, помимо более или менее очевидных природных факторов, указываю-
щих на присутствие ортогональности, существуют факторы антропоморфные,
проистекающие из устройства самого человеческого тела.
Становление человека связано с четвертичным или антропогенным гео-
логическим периодом до 4 млн. лет от нашего времени [7, с. 100—106]. По
последним данным, в начале этого периода предки современного человека
и некоторые другие виды приматов (например, австралопитеки) начали ос-
ваивать прямохождение. По-видимому, этот процесс во многом определился
сокращением площади лесных массивов и переселением в лесостепь, в са-
ванну, где среди высокой травы верхний обзор местности лучше обеспечивал
поиск пропитания (плодовые деревья, охота) и, конечно, безопасность от
хищников. Возник феномен homo erectus — человек выпрямившийся.
Человек стал единственным животным — существом, у которого продоль-
ная ось тела совпала с вертикалью. В свою очередь, постепенное освобожде-
ние рук от функций лазания по деревьям и передвижения на четвереньках
позволило еще раньше начать освоение простейших орудий — камней и
палок. Так возник homo habilis — человек умелый.
В результате возник самый важный, осевой признак строения человече-
ского тела — его доминирующая вертикальная ось. Почти у всех животных
главная (продольная) ось тела параллельна поверхности земли. И только у
человека главная ось тела (в бодрствующем состоянии) перпендикулярна
поверхности, т. е. совпадает с радиусом планеты (рис. 3.3) [8].
Более трех миллионов лет понадобилось, чтобы существо, становящее-
ся человеком, начало осознавать свое коренное пространственное отличие
Цифры в скобках указывают период
существования, миллионы лет назад
человек прямоходящий
австралопитек (homo ereefus) (2-0 1);
африканский
(ausrratopfthecL'S человек умелый
j/ffcanusJ (homo habtfis)
(3,1-2,5) (2,5-1.3)
проконсул
(20-15}
австралопитек
(austrafopithecus
afarensis), ' ' --r
«Люси» (4 1-3) Л ДК
шимпанзе S3 few
и горилла
л л л
неандерта-
лец / homo
sapiens
oeantferta-
fenszsj
(0,12-0,03)
человек разумный
(homo sapiens)
(0.1 до нашего времени)
Рис. 3.3. Становление человека вертикального
142 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
от других обитателей Земли — наглядно выраженную вертикальность свое-
го тела. Зримыми примерами и ориентирами подобной вертикальности ему
служили небесные ориентиры: Солнце, Луна, звезды, их лучи, падающий
сверху дождь, подымающийся кверху огонь костра, а в живой природе дере-
вья, травы, тростник (рис. 3.4).
Рис. 3.4. «Человек вертикальный» ищет в природе родственные ему вертикальные
структуры и направления:
а — человек вертикальный; б— в — деревья, солнечный луч и струи дождя во внешнем мире; г —
сталактиты в пещере; д — огонь очага в жилище
Наверное, эта их вертикальность — родственность человека и растений
по линии вертикальной оси во многом предопределила очень раннее возник-
новение культа деревьев и трав. Во многих фольклорных традициях деревья
выступают друзьями и защитниками слабых и обиженных. Вертикальность
оси тела как-то неосознанно объединила человека не с животными, а имен-
но с деревьями. В современной фантастике, в эпизодах борьбы с темными
«звериными» силами именно деревья встают на сторону человека, на сторону
правого дела. У романтиков и в современной фантастике деревья признаются
равными человеку обитателями Земли и даже наследниками человечества.
У великого романтика серебряного века поэта Н.С. Гумилева:
«Я знаю, что деревьям, а не нам
Дано величье совершенной жизни.
На ласковой земле — сестре звездам
Мы — на чужбине, а они — в отчизне».
В результате такого необычайно длительного по человеческим меркам
«геологического» процесса самоосмысления вертикальность оказалась до-
статочно ярко представлена во многих традиционных культурах: от просто-
го вертикального шеста, жертвенного столба и статуи бога до современного
небоскреба и телевизионной мачты (рис. 3.5).
Возможность повернуть голову в вертикальной плоскости позволила
человеку смотреть прямо вверх — обращаться к зенитному солнцу, к небу, к
богу. Наверное, именно этой вертикальной направленности человек обязан
своим устремлением вверх, в космос.
Второй особый признак морфологии человека заключается в следующем.
Тело человека в отличие от тела животных развернуто фронтально. Действи-
тельно, на нашей планете у подавляющего большинства живых существ: мле-
копитающих, птиц, земноводных, рыб, пресмыкающихся, насекомых — тело
Глава 3. Культурные основания пространственной организации ПКА
143
Рис. 3.5. Человек помещает вертикаль в центр своего бытия:
а — человек вертикальный; б — гномон — солнечные часы; в — храм в центре села Гаврилов-
ского; г — собор в центре города Кенигсберг; д — небоскреб «Трансамерика»
развернуто продольно в горизонтальном направлении. В целом можно ска-
зать, что фронтальное развертывание тела преобладает только у приматов и
только в тех случаях, когда они передвигаются не на четвереньках, а на двух
задних конечностях.
С такой позиции можно утверждать, что впервые на планете Земля
появилось живое существо с преобладанием фронтального развертывания
тела и черепа (рис. 3.6) [8].
Цифры соответствуют объему мозга в см-
Рис. 3.6. Становление фронтально развернутого черепа
В итоге человек оказался единственным на планете живым существом,
построенным по ортогональным осям. Отсюда его естественная система ори-
ентации в пространстве природы: вверх-вниз, вперед-назад, вправо-влево.
От этого природного построения человеческого тела, очевидно, происходит
и система его ориентации, и ортогональные декартовы координаты.
Здесь можно заметить, что в вертикальном положении человек находится
перпендикулярно к силовым линиям магнитного поля Земли и по направ-
лению распространения ее гравитации. В горизонтальном положении прин-
ципиально другая ситуация — тело человека параллельно силовым линиям
магнитного поля Земли и перпендикулярно распространению гравитации.
Осмысливая эту морфологическую особенность человека и основанную
на ней глубинную многотысячелетнюю культурную традицию, можно выйти
на конкретный принцип пространственной организации ОС и ориентации
в нем человеческого тела.
Осознание своей вертикальности повлекло за собой развитие темы
трехмерности пространства и построение трех соответствующих этой трех-
мерности прямоугольных координат. Эти координаты генетически строятся
от человека как от центра. Они естественно продолжают главные оси его
пространственной структуры — продлевают его осевые направления в про-
странстве: вверх и вниз, вперед и назад, вправо и влево. Позиционируя себя,
свою особенность в окружающем пространстве, человек предъявляет свою
ортогональность (рис. 3.7).
144 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Рис. 3.7. Человек представляет свою ортогональность в сакральных фигурах:
а — человек ортогональный; б — неолит. Крест на днище ритуального сосуда; в — Индия. Вишва-
ваджра. Схема развертывания Вселенной; г-д — Византия. Власть бога, простирающаяся на
все четыре стороны света, представлена горизонтальным крестом на православной просфоре
и шестиконечным крестом над храмом
Уже египтяне эпохи Старого царства (III тысячелетие до н.э.) разбивали
оси зданий и колоннад по прямоугольным координатам. При высекании ста-
туй они наносили на грани каменного блока прямоугольную сетку и по ней
делали прорись пяти проекций будущей статуи или сфинкса. Точно так же, по
модульной сетке несущих конструкций современный архитектор проектирует
здание: план, разрез, фасады. Принцип проектирования по осям, по сетке
издавна и по сей день работает как универсальный принцип архитектурного
и в целом всего технического проектирования (рис. 3.8).
Рис. 3.8. Проектирование начинается с построения ортогональной сетки:
а — человек ортогональный; б — Древний Египет. Генеральный план храма Монтухотепов;
в — Индия. Гумбаога. План мечети; г — Россия. План типовой квартиры; д — Древний Китай.
Схематический план города
Так называемые декартовы координаты, три оси, представляющие трех-
мерность пространства (X, Y, Z), сегодня видятся нам не просто средством его
математического описания, но и следствием онтологического развития самого
тела человека. Три координатные оси естественно проистекают из простран-
ственной ориентации человеческого тела: вверх-вниз, вперед-назад, вправо-вле-
во. Можно сказать, что, осваивая и осмысливая пространство природы, человек
проектирует в него свою собственную осевую ортогональную трехмерность.
В таком пространственном аспекте, важном для понимания его морфологи-
ческой природы, человек предстает перед нами не просто как homo erectus — че-
ловек выпрямившийся (буквально — вставший), но и как homo ortho-gonius —
человек прямоугольный. Такая природная прямоугольность, правильность
(orto) человека во многом объясняет специфику восприятия им окружающего
мира и особенности конструирования собственного пространственного мира,
пространства своей жизнедеятельности (рис. 3.9).
Глава 3. Культурные основания пространственной организации ПКА
145
Рис. 3.9. По ортогональным осям человек проектирует и строит важнейшие куль-
товые структуры:
а — человек ортогональный; б — Древний Египет. Большой алтарь храма Солнца; в — Китай.
Пекин. Алтарь Неба; г — культура майя. Чичен Итца. Пирамида; д — Мьянма. Паган. Храм
Ананды; е — Италия. Ренессанс. Браманте. Проект собора Святого Петра
е
Осознание человеком своей прямоугольности протекало очень медлен-
но. Человек постоянно неосознанно искал и до сих пор продолжает искать в
природе подобные себе правильные, прямоугольные, ортогональные и просто
геометрические формы: в кристаллах, горных образованиях, рисунке местно-
сти и облаков. Ему неосознанно хочется найти в природе что-то родственное
самому себе, своему собственному построению.
И когда он находит нечто похожее на прямоугольное, правильное, им
овладевает некая особая эйфория. Ему начинает казаться, что он нашел под-
тверждение того, что он не одинок во Вселенной, что правильность формы
присуща именно человеку, что правильные формы возникают как проявление
человеческого разума, что задолго до его прихода существовали иные, великие
цивилизации, или Землю посещали могущественные, но родственные ему по
разуму, а еще лучше и по морфологии, пришельцы.
Когда человек научился целенаправленно создавать нечто своими руками,
он естественно начал проектировать себя в пространство природы: изобретать
прямоугольные формы.
Прямоугольные жилища из жердей и веток встречаются уже в палеоли-
те. Но позднее, в неолите при переходе к оседлому образу жизни в домах,
построенных из глины и даже из камня, все еще продолжает доминировать
круглый план. В кочевой архитектуре круглый план жилища продолжает
доминировать до нашего времени. Живя в пространстве природы, кочевой
человек неосознанно уподобляет свой дом, свой закрытый пространственный
мир миру видимому, ограниченному по кругу горизонтом*.
Только при утверждении земледелия человек начал ощущать свою относи-
тельную независимость от природы, от сбора и добычи пищи. С развитием про-
изводящего хозяйства у человека появилась возможность делать запасы пищи.
Систематическая обработка земли и необходимость создания запасов пищи про-
диктовали необходимость перехода к оседлой жизни. Для хранения пищи,
в первую очередь зерна, нужны стационарные хранилища.
Осев на землю, человек начал активно осваивать окружающее про-
странство. Теперь это было уже не пространство обитания, как у живот-
ных, а пространство постоянной жизнедеятельности, формируемое самим
человеком. Человек начал проектировать в осваиваемое им ближайшее
* В греческом языке horison (horisontos) — разграничивающий. В русском языке близкое
по значению слово «окоём» — то, что вмещает в себя око, описывает все видимое окружающее
пространство, ограниченное горизонтом.
146 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
природное окружение, в пространство своей активной жизнедеятельности
свою правильность, прямоугольность и постепенно перешел к квадратному
или прямоугольному плану здания. Этот переход затянулся на несколько
тысячелетий и донес до нас ряд переходных форм, позволяющих говорить о
том, что прямоугольность исходила из центра круглого дома, от того места,
где его хозяин — сам человек помещал сначала квадратный в плане очаг, а
затем и квадратный алтарь для обращения вверх по вертикали, к небу, к богу
И уже эта центральная прямоугольность, правильность проектировалась на
внешние стены, постепенно преобразовывая их форму
Прямолинейность и вертикальность диктовались и технологией строи-
тельства, наиболее это выражено там, где для него использовался строевой
лес. Один из вариантов последовательности перехода от круглого дома к
прямоугольному мы можем наблюдать в неолитической архитектуре Ближ-
него Востока. От плоского или наклонного перекрытия круглого дома к
перекрытию с центральным столпом. По мере увеличения внутреннего про-
странства, к центральному четырехстолпию, отмечающему в центре здания
человеческую ортогональность, и уже от него к прямым наружным стенам
и квадратному плану. Здесь же в центре или в фокусе очеловеченного про-
странства встречается квадратный алтарь или очаг-алтарь, утверждающий
на месте центрального столпа и вертикаль, и человеческую правильность.
При переходе от кочевого образа жизни к оседлому такой же процесс
постепенной трансформации круглого жилища в квадратное мы наблюдаем
на примере традиционного якутского жилища — колымана. Но если на Ближ-
нем Востоке этот процесс занял не одну тысячу лет, то в Якутии он прошел
основные стадии за один XIX век (рис. 3.10, 3.11).
Рис. 3.10. От кубического алтаря в центре круглого в плане здания к центральному
четырехстолпию и далее к квадратному в плане дому:
а—в — Кипр, VI-IV тысячелетия до н. э.; г — Хаджилар, IV тысячелетие до н. э.
Рис. 3.11. От квадратного очага в центре круглого в плане колымана к центральному
четырехстолпию и далее к квадратной в плане зимней юрте (а—г). Якутия, XIX век
Глава 3. Культурные основания пространственной организации ПКА
147
Далее мы убедимся, что подобный постепенный переход от круга к ква-
драту наблюдается и в процессе современного развития пространственной
структуры космических аппаратов.
3.3.2. Круг и квадрат в построении пространство
жизнедеятельности человека: в архитектуре и культуре
Итак, мы вышли на проблему круга и квадрата.
Этой проблемой были озабочены все великие умы начиная с глубокой
древности и до нашего времени: Пифагор и китайские мудрецы, индийские и
арабские математики Средневековья, основоположники европейской науки.
Наконец давайте вспомним, что число п, определяющее соотношение круга и
квадрата, не вычислено до сих пор. Оно принципиально не может быть вы-
числено абсолютно точно, а только с той или иной степенью приближения.
Число л — иррационально и в каком-то смысле входит в состав тех пример-
но тридцати фундаментальных физических констант тех, самых постоянных
чисел, которые, по современным научным представлениям, определяют
устройство нашего варианта Вселенной.
Мы заметили, что в архитектуре квадратное жилище возникает вместе с
развитием производящего хозяйства и становлением оседлых человеческих
поселений. Действительно, организовать в ограниченном пространстве осед-
лого человеческого поселения и даже состыковать группу прямоугольных домов
гораздо проще, чем группу домов круглых. Прямоугольный дом проще сориен-
тировать на местности по странам света. Прямоугольный дом проще разделить
на комнаты. В прямоугольном доме можно спать вдоль стен. В прямоугольном
доме проще расставить мебель. В целом прямоугольное пространство, создан-
ное для человека — существа прямоугольного, можно использовать гораздо
экономичнее, эффективнее, рациональнее, технологичнее, чем пространство
округлое. Человек воспринимает прямоугольное пространство как естествен-
ное продолжение своей собственной прямоугольное™, правильности.
Рационально поделить обрабатываемую землю на прямоугольные участки
достаточно просто, а на круглые — невозможно. Круглый дом крайне сложно
разделить на удобные комнаты. Круглые дома в отличие от прямоугольных
сложно пристроить один к другому. Практические преимущества прямоуголь-
ной формы в условиях земледелия и оседлого жилья очевидны.
Утвердив приоритет квадратного над круглым, человек объявил прису-
щий строению его тела угол 90° прямым, прямоугольным, ортогональным и
просто правильным, в отличие от других, неправильных углов и форм. С тех
пор свою прямоугольную природу человек почитает как единственно правиль-
ную, а следовательно, считает ее достаточным основанием для того, чтобы
изменять мир, строить его под себя, под свою правильность и даже править
этим миром. Поэтому во многих языках слова «право», «правда», «править»,
«правило», «правитель», «правильный» происходят от общего корня.
Но вернемся к проблеме квадратуры круга. Попытаемся понять: как
мыслились, с чем из высоких природных и сакральных реалий соотносились
круг и квадрат в архитектуре и в культуре?
148 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
На разных стадиях развития культуры, в контексте разных культурных
традиций при исходной антропоморфной общности происхождения квадрата
в его соотнесении с природными реалиями наблюдаются некоторые различия.
У индоевропейских народов в эпоху бронзы, когда с появлением металли-
ческого оружия человек ощутил свое господство над окружающей природой
и над другим, не вооруженным металлом человеком, постепенно возникла
и стала крепнуть идея антропоморфного божества. Эта эпоха оставила нам
главные массивы героического эпоса: «Иллиаду» и «Одиссею», Махабхарату
и Рамаяну, позднее у германцев Эдду и Беовульфа, другие, менее известные
эпосы. В культурологии эта эпоха так и называется — эпической или геро-
ической эпохой.
Эпос утверждал божественное происхождение человека и даже его прямое
родство с богами. Древнеегипетские фараоны почитались сыновьями Амона.
В античной традиции Геракл был сыном Зевса. Ахилл — сыном морской бо-
гини Фетиды, и т. д. В результате такого сакрального самоутверждения че-
ловека новые антропоморфные боги низвергли старых зооморфных титанов.
Именно эту эпоху можно соотнести с утверждением господства в архитектуре
прямоугольных, правильных строений.
На ранних стадиях развития культурных традиций весь мир, каждое су-
щество, растение и даже каждый неживой предмет, каждое явление природы
представлялись одухотворенными. Эту стадию принято называть анимизмом
(греч. anima — душа). Непонятный человеку современного Запада секрет
японской культуры и архитектуры во многом определяется именно этой
одухотворенностью всего сущего, сохраненной японским народом в архаи-
ческой традиции синто.
В анимистической религии синто каждый живой и неживой предмет
окружающего мира наделен ками — некоей сущностью, чем-то вроде души
и потому требует соответствующего отношения и к себе, и к окружающему
миру. В японской традиции природные и рукотворные предметы не просто
расставляются и соответственно воспринимаются по необходимости или по
композиции. Все предметы от гор до мелкого камешка, от здания и до чашки
исполняются собственным смыслом, душой, особой собственной сущностью —
ками и вступают в сложные и гармоничные, по-своему логичные простран-
ственные и временные отношения [9].
На более поздних стадиях развития культурных традиций божества при-
обретают конкретные природные формы, а еще позднее формы обожествлен-
ных живых существ: рыб, змей, быков и других животных в зависимости от
природного ареала распространения той или иной культурной традиции.
Овладев металлическим бронзовым оружием, человек возомнил себя
царем природы (видимо, впервые). С началом эпохи бронзы в III тысячелетии
до н. э. появляются первые, не условные, как в палеолите, где главное, вни-
мание уделялось изображению животных, а более или менее реалистические
изображения человека. У человека возникло претенциозное желание объявить
(сделать) богов похожими на человека — антропоморфными. Именно поэтому
у всех индоевропейских народов, да и не только у них, центральным собы-
тием мифологии оказалась борьба новых и старых богов. Старые боги были
зооморфные — змееногие титаны в Греции, змееногий Вритра у ведических
Глава 3. Культурные основания пространственной организации ПКА 149
ариев, змей у славян, германцев, балтов. В Месопотамии новый верховный
бог Мардук борется с покрытым чешуей чудовищем — с владычицей водной
бездны Тиамат (рис. 3.12).
Новые антропоморфные боги, естественно, победили старых — зооморф-
ных. Человек, вооруженный металлом, победил животный мир сначала на
земле, а потом и на небе.
Рис. 3.12. Борьба новых антропоморфных богов со старыми зооморфными:
а — Греция. Зевс и змееногий Тифон; б — Вавилон. Мардук и владычица водной бездны Тиамат;
в — в христианстве эта тема отразилась в легенде о Святом Георгии
Но человек — существо квадратное, а на небе все круглое — сам не-
босвод, Солнце, Луна, кольца Сатурна, орбиты планет, спиральные галак-
тики. И человек вместе с антропоморфными богами устремляет в небо свою
собственную «квадратность». У ведических ариев возникает ахавания-агни —
квадратный алтарь неба* (рис. 3.13). У персов возникает загадочная небесная
обитель «квадратная Вара». Позднее у христиан утверждается квадратный в
плане и даже кубический Горний Иерусалим.
Рис. 3.13. В эпоху бронзы после победы антропоморфных богов над зооморфными
небо становится квадратным, ортогональным, правильным как сам человек:
а — план ведической алтарной системы: слева — квадратный в плане алтарь неба, справа —
круглый алтарь земли, в центре алтарь веди — алтарь познания. Ведать — знать. Познание —
путь от земли к небу. Соотношение размеров алтаря неба и земли — 3/4, приближено к числу
л: квадратное небо должно полностью покрывать и защищать круглую землю; б — идея квад-
ратного неба проектируется за пределы существования «Этого Мира». Непал. В квадратном
небесном океане на змее Шешу спит бог Вишну. Мир еще не родился
* Алтарь неба (ахавания агни) — квадратный... Алтарь земли (гархапатья агни — алтарь домо-
хозяина) — круглый, потому что этот мир — круглый (Шатапатха брахмана около III века до н. э.)
150 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Главное во всей этой идее то, что на небе, там, где обитают уже очело-
веченные антропоморфные боги, все должно быть по-человечески правиль-
ным, а значит квадратным. Даже в тех случаях, когда в той или иной форме
сохраняется культ старых зооморфных богов, эти боги, уже встроенные в
новый пантеон, помещаются на квадратное небо. Квадратное небо приобре-
тает статус изначального. Так вишнуитская традиция индуизма представляет
в архитектуре картину мира до рождения самого мира в небесном океане
(см. рис. 3.13).
Естественно, что при такой установке большинство алтарей в большин-
стве религий приобрели квадратную или хотя бы прямоугольную в плане
форму. Во многих случаях алтари стали кубическими. То же самое произошло
со многими главными святынями: от ветхозаветного «жертвенника из дерева
ситтим» до современного православного алтаря (престола). Кубические древ-
неегипетские храмовые алтари и античные жертвенники. Главные святыни
христианства Кувуклия и главная святыня ислама Кааба — кубические даже
по своему названию.
Человеческая правильность, некогда вознесенная на небо вместе с ан-
тропоморфными богами, спроектировалась обратно — с неба на землю,
(рис. 3.14, 3.15).
Каждый раз, когда в той или иной религии, в той или иной стране тре-
бовалось архитектурой утвердить категорию закона или категорию власти,
а б в г д
Рис. 3.14. Храмовые алтари многих религий имеют форму куба:
а — Древний Египет. Алтарь храма Амона в Карнаке; б — Древний Рим. Алтарь на форуме;
в — Индия. Алтарь линга-йони в святилище бога Шивы; г — Палестина. Ковчег Завета. Ре-
конструкция по Торе; д — Православный храмовый алтарь (Престол)
Рис. 3.15. Главные святыни многих религий имеют форму куба:
а — Древняя Персия. Накш и Рустем. Храм Огня; б — Иерусалим. Храм Гроба Господня. Куву-
клия; в — Мекка. Кааба
Глава 3. Культурные основания пространственной организации ПКА
151
освященную небесной, квадратной правильностью, возникали кубоватые
здания: простые кубоватые храмы на ранних стадиях развития различных
религий, резиденции правителей и просто лиц, претендующих на власть.
Квадратный фасад, кубоватая форма характерны для этих резиденций власти
от Древнего Египта до современности (рис. 3.16).
Рис. 3.16. На ранних стадиях принятия новой религии власть нового бога утвер-
ждалась кубическими храмами:
а — Древний Китай. Ранняя буддийская пагода; б — Сицилия. Ла Куба — раннехристианский
храм; в — Россия. Великий Новгород. Георгиевский собор
Каждый раз, когда правитель хотел подчеркнуть правильность и пра-
вомочность, целостность и неколебимость, небесную освященность своей
власти, он обращался к квадрату в плане. Незыблемость власти феодала
утверждалась кубическим донжоном — жилой башней замка. Власть царя,
епископа, буржуазной республики и банкирского дома утверждалась кубом
дворца (рис. 3.17). Подчеркивая осененную небом вечность своей власти
над Поднебесной, император Китая строил себе квадратный в плане дворец.
Рис. 3.17. Кубические здания утверждают правильность, незыблемость земной
власти:
а — Италия. Власть феодала утверждается кубическим замком; б — Флоренция. Власть буржу-
азной республики утверждается кубическим зданием палаццо Веккио; в — Флоренция. Власть
банкирского дома утверждается кубическим палаццо; г — Россия. Москва. Кремль. Власть царя
утверждается кубическим зданием Грановитой палаты; д — СССР. Власть коммунистической
партии утверждается зданием Дворца Съездов
Вознесенный на небо вместе с антропоморфными богами квадрат стал
возвращаться на землю в качестве образца для подражания, в качестве бо-
жественного указания и для жреца, и для царя, и для зодчего. Правильные
152 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
храмы, дворцы, крепости строились по образу и подобию» небесных дворцов
богов. Упоминания о небесном образце какого-нибудь значительного здания
сохранились во многих традициях. Эти упоминания служили законным, выс-
шим, божественным обоснованием его структуры. Христиане в поисках пра-
вильности, божественности своих строений ориентировались на кубический
небесный, «Горний Иерусалим». В Кампучии сохранилось предание о том,
что строители Ангкор-вата были отправлены царем в командировку на небо,
чтобы изучить небесный дворец богов, и только потом они были допущены
к строительству по его образу и подобию.
У индоевропейцев, да и не только у них, традиционные архитектурные
формы, различные изображения и даже фигуры орнаментов ориентировались
квадратом в небо. Человек предъявлял Небу свою правильность и апелли-
ровал к божественному источнику своей правильности. Круглая колонна
неизменно завершалась квадратной капителью. Конечно, можно говорить о
конструктивной необходимости, об удобстве опирания балок покрытия, но
квадратное завершение присутствует и там, где опирания вовсе не требует-
ся. Мы уже говорили о том, что в традиционных культурах конструктивная
необходимость как-то счастливо совпадает с сакральным смыслом той или
иной формы (рис. 3.18).
Рис. 3.18. Обращаясь к небу человек представляет себя квадратными в плане архи-
тектурными формами:
а — Юго-восточная Европа. Энеолит. Семейный алтарик; б — Китай. Обсерватория; в — Индия.
Вотивный ступа; г — капитель в буддийском храме; д — античная капитель
Интересно, что, создавая в кровле дома отверстие не только для выхода
дыма от очага, но и для общения с богом, человек исподволь строго учитывал
логику круга и квадрата. Квадратным, по-человечески правильным отвер-
стием открывалось в небо оседлое человеческое жилище. В одном из древ-
нейших неолитических поселений Чатал Хуюке (VI—V тысячелетие до н. э.)
входы в жилые дома были устроены в плоской кровле. Они были обраще-
ны к небу квадратными отверстиями. Еще раз отметим сакральность такого
конструктивного решения. В оседлом прямоугольном жилище, перекрытом
по деревянным балкам, устроить квадратное отверстие гораздо проще, есте-
ственнее, чем круглое. Много позднее в домах римского города Помпеи в
главном помещении большого жилого дома — в атриуме под квадратным или
прямоугольным отверстием в кровле (имплювием) находился прямоугольный
плоский бассейн (комплювий) с непременным квадратным в плане главным
домашним алтарем перед бассейном, а иногда и в его центре.
Глава 3. Культурные основания пространственной организации ПКА 153
В ранних храмах Античной Греции над статуей бога было устроено
квадратное отверстие. С глубокой древности греки, как и другие народы,
привыкли возносить жертвы и молитвы к небу на открытых небу алтарях,
расположенных на территории святилищ. С появлением храмов и началом
поклонения статуе бога греки, помимо возможности обращения к статуе бога
в храме, сохранили возможность прямого обращения к богу на небе.
Обращаясь квадратным отверстием в кровле снизу верх, к богу, человек
предъявляет ему свою «квадратность», правильность (рис. 3.19).
Рис. 3.19. Оседлое жилище человек раскрывает к небу квадратным проемом:
а — Чаттал Хююк, VI тысячелетие до н. э.; б — Китай. Подземная деревня; в — Древний Рим.
Помпеи. Атриум
Отверстие в куполе римского храма всех богов Пантеона было круглое.
Это открытое небу отверстие называлось oculus — око, глаз. Через него боги
заглядывали в храм солнечным светом, дождем, звуками грома, отсветами
молнии.
В Восточной Римской империи — Византии — в IV веке н. э. христиан-
ство было признано государственной религией. Со временем вместо кругло-
го центрального отверстия в куполе храма появилось изображение Бога —
Пантократора (Вседержителя), заглядывающего в храм строгим, а иногда и
гневным взором.
В своем доме, в храме Бог обращается к человеку сверху вниз. Бог —
принадлежность космоса, и потому он предъявляется в круглом куполе, в
округлом светящемся ореоле (в христианстве — мандорла), с круглым све-
тящимся нимбом вокруг головы (рис. 3.20).
Итак, в индоевропейской традиции начиная с эпохи бронзы небо пред-
ставлялось квадратным, а земля круглой. Отсюда, казалось бы, чисто матема-
тическая проблема определения числа л, т. е. численного соотношения рав-
ных по площади круга и квадрата, оказывается глубочайшей содержательной
проблемой определенного соотношения — вычисления формулы равенства
площади квадратного неба и круглой Земли.
Это была не только проблема соотнесения земли и неба — поиск маги-
ческого числа или, по-современному, определяющей константы, лежащей в
основе Вселенной. Это была и опосредованная проблема соотношения чело-
века и Бога. Но это была и проблема защиты. Небо — купол — сень — защита.
154 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Рис. 3.20. Бог заглядывает в храм через круглый окулюс:
а — Рим. Пантеон. Бог заглядывает в храм солнечным лучом, дождем, громом; б—в — Византия.
Кахрие Джами. Христос-Вседержитель смотрит в храм из люнета купола
Равен ли небосвод по площади поверхности земли? Способна ли небесная
сень защитить землю? Этой проблемой человечество озабочено и сегодня.
Китайская традиция также была крайне озабочена проблемой взаимо-
действия неба и земли. В отношения между Землей и небом китайцы ввели
надмирный, космический принцип возникновения и развития всей жизни
Вселенной — дао.
Что касается круга и квадрата, китайская традиция вполне признает са-
кральность и квадрата, и круга. Квадрат выступает как санкционированный
Небом идеал, обязательный для храмов, дворцов и квадратных (прямоуголь-
ных) в плане городов. Но в этом признании китайская традиция, так же как
и мы в нашем суждении, соотносит круг с природой, в том числе с природой
космоса, а квадрат с человеческой культурой. Верхние ярусы Алтаря Неба
обращены в небо, и потому они круглые. Нижний ярус обращен к земле,
к человеку, и потому он квадратный в плане и ориентирован на все четыре
стороны по ортогональным координатам. В Люйши чуньцю — энциклопе-
дическом трактате III века до н. э. под глубиной подразумевается глубина
человека и созданной им культуры:
Есть великий Круг в вышине
И великий квадрат в глубине;
Ты, сумевший это взять образцом,
Станешь матерью народа и отцом.
Получается, что китайская традиция оказывается ближе других к совре-
менному пониманию проблемы. И если божественное почитать как санкцио-
нированную небом часть человеческой культуры, то квадрат также приходится
признать божественным установлением (рис. 3.21) [10, с. 281—282].
Правильные, квадратные в плане города и во всяком случае города с
двумя пересекающимися под прямым углом осями — главными улицами,
с самого начала градостроительства, с IV тысячелетия до н. э. почитались
как идеальные, как божественные предначертания. В европейской науке
они назывались регулярными. Они создавались как крепости на чуждой,
вновь осваиваемой или завоеванной территории, в колонизуемой местности
Глава 3. Культурные основания пространственной организации ПКА
155
Рис. 3.21. Китай:
а — идеальный, квадратный город состоит из квадратных кварталов; б — Пекин. Алтарь неба.
Власть круглого Неба простирается на все четыре стороны света над квадратным алтарем, квад-
ратным дворцом, квадратным городом, квадратной Срединной Империей; в — тема квадрата
и круга на фасаде дворцовой часовни
по единому, идеальному, правильному плану. И прежде всего на местности
утверждалась новая точка отсчета бытия, новый центр завоеванного мира.
От этого центра разбивались в плане две ортогональные правильные оси во-
енного лагеря и будущего города. Можно сказать, что в чуждой, неправиль-
ной местности завоеватели утверждали свои собственные, предписанные их
богами представления о правильности, о правильном обустройстве земного
бытия (рис. 3.22).
Рис. 3.22. По ортогональным осям человек проектирует и строит новые, идеальные
города:
а — Древний Египет. Иероглиф «город»; б — Древняя Индия. Схема идеального города; в —
Римский колониальный город Ламбезис построен по схеме военного лагеря; г — США. Город
Филадельфия
Здесь мы рассмотрели только города, построенные единовременно по
единому ортогональному плану, утверждающему ортогональность, правиль-
ность новой власти, пришедшей на новую территорию или завоевавшей ее
и утверждающей новый порядок жизни. Такие правильные города можно
назвать колониальными.
Другие города, те, которые сотни и даже тысячи лет развивались на
своей территории как природные организмы, в традиционной западноевро-
пейской науке еще недавно пренебрежительно именовались нерегулярными,
стихийными. В конце XX века в отечественной науке и практике их стали
называть историческими городами. Сегодня вслед за крупнейшим русским
градостроителем первой половины XX столетия В.Н. Семеновым такие го-
рода, развивающиеся по своим особым, природным законам, мы называем
156 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
естественными городами [11]. Развитие этих намного более сложных, раз-
вивающихся по иным природным законам градостроительных структур мы
рассмотрим в другом разделе этой главы.
3.3.3. Круг и квадрат в пространственном построении КА
Сегодня, когда человечество строит станции в космосе, на первом этапе,
пока что только на околоземной орбите, хочется понять: насколько антро-
поморфная «квадратность» может распространиться и в этом направлении?
Насколько она необходима для создаваемого человеком в новых условиях,
казалось бы, принципиально нового типа пространства жизнедеятельности?
И здесь мы уже сегодня можем выявить общую закономерность. В про-
цессе полувекового развития и усложнения космических аппаратов наблю-
дается отчетливая тенденция постепенного перехода преобладания от ранних
простейших круглых форм к более сложным прямоугольным и далее —
к развертыванию больших орбитальных станций по трем ортогональным
координатам.
Осваивая Землю, человек, строивший сначала круглые в плане шалаши и
жилища, постепенно ввел присущий ему принцип прямоугольности, ортого-
нальности в свои постройки, а затем, обретя самоуверенность, спроектировал
этот принцип на небо для вочеловеченных богов.
Осваивая космос, человек начал опять-таки с округлой капсулы первого
спутника. Но с самого начала круглая капсула была заполнена произведени-
ями человека — ортогональными объемами приборов. Сегодня человек уже
в полной мере приступил к проектированию себя, своей ортогональности в
околоземное пространство.
Характерно, что на этапе освоения космического пространства, следую-
щем за этапом освоения пространства земного, процесс постепенного пере-
хода от преобладания круглых форм к преобладанию форм прямоугольных,
естественно, повторяется.
Но повторяется он в темпе, ускоренном как минимум на два порядка.
В ходе неолитической революции процесс перехода от круглого к квадратному
жилищу занял тысячелетия. В ходе космической революции процесс перехода
от преобладания круглых структур к преобладанию структур прямоугольных
занял всего несколько десятилетий.
Первые космические аппараты, еще не пилотируемые, еще не вочелове-
ченные начинают свое развитие опять-таки со сферы.
Мы уже заметили, что со времени первого появления человека на орбите
постепенно изменилась установка для пребывания человека в космосе. Перво-
начальная установка была направлена сначала на простое выживание, а затем
на минимальное обеспечение условий для работы. Современная установка
ориентирована на долговременную полноценную, продуктивную научную и
творческую деятельность человека в условиях орбитальной станции.
По мере нарастания присутствия человека и (или) его производных —
помещений, механизмов, приборов в КА начинают доминировать прямо-
угольные формы. Эта тенденция легко прослеживается на протяжении всей
Глава 3. Культурные основания пространственной организации ПКА 157
цепочки их развития. Создаваемые человеком приборы строятся и компону-
ются как прямоугольные структуры. В них проектируется и реализуется есте-
ственная прямоугольность человека. Вспомним еще раз, что великий русский
ученый Павел Флоренский определял все инструменты, приборы и всю тех-
нологическую цивилизацию как развитие возможностей природных человече-
ских органов, как «органо-проекцию» человека в окружающее пространство*.
В современных беспилотных системах — там, где главной целью является
достижение какой-либо планеты, преодоление атмосферы или ускоренное
преодоление больших расстояний с использованием запасов топлива, а также
там, где требуется герметичность, космические аппараты сохраняют рацио-
нальное преобладание обтекаемых сферических форм.
Беспилотные аппараты, предназначенные для работы в открытом космо-
се, в случаях, когда не требуется герметичность, строятся в виде прямоуголь-
ных, часто кубических структур. В них «квадратность» доминирует во всем,
даже во внешнем абрисе. Их антенны и солнечные батареи простираются на
все четыре стороны по декартовым прямоугольным координатам. Получает-
ся, что и на орбите Земли, и в Солнечной системе, и в дальнем космосе они
наглядно представляют главное морфологическое свойство человека — его
осевую прямоугольность.
В культурологическом смысле можно сказать, что в случае с архитектур-
ным освоением космоса, мы в очередной раз возвращаемся к древнейшим
обобщениям, к древнейшим представлениям о зарождении и развертыва-
нии мира, жизни, любой развивающейся структуры АВ OVO — от яйца: от
шара первого спутника к построенной по прямоугольной сетке внутренней
структуры корабля и далее вплоть до сложных, развертывающихся по трем
пространственным координатам, прямоугольных, вочеловеченных, пилоти-
руемых космических станций.
И здесь уже сегодня происходит определенное развитие и усложнение
самой прямоугольной структуры. Орбитальная станция «Мир» развертывалась
от стыковочных узлов потрем прямоугольным координатам. Следующий этап —
МКС строится уже как ярусная прямоугольная решетка.
Выходя на историческое обобщение, можно сказать, что при кочевом
образе жизни и на земле, и в космосе человек обходился круглым в плане
жилищем. При переходе к оседлости и на земле, и в космосе человек раз-
вертывает в пространстве антропоморфные прямоугольные структуры
(рис. 3.23, 3.24).
3.3.4. Естественные и искусственные системы мер
В современном мире, в мире так называемого научно-технического про-
гресса принято считать, что всякая наука начинается с измерения. Поэтому
по традиции, выработанной за последние несколько столетий, прежде чем
приступить к проектированию некоей пространственной структуры, мы
должны оговорить системы мер, возможные и (или) необходимые для такого
проектирования. Начнем с общеизвестного.
* Этот процесс можно проследить в целом ряде публикаций [12, 13].
158 Часть /. Исходные данные для компоновки пилотируемого космического аппарата
г
Рис. 3.23. В «круглый» космос отправляются первые круглые аппараты, постепенно при-
спосабливаемые для человека. Двигательный и грузовой отсеки компонуются из сфер и
цилиндров. Приборный отсек и помещения для человека компонуются ортогонально:
а — первый спутник; б — грузовой корабль «Прогресс»; в — современный малый КА; г — ПКА «Алмаз»
Рис. 3.24. Человек и поственные ИН ОС развертываются по ортогональным осям:
а — человек ортогональный; б — орбитальная станция «Мир» развертывается по ортогональ-
ным осям; в — МКС развертывается как ортогональная пространственная решетка
в
Сегодня метрическая система мер охватывает все сферы нашей жизни.
Название метрической системы («метр» — французское metre) происходит от
греческого metron — мера. Метр был введен в Париже в эпоху Французской
революции 7 апреля 1795 года. За единицу измерения длины была принята
рассчитанная еще в 1791 году, совершенно условная единица длины, равная
одной десятимиллионной от 1/4 длины парижского меридиана*.
Можно заметить, что такая искусственная единица измерения не имеет
прямого отношения к метрике человека, который ее установил достаточно
произвольно.
* Сегодня точный размер эталонного метра исчисляется как длина пути, проходимого
светом в вакууме за 1/299 792 458 с.
Глава 3. Культурные основания пространственной организации ПКА 159
В большинстве традиционных культур, равно как в современной науке
и практике, принята весьма удобная десятичная система счисления. В своих
истоках десятичная система антропоморфна — она происходит от счета на
пальцах рук. В некоторых архаичных традициях, в жарких странах, где люди
ходили босиком, присутствовала двадцатеричная система счисления: 10 паль-
цев на руках + 10 пальцев на ногах. Других столь очевидных оснований для
десятичной системы в природе как будто не наблюдается.
В природе присутствует основание и для другой наглядной системы счис-
ления — двенадцатеричной. Это основание исходит от важнейшего зримого
временного цикла — один оборот Земли вокруг Солнца примерно соответ-
ствует 12 полным циклам оборота Луны вокруг Земли. В солнечном году
12 лунных месяцев.
Ниспосланные свыше небесные законы и связанные с ними числа в
древности почитались как божественные. Некоторое несоответствие годового
солнечного и лунного циклов казались странными и неуместными для ми-
рового порядка, но принимались как объективная, божественная данность.
Древние цивилизации предпринимали огромные усилия для увязки солнеч-
ного и лунного календарей. По-видимому, эта неувязка послужила одним из
важнейших, божественных стимулов для развития математики.
Десятичная, антропоморфная система счисления, по-видимому, преобла-
дала в быту еще у первобытного человека из-за своей очевидной, физической
реальности — 10 пальцев на руках.
Древние традиции, в которых были развиты представления о небесных
истоках жизни и небесных божествах, в сакральных целях пользовались пре-
имущественно небесной, божественной двенадцатеричной системой счисле-
ния. Течение жизни — время, которое древние почитали как божественную
данность, мы и поныне измеряем в двенадцатиричной системе. Сутки делятся
на 24 часа, из которых, как и в древности, 12 соотносятся с днем, а 12 —
с ночью. Час делится на 60 (12x5) минут, минута на 60 (12x5) секунд.
В метрике 1 английский фут (foot, букв. — ступня) равен 12 дюймам. По
12 штук — дюжинами до сих пор во многих странах продаются куриные яйца,
олицетворяющие в традиционных культурах начало, семя, зародыш нового
мира, новой жизни, нового жизненного цикла. Даже сегодня сугубо бытовые
предметы: тарелки, чашки, ложки, ножи, вилки, некогда предназначавшиеся
для ритуала торжественной трапезы, мы все еще считаем дюжинами.
Следы этой древней сакральности числа 12 неизменно присутствуют во
многих культурных традициях: 12 знаков зодиака в астрологии и астрономии,
12 зверей в китайской традиции летоисчислении, 12 апостолов в христианстве
и т. п. Человек привык делить окружность видимого горизонта на 12 частей, а
позднее на 360°, кратных числу 12. К этой теме мы еще когда-нибудь вернем-
ся при рассмотрении проблемы внешнего обзора и визуальной ориентации
в космическом пространстве.
С развитием западной, антропоцентричной, техногенной цивилизации
человечество с новым пиететом обратилось к преобладанию первобытной
десятичной системы счисления.
Сегодня в архитектуре, в строительных и инженерных технологиях внешне
господствует метрическая система. Но при более пристальном рассмотрении
160 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
основных архитектурных размерностей можно убедиться, что на самом деле эти
размерности проистекают из древних, традиционных антропоморфных мер.
Не случайно Международная метрическая комиссия, утвердившая в 1872 году
1 метр как эталон длины, определила традиционные антропоморфные эта-
лоны длины как естественные.
Космическую станцию, равно как здания и сооружения на Земле, человек
строит для себя, создает по своим меркам. Поэтому для нашей темы полезно
учесть многотысячелетний земной опыт.
Основополагающий земной строительный модуль равен 30 см = 1 футу*.
Фут — размер мужской стопы — одна из древнейших единиц измерения
длины**. В сборном железобетоне базовые размеры (в осях) плит перекры-
тия, балок, ферм, колонн, перемычек, стеновых панелей кратны 30 см:
30-60-120-180-240-300-360-480-600-900-1200-1800—2400—3600—4800—
600-7200-9000-12 000... см.
В кирпичной кладке расчетная высота ряда составляет 7,5 см (6,5 см + 1 см —
сам кирпич + слой раствора) = 1/4 фута. Четыре ряда кладки дают расчетную
высоту 30 см (1 фут).
Стандартная ширина ступени (проступь) для жилых и общественных зда-
ний принята равной 30 см (1 фут). Стандартная высота ступени (подступенок) —
15 см, или два ряда кирпичной кладки (1/2 фута). Соответственно, для стан-
дартных лестниц жилых домов сумма размеров подступенок + проступь +
подступенок составляет 15 + 30 + 15 = 60 см, т. е. опосредованную длину
человеческого шага. При шаге на две ступени — для шага взрослого мужчи-
ны. При шаге на одну ступень — для шага детей, женщин и пожилых людей.
Эта же сумма размеров — 60 см = подступенок + проступь + подступенок
установлена для нестандартных и специальных лестниц. Например, для по-
логой парадной лестницы: 12 + 36 + 12 = 60 см = 2/; для крутой технической
лестницы: 17,5 + 25 + 17,5 = 60 см = 2/
Вертикальная размерность кирпичной кладки и лестницы жестко связаны
с высотой этажа (от пола до пола): 270, 330, 390, 450, ... см. Соответственно,
высота помещения «в свету» (от пола до потолка) составляет 240, 300, 360,
420... см. Здесь высотный модуль равен преимущественно 2 футам: по 2 ступе-
ни (1/) в каждом из двух соединяющих этажи лестничных маршей (рис. 3.25).
В китайской и японской традиции размер жилого помещения и всего дома
в целом определяется количеством циновок из рисовой соломы — единиц
площади — модульных спальных мест, которые можно разместить в доме.
Характерно, что размер стандартной циновки, сложившийся в китайской тра-
диции в эпоху Чжоу (XII—III век до н. э.), составлял около 176 см (рис. 3.26).
Для сравнения, в русской традиции размер мерной или маховой сажени
составлял 176,4 см — расстояние размаха рук или роста среднего человека***.
Размер стандартной избы (в осях) составляет около 600 см. Соответственно,
внутренний размер избы «в свету» будет около 570 см, или несколько больше
* Современный английский фут — 30,48 см. Здесь и далее приводится округленный ме-
трический размер 1 фута — 30 см.
** Средний античный фут (греч — pus, лат. — pes) — 29,62 см.
*** В дальнейших примерах для простоты запоминания размер русской сажени округлен
от 176,4 до 176 см.
Глава 3. Культурные основания пространственной организации ПКА
161
а
—| -120см =4 f
—-| -180см = 6Г
----| - 240c« = 8f
------1 -300см- Юf
-------1 - 360см- 12f
-------—| -480см”18Г
------------1 -600 см- 20 f
---------------1 - 720 см - 24 f
-----------------1 - 840 см-28 f
-------------------1 - 900 см - 30 f
-------------------------1 -1200 см-40 f
--------------------------------------1 -1800cM = 60f
----------------------------------------------------1 - 2400cM = 80f
в
Рис. 3.25. Современное строительство построено на модуле 30 см = 1/:
а — кирпичная кладка по высоте построена на модуле 30 см = 1/ 6,5 см кирпич + 1,0 см
шов = 7,5 см, (7,5 х 4) см = 30 см = 1/; б — лестница построена на модуле 30 см = 1/. Размер
проступи = 30 см = 1/. Размер подступенка = 15 см = 0,5/. Сумма размеров одной проступи и
двух подступенков = 60 см = 2/. Соответственно лестнице с модулем = 60 см = 2/по 30 см на
каждый из двух маршей построена высота этажа от пола до пола: 270 — 330 — 390 — 450 — ... см;
в — номенклатура размеров современных сборных железобетонных изделий построена на
модуле 30 см = 1/(в осях)
Рис. 3.26. Китайский и японский дом строится
по модулю циновки — спального места
трех саженей (около 530 см). Это означает, что на лавке вдоль стены могли
относительно свободно разместиться для сна три человека. Таким образом
стандартный размер бревна при рубке избы (с учетом угловой перевязки и
выпуска концов бревен) составляет 6,4 м.
Этот перечень примеров можно было бы продолжить, но даже из при-
веденных основных строительных размерностей очевидно, что современная
метрическая система мер для нужд архитектуры, для создания пространства
жизнедеятельности человека и общества адаптировала древнюю антропом-
орфную систему размерностей.
Традиционная антропоморфная размерность могла базироваться не толь-
ко на размере стопы, но и на других параметрах человека. Очевидно, что
162 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
до появления массового многоэтажного строительства при горизонтальной
разбивке плана здания на земле предпочтение отдавалось футу — размеру
стопы. При разбивке вертикальной или объемной структуры в ряде традиций
предпочтение нередко отдавалось локтю — ручной мере.
В Древнем Египте одним из основных строительных модулей служил
локоть. В русской строительной традиции основная строительная мера са-
жень — средний рост человека.
В древности и Средневековье размерность была иерархична. Одна систе-
ма мер применялась для строительства обыденных зданий. Другая система,
отмеченная именем царя, божественного правителя, — для храмового и двор-
цового строительства. В Древнем Египте обычной мерой при строительстве
жилья был локоть с пальцами, сжатыми в кулак (около 46,5 см)*. При соз-
дании храмов, обелисков, статуй, сфинксов и других «памятников вечности»
в качестве модуля применялся царский локоть с вытянутыми пальцами (егип. —
тех = 52,3 см)**.
В практической работе применялась система мерных жезлов — эталонов
длины, по которым осуществлялась разбивка в натуре. В древности эталон-
ные жезлы изготовлялись из твердого дерева: коэффициент продольного
расширения дерева при изменениях температурно-влажностного режима
очень незначителен (рис. 3.27). В 1799 году во Франции эталонный метр был
изготовлен из платины, которая из всех ценных металлов имеет наименьший
коэффициент линейного расширения.
Сегодня, составляя план здания или разбивая его в натуре, мы прежде
всего фиксируем ортогональную сетку осей. При разбивке здания древние
египтяне использовали визирный инструмент и водяной уровень. Совре-
менные геодезисты при разбивке осей пользуются теодолитом и нивелиром.
Во многих традициях практиковалась разбивка с помощью натянутого шнура.
В древнеегипетской и античной традиции засвидетельствована система
разбивки модульной ортогональной сетки. В Древнем Египте при разбивке
сетки на блоках, предназначенных для храмовых статуй, применялся модуль
в 1 царский локоть***. В античных храмах — модуль разбивки 1 фут.
В ряде западных практик разбивка сетки с модулем в 1 фут все еще со-
храняется. При этом площадь помещения измеряется в квадратных футах.
В итоге можно констатировать, что в современной метрической системе,
когда она применяется при организации пространства, используется та же
размерность, те же естественные модули, те же приемы в создании эталонов,
те же способы разбивки зданий, что и в восходящей к глубокой древности
антропоморфной системе мер.
Входя в любое помещение, человек неосознанно соотносит свои размеры
с размерами помещения и тем более жилого помещения, как бы примеривая
его на себя. Если в габариты помещения укладываются целые модули размеров
* На Руси локоть в XVI-XVII веках — 46 см.
** На Руси существовали обыденная — маховая, или мерная, сажень (176,4 см) и сакральные
царская (186,4 см) и церковная сажень (197,4 см), применявшаяся при строительстве храмов.
*** Модуль, используемый в сакральных сооружениях, естественно, обожествлялся: «Ты
несешь небеса в ладони своей руки, Ты покрыл землю как место для твоей сандалии». Обра-
щение к богу Осирису. Древний Египет. XXIV век до н. э.
Глава 3. Культурные основания пространственной организации ПКА
163
Рис. 3.27. Древнеегипетский зодчий с мерными жезлами
и его рабочая линейка
человека, он чувствует себя вполне комфортно. Этим во многом объясняет-
ся та привлекательность, то неосознанное очарование, которое испытывает
современный человек, попадая и в традиционную избу, и в конструктивист-
скую, предельно компактную, но уютную квартиру
В конце 20-х годов прошедшего столетия в России и Западной Европе
шла интенсивная разработка модели нового социального жилища. Ставилась
задача создания оптимально комфортного жилья при максимальной эко-
номии площади и пространства. С этой точки зрения экспериментальные
дома того времени предельно экономичны. Характерно, что модуль разбивки
помещений в свету (от стены до стены) составлял 176 см — сажень, как и в
традиционной русской избе. Этому способствовал и тот факт, что в России
еще не был завершен полностью переход к метрической системе мер*.
Современное развитие глубокой общечеловеческой традиции метрики
жилого пространства оказалось на десятилетия заторможено консервативной,
самодостаточной индустрией панельного домостроения. Положение начало
медленно исправляться только в 1980-е годы с постепенным введением новых,
улучшенных серий типового сборного жилья.
Очевидно, что сегодня жилые помещения следует проектировать исходя
из модуля 180 см и проистекающих от него кратных размеров: 360, 720, 1080 см
и т. д. Такой модуль, во-первых, кратен действующему традиционному
строительному модулю (30 см); во-вторых, модуль 180 см представляет тра-
диционную русскую сажень (176,4 см), несущественно адаптированную к
современному процессу акселерации. При необходимости в перспективе он
может быть еще увеличен.
Что касается вертикальной размерности жилого помещения, то на Земле
она остается заданной модулем подъема лестницы — 30 см, или 1 футом. Ис-
ходя из закономерностей построения лестницы с общим шагом по вертикали
60 см (4 ступени — 2 фута), высота этажа (от пола до пола) может варьировать:
* В России применение метрической системы мер было рекомендовано законом от 4 июня
1899 года. Автор закона Д.И. Менделеев. В качестве обязательной она была введена декретом
СНК РСФСР от 14 сентября 1918 года, а для СССР Постановлением СНК СССР от 21 июля
1925 года.
164 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
270, 330, 390 см и т. д. Соответственно, высота помещения в свету (от пола
до потолка) — 240, 300, 360 см.
При этом высота 240 см выступает как предельный минимум по сани-
тарным и метрическим соображениям. Дело в том, что под потолком в слое
30—40 см скапливаются легкие фракции отработанного и загрязненного воз-
духа: продукты дыхания, горения, летучие запахи и т. п. При высоте менее
240 см движение человека по комнате приводит к перемешиванию воздуха.
В результате загрязненный воздух опускается в зону дыхания и попадает в легкие.
С метрической точки зрения при расчетном росте 180 см расстояние от
головы до потолка в 60 см воспринимается как минимально возможное, не
угнетающее психику. Высоту в 240 см рекомендуется использовать в техниче-
ских и служебных помещениях, связанных с временным, как правило крат-
косрочным, пребыванием людей. В спальных и других жилых помещениях
такая высота возможна в случае, если они раскрываются в более высокое и
просторное общественное пространство жилья.
Оптимальной высотой жилого помещения признается высота 300 см
в свету — от пола до потолка. При расчетном росте человека 180 см такая
высота помещения дает соотношение с ростом человека 5:3, которое близко
к оптимальному*.
Высота жилого помещения ни при каких обстоятельствах не может быть
больше его ширины. В противном случае у человека возникает ощущение
коридора и даже колодца. В таком аспекте высота 300 см при минимальной
стандартной ширине комнаты 360 см (две сажени) дает соотношение 1:1,2,
что близко к классической пропорции одной из важнейших функций золо-
того сечения, так называемого живого квадрата — 1:1,118.
Как ни странно, общечеловеческая, антропоморфная (футовая) размер-
ность все еще достаточно отчетливо прослеживается и в проектировании,
и в основе строительной индустрии. Ее реализация на современном уровне
требует только некоторой коррекции — приведения в соответствие с совре-
менным вариантом антропоморфной метрики.
Сегодня, когда разрабатываются проекты больших орбитальных станций
нового поколения, во весь рост встает проблема обеспечения в их пространстве
не просто комфорта, но условий для полноценной, продуктивной жизнедеятель-
ности человека в процессе орбитального полета. Один из важнейших аспектов
этой проблемы — метрика внутреннего пространства космической станции.
На поверхности земли, в условиях земного тяготения человек передви-
гается на ногах. В этих условиях стопа и шаг служат средствами измерения
и модульной разбивки пространства жизнедеятельности.
В условиях космоса, при отсутствии земного тяготения, в невесомости
главным средством не только всей работы, но и главным средством передви-
жения в пространстве станции оказываются руки**.
* Ср. 5:3 или 1:1,666... и золотое сечение 1,0:1,618... . О золотом сечении см. [14,
с. 460-487, 15, с. 256-284].
** Нет ничего зазорного в том, что в таком аспекте нам придется обратиться к эргономи-
ческому опыту наших далеких предков, которые, по данным современной науки, миллионы
лет назад жили на деревьях. Главным средством не только самой разнообразной деятельности,
но и главным средством передвижения у них были руки. А ноги, сконструированные наподобие
рук, служили дополнительным, но весьма важным инструментом передвижения и действия.
Глава 3. Культурные основания пространственной организации ПКА
165
И здесь, в космосе, из двух традиционных антропоморфных модульных
систем «от стопы» и «от ладони», по-видимому, естественно предпочтение
оказывается за «ручной» системой.
В русском варианте эта система фигурирует с некоторыми определен-
ными элементами кратности, вытекающими из природных пропорций че-
ловеческого тела:
• сажень мерная (маховая) — размах рук, средний рост человека при-
мерно равен 40 вершкам ® 70 дюймам ® 176 см;
• аршин — длина вытянутой вперед руки от плеча до кончика среднего
пальца равна 16 вершкам = 28 дюймам = 71,12 см;
• локоть ~ 10 вершкам ~ 18 дюймам ~ 46 см;
• пядь (большая) — расстояние между пальцами развернутой ладони от
конца большого пальца до конца мизинца ® 5 вершкам ® 9 дюймам ® 23 см;
• пядь (малая) — расстояние между пальцами развернутой ладони от конца
большого пальца до конца указательного ® 4 вершкам ® 7 дюймам ® 18 см;
• вершок (кулака) — вторая фаланга большого пальца = 4,44 см;
• дюйм — верхняя фаланга указательного пальца = 2,54 см.
Некоторые незначительные невязки в кратности мер обусловлены го-
сподствующей со времен Петра I тенденцией к переориентации русских мер с
«ручной» системы на «ножную», главным образом на английский фут. Вместе
с тем такая переориентация сделала русскую систему мер очень близкой к
современной международной, также сориентированной на антропоморфный
вариант англо-саксонской метрики (рис. 3.28).
прямая сажень
мерим сажень
i| 41 11
Н Я Я 41 61 Я~
3Z3E
Uj 1«| 171 >»| 1>| i|
половина великой сажени—
0 . .? 10 7 У ,*>9
Рис. 3.28. Традиционная русская метрика и рабочее
мерило новгородского зодчего
Теперь следует заметить, что антропоморфная модульная система заложе-
на во многих видах современного конструирования. К примеру, диаметры труб
измеряются в дюймах, в дюймах и пядях строится все, с чем работают руками:
детали мебели, панели управления, приборы, клавиатура рояля, клавиатура и
другие параметры компьютера и т. д. Стоит упомянуть и о том, что рабочие
места, спальные места, душевые, проемы, мебель и т. п. проектируются на
основе эргономики — науки о параметрах человека и максимально эконо-
мичных движениях, а потому естественно (хотя, возможно, и неосознанно)
оказываются созданными в системе традиционной антропоморфной метрики.
166 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Такая система в ее «ручном» варианте: дюйм, пядь, локоть — характер-
на для всех традиционных культур, западных — Древнего Египта, Месопо-
тамии, античной Греции и Рима, Европы и восточных — Индии и Китая.
Расхождение присутствует только в размерности дюйма. На Западе дюйм
соотносится с длиной фаланги пальца, а на Востоке — с ее шириной. Так
что в рассматриваемом аспекте систему антропоморфной метрики можно
признать международной (табл. 3.1).
Остается только соотнести эту систему с глубинной общечеловеческой
традицией: современную детализированную эргономику с традиционным
опытом человеческой практики и высокого донаучного обобщения.
Следует констатировать, что в условиях Земли, где главным средством
передвижения выступают ноги, метрика «от ноги» (фут) используется для
разбивки проектируемого пространства на поверхности земли и всех про-
цессов, связанных с передвижением человека, в том числе и по вертикали
(лестница). Метрика «от руки» (пядь, дюйм) используется для всей рукот-
ворной деятельности человека.
В нашем случае, в условиях невесомости при проектирования КА нога
(стопа — фут) используется главным образом как средство фиксации тела на
рабочем месте, а также в операциях, связанных с тренажерами, медицинскими
обследованиями и личной гигиеной. В результате спектр применения метрики
«от ноги» для ПКА принципиально сужается и ограничивается фиксацией
отдельных положений тела. В свою очередь, спектр применения метрики
«от руки» при проектировании ПКА принципиально расширяется и, поми-
мо собственно рукотворной деятельности, распространяется на основные
параметры, связанные с передвижением человека в условиях невесомости с
помощью рук.
В силу своей человеческой природы, в силу традиции и восходящих к этой
традиции метрических стандартов современный архитектор и конструктор
любой предназначенной для человека техники мыслит и проектирует (часто
неосознанно) в традиционной, антропоморфной метрике.
Однако важно, чтобы такое неявное мышление и проектирование на
новом витке исторической спирали, на современном уровне развития техно-
логии обратилось к традиции и стало сознательным и системным.
Для реализации естественной, антропоморфной метрики в компьютерном
проектировании необходимо всего лишь заложить в проектные программы
антропоморфную модульность.
В таком аспекте перед нами стоит чисто техническая задача — запро-
граммировать компьютер на антропоморфную модульность проектирования,
сохранив метрическую размерность как универсальную (условно математи-
ческую) систему описания пространства и предметов.
Антропоморфная модульность в такой двухъязыкой системе будет рабо-
тать как логика диалога человека и компьютера в проектном процессе. Ме-
трическая размерность будет выступать как логика общения компьютера с
внешним миром, в первую очередь с умными машинами, изготавливающими
и собирающими детали и узлы ПКА.
Совершенно очевидно, что такая система изначально, уже при проек-
тировании заложит принцип удобства «ручного» обслуживания и ремонта
оборудования и конструкций в условиях орбитального полета.
Таблица 3.1
Антропоморфные меры длины в некоторых традиционных культурах
Древний Египет Древняя Индия Англия Россия
1 палец = 1,87 см 1 ладонь = 4 пальцам = 7,5 см 1 пядь малая = 12 пальцам = 22,5 см 1 пядь большая = 14 пальцам = 26,25 см 1 стопа = 16 пальцам = 30 см 1 локоть малый = 24 пальцам = 45 см 1 локоть царский = 28 пальцам = 52,5 см1 1 ангула (палец) = 3/4 дюйма = 1,905 см2 1 витасти (пядь) = 12 ангул = 22,86 см 1 пада (стопа) = 14 ангул = 26,67 см 1 аратхи (локоть) = 24 ангул = 45,72 см 1 вьяма (сажень) = 84 ангул = 160,02 см 1 гархапатья = 108 ангул = 207,40 см3 1 дюйм (палец) = 2,54 см4 1 хенд (ладонь) = 4 дюймам =10,16 см5 1 фуг (стопа) = 12 дюймам = 30,48 см 1 ярд (рука) = 36 дюймам = 91,44 см6 1 дюйм (палец) = 2,54 см 1 вершок = 1 и 3/4 дюймам ® 4,45 см7 1 пядь малая = 7 дюймам ® 18,0 см8 1 пядь большая = 9 дюймам ® 23,0 см9 1 фут (стопа) = 12 дюймам = 30,48 см 1 локоть = 18 дюймам ® 46 см 1 аршин (рука) = 28 дюймам = 71,12 см10 1 сажень маховая = 176,4 см" 1 сажень церковная = 186,4 см 1 сажень царская = 197,4 см
Очевидно, что в большинстве случаев использовалась мера «от руки». При разбивке на земле преимущество отдавалось мере «от ноги», а также росту или, что то же самое, размаху рук. 'Использовался для разбивки сакральных объектов. 2Ширина средней фаланги среднего пальца. ’Или «Лук Вишвакармана» — букв. Владыки Всех Форм — зодчего богов. Употреблялся для разбивки алтарей и святилищ (гархапатья-агни — алтарь домохозяина; гарбха-гри- ха — святилище храма). Длина фаланги указательного пальца. 5Имеется в виду полная ширина ладони. 6По преданию: длина от кончика носа до конца пальцев вытянутой вперед руки одного из английских королей. 7Вверх кулака — длина средней фаланги большого пальца. "Расстояние от конца большого до конца указательного пальца. ’Расстояние от конца большого пальца до конца мизинца. |0Длина руки от кончика среднего пальца до плеча (до подмышки). "Средний рост или размах рук.
168 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
«Размышлять» и проектировать вместе с конструктором компьютер будет
в системе антропоморфной метрики, а выдавать описание результата — про-
екта для его реализации в натуре в общепринятой, удобной для расчетов и
технологий метрической десятичной системе.
Процедурно такая задача может быть решена путем создания профессио-
нальным проектировщиком технического задания на разработку или коррек-
тировку такой двухъязыкой компьютерной программы для соответствующего
вида проектирования.
Здесь следует еще раз заметить, что в такой двойственной системе раз-
мерности, охватывающей обе стадии процесса проектирования: конструи-
рование и описание, нет никаких существенных противоречий. Наоборот,
существует общность двух систем на глубинном уровне морфологии человека
и человеческой культуры. Метрическая система в своем простейшем виде, в
виде десятичной системы счисления по пальцам двух рук изначально также
антропоморфна.
3.4. Организация пространства жизнедеятельности человека
и общества
3.4.1. Пространство обитания и пространство жизнедеятельности
В этом разделе мы рассмотрим основные виды пространства жизнедея-
тельности человека и общества и основные законы, происходящие из при-
роды и культуры и определяющие принципы и приемы такой организации.
На очередном витке исторического развития земной цивилизации про-
цесс освоения человеком пространства космоса в целом ряде своих аспектов
повторяет процесс освоения пространства планеты Земля. При всех различиях
благоприятной для развития человека земной среды и среды космоса, небла-
гоприятной для пребывания человека, закономерности развития простран-
ственных структур, создаваемых человеком для своей жизнедеятельности,
имеют определенное сходство.
На ранних стадиях становления человек, как и все земные животные,
осваивал, вживался в окружающую среду — в пространство обитания. Чело-
век приспосабливался к этой среде, встраивался в свою экологическую нишу.
Как и все животные, человек использовал ресурсы природы естественными
для всех животных способами: собирательством и охотой.
Но в отличие от других животных человек в процессе своей эволюции
совершенствовал естественные способы использования природных ресурсов.
Он создавал орудия сначала для охоты, а затем и для труда. Он научился ис-
пользовать огонь.
Видимо, с этого времени, скорее всего сидя вокруг костра и задумчиво
глядя в огонь, человек начал не только воспринимать, но и осмысливать
пространство природы и свое место в нем. Для нас в этом процессе самое
интересное то, что уже в эпоху палеолита человек начал проектировать. Свое
Глава 3. Культурные основания пространственной организации ПКА 169
представление об окружающем мире он проектировал в пространство пещеры
и фиксировал его на стенах, на потолке и полу в виде рисунков, росписи,
рельефов и даже в виде своеобразной скульптуры.
Параллельно, при создании постоянного или временного жилища (зем-
лянки или шалаша), человек фиксировал эти представления в структуре соз-
даваемого пространства, в конструкциях, в технических приемах, в декоре.
С какого-то момента своей эволюции человек начал особенно активно
преобразовывать часть пространства своего обитания, приспосабливать его
для своих нужд. Этот момент обычно соотносится с периодом так называ-
емой неолитической революции, с переходом к производящему хозяйству:
к земледелию и скотоводству. Переход к производящему хозяйству привел
к избыточному производству продуктов питания, к резкому росту населения
и к необходимости создания хранилищ для гарантированного запаса пищи.
Избыточное производство пищи позволило освободить часть населения от
ее добычи и дало импульс для возникновения специализации — профессий,
в первую очередь ремесленников. Вместе с тем избыток производства пищи
и специализация деятельности дали толчок к постепенному социальному
расслоению общества на служителей культа, управителей-воинов, обеспечи-
вающих сохранность и распределение запасов, и торговцев, обеспечивающих
товарообмен с ближними и дальними соседями.
Именно с этим периодом соотносится процесс перехода человека к
оседлому образу жизни. Осев на землю, человек приступил к построению
в пространстве природы, в пространстве обитания многих живых существ
принципиально нового типа пространства, искусственно созданного, пред-
назначенного для своей постоянной активной жизнедеятельности*.
Этот новый по смыслу и назначению вид пространства, созданный че-
ловеком в пространстве обитания, в пространстве природы, на протяжении
всей предыстории и истории человеческой цивилизации развивался по двум
видам законов природы: по собственно законам организации природного
пространства и по специфическим законам организации пространства, про-
истекающим из природных особенностей человека: особенностей его морфо-
логии, социальной организации и особенностей построения его культуры —
восприятия и построения им окружающего его мира.
Проецируя современный процесс освоения космического пространства
на исторический процесс освоения человеком пространства Земли, можно
выявить определенное сходство в протекании этих процессов. При опреде-
ленном допущении можно сказать, что, в силу изменения преобладающей
установки на освоение космоса, пространство, организованное в космосе на
предыдущих стадиях для временного пребывания человека, можно расцени-
вать преимущественно как пространство обитания, как техногенный вариант
встраивания человека в новую для него среду. На новой, современной стадии
человек стремится создать в космосе пространство активной и полноценной
жизнедеятельности.
* В 20-е годы прошедшего века профессор ВХУТЕМАСа Николай Александрович Ладовский
определил архитектора как организатора пространства жизнедеятельности: «Пространство, а
не камень есть материал архитектуры».
170 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
3.4.2. Два типа пространства жизнедеятельности человека
и общества
В процессе исторического развития исполняя, используя, осмысливая и
интерпретируя в своих произведениях законы природы, человек постепен-
но сформировал пространство своей жизнедеятельности. В одних случаях
это пространство вписывается в природные пространственные структуры.
В других формируется как новая — искусственная пространственная структура.
Всю сложную, многоуровневую и многоплановую структуру пространства
жизнедеятельности человека и общества можно разделить на два принципи-
ально различных типа пространства.
Первый тип — пространство созидания.
Второй тип — пространство коммуникации.
Пространство созидания трехмерно и центрично.
Пространство коммуникации одномерно, линейно.
В пространстве созидания происходит воспроизводство жизни, культу-
ры — всего того материального и духовного, что производит человечество.
В пространстве коммуникации (от точки к точке) происходит передви-
жение людей, материальных ценностей и информации.
Эти два пространства составляют неразделимое единство. При отмира-
нии пространства созидания отпадает необходимость в путях сообщения и
дороги зарастают травой.
При отмирании пространства коммуникации пространство созидания
и находящееся в нем сообщество оказываются изолированными от мира и
впадают в гомеостаз. Их развитие на долгое время приостанавливается.
Ни одна сложная структура не может существовать сколько-нибудь продук-
тивно и длительно без гармоничного взаимодействия пространства созидания
и пространства коммуникации.
3.4.3. Пространство созидания
Мы привыкли начинать историю человеческого жилища с пещеры. Когда-то
в борьбе за это постоянное природное укрытие человек стал конкурировать
с крупными хищниками: пещерным медведем, львом, саблезубым тигром.
Попытаемся представить себе, какова была естественная организация про-
странства пещеры, отвоеванной у хищника и обжитой человеком.
У входа в пещеру из подручных камней и ветвей сооружали защитную
стенку от ветра, дождя и от нежелательных гостей. В случае ожидаемой опас-
ности у стенки мог сидеть караульщик. В глубине пещеры в одном из углов
женщины кормили младенцев и пестовали малышей. В другом углу старики
обучали юношей. В середине, у костра мужчины кололи кремень, делали ору-
дия труда и охоты, женщины готовили пищу, выделывали шкуры, сшивали
из них одежду, плели циновки.
Центром всего пространства был очаг. Он давал тепло и свет, на нем
готовили пищу. Но главное — огонь, поднимающийся к своду, утверждал в
центре пространства пещеры вертикальную ось, вокруг которой обращалось
все бытие первобытного рода.
Глава 3. Культурные основания пространственной организации ПКА
171
Ночью, когда внешние вертикальные и горизонтальные ориентиры рас-
творялись во тьме, именно эта вертикальная, живая, полная движения, ярко
светящаяся ось была особенно важна для уверенного бытия человека и всего
рода. Она становилась центром и смысловым средоточием его жизни. Много
позднее латиняне стали называть подобную ось axis mundi — ось мировая.
Со временем, по мере развития человеческого общества, каждое место,
некогда естественно определившееся в пространстве пещеры для того или
иного назначения, развернулось в отдельное общественное учреждение. Место
караульного стало заставой, казармой, фортом. Место кормления младенцев
стало яслями и детским садом. Место, где в пещере отлеживались больные и
раненные на охоте, со временем стало больницей. Место общения стариков
и юношей стало школой и университетом. Место приготовления пищи стало
столовой и рестораном. Место изготовления орудий стало заводом. Место
выделки шкур — фабрикой. А место костра, родового очага стало алтарем,
храмом, святилищем.
Специализация отдельных мест в пространстве пещеры имела и сакраль-
ный характер. Под полом пещеры, иногда прямо под очагом хоронили ушед-
ших, чтобы укрепить силу рода, его корень и общаться с предками, чтобы они
могли прийти на помощь в трудную минуту. При этом уже на самых ранних
стадиях полагалось, что предки (их души) уходили наверх и становились «не-
бесными предками». Это направление указывал огонь в центре пещеры. Туда
уходил дым от пищи, принесенной в жертву предкам на очаге.
Священнодействие тоже разделилось на несколько видов. Так, ритуальное
действо, с пением и плясками вокруг костра, помимо культовых структур,
развилось в античный театр с его круглой орхестрой, по которой во время
представления с пением и танцем вокруг алтаря кружился хор. От этого ри-
туала до нас почти в неизменном виде дошли хороводы вокруг костра или
вокруг новогодней елки.
Помимо освоения природного убежища — пространства пещеры, чело-
век начал обустраивать свое жилище в пространстве природы — создавать в
нем свое собственное, рукотворное укрытие, то, что со временем стало его
Домом. В этом длительном процессе изначальный принцип развертывания
пространства от первоначального смыслового ядра — от сакрального очага и
камня, на который клали или лили жертву «небесным предкам», продолжал
развиваться.
Характерно, что в своем развитии все специализированные общественные
пространства стремились сохранить присущую пещере изначальную цент-
рическую структуру с axis mundi, которая представляла средоточие смысла
жилого пространства.
В центре кочевых и ранних оседлых жилищ сохранился очаг. Со време-
нем в оседлых жилищах очаг сместился в угол или на фронтальную стену.
Тот, что сместился в угол, стал печью. Тот, что сместился на фронтальную,
парадную стену, стал камином.
Но в любом виде очаг неизменно сохранял свою организующую роль в
пространстве жилища. В японской традиции в неотапливаемом доме в важ-
ных случаях в центре комнаты ставится жаровня. В русской православной
традиции, помимо традиционной русской печи, главным смысловым центром
172 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
оказывается киот с иконами и горящей лампадой в правом верхнем углу
комнаты. В более поздних жилищах центральное место занял стол для еже-
дневной и праздничной семейной трапезы, которая с первобытных времен
сохранила свое значение важного ритуала (рис. 3.29).
а
Рис. 3.29. Очаг — средоточие смысла простого жилища:
а—б — родовой очаг в центре пещеры и архаического жилища; в—г — печь и семейный стол
под образами с лампадой в русской избе
То же самое происходит с открытым частным и общественным простран-
ством: двором, площадью. В развитом хозяйстве, во дворе открытом в южных
регионах и перекрытом на севере обязательно присутствует особо отмеченный
смысловой акцент, фиксирующий в каждом данном пространстве нижнее
основание оси бытия — axis mundi. Таким объектом может быть семейный
алтарь, очаг, печь, колодец или бассейн, священное дерево, памятный столб,
камень, стела, барельеф, статуя (рис. 3.30).
Рис. 3.30. В центре развитого дома — двор с сакральными родовыми объектами:
колодцем, бассейном, очагом, алтарем:
а — Вавилонское царство. Город Ларса. В каждом дворе колодец; б— в — Древний Рим. Помпеи.
В центре атриумов и перистиля бассейн с алтарем; г — Япония. В центре традиционного дво-
рика маленький бассейн, выдолбленный в камне, семейный алтарь-курильница и миниатюрная
«роща»; д — Персия. В центре двора бассейн и два дерева; е — Россия. В центре крестьянского
двора колодец; ж—и — Германия. Очаг на фронтальной стене крытого двора
Глава 3. Культурные основания пространственной организации ПКА 173
В центре, в фокусе пространства всех античных общественных зданий,
будь то святилище или храм, гимнасий или дом для приема почетных гостей,
зал городского собрания или театр, устанавливался алтарь (рис. 3.31).
Сакральный для данного пространства объект не обязательно находит-
ся в геометрическом центре этого пространства. Он может находиться в его
смысловом фокусе, он может сам отмечать или образовывать этот фокус.
В качестве фокуса пространства может выступать его центр, центр его важ-
нейшей части, а также проекция этого центра на фронтальную стену, реже на
боковую стену в зависимости от логики развертывания самого пространства.
Рис. 3.31. Античная Греция. Приена:
а — Пританей. Дом ритуальных собраний отцов города. Во дворе колодец и алтарь для возжи-
гания жертв богам города; б — гимнасий. У фронтальной колоннады двора алтарь бога покро-
вителя спорта; в — Экклезиастерий, зал городского собрания. В центре амфитеатра — алтарь
Афины, покровительницы города; г — театр. Алтарь в центре орхестры
Даже сегодня мы можем убедиться, что двор городского многоквартир-
ного дома, в центре пространства которого есть фонтан, цветочная клумба
или просто декоративная ваза, живет относительно полноценной жизнью.
Объект, находящийся в фокусе пространства двора, неосознанно сакрали-
зуется, становится для людей, населяющих двор, центром притяжения, сво-
еобразной нижней пятой все той же axis mundi, мировой осью локального,
соседского бытия. Там, где люди начинают ходить через центральную клумбу,
пространство двора выморачивается, двор как общественное пространство
умирает (рис. 3.32).
Рис. 3.32. Сакрализуемый объект в фокусе открытого общественного пространства:
а — Россия. Великий Новгород. Городская слобода окружает площадь с храмом; б — Италия.
Сиена. Площадь ориентирована на городские регалии у портала ратуши под колокольней; в —
Россия. Конец 20-х годов XX века. Жилой комплекс с фонтаном и клумбой в центре
174 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
На открытых общественных пространствах: священных участках, площа-
дях, агорах, форумах и т. п. — может возникать множество фокусов, отме-
ченных сакральными объектами. В античной, а позднее и в средневековой
традиции на агоре, форуме, на соборной или ратушной площади такими
объектами могут быть общегородские и частные (вотивные) алтари*, статуи
или другие изображения богов, святых, героев и почетных граждан, вотивные
стелы, памятные доски (рис. 3.33).
Рис. 3.33. Главная площадь с городскими святынями:
а — Культура майя. Тикаль. Алтари на площади перед комплексом пирамид и храмов; б —
Античная Греция. Приена. Агора. В центре пространства площади алтари, статуи, стелы; в —
Россия. Москва. Красная площадь В фокусе пространства Собор Покрова и лобное место
представляют Иерусалим и Голгофу. Перед стеной Кремля — мемориальные часовни
Само собой разумеется, что в центре открытого пространства святилищ
и культовых комплексов всегда находился алтарь, система алтарей, ритуаль-
ный бассейн, священный источник, а позднее какая-либо монументальная
форма (рис. 3.34).
Рис. 3.34. В центре пространства культового комплекса алтарь или священный водоем:
а — Древний Египет. Комплекс пирамиды Джосера. Система алтарей в центре главной риту-
альной площади; б — Пакистан. Лахор. Священный водоем Зам-Зам в центре главной площади
мечети; в — Россия. Троице-Сергиева лавра. Святой источник в центре соборной площади
В реликтовых, традиционных культурах встречаются многоконфесси-
ональные общественные пространства. Еще недавно, почти до последней
трети XX века страна Непал считалась реликтовой страной. Горная долина
Катхманду тысячи лет служила убежищем, куда с равнины Индостана при
нашествии уходили адепты вытесненных религий.
* От латинского votum — желание. Вотивные алтари, стелы, надписи, созданные по обету,
данному во исполнение желания: победа в битве, спасение во время шторма, удачная поездка
или торговая операция и т. п. На Руси ставили вотивные (обетные) кресты, часовни, храмы.
Глава 3. Культурные основания пространственной организации ПКА
175
В городке Бунгмати двор-площадь объединяет общины нескольких кон-
фессий буддистов махаяны и индуистов: шиваитов и вишнуитов. Здесь есть
и буддийские ступы, и шиваитский храм, и кришнаитский храм, и понятное
всем на глубинном архаическом уровне священное дерево. Но главное, что
объединяет в едином пространстве людей всех вариантов религий, это во-
доем — бассейн с источником, оформленным в виде дракона — макара. Из
этого источника все пьют и набирают воду для приготовления пищи. У него
все моются, женщины моют посуду и стирают. Здесь же, у источника воды,
резвятся дети (рис. 3.35).
Рис. 3.35. Двор-площадь многоконфессиональной общины с храмами, ступами и
общим для всех водоемом. Непал. Город Бунгмати
Последний пример показывает, что проблема гармоничного проживания
многонационального и многоконфессионального сообщества людей в ограни-
ченном пространстве при определенных условиях решалась в традиционной
культуре достаточно успешно.
Очевидна сама логика построения такого пространства. У каждой груп-
пы, входящей в сообщество, в общем пространстве жизнедеятельности есть
своя четко представленная ценность. Никто не чувствует себя ущемленным.
У всего сообщества в целом есть общее пространство жизнедеятельности и
доминирующая, одинаково важная, сакральная для всех ценность — в данном
случае источник воды, источник жизни*.
* Принципиально иную позицию в отношении сходной многоконфессиональной и много-
национальной ситуации в конце 80-х годов прошедшего столетия предъявил известный идео-
лог постмодернизма в архитектуре Чарльз Дженкс. В то время в Сан Франциско, городе эми-
грантов из Европы, Азии и Латинской Америки, городе многих конфессий и национальностей
произошли серьезные этнические столкновения. Для снятия межнациональных конфликтов
правительством штата было принято решение о строительстве культурных центров для всех
национальных общин. Дженкс, которому была поручена идеологическая программа строитель-
ства, решил отказаться от всех культурных традиций, создать постмодернистскую «свободную
площадку для общения». Он декларировал и стимулировал создание таких культурных центров,
в которых представитель каждой национальности не смог бы найти ничего напоминающего
ему о культурной традиции его народа. Внутренние пространства новых культурных центров
были по-постмодернистски перекошены. Все интерьеры, стены и потолки были обиты техни-
ческим коричневым гофрированным картоном, используемым для упаковки холодильников.
Грубо говоря, была последовательно и целенаправленно реализованы идея отказа от всех нацио-
нальных и культурных традиций и старая большевистская доктрина: на помойке все равны.
176 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Пространство созидания, пространство человеческого творчества можно
определить как пространство воспроизводства самого вида homo sapiens sapiens,
как пространство воспроизводства материальных и духовных ценностей и
в целом как пространство воспроизводства человеческого общества и его
культуры.
На всех своих уровнях: на уровне традиционного помещения, дома,
двора, села, города — это пространство трехмерно и центрично, можно даже
сказать, центростремительно. Естественные поселения и естественные горо-
да всегда обладали единым центром — наглядной вертикалью — все той же
axis mundi повседневного общего бытия. Так, в Москве в пределах Садового
кольца (бывшего Земляного города), а по ряду направлений и за его пре-
делами, из местных общественных центров всегда была видна колокольня
Ивана Великого (рис. 3.36)
Рис. 3.36. Естественное поселение ориентировано на центральное пространство с
вертикальной доминантой:
а — поселение Трипольской культуры, IV-III тысячелетие до н. э.; б — Русский Север, село
Конецгорье (по Ю.С. Ушакову); в—г — из общественных центров отдельных районов города
видна главная вертикальная ось города — колокольня Ивана Великого
Выходя на более глубокий уровень, можно заметить, что и природное
пространство в большинстве благоприятных для заселения ландшафтов как
бы предуготовано для человека и строится по тому же принципу. В центре,
в фокусе пространства, избранного родом или племенем для длительной осед-
лой жизни, всегда присутствует место, способное служить естественным, а
затем и наделенным особым, сакральным смыслом вертикальным акцентом.
Это может быть холм, мысовой выступ высокого берега реки или озера.
И, особенно характерный, мысовой выступ у слияния двух рек. На таком
естественном возвышении всегда присутствует некий особый природный знак:
одинокое большое дерево, роща, выразительная скала или моренный валун.
Такой природный знак непременно сакрализуется человеком, и тогда вся
населенная им местность приобретает особый смысл. Дерево и роща стано-
вятся священными. Камень наделяется особыми свойствами и со временем
превращается в алтарь-жертвенник. По мере развития поселения или группы
поселений этот природный акцент приобретает роль общего святилища. Со
временем он обносится валом и рвом и превращается в особо огражденное
пространство — городище (рис. 3.37).
Такое мысовое городище со временем становится ядром развертывания
естественного русского города. Со временем городище, которое первоначаль-
но служило и общим ориентиром, и культовым центром, становится местом,
Глава 3. Культурные основания пространственной организации ПКА
177
Рис. 3.37. Городище — сакральное место, вокруг которого обращается вся окружа-
ющая жизнь:
а — городище, окруженное селищами; б — типичное для древних славян мысовое городище
Вщиж; в — город Владимир развивался поэтапно от мысового городища
где размещается духовная и светская власть. Городище обносится не только
валом и рвом, но и защитными стенами. Возникает кремль — смысловое,
духовное и властное ядро города и одновременно на случай войны убежище
для населения самого города и окружающих сел.
Дальнейшее развитие идет циклически. По мере того как город растет и
богатеет, прорастание улиц, идущих от кремля дорогами в ближние и даль-
ние города и села, сменяется кольцеванием защитных стен. Внутри нового
кольца защитных стен происходит перестройка улиц и пригородов в город-
ские структуры со своей собственной пространственной и функциональной
организацией.
Циклы шли столетиями один за другим. Прорастание улиц в пространство
природы сменялось кольцеванием защитных стен. Разные города по мере сво-
его развития, определявшегося самыми разными историческими причинами,
сохранились до нашего времени на разных стадиях своего пространственного
развертывания, как это показал Г.Я. Мокеев (рис. 3.38).
Рис. 3.38. Естественный город, как и многие природные структуры, развер-
тывается по спирали:
а—б — естественный город развертывается в пространстве природы циклически, по
спирали (по Г.Я. Мокееву); в—г — также по спирали развертываются раковина мол-
люска и галактика
178 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
В классицистической, восходящей к XIX веку, композиционной теории
градостроительства города делились на регулярные (построенные по единому
плану) и нерегулярные, неупорядоченные (стихийно развивающиеся в течение
сотен, иногда тысяч лет). Приведенный нами многовековой процесс разви-
тия такого стихийного города не мог быть описан в рамках композиционной
теории градостроительства, в которой определяющими критериями служили
идеологический заказ и авторские формальные решения.
К концу XX столетия термин «нерегулярный город» сменился более
близким по смыслу термином «исторический город». Сегодня вслед за
крупнейшим русским градостроителем первой половины XX столетия
В.Н. Семеновым такие города, развивающиеся по своим особым, природным
законам, мы называем естественными городами [11]. В таком историческом
и смысловом контексте термин «естественный город», сформулированный
им еще в 1912 году, более полно и точно указывает на сложность природного
и культурного процесса многовекового развития человеческого поселения.
Сегодня человечество выходит в космос уже не только своими техноло-
гиями, но и как созидательное, творческое сообщество. Оно приступает к
осмыслению и освоению космоса силами всей своей культуры. Поэтому для
нас важны закономерности традиций проектирования и в целом закономер-
ности антропного, человеческого, а в конечном счете природного, развер-
тывания больших пространственных структур, которые человек создавал для
жизнедеятельности человеческого общества на всех его уровнях.
Заметим, что принцип центричности в развитии пространственных
структур присутствует и на космическом, и на атомарном уровне. В центре
Земли — ядро. Спутники кружат вокруг планет. В центре нашей планетной
системы — Солнце. В центре галактики по современным данным находится
черная дыра, в центре атома — ядро, и т. д.
Итак, можно констатировать, что центричность построения пространства
жизнедеятельности человека и общества имеет и природные, и культурные
основания.
Сборка русской бревенчатой избы начиналась с ритуала посадки малень-
кой березки в ее центре — временного обозначения будущей оси бытия нового
дома. Строительство любого храма начиналось с алтаря, с закладки камня
на специально освященном месте, для него выбранном и предназначенном.
От такого смыслового центра, от краеугольного камня начиналось развер-
тывание всякого общественного пространства: здания, в том числе и храма,
поселения и города.
В зданиях такое развертывание шло преимущественно в процессе исто-
рического развития самого типа здания, с течением времени — от одной
постройки к другой. В поселении и городе стадии пространственного развер-
тывания могут проявляться как процесс длительного циклического развития
одного города. Но эти же стадии могут предстать как та или иная стадия,
надолго зафиксировавшаяся в структуре каждого конкретного города.
В этом эволюционном процессе наблюдаются два основных вида про-
странственного развертывания.
Глава 3. Культурные основания пространственной организации ПКА
179
Первый вид — циклическое развертывание самой структуры.
Пространственное развертывание дома, храма, человеческого поселения,
города происходит циклически. В составе каждого цикла развертывания го-
рода наблюдаются три основные стадии.
Первая стадия — радиальное или ветвевое прорастание от центра во
внешнее пространство, в пространство окружающей природы.
Вторая стадия — кольцевание, замыкание освоенного пространства коль-
цевыми стенами или кольцевыми коммуникациями.
Третья стадия, характерная для естественного города, — упорядочение
структуры внутри новой кольцевой границы: перераспределение функций,
формирование новых локальных центров и организация новых территорий
вокруг этих центров (рис. 3.39).
Рис. 3.39. Каждый цикл исторического развития естественного русского города со-
держит три стадии построения его пространственной структуры:
а — ветвевое прорастание города во внешнее пространство; б — кольцевание — ограждение
защитными стенами, а позднее кольцами коммуникаций; структурирование города внутри
нового кольца стен: в — городская слобода у нового кольца стен; г — центр города. Сектор со
своим общественным центром
Второй вид. Развертывание через порождение новых, дочерних структур.
В этом случае пространственное развертывание выступает как некоторая
аналогия размножения.
При таком развертывании из смыслового центра пространственной струк-
туры выносится во внешнее пространство, в пространство природы один из
аспектов ее смысла — семя смысла. И уже от этого семени начинается рост,
развертывание новой, дочерней структуры.
Подводя итог, следует заметить, что в общечеловеческой культурной тра-
диции пространство жизнедеятельности строится как сложная многоуровне-
вая структура. Развитие каждого элемента этой структуры определяется тем
смыслом, который первоначально закладывается в него человеком.
Каждая из структур первичного уровня имеет свое центральное простран-
ство и свой центр, устанавливающий смысловой приоритет и консолидиру-
ющий вокруг него конкретную группу индивидов, то или иное сообщество,
объединенное по признаку родства, территориальной, профессиональной,
национальной или религиозной общности.
180 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Структура более высокого уровня сложности имеет центральное про-
странство, представляющее все структуры предшествующего уровня. Ее смыс-
ловой центр может быть представлен либо как единое высокое обобщение
смысловых центров предшествующего уровня, либо как то же обобщение, но
в сопровождении указаний на смысловые центры пространственных структур
предшествующего уровня.
Современное общество потребления настраивает человека на эгоцентризм
и так называемое самовыражение. С таким настроением человек непроиз-
вольно или совершенно сознательно стремится оказаться в центре внимание,
в центре события, в центре общественного пространства.
В общечеловеческой культуре возможность нахождения человека в центре
или в фокусе общественного пространства исключалась традиционной цен-
тральной постановкой алтаря или другого сакрального объекта (рис. 3.30-3.32).
В пространстве созидания человек не может и не должен находиться в цен-
тре пространства.
В центре пространства созидания может находиться только освященное
традицией нижнее основание вертикальной оси этого пространства, соединя-
ющей его с небом, с зенитом. Вокруг этой оси обращается все бытие данного
человеческого сообщества. Очевидно, что еще в первобытную эпоху никому
не приходило в голову заменить собой костер в центре пещеры.
Человек может продуктивно, творчески фигурировать вокруг этого цен-
тра, при нем. Он может даже обращаться и апеллировать к нему, как это
происходит во всех религиозных традициях, но ни в коем случае не подме-
нять его собою.
Итак, мы определили основные закономерности развертывания главного
вида пространства жизнедеятельности человека — пространства созидания.
Его развертывание происходит на нескольких уровнях: уровень жилища,
уровень общественного здания или открытого общественного пространства
(к примеру, двора в городском квартале), уровень главного общественного
пространства поселения.
Исходя из природных и культурных закономерностей развертывания
пространства жизнедеятельности человека и общества, можно прогнозиро-
вать основные принципы развертывания больших космических станций на
достаточно продолжительную перспективу.
1. Центрическое построение пространственной структуры, предназна-
ченной для каждой группы космонавтов: исследовательского коллектива или
иного сообщества.
2. Иерархическое построение общей структуры КС, при которой центри-
ческие структуры для каждой группы объединяются вокруг общественного
центра всей станции.
3. Циклическое развертывания пространства КС, при котором этапы
ветвевого развертывания по основным координатам сменяются этапами
кольцевания всей структуры КС.
Циклический процесс общего пространственного развертывания и прин-
ципы иерархической организации пространства КС с системой общественных
центров были намечены уже в ранних работах К.Э. Циолковского [6].
Глава 3. Культурные основания пространственной организации ПКА
181
3.4.4. Пространство коммуникации
Пространство коммуникации принципиально отличается от простран-
ства созидания. Пространство, в котором происходит созидание, трехмерно
и центрично. Пространство, в котором протекают коммуникации, одномерно
и линейно. Простейшая коммуникация — линия, соединяющая две точки.
Сегодня, в эпоху техногенной потребительской цивилизации, простран-
ство коммуникации подавляюще доминирует над пространством созидания.
Не будем говорить о бессмысленной — для проведения времени массовой
езде на автомобиле, о глобальных сетях связи и т. п.
Достаточно заметить, что при вождении автомобиля у человека появля-
ется ощущение занятости чем-то существенным. При разговоре по сотово-
му телефону человек старается по возможности прохаживаться. И в том, и
в другом случае он представляет свое нахождение в линейном пространстве
коммуникации, как бы погружается в него.
Мы остановимся на закономерностях пространственного развертывания
коммуникаций, на их общей морфологии.
В живой природе мы наблюдаем три формы коммуникаций: ветвь, петля,
кольцо. Эти три формы присутствуют в каждом живом организме на разных
уровнях — от уровня клетки до общей системы обмена веществ (рис. 3.40).
Рис. 3.40. Три формы коммуникации в быту:
а — ветвевая, петлевая и кольцевая формы; б — лист; в — схема кровоснабжения кишеч-
ника; г — схема кровоснабжения тела человека
В целом в природе мы наблюдаем множество циклических процессов,
замкнутых в круговое движение: известный со школы круговорот воды в при-
роде, пищевую цепочку от почвы к растениям — далее к животным и снова в
почву. Такие процессы могут протекать в течение месяцев, годов или многих
миллионов лет; например, круговорот углерода: из вулканов в атмосферу, из
атмосферы в океан, из океана в осадочные породы — известняки на его дне.
Всякую коммуникацию можно определить как линию движения, будь то
движение каравана верблюдов или электрического тока в проводе. Поэтому
для начала проследим развертывание линии движения человека.
182 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Приходя на работу, человек проходит от двери к своему рабочему месту —
это простейший путь от точки до точки. Начальник общается с несколькими
подчиненными — это уже ветвевая структура от одной точки до нескольких.
Рассмотрим этапы развертывания коммуникации на разных стадиях раз-
вития обыденного процесса приготовления пищи.
Приходя в старую провинциальную гостиницу без удобств, уставший
приезжий садится за стол, выпивает стакан чая и укладывается спать. Это
одна линия — от двери до стола или койки. В современной гостинице эта
линия приобретает ответвления: в туалет, к столу, к телевизору, к кровати.
На домашней кухне, где семья собирается за столом (сегодня хотя бы за
завтраком и ужином и по выходным), хозяйка движется от обеденного стола
к холодильнику, от холодильника к мойке, от мойки к разделочному столу,
от рабочего стола к плите, от плиты к рабочему столу и с него или прямо
с плиты подает еду на обеденный стол. По сравнению с гостиницей интен-
сивность коммуникации вырастает на порядок, и простая линия или ветвь
трансформируется в петлю.
На кухне студенческой столовой или ресторана по периметру варочного
зала стоят различные агрегаты: электрические котлы, сковороды, разделоч-
ные столы и т. п. В студенческой столовой с одной стороны зала скомпоно-
ван фронт раздачи пищи. В центре варочного зала стоит секционная плита,
вокруг которой происходит основное движение поваров. По сравнению с
домашней кухней интенсивность коммуникации вырастает еще на порядок,
и петля трансформируется в кольцо (рис. 3.41).
Рис. 3.41. Три формы коммуникции в быту:
а — ветвевая, петлевая и кольцевая формы; б — ветвевая схема в гостиничном номере;
в — петлевая схема на домашней кухне; г — кольцевая схема на кухне столовой или ресторана
То же явление можно обнаружить на примере жилого района. При
пятиэтажной застройке там, где плотность застройки, а следовательно, и
количество транспорта минимальны, автомобильные подъезды к дому, как
правило, тупиковые. При двенадцатиэтажной застройке, т. е. при повыше-
нии плотности движения, устраиваются петлевые структуры. Наконец, при
еще более высокой плотности движения, при застройке в двадцать и более
этажей возникают кольцевые проезды (рис. 3.42).
В XIX веке и первой половине XX века с развитием промышленности и
появлением железных дорог развертываются ветвевые, петлевые и на инфра-
структурном уровне кольцевые коммуникации. Во второй половине XX века
Глава 3. Культурные основания пространственной организации ПКА
183
а б в г
Рис. 3.42. Три формы коммуникаций в жилых структурах:
а — ветвевая схема подъездов при пятиэтажной застройке и малом количестве автомобилей
в 1950—1960-е годы; б — петлевая схема при 12—16-этажной застройке и увеличении количе-
ства автомобилей в 1970-е годы; в — кольцевая схема при 24-этажной застройке и массовой
автомобилизации в 1980-е годы; г — петлевая и кольцевая схема в структуре жилого района
с переходом на большегрузный автомобильный транспорт, обладающий боль-
шей маневренностью, преобладают петлевые и кольцевые схемы.
Так три основные формы коммуникации: линия, петля, кольцо — обна-
руживаются в живой природе, в ежедневном бытовом движении человека, в
построении транспортных систем (рис. 3.43).
Рис. 3.43. Три формы коммуникаций в железнодорожной и позднее в автомобиль-
ной инфраструктуре Москвы:
а — ветвевой железнодорожный ввод на крупное предприятие; б — ветвевые и петлевые
структуры в промышленной зоне; в — петлевая структура в системе железных дорог города.
Конец XIX века; г — Московская окружная железная дорога в системе города. Конец XIX —
начало XX века; д — Московская кольцевая автодорога в транспортной схеме Генплана
1971 года. Середина XX века
В процессе освоения природной территории человек создает те же струк-
туры, хотя бы в виде тропинок.
Охотник, осваивая новый для него участок тайги, движется вверх по
течению речки. Дойдя до впадения в нее ручья, он ставит шалаш или рубит
избушку для зимовья, обозначая центр вновь осваиваемой территории.
Двигаясь далее вверх по речке, знакомясь с новой местностью, охотник
ставит капканы, силки, ловушки, а затем возвращается к своей стоянке.
В следующий заход охотник идет вверх по долине ручья и опять возвращается
к своему становищу. В третий заход он может пройти вниз по долине речки
и опять-таки вернуться к становищу. Здесь налицо простая коммуникация —
три линии от стоянки до крайней точки разведочного маршрута.
184 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
По мере освоения местности для рационализации своего движения при
осмотре поставленных им капканов и ловушек охотник ищет путь в верховьях,
через водораздел, от речки до ручья. Найдя такой путь, в своих регулярных
обходах охотничьих угодий он начинает двигаться вверх по речке, затем через
водораздел и далее вниз по ручью к исходной стоянке. При возрастающей
регулярной эксплуатации охотничьих угодий возникает петлевая структура
коммуникации.
Освоив все возможные петлевые пути регулярных обходов, проложив
тропы, охотник обходит освоенный им участок тайги по его периметру. Коль-
цевой обход становится особенно важным в случае появления соседей и воз-
никновения необходимости провести хотя бы условную границу (рис. 3.44).
Рис. 3.44. В процессе освоения природной территории система коммуникаций раз-
вивается от ветвевой схемы к петлевой и далее к кольцевой (а):
б — схема освоения славянским племенем речной системы; в — схема освоения речных систем
севера Великим Новгородом. Речные пути и волоки; г — схема построения системы общеевро-
пейских речных путей, задуманная Карлом Великим в начале IX века и реализованная в XX веке
Это явление широко распространено в живой природе. Так волк метит
по периметру долину обитания своей семьи, устанавливает границы и дого-
ворные отношения с соседями по лесу. Инстинкт владельца заставляет волка
регулярно обегать освоенную территорию и освежать метки на ее границах.
В результате нарастания регулярности и интенсивности использования тер-
ритории возникают кольцевые коммуникации.
На основании хотя бы трех приведенных примеров можно достаточно
отчетливо сформулировать закономерность развития формы коммуникации.
При нарастании интенсивности коммуникация изменяет свою форму: от
линии к петле, от петли к кольцу.
Эта закономерность характерна для многих природных, исторических и
технологических процессов. Так, в технике три категории надежности инже-
нерного обеспечения объекта, например электроснабжения, подразумевают
его линейное, петлевое или кольцевое подключение к магистральным сетям.
Три формы коммуникаций наблюдаются и в процессе циклического
развертывания естественного города. На примере Москвы и других больших
европейских городов можно убедиться, что в каждом таком цикле стадии
развития радиальных ветвевых коммуникаций, связывающих город с внеш-
ним миром, сменяются стадиями формирования кольцевых коммуникаций,
объединяющих город в единую сбалансированную самоорганизующуюся
коммуникативную структуру (рис. 3.45).
Глава 3. Культурные основания пространственной организации ПКА
185
Рис. 3.45. Коммуникации устанавливают связи города с внешним миром и при ин-
тенсивном развитии формируют кольца:
а — изначальные связи Москвы с другими городами России. XI—XII веке; б — ветвисто-веер-
ные и кольцевые структуры в теле города. XV—XX века (по Г.Я. Мокееву); в — коммуникации
московской агломерации. Схема Б. Сакулина. 1918—1921 годы XX века; г — Москва в системе
планируемых еврокоридоров. Начало XXI века
Завоевание мира великими воителями (Александр Македонский, импе-
раторы Древнего Рима, Чингисхан и др.) становилось успешным и обеспе-
чивало стабильное существование нового гигантского государства только в
случае установления стабильных форм коммуникаций.
Новая структура с ветвевыми коммуникациями оставалась формой набега
и существовала только на протяжении немногих десятилетий — на протяже-
нии времени жизни своего создателя, например Александра Македонского.
Структура с системой петлевых коммуникаций может существовать не-
сколько столетий, например система сбора дани, установленная Батыем на
основе имперских коммуникаций, заложенных его дедом Чингисханом.
И только структуры, установившие в своей основе стабильную кольцевую
коммуникацию, имеют шанс выжить в течение тысячелетий. Так, например,
внутриконтинентальное Средиземное море, вне зависимости от того, кто до-
минировал в его эксплуатации: критяне, ахейцы, греки, финикияне, римляне,
византийцы, венецианцы, арабы, европейцы, многие тысячи лет существует
как стабильная кольцевая коммуникативная структура (рис. 3.46).
Обобщая, можно заметить, что радиально направленные коммуникации
соотносятся с приоритетом отраслевого развития. Такие коммуникации сое-
диняют город (регион, страну) с источниками сырья и товарными рынками.
Кольцевые коммуникации соотносятся с приоритетом территориального
развития, с установлением баланса между отраслями в рамках стабильной
экономической системы.
Применительно к России следует заметить, что еще со времен Ивана
Грозного и уже систематически, начиная со времени царствования Петра I,
Россия стремилась замкнуть свой периметр в кольцо коммуникаций с помо-
щью Транссиба и Северного морского пути. С коммуникативной точки зрения
современная проблема осознания этого фактора — это вопрос длительности
жизни нашего государства (рис. 3.47).
Мировой океан, простирающийся по всей поверхности земного шара,
осваивался сначала линейными маршрутами: от одного географического пун-
кта до другого и обратно. Затем возникли петлевые маршруты. Например,
186 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Рис. 3.46. Функционирование кольцевых коммуникаций в Средиземном море,
несмотря на смену господствующих цивилизаций, обеспечило стабильное
развитие региона в течение трех тысяч лет
Рис. 3.47. Замыкание кольца коммуникаций в виде Транссибирской маги-
страли и Северного морского пути обеспечит стабильное развитие России
на многие сотни лет
Глава 3. Культурные основания пространственной организации ПКА
187
Колумб, проплыв вдоль берегов вновь открытых земель, мог вернуться в
Европу другим путем. И, наконец, земной шар был замкнут кольцом Ма-
геллана (рис. 3.48).
Рис. 3.48. Ветвевая, петлевая и коль-
цевая схемы в процессе освоения ми-
рового океана:
а — линейный путь Васко да Гамы в Индию;
б — петлевые пути плаваний Колумба в
Америку; в — кругосветное путешествие
Магеллана замкнуло кольцо коммуникаций
вокруг земного шара
в
То же самое произошло и с освоением космоса. Сначала вертикальный
пуск ракеты с ее возвратом примерно в ту же точку. Затем петлевая траекто-
рия баллистической ракеты. Потом кольцо орбиты спутника.
Отличие процесса освоения космоса от подобных предыдущих процес-
сов освоения земного пространства в том, что предыдущие циклы освоения
пространства протекали на поверхности Земли, можно сказать в одной пло-
скости, а освоение космоса позволило создать пространственную, сфериче-
скую систему кольцевых коммуникаций. Стабильность существования этой
сферической глобальной коммуникативной структуры во многом определяет
стабильность существования нашей, на сегодня преимущественно техноген-
ной цивилизации (рис. 3.49).
Рис. 3.49. Ветвевая, петлевая и кольцевая структуры на разных стадиях освоения
космоса:
а — траектория ракеты-фейерверка; б — траектория баллистической ракеты; в — траектория и
орбита спутника; г — сферическая оболочка из орбит спутников Земли; д — самая устойчивая
кольцевая структура коммуникаций — Солнечная система — существует более 4 миллиардов
лет. Схема Коперника
188 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Исторический опыт пространственной организации жизни человеческого
общества на всех его уровнях показывает, что общение людей по кругу, вокруг
некоего центра, представляющего общую смысловую ценность, оказывает-
ся наиболее продуктивным. Таким сообществом может выступать семья,
племя, территориальная община: будь то малое поселение или город, про-
фессиональная гильдия, государство и в целом мировое сообщество. Самые
насущные, самые конфликтные проблемы даже на мировом уровне решаются
по традиции за круглым столом. Именно круговое общение обеспечивает
установление общего согласия, стабильность совместной жизни и устойчивое
развитие каждого из таких сообществ (рис. 3.50).
В итоге следует отметить важность установленной закономерности для
понимания роли построения коммуникаций при решении конкретной про-
блемы — проблемы проектирования орбитальных станций нового поколения.
г
Рис. 3.50. Наиболее устойчивая и продуктивная система общения — кольцо вокруг
общего центра:
а — русская крестьянская семья за обеденным столом; б — африканское племя вокруг костра;
в — современный летний симпозиум. Русские и американские студенты вокруг костра; г —
заседание Комитета Организации Объединенных Наций за круглым столом
Глава 3. Культурные основания пространственной организации ПКА
189
Рис. 3.51. Ветвевые и петлевые структуры (а — «Мир»; б — МКС);
кольцевые структуры (в — по К.Э. Циолковскому. Начало XX века; г — по В. Брауну. Вто-
рая половина XX века)
С точки зрения морфологии коммуникаций можно утверждать, что раз-
витие больших космических станций по мере нарастания интенсивности их
функционирования будет протекать по следующим стадиям:
• ветвевые структуры — например, станция «Мир».
• петлевые структуры — к структуре этого типа уже сейчас начинает
тяготеть МКС;
• кольцевые структуры — стабильные структуры недалекого будущего,
предсказанные еще К.Э. Циолковским и другими провидцами науки (рис. 3.51).
3.4.5. Взаимодействие пространства созидания и пространства
коммуникации
Итак, пространство созидания и пространство коммуникации принци-
пиально различны по своей природе. Пространство созидания трехмерно и
центрично. Пространство коммуникации линейно и одномерно.
При проектировании любой пространственной структуры от сотового
телефона до города важно определить характер взаимодействия этих двух
принципиально различных пространств.
Еще раз можно констатировать, что со второй половины XX века со-
временная эпоха демонстрирует самодовлеющее преобладание коммуника-
тивного пространства. Сегодня декларируется господство так называемого
информационного общества. При этом подразумевается, что информация
не только передается, но и создается в информационных сетях. И это неко-
торое преувеличение.
На самом деле информация создается в рабочем кабинете, в лаборатории,
хотя и с помощью компьютера, и только потом поступает в сеть*. Разделение
функций пространства созидания и пространства коммуникации, функции
создания чего-либо и функции передачи этого вновь созданного на некое
расстояние сохраняется и в этой системе.
Но обратимся к структуре реального бытового пространства, в котором
постоянно живет, пребывает и передвигается человек.
* Понятно, что в данном случае под создаваемой информацией понимается новое знание,
а отнюдь не трансляция или интерпретация чего-то известного или малоизвестного.
190 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
В реальной городской жизни коммуникации и коммуникативное про-
странство сегодня становятся самодовлеющими. Это ощущается уже на уров-
не квартиры. В типовой квартире, как правило, отсутствует общая комната,
комната для сбора и общения всей семьи. В 50-е годы, после Великой Оте-
чественной войны, в самом начале массового индустриального строитель-
ства реальная обеспеченность жильем была менее 3 м2 на человека. Норма
заселения в новые дома в 1950-е годы стала сначала 6 м2, а позднее 9 м2 на
человека. Поэтому вместо традиционной для благополучного Запада кварти-
ры по схеме п + 1 — каждому по комнате и общая комната для семьи была
принята вынужденно урезанная норма п — 1: в комнате могут жить двое, и
общая комната может быть совмещена с чьей-то спальней. В результате из
обихода исчезла никем не занятая для сна общая, семейная комната. Поэ-
тому на месте общей комнаты, которая тысячелетия служила ядром жилого
пространства, возник коридор. На месте трехмерного пространства созидания
возникло одномерное пространство коммуникации (рис. 3.52) [16].
а б в
Рис. 3.52. В перспективном жилище экономкласса 20—30-х годов XX веке в общей
комнате с традиционной пространственной организацией за обеденным столом
собирались все члены семьи. Новаторские квартиры экономкласса:
а — в одном уровне. Германия; б — в двух уровнях. Россия; в — малометражная квартира. Рос-
сия в 1960—1970-х годах. Все комнаты — спальни. Общая комната с традиционным семейным
столом отсутствует. Вместо нее узкие коридоры-тамбуры
Сегодня, выйдя из своей комнаты, человек уже в собственной квартире
попадает в одномерное коммуникативное пространство коридора. Затем — в
другой, общий поэтажный, коридор. За ним идет вертикальная шахта лифта
или лестницы. Выйдя на улицу, человек движется в русле тротуара или в
экипаже по строго отведенной трассе коммуникации. Спускаясь в метро,
человек канализуется наклонным тоннелем эскалатора, а затем подземным
тоннелем метро, где он пребывает в вагоне-капсуле, подобно объекту пнев-
мопочты. Потом опять наклонный канал эскалатора, опять канал тротуара
и, наконец, канал служебного коридора в институте или на работе. Только
после этого человек попадает на свое на рабочее место, в помещение, которое
весьма условно можно назвать пространством созидания.
Коридорная система построения жилого, учебного, делового и обще-
ственного пространства все еще господствует в структуре действующих и
проектируемых зданий. Коридорная система восходит к XIX столетию, к
эпохе промышленной революции, к казармам для рабочих и далее к баракам,
Глава 3. Культурные основания пространственной организации ПКА 191
к заводским общежитиям, к коммунальным квартирам, к коридорным гости-
ницам — ко всем тем пространствам, в которых не подразумевается активная
созидательная деятельность человека. Даже громадные элитные квартиры
сегодня все еще нередко проектируются и строятся на основе все того же
коридора.
В коридорной системе просто негде разместить и даже обозначить про-
странственный и смысловой центр общего бытия. Пространство созидания
по существу отсутствует, и людей просто негде объединить для реализации
общей цели, будь то научное открытие или воспитание ребенка.
В результате доминирования по горизонтали коридорной системы, а по
вертикали — системы лифтов и лестниц принципиально снижаются сози-
дательные возможности человека, семьи, общества. В коридорной системе
человек лишается возможности реализовать свое главное назначение — свою
творческую сущность. Такое построение пространства жизнедеятельности
во многом определяет и деградацию семьи, и, как следствие, демографи-
ческий спад, и снижение производительности труда, и отставание научных
разработок.
Подобный процесс протекает и на уровне города. В пространстве города
все более доминируют самодовлеющие транспортные каналы. Эти каналы
почти так же, как стены и рвы в эпоху Средневековья, жестко разрезают
город на отдельные анклавы, связанные между собой только подземными
щелями пешеходных переходов. Одновременно в угоду сиюминутной при-
были уничтожаются общественные пешеходные пространства: традиционные
дворы, скверы, площади и т. п.
Между тем историческое развитие естественного города свидетельствует
о том, что проблема взаимодействия пространства созидания и пространства
коммуникации в процессе циклов их попеременного преобладания неодно-
кратно разрешалась достаточно успешно для своего времени.
В циклическом процессе эволюции городского пространства на каждом
новом витке исторического развития в новых экономических, социальных и
технических условиях характерны определенные повторы общей простран-
ственной ситуации. Такие повторы предоставляют возможность установить
общее направление развития процесса и закономерности трансформации го-
родского пространства в результате взаимодействия пространства созидания
и пространства коммуникации.
В естественных поселениях: в селах и городах — на ранней стадии их
становления улица была руслом коммуникации. Но гораздо важнее то, что
улица (у-лица) вместе с деревенской площадью выполняла роль обществен-
ного пространства. Деревенская улица была ядром общественной жизни. На
ней крестьяне собирались для совместных работ: сева, покоса, жатвы и т.
п. На ней собирали скот для коллективного выпаса. На улице играли дети,
справляли свадьбы, проходили гулянья. Бабы собирались и обменивались
новостями у колодца, мужики — у трактира. На улице проводились собра-
ния для обсуждения общественно важных проблем — крестьянские сходы.
В праздничные дни все собирались и общались у храма.
Транзитные передвижения по деревенской улице: пешеходы, обозы,
кареты, верховые — происходили медленно, появлялись достаточно редко
192 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
и обычно задерживались для отдыха на сельской улице-площади: у колод-
ца — напоить лошадей, у трактира — принять пищу, у церкви. Возникало
естественное общение с сельскими жителями. Такие транзиты не снижали,
а, наоборот, повышали общественную роль деревенской улицы, наглядно
связывая местное сообщество с жизнью региона, а иногда и всего государства.
С появлением средневекового города картина принципиально измени-
лась — городское пространство вывернулось, средоточие жизни сместилось
внутрь отдельных городских образований. Русский средневековый город
состоял из отдельных, во многом самостоятельных и самоуправляющихся
анклавов: слобод, монастырей, боярских усадеб. Эти анклавы жили в созида-
тельном пространстве своей собственной жизнью. В фокусе каждого такого
пространства находился храм или часовня, и такой приходский храм, был
виден из каждой избы.
Обычное право Древней Руси (право по отцовскому и дедовскому обы-
чаю), подкрепленное первой известной нам письменно оформленной гра-
достроительной нормой — «Кормчей книгой», восходящей к византийскому
кодексу Юстиниана (VI век н. э.), как и всякое традиционное градострои-
тельное установление, можно свести к двум основным принципам.
1. «Никто не имеет права загородить соседу вид на море».
2. «Никто не имеет права загородить соседу вид на храм».
Дороги существовали как отдельная система, размещенная за пределами
этих анклавов. Они доходили только до ворот слободы, монастыря, усадьбы.
В большинстве случаев это были грязные неблагоустроенные проселки. При
уплотнении городской застройки в зажиточных кварталах дороги мостились*.
Но в принципе это были такие же, как и сегодня, транспортные клоаки. Пе-
ресечь такую клоаку без специальной обуви в Средневековье было во всяком
случае затруднительно. В современном городе такое пересечение автомаги-
страли опасно для жизни пешехода.
В результате реформ Петра I пространство города опять вывернулось
наизнанку. По указу императора «строить вдоль першпектив» улица вновь
стала общественным пространством. К этому пространству по указу царя
обратились дворцы вельмож, а вслед за ними магазины, рестораны, театры,
клубы, парки и скверы. Улица наполнилась пешеходами и каретами. На улице
встречались, знакомились, прогуливались, вели беседы, выясняли отношения.
С приходом массового автомобиля городская улица вновь превратилась в
транспортную клоаку и в значительной мере утратила свою роль обществен-
ного пространства. Атам, где она стала автомагистралью, транспортной раз-
вязкой, эта роль оказалась утраченной полностью. Городское пространство в
очередной раз вывернулось. Улицы выделились из пространства города как
отдельное коммуникационное явление — транспортная инфраструктура.
И теперь уже общественное пространство стало смещаться обратно, внутрь
городских кварталов.
По существу структура современного городского пространства стала
возвращаться к некогда естественному средневековому построению. Цикли-
ческий процесс перестройки пространственной структуры естественного
* К примеру, в Великом Новгороде в некоторых раскопах находили остатки более 10 слоев
деревянных мостовых.
Глава 3. Культурные основания пространственной организации ПКА
193
русского города на новом этапе, в котором ведущую роль сыграло развитие
транспорта, вступил в очередную фазу перестройки пространственной струк-
туры города (рис. 3.53).
В Западной Европе и в США, где автомобиль стал массовым средством
передвижения еще в 30-е годы прошедшего столетия, транзитные автомаги-
страли в большинстве случаев проложили в обход городов и селений.
В России автомобиль начал становиться массовым только с 70-х годов
прошедшего столетия. Автомобильные магистрали развивались постепенно
на месте старых гужевых трактов, проходивших через города и деревни. Ред-
кие объездные дороги начали строить только в конце 80-х годов В результате
транзитный транспортный поток прошел через многие малые города и де-
ревни и по существу уничтожил их общественное пространство.
Деревенский житель утратил возможность перейти на другую сторону
улицы к родителям, к брату, к свату, к теще, к бабушке. Через дорогу уже
нельзя прогнать скот или пойти на работу. Взрослые утратили пространство
совместной деятельности, общения и развлечения. Дети утратили игровое
пространство, пространство общения и развития. Деревня из полноцен-
ного созидательного сообщества превратилась в маргинальный придаток к
магистрали. Естественно сформированное веками пространство созидания
Рис. 3.53. На разных исторических стадиях развития улица выступает то как главное
общественное пространство человеческого поселения, то как транспортный канал:
а — улицы и центральная площадь — главное общественное пространство села. Русский Север.
Село Конецгорье; б — площадь с храмами, водоемом и рынком — главное общественное про-
странство торгового села. Западная Россия. Село Великое; в — общественное пространство
городской слободы с храмом и погостом. Улица — внешняя дорога — транспортный канал.
Город Владимир. Изображение с иконы начала XVII в.; г — общественное пространство го-
рода — главная улица — Тверская. Москва. Середина XIX в.; д — главная улица — Тверская
превратилась в непреодолимый для пешехода транспортный канал. Москва. Начало XXI века
194 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
оказалось вымороченным. Пронзенная транзитной магистралью деревня ли-
шилась своего традиционного производственного, социального, культурного
потенциала и стала вымирать.
Между тем опасность уничтожения общественного пространства города
транзитной магистралью была замечена очень давно. С глубокой древности
транзитная магистраль никогда не проходила через центр города и тем более
через кремль. Она всегда шла касательно к нему, через главное торжище или
еще дальше — через ярмарочное поле, расположенное за стенами города.
Так проясняется общая закономерность взаимодействия созидательного
и коммуникативного пространства.
В пространстве жизнедеятельности человека: в комнате, квартире, доме,
дворе, квартале, городе — русло транзитной коммуникации не должно пере-
секать пространства созидания, не должно затрагивать его ядро и ни в коем
случае не проходить через центр.
Рис. 3.54. Внешние транспортные магистрали строятся как кольца за пре-
делами города:
а — кольцо грузовых магистралей проходит за пределами городов-спутников. Схема
Э. Говарда. Конец XIX века; б — кольцо окружной железной дороги строится за
пределами города. Москва. Конец XIX — начало XX века; в — кольцевая автодорога
(МКАД) строится за пределами города. Москва. Середина XX века
По отношению к трехмерному пространству созидания одномерное, ли-
нейное пространство коммуникации может и должно идти в обход его или
через его периферию по касательной или, по дуге вокруг центра (рис. 3.54).
Проблема гармоничного взаимодействия пространства созидания и про-
странства коммуникации существует на всех уровнях пространства жизнеде-
ятельности человека и общества от отдельного помещения до глобальных и
космических структур.
Глава 3. Культурные основания пространственной организации ПКА
195
Тотальное доминирование пространства созидания в ущерб пространству
коммуникации, в ущерб системе коммуникаций приводит к свертыванию
культуры, к гомеостазу отдельных пространств созидания — к консервации,
остановке развития.
Тотальное доминирование пространства коммуникации в ущерб про-
странству созидания приводит к упадку материального и духовного производ-
ства, к деградации культуры и личности. Подобный этап в этом циклическом
процессе развития мы переживаем в настоящее время.
В любой продуктивно действующей структуре два типа пространства:
пространство созидания и пространство коммуникации представляют еди-
ную сбалансированную систему. В сотовом телефоне батарейка продуцирует
ток, в чипах происходят различные преобразования, проводники (провода и
спайки) выступают как средства коммуникации.
Итак, любые продуктивные пространственные структуры построе-
ны на гармоничном сочетании пространства созидания и пространства
коммуникации.
3.4.6. Пространство созидания и пространство коммуникации
в виртуальном мире
С приходом компьютерных технологий во все сферы жизни в очередной
раз на совершенно новом уровне возникла проблема взаимодействия человека
и машины, или проблема интерфейса.
Сегодня в подражание компьютерному миру в архитектуре, да и не толь-
ко в ней, вошло в моду виртуальное пространство, которому по неведению
приписываются самые разнообразные характеристики неопределенности:
неправильность, деконструктивность, произвольность и, главным образом,
некая коммуникативность и т. п. Современная модная архитектура деклари-
рует такой подход, как необходимость следовать за развитием виртуального
компьютерного мира.
На самом деле развитие виртуального мира от точечного (байтового) к ли-
нейному, от линейного к плоскостному, от плоскостного к пространственному
свидетельствует о его нарастающем усложнении. Такое усложнение виртуального
пространства можно проследить на простом примере развития компьютерных игр.
Первые, представляющие движение, компьютерные игры (ходилки) были
покадровыми (байтовыми). Затем появились игры, в которых движение про-
текало линейно в плоскости экрана. Далее появились многоэтажные ходил-
ки. Движение в плоскости экрана приобрело вертикальную составляющую,
стало двумерным.
Позднее движение на экране приобрело глубину: автомобильные трассы
или глухие коридоры, тоннели с бесконечными поворотами. Постепенно
в концах и на стыках коридоров начали появляться все более обширные
пространства. Сначала это были просто прямоугольные бункеры. По мере
нарастания мощности персональных компьютеров бункеры начали приоб-
ретать все более и более сложный и причудливый абрис — характер пещеры.
Виртуальное пространство становилось трехмерным.
196 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Со временем эти виртуальные пещеры стали приобретать архитектурный
характер. Они все более и более походили на залы фантастических дворцов.
Именно в таких залах происходили главные события игры — чаще всего драки
и целые сражения. Но постепенно в это трехмерное виртуальное простран-
ство стали проникать позитивные тенденции, например те, которые ранее
в двухмерном варианте обозначили себя как игры типа стратегии развития.
Став трехмерным, виртуальное пространство стало приобретать признаки
пространства созидания.
Такой же процесс последовательного перехода от точки (байта) к про-
странственной структуре можно наблюдать в процессе проектирования любой
структуры, будь то здание, промышленный агрегат или прибор. Первое, что
делает проектировщик, — ставит точку, место отсчета, затем проводит линию.
После этого разбивает двухмерную ортогональную сетку осей. По такой сетке
он отстраивает несколько плоских проекций проектируемого объекта. И, на-
конец, создает его трехмерный, пространственный вид. Эта последователь-
ность в целом характерна и для традиционного проектирования на кульмане,
и для современного компьютерного проектирования.
Всякий новый уровень усложнения требует нового уровня упорядоченно-
сти, нового уровня пространственной организации, требует своей собственной
архитектуры, которая в чем-то сознательно, а в целом неосознанно строится
по законам общечеловеческой культурной традиции освоения природного
или создания рукотворного, архитектурного пространства.
В середине XX столетия лидеры новых технологий говорили об архи-
тектуре электронных машин. Затем они стали говорить об архитектуре ком-
пьютерных программ. Сегодня речь идет о построении пространства, т. е. по
существу об архитектуре сайтов. В конечном счете развитие новой, компью-
терной технологии, породившей виртуальное пространство, пошло по пути,
во многом сходном с развитием и усложнением пространства архитектурного.
Сегодня можно утверждать, что в этом аспекте онтогенез новорожденного
компьютерного мира во многом подобен филогенезу человеческой культуры.
С такой точки зрения становится очевидным парадокс: виртуальный
компьютерный мир в своем развитии следует по традиционному пути ар-
хитектуры, стремится отстроить себя по ее законам, а модная виртуальная
архитектура всего лишь повторяет давно пройденные, наименее упорядочен-
ные, наименее отстроенные произвольные поиски давно прошедшей стадии
развития виртуального компьютерного мира.
В профессиональном отношении такой парадокс возникает в результате
отставания в создании и освоении архитекторами новых (пространственных)
компьютерных программ. Образовалась временная лакуна протяженностью
примерно в пятнадцать лет, почти в целое архитектурное поколение. Возни-
кает очередной разрыв в преемственности традиционного пространственного
мышления архитектора.
Разделение профессий здесь сыграло злую шутку со всеми проектировщи-
ками. Составители проектных программ — профессиональные математики-про-
граммисты изготавливали их по своему усмотрению, часто не давая себе труда
осмыслить существо и механизмы самого проектирования. Такие программы
Глава 3. Культурные основания пространственной организации ПКА 197
чаще работали как математическое описание, но не как собственно проектиро-
вание. Смысл и механизм проектирования часто ускользали из таких программ.
В сложном техническом проектировании, там, где проектировщики владе-
ли математическим аппаратом и сами создавали программы проектирования,
дело обстояло относительно благополучно.
В архитектурном проектировании программа предлагалась, даже навя-
зывалась извне. Профессиональный проектировщик оказывался не соучаст-
ником, соавтором и даже не заказчиком создания программы, а только ее
потребителем. Проектирование программ для проектирования и собственно
проектирование оказались в двух разных областях деятельности.
И здесь очевидно, что изготовление инструмента, тем более достаточно
сложного, не может происходить без участия того, кто будет работать этим
инструментом.
Участие самого проектировщика в создании компьютерных программ для
проектирования должно иметь свои четко определенные позиции для начала
хотя бы в виде составления технического задания для разработки программ
проектирования [17].
3.5. Организация внутреннего пространства ПКС
3.5.7. Организация пространства созидания
в составе структуры ПКС
Пространственная структура ПКС, как и всякая пространственная струк-
тура, предназначенная для жизнедеятельности человека и общества, состоит
из пространства созидания и пространства коммуникации. Их соотношение в
рамках сложной пространственной системы должно быть сбалансированным,
обеспечивающим стабильный процесс самоорганизации и саморазвития.
Для нормального, полноценного функционирования каждой из двух
систем, составляющих взаимозависимый, взаимодополняющий и взаимо-
обогащающий симбиоз, можно использовать целый комплекс принципов и
приемов, составляющих многотысячелетний общечеловеческий опыт орга-
низации пространства.
Проектирование — сложный многоплановый и многокомпонентный
процесс. Вспомним, что слово «проектирование» происходит от латинского
proectio — бросание вперед.
На практике и в архитектуре, и в технике в отношении проектирования
обычно применяется термин «компоновка». Термин «компоновка» восходит
к латинскому сот-ропо — складывать, собирать, суммировать. Таким обра-
зом, и по существу, и по исходному значению слова компоновка — это всего
лишь один из технических приемов проектирования. При реализации в на-
туре той или иной компоновки его можно заменить уже чисто техническим
термином «сборка».
Собственно проектирование предшествует такой сборке и закладывает
в проектируемую структуру целую палитру возможностей для последующей
198 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
компоновки. Ядро и главный, ключевой момент процесса проектирования —
творческий акт. Природа самого творческого акта исследована все еще не-
достаточно. Не вдаваясь подробно в существо и в механизм творчества,
отметим только важнейшие компоненты проектирования: те объективные
реалии, которые предшествуют творческому акту, создают для него основу
и предоставляют возможности для реализации.
1. Целевая установка, определяющая основное направление творческого
поиска.
2. Мировой опыт человеческой культуры в сфере организации простран-
ства жизнедеятельности человека и общества и мировой опыт организации
пространства жизнедеятельности космических аппаратов как современная
часть всего опыта мировой культуры.
3. Приемы организации пространства как средство реализации всего
этого опыта при создании проекта.
4. Эмпирическое обобщение, необходимое каждому проектировщику
для учета всего множества самых разных факторов при создании итогового
результата — проекта космической станции.
В нашем случае целевая установка определена как создание пространства
для полноценной, продуктивной жизнедеятельности человека и человече-
ского сообщества в конкретной ситуации больших ПКС нового поколения.
Основные позиции мирового опыта в процессе становления и развития
(развертывания) пространства жизнедеятельности рассмотрены далее.
Задачами данного раздела выступают следующие.
1. Определение основных направлений развития пространства ПКС.
2. Применение (адаптация) выявленных принципов и формирование
палитры приемов, предоставляющих возможности для реализации целевой
установки.
Пространство ПКС развивается в рамках общей логики развертыва-
ния пространства жизнедеятельности. Такова логика освоения природного
пространства, логика развертывания архитектурного пространства, логика
развертывания пространства города как долгоживущего природного и антро-
погенного организма и, наконец, логика развертывания виртуального про-
странства, которая моделирует и естественно во многом повторяет подобные
процессы, протекающие в природе и в человеческой культуре.
Осваивая пространство земной природы, первобытный человек находил-
ся в постоянном движении. Он передвигался, приспосабливаясь к сезонам
созревания плодоносящих растений, которыми он кормился, выходя на не-
рест рыбы, следуя за сезонными откочевками стадных животных, на которых
он охотился, приноравливаясь к изменениям климата, уходя от стихийных
бедствий.
Еще сегодня целый ряд реликтовых племен Азии и Африки, Америки,
не прошедших стадию неолитической революции, стадию становления про-
изводящего хозяйства, ведут подобный образ жизни. Но и на стадии произ-
водящего хозяйства, в случаях, когда его основанием служит скотоводство,
целые племенные группы продолжают жить подобным образом. В их жизни
главное место занимает процесс передвижения с места на места: от стоянки к
стоянке. Можно сказать, что у таких сообществ, как и у большинства наших
Глава 3. Культурные основания пространственной организации ПКА
199
первобытных предков, приоритетную роль в пространстве жизнедеятельности
играет пространство коммуникации.
Первоначально человек передвигался пешком. Затем появились плот и
лодка. На этой стадии средство передвижения, средство коммуникации в
ряде природных ситуаций стало семейным жилищем, приобрело свойство
пространства созидания. В некоторых культурных традициях, развивавших-
ся на реках и озерах, такое положение сохранилось до нашего времени, и
многотысячелетний опыт этих традиций может быть использован при про-
ектировании ПКС.
С приручением лошади было освоено новое средство передвижения:
верховое, вьючное, а затем и колесное. И здесь так же, как и в предыдущем
случае, у некоторых народов, например у монголов, на какой-то период юрта,
поставленная на колеса, стала передвижным жилищем.
С развитием техники появились сначала поезд и пароход, а затем и авто-
мобиль, которые в ряде случаев используются как кочевое жилище. Система
жилищ-трейлеров, широко практикующаяся в США, сохранила и развила в
этой стране современный компонент кочевой традиции (рис. 3.55).
Наконец, в качестве средства передвижения человек создал самолет и
ракету. Для этого многотысячелетнего циклического процесса характерны
несколько закономерностей.
1. На каждом историческом этапе увеличивалась скорость передвижения
человека.
2. Соответственно, в каждом новом средстве передвижения возрастала
изолированность человека от природы.
Рис. 3.55. Мобильное жилище в традиционных культурах и в современности:
а — тростниковый корабль шумеров. Реконструкция Т. Хейердала; б — китайская жилая лодка;
в — ханская юрта монголов. В центре современного жилого пространства сохраняется стол для
совместной трапезы: г — купе в поезде. Начало XX века; д — каюта на корабле. Начало XX века;
е — современный жилой трейлер. США
200 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
3. В ряде случаев средство передвижения становилось человеческим жи-
лищем, приобретало свойства пространства созидания.
Подобный процесс мы наблюдаем и в развитии новейших средств пере-
движения — в развитии пилотируемых космических аппаратов.
В случае с ПКС при определенном допущении можно сказать, что сам
орбитальный полет, включая корректировку орбиты, представляет собой осо-
бую разновидность кочевой жизни. Здесь линия кольцевой или эллиптической
орбиты оказывается одномерным пространством коммуникации.
Но параллельно сам космический аппарат, помимо средства передвиже-
ния, становится человеческим жилищем и местом продуктивной деятельно-
сти, т. е. опять-таки приобретает основные свойства пространства созидания.
Пространство первых космических кораблей было локальным, точечным.
По мере развертывания космических аппаратов оно становилось все более
протяженным. Сегодня пространство ПКС, состоящее из цилиндрических
отсеков и компактных стыковочных узлов, по существу остается линейным,
одномерным. Оно уже усложнилось до ветвевых структур, и очевидна тенден-
ция перехода к решетчатым структурам. Но само по себе, внутри себя оно все
еще линейно и по существу одномерно. Возможности организации в этих ли-
нейных структурах полноценного пространства созидания крайне ограничены.
Здесь требуются принципиально новые решения. В противном случае
кризис тотального доминирования пространства коммуникации, который
захватил наши квартиры, здания и города, может распространиться и на
новые структуры в космосе.
Законы пространственного развертывания, характерные и для природы,
и для человеческой культуры, действительны и в космосе.
Итак, ключевой, первоочередной задачей организации пространства
больших ПКС нового поколения выступает проблема становления и раз-
вертывание полноценного пространства созидания — принципиально новой
структуры в развитии ПКС.
Для ПКС нового поколения сегодня можно наметить три иерархических
уровня, на которых формируется пространство созидания:
• первый уровень — рабочее место индивида, которое может быть смен-
ным местом для нескольких исследователей, а также личное пространство
по месту проживания, которое может совмещать функции индивидуального
рабочего места и места отдыха;
• второй уровень — общее пространство для рабочей группы по отдельному
направлению исследований — постоянного или временного исследовательского
и творческого коллектива, а также общее пространство для совместного прожи-
вания группы индивидов, которые могут объединиться по различным признакам;
• третий уровень — общее пространство для всего коллектива ПКС.
При всей общности принципов построения пространства всех трех уров-
ней, каждое из них имеет свою специфику.
1. Пространство созидания первого уровня: личное рабочее место и
место проживания.
Пространство созидания в структуре ПКС начало зарождаться естествен-
ным, функциональным путем. Каждое рабочее место уже по своему назна-
чению в принципе выступает как первый уровень пространства созидания.
Глава 3. Культурные основания пространственной организации ПКА 201
Каждое рабочее место несет в себе созидательный смысл. Исходя из
этого смысла, оно начинает формировать само себя. Каждое рабочее место
естественно формирует себя как некое, так или иначе, реально или условно
выделенное пространство. И здесь надо определить его естественные эрго-
номические и психологические параметры. Но главное — нужно скоррек-
тировать, а чаще просто вырастить, довести до максимально возможного
оптимума его уже образовавшуюся структуру*.
В каждом пространстве созидания первого уровня можно выявить место
расположения его смыслового фокуса.
Внимание исследователя или экспериментатора естественно сосредото-
чено на предмете эксперимента, на приборе, группе приборов, группе ком-
пьютерных экранов. В этом случае можно говорить о некоем специфическом
виде диалога по схеме человек — экспериментальная установка, человек —
прибор, человек — компьютер. Надо учесть, что любой диалог возникает
только при наличии общей цели диалога, общей проблемы, общего интере-
са. И здесь обозначением этой цели как центра общения может выступать
смысловой фокус пространства, реально или условно присутствующий между
исследователем и группой приборов.
При этом следует учесть, что этот смысловой фокус пространства рабочего
места не может находиться ни на фронте приборов, ни в зоне ближайшего,
личного пространства человека. Только при таком расположении смысло-
вой фокус пространства может выступать в качестве посредника, обеспечи-
вающего продуктивный диалог человек — прибор, человек — компьютер.
В случае работы с компьютером таким центром, посредником при общении
выступают клавиатура, мышь, сенсорная панель.
С помощью такого посредника происходит один из возможных видов
преобразования информации от мысли человека через посредника к ее фик-
сации на мониторе компьютера и в обратном направлении — от информации,
отображенной на мониторе, к человеку, к отображению в его мыслях. В си-
стеме человек — машина, в данном случае компьютер, схема преобразования
информации аналогична универсальной схеме преобразования (см. рис. 3.2).
Предварительно наметив оптимальное место смыслового фокуса простран-
ства рабочего места, можно сформировать или скорректировать конфигурацию
фронта приборов и общих параметров рабочего места. А затем, отметив его
пространственные границы, определить реальные или условные, минимально
необходимые средства его выделения в зависимости от его назначения и кон-
кретных условий расположения рабочего места в пространстве ПКС.
Не следует полагать, что последняя процедура является некоей новацией.
На практике каждый космонавт и каждый человек вообще так или иначе,
физически или условно, интуитивно выделяет и оформляет, хотя бы как-то
обозначает пространство своего рабочего места.
На современном этапе эту личную интуицию надо развить до осмыслен-
ного, объективного структурирования полноценного пространства созидания,
обладающего своими, пускай во многом условными, но обязательными ос-
новами: смысловым центром и границами.
* Именно так сегодня, пока что чисто эмпирически, поступает каждая новая смена эки-
пажа космонавтов.
202 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Другой вид пространства первого уровня — личное пространство по месту
проживания. Пространство для отдыха и сна может строиться в различных
вариантах: в той или иной степени совмещенным с индивидуальным рабочим
пространством или отдельным от него. В последнем случае, помимо общих
эргономических параметров, важны личные пространственные предпочтения
каждого конкретного субъекта и, конечно, дистанционные параметры, при-
сущие той культурной традиции, представителем которой является данный
субъект*.
2. Пространство созидания второго уровня.
Пространство созидания второго уровня может образовываться на основе
двух принципов общности: отраслевой и территориальной.
Отраслевой принцип подразумевает общность профессиональных интере-
сов. В случае ПКС это общее направление исследовательской деятельности,
общая работа по налаживанию уникального производства и т. п.
Такое пространство — центр общения творческого коллектива, работаю-
щего над решением общей проблемы. Оно подразумевает групповой рабочий
диалог и формируется как ядро, объединяющее группу рабочих мест.
В ядре расположения группы индивидуальных рабочих мест это про-
странство может быть выделено достаточно условно. В особых случаях это
может быть отдельное помещение, в которое выходят и (или) на которое
ориентированы помещения рабочих мест.
В таком пространстве происходит постоянное обсуждение программы,
стратегии, тактики и результатов общей работы, мозговой штурм для реше-
ния назревшей проблемы, принятие коллегиальных решений. И здесь важен
центрический принцип пространственной организации.
Диалог двух индивидуумов или даже групповой диалог по схеме глаза
в глаза пригоден в основном при установлении сугубо личных отношений.
При совместной работе такой диалог стимулирует противостояние личностей,
противостояние мнений, провоцирует спор, чреватый конфликтом, и потому,
как правило, непродуктивен.
Много интересных примеров предметной фиксации смыслового фокуса
при диалоге можно найти в традиционных культурах.
Любопытный прием налаживания диалога двух незнакомых людей бытует
в адыгейской традиции. Жениха и невесту, сосватанных родителями заочно,
еще в раннем детстве и никогда не видевших друг друга, сажают в свадеб-
ную карету и кладут между ними специальную, особым образом вышитую и
украшенную подушечку. Между стесняющимися при такой первой встрече
молодыми людьми обозначается посредник. И в своем первом разговоре они
обращаются не друг к другу, а к этой подушечке: «Эй чаканка-подушка...».
Чтобы снять эту проблему, центр созидательного пространства второ-
го уровня обязательно выделяется и фиксируется каким-либо предметом,
способным непроизвольно сосредоточить на себе внимание окружающих
его участников группового диалога. Он служит обозначением общей цели
* К примеру, известно, что для культурных традиций, сложившихся на юге, в условиях
теплого климата и высокой плотности населения характерна меньшая дистанция личного
комфортного общения, нежели для культурных традиций, сложившихся в условиях севера с
низкой плотностью населения.
Глава 3. Культурные основания пространственной организации ПКА 203
диалога. Этот центральный предмет как бы сакрализуется и потому должен
стоять на некотором возвышении, но не препятствовать прямому визуаль-
ному контакту. Вспомним костер в пещере, очаг в доме, круглый семейный
стол на дачной террасе с обязательным букетом цветов в центре стола (см.
рис. 3.30). Рачительная хозяйка, хранительница домашнего очага, интуитив-
но ставит в центре стола какой-нибудь предмет, обозначающий общность,
целостность семьи, объединяющий гостей: вазочку с цветами или фруктами,
пирог, самовар, чайник и т. п.
