



































Автор: Лунин Б.С. Матвеев В.А. Бесараб М.А.
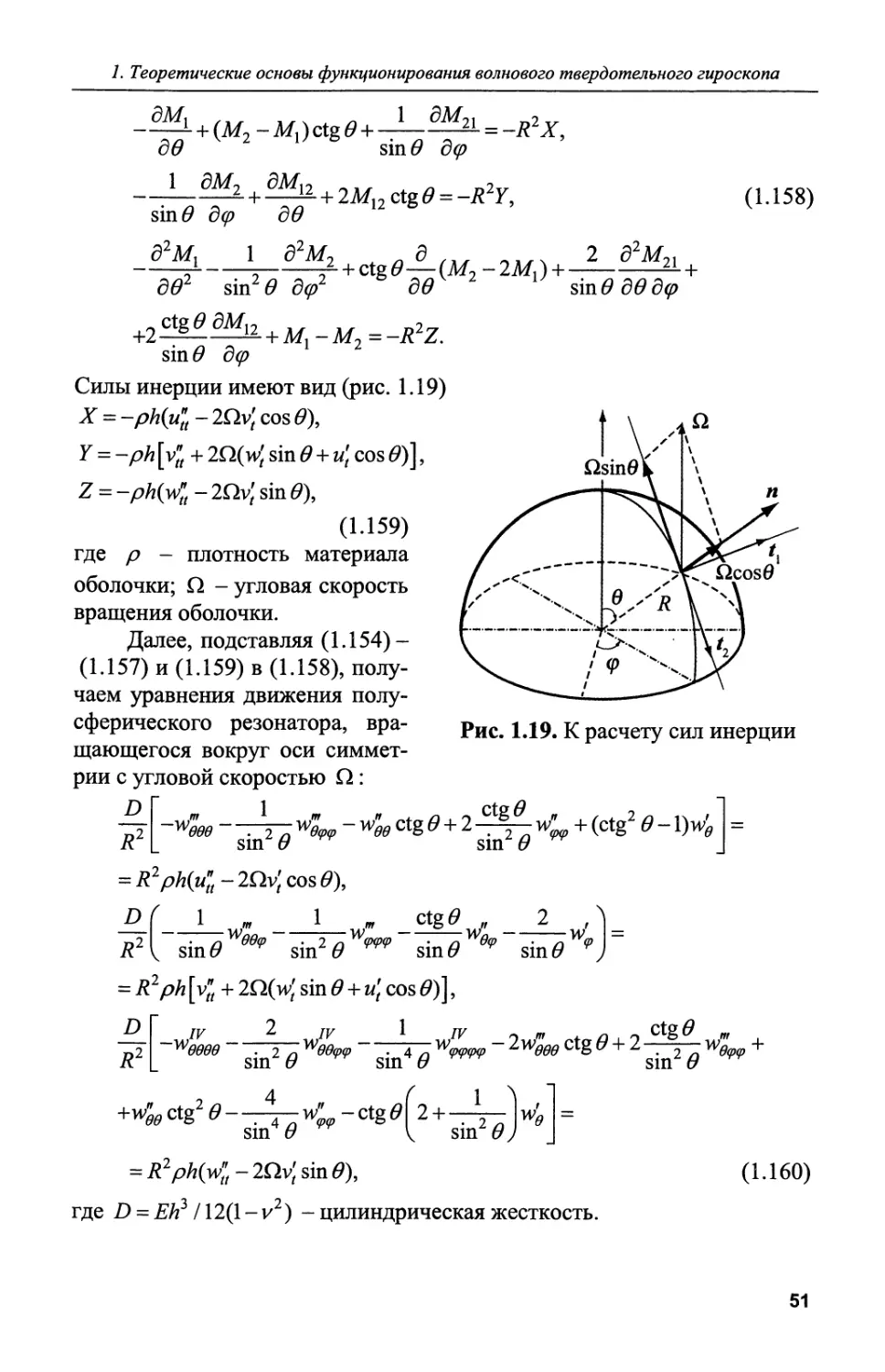
Теги: колебания тел колебания тел с распределенными массой и упругостью возбуждение колебаний кинематика математическо-механическая геометрия движения механика радиотехника
ISBN: 978-5-88070-381-4
Год: 2014



волновой
ТВЕРДОТЕЛЬНЫЙ
ГИРОСКОП
Б.С. Лунин, ΒΑ Матвеев, ΜJL Басараб
Волновой
твердотельный
гироскоп
Теория и технология
Москва
Радиотехника
2014
УДК 534.16:531.15
ББК 22.2
Б 27
Рецензент:
А.В. Бабиченко - докт. техн. наук,
директор учебно-научного центра,
ОАО «Раменское приборостроительное конструкторское бюро»
Лунин Б.С., Матвеев В.А., Басараб М.А.
Б 27 Волновой твердотельный гироскоп. Теория и технология.
Монография. - М.: Радиотехника, 2014. - 176 с: ил.
ISBN 978-5-88070-381-4
Рассмотрены вопросы теории и моделирования волновых твердотельных
гироскопов различной конфигурации. Затронуты аспекты, связанные с
повышением точности, балансировкой ВТГ, освещены основные
технологические процессы, используемые при их производстве. Показаны
проблемы построения электроники и приведены методы обработки
выходной информации.
Монография представляет интерес для научных и инженерно-
технических работников, специализирующихся в области проектирования
и разработки гироскопов и гироскопических систем. Может быть
полезна в качестве учебного пособия при изучении гироскопических
систем студентами вузов.
УДК 534.16:531.15
ББК 22.2
ISBN 978-5-88070-381-4 © Коллектив авторов, 2014
О ЗАО «Издательство «Радиотехника», 2014
Оглавление
Предисловие 6
Введение 8
1. Теоретические основы функционирования волнового
твердотельного гироскопа 13
1.1. Математическая модель идеального кольцевого ВТГ 13
1.1.1. Принцип действия кольцевого ВТГ 13
1.1.2. Динамика идеального кольцевого ВТГ 15
1.2. Математическая модель неидеального кольцевого ВТГ 31
1.2.1. Динамика неидеального кольцевого ВТГ 31
1.2.2. Модели погрешности неидеального кольцевого ВТГ 35
1.3. Математическая модель оболочечного ВТГ 48
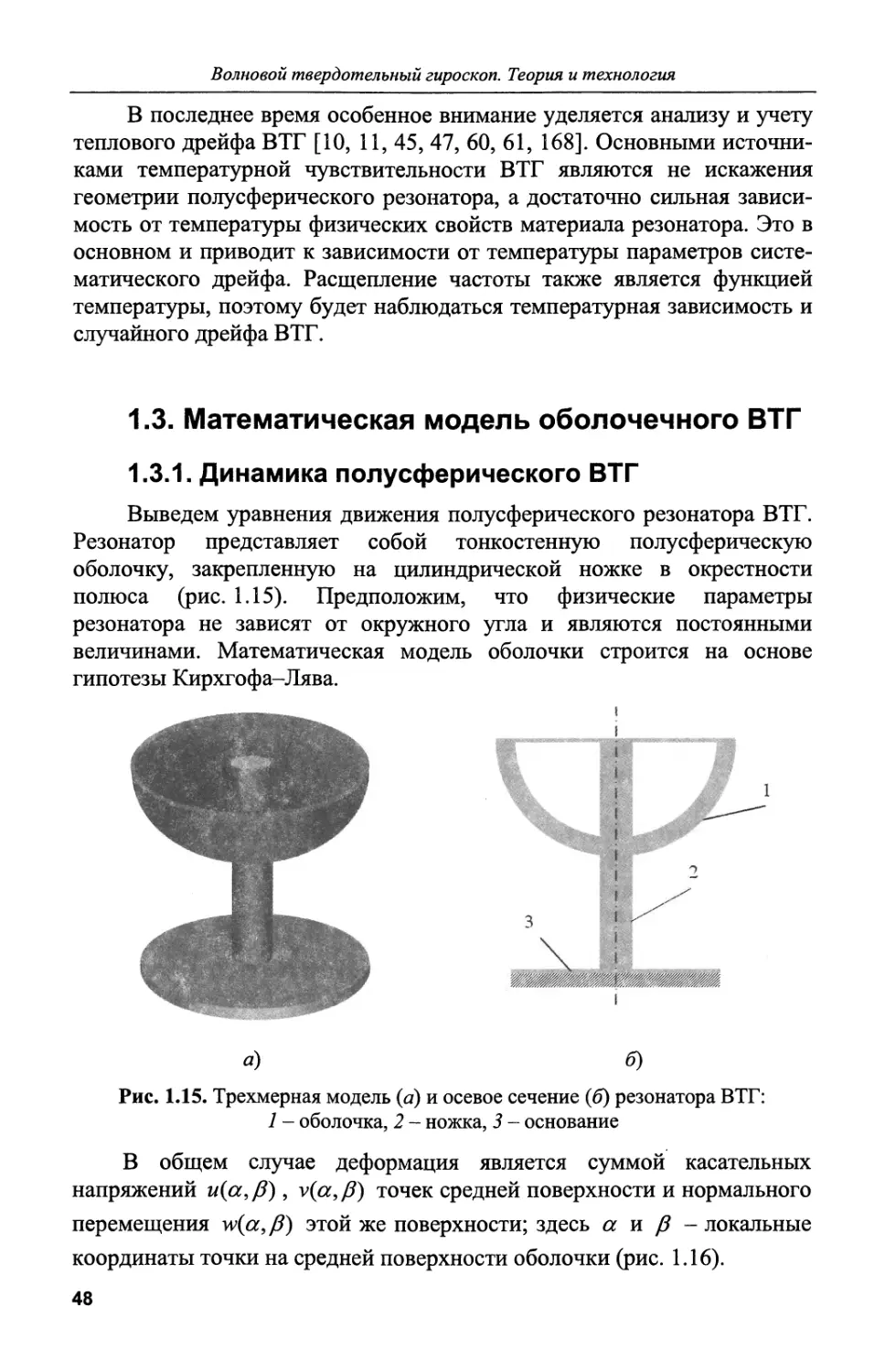
1.3.1. Динамика полусферического ВТГ 48
1.3.2. Динамика цилиндрического ВТГ 53
2. Проектирование и производство резонаторов волнового
твердотельного гироскопа 56
2.1. Конструкция ВТГ 56
2.2. Проектирование резонаторов ВТГ 62
2.3. Диссипативные свойства кварцевого стекла 66
2.4. Обработка кварцевого стекла при производстве
резонаторов ВТГ 69
2.4.1. Особенности механической обработки поверхности 69
2.4.2. Химическая обработка поверхности 71
2.4.3. Отжиг кварцевого стекла 72
2.4.4. Нанесение металлического покрытия с малой диссипацией .... 74
2.5. Характеристики резонаторов ВТГ 79
2.5.1. Частотные характеристики 79
2.5.2. Добротность 82
2.5.3. Массовый дисбаланс 84
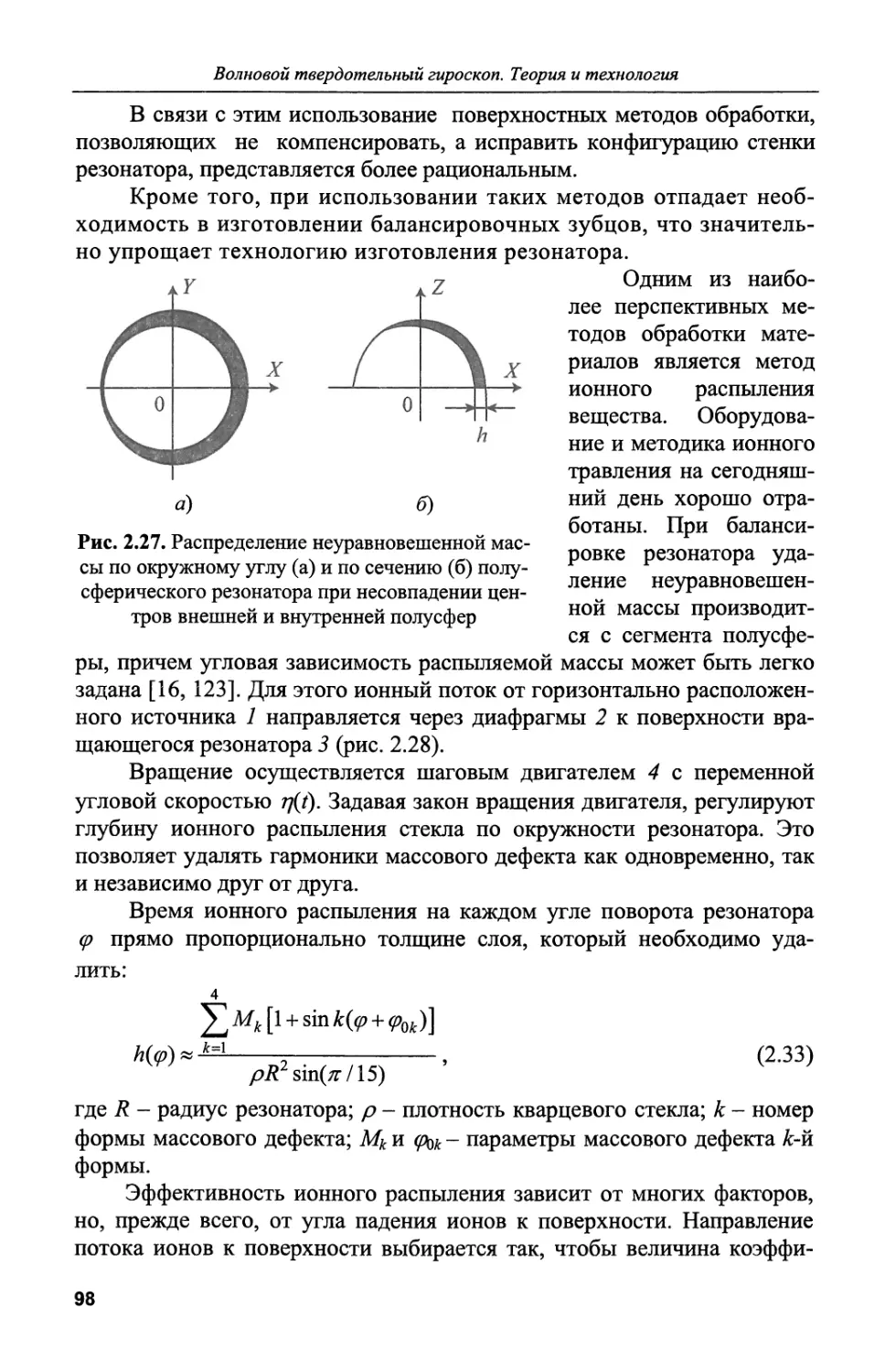
2.6. Балансировка полусферического резонатора ВТГ 86
3. Сборка и вакуумирование чувствительных элементов
волнового твердотельного гироскопа 102
3.1. Обеспечение равномерности зазоров в ВТГ 102
3.2. Соединение деталей ВТГ 105
3.3. Вакуумирование чувствительных элементов ВТГ 114
4. Электроника волнового твердотельного гироскопа 122
4.1. Общие принципы построения электронных систем
управления ВТГ 122
4.2. Измерительные системы ВТГ 131
3
4.3. Применение цифровых сигнальных процессоров
в электронике ВТГ 137
4.4. Надежность ВТГ 141
4.4.1. Предварительный расчет надежности 142
4.4.2. Экспериментальная оценка MTBF 143
4.5. Обработка выходной информации ВТГ методом
вариации Аллана 145
Заключение 158
Литература 159
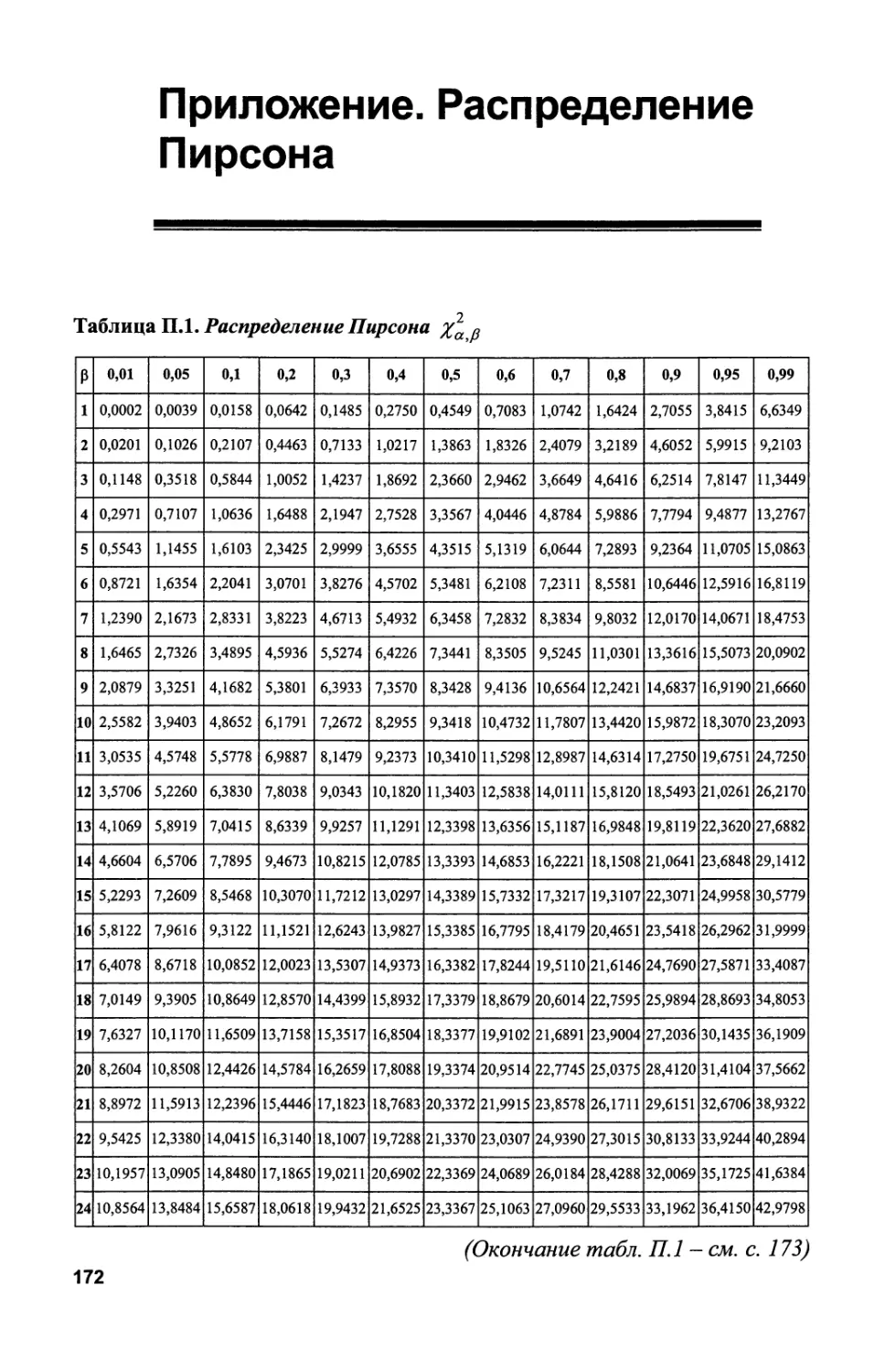
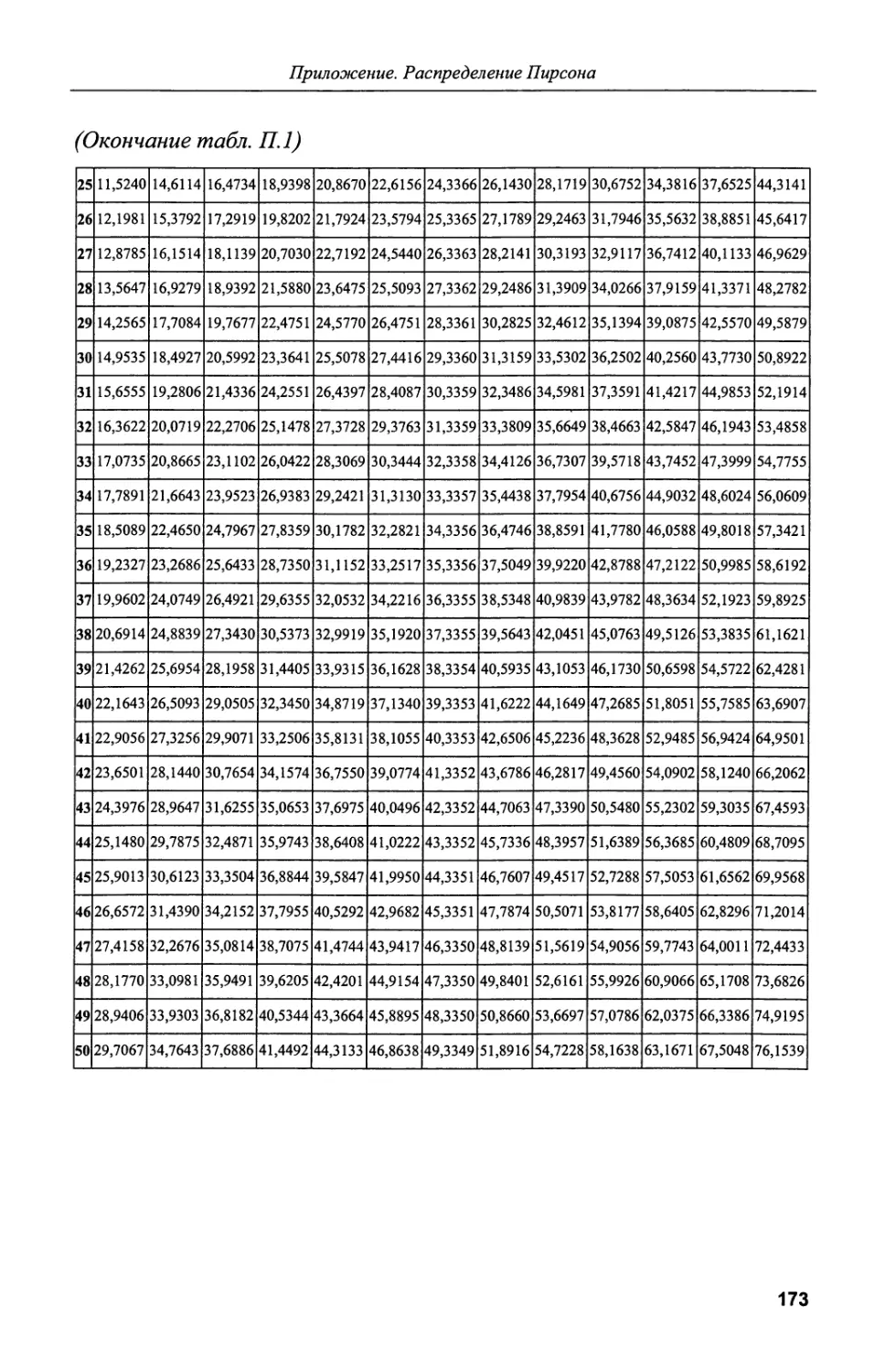
Приложение. Распределение Пирсона 172
Сведения об авторах 174
4
Contents
Preface 6
Introduction 8
1. Theoretical bases of functioning the Coriolis vibratory gyroscope ....13
1.1. Mathematical model of the perfect CVG 13
1.1.1. Principle of operation of the ring-resonator CVG 13
1.1.2. Dynamics of the perfect ring-resonator CVG 15
1.2. Mathematical model of the imperfect CVG 31
1.2.1. Dynamics of the imperfect CVG 31
1.2.2. Error models of the imperfect CVG 35
1.3. Mathematical model of the shell-resonator CVG 48
1.3.1. Dynamics of the hemispherical resonator gyroscope 48
1.3.2. Dynamics of the cylindrical resonator gyroscope 53
2. Design and manufacture of the CVG resonators 56
2.1. CVG design 56
2.2. Construction of CVG resonators 62
2.3. Dissipative properties of silica glass 66
2.4. Processing of the silica glass during the manufacture
of CVG resonators 69
2.4.1. Features of surface machining 69
2.4.2. Chemical surface treatment 71
2.4.3. Silica glass annealing 72
2.4.4. Metal coating with low dissipation 74
2.5. Features of CVG resonators 79
2.5.1. Frequency response 79
2.5.2. Quality factor 82
2.5.3. Mass misbalance 84
2.6. Balancing of the HRG resonator 86
3. Assembling and degassing sensitive elements
of the Coriolis vibratory gyroscopes 102
3.1. Ensuring uniformity of gaps in CVG 102
3.2. Joining CVG parts 105
3.3. Degassing CVG sensitive elements 114
4. Electronics of the Coriolis vibratory gyroscope 122
4.1. General principles of the CVG control system construction 122
4.2. Measuring system of the CVG 131
4.3. Using the digital signal processors in CVG electronics 137
4.4. CVG reliability 141
4.4.1. Preliminary evaluation of reliability 142
4.4.2. Experimental estimation of MTBF 143
4.5. Processing the CVG output information
by means of the Allan variance 145
Conclusion 158
References 159
Appendix. Pearson distribution 172
About authors 174
5
Предисловие
Широкое внедрение гироскопических приборов в современную
информационную среду привело к тому, что сегодня разрабатываются и
используются десятки типов разнообразных навигационных приборов.
Волновые твердотельные гироскопы (ВТГ) относят к наиболее
перспективным из них. Уникальный набор свойств позволил им занять
лидирующее положение в космической технике, обеспечивая информацией
околоземные и межпланетные автоматические станции, непрерывно
функционирующие в космосе в течение 15-20 лет.
Как часто бывает при появлении и быстром развитии технических
новшеств, значительная часть технической информации по ВТГ
сосредотачивается в патентах и в многочисленных периодических изданиях,
затрудняя инженерам ориентирование в нарастающем потоке
информации.
Предлагаемая вашему вниманию книга обобщает многолетний
опыт авторов в области ВТГ и призвана оказать существенную помощь
инженерам-разработчикам, предоставляя им возможность ознакомиться
с современным состоянием теории и технологии этого класса приборов.
Особенность производства ВТГ состоит в необходимости
использования комплекса технологий механической и химической обработки
кварцевого стекла, прецизионных технологий сборки и вакуумирования
приборов, специфических методов контроля их характеристик.
Необычных подходов требует и разработка электроники, а также алгоритмов
управления и обработки информации ВТГ. При обсуждении этого
широкого круга вопросов авторы стремились дать читателю ясное
представление о путях решения этих проблем.
Книга состоит из четырех глав. В первой главе рассмотрены
теоретические основы функционирования ВТГ, включая
математические модели погрешности прибора. Вторая глава посвящена
проектированию и производству основной детали ВТГ - полусферическому
резонатору. В третьей главе рассмотрены вопросы, связанные с
конструкцией, сборкой и вакуумированием ВТГ. В четвертой главе
обсуждаются принципы построения электронных систем управления,
проблемы обработки информации и вопросы надежности ВТГ.
Авторы считают свои долгом выразить благодарность многим
специалистам, которые предоставили информацию для этой книги и
сделали полезные критические замечания, учтенные при доработке рукописи.
Preface
Widespread introduction of the gyroscopic instruments in the modern
information environment has led developing and using dozens of different
types of navigation devices. The Coriolis vibratory gyroscopes (CVG) are
among the most promising of them. Unique set of properties allow them to
take a leading position in space technology, providing information to near-
Earth and interplanetary automatic stations, operating continuously in space
for 15-20 years.
As often happens after appearance and rapid development of
technological innovations, much of the technical information on the CVG is contained
in patents and in numerous periodicals, hampering engineers orientation in
the growing flow of information.
This book offered to your attention summarizes the authors' many years
of experience in the field of CVG investigations and aims to provide
substantial assistance to design engineers, enabling them to familiarize themselves
with the current state of theory and technology of this class of devices.
Manufacture of the CVG is connected with the need to use complex
technology of mechanical and chemical processing of quartz glass, precision
technology of vacuum devices assembly, and specific methods of controlling
their characteristics. Unusual approaches are required to develop electronics
and control algorithms and information processing in the CVG. In discussing
the broad range of issues, we have sought to give the reader a clear idea on
how to tackle these problems.
The book consists of four chapters. The first chapter deals with the
theoretical foundations of the CVG, including mathematical models of the
instrument errors. The second chapter is devoted to the design and
manufacture of the hemispherical resonator as the main part of the hemispherical
resonator gyroscope (HRG). The third chapter discusses issues related to the
design, assembly, and degassing in CVG. The fourth chapter discusses the
principles of electronic control systems, information processing problems,
and questions of CVG reliability.
The authors are grateful to many experts who provided information for
this book and made useful criticisms taken into account when finalizing the
manuscript.
Введение
История гироскопии начинается с известных опытов Л. Фуко
(1852 г.), который с помощью быстровращающегося ротора,
помещенного в кардановый подвес, экспериментально показал наличие
суточного вращения Земли. Отсюда возникло и само название такого
устройства - гироскоп, что означает по-гречески «гиро» - вращение, «скопео»
- наблюдаю.
Интенсивное развитие механических роторных гироскопов
началось в XX в. Это было вызвано развитием авиации, судостроения,
космической и ракетной техники, подвижных наземных объектов,
маркшейдерского дела. Прецизионные поплавковые и динамически
настраиваемые гироскопы находят широкое применение в современных
системах ориентации, стабилизации и навигации благодаря высокой
надежности и отработанной технологии производства. Однако,
традиционная гироскопия постепенно сдает свои позиции, уступая место
новым поколениям оптических, вибрационных (микромеханических),
волновых твердотельных и других гироскопов [9, 20, 26, 34, 167]. Особенно
это касается тех областей техники, где требуется миниатюризация и
снижение стоимости систем при обеспечении заданной точности,
надежности, времени готовности и срока службы в сложных условия
эксплуатации.
Отвечающие современным требованиям волновые твердотельные
гироскопы (ВТГ) разработаны в середине 1980-х гг. [155-160, 163, 174,
199]. В основе их работы лежит явление инертности упругих волн. Этот
эффект открыл британский физик Дж. Брайан в конце XIX в. при
исследовании движения волновой картины, возникающей при изгибных
колебаниях тонкого кольца на вращающемся основании [114]. Угловые
скорости вращения кольца Ω и стоячей волны Ω неодинаковы и
связаны простым соотношением:
& = BFQ, (B.1)
где BF- коэффициент Брайана.
Другими словами, при вращении основания стоячая волна
движется относительно кольца, что объясняется действием кориолисовых сил
инерции. Свои расчеты Брайан подтвердил экспериментально,
наблюдая в микроскоп колеблющуюся кромку тонкостенного бокала,
расположенного на вращающемся столике. Число поворотов стоячей волны
(которое определялось подсчетом числа проходивших в поле зрения
8
Введение
микроскопа пучностей или узлов) всегда меньше реального числа
поворотов бокала, то есть угловая скорость вращения стоячей волны меньше
угловой скорости вращения носителя колебаний.
Брайан рассмотрел частный случай движения - равномерное
вращение колеблющегося кольца. В 60-х гг. XX в. Д. Линч [159]
экспериментально доказал применимость этого эффекта в случае вращения
кольца с переменной угловой скоростью. Позднее В. Ф. Журавлевым и
Д. М. Климовым теоретически доказано, что эффект Брайана
справедлив для любого закона вращения основания Ω(Υ) [12, 69, 70]. Угол
поворота стоячей волны φ(ί) относительно кольцевого резонатора
выражается при этом формулой
2 г
φ«) = --—\Ω(τ)άτ9 (Β.2)
где к - параметр, определяющий моду колебаний кольца.
Эффект Брайана можно использовать для построения датчика
угловой скорости (В.1) и углового перемещения (В.2). Поскольку
положение узлов и пучностей стоячей волны относительно кольца зависит от
его углового перемещения, то, измеряя их эволюцию <p(t), можно
определить угловую скорость Ω(ί). Для определения произвольного
углового движения объекта относительно инерциального пространства
необходимо иметь три таких датчика, ориентированных по трем взаимно
перпендикулярным осям. Информация об угловом положении объекта
будет при этом описываться тремя интегралами вида
\nj(r)dz = -1^(pj{t\ 7 = 1,2,3. (В.З)
о 2
В конструкциях ВТГ используют тонкостенные полусферические
или цилиндрические резонаторы. Колебания кромки таких резонаторов
идентичны колебаниям тонкого кольца и подчиняются тем же
закономерностям [46, 62, 64, 105-107].
На рис. В.1 показана хорошо известная конструкция ВТГ,
предложенная фирмой Delco Electronics (США) [155] в начале 1980-х гт.
Основной деталью является тонкостенный высокодобротный
полусферический резонатор, изготовленный из кварцевого стекла. Измерение
параметров стоячей волны и управление колебаниями осуществляются
емкостными датчиками и актюаторами, расположенными на узле
возбуждения и измерительной плате. Эти три основные детали ВТГ спаяны
между собой; внутри собранного блока создается вакуум. Для
управления всеми процессами в ВТГ и формирования выходной информации
используется специальная электронная система.