Если на уровне личного рабочего места такой посредник выполняет в про-
цессе работы техническую функцию по схеме человек — машина, то на уровне
общественного пространства он выполняет функцию по схеме человек —
человек. И потому он наделяется неким смыслом общим для группы людей.
Вспомним, что с такой же целью, с целью своего объединения в одном
общем направлении, пускай и очень далеком и недостижимом, люди неког-
да придумали Бога. Чтобы приблизить этот далекий общий ориентир, чтобы
обозначить его в своем кругу, люди создали алтарь, жертвенник, к которому
обращались и вокруг которого совершали ритуал. Очаг и алтарь в центре
пространства служили свидетельством присутствия Бога на земле и центром
объединения людей. Люди собирались у алтаря, чтобы принять важнейшие
в своей жизни решения.
Этот центральный объект, обозначающий общий для всех участников
интерес, в зависимости от конкретной ситуации может как-то соотносить-
ся с предметом общего для них исследования или быть далеким от него.
Возникновение такого центра, обозначающего общий интерес группы, в зна-
чительной мере снимает проблему прямого противостояния индивидуумов и
настраивает их на общую продуктивную творческую работу.
Пространство, основанное на территориальном принципе общения,
может быть реализовано в нескольких вариантах.
При расселении жителей ПКС по исследовательским группам в таком
срединном пространстве могут присутствовать приемы построения простран-
ства созидания творческого коллектива и пространства общечеловеческого
общения.
При расселении жителей ПКС по территориальному принципу: прин-
ципу землячества, национальному или конфессиональному — могут быть
приняты за основу общечеловеческие ценности, выраженные в специфике
той или иной традиции.
В специфических условиях отсека, предназначенного для космического
туризма, люди разных национальностей и различных культурных и конфес-
сиональных традиций в центральном пространстве туристического отсека
могут знакомиться, общаться, обмениваться впечатлениями.
Такое пространство, служащее привычным вариантом клубной гостиной,
организуется по тому же центрическому принципу с общим центральным
объектом, выступающим как обобщенное представление общечеловеческих
культурных традиций. При этом по соседству или в окружении центрального,
общего для всех объекта могут присутствовать объекты, соотносимые с куль-
турной традицией каждого из представителей туристического контингента.
204 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
В этом варианте пространство созидания самой своей структурой ини-
циирует и формирует общность людей.
3. Пространство созидания третьего уровня.
Пространство созидания третьего уровня продуцирует общность людей
на уровне всего контингента ПКС, постепенно превращая его в коллектив.
И это главное его назначение. Оно может располагаться в фокусе про-
странства всей станции.
В таком варианте пространства созидания особенно важна его много-
функциональность, или, точнее, отсутствие монофункциональности (специ-
ализации) помещения, к которой мы привыкли за последнее время. В нем
могут проходить любые общественные мероприятия: зрелищные, вплоть до
голографических фильмов, концертные, выставочные, научные, религиоз-
ные, организационные, самодеятельные, физкультурные и т. д. Но все эти
мероприятия могут присутствовать в этом центральном пространстве ПКС
только как эпизоды его многообразного использования.
Это пространство должно быть центричным, с небольшим центральным
возвышением, на котором может присутствовать предмет, соотносимый с
важнейшими общечеловеческими ценностями.
В зависимости от размеров самого пространства, от размеров и состава
коллектива ПКС в нем могут присутствовать и местные фокусы, представля-
ющие варианты общечеловеческих ценностей в интерпретации тех культурных
традиций, представители которых составляют коллектив станции. Каждый
член многообразной команды ПКС в такой ситуации будет, пускай даже не-
осознанно, чувствовать, что и он сам, и культурная традиция, к которой он
принадлежит, органично входят в нечто большее — в единое пространство
общечеловеческой культуры.
Примерно так чувствовал себя человек любой национальности и любой
веры на главной площади позднего античного города, объединившего Сре-
диземноморскую ойкумену в пространстве общей эллинистической культуры.
Ту же картину мы наблюдаем на примере двора-площади многоконфессио-
нальной общины в Непале (см. рис. 3.33, б и 3.35).
Иерархическое, трехуровневое построение системы пространства сози-
дания создает основополагающую пространственную структуру для форми-
рования стройной системы самоорганизации на всех уровнях от индивида до
общего, разнопланового и разностороннего контингента ПКС.
3.5.2. Организация пространства коммуникации
в составе структуры ПКС
Пространство коммуникации — это не просто система связок и техни-
ческих переходов, каналов для движения. При всей его одномерной направ-
ленности оно может формироваться в самых разнообразных смысловых и
параметрических вариантах. В земных условиях, в традиционных культурах
особым образом сформированное пространство коммуникации нередко
выступает как проводник, как путеводитель, направляющий и организу-
ющий движение, придающий ему не просто комфортный, но ощущаемый
Глава 3. Культурные основания пространственной организации ПКА
205
неосознаваемый и осознанный смысл и поступательный, если не сказать
познавательный, характер.
С помощью специальных архитектурных приемов, в частности с помо-
щью ритмических построений, протяженность пространства коммуникации
может быть зрительно уменьшена или увеличена. Может быть изменена
глубина его перспективы.
Специальными приемами можно усилить эффект цельности простран-
ства или создать ситуацию, формирующую этапы движения. При длительном
движении к общему центру можно ускорить движение — снять утомление
путем последовательного уменьшения длины этапов.
В этом случае обратный путь с последовательным наращиванием дли-
тельности этапов движения снимает утомление от длительного общения и,
наращивая эффект удаления, уже по пути следования начинает удовлетворять
потребность человека в уединении для индивидуальной работы или отдыха.
Теми же архитектурными приемами можно зрительно расширять или су-
жать пространство коммуникации и в зависимости от поставленной задачи де-
лать его разнообразным, гармонично настроенным и насыщенным смыслом.
В некоторых случая в пространстве коммуникации можно создать общую
для всех ось движения. В случае необходимости интенсивного и быстрого
движения (например, при эвакуации) в пространстве коммуникации в ус-
ловиях невесомости целесообразно по оси пространства на всем его протя-
жении установить стационарную или сделать автоматически выдвигающуюся
штангу. Такая штанга способна обеспечить достаточно быстрое передвиже-
ние с помощью рук значительного числа людей. Подобные штанги вот уже
более ста лет устанавливаются в пожарных депо. По ним через проем в полу
в случае тревоги пожарные мгновенно спускаются к машине из комнаты
дежурной смены.
Есть и еще один интересный аспект построения пространства коммуникации.
Совместное движение в пространстве коммуникации к общему пункту
назначения и даже в общем направлении неосознанно способствует непро-
извольному знакомству и, казалось бы, неожиданному взаимному интересу
людей. Заметим, как легко люди знакомятся в вагоне поезда, в кресле само-
лета, в коридоре учреждения и даже в потоке толпы, текущей по тротуару.
Многие идеи, споры, дискуссии зарождались в коридоре научного учреж-
дения на подоконнике по пути в столовую. В такие моменты пространство
коммуникации на мгновение приобретает качества пространства созидания. В
полноценно сформированном пространстве коммуникации возникает особое
ощущение хотя и линейного, но в целом поступательного движения.
Эти потенциальные качества пространства коммуникации особенно
важны в замкнутой, затесненной структуре ПКС.
Контраст между статичным пространством созидания и динамичным
пространством коммуникации обогащает восприятие мира, делает полно-
ценным ощущение жизни, способствует продуктивной творческой жизне-
деятельности.
206 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
3.5.3. Пространственная граница.
Внутренние границы и переходные пространство
В процессе освоения космоса начали проясняться смысловые различия
в функциях человека и прибора. При определенном допущении приборами
оказываются и робот, и управляющий им компьютер.
За прибором закреплены функции измерения количественных показате-
лей известных явлений и обнаружение ранее неизвестных явлений, оказав-
шихся в диапазоне действия прибора.
За человеком сохраняются функции создания прибора, определения его
возможностей, создания программ его работы, сбор и анализ полученных
результатов. Но главное — в любом случае за человеком остается осмысле-
ние не только результатов и процесса исследования, но и самого феномена
взаимодействия с космосом через посредство прибора.
Прибор соотносится с космосом как объект с объектом. Человек соотно-
сится с космосом не только как объект с объектом в техническом смысле и не
только как субъект с объектом, что очевидно, но и как субъект с субъектом.
Такое предположение может строиться на основании того, что отношения
прибора с космосом преимущественно строятся по схеме известное — неиз-
вестное. Отношения человека и космоса строятся по схеме неизвестное —
неизвестное. Вряд ли кто осмелится утверждать, что человек изучен лучше,
чем изучен космос, или что космос изучен лучше, чем изучен человек. И в
таком смысле отношения человека и космоса видятся несколько более рав-
ноправными и, наверное, более продуктивными.
Именно это является не только научной, технической или иной целью,
но прежде всего целью, направленной на формирование мировоззрения,
определяющего взаимоотношения человечества и космоса. Этой проблеме
еще девяносто лет назад посвятил свою книгу К.Э. Циолковский [6].
Взаимодействие известного прибора с неизвестным космосом может дать
результат только в диапазоне, присущем прибору. Даже на уровне логической
схемы очевидно, что взаимодействие неизвестного с неизвестным дает прин-
ципиально, на порядки более широкую палитру возможностей.
Здесь важно, что взаимодействие человека и космоса по схеме неизвестное —
неизвестное может простираться не только в известной части всех возможных
диапазонов, но и в безграничном поле диапазонов неизвестных. Именно в одной
из точек, линий, струн, мембран, структур и мало ли чего еще, что, по современ-
ным представлениям, описывает это неизвестное нам безграничное поле, может
обозначиться и даже раскрыться ключевой момент взаимодействия в виде науч-
ного открытия, понимания, предчувствия или какого-либо иного акта познания.
Космос в целом несет в себе информацию о самом себе. Но сегодня есть
достаточные основания говорить о том, что и каждая точка космического
пространства несет в себе информацию обо всем космосе в целом.
Человек выходит на взаимодействие с космосом как личность, как про-
дукт и представитель культуры и как одно из производных биосферы Земли*.
* Этот факт постепенно начинает осознаваться современными космологами. Ученые конца XIX —
начала XX в. продолжали работать в контексте традиционной мировой культуры. Современные космо-
логи, наверное, чрезмерно увлеклись результатами достижений новейших технологий и, конечно, ма-
тематики. Сегодня уже есть свидетельства осознания этого факта [ 18, с. 364; 19, с. 371,372; 3, с. 9, 20—22].
Глава 3. Культурные основания пространственной организации ПКА 207
Как представитель общечеловеческой культуры, как ее органичная частица,
человек несет в себе содержание и свойства всей культуры в целом.
Из этого возможного сходства следует, что человеческий индивидуум,
вступающий во взаимодействие с космосом, должен не только неосознанно
нести в себе признаки своей культуры. И автор проекта станции, и космо-
навт-исследователь должны принципиально расширить для себя границы
собственного понимания человеческой культуры хотя бы в аспекте ее про-
странственной организации.
Такое понимание может быть заложено в самого индивида в процессе обу-
чения. Но особенно важно, что оно может активно присутствовать как среда, в
которой живет, мыслит и действует человек. В данном случае как организация
пространства, формирующая жизнь человека и общества и потому наглядно
или условно представляющая собой смысл и содержание этой культуры.
Одним из важнейших факторов, составляющих и формирующих орга-
низацию пространства, выступает пространственная граница. Со смысловой
точки зрения границы можно разделить на обозначающие, разделяющие и
преобразующие.
Пространственная граница — сложное многофакторное явление. В каждом
конкретном случае для построения границы между двумя внутренними про-
странствами ПКС может применяться весь необходимый набор этих факторов.
Обозначающий вариант пространственной границы может быть отмечен
знаком, изображением, смысловой деталью. В простейшем виде знак может
быть представлен техническим или иным условным обозначением, преду-
предительной надписью и т. п.
В семиотике — науке о знаках — знак чаще всего считается явлением ус-
ловным, договорным. Но по своему происхождению знак во многом восходит
к изображению. Развитие письменности началось с изображения предметов.
Эти изображения постепенно становились все более и более условными и
в конце концов оформлялись как знаки, не имеющие ни малейшего сходства
с изображаемым предметом. Этот процесс можно проследить на примере
развития месопотамской клинописи.
Вместе с тем в нашем быту сохранилось множество привычных для всех,
очевидных знаков-изображений, над смыслом которых мы просто не задумы-
ваемся. Вспомним известное всем по станциям метро изображение «выход» —
прямоугольный контур, разорванный по длинной стороне с изображением
черточки или стрелки в этом разрыве. В Древнем Египте именно так изобра-
жался дом с указанием входа.
Имя фараона заключалось в картуш — в под прямоугольный, иногда
овальный замкнутый контур со специальным узлом по короткой стороне.
Греческое определение верховного правителя Египта «фараон» восходит
к египетской титулатуре «Пер-О» — «Великий Дом». Имя фараона изобра-
жалось в картуше — в Его Доме, замкнутом священным узлом, закрытом и
тайном для всех. В этих примерах так называемый знак представляет план
простейшего дома.
Изобразительная граница может быть отмечена простой линией, особым
оформлением проема или каким-либо изображением на двери, стене, полу
или потолке.
208 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Очевидно, что и знаковое, и изобразительное обозначение границы в
многоязыком коллективе должно быть основано на наглядных общечелове-
ческих пространственных представлениях. Такие представления в очевидном
для всех варианте присутствовали на иероглифической стадии зарождения и
становления письменности (рис. 3.56).
Архитектурная деталь, фиксирующая границу, может быть ее контуром:
порогом, карнизом, профильной раскладкой на стене.
Шуиг* IV ;ыс *он.э. IF гы: дг и > и? -3 - КрСИВ 1 IbX.fti ->.
г- “ ft ft
& Sjfef ММ
Л ж
& а &
№
$ &
Рис. 3.56. Письменный знак некогда был понятным всем, наглядным
изображением:
а — Месопотамия. Становление клинописи. От изображения к знаку. Изображения, по-
нятные каждому человеку с глубокой древности, не требуют пояснений на разных языках;
б — современный знак «вход» указывает направление прохода в следующее помещение;
в — Древний Египет. Иероглиф рг — дом открытый для всех. План дома: дом открыт, вход
указан; г — картуш с именем фараона рг-о — «Великий Дом». Дом сына бога закрыт для
смертных; д — картуш в рельефе. Вход завязан священным узлом
У разделяющей границы может быть множество вариантов в зависимости
от характера разделения двух пространств. Такая граница может быть весьма
условной. Например, световым лучом или пленкой, приборами, дезинфици-
рующими, контролирующими состояние среды, движение или иные факторы.
Граница может представлять собой и реальную пленочную мембрану, обе-
спечивающую поддержание температурного, влажностного, биологического,
светового, звукового или иного режима помещения.
Граница может быть оформлена порталом со свободным проемом или с
проемом, закрытым дверью или люком. В традиционных культурах, помимо
физического разграничения пространства, портал и сама дверь представляют
смысл и структуру того пространства, в которое предстоит перейти человеку.
Над входом в традиционный жилой дом обязательно утверждался некий са-
кральный предмет, демонстрирующий освященность внутреннего простран-
ства или просто оберегающий его. Вспомним традицию вешать лошадиную
подкову над входом в дом.
В большинстве культурных традиций над порталом храма в его фронтоне
или тимпане иконографическими средствами представляется главный смысл
Глава 3. Культурные основания пространственной организации ПКА 209
храмового пространства — изображение бога, святого или божественного
явления, которому посвящен храм: Рождество, Преображение, Успение и т.
п. Сегодня в Москве на Красной площади можно убедиться, что священное
пространство Московского Кремля представлено над порталами проездных
башен Спасской и Никольской киотами с соответствующими иконами, изо-
бражениями святых — покровителей и охранителей Кремля.
В христианском храмовом зодчестве в готике и русской владимиро-суз-
дальской традиции так называемый перспективный портал главного входа
формируется как многослойная структура. Эта структура в сжатом, субли-
мированном виде представляет структуру внутреннего пространства храма:
количество опор и пролетов — продольных (нефов) и поперечных (травей)
пролетов. Подобные приемы характерны и для других культурных традиций.
Смысл храмового пространства проектируется из его центра на фасад храма
как на внешний экран. Эти проекции представляют различные аспекты
подразумеваемого содержания храмового пространства.
Человек, входящий в храм, при переходе из одного пространства в другое
неосознанно проходит через представленную в портале структуру его вну-
треннего пространства и оказывается не просто очищенным, но и непро-
извольно подготовленным к полноценному, многоаспектному восприятию
смысла и характера этого пространства (рис. 3.57).
Рис. 3.57. Портал храма или мавзолея представляет его религиозное содержание и
структуру внутреннего пространства:
а — Франция. Собор Богоматери в Лане. В перспективном портале представлены структура
внутреннего пространства храма и скульптурные изображения, предъявляющие его религиозное
содержание; б — Россия. Георгиевский собор в Юрьеве-Польском. Перспективный портал при-
дела представляет структуру внутреннего пространства храма и рельефные изображения, предъ-
являющие его религиозное содержание; в — Индия. Тадж-Махал. Портал мавзолея представляет
структуру центрального пространства и его религиозное содержание в виде текстов Корана
Граница перехода между двумя пространствами может быть оформлена
в виде специально выделенного пространства. Это пространство может вы-
полнять функции посредника между двумя более значительными по смыслу
и (или) величине пространствами. Помимо изолирующей, защитной функ-
ции, оно может быть предназначено для временной приостановки движения,
психологической релаксации или, наоборот, для сосредоточения.
Выделение такого пространства-посредника может содержать реальные и
условные компоненты. Оформление порталов этого пространства-посредника
210 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
изнутри может представлять пространство, в которое предстоит перейти.
Внешнее оформление порталов должно представлять то пространство, ко-
торое предваряет портал, и тем самым подчеркнуто фиксировать границу
этого пространства (рис. 3.58).
в г
Рис. 3.58. Переходное пространство предваряет вход в главное
пространство:
а — крытый приямок перед входом в землянку древних славян; б — входной
тамбур перед входом в тибетский дом; в — сени перед входом в русскую избу;
г — нартекс — галерея для очищения перед входом в христианский храм. Рим.
Базилика Сан-Клименте
С психологической точки зрения пространство-посредник предназначе-
но для перенастройки и в каком-то смысле для преобразования состояния
личности (см. рис. 3.2).
Сходный с этим типом, но несколько иной тип границы, как перехо-
да из одного пространства в другое, представляет специально выделенное,
самостоятельное пространство, в котором происходят некие качественные
изменения ситуации.
В ранней христианской традиции роль такого предхрамового простран-
ства выполнял нартекс — специальная галерея перед дверями храма, в которой
кающийся или неофит проходил очистительный ритуал. В разных культурных
традициях присутствует множество вариантов многоступенчатого очищения
и преображения человека, приближающегося к святыне.
Глава 3. Культурные основания пространственной организации ПКА 211
В случае ПКС к подобному типу пространства — пространству преоб-
разования можно отнести тамбур или шлюз, необходимый для перехода в
пространство с иными физическими или биологическими характеристиками,
например шлюз для доступа в специальную лабораторию или для выхода в
космос. В таком шлюзе преобразуется и вся среда, и сам человек, помещен-
ный в особые условия скафандра.
Отдельная тема при прохождении пространственной границы — дверь. У
двери или люка должна быть центральная часть, размещенная в зоне опти-
мального восприятия. Также в зоне оптимального восприятия должно быть
размещено запорное устройство. И здесь вступают в силу правила эргономики,
которые требуют отдельного специального рассмотрения.
Для двери или люка важны не только их структура и оформление.
Двери распашные и откатные могут быть правого и левого открывания,
т. е. открываться правой или левой рукой. Большинство людей (около двух
третей населения Земли) — праворукие. У них основные действия, будь то
еда, работа с каким-либо инструментом, рисование и письмо, осуществля-
ются правой рукой. Поэтому большинство дверей в жилых и общественных
учреждениях при входе в помещение открываются правой рукой.
Но в таком открывании есть и специальный смысл. Как было замечено
ранее, человек и общество сформировались в Северном полушарии планеты.
Их внимание естественно было обращено на юг, в сторону солнца, которое ос-
вещало и обогревало их мир и всему давало жизнь. Ежедневное непроизвольное
и осознанное слежение за движением солнца за сотни тысяч лет выработало
привычку озирать окружающий мир по ходу солнца — слева направо, по часовой
стрелке. Поэтому, открывая дверь правой рукой, распахивая или откатывая ее
слева направо, человек непроизвольно осматривает новое для него простран-
ство также слева направо. И эту специфику восприятия надо учитывать при
построении пространства, в которое человек проникает через дверь или люк.
В итоге можно констатировать, что у пространственной границы и
специального переходного пространства может быть множество разновид-
ностей в зависимости от конкретной ситуации. Каждый конкретный вари-
ант зависит во-первых, от смысла, назначения, свойств и параметров двух
или более пространств, которые предстоит разграничить и (или) объединить
посредством перехода; во-вторых, от цели создания и характера самого пе-
реходного пространства.
3.5.4. Внешние границы и пространственное развертываение ОС
Внешние границы ПКС выступают прежде всего как замкнутая оболоч-
ка, как система защиты от множества известных и неизвестных факторов
не просто неблагоприятного, но агрессивного и в этом смысле враждебного
воздействия ближнего и дальнего космоса.
Внешняя граница физически образуется на трех уровнях:
• внешняя поверхность скафандра;
• внешняя поверхность отдельного модуля;
• внешний контур все космической станции.
212 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
С точки зрения деятельности внешняя граница на всех трех уровнях не-
сколько расширяется за счет оперативного рабочего поля вокруг скафандра,
отдельного модуля и всего комплекса ПКС (см. гл. 9, рис. 9.17).
Развитие и усложнение структуры орбитальных станций проходит в несколько
этапов. Общую тенденцию в развертывании пространственной структуры ОС по
мере ее усложнения можно охарактеризовать как постепенный переход от линей-
ных структур к плоским ортогональным и далее к пространственным структурам.
Интересно, что основные направления перспективного развития и те
этапы, к которым только приближается современная космонавтика, были
намечены еще в начале XX века ее основоположниками К.Э. Циолковским и
Г. Обертом. Подобные перспективные варианты построения пространствен-
ной структуры ОС продолжали разрабатываться в течение всего XX века.
Современный этап пространственного развертывания ОС можно опреде-
лить как переход от ортогональной ветвевой структуры «Мир» к построению
ортогональной пространственной решетки (МКС).
Очевидно, что на следующем этапе появятся замкнутые кольцевые
структуры. Такие структуры могут развертываться в одной плоскости, как
предсказывал еще К.Э. Циолковский. Но уже в ближайшей перспективе
развертывание пойдет по направлению создания трехмерных замкнутых
пространственных структур.
Часть окружающего ОС космического пространства приобретет новое
качество — окажется огороженной. Первоначально это чисто визуальное
ограничение будет определяться линейным контуром из модулей, ферм и
других элементов структуры ОС. Затем оно естественно будет тяготеть к за-
мыканию и приобретет ограждение в виде замыкающих пространство между
элементами контура решеток, сеток и других видов защиты. В этом случае в
границах общей структуры ОС появится внутреннее космическое простран-
ство ОС. Для нас важно, что это пространство будет восприниматься как
свое, в определенном смысле обжитое*.
В функциональном отношении такое внутреннее пространство ОС ста-
нет новой безопасной зоной для работы в открытом космосе: для постановки
приборов и проведения наблюдений, для размещения технических установок,
обеспечивающих работу станции, для размещения технологий, требующих
условий открытого космоса, для тренировки космонавтов, для посещения
космических туристов.
Это пространство окажется своеобразным подобием двора в развитом
жилом доме, в городском квартале или подобием открытого общественного
пространства в традиционном человеческом поселении (см. рис. 3.30, 3.32, 3.35).
В процессе орбитального полета все небесные ориентиры: Земля, Солнце,
Луна, звезды — изменяют свое расположение в течение нескольких минут.
В такой ситуации ориентация по внешним космическим объектам и по окру-
жающим двор отдельным структурам ОС окажется крайне затруднительной.
* Циклический процесс развертывания пространственной структуры ОС, в котором про-
растание ортогональный ветвевых структур в окружающее пространство сменяется кольцева-
нием и замыканием вокруг общего центра, можно сравнить с циклическим процессом про-
странственного развертывания естественного города (см. рис. 3.38, 3.39).
Глава 3. Культурные основания пространственной организации ПКА 213
И потому, как это ни странно выглядит в космосе, в таком внутреннем косми-
ческом дворе появится смысловой центр, представленный неким объектом —
внутренним ориентиром, необходимым в процессе перемещения человека
в пространстве условно замкнутого космического двора.
Появление такого центра неизбежно, так же как появление колодца во
дворе крестьянской усадьбы, фонтана в центре двора большого городского дома
или монумента в центре городской площади. Человеческое сообщество при
построении пространства жизнедеятельности на любом его уровне — от семьи
до государства — всегда создает смысловой центр, вокруг которого обращается
все его бытие. Законы природы действенны и для людей, и для космоса: плане-
ты вращаются вокруг Солнца, а галактики — вокруг черной дыры (рис. 3.59).
Рис. 3.59. Развертывание структуры ОС в пространстве двора:
а — проект ОС с кольцевой фермой; б — Англия. Уэльс. Замок Кайрфиллд; в — Россия. Нов-
город Великий. XII век. Двор художника Олеся Гречина
Развертывание пространства жизнедеятельности человека и общества при
освоении подземного и космического пространства от простейшего укрытия
до города вне поверхности земли имеет немало соответствий в построении
пространственных структур (рис. 3.60, 3.61).
Рис. 3.60. Освоение подземного пространства:
а — простейшее ямное укрытие; б — родовая пещера с центральным пространственным ядром;
в — Каппадокия. Подземный город
214 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
Рис. 3.61 Освоение космического пространства:
а — кабина Apollo. 1966 год; б — проект «Трансхаб» с центральным пространственным ядром;
в — одна из схем компоновки МКС
3.5.5. Культурный контекст при проектировании ПКА
Мир развивается по своим законам. На каждом этапе своего развития че-
ловечество постепенно углубляет свое научное знание этих законов. Человек
и человеческое общество также развивается по своим законам. Эти законы
имеют много общего с законами развития нашего мира.
То же самое происходит с законами развития культуры. Культура не про-
сто отражает состояние развития общества. Она реализует осознанные (науч-
ные) и неосознанные (донаучные) представления человечества о мире, о его
устройстве и законах функционирования. Эти представления проявляются в
материальном творчестве: в архитектуре, искусстве, в бытовых и культовых
предметах, в текстах.
Архитектура занимается организацией пространства жизнедеятельности
человека и общества. Долгое время развитие архитектуры характеризовалось
как развитие различных стилей, определяющих особенности построения ар-
хитектурной формы. В XX веке архитектуру стали определять через влияние
на нее природных, социальных, экономических, политических, технологи-
ческих и иных факторов развития общества.
Но у архитектуры, так же как у всего нашего мира, так же как у челове-
ческого общества, так же как у всей культуры, есть свои собственные законы
развития. И эти законы во многом отражают развитие нашего мира.
Так же как наша Вселенная, архитектура развертывается в пространстве.
Так же как во Вселенной, этот процесс имеет свои законы и происходит
циклически. На каждой новой стадии развития, при появлении новых тех-
нических и иных возможностей этот процесс в своей основе повторяет и
развивает предыдущие стадии, но уже на уровне новых возможностей.
Эта общность законов развития определяется единой, не осознаваемой
большинством людей целью существования человечества, единым целевым
процессом познания и созидания.
В одном из рассказов Василия Шукшина случайно зашедший в деревню
и поселивший в пустующей избе одинокий человек, умирая, говорит мужи-
кам: «Я объяснил бы, я теперь знаю: человек — это... нечаянная, прекрасная,
мучительная попытка природы осознать самое себя» (Василий Шукшин,
рассказ «Залетный»).
Глава 3. Культурные основания пространственной организации ПКА 215
В те эпохи, когда доминирующей установкой общества становится сози-
дание, эта цель обозначается более явно. В те эпохи, когда доминирующей
установкой общества становится потребление, эта цель уходит на дальний
смутный план.
Но в любом случае, на любой стадии развития общества, культуры, науки,
философии и любой познавательной и созидательной деятельности эта цель
так или иначе продолжает фигурировать как осознаваемая, а чаще как нео-
сознанная человеком единая целевая установка. Без такой целевой установки
невозможно никакое развитие.
На современном этапе цель массового сознания принципиально сужается
до упования на технологические инновации, которые дадут возможность ма-
териального благополучия. Обществу навязывается идеал неограниченного,
избыточного потребления ради получения удовольствия.
Но развитие технологий, автоматизация производства, свободный доступ
каждого к неограниченному кругу информации имеют своей конечной целью
отнюдь не общество потребления ради получения удовольствия. Освобожде-
ние миллиардов людей от массового тяжелого механического труда позволяет
им проявить себя в труде творческом.
В каждой познавательной и созидательной деятельности, в том числе в
инновационном проектировании ПКА, надо не просто отвечать на сиюми-
нутные запросы общества. Особенно важно понимать, чувствовать или хотя
бы ощущать единую, всегда далекую общечеловеческую цель — познание и
созидание.
На современной стадии развития цивилизации человек вышел в космос.
И здесь, в космосе, и человек как личность, и группа людей как первичная
ячейка человеческого общества, естественно, представляют все человечество
со всей его культурой и многотысячелетним опытом познания и созидания.
Об этом говорил еще К.Э. Циолковский.
Весь этот опыт проявляется не только в самой личности человека, в его
технических и научных достижениях. На этом новом этапе он неизбежно
проявляется в общечеловеческой культуре, развивающейся теперь уже в
условиях космоса, и в первую очередь в законах организации пространства
жизнедеятельности человека и общества.
Контрольные вопросы к главе 3
1. Как происходит смена целевой установки при организации пространства ОС
нового поколения.
2. Что такое система СИ и традиционная антропоморфная метрика?
3. Ортогональное осевое построение человеческого тела и его роль в организа-
ции традиционного пространства и пространства ПКА.
4. На какие два типа разделяется пространство жизнедеятельности человека и
общества? Приведите их основные характеристики с примерами традиционного по-
строения пространства созидания.
5. Приведите три основных морфотипа коммуникаций с примерами.
216 Часть I. Исходные данные для компоновки пилотируемого космического аппарата
6. Какие иерархические уровни пространства созидания при проектировании
ПКС нового поколения вы знаете? Назовите их основные особенности.
7. Расскажите о традиционных системах ориентации и проблемах ориентации
применительно к ПКС.
8. Приведите возможные варианты пространственного развертывания ПКС.
Литература к главе 3
1. Раушенбах Б.В. Пристрастие. М.: АГРАФ, 2011. 484 с.
2. Органопроекция // Священник Павел Флоренский. Сочинения в 4 т. Т. 3 (1).
М.: Мысль, 2000. С. 402-421.
3. Вернадский В.И. Биосфера и ноосфера. М.: Айрис-Пресс, 2009. 576 с.
4. Павлов Н.Л. Алтарь. Ступа. Храм. Архаическое мироздание в архитектуре
индоевропейцев. М.: Олма-Пресс, 2001. 368 с.
5. Грин Б. Элегантная вселенная. М.: УРСС, 2005. 286 с.
6. Циолковский К.Э. Философия космической эпохи. М.: Академический проект;
Трикста, 2014. 239 с.
7. Большая Советская Энциклопедия. 3-е издание. В 30 томах. Том 2. Ангола —
Барзас. М.: Советская энциклопедия, 1970. 632 с.
8. Larousse. Всемирная иллюстрированная энциклопедия. М.: ACT, 2010. 1232 с.
9. Накорчевский А.А. Синто. СПб.: Азбука-классика, 2003. 448 с.
10. Ткаченко Г.А. Избранные труды. Китайская космология и антропология. М.:
ООО «РАО Говорящая книга», 2008. 362 с.
11. Семёнов В.Н. Благоустройство городов. М.: Типография П.П. Рябушинского,
1912. 184 с.
12. Гордиенко Н.И. Космонавтика. Иллюстрированная энциклопедия. М.: ЭКСМО;
Наше слово, 2011. 256 с.
13. Туманов А.В., Зеленцов В.В., Щеглов Г.А. Основы компоновки бортового обо-
рудования космических аппаратов: учебное пособие. 3-е изд. М.: Изд-во МГТУ
им. Н.Э. Баумана, 2018. 576 с.
14. Смысл закона золотого сечения // Священник Павел Флоренский. Сочине-
ния в 4 т. Т. 3 (1). М.: Мысль, 2000. С. 482-486.
15. Очинский В.В. К концепции золотой пропорции в естествознании // Мета-
физика век XXI. Сб. трудов. М.: БИНОМ. Лаборатория знаний, 2006. С. 256—284.
16. Гинзбург М.Я. «Жилище». Опыт пятилетней работы над проблемой жилища.
М.: Госстройиздат, 1934. 192 с.
17. Павлов Н.Л. Архитектура. Введение в профессию. М.: Архитектура-С, 2018. 472 с.
18. Барроу Дж. Новые теории всего. В поисках окончательного объяснения.
Минск: Попурри, 2012. 368 с.
19. Барышев Ю., Теерикорпи П. Фрактальная структура вселенной. Очерк разви-
тия космологии. САО РАН. Нижний Архыз, 2005. 396 с.
20. Моисеев Н.П. Расставание с простотой. М.: АГРАФ, 1998. 480 с.
21. Чижевский А.Л. Космический пульс жизни: Земля в объятиях Солнца. Гелио-
тараксия. М.: Мысль, 1995. 768 с.
22. Налимов В.В. Облик науки. СПб.; М.: Издательство МБА, 2010. 368 с.
Часть II
ОПРЕДЕЛЕНИЕ ОБЛИКА ПИЛОТИРУЕМОГО
КОСМИЧЕСКОГО АППАРАТА
ГЛАВА 4. БЛОЧНО-МОДУЛЬНАЯ КОМПОНОВКА ПИЛОТИРУЕМОГО
КОСМИЧЕСКОГО АППАРАТА
4.1. Компоновка пилотируемого космического аппарата
Компоновку ПКА в значительной степени определяют параметры оби-
таемого пространства, в котором работает экипаж. Оно включает в себя:
• герметичный объем, где система жизнеобеспечения (СЖО) создает
условия, приближенные к земным;
• негерметичное пространство, где обеспечиваются условия для безопас-
ной деятельности экипажа в открытом космосе.
Параметры компоновки бортового оборудования ПКА, как обслужи-
ваемого, так и необслуживаемого экипажем, являются вспомогательными.
Облик ПКА формируется в условиях ограничений, важнейшие из которых:
• технологические, возникающие в связи с необходимостью изготовления
и испытания всех элементов ПКА в земных условиях;
• экономические, связанные со требованиями снижения стоимости эле-
ментов ПКА;
• транспортные, обусловленные энергетическими возможностями средств
выведения, — максимально допустимой выводимой массой и габаритами
зоны полезного груза;
• функциональные, появляющиеся при выполнении целевых задач,
например, ограничения, связанные с аэротермодинамикой и прочностью
конструкции СА или диктуемые требованиями безопасности полета экипажа.
Эффективным подходом к определению облика ПКА, позволяющим
удовлетворить указанные требования, является использование блочно-мо-
дульной компоновки, в которой все элементы ПКА организованы в виде
иерархической системы блоков и модулей.
Блоком называется группа функционально объединенных элементов,
предназначенных для выполнения определенной задачи. Как правило, блок —
готовая, унифицированная часть изделия. В качестве блока можно выделить
отсек ПКА, выполняющий специфическую задачу: агрегатный отсек, стыко-
вочный и шлюзовой отсеки, а также спасаемый аппарат (СА). Блоки-отсеки
компонуются в единый самостоятельный КА.
Модулем называется законченный элемент, выполняющий самостоя-
тельную функцию. Как правило, это самостоятельная (автономно управ-
ляемая), независимая часть системы. В качестве модуля можно определить
самостоятельный КА, выполняющий в составе ПКА определенную функцию:
220 Часть II. Определение облика пилотируемого космического аппарата
исследовательский, жилой, шлюзовой, технологический. Транспортный ПКА,
находящийся в составе орбитального ПКА, также может быть рассмотрен как
один из модулей: модуль снабжения, двигательный модуль.
Блочно-модульный принцип реализуется в случае, когда блоки достав-
ляются к ПКА специализированными транспортными КА и собираются на
орбите в единый комплекс, как, например, элементы фермы и солнечных
батарей американского сегмента МКС.
Согласно архитектурному определению модулем (лат. modulus) называ-
ется мера — размер, кратным которому принимаются все другие размеры в
проекте. Выбор базовых проектных параметров модулей ПКА, из которых
формируются герметичный объем, негерметичное рабочее пространство и
вспомогательные системы определяет архитектуру космического комплекса.
Облик ПКА можно разделить на ряд автономных модулей-блоков, ко-
торые разрабатывают одновременно несколько фирм-разработчиков. Блоч-
но-модульное построение ПКА позволяет обеспечить решение широкого
класса задач при серийном выпуске блоков и модулей ограниченной но-
менклатуры и компоновке из них ПКА с заданными техническими параме-
трами. Таким образом, блочно-модульная компоновка позволяет:
• создать эффективную структуру целевых и вспомогательных объектов
на всех уровнях системы;
• выявить и правильно организовать все потоки информации, энергии,
материальных средств;
• осуществить правильное взаимодействие функций блоков на различных
уровнях системы управления;
• создать интегрированную систему выполнения целевых задач;
• эффективно использовать методы научной организации труда;
• упростить проектирование, монтаж и эксплуатацию ПКА;
• повысить надежность — сократить стоимость резервирования и время
восстановления работоспособности.
Созданная на базе блочно-модульного подхода, иерархия ПКА составля-
ет пилотируемую космическую инфраструктуру из отсеков, объединенных в
специализированные модули транспортных и орбитальных ПКА. Такая ин-
фраструктура позволяет эффективно строить ряды моделей и модификаций
ПКА для каждой целевой задачи и, исходя из конкретного объема требований,
комплектовать ПКА минимально необходимым числом блоков.
Блочно-модульное разделение позволяет удовлетворить ограничениям
средств выведения. Унификация блоков и модулей, а также интерфейсов для
конструктивного, энергетического и информационного сопряжения модулей
позволяет удовлетворить экономическим и технологическим ограничениям.
Космическая инфраструктура дает возможность комплектовать орбиталь-
ные ПКА функциональными модулями и блоками в соответствии с числом
членов экипажа. Выделение периферийных и центральных блоков позволяет
при увеличении численности экипажа одновременно наращивать целевое и
вспомогательное оборудование. Тем самым обеспечивается минимизациия
стоимости ПКА. В то же время, если потребуется, несложно будет наращи-
вать функциональные возможности в процессе эксплуатации. Блочное по-
строение ПКА дает возможность составлять различные схемы организации
Глава 4. Блочно-модульная компоновка пилотируемого космического аппарата 221
герметичного и негерметичного пространства путем различных комбинаций
блоков, что создает благоприятные технические условия для перехода от ча-
стичного освоения космического пространства к комплексному. Реализация
блочно-модульного принципа построения ПКА достигается при выполне-
нии условий физической, информационной и программной совместимости.
Полученная на основе стандартизации интерфейсов открытая архитектура
модулей позволяет модернизировать орбитальные комплексы путем замены
отдельных модулей более совершенными без изменения остальных и всей
структуры в целом.
К недостаткам блочно-модульного подхода следует отнести некоторое
снижение эффективности ПКА, например массовая эффективность снижается
вследствие введения дополнительных соединительных элементов интерфейса.
4.2. Блочная компоновка пилотируемых космических аппаратов
Блочная компоновка ПКА обусловливает его деление на отсеки. Каж-
дый отсек предназначен для аппаратуры, решающей специфическую задачу.
Например, задача обитаемого отсека заключается в обеспечении жизнедея-
тельности экипажа, а задача агрегатного отсека — в управлении движением
центра масс, в энергообеспечении и пр.
Блочная компоновка позволяет унифицировать отсеки для различных
ПКА, например, в пилотируемых и беспилотных транспортных кораблях
серий «Союз» и «Прогресс», а также в первых ОС «Салют» был использован
унифицированный агрегатный отсек. Также благодаря унификации обитаемых
отсеков пилотируемого комплекса «Алмаз» удалось создать семейство моду-
лей ОС «Салют», «Мир» и МКС. Унификация помогает не только снизить
стоимость, но и повысить надежность пилотируемых аппаратов, поскольку
любые изменения в конструкции могут быть сперва опробованы на беспи-
лотных аппаратах.
Как правило, компоновка отсеков ПКА строится вдоль одной оси: раз-
личают вертикальную и горизонтальную компоновки отсеков. Вертикальная
аналогична компоновке многоэтажного дома-башни, она включает в себя
систему этажей и соединяющих их шахт. Горизонтальная подобна компоновке
таких традиционных транспортных средств, как вагон поезда, фюзеляж само-
лета, она содержит систему тамбуров, коридоров и купе. Понятия вертикали
и горизонтали связаны с направлением силы тяжести, и их различия нужно
учитывать при проектировании ТКА.
В блочной компоновке транспортных КА капсульного типа обычно вы-
деляется обитаемый отсек-кабина, который служит для выведения экипажа
на орбиту, орбитального полета и возвращения на Землю. Форма и размеры
кабины определяются прежде всего параметрами процесса посадки: траекто-
рией спуска, аэродинамическими характеристиками, схемой тепловой защиты
и т. п. Подобные кабины, как правило, имеют вертикальную компоновку, что
обеспечивает удобство наземного обслуживания ТКА и наиболее эффектив-
ное использование пространства при малом удлинении отсека. На рис. 4.1, а
222 Часть II. Определение облика пилотируемого космического аппарата
представлен отсек экипажа ТКА «Аполлон». Единственный отсек-кабину
большого объема наиболее эффективно использовать для многоразовых
возвращаемых аппаратов типа ПТК «Федерация», Orion, Dragon, Starliner.
б
Рис. 4.1. Вертикальная компоновка кабины ТКА:
а — одноэтажная компоновка командного модуля ТКА «Аполлон» ( / — среднее кресло в
сложенном состоянии; 2 — пульт навигационных приборов; 3 — верхний люк; 4 — глав-
ный пульт управления; 5 — кресло у пульта управления; 6 — койка); б — двухэтажная
компоновка ТКА «Союз» ( / — агрегат стыковки с внутренними переходом; 2 — сервант;
3 — бытовой отсек; 4 — люк спускаемого аппарата; 5 — кресла экипажа; 6 — СА)
В случае одноразового или частично многоразового ТКА кабина может
быть разделена на два отсека: СА и орбитальный отсек. Такая компоновка
использована на ТКА серии «Союз», ТКС и «Шэньчжоу». Орбитальный
стыковочно-шлюзовой переходный отсек применялся также в составе КА
«Аполлон» при стыковке с ТКА «Союз-19» в рамках программы ЭПАС. Как
показано на рис. 4.1, б, обитаемый объем ТКА «Союз» имеет башенную,
двухэтажную компоновку: первый этаж — СА, второй — бытовой отсек.
Компоновка кабин многоразовых ТКА, совершающих посадку по-само-
летному и строится соответственно, как компоновка фюзеляжа самолетов.
Варианты таких кабин иллюстрирует рис. 4.2, где представлена эволюция
компоновок проекта МТКА Hermes. Кабины тяжелых МТКА Space Shuttle
и «Буран» с герметичной кабиной большого диаметра и малого удлине-
ния имеют горизонтальную многоэтажную компоновку (рис. 4.3). Однако
в отличие от кабин самолетов компоновка кабин МТКА, совершающих
вертикальный старт, должна предусматривать две конфигурации: старто-
вую (вертикальную) и посадочную (горизонтальную). Эти конфигурации
Глава 4. Блочно-модульная компоновка пилотируемого космического аппарата 223
Рис. 4.2. Варианты компоновок проекта МТКА Hermes:
а — первоначальная компоновка с экипажем из двух—четырех человек; б — увеличенный вариант
с экипажем из двух—пяти человек; в — вариант с кабиной и грузовым отсеком (1979); г — уве-
личенный вариант с экипажем из шести человек и грузовым отсеком на 4,5 т ПН (1984—1985);
д — вариант со шлюзовой камерой в грузовом отсеке (1985); е — вариант корабля снабжения
ОС Columbus с герметичным модулем в грузовом отсеке, стыковочным узлом на шлюзовой
камере и экипажем из трех человек (1987); ж — вариант без грузового отсека со стыковочным
узлом на корме и экипажем из трех человек, размещаемым в отстреливаемой кабине (1987);
з — вариант дополненный одноразовым орбитальным отсеком со стыковочным узлом, располо-
женным под углом (1988); и — вариант с симметричной компоновкой орбитального отсека без
стыковочного узла (1989); к — вариант без отстреливаемой кабины с катапультными креслами
и стыковочным узлом на корме (1989)
должны обеспечивать различное положение кресел космонавтов (рис. 4.4)
[1], наличие дополнительных лестниц и трапов для перемещения экипажа
перед стартом и пр.
Герметичные грузовые отсеки тяжелых одноразовых транспортных ПКА
снабжения, таких как функционально-грузовой блок ТКС, ATV, HTV, имеют
горизонтальную компоновку, что позволяет эффективно организовать про-
странство отсека большого удлинения в виде центрального коридора, окру-
женного стеллажами с грузами. Примером может служить компоновка гру-
зового отсека ТКА ATV, показанная на рис. 1.23, б (см. гл. 1).
При построении компоновочных схем отсеков орбитальных ПКА, функ-
ционирующих в условиях невесомости, в общем случае нет необходимости
ориентироваться на направление силы тяжести. Для каждого рабочего места в
отсеке может быть определено свое направление местной вертикали, которое
224
Часть II. Определение облика пилотируемого космического аппарата
Рис. 4.3. Компоновка кабины МТКА «Буран»:
1 — агрегатный отсек; 2 — бытовой отсек; 3 — командный отсек; 4, 6 — катапультные кресла
(в посадочном и стартовом положениях); 5 — люк для катапультирования; 7 — шлюзовая ка-
мера кабины; 8 — нижний пол; 9 — верхние иллюминаторы; 10, 11 — рабочие места РМ-4 и
РМ-3; 12 — верхний пол; 13 — задний иллюминатор; 14, 15 — рабочие места РМ-5 и РМ-6;
16 — ассенизационно-санитарное устройство; 17, 19 — рабочие места РМ-2 (летчика) и РМ-1
(командира); 18 — переходные люки из БО в КО; 20 — эксплутационные люки; 21—23 — при-
борные отсеки ПО-1, ПО-7 и ПО-2; 24 — входной люк; 25 — буфет
20 25 24
а б в
Рис. 4.4. Стартовое и посадочное положение кресел МТКА Space Shutlle:
а — посадочная конфигурация; б — стартовая конфигурация; в — кинематическая схема кресла;
1 — поддержка голеней; 2 — центр вращения кресла; 3 — точка крепления спинки; 4 — под-
локотник; 5 — ось Ох; 6 — смещение спинки на 10°; 7 — смещение верхней части спинки и
подголовника на 8°
Глава 4. Блочно-модульная компоновка пилотируемого космического аппарата 225
фактически задает ориентацию «голова—ноги» человека-оператора, как пока-
зано на рис. 4.5. Это позволяет наиболее компактно размещать оборудование
в отсеке. Однако для орбитальных ПКА также используют вертикальную или
горизонтальную схему компоновки, чтобы исключить дезориентацию членов
экипажа из-за неупорядоченной компоновки рабочих мест в отсеке, а также
с учетом необходимости обеспечивать эффективное проведение наземных
тренировок на макете отсека. Следует отметить, что каждый из отсеков может
иметь свою компоновку.
Рис. 4.5. Варианты направления местной вертикали (показаны
стрелками) для различных рабочих мест в отсеке орбитального
пилотируемого космического аппарата
Выбор того, какой будет компоновка отсеков — горизонтальной или вер-
тикальной, определяется ограничениями по форме и размерам КА, обуслов-
ленными средствами выведения, технологичностью изготовления, удобством
наземной отработки и тренировки экипажей, ориентацией ПКА в процессе
полета относительно Земли, Солнца и других объектов, эргономичностью и
архитектурой обитаемого пространства и т. д.
Ограничения на габариты коридора определяются ограничениями по диа-
метру отсека КА со стороны средств выведения. Например, если рассмотреть
сечение гипотетического цилиндрического отсека диаметром D, в котором ор-
ганизована жилая зона в виде коридора с квадратным поперечным сечением со
стороной стенки размером Н, так что квадрат точно вписан в круг (рис. 4.6, а),
то выполняется соотношение
£)=/7^2 = 1,4/7.
Если из условия работы человека
в полный рост взять высоту коридора
Н = 2,0 м, то минимальный диаметр
отсека будет D = 2,8 м. Как показано
на рис. 4.6, б на примере сечения ко-
ридора модуля американского сегмента
МКС, размер стенки квадратного ко-
ридора (Я = 2,13 м) и диаметр модуля
(Z) = 4,27 м) за счет дополнительных
объемов, занятых бортовым оборудо-
ванием, соотносятся так: D ~ 2,0Я.
Рис. 4.6. Соотношение диаметра и вы-
соты коридора жилой зоны для сечения
цилиндрического модуля:
а — сечение теоретически определенной
компоновки (D = 1,47/); б — сечение модуля
американского сегмента МКС (D = 2Н)
226
Часть II. Определение облика пилотируемого космического аппарата
При малом диаметре отсека, например при D = 2,5 м, человек ростом
выше 1,78 м не сможет полностью выпрямиться в коридоре. Сечение коридора
при горизонтальной компоновке получается слишком тесным, так что вы-
годнее будет вертикальная компоновка. Примером вертикальной, башенной
компоновки моноблочной ОС может служить разработанный в США ранний
(1963—1969) проект одноразовой пилотируемой военной космической лабо-
ратории Manned Orbiting Laboratory (MOL), представленный на рис. 4.7 [2].
Планировалось, что станция MOL массой 14 470 кг будет выведена на орби-
ту ракетой-носителем Titan IIIC вместе с пристыкованным ТКА Gemini В,
на борту которого должен находиться экипаж из двух астронавтов. В цилин-
дрическом корпусе ОС длиной 21,9 м и диаметром 3,05 м расположен гер-
метичный отсек. Вторым этажом является герметичный отсек ТКА Gemini.
б
Рис. 4.7. Вариант компоновки орбитальной станции MOL КН-10 Dorian:
а — вид сбоку; б — вид сверху; 1 — направление полета; 2 — ТКА Gemini; 3 — агрегат-
ный отсек с внутренним переходом; 4 — обитаемый отсек; 5 — фотоаппарат КН-10;
6 — звездный датчик; 7 — поворотное зеркало; 8 — вторичные зеркала; 9 — первичное
зеркало; 10 — объектив (направление на Землю)
При допустимом диаметре отсека D = 4,0...5,5 м, обусловленном зоной
полезного груза средства выведения, горизонтальная компоновка цилин-
дрического модуля допускает различную архитектуру интерьера: одно- или
двухуровневую, с симметричным или ассиметричным расположением при-
борного и обитаемого объемов (рис. 4.8) [3]. Выбор архитектуры определяется
целевым назначением модуля и существующими ограничениями, например
его заданной центровкой.
Наиболее рациональна компоновочная схема с центральным коридором
высотой Н = 2,0...2,75 м. Зоны размещения бортового оборудования распо-
ложены вдоль внутренней поверхности модуля, а обитаемый объем занимает
его центральную часть, как показано на рис. 4.6, а. Форма и размеры элемен-
тов интерьера определяются архитектурой, эргономикой и художественным
оформлением пространства, разделением его на рабочую, жилую и другие
зоны.
Глава 4. Блочно-модульная компоновка пилотируемого космического аппарата 227
Рис. 4.8. Варианты компоновки внутреннего интерьера цилиндричес-
кого модуля, рассмотренные при проектировании станции Freedom:
а — центральный коридор; б — двухуровневый коридор; в — центральная
стойка с оборудованием; г — две стойки с оборудованием; д — смещенная
стойка с оборудованием; е — центральный коридор сложного поперечного
сечения и увеличенного объема
Подобная компоновочная схема использована практически на всех
современных и проектируемых малых моноблочных орбитальных стан-
циях, периодически посещаемых экипажем. Простейшую компоновку
имеет малая экспериментальная китайская ОС «Тянь-Гун-1» (рис. 4.9).
Здесь имеется один агрегатный отсек для управления движением центра масс
и один цилиндрический обитаемый отсек с горизонтальной компоновкой
коридора и установленным на торце стыковочным узлом.
228
Часть II. Определение облика пилотируемого космического аппарата
Рис. 4.9. Компоновка орбитальной станции «Тянь-Гун-1»:
1 — агрегатный отсек; 2 — видеокамера; 3 — отсек для экипажа; 4 — обитаемый объем (цен-
тральный коридор); 5 — каюта; 6 — иллюминатор; 7 — стыковочный агрегат с внутренним
переходом
Примером компоновки малой моноблочной ОС без агрегатного отсека
может служить проект коммерческой космической станции, разработанный
компанией «Орбитальные технологии» и предназначенной для того, чтобы
обеспечить доступ частных компаний к пилотируемым космическим полетам
на околоземной орбите [4]. Компоновочная схема данной станции (рис. 4.10)
строится на основе шлюзовой камеры для российского сегмента МКС. Герме-
тичный отсек составлен из цилиндрической и сферической оболочек. Четыре
стыковочных узла, которыми располагает данная компоновка позволяют, по
замыслу разработчиков, пристыковывать к ОС транспортные КА семейства
«Союз», «Прогресс» и перспективный пилотируемый транспортный корабль
«Федерация». Функции агрегатного отсека выполняет ТКА, пристыкованный
к одному из узлов.
Данная ОС имеет малый герметичный объем около 20 м3 и весьма огра-
ниченные зоны для внекорабельной деятельности. Такой орбитальный блок
будет играть исключительно роль узла, т. е. предоставлять в основном вспо-
могательные функции стыковки для организации орбитального комплекса
из нескольких ТКА.
Компоновка базового блока пилотируемого комплекса ОС «Алмаз»
(рис. 4.11) включает в себя два герметичных отсека: рабочий отсек перемен-
ного диаметра (большой диаметр, малый диаметр и конический переходник
между ними) и шлюзовую камеру. Все агрегаты, в том числе двигательная
установка и системы электропитания, крепятся к рабочему отсеку и шлюзовой
камере, на которой размещен стыковочный узел для приема транспортных
КА снабжения.
Компоновка ОС «Салют-6» с двумя стыковочными узлами (рис. 4.12)
содержит агрегатный отсек и три герметичных обитаемых отсека: рабочий,
переходный первого стыковочного узла и промежуточную камеру второго
стыковочного узла. Благодаря двум стыковочным узлам впервые отработаны
Глава 4. Блочно-модульная компоновка пилотируемого космического аппарата 229
а
Рис. 4.10. Общий вид малой коммерче-
ской космической станции «Орбиталь-
ные технологии» (а) и внутренняя ком-
поновка обитаемого отсека (два вида) (б)
б
Рис. 4.11. Компоновка базового блока орбитальной станции «Алмаз»:
1 — антенны системы стыковки; 2 — датчики солнечной ориентации; 3 — двигатели стаби-
лизации; 4 — вакуумная емкость; 5 — измеритель массы тела; 6 — запасы воды; 7— антенны
системы связи «Аврора»; 8 — звездный фотоаппарат; 9 — научная аппаратура; 10 — регене-
рационные патроны; И — манипулятор для обслуживания капсулы сброса информации;
12 — передатчик системы ручной стыковки; 13 — стыковочный узел; 14 — двигатель кор-
рекции; 15 — капсула сброса информации; 16 — антенна передачи информации; 17 — топ-
ливные баки; 18 — комплексный спортивный тренажер; 19 — фототелевизионная система;
20 — длиннофокусный фотоаппарат; 21 — топографический фотоаппарат; 22 — оптичес-
кий визир; 23 — уголковый лазерный отражатель; 24 — панорамное обзорное устройство;
25 — телекамера; 26 — инфракрасный датчик вертикали; 27 — электромеханическая система
стабилизации и поворота
230
Часть II. Определение облика пилотируемого космического аппарата
Рис. 4.12. Схема деления на отсеки орби-
тальной станции «Салют-6»:
1 — передний стыковочный узел; 2 — выходной
люк; 3 — зона малого диаметра рабочего отсека;
4 — коническая часть рабочего отсека; 5 — зона
большого диаметра рабочего отсека; 6 — агре-
гатный отсек; 7 — задний стыковочный узел;
8 — переходный отсек; 9 — переднее днище;
10 — люк между переходным и рабочим отсеком;
11 — отсек научной аппаратуры; 12 — люк между
промежуточной камерой и рабочим отсеком;
13 — промежуточная камера
снабжение станции грузами и прием экспедиций посещения. Дальнейшее
развитие горизонтальной компоновки показано на примере проекта жилого
модуля межпланетного ТКА. Как показано на рис. 4.13, жилой модуль состоит
из агрегатного отсека и четырех герметичных обитаемых отсеков.
При увеличении диаметра отсека увеличивается и высота коридора,
например при диаметре D = 6...8 м высота будет Н = 3...4 м, что позволяет
либо ввести двухуровневую компоновку коридора (см. рис. 4.8, б, в), либо
перейти к вертикальной многоэтажной компоновке. Большая площадь пола
при вертикальной компоновке позволяет разделить этаж перегородками на
отдельные помещения. Такую компоновку имеет основной модуль ОС Skylab.
Рис. 4.13. Проект компоновки модуля межпланетного ПКА:
1 — центрифуга; 2, 4 — туалет; 3 — каюты; 5 — переходный отсек № 2; 6 — переходный
отсек № 1; 7— рабочий отсек; 8 — жилой отсек; 9 — агрегатный отсек; 10 — велоэрго-
метр; 11 — каюта; 12 — запас воды (дополнительная радиационная защита); 13 — стол
Глава 4. Блочно-модулъная компоновка пилотируемого космического аппарата 231
Орбитальная станция Skylab (рис. 4.14) — это кластер из четырех основных
элементов [5], который был выведен одним пуском двухступенчатого вариан-
та PH Saturn V. Кластер состоит из орбитальной мастерской Orbital Workshop
(OWS), модуля шлюзовой камеры Airlock Module (AM), стыковочного адаптера
Multiple Docking Adapter (MDA) и астрономического модуля телескопов Apollo
Telescope Mount (ATM), а также из вспомогательных конструкций и экранов
тепловой и противометеоритной защиты. Станция (включая ТКА «Апол-
лон») имела массу 90 606 кг и полезный рабочий объем герметичных отсеков
354 м3, общая длина 35,1 м, ширина по панелям СБ 27 м.
Рис. 4.14. Компоновка орбитальной станции Skylab:
/ — ТКА «Аполлон»; 2 — отсек телескопов (Apollo Telescope Mount, ATM) размерами 3,96 x
x 3,05 м; 3 — жесткий кожух; 4 — жилой модуль (Orbital Workshop, OWS) размерами 14,6 х 6,7 м;
5 — шлюзовая камера (Airlock Module, AM) размерами 5,49 х 3,05 м; 6 - стыковочный адаптер
(Multiple Docking Adapter, MDA) размерами 5,2 x 3,05 м
Орбитальная мастерская Orbital Workshop (OWS) — наиболее крупно-
габаритный модуль из использовавшихся до настоящего времени в ПКА
имеет длину 14,6 м, диаметр 6,7 м и массу 35 780 кг. Модуль, построенный
на базе второй ступени PH Saturn IB (S-IVB), предназначен для проживания
и работы экипажа из трех человек. Он служит хранилищем большинства не-
пополняемых запасов. Здесь размещены панели солнечных батарей, а также
запасы холодного газа и двигатели для системы стабилизации и ориентации.
Переделанная ступень не имела никаких других двигательных установок.
232
Часть II. Определение облика пилотируемого космического аппарата
Бак жидкого водорода ступени объемом герметичного пространства 292 м3
использован как жилой отсек. В полюсе верхнего днища бака размещен
люк. Жилой отсек разделен сетчатыми переборками на два этажа (рис. 4.15).
Верхний этаж OWS имеет наибольший жилой объем, он отделен от нижнего
рамой толщиной 0,203 м с алюминиевой сеткой. Верхний этаж разделен на
экспериментальную зону, складское кольцо и купол. Основные элементы ку-
пола — входной люк, смесительная камера системы управления вентиляцией
и воздуховоды. На нижнем этаже находится отсек экипажа, разделенный на
четыре зоны: кают-компанию, отсек управления отходами, спальный отсек
и экспериментальный отсек.
Рис. 4.15. Вертикальная компоновка отсеков модуля OWS орби-
тальной станции Skylab:
1 — отсек отходов; 2 - днище отсека отходов; 3 - нижний этаж; 4 — пол;
5 — этаж с каютами; 6 — потолок; 7 — верхний отсек; 8 — купол верх-
него отсека; 9 - отсек оборудования; 10 — кают-компания; // — отсек
удаления отходов; 12 — спальный отсек
Отсеки MDA и AM были объединены в отдельный модуль и имели го-
ризонтальную компоновку. Во время выведения сборка стыковочного адап-
тера и шлюзового отсека поддерживается фермой, которая воспринимает
и нагрузки от орбитальной обсерватории, установленной при старте сверху
над MDA. К ферменной конструкции также крепятся различные элементы
бортового оборудования ОС.
Стыковочный адаптер MDA предназначен для перехода экипажа в ОС и
организации связи ТКА и модулей ОС. Основной стыковочный узел распо-
ложен на оси MDA, а резервный — на цилиндрической поверхности. Отсек
MDA в общей конфигурации — это цилиндр с коническим днищем, уста-
новленный на передней части шлюзового отсека и выступающий вперед за
цилиндрический экран, который смонтирован в передней части OWS.
Шлюзовой модуль является сборочной единицей, расположенной между
OWS и MDA. Его цилиндрический туннель служит для перехода из отсеков
Глава 4. Блочно-модульная компоновка пилотируемого космического аппарата 233
MDA/STS в OWS. Он разделен на три отсека двумя внутренними переборка-
ми, оборудованными люками, передний люк ведет в отсек конструктивной
переходной секции (STS), а задний — в OWS. Центральный отсек имеет люк
для выхода в открытый космос.
Конструктивная переходная секция, расположенная на конце туннеля
шлюзового модуля, служит для соединения со стыковочным отсеком. Для
разгрузки переднего купола OWS туннель шлюзового отсека присоединяется
к OWS гибким сильфоном.
4.3. Модульная компоновка пилотируемых комплексов
Начиная с самых ранних проектов космических поселений ПКА рассма-
тривались как комплекс. Согласно ГОСТ 2.101—68 «ЕСКД. Виды изделий»
комплекс образуют два и более специфицированных изделия, предназна-
ченных для выполнения взаимосвязанных эксплуатационных функций, но
не соединенных на предприятии-изготовителе сборочными операциями.
Каждое из изделий, входящих в комплекс, служит для выполнения одной
или нескольких основных функций, установленных для всего комплекса.
Пилотируемый космический аппарат строится в виде комплекса из не-
скольких самостоятельных КА на модульной основе. Каждый КА-модуль
исполняет специфическую целевую функцию. Например, для межпланетного
транспортного КА логично деление на два модуля: экспедиционный КА, обе-
спечивающий перелет, и десантный КА для взлета и посадки на планету. Для
примера на рис. 4.16 представлен лунный межпланетный комплекс «Апол-
лон», состоящий из командного и лунного модулей, которые запускались
одной ракетой-носителем [6]. Для образования межпланетного комплекса
требовались маневрирование и перестыковка модулей.
Рис. 4.16. Транспортный корабль «Аполлон» с командным и лунным модулями
и схема их перестыковки:
а — отделение адаптера от PH; б — разворот командного модуля; в — стыковка с лун-
ным модулем; г — отделение комплекса от PH
234
Часть II. Определение облика пилотируемого космического аппарата
20 19
Рис. 4.17. Компоновка транспортного корабля снабжения транспортной косми-
ческой станции:
7 — возвращаемый аппарат; 2 — герметичное днище; 3 — двигатели коррекции и сближе-
ния; 4 — БЦВМ; 5, 18 — антенна; 6 — гироскопические приборы; 7— блок ориентации на
Солнце; 8 — антенна системы стыковки; 9 — иллюминаторы; 10— телевизионные камеры;
11 — коническое днище; 12 — аварийные батареи электропитания; 13 — коническая обе-
чайка; 14 — ИК-вертикаль; 15— оптический визир; 16— цилиндрическая обечайка; 17 —
орбитальный радиолокатор; 19 — агрегаты системы жизнеобеспечения; 20 — бак с водой;
27, 36 — сферические баллоны системы наддува и разгерметизации; 22 - аппаратура системы
управления; 23, 30 — электронные блоки; 24, 29 — двигатели ориентации и стабилизации;
25 — сферические гелиевые баллоны системы наддува; 26 — буферные аккумуляторные
батареи; 27 — блоки контроля и управления системы электропитания; 28— солнечные ба-
тареи; 31 — цилиндрические баки с топливом; 32 — антенны системы поиска; 33 — пульт
управления сближением и стыковкой; 34 — электронные блоки системы стыковки; 35 —
емкости с кислородом и азотом; 37 — антенны системы стыковки; 38— блоки поглотителей
системы жизнеобеспечения; 39 — контейнеры с рационом питания
Глава 4. Блочно-модулъная компоновка пилотируемого космического аппарата 235
Модульную структуру имел транспортный корабль снабжения (ТКС)
комплекса «Алмаз» (рис. 4.17). В состав ТКА входили два автономных модуля:
функционально-грузовой блок (ФГБ) и возвращаемый аппарат (ВА). Каждый
из модулей имел свою двигательную установку и систему управления. Компо-
новка обитаемых отсеков у них различная: у ВА была вертикальная, а у ФГБ —
полутораэтажная горизонтальная с мостиком управления над стыковочным
узлом.
Китайский ТКА «Шэньчжоу» (рис. 4.18) также представляет собой ком-
плекс из двух модулей: агрегатного отсека с СА и бытового отсека, который
является автономным КА, способным совершать длительный орбитальный
полет после разделения отсеков и посадки СА. Здесь также различная ком-
поновка обитаемых пространств: СА вертикальной компоновки пристыкован
к орбитальному отсеку горизонтальной компоновки.
Гибкость модульной архитектуры позволяет использовать автономные
модули, разработанные для одной космической программы, в других про-
граммах. Например, по завершении лунной программы командный модуль
«Аполлон» использовался в качестве ТКА на околоземной орбите. После
увеличения запаса топлива для причаливания и ориентации данный модуль
был применен для доставки экипажа на ОС Skylab и в международном полете
по программе ЭПАС.
Возможность оснащения функционально-грузового блока ТКС специа-
лизированным модулем полезной нагрузки вместо модуля ВА позволила со-
здать на основе ТКС семейство модулей дооснащения ОС «Салют-7», «Мир»
и МКС. Модуль «Квант-2» (рис. 4.19, а) был предназначен для дооснащения
станции научной аппаратурой, оборудованием для обеспечения выходов
членов экипажа в открытый космос, а также для проведения разнообразных
научных исследований и экспериментов. Модуль состоял из трех герметичных
отсеков: приборно-грузового, приборно-научного и специального шлюзового
с открываемым наружу выходным люком диаметром 1 м.
Модуль «Кристалл» (рис. 4.19, б) был предназначен для проведения тех-
нологических и других научных исследований и экспериментов и для обе-
спечения стыковок с кораблями, оснащенными андрогинно-периферийны-
ми стыковочными агрегатами. Он состоял из приборно-грузового отсека и
переходно-стыковочного, оснащенного двумя андрогинно-периферийными
стыковочными узлами.
236 Часть II. Определение облика пилотируемого космического аппарата
Модуль «Спектр» (рис. 4.19, в) был предназначен для проведения научных
исследований и экспериментов по дистанционному зондированию Земли, а
также для дооснащения станции дополнительными источниками электроэ-
нергии. Он состоял из герметичного приборно-грузового и из негерметичного
отсека, на котором были установлены две основные и две дополнительные
солнечные батареи и приборы научной аппаратуры.
Модуль «Природа» (рис. 4.19, г), предназначенный для проведения на-
учных исследований и экспериментов по дистанционному зондированию
Земли, состоял из одного герметичного приборно-грузового отсека.
На базе модуля ВА ТКС предлагалось построить корабль-спасатель для
МКС, а также ТКА для космического туризма по программе Excalibur Almaz
(рис. 4.19, д).
Модульная компоновка позволяет перейти от замкнутой архитектуры,
когда ПКА создается как конструктивно законченное средство для решения
целевых задач на протяжении ограниченного периода времени к открытой
архитектуре, позволяющей собрать комплекс из нескольких ПКА. Он будет
служить платформой для решения целевых задач начального периода экс-
плуатации, а также предоставит возможность изменять их специализацию
для дальнейших периодов эксплуатации.
Рис. 4.19. Варианты использования модульной компоновки ТКА на примере мо-
дулей ОС «Мир», построенные на базе функционально-грузового блока ТКС:
а — модуль «Квант-2»; б — модуль «Кристалл»; в — модуль «Спектр»; г — модуль «Природа»;
д — Exalibur Almaz (проект) — пилотируемый КА, построенный на базе ВА ТКС; е — буксир
для модуля «Квант»
Глава 4. Блочно-модулъная компоновка пилотируемого космического аппарата 237
Примером модульного ТКА может служить грузовая космическая си-
стема «буксир-контейнер», реализованная при доставке модуля «Квант»,
когда в качестве буксира использовался вариант ФГБ ТКС (рис. 4.19, е).
Разработанный РКК «Энергия» проект «Паром» (рис. 4.20) представля-
ет собой комплекс из межорбитального буксира с ресурсом эксплуатации
15 лет и широкой номенклатуры автономных грузовых контейнеров различ-
ной грузоподъемности — от 4 т (выводимых PH «Союз») до 13 т (выводимых
PH «Протон»). Наряду с герметичными контейнерами буксир сможет достав-
лять на орбиту МКС крупногабаритные негерметичные платформы с научной
аппаратурой. Буксир с двумя стыковочными узлами (один — для контейнера,
другой — для причаливания к МКС) должен поднимать лишенные собствен-
ной маршевой двигательной установки (ДУ) контейнеры с низкой опорной
орбиты до орбиты МКС. После разгрузки контейнеров буксир, дозаправив-
шись от них, должен спустить контейнеры с орбиты, вернуться и остаться
ждать новый контейнер в составе МКС.
Рис. 4.20. Модульная транспортная система «Паром»:
а — ОС; б — межорбитальный буксир; в — грузовой контейнер;
1 — выведение грузового контейнера на низкую опорную орбиту;
2 — расстыковка ОС и буксира и перелет на орбиту контейнера;
3 — автономный полет контейнера; 4 — стыковка буксира с кон-
тейнером; 5 — продолжение полета ОС; 6 — доставка контейнера
буксиром на ОС
Модульная компоновка орбитальных ПКА позволяет развертывать на ор-
бите большие космические комплексы без использования PH сверхтяжелого
класса. Гибкость адаптации модульных орбитальных комплексов для реше-
ния новых задач должна обеспечиваться не за счет избыточности размеров и
ресурса модулей, а благодаря реконфигурации комплекса путем замены или
добавления модулей. Автономные KA-модули после выведения на опорную
орбиту выполняют маневры дальнего и ближнего наведения и стыкуются,
238
Часть II. Определение облика пилотируемого космического аппарата
образуя орбитальный комплекс. Двигательные установки (ДУ) и системы
управления (СУ) модулей, работающие в составе комплекса, объединяются
и используются в единой системе. Если потребуется, модули могут отстыко-
вываться и совершать автономный полет или утилизироваться.
Модули следует создавать специализированными, с четко выраженным
функциональным назначением. При этом они должны иметь унифицирован-
ную конструкцию, что позволяло бы выпускать их серийно. Ниже приведены
примеры специализации модулей орбитальных ПКА:
• жилой — для создания комфортных условий для экипажа;
• исследовательский — для размещения научного оборудования;
• энергетический — для получения электроэнергии;
• двигательный — для управления движением;
• технологический — для размещения технологического оборудования;
Таким образом, для определения облика модульного космического ком-
плекса требуется установить номенклатуру модулей и построить компоновоч-
ную схему их размещения, которая позволяет реализовать организацию общего
герметичного обитаемого объема, зоны внекорабельной деятельности, а также
и расположение бортового оборудования. Пример организации герметичного
пространства ОС «Мир» одной из ранних конфигураций показан на рис. 4.21.
На рисунке видно, что обитаемое пространство модульной ОС в целом по-
добно разветвленной пещере. Компоновочная схема должна предусматривать
развитие такой «пещеры» с учетом требований к логистике (грузопотокам и
зонам хранения), а также путей безопасной эвакуации экипажа в аварийной
ситуации.
Рис. 4.21. Компоновочная схема общего обитаемого объема модульной ОС на
примере ОС «Мир» Г-образной конфигурации:
I — ТКА «Союз»; II — базовый блок; III — модуль «Квант»; IV — ТКА «Прогресс»; 1 — спу-
скаемый аппарат; 2 — бытовой отсек; 3 — шлюзовая камера; 4 — переходный люк; 5 — ра-
бочая зона модуля «Квант-2»; 6 — стыковочный отсек; 7 — рабочая зона; 8 — жилая зона;
9 — переходный отсек; 10 — внутренний переход стыковочного узла; 11 — рабочая зона мо-
дуля «Квант»; 12 — переходный тоннель; 13 — герметичный отсек грузового ТКА
Глава 4. Блочно-модульная компоновка пилотируемого космического аппарата 239
Модульная компоновка имеет первый базовый модуль-ядро, к которому, по
аналогии с процессом кристаллизации, пристыковываются модули дооснаще-
ния, а к ним, в соответствии с проектом, могут присоединяться дополнитель-
ные модули. При каждой трансформации компоновки варьируются инерци-
онно-массовые характеристики и механические характеристики комплекса —
собственные частоты колебаний и нагрузки в элементах конструкций. Для мо-
дульной компоновки в целом изменяются уровни микрогравитации, вибрации,
тепловые режимы и пр. Следовательно, при проектировании модульного ПКА
требуется разработать план развертывания, в котором отражаются изменения
параметров компоновки.
Например, концепция программы космической деятельности России
предполагает, что по завершении программы работы МКС возможно развитие
ее российского сегмента с преобразованием его в орбитальный пилотируемый
сборочно-эксплуатационный комплекс (ОПСЭК). Его задачи — выполнение
программ космических исследований, летная отработка российских пилоти-
руемых транспортных кораблей нового поколения, создаваемых технологий,
КА и систем будущего. Фазы трансформации исходной модульной компо-
новки PC МКС в ОПСЭК показаны на рис. 4.22 [7].
Рис. 4.22. План развертывания ОПСЭК на базе российского сегмента (PC) МКС:
а — PC МКС; б — замена отработавшего ресурс модуля ФГБ «Заря» универсальным базо-
вым модулем; в — вывод из эксплуатации отработавших ресурс модулей «Звезда» и «Поиск»
(первоначальное название — МИМ-2); г — конфигурация после вывода из эксплуатации
многофункционального лабороторного модуля (МЛМ) «Наука»; 1 — МЛМ; 2 — «Рассвет»
(первоначальное название — МИМ-1); 3 — ФГБ; 4— «Поиск»; 5— служебный модуль (СМ);
6 — универсальный базовый модуль; 7 — пилотируемый транспортный корабль нового по-
коления «Федерация»
На этапе I в состав PC МКС дополнительно к работающим модулям будут
введены многоцелевой лабораторный модуль (начальная масса — 20,7 т), узло-
вой модуль (4 т), два научно-энергетических модуля (по 20 т), а также перио-
дически обслуживаемый автономно летающий технологический КА (7,8 т). На
этапах П—IV предполагается, что в состав ОПСЭК будут введены три тяжелых
модуля (по 40 т): базовый универсальный модуль и два научно-энергетических
модуля вместо модулей меньшей размерности, выработавших свой ресурс.
Компоновка трансформирующихся орбитальных комплексов должна
позволять заменять модули без нарушения работоспособности системы.
В компоновочной схеме должны быть предусмотрены зоны безопасности
для причаливания и расстыковки KA-модулей, в которых приближающийся
модуль не может задеть элементы комплекса.
240 Часть II. Определение облика пилотируемого космического аппарата
В настоящее время модульный принцип построения орбитальных станций
успешно отработан на практике при создании ОС «Салют-7», «Мир» и МКС
на базе модулей, разработанных для ОС «Алмаз», выводимых на орбиту PH
тяжелого класса «Протон». Компоновочная схема МКС включает широкую
номенклатуру модулей, разработанных космическими агентствами многих
стран и доставленных на орбиту различными средствами выведения.
Построение орбитальных комплексов с использованием автономных
ПКА-модулей эффективно при создании относительно малых ОС, но при
увеличении размеров орбитального ПКА перестает быть оптимальным
техническим решением, поскольку при создании каждого модуля требует-
ся разрабатывать фактически полностью автономный транспортный КА,
в котором множество бортовых систем используются только один раз для
доставки модуля. Более эффективно при построении ОС применять развитую
транспортную инфраструктуру, состоящую из одноразовых серийных ТКА,
многоразовых или частично многоразовых транспортных аэрокосмических
систем.
Отлаженная транспортная инфраструктура позволяет строить орбиталь-
ный комплекс из функционально законченных блоков-модулей. Они не яв-
ляются автономными и функционируют только в составе комплекса, выпол-
няя специфическую задачу: лабораторный модуль, шлюзовой модуль и т. п.
Модули могут быть полностью жилыми (герметичными), агрегатными (как
герметичными, так и негерметичными) и комбинированными, содержащими
герметичные и негерметичные отсеки. Используются такие негерметичные
блоки, как платформы с научной аппаратурой, модули силовых конструк-
ций, агрегатные модули, энергетические модули и пр. Таким образом, уве-
личивается гибкость архитектуры ПКА и становится возможным расширить
пространство для деятельности экипажа.
Блоки-модули успешно эксплуатировались в составе ОС «Мир» (модуль
«Квант» и стыковочный отсек) и применяются на PC МКС (модули «Пирс»,
МИМ-1 и МИМ-2). После ввода в эксплуатацию многоразовой транспорт-
ной системы Space Shuttle рассматривалось множество проектов создания ОС
из блоков-модулей, выводимых на орбиту в грузовом отсеке многоразового
транспорстного космического корабля. В результате все модули американ-
ского сегмента МКС были доставлены на орбиту таким способом.
Использование манипулятора при сборке модулей позволяет располагать
модули плотнее и выстраивать более сложные компоновки герметичного про-
странства. Компоновка ОС в целом должна обеспечивать жесткость, необхо-
димую для того, чтобы исключить колебания конструкции при управлении
станцией и работе экипажа. Для ОС, работающих на низкой околоземной ор-
бите, компоновка модулей должна обеспечивать минимальный мидель, чтобы
снизить влияние разряженной атмосферы и риск столкновения с частицами.
С появлением программ коммерческого освоения околоземного про-
странства возникли проекты орбитальных станций, составленных из модулей
малой размерности, выводимые на орбиту PH среднего класса. Примеры
компоновочных схем посещаемых малых орбитальных станций [8], разра-
ботанные компанией Atlas Aerospace и консорциумом «Космическая регата»
для реализации коммерческих, научных и производственных пилотируемых
Глава 4. Блочно-модулъная компоновка пилотируемого космического аппарата 241
программ, показаны на рис. 4.23. Общий объем обитаемого пространства для
работы экипажа в связках малых орбитальных станций может варьироваться
в пределах 40... 100 м3, что позволяет обеспечить работу экипажа из двух-трех
космонавтов в течение 30—60 сут.
Рис. 4.23. Две компоновочные схемы малых модульных ОС:
1 — грузовой ТКА; 2— энергетический модуль; 3 — стыковочный модуль; 4— пилотируемый
ТКА; 5 — служебный отсек; 6 — лабораторный модуль
Орбитальные комплексы, составленные из малых автономных модулей,
имеют относительно невысокую стоимость и неопределенное время разра-
ботки, что может обеспечить сокращение сроков подготовки целевых миссий
на орбиту, гибкую программу пилотируемых полетов, нацеленную на выпол-
нение требований заказчика, минимизацию объема работ по обслуживанию
(ремонту, профилактике) орбитальных объектов, решение целевых задач с
минимальной избыточностью используемых средств.
Модульные компоновки рассматриваются в качестве проектов космиче-
ских отелей. На рис. 4.24 показана компоновка космического отеля компа-
нии Bigelow Aerospace, созданная с помощью надувных модулей различного
объема — от 180 до 2700 м3. Использование модулей трансформируемой
конструкции позволяет существенно расширить объем жилого пространства,
который может быть предназначен для экипажа и туристов. Снабжение отеля
предполагается осуществлять космическими аппаратами Space X Dragon и
Boeing Starliner.
Модульная компоновка ПКА включает в себя компоновку обитаемого
объема, составленного из герметичных модулей, и общую компоновку ПКА
с учетом негерметичных элементов каркаса, необходимых для размещения
бортового оборудования и научной аппаратуры. В процессе компоновки
определяют номенклатуру используемых модулей и проводят ее оптимизацию
для повышения экономической эффективности проекта.
242
Часть II. Определение облика пилотируемого космического аппарата
Рис. 4.24. Компоновочные схемы модульного космического
отеля компании Bigelow Aerospace:
а — общий вид отеля из четырех модулей; б — номенклатура надувных
модулей (/ — ВА-330 объемом 330 м3, массой 23 т, диаметром 6,7 м;
2— ВА-2100 объемом 2100 м3, массой 100 т, диаметром 15,24 м; 3 — уз-
ловой модуль, аналогичный модулю МКС; 4— ISPCS объемом 2700 м3,
массой 148 т, диаметром 15,24 м; 5 - ВА-1150 объемом 1150 м3, массой
70 т, диаметром 13,0 м; 6 — Sundancer объемом 180 м3, массой 8,6 т,
диаметром 6,3 м)
Исследования показывают, что продуманная унификация модулей дает
возможность гибко и экономно создавать на основе нескольких базовых эле-
ментов разнообразные компоновки ПКА различного целевого назначения
(рис. 4.25) [9].
Глава 4. Блочно-модулъная компоновка пилотируемого космического аппарата 243
Рис. 4.25. Пример организации пилотируемых космических аппаратов различного
назначения на базе двух модулей:
1 — орбитальная база; 2 — универсальный модуль; 3 — научно-энергетический модуль;
4 — МКС; 5 — орбитальная база на базе PC МКС; 6 — посещаемая платформа; 7— около-
планетная база; 8 — планетная база; 9 — межпланетный комплекс
4.4. Компоновка герметичных модулей орбитальных ПКА
Компоновка общего герметичного объема ПКА выполняется путем гер-
метичного соединения внутренними переходами объемов отдельных модулей,
в результате чего формируется обитаемое пространство в виде разветвленно-
го коридора. При этом схемы соединения модулей могут быть различными.
Отработанными на практике схемами компоновки герметичных моду-
лей орбитального комплекса, построенного из автономных кораблей-мо-
дулей, являются линейная и лучевая компоновки. Как пример линейной
модульной компоновки можно привести комплекс «Алмаз», состоявший в
первоначальном проекте из базового блока и двухмодульного транспортного
корабля снабжения, постоянно пристыкованного к ОС (рис. 4.26, а). Суще-
ствовал вариант оснащения ОС «Алмаз» двумя ТКС-модулями (рис. 4.26, б).
На практике линейная двухмодульная ОС была реализована в орбитальном
комплексе «Салют-7» — «Космос 1443» (рис. 4.26, в).
Технология работы с блочно-модульной ОС отрабатывалась в полетах
многоразовой космической лаборатории SpaceLab. Лаборатория, предназна-
ченная для проведения экспериментов на орбите Земли в условиях микрогра-
витации, функционировала в грузовом отсеке ТКА и не переводилась в авто-
номный полет. SpaceLab состоит из нескольких блоков-модулей: герметичного
244
Часть II. Определение облика пилотируемого космического аппарата
Рис. 4.26. Линейная модульная компоновка орбитальной станции на основе авто-
номных КА-модулей:
а — ОС «Алмаз»; б — комплекс «Алмаз» второго этапа; в — орбитальный комплекс «Салют-7» —
«Космос 1443» (ТКС) - ТКА «Союз»
отсека, негерметичной открытой платформы и другого оборудования, поме-
щаемого в грузовой отсек Space Shuttle (рис. 4. 27). Такие блоки были одним
из вариантов полезной нагрузки МТКА Space Shuttle, повышающим ее гиб-
кость. В каждом полете использовался определенный набор компонентов,
соответствующий потребностям миссии. Длительность функционирования
такой ОС ограничена возможностями многоразового транспортного кора-
бля. Максимальная продолжительность полета SpaceLab составила 16 суток.
Автономную малую ОС, собираемую на орбите с помощью МТКА из
нескольких линейно состыкованных блоков-модулей типа SpaceLab и до-
полнительного энергетического модуля, планировалось создать в проекте
Manned Orbiting Facility (MOF) (рис. 4.28).
Фактически, линейная модульная компоновка — это способ увеличить
длину фюзеляжа, обходя габаритные ограничения средств выведения. С точки
зрения организации герметичного объема, таким способом создается прямой
протяженный коридор. С увеличением длины комплекса, организованного
подобным образом, будет повышаться уровень микро гравитации на краях
Глава 4. Блочно-модульная компоновка пилотируемого космического аппарата 245
а б
Рис. 4.27. Компоновка ОС SpaceLab в грузовом отсеке МТКА Space Shuttle:
а — основные компоновочные элементы; б — варианты компоновки; 1 — МТКА; 2 — пе-
реходник; 3 — тоннель; 4 — модуль ОС; 5 — негерметичная платформа
Рис. 4.28. Проект автономной станции MOF
ПКА, причем особенно при разворотах. Относительно общей компоновки
возможность размещения негерметичного оборудования имеется только на
внешней поверхности модулей, которая сравнительно невелика.
При создании протяженной линейной компоновки возможно возник-
новение значительных изгибающих моментов и напряжений в стыковочных
узлах. Также будет увеличиваться момент инерции ПКА и возникнет момент
гравитационных сил, ориентирующий ПКА по радиусу Земли, что требуется
учитывать при размещении бортовой аппаратуры и проектировании системы
управления.
Лучевая компоновка, основанная на построении системы разветвленных
коридоров путем соединения отсеков в узловых модулях, позволяет создать
246
Часть II. Определение облика пилотируемого космического аппарата
компактную конфигурацию ОС с большим герметичным объемом и высоким
потенциалом развертывания. Многие проекты модульных компоновок ОС но-
вого поколения иллюстрируют эффективность модульной лучевой структуры.
Пример лучевой компоновки модульной ОС — компоновка орбитальной
станции «Мир» (рис. 4.29). В процессе развертывания ОС «Мир» претерпела
ряд изменений конфигурации: линейная, Г-образная, Т-образная, кресто-
образная. Модули дооснащения были пристыкованы как по оси базового
блока, так и по четырем ортогональным полуосям, перпендикулярным про-
дольной оси.
Рис. 4.29. Лучевая компоновка ОС «Мир»:
7 — модуль «Квант»; 2 — ТКА «Прогресс»; 3 — базовый модуль; 4 — модуль «Природа»; 5 —
модуль «Спектр»; 6 — ТКА «Союз-ТМ»; 7 — модуль «Кристалл»; 8 — стыковочный модуль;
9 — модуль «Квант-2»
Глава 4. Блочно-модульная компоновка пилотируемого космического аппарата 247
Дальнейшее развитие орбитальных ПКА, построенных по лучевой ком-
поновке, вероятно, будет вестись в направлении создания разветвленных
лучевых компоновок (рис. 4.30). Для построения подобной компоновки
необходимо будет оснастить базовые модули (например, базовый блок ОС
«Мир») дополнительными стыковочными узлами или использовать специа-
лизированные узловые модули (например, узловой модуль российского сег-
мента МКС, стыкуемый к многофункциональному лабораторному модулю
(МЛМ) «Наука», или узловые модули Node 1—Node 3 американского сегмента
МКС). Соединение через узловые модули увеличивает общее количество
модулей и число стыковочных узлов, однако такая компоновка оказывается
предпочтительной, поскольку полнее реализует модульный принцип. Узловой
модуль, выполняющий функцию соединительного элемента, может иметь
оптимизированную, усиленную конструкцию, в то время как обычный мо-
дуль оптимизирован под размещение научного оборудования. Следовательно,
в результате применения разветвленной лучевой компоновки достигаются
наилучшие характеристики системы в целом.
Рис. 4.30. Соединение модулей по разветвленной лучевой схеме:
а — схема пространственной разветвленной лучевой компоновки; б — непосред-
ственное присоединение модулей к базовому блоку; в — соединение модулей через
узловые модули
По разветвленной лучевой схеме построена компоновка МКС, один из
первых вариантов которой представлен на рис. 4.31. Существуют проекты
российской ОС нового поколения, где каждое ответвление в модульной ком-
поновке представляет собой отдельный ярус-этаж (рис. 4.32) [7].
При лучевой компоновке оси модулей могут располагаться неортого-
нально. Такая схема позволяет повысить компактность и максимизировать
герметичный объем в заданной области пространства. Примером неортого-
нальной лучевой компоновки модулей можно считать ранний вариант про-
екта орбитального отеля испанской компании Galactic Suite [10]. На рис. 4.33
показана компоновка этого отеля по состоянию на 2006 г. К сферическому
сегменту базового модуля пристыковывается 10—12 жилых модулей, в число
которых входят номера для туристов, каюты для обслуживающего персонала
и технические модули.
248
Часть II. Определение облика пилотируемого космического аппарата
Рис. 4.31. Многоузловая лучевая компоновка ОС МКС ранней
конфигурации
Рис. 4.32. Возможный облик пилотируемой ОС нового поколе-
ния с тремя (I, II, III) одновременно эксплуатируемыми ярусами
Глава 4. Блочно-модульная компоновка пилотируемого космического аппарата 249
Рис. 4.33. Компоновка модульного космического отеля Galactic Suite
(проект 2006 г.):
а — общий вид отеля; б — компоновка обитаемого объема модулей
Для обеспечения плотной компоновки модулей они выполнены в виде
тела вращения, состоящего из конического, цилиндрического и полусфери-
ческого отсеков. Стыковочный узел находится на конце конического отсека.
Иллюминаторы расположены на полусферическом отсеке. На рис. 4.33, б
также показан проект интерьера герметичного объема, выполненный в виде
сопряженных цилиндрических и сферических поверхностей. Согласно про-
екту модули могут выполняться надувными.
Лучевая схема может неограниченно расширяться, однако при этом за-
трудняется перемещение людей и грузов между модулями, поскольку из узло-
вых модулей в каждую ветвь модулей имеется, как правило, один вход-выход.
Для того чтобы оптимизировать внутренний трафик движения людей и гру-
зов внутри модулей, их компоновка должна иметь петлевую или кольцевую
структуру коридоров, которая предоставляет два пути посещения каждого
модуля. В случае разгерметизации модуля для обеспечения безопасности тре-
буется перекрыть два люка, однако изоляция одного из модулей не исключает
успешной эксплуатации остальных. Необходимо только будет изменить схему
перемещения между ними.
Кольцевая схема соединения модулей «колодцем» (рис. 4.34, а) позволяет
организовать циркуляцию грузов внутри жилого пространства, состоящего
минимум из четырех модулей. Можно также использовать узловые модули,
что показано на рис. 4.34, б. При увеличении числа модулей можно органи-
зовать несколько кольцевых коридоров (рис. 4.34, в).
Примером компоновки ОС с модулями, соединенными в кольцевую
схему переходными коридорами, может служить проект европейской ОС
Man-Tended Free Flyer (MTFF) (рис. 4.35). Посещаемая автономная станция
MTFF, состоящая из одного-двух герметичных блоков типа Spacelab и агрегат-
ных модулей с солнечными батареями, должна была собираться с помощью
МТКА Space Shuttle. Предполагалось, что снабжение ОС будет обеспечивать
европейский МТКА Hermes.
250
Часть II. Определение облика пилотируемого космического аппарата
О D
в
Рис. 4.34. Кольцевые компоновки модулей:
а — непосредственное соединение модулей; б — соединение модулей через
узловые модули; в — компоновка с несколькими кольцевыми коридорами;
НАВ — жилой модуль; LAB — лабораторный модуль; LOG — складской модуль
Рис. 4.35. Проект ОС Man-Tended Free Flyer с кольцевой
компоновкой герметичных отсеков:
1 — МТКА Hermes; 2 — базовый блок; 3 — модуль дооснащения;
4 — негерметичная платформа; 5 — спасательный ТКА
Кольцевая компоновка модулей может быть дополнена элементами лу-
чевой компоновки, как, например, в проекте космического операционного
центра Space Operations Center (SOC) (рис. 4.36) [11]. Данная ОС предназ-
началась для сборки на орбите крупногабаритных конструкций межпланетных
ТКА. Центром компоновки был энергетический модуль с панелями солнеч-
ных батарей и радиаторов системы обеспечения теплового режима большой
площади, вынесенных на штангах. К энергетическому модулю планировалось
присоединить два жилых, складской, технологический, два лабораторных
модуля и стапели для космических буксиров.
Можно увеличить плотность компоновки модулей, использовав схему
«плот», при которой модули размещаются вплотную друг к другу (рис. 4.37, а).
Поскольку оси модулей параллельны, можно организовать нескольких
Глава 4. Блочно-модульная компоновка пилотируемого космического аппарата 251
Рис. 4.36. Компоновка космического операционного центра SOC-82
переходов между модулями (рис. 4.37, б). По схеме «плот» модули могут быть
скомпонованы в несколько уровней как в плоскости, так и в пространстве.
Соединять модули можно вспомогательными переходными модулями-ко-
ридорами (рис. 4.37, в). Это позволяет организовать трафик людей и грузов,
а также, если потребуется, изоляцию модулей.
Большой объем герметичного пространства может быть построен в модуль-
ном ПКА экстенсивным путем — за счет наращивания числа модулей. При
этом из большого числа модулей могут быть сформированы регулярные струк-
туры. На рис. 4.38, а приведена компоновочная схема прямоугольной решетки
из модулей. Такая схема может быть развернута на базе крестообразной лучевой
схемы (показанной пунктиром) и затем постепенно надстраиваться. Для того
чтобы повысить плотность компоновки, нужно выбрать компоновочную схему
с треугольной решеткой модулей (рис. 4.38, б). При этом решетка может быть
Рис. 4.37. Компоновка модулей по схеме «плот»:
а — принцип компоновки модулей; б — организация нескольких переходов между
модулями; в — пространственная двухуровневая компоновка модулей, соединенных
модулями-коридорами
252
Часть II. Определение облика пилотируемого космического аппарата
как плоской, так и пространственной — тетраэдрической (рис. 4.38, в) [12]. Еще
большую плотность компоновки обеспечивает пространственный компактный
кластер модулей, составленных по схеме «плот», как показано на рис. 4.38, г.
Использование компактных компоновок модулей существенно усложня-
ет сборку ПКА на орбите. Для обеспечения прочности конструкции может
потребоваться временное использование ферменных конструкций, которые
будут поддерживать решетку до прибытия новых модулей (рис. 4.38, в).
Компактное размещение модулей дает преимущества при перемещении
космонавтов внутри герметичного объема, однако возникает затенение моду-
лей друг другом, что затрудняет размещение элементов бортового оборудова-
ния, а также научной аппаратуры в негерметичном исполнении на внешней
поверхности ПКА. При разработке общей компоновки ПКА для размещения
указанных элементов требуется применять специальные элементы силового
каркаса.
Рис. 4.38. Основные типы компоновок из собранных герметичных мо-
дулей решеток:
а — прямоугольная плоская решетка; б — треугольная плоская решетка; в — те-
траэдрическая пространственная решетка; г — пространственный компактный
кластер модулей по схеме «плот»; 1 — группа модулей, формирующая базовый
элемент решетки; 2 — узловые модули — точки роста решетки
Глава 4. Блочно-модульная компоновка пилотируемого космического аппарата 253
4.5. Общая компоновка модульных орбитальных ПКА
Развитие орбитальных ПКА связано с увеличением в их составе доли не-
герметичного оборудования. К элементам бортового оборудования, функци-
онирующим автономно вне герметичного жилого объема и требующим лишь
периодического обслуживания или замены экипажем, относятся системы
энергообеспечения (панели солнечных батарей, буферные аккумуляторные
батареи, электропреобразователи и пр.), радиаторы СОТР, элементы систе-
мы управления движения (двигательные установки, силовые гироскопы,
датчики и пр.), научные приборы, для работы которых необходим вакуум,
и т. п. Размещение данного оборудования за пределами герметичного объ-
ема позволяет освободить пространство для жизнедеятельности экипажа,
но требует дополнительных элементов конструкций, образующих каркас
ПКА. Каркас можно также применять для усиления несущей способности и
жесткости связки герметичных модулей. Современные компоновки негерме-
тичного каркаса орбитальных ПКА основаны на использовании ферменных
конструкций, образующих так называемый ферменный скелет, собираемый
непосредственно на орбите или построенный из отдельных ферм-модулей.
Простейшая линейная компоновка фермы формирует продольный или
поперечный однобалочный каркас. Компоновочная схема, центральным
элементом которой является главная поперечная ферма, была разработана
для ОС «Мир-2» и Freedom.
В облегченном варианте компоновки (на 1990 г.) ОС «Мир-2» должна была
состоять (рис. 4.39) из базового модуля «Звезда», служебного модуля на базе
ФГБ ТКС, двух универсальных стыковочных модулей (УСМ), оборудованных
стыковочными узлами для присоединения модулей, двух стыковочных отсеков
(СО) СО1, СО2, выполнявших также функции шлюзовых камер, а также из
специализированных малых исследовательских модулей (МИМ): техноло-
гического, биотехнологического и модуля ДЗЗ. В составе данного варианта
предполагалось использовать блоки-модули дооснащения малой размерности,
доставляемые модификацией ТКА «Прогресс», поскольку опыт создания мо-
дулей для орбитального комплекса «Мир» показал, что 20-тонные модули на
базе ФГБ очень сложны в изготовлении и имеют длительный цикл испытаний.
Проект ОС «Мир-2» предусматривал дополнение разветвленной лучевой
модульной компоновки герметичных модулей поперечной фермой науч-
но-энергетической платформы (НЭП) длиной 52 м. НЭП состояла из двух
модулей, каждый из которых включал в себя герметичный отсек и ферму.
Гермоотсек НЭП пристыковывался к УСМ, как и другие модули дооснаще-
ния, расширяя обитаемый объем. Доставлять НЭП на орбиту предполагалось
с помощью модификаций грузового корабля «Прогресс».
Ферма была оборудована поворотными панелями солнечных батарей и
газотурбинными установками на базе солнечных концентраторов, обеспечи-
вающими суммарную мощность системы энергоснабжения 38 кВт. На ферме
также были размещены радиаторы СОТР и дистанционно управляемые ДУ
для управления ОС. Кроме того, было предусмотрено размещение четырех
модулей-платформ для блоков негерметичного оборудования массой по 3...4 т
каждый.
254
Часть II. Определение облика пилотируемого космического аппарата
Вид Г
-17600
Рис. 4.39. Вариант компоновки «Мир-2» (проект 1993 г.):
/ — двухстепенной привод; 2 — гермоотсек НЭП; 3 — универсальный стыковочный модуль;
стемы; 7— стыковочный отсек; 8— ТКА; 9— солнечная газотурбинная установка; 10 — базовый
14 — ферма энергоустановки; 15 — панели СБ
Глава 4. Блочно-модульная компоновка пилотируемого космического аппарата 255
8850
27 700
4 — выносная ДУ; 5 — модуль дооснащения; 6 — зона размещения рельсовой транспортной си-
блок; 11 — зона установки научной аппаратуры; 12 — радиатор СОТР; 13 — основная ферма;
256
Часть II. Определение облика пилотируемого космического аппарата
Общая масса «Мир-2» составляла около 90 т при массе исследователь-
ской аппаратуры 15 т. Высота рабочей орбиты — 450 км, продолжительность
штатной эксплуатации — предположительно 3 года, но рассматривался и срок
активного функционирования 10 лет. На ОС «Мир-2» должен был постоянно
присутствовать экипаж из двух-трех человек.
Компоновочная схема обитаемой орбитальной базы проекта ОС Freedom
(рис. 4.40) состояла из поперечной фермы и герметичного жилого объема,
построенных из модулей, доставляемых МТКА [13—15].
Проекты ОС Freedom в разные годы предусматривали длину поперечной
балки 149, 135, 97 и 48,5 м. Ферма квадратного сечения со стороной 5 м со-
стояла из трех сегментов: неподвижной средней части и поворотных концевых
частей с приводами для размещения и ориентации СБ. Модули СБ содержали
оборудование, необходимое для приема солнечной энергии, преобразования
ее в электричество, хранение и распределение потребителям. Планировалось
использовать восемь крыльев панелей СБ размерами 10,5 х 35 м каждое.
Для проведения работ в открытом космосе, разгрузки Space Shuttle и
операций с полезной нагрузкой на внешней поверхности станции на ферме
предусматривалась мобильная транспортная система. Она состояла из мани-
пулятора и мобильного транспортера, движущегося по рельсам вдоль фермы,
на которой предполагалось разместить различные элементы бортового обо-
рудования и узлы для крепления полезной нагрузки. Стабилизация и ориен-
тация ОС контролировались четырьмя двигательными модулями на ферме,
каждый из которых содержал баки для хранения гидразина и шесть двигателей
с тягой около 111 Н. Для постоянной компенсации сопротивления атмосфе-
ры дополнительно использовались электроракетные двигатели тягой 1,11 Н.
Основой герметичного объема ОС Freedom являлась кольцевая структура
(рис. 4.41), собираемая из четырех узловых цилиндрических модулей диамет-
ром 4,3 м и длиной около 5,18 м и двух специализированных цилиндриче-
ских модулей — жилого и лабораторного диаметром 4,45 м и длиной 13,4 м
соответственно. Первый узел, между лабораторным модулем и модулем
Columbus, был предназначен для управления, связи и управления движением
при сборке станции. Второй, пристыкованный к первому и расположенный
между жилым модулем и японским лабораторным модулем, служил резервной
системой управления. Третий и четвертый узлы, находящиеся на переднем конце
лабораторного и жилого модулей, предназначались для управления стыковкой
со Space Shuttle и дистанционного управления манипуляторами, а также для
осуществления внекорабельной деятельности. Каждый из этих узловых модулей
должен был иметь полусферический модуль-иллюминатор в виде купола для
контроля операций в ближнем космосе и стыковки со Space Shuttle. В данной
схеме ферма и блок герметичных модулей были независимыми элементами
компоновки, соединяемыми между собой специальными узлами крепления.
Лабораторный модуль предназначен для производственных эксперимен-
тов в условиях микрогравитации, поддержки длительных экспериментов в ус-
ловиях микрогравитации и герметичного объема (биологических, физических,
химических и пр.), медицинских экспериментов по адаптации к длительным
космическим полетам, обслуживания ремонтного модуля Orbital Replacement
Units (ORUs) и проведения ремонтных работ на орбите.
Глава 4. Блочно-модульная компоновка пилотируемого космического аппарата 257
Рис. 4.40. Базовая конфигурация ОС Freedom (размеры указаны в метрах):
/ — лабораторный модуль; 2 — одностепенной привод; 3 — зона размещения научной
аппаратуры; 4 — одностепенной привод СБ; 5 — жилой модуль; 6 — складской мо-
дуль; 7— европейский научный модуль; 8— японский научный модуль; 9— радиатор
СОТР; 10 — энергетический модуль
Рис. 4.41. Компоновка герметичных модулей ОС Freedom:
а — кольцевая компоновка базовых модулей; б — полная компоновка; / — узловой модуль;
2 — купол; 3 — стыковочные узлы; 4 — лабораторный модуль; 5 — узловой модуль; 6 — узел
для швартовки европейского научного модуля; 7— узел для швартовки японского научного
модуля; 8 — складской модуль; 9 — жилой модуль; 10— шлюзовая камера; // — европейский
научный модуль; 12— японский научный модуль; 13 — японская негерметичная платформа;
14 — японский складской модуль
258 Часть II. Определение облика пилотируемого космического аппарата
Жилой модуль предназначен для проживания восьми членов экипажа.
В нем предполагалось наличие кают, камбуза, кают-компании, универсальной
мастерской, комнаты личной гигиены, медицинского отсека для экстренной
помощи, спортивных тренажеров и складских помещений. Модуль должен
был служить защищенным пространством для длительного пребывания, рабо-
ты, питания, сна, спортивных занятий и медицинского обслуживания людей.
В случае аварийной ситуации он должен был стать укрытием для экипажа
до прибытия корабля-спасателя. Пол и потолок модуля предназначались для
размещения запасов, необходимых для длительного существования экипажа.
К узловым модулям планировалось пристыковывать дополнительные
модули-лаборатории и складские модули. Европейский герметичный лабо-
раторный модуль Columbus диаметром 4 м и длиной 12,8 м предназначался
для изучения физики жидкости и материаловедения, а также для проведения
биологических экспериментов. Японский экспериментальный модуль JEM
представляет собой сборку из лаборатории и платформы для экспонирования.
Входящая в его состав лаборатория в виде герметичного цилиндрического
модуля диаметром 4,3 и длиной 10,7 м, была предназначена для разнообраз-
ных исследований. На торце модуля крепится негерметичная платформа
размерами 7x7 м для проведения экспериментов в открытом космосе. Теле-
управляемый манипулятор должен переносить оборудование с платформы в
шлюзовую камеру, а затем в герметичную лабораторию. Предусматривалось
использование складских модулей двух типов — герметичных и негерметич-
ных. Их предполагалось многократно возвращать на Землю с помощью МТКА
для пополнения запасов и доставлять к ОС на Space Shuttle. Японский склад-
ской модуль диаметром 4,2 и длиной 14,7 м должен был пристыковываться к
японскому лабораторному модулю. Специализированный модуль — шлюзовая
камера, предназначался для выходов в открытый космос.
На практике схема ОС с однобалочным каркасом реализована на МКС
в результате объединения проектов ОС «Мир-2» и Freedom. МКС собира-
ют на монтажной орбите высотой 380 км и наклонением 51,6°. Ее масса по
окончании строительства составит более 400 т. Станция будет включать в
себя 33 блока с общим объемом гермоотсеков около 1200 м3. Максималь-
ный размер станции составляет 108 м. Она состоит из российского и аме-
риканского сегментов. Схема компоновочных элементов МКС (рис. 4.42)
показывает, какие основные герметичные модули двух проектировавшихся
компоновок вошли в ее состав. В связи с объединением проектов кольцевая
схема соединения модулей была заменена на разветвленную лучевую. При
этом была сохранена единая ферма, построенная из негерметичных модулей
РЗ/Р4, Р5, Р6, S3/S4, S5, S6 (рис. 4.43). Модули фермы доставлялись на орбиту
МТКА полностью собранными и оснащенными системами электропитания,
терморегулирования, элементами транспортной системы и платформами для
полезной нагрузки. На орбите проводились только стыковка модулей и раз-
вертывание панелей СОТР и СБ.
Пример компоновки ОС на базе однобалочного каркаса с центральной
продольной фермой показан на рис 4.44 [16]. Протяженная коробчатая стерж-
невая ферма использована для построения гравитационно-стабилизированной
ОС по схеме «силовая башня». К ферме крепятся разнообразные полезные
Глава 4. Блочно-модульная компоновка пилотируемого космического аппарата 259
Рис. 4.42. Структура блоков-модулей МКС:
/ — ферма Z1; 2 — платформа ESP-3; 3 — платформа ELC-4; 4 — ферма S3/S4; 5 — панели
СБ фермы правого борта; 6 — ферма S5; 7 — ферма S6; 8 — платформа ELC-2; 9 — модуль
«Рассвет» (ранее МИМ-2);/0 — дооснащение МЛМ «Наука» (шлюзовая камера и радиатор
СОТР); // — модуль МЛМ «Наука»; 12 — панели СБ модуля «Звезда»; 13 — служебный мо-
дуль (СМ) «Звезда»; 14— модуль «Поиск» (ранее МИМ-1); 15 — манипулятор ERA; 16— ФГБ
«Заря»; 17 — РМА-1; 18 — AMS-02; 19 — ферма S1; 20 — OBSS; 21 — манипулятор SPDM
Dextre; 22 — манипулятор Canadarm-2; 23 — мобильный транспортер MBS; 24 — ферма SO;
25 — ферма Р1; 26 — платформа ELC-3; 27 — панели СБ фермы левого борта; 28 — ферма Р6;
29 — ферма Р5; 30 — ферма РЗ/Р4; 31 — модуль Node-3 Tranquility; 32 — платформа ELC-1;
33 — адаптер РМА-3; 34 — модуль JEM EF и манипулятор RMS; 35 — модуль JEM ELM-PS;
36 — модуль JEM PM Kibo; 37 — платформа ESP-1; 38 — РМА-2; 39 — модуль Node-2 Harmony;
40 — модуль US Lab Destiny; 41 — модуль EU Lab Columbus; 42 — модуль PMM Leonardo; 43 —
модуль Node-1 Unity; 44 — платформа ESP-2; 45 — шлюзовая камера Quest; 46 — модуль Cupola
нагрузки: герметичные модули, складские платформы и панели солнечных
батарей. На рис. 4.45 приведен пример размещения на схеме типа «силовая
башня» модулей для обслуживания ТКА [17].
При такой компоновке ферма, на концах которой расположены основные
массы, ориентирована по радиусу орбиты и наилучшие условия наблюдения
Земли созданы на нижнем конце фермы, а наилучшие условия для наблюде-
ния астрономических объектов в космосе — на ее верхнем конце.
Компоновка по схеме «силовая башня» требует тщательной проработки
вопросов управления. При выборе данной компоновочной схемы необходи-
мо учитывать, что гравитационная ориентация формируется естественным
образом и требует малых энергетических затрат на стабилизацию, что может
быть важно для ПКА большой массы. Однако изменение ориентации такой
компоновки энергетически невыгодно. Опыт эксплуатации ОС «Мир» и МКС
показал, что в настоящее время чаще используются орбитальная и путевая
системы координат.
Увеличение массы и габаритов орбитального ПКА предусматривает ус-
ложнение ферменного скелета. Например, основой компоновки ОС «Мир-2»
в конфигурации орбитального сборочно-эксплуатационного центра (ОСЭЦ)
должна была стать крестообразная ферма, собираемая в космосе (рис. 4.46).
260
Часть II. Определение облика пилотируемого космического аппарата
Рис 4.43. Негерметичные ферменные модули МКС:
а - S3/S4 и РЗ/Р4; б - S1 и Р1; в - S5 и Р5; г - Z1; д - SO; е - S6 и Р6
Рис. 4.44. Компоновочная схема ОС
по типу «силовая башня»:
1 — направление в надир; 2 — направле-
ние полета
Конструкция фермы близка к конструк-
ции уже испытанных в космосе мачт
«Рапана» и «Софора». По краям главной
балки ферменного скелета на дополни-
тельных фермах размещались солнеч-
ные электростанции на базе гелиокон-
центраторов и СБ. Вдоль второй балки
(ортогональной главной) планировалось
разместить крупногабаритные герметич-
ные модули.
Предполагались масса ОСЭЦ —
100... 120 т, объем обитаемых отсеков —
360 м3, мощность системы энергопита-
ния — 100 кВт, экипаж — три—шесть
человек. В состав станции должны были
войти тяжелые модули, выводимые PH
«Энергия». Проектом предусматривались
следующие элементы: базовый блок —
дублер аналогичного блока орбитально-
го комплекса «Мир», орбитальный док
Глава 4. Блочно-модульная компоновка пилотируемого космического аппарата 261
Рис. 4.45. Компоновка модулей для обслуживания КА на ферме ОС, имею-
щей компоновочную схему «силовая башня»:
а — конфигурация в процессе сборки; б — рабочая конфигурация; 1 — стыковочный узел
для межорбитального буксира; 2 — модуль-ангар для обслуживания КА; 3 — складской
модуль; 4 — заправочный модуль; 5 — стыковочный узел для МТКА; 6 — манипулятор;
7 — межорбитальный буксир
массой 90 т, выводимый на орбиту PH «Энергия», служебный, технологиче-
ский, биотехнологический и два исследовательских модуля.
На рис. 4.47 представлена крестообразная компоновочная схема ОС типа
«силовая башня», которая рассматривалась как один из вариантов станции
Freedom. Основным несущим элементом является ферменная балка длиной 120 м,
ориентированная по местной вертикали. Имеются также три поперечные
балки. Средняя ферма длиной 60 м предназначена для крепления СБ суммар-
ной мощностью 80 кВт. Остальные две фермы служат для размещения астро-
физической аппаратуры (верхняя балка) и аппаратуры ДЗЗ (нижняя балка).
Пять герметичных модулей (два жилых, два лабораторных и модуль снаб-
жения) прикреплены на ближнем к Земле конце ферменной балки. Экипаж
из шести—восьми человек сменяется каждые 90 сут. Станция собирается на
орбите высотой 530 км и наклонением 28,5°. Согласно плану развертывания
в первую очередь строится поперечная ферма с СБ, во вторую — ферменная
балка и только в третью — блок герметичных модулей. Все блоки предпо-
лагалось выводить на орбиту с помощью МТКА. Монтаж станции планиро-
валось завершить за 9—12 мес. после семи полетов Space Shuttle. Расчетный
срок эксплуатации станции — 25 лет.
262
Часть II. Определение облика пилотируемого космического аппарата
Рис. 4.46. Компоновка ОС «Мир-2» в варианте ОСЭЦ:
1 — герметичный модуль; 2 — панель СБ; 3 — полезная нагрузка, размещенная на
ферме; 4 — ферма; 5 — мобильный комплекс обслуживания полезных нагрузок с
манипулятором; 6 — энергетическая установка с гелиоконцентратором
Более жесткой конструкцией, чем однобалочная, является двухбалочная
коробчатая схема ОС (вариант развития ОС Freedom) для обслуживания
транспортных операций «Земля—Луна» (рис. 4.48). Центральным элемен-
том каркаса служит прямоугольная рама из коробчатых ферм размерами
НО х 44,5 м. Компоновка имеет такую же гравитационную стабилизацию
вдоль местной вертикали, как в схеме «силовая башня». Посередине рамы
проходит главная поперечная ферма длиной 154 м, на концах которой
расположены радиаторы системы терморегулирования и СБ площадью
1780...6000 м2, что позволяет достигать мощности солнечной электростанции
в пределах 75...300 кВт.
На главной поперечной ферме вблизи центра масс размещен комплекс
из пяти герметичных блоков-модулей. Такое расположение обеспечивает
минимальный уровень динамических возмущающих воздействий на обо-
рудование для исследований материалов в условиях невесомости. На краях
прямоугольной рамы размещены ангары для обслуживания КА. Ферму пла-
нировалось оснастить транспортной системой с дистанционно управляемым
манипулятором.
Глава 4. Блочно-модульная компоновка пилотируемого космического аппарата 263
Рис. 4.47. Конструктивно-компоновочная схема ОС с крестообразным балочным
каркасом:
1 — радиаторы энергосистемы; 2 — антенны; 3 — лаборатория материаловедения; 4 — пе-
редвижной дистанционно управляемый манипулятор; 5 — модуль снабжения; 6 — модуль
оборудования коммерческих программ; 7 — жилой модуль; 8 — научное оборудование; 9 —
лабораторный модуль; 10 — верхняя балка; 11 — верхняя вертикальная балка; 12 — солнечные
батареи; 13 — узлы крепления сменного оборудования и хранения инструмента; 14 — отсек
хранения обслуживаемых полезных нагрузок (например, ИСЗ); 15 — поперечная балка; 16 —
узел вращения СБ; /7— двигатели реактивной системы управления; 18 — нижняя вертикальная
балка; 19 — хранилище топлива системы дозаправки; 20 — радиаторы СОТР; 21 — порт для
дозаправляемых ИСЗ; 22 — межорбитальный транспортный аппарат; 23 — топливные баки
для межорбитального транспортного аппарата; 24 — дополнительные балки; 25 — шлюзовые
отсеки; 26 — нижняя балка; 27 — порт для причаливания транспортных кораблей
Помимо ферменных балок и рам в каркасе крупногабаритной ОС могут
использоваться ферменные панели. На рис. 4.49 показан пример компо-
новки каркаса ОС по Т-образной схеме [16], где силовая ферменная балка
дополняется крупногабаритной подкрепленной стержневой ферменной
панелью СБ. Панель перпендикулярна балке, т. е. сориентирована так, что
при гравитационной стабилизации ОС ее аэродинамическое сопротивление
264
Часть II. Определение облика пилотируемого космического аппарата
Рис. 4.48. Конструктивно-компоновочная схема двухбалочного варианта ОС:
1 — привязные полезные нагрузки на верхней и нижней фермах; 2 — системы наблюдения
за космическими объектами; 3 — экспериментальная солнечная энергосистема; 4 — штатные
солнечные энергосистемы; 5 — радиаторы системы энергоснабжения; 6 — отсек для межор-
битального транспортного аппарата; 7 — комплекс оборудования для исследования Земли;
8 — модуль снабжения; 9 — передвижной дистанционно управляемый манипулятор; 10 —
ферменные балки; 11 — жилой модуль; 12 — лаборатория материаловедения; 13 — радиатор
СОТР; 14 — оборудование наблюдения за Солнцем; 15 — отсеки для хранения обслуживаемых
полезных нагрузок (например, ИСЗ); 16 — европейский и японский исследовательские модули
минимально. Комплекс модулей расположен внизу фермы, что дает необ-
ходимый для стабилизации гравитационный градиент. Но поскольку панель
СБ в такой схеме неподвижна, ее эффективность низка, так что требуется
в 2,5 раза большая площадь преобразователей энергии, чем у управляемых
СБ. Комплекс герметичных отсеков расположен вдали от центра масс, и зона
обзора ограничена из-за большой площади панели СБ.
Другим примером может служить представленная на рис 4.50 компо-
новочная схема «платформа» орбитального пилотируемого космического
Глава 4. Блочно-модульная компоновка пилотируемого космического аппарата 265
эксплуатационного центра, предложен-
ного на базе ОС Freedom [18]. В состав
ОС должны были войти:
— комплекс д ля изготовления, сборки
и испытаний крупногабаритных конст-
рукций;
— комплекс для сборки, проверки
и запуска межорбитальных буксиров, в
том числе пилотируемого ТКА OTV для
полетов космонавтов на стационарную
орбиту.
К существующей поперечной фер-
менной балке ОС Freedom (см. рис. 4.40)
была добавлена ортогональная ей силовая
ферменная балка с ферменной платфор-
мой на конце, которую предполагалось
использовать как склад для сборки и
Рис. 4.49. Т-образная схема компо-
новки каркаса ОС:
/ — направление в надир; 2 — направле-
ние полета
стапель для испытаний КА. Разнесение масс позволяло сформировать гравита-
ционно стабилизированную систему. Мобильный центр обслуживания должен
был перемещаться по вертикальной ферме для стыковки и обслуживания ТКА.
Следует отметить, что каркас, построенный из прямолинейных балок
большого удлинения, дает малую жесткость конструкции. Низкие собствен-
ные частоты колебаний каркаса с пристыкованными массивными элемента-
ми полезной нагрузки могут создавать проблемы при управлении ОС. Дру-
гим недостатком такой компоновки является трудность проведения работ
Рис. 4.50. Компоновочная схема «платформа» космического дока
266 Часть II. Определение облика пилотируемого космического аппарата
в открытом космосе. Большая зона размещения негерметичной полезной
нагрузки увеличивает риск потери инструментов и блоков аппаратуры в про-
цессе внекорабельной деятельности (ВКД). Для монтажно-испытательных
работ в открытом космосе желательно предусмотреть в компоновке безопас-
ное пространство — «ангар» или «внутренний двор». Его можно организовать
различными способами с помощью ферменного каркаса.
Один из примеров компоновки ОС с негерметичным рабочим ангаром —
пространственная компоновочная схема ОС «Дельта» (рис. 4.51) [16]. Внутри
треугольной призмы из ферменных пластин имеется безопасное пространство
для выполнения работ в открытом космосе, например по обслуживанию или
строительству КА. В приведенном проекте панели СБ расположены на одной
из граней призмы, а ориентация на Солнце поддерживается разворотом всей
ОС. Герметичные модули, расположенные на ребрах и вершинах призмы,
т. е. вдали от центра масс, соединяются между собой тоннелями, что обеспе-
чивает инерционно сбалансированную конфигурацию. Данная компоновка
отличается высокой жесткостью, однако панель СБ в этом случае оказыва-
ется неуправляемой.
Рис. 4.51. Компоновочная схема орбитальной станции «Дельта»:
1 — направление полета; 2 — направление на Солнце
На рис. 4.52 приведен вариант компоновочной схемы космического дока на
базе ОС Freedom, где негерметичный ангар большого объема выполнен в виде
параллелепипеда, составленного из ферменных или надувных конструкций [18].
В ангаре, пристыкованном к поперечной ферме ОС, предполагалось соби-
рать, обслуживать и дозаправлять ТКА, работающие на траектории Луна —
Земля. Компоновочная схема Atrium космического дока, построенного на базе
двухбалочной конфигурации ОС (рис. 4.53), предусматривала создание еще
большего по объему ангара в форме параллелепипеда с кожухом из плоских
надувных отверждаемых стенок [18].
Компоновки, предусматривающие наличие крупногабаритных ангаров,
имеют большое миделевое сечение, что делает неэффективным их исполь-
зование на низкой околоземной орбите из-за сопротивления, вызванного
разряженным газом в термосфере Земли. Они могут быть востребованы, на-
пример, для станций, функционирующих на высоких или околунных орбитах,
Глава 4. Блочно-модулъная компоновка пилотируемого космического аппарата
267
Рис. 4.52. Компоновочная схема космического дока на базе ОС Freedom:
1 — хранилище компонентов топлива; 2 — модуль с центром управления доком; 3 — тоннель;
4 — поворотные стапели для обслуживаемых КА; 5 — ворота для входа КА; 6 — зона разме-
щения обслуживаемого КА; 7 — обслуживаемый КА
где нет влияния атмосферы. Стенки ангара при этом могут обеспечивать
радиационную защиту
Негерметичный каркас ПКА может быть также основан на криволинейных
балочных конструкциях, например ферменная балка может быть кольцевой [19].
Представленная на рис. 4.54, а компоновочная схема имеет кольцевую ферму 7,
окружающую базовый блок 2, продольная ось которого перпендикулярна пло-
скости кольца. Базовый блок соединен с каркасом в радиальном направлении
с помощью герметичных модулей 5, пристыкованных к узловому модулю 4
базового блока, аналогично компоновке ОС «Мир».
Внешние торцы модулей посредством скользящих шарниров присоедине-
ны к внутреннему периметру кольца. На боковой поверхности герметичных
модулей 3 могут быть установлены дополнительные стыковочные узлы 5 для
модулей дооснащения 6. На внешнем периметре фермы с помощью унифи-
цированных монтажных площадок 7 крепятся протяженные, разворачивае-
мые в радиальном направлении конструкции — панели солнечных батарей 8
радиаторы 9 и др., а на боковых гранях размещаются платформы 10
268
Часть II. Определение облика пилотируемого космического аппарата
с оборудованием. Монтажные площадки дополнительно могут быть снабжены
приводами 77 для ориентации элементов. На базовом блоке установлен мани-
пулятор 72. На торцах базового блока имеются осевые стыковочные узлы 75,
предназначенные для причаливания других КА. Двигательные установки 14
системы ориентации КА обеспечивают требуемые управляющие моменты.
Образованная кольцевой фермой 7 и подкрепляющими ее в радиальном на-
правлении модулями 5, силовая схема служит жестким основанием, к кото-
рому крепятся все элементы КА. По диаметру кольцеобразная ферма может
быть соединена с экспериментальными модулями и снабжена по отношению
к ним приводами поворота (рис 4.54, б).
По аналогии с двухбалочной схемой (см. рис. 4.48) возможна компоновка
с концентрическими кольцевыми фермами 7 и 75 (рис. 4.54, в). Два кольца
связывают ферменные спицы 16. В такой схеме элементы СБ выполнены в
виде полотен <?, натянутых между кольцами.
Безопасное негерметичное пространство в крупногабаритной ОС исполь-
зуется не только для проведения монтажных работ, но и как логистическое —
Рис. 4.53. Компоновочная
схема Atrium космического
дока:
1 — направление полета; 2 —
жилой модуль; 3 — модуль управ-
ления; 4 — двухбалочная ферма;
5 — поперечная балка; 6 — мо-
бильная система обслуживания
КА; 7 — вход в ангар; 8 — обслу-
живаемый КА на подходе к анга-
ру; 9— хранилище компонентов
топлива; 10— ангар; И — надув-
ные (отвержденные) стенки
ангара
Глава 4. Блочно-модулъная компоновка пилотируемого космического аппарата 269
Рис. 4.54. Компоновочная схема ОС с кольцевой фермой (а), с поворотной фермой (б)
и с концентрическими фермами (в):
/, 15 — кольцевая ферма; 2 — базовый блок; 3 — герметичные модули; 4 — узловой модуль;
5 — стыковочные узлы; 6 — модули дооснащения; 7 — унифицированная монтажная площад-
ка; 8 — панель СБ; 9 — радиатор СОТР; 10 — платформа с оборудованием; 11 — привод для
ориентации элементов; 12 — манипулятор; 13 — осевой стыковочный узел; 14 — двигательная
установка; 16 — ферменные спицы
Часть II. Определение облика пилотируемого космического аппарата
Z1Q
для хранения различных материалов и оборудования. На рис. 4.55 приведена
компоновочная схема ОС со сферическим стержневым каркасом [20]. Вну-
тренняя часть сферы представляет собой ангар, в котором находится склад
оборудования. Герметичные модули располагаются на внешней поверхности
по геодезическим линиям сферы. По мере развертывания они могут быть
соединены в петлевые и кольцевые структуры. Панели СБ крепятся к узлам
сферической фермы. Каркас ОС — складной. Для обслуживания орбитальной
станции предусмотрен мобильный комплекс с манипулятором.
При построении блочно-модульных компоновочных схем околозем-
ных низкоорбитальных ПКА необходимо учитывать, что аэродинамическое
7—__
Рис. 4.55. Компоновочная схема ОС
со сферическим стержневым карка-
сом и задействованым внутренним
пространством:
а — базовые компоненты в транспортной
конфигурации; б — базовые компоненты
в рабочей конфигурации; в — вид ОС в
процессе развертывания; 1 — мобильная
система обслуживания; 2 — сферическая
трансформируемая ферма; 3 — склад-
ской модуль для негерметичных грузов;
4 — герметичный модуль; 5 — узловой
герметичный модуль
Глава 4. Блочно-модульная компоновка пилотируемого космического аппарата 271
сопротивление существенно возмущает радиус орбиты. Поскольку при этом
требуется постоянная выдача импульсов коррекции, важными задачами
компоновки такой ОС являются минимизация миделевого сечения и аэро-
динамическая балансировка. Создание крупногабаритных конструкций с
большим миделем подразумевает увеличение высоты рабочей орбиты, что
влечет необходимость усиления радиационной защиты экипажа.
Контрольные вопросы к главе 4
1. Каковы требования к облику ПКА?
2. Что такое блочно-модульная компоновка?
3. Какие существуют виды блочно-модульной компоновки ПКА. Что является
критерием для выбора вида компоновки?
4. Что такое вертикальная и горизонтальная компоновка отсеков?
5. По какому принципу проводится деление орбитальной станции на отсеки?
6. Какие существуют варианты модульной компоновки орбитальных станций?
7. Расскажите о принципах общей компоновки ПКА.
Литература к главе 4
1. Goodman J.R. Design/Development of Spacecraft & Module Crew Compartments.
URL: https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20100031059.pdf (дата обраще-
ния 25.06.2017).
2. De Chiara G. «MOL». The «Blue suit» space station. URL: http://www.thespacereview.
com/article/2121/1 (дата обращения 25.06.2017).
3. Out of this World: The New Field of Space Architecture / Ed. Howe A.S., Sherwood B.
AIAA, 2009. 421 p.
4. Орбитальные технологии. URL: http://orbitaltechnologies.ru/index.php?lang=ru
(дата обращения 25.06.2017).
5. Schneider W.C. Skylab as applicable to a large space station // NASA technical
memorandum NASATM x-73073 Report On Period 1967—1974. Washington, D. C. NASA.
1976. URL: https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/19760022256.pdf (дата
обращения 25.06.2017).
6. Langley R.D. The Apollo 14 Docking Anomaly // Proc, of the 7th Aerospace
Mechanisms Symposium. 1972. P. 191-201. URL: https://ntrs.nasa.gov/archive/nasa/casi.
ntrs.nasa.gov/19730010139.pdf (дата обращения 25.06.2017).
7. Сапрыкин О.А. Открытые системы на орбите // Пилотируемые полеты в космос.
2013. № 1 (6). С. 15-28.
8. Атлас Аэроспейс. URL: http://www.atlasaerospace.net/eng/spacehotel.htm
(дата обращения 25.06.2017).
9. Лопота В.А. Космическая миссия поколений XXI века // Полет. 2010. № 7.
С. 3-12.
10. Galactic suite group. URL: http://www.galacticsuitegroup.com/vision-eng/ (дата
обращения 25.06.2017).
11. Lindroos М. Space Ops Center-82 // Encyclopedia Astronautica. URL: http://www.
astronautix.com/craft/spaenter.htm (дата обращения 25.06.2017).
272
Часть II. Определение облика пилотируемого космического аппарата
12. Cohen М.М. Space station architecture, module, berthing hub, shell assembly,
berthing mechanism and utility connection channel. US Patent 4,728,060. 1988. URL:
https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20080004088.pdf (дата обращения
25.06.2017).
13. Space station Freedom design, development, assembly, and operation (Tier 1):
environmental impact statement. 1991. URL: https://catalog.hathitrust.org/Record/100986134
(дата обращения 25.06.2017).
14. TIER I: Environmental impact statement for space station freedom Final Report.
NASA-TM-109734. 170 p.
15. Space Station Freedom _WP3 Attached Payload Accommodations Equipment User
Handbook NASA-CR-195717. General Electric Company. Astro-Space Division, 1989. 45 p.
16. Space Station Reference Configuration Description. NASA-TM-87493. 1984. URL:
https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/19850022833.pdf (дата обращения
25.06.2017).
17. Space Station Automation Study Final Report. Vol. II. Technical Report Autonomous
Systems and Assembly NASA-CR-176092. 1984. URL: https://ntrs.nasa.gov/archive/nasa/
casi.ntrs.nasa.gov/19850024862.pdf (дата обращения 25.06.2017).
18. Lindroos M. Spacedock// Encyclopedia Astronautica. URL: www.astronautix.com/
craft/spaedock.htm (дата обращения 25.06.2017).
19. Космический аппарат / Б.Е. Патон, Ю.П. Семенов, О.В. Кириленко,
С.А. Дяченко и др. Патент RU 2072951. 1997. URL: http://www.findpatent.ru/
patent/207/207295l.html (дата обращения 25.06.2017).
20. David М., Kompella R. Space station and assembly method // Space Habitability
Integrating Human Factors into the Design Process to Enhance Habitability in Long Duration
Missions. Berlin, 2012. 156 p. URL: www.extreme-design.eu/doc/2012-PhD-Schlacht.pdf
(дата обращения 25.06.2017).
ГЛАВА 5. КОНСТРУКТИВНАЯ КОМПОНОВКА
ОБИТАЕМЫХ МОДУЛЕЙ
5.1. Основные компоновочные элементы
Задача конструктивной компоновки обитаемого модуля — это увязка
его элементов с учетом их взаимного влияния. Конструктивная компоновка
должна удовлетворять требованиям заданных тактико-технических, функци-
ональных и эргономических характеристик, определяемых целевым назначе-
нием модуля. В ходе компоновки необходимо согласовать форму, размеры и
расположение основных групп компоновочных элементов:
• элементов герметичного контура;
• силовых элементов конструкции;
• элементов защиты модуля от внешних неблагоприятных воздействий;
• блоков оборудования, размещаемого в герметичном контуре модуля;
• элементов интерьера обитаемого объема;
• блоков оборудования, размещаемых вне герметичного контура;
• элементов, обеспечивающих работу экипажа в открытом космосе.
В результате конструктивной компоновки формируется теоретический
чертеж модуля, который согласно ГОСТ 2.102—2013 «Единая система кон-
структорской документации (ЕСКД). Виды и комплектность конструкторских
документов» представляет собой документ, определяющий геометрическую
форму (обводы) изделия и координаты расположения составных частей.
Например, на теоретическом чертеже базового модуля орбитальной станции
«Алмаз» [1] (рис. 5.1) показаны форма отсеков модуля и расположение таких
основных эксплуатационных элементов, как люки и иллюминаторы.
На рис. 5.2 приведена схема рабочего отсека ОС «Салют». В герметичном
объеме модуля выделены две основные зоны: жилая, где размещаются экипаж
и оборудование, необходимое для его жизни и деятельности, и приборная,
где расположено прочее бортовое оборудование [2]. Границей этих зон служат
части интерьера, которые могут включать элементы интерфейса и органы
управления аппаратурой, находящейся в приборной зоне.
Приборная и жилая зоны в свою очередь разделяются на функциональ-
ные зоны. На рис. 5.3 это показано на примере внутренней компоновки на-
учно-энергетического модуля для МКС, проектируемого в РКК «Энергия».
(Подробнее вопросы зонирования жилого объема рассмотрены в гл. 8).
Блоки бортового оборудования размещены на силовом каркасе внутри
модуля. На рис. 5.4 приведены компоновочная схема силового каркаса мно-
гоцелевого лабораторного модуля МКС и зоны размещения на нем блоков
целевой аппаратуры общим объемом 8 м3 [3].
274
Часть II. Определение облика пилотируемого космического аппарата
Рис. 5.1. Теоретический чертеж базового модуля ОС «Алмаз»:
1 — адаптер СА; 2 — ферма для крепления СА; 3 — герметичный отсек; 4 — двигательный
отсек; 5 — малая шлюзовая камера; 6 — шлюзовой отсек
Рис. 5.2. Рабочий отсек ОС «Салют»,
разделенный на приборную (заштри-
хована) и жилую зоны
Вместо силового каркаса может
использоваться крупноблочная компо-
новка бортовой аппаратуры в отсеке,
при которой каждый блок имеет свою
базовую несущую конструкцию. Эти
блоки крепятся непосредственно к си-
ловому набору отсека с помощью ми-
нимального числа силовых элементов.
На рис. 5.5 приведена схема крепления
унифицированных стоек с полезной
нагрузкой International Standard Payload
Rack (ISPR) к модулю AC МКС.
Компоновка элементов конструкции модуля определяется силовой
схемой, построенной на основе расчетных случаев его нагружения и норм
прочности. Силовая схема включает в себя обшивку и подкрепляющие эле-
менты. Обшивка изготавливается из металлических листов (алюминиевых и
титановых сплавов, стали) и композиционных материалов. Она может быть
гладкой, гофрированной, вафельной и многослойной. Оболочка герметичного
модуля, нагруженная в условиях космического полета избыточным давлением
искусственной атмосферы, работает только на растяжение. Для минимизации
массы конструкции необходимо, чтобы обшивка была безмоментной оболоч-
кой, построенной по силовой схеме монокок без подкрепляющих элементов.
Наилучшая форма построенного по схеме монокок герметичного модуля
КА — сфера, так как она имеет наименьшую площадь поверхности при за-
данном объеме. Также высоким массовым совершенством обладают отсеки
Глава 5. Конструктивная компоновка обитаемых модулей
275
Рис. 5.3. Компоновочная схема научно-энергетического модуля МКС (по мате-
риалам РКК «Энергия»):
1 — каюта; 2 — зоны грузов и ПН (или каюта); 3 — оборудование СЖО; 4 — пост управле-
ния; 5 — зоны служебных систем; 6 — зоны средств медицинского обеспечения
Рис. 5.4. Схема силового каркаса (/) многоцелевого лабораторного мо-
дуля МКС и зоны размещения на нем блоков целевой аппаратуры (2)
с оболочками в форме тел вращения: цилиндрические, конические и т. п.,
имеющие выпуклые днища. Делать плоское днище отсека неэффективно,
поскольку оно будет работать на изгиб и для него потребуется мощное под-
крепление, утяжеляющее конструкцию.
При выведении на орбиту и эксплуатации модуль нагружается пере-
резывающими инерционными нагрузками, сосредоточенными силами и
276
Часть II. Определение облика пилотируемого космического аппарата
Рис. 5.5. Схема крепления стойки бортовой аппаратуры ISPR в модуле аме-
риканского сегмента МКС:
а — конструкция лонжерона и проушины (/- кронштейн крепления стойки, 2- крон-
штейн); б — сечение модуля; в — узлы крепления (стрелками показаны ограничения
по степеням свободы)
моментами, поэтому часто используется силовая схема полумонокок. В ней
оболочка усиливается дополнительными подкрепляющими элементами си-
лового набора, которые подразделяются на продольные и поперечные. К по-
перечным относятся шпангоуты, к продольным — лонжероны и стрингеры.
Шпангоуты, представляющие собой замкнутые кольцевые конструк-
ции, по величине воспринимаемых нагрузок подразделяются на силовые
(усиленные) и нормальные, а по роду выполняемой работы — на торцевые,
обеспечивающие соединение с другими отсеками, стыковочными узлами
или средствами выведения, и промежуточные, подкрепляющие обшивку на
участках между торцевыми шпангоутами. Пример конструктивной компо-
новки силовых элементов отсека, подкрепленного шпангоутами, показан
на рис. 5.6 [4].
Силовые шпангоуты, предназначенные для передачи на обшивку боль-
ших сосредоточенных сил и моментов в виде потока касательных напряже-
ний, должны иметь с ней прочную связь. Конструкции силовых шпангоутов
могут быть разнообразны. Это мощные плоские силовые рамы с высокой
прочностью на изгиб в своей плоскости. Для увеличения момента сопротив-
ления изгибу используют сечения шпангоутов, у которых полки вынесены
за пределы герметичного объема (рис. 5.7). Нормальные шпангоуты прида-
ют заданную форму поперечному сечению корпуса и подкрепляют обшивку.
Шаг установки шпангоутов, который определяется из выражения для расче-
та наиболее эффективной работы обшивки, лежит в пределах 150...500 мм.
Нормальные шпангоуты, которые выполняются из гнутых или прессованных
профилей, обычно состоят из нескольких частей, соединенных накладками.
В местах пересечения шпангоутов со стрингерами в стенке шпангоутов
делаются вырезы.
Глава 5. Конструктивная компоновка обитаемых модулей
277
Рис. 5.6. Компоновочная схема силовых элементов ра-
бочего отсека ОС «Салют»:
/ — переднее днище; 2, 4, 6, 8 — цилиндрические обечайки;
5, 5, 7— промежуточные шпангоуты; 9— коническая оболочка;
10 — цилиндрическая оболочка; / / — заднее днище
Рис. 5.7. Сечение силово-
го торцевого шпангоута,
соединяющего обечайку и
днище модуля американ-
ского сегмента МКС
В лонжеронных отсеках основными силовыми элементами являются
лонжероны, которые воспринимают практически весь изгибающий момент.
При этом в их поясах возникают сжимающие и растягивающие усилия.
В зависимости от условий нагружения в отсеке может быть от двух до восьми
лонжеронов. Силовая схема лонжеронного отсека АС МКС представлена на
рис. 5.8.
Различают основные и вспомогательные лонжероны. Основные, про-
ходящие вдоль всего отсека, воспринимают сосредоточенные продольные
и изгибающие нагрузки большой интенсивности. На рис. 5.5, а приведе-
но сечение лонжерона модуля АС МКС и узел крепления к нему стойки
ISPR, а также показано расположение восьми лонжеронов в сечении отсека
(рис. 5.5, б). В местах пересечения лонжеронов с другими силовыми элемен-
тами в последних делаются вырезы. Лонжероны обрываются только в местах
стыковки с другими отсеками или при пересечении с мощными шпангоутами.
Вспомогательные лонжероны ставят в тех местах, где требуется усиление кор-
пуса (большие вырезы в оболочке). Схема технологического членения лон-
жеронного отсека узлового модуля Unity АС МКС представлена на рис. 5.9.
Стрингеры — это продольные силовые элементы, подкрепляющие об-
шивку и воспринимающие вместе с ней изгибающий момент. Стрингеры
изготавливаются из прессованных профилей различного сечения. Стрингер-
ный отсек выполняется в виде тонкостенной оболочки, подкрепленной сило-
вым набором. Продольный силовой набор состоит из часто расположенных
278
Часть II. Определение облика пилотируемого космического аппарата
Рис. 5.8. Силовая схема лонжеронного отсека АС МКС:
а — вид сверху; б — изометрический вид; 1 — лонжерон; 2 — панель обшивки; 3 — шпангоут
Рис. 5.9. Схема технологического членения лонжеронного отсека АС МКС на примере
узлового модуля Unity:
1 — шпангоут; 2 — панель обшивки с отверстием; 3 — боковой агрегат швартовки Common
Berthing Mechanism (CBM); 4 — обечайка агрегата швартовки CBM; 5 — панель обшивки;
6 — панель обшивки, подкрепленная лонжеронами; 7 — внешние лонжероны; 8 — панель
конического днища; 9 — передний агрегат швартовки СВМ
Глава 5. Конструктивная компоновка обитаемых модулей
279
(с шагом 80...250 мм) силовых стрингеров, подкрепляющих обшивку и вос-
принимающих с ней весь изгибающий момент. Поперечный набор стрингер-
ного отсека состоит из нормальных и силовых шпангоутов. При пересечении
стрингеров с другими силовыми элементами делают вырезы для прохода
стрингера и для усиления в этом месте ставят накладки. Обшивка, большей
чем в лонжеронных отсеках толщины, воспринимает изгибающий и крутя-
щий моменты и поперечную силу.
В отсеках, испытывающих значительные нагрузки, устанавливают допол-
нительные силовые конструкции — фермы, рамы и пр. На рис. 5.10 показана
компоновка узлового модуля Unity АС МКС [5]. Необходимость разместить
четыре дополнительных радиальных стыковочных узла, воспринимающих
нагрузки от пристыкованных модулей, потребовала включения в силовую
схему системы дополнительных силовых коробов и стоек, окаймляющих
зону установки стыковочных узлов (рис. 5.11). Избежать использования до-
полнительных силовых элементов позволяет рациональный выбор формы
отсека. На рис. 5.12 представлена компоновка узлового модуля «Причал»
российского сегмента МКС [3]. Сферическая форма модуля (диаметром
около 3 м) обеспечивает наилучшие условия нагружения оболочки отсека и
дает возможность минимизировать массу его конструкции.
Элементами тепловой, радиационной, микрометеоритной и пр. видов
защиты модуля от неблагоприятных воздействия являются различные экра-
ны. Эти элементы располагаются слоями на внешней поверхности обшивки
Рис. 5.10. Внутренние силовые элементы узлового мо-
дуля Unity АС МКС:
1 — силовой каркас конического днища; 2 — рама стойки бор-
товой аппаратуры; 3,5 — силовые коробы; 4 — рама усиления
узлов швартовки
280
Часть II. Определение облика пилотируемого космического аппарата
Рис. 5.11. Внутренние силовые элементы
узлового модуля Unity АС МКС:
а — коробы ниши; б — кронштейны стоек борто-
вой аппаратуры; в — коробы средней площадки;
г — силовая схема; /, 3 — силовые коробы; 2 —
рама стойки бортовой аппаратуры; 4 — внутренняя
стойка; 5 — направляющая люка
Рис. 5.12. Компоновка узлового мо-
дуля «Причал» PC МКС:
/ — стыковочный агрегат (пассивный); 2 —
юстировочные поверхности для установки
дополнительного оборудования; 3 — антен-
на 2АСФ1-М-ВКА; 4 — антенна «Клест»;
5 — стыковочный агрегат (активный); 6 —
антенна АО-753А; 7 — блок телекамеры;
8 — поручни ВКД
Глава 5. Конструктивная компоновка обитаемых модулей
281
модуля. На рис. 5.13 показано сечение оболочки ОС «Салют-6» [6]. На гер-
метичной оболочке станции размещены маты экранно-вакуумной изоляции,
поверх которых установлены радиаторы системы терморегулирования. Внутри
к корпусу подведены трубки термостатирования.
Рис. 5.13. Сечение оболочки орби-
тальной станции «Салют-6»:
1 — наружный радиатор; 2 — трубка контура
охлаждения; 3 — многослойная экранно-ва-
куумная изоляция; 4— герметичный корпус
станции; 5 — сварной шов; 6 — шпангоут,
вваренный в корпус; 7— трубка термостати-
рования корпуса; 8— каркас для крепления
внутренних элементов станции
Внешняя компоновка бортового оборудования и элементов модуля
МКС «Заря», обеспечивающих работу экипажа в открытом космосе, при-
ведена на рис. 5.14 [7]. Внешние элементы должны быть расположены
с учетом компоновки модуля в транспортном положении в зоне полезного
груза средства выведения. Примеры компоновочных схем модулей PC МКС
под обтекателями PH представлены на рис. 5.15 [8]. К трансформируемым
крупногабаритным элементам внешней компоновки модуля относятся панели
СБ, радиаторы СОТР, манипуляторы робототехнических систем.
Компоновка таких внешних элементов многофункционального лабора-
торного модуля (МЛМ) PC МКС в рабочем и в транспортном положениях
показана на рис. 5.16 [3].
Для обитаемых отсеков конструктивная компоновка в многом опреде-
ляется компоновкой элементов контура герметичности.
Плоскость II
Плоскость III
Рис. 5.14. Внешняя компоновка бортового оборудования модуля МКС «Заря»:
7 — активный гибридный стыковочный агрегат; 24— периферийный пассивный стыковочный агрегат; 27 — пассивный боковой стыковоч-
ный агрегат; 28, 56 — двигатели причаливания и стабилизации 11Д458; 4, 46 — двигатели точной стабилизации 17Д58Э; 5, 42 — двигатели
коррекции и сближения 11Д442; 3 — антенны АС-ВКА системы «Курс-А»; 77, 31, 55, 64 — антенны АКР-ВКА системы «Курс-А»; 43 — антен-
ны 2АСФ1М-ВКА системы «Курс-А»; 44 —антенна 2АО-ВКА системы «Курс-А»; 25 — антенны 2АР-ВКА системы «Курс-П»; 26 — антенны
АР-ВКА системы «Курс-П»; 30, 57 — антенны 4АО-ВКА системы «Курс-А»; 10 — А1-798А-2, 37-А1-798А-1 антенны системы «Компарус»;
9 — антенны АД-18-7 радиотелеметрической системы; 38 — антенны АД-18-8 радиотелеметрической системы; 32, 49 — антенны АД-18-5
радиотелеметрической системы; 63 — антенны АД-18-6 радиотелеметрической системы; 40 — антенны AM-67-1 системы «Сириус»; 48— антенны
AM -67-2 системы «Сириус»; 75, 65 — телевизионные антенны АД-17; 76,22 — антенны ТОРУ AM -1; 2,23 — солнечные датчики; 6 — панель солнеч-
ной батареи; 7,35, 51, 61 — баки окислителя низкого давления; 8,36, 50, 62 — баки горючего низкого давления; 72,33, 52, 60— баки горючего высо-
кого давления (резервные); 13,34, 53, 59 — баки окислителя высокого давления (резервные); 14— привод солнечной батареи; 77— защитный экран;
18 — мишени; 19, 29 — телевизионная камера; 20 — стыковочная мишень; 27 — стыковочно-такелажный узел (EFGF); 39 — прибор ори-
ентации на Землю; 41 — антенна системы измерения текущих навигационных параметров АС-11; 45 — панели «Компласт»; 47 — поручень;
54 — насос компонентов топлива; 58 — панель радиаторов
284
Часть II. Определение облика пилотируемого космического аппарата
Рис. 5.15. Компоновочные схемы модулей PC МКС под обтекателями PH:
а — служебный модуль «Звезда»; б — многоцелевой лабораторный модуль «Наука»; в — проек-
тируемый научно-энергетический модуль (НЭМ); 1 — герметичные отсеки; 2— негерметичный
отсек; 3 — зоны размещения сложенных панелей солнечных батарей
Рис. 5.16. Компоновочная схема внешних элементов модуля
МЛМ PC МКС в транспортном (а) и рабочем (б) положении
Глава 5. Конструктивная компоновка обитаемых модулей
285
5.2. Компоновка контура герметичности
5.2.7. Элементы контура герметичности обитаемых отсеков
Для сохранения искусственной атмосферы в условиях космического
полета обитаемый модуль должен быть герметичным. По ГОСТ 24054—80
«Изделия машиностроения и приборостроения. Методы испытаний на гер-
метичность. Общие требования» герметичность определяется как свойство
конструкции или материала препятствовать проникновению жидкости, газа
или пара. В ходе конструктивной компоновки модуля определяется грани-
ца герметичного объема и формируется контур герметичности — замкнутая
цепочка элементов, обеспечивающих герметичность внутреннего объема в
окружающем пространстве. В контур герметичности входят:
• корпус (обшивка и элементы силового набора);
• уплотняемые соединения частей корпуса между собой и со смежными
герметичными конструкциями;
• технологические, эксплуатационные, функциональные люки;
• гермовводы электрических и пневмогидравлических магистралей;
• клапаны и другие узлы герметизации, число которых может достигать
нескольких сотен.
Схема контура герметичности базового модуля ОС «Салют» приведена
на рис. 5.17 [6].
Рис. 5.17. Схема контура герметичности ОС «Салют»:
I — переходной отсек; II — рабочий отсек; III — отсек научной аппарату-
ры; IV — агрегатный отсек; V — промежуточная камера; / — герметичные
соединения корпуса со шлюзовой камерой, стыковочным агрегатом и т. п.;
2 — эксплуатационные люки, открываемые в полете; 3 — иллюминаторы;
4 — гермостыки между отсеками станции; 5 — электрические, воздушные
и жидкостные гермовводы
Обитаемый модуль может состоять из нескольких отсеков. Отсеки пред-
ставляют собой отдельные узлы, соединяемые гермостыками (см. рис. 5.17), об-
разованными двумя шпангоутами, имеющими контактирующие поверхности —
фланцы, зазор между которыми изолирован уплотнениями.
Гермостыки, являющиеся разъемными вакуумными соединениями,
должны быть такими, чтобы можно было выполнять их сборку и разборку
286
Часть II. Определение облика пилотируемого космического аппарата
без нарушения целостности уплотнений. В космической технике в гермосты-
ках (рис. 5.18) используют фланцевые соединения, включающие два фланца и
размещенный между ними уплотнитель. Под действием усилия герметизации
фланцы прижимаются друг к другу и уплотнитель деформируется, создавая
в соединении герметичный барьер.
Уплотнение фланцевого соединения должно обеспечивать герметичность
во всем рабочем диапазоне температур при тепловом расширении и сжатии
элементов. Материал уплотнения должен обладать пластичностью, обеспе-
чивающей заполнение неровностей стыка при достаточной упругости для
компенсации температурных и механических деформаций фланцев, а также
не должен терять своих эластичных свойств во время космического полета на
всем протяжении эксплуатации стыка. В качестве уплотнителей используют
деформируемые резиновые кольца, которые дублируются для обеспечения
надежности.
Рис. 5.18. Конструктивные схемы гермостыков:
а — гермостык между переходным и рабочим отсеком ОС «Салют»; б — гермостык между
отсеками шлюзовой камеры Quest АС МКС; 1 — герметизирующие резиновые уплотнения;
2 — днище рабочего отсека со шпангоутом; 3 — оболочка переходного отсека со шпангоутом
Другие способы уплотнения вакуумных соединений приведены, напри-
мер, в работе [9].
Для количественной оценки герметичности элементов контура при отра-
ботке и контрольных испытаниях используются характеристики утечки или
натекания, определяемые по изменению давления газа в замкнутом объеме
за известный промежуток времени. Требования к герметичности сформули-
рованы в ГОСТ 24054-80 и ГОСТ 25136-82 «Соединения трубопроводов.
Методы испытаний на герметичность». Конструкция считается герметичной,
если ее проницаемость для жидкостей и газов настолько мала, что ею можно
пренебречь.
Глава 5. Конструктивная компоновка обитаемых модулей
287
5.2.2. Иллюминаторы
Иллюминаторы — это элементы остекления герметичного модуля. Они
должны обеспечить герметичность, прочность и заданные оптические свой-
ства в течение всего времени его эксплуатации. Иллюминаторы необходимы
для наблюдения, научной и операторской работы, а также для психологиче-
ской разгрузки экипажа (табл. 5.1). На рис. 5.19 показан пример компоновки
иллюминаторов типа ТСК 316 в составе служебного модуля «Заря» PC МКС
[10], который имеет наибольшее остекление.
Таблица 5.1
Требования к иллюминаторам
Использование Расположение
Операция сближения: координаты сближения, стыковка с другими модулями Около рабочих мест со связью, панелями управления, видеоприборами и т. д.
Мониторинг и поддержка внекора- бельной деятельности Расположение, обеспечивающее четкое стереоскопическое наблюдение за внекорабельной деятельностью опера- тора
Наблюдение Земли и неба, описание неожидаемых явлений и событий Около рабочих мест исследователей
Научные наблюдения и эксперименты Вдали от мест ожидаемого передвижения членов экипажа
Психологическая поддержка экипажа, для отдыха и улучшения настроения при длительном пребывании в огра- ниченном объеме Около мест отдыха и общественной жизни, мест монотонной работы (с физической нагрузкой), индиви- дуальных отсеков
Фотографирование Расположение, обеспечивающее вид Земли (если возможно) или других интересующих объектов на небе
При проектировании и размещении иллюминаторов необходимо учиты-
вать следующие требования:
• размер, толщина и расположение иллюминатора должны соответство-
вать требованиям к полю зрения, необходимого для выполнения поставлен-
ной задачи;
• вокруг иллюминатора должно быть достаточно места для наблюдателя
в нейтральном положении и для необходимого оборудования;
• наличие ограничителей и фиксаторов, позволяющих наблюдателю долго
оставаться в определенном положении;
• наличие защитных стекол, фильтров и крышек для защиты поверхности
иллюминатора и снижения нежелательного освещения и нагрева.
288
Часть II. Определение облика пилотируемого космического аппарата
Рис. 5.19. Расположение иллюминаторов служебного
модуля «Звезда» PC МКС:
/ — ТСК.316.01.000 (диаметром 426 мм, без покрытия); 2 —
ТСК.316.02.000 (диаметром 228 мм); 3 — ТСК.316.02-1.000;
4 — ТСК.316.03.000 (диаметром 80 мм)
Конструктивные решения иллюминаторов, различаются по количеству сте-
кол: одно-, двух- и трехстекольные. В одностекольном иллюминаторе (рис. 5.20)
используется многослойное стекло-триплекс [И]. При повреждении одного
из слоев герметичность иллюминатора не нарушается. В многостекольных
иллюминаторах (рис. 5.21) [11] имеются межстекольные камеры, заполненные
Рис. 5.20. Конструкция одностекольного смотрового
иллюминатора с триплексом:
1 — обойма; 2 — прижимное кольцо; 3 — стекло-триплекс;
4 — технологическая крышка; 5, 6 — прокладки
Глава 5. Конструктивная компоновка обитаемых модулей
289
газом, что позволяет создать многобарьерный контур герметичности: при
разгерметизации одного стекла герметичность контура сохраняется, а повре-
жденное стекло можно заменить.
Стекла установлены в корпусе иллюминатора с помощью системы уплот-
нений. Иллюминаторы крепятся к корпусу модуля фланцевым соединением
так, чтобы внутреннее давление прижимало фланец к обшивке. Различные
конструкции иллюминаторов приведены на рис. 5.22 и 5.23.
б
Рис. 5.22. Конструктивная схема иллюминатора ОС Skylab в сечении:
а — покрытия стекол (/ — антибликовое покрытие; 2 — слой золота, нанесенный
путем осаждения из пара; 3 — стекло из литого кремния; 4 — защитное покрытие
от ультрафиолетового и инфракрасного излучения); б — конструкция крепления
защитного стекла (/ — защитное стекло; 2 — фиксатор; 3 — направление внутрь
герметичного отсека)
Рис. 5.23. Конструктивная схема (а) и сечение (б) иллюминатора кормового поста
управления МТКА Space Shuttle:
/ — внутреннее стекло гермоконтура; 2 — внутренняя обойма; 3 — проставка; 4 — внешнее
стекло; 5 — окантовка иллюминатора в оболочке отсека; 6 — внешняя обойма; 7 — уплотнение
A—A
Рис. 5.21. Конструктивные схемы многостекольных иллюминаторов:
а — смотровой; 1 — обойма; 2 — технологическая внешняя крышка; 3 — технологиче-
ская внутренняя крышка; 4, 5 — прокладка; 6 — крепежный винт; 7 — внешнее при-
жимное кольцо; 8 — внутреннее прижимное кольцо; 9, 10, 11, 12 — уплотнение; 13,
14 — стеклянный диск; б — трехстекольный приборно-смотровой: 1,5 — технологическая
крышка; 2, 4 — обойма; 3, 6 — уплотнение; 7, 8 — прижимное кольцо; 9 — внешнее стекло;
10 — среднее стекло; 11 — внутреннее стекло
292
Часть II. Определение облика пилотируемого космического аппарата
На стекла иллюминатора наносятся различные покрытия: антибликовые,
защищающие от инфракрасного и ультрафиолетового излучения и пр. Состав
стекол и применяемые покрытия определяют спектр электромагнитных волн,
проходящих через иллюминатор. На рис. 5.24 показано сечение двухстеколь-
ного иллюминатора АС МКС с указанием покрытий, нанесенных на стекла.
13
Рис. 5.24. Сечение иллюминатора модуля
американского сегмента МКС:
1 — обойма внутреннего защитного стекла (защита
от царапин); 2 — обойма; 3 — окантовка иллюми-
натора в оболочке отсека; 4 — защитное кольцо;
5 — обойма внешнего защитного стекла (защита
от частиц); 6— космическое пространство; 7— за-
щитное стекло излитого кремния с многослойным
упрочняющим покрытием; 8 — внешнее стекло из
литого кремния с покрытием Mg2F; 9 — внутрен-
нее стекло из литого кремния с покрытием Mg2F;
10 — теплозащитное покрытие; 11 — стекло с по-
крытием, защищающим от инфракрасного излуче-
ния; 12 — стекло с многослойным упрочняющим
покрытием; 13 — внутреннее пространство отсека
Иллюминаторы подвержены внешнему и внутреннему загрязнению, что
серьезно снижает эффективность их использования. Источниками загрязне-
ния наружной поверхности являются продукты работы двигателей, а также
микрометеороиды и космический мусор. Под воздействием этих частиц
на поверхности стекла возникают каверны, снижающие прочность стекла.
Например, за время эксплуатации МКС на стеклах иллюминаторов обна-
ружены десятки мелкократерных повреждений размером до 1 мм. Имеются
также отдельные повреждения средних размеров с кавернами до 4,5 мм от
субмиллиметровых частиц [10].
Рис. 5.25. Иллюминатор с лепестковой диафрагмой: а — общий вид; б — с воз-
душным коллектором; в — без воздушного коллектора:
1 — диафрагма; 2 — воздушный коллектор; 3 — иллюминатор
Глава 5. Конструктивная компоновка обитаемых модулей 293
В процессе полета необходимо постоянно контролировать состояние
внешних стекол иллюминаторов и, если необходимо, проводить их ремонт
и чистку. На PC МКС контроль состояния иллюминаторов выполняет эки-
паж с периодичностью 2 раза в год. На внутренней поверхности стекол могут
оставаться отпечатки пальцев, а также оседать различные вещества и мелкие
компоненты, плавающие в атмосфере отсека. Для того чтобы предотвратить
загрязнение иллюминаторов, они должны быть снабжены специальными
крышками и прочими средствами защиты от загрязнений, например допол-
нительными стеклами-экранами (см. рис. 5.22, 5.24).
Для изменения светового потока, проходящего через иллюминатор, приме-
няют лепестковые диафрагмы (ГОСТ 23645—79 «Диафрагмы иллюминаторов ле-
тательных аппаратов. Методы расчета геометрических параметров». На рис. 5.25
представлен иллюминатор с диафрагмой.
5.2.3. Люки
Люки — это элементы, позволяющие организовать перекрываемые про-
ходы в контуре герметичности. Входные и выходные люки служат для пе-
ремещения экипажа в ПКА на Земле или при выходе в открытый космос.
Люки-лазы между отсеками одного модуля позволяют выполнять перекрытие
и герметизацию перехода для изоляции отдельного отсека, например, в ава-
рийной ситуации или при шлюзовании. Люки интегрированы в конструкцию
стыковочных агрегатов с внутренним переходом.
Расположение люков на ОС «Салют-6» было показано на рис. 5.17.
В состав контура герметичности входят два люка стыковочного узла и два люка
между отсеками. Размещение и размеры люков на ТКА «Союз» приведены
на рис. 5.26 [12]. В состав контура герметичности входят люк-лаз для вхо-
да-выхода экипажа в спускаемый аппарат (СА), люк стыковочного узла, люк
для посадки экипажа (он же — для выхода в космос). Все люки открываются
внутрь. На ТКА «Шэньчжоу», имеющем аналогичную компоновку, люк между
Рис. 5.26. Расположение люков на ТКА «Союз»:
/ — люк внутреннего перехода стыковочного узла (диаметр 800 мм); 2 — люк СА
(диаметр 600 мм); 3 — люк бытового отсека (диаметр 660 мм)
294
Часть II. Определение облика пилотируемого космического аппарата
СА и бытовым отсеком (БО) имеет диаметр 0,7 м (в ТКА «Союз» — 0,6 м),
а выходной люк — 0,8 м (в ТКА «Союз» — 0,66 м).
Люки должны обеспечивать надежность и безопасность функциониро-
вания при минимальной массе конструкции. Требования, предъявляемые к
люкам, можно разделить на функциональные, эксплуатационные, конструк-
ционные, а также требования к герметичности.
Функциональные требования'.
• люки и их элементы (петли, замки, приводы, уплотнения и т. д.) долж-
ны быть предназначены для многократного использования;
• люки должны быть разработаны таким образом, чтобы их можно было
использовать как в космическом полете, так и при наземной отработке отсека
при его различных ориентациях, необходимых по технологии изготовления
и испытания КА;
• люки должны быть рассчитаны на открытие-закрытие одним членом
экипажа одной рукой в условиях невесомости;
• люки должны иметь механизмы, позволяющие открывать и закрывать
их вручную с обеих сторон;
• внутренние люки должны обеспечивать операции открывания-запи-
рания и открытия с каждой стороны люка на месте (без дистанционного
управления);
• внешние люки должны обеспечивать операции открытия и запирания
изнутри так же, как внутренние, а кроме того, обеспечивать возможность их
дистанционного открытия снаружи;
• привод замка люка должен иметь для открытия две различные и ясные
операции, что уменьшает вероятность случайного открытия;
• механизм запирания люка должен иметь систему индикации, показы-
вающую состояние замка: «открыто», «закрыто», «на предохранителе»;
• внутренние люки должны иметь индикаторы, показывающие перепад
давления на люке, а также средства для выравнивания давления;
• конструкция люка должна обеспечивать изоляцию герметичного объема
отсека за 3 мин, включая закрытие люка.
Эксплуатационные требования'.
• люки и их механизмы должны быть спроектированы так, чтобы их
состояние (состояние их узлов) можно было контролировать в процессе
эксплуатации;
• люки должны обеспечивать простоту демонтажа;
• механизмы и элементы люка должны быть спроектированы ремонто-
пригодными или заменяемыми в наземных условиях и в условиях полета.
Требования к герметичности'.
• должны быть предусмотрены избыточность замкнутых контуров уплот-
нения зазоров и возможность контроля герметичности между этими конту-
рами без нарушения герметичности всего люка;
• возможность контроля уплотнений должна быть обеспечена с двух
сторон люка.
Конструкционные требования'.
• люки и их элементы не должны быть основными силовыми элемента-
ми, т. е. не должны нести основную нагрузку; они должны быть разгружены;
Глава 5. Конструктивная компоновка обитаемых модулей
295
• силовые элементы, окружающие люки, особенно используемые для
спасательных операций, должны быть спроектированы таким образом, чтобы
предотвратить вероятность заклинивания, мешающего выходу экипажа в
аварийных ситуациях;
• люки и их элементы должны позволять движение с различной скоро-
стью между несущим каркасом и люком, так же как и раскрытие уплотнений
при этих скоростях;
• в люки должен быть встроен иллюминатор, для того чтобы контроли-
ровать обстановку за люком;
• должны быть предусмотрены надежные зарезервированные устройства,
предотвращающие случайное открытие или разгерметизацию люка.
При конструктивной компоновке люков необходимо учитывать наличие
на нем перепада давления. В частности, для выходных люков шлюзовых камер
этот перепад должен быть равен давлению в отсеке. Перепад давления может
использоваться для обжатия уплотнений или для экстренного открытия люка
(например, когда приходится аварийно покидать КА). В первом случае люк
должен открываться внутрь отсека с повышенным давлением, а во втором —
наружу. Для того чтобы исключить деформацию конструкции, люки, предна-
значенные для экстренного открытия, должны иметь средства для быстрого
выравнивания перепада давления на люке.
Примером люка, в конструкцию которого включено устройство контроля
перепада давления, служат люки модулей ОС типа «Алмаз» и «Салют», позво-
ляющие герметизировать переход между
отсеками (см. рис. 5.17) [13]. Основными
характеристиками устройства люка явля-
ются его внутренний диаметр (800 мм),
угол открытия (105°), время открытия
механизма герметизации (2 с), время
отвода крышки (5 с), масса (25 кг) и
число циклов открытия-закрытия (300
циклов).
Для обеспечения надежной работы
люка в открытом положении резиновые
уплотнения закрываются защитным
кольцевым кожухом, который может
открыть или закрыть один член экипажа
с любой стороны люка. Люк, показан-
ный на рис. 5.27, имеет сферическую
крышку 7, подвешенную на траверсе 5.
Крышка обращена выпуклостью в сто-
рону пониженного давления. Люк гер-
метизирован двухбарьерным резиновым
уплотнением 3 в окантовке 6 люка.
Механизм герметизации 4 создает
прижатие, необходимое для предвари-
тельной герметизации люка. Основ-
ное обжатие уплотнения с требуемой
Рис. 5.27. Конструктивная схема люка
ОС типа «Алмаз»:
/ — сферическая крышка; 2 — рукоятка;
3 — двухбарьерное резиновое уплотнение; 4 —
винтовой механизм герметизации; 5 — тра-
верса; 6 — окантовка люка; 7 — пружинный
механизм
296 Часть II. Определение облика пилотируемого космического аппарата
степенью герметизации создается при наддуве отсека, когда избыточное
давление прижимает крышку люка к окантовке. Усилие предварительной гер-
метизации при диаметре люка в свету, равном 800 мм, составляет 400...450 кг.
Винтовой механизм герметизации 4 люка должен быть рассчитан на потребное
усилие оператора не более 16 кг на рукоятке 2. Для контроля усилия герме-
тизации между крышкой 7 и траверсой 5 ее подвески установлен пружинный
механизм 7, который при полном ходе винтового механизма герметизации 4
даже при ошибках оператора создает усилие прижима крышки не более 600 кг.
Крышка люка, подвешенная на пружинном механизме, играет роль предо-
хранительного клапана: при перепаде давления до 0,1 атм она отходит от
окантовки и сбрасывает избыточное давление.
Для того чтобы обеспечить равномерное обжатие уплотнений люка,
его снабжают специальным запорным устройством с множеством замков
и механизмов синхронизации срабатывания замков. На рис. 5.28 показаны
Рис. 5.28. Общий вид люка ОС Skylab (я), конструкция привода замков (0,
уплотнения и замка (в):
I — замок; 2 — петля; 3 —крышка люка
Глава 5. Конструктивная компоновка обитаемых модулей
297
конструкция люка и его запорного устройства для ОС Skylab. Здесь исполь-
зуются поворотная ручка и радиальные рычаги для привода шести замков,
расположенных по периметру люка. Применяются две плоскости уплотнений
для герметизации стыка, а также уплотнение оси рукоятки, что необходимо
для открытия люка с двух сторон. На рис. 5.28 видно, что при срабатывании
замка используется клиновидная защелка, которая при движении рычага,
вызванного поворотом рукоятки, создает прижимающее усилие.
Конструкция люка-лаза СА ТКА «Союз» представлена на рис. 5.29. Люк
открывается внутрь СА, и при автономном полете уплотнения обжаты избы-
точным давлением. Люк СА при полете ТКА является внутренним, а после
разделения отсеков перед посадкой СА становится внешним. Он снабжен
теплозащитой, на его внешней поверхности установлено гнездо для ключа,
которым люк может быть открыт снаружи. Запорное устройство имеет шесть
замков и рычажный механизм синхронизации открытия. На крышке люка
расположены клапаны выравнивания давления.
После аварии во время испытаний космического аппарата Apollo-1
в США существенно изменились требования к аварийному покиданию
КА: экипаж должен открыть люк за 3 с и покинуть КА в течение 30 с.
Для удовлетворения этим требованиям был разработан унифицированный
входной люк, открывающийся наружу (рис. 5.30) [12]. По периметру он закре-
плен 15 взаимосвязанными замками, создающими достаточную прижимную
силу для его уплотнения при воздействии внутреннего давления. Рукоятка с
храповым механизмом позволяет экипажу открывать и закрывать люк за пять
двойных ходов ручки, которая также синхронизирует усиливающий плунжер
для открытия замков внешнего люка на головном обтекателе (если он уста-
новлен). Противовес уменьшает время открытия в аварийных ситуациях. Как
только замки открываются, гидравлический цилиндр наполняется газообраз-
ным азотом, воздействующим на поршень, для того чтобы ускорить открытие
конструкции общей массой до 160 кг и удерживать ее в открытом положении.
В штатном режиме замковым механизмом можно управлять вручную с
обеих сторон люка, а в случае аварии люк можно изнутри открыть вручную
с помощью механизма-усилителя. За пять движений ручки храповой меха-
низм освобождает защелки замков, и как только они открываются, снимается
блокировка и пневмотолкатель открывает люк.
Унифицированный люк содержит следующие механические компоненты:
• замки для удержания люка в закрытом положении;
• рычаги для передачи движения к замкам;
• редуктор с ручным приводом для перемещения рычагов;
• плунжерный механизм для открытия люка в головном обтекателе;
• поршневой толкатель для открытия люка и контроля его движения в
качестве противовеса;
• управляемый вручную клапан выравнивания давления по обе стороны
люка;
• винтовой механизм крепления для аварийного закрытия и удержания
люка.
Схема механизма открытия петель люка, показанная на рис. 5.31, демон-
стрирует расположение уплотнений и рычажный механизм с пневмоусилителем.
298
Часть II. Определение облика пилотируемого космического аппарата
Рис. 5.29. Запорное устройство (а) и схема герметизации люка-лаза СА
ТКА «Союз» (б):
1 — рукоятка; 2 — днище; 3 — диафрагма; 4 — тяга; 5 — муфта; 6 — ручка; 7 —
вал; 8— уплотнение; 9— замок; 10— положение рукоятки при закрытой крышке;
11 — положение рукоятки при открытой крышке
Глава 5. Конструктивная компоновка обитаемых модулей
299
Рис. 5.30. Унифицированный выходной люк КА Apollo:
1 — выходное звено привода замков; 2 — редуктор; 3 — рукоятка
открытия-закрытия; 4 — замок; 5 — иллюминатор; 6 — клапан вырав-
нивания давления; 7 — петля
Рис. 5.31. Схема механизма открытия петель люка КА Apollo:
1 — силовой цилиндр привода; 2 — герметизирующее уплотнение;
3 — тепловое уплотнение; 4 — замок в открытом положении; 5 — петля
в открытом положении; 6 — люк в открытом положении
300
Часть II. Определение облика пилотируемого космического аппарата
Рис. 5.32. Эксцентриковый механизм
замка люка КА Apollo:
1 — крышка люка; 2 — тяга; 3 — окантовка
люка; 4 — замок; 5 — рычаг с двумя шаровы-
ми опорами; 6— коромысло; 7— кронштейн
тии замков люка КА и привода зам
Пятнадцать замков расставлены с
шагом примерно 14 см по периметру
люка (см. рис. 5.30). Каждый замок
имеет приводной рычаг, соединяющий
рычаг и ведомый рычаг, собранные в
корпусе и закрепленные на внутренней
поверхности крышки. Регулировочные
прокладки под корпусом позволяют
равномерно распределять силу обжатия
уплотнений. Обработанные посадочные
площадки под корпус замка позволяют
настроить правильное перемещение
эксцентрикового приводного рычага
(рис. 5.32).
Механизм связей замков представ-
ляет собой цепь рычагов, работающих
на растяжение-сжатие с регулировками
положения каждого замка. Функция
редуктора состоит в открытии-закры-
>в люка в головном обтекателе для ава-
рийного случая.
На ручке и редукторе смонтированы кнопки управления направлением
движения храпового колеса и предохранителей привода замков. Для того
чтобы предотвратить случайное открытие замков под действием вибраций или
вследствие ошибки оператора, они блокируются подпружиненной защелкой,
заклинивающей механизм закрытия в конце его хода. При нормальном (не-
аварийном) открытии люка защелку открывают вручную перед использовани-
ем ручки привода замков. Защелка устроена таким образом, что блокировка
снимается при открытии люка снаружи.
Открывающийся наружу боковой люк для посадки-высадки экипажа
МТКА Space Shuttle (рис. 5.33) [12] оборудован пиротехническим устройством
для его отстрела в аварийной ситуации. Люк расположен на средней палубе,
и его можно открыть как изнутри, так и снаружи. Люк крепится к туннелю
кабины петлями, трубой-торсионом и опорными фитингами. Направление
открытия люка — 90° вниз (при горизонтальном расположении орбитального
самолета и 90° вбок (при вертикальном положении ТКА на старте). Люк ди-
аметром 1,016 м имеет в центре иллюминатор для обзора диаметром 254 мм.
Уплотнение люка обжимается замками в закрытом положении. Тепловым
барьером служит упругий элемент, изготовленный из инконелевой (жаро-
прочный сплав на основе никеля) проволочной сетки. Между плиточным
покрытием многоразовой теплозащиты фюзеляжа и люком проложен шнур
из керамического волокна. Общая масса люка — 133,3 кг.
Конструктивная схема и основные элементы люка стыковочных агрегатов
общего механизма швартовки (СВМ) американского сегмента МКС показаны
на рис. 5.34. Люки открываются внутрь модуля и уплотняются избыточным
давлением. Для приводов замков, расположенных на внешней поверхности
люка, используется система рычагов и кулачков.
Глава 5. Конструктивная компоновка обитаемых модулей
301
Рис. 5.33. Схема люка МТКА Space Shuttle:
а — общий вид (/ — стойка опоры люка; 2 — замок двойного действия; 3 — рукоятка в по-
ложении «открыто»; 4 — индикатор положения рукоятки «закрыто»; 5— привод замков (ход
рукоятки — 440°); 6 — тяга; 7— качалка; 8— кронштейн опоры люка; 9— ручка для открытия
люка); б — замок одинарного действия; в — замок двойного действия с рычагом для раскры-
тия уплотнения; г — положение замка двойного действия при закрытом люке; д — раскрытие
уплотнения при открытии люка
При компоновке люков необходимо предусматривать места для разме-
щения и фиксации их крышки в открытом положении; она не должна соз-
давать помех перемещению членов экипажа и грузов. Доступ к крыше люка
должен быть свободным для быстрого закрытия в аварийной ситуации. Люк
внутреннего перехода стыковочного узла АС МКС, выполненный сдвижным,
перемещается по направляющим (см. рис. 5.11, г).
302
Часть II. Определение облика пилотируемого космического аппарата
Рис. 5.34. Схема компоновки внутренней поверхности крышки люка стыковочного
I — индикатор («Открыто-Закрыто») клапана выравнивания давления; 2 — предостерегающая надпись;
5 — уплотнение; 6 — инструкция по открытию люка; 7 — база направляющей; 8 — направляющая;
13 — тяга; 14 — инструкция по закрытию люка; 15 — ручка; 16 — иллюминатор; 17 — замок;
21 — фиксатор в открытом положении; 22 — клапан выравнивания давления; 23 — рукоятка
Глава 5. Конструктивная компоновка обитаемых модулей
303
19 20 16
14 23 2 22
б
агрегата СВМ американского сегмента МКС:
3 — указатель направления движения рукоятки для открытия/закрытия люка; 4 — рукоятка;
9 — крепеж направляющей; 10— штифт; И — кулачковый механизм привода; 12 — толкатель;
18 — ролик; 19 — указатель положения кулачкового механизма привода; 20 — ремень-ручка;
фиксатора
304 Часть II. Определение облика пилотируемого космического аппарата
5.3. Конструктивная компоновка трансформируемых отсеков
Ограничения, накладываемые на форму и размеры герметичных отсеков
ПКА габаритами зоны для ПН средств выведения, приводят к необходимо-
сти использовать трансформируемые конструкции, доставляемые на орбиту
в сложенном виде и приводимые там в рабочее положение. Использование
трансформируемых элементов усложняет конструкцию и увеличивает массу
отсека, однако позволяет существенно увеличить объем обитаемого про-
странства. При работе с трансформируемым отсеком появляется необходи-
мость его испытаний после приведения в рабочее положение, для того чтобы
подтвердить динамические и прочностные характеристики, герметичность и
безопасность.
Компоновка трансформируемого отсека требует решения задачи разме-
щения бортового оборудования с учетом расположения элементов его герме-
тичного контура в транспортной и рабочей конфигурациях. В транспортной
конфигурации сложенная оболочка отсека может препятствовать размещению
элементов, а в рабочей — оболочка большого объема требует установки до-
полнительных каркасов для размещения оборудования и организации рабочих
мест экипажа. Таким образом, компоновка трансформируемых отсеков долж-
на предусматривать выбор схемы трансформации оболочки отсека и выбор
схемы трансформации элементов внешнего и внутреннего оснащения отсека.
По способу трансформации можно выделить отсеки со складной жесткой
оболочкой и отсеки с мягкой оболочкой. В качестве средств развертывания
могут использоваться механические приводы или наддув оболочки газом.
Отсеки с жесткой раскладной оболочкой, например, телескопические или
использующие гофры, позволяют увеличивать объем модулей путем трансфор-
мации преимущественно в одном направлении (в осевом или радиальном).
В таких модулях компоновка бортового оборудования не требует сложных
трансформаций внутреннего оснащения. Установку и испытания большей
части элементов можно проводить в наземных условиях.
Отсеки с мягкой оболочкой позволяют плотно упаковать ее в транспорт-
ном положении, но в силу этого возникают ограничения по размещению на
оболочке люков, иллюминаторов и другого оборудования, которое не может
быть «смято». Такие элементы должны быть размещены либо на специаль-
ных жестких обечайках, либо на торцах отсека. Надувные отсеки с мягкой
оболочкой теоретически позволяют создать в космосе значительно больший
единичный герметичный объем, чем это возможно для других типов транс-
формируемых отсеков. Однако внутреннее и внешнее оснащение отсеков с
мягкой оболочкой требует использования специальных конструкций и тех-
нологических операций по монтажу и наладке оборудования.
5.3.7. Телескопические отсеки
Модули телескопической конструкции состоят из нескольких коаксиаль-
ных оболочек, вложенных одна в другую на этапе выведения. После выведе-
ния и стыковки к ОС оболочки модуля выдвигаются в осевом направлении, и
Глава 5. Конструктивная компоновка обитаемых модулей
305
объем модуля увеличивается. Каждый из сегментов телескопической оболочки
имеет конструкцию, близкую к конструкции обычной жесткой оболочки, и
изготавливается по традиционной технологии. Часть отсека может быть за-
полнена оборудованием в наземных условиях, а после развертывания отсека
его увеличенный объем дооснащается оборудованием.
К недостаткам телескопического модуля следует отнести сложность, а
также достаточно большую массу механизмов развертывания и обеспечения
герметичности (направляющие, уплотнения, устройства фиксации составных
оболочек в транспортном и рабочем положениях и пр.). Кроме того, теле-
скопический модуль имеет большое удлинение, что негативно сказывается
на его компоновочных свойствах и жесткости.
Примером конструктивной схемы телескопического отсека может служить
проект модуля для работы в составе лаборатории SpaceLab [14]. На рис. 5.35, а
представлен модуль SpaceLab 5, состоящий из переднего днища 6, перед-
ней цилиндрической обечайки 7, задней цилиндрической обечайки 2 и за-
днего днища 7. Внутри обечайки 4 расположена стойка 5, обеспечивающая
жесткость стыка обечаек. Обечайки 7, 2 имеют оболочки 7 (рис. 5.35, б)
с системой подкрепляющих внутренних 19 и внешних 8 кольцевых шпангоу-
тов. В сложенном состоянии обечайки соединяются с днищами стыковочными
шпангоутами. Обечайка 4 соединяется шпангоутом Юс ответным шпангоу-
том 12 на днище 6 (рис. 5.35, б). Стыковочные шпангоуты удерживаются в
транспортном положении зажимами 77.
Увеличение объема модуля происходит в результате выдвижения теле-
скопической цилиндрической оболочки 76, соединенной с помощью сварки
с днищем 6. После освобождения зажимов 77 оболочка выдвигается по на-
правляющему шпангоуту 17 до соприкосновения конических поверхностей
шпангоутов 15 и 18. Кольцевое уплотнение стыка 14 также расположено на
шпангоуте 77.
Вариант с одной выдвигаемой оболочкой телескопического отсека в ра-
бочем положении, размещенный в грузовом отсеке Space Shuttle, показан на
рис. 5.35, в. Однако возможна организация аналогичной выдвижной обо-
лочки и в обечайке 2. Вид телескопического модуля с двумя выдвигаемыми
оболочками представлен на рис. 5.35, г в транспортном, а на рис. 5.35, д —
в рабочем положении.
На рис. 5.35, е приведен альтернативный вариант конструкции телескопи-
ческого отсека. В этом варианте неподвижной является внутренняя оболочка 22,
снабженная фиксирующими шпангоутами 25, упирающимися в рабочем по-
ложении в направляющие шпангоуты 24. 25. Выдвигаемые оболочки 26 и 27
соединяются в транспортном положении фиксирующими фланцами 28. 29
и зажимами 77. Расфиксация зажимов может быть выполнена приводным
рычагом 30. Отсек в рабочем положении показан на рис. 5.35, ж.
Другим примером может служить модуль Hab/Lab (Habitation Module;
Laboratory Module) проекта медикобиологической ОС Life and Biological
Sciences Facility (LaBS), разработанного центром космической архи-
тектуры SICSA (Sasakawa International Center for Space architecture) [15].
В транспортном положении модуль имеет длину около 13,7 м, а в рабочем
удлиняется практически в 2 раза до 25,9 м. На рис. 5.36, а показана силовая
306
Часть II. Определение облика пилотируемого космического аппарата
Рис. 5.35. Проект телескопического отсека ОС SpaceLab:
а — основные элементы отсека; б — схема зачековки двух сегментов оболочки; в — компоновка
двумя выдвигаемыми оболочками в транспортном и рабочем положении; е — альтернативная схема
в рабочем положении; 1,6 - днище; 2 — задняя цилиндрическая обечайка; 3 — стойка;
шпангоуты; 9 — крепежный элемент; 10, 12, 28, 29 — стыковочные шпангоуты; 11 — зажим;
хода; 16, 26, 27 — выдвигаемая оболочка; 17 — направляющие шпангоуты; 19 — внутрен-
22 — внутренняя оболочка; 30 — приводной рычаг 31 — пружина
Глава 5. Конструктивная компоновка обитаемых модулей
307
модуля в грузовом отсеке Space Shuttle в транспортном и рабочем положении; г, д — вариант с
зачековки оболочек; ж — альтернативная схема варианта с двумя выдвигаемыми оболочками
4 — передняя цилиндрическая обечайка; 5 — модуль SpaceLab; 7 — оболочка; 8 — внешние
13 — сварной шов; 14 — уплотнение стыка; /5, 18, 23, 24, 25 — поверхности-ограничители
ние шпангоуты; 20 — кабина МТКА Space Shuttle; 21 — грузовой отсек МТКА Space Shuttle;
308 Часть II. Определение облика пилотируемого космического аппарата
схема модуля. В выдвигаемой секции предусмотрены рамы для размещения
оборудования, монтируемого на Земле. Секция выдвигается по лонжеро-
нам-направляющим (рис. 5.36, б). Внутреннее оснащение модуля представ-
лено на рис. 5.36, в в промежуточной фазе процесса трансформации. Видно,
что выдвигаемая секция полностью оснащена оборудованием, а освободив-
шийся при трансформации значительный объем может быть использован
для дооснащения.
Рис. 5.36. Проект телескопического модуля Hab/Lab:
а — силовая схема; б — схема лонжерона-направляющей; в — внутреннее оснащение модуля
5.3.2. Отсеки с гофрированной оболочкой
Гофрирование (от фр. gaufrer — выдавливать рельефный рисунок) — про-
цесс создания складок — ребер жесткости (гофров) — в листовых материалах
путем гибки листа с целью улучшения прочностных характеристик материа-
ла и способности материала сопротивляться образованию деформации. Для
трансформации жесткой оболочки отсека может быть использовано конечное
количество складок, полученное в процессе ее гофрирования.
Один из вариантов построения гофра — изометрическое преобразо-
вание замкнутой оболочки в виде усеченного кругового конуса [16, 17],
реализуемое рассечением ее поверхности семейством плоскостей, нормальных
оси конуса, и последовательным зеркальным отражением частей поверхно-
сти относительно соответствующих плоскостей уп+ 1? ..., к (рис. 5.37, а).
Глава 5. Конструктивная компоновка обитаемых модулей
309
В результате образуется гофрированный диск толщиной, равной высоте гофра.
Расчеты показывают, что неизменной кривизне оболочки в зоне вершины
гофра в процессе трансформации соответствует угол конусности оболочки
а = 25°. Из нескольких конических оболочек может быть построен герме-
тичный отсек с большим коэффициентом трансформации (рис. 5.37, б).
Макет подобного отсека на стапеле в транспортном и рабочем положениях
приведен на рис. 5.37, в.
Рис. 5.37. Гофр, полученный изометрическим преобразованием круговой кониче-
ской оболочки, и отсек на его основе:
а — схема построения гофра; б — геометрия трансформируемого отсека; в — макет отсека в
транспортном и рабочем положениях
Для трансформации жесткой оболочки необходимо, чтобы образование
складок на поверхности проходило без деформации (растяжения-сжатия,
искривления) линии складки. В этом случае не будет возникать внутренних
напряжений, а линии сгиба могут быть оформлены, как шарниры-петли
с одной степенью свободы. Такое гофрирование, предполагающее только
вращение плоских многогранников относительно прямолинейных складок
без их деформации, называется естественным.
Естественное гофрирование прямой круговой цилиндрической оболочки
возникает при потере устойчивости под действием скручивания (рис. 5.38).
При этом начинают образовываться так называемые гиперболоидные складки.
310
Часть II. Определение облика пилотируемого космического аппарата
Рис. 5.38. Движение оппозиционных вершин гофра при потере устойчи-
вости цилиндрической оболочки при кручении:
а — схема образования регулярного гофра при скручивании оболочки; б — характе-
ристики гофра; в — первая форма потери устойчивости с 14 ячейками; г — вторая
форма потери устойчивости с 12 ячейками
Процесс потери устойчивости проходит несколько стадий. В момент потери
устойчивости в зависимости от геометрии оболочки начинает формировать-
ся определенное число ячеек гофра, близких по форме к параллелограмму.
Каждая ячейка имеет на гранях внешние складки-выступы и на диагонали
складку-впадину. На пересечении внешней и внутренней складок ячейки
гофра возникает коническая особенность — вершина гофра. Образованные
складки превращают оболочку в механизм. При вращении ограничивающих
сечений треугольные фрагменты оболочки поворачиваются относительно
складок и формируется плоская диафрагма. В процессе потери устойчивости
могут образовываться ячейки нескольких типов (мод потери устойчивости),
которые различаются движением оппозитных вершин (показаны на рис. 5.38
стрелками) относительно внутренних диагональных складок. При первой моде
траектория движения отмеченных вершин навстречу друг другу пересекает
складку одной ячейки гофра, а при второй — двух ячеек.
При скручивании оболочки образуется самоорганизующийся регулярный
гофр, характеризуемый углами ос и Р [ 18]. Наблюдаются разные формы волн по-
тери устойчивости, захватывающие одну или две ячейки гофра. Показанные на
рис. 5.38 результаты получены на бумажном цилиндре (плотность бумаги 80 г/м2)
диаметром 36 мм с различной высотой оболочки А. Форма с 14 ячейками
получена при h = 6,5 мм, форма с 12 ячейками — при h = 13 мм.
Благодаря геометрическим свойствам гиперболоидной складки, которая
представляет собой сложную многогранную поверхность, эту складку можно
преобразовать в цилиндрическую поверхность поворотом кольцевых шпанго-
утов в разные стороны вокруг продольной оси отсека. При этом расстояние
между шпангоутами возрастет и объем отсека увеличится. В качестве оболочки
могут быть использованы как левые, так и правые гиперболоидные складки.
Глава 5. Конструктивная компоновка обитаемых модулей
311
У отсека, составленного из нескольких сложенных обечаек таким образом,
что количество левых складок будет равно количеству правых, исключен
взаимный поворот торцевых шпангоутов.
Схему гофрирования с гиперболоидными складками (в англоязычной
литературе она обозначается как Kresling [19]) предполагалось использовать
на станции «Мир» для организации шлюзового отсека. При диаметре 2 м
в сложенном состоянии отсек имел длину 0,362 м, а в рабочем состоянии —
2,514 м. В результате объем отсека, составленного из двух обечаек с противо-
положным направлением гофра, увеличивался почти в 7 раз [20]. На рис. 5.39
представлен макет отсека толщиной 1 мм, выполненный из стали 12Х18Н10Т
[16]. Для приведения отсека из транспортного (сложенного) положения
в рабочее (развернутое) выполняется его наддув избыточным давлением.
Поскольку в процессе развертывания оболочки происходят пластические
деформации ребер, перед началом эксплуатации отсека требуется провести
его опрессовку избыточным давлением, превышающем штатное давление
в 1,5 раза. После развертывания отсека в нем монтируется силовой каркас
для установки оборудования.
Рис. 5.39. Макет отсека на основе трансформируемой цилиндрической двух-
секционной оболочки на промежуточных стадиях трансформации (я, б) и
в развернутом состоянии (в)
Как показали эксперименты, основным недостатком подобной схемы
является трудоемкая технология формирования гиперболоидных складок,
требующая создания сложного специального оборудования для каждого
типоразмера конечного изделия. Для гофрирования металлической цилин-
дрической оболочки была разработана специальная технология пластиче-
ской деформации складок с использованием специальных инструментов-да-
вильников. Опытным путем установлено, что оптимальный результат при
формировании складок можно получить лишь в диапазоне соотношений
0,3 < H/D < 0,6, где Н — высота трансформируемой части оболочки; D — ди-
аметр оболочки-заготовки [16].
312
Часть II. Определение облика пилотируемого космического аппарата
Рис. 5.40. Схема пара-
метризации цилиндра:
указаны длины сторон тре-
угольной грани и их углы по-
дъема
В общем случае естественный гофр прямого
кругового цилиндра представляет собой набор оди-
наковых треугольных граней, соединенных в спи-
ральные ленты [21]. Параметризация гофра строится
с помощью двух многозаходных спиралей, обозна-
ченных как а и Ь, которые имеют число заходов п и
т соответственно (рис. 5.40).
Спирали разделяют поверхность цилиндра на
криволинейные параллелограммы со сторонами 1а и
1Ь. Диагонали параллелограммов 1С образуют третий
набор спиралей (рис. 5.41). Следовательно, общее
описание триангулированных цилиндров, составлен-
ных из одинаковых треугольных пластин, располо-
женных на винтовых полосах (см. рис. 5.41), может
базироваться на наблюдении, что узлы триангуля-
ции лежат на пересечении трех множеств спиралей.
Спирали названы по именам ближайших сторон
треугольника: я, Ь, с. Все спирали, принадлежащие
одному множеству, одинаковы, за исключением
углового смещения вокруг оси цилиндра.
Позиция узлов и, следовательно, конфигурация
триангулированного цилиндра полностью определяются двумя из трех этих
многозаходных спиралей, а третье множество проходит через их точки пе-
ресечения. Здесь для описания триангуляции будут использованы спирали
Рис. 5.41. Геометрическое определение узлов триангулирован-
ного цилиндра (I) в терминах трех наборов спиралей, боко-
вой вид (II) и вид в плане (III):
а — однозаходная (т = 1) ^-спираль; б — семизаходная (п = 7) />-спи-
раль; в — восьмизаходная (с = т + п = 8) с-спираль (начало первого
захода всех спиралей в цилиндрических координатах (г, 0, 0))
Глава 5. Конструктивная компоновка обитаемых модулей
313
а и Ь. Их параметрами будут радиус г и углы подъема ос и Р соответственно
(угол может быть больше л/2 для левой резьбы). Примеры триангулированных
цилиндров с различными параметрами даны на рис. 5.42.
Можно выбрать такие параметры триангуляции, которым соответствует
естественное гофрирование. При этом предполагается, что все треугольники
в процессе складывания двигаются единообразно. Простейший случай, когда
при складывании lb/la = const эквивалентен предположению, что при склады-
Рис 5.42. Триангулированные цилиндры с параме-
трами r= 1,1ь/1а = 1, tn = 1 в полностью развернутом
виде (I) и полностью сложенном виде (II) для числа
заходов /^-спирали: 1 - п = 5; 2 — п = 3 — п = 7
вании может деформироваться только одна сторона — 1С. При таком подходе
свойства складываемого цилиндра, описанного параметрами lb/la и числом
заходов спиралей (w, п) могут быть представлены на графике зависимости
1с/1а от 8 = (3 - ос. Разность углов подъема спиралей лежит в пределах 0 < 8 <
< л/2, где нулевому значению соответствует полностью сложенный цилиндр.
Контурный график поверхности параметра 1с/1а в зависимости от пара-
метров lb/la и 8 для случая т =1, п = 7 приведен на рис. 5.43, а. Пунктиром
на рис. 5.43, а выделена кривая, ограничивающая область, где выполняет-
ся условие недеформированного развертывания цилиндра. Значение lb/la =
= 0,788 является минимально возможным для складываемых цилиндров.
Например, линия уровня 1с/1а = 1,75 на этом графике показывает, что при
314
Часть II. Определение облика пилотируемого космического аппарата
б
lb/la = 1,039 деформации при изме-
нении угла 8 очень малы (в пределах
0 < 8 < 0,94), поскольку в этом диапазо-
не линия уровня близка к прямой, па-
раллельной оси абсцисс. Линия уровня
lb/la = 1,64 (на графике не показана) еще
более гладкая (дает деформацию менее
0,1 %), но в меньшем диапазоне углов:
0 < 8 < 0,40. Верхний предел lb/la =
= 1,497. На рис. 5.43, б показаны линии
уровня для параметра г/1а. Видно, что
при уменьшении 8 сужается и радиус
развертываемого цилиндра.
Гофрированная многогранная обо-
лочка, аппроксимирующая гладкую
оболочку, может быть составлена не
только из треугольных, но и из мно-
гоугольных пластин (рис. 5.44). Она
может быть получена путем форми-
рования складок из плоского листа с
последующей заделкой продольного
шва. Подробнее инженерный метод
построения гофра, аналогичного ги-
перболоидной складке, рассмотрен
в работе [18]. Метод складывания
гофра, основанный на серии выверну-
тых складок, образующих замкнутую
Рис. 5.43. Графики зависимости от угла
6 параметров гофрированного цилиндра
для числа заходов спиралей т = 1, п = 7:
а — IJI;, б — г/1а
Рис. 5.44. Схемы гофрирования плоского листа для получения цилиндров:
а — развертка (сплошная линия — внешний сгиб, пунктирная — внутренний); б — сложен-
ный вид; в — фазы складывания гофрированного цилиндра; 1 — равнобедренная трапеция;
2 — трапеция общего вида; 3 — четырехугольник общего вида
Глава 5. Конструктивная компоновка обитаемых модулей
315
цилиндрическую поверхность, применялся, например, в гармошках и мехах
объективов первых фотоаппаратов [22].
Складывание цилиндра «гармошкой» предполагает, что основные складки
перпендикулярны оси цилиндра. Некоторые варианты разверток для этого
типа гофра приведены на рис. 5.45. Если основные складки расположены под
наклоном к оси цилиндра, то получаются спиральные гофры, аналогичные
показанным на рис. 5.42, развертки которых представлены на рис. 5.46 [23].
Большой опыт гофрирования плоского листа накоплен в японском
искусстве оригами, которое в настоящее время используется при создании
строительных конструкций [23]. Важной парадигмой в инженерном орига-
ми является жесткое оригами, когда предполагается, что гофр состоит из
абсолютно жестких многоугольных панелей, соединенных цилиндрически-
ми шарнирами вдоль ребер. Это позволяет свести моделирование складных
конструкций к кинематическому анализу пространственных механизмов.
Рис. 5.45. Различные развертки гофров типа «гармошка»:
сплошные линии — складки-выступы; пунктирные линии — складки-впадины; в окружностях
указаны буквы A—F — плоские элементы гофра, цифры 1—6 — характерные складки
316
Часть II. Определение облика пилотируемого космического аппарата
Рис. 5.46. Различные развертки спиральных гофров (экспликацию см. на рис. 5.45)
Для космических конструкций (панелей СБ и солнечных парусов) наибольшее
распространение получила схема гофрирования «Миура-ори» [24]. Сравнение
гофра «Миура-ори» для цилиндра с гофром типа гиперболоидной складки
представлено на рис 5.47. С помощью схемы типа «Миура-ори» могут быть
гофрированы не только цилиндрические, но и более сложные поверхности.
Рис. 5.47. Сравнение гофров для цилиндри-
ческой поверхности:
а — гофр типа гиперболоидной складки для че-
редующихся противоположно скрученных рядов;
б — оригами-гофр «Миура-ори»
Глава 5. Конструктивная компоновка обитаемых модулей
317
Важной задачей является фиксация гофрированной оболочки в рабочем
положении. Это может быть сделано путем обеспечения постоянного наддува,
замками в шарнирах или пластическими деформациями материала оболочки.
В последнем случае можно использовать не только естественное гофрирова-
ние, но и гофрирование с деформациями складок. Деформации в процессе
развертывания при таком подходе моделируются изменением длин ребер
панелей или углов складывания. Это позволяет создавать самофиксирую-
щиеся оболочки [25]. Поскольку складки получаются прямолинейны-
ми, для предотвращения разрушения достаточно усилить их стрингерами.
Не полностью раскрытые складки сами по себе могут быть использованы как
стрингеры, подкрепляющие оболочку.
Гофрированные конструкции отсеков могут быть комбинированными,
состоящими из жестких складных панелей, дополненных мягкими оболоч-
ками. В качестве примера на рис. 5.48 представлен проект отсека с комби-
нированной конструкцией [26]. В ней имеются две оболочки: внешняя —
А —А
Рис. 5.48. Гибридная конструкция трансформируемого модуля:
а — в сложенном состоянии под обтекателем PH; б — в рабочем состоянии; / —
жесткая складная оболочка; 2 — мягкая надувная оболочка; 3 — шарнир
318 Часть II. Определение облика пилотируемого космического аппарата
складная жесткая, и внутренняя — надувная гибкая. Жесткая оболочка
служит защитным экраном, обеспечивающим прочностные и жесткостные
характеристики конструкции. Гибкая оболочка обеспечивает герметичность
и трансформацию жесткой под действием внутреннего давления. При необ-
ходимости внешняя жесткая оболочка может быть зафиксирована в разло-
женном состоянии и герметизирована, например, сваркой.
На рис. 5.48, а показан надувной отсек в сложенном положении. Складки
внешней оболочки образуют подкрепленный цилиндрический отсек, имею-
щий большую жесткость при выведении. Гибкая оболочка свободно уложена
внутри жесткой. На рис. 5.48, б представлена оболочка многогранного сечения
со скругленными углами в рабочем положении. Можно предположить, что
под действием внутреннего давления ее плоские участки приобретут кривизну,
что должно быть учтено при расчетах на прочность.
Варьируя число складок, можно менять диаметр оболочки в рабочем
положении так, что для широкого диапазона этих диаметров наружный диа-
метр в сложенном положении может оставаться неизменным. Это важно
для компоновки такой оболочки под обтекателем PH. При необходимости
трансформируемая оболочка может иметь внутреннее жесткое ядро. Наи-
более сложной задачей в этом случае будет формирование днищ оболочки
данной схемы.
5.3.3. Отсеки с мягкой оболочкой
Трансформируемые отсеки с мягкой оболочкой, как правило, являются
пневматическими конструкциями — разновидностью предварительно напря-
женных конструкций, способных противостоять действию внешних нагру-
зок за счет избыточного давления наполняющего их газа. Пневматические
конструкции широко применяют при строительстве зданий и сооружений,
а также летательных аппаратов [27—29]. В космической технике обычно ис-
пользуют воздухонесомые (надувные) конструкции — стержни или панели,
несущая способность которых (сопротивление сжатию, изгибу, кручению)
обеспечивается постоянным давлением газа в их замкнутом объеме. Обычно
воздухонесомые конструкции представляют собой отдельные конструктив-
ные элементы с высоким внутренним давлением газа, что требует высокой
степени герметизации.
По силовой схеме надувные конструкции разделяются на оболочки трех
видов (рис. 5.49):
• бескаркасные, поддерживаемые перепадом давления между внутренним
объемом отсека и окружающей средой (в случае КА — это вакуум, в случае
герметичного обитаемого отсека давление в надувной оболочке определяется
параметрами искусственной атмосферы);
• подкрепленные пневматическим каркасом, напряженным внутренним
избыточным давлением в силовых элементах — аэробалках, аэроматах и пр.;
(состав газа и его рабочее давление в каркасе могут отличаться от параметров
искусственной атмосферы в отсеке);
Глава 5. Конструктивная компоновка обитаемых модулей
319
Др2 ДР2
а б в
Рис. 5.49. Схемы надувных конструкций:
а — бескаркасные; б — подкрепленные пневматическим каркасом;
в — комбинированные
• комбинированной конструкции — с избыточным давлением, имеющие
пневматический каркас.
Первым надувным отсеком ПКА, работавшим в космосе, была шлюзовая
камера «Волга» космического аппарата «Восход-2». Камера, использовавшаяся
при первом выходе человека в открытый космос, успешно выполнила свою
целевую функцию. Однако данная конструкция имела ограниченное время
работы. При создании надувных отсеков для длительного функционирова-
ния в составе ОС требуются новые материалы, обладающие повышенной
стойкостью к факторам космического полета. К потенциальным преимуще-
ствам технологии надувных модулей с многослойной тканевой герметичной
оболочкой относятся [30]:
• значительное увеличение диаметра и полезного объема обитаемых кос-
мических модулей в рабочем положении при обеспечении возможности их
выведения существующими PH тяжелого и среднего классов со штатными
головными обтекателями;
• существенное улучшение эргономичности обитаемых отсеков, повы-
шение комфортности долговременного пребывания экипажа, обеспечение
необходимых условий для проведения сложных научных и технологических
экспериментов;
• увеличение массового совершенства (обеспечение необходимых проч-
ности и жесткости при наименьшей массе) конструкции корпуса приблизи-
тельно в 3 раза по отношению к объему и в 1,5 раза по отношению к площади
корпусов традиционных металлических модулей;
• возможность обеспечения повышенных уровней защиты от микроме-
теороидов и ионизирующего излучения космического пространства с мень-
шими массовыми затратами, чем в традиционных модулях.
В качестве надувных отсеков используются осесимметричные оболочки
различной формы: сферические, цилиндрические или тороидальные; наилуч-
шей формой является сфера, имеющая наименьшую площадь поверхности
при заданном объеме.
На рис. 5.50 приведена компоновка сферического модуля FLECS (Flexible
Expandable Commercial Module) утилизации отходов из проекта фирмы Thales
Alenia Space, расширяющего возможности логистического модуля MPLM аме-
риканского сегмента МКС [31]. Модуль состоит из отсека с измельчителем
320
Часть II. Определение облика пилотируемого космического аппарата
а
Рис. 5.50. Применение надувных модулей в составе МКС:
а — внешний вид европейского модуля FLECS фирмы Thales Alenia Space для МКС;
б — схема применения модуля для утилизации отходов (1 — жесткая крышка; 2 —
предохранительный клапан; 3 — модуль МКС; 4 — модуль-измельчитель; 5 — стык
одноразового надувного модуля и измельчителя; 6 — модуль с отходами (пустой);
7 — модуль с отходами (полный))
Глава 5. Конструктивная компоновка обитаемых модулей
321
Рис. 5.51. Проекты сферических модулей-расширений для МКС:
а — сфера диаметром 4 м; б — сфера диаметром 8 м; в — сфера диаметром 16 м
отходов и надувной оболочки для их хранения. В транспортном положении
модуль имеет вид жесткого сегмента сферы диаметром около 2,5 м, на торце
которого установлен стыковочный агрегат СВМ. В рабочем положении сфе-
рический надувной отсек имеет диаметр около 4,6 м.
На рис. 5.51 продемонстрированы три варианта компоновки европейского
проекта сферических модулей ОС диаметром 4, 8 и 16 м [32], пристыкованных
к типовому узловому модулю МКС. В табл. 5.2 приведены характеристики
модулей в сравнении с модулем TransHub. Модуль диаметром 4 м может слу-
жить тестовым изделием или расширять возможности узлового модуля FLECS
(см. рис. 5.50). Модуль диаметром 8 м может быть использован для работы
четырех—шести человек. При диаметре 16 м модуль имеет объем, сравнимый с
герметичным объемом всех модулей МКС. Толщина многослойной оболочки
Таблица 5.2
Характеристика надувных модулей различных типов
Характеристика Сфера 4 Сфера 8 Сфера 16 TransHub
Площадь поверхности, 5, м2 50 201 804 262
Объем, И, м3 33,5 268,0 2144,0 339,8
V/S, м 0,67 1,33 2,67 1,30
Площадь рабочей зоны (при высоте потолка h = 2,15 м), м2 9,3 132,3 970,0 136,1
Расчетное число членов экипажа в отсеке, чел. 1-2 4—6 12-15 6
Масса основной конструкции, кг 200 804 3216 1039
322
Часть II. Определение облика пилотируемого космического аппарата
разрабатываемых модулей достигает 0,5 м. В проекте предполагается, что для
защиты от радиации между слоями оболочки может быть помещена жидкость.
При всех преимуществах конструкции в сферическом отсеке затруднена ком-
поновка элементов интерьера, особенно в случае сферы малого радиуса, что
приводит к необходимости выбора оболочек других форм.
В качестве примера цилиндрической оболочки на рис. 5.52 представлена
шлюзовая камера «Волга», состоящая из верхней жесткой части с люком для
выхода в космос и нижнего монтажного колодца, состыкованного с флан-
цем корабля. Жесткие элементы соединены между собой цилиндрической
Рис. 5.52. Шлюзовая камера «Волга»:
а — общий вид камеры в рабочем положении; б — компоновка камеры на КА «Восход-1»
в транспортном положении; в — компоновка камеры в рабочем положении
гермооболочкой, подкрепленной силовым каркасом, состоящим из системы
продольных аэробалок в виде надувных резиновых цилиндров, на которые
надет чехол из прочной ткани. Шлюзовая камера в сложенном виде крепилась
снаружи СА корабля над люком для выхода в космос. В ней размещались
системы, обеспечивающие развертывание оболочки на орбите путем наддува
аэробалок, система регулирования давления в шлюзовой камере при шлюзо-
вании, пульт управления, элементы страховки и фиксации космонавта при
выходе, система отделения шлюза от корабля после выполнения программы
и другие элементы.
Международный центр космической архитектуры Сасакава (SICSA) на
базе Хьюстонского университета [33] разработал проект надувного модуля
с цилиндрической оболочкой без пневматического каркаса (рис. 5.53). Форма
Глава 5. Конструктивная компоновка обитаемых модулей
323
Рис. 5.53. Надувной модуль разработ-
ки SICSA
модуля поддерживается в рабочем со-
стоянии посредством системы тросов
и мембран, которые служат одновре-
менно каркасом многоэтажной компо-
новки интерьера отсека. Преимущество
такой компоновки — высокая компакт-
ность в транспортном положении, а
недостаток — малая жесткость.
В качестве примера тороидального
надувного отсека на рис. 5.54 приведен
прототип надувной ОС в виде тора на-
ружным диаметром 7,3 м, созданный
фирмой Goodyear Aerospace Corporation
(GAC). Этот отсек объемом примерно
65 м3 укладывался в контейнер диа-
метром около 2,4 м. Погонная масса
оболочки из дакрона с внутренним
герметизирующим слоем из пропитан-
ного бутилом нейлона составляет —1,2 кг/м2. Расчетное давление в прототипе
было равно 34 500 Па (0,345 ата). Объем отсека был достаточен для жизни
двух членов экипажа.
На рис. 5.55 приведен пример надувного модуля комбинированной кон-
струкции, разработанного в Ливерморской национальной лаборатории (США)
в 1989 г. Модуль длиной 17 м и диаметром 5 м состоял из нескольких надув-
ных тороидальных секций овального сечения, заключенных в общую цилин-
дрическую оболочку. Внешняя оболочка надувалась до давления 17,2 кПа,
а внутренние обитаемые оболочки-секции надувались до давления 51,7 кПа.
Секции соединялись центральным коридором диаметром 1 м. Предполагалось,
Рис. 5.54. Прототип надувной ОС компании Goodyear
Aerospace Corporation (1961 г., NASA):
а — компоновка макета ОС; б — прототип надувной тороидальной
оболочки диаметром 7,3 м
324
Часть II. Определение облика пилотируемого космического аппарата
Рис. 5.55. Компоновка надувного модуля,
разработанного Ливерморской нацио-
нальной лабораторией:
1 — внешняя оболочка модуля; 2 — коридор;
3 — внутренняя оболочка отсека; 4 —защит-
ный экран
что такая компоновка обеспечивает безопасную работу с модулем при раз-
герметизации отдельных секций.
Для придания надувному отсеку дополнительной жесткости в его кон-
струкцию может быть встроен каркас, который служит силовым элемен-
том, воспринимающим нагрузки при выведении на орбиту, и может быть
использован для размещения части бортового оборудования, необходимого
для начала функционирования модуля. Такая компоновка была применена
в концепции надувного модуля TransHub, разработанного в конце 1990-х гг.
Космическим центром им. Джонсона совместно с NASA для использования
в составе марсианского межпланетного корабля с целью получения легкой
конструкции максимального объема, необходимого для длительных переле-
тов [34]. В дальнейшем модуль (см. табл. 5.2) предназначался для работы в
составе ОС Freedom и МКС. Модуль TransHub предполагалось выводить на
орбиту с помощью МТКА Space Shuttle. Вид развернутого модуля TransHub,
пристыкованного к МКС, представлен на рис. 5.56. Планируемая продолжи-
тельность его работы в условиях космического пространства — 10 лет.
Согласно проекту модуль TransHub имел тороидальную форму с овальным
поперечным сечением (максимальный диаметр — 8,23 м) и жесткий централь-
ный каркас-ядро диаметром 3,35 м и длиной 10,97 м (рис. 5.57). Каркас был
составлен из восьми лонжеронов, переставляемых полок (сложенных при
запуске), шпангоутов, водяного бака (в качестве экрана радиационной защи-
ты), рамы для установки оборудования и интегрированных трубопроводов.
Рис. 5.56. Модуль TransHab, пристыкованный к МКС
Глава 5. Конструктивная компоновка обитаемых модулей
325
Рис. 5.57. Конструкция модуля TransHub и его ядра:
1 — складные панели межэтажного перекрытия; 2 — лонжерон;
3 — полка; 4 — бак с водой (защита от радиации)
Система наполнения и шар-баллоны с газом встроены в негерметичный
отсек, расположенный на конце ядра. Давление наддува составляет 760 мм рт. ст.
(1 атм). Переставляемые полки при запуске служат стенками кессона ядра, по-
вышающего жесткость конструкции. Больше половины полок использованы
в конструкции перекрытий уровней в надувном объеме после пристыковки
к МКС.
Модуль TransHab спроектирован для длительного обеспечения жизнеде-
ятельности экипажа из шести человек. Его архитектура представляет собой
интегрированное жилое пространство из личных и общественных помеще-
ний. Оно включает в себя помещения для сна, приготовления и принятия
пищи, выполнения гигиенических процедур и физических упражнений, для
отдыха, а также складские помещения и укрытия от радиации. Задачи ди-
зайна жилого помещения — поддержание локальной вертикальной конфи-
гурации компоновки, разделение пространств для физических упражнений
и для принятия пищи, обеспечение кают большого объема для всех членов
экипажа. Внутри герметичный объем разделен на четыре функциональных
уровня (рис. 5.58). Первые три из них формируют жилую зону, а четвертый
служит переходным адаптером к МКС.
На первом уровне (рис. 5.59, а) расположены кухня (три кухонных стойки
МКС), кают-компания с большим столом, помещения для размещения гру-
зов в мягких сумках. Также там находится иллюминатор, ориентированный
на Землю. Отличительной особенностью архитектуры этого уровня является
то, что в кают-компании высота потолка в 2 раза выше, чем в других поме-
щениях. Такое решение особенно важно при длительном полете, поскольку
расширяет пространство, обеспечивая психологическую разгрузку экипажа.
На втором уровне (рис. 5.59, б) в центре размещены каюты экипажа,
а на краю расположена мастерская, занимающая половину площади пола.
326
Часть II. Определение облика пилотируемого космического аппарата
Рис. 5.58. Внутренняя компоновка модуля TransHab:
I—IV — уровни; 1 — складские стойки; 2 — надувные шпангоуты; 3 — межэтажное
перекрытие; 4 — агрегат швартовки СВМ; 5 — противометеоритный экран; 6 — пе-
реходный отсек; 7 — бак с водой; 8 — шар-баллоны с газами для наддува; 9 — негер-
метичный агрегатный отсек
Глава 5. Конструктивная компоновка обитаемых модулей
327
Рис. 5.59. Компоновка трех уровней
модуля TransHab:
а — первого; б — второго; в — третьего
Каюты экипажа окружены кессоном толщиной 50...76 мм, заполненным
водой и предназначенным для защиты экипажа от радиации при солнечных
вспышках. В каждой каюте есть персональный шкаф, рабочее место, спальное
место, а также интегрированные системы связи, электропитания, отопления
и вентиляции.
На третьем уровне находится медицинский центр, оборудованный двумя
медицинскими стойками МКС, элементами системы индивидуальной гиги-
ены, беговой дорожкой и велоэргометром. В нем имеются помещения для
медицинских переговоров с Землей, а также иллюминатор, направленный
на Землю (рис. 5.59, в). В иллюминатор можно наблюдать Землю в процессе
занятий спортом, что способствует психологической разгрузке. На данном
уровне также размещается склад для грузов, хранящихся в мягких сумках,
аналогичный складу на первом уровне.
На четвертом уровне проходит герметичный переходный тоннель между
модулем и МКС (см. рис. 5.58), с обеих сторон заканчивающийся стыковоч-
ными узлами. Он является единственным герметичным отсеком, доступным в
транспортном положении модуля. Другие помещения находятся в сложенном
состоянии. Отсек обеспечивает механическое сопряжение модуля с МКС,
коммуникации и переходы экипажа в другие сегменты МКС, размещение важ-
ного бортового оборудования в транспортном положении (ненаполненном).
Были изготовлены и испытаны несколько прототипов модуля TransHub,
однако реализация проекта была приостановлена. Наработанные материалы
по соглашению с NASA были использованы коммерческой компанией Bigelow
328
Часть II. Определение облика пилотируемого космического аппарата
Рис. 5.60. Надувной модуль BEAM в рабочем положении (л) и в разрезе (б)
Aerospace для создания проекта надувного модуля Nautilus диаметром 6,7 м
и длиной 13,7 м для орбитальной гостиницы.
Компания Bigelow Aerospace провела ряд успешных испытаний надувных
бескаркасных герметичных отсеков [35]. Надувные модули Genesis I (запу-
щен в 2006 г.) и Genesis II (запущен в 2007 г.) продемонстрировали техноло-
гии создания надувных обитаемых модулей. Космический аппарат Genesis I
массой 1360 кг и длиной 4,4 м имеет диаметр в свернутом состоянии 1,6 м,
в надутом — 2,54 м. Полезный объем надувного отсека составляет 11,5 м3,
Рис. 5.61. Компоновка комбинированного модуля МКС разра-
ботки SICSA в транспортном (л) и в рабочем положении (б):
1 — адаптер PH; 2 — оболочка в сложенном состоянии; 3 — стыковоч-
ный агрегат; 4 — головной обтекатель PH
07600
б
Глава 5. Конструктивная компоновка обитаемых модулей
329
давление наддува — 51,7 кПа (около 0,5 атм). Оболочка надувного отсека
имеет многослойную конструкцию толщиной около 150 мм. Размеры Genesis
составляют одну треть от размеров проектируемого модуля ВА 330 космиче-
ского отеля компании Bigelow Aerospace [36].
На рис. 5.60 представлен экспериментальный надувной модуль доос-
нащения BEAM (Bigelow Expandable Activity Module), запущенный и при-
стыкованный к МКС в 2016 г. для проведения двухлетнего тестирования
[37]. В транспортном положении этот модуль массой 1400 кг представляет
собой цилиндр диаметром 2,36 м и длиной 2,16 м. В рабочем положении
длина модуля в 2 раза увеличивается — до 4,01 м, а диаметр — до 3,23 м.
В результате герметичный объем модуля составляет 16 м3.
На рис. 5.61 представлен вариант комбинированной компоновки надувного
модуля и типового герметичного модуля МКС. Герметичный цилиндрический
отсек выполняет роль центрального каркаса, который несет первоначальный
объем научной аппаратуры. Надувная оболочка в рабочем положении создает
значительный дополнительный объем, позволяющей расширить функцио-
нальность модуля.
В настоящее время в РКК «Энергия» разрабатывается проект трансфор-
мируемого обитаемого космического модуля [30] с горизонтальной компонов-
кой, обеспечивающей улучшенные эргономичность и радиационную защиту
экипажа (рис. 5.62) [38]. Основу модуля составляет каркас-ядро квадратного
сечения размерами 2 х 2 м с закрепленными на стенах стойками глубиной
около 350 мм для научной аппаратуры (рис. 5.63, а) [39].
Рис. 5.62. Компоновочная схема надувного трансформируемого модуля для
PC МКС:
/ — приборно-агрегатный отсек «Прогресс»; 2 — внутренний жесткий отсек; 3 —
стыковочный агрегат; 4 — многослойная трансформируемая герметичная оболочка
330
Часть II. Определение облика пилотируемого космического аппарата
Рис. 5.63. Компоновочная схема внутреннего объема надувного модуля
для PC МКС:
а — схема использования объема; б — компоновка складского модуля; 1 — при-
борная зона каркаса-ядра; 2 — обитаемая зона каркаса-ядра; 3 — герметичная
оболочка; 4 — перегородка; 5 — складируемые грузы
К достоинствам данной компоновочной схемы относится то, что цен-
тральная зона имеет повышенную защиту от ионизирующего излучения. Че-
тыре трансформируемые зоны большого объема с двумя плоскими стенками
могут быть использованы для складирования оборудования и припасов, раз-
мещения дополнительной служебной и научной аппаратуры с необходимыми
рабочими местами, тренажеров и диагностических стендов, организации бы-
товых помещений, а также, в перспективе, индивидуальных кают для членов
экипажа. Пример организации складского модуля показан на рис. 5.63, б.
Рис. 5.64. Малоразмерный трансформируемый надувной модуль для PC МКС,
выводимый PH «Союз-2» этапа 16 в транспортном (а) и в рабочем положении (б)
Глава 5. Конструктивная компоновка обитаемых модулей
331
В рамках данного проекта разработаны конструктивно-компоновоч-
ные схемы модулей различного типоразмера в транспортном и в рабочем
положении с учетом ограничений, накладываемых средствами выведения и
инфраструктурой космической станции. Диаметр оболочки в транспортном
положении равен 3,75 м, в рабочем —7,1 м. Возможны конфигурации как
малоразмерных модулей, выводимых PH «Союз-2» этапа 16 (рис. 5.64) массой
8,28 т с длиной отсека около 6 м и герметичным объемом около 100 м3, так и
полноразмерных, выводимых PH «Протон-М» или «Ангара-А5», массой 20,7 т
с длиной отсека до 15 м и герметичным объемом около 250 м3 [38].
Кроме того, разработаны структура и состав оболочки, а также технология
ее изготовления из отечественных материалов. ПАО «РКК «Энергия» совмест-
но с ФГУП «ЦНИИмаш» была успешно экспериментально опробована гибкая
микрометеороидная защита выбранных структуры и состава. Удельная масса
защиты составляет -14,6 кг/м2, толщина в рабочем положении — 310 мм,
в транспортном положении за счет поджатия защиты -120 мм (до рабочей
толщины восстанавливается за счет упругих сил).
Рис. 5.65. Гибкая многослойная оболочка надувного модуля Trans Hub (а) и FLECS (б):
1 — подкладка-лейнер; 2 — эластичный баллон; 3 — силовой слой; 4 — противометеоритный
экран; 5 — теплозащитный экран; 6 — слой защиты от атомарного кислорода; 7 — система
развертывания; 8 — герметичный объем; 9— космическое пространство; 10— иллюминаторы;
11 — внутренняя (огнеупорная) защита; В — Betacloth; Т — Kapton; N — Nextel; К — Kevlar;
Р — Poliamide; X — Nomex
332
Часть II. Определение облика пилотируемого космического аппарата
Гибкая оболочка надувного модуля имеет несколько функциональных
слоев, обеспечивающих герметичность, прочность, теплоизоляцию и защиту
от воздействия радиации, метеоритов и космического мусора. Ее основны-
ми слоями являются внутренняя подкладка-лейнер 7, эластичный баллон
2, силовой слой 5, защитный экран 4 от микрометеоритов и космического
мусора, теплозащитный экран 5 и слой для защиты от атомарного кислорода
(рис. 5.65, а). Также могут быть добавлены слои радиационной защиты и
система сброса статического электрического заряда. Внутренняя подкладка
защищает баллон от повреждений изнутри, таких как проколы и возгорания.
Она изготовлена из прочного износостойкого материала, который легко очи-
щается от загрязнений и хорошо поглощает звуки.
Баллон предназначен для удержания газа в герметичном объеме модуля.
Материал баллона должен обладать минимальной газовой проницаемостью и
достаточной гибкостью и износостойкостью, а также выдерживать все условия
космического полета. Баллон сопрягается с силовой оболочкой и подклад-
кой таким образом, чтобы в процессе раскрытия надувной конструкции его
оболочка не образовывала складок и не выпучилась во избежание локальных
напряжений, которые могу повлечь за собой его разрушение при длитель-
ной эксплуатации. Баллон может быть составлен из одного или нескольких
слоев. Одиночный слой прост в изготовлении, однако многослойный баллон
позволяет создать конструкцию, устойчивую к образованию течей.
Силовая оболочка воспринимает нагрузки, действующие на надувную
конструкцию, основной из которых является растяжение под действием
внутреннего давления. По американским стандартам расчет на прочность
надувных космических конструкций проводится с коэффициентом запаса
Таблица 5.3
Основные материалы для силовой оболочки
Характеристика Kevlar РВО Spectra 1000 Vectran HS (LCP)
Предел прочности, (Н/м2)106 3,38 5,65 2,99 2,84
Предел прочности на разрыв, гс/ден* 23 41 35 23
Модуль упругости, гс/ден 555 1300 2000 680-840
Удлинение при разрыве, % 3,6 3,5 2,7 2,2-2,5
Плотность, кг/м3 1440 1500 970 1410
Ломкость при изгибе Средняя Средняя Отличная Хорошая
при низкой температуре, °C -196 — -25 -160
Воспламеняемость, LOI** 27-29 >56 18-19 28
Сопротивление истиранию Среднее Средняя Отличное Хорошее
* Внесистемная единица линейной плотности волокон или нитей, т. е. отношение их массы к длине (1 ден = 0,000 000 11 кг/м). * * Индекс LOI — минимальное содержание кислорода в атмосфере, которое может поддер- живать пламя при горении термопластичного материала.
Глава 5. Конструктивная компоновка обитаемых модулей
333
прочности, равным 4, для компенсации случайных факторов, связанных с
использованием сильно деформируемой конструкции. Силовая оболочка со-
ставляется из нескольких частей ткани. Для компенсации потери прочности
в швах необходимо усиливать ткань в местах стыка, повышая на 10...20 %
значение прочности. Пример конструкции многослойной оболочки европей-
ского надувного модуля FLECS приведен на рис. 5.65, б.
Основные материалы для изготовления силовой оболочки приведены в
табл. 5.3. Композиционный материал РВО (полипарафенилен бензобис окса-
золин) имеет наивысшие прочностные характеристики, однако разработан
относительно недавно и пока еще слишком дорог. Как правило, в космиче-
ской технике используется кевлар, хорошо зарекомендовавший себя и более
доступный. Склонность кевлара к растрескиванию под действием изгиба
не является проблемой, поскольку в надувной конструкции радиусы изгиба
материала велики и число циклов изгиба мало.
Достаточную прочность силовой оболочки невозможно обеспечить только
за счет ткани, необходимо в качестве силовых элементов использовать тесь-
му — специальную ленту, расположенную в окружном и в меридиональном
направлениях с определенным шагом. Меридиональные ленты лежат поверх
окружных и сшиваются в месте пересечения, в результате чего поверх ткани
образуется сетка из лент. При конструировании такой сетки важно правильно
выбрать шаг и ширину ленты, а также способ соединения лент с тканью. Эти
факторы определяют степень равномерности нагружения силовой оболочки и
точность формы (отсутствие выпучивания оболочки между лентами). Жесткие
элементы (например, иллюминаторы) вшиваются в оболочку и обрамляются
каркасом из лент. Каркас из лент со встроенным в оболочку иллюминатором
европейского прототипа надувного модуля IMOD, подобного по компоновке
модулю TransHub, представлен на рис 5.66.
Конструктивная схема узла трехслойного иллюминатора для гибкой обо-
лочки надувного КА приведена на рис. 5.67 [40]. Многослойная гибкая обо-
лочка 7 имеет отверстия для иллю-
минатора в каждом слое. С силовой
оболочкой иллюминатор соединяется
посредством набора лент 6, которые
крепятся петлями 5 на блоках 4,
размещенных по периметру корпуса
иллюминатора. С герметичной обо-
лочкой /корпус связан накладками с
уплотнением 3. Другие слои оболоч-
ки 7 имеют отверстия, так что иллю-
минатор оказывается утоплен в нее.
Переход между гибкой оболоч-
кой и жестким ядром — критически
важный узел. Здесь должны быть
обеспечены герметичность и проч-
ность соединения. Крепление эла-
стичного баллона к силовой оболочке
должно быть независимым.
Рис. 5.66. Каркас из лент оболочки с ил-
люминатором надувного модуля IMOD
334
Часть II. Определение облика пилотируемого космического аппарата
Рис. 5.67. Устройство иллюминатора в гибкой оболочке надувно-
го модуля:
1 — многослойная гибкая оболочка; 2 — иллюминатор; 3 — накладка с
уплотнением; 4 — блок; 5 — петля; 6 — лента; 7 — герметичная оболочка
Рис. 5.68. Схема крепления оболочек к
жесткому каркасу-ядру в модуле TransHub:
1 — силовой торцевой шпангоут; 2 — зажим для
фиксации кольца; 3 — лента силового каркаса;
4 — герметичная оболочка; 5 — кольцо кре-
пления лент силового каркаса; 6 — уплотнение
герметичной оболочки; 7 — кольцо фиксации
герметичной оболочки
Упрощенная схема крепления оболочек к каркасу-ядру в модуле TransHub
показана на рис. 5.68. Здесь силовая оболочка обернута вокруг конического
кольца овального сечения, закрепленного на шпангоуте. Внутреннее давле-
ние через оболочку баллона прижимает кольцо к шпангоуту, защемляя си-
ловую оболочку. Кольцо воспринимает растягивающую нагрузку в окружном
направлении. Ленты крепятся отдельными узлами аналогично конструкции
Глава 5. Конструктивная компоновка обитаемых модулей 335
хомут—ролик. Каждый узел выполнен самоустанавливающимся для наилуч-
шего распределения нагрузки. Оболочка герметичного баллона крепится к
шпангоуту посредством кольцевого уплотнения с использованием резиновых
колец и герметиков.
Более подробная конструктивная схема узла крепления герметичной
оболочки к каркасу для модуля Genesis приведена на рис. 5.69 [41]. Оболоч-
ка, состоящая из герметичного слоя-мембраны и силового слоя, герметично
крепится к жесткому ядру через соединительный шпангоут, состоящий из
трех колец. Герметичный слой оболочки зажимается болтами между кольца-
ми 7 и 10 . Герметичность обеспечивается резиновым уплотнением 2. Край
оболочки укрепляется в фиксирующей канавке 9. Для исключения излома
герметичной оболочки в месте стыка используется прокладка 3 заданного
радиуса кривизны. Силовая оболочка 5 крепится к шпангоуту лентами 6, на
концах которых выполнены петли 12. Эти петли продеты в силовое кольцо
<?, помещаемое в паз кольца шпангоута 10, которое фиксируется внешним
кольцом шпангоута 7 и болтами. Шпангоут в сборе коаксиально крепится к
силовому элементу ядра 77.
Гибкий экран, предназначенный для защиты слоев оболочки модуля от
микрометеоритов и космического мусора, состоит из нескольких слоев керами-
ческой ткани Nextel, разделенных полиуретановой пеной с открытыми пора-
ми. Пена предназначена для установки слоев экрана на заданном расстоянии.
В сложенном состоянии пена подвергается вакуумированию и сжимается под
действием атмосферного давления, что позволяет минимизировать объем
оболочки и упростить развертывание. В условиях космического полета при
отсутствии атмосферного давления слои пены за счет упругости восстанавли-
вают свою толщину. Внутренний слой защитного экрана сделан из кевлара.
При попадании в экран твердая частица, проходя через слои керамической
ткани, разрушается и тормозится. Осколки частицы, потерявшие скорость,
останавливаются слоем из кевлара.
Теплозащитный слой состоит из внутреннего термического слоя, слоев
экранно-вакуумной теплоизоляции (ЭВТИ) и внешнего слоя с заданными
оптическими свойствами. Слой для защиты от действия атомарного кис-
лорода применяется на низкой околоземной орбите. Состоящий из ткани
Betaglass, он расположен на алюминиевой подложке для защиты от статиче-
ского электричества.
Многослойная оболочка модуля имеет значительную толщину, и для ее
укладки в транспортном положении и развертывания требуется специальная
схема рифления и система развертывания. Схема рифления модуля TransHub
представлена на рис. 5.70. Оболочка в сложенном состоянии имеет складки,
укладываемые вокруг ядра.
Система развертывания предназначена для поддержания оболочки модуля
в транспортном положении. Она должна выдерживать нагрузки, вызванные
внутренним давлением в сложенной оболочке на этапе выведения. Систе-
ма развертывания состоит из комплекта ремней рифления, стягивающих в
транспортном положении каждый третий сегмент оболочки таким образом,
чтобы он примыкал к ядру. Два незарифленых сегмента согнуты, уложены
и закреплены, а в процессе развертывания они под действием внутреннего
Рис. 5.69. Узел крепления герметичной гибкой оболочки к ядру-каркасу для модуля Genesis:
а — сечение; б — изометрический вид; в — вид с разнесенными частями; 7 — кольцо; 2 — уплотнение; 3 — прокладка; 4 — герметичная
оболочка; 5 — силовая оболочка; 6 — лента; 7— внешнее кольцо шпангоута; 8 — силовое кольцо; 9 — фиксирующая канавка; 10 — коль-
цо шпангоута; 11 — силовой элемент ядра; 12 — петля
Глава 5. Конструктивная компоновка обитаемых модулей
337
Рис. 5.70. Схема рифления и порядок раскрытия оболочки
модуля TransHub:
а — образование системы складок и впадин; б — укладка складок
вокруг ядра; 1 — направление складывания; 2 — складка сложенной
оболочки; 3 — торцевой силовой шпангоут; 4 — жесткая оболочка
ядра; 5 — впадина между складками сложенной оболочки
давления распрямляются, образуя выступы (см. рис. 5.70). Ремни рифления
удерживаются сложенными тросами (рис. 5.71). Все тросы одного сегмента
связаны петлями, они освобождаются одним пироножом. После раскрытия
сегмент оболочки увеличивает радиус, и оболочка становится торообразной.
На рис. 5.72 приведена схема укладки оболочки российского надувного
модуля [39]. Здесь в каждой из четырех зон между сторонами каркаса-ядра
и внутренней поверхностью головного обтекателя PH герметичная оболочка
Рис. 5.71. Конструкция системы рифления модуля TransHub:
1 — фиксирующие ленты на каждом третьем сегменте оболочки; 2 — ядро;
3 — шнур рифления; 4 — рифление после образования складок
338
Часть II. Определение облика пилотируемого космического аппарата
уложена в виде двух симметричных петель S-образной формы навстречу друг
другу, зачекованных между собой по внешнему несущему слою (рис. 5.72).
Надувные конструкции приобретают свою расчетную форму под дей-
ствием избыточного давления наполняющего их газа. При этом развернутая
конструкция будет обладать высокой чувствительностью к изненениям дав-
ления. При снижении давления жесткость системы может уменьшиться, если
не будут предприняты дополнительные меры. Надежность и безопасность
эксплуатации надувных отсеков с гибкой неподкрепленной оболочкой зависят
от способности оболочки удерживать свою форму при падении внутреннего
давления, например при возникновении нештатной ситуации.
Рис. 5.72. Схема укладки герметичной оболочки российского надувного
модуля:
1 — внутренняя поверхность головного обтекателя PH; 2 — трансформируемая
герметичная оболочка; 3 — узлы зачековки; 4 — жесткий несущий каркас-ядро;
5 — полезная зона постоянного объема
Можно придать дополнительную жесткость развернутым надувным кон-
струкциям, сформировав дополнительный каркас, созданный, например,
из гибких стержней. Такие стержни могут выступать в роли предварительно
напряженных спиц, фиксирующих за счет накопленной внутренней энергии
надувную оболочку в развернутом состоянии. Поддерживать форму оболочки
также может внутренний каркас элементов интерьера.
Другой способ придания жесткости надувной оболочке — ее отверждение
различными способами [42]. Это позволит обеспечить постоянную форму,
прочность и устойчивость оболочечной конструкции без поддержания по-
стоянного давления наддува.
Тепловое затвердевание оболочки из термоотверждающегося (термо-
реактивного) полимера под действием встроенных электронагревателей
позволяет контролировать данный процесс, но требует значительных энер-
гозатрат и сложной системы гибких нагревательных элементов, встроенных
в оболочку. К тому же термореактивные материалы позволяют проводить
Глава 5. Конструктивная компоновка обитаемых модулей
339
только необратимое отверждение, после которого изменить форму будет уже
невозможно.
Стеклование предварительно нагретой термопластической оболочки
(например, из композитов на основе полиуретана) при ее охлаждении ниже
температуры стеклования является простым способом, при котором можно
многократно размягчать и отверждать оболочку, однако и здесь требуется
создание сложной системы нагревателей.
Отверждение материала под действием ультрафиолетовых или инфракрас-
ных лучей — простая, пассивная, многократно тестированная технология,
позволяющая отвердить надувную конструкцию просто путем освещения
ее Солнцем. Однако это требует больше времени на затвердевание, и таким
процессом трудно управлять.
Придание жесткости пластиковой оболочке с заламинированной в ней
алюминиевой фольгой за счет необратимых пластических деформаций тонко-
го слоя алюминия — наиболее отработанный способ ее отверждения. Он был
использован при создании надувного спутника-шара Echo I (США, 1960 г.),
а также широко распространен в быту, например для придания жесткости
оболочке тюбика зубной пасты. К недостаткам данного способа можно от-
нести более высокое давление, необходимое для развертывания надувной
конструкции, а также значительные кольцевые напряжения в оболочке.
Отверждать надувную оболочку также можно за счет химической реак-
ции между газом, наполняющим конструкцию, и проницаемой структурой
стенки. Этот способ достаточно прост, однако гарантированно обеспечить
равномерное отверждение оболочки с его помощью довольно трудно.
Простым пассивным способом придания жесткости надувной конструк-
ции является использование двухслойной оболочки, заполненной пеной,
затвердевающей при высыхании. Но такой способ является необратимым,
пассивным и требует тщательного предварительного распределения пены. При
этом также возможны локальные неконтролируемые «разбухания» оболочки.
Отверждать конструкцию можно еще путем выпаривания водораствори-
мой смолы, которой предварительно пропитана оболочка. Это обратимый
метод, поскольку смола может быть повторно растворена. К тому же про-
цессом отверждения здесь легко управлять, контролируя влажность смолы.
Однако имеются и значительные трудности при доставке оболочки в «мок-
ром» состоянии на орбиту. Понижается массовое совершенство конструкции
из-за того, что вода после отверждения теряется. Также при дегазации импульс
уходящих газов может вызвать возмущение КА.
Контрольные вопросы к главе 5
1. Из каких компоновочных элементов происходит формирование ПКА?
2. Какова конструкция отсеков орбитальной станции?
3. Расскажите о внешней компоновке орбитального модуля.
4. Какова конструкция иллюминаторов и как происходит обеспечение гермети-
зации?
340 Часть II. Определение облика пилотируемого космического аппарата
5. Расскажите о конструкции люков ПКА.
6. Опишите конструкцию телескопических отсеков.
7. Какова конструкция отсеков с гофрированной оболочкой?
8. Опишите конструкцию трансформируемых мягких оболочек.
Литература к главе 5
1. Grahn S. The Almaz Space Station Program. URL: http://www.svengrahn.pp.se/
histind/Almprog/almprog.htm (дата обращения 10.07.2017).
2. Феоктистов К.П. Научный орбитальный комплекс. Новое в жизни науке и
технике. Сер. Космонавтика, астрономия. М.: Знание, 1980. № 3. 64 с.
3. Состояние и перспективы PC МКС // Через тернии к звездам. URL: http://
murmolka.com/post/1 14490/Sostoyanie-i-perspektivyi - RS-M KS-M LM - U M -
NEMseredina-2013-РО- (дата обращения 10.07.2017).
4. Технология сборки и испытаний космических аппаратов / под общ. ред. И.Т Бе-
лякова, И.А. Зернова. М.: Машиностроение, 1990. 352 с.
5. Zipay J.J., Bernstein K.S., Bruno Е.Е., Patin R., Deloo P. Structural Verification
of the First Orbital Wonder of the World — The Structural Testing and Analysis of
the International Space Station (ISS). NASA report JSC-CN-23255. URL: https://ntrs.
nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20110013394.pdf (дата обращения 10.07.2017).
6. Семенов Ю., Горшков Л. Станция «Салют 6»: дом, лаборатория, машина //
Наука и жизнь. 1981. № 4. С. 14—22.
7. Владимиров А. «Заря» на орбите // Новости космонавтики. 1999. № 1. С. 2—7.
URL: http://epizodsspace.airbase.rU/bibl/nk/1999/l/1999-l.html (дата обращения
10.07.2017).
8. Бидеев А.Г., Семин А.Ю., Кузнецов А.В., Ахмедов М.Р. Проектирование системы
энергоснабжения научно-энергетического модуля для российского сегмента между-
народной космической станции // Космическая техника и технологии. 2015. № 2 (9).
С. 64-74.
9. Львов Б.Г., Шувалов А.С. Современные сверхвысоковакуумные уплотнения.
М.: Высшая школа, 1984. 71 с.
10. Влияние высокоскоростных ударов метеороидов и частиц космического
мусора на прочность стекол иллюминаторов модулей Международной космической
станции / Ю.А. Воробьев, Р.М. Магжанов, В.И. Семенов, В.В. Устинов и др. // Кос-
мическая техника и технологии. 2015. № 1 (8). С. 53—66.
11. Симоньянц Р.П., Шумилов И.М. Элементы конструкции летательных аппара-
тов. Альбом чертежей. М.: Изд-во МГТУ им. Н.Э. Баумана, 1977. 34 с.
12. Johnson G. Worldwide Spacecraft Crew Hatch History. NASA Technical Report:
JSC-CN-21016; JS-2010-001. 2009. URL: http://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/
20100033406_2010036532.pdf (дата обращения 10.07.2017).
13. Главацкий Л.А. Повышение безопасности и надежности функционирования
люков выхода космонавтов в открытый космос // Научно-технические разработки
КБ «Салют». М.: Машиностроение, 2010. С. 525—527.
14. Taylor Т.С. Expandable spacecraft. Patent US 4562979. 1986. URL: https://www.
google.com/patents/US4562979 (дата обращения 10.07.2017).
15. Barker D.C., Mody S., KanverC., Whalen D. The Life and Biological Sciences (LaBS)
Facility: An Evolution in Space Station Design// Proc. Space 2004 Conference and Exhibit 28—30
September 2004, San Diego, California AIAA 2004-5979. URL: https://arc.aiaa.org/
doi/abs/10.2514/6.2004-5979 (дата обращения 10.07.2017).
Глава 5. Конструктивная компоновка обитаемых модулей
341
16. Патон Б.Е., Лобанов Л.М., Волков В.С. Конструкции преобразуемого объема
(Обзор) // Автоматическая сварка. 2011. № 12. С. 30—39.
17. Лобанов Л.М., Волков В.С. Разработка технологии изготовления двухстенчатой
сварной конструкции преобразуемого объема // Автоматическая сварка. 2012. № 10.
С. 37-42.
18. Hunt G. И<, Ario I. Twist buckling and the fold able cylinder: an exercise in origami //
International Journal of Non-Linear Mechanics. 2005. Vol. 40. Iss. 6. P. 833—843.
19. Kresling B. Plant «design»: mechanical simulations of growth patterns and bionics //
Biomimetics. 1995. No. 3 (3). P. 105-222.
20. Журавлев Е.И. Принципы создания трансформируемых отсеков космических
аппаратов // Ракетно-космическая техника: фундаментальные и прикладные про-
блемы: труды 2-й Межд. конф. (18—21 ноября 2003 г.). М.: Изд-во МГТУ им. Н.Э. Бау-
мана, 2005. Ч. III. С. 147-148.
21. Guest S.D., Pellegrino S. The folding of triangulated cylinders // ASME Journal of
Applied Mechanics. 1994. Part I. Vol. 61. P. 773-777; 1994. Part II. Vol. 61. P. 778-783;
1996. Part III. Vol. 63. P. 77-83.
22. Kane N.R. Mathematically optimized family of ultra-low distortion bellow fold
patterns. US Patent 6054194. 2000. URL: https://www.google.com/patents/US6054194 (дата
обращения 10.07.2017).
23. Nojima T. Modelling of Folding Patterns in Flat Membranes and Cylinders by
Origami // JSME International Journal. Series C. 2002. Vol. 45 (1). P. 364-370.
24. Miura K. Method of packaging and deployment of large membranes in space. Tech.
Report 618. The Institute of Space and Astronautical Science. 1985. URL: https://repository.
exst.jaxa.jp/dspace/bitstream/a-is/7293/l/SA0035000.pdf (дата обращения 10.07.2017).
25. You Z., Cole N. Self-Locking Bi-Stable Deployable Booms // Proc, of 47th А1АА/
ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference.
Newport, Rhode Island, 2006. URL:https://arc.aiaa.org/doi/abs/10.2514/6.2006-1685 (дата
обращения 10.07.2017).
26. Dorfman B.F. Inflatable Structure. U.S. Patent Application 61497032. 2011. URL:
http://www.ingentaconnect.com/content/ben/rptst/2012/00000002/00000002/
art00002?crawler=true (дата обращения 10.07.2017).
27. Справочник проектировщика промышленных, жилых и общественных зданий
и сооружений. Расчетно-теоретический / под ред. А.А. Уманского. М.: Гос. Изд-во
лит. по строительству, архитектуре и строительным материалам, 1960. 1040 с.
28. Пневматические строительные конструкции. / В.В. Ермолов, УУ Бэрд,
Э. Бубнер и др.; под ред. В.В. Ермолова. М.: Стройиздат, 1983. 439 с.
29. Катанский В.В. Проектирование баллонно-такелажных конструкций и обо-
рудования оболочек воздушных судов. ОНТИ, 1936. 374 с.
30. Годовой отчет открытого акционерного общества «Ракетно-космическая
корпорация «Энергия» имени С.П. Королёва» за 2012 год. URL: https://www.energia.
ru/ru/disclose/areports/areports_2012.pdf (дата обращения 10.07.2017).
31. Carrera Е. Application and Simulation of Inflatable Structures for Manned and
Unmanned Space Vehicles. Plenary Lectures // Proc, of Structural Membrane 2011,
V International Conference on Textile Composites and Inflatable Structures. CIMNE
Barcelona 5-7 October 2011. URL: http://porto.polito.it/id/eprint/2443778 (дата обра-
щения 10.07.2017).
32. Vogler A. Modular Inflatable Space Habitats// First European Workshop on Inflatable
Space Structures. 21-22 May 2002, ESA/ESTEC, Noordwijk, Netherlands. URL: http://
spacearchitect.org/pubs/ESA-WPP-200.pdf (дата обращения 10.07.2017).
342
Часть II. Определение облика пилотируемого космического аппарата
33. Bell L. Part I: Space structures and support // SICSA space architecture seminar
lecture series. Sasakawa International Center For Space Architecture (SICSA).
URL: www.sicsa.uh.edu (дата обращения 10.07.2017).
34. Schneider W.C. Advanced structural and inflatable hybrid spacecraft module. Patent
US 6231010. 2001. URL: https://www.google.com/patents/US6231010 (дата обращения
10.07.2017).
35. Bigelow R.T. Inflatable satellite bus. Patent US 6962310. 2005. URL: http://www.
patentbuddy.com/Patent/6962310#sthash.lsHxDlzK.dpuf (дата обращения 10.07.2017).
36. Bigelow Aerospace. URL: http://bigelowaerospace.com/(дата обращения 10.07.2017).
37. The Bigelow Expandable Activity Module (BEAM). URL: http://bigelowaerospace.
com/beam/ (дата обращения 10.03.2016).
38. Трансформируемые крупногабаритные конструкции для перспективных
пилотируемых комплексов / И.И. Хамиц, И.М. Филиппов, Л.С. Бурылов, Н.Г. Мед-
ведев и др. // Космическая техника и технологии. 2016. № 2 (13). С. 23—33.
39. Хамиц И.И., Бурылов Л.С., Чернецова А.А. Космический трансформируемый
модуль. Патент RU 2561888. 2015. URL: https://fmdpatent.ru/patent/256/2561888.html
(дата обращения 10.03.2018).
40. Schneider W.C., Lardizabal Е.Е. Spacecraft window assembly. Patent US 6938858.
2005. URL: https://www.google.com/patents/US6938858 (дата обращения 10.07.2017).
41. Merits J., Common R.J., Rusi J.A. Apparatus for sealing and restraining the flexible
pressure boundary of an inflatable spacecraft. Patent US 6974109. 2005. URL: https://www.
google.ch/patents/US6974109 (дата обращения 10.07.2017).
42. Cadogan D., Grahne M., Mikulas M. Inflatable space structures: A new paradigm
for space structure design // 49th International Astronautical Congress Proceedings, (IAF-
98-1.1.02). 1998. URL: https://www.tib.eu/de/suchen/id/BLCP%3ACN028607268/
Inflatable-Space-Structures-A-New-Paradigm-for/ (дата обращения 10.07.2017).
ГЛАВА 6. ПОСТРОЕНИЕ КОСМИЧЕСКИХ КОМПЛЕКСОВ
6.1. Космические комплексы на базе
блочно-модульной архитектуры
6.1.1. Методы и средство создания комплекса
Компонентами космического комплекса являются автономные ПКА, мо-
дули и блоки дооснащения (см. гл. 4). Все эти элементы, детали, сборочные
единицы и комплекты, предназначенные для выполнения вспомогательных
функций, например для монтажа, а также комплекс запасных частей, укла-
дочные средства, тары и пр. изготавливаются и испытываются на Земле, а
затем транспортные системы доставляют их на рабочую орбиту, где собира-
ется комплекс.
Согласно ГОСТ 23887—79 «Сборка. Термины и определения» сборка — это
технологический процесс, содержащий действия по установке и образованию
соединений составных частей заготовки или изделия. Монтаж — это уста-
новка изделия или его составных частей на месте использования.
При компоновке космического комплекса необходимо учитывать методы
его сборки и способы монтажа компонентов, возможность их обслуживания
и ремонта, а также гибкого изменения компоновки в процессе построения
комплекса.
Методы монтажа космического комплекса можно разделить на непо-
средственную стыковку модулей, стыковку модулей с применением про-
межуточных механизмов и сборку конструкций. При сборке компонентов
комплекса используются, как правило, специальные разъемные соединения —
стыковочные узлы, в конструкции которых имеются устройства, обеспечи-
вающие заданную точность позиционирования, жесткость, прочность и гер-
метичность соединения, а также возможность разъединения компонентов.
Применение неразъемных соединений, полученных сваркой и склеиванием,
пока менее распространено, хотя и здесь имеется научно-технический задел,
который можно будет использовать по мере увеличения размеров комплексов.
При непосредственной стыковке компонент комплекса доставляется к
месту установки и причаливает к заданному стыковочному узлу с помощью
собственной автономной системы управления движением. В англоязычной
литературе для обозначения данной операции используется аналогичный
морской термин docking — активное причаливание корабля за счет собствен-
ного хода.
344
Часть II. Определение облика пилотируемого космического аппарата
При стыковке с использованием промежуточных механизмов компонент
комплекса доставляется к стыковочному узлу дистанционно управляемой
робототехнической системой. Для данного способа монтажа в англоязычной
литературе применяется морской термин «швартовка» — berthing, подразу-
мевающий причаливание корабля с использованием посторонних средств,
например буксиров. Компоненты собираются дистанционно управляемыми
роботами или непосредственно членами экипажа в процессе выхода в от-
крытый космос.
Непосредственная стыковка аналогична операциям по приему транс-
портных КА — в качестве компонентов комплекса применяются специа-
лизированные транспортные корабли-модули, масса и габариты которых
определяются возможностями PH.
Например, на базе ТКА ТКС, выводимого на орбиту PH тяжелого класса
«Протон», благодаря изначально заложенной в его конструкцию модульной
архитектуре созданы различные тяжелые научные модули и буксир для до-
ставки крупногабаритного модуля «Квант» (см. рис. 4.19).
Для доставки малых модулей с помощью PH среднего класса «Союз»
используются специальные модификации ТКА «Прогресс». Например, гру-
зовой корабль «Прогресс М-С01» (рис. 6.1, а) имел полную массу 7130 кг, из
которых 3676 кг составляла масса стыковочного отсека СО1 «Пирс». Основ-
ные отличия корабля-модуля «Прогресс М-СО1» от корабля «Прогресс М»
заключаются в том, что вместо грузового отсека и отсека компонентов до-
заправки установлены стыковочный отсек и переходная проставка; введен
разделяемый стык между стыковочным отсеком и переходной проставкой;
установлен гибридный стыковочный агрегат для обеспечения стыковки к
надирному стыковочному узлу служебного модуля «Звезда»; доработаны ме-
ханизмы и экраны радиотехнической защиты антенн системы «Курс» при их
установке на стыковочном отсеке; проведены доработки бортовых систем в
связи с изменением назначения корабля и состава его отсеков. Компоновка
ТКА для доставки узлового модуля показана на рис. 6.1, б.
а б
Рис. 6.1. Специализированные транспортные ТКА «Прогресс» для доставки мо-
дулей к МКС:
а — грузовой корабль-модуль «Прогресс М-СО1»; б — грузовой корабль-модуль для доставки
узлового модуля (/ — доставляемый модуль; 2 — переходная проставка; 3 — переходный и
агрегатный отсеки ТКА «Прогресс»)
Глава 6. Построение космических комплексов
345
Непосредственная стыковка эффективна при малом количестве компо-
нентов в комплексе, когда можно обеспечить свободную от элементов кон-
струкций зону безопасности [1] для причаливания модулей (рис. 6.2). При
автоматической стыковке используются радиотехнические и оптические си-
стемы наведения и управления, что требует наличия в районе стыковочного
узла антенных систем, экранов и датчиков со своими специфическими зонами
обзора и требованиями к размещению. При большом количестве модулей и
их плотной компоновке в составе комплекса более эффективным способом
оказывается швартовка.
Рис. 6.2. Допустимые отклонения продольной оси КА
от оси стыковочного узла, определяющие зону без-
опасности для причаливания ТКА к МКС:
d — ближняя дистанция; D — дальняя дистанция; ос — допу-
стимый угол отклонения на ближней дистанции; [3 — допусти-
мый угол отклонения на дальней дистанции; 1 — стыковочный
узел; 2 — ось стыковочного узла
Параметр ТКА МТКА
(см. рис. 6.2) «Союз» / «Прогресс» Space Shuttle
d, м................. - 9,1
Z), м.............. 200 122
ос, град........... 10 10
Р, град............ 45 12
Швартовка модулей была использована на ОС «Мир» для формирования
крестообразной компоновки. Порядок перестыковки модуля представлен
на рис. 6.3. Автономный модуль причаливает к осевому стыковочному узлу,
оснащенному системой автоматической стыковки, а затем перемещается на
боковой узел, не оснащенный такой системой. Операция выполняется ма-
нипулятором (рис. 6.4, а) автоматической системы перестыковки модулей
(АСПр) в составе причалившего модуля. На переходном отсеке базового
блока ОС «Мир» были установлены два узла захвата (рис. 6.4, б) манипуля-
тором, каждый из которых позволял перенести модуль на два соседних узла.
Манипулятор АСПр, установленный на причалившем модуле (рис. 6.4, в),
опускается на узел захвата (рис. 6.4, г), происходит их соединение, модуль от-
стыковывается от осевого узла и переносится в новое положение (рис. 6.4, д),
а затем пристыковывается к боковому узлу (рис. 6.4, е).
Швартовка модулей с помощью универсальных мобильных манипуля-
торов позволяет доставлять герметичные и негерметичные компоненты, ли-
шенные собственных систем управления движением с помощью серийных
ТКА или МТКА типа Space Shattle. Монтируемые компоненты могут быть
перемещены на значительное расстояние от места стыковки ТКА и с высокой
точностью установлены на заданное место.
На рис. 6.5 показаны фазы перемещения и установки модуля МИМ-1 из
транспортного отсека МТКА на надирный порт модуля «Заря». Первая фаза
монтажа заключается в извлечении модуля из грузового отсека манипулятором
МТКА. Во второй фазе происходит передача модуля от манипулятора МТКА
346
Часть II. Определение облика пилотируемого космического аппарата
Рис. 6.3. Перестыковка автоматически причалившего модуля:
а — стыковка модуля к базовому блоку ОС; б — перенос модуля с помощью манипулятора;
в — модуль в рабочем положении на боковом стыковочном узле
Рис. 6.4. Общий вид и порядок работы манипулятора АСПр ОС «Мир»:
а — общий вид манипулятора и узла захвата; б — расположение узлов захвата на ОС; в — модуль,
оснащенный манипулятором, пристыкован к ОС; г — манипулятор наклоняется и стыкуется
к узлу захвата; д — расстыковка и перенос модуля манипулятором; е — установка модуля в
рабочее положение; 1 — манипулятор; 2 — узел захвата; 3 — стыковочный агрегат
Рис. 6.5. Перемещение и швартовка модуля МИМ-1 с помощью двух универсальных манипуляторов:
а — первая фаза; б — вторая фаза; в — третья фаза; г — четвертая фаза
348 Часть II. Определение облика пилотируемого космического аппарата
к мобильному манипулятору МКС. В третьей фазе манипулятор МКС пере-
носит модуль к месту установки. Во время четвертой фазы модуль швартуется
к стыковочному узлу. Швартовка подразумевает захват КА манипулятором,
перевод КА манипулятором к месту установки, грубое выравнивание, точное
выравнивание и жесткое соединение, позволяющее осуществить стыковку
коммуникаций и создание герметичного внутреннего перехода.
При стыковке с использованием манипуляторов в зоне стыка не требуется
размещать дополнительные системы. Компоненты соединяются с высокой
точностью и малыми скоростями и ускорениями, что позволяет упростить
конструкцию и уменьшить массу стыковочных узлов.
Стыковочный узел выполняет следующие основные операции:
• амортизацию;
• компенсацию начального промаха;
• сцепку (образование первичной связи);
• выравнивание;
• стягивание;
• совмещение стыка с окончательным выравниванием;
• жесткое соединение (образование вторичной связи);
• расстыковку (разъединение первичной и вторичной связей);
• расталкивание агрегатов после разъединения;
• управление, сигнализацию и контроль в процессе стыковки.
Стыковочный узел может выполнять ряд дополнительных операций по
образованию коммуникаций между соединяемыми компонентами:
• создание герметичного внутреннего перехода;
• контроль герметичности стыка;
• открытие крышек люков и освобождение перехода;
• соединение электрических и гидравлических разъемов.
Стыковочный узел состоит из двух стыковочных агрегатов, установленных
на соединяемых КА и представляющих собой сложные мехатронные системы,
проектирование которых является отдельной задачей [2]. Стыковочные агре-
гаты работают как механизмы с высшими кинематическими парами. Контакт
агрегатов происходит по направляющим поверхностям, геометрия которых
позволяет перейти от начальных условий, при которых происходит касание,
к неподвижному соединению с заданной точностью. В процессе стыковки
один стыковочный агрегат работает в активном режиме, а другой, ответный,
является пассивным. Следовательно, активный и пассивный агрегаты могут
иметь различные конструкцию и геометрию направляющих поверхностей.
Если геометрия направляющих поверхностей обоих агрегатов окажется оди-
наковой, то стыковочный узел будет называться андрогинным (двуполым).
К соединениям компонентов большого космического комплекса предъ-
являются различные требования, что приводит к увеличению номенклатуры
стыковочных узлов: для соединения герметичных отсеков, негерметичных
отсеков, герметичных отсеков с негерметичными. Например, номенклатура
стыковочных узлов, использованная на МКС [3] и показанная на рис. 6.6,
насчитывает более десяти различных агрегатов.
Глава 6. Построение космических комплексов
349
Рис. 6.6. Применяемые типы соединений модулей на МКС (активные стыковочные
агрегаты обозначены четными номерами, пассивные — нечетными):
1,2— андрогинно-периферийный агрегат стыковки (АПАС-95); 3, 4 — Carrier Attachment
System (CAS); 5, 6 — Common Berthing Mechanism (CBM); 7, 8 — Exposed Facility Berthing
Mechanism (EFBM); 9, 10 — Exposed Facility Unit (EFU); 11, 12 — Modified Rocketdyne Truss
Attachment System MRTAS); 13, 14 — Module to Truss Segment Attachment System (MTSAS);
15, 16— Mobile Transporter/Mobile Remote Servicer Base System (MT/MBS); 17, 18— Rocketdyne
Truss Attachment System (RIAS); 19, 20 — Segment to Segment Attachment System (SSAS); 21, 22 —
гибридные стыковочные системы «штырь — конус» с внутренним переходом (ССВП*- М8000);
23, 24 — стыковочные системы «штырь — конус» с внутренним переходом (ССВП)
6.7.2. Стыковочные узлы герметичных отсеков
Стыковочные узлы герметичных отсеков должны обеспечивать герметич-
ный внутренний переход между соединяемыми объемами, который строится
на основе фланцевого соединения двух цилиндрических шпангоутов. Сое-
динение и стягивание фланцев производятся с помощью узлов стягивания и
системы направляющих (штифтов, штырей, пазов и пр.). Герметизация стыка
выполняется системой уплотнений.
Существуют особенности герметизации стыка, которые необходимо учи-
тывать при проектировании:
• возможность механических воздействий и загрязнений до стыковки
(при наземной подготовке, в автономном полете и т. п.);
• воздействие на уплотнения условий открытого космоса;
• возможность частичного неравномерного раскрытия стыка под дей-
ствием внешних нагрузок;
• возможность поперечного смещения стыкуемых фланцев на 1...2 мм
от соосного положения;
Стыковочный агрегат системы стыковки и внутреннего перехода.
350
Часть II. Определение облика пилотируемого космического аппарата
• широкий диапазон температур при стыковке;
• отсутствие адгезии материалов уплотнений при длительном стягивании
(необходимо для надежной расстыковки).
Для обеспечения надежности стыка уплотнения состоят из двух концен-
трических уплотняющих прокладок. На рис. 6.7 приведены сечения установ-
ленных в Т-образных канавках прокладок различных стыковочных узлов.
а б
в
Рис. 6.7. Примеры уплотнения фланцев стыковочных узлов:
а — российский стыковочный узел «штырь — конус»; б — российский андрогинно-перифе-
рийный стыковочный узел; в — варианты уплотнений для американского андрогинно-пе-
риферийного стыковочного узла
На стыковочных узлах американского сегмента МКС применяется уплотне-
ние Gask-0-Seal (рис. 6.8). Прокладка-уплотнение из силиконового эластомера
отформовывается непосредственно в уплотнительных канавках сепаратора из
алюминиевого сплава (диаметр кольца-сепаратора 1372 мм, ширина 28,5 мм,
толщина 5 мм). Форма уплотнительного кольца такова, что при стягивании
уплотняемых поверхностей прокладка деформируется, заполняя всю площадь
уплотнений (рис. 6.8, а, б). Сепаратор, имеющий уплотнение с двух сторон
(рис. 6.8, в), крепится к стыковочному шпангоуту (рис. 6.8, г). Сепаратор
состоит из восьми секций, каждая из которых может быть независимо де-
монтирована и заменена в случае нарушения уплотнения (рис. 6.8, д). Для
повышения надежности между кольцами уплотнений изготовлены перемыч-
ки, что позволяет создать зоны безопасности (рис. 6.8, е). Такая конструкция
более ремонтопригодна, чем обычные уплотнения с канавками. Недостаток
такого подхода — наличие двух уплотняемых стыков в узле вместо одного,
что ухудшает надежность герметичного соединения.
Глава 6. Построение космических комплексов
351
Рис. 6.8. Уплотнение Gask-0-Seal:
а — профиль уплотнения Gask-0-Seal в недеформированном состоянии; б — профиль уплотне-
ния в деформированном состоянии; в — конструкция уплотнений на сепараторе; г — крепление
сепаратора; д — сегменты сепаратора; е — конструкция уплотняющих колец с перемычками;
1 — уплотнение разъемного стыка между узлами; 2 — стационарное уплотнение стыка между
сепаратором и шпангоутом; 3 — отверстие под крепеж; 4 — шпангоут пассивного узла швар-
товки СВМ; 5 — крепеж; 6 — сепаратор уплотнений; 7 — уплотнение-перемычка
Стыковочный агрегат узла с внутренним переходом состоит из корпуса,
стыковочного механизма, стыковочного шпангоута и дополнительных узлов [2].
Корпус стыковочного агрегата служит основным силовым элементом, сты-
ковочный шпангоут выполняет роль фланца, стыковочный механизм обе-
спечивает выполнение стыковочных операций. Расположение стыковочного
механизма может быть как центральным — на люке герметичного перехода,
так и периферийным — вокруг перехода. В настоящее время применяются
стыковочные узлы с центральным стыковочным механизмом и направляю-
щими поверхностями «штырь — конус», а также андрогинные стыковочные
узлы с периферийным расположением стыковочного механизма и поверхно-
стями в виде колец с направляющими выступами.
Стыковочный узел «штырь — конус» состоит из активного агрегата, име-
ющего стыковочный механизм со штырем, и ответного пассивного агрегата
с приемным конусом [2]. Такая геометрия (рис. 6.9) позволяет проводить
стыковку со значительными начальными рассогласованиями в расположе-
нии стыкуемых объектов, что обеспечивает высокую надежность автономной
352
Часть II. Определение облика пилотируемого космического аппарата
Рис. 6.9. Геометрия стыковочного узла типа «штырь — конус»:
а — начальное отклоненное положение; б — конечное положение
непосредственной стыковки. Кроме того, масса стыковочного узла мини-
мальна вследствие использования одного активного стыковочного механизма.
В настоящее время на российском сегменте МКС используются стыко-
вочные узлы «штырь — конус» ССВП Г4000. Основные фазы работы этого
узла приведены на рис. 6.10.
Корабль, оборудованный активным стыковочным агрегатом, при подхо-
де к кораблю с пассивным агрегатом выдвигает телескопический штырь, на
конце которого расположен щуп. Касаясь конуса, щуп по инерции или под
действием двигателей малой тяги скользит по его поверхности до попадания
в гнездо. Защелки, имеющиеся в приемном гнезде, при прохождении головки
утапливаются, а затем жестко фиксируют щуп в гнезде. Момент касания со-
провождается ударом, энергия которого поглощается демпферами, состоящими
из электромеханического демпфера и демпфирующих пружин, потом привод
возвращает штангу, стягивая стыкующиеся корабли. После сцепки защелки го-
ловки, скользя по сужающимся пазам гнезда, разворачивают корабли по крену,
уменьшая начальное рассогласование. При стягивании рычаги расходятся в
стороны и фиксируют активный корабль в конусе, окончательно согласовы-
вая угловое положение стыкующихся объектов. Когда плоскости стыковочных
шпангоутов придут в соприкосновение, срабатывают периферийные замки,
прижимающие шпангоуты с усилием до 10 тс. В результате корабли жестко и
надежно соединяются.
После того как завершается стыковка, проверка герметичности стыка и
выравнивание давления между состыковавшимися кораблями, крышки люков
с помощью электроприводов отводятся назад и закрепляются. Вследствие ис-
пользования центрального стыковочного механизма габариты крышек люков
получаются значительными, поэтому при компоновке герметичного объема
отсека требуется предусмотреть такие зоны размещения крышек, которые ис-
ключали бы перекрытие герметичного перехода. Для размещения крышек могут
использоваться специальные «выштамповки» в оболочке отсека (рис. 6.10, ж).
Глава 6. Построение космических комплексов
353
Рис. 6.10. Схема основных этапов работы стыковочного узла «штырь-конус»:
а — касание; б — сцепка; в — стягивание; г — выравнивание; д — жесткое и герметичное
соединение; е — открытие переходных люков; ж — компоновка открытых крышек люков
в корпусе отсека; / — приемный конус, 2 — стыковочный механизм с приводом штанги;
3 — штанга; 4 — гнездо; 5 — головка штанги; 6 — рычаги выравнивания; 7 — направляю-
щий штырь, 8 — направляющее гнездо; 9 — замок герметизации стыка; 10 — ограничитель
«жабо»; 11 — привод герметизации крышки; 12 — привод крышки
354 Часть II. Определение облика пилотируемого космического аппарата
Стыковочные агрегаты ССВП на транспортных КА и модулях располагают
таким образом, чтобы активный стыковочный агрегат всегда размещался на
причаливающем модуле, а пассивный агрегат — на орбитальном комплек-
се. В результате все автономные КА не могут стыковаться между собой, что
затрудняет спасательные операции и снижает гибкость транспортных опе-
раций. Андрогинные стыковочные узлы с периферийными стыковочными
механизмами решают данную проблему, поскольку все узлы с одинаковым
интерфейсом стыковочного агрегата могут соединяться между собой. Один
из агрегатов выполняет роль активного, а другой — пассивного. Такая уни-
версальность приводит к усложнению стыковочного механизма, увеличению
массы стыковочного узла и ужесточению допусков на начальное рассогласо-
вание агрегатов при стыковке.
Современные андрогинно-периферийные стыковочные узлы построены
на базе стыковочного агрегата АПАС-95 (рис. 6.11). Данный узел является
модификацией стыковочного агрегата АПАС-89, использованного на ОС
«Мир». Здесь направляющими элементами стыковочного механизма служат
лепестки кольца, ориентированные внутрь стыковочного шпангоута. Стыко-
вочный механизм основан на шести телескопических штангах, соединенных с
кольцом. При стыковке три лепестка направляющих активного (вытянутого)
и пассивного (втянутого) стыковочного кольца устраняют грубое рассогласо-
вание осей стыкующихся КА. Кольцо активного агрегата на штангах имеет
шесть степеней свободы, оно может перемещаться для обеспечения соеди-
нения замков стыковочных агрегатов. Далее амортизаторы гасят остаточную
кинетическую энергию. Затем происходит втягивание активного кольца для
обеспечения герметичного стыка и стыковки разъемов коммуникаций.
Для упрощения конструкции АПАС может быть выполнен только в пас-
сивной конфигурации, без возможности перемещения кольца с выступами.
а б
Рис. 6.11. Активная (а) и пассивная (б) конфигурации андрогинно-периферий-
ного стыковочного агрегата АПАС-95:
/ — привод стыковочного кольца; 2 — стыковочное кольцо; 3 — замок; 4 — стыковочный
шпангоут; 5 — проволочное перекрестье-мишень
Глава 6. Построение космических комплексов
355
С помощью агрегатов АПАС-95 пассивной конфигурации к МКС выполня-
лась стыковка МТКА Space Shuttle. Для этого использовались герметичные
адаптеры сопряжения РМА (Pressurized Mating Adapters). Модуль РМА имел
один агрегат швартовки СВМ и один АПАС-95.
Единый интерфейс стыковочных агрегатов позволяет успешно реализовы-
вать международные космические программы и обеспечивать взаимопомощь
при аварийных ситуациях с ПКА. Первый опыт стыковки советско-амери-
канского космического комплекса «Союз — Аполлон» продемонстрировал
возможность стыковки двух различных по конструкции, но единых по интер-
фейсу стыковочных агрегатов АПАС-75. Конструкция АПАС-95 легла в основу
международного стандарта стыковочных агрегатов IDSS (International Docking
System Standard), разработанного ведущими космическими агентствами [4].
Агрегаты IDSS (рис. 6.12) предназначены для стыковки КА массой 5...25 т и
стыковки данных аппаратов к космическим комплексам массой 100...375 т
или к разгонным блокам массой 30... 170 т.
На базе стандарта IDSS разработан стыковочный агрегат NASA Docking
System (NDS) для перспективных американских ПКА, показанный на
рис. 6.13. Данная система называется также Low Impact Docking System
(LIDS) — система стыковки с малыми ударными нагрузками, особенность
которой заключается в использовании
электромагнитов для сцепки колец [5].
Это андрогинный узел с возможностью
пиротехнической экстренной рассты-
ковки и передачи коммуникаций через
разъемы в стыковочном шпангоуте. Ди-
аметр внутреннего перехода может быть
расширен путем демонтажа направляю-
щих лепестков. Для коммерческих ПКА
фирма Boeing разрабатывает стыковоч-
ный узел SIMAC, совместимый с IDSS.
Если отсутствует прямая необходи-
мость в симметрии стыковочных агрега-
тов, для уменьшения массы стыковоч-
ных узлов на российском сегменте МКС
Рис. 6.12. Интерфейс международного
стандарта стыковочных агрегатов IDSS:
I—I — плоскость андрогинности; H-II — плос-
кость симметрии; III—III — ось стыковочного
узла; 1 — замки жесткой сцепки (12 шт.); 2 —
отверстие направляющего штифта; 3 — фикса-
тор замка; 4 — уплотнение; 5 — стыковочный
шпангоут; 6 — направляющий штифт; 7 — сты-
ковочное кольцо; 8 — направляющий лепес-
ток (3 шт.); 9 — замок мягкой сцепки (3 шт.);
10— зона размещения направляющих лепестков
ответного агрегата; // — плоскость размещения
стыковочного кольца в пассивном положении;
12 — плоскость стыка
356
Часть II. Определение облика пилотируемого космического аппарата
Рис. 6.13. Узел LIDS в пассивном (я) и активном (б) состоянии
применяется комбинированный узел ССВП-М8000, имеющий стыковочный
шпангоут от АПАС и центральный стыковочный механизм типа «штырь —
конус» (рис. 6.14). Этот узел, совместимый с узлом АПАС, обладает пре-
имуществами узла ССВП и подходит для стыковки тяжелых модулей МКС.
Рис. 6.14. Гибридный стыковочный узел ССВП-М8000, состоящий из
активного (а) и пассивного (б) агрегатов
Для соединения герметичных модулей путем швартовки манипулятором
на американском сегменте МКС используется стыковочный узел СВМ [6].
Этот полностью автоматизированный механизм выполняет выравнивание,
сцепку и соединение болтами модулей с образованием герметичного перехода.
Внешний диаметр узла составляет 1,96 м. Внутреннее проходное сечение гер-
метичного перехода имеет форму квадрата со стороной 1,17 м, края которого
скруглены по радиусу 0,28 м. Размеры тоннеля определяются необходимостью
Глава 6. Построение космических комплексов
357
а б
Рис. 6.15. Стыковочный узел СВМ, состоящий из активного АСВМ (а) и
пассивного РСВМ (б) агрегатов:
7 — направляющие лепестки; 2 — стыковочные шпангоуты; 3 — болты с электро-
приводом; 4 — замки; 5 — узел контроллера приводов
переноса между модулями стоек с оборудованием. Узел состоит из активного
АСВМ и пассивного РСВМ агрегатов (рис. 6.15).
Основные элементы АСВМ\
• стыковочный шпангоут;
• направляющие для грубого выравнивания;
• индикаторы готовности к сцепке;
• замки сцепки;
• штифты точного выравнивания;
• крепежные болты с приводами.
Основные элементы РСВМ\
• стыковочный шпангоут;
• направляющие для грубого выравнивания (восемь лепестков);
• ответная часть замков сцепки;
• система выравнивания температуры;
• гнезда для штифтов точного выравнивания;
• гайки для соединительных болтов.
Для уплотнения стыковочного перехода на активном узле имеется при-
валочная плоскость, а на пассивном установлены два концентричных уплот-
нительных кольца. В отличие от комбинированного узла ССВП узел АСВМ
со всеми механизмами установлен на том элементе, к которому производится
стыковка (на ОС), поскольку так проще обеспечить его питание, а агрегат ме-
ханизма узла ПСВМ — на стыкующемся элементе (модуле), который может не
иметь своего питания. Общий вид стыковочного узла показан на рис. 6.16 [6].
После того как манипулятор подводит модуль с узлом РСВМ к узлу
АСВМ, происходит грубое выравнивание: лепестки направляющих ограни-
чивают относительное перемещение и вращение узлов. Использование ма-
нипулятора позволяет существенно уменьшить массу системы амортизации
и размеры направляющих лепестков.
358
Часть II. Определение облика пилотируемого космического аппарата
Рис. 6.16. Разрез стыковочного узла СВМ:
1 — болт с электроприводом (16 шт.); 2 — направляющий штифт (4 шт.);
3 — паз штифта (4 шт.); 4 — гайка (16 шт.); 5 — направляющий лепесток
(16 шт.); 6 — фитинг сцепки (4 шт.); 7— замок сцепки (4 шт.); 8 — стыковоч-
ный шпангоут пассивного агрегата; 9 — стыковочный шпангоут активного
агрегата; 10 — толкатель (16 шт.); 11 — фиксатор (16 шт.); 12 — индикатор
готовности к сцепке (4 шт.); 13 — узел контроллера приводов
Как только выполнено грубое выравнивание, на расстоянии между плос-
костями стыка менее 114 мм срабатывают датчики готовности к сцепке. Этот
сигнал передается оператору манипулятора, чтобы тот включил электропри-
воды замков сцепки. На СВМ установлены четыре замка, обеспечивающих
захват, сцепку и стягивание фланцев. Для выполнения швартовки достаточно
работы трех замков. Четырехзвенный рычажный механизм замка (рис. 6.17),
приводимый в действие электроприводом, обеспечивает его большой ход и
достаточные допуски при захвате пассивного фланца. При этом на пассивном
узле предусмотрены четыре соответствующих фитинга. Узел замка расположен
внутри герметичного объема, так что его легко обслуживать и ремонтировать.
На пассивном кольце установлены амортизаторы, которые гасят остаточную
энергию сцепки, чтобы исключить нерасчетное давление на уплотнения.
Замки соединяют узлы и стягивают агрегаты. В процессе сцепки происхо-
дит точное выравнивание по штифтам. Для предотвращения сдвига фланцев
вместо штырей использованы профилированные накладки, установленные
внутри стыковочных шпангоутов (рис. 6.18). Накладки не требуют создания
отверстий на плоскости фланца и обеспечивают большую площадь контакта,
а также при необходимости могут быть легко заменены.
Для долговременного соединения и обжатия уплотнений используются
16 болтов с электроприводом. Болт диаметром 5/8 дюймов (около 16 мм)
имеет две зоны резьбы: направляющую резьбу для выравнивания болта и
Глава 6. Построение космических комплексов
359
Рис. 6.17. Работа рычажного механизма стягивания узла СВМ:
а — исходное положение; б — касание и захват; в — стягивание; г — конечное положение
ходовую резьбу для стягивания с усилием около 42 кН на болт. Механизмы
болтов также находятся внутри герметичного объема. Болты, равномерно
расставленные по окружности шпангоута, сначала затягиваются все вместе,
а затем поочередно подтягиваются группами для создания равномерного
распределения нагрузки на уплотнение.
Контроллеры приводов болтов сгруп-
пированы в четыре узла, установлен-
ные в проеме люка. После швартовки
эти контроллеры демонтируются, и
освобождается внутренний переход.
Электрические, информационные,
гидравлические и прочие линии ком-
муникаций прокладываются и соеди-
няются вручную после швартовки и
открытия люков.
Рис. 6.18. Узел компенсации сдвига
СВМ:
/ — стыковочный шпангоут пассивного
агрегата; 2 — штифт; 3 — стыковочный
шпангоут активного агрегата; 4 — пласти-
ны с выступом и с впадиной (расположе-
ны на шпангоутах друг напротив друга);
5 — болт
360
Часть II. Определение облика пилотируемого космического аппарата
6.1.3. Стыковочные узлы негерметичных отсеков
Негерметичные компоненты космического комплекса (например, фер-
менный каркас) входят в состав его силовой схемы или служат для размеще-
ния научного оборудования. Логика развертывания космического комплекса
предполагает, что швартовка манипулятором негерметичных силовых эле-
ментов производится редко (как правило, один раз) и на длительное время,
поэтому невыгодно полностью автоматизировать процесс их соединения.
Автоматизация швартовки важна при стыковке массивных и ответственных
элементов, таких как центральные элементы фермы МКС. Операции швар-
товки менее важных элементов могут проходить при участии и под контролем
астронавтов при выходе в открытый космос. Механизмы швартовки должны
обеспечивать компенсацию рассогласования элементов, возникающую при
перемещении модуля манипулятором, а также точное позиционирование их
Рис. 6.19. Стыковочный узел SSAS, состоящий из активного (а) и пассивного (б)
агрегатов:
/ — узел болта с электроприводом (4 шт.); 2 — замок сцепки; 3 — штырь грубого позици-
онирования (3 шт.); 4 — штырь точного позиционирования (3 шт.); 5 — датчик касания (3
шт.); 6 — конус грубого позиционирования (3 шт.); 7 — конус точного позиционирования
(4 шт.); 8 — узел плавающей гайки (2 шт.); 9 — упор датчика касания (3 шт.); 10 — стержень
сцепки; / / — узел с фиксированной гайкой (2 шт.)
Глава 6. Построение космических комплексов
361
при сборке и механическом соединении. При этом требуется обеспечение
обратной связи, создаваемой датчиками готовности к сцепке.
На МКС для стыковки элементов фермы применяются два стыковочных
узла [7]. Узел SSAS (Segment-to-Segment Attachment System — система сты-
ковки сегмента к сегменту) имеет полностью автоматизированные агрегаты,
а узел RTAS (Rocketdyne Truss Attachment System — система стыковки фермы,
разработанная компанией Rocketdyne), наоборот, рассчитан на сборку с
участием астронавтов, выходящих в открытый космос. Общими элементами
негерметичных стыковочных механизмов фермы служат пары направляющих
гнездо — конус и соединительные болты.
Узел SSAS (рис. 6.19) применяется
для соединения внутренних сегмен-
тов фермы: S3/4, SI, SO, Pl, РЗ/4. Он
также снабжен активным и пассив-
ным периферийными стыковочными
агрегатами. Активный имеет болты,
оснащенные электроприводами, три
конуса грубого выравнивания, четы-
ре конуса точного выравнивания (по
углам сечения фермы в местах установ-
ки болтов), датчик готовности к сцепке
и замок-сцепку [3, 8], пассивный —
ответные гайки и гнезда для штифтов
и конусов, а также петлю для сцепки.
Датчик готовности к сцепке сраба-
тывает, когда расстояние между плос-
костями стыка достигает 76 мм. При
срабатывании датчика оператор пода-
ет команду на сцепку, замок которой
имеет дублированный электропривод
и аварийный ручной привод. Захваты
замка производят сцепку и стягивание
швартуемых конструкций. При стяги-
вании конусы точного выравнивания
устанавливаются в гнезда, в результате
чего совпадают оси болтов и гаек. Болты
закручиваются электроприводом. Бол-
товое соединение имеет систему датчи-
ков, подсоединенных к компьютерной
сети МКС для контроля состояния
соединения.
Оператор манипулятора располага-
ет пристыковываемый элемент фермы
таким образом, что срабатывают датчик
готовности к сцепке и замок сцепки
(рис. 6.20). Затем начинается стягива-
ние, при котором сперва выполняется
Рис. 6.20. Замок сцепки стыковочного
агрегата SSAS:
а — общий вид активного агрегата замка в
раскрытом положении; б — геометрия захва-
тов замка в закрытом положении
362 Часть II. Определение облика пилотируемого космического аппарата
грубое выравнивание по трем большим конусам, а затем — точное вырав-
нивание по четырем малым конусам. Сцепленные сегменты соединяются
болтами, расположенными по оси конусов точного выравнивания.
Узел RTAS (рис. 6.21) применяется для соединения внутренних сегмен-
тов фермы: S5, S6, Р5, Р6. Этот механизм является упрощенным механизмом
SSAS, в котором замок сцепки и болты не имеют электроприводов, астронавты
монтируют их вручную при выходе в открытый космос. Здесь используются
по четыре направляющих как грубого, так и точного выравнивания. Астро-
навты, выполняющие монтаж, визуально определяют готовность к сцепке.
Рис. 6.21. Активный (а) и пассивный (б)
агрегаты стыковочного узла RTAS:
7 — узел болта; 2 — гнездо грубого позициони-
рования; 3 — замок сцепки; 4 — гайка фикси-
рована в плоскости y—z; 5 — узел плавающей
гайки; 6 — выступ грубого позиционирования;
7 — стержень сцепки; 8 — гайка подвижна в на-
правлении ±у; 9 — гайка подвижна в плоскости
y—z\ в дополнение к подвижности в плоскости
y—z гайки обеспечивают ограниченные враща-
тельные степени свободы вокруг осей оу и oz
После грубого выравнивания стыкуемых элементов астронавты с по-
мощью электроинструмента приводят в действие замок-сцепку. Стягивание
продолжается до точного выравнивания по соответствующим конусам. Затем
астронавты затягивают электроинструментом четыре болтовых соединения,
после чего замок-сцепка раскрывается. Соединительные болты дублированы
на случай нештатной ситуации. Также можно освободить и заменить болт в
случае его заедания.
Модифицированный стыковочный узел MRTAS (Modifiend RTAS) ис-
пользуется для соединения секций Р5 и Р4, а также секций S5 и S4. Здесь
вместо одного замка-сцепки используются четыре замка (подпружиненные
защелки), фиксирующие конусы грубого выравнивания.
На рис. 6.22 представлена конструкция узла MRTAS. Для точного вырав-
нивания осей болтов и гаек служат втулки точного выравнивания. Болтовые
соединения имеют степени свободы для компенсации неточности сборки и
деформаций сечения, например под действием теплового расширения. Один
болт фиксирован, а три остальных могут перемещаться каждый в своем на-
правлении (рис. 6.23).
Глава 6. Построение космических комплексов
363
Рис. 6.22. Компоновка стыковочных узлов на секции Р5 фермы МКС:
/ — стык Р6—Р5 (узел RTAS — активный агрегат); 2 — узлы захвата манипулятором; 3 — стык
Р5—Р4 (узел MRTAS — пассивный агрегат); 4 — механизм стыковки MRTAS
6.1.4. Стыковочные узлы герметичных и негерметичных отсеков
Соединение герметичных компонентов с негерметичными компонентами
космического комплекса может быть проведено посредством стыковочных
узлов или узлов швартовки без образования герметичного перехода, например
с помощью узла СВМ соединяются узловой модуль Unity и негерметичный
модуль Z1. Более прочное и жесткое соединение может быть создано с ис-
пользованием ложементов и системы стержневых подкосов, применяемое
при соединении поперечной фермы с лабораторным модулем Destiny.
Ложемент LCA (Lab Cradle Assembly — узел ложемента лабораторного мо-
дуля) крепится к шпангоуту и лонжеронам лабораторного модуля (рис. 6.24).
Для швартовки центрального модуля фермы SO к LCA применяется стыко-
вочный узел MTSAS (Module to Truss Segment Attachment System — система
стыковки модуля к ферме).