9
Волновой твердотельный гироскоп. Теория и технология
В ВТГ отсутствует вращающийся ротор, что дает новому
гироскопу ряд преимуществ:
большой ресурс работы;
высокую точность и малую случайную погрешность;
устойчивость к тяжелым условиям эксплуатации (температура,
перегрузки, вибрация, гамма-излучение);
сравнительно небольшие габаритные размеры, массу и
потребляемую мощность;
сохранение инерциальной информации при кратковременном
отключении электропитания.
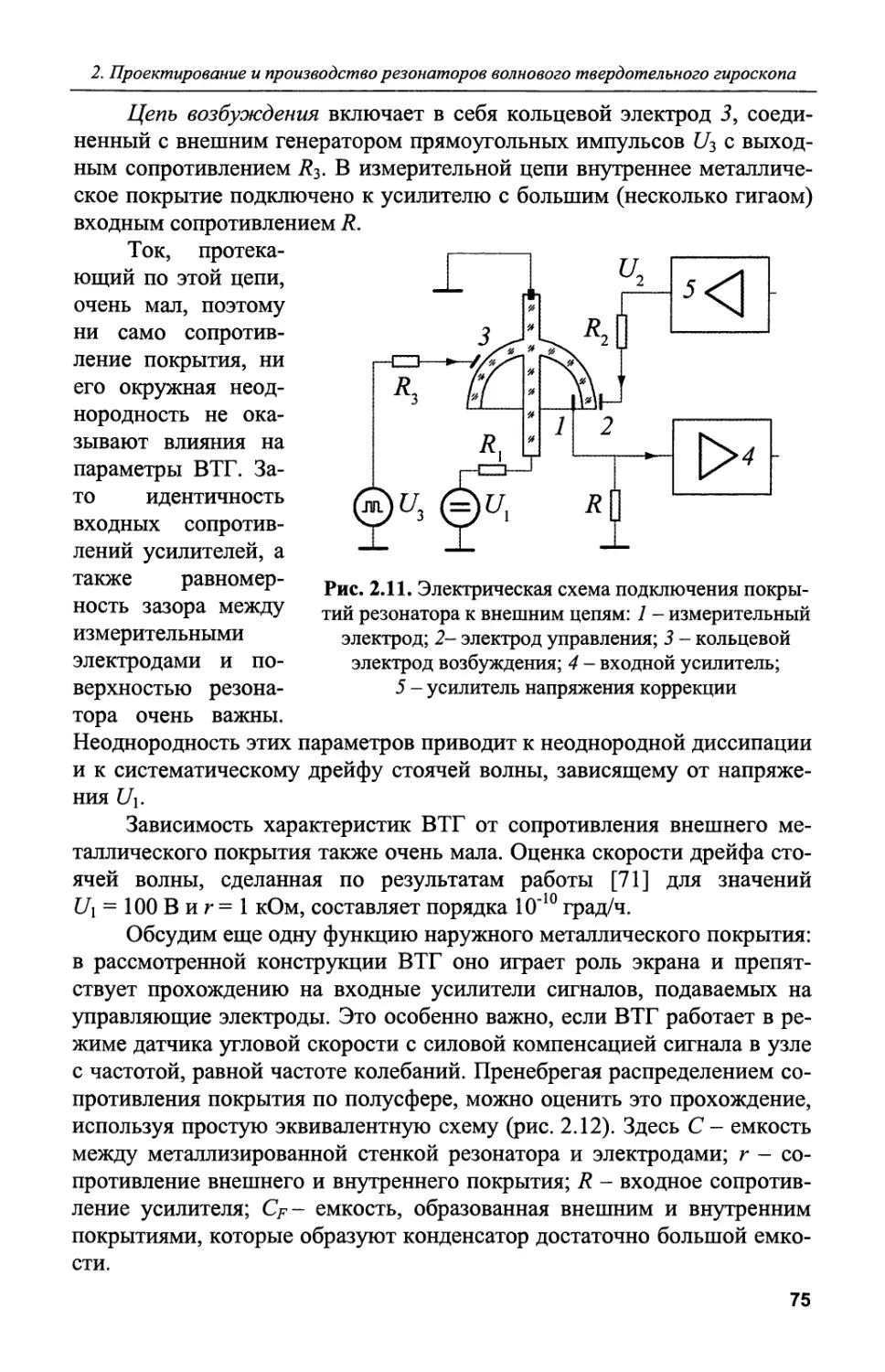
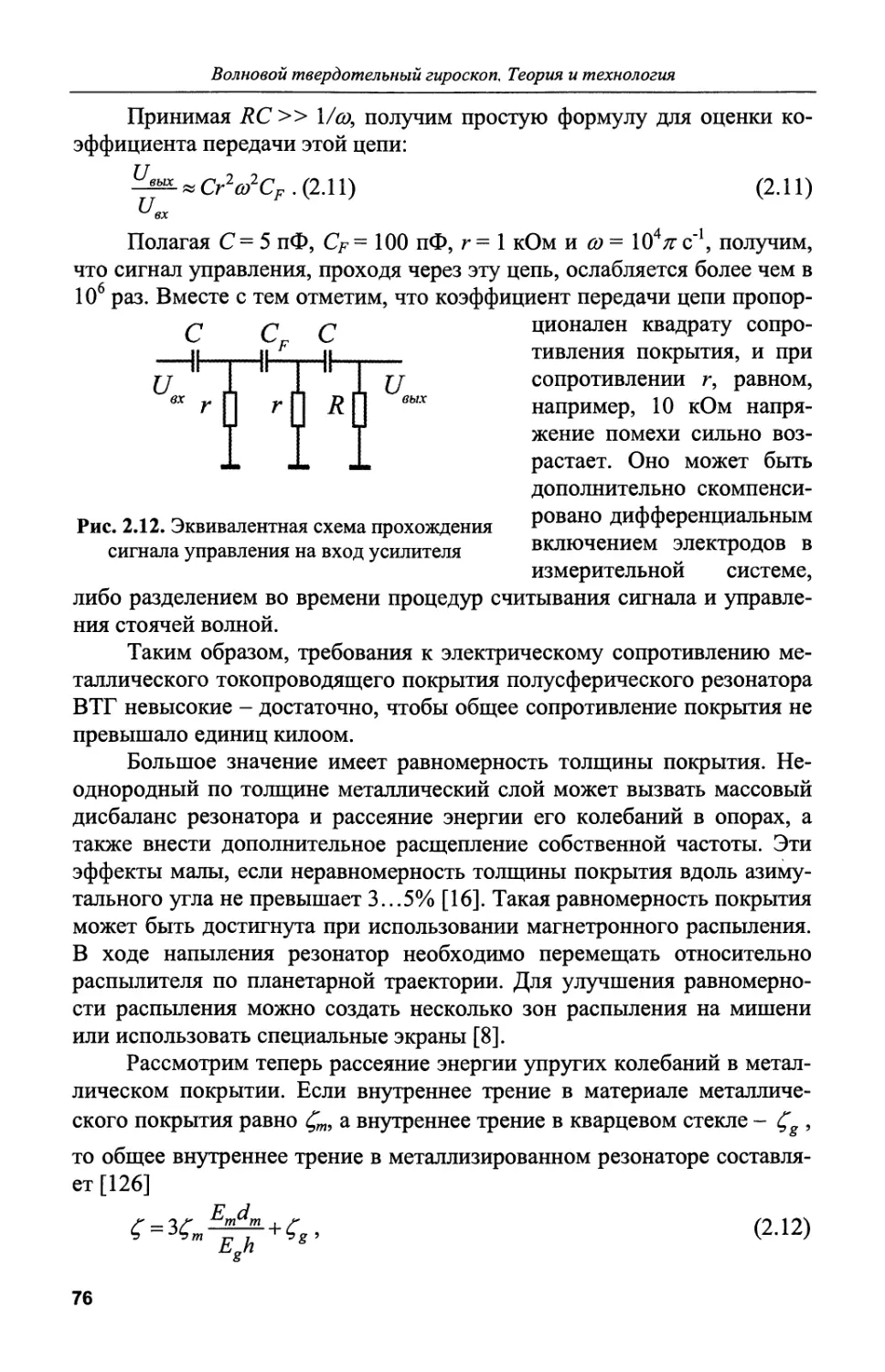
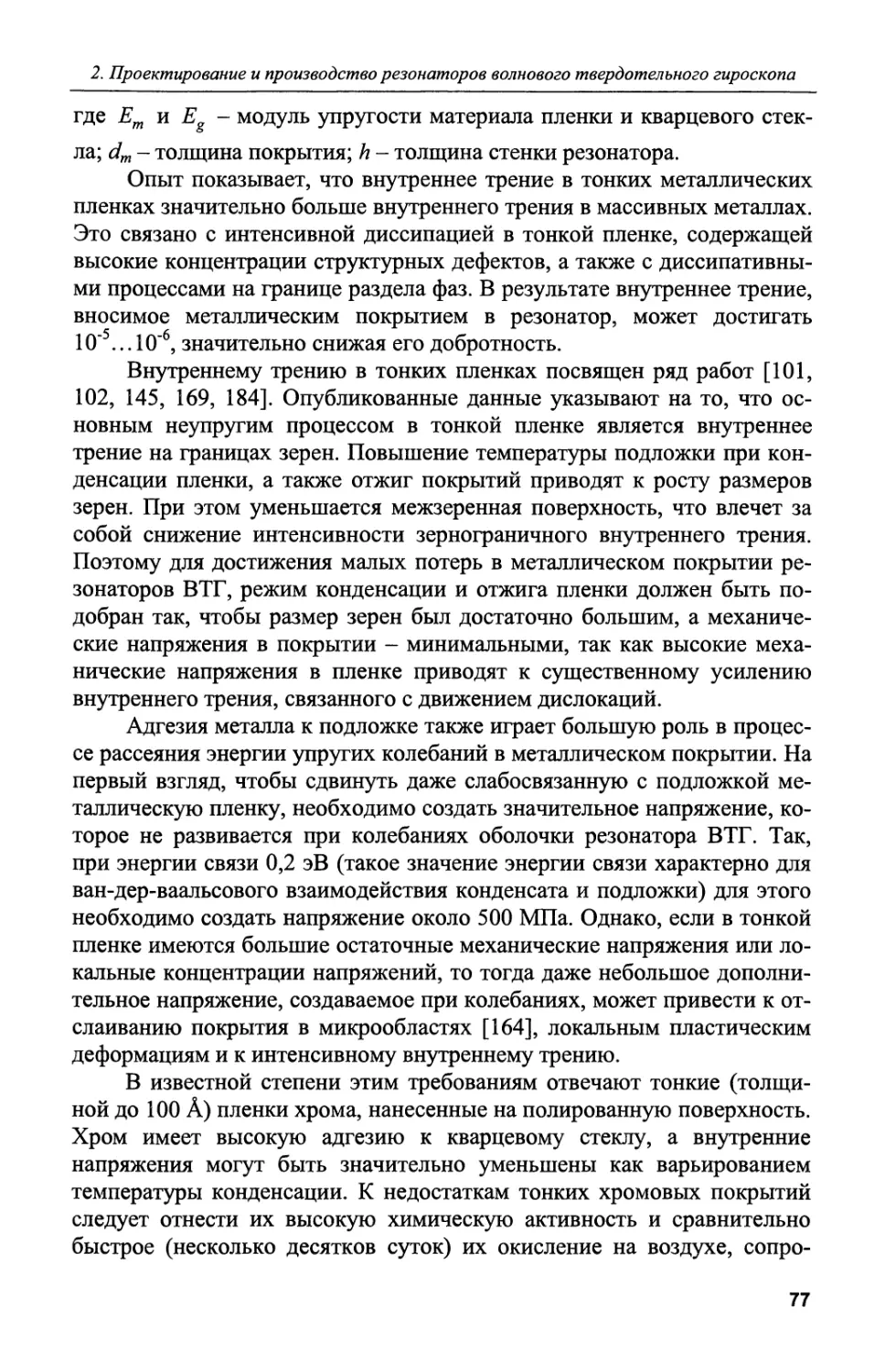
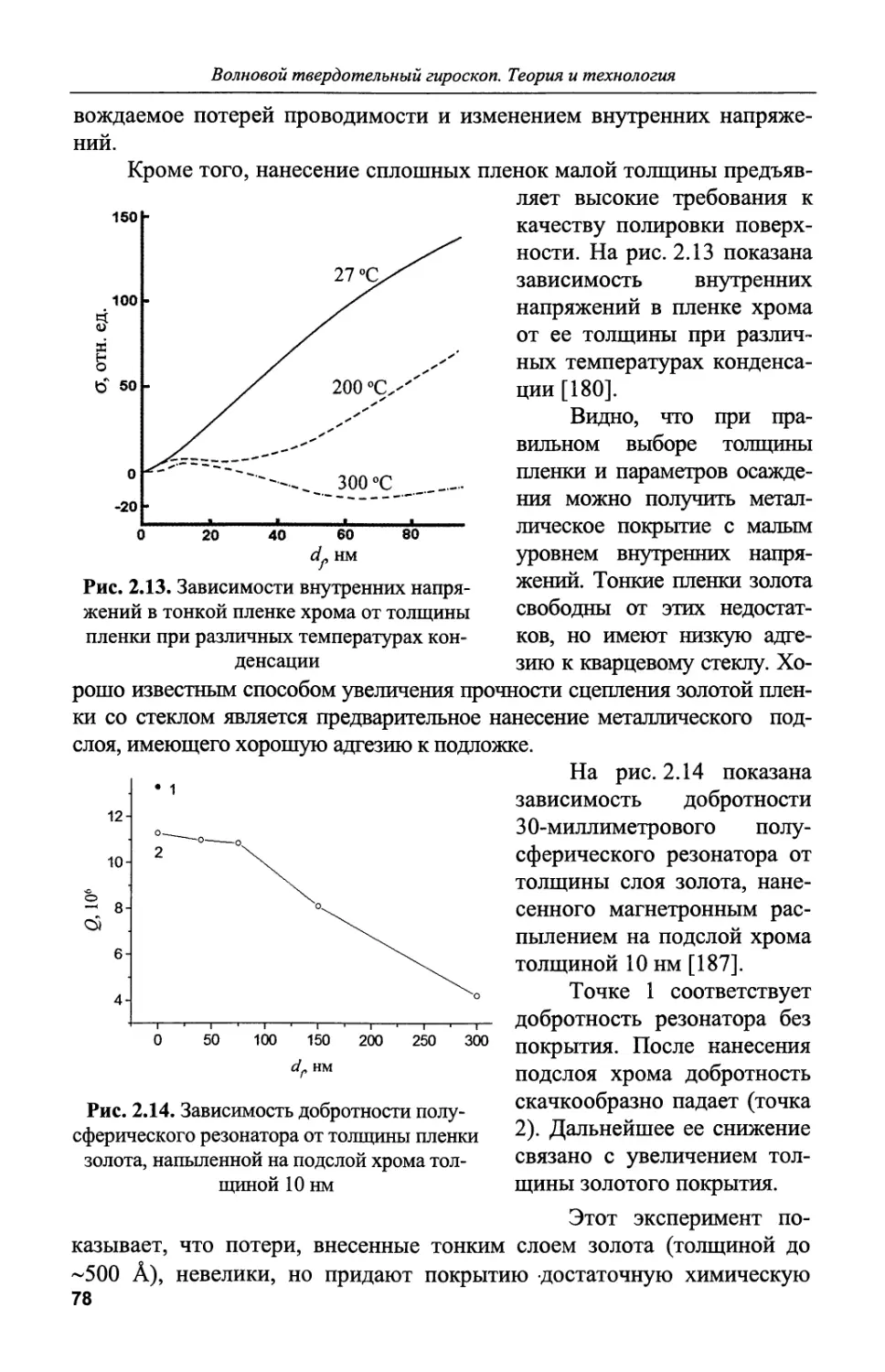
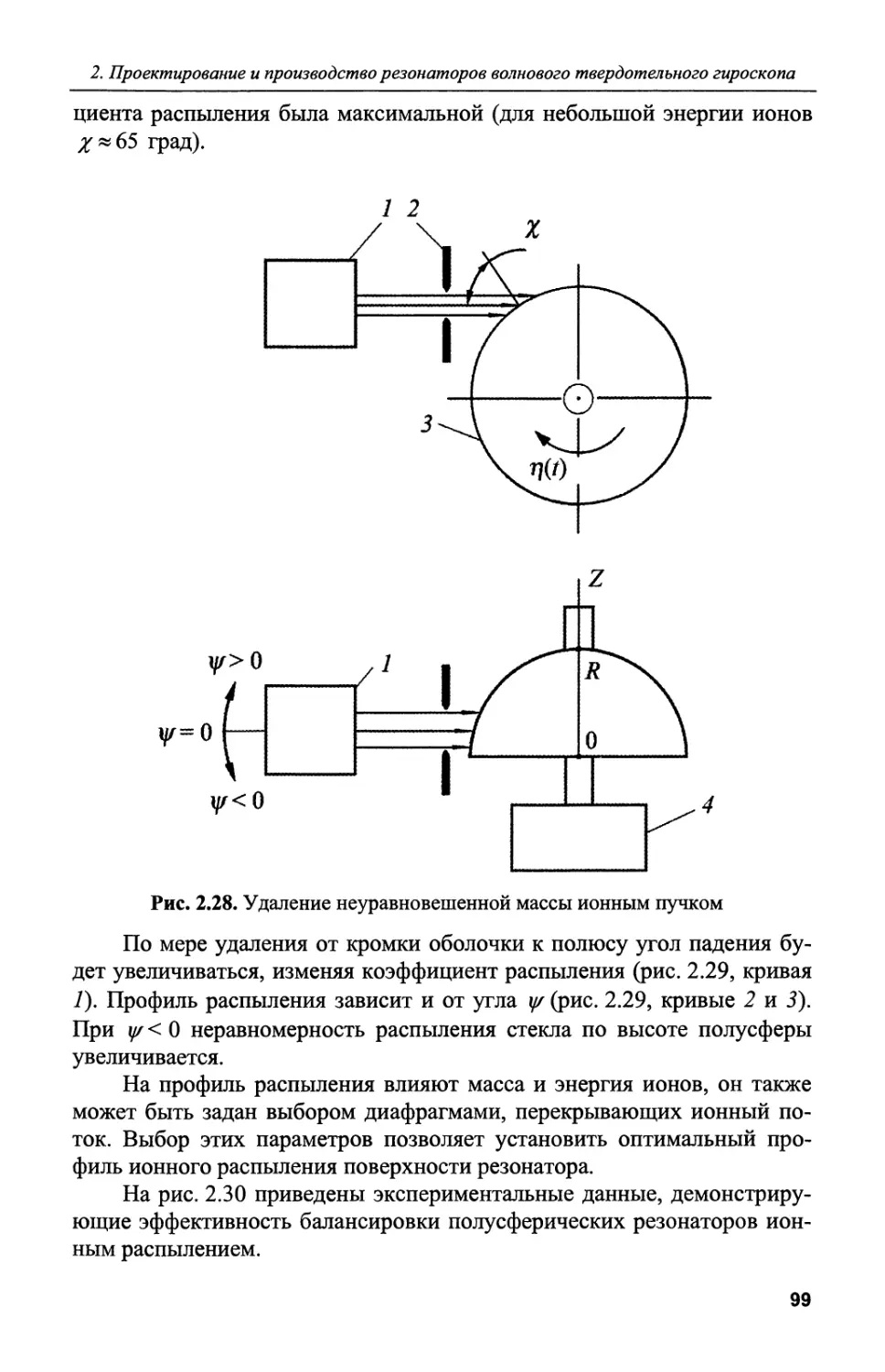
Рис. В.1. Конструкция ВТГ фирмы Delco Electronics:
1 - геттерный насос; 2 - гермоввод; 3 - измерительная плата; 4 - емкостный
управляющий электрод; 5 - емкостный датчик; 6 - узел возбуждения; 7 - резонатор; 8 -
кольцевой электрод; 9 - вакуумный корпус; 10 - коаксиальный гермоввод
В ходе испытаний этот ВТГ показал высокую точность -
случайная составляющая скорости дрейфа не превышала 0,005 град/ч. В начале
1990-х гг. в США была выпущена первая бесплатформенная инерциаль-
ная навигационная система (БИНС) авиационной точности на основе
ВТГ, а описанная выше конструкция была принята за основу в ряде
более поздних разработок [138, 149, 171].
В то же время достижение высоких характеристик ВТГ возможно
лишь при соблюдении ряда условий. Резонатор ВТГ должен иметь
высокую добротность и упруго-массовую симметрию, зазоры между ос-
10
Введение
новными деталями ВТГ должны быть выдержаны с высокой точностью.
Жесткие требования предъявляются к вакууму внутри прибора,
качеству управляющей электроники и методам обработки выходной
информации. Специфичность этих требований и необычность технологий
производства ВТГ являются причинами сравнительно медленного
внедрения этого перспективного прибора.
Длительный опыт разработки в разных странах позволяет
выделить два основных направления развития ВТГ:
1. Создание точных ВТГ на основе высокодобротных резонаторов
из кварцевого стекла. Производство таких приборов требует
использования ряда прецизионных технологий, их себестоимость высока, а
область применения ограничена, как правило, космической техникой.
2, Создание дешевых ВТГ низкой точности (со скоростью
случайного дрейфа 1-100 град/ч) общего применения. Снижение их
себестоимости достигается за счет ряда конструктивных и технологических
упрощений.
Это разделение на два направления связано с особенностями
внутреннего трения в материалах, используемых для изготовления их
резонаторов. Напомним, что под внутренним трением в твердом теле
понимают различные механизмы превращения энергии упругих колебаний в
теплоту. Количественно внутреннее трение ζ представляет собой
безразмерную величину, равную отношению энергии AW, рассеянной за
один период в некотором объеме твердого тела, к умноженной на 2 π
энергии деформации W, запасенной в этом объеме:
ΙπΨ
В качестве меры внутреннего трения часто используют другие
параметры: добротность Q, время затухания г, декремент затухания ψ. Эти
параметры связаны между собой простыми соотношениями:
ζ = 0Γ1~ = £, (Β.5)
π/τ π
где/- частота колебаний, Гц.
Низким уровнем внутреннего трения обладают некоторые
кристаллы, а также чистое кварцевое стекло. Кристаллические материалы,
ввиду высокой твердости и анизотропии упругих свойств, в
производстве резонаторов ВТГ не используются, и по существу,
высокодобротный резонатор с высокой изотропией упругих свойств можно сделать
только из кварцевого стекла. Именно такие прецизионные кварцевые
резонаторы используются для создания точных ВТГ. Другие материалы,
в том числе металлы, имеют уровень внутреннего трения на 2-3 порядка
выше, и изготовленные из них резонаторы [132-134, 136] (как и
построенные на их основе ВТГ) имеют худшие точностные характеристики.
11
Волновой твердотельный гироскоп. Теория и технология
Однако, такие ВТГ имеют низкую себестоимость, что позволяет этим
приборам занять соответствующую нишу на рынке навигационных
устройств.
Принципы, лежащие в основе функционирования ВТГ, нашли
применение и в разнообразных микромеханических вибрационных
гироскопах (МГ) [25, 113, 130, 131, 165]. И хотя их точность в настоящее
время невысока, малые габаритные размеры и себестоимость,
возможность массового производства и совершенствование технологии
открывают перед МГ широкие перспективы.
В последние десятилетия в мире опубликовано большое
количество монографий [3, 4, 9-12, 16-21, 25, 26, 36], статей, материалов
докладов, диссертаций [39-48, 50-52, 56, 58-73, 77, 78, 87, 88, 92-95, 97, 98,
100, 103-108, 110-124, 129-139, 143, 149-151, 155-163, 165-168, 171-174,
176-179, 183, 185-187], патентов [188-206], посвященных различным
аспектам моделирования, проектирования, обработки сигнала,
применения ВТГ и систем на их основе. Количество публикаций постоянно
растет, что связано с востребованностью такого типа приборов на рынке
систем ориентации, стабилизации и навигации подвижных объектов. К
сожалению, в настоящее время практически не существует работ, в
которых с единых позиций освещались бы как теоретические вопросы
моделирования, так и связанные с ними проблемы технологии и
проектирования ВТГ.
В предлагаемой читателю книге авторы постарались рассмотреть
наиболее важные вопросы теории ВТГ, основные технологические
процессы, используемые при их производстве, проблемы построения
электроники ВТГ и методы обработки выходной информации. Книга
является развитием ранее вышедших монографий [3,4, 16-18].
12
1. Теоретические основы
функционирования
волнового твердотельного
гироскопа
Как правило, рассматриваются два типа моделей ВТГ: упрощенная
кольцевая модель и модель на основе оболочек вращения. Однако в
последнее время распространение получили микромеханические ВТГ, в
которых тонкое упругое кольцо само является чувствительным
элементом. Поэтому в главе основное внимание будет уделено исследованию
именно его динамики. В разделе 1.3 кратко рассмотрены модели
полусферического и цилиндрического резонаторов.
1.1. Математическая модель идеального ВТГ
1.1.1. Принцип действия кольцевого ВТГ
Исследование принципа действия ВТГ удобно проводить с
использованием его кольцевой модели. Для этого выделим с кромки
резонатора кольцо радиуса R с конечной площадью поперечного сечения. Будем
считать, что центр этого кольцевого резонатора жестко связан с
основанием прибора.
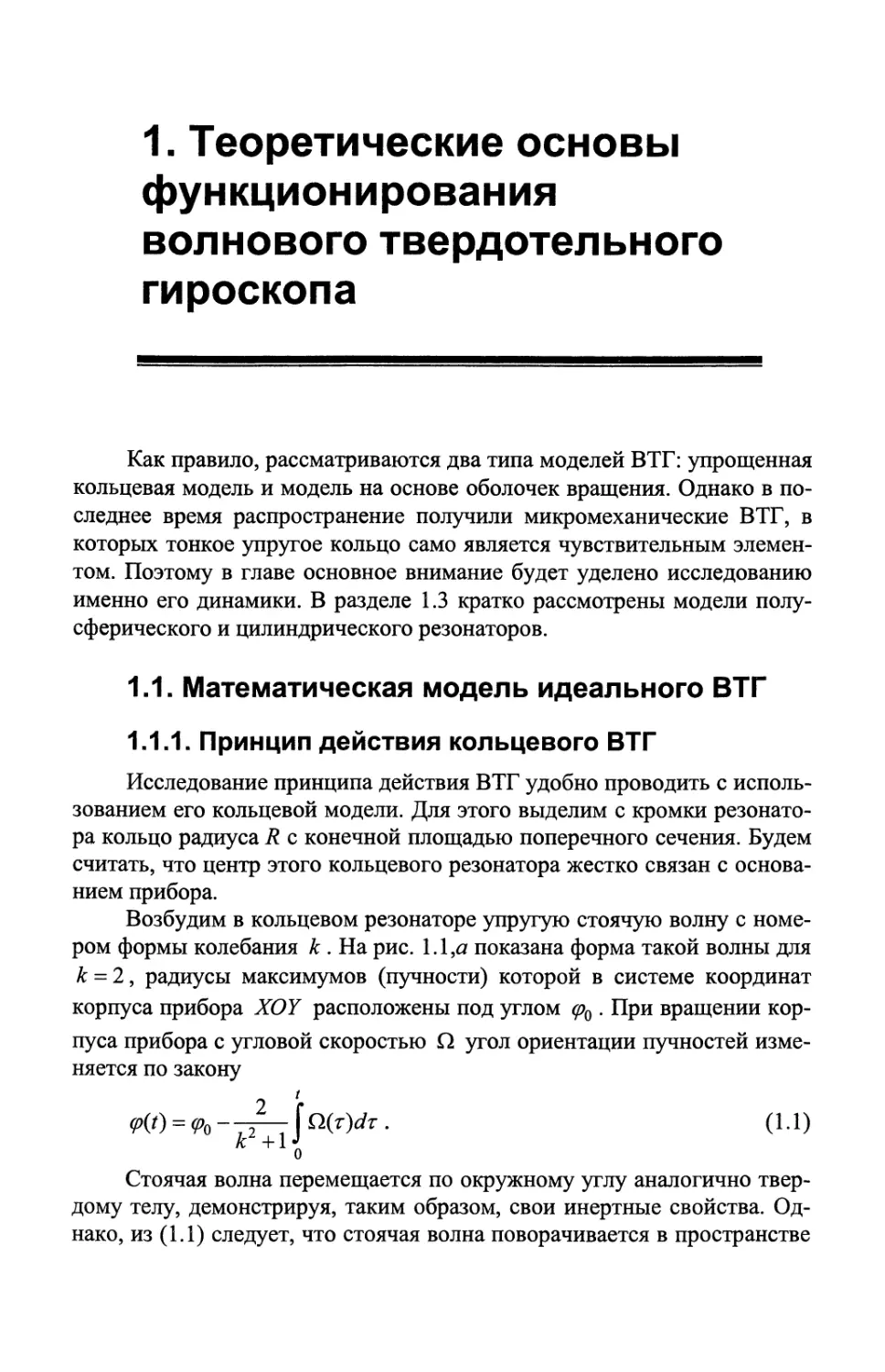
Возбудим в кольцевом резонаторе упругую стоячую волну с
номером формы колебания к . На рис. 1.1,α показана форма такой волны для
к = 2, радиусы максимумов (пучности) которой в системе координат
корпуса прибора ΧΟΥ расположены под углом φ0. При вращении
корпуса прибора с угловой скоростью Ω угол ориентации пучностей
изменяется по закону
2 Г
<p(t) = <p0--—\n(T)dr. (1.1)
* +lJo
Стоячая волна перемещается по окружному углу аналогично
твердому телу, демонстрируя, таким образом, свои инертные свойства.
Однако, из (1.1) следует, что стоячая волна поворачивается в пространстве
Волновой твердотельный гироскоп. Теория и технология
на угол, меньший угла поворота корпуса прибора, и при известном
угол φ(ί) служит мерой угла поворота основания:
2 f
0>(О -<Ро= "TFT Ω(τ)(1τ.
к +1*
(1.2)
В аналогичных условиях твердое тело с вертикальной осью
вращения при отсутствии трения повернулось бы относительно основания
на угол
I
φ(?)-φϋ=-\ςΐ{τ)άτ .
(1.3)
Отличие (1.2) от (1.3) заключается в масштабном коэффициенте
преобразования (коэффициенте прецессии или коэффициенте Брайана):
2
BF--
к2+\
<1 при к = 2,3,....
Y A
в)
б)
Рис. 1.1. Эффект Брайана в ВТГ: а - ориентация стоячей волны по второй
форме; б - механизм образования прецессии
Механизм возникновения прецессии (эффект Брайана) показан на
рис. 1.1,6. Пучности стоячей волны находятся в точках A, B,C,D. При
вращении полусферы эти точки совершают сложное движение:
относительное со скоростями Υ^,ν^,ν^Υο и переносное с угловой
скоростью Ω. Появившееся кориолисово ускорение элементов массы в
точках A,B,C,D обозначим W^, W0, WKC, W^, соответственно. Ко-
риолисовы силы инерции Р^, Р^, Р^, Р^, приложенные в точках
14
1. Теоретические основы функционирования волнового твердотельного гироскопа
А, С и В, D , направлены в противоположные стороны и создают
пары сил. Пары Р^, YKC и Р^, Р^ш противоположны по направлению и в
сумме дают равнодействующую пару кориолисовых сил инерции,
модуль которой пропорционален значению угловой скорости вращения
основания. Эта пара сил вызывает прецессию стоячей волны
относительно корпуса резонатора и в инерциальном пространстве.