Активный стыковочный агрегат MTSAS, установленный на ложементе,
имеет в своем составе четыре V-образных паза направляющих, в каждый из
364 Часть II. Определение облика пилотируемого космического аппарата
Рис. 6.23. Узел сцепки MRTAS:
1 — втулка резервного болта; 2 — резервный болт; 3 — основной болт; 4 — устано-
вочный цилиндр; 5 — основная плавающая гайка; 6 — резервная плавающая гайка;
7 — замок сцепки; 8 — гнездо грубого позиционирования; 9 — выступ грубого
позиционирования; 10— зазор замка сцепки
а
б
Рис. 6.24. Пассивный (а) и активный (б) агрегаты стыковочного узла
MTSAS:
1 — датчик касания; 2 — V-образная направляющая грубого позиционирования;
3 — замок сцепки; 4 — выступ точного позиционирования; 5 — стержень сцепки;
6 — выемка точного позиционирования; 7 — стержень грубого позиционирования
Глава 6. Построение космических комплексов
365
которых вмонтирован индикатор готовности к сцепке, замок-сцепку и три
направляющих точного выравнивания с болтами, а пассивный — четыре
штифта грубого выравнивания, петлю сцепки и три направляющих точного
выравнивания с гайками.
При монтаже оператор должен установить ферму таким образом, чтобы
сработали все четыре датчика готовности к сцепке, т. е. все четыре штифта
должны быть в контакте с V-образными направляющими. В результате сра-
батывания всех датчиков происходит сцепка. После стягивания и точного
выравнивания узлы скрепляются болтами.
Для того чтобы придать соединению фермы с герметичным модулем до-
полнительные прочность и жесткость, использована система телескопических
стержней (рис. 6.25).
Рис. 6.25. Усиление стыковочного узла герметичного модуля и модуля фермы
МКС с помощью телескопических стержней:
1 — телескопический стержень; 2 — модуль Destiny; 3 — модуль фермы SO
366 Часть II. Определение облика пилотируемого космического аппарата
Еще один вариант соединения герметичного и негерметичного модулей —
соединение японского модуля Kibo с негерметичной платформой, для ко-
торого используется показанный на рис. 6.26 специализированный узел
EFBM (Exposed Facility Berthing Mechanism — узел швартовки негерметич-
ной платформы), имеющий активный и пассивный стыковочные агрегаты.
Узлы имеют направляющие лепестки, аналогичные лепесткам узла СВМ,
но развернутые наружу. В центре узла расположена плата с разъемами, а по
краям размещены замки, подобные замкам-сцепкам узла СВМ.
Швартовка проводится в процессе внекорабельной деятельности экипажа.
Готовность к сцепке контролируют астронавты. По их команде включаются
замки и выполняется стягивание, в процессе которого разъемы на плате сое-
диняются. Для точного выравнивания используются направляющие штыри.
в г
Рис. 6.26. Стыковочные узлы японского сегмента МКС:
а — расположение стыковочных узлов на модуле Kibo (7 — активный агрегат EFBM; 2 —
узел швартовки СВМ; 3 — иллюминатор; 4 — люк шлюзовой камеры); б — расположение
стыковочных узлов на негерметичной платформе EF (5 — узел стыковки полезной нагрузки
EFU; 6 — узел захвата манипулятором; 7 — пассивный агрегат EFBM); в — активный агре-
гат EFBM (8 — замок сцепки; 9 — направляющие лепестки грубого позиционирования);
г — пассивный агрегат EFBM
Глава 6. Построение космических комплексов
367
6.1.5. Монтаж конструкций космического комплекса
Монтаж больших космических комплексов требует сооружения круп-
ногабаритных компонентов, доставленных транспортными КА в сложенном
виде или в виде комплекта деталей и узлов. К таким компонентам относятся,
например, ферменные конструкции, антенны, панели солнечных батарей, ра-
диаторы-излучатели и конструкции трансформируемых герметичных отсеков.
При компоновке этих узлов в составе комплекса следует учитывать техно-
логию проведения монтажа и необходимость размещения в зоне проведения
работ различных инструментов и приспособлений. Основными технологи-
ями монтажа являются перевод конструкции из транспортного положения
в рабочее и поэлементная сборка конструкции. На рис. 6.27 представлено
Рис. 6.27. Компоненты космического комплекса: комбинация раскладываемых (I) и
собираемых (II) ферменных конструкций (цифры 7—/означают очередность сборки
элементов)
368 Часть II. Определение облика пилотируемого космического аппарата
технологическое членение компоновочной схемы крупногабаритной ОС (один
из вариантов ОС Freedom) на компоненты, среди которых имеются как транс-
формируемые, так и поэлементно собираемые ферменные конструкции [9].
Установка и соединение компонентов трансформируемой конструкции
задаются кинематикой относительного перемещения ее узлов, заложенной
в конструкцию при проектировании и обеспеченной при изготовлении в
наземных условиях. Это сокращает время процесса монтажа и упрощает его.
Однако трансформируемые конструкции имеют и ряд недостатков. Поскольку
при неполном раскрытии они не могут выполнять свои функции, необходимо
обеспечить высокую надежность механизмов трансформации, что приводит
к удорожанию конструкции. Форма и размеры трансформируемой конструк-
ции заданы заранее, и изменять их при монтаже практически невозможно.
При поэлементной сборке установка и соединение всех деталей и узлов
выполняются непосредственно на месте в условиях космического полета.
При этом детали и узлы могут иметь упрощенную конструкцию. Кроме того,
предусмотрена возможность использовать неразъемные соединения (напри-
мер, полученные сваркой, расклепыванием), изменять и модернизировать
конструкцию. Однако поэлементная сборка требует более длительного вре-
мени монтажа и проведения испытаний собранной конструкции, подтверж-
дающих качество сборки. Поэтому предпочтительнее использовать гибридные
технологии монтажа, основанные на поэлементной сборке развертываемых
модулей, доставляемых на орбиту в виде транспортных упаковок.
По степени участия в технологических операциях монтаж можно раз-
делить на автоматический, полуавтоматический и ручной. Автоматический
монтаж может быть выполнен без участия человека, когда экипаж только
инициирует и контролирует процесс (как при выходе в открытый космос, так
и дистанционно). Полуавтоматический монтаж предполагает участие экипажа
в технологических операциях, а ручной — полностью проводит экипаж. По
месту проведения технологических операций монтаж можно разделить на
внутренний, проводимый внутри герметичного объема, и внешний, выполня-
емый в условиях открытого космоса.
Пример гибридной технологии монтажа — развертывание в 1979 г.
на станции «Салют-6» крупногабаритной антенны радиотелескопа КРТ-10
диаметром 10 м. Космический телескоп был доставлен на орбитальную
станцию «Салют-6» транспортным кораблем «Прогресс-7» в виде отдельных
блоков. Сборку развертываемых модулей радиотелескопа проводили члены
экипажа внутри герметичного объема станции, а затем были выполнены
контрольные операции и размещение антенны в устройстве выдвижения,
смонтированном на стыковочном узле в промежуточном отсеке ОС. После
разгерметизации этого отсека и отстыковки ТКА «Прогресс-7» антенна была
выдвинута и развернута. При демонтаже возникла нештатная ситуация — ан-
тенна зацепилась за выступающую крестовину стыковочной мишени на агре-
гатном отсеке станции «Салют-6». Для ликвидации сложившейся ситуации
потребовался выход членов экипажа в открытый космос.
Пример выполнения поэлементного ручного монтажа конструкции — со-
оружение в 1991 г. на наружной поверхности модуля «Квант» ОС «Мир» крупно-
Глава 6. Построение космических комплексов
369
габаритной фермы «Софора» квадратного поперечного (размерами 0,5 х 0,5 м)
длиной 14,5 м, имеющей массу 90 кг [10]. Ферма (рис. 6.28) состояла из ква-
дратных диафрагм 7 и раскладных продольно-диагональных У-образных эле-
ментов 2, составленных из стержней 5, фитингов 4, соединительных муфт 5
и шарниров 6.
При сборке на стержни У-образных элементов одного пояса фермы, про-
ходящие сквозь отверстия в диафрагме, устанавливались фитинги и муфты
У-образных элементов следующего пояса, фиксировавшиеся термомеханиче-
ским соединением с использованием муфты из материала с памятью формы
(рис. 6.29). Муфта из такого материала обжимает соединение штифт — хво-
стовик за счет изменения диаметра муфты при ее нагреве кварцевой лампой.
Рис. 6.28. Конструкция фермы «Софора»:
/ — диафрагма; 2 — У-образный элемент; 3 — стержень; 4 —
фитинг; 5 — соединительная муфта из материала с эффектом
памяти формы; 6 — шарнир
370
Часть II. Определение облика пилотируемого космического аппарата
Рис. 6.29. Термомеханическое сое-
динение узлов фермы:
/ — соединяемая деталь с хвостовиком;
2 — соединяемая деталь со штифтом;
3 — обжимная муфта из материала с
эффектом памяти формы
Для сооружения фермы в условиях
открытого космоса на внешней поверх-
ности модуля «Квант» были установлены
монтажная площадка и сборочный ста-
пель. Компоновка фермы в собранном
виде в составе комплекса представлена на
рис. 6.30 [10]. Ферма расположена под
углом 79° к продольной оси ОС и укре-
плена на основании четырьмя расчалка-
ми. Сборка фермы из 20 секций, в ходе
которой были получены 84 термомеха-
нических соединения, заняла 22 ч, что
потребовало совершить четыре выхода
в открытый космос. Таким образом,
ручная сборка погонного метра фермы
Рис. 6.30. Компоновка фермы «Софора» в составе комплекса «Мир» и схема
монтажа ВДУ на ферме «Софора»:
/ — базовый блок; 2 — модуль «Квант»; 3 — ферма «Софора» (приведены номера секций);
4 — полезная нагрузка (выносная двигательная установка); 5 — модуль «Квант-2»; 6 — мо-
дуль «Кристалл»; 7 — стапель; 8 — грузовая стрела; 9 — ТКА «Прогресс»; 10 — ТКА «Союз»
Глава 6. Построение космических комплексов
371
заняла более 1,5 ч, что свидетельствует о значительной трудоемкости дан-
ного процесса.
Использование фермы началось в 1992 г., когда на конце фермы «Софора»
во время выхода в открытый космос экипаж смонтировал выносную двига-
тельную установку (ВДУ) массой 750 кг для управления ОС по крену В 1998 г.
ВДУ была заменена. Для доставки модуля ВДУ был использован модифи-
цированный ТКА «Прогресс-М», у которого отсек с компонентами топлива
был заменен на отсек для доставки негерметичного груза. Схема монтажа
ВДУ представлена на рис. 6.30. ТКА был пристыкован к модулю «Квант».
На 13-й секции фермы, имеющей шарнирное звено, космонавты установили
ручной привод, с помощью которого часть фермы была отклонена в сторону
ТКА так, что ее конец оказался в зоне негерметичного отсека. ВДУ была из-
влечена из грузового отсека и состыкована с фермой, после чего ферма была
переведена в исходное состояние. Монтажные операции заняли около 6,5 ч.
Наряду с ВДУ к ферме «Софора» крепились различные полезные нагруз-
ки. В 1999 г. в рамках эксперимента «Рефлектор» на ферме космонавтами была
вручную смонтирована и раскрыта антенна размерами 6,4 х 5,2 м и массой
35 кг (масса с контейнером — 46,5 кг).
Примером развертывания трансформируемой конструкции стало со-
оружение в 1993 г. раскладной фермы длиной 5 м с поперечным сечением
размерами 0,3 х 0,4 м на наружной поверхности модуля «Квант» ОС «Мир»
в рамках эксперимента «Рапана». Ферма состояла из пяти ячеек, каждая из
которых содержала по четыре углепластиковые панели, шарнирно соединен-
ные между собой. Масса фермы составляла 13 кг. Ее конструкция разверты-
валась изготовленным из материала с эффектом памяти формы проволоч-
ным приводом, смонтированным на стержневых «ломающихся» диагоналях.
В ходе эксперимента космонавты проводили подготовительные действия
внутри обитаемого отсека, вынос транспортной упаковки конструкции на
поверхность отсека и соединение электрокабелей с пультом управления при-
водом. Развертывание выполнялось путем нагрева проволочных приводов. Для
монтажа фермы были совершены два выхода в открытый космос: во время
первого из них проводились подготовительные операции, а во время второго —
развертывание фермы и установка научного оборудования [10]. Непосредствен-
но развертывание фермы заняло около 5 мин [И]. Компоновка фермы «Ра-
пана» на модуле «Квант» в различных конфигурациях приведена на рис. 6.31.
Монтаж космических конструкций требует применения технологической
оснастки, размещение которой необходимо предусмотреть при компоновке
космического комплекса. При монтаже фермы «Софора» применялись мон-
тажная платформа и стапельное устройство (рис. 6.30). Ферма собиралась в
стапельном устройстве параллельно продольной оси ОС, а затем переводилась
в рабочее положение. Пример использования технологической фермы для
монтажа плотной тетраэдрической компоновки герметичных модулей пока-
зан на рис. 6.32 [12]. Ферма требуется для временного увеличения жесткости
конфигурации «двухлучевой» модульной компоновки до того момента, как
она будет замкнута герметичным модулем.
Для монтажа космических конструкций компоновка космического ком-
плекса может предусматривать различные средства (табл. 6.1). Кроме ручной
372
Часть II. Определение облика пилотируемого космического аппарата
Рис. 6.31. Компоновочная схема фермы «Рапана» в транс-
портном (7), промежуточном (2) и рабочем (3) положениях
сборки предусматриваются различные робототехнические средства автомати-
зации на основе дистанционно управляемых манипуляторов, которые могут
базироваться как на самом комплексе, так и на автономном КА-сборщике.
Использование сборочных машин дает возможность повысить производитель-
ность монтажа и уменьшить массу собираемых конструкций. Такая машина
представляет собой автоматическую производственность линию, на которой
из заготовок может создаваться неразъемная ферма минимальной массы.
В последнее время рассматривается возможность применения в космосе тех-
нологий трехмерной послойной печати.
Универсальные многозвенные манипуляторы робототехнических систем
применяют не только при монтаже космического комплекса, но и во время
его обслуживания. На МКС с их помощью можно перемещать грузы, швар-
товать модули и ТКА, а также передвигать членов экипажа во время выходов
в открытый космос к месту проведения работ, кроме того, они выполняют
роль подвижных штативов для видеосъемки и другие подобные операции.
Глава 6. Построение космических комплексов
373
Рис. 6.32. Сборка плотной компоновки герметичных модулей с использо-
ванием технологической промежуточной фермы:
а — монтаж фермы; б — монтаж герметичного модуля рядом с фермой; 1 — ферма;
2 — основной герметичный модуль; 3 — узловой модуль; 4 — малые модули; 5 — энерге-
тический модуль; I, II, III — нумерация узловых модулей по порядку операций монтажа
Таблица 6.1
Средства поэлементной сборки космического комплекса
Средства монтажа Функции экипажа Преимущества
Инструменты для ручной сборки при выходе в открытый космос Экипаж работает при выходе в открытый космос как бригада строителей Минимальная стоимость оснастки; высокая гибкость, возможность выполнения непредвиденных работ; локаль- ная сборка; малые или контро- лируемые нагрузки
Манипуляторы, краны и грузовые стрелы космичес- кого комплекса Локальная сборка (только вблизи комплекса). Устойчивая база для разме- щения манипуляторов. Дистанционное управление манипуляторами Малые или контролируемые нагрузки; возможность экипажа контролировать процесс при выходе в открытый космос
Свободно летаю- щие КА-сборщики Пилотирование КА. Дистанционное управление манипуляторами. Контроль работы и предот- вращение нештатных ситуаций Дистанционно проводимые опе- рации; выполнение непредвиден- ных операций; решение задач, требующих высокой точности; возможность управления с КА с Земли
Автоматические сборочные машины Обеспечение начальных условий. Запуск и останов процесса сборки. Контроль работы и предот- вращение нештатных ситуаций Создание крупногабаритных конструкций; дистанционно проводимые операции; малые или контролируемые нагрузки
374 Часть II. Определение облика пилотируемого космического аппарата
На МКС используются канадский манипулятор SSRMS (Space Station
Remote Manipulator System), японский манипулятор JEMRMS (Japanese
Experiment Module Remote Manipulator System) и европейский манипулятор
ERA (European Robotic Arm) (рис. 6.33, табл. 6.2 и 6.3) [13]. Каждый из мани-
пуляторов состоит из балок, соединенных сочленениями, имеющими приво-
ды с несколькими степенями свободы. На концах манипуляторов находятся
стыковочные устройства для крепления полезной нагрузки.
Таблица 6.2
Характеристики манипуляторов МКС
Параметр SSRMS ERA JEMRMS
Длина манипулятора, м 14,22 п,з 9,91
Длина балки, м 7,11 7,77 3,9
Число степеней свободы 7 7 6
Компоновка сочленений Смещенная Линейная Смещенная
Мобильность Мобильный Мобильный Фиксированный
Точность позициониро- вания, мм/град 65/0,71 40/1,00 50/1,8
Масса, кг 1336 630 757
Максимальная масса переносимого полезного груза, кг 116 000 8000 7000
Энергопотребление, Вт 1360 800 2300
Скорость перемещения, мм/с (с грузом, кг) 370 150 (1000) 20 (20 900) 12 (116 000) 200 150 (100) 40 (3000) 10 (8000) 60 (600) 30 (3000) 20 (7000)
Скорость вращения, град/с (с грузом, кг) 4,0 1,2 (1000) 0,15 (20 900) 0,04 (11 6000) 3,0 2,3 (100) 0,6 (3000) 0,15 (8000) 2,5 (600) 1,0 (3000) 0,5 (7000)
Таблица 6.3
Степени свободы манипуляторов МКС
Угловое перемещение Манипулятор
SSRMS ERA JEMRMS
Плечо:
крен ±270° ±185° Нет степени свободы
рыскание ±270° ±120° -1007+80°
тангаж ±270° ±120° -60°/+210°
Локоть: крен ±270° +307-176° -175°/+175°
Запястье: ±270° ±120° -180°/+90°
крен
рыскание ±270° ±120° -240°/+90°
тангаж ±270° ±185° -2157+215°
Глава 6. Построение космических комплексов
375
7110
7110
1360
16 940
а
Рис. 6.33. Габариты манипуляторов SSRMS (я), ERA (0, JEM RMS (в) и их компо-
новочная схема (г):
/ — база манипулятора; 2 — шарнир № 1; 3 — шарнир № 2; 4 — штанга № 1; 5 — шарнир № 3;
6 — локтевая видеокамера; 7 — штанга № 2; 8 — шарнир № 4; 9 — шарнир № 6; 10 — кистевая
видеокамера; 11 — захват манипулятора; 12 — шарнир №5; 13 — штанга № 3
Стыковочный узел манипулятора SSRMS [14] состоит из активного (effector—
исполнительный механизм) и пассивного (grapple — якорь) агрегатов.
Принцип действия стыковочного узла штырь — трос приведен на рис. 6.34.
Активный агрегат имеет цилиндрический корпус, в котором размещен замок,
состоящий из стыковочного шпангоута, двух колец, трех отрезков тросов и
осевого привода (рис. 6.34, а). Одно из колец остается неподвижным, а другое
376
Часть II. Определение облика пилотируемого космического аппарата
поворачивается вокруг оси корпуса. Пассивный агрегат имеет стыковочный
шпангоут, штырь и три направляющие (рис. 6.35), а также стыковочную ми-
шень. В начальный момент штырь пассивного узла входит в корпус активного
узла, кольца которого придвинуты к стыковочному шпангоуту (см. рис. 6.34, а).
При этом возможно значительное рассогласование осей стыковочных агрега-
тов, поскольку кольца развернуты так, что тросы расположены по окружности
(рис. 6.34, в). Далее подвижное кольцо поворачивается, в результате чего
тросы перекрещиваются и начинают контактировать со штырем (рис. 6.36, г).
При повороте на 80° тросы плотно охватывают штырь, ориентируя его по
центру активного агрегата, (рис. 6.34, д). После захвата штыря осевой при-
вод втягивает кольца, и тросы, взаимодействуя с упором на конце штыря,
натягиваются и стягивают стыковочные шпангоуты агрегатов (рис. 6.34, 0.
Для работы с манипулятором SSRMS разработано семейство пассивных
агрегатов [15], отличающихся функциональными возможностями. Простей-
ший агрегат FRGF (Flight Releasable Grapple Fixture), обеспечивает только ме-
ханическое соединение (рис. 6.35, а). Агрегат PVGF (Power and Video Grapple
Рис. 6.34. Фазы работы стыковочного устройства LEE (Latching End Effector)
манипулятора SSRMS:
а — начальное положение агрегатов; б — конечное положение агрегатов в состыкованном
виде (трос втянут); в — начальное положение тросов; г — начало вращения кольца; д —
охват и центрирование штыря тросами; 1 — штырь на пассивном агрегате захватываемой
полезной нагрузки; 2 — центрированное тросами положение штыря перед втягиванием;
3 — внешнее поворотное кольцо; 4 — внутреннее неподвижное кольцо; 5 — тросы в ис-
ходном положении; 6 — корпус активного агрегата; 7 — полезная нагрузка
Глава 6. Построение космических комплексов
377
Рис. 6.35. Пассивный агрегат стыковочного устройства манипулятора SSRMS:
а — агрегат типа FRGF; б — агрегат типа PDGF; 1 — направляющие (3 шт.); 2 — основа-
ние диаметром от 368,3 до 571,5 мм; 3 — мишень для захвата; 4 — штырь мишени (длина
101,4 мм); 5 — штырь (длина 274,3 мм); 6 — электроразъем; 7— крепежный болт (6 шт.)
Fixture) имеет разъемы, позволяющие соединять кабели передачи питания
на полезную нагрузку и получать видео с установленных на нем камер. Наи-
более сложный агрегат PDGF (Power and Data Grapple Fixture) предоставляет
возможность передавать наряду с питанием и видео управляющие команды
на манипулятор (рис. 6.35, б). Агрегаты типа PDGF могут быть использованы
для базирования манипулятора при его перемещении по поверхности ОС.
378
Часть II. Определение облика пилотируемого космического аппарата
Рис. 6.36. Комплекс SPDM:
1 — активный агрегат захвата (LEE)
со встроенной камерой и осветите-
лем; 2 — контейнеры для сменных
инструментов (ТНА); 3 — агрегат
захвата манипулятором PDGF; 4 —
эффектор для захвата сменных ин-
струментов (ОТСМ); 5 — датчик мо-
мента; 6 — кистевые шарниры (три
степени свободы); 7 — локтевой
шарнир (одна степень свободы);
8— плечевые шарниры (три степе-
ни свободы); 9— блок электроники;
10 — узел камеры с осветителем;
11 — привод поворота тела; 12 —
платформа рабочего места для фик-
сации астронавтов при ВКД
Точные монтажные работы могут быть проведены с помощью манипуля-
торов SSRMS и JEMRMS, оснащенных робототехническими комплексами-
насадками: манипулятором специального назначения SPDM (Special Purpose
Dexterous Manipulator) — для SSRMS и малым точным манипулятором SFA
(Small Fine Arm) — для JEMRMS. Комплекс SPDM [16] (рис. 6.36) массой 1560 кг
позволяет позиционировать грузы массой до 600 кг с точностью 2 мм. Он
оснащен двумя манипуляторами длиной по 3,5 м, расставленными на ши-
рину плеч, равную 2,37 м.
Место базирования манипулятора JEMRMS (рис. 6.37), установленного
на японском модуле Kibo, является фиксированным. Он предназначен для
обслуживания экспериментов, проводимых на негерметичной платформе.
Два других манипулятора являются мобильными. Благодаря симметричности
конструкции они могут перемещаться по поверхности МКС, поочередно за-
хватывая стыковочными устройствами различные базовые точки крепления
(агрегаты типа PDGF для SSRMS). Для перемещения манипулятора вдоль
фермы МКС используется мобильная база MBS (Mobile Base System), уста-
новленная на транспортере, который передвигается вдоль фермы. Робото-
технический комплекс МКС, состоящий из манипулятора SSRMS, насадки
SPDM и мобильной базы MBS приведен на рис. 6.38.
Мобильную робототехническую систему (рис. 6.39) с дистанционно
управляемым манипулятором MRMS (Mobile Remote Manipulator System) [17]
Глава 6. Построение космических комплексов
379
Рис. 6.37. Компоновка манипулятора JEMRMS на японском модуле Kibo:
1 —герметичный модуль; 2 — негерметичная платформа; 3 — рука манипулятора;
4 — захват манипулятора; 5 — модуль снабжения
Рис. 6.38. Мобильный робототех-
нический комплекс МКС:
1 — манипулятор SSRMS; 2 — мани-
пулятор-насадка SPDM; 3 — мобиль-
ная база манипулятора (MBS); 4 —
мобильный транспортер (МТ); 5 —
рельсы МТ на ферме МКС
380 Часть II. Определение облика пилотируемого космического аппарата
планируется использовать в качестве средства сборки крупногабаритных
ферменных конструкций. Эта система, сочетающая в себе транспортер, базу
для манипулятора и стапель для сборки ферменных конструкций, играет
центральную роль при сборке ОС начальной рабочей конфигурации и слу-
жит средством проведения погрузочно-разгрузочных работ при эксплуатации
ОС. На рис. 6.40 представлены фазы сборки сегмента фермы из стержней, на
рис. 6.41 — сборки сегмента раскладной фермы. Манипулятор доставляет сег-
мент фермы в сложенном состоянии от МТКА к месту сборки. Затем сегмент
соединяется стержнями с имеющейся фермой, после чего раскладывается.
Рис. 6.39. Схема мобильной робототехнической системы, оснащенной дистанци-
онно управляемым манипулятором MRMS, для сборки крупногабаритной фер-
менной конструкции (проект):
1 — оси стержней собираемой фермы; 2 — стойка с зубчатой рейкой; 3 — подвижная пе-
рекладина; 4 — узел захвата направляющего штыря; 5 — привод стоек с зубчатым колесом;
6 — узел поворота грузовой платформы; 7 — направляющие штыри в узлах фермы; 8— рама
основания; 9— поворотная грузовая платформа; 10— манипулятор MRMS; 11 — манипуля-
торы с устройством фиксации астронавтов-монтажников
Рис. 6.40. Фазы поэлементной сборки сегмента фермы из
стержней с помощью MRMS:
а — монтаж на подвижной перекладине сечения фермы; б — перемеще-
ние фермы в рабочее положение выдвижением перекладины на стойках;
монтаж сегмента фермы
Глава 6. Построение космических комплексов
381
Рис. 6.41. Фазы монтажа и развертывания складной фермы с использо-
ванием MRMS:
а — установка сегмента фермы в сложенном состоянии на подвижной переклади-
не; б — соединение нового сегмента стержнями с существующей конструкцией;
в — развертывание сегмента фермы
6.2. Космические комплексы на базе тросовых систем
Для построения космического комплекса наряду с жестким соединением
оболочечных и ферменных конструкций могут применяться гибкие связи с
использованием элементов (тросов, кабелей, шлангов и пр.), размеры сече-
ния которых значительно меньше их длины.
Применять тросы при освоении космического пространства было предло-
жено К.Э. Циолковским в 1895 г., а затем и другие ученые создавали проекты
космических тросовых систем и проводили эксперименты по их развертыва-
нию в космосе. На сегодняшний день наибольшая длина троса, развернутого
в космосе, составляет примерно 20 км. Результаты моделирования динамики
тросовых систем показывают, что их целесообразно применять при длине
троса более 1 км, но для этого требуются специальные технологии произ-
водства тросов и устройств их развертывания. Эксперименты показали, что
к недостаткам тросовых систем относятся необходимость гашения колебаний
троса и высокий риск его повреждения в процессе развертывания и эксплуа-
тации, например при столкновении с космическим мусором. Необходимость
в натяжении троса ограничивает возможности по ориентации и стабили-
зации комплекса. Однако гибкие связи позволяют осваивать значительное
пространство с минимальными затратами массы на несущие элементы, что
делает их перспективной космической технологией.
В космических экспериментах использовались многослойные тросы и ка-
бель-тросы (рис. 6.42, а) [18], основу которых составляют арамидные волокна
из материала типа Kevlar или Nomex. Трос имеет коаксиальную конструкцию
с одним потоком нагрузки, чувствительную к локальным повреждениям. Для
повышения его прочности предложена технология Hoytether многопоточно-
го троса (рис. 6.42, б) [19]. Подобный трос представляет собой статически
неопределимую ферменную конструкцию, состоящую из коротких отрезков
волокна. При локальном обрыве одного отрезка нагрузка перераспределяется
между другими, и трос сохраняет несущую способность.
382
Часть II. Определение облика пилотируемого космического аппарата
б
Рис. 6.42. Конструкции тросов, использованные в космических
экспериментах:
а — традиционный кабель-трос в эксперименте NASA Tethered Satellite System
(TSS) (1988): 1 — покрытие из Nomex для защиты от атомарного кислорода;
2 — силовая оплетка из Kevlar; 3 — слой изоляции из тефлона; 4 — проводник
из сплава меди и олова; 5 — основа троса из Nomex; б — многопоточный трос
Hoytether: 1 — резервные нити (изначально не нагружены); 2 — основные нити;
3 — место разрыва основной нити; 4 — резервные нити распределяют нагрузку
в узлы; 5 — резервные нити распределяют нагрузку из узлов на основные нити;
6 — зона локализации разрыва основной нити
Глава 6. Построение космических комплексов
383
Соединение и стыковка тросов к полезной нагрузке (рис. 6.43) требует
обеспечения равнопрочности и отсутствия концентрации напряжений в об-
ласти стыка [18].
В космической тросовой системе, элементы которой соединены гибкими
конструкциями большой протяженности, натяжение тросов осуществляется
силами различной природы: центробежными, аэродинамическими, гравита-
ционными, а также электродинамическими.
Рис. 6.43. Узел крепления троса к полезной нагрузке:
1 — трос; 2 — фитинг с крюком; 3 — фитинг со стержнем; 4 — защитная пружинная щеколда
Компоновочные схемы космических комплексов, использующих цен-
тробежные силы, предназначены для создания искусственной силы тяжести
(см. гл. 7).
Использование аэродинамического сопротивления для натяжения троса
предполагает, что соединяемые компоненты последовательно расположены
на низкой околоземной орбите и площадь миделевого сечения нарастает
от головного элемента к замыкающему. На рис. 6.44 приведена компоно-
вочная схема тросовой системы из двух компонентов в отклоненном от по-
ложения равновесия состоянии. Схема обладает устойчивостью, поскольку
момент аэродинамической силы восстанавливает положение равновесия.
В качестве головного элемента тросовой системы может выступать, напри-
мер, блок герметичных модулей, а в
качестве замыкающего — энергетиче-
ская установка с панелями СБ большой
площади.
Принцип построения тросовой си-
стемы, использующей гравитационный
градиент [20], представлен на рис. 6.45.
Две точечные массы тх и т2, движущие-
ся по двум круговым кеплеровым ком-
планарным орбитам радиусами г, > г2,
имеют различные периоды обращения:
более удаленная масса тх движется с
меньшей скоростью. Если соединить эти
массы тросом, то он натянется, так как
Рис. 6.44. Принцип натяжения троса
аэродинамическими силами:
С — центр масс связки; ось X — направ-
ление полета; ось Y — местная вертикаль;
А — площадь миделя; т — масса; h — плечо;
0 — угол атаки
384
Часть II. Определение облика пилотируемого космического аппарата
Рис. 6.45. Принцип натяжения
троса гравитационным градиентом:
у — местная вертикаль; С — центр масс;
g— нулевой уровень микроускорений;
т — масса; Т — натяжение троса; R —
компонент силы, восстанавливающей
равновесие; Z — центробежная сила;
G — гравитационная сила; г — радиус
орбиты
нижняя масса станет тянуть верхнюю. В результате верхняя масса будет уско-
ряться и под действием дополнительной центробежной силы будет стремиться
перейти на более высокую орбиту, а нижняя — тормозиться и под действием
Рис. 6.46. Компоновка ОС, использу-
ющей различные уровни микроускоре-
ний вдоль гравитационного градиента
в тросовой системе:
1 — ОС; 2 — перемещаемая вдоль троса
лаборатория переменного микроускоре-
ния; 3 — модуль-противовес
избыточной силы тяжести станет стре-
миться перейти на более низкую орби-
ту. Центр масс системы будет при этом
перемещаться по своей круговой орбите
с радиусом Г] > г0 > г2, а тросовая систе-
ма — гравитационно стабилизироваться
вдоль радиуса орбиты.
При большой длине троса гравита-
ционный градиент приведет к возник-
новению заметной разницы уровней
микроускорений, нарастающих к концам
троса (рис. 6.46) [21]. Поскольку ускоре-
ние свободного падения нелинейно за-
висит от расстояния до притягивающего
центра, в тросовой системе положение
центра масс и положение точки, в кото-
рой микроускорение равно нулю, не со-
впадают. Для обеспечения баланса уров-
ня микроускорений в зонах размещения
научной аппаратуры компоновка ОС
может предусматривать либо регулировку
длины троса, либо перемещение научного
модуля вдоль троса (см.рис. 6.46).
В случае натяжения троса гравита-
ционным градиентом форма натянутого
троса отличается от прямолинейной.
Влияние распределенной массы троса
и силы аэродинамического сопротивле-
ния, действующего на него, проявляется
Глава 6. Построение космических комплексов
385
в прогибе троса (рис. 6.47). При этом
трос в месте крепления отклоняется
от местной вертикали на угол 0, кото-
рый может быть уменьшен с помощью
дополнительных устройств натяже-
ния троса. Для компенсации угла 0,
а также для ориентации компонентов
космического комплекса относитель-
но троса может быть использована
специальная ферменная конструкция
(рис. 6.47) [18]. Изменение ориента-
ции КА относительно троса выпол-
няется перемещением узла крепления
троса по верхнему отрезку Г-образной
фермы.
Можно обеспечить натяжение тро-
са электродинамическими силами, если
в качестве троса использовать незам-
Рис. 6.47. Деформация троса под
действием распределенных сил (а) и
устройство для натяжения троса и ори-
ентации КА относительно троса (б):
1 — ОС; 2 — модуль-противовес; 3 — ферма;
4 — подвижный узел крепления троса; V —
направление полета; F<i — сила сопротив-
ления, действующая на трос; Т — сила на-
тяжения троса; 0 — угол отклонения троса
от местной вертикали; С — центр масс ОС
кнутый электрический проводник, на
концах которого установлены контак-
торы — источники и стоки зарядов в
ионосферную плазму. При движении
троса в магнитном поле Земли между
контакторами возникает естественная
разность потенциалов, достигающая
примерно 200 В на 1 км длины кабеля.
На рис. 6.48, а продемонстриро-
вана схема работы тросовой системы
в генераторном режиме. В частности,
в эксперименте NASA TSS-1R (полет Space Shattle STS-75) в 1996 г. была
достигнута максимальная длина развернутого троса, равная 19,6 км, и полу-
чен ток около 0,5 А [18]. Сила Ампера, возникающая при взаимодействии
троса-проводника с магнитным полем Земли (или другой планеты), натяги-
вает его. Если создать с помощью бортового источника питания на концах
троса искусственную разность потенциалов, противоположную по направле-
нию естественной разности потенциалов и превышающую ее по величине,
в тросе возникает обратный электрический ток, взаимодействие которого
с магнитным полем Земли приведет к ускорению орбитального комплекса
силой Ампера (рис. 6.48, б) [21].
Комбинация различных способов натяжения тросов позволяет формировать
сложные пространственные компоновки космических комплексов (рис. 6.49).
На рис. 6.50 приведены примеры компоновочных схем таких комплексов,
в которых сочетается использование аэродинамических и гравитационных
сил натяжения тросов.
Тросовые системы могут быть условно разделены на статические и ди-
намические. Статические сохраняют свою конфигурацию в течение полета,
а динамические предполагают изменение конфигурации: изменение длины
386 Часть II. Определение облика пилотируемого космического аппарата
Рис. 6.48. Схема натяжения троса силой Ампера в генераторном режиме
(а) и в режиме создания тяги (б):
1 — ОС; 2 — плазменный контактор; 3 — поток электронов; V — направление по-
лета; В — вектор напряженности магнитного поля Земли; J — направление тока в
проводящем тросе; Fd — сила сопротивления; Fa — сила тяги
Рис. 6.49. Различные компоновки космических комплексов на базе тросовых систем
Глава 6. Построение космических комплексов
387
Рис. 6.50. Примеры компоновок много-
модульных тросовых систем с гравитаци-
онным и аэродинамическим натяжением
тросов:
а — трехмодульная компоновка; б — четырех-
модульная компоновка; в — шестимодульная
компоновка; С — центр масс связки; осьх —
направление полета; ось у — местная верти-
каль; А — площадь миделя модуля; т — масса
модуля; h — плечо; 0 — угол атаки
троса, перемещение масс вдоль троса, изменение массы связываемых эле-
ментов, разрыв или восстановление связей.
Статические тросовые системы предполагается применять для постро-
ения на околоземной орбите космических электростанций пилотируемых
комплексов. Использование тросов позволяет развернуть панели СБ большой
площади. Часть вырабатываемой электроэнергии может быть потрачена на
компенсацию силой Ампера аэродинамического торможения такой круп-
ногабаритной конструкции. Варианты компоновок солнечной электростан-
ции с тросовой системой представлены на рис. 6.51. Применяя статическую
тросовую систему, можно скомпоновать пилотируемый комплекс с ядер-
ной энергоустановкой. Удаление источника радиоактивного излучения от
ОС на кабель-тросе позволяет создать значительную зону теневой защиты
(рис. 6.52, а) [22]. Обитаемая орбитальная станция (рис. 6.52, б) состоит из
базового блока 7, ядерной энергетической установки 2, включающей ядер-
ный реактор 3, защитный экран 4 и приборно-агрегатный отсек 5. Базовый
блок 7 и энергетическая установка 2 связаны между собой кабель-тросом 6,
Длина троса определяется по формуле
где L — радиационно безопасное расстояние между реактором и обитаемы-
ми отсеками орбитальной станции, м; £п — расстояние между реактором и
приборно-агрегатным отсеком, м; 7)п — доза, эквивалентная ионизирующему
излучению в районе приборно-агрегатного отсека за время функционирования
388
Часть II. Определение облика пилотируемого космического аппарата
Рис. 6.51. Варианты компоновочных схем солнечных электростанций на базе
тросовых систем с электродинамическим натяжением троса (стрелками от-
мечено направление полета):
а — с одним модулем и двумя контакторами; б — с одним модулем и одним контак-
тором; в — с двумя модулями; г — с четырьмя модулями
Рис. 6.52. Использование тросовой системы в компоновке ОС с ядерной
энергетической установкой:
а — принцип построения; б — расчетная схема для определения длины троса;
1 — обитаемые модули ОС; 2 — ядерная энергетическая установка; 3 — ядерный
реактор; 4 — защитный экран; 5 — приборно-агрегатный отсек; 6 — трос-кабель
Глава 6. Построение космических комплексов
389
энергетической установки, бэр; t — время пребывания экипажа на орбиталь-
ной станции, лет; D3 — допустимая доза облучения для экипажа орбитальной
станции за время его пребывания на станции, бэр; Т — продолжительность
функционирования ядерной энергетической установки, лет [23].
Космический комплекс на базе статических тросовых систем — устойчи-
вая к возмущениям, аэродинамически и гравитационно стабилизированная
конструкция. Его можно использовать в исследованиях дальнего космоса,
околоземного пространства, атмосферы и поверхности Земли с помощью
протяженных измерительных систем (например, интерферометров с большой
базой, равной длине троса), датчиков геофизических полей, разнесенных
или распределенных вдоль троса и опускаемых на тросе на низкие высоты
атмосферных зондов [24]. Кабель-тросы можно применять в качестве антенн
для связи в низкочастотном диапазоне.
На рис. 6.53 представлена компоновочная схема долговременного пи-
лотируемого орбитального тросового комплекса [25], в состав которого
входят два компонента: модульные ОС с базовыми блоками и пристыко-
вываемыми КА, соединенные несколькими тросами, и буксируемый КА,
соединенный привязным тросом с ОС. При этом один из тросов — глав-
ный силовой, а остальные — регулировочные. Каждая из ОС содержит
агрегатно-монтажный модуль (АММ), пристыкованный к базовому блоку.
Первый АММ 10 снабжен главным лебедочным механизмом (ЛМ) 20
для выпуска и втягивания главного троса 5, намотанного с одного конца на
барабан главного ЛМ 20, а другой его конец закреплен на втором АММ 77,
снабженным регулировочным ЛМ 21 для выпускания и втягивания регулиро-
вочных тросов 4, которые одним концом намотаны на барабаны регулировоч-
ного ЛМ, а другим — закреплены на первом АММ 10. Комплекс включает в
себя также длинномерные электрические кабели, а АММ содержат ферменные
конструкции, имеющие кабельные ЛМ для выпуска и втягивания намотанных
на барабанах длинномерных кабелей. На ферменных конструкциях установ-
лены электрические плазменные контакторы 28, 29, с которыми электрически
соединены концы этих кабелей. Длинномерные кабели предназначены для
пропускания по ним электрического тока с целью электродинамического
поддержания, повышения и коррекции орбиты комплекса, получения элек-
троэнергии, а также для излучения радиоволн и проведения других операций,
требующих применения длинномерных токопроводов.
Основную нагрузку несет главный трос 3, длина которого изменяется толь-
ко при разведении или сближении орбитальных станций 7 и 2. Изменением
длины регулировочных тросов 4 проводят частичную или полную разгрузку
главного троса 3, стабилизацию силы его натяжения, гашение продольных и
поперечных колебаний комплексов. При повреждении, разрушении или замене
главного троса регулировочные тросы 4 несут полную нагрузку до его восста-
новления или замены. Кабели 5 не несут нагрузок, поддерживается только
их небольшое натяжение, обеспечивающее отсутствие провисания и гашение
поперечных колебаний. Привязные тросы 14 и 15, обычно полностью втяну-
тые в причальные модули 72 и 13, выпускаются и втягиваются причальными
лебедочными механизмами 22 и 23 для отведения и приведения привязных
390
Часть II. Определение облика пилотируемого космического аппарата
Рис. 6.53. Схема проекта долговременного пилотируемого орбитального тросового
комплекса:
1,2 — орбитальные станции модульного типа; 3 — главный силовой трос, 4 — регулировочные
тросы; 5 — кабели; 6, 7 — базовые блоки ОС; 8, 9 — модули дооснащения; 10, 11 — агрегат-
но-монтажные модули, 12, 13 — причальные модули; 14, 15 — привязные тросы; 16, 17 —
привязные стыковочные модули; 18, 19 — буксируемые космические аппараты; 20 — главный
лебедочный механизм; 21 — регулировочный лебедочный механизм; 22, 23 — причальные
лебедочные механизмы; 24, 25 — ферменные конструкции; 26, 27 — кабельные лебедочные
механизмы; 28, 29 — электрические контакторы; 30, 31 — стыковочные узлы; 32, 33 — меха-
низмы перестыковки
Глава 6. Построение космических комплексов
391
Рис. 6.54. Поведение динамической тро-
совой системы при удлинении троса:
I — комплекс из двух состыкованных модулей;
II — расстыковка и удлинение троса; III —
модули перед разделением; IV — свободный
полет модулей; 1 — подъем орбиты; 2 — сход
с орбиты; х — направление полета центра связ-
ки; Г— натяжение троса; G — преобладающая
сила тяготения; Z — преобладающая центро-
бежная сила; А — результирующее ускорение;
D — результирующее торможение; tn — масса
модуля; 0 — угол наклона троса
стыковочных модулей 16 и 7 7 при выполнении стыковок, орбитальных манев-
ров, исследований верхних слоев атмосферы и других операций.
Динамические тросовые системы с гравитационным натяжением тросов
используют избыток и недостаток орбитальной скорости, возникающие при
соединении тросом двух масс, движущихся по орбитам различного радиуса
(см. рис. 6.45). В орбитальном полете тросовой системы нижний компонент
имеет недостаток, а верхний — избыток орбитальной скорости по сравнению
с той, какую имел бы свободный КА на круговой орбите той же высоты. По-
этому какой-либо объект (модуль, корабль, контейнер и т. п.), отделенный от
нижнего компонента, перейдет на эллиптическую орбиту с меньшей высотой
в перигее, а объект, отделенный от верхнего компонента, — с большей высотой
в апогее (рис. 6.54). Значение соответствующего изменения высоты перигея
или апогея орбиты составит около трех длин троса. За счет этого эффекта
при большой длине троса можно варьировать параметры орбит КА путем их
отделения без затрат топлива.
Динамическая тросовая система эффективна при транспортных опера-
циях по снабжению ОС. Если перед растыковкой ОС и ТКА разделяются с
помощью электроприводов без расходования рабочего тела и образуют тро-
совую систему, то ТКА при отделении переходит на эллиптическую орбиту и
может быть захвачен атмосферой, а ОС — на эллиптическую орбиту, которую
затем можно скруглить с малыми затратами топлива. На рис. 6.55 приведены
схема работы тросовой системы и параметры разделения ОС типа Freedom
и тяжелого МТКА типа Space Shutlle [18]. На начальной круговой орбите
высотой 500 км ОС массой 200 т и ТКА массой 100 т расходятся и образуют
тросовую систему с длиной троса 65 км. ОС при отделении ТКА переходит
на орбиту с параметрами 518 х 629 км (высота апогея х высота перигея), а
ТКА — на орбиту с параметрами 185 х 453 км.
392
Часть II. Определение облика пилотируемого космического аппарата
Рис. 6.55. Схема работы динамической тросовой системы ОС — ТКА и пример
маневра разделения:
I — комплекс ОС — ТКА; II — система перед разделением; III — разделение ОС и ТКА;
IV — выдача тормозного импульса ТКА, уборка троса и скругление орбиты ОС; 1 — ТКА;
2 — стыковочное устройство на конце троса; 3 — ОС
Рис. 6.56. Компоновочная схема динамической тросовой системы кос-
мического комплекса для обслуживания и заправки КА:
а — стыковка ТКА с модулем-хранилищем; б — стыковка ОС с хранилищем
для обслуживания ТКА; 1 — ОС; 2 — модуль-хранилище топлива; 3 — обслу-
живаемый КА; 4 — стыковочный агрегат; 5 — модуль-противовес
Глава 6. Построение космических комплексов
393
Для обеспечения нулевой относительной скорости при выполнении сты-
ковок КА с компонентом динамической тросовой системы необходимо, чтобы
стыкуемый КА двигался по эллиптической орбите, с тем чтобы уменьшить
затраты топлива на межорбитальные маневры и сближение. Например, для
стыковки выводимого с Земли объекта с нижним компонентом тросовой си-
стемы этот объект выводится на орбиту, высота которой в апогее равна высоте
орбиты нижнего компонента, а высота в перигее ниже ее на три длины троса.
В результате стыковка происходит в точке апогея КА с нулевой скоростью
встречи [18].
На рис. 6.56 показана компоновочная схема динамической тросовой
системы космического комплекса для обслуживания и заправки КА. Здесь
модуль, выполняющий функции хранилища топлива, к которому стыкуется
обслуживаемый КА (космический буксир), может отходить от базового блока
на тросе, обеспечивая наиболее выгодные условия стыковки. Для неизмен-
ности центра масс используется дополнительный модуль-противовес.
6.3. Космический комплекс на базе свободно летающих компонентов
Компоновка космического комплекса может изначально предполагать
отсутствие механической связи между его компонентами. В этом случае
комплекс образуют независимые КА, движущиеся каждый по своей орбите.
Такой орбитальный комплекс реализует концепцию «ОС — облако» (в ан-
глоязычной литературе constellation — созвездие).
Элементы комплекса могут быть постоянно обитаемыми, посещаемыми
и обслуживаемыми. Обслуживаемые элементы комплекса предполагается
выполнять в виде негерметичных космических платформ, работы на которых
экипаж проводит в условиях открытого космоса или дистанционно с помо-
щью робототехнических систем.
Примером проекта «облачного» космического комплекса можно считать
ОС Freedom, которая планировалась как система, состоящая из четырех ор-
битальных объектов: обитаемой базы, свободнолетающей лаборатории и двух
полярных платформ. Обитаемая база должна была находится на низкой около-
земной орбите высотой 278...500 км с наклонением 28,5°. Свободнолетающая
лаборатория Columbus разработки ЕКА предназначалась для экспериментов
в условиях микрогравитации и имела орбиту, близкую к обитаемой базе. Эту
платформу нужно было периодически обслуживать с помощью многоразовых
ТК Hermes. Две другие платформы разработки США и ЕКА должны были
находится на солнечно-синхронных полярных орбитах высотой 705 км с на-
клонением 98,2°. Однако проект не был реализован.
К преимуществам комплекса из автономных модулей следует отнести
возможность обеспечения специфических условий для проведения экспе-
риментов на каждом из модулей. Для полного использования уникальных
условий космического пространства (глубокий вакуум, низкий уровень мик-
роускорений, низкие температуры) при проведении научных экспериментов
и осуществлении производственных процессов целесообразно применять
394
Часть II. Определение облика пилотируемого космического аппарата
группу свободнолетающих обслуживаемых технологических КА. Такие ап-
параты должны иметь возможность периодически стыковаться со станцией,
дозаправляться топливом, позволять экипажу обслуживать эксперименталь-
ное, технологическое и бортовое оборудование.
Например, создаваемый в РКК «Энергия» модуль ОКА-Т (рис. 6.57)
предназначен для обслуживания научной аппаратуры в процессе проведе-
ния исследований в циклах автономного полета на орбите с многократными
стыковками с МКС [26].
Характеристика КА ОКА-Т
стартовая масса................................7400 кг
максимальная высота орбиты.....................700 км
масса топлива двигательной установки...........1760 кг
объем герметичного отсека......................34 м3
давление в зоне глубокого вакуума..............1,3—1,6 кПа
уровень микрогравитации........................10"6 g
длительность автономного полета в цикле........90—180 сут
мощность энергетической установки
для научной аппаратуры.........................5 кВт
число циклов автономного полета в год..........До 4
срок службы на орбите..........................7 лет
Рис. 6.57. Космический аппарат ОКА-Т в автономном полете:
/ — радиатор СОТР; 2 — служебный отсек; 3 — маршевые двигатели; 4 — отсек полезной
нагрузки; 5 — антенны системы стыковки; 6 — стыковочный агрегат; 7— двигатели причали-
вания и ориентации; 8 — антенна; 9 — панель солнечных батарей; 10 — выдвижной экран для
создания сверхглубокого вакуума; 11 — шлюзовая камера
Глава 6. Построение космических комплексов 395
Создание космического комплекса с автономно летающим КА ОКА-Т
позволит значительно расширить программу научных исследований в космосе
и провести ряд уникальных экспериментов, например, по выращиванию вы-
сокооднородных кристаллических структур, эпитаксиальных гетероструктур,
белковых кристаллов.
К недостаткам использования автономных модулей следует отнести
повышенные затраты рабочего тела, необходимые для перелетов между мо-
дулями и управления как каждым модулем в отдельности, так и взаимным
расположением модулей.
В настоящее время рассматриваются несколько способов управления
формацией КА без затрат рабочего тела. Для низкоорбитальных КА можно,
например, использовать аэродинамические силы. Управляя взаимной ориен-
тацией КА, можно управлять относительным движением их центров масс, что
требует, однако, периодического подъема орбит модулей. В случае высоких
околоземных орбит возможно применение силы солнечного давления [27] для
энергетических модулей с панелями СБ или радиаторов большой площади.
Изучаются способы управления относительным движением КА с использо-
ванием лазерных лучей. При этом пучок света перенаправляется с помощью
зеркала, а создаваемый лазером импульс применяется для управления [28].
Кроме того, можно использовать электростатические силы взаимодействия,
но в этом случае каждый из КА в формации должен накапливать заряд не-
обходимых величины и знака [29], что может вносить искажения в работу
электронной аппаратуры. Также существует возможность управлять формаци-
ей путем обмена импульсами: на один КА действует импульс, возникающий
при отделении от него массивного элемента, а другой КА получает импульс
при приеме этого элемента [30]. Обмен импульсами может обеспечивать
поток капель жидкости (например, в капельном теплообменнике) [31]. Также
может проводится обмен массивными грузовыми транспортными модулями,
что наряду с задачей управления реализует грузообмен между модулями.
Запуск модулей может осуществляться и электромагнитными катапультами
без расхода рабочего тела.
6.4. Развертывание космического комплекса
Создание орбитального космического комплекса включает два этапа:
монтаж и эксплуатацию. Кроме того, можно развертывать комплекс, когда
монтаж проводится параллельно с эксплуатацией, поскольку развертывание —
длительный процесс, составляющий значительную долю времени активного
существования ОС. Время развертывания определяется технологическими
циклами создания модулей, экономическими факторами, различными об-
стоятельствами непреодолимой силы, например, аварией средств выведения,
аварийными ситуациями и отказами на развертываемой ОС, политически-
ми и экономическими кризисами, изменением целей строительства ОС.
В настоящее время имеются два примера развертывания крупногабаритных
многомодульных ОС — «Мир» и МКС.
396
Часть II. Определение облика пилотируемого космического аппарата
График сборки ОС «Мир» приведен в табл. 6.4, а на рис. 6.58 представле-
на эволюция ее компоновки. Общее время сборки ОС составило 10,33 года.
Средний промежуток времени между вводом в строй элементов ОС—20,7 ме-
сяцев (1,7 года), минимальный промежуток — 5,4 месяца. Работа ОС в
пилотируемом режиме продолжалась 14,3 лет (с 13 марта 1986 г. по 16 июня
2000 г.). Таким образом, время развертывания составило 72 % времени всего
обитаемого полета.
Таблица 6.4
График сборки ОС «Мир»
№ модуля Элемент Дата монтажа Интервал, месяцев
1 Базовый блок 20.02.1986 —
2 Модуль «Квант» 12.04.1987 13,9
3 Модуль «Квант-2» 06.12.1989 32,3
4 Модуль «Кристалл» 10.06.1990 6,2
5 Модуль «Спектр» 01.06.1995 60,6
6 Стыковочный модуль 15.11.1995 5,6
7 Модуль «Природа» 26.04.1996 5,4
График сборки МКС приведен в табл. 6.5, а указание его позиций —
на рис. 6.59.Общее время сборки МКС на текущий момент (по последнему
доставленному элементу) составило 18,7 лет. Средний промежуток времени
между вводом в строй элементов ОС составил 5,2 месяцев, минимальный
промежуток, отличный от нуля, — 0,6 месяцев, а максимальный — 3,85 года
(из-за перерыва в работе транспортной системы Space Shuttle в результате
аварии). В настоящее время работа ОС предусматривается до 2024 г. с доос-
нащением ее новыми модулями.
Развертывание ОС «Мир» и МКС начиналось с запуска PH автономного
герметичного базового модуля. Однако развертывание ОС может начинать-
ся с запуска негерметичной платформы, как, например, в проекте станции
Freedom.
В первом полете МТКА Space Shuttle, запланированном на март 1995 г.,
должна была быть выведена часть фермы с СБ, после четвертого полета вместе
с доставкой лабораторного модуля уже возможна работа космонавтов на борту
станции в режиме посещения, а после одиннадцатого полета — постоянное
пребывание на станции экипажа, максимальная численность которого состав-
ляла восемь человек. Всего же предполагалось построить станцию после 20
полетов Space Shuttle, но рассматривались и варианты выведения отдельных
частей с помощью одноразовых носителей.
Глава 6. Построение космических комплексов
397
Рис. 6.58. Эволюция компоновки ОС «Мир»:
а — 1986 г.; б — 1987 г.; в — 1989 г.; г — 1990 г.; д — 1995 г.; е — 1996 г: 1 — базовый блок; 2 —
«Квант»; 3 — модуль «Квант-2»; 4 — «Кристалл»; 5 — модуль «Спектр»; 6 — стыковочный
модуль; 7 — модуль «Природа»
398
Часть II. Определение облика пилотируемого космического аппарата
Таблица 6.5
График сборки МКС (см. рис. 6.59)
Элемент Поз. на рис. 6.59 Обозначе- ние Дата монтажа Интервал, мес.
Функционально-грузовой блок «Заря» 10 ФГБ 20.11.1998 -
Соединительный модуль «Юнити» 11 NODE1 07.12.1998 0,6
Служебный модуль «Звезда» 8 СМ 26.07.2000 19,9
Модуль корневого сегмента и гиродинов на Nodel 11 Z1 13.10.2000 2,6
Энергетический модуль (секция СБ АС) на Z1 6 Р6 08.12.2000 1,9
Лабораторный модуль «Дестини» 19 LAB 10.02.2001 2,1
Манипулятор на модуле LAB (Canadarm) 21 SSRMS 22.04.2001 2,4
Шлюзовая камера «Квест» 17 A/L 15.07.2001 2,8
Стыковочный отсек «Пирс» 7 СО1 17.09.2001 2,1
Ферма SO 12 SO 17.04.2002 7,1
Подвижная сервисная система — MSS 11.06.2002 1,8
Ферма S1 13 SI 10.10.2002 4,0
Устройство для перемещения оборудова- ния и экипажа 13 CETA 10.10.2002 0,0
Ферма Р1 4 Pl 26.11.2002 1,6
Устройство В системы перемещения оборудования и экипажа 4 CETA(B) 26.11.2002 0,0
Ферма РЗ/Р4 5 P3/P4 12.09.2006 46,2
Ферма Р5 6 P5 13.12.2006 3,1
Ферма S3/S4 15 S3/S4 12.06.2007 6,0
Ферма S5 16 S5 11.08.2007 2,0
Соединительный модуль «Гармония» 20 NODE2 26.10.2007 2,5
Лабораторный модуль «Колумбус» 18 COL 12.02.2008 3,6
Японский грузовой модуль (1-й доставленный элемент модуля «Кибо») 23 ELM-PS 14.03.2008 1,0
Японский научно-исследовательский модуль «Кибо» 23 JEM 03.06.2008 2,7
Ферма S6 16 S6 18.03.2009 9,6
Малый исследовательский модуль «Поиск» 9 МИМ2 12.11.2009 8,0
Жилой модуль «Транквилити» 3 NODE3 12.02.2010 3,1
Обзорный модуль «Купола» 1 cupola 12.02.2010 0,0
Малый исследовательский модуль «Рассвет» 2 МИМ1 18.05.2010 3,2
Многофункциональный модуль «Леонардо» 23 PMM 01.03.2011 9,6
Магнитный спектрометр «Альфа» 14 AMS-02 19.05.2011 2,6
Глава 6. Построение космических комплексов
399
Рис. 6.59. График сборки МКС (позиции см. в табл. 6.5)
Контрольные вопросы к главе 6
1. Расскажите о принципах и способах построения космического комплекса.
2. Опишите конструкцию и принцип действия стыковочных узлов герметичных
отсеков «штырь — конус» и андрогинного.
3. Как происходит соединение негерметичных отсеков?
4. Как производят монтажные работы в космосе?
5. Расскажите об использовании манипуляторов при монтажных работах в кос-
мосе.
6. Как применяют тросовые системы в компоновке орбитальных станций?
Литература к главе 6
1. Russian Segment Specification International Space Station Program Revision H 4.
2001. SSP41163H. URL: SSP-41163H.pdf (дата обращения 20.07.2017).
2. Сыромятников B.C. Стыковочные устройства космических аппаратов. М.:
Машиностроение, 1984. 216 с.
3. Cook J., Aksamentov V., Hoffman Т., Bruner W. ISS Interface Mechanisms and their
Heritage Ц NASA Report JSC-CN-23389, JSC-CN-24225. 2011. URL: https://ntrs.nasa.
gov/archive/nasa/casi.ntrs.nasa.gov/20110010964.pdf (дата обращения 20.07.2017).
4. International Docking System Standard (IDSS). Interface Definition Document.
Revision C. 2013. URL:http://internationaldockingstandard.com/ (дата обращения
20.07.2017).
400
Часть II. Определение облика пилотируемого космического аппарата
5. Androgynous, Reconfigurable Closed Loop Feedback Controlled Low Impact Docking
System With Load Sensing Electromagnetic Capture Ring / J.L. Lewis, M.B. Carroll, TD. Le,
R.H. Morales. Patent US 6354540. 2007. URL: www.patents.com/us-6354540.html (дата
обращения 20.07.2017).
6. Foster R.M., CookJ.G., Smudde P.R., Henry M.A. Space Station Berthing Mechanisms,
Attaching Large Structures On-Orbit that were Never Mated on the Ground // Proc, of a
37th Aerospace Mechanisms Symposium. P. 301—314.
7. Katell G. Design and Verification of Space Station EVA-Operated Truss Attachment
System // Proc, of a 35th Aerospace Mechanisms Symposium. NASA 2001. P. 199—212.
URL: https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20010071164.pdf (дата обра-
щения 20.07.2017).
8. Bolton V.J. Reliability and Fault Tolerance in ISS Thermofoil Spaceflight Heaters //
Proc, of a 38th Aerospace Mechanisms Symposium NASA, 2006. P. 129. URL: https://ntrs.nasa.gov/
archive/nasa/casi.ntrs.nasa.gov/20060028221.pdf (дата обращения 20.07.2017).
9. Queijo M.J., Buttorfleld A.J., Cuddihy W.F., King C.B., Garn P.A.
An Advanced Technology Space Station for the Year 2025, Study and Concepts. The Bionetics
Corporation. Hampton, VA. 23666 Contract NA61-18267. 1987. URL: https://ntrs.nasa.
gov/archive/nasa/casi.ntrs.nasa.gov/19870010907.pdf (дата обращения 20.07.2017).
10. Кравченко Ю.Д., Лихачев В.А., Разов А.И., Трусов С.Н., Чернявский А.Г. Опыт
применения сплавов с эффектом памяти формы при сооружении крупногабаритных
конструкций в открытом космосе //ЖТФ. 1996. Т. 66. № 11. С. 153—161.
11. Кравченко Ю.Д., Корнеев В.Ю., Капустин В.Л., Хабарова Т.Д. Ферменная
приводная конструкция. Патент RU 2105703. 1998. URL: http://www.fmdpatent.ru/
patent/210/2105703.html (дата обращения 20.07.2017).
12. Cohen М.М. Space station architecture, module, berthing hub, shell assembly,
berthing mechanism and utility connection channel. Patent US 4728060. 1988. URL: https://
www.google.com/patents/US4728060 (дата обращения 20.07.2017).
13. International Space Station Robotics: A Comparative Study of ERA, JEMRMS and
MSS / L. Patten, L. Evans, L. Oshinowo, M. Ochisor at all // Proc, of a 7th ESA Workshop
on Advanced Space Technologies for Robotics and Automation (ASTRA 2002). ESTEC,
Noordwijk, Netherlands, November 19—21,2002. URL: http://robotics.estec.esa.int/ASTRA/
Astra2002/Papers/astra2002_ 1.3-1.pdf (дата обращения 20.07.2017).
14. Robot arm’s payload acquiring sequence. URL: http://iss.jaxa.jp/iss/3a/orb_rms2_e.
html (дата обращения 20.07.2017).
15. Mobile Servicing System to User (Generic) Interface Control Document. SSP
42004. Part 2. Revision A. 1997. URL: http://spacecraft.ssl.umd.edu/design_lib/42004.mss.
user.ICD.2.pdf (дата обращения 20.07.2017).
16. Callen P. Robotic Transfer and Interfaces for External ISS Payloads // Proc, of a
3rd Annual ISS Research and Development Conference, 2014. URL: https://ntrs.nasa.gov/
archive/nasa/casi.ntrs.nasa.gov/20140008717.pdf (дата обращения 20.07.2017).
17. Space Station Automation Study Final Report. Vol. II. Technical Report Autonomous
Systems and Assembly. NASA-CR-176092. 1984. URL:https://ntrs.nasa.gov/archive/nasa/
casi.ntrs.nasa.gov/19850024862.pdf (дата обращения 20.07.2017).
18. The roles of tethers on space station / Ed. by G. von Tiesenhausen. NASA Technical
Memorandum NASA-TM-86519. 1985. URL: https://ntrs.nasa.gov/archive/nasa/casi.ntrs.
nasa.gov/19850025841.pdf (дата обращения 20.07.2017).
19. The Hoytether. A Space-Survivable Tether Structure. URL: http://www.tethers.
com/hoytether.html (дата обращения 20.07.2017).
20. Tethers in Space Handbook / Ed. by M.L. Cosmo, E.C. Lorenzini // Grant NAG8-
1160. Third Edition. 1997. URL:https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.
gov/19980018321.pdf (дата обращения 20.07.2017).
Глава 6. Построение космических комплексов
401
21. Applications of Tethers in Space / W.A. Baracat, Compiler. NASA Workshop
Proceedings. 1985. Vol.l. Conference Publication 2422. URL: https://ntrs.nasa.gov/archive/
nasa/casi.ntrs.nasa.gov/19860018935.pdf (дата обращения 20.07.2017).
22. Bents D.J. Tethered Nuclear Power for the Space Station. NASA Technical
Memorandum NASA-TM-97023. 1985. URL: https://ntrs.nasa.gov/archive/nasa/casi.ntrs.
nasa.gov/19850018601.pdf (дата обращения 20.07.2017).
23. Синявский В.В., Масленников А.А. Обитаемая орбитальная станция. Патент
RU 1828632. 1996. URL: http://www.fmdpatent.ru/patent/182/1828632.html (дата обра-
щения 20.07.2017).
24. Осипов В.Г., Шошунов Н.Л. Космические тросовые системы: история и пер-
спективы // Земля и Вселенная. 1998. № 4. С. 19—29. URL: http://epizodsspace.no-ip.
org/bibl/ziv/1998/4/kos-tros-sis.html (дата обращения 20.07.2017).
25. Долговременный пилотируемый орбитальный тросовый комплекс / Т.К.
Веселова, Ю.И. Григорьев, Е.А. Демина, Н.И. Зеленщиков и др. Патент RU 2088491.
1997. URL: http://www.findpatent.ru/patent/208/2088491.html (дата обращения
20.07.2017).
26. Годовой отчет Открытого акционерного общества «Ракетно-космическая
корпорация «Энергия» имени С.П. Королёва» за 2014 год. URL: https://www.energia.
ru/ru/disclose/areports/areports_2014.pdf (дата обращения 20.07.2017).
27. Зараменских И.Е., Овчинников М.Ю. Использование давления солнечной
радиации для компенсации влияния полярного сжатия Земли на относительное
движение формации спутников // Препринт ИПМ им. М.В. Келдыша РАН. 2009.
№ 5. 23 с.
28. Bae Y.K. A Contamination free ultrahigh precision formation flying method for
micro-, nano-, and pico- satellites with nanometer accuracy // AIP Conf. Proc., 2006.
No. 813. P. 1213-1223.
29. Challenges and prospects of coulomb spacecraft formation control of the astronautical
sciences / H. Schaub et al // J. Astronaut. Sci. 2004. Vol. 52. P. 169-193.
30. Шестаков C.A., Иванов Д.С. Оптимизационные задачи при управлении группо-
вым полетом спутников с помощью переброса массы // Препринт ИПМ им. М.В. Кел-
дыша РАН, 2014. No. 69. 25 с.
31. Ketsdever A., Schonig J.A. Constant momentum exchange to maintain spacecraft
formations // J. Spacecr. Rockets. 2012. Vol. 49 (1). P. 69-75.
ГЛАВА 7. КОМПОНОВКА ПКА С ИСКУССТВЕННОЙ СИЛОЙ ТЯЖЕСТИ
7.1. Поле искусственной силы тяжести
Невесомость — один из наиболее существенных негативных факторов,
влияющих на человека в космическом полете. Устранить его можно путем
имитации воздействия на организм ускорения свободного падения за счет
придания телу эквивалентного постоянного ускорения, которое можно соз-
дать, например, при разгоне (торможении) или при вибрации. Однако в
первом случае действие ускорения будет кратковременным, во втором — зна-
копеременным. Основной способ имитации ускорения свободного падения
заключается в использовании центростремительного ускорения, создаваемого
вращением тела.
Сила тяжести, действующая на перемещающуюся по поверхности Земли
материальную точку, описывается выражением
G = mg(R9/\r01)2 +/и[йф x(Qe xF0)] + /m[2Q® хЙ], (7.1)
где т — масса точки; g — вектор ускорения свободного падения вблизи
поверхности Земли; — радиус Земли; — вектор угловой скорости враще-
ния Земли; rQ — радиус-вектор от центра Земли до материальной точки, V — век-
тор скорости движения материальной точки относительно поверхности Земли.
Сила тяжести на поверхности Земли определяется только весом тела
G® = wg(^/|r0 I)2- (7.2)
Поскольку для Земли, где |g| = 9,8l м/с2, |Q©| = 7,292 • 10-5 рад/с, при переме-
щениях человека со скоростью около |И| = 1,3 м/с в формуле (7.1) первое
слагаемое на четыре порядка больше остальных.
Искусственная сила тяжести (ИСТ) на пилотируемом КА, масса которого
многократно меньше массы Земли, может быть создана посредством равно-
мерного вращения аппарата вокруг оси 00' с угловой скоростью Qo:
Gq = x(q0 xr)J + w^2Q0 хИ^ (7.3)
где r — радиус-вектор от оси 00' до материальной точки; V — вектор от-
носительной скорости материальной точки.
Глава 7. Компоновка ПКА с искусственной силой тяжести 403
Различие полей земной и искусственной силы тяжести иллюстрирует
рис. 7.1. Прежде всего следует отметить, что векторы G0 и <70 направлены
противоположно: сила тяжести — к центру Земли, а ИСТ — от оси вращения.
Из-за этого понятие горизонта в системе ИСТ изменяется: поверхность пола
не уходит за горизонт, а поднимается вверх к потолку. Из выражения (7.3)
также следует, что имеются две составляющие ИСТ:
• статическая, определяемая центростремительным ускорением;
• динамическая, определяемая ускорением Кориолиса.
а б
Рис. 7.1. Различие в полях естественной (а) и искусственной (б) силы тяже-
сти, а также различия в виде горизонта
Вектор «ускорения свободного падения» gc статической составляющей
ИСТ в отсеке КА направлен по радиусу вращения г от центра вращения, и
его модуль определяется формулой
gc(r) = rQ02. (7.4)
Как следует из уравнения (7.4) значение ускорения gc линейно зависит
от расстояния до оси вращения, т. е. имеется постоянный гравитационный
404 Часть II. Определение облика пилотируемого космического аппарата
Рис. 7.2. Схема статической со-
ставляющей ИСТ и гравитаци-
онный градиент
градиент ИСТ, определяемый квадратом уг-
ловой скорости (рис. 7.2):
— (7.5)
аг
Наличие гравитационного градиента
ограничивает компоновку КА с ИСТ, посколь-
ку позволяет создать однородное поле gc ~ g
только в определенном диапазоне радиусов:
(7.6)
где гп — радиус на уровне пола отсека с ИСТ,
Н — максимальная высота этого отсека
(см. рис. 7.2). В качестве основной характе-
ристики ИСТ принимается значение gc на
уровне пола:
<?n =gc(rn),
тогда однородность поля gc, определяемая по формуле
£п <£с(^п -^0 _ Н (у у}
gn
не зависит от угловой скорости и обратно пропорциональна радиусу пола.
Например, для отсека высотой 2 м однородность поля ИСТ, равная 5 %, до-
стигается при радиусе пола 40 м, а однородность поля в 1 % — при радиусе
пола 200 м.
Динамическая составляющая ИСТ возникает при движении объекта в
отсеке с ИСТ с постоянной скоростью V относительно отсека. Это допол-
нительное «ускорение свободного падения», противоположное вектору уско-
рения Кориолиса:
gK=2(Q0xP), (7.8)
оно направлено перпендикулярно плоскости, в которой лежат векторы Qo и
V. Модуль вектора динамической составляющей зависит от угла а между
направлением движения объекта и направлением оси вращения
gK=2Q0Ksina. (7.9)
Соотношение модулей ускорений gK и gc определяется следующим
образом:
£к=20оИ = 2_И
gn К.
где Vn = rnQ0 — окружная скорость точек пола.
Глава 7. Компоновка ПКА с искусственной силой тяжести
405
Из (7.10) следует, что при заданной максимальной скорости движения
объекта в отсеке увеличение окружной скорости Vn приводит к ослаблению
влияния динамической составляющей ИСТ
Выражение (7.9) позволяет сделать вывод, что динамическая составляю-
щая равна нулю, если объект неподвижен или если он движется параллельно
оси вращения, т. е. векторы Qo и V параллельны (рис. 7.3, а). При переме-
щении объекта тангенциально против направления вращения динамическая
составляющая ИСТ противонаправлена со статической и уменьшает ИСТ
(go = Sc _ £к)> как показано на рис. 7.3, б. Если объект тангенциально пере-
мещается в сторону вращения, то динамическая составляющая ИСТ сона-
правлена со статической и увеличивает ИСТ (g0 = gc + gK), как показано на
рис. 7.3, в.
Рис. 7.3. Влияние динамической составляющей ИСТ при движении по поверх-
ности пола:
а — параллельно оси вращения; б — тангенциально против вращения; в — тангенциально
в направлении вращения
Если объект движется в поле ИСТ с постоянной скоростью в направ-
лении оси вращения (например, поднимается или спускается по лестнице),
то динамическая составляющая ИСТ действует в тангенциальном направле-
нии. Ее воздействие проявляется как изменение местной вертикали, которое
следует учитывать при проектировании лестниц и подъемных устройств КА
с ИСТ. Спуск и подъем в условиях ИСТ должны согласовываться с направ-
лением вращения.
На рис. 7.4 показано, при каких условиях динамическая составляющая
ИСТ будет «отрывать» человека от лестницы. В результате направление местной
406
Часть II. Определение облика пилотируемого космического аппарата
Рис. 7.4. Влияние динамической состав-
ляющей ИСТ при подъеме и спуске по
лестнице
вертикали (вектора g0) изменится и
возникнет кажущийся наклон лестни-
цы на движущегося по ней человека.
На рис. 7.5 показаны лестницы для
подъема и спуска, имеющие равный
кажущийся наклон [1,2]. Если пол КА
с ИСТ не будет являться цилиндриче-
ской поверхностью, соосной с 00',
также будет возникать кажующийся
уклон. Если, например, вокруг оси
00' вращается отсек с протяженным
плоским полом, то расстояние от оси
вращения до точек пола будет различ-
ным (рис. 7.6, а). При перемещении
по такому полу возникнет кажущийся
Рис. 7.5. Вид лестниц для КА с ИСТ с постоянным кажущимся уклоном:
а — для подъема в направлении вращения; б - для спуска против направления вращения
уклон (рис. 7.6, б). На рис. 7.6, в представлен модуль, имеющий цилиндриче-
скую поверхность пола, в котором кажущегося уклона не возникает [2].
Еще более сложная картина возникает при движении тела с ускорением
в поле ИСТ. Ее можно проанализировать с помощью программы по расчету
и визуализации траекторий частиц, движущихся с ускорением [3]. В качестве
примера на рис. 7.7 приведены траектории полета баскетбольного мяча, бро-
шенного в корзину при естественной и при искусственной силе тяжести [4].
Также весьма оригинальным получается вид струй воды в условиях большого
градиента ИСТ (рис. 7.8).
Рассмотренные отличия поля ИСТ от поля земной силы тяжести пока-
зывают, что ИСТ можно эффективно использовать, например, в следующих
случаях:
Глава 7. Компоновка ПКА с искусственной силой тяжести
Рис. 7.6. Векторы центростремительного, кориолисового и суммарного ускорений
при движении человека по плоскому полу вращающегося модуля КА (я), возни-
кающий при этом кажущийся уклон пола (0 и вид модуля, пол которого имеет
радиус кривизны (в):
С — ускорение Кориолиса; V — скорость движения человека; g — направление местной
вертикали (суммарное ускорение)
Рис. 7.7. Траектория полета баскетбольного мяча после броска, выполненно-
го в земных условиях (обозначена точками) и при ИСТ gn = g с различными
радиусами гп:
1 — г = 1000 м; 2 — г = 100 м; 3 — = 100 м; 4 — = Юм
408
Часть II. Определение облика пилотируемого космического аппарата
Рис. 7.8. Вид струй воды в условиях ИСТ:
а — фонтан, работающий в условиях ИСТ; б — наполнение стакана в условиях
большого градиента ИСТ
• на КА для межпланетных перелетов и исследования дальнего космо-
са, где не требуются частые стыковки транспортных кораблей и коррекции
орбиты;
• на околоземной орбитальной станции, предназначенной для отработки
оборудования и медико-биологических экспериментов в условиях длительного
пребывания человека на планетах с меньшей, чем на Земле, силой тяжести —
Луне, Марсе и астероидах;
• на околоземной орбитальной станции, предназначенной для приема
космических туристов, желающих провести время в необычной обстановке;
при этом наличие силы тяжести может снизить медицинские требования к
участникам космического полета.
7.2. Медико-биологические аспекты создания искусственной силы
тяжести
Поскольку ИСТ создается как средство защиты человека от невесомо-
сти, выбор компоновочных параметров КА с ИСТ опирается прежде всего
на физиологические и биомеханические факторы. Сенсорный механизм
пространственной ориентации человека основан на зрении, вестибулярном
аппарате и механических рецепторах, расположенных в мускулах, сухожили-
ях и суставах. В невесомости зрение в отсутствии стимулов со стороны силы
тяжести предоставляет основную информацию для ориентации в простран-
стве. Описанные выше физические различия полей гравитации и ИСТ могут
приводить к нарушениям в работе вестибулярного аппарата.
Вестибулярный аппарат — сложный рецептор инерционных сил, распо-
ложенный во внутреннем ухе (рис. 7.9). Его структурная основа — комплекс
Глава 7. Компоновка ПКА с искусственной силой тяжести
409
Рис. 7.9. Анатомия вестибулярного аппарата:
а — расположение чувствительных органов вестибулярного аппарата; б — строение отоли-
товой ампулы; в — строение отолитового аппарата; 1 — ампула; 2 — передний полукружной
канал; 3 — задний полукружной канал; 4 — горизонтальный полукружной канал; 5 — пе-
репончатый мешочек; 6 — мешочек; 7 — эндолимфа; 8 — купула; 9 — ампулярный нерв;
10 — ампулярные гребешки; 11 — полукружные каналы; 12 — горизонтальная плоскость
скоплений реснитчатых клеток внутреннего уха, эндолимфы, включенных в
нее известковых образований — отолитов и желеобразных купул в ампулах
полукружных каналов. Из рецепторов равновесия поступают сигналы двух
типов — статические (связанные с положением тела) и динамические (свя-
занные с ускорением). И те, и другие возникают при механическом раздраже-
нии чувствительных волосков. При изменении положения тела изменяется и
направление силы, действующей со стороны отолита на чувствительные воло-
ски. Раздражающее воздействие на полукружные каналы оказывает ускорение
движения всего тела или головы, возникающее в плоскости каждого канала.
Овальный мешочек (утрикулюс) играет ведущую роль в восприятии положения
тела и участвует в реализации ощущения вращения. Круглый мешочек (сак-
кулюс) дополняет овальный, он необходим для восприятия вибраций.
В нормальных условиях поле гравитационной силы тяжести воздейству-
ет на отолиты, импульсы от которых поступают в мозг и согласуются с тем,
что человек видит и ощущает в своем теле. Однако при сложном вращении
в условиях ИСТ ускорения и перемещения могут вызвать конфликт между
зрительной информацией и сигналами из вестибулярного аппарата, в ре-
зультате чего возникают дезориентация и болезнь движения (которую часто
называют «укачиванием»).
410
Часть II. Определение облика пилотируемого космического аппарата
Организм каждого человека чувствителен к ускорению Кориолиса. У того,
кто ведет активный образ жизни, симптомы болезни движения могут проя-
виться при угловой скорости вращения больше 1 об/мин (Qo >0,1 рад/с).
Кроме того, такая болезнь может развиться под действием прецессионного
ускорения, возникающего при поворотах головы во вращающейся системе:
e = Q0xco, (7.11)
где со — относительная угловая скорость вращения головы.
При повороте головы рецепторы внутреннего уха посылают в нервную
систему не только информацию об угловой скорости со, но и информацию
об угловой скорости Qo что может стать причиной дезориентации, поскольку
принимаемая информация не соответствует поступающей в нервную систему
информации от других рецепторов, например от зрительных.
Очевидно, что е = 0, если векторы со и Qo параллельны. Для предотвра-
щения вестибулярных реакций при поворотах головы в системах с ИСТ ре-
комендуется уменьшить угловую скорость, ограничить число поворотов го-
ловы, совершать только поступательные движения, поворачивать голову
вокруг оси, параллельной оси вращения системы.
Чаще всего человек поворачивает голову в направлении «влево—вправо»,
и если по условиям компоновки не удается совместить ось этого вращения
с осью вращения ИСТ, то для минимизации прецессионного ускорения
желательно тренировать экипаж заменять поворот головы движением глаз.
Однако эта замена помогает лишь в процессе бодрствования, поскольку во
сне человек может непроизвольно поворачивать голову. Поэтому при компо-
новке отсеков с ИСТ спальное место стоит располагать вдоль оси вращения.
Кроме того, человек часто поворачивает голову в направлении верх—вниз,
например работая за компьютером.
Медико-биологические исследования показали, что человек может жить
и работать во вращающемся объекте без последствий, опасных для его здо-
ровья, если угловые скорости вращения не будут превышать 3 об/мин [5].
Значение частоты вращения, после которого начинаются проблемы с вести-
булярным аппаратом, составляет около 3,82 об/мин, однако до 6 об/мин
человек способен адаптироваться к повышенной частоте вращения спустя не-
которое время. При скоростях вращения 0,3<Q0 <0,6 рад/с на начальном
этапе вращения возникают симптомы болезни движения, однако после 6—8 сут
появляется адаптация и дальнейшее пребывание во вращающейся системе
характеризуется нормальным состоянием и работоспособностью.
Верхний стационарный предел ускорения ИСТ gnMaKC может быть выбран
исходя из того, что человек при работе на КА с ИСТ не должен испытывать
действие силы тяжести, превышающей 1g. Тогда ограничением становится его
передвижение против направления вращения (см. рис. 7.3, б), поскольку именно
в этом случае динамическая составляющая ИСТ складывается со статической.
Эффективная минимальная величина ускорения £пмин выбирается таким
образом, чтобы у человека в космическом полете не развивались физиологи-
ческие последствия, характерные для адаптации к невесомости. Выбор ниж-
него предела ускорения ИСТ также может быть основан на требованиях
Глава 7. Компоновка ПКА с искусственной силой тяжести 411
практичности и простоты исполнения технической реализации ИСТ в КА.
Другим критерием может служить обеспечение с помощью ИСТ естественного
окружения: возможности естественной конвекции, нормального поведения
жидкости, сохранения предметов на рабочих поверхностях в неподвижном по-
ложении, а также использования обыкновенной сантехники. Биомеханическим
критерием выбора значения gnMI4H может служить возможность человека ходить
без посторонней помощи в условиях ИСТ.
Проведенные на летающих лабораториях тесты позволили сделать вывод,
что ходьба без скафандра возможна до 0,12g. Исследования показывают, что
допустимым уровнем ИСТ, удовлетворяющим другим критериям, является 0,2g.
С учетом того, что при движении в ИСТ динамическая составляющая может
уменьшать суммарную ИСТ (см. рис. 7.3, в), то выбирается минимальное зна-
чение около 0,3g. Проведенные в 1977 г. в СССР космические эксперименты
на грызунах показали, что критическим с точки зрения физиологии уровнем
ИСТ является 0,28g. Для уровней ИСТ выше этого значения физиологические
эффекты поведения испытуемых не отличались от полученных при 1g, а для
уровня ИСТ ниже 0,28g физиологические эффекты не отличались от получен-
ных при 0g. В результате экспериментов на центрифугах короткого радиуса,
проведенных во время полетов ОС SpaceLab в 1992—1998 гг. у испытуемых
ощущения действия силы тяжести возникали при уровне ИСТ выше 0,22g.
Ограничения по гравитационному градиенту в пределах человеческого
роста установлены медико-биологическими исследованиями на уровне 15 %
от gn. Это при Я = 1,8 м дает по формуле (7.6) минимальный радиус враще-
ния гп =12,0 м.
Результаты исследований свидетельствуют, что для профилактики неблаго-
приятного воздействия микрогравитации значение ИСТ должно находиться в
диапазоне 0,3g <gn < 1,0g, причем наилучшим будет уровень ИСТ, равный
земному: gn = g.
Проведенные исследования позволяют построить диаграмму проектных
параметров ИСТ и выделить на ней зону комфортного пребывания человека
(рис. 7.10) [6]. Эта диаграмма показывает, что наиболее комфортную ИСТ можно
создать только при больших радиусах вращения, когда гп > 70 м, допустимый
уровень комфорта достигается при гп >20 м, а при меньших радиусах вращения
начинают существенно проявляться динамическая составляющая ИСТ и гра-
витационный градиент.
При проектировании КА с малым радиусом вращения, где поле ИСТ
имеет большой гравитационный градиент, необходимо компоновать рабочие
пространства таким образом, чтобы минимизировать движения экипажа в на-
правлении вдоль радиуса. При этом движения в тангенциальном направлении
(см. рис. 7.3, б, в) должны быть ограничены таким образом, чтобы динамиче-
ская составляющая ИСТ не превышала 50 % статической. Скорость движения
в осевом направлении (см. рис. 7.3, а) также должна быть ограничена, чтобы
при перемещениях конечностей по радиусу вращении не возникало значи-
тельных возмущений. Например, при ходьбе в осевом направлении подъем
ноги вызывает воздействие ускорения Кориолиса в одном направлении, а
при опускании — в другом, что может нарушить походку.
412
Часть II. Определение облика пилотируемого космического аппарата
Рис. 7.10. Диаграмма проектных параметров ИСТ с
отмеченной на ней зоной комфорта
Перемещения вдоль радиуса при переходе через ось вращения вызыва-
ют смену знака ИСТ, и направление верх—вниз заменится на вниз—вверх,
поэтому перемещения человека через ось вращения должны сопровождаться
разворотом на 180°. Такой разворот удобно совершать в условиях невесо-
мости в невращающемся центральном отсеке-базе, расположенном на оси.
При проектировании необходимо задать его минимальный радиус исходя из
допустимой окружной скорости, с которой человек переходит из поля ИСТ
в состояние невесомости. В некоторых исследования предлагается выбирать
радиус базы равным 1,8...3,0 м.
В результате можно сформулировать медико-биологические принципы
компоновки КА с ИСТ:
• движение людей через ось вращения должно быть сведено к мини-
муму; переход через ось должен происходить только через невращающийся
отсек-базу;
• жилые и рабочие пространства должны быть расположены как можно
дальше от оси вращения;
• отсеки должны быть соориентированы таким образом, чтобы основные
перемещения людей совершались вдоль оси вращения;
• рабочие места должны минимизировать повороты головы в процессе
работы;
• спальные места следует проектировать так, чтобы продольная ось че-
ловека была сонаправлена с осью вращения;
Глава 7. Компоновка ПКА с искусственной силой тяжести
413
• для уменьшения рассогласования между зрением и вестибулярным
аппаратом рекомендуется визуально подчеркивать линии поля ИСТ, а также
минимизировать число иллюминаторов в жилых и рабочих помещениях,
чтобы вращающийся вид не вызывал болезнь движения.
7.3. Компоновка космического аппарата с искусственной силой
тяжести
В простейшем случае создание ИСТ может быть достигнуто путем ор-
ганизации вращения КА вокруг центра масс. С механической точки зрения
КА с ИСТ, закрученный вокруг оси, проходящей через центр масс, пред-
ставляет собой гироскопическую систему, обладающую значительным кине-
тическим моментом. Режим движения такой системы может быть устойчи-
вым или неустойчивым в зависимости от выбранных инерционно-массовых
характеристик.
При выборе оси вращения 00' необходимо, чтобы она не только про-
ходила через центр масс КА, но и совпадала с одной из главных осей инерции.
При этом соотношение главных моментов инерции влияет на устойчивость
КА. Естественная устойчивость — важный критерий системы с ИСТ, посколь-
ку она должна сохранять ориентацию при возмущениях, возникающих из-за
перемещений членов экипажа и при авариях системы стабилизации и ори-
ентации. На рис. 7.11 показано, как выбор оси вращения влияет на устойчи-
вость. Здесь ось вращения 00' совпадает с осью инерции Ох.
Рис. 7.11. Устойчивость вращающегося тела при раз-
личных соотношениях моментов инерции Jx, Jy, Jz
(ось вращения совпадает с осью Ох):
N — нейтральное положение; I — область устойчивости;
II — область условной устойчивости; III — область неу-
стойчивости; а — большая маневренность; б — большая
устойчивость
414 Часть II. Определение облика пилотируемого космического аппарата
Как видно из рис. 7.11, в случае, когда момент инерции относительно оси
вращения минимален, КА считается условно устойчивым. По такой схеме в
1973 г. члены экипажа ОС Skylab раскрутили модуль Orbital Workshop вокруг
продольной оси. Перемещаясь по окружности импровизированной беговой
дорожки из шкафов в складском отсеке модуля Orbital Workshop диаметром
6,3 м (рис. 7.12), они экспериментально кратковременно получили уровень
ИСТ около 0,165g, близкий к силе тяжести на Луне.
Рис. 7.12. Фазы эксперимента по получению ИСТ при движении астронав-
та по беговой дорожке в модуле ОС Skylab (1973)
Наибольшая устойчивость вращения обеспечивается тогда, когда момент
инерции КА относительно оси вращения гораздо больше двух других главных
моментов инерции. Этому критерию отвечают компоновки типа «тор» и
«колесо» (рис. 7.13, я, б), появившиеся одними из первых в проектах ОС,
однако их создание вызывает трудности из-за больших габаритов конструк-
ций. Так, при радиусе гп = 20 м (на границе зоны комфорта ИСТ) длина
герметичного тороидального отсека, который необходимо собрать на орбите,
будет равна приблизительно 125,7 м. Близкими по устойчивости к тороидаль-
ным компоновкам оказались компоновки типа «звезда» (рис. 7.13, в—д).
Рис. 7.13. Компоновки КА с ИСТ, обеспечивающие устойчивость вращения
На рис. 7.14 приведены два варианта компоновки типа «колесо» ОС с ИСТ,
имеющей трансформируемую конструкцию, которая может быть выведена на
орбиту одним пуском сверхтяжелой PH типа Saturn V [7, 8]. Оба варианта
предусматривают использование наряду с жесткими отсеками надувных кон-
струкций. В первом, более технологичном, варианте (рис. 7.14, а) применены
шесть цилиндрических отсеков, однако при этом тор заменяется шестиугольником,
в котором имеются значительные прямолинейные участки. При движении по
этим участкам в условиях ИСТ будет возникать кажущийся уклон пола (см.
рис. 7.6, а, б) из-за малого радиуса (гп = 22,5 м). Во втором варианте исполь-
зуются 12 отсеков в форме сегмента тора. Этот вариант сложнее технологиче-
ски, но позволяет создать более комфортные условия для экипажа.
Глава 7. Компоновка ПКА с искусственной силой тяжести
415
Рис. 7.14. Варианты проекта раскладной конструкции ОС с ИСТ,
выводимой одним пуском PH типа Saturn V (гп = 22,5 м):
а — вариант с цилиндрическими отсеками; б — вариант с отсеками в виде
сегментов тора; 1 — надувной сегмент; 2 — панель солнечной батареи;
3 — жесткий сегмент
416
Часть II. Определение облика пилотируемого космического аппарата
В компоновках типа «звезда» вместо непрерывного тороидального кори-
дора используются независимые отсеки, закрепленные на радиальных эле-
ментах конструкции. В случае, когда компоновка КА с ИСТ не допускает
использования больших радиусов вращения гп, принципиальной становится
ориентация продольной оси модуля относительно оси вращения 00'.
У отсеков цилиндрической формы можно отметить ряд важных принципов
компоновки.
Радиальное расположение отсеков (см. рис. 7.13, в) имеет наибольшие
преимущества, однако данный вариант не будет оптимальным с точки зрения
комфорта пребывания экипажа:
• компоновка отсеков модуля будет вертикальной, как на станции Skylab;
• каждый из уровней будет круговым, что следует учитывать при компо-
новке рабочих мест, в частности, все иллюминаторы на одном уровне будут
направлены в различные стороны;
• одновременно обеспечиваются несколько уровней с различными зна-
чениями gc, что может быть использовано для проведения многочисленных
исследований;
• необходимо придавать полу каждого уровня отсека кривизну, чтобы
избежать кажущегося наклона (см. рис. 7.6, в).
• члены экипажа вынуждены постоянно перемещаться через различные
уровни ИСТ, причем невозможно устранить действие динамической состав-
ляющей ИСТ;
• большой гравитационный градиент затрудняет работу с оборудованием,
инструментами и принадлежностями и их перемещение с уровня на уровень;
а также может увеличивать риск падения членов экипажа при перемещениях
между уровнями из-за развития болезни движения;
• большой объем модуля приходится отводить под лестницу или лифт
для перемещения между уровнями;
• расположение рабочих мест экипажа по периметру цилиндрического
модуля приводит к тому, что вектор угловой скорости поворотов головы со в
направлении вправо—влево будет перпендикулярен вектору угловой скорости
Qo вращения, а прецессионное ускорение (7.11) будет равно нулю, однако
повороты головы вперед—назад будут вызывать болезнь движения.
Тангенциальное расположение отсеков (см. рис. 7.13, д) имеет промежу-
точную степень комфорта, в предельном случае такого их расположения
получается тороидальный КА:
• компоновка отсеков модуля будет горизонтальной, как на большинстве
ОС;
• гравитационный градиент получается малым;
• основное направление перемещений экипажа по модулю будет близ-
ко к движению по кругу; при этом динамическая составляющая ИСТ не
отсутствует полностью, она будет только уменьшать или увеличивать ИСТ
(см. рис. 7.3, б, в).
• желательно придать полу отсека кривизну (рис. 7.15), чтобы избежать
кажущегося наклона; стоит придать кривизну всем рабочим поверхностям
(столам, пультам и пр.), чтобы при перемещении по ним инструментов
Глава 7. Компоновка ПКА с искусственной силой тяжести
417
Рис. 7.15. Очертания пола при тангенциальном расположении цилиндриче-
ского отсека с ИСТ
воздействие динамической составляющей ИСТ не изменяло местной
вертикали;
• при размещении рабочих мест по краям коридора вектор угловой скорости
поворотов головы со будет перпендикулярен вектору угловой скорости Qo вра-
щения, и прецессионное ускорение (7.11), вызывающее болезнь движения, будет
возникать при повороте головы как вперед—назад, так и вправо—влево;
• зоны обзора иллюминаторов, располагающихся на рабочих местах
по образующей модуля, будут направлены параллельно оси вращения; при
большой скорости вращения это может вызвать затруднения из-за влияния
окружной скорости.
Осевое расположение отсеков (см. рис. 7.13, г) обеспечивает максималь-
ный комфорт экипажа, поскольку ось отсека параллельна оси вращения:
• компоновка отсеков модуля будет горизонтальной, как на большинстве
ОС;
• гравитационный градиент невелик;
• основное направление перемещений экипажа по модулю будет парал-
лельно оси вращения; при этом динамическая составляющая ИСТ не будет
проявляться (см. рис. 7.3, а);
• пол и рабочие поверхности могут быть плоскими;
• размещение рабочих мест по краям коридора приведет к тому, что век-
тор угловой скорости поворотов головы со в направлении вверх—вниз будет
перпендикулярен вектору угловой скорости Qo вращения и прецессионное
ускорение (7.11) будет равно нулю, однако повороты головы влево—вправо
будут вызывать болезнь движения;
• зоны обзора иллюминаторов, расположенных на рабочих местах по
образующей модуля, будут направлены в тангенциальном направлении, так
что визуальное восприятие вращения будет наиболее комфортным.
Одна из основных проблем для ОС с ИСТ — воздействие на вращаю-
щийся КА возмущений, вызываемых дисбалансом и импульсами при пере-
мещениях и работе экипажа. Эти возмущения могут спровоцировать неже-
лательные колебания и прецессию КА. В табл. 7.1 [9] приведены различные
возмущения и способы их компенсации для ОС с ИСТ, в табл. 7.2 — числен-
ные значения возмущений для двух компоновок ОС с ИСТ типа «колесо»
418
Часть II. Определение облика пилотируемого космического аппарата
с различным радиусом гп [7]. Из приведенной таблицы видно, что с увели-
чением радиуса компоновки возмущения существенно уменьшаются, что
вызвано ростом момента инерции КА и снижением угловой скорости его
вращения.
Таблица 7.1
Возмущения, воздействующие на вращающуюся ОС с ИСТ, наблюдаемые эффекты и спосо-
бы их компенсации
Возмущения Эффект Способ компенсации
_lJ LyJ • J ш ш 5 L6
Инерционные
Конструктивный начальный дисбаланс X X X X
Перемещения:
экипажа X X X X X (X)
грузов X X X X X X (X) (X)
при раскрытии элементов конструк- X X X X X X (X) (X)
ции
Работа механизмов X X X (X)
Гибкость конструкции X X (X) (X)
Внешние
Гравитационный градиент X X
Сопротивление атмосферы X X (X)
Солнечное давление X X
Магнитное поле X X
Метеориты X X
Стыковка ТКА X X X X X (X)
Утечка газов X X
Примечания: I — колебания; II — смещение центра масс; III — резонанс; 1 - — импульс ОС;
2 — конструкция; 3 — система балансировки; 4 — демпфер колебаний; 5 — силовые гиро-
скопы; 6 — реактивная система стабилизации; в скобках — вспомогательный фактор.
Таблица 7.2
Значения возмущений для компоновок ОС с ИСТ типа «колесо»
Тип возмущения Значения углов, град, при радиусе компоновки, м
9 46
а а
Радиальное перемещение экипажа 9 0...12 0,7 0...0,8
Поперечное (трансверсальное) перемещение экипажа 13 0...5 1,0 о...о,з
Перемещение экипажа в окружном направлении 108 80...-80 3,о 3,0...-3,0
Удар при стыковке с ТКА 2 2...-2 0,05 0..Д04
Примечания'. 1. а — максимальный угол колебаний оси. 2. Р — < колебаний по направлению вращения. относительный угол
Глава 7. Компоновка ПКА с искусственной силой тяжести 419
Значительные габариты и масса ПКА с ИСТ, имеющих устойчивую ком-
поновку типа «тор», «колесо» или «звезда», вызывают трудности при управ-
лении ее переориентацией в пространстве, поскольку такой КА представляет
собой гироскоп, парирующий изменение положения оси 00'.
Для повышения маневренности КА с ИСТ необходимо уменьшить мо-
мент инерции относительно одной из главных осей, перпендикулярных оси
вращения. Наиболее простой вариант — компоновка типа «гантель», при
которой два массивных отсека диаметрально разнесены вдоль оси, перпен-
дикулярной оси вращения. Компоновка типа «гантель» (см. рис. 7.11) менее
устойчива, но более маневренна [10], чем рассмотренные выше.
В связи с действием центробежной силы компоновка типа «гантель»
может быть реализована с использованием тросовой системы, соединяющей
два массивных тела. Это могут быть, например, жилой отсек и агрегатный
Рис. 7.16. Формирование компоновочной схемы КА с ИСТ на базе тросовой
системы типа «гантель»:
а — в проекте эксперимента на КА «Восход-4»; б — в эксперименте Gemini XI — Agena
(7 — противовес (последняя ступень PH); 2 — КА; 3 — поперечный демпфер; 4 — про-
кладка троса на КА; 5 — узел перецепки с продольным демпфером; 6 — трос; 7— лебедка)
420 Часть II. Определение облика пилотируемого космического аппарата
отсек-противовес (рис. 7.16). По такому принципу был запланирован на 1964 г.
эксперимент с раскруткой связки КА «Восход-4» и последней ступени PH.
Подобный эксперимент по созданию ИСТ был проведен на практике в полете
связки КА Gemini XI и ракетной ступени Agena (1966). Однако небольшая
длина троса (36 м) и малая скорость вращения 55 град/с не позволили полу-
чить в данном эксперименте ускорение более 0,00015g [11].
Вариант компоновки типа «гантель» КА для исследования дальнего кос-
моса представлен на рис. 7.17 [9]. Здесь радиально расположенный жилой
отсек и ядерная энергоустановка соединены протяженной стержневой фер-
мой с расчалками в направлении оси OZ. В середине компоновочной схемы
размещены топливные баки и электроракетные двигатели малой тяги, что
позволяет обеспечить заданную центровку при расходовании топлива.
Рис. 7.17. Компоновочная схема КА с ИСТ для исследования дальнего космоса:
1 — стыковочный узел для приема ТКА (при отсутствии вращения комплекса); 2 — жилой
надувной модуль типа TransHub; 3 — двигатели стабилизации и управления вращением
комплекса; 4 — трансформируемая ферма; 5 — ванты; 6 — силовые тросы (воспринимаю-
щие центробежные силы); 7— ядерная энергоустановка; 8 — маршевые ЭРД; 9 — распорка;
10 — топливный бак; 11 — радиатор
Организация ИСТ на борту пилотируемого КА, закрученного вокруг
центра масс, имеет как преимущества, так и недостатки. К достоинствам
ИСТ следует отнести устранение одного из наиболее существенных негатив-
ных факторов, влияющих на человека в космическом полете. Преимущества
для основных систем КА, обеспечиваемых ИСТ, связаны с осуществлением
свободной конвекции в газе и жидкости, а также в возможности разделения
смесей путем осаждения. Это позволяет упростить и приблизить к земным
аналогам элементы системы жизнеобеспечения: систему вентиляции, термо-
регулирования, приготовления пищи, удаления отходов и пр.
Глава 7. Компоновка ПКА с искусственной силой тяжести 421
К недостаткам ИСТ следует отнести нестационарные динамические
нагрузки, возникающие при работе экипажа и оборудования, сложность
стабилизации и ориентации вращающегося КА, управление движением его
ЦМ. Большие трудности возникают при сближении и стыковке транспорт-
ных КА с вращающейся ОС. Наличие ИСТ сводит на нет все преимущества
микрогравитации, делающие уникальными условия проведения исследова-
ний и производственной деятельности в космическом полете. Кроме того,
затруднено проведение экспериментов ДЗЗ с борта вращающейся ОС.
В силу этих причин рациональными являются проекты комбинированных
компоновок КА с ИСТ, в которых имеются как элементы-базы, неподвиж-
ные в связанной системе координат, так и вращающиеся элементы-роторы
(рис. 7.18) [12].
На рис. 7.19 представлен вариант одной из ранних комбинированных
компоновок большой ОС с ИСТ [13], где вдоль оси вращения также рас-
положены невращающиеся отсеки, образующие базу, в которой размещены
а
Рис. 7.18. Вариант компоновки ОС с ИСТ с неподвижной базой и вращающим-
ся ротором:
а — рабочая конфигурация; б — схема развертывания; в — транспортная конфигурация при
выведении; 1 — противовес (верхняя ступень PH); 2— панель солнечных батарей; 3— невра-
щающаяся база с научным оборудованием; 4 — раскладывающаяся штанга; 5 — жилой модуль
422
Часть II. Определение облика пилотируемого космического аппарата
б
Рис. 7.19. Варианты комбинированной компоновки большой ОС с ИСТ с не-
подвижной осью и вращающимся ротором (1960):
а — общий вид базовой компоновки; б — изометрический вид базовой компоновки;
в — компоновка с увеличенным ротором; 1 — манипуляторы для швартовки ТКА;
2 — стыковочный отсек; 3 — антенны; 4 — отсек для медицинских экспериментов в
условиях микрогравитации; 5 — отсек систем регенерации; 6 — отсек электронного
оборудования; 7 — жилой отсек; 8 — камбуз; 9 — отсек для астрофизических экспери-
ментов; 10 — агрегатный отсек; 11 — экран теневой радиационной защиты; 12 — ядерная
энергоустановка; 13 — холодильник-излучатель; 14 — складской модуль с внутренним
переходом; 15 — баки с топливом; 16 — центральный отсек; 17 — служебный отсек;
18 — отсек управления; 19 — датчики системы ориентации и стабилизации; 20 — вра-
щающийся узловой модуль
Глава 7. Компоновка ПКА с искусственной силой тяжести 423
лаборатории микрогравитации, стыковочные узлы для приема ТКА и средства
ДЗЗ. Отсеки, в которых создается ИСТ, расположены параллельно оси вра-
щения в одном или нескольких роторах. Имеются проекты, где используются
одинаковые роторы, вращающиеся относительно базы в противоположных
направлениях для компенсации возмущений и улучшения управляемости.
На рис. 7.20 приведена комбинированная компоновка большой ротор-
ной ОС [14], для которой выбран уровень лунной гравитации, что позволяет
в орбитальном полете адаптировать экипаж для работы на лунной базе. ОС
включает в себя большой вращающийся тор, соединенный ферменными
спицами с центральной цилиндрической втулкой.
Исходя из уровня ИСТ, равного gn =1,63 м/с2 (0,166g), выбран радиус
вращающейся конструкции 114,5 м. При этом скорость вращения ротора
составит 1,14 об/мин. Диаметр кругового сечения тора равен 15,3 м, что создает
обитаемый объем около 1,3-105 м3. Спицы имеют сечение в виде равносторон-
него треугольника со стороной 5,6 м. Масса конструкции составляет 1,65 млн кг,
момент инерции — 2,16* 1010 кг м2, вращательный импульс ротора 2,58 109кг м2/с.
Центральная втулка имеет диаметр 15 м и длину 100 м. На одном ее торце
расположена ферменная платформа-диск (диаметр диска — 158 м, толщина —
5 м) для размещения складов, энергетического оборудования, научной аппа-
ратуры и оранжерей (куполообразные конструкции диаметром 25 м и высо-
той 5 м), на другом установлен космический док в виде куба со стороной
67 м, позволяющий выполнить прием ТКА для снабжения ОС, заправку, ре-
монт и сборку лунных ТКА. Док включает в себя герметичные отсеки для
экипажа, оборудование для дистанционной сборки и обслуживания ОС.
К втулке жестко присоединена траверса длиной 290 м квадратного сече-
ния со стороной 5 м, используемая для монтажа различных систем, например
аппаратуры дистанционного зонирования Земли (ДЗЗ). В развитие данной
компоновки можно для увеличения жилого пространства спроектировать
герметичными спицы тора, а также всю траверсу, которую также можно ис-
пользовать для хранения и обслуживания роботов-сборщиков.
Ось вращения тора параллельна плоскости эклиптики и постоянно на-
правлена на Солнце, поэтому ОС должна постоянно прецессировать с пе-
риодом один оборот в год, что позволит тратить минимум энергии в случае,
когда вращательный импульс относительно оси вращения тора равен нулю.
Четыре солнечных концентратора диаметром 39 м (КПД преобразователей —
40 %) служат основным источником энергии для оборудования, установлен-
ного на втулке. Они расположены на платформе и ориентированы на Солнце.
Еще два солнечных концентратора, установленных на вращающемся торе,
предназначены для его энергообеспечения. Площадь холодильников-радиа-
торов, разделенная пополам между платформой и тором, составляет 6950 м2.
Две дискообразные конструкции (по одной с каждой стороны тора) по-
могают уменьшить вращательный импульс ОС вокруг ее оси вращения. Один
из дисков вращается в сторону, противоположную вращению тора, другой —
неподвижен относительно втулки, кроме того, он заполнен жидкостью (водой
или топливом), которая циркулирует противоположно направлению вращения
тора. Скорость циркуляции жидкости регулируется насосами, что позволяет
управлять значением вращательного импульса, снижая его до нуля.
424
Часть II. Определение облика пилотируемого космического аппарата
Рис. 7.20. Комбинированная компоновочная схема большой роторной ОС:
1 — вращающийся тор (обитаемые отсеки); 2 — невращающаяся платформа; 3 — солнечная
энергоустановка; 4 — балансировочный ротор; 5 — отсек-лаборатория; 6 — ферма; 7 — цен-
тральный герметичный отсек (база); 8 — космический док
Глава 7. Компоновка ПКА с искусственной силой тяжести 425
При создании ИСТ возможны и более сложные комбинированные компо-
новки, включающие несколько роторов различной конфигурации. Например,
дополнительный ротор-маховик может использоваться для уменьшения плеча
противовеса в компоновке типа «гантель» (рис. 7.21) [15]. Здесь массивный
энергетический модуль закручен в сторону, противоположную вращению
жилого модуля, и за счет разницы в моментах инерции можно уменьшить
габариты КА.
Рис. 7.21. Уменьшение плеча про-
тивовеса введением вращающегося
противовеса-маховика:
1 — маховик-противовес; 2 — агрегатный
модуль; 3 — вантово-стержневая ферма; 4 —
жилой модуль с ИСТ
Недостаток комбинированных компоновок — необходимость создания
высоконадежных узлов вращения и герметичных соединений, по которым
члены экипажа могут переходить из ротора в базу. Таких недостатков ли-
шены трансформируемые компоновки, например, на базе тросовых систем
(рис. 7.22), где жилой и агрегатный модули соединены тросом переменной
длины. Для проведения коррекций орбиты, операций стыковки с ТКА и мик-
рогравитационных экспериментов трос укорачивается и два модуля жестко
соединяются. Если необходимо создать ИСТ, трос удлиняется и система за-
кручивается вокруг ЦМ (реализуется схема «гантель»). Переменный радиус
вращения позволяет проводить эксперименты по ИСТ в широком диапазоне
проектных параметров, моделировать силу тяжести не только на Земле, но и
на Луне или Марсе, что важно при подготовке межпланетных пилотируемых
полетов.
В проекте Rotationally INduced Gravity vehicle (RING) (рис. 7.23) предло-
жена компоновка межпланетного ПКА с ИСТ на базе тросовой системы [16].
Два герметичных модуля — жилой и складской — связаны с центральным
агрегатным модулем тросами длиной 100 м. Жилой модуль служит для раз-
мещения экипажа, складской — запасов и комплектов запасных частей обо-
рудования. Обитаемые модули имеют эллиптическое сечение (3,0 х 2,26 м),
что увеличивает полезную площадь пола. Центральный модуль предна-
значен для размещения энергетической и двигательной систем, систе-
мы управления тросами и хранения запасов воды. При вращении связ-
ки вокруг продольной оси центрального модуля с частотой 1,63 об/мин
в обитаемых модулях создается ИСТ на уровне 0,3g. Для пополнения запасов
обитаемые модули раз в два месяца подтягиваются к центральному модулю,
и после стыковки через герметичный переход происходит обмен грузами
между жилым и складским модулем.
426
Часть II. Определение облика пилотируемого космического аппарата
а
б
Рис. 7.22. Проект ОС с ИСТ AG_LAB (NASA) с использованием
трансформируемой тросовой системы:
а — микрогравитационная конфигурация для стыковки с транспортными
КА и для коррекции орбиты; б — рабочая конфигурация для создания ИСТ
Глава 7. Компоновка ПКА с искусственной силой тяжести
427
Рис. 7.23. Тросовая система с ИСТ проекта RING:
а — компоновка комплекса; б — сечение обитаемого модуля: 1 — двигательная установка с
ядерным реактором; 2 — система управления тросами; 3 — жилой модуль; 4 — запасы воды;
5 — центральный модуль; 6 — складской модуль; 7 — баки с топливом; 8 — коммуникации,
воздуховоды; 9 — лонжерон; 10 — электрические коммуникации; 11 — низ отсека; 12 — пере-
крытие; 13 — верх отсека (направление к центральному модулю)
428 Часть II. Определение облика пилотируемого космического аппарата
Использование тросовых систем в компоновках ПКА с ИСТ позволяет
уменьшить массу конструкции, например, по сравнению с ее массой при
использовании стержневых ферм, но требует решения проблемы надежного
перемещения людей и грузов между модулями, связанными тросами.
7.4. Архитектурные аспекты помещений с ИСТ
Архитектурные аспекты компоновки КА с ИСТ связаны с организацией
жилого пространства в поле силы тяжести, отличающейся от привычной
гравитационной. Поскольку в поле ИСТ (из-за наличия динамической со-
ставляющей) направления движения неравнозначны, возникает необходи-
мость подчеркивать архитектурными средствами различия направлений
сторон света, важнейшими из которых являются (см. рис. 7.3) направление
вдоль оси вращения и тангенциально в направлении вращения и против
вращения. Эти направления при движении в поле ИСТ создают у человека
такие же физиологические различия, как и направления верх—вниз. Двигаясь
в направлении вращения, человек испытывает увеличение силы тяжести (см.
рис. 7.3, в), против вращения — ее уменьшение (см. рис. 7.3, б). Эту пару на-
правлений можно условно принять за ось восток—запад. Если считать, как
принято в теоретической механике, положительным вращение КА против
часовой стрелки при взгляде с конца вектора Qo, то это направление взгляда
можно определить как взгляд вперед в направлении на север (рис. 7.24).
Следовательно, восточное направление (правая сторона) будет соответство-
вать направлению вращения, а западное — против вращения. Ось север—юг,
таким образом, параллельна оси вращения и при равномерном движении
вдоль нее не возникает динамической составляющей ИСТ. Однако в поле
Рис. 7.24. Направления сторон света в системе с ИСТ
Глава 7. Компоновка ПКА с искусственной силой тяжести
429
ИСТ направления север—юг также имеют физиологические различия, свя-
занные с прецессионным ускорением (7.11).
Другой задачей архитектуры помещений с ИСТ является поддержка
психологических установок, позволяющих предвидеть поведение тел в поле
ИСТ, прежде всего, их поведение в свободном падении. Движущаяся к полу
точечная масса в условиях ИСТ будет отклоняться от местной вертикали в
направлении «против вращения», т. е. в западном (рис. 7.25). Отклонение будет
тем больше, чем меньше радиус вращения гп. Траектория свободного падения
тела есть эвольвента, параметры которой определяются однородностью стати-
ческой составляющей поля ИСТ (7.7).
Рис. 7.25. Падение тела с высоты 2 м:
а — в условиях земной силы тяжести; б — в условиях эквивалентной ИСТ
при различных радиусах гп: 1 — 10 000 м; 2— 1000 м; 3— 100 м; 4— Юм
Архитектурными решениями описанных выше задач могут быть, напри-
мер, варианты дизайна помещений и рабочих мест, в которых маркируются
стороны света и траектории свободного падения. На рис. 7.26 показано, как
изменяется дизайн комнаты при переходе от земного тяготения к ИСТ. Для
а
Рис. 7.26. Пример изменения интерьера комнаты при переходе от
земного тяготения (а) к ИСТ (б)
б
430 Часть II. Определение облика пилотируемого космического аппарата
маркировки под потолком комнаты использованы желтые треугольники для
западного направления и синие круги — для восточного. На северной стене
проведены полосы-эвольвенты, соответствующие траекториям свободного
падения. Вид этих полос позволяет составить представление о местном ра-
диусе вращения: чем сильнее наклон, тем меньше радиус. Такая маркировка
удобна при многоуровневой компоновке отсека с ИСТ: на каждом уровне
кривизна полос будет отличаться.
7.5. Компоновка центрифуг для создания локальной ИСТ
Трудности проектирования КА с полноценной ИСТ делают актуальной
задачу создания локальной ИСТ с помощью центрифуг, размещенных внутри
обитаемого объема КА. Эти установки необходимы для проведения меди-
ко-биологических исследований и профилактики неблагоприятного воздей-
ствия микрогравитации. Создание центрифуги в герметичном отсеке КА вво-
дит ограничение на величину максимального радиуса вращения. Например,
для герметичных модулей МКС, имеющих максимальный диаметр не более
4,2 м, радиус центрифуги ограничен 1,5...1,8 м. Для систем ИСТ такого типа
вводится специальное обозначение — центрифуга короткого радиуса (ЦКР).
При среднем радиусе центрифуги ось вращения ОХ проходит вблизи тела
человека, а при коротком — даже проходит через него (рис. 7.27). При этом
из-за большого гравитационного градиента (7.5) значение центростреми-
тельного ускорения в различных частях тела может существенно различать-
ся. Большой гравитационный градиент в ЦКР может оказывать негативное
влияние на организм, например на перераспределение жидких сред. Однако
медико-биологические исследования установили устойчивость человека к
перегрузкам с большим гравитационным градиентом, если величина ИСТ в
ЦКР будет близка к земной.
Малые габариты ЦКР исключают возможность длительного пребыва-
ния в ней человека, поэтому ЦКР является не полноценной системой ИСТ,
Рис. 7.27. Гравитационный градиент ИСТ в направлении «голова —
таз», действующий на человека в ЦКР при имитации перегрузки
на уровне стоп gn = g:
а — центрифуга короткого радиуса (г„ = 1,6 м); б — центрифуга среднего
радиуса (г„ = 7,25 м); G — перегрузка; ОХ — ось вращения; А — перегрузка на
уровне глаз; В — перегрузка на уровне сердца; Р — перегрузка на уровне стоп
Глава 7. Компоновка ПКА с искусственной силой тяжести
431
а только тренажером — средством профилактики воздействия микрограви-
тации. Вращения членов экипажа в ЦКР могут быть кратковременными, но
периодически повторяющимися. Предпочтительным направлением перегруз-
ки ИСТ для проведения тренировок на ЦКР является перегрузка «голова-
таз» (см. рис. 7.27) Однако для ночного сна можно использовать перегрузки
в направлении «грудь—спина».
Режим применения ЦКР задает соотношение перегрузки, длительности
и периодичности вращений. Он определяется путем медико-биологических
исследований и с учетом эффективности применения ЦКР как средства
профилактики. Наилучшими из изученных режимов применения ЦКР ока-
зались следующие [5]:
• трехсуточный цикл воздействия ИСТ «голова—таз», равной 1,2g на
уровне стоп, по 40 мин 3 раза в сутки;
• трехсуточный цикл воздействия ИСТ «голова—таз», равной 1,2g на уров-
не стоп, по 60 мин 2 раза в сутки в сочетании с водно-солевыми добавками;
• шестисуточный цикл воздействия ИСТ «голова—таз», равной 0,8g...1,6g
на уровне стоп, по 60 мин 2 раза в сутки в сочетании с физической нагрузкой
на велоэргометре.
Эти режимы необходимо учитывать при проектировании систем управ-
ления и энергообеспечения пилотируемого КА с ЦКР, а также при анализе
динамики его конструкции.
Компоновка ЦКР на борту обитаемого модуля КА определяется ее радиу-
сом: установки, имеющие радиус менее 1 м, могут быть размещены аналогично
другим видам тренажеров — велоэргометру или бегущей дорожке. Например,
ЦКР Microgravity Vestibular Investigations rotator, совершившая полет в составе
лаборатории SpaceLab International Microgravity Laboratory (IML-1) на борту
Space Shuttle STS-42 в 1992 г., располагалась «на полу» вблизи заднего торца
модуля, установленного в грузовом отсеке (рис. 7.28).
Рис. 7.28. ЦКР Microgravity Vestibular Investigations rotator:
a — внешний вид; б — место установки в модуле лаборатории SpaceLab; 1 — модуль SpaceLab;
2 — МТКА Space Shuttle; 3 — место установки ЦКР
432
Часть II. Определение облика пилотируемого космического аппарата
На данной ЦКР, имеющей вид кресла, ось вращения расположена вблизи
центра масс человека. Голова испытателя, находящегося на расстоянии 0,5 м
от оси вращения, испытывает ускорение 0,22g (—Gz), в то время как ноги на-
ходятся с противоположной стороны оси, испытывая ускорение 0,36g (+Gy.
Положение кресла в экспериментах изменяли так: испытуемый сидел вер-
тикально и поворачивался вокруг оси рыскания (слева направо) или лежал
и двигался либо вокруг оси тангажа (вперед и назад), либо вокруг оси крена.
ЦКР имела три режима изменения скорости: синусоидальный (предсказуе-
мо двигаясь туда и обратно на то же расстояние с постоянной скоростью),
псевдослучайный (непредсказуемое перемещение назад и вперед на разное
расстояние и с разной скоростью) и ступенчатый (начало движения и резкая
остановка).
Система для исследования визуальной и вестибулярной системы — Visual
and Vestibular Investigation System (VVIS), разработанная Европейским косми-
ческим агентством, была использована в составе космической лаборатории
Neuro Lab в полете STS-90 в 1998 г. Она также была установлена в задней
части модуля SpaceLab (рис. 7.29, а).
Радиус центрифуги составлял 0,5 м. Установка представляла собой крес-
ло, размещаемое в двух положениях: вертикально и горизонтально. В этих
положениях использовались две частоты вращения — 254 и 180 град/с, что
позволяло получать центростремительное ускорение 1 g и 0,5 g соответственно.
Время вращения в одном эксперименте составило около 7 мин. При верти-
кальном расположении кресла (рис. 7.29, б) ось «голова—таз» располагалась
параллельно оси вращения. Испытатель мог сидеть в кресле в четырех по-
ложениях относительно направления вращения: лицом, спиной, правым и
левым боком.
Кресло ЦКР имело пятиточечный ремень безопасности, ложементы для
фиксации плеч, шеи, коленей, тела, а голова фиксировалась шлемом. При гори-
зонтальном расположении кресла испытатель был размещен вдоль плеча ЦКР
таким образом, что его голова находилась на расстоянии 0,65 м от оси враще-
ния. В этом случае центробежная сила действовала вдоль продольной оси тела.
Когда испытатель лежал на спине (рис. 7.29, в), ось вращения была примерно
на уровне бедра, что позволяло создавать специфический гравитационный
градиент: центростремительное ускорение, действующее на голову, было
направлено от головы к ногам, а действующее на ноги, имело направление
от ног к голове.
Проекты ЦКР с радиусом, приближающимся к радиусу герметичного
модуля, предусматривают такую компоновку ротора центрифуги, при кото-
рой ось вращения ЦКР совпадает со строительной осью модуля. Например, в
проекте научного медико-биологического модуля Medilab для станции «Мир»,
представленном в 1989 г. [17], компоновка которого представлена на рис. 8.39
(см. гл. 8), ЦКР диаметром около 4 м была расположена вокруг переходного
туннеля вблизи стыковочного узла модуля. Установка предназначалась для
выбора в реальном полете наилучших режимов профилактики негативного
влияния невесомости на организм космонавтов.
В проекте модуля Centrifuge Accommodation Module (САМ) американско-
го сегмента МКС ротор ЦКР диаметром 2,5 м размещался на торце модуля
Глава 7. Компоновка ПКА с искусственной силой тяжести
433
в
Рис. 7.29. Компоновка ЦКР Visual and Vestibular Investigation System (WIS):
a — расположение установки в модуле SpaceLab при вертикальном расположении кресла;
б — вид модели ЦКР при вертикальном расположении кресла; в — схема ЦКР при горизон-
тальном расположении кресла
434
Часть II. Определение облика пилотируемого космического аппарата
Рис. 7.30. Компоновка ЦКР в проекте
модуля САМ для АС МКС:
1 — стойки с аппаратурой СОЖ; 2 — стойка
для хранения материалов; 3 — стойка с пер-
чаточным ящиком для биологических экспе-
риментов; 4 — стержни крепления ротора к
оболочке модуля; 5 — центрифуга; 6 — кон-
тейнер для испытания образцов
включает в себя перчаточный ящик
(рис. 7.30). Установка была предназна-
чена для проведения экспериментов с
ИСТ в диапазоне 0,001 g..2g. Масса ро-
тора ЦКР составляет 1875 кг. Размеры
центрифуги позволяют проводить экс-
перименты только с микроорганизма-
ми, растениями и мелкими животны-
ми не больше крысы. Одновременно
допускается проведение эксперимен-
тов с восьмью объектами. Кроме того,
предусмотрена возможность создавать
в ЦКР два уровня ИСТ.
Модуль САМ (рис. 7.30) массой
10 т, разработанный специально для
размещения ЦКР, имеет диаметр 4,4 м
и длину 8,9 м [18]. Он был предназна-
чен для размещения 14 стандартных
стоек МКС, в четырех из которых
находится экспериментальное обо-
рудование, а остальные играют роль
складов. Оборудование для прове-
дения экспериментов наряду с ЦКР
ссой 680 кг с рабочим объемом 0,5 м3
для работы с биологическими образцами в контролируемом микроклимате
с температурой 18...27 °C (одна стойка), оборудование СЖО (две стойки) и
морозильную камеру (одна стойка).
На рис. 7.31 приведена компоновка ЦКР Human Powered Centrifuge диа-
метром около 4 м, которую предполагалось размещать на торце модуля ОС
SpaceLab в полетах МТКА Space Shuttle [19, 20]. Размеры ЦКР были таковы,
что испытуемый мог находиться в ИСТ только сидя. Человек, крутящий пе-
дали велоэргометра лежа на спине, приводит в движение центрифугу. Сердце
человека, вращающегося на такой ЦКР, отстоит на 70 см от центра вращения.
Гравитационный градиент получается значительным, когда на уровне сердца
ИСТ равно 1,2 g, а на уровне ног ИСТ достигает примерно 3,5 g.
При компоновке центрифуг среднего радиуса в модулях ПКА сталкива-
ются с ограничениями, накладываемыми на диаметр герметичного модуля
средствами выведения. При использовании жестких отсеков наибольший
диаметр центрифуги позволяет человеку лежать и сидеть, но не вставать. Уве-
личить радиус центрифуги можно путем использования трансформируемых
отсеков. На рис. 7.32 показана компоновочная схема центрифуги диаметром
7,2 м, оснащенной беговой дорожкой и велоэргометром, которую предпола-
галось разместить в надувном модуле типа TransHub [21].
На рис. 7.33 показан вариант размещения в герметичном трансформиру-
емом модуле ПКА шестиместной ЦКР, в которой члены экипажа располага-
ются лежа [22]. Установка состоит из двух роторов, вращающихся в противо-
положных направлениях для обнуления кинетического момента (рис. 7.33, а).
Кольцевые подшипники роторов крепятся к двум центральным стойкам
Глава 7. Компоновка ПКА с искусственной силой тяжести
435
Рис. 7.31. Компоновка ЦКР с педальным приводом для МТКА Space Shuttle:
1 — внешний привод; 2 — центральная ступица; 3 — рейки крепления кресла; 4 —
кресло; 5 — видеокамера; 6 — педальный механизм; 7— педали; 8 — центральная
секция ЦКР; 9— научная аппаратура; 10— основание; 11 — боковая секция ЦКР
Рис. 7.32. Проект центрифуги для спортив-
ных тренировок в модуле типа TransHab
(NASA, 1999):
1 — надувной модуль; 2 — центрифуга; 3 — ве-
лоэргометр; 4 — беговая дорожка
436
Часть II. Определение облика пилотируемого космического аппарата
в ядре модуля. Между стойками предусмотрено пространство для доступа к
роторам (рис. 7.33, б). Роторы выполнены складными, что позволяет увели-
чивать радиус ЦКР после трансформации модуля (рис. 7.33, в, г). Частота
вращения роторов контролируется лазерными датчиками по меткам, нане-
сенным на стойках. Члены экипажа располагаются на лежаках, установлен-
ных по ободу ротора (см. рис. 7.33, г). Для безопасности роторы снабжены
защитными кожухами.
Другой пример компоновки центрифуги диаметром 7,2 м для проведе-
ния биомедицинских экспериментов на МКС в надувном модуле Space-BEE
Рис. 7.33. Вариант конструкции ЦКР для размещения в модуле ПКА:
а — компоновочная схема модуля; б — расположение ЦКР; в — ЦКР в транспортном поло-
жении; г — ЦКР в рабочем положении; 7 — модуль КА; 2 — центральные поддерживающие
стойки; 3 — роторы ЦКР; 4 — кожух; 5 — гибкое ограждение; 6 — лежак; 7— член экипажа;
8 — метки; 9 — кольца подшипника; 10 — конструкция опорного кронштейна; 77 — колея
ЦКР; 12 — лазерные датчики; 13 — узел привода; 14 — датчик ускорений
Глава 7. Компоновка ПКА с искусственной силой тяжести
437
а
Рис. 7.34. Компоновка модуля Space-BEE с ЦКР для МКС (2005):
1 — агрегат стыковки СВМ; 2 — надувная оболочка; 3 — ротор центрифуги; 4 — агрегат
стыковки ССВП; 5 — модуль дооснащения МКС
представлен на рис. 7.34 [21]. Внешний диаметр модуля дооснащения МКС
в транспортном положении равен 4,5 м, в рабочем — 9м (при этом герме-
тичный объем модуля составляет около 130 м3). Масса модуля варьируется в
пределах 8... 12 т. Он содержит жесткий центральный каркас-втулку к которой
крепится многослойная надувная тороидальная оболочка толщиной 0,36 м. На
торцах каркаса устанавливаются стыковочные агрегаты для соединения с узло-
вым модулем МКС (агрегат стыковки типа СВМ) и для приема ТКА (агрегат
стыковки типа АПАС или ССВП). Вокруг втулки вращается центрифуга мас-
сой около 500 кг, представляющая собой сплошной обод-пол диаметром 7,2 м,
составленный из 2 сборных кольцевых шпангоутов и 48 сотовых панелей
пола, соединенный 8 спицами с подшипниками, установленными на карка-
се-втулке. Центрифуга монтируется экипажем на орбите после приведения
модуля в рабочее положение. Сменные тренажеры и медицинское оборудо-
вание, доставляемое ТКА, могут быть размещены как на ободе установки,
так и внутри каркаса-втулки. Все оборудование должно жестко крепиться к
ободу при разгоне и торможении центрифуги. Члены экипажа переходят в
модуль Space-BEE и через один из трех люков во втулке попадают на обод
центрифуги.
Центрифуга Space-BEE должна обеспечивать ИСТ около 0,3 g на уров-
не пола. Для этого угловая скорость вращения ротора должна составлять
0,90 рад/с (8,63 об/мин), чтобы касательная скорость на ободе была равна
3,25 м/с. В проекте рассматриваются три варианта привода обода (рис. 7.35):
электроприводы, установленные во втулке, работающие на воздухе реак-
тивные двигатели, установленные на ободе ЦКР, а также раскрутка ЦКР
438
Часть II. Определение облика пилотируемого космического аппарата
Рис. 7.35. Варианты привода центрифуги в модуле Space-BEE:
а — электроприводы; б — реактивные двигатели, установленные на
ободе; в — раскрутка по принципу турбины
по принципу турбины — струями воздуха, поступающими от форсунок на вну-
тренней поверхности оболочки модуля на лопатки, установленные на ободе.
По предварительным оценкам мощность электроприводов для вращения
центрифуги оказывается значительной — она составляет около 500 Вт. Ис-
пользование сжатого воздуха позволяет снизить потребляемую мощность, так
как пневмодвигатели располагаются на большем радиусе. Для обеспечения
циркуляции воздуха при интенсивных физических упражнениях на центри-
фуге в модуле Space-BEE предполагается обмен атмосферы в модуле шесть
раз в час, для чего используются воздуховоды, соединяющие модуль с МКС.
Выход воздуха может быть организован через сопла, раскручивающие обод по
принципу турбины. Для уменьшения гироскопических моментов, действую-
щих на МКС со стороны модуля Space-BEE, в нем можно использовать две
ЦКР, вращающиеся в противоположные стороны.
При разработке компоновочных схем центрифуг требуется наряду с общей
компоновкой ротора в отсеке решить задачи компоновки агрегатов вращаю-
щегося интерфейса для передачи электро-, гидро- и пневмопитания, а также
информационных каналов к оборудованию на вращающемся роторе и обес-
печить наилучшую компоновку агрегатов системы виброизоляции ротора,
которая должна, с одной стороны, защитить КА от возмущений, вызываемых
перемещениями членов экипажа в центрифуге, с другой — исключить переда-
чу на ротор возмущений, вызываемых работой экипажа и оборудования МКС.
Контрольные вопросы к главе 7
1. Что такое искусственная сила тяжести и как ее можно получить?
2. Как искусственная сила тяжести влияет на космонавта?
3. Расскажите о конструктивно-компоновочном исполнении системы искус-
ственной силы тяжести.
4. Какова компоновка интерьера кабины ПКА с искусственной гравитацией?
5. Опишите конструктивно-компоновочные схемы размещения центрифуг на
борту.
Глава 7. Компоновка ПКА с искусственной силой тяжести 439
Литература к главе 7
1. Hall Т. W. The architecture of artificial gravity: archetypes and transformations of terres-
trial design. University of Michigan. 1993. URL: www.artificial-gravity.com/SSI-1993-Hall.pdf
(дата обращения 10.05.2017).
2. Hall T.W. Artificial Gravity. URL: http://www.artificial-gravity.com/ (дата обраще-
ния 10.05.2017).
3. Программа для моделирования поведения частиц в поле искусственной силы
тяжести SpinDoctor. URL: http://www.artificial-gravity.com/sw/SpinDoctor/SpinDoctor.
htm (дата обращения 10.05.2017).
4. Hall Т. W. Artificial gravity visualization, empathy and design // Proc, of Space 2006.
19-21 September 2006, San Jose, California. AIAA 2006-7321. 22 p.
5. Котовская A.P., Шипов A.A., Виль-Вильямс И.Ф. Медико-биологические аспек-
ты проблемы создания искусственной силы тяжести. М.: Издательская фирма «Сло-
во», 1996. 204 с.
6. Hall T.W. Architectural Considerations for a Minimum Mass, Minimum Energy,
Artificial Gravity Environment // Proc, of 32nd International Conference on Environmental
Systems (ICES), San Antonio, TX, 15-18 July 2002. SAE 2002-01-2431. URL: http://
www.arch.cuhk.edu.hk/~hall/ag/SAE-2002-01-2431.pdf (дата обращения 10.05.2017).
7. Berglund R.A. Space-station research configurations //Report on the research and
technological problems of manned rotating spacecraft. NASA Technical note D-1504. 1962.
P. 9-20.
8. Preliminary technical data for Earth orbiting space station. NASA Report. Vol.II.
Configuration, integration and weights. 1966. URL: http://ntrs.nasa.gov/archive/nasa/casi.
ntrs.nasa.gov/19670018324_1967018324.pdf (дата обращения 10.05.2017).
9. Kent J.В. Preliminary Assessment of Artificial Gravity Impacts to Deep-Space Vehicle
Design. NASA JSC-EX-02-50. 2002. 31p. URL: http://www.artificial-gravity.com/NASA-
JSC-EX-02-50.pdf (дата обращения 10.05.2017).
10. Kurzhals P.R., Adams J. J. Dynamics and Stabilization of the Rotating Space Station //
Astronautics, 1962. Vol. 7. No. 9. P. 11—24.
11. Сыромятников В.С. 100 рассказов о стыковке. М.: Логос, 2003. 568 с.
12. Artificial Gravity Space Station // Future Expansion. URL: http://nassp.sourceforge.
net/wiki/Future_Expansion (дата обращения 30.11.2017).
13. Kramer S.B., Byers R.A. A Modular Concept for a Multi-Manned Space Station //
Proc, of the Manned Space Station Symposium. Institute of the Aeronautical Sciences, April
20-22. 1960. P. 36-72.
14. Queijo M.J., Buttorfleld A.J., Cuddihy W.F., King C.B., Garn P.A. An Advanced
Technology Space Station for the Year 2025, Study and Concepts. The Bionetics Corporation.
Contract NA61-18267. 1987. URL: https://trove.nla.gov.au/work/186642297selectedversio
n=NBD5923066 (дата обращения 30.1 1.2018).
15. Sullivan T.A. Artificial G Facility for Bioastronautics, Human Exploration Science
& HEDS Technology Demo Missions. NASA. 2003. URL: http://www.artificial-gravity.
com/NASA-JSC-Sullivan-20030807.pdf (дата обращения 10.05.2017).
16. Hines G.D. RING: Rotationally-INduced Gravity vehicle with elliptical pressurized
modules. Sasakawa International Center for Space Architecture Report. URL: http://
www.uh.edu/sicsa/library/media/publications/RING (дата обращения 10.05.2017).
440 Часть II. Определение облика пилотируемого космического аппарата
17. Григорьев А.И., Ильин Е.А., Холин С.Ф., Ивановский Ю.Р., Правецкий И.В. Цели
и задачи проекта медицинской лаборатории «Medilab» в космосе // Космическая
биология и авиакосмическая медицина. 1989. № 23 (3). С. 7—21.
18. Clement G., Bukley A. Artificial Gravity. New York, Springer, 2007. 356 p.
17. Hypergravity exercise against bed rest induced changes in cardiac autonomic control /
K. Iwasaki, T. Shiozawa, A. Kamiya, D. Michikami at all // European Journal of Applied
Physiology. 2005. Vol. 94. Iss. 3. P. 91-285.
19. MulenburgG.M., VernikosJ. Human powered centrifuge. Patent US 5616104. 1995.
URL: https://www.google.com/patents/US5616104 (дата обращения 30.11.2017).
20. Pinni M. Space-BEE: Space Biomedical Exercise Environment. A Personal
Centrifuge within an Inflatable Structure. NASA report 2005-01-3049. 2005. URL: http://
sicsa.egr.uh.edu/sites/sicsa/files/files/publications/spacebee.pdf (дата обращения
30.11.2018).
21. Biddlecom C.A. System and method of providing artificial gravity. Patent US 9359091.
URL: www.google.ch/patents/US9359091 (дата обращения 10.05.2017).
Часть III
КОМПОНОВКА СИСТЕМ ПИЛОТИРУЕМОГО
КОСМИЧЕСКОГО АППАРАТА
ГЛАВА 8. КОМПОНОВКА ОБИТАЕМОГО ОБЪЕМА ПИЛОТИРУЕМОГО
КОСМИЧЕСКОГО АППАРАТА
8.1. Характеристики внутреннего объема пилотируемого
космического аппарата
8.7. 7. Деление герметичного объема
Цели компоновки внутреннего объема:
• размещение необходимых блоков бортового оборудования;
• рациональная организация пространства рабочих мест и путей пере-
мещения экипажа;
• оформление интерьера ПКА.
Компоновка оборудования во внутренних герметичных объемах ПКА
должна обеспечить длительную и продуктивную деятельность человека.
В процессе блочно-модульной компоновки ПКА разделяется на модули,
которые в свою очередь состоят из отсеков (см. гл. 4). В результате такого
деления образуется ряд герметичных контуров (см. гл. 5).
Внутренний объем герметичного контура делится на агрегатный (ИА), не-
обходимый для размещения элементов бортового оборудования, и обитаемый
(Ио) — пространство для экипажа. Соотношение этих объемов для нескольких
ПКА приведено в табл. 8.1, из которой видно, что доля обитаемого объема
больше доли агрегатного.
Необходимый обитаемый объем ПКА определяется программой и продол-
жительностью полета, а также численностью экипажа. В настоящее время в
связи с увеличением длительности полета и численности экипажа при выборе
Таблица 8.1
Обитаемый (Ио) и агрегатный (ИА) объемы пилотируемого космического аппарата
ПКА Го, м3 ГА, м3 ИО/ИА
«Союз» 6 4 1,5
Apollo (командный отсек) 6 4 1,5
Space Shuttle (кабина экипажа) 66 14 4,7
Модуль «Звезда» PC МКС 47 42 1,1
Модуль Lab АС МКС 61 39 1,6
444
Часть III. Компоновка систем пилотируемого космического аппарата
требуемого внутреннего объема следует использовать принцип гарантирован-
ной достаточности обитаемого пространства ПКА в расчете на одного члена
экипажа для выполнения всем экипажем полета определенной длительности.
В табл. 8.2 приведены справочные данные о величине внутреннего объема
для различных пилотируемых ПКА и их модулей [1, 2], а также приближенно
указаны максимальная длительность полета ПКА и штатная численность эки-
пажа, куда не входят для ОС число членов экипажа экспедиций посещения.
Таблица 8.2
Внутренние объемы различных пилотируемых космических аппаратов
ПКА Внутренний объем, м3 Численность экипажа, чел. Длитель- ность полета, сут Удельный объем, м3/чел.
«Восток» Эксперименте 5,2 гльные 1 5 5,2
«Восход» 5,2 3 1 1,7
«Меркурий» 1,7 1 1 1,7
Gemini 2,6 2 14 1,3
«Союз» Транспорт! 10,5 чые 3 17 3,5
Space Shuttle (кабина МТКА) 65,8 7 17 9,4
Комплекс Apollo («Лунная программа») 10,7 3 12 3,6
ОС «Салют-6» Орбитальн 86,5 ые 2 184 43,3
Орбитальный кластер Skylab 352,4 3 84 117,5
Орбитальный комплекс «Мир» 394,6 3 437 131,5
Орбитальный комплекс МКС 916 6 340 152,7
Для орбитальных комплексов указан максимальный внутренний объем,
достигнутый в процессе развертывания. В случае орбитального комплекса
«Мир» максимальная длительность полета была достигнута при таком объеме
253 м3 (84,3 м3/чел.). (Дополнительную информацию для беспилотных и пер-
спективных ТКА см. в 1.4.3.)
Невесомость позволяет использовать пространство обитаемого объема
более экономно, чем в условиях гравитации. В условиях действия силы тя-
жести жилые и рабочие помещения, как правило, сравнивают по площади
пола, предполагая высоту потолка достаточной для человека. В условиях
невесомости доступным для работы оказывается весь объем, что позволяет
использовать помещение, меньшее чем на Земле, более эффективно: каждое
рабочее место может иметь свою местную вертикаль (см. рис. 4.5), однако
не следует переоценивать возможности, предоставляемые доступным в не-
весомости объемом над головой. Следует отметить, что увеличение объема
на одного члена экипажа повышает комфортность и продуктивность работы.
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 445
На рис. 8.1 приведена зависимость длительности полета экипажа от вели-
чины обитаемого объема герметичных отсеков в расчете на одного члена эки-
пажа, построенная на основе анализа выполненных полетов советских, а также
российских и американских ПКА [1]. Доля свободного объема определяется
компоновкой оборудования в отсеке. При полетах длительностью от 25 до
240 сут герметичный объем на одного члена экипажа оказывается практи-
чески одинаковым — около 28 м3. Стандарт NASA-STD-3000 устанавливает
оптимальный объем 19 м3/чел. и минимально допустимый объем 5 м3/чел.
для полетов длительностью от 6 до 12 месяцев. В результате исследований,
проведенных НАСА, получена эмпирическая зависимость
V= 4,88271пГ— 3,9113, (8.1)
где V — обитаемый объем, м3/чел.; Т — длительность полета, сут [3], имеющая
асимптоту, равную К~ 26 м3/чел. при полетах длительностью более 250 сут.
Герметичный объем ПКА в расчете на одного члена экипажа, м3
Рис. 8.1. Зависимость объема обитаемого пространства ПКА в расчете
на одного члена экипажа от максимальной длительности полета экипажа
Сравнение графика, изображенного на рис. 8.1, и эмперической зависи-
мости (8.1) позволяет сделать вывод, что увеличение объема при длительно-
сти полета более 250 сут плохо аппроксимируется формулой (8.1). Практика
показала, что в полетах большой длительности требуется дополнительный
объем, поскольку в случае многочисленного экипажа недостаток места сни-
жает эффективность работы, а увеличение продолжительности полета ощу-
тимо обостряет чувство тесноты.
Для успешного выполнения программы полета необходимо создать нор-
мальные условия для жизни и работы экипажа в обитаемом объеме. Кос-
мическое жилище должно быть многоцелевой системой «человек — среда»,
в которой люди могли бы удовлетворять не только естественные потребно-
сти, в том числе физиологические, но и культурные, например, эстетические,
духовные.
446
Часть III. Компоновка систем пилотируемого космического аппарата
8.1.2. Функциональное зонирование внутреннего объема
При проведении компоновки обитаемый объем распределяется между
функциональными зонами деятельности. В качестве основных зон необхо-
димо предусмотреть:
• пути перемещения людей и грузов;
• рабочие зоны;
• складские зоны;
• зоны проведения гигиенических процедур;
• зоны для сна;
• зоны для приготовления и приема пищи;
• зоны для отдыха;
• зоны для занятия спортом и проведения медицинских процедур.
Среди зон деятельности требуется выделить зоны индивидуального и
общего пользования, например, индивидуальные каюты космонавтов и кают-
кампанию для всего экипажа. В качестве примера на рис. 8.2 показано распре-
деление объема 332,7 м3 по функциональным зонам в проекте жилого модуля
ПКА для полета к астероиду, рассчитанного на экипаж из четырех человек [4].
Рис. 8.2. Распределение объема по функциональным зонам
К компоновке каждой функциональной зоны предъявляются специфи-
ческие требования.
Требования к рабочим зонам:
• взаимосвязанные операции, использующие одно и то же оборудование,
должны проводиться в смежных зонах;
• рабочие места следует изолировать, если благодаря этому улучшаются
безопасность и работоспособность экипажа, а также если проводимые на
данных местах операции несовместимы, например создают радиопомехи;
• при размещении аппаратуры зонирование должно обеспечивать мини-
мальные длину и массу кабельных сетей;
• должно быть предусмотрено рабочее место для ремонтного участка,
изолированное от остальных частей ПКА.
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 447
Требования к бытовым зонам:
• места для сна, тренировок, приема пищи и гигиенических процедур
должны быть, если это возможно, разделены;
• участки личной гигиены и туалет должны быть расположены рядом со
спальными местами на удалении от камбуза;
• вход и выход членов экипажа из личных кают не должны беспокоить
остальных членов экипажа и приводить к заторам при эвакуации в аварий-
ных ситуациях.
Требования к компоновке постов управления и рабочих мест операторов
будут подробно рассмотрены в гл. 10.
Четко разделить объемы функциональных зон в реальных ПКА удается
очень редко. Объем герметичного контура ПКА невелик и фиксирован. По-
этому в ходе компоновки требуется предусмотреть либо возможность транс-
формации функциональных зон, либо совмещение нескольких зон в одном
объеме, например зона собраний экипажа и зона приема пищи традиционно
объединяются в зону кают-кампании.
Как правило, для ПКА малого объема основной функциональной
зоной является рабочая, а все остальные зоны совмещены с ней. Относи-
тельное разграничение зон достигается рациональным размещением рабо-
чих мест членов экипажа и оборудования, а также подчеркивается оформ-
лением интерьера. Как показывают примеры, приведенные в табл. 8.3,
Таблица 8.3
Распределение объемов в пилотируемых космических аппаратах
Вид деятель- ности ПКА
Apollo «Салют» Skylab Space Shuttle «Мир» МКС
Сон В рабочей зоне В рабочей зоне В отдель- ных поме- щениях В отдель- ных поме- щениях В отдель- ных поме- щениях В отдельных помещениях
Гигиена В рабочей зоне Душ в рабочей зоне Душ в рабочей зоне В рабочей зоне Стационар- ный душ в модуле «Квант 2» Нет душа
Туалет В рабочей зоне В рабочей зоне Отдельно в зоне гигиены Отдельное помещение Отдельное помещение Два отдельных туалета
Питание В рабочей зоне В рабочей зоне Отдель- ная каюта В рабочей зоне В рабочей зоне Кабина со столом для всего экипажа
Работа В рабочей зоне и на поверхно- сти Луны Приборы отделены от общей комнаты В кабине и вне ее Во всем объеме В основном и научных модулях В отдельных модулях и на приборах, расположен- ных на стойках
Отдых и упраж- нения В рабочей зоне и на поверхно- сти Луны В основ- ном модуле В рабо- чей зоне В рабочей зоне В рабочей зоне и отдельных каютах В рабочей зоне, отдель- ных модулях и каютах
448
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 8.3 Распределение объемов в ОС «Салют»:
7 — люк для ВКД; 2 — место хранения космических скафандров; 3 — иллюминатор; 4 — пульт
управления; 5 — велоэргометр; 6 — душевая установка; 7 — место для сна; 8 — шлюзовая
камера; 9 — туалет; 10 — телескоп; 11 — беговая дорожка; 12 — место для приема пищи
а
б
Рис. 8.4. Распределение объемов в ОС Skylab:
а — объемы отсеков: 1 — стыковочный адаптер;
2 — шлюзовая камера; 3 — купол жилого модуля; 4 —
верхний отсек жилого модуля; 5 — этаж с каюта-
ми жилого модуля; 6 — отсек отходов; б — объемы
кают: 1 — каюты для сна; 2 — место для физических
упражнений; 3 — рабочая зона; 4 — складной душ;
5 — кают-компания; 6 — иллюминатор; 7 — отсек уда-
ления отходов
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 449
в транспортных ПКА и одномодульных ОС типа «Алмаз» нет отдельных зон
для сна, гигиены, питания — они расположены в единой рабочей зоне. На
рис. 8.3 приведено размещение оборудования, относящегося к различным видам
деятельности, внутри общей рабочей зоны ОС «Салют» [2]. В ПКА, состоящих
из нескольких отсеков, рабочая и бытовая зоны могут быть разнесены по отсе-
кам. Так, в ТКА «Союз» основная рабочая зона экипажа — спускаемый аппа-
рат, а бытовой отсек выполняет функции, соответствующие своему названию.
В ПКА, имеющих в своем составе отсеки значительного объема, для каж-
дой функциональной зоны может быть выделено отдельное помещение,
как, например, на ОС Skylab, компоновка которой рассмотрена в 4.2 (см.
рис. 4.14, 4.15). Разделение обитаемого объема данной ОС на функциональ-
ные зоны представлено на рис. 8.4 [2].
В крупных орбитальных ПКА типа многомодульных ОС «Мир» и в рос-
сийском сегменте МКС, имеющих значительный внутренний объем, уда-
ется провести более четкое зонирование (рис. 8.5, а) [2]. Применяемая на
американском сегменте МКС модульная система полезных нагрузок (стоек)
позволяет гибко модифицировать зонирование в процессе полета путем за-
мены или переноса стоек, каждая из которых оформляется как отдельная
зона деятельности: рабочее место, пульт управления, каюта и т. д. (рис. 8.5, б).
8.2. Компоновочные элементы интерьера
8.2.1. Интерьер и его основные элементы
Для обеспечения благоприятных условий жизни и деятельности экипажа
внутреннее пространство обитаемого объема ПКА должно быть оформлено
в целостной, эстетически совершенной форме, что подразумевает создание
интерьера обираемого объема (interieur фр. — внутренний). В процессе разра-
ботки дизайна интерьера происходит синтез науки и искусства: архитектуры,
эргономики, художественного и промышленного дизайна [5]. Технические
и медико-биологические факторы, такие как назначение ПКА (транспортный,
орбитальный), необходимость обеспечивать работу человека в условиях неве-
сомости, требование оптимальной компоновки и др., определяют специфику
построения космических интерьеров, однако гуманитарный и художественный
аспекты все же остаются доминирующими. При создании интерьера должны
учитываться требования пространственной организации (см. гл. 3).
Как правило, интерьер складывается из нескольких основных элементов:
конструктивных, ограничивающих объем, разграничительных, функциональ-
ных, декоративных.
К конструктивным элементам интерьера относятся элементы герметично-
го контура: оболочка отсека, люки, иллюминаторы, рамы силовых каркасов
для размещения оборудования и пр.
450
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 8.5. Распределение объемов в ОС МКС:
а — российский сегмент (7 — транспортный корабль «Союз», 2 — сервисный модуль «Звез-
да», 3 — грузовой модуль «Заря»); б — американский сегмент (7 — шлюзовой отсек Quest,
2 — узловой модуль Unity, 3 — узловой модуль Tranguility, 4 — герметичный сопрягающий
адаптер, 5 — американский лабораторный модуль Destiny, 6 — открытая платформа EF,
7 — японский экспериментальный модуль Kibo, 8 — герметичный сопрягающий адаптер,
9 — европейский лабораторный модуль Columbus, 10 — узловой модуль Harmony)
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 451
Разграничительные элементы предназначены для зонирования объема,
которое включает:
• выделение в интерьере описанных выше функциональных зон деятель-
ности, обладающих специфическими требованиями к эргономике, органи-
зации и декоративному оформлению пространства;
• функциональное перераспределение пространства, что особенно ак-
туально для многофункциональных обитаемых объемов малых ОС и ПКА;
• формирование визуального восприятия обитаемого объема, например,
изменение визуального восприятия пропорций объема, позволяющее с по-
мощью приемов дизайна сделать тесное пространство более уютным;
• оптимизацию использования пространства ограниченного объема;
• художественное оформление пространства.
Один из самых простых методов зонирования — установка декоративных
ширм. Например, агрегатный объем ПКА отделяют от обитаемого декоратив-
ные панели. Использование в интерьере базового блока ОС «Мир» съемных
панелей, обеспечивающих доступ к установленному за ними оборудованию,
показано на рис. 8.6.
Другими элементами зонирования могут быть жесткие перегородки из
металла и пластика, а также мягкие из ткани. Так, тканевой ширмой были
отделены спальные места в МТКА Space Shuttle. Используемые материалы
должны быть безопасны, а также должны обеспечивать легкость очистки и
высокую эффективность освещения. Большое значение имеет структура по-
верхностей перегородок. В космических объектах рекомендуется использовать
Рис. 8.6. Использование декоративных панелей в интерьере базового блока ОС
«Мир»
452
Часть III. Компоновка систем пилотируемого космического аппарата
материалы с мелким симметричным рельефом. Хотя грубые текстуры поверх-
ности эстетически более интересны, в невесомости они легко загрязняются
и их сложно чистить. Для перегородок могут быть использованы материалы
с изменяемыми оптическими свойствами, например электрохромные стекла,
меняющие прозрачность при пропускании электрического тока.
Значительные по объему отсеки могут быть разделены фиксированными
жесткими перегородками. На ОС Slylab перегородками было разделено про-
странство отсека OWS на два этажа и были выделены отдельные помещения
на нижнем этаже. На ОС «Мир» две каюты также были отделены от общего
объема фиксированными перегородками с дверями. В проектах трансформи-
руемых модулей для зонирования предусматриваются быстро разбираемые
складные перегородки (см. 5.3.3), перестановкой которых можно трансформи-
ровать функциональные зоны. На рис. 8.7 схематично показаны способы раз-
деления цилиндрического модуля продольными складными перегородками.
Рис. 8.7. Схема использования складных перегородок для формирования
различных функциональных зон в обитаемом объеме (показано поперечное
сечение цилиндрического модуля):
а — одна общая зона; б — две независимые рабочие зоны; в — выделение малой ра-
бочей зоны в общей зоне; 1 — обшивка; 2 — лонжерон; 3 — перегородка; 4 — шарнир
При проектировании интерьера ПКА необходимо учитывать, что перего-
родки и ширмы в условиях невесомости существенно влияют на циркуляцию
искусственной атмосферы. Для того чтобы исключить застойные зоны, не-
обходимо провести расчеты циркуляции потоков газа в интерьере ПКА. При
компоновке перегородок должны быть учтены требования безопасности и
возможность беспрепятственной эвакуации экипажа в нештатной ситуации.
Разграничение зон может быть проведено посредством расстановки
мебели, например стола или шкафа. Крупногабаритное оборудование, раз-
мещаемое в отсеке, в частности, пульт управления или технологическая
установка, также может разделять интерьер на зоны. Еще один метод зо-
нирования пространства в интерьере — создание объемов разных формы
и размеров, выделение ниш, подиумов и прочих элементов. Так, наличие
в герметичном контуре базового блока ОС «Мир» обечаек большого и
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 453
малого диаметров приводит к разделению интерьера на две зоны: бытовую
и рабочую соответственно. А при компоновке ОС «Алмаз», имевшей близ-
кий по конфигурации герметичный контур, зонирование было выполнено
наоборот (см. рис. 4.11).
Существенную роль в зонировании интерьера играют цвет и освещение,
которые даже без дополнительных перегородок дают возможность визуально
разделить обитаемый объем. Установлено, что различные цвета вызывают у
человека различные эмоции. Голубой, зеленый и фиолетовый тона считают-
ся холодными, спокойными и располагают отдыху, красный, оранжевый
и желтый стимулируют психофизиологические функции и рекомендуются
для рабочих зон и зон восстановления, темные или насыщенные цвета стоит
применять для окраски небольших отдельных участков. Если используются
различные цвета, то в пределах одного участка их не должно быть более пяти.
Окраска интерьера должна обеспечивать эстетически и психологически
удовлетворительные условия для экипажа. Исследования показали, что при
непродолжительных полетах мужских экипажей, занятых содержательной
работой, «притягательная» окраска способствует повышению работоспособ-
ности. При длительном полете в замкнутом объеме утомление и раздражение
могут вызывать как однообразная окраска элементов интерьера, так и чрез-
мерно яркая, пестрая цветовая гамма. Для полетов большой продолжитель-
ности решением проблемы может стать предусмотренная при компоновке
возможность периодического изменения цветового решения, например,
с помощью сменных панелей.
На российских КА стеновые панели окрашены в неяркие спокойные
цвета. Например, в интерьере базового блока ОС «Мир» использованы
панели разного цвета: рабочая зона — в голубых и зеленых тонах, салон —
в теплых тонах. Отсеки на американских ПКА выполнены серыми или бе-
лыми. Яркие цвета используются для маркировки и цветного кодирования.
Например, в модулях АС МКС синего цвета сделаны поручни и продольные
лонжероны для установки стоек с оборудованием.
Усилить любое цветовое решение поможет свет. Благодаря подсветке есть
возможность менять функциональную нагрузку интерьера в зависимости от
времени суток, а также визуально увеличивать или уменьшать объем путем
изменения его психологического восприятия.
К декоративным элементам, создающим необходимую чувственно-пси-
хологическую атмосферу и удобство при взаимодействии людей со средой,
относятся дизайн различных деталей интерьера, отделка панелей и различные
элементы, украшающие обитаемую среду. Художественное решение интерьера
может быть выполнено в различном стиле, что зависит от многих факторов,
в том числе и от модных тенденций в дизайне. Примеры различных подходов
дизайнеров к оформлению интерьера одного и того же модуля ОС, рассмот-
ренного на рис. 8.6, приведены на рис. 8.8 [6, 7].
В полете члены экипажа, как правило, приспосабливают задуманный
дизайнерами интерьер под себя и обживают его, добавляя собственные ин-
дивидуальные элементы декора: фотографии, наклейки, привезенные с собой
сувениры и пр., что улучшает психологический и эмоциональный настрой
454 Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 8.8. Дизайн-проекты интерьеров базового блока ОС:
а — реализованный проект интерьера базового блока ОС «Мир» (автор Г.А. Балашова, 1980-е гг.);
б — футуристический проект интерьера модуля «Звезда» PC МКС (автор Н. Поскребышева,
2010 г.)
а
Рис. 8.9. Интерьер лабораторного модуля АС МКС:
а — после запуска модуля; б — после нескольких лет работы модуля
экипажа. Поэтому дизайн интерьера ПКА, особенно орбитального, предна-
значенного для длительных полетов, должен предусматривать возможность
индивидуализации и адаптации членов экипажа в процессе полета.
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 455
При проектировании интерьеров ПКА необходимо учитывать, что в про-
цессе эксплуатации их вид может быть сильно изменен вследствие добавле-
ния большого количества предметов, накапливающихся в процессе работы
и занимающих объем в обитаемом пространстве. Пример такого изменения
представлен на рис. 8.9.
8.2.2. Компоновка коридоров и проходов
При компоновке обитаемого объема требуется разработать схему путей
перемещения людей и грузов в рабочих и аварийных ситуациях. Данная схема
строится на основе расчета транспортных потоков. Ее топология должна
составляться с учетом правил организации пространства коммуникации,
рассмотренных в гл. 3.
При компоновке путей перемещения людей в ПКА следует учиты-
вать, что в состоянии невесомости они могут перемещаться из одной точки
в другую, лишь отталкиваясь от твердой поверхности или использовав прин-
цип реактивного движения, т. е. отбросив от себя некоторую массу. Если чело-
век или груз приведен в движение, то он будет двигаться до тех пор, пока его
намеренно не остановят с помощью какого-то двигателя или механического
стопора или пока он не ударится о другой предмет или поверхность. Вдоль
коридоров и проходов необходимо устанавливать поручни. Также могут быть
предусмотрены различные транспортеры или переносные двигатели.
Для перемещения людей и грузов организуются как специальные кори-
доры, так и проходы между рабочими местами в отсеках. На орбитальной
станции (по данным эксплуатации ОС Skylab) нормальная скорость пере-
движения людей равнялась 0,4...0,6 м/с, перемещения грузов — 0,15...0,3 м/с,
а максимальная скорость перемещения составляла 1,8 м/с.
При компоновке коридоров следует учитывать, что перемещения человека
в условиях невесомости происходят головой вперед или при вертикальном
нейтральном положении тела. Размер прохода должен обеспечивать прохож-
дение человека без скафандра и в скафандре с грузом, имеющим максималь-
ный нормативный размер (рис. 8.10) [2, 8].
Организация путей перемещения людей и грузов внутри отсека зависит
от численности экипажа, положения рабочих мест, цели и частоты переме-
щений, а также от размеров и характера грузов.
В отсеках КА с многочисленным экипажем могут возникать пробки.
В объектах малого объема с большим количеством аппаратуры также возни-
кают затруднения при перемещении. Экипаж МТКА Space Shuttle отмечал,
что заторы возникали во время полета экипажа, состоящего из семи-восьми
человек, особенно в конце рабочих смен.
При компоновке проходов в отсеке необходимо минимизировать воз-
можность заторов, а также столкновений людей и грузов. Для этого необхо-
димо формировать рабочие зоны вокруг рабочих мест и зоны перемещения
таким образом, чтобы перемещение членов экипажа не мешало работающим
(рис. 8.11) [8].
456
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 8.10. Минимальные размеры прохода для одного члена экипажа в легкой одежде:
1 — стандартный переходной люк; 2 — стандартный проход; 3 — максимальный габарит груза;
4 — минимальный зазор
Рис. 8.11. Зоны перемещения членов экипажа:
/ — максимальные размеры зон размещения членов экипажа при работе; 2— габариты
зоны перемещения
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 457
При конструировании интерьера отсека следует учитывать, что стены,
потолок, панели управления и другие поверхности могут использоваться для
изменения направления движения в условиях невесомости. При этом на ука-
занные элементы будут воздействовать значительные динамические нагрузки,
которые не должны вызывать необратимых деформаций и разрушений.
При компоновке интерьера коридоров и проходов нужно предусматривать
маркировку характерных направлений для ориентации членов экипажа при
перемещении. На Земле вследствие гравитации имеется одно определенное
направление — вертикаль, при полете на космическом корабле для улуч-
шения ориентации в условиях невесомости можно «верх» и «низ» выделить
цветом: например, пол сделать в зеленых тонах или черным (темно-серым),
потолок — белым или голубым. Соседние отсеки, если они четко разграни-
чены, могут иметь различные ориентиры верха и низа. В узловых модулях,
где пересекаются несколько транспортных путей, желательно использовать
указатели с информацией о том, куда ведет каждый из переходов.
8.23. Компоновка фиксаторов и опор
Если человек, находясь в невесомости, окажется в центре помещения,
откуда нельзя дотянуться до какого-нибудь закрепленного предмета, то он
будет лишен возможности активно перемещаться. Под действием начальных
возмущений его тело может начать беспорядочное перемещение, которое не-
возможно остановить без специального двигателя, без удара о твердую поверх-
ность или захвата каких-либо закрепленных предметов. Такое перемещение
может дезориентировать человека и даже вызвать приступ морской болезни, а
также привести к ударам о другие предметы, из-за чего могут быть нанесены
травмы или повреждены его защитная одежда и снаряжение. Следовательно,
компоновка интерьера обитаемого объема должна быть такой, чтобы членам
экипажа всюду была обеспечена досягаемость каких-либо закрепленных пред-
метов или поверхностей, а также чтобы в их распоряжении были средства,
предотвращающие возможность оказаться в центре помещения.
Одно из необходимых условий обеспечения успешной работы космонав-
та — наличие средств, помогающих ему фиксироваться в положении, удобном
для выполнения управляющих действий, а также фиксирующих используе-
мые им предметы. Фиксация тела может осуществляться за ступни, голени,
бедра, область талии и руки (табл. 8.3) [9].
Наиболее часто в ПКА используются фиксаторы для ступней, посколь-
ку они обеспечивают лучшую устойчивость во время длительной работы
и дают возможность реализовать широкий диапазон рабочих поз, полностью
освобождая руки космонавта. Фиксаторы ног предусмотрены двух видов (рис.
8.12): жесткие и гибкие (позволяющие отрывать пятки и носки ног от пола).
Если человеку нужно стоя прикладывать большое усилие к органу управления,
ступни его ног должны быть закреплены, причем крепления следует распо-
лагать на расстоянии 300...350 мм друг от друга (рис. 8.12, а). Конструкция
фиксаторов ступни должна быть рассчитана на минимальные нагрузки растя-
жения и скручивания, равные 445 Н и 200 Н м, с запасом по текучести 1,1
458
Часть III. Компоновка систем пилотируемого космического аппарата
Таблица 8.3
Способы фиксации космонавта во время работы
Закрепляемая часть тела Элементы фиксации Число точек фикса- ции Типовые выполняемые операции
Рука Поручень, скоба, элемент конструкции 1 Переключение органов управления (клавиши, тумблеры и т. п.), считыва- ние показаний приборов, ведение связи
Ступни ног + торс Полужесткие лямки, скобы 2 Открытие и закрытие створок на петлях, бытовые процедуры, медицинские исследования
Ступни ног + + руки Торс + руки Лямка + поручень Пояс + поручень 3 Извлечение и укладка аппаратуры, ведение кино- и фотосъемки
Торс + ступни ног Пояс + лямки 4 Перезарядка регистрирующей аппара- туры, монтаж блоков средней величи- ны с приложением умеренных усилий
Торс + ступни ног + рука Пояс + лямка + поручень 5 Сборка и разборка стандартных резьбовых соединений, монтаж и демонтаж крупных блоков с навига- ционным оборудованием и ручное управление
Рис. 8.12. Конструктивные схемы устройств для фиксации ступней:
а — гибкая; б — жесткая ( / — крепежная рама; 2 — ножная панель; 3 — регули-
ровочная планка; 4 — боковой кронштейн)
445 Н
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 459
и запасом прочности 2,0 соответственно. Схема приложения нагрузок на
фиксатор представлена на рис. 8.12, б [10].
На рис. 8.13 и 8.14 показаны зоны досягаемости космонавта при фиксации
ступней [10]. Данные получены с помощью компьютерной антропометричес-
кой модели по данным обмера 192 мужчин и 22 женщин — кандидатов
в астронавты. Среди мужчин 5-й процентиль (процентиль — мера, в которой
процентные значения общих значений равны этой мере или меньше ее) со-
ответствует росту 167,9 см, а 95-й — 180 см, среди женщин 5-й процентиль
соответствует росту 157,6 см, 95-й — 175,7 см.
Обычно фиксаторы ступней расположены в отсеке на рабочих местах
членов экипажа. Однако для отсеков большого объема могут использовать-
ся устройства фиксации стоп, позволяющие перемещаться по станции и
Z4 1 2 Размер Радиус области досягаемости пальцев в фиксирующей плоскости х—z, см
гибкой жесткой
о 95-й порцентиль у мужчин 222 212
5 J г 5-й порцентиль у женщин 188 172
Рис. 8.13. Границы достигаемой области спереди и сзади при фиксации ступней
в невесомости:
1 — радиус; 2 — максимальный наклон тела вперед; 3 — гибкая фиксирующая скоба
90° ' 75° 60° Размер Угол, град Радиус области досягаемости пальцев в плоскости z—y, см, по оси
Z У
95-й порцентиль у мужчин 90 222 0
75 193 80
60 160 110
5-й порцентиль у женщин 90 180 0
75 175 28
У 60 140 80
Рис. 8.14. Граница досягаемости сбоку при фиксации ступней в невесомости гибким
фиксатором
460
Часть III. Компоновка систем пилотируемого космического аппарата
выполнять работу, требующую приложения значительных усилий и моментов.
На рис. 8.15 в качестве примера показаны фиксаторы кулачкового типа —
кляйммеры, применявшиеся на ОС Skylab для фиксации ног космонавтов
на сетчатом перекрытии (полу) отсека OWS. Фиксаторы крепились на обуви
членов экипажа (рис. 8.15, а). Параметры сетки, использованной для пере-
крытия отсека, приведены на рис. 8.15, б. Ступня фиксируется путем уста-
новки кляйммера в отверстия сетки и поворота ботинка (рис. 8.15, в, г) [10].
Поручни и ручки следует предусматривать в основных пунктах космиче-
ского корабля, чтобы обеспечить космонавту устойчивость при приложении
усилия к органам управления. На рис. 8.16 представлены несколько типов этих
элементов, предназначенных для захвата голыми руками (без скафандра) [9]. На
рис 8.17 приведены зоны досягаемости при использовании ручной скобы [2].
На рис. 8.18 показан кронштейн для крепления поручня овального се-
чения на универсальной стойке АС МКС [8, 10]. Кронштейны такого типа,
имеющие различную длину, можно переставлять с места на место, чтобы
крепить с их помощью поручни овального сечения. Кроме того, они имеют
кольцо для крепления фиксирующего ремня, троса или карабина.
в
Рис. 8.15. Фиксация ног космонавта на ОС Skylab:
а — ботинок космонавта с кулачками для фиксации с помощью кляйммеров (/ — грибообраз-
ный (маленький, средний, большой); 2 — треугольный); б — решетка перекрытия, для фикса-
ции ног космонавта ( / — диаметр отверстия в каждой точке пересечения 11 мм (0,435...0,444
дюйма); 2 — радиус (типичный) 6,75 мм (0,25 дюйма); 3 — диаметр (типичный) 2 ± 0,18 мм
(0,08 ± 0,015 дюйма); 4 — 50,4 мм (4,2 дюйма); 5 — угол (типичный) 60°); в — фиксация ног
с помощью треугольного кляймера; г — фиксация ног с помощью грибообразного кляймера
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 461
Рис. 8.16. Формы поручней, используемых в ПКА при внутрикорабельной деятель-
ности (D = 6...25 мм, Т= 13 мм, Х= 32...50 мм, Y= 65...200 мм, Z= 75...90 мм)
Рис. 8.17. Радиус границы области досягаемости кончи-
ками пальцев при фиксации рукой за поручень (95-й
процентиль у мужчин — 195 см, 5-й процентиль у жен-
щин — 150 см)
462
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 8.18. Внешний вид кронштейна (а) и крепление кронштейна (б)
для элементов фиксации тела на стойке АС МКС:
1 — гнездо для ключа винта крепления кронштейна к стойке; 2 — кольцо для
троса; 3 — зажим для установки поручня; 4 — поручень
Все сидения в интерьере ПКА должны быть снабжены ремнями. Крепеж-
ные приспособления следует предусматривать для всех коек. Пример фикси-
рующего ремня с карабинами на концах, а также текстильными застежками и
дополнительными лентами для более равномерного распределения нагрузок
на тело приведен на рис. 8.19 [8, 10].
Фиксаторы, включающие в себя
привязные ремни и обвязку на плечи,
фиксаторы тела, фиксаторы ступней и
фиксаторы для сна должны удовлетво-
рять следующим требованиям:
• обеспечивать равномерное рас-
пределение по телу давления фикса-
тора, чтобы избежать дискомфорта и
излишних усилий при пребывании в
зафиксированном положении;
• обеспечивать четырехчасовую не-
прерывную работу в зафиксированном
положении;
Рис. 8.19. Привязной ремень:
/ — ремень; 2 — карабин; 3 — регулировоч-
ное устройство
• соответствовать позе человека в невесомости;
• обеспечивать возможность очистки и ремонта фиксаторов на орбите;
• фиксаторы должны иметь конструкцию, позволяющую регулиро-
вать их в зависимости от размеров тела космонавта.
На рис. 8.20 приведена компоновочная схема фиксирующих элементов
в интерьере лабораторного модуля АС МКС [9]. При создании дизайна ин-
терьера для четкой идентификации средств фиксации следует использовать
контрастные цвета. При компоновке средств фиксации необходимо обеспе-
чить следующее:
• минимальное количество операций при фиксации и расфиксации;
• малое время фиксации и расфиксации (до 10... 12 с);
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 463
Рис. 8.20. Компоновка средств фиксации космонавтов
в интерьере модуля ОС:
1 — поручни; 2 — штатив для аппаратуры; 3 — фиксатор ступней; 4 —
трос; 5 — кронштейн крепления троса; 6 — поясной ремень фиксации
торса; 7— сумка с инструментами; 8 — кронштейн крепления штатива
к поручню
• восприятие фиксирующими элементами реакций на максимальном
усилии, развиваемым космонавтом — до 600 Н по всем направлениям;
• невозможность самопроизвольной расфиксации;
• максимальные производительность труда и подвижность космонавта
(в пределах конуса с углом при вершине до 45°);
• оптимальное мышечное напряжение работающего космонавта.
8.2.4. Монтаж и крепление оборудования
Все предметы во внутреннем объеме ПКА, начиная с крупных блоков
оборудования и кончая мелкими деталями, должны быть закреплены в местах
работы и хранения. В условиях невесомости объекты, которые в обычных
земных условиях лежат на горизонтальной поверхности (карандаши, бумага,
книги, провода и т. д.), будут «плавать». Следовательно, при проектировании
интерьера ПКА для них требуется предусмотреть средства фиксации. Для
предотвращения «свободного плавания» относительно небольших предметов
используются трубчатые ленты, прищепки, заколки, жгуты, текстильные за-
стежки, полоски ткани, сетки и сумки (рис. 8.21) [10].
464
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 8.21. Фиксаторы для малых элементов оборудования
кабин ПКА:
/ — мешок для временного хранения; 2 — лента; 3 — типичный
крепеж кабеля; 4 — упаковка «Велкро» (а — петля, б — крючок);
5 — типичная стропа; 6 — металлические пружины; 7 — элас-
тичные тяжи
По результатам полетов была выведена эмпирическая формула для опре-
деления необходимой площади основания фиксатора, наклеенного на эле-
мент, для надежного крепления в интерьере отсека:
F = 2M,
где F — площадь, см2; М — масса элемента, кг.
Для сменных блоков оборудования и других крупных перемещаемых
предметов в условиях невесомости используются поворотные крепления,
приводимые в действие одной рукой, поскольку другой рукой человек может
удерживать себя на рабочем месте и компенсировать реакции, возникающие
при фиксации и расфиксации. На ПКА крепеж блоков должен быть стан-
дартным, а количество видов крепежа минимальным, чтобы уменьшить ко-
личество необходимых инструментов. Например, на МКС в связи наличием
аппаратуры, изготовленной производителями, которые используют различные
системы мер, нужно иметь инструменты и с английскими, и с метрическими
ключами. Чтобы их можно было легко различать, введена цветная маркировка
каждого комплекта.
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 465
При компоновке оборудования во внутреннем объеме ПКА следует преду-
смотреть возможность его обслуживания экипажем. Требования к обслужи-
ванию и ремонту бортового оборудования ПКА приведены в табл. 8.4 [10].
Таблица 8.4
Требования к обслуживанию и ремонту бортовой аппаратуры
Требования Мероприятия по выполнению требований
Наращивание и подгонка Конструкция как оборудования, так и матобеспечения должна позволять наращивать и изменять ее конфигу- рацию во время полета
Независимость Системы и подсистемы должны быть, как правило, функционально, механически, электрически и элек- тронно независимы
Вспомогательные устрой- ства для ремонта(напри- мер, электрические выходы) Должны быть доступны в местах возможных наруше- ний или в обозначенных местах обслуживания
Надежность Конструкция оборудования должна иметь минималь- ную частоту профилактического обслуживания и регу- лировки
Простота Операции по обслуживанию должны иметь минималь- ную сложность
Затраты времени Конструкция должна обеспечивать минимальные за- траты времени на обслуживание
Оборудование Число инструментов и оборудования для обслужива- ния должно быть минимальным
Опасные условия Конструкция должна исключать возникновение опас- ностей во время обслуживания
Критические операции Должна быть предусмотрена возможность обслужива- ния важных систем без нарушения как этих, так и дру- гих важных систем
Некритические операции Конструкция не очень важных систем должна обеспе- чивать работу в ухудшенном состоянии в ожидании об- служивания. Ухудшенное состояние не должно вызы- вать дополнительные повреждения или усиливать начальное нарушение
Потеря избыточной надежности Об этом должно быть сразу же сообщено экипажу
Соединения Должны использоваться быстроразъемные соединения
Разъемы Должны применяться втыкаемые разъемы
Быстросъемный крепеж При совместимости с другими требованиями (напри- мер, с силой законтривания) следует использовать быстросъемный крепеж
466
Часть III. Компоновка систем пилотируемого космического аппарата
Окончание табл. 8.4
Требования Мероприятия по выполнению требований
Возможность замены Емкость съемных элементов (фильтров, экранов, бата- реек и т. п.) должна быть больше минимальных функ- циональных потребностей системы
Автоматизация Проверка, поиск и изоляция повреждения должны быть максимально автоматизированы
Фиксаторы Следует использовать устройства для улучшения пере- мещения экипажа и оборудования, а также фиксаторы
Специальные знания, необходимые для обслу- живания Должны быть минимальными
Пайка, сварка и анало- гичные мероприятия Должны быть минимальными
При компоновке обслуживаемого оборудования должны быть обеспе-
чены [10]:
• визуальная и физическая доступность;
• модульность конструкции, возможность удаления и замены ее элементов;
• возможность определения неисправности и ее изоляция;
• наличие средств управления обслуживанием оборудования.
Обслуживание и ремонт оборудования — строго планируемые мероприя-
тия. Расписание профилактического обслуживания оборудования не должно
мешать выполнению других работ. Если ради планового обслуживания необ-
ходимо прервать работу важных систем, то следует предусмотреть установку
резервного оборудования. Поскольку эффективное выполнение профилакти-
ческих работ требует затрат времени, объема пространства и усилий, нужно
сравнить затраты на ремонт с затратами на установку новых элементов.
Все ремонтные работы проводит космонавт, имеющий допуск на их вы-
полнение, с учетом требований «Правил по охране труда при работе с инстру-
ментом и приспособлениями». Если понадобиться, он должен использовать
защитные очки, маски и перчатки.
Все системы, находящиеся под электрическим напряжением или имею-
щие движущиеся части, должны быть закрыты чехлами или крышками, кото-
рые не только защищают оборудование, например от попадания в приборы и
механизмы посторонних предметов, но и обеспечивают безопасность экипажа.
Требования, предъявляемые к чехлам и крышкам [10]:
• недоступные места должны быть опечатаны во избежание попадания
туда мелких предметов;
• удаление чехлов при обслуживании оборудования должно быть бы-
стрым и легким;
• если чехол не закреплен, это должно быть видно, даже если он нахо-
дится на месте;
• не являющиеся несущими элементами конструкции чехлы должны
выдерживать минимальную нагрузку, создаваемую экипажем (450 Н);
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата A6J
• если способ открывания крышки неочевиден, на ее наружной стороне
всегда должна находиться инструкция, включая инструкцию к прилагаемому
инструменту;
• перегородки, кронштейны и другие детали не должны мешать снятию
чехлов и открыванию крышки;
• независимо от частоты операций по обслуживанию должен быть обес-
печен доступ к крышке, чтобы, если потребуется, можно было полностью
удалить крышку или демонтировать оборудование;
• все крышки, которые не снимаются полностью, должны сами зафик-
сироваться в открытом положении;
• если используются вентиляционные экраны, отверстия или сетки,
вентиляционная поверхность должна быть доступной.
При компоновке съемного и обслуживаемого оборудования необходи-
мо учитывать наличие разъемов электрических, гидравлических и прочих
бортовых коммуникаций. Электрические кабели должны быть выполнены
в соответствии с ГОСТ 23542—79 «Кабели и жгуты для межприборных со-
единений. Ряды предельных отклонений длин». К электрическим разъемам
предъявляются следующие требования:
• электрические кабели должны обладать гибкостью, иметь достаточную
длину и защиту, для того чтобы включать и отключать блоки аппаратуры без
повреждений проводов или разъемов;
• при соединении электрических разъемов соединяемые проводники
должны автоматически совмещаться;
• электрические разъемы должны быть сконструированы таким образом,
чтобы исключалась возможность возникновения дуги или искр при соеди-
нении и разъединении;
• для отключения электрического разъема должно требоваться не более
одного оборота его корпуса;
• электрические разъемы должны быть обеспечены самоконтрящимся
пред охран ител ем.
К разъемным соединениям трубопроводов предъявляются требования:
• соединения трубопроводов должны соответствовать ГОСТ 15763—2003
«Соединения трубопроводов резьбовые и фланцевые» и ГОСТ 16037—80 «Со-
единения сварные стальных трубопроводов. Основные типы, конструктивные
элементы и размеры» и обеспечивать удобное обслуживание;
• все трубопроводы должны иметь указание направления потока и долж-
ны быть снабжены клапанами высокого давления (до 125 Па), позволяющими
закрывать их при расстыковке;
• конструкция мест подсоединения и разъединения трубопроводов
должна исключать утечки транспортируемых веществ, особенно токсичных.
Все соединения коммуникаций должны собираться и разбираться одной
рукой, причем при замене каждого из разъемов без удаления или замены
остальных. Например, располагать разъемы на оборудовании в несколь-
ко рядов нежелательно, но если это необходимо, то их следует размещать
в шахматном порядке. Разъемы в одном ряду должны быть установлены
так, чтобы до них можно было свободно дотянуться рукой при выравнива-
нии и вставке еще одного. Когда требуется разъединять большое количество
468
Часть III. Компоновка систем пилотируемого космического аппарата
различных коммуникаций, нужно использовать разрывные электро- и
гидропневмоплаты.
Разъемы должны быть сконструированы и смонтированы таким образом,
чтобы не возникало ошибочного соединения. На кабелях должны быть нане-
сены различные метки, в том числе необходимые для обеспечения быстрой,
легкой и безопасной работы, а также ключи или штыри для выравнивания.
Например, если разъемы, установленные на концах незакрепленных кабелей
или шлангов, различны, то во избежание неправильного соединения каждый
из разъемов должен быть помечен. Свободные концы кабелей и шлангов
должны иметь крепление, чтобы в условиях невесомости они не отлетали
друг от друга.
Как всякие механизмы, разъемные элементы не всегда абсолютно надеж-
ны, поэтому их количество следует сократить до рационального минимума.
Конструкция используемых разъемов должна обеспечивать безопасность при
эксплуатации.
8.2.5. Компоновка источников света
Система освещения кабины ПКА должна проектироваться в соответствии
ГОСТ ИСО 8995—2002 «Принципы зрительной эргономики. Освещение ра-
бочих систем внутри помещений», чтобы экипаж мог выдерживать экстре-
мальные условия жизнедеятельности и работы. В табл. 8.5 приведены нормы
освещенности для разных зон КА [11].
Главное средство освещения отсеков ПКА — искусственные источники
света. Хорошо спроектированная система освещения должна обладать высо-
кой надежностью и возможностью резервирования светильников. Размещение
светильников и уровень освещенности должны соответствовать расположению
и функциям освещаемых объектов (табл. 8.6) [12].
К системе освещения отсека ПКА предъявляются следующие требования:
• основное освещение отсека должно быть по возможности рассеянным,
для чего следует применять диффузные источники света;
Таблица 8.5
Нормы освещенности для разных зон пилотируемых космических аппаратов
Зона Освещенность, лк
ТКА ОС
Общая 32-108 54-108
Зона чтения 215-323 >323
Зона приготовления пищи 54 >215
Столовая 108 >323
Зона мытья посуды 108 >269
Места отдыха 108 >323
Зона сохранения здоровья 108-215 >269
Зона проведения процедур личной гигиены 108-215 >269
Складская зона 32-54 54
Коридор 11-22 54-108
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 469
Таблица 8.6
Максимальные значения уровня освещенности зон ПКА с учетом различных условий
Зона или задача Освещен- ность, лк Зона или задача Освещен- ность, лк
Отсек экипажа: 108 Зона сохранения здоровья: 215
переходы 54 первая помощь 369
люки 108 медицинский осмотр 1076
ручки 108 внутривенное вливание 807
лестница 108 наблюдение 538
Складская зона 108 Рабочий отсек: 323
Кают-компания: 215 техобслуживание 269
чтение 538 органы управления 215
отдых 323 зона монтажа оборудования 269
камбуз 215 зона работы с информацией 323
общая 269 Приборная панель
Зона приготовления пищи 232 позитивная 215
Зона проведения процедур личной гигиены: 108 негативная 54
естественные отправления 164 Освещение при считывании показаний приборов 323
умывание, душ 269 верхняя подсветка шкал 21
Зона сна 54 нижняя подсветка шкал 32
• все рабочее пространство должно освещаться с одинаковой интенсив-
ностью, общее освещение панелей и приборов должно быть от 0,34 до 7 лк;
• необходимо оптимально разместить светильники, чтобы создавать доста-
точную освещенность членам экипажа при выполнении работы, не вызывать
утомление глаз, обеспечивать наименьшее энергопотребление и заданную
надежность;
• оптимальной считается освещенность в 269...323 лк на главных рабо-
чих поверхностях с возможностью увеличивать ее уровень до 530 лк, если
это потребуется;
• рассеивающее отражение света от внутренних поверхностей кабины
(стен, пола, потолка) должно ограничивать образование резких теней, спо-
собных искажать восприятие человека-оператора;
• необходимо ограничить возникновение бликов от гладких поверхно-
стей (панелей приборов, стеклянных элементов, мониторов и др.), которые
могут искажать восприятие человека-оператора; отражение от неосвещенных
приборов и панелей не должно превышать 17 лк;
• недопустимо попадание световых лучей в глаза космонавтам;
• если выполнение задания требует дополнительного освещения, то ре-
комендуется использовать источник белого света среднего уровня яркости;
• дисплеи должны иметь автономную подсветку и регулировку яркости.
470
Часть III. Компоновка систем пилотируемого космического аппарата
Большое влияние на качество освещения оказывают текстура и цвет
поверхности. Различные материалы по-разному влияют на условия ос-
вещенности. Гладкие и глянцевые материалы, приборные панели, стекла
иллюминаторов, окрашенные поверхности могут создавать зеркальное ото-
бражение и световые блики, ослепляющие человека. Можно уменьшить
или ограничить эти явления, правильно разместив источники света. Ни
оттенок, ни цвет отражающей поверхности не оказывают решающего вли-
яния на восприятие. Наиболее эффективно воздействуют характеристики
отражающих поверхностей. Рекомендуются следующие коэффициенты от-
ражения от разных поверхностей: 25...45 % от пультов управления, 15...25 %
от рабочих столов, 60...80 % от поверхностей стен и потолков и 30...40 % от
пола. Соблюдение этих условий дает равномерное освещение кабины. На все
стеклянные поверхности должны нанесены светоотражающие покрытия, а
металлические части приборов должны быть анодированы. Отношение ярко-
стей источника света и окружающего фона на станции внутри угла обзора 30°
должно составлять 3:2, внутри угла обзора 60° — 5:1, между светильником и
окружающими полями — не более чем 20:1. В табл. 8.7 приведены некоторые
отношения яркости между освещенными объектами [13].
Помимо обеспечения восприятия зрительной обстановки освещение
вызывает прямую и косвенную физиологическую и биологическую реакции.
Исследования показали, что для человека полезно соответствие внутреннего
искусственного освещения естественному дневному освещению. Физиче-
ская работоспособность и поддержание психофизиологического состояния,
зрительная бдительность, комфортная обстановка для глаз и меньшая сте-
пень их утомления достигаются тогда, когда источник искусственного света
продуцирует всю область видимого и сбалансированного ультрафиолетового
излучения Солнца. У людей, не получающих ультрафиолета в достаточном
объеме, снижается усвоение организмом кальция, что в условиях длительного
космического полета может привести к деминерализации костей. Современ-
ные флуоресцентные лампы обеспечивают спектральную мощность солнеч-
ного излучения. Используя в космическом полете искусственное освещение,
Таблица 8.7
Рекомендуемые отношения яркости между освещенными объектами
Объект сравнения Среда
внутри ПКА вне ПКА
Между освещенными и темными поверхностями в пределах зрительной задачи 5:1 5:1
Между объектом внимания и более темным окружением 3:1 5:1
Между объектом внимания и более светлым окружением 1:1 1:10
Между объектом внимания и более отдаленным светлым полем 1:10 —
Между светильником и соседними полями 20:1 —
Между рабочей зоной и окружением 20:1 —
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 471
эквивалентное солнечному излучению в диапазоне волн от 270 до 1500 нм
с минимальной интенсивностью около 2600 лк, можно воздействовать на
физиологические и биологические реакции организма.
Наиболее подходящими источниками света являются люминесцентные
лампы, потребляющие меньше электроэнергии, чем лампы накаливания, и
выделяющие меньше тепла в окружающую атмосферу. Кроме того, их можно
использовать для создания белого света, при котором цветовое зрение обо-
стряется. В настоящее время все более широкое применение находят свето-
диодные источники вследствие их малого энергопотребления.
Световое оборудование используется как для внутреннего, так и для
внешнего освещения. Внешнее освещение космического корабля должно
позволять ориентироваться при обнаружении, сближении и стыковке КА,
а также во время внекорабельной деятельности. К внешнему освещению отно-
сятся сигнальные огни, освещение стыковочных узлов и устройств, огни ори-
ентации в пространстве, освещение мест внекорабельной деятельности и путей
к ним (более подробно см. в гл. 9).
Внутреннее освещение отсеков ПКА должно создавать достаточный све-
товой режим для функционирования зрительного аппарата во всех отсеках
и рабочих зонах. При разработке компоновки необходимо рассматривать
следующие случаи освещения и соответствующие им источники света:
пульты управления и дисплеи: электро- и компактные люминесцентные
лампы, волоконная оптика, лампы накаливания для проекции, светодиоды,
жидкие кристаллы;
ночное освещение: электро- и хемилюминесцентные лампы, лампы нака-
ливания, светодиоды, фосфоресцирующие лампы;
помещения для экипажа: флуоресцентные лампы, лампы накаливания,
проецируемый свет;
рабочие зоны: флуоресцентные лампы, проектируемый свет, светодиоды,
газоразрядные лампы низкого давления;
общие зоны: флуоресцентные лампы, газоразрядные лампы низкого давления;
наружное освещение: газоразрядные лампы низкого и высокого давления;
графические дисплеи: освещение заливающим светом.
Светильники должны иметь современный дизайн, обеспечивать рассеян-
ный свет и не допускать превышения норм отражения световых лучей от стен,
пола и потолка кабины. Чтобы получить наилучшую видимость и обеспечить
необходимую яркость освещения рабочих зон, следует предусматривать воз-
можность регулировки освещенности и яркости. Для этого органы управления
светом необходимо размещать в непосредственной близости от оператора.
В качестве примера на рис. 8.22 представлен светильник, который применя-
ется в модулях МКС [14].
В процессе космического полета приходится работать не только при
искусственном освещении, иногда необходимо проводить исследования,
при которых основным источником освещения являются солнечные лучи и
отраженный от Земли свет. Это происходит, например, при наблюдении за
Землей и космическим пространством через иллюминаторы или при работе в
открытом космосе. На затемненной части орбиты требуется дополнительное
472
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 8.22. Светильник GLAs:
1 — выключатель; 2 — регулятор яркости
освещение. Солнечный свет в виде пря-
мых или отраженных от облаков лучей
может попадать через иллюминаторы в
кабину и создавать яркостную завесу
или сильную солнечную засветку, что
приводит к резкому ухудшению зре-
ния. Для уменьшения или ограничения
влияния солнечных лучей иллюмина-
торы должны иметь светофильтры и
диафрагмы, позволяющие без ущер-
ба для зрения проводить визуальные
наблюдения.
8.3. Компоновочные элементы бытовых отсеков
8.3.1. Оборудование для организации приема пищи
Качество продуктов питания на ПКА оговорено в ГОСТ Р 50804—95
«Среда обитания космонавта в пилотируемом космическом аппарате. Общие
медико-технические требования». Пища в космическом полете должна хра-
ниться в специфических условиях механических и тепловых воздействий.
В связи с этим были разработаны специальные методы обработки и упаковки
пищи, с помощью которых она получалась легкой, питательной, содержала
мало грубых, трудно перевариваемых веществ и по своей структуре, вкусу и
цвету приближалась бы к натуральным продуктам питания. Разработанные в
СССР и США продукты питания удовлетворяют этим сложным требованиям
и имеют в среднем следующий состав: 17 % белка, 32 % жиров и 51 % угле-
водов. Космонавты получают 2800...3200 ккал в день, но для тех полетов, в
которых планируется выход из космического корабля, суточная калорийность
питания повышается до 3600 ккал [15].
Условия жизнедеятельности на борту ПКА (состояние невесомости, эмо-
ционально-психическое напряжение, ограниченный объем кабины корабля)
обусловливают особый рацион питания космонавтов, который должен удов-
летворять следующим требованиям:
• сбалансированность по основным незаменимым компонентам в соот-
ветствии с научным подходом к рациональному питанию;
• высокая энергетическая ценность при минимальных массе и объеме;
• стойкость продуктов к различного рода климатическим и механиче-
ским воздействиям;
• доброкачественность в течение длительного срока хранения.
К особенностям организации питания следует отнести:
• повышенная прочность тары и упаковки продуктов в связи с перегрузками;
• невозможность применения обычной посуды (тарелки, чашки, стака-
нов) из-за невесомости;
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 473
• ограничение содержания в продуктах жидкой фазы; по свойствам они
должны максимально приближаться к продуктам, потребляемым в земных
условиях, однако они не должны быть только сухими, брикетированными
или и виде таблеток;
• повышенные требования к продуктам, которые крошатся и вследствие
этого являются опасными для здоровья космонавтов (например, попадание
крошек в глаза или дыхательные пути в условиях невесомости, загрязнение
кабины и пр.);
• длительность сроков хранения, полноценность продуктов по составу,
ограничение по массе и объему, отсутствие несъедобной части.
Продукты можно хранить в натуральном и сублимированном виде. Нату-
ральные продукты, имеющие ограниченный срок хранения, применяют при
краткосрочных полетах (они хранятся в консервированном виде или в ва-
куумной упаковке). На ПКА, предназначенных для кратковременных полетов
(КА «Восток», «Восход») масса суточного рациона продуктов в натуральном
виде составляла 1,5 кг, в которых содержалось 1,2 л воды. Для увеличения
срока годности продукты можно хранить в холодильнике. Вид холодильника
(в открытом состоянии), использованного на ОС «Мир», показан на рис. 8.23.
Продукты в условиях невесомости употребляют непосредственно из тары,
а весь рацион расфасован порциями на один прием. Супы, мясосодержащие
смеси, напитки содержатся в тубах по 160 г, продукты, которые могут кро-
шиться (хлебобулочные изделия, конфеты и т. д.), делятся на части.
Наличие на борту системы регене-
рации воды из отходов позволяет умень-
шить массу и объем рациона питания за
счет использования сублимированных
продуктов, отличающихся высоким ка-
чеством при сохранении натурального
цвета, вкуса и запаха. Готовые продукты
(супы, вторые блюда с гарниром и мясом,
напитки, молоко), приготовленные мето-
дом сублимации, пригодны для длитель-
ного хранения (9—12 месяцев), готовы к
употреблению непосредственно из упа-
ковки после их восстановления водой.
Вид предназначенных для космонавтов
упакованных пищевых продуктов россий-
ского производства в виде концентратов,
а также консервов в банках и тубах с по-
вышенным содержанием сухих веществ
представлен на рис. 8.24.
Рацион, состоящий на 50 % из реге-
нерируемых продуктов, имеет массу 0,6 кг,
общая масса с упаковкой (в зависимости
от калорийности) составляет 750...850 г,
объем — 2,1...2,4 дм3. Восстановление
Рис. 8.23. Холодильник на ОС
«Мир»
474
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 8.24. Продукты питания в тубах и банках
а
Диаметр
около 120 см
(48 дюймов)
Рис. 8.25. Устройство для приготовления пищи на ОС Skylab:
а — общий вид; б — габаритные размеры; 1 — липучки для фиксации голых ног; 2 — уста-
новка для подготовки питьевой воды; 3 — дозатор горячей воды; 4 — дозатор холодной
воды; 5 — фиксатор бедер; 6 — треугольные фиксаторы обуви
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 475
сублимированных продуктов в полете с помощью специальной установки
для регенерации воды из атмосферной влаги успешно применялось на ОС
«Салют» и «Мир». Рационы и продукты описанного типа использовались в
полетах продолжительностью до 1 года.
Для приготовления пищи в обитаемом объеме ПКА должно быть выде-
лено рабочее место — камбуз или кают-кампания, оснащенное специальным
оборудованием. Тепловая обработка продуктов на ПКА возможна только в
герметичной посуде. Способ нагрева пищи — кондуктивный или токами
высокой частоты. В качестве примера на рис. 8.25 приведено устройство для
приготовления и приема пищи на ОС Skylab, рассчитанное на трех членов
экипажа [10].
Пищу принимают в строго определенные часы в соответствии с биорит-
мами организма. Суточный рацион питания делится на четыре приема: пер-
вый завтрак, второй завтрак, обед и ужин. По программе полета промежутки
между приемами пищи обычно не должны превышать 4...5 ч.
8.3.2. Оборудование для организации отдыха
Представление об отдыхе зависит от особенностей личности, продол-
жительности полета, окружающей среды. Для восстановления работоспо-
собности в различных условиях требуются определенные формы отдыха:
в изоляции люди предпочитают пассивному отдыху работу, они тратят на еду
в 2 раза больше времени, чем в обычных условиях. В изолированных группах
наиболее популярный отдых — разговоры, чтение книг, просмотр фильмов
и телепрограмм.
На основании анализа полетов американских астронавтов на космическом
корабле Space Shuttle составлен перечень предметов, используемых для отды-
ха, и разработаны рекомендации желательных конструкций для обеспечения
полноценного отдыха в космическом полете. В табл. 8.8 приведен перечень
этих предметов по степени предпочтения, которую следует учитывать при
компоновке интерьеров обитаемого отсека, а в табл. 8.9 представлена орга-
низация мест отдыха [10]. В частности, каюты космонавтов на ОС «Мир» и
МКС оборудованы иллюминаторами для создания комфортных условий во
время отдыха членов экипажа. Состав оборудования должен включать сред-
ства для воспроизведения мультимедиа (аудио-, видео- и электронные книги).
В настоящее время их функцию успешно выполняют бортовые ноутбуки и
планшеты. Также по желанию космонавтов можно разместить на борту раз-
личные музыкальные инструменты.
8.3.3. Оборудование для организации сна
Сон, естественно, совершенно необходим для восстановления работоспо-
собности космонавта. При компоновке ПКА требуется выделить в обитаемом
отсеке отдельное место (каюту) для сна космонавтов. Общий вид кают на
476
Часть III. Компоновка систем пилотируемого космического аппарата
Таблица 8.8
Перечень предметов для отдыха космонавтов в космическом аппарате
Предметы Приоритет
Иллюминатор для внешних наблюдений 1
Тренажеры 2,5
Магнитофон, проигрыватель 2,5
Книги 4
Спортивные снаряды 5
Радиоприемник 6
Газеты 7
Журналы 8
Фотоаппаратура 9
Аппаратура для личной радиосвязи 10
Телевизор и
Письменные принадлежности 12
Шахматы 13
Головоломки 14
Таблица 8.9
Организация мест отдыха
Вид отдыха Оборудование мест отдыха
Чтение Фиксаторы или сидения в изолированном месте Комфортное для чтения страниц освещение Удобные условия для концентрации внимания Место для хранения книг и печатных материалов
Общение, переговоры Комфортная обстановка, способствующая социаль- ному взаимодействию Уровень шума ниже уровня помех речи Низкий уровень освещенности Близость к кухне
Наблюдение космического пространства, наблюдение за Землей и ее фотографи- рование Близость к иллюминаторам Наличие бинокля, телескопа для наблюдения Низкий уровень освещенности Наличие фото- и киноаппаратуры
Визуальные развлечения (видеозаписи, игры и т. п.) Переменное освещение Оборудование для визуальных развлечений, фильмо- тека, источники энергии Фиксаторы или сидения для просмотра
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 477
Окончание табл. 8.9
Вид отдыха Оборудование мест отдыха
Активные игры Близость к персональным гигиеническим устройствам Подходящая вентиляция и регуляция температуры с учетом повышенной активности Мягкие поверхности Место хранения принадлежностей для игр, включая персональные предохранительные щитки Акустическая и динамическая изоляция от чувстви- тельных мест модуля
Прослушивание музыки Аудиоустройства, места их хранения, источники энергии Музыкальные записи, место их хранения Динамики или наушники
различных ПКА показан на рис. 8.26 [2]. Однако вследствие ограниченных
объемов гермоотсеков это не всегда выполнимо, и спальное место компонуется
в общем жилом объеме. Для фиксации человека во время сна применяется
специальное устройство, напоминающее кровать (рис. 8.27) [10].
Рис. 8.26. Устройства для сна на ОС:
а — Skylab; б — «Мир»; в — МКС
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 8.27. Типичные фиксаторы для сна:
1 — съемные фиксаторы головы; 2 — съемная подушка (дышащая ткань и губка из 100%-ного
хлопка и звукопоглощающая губка Pirelli); 3 — личный спальный мешок (дышащая ткань из
100%-ного хлопка); 4 — эластичные фиксаторы для тела; 5— быстро затягивающаяся пряжка;
6 — мягкая платформа; 7 — винтовая пружина в тканевой оболочке; 8 — фиксатор на стороне
переменной длины; 9 — платформа (войлок «номес» и дышащая ткань из 100%-ного хлопка)
83.4. Складское оборудование
При компоновке ПКА необходимо учитывать специфические требова-
ния к складским помещениям и хранилищам личных вещей, оборудования,
запасных частей и принадлежностей, рационов питания и других объектов,
которые использует экипаж.
Для транспортного ПКА одна часть указанных предметов является
полезным грузом и во время всего полета хранится в упакованном виде,
а другая — используется. На орбитальном ПКА все хранящееся оборудование
применяется в соответствии с планом полета.
При хранении периодически используемые предметы должны быть мар-
кированы, каталогизированы в базе данных оборудования и так рассортиро-
ваны по контейнерам, чтобы время на их поиск и доступ к ним было непро-
должительным. Для экономии времени экипажа вещи должны храниться как
можно ближе к месту их использования. Все места складирования и предметы
должны быть закодированы в соответствии с общей системой складирования
на ПКА.
Для хранения предметов на борту ПКА должна быть предусмотрена си-
стема из ящиков и сумок с ремнями, сетками, заколками или прокладками
из пенистого материала. При хранении в контейнере предметы должны быть
закреплены так, чтобы при его открывании они не «выплывали» наружу.
В то же время предметы должны без усилий выниматься и возвращаться
на место хранения. Изъятие одного предмета не должно нарушать условий
хранения других.
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 479
Рис. 8.28. Пример хранения инструментов для внутрикорабельной деятельности:
а — нижняя укладка с инструментами ( / — головки; 2 — отвертки; 3 — инструмент для от-
крывания ящиков; 4 — универсальный переходник; 5 — торцевой ключ с храповиком; 6 —
струбцина; 7 — ударник; 8 — дрель; 9 — головки со сверлами для дрели); б — верхняя укладка
с инструментами ( / — смотровое зеркало; 2 — плоскогубцы с изолированными ручками; 3 —
буравчик; 4 — пробойник; 5 — монтировочная лопатка; 6 — гаечные ключи; 7— механические
пальцы); в — ящик с инструментами
480
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 8.29. Размещение инструментов в сумке:
а — сумка в закрытом состоянии; б — сумка в открытом состоянии ; в — раз-
вернутая сумка: 1 — название инструмента; 2,1 — карман; 3 — маркировка
размера инструмента; 4, 5, 8 — U-образный зажим; 6 — застежка-липучка
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 481
Для оптимизации хранения вещей следует:
• предусмотреть управляемые вручную (рукой без инструмента) ограни-
чители, которые будут препятствовать произвольному открытию контейнера,
и обеспечить его положение в открытом состоянии;
• применять запирающие приборы, контейнеры и крышки, имеющие
сходное устройство;
• использовать контейнеры, для работы с которыми (выдвигание из
стеллажа, открытие) не требуется усилие более 150... 160 Н;
• иметь стеллажи систем хранения с направляющими, обеспечивающими
выравнивание ящика при открывании и закрывании.
При компоновке камбуза нужно предусматривать две формы хранения
продуктов питания: централизованную и распределенную, располагая неко-
торые из них в буфете, а основную массу — в отдельном хранилище.
Место хранения инструментов должно быть организовано так, чтобы
было удобно искать, хранить и заменять их при необходимости. Инстру-
менты следует располагать в легкодоступном, маркированном контейнере
в определенном порядке (рис. 8.28) [10]. На рис. 8.29 приведен пример хра-
нения инструментов в сумке [9].
Укладка инструмента должна соответствовать следующим требованиям:
• должен использоваться системный подход к размещению и применению
инструментов и средств технического обслуживания в течение всего полета;
• специализированные инструменты должны укладываться в места, со-
ответствующие их функциональному приложению;
• инструменты общего назначения должны быть сгруппированы в одной
конкретной области;
• перечень инструментов с инструкцией по их применению должен на-
ходиться на борту ПКА.
Укладка с инструментом должна иметь маркировку, удовлетворяющую
следующим требованиям:
• названия должны быть легко узнаваемы и соответствовать наименова-
ниям, указанным на этикетке инструмента;
• название специализированного инструмента должно содержать опи-
сание конкретной задачи, для выполнения которой он предназначен, но не
должно быть идентифицировано с названием оборудования;
• если специализированный инструмент абсолютно необходим, то он
должен иметь кодирование или маркировку, указывающую на его назначение;
• в укладочном контейнере около каждого инструмента, если он не яв-
ляется легкоузнаваемым, должна быть размещена этикетка с указанием того,
для выполнения каких операций он предназначен;
• все инструменты, градуированные в единицах СИ или неметрических
единицах англоязычных стран, должны быть соответствующим образом за-
кодированы (маркированы);
• наличие инструмента должно отслеживаться системой управления за-
пасов с помощью автоматизированной системы учета.
482 Часть III. Компоновка систем пилотируемого космического аппарата
83.5. Одежда
К объектам, которые размещаются в отсеках ПКА, относятся и комплекты
одежды космонавтов. Гардероб космонавта состоит из скафандра, полетного
костюма и нательного белья [16], причем для транспортных операций и для
работы на орбите предусмотрены различные комплекты одежды.
Нательное белье непосредственно соприкасается с кожей, поэтому не
должно оказывать на нее раздражающего воздействия. Для его изготовления
используют хлопчатобумажные, шелковые, искусственные и синтетические
волокна, а также их смеси.
Ткань, из которой оно изготавливается, должна отвечать следующим
требованиям:
• обладать достаточной прочностью для длительного ношения и крепле-
ния к ней датчиков биотелеметрической информации;
• ее свойства не должны изменяться после стирки и различных видов
стерилизации;
• должна быть легкой, эластичной, не затруднять теплопередачу и не
препятствовать испарению влаги с поверхности тела;
• должна обеспечивать очистительные функции, быть гигроскопичной
и влагоемкой, а влага, впитанная бельем, должна легко удаляться во внеш-
нюю среду.
В связи с увеличением длительности полетов встает задача снижения
микробной обсемененности кожи. Один из способов борьбы с нею — ис-
пользование антимикробных текстильных материалов. Сложность создания
такого белья состоит в том, что его ношение может привести к возникнове-
нию различного рода дисбактериозов.
Полетный костюм применяется в длительных полетах на российских
орбитальных станциях. Он содержит силовые элементы, предназначенные
для имитации действия на человека весовой нагрузки. Ткань, из которой его
изготавливают, должна обладать следующими качествами:
• быть несгораемой;
• не выделять газообразных продуктов в условиях вакуума;
• быть легкой, мягкой, эластичной;
• быть стойкой к износу, стиранию, разрыву, ломке и усадке;
• сохранять свои свойства после чистки, стирки или стерилизации;
• в условиях носки не должны возникать заряды, создающие напряжен-
ность электростатического поля больше 20 кВ/м.
Такой костюм должен обеспечивать свободу и широту движения, он должен
быть продуманным, для того чтобы его было легко и быстро надевать и снимать.
Одежда должна быть просторной, чтобы обеспечивалась циркуляция воздуха,
а также она должна хорошо сочетаться с нательным бельем и теплозащитным
костюмом. Одна из основных функций полетного костюма — предотвращение
излишней теплоотдачи и накопления избыточного тепла.
Теплозащитный костюм для российских космонавтов должен обеспечи-
вать тепловой комфорт при понижении температуры в кабине космическо-
го корабля (в случае аварийной ситуации). Он не является повседневной
одеждой и хранится в условиях, обеспечивающих его быстрое применение.
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 483
Американские космонавты вместо теплозащитного костюма используют
теплозащитное белье.
При полете в ТКА на участке выведения или в СА и на участке спуска
с орбиты используется комплект, состоящий из нательного белья, поверх
которого надеваются теплозащитный костюм с вентиляцией и защитный
скафандр (см. гл. 12) [17]. После выполнения транспортных операций чле-
нам экипажа необходимо переодеться: скафандр следует снять, просушить
и уложить на хранение, и для этого в кабине ТКА должно быть предусмот-
рено достаточно места.
Поскольку в кабине ПКА внешняя среда кондиционируется, защитная
функция одежды не очень важна, однако она выполняет важные вспомога-
тельные функции, обеспечивая фиксацию тела, хранение различных бытовых
предметов и легких инструментов, крепление устройств для фиксации тела
или тяг спортивных тренажеров. Поэтому на одежде должны быть удобно
расположены карманы и соответствующие устройства, которые не будут
стеснять движения космонавта при выполнении работы. Все характеристики
одежды выбираются так, чтобы она соответствовала задачам как полета, так
и возвращению на Землю. Большое внимание уделяется выбору и разработке
материалов для ее изготовления.
Полетный костюм и нательное белье, предназначенные для повседнев-
ной носки, могут быть одноразового или многоразового использования.
Одежда одноразового использования предназначена для ношения в течение
определенного отрезка времени, после чего ее помещают в отходы, а космо-
навт получает новый комплект одежды. Одежду многоразовую носят также
в течение того же или меньшего отрезка времени, что и одноразовую, но она
после этого подвергается чистке.
Каждый из видов одежды имеет свои преимущества и недостатки. При-
менение одноразовой не требует специального оборудования для чистки и
упрощает конструкцию бытового оборудования космического корабля. Однако
при увеличении продолжительности полета и численности экипажа запасы
одежды могут достигнуть объемов, обременительных для транспортных кора-
блей. На российских ОС использовались одноразовые комплекты одежды. На
Space Shuttle при длительности полета не более 10 дней одежду возвращали для
повторного употребления. На МКС из-за большой продолжительности полета
и отсутствия места для хранения запасов одежды ее используют повторно.
8.4. Компоновка инфраструктуры медицинского обеспечения
8.4.1. Контроль состояния здоровья и работоспособности экипажа
Безопасность и эффективность деятельности экипажей КА зависит от
состояния здоровья каждого из его членов. Условия космического полета ока-
зывают серьезное влияние на здоровье космонавта и сказываются после его
возвращения на Землю. Роль медицинского обеспечения наряду со стандарт-
ными процедурами для поддержания общего состояния здоровья заключается
484
Часть III. Компоновка систем пилотируемого космического аппарата
в профилактике воздействия невесомости на организм космонавта и подго-
товке его к возвращению на Землю, а также к контролю санитарно-гигиени-
ческого состояния корабля и экипажа. Медицинское обеспечение в течение
полета играет большую роль в послеполетной реабилитации и дальнейшей
жизни космонавта. Опыт, накопленный в длительных полетах российских
(советских) космонавтов, позволил разработать эффективно действующую
отечественную систему оказания медицинской помощи и профилактики
(СОМП), схема которой представлена на рис. 8.30 [18].
Рис. 8.30. Схема системы оказания медицинской помощи и профилактики
Основой СОМП служит разработанный перечень функциональных рас-
стройств, заболеваний и повреждений, возникновение которых наиболее
вероятно при выполнении работ во время космического полета. Проблема
медицинского обеспечения экипажа в полете решается комплексно. Первая
медицинская помощь может быть оказана с использованием медицинской
укладки одним из членов экипажа, профессионально подготовленным к этому.
Также необходимую помощь может дистанционно оказать врач экипажа, на-
ходящийся в центре управления полетом, участвовавший в подготовке эки-
пажа и знающий состояние здоровья каждого космонавта, находящегося на
орбите. В случае необходимости он может получить консультацию у ведущего
медицинского специалиста или инженера по медицинскому оборудованию.
В комплексе мер по обеспечению здоровья и работоспособности эки-
пажа во время полета важная роль принадлежит медицинскому контролю.
Известно, что незначительное недомогание со временем может развиться
в серьезное заболевание, которое приведет к срыву программы полета. По-
этому целью медицинского контроля является постоянная оценка состояния
здоровья космонавта.
На основе обобщения российского опыта длительных космических
полетов сформулированы следующие основные принципы медицинского
контроля [18]:
• патогенетический принцип — ориентация на выявление и диагности-
ку наиболее вероятных прогнозируемых состояний и заболеваний в связи с
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 485
техническими, энергетическими, весовыми и другими ограничениями, а также
с отсутствием врача в большинстве экипажей;
• плановые периодические скрининговые обследования экипажа для
обнаружения отклонений от нормы или возникновения заболеваний; вы-
явление членов экипажа, нуждающихся в дополнительных медицинских
обследованиях и лечебно-профилактических мероприятиях;
• индивидуализация диагностических обследований с учетом особенно-
стей состояния здоровья, выявленных в процессе подготовки к полету;
• коррекция программы обследований в зависимости от состояния чле-
нов экипажа, включающая как изменение сроков, так и объема обследований
в зависимости от развивающихся в полете реакций организма;
• оценка изменений функций организма с учетом адекватности условиям
среды обитания;
• преемственность проведения обследований на всех этапах подготовки
к полету, в полете и после его завершения благодаря использованию иден-
тичных методических приемов и условий проведения обследований;
• информационно-анамнестический анализ, предусматривающий ис-
пользование информации, содержащейся в базе данных, для сопоставления
результатов текущих обследований с результатами других медицинских об-
следований во время и после полетов;
• конфиденциальность результатов медицинских обследований и уста-
новление тесного контакта наземного медицинского персонала с экипажем
во время и после полета.
Виды медицинского контроля в длительном космическом полете делятся
на текущий, проводимый ежедневно и оперативный.
В оперативный контроль состояния здоровья космонавта входят:
• оперативный контроль на активных и наиболее ответственных участках
полета (ВКД, стыковка и пр.);
• оценка динамики физиологических показателей и работоспособности
космонавтов в процессе полета;
• диагностика основных состояний, возникновение которых связано со
штатными условиями полета, нештатными или аварийными ситуациями;
• рациональное планирование сроков проведения штатных или углу-
бленных (по показаниям) медицинских обследований;
• проведение тестов для оценки состояния тренированности и эффек-
тивности использования космонавтами комплекса средств профилактики
и выявление показаний для коррекции их режимов.
Комплекс мер по обеспечению здоровья и работоспособности экипажа
во время полета включает профилактические мероприятия, а также борто-
вое оборудование для их проведения. В основу профилактики в длительных
полетах положены физические упражнения, выполняемые космонавтами на
тренажерах и с помощью нагрузочных костюмов.
На основании опыта полетов на ОС «Мир» определены основные виды
физических тренировок, обеспечивающих:
• поддержание хорошего состояния здоровья и высокой работоспособ-
ности членов экипажа на всех этапах космического полета;
486
Часть III. Компоновка систем пилотируемого космического аппарата
• профилактику нарушений деятельности сердечно-сосудистой системы
и ортостатической неустойчивости после завершения полета;
• сохранение структуры и функций мышц и, следовательно, поддержа-
ние на уровне, близком к исходному, мышечной силы, силовой, статической,
скоростной и общей выносливости организма;
• стабилизацию функционирования системы управления движениями
на уровне, достаточном для поддержания вертикальной позы, локомоций
(вид двигательной деятельности, связанный с активным перемещением в
пространстве) ходьбы и бега, а также точечных характеристик произвольных
движений;
• сведение к минимуму нарушений обмена веществ (в частности, водно-
солевого и минерального) [19].
Для профилактики в длительных космических полетах применяют сред-
ства, перечисленные в табл. 8.10.
Таблица 8.10
Средства медицинской профилактики
Средства Назначение
Активные'. беговая дорожка, велотренажер, резистивные тренажеры координационные тренажеры с ре- зистивными нагружателями органов управления с помощью простейших (пружины, магнитные замки) и бо- лее совершенных (гидравлических) устройств Поддержание общей тренированности, адекватной работоспособности, тренировка скоростных и силовых качеств, силовой, статической, скоростной и общей выносли- вости, структуры и функции мышц, орто- статической устойчивости и других качеств организма Тренировка систем управления движения- ми в условиях резистивной нагрузки во время отдыха и некоторых рабочих опера- ций, психологически облегчающая выпол- нение нагрузок
Пассивные'. нагрузочные костюмы с индивиду- альными тензодатчиками индивидуальный компенсатор опор- ной разгрузки электростимулятор центрифуга короткого радиуса бортовая экспертная автоматизиро- ванная система управления физиче- скими тренировками (БЭАСУ ФТ) Создание нагрузки на опорно-двигатель- ный аппарат и скелетную мускулатуру Создание опорной нагрузки с целью ком- пенсации дефицита опорных раздражений Электростимуляция мышц скелетной му- скулатуры для профилактики аторфии мышц и других мышечных нарушений Профилактика неблагоприятных влияний не- весомости в различных системах организма Автоматизированная индивидуальная экс- пертная оценка физического состояния членов экипажа и управления тренировоч- ным процессом
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 487
8.4.2. Бортовое профилактическое оборудование
На борту ПКА для поддержания физической формы экипажа и профилак-
тики вредного воздействия невесомости на организм размещают спортивные
тренажеры и специальное профилактическое оборудование.
На ОС МКС используются российский и американский комплекты тре-
нажеров. Каждый из комплектов включает велотренажер, силовой тренажер
и беговую дорожку. Также для проведения силовой тренировки основных
мышечных групп предусмотрены индивидуальные для каждого члена эки-
пажа комплекты эспандеров.
Велотренажер ВБ-3 (рис. 8.31) обеспечивает физические тренировки кос-
монавтов и получение функциональных проб с дозированной физической
нагрузкой. Бортовой велоэргометр дополняет и разнообразит физические
упражнения, реализуя стандартное нагружение сердечно-сосудистой систе-
мы. Велоэргометр позволяет контролировать нагрузки в диапазоне от 50 до
250 Вт при частоте педалирования от 40 до 100 об/мин. Время непрерывной
работы при средней мощности 150 Вт на педальном валу и частоте вращения
60 об/мин составляет не более 2 ч. Уровень шума на расстоянии 1 м от рабо-
тающего тренажера — не более 65 дБ. В рабочем положении его габариты не
более 1200 х 950 х 800 мм, в транспортном — 980 х 400 х 500 мм, а масса — не
более 27 кг [20].
Рис. 8.31. Велотренажер ВБ-3 в рабочем (а) и в сложенном виде (б)
Силовой тренажер «Нагружатель силовой НС-1М» (рис. 8.32) состоит
из двух нагрузочных устройств, обеспечивающих нагрузку от 5 до 30 кг, и
системы из тросов и блоков, которые устанавливаются на велоэргометр, что
позволяет чередовать силовые упражнения (сгибание-разгибание тела и рук,
имитация гребли и метания молота и т. п.) с ездой на велосипеде [21].
Беговая дорожка БД-2 имитирует нагрузки, которые человек испытывал
бы под действием земной гравитации. В состав тренажера входят беговая
дорожка» (рис. 8.33), пульт управления и нагрузочная система, состоящая
из ремней и тросов, которая обеспечивает при выполнении упражнения
488
Часть III. Компоновка систем пилотируемого космического аппарата
Положение 1
Положение 2
Рис. 8.32. Конфигурации крепления трена-
жера НС-1М на велоэргометре:
1, 2— нагрузочное устройство; 3, 4 — упоры
для ног на педалях велоэргометра; 5, 7, 9, 8 —
тросовая система с блоками; 6, 10 — узлы кре-
пления тросов
Рис. 8.33. Беговая дорожка БД-2:
а — конструктивная схема (7 — полотно, 2 — опорные ролики, 3 — общий вид конструкции
БД-2 для установки в CM PC МКС, 4 — защитная накладка, 5 — тензоусилитель, 6 — элек-
тропривод, 7 — блок управления, 8 — тензоизмерительная платформа); б — рабочее поло-
жение тренажера (7 — отсек для установки БД-2, 2 — тренажер, 3 — нагрузочная система,
4 — пульт управления)
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 489
постоянную нагрузку, эквивалентную массе от 40 до 70 кг, в направлении
продольной оси тела для воспроизведения в условиях микрогравитации
опорных реакций. Беговая дорожка позволяет осуществлять в условиях не-
весомости ходьбу со скоростью от 2,4 м/с, бег в активном и пассивном ре-
жимах со скоростью до 20 м/с [22]. Масса тренажера 460 кг, размеры полотна
дорожки 400 х 1200 мм.
Для профилактики воздействия невесомости на борту PC МКС разме-
щают специальные костюмы и стимуляторы.
Пневмовакуумный костюм «Чибис» предназначен для создания отрица-
тельного давления вокруг нижней части тела (рис. 8.34) [23]. Костюм соз-
дает разрежение вокруг нижней части тела
космонавтов, а также продольную нагрузку
на его опорно-мышечный аппарат с целью
предотвращения расстройств, возникающих
при длительном воздействии невесомости.
Этот костюм позволяет космонавту вы-
полнять определенные физические упраж-
нения. Сочетание декомпрессии в нижней
части тела и ходьбы обеспечивает оптималь-
ные условия для тренировки сосудов ног и
воспрепятствования излишнего депониро-
вания в них крови и возврату ее к сердцу.
Тренировочные нагрузочные костюмы
(ТНК-1) и костюм постоянного ношения
«Пингвин», создающий нагрузки на опорно-
двигательный аппарат и скелетную муску-
латуру космонавтов, содержат системы ре-
зиновых амортизаторов, действие которых
направлено на компенсацию дефицита на-
грузки на опорно-двигательный аппарат при
выполнении упражнений и профессиональ-
ной работы [23]. Величина нагрузки в костю-
ме «Пингвин» (рис. 8.35) за 8...12 ч в сутки
может достигать 30 % веса космонавта, а
в тренировочном костюме ТНК-1 — до 70 %.
Специальные элементы одежды пред-
назначены для защиты от перегрузок, на-
пример костюм «Кентавр» применяется
на ТКА для защиты космонавтов от пере-
грузок, возникающих на этапе спуска на
Землю, и для повышения ортостатической
устойчивости. Его надевают под спаса-
тельный скафандр «Сокол». Во время пе-
Рис. 8.34. Пневмовакуумный кос-
тюм «Чибис»:
/ — металлическая поясничная часть;
2 — гофрированные штаны; 3 — ме-
таллические башмаки; 4 — плечевые
ремни; 5 — резиновый герметизирую-
щий пояс; 6 — ремень для затягивания
регрузок за счет упругих материалов костюм блокирует стекание жидкости.
Изделия «Браслет» и «Браслет-М» представляют собой пояс из эластичных ма-
териалов, который накладывается на проксимальную область бедер (области
490
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 8.35. Нагрузочный костюм «Пингвин», имеющий
амортизаторы:
1 — грудные; 2, 6 — передние ножные; 5, 8 — задние косые нож-
ные; 4, 9, 10 — задние прямые ножные; 5, 11 — передние ножные
косые; 7 — наспинные
Рис. 8.36. Комплект аппаратуры
«Стимул-01»
в районе суставов) и создает нагрузку на
вены [24]. Это средство предназначено для
регулирования кровообращения в орга-
низме в условиях невесомости.
В космосе кровь приливает к голове,
начинается гиперемия лица, вздуваются
артерии. «Браслет» же приближает крово-
обращение к тому, что наблюдается в позе
сидя. Кровь, которая могла бы прилить
к голове, теперь удерживается в нижней
половине тела.
Электростимуляторы «Тонус-3» и
«Стимул-01» предназначены для электро-
миостимуляционной тренировки мышц.
В частности, комплект «Стимул-01» сти-
мулирует мышцы нижних конечностей и
спины космонавта в условиях космического
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 491
полета на PC МКС [25]. В состав его аппаратуры (рис. 8.36) входят электроми-
остимулятор ЭМС НЧ для низкочастотной раздельной электромиостимуляции
мышц правой (левой) половины тела (мышц бедер, голени, спины) и ЭМС ВЧ
для высокочастотной раздельной электромиостимуляции в тренировочном и
восстановительном режимах.
8.4.3. Бортовое медицинское оборудование
Для проведения оперативного медицинского контроля скафандры оснаща-
ют специализированными комплексами диагностической аппаратуры. Меди-
цинский контроль космонавтов на ответственных участках полета российских
ТКА при запуске и посадке осуществляется комплексами «Альфа» [25]. Этот
блок бортовой аппаратуры (рис. 8.37), имеющий размеры 125 х 90 х 96 мм,
массу 0,75 кг и потребляемую мощность не более 3,5 Вт, предназначен для
съема, усиления и передачи физиологических сигналов (в том числе электро-
кардиограммы и пневмограммы) в режиме реального времени одновременно
у трех космонавтов на активных участках полета в условиях перегрузок. Для
снятия сигналов с членов экипажа используется пояс с датчиками, электро-
дами и кабелем отведений общей массой 0,2 кг.
Для получения оперативной информации о состоянии здоровья членов
экипажа в реальном масштабе времени на борту МКС установлен специ-
ализированный аппаратный комплекс КМА-01 (рис. 8.38) [25]. Он также
используется для периодического медицинского контроля и углубленных
обследований различных систем и функций организма, а также для обеспе-
чения электропитания медицинской аппаратуры, не входящей в его состав:
измерителя массы тела и внешних медицинских исследовательских приборов.
Предусмотрена возможность ввода идентификационных данных обследуе-
мого, а также получения сопутствующей информации: частоты вращения
педального вала велоэргометра и мощности на его педальном валу.
Рис. 8.38. Специализированный
диагностический комплекс КМА-01
Рис. 8.37. Комплекс «Альфа»
492
Часть IIL Компоновка систем пилотируемого космического^ аппарата
В состав этого комплекса входят три
блока: электромедицинской аппарату-
ры; управления измерителем массы;
питания и устройства съема информа-
ции. В автоматическом режиме они
обеспечивают съем, преобразование,
предварительную обработку и выдачу
результатов медицинских обследований
в цифровом виде.
В результате будет получена следу-
ющая физиологическая информация:
электрокардиограммы; уровень арте-
Рис. 8.39. Измеритель массы тела риального давления; реограммы и ре-
ИМ-01М оэнцефалограммы, снятые в процессе
исследований, отражающих изменения
во времени полного электрического сопротивления ткани и, таким образом,
кровенаполнения ее сосудов; динамограммы.
Для контроля за обезвоживанием организма в невесомости при дли-
тельном полете проводятся наблюдения за массой членов экипажа. Для ее
определения в условиях невесомости используется специальное устройство
ИМ-01М. Этот измеритель массы тела (рис. 8.39) [25], имеющий габариты
79,8 х 72 х 31,8 см и массу около 11 кг, состоит из платформы и упруго-
го амортизатора. Принцип работы комплекса основан на преобразовании
и пересчете на массу тела периода колебаний специальной платформы, на
которой закреплен космонавт или размещен какой-либо предмет. Высокая
точность устройства позволяет проводить измерения массы в условиях неве-
сомости как в диапазоне от 50 до 100 кг, так и в пределах 0,02...2,00 кг.
Оказание медицинской помощи во время полета ПКА обеспечивается
с помощью аппаратуры для диагностики и медикаментов, используемых
при заболеваниях и травмах. Одним из факторов, определяющих уровень
оказания медицинской помощи в условиях космического полета, является
ограничение массы и объема медицинской укладки. На борту ТК, объем
кабины которого ограничен, есть аптечка для оказания первой медицинской
помощи, а на борту ОС — комплект медицинской аппаратуры и укладки
с медицинскими препаратами, размещенные в специальной стойке. Исполь-
зуется такое же медицинское оборудование, что и применяется на Земле,
но с определенными доработками. К медицинской аппаратуре предъявля-
ются такие же требования по массе, габаритам и энергопотреблению, как и
к приборам бортовой аппаратуры. Схема бортовой системы СОМП ОС «Мир»
представлена на рис. 8.40 [19].
На российском сегменте МКС размещено следующее диагностическое
оборудование:
• многофункциональный комплекс «Гамма-1М», позволяющий прово-
дить углубленные исследования сердечно-сосудистой системы членов эки-
пажа, находящегося на борту ПКА [25]. Регистрация осуществляется одно-
временно по шести каналам в соответствии с программами обследования,
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 493
Рис. 8.40. Схема СОМП орбитальной станции «Мир»
которые можно изменять введением
новых устройств съема информации.
Комплекс «Гамма-1М» имеет выходы
на радиотелеметрическую систему, маг-
нитный регистратор, ЭВМ;
• биохимический анализатор ^па-
раметров крови «Рефлотрон-4» (рис.
8.41) [25] и биохимический анализатор
10 параметров мочи «Уролюкс»;
• носимый прибор «Кардиореги-
стратор-90205» для суточных замеров
Рис. 8.41. Анализатор крови «Рефлот-
рон-4» с укладками
электрокардиограммы космонавта с
непрерывной работой в течение 24 ч;
• прибор «Гематокрит» для анализа крови.
Кроме того, на борту в 15 укладках (рис. 8.42) [23], каждая из которых
соответствует целевому назначению (сердечно-сосудистые средства, проти-
вовоспалительные и т. д.), размещены медицинские препараты, промарки-
рованные и снабженные инструкцией по применению, а также «Методиче-
скими указаниями для космонавтов по оказанию само- и взаимопомощи».
Все медицинские препараты заменяются по истечении сроков годности.
В число медицинских укладок входят содержащие:
• сердечно-сосудистые средства;
• желудочно-кишечные и урологические средства;
• психотропные средства;
• антисептические средства;
• перевязочные средства;
• противовоспалительные средства (4 укладки);
• средства против ожогов и травм;
• препараты неотложной помощи;
• мази;
• препараты с ацетилсалициловой кислотой;
• антибиотик линкомицин;
• фиксирующие шины.
494
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 8.42. Содержимое амбулаторной медицинской укладки (меди-
каменты и оборудование) МКС
Рис. 8.43. Операционный стол — систе-
ма фиксации космонавта при оказании
медицинской помощи на МКС
Многие медицинские обследова-
ния, а также внутривенные инъекции
можно проводить без специальной
фиксации. Однако более сложные ме-
дицинские процедуры требуют фикса-
ции для удержания пациента и средств
оказания помощи вблизи от бортового
медика. В острой ситуации, связанной
с угрозой жизни, может оказаться не-
обходимо выполнить фиксацию мак-
симально быстро. Необходимо также
предусматривать специальное место для
хранения израсходованных медицинских материалов (тампонов, шприцов
и т. п.). Поэтому на борту ПКА, совершающего длительный полет, следует
разместить специальный медицинский операционный стол, один из вариан-
тов которого показан на рис. 8.43 [23]. Для экономии пространства при ком-
поновке вместо специального медицинского стола стоит применять другие
поверхности, например стены отсеков или рабочие столы. Кроме того, можно
использовать небольшие гибридные системы из быстро разворачивающихся
поверхностей, закрепив их на удобных для монтажа конструкциях.
8.4.4. Компоновка медицинского оборудования
При компоновке медицинского оборудования следует основываться на
программе СОМП и учитывать особенности режима проведения тренировок
и обследований членов экипажа. К примеру, в ограниченном объеме жилого
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 495
отсека необходимо разместить тренажеры таким образом, чтобы обеспечить
ежедневную возможность заниматься на них всем членам экипажа в течение
заданного диапазона времени. Причем конструкция тренажеров должна быть
складной, поскольку требуются значительные свободные зоны для проведе-
ния занятий.
При компоновке тренажеров необходимо учитывать, что они оказывают
значительные динамические нагрузки на конструкцию ПКА. Для уменьшения
возмущений от беговой дорожки используют различные системы виброизо-
ляции, как пассивные, так и активные.
Пример компоновки элементов профилактического оборудования
в базовом блоке ОС «Мир» приведен на рис. 8.44. Здесь устройство для из-
мерения массы тела расположено в зоне малого диаметра рабочего отсека,
велотренажер находится на откидной панели, закрывающей иллюминатор
в зоне большого диаметра рабочего отсека, а беговая дорожка — за велотре-
нажером рядом с каютами.
Рис. 8.44. Размещение профилактического оборудования на базовом блоке ОС
«Мир»:
1 — устройство для измерения массы тела; 2 — велотренажер; 3 — беговая дорожка
Аналогичная компоновка сохранена и в модуле «Звезда» российского
сегмента МКС. Поскольку в настоящее время все российские тренажеры
размещают в одном модуле СМ при наличии в составе экипажа трех рос-
сийских космонавтов, время ежедневных тренировок составляет не менее
4 ч, а в случае нахождения на борту двух космонавтов оно увеличивается до
7 ч [21]. Американские тренажеры размещены в различных модулях: беговая
дорожка Т2 — в модуле Node 3, велотренажер Cevis — в модуле Lab, а сило-
вой тренажер ARED — в модуле Node 1. По мере добавления новых модулей
к российскому сегменту МКС расположение тренажеров может меняться.
Размещение таких элементов медицинского оборудования, как центри-
фуга или операционный стол, может потребовать специальных компоно-
вочных решений и создания специализированного отсека или модуля ПКА.
Например, для ОС «Мир» планировалось создать специальный медицинский
496 Часть III. Компоновка систем пилотируемого космического аппарата
модуль Medilab для проведения биомедицинских исследований и обследова-
ния космонавтов. Научный медико-биологический модуль, анонсированный
в 1989 г., предполагалось запустить в 1990 г., но, к сожалению, его разработка
была прекращена в связи с экономическими трудностями.
Цели исследований, проводимых в медицинском лабораторном модуле, —
разработка мер профилактики нарушений психического здоровья и активного
медицинского контроля; контроль состояния окружающей среды; изучение
реакции физиологических и механических систем человека на условия кос-
мического полета; развитие и эволюция биологических систем в космическом
полете. Для проведения этих исследований в состав экипажа включают одного
или двух специалистов (врача и физиолога).
Рис. 8.45. Проект компоновки медицинского модуля ОС «Мир»:
1 — стыковочный узел; 2 — центрифуга; 3 — лабораторный блок; 4 — операционный блок;
5 — виварий для работы с животными; 6 — санитарный блок с шлюзовой камерой
Модуль, компоновочная схема которого представлена на рис. 8.45 [26],
имеет диаметр около 4 м, длину 11 м, рабочий герметизированный объем
100 м3. Медицинское оборудование имеет суммарную массу 2703,71 кг, за-
нимает объем 10,5 м3 и потребляет 11,445 кВт электроэнергии. В модуле
были предусмотрены отсеки, изоляторы для проведения исследований вли-
яния космических условий на физиологию человека (включая центрифу-
гу), отделение клинических и биологических исследований, включающих
также эксперименты на животных.
8.5. Компоновка рабочих мест для научных экспериментов
8.5.7. Рабочие места российского сегмента МКС
В качестве примера размещения рабочих мест для проведения научных
экспериментов на российском сегменте МКС можно привести компоновку
многоцелевого лабораторного модуля МЛМ «Наука» (рис. 8.46) [27].
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 497
Рис. 8.46. Размещение целевого оборудования в МЛМ «Наука»:
а — правый борт; б — левый борт (7 — многозонная печь; 2 — перчаточный бокс; 3 — мо-
дуль-полки «узкие»; 4 — модуль-полки «широкие»; 5 — УРМ вблизи иллюминатора; 6 — тер-
мостат (низкотемпературный); 7 — поворотная виброзащитная платформа)
498 Часть III. Компоновка систем пилотируемого космического аппарата
Герметичный отсек МЛМ содержит 16 внутренних универсальных рабочих
мест (УРМ) и 6 мест для хранения полезных нагрузок, которые размещены
за панелями интерьера и которые можно использовать в качестве УРМ, что
значительно расширяет возможности проведения научных исследований.
Характеристики УРМ [27] приведены ниже.
Среднесуточное энергопотребление, кВт........... До 1
Суммарный объем аппаратуры, м3 ................. До 8
Дискретные команды управления, шт. ............. 150
Фидеры питания управления, шт.
дистанционного .............................. 49
ручного ..................................... 36 (+14 — бортовых)
Телеметрические параметры:
дискретные ................................. 180
аналоговые................................... 78
температурные .........
Информационные интерфейсы
....................... 65
....................... RS-422, RS-485, Ethernet,
MILSD 1553В, RS-232, USB
Телевизионные каналы ....................... 6
Радиотехнические интерфейсы, шт. ............. 2
Вакуумный интерфейс, 10-2 мм рт. ст. ......... 2
Универсальные рабочие места оснащены целевым оборудованием, таким
как перчаточный бокс, высоко- и низкотемпературные инкубаторы для био-
логических и биотехнологических исследований, универсальная многозонная
вакуумная печь для экспериментов в области космического материаловедения,
усовершенствованная поворотная виброзащитная платформа для предохра-
нения целевых нагрузок от бортовых вибраций при проведении экспери-
ментов. Для размещения дополнительной аппаратуры предназначена стойка
с выдвижными модуль-полками (рис. 8.47) [27].
Рис. 8.47. Стойка для аппаратуры
с выдвижными модуль-полками:
1 — модуль-полки; 2 — рама-арка;
3 — рама-полка; 4 — коммутаци-
онные колодки и электроразъемы
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 499
Кроме модуля МЛМ в состав российского сегмента МКС входят модули
МИМ1 и МИМ2. В малом исследовательском модуле МИМ-1 предусмотрены
три УРМ, характеристики которых приведены ниже [27].
Число УРМ ..................................От 1 (на базе УРМ-Д)
До 3 (на базе ММ3)
Фидеры питания (дистанционного управления
и бортовые розетки) и телеметрические параметры
(дискретные, аналоговые, температурные), шт. Ресурсы для научной
аппаратуры предоставляются
от СМ по внешним кабелям
Суммарная масса научной аппаратуры.......... Более 240 кг
В модуле МИМ-1 размещены стационарные установки для проведения
научных исследований (рис. 8.48). Перчаточный бокс «Главбокс-С» за счет
наличия шлюзов, средств очистки и стерилизации создает среду для работы
со стерильными, опасными или сыпучими веществами. Объем камеры —
0,15 м3. Термостаты ТБУ-В и ТБУ-Н полезным объемом 10 л с температурой
термостатирования от 2 от 37 °C и —20 °C соответственно, создают необхо-
димые температурные режимы для работы с биообъектами. Универсальная
виброзащитная платформа ВЭП-У с массой научной аппаратуры до 50 кг,
коэффициентом виброизоляции на частоте 0,4...250 Гц не менее 20 дБ защи-
щает научную аппаратуру от фоновых вибраций.
б
в
Рис. 8.48. Аппаратура, установленная в модуле МИМ-1:
а — аппаратура «Главбокс-С»; б — термостат ТБУ-Н; в — термостат ТБУ-В; г — вибро-
защитная платформа универсальная ВЭП-У
В малом исследовательском модуле МИМ-2 находятся три УРМ, харак-
теристики которых приведены ниже [27].
Энергообеспечение (среднесуточное), Вт ......
Тепловыделение в атмосферу, Вт ..............
Суммарный объем аппаратуры, м3 ..............
Информационные интерфейсы....................
Телевизионные каналы ........................
Вакуумный интерфейс..........................
Высокочастотные каналы передачи данных
между герметичным объемом и наружной
поверхностью ГО-Вне ГО ......................
300
До 300
Не менее 1,5
RS-422, RS-485, Ethernet,
RS-232, USB
Не менее 2
1 (до стыковки МИМ-2)
2
500
Часть III. Компоновка систем пилотируемого космического аппарата
8.5.2. Рабочие места американского сегмента МКС
На американском сегменте МКС, включая европейский и японский
модули, научно-исследовательская аппаратура размещена в международ-
ных стандартных стойках (ISP), представляющих собой унифицированный
шкаф-стеллаж (рис. 8.49). Схема установки стоек в модулях и способ их кре-
пления рассмотрены в гл. 5 (см. рис. 5.5).
В стойке устанавливаются блоки научной аппаратуры, габариты которых
соответствуют стандартному размерному ряду. Стойка обеспечивает устанав-
ливаемую аппаратуру электроэнергией, охлаждением, водой и газами, а также
интерфейсами для связи и регистрации результатов экспериментов. Основ-
ные компоненты ISP: индикатор, сервисный переключатель, огнетушитель,
гнезда для установки приборов, аппаратура, позволяющая ускорить обработку
результатов экспериментов.
Для ускорения обработки результатов множества небольших экспериментов
на МКС применяют блоки научной аппаратуры Express (рис. 8.50) [28]. Для них
не требуется использовать полный объем и всю массу ISP. Набор аппаратуры
устанавливается в каркасе. Размещенные приборы могут быть использованы
для проведения эксперимента, в котором участвуют как все блоки, так и один
блок — в случае выполнения отдельных экспериментов.
Рис. 8.49. Международная стан-
дартная стойка ISP для научной
аппаратуры:
1,8— интерфейсы нижней области;
2 — алюминиевая шина заземления;
3 — алюминиевая центральная шина;
4 — верхний узел крепления; 5 — съем-
ные боковые пластины; 6 — корпус;
7 — нижний узел крепления; 9 — точка
опоры
Рис. 8.50. Исследовательская стойка Express,
укомплектованная научной аппаратурой:
1 — кубический модуль Cube Lab; 2 — рамка, состоя-
щая из 16 кубических модулей; 3 — контейнер стойки;
4 — фиксатор рамок
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 501
Стойки ISP вмещают по 8 стандартных блоков полезной нагрузки, раз-
мещенных в 2 колонках по 4 блока в каждой из них. Такая конфигурация
называется «8/2». Если полезная нагрузка не укладывается в стандартный
объем, то она может занять больший, например двойной.
Исследовательская стойка Express представляет собой многоцелевой
научно-исследовательский центр, состоящий из экспериментальных моду-
лей. В качестве вставки в стойки Express установлены три рамки, в каждой
из которых размещаются до 16 модулей Cube Lab стандартных размеров
10 х 10 х 10 см. Каждый из них может иметь свое назначение.
Стойки Express можно подразделить на два типа: стандартной и нестан-
дартной комплектации. Эта классификация основана на количестве интер-
фейсов и возможностях аппаратуры стойки. Нестандартная стойка имеет
большие грузоподъемность и объем, чем стандартная, а также оснащается
сложными уникальными интерфейсами. Причиной нестандартности могут
стать требования интерфейса и обслуживания (вода, вакуум, удаление газов
и т. д.), которые стандартная стойка не может предоставить. На рис. 8.51
представлена стойка с нестандартной аппаратурой.
Для защиты аппаратуры от вибраций и микрогравитации используется
система ARIS (рис. 8.52), которая позволяет измерять вибрационные уско-
рения и ограничивать их воздействие на аппаратуру. С ее помощью можно
демпфировать вибрации, действующие на один из приборов. Затухание до-
стигается в результате создания реактивной силы между стойкой и полез-
ной нагрузкой. Для этого используются восемь электроприводов, получа-
ющих команды от трех акселерометров. Система работает на частотах ниже
1000 Гц, максимальная эффективность достигается в диапазоне 20...200 Гц.
Рис. 8.51. Стойка с нестандартной научной
аппаратурой для изучения явления микро-
гравитации:
1 — блок питания; 2 — направляющие фиксато-
ров и поручней; 3 — выдвижная секция; 4 — ро-
зетки постоянного тока; 5, 11 — сигнальный ого-
нек; 6 — перчаточный порт; 7— панель контроля
и управления; 8 — рабочий объем; 9 — шлюз;
10 — боковой порт; 12— панель переключателей
502
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 8.52. Основные компоненты системы
ARIS:
1 — привод 3; 2 — привод 7; 3 — привод 2; 4 —
акселерометр 7; 5, 10 — верхний амортизатор;
6 — привод 7; 7— акселерометр 2; 8— блок элек-
троники 3;9— привод 8; 11 — блок электроники 7;
72 — контроллер; 13 — блок электроники 2;
14 — блок управления приводами; 75 — привод 5;
76 — акселерометр 2; 17 — приборная панель;
18 — основание; 19 — привод 4\ 20 — привод 6
а
б
Рис. 8.53. Оборудование для изоляции биообъектов на американс-
ком сегменте МКС:
а — вид спереди; б — вид сбоку; в — вид сзади; 7 — съемные перчатки;
2 — отверстия в передних стеклах; 3 — отсек отфильтрованного воздуха;
4 — обработка отходов; 5 — автоматическая микробиологическая система;
6 — инкубатор; 7 — освещение рабочей поверхности и регулятор подачи
воздуха; 8 — система фильтрации воздуха; 9 — внутренний вентилятор
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 503
Биомедицинские эксперименты проводятся в специально оборудован-
ных рабочих местах, обеспечивающих герметизацию и стерильность при
проведении экспериментов. Габариты рабочих мест вписываются в размеры
ISP (рис. 8.53) [29].
В базовой компоновке американский сегмент МКС включает в себя
множество ISP, имеющих различное назначение. Например, в лабораторном
модуле из 24 стоек для научной аппаратуры можно использовать 13. Один
из ранних вариантов компоновки модулей американского сегмента МКС с
указанием расположения ISP показан на рис. 8.54 [28].
В американском лабораторном модуле МКС установлено оборудова-
ние для наблюдения Земли. Для этого в надире его корпуса размещен ил-
люминатор диаметром 51 см, который имеет угол поля зрения примерно
± 40°, как показано на рис. 8.55 [30]. С иллюминатором связана специальная
стойка исследовательского центра WORF, созданная на базе стойки Express,
объем которой 0,8 м3. Преобразователь электроэнергии обеспечивает пита-
ние аппаратуры напряжением 120 В постоянного тока. На рис. 8.56 приведен
внешний вид этой стойки с установленной аппаратурой [30].
Рис. 8.54. Схема размещения научной аппаратуры в лабораторных модулях аме-
риканского сегмента МКС:
1 — JEM — японский научный модуль; 2 —JEM ELM-PS — японский эксперименталь-
ный модуль технического обеспечения; 3 — ESA АРМ — европейский модуль Columbus;
4 — САМ — модуль с центрифугой; 5 — Airlock — шлюзовая камера; 6 — US Lab — ла-
бораторный модуль США; 7 — Node 1 — узловой модуль; 8 — Node 3 — узловой модуль;
9— Rephased Hab — жилой модуль; 10— Node 2 — узловой модуль; I — системные стойки;
II — приборные стойки NASA; III — стойки исследования микрогравитации; IV — стойки
дооснащения; V — международные стойки
504
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 8.55. Поле зрения иллюминатора лабораторного модуля аме-
риканского сегмента МКС:
/ — стыковочный узел; 2 — обитаемый модуль; 3 — европейский модуль;
4 — лабораторный модуль; 5 — японский модуль
Рис. 8.56. Установка аппаратуры в WORF:
а — схема установки аппаратуры в отсеке (/ — размещение аппаратуры управле-
ния камерой, 2 — иллюминатор для наблюдения Земли); б — шкаф для монтажа
аппаратуры (7 — нижняя полка, 2 — направляющие для установки аппаратуры,
3 — верхняя полка, 4 — контроллер интерфейса, 5 — переключатель каналов,
6 — преобразователь электроэнергии, 7 — стойка полезного груза)
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 505
Контрольные вопросы к главе 8
1. Какова зависимость объема кабины экипажа ПКА от численности
космонавтов и продолжительности полета?
2. Как происходит перемещение космонавта внутри орбитального отсека?
3. Каким образом и зачем космонавт фиксируется во время работы?
4. Каковы требования к монтажу оборудования в отсеках ПКА?
5. Как проектируют интерьер кабины (цвет панелей, освещенность)?
6. Каковы конструкция и компоновка оборудования бытовых отсеков
ПКА?
7. Расскажите об одежде космонавта и требованиях к ее изготовлению.
8. Что подразумевается под медицинским оборудованием ПКА?
9. Расскажите о профилактике здоровья космонавта в космическом
полете.
10. Опишите научные модули российского сегмента МКС, их конструк-
цию и размещение в них аппаратуры.
Литература к главе 8
1. Ярополов В.И. Внутренний объем обитаемого пространства пилотируемого
космического аппарата, необходимый для выполнения полета определенной дли-
тельности // Пилотируемые полеты в космос. 2012. № 1 (3) С. 87—98.
2. Haeuplik-Meusburger S. Architecture for Astronauts. An Activity-based Approach.
Wien.: Springer, 2011. 316 p.
3. Simon M., Whitmire A., Otto C.D. Neubek Factors Impacting Habitable Volume
Requirements: Results from the 2011 Habitable Volume Workshop // NASA Report NASA/
TM-2011-217352. URL: https://ston.jsc.nasa.gov/collections/trs/_techrep/TM-2011-217352.
pdf (дата обращения 20.07.2019).
4. Rucker M.A., Thompson S. Developing a habitat for long duration, deep space missions //
Proc, of Global Space Exploration Conference (GLEX-2012). 22-24 May 2012. Washington,
DC. Paper GLEX-2012.05.3.8x12222. 10 p. URL: http://www.csc.caltech.edu/references/
RuckerThompson_DeepSpaceHab.pdf (дата обращения 20.07.2019).
5. Соловьев H.K. Художественное формообразование интерьера (Принципы,
факторы, средства). М.: МГХПУ, 1996. 270 с.
6. Моизер Ф. Галина Балашова. Архитектор советской космической программы.
Berlin: DOM publishers, 2018. 192 с.
7. Результаты конкурса «Дизайн рабочей, бытовой и предметной среды пилоти-
руемых космических аппаратов». URL: http://www.designet.ru/competition/
russian/?id=43990 (дата обращения 20.07.2019).
8. NASA Man-systems integration standards. Vol. I. Sec. 8. Architecture. URL: http://
msis.jsc.nasa.gov/sections/section08.htm (дата обращения 04.02.2019).
506
Часть III. Компоновка систем пилотируемого космического аппарата
9. NASA Man-systems integration standards. Vol. I. Sec. 11. Hardware and equipment
URL: http://msis.jsc.nasa.gov/sections/sectionll.htm (дата обращения 04.02.2019).
10. Пернер К.Д., Лендгок В.А. Планировка и оформление обитаемых помещений //
Космическая биология и медицина: в 5 т. Т. 2. Обитаемость космических летательных
аппаратов. М.: Наука, 1994. С. 208-238.
11. Нечаев А.П., Астахов А.В., Исаев Г.Ф., Трофимов В.Н. Психофизиологические
требования к рабочему месту, органам управления, индикации и сигнализации //
Космическая биология и медицина: в 5 т. Т. 4. Здоровье, работоспособность, безо-
пасность космических экипажей. М.: Наука, 2001. С. 325—353.
12. Леонов А.В., Беляев Р.И. Оптимизация параметров внутреннего освещения
орбитальных космических станций // Светотехника. 2007. № 4. С. 41—44.
13. Видрайт Ч.Д., Ленгл Р.К. мл., Корос А.С. Шум, вибрация, освещенность //
Космическая биология и медицина: в 5 т. Т. 2. Обитаемость космических летательных
аппаратов. М.: Наука, 1994. С. 152-184.
14. International Space Station Familiarization. Mission Operations Directorate Space
Flight Training Division. NASA TD9702A, 1998. URL: http://er.jsc.nasa.gov/seh/td9702.
pdf (дата обращения 20.07.2019).
15. Space food and nutrition. An Educator’s Guide With Activities in Science and
Mathematics. NASA EG-1999-02-115-HQ. URL: http://www.nasa.gov/pdf/143163main_
Space.Food.and.Nutrition.pdf (дата обращения 20.07.2019).
16. Ажаев A.H., Берлин А.А., Шумилина А.Г., Виллареал Дж. Д., Гроундс Ф. Одежда
и личная гигиена космонавтов // Космическая биология и медицина: в 5 т. Т. 2.
Обитаемость космических летательных аппаратов. М.: Наука, 1994. С. 185—207.
17. Горжалцан Ю. Одежда космонавта. URL:http://rosgeroika.ru/podvigi-v-
nasledstvo/2016/march/odezhda-kosmonavta (дата обращения 04.02.2019).
18. Егоров А.Д. Теория и методологии медицинского контроля в длительных
космических полетах. ИМБП РАН, 2001. URL: http://www.imbp.ru/webpages/winl251/
Science/UchSov/Docl/2001/Egorov_actsp.html (дата обращения 04.02.2019).
19. Орбитальная станция «Мир». Космическая биология и медицина: в 2 т. Т. 1.
Медицинское обеспечение длительных полетов. М.: Изд-во ООО «Аником», 2001. 661 с.
20. Мишаков В.В. Состояние разработки велотренажера ВБ-ЗМ. Готовность
ВБ-ЗМ к доставке на борт МКС в первой половине 2009 года. URL: http://nts.imbp.ru/
doc/2008/09/VB-3M.ppt (дата обращения 04.02.2019).
21. Ярманова Е.Н. Степень готовности российского тренажерного оборудования
к обеспечению физических тренировок при увеличении экипажа МКС до 6 человек.
URL: http://nts.imbp.ru/doc/2008/09/tren.ppt (дата обращения 04.02.2019).
22. Красильников А. Бегущая дорожка БД-2 для МКС // Новости космонавтики.
2013. № 6 (365). С. 24-25
23. Григорьев А.И., Козловская И.Б., Дитлайн Л.Ф., Соуин Ч.Ф. Профилактические
мероприятия в кратковременных и длительных полетах // Космическая биология и
медицина: в 5 т. Т.4. Здоровье, работоспособность, безопасность космических эки-
пажей. М.: Наука, 2001. С. 252—309.
24. Бортовое медицинское оборудование российского сегмента Международной
космической станции (РСМКС). URL: http://www.imbp.ru/WebPages/WIN1251/
Articles/2000/Noskin0300_r.html (дата обращения 08.07. 2016).
Глава 8. Компоновка обитаемого объема пилотируемого космического аппарата 507
25. Федеральное государственное унитарное предприятие Специальное конструк-
торское технологическое бюро «Биофизприбор» Федерального медико-биологиче-
ского агентства России. URL: http://biofizpribor.ru (дата обращения 08.07. 2016).
26. Григорьев А.И., Ильин Е.А., Холин С.Ф., Ивановский Ю.Р., Правецский Н.В. Цели
и задачи проекта медицинской лаборатории «Medilab» в космосе // Космическая
биология и авиакосмическая медицина. 1989. № 23 (3). С. 7—21.
27. Российский сегмент МКС. Справочник пользователя. URL: http://knts.
tsniimash.ru/ru/src/CenterInfRes/iss_rs_guide.pdf (дата обращения 17.01.2019).
28. International Space Station Evolution Data Book Vol. I. Rev. 1 / Editor
C.A. Jorgensen NASA/SP-2000-6109. URL: http://citeseerx.ist.psu.edu/viewdoc/downloa
d?doi=10.1.1.32.4499&rep=repl&type=pdf (дата обращения 17.01.2019).
29. ISS utilization: WORF (Window Observational Research Facility). URL: https://
directory.eoportal.org/web/eoportal/satellite-missions/i/iss-worf (дата обращения
04.02.2019).
30. Пацсон Д.Л., Мак Дженнис М.П., Викторов А.Н. Микробиологическая обсе-
мененность // Космическая биология и медицина: в 5 т. Т. 2. Обитаемость космиче-
ских летательных аппаратов. М.: Наука, 1994. С. 127—151.
ГЛАВА 9. КОМПОНОВКА ЗОН ВНЕКОРАБЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ
9.1. Организация внекорабельной деятельности
9.1.1. Виды внекорабельной деятельности
Термин «внекорабельная деятельность» (ВКД), аналогом которого явля-
ется английский термин extra-vehicular activity (EVA), служит для общего обо-
значения работы экипажа вне герметичного объема: в разгерметизированных
или негерметичных отсеках, а также в открытом космическом пространстве
(ОКП) на внешней поверхности КА. Для межпланетных ПКА под ВКД под-
разумевается работа экипажа вне корабля на поверхности небесного тела.
Необходимость выполнения ВКД как эффективного средства решения
важных задач во время пилотируемых полетов предвидел еще К.Э. Циолков-
ский, который в своих работах сформулировал основные принципы создания
средств защиты и страховки находящегося в открытом космосе человека.
С момента первого выхода в открытый космос 18 марта 1965 года летчика-кос-
монавта А.А. Леонова, который длился 12 минут, 50-летний опыт ВКД (на
10.08.2015 г.) насчитывает 377 выходов. Максимальное число выходов совершил
космонавт А.В. Соловьев: в течение пяти космических полетов (1980—1990) он
16 раз выходил за пределы ОС и провел в открытом космосе 82 часа.
Во время внекорабельной деятельности человек должен быть облачен
в индивидуальный защитный костюм — скафандр (от греч. сжасрод — лодка,
avf|p — человек). Критериями начала ВКД являются:
разгерметизация пространства, в котором находится человек в скафандре;
переход скафандра на автономное питание;
переход человеком в скафандре внешней границы ПКА (например, за
пределы люка).
В процессе ВКД реализуются все основные виды технологической де-
ятельности: сборочные и монтажные работы; ремонтные работы; аварий-
но-спасательные работы; контрольно-испытательные и инспекционные ра-
боты и др. По целевым задачам выходы в открытый космос на отечественных
ОС распределяются следующим образом [1]:
• дооснащение и техническое обслуживание — 49 %;
• работа с научной аппаратурой — 29 %;
• устранение нештатных ситуаций и ремонт — 22 %.
Примерами выполненных во время ВКД работ могут служить:
• монтаж дополнительных панелей СБ («Салют-7», ОС «Мир»);
Глава 9. Компоновка зон внекорабельной деятельности 509
• сборка и установка крупногабаритных ферменных конструкций (фермы
«Софора», «Рапана», выносная ДУ, антенна «Рефлектор» на ОС «МИР»);
• монтаж элементов на внешней поверхности ОС (PC МКС: кабельные
трассы СМ-ФГБ (2000), СМ-СО1 (2001); грузовая стрела (2001); газозащитные
устройства на двигателях ориентации (2001); противометеоритные панели
(2002); антенны, мишени стыковочных узлов и пр.);
• запуск микроспутников (ОС МКС);
• инспекции стыковочных агрегатов и удаление посторонних предметов,
мешающих стыковке (антенна КРТ-10 на ОС «Салют-6», обеспечение сты-
ковки модуля «Квант» с ОС «Мир», очистка стыковочного узла от уплотни-
тельного кольца на МКС);
• ремонт объединенной двигательной установки («Салют-7»);
• ремонт выходного люка на модуле «Квант-2» ОС «Мир».
Специфическими особенностями ВКД в условиях работы в открытом
космосе является необходимость:
• проведения шлюзования при входе и выходе из герметичного объема;
• использования скафандра, имеющего ограничения по подвижности
элементов и функциональным возможностям работающего в нем космонавта;
• работы в условиях невесомости;
• специальных мероприятий для исключения неконтролируемого отде-
ления космонавтов и используемых ими предметов от ПКА и безвозвратного
ухода их в открытое космическое пространство;
• учета особенностей поведения материалов и конструкций в условиях
воздействия факторов космического полета.
Если целевые задачи ПКА предусматривают проведение ВКД, что допу-
скается его компоновкой, следует решить задачи организации негерметичного
пространства и размещения в нем элементов, требующихся для эффективной
работы космонавтов в скафандрах.
9.7.2. Циклограмма выхода в открытый космос
Поскольку время автономного существования человека в скафандре
ограничено, сложные работы могут включать несколько выходов, например,
для выполнения подготовительных, основных и заключительных операций.
Проведению ВКД предшествует подготовительный этап, включающий пла-
нирование работ, подготовку скафандров и необходимого оборудования,
а также проведение тренировок в скафандрах. Сложные предусмотренные
планом полета монтажные операции отрабатываются в наземных условиях
в гидробассейне. Для каждого выхода в открытое космическое пространство
составляется циклограмма. При проведении ВКД работа экипажа в тени не
планируется. Время в тени используется как резервное для работы экипажа
в случае отставания от циклограммы.
В качестве примера в табл. 9.1 описан выход ВКД № 37а, совершенный
27 января 2014 года в рамках экспедиции МКС-38 космонавтами Оле-
гом Котовым (01) и Сергеем Рязанским (02) в скафандрах «Орлан-МК»
510
Часть III. Компоновка систем пилотируемого космического аппарата
Таблица 9.1
Циклограмма внекорабельной деятельности 27 января 2014 года
№ Исполни- тель Содержание операции Время выполне- ния опера- ции, мин Текущее время ВКД, ч:мин Текущее время ВКД GMT; ч:мин
Поворот СБ-IV в зону 9
Тень 17:49—18:23
1 02 Открытие выходного люка (ВЛ 1) (18:10) 6 00:00 18:16
2 01; 02 Установка защитного кольца (ЗК) 3 00:09 18:19
3 02 Выход из стыковочного отсека (С01), переход на выходное устройство (ВУ) 3 00:12 18:22
4 01; 02 Выведение из ВЛ 1 съемного пово- ротного поручня 2 00:14 18:24
5 02 Транспортировка съемного поворот- ного поручня к поручню 2411 (п 2411), временная фиксация (ВУ-2313-2314- 2315-2316-2317-2318-2411) 10 00:24 18:34
6 01; 02 Выведение из ВЛ1 моноблока HRC и кабелей (CLB) 8 00:32 18:42
7 01 Выход из С01 3 00:35 18:45
8 01; 02 Транспортировка моноблока HRC к п 2411 (ВУ-2313-2314-2315-2316- 2317-2318-2411) 5 00:40 18:50
Поворот СБ-IV в зону 13
9 01; 02 Транспортировка моноблока HRC, съемного поворотного поручня и CLB к УРМ-Д по IV пл РО бд СМ (пп 2411-2442-2443-УРМД1У) 5 00:45 18:55
10 02 Установка съемного поворотного поручня в посадочное место ВРМ. Фиксация площадки «Якорь» с помощью ФПД 10 00:55 19:05
11 01; 02 Переход на смешанную систему страховки. Вход в площадку «Якорь» 2 00:57 19:07
12 01; 02 Установка моноблока HRC на ДПН 8 01:05 19:15
13 01; 02 Стыковка разъемов (рзм) HRC и ДПН: рзм Х8-ФПД HRC + рзм Х8 ДПН; рзм Х5-ФПД HRC + рзм Х5 ДПН; рзм Х\¥2-ФПД HRC + рзм XW2 ДПН. Контроль ЦУП-М стыковки рзм по телеметрии. Подвязка слабины кабеля (кбл) 7 01:12 19:22
Глава 9. Компоновка зон внекорабельной деятельности
511
Продолжение табл. 9.1
№ Исполни- тель Содержание операции Время выполне- ния опера- ции, мин Текущее время В кд, ч:мин Текущее время вкдсмт; ч:мин
Тень 19:22—19:56 (отдых) 34 01:46 19:56
14 01; 02 Переход на российскую систему страховки. Демонтаж съемного поручня и временная фиксация 5 01:51 20:01
15 01; 02 Переход к антенне РЛС WA4 п 2642 5 01:56 20:06
16 01; 02 Переход к ФП11. Открытие клапана ЭВТИ на ФП11. Переход по трассе кбл от антенны РЛС WA4 к ФП11 (п 2443 - мягкие поручни - 2511-2541-2542- 2512-2647- 2646-2645-2644-2643-2642-2641-2634- 2633-2632-2631-2732) 5 02:01 20:11
17 01; 02 Поиск рзм ХФП11-4 (шк 00015194J) антенны РЛС WA4, рзм ХФП11-4 кбл *310KD-XW24 антенны РЛС WA4, рзм ХФП11-4 кбл *310KD-XW8 наФПН, рзм ХФП11-4 кбл укл MRC2 + рзм ХФП11 -4 на ФП 11. Закрытие рзм ХФП11-4 антенны РЛС WA4 крышкой. Смотка кбл антенны РЛС WA4 в бухту, фиксация бухты проволоч- ными фиксаторами и крепление в фиксатор № 9 (п 2632) на торце АО в районе ФП 11. Фотографирование. Закрытие клапана ЭВТИ на ФП11 20 02:21 20:31
18 01; 02 Переход к моноблоку HRC к УРМ-Д по IV пл РО бд СМ 9 02:30 20:40
19 01 Переход на смешанную систему страховки. Демонтаж защитной крышки объектива HRC 5 02:35 20:45
20 01; 02 Переход на ВУ С01 со съемным поручнем и крышкой HRC. Временная фиксация на ВУ 10 02:45 20:55
512
Часть III. Компоновка систем пилотируемого космического аппарата
Продолжение табл. 9.1
№ Исполни- тель Содержание операции Время выполне- ния опера- ции, мин Текущее время ВКД, ч:мин Текущее время ВКД GM1; ч:мин
Поворот СБ-IV в зону 9
Тень 20:55—21:29 (отдых) 34 03:19 21:29
21 01; 02 Выведение из ВЛ1 моноблока MRC 5 03:24 21:34
22 01; 02 Транспортировка моноблока MRC к пп 2411 (ВУ-2313-2314-2315-2316-2317-2318-2411) 4 03:28 21:38
Поворот СБ-IV в зону 13
23 01; 02 Транспортировка моноблока MRC к УРМ-Д по IV пл РО бд СМ (пп 2411-2442-2443-УРМД1У) 5 03:33 21:43
24 01; 02 Установка моноблока MRC на УРМ-Д 5 03:38 21:48
25 01; 02 Извлечение рзм ХФП19-1, ХФП19-3, ХФП19-6 из лирок MRC. Открытие клапана ЭВТИ ФП19-1 15 03:53 22:03
25 01; 02 Стыковка рзм: рзм ХФП19-1 MRC + рзм ХФП19-1 на ФП19-1 рзм ХФП19-3 MRC + рзм ХФП19-3 кбл укл М RC1 рзм ХФП19-6 MRC + рзм ХФП19-6А кбл укл MRC2. Фотографирование. Закрыть клапан ЭВТИ на ФП19-1. Контроль ЦУП-М стыковки рзм по телеметрии 15 03:53 22:03
26 01; 02 Внешний осмотр скафандров, протирка перчаток полотенцами, отброс полотенец 5 03:58 22:08
27 01; 02 Переход на ВУ С01. Демонтаж защитной крышки с объектива моноблока MRC и фиксация ее на CLB. Контроль ЦУП-М стыковки ВЧ-рзм с использованием БЗУ 10 04:08 22:18
Глава 9. Компоновка зон внекорабельной деятельности
513
Окончание табл. 9.1
№ Исполни- тель Содержание операции Время выполне- ния опера- ции, мин Текущее время ВКД, ч:мин Текущее время вкдомт; ч:мин
Поворот СБ-П в зону 13
28 01; 02 Переход на коническую часть ФГБ с CLB. Переход на смешанную систему страховки. Переход к Ф-образным поручням между I—II пл РО бд СМ. Фотографирование 10 04:18 22:28
01; 02 Переход на ГА ФГБ с помощью лебедки. Переход на ВУ С01 10 04:28 22:38
Тень 22:28—23:02 24 04:52 23:02
29 02 Переход на коническую часть ФГБ с CLB 05 04:57 23:07
30 01 02 Демонтаж адаптера WIF с SSRMS. Переход на ВУ С01. Заведение адаптера WIF. Контроль за действиями 01. Фотографирование. Переход на ВУ С01 :20 05:17 23:27
31 01; 02 Выведение укладки СКК № 2-СО :05 05:22 23:32
Переход СБ-П, СБ-IV в режим сопровождения
32 01; 02 Переход к месту установки СКК № 2-СО с укладкой (пп 3026-3027-3030-3031-3032) 3 05:25 23:35
33 01; 02 Надевание защиты кассеты. Демонтаж СКК № 2-СО. Переход с СКК № 2-СО к ВУ. Заведение СКК № 2-СО в С01 10 05:35 23:45
34 01; 02 Инвентаризация американского инструмента и оборудования, осмотр перчаток СК 3 05:38 23:48
35 01 Вход в СО 1 2 05:40 23:50
36 02 Вход в СО 1 2 05:42 23:52
37 01; 02 Снятие ЗК 2 05:44 23:54
38 02 Закрытие выходного люка ВЛ 1 6 05:50 00:00
Тень 00:00—00:35
514
Часть Ш. Компоновка систем пилотируемого космического аппарата
из стыковочного отсека «Пирс». Обозначения О1 и 02 — это номера, присво-
енные космонавтам во время выполнения ВКД. Зоны проведения работ на
внешней поверхности МКС показаны на рис. 9.1. В зоне I на служебном модуле
СМ «Звезда» выполнялись следующие работы: монтаж камеры высокого раз-
решения (HRC) и камеры среднего разрешения (MRC) на универсальное рабо-
чее место (УРМ-Д) на полуплоскости IV рабочего отсека (РО) большого диа-
метра служебного модуля; проведение фотосъемок электросоединителей
на фиксирующих платах ФП11 и ФП19 модуля. В зоне II на герметичном
Рис. 9.1. Зоны работы при ВКД № 37а:
а — расположение зон работы на внешней поверхности МКС; б — адаптер WIF в гнезде зам-
кового концевого захвата манипулятора SSRMS; в — кассета СКК № 2; г — размещение бло-
ков аппаратуры на универсальном рабочем месте; I, II, III — зоны работы; 1 — адаптер WIF;
2 — модуль «Заря»; 3 — большой диаметр рабочего отсека модуля «Звезда (IV полуплоскость);
4 — универсальное рабочее место; 5 — кассета СКК № 2; 6 — модуль «Пирс»; 7— рабочее
место космонавта; 8 — блок аппаратуры HRC; 9 — блок аппаратуры MRC
Глава 9. Компоновка зон внекорабельной деятельности
515
адаптере модуля ФГБ «Заря» был выполнен демонтаж адаптера узла сопря-
жения с рабочей площадкой (WIF) с SSRMS на ФГБ. В зоне III на стыковоч-
ном отсеке СО1 «Пирс» был проведен демонтаж кассеты СКК № 2-СО [2].
9.2. Скафандры для внекорабельной деятельности
Космический скафандр для ВКД — это комплекс специализированной
одежды и различных устройств для защиты человека от неблагоприятных для
него факторов космического полета и внешней среды. Основными компо-
нентами комплекса являются защитный костюм и автономная система обе-
спечения жизнедеятельности. Космический скафандр для ВКД представляет
собой ПКА в миниатюре [3].
В отличие от индивидуальных систем жизнеобеспечения, предназначен-
ных для внутрикорабельной деятельности, и аварийно-спасательных скафан-
дров, используемых при транспортных операциях, система жизнеобеспечения
скафандра для ВКД предназначена для выполнения длительных работ (6...8 ч).
На рис. 9.2 приведена блок-схема автономной системы жизнеобеспечения
скафандра типа «Орлан» [3].
Современные скафандры выполнены по антропоморфной форме
с ранцевой системой жизнеобеспечения, размещаемой на спине, и органа-
ми управления, размещаемыми спереди. На рис 9.3 и в табл. 9.2 приведены
внешний вид и габаритные размеры спасательных скафандров [4].
Компоновка основных элементов российского скафандра «Орлан-М»
представлена на рис. 9.4 [5]. Скафандр для ВКД, имеющий полужесткую
конструкцию, содержит следующие элементы: верхнюю жесткую часть
с шлемом и пультом управления; люк для входа в скафандр с размещенной
в нем автономной системой жизнеобеспечения; нижнюю мягкую часть обо-
лочки скафандра, включающую нижнюю часть корпуса и ботинки; мягкие
рукава с перчатками; теплозащитный костюм с экранно-вакуумной изоляци-
ей; блок с радиотелеметрической аппаратурой (съемный); костюм водяного
охлаждения; шлемофон; нижнее белье с гигиеническими плавками; пояс
с биомедицинскими датчиками.
Основными требованиями, предъявляемыми к скафандрам, являются
обеспечение подвижности космонавта и удобство при работе. Необходимую
зону обзора при проведении работ обеспечивает изготовленный из прозрач-
ного поликарбоната шлем скафандра, который обладает большой ударной
прочностью. Шлем крепится к скафандру с помощью прижимного защел-
кивающегося кольца, и поэтому он не может поворачиваться относительно
скафандра. Сферическая форма шлема дает космонавту возможность пово-
рачивать голову в любую сторону.
Зоны обзора американского скафандра типа EMU показаны на рис. 9.5 [6,7].
На левой стороне шлема размещен герморазъем, позволяющий космонавту
в скафандре пить или принимать пищу. В затылочной части шлема имеется
516
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 9.2. Блок-схема автономной системы жизнеобеспечения российского ска-
фандра «Орлан» для выхода в открытый космос:
7 — внутренняя полость наспинной части скафандра; 2 — патрон поглощения углекис-
лого газа и вредных примесей; 3 — бак с запасом воды; 4 — баллон с резервным запасом
кислорода; 5 — костюм водяного охлаждения; 6 — пояс с медицинскими датчиками;
7 — предохранительный клапан; 8 — инжектор; 9 — датчик-сигнализатор расхода газа;
10 — радиопереговорное устройство; 77 — скафандр (многослойная оболочка); 12 — сигна-
лизаторы аварийных режимов работы; 13 — манометр для контроля давления в скафандре;
14 — электрический пульт управления и контроля; 75 — пульт управления пневмогид-
росистемами АСОЖ; 16 — ручка включения инжектора и аварийной подачи кислорода;
77 — регулятор давления в скафандре; 18 — переключатель режимов давления в скафан-
дре; 19 — ручка включения резервного запаса кислорода; 20 — клапан регулирования
температуры подаваемой в костюм водяного охлаждения воды и включения подачи воды
в теплообменник; 21 — объединенный разъем коммуникаций; 22 — клапан включения в
работу резервной гермооболочки; 23 — гидроакуумулятор с сепаратором пузырьков газа;
24 — водяной насос; 25 — редуцирующее устройство; 26 — блок электроавтоматики, кон-
троля медицинской аппаратуры; 27 — фильтр-ограничитель расхода; 28 — влагоотдели-
тель; 29 — выход пара в вакуум; 30 — блок редуктора с запорным клапаном; 31 — баллон
с основным запасом кислорода; 32 — автономный источник электропитания; 33 — блоки
радиотелеметрической системы и антенно-фидерное устройство; 34 — теплообменник;
35 — основной и резервный вентиляторы (блоки 32 и 33 при работе систем скафандра по
электрофалу связи с бортом обитаемого объекта могут не устанавливаться)
Глава 9. Компоновка зон внекорабельной деятельности
517
Рис. 9.3. Габаритный чертеж скафандра для ВКД
(1—7) — обозначение размера
Таблица 9.2
Параметры скафандров с индивидуальной системой жизнеобеспечения для ВКД
Параметр Максимальная величина для скафандра Примечание
Space Shuttle «Орлан-ДМА»
Обозначение размеров скафандра (см. рис. 9.3):
1 192 189 Руки опущены
2 85 80 Руки опущены
3 66 68 Руки прижаты
4 51 53 Руки прижаты
5 81 119
6 58 48
7 18 19
Давление в скафандре, Па 29,6 40 Нормальное рабочее
Объем скафандра в сложенном состоянии, м3 0,48 0,37 —
Масса полностью снаряженного скафандра, кг 132 103 Без массы оборудования шлюзовой камеры
518 Часть Ш. Компоновка систем пилотируемого космического аппарата
11 12 13 14
Рис. 9.4. Конструктивная схема скафандра «Орлан»:
/ — батарея; 2 — основной кислородный баллон; 3 — блок телеметрии; 4 — влагосборник;
5 — измерительный комплекс; 6 — теплообменник; 7 — фильтр; 8 — бачок с питающей
водой; 9 — поглотительный патрон; 10— наспинный ранец; // — основной и резервный
вентиляторы; 12 — запасной кислородный баллон; 13 — регуляторы давления скафандра;
14 — кираса; 15 — узел крепления сейфера; 16 — питьевой бачок; 17 — костюм водяно-
го охлаждения; 18 — белье; 19 — основной и резервный насосы; 20 — радиостанция;
21 — нижняя мягкая часть скафандра; 22 — электрический разъем; 23 — страховочный фал;
24 — страховочный фал переменной длины; 25 — объединенный разъем; 26 — электриче-
ский пульт; 27 — манометр; 28 — шлемофон; 29 — светофильтр; 30 — верхний иллюмина-
тор; 31 — светильники; 32 — рукава; 33 — пневмопульт; 34 — узел крепления скафандра;
35 — блок радиотелеметрической аппаратуры; 36 — разъем шланга аварийной подачи
кислорода; 37 — ботинки
прокладка из силиконовой резины, которая обеспечивает космонавту комфорт
во время отдыха, а также в периоды ускорения или торможения космического
корабля. Съемные смотровые щитки задерживают интенсивный видимый свет
и ультрафиолетовое излучение, когда космонавт находится за пределами кос-
мического корабля. Для работы в тени на шлем устанавливаются светильники.
Для обеспечения подвижности (руки, ноги) при высоком давлении
в скафандре (около 40 кПа) он снабжен герметическими подшипниками
и мягкими шарнирами. На рис. 9.6 представлена схема движений, обеспечи-
ваемых в скафандрах для ВКД [4].
Для фиксации скафандра на борту станции в нижней части жесткого
корпуса имеется силовой элемент — шпангоут. Находясь в скафандре, кос-
монавт может работать в ограниченных зонах. На рис. 9.7 приведены форма
и размеры оптимальных рабочих зон ВКД космонавта в скафандре типа
«Орлан» и EMU [6, 7].
Глава 9. Компоновка зон внекорабельной деятельности
519
а
Рис. 9.5. Схема зон обзора (а) шлема космонавта в скафандре (б):
1 — нижняя — 70°; 2 — верхняя — 70°; 3 — верхняя боковая — 62°; 4 — боковая — 85°;
5 — нижняя боковая — 85°
Рис. 9.6. Схема движений, обеспечиваемых в скафандрах для ВКД при полете на ОС
«Салют» («Орлан-Д»), «Мир» («Орлан-ДМА») и Space Shuttle:
/ — плечо; 2 — локоть; 3 — кисть; 4 — пояс; 5 — бедро; 6 — голень; 7 — стопа; а — сгибание-
разгибание; б — отведение—приведение; в — вращение; г — латерально-медиальное движение
(приближение—удаление относительно срединной плоскости)
520 Часть III. Компоновка систем пилотируемого космического аппарата
400 опт
540 макс
470 макс
б
Глава 9. Компоновка зон внекорабельной деятельности
521
9.3. Компоновка шлюзовых камер
Для того чтобы обеспечить выход человека в космическое пространство
и возвращение обратно, не нарушая при этом герметичность всего жилого
объема, компоновка ПКА должна включать специальный отсек — шлюзо-
вую камеру (ШК), выполняющую функцию тамбура. Первая шлюзовая ка-
мера, установленная на борту космического корабля «Восход», имевшая вид
трубы, монтировалась после вывода аппарата в космическое пространство
(см. рис. 5.52). Камера имела люк, отделявший ее полость от гермокабины.
Первые выходы американских астронавтов осуществлялись из разгермети-
зированного ПКА. На орбитальных станциях типа «Салют» в качестве ШК
использовался переходный отсек (см. рис. 4.12).
На ОС Skylab была предусмотрена специальная ШК, компоновка которой
приведена на рис. 9.8 [8]. Существенным недостатком данной компоновки
является то, что она расположена в «проходном» коридоре, соединяющем
Рис. 9.8. Шлюзовая камера ОС Skylab (показаны приборы и контрольные датчики):
1 — трубопровод в орбитальный блок станции; 2 — осветительные лампы и поручни; 3 —
люк для выхода в открытый космос; 4 — хранилище кассет с пленкой для комплекта ATM;
5 — запасное хранилище (съемное); 6 — молекулярное сито; 7 — штепсельная розетка; 8 —
трубопроводы системы вентиляции; 9 — окно; 10 — блок регуляторов состава газовой смеси;
11 — хранилище; 12 — разъемы электрокабелей и трубопроводов кислорода; 13 — телетайп;
14 — разъемы кабеля ТВ камеры; 15 — вспомогательные пульты; 16 — распределительный кла-
пан баллонов со сжатым азотом; 17 — осветительные лампы в туннеле; 18 — крышка люка;
19 — осветительные панели; 20 — пульт управления; 21 — контейнер с бумажной лентой для
телетайпа; 22 — хранилище кассет с пленкой для комплекта ATM
522 Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 9.9. Шлюзовая камера ОС «Мир»
на модуле «Квант»:
1 — средство перемещения космонавтов в космосе;
2 — рабочее место с грузовой стрелой; 3 — выход-
ной люк; 4 — космический скафандр «Орлан-Д»;
5 — устройство для выхода космонавтов в космос;
6 — переходной люк
жилой и стыковочный отсеки.
Для выхода в открытый космос
из такой камеры необходимо за-
крыть два внутренних люка, пе-
рекрыв тем самым путь из жи-
лого отсека к ТКА, что снижает
безопасность полета. В настоя-
щее время все компоновки ШК
выполняются «тупиковыми».
На ОС «Мир» в состав мо-
дуля «Квант-2» входил специа-
лизированный шлюзовой отсек
с люком большого диаметра (око-
ло 1 м), компоновочная схема
которого показана на рис. 9.9.
Большой объем отсека позво-
лил размещать в нем крупнога-
баритное оборудование, в том
числе средство для перемеще-
ния космонавтов [9].
До установки на МКС специализированных ШК выход в космос в рос-
сийских скафандрах осуществлялся через переходной отсек служебного
модуля «Звезда», а в американских — через шлюзовую камеру Space Shuttle,
компоновка которой показана на рис. 9.10 [10].
Рис. 9.10. Компоновка шлюзовой камеры пилотируемого корабля Space Shuttle (а)
и ее схема с габаритными размерами (б):
1 — съемные поручни; 2 — поручни; 3 — дисплеи и контрольные панели; 4 — рычаг привода
открытия выходного люка; 5 — фиксатор для ног; 6 — фонари; 7 — портативные кислород-
ные системы (только на орбите); 8— жидкокристаллические дисплеи и контрольные панели;
9 — уплотнение люка
Глава 9. Компоновка зон внекорабельной деятельности
523
В настоящее время МКС имеет три специализированных шлюзовых мо-
дуля, позволяющих осуществлять выход в открытый космос: стыковочный
отсек «Пирс», малый исследовательский модуль МИ М2 «Поиск» и шлюзовую
камеру «Квест». Стыковочный отсек «Пирс» и модуль «Поиск» близки по
конструкции и имеют двойное назначение. Модуль может использоваться как
шлюзовой отсек для выходов в открытый космос двух членов экипажа и служит
дополнительным портом для стыковки с МКС пилотируемых кораблей типа
«Союз ТМ» и автоматических грузовых кораблей типа «Прогресс М». Кроме
того, он обеспечивает возможность дозаправки баков PC МКС компонентами
топлива, доставляемыми на грузовых транспортных кораблях.
Стыковочный отсек (СО 1) «Пирс», показанный на рис. 9.11 [11], состо-
ит из герметичного корпуса и установленных в нем аппаратуры, служебных
систем и элементов конструкции, обеспечивающих выходы в открытый кос-
мос. В корпусе установлены два кольцевых шпангоута с люками для выхода
в открытый космос, имеющих диаметр в свету 1000 мм. В каждой крышке есть
иллюминатор диаметром в свету 228 мм. Оба люка абсолютно равнозначны,
любой из них можно использовать исходя из того, с какой стороны «Пирса»
удобнее проводить выход членов экипажа в открытый космос. Каждый из
люков рассчитан на 120 открываний. Для удобства работы космонавтов в
Рис. 9.11. Внутренняя компо-
новочная схема ШК стыковоч-
ного отсека «Пирс»:
/ — дренажный клапан; 2 — вы-
ходной люк № 1; 3 — поручни; 4 —
контрольная аппаратура; 5 — внут-
ренняя стойка системы управле-
ния; 6 — зона хранения скафанд-
ров; 7 — расположение членов
экипажа при подготовке к ВКД;
8 — стыковочный узел; 9 — выход-
ной люк № 2
524 Часть III. Компоновка систем пилотируемого космического аппарата
открытом космосе вокруг люков имеются кольцевые поручни внутри и сна-
ружи отсека. Снаружи всех элементов корпуса отсека также установлены
поручни, что облегчает работу членов экипажа во время выходов.
Шлюзовая камера «Квест» (рис. 9.12) [12] представляет собой герметич-
ный модуль, состоящий из двух основных отсеков, состыкованных своими
торцами с помощью соединительной перегородки и люка: отсека экипажа,
через который астронавты выходят из МКС в открытый космос, и отсека
Рис. 9.12. Универсальная шлюзовая камера «Квест»:
а — общий вид (7 — выходной люк (направление в надир); 2 — надир; 3 — правый борт;
4 — отсек экипажа; 5 — отсек оборудования; 6 — емкости хранения газов высокого давления
(кислорода и азота); 7— места хранения инструмента для ВКД); б — размещение оборудования
(7 — рабочее место надевания скафандра; 2 — отсек оборудования; 3 — блок аккумуляторных
батарей; 4 — блок питания; 5 — блок зарядки аккумуляторов скафандров; 6 — блок дозаправки
скафандров водой; 7 — бак с водой; 8 — отсек экипажа; 9 — выходной люк; 10 — блок подачи
воздуха в шланги UIA; 77 — внутренний люк шлюзовой камеры); в — компоновка отсека эки-
пажа (7 — крышка выходного люка; 2 — скафандры EMU; 3 — вентиляционный воздуховод;
4 — блок интерфейсных разъемов UIA; 5 — шланг-кабель); г — компоновка отсека оборудова-
ния (7 — стойка системы управления; 2 — места хранения скафандров «Орлан»)
Глава 9. Компоновка зон внекорабельной деятельности
525
оборудования, где хранятся агрегаты и скафандры для обеспечения ВКД. Там
же расположено оборудование, которое используется в ночь перед выходом в
открытый космос для удаления азота из крови астронавта в процессе сниже-
ния атмосферного давления. Эта процедура позволяет избежать проявления
признаков декомпрессии после возврата космонавта из открытого космоса
и наддува отсека.