В кольцевом резонаторе одновременно могут существовать
различные формы упругих колебаний с номерами к = 2,3,... При этом
образуется несколько независимых каналов измерения вращения
основания с формулами преобразования (1.2) и коэффициентом прецессии
BF = -^—. (1.4)
к2+\
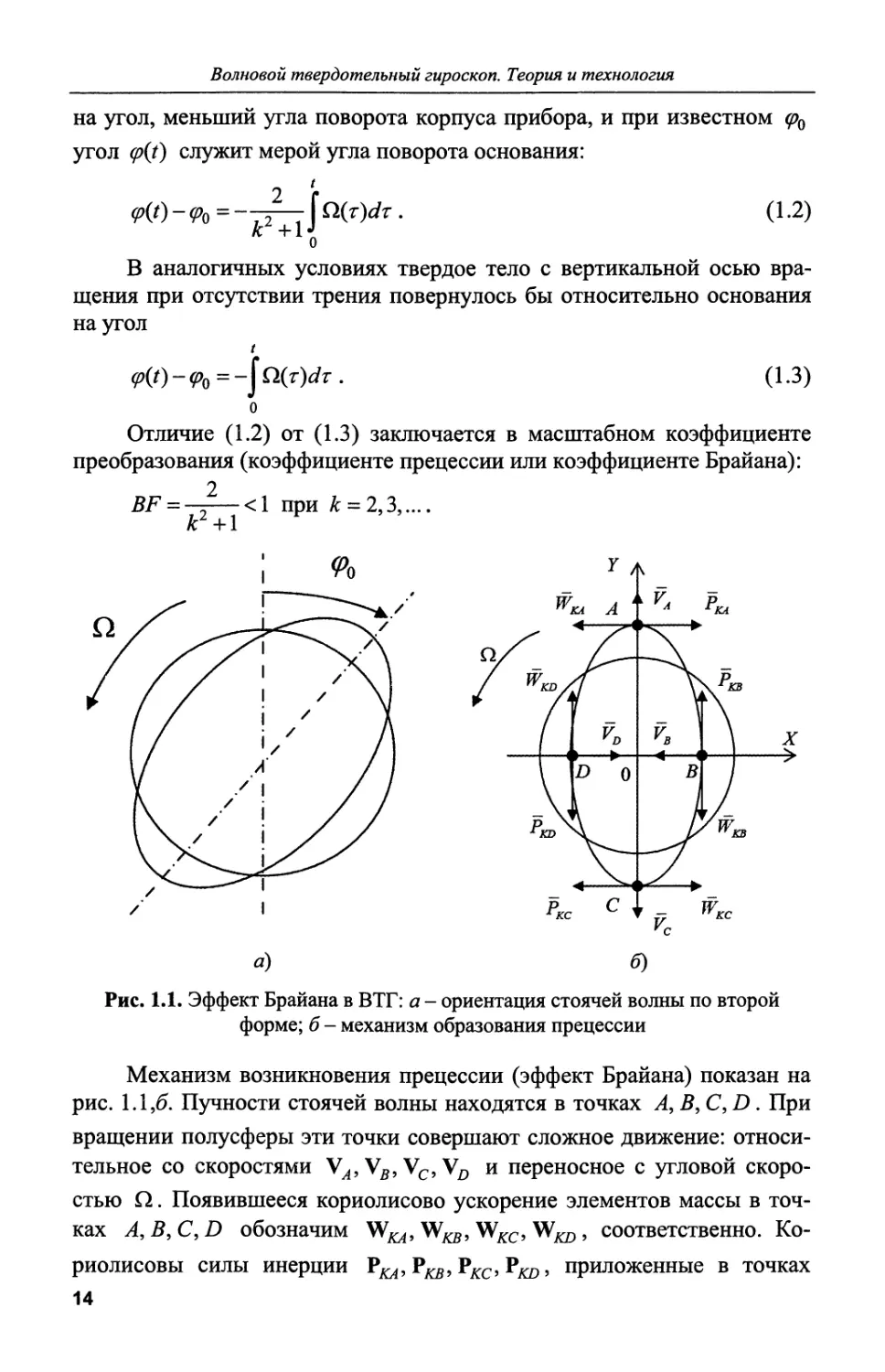
Вторая форма колебаний (к = 2) чаще всего используется в
качестве рабочей, поскольку она является низшей собственной формой из-
гибных колебаний полусферического резонатора (рис. 1.2,в). Нулевая
форма (к = О) соответствует колебаниям растяжения-сжатия и не
учитывается при исследовании динамики ВТГ, поскольку деформации
растяжения резонатора малы по сравнению с деформациями изгиба
(рис. 1.2,я). Первая форма (к = 1) соответствует перемещению
резонатора как твердого тела, ее необходимо учитывать при решении
уравнений движения ВТГ с учетом деформации ножки резонатора (рис. 1.2,6).
а) б) в)
Рис. 1.2. Низшие собственные формы колебаний резонатора
при к = О (а), к = 1 (б), к = 2 (в)
1.1.2. Динамика идеального кольцевого ВТГ
Решение задач динамики упругого кольца [68] представляет
интерес не только в качестве одного из подходов к приближенному
исследованию динамических процессов в осесимметричной оболочке
резонатора ВТГ. Кольцевые резонаторы находят непосредственное
15
Волновой твердотельный гироскоп. Теория и технология
применение в качестве микроэлектромеханических чувствительных
элементов гироскопических систем [19,113]. Возможны схемы
крепления с помощью внутреннего, либо наружного упругих подвесов
(рис. 1.3).
Кроме того, кольцевая модель идеально подходит для
исследования ВТГ с цилиндрическим резонатором, коэффициент
прецессии которого в пределе стремится к коэффициенту прецессии
кольца с увеличением отношения высоты цилиндра к его радиусу.
Задача о колебаниях кругового кольца является составной частью
исследований колебаний различных деталей конструкций с
вращающимися узлами круговой формы [28].
Рис.
Рис
а) Ъ
1.3. Кольцевой резонатор с внутренним (а) и наружным (б) подвесами
Рассмотрим основные
геометрические соотношения для
элементов кольцевого резонатора,
образованных при малом
значении угла Αφ при произвольном
значении угла φ.
Пусть в недеформирован-
ном состоянии элемент
резонатора представлен отрезком аах
(рис. 1.4).
Координаты начала и конца
этого отрезка в системе
координат корпуса ΧΟΥ имеют
1.4. Геометрия кольцевого следующие значения:
резонатора
Г'
У\
>1
у
У
о
i
\v + Av\
^^v£
w +
αλ
5
Aw/
/
ι
\ χ\
α
5
'W
с
Ι μ*4·
Ι Χ
χ
16
1. Теоретические основы функционирования волнового твердотельного гироскопа
x = Rcos(p, y = Rsinp; xl=Rcos((p + A(p), yx = Rsin(#? + Αφ). (1.5)
Длина малого отрезка осевой линии элемента аах вычисляется по
формуле
As = ^(xl-x)2+(yl-y)2. (1.6)
Подставляя в (1.6) значения координат (1.1), для малого угла Αφ
приближенно находим
As*RAφ. (1.7)
При наличии деформаций резонатора его элемент аах примет
положение аах. При этом начало отрезка имеет положительные
перемещения деформации по касательной и нормали к осевой линии ν
и w, а конец - перемещения ν + Δν и w + Aw. Координаты начала и
конца отрезка аах и его длина вычисляются по формулам
χ = R cos φ - ν sin φ - wcos φ, у = R sin φ + ν cos φ - w sin φ,
xx =^cos(^ + A^)-(v + Av)sin(^ + A^)-(vv+Avv)cos(^ + A^), (1.8)
yx = R sin(^ + Αφ) + (ν + Αν) cos(#> + Αφ) - (w + Aw) sin(#> + Αφ);
As = j(x~l-x)2 + (Jl-ri2. (1.9)
Принимая во внимание, что при Αφ —> О
Δν«ν'Δ^, Δτν«νι/Δ^, ϋοβΔ^^Ι, sinA#?«A#>,
из (1.8) находим
As « Αφ^ + ν' - wf + (ν + Wf . (1.10)
Здесь и далее штрихами обозначаются производные по углу φ, а
координаты ν и w принимаются за обобщенные координаты
кольцевого резонатора.
В дальнейшем будем исходить из гипотезы нерастяжимости
средней линии резонатора при его деформации, что соответствует
выполнению условия
Ay = As" (1.11)
или, с учетом (1.7), (1.10),
{R + v'-wf+{v + w,)2=R1. (1.12)
Линеаризация условия нерастяжимости (1.11) приводит к
соотношению
v' = w. (1.13)
При деформации резонатора, возникающей в плоскости
окружности его средней линии, в каждой его точке происходит поворот
касательной на угол
17
Волновой твердотельный гироскоп. Теория и технология
Ψ = Ψ\+Ψι, (1.14)
где угол ψχ - поворот касательной из-за тангенциальной деформации,
связанный с перемещением сечения на ν; угол ψ2 - поворот
касательной из-за радиальной деформации, связанный с различием перемещения
концов малого отрезка длины Rkcp в радиальном направлении.
Для малых значений углов ψί9ψ2 получаем
ν 1 ,
Ψι*Ί9 ^*-^·
Тогда (1.14) примет вид
1(у+и/). (1.15)
К
Угол поворота касательной (1.15) является источником
образования упругого момента в поперечном сечении кольца при его
деформации стоячими волнами.
Определим основные кинематические зависимости для
произвольной точки на осевой средней линии кольцевого резонатора
при относительных скоростях v,w, вносимых деформацией. Угловую
скорость вращения основания пока считаем равной нулю: Ω = 0.
Определяем тангенциальную Уц и радиальную ν± составляющие
абсолютной точки на средней линии резонатора для малых значений ν
и w:
11 (1.16)
Vj_ = νν + Ων.
Здесь (·) обозначает производную по времени.
Для вывода уравнений динамики кольцевого резонатора
используется метод Лагранжа [12, 17]. Поскольку обобщенные
координаты резонатора ν и w являются функциями двух независимых
переменных t и φ, то необходимо прежде всего определить сами
уравнения Лагранжа. Для этого рассматривается структура
кинетической и потенциальной энергии кольца, плотности которых
(значения на единицу угла) определяются выражениями
T = ±pS(v*+vl)=±pS(v2+w2), Ъ~Х\ (1.17)
где ρ - плотность материала кольца; S - площадь поперечного сечения
кольца; R - радиус средней нейтральной линии кольца; Ε - модуль
упругости материала; J - момент инерции поперечного сечения кольца
относительно нейтральной оси; χ - изменение кривизны нейтрального
слоя кольца.
18
/. Теоретические основы функционирования волнового твердотельного гироскопа
С учетом (1.15)
1 , 1
—ψ = —
* = ^' = ^(v4>/), (1.18)
n = ^(vr + wff)2. (1.19)
2R*K J
Удельный лагранжиан системы представляется выражением
L = ?^ = v2+w2-fc2(v' + w")2, (1.20)
pS
где
2 EJ
к
pSR4
Из функции Лагранжа и уравнения связи (1.13) сформируем
следующий двойной интеграл с фиксированными пределами:
<Р2*2
1= J ^{L{v^v\wn) + X{t^)f{v\w))dtd9, (1.21)
<Ρι h
где λ(ΐ,φ) - неопределенный множитель Лагранжа; /(v',w) = v'-w = 0
-уравнение связи (1.13).
В соответствии с принципом Гамильтона реальное движение
системы из заданного начального состояния {q\,tx) в фиксированное
конечное состояние (<p2,t2) проходит так, что интеграл (1.21) имеет
минимальное значение. Обобщенными координатами системы являются
перемещения v, w, поэтому минимум интеграла (1.21) по вариациям
этих переменных соответствует условию
SI(Sv,Sw) = 0,
где δ - символ приращения функции или переменной.
В развернутом виде из последнего выражения имеем
δΙ = \ Г —δν +— δή +—δν +
llydv dw dv'
+—δν/ + λ^δν' + λ^δνλώάφ = 0. (1.22)
dw" dv' dw J
Преобразуя уравнение (1.22) с использованием правила
интегрирования по частям и принимая во внимание, что вариация δν, δ\ν в
фиксированных начальной и конечной точках равны нулю, получаем
и
d_dL_ д__Ы^ ±_{λ^_
dt dv dcp dv' dcp \ dv'
δν +
19
Волновой твердотельный гироскоп. Теория и технология
f d dL d2 dL д/Л
dt dw dq>2 dw" dw
Sw
did φ = 0.
Последнее условие выполняется тогда, когда выражения под
интегралом, стоящие сомножителями при приращениях Sv, Sw, обращаются
в нуль. В результате получаем следующие уравнения Лагранжа
упругого кольцевого резонатора:
dt dv dcpdv' άφ\ dv'J
, (1.23)
d dL d2 dL лд/ 0
dt dw dcp2 dw" dw
Подставляя в уравнения (1.23) функцию Лагранжа (1.20) и
учитывая (1.13), находим
v-^nT + O + A^O,
w + k2{wiv+vm) + X = 0.
Уравнения (1.24) совместно с уравнением связи (1.13) полностью
описывают собственное движение кольцевого резонатора φ .
Продифференцируем второе уравнение (1.24) по φ и вычтем
результат из первого уравнения. Последнюю разность
продифференцируем еще раз по φκ исключим ν с помощью (1.13). В
результате имеем
w"-м? + к2(чР+2wIV'+W) = 0. (1.25)
Таким образом получено однородное дифференциальное уравнение
относительно переменной w, характеризующей деформации упругого
кольца в радиальном направлении.
Аналогично уравнению колебаний резонатора при неподвижном
основании (1.25) может быть получено уравнение динамики в случае
Ω*0 (при Ω2«1, Ω«1):
w'-w + ^w' + k2^71 +2wIV +W) = 0 . (1.26)
При анализе движения кольцевого резонатора можно перейти к
безразмерному времени τ = κί и безразмерной угловой скорости
вращения основания m = Q/ к :
w"-w + 4mw' + wVI +2wIV +w" = 09 (1.27)
где временные производные вычислены по безразмерному времени τ .
Для однозначного решения уравнения динамики его необходимо
дополнить начальными условиями и условиями периодичности по
окружному углу φ , например,
20
/. Теоретические основы функционирования волнового твердотельного гироскопа
п\ п\ (1.2о)
Μ>«\θ,ί) = \ν(1)(2π,ί), 1 = 0,5.
В общем случае угловая скорость вращения основания входит в
уравнение (1.27) в качестве переменного во времени коэффициента.
Поэтому само по себе вращение основания не может привести к
образованию упругих колебаний кольцевого резонатора. Однако при
возбуждении в резонаторе упругих волн каким-либо внешним
воздействием их дальнейшая динамика оказывается зависимой от
вращения основания, что и используется в данном типе инерциальных
датчиков.
Решение уравнения динамики методом гармонического баланса.
Решение (1.27), (1.28) будем искать в форме, позволяющей установить
параметры стоячей волны в кольцевом резонаторе. Такому решению
соответствует совокупность независимых друг от друга функций типа
м<^?, т) = а(т) cos (2(^-^0) + а(т)), (1.29)
где α(τ) - перемещение стоячей волны в радиальном направлении;
а(т) - круговая эволюция стоячей волны в пространстве.
Подставляя (1.29) в (1.27), получим
-(5а + (36 + 4ш2 +Sma-5a2)a)cosfi +
+ (2(5a-4m)a + (5a-4m)a)smfi = 0, (1.30)
где β = 2(φ-φ0) + α.
Равенство (1.30) выполняется, когда
2ά(5ά - Am) + а(5а - 4ώ) = 0
или
a(r) = -\m(s)ds. (1.31)
5 J
о
Тогда амплитуда α(τ) находится из решения уравнения
5а + П6 +—ш2)а = 0. (1.32)
Рассмотрим частные случаи решения уравнения (1.32). При
отсутствии вращения основания (яг = 0) получаем уравнение с
постоянными коэффициентами
5я + 36а = 0, (1.33)
которое при начальных условиях
а(0) = а0, ά(0) = 0
имеет решение
α(τ) = α0 cos μ2τ , (1-34)
21
Волновой твердотельный гироскоп. Теория и технология
где μ2 = 6 / V5 - безразмерная частота собственных упругих колебаний
невращающегося резонатора по второй форме.
В размерном виде частота колебаний стоячей волны определяется
как
Подставляя (1.31), (1.34) в (1.29) и принимая для невращающегося
основания α (τ) = О, получаем
\ν(φ, τ) = а0 cosμ2τ cos 2(φ - φ0) . (1.35)
Из решения (1.35) видно, что пучности стоячих волн имеют место
при углах
φ* = φ0 + (т - 1)/г, т = 1,2 ,
где φ0 - начальный угол, соответствующий направлению возбуждения
исходных колебаний.
При вращении основания с постоянной угловой скоростью
ш = ш0= const решение (1.27) принимает вид
w(#?,r) = a(r)cos 2(φ-φ0) + — т0т , (1.36)
где
2 , 16 2
α(τ) = α0 cos μ^ \ M2=Jm2+ — &o
Из последнего выражения видно, что постоянная скорость
вращения основания изменяет как собственную частоту колебаний
основания μ2, так и пространственное положение стоячей волны.
Поэтому измерение частот спектра колебаний стоячих волн может дать
информацию о вращении основания. Однако основным измерительным
каналом следует считать измерение положения пучностей стоячей
волны по отношению к корпусу прибора. Из (1.36) следует также, что
пучности колебаний имеют место при
cosf 2(φ-φ0) + -ϋτ0τ =1,
5
т.е.
φ* = φ0 + (ιη-1)π — ш0т9 /я = 1,2. (1-37)
Измеряя в системе координат корпуса прибора угол φ, получаем
информацию о скорости вращения основания яг0 или о величине угла
поворота основания а0 = ш0т.
22
/. Теоретические основы функционирования волнового твердотельного гироскопа
По отношению к инерциальному пространству стоячая волна
поворачивается со скоростью
**(г) = |аг0. (1.38)
Формула (1.38) отражает инертные свойства стоячих волн в
резонаторе, которые поворачиваются в инерциальном пространстве со
скоростью, составляющей 60% скорости поворота основания.
При произвольном вращении основания (яг(г) * const) функция
α(τ), входящая в решение (1.29), определяется формулой (1.31). В этом
случае также сохраняется возможность измерения вращения по
положению стоячей волны по углу
2 г
φ(τ) = φ0 + (τη-1)π— m(s)ds. (1-39)
5о
При этом характер функции α(τ) определяется решением линейного
нестационарного уравнения (1.27).
Решение уравнений динамики методом Бубнова-Галеркина.
Рассмотрим метод Бубнова-Галеркина [3, 17, 18] применительно к
решению уравнения свободных колебаний идеального вращающегося
нерастяжимого кольца:
w'-w + zr2^ + 2μΛ + ι/) = 0. (1.40)
Уравнение (1.40) - шестого порядка относительно
пространственных переменных и второго порядка относительно времени.
Следовательно, необходимо задание шести граничных условий и двух
начальных. Если фаза колебаний не важна, можно задать лишь граничные
условия. Для кольца ими являются шесть условий периодичности (1.28).
Как известно, этим условиям удовлетворяют функции
тригонометрического базиса
{1, cos#>,sin#>,cos2#>,sin2#?,...,cos«#>,sinw^,...}. (1-41)
Рассмотрим колебания по второй (основной) форме. В этом случае
в системе (1.41) следует оставить лишь две функции: cos2#> и sin 2^?.
Тогда разложение искомой функции w в ряд имеет вид
\ν(φ, t) = a(t) sin 2φ + b(t) cos 2φ , (1.42)
где a(t), b(t) - неизвестные коэффициенты, зависящие от времени.
Согласно методу Бубнова-Галеркина следует приравнять к нулю
скалярные произведения левой части (1.40) на функции
пространственного базиса cos 2φ и sin 2φ , т.е.
23
Волновой твердотельный гироскоп. Теория и технология
ί(<
2л-
j(ri'-w + K2(w™ + 2ww + w,')))cos2<pd<p = 09
(1.43)
(w" - w+к2 (wm + 2ww + W)) sin 2^/^ = 0.
о
Подставляя в (1.43) вместо w выражение (1.42), после
интегрирования получаем систему обыкновенных дифференциальных
уравнений
а + а = 0,
5 2 (1.44)
и 36к и η
Ь + Ь = 0.
5
Данная система описывает два гармонических осциллятора с
одинаковой собственной частотой
ω2=-ΓΖ- (L45)
Приближенное решение имеет вид
w(<p9 t) = (A2 sin ω2ί + Β2 cos ω2ί) sin 2φ +
+ (C2 sin ^ + &2 cos ^0 cos Ί-Ψ- (1.46)
Таким образом, колебание кольцевого резонатора представляется в
виде суммы двух стоячих волн, ортогональных по окружному углу и
фазе.
Аналогично, для третьей формы колебаний имеем
24
w(cp, t) = (A3 sin ω3ί + Β3 cos αψ) sin 3<p + (C3 sin ω3ί + D3 cos o%i) cos 3φ.
Произвольное колебание кольцевого резонатора является суммой
бесконечного числа собственных колебаний вида
00
w(p^) = ^(ak(t)smkp + bk(t)coskp). (1.47)
k=l
Резонатор ВТГ как обобщенный маятник Фуко. При ненулевой
скорости вращения основания вместо (1.40) следует взять уравнение
(1.26)
w" - w + 4Ωμ/ + к2 (wVI + 2wIV + w") = 0.
В этом случае коэффициенты (1.42) находятся из системы
24
1. Теоретические основы функционирования волнового твердотельного гироскопа
.. 8 · Ъбк*
а—Ω6 +
5 5
b+-Qa+
5 5
я = 0,
b = 0.
(1.48)
(1.49)
Вводя комплексную величину
ζ = а + ib ,
получим уравнение
ζ + 2ιβζ + ω%ζ = О,
где /? = 0,2Ω.
Решение (1.49) имеет вид
z(t) = Q~ipt (ς е**+С2 е"г'^), (1.50)
где С1? С2 - комплексные числа, определяемые начальными условиями.
Из (1.49) видно, что скорость прецессии колебаний ВТГ
,9 = -0,4Ω. (1.51)
Возьмем на плоскости декартову систему координат и рассмотрим
траекторию точки, координаты которой меняются по закону
χ = a(t)9 у = b(t).
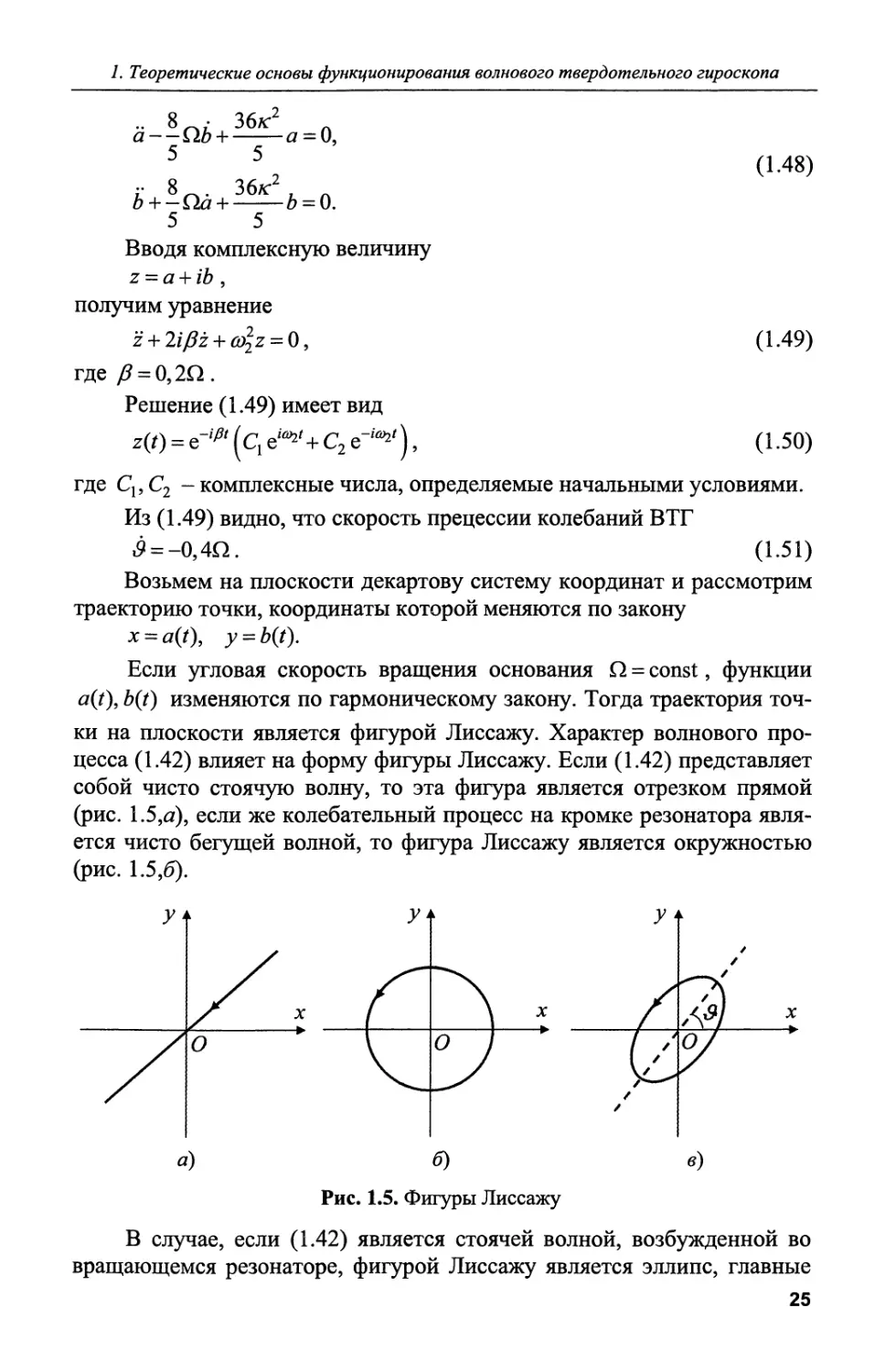
Если угловая скорость вращения основания Ω = const, функции
a(t), b(t) изменяются по гармоническому закону. Тогда траектория
точки на плоскости является фигурой Лиссажу. Характер волнового
процесса (1.42) влияет на форму фигуры Лиссажу. Если (1.42) представляет
собой чисто стоячую волну, то эта фигура является отрезком прямой
(рис. 1.5,я), если же колебательный процесс на кромке резонатора
является чисто бегущей волной, то фигура Лиссажу является окружностью
(рис. 1.5,6).
О
а)
Рис. 1.5. Фигуры Лиссажу
В случае, если (1.42) является стоячей волной, возбужденной во
вращающемся резонаторе, фигурой Лиссажу является эллипс, главные
25
Волновой твердотельный гироскоп. Теория и технология
оси которого меняют ориентацию относительно системы координат,
причем угол наклона одной из главных осей этого эллипса к оси Ох
равен 23 , где 3 - угол текущей ориентации пучности стоячей волны
относительно резонатора (рис. 1.5,в).
Аналогом прецессии стоячей волны в резонаторе ВТГ является
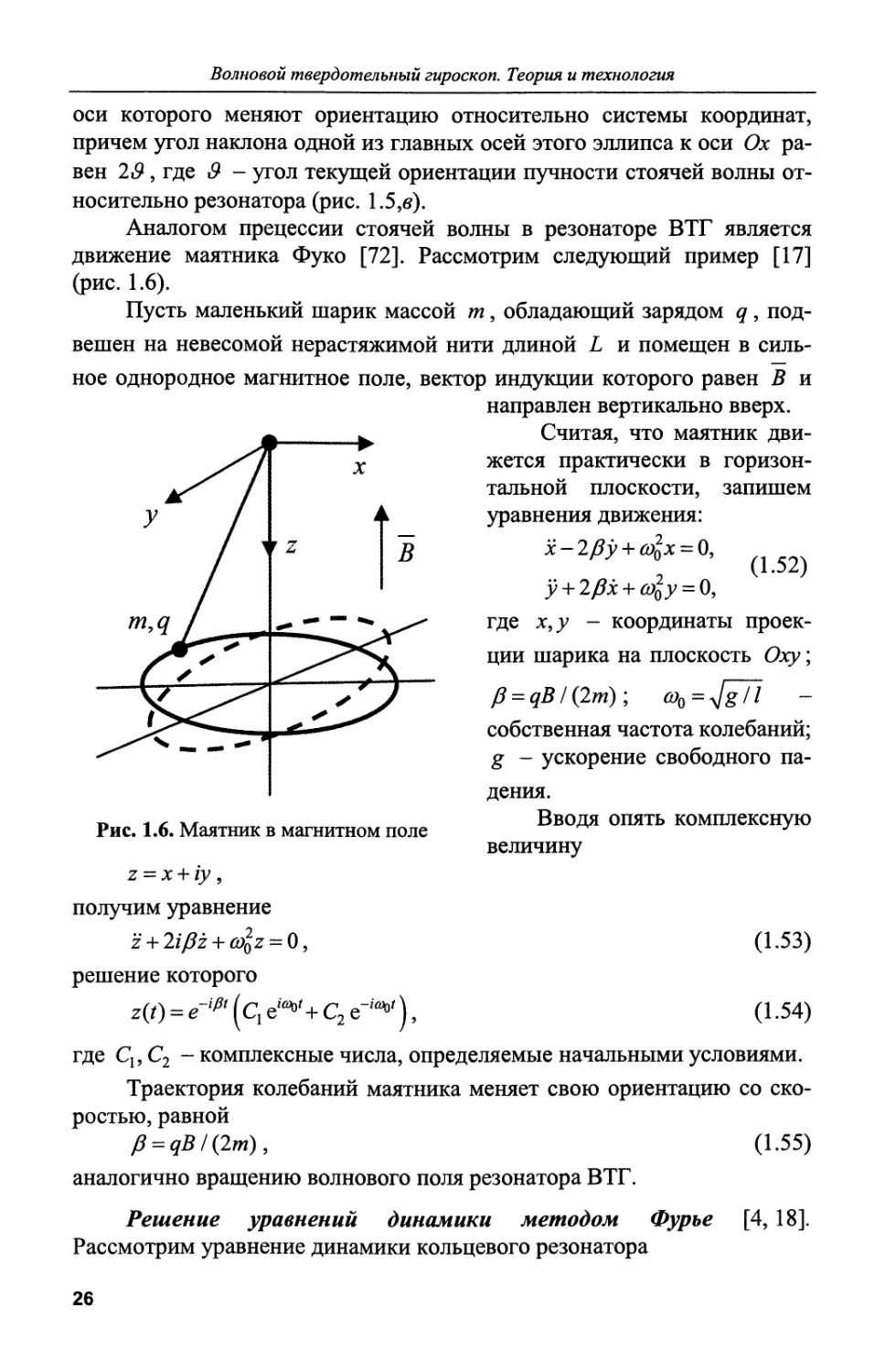
движение маятника Фуко [72]. Рассмотрим следующий пример [17]
(рис. 1.6).
Пусть маленький шарик массой т, обладающий зарядом q ,
подвешен на невесомой нерастяжимой нити длиной L и помещен в
сильное однородное магнитное поле, вектор индукции которого равен В и
направлен вертикально вверх.
Считая, что маятник
движется практически в
горизонтальной плоскости, запишем
уравнения движения:
х-2ву + й)пх = 0,
НУ ° (1.52)
у + 2βχ + ωΐ у = О,
где х,у - координаты
проекции шарика на плоскость Оху;
P = qBI(2m)\ ω0=^ϊϊ -
собственная частота колебаний;
g - ускорение свободного
падения.
Ώ 1Ги Вводя опять комплексную
Рис. 1.6. Маятник в магнитном поле J
величину
ζ = χ + iy ,
получим уравнение
ζ + 2ίβζ + ω%ζ = 0, (1.53)
решение которого
z(t) = e~ipt (ς е/й*' + С2 е"'^'), (1.54)
где Cl9C2 - комплексные числа, определяемые начальными условиями.
Траектория колебаний маятника меняет свою ориентацию со
скоростью, равной
fi = qB/(2m)9 (1.55)
аналогично вращению волнового поля резонатора ВТГ.
Решение уравнений динамики методом Фурье [4, 18].
Рассмотрим уравнение динамики кольцевого резонатора
26
1. Теоретические основы функционирования волнового твердотельного гироскопа
w" -w+4Qw' + /с2(м>щ + 2ww +w") = 0 (1.56)
с начальными условиями
Μφ90) = αο(φ)9 w((p,0) = α^φ) . (1.57)
Перейдем от оригинала w = w((p,t) к фурье-образу W = W(s,t)
относительно аргумента φ:
2π
Используя свойства преобразования Фурье, вместо
дифференциального уравнения в частных производных (1.56) получаем
обыкновенное дифференциальное уравнение
W + 4Qi^— W + k2<<S 7^ S W = 0 (1.58)
s2+l s2+l
с начальными условиями
W(s90) = a0(s), ^,0) = ^), (1.59)
где
2π
aJ(s) = -7=\aJ(<p)Q-i<psd<p9 y = 0,l.
Решение (1.58) представляется в виде
W(s,t) = e-'^>' ici(s)^2(s)+fiHs) + C2(s) e-i'^P^^>
(1.60)
где C^s), C2(s) - неопределенные функции;
s +1 Vs2+1
Считая Ω2 «1, приближенно запишем
W(s,t) = e-Ws)' (C, eito(i)+ C2 e4'^). (1.61)
Выражая неопределенные функции Cl(s),C2(s) из начальных
условий (1.59), получим
1 2ф) ' 2 2ф)
Оригинал представляется в виде ряда Фурье:
w#,0=fV(*,0e'Vs. (1.62)
S=—00
Для резонансной второй рабочей формы колебаний (s = ±2) имеем
27
Волновой твердотельный гироскоп. Теория и технология
w((p,t) = Q
4
-ίΩ-t ~.
5 J-Ψ
lt—j=K -lt—f=K
Q(2)e S + C2(2)e s
+ e
4
iQ-t ..
5 ^"2^
Ci(-2)e ' ^ч-С^-^е'
л/5
Влияние внутреннего трения и внешней нагрузки. Деформация
кольцевого резонатора упругими волнами сопровождается потерей
энергии на преодоление внутреннего трения. Распространенной
моделью механизма внутренней диссипации является модель
Кельвина - Фойгта, обобщающая закон Гука на случай неупругих деформаций
[17]:
σ = Ε(ε + ξέ), (1.63)
где σ - напряжение; ε - деформация; ξ - безразмерная величина,
характеризующая время затухания неупругих релаксаций.
При наличии трения процедура составления уравнения динамики
резонатора отличается тем, что вместо функции Лагранжа (1.20) следует
исходить из выражения
pS
R δφ.
Уравнения динамики резонатора в размерной и безразмерной
формах имеют вид
wn-w + 4nw' + K2(wVI + 2wIV + Wr) + *2f(ww +2wIV +w") = 0 , (1.64)
w" - w + 4mw' + v/7 + 2wIV + w" + ξ^71 + 2wIV + wn) = 0 . (1.65)
Если коэффициент ξ достаточно мал, то внутреннее трение слабо
сказывается на пространственном положении стоячих волн и лишь
приводит к их постепенному затуханию. Положим в (1.65) ш = 0
(свободные колебания), тогда
w"-w+ wVI + 2wIV + W + ξ(ήνι + 2wIV + w") = 0.
Решение (1.66) ищем в виде
\ν(φ, τ) = α(τ) cos 2{φ - φ0) .
Подставляя (1.67) в (1.66), получим
ά + ξ—ά + — α = 0. (1.68)
ь 5 5
Решением (1.68) при а(0) = а0, я (0) = 0 является функция
а(т) = а0 ο~δτ cosμ2τ (1-69)
(экспоненциально затухающая амплитуда), где
(1.66)
(1.67)
28
1. Теоретические основы функционирования волнового твердотельного гироскопа
. 18- 36 (,18
При этом решение (1.66) определяется формулой
\ν(φ,г) = α0 ο~δτ cosμ2τcos2{φ-φ0) . (1-70)
Для постоянной угловой скорости вращения основания можно
записать
w((p,T) = a0e cos/i2rcos| 2(φ-φ0) + — т0т |,
(1.71)
и измерение вращения основания можно, как и прежде, осуществлять по
положению пучностей колебаний стоячих волн по отношению к
корпусу прибора.
Важной характеристикой резонатора является добротность
q~> α·72)
ω2ξ
где ω2 - собственная частота упругих колебаний по второй форме:
ω2=κμ2=6,
EJ
\~5pSR4 '
Для плавленого кварца
β = 106...108.
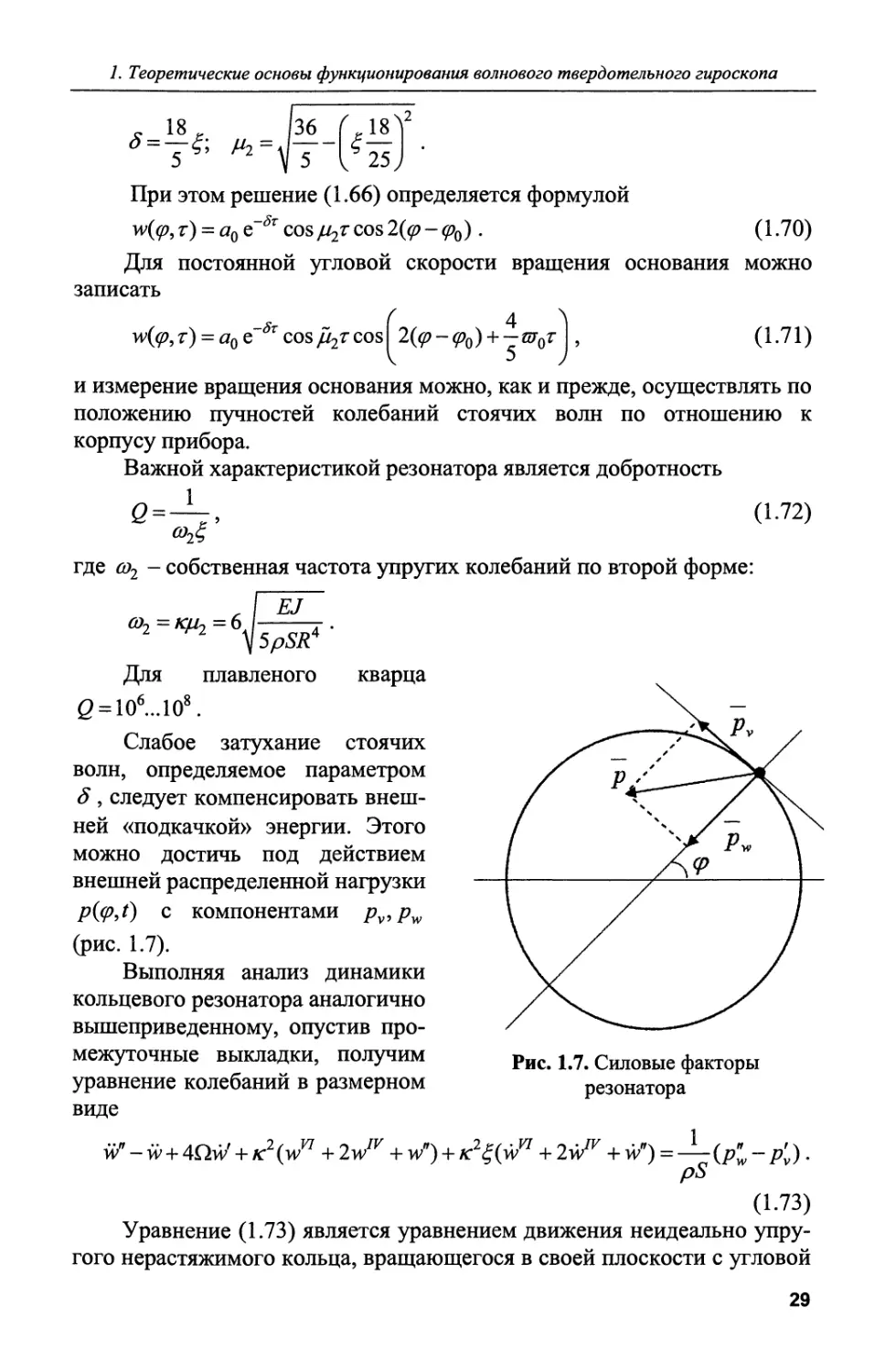
Слабое затухание стоячих
волн, определяемое параметром
δ , следует компенсировать
внешней «подкачкой» энергии. Этого
можно достичь под действием
внешней распределенной нагрузки
p(<p,t) с компонентами pv9pw
(рис. 1.7).
Выполняя анализ динамики
кольцевого резонатора аналогично
вышеприведенному, опустив
промежуточные выкладки, получим
уравнение колебаний в размерном
виде
η'-# + 4Ωμ/ + *2(ι/7 +2wiv + ™η) + κ2ξ(4?νι + 2wIV +wn) =—(pnw-p'v).
pS
(1.73)
Уравнение (1.73) является уравнением движения неидеально
упругого нерастяжимого кольца, вращающегося в своей плоскости с угловой
Рис. 1.7. Силовые факторы
резонатора
29
Волновой твердотельный гироскоп. Теория и технология
скоростью Ω вокруг оси симметрии и подверженного действию
внешней распределенной нагрузки.
Рассмотрим уравнение динамики кольцевого ВТГ (1.73) с учетом
системы позиционного возбуждения [17]
wn - w+4Ωνΐ/ + к2(уР + 2wIV + wn) +
+κ2ξ(^ +2wIV +wn) = Hcos2(<p-<p0)cosAt, (1.74)
где Η = 2ε0ν£L(ndlpS)~l sin φ3 - амплитуда возбуждения;
€0 =8,85· ΙΟ"12 Φ/м - диэлектрическая постоянная; V0 - амплитуда
напряжения; L - высота электрода; d0 - начальный зазор между
поверхностями электрода и резонатора; λ - частота возбуждения; φ3 -
угловой размер электродов возбуждения; φ0 - ориентация первого
электрода.
В резонансном случае положим λ = ω0. Решение (1.74) будем
искать в виде
w(<p, t) = p(t) cos 2φ + q(t) sin 2φ. (1.75)
Используя метод Бубнова-Галеркина, получим систему
ρ + ω2ξρ + ωΐρ —Qq = — Я cos 2φ0 cos ω0ί,
q + ω2ξ<ΐ + 602q + -Ωρ = —Я sin 2φ0 cos ω0ί.
Фикции p(t), q(t), в свою очередь, будем искать в виде
p(t) = a cos ω0ί + т sin ω0ί,
q(t) = b cos ω0ί + η sin ω0ί.
Тогда для величин а9т9Ь,п имеем систему уравнений
ηιωΐξ—Ωω0η = —Я cos 2φ0,
8 1
ηωΙξ + -Ω.ω0Ίη = -Ηύη2φ0, (1-77)
a = b = 0.
Выражение для перемещения кромки резонатора можно привести
к следующей форме:
w(g>, t) = A sin ω0ί cos 2{φ - 3), (1-78)
где
A = yjm2+n2; tg2S = —.
m
Выражая т,п из (1.77), получим
(1.76)
30
1. Теоретические основы функционирования волнового твердотельного гироскопа
tg2^5<ftg2^-8Q. *2(Л-*>.
8Ω
5ofc + 8ntg2fl,' э 5α$ξ'
Η
A = —T-cos2(<p0-&).
5ωό0ξ
Анализ (1.79) показывает, что:
при Ω = 0 ориентация волнового поля в резонаторе ВТГ постоянна
и определяется ориентацией электродов позиционного возбуждения
«9 = φ3, т.е. стоячая волна «привязана» к корпусу прибора;
при Ω φ 0 (с учетом малости Ω2) пучность стоячей волны отстает
от направления возбуждения на угол, определяемый величиной угловой
скорости, собственной частотой и затуханием:
%-l9 = iarctg-T-. (1.80)
2 5ω*ξ
1.2. Математическая модель неидеального ВТГ
1.2.1. Динамика неидеального ВТГ
В идеальной системе, описываемой уравнением колебаний
w'-w+k^w71 + 2wIV +w") = 09 (1.81)
возможно существование стоячих волн с собственными частотами
%=^^,* = 2,3,.... (1.82)
y]k2+l
Наиболее важным является случай возбуждения колебаний по
второй форме, когда стоячая волна описывается в виде
w(q>, t)-A (cos 2φ0 cos 2φ + sin 2φ0 sin 2φ) cos ω2ΐ, (1.83)
где А - амплитуда; φ0 - угол ориентации волны; ω2 = 6к IV5 -
собственная частота.
Практический интерес представляет исследование неидеальных
систем, в которых один или несколько параметров (плотность, модуль
упругости, толщина оболочки и др.) неоднородны [56, 63, 65, 73, 100,
103, 104].
Рассмотрим уравнение динамики неидеального ВТГ на
неподвижном основании. В системе уравнений Лагранжа (1.24)
ν-ΛΓ2(Μ/" + ν") + Λ' = 0,
w+a:2(w/k+vw) + A = 0,
параметр к2 не является постоянным и зависит от окружного угла:
31
Волновой твердотельный гироскоп. Теория и технология
κ2 = κ2{φ). (1.84)
Повторяя выкладки, приведенные ранее для идеального
резонатора, из уравнений Лагранжа получим следующее уравнение динамики
неидеального ВТГ:
w'-w+^K + ^+^V + w^O. (1.85)
Для однозначного решения уравнения (1.85) следует определить
начальные и граничные условия. Как функция окружного угла, w
должна удовлетворять условиям периодичности:
w(!\0,t) = w(l)(2^t), 1 = 0^5. (1.86)
Начальные условия зададим в виде
w(<p,0) = a(<p)9 w(<p,0) = 0. С1·87)
Воспользуемся методом Фурье (разделения переменных) [18] и
представим искомое решение в виде произведения двух функций:
4>(φ,ί) = Φ(φ)4(ί). (1.88)
В результате после разделения переменных получим
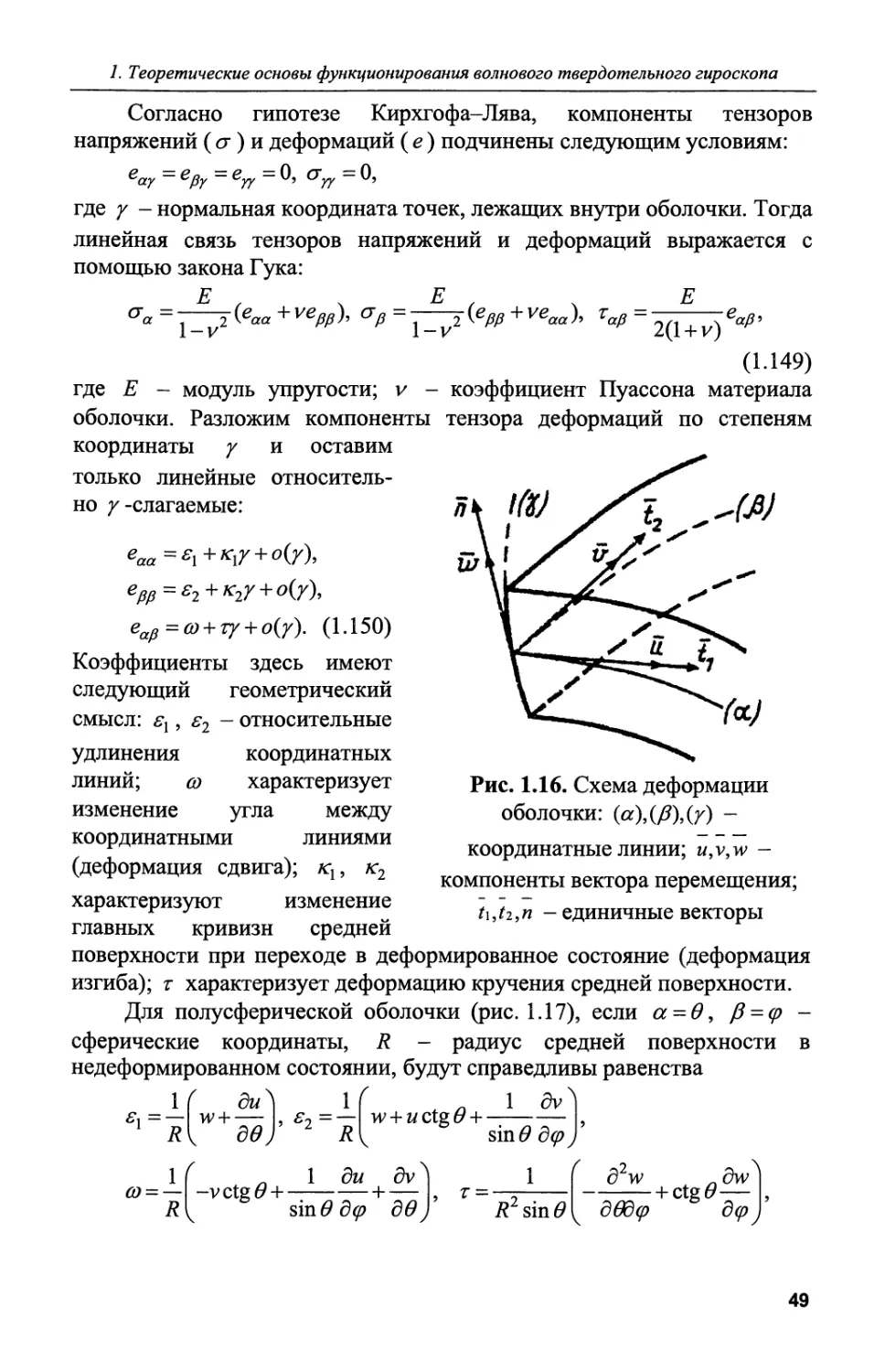
ψ = (к\Ф° + Ф))™+(к\ф» + Ф))
ψ φ"-φ
Выражение в левой части (2.9) зависит только от времени, а в
правой - только от окружного угла. Следовательно, обе части (1.89) равны
постоянной, и для функции Φ имеем задачу на собственные значения
(/.2(ф"+ф))1У+(/.2(ф"+ф))^я(ф"-ф), (190)
Ф(/)(0) = Ф(/)(2/г), / = 0Д
При определенных допущениях эта задача имеет вещественный
бесконечный дискретный спектр Лк. Каждому собственному числу
соответствует собственная функция Фк (или несколько взаимно
ортогональных собственных функций в случае вырожденности). Тогда
функция Ψ удовлетворяет уравнениям
Ψ + ^Ψ = 0, (1.91)
решения которых имеют вид
yk=AkcosJI~kt + BksmJI~kt (!·92)
и зависят от неизвестных постоянных Ак9Вк.
Общее решение (1.85) представляется в виде ряда
00 00
^,о=Хф^=£ф*(лсо8^+^8ш74^ а·93)
к=\ к=\
32
1. Теоретические основы функционирования волнового твердотельного гироскопа
коэффициенты Ak,Bk которого находятся из условия удовлетворения
начальным условиям:
00
м<р, 0) = Σ 4Ф* =*(?)> О·94)
k=l
00
М990) = ^у[^ВкФк=0. (1.95)
к=\
Учитывая ортогональность собственных функций, имеем
(*,Ф*)
11ф
Α=ψ^> Вк=0, £ = 1,2,... (1.96)
к Пж II2 ' * '
■ &||
Здесь звездочкой обозначено комплексное сопряжение, а (·,·)>!I'll ~~ со"
ответственно скалярное произведение и норма в пространстве L2[0,2/r)
- периодических с периодом 2/г функций, интегрируемых с квадратом
на интервале [0,2/г).
Обозначим а>к = у[л~к . Тогда
^Λθ=Σν-#φ*°°8^· (L97)
ti |φ*|
Основная сложность заключается в нахождении
последовательности собственных значений Лк и соответствующих им собственных
функций Фк задачи (1.90). Будем искать Фк в виде конечного ряда по
полной системе координатных функций ψρ (необязательно
ортогональных):
Ф*(Р) = £С<*У>)· (1.98)
В качестве базисных функций могут использоваться
алгебраические или тригонометрические полиномы, сплайны и др.
Подставив (1.98) в (1.90) и воспользовавшись методом Бубнова-
Галеркина, можно получить обобщенную алгебраическую задачу на
собственные значения
^аргСр=-Л^ргСр9 г = 1,2,..., (1.99)
р=\ /7=1
где
2я-г
α,= \ \(*?(ψ' + Ψ,)Τ+(**(ψ' + Ψρ))'
Ψτάφ; (1.100)
33
Волновой твердотельный гироскоп. Теория и технология
2π
βρτ = \{ψρ-ψρ)ψ\άφ. (1.101)
о
К системе (1.99) следует также добавить шесть условий
периодичности:
^С^\0) = ^С^\2я), / = 0Т5. (1.102)
р=\ р=\
Тогда система (1.99), (1.102) может быть решена одним из известных
методов, в результате чего определяются собственные значения Лк и
соответствующие собственные векторы
Остановимся на случае тригонометрического базиса, функции
которого удовлетворяют условиям периодичности:
Фк(<р)= ^Срк)¥р{ф), (1.103)
ρ=-Ν
где
[sin ρφ, ρ>0,
[cos ρφ, ρ<0.
Для базисных функций выполняется условие ортогональности:
Г/г, р = гФ0,
2/г, р = г = 0,
[0, ρ Φ г.
Подставив (1.104) в (1.100), после многократного интегрирования
по частям находим:
^2/ 2_1ч2 2*
Ε>-\κιψψΓ(1φ, (1.105)
(г +1) i
м«И— _' .: (1ло4)
2π
\ψρΨγ<*<Ρ =
α. ~™^
2π(^+ϊ) ο
/3pr=Spr, (1.106)
где δ - символ Кронекера.
Таким образом, вместо обобщенной задачи на собственные
значения (1.99) имеем обычную задачу на собственные значения:
^аргСр=-ЯСг, г = 1,2,... (1.107)
р=1
Очевидно, в частном случае, когда κ = κ0 = const, получаем
рассмотренное ранее решение в виде стоячих волн с частотами
к(к2-\)
yjk2+l
34
1. Теоретические основы функционирования волнового твердотельного гироскопа
В более общем случае целесообразно вместо аналитического
исследовать численные методы решения уравнений динамики
неидеального ВТГ [44, 93-95, 119-122, 137].
1.2.2. Модели погрешности неидеального ВТГ
Основной причиной погрешности ВТГ являются технологические
дефекты резонатора. Наиболее существенное влияние на поведение
стоячих волн в резонаторе оказывает четвертая гармоника разложения
Фурье неоднородностей таких параметров, как плотность, модуль
упругости, толщина оболочки. Рассмотрим основные источники
погрешностей резонатора ВТГ [17,18].
Неоднородность распределения массы резонатора.
Предположим, что плотность материала резонатора неоднородная по окружному
углу, т.е.
Р = Р(<Р). (1-108)
Предположим, что плотность может быть разложена в ряд Фурье:
м
Р = Ро
ι + Σεη>00*™(<Ρ-θ™)
(1.109)
где р0 = const; sm, вт - относительные величины и ориентации
дефекта плотности по т -й гармонике.
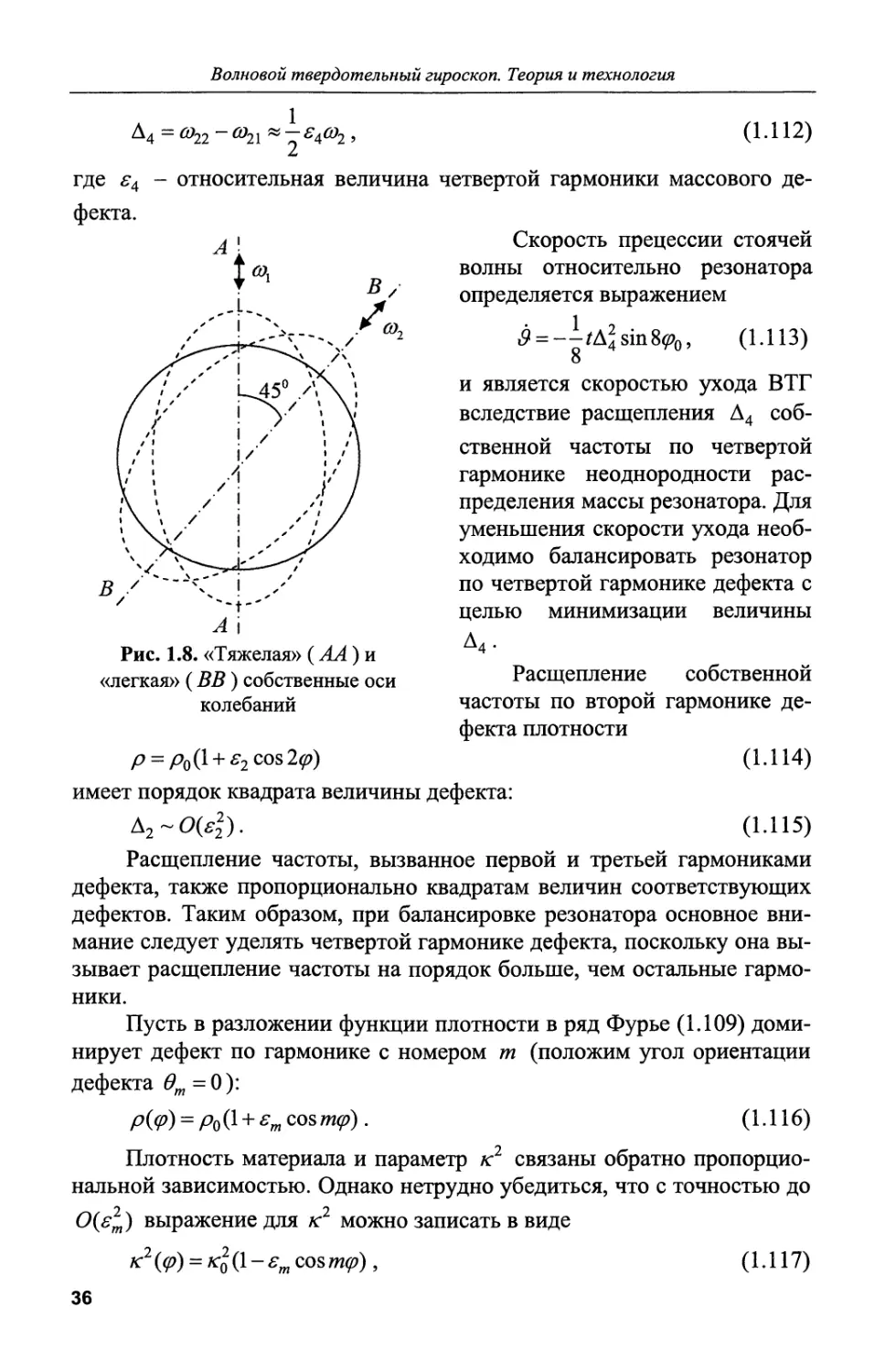
В частности, наличие четвертой гармоники дефекта приводит к
появлению в резонаторе системы двух собственных осей, развернутых
между собой на угол π 14 , таких, что собственные частоты колебаний
резонатора вдоль каждой из этих осей достигают наибольшего и
наименьшего значений (рис. 1.8). Собственная ось, относительно
которой собственная частота колебаний меньше, называется «тяжелой» (ось
меньшей жесткости); ось с большей собственной частотой называется
«легкой» (ось большей жесткости).
Изначально возбужденная стоячая волна (1.83)
\ν(φ,ί) = Αο,ο$2{φ-φ0)ο,ο$ω2ί (1.110)
разрушается, и колебательный процесс представляется в виде суммы
двух гармонических колебаний с различными частотами:
\ν(φ, t) = ^4(cos 2φ0 cos 2#>cos ω21ί + sin 2φ0 sin 2φ cos ω22ί) . (1.111)
Угол φ0 определяет ориентацию волны относительно тяжелой
собственной оси.
Наличие четвертой гармоники распределения плотности по кромке
резонатора приводит к расщеплению частоты, пропорциональному
величине дефекта:
35
Волновой твердотельный гироскоп. Теория и технология
1
где ε4
фекта.
ΔΑ=ω22-ω21*^-εΑω2, (1-112)
относительная величина четвертой гармоники массового де-
Рис. 1.8. «Тяжелая» (АА ) и
«легкая» (ВВ) собственные оси
колебаний
Скорость прецессии стоячей
волны относительно резонатора
определяется выражением
& = --tA24 sin 8^0, (1.113)
о
и является скоростью ухода ВТГ
вследствие расщепления Δ4
собственной частоты по четвертой
гармонике неоднородности
распределения массы резонатора. Для
уменьшения скорости ухода
необходимо балансировать резонатор
по четвертой гармонике дефекта с
целью минимизации величины
Δ4.
Расщепление собственной
частоты по второй гармонике
дефекта плотности
(1.114)
/? = /?0(l + £:2cos2#>)
имеет порядок квадрата величины дефекта:
Α2~0(ε22). (1.115)
Расщепление частоты, вызванное первой и третьей гармониками
дефекта, также пропорционально квадратам величин соответствующих
дефектов. Таким образом, при балансировке резонатора основное
внимание следует уделять четвертой гармонике дефекта, поскольку она
вызывает расщепление частоты на порядок больше, чем остальные
гармоники.
Пусть в разложении функции плотности в ряд Фурье (1.109)
доминирует дефект по гармонике с номером т (положим угол ориентации
дефекта 6т = 0):
р(<р) = Po(l+ sm cos τηφ). (1.116)
Плотность материала и параметр к2 связаны обратно
пропорциональной зависимостью. Однако нетрудно убедиться, что с точностью до
0(ε21) выражение для к2 можно записать в виде
κ\φ)
= *S(i-
£mCOSW(2>),
(1.117)
36
/. Теоретические основы функционирования волнового твердотельного гироскопа
где
«о=-^т· (1-П8)
0 PoSR4
Анализ решения системы (1.107) проводится путем подстановки
(1.110) в выражение для коэффициентов (1.105). Рассмотрим наиболее
интересующий нас случай т = 4:
κ2(φ) = 4(1-ε4 cos4#>) . (1.119)
Из (1.100) получим
2/^2 1Л2
а„г = Ή
2рЧр-Ъ
(in
*рг - Л0 ~ ,2 14
2π(τι +1)
(1.120)
j Ψρψ№-εΑ \ Ψ-ΑΨρΨ^Ψ
V о о
В резонансном случае в (1.103) возьмем лишь слагаемые,
соответствующие ρ = ±2 . Имеем следующие значения расщепленных частот:
<»»=>!z[l-fj> «22=^[l + ^J, (1-121)
откуда получаем (1.112).
Из (1.121) следует, что двухчастотный периодический процесс в
системе возможен при 0 < εΑ < 2 .
Пример. Рассмотрим кварцевый кольцевой резонатор со
следующими физическими параметрами: R = 2,5*10~2'м; S = lh,
1 = п = 1х10-3м; р0 = 2,5x10s кг/м3; I = lh3/12; Е = 7*1010 Η/м2.
Частота колебаний идеального резонатора по второй основной форме
ω2= 6,56*103 рад/с. Найдем расщепление частоты, вызванное
четвертой гармоникой дефекта плотности
p = p0[l + s4cos4(cp -Θ4)},
при ε4=0,1; θ4 = 0.
Воспользуемся изложенным выше методом с разложением по
тригонометрическому базису. В результате численного эксперимента
находим следующие частоты колебаний: ω21 = 6,39*103,
со22 = 6,72*103. Расщепление частоты по четвертой гармонике
А4 = ω22 - ω21 = 328,0, что близко к величине (1.112): А4 « 327,9.
Идентификация осей жесткости. Рассмотрим далее следующий
алгоритм идентификации осей жесткости и определения расщепления
частоты [41]. Возьмем выражение (1.94) с естественным началом
отсчета по окружному углу:
37
Волновой твердотельный гироскоп. Теория и технология
\ν(φ, t) = A (cos 2(θ0 -φ0) cos 2(θ0 - φ) cos ω21ί +
+ sin 2(θ0 -φ0) sin 2(θ0-φ) cos ω22ί)9 (1.122)
где θ0 - угол, определяющий ориентацию одной из осей жесткости.
Очевидно, что в случае, когда
—22. = — , 0<ω21<ω22, m,neZ+, (1.123)
ω21 η
где Ζ+ - множество целых положительных чисел, волновая картина
(1.122) повторяется с периодом
Т=Ьш = Ъш (1124)
ω21 ω22
Если (1.124) выполняется приближенно, величину Τ можно
рассматривать как почти период.
Возбужденная в резонаторе в момент времени t = О стоячая волна
с начальной амплитудой
α(φ) = A (cos 2(θ0 -φ0) cos 2(θ0 -<p) + sin 2(θ0 - φ0) sin 2(θ0 - φ)), (1.125)
при 0<t<T/2 прецессирует в направлении оси жесткости. На
интервале Τ12 < t < Τ прецессия происходит в обратном направлении и
т.д., а в моменты времени jT /2 (j = 0,1,...) возникают биения.
Общий период можно определить путем постановки датчика,
ориентированного под углом начального возмущения φ0. Максимальный
сигнал с датчика будет регистрироваться в моменты времени jT. С
этими моментами можно также синхронизировать параметрическое
возбуждение колебаний.
Изучим особенности колебаний вида (1.122). Будем считать, что
дробь ml η в (1.123) несократима, т.е. тип- взаимно простые
натуральные числа. При этом возможны следующие варианты:
1) т - нечетное, η - четное;
2)т- четное, η - нечетное;
3) т - нечетное, η - нечетное.
Для произвольного τ в первом варианте имеем
w(eo,r)-wie0,r + |j = 0. (1.126)
во втором
w(0o,t) + wUO9t + ^) = O. (1.127)
Особенностью третьего варианта является тот факт, что для
произвольного угла φ
38
1. Теоретические основы функционирования волнового твердотельного гироскопа
\ν(φ9τ) + Μ>{φ,τ + -\ = 0. (1.128)
Кроме того,
wL,r + -l = wL,r + — 1 = 0. (1.129)
4j {" 4
Используя (1.126)—(1.129), можно идентифицировать собственные
оси жесткости резонатора ВТГ, а возбуждая стоячие волны вдоль
каждой из этих осей и измеряя соответствующую частоту колебаний,
находить расщепление частоты.
Погрешности, вызываемые вибрациями основания. При наличии
первой, второй и третьей гармоник распределения массы резонатора по
окружному углу при продольной или поперечной вибрации волновая
картина имеет паразитную составляющую, которая искажает полезный
сигнал. Это объясняется тем, что помимо основной формы колебаний в
резонаторе возбуждается ряд побочных форм, вызывающих
погрешность прибора. Балансировка резонатора по первым трем гармоникам
дефекта плотности дает возможность применять гироскоп в жестких
условиях воздействия вибраций. Рассмотрим влияние продольной и
поперечной вибраций основания на невращающийся резонатор.
Продольная вибрация. Пусть резонатор движется вдоль оси
симметрии по закону (рис. 1.9,а)
z = z0cos/lt, (1.130)
где z0 и λ - соответственно амплитуда и частота вибрации.
Неоднородность распределения массы представим в виде
ρ = р0 (1 + εχ cos(#> -φχ) + ε2 cos 2(φ -φ2) + ε3 cos 3(φ -φ3)). (1.131)
Тогда в резонансном случае (Α = ω2) угол ориентации стоячей волны
определится выражением
tg2l9 = tg2£>2, (1.132)
т.е. стоячая волна «привязана» к ориентации второй гармоники дефекта.
Воздействие продольной вибрации эквивалентно действию некоторого
позиционного возбуждения вдоль оси дефекта по второй гармонике.
Поперечная вибрация. В этом случае резонатор движется
следующим образом (рис. 1.9,6):
jc = jc0cos^, y = yQcosXt. (1.133)
В резонансном случае угол θ ориентации пучности стоячей волны
определяется формулой
t 0_ (Α + Β + 0)ει8Ϊηφι+(Α-Β + 0)ε33\η3φ3 (1.134)
(А + В + С)ех cos φχ + (А - В + С)^3 cos3#>3
39
Волновой твердотельный гироскоп. Теория и технология
Очевидно, что в случае наличия дефекта плотности по первой и
третьей гармоникам ориентация стоячей волны определяется углами
φγ,φ3, т.е. поперечная вибрация привязывает стоячую волну к первой и
к третьей гармоникам дефекта массы.