Отсек экипажа представляет собой переработанную внешнюю шлюзо-
вую камеру корабля Space Shuttle. Его основные технические характеристи-
ки: высота 2565 мм; внешний диаметр 1996 мм; герметичный объем 4,25 м3.
Он оборудован люком для выхода в открытый космос диаметром 1016 мм,
гермолюком для перехода в отсек оборудования, панелью подключения ин-
терфейсных разъемов, насосом для откачивания атмосферы, пультом управ-
ления шлюзованием. Также отсек оснащен системой освещения, наружными
поручнями и интерфейсными разъемами UIA (Umbilical Interface Assembly)
для подключения систем жизнеобеспечения, расположенными на одной из
стен отсека экипажа и предназначенными для подачи воды, отвода жидких
отходов и подачи кислорода. Разъемы используются, кроме того, для обес-
печения связи и электропитания скафандров, причем могут обслуживать од-
новременно два скафандра (как российских, так и американских).
Отсек оборудования оснащен служебными системами для выполнения
операций по надеванию и снятию скафандров, а также для периодического
проведения работ по их техническому обслуживанию. Его основные техниче-
ские характеристики: длина 2962 мм; внешний диаметр 4445 мм; герметичный
объем 29,75 м3. Отсек оборудован люком для перехода в отсек оборудования
и люком для перехода в МКС, двумя стандартными стойками со служебными
системами, аппаратурой для обслуживания скафандров и отладки оборудова-
ния для ВКД, насосом для откачивания атмосферы, панелью подключения
интерфейсных разъемов. В отсеке также расположены устройства для поддер-
жания в нем атмосферы, аккумуляторные батареи, система электропитания
и другие системы, обеспечивающие жизнедеятельность.
Как видно из приведенных выше вариантов ШК, разработанных для
различных космических кораблей и орбитальных станций, это сложная тех-
ническая система. В шлюзовой камере космонавт готовится к выходу в от-
крытый космос и надевает скафандр. Установленное в камере оборудование
не должно иметь выступающих углов и острых кромок, которые могут по-
вредить скафандр. Если таковые имеются, то они должны иметь ограждения.
Токопроводящие кабели должны быть защищены от возгорания, поскольку
в шлюзовой камере кислородная атмосфера. Следует обратить особое вни-
мание на проектирование тоннеля, предназначенного для выхода из камеры
в открытый космос. Для ВКД космонавтам понадобятся инструменты, аппа-
ратура и прочее снаряжение, поэтому диаметр и люка, и выходного тоннеля
должен обеспечить беспрепятственный выход как с грузом, так и без него.
На рис. 9.13. приведена схема транспортировки груза в тоннеле, диаметр
которого (в свету) [6] определяется выражением
D = (Т + М)п + Sn + С,
526
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 9.13. Схема выхода космонавта в открытый космос через тоннель с грузом:
а — план перемещения грузов в шлюзовой камере; б — две шлюзовые камеры различного
диаметра; в — два груза различных размеров и формы; D — диаметр тоннеля в свету; D] —
минимальный диаметр; D2 — максимальный диаметр; С{ — зазор между двумя космонавтами,
одновременно транспортирующими груз в тоннеле; С2, С3 — минимально и максимально допус-
тимый зазор между грузом и стенкой тоннеля соответственно, выбираемый исходя из формы
и размеров сечения тоннеля (круглый, квадратный) и конфигурации транспортируемых грузов
Глава 9. Компоновка зон внекорабельной деятельности 527
где Т — размер пристеночной зоны безопасности; М — поперечный размер
космонавта в скафандре с руками, сложенными на груди; п — численность
космонавтов с грузом, одновременно находящихся в тоннеле; S — макси-
мальный размер транспортируемого груза; С — гарантированный зазор между
грузом и стенкой.
Узкий проход может создать трудности при транспортировке грузов, что
снижает производительность. Длина тоннеля, имеющего два выхода, должна
быть не более чем в 2 раза больше минимальной длины космонавта в ска-
фандре. Длина тоннеля, имеющего один выход, должна быть больше этой
минимальной длины.
Люки (двери), отделяющие объем шлюзовой камеры от внутреннего объ-
ема космического корабля и открытого космоса, должны иметь шарнирный
подвес, что облегчит герметизацию люка (двери) при закрытии. Люки шлю-
зовой камеры должны иметь запирающее устройство, позволяющее открывать
и закрывать их с двух сторон. Максимальное усилие на открытие/закрытие
люка должно быть не более 200 Н. Диаметр люка должен обеспечивать работу
при ВКД как вне шлюзовой камеры, так и внутри нее. Около люка на внеш-
ней стороне ШК необходимо установить поручни, облегчающие космонавту
вход и выход. Тепловая защита люка ШК не должна создавать трудности при
входе и выходе из камеры.
Процедура выхода в ОКП имеет ряд особенностей. Прежде всего, это
связано с различием параметров атмосферы в герметичных отсеках и скафан-
драх. Если в герметичных отсеках ПКА поддерживаются давление примерно
101,3 кПа/l атм и такое же соотношение азота и кислорода, как на Земле,
то в скафандрах необходимо обеспечить пониженное давление, которое,
с одной стороны, обеспечивает подвижность их мягких частей, а с другой —
не наносит вреда здоровью человека. Поэтому в скафандрах поддерживается
«чисто» кислородная атмосфера с давлением 40,5 кПа/0,4 атм. При более
высоких давлениях скафандры становятся жесткими, и в них трудно работать
в течение длительного времени. В случае быстрого перехода от кислородно-
азотной атмосферы с давлением 30,4/0,3...40,5/0,4 кПа/l атм растворенный
в крови человека азот может перейти в газообразную фазу, вызвав смертельно
опасную декомпрессию. Поэтому процедура понижения давления и измене-
ния состава атмосферы проводится достаточно медленно. Перед шлюзованием
выполняется десатурация — вымывание азота из крови человека посредством
вдыхания чистого кислорода при нормальном давлении. В скафандре посте-
пенно создается «чисто» кислородная атмосфера с одновременным снижением
давления. Рабочее давление в российских скафандрах «Орлан-М» выше, чем в
американских, поэтому на десатурацию требуется меньше времени (методика
шлюзования предусматривает десатурацию непосредственно в скафандрах
«Орлан-М»). Космонавт в герметизированном скафандре в течение 30 мин
дышит чистым кислородом при давлении 101,3 кПа/l атм, затем в течение
примерно 1 ч давление в скафандре снижается до 40,5 кПа/0,4 атм.
Несколько сложнее американская практика процедуры шлюзования. На
МТКА серии Space Shuttle за сутки до выхода снижается давление в кабине
корабля до 40,5 кПа/0,4 атм. Перед облачением в скафандры астронавты
528
Часть III. Компоновка систем пилотируемого космического аппарата
в течение 1 ч дышат чистым кислородом через кислородные маски. Затем
астронавты герметизируют скафандры и в течение 40 мин понижают давление
в них до 30,4 кПа/0,3 атм. Если проводить шлюзование по российской мето-
дике — только за счет герметичности скафандров, без понижения давления
в кабине и без вдыхания кислорода, то десатурация и шлюзование займут
около 4 ч. При снижении давления за 12 ч до выхода в ОКП и часовом вдыха-
нии кислорода время на десатурацию в скафандрах занимает немногим более
1 ч. Если же давление в кабине снизить за 1,5 сут до выхода, то кислородные
маски можно вообще не использовать, а время десатурации в скафандрах
составит около 40 мин.
Кроме шлюзовых отсеков, предназначенных для выхода космонавтов,
в компоновку ПКА также могут входить малые ШК, предназначенные для
перемещения оборудования и материалов за пределы герметичного контура.
Малые ШК могут быть встроены в конструкцию модуля, как, например, ШК
на ОС «Алмаз» (см. рис. 4.11) для капсул сброса информации или ШК на
японском модуле МКС [13]. Технические характеристики шлюзовой камеры
модуля JEM Airlock японского модуля Kibo приведены ниже.
Диаметр, м:
внешняя сторона.......................... 1,7
внутренняя сторона (внутри модуля РМ) ..... 1,4
Длина, м..................................... 2,0
Давление в герметизированном модуле, гПа ... 1047
Допустимые размеры перемещаемого груза, м ... 0,64 х 0,84 х 0,80
Допустимая масса перемещаемого груза, кг .... 300
Энергопотребление, Вт........................ 600
Габариты зоны размещения полезного груза ШК [ 13] показаны на рис. 9.14.
Научная аппаратура размещается на подвижном столе, который после разгер-
метизации камеры выдвигается за пределы модуля, как показано на рис. 9.15
[13]. Таким образом, с борта МКС могут быть запущены, например, малые КА.
а б в
Рис. 9.14. Зона размещения полезного груза ШК Kibo
(размеры в мм):
а — вид сверху; б — вид сбоку; в — вид с торца
Малая ШК может пристыковываться в виде отдельного модуля, так же
как ШК, устанавливаемая на лабораторном модуле МЛМ «Наука» PC МКС
(рис. 9.16) [14]. Параметры ШК, которая позволяет извлекать из станции
полезные нагрузки значительных габаритов и массы, приведены ниже.
Глава 9. Компоновка зон внекорабельной деятельности
529
в
Рис. 9.15. Компоновка ШК Kibo:
а — перемещение груза в ШК; б - ШКс размещенным в ней грузом; в — механизм
установки грузов из ШК на платформу EF
Рис. 9.16. Перспективная автоматизированная ШК для проведения эксперимен-
тов, установленная на модуле PC МЛМ «Наука»:
1 — агрегат внешней крышки; 2 — пассивное устройство фиксации; 3 — поручни; 4 — таке-
лажный элемент FRGF; 5— стыковочный пассивный модифицированный агрегат; 6— корпус;
7— площадка оператора; 8 — опоры; 9 — агрегат перемещения полезного груза
530
Часть III. Компоновка систем пилотируемого космического аппарата
Масса шлюзовой камеры, кг.............................. До 1050
Максимальная потребляемая
мощность с полезной нагрузкой, кВт .................. 1,5
Объем по газу, м3 ................................... 2,1
Максимальная масса полезной нагрузки
на агрегате перемещения полезного груза, кг ......... 150
Максимальные габариты полезной нагрузки, мм ......... 1200 х 500 х 500
Допустимое внутреннее давление, кг/см2............... 1,3
Остаточное давление при вакуумировании, мм рт. ст. . 10-4
Автоматизированная шлюзовая камера предназначена для проведения
следующих операций:
• извлечения полезных грузов из гермоадаптера МЛМ и размещения их
на внешней поверхности станции;
• приема полезных грузов от манипулятора ERA и перемещения их во
внутренний объем шлюзовой камеры и далее в головной отсек МЛМ;
• для проведения научных экспериментов во внутреннем объеме шлю-
зовой камеры;
• для проведения научных экспериментов снаружи шлюзовой камеры на
выдвинутом столе и на специально организованном месте.
9.4. Средства для работы человека в открытом космосе
9.4.7. Средства перемещения и фиксации при внекорабельной
деятельности
Работы, проводимые на внешней поверхности ПКА при ВКД, часто быва-
ют связаны с перемещением крупногабаритных блоков и конструкций. Боль-
шое значение имеет расположение членов экипажа, а также размещение мон-
тируемых блоков и инструментов во время проведения работ. Безопасность
этих работ обеспечивается комплексом унифицированных мероприятий.
Космонавт во время проведения работ при ВКД не должен повреждать
элементы конструкции и установленные на поверхности станции приборы и
агрегаты. С этой целью на стадии проектирования эти элементы размещаются
в тех определенных зонах, где космонавты не работают. Схема размещения ра-
бочих зон безопасности во время ВКД приведена на рис. 9.17 [15]. В процессе
ВКД необходимо обеспечить космонавту в зоне безопасности возможность
свободно перемещаться в условиях невесомости, фиксируя свое положение,
а во время работы — жестко закрепляться.
При перемещении по внешней поверхности ПКА космонавты должны
пользоваться поручнями, закрепленными на поверхности МКС. Конструк-
тивно поручни могут быть выполнены жесткими или мягкими. Жесткие
имеют прямоугольное или овальное сечение, как показано на рис. 9.18 [6, 7].
Для обеспечения надежного захвата поручня рукой в перчатке скафандра, он
должен размещаться на расстоянии около 60 мм от поверхности.
Рис. 9.17. Схема размещения рабочих зон безопасности при проведении ВКД на ФГБ (/); ПхО СМ (2); РО1 СМ (5);
на конической части СМ (4)\ в агрегатном отсеке СМ (5); РО2 СМ (6); СО1 (7)
532
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 9.18. Форма и сечение скобы (размеры в см) для фиксации
космонавта при ВКД:
а — сечение скобы; б — форма скобы, отношение L/W в интервале
1,66-3,0, оптимальное — 2,00, радиус скругления R = 0,5 W; в — поручень
прямоугольного сечения; г — поручень овального сечения
Глава 9. Компоновка зон внекорабельной деятельности
533
Поручни могут быть расположены либо непрерывно по всей длине
предполагаемого пути перемещения, либо секциями. По конструктивному
исполнению поручни могут быть ориентированы как вдоль, так и поперек
пути перемещения (рис. 9.19). Поручни-скобы могут быть утопленные или
выступающие. Утопленные скобы более удобны при транспортировке гру-
зов. Пример компоновки системы поручней на внешней поверхности PC
МКС показан на рис. 9.20 [16, 17]. Поручни пронумерованы для удобства
ориентации и выбора маршрута движения, на них часто устанавливается
научная аппаратура, имеющая небольшие габариты и массу.
а б
Рис. 9.19. Поручни-фиксаторы — параллельные (а) и поперечные (б) скобы
Мягкие поручни-леера изменяемой длины применяются для соединения
участков трассы поручней, имеющих расстояние более 680 мм. Леер состоит
из двух карабинов и двух фалов различной длины.
Большое значение имеет система страховки космонавта во время ВКД.
В российской системе страховки используются два страховочных фала
(у скафандра «Орлан-ДМА» длина фала 0,7...1,0 м) с карабинами для фик-
сации космонавта в скафандре к поручням. При перемещении космонавта
по поверхности станции один из карабинов должен быть обязательно при-
стегнут. При отстыковке одного из фалов космонавт дополнительно страхует
себя, держась за поручень рукой.
Для расширения локальной зоны ВКД без перецепки одного из страхо-
вочных фалов скафандра «Орлан» применяется страховочный фал переменной
длины. Он состоит из двух карабинов, соединенных между собой специально
сконструированным леером.
На рис. 9.21 приведен страховочный фал, который, удлиняясь и укорачи-
ваясь автоматически, позволяет космонавту перемещаться в пределах рабочей
зоны, но исключает его несанкционированное отделение от обслуживаемого
объекта [18].
Устройство имеет страховочный фал 1 с гильзами 3 на концах, перпен-
дикулярно осям которых в сквозные отверстия вставлены пальцы 4. К ним
петлями присоединены концы страховочного фала 7, помещенного внутрь
a
б
Рис. 9.20. Компоновка системы поручней на внешней поверхности PC МКС (поручни отмечены номером с префиксом «п»):
а — зона ПхО CM СО1; б — зона СО1 ПхО CM РО1 СМ; в — зона РО1 СМ; г — зона МЛМ
536 Часть III. Компоновка систем пилотируемого космического аппарата
пружины растяжения 2 с концевыми витками, размещенными между витками
резьбы на гильзах 3 и зафиксированными накидными гайками 5. На пружи-
ну растяжения 2 и накидные гайки 5 надет чехол из мягкого материала 6,
концы которого защемлены обоймами 7 с помощью нажимных гаек 8. Во
внутреннюю резьбу гильзы 3 ввернуты элементы для прикрепления объектов
страховки 9 (серьги, крюки, резьбовые стержни, карабины и пр.).
3 8 7 5 4 2 6 1
1 6 2 5 7 4 3 8 9
Рис. 9.21. Страховочный фал переменной длины PC МКС
Страховочное устройство используется следующим образом. Один конец
страховочного устройства посредством элемента 9 закрепляется на объекте
страховки, например на космонавте или блоке оборудования. Другой конец
крепится к элементу конструкции, например к поручню на внешней поверх-
ности КА. При перемещении космонавта от точки закрепления страховочный
фал 7, пружина растяжения 2 и чехол 6 растягиваются. При возвращении
космонавта к точке крепления страховочное устройство сокращается до пер-
воначального состояния без каких-либо специальных действий космонавта,
не образуя излишней длины и слабины, располагаясь по прямой линии без
петель, узлов, зацепов за внешние элементы конструкции, во избежание
создания помех в зоне работ.
При работе в открытом космосе на МКС космонавту приходится исполь-
зовать инструменты российского и американского производства. Для удобства
работы разработан специальный адаптер фала скафандра «Орлан» — адаптер
ОТА, в который входят элементы, расширяющие возможности скафандра:
петли страховочного фала, посадочное место для крепления американского
фала фиксатора туловища и универсального страховочного фала.
Универсальный страховочный фал (MUT) и фал фиксации туловища
(BRT) разработаны для высвобождения рук и повышения устойчивости кос-
монавта во время работы на рабочей площадке. Фалы могут быть использо-
ваны для переноса инструментов при смене рабочего места.
Американский страховочный фал (лебедка) позволяет космонавту пере-
мещаться в широком диапазоне углов, оставаясь пристегнутым к конструкции
МКС. Фал состоит из катушки страховочного фала, разгрузочного фала и узла
карабина космонавта. Разгрузочный фал представляет собой страховочную
ленту, которая при нагрузке, превышающей 33,5 кг, начинает разрываться.
Максимальная нагрузка на растяжение ограничивается 45 кг.
Глава 9. Компоновка зон внекорабельной деятельности
537
Карабины страховочных фалов выполняются таким образом, чтобы
их невозможно было случайно открыть. Пример конструкции карабинов,
использованных при ВКД на МТКА Space Shuttle и АС МКС, показан на
рис. 9.22 [6]. У карабинов есть замок, который действует при одновремен-
ном нажатии двух кнопок, расположенных на противоположных сторонах
карабина. Карабины имеют разные размеры: большой крепится к модулю,
маленький — к скафандру космонавта. Кроме того, к скафандру могут быть
пристегнуты две привязи.
Рис. 9.22. Карабины страховочных фалов, использованных при ВКД на МТКА
Space Shuttle (размеры в см)
При проектировании устройств для фиксации космонавта во время ВКД
следует обеспечивать их соответствие следующим требованиям:
• гарантированное восприятие реакций на усилия, развиваемые космо-
навтом;
• минимум времени срабатывания устройства и минимальное количество
манипуляций, проводимых космонавтом при фиксации;
Рис. 9.23. Привязь с изменяемой жесткостью:
1 — механизм крепления к поручню; 2 — набор
сферических шарниров; 3 — узел крепления полез-
ной нагрузки (скафандра); 4 — привод стягивания
сферических шарниров; 5 — интерфейс ЕСОМ для
соединения с другими привязями; 6 — привод бло-
кировки механизма крепления
538
Часть III. Компоновка систем пилотируемого космического аппарата
• максимальная подвижность космонавта и максимальная производитель-
ность труда при выполнении операций;
• исключение самопроизвольной расфиксации.
Для фиксации космонавта к поручню во время работы на АС МКС может
использоваться привязь, имеющая достаточную длину для его свободного
перемещения в пространстве. Возможны два варианта конструктивного ис-
полнения привязи. Первый — привязь представляет собой трос, составлен-
ный из набора сферических шарниров (рис. 9.23) [10]. В ее состав входит
закрепленное на скафандре устройство, позволяющее за счет усилия, прила-
гаемого вдоль троса, делать эту привязь жесткой, фиксирующей космонавта
в рабочем положении, или мягкой, позволяющей ему перемещаться. Второй —
привязь длиной около 90 см, изготовленная из термостойкой ткани Nomex
(рис. 9.24) [6]. Ее техническая характеристика: масса 0,42 кг; максималь-
ная нагрузка на растяжение 34 кг; предельная эксплуатационная нагрузка
265 кг; прочность на разрыв 635 кг. Недостатком каждого из вариантов явля-
ется отсутствие автоматической установки необходимой длины привязи для
перемещения в рабочей зоне.
Для того чтобы исключить безопорное состояние при работе, исполь-
зуются средства фиксации ботинок скафандра. На PC МКС применяется
устройство «Якорь», показанное на рис. 9.25 [17, 19], которое позволяет кос-
монавту принять наклонную рабочую позу, благодаря чему размеры рабочей
зоны увеличиваются до 300 % и обе его руки высвобождаются для более
продуктивной деятельности [10].
Аналогичное устройство крепления ботинок скафандра (рис. 9.26)
используется для фиксации космонавтов на манипуляторе SSRMS [10].
Устройство представляет собой платформу с пассивным стыковочным агре-
гатом манипулятора, установленную на кардановой опоре, позволяющей
изменять ориентацию по крену и дифференту. Масса платформы — 3,8 кг,
допустимая нагрузка — до 450 Н в любом направлении. На платформе раз-
мещены узлы фиксации ботинок, а также штанга с поручнями и ящиком для
инструментов. Размеры устройства для крепления показаны на рис. 9.27 [6].
Глава 9. Компоновка зон внекорабельной деятельности
539
Рис. 9.25. Устройство фиксации «Якорь» и его зоны досягаемости:
а — общий вид; б — схема перемещений для фиксации ступней; в — схема деформации бо-
тинка; г — дополнительные поручни фиксации; д,е — максимальная и оптимальная соответ-
ственно рабочие зоны в скафандре; 7 — кронштейн крепления пятки; 2 — скоба; 3 — ботинок
скафандра до деформации; 4 — ботинок скафандра, прижатый скобой; 5 — максимальная
зона досягаемости; 6 — оптимальная зона досягаемости
63,50
52,07
Рис. 9.26. Устройство MFR (Manipulator Foot Restrain) фиксации космонавта на манипу-
ляторе (размеры в см):
1 — регулировка штанги по рысканию; 2 — регулировка вращения штанги; 3 — регулировка
наклона штанги; 4 — регулировка опор ботинок по рысканию
540
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 9.27. Устройство крепления ботинок скафандра EMI АС МКС (размеры в см):
1 — кронштейн крепления пятки; 2 — фиксирующий кант на каблуке; 3 — скоба
9.4.2. Установки для маневрирования космонавта
Создание больших орбитальных станций и межпланетных пилотируемых
кораблей предполагает возможность автономных передвижений космонавтов
при ВКД для проведения:
1) спасательных операций:
• спасение экипажа, покинувшего станцию;
• обеспечение транспортировки экипажа из терпящей (терпящего)
бедствие станции (корабля);
• возвращение ценного оборудования;
• возвращение второго, неисправного УМ К;
2) транспортные операции:
• транспортировка оборудования в зоны, недоступные манипулятору;
• быстрое перемещение космонавта из удаленной точки в ШК (по
медицинским показаниям);
3) операции по осмотру станции:
• инспекция космических объектов;
• внешний контроль за срабатыванием систем станции или соедине-
ниями отдельных элементов;
• внешний осмотр малодоступных мест станции;
4) ремонтно-сборочные операции:
• монтаж крупногабаритных конструкций (поддержка, выравнивание,
соединение);
• дублирование отказавшего манипулятора;
• ремонт или замена элементов в труднодоступных местах станции;
• ремонт и замена оборудования других космических объектов.
Глава 9. Компоновка зон внекорабельной деятельности
541
Все эти операции повышают эффективность использования космической
станции и снижают стоимость ее эксплуатации. Поэтому в составе средств
ВКД используются установки для перемещения и маневрирования космо-
навтов (УПМК), представляющие собой интегрированный со скафандром
двигательный модуль.
На ОС «Мир» прошла испытания УПМК 21 КС, выполненная в виде
ранца, охватывающего скафандр космонавта с двух сторон [20]. УПМК 21 КС
имеет те же самые обеспечивающие работу космонавта подсистемы, что и
космический корабль (рис. 9.28).
Подсистема электропитания, состоящая из двух серебряно-цинковых ак-
кумуляторов, коммутационной аппаратуры и системы защиты, обеспечивает
электропитанием все системы установки. При отказе системы электроснаб-
жения скафандра подсистема электропитания УПМК обеспечивает системы
скафандра. Напряжение электропитания 27 ± 7В, емкость основного акку-
мулятора 18,0 А-ч, резервного — 8,5 А-ч.
Рис. 9.28. Конструктивная схема УПМК 21 КС «Мир»:
/ — блок двигателей (4 шт.); 2 — баллон со сжатым воздухом (2 шт.); 3 — аккумулятор резервный;
4 — блок коммутации; 5 — навигационные огни (4 шт.); 6 — блок управления; 7 — основной
аккумулятор; 8— пульт управления вращением; 9— пульт управления перемещением; 10— шпан-
гоут; 11 — блок датчиков угловых скоростей; 12 — агрегаты подсистем исполнительных органов
542
Часть III. Компоновка систем пилотируемого космического аппарата
Система исполнительных органов УПМК состоит из двух одинаковых
полукомплектов, каждый из которых включает в себя баллон (топливный
бак) с вентилем, обратный клапан, электроклапан, редуктор, 16 двигателей
с тягой по 5,0 Н каждый, предохранительный клапан, датчики и сигнализато-
ры давления. Каждый баллон заполнен 28 л воздуха под давлением 32 МПа,
которое понижается редуктором до давления 1,25 МПа, необходимого для
работы двигателей. При функционировании подсистемы сначала включается
первый полукомплект, а после расходования воздуха из его баллона и падения
давления до 11,0 МПа запускается второй путем подачи команды на механизм
открытия электроклапана. Оставшийся в первом баллоне газ необходим для
обеспечения возвращения космонавта на корабль.
Двигательная установка состоит из 32 двигателей, размещенных в че-
тырех блоках, установленных на ранце таким образом, чтобы, во-первых,
при создании линейных перемещений равнодействующая тяг включаемых
двигателей проходила через центр масс системы «УПМК — космонавт в ска-
фандре»; во-вторых, вращения осуществлялись парами сил, действующими
в плоскостях, перпендикулярных осям координат.
УПМК крепится элементами фиксации, расположенными на скафан-
дре спереди. В передней части УПМК на двух шарнирах крепится жесткий
пояс — шпангоут (рис. 9.29) [19]. На нем расположены узлы крепления ска-
фандра к установке: центральный замок, два боковых штыря и узлы крепления
Рис. 9.29. Схема УПМК орбитальной станции
«Мир»:
а — вид сбоку; б — вид сверху; в — ответные части
скафандра для закрепления в УПМК; г — последо-
вательность входа в УПМК; / — корпус; 2 — сило-
вой шпангоут; 3 — поворотные штанги; 4 — пульты
управления; 5 — меньшая часть силового шпан-
гоута; 6 — большая часть силового шпангоута;
7 — быстроразъемный замок; 8 — центральный
замок крепления скафандра; 9, 10 — боковые штыри
для крепления скафандра в УПМК; 11 — ответная
часть центрального замка; 12 — опора
Глава 9. Компоновка зон внекорабельной деятельности
543
двух поворотных телескопических штанг, на которых размещены два пульта:
левый — с ручками управления линейными перемещениями и правый —
для управления вращением. Поворотные штанги обеспечивают два положе-
ния: рабочее — при пилотировании и транспортное — при хранении. Длину
штанг можно регулировать в зависимости от антропометрических размеров
космонавта.
На МТКА Space Shuttle использовалась УПМК MMU (Manned Maneu-
vering Unit) (рис. 9.30), которая представляет собой автономную ранцевую
систему, снабженную двигателями. Она позволяет космонавту во время ВКД
удаляться на безопасное расстояние от корабля [4].
УПМК является модульной конструкцией. Для ее размещения и обслу-
живания используется специальная платформа в грузовом отсеке МТКА,
которая содержит все необходимое для надевания, снятия и профилактики
устройства. Управлять УПМК можно с помощью рукояток, расположенных
на концах двух поворотных штанг. Левой рукояткой регулируется поступатель-
ное движение УПМК: вперед-назад, вверх-вниз, вправо-влево; правой —
вращательное: влево—вправо, тангаж вверх—вниз, курс влево—влево. Для
обеспечения надежности работы все системы УПМК дублируются. Силовая
установка состоит из четырех блоков, по три двигателя в блоках, распо-
ложенных на углах УПМК, один двигатель развивает тягу, равную 7,56 Н.
В качестве рабочего тела используется азот, хранящийся под давлением
20,7 МПа в двух баках, каждый из которых содержит по 5,9 кг рабочего тела.
Максимальная скорость УМК составляла 20,12 м/с при полезной нагрузке
200 кг (космонавт в скафандре). Масса конструкции УПМК — 154,22 кг.
На МТКА Space Shuttle шесть астронавтов применяли УПМК MMU в
ходе девяти выходов в открытый космос. На орбитальной станции «Мир» два
космонавта провели два полета на УПМК 21 КС. Максимальное удаление от
КА составило 96 м при скорости полета 15,84 м/с, время полета — 1 ч 22 мин
(астронавт — Б. Маккэндлис, полет — 41 -В Shuttle). Космонавт А.С. Вик-
торенко во время полета удалился со скоростью 21 м/с на 45 м от станции
«Мир». Полет продолжался 1 ч 33 мин.
Для обеспечения безопасности проведения ВКД для PC МКС разраба-
тывается устройство самоспасения космонавта (УСК) в случае его удаления
от станции при нештатной ситуации. УСК обеспечивает автоматическую
стабилизацию пространственного положения космонавта в случае потери
им контакта со станцией, а также возможность маневрировать в безопорном
пространстве. Установка «Сейфер» представляет собой упрощенный вариант
УПМК. Устройство спасения космонавта состоит из системы исполнительных
органов (газоструйных микродвигателей, емкости с запасом газа и трубопро-
водов), системы управления движением (блоков управления стабилизаци-
ей, перемещением, ориентацией и датчиков угловых перемещений), пульта
управления (рис. 9.31) [5].
Масса космонавта с УСК составляет 255 кг, из которых 200 кг — масса пол-
ностью снаряженного скафандра и 55 кг масса УСК. Моменты инерции системы
«УСК — скафандр — космонавт» относительно центральных осей (см. рис. 2.7)
примерно равны: Jx = 4,7 кгс-м-с2; Jy =1,4 кгс-м-с2, Jz = 4,1 кгс-м-с2. Изменения
544
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 9.30. Компоновка УПМК MMU
(размеры в см):
а — общий вид УПМК (MMU); б, в — проекции
УПМК MMU: 1 — выдача сигнала включения
двигателей (2 шт.); 2 — батарея (2 шт.); 3 — вы-
ключатель сигнального освещения; 4 — двигатели
(24 шт.); 5 — зарядный клапан для рабочего тела;
6 — баки с рабочим телом (2 шт.); 7 — точки
крепления вспомогательной аппаратуры (по 3
с каждой стороны); 8 — перезарядка топлива,
быстросъемный шланг; 9 — точки крепления
наземного вспомогательного оборудования;
10 — шарнир и замок поручня (2 шт.); 11 — под-
соединение источника питания; 12— сигнальные
огни (3 шт.); 13 — рычаг регулировки угла накло-
на поручня (2 шт.); 14 — измеритель давления
рабочего тела (2 шт.); 15 — выключатель основ-
ного источника питания (2 шт.); 16 — кольцо
расцепки УМК/ранец (2 шт.); 17 — замок ремня
скафандра (2 шт.); 18 — контактная кнопка
ранца скафандра (4 шт.); 19 — замок для убор-
ки поручня на каркасе; 20 — прерыватели цепи
(8 шт.); 21 — регулируемый поручень (2 шт.); 22 —
ручка управления вращением; 23 — выключа-
тель отсечного клапана; 24 — боковые опоры
для корпуса (2 шт.); 25 — выключатели внешне-
го источника питания; 26 — ручка управления
поступательным движением; 27 — выключатели
питания гироскопа и режима управления; 28 —
рычаг регулировки длины поручня (2 шт.)
Глава 9. Компоновка зон внекорабельной деятельности
545
Рис. 9.31. Компоновка УСК «Сейфер» на скафандре «Орлан-М»:
/ — пульт ручного управления в положении хранения; 2 — пульт в рабочем положении;
3 — УСК до установки на скафандр; 4 — элементы крепления УСК/скафандр
моментов инерции для космонавтов различной комплекции составляют
±10 %. В качестве исполнительных двигателей используются газоструйные
микродвигатели с тягой в вакууме равной 0,3...0,5 кгс. Они обеспечивают сум-
марное приращение скорости не менее 3,6 м/с, линейное ускорение в пределах
0,03...0,06 м/с2 и угловое ускорение 5... 10 град/с2. Расчетная продолжительность
самоспасения — не более 20 мин.
9.4.3. Телескопическая грузовая стрела
Для переноса грузов, а также для перемещения космонавтов по поверх-
ности МКС при проведении ВКД на внешней поверхности размещена те-
лескопическая грузовая стрела (ГСт) (рис. 9.32). Она состоит из поста опе-
ратора с площадкой «Якорь» и двумя ручными приводами (на рис. 9.32, в
показан вариант ГСтМ с электрическим приводом), балки с приводом и
леером, страховочно-транспортировочного устройства (СТУ) и устройства
захвата [14]. Балка представляет собой телескопическую конструкцию из
трубчатых звеньев, ее длина может изменяться в пределах 1,5... 15 м. Вдоль
балки проложен гибкий леер, прикрепленный к каждому из звеньев, кото-
рый служит для перемещения космонавта вдоль стрелы. Одновременно он
является средством страховки в случае поломки любого из звеньев балки.
Предусмотрены три варианта возвращения космонавта, находящегося на
стреле: складывание стрелы с помощью привода, передвижение вдоль стрелы
с использованием СТУ и перемещение вдоль стрелы с применением леера.
В табл. 9.3 приведены параметры двух модификаций стрелы [21], на рис. 9.33
показана конструктивная схема ГСт, а на рис. 9.34 представлены зоны МКС,
которые можно обслуживать с помощью стрелы [22].
546
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 9.32, л, б (начало). Телескопическая грузовая стрела ГСт:
а — общий вид; б — степени свободы
Глава 9. Компоновка зон внекорабельной деятельности
547
Пульт управления
Электромеханический привод
Кабель элекропитания
в
Рис. 9.32, в (окончание). Телескопическая грузовая стрела ГСт:
в — положение космонавта при работе с грузовой стрелой
Электромеханический привод
выдвижения стрелы « я
Электромеханический привод
подъема и опускания стрелы
Рабочая зона правой руки «Орлана»
Таблица 9.3
Параметры грузовой стрелы
Моди- фикация грузовой стрелы Грузо- подъем- ность, кг Степень автоматизации Дополни- тельные аксессуары Примечание
Тангаж, рыскание Крен Выдвиже- ние, втягивание
ГСт 800 Редуктор с ручным приводом Ручное вращение любого звена Переме- щение каждого звена за рукоятку Два такелаж- ных узла, два якоря Якорь оригиналь- ной конструк- ции
ГСтМ 3000 Редуктор с ручным приводом Ручное вращение только конечного звена с такелаж- ным узлом Редуктор с ручным приводом Пост оператора с якорем, СТУ, мобильное звено «Гусек» Якорь российско- американ- ской разработки
Рис. 9.33. Конструктивная схема телескопической стрелы:
а — общий вид стрелы; б — схема тросовой системы удлинения телескопической балки; 1 — рукоятка разворота площадки
13 вокруг оси 72; 2 — редуктор; 3 — рукоятка разворота стрелы относительно оси 4\ 4 — ось подвижной балки; 5 — ре-
дуктор; 6 — узел выдвижения; 7 — балка; 8 — рукоятка фиксации груза; 9 — механизм крепления груза; 10 — рукоятка
запорного диска; 11 — неподвижное звено; 12 — ось опоры; 13 — поворотная площадка; 14 — неподвижная опора; 75 —
установочный замок; 16 — винт замка; 17 — зажим замка; 18 — стойка; 19 — ограничитель движения пятки оператора;
20 — скоба крепления носка обуви оператора; 27 — подшипники; 22 — барабан складывания; 23 — ось барабана выдви-
жения; 24 — трос складывания; 26 — узлы крепления троса; 27 — пружинный компенсатор; 28 — подвижные звенья;
29 — роликовые опоры; 30 — рукоятка привода выдвижения; 31 — барабан; 32 — трос выдвижения
Глава 9. Компоновка зон внекорабельной деятельности
549
Рис. 9.34. Зоны досягаемости грузовой стрелы, установленной на модуле «Пирс»
(CO-1) PC МКС
9.4.4. Переносное рабочее место и инструменты
Переносное рабочее место (ПРМ) — это комплекс средств, предна-
значенных для фиксации космонавта, инструментов и полезной нагрузки,
с которой проводятся работы, с целью создания благоприятных условий для
успешного выполнения задач ВКД в локальной зоне.
Переносное рабочее место, применяемое на PC МКС, показано на рис. 9.35, а
[15]. Оно может быть закреплено около выходного люка (рис. 9.35, б) [2],
присоединено к концевому захвату манипулятора ERA или концевому звену
ГСтМ, а также установлено на поверхности модулей. ПРМ оснащено пло-
щадкой «Якорь» для крепления ботинок скафандров «Орлан» и EMU, оно
имеет поручни, чтобы космонавт мог держаться руками при фиксации ног.
ПРМ оборудовано механическим приводом, благодаря которому космонавт,
закрепленный на площадке «Якорь», может выполнять развороты на углы по
тангажу ± 90°, крену ± 90° по курсу ± 360°.
Для работы с манипулятором МКС на АС используется переносная ра-
бочая платформа PWP (Portable Work Platform), общий вид которой приведен
на рис. 9.36 [10]. PWP состоит из кронштейна для полезной нагрузки TERA
(Temporary Equipment Restraint Aid), узла фиксации ног APFR (Articulating
Portable Foot Restraint) и кронштейна для инструментов (Tool Stanchion).
Кронштейн TERA (рис. 9.37) является основой рабочего места [11]. Для сое-
динения с манипулятором он оснащен агрегатом стыковки PDGF (см. 6.1.5),
позволяющим передавать питание для инструментов и полезной нагрузки.
Во время ВКД космонавту приходится выполнять различные работы. Для
этого используются специальные инструменты, компенсирующие ограниче-
ния, накладываемые на возможности космонавта при работе в скафандре,
некоторые из них показаны на рис. 9.38 [11].
550
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 9.35. Переносное рабочее место:
а — внешний вид; б — компоновка на модуле СО1 (3024, 3025, 3026, 3027 — номера поручней)
Самым существенным технико-эргономическим ограничением является
требование отсутствия или минимизации реактивного воздействия на руку
космонавта, которое особенно важно при работе с инструментами, осна-
щенными энергетическими приводами. Для производительного выполнения
наиболее распространенных монтажно-демонтажных операций одной рукой
целесообразно использовать инструменты, обеспечивающие оперативное
жесткое механическое соединение пары винт—инструмент.
Бортовой набор содержит инструменты для выполнения всего установ-
ленного спектра операций. Они снабжены элементами фиксации, чтобы можно
было закрепить их на скафандре. Для размещения инструментов используются
специальные контейнеры, один из них приведен на рис. 9.39 [10].
Рис. 9.37. Кронштейн для полезной нагрузки TERA:
1 — узел крепления кронштейна при хранении; 2 — агрегат
стыковки с манипулятором PDGF; 3 — узел крепления стра-
ховочного фала; 4 — соединительный фитинг сетевой розетки
(2 шт.); 5 - петля для карабина фала; 6 — катушка с фалом
для оборудования; 7 - стыковочный агрегат для адаптера
полезного груза ORU; 8 — фиксатор стыковочного адаптера;
9 — переключатель; 10— поручень; 11 - кронштейн для стра-
ховочного фала; 12 — вспомогательные элементы; 13 — крон-
штейн крепления рабочего места космонавта; 14 — демпфер
для снижения динамических нагрузок
Рис. 9.36. Переносное рабочее место PWP для манипулятора МКС:
1 — кронштейн для полезной нагрузки TERA; 2 — стыковочный агрегат для
адаптера полезного груза Orbital Replacement Unit (ORU); 3 — полезный груз
(габариты 1,5 х 1,4 х 1,2 м, масса 260 кг); 4 — оптимальная рабочая зона; 5 —
стойка для крепления инструментов; 6 — максимальная зона досягаемости;
7 — устройство фиксации астронавта на манипуляторе APFR; 8 — демпфер для
снижения динамических нагрузок
552
Часть III. Компоновка систем пилотируемого космического аппарата
е
Рис. 9.38. Ручные инструменты, используемые космонавтами во время ВКД:
а — молоток; б — зубило; в — рычажное приспособление с ножницами; г — плоскогубцы; д —
кусачки; е — малоинерционный привод (/ — шпиндель, 2 — фиксатор, 3 — боек, 4 — муфта,
5 — электродвигатель, 6 — поворотный груз, 7 — ползун); ж — световой паяльник (/ — лампа,
2 — зеркало)
Глава 9. Компоновка зон внекорабельной деятельности
553
Рис. 9.39. Контейнер для инструментов АС МКС:
а - внешний вид (габариты 800x800x430 см); б - схема размещения инструментов вну-
три контейнера; / - панель с креплениями для инструментов; 2 - панель с насадками
для ключа с усилителем крутящего момента; 5, 5 - резервные узлы крепления панелей;
4 — панель для ключа с трещоткой; 6 — панель для ключа с усилителем крутящего мо-
мента; 7 — панель для фалов, тросов и карабинов; 8 - полка для размещения мешков с
отходами; 9 — полка с креплениями для инструментов
554
Часть III. Компоновка систем пилотируемого космического аппарата
9.5. Компоновка рабочих мест на внешней поверхности ПКА
9.5.7. Рабочие места на модулях российского сегмента МКС
Для размещения научного оборудования комплекса целевых нагрузок
на внешней поверхности модулей PC МКС предусмотрены специализи-
рованные наружные универсальные рабочие места (УРМ-Н), на которых
конструктивно обеспечивается возможность механического закрепления
и подключения НА к служебным системам МКС: на служебном модуле —
4 шт. (с учетом доставляемых УРМ — 8 шт.), на модуле МИМ2 — 5 шт.
(с учетом доставляемых УРМ — 8 шт.), на лабораторном модуле МЛМ —
9 шт. (с учетом доставляемых УРМ — 13 шт.).
Компоновка четырех УРМ-Н на поверхности служебного модуля «Звезда»
показана на рис. 9.40 [14]. Рабочее место УРМ-Hl расположено на внешней
поверхности модуля по плоскости III отсека РО1. В качестве механического
устройства для фиксации научной аппаратуры на корпусе модуля на пере-
ходной плате установлена базовая точка пассивная (БТП). Во время ВКД
космонавты с помощью адаптера, в состав которого входит базовая точка
Рис. 9.40. Размещение наружных уни-
версальных рабочих мест (УРМ-Н) на
модуле «Звезда» МКС
I
Глава 9. Компоновка зон внекорабельной деятельности 555
активная (БТА), устанавливают на БТП блоки аппаратуры. Рабочее место
УРМ-Н2 на корпусе отсека РО2 состоит из системы поручней, имеющих
квадратное сечение размерами 25 х 25 мм. Поручни расположены между плос-
костями I и II таким образом, что нормаль к линии, соединяющей центры
сечений двух центральных поручней, проходит под углом 47° от плоскости I
в сторону плоскости II. Научная аппаратура фиксируется на поручнях специ-
альными замками.
Рабочее место УРМ-НЗ образуется четырьмя резьбовыми отверстиями
М12 с базой размерами 400 х 1200 мм, расположенными в опорах головного
обтекателя на внешней поверхности модуля по плоскости II (см. рис. 9.40).
Рабочее место У PM- Н4 размещено на корпусе модуля симметрично УРМ-НЗ
по плоскости IV. Научная аппаратура крепится к этим рабочим местам с
использованием доставляемых УРМ (УРМ-Д), что позволяет размещать до
трех блоков научной аппаратуры (рис. 9.41) [23]. Техническая характерис-
тика интерфейсов УРМ-Н модуля «Звезда» МКС приведена ниже [14]:
Энергообеспечение (среднесуточное), Вт ...........300
Информационные интерфейсы.........................RS-422, RS-485
Телевизионные каналы (возможно использование
линии связи для ТВ-камеры ВКД) .................. 1
Высокочастотные каналы (500-м) ГО-ВнеГО ..........2
Рис. 9.41. Общий вид доставляемого универсального рабочего места УРМ-Д:
1 — блок электрических разъемов; 2 — базовая панель; 3 — блок полезной нагрузки (направ-
ление + У, в зенит); 4 — пассивный стыковочный адаптер на блоке полезной нагрузки; 5— ак-
тивный стыковочный адаптер на УРМ-Д; 6 — блок полезной нагрузки (направление +Z, от
левого борта); 7- платформа УРМ-Д; 8— блок полезной нагрузки (направление — К, в надир)
556
Часть НЕ Компоновка систем пилотируемого космического аппарата
В состав УРМ-Д (рис. 9.42) входят основание, базовая точка пассивная
(БТП), платформа с тремя пассивными частями адаптеров НА и устройством
стыковки для установки на БТП [14]. Нормали трех пассивных адаптеров,
установленных на платформе, должны быть ориентированы по осям ±УСМ
и +ZCM. Для каждого блока НА, размещаемого на адаптерах УРМ-Д, строится
круговая диаграмма зоны обзора аппаратуры (рис. 9.43) [14], где отмечаются
элементы конструкций МКС, попадающие в поле зрения.
Адаптер полезной
нагрузки пассивный
17КС.600Ю 1152А-0
Адаптер полезной
нагрузки активный
17КС.600Ю 1151А-0
Адаптер полезной
нагрузки
17КС600Ю 1150А-0
Платформа
с адаптерами
17КС.600Ю 1501А-210
Универсальное рабочее место
доставляемое (УРМ-Д)
17КС.600Ю 1501А-0
Устройство стыковки БТА
27КСМ.152Ю 7110-0
Базовая точка
пассивная
27КСМ.152Ю
7200-0,
Основание
17КС.600Ю 1501А-170
Фиксирующая плата (ФП-20)
17КС.600Ю 1501А-350
Рис. 9.42. Элементы конструкции доставляемого рабочего места УРМ-Д
Фиксирующая
плата (ФП-21)
17КС.600Ю-
1501А-150
Компоновка рабочих мест на внешней поверхности модуля МИМ-2
представлена на рис. 9.44. На двух базовых точках, находящихся в непосред-
ственной близости от выходных люков, могут быть закреплены либо рабочее
место УРМ-Д с тремя блоками аппаратуры, либо грузовая стрела.
Внешние ресурсы модуля МИМ-2 для размещения научной аппаратуры
приведены ниже [14].
Универсальные рабочие места (УРМ), шт. .............. До 4
Среднесуточное энергопотребление, Вт................ 85
Суммарный объем аппаратуры, м3....................... До 1,0
Дискретные команды управления, шт. ................. 30
Фидеры питания, шт.:
дистанционного управления ........................ 6
бортовые розетки.................................. 2
Глава 9. Компоновка зон внекорабельной деятельности
557
ЛО , ° то
,20 -*-Г 2Q
"77° 180
Рис. 9.43. Круговая диа- %
грамма зоны обзора науч-
ной аппаратуры, установ-
ленной на УРМ-Н4 (ось
визирования в зенит)
Телеметрические параметры, шт.:
дискретные ..................................... 20
аналоговые...................................... 20
температурные .................................. 10
Информационные интерфейсы.......................... Ethernet
Телевизионные каналы, шт........................... 1
Вакуумный интерфейс, 10-2 мм рт. ст. .............. 1
Суммарная масса научной аппаратуры, кг ............ Более 240
Компоновка рабочих мест на внешней поверхности лабораторного мо-
дуля МЛМ показана на рис. 9.45. Для минимизации ВКД при установке на
внешние рабочие места НА предусмотрены европейский манипулятор ERA
и автоматизированная шлюзовая камера (ШК).
Наружные универсальные рабочие места УРМ-Н 1, УРМ-Н2 на базе пас-
сивного устройства фиксации (УФП) размещены на внешней поверхности
приборного герметичного отсека (ПГО) многоцелевого лабораторного модуля
на плоскости I. Установка научной аппаратуры на УРМ-Н 1, УРМ-Н2 обеспе-
чивается посредством адаптера полезной нагрузки (АПН).
Рабочее место УРМ-НЗ на базе УФП расположено снаружи ПГО МЛМ
между плоскостями II и III. Научная аппаратура устанавливается на УРМ-НЗ
с помощью адаптера полезной нагрузки АПН. Рабочее место УРМ-Н4 на базе
УФП размещено снаружи ШК. Установка научной аппаратуры на УРМ-Н4
обеспечивается с помощью адаптера полезной нагрузки АПН.
558 Часть III. Компоновка систем пилотируемого космического аппарата
I
Рис. 9.44. Компоновка рабочих мест на внешней поверхности модуля МИМ-2:
а — изометрический вид; б — вид на активный стыковочный узел; УРМ — универсальное
рабочее место; БТП — базовая точка пассивная; ММ3 — магнитно-механический замок для
размещения научной аппаратуры; ГСтМ — грузовая стрела (модернизированная)
Рабочее место УРМ-Н5 на базе базовой точки пассивной (БТП) располо-
жено снаружи ПГО МЛМ на плоскости III. Для установки научной аппарату-
ры на УРМ-Н5 используется устройство стыковки БТА. На УРМ-Н5 можно
разместить универсальную платформу УРМ-Д с активными адаптерами, что
позволяет установить три полезные нагрузки одновременно. Для установки
аппаратуры на платформу применяются адаптеры полезной нагрузки пассив-
ные. Рабочее место УРМ-Н6 на базе БТП находится снаружи ПГО МЛМ на
плоскости I. Для установки научной аппаратуры на УРМ-Н6 используется
устройство стыковки БТА. На УРМ-Н6 предусмотрена возможность установ-
ки универсальной платформы УРМ-Д с активными адаптерами, на которой
допустимо разместить три полезные нагрузки одновременно. Для установки
научной аппаратуры на платформу используются адаптеры полезной нагрузки
пассивные. Рабочее место УРМ-Н7 на базе опоры (ОП) находится снаружи
ГА МЛМ между плоскостями III и IV. Размещение научной аппаратуры на
УРМ-Н7 осуществляется с применением основания для ее установки на опору ОП.
Рабочее место УРМ-Н8 на базе опоры ОП расположено снаружи ПГО
МЛМ на плоскости II. Размещение научной аппаратуры на УРМ-Н8 обеспе-
чивается посредством основы для ее установки на опору ОП. Рабочее место
УРМ-Н9 на базе опоры ОП размещено снаружи ПГО МЛМ на плоскости
IV. Для установки научной аппаратуры на УРМ-Н9 используется основа для
Глава 9. Компоновка зон внекорабельной деятельности
559
УРМ-Н5
БТЛ1
(для ERA)
УРМ-Н9
УРМ-НЗ (УФПЗ)
УРМ-Н7------
Купол
с иллюминатором
УРМ-Н8
Шлюзовая камера
УРМ-Н4(УФП4)
а
Рис. 9.45. Компоновка рабочих мест на внешней поверхности многоцелевого
лабораторного модуля (МЛН):
а — вид с левого борта; б — вид с правого борта
560 Часть III. Компоновка систем пилотируемого космического аппарата
ее установки на опору ОП. Рабочее место УРМ-Н на базе УФП находится
на выдвижном столе ШК. Научная аппаратура устанавливается на УРМ-Н4
с помощью адаптера полезной нагрузки АПН. На выдвижном столе ШК также
предусмотрены конструктивные элементы для закрепления полезной нагрузки
при проведении экспериментов на выдвинутом столе.
Внешний вид и описание адаптеров для научной аппаратуры приведены
в табл. 9.4.
Таблица 9.4
Адаптеры для научной аппаратуры PC МКС
Внешний вид адаптера Описание
Базовая точка пассивная (БТП) используется для обеспечения уста- новки НА или УРМ-Д; масса полез- ного груза — 200 кг
Универсальное рабочее место, достав- ляемое УРМ-Д, позволяет увеличить число рабочих мест для установки НА до трех; масса полезного груза 150 кг
— Устройство фиксации пассивное (УФП) используется для установки НА манипулятором ERA; масса полезного груза 150 кг (патенты RU 2583992, 2583993)
Опора пассивная (ОП) применяется для установки НА; полезная нагрузка 30 кг
—
9.5.2. Рабочие места на других сегментах МКС
Для размещения научного оборудования на внешней поверхности мо-
дулей АС МКС предусмотрены специализированные платформы (рис. 9.46).
Шесть агрегатов стыковки для негерметичного оборудования размещены на
сегментах S3 и РЗ поперечной фермы ITS (США), европейская платформа
COF-EPF (Columbus External Payload Facilities) расположена на торце евро-
пейского научного модуля Columbus, а негерметичная платформа JEM-EF
(Japanese Experiment Module-Exposed Facility) является частью японского
научного модуля Kibo. Кроме того, имеются складские платформы для хра-
нения различного негерметичного оборудования.
Глава 9. Компоновка зон внекорабельной деятельности
561
Рис. 9.46. Схема размещения НА на поверхности модулей АС МКС
На платформах поперечной фермы негерметичная полезная нагрузка уста-
навливается с помощью грузовых платформ ExPRESS Logistics Carrier (ELC).
Проект МКС предполагал доставку на орбиту и возвращение на Землю таких
платформ с закрепленным на них научным оборудованием в грузовом отсеке
МТКА Space Shuttle. На платформе ELC (рис. 9.47) для установки блоков на-
учной аппаратуры общей массой 4445 кг предусмотрены до 12 узлов крепле-
ния FRAM (Flight Releasable Attachment Mechanism) на площади размерами
примерно 4,3 х 4,9 м, электропитание через две шины на 120 В постоянного
тока мощностью до 3 кВт каждая, а также каналы связи с пропускной способ-
ностью до 95 Мбит/с для передачи телеметрии и научной информации [24].
На платформе ELC имеется агрегат швартовки к ферме CAS (Carrier
Attachment System — система стыковки грузов), представленный на рис. 9.48
[И]. Стыковочный узел CAS, представляющей собой модификацию узла SSAS
(см. 6.1.3), включает в себя центральный замок-сцепку, три направляющие и
привод платы с разъемами. Соединение обеспечивается не болтами, а только зам-
ком-сцепкой, близким по конструкции к замку SSAS. После сцепки дублирован-
ный привод платы подстыковывает разъемы к установленной полезной нагрузке.
На сегменте РЗ имеются два таких агрегата. Агрегат UCCAS-1, направлен-
ный в зенит, используется для размещения платформ с НА, предназначенной
для исследования космоса. Агрегат UCCAS-2, направленный в надир, приме-
няется для установки платформ с НА, предназначенной для дистанционного
зондирования Земли. На сегменте фермы S3 находятся четыре одинаковых узла
PAS (Payload Attachment System), два из которых направлены в зенит (PAS-1
и PAS-2), а два — в надир (PAS-3 и PAS-4), как показано на рис. 9.49 [25].
На стыковочных агрегатах фермы кроме платформ ELC можно монтировать
крупногабаритные научные приборы, а также внешние складские платформы
ESP. Например, на узле PAS-2 размещен спектрометр AMS, а на узле PAS-3
установлена складская платформа ESP-3 (рис. 9.49).
562
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 9.47. Компоновка платформы ELC:
7 — киль; 2 — агрегат стыковки с манипулятором FRGF; 3 — система швартовки EBCS; 4 —
агрегат стыковки с МКС PCAS; 5 — разъем коммуникаций UMA; 6 — агрегаты стыковки с
манипулятором PVGF; 7— блок ПН с адаптером ORU; 8— узел крепления ПН FRAM; 9— пас-
сивная платформа узла FRAM; 10 — конструкция платформы; 11 — блок научной аппаратуры;
12 — блок системы управления; 13 — узел крепления в грузовом отсеке МТКА; 14, 15 — узлы
коммуникации с МТКА
Складские платформы размещены на модуле Columbus (ESP-2) и на по-
верхности модуля Destiny (ESP-1). Вид складской платформы ESP-2 показан
на рис. 9.50 [26]. Монтаж платформ выполняется манипулятором SSRMS,
установленном на мобильной платформе (Mobile Base System), перемещаю-
щейся вдоль фермы.
При компоновке внешней полезной нагрузки на ферме следует учитывать
зоны вращения панелей СБ и РТО, которые могут попадать в поле зрения
научной аппаратуры. При этом направления в зенит и надир остаются неза-
тененными (рис. 9.51).
Европейский модуль Columbus (рис. 9.52) [25] имеет на торце платформу
для внешней полезной нагрузки CEPF (Columbus External Payloads Facility),
состоящую из двух рам SO и SD для размещения научной аппаратуры. На
каждой из рам есть по две площадки-адаптера СЕРА для крепления аппа-
ратуры. Две площадки ориентированы в направлении правого борта (SOX и
SDX), одна — в зенит (SOZ) и одна — в надир (SDN).
Состав и схема членения CEPF приведены на рис. 9.53. Каждая из площа-
док СЕРА имеет интерфейс, совместимый с адаптером FRAM стойки ExPRESS.
Габариты адаптера СЕРА и зоны полезной нагрузки представлены на рис. 9.54.
Глава 9. Компоновка зон внекорабельной деятельности
563
Рис. 9.48. Агрегат стыковки CAS:
а — стыковочный агрегат (7 — механизм сборки (активная половина), 2, 5, 7— на-
правляющая, 3 — замок, 4 — кронштейн крепления агрегата к платформе, 6 - силовая
рама, 8 — складной поддерживающий элемент конструкции); б - замок (7 — захват
замка, 2 — стопорящий болт, 3 — регулировочный винт)
Рис. 9.49. Размещение стыковочных узлов для установки негерметичных платформ
с полезной нагрузкой ExPRESS Logistics Carrier (ELC) и External Stowage Platform
(ESP) на ферме МКС:
7 — ESP-3; 2 — ELC-2; 3 — платформа с альфа-магнитным спектрометром AMS; 4 — сегмент
фермы S1; 5 — сегмент фермы SO; 6 — сегмент фермы Р1; 7 — ELC-3; 8 — ELC-1; 9 — модуль
Kibo; 10 — ESP-1 (на модуле Destiny); 77 — ESP-2 (на модуле Quest); 72 — модуль Columbus;
13 - ELC-4
564
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 9.50. Компоновка складской платформы ESP в стартовой конфигурации:
а — вид сверху; б — вид снизу; I — свободное место с адаптером FRAM
Рис. 9.51. Расположение зон размещения ПН на ферме МКС относительно зон вра-
щения солнечных батарей (СБ) и системы радиационных теплообменников (РТО)
АС МКС:
а — зоны вращения СБ и РТО (7 — платформа ELCP3, 2 — платформа ELC IL, 3 — плат-
форма ELC_OL, 4 — платформа ELC_OU, 5 — зоны вращения солнечных батарей, 6 — зона
вращения радиаторов РТО); б — размещение герметичных платформ для установки полезной
нагрузки (7 — платформа ELC_IL, 2 — платформа ELC_OL, 3 — платформа ELC_OU)
Глава 9. Компоновка зон внекорабельной деятельности
565
2010
10 027
Рис. 9.52. Общий вид модуля Columbus с платформой Columbus External Payload
Facility (CEPF):
1 — модуль Columbus; 2 — CEPF рама SD; 3 — условное направление правый борт; 4 — CEPF
рама SO; 5 — условное направление вверх; 6 — условное направление левый борт; 7— условное
направление вниз (палуба модуля)
Рис. 9.53. Платформа СЕРЕ
а — членение платформы; б — компоновка адаптеров на раме SO; в — рама; 1 — плоскость
стыка полезного груза и рамы; 2 — пассивный стыковочный адаптер FRAM; 3 — активный сты-
ковочный адаптер FRAM; 4 — блок полезной нагрузки; 5 — рама SO; 6 — рама SD; 7— днище
модуля Columbus
566
Часть III. Компоновка систем пилотируемого космического аппарата
1217,1
863,6
1168,4
i 193,8
б
Рис. 9.54. Компоновка адаптера CEPF и зоны его полезной нагрузки:
а — компоновка полезного груза на платформе (/ — плоскость стыка адаптеров, 2 — Н-кре-
пление, 3 — активная рамка); б — общий вид и чертеж адаптера
Глава 9. Компоновка зон внекорабельной деятельности
567
Рис. 9.55. Общий вид японского модуля Kibo с платформой ЕЕ
/ — негерметичный логистический модуль ELM-ES (Experiment Logistics Module-Exposed
Section); 2— платформа EF (Exposed Facility); 3— герметичный модуль PM (Pressurired Module);
4 — герметичный логистический модуль ELM-PS (Experiment Logistics Module-Pressurired
Section); 5 — манипулятор JEM
Характеристика адаптера СЕРА
Полная масса внешней полезной нагрузки, включая СЕРА
и активный адаптер FRAM .......................... 290 кг
Чистая масса полезной нагрузки...................... До 226 кг
Размеры (ширина х глубина х высота) внешней
полезной нагрузки, в том числе активного FRAM ...... 1168 х 864 х 1375 мм
Объем внешней полезной нагрузки .................... 1,39 м3
Диапазон температур работоспособности интегрированной
внешней полезной нагрузки для обеспечения работы
FRAM при установке и снятии ......................— 62...+ 36 °C
Максимальная мощность, обеспечиваемая Columbus
для функционирования аппаратуры .................... 1,25 кВт
Общая мощность для всех четырех внешних полезных
нагрузок............................................До 2,5 кВт
Значение напряжения в двух шинах постоянного тока,
питающих рабочее место.......................... 120 В
Скорость передачи данных по интерфейсу — аналогу
Ethernet............................................ 1,55 Мбит/с
Скорость передачи данных по видеоканалу ............ 32,5 Мбит/с
Напряжение импульсных командных линий:
три линии ........................................28 В
три линии ........................................ 5 В
568 Часть III. Компоновка систем пилотируемого космического аппарата
б
Рис. 9.56. Модуль полезной нагрузки EFU:
а — общий вид (7 — агрегат для стыковки с платформой EF, 2 — агрегат для захвата мани-
пулятором, 3 — корпус, 4 — узлы крепления в ТКА); б — пример компоновки полезной на-
грузки в модуле (7 - научная аппаратура, 2 — блок телеметрии, 3 — оптическая аппаратура;
4 — аппаратура связи, 5 — блок СОТР, 6 — телекамера высокой четкости)
При необходимости в дополнение к CEPF на цилиндрической поверхно-
сти модуля, могут быть размещены складские платформы ESP (см. рис. 9.50).
Японский модуль Kibo, как показано на рис. 9.55, имеет в своем составе
платформу EF (Exposed Facility) для экспонирования научной аппаратуры
за пределами герметичного объема [13]. Платформа пристыкована к торцу
модуля, на котором установлена шлюзовая камера, через нее на платформу
манипулятором JEMRMS могут быть вынесены образцы и блоки аппаратуры.
Параметры ШК приведены в табл. 9.4.
На платформе предусмотрены 12 стыковочных агрегатов EFU (Exposed
Facility Unit), предназначенных для установки контейнеров с научной ап-
паратурой и предоставления им необходимых интерфейсов. Общий вид
контейнера и схема его компоновки показан на рис. 9.56 [13]. Контейнеры
доставляются на орбиту ТКА HTV (см. 1.4.3). Максимальная масса полезной
нагрузки в одном контейнере не должна превышать 500 кг.
Глава 9. Компоновка зон внекорабельной деятельности
569
Контрольные вопросы к главе 9
1. Расскажите об особенностях внекорабельной деятельности.
2. Каково назначение и конструкция скафандра «Орлан»?
3. Назовите требования к конструкции скафандра для ВКД.
4. Какие функции выполняет шлюзовая камера и какая аппаратура в ней раз-
мещается?
5. Приведите сравнительные характеристики известных шлюзовых камер.
6. Как космонавт перемещается и фиксирует свое положение во время ВКД?
7. Какие есть средства страховки космонавта в процессе ВКД?
8. Каково назначение УМ К, сравните конструкции российской и американской
УМ К?
9. Опишите конструкцию и принцип работы грузовой стрелы российского сег-
мента МКС.
10. Как устроено переносное рабочее место космонавта и какие инструменты он
использует во время ВКД?
11. Расскажите, где находятся рабочие места для размещения аппаратуры на PC
МКС и какая у них конструкция.
12. Как размещены и какую конструкцию имеют рабочие места для размещения
научной аппаратуры на американском сегменте МКС?
Литература к главе 9
1. Александров А.П., Гречка В.Д., Кобрин В.И., Цыганков О.С. Сборочно-монтаж-
ные и ремонтно-восстановительные работы в космическом пространстве: учебное
пособие для вузов. Харьков: ХАИ, 1990. 248 с.
2. Справка по выходу экипажа МКС в открытый космос 27 января 2014 г. URL:
http://www.mcc.rsa.ru/out270114_center.htm (дата обращения 20.03.2018).
3. Алексеев С.М. Космические скафандры вчера, сегодня, завтра // Новое в жизни,
науке, технике. Сер. «Космонавтика, астрономия». № 2. М.: Знание, 1987. 64 с.
4. Баррон Д.Мак., Витсетт Ч., Северин Г.И., Абрамов И.П. Индивидуальные си-
стемы жизнеобеспечения космонавтов. Обеспечение внекорабельной деятельности //
Космическая биология и медицина: в 5 т. Т. 2. Обитаемость космических летательных
аппаратов. М.: Наука, 1994. С. 389-460.
5. Космические скафандры России / И.П. Абрамов и др. М.: ОАО Науч.-произв.
предприятие «Звезда», 2005. 356 с.
6. NASA Man-systems integration standards. Vol. 1. Sec. 14. Extravehicular activity
(EVA) URL: http://msis.jsc.nasa.gov/sections/sectionl4.htm (дата обращения 10.09.2018).
7. Russian Segment Specification International Space Station Program Revision H 4.
2001. SSP41163H. URL: SSP-41163H.pdf (дата обращения 20.07.2017).
8. Конструкция и системы орбитальной станции «Скайлэб». URL: http://
epizodsspace.airbase.ru/bibl/skylab/04.html (дата обращения 10.09.2018).
9. Орбитальные станции. URL: https://helpiks.org/l-122893.html (дата обращения
14.06.2018).
10. EVA Tools and Equipment Reference Book. NASA TM-109350. NASA, 1993.
URL: https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/19940017339.pdf (дата обраще-
ния 10.09.2018).
570
Часть III. Компоновка систем пилотируемого космического аппарата
11. Reference guide to the space station 1SS. Utilization edition 2015. URL: http://
www.nasa.gov/sites/default/files/atoms/files/np-2015-05-022-jsc_iss_utilization_guide_2015-
508c.pdf (дата обращения 17.01.2019).
12. Шлюзовая камера «Quest». URL: http://www.gctc.ru/main.php?id=327 (Дата
обращения 20.07.2019).
13. Kibo Exposed Facility User Handbook. URL: http://iss.jaxa.jp/kibo/library/fact/
data/JFE_HDBK_all_E.pdf (дата обращения 17.01.2019).
14. Российский сегмент МКС. Справочник пользователя. URL: http://knts.
tsniimash.ru/ru/src/CenterlnfRes/iss_rs_guide.pdf (дата обращения 17.01.2019).
15. Александров А.П. Обеспечение безопасности внекорабельной деятельности
экипажами Международной космической станции // Полет, 2001. № 8. С 3—9.
16. Легостаев В.П., Марков А.В., Сорокин И.В. Целевое использование россий-
ского сегмента МКС: значимые научные результаты и перспективы // Космическая
техника и технологии. 2013. № 2. С. 3—18.
17. Цыганков О.С. Пятидесятилетие внекорабельной деятельности // Космическая
техника и технологии, 2013. № 1. С. 3—16.
18. Цыганков О.С. Страховочное устройство для условий невесомости. Патент
RU 2528504. 2012. URL: http://www.fmdpatent.ru/patent/252/2528504.html (дата обра-
щения 10.09.2018).
19. Цыганков О.С. Трудовая деятельность в безопорном пространстве. URL: http://
www.mosoblpress.ru/mass_media/3/l 12/item98865/ (дата обращения 10.09.2018).
20. Индивидуальная установка для перемещения космонавта в скафандре в от-
крытом космосе / Г.И. Северин и др. Патент SU 1759732. 1990. URL: http://www.
fmdpatent.ru/patent/175/1759732.html (дата обращения 10.09.2018).
21. Александров А.П., Павлов В.Н., Ульянов В.С. Модернизация грузовой стрелы
российского сегмента МКС в полете // Полет. 2009. № 7. С. 5—24.
22. Устройство для перемещения грузов, преимущественно за пределами нахо-
дящегося на орбите космического корабля / Сыромятников В.С. и др. Патент RU
2167083. 2001. URL: http://www.fmdpatent.ru/patent/216/2167083.html (дата обращения
10.09.2018).
23. Overview of Attached Payload Accommodations and Environments on the
International Space Station. NASA/TP-2007-214768. URL: https://www.nasa.gov/
pdfZ190373main_TP-2007-214768.pdf (дата обращения 10.09.2018).
24. ExPRESS_Logistics_Carrier. URL: https://en.wikipedia.org/wiki/ExPRESS_
Logistics_Carrier (дата обращения 20.03.2018).
25. Research Announcement for ISS Experiments relevant to study Global Climate
Change. Annex 1: Additional technical Information on ISS capabilities and background
information. URL: http://wsn.spaceflight.esa.int/docs/201107/Annexl-ESA-lSS-CC-AO-
Climate-Change.pdf (дата обращения 10.09.2018).
26. External stowage platform. URL: https://en.wikipedia.org/wiki/External_stowage_
platform (дата обращения 20.03.2018).
ГЛАВА 10. КОМПОНОВКА ПОСТОВ УПРАВЛЕНИЯ
Компоновка пилотируемых КА, предназначенных для выполнения це-
левых программ, должна предусматривать для космонавта возможность не
только длительно существовать в непривычных условиях, но также обеспечить
выполнение экипажем работ в соответствии с программой полета. Управление
полетом ПКА — один из наиболее трудоемких и сложных этапов процесса их
эксплуатации. При проектировании системы управления необходимо точно
разграничить функции, реализуемые Центром управления полетом (ЦУП),
автоматикой и космонавтом. Независимо от стратегического плана полета
система управления выполняет следующее [I]:
I) коррекцию номинального стратегического плана полета;
2) навигационные измерения и баллистические расчеты;
3) выдачу на бортовые системы КА «срочных» управляющих воздействий
(УВ), которые необходимо немедленно осуществить в ходе операции для
срочной реализации решения, принятого по результатам контроля;
4) выдачу на бортовые системы КА «несрочных» УВ, исполняемых
в любой удобный момент в течение определенного времени;
5) выдачу на бортовые системы УВ с точно заданным временем испол-
нения;
6) управление системами КА в типовых полетных операциях, т. е. после-
довательную выдачу на бортовые системы УВ в соответствии с циклограммой
операции;
7) разработку в процессе полета и проведение, если потребуется, новых
(нетиповых) полетных операций;
8) непрерывный контроль параметров состояния КА;
9) периодический контроль параметров состояния КА;
10) обнаружение и идентификацию заранее рассмотренных нештатных
ситуаций в процессе контроля параметров состояния КА;
11) обнаружение непредвиденных (не рассмотренных заранее) нештатных
ситуаций в процессе контроля состояния КА;
12) оценку полета, выработку и принятие решений по дальнейшему его
выполнению;
13) реагирование на рассмотренные нештатные ситуации, требующие
срочного вмешательства сразу после их обнаружения;
14) реагирование на рассмотренные нештатные ситуации с большим
располагаемым временем;
572 Часть III. Компоновка систем пилотируемого космического аппарата
15) реагирование на нерассмотренные нештатные ситуации, требующие
срочного вмешательства;
16) реагирование на нерассмотренные нештаные ситуации с большим
располагаемым временем.
Перечисленные функции подразделяются на следующие группы: от-
носящиеся к планированию полета и реализации плана полета (1-7); к
контролю полета (8—11); к принятию и реализации решений, принятых
по результатам контроля (12—16). Эти функции осуществляют ЦУП с по-
мощью бортовой автоматики и экипаж. Эффективная работа экипажа с
техническими средствами может быть обеспечена комплексным систем-
ным подходом к созданию ПКА, который заключается в том, что проек-
тируется не просто техническое устройство, а единая система человек —
машина. Экипаж рассматривается как ее главное звено — субъект труда,
а управляемые экипажем бортовые системы — как средства труда.
10.1. Особенности компоновки системы управления ПКА
10.1.1. Структура контура управления
Эффективное управление полетом ПКА реализуется при комплексном
подходе, когда в управлении участвуют экипаж, АСУ и ЦУП. Их совокупность
создает контур управления ПКА (рис. 10.1) [1], в который входят:
• наземный комплекс управления (НКУ), состоящий из командно-
измерительного комплекса (КИК), спутниковой системы контроля и управ-
ления (ССКУ), наземных и спутниковых систем связи (СС);
• бортовая автоматика ПКА или бортовой комплекс автоматического
управления (БКАУ), включающий бортовую вычислительную систему (БВС)
и коммутационно-вычислительную систему, преобразующую сигналы БВС
в релейные управляющие воздействия;
• экипаж ПКА со средствами управления бортовыми системами и отоб-
ражения информации.
К системе управления предъявляются повышенные требования по на-
дежности работы, что обеспечивается избыточностью (резервированием)
функциональных элементов в контуре управления (см. гл. 12.2.3).
10.1.2. Место космонавта в контуре управления ПКА
Участие космонавта в работе системы управления придает ей гибкость, а
также позволяет выполнить оценку ее возможностей при возникновении неш-
татных ситуаций, прогнозирование и управление полетом в таких ситуациях.
Благодаря этому можно спроектировать единый комплекс бортового
управления с меньшими массой и энергопотреблением, обеспечивающий
высокую надежность, что очень важно для ПКА, рассчитанного на длительное
Глава 10. Компоновка постов управления
573
Рис. 10.1. Структурная схема совмещенного контура управ-
ления полетом:
У В — управляющие воздействия; РГ — радиограммы экипажу МКС;
СЭ — сообщения экипажа; СОИ — система отображения инфор-
мации; ТМИ — телеметрическая информация; ЦИ — цифровая
информация
существование. Космонавт управляет движением либо вручную (РСУ), либо
с помощью системы полуавтоматического управления (СПУ).
СПУ отличается от РСУ тем, что работа космонавта облегчается введе-
нием командных (директорных) приборов, на которых индуцируются модели
не только простейшие информационные, но и информационно-исполни-
тельные в виде командных сигналов. Алгоритмы управления формируются
в специальном вычислителе, а сигналы управления появляются на приборах
системы отображения информации. Роль космонавта сводится к отработке
команд, сформированных в специальном вычислителе. Путем сравнения
фактических значений параметров движения ПКА со значениями, заданными
вычислителем, оператор оценивает величину и направление рассогласования
и устраняет их с помощью рулевых органов управления. Характер и качество
управления определяются динамическими характеристиками КА и характе-
ристиками командных приборов.
При практической разработке полуавтоматического бортового комплек-
са управления одной из важнейших задач является распределение функций
между космонавтом-оператором и автоматом. Из составленного перечня
задач и режимов, которые должны быть реализованы бортовым управлением,
574
Часть III. Компоновка систем пилотируемого космического аппарата
определяется, какие задачи должен решать космонавт, а какие — автоматиче-
ская система. Путем моделирования проверяется правильность распределения
обязанностей. В данном случае под надежностью работы оператора понима-
ется его свойство выполнять определенные функции с требуемым качеством,
необходимым для достижения поставленной цели с заданной эффективностью
в условиях эксплуатации. Характеристики надежности на первых витках по-
лета снижаются в связи с адаптивными перестройками организма космонавта.
Функционирование организма космонавта, работающего в замкнутом контуре
управления, можно упрощенно представить в виде динамической системы,
состоящей из последовательного соединения воспринимающих органов-ана-
лизаторов, центральной нервной системы (ЦНС) и двигательных органов —
эффекторов. В центральной нервной системе формируются ответные реакции
на внешние и внутренние раздражители, которые передаются на эффекторные
органы (рис. 10.2).
Рис. 10.2. Блок-схема человека-оператора
При ручном управлении ПКА космонавт получает необходимую для этого
информацию с приборов системы отображения информации пульта космо-
навта, оптических приборов ПКА и т. п. На основании полученных данных
он формирует информационную модель полета, которую реализует, используя
органы управления. При этом космонавт, адаптируясь, стремится приспосо-
биться к системе ПКА + РСУ для обеспечения требуемого качества управ-
ления. В работе РСУ, так же как и в работе СПУ, участвуют космонавт-опе-
ратор, машинная часть этих систем и КА (рис. 10.3).
При проектировании ручного и полуавтоматического управления КА
космонавт рассматривается как часть управляющей системы.
Рис. 10.3. Схема работы системы полуавтоматического управления
Глава 10. Компоновка постов управления
575
10.2. Требования к построению космической эргономической
системы
Космическую эргономическую систему (КЭС), а также каждую ее со-
ставляющую следует рассматривать как систему человек — машина — среда,
состоящую из эргономических и неэргономических элементов [2].
Эргономическое обеспечение КЭС — это совокупность методов и средств,
используемых на всех этапах разработки и функционирования КЭС и ее
компонентов и предназначенных для формирования заданного уровня эрго-
номических свойств КЭС путем обоснования и выбора организационно-про-
ектных решений, создающих оптимальные условия для высокоэффективной
и качественной деятельности человека во всех компонентах КЭС.
В состав обеспечения входят три комплекса:
I. Комплекс методов, методик, нормативных и справочных данных, обес-
печивающих возможность заказчику и разработчику:
• обоснованно и конструктивно формулировать требования к уровню
эргономического качества технического, информационного, программного
и организационного обеспечения компонентов КЭС;
• выбирать наиболее целесообразные способы реализации эргономичес-
ких решений в виде организационно-проектных решений по совершенство-
ванию технического, информационного, программного и организационного
обеспечения КЭС;
• применять планируемую и фактически реализованную эффективность
эргономических решений на каждой стадии (каждом этапе) создания и функ-
ционирования КЭС и ее компонентов.
2. Комплекс методов, учебно-методических документов и технических
средств подготовки, обеспечивающих возможность заказчику и разработчику
формировать систему отбора, подготовки, аттестации и повышения квали-
фикации всех категорий эргатических элементов КЭС (экипажа);
3. Комплекс методов, средств и организационно-технических меропри-
ятий, обеспечивающих:
• контроль и управление качеством деятельности эргатических элемен-
тов КЭС;
• контроль функционального состояния эргатических элементов КЭС и
поддержание необходимого уровня их работоспособности:
• безопасность труда человека в КЭС;
• создание системы морально-психологического и материально-эконо-
мического стимулирования элементов КЭС на высокоэффективную работу
и совершенствование методов использования ее результатов.
Реализация эргономического обеспечения КЭС имеет специфические
особенности и зависит от жизненного цикла КЭС.
10.2.1. Эргономическое обеспечение но стадии разработки КЭС
или ее компонентов
Можно выделить четыре целевых принципа внедрения эргономического
обеспечения: прагматической эргономичности, адаптивной эргономичности,
научной эргономичности и информативной эргономичности.
576 Часть III. Компоновка систем пилотируемого космического аппарата
Большую роль играет также принцип системности при проектировании
эргономического обеспечения КЭС, заключающийся в комплексном рассмо-
трении влияния всех ее элементов на эффективное выполнение поставленной
задачи с учетом роли и места человека при решении конкретных задач в КЭС.
Общие эргономические требования к КЭС и ее компонентам как систе-
мам человек — машина сформулированы в ГОСТ 20.39.108—85 «Требования
по эргономике, обитаемости и технической эстетике. Номенклатура и по-
рядок выбора».
Кроме обычных эргономических требований существуют специфические,
относящиеся только к КЭС:
• наряду с распределением функций между эргатическими и неэргати-
ческими элементами встает задача распределения функций между наземным
комплексом управления и экипажем комического корабля;
• определение длительности полета и продолжительности космических
суток;
• определение численности экипажа и распределение между ними функ-
ций, определяемых планом полета.
Требования к организации деятельности отдельных КЭС должны учиты-
вать специфические условия работы человека в космосе, такие как фиксация
космонавта на рабочем месте при выполнении работы, для чего необходимо
предусмотреть специальные крепления. Следует учитывать то, что при работе
в условиях невесомости рабочая поза может быть любой. Возможны изме-
нения в работе органов-анализаторов организма космонавта (уменьшение
остроты зрения и др.), вызванные условиями полета.
Для обеспечения качественного эргономического проектирования КЭС
разрабатывается программа обеспечения ее эргономического качества, вклю-
чающая: определение организационной структуры с указанием полномочий и
ответственности должностных лиц за выполнение каждого пункта програм-
мы; подробное описание всех задач (подзадач) по обеспечению заданного
эргономического качества и методов их решения; плановые сроки начала и
окончания решения каждой задачи (подзадачи); методы оценки и правила
контроля, позволяющие проверить результаты решения каждой задачи (под-
задачи); порядок документирования результатов мероприятий, выполняемых
для решения задач (подзадач).
Программа обеспечения качества КЭС, которая координируется с про-
граммой обеспечения надежности и другими программами, должна предус-
матривать решение следующих задач.
На стадии технического задания выполняются: разработка требований
к месту и роли человека в проектируемой КЭС; выбор основных направле-
ний улучшения эргономического качества и оценка ожидаемого результата;
разработка организационно-функциональной схемы КЭС (системное эрго-
номическое проектирование); определение степени участия человека в вы-
полнении функции КЭС (определение необходимого уровня автоматизации);
формулирование требований к способам предоставления информации эрга-
тическим элементами КЭС (периодичность, допустимое запаздывание и др.).
На стадии проектирования проводятся: разработка вариантов организа-
ционно-проектных решений КЭС (системное и элементное эргономическое
Глава 10. Компоновка постов управления
577
проектирование); исследование эргономического качества различных ва-
риантов, их сравнение с установленными эргономическими нормативами,
оценка вариантов ожидаемого результата; детальная проработка выбранного
варианта организационно-проектного решения КЭС, включающая уточнение
исследования его эргономического качества и уточненную оценку ожидаемо-
го результата; разработка информационных моделей и структур деятельности
эргатических элементов КЭС; разработка компоновок и общих видов рабочих
мест КЭС; оценка времени загрузки экипажа, эффективности и надежности
КЭС и ее подсистем с учетом эргономических факторов; определение способов
получения, сбора и предоставления информации; организация эксплуатации и
технического обслуживания комплекса технических средств КЭС и разработка
соответствующей документации; разработка требований к профессиональному
отбору и подготовке эргатических элементов КЭС; эргономические испыта-
ния опытных образцов подсистемы КЭС, а также КЭС в целом; уточнение
всех ранее принятых проектных решений по обеспечению эргономического
качества КЭС и корректировка конструкторской документации.
На этапе изготовления и ввода в эксплуатацию осуществляются: разра-
ботка эргономических требований к технологическому процессу, нормам и
способам реализации эргономических требований; анализ влияния реали-
зуемого технологического процесса на эргономическое качество изготовля-
емых подсистем КЭС; анализ эргономических дефектов КЭС и разработка
рекомендаций для их предупреждения или устранения; оценка фактического
результата от реализации эргономически обоснованных решений при проек-
тировании и изготовлении КЭС.
На этапе эксплуатации проводятся: совершенствование уровня подготов-
ки эргатических элементов КЭС; эргономический анализ опыта эксплуатации
КЭС; сбор информации об оценке деятельности персонала КЭС; разработка
рекомендаций по совершенствованию организации и алгоритмов деятельности,
по предупреждению ошибок человека при управлении; выдача эргономически
обоснованных рекомендаций для технического задания на модернизацию КЭС.
Разработка эргономических требований, изложенных в программе обе-
спечения эргономического качества КЭС, реализуется при решении следу-
ющих задач:
• эргономической организации системы человек — машина, включающей
выбор средств отображения информации, органов управления, организации
рабочего места и др.;
• принятии эргономических требований к организации деятельности
каждого члена экипажа;
• составлении эргономических требований к среде обитания.
Рабочие места космонавтов (посты), обеспечивающие управление поле-
том ПКА, разрабатываются с учетом всех требований, предъявляемых к КЭС.
10.2.2. Размещение постов управления но орбитальной станции
В космическом корабле термин «рабочее место» (пост) относится
к трем зонам: наблюдения, управления полетом и проведения эксперимен-
тов. Большинство требований и конструктивных решений, применяемых
578
Часть III. Компоновка систем пилотируемого космического аппарата
при организации рабочих мест на Земле, применимы и к рабочим местам
в невесомости. Большинство эргономических требований к конструированию
рабочих мест, панелей управления и наблюдения, дисплеям компьюторов
и работе оператора с ними также совпадают. Однако есть и особенности:
широкий диапазон ускорений в ПКА накладывает ряд дополнительных тре-
бований, например необходимость работы в скафандре предъявляет к этим
участкам специфические требования.
6 17 4 9
Рис. 10.4. Размещение постов управле-
ния на орбитальной станции «Салют»:
1 — пост № 1; 2 — пост № 2; 3 — пост № 3;
4 — пост № 4; 5 — пост № 5; 6 — пост № 6;
7— пост № 7; 8— правый борт; 9 — левый борт
Орбитальная станция «Салют-6»
имела семь постов (рабочих мест) [3],
каждое из которых было предназначено
для выполнения определенных работ
(рис. 10.4).
Пост № 1 — центральный пост
управления. Здесь имеются два рабо-
чих места, находится главный пульт
управления с командно-сигнальны-
ми устройствами для выдачи команд
и индикатором положения станции
(как точки) относительно поверхности
Земли, индикаторами идущих авто-
матических программ, оптическими
и звуковыми сигнализаторами, часа-
ми и т. п. Кроме того, там установлены оптические приборы для визуальной
ориентации по Земле, пульт управления бортовой вычислительной машиной,
справочно-информационное устройство.
Пост № 2, который используется для ручной астроориентации стан-
ции, оборудован пультом, средствами связи, астроприборами и рукояткой
управления.
Пост № 3 предназначен для управления субмиллиметровым телескопом
и автономной системой охлаждения приемников телескопа. Он оснащен
пультами, средствами связи, визиром и ручками управления.
Пост № 4 создан для работы с медико-биологическим оборудованием.
Он находится в нижней центральной части рабочего отсека на стыке цилин-
дров большого и малого диаметров. Здесь же размещено оборудование для
проведения кино- и фотосъемок. Зоны выполнения физических упражнений
находятся неподалеку от поста № 4.
Посты № 5 и № 6 расположены в переходном отсеке.
Пост № 7 используется для работы с пультами управления системы ре-
генерации воды из конденсата и научной аппаратуры.
Все посты оснащены светильниками и средствами связи.
10.23. Особенности компоновки постов управления ПКА
Стыковка двух космических аппаратов на орбите, как правило, происхо-
дит автоматически, космонавт включается в процесс управления стыковкой
только при сбое автоматики. Он контролирует процесс стыковки с помощью
Глава 10. Компоновка постов управления
579
визуального средства наблюдения ВСК-4 (прибор — визир специальный
космонавта), а также посредством телекамеры стыковки, блока коммутации
телевизионных сигналов, блока синхронизации, блока радиопередатчика
с кодером и пр. Это объясняется тем, что транспортные корабли серии
«Союз-ТМА», орбитальные станции «Салют» и «Мир» не имеют иллюминато-
ров, через которые можно непосредственно визуально вести контроль за сты-
ковкой, и поэтому наблюдение выполняется с помощью визира (рис. 10.5) [4].
Рис. 10.5. Компоновочная схема поста управления полетом
в ТК «Союз-ТМА» (а) и ОС «Мир» (б):
1 — размещение поста управления полетом; 2 — визир
580 Часть III. Компоновка систем пилотируемого космического аппарата
В отличие от ТКА «Союз-ТМА» транспортный корабль снабжения (ТКС)
пилотируемого комплекса «Алмаз» имел остекленную кабину (аналогично само-
лету), позволяющую космонавту непосредственно наблюдать за процессом сты-
ковки, а также вести наблюдения во время орбитального полета (рис. 10.6) [5].
Рис. 10.6. ТКС «Алмаз»:
1 — остекление кабины; 2 — пост управления полетом; 3 — пульт управления полетом
А —А
У орбитальных кораблей «Буран» [4] и Space Shuttle [6] остекление фонаря
кабины позволяет космонавту визуально контролировать посадку и маневры
корабля в космосе. Иллюминаторы, установленные на крыше кабины, ис-
пользуются для контроля стыковки и работы манипулятора (рис. 10.7—10.9).
Рис. 10.7. МТТА «Буран»:
/ — верхний иллюминатор; 2 — остекление кабины
Глава 10. Компоновка постов управления
581
Рис. 10.8. Поля зрения из кабины пилота МТКА Space Shuttle при посадке и ма-
неврировании в космосе:
а — углы поля зрения и размеры остекленения кабины (вид сверху); б — углы поля зрения в
иллюминаторы (вид сбоку); / — обвод корпуса; 2 — ось симметрии; 3 — положение глаз; 4 —
рама лобового стекла кабины; 5— верхний иллюминатор; 6— иллюминатор грузового отсека
Рис. 10.9. Поля зрения из кабины оператора МТКА Space Shuttle при визуальном кон-
троле стыковки и работы манипулятора:
а — вид сверху; б - вид сбоку; / - углы обзора верхнего иллюминатора; 2 - углы обзора гру-
зового иллюминатора
582
Часть III. Компоновка систем пилотируемого космического аппарата
1
Рис. 10.10. Размещение модуля «Купол» (/) на ОС МКС
2000
Рис. 10.11, а (начало). Общий вид модуля «Купол;
Глава 10. Компоновка постов управления
583
Рис. 10.11, б (окончанние). Компоновка модуля «Купол»:
/ — микрометеоритная защита; 2 — поручень для внекорабельной деятельности; 3 — крышка
круглого иллюминатора; 4 — внутренний поручень; 5 — круглый иллюминатор (0 706 мм);
6 — пульт управления манипулятором МКС; 7 — роботизированная станция; 8 — крышка
бокового иллюминатора; 9 — транспортировочный узел захвата манипулятором
На МКС для контроля за работой манипуляторов и стыковки установлен
модуль «Купол» (рис. 10.10) [7]. Он является встроенным модулем обсерва-
тории МКС, установленным на модуле Node 3 (рис. 10.11), и обеспечивает
наблюдение за Землей, космическим пространством, работой манипулято-
ра при стыковке ТК (ATV, HTV, «Дракона»), а также обзор МКС. Диаметр
модуля около 2 м, высота 1,5 м. Он имеет шесть трапециевидных боковых
окон и круглое верхнее окно, направленное в надир. В нерабочее время окна
защищены крышками от микрометеорных потоков и мелкого космическо-
го мусора. «Купол» оснащен станцией управления работой манипулятора и
компьютером, рабочими местами для установки научного оборудования, а
также системой терморегулирования, аудио- и видеосвязью. В отличие от
предыдущих ОС наличие больших иллюминаторов обеспечивает космонавтам
обзор Земли. При длительном пребывании экипажей на МКС это повышает
их психологическую устойчивость.
Роботизированная станция (RWS) обеспечивает дистанционное управле-
ние манипулятором МКС. Станция состоит из трех видеомониторов, один
из которых служит для контроля ручного управления поступательным и вра-
щательным движением манипулятора. Кроме мониторов в состав станции
входят блок индикации и управления, портативный компьютер, блок курсора
искусственного зрения и устройства управления [8]. Основной блок управ-
ления манипулятором размещается в лабораторном модуле и при работе в
модуле «Купол» туда переносятся внешние компоненты (рис. 10.12). В состав
584
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 10.12. Роботизированная пе-
реносная станция:
1 — джойстик управления поступатель-
ным движением; 2 — видеомонитор; 3 —
джойстик управления вращением; 4 —
блок курсора искусственного зрения и
устройства управления; 5 — портатив-
ный компьютер; 6 — блок индикации
и управления
стойки, размещенной в лабораторном модуле, входят устройство видеокон-
троля и электронный блок управления, в котором установлено программное
обеспечение работы манипулятора. Рабочей является только одна станция.
Активная станция осуществляет оперативный контроль и управление, в то
время как резервная обеспечивает контроль и автоматический останов в случае
нештатной ситуации. При выходе из строя активной станции резервная авто-
матически переходит в рабочий режим. Переносная станция взаимодействует
с локальной шиной МКС и локальной шиной питания и передачи данных
приборов интерфейса (PDGF), а также с командной шиной [8].
10.2.4. Требования к компоновке кабины и пульта управления
Размеры кабины и компоновка пульта управления определяются объ-
емно-массовыми характеристиками оборудования, входящего в пульт ПКА.
Кроме общих эргономических требований к пультам управления полетом ОС
предъявляются следующие специфические требования [2].
1. Минимальные размеры и возможность компактного размещения в отсеках
космического корабля. Габариты поста управления и всех других элементов
не должны превышать установленных пределов размеров кабин и отсеков, в
которых размещается данный компонент.
2. Минимальный вес конструкции приборов. При определении размеров
пульта расчет должен проводиться в соответствии с установленными нормати-
вами: внешние контуры пульта должны позволять размещать его максимально
компактно, масса и габариты приборов, устанавливаемых в пультах, должны
быть минимальными. Это требование не должно входить в противоречие
с требованиями по точности воспроизведения информации.
Глава 10. Компоновка постов управления
585
3. Удобство подхода к рабочему месту. Пульт управления, кресло космо-
навта, входные и выходные устройства должны быть размещены таким об-
разом, чтобы он мог быстро и без труда занять свое рабочее место и быстро
покинуть его в случае необходимости. При установке рабочего места космо-
навта желательно обеспечить визуальный обзор в направлении основного
движения корабля.
4. Надежная работа приборов и органов управления, противопожарная без-
опасность, защита от воздействия агрессивных сред. В настоящее время тре-
бования по надежности, эффективности и безопасности пультов индикации
назначаются в соответствии с существующими методиками определения этих
характеристик.
5. Применение рациональных средств индикации и обеспечение комфортных
условий работы космонавтов за пультом. Приборы индикации, сигнализации
и ручного управления создают на основе технических руководств по инже-
нерной психологии.
6. Технологичность конструкции. Материалы, оборудование для изго-
товления и контроля, технологические процессы при изготовлении систем
индикации, пультов управления и элементов, а также приборов для ручно-
го и полуавтоматического управления должны удовлетворять современным
требованиям к таким изделиям.
7. Типизация размещения основных приборов и средств управления. Раз-
мещение панелей и приборов индикации должно обеспечивать наилуч-
шие условия визуального наблюдения за ними и наиболее удобный доступ
к ним. Каждый прибор и ручка должны иметь свое точно определенное место,
чтобы у космонавта выработался автоматизм движений. При определении зон
размещения приборов и средств управления необходимо учитывать частоту
и режимы пользования тем или иным прибором или органом управления.
8. Максимальное применение стандартных узлов, приборов, органов управ-
ления и их унификация. Несомненно, целесообразно унифицировать приборы
и органы управления. Часть унифицированных и наиболее широко распро-
страненных приборов и органов управления должна быть стандартизирована.
9. Эстетические требования. Приборы индикации и часть средств управ-
ления обычно размещаются на специальных плоских панелях. Размещение
панелей и приборов должно обеспечивать наилучшие условия визуального
наблюдения за ними и наиболее удобный доступ к ним. При компоновке
приборов и органов управления на пульте необходимо придерживаться реко-
мендуемых зон размещения в зависимости от назначения и типов приборов,
а также эстетических требований.
Результаты экспериментов в наземных условиях и практика реальных
космических полетов позволяют заключить, что экипаж выполняет разно-
образные функции [9], основные из которых следующие:
• контроль за работой бортовой аппаратуры ПКА;
• восстановление работоспособности бортовых систем путем замены от-
казавших приборов и блоков резервными, регулировка отдельных параметров
и простейший ремонт;
586 Часть III. Компоновка систем пилотируемого космического аппарата
• управление движением ПКА: ориентация, стабилизация относитель-
но центра масс, сближение и стыковка на орбите, коррекция орбиты, сход
с орбиты, посадка;
• управление работой бортовых систем;
• осуществление связи с Землей или другими ПКА;
• корректировка и смена программы полета, решение навигационных
задач, визуальное наблюдение;
• монтаж и демонтаж отдельных узлов корабля, выполнение работ с вы-
ходом в космическое пространство;
• выполнение специальных работ, например наблюдение за внешними
объектами, приведение специальных опытов.
Полеты ПКА России и США убедительно показали необходимость и це-
лесообразность создания ручных или полуавтоматических систем управления.
Для успешного управления полетом космонавта необходимо обеспечить опе-
ративной и достоверной информацией о состоянии бортовых систем и бал-
листических параметров ПКА. Эту задачу выполняет интегрированная СОИ.
К основным подсистемам интегрированой СОИ относятся [10] следующие.
1. Экранные индикаторы, которые также являются функциональными
элементами систем полуавтоматического управления и входят в систему ин-
дикации всего ПКА. На электронных индикаторах индуцируются информа-
ционно-исполнительные модели в виде командных сигналов. К индикаторам
систем полуавтоматического управления также относятся оптический визир,
предназначенный для дальнего наблюдения и наведения на объекты нави-
гации, оптико-механический построитель местной вертикали (оптический
ориентатор), позволяющий космонавтам привести ПКА в путевую систему
координат, стабилизировать его в этом положении, а также ориентировать
корабль по курсу в путевой системе координат.
В системах полуавтоматического управления используются такие элек-
тромеханические и электронные индикаторы и приборы пульта космонавта,
как индикатор пилотажный командный, показывающий угловую скорость,
угловые рассогласования и угловое положение ПКА относительно трех осей;
индикатор периода упругих колебаний и задатчик уставки для формирования
импульсов бортовой цифровой вычислительной машины (БЦВМ), предна-
значенный для учета влияния упругости элементов конструкции; блок ввода
уставок, позволяющий вручную ввести необходимую уставку на разворот ПКА
относительно его центра масс по трем осям и выполнять заданный разворот,
используя индикатор пилотажный.
2. Комбинированные индикаторы и БЦВМ позволяют совмещать разно-
родную информацию с помощью централизованной системы сигнализации,
включая речевой синтезатор. Они требуются для успешного выполнения по-
летного задания, во время которого возникает необходимость восприятия и
обработки большого объема разнообразной информации в реальном масштабе
времени для принятия правильного решения. Анализ известных разработок
по созданию видимого изображения с использованием различных физиче-
ских принципов (оптоэлектроники, люминесцентных элементов, голографии
и др.) показывает, что в настоящее время значительными преимуществами
Глава 10. Компоновка постов управления
587
по разрешающей способности, яркости, ряду других показателей обладают
устройства с жидкокристаллическими экранами различного типа.
3. Централизованные системы сигнализации, многофункциональные
устройства ввода информации, электронно-вычислительные машины си-
стем отображения информации (СОИ) или специализированные системы
поддержки оператора (СПО).
4. Интеллектуальные системы поддержки оператора.
Для ПКА длительного существования особое значение имеют системы
СПО, которые осуществляют контроль за расходом ресурсов, ЗИП и расход-
ных материалов. Создание бортовой СПО — одно из важнейших направлений
СОИ. В средствах воспроизведения и отображения информации используется
большое количество новейших материалов, для изготовления которых при-
меняются различные технологические процессы. За последнее время сред-
ства отображения претерпели значительные технические изменения в связи
с применением электроники, микроминиатюризации, эргономики, а также
повышением их надежности и эффективности использования.
Существует общее подразделение средств воспроизведения и отображения
информации по способу использования. По назначению СОИ подразделяют-
ся на устройства индивидуального и коллективного пользования. Устройства
индивидуального пользования предназначены для получения информации
только одним человеком-оператором, а коллективного — для одновременной
работы нескольких операторов.
Все средства воспроизведения и отображения информации можно разде-
лить на две большие группы: регистрирующего воспроизведения и наглядного
отображения, которые в свою очередь делятся на две подгруппы.
К средствам регистрирующего воспроизведения относятся подгруппы
механических и немеханических устройств. Группа средств наглядного ото-
бражения информации подразделяется на подгруппы непосредственного и
проекционного отображения.
Системы непосредственного отображения информации на экране стро-
ятся либо с использованием жидкокристаллических экранов (обычных и
знаковых), либо с использованием знаковых индикаторов в виде матрицы.
К матричным средствам непосредственного отображения относятся устрой-
ства, в которых используется набор готовых знаков: газоразрядные знаковые
лампы, световые решетки, волоконно-оптические индикаторы, знаковые
барабаны, транспаранты, знаковые лампы накаливания, электролюменес-
центные индикаторы и индикаторы на жидких кристаллах.
Лазерные системы с пассивным и активным экранами используются
в качестве источника проекционного отображения информации.
10.3. Система отображения информации
В ходе космического полета в системе управления реализуются процессы,
решающие задачу формирования необходимой для управления информации.
Указанные процессы характеризуются следующими видами информацион-
ного обеспечения:
588 Часть III. Компоновка систем пилотируемого космического аппарата
• баллистическо-навигационным обеспечением (БНО):
• командно-программным обеспечением (КПО);
• информационно-телеметрическим обеспечением (ИТО);
• контрольно-диагностическим обеспечением (КДО);
• информационным обеспечением деятельности экипажа (ИОДЭ);
• информационно-медицинским обеспечением (ИМО);
• методическим обеспечением нестандартных операций (МОНО);
• информационным обеспечением выполнения целевой программы
(ИОЦП).
На рис. 10.13 представлена схема информационного обеспечения про-
цесса управления полетом [1].
Рис. 10.13. Схема информационного обеспечения процес-
са управления полетом
10.3.1. Построение системы отображения информации
СОИ на космическом аппарате — это совокупность приборов, индика-
торов, сигнализаторов, устанавливаемых на рабочих местах членов экипажа
в соответствии с определенными правилами. Она предназначена для выдачи
информации членам экипажа о состоянии космического аппарата, его по-
ложении в пространстве, о работе силовой установки и бортового оборудо-
вания. СОИ — важная часть эргатической системы экипаж — космический
аппарат — среда.
По принципу построения СОИ можно подразделить на четыре типа [11].
1. Системы с индивидуальным способом предъявления информации,
характеризующимся тем, что состояние каждого контролируемого параметра
отображается своим индивидуальным индикатором. Каждый из параметров
функционально может быть не связан с остальными. Предъявление параме-
тров проводится всеми СОИ одновременно (рис. 10.14) [11].
Глава 10. Компоновка постов управления
589
Рис. 10.14. Схема индивидуального предъявления информации
Преимуществами такого типа СОИ являются простота построения, пол-
нота и оперативность отображения информации, надежность (при отказе
одной из СОИ космонавт может восстановить информацию по показаниям
других индикаторов).
Недостатки подобной системы — большой избыточной объем информа-
ции, трудность сопоставления множества различных показаний для оценки
ситуации в целом, большая площадь СОИ, что увеличивает время поиска
информации. Для сокращения времени поиска применяют различные методы
функциональной компоновки отдельных СОИ: метод мнемосхем, структур-
ных схем, группировка СОИ по целевому или функциональному признаку.
2. Системы с отображением информации в обобщенной форме [11] ха-
рактеризуются тем, что информация о множестве параметров отображается
на одном индикаторе в виде единой обобщенной характеристики (рис. 10.15).
Преимущества подобной СОИ — резкое сокращение передаваемого
космонавту потока информации с помощью устройства коммутации и вы-
числительного комплекса, увеличение и выделение доли существенно необ-
ходимой информации в общем потоке, ее автоматическое обобщение, снаб-
жение космонавта информацией о ситуации в целом без каких-либо затрат
времени с его стороны.
Недостатки подобной СОИ — увеличение времени поиска информа-
ции, требующейся для отыскания причины выхода за допустимые преде-
лы обобщенной характеристики, надежности отображения; необходимость
590
Часть III. Компоновка систем пилотируемого космического аппарата
значительного объема знаний о поведении контролируемого объекта управ-
ления. Для устранения недостатков устанавливаются дополнительные инди-
каторы, на которые выводятся значения наиболее важных параметров.
3. Системы с регулируемым потоком информации [11] характеризуется тем,
что поток передаваемой информации, идущий от объекта управления, искус-
ственно последовательно делится на ряд малых потоков, предъявляемых кос-
монавту на одних и тех же приборах. СОИ подобного типа подразделяются на
предъявляющие информацию с приоритетом и предъявляющие информацию
только о тех параметрах, которые вышли за допустимые пределы (рис. 10.16).
Преимущества СОИ — существенное сокращение передаваемого потока
информации, сокращение площади информационной панели, наглядность
отображения каждой фазы управляющего процесса. Недостаток СОИ по-
добного типа — длительный поиск причин выхода за допустимые пределы
какого-либо параметра вследствие ограниченного числа объектов информа-
ции на панели, необходимость априорных знаний о возможном поведении
объекта управления.
4. Системы с иерархическим способом предъявления информации [11]
характеризуются многоступенчатой структурой ее построения. На ступе-
ни I отображается состояние контролируемого объекта в целом, космонавт
Рис. 10.15. Схема предъявления информа-
ции в обобщенной форме:
УК — управляющий комплекс; ВК — вычислитель-
ный комплекс
Рис. 10.16. Схема предъявления ин-
формации с регулируемым потоком
Глава 10. Компоновка постов управления
591
непрерывно снабжается информацией об общем состоянии аппарата без де-
тализации. На ступени II по запросу космонавта предъявляется информация
о состоянии определенной системы аппарата. На ступени III по требованию
космонавта отображается информации о состоянии каждой контролируемой
системы в качественной или количественной форме (рис. 10.17).
Рис. 10.17. Схема СОИ с иерархическим способом предъявле-
ния информации
Система с иерархической подачей информации объединяет в себе все
преимущества трех предыдущих систем. Для ее реализации необходимо иметь
на борту высокоразвитый вычислительный комплекс, специальные высоко-
надежные системы связи с отдельными СОИ и индивидуальный основной
индикатор.
Выбор типа СОИ зависит от соотношения потока поступающей инфор-
мации (Гинф) и способности космонавта ее воспринять (Гкос). Если Гинф < Гкос,
то целесообразно применять СОИ с индивидуальным способом предъявления
информации. Если Гинф = Гкос, то можно использовать СОИ как с индивиду-
альным, так и с групповым способом предъявления информации. При Гинф >
>FKOC и возможности разделения потока информации на приоритетные группы
592 Часть III. Компоновка систем пилотируемого космического аппарата
целесообразно выбрать способ с регулируемым потоком информации, но тогда
на каждом этапе работы должно выполняться условие Гинф < Гкос. Если Гинф > Гкос
и невозможно разделить поток информации на ряд частных потоков, то сле-
дует применять СОИ с иерархическим способом предъявления информации.
10.3.2. Средства отображения информации
Информационные процессы невозможны без средств воспроизведения и
отображения информации (рис. 10.18), которая в вычислительных системах и
в системах управления представляется символами и образами [12]. Воспроиз-
ведение информации — это регистрация символов на материальном носителе.
Отображение информации — это представление ее в форме, приемлемой
для непосредственного восприятия органами чувств человека (зрением, слу-
хом, осязанием, обонянием, вкусом). Способность органов чувств восприни-
мать информацию различна. Поданным психологов максимальная пропуск-
ная способность органов чувств человека следующая: зрения — 35-106 бит/с
(по другим источникам до 109 бит/с); слуха — 25-104 бит/с; осязания —
2-103 бит/с; обоняния — 10 100 бит/с; вкуса — НО бит/с. Наиболее эффек-
тивным является зрительное восприятие. Многообразие, большой объем
и частое обновление информации требуют применения средств, обеспечи-
вающих представление ее в визуальной форме. Физической реализацией
информационной модели, предназначенной для зрительного восприятия,
является информационное поле средств воспроизведения — находящаяся
в поле зрения оператора часть пространства, предназначенная для передачи
информации, представленной совокупностью оптических образов. В соответ-
ствии с инженерно-психологическими требованиями (ИПТ), изложенными в
ГОСТ 27833—88 «Средства отображения информации. Термины и определе-
ния», средства отображения информации должны обеспечивать объем, состав
и форму предъявления информации, соответствующие решаемым задачам и
психологическим возможностям человека; лаконичность сигналов, поскольку
быстрота приема и точность обработки приблизительно равна количеству сиг-
налов, принимаемых оператором; иметь форму, не требующую от оператора
дополнительного перекодирования; способствовать максимально возможной
разгрузке памяти человека, не снижая его работоспособности; обеспечивать
оператору возможность предвидеть дальнейшее развитие ситуации; исключать
как недогрузку, так и перегрузку потока информации. По воздействию на
органы чувств оператора СОИ подразделяются на визуальные, акустические,
тактильные и проприоцептивные (ощущение относительного положения ча-
стей, т. е. ощущение своего тела).
Конкретно типы, количество и размещение СОИ выбирается исходя из
особенности работы анализаторов человека, формирования образа объекта
управления, последовательности и важности выполняемых операций, тре-
буемой скорости и точности выполнения работы. Классификация средств
индикации приведена в табл. 10.1 [11].
В современных СОИ информация поступает оператору в закодированном
виде. Под кодовой информацией понимают способ отождествления условных
Рис. 10.18. Классификация средств отображения информации
594
Часть III. Компоновка систем пилотируемого космического аппарата
Таблица 10.1
Классификация средств индикации
Группа Подгруппа Средства, используемые для выделения каждого индикатора
Визуальные Условные, световые, изобразительно шкальные и цифровые, печатный материал, комплексные системы, изображения на мониторе Яркость, контрастность, временные характеристики, цвет, текстура, движение, расстояние, информаци- онная емкость, способ кодирования
Акустические Речевые, сложные нерече- вые, использующие чистые тона Частота, громкость, отношение сигнала к шуму, конфигурация, тембр, направление источника звука, временные характеристики
Тактильные Вибрационные Вибрация, интенсивность, конфигу- рация, текстура, движение, времен- ные характеристики
Проприо- цептивные Статические, динамические Градация механических воздействий: силовых, кинематических, вибрационных
знаков (сигналов) с тем или иным реальным (физическим) признаком инфор-
мации (скорость, давление, температура и т. п.). При этом становится важной
проблема согласования «выходов» машины и «входов» человека. Символы,
передающие информацию, называются алфавитом. Он строится и оценива-
ется по следующим независимым параметрам: модальность сигнала, длина
алфавита, мера абстрактности кода, компоновка знака или группы знаков.
Вид алфавита выбирается исходя из характера передаваемой информации и
задач, решаемых оператором. Главную роль в распознавании знака играют
его контур, угловой размер и яркость. К контуру добавляются внешние и
внутренние детали в виде цифр, букв и символов, а также цвета.
1033. Требования к размещению системы отображения
информации
Поскольку определяющим звеном ручной и полуавтоматической систем
управления движением ПКА является человек, то качество его работы су-
щественно зависит от условий труда, которые сформулированы в эргономи-
ческих требованиях.
На ПКА, оснащенных большим количеством систем оборудования, кос-
монавт не успевает в процессе полета, выполняя свои основные задачи, кон-
тролировать все системы бортового оборудования и получать полный объем
информации об их работе. Для его разгрузки в анализе работоспособности
комплекса оборудования используют два одновременно функционирующих
метода контроля [13].
Глава 10. Компоновка постов управления
595
1. Бортовая ЭВМ по заложенным алгоритмам проводит диагностику
правильного функционирования ПКА и его систем. Информация о контро-
ле в виде обобщенных параметров передается на систему индикации пульта
космонавта, чтобы он мог в любой момент судить о функционировании
систем корабля.
2. Используются телеметрические системы борт — Земля для контроля
параметров бортового оборудования ПКА и состояния здоровья экипажа
службами управления полетом в ЦУПе. При этом в основном выполняются
следующие функции:
• оказание помощи при выполнении программы полета;
• расширение возможностей космонавтов при проведении анализа ра-
боты систем бортового оборудования при помощи находящихся в ЦУПе
специалистов по различным системам оборудования ПКА;
• обеспечение в случае необходимости управления ПКА с Земли посред-
ством командных радиолиний.
Для обеспечения эффективной работы по управлению ПКА необходимо:
• группировать средства индикации по степени важности: основные пара-
метры (углы, угловые скорости, программные углы разворота, перечень пода-
ваемых команд), вспомогательные параметры, информационные параметры;
• размещать иллюминаторы таким образом, чтобы они обеспечивали
хороший обзор для ориентации в пространстве;
• при компоновке кабины объединять блоки системы управления на базе
общих принципов действия и взаимного дополнения;
• размещать приборы менее надежные и требующие регулировки таким
образом, чтобы к ним был свободный доступ;
• планировать такую компоновку, которая будет обеспечивать быстрый
и удобный доступ к приборам, находящимся в других отсеках.
Поступающую на систему отображения информацию можно подразделить
на следующие подсистемы [13]:
• подсистему аварийно-предупредительной световой и звуковой сигна-
лизации (ПАПС);
• подсистему ручного контура управления системами и процессами (ПРКУ);
• подсистему контроля параметров систем и окружающей среды (ПКП);
• подсистему отображения пилотажно-навигационной информации (ППНИ);
• подсистему обмена информацией с бортовым вычислительным ком-
плексом (БВК) или пульты управления БВК (ПУ БВК);
• подсистему обеспечения космонавтов программно-временной инфор-
мацией (ППВИ);
• информационно-поисковую систему (ИПС) как элемент системы под-
держки оператора (СПО);
• подсистему оперативного управления космонавтов (ПОУК).
СОИ ПКА должна обеспечить космонавта информацией о навигацион-
ных параметрах, работе бортовых систем и механизмов, климатических усло-
виях в кабине и др. Эта функция выполняется аварийно-предупредительной
подсистемой, к которой предъявляются следующие требования: оповещение
о возникновении отказов, приводящих к опасной ситуации, или о появле-
нии неисправностей, препятствующих выполнению программы; оповещение
596 Часть III. Компоновка систем пилотируемого космического аппарата
о наступлении критических и опасных режимов полета или о невыполнения
предписанного алгоритма работы членами экипажа или системами; оповещение
о правильности действий, предусмотренных алгоритмом работы или программой.
Информация собирается датчиками, устанавливаемыми в отсеках и си-
стемах, информация с которых поступает на пульты пилотов.
103.4. Органы управления
Органы управления предназначены для передачи управляющих воздей-
ствий от оператора к машине и обеспечивают выполнение требуемого дей-
ствия с заданной точностью и в пределах допустимого времени. Космонавт
может осуществлять управление с помощью рук, ног и голоса. Подавляющее
большинство бортовых органов управления относится к ручным.
При выборе органа управления следует принимать во внимание:
• его назначение в системе, т. е. соответствие выполняемым оператором
(ввод команд, регулировка параметров и т. п.);
• степень важности и частоту использования;
• необходимый диапазон перемещений или количество позиций, в ко-
торые должен устанавливаться орган управления;
• требования к точности и скорости его установки, прикладываемому к
нему усилию;
• легкость опознания самого органа управления и его состояния в ра-
бочем положении; возможность блокировки в требуемом положении (если
необходимо); возможность и удобство работы в скафандре (если потребуется).
Органы управления должны иметь блокировки и ограждения, исключа-
ющие возможность случайного включения или выключения.
Органы управления могут быть клавишными и кнопочными переклю-
чателями (ГОСТ 22614-77), тумблерами (ГОСТ 22615—77), поворотными
переключателями и выключателями (ГОСТ 22613—77), рычагами управления
(ГОСТ 21753—76), маховиками управления, штурвалами и рулевыми колеса-
ми (ГОСТ 21752-76).
Для управлении полетом ПКА применяются ручки управления (типа
джойстиков) [14], которые устанавливают на центральном кресле на подло-
котниках (рис. 10.19). В зависимости от положения ручки бывают:
Рис. 10.19. Ручки управления:
а — без защитного чехла; б — с защитным чехлом
Глава 10. Компоновка постов управления
597
• РУл (РуД) — ручка левая, расположенная по левому борту, предназна-
чена для управления продольными перемещениями корабля: вверх-вниз,
вправо-влево; для перемещения назад-вперед на ручке установлен тумблер.
• РУп (РуО) — ручка правая, расположенная по правому борту, предна-
значена для управления ориентацией корабля по крену, тангажу и рысканию.
103.5. Размещение рабочих зон но пультах управления
Управление движением ПКА осуществляется с постов управления, в кото-
рых сосредоточены средства обеспечения информацией и средства управления
полетом. Эти средства размещаются на пультах управления (Remote Control
Unit) — основном элементе рабочего места космонавта, одном из основных
средств взаимодействия человека и машины.
Развитие космической техники внесло серьезные коррективы в понятие
«рабочее место космонавта». Идет непрерывный рост количества пультов и
дисплеев на центральном посту управления полетом пилотируемого космиче-
ского аппарата. На корабле «Восток» был только один пульт. На орбитальной
станции «Мир» их стало уже девятнадцать. Пульты имеют разное назначение:
с одних информация поступает непрерывно и требует отслеживания, с других —
эпизодически и носит справочный характер. В зависимости от вида информа-
ции рабочие зоны на пульте можно разместить следующим образом (рис. 10.20).
Рис. 10.20. Рекомендуемое размещение рабочих
зон на пульте управления
В соответствии с ГОСТ 23000—78 «Система “Человек — машина”. Пульт
управления. Общие эргономические требования», А — зона для расположе-
ния наиболее важных и часто используемых органов управления и средств
отображения информации; Б — зона для расположения нечасто использу-
емых органов управления и средств отображения информации (в пределах
досягаемости и обзора); В — зона для расположения редко используемых
598
Часть III. Компоновка систем пилотируемого космического аппарата
органов управления (в пределах максимальной досягаемости, обзор только
при движении глаз и головы); Г — зона для размещения вспомогательных
органов управления (вне пределов досягаемости и обзора из исходного ра-
бочего положения).
Пульт управления является таким элементом ПКА, от надежности и
четкости работы на котором космонавта-оператора во многом зависит успех
решения поставленных экипажу задач.
В поле зрения человека различают три зоны: первая — с углом от нор-
мальной линии взора ±15; вторая — ±30°; третья — ±60° (рис. 10.21) [11].
В первой зоне размещают средства информации, требующие частого и точ-
ного считывания показаний приборов, во второй — приборы, не требующие
точного и быстрого считывания показаний, в третьей — редко используемые
Горизонтальная
линия взора
Сагиттальная
плоскость
Нормальная
линия взора
Рис. 10.21. Зоны зрительного наблюдения в горизонтальной (а) и вертикаль-
ной плоскости (б):
1 — первая зона с телесным углом ±15°; 2 — вторая зона с углом ±30°; 3 — третья зона
с углом ±60°
приборы, так как считывание информации с приборов может требовать по-
ворота головы.
Поле зрения зависит от поворота не только головы, но и глаз (рис. 10.22)
[9]. При компоновке пультов, используемых в ПКА, необходимо учитывать
смещение нормальной линии взора вниз на 10° в условиях невесомости
(см. рис. 2.3).
В моторном поле* также различают три зоны (рис. 10.23): 7 — зона макси-
мальной досягаемости, которая ограничена дугами, описываемыми предпле-
чьями при движении рук с опорой в локтевых суставах; 2 — зона легкой до-
сягаемости, она ограничена дугами, описываемыми расслабленными руками
* Моторное поле — пространство рабочего места человека-оператора с размещенными
органами управления, в котором осуществляются двигательные действия оператора по управ-
лению системой человек — машина.
Глава 10. Компоновка постов управления
599
Рис. 10.22. Зоны видимости в вертикальной и горизонтальной
плоскостях:
а — при повороте только глаз; б — при повороте головы; в — при повороте го-
ловы и глаз
при движении в плечевых суставах; 3 — зона досягаемости, ограниченная
дугами, описанными максимально вытянутыми руками при движении их
в плечевом суставе.
Основой рабочего места служит пульт управления; по ГОСТ 23000—78 он
должен удовлетворять следующим требованиям:
• поверхность пульта должна обладать диффузным или направленно-рас-
сеянным отражением светового потока, исключающем появление бликов
в поле зрения;
• на пультах, предназначенных для управления однотипными системами,
необходимо соблюдать одинаковое размещение наиболее важных, часто ис-
пользуемых и аварийных органов управления, средств отображения и ввода
информации;
600
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 10.23. Зоны для выполнения ручных операций и размещения
органов управления:
а — вид сбоку; б — вид сверху
• пульты не должны иметь посторонних не отражающих его функцио-
нальное назначение элементов, затрудняющих работу оператора или отвле-
кающих его внимание, а также острых углов, выступов и т. п., которые могут
стать причиной травмы оператора;
• при необходимости пульты могут быть оборудованы выдвижными ящи-
ками для хранения документации, досками для ведения служебных записей,
местами для размещения переносного оборудования.
Форма и размеры панели пульта определяется количеством располо-
женных на нем элементов. Размеры зон размещения СОИ и ОУ не должны
зависеть от рабочего положения оператора. Размещение СОИ и органов
управления на пульте выполняется на основе приоритета, группировки и
взаимосвязи. При определении приоритета используют частоту и степень
использования; точность и скорость считывания информации; размещение
органов управления; влияние (значимость) ошибки считывания или запаз-
дывания операций на надежность и безопасность работы системы.
Аппаратура должна быть размещена таким образом, чтобы наименее на-
дежные приборы имели наилучший доступ для их замены и ремонта.
Существуют два способа группировки СОИ и органов управления.
1. Функциональный, когда группировка приборов СОИ осуществляется
с учетом либо их совместного использования при выполнении конкретной
задачи, либо принадлежности к одному из компонентов системы.
2. Последовательный, при котором приборы СОИ располагаются в по-
рядке последовательного использования, определяемого алгоритмом дея-
тельности оператора.
Функционально связанные между собой средства СОИ и органы управ-
ления следует располагать по возможности близко друг от друга, компонуя
их таким образом, чтобы рука оператора при выполнении манипуляций
Глава 10. Компоновка постов управления
601
управления не закрывала приборы СОИ. Поэтому приборную доску следует
делить на секции, ряды, группы, учитывая что такой подход иногда может
отвлекать внимание оператора.
Управляющие движения оператора должны совпадать с естественным
направлением (табл. 10.2) [2]. Направление движения органов управления
должно рассматриваться в связи с расположением и ориентацией оператора
относительно их и управляемого объекта. При размещении средств индикации
на наклонных панелях пультов взаимосвязи принимаются соответствующими
тем, которые имеют место при расположении приборов на вертикальной или
горизонтальной панели.
Таблица 10.2
Рекомендованные направления движения органов управления
Движение, состояние управляемого объекта Действие на органы управления
Движение рычага Поворот рукояток маховика, штурвала Нажатие кнопки, клавиши
Пуск Увеличение Подъем Открытие Вперед Вправо Вверх В ключе Вверх, от себя, вправо но По часовой стрелке Верхних, передних, правых
Остановка Уменьшение Спуск Закрытие Вниз Влево Назад Примечание. Кроме орган Выключе Вниз, на себя, влево ов управления, управля ние Против часовой стрелки ющих клапанами. Нижних, задних, левых
Выявлено, что увеличение суммарной площади лицевых панелей пультов
управления происходит при незначительном увеличении объема, отводимо-
го для их размещения. Сокращение количества пультов управления может
быть достигнуто путем их комплексного использования (вывод на одни те
же транспаранты различной информации за счет коммутации сигналов и
сменных масок на лицевые панели, а также выдача команд в закодированном
виде в матричной форме либо цветовым кодом).
При разработке рабочего места в невесомости важнейшим требованием
является сохранение нейтрального положения тела космонавта при работе
(рис. 10.24): панели управления должны быть выше, поскольку линия взгляда
ниже, чем в обычных земных условиях [15].
602
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 10.24. На космической станции панель управления находится
для мужчин на расстоянии 50 см от глаз (а), а для женщин — 40 см
от глаз (5)
При проектировании рабочего места для работы в условиях невесомо-
сти необходимо предусмотреть устройства для фиксации тела космонавта
в рабочем положении (см. рис. 8.20, табл. 8.3) и рабочих материалов (бумаги,
ручек и пр.). Используются фиксаторы для ступеней ног, бедер и корпуса тела.
Конструкция фиксаторов должна позволять настраивать их в зависимости
от размеров тела космонавта (см. 2.1.1). Кресла с привязными ремнями не
обеспечивают комфортного состояния при работе.
Во время полета может возникнуть необходимость работы с внешними
люками, шлюзами, системой регулировки состава и атмосферного давления
и др., причем работа может проводиться под давлением в скафандре. Это
необходимо учесть при конструировании рукояток, кнопок и т. п. В целом
детали должны быть крупнее, более удалены друг от друга и требовать для
включения и выключения больших усилий и перемещений.
При проектировании рабочего места необходимо учитывать антропоме-
трические признаки для рассматриваемого контингента операторов. Обычно
исходят из 5-го и 95-го перцентилей антропометрического признака. При
проектировании рабочего места в космических полетах с участием интерна-
циональных экипажей требуется учитывать национальные антропометриче-
ские особенности. В условиях невесомости изменяется взаимоотносительное
положение рук, ног, головы и других частей тела космонавта, что требует
коррекции принятых антропометрических критериев на основе двигательной
активности и рабочих поз космонавта. Все рабочие места операторов должны
быть снабжены средствами фиксации, описанными в 8.2.3.
Глава 10. Компоновка постов управления
603
10.4. Компоновка кабины и системы отображения информации
10.4.1. Система отображения информации космического корабля
«Союз-ТМА» и пульт ручного управления PC МКС
Развитие космической техники, усложнение задач по управлению кос-
мическим кораблем, увеличение количества задач, решаемых космонавтом
на борту аппарата, потребовало значительного усовершенствования СОИ
космического корабля. Большую роль в совершенствовании аппаратуры СОИ
сыграли появление и применение в новых разработках жидкокристалических
дисплеев, бортовой вычислительной техники с высоким быстродействием,
обширной памятью, малыми массами и габаритами. Это позволило создать
новые совершенные СОИ для космических кораблей [13, 14, 16, 17]. Основ-
ным разработчиком СОИ для ПКА является НИИАО.
Исходя из разработанной концепции СОИ ПКА можно сформулировать
следующие требования к ней.
1 . СОИ ПКА должна иметь:
• средства контроля основных параметров и режимов работы бортовых
систем, параметров среды обитания экипажа, запасов рабочих тел (топлива,
газа);
• средства контроля параметров движения ПКА и его местоположения
относительно Земли, места посадки относительно наземных измерительных
пунктов;
• средства выдачи команд управления в объеме, достаточном для реше-
ния основных задач полета и возвращения на Землю;
• средства оповещения экипажа о наступлении критических ситуаций
на борту ПКА;
• средства связи экипажа с ЦУП;
• средства управления средой обитания в кабине корабля.
2 . СОИ ПКА совместно с радиотехническими, оптическими и телевизион-
ными средствами измерения и наблюдения должна обеспечивать автономное
решение задач причаливания, облета заданной цели, стыковки со станцией
или другим кооперируемым КА, ориентации в пространстве относительно
Земли, спуска с орбиты.
3 . Задачи баллистическо-навигационного обеспечения маневров на ор-
бите, дальнего сближения и штатных режимов спуска и посадки решаются
наземными средствами. Данные, необходимые для системы управления
движением, должны вводиться ЦУП или с пульта космонавтов по указанию
ЦУП, отрабатываться бортовыми средствами автоматики и контролироваться
экипажем. Приоритет в управлении принадлежит ЦУП.
Применительно к кораблю «Союз» на СОИ «Сириус» было возложено
решение следующих задач:
• контроль работы основных бортовых систем на всех этапах полета и
после приземления;
• управление системой ручной ориентации по оптическому ориентатору
и ионным датчикам;
604 Часть III. Компоновка систем пилотируемого космического аппарата
• управление движением корабля на орбите;
• управление системами, которые обеспечивают сближение, стыковку,
маневр на орбите, выход космонавтов в открытое космическое пространство,
спуск с орбиты и посадку корабля;
• управление системами жизнеобеспечения;
• управление аппаратурой спускаемого аппарата и бытового отсека;
• контроль автоматических и полуавтоматических режимов управления
системами корабля;
• контроль автоматического ввода уставок в системы, обеспечивающие
астроориентацию корабля, маневр, работу сближающе-корректирующей
двигательной установки, ввод уставок вручную;
• контроль напряжения на шинах питания корабля и тока заряда-разряда
аккумуляторных батарей корабля;
• контроль параметров атмосферы (давление, температура, влажность)
в кабине спускаемого аппарата и бытового отсека, температуры и давления
в приборном отсеке;
• контроль давления в баллонах систем ориентации и двигательной
установки;
• индикация расстояния до другого корабля и скорости сближения с ним;
• определение времени полета, зон радиосвязи с наземными измеритель-
ными пунктами, времени вхождения в тень Земли и выхода и тени, числа
витков вокруг Земли.
На выбор решений накладываются ограничения по объему, массе, энер-
гопотреблению при высоких требованиях к надежности аппаратуры.
Развитием СОИ «Сириус» стала система «Нептун». Для ПКА «Союз-ТМА»
разработана новая СОИ «Нептун-МЭ» (рис. 10.25) и интегрированный пульт
управления (ИнПУ) [18]. На борту ПКА «Союз-ТМА» два ИнПУ: один —
у командира корабля, другой — у сидящего слева бортинженера. Пульт служит
для контроля и оперативного управления бортовыми системами транспорт-
ного корабля «Союз-ТМА».
Рис. 10.25. Общий вид панели пульта «Нептун-МЭ»
Для оперативного управления используется интегрированный пульт
(персональный компьютер) ручного контура управления служебного модуля
международной станции МКС [10]. Кроме того, в каждом отсеке имеются
переносные пульты СОИ (рис. 10.26)
Глава 10. Компоновка постов управления
605
Отличительной чертой пульта явля-
ется использование одноэкранной СОИ,
а также построение интерфейса на прин-
ципиально новом подходе. Это позволило
значительно сократить размеры и массу
пульта. На рис. 10.27 представлена ком-
поновка СОИ «Нептун-МЭ» в кабине ТК
«Союз-ТМА».
Рис. 10.26. Интегрированный пульт
управления. СОИ «Нептун-МЭ»
1 12 13 14
Рис. 10.27. Размещение СОИ «Нептун-МЭ» в кабине ТК «Союз-ТМА:
/ — интегрированный пульт управления (ИнПУ); 2 — цифровая клавиатура для введения кодов
(для навигации по дисплею ИнПУ); 3 — блок управления маркером для навигации по дисплею
ИнПУ; 4 — блок, элетролюминесцентной индикации текущего состояния систем; 5— РВП-1 и
РВП-2 — ручные поворотные вентили, отвечающие за наполнение магистралей кислородом из
шаробаллонов, один из которых расположен в приборно-агрегатном отсеке; 6 — электропнев-
моклапан подачи кислорода при посадке; 7— визир специальный космонавта для наблюдения
командиром корабля во время стыковки за стыковочным узлом (для передачи изображения здесь
применяется примерно такая же система зеркал, как в перископе подводной лодки); 8 — ручка
управления движением, с помощью которой командир корабля управляет двигателями для
придания кораблю линейного (положительного или отрицательного) ускорения; 9 — ручка
управления ориентацией, которой командир корабля задает вращение аппарата вокруг центра
масс; 10 — холодильно-сушильный агрегат, отводящий из корабля тепло и влагу, неизбежно
накапливающиеся в воздухе вследствие присутствия на борту людей; 11 — тумблеры включе-
ния вентиляции скафандров при посадке; 12 — вольтметр; 13 — блок предохранителей; 14 —
кнопка запуска консервации корабля после стыковки для сохранения ресурса «Союза-ТМА»
(после стыковки электропитание и вентиляция поставляются уже самой орбитальной станцией)
606 Часть III. Компоновка систем пилотируемого космического аппарата
10.4.2. Система отображения информации орбитального комплекса
«Алмаз»
Пилотируемый орбитальный комплекс «Алмаз» состоял из орбитальной
пилотируемой станции «Алмаз» (ОПС) и транспортного корабля снабжения
(ТКС), который в свою очередь включал в себя функционально-грузовой блок
(ФГБ) и возвращаемый аппарат (ВА). В состав СОИ комплекса входили пульты
центральных постов и специализированные периферийные пульты и ручки управ-
ления. На рис. 10.28 показана блок-схема СОИ орбитального комплекса «Алмаз».
Система отображения информации (СОИ) комплекса «Алмаз» состоит
из следующих компонентов [19]:
• комплекс «Марс» для ОПС «Алмаз»;
• бортовая информационно-поисковая система (БИПС);
• дисплейный комплекс космонавтов (ДИСК-1);
• комплекс «Юпитер» транспортного корабля снабжения (ТКС) для ФГБ
(рис. 10.30);
• комплекс «Икар» для ВА.
В состав каждого из комплексов входят многофункциональные индика-
торы, дисплейные процессоры, матричные командно-сигнальные устройства,
центральные многофункциональные пульты управления, специализирован-
ные периферийные пульты, датчики, светильники, ручки управления дви-
жением и специальные оптико-электронные приборы для проведение пла-
новых работ с научной аппаратурой, обеспечения перехода в транспортный
корабль и выхода в космос, оценки правильности функционирования систем
станции на всех этапах и режимах эксплуатации, оценки работоспособности
служебных систем и экспериментального оборудования, обнаружения и ло-
кализации отказов и аварийных ситуаций, контроля запаса основных рабо-
чих компонентов систем, контроля и регулирования параметров внутренней
среды станции и системы освещения.
Пульт ППР — 1 (рис. 10.29) предназначен для обеспечения работы кос-
монавта при выполнении следующих задач:
• управление движением станции — ориентация, стабилизация, коррек-
ция орбиты;
• определение навигационной обстановки;
• индикация параметров и контроль за работой системы стабилизации,
ориентации и двигательных установок;
• индикация параметров и контроль за работой системы жизнеобеспечения;
• контроль за работой системы электропитания, бортовой автоматики
(БА), системы терморегулирования (СТР), медицинский контроль;
• управление пиротехническими средствами;
• индикация времени полета, определение текущего времени, хрономе-
трирование отдельных операций, оповещение экипажа о заданном времени;
• управление системой телевидения и периодическая индикация ее
параметров;
• контроль за работой программных устройств системы управления,
а также ручного включения программы выдачи команд в программе в задан-
ной временной последовательности;
Комплекс «Алмаз» — комплекс 11Ф712
Рис. 10.28. Блок-схема СОИ орбитального комплекса «Алмаз»:
ПГО — пульт грузового отсека; ППР — пульт пилота рабочего отсека; ПСР — пульт связи рабочего отсека; ПОР — пульт оператора рабочего
отсека; ПШК — пульт шлюзовой камеры; ППШО — пульт предшлюзовой камеры; ПФТ — пульт фототелевизионной аппаратуры; ПБО —
пульт бытового отсека; КСУ — командно-сигнальное устройство; ПАУ — пульт ассенизационного устройства; ПНА — пульт научной аппа-
ратуры; РУП (Л) — ручка управления правая (левая); ДТВ, ДТЖ — датчики температуры воздуха и жидкости
608
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 10.29. Главный пульт пилота рабочего отсека ППР-1 центрального поста ОПС «Алмаз»:
1 — командно-сигнальные пульты (КСП); 2 — блок контроля (БКП) — блок вызова аналого-
вых параметров на видеоконтрольное устройство (ВКУ); 3 — видеоконтрольное устройство;
4 — электролюминесцентный цифровой индикатор уровня топлива двигательной установки
ОПС: горючего и окислителя; 5 — четырехшкальный блок индикации параметров (БИП) га-
зоразрядный; 6 — электролюминесцентный цифровой индикатор контроля углов разворота
станции; 7 — электролюминесцентный мнемоиндикатор работы двигателей ориентации и
направления вращения станции; 8 — индикаторы трехшкальные со световым отсчетом; 9 —
табло сигнальной люминесцентной системы аварийно-предупредительной звуковой и световой
сигнализации; 10 — пульт управления бортовой оптической информационно-поисковой систе-
мы; // — индикатор электролюминесцентный цифровой кодовых сообщений; 12— индикатор
электролюминесцентный цифровой ввода и контроля ввода уставок; 13 — бортовые часы с
секундомером и будильником; 14 — индикатор навигационный космический с качественным
и количественным способами представления местоположения станции по долготе и широте
• получение информации об углах и угловых скоростях разворота станции
по курсу, крену и тангажу;
• запасах компонентов топлива в баках станции.
Центральное место в СОИ «Юпитер» занимает пульт грузового отсека,
показанный на рис. 10.30 [19].
Как и на главном пульте ОПС основными средствами СОИ «Юпитер»
ТКС являются подсистема световой и звуковой сигнализации, командно-сиг-
нальные пульты (КСП), электронная система отображения информации с
использованием ВКУ телевизионного типа и др. На рис. 10.31. представлена
схема размещения СОИ в кабине ПКА «Алмаз» [19], в табл. 10.3 приведены
ее количественные характеристики.
Глава 10. Компоновка постов управления
609
Рис. 10.30. Пульт СОИ «Юпитер»:
/ — табло сигнальные электролюминесцентные подсистемы аварийно-преду-
предительной звуковой и световой сигнализации (ТСЭ); 2— комбинированный
электронный индикатор (КЭИ) с использованием видеоконтрольного устрой-
ства (ВКУ) телевизионного типа на ЭЛТ и накладного шкального устройства,
аналогичного КЭИ на пульте центрального поста станции; 3 — блоки контроля
параметров или блоки кнопочных переключателей вызова параметров (БКП) на
контроль на ВКУ; 4 — командно-сигнальные пульты матричного типа (КСП);
5 — измерительные приборы ФГБ; 6 — ручки управления ориентацией и про-
дольным движением ФГБ пальчикового типа (РУ); 7— бортовые часы косми-
ческие (БЧК)
Рис. 10.31. Компоновка центрального поста управления
ОПС «Алмаз»:
/ — командно-сигнальное устройство (КСУ); 2 — пульт пилота
рабочего отсека (ППР-1); 3 — пульт управления фототелевизи-
онной аппаратурой (ПФТ-1); 4 — ручка управления ориентацией
станции пальчикового типа (РУ); 5 — пульт управления системой
радиосвязи (ПСР-1)
Таблица 10.3
Количественные характеристики СОИ орбитального комплекса «Алмаз»
Количество компонентов СОИ ППР ПОР ПВО ПФТ ПАУ ППШО ПСР ПШК ПНА Щ1 Щ2 ИТОГО
Пульты 1 1 1 1 1 1 1 1 1 1 1 11
Табло 3x5 11 6 2 3 1 2 1 2 28
Табло 2x9 КСП 2 2 4
Табло 3x9 КСП 3 3 3 9
Общее количество сигнализаторов 283 178 30 45 15 73 85 23 732
Кнопки 200 101 42 24 20 91 131 43 15 16 8 691
Тумблеры 3 3
Галетные переключатели 8 5 1 1 1 3 2 1 22
Количество регуляторов 10 4 1 1 7 4 6 33
Общее количество органов управления 221 ПО 44 25 21 99 138 51 16 16 8 749
Количество матричных команд 234 162 243 639
Приборы со световым отсчетом 3 2 1 1 7
Навигационные индикаторы 1 1
Индикаторы на основе ЭЛТ 1 1 2
Индикаторы группового контроля на ГРИ 1 1
Электромеханические цифровые индикаторы 2 1 2 5
Электролюминесцентные цифровые приборы 4 4
Количество аналоговых шкал приборов для измерения параметров систем 17 2 1 4 6 1 31
Электромеханические часы-будильник 1 — —
Глава 10. Компоновка постов управления
611
Управление полетом осуществля-
ется с помощью ручек управления,
аналогичных применяемым в СОИ
«Сириус». Штатно ручки зафикси-
рованы в пульте, в рабочем поло-
жении они выдвигаются. Для того
чтобы исключить тремор руки, на
ПКА «Алмаз» были предусмотрены
специальные упоры, которые были
установлены на откидной крышке
ручки (рис. 10.32) [19].
10.43. Аппаратура управления ручной стыковкой космических
аппаратов
При отказе системы автоматической стыковки «Курс» космонавт перехо-
дит на режим ручного управления стыковкой. Для этого маневра использу-
ется система ТОРУ (Телеоператорный режим управления) — дистанционная
ручная система сближения и стыковки космических аппаратов. Эта система
использовалась при стыковке транспортных кораблей «Союз» и «Прогресс»
с ОС «Салют», «Мир». Она же применяется при стыковке ТК с ОС МКС.
Если ТК автоматический, то управлять стыковкой можно и с борта ОС. Си-
стема ТОРУ состоит из пульта управления и двух ручек управления: правой
и левой. Правая РуО предназначена для управления ориентацией корабля,
левая РуП — для его линейного перемещения. Пульт состоит из двух пане-
лей: панель бортовых систем (ПБС) позволяет контролировать состояние
бортовых систем, а с помощью панели выдачи команд (ПВК) формируются
управляющие команды, так как на ней установлены средства индикации и
управления (рис. 10.33) [20].
Рис. 10.33. Панели пульта управления ручной стыковкой космиче-
ских аппаратов:
а — панель бортовых систем; б — панель выдачи команд
612
Часть III. Компоновка систем пилотируемого космического аппарата
а б
Рис. 10.34. Компоновка аппаратуры ТОРУ в кабине ПКА:
а — комплект системы ТОРУ; б — компоновка пульта, монитора и ручек управ-
ления; / — ручка управления РуП; 2 — пульт управления; 3 — монитор; 4 — РуЛ
Процесс стыковки контролируется с помощью телекамеры. На рис. 10.34
представлен вид учебной станции ТОРУ, установленной в Центре подготов-
ки космонавтов [20]. Космонавт смотрит на ТВ-монитор, где представлен
процесс стыковки или расстыковки кораблей. Действуя переключателями и
ручками, он управляет движением корабля, наблюдая за процессом на экране
монитора. Ход процесса дублируется звуковым сигналом.
Контрольные вопросы к главе 10
I. Назовите системы управления ПКА и требования, предъявляемые к ней.
2. Какая разница между СПУ и РПУ? Нарисуйте блок-схему реакции организма
человека-космонавта на внешние воздействия.
3. Каково назначение системы отображения информации? Нарисуйте схему ее
построения.
4. Приведите классификацию средств предъявления информации.
5. Назовите требования к размещению системы отображения информации.
6. С помощью чего реализуется управление полетом ПКА?
7. Перечислите требования к компоновке рабочего места командира ПКА.