/ Ί
x = xQcosXt f
Π-
\ У=У
0ςο8λί
0 \
^^N. ^
^4 \
4 1
41
a) 6)
Рис. 1.9. Продольная (я) и поперечная (б) вибрации резонатора
Имеет место и обратный эффект: колебания резонатора по второй
форме вызывают колебания центра масс. Эти колебания передаются
опорам, что приводит к дополнительному (и зависящему от ориентации
волновой картины) рассеянию энергии колебаний.
Разнодобротность резонатора. Наличие диссипации энергии в
резонаторе ВТГ приводит к затуханию амплитуды колебаний при
условии однородности диссипативных свойств по окружному углу. Если
добротность резонатора зависит от окружного угла, то появляется
скорость ухода стоячей волны.
Для описания затухающих колебаний упругих тел используется
модель Кельвина-Фойгта (1.63):
σ = Ε(ε + ξέ).
Если ξ - постоянная, то колебания резонатора затухают по
экспоненциальному закону, при этом свойства колебаний не изменяются.
Зависимость величины ξ от окружного угла приводит к тому, что
постоянная времени (добротность) зависит от ориентации волновой картины.
Это явление называется разнодобротностью резонатора по окружному
углу.
Представим неоднородность величины ξ{φ) рядом Фурье
г \
ξ(φ) = ξ0\ l + 2>cos%>-^) , (1.135)
ν * J
40
1. Теоретические основы функционирования волнового твердотельного гироскопа
где ξ0 - номинальное значение; ξ1ί,φ1ζ - соответственно величины и
ориентации относительных дефектов.
Наиболее существенное влияние на динамику резонатора
оказывает четвертая гармоника дефекта в разложении (1.135). Запишем
выражение, определяющее скорость прецессии (ухода) стоячей волны:
& = -BFQ + -co^4sm4(&-<p4), (1.136)
Если входная угловая скорость Ω удовлетворяет условию
\ςΐ\<ζΐ=-±-ωΙξ0ξι, (1.137)
4BF
то интегрирующий эффект гироскопа отсутствует. Если выполнено
условие
|Ω|>Ω\ (1.138)
то интегрирующий эффект сохраняется с некоторой систематической
погрешностью. Область от 0 до Ω* называют зоной «захвата» стоячей
волны (рис. 1.10).
Наличие четвертой гармоники диссипативного дефекта приводит к
появлению в резонаторе системы двух осей, развернутых на 45°,
называемых собственными осями вязкости (рис. 1.11).
Рис. 1.10. График средней скорости Рис. 1.11. Собственные оси
ухода (2); прямая | ν |= ^Ω (1) вязкости, τ2 > Ц
Постоянные времени колебаний вдоль каждой из этих осей
достигают наименьшего и наибольшего значений. Вызванный разнодоброт-
ностью дрейф волновой картины, как правило, компенсируется
алгоритмически.
Компенсация этого вида ухода осложняется тем, что добротность
(или постоянная времени) зависит от многих параметров. К ним можно
отнести, например, изменение внутреннего трения в проводящем
покрытии, наносимом на резонатор, вызванном протеканием в нем раз-
41
Волновой твердотельный гироскоп. Теория и технология
личных диффузионных и химических процессов. Добротность также
зависит от давления остаточного газа в приборе, может измениться при
случайном попадании на поверхность микрочастиц и т.п.
Дефекты систем возбуждения резонатора. Идеальный
резонатор имеет скорость ухода, если система его возбуждения неидеальна
(неодинаковость напряжения питания или некруглость кольцевого
электрода).
Неодинаковость напряжения питания кольцевого электрода. Если
кольцевой электрод сегментирован, а питание отдельных сегментов
осуществляется от разных источников напряжения, то может
возникнуть неоднородность потенциала по окружному углу [171]. Пусть
амплитуда напряжения питания кольцевого электрода имеет четвертую
гармонику по окружному углу:
K = (K0+vcos4#?)costf>0i, (1.139)
причем ν « V0. Тогда скорость ухода стоячей волны выражается так:
3 = -BFto-— g°KoV^sin4,9, (1.140)
40 (»0pSdl
где ε0 =8,85·10~12 Ф/м - диэлектрическая постоянная; L- высота
электрода; d0 - зазор между электродом и резонатором.
Размер области захвата, в которой отсутствует интегрирующий
эффект, равен
П--1-2Щ, (1.141)
16 co0pSd0
или, через добротность Q,
Ω*=^-Β*Ι. (1.142)
16βΚ0
Неравномерность зазора кольцевого электрода по четвертой
гармонике. Пусть величина зазора между кольцевым электродом и
резонатором имеет четвертую гармонику по окружному углу:
d = d0+ecos4(p + w((p,t), (1.143)
где е -эксцентриситет.
Выражение для скорости ухода стоячей волны имеет вид
S = -BFQ.+ Ъб<УьеЬ sill 4,9. (1.144)
40co0pd*S
Область захвата равна
42
1. Теоретические основы функционирования волнового твердотельного гироскопа
16 Q d0
Помимо рассмотренных типов дефектов возможны и другие
источники погрешностей: комбинации дефектов, погрешности выставки
электродов съема ДУС, неперпендикулярность оси резонатора к
плоскости закрепления, нелинейные деформации и др. [56, 73, 100].
Модель дрейфа ВТГ. Угловое перемещение ВТГ вычисляется
исходя из углового перемещения стоячей волны относительно его
резонатора. Вследствие ряда причин стоячая волна может прецессировать
даже в отсутствие внешнего вращения. Этот угловой дрейф может носить
как случайный, так и систематический характер, его величина зависит
от характеристик резонатора и определяет точность гироскопа.
На основании анализа основных источников дрейфа ВТГ [16]
угловая скорость вращения стоячей волны в полусферическом резонаторе
может быть записана в виде
л d3 _.(' L· Л Δ4Ν A/n ч k2co0N
dt I R2 J 4VZ^ R2
[ sin4Q9-g>4)
1 1
+ ^sin2r, (1.146)
A
где 3 - угловое положение стоячей волны; Ω - угловая скорость
вращения основания; А - интенсивность колебаний; N - эллиптичность
колебаний; к\ик2- коэффициенты; R - средний радиус полусферической
оболочки резонатора; соо - круговая частота колебаний; ц - время
затухания амплитуды стоячей волны вдоль оси максимальной добротности;
τ2 - время затухания амплитуды стоячей волны вдоль оси минимальной
добротности; щ - угол ориентации консервативного дефекта оболочки;
Ψα - угол ориентации диссипативного дефекта оболочки; μ - параметр,
определяющий мощность возбуждения; Δ4 - разность собственных
частот резонатора; γ- фазовый сдвиг между фазой колебаний оболочки и
фазой импульса параметрического возбуждения.
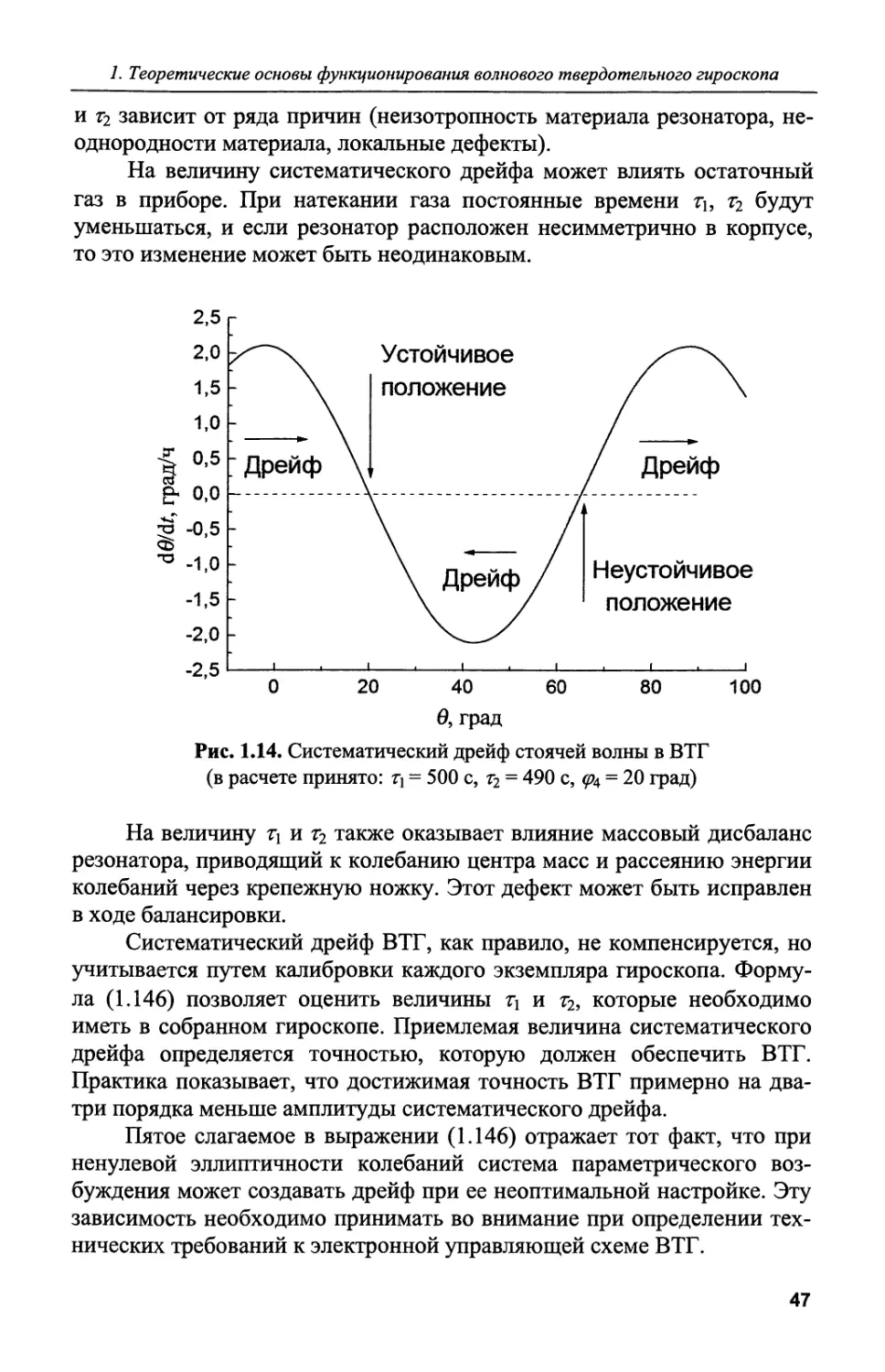
Рассмотрим подробнее слагаемые, входящие в эту формулу.
Первое слагаемое в (1.146) связывает угловую скорость вращения
стоячей волны с определяемой угловой скоростью вращения
основания Ω. Стоящий в скобках множитель, связывающий эти две величины,
в общем случае зависит от интенсивности колебаний оболочки. Этот
нелинейный эффект учитывается коэффициентом къ рассчитанным
теоретически, и равным 0,02167 для второй, низшей, моды колебаний (по
данным [16] &ι=0,0054). Этот эффект очень мал и может быть
существенен для малогабаритных полусферических резонаторов, когда радиус
резонатора становится малым и относительная амплитуда колебаний
43
Волновой твердотельный гироскоп. Теория и технология
увеличивается. Он может быть скомпенсирован стабилизацией
амплитуды колебаний оболочки и последующей калибровкой масштабного
коэффициента гироскопа. Величина коэффициента BF для
тонкостенной полусферы равна 0,312.
Во второе, третье и пятое слагаемые выражения (1.146) входят
параметры АиК Поясним их смысл. Колебания в резонаторе
описываются уравнениями двух одномерных осцилляторов, совершающих
колебания вдоль ортогональных осей, угол между которыми составляет 45°.
Радиальные колебания кромки тонкой полусферической оболочки в
направлении угла φ, в момент времени t в рэлеевском приближении
могут быть записаны следующим образом:
\ν(φ, ί) = α cos 2{φ - Θ) cos(W - ψ) + q sin 2(φ - θ) sin(tftf - ψ) . (1.147)
Идеальным аналогом ВТГ может служить математический
маятник (осциллятор), колебания которого показаны на рис. 1.12. В случае
колебаний с малой амплитудой
траекторию маятника в плоскости ΟΧΥ
можно считать эллипсом с
полуосями а (амплитуда) и q (квадратура), с
углом ориентации главной оси
эллипса θ и фазой колебания ψ.
Интенсивность колебаний при
этом определим как А = а2 + q2 , a
эллиптичность как N = 2aq .
Эллиптичность и площадь, ограниченная
эллипсом, связана соотношением
Рис. 1.12. Колебания двумерного s = naq = 0,5πΝ.
осциллятора ^ Г
Стоячая волна образуется при
q=0 (тогда соответственно 7V=0), в этом случае второе, третье и пятое
слагаемые в (1.146) обнуляются. Подавление эллиптичности колебаний
является необходимым для обеспечения работы гироскопа. Для этого в
ВТГ используется система коррекции, однако случайные погрешности в
измерении эллиптичности приводят в реальном приборе к отличию от
нуля q hN (хотя при этом q«d). Возникающий при этом дрейф не
может быть компенсирован и является случайным.
В идеальном резонаторе положение осей нормальных колебаний
относительно полусферической оболочки может быть любым, однако в
реальном резонаторе, как правило, всегда есть небольшие нарушения
его осевой симметрии, которые снимают вырождение собственных
частот и приводят к появлению двух собственных частот со\ и α>ι
(см. рис. 1.8). Положение осей нормальных колебаний относительно
оболочки в таком резонаторе задается в (1.146) углом <ро, который ука-
44
1. Теоретические основы функционирования волнового твердотельного гироскопа
зывает направление собственной оси с меньшей из двух собственных
частот. Разночастотность Af = Δ4 / 2π представляет собой разность
между этими частотами колебаний, которую стремятся свести к нулю.
Рассмотрим дрейф стоячей волны, связанный с разностью
собственных частот в реальном резонаторе. Если резонатор неподвижен и
колебания оболочки незатухающие, то изменение основных параметров
может быть записано в виде
А= 0; iVr=4A4V^2-iVr2sin4(l9-^0);
ό Δ4^ лга л · V* A,Q ч (1Л48)
* = , ΐ cos4(,9-ff0); ψ= 4 cos4(,9-^0).
4λΙΑ2-Ν2 2V.
2
ΑΑ-Ν
Если Δ4 Φ 0, το Ν и «9 связаны друг с другом через систему
нелинейных уравнений и не могут быть рассмотрены независимо. Уравнения
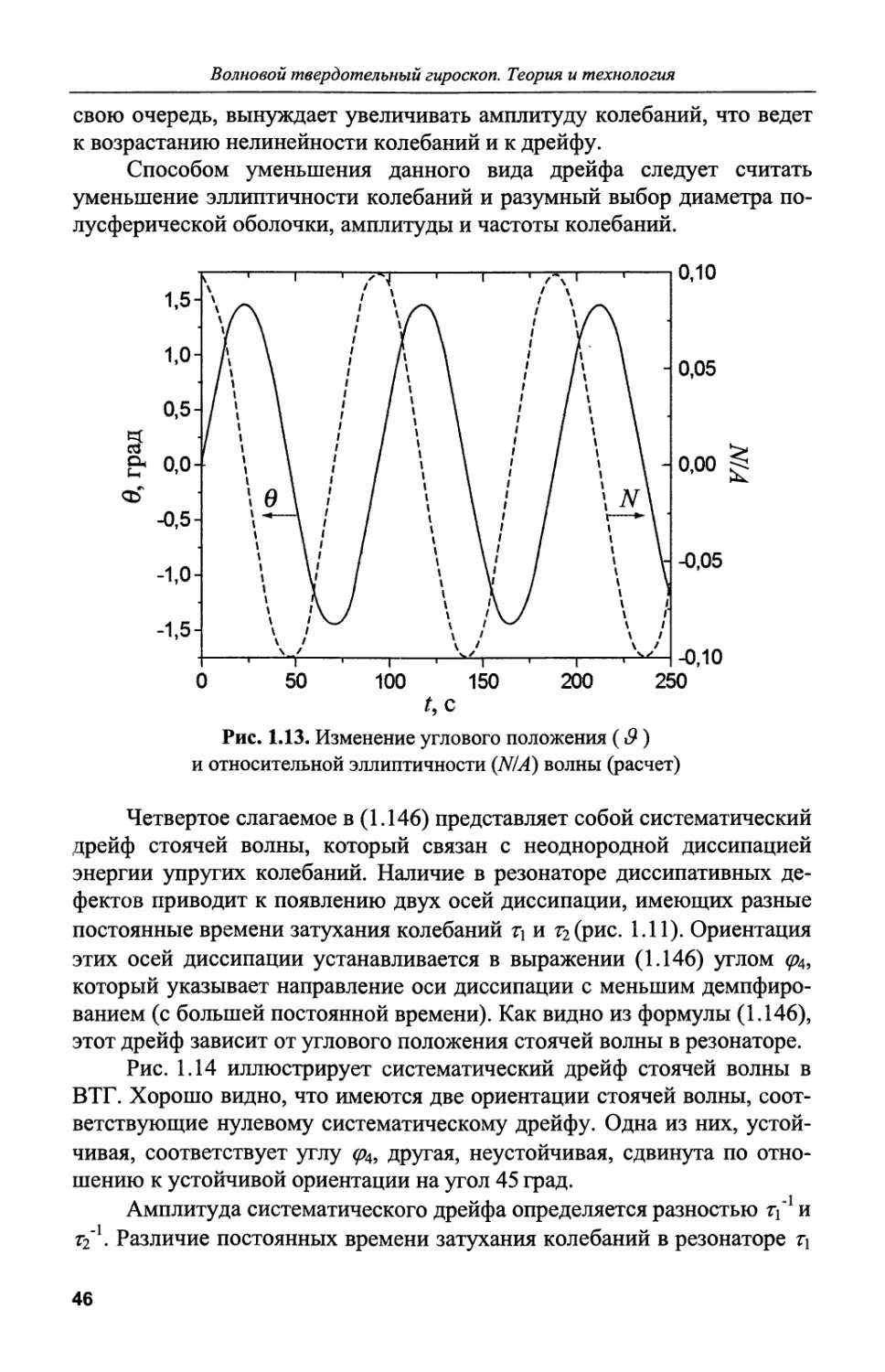
(1.148) могут быть решены численно. На рис. 1.13 показаны результаты
численного решения (1.148) методом Рунге-Кутты для случая: щ = 0,
Δ4 = 0,02·2π с"1 (что соответствует Δ/* = 0,02Γι*) и начальных условий
А = 1, Ν=0919 ψ=0, «9 = 0 (при этом очевидно, что cos4(l9-^0) = l и
sin4(,9-^0) = 0).
Видно, что наличие разночастотности приводит к колебательному
движению волновой картины, амплитуда которого зависит от
эллиптичности N. Причиной возникновения разночастотности обычно является
нарушение осевой симметрии резонатора при его изготовлении.
Сильная зависимость дрейфа стоячей волны от разночастотности и
эллиптичности может привести к разнообразным эффектам. Если, например, в
силу каких-либо погрешностей электронной системы, эллиптичность
поддерживается постоянной, то величина случайного дрейфа будет
зависеть от положения стоячей волны согласно (1.148). В других случаях
могут наблюдаться эффекты типа «нулевого дрейфа», а также
зависимость дрейфа от технических факторов (например, изменение фазовых
характеристик измерительного тракта, которое может иметь место при
прогреве аппаратуры и т.п.).
Третье слагаемое в формуле (1.146) определяет дрейф, связанный с
нелинейностью колебательной системы. Такая погрешность присуща
всем без исключения гироскопам, реализующим идею маятника Фуко.
Коэффициент k2 для второй формы колебаний равен 0,19 [16]. Расчеты
показывают, что с уменьшением диаметра резонатора дрейф быстро
возрастает.
Следует учитывать, что уменьшение диаметра резонатора влечет
за собой и уменьшение размеров емкостных электродов, приводящее к
ухудшению соотношения сигнал/шум в измерительном тракте. Это, в
45
Волновой твердотельный гироскоп. Теория и технология
свою очередь, вынуждает увеличивать амплитуду колебаний, что ведет
к возрастанию нелинейности колебаний и к дрейфу.
Способом уменьшения данного вида дрейфа следует считать
уменьшение эллиптичности колебаний и разумный выбор диаметра
полусферической оболочки, амплитуды и частоты колебаний.
1.И
1,0-
0,5-
3
& 0,0-
-0,5-
-1,0-
-1,5-
к
\
А \
\ /
1 V
J А
1 /ι
/ ι
1 / »
/ *
|
|
< 1
\ \
\ \ ι
\θ\ I
» \ '
V \ '
V \ '
t V
* \
\ ι V.
\ /
\ /
т-^
(\,
' У
-' А
' / 1
' / ι
τ |
1
1 \ '
1 \ /
ι \ J
ι \ /
* V
\ λ-
-Λί-
1 /-ч I
/ \
/ \
ι ν
/ I
/ м
-> г
1
\ -
» \
ι \
ι \
ι \
* V
ν ι
\ ί
\ /
\ /
\ /
г-^—
0,10
10,05
0,00
-0,05
-0,10
50
200
250
100 150
Рис. 1.13. Изменение углового положения (# )
и относительной эллиптичности {ΝΙΑ) волны (расчет)
Четвертое слагаемое в (1.146) представляет собой систематический
дрейф стоячей волны, который связан с неоднородной диссипацией
энергии упругих колебаний. Наличие в резонаторе диссипативных
дефектов приводит к появлению двух осей диссипации, имеющих разные
постоянные времени затухания колебаний τ\ и г2(рис. 1.11). Ориентация
этих осей диссипации устанавливается в выражении (1.146) углом φ4,
который указывает направление оси диссипации с меньшим
демпфированием (с большей постоянной времени). Как видно из формулы (1.146),
этот дрейф зависит от углового положения стоячей волны в резонаторе.
Рис. 1.14 иллюстрирует систематический дрейф стоячей волны в
ВТГ. Хорошо видно, что имеются две ориентации стоячей волны,
соответствующие нулевому систематическому дрейфу. Одна из них,
устойчивая, соответствует углу φ4, другая, неустойчивая, сдвинута по
отношению к устойчивой ориентации на угол 45 град.
Амплитуда систематического дрейфа определяется разностью τ{1 и
г2-1. Различие постоянных времени затухания колебаний в резонаторе τ\
46
1. Теоретические основы функционирования волнового твердотельного гироскопа
и ъ зависит от ряда причин (неизотропность материала резонатора,
неоднородности материала, локальные дефекты).
На величину систематического дрейфа может влиять остаточный
газ в приборе. При натекании газа постоянные времени τ\, τ2 будут
уменьшаться, и если резонатор расположен несимметрично в корпусе,
то это изменение может быть неодинаковым.
2,5
2,0
1,5
1,0
^ °'5
:£ -0,5
*° -1,0
-1,5
-2,0
-2,5
0 20 40 60 80 100
0, град
Рис. 1.14. Систематический дрейф стоячей волны в ВТГ
(в расчете принято: т\ = 500 с, т2 = 490 с, <р4 = 20 град)
На величину τ\ и г2 также оказывает влияние массовый дисбаланс
резонатора, приводящий к колебанию центра масс и рассеянию энергии
колебаний через крепежную ножку. Этот дефект может быть исправлен
в ходе балансировки.
Систематический дрейф ВТГ, как правило, не компенсируется, но
учитывается путем калибровки каждого экземпляра гироскопа.
Формула (1.146) позволяет оценить величины τ\ и т2, которые необходимо
иметь в собранном гироскопе. Приемлемая величина систематического
дрейфа определяется точностью, которую должен обеспечить ВТГ.
Практика показывает, что достижимая точность ВТГ примерно на два-
три порядка меньше амплитуды систематического дрейфа.
Пятое слагаемое в выражении (1.146) отражает тот факт, что при
ненулевой эллиптичности колебаний система параметрического
возбуждения может создавать дрейф при ее неоптимальной настройке. Эту
зависимость необходимо принимать во внимание при определении
технических требований к электронной управляющей схеме ВТГ.
47
[ \
; Дрейф V
'
Устойчивое
положение
\ /
\ "* /
\ Дрейф /
ilil
/ Дрейф
Неустойчивое
положение
. 1 ,,....J
Волновой твердотельный гироскоп. Теория и технология
В последнее время особенное внимание уделяется анализу и учету
теплового дрейфа ВТГ [10, 11, 45, 47, 60, 61, 168]. Основными
источниками температурной чувствительности ВТГ являются не искажения
геометрии полусферического резонатора, а достаточно сильная
зависимость от температуры физических свойств материала резонатора. Это в
основном и приводит к зависимости от температуры параметров
систематического дрейфа. Расщепление частоты также является функцией
температуры, поэтому будет наблюдаться температурная зависимость и
случайного дрейфа ВТГ.
1.3. Математическая модель оболочечного ВТГ
1.3.1. Динамика полусферического ВТГ
Выведем уравнения движения полусферического резонатора ВТГ.
Резонатор представляет собой тонкостенную полусферическую
оболочку, закрепленную на цилиндрической ножке в окрестности
полюса (рис. 1.15). Предположим, что физические параметры
резонатора не зависят от окружного угла и являются постоянными
величинами. Математическая модель оболочки строится на основе
гипотезы Кирхгофа-Лява.
а) б)
Рис. 1.15. Трехмерная модель (а) и осевое сечение (б) резонатора ВТГ:
1 - оболочка, 2 - ножка, 3 - основание
В общем случае деформация является суммой касательных
напряжений ιι(α,β), ν(α,β) точек средней поверхности и нормального
перемещения w(a, β) этой же поверхности; здесь а и β - локальные
координаты точки на средней поверхности оболочки (рис. 1.16).
48
1. Теоретические основы функционирования волнового твердотельного гироскопа
Согласно гипотезе Кирхгофа-Лява, компоненты тензоров
напряжений (σ) и деформаций (е) подчинены следующим условиям:
ear=efr=e7r=0> аГГ=0>
где γ - нормальная координата точек, лежащих внутри оболочки. Тогда
линейная связь тензоров напряжений и деформаций выражается с
помощью закона Гука:
F F F
^a=j^(em+vefifi)9 σβ=γ—^(βββ+νβαα)9 ταβ=--—βαβ9
(1.149)
где Ε - модуль упругости; ν - коэффициент Пуассона материала
оболочки. Разложим компоненты тензора деформаций по степеням
координаты γ и оставим
только линейные
относительно γ -слагаемые:
^Ш
eaa=sl+rclr + o(y\
βββ=£2 + κ2χ + ο(γ),
εαβ=ω + τγ + ο(χ). (1.150)
Коэффициенты здесь имеют
следующий геометрический
смысл: εΧ, ε2 - относительные
удлинения координатных
линий; ω характеризует
изменение угла между
координатными линиями
(деформация сдвига); к19 к2
характеризуют изменение
главных кривизн средней
поверхности при переходе в деформированное состояние (деформация
изгиба); τ характеризует деформацию кручения средней поверхности.
Для полусферической оболочки (рис. 1.17), если α = θ, β = φ -
сферические координаты, R - радиус средней поверхности в
недеформированном состоянии, будут справедливы равенства
Рис. 1.16. Схема деформации
оболочки: (α),(β),(χ) ~
координатные линии; u,v,w -
компоненты вектора перемещения;
t\,t2,n - единичные векторы
Η ди
1 r[ дв
ω = -
(
-vctg<9 +
1
]_
R ,
ди
w + uctg0 + —
1 dv
dv
ύηθδφ дв
τ = ~
sin θ δφ
1
iT sin 0
d2w
+ ctg<9—
δθδφ δφ
49
Волновой твердотельный гироскоп. Теория и технология
*,= —
R2
w + -
дв2
> к2 — ~
R2
W + -
1 dzw
+ ctg<9
dw
~θθ
(1.151)
sin2 θ д<р2
Примем гипотезу о нерастяжимости средней поверхности
оболочки. Тогда уравнения, определяющие изгибания оболочки,
получаются приравниванием нулю трех компонент тангенциальной
деформации:
ει=ε2 = ω = 0. (1.152)
Рис. 1.17. Сферические
координаты
Рис. 1.18. Нагрузки, действующие
на элемент оболочки
Подставляя (1.150) в (1.149), получим
Ε Ε Ε
1-ν μ 1-ν 2(1 +ν)
Запишем выражения для сил и моментов через составляющие
деформации (рис. 1.18):
нормальные силы
ЛГ1=ЛГ2=0; (1.154)
сдвигающие силы
Si=S2=0; (1.155)
изгибающие моменты
Eh5
Мх= —{κχ+νκ2)\ Μ2-
1 12(1-v2) l 2 2
Eh г ч
12(1-ν2)
крутящие моменты
М12=М21=:
Eh5
(1.156)
(1.157)
12(1 +ν)
Здесь h - толщина оболочки.
Согласно принципу Даламбера, после исключения
перерезывающих сил, уравнения равновесия элемента оболочки примут вид:
50
1. Теоретические основы функционирования волнового твердотельного гироскопа
дв sin0 д<р
2- + — + 2M12ctg0 =-/ГУ,
sin# d#> d#
(1.158)
32Μλ
дв2 sin20 d#>'
1 62М2 , п д ίλ, .__ч 2 д2М21
*- + ctg0—(М2-2М1) + *L-
дв
ύηθδθδφ
+2^™η+Μλ-Μ2=-Ι?Ζ.
sin θ δφ
Силы инерции имеют вид (рис. 1.19)
X = -ph(u"t - 2Ων; cos θ),
Υ = -ph [v"t + 2Cl(Wt sin θ + u\ cos (9)],
Z = -/?A(M£-2Qv;sin0),
(1.159)
где /? - плотность материала
оболочки; Ω - угловая скорость
вращения оболочки.
Далее, подставляя (1.154)-
(1.157) и (1.159) в (1.158),
получаем уравнения движения
полусферического резонатора,
вращающегося вокруг оси
симметрии с угловой скоростью Ω:
Рис. 1.19. К расчету сил инерции
D_
R2
1
ύθθθ
sin2 θ
sin θ
= R2ph(u1t-2Clvtcos0),
D
-wm
ctg<9
Wa
R\ sm# ψ sin θ sin# ψ sm# ψ
= R2ph [v"tt + m(Wt sin θ + u\ cos θ)],
_£>_"
Я2
jv
sin20
1 ^-2^ctg0 + 2^wZ
sin40
sin 0
+>v^ctg20-
4 Γ 1
-< -ctg^ 2-f-
sin40 φφ
sin2 (9
= ^ν/ζ(ν^;-2Ων;8ίη/9),
(1.160)
где D = Eh3112(1 -v2) - цилиндрическая жесткость.
51
Волновой твердотельный гироскоп. Теория и технология
Для получения решения системы уравнений (1.160) разложим
перемещения точек резонатора по второй собственной форме колебаний
нерастяжимой оболочки:
w(0, φ, t) = U(θ)(p(t)cos2(p + q(t)sin2(p)9
v(0, φ, t) = V(0)(p(t)sin2<p-q(t)cos2<p)9 (1.161)
w(0, φ, t) = W(e)(p(t)cos2<p + q(t)sin2(p).
Здесь U{6), V(fi), W{6) - функции Рэлея для сферической оболочки
[27]; p(t), q(t) - неизвестные функции.
Будем считать, что кромка резонатора определяется углом θ0.
Подставляя (1.161) в (1.160) и применяя метод Бубнова-Галеркина при
составлении дифференциальных уравнений для функций p(t), q(t),
получаем уравнения, описывающие динамику второй собственной формы
колебаний идеального полусферического резонатора:
(m0p,;t-2Clbqfi+c0p = 0,
\mQqntt+2£lbp't+c0q = ^
где
т0 = -R2ph \ (U2 + V2 + W2) sin θ άθ,
(1.162)
b = 2R2ph J V{U cos0 + W sin Θ) sin Θ άθ,
-Wm-W'ctg0 +
3 + 2cos2^^ Qctgfl
sin20
sin2 θ
W'-S
W
u+
2Wn + 2W'ctg0-4
-WIV-2W'"ctg0 +
l + cos2fl
sin20
9-sin2 (9
sin20
W
Wn-
sin#
ctg0
sin20
(9 + 2sin20)JT
W
ήηθάθ.
Коэффициент прецессии стоячей волны в резонаторе выражается
формулой
"О
f V(U cosO + W sin θ) sin θ άθ
BF = -
._ ο_
2mn
J(i/2 + K2 + )^2)sin(9J6>
(1.163)
52
1. Теоретические основы функционирования волнового твердотельного гироскопа
Функции Рэлея могут быть определены из решения системы
дифференциальных уравнений (1.152), имеющей развернутый вид:
(w + du/d0 = O,
\wsm0 + ucosO + dv/d(p = O9 (1.164)
[-ν cos θ + ди Ι θφ + sin θ dv Ι δθ = 0.
После отделения окружного угла φ полученная система сводится к
линейному дифференциальному уравнению второго порядка по углу θ:
K"sin20-Fsin0cos0-3r = O. (1.165)
Его решением, голоморфным в вершине сферического купола, будет
V(0) = sm0tg2-.