8. Расскажите об эргономической системе ПКА и предъявляемых к ней требо-
ваниях.
9. Какие требования предъявляются к компоновке кабины и пульта управления?
Глава 10. Компоновка постов управления
613
Литература к главе 10
I. Управление космическими полетами: учеб, пособие: в 2 ч./ В.А. Соловьев, Л.Н. Лы-
сенко, В.Е. Любинский; под ред. Л.Н. Лысенко. М.: Изд-во МГТУ им. Н.Э. Баумана, 2009.
2. Попович П.Р., Кубинский А.И., Колесников Г.М. Эргономическое обеспечение
деятельности космонавтов. М.: Маш., 1985. 272 с.
3. Феоктистов К.П. Научный орбитальный комплекс. М.: Знание, 1980. 64 с.
4. Орбитальные станции. URL: http://helpiks.org/l-l22893.html (дата обращения
Ю.09.2018).
5. Транспортный корабль снабжения ТКС. URL: http://kosmo-apparaty.ru/ka/
transportnyiy-korabl-snabzheniya-tks.htm (дата обращения 10.09.2018).
6. Goodman J.R. Design/Development of Spacecraft & Module Crew Compartments.
URL: https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20l0003l059.pdf (дата обраще-
ния Ю.09.2018).
7. Research Announcement for ISS Experiments relevant to study Global Cli-mate
Change. Annex I: Additional technical Information on ISS capabilities and background
information. URL: http://wsn.spaceflight.esa.int/docs/20l 107/Annexl-ESA-ISS-CC-AO-
Climate-Change.pdf (дата обращения 10.09.2018).
8. International Space Station Evolution Data Book. Vol. I. Baseline Design Rev. A /
Editor C.A. Jorgensen NASA/SP-2000-6109. URL: http://ntrs.nasa.gov/archive/nasa/casi.
ntrs.nasa.gov/20000120038.pdf (дата обращения 17.01.2019).
9. Поле зрения оператора // Учебно-методический комплекс «Охрана труда». URL:
http://bgd.alpud.ru/_private/ERGONOM/glava3/pole_sren.htm (дата обращения 10.09.2018).
Ю. Тяпченко Ю.А. Интегрированная СОИ космического корабля «Союз-ТМА»
и пульт ручного контура управления Российского сегмента МКС «Альфа». URL:
http://astronaut.ru/bookcase/article/arl5l.htm (дата обращения 10.09.2018).
11. Справочник по инженерной психологии / под. ред. Б.Ф. Ломова. М.: Маш.,
1982. 368 с.
12. Классификация средств воспроизведения и отображения информации. URL:
http://www.ie.tusur.ru/books/COI/page_l9.htm (дата обращения 10.09.2018).
13. Тяпченко Ю.А. Анализ и синтез подсистем СОИ ПКА. URL: http://www.
cosmoworld.ru/spaceencyclopedia/publications/analiz.pdf (дата обращения 10.09.2018).
14. Тяпченко Ю.А. Системы отображения информации типа «Сириус» космиче-
ских аппаратов «Союз-7К», «Союз-А8», «Союз-М», станций «ДОС-17К». URL: http://
astronaut.ru/bookcase/article/arl52.htm (дата обращения 10.09.2018).
15. Пернер К.Д., Лендгок В.А. Планировка и оформление обитаемых помещений //
Космическая биология и медицина: в 5 т. Т. 2. Обитаемость космических летательных
аппаратов. М.: Наука, 1994. С. 208-238.
16. Тяпченко Ю.А., Тюленева Г.Ф. Средства отображения информации и органы
управления СОИ пилотируемых космических кораблей // Человеческий фактор:
Проблемы психологии и эргономики. 2001. № 2. Ч. 1. С. 39—42. URL: http://www.
cosmoworld.ru/spaceencyclopedia/publications/pr_tver.pdf (дата обращения 10.09.2018).
17. Тяпченко Ю.А. Системы отображения информации типа «Нептун» космиче-
ских аппаратов «Союз-Т», «Союз-ТМ». URL: http://www.cosmoworld.ru/
spaceencyclopedia/publications/neptun_l.pdf (дата обращения 10.09.2018).
18. Корвяков В.П. Разработка прототипа планшетного интерфейса «человек—ма-
шина» для транспортного пилотируемого корабля «Союз-МС» // Вестник МГТУ им.
Н.Э. Баумана. Сер. Приборостроение. 2017. № 6. С. 93-114.
19. Тяпченко Ю.А. Системы отображения информации комплекса «Алмаз». URL:
http://www.cosmoworld.ru/spaceencyclopedia/publications/tg_almaz.pdf (дата обращения
10.09.2018)
20. Russian Toru Space Station Docking System. URL: http://www.hightechscience.
org/toru.htm (дата обращения 10.09.2018).
ГЛАВА 11. КОМПОНОВКА ОБОРУДОВАНИЯ СИСТЕМЫ
ЖИЗНЕОБЕСПЕЧЕНИЯ
11.1. Структура системы жизнеобеспечения
Компоновка бортового оборудования системы жизнеобеспечения (СЖО)
экипажа ПКА основывается на структуре данной системы, определяемой
программой и длительностью полета. Требования к СЖО определяются
ГОСТ Р 50804—95 «Среда обитания космонавта в пилотируемом космическом
аппарате». Термины и определения комплекса СЖО космонавта в ПКА, сфор-
мулированы и закреплены в ГОСТ 28040—89 «Комплекс систем обеспечения
жизнедеятельности космонавта в пилотируемом космическом аппарате. Тер-
мины и определения». В табл. 11.1 приведены основные параметры среды
обитания и физиологические нормативы СЖО [1].
Таблица 11.1
Параметры среды обитания и физиологические нормативы СЖО
Параметр Значение параметра
минимум максимум оптимум
Искусственная Общее давление, кПа/мм рт. ст. атмосфера 33,3/250 107/800 54-69/405-520
Парциальное давление, кПа/мм рт. ст.: кислорода 16/120 40/300 20,6/155
азота 9,3/70 80/600 47/350
углекислого газа 0 1,0/7,6 0,0
Потребление кислорода, г/(чел. сут) 760 990 850
Выделение углекислого газа, г/(чел.-сут) 870 1215 990
Дыхательный коэффициент (отношение удаляемого из организма СО2 к поглощенному за то же время О2) 0,80 1,0 0,87
Водообеспеченш Метаболическая вода, г/(чел.-сут) ? и питание 250 350 300
Гигиеническая вода, г/(чел. сут) 680 2630 —
Потребление воды и пищи, г/(чел. сут) 1500 6400 2800
Выделение мочи, г/(чел. сут) 1100 2000 1400
Выделение экскрементов, г/(чел. сут) 90 200 НО
Глава 11. Компоновка оборудования системы жизнеобеспечения
615
Окончание табл. 11.1
Параметр Значение параметра
минимум максимум оптимум
Микроклимат
Температура, °C: стенок жилого отсека 18,0 26,0 22,0
воздуха 16 24 21,0 ± 1,0
Относительная влажность, % 30 70 45
Тепловыделение экипажа, мДж/(чел. • сут) 10,5 14,7 11,7
С методикой проектирования СЖО можно познакомиться в соответству-
ющих учебных пособиях, например [1, 2]. Существует множество критериев,
помогающих оценить качество разработанной СЖО, главным из которых
является создание условий для поддержания нормальной работоспособности
человека и обеспечения его безопасности.
При разработке СЖО учитывают следующие конкретные технические
требования к ПКА:
• периоды регулярного снабжения;
• время существования;
• высота орбиты, норма герметичности;
• состав атмосферы;
• барометрическое давление;
• мощность энергетической установки и др.
При проектировании необходимо учитывать следующие параметры жиз-
недеятельности человека:
• уровень метаболического тепловыделения;
• выделение углекислого газа;
• потребление кислорода;
• выделение мочи;
• скрытую теплоотдачу;
• производимую метаболическую воду;
• выделение вредных примесей и др.
В кратковременных полетах (продолжительностью менее 1 месяца) можно
удовлетворить все требования к СЖО, создав на корабле запасы компонентов,
обеспечивающие жизнедеятельность экипажа (кислорода, воды, пищи и т. п.), и
использовав систему удаления отходов. В длительных полетах увеличение доли
запасов в массе полезной нагрузки и неизбежное снижение качества продук-
тов питания требуют размещения на борту систем регенерации, позволяющих
восстанавливать исходные свойства компонентов, — получать воду из водо-
содержащих отходов, обновлять атмосферу и производить продукты питания.
Регенерация веществ, потребляемых человеком в процессе жизнедея-
тельности из среды, происходит на Земле в основном за счет биологических
процессов, протекающих в биосфере. Техническое решение этой проблемы
при длительных полетах на ОС основано на использовании методов создания
искусственных замкнутых СЖО.
616
Часть III. Компоновка систем пилотируемого космического аппарата
Время работы системы регенерации на КА существенно отличается от
времени, в течение которого функционирует природная биологическая систе-
ма, обладающая устойчивостью на бесконечном интервале времени. Искус-
ственная техническая система может функционировать ограниченное время:
часы, сутки, месяцы и т. д. Требования к периоду работы системы регенерации
определяются ее составом и конструктивным решением.
Например, система регенерации PC МКС (рис. 11.1) состоит из пяти
подсистем [3]:
• формирования среды обитания, обеспечивающей рациональную
организацию массообмена экипажа со средой (подвод компонентов и уда-
ление отходов), включающей систему обеспечения газового состава (СОГС),
систему подачи питьевой, санитарно-гигиенической и бытовой воды и уда-
ления жидких отходов (СОВ) и систему обеспечения продуктами питания и
удаления твердых отходов (СОП);
• очистки компонентов среды и концентрирования отходов, получаемых
в результате жизнедеятельности живого организма или работы технических
устройств (например, удаление пыли, микробной флоры, углекислого газа
и т. д. из газовой среды), разделения отходов на удаляемые и перерабатывае-
мые компоненты;
• утилизации, осуществляющей предварительное преобразование отходов
до соединений, из которых могут быть восстановлены необходимые продукты;
Рис. 11.1 Структурная схема комплекса регенерационных СЖО PC МКС:
I — обитаемый отсек; II — система очистки атмосферы от вредных примесей (СОА — МП);
III — система очистки атмосферы от углекислого газа (СОА — У Г); IV — система концентри-
рования углекислого газа (СК — УГ); V — система переработки углекислого газа (СП — УГ);
VI — система электролиза воды и генерации кислорода «Электрон» (СЭВ); VII — запасы воды;
VIII — система регенерации воды из конденсата атмосферной влаги (СРВ — К); IX — система
регенерации воды из урины (СРВ — У); X — сборник концентрата урины; XI — система реге-
нерации санитарно-гигиенической воды (СРВ — СГ); XII — душевое умывальное устройство;
XIII — ассенизационное устройство; / — очищенная санитарно-гигиеническая вода; 2— воздух;
3 — вредные примеси; 4 — углекислый газ; 5 — метан; 6 — водород; 7 — вода; 8 — кислород;
9— питьевая вода; 10— загрязненная санитарно-гигиеническая вода; // — концентрат урины;
12 — смывная вода; 13 — урина и вода смывная; 14 — концентрат атмосферной влаги
Глава 11. Компоновка оборудования системы жизнеобеспечения
617
• производства конечных продуктов, обеспечивающей восстановление
израсходованных компонентов среды из подготовленных веществ с возмож-
ностью добавления недостающих компонентов из имеющихся запасов;
• кондиционирования и консервации, предназначенной для придания
продуктам определенных органолептических свойств (запаха, вкуса, тем-
пературы) и обеспечения возможности длительного хранения веществ (со-
здание аэроионного состава атмосферы, добавления в дистиллированную
воду минеральных соединений и консервантов, предотвращающих развитие
микробной флоры и пр.).
Некоторые технологические процессы указанных подсистем могут быть
объединены в одном комплексе научной аппаратуры, например в одном агре-
гате могут проходить процессы регенерации кислорода и воды. Для других под-
систем требуется распределить элементы по всему обитаемому объему ПКА.
В результате разработки СЖО формируются состав бортового оборудова-
ния и требования к его размещению в отсеках ПКА. В структуре СЖО можно
выделить четыре группы оборудования, предназначенного для следующего:
• создания искусственной атмосферы;
• водообеспечения;
• формирования микроклимата;
• сбора и удаления отходов.
На рис. 11.2 в качестве примера приведена схема размещения оборудо-
вания СЖО в отсеках ПКА «Союз» [4]. На МКС элементы СЖО разнесены
по различным модулям ОС (рис. 11.3) [5].
Рис. 11.2. Схема размещения агрегатов СЖО в отсеках ПКА «Союз»:
1 — подогреватель пищи в тубах; 2 — автономный поглотитель углекислого газа; 5, 4, 18 —
регенерационные установки; 5, 17 — ручной насос; 6, 10 — сборники конденсата; 7, 9 — хо-
лодильно-сушильный агрегат; 8 - орбитальный отсек; 11 — С А; 12 — жидкостно-жидкостной
теплообменник; 13 — газожидкостной теплообменник; 14 — регулятор расхода жидкости;
15 — радиационный теплообменник; 16 — секционный жидкостно-жидкостной теплообмен-
ник; 19 — блок регулирования давления; 20 — приборный отсек
618
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 11.3. Схема размещения подсистем СЖО в отсеках МКС:
1 — ТКА «Прогресс»; 2 — «Звезда»; 3 — «Наука»; 4 — «Заря»; 5 — научно-энергетический
модуль; 6 — Unity; 7 — Destiny; 8 — Quest; 9 — Hab; 10 — емкости с газами атмосферы;
11 — системы контроля температуры и влажности; 12 — системы, консервируемые после при-
стыковки научно-энергетического модуля; 13 — системы приготовления пищи; 14 — системы
контроля углекислого газа в атмосфере; 15 — системы переработки воды; 16 — системы гене-
рации кислорода; 17 — системы переработки урины; 18 — санитарно-гигиенические системы;
19 — емкости с водой
11.2. Компоновка оборудования системы обеспечения газовой
среды
11.2.1. Параметры искусственной атмосферы
Атмосфера — смесь различных газов, окружающих Землю и обеспечива-
ющих жизнь организмов. В ее состав входят 10 различных газов, преимуще-
ственно азот (78 %) и кислород (21 %), а оставшийся 1 % приходится на долю
аргона, гелия, неона, углекислого газа и пр. На уровне моря давление смеси
равно 101,3 кПа (760 мм рт. ст.), парциальное давление кислорода — 13,3 кПа
(100 мм рт. ст.), парциальное давление углекислого газа — менее 0,5 кПа
(4 мм рт. ст.). В атмосфере кроме газов могут также присутствовать различ-
ные примеси природного или техногенного происхождения в газообразной,
твердой (пыль, взвеси) и жидкой (различные пары, аэрозоли, капли) фазах.
Для обеспечения жизнедеятельности космонавтов в ПКА создается
искусственная газовая атмосфера (ИГА). Как показано в табл. 11.2 [6], для
формирования ИГА на ПКА различных типов, как правило, используются
параметры земной атмосферы (многогазовая ИГА) или исключительно кис-
лородная атмосфера (моногазовая среда) с пониженным давлением.
Глава И. Компоновка оборудования системы жизнеобеспечения
619
Таблица 11.2
Данные о составе ИГА в кабинах российских и американских космических кораблей
и в обитаемых отсеках орбитальных станций
ПКА Давление, кПа / мм рт. ст. / psi Содержанние, %
О N
«Восток», «Восход», «Союз», «Салют», «Мир» 101,3 / 760 / 14,7 97 / 730-118,7 / 890 19-32 66-78
«Меркурий» 34,4 / 258 /5 100 0
Gemini 34,4 / 258 /5 100 0
Apollo (командный и лунный) 34,4 / 258 /5 100 0
Skylab 34,4 / 258 /5 70 30
Space Shuttle и Skylab 101,3 / 760 / 14,7 21 79
«Союз—Аполлон» (ЭПАС) 101,3 / 760 / 14,7 35-40 —
Моногазовую кислородную ИГА, отличающуюся повышенной пожа-
роопасностью, требуется создавать при длительных полетах и при работе
в открытом космосе по следующим причинам:
• высокое давление (101,3 кПа / 760 мм рт. ст.) в кабине предъявляет
повышенные требования к прочности корпуса, что значительно увеличит
стартовую массу корабля;
• при давлении 101,3 кПа / 760 мм рт. ст. утечки газа из гермокабины
будут значительно выше, чем при меньшем давлении, особенно при потерях
газа во время шлюзования;
• высокая плотность газовой смеси приводит к значительным нагрузкам
на электрические приводы вентиляторов;
• поддержание в гермокабине высокого парциального давления азота
66,7 кПа / 500 мм рт. ст. создает трудности при подготовке к ВКД в скафандрах
с давлением 26,7...40 кПа / 200...300 мм рт. ст., так как для предотвращения
высотной болезни требуется длительная процедура десатурации (удаление
азота из крови). За 12 ч до выхода в открытый космос давление в гермоотсеке
постепенно снижают с 101,3 кПа / 760 мм рт. ст. до 79,4 кПа / 528 мм рт. ст.,
при этом атмосфера обогащается кислородом и в ней снижается доля азота.
После установления в кабине давления 79,4 кПа / 528 мм рт. ст. космонавты
в течение 40 мин дышат чистым кислородом для завершения десатурации
организма.
Экспериментально установлено, что в результате длительного пребыва-
ния в условиях ИГА при снижении двигательной активности у космонавтов
развивается состояние психофизиологического истощения — астенизация.
Оно характеризуется снижением функциональных возможностей центральной
нервной системы, проявляющимся в ухудшении работоспособности и памя-
ти, психической утомляемости, снижении внимания, развитии повышенной
реактивности наряду с раздражительной слабостью. Для профилактики раз-
вития астенизации во время длительных космических полетов предполагается
применять ИГА с нестационарными параметрами барометрического давления
620 Часть III. Компоновка систем пилотируемого космического аппарата
и состава смеси газов. Например, ежедневно в кабине может проводиться
шестичасовое изменение атмосферного давления, имитирующее подъем на
высоту 2500...5000 м, что способствует смягчению симптомов, характерных
для гиподинамии.
Обитаемый отсек ПКА оснащают системой обеспечения газовой среды
(СОГС) для дыхания экипажа, которая представляет собой совокупность
функционально связанных технических и биотехнических средств, регули-
рующих состав и параметры газовой среды, в том числе:
• качественный состав;
• общее давление;
• парциальные давления компонентов;
• содержание пыли, вредных примесей и микробной флоры;
• влажностно-температурный режим (микроклимат);
• аэроионный состав;
• скорость движения воздуха в обитаемом отсеке.
Требующиеся химический состав и физические характеристики газовой
среды поддерживаются средствами как СОГС, так и бортовой системы обе-
спечения теплового режима (СОТР) ПКА. Также система вентиляции оби-
таемого отсека организует потоки в газовой среде и служит вспомогательным
средством очистки среды от пыли и микробной флоры.
СОГС выполняет следующие функции:
• подачу кислорода в атмосферу кабины исходя из среднесуточного
потребления его одним человеком — 25 л/чел.;
• удаление углекислого газа из атмосферы из расчета среднесуточного
выделения одним человеком — 20 л/чел.;
• удаление из атмосферы газообразных и других примесей;
• контроль газового состава по программам поддержания микроклимата;
• сигнализацию в случае изменения атмосферы по параметрам микро-
климата;
• подачу сигнала о падении давления в кабине;
• выравнивание давления между отсеками, стравливание давления из
шлюзовых отсеков и их наддув;
• поддержание заданного давления между рабочим отсеком и переход-
ной камерой.
Основные компоновочные элементы СОГС:
• оборудование для регулирования состава атмосферы;
• оборудование для организации газового обмена;
• средства контроля за состоянием атмосферы;
• средства очистки атмосферы.
Рассмотрим эти элементы более подробно.
11.2.2. Оборудование для регулирования состава атмосферы
Состав ИГА можно обогащать запасенными компонентами или про-
изведенными на борту ПКА. Хранить их можно в химически чистом виде
(в различных агрегатных состояниях) или в виде соединений. Критерием
выбора способа хранения запасов является минимизация массы и объема
Глава 11. Компоновка оборудования системы жизнеобеспечения
621
запасов при приемлемых энергетических затратах на получение компонентов
на борту. Существует четыре способа хранения газов в химически чистом виде:
в газовой фазе под давлением, в жидком состоянии, в сверхкритическом или
в твердой фазе [6]. Газообразный кислород при давлении 101,3 кПа (760 мм рт. ст.)
и температуре 293 К имеет плотность 1,33 кг/м3. Для уменьшения объема его
хранят при повышенном давлении. Качество подобной системы хранения
определяется двумя показателями — относительной массой баллона и отно-
сительным объемом баллона:
где тг — масса баллона и газа; Иб, Иг — объем баллона и газа соответ-
ственно.
Система на запасах газовой фазы проста в использовании — на выходе
из баллона установлены клапан и редуктор, с помощью которых регулируют
подачу газа.
Масса системы на запасах газа в жидком виде меньше массы системы на
запасах в газовой фазе. Плотность жидкого кислорода при давлении 100 кПа
(750 мм рт. ст.) равна 1130 кг/м3. При подобном способе хранения возникают
проблемы с термостатированием баллонов с жидким кислородом, поскольку
температура жидкого кислорода составляет —222,65 °C. Теплоприток через
теплоизоляцию и по тепловым мостам (места крепления) приводит к посто-
янному испарению кислорода. Если система законсервирована или расход
кислорода меньше испаряющегося, то испаряющийся кислород сбрасывают
через предохранительные клапана. В этом случае потери могут доходить до
25 %.
Еще одна проблема при использовании жидкого кислорода — разделение
фаз при столь низких температурах. Кислород в сверхкритическом состоянии
при Т> Гкр ир >ркр (Гкр = 154,76 К,ркр = 5,076 МПа) находится в газовой фазе,
его плотность равна 400,84 кг/м3. Хотя температура газа в сверхкритическом
состоянии выше, чем у жидкого кислорода, она тем не менее невысокая. По-
этому за счет теплопотока через изоляцию и конструктивные элементы газ
прогревается, что приводит к повышению давления и необходимости сброса
части газа за борт. Таким образом, система на запасах газа при сверхкритиче-
ском состоянии не может длительно работать без специальной системы тер-
мостатирования. Эту систему применяли на ТКА Gemini и Apollo, имеющих
малую продолжительность полета.
Плотность твердого кислорода 1270 кг/м3, однако температура его плав-
ления (около —250 °C) делает такой способ хранения более сложным и прак-
тически неприменимым.
Производство кислорода для дыхания экипажа осуществляется с помощью
самого различного оборудования. Например, на МКС получение кислорода
обеспечивает установка «Электрон-ВМ», разработанная ОАО «НИИхим-
маш» (рис. 11.4) [7]. Ее производительность составляет 25... 160 л кислорода
в час (достаточно для дыхания шести человек), к тому же дополнительно она
622
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 11.4. Общий вид блоков установки «Электрон-ВМ» (а) и компоновочная
схема блоков в модуле «Звезда» (б):
1 — блок дожигания; 2 — блок жидкостной (БЖ); 3 — блок согласования сигналов и
команд (БССК); 4 — блок продувки азотом (БПА-М)
вырабатывает еще 50...320 л водорода в час. Принцип действия установки
«Электрон-ВМ» — электролиз воды со щелочным электролитом в проточном
электролизере с последующими разделением газожидкостной смеси в стати-
ческих разделителях и каталитической очисткой производимого кислорода.
Установка «Электрон-ВМ» включает в себя жидкостный контур с 30%-ным
раствором гидрооксида калия (КОН), газовые магистрали с регулятором дав-
ления и электромагнитные клапаны (КЭ).
Жидкостной контур помещен в герметичный корпус, наддуваемый азотом
для повышения безопасности. С внешней стороны к жидкостному контуру
подключена периодически заменяемая емкость для воды (ЕДВ). В жидкостный
контур входят электролизный блок, два теплообменника, насос и буферная
емкость. Насос обеспечивает циркуляцию электролита через электролизный
блок. Буферная емкость, предназначенная для восполнения воды, израсхо-
дованной при ее разложении на кислород и водород в электролизном блоке,
и выполняет роль мембранного насоса. Регулятор давления поддерживает
заданный перепад давлений в кислородной и водородной магистралях.
Пневмогидравлическая схема установки «Электрон-ВМ» показана на
рис. 11.5 [8]. Кислород генерируется в электролизном блоке за счет электролиза
воды, содержащейся в растворе гидроокиси калия. По массе вода содержит 89 %
кислорода. В результате реакции вода разлагается на кислород и водород.
Глава 11. Компоновка оборудования системы жизнеобеспечения
623
Рис. 11.5. Пневмогидравлическая схема установки «Электрон-ВМ»:
/ — емкость для воды (ЕДВ); 2 — электроклапан воды; 3 — буферная емкость; 4 — воздух
из отсека; 5 — герметичный корпус, заполненный азотом (р = 16,7 МПа); 6 — насос для
перекачки раствора КОН; 7— электролизный блок; 8 — электроклапан продувки азотом;
9 — разделитель; 10 — датчик потока жидкости; // — теплообменник; 12 — датчик темпера-
туры; 13 — датчик кислорода; 14 — датчик водорода; 15 — регулятор давления; 16 — элек-
троклапан подачи водорода; 17— электроклапан подачи кислорода; 18— удаление водорода
за борт; 19 — подача кислорода в отсек; 20 — контроль давления азота; 21 — подача азота
Кислород подается непосредственно в атмосферу служебного модуля, а водо-
род сбрасывается в космическое пространство. Электролизный блок состоит
из 12 элементов, заключенных во взрывобезопасный корпус. Элементы охлаж-
даются системой терморегулирования (СТР). Разложения 1 кг воды со скоро-
стью выделения 25 л кислорода в час при давлении 101,3 кПа (760 мм рт. ст.)
достаточно для дыхания одного человека в течение суток. Для обеспечения
суточной потребности в кислороде экипажа из трех-четырех человек необ-
ходимо 3...4 кг воды в сутки. Потребляемая мощность при этом составляет
примерно 1 кВт.
Установка «Электрон-ВМ» управляется бортовой вычислительной систе-
мой. В процессе эксплуатации контролируются состояние клапанов, давление
кислорода и водорода, наличие водорода в магистрали кислорода и наличие
кислорода в магистрали водорода.
Установка включает в свой состав:
• технологический блок — блок жидкостный (БЖ), который реализует
все технологические процессы, его масса 160 кг;
• блок согласования сигналов и команд (БССК), служащий электрон-
ным посредником между БЖ и бортовым управляющим компьютером, его
масса 2,5 кг;
• комплект соединительных электрических кабелей (КСК) массой 1,0 кг.
Потребляемая мощность установки:
• на электролиз — 190... 1470 Вт (в зависимости от производительности);
624
Часть III. Компоновка систем пилотируемого космического аппарата
• на все другие цели (насосы, исполнительные элементы, датчики и т. п.) —
менее 10 Вт;
• удельная мощность (в расчете на 1 л кислорода в час) — 7,6...9,2 Вт
(в среднем 8,1 Вт).
Кислород также можно получать из перекиси водорода, которая при тем-
пературе газообразования и в присутствии катализатора (платина) разлагается
на воду и кислород. Из 2,1 кг Н2О2 получают 1 кг кислорода и 1,1 кг воды.
Реакция проходит с большим выделением тепла, так что требуется охлаждение.
В качестве источников получения кислорода могут быть использованы
химические соединения щелочных металлов: NaO2, КО2, LiC102, NaC102, яв-
ляющиеся твердыми соединениями, которые сравнительно легко выделяют
кислород. Система запаса кислорода с надпероксидом калия применялась на
КА «Восток», «Восход», «Союз» и «Салют».
В табл. 11.3 [9] приведено содержание кислорода в восьми соединениях
щелочных металлов, которые при протекании химических реакций выделяют
кислород, одновременно поглощая углекислый газ. При взаимодействии таких
соединений с набегающим потоком воздуха происходит химическая реакция
2КО2 + СО2 + Н2О -► К2СО3 + Н2О + 1,5 О2
Таблица 11.3
Содержание кислорода в некоторых химических соединениях щелочных металлов
и способность их к поглощению углекислого газа
Вещество Количество активного кислорода, %/(л/кг) Способность к поглощению углекислого газа, л/кг
Перекись лития Li2O2 34,7/242 487
Надперекись лития LiO2 61,5/430 287
Перекись натрия Na2O2 20,5/143 287
Надперекись натрия NaO2 43,6/305 203
Озонид натрия NaO3 56,3/394 158
Перекись калия К2О2 14,5/101,5 203
Надперекись калия КО2 33,8/236 158
Озонид калия КО3 46,0/322 128,5
Твердотопливный генератор кислорода (ТГК) представляет собой заме-
няемый патрон (кассету) с воспламеняющим устройством, ударным механиз-
мом, фильтром, противопыльным фильтром и вентилятором, размещенными
в одном корпусе.
Конструктивная схема генератора кислорода, входящего в состав ис-
пользуемого на МКС прибора очистки TCCS, показана на рис. 11.6 [5].
Процесс получения кислорода заключается в термическом разложении кис-
лородсодержащего вещества, впрессованного в цилиндрический корпус.
Выходящий из генератора газ охлаждается воздушным потоком. Количе-
ство кислорода, выделяемого одной кассетой, составляет 600 л. Температура
Глава 11. Компоновка оборудования системы жизнеобеспечения
625
Рис. 11.6. Каталитический генератор кислорода TCCS:
1 — корпус; 2 — уплотнительное кольцо; 3 — изоляция; 4 — те-
плообменник; 5 — датчик температуры; 6 — передняя панель;
7 — адаптер; 8 — электрический разъем; 9 — катализатор; 10 —
экранирующая сетка; // — стопорное кольцо; 12— нагреватель
наружной поверхности ТГК может повышаться до 50 °C. Процесс охлаждения
генератора продолжается около 3 ч при работающем вентиляторе. Генератор
включается при увеличении численности экипажа или в случае нештатных
ситуаций. В качестве кислородсодержащего вещества используются гидраты
щелочных металлов.
Существенным недостатком твердотельного генератора кислорода явля-
ется пожароопасность из-за высокой температуры, до которой нагревается
его корпус. Кроме того, генератор — прибор одноразового действия, а значит,
требуется заменять патрон после каждого включения.
11.2.3. Средства организации газового обмена
Газообмен в отсеке обеспечивается системой вентиляции, которая фор-
мирует требуемые параметры газовой смеси и, организуя циркуляцию газа,
удаляет примеси во всем объеме отсека. Система наддува отсека компенсирует
утечки газов, возникающих вследствие конструктивной негерметичности отсе-
ка или запланированной разгерметизации отсека (например, при ВКД). Отсек
может быть разгерметизирован в случае нештатной ситуации (пожар, пробой
отсека и т. п.), когда необходимо предотвратить взрывную декомпенсацию,
а также обеспечить продолжительность падения давления достаточную для
того, чтобы экипаж успел применить индивидуальные средства защиты или
перейти в другой отсек.
626 Часть III. Компоновка систем пилотируемого космического аппарата
Система вентиляции отсека включает воздуховоды подачи и удаления
газов, приточные и вытяжные устройства, датчики, систему регулирования
параметров газовой среды. Кроме того, в нее интегрируются оборудование
для удаления вредных примесей и элементы системы кондиционирования,
поддерживающие заданный микроклимат. Пример схемы размещения эле-
ментов системы вентиляции в модуле СМ МКС показан на рис. 11.7 [10].
Рис. 11.7. Система вентиляции модуля СМ:
/ — жилая зона; 2 — приборная зона; 5, 4, 2/, 22 — жесткие воздухонепроницаемые перегородки;
5 — переходной отсек; 6 — переходная камера; 7 — бортовой кондиционер; 8 — бортовой кон-
диционер, расположенный по правому борту; 9, 10— вентиляторы, встроенные в кондиционер
левого борта; //, 12 — вентиляторы, встроенные в кондиционер правого борта; 13 — жесткий,
непроницаемый воздуховод, расположенный по левому борту; 14 — вентилятор воздуховода
левого борта; 15 — жесткий, непроницаемый воздуховод, расположенный по правому борту;
16 — вентилятор воздуховода правого борта; /7, 18 — пылезащитные фильтры на выходе
воздуховодов в отсеки; 19, 20 — входные штуцеры БК 7, 8; 39, 42 — входной штуцер конди-
ционера; 23 — выделенная зона; 24 — теплонапряженная аппаратура; 25 — газожидкостной
теплообменник; 26 — воздуховод выделенной зоны; 27 — вентилятор выделенной зоны; 28,
29 — агрегат, установленный внутри воздуховода выделенной зоны; 30 — зазор для прохода
воздуха; 31 — сетка-фильтр на входе в теплообменник 25; 32 — полость приборной зоны;
33, 36 — воздухозаборный люк; 34 — защитная сетка люка; 35, 38 — заслонка ручной ре-
гулировки; 37, 52, 63, 67 — защитная сетка; 40, 43 — воздуховод от кондиционера к сме-
сителю; 41, 44 — смеситель; 45 — коллектор; 46, 47, 53, 56, 61 — жесткий воздуховод; 48,
49 — вентиляционная решетка; 50 — мягкий воздуховод; 51, 54, 57 — расходный элемент
воздуховода; 59 — вентилятор приборной зоны; 60 — каюта; 64 — регулятор расхода воздуха;
65 — воздуховод в переходную камеру; 68 — вентилятор жилой зоны; 69 — электроподогреватель
Глава 11. Компоновка оборудования системы жизнеобеспечения 627
Задачи системы вентиляции — перемешивание газов и выравнивание
поля концентраций газовых примесей в атмосфере отсека до нормирован-
ных значений. При компоновке отсека необходимо построить схему цирку-
ляции воздушных потоков. На рис. 11.8 показана схема циркуляции воздуха
в отсеке японского модуля МКС Kibo (по-японски «кибо» — надежда) [11].
В соответствии с данной схемой рациональный режим вынужденной кон-
векции обеспечивается благодаря тому, что движение газов в отсеке приоб-
ретает вихревой характер благодаря соответствующей компоновке приточных
и вытяжных отверстий.
Рис. 11.8. Схема организации воздушных потоков в модуле Kibo:
1 — герметичный модуль JEM РМ; 2— экспериментальный складской
модуль JEM ELM; 3 — внутренний переход стыковочного узла; 4 —
охлаждающий вентилятор; 5 — контроль температуры и влажности
На рис. 11.9 приведены девять вариантов траекторий вихревого движения
газа в плоскости поперечного сечения отсека при различном расположении
приточных и вытяжных отверстий [1].
Пример блок-схемы системы управления атмосферой отсека американ-
ского модуля МКС показан на рис. 11.10. Основным блоком, регулирующим
состав атмосферы и контролирующим давление, является блок управления
атмосферой кабины, представленный на рис. 11.11 [5].
Циркуляцию атмосферы поддерживают два блока обеспечения кабины
воздухом ССАА — система создания аэрации атмосферы и система управ-
ления воздухообменом в кабине, ОРУ (открытое распределительное устрой-
ство). Блок, приведенный на рис. 11.12 [5], состоит из вентиляторов, датчика
давления и звукоизолирующего корпуса. Воздух подается в отсеки по системе
трубопроводов (рис. 11.13) [5] с вмонтированными в них блоками подачи
кислорода, гасителя колебаний, фильтра и датчика температуры. Воздух из
отсека также отводится по трубопроводу.
628 Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 11.9. Варианты схемы вентиляции отсеков (первая цифра
обозначает номер приточного отверстия, вторая — вытяжного)
Рис. 11.10. Блок-схема системы регулирования и управления атмосферой отсека:
1 — подача кислорода; 2 — подача азота; 3 — контроллер; 4 — электропитание; 5 — сило-
вые цепи; 6 — управляющие цепи; 7 — забор воздуха из отсека; 8 — регулирующий клапан;
9 — запорный клапан; 10 — вход вакуумирования отсека; 11 — дренажное устройство для
сброса газа в космос; 12 — космическое пространство; 13 — противометеороитный экран;
14 — оболочка герметичного контура отсека; 15 — подача воздуха в отсек; 16 — диффузор;
17 — атмосфера отсека; 18 — регулятор подачи азота; 19 — регулятор подачи кислорода;
20 — датчик давления; 21 — датчик давления атмосферы; 22 — панель управления давлением
Глава 11. Компоновка оборудования системы жизнеобеспечения
629
Рис. 11.11. Внешний вид блока
регулирования и управления ат-
мосферой отсека АС МКС:
1 — вход азота; 2 — вход кислорода;
3 — управление потоком азота с за-
щитой; 4 — управление потоком кис-
лорода с защитой; 5 — подключение
электропитания; 6 — питание системы
контроля; 7 — телеметрия; 8 — сигнал
срабатывания
Рис. 11.13. Трубопровод для подачи воздуха и вентиляции:
1 — блок вентиляторов ССАА; 2 — соединительный воздуховод; 3 — датчик конденсата; 4 —
диффузор подачи воздуха; 5 — воздуховод подачи воздуха; 6 — входное отверстие с биологи-
ческим фильтром; 7 — датчик температуры; 8 — демпфер пульсаций потока
630
Часть III. Компоновка систем пилотируемого космического аппарата
а
18 17 16J
б
Рис. 11.12. Вид сбоку (а) и в разрезе (б) блока вентиляторов ССАА:
1 — датчик перепада давления; 2 — напорный клапан; 3 — указатель направления враще-
ния; 4 — входной фланец; 5 — электроразъемы питания и передачи данных; 6 — таблич-
ка, предупреждающая о нагретой поверхности; 7 — кронштейны для крепления поруч-
ней; 8 — контроллер; 9 — электрический ввод; 10 — кронштейн крепления вентилятора;
11 — направление движения воздуха; 12 — выходной фланец; 13 — спрямляющая решетка;
14 — импеллер; /5 — лопасти статора; 16 — распределитель потока; 17 — мотор; 18 — диффузор
Глава 11. Компоновка оборудования системы жизнеобеспечения
631
2 1
Рис. 11.14. Размещение датчика давле-
ния атмосферы на панели интерьера:
1 — датчик на кронштейне; 2— панель инте-
рьера; 3 — соединительный кабель; 4 — блок
преобразователей сигналов
Давление в отсеках измеряется дат-
чиками, которые размещены на пане-
лях интерьера отсека (рис. 11.14) [5].
При повышении давления оно может
сбрасываться автоматическим клапа-
ном типа VRV (рис. 11.10) или вручную
клапаном стравливания давления типа
MPLV.
Одной из функций системы газо-
обмена является периодическая замена
атмосферы в отсеке для удаления из
нее накапливающихся примесей. При
этом весь газ из отсека выводится в
космическое пространство, а на его
место подается свежая газовая смесь
из запасов. Данную операцию можно
выполнять вакуумным и вытеснитель-
ным способами [1].
При вакуумном способе проводит-
ся разгерметизация отсека, давление
в нем падает, а затем он заполняется
свежей газовой смесью. Недостаток этого способа заключается в интенсивной
десорбции в отсек различных веществ, сорбированных на конструкционных
элементах и материалах. С уменьшением давления изменяются диэлектри-
ческие свойства материалов, поэтому необходимо отключать электрические
устройства и оборудование.
При вытеснительной замене одновременно происходят разгерметиза-
ция отсека и подача в него свежих газов. При использовании такой схемы
вытяжное и приточное отверстия вентиляции должны быть расположены
в противоположных местах отсека. Свежий газ через коллектор должен рав-
номерно по всему сечению поступать в отсек, вытесняя отработанный газ
к противоположному торцу отсека, где он удаляется через вытяжные отверс-
тия (рис. 11.15).
Распределительный воздуховод-
коллектор целесообразно изготав-
ливать из мягкого материала, чтобы
его можно было хранить свернутым,
приводя в рабочее состояние только
при смене газового состава. Прямо-
угольный профиль распределения
скорости, сформированный в потоке
коллектором, по мере продвижения
будет трансформироваться в парабо-
лический. Поэтому вытяжные отвер-
стия следует располагать в торцевой
части ближе к цилиндрической стенке
Рис. 11.15. Схема смены атмосферы
отсека вытеснительным методом:
1 — отсек; 2 — коллектор подачи свежего
воздуха; 3 — вытяжные устройства; 4 — без-
моментные сопла
632
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 11.16. Дренажное устройство для сброса газа в космическое
пространство:
1 — панель обшивки (днище отсека); 2 — забор газа; 3 — гибкий шланг;
4 — противометеороидный экран; 5— безмоментное сопло; 6— кронштейн;
7 — штуцер; 8 — V-образный ленточный хомут; 9 — колено
отсека, что обеспечивает максимальное удаление отработанной атмосферы
при минимальных потерях свежей. Газ удаляется через безмоментные сопла,
чтобы не изменялись траектория и ориентация КА. Конструктивная схема
подобного дренажного устройства для сброса газа показана на рис. 11.16 [5].
11.2.4. Средства контроля состояния атмосферы
В полете происходит загрязнение атмосферы. Один источник загрязне-
ния — продукты жизнедеятельности экипажа, прежде всего углекислый газ
и вода, а также газовыделение из конструкционных материалов и работающей
бортовой аппаратуры. В атмосферу отсеков поступают около 400 токсичных
соединений, выделяемых человеком или микроорганизмами, а также проис-
ходит сублимация в атмосферу конструкционных и декоративных материалов,
связующих, клеев и др. Другим источником является грязь, появившаяся
в процессе изготовления космического аппарата и поступающая с прибыва-
ющими на ОС грузами [6].
Загрязнение атмосферы можно подразделить на два вида: газами или
взвешенными частицами (жидкими и твердыми). До 1990 г. на борту ПКА из
всего спектра газообразных токсических веществ количественно определя-
лись гидразины и основные компоненты атмосферы — кислород и углекис-
лый газ. Следующим шагом стало получение количественной информации
о содержании четырех газов: НС1, HCN, HF, СО, являющихся продуктами
Глава 11. Компоновка оборудования системы жизнеобеспечения 633
терморазрушения пластических материалов в кабине. В процессе эксплуа-
тации СЖО выяснилось, что датчик СО также регистрирует взрывоопасное
накопление водорода в кабине.
Допустимый уровень загрязнения определяется коэффициентом без-
опасности предельно допустимой концентрации (ПДК), значение которого
определяется тяжестью токсического эффекта.
Действия групп управления и экипажа МКС в нештатных ситуациях,
связанных с загрязнением атмосферы, определяется токсикологической
опасностью и концентрацией конкретной примеси, попавшей в атмосферу
станции. В общем случае алгоритм действий следующий:
• оценка уровня токсикологической опасности и концентрации приме-
сей в атмосфере;
• выбор индивидуальных средства защиты для экипажа;
• отключение тех систем, на которые микропримеси оказывают небла-
гоприятное воздействие;
• включение системы (или выбор необходимого режима работы), обе-
спечивающей удаление или сбор вредных примесей;
• если необходимо, изоляция загрязненного отсека.
Средства газового анализа PC МКС предназначены для непрерывного конт-
роля парциального давления кислорода, углекислого газа, паров воды, содержа-
ния водорода в атмосфере жилых отсеков, а также выдачи аварийного сигнала на
пульте аварийной и предупредительной сигнализации (ПСС). В состав средств
газового анализа PC МКС входят газоанализатор СМ и газоанализатор ФГБ.
Газоанализатор СМ состоит из электрохимического датчика кислорода,
датчика теплопроводности для измерения парциального давления углекисло-
го газа, электролитического датчика для измерения парциального давления
водяных паров, датчика электропроводности для измерения содержания
водорода в атмосфере, блока фильтров-поглотителей, датчика потока, ми-
кровентилятора. Все элементы газоанализатора установлены на одной плате.
Члены экипажа включают его с помощью бортовой цифровой вычислитель-
ной системы (БЦВС) или по команде из ЦУПа, поступающей по командной
радиолинии. Газоанализатор СМ работает постоянно, его выключают только
на время проведения технического обслуживания и ремонта. Параметры с
газоанализаторов выводятся на дисплей БЦВС.
Газоанализатор измеряет следующие параметры:
парциальное давление, кПа/мм рт. ст.:
кислорода ................................ 0—46,7/350
углекислого газа..........................0—3,3/25
паров воды................................0—4/30
содержание водорода в атмосфере...........0—2,5 %
Газоанализатор ФГБ непрерывно одновременно определяет:
парциальное давление, кПа/мм рт. ст.:
кислорода ................................ 0—46,7/350
углекислого газа .........................0—3,3/25
паров воды................................0—4/30
634 Часть III. Компоновка систем пилотируемого космического аппарата
Все элементы газоанализатора, кроме чувствительного элемента датчика
измерения влажности, размещены внутри одного корпуса. Подвод воздуха
к датчикам О2 и СО2 обеспечивает микровентилятор. Газоанализатор измеряет
парциальные давления О2, СО2, Н2О и передает их значения в ЦУП и на борто-
вые дисплеи. Аварийные сигналы выдаются в ЦУП при содержании кислорода
менее 16 кПа (120 мм рт. ст.) или углекислого газа более 2,7 кПа (20 мм рт. ст.).
Для оценки состояния атмосферы отсеков и модулей в каждом из них
установлены датчики, позволяющие отбирать пробы воздуха. Схема разме-
щения таких датчиков в отсеках АС МКС приведена на рис. 11.17 [5].
Рис. 11.17. Схема размещения датчиков отбора проб воздуха:
1 — жилой модуль; 2 — первый узловой модуль; 3 — шлюзовая камера;
4 — лабораторный модуль; 5 — складской модуль; 6 — модуль центрифуги;
7— японский модуль; 8— европейский модуль; 9— второй узловой модуль;
10 — направление полета; 11 — анализатор состава атмосферы
Газовый состав атмосферы контролируют анализаторы, обрабатывающие
пробы воздуха, взятого из отсеков станции. Функциональная блок-схема ана-
лизатора состава атмосферы в отсеках АС МКС представлена на рис. 11.18 [5].
Масса блока - 77,2 кг; объем — 0,25 м3; средняя потребляемая энергия —
180 Вт, аварийная — 250 Вт, пиковая — 250 Вт; выделяемая мощность —
130 Вт. Внешний вид анализатора показан на рис. 11.19 [5].
Длительное пребывание экипажа и других биологических объектов на
борту ПКА приводит к загрязнению атмосферы органическими соедине-
ниями, микробами и вирусами. Для быстрого выявления каждого из видов
загрязнений требуются специальные анализаторы, позволяющие в реальном
времени контролировать содержание летучих органических веществ в ИГА.
Глава 11. Компоновка оборудования системы жизнеобеспечения
635
Рис. 11.18. Схема блока анализатора состава атмосферы:
1 — ионный насос; 2 — дефлектор; 3 — электрометры; 4 — выходы; 5 — ионные детекторы;
6 — источник ионов; 7— анод; 8 — молекулы газа; 9— вход проб газа; 10 — входное отверстие;
11 — нить накаливания; 12 — электронный луч; 13 — фокусирующая ионы линза; 14 — диа-
фрагма; 15 — поток ионов; 16 — анализатор (массовый сепаратор); 17 — магнит анализатора;
18 — вакуумная камера анализатора; 19 — магнит ионного насоса; 20 — масс спектрометр;
21 — линия сброса газа за борт; 22 — забор проб воздуха (7 точек); 23 — баллон газа с эталон-
ными характеристиками для калибровки; 24 — нагреватель образцов; 25 — вентилятор
На рис. 11.20 приведена схема установки VOA (Volatile Organic Analyzer),
построенной на базе газового хроматографа (GC) и спектрометра ионной
подвижности (IMS), позволяющей распознавать наличие в атмосфере МКС
опасных летучих органических соединений. Внешний вид блока VOA показан
на рис. 11.21 [5].
Часто в кабине космического корабля можно обнаружить свободно взве-
шенные частицы. Наличие их значительного количества объясняется микро-
гравитацией. Крупными частицами являются чешуйки краски, кожи, текс-
тильных волокон, пыли, остатки пищи. Микрогравитация может привести
к тому, что частицы будут долго висеть на одном месте, прежде чем попадут
в воздушный фильтр. Для ПКА при продолжительности полета более одной
недели максимальный уровень количества частиц не должен превышать
200 мкг/м3. На борту ПКА необходимо разместить приборы для сбора пыли
и подсчета количества частиц в реальном масштабе времени. Схемы таких
приборов приведены на рис. 11.22, 11.23 [12].
636
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 11.19. Анализатор состава атмосферы:
1 — высоковольтный блок питания; 2 — масс-спектрометр; 3 — корпус блока электроники;
4 — печатные платы; 5 — низковольтный блок питания; 6 — фильтр электромагнитных помех;
7 — блок входных клапанов; 8 — компрессоры для забора проб; 9 — баллон для проб воздуха
13
14
15
16
t__________________________________
Рис. 11.20 Блок-схема анализатора органических соединений VOA:
1 — диагностический вход; 2 — вход пробы воздуха; 3 — фильтр; 4 — переключающий клапан;
5 — концентратор; 6 — насос; 7— клапан; 8 — газовый хроматограф (два канала); 9 — спектро-
метр ионной подвижности; 10— контроллер; 11 — система управления распределением азота;
12 — калибровочная система; 13 — выход охлаждающего воздуха; 14 — информационные ка-
налы; 15 — электропитание; 16 — подача азота; 17 — подача воздуха для охлаждения приборов
18
Рис. 11.21. Внешний вид блока VOA:
1 — крепежные фиксаторы; 2 — тепловой развязывающий усилитель; 3 — перепускной клапан азота; 4 — фильтр азота; 5 — печатные платы
контроллера; 6 — рециркуляционный диффузионный сетчатый фильтр управления и очистки потока; 7 — измеритель количества ионов;
8 — выходные фильтры; 9 — датчики потока проб воздуха; 10 — аккумулятор; 11 — насос; 12 — концентратор; 13 — впускной клапан;
14 — переключающий клапан; 15 — система калибровки с подогревателем; 16 — вход (источник проникновения); 17 — клапан системы ка-
либровки; 18 — датчик давления азота; 19 — регулятор расхода азота; 20 — микронный фильтр; 21 — циркуляционный насос; 22 — фильтр
очистки азота; 23 — датчик потока; 24 — предохранительный клапан; 25 — регулятор подачи азота; 26 — отсечной клапан азота; 27 — сиг-
нализатор давления азота; 28 — направляющие штифты; 29 — подача азота; 30 — разъем электропитания; 31 — разъемы передачи данных;
32 — датчик давления; 33 — кран; 34 — датчик фильтров; 35 — ручка; 36 — забор проб воздуха; 37 — диагностический вход
638
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 11.22. Пылезаборник в продоль-
ном разрезе:
/ — входное отверстие размером 2,5 х 12 мкм;
2— сетка размером 100 мкм из нержавеющей
стали (экран); 3 — фильтр для частиц раз-
мером 10... 100 мкм; 4 — фильтр для частиц
размером 2... 10 мкм; 5— фильтр для частиц
размером меньше 2,5 мкм; 6 — уплотнитель
частиц размером 10 мкм; 7 — выход объем-
ного потока величиной 1 л/мин; 8— уплот-
нитель частиц размером 2,5 мкм; 9— выход
объемного потока 1 л/мин; 10 — выход объ-
емного потока величиной 10 л/мин
Рис. 11.23. Прибор для подсчета ча-
стиц в реальном масштабе времени
(продольный разрез):
1 — съемная чувствительная камера /
световая ловушка; 2 — линза; 3 — корпус
детектора из силикона; 4 — оптический
фильтр; 5 — плоские стеклянные окна;
6 — печатная плата; 7 — пульсирующий
источник света; 8 — корпус; 9 — линза;
10 — рабочий объем
11.2.5. Средства очистки атмосферы
В состав системы очистки атмосферы ПКА входят поглотители влаги,
углекислого газа и фильтры, улавливающие аэрозоли и абсорбирующие га-
зообразные примеси. Аэрозоли задерживаются фильтрами с размерами пор
40...70 мкм, встроенными в вентиляторы кабины и панели, для охлаждения
которых нужен чистый воздух. Фильтрующая система при сборе отходов
имеет бактериальные фильтры с размером пор 0,45 мкм. При наличии кан-
церогенных веществ основной задачей системы очистки атмосферы является
защита членов экипажа от их влияния на уровне ниже вероятности 0,0001 для
каждого полета. После очистки воздух возвращается в кабину. В составе СЖО
имеются поглотители и фильтры, предназначенные для выполнения штатных
операций и парирования нештатных ситуаций.
Глава 11. Компоновка оборудования системы жизнеобеспечения 639
Углекислый газ может поглощаться путем его адсорбции различными со-
единениями. Например, гидроокись лития весьма надежна в работе и быстро
поглощает СО2 при наличии потока газа.
В российском сегменте МКС очистка атмосферы от углекислого газа
проводится системой «Воздух» (рис. 11.24), которая условно разделена на
блок предварительной очистки воздуха (БПО), блок теплообменников (ВТ)
и блок очистки атмосферы (БОА) [8].
Рис. 11.24. Система очистки атмосферы «Воздух»:
I — блок предварительной очистки воздуха; II — блок теплообменников; III — блок очистки
атмосферы; IV — панель управления блока очистки атмосферы; а — воздух, загрязненный
углекислым газом; б — воздух, очищенный от углекислого газа; в — магистраль откачки
воздуха из патрона перед регенерацией; г — магистраль отвода углекислого газа за борт; 1 —
входной патрон с силикагелевым осушителем ОС-1; 2 — выходной патрон с силикагелевым
осушителем ОС-2; 3 — электронагреватель ЭН-1; 4 — электронагреватель ЭН-2; 5 — кла-
пан ПКО; 6 — газо-газовый теплообменник ГГТ; 7 — газожидкостный теплообменник ГЖТ;
8 — измеритель расхода ВИР; 9 — фильтр; 10 — вентилятор; 11 — поглотительный патрон
ПП-1; 12— поглотительный патрон ПП-2; 13 — поглотительный патрон ПП-3; 14— клапан
БВК-3; 15 — клапан БВК-2; 16 — клапан БВК-3; 17 — насос; 18 — клапан ABK-1; 19 — кла-
пан ABK-2; 20 — клапан ABK-3; 21 — клапан ABK СОА; 22 — выход углекислоты в вакуум;
23 — выход воздуха в модуль СМ
Система «Воздух» состоит из трех патронов с молекулярными ситами,
двух патронов с силикагелем, двух электрических нагревателей, газо-газового
и газожидкостного теплообменников, вакуумного насоса, восьми клапанов и
вентилятора. Влагопоглотителем в системе служит силикагель. Углекислый
газ из атмосферы удаляется молекулярными ситами, роль которых выполняет
твердый пористый адсорбент в виде цеолита. Принцип работы молекулярных
сит основан на действии капиллярных сил. Производительность системы
по поглощению СО2 зависит от величины расхода воздуха через систему, от
продолжительности циклов сорбции и регенерации, от концентрации СО2
640 Часть III. Компоновка систем пилотируемого космического аппарата
в атмосфере. После насыщения цеолит регенерируется забортным вакуумом.
Когда патрон-поглотитель ПП-1 адсорбирует СО2, патрон-поглотитель ПП-2
находится в процессе регенерации, а патрон-поглотитель ПП-3 отключен.
Углекислый газ удаляется из АС МКС через блок фильтров 4BMS массой
173 кг, который имеет энергопотребление 497 Вт (рис. 11.25). Фильтр углекис-
лого газа имеет молекулярные сита из цеолита 5А. Для удаления влаги в блоке
фильтров установлены патроны с силикагелем и цеолитом 13Х (рис. 11.26) [5].
Рис. 11.25. Схема блока фильтров 4BMS системы удаления углекислого газа:
1 — вход воздуха; 2 — выход воздуха; 3 — блок осушителя (адсорбция); 4— насос подачи возду-
ха; 5 — выход углекислого газа; 6 — датчик абсолютного давления; 7— десорбция (выделение)
углекислого газа; 8 — электронагреватели; 9 — блок поглощения углекислого газа; 10 — дат-
чик температуры; 11 — теплообменник-холодильник; 12 — хладагент; 13 — датчик перепада
давления; 14 — вентилятор-нагнетатель; 15 — обратный клапан; 16 — силикагель; 17 — блок
осушителя (десорбция); 18 — клапан-переключатель
На МКС постоянно работают российская система бортовой очистки от
микропримесей воздуха служебного модуля (СБМП) и аналогичная амери-
канская система TCCS. Резервным средством на случай отказа обеих систем
служит фильтр вредных примесей (ФВП). СБМП предназначена для очистки
атмосферы обитаемых отсеков от вредных микропримесей, выделяемых че-
ловеком и конструкционными материалами. Такая система эксплуатируется
на МКС с момента запуска российского служебного модуля «Звезда», а до
этого она в течение 13 лет успешно функционировала на космической стан-
ции «Мир».
Глава 11. Компоновка оборудования системы жизнеобеспечения
641
Рис. 11.26. Внешний вид патрона фильтра 4BMS:
1 — интерфейс загрязненного воздуха; 2 — разъемы подключения нагревателя и датчика тем-
пературы; 3 — место крепления системы ручного управления клапаном-переключателем; 4 —
интерфейс воздуха и углекислого газа; 5— кронштейны крепления; 6— адсорбер углекислоты;
7 — обратный клапан; 8 — осушитель
Принципиальная схема системы приведена на рис. 11.27 [13]. В состав
СБМП входят аппараты, разработанные, изготовленные и поставляемые
ОАО «НИИхиммаш»: ФОА — фильтр адсорбционный нерегенерируемый,
предназначенный для поглощения и долгосрочного удержания «тяжелых»
углеводородов; ЗПЛ — адсорбционный фильтр, регенерируемый мето-
дом термовакуумной десорбции с использованием космического вакуума,
предназначенный для поглощения легких и среднесорбируемых примесей;
ПКФ — палладиевый каталитический фильтр низкотемпературный, кото-
рый предназначен для окисления водорода, угарного газа и сероводорода.
ПКФ-Т — палладиевый каталитический фильтр высокотемпературный, ко-
торый предназначен для окисления метана и угарного газа. СБМП работает
следующим образом: экипаж вручную с ПУ БМП переключает режимы работы
и управляет отдельными элементами (вентиляторами, нагревателями и т. д.).
Очистка атмосферы может выполняться либо с использованием двух патронов
одновременно, либо каждого из них поочередно. Кроме того, предусмотрен
режим, когда один патрон регенерируется, а другой адсорбирует вредные
примеси.
642
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 11.27. Блок-схема СБМП:
/ — загрязненный воздух из гермоконтура отсека; 2 — воздух после дожигания метана;
3 — вентилятор; 4 — фильтр предварительной очистки; 5 — адсорбер № 1; 6 — сброс микро-
примесей в вакуум; 7 — адсорбер № 2; 8 — блок клапанов вакуумных; 9 — электроклапан
«Регенерация»; 10 — электроклапан «Выход»; 11 — электроклапан «Очистка»; 12— каталити-
ческий высокотемпературный фильтр; 13 — каталитический фильтр; 14— подача очищенного
воздуха в гермоконтур отсека; 15 — гидравлическое сопротивление
Фильтр вредных примесей предназначен для поглощения ацетона, ам-
миака, сероводорода, окиси углерода, углеводородов и других вредных газо-
образных примесей из атмосферы кабины. Фильтр, установленный в ФГБ,
состоит из сменной кассеты с химическим поглотителем и активированным
углем и из незаменяемой части — катализатора для окисления СО в СО2.
Включение ФВП выполняется перед прибытием первой экспедиции на
станцию. Он работает до момента включения СОГС в служебном модуле, в
дальнейшем используется для очистки атмосферы в случае ее загрязнения в
аварийных ситуациях.
Блок-схема прибора очистки TCCS приведена на рис. 11.28. Его
масса — 77,2 кг; объем — 0,25 м3; средняя потребляемая энергия — 180 Вт,
аварийная — 250 Вт, пиковая — 250 Вт, выделяемая мощность — 130 Вт. Внеш-
ний вид блока показан на рис. 11.29 [5]. На рис. 11.30, 11.31 [5] представлены
конструктивные схемы входящих в нее угольного фильтра и патрона с гидра-
том лития. Характеристики угольного фильтра и патрона с гидратом лития
приведены ниже [5].
Угольный фильтр
Масса, кг ..................11,7
Объем, м3 .................0,069
Объем угля/сорбента, м3 ...0,046
Патрон с гидратом лития
.........2,8
.........0,004
.........2,8
Глава 11. Компоновка оборудования системы жизнеобеспечения
643
Рис. 11.28. Блок-схема прибора очистки TCCS атмосферы от микропримесей:
1 — вход воздуха из кабины; 2 — отбор пробы воздуха; 3 — угольный фильтр (22,7 кг дре-
весного угля); 4 — датчики скорости; 5 — нагнетатель; 6 — расходомер; 7— измерительная
шайба; 8 — патрон с сорбентом (1,4 кг гидрата лития); 9 — байпас; 10 — выход воздуха
в кабину; 11 — датчики температуры; 12 — блок каталитических окислителей (прибор имеет
следующие характеристики: 0,5 кг 0,5%-ного глинозема, рабочая температура 673 К, мак-
симальная — 811 К)
Рис. 11.29. Внешний вид блока очистки TCCS атмосферы от микропримесей:
1 — линия забора проб; 2 — вход воздуха; 3 — выход воздуха; 4 — патрон с сорбентом (гидратом
лития); 5 — расходомер; 6 — регулирующий клапан; 7 — блок каталитических окислителей;
8 — угольный фильтр
644
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 11.30. Угольный фильтр:
1 — крепежный кронштейн; 2 — вход воздуха; 3 —
пружинные толкатели (8 шт.); 4 — верхний фланец;
5 — корпус; 6 — фильтр и сетка (2 узла); 7 — нижний
фланец; 8 — выход воздуха
1
Рис. 11.31. Патрон с гидратом лития:
1 — крышка со штуцером входа; 2 — про-
ставка; 3 — проставка с сеткой; 4 — фильтр;
5 — емкость с гидратом лития; 6 — пружина;
7 — крышка со штуцером выхода
Глава 11. Компоновка оборудования системы жизнеобеспечения
645
11.2.6. Размещение блоков СО ГС но ПКА
Массовые характеристики и энергопотребление блоков в подсистеме ре-
генерации воздуха (рассчитанные на трех человек) приведены в табл. 11.4 [3].
Из таблицы видно, что с увеличением энергопотребления и массы агрегатов
уменьшается масса расходуемых компонентов. Компоновка основных бло-
ков оборудования для формирования искусственной атмосферы проводится
компактно, как правило, в середине модуля. Пример размещения блоков
оборудования регенерации атмосферы АС МКС в стандартной стойке пока-
зан на рис. 11.32 [5]. При компоновке блоки соединяются в соответствии с
блок-схемой, приведенной на рис. 11.33.
Схема размещения элементов СОГС в американском сегменте МКС
приведена на рис. 11.34 [14].Компоновочные схемы размещения блоков ре-
генерации атмосферы в модулях МКС показаны на рис. 11.35 [5] и рис. 5.3.
Рис. 11.32. Компоновка блока
очистки воздуха:
/ — блок питания; 2 — распреде-
лительный блок; 3 — главный ана-
лизатор компонентов; 4 — блок кон-
троля загрязнений воздуха; 5— блок
удаления углекислого газа; 6 — кон-
струкция стойки; 7— воздуховод; 8—
клапан системы терморегулирова-
ния; 9 — узел крепления стойки;
10 — блок управления атмосферой
Таблица 11,4
Массовые характеристики и энергопотребление блоков в подсистеме регенерации воздуха
Варианты блоков и подсистем Энергопо- требление (не более), Вт Масса агрегатов (не более), кг Масса расходуемых компонентов, кг Тип КА
обеспечение О2 удаление СО2 суммарная ТКА
Газообразный О2и химический поглотитель 10 15 7,8 6,3 (5,4)* 14,1 (13,2)*
Твердый источник О2 и химический поглотитель 10 15 6,6 6,3 (5,4)* 12,9 (12)*
Надперекись калия и химический поглотитель 20 15 10,8 0,9 11,7
Сверхкритический О2 и химический поглотитель 30 20 4,2 6,3 (5,4)* 10,3 (9,6)*
Перекись водорода и химический поглотитель 30 50 4,2 6,3 (5,4)* 10,5 (9,6)*
Жидкий О2 и химический поглотитель 10 20 3,6 6,3 (5,4)* 9,9 (9,0)*
Надперекись натрия — 15 8,4 0,6 8,4
Газообразный О2 и регенерируемый поглотитель 300 150 7,8 0,6 8,4
Твердый источник О2 и регенерируемый поглотитель 300 150 (200)** 6,6 0,6 7,2 ОС
Электролиз Н2О и регенерируемый поглотитель 1050 450 (700)** 4,2 0,6 4,8
Перекись водорода и регенерируемый поглотитель 300 200 (270)** 4,2 0,6 4,8
Концентратор — регенерируемый поглотитель по реакции Саботье; электролиз воды 1300 300 (600)** 1,8 — 1,8
Концентратор СО2; топливный элемент — электролиз СО2 и Н2О на катализаторе в реакторе Будуэра * По химическому поглотителю в скобках приведены д ** В скобках указана эквивалентная масса, учитывают 1300 анные для гидре ая энергопотреб 200 (550)** юкиси лития. >ление и терморс 0,6 !гулирование (, данные для ок 0,6 :иси лития).
Глава 11. Компоновка оборудования системы жизнеобеспечения
647
Рис. 11.33. Блок-схема прибора регулирования содержания СО2 в атмосфере кабины:
1 — контроль температуры и влажности; 2 — устройство удаления СО2; 3 — блок переработки
СО2; 4 — система очистки атмосферы; 5 — гермоконтур отсека; 6 — система генерации О2;
7 — анализатор атмосферы; 8 — магистраль подачи воздуха, загрязненного СО2 (34 м3 /ч);
9 — сброс СО2; 10 — поток СО2 (4 кг/день); 11 — сброс в космическое пространство СО2 и
СН4 (1,7 кг/день); 12 — сброс Н2 в космическое пространство; 13 — выход воды (2,9 кг/день);
14 — очищенная атмосфера; 15 — подача воздуха; 16 — отбор воздуха; 17 — выход кислорода
(5,1 кг/день); 18 — подача воды (5,8 кг/день); 19— пробы воздуха; 20— сброс воздуха в космос
Рис. 11.34. Функциональная схема размеще-
ния СОТС в АС МКС:
В — воздух; Модули: I — Unity (Nodel); II —
Destiny (Lab); III — Quest (Airlock); 1 — клапан
выравнивания давления с ручным управлением;
2 — датчик давления; системы вакуумирования 5;
распределения вакуума к бортовому оборудованию 4;
5 — бортовое оборудование; подачи азота 6; рас-
пределения азота 7; обнаружения пожара и пожа-
ротушения 8\ контроля атмосферы 9; 10 — панель
управления давлением атмосферы; система венти-
ляции и сброса давления 77; 12 — насос откачки
воздуха из шлюзовой камеры; 13 — компрессор за-
правки кислорода; система контроля температуры и
влажности 74; 15 — СЖО скафандров; 16 — подача
кислорода и азота в стыковочный адаптер (РМА2)
648
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 11.35. Компоновочные схемы блоков СЖО в модулях МКС «Звезда» (а) и
Destiny (б):
«Звезда» (7 — система «Электрон», 2 — система очистки воздуха «Воздух», 3 — система
водообеспечения, 4 — генераторы кислорода, 5 — газоанализатор, 6 — системы гигие-
ны, 7 — туалет, 8 — контейнер с отходами); Destiny (7 — задний люк (в модуль Node 1),
2 — передний люк (в модуль Node 2), 3 — система вакуумирования, 4 — нижний ряд стоек
с научной аппаратурой, 5 — правый ряд стоек с научной аппаратурой, 6 — верхний ряд стоек с
научной аппаратурой, 7 — левый ряд стоек с научной аппаратурой, 8 — система терморегули-
рования и система управления атмосферой, 9 — системы очистки атмосферы, 10 — система
водообеспечения, 77 — запасы воды, 12 — система подачи азота, 13 — датчик давления, 14 —
панель управления давлением атмосферы)
Глава И. Компоновка оборудования системы жизнеобеспечения
649
11.3. Компоновка оборудования системы водообеспечения
113.1. Параметры системы водообеспечения
В процессе полета в замкнутом объеме ПКА происходят потребление и
выделение воды. В зависимости от целей полета оборудование СЖО позволяет
организовать систему водообеспечения или как разомкнутую с удалением отра-
ботанной воды, или как замкнутую с регенерацией воды. Для разомкнутой си-
стемы определяющими являются нормы водообеспечения, а для замкнутой —
нормы водопотребления.
Вода на борту ПКА может быть получена как из непополняемых за-
пасов, так и в результате функционирования технологических установок,
например топливных элементов, или в результате работы системы регене-
рации воды. В частности, система водообеспечения экипажа ТКА Apollo
состояла из двух частей. В командном модуле она была основана на исполь-
зовании воды, получаемой в результате работы топливных элементов. Вода
из топливных элементов, расположенных в техническом отсеке, поступа-
ла в командный модуль по трубопроводу. Перед этим она охлаждалась до
24 °C при понижении давления с 4 до 1,7 атм и очищалась от водорода.
В лунном модуле ТКА Apollo водообеспечение было основано только на запасах
воды, поскольку топливные элементы не были предусмотрены.
На борту орбитальной станции «Салют-4» в 1974 г. впервые была опробо-
вана система регенерации воды, позволяющая превратить влагосодержащие
отходы жизнедеятельности человека, а также технических и биологических
систем в питьевую воду. Работоспособность системы была подтверждена не-
прерывной четырехлетней эксплуатацией на станции «Мир», где только за
время третьей основной экспедиции продолжительностью 366 суток было
регенерировано 1,5 т воды.
Система водообеспечения PC МКС построена на двух различных принци-
пах: на доставке воды транспортными космическими кораблями и на регене-
рации воды из конденсата атмосферной влаги. В системе водообеспечения АС
МКС питьевая вода получается путем переработки конденсата в лабораторном
модуле и за счет поставок воды из запасов. Вода для санитарно-гигиенических
нужд добывается регенерацией сточных вод.
Параметры воды, используемой на борту ПКА, определяются ее назна-
чением. Основное различие имеют параметры питьевой, санитарно-гигиени-
ческой и технической воды. Качество питьевой воды, потребляемой на борту
КА, независимо от способа ее получения определяется ГОСТ 51232-98 «Вода
питьевая. Общие требования к организации и методам контроля качества»
и ГОСТ 2874—82 «Вода питьевая. Гигиенические требования и контроль за
качеством».
Материалы, применяемые в системе водоснабжения, не должны придавать
воде неприятный привкус. Поскольку длительно хранящаяся вода загрязня-
ется нетоксичными выделениями из материалов емкостей и возможными
попаданиями микрофлоры, перед употреблением ее очищают, устанавливая
650
Часть III. Компоновка систем пилотируемого космического аппарата
перед раздаточным устройством аппарат для дезодорирования и обеззаражи-
вания воды.
Консервацию воды обеспечивает электролитически вводимое ионное
серебро, норматив на содержание которого в регенерированной воде зна-
чительно отличается от нормативов для питьевой воды (в России и США
норматив для питьевой воды 0,05 мг/л). Требования к приборам регенерации
воды основаны на многочисленных требованиях к химическим, физическим,
органолептическим и биологическим критериям качества. При использовании
регенерированной питьевой воды необходимо тщательно контролировать:
• автоматически с помощью биодатчиков микробную обсемененность
воды на соответствие ГОСТ 18963—73 «Вода питьевая. Методы санитарно-бак-
териологического анализа»;
• состав примесей (азот аммиака, азот нитратов, сульфаты, метанол и
других влагосодержащих отходов) на соответствие ГОСТ 51232—98.
Контроль за качеством воды на PC МКС также проводится с помощью
методов наземного анализа контрольных проб.
11.3.2. Оборудование системы хранения воды
Запасы воды на PC МКС пополняются за счет воды, доставляемой ТКА
«Прогресс». Вода из запасов расходуется для компенсации потерь в цикле
регенерации воды. Для продолжительного хранения питьевой воды и раздачи
ее по мере необходимости потребителям на PC МКС установлена система
«Родник», в которую входят два водяных бака БВ-1 и БВ-2, панель управле-
ния (ИКР) и блок перекачки (рис. 11.36) [8].
Рис. 11.36. Схема заправки емкостей для воды:
I — панель системы «Родник»; II — блок перекачки; III — пульт управления; 1 — бак
с водой; 2 — клапан пуска воды; 3 — клапан дренажа водяной полости; 4 — клапан
дренажа воздушной полости; 5 — фильтр; 6 — предохранительный клапан; 7— насос;
8 — емкость для воды (ЕДВ)
Глава 11. Компоновка оборудования системы жизнеобеспечения
651
Вместимость каждого бака составляет 210 л, концентрация ионов серебра
в воде — 0,5 мг/л, срок ее хранения — 3 года. Вода для потребления перекачи-
вается в емкости для воды (ЕДВ) меньшего объема (21 л). Вода в ЕДВ закачи-
вается из баков системы «Родник» с помощью блока перекачки. Она подается
в эластичную оболочку ЕДВ, размещенную в алюминиевом корпусе. Время за-
правки ЕДВ блоком перекачки — не более 35 мин, срок хранения в ЕДВ — 1 год.
Вода из ЕДВ для питья потребляется через приемное устройство, на кото-
рое предварительно надевается индивидуальный мундштук. Поступление воды
регулируется нажатием кнопки перепускного клапана приемного устройства.
Схема потребления воды приведена на рис. 11.37 [8].
Рис. 11.37. Схема потребления воды из емкости для воды:
1 — ручной насос; 2 — предохранительный клапан; 3 — приемное устройство; 4 —
мундштук; 5 — емкость для воды
Баки запасов воды в АС МКС размещают в лабораторном модуле и на-
полняют при прилете ТКА. Каждый бак вмещает 408 кг воды. Общий объем
баков не превышает 4,7 м3. Резервный запас воды, составляющий 43 кг, хра-
нится в отдельном контейнере (рис. 11.38), заправляемом при прилете ТКА [5].
Водопровод состоит из трубопроводов с холодной и горячей водой, кла-
панов, мундштуков для питья (свой для каждого члена экипажа), ввода воды
в емкости с продуктами для их приготовления. Для учета расхода воды и со-
блюдения кулинарных пропорций в системе установлен дозатор. На корабле
Apollo дозирующее устройство отмеряло по 30 мл холодной и горячей воды.
Рис. 11.38. Контейнер для хранения резервно-
го запаса воды в АС М КС
652 Часть III. Компоновка систем пилотируемого космического аппарата
1133. Оборудование системы регенерации воды
В СЖО космического корабля поступают водосодержащие отходы из
различных источников. Это предполагает наличие нескольких вариантов по-
строения системы водоочистки. Они могут перерабатываться индивидуально
для каждого источника или комплексно. Первый подход позволяет поэтап-
но увеличивать замыкание круговорота воды. Подобная схема применялась
на орбитальной станции «Мир». Общие принципы конструирования таких
систем — модульное исполнение отдельных узлов и максимально возможная
их унификация.
Каждая подсистема сочетается с одним или несколькими устройствами,
обеспечивающими сбор водосодержащих отходов. Подсистема регенерации
воды из конденсата атмосферной влаги сочетается с холодильно-сушильным
агрегатом, регенерации воды из санитарно-гигиенических отходов — с душе-
вым и умывальным устройством, регенерации воды из мочи — с ассенизаци-
онным устройством.
В PC МКС используется система регенерации воды из конденсата
атмосферной влаги (СРВ-К2М), предназначенная для приема газожид-
костной смеси (ГЖС), поступающей из системы СТР, очистки и конди-
ционирования отделенной жидкости до состояния питьевой воды, раздачи
горячей и охлажденной питьевой воды потребителям. Конденсат атмос-
ферной влаги, образующийся в жилом отсеке PC, собирается на холодных
поверхностях теплообменников-осушителей системы СТР. Затем он в виде
ГЖС поступает в систему СРВ-К для очистки и получения питьевой воды.
К экипажу приходит вода в горячем и теплом виде через блок раздачи и подо-
грева. Вода из системы регенерации используется для питья, восстановления
сублимированных продуктов и приготовления соков, кофе, чая, а также для
проведения санитарно-гигиенических процедур.
Система СРВ-К функционирует постоянно. Среднесуточная выдача ре-
генерированной воды составляет 1,2... 1,3 л/чел. Пневмогидросхема системы
СРВ-К приведена на рис. 11.39, а ее внешний вид представлен на рис. 11.40 [8].
Система водообеспечения АС МКС, как показано на блок-схеме, при-
веденной на рис. 11.41, состоит из нескольких подсистем: системы сбора и
удаления конденсата, емкостей для хранения воды, поступающей из топлив-
ных элементов, сети распределения воды, системы очистки воды, автоматики
управления процессом переработки и определения качества воды, блока пре-
образования урины. Схема размещения системы водообеспечения в АС МКС
представлена на рис. 11.42 [14].
Частью системы кондиционирования и вентиляции АС МКС является
система сброса конденсата с помощью двух вентиляционных отверстий,
каждое из которых имеет производительность 65 кг/ч при давлении 101,3 кПа [5].
Схема расположения двух блоков сброса конденсата в лабораторном модуле
АС МКС представлена на рис. 11.43. Схема одного блока системы сброса
конденсата показана на рис. 11.44 [5]. В состав блока входят основной и ре-
зервный электромагнитные клапаны для сброса конденсата, подогреваемый
дренажный штуцер и фильтр частиц.
Рис. 11.39. Певмогидросхема системы регенерации воды из конденсата СРВ-К:
I — блок регенерации № 1; II — блок регенерации № 2; III — блок кондиционирования воды; IV — блок раздачи и подогре-
ва воды; 1 — газожидкостная смесь из системы терморегулирования; 2 — фильтр; 3 — клапан; 4 — сигнализатор проскока
жидкости; 5 — разделитель газа и жидкости; 6 — индикатор проскока жидкости; 7 — воздух; 8 — электроклапан; 9 — насос;
10 — предохранительный клапан; 11 — мембранный насос; 12 — блок колонок очистки; 13 — сигнализатор проскока приме-
сей; 14 — колонка насыщения солями и ионами серебра; 15 — вентиль; 16 — контейнер технической воды; 17 — контейнер
питьевой воды; 18 — нагреватель; 19 — отбор проб; 20 — горячая вода; 21 — холодная вода
654
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 11.40. Внешний вид блоков аппаратуры системы
регенерации воды из конденсата СРВ-К
Рис. 11.41. Блок-схема системы регенерации и распределения воды:
I — блоки системы регенерации воды; II — системы СЖО; III — прочие системы; / — подача
воды системам бортового оборудования; 2 — подача воды в системы ВКД; 3 — подача воды
членам экипажа; 4 — системы хранения и распределения воды; 5 — системы переработки и
контроля воды; 6 — системы сбора и хранения воды; 7— системы контроля температуры и
влажности СЖО; 8 — конденсат; 9— регенерированная вода; 10 — использованная вода; 11 —
пополнение запасов воды; 12 — вода, полученная в топливных элементах; 13 — МТКА Space
Shuttle; 14 — аварийный доступ к воде; 15 — моча; 16 — дренаж; 17 — дистиллят; 18 — сбор
мочи; 19 — предварительная обработка мочи и смывной воды; 20 — моча и смывная вода;
21 — системы переработки мочи и смывной воды; 22 — концентрат; 23 — удаляемые отходы
Глава И. Компоновка оборудования системы жизнеобеспечения
655
Рис. 11.42. Функциональная схема размещения аппаратуры водообеспечения в аме-
риканском сегменте МКС:
I — модуль Unity (Nodel); II — модуль Destiny (Lab); III — модуль Quest (Airlock); / — систе-
ма контроля температуры и влажности; 2 — емкости для хранения воды; 3 — система сброса
конденсата; 4 — система дозаправки скафандров; 5 — СЖО скафандров
Рис. 11.43. Размещение
блоков сброса конденсата
в вакуум в лабораторном
модуле АС М КС Destiny:
1 — вентиляционный блок
правый борт надир; 2 — вен-
тиляционный блок левый
борт зенит; 3 — носовое дни-
ще модуля; 4 —кормовое
днище модуля
Одной из наиболее сложных систем является система регенерации воды
из предварительно консервированной для предотвращения размножения
бактерий и химического разложения урины. Данная операция проводится в
PC МКС в отдельном блоке СРВ-УМ (рис. 11.45) [15]. Основной метод ре-
генерации воды из урины для ПКА — дистилляция. Дистиллятор выполняет
вакуумную дистилляцию, циркуляцию урины и конденсата с рекуперацией
тепла конденсации пара. Циркуляция и подпитка жидкостью осуществляются
встроенными насосами. Электроэнергия подается на электропривод дистил-
лятора и термоэлектрический тепловой насос, где за счет эффекта Пельтье
656
Часть III. Компоновка систем пилотируемого космического аппарата
1
5 5 6
Рис. 11.44. Схема системы сброса в вакуум
конденсата влаги в АС МКС:
1 — вход собранного конденсата; 2 — фильтр частиц;
3 — к системе вентиляции; 4 — сильфон; 5 — элек-
тромагнитные клапаны; 6 — штуцер на днище отсе-
ка; 7 — фитинг; 8 — обогреватель; 9 — дренажный
штуцер сброса конденсата
Рис. 11.45. Схема блока регенерации воды из урины СРВ-УМ российского сегмен-
та МКС:
I — урина из системы приема и консервации СПК-У; II — хладагент; III — конденсат в систему
очистки СРВ-К; 1 — дистиллятор; 2 — компрессор пара; 3 — насос; 4 — термоэлектрический
тепловой насос; 5 — теплообменник-охладитель; 6 — емкость для упаренного раствора; 7 —
датчик заполнения/опорожнения емкости; 8 — насос конденсата; 9 — ресивер; 10 — емкость
промежуточная; 11 — воздуходувка; 12— вакуумный насос; 13 — предохранительный клапан;
14 — электромагнитный клапан; 15 — фильтр
Глава 11. Компоновка оборудования системы жизнеобеспечения 657
происходит внутренний перенос тепловой энергии от конденсата к урине.
Энергия отводится в охлаждаемом внешним хладагентом теплообменнике.
Схема работы многоступенчатого дистиллятора, разработанная в ОАО
«НИИхиммаш», представлена на рис. 11.46 [16]. Процесс происходит в не-
сколько стадий при пониженном давлении (0,035...0,1 кг/см2) и температуре
ниже 55 °C. Процессы испарения и конденсации протекают на тонкостенных
вращающихся поверхностях, при чем теплота конденсации в одной ступени
используется для испарения жидкости в другой ступени (на другой стороне
поверхности вращения). Разность температур обеспечивается снижением
давления от ступени к ступени.
Рис. 11.46. Блок регенерации воды на основе парокомпрессионной дистилляции мочи:
1 — центробежный многоступенчатый вакуумный дистиллятор; 2 — термоэлектрический
тепловой насос; 3 — теплообменник-охладитель; 4 — привод вращения дистиллятора; 5 —
перенос тепловой энергии от конденсата к урине; 6 — электропитание теплового насоса;
7 — хладагент; 8 — к ресиверу; 9 — дистиллят; 10 — урина
Система СРВ-УМ массой 125 кг с энергопотреблением 120 Вт-ч/л ре-
генерированной воды (в среднем 25 Вт в день на экипаж из трех человек)
обеспечивает степень регенерации воды 88 %.
11.4. Компоновка оборудования системы формирования микроклимата
Формирование в замкнутом объеме ПКА заданного микроклимата (со-
четания температуры и влажности ИГА) обеспечивает оборудование систем
терморегулирования и кондиционирования. Нормативы параметров ми-
кроклимата в отсеке были приведены в табл. 11.1. Обеспечение параметров
658
Часть III. Компоновка систем пилотируемого космического аппарата
микроклимата является комплексной задачей, поскольку процессы испарения
и конденсации существенно зависят от температуры и давления газа в отсеке.
На рис. 11.47 представлена схема зависимости температуры от относительной
влажности в отсеке [17]. Нормальная работоспособность человека наблюда-
ется при следующем тепловом режиме: температура 18...20 °C, относительная
влажность 40...60 %. При повышении влажности до 70...90 % и температуры
до 25...30 °C работоспособность членов экипажа падает примерно на 35 %.
Для поддержания заданного температурного режима в герметичном отсеке
с газовой атмосферой строится внутренняя система обеспечения теплового
режима (СОТР), использующая перенос тепла потоками газа, сформирован-
ными системой вентиляции от источников тепла (аппаратуры или членов
экипажа) к теплообменным агрегатам внешней СОТР, обеспечивающей те-
пловой режим ПКА в целом.
Проектирование систем СОТР КА и интеграция в нее системы форми-
рования микроклимата СЖО являются самостоятельными задачами, рассмо-
тренными, например, в издании [18]. Основы компоновки агрегатов СОТР КА
представлены в пособии [19]. В качестве примера на рис. 11.48 приведена
схема размещения блоков системы обеспечения температуры и влажности в
СОТР ТКА «Союз» [20].
Блок-схема системы формирования микроклимата приведена на рис. 11.49
на примере системы ТНС АС МКС [5], имеющей следующие характеристики:
• масса — 93,6 кг;
• потребление энергии при производительности 203 л/с — 467,5 Вт;
• максимальная потребляемая мощность — 3 кВт;
Рис. 11.47. Зависимость температуры от
относительной влажности атмосферы гер-
метичного обитаемого объекта, определя-
ющая зоны обитаемости:
1 — зона оптимальных условий для операторской
работы сидя с фиксацией тела относительно
объекта; 2 — зона оптимальных условий для
физической работы в движении; 3 — комфорт-
ная зона; 4 — зона ощущения холода; 5 — зона,
в которой ощущается дискомфорт от сухости
окружающей среды; 6 — зона, где ощущается
высокая температура; 7— зона ощущения зноя;
8 — зона теплового стресса; 9 — зона ощущения
дискомфорта от повышенной влажности
Глава И. Компоновка оборудования системы жизнеобеспечения
659
Рис. 11.48. Схема системы обеспечения теплового режима космического корабля
«Союз»:
1 — экранно-вакуумная теплоизоляция; 2 — двигатели ориентации; 3 — радиационные
поверхности; 4 — контур жилых отсеков; 5 — насос контура жилых отсеков; 6 — жидкост-
но-жидкостный теплообменник; 7, 14 — датчики температуры; 8 — теплозащитная обмазка
спускаемого аппарата; 9 — теплообменник-конденсатор; 10 — комфортный вентилятор;
11 — насос контура наружных радиаторов; 12— контур наружных радиаторов; 13 — регулятор
расхода жидкости; 15 — газожидкостный теплообменник; 16 — змеевик агрегатного отсека;
17 — подвижная крышка сопла двигателя; АО — агрегатный отсек; БО — бытовой отсек;
ПО — приборный отсек; СА — спускаемый аппарат
• питающее напряжение — 120 В постоянного тока;
• расход воздуха - 140...265 л/с
• расход воздуха в модуле Lab — 194 л/с;
• допустимая температура в отсеках — 15,6...32 °C.
• точность поддержания температуры в модуле — ± 7 °C;
• влажность — 25...70 %.
При создании СЖО отвод тепла из атмосферы кабины проводится одно-
временно с отводом выделяемой экипажем влаги с помощью единого агрегата
типа теплообменника-конденсатора.
Структурная схема системы формирования микроклимата показана на
примере системы ТНС АС МКС (рис. 11.49) [5].
В ее состав входят:
• сборка вентиляторов (ССАА, см. рис. 11.12);
• конденсационный теплообменник (ТНС СНХ), показанный на рис. 11.50
(масса — 20,6 кг; расход жидкости — 558 кг/ч; объем — 0,04 м3);
• блок контроля осушенного воздуха (ТНС TCCV), представленный на
рис. 11.51 (масса — 6,3 кг; потребляемая мощность в статике — 6,8 Вт, в ди-
намике — 15,7 В; объем — 0,027 м3);
• датчики температуры воздуха, изображенные на рис. 11.52 (характери-
стики приведены ниже);
• водный сепаратор (ТНС ССАА), приведенный на рис. 11.53 [5] (масса —
11,95 кг; потребляемая мощность — 46,36 Вт; объем — 0,054 м3);
• жидкостный датчик теплообменника (ТНС ССАА НХ);
• панель управления (ТНС ССАА EIB);
• блок формирования бортовой атмосферы (ААА);
660
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 11.49. Блок-схема системы контроля температуры и влажности в отсеках АС МКС:
1 — блок вентиляции отсека (ССАА); 2 — блок управления климатом (ААА); 3 — блок межмо-
дульной вентиляции (IMV); 4 — отсек; 5 — элементы конструкции; 6 — система электропита-
ния; 7— питающее напряжение (120 В постоянного тока); 8 — контроль; 9 — управление; 10
— выход теплоносителя; 11 — вход теплоносителя; 12 — сконденсированная вода; 13 — подача
воздуха; 14 — забор воздуха; 15 — система управления МКС; 16 — СОТР; 17 — система водо-
обеспечения; 18 — система очистки атмосферы
Глава 11. Компоновка оборудования системы жизнеобеспечения
661
Рис. 11.50. Конденсационный
теплообменник ТНС СНХ:
1 — воздухозаборник; 2 — воздух;
3 — монтажная скоба (4 шт.); 4 —
интерфейс датчика температуры
и обратного клапана; 5 — выход
воздуха в систему очистки атмос-
феры; 6 — конденсатор; 7— подвод
охлаждающей жидкости; 8 — выход
конденсата в систему водообеспече-
ния; 9 — слив охлаждающей жид-
кости; 10 — магистраль хладагента
теплообменника
б
Рис. 11.51. Блок контроля осушен-
ного воздуха ТНС TCCV:
а — вид спереди; б — изометрический вид;
1 — передняя панель; 2 — электрические
разъемы; 3 — положение рычага для нагре-
ва воздуха; 4 — положение рычага для ох-
лаждения воздуха; 5 — рычаг управления;
6 — поручень; 7 — исполнительный орган;
8 — индикатор положения клапана; 9 —
рычаг привода заслонки; 10 — уплотни-
тельная прокладка; 11 — заслонка байпаса;
12 — уплотнения; 13 — заслонки; 14 —
шарнир; 15 — пружина кручения; 16 —
ось заслонки
662
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 11.52. Датчики температуры АС МКС (а) и европейского модуля (б):
1 — датчик; 2 — монтажный кронштейн; 3 — стенка канала или панель обшивки
Характеристики датчиков температуры приведены ниже.
Американский
Европейский
сегмент
45,5..........................
82
1
34,5..........................
1............................
1,7-60,0.....................
± 0,50 .......................
Масса, г.........................
Объем, см3.......................
Потребляемая мощность, мВт.......
Рабочее давление, кПа............
Выходной сигнал, мА..............
Диапазон измеряемых
температур, °C...................
Погрешность измерения
температуры, °C .................
модуль
50
104,0
1
1,7-57,0
± 0,50
Рис. 11.53. Водный сепаратор
ТНС ССАА:
1 — вход конденсата/воздуха; 2 —
выход воздуха; 3 — контроллер двига-
теля; 4 — разъем питания; 5— разъем
интерфейса; 6 — выход конденсата;
7— предохранительный клапан; 8 —
акустическая защита двигателя; 9 —
датчик давления; 10 — электромаг-
нитный клапан; И — монтажная
рама; 12 — акустическая защита во-
дяного сепаратора
Глава 11. Компоновка оборудования системы жизнеобеспечения
663
Рис. 11.54. Блок удаления атмосферной влаги ТНС:
1 — вход влажного воздуха; 2 — выход воды; 3 — выход воздуха; 4 — корпус; 5 — привод ро-
тора; 6 — воздушная камера; 7 — камера сбора воды; 8 — устройство забора воды; 9 — ротор
Рис. 11.55. Стойка с аппаратурой регулировки температуры и влажности THC/TCS:
1 — система контроля и управления расходом воздуха; 2 — предохранитель; 3 — сборка венти-
ляторов (ССАА ORU); 4 — конденсационный теплообменник (ТНС СНХ); 5 — дистанционный
блок распределения электропитания; 6 — блок контроля осушенного воздуха (ТНС TCCV);
7 — датчик температуры уходящего воздуха; 8 — канал подачи воздуха; 9 — корпус стойки;
10 — распределительный щит; 11 — датчик температуры; 12 — блок ручного управления рас-
ходом; 13 — насосная установка; 14 — блок подачи азота; 15 — панель интерфейсных разъемов
664
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 11.56. Функциональная схема размещения аппаратуры обеспечения темпера-
туры и влажности атмосферы в АС МКС:
I — модуль Unity (Nodel); II — модуль Destiny (Lab); III — модуль Quest (Airlock); IV — сты-
ковочный адаптер PMA1; V — стыковочный адаптер РМА2; В — воздух; 1 — блок междумо-
дульной вентиляции; 2 — вентилятор; 3 — система управления атмосферой; 4 — аппаратура
управления климатом отсека; 5 — система очистки атмосферы; 6 — система водообеспечения;
7— система контроля атмосферы; 8 — система обнаружения пожара и пожаротушения; 9 —
обмен воздухом с модулями PC МКС
• блок удаления атмосферной влаги, показанный на рис. 11.54 (масса —
11,0 кг; потребляемая мощность — 46,1 Вт; объем — 0,05 м3);
• блок удаления загрязняющих частиц из воздуха.
Компоновка комплекта аппаратуры системы контроля температуры и
влажности (THC/TCS) в стойке показана на рис. 11.55. Стойка размещена в
лабораторном модуле АС МКС в секции LS6. На рис. 11.56 приведена схема
расположения блоков системы обеспечения температурного режима и влаж-
ности в отсеках АС МКС [14].
11.5. Компоновка экологического оборудования
Кроме оборудования для обеспечения жизнедеятельности на борту ПКА
размещаются системы по формированию окружающей человека среды. Дан-
ные системы формируют экологию космического полета. По назначению эко-
логическое оборудование можно разделить на несколько группы оборудование
для борьбы с шумом, оборудование для личной гигиены, оборудование для
уборки помещений, оборудование для хранения и удаления отходов.
Глава И. Компоновка оборудования системы жизнеобеспечения
665
11.5.1 Компоновка оборудования для борьбы с шумами
Источниками шума в герметичном объеме ПКА являются в основном ви-
брации и удары, возникающие при работе оборудования. По характеру колебаний
источники вибрационной энергии можно подразделить на конструкционные,
крутильные и изгибные, поперечные и осевые, непрерывные и прерывистые,
случайные и стационарные. В космическом корабле вибрация, вызывающая шум,
как правило, передается через элементы конструкции [20]. Также в орбитальной
фазе полета шум вызывают трение в механизмах и турбулентное течение воздуха
в вентиляторах и воздуховодах системы жизнеобеспечения.
Наличие источников шума в зависимости от времени их воздействия
приводит к различной степени утомляемости космонавта и снижения его
слуха. Это обстоятельство, а также возрастающая неразборчивость речи при
восприятии голосовых команд или звуковых сигналов тревоги на фоне шума
сказываются на безопасности полета.
Значения допустимых уровней звукового давления в октавных полосах
частот для ПКА приведены в табл. 11.5, а максимально допустимые уровни
звука за 16-часовой рабочий период в обитаемых отсеках и в местах крат-
ковременного пребывания членов экипажа — в табл. 11.6.
Сопоставление расчетных уровней шума и шумового режима для каждого
прибора или механизма, который должен быть установлен на борту, с рабо-
чими уровнями шума аппаратуры позволяет судить о возможных источниках
шума. Для выяснения источника шума проводят осмотры и выслушивание
оборудования, а также контроль вибраций датчиками.
Таблица 11.5
Допустимые уровни звукового давления в обитаемых отсеках ПКА (длительность полета
свыше 30 суток)
Вид деятель- ности Уровни звукового давления, дБ, в октавных полосах частот, Гц Эквивалент- ные уровни звука, дБА
31,5 63 125 250 509 1000 2000 4000 8000
Российский сегмент (ГОСТ Р 50804—95)
Работа 93 79 70 63 58 55 52 50 49 60
Сон 86 71 61 54 49 45 42 40 38 50
Работа в модуле + полезная нагрузка (NC-50 + NC-48) Амер 73 шканск 66 ий cezi 60 мент (! 56 SSP4H 53 000, SS 51 iP 500S 50 •4) 49 Не нормируется
Работа только в модуле (NC-50) 71 64 58 54 51 49 48 47 То же
Сон (NC-40) Примечание. NC — тра и включенные тельно непрерывн» для сна. 64 норма в станд ЭГО (ПО( 56 тивные дрт NA УГОЯННС 50 кривьк СА: NC >го) шуг 45 s шума, >50 - j иа, NC- 41 разраб зля Tpai -48 - д. 39 отанны зспорть ИЯ пост» 38 е исход юго сре оянноп 37 ;я из пр ;дства ( э шума сдельного спек- модуль) относи- в пределах зоны
666
Часть III. Компоновка систем пилотируемого космического аппарата
Таблица 11.6
Максимально допустимые уровни шума за 16-часовой
рабочий период
Максимальное время воздействия,ч Суммарный уровень звукового давления, дБА
4 63
2 66
1 69
0,5 72
Для ликвидации механических источников шума рекомендуется прово-
дить различные мероприятия [21].
• При вибрации — балансировку вращающихся частей, увеличение
массы, если это допустимо, демпфирование поверхностей, демпфирование
сдерживающими связями, устранение резонанса, увеличение жесткости,
уплотнение, сжатие, изоляция от органов управления и уменьшение скоро-
сти, использование композитных слоистых материалов.
• При вибрации пола, стен и каркаса — уменьшение площади вибри-
рующей поверхности, увеличение массы, изменение жесткости, расстройку
резонанса, добавка демпфирующего материала или покрытия.
• При вибрации узлов крепления аппаратуры — использование пра-
вильно подобранных амортизаторов, закрепление внешних компонентов на
вибрирующих узлах, расстройка и недопущение резонанса.
• При вибрации трубопроводов, вызываемой потоком жидкости или газа —
использование упругих соединений трубопроводов, а также упругой подвески
трубопроводов.
• В случае неудачного взаимного положения источника и приемника
вибраций — располагать источник и приемник в узлах вибрации так, чтобы
изменить положение источника, приемника или того и другого, увеличить
расстояние между источником и приемником.
• При ударах — устранение возможности возникновения ударов, со-
кращение зазоров, уменьшение области удара, использование эластичных
материалов, изоляция области ударов, ликвидация зазоров между частями,
ограждение мест ударов, применение надлежащей смазки, учет результатов
последующих ударов, снижение скорости удара, использование разнородных
материалов.
• В случае трения — выбор смазки, применение разнородных материалов,
шлифование контактирующих поверхностей, исключение контакта трущихся
поверхностей, использование роликов, антифрикционное нагружение, уста-
новка прецизионных деталей в механизмах, оптимальная нагрузка.
• При турбулентности — снижение скорости потока, покрытие трубо-
и воздухопроводов мягкими материалами, выпрямление потоков, удаление
препятствий потоку, применение глушителя, выравнивание трубопроводов,
использование клапанов соответствующего размера, установка нешумящих
воздуховодов.
Глава 11. Компоновка оборудования системы жизнеобеспечения 667
Уровень шума измеряется с помощью датчиков, устанавливаемых в отсеке
ОС. Места установки датчиков определяют экспериментально. В настоящее
время вследствие монтажа различных глушителей шума, виброизоляторов,
звукопоглощающих матов, вибродемпфирующих покрытий уровни шума в
рабочем отсеке CM PC МКС от постоянно действующего бортового оборудо-
вания по результатам акустических измерений в полете в зоне центрального
поста составляют 65...67 дБА, в широкой части рабочего отсека — 64...65 дБА,
в каютах (с плотно закрытыми дверями) — 52...55 дБА.
Для снижения уровня шума целесообразно периодически выключать наи-
более шумные системы. Если на борту находятся источники шума, которые
устранить невозможно, то космонавтам следует либо надевать шумозащитный
шлем или полушлем, либо использовать ушные заглушки (беруши).
11.5.2. Компоновка оборудования для санитарно-гигиенического
обеспечения
Медицинское обеспечение космических полетов включает в себя ком-
плекс мероприятий по поддержанию санитарно-гигиенических условий в
обитаемых кабинах космических кораблей и соблюдения космонавтами пра-
вил личной гигиены (рис. 11.57) [21]. Указанные процедуры играют важную
Рис. 11.57. Блок-схема системы санитарно-гигиенического обеспечения МКС
668
Часть III. Компоновка систем пилотируемого космического аппарата
роль в сохранении здоровья членов экипажа, обеспечении его безопасности,
комфорта и результативности работы, поддержании устойчивого морального
состояния.
Условия обитания человека в замкнутом герметичном пространстве предъ-
являют жесткие требования к санитарно-гигиеническому состоянию объекта.
К факторам, ухудшающим санитарную обстановку на борту КК, относится
невесомость, из-за которой не происходит очищения атмосферы от аэрозо-
льных частиц, вызываемого обычно силой тяжести.
Уборка обитаемого отсека непосредственно влияет на здоровье, безопас-
ность, комфорт, моральное состояние и результативность работы экипажа. Ор-
ганизация уборки существенно зависит от конструкции и компоновки отсека.
Все облицовочные материалы интерьера должны быть гладкими, твердыми,
непористыми и легко поддаваться чистке. Кроме того, поверхности должны
быть хорошо вентилируемыми и сухими. На мокрых, плохо вентилируемых
поверхностях вырастает плеснь, особенно в зонах проведения процедур лич-
ной гигиены, приготовления и приема пищи. Для уборки как сухого, так и
влажного мусора используют пылесос, приспособленный также для очистки
фильтров СЖО и удаления свободно плавающих жидкостей. Для выполнения
указанных работ должны быть предусмотрены различные насадки. Пылесос
укомплектован одноразовыми вакуумными пакетами [5, 22].
В космическом полете мероприятия личной гигиены приобретают боль-
шое значение, поскольку предотвращают загрязнение воздуха микрочасти-
цами, аэрозолями и газообразными продуктами, выделяемыми человеком.
В частности, за сутки на теле человека накапливается около 2...3 г омертвевших
частиц кожи, волос и тому подобных загрязняющих веществ. Значительный
вклад в загрязнение воздуха вносят также газообразные вещества, образующи-
еся при разложении пота и секреции сальных желез. Основные мероприятия
по санитарно-гигиеническому обеспечению космонавта в зависимости от
длительности полета перечислены в табл. 11.7 [23]. Условно полеты по дли-
тельности можно разделить на три категории: 1-я — до 10 сут, 2-я — до 30 сут,
3-я — свыше 30 сут. В зависимости от продолжительности полета объем гигие-
нических процедур и их режим на борту корабля существенно изменяются.
Таблица 11.7
Мероприятия по санитарно-гигиеническому обеспечению
Категория полетов Продолжительность полетов Гигиенические процедуры
1 Кратковременные (до 10 сут) Очистка кожи рук и лица, обработка воло- систой части головы, чистка зубов и полости рта. Бритье бороды и усов
2 Средней продолжительности (до 30 сут) Кроме процедур, указанных выше, общая гигиеническая обработка тела, стрижка волос и ногтей. Периодическое мытье головы
3 Длительные (более 30 сут) Наряду с процедурами, указанными выше, ежедневное умывание и периодический прием душа (не реже одного раза в 10 дней)
Глава И. Компоновка оборудования системы жизнеобеспечения
669
Объем комплекса санитарно-гигиенических мероприятий зависит не только
от длительности, но и от целей пилотируемого полета, численности экипажа,
а также от количества мужчин и женщин в составе экипажа.
Обеспечение космонавтов средствами личной гигиены обусловлено
спецификой их использования в условиях невесомости и ограниченного
пространства отсека, а также наличием ограничений по массе и габаритам,
энерго- и водообеспечения. Одним из главных требований к средствам личной
гигиены космонавтов является их абсолютная нетоксичность при длительном
и систематическом использовании. Кроме того, к системам личной гигиены
космонавта предъявляются следующие требования:
• поддержание субъективного ощущения чистоты тела и полости рта;
• нормализация объема и физико-химических свойств пота, выделений
сальных желез и поддержание присущего каждому индивидууму количествен-
ного и видового состава микрофлоры;
• снижение загрязнения обитаемых помещений антропогенными аэро-
золями и газообразными веществами, дегазация воздуха.
Каждая из категорий полета (см. табл. 11.7) комплектуется определенным
набором средств личной гигиены. Для обработки кожи космонавты в процессе
полета используют сухие или пропитанные специальными составами салфетки
или полотенца, которые герметично упакованы в укладки, различающиеся по
цвету в зависимости от назначения.
Для краткосрочных полетов (категории 1) для локальной очистки кожи
и полости рта используют различные салфетки. Также в полете требуются
принадлежности для бритья. С увеличением длительности полета до 30 сут
(категория 2) эти средства дополняют влажными полотенцами для кожи и
средствами для ухода за волосами и ногтями. На борту ПКА набор средств
личной гигиены хранится в укладках (табл. 11.8).
Таблица 11.8
Предметы личной гигиены, применяемые российскими космонавтами в полетах
категории 1—3
Предмет Назначение Число на одного космонавта, шт. Размеры, мм Масса, г Кате- гория полета
Марлевые салфетки: влажные Для обработки кожи лица, шеи, рук и лица после бритья 4—5 в сутки 330 х 250 12 1, 2, 3
сухие Для протирания лица и вспотевших участков тела, для обработки предметов приема пищи 1—4 в сутки 330 х 255 4 1, 2, 3
670
Часть III. Компоновка систем пилотируемого космического аппарата
Окончание табл. 11.8
Предмет Назначение Число на одного космонавта, шт. Размеры, мм Масса, г Кате- гория полета
Рукавичка из вафельной ткани Для обработки душевой установки и умывальника 2 в сутки 180 х 150 40 3
Санитарная салфетка Для влажной дезинфекции внутренних поверхностей кабины 1—4 на 7 суток 500 х 350 100 1, 2, 3
Полотенце: вафельное влажное вафельное сухое махровое Для обтирания тела и головы при смене нательного белья, после работы в скафандре Для вытирания лица, рук и тела после умывания Для вытирания после душевых процедур 1- 3 на 3 суток 1 на 3 суток 1 на 7 суток 1000 х 350 1000 х 350 1000 х 350 200 80 200 2 2 3
Мочалка из вафельной и махровой ткани Для мытья при приеме душевых процедур 1 на процедуру 500 х 95 55-100 3
Пакеты-подушечки с моющедизенфи- цирующим сред- ством Для мытья лица и рук 8 в сутки 90 х 60 7 3
Комплект предме- тов туалета: массажная расче- ска, щетка для волос, пилка для ногтей, набор зубочисток, жева- тельная резинка Для ухода за волосами, ногтями и зубами 1 комплект 320 х 150 х х 50 400 1, 2, 3
Глава И. Компоновка оборудования системы жизнеобеспечения
671
В полетах длительностью свыше 30 сут (категория 3) к перечисленным
выше средствам добавлено оборудование для умывания и приема душа.
Принципиальная схема замкнутой системы санитарно-гигиенического во-
дообеспечения приведена на рис. 11.58 [24].
Конструктивное решение душевой кабины на ОС Skylab и «Салют» приве-
дено на рис. 11.59 [22]. Для экономии места установка может быть складной.
Кабина из прозрачного или полупрозрачного материала на двух обечайках
имеет фланцы для крепления в разобранном виде к конструктивным элементам
отсека. Космонавт, войдя в кабину, закрепляет ноги в фиксаторах. Включение
и регулировка температуры воды выполняются вручную. Комфортная темпе-
ратура воды составляет 40...41 °C, расход — 0,2... 1,9 кг/мин. Моющий раствор
подается через душевую форсунку. Вода и моющий раствор удаляются возду-
хом, циркулирующим через кабину. Продолжительность душевой процедуры —
3...4 мин, минимальное потребление воды — 2,5 кг.
Обработка отдельных частей тела — рук, лица и т. п., а также стрижка и
бритье выполняются в специальных боксах (рис. 11.60) [1].
Рис. 11.58. Принципиальная схема замкнутой системы санитарно-гигиенического
водообеспечения:
1 — насос откачки влаги из влагопоглотителей; 2 — поглотитель капельной влаги из транспорт-
ного воздуха; 3 — вентиляторы транспортного воздуха; 4 — сепараторы (разделители) водо-
воздушной среды; 5 — фильтр механических примесей, находящихся в водовоздушной среде;
6 — насос; 7— сборник использованной воды; 8 — блок очистки от растворенных загрязнений;
9 — сборник восстановленной воды; 10— нагреватель; 11 — влагопоглотитель; 12— отверстие
для частичной замены транспортного воздуха; 13 — душевая кабина; 14 — шланг с распылите-
лем воды; 15 — фиксирующее устройство; 16 — шланг для дыхания; 17 — умывальная кабина
612
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 11.59. Душевая кабина ОС Skylab (а) и «Салют» (б) (в рабочем и в сложенном
состоянии):
/ — фиксатор ног; 2 — насос; 3 — фильтр; 4 — центробежный сепаратор; 5 — водос-
борник; 6 — гибкий шланг; 7 — ручная насадка для душа; 8 — цилиндрический гибкий
корпус из водонепроницаемой ткани; 9 — нижнее кольцо (закрепленное на полу отсека);
10 — система подачи воды; 11 — молния; 12 — прозрачный гибкий корпус; 13 — поддон
со сборником капель
10 11
Рис. 11.60. Принципиальная схема умывальни-
ка космического аппарата:
1 — бокс; 2 — форсунка; 3 — клапан; 4 — смеситель;
5 — механический фильтр; 6 — сепаратор; 7 — насос;
8 — дезодоратор; 9 — фиксаторы ног; 10 — горячая
вода; 11 — холодная вода; 12 — в отсек
Глава 11. Компоновка оборудования системы жизнеобеспечения
673
Рис. 11.61. Схема ассенизационного устройства:
а — приемник твердых и жидких отходов (/ — шнурки-удавки; 2 — корпус; 3 — вкладыш; 4 —
седло-сиденье; 5— кольцо; 6— крышка; 7— воронка; 8— ручка замка; 9 — замок; 10— панель;
11 — концевой выключатель; 12 — штуцер подачи промывочного раствора; 13 — фильтр; 14 —
патрубок); б — система приема и консервации урины (СПК-УМ) (/ — устройство для приема
урины; 2 — дозатор консерванта и смывной воды; 3 — емкость с консервантом; 4 — емкость
для смывной воды; 5, 6 — датчики заполнения и опорожнения емкости; 7 — центробежный
сепаратор; 8 — электромагнитный клапан; 9 — емкость для сбора урины; 10 — резервный
статический сепаратор; 11 — сигнализатор; 12 — вентилятор; 13 — воздушный фильтр; 14 —
воздух с уриной; 15 — воздух; 16 — воздух из приемника твердых отходов)
674
Часть III. Компоновка систем пилотируемого космического аппарата
Основными требованиями, предъ-
являемыми к боксам, являются недопу-
стимость попадания отходов в атмос-
феру отсека и немедленное принуди-
тельное удаление их с тела человека.
Транспортировку отходов в условиях
невесомости обеспечивает воздух ка-
бины. Вода, использованная в сани-
тарно-гигиенических целях, регенери-
руется в блоке СРВ-СГ (см. рис. 11.1).
Важнейшим компоновочным эле-
ментом ПКА, относящимся как к обору-
дованию для санитарно-гигиеническо-
го обеспечения, так и к оборудованию
для обеспечения жизнедеятельности,
является ассенизационно-санитарное
устройство.
Принципиальная схема такого уст-
ройства с раздельным удалением мочи и
кала приведена на рис. 11.61 [1]. Его ос-
новными элементами являются приемник
твердых и жидких отходов (рис. 11.61, а),
а также система приема и консервации
урины СПК-УМ (рис. 11.61, б). Транс-
Рис. 11.62. Размещение ассенизаци-
онного устройства в модуле «Рассвет»
PC МКС
портировка отходов в устройстве происходит воздушным потоком. Твердые
отходы в пористом вкладыше удерживаются воздушным потоком. Воздух за-
сасывается вентилятором из отсека и после прохождения по системе (включая
сепарацию и очистку) выбрасывается снова в отсек [16, 24]. Размещение ассе-
низационного устройства в модуле «Рассвет» PC МКС показано на рис. 11.62.
11.53. Система удаления мусора и отходов
За время работы на борту ОС скапливается значительное количество от-
ходов, классификация которых приведена в табл. 11.9. Мусор и отходы, лю-
бого вида образующиеся на борту ПКА, должны быть классифицированы по
степени токсичности, которая создает угрозы здоровью экипажа.
Отходы КА подразделяются по уровням токсической опасности: на безо-
пасные (уровень 0), критически опасные (уровень 1), катастрофически опасные
при контакте, но которые могут быть изолированы на борту ПКА (уровень 2),
отходы, катастрофически опасные, способные вызвать системную аварию, но
которые могут быть изолированы на борту ПКА (уровень 3), катастрофически
опасные, которые не могут быть изолированы на борту ПКА (уровень 4) [25].
Бытовой мусор, особенно отходы продуктов питания, может причинить
дискомфорт космонавту и даже вред его здоровью. Газообразные и жидкие
выделения, образующиеся при разложении, брожении и гниении отходов
способны вызывать раздражение глаз, контакт с ними может приводить
Глава 11. Компоновка оборудования системы жизнеобеспечения 675
Таблица 11.9
Классификация мусора / отходов
Категории мусора/отходов Код/класс Состав мусора/отходов
Аккумуляторные батареи ВА Аккумуляторные батареи всех типов (т. е. Ni-Cad, щелочные и др.)
Биологические / биомедицинские материалы ВВ Любые твердые или жидкие материалы, которые могут представлять опасность заражения для человека. Жидкости и лабораторные отходы, содержащие человеческие болезнетворные агенты, абсорби- рующий материал, насыщенный кровью, продукты крови, жидкости тела, выделения, а также выделения, загрязненные видимой или высохшей кровью
Острые предметы SH Использованные членами экипажа иглы и шприцы, целые или разбитые объекты, спо- собные нанести рваные раны или повредить кожу (т. е. стекло, скальпели, пластиковые шприцы и т. д.)
Химически опасные материалы СН Любой мусор в твердой, жидкой или полутвер- дой фазе, загрязненный химическим веще- ством, которое требует специальной обработки во время утилизации
Радиоактивные материалы РА Твердые, жидкие или газообразные радиоак- тивные материалы либо материалы, способные стать радиоактивными, которые невозможно в дальнейшем использовать
Безопасный и бытовой мусор NR Любой материал, определенный как мусор, который не соответствует ни одному из приведенных выше определений и не пред- ставляет экологической опасности
к раздражению кожи, а вредные запахи создадут дискомфорт в обитаемом
объеме отсека. Для работы с отходами должны быть предусмотрены специ-
альные средства защиты: очки, перчатки и защитные маски-противогазы,
оснащенные угольным фильтром [25].
В ГОСТ Р-52925—2018 «Изделия космической техники. Общие требо-
вания к космическим средствам по ограничению технического засорения
околоземного космического пространства» сформулировано общее требо-
вание по ограничению техногенного засорения околоземного космического
пространства при использовании пилотируемых орбитальных средств. При
выполнении штатных операций должен быть исключен неорганизованный
выброс твердого мусора в околоземное космическое пространство. Для того
чтобы удовлетворить это требование, на ПКА должна быть предусмотрена
либо система хранения отходов, либо система их организованного удаления.
676
Часть III. Компоновка систем пилотируемого космического аппарата
Например, на ОС Skylab меньший по объему бак жидкого кислорода сту-
пени S-IVB был превращен в контейнер для сбора отходов. На общем днище,
разделяющем баки кислорода и водорода, был смонтирован шлюз. Контейнер
сбора отходов был разделен на отсек для твердых (объемом 62,5 м3) и отсек
для жидких отходов (7,4 м3). Для МКС был предложен проект трансформи-
руемого модуля FLECS для хранения отходов (рис. 5.50).
Система организованного удаления отходов может быть построена с ис-
пользованием одноразовых грузовых ТКА, заполняемых отходами, сгораю-
щими вместе с ними в плотных слоях атмосферы после завершения полета.
В этом случае должны быть определены допустимые сроки хранения мусо-
ра/отходов на борту ПКА, согласованные с графиком полетов ТКА снабжения.
Мусор/отходы на МКС сортируются в соответствии с требованиями эко-
логической безопасности на борту МКС. Для того чтобы свести к минимуму
количество вредного и опасного мусора/отходов на орбите, приоритет для
удаления мусора и отходов следующий [26]:
в
Рис. 11.63. Контейнер для сбора твердых отходов:
а — общий вид; б — контейнер с пристыкованным приемным устройством; в — схема хране-
ния неиспользованных и использованных контейнеров ( / — приемная емкость; 2 — основная
емкость; 3 — днище; 4 — откидная крышка; 5 — элементы крепления; 6 — герметизирующая
прокладка; 7 — решетка; 8 — отсосный патрубок; 9 — герметичная заглушка; 10 — заслонка;
11 — корпус; 12— проушины; 13 — уплотнительный элемент; 14 — вкладыши; 15 — приемное
устройство; 16 — лента; 17 — натяжное устройство; 18 — промежуточные проставки)
Глава 11. Компоновка оборудования системы жизнеобеспечения
677
• опасный мусор/отходы, (медицинские, биологические и др);
• отходы жизнедеятельности экипажа;
• влажный мусор;
• сухой мусор.
Мусор/отходы не должны складироваться в рабочей зоне и каютах эки-
пажа, для этого на борту должно быть оборудовано определенное место.
Для складирования безвредного бытового мусора/отходов в складских зонах
Рис. 11.64. Контейнеры для хранения жидких отходов в PC МКС:
1 — мочеприемник; 2 — емкость для твердых отходов; 3 — приемник твердых отходов; 4 —
емкость для жидких отходов (урины)
Рис. 11.65. Размещение
мусора и отходов в ТКА
678 Часть III. Компоновка систем пилотируемого космического аппарата
должны быть установлены стандартные укладки. Также необходимо преду-
смотреть укладки для нештатных ситуаций. Мусор/отходы, несовместимые с
бытовыми, должны содержаться в специализированных укладках. Для отходов,
образующихся в результате экспериментов, укладки предоставляет разработ-
чик эксперимента. Опасный мусор должен быть локализован и изолирован.
Наиболее опасные отходы могут храниться в контейнерах, расположенных
вне герметичных отсеков.
Влажный бытовой мусор должен отделяться от сухого бытового мусора.
Контейнеры для мусора должны иметь крышки с запорными устройствами.
Все контейнеры должны быть промаркированы во избежание опасности пе-
ремешивания мусора. Еда и другие отходы, которые могут разлагаться биоло-
гически, должны стабилизироваться или пассивироваться с использованием
биоцидов и холодильников, а также путем эвакуации или уплотнения. Твердая
пища, насколько это возможно, должна отделяться от жидкой и помещать-
ся в контейнеры, сумки с застежкой на молнию, мешки и прессоваться для
удаления воздуха.
При добавлении мусора в хранилище необходимо принимать меры пре-
досторожности, чтобы при упаковке новой порции не разлетался уже упако-
ванный. Для этого используется специальный мусоросборник.
На PC МКС твердый мусор/отходы собираются в специальные сетчатые
пластиковые мешки, которые затем хранятся в алюминиевых 20-литровых
контейнерах (рис 11.63) [27]. Заполненные контейнеры перекладывают в
грузовой корабль «Прогресс» для дальнейшей утилизации. Жидкие отходы
хранятся в герметичных контейнерах (рис. 11.64) [22].
Бытовой и опасный для экологии мусор/отходы перед отправкой с борта
ОС должен проходить обработку и утилизацию [25]. Для предварительного
преобразования минеральных или органических отходов в вещества, из ко-
торых в дальнейшем могут быть регенерированы необходимые компоненты
среды, и для уменьшения массы и объема удаляемых веществ на борту ПКА
должна быть предусмотрена система утилизации отходов. Утилизации также
подвергаются материалы, представляющие экологическую опасность. Суще-
ствующие системы утилизации описаны, например, в работе [26]. Поскольку
утилизация проходит со значительным выделением теплоты, на борту ПКА
необходимо предусмотреть специальное рабочее место.
Возвращаемые на Землю мусор и отходы в грузовом отсеке ТКА разме-
щаются в соответствии с требованием обеспечения определенного положения
центра масс и моментов инерции аппарата. Вид отсека, заполненного мусо-
ром, приведен на рис. 11.65.
Глава 11. Компоновка оборудования системы жизнеобеспечения
679
Контрольные вопросы к главе 11
I. Для чего предназначена СЖО ПКА? Укажите назначение и состав основных
подсистем СЖО.
2. Какие имеются способы формирования и контроля искусственной атмосферы ПКА?
3. Укажите основные компоновочные элементы бортового оборудования для
получения кислорода в космическом полете, организации газообмена в отсеках ПКА.
4. С помощью, каких средств, проводится очистка атмосферы отсека ПКА?
5. Укажите основные компоновочные элементы бортового оборудования для
хранения, использования и регенерации воды на борту ПКА.
6. Сформулируйте основные требования к климатическим условиям в отсеке
ПКА. Укажите средства обеспечения климатических условий на борту ПКА.
7. Какие источники шума имеются на борту ПКА и какие средства используют-
ся для снижения шума?
8. Какие санитарно-гигиенические требования предъявляются к отсекам ПКА
и какие средства используются для их обеспечения?
9. Приведите классификацию отходов, образующихся в процессе эксплуатации
ПКА, и перечислите бортовое оборудование, необходимое для утилизации отходов.
Ю. Разработайте компоновку систему водообеспечения экипажа малой туристи-
ческой орбитальной станции.
Н. Разработайте компоновку СЖО для орбитальной станции с искусственной
гравитацией.
Литература к главе 11
I. Малоземов В.В., Рожнов В.Ф., Правецкий В.Н. Системы жизнеобеспечения эки-
пажей летательных аппаратов: учебник для втузов. М.: Машиностроение, 1986. 584 с.
2. Рожнов В.Ф. Космические системы жизнеобеспечения: учебное пособие. М.:
МАИ ПРИНТ, 2009. 344 с.
3. Самсонов Н.М., Томашпольский М.Ю., Бобе Л.С., Гаврилов Л.И. Регенерационные
системы жизнеобеспечения длительных космических полетов // Российский космос.
2006. № 7. С. 11—20. URL: https://niichimmash.ru/press/publications/regeneratsionnye-
sistemy-zhizneobespecheniya-dlitelnykh-kosmicheskikh-poletov/ (дата обращения 20.03.2018).
4. Космонавтика. Энциклопедия. М.: Советская энциклопедия, 1985. 526 с.
5. Living Together in Space: The Design and Operation of the Life Support Systems on the
International Space Station. NASA Report NASA/TM—98-206956. Vol.l. URL: https://spacecraft.
ssl.umd.edu/academics/697S09/docs/NASA-TM-98-206956.pdf (дата обращения 20.03.2018).
6. Малкин В.Б. Барометрическое давление, газовый состав // Космическая био-
логия и медицина: в 5 т. Т. 2. Обитаемость космических летательных аппаратов. М.:
Наука, 1994. С. 9-65.
7. Система «Электрон-ВМ». URL: https://www.niichimmash.ru/projects/elektron-vm/
(дата обращения 20.07.2019).
8. Системы жизнеобеспечения космических аппаратов. URL: http://zrenielib.ru/
docs/index-11039.html (дата обращения 20.03.2018).
9. Кислородное питание экипажа космического корабля. URL: http://
www.physiologynorma.ru/chelovek-na-kosmicheskoj-orbite/kislorodnoe-pitanie-ekipazha-
kosmicheskogo-korablya/ (дата обращения 20.03.2018).
10. Федотов В.К., Цихоцкий В.М., Куликов Ю.Б. Система вентиляции служебно-
го модуля орбитальной станции. Патент RU 2148539. 2000. URL: http://www.freepatent.
ru/patents/2148539 (дата обращения 20.03.2018).
680
Часть III. Компоновка систем пилотируемого космического аппарата
11. Kibo Exposed Facility User Handbook. URL: http://iss.jaxa.jp/kibo/library/fact/
data/JFE_HDBK_all_E.pdf (дата обращения 17.01.2019).
12. Джеймс Дж. Г, Коулман М.Е. Токсическое действие газообразных примесей
и аэрозолей // Космическая биология и медицина: в 5 т. Т. 2. Обитаемость космиче-
ских летательных аппаратов. М.: Наука, 1994. С. 66—99.
13. Система очистки атмосферы от микропримесей. URL: http://www.niichimmash.ru/
projects/sbmp/ (дата обращения 20.03.2018).
14. International Space Station Familiarization. Mission Operations Direc-torate Space
Flight Training Division. NASA TD9702A, 1998. URL: http://er.jsc.nasa.gov/seh/td9702.
pdf (дата обращения 20.07.2019).
15. Создание комплекса средств жизнеобеспечения на базе уже существующих
систем. Часть I. URL: unnatural.ru/mb-lv (дата обращения 8.10.2017).
16. Бобе Л.С., Раков В.В., Аракчеев Д.В., Канаев П.А. Влияние неконденсирую-
щихся газов на процесс тепломассообмена в центробежном дистилляторе системы ре-
генерации воды из урины // «Труды МАИ». 2012. Выпуск № 52. URL: http://trudymai.ru/
published.php?ID=29453 (дата обращения 10.10.2017).
17. Шибанов Г.П. Обитаемость космоса и безопасность пребывания в нем чело-
века. М.: Машиностроение, 2007. 547 с.
18. Основы теплопередачи в авиационной и ракетно-космической технике.
Учебник для авиационных специальностей вузов / Под общ. ред. В.С. Авдуевского,
В.К. Кошкина. 2-е изд. М.: Машиностроение, 1992. 528 с.
19. Туманов А.В., Зеленцов В.В., Щеглов Г.А. Основы компоновки бортового обо-
рудования космических аппаратов: учебное пособие. 3-е изд. М.: Изд-во МГТУ им
Н.Э. Баумана, 2018. 576 с.
20. Богатова Р.Н., Аллен К.С., Крутина И.В., Гудман Дж.Р. Микроклимат, аку-
стическая обстановка, освещенность // Космическая биология и медицина: в 5 т. Т. 5.
Российско-американское сотрудничество в области космической биологии и меди-
цины. М.: Наука, 2009. С. 355—374.
21. Шумилина Г.А. Личная гигиена космонавта // Орбитальная станция «Мир».
Космическая биология и медицина: в 2 т. Т. 1. Медицинское обеспечение длительных
полетов. М.: изд-во ООО «Аником», 2001. С. 104—114.
22. Haeuplik-Meusburger S. Architecture for Astronauts. An Activity-based Approach.
Wien.: Springer, 2011. 316 p.
23. Шумилина Г.А., Виллареал Дж.Л. Система личной гигиены // Космическая
биология и медицина: в 5 т. Т. 5. Российско-американское сотрудничество в области
космической биологии и медицины. М.: Наука, 2009. С. 499—507.
24. Ажаев А.Н., Берлин А.А., Шумилина А.Г., Виллареал Дж.Д., Гроундс Ф. Одежда
и личная гигиена космонавтов // Космическая биология и медицина: в 5 т.
Т. 2. Обитаемость космических летательных аппаратов. М.: Наука, 1994. С. 185—207.
25. Non-Recoverable Cargo (Trash/Waste) Management Plan. International Space
Station Program SSP50481 RSA, NASA, 2000. URL: http://spaceref.com/iss/ops/SSP50481.
nonrec.cargo.plan.pdf (дата обращения 20.03.2018).
26. Попов В.В., Назаров Н.М. Изоляция и удаление отходов // Космическая био-
логия и медицина: в 5 т. Т. 2. Обитаемость космических летательных аппаратов. М.:
Наука, 1994. С. 374-388.
27. Волошина О.Е., Михеев В.М., Черненко В.Е. Контейнер для твердых отходов,
преимущественно для ассенизационно-санитарных устройств пилотируемых косми-
ческих аппаратов. Патент RU2161110. 2000. URL: http://www.fmdpatent.ru/patent/
216/2161110.html (дата обращения 20.03.2018).
ГЛАВА 12. КОМПОНОВКА СИСТЕМ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ
ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО АППАРАТА
12.1. Основные понятия надежности и безопасности ПКА
72.7.7. Термины и определения
Пилотируемый космический аппарат представляет собой сложную тех-
ногенную систему, в которую наряду с техническими подсистемами входит
экипаж. Техногенная система существует и управляется экипажем как единое
целое в результате взаимодействия, распределения имеющихся, поступающих
извне и продуцируемых этой системой ресурсов: веществ, энергии и инфор-
мации. При компоновке такой системы должны быть учтены требования на-
дежности и безопасности, определяемые государственными стандартами ГОСТ
Р 56526-2015 «Требования надежности и безопасности космических систем,
комплексов и автоматических космических аппаратов», ГОСТ 27.002—2015
«Надежность в технике (ССНТ). Термины и определения» и ГОСТ Р 51333—99
«Безопасность машин. Основные понятия, общие принципы конструирова-
ния. Термины, технологические решения и технические условия».
Безопасность в космической технике определяется как способность орби-
тальной станции (ОС), космического аппарата (КА), автоматического косми-
ческого аппарата (АКА) и их составных частей не переходить во всех заданных
режимах эксплуатации в состояние, угрожающее жизни эксплуатирующего
обслуживающего персонала, сопрягаемым объектам и природной среде.
Под надежностью понимают совокупность свойств, характеризующих
способность ОС, КА обеспечивать в процессе функционирования получение
заданного в тактико-техническом задании (техническом задании) выходного
эффекта при заданных условиях и режимах эксплуатации.
Несоответствие техногенной системы требованиям надежности и безопас-
ности может приводить к возникновению опасных событий, различающихся
уровнем угроз и возможного ущерба: нештатным и аварийным ситуациям,
авариям и катастрофам.
Нештатной ситуацией (НшС) называется состояние орбитальной стан-
ции (космического аппарата, автоматического космического аппарата), их
составных частей и привлекаемых средств, характеризующееся любым откло-
нением от заданной (штатной) программы эксплуатации, вызванное ошиб-
ками и несанкционированными действиями обслуживающего персонала,
682
Часть III. Компоновка систем пилотируемого космического аппарата
повреждениями и отказами техники, отклонениями параметров внешней
среды от расчетных значений, потенциально способными привести к воз-
никновению опасной или аварийной ситуации.
Риск возникновения опасного события определяется как сочетание веро-
ятности возникновения опасного события и тяжести возможного ущерба.
Согласно Федеральному закону РФ от 27.12.2002 (ред. от 28.11.2015) «О тех-
ническом регулировании» № 184—ФЗ, «риск — вероятность причинения вреда
жизни или здоровью граждан, с учетом тяжести этого вреда». Риск является
количественной характеристикой действия опасностей, формируемых кон-
кретной деятельностью человека, и определяется как число опасных событий,
вызванных действием конкретной опасности отнесенных к определенному
количеству людей за заданный период времени.
Различают допустимый риск, который в данной ситуации считается прием-
лемым при существующих обстоятельствах, и остаточный риск, остающийся
после предпринятых защитных мер. В результате анализа риска при проек-
тировании техногенных систем по ГОСТ Р 51344—99 «Безопасность машин.
Принципы оценки и определения риска» проводится оценка степени защи-
щенности системы при различных уровнях угроз.
12.12. Классификация нештатных ситуаций
Нештатные ситуации разделяются на рассмотренные, выявленные и учтен-
ные в технической документации и на нерассмотренные, данные о которых не
были учтены при проектировании. Ниже приведены примеры НшС, которые
могут быть вызваны отказами основных систем ПКА [1].
Корпус.
• потеря несущей способности корпуса — аварийная ситуация;
• разрушение отдельных узлов или агрегатов корабля — опасная ситуация;
• возгорание — аварийная ситуация;
• разрушение соединений — опасная ситуация;
• нарушение герметичности корпуса — аварийная ситуация.
Двигательная установка'.
• отказ функционирования отдельных узлов или агрегатов — опасная ситуация;
• потеря герметичности — опасная ситуация;
• взрыв — аварийная ситуация.
Система энергообеспечения'.
• неэффективность средств защиты от статического электричества —
опасная ситуация;
• пожар - опасная ситуация;
• короткое замыкание в бортовой электрической цепи — опасная
ситуация;
• скачки напряжения в системе электропитания — опасная ситуация;
• отказ или нарушение работы химических батарей — опасная ситуация;
• нарушения в работе солнечных батарей — опасная ситуация.
Система жизнеобеспечения'.
• отказ или нарушение работы системы формирования ИГА — опасная
ситуация;
Глава 12. Компоновка систем обеспечения безопасности ПКА
683
• отказ или нарушение системы водообеспечения — опасная ситуация;
• отказ или нарушение работы системы терморегулирования — опасная
ситуация;
• недоступность аварийного снаряжения — опасная ситуация:
• высокий уровень шума — неопасная ситуация;
• отказ или нарушение работы системы удаления отходов — неопасная
ситуация.
По способу выхода из НшС они подразделяются на ситуации:
• критические, приводящие к нарушению работоспособности ПКА,
для устранения которых задействуются средства, позволяющие продолжить
эксплуатацию;
• парируемые, при которых работоспособность ПКА сохраняется только
при переходе на предусмотренную нештатную программу полета;
• локализируемые, при которых ПКА сохраняет работоспособность за
счет внутрисистемного или межсистемного резерва;
• неопределяемые, при которых нарушается работоспособность ПКА, но
сами ситуации не контролируюся располагаемыми средствами.
Нештатные ситуации бывают расчетными и нерасчетными. Выход из рас-
четной НшС гарантируется проектом технической системы, а из нерасчетной —
не гарантируется. Расчетные НшС могут быть эффективно проанализиро-
ваны методами теории надежности, поскольку большинство таких ситуаций
возникают вследствие отказов бортового оборудования.
12.13. Классификация отказов
Отказ определяется ГОСТ 27.002—2015 как событие, заключающееся в
нарушении работоспособного состояния объекта. В соответствии с рекомен-
дациями Госстандарта РФ отказы принято классифицировать по категориям.
Все отказы, наблюдающиеся в работе компонентов ПКА или оборудования,
можно подразделить на внезапные и постепенные.
Внезапные отказы вызваны резким изменением состояния элементов ПКА
или внешнего воздействия. Например, отдельные элементы конструкции ПКА
или оборудования имеют запас прочности ниже допустимого и не способ-
ны сохранять работоспособность при мгновенных случайных возрастаниях
внешних нагрузок, которые могут возникнуть в реальных условиях. В этом
случае после некоторого сравнительно быстрого количественного изменения
нагрузки нарушается функционирование элемента.
Постепенные отказы, в отличие от внезапных отказов, зависят главным
образом от срока службы аппаратуры, когда в результате постепенного срав-
нительно медленного изменения значения того или иного параметра элемента
ПКА или оборудования оно выходит за допустимые пределы, предусмотренные
техническими условиями, из-за чего этот элемент перестает выполнять все
основные функции или их часть. Постепенные отказы являются закономер-
ным и неизбежным результатом естественных процессов износа и старения
комплектующих деталей и материалов, поэтому их можно предотвратить,
периодически проверяя аппаратуру и своевременно (если это возможно)
684
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 12.1. Зависимость интенсивности отказов X от времени эксплуатации
заменяя отдельные элементы. Постепенные отказы составляют примерно 70 %
общего числа отказов.
Суммарное время работы конструкции до полного износа, определяющее
технический ресурс объекта, называется долговечностью. Интенсивность отка-
зов (отношение плотности распределения вероятности отказов к вероятности
безотказной работы) зависит от времени существования ПКА (рис. 12.1).
Отказы по характеру последствий разделяются на два вида:
• катастрофические (полные), приводящие к безусловному прекращению
функционирования КА;
• частичные, вызывающие снижение эксплуатационных характеристик
(эффективности) изделия.
12.2. Обеспечение безопасности и надежности ПКА
12.2.1. Критерии и методы оценки безопасности
Эффективность обеспечения безопасности ПКА достигается качествен-
ным анализом и количественной оценкой безопасности функционирования
аппарата. Используемые критерии безопасности должны учитывать такие
существенные параметры и характеристики объекта, как его компоновку, про-
грамму работы, последовательность включения отдельных подсистем, запасы
расходуемых материалов, энергоресурсов и т. п. Численное значение критерия
должно определяться, с одной стороны, детерминированными основными
проектными параметрами, с другой — стохастическими характеристиками
надежности технических систем, человека-оператора и внешних воздействий
Глава 12. Компоновка систем обеспечения безопасности ПКА
685
надежности технических систем, человека-оператора и внешних воздействий
космической среды. Следовательно, обобщающий критерий должен обладать
вероятностной мерой.
Реализация требований безопасности начинается с момента разработки
ПКА как для аппарата в целом, так и для всех составных частей. За основу
берутся численные показатели доверительной безопасности, полученные рас-
четно-экспериментальным или экспериментальным путем. Эти значения не
должны быть ниже значений, заданных в техническом задании (ТЗ).
Уровень безопасности полета подтверждается расчетным методом и до-
полняется инженерным анализом функционирования ПКА и его систем при
возникновении НшС.
Процесс оценки уровня безопасности включает:
• разработку исходных данных;
• анализ и составление перечня возможных НшС для всех участков
полета;
• расчет вероятности появления возможных НшС;
• определение степени опасности НшС для их проверки на моделях и
стендах, проведение стендовых, летных и других испытаний;
• расчет уровня безопасности полета по определенным методикам, учи-
тывающим способы выхода из НшС и последствия каждой НшС для без-
опасности дальнейшего полета.
При разработке исходных данных для оценки безопасности полета выпол-
няются следующие работы: анализ требований тактико-технического задания;
рассмотрение схемы и программы полета; анализ траекторий полета; изуче-
ние состава и устройства систем, а также циклограммы функционирования
аппаратуры; обзор аналогов ПКА, сбор и систематизация сведений о НшС,
имевших место в предыдущих полетах, и др.
Анализ и составление перечня возможных НшС проводятся на основе
изучения опыта разработки и эксплуатации прототипов и имевших место
НшС, а также возникавших отказов у каждой системы ПКА и их влияния
на функционирование ПКА. Затем составляется перечень возможных видов
отказов оборудования ПКА и их влияния на функционирование аппарата.
Обнаружение и распознавание НшС проводятся комплексно с помощью
бортовых средств телеметрии и средств наземного измерительного комплекса.
Наиболее эффективными методами для этого являются анализ структурных
схем функционирования ПКА и имитационное моделирование.
Например, эффективность работы экипажа ПКА в системе человек —
машина в условиях НшС зависит от воздействия на него стресс-факторов
в заданном или наихудшем сочетании. Деятельность может быть оценена
степенью изменения критериев качества работы: точности, своевременного
выполнения операций и т. п.
Деятельность космонавта-оператора при возникновении НшС можно
разделить на четыре этапа:
• поиск и идентификация информации;
• оценка информации и выделение совокупности информационных
признаков;
686
Часть III. Компоновка систем пилотируемого космического аппарата
• формирование концептуальной модели деятельности и принятие
решения;
• практическая реализация принятого решения.
На первом этапе задача космонавта-оператора заключается в том, чтобы
следить за поведением управляемого объекта (положением в пространстве, ди-
намическими характеристиками и др.). Эта деятельность требует повышенного
внимания и ведет к предельной нагрузке рецепторов и быстрому утомлению,
т. е. к максимальной скорости снижения работоспособности.
На втором этапе превалирует деятельность, связанная с анализом фак-
тической информации, полученной от управляемого объекта или процесса,
и сравнением их с эталонной информацией. На этом этапе наиболее трудо-
емкими операциями являются:
• своевременный и правильный выбор информации, характеризующей
оптимальный процесс управления;
• оценка сложившейся ситуации, требующая от космонавта высокой
профессиональной подготовки.
На третьем этапе космонавт должен принять решение о том, какой вид
управления целесообразно реализовать в сложившейся ситуации.
На четвертом этапе результат является итогом деятельности космонавта
на предыдущих этапах, поэтому допущенная здесь ошибка может обесценить
всю его работу.
При определении степени опасности НшС используется классификация
критичности ситуаций, которая определяется ущербом от нее: усложнением
условий полета (УУП), возникновением опасных ситуаций (ОпС), аварийных
ситуаций (АС) и катастрофических ситуаций (КС), а также вероятностью воз-
никновения НшС. В процессе проектирования требуется обеспечить защи-
щенность ПКА от возможного ущерба. Для оптимизации затрат на создание
защитных средств снижается степень защищенности по мере уменьшения
вероятности наступления опасного события (табл. 12.1).
В ходе экспериментальной оценки влияния НшС на безопасность при
проведении комплексных испытаний на моделях проверяют влияние НшС
на функционирование систем, а также отрабатывают алгоритм действия эки-
пажа при НшС и проверяют эффективность средств индикации и аварийной
сигнализации.
Таблица 12.1
Степень защищенности системы при различных уровнях угроз
Вероятность наступления события Режим работы Степень защищенности
Высокая Нормальные условия эксплуатации Повышенная
Средняя Усложнение условий полета Достаточная
Низкая Проектные аварии Частичная
Крайне низкая Запроектные аварии Недостаточная
Исчезающе малая Гипотетические аварии Низкая
Глава 12. Компоновка систем обеспечения безопасности ПКА
687
1222. Система обеспечения безопасности и надежности ПКА
Общие требования по уменьшению рисков при проектировании и кон-
струировании ПКА приведены в ГОСТ 51333—99. Для предупреждения рисков
необходимо иметь информацию о поведении систем ПКА и состоянии окру-
жающей среды. Такая информация поступает по каналам связи с экипажем,
по каналам телеметрических измерений, от средств контроля космического
пространства и т. п. Применение компьютерных технологий позволяет вы-
бирать наилучшие варианты решения проблем, связанных с риском возник-
новения НшС.
Для того чтобы предусмотреть возможность возникновения рисков, необ-
ходимо при проектировании ПКА использовать опыт разработки и эксплуа-
тации, накопленный в течение всего периода развития космической техники.
Было выявлено, что источниками вероятных рисков являются:
• несоблюдение требований к надежности бортового оборудования;
• ошибки экипажа;
• сбой программного обеспечения;
• оборудование и методы, применяемые для сбора и представления
информации.
Как показывает анализ аварийных ситуаций, имевших место при эксплу-
атации ПКА, НшС возникают по следующим причинам:
• неисправность и отказы бортовых систем — около 70 %;
• воздействие неблагоприятных факторов окружающей среды — около 12 %;
• ошибки проектирования, допущенные разработчиками PH и ПКА, —
около 6 %;
• неисправности и отказы систем управления полетом — менее 5 %;
• ошибки экипажа и специалистов по планированию полета — менее 4 %;
• ошибки ЦУП — около 2 %;
• заболевания членов экипажа — около 1 %.
До завершения процесса проектирования сложно анализировать разра-
батываемую конструкцию. Между тем изменения конструкции в конце про-
ектирования приводят к срыву сроков изготовления аппарата и увеличению
его стоимости. Поэтому во время проектирования следует периодически
проводить в режиме динамической игры компьютерное моделирование воз-
можных рисков, связанных с ними НшС, и вносить изменения в разрабаты-
ваемое изделие.