Используя (1.164), легко найдем:
U(0) = V(0) = sin0tg2-, W(0) = -(2 + cos0)tg2-. (1.166)
Подстановка (1.166) в (1.163) для θ0=π/2 дает следующее
значение параметра прецессии: BF « 0,277.
1.3.2. Динамика цилиндрического ВТГ
Рассмотрим свободные колебания тонкой упругой
цилиндрической оболочки радиуса R и длины L . Будем использовать
цилиндрические координаты
a = z = s, β = φ, y = r,
Которые связаны с прямоугольными декартовыми соотношениями
χ = г cos φ, у = г sin φ, ζ = ζ .
Параметры Ляме имеют вид:
Ηj = 1, Н2 — R> H^ = 1 ·
Обозначим деформации точек оболочки вдоль координатных
линий как
uz9u9,ur.
Часто бывает удобно перейти от координаты ζ = s к безразмерной
координате ξ = s IR .
В данном случае, в отличие от полусферической оболочки, нельзя
воспользоваться условиями нерастяжимости
εχ=ε2=εη=0 (1.167)
По причине того .что гауссова кривизна вдоль координаты s равна
нулю. Если оболочка не очень короткая, т.е.
|J|»1, (U68,
то вместо (1.167) можно взять следующие условия нерастяжимости:
53
Волновой твердотельный гироскоп. Теория и технология
иг=^. (1.171)
s2=sl2=0. (1.169)
Это приводит к двум уравнениям связи:
*Ь-„,=0, *t+*t = 0. (1.170)
δφ δξ δφ
Введем функцию ψ(ξ9φ,ί), такую, что
δψ δψ δ2ψ
При ξ = 0 выберем условие жесткого закрепления:
м =^t = 0, (1.172)
г δξ
а край ξ = ξ0 = LIR положим свободным:
^ = ^ = 0. (1.173)
δξ2 δξ3
Из последних выражений и уравнений (1.171) получаем такие же
краевые условия для ψ :
ψ = ^ = 0 (1.174)
δξ
(при ξ = 0) и
^ = ^ = 0 (1.175)
δξ2 δξ3
(при£ = £0=1/Я).
Упрощенное уравнение динамики свободных колебаний тонкой
цилиндрической оболочки имеет вид:
4..
д ψ δ ψ δ ψ ο
a/ dp2 d£4 [V V dp4 J
ay+2^V+^V
= 0, (1.176)
где
h2
4= _Ό2η „2ч » * =T^2-^'
C2:
p^(l-vz)' 3i?z
£ - модуль упругости; ν коэффициент Пуассона; ρ - плотность.
Разделяя переменные, представим ψ как
ψ(ξ,φ,ί) = χ¥(ξ)οο3η(φ-φ0)οο8ω(ί-ί0), (1.177)
где <р0 - начальная ориентация стоячей волны; η - номер формы
колебаний; ω собственная частота свободных колебаний.
Подставляя (1.177) в (1.176), получим
54
^Γ = /?4Ψ, (1-178)
1. Теоретические основы функционирования волнового твердотельного гироскопа
где
/?4=ί-Γ^(ΐ+«2)-ινα-Λ2)21.
η L J
Уравнение (1.178) аналогично уравнению свободных колебаний
стержня, его решение имеет вид:
4(ξ) = Α&βξ + Β&βξ + €*ΪΆβξ + Ώοο*βξ.
Из граничных условий (1.174), (1.175) следует, что
С = -А, D = -B.
Уравнение (1.178) имеет бесчисленное множество решений
ψ*(£) = <?4
ЦЩ) УЩ)
(1.179)
4S(A#0) г(Д£0),
выражающихся через функции Крылова
S(x) = (ch χ + cos x) 12, Τ {χ) - (sh χ + sin jc) / 2,
£/(jc) = (ch jc - cos jc) / 2, K(jc) = (sh jc - sin jc) / 2.
В (1.179) Ck - произвольная постоянная.
В уравнении (1.179) fik находятся из соотношения
chA^0cos^0=-l.
Соответствующие собственные частоты равны
да _ Uf+gVfr2-!)2"
" v *V+1)
асимптотически стремясь к частотам упругого кольца при L -» оо.
Наименьшее значение /? равно Д«1.875<^0"1.
Компоненты перемещений выражаются согласно (1.171):
и ^ = -Ψ'(£) cos w(#> - #>0) cos бу(^ -10),
ΐ4φ=-ηΨ(ξ)$ΪΏ.η(φ-φ0)οθ8ω(ί-ί0)9 (1.182)
ur - -π2Ψ(ξ) cos π(φ - #>0) cos ω(ί -10),
(1.180)
(1.181)
где
П(5) = с*А
?W) tW)
(1.183)
^(А4ь) ПАЙ),
При наличии угловой скорости вращения основания Ω, стоячая
волна поворачивается с угловой скоростью
3 = -- ?5 —-, (1.184)
n2+l + R2dk/(n2L2)
где коэффициент dx « 4.65.
55
2. Проектирование и
производство резонаторов
волнового твердотельного
гироскопа
Резонатор является наиболее ответственной деталью ВТГ.
Достижение его высоких характеристик требует правильного выбора
конструкционного материала, использования ряда специальных технологий
обработки кварцевого стекла, нанесения проводящих покрытий с малой
диссипацией, а также применения нестандартных измерительных
методов. Эти вопросы рассматриваются в настоящей главе.
2.1. Конструкция ВТГ
Отличия в способах обработки стекла и металлов влекут за собой
различные конструкторские и технологические подходы при создании
ВТГ высокой точности и гироскопических датчиков общего применения
[150,173,186]. Особенности этих технических решений рассмотрены
ниже.
Конструкция высокоточных ВТГ. При разработке ВТГ с
резонатором из кварцевого стекла необходимо учитывать следующие
условия:
обработка кварцевого стекла достаточно трудоемка, поэтому
форма резонатора должна быть максимально простой;
конструкция резонатора должна предусматривать возможность
балансировки резонатора для устранения упруго-массовой
неоднородности;
достижение высокой добротности требует использования бескон-
такных датчиков и актюаторов;
остаточный газ внутри прибора приводит к дополнительному
демпфированию колебаний, поэтому внутри ВТГ необходимо
поддерживать вакуум не хуже ~10"6 мм рт.ст.
Рассмотрим выполнение этих условий на примере ВТГ,
представленного на рис. В.1. Резонатор из кварцевого стекла изготовлен
в виде тонкостенной полусферы с крепежной ножкой. На кромке резо-
2. Проектирование и производство резонаторов волнового твердотельного гироскопа
натора имеются зубцы, предназначенные для его балансировки. Зубцы
не деформируются при колебаниях, что позволяет сравнительно просто
(например, с помощью лазера) удалять с них значительное количество
неуравновешенной массы без изменения жесткостных и диссипативных
характеристик резонатора. Для измерения амплитуды колебаний
использованы емкостные датчики, расположенные на измерительной
плате. Поддержание колебаний кромки резонатора на постоянном уровне
осуществляется переменным электрическим полем, создаваемым
кольцевым электродом возбуждения, а подавление квадратурных колебаний
- емкостными корректирующими электродами. Для обеспечения
высокой эффективности работы емкостных электродов на внутреннюю и
внешнюю поверхности полусферы нанесен тонкий проводящий
металлический слой, служащий второй обкладкой емкостных датчиков и ак-
тюаторов. Эти три основные детали ВТГ герметично соединены между
собой так, что между поверхностями резонатора, измерительной платы
и узла возбуждения имеется небольшой равномерный зазор. Для
обеспечения вакуума внутри ВТГ в прибор встраивают газопоглотитель.
Несмотря на высокие эксплуатационные характеристики ВТГ
данного типа получил ограниченное применение из-за сложности
производственной технологии и высокой себестоимости. Стремление
упростить и удешевить прибор привело к появлению новых конструктивных
решений. В 1995 г. фирма Litton (США) объявила о создании новой
конструкции ВТГ, где в одном вакуумном корпусе объединялось сразу
три малогабаритных чувствительных элемента новой конструкции
(рис. 2.1) [161, 171,185].
Рис. 2.1. Трехосный ВТГ фирмы Litton: 1 - общий вакуумный корпус; 2 -
одноосный чувствительный элемент; 3 - электронный блок; 4 - полусферический
резонатор; 5 - электродный узел; 6 - электрод
57
Волновой твердотельный гироскоп. Теория и технология
Основной частью этого комбинированного чувствительного
элемента является 30-миллиметровый полусферический резонатор 4 с
одной внутренней крепежной ножкой. Емкостные электроды 6,
используемые для измерения параметров стоячей волны и для управления ею,
расположены на внутреннем электродном узле 5. Все детали
герметично соединены между собой стеклоприпоем и не требуют использования
отдельного вакуумного корпуса. (В некоторых более поздних моделях
ВТГ этой фирмы с целью повышения надежности используется
дополнительный металлический герметичный корпус.) Предложенная
конструкция оказалась технологически проще, а ее технические
характеристики - выше.
Следующий шаг в развитии конструкции ВТГ стал возможен
благодаря разработке технологии балансировки резонатора ионным пучком
[123, 188]. Удаление несбалансированной массы пучком ионов менее
производительно по сравнению с лазерным испарением. Однако
основным достоинством ионной технологии является возможность
балансирования беззубцовых резонаторов, поскольку ионное травление
практически не нарушает структуру кварцевого стекла и дает возможность
удалять материал прямо с поверхности полусферы. Это позволяет
избежать сложных и дорогостоящих технологических процедур,
необходимых при изготовлении зубцов. Кроме того, исходный массовый
дисбаланс беззубцовых резонаторов в несколько раз ниже, чем для их
зубчатых аналогов. Другими преимуществами ионной технологии являются
простой балансировочный алгоритм и высокая точность балансировки.
Ионная технология балансировки позволяет существенно упростить
производство ВТГ и сделать его цену приемлемой для широкого
использования в навигационных приборах гражданского назначения,
например, в инклинометрах, предназначенных для контроля траектории
газовых и нефтяных скважин [124].
Наконец, еще одно усовершенствование конструкции ВТГ связано
с упрощением совмещенного электродного узла [190, 198]. Известно,
что кромка полусферического резонатора при колебаниях перемещается
не только перпендикулярно оси резонатора, но и параллельно ей. Это
обстоятельство позволяет разместить все электроды на плоском
электродном узле, расположив его параллельно торцевой кромки
полусферической оболочки резонатора. Идея этого подхода представлена
на рис. 2.2. В новом варианте конструкции ВТГ металлическое
покрытие наносится только на торцевую кромку полусферы, что значительно
уменьшает внутреннее трение в резонаторе и упрощает технологию его
изготовления. В этой конструкции значительно проще обеспечить
равномерность плоского зазора между торцевой поверхностью резонатора
и плоским электродным узлом.
58
2. Проектирование и производство резонаторов волнового твердотельного гироскопа
Также имеет место снижение интенсивности газового трения, так
как размеры зазора (и, соответственно, характерное время установления
равновесной концентрации газа в зазоре) в этой конструкции малы. В
результате ВТГ становится
менее чувствительным к
изменению вакуума внутри корпуса
при эксплуатации. Используя
эту конструктивную схему,
фирма SAGEM DS разработала
БИНС Regys 20, основанную на
чувствительных элементах с
резонаторами диаметром 20 мм.
Скорость случайного дрейфа
составляет 0,1 град/ч, рабочий
ресурс - 15 лет непрерывной
работы. Масса БИНС - 3,1 кг,
объем - 1 л, потребляемая
мощность составляет 10 Вт.
2
5
Рис. 2.2. ВТГ с плоским узлом
электродов: 1 - резонатор; 2 - электродный
узел; 3 - металлизированная
поверхность резонатора; 4 - электрод;
5 - место соединения резонатора с
электродным узлом
Конструкция ВТГ невысокой точности общего применения.
Простота механической обработки металлов делает привлекательным
их использование в качестве конструкционного материала недорогих
вибрационных гироскопов низкой точности, хотя добротность металлов,
как уже говорилось, гораздо ниже добротности кварцевого стекла.
В тонкостенных металлических резонаторах основной диссипа-
тивный процесс связан с возникновением тепловых потоков при
деформации материала. При деформации твердого тела температура в его
различных областях будет зависеть от степени локальной деформации
среды. При колебаниях резонатора материал на внешней и внутренней
стороне деформируется противоположным образом (например, если
внешние слои растягиваются, то внутренние слои сжимаются).
Соответственно локальные температуры в этих слоях будут разные. В
результате между зонами с разной деформацией и разной локальной
температурой возникают тепловые потоки, интенсивность которых зависит от
теплопроводности материала. Эти тепловые потоки будут выравнивать
локальные температуры тела, приводя к необратимому превращению
механической энергии в тепловую. Теория этого явления была
разработана Зинером [75]. Определить величину этих потерь энергии колебаний
(называемых термоупругими потерями), можно по формуле
ζ=ι
ωτ
(2.1)
1 + (ωτ)2
где /иг- соответственно интенсивность и время тепловой релаксации:
59
Волновой твердотельный гироскоп. Теория и технология
2
1 = ЕТ—; г« —, (2.2)
С/ ξ
где Ε -.модуль упругости; Т- температура; а - коэффициент линейного
теплового расширения; Ср - теплоемкость; χ - расстояние, которое
должен пройти тепловой поток; ·ξ- коэффициент температуропроводности.
Для тонкостенных металлических резонаторов интенсивность
этого вида внутреннего трения оказывается очень высокой, достигая
максимума при сот = 1, в результате чего добротность металлических
полусферических и цилиндрических резонаторов оказывается низкой. Чтобы
уменьшить интенсивность термоупругих потерь, можно использовать
металлы с низким а (например, инвар), что приведет к / —» 0, либо
изменить конструкцию резонатора таким образом, чтобы существенно
увеличить характерную толщину колеблющейся части резонатора. Это
увеличит время тепловой релаксации и сдвинет максимум термоупругих
потерь в область очень низких частот.
Рассмотрим наиболее удачные конструкции ВТГ с металлическим
резонатором, где реализованы эти подходы.
В малогабаритном датчике угловой скорости, разработанном
фирмой Innalabs [135], резонатор выполнен в виде цилиндра, на дно
которого приклеены пьезокерамические элементы (рис. 2.3). Они
используются как для возбуждения, так и для измерения параметров колебаний.
! 2
Рис. 2.3. Конструкция ВТГ фирмы Innalabs: 1 - корпус; 2 - крепежный винт;
3 - резонатор; 4 - основание
Материал резонатора - NiCrTi-сплав с низким коэффициентом
линейного теплового расширения. Резонатор 3 диаметром 17...43 мм
крепят на основании 4 винтом 2 и устанавливают собранный чувствитель-
60
2. Проектирование и производство резонаторов волнового твердотельного гироскопа
ный элемент в корпус 1. Добротность резонатора составляет (1...4)-104.
Электронный блок управления собран на плате размером 45x45 мм и
обеспечивает поддержание постоянной амплитуды колебаний в
пучностях волновой картины и подавление синфазных и квадратурных
колебаний в ее узлах путем подачи управляющих напряжений на
соответствующие пьезоэлементы. Такие ВТГ работоспособны при температуре
от -40 до + 75°С и обеспечивают точность измерения угловой скорости
1...5 град/ч.
Другой подход к конструированию ВТГ с металлическими
резонаторами состоит в принципиальном изменении его конструкции. В ВТГ
QUAPASON фирмы SAGEM DS резонатор выполнен в виде двойного
камертона (рис. 2.4) [153].
Тэ£1
7?-мода
Й13
Г-мода
в)
б)
Рис. 2.4. ВТГ фирмы SAGEM DS: a - конструкция чувствительного элемента;
б - радиальная и тангенциальная колебательные моды резонатора
В таком резонаторе существуют две ортогональные колебательные
моды с одинаковыми частотами - радиальная (Я-мода) и
тангенциальная (Г-мода). Уравнивание собственных частот этих мод проводят в
ходе балансировки, которая выполняется высверливанием отверстий в
торцевой части стержней. Для возбуждения и измерения колебаний
служат пьезоэлементы, приклеенные к боковой поверхности резонатора.
Термоупругие потери в таком резонаторе оказываются значительно
меньше, чем в тонкостенном цилиндре, за счет увеличения толщины
колеблющегося элемента. Структура управляющей электроники
аналогична используемой в ВТГ с полусферическим или цилиндрическим
резонаторами.
61
Волновой твердотельный гироскоп. Теория и технология
Этот ВТГ может работать как в режиме датчика угловой скорости,
так и в режиме датчика угла. Он имеет малое время готовности (0,5 с) и
достаточную для ряда применений точность (около 10 град/ч).
Использование пьезоэлементов в качестве датчиков и актюаторов
характерно для ВТГ этого класса, однако надо учитывать, что
внутреннее трение в пьезокерамике велико. Поэтому будет иметь место
запаздывание между деформацией пьезоэлемента и выходным сигналом, что
в дальнейшем может привести к ошибкам в вычислении параметров
волновой картины.
Независимо от конструкции, основной деталью ВТГ является его
резонатор и, в конечном счете, его качество ограничивает
характеристики прибора. Для достижения необходимых параметров резонатора
необходимо внимательно отнестись к его конструированию, выбору
материала и разработке комплекса производственных технологий.
2.2. Проектирование резонаторов ВТГ
При проектировании резонатора ВТГ прежде всего определяется
его общая конструкция, которая зависит как от назначения
проектируемого гироскопа, так и от технологических возможностей производства.
На этом этапе устанавливается диаметр резонатора, конструкция
крепежной ножки (односторонняя или двусторонняя), а также наличие или
отсутствие балансировочных зубцов, что определяется планируемой
технологией балансировки.
Следующий этап конструирования включает в себя выбор
основных геометрических параметров резонатора: толщины и профиля его
стенки, размеров зубцов, а также диаметра и длины ножки.
Толщина стенки линейно связана с рабочей частотой резонатора.
При выборе этих параметров следует принимать во внимание несколько
соображений.
Систематический дрейф ВТГ обратно пропорционален времени
затухания колебаний, которое зависит от частоты колебаний/резонатора
и его добротности Q:
Т=0_=2^,± 23)
/г/ AW /г/
Согласно этой формуле, частоту (а, следовательно, и толщину
стенки) следует выбирать как можно меньше, однако надо учитывать,
что добротность резонатора определяется многими факторами:
n-'=_L+-L+_J_+_L+ =Mk+^k+^^L+^k+
Qm Qsur Qcoa, Qfi* '" ^W 2πΨ 2πΨ 2πΨ ' '
(2.4)
62
2. Проектирование и производство резонаторов волнового твердотельного гироскопа
где AWm- диссипация в материале резонатора; AWsur - диссипация в
поверхностной зоне; AWcoat - диссипация в металлическом покрытии;
ΑΨβχ - рассеяние в креплении.
При утонении стенки энергия колебаний резонатора W
уменьшается, тогда как рассеиваемая энергия при деформации металлического
покрытия и поверхностного слоя практически не меняется. Поэтому
уменьшение толщины стенки будет сопровождаться относительным
ростом потерь AWsur и AWcoat. При этом существенное увеличение
постоянной времени резонатора может быть получено, если AWm > AWsur +
AWcoat + ΑΨβχ. В противном случае выигрыш в величине τ невелик и
будет сопровождаться технологическими проблемами, возникающими при
изготовлении резонаторов с очень тонкой стенкой. Неизбежные
отклонения в геометрии тонкой оболочки будут вызывать значительный
массовый дисбаланс резонатора, что потребует пропорционального
увеличения точности балансировки. Эти соображения ограничивают
минимальную толщину стенки величиной 0,5...0,7 мм и, соответственно,
определяют нижнюю границу рабочей частоты резонатора.
Профиль стенки не влияет на работу ВТГ, однако при колебаниях
полусферического резонатора с постоянной толщиной стенки
напряжения в материале распределены по оболочке неравномерно. Максимум
имеет место вблизи соединения полусферической оболочки с
крепежной ножкой. Утолщение стенки в направлении от края оболочки к
ножке позволяет снизить максимальные напряжения в материале
резонатора. С этой целью в патенте [203] толщина стенки h выбрана
максимальной вблизи полюса полусферы (h = h0), а по направлению к кромке она
изменяется по закону
hMl + ™a)2 , (2.5)
4
где а - угол между вектором, проведенным из центра полусферы в
некоторую точку оболочки, и осью симметрии (кромке соответствует
а =90 град).
Конфигурация балансировочных зубцов выбирается таким
образом, чтобы на их поверхности были области с малыми деформациями
материала. Именно с этих областей производится удаление
неуравновешенной массы при балансировке резонатора. Если зубец при
колебаниях деформируется, то удаление с него материала приведет не только к
изменению распределения массы, но и к уменьшению жесткости в
данном направлении. В связи с этим целесообразно конструктивно
увеличить жесткость балансировочного зубца. В качестве примера на рис. 2.5
показана конструкция балансировочного зубца, примененная в
резонаторе ВТГ фирмы Northrop Grumman (США) [171].
63
Волновой твердотельный гироскоп. Теория и технология
=17,10
ЗОНА ЛАЗЕРНОЙ
ОБРАБОТКИ
В этой конструкции общее число зубцов равно 31, угловая ширина
каждого составляет около 7,5 град. Зубец имеет увеличенное
поперечное сечение и его деформация при колебаниях незначительна, особенно
в центре торцевой поверхности. Эта область и может быть использована
для удаления материала
лазерным испарением.
Геометрия ножки
определяет спектр ее собственных частот.
Близость любой собственной
частоты ножки к рабочей частоте
колебаний резонатора может
резко изменить его характеристики.
Учитывая, что добротность
колебаний, связанных с закрепленной
ножкой, обычно невелика
(порядка 102), необходимо
обеспечить отнесение этих колебаний от
рабочей частоты примерно на
1 кГц. Это достигается
соответствующим выбором
геометрических параметров ножки (длина,
диаметр) резонатора в процессе
его проектирования.
Для расчета спектра собственных частот резонатора с заданными
геометрическими параметрами наиболее удобно использовать конечно-
элементное моделирование. При этом тело резонатора разбивается на
мелкие элементы, вершины которых образуют пространственную сетку
узлов.
Потенциальная энергия резонатора представляется как функция
перемещений узлов, а кинетическая - как функция их скоростей. По
этим функциям и формируются уравнения движения конструкции. Для
полученной системы уравнений определяются собственные частоты и
соответствующие им собственные формы колебаний. В настоящее
время существуют различные пакеты программ, позволяющие
сравнительно легко выполнить подобные расчеты (например, COMSOL
Multiphysics и другие).
В качестве примера на рис. 2.6 приведено изменение некоторых
собственных частот полусферического резонатора из кварцевого стекла
диаметром 30 мм с внутренней крепежной ножкой. На рис. 2.6,а
показано изменение собственных частот при варьировании диаметра ножки, а
на рис. 2.6,6 - при варьировании толщины стенки. Хорошо видно, что
при диаметре ножки 7 мм или 10,3 мм имеет место совпадение
собственных частот колебаний оболочки и ножки. Нежелательная близость
R =15,55
Рис. 2.5. Конфигурация
балансировочного зубца ВТГ фирмы
Northrop Grumman
64
2. Проектирование и производство резонаторов волнового твердотельного гироскопа
собственных частот может возникнуть и при неверном выборе толщины
оболочки (0,85 мм или 0,97 мм).
а)
12000
11000
10000
(-и 9000
ь:
8000
7000
6000
б)
Рис. 2.6. Конечноэлементное моделирование спектра собственных частот
полусферического резонатора (1 - крутильные колебания ножки; 2-1-я мода
изгиба ножки; 3 - колебание оболочки вокруг ножки; 4 - 2-я мода изгибных
колебаний оболочки): а - варьирование диаметра ножки (толщина оболочки
h = 1,25 мм); б - варьирование толщины стенки (диаметр ножки D = 8 мм)
Аналогичные зависимости могут быть получены и для других
элементов конструкции резонатора (например, для радиусов сопряжения
оболочки и ножки и т.п.). С помощью таких зависимостей можно
выбрать оптимальные геометрические размеры элементов резонатора и
допуски на них. Точность расчетов при этом вполне достаточна.
65
Волновой твердотельный гироскоп. Теория и технология
2.3. Диссипативные свойства кварцевого стекла
В качестве материала высокодобротных резонаторов практически
всегда используется кварцевое стекло. По величине внутреннего трения
оно уступает лишь сапфиру, который обладает свойственной кристаллу
анизотропией свойств, очень сложен в обработке и дорог.
Кварцевое стекло представляет собой разновидность аморфного
кремнезема (Si02), получаемую путем переохлаждения
соответствующего расплава. Для производства кварцевого стекла используется
природный и синтетический кварц, кристобалит, аморфный кремнезем и
его летучие соединения (S1CI4, Si(OC2H5)4 и др.) и различные
технологии наплава. В зависимости от способа производства свойства
кварцевого стекла несколько различаются. Исходя из этого, выделяют четыре
типа кварцевого стекла [147]. Основные черты этих типов кварцевых
стекол приведены в табл. 2.1 [15, 127, 128, 146].
Таблица 2.1. Основные характеристики кварцевого стекла
1 Характеристики
Метод
производства
1 Содержание
примесей, ppm:
ki
Fe
Na
Ρ
юн
Марки:
РФ
Германия
rHeraeus"
США
f'Corning"
['General Electric"
Япония
"Nippon"
"Tosoh"
Франция
'Quartz et
silice"
Англия
r'Thermal
Syndicate"
Тип I
Плавка сырья в
печи
50...180
0,7...5,0
4...7
2...4
КИ
Infrasil-301,302,
303
GE-105,114,
125,201
IF, 2020, 2030
Pursil-259,403
IR-Vitreosil
Тип П
Плавка сырья в
пламени
10...50
0,5...3,0
0,06...2,0
400
KB; КУ-2
Homosil, Herasil-
1,2,3
GE-102,104
UF,SG,1020,
1060
Pursil optique
Vitreosil 0.55, 0.66
ТипШ
Парофазный
гидролиз SiC14 в
пламени
0,05
0,1
0,04
0...50
1200
КУ-1;Р
Suprasil-1,2, 3,
311,312
Corning
7940,7980
GE-151
BF,4040
ES
Tetrasil
Spectrosil
Тип ГУ
Окисление SiC14
в плазме
0,05 Ι
0,1
0,04
2...10
0...500
КУВИ
Suprasil-300
Corning 7943
ED-A,C
Spectrosil WF
Классификация достаточно условна, существуют кварцевые стекла
(например, кварцевое стекло КС4В [49, 175], Corning 7958 и др.), изго-
66
2. Проектирование и производство резонаторов волнового твердотельного гироскопа
тавливаемые по многостадийным технологиям, не позволяющим
отнести их к одному из этих четырех типов.
Кварцевое стекло типа I получают плавлением в электропечи
крупки кремнезема в вакууме или в водородной среде. Такое стекло
характеризуется низкой концентрацией гидроксильных групп и
значительным содержанием минеральных примесей, переходящих в расплав
из сырья.
Кварцевое стекло типа II также наплавляется из крупки
кремнезема, но в факеле водородно-кислородного пламени. Эта технология
более производительна, однако уровень минеральных примесей остается
высоким, концентрация гидроксильных групп резко повышается, а
структура кварцевого стекла приобретает слоистый характер. Из-за
значительной концентрации минеральных примесей оба этих типа стекла
имеют низкую добротность и не подходят для изготовления
резонаторов ВТГ.
Кварцевое стекло типа III изготавливается
высокотемпературным гидролизом SiCl4 в водородно-кислородном пламени. Содержание
примесей в этом кварцевом стекле низкое, за исключением хлора и
гидроксильных групп. Концентрация последних обычно высокая (до
1300 ррт).
Наиболее чистыми являются безгидроксильные кварцевые стекла
(тип IV), получаемые обычно окислением SiCl4 в высокочастотной
плазме; концентрация примесей составляет в нем всего несколько ррт.
Кварцевые стекла последних двух типов могут быть использованы в
качестве материала резонаторов ВТГ.
Промышленно кварцевое стекло выпускается в виде блоков,
дисков, прутков, пластин. Качественные показатели стекла (спектры
поглощения, содержание примесей, оптическая однородность, двулуче-
преломление, бессвильность, мелкозернистая неоднородность, пузыр-
ность) регламентируются в технической документации, однако
добротность в число этих показателей не входит.
Современные представления о структуре кварцевого стекла в
значительной мере основаны на данных дифракционных методов
исследования и рассматривают ее в виде беспорядочной, непрерывной
пространственной сетки, состоящей из соединенных вершинами Si04-
тетраэдров. При этом каждый атом кислорода связан с двумя атомами
кремния со средним значением угла связи Si-0-Si около 140 град,
образуя плоские и пространственные кольца с разным числом членов. Когда
стекло находится в расплавленном равновесном состоянии, то
концентрация колец каждого вида определяется константой равновесия,
зависящей от температуры. При медленном охлаждении соотношение
концентраций разных колец меняется, однако, начиная с некоторого
момента, из-за увеличивающейся вязкости расплава структурные
67
Волновой твердотельный гироскоп. Теория и технология
превращения замедляются настолько, что процесс перестает быть
равновесным. Стекло застывает, а его конечная структура соответствует
структуре равновесного расплава при некоторой температуре,
называемой «структурной» или «фиктивной». Эта условная температура и
является макрохарактеристикой структуры стекла. Поскольку условия
охлаждения различаются не только для различных наплавляемых блоков, но
даже в пределах одного блока, то и свойства разных кусков кварцевого
стекла одной марки также различаются.
Структура кварцевого стекла оказывает большое влияние на
внутреннее трение в нем. Внутреннее трение в кварцевом стекле при
температурах ниже 100°С в основном определяется движением атома
кислорода вокруг Si-0-Si связи. В отличие от кристаллического кварца, где
имеется только один потенциальный минимум для О-атома, в
кварцевом стекле имеются несколько положений равновесия, в которых атом
кислорода может находиться с более или менее одинаковой
вероятностью. Эта ситуация показана на рис. 2.7. Деформация среды при коле-
Дбаниях изменяет асимметрию
потенциальных ям, вызывая
переходы О-атома между
близкими положениями 1-5 и приводя
к внутреннему трению. Этот
диссипативный процесс
получил название «структурной
релаксации». Он характерен для
всех без исключения стекол.
Хотя наибольшая
интенсивность структурной релаксации
Рис. 2.7. Ближний порядок в кварцевом имеет место ПРИ температуре
стекле ~50 К, этот процесс
практически полностью определяет дис-
сипативные свойства кварцевого стекла до температуры ~100°С.
В качестве примера на рис. 2.8 показана температурная
зависимость добротности кварцевого стекла КУ-1. Из рисунка видно, что на
интервале 200°С добротность изменяется почти на два порядка. При
температуре свыше 100°С становится заметным влияние другого
фундаментального диссипативного процесса - фонон-фононного
взаимодействия.
Теория этого явления была разработана Ахиезером и развита Бем-
мелем и Дрансфельдом [5]. Деформация среды, вызываемая
проходящей волной, приводит к изменению частоты фононов и к нарушению их
распределения, которое отклоняется от равновесного распределения
Планка.
68
2. Проектирование и производство резонаторов волнового твердотельного гироскопа
Процесс восстановления теплового равновесия фононного газа
сопровождается рассеянием энергии волны и снижением добротности.
Таким образом, для килогерцовых частот добротность кварцевого стекла
оказывается максимальной при температуре 100...120°С. Эта
особенность кварцевого стекла была использована в ВТГ типа HRG 130P
фирмы Northrop Grumman, механический блок которого термостатирован
при температуре около 120°С.
О)
н
г,°с
-100 -50 0 50 100
Рис. 2.8. Температурная зависимость добротности кварцевого стекла КУ-1
2.4. Обработка кварцевого стекла при
производстве резонаторов ВТГ
2.4.1. Особенности механической обработки
поверхности
Для формообразования резонатора ВТГ можно использовать
различные способы обработки стекла, хорошо известные в оптической
промышленности. Технологии резки, шлифовки и полировки стекла
подробно описаны в ряде монографий [2, 6, 7, 31-33]. Не останавливаясь
на этом, отметим основные особенности механической обработки
кварцевого стекла при производстве высокодобротных резонаторов ВТГ.
Осевая симметрия резонатора. Геометрические размеры
резонатора могут колебаться в достаточно широких пределах - это повлияет
лишь на величины собственных частот. При рациональном выборе
геометрии резонатора величина допусков может составлять несколько
десятых долей миллиметра. Однако высокая осевая симметрия резонатора
очень важна. Смещение центров внутренней и внешней полусфер
резонатора, асимметрия ножки ведут к массовому дисбалансу резонатора,
который придется устранять с помощью балансировки.
69
Волновой твердотельный гироскоп. Теория и технология
Состояние поверхности после механической обработки.
Поверхность вносит большой вклад в рассеяние энергии колебаний. После
механической обработки поверхность стекла никогда не бывает идеально
гладкой, на ней всегда имеются трещины и изломы, многие из которых
могут проникать на значительную глубину. Поэтому можно говорить о
поверхностном слое, свойства которого отличаются от свойств массива
стекла. Внутреннее трение в поверхностном слое гораздо выше, чем в
объеме, и связано с изменением температуры поверхностных
микрочастиц при колебаниях и с возникновением локальных тепловых потоков
между ними.
На рис. 2.9 показана структура поверхностного слоя кварцевого
стекла после механической обработки.
Зона 1 возникает при
адсорбции частиц из
окружающей среды и их
взаимодействии с
поверхностными атомами. Вязкая зона
2 возникает при полировке
стекла в результате
взаимодействия полировальной
среды с поверхностью
стекла и образования
гидратов кремниевых кислот,
ее толщина составляет
несколько десятков
нанометров. Зона 3 представляет
собой полированную поверхность, созданную в результате смятия
выступов и заполнения впадин материалом выступов; ее толщина может
достигать десятых долей микрона. Глубина впадин определяется
размером зерен абразивных материалов, использованных при обработке,
однако глубина трещин оказывается значительно больше (зона 4).
Механическая обработка также приводит к возникновению пластических
деформаций на глубинах, значительно удаленных от поверхности (зона 5),
и только затем структура материала становится идентичной структуре
стекла в объеме. Толщина всех зон определяется процессом
механической обработки стекла.
Для уменьшения толщины нарушенного слоя обработку
поверхности часто осуществляют последовательностью абразивов так, чтобы
нарушения поверхности на одном этапе обработки удалить на
следующем (асимптотическая обработка). Это позволяет уменьшить размер
дефектов поверхностного слоя и увеличить добротность резонатора.
Но, как показывают результаты исследования поверхности
кварцевого стекла оптическими методами, даже очень тщательно отполиро-
70
Рис. 2.9. Структура поверхностного слоя
кварцевого стекла после механической
обработки: 1 - адсорбционный слой;
2 - вязкая зона; 3 - микрорельеф;
4 - трещины; 5 - деформированная зона;
6 - ненарушенный материал
2. Проектирование и производство резонаторов волнового твердотельного гироскопа
ванная поверхность имеет нарушенный слой толщиной в несколько
десятых долей микрона, связанный с образованием гидроокисла
SiOx[OH]y.
Кроме того, как показали эксперименты, компоненты абразивных
материалов, используемые при шлифовке и полировке кварцевого
стекла, способны проникать на глубину 0,1...0,2 мкм [152]. Эти
обстоятельства приводят к необходимости использования химических средств для
финишной обработки поверхности резонаторов из кварцевого стекла.
2.4.2. Химическая обработка поверхности
Для удаления нарушенного слоя кварцевого стекла обычно
используют химическое травление. В качестве травителя часто применяют
водные растворы плавиковой кислоты.
В общем виде химическое взаимодействие стеклообразного Si02 с
растворами плавиковой кислоты можно представить в виде
Si02 +6HF = H2SiF6 +2H20, (2.6)
n-H2SiF6 +2η·Η20 = (Si02)n +6nHF, (2.7)
где η - степень полимеризации поликремниевой кислоты.
Поскольку поверхностный слой кварцевого стекла после
механической обработки имеет неоднородную структуру и состав, травление
различных его участков будет происходить с различной скоростью.
Продукты травления (поликремниевые кислоты различной степени
полимеризации) будут адсорбироваться на неоднородной поверхности по
разному, препятствуя взаимодействию травильного раствора с
поверхностью. Диффузия раствора сквозь этот гелеобразный поверхностный
слой продуктов травления ограничивает скорость всего процесса, и в
результате травление происходит очень неравномерно, с увеличением
шероховатости поверхности.
Для удаления образующихся нерастворимых в воде фторидов и
фторсиликатов в травильную ванну добавляют сильную минеральную
кислоту, обычно серную. Серная кислота также связывает
образующуюся реакционную воду, способствуя поддержанию в травильном
растворе высокой концентрации плавиковой кислоты.
Химическое травление можно осуществлять и солями плавиковой
кислоты. Наиболее эффективен при этом фторид-бифторид аммония
NH4FNH4HF2 [1]. При его взаимодействии с серной кислотой в
травильном растворе образуется плавиковая кислота:
2NH4F + H2S04 -> (NH4)2S04 + 2HF, (2.8)
NH4HF2 + H2S04 -> (NH4)2HS04 + 2HF.
Для увеличения эффективности очистки поверхности часто
применяют цикловую химическую обработку. Цикл включает в себя
обработку изделия в травильном растворе и промывку в воде или в серной
71
Волновой твердотельный гироскоп. Теория и технология
кислоте. Число таких циклов может достигать нескольких десятков. С
этой же целью в травильные растворы добавляют поверхностно-
активные вещества - диметилформамид, бутанол и другие. Выбранная
технология химической обработки должна обеспечивать достаточно
высокую скорость растворения материала, не допуская его локального
растравливания по трещинам. Результаты химической обработки
зависят от предшествующей ей механической обработки - чем выше ее
класс, тем меньший эффект дает химическое травление. Как показывает
опыт, в зависимости от начального состояние поверхности, химическое
травление позволяет увеличить добротность резонатора в 1,5... 15 раз,
при этом глубина удаляемого слоя составляет 1.. .5 мкм.
2.4.3. Отжиг кварцевого стекла
Размеры выплавляемых блоков кварцевого стекла по длине и
диаметру могут достигать нескольких десятков сантиметров. Условия
охлаждения стекломассы при плавке зависят от расстояния до
поверхности, поэтому структура стекла неодинакова в пределах одного блока.
В качестве примера на рис. 2.10 приведены величины фиктивной
температуры и концентрации гидроксильных групп по сечению нескольких
блоков кварцевого стекла [74].
[ОН], %
^/х
1 1
°С
-1300
J
-12(Ю_
Ί100
/
3
2
Я, см
I
-3
о
а)
б)
Рис. 2.10. Изменение фиктивной температуры (а) и концентрации
гидроксильных групп (б) по диаметру различных блоков (1, 2, 3) кварцевого стекла
Отметим также, что при охлаждении возможно возникновение
значительных внутренних напряжений в стекле. Численное
моделирование процесса охлаждения кварцевого блока показывает, что из-за
аномального поведения коэффициента термического расширения могут
72
2. Проектирование и производство резонаторов волнового твердотельного гироскопа
возникать сильные остаточные напряжения, причем наиболее опасными
зонами являются центры торцевых поверхностей [109].
Внутренние напряжения в кварцевом стекле изменяют ближний
порядок в нем и уширяют пик низкотемпературного внутреннего
трения. Резонаторы, вырезанные из таких участков блока, имеют
невысокую добротность, однако она может быть существенно улучшена путем
отжига, в ходе которого происходит релаксация внутренних
напряжений и структуры стекла. При отжиге при температуре Г резонаторов,
изготовленных из кварцевого стекла КУ-1, время термообработки,
необходимое для достижения структурой стекла квазиравновесного
состояния, должно составлять 6-Ю-15ехр(85800/RT) ч [89]. Хотя отжиг
может проводиться в довольно широком диапазоне температур,
рекомендуемая температура отжига кварцевого стекла КУ-1 составляет
950...1050°С. Термообработка КУ-1 при более низкой температуре
приводит к образованию напряженного дегидроксилированного
поверхностного слоя и к формированию поверхностных микротрещин,
которые резко ухудшают диссипативные характеристики резонаторов [90].
Режим охлаждения определяется размерами отжигаемого изделия.
При охлаждении в стекле возникает градиент температуры и
температурные напряжения. Например, для стеклянной пластины толщиной h,
охлаждаемой с постоянной скоростью V, разность температур AT в
средней плоскости пластины и на поверхности может быть вычислена
по формуле [170]
ΑΤ = ψ£, (2.9)
где ρ - плотность стекла; С - удельная теплоемкость; χ -
теплопроводность.
Величина остаточных напряжений в стекле при этом равна
2ЕаАТ
σ = , (2.10)
3(1-ν)
где Ε - модуль упругости; а- коэффициент теплового расширения; ν-
коэффициент Пуассона.
Задавая максимально допустимую величину остаточных
напряжений, можно определить по (2.10) допустимую разность температур в
материале и затем по (2.9) рассчитать максимальную постоянную скорость
охлаждения. Определим, например, максимальную скорость
охлаждения пластины из кварцевого стекла толщиной 1 см. Пусть допустимые
остаточные напряжения составляют 104 Па. Принимая Ε = 7,36· 1010 Па,
а = ΟΊΟ-7 Κ"1, ν = 0,18, С = 728 Дж-кг^К"1, χ = 1,35 Втм^К1,
/?=2,2·103κγ·μ"3, получим, что допустимая разность температур AT не
должна превышать -0,3 К. Тогда скорость охлаждения не должна пре-
73
Волновой твердотельный гироскоп. Теория и технология
вышать 0,02 К-с"1 (~1,2 К-мин"1). Контролируемое охлаждение
отжигаемой детали проводят до температуры 920...950°С, затем следует
естественное охлаждение в печи. Так как максимальная скорость
охлаждения обратно пропорциональна толщине отжигаемого изделия, то для
сокращения времени отжига целесообразно отжигать готовый резонатор
или его полуфабрикат, а не массивную исходную заготовку.
2.4.4. Нанесение металлического покрытия с малой
диссипацией
Для обеспечения эффективного функционирования емкостных
датчиков и актюаторов на поверхность полусферического резонатора
наносится проводящее металлическое покрытие. Металлизация
поверхности является финишной операцией изготовления резонаторов и
должна быть произведена таким образом, чтобы существенно не ухудшить
их характеристики, достигнутые на предыдущих стадиях изготовления -
добротность, расщепление собственной частоты и массовый дисбаланс.
Решение задачи металлизации предполагает выбор материала покрытия,
метода его нанесения, а также поиск оптимальных режимов этого
процесса.
Рассмотрим прежде всего электрические характеристики,
которыми должны обладать металлические покрытия резонатора на примере
ВТГ фирмы Delco Electronics (рис. В.1). В этой конструкции
металлизируется вся поверхность полусферического резонатора за исключением
его торцевой кромки, которая играет роль изолятора между покрытиями
на внешней и внутренней поверхности полусферы. Эти два проводящих
покрытия подключаются к электронному блоку ВТГ через внешнюю и
внутреннюю ножки. На рис. 2.11 показана электрическая схема
подключения металлических покрытий резонатора к внешним цепям. Таких
цепей три: измерительная цепь, цепь управления и цепь возбуждения.
Измерительная цепь включает в себя измерительные электроды 1 (4
пары внутренних измерительных электродов, расположенные через
45°), которые образуют электрическую емкость с металлическим
покрытием внутренней полусферы, и которые подключены к входам
усилителей 4 с высоким входным сопротивлением R. Металлическое
покрытие внутренней полусферы подключается к источнику постоянного
напряжения U\ с внутренним сопротивлением R\.
Цепь управления включает в себя управляющие электроды 2 (16
наружных управляющих электродов, соединенных по четыре), на
которые подаются управляющие напряжения U2 от внешних усилителей с
выходным сопротивлением R2. Металлическое покрытие внешней
полусферы при этом заземляется.
74
2. Проектирование и производство резонаторов волнового твердотельного гироскопа
Цепь возбуждения включает в себя кольцевой электрод 3,
соединенный с внешним генератором прямоугольных импульсов С/3 с
выходным сопротивлением R3. В измерительной цепи внутреннее
металлическое покрытие подключено к усилителю с большим (несколько гигаом)
входным сопротивлением R.
Ток,
протекающий по этой цепи,
очень мал, поэтому
ни само
сопротивление покрытия, ни
его окружная
неоднородность не
оказывают влияния на
параметры ВТГ.
Зато идентичность
входных
сопротивлений усилителей, а
также
равномерность зазора между
измерительными
электродами и
поверхностью
резонатора очень важны.
Неоднородность этих параметров приводит к неоднородной диссипации
и к систематическому дрейфу стоячей волны, зависящему от
напряжения U\.
Зависимость характеристик ВТГ от сопротивления внешнего
металлического покрытия также очень мала. Оценка скорости дрейфа
стоячей волны, сделанная по результатам работы [71] для значений
£/ι = 100Βηγ=1 кОм, составляет порядка 10"10 град/ч.
Обсудим еще одну функцию наружного металлического покрытия:
в рассмотренной конструкции ВТГ оно играет роль экрана и
препятствует прохождению на входные усилители сигналов, подаваемых на
управляющие электроды. Это особенно важно, если ВТГ работает в
режиме датчика угловой скорости с силовой компенсацией сигнала в узле
с частотой, равной частоте колебаний. Пренебрегая распределением
сопротивления покрытия по полусфере, можно оценить это прохождение,
используя простую эквивалентную схему (рис. 2.12). Здесь С - емкость
между металлизированной стенкой резонатора и электродами; г -
сопротивление внешнего и внутреннего покрытия; R - входное
сопротивление усилителя; CF- емкость, образованная внешним и внутренним
покрытиями, которые образуют конденсатор достаточно большой
емкости.
Рис. 2.11. Электрическая схема подключения
покрытий резонатора к внешним цепям: 1 - измерительный
электрод; 2- электрод управления; 3 - кольцевой
электрод возбуждения; 4 - входной усилитель;
5 - усилитель напряжения коррекции
75
Волновой твердотельный гироскоп. Теория и технология
Принимая RC» Ι/ω, получим простую формулу для оценки
коэффициента передачи этой цепи:
^«CrVCF. (2.11) (2.11)
Полагая С = 5 пФ, CF = 100 пФ, г = 1 кОм и ω= 104;гс"1, получим,
что сигнал управления, проходя через эту цепь, ослабляется более чем в
106 раз. Вместе с тем отметим, что коэффициент передачи цепи
пропорционален квадрату
сопротивления покрытия, и при
сопротивлении г, равном,
например, 10 кОм
напряжение помехи сильно
возрастает. Оно может быть
дополнительно скомпенси-
Рис. 2.12. Эквивалентная схема прохождения Ровано Дифференциальным
сигнала управления на вход усилителя включением электродов в
измерительной системе,
либо разделением во времени процедур считывания сигнала и
управления стоячей волной.
Таким образом, требования к электрическому сопротивлению
металлического токопроводящего покрытия полусферического резонатора
ВТГ невысокие - достаточно, чтобы общее сопротивление покрытия не
превышало единиц килоом.
Большое значение имеет равномерность толщины покрытия.
Неоднородный по толщине металлический слой может вызвать массовый
дисбаланс резонатора и рассеяние энергии его колебаний в опорах, а
также внести дополнительное расщепление собственной частоты. Эти
эффекты малы, если неравномерность толщины покрытия вдоль
азимутального угла не превышает 3...5% [16]. Такая равномерность покрытия
может быть достигнута при использовании магнетронного распыления.
В ходе напыления резонатор необходимо перемещать относительно
распылителя по планетарной траектории. Для улучшения
равномерности распыления можно создать несколько зон распыления на мишени
или использовать специальные экраны [8].
Рассмотрим теперь рассеяние энергии упругих колебаний в
металлическом покрытии. Если внутреннее трение в материале
металлического покрытия равно ζ„9 а внутреннее трение в кварцевом стекле - ζξ ,
то общее внутреннее трение в металлизированном резонаторе
составляет [126]
ζ = 3ζΜ^ + ζ8, (2.12)
Egh
76
2. Проектирование и производство резонаторов волнового твердотельного гироскопа
где Ет и Ε - модуль упругости материала пленки и кварцевого
стекла; dm - толщина покрытия; h - толщина стенки резонатора.
Опыт показывает, что внутреннее трение в тонких металлических
пленках значительно больше внутреннего трения в массивных металлах.
Это связано с интенсивной диссипацией в тонкой пленке, содержащей
высокие концентрации структурных дефектов, а также с диссипативны-
ми процессами на границе раздела фаз. В результате внутреннее трение,
вносимое металлическим покрытием в резонатор, может достигать
10"5... 10"6, значительно снижая его добротность.
Внутреннему трению в тонких пленках посвящен ряд работ [101,
102, 145, 169, 184]. Опубликованные данные указывают на то, что
основным неупругим процессом в тонкой пленке является внутреннее
трение на границах зерен. Повышение температуры подложки при
конденсации пленки, а также отжиг покрытий приводят к росту размеров
зерен. При этом уменьшается межзеренная поверхность, что влечет за
собой снижение интенсивности зернограничного внутреннего трения.
Поэтому для достижения малых потерь в металлическом покрытии
резонаторов ВТГ, режим конденсации и отжига пленки должен быть
подобран так, чтобы размер зерен был достаточно большим, а
механические напряжения в покрытии - минимальными, так как высокие
механические напряжения в пленке приводят к существенному усилению
внутреннего трения, связанного с движением дислокаций.
Адгезия металла к подложке также играет большую роль в
процессе рассеяния энергии упругих колебаний в металлическом покрытии. На
первый взгляд, чтобы сдвинуть даже слабосвязанную с подложкой
металлическую пленку, необходимо создать значительное напряжение,
которое не развивается при колебаниях оболочки резонатора ВТГ. Так,
при энергии связи 0,2 эВ (такое значение энергии связи характерно для
ван-дер-ваальсового взаимодействия конденсата и подложки) для этого
необходимо создать напряжение около 500 МПа. Однако, если в тонкой
пленке имеются большие остаточные механические напряжения или
локальные концентрации напряжений, то тогда даже небольшое
дополнительное напряжение, создаваемое при колебаниях, может привести к
отслаиванию покрытия в микрообластях [164], локальным пластическим
деформациям и к интенсивному внутреннему трению.
В известной степени этим требованиям отвечают тонкие
(толщиной до 100 А) пленки хрома, нанесенные на полированную поверхность.
Хром имеет высокую адгезию к кварцевому стеклу, а внутренние
напряжения могут быть значительно уменьшены как варьированием
температуры конденсации. К недостаткам тонких хромовых покрытий
следует отнести их высокую химическую активность и сравнительно
быстрое (несколько десятков суток) их окисление на воздухе, сопро-
77
Волновой твердотельный гироскоп. Теория и технология
вождаемое потерей проводимости и изменением внутренних
напряжений.
Кроме того, нанесение сплошных пленок малой толщины
предъявляет высокие требования к
качеству полировки
поверхности. На рис. 2.13 показана
зависимость внутренних
напряжений в пленке хрома
от ее толщины при
различных температурах
конденсации [180].
Видно, что при
правильном выборе толщины
пленки и параметров
осаждения можно получить
металлическое покрытие с малым
уровнем внутренних напря-
Рис. 2.13. Зависимости внутренних напря- жений. Тонкие пленки золота
жений в тонкой пленке хрома от толщины свободны от этих недостат-
пленки при различных температурах кон- ков, но имеют низкую адге-
денсации зию к кварцевому стеклу.
Хорошо известным способом увеличения прочности сцепления золотой
пленки со стеклом является предварительное нанесение металлического
подслоя, имеющего хорошую адгезию к подложке.
На рис. 2.14 показана
зависимость добротности
30-миллиметрового
полусферического резонатора от
толщины слоя золота,
нанесенного магнетронным
распылением на подслой хрома
толщиной 10 нм [187].
Точке 1 соответствует
добротность резонатора без
покрытия. После нанесения
подслоя хрома добротность
скачкообразно падает (точка
2). Дальнейшее ее снижение
связано с увеличением
толщины золотого покрытия.
Этот эксперимент
показывает, что потери, внесенные тонким слоем золота (толщиной до
~500 А), невелики, но придают покрытию достаточную химическую
78
12-
10-
2 8-
6-
4-
• 1
2
■—о 0
О
о
50
100
150
ί/„ нм
200 250 300
Рис. 2.14. Зависимость добротности
полусферического резонатора от толщины пленки
золота, напыленной на подслой хрома
толщиной 10 нм
2. Проектирование и производство резонаторов волнового твердотельного гироскопа
стойкость. Получаемая при данном методе металлизации добротность
резонатора оказывается достаточной для большинства практических
применений ВТГ.
2.5. Характеристики резонаторов ВТГ
2.5.1. Частотные характеристики
К основным частотным характеристикам полусферического
резонатора, подлежащим измерению, следует отнести собственную частоту
изгибных колебаний оболочки (2-я форма) и расщепление этой частоты,
связанное с упруго-массовой неоднородностью оболочки. Кроме того,
необходимо измерять низкочастотный спектр собственных частот,
связанных с ножкой резонатора, которые могут оказаться недопустимо
близкими к рабочей частоте колебаний.
Измерение частоты 2-й формы колебаний оболочки обычно не
вызывает затруднений. Следует учитывать, что частота колебаний
резонатора зависит от температуры - это связано с температурной
зависимостью модуля упругости. Относительное изменение частоты составляет
~10"4 на один градус изменения температуры. На основе
экспериментально измеренной температурной характеристики резонатора при
работе ВТГ определяется температура прибора и вносится поправка
параметров систематического дрейфа стоячей волны.
Измерение расщепления собственной частоты резонатора
ВТГ. Расщепление собственной частоты резонатора наиболее просто
измерить методом биений, сущность которого поясняется на рис. 2.15.
Для измерения колебаний резонатора используют два емкостных
датчика Д1 и Д2, расположенные вблизи его кромки, а для возбуждения -
электроды ЭВ1 и ЭВ2. При замыкании ключа S\ замыкается цепь
положительной обратной связи и образуется автогенератор, включающий
полосовой усилитель 7, фазовращатель 2 и источник постоянного
напряжения Е. Частота автогенератора задается самим
полусферическим резонатором, включенным в цепь обратной связи. Если
собственные оси резонатора не располагаются напротив датчиков Д1 и Д2, то в
резонаторе будут возбуждаться колебания вдоль обеих собственных
осей. При размыкании ключа SI эти колебания станут свободно-
затухающими, причем сигналы с двух датчиков будут представлять
собой гармонические колебания с пульсирующей амплитудой, а период
этих пульсаций (биений) будет практически равен Af~l = ΙπΔΓ^ .
Измерение периода биений позволяет с хорошей точностью определить Δ/* в
тех случаях, когда времена затухания свободных колебаний т^2 вдоль
собственных осей близки друг к другу и существенно превышают пери-
79
Волновой твердотельный гироскоп. Теория и технология
од биений. Вращая резонатор вокруг оси, совмещают направление
собственных осей резонатора с датчиками Д1 и Д2. В этом случае при
возбуждении колебаний, например, в направлении ЭВ1-Д1, колебания по
другой оси (ЭВ2-Д2) отсутствуют, т.е. такая конфигурация позволяет
независимо возбуждать колебания вдоль собственных осей резонатора.
Для измерения разности частот можно использовать
электроннолучевой осциллограф 3, подав напряжения с датчиков Д1 и Д2 на его
входы X и Y. На экране образуется фигура Лиссажу (эллипс), эволюция
которого позволяет легко определить Af. Более точное измерение
расщепления собственной частоты можно выполнить с помощью
фазометра 4, используя сигнал одного из датчиков в качестве опорного. Измеряя
скорость изменения фазы сигнала второго датчика, можно надежно
определить Δ/и в тех случаях, когда Af~l> ζί}2.
2 Η
Рис. 2.15. Схема измерения расщепления собственной частоты резонатора
Измерение низкочастотного спектра собственных частот
резонатора. В низкочастотном спектре полусферического резонатора
ВТГ может быть несколько собственных частот, связанных с ножкой и
достаточно близких к частоте 2-й моды колебаний резонатора [77, 78]:
крутильные колебания ножки; изгибные колебания ножки; колебания
полусферы относительно закрепленной ножки.
Низкочастотный спектр собственных частот рассчитывается на
этапе конструирования резонатора, достоверность этого расчета
проверяется экспериментально. Наиболее просто низкочастотный спектр
собственных частот может быть измерен ударным методом (рис. 2.16).
Резонатор 1 закрепляется на массивном основании 2. Способ его
закрепления должен быть таким же, как и в реальном приборе. Возбуждение
колебаний осуществляют ударом бойка по оболочке или по ножке
резонатора.
80
2. Проектирование и производство резонаторов волнового твердотельного гироскопа
Эксперименты проводят на воздухе, для регистрации колебаний
используют микрофон 3 или пьезодатчик 4, подключаемые к усилителю
5. Амплитудно-частотный спектр сигнала измеряют анализатором
спектра 6.
Несмотря на
простоту, этот метод позволяет
получать достаточно
надежные данные.
Величины найденных
собственных частот для
воздуха лишь незначительно
отличаются от частот для
вакуума, и основная
ошибка опыта связана с
разрешающей
способностью анализатора спектра,
составляющей обычно несколько десятков герц.
На рис. 2.17 в качестве примера приведен измеренный
низкочастотный спектр собственных частот 30-миллиметрового резонатора.
Рис. 2.16. Измерение спектра частот
полусферического резонатора
0,40
0,35
0,30
0,25
0,20
0,15
0,10
Г
3200
4500
i т
-
-
-
; J
ι
3750
I J
1
iW
WvJ
1
6875
I
1 t
lilt
Ι ι 1
3000
4000
5000
^,Гц
6000
7000
8000
Рис. 2.17. Низкочастотный спектр собственных частот 30-миллиметрового
полусферического резонатора
Идентификация частотных компонент проводится путем
сравнения экспериментальных и расчетных данных. В примере на рис. 2.17
частотный компонент 3200 Гц соответствует изгибу ножки, компонент
3750 Гц - ее кручению, компонент 4500 Гц - 2-й форме изгибных
колебаний, компонент 6875 Гц - колебанию оболочки вокруг ножки.
81
Волновой твердотельный гироскоп. Теория и технология
2.5.2. Добротность
Измерение добротности кварцевых резонаторов обычно
производят методом свободно-затухающих колебаний. Возбуждение колебаний
в резонаторе может осуществляться разными методами, например, с
помощью механического удара по оболочке или с помощью переменной
электрической силы.
Измеряя время затухания свободных колебаний, вычисляют
добротность резонатора по (2.3). Измерения должны проводиться в
вакууме, поскольку соударения молекул остаточного газа с движущейся
стенкой резонатора приводят к дополнительному рассеянию энергии
колебаний. Вносимые в резонатор дополнительные потери
пропорциональны давлению остаточного газа
ς(Ρ)=^=τΐϊϊΓ> (2ЛЗ)
где Ρ - давление остаточного газа;/- частота колебаний; V — средняя
тепловая скорость движения молекул остаточного газа; h - толщина
стенки резонатора; р- плотность материала резонатора.
Влияние газового трения резко возрастает, если резонатор
установлен в ВТГ и его колебания происходят в узком зазоре. Концентрация
газа в зазорах при этом меняется, а ее выравнивание происходит с
некоторым запаздыванием за счет истечения газа сквозь зазор и
сопровождается необратимым превращением энергии колебаний в тепло.
Если добротность кварцевых резонаторов превышает 107, то при
измерениях необходимо учитывать влияние молекул атмосферной воды,
адсорбированных на его поверхности. Механизм адсорбции воды на
кварцевом стекле достаточно сложный. В обычных условиях
поверхность кварцевого стекла полностью гидроксилирована. Согласно
общепринятому механизму адсорбция молекул воды происходит воды с
помощью водородных связей на соседних поверхностных гидроксильных
группах, образующих двойной активный центр (рис. 2.18,я) [79].
При адсорбции на полностью гидроксилированной поверхности
молекулы воды сначала покрывают все поверхностные активные
центры, образуя монослой более или менее лишенный подвижности.
Дальнейшая адсорбция идет путем образования водяных кластеров на уже
адсорбированных молекулах воды в монослое. Цепочки таких кластеров
образуют на поверхности полислой.
Другой механизм связан с образованием адсорбционных
комплексов, связанных с атомами кремния координационной связью
(рис. 2.18,6). Водородные и координационные связи могут быть
разорваны при колебаниях, и такой механически инициированный разрыв
связи может повлечь за собой десорбцию молекулы, либо, через
некоторый промежуток времени, образование новой связи. В любом случае
82
2. Проектирование и производство резонаторов волнового твердотельного гироскопа
гидратирование ведет к рассеянию энергии упругих колебаний и
воспринимается как увеличение внутреннего трения в резонаторе.
Влияние различных
н н
\ /
о
Si
/ι\
Si
/ι\
ι/-
Si
/1\
О О О
/ ι \
а)
б)
Рис. 2.18. Механизм адсорбции воды на
кварцевом стекле
процессов газового трения
иллюстрирует рис. 2.19, где
приведены зависимости
внутреннего трения в
полусферическом резонаторе от
давления остаточного газа,
измеренные при комнатной
температуре для одного и
того же резонатора после
хранения на воздухе (7) и
затем после 10-дневного
пребывания в вакууме (2).
При давлении
остаточного газа свыше
-3,5-10"3 Па скорость
сорбции молекул воды на
активных центрах поверхности
кварцевого стекла гораздо
выше скорости десорбции,
гидратный монослой
полностью сформирован и
вносимые им потери энергии
колебаний постоянны и не
зависят от давления. В этой
области наблюдается только
газовое трение,
описываемое (2.13). Однако если
давление меньше ~3,5 · 10"3 Па,
то гидратный монослой
заполнен лишь частично.
Потери энергии колебаний пропорциональны этой степени заполнения, и
поэтому крутизна зависимости ζ(Ρ) резко возрастает. В целом вид
зависимости ζ(Ρ) соответствует изотерме адсорбции микропористого
твердого тела, что согласуется с современными представлениями о
структуре поверхности кварцевого стекла.
Из рис. 2.19 также видно, что внутреннее трение зависит и от
времени пребывания резонатора в вакууме. Этот эффект связан с
существованием на поверхности кварцевого стекла устойчивых
адсорбционных комплексов с координационной связью, показанных на рис. 2.18,6.
Для устранения адсорбционных диссипативных эффектов необходимо
83
7,0-
6,5-
6,0-
5,5-
1
J
Τ
\
I
1^^-"~^
2
„·
0,02
0,04
Ρ, Па
0,08
Рис. 2.19. Зависимость внутреннего трения в
резонаторе от давления остаточного газа: 1 -
исходное состояние; 2 - после десяти дней в
вакууме
Волновой твердотельный гироскоп. Теория и технология
перед измерениями прогревать резонаторы в вакууме при температуре
~150...200°С.
Если исследуемый резонатор имеет массовый дисбаланс, то
результат измерения добротности будет зависеть от характера
закрепления резонатора, так как массовый дисбаланс вызывает вибрацию ножки
и рассеяние энергии колебаний резонатора в опорах. Для устранения
этого эффекта резонаторы необходимо балансировать, чтобы
остаточный массовый дисбаланс не превышал ~30 мкг. При таком остаточном
массовом дисбалансе внутреннее трение, внесенное рассеянием энергии
в опорах, менее 10"10, и им можно пренебречь. При измерении
добротности несбалансированных резонаторов следует принимать меры,
ослабляющие передачу энергии колебаний в опоры, например,
использовать проволочные подвесы и т.п.
2.5.3. Массовый дисбаланс
Массовый дисбаланс резонатора вызывает колебания его центра
масс, в результате чего в опорах возникают переменные силы. При
колебаниях несбалансированного резонатора с амплитудой а и круговой
частотой ω, реакции в опорах в декартовых координатах с хорошим
приближением могут быть записаны в виде [66, 61]
Fx = О,25αω2 [3Ml cos(20 -φι) + Μ3 cos(20 - 3φ3)] sin cot,
Fy = 0,25αω2 [3Ml sin(20 -φι)-Μ3 sin(20 - 3φ3)] sin cot, (2.14)
Fz = 0, Ъасо1 [M2 cos(2# - 2φ2)\ sin cot,
где Мх_3 и φχ_3 - параметры массового дисбаланса; Θ- ориентация
стоячей волны в резонаторе.
Для определения параметров массового дефекта можно измерить
реакции в опорах при различной ориентации стоячей волны. Простой
метод измерения параметров массового дефекта предложен в патенте
[188]. Метод основан на измерении вибрации ножки
несбалансированного резонатора, его сущность поясняется рис. 2.20. Резонатор 1 с
предварительно устраненным расщеплением собственной частоты, упруго
закреплен за один из концов ножки, а к другому концу присоединен
пьезоэлектрический датчик 2.
Этот датчик имеет круговую диаграмму чувствительности в
плоскости ΧΟΖ. Амплитуда сигнала датчика U пропорциональна амплитуде
колебаний ножки, и при возбуждении стоячей волны вдоль направления
X, согласно первому уравнению (2.14) при θ=0, равна
U = Kl(3Ml cos <pl+M3 cos <p3) + K2M2 cos2#>2, (2.15)
84
2. Проектирование и производство резонаторов волнового твердотельного гироскопа
Формула (2.15)
показывает, каким образом амплитуда
сигнала пьезодатчика зависит
от угла поворота резонатора
φ. Такая сравнительно
простая зависимость получается
благодаря измерению
проекции вибрации на направление
ориентации стоячей волны.
Если повернуть
резонатор вокруг его оси на
некоторый угол φ в направлении,
указанном на рис. 2.20
стрелкой, то величины всех углов в
(2.15) изменяются на этот угол
поворота, и тогда при
повторном возбуждении стоячей
ΗψΗ
Рис. 2.20. Измерение вибрации ножки
несбалансированного полусферического
резонатора
волны вдоль осиХ(#= 0) получим следующее выражение:
U {φ) = Кх [ЗМ{ cos(#> + <pl) + M3 cos 3(φ + φ3)] + Κ2Μ2 cos 2(φ + φ2) =
= U0l cos(#> + q\) + U02 cos 2(φ + φ2) + U03 cos 3(φ + φ3), (2.16)
где Κχ и К2 - экспериментально определяемые коэффициенты.
Измеряя напряжение пьезодатчика при вращении резонатора вокруг
оси, получаем зависимость
U {φ). Пример такой
зависимости, измеренной при
исследовании полусферического резона- ^
тора диаметром 30 мм, приведен ^
на рис. 2.21. Отрицательным к
значениям U соответствует
изменение фазы вибрации на
180 град.