Обеспечить безопасность полета можно только путем комплексного ре-
шения ряда взаимосвязанных вопросов, включающего:
• научное обоснование общих требований по обеспечению безопасности
космических полетов;
• оценку влияния различных неблагоприятных факторов космического
полета на безопасность экипажа;
• разработку методик оценки уровня безопасности и установление до-
пустимой степени риска;
• классификацию и анализ опасностей, специфических для различных
ПКА, а также разработку мероприятий по борьбе с ними;
688 Часть III. Компоновка систем пилотируемого космического аппарата
• формулирование общих принципов и отработку обобщенных алгорит-
мов моделирования различных аварийных ситуаций;
• поиск путей локализации аварийных ситуаций или выхода из них с
минимальными потерями и т. д.
Надежность и безопасность ПКА закладываются при его проектировании
и обеспечиваются при его изготовлении (рис. 12.2).
Рис. 12.2. Блок-схема обеспечения надежности
и безопасности ПКА
Обеспечение надежности связано с реализацией многочисленных орга-
низационных и технических мероприятий, предусматриваемых программой
обеспечения надежности (ПОН), содержащей четыре этапа проведения ме-
роприятия [2].
Проектирование
1. Разработка и согласование требований по надежности.
2. Исследование надежности методом математического моделирования,
обоснование видов резервирования, нормирование надежности.
3. Составление перечня возможных отказов и определение критических
элементов.
4. Анализ данных по надежности аналогов и обоснование возможности
выполнения требований по надежности.
Глава 12. Компоновка систем обеспечения безопасности ПКА
689
5. Разработка проекта методики оценки надежности и обоснование объ-
ема испытаний.
Разработка рабочей документации
1. Экспертиза программы испытаний в части соблюдения требований по
надежности.
2. Экспертиза и согласование частных программ обеспечения надежности.
3. Организация и проведение защит конструкторской документации на
надежность.
4. Уточненный анализ возможных отказов и выпуск перечня критических
документов.
Автономные и комплексные испытания
1. Анализ результатов испытаний.
2. Работа по устранению причин отказов и дефектов при испытаниях и
изготовлении.
3. Контроль выполнения мероприятий ПОН.
4. Оценка надежности по результатам испытаний составных частей.
5. Разработка программы эксплуатационных испытаний.
6. Разработка методики оценки надежности системы.
7. Выпуск итогового отчета о готовности системы к эксплуатационным
испытаниям с оценкой ее надежности.
Рис. 12.3. Характер изменения оценок надежности ПКА по
этапам его отработки:
Н — вероятность безотказной работы; //„р — проектный уровень; Я|1Л1| „ —
уровень на начало наземных автономных испытаний; Нпзмк — уровень
на конец наземных автономных испытаний; — уровень на начало
наземных комплексных испытаний; //11К11 к — уровень на конец наземных
комплексных испытаний; ЯЛ1|1 — уровень на начало эксплуатационных
испытаний; //JHK — уровень на конец эксплуатационных испытаний
690 Часть III. Компоновка систем пилотируемого космического аппарата
Эксплуатационные испытания
1. Анализ результатов испытаний и устранение замечаний и неисправностей.
2. Разработка (если необходимо) программ повышения надежности, обе-
спечение и контроль их выполнения.
3. Выпуск периодических отчетов по надежности системы.
4. Выпуск отчета о результатах испытаний с оценкой надежности; разра-
ботка программ повышения надежности.
На рис. 12.3 приведен характер изменения оценки надежности системы
по мере ее проектирования, автономных и комплексных испытаний и эксплу-
атации. На каждом из этапов разработки изделия его надежность повышается
и приближается к расчетной.
При расчете надежности на этапе проектирования ПКА разбивают на ряд
независимых элементов, представляющих замкнутую систему. Влияние каж-
дого из элементов на надежность системы зависит от схемы их соединения в
систему. Различают два вида систем: с последовательным и с параллельным
соединением элементов. В первом случае выход из строя одного элемента
приводит к выходу из строя всей системы, во втором — для выхода из строя
всей системы должны выйти из строя все составляющие ее элементы.
Таким образом, одним из основных способов обеспечения надежности
ПКА является резервирование — установка дополнительных, резервных,
средств или систем. На первом этапе проектирования параметры резервиро-
вания бортовой аппаратуры определяются исходя из анализа эксплуатации
изделий-аналогов.
12.23. Способы резервирования систем
При выборе параметров резервирования блоков аппаратуры ПКА опре-
деляется вид резервирования: «холодное» или «горячее». В первом случае
резервный блок не функционирует до момента отказа. Преимущество этого
вида том, что прибор не вырабатывает свой ресурс, недостаток — запаздыва-
ние в случае включения за счет неизбежного переходного процесса выхода на
рабочий режим. Во втором случае резервный блок постоянно функционирует
и система готова к работе сразу же после отказа основного блока. Недостат-
ком такого вида является то, что непрерывная работа приводит к выработке
рабочего ресурса блока.
Возможны следующие системы подключения резервных блоков [2]:
1) параллельное резервирование (рис. 12.4);
а б
Рис. 12.4. Схема параллельного горяче-
го (а) и холодного резервирования (б):
1 — основной блок; 2 — резервный блок
Глава 12. Компоновка систем обеспечения безопасности ПКА
691
2) последовательное резервирование (рис. 12.5).
Рис. 12.5. Последовательное резерви-
рование:
1 — основной блок, 2 — резервный блок
Резервирование может быть как общим, так и раздельным (рис. 12.6,
12.7). При общем резервируется целиком вся цепь блоков, при раздельном —
отдельные блоки цепи.
Рис. 12.6. Схема общего резервирования:
/, 2, п — основные боки; /*, 2*, п* — резервные блоки
Рис. 12.7. Раздельное резервирование:
/, 2, 3 — основные блоки; /*, 2*, 3* — резервные блоки
Схема скользящего резервирования (рис. 12.8) позволяет использовать
резервный блок для замены в случае выхода из строя любого аналогичного
блока.
Рис. 12.8. Схема скользящего резервирования:
/, 2, 3 — основные блоки; 4 — резервный блок
Кроме этих методов резервирования используются следующие:
• мажоритарное резервирование — надежность повышается в случае при-
нятия решения о подключении резервного блока только в том случае, когда
команду выдадут два или более управляющих органов;
• толерантное резервирование — система называется толерантной, если
для обнаружения, локализации и устранения собственных неисправностей
она не требует вмешательства человека. Программная избыточность реализу-
ется: дублированием в памяти особо важных программ и данных; тестовыми
692 Часть III. Компоновка систем пилотируемого космического аппарата
и диагностическими программами на различном программном уровне; из-
быточностью, которая наряду с другими функциями должна способствовать
возможности проведения повторного запуска рабочих программ. Временная
избыточность преследует две цели: возможность обнаружить ошибку с по-
мощью вторичного выполнения программы и восстановить вычислительный
процесс после ее обнаружения;
• функциональное резервирование — резервирование, при котором функ-
ции отказавшего элемента передаются другому элементу, выполняющему эти
функции иными способами. Например, при отказе спутника-ретранслятора
передача видеоинформации может вестись на наземные пункты приема [2].
В условиях пилотируемого полета человеку часто отводится роль эргати-
ческого резерва имеющихся систем, например системы управления. Так, ре-
зервным для основного автоматического режима управления является ручной
режим управления системами.
12.3. Требования безопасности системы космонавт — среда
Систематически совершаемые пилотируемые полеты, проведение сложных
экспериментов как в замкнутом объеме ПКА, так и в процессе ВКД связано
с рисками в системе космонавт — среда. Пребывание экипажей на ПКА со-
ставляет сейчас от нескольких месяцев до одного года, а работа в открытом
космосе достигает нескольких часов. Это обусловливает существенное ужесто-
чение требований по обеспечению безопасности жизнеобеспечения экипажей
ПКА [I]. Требования к разработчикам СЖО космической техники сформули-
рованы в ГОСТ 28040—89 «Комплекс систем обеспечения жизнедеятельности
космонавта в пилотируемом космическом аппарате. Термины и определения».
Безопасность эксплуатации ОС должна обеспечиваться на основе выпол-
нения комплекса требований [2]:
• рациональная избыточность по структуре и функциональному резер-
вированию элементов;
• выбор и применение комплектующих изделий, обладающих высокой
надежностью, в том числе повышенными характеристиками долговечности,
обеспечивающими назначенный срок службы модуля;
• проектирование систем с максимальным использованием опыта пре-
дыдущих разработок;
• использование принципов ремонтопригодности, позволяющих свое-
временно обнаружить отказ и заменить отказавшие приборы и агрегаты;
• введение средств дублирования функций отдельных систем на время
технического обслуживания и ремонтно-восстановительных работ;
• выполнение необходимого объема экспериментальной отработки в
наземных условиях; в отдельных случаях решение задач экспериментальной
отработки проводится путем использования результатов такой отработки
изделий-аналогов, в том числе результатов летных испытаний;
• обеспечение безопасности эксплуатации за счет высокой надежности
бортовых систем, использования структурного функционального резерва,
средств контроля технического состояния и аварийной защиты, необходимого
Глава 12. Компоновка систем обеспечения безопасности ПКА
693
резерва, своевременного технического обслуживания и ремонтно-восстано-
вительных работ;
• обеспечение функционирования модуля ПКА при возникновении
нештатных и аварийных ситуаций;
• обеспечение защиты экипажа от неблагоприятного воздействия внеш-
них факторов;
• обеспечение спасения экипажа в случае возникновения опасных для
жизни нештатных и аварийных ситуаций.
Требования по обеспечению безопасности полета, предъявляются:
• к компоновке и конструкции ПКА и его системам по обеспечению
безопасности;
• к выбору конструкционных материалов;
• к безопасности деятельности экипажа на борту ПКА;
• к реализации возможности функционирования в условиях неблагопри-
ятного воздействия окружающей среды.
723.7. Требования к компоновке и конструкции ПКА
Для того чтобы обеспечить безопасность экипажа, необходимо при ком-
поновке ПКА соблюдать перечисленные ниже требования [1].
1. Конструктивные элементы ПКА и его системы в местах возможного
нахождения членов экипажа не должны иметь острых углов, кромок, опасных
выступов, движущихся и вращающихся деталей, а при их наличии должны
быть исключены травмы членов экипажа и механические повреждения ска-
фандра. В табл. 12.2. приведены рекомендации по оформлению скруглений,
углов, плоскостей и кромок.
Таблица 12.2.
Рекомендованные скругления углов и плоскостей
Элементы и фрагменты Радиус, мм Примечание
конструкции внешний внутренний
Отверстия, панели, крышки (радиусы углов в плоскости панели) 6,4 3,0 3,0 1,5 Предпочтительный Минимальный
Острые углы 13,0 — Минимальный
Открытые грани толщиной: 2,0 мм и более 0,5—2,0 мм менее 0,5 мм > 1,0 Полный радиус Сглаженный или скругленный Минимальный
Малогабаритное оборудование, используемое при работе откры- той рукой или рукой в перчатке скафандра Примечание. Вместо радиуса скруглс 45° х 1,5 мм (минимально). Ширину ными радиусами скруглений. 1,0 5ния допустима (| фаски следует вь эаска с гладко 1бирать в сооте Минимальный скошенными краями {етствии с приближен-
694
Часть III. Компоновка систем пилотируемого космического аппарата
2. Конструкция ПКА и системы, размещенные в нем, должны обеспечивать:
• предотвращение вредного воздействия ударных ускорений, виброопас-
ных воздействий, вредного воздействия повышенного уровня ультразвука;
• снижение уровня шума до допустимого, а также уровня инфразвука;
• обеспечение электробезопасности;
• предотвращение произвольного развинчивания или разъединения бол-
товых, шпоночных и других соединений;
• оснащение крепления съемных частей невыпадающими винтами или
болтами;
• обеспечение надежного крепления или фиксации приборов и мобиль-
ного оборудования;
• обеспечение защиты экипажа при росте уровня радиации выше допус-
тимого;
• защита выступающих частей (крышек, люков, крепежа, переносных
агрегатов и др.) защитными чехлами (см. 8.2.3);
• установка уловителей жидкостей и газов в случае их утечки из трубо-
проводов.
3. Обитаемые отсеки ПКА должны иметь автономное обеспечение под-
держания необходимого давления и состава газовой среды.
4. Конструкция ПКА должна обеспечивать экипажу возможность выпол-
нения в аварийной обстановке всех основных функций вплоть до момента
спасения.
5. Кабельные соединения и трубопроводы должны быть защищены от
действия огня, вакуума и коррозии.
6. Контейнеры со взрывоопасными материалами, сосуды под высоким
давлением, контейнеры с летучими газами и емкости с ядовитыми жидкостя-
ми должны быть расположены вне кабины или как можно дальше от жилых
и служебных помещений ПКА.
7. На борту ПКА должно быть исключено:
• наличие потенциальных источников воспламенения, образование
взрывоопасных сред и возникновение источника инициирования взрыва;
• превышение допустимого давления в магистралях и емкостях;
• превышение или понижение допустимого уровня атмосферного дав-
ления внутри отсеков;
• использование токсичных веществ в системах, расположенных в жилых
отсеках;
• нагрев оборудования до температуры выше максимально допустимой;
• попадание горюче-смазочных материалов на узлы и детали, подвер-
женные искрению или сильному нагреву;
• образование в атмосфере кабины вредных примесей в количествах,
выходящих за нормы предельно допустимых значений.
8. Бортовое оборудование ПКА должно быть выполнено с соблюдением
требований по электробезопасности в соответствии с ГОСТ Р МЭК 60204 —
1—2007 «Безопасность машин. Электрооборудование машин и механизмов,
часть 1. Общие требования».
9. Должна быть выполнена защита экипажа и оборудования от статиче-
ского электричества.
Глава 12. Компоновка систем обеспечения безопасности ПКА
695
10. ПКА должен иметь защиту от метеоритных частиц и фрагментов кос-
мического мусора.
11. ПКА должен соответствовать требованиям пожаробезопасности.
12. До включения двигательной установки и в процесс ее работы экипаж
должен иметь возможность контроля углового положения ПКА и его угловой
скорости.
13. Должен обеспечиваться визуальный контроль процесса стыковки на
всех его этапах.
14. Каждый изолированный отсек должен иметь не менее двух выходов.
15. Люки — лазы ПКА должны открываться и закрываться с двух сторон.
16. Время аварийного открывания — закрывания люков должно быть
5...7 с.
17. Гермолюки должны быть снабжены блокировкой, исключающей их
случайное открытие: иметь фиксацию и сигнализацию в открытом и закры-
том состоянии.
18. Размеры гермолюков должны обеспечивать беспрепятственный проход
членов экипажа в скафандрах и пронос оборудования.
19. ПКА должен быть оборудован быстрооткрывающимся люком для
покидания его экипажем при возникновении аварийных ситуаций на стар-
товой позиции.
20. Конструкция ПКА должна обеспечивать экипажу доступ к бортовой
аппаратуре для выполнения аварийного ремонта в процессе полета.
21. Конструкция иллюминаторов ПКА должна исключать возможность
поражения экипажа ультрафиолетовым излучением Солнца.
22. Запрещается размещать на борту ПКА концентраторы солнечных
лучей в зоне попадания солнечного света.
23. Для защиты экипажа от случайного контакта с достаточно горячими
или холодными предметами, которые могут быть причиной травмы, необхо-
димо обеспечивать их теплоизоляцию или ограждение.
24. Оборудование, которое в аварийном состоянии может стать препят-
ствием для покидания отсека экипажем, не должно располагаться вблизи
входов и выходов.
25. В конструкции ПКА должна быть предусмотрена возможность ава-
рийной расстыковки состыкованных КА.
26. ПКА, которые могут встречаться с другими КА или функционировать
в непосредственной близости от них, должны иметь габаритно-опознаватель-
ные огни, а также средства наблюдения за соседним аппаратом.
27. При работе нескольких ПКА на небольшом удалении друг от друга
должна быть обеспечена двусторонняя связь на согласованных частотах.
28. Должна обеспечиваться работоспособность основных систем ПКА в
условиях вакуума.
29. Конструкция гидросистем должна исключать пролив жидкости в отсек.
30. Конструкция гидравлических и пневматических систем должна обес-
печить заправку жидкостями и газами без их потерь (пролива) и газовых про-
бок, а также исключать неправильную стыковку, подсоединение агрегатов и
трубопроводов.
696 Часть III. Компоновка систем пилотируемого космического аппарата
31. В топливной системе ПКА должно быть исключено возникновение
электростатических разрядов.
32. Системы, отказ которых может привести к возникновению аварийной
ситуации, должны резервироваться.
33. Команды, выдаваемые вручную, должны обладать приоритетом ис-
полнения по отношению к командам, выдаваемым бортовой автоматикой.
34. Конструкция оборудования ПКА должна обеспечивать выполне-
ние экипажем жизненно важных операций в скафандрах под избыточным
давлением.
35. Резервные блоки и системы, от работы которых зависит безопасность
экипажа, по возможности должны быть установлены в разных отсеках.
36. На орбитальном участке полета должно быть предусмотрено автомати-
ческое, с пульта космонавта и с наземного комплекса управления, включение
и выключение двигательной установки.
37. Должен обеспечиваться отстрел всех систем, оказывающих влияние
на послепосадочное положение аппарата.
При разработке компоновочной схемы аппарата необходимо уделять
особое внимание удобному размещению бортовой аппаратуры. Приборы и
агрегаты, которые, как показывает предыдущий опыт эксплуатации, наиболее
часто выходят из строя, а также требующие замены в процессе эксплуатации
отдельных элементов (фильтры и пр.) необходимо размещать в местах, до-
ступных для их обслуживания и ремонта.
72.3.2. Требования к выбору конструкционных материалов
При проектировании и производстве ПКА используются различные мате-
риалы: металлы, пластмассы, композиционные материалы, ткани и пр. В гл. 2
было рассмотрено влияние различных материалов, из которых изготавливается
интерьер кабины, на состав находящегося в нем воздуха. Для предотвращения
загрязнения атмосферы кабины необходимо при выборе материалов исходить
из следующих требований [4].
1. Для изготовления конструкций ПКА и полетной одежды необходимо ис-
пользовать материалы с повышенной огнестойкостью и термостабильностью.
2. Конструкционные материалы, применяемые на ПКА, должны соответ-
ствовать нормам прочности, а также не должны выделять вредных и загряз-
няющих веществ и образовывать вторичные опасные соединения в реальных
условиях при высоких температурах и низких давлениях.
3. Все полимерные материалы, предназначенные для использования в
обитаемых отсеках ПКА, необходимо подвергать санитарно-химической и
токсикологической оценке в связи с возможностью загрязнения среды оби-
тания продуктами газовыделений.
4. Использование в обитаемых отсеках ПКА полимерных материалов
допускается не ранее трех месяцев после их промышленного изготовления.
5. Применение опытных образцов полимерных материалов допускается
в исключительных случаях после их испытания в условиях предполагаемой
эксплуатации.
Глава 12. Компоновка систем обеспечения безопасности ПКА
697
6. Материалы полетной одежды не должны:
• способствовать накоплению статического электричества;
• вступать в химические реакции с веществами, входящими в состав
атмосферы обитаемых отсеков;
• приводить к появлению в атмосфере кабины пыли, ворса и волокон.
1233. Требования, обусловленные неблагоприятным воздействием
внешней среды
Агрессивная среда, в которой работает ПКА, накладывает свои требова-
ния на обеспечение безопасности [4].
1. При планировании полета (выборе даты старта) необходимо учитывать
условия радиационной обстановки.
2. Траектория полета ПКА должна выбираться с учетом выполнения тре-
бований по радиационной безопасности.
3. Бортовое оборудование системы жизнеобеспечения должно быть ду-
блировано для обеспечения безопасности полета.
4. ПКА должен иметь защитные устройства от пробоев корпуса микро-
метеоритами или фрагментами космического мусора.
5. Оборудование стартовой позиции должно предусматривать наличие
молниеотводов (диверторов), исключающих возможность попадания молнии
в ракету-носитель при старте.
6. Выбор времени и места приземления спасаемого ПКА по возможности
должен проводиться с учетом выполнения требований по метеоусловиям.
7. В случае посадки при неблагоприятных погодных условиях должны
быть предусмотрены специальные мероприятия по обеспечению безопасно-
сти экипажа.
123.4. Требования к безопасности деятельности экипажа
но борту ПКА
Безопасность экипажа, работающего на борту ПКА, зависит от возник-
новения НшС, связанных с действиями экипажа, а также вызванных услови-
ями полета, для предотвращения которых при проектировании необходимо
выполнять следующие требования.
1. В предусмотренных НшС деятельность экипажа должна быть строго
регламентирована бортовой документацией.
2. На начальном этапе полета необходимо предусматривать средства и
мероприятия по ускорению адаптации организма к условиям космического
полета и исключению несанкционированных действий.
3. Циклограмма деятельности экипажа в полете должна разрабатываться
с учетом обеспечения безопасности на всех этапах полета.
4. При выполнении полета экипаж должен регулярно проводить контроль
состояния бортовых систем и осмотр оборудования.
5. Перед выполнением маневров любых видов и в процессе их проведения
экипаж по внешним ориентирам и приборам должен обеспечивать визуальный
контроль положения ПКА в пространстве и его изменения.
698
Часть III. Компоновка систем пилотируемого космического аппарата
6. При выполнении основных жизненно важных операций на борту ПКА
должно предусматриваться дублирование функций экипажа наземным ком-
плексом управления.
7. На наиболее ответственных и опасных участках полета должна быть
предусмотрена возможность координации действий экипажа и ЦУП по ка-
налам связи.
8. Космонавты должны иметь возможность выполнять основные операции
на борту ПКА как в скафандре, так и без него.
9. Экипаж ПКА при передвижении и перемещении грузов в условиях
невесомости должен осуществлять строгий контроль скорости и ускорения
перемещения.
10. Основные операции на борту ПКА должны уметь выполнять не менее
двух членов экипажа, а их проведение должно проходить при взаимном кон-
троле и подстраховке.
11. При организации деятельности экипажа на борту ПКА должны быть
приняты меры по предотвращению:
• невыполнения (пропуска) основных операций;
• несанкционированных действий;
• возможности неправильной установки и сочленения разъемных блоков,
узлов, деталей, электрических и пневматических разъемов;
• непроизвольного (случайного) нажатия клавиш, включения (отклю-
чения) тумблеров и пр.;
• возможных ошибочных включений органов управления при обслужи-
вании и устранении неисправностей;
• физиологических и психологических перегрузок.
12. График режима работы экипажа по возможности нужно строить таким
образом, чтобы уменьшить время бесконтрольного состояния ПКА.
13. В процессе полета должно быть исключено бесконтрольное изменение
режима труда и отдыха (РТО) экипажа.
С точки зрения эргономики высокая надежность человека-оператора
означает безошибочность его работы с техникой и другими операторами.
Отклонения от РТО могут стать причиной нарушения надежности профес-
сиональной деятельности космонавта. Для оценки влияния отклонений от
РТО при полете ОС «Мир» была разработана балльная система оценок. Харак-
терные нарушения РТО и оценка степени их влияния на надежность работы
экипажа ОС «Мир» приведены в табл. 12.3. На рис. 12.9 показана оценка ча-
стоты ошибок, допущенных экипажем (ОДЭ) из-за напряженности РТО [5].
Глава 12. Компоновка систем обеспечения безопасности ПКА
699
Таблица 12.3
Оценка, в баллах, влияния на состояние космонавта отклонений от режима труда и отдыха
Характеристика отклонения Оценка, баллы
Нарушение ритма сна Ночные побудки по сигналам технических систем Эпизоды ночных работ со сдвигом фазы ритма «сон — бодрствование» 3
при величине сдвига: 4
не более 3 ч
4-5 ч 7
6 ч 10
не установленной 5
Напряженный распорядок деятельности (фактор перегрузки) Заявления членов экипажа о напряженном характере РТО 10
Свидетельство напряженности со стороны специалистов группы медицинского обеспечения главной оперативной группы управления (ГОГУ) 9
Увеличение фактической продолжительности рабочего дня сверх номинала:
на 1—2 ч 6
более чем на 2 ч 7
Увеличение плановой продолжительности рабочей зоны, Работа в выходные дни: 5
при частичной занятости рабочего дня 4
при полной занятости выходного дня 8
Отказ экипажа от выполнения отдельных РТО (физические упражнения, прием пищи, личное время и др.) или смещение из-за перегрузки работой 2
Объективные и субъективные признаки ухудшения состояния членов экипажа (фактор психологического дискомфорта)'.
Сокращение длительности сна Ухудшение качества сна (беспокойный, поверхностный, со спонтанными 7
пробуждениями, трудные засыпание и подъем) 4
Просьбы экипажа пораньше уйти спать и подольше поспать утром 1
Появление симптомов усталости Снижение оценки работоспособности до удовлетворительного уровня, 5
а возможно, и ниже 8
Рис. 12.9. Зависимость частоты ошибок, допущенных экипажем, от напряженности РТО
700 Часть III. Компоновка систем пилотируемого космического аппарата
12.4. Компоновка средств защиты экипажа ПКА от метеоритных
потоков и космического мусора
Существенную угрозу для ПКА представляет столкновение с частицами
как естественного (метеориты), так и искусственного (техногенные частицы)
происхождения, причем столкновение с техногенными частицами в настоящее
время представляет наибольшую опасность. Возможным ущербом от такого
столкновения может быть разгерметизация обитаемого объема или выход из
строя оборудования на внешней поверхности ПКА.
Риск разгерметизации в результате столкновения с частицами прямо про-
порционален предполагаемому времени эксплуатации и площади уязвимой
поверхности ПКА. В общем случае по уровню опасности воздействия высо-
коскоростных частиц на аппарат подразделяют на два вида:
• некритичные — малозаметные, допустимые для дальнейшего длитель-
ного нормального функционирования элементов и систем КА;
• критичные — решающие, т. е. вызывающие сразу или в течение срав-
нительно ограниченного периода времени отказ функционирования важного
элемента конструкции или системы, а в дальнейшем, возможно, и ПКА в
целом.
При разработке средств защиты ПКА от пробоя частицами решаются
две задачи:
• разработка экранной защиты;
• определение последствий пробоя герметичных модулей для выживае-
мости ПКА и разработка мероприятий по снижению риска катастрофических
последствий пробоя.
Проектным параметром, определяющим степень защищенности моду-
лей, является вероятность непробоя (ВНП) герметичных оболочек модулей
и оболочек непустых топливных баков [6]. Вероятность А пробоев за время
эксплуатации Т определяется распределением Пуассона:
Р(А) = —(12.1)
где N — усредненное ожидаемое число пробоев (параметр распределения) за
время Т.
Из уравнения (12.1) получим
ВНП = Р(0) = еЛ (12.2)
А = лДОэфТ, (12.3)
где n(d) — плотность кумулятивного потока частиц, част.*м-2/год; Т— время
эксплуатации, год; 5эф — эффективная уязвимая поверхность герметичной
оболочки, м2.
На стадии проектной проработки методика оптимизации экранной за-
щиты включает пять этапов работ.
1. Исходя из заданной величины ВНП = Р(0) по формуле (12.2) опреде-
ляется среднее количество ударов частиц А, сопровождаемое пробоем.
Глава 12. Компоновка систем обеспечения безопасности ПКА
701
2. Используя модели частиц (n(d)) и исходя из оценки 5эф, по формуле
(12.3) определяется максимальный размер частиц Jo, удар которых экранная
защита модуля должна выдержать.
3. Исходя из толщины гермооболочки и конструкции внешних элемен-
тов корпуса выбираются параметры типовой экранной защиты (толщина и
количество экранов, расстояние между ними), обеспечивающей стойкость к
ударам частиц размером менее dQ.
4. Гермооболочка разбивается на зоны, различающиеся толщиной стенки,
возможностью установки экранов, ориентацией относительно вектора орби-
тальной скорости (для профилирования защиты в зависимости от степени
опасности по направлениям подлета частиц), и создается компьютерная мо-
дель модуля для дальнейших расчетов ВНП.
5. На основе анализа результатов расчетов определяется относительный
вклад отдельных зон в общую вероятность пробоя для модификации параме-
тров экранов в отдельных зонах. Этот процесс имеет итерационный характер
с целью снижения риска пробоя до требуемого уровня.
Риск разгерметизации определяется средней вероятностью пробоя еди-
ницы поверхности гермооболочки ПКА. Например, удельный риск пробоя
модулей PC МКС принят на уровне 105 м2/год. Значения ВНП отдельных
модулей ПКА могут устанавливаться на основе принципа равного удельного
риска пробоя для всех модулей. В табл. 12.4 приведены требуемые значения
ВНП для модулей PC МКС [6].
Таблица 12.4
Требуемые значения ВНП модулей PC МКС
Элемент Требования по ВНП Продолжитель- ность, лет Дата запуска
ФГБ 0,979 15 11.1998
Служебный модуль (после запуска) 0,94 3,7 11.1999
Служебный модуль (после установки дополнительных противоосколочных панелей) 0,95 15 12.1999
МЛМ 0,979 15 —
ШК МЛМ 0,998 15 —
Стыковочный отсек 1 0,996 2 03.2000
МИМ 1 0,994 15 05.2010
МИМ 2 0,995 15 11.2009
«Прогресс М» «Прогресс М1» 0,85 15 1999
«Прогресс М» «Прогресс М1» (после усиления защиты) 0,95 (ПС) 15 2012
«Союз ТМА» 0,8 15 1999
«Союз ТМА» (после усиления защиты) 0,93 (ПС) 15 2012
702
Часть III. Компоновка систем пилотируемого космического аппарата
Для зашиты гермооболочки можно применять специальные экраны — так
называемые дополнительные противоосколочные панели. Конструктивная
схема панели, устанавливаемой на рабочем отсеке малого диаметра служеб-
ного модуля PC МКС, показана на рис. 12.10 [6].
Рис. 12.10. Конструктивная схема допол-
нительной противоосколочной панели
служебного модуля PC МКС
Второй
Первый
ЛистАМг-6 ГофрАМг-6
60
Стеклотекстолит
iiaiia i i aiiaiiaiiai isiisiisiis: i siiaiia:
Ткань суровая 6
Защита от пробоя также может обеспечиваться путем повышения стой-
кости отдельных элементов конструкции или систем КА от метеорно-техно-
генного воздействия следующими способами:
• местным утолщением стенки корпуса критичного элемента;
• использованием экранирующего эффекта расположенных рядом с рас-
сматриваемым элементом других элементов,
• изменением формы или поперечного сечения самого критичного
элемента,
• заменой исходного материала критичного элемента материалом более
прочным к пробою,
• оснащением оптических приборов крышками (одноразовыми или пе-
риодически срабатывающими), защищающими объективы от повреждения
в период отключения прибора.
Защитные экраны могут быть изготовлены в виде многослойных пане-
лей, состоящих из сотопанелей, сетки, пеноматериалов, тканых материалов
(типа Кевлар) и др. Например, для защиты модулей АС МКС используются
защитные экраны, представляющие собой сэндвич-панели. Конструкция
защитных экранов модуля Columbus (рис. 12.11) [7] состоит из нескольких
слоев: внешнего щита — из А1 6061-Тб толщиной 2,5 мм, заполнителя —
ткани Кевлар + Nextel, пропитанной эпоксидной смолой, внутреннего щита —
Al 2219-Т851 толщиной 4,5 мм, теплоизоляции, приклеенной под заполнитель.
Характеристики защитного экрана приведены в табл. 12.5 [7].
Направление полета
фрагмента
космического
мусора
А1-2,5
Рис. 12.11. Конструктивная схема защитного экрана модуля Columbus
Глава 12. Компоновка систем обеспечения безопасности ПКА 703
Таблица 12.5.
Характеристика слоев защитного экрана модуля Columbus
Слой Материал (толщина слоя) Удельная масса, г/см2
Внешний слой А16061-Т6 (2,5 мм) 0,7
Наполнитель Nextel 312 AF-62, 4 слоя Kevlar 129, стиль 812, 18 слоев Эпоксидный клей 914 0,4 0,9
Теплоизоляция МЫ 0,2
Задняя стенка1 Al 2219-Т851 (4,8 мм) 1,3
Несущая стенка2 Примечания’. 1. Общая тол! Al 2219-Т851 (2,8 мм) Kevlar + эпоксидный клей цина задней стенки 22 мм. 2. Общая i 7,4 3,8 голщина экрана 79 мм.
Перспективным представляется применение экранов из изолированных
активных элементов, закрепленных на легкой тканевой основе, что суще-
ственно снижает массу защиты. При внедрении частиц активные элементы
экрана претерпевают химическое превращение с выходом газофазных продук-
тов, что приводит к повышению давления на стенки образующегося кратера,
улучшению фрагментации и увеличению поперечного импульса фрагментов
разрушения. Установлено, что наиболее перспективными активными мате-
риалами являются композиты с фторопластовой матрицей и металлическим
наполнителем, отличающиеся высокой энергетикой и достаточно стабильные
в орбитальных условиях. По предварительной оценке масса активной защиты
при нормативном уровне безопасности будет на 30...40 % меньше применяе-
мой в настоящее время защиты модулей МКС [8, 9].
12.5. Компоновка средств защиты от радиационного облучения
12.5.1. Система обеспечения радиационной безопасности
Одна из важных задач компоновки ПКА — обеспечение радиаци-
онной безопасности оборудования и экипажа. Требования по обеспече-
нию радиационной безопасности экипажа ПКА были сформулированы в
ГОСТ 25645.214—85 «Безопасность радиационная экипажа космического
аппарата в космическом полете. Модель обобщенного радиобиологического
эффекта». Вопросы защиты экипажа космического корабля во время по-
лета определяются ГОСТ 13.280 «Защита от радиационного излучения» и
ГОСТ 25645.134-86 «Лучи космические солнечные. Модель потоков протонов».
На космический аппарат действует как стохастическое, так и детерми-
нированное излучение (см. гл. 1). Это галактическое космическое излучение
(ГКИ), излучение радиационных поясов Земли (РПЗ), солнечное космическое
излучение (СКИ), нейтроны космического пространства и альбедо. Кроме
космической радиации возможно воздействие на экипаж излучения от ядерных
энергетических установок и других бортовых источников. Таким источником
704
Часть III. Компоновка систем пилотируемого космического аппарата
является, например, гамма-высотомер «Кактус», устанавливаемый в днище
спускаемого аппарата ТКА «Союз».
Действие ионизирующих излучений представляет собой сложный про-
цесс. Эффект облучения зависит от величины поглощенной дозы излучения,
ее мощности и вида излучения, а также от объема облученных материалов.
В табл. 12.6 приведены применяемые для количественной оценки доз из-
лучения термины и единицы СИ и дано сравнение единиц системы СИ и
внесистемных единиц [10].
При компоновке ПКА необходимо руководствоваться требованиями си-
стемы обеспечения радиационной безопасности (СОБР), в которую входят
оценочные расчеты ослабления корпусом отсека и средствами дополнительной
радиационной защиты (экранами) ионизирующих излучений космического
Таблица 12.6
Термины и единицы, используемые в радиобиологии
Термины Дозиметрические единицы и их определение в СИ и СГС
СИ СГС
Экспози- ционная доза X Кулон на килограмм (Кл/кг, С/kg) — единица экспози- ционной дозы, когда сопря- женная корпускулярная эмиссия производит в 1 кг сухого атмосферного воздуха ионы, несущие один кулон электричества каждого знака. 1 Кл/кг= 3,88-103 Р Рентген (Р, R) — единица экспозицион- ной дозы рентгеновского или гамма-из- лучения, при прохождении которого образующаяся корпускулярная эмиссия в 1 см3 сухого атмосферного воздуха при 0° С и давлении 760 мм рт. ст. после завершения всех ионизационных процессов создает ионы, несущие 1 электростатическую единицу количе- ства электричества каждого знака (2,08-Ю9 пар ионов). 1 рентген = 1 ед. СГС/см3 (1 Р = 2,58-10-4 Кл/кг)
Поглощен- ная доза D = de/dm Грей (Гр, Gy) — величина энергии ионизирующего излучения в 1 Дж, передан- ная веществу массой 1 кг. 1 Гр = 1 Дж/кг = 100 рад Рад (рад, rad) — единица поглощенной дозы, когда 1 г вещества передается энергия 100 эрг. При экспозиционной дозе 1 Р поглощенная доза в биологи- ческой ткани с точностью до 10 % численно равна 1 рад. 1 рад = 100 эрг/г = 10-2 Гр
Эквива- лентная доза Н= DW Зиверт (Зв, Sv) — погло- щенная доза D в органе или ткани, умноженная на соответствующий взвеши- вающий коэффициент для данного вида излучения W (называемый также коэффициентом качества излучения). 1 Зв = 1 Гр W = 100 бэр Бэр — единица эквивалентной дозы. 1 бэр=1 рад W 1 бэр = 10-2Зв
Глава 12. Компоновка систем обеспечения безопасности ПКА
705
пространства вследствие поглощения его энергии при прохождении через
толщу вещества. Расчет проводится с целью определения уровней радиаци-
онных нагрузок на экипаж в зависимости от массовой толщины защиты —
отношения массы материала к единице площади экрана (обычно в литературе
используют внесистемную единицу — г/см2).
При разработке системы нельзя исходить из принципа «польза — затра-
ты». Критерием должна быть доза облучения, гарантирующая длительное
здоровье космонавта после полета. Ниже представлены пределы доз (мЗв),
получаемые человеком в различных условиях [11]:
Фоновая доза на поверхности Земли за сутки..............0,003
Доза на борту космической станции за сутки..............0,5
Доза за год в космическом полете ......................180
Основной дозовый предел за год полета .................500
Дозовый предел за год для персонала группы А
на Земле (в среднем за 5 лет) ..........................20
Эффективная доза, получаемая во время рентгеновского
снимка грудной клетки .................................0,1
Профессиональный предел дозы космонавта/персонала
группы А................................................1000
Радиационная безопасность космонавта определяется дозовым лимитом,
который задается нормативным уровнем радиации (НУР). В качестве критерия
оценки радиационной опасности излучения могут быть выбраны дозы излуче-
ния для различных органов и тканей (табл. 12.7) [12]. Наиболее чувствительны
к радиации костный мозг, кожа, гонады (органы, продуцирующие половые
клетки), хрусталики глаз, кроветворная система. Из соотношения уровней
облучения, ожидаемых в полете, и нормативных уровней радиации из этих
органов и тканей определяется так называемый критический орган, который
в дальнейшем используется при анализе радиационной безопасности и вы-
боре средств защиты. Некоторые значения НУР приведены в табл. 12.8 [13].
Таблица 12.7
Выбор дозы как критерия оценки радиационной опасности излучения
Источник радиационной опасности Толщина защиты, г/см2 Доза как критерий
ГКИ >1 Среднетканевая доза, доза на костный мозг
ски <1 Поверхностная доза на кожу, хрусталик глаза
1...5 Максимальная поглощенная доза в крити- ческом органе
>5...10 Среднетканевая доза, доза на костный мозг
РПЗ (протоны) <2 Поглощенная доза в критическом органе
>2 Среднетканевая доза, доза на костный мозг, гонады
РПЗ (электроны) <1 Поверхностная доза, доза на кожу
706
Часть III. Компоновка систем пилотируемого космического аппарата
Таблица 12.8
НУР для различных критических органов
Критический орган, глубина в ткани Продолжительность экспозиции Дозовый лимит, эквивалентная доза, Зв
Кроветворная система Однократное острое 0,15
30 дней 0,25
Один год 0,5
Хрусталик глаза 30 дней 0,5
Один год 1
За карьеру 2
Кожа (на глубине 0,01 см) 30 дней 1,5
Один год 3
За карьеру 6
Все тело Профессиональный предел за карьеру 1
Допустимый НУР, устанавливаемый для экипажа ПКА, зависит от вре-
мени полета и объема программы, при этом не должно быть нарушения ра-
ботоспособности членов экипажа и появления неблагоприятных последствий
после завершения полета. При определении допустимой дозы исходят из ряда
требований: не занижать допустимую дозу; избегать чрезмерного увеличения
массы пассивной защиты и не допускать излишне высокой дозы, что может
сказаться на дальнейшем здоровье космонавта.
В табл. 12.9 приведены рекомендуемые НУР, разработанные в СССР на
основании опыта космических полетов. Приведенные значения НУР отно-
сятся к равномерному облучению или воздействию на костный мозг, глубина
нахождения которого принята равной 50 мм. Для других критических органов
тела используют следующие коэффициенты перехода: 3 — для кожи; 1,5 —
для хрусталика глаза и 1 — для гонад, которые применяют в случае неравно-
мерного облучения тела [12]. На основании полетов ОС «Салют» и «Мир» в
СССР были определены величины доз для длительных полетов, приведенные
в табл. 12.10 [14].
Фактические значения индивидуальной дозы радиации в реальных ус-
ловиях полета советских и американских ПКК и ОС в большинстве случаев
Таблица 12.9
Нормативные уровни радиации в зависимости от длительности полета
Длительность полета, месяцы НУР за полет, бэр Длительность полета, месяцы НУР за полет, бэр
1 50 6 но
2 65 8 125
3 80 10 140
4 90 12 150
5 100 — —
Глава 12. Компоновка систем обеспечения безопасности ПКА
707
Таблица 12.10
Значения нормированных доз для полетов различной длительности
Длительность полета, месяц Нормативный уровень радиационного риска, Л„ 10-< Предельно допустимая равноценная доза, сЗв Контрольная часовая мощность равноценной дозы, мкЗв
1 0,6 10,5 146
3 1,8 21,5 100
6 3,6 37.0 85
12 7,2 66,5 76
18 10,8 93,5 71
24 14,4 118,5 68
30 18,0 140,5 65
36 21,5 162,5 62
были намного ниже допустимого уровня. Так, наибольшая эквивалентная
доза радиации зарегистрирована при полете длительностью 84 сут последнего
экипажа станции Skylab: она составила от 14 до 18 бэр на кожу для разных
членов экипажа [12]. В табл. 12.11 приведены суммарные и суточные дозы
радиации, полученные экипажами различных ОС.
Таблица 12.11
Суммарные и суточные дозы радиации во время пилотируемых полетов на КА и ОС
Миссия Запуск и посадка Продол- житель- ность Элементы орбиты Суммарные дозы радиа- ции, рад Среднее за сутки, рад/сут
Apollo 11 16.07.1969- 24.07.1969 8 дней 3 ч 18 мин Полет на Луну и возвращение на Землю 0,18 0,022
Skylab 4 16.11.1973- 08.02.1974 84 дней 1 ч 15 мин Орбитальный полет, высота орбиты 422-437 км 10,88-12,83 0,129-0,153
Space Shuttle Mission 41—C 06.04.1984- 13.04.1984 6 дней 23 ч 40 мин Орбитальный полет, перигей 222 км, апогей 468 км 0,559 0,079
ОС «Мир» 1986-2001 15 лет Орбитальный полет, высота орбиты 385-393 км — 0,020-0,06
МКС 2001-2004 4 года Орбитальный полет, высота орбиты 337—351 км — 0,010-0,020
708 Часть III. Компоновка систем пилотируемого космического аппарата
12.5.2. Риски, возникающие при радиационном облучении
Возникающие вследствие радиационного облучения во время космиче-
ского полета риски можно подразделить на биологические, технические и
эргономические [15]. Место, роль и обусловленность эргономического ради-
ационного риска в длительном космическом полете приведены на рис. 12.12.
Биологические риски связаны с возникновением радиобиологических (со-
матических и отдаленных) реакций организма на облучение, имевшее место в
процессе полета [15]. Излучение в космическом пространстве характеризуется
сложным составом излучения с энергетическим спектром в диапазоне от несколь-
ких килоэлекгрон-вольтов до сотен гигоэлектрон-вольтов, различных по своему
биологическому воздействию. Радиобиологические исследования проводятся
при строгой количественной оценке поглощенных доз клетками и различными
тканями организма. Эффект облучения зависит от величины поглощенной дозы,
ее мощности, вида излучения, объема облученных тканей и органов.
По мнению биологов, воздействие космической радиации имеет комплекс-
ное влияние на организм человека. Во первых, это влияние на ДНК, что может
сказаться через длительный промежуток времени. Во вторых, недостаточно
Рис. 12.12. Место, роль и обусловленность эргономического радиаци-
онного риска в длительном космическом полете
Глава 12. Компоновка систем обеспечения безопасности ПКА
709
изучен процесс влияния на организм малых доз радиации. Не существует пря-
мой связи между величиной дозы, количеством радиации и радиационными
повреждениями. Как полагают биологи, разные типы хромосом различным
образом реагируют на радиацию. В третьих, не ясны результаты воздействия на
биологические структуры одновременно двух или нескольких видов радиации:
например, ГКИ и СКИ или ГКИ, СКИ и радиационных поясов.
Эргономические риски связаны с нарушениями операторской и физиче-
ской работоспособности космонавта, вызванными влиянием радиации или
нарушениями условий жизнедеятельности экипажа. Эргономические риски
существенно зависят от наличия биологических и технических рисков.
Технические риски связаны с возрастанием вероятности отказа приборов и
систем космического аппарата под действием радиационного облучения. Физи-
ческие механизмы воздействия космической радиации на материалы и элементы
оборудования КА зависят от вида и энергии воздействующего излучения, типа
облучаемого материала, условий облучения — интенсивности воздействующе-
го излучения, температуры материала и ряда других факторов. Составляющие
многокомпонентного по своему составу и энергии ионизирующего излучения
космического пространства могут воздействовать на КА в различных сочетаниях
и в разной временной последовательности, в результате чего возникающие в
материалах КА радиационные эффекты имеют весьма сложный характер [16].
Для описания радиационной стойкости конструкционных материалов и
элементов оборудования используют следующие термины:
• радиационная стойкость материала — способность выполнять опре-
деленные функции и сохранять заданные характеристики во время и после
воздействия радиации;
• предел радиационной стойкости — доза или флюенс ионизирующих
излучений, при которых изменения основных наиболее важных технических
характеристик материалов не превышает допустимых значений;
• радиационный отказ — нарушение работоспособности материала эле-
мента вследствие воздействия ионизирующих излучений.
В табл. 12.12 приведены усредненные данные о радиационной стойкости
некоторых материалов и элементов оборудования.
Воздействие радиации на солнечные батареи. Солнечные батареи набира-
ются из фотоэлектрических преобразователей (ФЭП), которые изготовляют из
кристаллического кремния или арсенида галлия (GaAs). Наибольшее повре-
ждающее воздействие на ФЭП оказывают протоны РПЗ и СКИ. Ухудшаются
параметры, вольт-амперная характеристика, ток короткого замыкания и напря-
жение холостого хода. Большой комплекс исследований, связанных с влияни-
ем радиации на бортовые системы, был проведен на спутниках «Электрон». Их
результаты показали, что полеты в области РПЗ приводят к значительному сни-
жению эффективности солнечных батарей: ИСЗ «Электрон-1» из-за отказа СБ
проработал 40 суток; «Электрон-2», имевший более вытянутую траекторию, —
5 месяцев; «Электрон-3» и «Электрон-4», имевшие СБ с защитным покрытием,
функционировали 6 и 8,5 месяцев соответственно. Для защиты фотоэлетри-
ческих преобразователей от радиационного воздействия используют тонкие
пластины (100...200 мкм), изготовленные из специального стекла.
710
Часть III. Компоновка систем пилотируемого космического аппарата
Таблица 12.12
Радиационная стойкость материалов и элементов оборудования
Изделие, материал Доза, Гр Изменение характеристик, характер воздействия
Полупроводниковые приборы 103—104 Увеличение обратных токов, снижение усиления
Микропроцессоры Большие интегральные микросмехы 102—1СР Обратимые и необратимые перемежающие отказы, радиационный сбой
ФЭП 103—104 Снижение КПД
Оптические стекла 103-104 Ухудшение прозрачности вследствие радиационного окрашивания
Волоконная оптика 102—103 Снижение амплитуды передаваемого сигнала в результате радиационного окрашивания
Интегральная оптика 102—103 Снижение КПД, радиационная окраска световодов
Полимерные материалы 104-106 Деградация оптических, механических и электроизоляционных характеристик
Терморегулирующие покрытия 105—107 Увеличение коэффициента поглощения солнечного излучения
Металлы Ю’-Ю10 Ухудшение механических характеристик
Воздействие радиации на терморегулирующие покрытия. Для отвода из-
быточного тепла применяют покрытия, имеющие коэффициент поглоще-
ния солнечного излучения (0,1...0,3) и коэффициент черноты (0,8...0,9). Этим
требованиям удовлетворяют белые эмали, содержащие ZnO, SrO2,TiO2. Под
влиянием радиации белые эмали окрашиваются, что приводит к увеличению
коэффициента поглощения солнечного излучения.
Радиационное воздействие на оптические и полимерные материалы. Воз-
действие ионизирующего излучения на оптические материалы вызывает их
окрашивание и люминесценцию. Окрашивание зависит от вида воздейству-
ющего излучения, а люминесценция — от мощности. При воздействии ра-
диационного облучения в полимерах в зависимости от их свойств возникают
необратимые и обратимые изменения. К первым относятся деструкция и
сшивание, приводящие к разрушению или образованию новых химических
групп, выделению газообразных продуктов. Характерным для второй груп-
пы является присущая всем полимерам радиационная электропроводность,
существенно снижающая их электроизоляционные свойства при облучении.
Радиационные эффекты в радиоэлектронике. Отказы и сбои в работе борто-
вого электронного оборудования КА, вызываемые радиационным излучением,
делятся на две группы: на отказы, спровоцированные постепенным ухудшени-
ем характеристик элемента микроэлектроники, и на внезапные сбои и отказы,
связанные с воздействием отдельных заряженных частиц, так называемые
одиночные случайные эффекты. Большое влияние на работоспособность
радиоэлектроники оказывает время, которое КА находится под воздействи-
ем ионизационного излучения. На рис. 12.13 приведена зависимость частоты
сбоев в микросхемах памяти (объемом 16 Мбайт) от времени полета КА [17].
Глава 12. Компоновка систем обеспечения безопасности ПКА
711
Время полета, ч
Рис. 12.13. Количество сбоев в работе микроэлектроники при полете на раз-
личных орбитах:
а — орбита МКС — Н = 426 км, i = 51,6°; б — солнечно-синхронная орбита,
Н = 900 км, i = 97°; в — высокоэллиптическая орбита — На = 500 км, Нр = 40 000 км,
i = 63°; г — геостационарная орбита, Н = 36 000 км, i = 0°
Радиационная опасность для изделий космической техники на борту КА
зависит от следующего:
• индивидуальных характеристик материала и прибора, которые опреде-
ляются величиной линейной передачи энергии или параметрами случайного
процесса возникновения одиночных случайных эффектов (так называемого
сечения одиночных случайных эффектов [17]), и отражают их радиационную
стойкость (чувствительность);
712 Часть III. Компоновка систем пилотируемого космического аппарата
• воздействующего радиационного окружения, характеризующегося диф-
ференциальными энергетическими спектрами потока или плотности потока
частиц, которое отражает радиационные условия на борту КА [17].
Влияние космической радиации на конструкционные материалы. Корпуску-
лярная радиация при длительном воздействии на материал, имеющая соот-
ветствующую мощность, вызывает его повреждение в виде поверхностной
эрозии, ионизации вещества и смещения атомов. Поверхностная эрозия —
выбивание протонами атомов или групп атомов с поверхности металлов. Наи-
менее устойчивы к поверхностной эрозии медь, серебро, золото, а устойчивы
окислы металлов и алюминий, в первую очередь его окись. От эрозии могут
защитить, например, покрытия из TiO2, SiO2 и др.
Ионизация вещества — отрыв электронов от атомов, что существенно
изменяет электрические и некоторые другие характеристики материалов. Сме-
щение атомов — выбивание атома со своего места в кристаллической решетке
при столкновении с частицей, что существенно для металлов, особенно для
полупроводников, стекла и керамики. В табл. 12.13 приведены характеристики
возможного изменения свойств конструкционных материалов под действием
РПЗ, СКИ и ГКИ [17].
Таблица 12.13
Возможное изменение свойств конструкционных материалов
Материал Изменяемые свойства Внутренний РПЗ Внешний РПЗ Солнечный ветер и СКИ ГКИ
1 мг/см2 1 г/см2 слой объе- мом 1 мг/см2 слой объе- мом 1 г/см2 по- верх- ност- ный слой слой объе- мом 1 мг/см2 поверхност- ный слой и слой объемом 10 г/см2
Политера- фторэтилен Механические, электрические (на воздухе) ++ ++ ++ ++ ++* —
Механические, электрические (без воздуха) ++ + ++ + +* +* —
Другие пластмассы Оптические, механические, электрические, размеры ++ — ++ — _* _* —
Эластомеры Механические ++ — + + — _* _* —
Масла и смазки Смазочные, консистентность ++ — ++ * —
Стекло Оптическая прозрачность, механические, электрические размеры ++ ++ + ++ ++* — ++* ++* +* —
Глава 12. Компоновка систем обеспечения безопасности ПКА
713
Окончание табл. 12.13
Материал Изменяемые свойства Внутренний РПЗ Внешний РПЗ Солнечный ветер и СКИ ГКИ
1 мг/см2 1 г/см2 слой объе- мом 1 мг/см2 слой объе- мом 1 г/см2 по- верх- ност- ный слой слой объе- мом 1 мг/см2 поверхност- ный слой и слой объемом 10 г/см2
Плавлен- ный кварц и кристаллы Оптическая прозрачность ++* — ++ — ++* _* —
Кристаллы Механические, электрические, размеры ++* * +* ** ++* __*** —
Полупрово- дники Неосновная электропровод- ность ++ ++ + * ++* — —
Основная электропрово- дность ++ — — — ++* — —
Металлы Примечания’. — менении даннс го вида или нс этого вида и и материала, пре но временное лов; *** возмоэ Ферромагнетизм ++ ++* — —
Механические, электрические — не имеется ника! эго материала; - из/ ^которые их свойст! х свойства; + свойс дерпевают существе увеличение электрс кно временное увел! СИХ повр| 1учение л за; ++ и тва, важ! ;нные из шроводн имение э. еждени 1ействус злученг чые в о менени ости в лектрог й, важн jt на осе ie дейст бычном я; * дан) случае < фОВОДН ых при ( эбо чувс вует на техниче чые тре£ эсобенн» ости во ++* эбычном твительн большук JCKOM пр >уют уто1 0 чувств] время со технич [ые мате ) часть именен шения; ительнь лнечно) еском при- ;риалы это- материалов ии данного ** возмож- IX материа- й вспышки.
12.5.3. Средства мониторинга радиационной обстановки
Обеспечить радиационную безопасность в космическом полете можно
только при постоянном мониторинге радиационной обстановки вне и внутри
ПКА. Это особенно необходимо при вспышках на Солнце, которые сопрово-
ждаются мощными солнечными протонными событиями (СПС). Уровень ра-
диации в это время может превышать фоновый уровень на несколько порядков.
Такое резкое увеличение уровня радиации требует принятия специальных мер
защиты (ограничение передвижения членов экипажа по станции, изменение
режима работы бортовых систем и пр.). Меры защиты должны быть реализо-
ваны на начальной стадии (менее через за 1 ч) с момента обнаружения потока.
Для контроля радиационной обстановки в жилых отсеках ПКА в состав
бортового оборудования должна входить система контроля радиационной об-
становки (СКРО). Блок-схема состава такой аппаратуры для ТКА ПТК-НП
приведена на рис. 12.14 [18].
714
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 12.14. Блок-схема состава бортовой аппаратуры системы контроля
радиационной обстановки ТКА ПТК-НП
Бортовое оборудование для оперативного контроля уровня радиа-
ции на борту МКС представлено на рис. 12.15 [11].
Дозиметр Р-16 (рис. 12.15, а), обеспечивающий измерение поглощенной
дозы ионизирующего излучения, имеет почти изотропную чувствительность
и высокую точность [19]. Детекторами дозиметра служат две газовые иониза-
ционные камеры: камера D1 с внешним дополнительным тканеэквивалент-
ным диэлектрическим экраном с толщиной стенки 3,0 г/см2 и камера D2 со
стенками из тканеэквивалентного материала толщиной 0,5 г/см2.
Дозиметр «Пилле-МКС» (рис. 12.15, б) состоит из набора переносных
дозиметров, размещаемых в специальной укладке, и пульта управления.
Дозиметры позволяют контролировать индивидуальную накопленную дозу,
которую получают космонавты при вспышках на Солнце или при ВКД. Доза
определяется с помощью пульта, в который установлен дозиметр. Еще один
дозиметр установлен в пульте в дежурном режиме [11].
Штатный прибор «Люлин-МКС» (рис. 12.15, в) для измерения уровня ра-
диации на станции в отличие от дозиметров «Пилле-МКС», которые обычно
используют для измерения накопленной радиации, способен за 30 с опреде-
лить мощность дозы в любой точке станции. Прибор состоит из зарядного
устройства, которое также служит для передачи данных, и четырех дозиметров.
К индивидуальным средствам контроля относятся индивидуальные дози-
метры ИД-3 МКС (рис. 12.15, г), которые космонавты носят с собой.
На МКС проблема обнаружения СПС решается с помощью системы
контроля радиационной обстановки, которая не только регистрирует дозу
радиации внутри отсека, но и посредством специальной программы пред-
сказывает появление потока СПС. Однако полученная таким образом ин-
формация требует принятия защитных мер в аварийном режиме, поскольку
аппаратура реагирует на поток уже развивающегося СПС. Это обусловлено
тем, что начальная стадия развития СПС остается незамеченной, так как на
«защищенных» витках орбиты ПКА поток протонов ослабляется из-за экра-
нирования его магнитным полем Земли. Перспективным способом прогно-
зирования СПС могут быть прогнозы, выдаваемые высокоорбитальными КА
Глава 12. Компоновка систем обеспечения безопасности ПКА
715
в г
Рис. 12.15. Средства радиационного контроля:
а — штатный дозиметр Р-16; б — штатный дозиметр «Пилле-МКС»; в —
штатный дозиметр «Люлин-МКС»; г — индивидуальный дозиметр ИД-3 МКС:
1 — ионизационная камера D1; 2 — ионизационная камера D2; 3 — кон-
тейнер для дозиметра; 4 — укладка для дозиметров; 5 — пульт управления
с дозиметром в дежурном режиме; 6 — зарядное устройство
или спутниками, работающими на ГСО, которые регистрируют начальную
стадию развития события СПС в межпланетном пространстве. Однако эта
информация также появляется с временной задержкой. Более оперативным
является метод передачи данных онлайн с дозиметра, работающего на гео-
стационарном спутнике, например на американском спутнике GOES-8 или
российском «Экспресс АЗ».
12.5.4. Компоновка экранов радиационной защиты
Идеальная защита от радиации должна иметь массовую толщину земной
атмосферы, т. е. удельную массу экрана 1000 г/см2, и такое же магнитное поле,
как вокруг земного шара в районе экватора. Для создания эквивалентной за-
щиты от радиации в космосе потребовался бы слой воды толщиной около 10 м
или свинцовый экран толщиной около 1 м.
Экраны являются пассивными средствами физической радиационной защи-
ты экипажа ПКА. Их действие основано на эффекте ослабления ионизирующих
716 Часть III. Компоновка систем пилотируемого космического аппарата
излучений при их взаимодействии с веществом. В качестве меры толщины
экрана, как правило, используют так называемую массовую толщину, т. е.
удельную массу вещества, из которого сделан экран.
Массовая толщина экранов пассивной защиты зависит от характеристик
излучения, материала защиты, траектории, продолжительности полета, ком-
поновки корабля и выбранных критериев радиационной безопасности. Уве-
личение толщины обшивки корпуса аппарата приводит к снижению уровня
радиации в отсеках экипажа. На рис. 12.16 показана зависимость эквивалент-
ной дозы радиации от толщины защиты при воздействии различных излуче-
ний [17]. Видно, что для защиты от ГКИ требуется существенно увеличить
толщину обшивки (несколько десятков граммов на квадратный сантиметр).
Рис. 12.16. Зависимость величины эквивалентной дозы радиации от толщины защиты:
а — орбита полета на Марс (проект NASA, высокая солнечная активность 980 дней, 620 дней — на
Марсе); б — орбита МКС (год полета, минимум солнечной активности, предельно допустимая
доза — 1 Зв)
Для околоземных орбит высотой до 400 км с наклонением плоскости
орбиты 50° при эффективной толщине защиты не менее 3 г/см2 специальной
радиационной защиты не требуется.
На основании анализа показаний дозиметров, установленных на геостацио-
нарных спутниках и ОС «Мир», была определена толщина эффективной защи-
ты при СПС различной мощности. На рис. 12.17 для КА на геостационарной
орбите приведена расчетная зависимость мощности поглощенной дозы (т. е.
приращение поглощенной дозы под воздействием излучения СПС за единицу
времени) от эффективной толщины плоской защиты и экспериментальные
данные [19]. На рис. 12.18 представлена расчетная зависимость среднесуточной
поглощенной дозы на орбитах ОС «Мир» и МКС от эффективной толщины
плоской защиты и экспериментальные данные [19].
Для оценки эффективности экранов пассивной радиационной защиты ис-
пользуется функция экранированности точки внутри защищаемого объема —
Глава 12. Компоновка систем обеспечения безопасности ПКА
717
Рис. 12.17. Расчетные зависи-
мости мощности поглощенной
дозы от эффективной толщи-
ны плоской защиты (кривые)
и экспериментальные данные
для КА «Экспресс АЗ» на ГСО
(точки) для ограниченных ин-
тервалов времени развития
событий СПС (7 — 3-6 UT
9.10.2000; 2 —0-3 UT 15.07.2000;
5-0-3 UT 25.09.2001)
Рис. 12.18. Расчетные зависимо-
сти среднесуточной поглощен-
ной дозы на орбитах ОС «Мир»
(кривая 7) и МКС (кривая 2) от
эффективной толщины плоской
защиты и эксперименталь-
ные данные дозиметров Р-16
(точки) для СПС в ноябре 2000 г.
(точки 7)1(1) и 7)2(1) — пока-
зания дозиметров № 1 и № 2
на ОС «Мир» соответственно;
точки 7)1(2) и 7)2(2) — пока-
зания дозиметров № 1 и № 2
на МКС соответственно)
функция плотности вероятности встретить в любом направлении из рассма-
триваемой точки толщину защиты в интервале от 5 до 5 + dS. Расчет функций
экранированное™ в исследуемой компоновке ПКА проводится в соответствии
с ГОСТ 25645.204—83 «Безопасность радиационная экипажа космического
аппарата в космическом полете. Методика расчета экранированное™ точек
внутри фантома» для заданного множества точек.
718 Часть III. Компоновка систем пилотируемого космического аппарата
Обитаемые космические аппараты следует компоновать таким образом,
чтобы основная масса бортовой аппаратуры и грузов (конструкция, приборы,
запасы топлива и продовольствия) с целью ослабления излучения была раз-
мещена вокруг зон обитания экипажа. Необходимо предусматривать в кабине
зону с усиленной радиационной защитой, которую экипаж может использовать
в качестве радиационного убежища при ухудшении радиационной обстановки.
При проведении компоновки строится радиационно-геометрическая
модель ПКА в виде набора геометрических фигур, заполненных вещества-
ми, имеющими разные физико-технические характеристики, которые пере-
считываются на эквивалентные массовые толщины радиационной защиты.
Ниже приведены эквивалентные толщины защиты (г/см2) для различных ПКА:
Командный модуль Apollo...7,5
Space Shuttle.............До 10-11
МКС.......................До 15
Лунный модуль Apollo......1,5
Скафандр космонавта.......0,25
Дозы полученного облучения существенно зависят от толщины защитных
экранов неравномерно распределены как в теле человека, так и во времени.
Приведенные ниже примеры дают представление о значениях индивидуаль-
ной дозы радиации, получаемой членом экипажа в различных условиях [20].
Важными параметрами являются экранирующие свойства материалов,
используемых в конструкции ПКА. Например, корпус корабля Apollo, сде-
ланный в основном из алюминия, нержавеющей стали и фенольно-эпоксид-
ных смол, создает экран удельной массой 7,5 г/см2. Такого экрана достаточно
для защиты трех космонавтов от обычной солнечной радиации. При внеш-
нем излучении протонами с энергией 40 МэВ, потоком 107 частиц/(м2-с),
в командном модуле Apollo астронавт получает эквивалентную дозу ради-
ации для кожи — 0,009 Зв/ч, для внутренних органов на глубине 1 см —
0,004 Зв/ч, для внутренних органов на глубине 10 см — 0 Зв/ч. При том же
внешнем излучении в лунном модуле Apollo, изготовленном только из алюми-
ниевых сплавов, астронавт получает эквивалентную дозу радиации для кожи —
0,21 Зв/ч, для внутренних органов на глубине 1 см — 0,10 Зв/ч, для внутрен-
них органов на глубине 10 см — 0 Зв/ч. При таком же внешнем излучении,
находясь только в скафандре, астронавт получает эквивалентную дозу ра-
диации для кожи — 0,40 Зв/ч, для внутренних органов на глубине 1 см —
0,20 Зв/ч, для внутренних органов на глубине 10 см — 0 Зв/ч.
Таким образом, имеющий тепловую защиту спасаемый аппарат ТКА
можно использовать в качестве радиационного убежища. Самая мощная из
зарегистрированных до сих пор солнечных вспышек создала бы для космо-
навтов внутри этого корабля дозу облучения всего лишь в 70 мрад.
В качестве примера на рис. 12.19 [19] представлена радиационно-геоме-
трическая модель базового блока ОС «Мир». Результаты расчетов уровней ра-
диации в отдельных отсеках ОС, проведенных по В.П. Демину с соавторстве и
В.Г. Митрипасу с соавторстве [19], приведены в табл. 12.14.
Глава 12. Компоновка систем обеспечения безопасности ПКА
719
Рис. 12.19. Распределение экранирующей массы в базовом блоке ОС «Мир»:
Р-16 — место размещения штатного дозиметра; СБД — салон большого диаметра;
СМД — салон малого диаметра; ЦПУ — центральный пульт управления; ПХО —
переходной отсек
Таблица 12.14
Уровни радиации в отсеках ОС «Мир» (расчетные)
Модель В.П. Демин с соавторстве, 1994 В.Г. Митрикас с соавторстве, 1994
Центральный пульт управления (ЦПУ) 1,6 0,64
Салон малого диаметра (СМД) 3,37 0,23
Салон большого диаметра (СБД) 0,48-0,82 0,7-0,89
Каюта командира корабля (ККК) 1,86-2,67 1,6-2,25
Каюта бортинженера (КБИ) 1,97-2,67 1,17-2,26
Пример радиационно-геометрической модели научно-энергетического
модуля МКС, состоящего из герметичного и негерметичного отсеков, показан
на рис. 12.20, а [13]. Начало системы координат О модели находится на пере-
сечении оси модуля с плоскостью шпангоута 4. Ось ОХ направлена в сторону
негерметичного отсека, ось OY — в зенит, ось OZдополняет выбранные оси до
правой тройки осей координат. Цилиндрическая часть герметичного отсека
расположена в диапазоне координат модели —600<АХ— 50. Распределения
средних толщин защиты вдоль оси модуля в направлении осей ОУи OZc шагом
по оси ОХ в 1 см приведены на рис. 12.20, б, в. Сравнение радиационно-гео-
метрической модели с компоновкой модуля (см. рис. 5.3) показывает, что
из пяти цилиндрических секций герметичного отсека наименьшей защитой
обладает первая, где расположены каюты экипажа. В табл. 12.15 приведены
720
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 12.20. Радиационно-геометрическая модель научно-энергетического модуля
(1—5 — номера секций, размеры даны в см) (а) и распределение средних толщин за-
щиты вдоль оси модуля в направлении оси OY (б) и распределение средних толщин
защиты вдоль оси модуля в направлении оси OZ (в)
Глава 12. Компоновка систем обеспечения безопасности ПКА
721
Таблица 12.15
Суммарные дозы радиации в секциях герметичного отсека научно-энергетического модуля
Источник (доза) Высота орбиты, км Секция
1 2 3 4 5
Квазистационар- ные РПЗ и ГКИ (мкЗв/сут) 360 1087,9 1014,6 973,8 992,3 1037,2
460 1618,6 1471,1 1389,0 1431,0 1541,0
Наиболее небла- гоприятное СПС (мкЗв) 400 48 747,4 30 005,5 21 222,7 23 255,6 26 201,6
460 49 847,3 30 721,1 21 748,2 23 819,2 26 832,5
суммарные дозы радиации, полученные экипажем в секциях герметичного
отсека от различных источников [13]. Видно, что наиболее защищенной яв-
ляется секция 5, где установлены служебные системы. Способы дополнитель-
ной защиты кают необходимо рассматривать для случая формирования доз
от протонов наиболее неблагоприятного СПС. В работе [13] рекомендуется
создать дополнительную защиту кают путем заливки оболочки секции 1 мо-
дуля парафином (масса 170,4 кг), что при незначительных дополнительных
затратах масс позволит снизить дозы облучения экипажа на 7...10 %.
В конструкциях ПКА, предназначенных для длительных полетов в радиа-
ционных поясах Земли (высокие эллиптические и геостационарные орбиты),
необходимо предусматривать специальные меры защиты: введение в конструк-
цию специальных экранов и применение локальной защиты критических
органов человека. Толщина защиты радиационного убежища на космическом
корабле, предназначенном для длительных полетов, зависит от программы и
длительности полета, фазы цикла солнечной активности, вклада в суммарную
дозу излучения других космических источников. В табл. 12.16 приведена тол-
щина радиационной защиты для ПКА, совершающего межпланетный перелет,
при значении риска облучения 0,01 и площади поверхности радиационного
убежища 25 м2 при различной солнечной активности.
При более длительных полетах толщина защиты радиационного убежища
резко возрастает, так как доза ГКИ приближается к дозе оправданного риска
и требуется или большая кратность ослабления дозы СКИ, или защита оби-
таемых отсеков от ГКИ [12].
Таблица 12.16.
Толщина радиационной защиты при межпланетном перелете
Уровень солнечной активности Время полета, сут Толщина защиты, г/см2
Максимум 200 1000 12 30
Минимум 200 650 5 30
722 Часть III. Компоновка систем пилотируемого космического аппарата
Однако опасность представляют не только первичная радиация, но и
вторичное излучение, возникающее при прохождении частицами экранов. На
рис. 12.21 показано, какие дозы (в относительных единицах) получат кос-
монавты внутри ПКА при облучении ионизирующими частицами несколь-
ких видов (первичные протоны, вторичные протоны и нейтроны) в случае
использования защитного алюминиевого экрана различной толщины [21].
Протоны космического
Удельная плотность
экрана из алюминия, г/см2
Рис. 12.21. Захваченные протоны из состава космических лучей
(а) и солнечные протоны (б) в РПЗ вызывают в ПКА вторичную
радиацию, дозы которой зависят от толщины алюминиевой об-
шивки отсеков:
-------первичные протоны;--------вторичные протоны;--------
вторичные нейтроны
Удельная плотность
экрана из алюминия, г/см2
б
Увеличение массы экранов не решает проблему, так как при прохождении
электронов высоких энергий через металлы генерируется рентгеновское излу-
чение (явление, известное как «тормозное излучение»). Когда корабль прохо-
дит через радиационные пояса, в нем возникают мощные потоки вторичной
радиации. Другого рода вторичная радиация (потоки мезонов, каскадных и
испарительных нейтронов, а также протонов отдачи) возникает в результате
ядерных взаимодействий в экранирующем материале. Все эти виды вторичной
радиации представляют потенциальную опасность для космонавтов. Если эта
опасность велика, для защиты от вторичной радиации в ПКА необходимо
использовать дополнительные внутренние экраны.
Глава 12. Компоновка систем обеспечения безопасности ПКА
723
12.5.5. Перспективные способы радиационной защиты
Необходимость увеличения срока активной работы КА и обеспечения
безопасности при межпланетных полетах ставит вопрос о развитии новых
способов защиты КА от радиации. Разрабатываются активные и комбини-
рованные способы защиты, совершенствуются материалы, используемые для
создания защитных экранов.
К активным способам можно отнести физические методы, обеспечиваю-
щие отклонение заряженных частиц от обитаемого отсека ПКА. Это можно
обеспечить, создав вокруг корабля электромагнитное или электростатическое
поле. Эксперимент с проведением электростатической защиты проводился на
КА «Бион» («Космос-605») и позволил сделать вывод о возможности созда-
ния подобной радиационной защиты. Для ее реализации необходимо иметь
материалы, из которых можно было бы создать сверхпроводящие магниты
с обмотками из специальных нанопроводов. Проблема заключается в том,
что еще неизвестно, к каким последствиям приведет пребывание человека и
аппаратуры в магнитном поле.
Существует несколько направлений разработки новых конструкций за-
щитных экранов.
Для уменьшения потока вторичной радиации предлагается использовать
для экрана композиционный материал, состоящий из элементов с малыми
значениями атомного заряда. Это водородсодержащие материалы, к которым
относятся большинство полимеров, а также материалы, содержащие бор или
нитрид бора. При взаимодействии тяжелых ядер ГКИ с легкими элементами
первичные ядра интенсивно распадаются на фрагменты с малым пробегом в ма-
териале экрана, вследствие чего радиационные потоки за экраном значительно
ослабляются. На рис. 12.22 представлено изменение удельной эквивалентной
дозы в зависимости от толщины и материала экрана [16]. Лунный реголит при-
веден для сравнения как материал, пригодный для строительства базы на Луне.
На рис. 12.23 приведено отношение прошедшего через экран потока энергии
Р к полному потоку энергии Ро в зависимости от толщины экрана. Как видно
из графиков, максимальная защита обеспечивается экраном из полиэтилена.
Рис. 12.22. Зависимость удельной
эквивалентной дозы, обусловлен-
ной частицами ГКИ, от толщины
и материала защитного экрана:
1 — алюминий; 2 — лунный реголит;
3 — вода; 4 — полиэтилен
724
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 12.23. Зависимость отношения прошедшего через экран потока энергии Р
к полному потокуРо от удельной толщины (а) и толщины экрана (6) из разных ма-
териалов: / — полиэтилен с добавлением водорода; 2 — полиэтилен с добавлением нитрида
бора; 3 — алюминий
В качестве экрана в проекте межпланетного корабля при полете на Марс
используются навесные топливные баки [22]. Компоновочная схема баков-
экранов для такого ПКА показана на рис. 12.24. Баки являются отдельными
модулями, которые присоединяются к обитаемому модулю через стыковоч-
ные агрегаты типа АПАС. Недостатком подобных экранов будет снижение
эффективности защиты по мере выработки топлива.
Рис. 12.24. Компоновочная схема
межпланетного КА с навесными
водяными баками
На американском модуле МКС предполагалось разместить в каюте «во-
дяное одеяло» — спальный мешок, у которого роль наполнителя выполняет
слой воды толщиной от 5 до 15 см (рис. 12.25, а). В каюте служебного модуля
PC МКС испытывались полиэтиленовые плиты, которые можно использовать
при отделке для защиты от всплесков космической радиации. Расположение
полиэтиленовых плит в каюте показано на рис. 12.25, б [11].
Глава 12. Компоновка систем обеспечения безопасности ПКА
725
а б
Рис. 12.25. Средства защиты астронавта в каюте:
а — «водяное одеяло» (проект НАСА); б — полиэтиленовые плиты
радиационной защиты
Более эффективным, чем использование в качестве экранов емкостей с
водой, оказывается применение водосодержащих материалов. В работах ИМБП
РАН рассматривается вариант защиты экипажа от радиационного излучения с
помощью панелей экранов из водосодержащих материалов, роль которых игра-
ют средства личной гигиены. Влажная салфетка в упаковке габаритами 7,0 х
х 7,0 х 1,5 см и массой 95 г имеет плотность 1,3 г/см3, а удельная масса четырех
слоев упаковок салфеток составляет 7,8 г/см2. Влажное полотенце в упаков-
ке габаритами 13,5 х 9,0 х 2,0 см и массой 220 г имеет плотность 0,9 г/см3, а
удельная масса четырех слоев упаковок составляет 7,2 г/см2. Закрепленные
на стенках каюты в четыре слоя упаковки оказались эффективным экраном.
На рис. 12.26 показана схема размещения такого экрана в каюте экипажа СМ
на PC МКС при проведении космического эксперимента «Матрешка-Р» [И].
Ожидаемое снижение дозы в результате использования экрана составляет
около 15 %. Преимущество такого экрана состоит в том, что одновременно он слу-
жит удобным складом для средств личной гигиены. В массу экрана (около 100 кг)
фактически включена масса запаса салфеток и полотенец.
В настоящее время интенсивно ведутся работы по изысканию фармако-
логических средств защиты человека от облучения. Однако применение этих
препаратов в силу ряда причин не дает эффективных результатов. К тому же с
помощью фармакологических средств можно обеспечить человеку защиту от
рентгеновских лучей и гамма-излучения, но не от сильного ионизирующего
излучения альфа-частиц, протонов и быстрых нейтронов.
726
Часть III. Компоновка систем пилотируемого космического аппарата
а б в
Рис. 12.26. Экран «шторка защитная» для размещения упаковок со средствами
личной гигиены:
а — схема экрана; б — схема размещения экрана в каюте; в — крепление упаковок в укладке;
г — габаритный чертеж экрана; 1 — экран; 2 — средняя откидная секция экрана; 3 — иллю-
минатор; 4 — каюта; 5 — текстильная петля
г
Глава 12. Компоновка систем обеспечения безопасности ПКА
727
12.6. Компоновка систем безопасности транспортных ПКА
Космический полет транспортного ПКА можно разделить на три этапа:
выведение на орбиту, орбитальный полет, спуск с орбиты и посадка на по-
верхность Земли. На каждом из них существует вероятность возникновения
опасных ситуаций и причинения значительного ущерба. Следовательно, ком-
поновку ТКА нужно проводить с учетом минимизации возможных рисков.
Угроза аварийной разгерметизации кабины возникает на этапах полета
тогда, когда ТКА совершает динамические операции и подвергается повы-
шенным нагрузкам: при выведении на орбиту, при операциях стыковки и
расстыковки с ОС, при посадке на Землю. Аварийная разгерметизация стала
причиной гибели экипажа ТКА «Союз-11».
Для того чтобы обеспечить жизнедеятельность и работоспособность членов
экипажа в случае разгерметизации ТКА, применяются спасательные скафан-
дры мягкого типа, представляющие собой многослойный комбинезон со встро-
енным мягким шлемом, мягкой обувью и съемными перчатками. В россий-
ских ТКА типа «Союз» предусмотрены спасательные скафандры «Сокол» [23]
(рис. 12.27). Они выпускаются нескольких размеров для людей ростом от
161 до 182 см с обхватом груди от 96 до 108 см (размеры 48—54) с учетом до-
полнительной индивидуальной подгонки. Масса скафандра составляет 9... 10 кг.
Для функционирования спасательного скафандра «Сокол» на борту
ТКА должны быть размещены элемен-
ты СОЖ, схема которой приведена на
рис. 12.28 [23]. Скафандр соединяется с
бортовой СОЖ шлангами и электрически-
ми кабелями. Наддув скафандра, дыхание
и частичное охлаждение космонавта в раз-
герметизированном ТКА обеспечивается
путем подачи в шлем кислорода (или га-
зовой смеси содержащей 40 % кислорода
и 60 % азота). Допускается пребывание в
скафандре при отсутствии вентиляции: с
открытым гермошлемом и снятыми пер-
чатками — до 1 ч (при давлении в ТКА
760±40 мм рт. ст. (5,7±0,3 МПа) и темпе-
ратуре +25 °C), с закрытым гермошлемом,
надетыми перчатками и при открытом регу-
ляторе давления — до 15 мин.
Рис. 12.27. Спасательный скафандр «Сокол КВ-2»:
1 — оболочка скафандра; 2 — перчатки; 3 — зеркало;
4 — разъем шлема; 5 — шлемофон; 6 — поперечная
лямка с карабином; 7 — регулятор давления; 8 —
передние молнии; 9 — манометр; 10 — передняя
лямка подтяга (регулировки) корпуса; 11 — венти-
ляционный шланг; 12 — шланг подачи кислорода;
13 — карманы; 14 — электроразъемы радиосвязи и
медицинских датчиков
728
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 12.28. Схема бортовой СОЖ скафандра «Сокол КВ-2» для ТКА «Союз-ТМ»:
1 — запас кислорода в баллонах; 2 — обратный клапан; 3 — сброс кислорода в атмосферу
перед приземлением ТКА; 4 — электроклапан; 5, 6 — вентили; 7, 10, 12 — управляемые
электроклапаны; 8 — кислородный баллон; 9, 13 — редукторы; 11 — блок барореле; 14 —
вентилятор; 15 — блок БР-1М; 16 — спасательный скафандр; 17 — регулятор давления в
скафандре; 18 — групповой ввод шлангов; 19 — система вентиляции скафандра; 20 — ко
второму и третьему спасательным скафандрам
Угроза воздействия повышенных перегрузок возникает на участке выведе-
ния и посадки ТКА. При касании поверхности Земли спускаемым аппаратом
в процессе посадки возникает также угроза ударной травмы. Для того чтобы
обеспечить переносимость космонавтом длительно действующих ускорений
при взлете, штатном или аварийном входе спускаемого аппарата в плотные
слои атмосферы, используется амортизационное кресло, которое является
основным рабочим местом космонавта в ТКА. Использование в кресле инди-
видуально моделированного ложемента со специальными свойствами позво-
лило существенно повысить способность человека переносить действующие
на него перегрузки. Ложемент позволяет:
• сформировать оптимально компактную позу космонавта с учетом ин-
терьера кабины и расположения органов управления;
• относительно равномерно распределить по большой поверхности ста-
тическое и динамическое давление опоры на тело при действии перегрузок;
• ограничить изменение формы тела при действии перегрузок при раз-
личных скоростях их нарастания;
• снизить действующие на космонавта перегрузки и скорости их нараста-
ния путем деформации ложемента.
В российских ТКА типа «Союз» используется амортизационное кресло
«Казбек» (рис. 12.29). Габариты кресла — «Казбек-УМ» 770 х 650 х 25 мм.
Масса кресла (без учета массы ложемента) — не более 23 кг, масса ложемента —
Глава 12. Компоновка систем обеспечения безопасности ПКА
729
Рис. 12.29. Амортизационное кресло «Казбек»:
а — конструкция кресла; б — поза космонавта в кресле: 1 — кожух амортизатора; 2 — жгут
связи; 3 — поворотная ручка; 4 — амортизатор; 5 — каркас; 6 — кронштейн с датчиками
перегрузки; 7 — ложемент; 8 — жгут для измерения физиологических параметров
не более 7 кг. Кресло обеспечивает переносимость перегрузок до 30 g и амор-
тизацию посадочного удара при скорости соударения до 8 м/с. При штатной
работе кресло занимает два положения: нижнее, оптимальное для перенесе-
ния перегрузок выведения и спуска, и верхнее, необходимое для амортизации
посадочного удара. Перевод кресла в верхнее положение выполняется амор-
тизатором-подъемником при срабатывании его пиротехнического заряда от
бортовой команды. Рабочий ход амортизатора 250 мм. Регулирование амор-
тизатора-подъемника в зависимости от конкретной массы системы кресло —
скафандр — оператор (т. е. установка одного из четырех режимов нагружения
амортизатора) проводится на этапе предполетной подготовки [24, 25].
При компоновке амортизационных кресел в спускаемых аппаратах
капсульного типа необходимо учесть их размещение относительно пульта
управления, а компоновку системы амортизации проводить с учетом рабочего
хода амортизаторов. Компоновка амортизационного кресла «Казбек-УМ» в
спускаемом аппарате ТКА «Союз-ТМА» приведена на рис. 12.30 [26], в ТКА
Apollo — на рис. 12.31 [27].
Помимо амортизационных кресел для обеспечения безопасного уровня пе-
регрузок при посадке используются двигатели мягкой посадки, (см. рис. 12.30,
поз. 2) предназначенные для гашения остаточных линейных и угловых ско-
ростей возвращаемого аппарата до нулевых значений. Компоновка этих
двигателей на ТКА «Союз-ТМА» представлена на рис. 12.30. Для тяжелых
многоразовых возвращаемых аппаратов дополнительно могут использоваться
посадочные устройства, в состав которых могут входить реактивные двигате-
ли и амортизированные посадочные опоры (рис. 12.32, а) [28] или надувные
баллоны (рис. 12.32, б) [29]. Эти устройства выполняют те же функции, что
и шасси, применяемые на МТКА, выполняющих посадку по-самолетному.
Угроза аварии транспортной космической системы на атмосферном участ-
ке траектории выведения требует применения на ТКА системы аварийного
730
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 12.30. Компоновка амортизационного
кресла «Казбек-УМ» в ТКА «Союз-ТМА»:
1 — спецвычислитель; 2 — секционированные
двигатели мягкой посадки; 3 — блок измерения
линейных ускорений; 4 — амортизатор-подъемник
регулируемый; 5 — пульт «Нептун-МЭ»; 6 — ручка
управления движением; 7 — амортизационное
кресло «Казбек-УМ»; 8 — холодильно-сушильный
агрегат; 9 — моноблок «Рассвет-М»; 10 — приборы
системы записи и измерений
Рис. 12.31. Компоновка амортизационных кресел в ТКА Apollo:
1 — приборная доска; 2 — ручка выходного люка; 3 — туннель для перехода в лунный модуль
Рис. 12.32. Посадочные устройства многоразовых возвращаемых
аппаратов:
а — посадочное устройство ТКА «Федерация»; б — посадочное устройство
ТКА «Starliner»; 1 — корпус возвращаемого аппарата; 2 — сопла посадочной
тведотопливной двигательной установки; 3 — опора посадочного устройства;
4 — надувные амортизирующие баллоны
Глава 12. Компоновка систем обеспечения безопасности ПКА
731
спасения (САС). Выбор САС определяется типом спасаемой в аварийной
ситуации части ТКА, конструктивно-компоновочными особенностями отде-
ляемой при аварии части ТКА, типом средств ее отделения и увода, а также
способом приземления членов экипажа и спасаемой части ТКА.
По первому признаку схемы аварийного спасения делятся на три основ-
ных типа: спасение экипажа в катапультируемых креслах, спасение отсека
экипажа и спасение ТКА в целом.
Использование катапультируемых кресел целесообразно при малом числе
членов экипажа или в случае невозможности спасти отдельный отсек ТКА.
Сравнительная простота и высокая отработанность катапультируемых кресел
в авиации являются очевидными преимуществами этого метода аварийного
спасения, однако для его эффективного применения в аварийных ситуациях
на участке выведения требуется решение ряда сложных задач, в том числе:
• выполнение увода катапультируемого кресла на большое расстояние от
ТКС при авариях вблизи старта из-за наличия зоны высокого избыточного
давления и больших тепловых потоков при взрыве и пожаре ракеты-носителя,
для чего ракетный твердотопливный разгонный блок кресла, срабатывающий
при аварии до контакта подъема, должен обеспечить дальность полета 500 м
при высоте в вершине траектории 300 м;
• защиту экипажа от теплового и акустического воздействия струй дви-
гательной установки ракеты-носителя при катапультировании в зоне высоких
аэродинамических нагрузок (время полета — от 40 до 80 с);
• обеспечение характеристик катапультируемых кресел по предельной
максимальной высоте и скорости применения (высота 35 км при М = 3,5),
превышающих аналогичные параметры авиационных кресел;
• создание системы управления, позволяющей регулировать высоту тра-
ектории кресла в случае падения ракеты-носителя после старта;
В состав катапультного устройства аварийного спасения входят:
• кресло с космонавтом в скафандре, запасом кислорода и продовольствия;
• вмонтированные в кресло ракетные двигатели твердого топлива;
• пиротехнические средства отделения крышки аварийного люка;
• система парашютов для стабилизации полета, отделения кресла, мяг-
кой посадки;
• система аварийного срабатывания;
• направляющие поверхности для движения кресла.
Система катапультирования пилотов была разработана для МТКА «Буран».
Катапультирование на старте и при посадке выполнялось в специально раз-
работанных скафандрах «Стриж» в открытых катапультных креслах К-36РБ,
разработанных в КБ «Звезда». Кресло, показанное на рис. 12.33, позволяет
катапультировать экипаж в защитных костюмах на высотах 22...25 км при
скоростях М = 2,2...2,5, а также при взлете и посадке [30].
Спасательный скафандр «Стриж» представляет собой скафандр мягкой
конструкции со встроенным шлемом, изготовленным из поликарбоната.
Оболочка двухслойная: наружная — силовая, внутренняя — герметичная.
На оболочке закреплен спасательный надувной ворот и смонтирована под-
весная-привязная система для фиксации в катапультном кресле и спуска на
732
Часть III. Компоновка систем пилотируемого космического аппарата
а б
Рис. 12.33. Катапультное кресло К-36РБ:
а — общий вид; б — космонавт в кресле в спасательном скафандре «Стриж»
парашюте. Пилот МТКА «Буран» размещался в катапультном кресле К-36РБ
и присоединялся к отрывным разъемам системы жизнеобеспечения, электро-
питания и связи, установленным на кресле. Рядом с креслом, на полу каби-
ны МТКА «Буран», размещался блок регенерационной системы, в котором
находились агрегаты системы жизнеобеспечения [31].
Компоновка катапультных кресел в кабине «Бурана» представлена на
рис. 12.34 [31]. Катапультное кресло обеспечивало удаление экипажа на рас-
стояние 500 м за 9... 10 с. Оно оснащено энергетической установкой, состоящей
из двухтрубного стреляющего механизма и двух ракетных двигателей тягой
600 и 3000 кгс, а также системой управления, обеспечивающей формирование
оптимальной траектории. Возможные траектории катапультирования пока-
заны на рис. 12.35 [31].
При создании многоместных кос-
мических кораблей в случае аварий-
ной ситуации более эффективный
способ — спасение экипажа вместе с
частью космического корабля мето-
дом отделения головного блока раке-
ты-носителя. После отделения и увода
Рис. 12.34. Установка катапультных
кресел в командном отсеке МТКА
«Буран»:
/ — линейное разделительное устройство;
2—аварийный люк; 3 — кронштейн толкателя;
4 — толкатель; 5— замки временной задерж-
ки; 6 — направляющие кресла; 7 — ката-
пультное кресло
Глава 12. Компоновка систем обеспечения безопасности ПКА
733
Рис. 12.35. Возможные траектории катапультирования экипажа
МТКА «Буран»
отделяемого головного блока (ОГБ) на безопасное расстояние от него отде-
ляется спасаемый отсек ТКА (спускаемый аппарат, носовая часть или отсек
экипажа), который совершает автономный баллистический полет, управляе-
мый спуск и приземление. По этой схеме разработаны средства аварийного
спасения экипажей ТКА капсульного типа «Союз», Apollo, Dragon, Orion и др.
Компоновка и состав ОГБ определяются компоновочной схемой ТКА,
расположением спасаемого отсека, наличием головного обтекателя и т. д.
При верхнем расположении спасаемого отсека и отсутствии головного обте-
кателя ОГБ включает только отсек и ДУ аварийного увода. Подобная схема
использована, например, на ТКА Apollo и Orion.
Отделяемый головной блок ТКА Apollo (рис. 12.36) состоит из спускаемого
аппарата (СА) и отсека ДУ аварийного увода, соединенных фермой [12]. Для
защиты СА от воздействия струй ДУ предусмотрен теплозащитный экран. В от-
секе ДУ размещены три твердотопливных двигателя (основной, разделительный
12 070
Рис. 12.36. Отделяемый головной блок ТКА Apollo:
1 — балансировочный груз; 2 — дестабилизаторы; 3 — ферма; 4 — СА;
5 — теплозащитный экран; 6 — двигательная установка аварийного
увода; 7 — приборы автоматики средств аварийного спасения
734
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 12.37. Отделяемый головной блок
ТКА «Союз»:
1 — блистер оптического визира; 2 — спу-
скаемый аппарат; 3 — бытовой отсек; 4 —
верхняя опора; 5 — двигатель САС на го-
ловном обтекателе; 6 — верхний конус ГО;
7 — центральный двигатель; 8 — двигатель
разделения; 9 — управляющие двигатели;
10 — балансировочный груз; 11 — двигатель
сброса створок головного бтекателя; 12 —
уводимая часть головного обтекателя; 13 —
ложемент; 14 — решетчатый стабилизатор
и управляющий), приборы автоматики
САС, раскрывающиеся дестабилизаторы
и балансировочный груз, обеспечиваю-
щие необходимые аэродинамические
характеристики ОГБ. После раскрытия
дестабилизаторов происходит разворот
ОГБ на 180°, при этом СА разворачи-
вается лобовым щитом вперед.
Компоновочная схема ОГБ услож-
няется, когда ТКА защищен головным
обтекателем, а выше спасаемого отсека
расположены другие отсеки. Такая ком-
поновочная схема применена на ТКА
типа «Союз». Здесь ОГБ (рис. 12.37)
включает СА, бытовой отсек, часть
головного обтекателя (ГО) и ДУ САС.
Головной обтекатель является несу-
щим корпусом ОГБ и служит для раз-
мещения основных агрегатов средств
аварийного спасения. Силовая связь
между ГО и отсеками КА обеспечи-
вается посредством трех ложементов,
опорные площадки которых размеще-
ны в двух поясах: верхний расположен
в районе стыка между СА и бытовым
отсеком. Конструкция опорных пло-
щадок позволяет сбросить створки ГО
после нормального прохождения ат-
мосферного участка траектории или
после отделения СА от ОГБ в процес-
се аварийного спасения. На верхнем
конусе ГО размещены приборы авто-
матики средств аварийного спасения,
а на нижнем торцевом шпангоуте —
четыре раскрываемых решетчатых ста-
билизатора, уложенные при нормальном
полете вдоль образующей ГО (в случае
аварии они раскрываются и фиксируют-
ся в раскрытом положении). Уводимая
часть ГО связана пиромеханизмами с
нижней частью обтекателя, остающейся
в случае аварии на PH.
Схема «спасение отсека экипажа»
наряду с применением специальных
средств отделения и увода ОГБ, а также
обеспечения автономного полета ОГБ
Глава 12. Компоновка систем обеспечения безопасности ПКА
735
требует создания специальных программ функционирования бортовых систем
КА (системы управления спуском, комплекса средств посадки, системы разде-
ления и т. д.), обеспечивающих автономный полет и посадку СА в аварийных
условиях. После выхода ОГБ за пределы опасной зоны от него отделяется СА,
а затем начинается этап автономного полета СА, для которого необходимо обе-
спечить запас высоты для разворота СА и последующей стабилизации, а также
для введения парашютной системы и подготовки к посадке.
Для аварийного отделения и увода ОГБ необходимы специальные двигатели
с тягой, достаточной для быстрого его выхода из опасной зоны и преодоления
аэродинамического сопротивления в случае аварии в зоне максимальных ско-
ростных напоров. ДУ системы аварийного спасения ТКА «Союз» (рис. 12.38),
имеющая массу 2800 кг, состоит из основного двигателя отделения и увода ОГБ,
разделительного двигателя сброса ДУ после нормального прохождения атмосфер-
ного участка или отделения СА от ОГБ в процессе аварийного спасения и управ-
ляющих двигателей формирования заданной траектории движения ОГБ [12].
Рис. 12.38. Двигательная уста-
новка системы аварийного спа-
сения КК «Союз»:
1 — балансировочный груз; 2— соп-
ла двигателя разделения; 3 — корпус
двигателя разделения; 4 — управля-
ющий двигатель; 5 — сопла основ-
ного двигателя; 6 — корпус основ-
ного двигателя
На современных ракетно-космических системах параметры твердотоплив-
ных двигателей, входящих в состав ДУ САС, в основном зависят от массовых
характеристик ОГБ. Они составляют:
• для основного двигателя тяга 50... 150 тс, время работы т = 2...6 с;
• для разделительного двигателя тяга 6... 18 тс, т < 1 с;
• для управляющего двигателя тяга 0,5...2 тс, т = 0,5... 1 с.
Основные требования к компоновке САС:
• двигатели САС должны быть установлены в головной части обтекателя
ракеты - носителя;
• сопла двигателей должны быть расположены таким образом, чтобы
при их срабатывании струя газов, истекающая из сопел, не была направлена
на конструкцию ракеты-носителя (обтекателя, переходного отсека и т. д.).
Следует отметить, что двигатели САС ОГБ являются по определению
редко используемым элементом. Фактически это балласт для ракеты-носи-
теля, хотя двигатели САС при штатном выведении могут использоваться для
создания дополнительного импульса, что позволяет увеличить массу ПН для
ТКА. Подобная компоновочная схема САС актуальна для многоразовых ТКА,
поскольку спасение их целиком требует значительных затрат энергии. Проекты
САС такого типа показаны на рис. 12.39. В проекте ТКА «Клипер» на пере-
ходном отсеке установлены твердотопливные двигатели САС, выполняющие в
736
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 12.39. Компоновочные
схемы САС толкающего типа:
а — САС ТКА «Клипер»; б — САС
ТКА Dragon 2; I — ТКА «Клипер»;
II — переходный отсек с двигате-
лями САС; III — возвращаемый
аппарат ТКА Dragon 2; IV — негер-
метичный грузовой отсек ТКА Dragon;
1 — откидной решетчатый стабили-
затор; 2 — двигатель довыведения,
выполняющий функции САС; 3 —
двигатель мягкой посадки, выполня-
ющий функции САС
Таблица 12.17
Характеристики катапультирующего устройства и системы аварийного спасения с отделяемой
головной частью
Катапультирующее устройство Система аварийного спасения
Отказ одного из устройств не уменьша- ет шанс на выживание остальных членов экипажа Отказ системы приведет к неминуемой гибели всего экипажа КА
Может использоваться как при взлете, так и при посадке аппарата (при отказе штатных парашютных систем КА) Обеспечивает спасение только на начальном участке полета (с момента старта до отделения ДУ САС)
Не предоставляет защиты от механиче- ских, термических, акустических нагрузок при эвакуации, а также от набегающего потока при больших скоростях ракеты-носителя Обеспечивает надежную защиту от всех поражающих факторов, возникающих при аварии ракеты-носителя
Примерное время выведения экипажа из опасной зоны около 1 с Примерное время выведения экипажа из опасной зоны около 2 с
Перегрузки до 24 g в течение 0,27 с Перегрузки до 15 g в течение 2 с
Располагается внутри СА, уменьшая полезный объем КА Располагается над КА, увеличивая нагрузку на головной обтекатель
Масса кресла с космонавтом 150—200 кг Масса двигательной установки 2—2,5 т
Спасает только экипаж Спасает экипаж и часть дорогостоящего оборудования
Относительная дешевизна и простота установки Дорогостоящее оборудование. Установка осложняется взрывоопасным твердым топливом ДУ САС
Может использоваться повторно После сбрасывания на первом этапе полета приходит в негодность
Глава 12. Компоновка систем обеспечения безопасности ПКА
737
штатном режиме функции ДУ довыведения на опорную орбиту [32]. В проекте
пилотируемого ТКА Dragon 2 [33] функцию ДУ САС выполняют двигатели,
обеспечивающие в штатном режиме мягкую реактивную посадку.
Сравнение преимуществ и недостатков схем спасения, которые могут быть
использованы при выборе САС ТКА, приведены в табл. 12.17 [34].
12.7. Компоновка систем безопасности на орбитальном участке
полета
Решение задачи обеспечения безопасности экипажа при возникновении
нештатной ситуации во время орбитального полета зависит от степени опас-
ности возникшей нештатной ситуации. При возникновении критической
или далекой от критической ситуации ее парирование осуществляется путем
дублирования бортовых систем, которые исходя из анализа безопасности,
имеют наименьшую надежность.
В табл. 12.18 [35, 36] приведены возможные варианты НшС и причины
их возникновения, возможные медицинские последствия для экипажа и пе-
речень аварийных процедур.
Источникам опасности на орбитальном участке полета является ВКД.
К основным опасностям при ее проведении относят [37]:
• изменение окружающей среды в обитаемом космическом объекте или в
скафандре, используемом при ВКД (дым, бактериальное загрязнение, пыль,
нарушение состава атмосферы, повышенная влажность, отклонение от нормы
давления и температуры и т. п.);
• возможность возгорания и взрыва (вследствие короткого замыкания в
электрической цепи, пробоя диэлектрика из-за накопления электростатиче-
ского заряда, попадания в кислородную среду масла, наличия компонентов
топлива в зоне расположения источника тепла и т. п.);
• виброударное или акустическое воздействие (вследствие разбаланси-
ровки вращающихся элементов, соударения с посторонними предметами,
перемежающегося засорения пневмогидравлического тракта и т. п.);
• воздействие высокой температуры (вследствие нарушения режима ра-
боты источника тепла, резких перепадов температуры из-за неисправности
автоматики, отказов системы охлаждения);
• поражение электрическим током (вследствие короткого замыкания,
электростатического разряда и т. п.);
• воздействие различных видов излучения (электроманитного, ионизи-
рующего и др.)
• возможность коррозионного повреждения материала скафандра;
• негативное воздействие биологических, физиологических и психоло-
гических факторов;
• возможность микрометеоритного повреждения скафандра.
Анализ рисков, возникающих при работе в скафандре, позволяет разделить
их на три основные категории: отказы автономной системы жизнеобеспечения;
Таблица 12.18
Показания к действиям по сценариям покидания кабины при НшС
Событие Возможные причины Аварийные процедуры Медицинские последствия
Падение давления Удар осколка или метеорита, отказ системы СЖО, плохая герметизация люка От секунд до часов: надевание скафандра, кислородной маски, ремонтные работы, эвакуация Декомпенсационные проявле- ния, травмирование осколками
Пожар или взрыв Перегрузка электрической цепи, утечка летучих ве- ществ, разрыв контейнера под давлением От секунд до минут: надевание кислородной маски, защитных очков, борьба с огнем и эвакуация. От минут до часов: ремонтные работы и эвакуация Ожоги, отравление дымом, раны от осколков
Утечка токсиче- ских веществ Прорыв трубопровода или сосуда От секунд до минут: надевание кислородной маски, эвакуация из загрязненного модуля, остановка утечки. От минут до часов: специальная обработка (детоксикация), процедура очистки, защита рук перчатками, эвакуация Вдыхание токсических веществ, поражение легких, гипоксия
Первичное медицинское событие Декомпенсация, болезни, электрошок, инфекционное заболевание, изолированная травма От секунд до минут: неотложная помощь, реанимация, подготовка к лечению или транспортировке. От минут до часов: лечение имеющи- мися средствами, эвакуация больного или пораженного В соответствии с характером первичного события распростра- нение инфекции среди членов экипажа, быстрое расходование лекарств и материалов
Отказ системы ориентации Неисправность системы навигации или наведения, отказ двигателей малой тяги От секунд до минут: внесение коррек- ции, изменение мощности двигателей. От минут до часов: внесение коррекции, эвакуация Травмирование, нейровестибуля- ция, потеря ориентации
Воздействие радиации Солнечная вспышка, неис- правность ядерного источ- ника электроэнергии, неудачный эксперимент, события искусственного происхождения (наземный или орбитальный ядерный взрыв) От секунд до минут: эвакуация из зоны облучения, уход в безопасную зону, экранирование, меры по ликви- дации источника облучения. От минут до часов: дезактивация, процедуры очистки, лечение пора- женных членов экипажа, эвакуация части или всего экипажа Синдром острого лучевого поражения, симптомы со сторо- ны желудочно-кишечного тракта, ЦНС системы крови. Длительное воздействие: риск злокачественных новообра- зований, ограничение профес- сиональной деятельности из-за полученной дозы
Неисправность системы жизнеобеспечения Нарушения в механических или электрических схемах, потеря расходных материа- лов От секунд до минут: остановка утечки расходных материалов, принятие медицинских мер. От минут до часов: ремонт поврежде- ния, эвакуация Гипоксия, гипотермия, гиперо- термия, дегидратация
740
Часть III. Компоновка систем пилотируемого космического аппарата
отказы оборудования, сопрягающегося с автономной СОЖ; НшС, связанные
с деятельностью космонавта при выполнении им работ в открытом космосе.
При выполнении ВКД единственным средством, обеспечивающим без-
опасность космонавта, является скафандр. Статистика показывает, что 80 %
возможных отказов оборудования скафандра приводит к невыполнению про-
граммы выхода, 50 % этих отказов могут привести к потере функции жизне-
деятельности и подвергнуть жизнь космонавта опасности. Отказы подсистем,
обеспечивающих жизнедеятельность космонавта во время работы в скафандре,
блокируются аварийной кислородной системой, предусмотренной для такого
случая. Опасность также представляют возможные утечки кислорода, наиболее
вероятным источником которых служат уплотнения в шарнирах скафандра.
Контроль параметров атмосферы в скафандре проводится автоматической
аварийной системой, предупреждающей космонавта о возникновении НшС.
Запаса кислорода в аварийной системе хватает примерно на 30 мин, что долж-
но обеспечить возвращение в шлюзовую камеру ПКА.
Особое внимание при компоновке ПКА необходимо уделять средствам
обеспечения пожарной безопасности, поскольку возможность возникновения
пожара в замкнутом обитаемом объеме создает значительные риски. Пожар на
борту ТКА Apollo-1 в наземных условиях привел к гибели экипажа. Во время
полета ОС «Салют-7» дважды отмечались пожароопасные ситуации, связанные
с перегревом неисправной электроаппаратуры. Две пожароопасных ситуации
с твердотельным генератором кислорода имели место на борту ОС «Мир» в
1994 и 1997 гг. Эти ситуации на ОС были вовремя обнаружены и устранены.
Источником пожара на борту ПКА являются электрические системы бор-
товой аппаратуры, генераторы кислорода, научное оборудование, имеющее
высокотемпературные режимы работы. Развитие пожара могут поддерживать
кислородные системы и горючие материалы, применяемые в конструкции
ПКА. В табл. 12.19 приведены некоторые из таких материалов и их процент-
ное содержание в конструкции МКС.
Таблица 12.19
Горючие материалы, которые могут вызвать пожар на ПКА
Тип горючего полимерного материала Доля от общего количества горючих материалов, % Тип горючего полимерного материала Доля от общего количества горючих материалов, %
Силикон 20,8 Поливинилхлорид 5,7
Эпоксидные смолы 20,8 Полиуретан 4,9
Полипропилен 15,1 Полипрофинилиноксид 4,9
Поликарбонат 8,7 Фенолформальдегид 3,8
Тефлон 6 Плисульфон 1,8
Полиамиды 5,7 Полиэстер 1,8
Глава 12. Компоновка систем обеспечения безопасности ПКА
741
Специалистами РКК «Энергия» им. С.П. Королева совместно с ВНИИПО
МЧС России и другими организациями разработан комплекс профилакти-
ческих и активных мер, позволяющих предупредить пожароопасные ситуа-
ции, а в случае возгорания справиться с пожаром и его последствиями [38].
Пожаробезопасность МКС обеспечивается мероприятиями на трех уровнях
(табл. 12.20).
Таблица. 12.20
Мероприятия обеспечения пожарной безопасности российского сегмента МКС
Первый уровень. Пассивные средства Второй уровень Третий уровень. Активные средства
Применение аппаратуры и устройств, атестованных на пожароустойч и вость Системы, содержащие собственные средства пожаробезопасности Средства пожаротушения
Применение материалов и конструкций высокой пожаростойкости Автоматы защиты от перегрева при приготов- лении пищи, воды и пр. Средства пожарообнару- жения
Применение материалов, не горючих в среде, содер- жащей до 40 % кислорода Отключение вентиляции гермоотсека (торможение воздушного потока в отсеке) Система пожарообнару- жения и пожаротушения модуля «Заря»
Поддержание в атмосфере гермоотсека содержания кислорода не более 21,6 % Газоанализаторы содержа- ния кислорода в системе электролиза воды «Элек- трон-В М» Система «Сигнал-ВМ» модуля «Звезда»
Обеспечение герметично- сти магистралей горючих газов и жидкостей Анализаторы содержания водорода в атмосфере станции Система пожаротушения модуля «Пирс»
Исключение застойных зон Огнетушитель в каждом модуле Средства газового анализа атмосферы отсеков
Исключение источников воспламенения, пассивная защита, защита от статиче- ского электричества, перегрева — —
Мероприятия первого уровня обусловливаются принятыми в космической
отрасли нормативными документами (стандартами и техническими услови-
ями), используемыми при разработке оборудования и конструкций. Каждый
отдельно взятый прибор, блок, агрегат на стадии его разработки проходит
оценку на пожаробезопасность и получает заключение о применении.
Мероприятия второго уровня — средства обеспечения пожаробезопасно-
сти, предусматриваемые при разработке приборов, узлов, агрегатов и систем
космического корабля (системы аварийной защиты, средства контроля и
диагностики и т. п.). Мероприятия второго уровня должны обеспечивать
742
Часть III. Компоновка систем пилотируемого космического аппарата
полную пожарную безопасность разработанного и применяемого оборудо-
вания, включая нештатные ситуации.
Мероприятия третьего уровня — активные средства, т. е. средства пожа-
рообнаружения и подавления пожара [38].
Для защиты органов зрения и дыхания членов экипажа при тушении по-
жара, а также до восстановления среды обитания после пожара применяются
средства индивидуальной защиты. Кроме того, используются средства очистки
атмосферы, удаляющие продукты термодеструкции материалов после пожара.
Например, после пожара для очистки атмосферы ОС «Мир» в базовом блоке
и в модуле «Квант» были включены системы удаления вредных примесей.
Приблизительно за 36 ч содержание вредных примесей было снижено на 90 %,
что позволило экипажу дышать без респираторов.
Модуль «Звезда» МКС оснащен средствами пожарообнаружения и по-
жаротушения, в состав которых входят система обнаружения и оповещения
о пожарной ситуации «Сигнал-ВМ», два огнетушителя и три противогаза
ИПК-1М. Система «Сигнал-ВМ», предназначенная для обнаружения задым-
ленности атмосферы отсека, состоит из 10 дымовых датчиков ДС-7А, располо-
женных внутри гермообъема модуля «Звезда». Сигнал с датчиков поступает на
пульт пилота, место возгарания указывается с помощью светодиода. В случае
срабатывания двух и более датчиков дыма на пульте космонавта загорается
табло «ПОЖАР» и включается звуковая сирена с модулированным сигналом,
а на бортовом и переносных дисплеях появляется сообщение, указывающее
на место возникновения пожара.
Для тушения возгораний на МКС имеются огнетушитель космический руч-
ной ОКР-1 и огнетушитель специальный переносной ОСП-4, которые тушат
пожар струей воздушно-механической пены, пузырьки которой наполнены
азотом. Пена изолирует возгорание от кислорода атмосферы внутри корабля
и охлаждает зону горения. Огнетушители ОКР-1 и ОСП-4 (рис. 12.40) [38]
различаются типом огнетушащего вещества, габаритами, массой и соответ-
ственно количеством вырабатываемой огнетушащей пены. Более объемный
ранцевый огнетушитель ОСП-4 размещен в наиболее просторном и свободном
модуле «Заря». Портативный ручной огнетушитель ОКР-1, которым можно
управлять одной рукой, размещен в модулях «Звезда» и «Пирс».
Для защиты органов дыхания и зрения космонавтов используется изо-
лирующий космический противогаз ИПК-1М, являющийся индивидуальным
средством защиты одноразового действия. Время защитного действия проти-
вогаза составляет от 20 мин (при выполнении работы средней тяжести) до 140
мин (в состоянии покоя).
Возгорание в отсеках АС МКС обнаруживается с помощью датчиков
дыма, установленных в системах вентиляции и местах размещения аппара-
туры, обладающей большим энергопотреблением [35].
Датчик имеет габариты 175 х 178 х 146 мм, массу 1,41 кг и энергопотре-
бление 1,48 Вт. Схема датчика дыма показана на рис. 12.41, а. При срабатыва-
нии датчиков сигнал о пожаре выводится на панель пожарной сигнализации,
приведенную на рис. 12.41, б, а также дублируется на мониторы компьютеров
на рабочих местах членов экипажа.
Глава 12. Компоновка систем обеспечения безопасности ПКА
743
Во время пожара, как правило, обра-
зуется значительное количество продук-
тов сгорания, что загрязняет атмосферу
кабины. Для очистки воздуха кабины от
продуктов сгорания и пожаротушения
применяются фильтры. Схема фильтрую-
щего патрона, применяемого на АС МКС,
приведена на рис. 12.42 [35]. В качестве
наполнителя в фильтре используются
пропитанный кислотой древесный уголь,
гидрооксид лития и катализатор-окисли-
тель. Очистка атмосферы в герметичных
шкафах с бортовой аппаратурой прово-
дится с помощью фильтрующего патрона
по схеме, показанной на рис. 12.43 [35].
При возникновении аварийной ситу-
ации, связанной с загрязнением атмосфе-
ры, во всех отсеках закрываются клапаны
и выключаются вентиляторы, а приборы
Рис. 12.40. Огнетушители ОКР-1 (а)
и ОСП-4 (б) на PC МКС
системы обеспечения газовой среды переходят в режим ожидания или выклю-
чаются. Дальнейшие восстановительные операции члены экипажа выполняют
под контролем центра управления до полного удаления токсичных веществ.
Для работы экипажа должны быть предусмотрены комплекты индивидуаль-
ной защиты органов дыхания. Схема комплекта, применяемого на АС МКС,
представлена на рис. 12.44 [35].
Рис. 12.41. Элементы системы обнаружения пожара на АС МКС:
а — датчик дыма (7 — лазерный луч, пересекающий поток воздуха;
2 — рассеянный дымом луч; 3 — фотодиод; 4 — блок электроники,
5 — лазерный диод; 6 — направление потока воздуха); б — панель
пожарной сигнализации
744
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 12.42. Схема фильтрующего патрона для
очистки воздушной среды от дыма и токсич-
ных примесей, применяемого на АС МКС:
/ — патрон; 2 — выходной конус патрона; 3 — вен-
тилятор; 4 — приводной электродвигатель вентиля-
тора с его системой управления; 5 — кабель подвода
электропитания и подачи информационных сигналов
о состоянии воздушной среды; 6 — канал выхода очи-
щенного системой воздуха; 7 — пружинные кольца
фиксации слоев наполнителя; 8 — перемещающаяся
к центру патрона кольцевая опорная плата; 9 — ката-
лизатор-окислитель; 10 — поглотитель типа гидроок-
сида лития; 11 — пропитанный кислотой древесный
уголь; 12 — неподвижная кольцевая опорная плата;
13 — пятислойный электростатический фильтрую-
щий элемент; 14 — слой активированного древесного
угля; 15 — многослойный стекловолоконный фильтр;
16 — силовой кожух патрона; 17 — входной съемный
конус патрона; 18 — канал подвода воздуха, подле-
жащего очистке
Рис. 12.43. Схема подключения фильтру-
ющего патрона к стойке с аппаратурой
АС МКС для ее очистки от продуктов
сгорания и веществ, применявшихся при
тушении пожара:
1 — фильтрующий патрон; 2 — герметичная
стойка с аппаратурой, в которой произошел
пожар; 3 — шланг подачи загрязненного воздуха
на вход фильтрующего патрона
Глава 12. Компоновка систем обеспечения безопасности ПКА
745
Рис. 12.44. Комплект индивидуальной защиты органов дыхания астронавта АС МКС:
1 — шкаф для хранения комплекта; 2 — запас кислорода; 3 — регулирующий и предохра-
нительный клапаны; 4 — место хранения запаса кислорода; 5 — система связи; 6 — панель
стойки ОС; 7 — тройник; 8 — шланг подачи кислорода (5... 10 м); 9 — маска; 10 — баллон с
редуктором; И — крепление шланга на текстильной застежке; 12 — крепление маски; 13 —
кронштейны крепления баллона
При возникновении сверхкритической НшС ситуации спасение экипажа
возможно только путем аварийного покидания ПКА с помощью спасательно-
го КА. Для реализации данной операции необходимо выполнять следующие
требования:
• на борту КА спасателя должны находиться спасательные скафандры
для экипажа, которые можно быстро надеть без посторонней помощи и в
которых можно длительно пребывать;
• на борту КА спасателя необходимо предусматривать аварийные за-
пасы расходуемых материалов (воды, пищи, электроэнергии, компонентов
топлива и т. п.);
746
Часть III. Компоновка систем пилотируемого космического аппарата
Рис. 12.45. Многоразовый космический корабль-спасатель HL-20 (1988)
• конструкция, компоновочная схема и оборудование ПКА должны
обеспечивать возможность стыковки со спасательным КА и эвакуацию эки-
пажа аварийного ПКА на борт спасательного КА через стыковочный узел
или открытый космос;
• оборудование отсеков не должно препятствовать космонавтам в ска-
фандрах занять свои места в спасательном корабле как через люк, так и из
открытого космоса;
• для случаев, когда спасение экипажа не может быть обеспечено ни
использованием штатного СА, ни спасательного КА, должны быть пред-
усмотрены индивидуальные средства спасения космонавтов.
Для спасения экипажа ОС в качестве спасательного обычно применяют
штатный ТКА, доставивший космонавтов на орбиту. На МКС в качестве
корабля-спасателя используются ТКА серии «Союз». Количество постоянно
пристыкованных к ОС ТКА определяется численностью экипажа ОС. При
использовании ограниченного по численности парка многоразовых ТКА (на-
пример, типа МТКА Space Shuttle), которые не могут быть постоянно при-
стыкованы к ОС из-за снижения эффективности транспортных операций, в
составе ОС необходимо предусмотреть размещение специального корабля-спа-
сателя упрощенной конструкции, который нужен только для возвращения
многочисленного экипажа. Пример проекта корабля-спасателя, созданного
на базе ВА ТКС, приведен на рис. 4.19. Пример проекта многоразового ко-
рабля-спасателя HL-20, аэродинамическая компоновка которого основана
на компоновке советского КА «Бор-4», продемонстрирован на рис. 12.45.
Этот КА массой 10 884 кг предназначен для возвращения с орбиты в герме-
тичном отсеке объемом 16,4 м3 до 10 членов экипажа (максимальная масса
1270 кг) и 545 кг груза [39].
Глава 12. Компоновка систем обеспечения безопасности ПКА
747
Контрольные вопросы к главе 12
I. Перечислите нештатные ситуации и дайте их классификацию.
2. Что такое понятие отказа? Классификация отказов.
3. Как проводится оценка безопасности полета?
4. Приведите способы обеспечения надежности и безопасности полета.
5. Какие вы знаете конструктивно-компоновочные способы обеспечения безо-
пасности и надежности полета?
6. Как обеспечивается безопасность экипажа в космическом полете?
7. Какие предусмотрены средства защиты ПКА от метеорных потоков и фраг-
ментов космического мусора?
8. Как влияет радиация на космонавта?
9. Как влияет радиация на конструкционные материалы и бортовое оборудова-
ние ПКА?
Ю. Какая компоновка у радиационной защиты ПКА?
11. Какая радиационная защита ПКА предполагается в будущем?
12. Перечислите средства обеспечения безопасности космонавта при разгерме-
тизации кабины ПКА.
13. Какие средства аварийного спасения космонавта предусмотрены при аварии
ПКА на различных этапах космического полета?
14. Какие противопожарные средства необходимо размещать на борту ПКА?
15. Как обеспечивается безопасность при ВКД?
Литература к главе 12
I. Микрин Е.А., Мелихов В.И. Анализ нештатных ситуаций и критичности про-
граммного обеспечения в проекте Международной космической станции // Надеж-
ность и техническая диагностика. 2003. № 4. С. 52—54.
2. Золотов А.А., Оделевский В.К., Радченко В.В., Уерников А.И. Прикладные ме-
тоды и алгоритмы обеспечения надежности и безопасности технических систем на
этапе их разработки и эксплуатации. М.: Изд-во МАИ, 2013. 352 с.
3. Мельников И.В. Основные особенности обеспечения надежности и безопас-
ности эксплуатации модулей космических станций //Актуальные проблемы Россий-
ской космонавтики. Труды XXXVIII академических чтений по космонавтике / под
ред. А.К. Медведевой. Комиссия РАН по разработке научного наследия пионеров
освоения космического пространства. Москва, 2014. С. 35.
4. Справочник по безопасности космических полетов / Г.Т. Береговой,
В.И. Ярополов и др. М.: Маш., 1989. 336 с.
5. Степанова С.И., Нестеров В.Ф., Сараев И.Ф., Сметанин А.В., Нечаев А.И., Га-
личий В.А. Организация труда и отдыха // Орбитальная станция «Мир». Т. I Меди-
цинское обеспечение длительных полетов. М.: ООО «Аником», 2001. С. 334—365.
6. Волков О.В., Горбенко А.В., Шевченко И.В. Защита Российских модулей Меж-
дународной космической станции от техногенных частиц // Известия Самарского
научного центра Российской академии наук. 2012. Т. 14. № I (2). С. 480—482.
7. Destefanis R., Ате г io Е., Briccarello М., Belluco М., Faraud М., Tracino Е., Lobascio С.
Space Environment Characterisation of Kevlar®: Good for Bullets, Debris and Radiation
too // Proceedings of the 11 th International Symposium on Materials in a Space Environment,
748
Часть III. Компоновка систем пилотируемого космического аппарата
15—18 September 2009. Aix-en-Provence. France. 9 р. URL: http://esmat.esa.int/materials_
news/isme09/pdf/3-Ground/S3%20-%20Destefanis.pdf (дата обращения 20.03.2016).
8. Кононенко М.М., Малкин А.И., Шумихин Т.А. Устройство для защиты косми-
ческих аппаратов и станций от высокоскоростного ударного воздействия частиц
космической среды. Патент РФ RU №2299838. URL: http://www.freepatent.ru/images/
patents/169/2299838/patent-2299838.pdf (дата обращения 10.08.2018).
9. Кононенко М.М., Малкин А.И., Шумихин Т.А. Устройство для защиты косми-
ческих аппаратов и станций от высокоскоростного ударного воздействия частиц
космической среды. Патент РФ RU №2299839. URL: http://www.freepatent.ru/images/
patents/169/2299839/patent-2299839.pdf (дата обращения 10.08.2018).
10. Шафиркин А.В., Бенгин В.В. Особенности действия космической радиации
на биологические объекты и радиационный риск длительных космических полетов //
Ядерная физика в Интернете. URL: http://nuclphys.sinp.msu.ru/cosmrad/cosmradl.htm
(дата обращения 10.08.2018).
11. Шуршаков В.А. Защита материалов эскизного проекта «Укладка «Шторка-
Защитная» (КЭ «МАТРЕШКА-Р»). Презентация доклада на заседании № 10 НТС
ГНЦ РФ-ИМБП РАН от 28.04.2009 г. URL: http://nts.imbp.ru/doc/2009/10/10.ppt (дата
обращения 10.08.2018).
12. Космические аппараты / под общ. ред. К.П. Феоктистова. М.: Воениздат,
1983. 319 с.
13. Петров В.М. Рассмотрение итогов выполнения СЧ ОКР «Разработка пояс-
нительной записки эскизного проекта НЭМ «Радиационная безопасность экипажа».
Презентация доклада на заседании № 20 НТС ГНЦ РФ-ИМБП РАН от 20.06.2013 г.
URL: http://nts.imbp.ru/doc/2013/20/texproject%20NEM%202013.pptx (дата обращения
10.08.2018).
14. Обеспечение радиационной безопасности пилотируемых полетов на орби-
тальной станции Мир / В.М. Петров и др. // Орбитальная станция «Мир». Т. 1 Ме-
дицинское обеспечение длительных полетов. М.: ООО «Аником», 2001. С. 187—230.
15. Тимме Е.А., Петров В.М. Эргономический риск в длительном космическом
полете: понятийный аппарат // Теория и практика прикладных и экстремальных
видов спорта. 2012. № 2 (24). С. 10-14. URL: http://sportlib.info/Press/TPPEVS/2012N2/
pl0-14.htm (дата обращения 10.08.2018).
16. Новиков Л.С. Космическое материаловедение: учебное пособие. М.: МАКС
Пресс, 2014. 448 с.
17. Кузнецов Н.В. Радиационная опасность на околоземных орбитах и межпла-
нетных траекториях космических аппаратов // Ядерная физика в Интернете. URL:
http://nuclphys.sinp.msu.ru/crd/index.html (дата обращения 10.08.2018).
18. Шуршаков В.А. Комплекс индивидуального дозиметрического контроля пер-
спективной пилотируемой транспортной системы. Презентация доклада на заседа-
нии № 18 НТС ГНЦ РФ-ИМБП РАН от 22.11.2012 г. URL: nts.imbp.ru/doc/2012/18/
shurshakov.ppt (дата обращения 10.08.2018).
19. Кузнецов Н.В., Ныммик Р.А., Панасюк М.И., Сосновец Э.Н., Тельцов М.В. Ре-
гистрация и прогнозирование поглощенных доз радиации от потоков солнечных
протонов на борту орбитальных станций // Космические исследования. 2004. Т. 42.
№ 3. С. 211-218.
20. Космическая радиационная защита. URL: http://bolshoyforum.com/wiki/
Космическая_радиационная_защита (дата обращения 10.08.2018).
21. Радиация. Мероприятия по обеспечению безопасности пилотируемых поле-
тов. URL: http://revolutiy.narod.ru/Otkritiy/tainy_istoriy/radiaziy.htm (дата обращения
10.08.2016).
Глава 12. Компоновка систем обеспечения безопасности ПКА
749
22. Славин С. Невидимый враг космических путешественников // Техника мо-
лодежи. 2007. № 6. С. 6-8.
23. Космические скафандры России /И.П. Абрамов и др. М.: ОАО НПП «Звез-
да», 2005. 360 с.
24. Рабинович Б.А. Безопасность космонавта при посадочном ударе спускаемого
аппарата о грунт. М., 2014. 278 с.
25. Кресло амортизационное «КАЗБЕК — УМ» // ОАО НПП «Звезда». URL:
http://www.zvezda-npp.ru/ru/node/113 (дата обращения 20.07.2019).
26. Основные доработки корабля «Союз ТМА». URL: http://www.energia.ru/ru/
iss/soyuz-tma/soyuz-tma_02.html (дата обращения 10.08.2018).
27. Кострова Н. Кто на Луне главный? Астроном Владимир Сурдин о лунной
гонке 1960-х, космическом туризме и забытых на Луне автомобилях. URL: https://
www.colta.ru/articles/specials/10950 (дата обращения 10.08.2018).
28. Разработчики нового российского пилотируемого корабля объяснили отказ
от реактивной посадки. URL: http://maxpark.com/community/5255/content/3318357
(дата обращения 10.08.2018).
29. Boeing CST-100 Starliner. URL: http://www.boeing.com/space/starliner/ (дата
обращения 10.08.2018).
30. Спасательный скафандр «Стриж» и катапультное кресло К-36РБ. URL:
http://y-v-g.ru/Tur/html/34.html (дата обращения 10.08.2016).
31. Катапультирование экипажа // Энциклопедия крылатого космоса. URL:
http://www.buran.ru/htm/katapu.htm (дата обращения 10.08.2016).
32. Жердев М. «Клипер»: многоразовый преемник «Союзов»? URL: http://
www.telenir.net/transport_i_aviacija/vzlyot_2005_08_09/p27.php (дата обращения
10.08.2018).
33. Dragon V2 успешно прошел тестирование системы спасения экипажа. URL:
http://cosmic.ucoz.ua/news/dragon_v2_uspeshno_proshel_testirovanie_sistemy_spasenija_
ehkipazha/2015-05-06-70 (дата обращения 10.08.2016).
34. Махнович С.В., Визняк Е.А. Сравнительный анализ систем аварийного спасе-
ния экипажа космического корабля // Наука ЮУрГУ: материалы 66-й научной кон-
ференции Секции технических наук. 2014. С. 54—60. URL: http://dspace.susu.ru/xmlui/
bitstream/handle/0001.74/4298/6.pdf?sequence=l (дата обращения 10.08.2018).
35. Living Together in Space: The Design and Operation of the Life Support Systems
on the International Space Station. NASA Report NASA/TM—98—206956. Vol. 1. URL:
https://spacecraft.ssl.umd.edu/academics/697S09/docs/NASA-TM-98-206956.pdf (дата
обращения 20.03.2018).
36. Александров А. П. Безопасность пилотируемых космических полетов // Полет.
2010. № 4. С. 3-9.
37. Шибанов Г.П. Обитаемость космоса и безопасность пребывания в нем чело-
века. М.: Маш., 2007. 547 с.
38. Романов С.Ю., Семенов А.В., Андреева Т.В. Системы и средства обеспечения
пожарной безопасности российского сегмента МКС // Каталог «Пожарная безопас-
ность»-2004. U RL: http://www.secuteck.ru/articles2/firesec/sistemi_i_sredstva_obesp_poj_
bezop (дата обращения 20.03.2018).
39. HL-20. American manned spaceplane. URL: http://www.astronautix.eom/h/hl-20.
html (дата обращения 10.08.2018).
ОГЛАВЛЕНИЕ
Предисловие........................................................5
Принятые сокращения................................................8
Введение...........................................................11
Цели и задачи освоения человеком космического пространства.11
Критические технологии пилотируемой космонавтики...................16
Обитаемые космические сооружения...................................18
Цели и задачи компоновки различных пилотируемых космических
аппаратаов......................................................33
Литература к Введению...........................................34
Часть I. ИСХОДНЫЕ ДАННЫЕ ДЛЯ КОМПОНОВКИ
ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО АППАРАТА..............................35
Глава 1. Организация пилотируемого космического полета..........37
1.1. Юридические аспекты космической деятельности...............37
1.2. Целевое назначение пилотируемых космических аппаратов......38
1.3. Космическая программа пилотируемых полетов.................43
1.4. Логистика космической программы пилотируемых полетов.......50
1.4.1. Организация снабжения пилотируемого космического аппарата....50
1.4.2. Тара и размещение грузов..............................54
1.4.3. Транспортные космические системы......................62
1.4.4. Планирование транспортных операций....................76
Контрольные вопросы к главе 1...................................79
Литература к главе 1............................................79
Глава 2. Человек в космическом полете...........................82
2.1. Геометрия тела человека....................................82
2.1.1. Антропометрические характеристики человека............82
2.1.2. Антропометрические характеристики человека в условиях
невесомости..................................................83
2.2. Функционирование человека в космическом полете.87
2.2.1. Ограничения подвижности ..............................87
2.2.2. Питание космонавтов во время полета...................88
2.2.3. Метаболизм............................................90
2.2.4. Заболевания экипажа...................................92
2.2.5. Физическая нагрузка ..................................93
2.2.6. Психологические и социальные аспекты нахождения человека
в космическом пространстве...................................94
Оглавление 751
2.3. Воздействие космической среды на человека во время полета....101
2.3.1. Воздействие внешней среды...............................101
2.3.2. Внешние силовые воздействия.............................105
2.3.3. Воздействие электромагнитных полей......................117
2.3.4. Потоки частиц...........................................120
Контрольные вопросы к главе 2.....................................129
Литература к главе 2..............................................129
Глава 3. Культурные основания пространственной организации
пилотируемых космических аппаратов................................131
3.1. Процесс освоения космоса в контексте развития мировой культуры...131
3.2. Современный этап освоения космоса. Смена целевых установок
при организации пространства КА.....................................138
3.3. Морфология человека и некоторые особенности построения
пространства жизнедеятельности человека и общества..................140
3.3.1. Особенности морфологии человека. Человек — существо
ортогональное.............................................140
3.3.2. Круг и квадрат в построении пространства жизнедеятельности
человека: в архитектуре и культуре.............................147
3.3.3. Круг и квадрат в пространственном построении КА.........156
3.3.4. Естественные и искусственные системы мер................157
3.4. Организация пространства жизнедеятельности человека и общества...168
3.4.1. Пространство обитания и пространство жизнедеятельности..168
3.4.2. Два типа пространства жизнедеятельности человека и общества.... 170
3.4.3. Пространство созидания..................................170
3.4.4. Пространство коммуникации...............................181
3.4.5. Взаимодействие пространства созидания и пространства
коммуникации...................................................189
3.4.6. Пространство созидания и пространство коммуникации
в виртуальном мире ............................................195
3.5. Организация внутреннего пространства ПКС.....................197
3.5.1. Организация пространства созидания в составе структуры ПКС .197
3.5.2. Организация пространства коммуникациив составе
структуры ПКС .................................................204
3.5.3. Пространственная граница. Внутренние границы
и переходные пространства......................................206
3.5.4. Внешние границы и пространственное развертываение ОС........211
3.5.5. Культурный контекст при проектировании ПКА..............214
Контрольные вопросы к главе 3.....................................215
Литература к главе 3..............................................216
Часть II. ОПРЕДЕЛЕНИЕ ОБЛИКА ПИЛОТИРУЕМОГО
КОСМИЧЕСКОГО АППАРАТА..............................................217
Глава 4. Блочно-модульная компоновка пилотируемого космического
аппарата..........................................................219
4.1. Компоновка пилотируемого космического аппарата...............219
752 Оглавление
4.2. Блочная компоновка пилотируемых космических аппаратов.......221
4.3. Модульная компоновка пилотируемых комплексов................233
4.4. Компоновка герметичных модулей орбитальных ПКА..............243
4.5. Общая компоновка модульных орбитальных ПКА..................253
Контрольные вопросы к главе 4....................................271
Литература к главе 4.............................................271
Глава 5. Конструктивная компоновка обитаемых модулей.............273
5.1. Основные компоновочные элементы.............................273
5.2. Компоновка контура герметичности............................285
5.2.1. Элементы контура герметичности обитаемых отсеков.......285
5.2.2. Иллюминаторы...........................................287
5.2.3. Люки...................................................293
5.3. Конструктивная компоновка трансформируемых отсеков..........304
5.3.1. Телескопические отсеки.................................304
5.3.2. Отсеки с гофрированной оболочкой.......................308
5.3.3. Отсеки с мягкой оболочкой..............................318
Контрольные вопросы к главе 5....................................339
Литература к главе 5.............................................340
Глава 6. Построение космических комплексов.......................343
6.1. Космические комплексы на базе блочно-модульной архитектуры.......343
6.1.1. Методы и средства создания комплекса...................343
6.1.2. Стыковочные узлы герметичных отсеков...................349
6.1.3. Стыковочные узлы негерметичных отсеков......................360
6.1.4. Стыковочные узлы герметичных и негерметичных отсеков........363
6.1.5. Монтаж конструкций космического комплекса..............367
6.2. Космические комплексы на базе тросовых систем...............381
6.3. Космический комплекс на базе свободно летающих компонентов.......393
6.4. Развертывание космического комплекса........................395
Контрольные вопросы к главе 6....................................399
Литература к главе 6.............................................399
Глава 7. Компоновка ПКА с искусственной силой тяжести............402
7.1. Поле искусственной силы тяжести.............................402
7.2. Медико-биологические аспекты создания искусственной силы тяжести.408
7.3. Компоновка космического аппарата с искусственной силой тяжести...413
7.4. Архитектурные аспекты помещений с ИСТ.......................428
7.5. Компоновка центрифуг для создания локальной ИСТ.............430
Контрольные вопросы к главе 7....................................438
Литература к главе 7.............................................439
Часть III. КОМПОНОВКА СИСТЕМ ПИЛОТИРУЕМОГО
КОСМИЧЕСКОГО АППАРАТА............................................441
Глава 8. Компоновка обитаемого объема пилотируемого
космического аппарата....................................443
8.1. Характеристики внутреннего объема пилотируемого
космического аппарата.............................................443
Оглавление 753
8.1.1. Деление герметичного объема............................443
8.1.2. Функциональное зонирование внутреннего объема..........446
8.2. Компоновочные элементы интерьера............................449
8.2.1. Интерьер и его основные элементы.......................449
8.2.2. Компоновка коридоров и проходов........................455
8.2.3. Компоновка фиксаторов и опор...........................457
8.2.4. Монтаж и крепление оборудования........................463
8.2.5. Компоновка источников света............................468
8.3. Компоновочные элементы бытовых отсеков......................472
8.3.1. Оборудование для организации приема пищи...............472
8.3.2. Оборудование для организации отдыха....................475
8.3.3. Оборудование для организации сна.......................475
8.3.4. Складское оборудование.................................478
8.3.5. Одежда.................................................482
8.4. Компоновка инфраструктуры медицинского обеспечения..........483
8.4.1. Контроль состояния здоровья и работоспособности экипажа.483
8.4.2. Бортовое профилактическое оборудование.................487
8.4.3. Бортовое медицинское оборудование......................491
8.4.4. Компоновка медицинского оборудования...................494
8.5. Компоновка рабочих мест для научных экспериментов...........496
8.5.1. Рабочие места российского сегмента МКС.................496
8.5.2. Рабочие места американского сегмента МКС...............500
Контрольные вопросы к главе 8....................................505
Литература к главе 8.............................................505
Глава 9. Компоновка зон внекорабельной деятельности..............508
9.1. Организация внекорабельной деятельности.....................508
9.1.1. Виды внекорабельной деятельности.......................508
9.1.2. Циклограмма выхода в открытый космос...................509
9.2. Скафандры для внекорабельной деятельности...................515
9.3. Компоновка шлюзовых камер...................................521
9.4. Средства для работы человека в открытом космосе.............530
9.4.1. Средства перемещения и фиксации при внекорабельной
деятельности.................................................530
9.4.2. Установки для маневрирования космонавта................540
9.4.3. Телескопическая грузовая стрела........................545
9.4.4. Переносное рабочее место и инструменты.................549
9.5. Компоновка рабочих мест на внешней поверхности ПКА..........554
9.5.1. Рабочие места на модулях российского сегмента МКС......554
9.5.2. Рабочие места на других сегментах МКС .................560
Контрольные вопросы к главе 9....................................569
Литература к главе 9.............................................569
Глава 10. Компоновка постов управления...........................571
10.1. Особенности компоновки системы управления ПКА..............572
10.1.1. Структура контура управления..........................572
10.1.2. Место космонавта в контуре управления ПКА.............572
754 Оглавление
10.2. Требования к построению космической эргономической системы...575
10.2.1. Эргономическое обеспечение на стадии разработки
КЭС или ее компонентов.........................................575
10.2.2. Размещение постов управления на орбитальной станции.....577
10.2.3. Особенности компоновки постов управления КПА...........578
10.2.4. Требования к компоновке кабины и пульта управления.....584
10.3. Система отображения информации..............................587
10.3.1. Построение системы отображения информации..............588
10.3.2. Средства отображения информации........................592
10.3.3. Требования к размещению системы отображения информации ....594
10.3.4. Органы управления......................................596
10.3.5. Размещение рабочих зон на пультах управления...........597
10.4. Компоновка кабины и системы отображения информации..........603
10.4.1. Система отображения информации космического корабля
«Союз-ТМА» и пульт ручного управления PC МКС ..................603
10.4.2. Система отображения информации орбитального
комплекса «Алмаз»...............................................606
10.4.3. Аппаратура управления ручной стыковкой космических
аппаратов......................................................611
Контрольные вопросы к главе 10....................................612
Литература к главе 10.............................................613
Глава 11. Компоновка оборудования системы жизнеобеспечения.........614
11.1. Структура системы жизнеобеспечения..........................614
11.2. Компоновка оборудования системы обеспечения газовой среды...618
11.2.1. Параметры искусственной атмосферы......................618
11.2.2. Оборудование для регулирования состава атмосферы.......620
11.2.3. Средства организации газового обмена...................625
11.2.4. Средства контроля состояния атмосферы..................632
11.2.5. Средства очистки атмосферы.............................638
11.2.6. Размещение блоков СОГС на ПКА..........................645
11.3. Компоновка оборудования системы водообеспечения.............649
11.3.1. Параметры системы водообеспечения......................649
11.3.2. Оборудование системы хранения воды.....................650
11.3.3. Оборудование системы регенерации воды..................652
11.4. Компоновка оборудования системы формирования микроклимата....657
11.5. Компоновка экологического оборудования......................664
11.5.1 Компоновка оборудования для борьбы с шумами.............665
11.5.2. Компоновка оборудования для санитарно-гигиенического
обеспечения....................................................667
11.5.3. Система удаления мусора и отходов.................674
Контрольные вопросы к главе И.....................................679
Литература к главе И..............................................679
Глава 12. Компоновка систем обеспечения безопасности пилотируемого
космического аппарата.............................................681
12.1. Основные понятия надежности и безопасности ПКА.............681
Оглавление
755
12.1.1. Термины и определения.................................681
12.1.2. Классификация нештатных ситуаций......................682
12.1.3. Классификация отказов.................................683
12.2. Обеспечение безопасности и надежности ПКА..................684
12.2.1. Критерии и методы оценки безопасности.................684
12.2.2. Система обеспечения безопасности и надежности ПКА.....687
12.2.3. Способы резервирования систем.........................690
12.3. Требования безопасности системы космонавт — среда .........692
12.3.1. Требования к компоновке и конструкции ПКА.............693
12.3.2. Требования к выбору конструкционных материалов........696
12.3.3. Требования, обусловленные неблагоприятным воздействием
внешней среды................................................697
12.3.4. Требования к безопасности деятельности экипажа
на борту ПКА.................................................697
12.4. Компоновка средств защиты экипажа ПКА от метеоритных
потоков и космического мусора....................................700
12.5. Компоновка средств защиты от радиационного облучения.......703
12.5.1. Система обеспечения радиационной безопасности.........703
12.5.2. Риски, возникающие при радиационном облучении.........708
12.5.3. Средства мониторинга радиационной обстановки..........713
12.5.4. Компоновка экранов радиационной защиты................715
12.5.5. Перспективные способы радиационной защиты.............723
12.6. Компоновка систем безопасности транспортных ПКА............727
12.7. Компоновка систем безопасности на орбитальном участке полета.737
Контрольные вопросы к главе 12...................................747
Литература к главе 12............................................747
Учебное издание
Туманов Анатолий Васильевич
Зеленцов Владимир Викторович
Павлов Николай Леонидович
Щеглов Георгий Александрович
Основы компоновки бортового оборудования
пилотируемых космических аппаратов
Редактор К.А. Осипова
Художник В.А. Филатова
Корректор О.В. Новикова
Компьютерная верстка Е.В. Жуковой
Оригинал-макет подготовлен
в Издательстве МГТУ им. Н.Э. Баумана.
В оформлении использованы шрифты
Студии Артемия Лебедева.
Подписано в печать 10.12.2019. Формат 70x100/16.
Уел. печ. л. 61,75. Тираж 300 экз.
Издательство МГТУ им. Н.Э. Баумана.
105005, Москва, 2-я Бауманская ул., д. 5, стр. 1.
press@bmstu.ru
www.baumanpress.ru
Отпечатано в типографии МГТУ им. Н.Э. Баумана.
105005, Москва, 2-я Бауманская ул., д. 5, стр. 1.
baumanprint@gmail.com