Аппроксимируя
экспериментальные точки функцией
(2.16), находят параметры ί/οι-оз»
прямо пропорциональные Μι_3,
и φχ_3. В приведенном примере
они равны:
C/oi = 549,2 мВ; q\ = 88,3 град;
ί/оз = 63,2 мВ; φ3 = 6,0 град.
600-
400-
200-
0-
-200-
-400-
-еоо-
\°
о\
"^э-о о (у slSLSL^
/о
/о
/6°
50
150
100
φ, град
Рис. 2.21. Зависимость сигнала
пьезодатчика от угла поворота
резонатора
и02 = 122,7 мВ; φ2 = 106,2 град;
85
Волновой твердотельный гироскоп. Теория и технология
Достоинством предложенного метода является его простота: для
всех измерений используется всего один датчик, а стоячая волна
возбуждается и измеряется в одних и тех же условиях. Вместо
пьезоэлектрического с успехом могут быть использованы и другие типы
датчиков: емкостные, электромаг-нитные и т.д.
2.6. Балансировка полусферического
резонатора
Цель балансировки резонатора ВТГ состоит в удалении
неуравновешенной массы. Хотя эта процедура технологически может быть
выполнена различными способами, о чем свидетельствует большое число
патентов [188, 193, 195], их можно условно разделить на две группы. К
первой группе относят методы удаления масс в отдельных точках
резонатора (например, с помощью лазера [48]). Во вторую группу входят
методы поверхностной обработки материала (например, химическое
или ионное травление) [16]. Рассмотрим особенности балансировки
резонаторов ВТГ этими методами.
Балансировка резонаторов ВТГ методом удаления точечных
масс. Распределение массы на единицу угла полусферической оболочки
резонатора вдоль окружного угла φ при удалении с нее точечной массы
Am, расположенной в направлении φ = О, может быть описано
разложением в ряд Фурье δ -функции [17]:
00
Μ (φ) = М0- 2Ат^ cos ϊφ . (2.17)
/=ι
Из выражения (2.17) понятны проблемы, связанные с
балансировкой резонатора точечными массами. Пусть, например, необходимо
устранить 1-ю форму массового дефекта величиной Мь ее ориентацию
относительно резонатора для простоты примем равной нулю. Удаление
с кромки резонатора точечной массы Ат = М{/2 (в направлении φ = 0)
устраняет ее, но одновременно создает такие же по величине 2-ю, 3-ю и
4-ю формы массового дефекта, которые необходимо устранять, причем
их последующая балансировка также будет сопровождаться появлением
новых кратных гармоник. Так, балансировка 2-й формы массового
дефекта двумя точечными массами будет сопровождаться появлением 4-й
формы, балансировка 3-й - появлением 6-й и т.д. То есть в этом случае
устранение любой формы массового дефекта требует удаления строго
определенного количества материала в нескольких точках. Например,
устранение массового дефекта 1-й формы вида Μχζο<$>φ требует
удаления масс в 10-ти точках (рис. 2.22).
86
2. Проектирование и производство резонаторов волнового твердотельного гироскопа
МД
ММ
MJ4
Как уже говорилось, точечное удаление масс выполняют не с
полусферической оболочки, а со специальных балансировочных зубцов,
чтобы избежать снижения добротности резонатора при балансировке.
Рассмотрим в качестве примера устранение 1-й формы массового
дефекта резонатора вида
Мх cos(#> + а), где а > 0.
Пусть полусферический
резонатор имеет 24 балансировочных
зубца, причем положение центра
зубца № 1 соответствует
направлению φ = 0. Примем также, что
угловая ширина зубца равна угловому
интервалу между ними.
Учитывая, что ориентация
массового дефекта в общем случае
не совпадает с ориентацией зубцов,
перепишем выражение массового
дефекта резонатора в виде
Мх cos(#> + а) - Мх cos a cos φ-Μχ sin a sin φ. (2.18)
Из (2.18) следует, что для балансировки зубчатого резонатора по 1-й
форме необходимо отдельно удалить его косинусную и синусную
составляющие. Кроме того, необходимо учитывать, что представление
(2.17) справедливо именно для точечного, в математическом смысле,
удаления массы. Удаление массы с недеформируемого
балансировочного зубца нельзя считать точечным, поэтому вместо (2.17) следует
использовать выражение [22]
Рис. 2.22. Схема удаления точечных
масс при балансировке 1-й формы
массового дефекта
м\ lA(P J
cosi^,
(2.19)
где Αφ - угловая ширина зубца. В рассматриваемом примере Αφ =
7,5 град, и (2.19) тогда может быть переписано в виде
Μ (φ) = Μ0- 2 Am (0,997 cos φ + 0,989 cos 2φ +
+0,975 cos 3^ + 0,955 cos 4φ+ ...). (2.20)
Удалим с зубца № 1 (его ориентация соответствует φ = 0) массу
тх = Мх cos a I (2 · 0,997), это приведет к устранению косинусной
составляющей 1-й формы массового дефекта в (2.18). Синусную часть можно
представить в следующем виде: -Мх sin a sin φ = Мх sin a cos(#> + π 12).
Максимум неуравновешенной массы при этом расположен под углом
φ = 270 град. Для устранения этой формы дефекта удаляем массу с
зубца № 19, равную тХ9 = Мх sin a I (2 · 0,997).
87
Волновой твердотельный гироскоп. Теория и технология
В результате этих операций массовый дефект вида Мх cos(#> + a)
будет полностью устранен, но одновременно возникнут новые формы
дефекта, а именно:
~ 0,989 д. , ■ ч о
Μ(φ) = Μ, cosα:-slncπcos2<2>-
^ 0,997 U ;
0,975
0,997
0,955
0,997
Mx (cos a cos 3φ + sin a sin 3φ)-
Mx (cos a + sin a) cos 4#>.
(2.21)
Для удаления образованного дефекта 2-й формы удаляем две
равные массы с зубцов № 7 (<р= 90 град) и № 19 {φ =210 град)
М,-0,989, . ν
Щ =т\9 ~ Л ,ъ Пм 2 (C0S^~sm^J·
(2.22)
4·(0,997)/ν
Эта процедура устраняет дефект 2-й формы (первое слагаемое в
(2.21)), но образует дополнительный дефект 4-й формы:
0,955-0,989, . .__ .
=— (cos a - sin α)Μλ cos Αφ .
(0,997)2 1
Суммарный дефект 4-й формы тогда равен
М4=-Мх
0,955
0,997
0,989, . ν
cos a + sma + cos a-sma)
0,997v \
cos4#>. (2.23)
Этот дефект устраняется удалением четырех равных масс с зубцов
№4, 10, 16 и 22 (соответственно <р= 45, 135, 225 и 315 град):
mA=min=mlt
-т·
;22-
м,
4-0,997
0 989
cos a + sin а + —' (cos a - sin a)
0,997v .
(2.24)
Осталось удалить 3-ю форму дефекта (второе слагаемое в (2.21)).
Это достигается удалением трех одинаковых масс с зубцов № 5, 13, 21,
равных
Mi cos a noo
Шс=т^= Шгуу - — , (2.25)
5 13 21 6-0,997
а также удалением трех одинаковых масс с зубцов № 3, 11 и 19, равных
Mjsina /о о*\
тх=ти =m]Q = . (2.26)
6-0,997
В итоге получаем схему удаления массового дефекта
Mj cos(#> + а), приведенную в табл. 2.2.
88
2. Проектирование и производство резонаторов волнового твердотельного гироскопа
Таблица 2.2. Алгоритм удаления массового дефекта Мх cos(#> + a)
Номер зубца, /
1
3
4
5
7
10
11
13
16
19
21
22
Удаляемая масса
Мх cos a
2-0,997
Mxsina
6-0,997
м\
4 -0,997
0 989
cos a + sin a + — f cos α - sin α)
0,997v ;_
Мх cos a
6-0,997
Мг 0,989, . ч
— z- cos α -sin см
4-(0,997)2V У
Mx
4 -0,997
0 989
cos a + sin α + — (cos α - sin a)
0,997v ;_
Mj sin α
6-0,997
Mj cos α
6-0,997
Mx
4-0,997
0 989
cos α + sin a + — (cos a - sin a)
0,997v ;
2M,sina M,-0,989, . ч
+— -(cosa-sina
3-0.997 4-(0,997)2V J
Mx cos a
6-0,997
Mt
4-0,997
0 989
cos a + sin a + — f cos α - sin a)
0,997V _
Полученные результаты показывают, что процесс балансировки
полусферического резонатора методом удаления точечных масс
оказывается весьма сложным. Основная проблема состоит в удалении строго
определенной массы с каждого зубца, что представляет значительную
сложность с технической точки зрения.
Если для удаления неуравновешенной массы используется лазер,
то для контроля величины удаляемой массы можно использовать
изменение расщепления собственной частоты. Пусть, например, балансиру-
89
Волновой твердотельный гироскоп. Теория и технология
ют резонатор с нулевым начальным расщеплением собственной частоты
(Αω = 0). Удаление массы Mlcosa/ (2-0,997) с зубца № 1 приведет к
возникновению 4-й формы дефекта 0,955M1cosacos4^/0,997 и к
появлению расщепления собственной частоты [4]
4 2^ 0,997 )Ме
где Ме - эффективная масса: Ме =1,52961 -Ml 8 (М-масса полусферы);
ω - частота колебаний резонатора.
Удаление массы с зубца № 1 производят до тех пор, пока величина
расщепления собственной частоты не достигнет значения,
определенного (2.27). Затем последовательно испаряют материал со следующих
зубцов, контролируя процесс по изменению Αω. После обработки
последнего зубца расщепление собственной частоты должно обратиться в
ноль. Такой подход позволяет избежать нестабильности лазерного
испарения стекла, связанного с изменением свойств поверхности,
мощности лазера и т.п.
Возможен и другой, более простой метод балансировки зубчатого
полусферического резонатора удалением точечных масс. Рассмотрим
его также на примере устранения массового дефекта 1-й формы,
который описывается (2.18).
Будем удалять массу с зубцов по закону
Mw/=m[l + cos(W+a)], (2.28)
где φ - угловое положение этого зубца; т - массовый коэффициент;
Муд, - масса, удаляемая с /-го зубца.
При этом из начального распределения массы резонатора по
окружному углу вычитается суммарное массовое распределение
Σ - Муы (φ)' возникаюЩее ПРИ удалении масс согласно (2.28). В
качестве примера в табл. 2.3 приведены распределения Мущ{<р) для
16-зубцового резонатора.
Для заданного значения а вычислим по (2.28) величину удаляемой
массы для каждого зубца. Пусть, например, а= 174 град. Результат
вычислений по (2.28) приведен в табл. 2.4.
Подставим значения удаляемых с каждого зубца масс в выражения
для их угловых распределений (табл. 2.3). Представим их сумму в виде
16 16 16 16 16
Σ МУ* (?) = Σ Mlc/ C0S Ψ + Σ M\si Sil1 Ψ + Σ M2ci C0S 1(P + Σ M2si Sil11(P +
i=l /=1 /=1 /=1 /=1
16 16 16 16
+Σ M3ci C0S 3(P + Σ МЪзг Sil1 ^Ψ + Σ M*ci C0S 4(P + Σ M*si δίΐ1 4<Ρ' (2'29)
i=l /=1 ι=1 ι=1
Значения множителей в (2.29) выражении равны
90
2. Проектирование и производство резонаторов волнового твердотельного гироскопа
|>ы= 15,9134м, £МЫ= 1,6724т; |>2с/=0,
w /.ι w (2.30)
|>2,=0; ΣΛ/3„=0, |χ,.=0; £л/4и.=0, Σ>«=°-
ι=1 ι=1 /=1 /=1 ί=1
Таблица 2.З. Массовое распределение, возникающее при удалении массы
mile i-го зубца 16-зубцового резонатора
1 Номер
зубца /
1
1
2
3
4
5
6
7
8
Массовое распределение
Μνόι(φ)
2
-w(cos φ + cos 2φ + cos 3#> + cos Αφ)
-m[cos(> - 22,5°) + cos 2(φ - 22,5°) + cos 3(φ - 22,5°) +
+ cos Α(φ - 22,5°)] * -m(0,924 cos #> + 0,3 83 sin φ + 0,707 cos 2φ +
+0,707 sin 2φ + 0,3 83 cos 3φ + 0,924 sin 3φ + sin 4#>)
-wi[cos(p - 45°) + cos 2(φ - 45°) + cos 3(φ - 45°) + cos 4(p - 45°)] »
« -w(0,707 cos ^ + 0,707 sin φ + sin 2#> - 0,707 cos 3φ +
+0,707 sin 3p-cos 4#>)
-m[cos(> - 67,5°) + cos 2(φ - 61,5°) + cos 3{φ - 61,5°) +
+ cos Α(φ - 67,5°)] * -m(0,3 83 cos φ + 0,924 sin #> - 0,707 cos 2φ +
+0,707 sin 2φ - 0,924 cos 3φ - 0,3 83 sin 3#> - sin Αφ)
-m[cos(> - 90°) + cos 2(φ - 90°) + cos 3(p - 90°) + cos 4(φ - 90°)] «
« -w(sin φ - cos 2#> - sin 3φ + cos 4#>)
-m[cos(^-112,50) + cos2(^-112,50) + cos3(^-112,5°) +
+ cos4(^-112,50)]«-w(-0,383cos^ + 0,924sin^-0,707cos2^-
-0,707 sin 2φ + 0,924 cos 3φ - 0,3 83 sin 3φ + sin 4#>)
-wi[cos(p -135°) + cos 2(^-135°) + cos 3(^-135°) +
+ cos Α(φ-135°)] «-m(-0,707 cos φ + 0,707 sin #>-
- sin 2#> + 0,707 cos 3φ+0,707 sin 3φ - cos Αφ)
-w[cos(^-157,5°) + cos2(^-157,50) + cos3(^-157,5°) +
+ cos 4(^-157,5°)] «-m(-0,924cos#> + 0,383sin#> + 0,707 cos 2φ-
-0,707 sin 2φ - 0,3 83 cos 3φ+0,924 sin 3φ - sin Αφ)
(Окончание табл. 2.3 - см. с. 92)
91
Волновой твердотельный гироскоп. Теория и технология
(Окончание табл. 2.3)
1
9
10
И
12
13
14
15
16
2
-m[cos(<p -180°) + cos 2(φ -180°) + cos 3(φ -180°) +
+ cos 4(φ -180°)] « -m(- cos φ + cos 2φ - cos 3φ + cos 4φ)
-m[cos((p - 202,5°) + cos 2(φ - 202,5°) + cos 3(φ - 202,5°) +
+ cos 4(φ - 202,5°)] * -m(-0,924 cos φ - 0,3 83 sin φ +
+0,707 cos 2φ + 0,707 sin 2^-0,383 cos 3φ - 0,924 sin 3φ + sin 4#>)
-m[cos(> - 225°) + cos 2(φ - 225°) + cos 3(φ - 225°) +
+ cos 4(φ - 225°)] * -m(-0,707 cos φ - 0,707 sin φ +
+ sin 2φ + 0,707 cos 3φ - 0,707 sin 3φ - cos 4#>)
-m[cos(<? - 247,5°) + cos 2(φ - 247,5°) + cos 3{φ - 247,5°) +
+ cos 4(^-247,5°)] «-m(-0,383cos<p-0,924sin<p-
-0,707 cos 2φ + 0,707 sin 2φ + 0,924 cos 3φ+
+0,3 83 sin 3φ - sin 4φ)
-m[cos(#> - 270°) + cos 2(φ - 270°) + m cos 3(φ - 270°) +
+ cos 4{φ - 270°)] « -m(- sin ^ - cos 2φ + sin 3#> + cos 4φ)
-m[cos(#> - 292,5°) + cos 2{φ - 292,5°) + cos 3(φ - 292,5°) +
+wcos 4(^-292,5°)] «-w(0,383cos^-0,924sin^-0,707 cos 2φ-
-0,707sin2<p-0,924cos3<p+0,383sin3^ + sin4#>]
-m[cos(^-3150) + cos2(^-3150) + cos3(^-315°) +
+ cos 4(^-315°)] * -m(0,707 cos φ-0,707 sin φ -
- sin 2φ - 0,707 cos 3φ - 0,707 sin 3φ - cos 4φ)
-m[cos(^-337,5°) +cos 2(^-337,5°) +cos 3(^-337,5°)+
+ cos4(^-337,50)]«-w(0,924cos^-0,383sin^ + 0,707cos2^-
-0,707 sin 2φ + 0,3 83 cos 3φ - 0,924 sin 3φ - sin 4φ)
Из (2.30) следует, что при заданном табл. 2.4 алгоритме
балансировки 2-я, 3-я и 4-я формы массовых дефектов не образуются при
любом значении т. Для устранения имеющейся 1-й формы массового
дефекта надо выбрать т так, чтобы косинусный и синусный множители
/ j Mlci и 7,._ Мы компенсировали соответствующие множители в
выражении (2.18), т.е.
92
2. Проектирование и производство резонаторов волнового твердотельного гироскопа
15,9134wi-0,995M1=0,
l,6724m-0,105M1=0.
Таблица 2.4. Значения удаляемых масс для а-174 град
Номер
зубца,
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
Угловое положение
зубца φι, град
0
22,5
45
67,5
90
112,5
135
157,5
180
202,5
225
247,5
270
292,5
315
337,5
Удаляемая масса
Муд/ = m[l+cos(^+a)]
0,0055m
0,0412m
0,2229m
0,5228m
0,8955m
1,284m
1,6293m
1,8788m
1,9945m
1,9588m
1,7771m
1,4772m
1,1045m
0,716m
0,3707m
0,1212m
Для нахождения коэффициента т используем любое из этих двух
уравнений и получаем m=0,0625Mi. Подставляя это значение в правый
столбец табл. 2.4 вычисляем значения удаляемой массы для каждого
зубца. Аналогичным образом могут быть удалены и другие формы
массового дефекта. Общая формула для массы, удаляемой с каждого зубца
резонатора, при балансировке &-формы массового дефекта имеет вид
Муда =^[1 + «**(я +<p0k)], (2.32)
где Mk и (pok- параметры массового дефекта k-й формы; де- угловое
положение г-го зубца; N- общее число зубцов резонатора.
93
Волновой твердотельный гироскоп. Теория и технология
На рис. 2.23 приведены диаграммы, иллюстрирующие удаление
одной и той же 1-й гармоники массового дефекта (в относительных
единицах) с 24-зубцового резонатора обоими алгоритмами.
ω. 0,4 4
Q °·3ΗΙ
аз
S 0,2
Έ
ω
сЗ 0,1
ο,ο-
а
1
1
9
го
Έ 0,04-^
ω
ξ 0,02-1
2 4 6 8 10 12 14 16 18 20 22 24
Номер зубца
в)
Ili^jll
2 4 6 8 10 12 14 16 18 20 22 24
Номер зубца
б)
Рис. 2.23. Распределение удаляемой массы по зубцам при устранении
1-й формы массового дефекта (^ι=10 град) для двух балансировочных алгоритмов
Сравнение результатов расчета показывает, что при использовании
второго алгоритма общая удаляемая масса примерно в 3 раза ниже, чем
для первого, причем максимальное значение удаляемой массы меньше
почти в 6 раз. Благодаря этому данный балансировочный алгоритм
оказывается значительно более удобным для практической реализации.
Пример технологии балансировки металлического зубчатого резонатора
94
2. Проектирование и производство резонаторов волнового твердотельного гироскопа
с использованием этого алгоритма приведен в [193]. Рассмотрим его
подробнее.
Для удаления неуравновешенной массы использован
электрохимический метод (рис. 2.24).
Рис. 2.24. Электрохимическое растворение металла с поверхности зубца: 1 -
резонатор; 2 - электролит; 3 - электрод; 4 - источник тока;
5 - выключатель
Резонатор 1 ( рис. 2.25,я) погружается в многоместную
электрохимическую ванну 2 (рис. 2.25,6), при этом каждый зубец погружен в
электролит отдельной электрохимической ячейки. Корпус ванны
выполнен из фторопласта и имеет секции (по числу зубцов), отделенные
друг от друга тонкими перегородками. В донную часть каждой секции
ввернут электрод 3, подключенный к системе электропитания. Для
электрохимического растворения металла на него подается постоянное
напряжение от источника тока 4 через выключатель 5. Резонатор 1
электрически подключается отдельным проводом к общей шине.
Согласно закону Фарадея количество удаленного металла прямо
пропорционально электрическому заряду, прошедшему через
обрабатываемую поверхность. Для удаления массы тг с /-го балансировочного
зубца через его поверхность надо пропустить заряд
а =
mi
~К
где К— постоянный коэффициент.
95
Волновой твердотельный гироскоп. Теория и технология
Коэффициент К определяют экспериментально по потере массы за
единицу времени электрохимического растворения. Величину
пропускаемого через поверхность зубца / электрического заряда β,
контролируют временем пропускания Ц постоянного тока /:
Величина тока определяется по формуле:
где S - площадь поверхности балансировочного зубца; ρ - плотность
тока, рекомендуемая для конкретного состава электролита и
температуры электрохимического растворения.
Рис. 2.25. Конструкция зубчатого металлического резонатора ВТГ (а) (1 -
крепежная ножка; 2 - балансировочный зубец); секционированная травильная
ванна для электрохимической обработки резонатора (б)
В качестве электролита могут быть использованы любые
электролиты, используемые для электрохимического растворения.
Предпочтительны кислотные электролиты, обеспечивающие растворение
продуктов, образующихся при электрохимическом растворении металла.
После электрохимической обработки резонатор промывают
дистиллированной водой и сушат.
Точность удаления массы с балансировочного зубца определяется
нестабильностью тока /, проходящего через его поверхность и ошибкой
во времени обработки *,·. На практике погрешность этих величин не
превышает 0,01...0,1%, что обеспечивает высокую точность удаления
неуравновешенной массы. Достоинством разработанного метода является
96
2. Проектирование и производство резонаторов волнового твердотельного гироскопа
возможность удаления любого количества материала с любого зубца,
при этом обработка всех зубцов может вестись одновременно, что
позволяет значительно уменьшить общее время балансировки.
На рис. 2.26 в качестве примера приведено изменение расщепления
собственной частоты в ходе электрохимического удаления
неуравновешенной массы. Первоначальное значение расщепления собственной
частоты составляло 20,7 Гц, конечное - 0,03 Гц. Как показывает рис. 2.26,
удаленная масса зависит от времени обработки практически линейно.
Электрохимическое удаление материала позволяет достаточно просто
осуществить и балансировку первых трех форм массового дефекта.
25-,
20 4
20 30 40 50 60 70
Время травления t, мин
Рис. 2.26. Изменение расщепления собственной частоты резонатора из
нержавеющей стали в ходе электрохимического удаления неуравновешенной массы
Балансировка резонаторов ВТГ удалением материала с
сегментов поверхности. В реальном полусферическом резонаторе
неуравновешенная масса распределена по всей его оболочке. Например,
типичной причиной возникновения 1-й гармоники массового дефекта
является несовпадение центров внешней и внутренней полусфер.
Рисунок 2.27 показывает для этого случая распределение
неуравновешенной массы по окружному углу и по сечению резонатора.
97
Волновой твердотельный гироскоп. Теория и технология
В связи с этим использование поверхностных методов обработки,
позволяющих не компенсировать, а исправить конфигурацию стенки
резонатора, представляется более рациональным.
Кроме того, при использовании таких методов отпадает
необходимость в изготовлении балансировочных зубцов, что
значительно упрощает технологию изготовления резонатора.
^
Фр
в)
б)
Рис. 2.27. Распределение неуравновешенной
массы по окружному углу (а) и по сечению (б)
полусферического резонатора при несовпадении
центров внешней и внутренней полусфер
Одним из
наиболее перспективных
методов обработки
материалов является метод
ионного распыления
вещества.
Оборудование и методика ионного
травления на
сегодняшний день хорошо
отработаны. При
балансировке резонатора
удаление
неуравновешенной массы
производится с сегмента
полусферы, причем угловая зависимость распыляемой массы может быть легко
задана [16, 123]. Для этого ионный поток от горизонтально
расположенного источника 1 направляется через диафрагмы 2 к поверхности
вращающегося резонатора 3 (рис. 2.28).
Вращение осуществляется шаговым двигателем 4 с переменной
угловой скоростью η(ή. Задавая закон вращения двигателя, регулируют
глубину ионного распыления стекла по окружности резонатора. Это
позволяет удалять гармоники массового дефекта как одновременно, так
и независимо друг от друга.
Время ионного распыления на каждом угле поворота резонатора
φ прямо пропорционально толщине слоя, который необходимо
удалить:
4
Κφ) * ^ = , (2.33)
/?i?2sin(/r/15)
где R - радиус резонатора; ρ - плотность кварцевого стекла; k - номер
формы массового дефекта; Мки Щъ- параметры массового дефекта к-и
формы.
Эффективность ионного распыления зависит от многих факторов,
но, прежде всего, от угла падения ионов к поверхности. Направление
потока ионов к поверхности выбирается так, чтобы величина коэффи-
98
2. Проектирование и производство резонаторов волнового твердотельного гироскопа
циента распыления была максимальной (для небольшой энергии ионов
χ * 65 град).
/ 2
v=o
ip>0
ψ<0
Рис. 2.28. Удаление неуравновешенной массы ионным пучком
По мере удаления от кромки оболочки к полюсу угол падения
будет увеличиваться, изменяя коэффициент распыления (рис. 2.29, кривая
1). Профиль распыления зависит и от угла ψ (рис. 2.29, кривые 2 и 3).
При ψ < О неравномерность распыления стекла по высоте полусферы
увеличивается.
На профиль распыления влияют масса и энергия ионов, он также
может быть задан выбором диафрагмами, перекрывающих ионный
поток. Выбор этих параметров позволяет установить оптимальный
профиль ионного распыления поверхности резонатора.
На рис. 2.30 приведены экспериментальные данные,
демонстрирующие эффективность балансировки полусферических резонаторов
ионным распылением.
99
Волновой твердотельный гироскоп. Теория и технология
Z. 1
0.95 Η
0.90
0.85 Η
0.80
0.2
1
0.4
z/R
0.6
1 1
0.8
Рис. 2.29. Относительное изменение коэффициента распыления кварцевого
стекла по высоте (Z) полусферы для угла падения ионов аргона χ = 65 град и
энергии 3 кэВ (1 - ψ= 0; 2 - ψ= 10 град; 3 - ψ= -10 град) (кромке оболочки
соответствует Ζ=0, полюсу -Z = R)
500 4
400 4
« зоо ч
ь~
200 -4
100 -4
• -1
о -2
100
φ, град
Рис. 2.30. График зависимости амплитуды вибрации ножки от угла поворота
резонатора до (7) и после (2) балансировки
100
2. Проектирование и производство резонаторов волнового твердотельного гироскопа
Кривая 1 показывает полную амплитуду вибрации ножки
несбалансированного полусферического резонатора диаметром 30 мм в
зависимости от угла поворота резонатора. Кривая 2 представляет ту же
зависимость после проведения балансировки методом ионного травления.
Видно, что амплитуда вибрации ножки уменьшилась в десятки раз.
В табл. 2.5 приведены данные о максимальной и минимальной
добротности резонатора до и после балансировки и рассчитанная для
этих случаев амплитуда скорости систематического дрейфа стоячей
волны.
Достигнутая в результате балансировки амплитуда скорости
систематического дрейфа, равная 2,2 град/ч, приемлема для большинства
применений ВТГ даже при сравнительно невысокой добротности
резонатора. Остаточная величина разночастотности составила 0,004 Гц;
остаточные значения трех первых гармоник массового дефекта
оболочки не превысили 20 мкг. Дальнейшее улучшение точности
балансировки может быть достигнуто повышением точности измерения параметров
неуравновешенной массы.
Таблица 2.5. Добротность резонатора и систематический дрейф
ВТГ до и после балансировки
До балансировки
После балансировки
\έmax j
хЮ6
0,6
5,5
хЮ6
0,5
5,45
Амплитуда скорости систематического
дрейфа ВТГ, град/ч
437
2,2
В ряде работ [42, 43, 92, 115-118] предлагаются универсальные
методики балансировки на основе методов искусственного интеллекта
(искусственные нейронные сети, генетические алгоритмы и др.).
Благодаря своей простоте, они могут эффективно использоваться при
различных постановках задачи балансировки. Вместе с тем следует отметить,
что этот класс алгоритмов не гарантирует в общем случае нахождения
оптимального решения, а позволяет за малое время найти так
называемые квазиоптимальные решения.
101
3. Сборка и вакуумирование
чувствительных элементов
волнового твердотельного
гироскопа
Сборка является ответственной операцией при изготовлении ВТГ.
Она включает в себя соединение его деталей в единый чувствительный
элемент, при этом должны быть выдержаны необходимые зазоры между
рабочими поверхностями. После сборки чувствительный элемент
герметизируется. Некоторые операции при сборке ВТГ аналогичны
сборочным операциям при производстве других типов приборов, поэтому
рассмотрим подробно проблемы сборки, характерные именно для ВТГ.
3.1. Обеспечение равномерности зазоров в ВТГ
Во всех ВТГ, использующих емкостные датчики и управляющие
электроды, выставка зазоров в них является одной из основных задач
сборки. Прежде всего оценим требования к равномерности зазоров в
ВТГ. В классической конструкции ВТГ имеется несколько групп
емкостных электродов, нанесенных на сферические поверхности плат,
расположенных снаружи и внутри резонатора. При сборке необходимо
обеспечить равномерность двух сферических зазоров, так как
неоднородность любого из них приводит к возникновению дополнительного
дрейфа стоячей волны. Для оценки влияния неравномерности зазоров
на характеристики ВТГ представим зависимость их величины от
окружного угла φ в виде ряда Фурье
00
ά(φ) = d0 + Σdicos K<P~<Pi). (3.1)
/=i
На дрейф стоячей волны влияет только четвертая гармоника
этого ряда. Если, например, для зазора между кольцевым электродом и
поверхностью резонатора d4 ф О, то эффективность параметрического
возбуждения колебаний будет зависеть от окружного угла и возникнет
дополнительный систематический дрейф стоячей волны со
скоростью [36]
3. Сборка и вакуумирование чувственных элементов волнового твердотельного гироскопа
άθ_
dt '
2ά0τ
sin4(0-0>4),
(3.2)
где τ- время затухания свободных колебаний в резонаторе.
Например, при d4 = 1 мкм, d0 = 100 мкм и τ = 1000 с амплитуда
скорости этого дрейфа составит ~1,6 град/ч. Изменение добротности
резонатора в течение срока службы (например, из-за натекания газа в
корпус, процессов старения материалов и т.п.) приведет к изменению
параметров этого дрейфа, поэтому неравномерность этого зазора должна
быть на уровне ~ 1% от его величины.
Влияние управляющих и измерительных электродов на
эволюцию волновой картины значительно слабее. Так, четыре управляющих
электрода площадью S, при приложении напряжения UynP вносят в
осциллятор потери энергии [16]
«^упр
(3.3)
ωΜάΙ
где RBUX - выходное сопротивление источника управляющего
напряжения; М- приведенная масса резонатора; d0 - величина зазора.
Пусть например, S= 1 см2, i/ynP = 100 В, d0 = 100 мкм,
R»
-■ 500 Ом, ω= 9000ЯТС"1 и М= 1 г, тогда Q^ = 7-10"17. При столь
малой величине вносимых потерь энергии, даже при большой
неоднородности этого зазора возникающий дрейф крайне мал и им можно
пренебречь. Что касается измерительных электродов, то в
классической конструкции ВТГ они работают на постоянном токе и их влияние
на диссипацию может быть существенно лишь при неправильной
работе входных усилителей. В табл. 3.1 приведена амплитуда скорости
систематического дрейфа для различных величин 4-й гармоники
дефекта зазора d4, питающего напряжения U и фазового сдвига φ,
вносимого входным усилителем.
Таблица 3.1. Амплитуда скорости систематического дрейфа (град/ч),
вызванного неоднородностью зазора в измерительной системе
d4, мкм
2
5
10
£/=100 В
Φ = 0,1
12
30
60
^ = 0,01
0,12
0,3
0,6
^ = 0,001
0,0012
0,003
0,006
t/=200B
^ = 0,1
48
120
240
^ = 0,01
0,48
1,2
2,4
^ = 0,001
0,0048
0,012
0,24
Из данных табл. 3.1 видно, что при нормальной работе входных
усилителей (т.е. когда ф= ЮЛ.ЛО3) при 5%-й неравномерности зазора
103
Волновой твердотельный гироскоп. Теория и технология
амплитуда скорости дополнительного систематического дрейфа
составит ~10"2 град/ч.
Кроме неоднородного затухания, неравномерность зазора в
измерительной системе может привести к изменению расщепления
собственной частоты. При приложении постоянного напряжения U к
измерительным электродам возникает сдвиг частоты колебаний [17]:
Αω =
36
ε0ϋ*
-sin2#>3,
5 πρ!αά\ω
плотность материала резонатора; h
(3.4)
где ρ - плотность материала резонатора; h - толщина стенки; ε§-
диэлектрическая постоянная; φ3 - угловой размер емкостного электрода.
Если зазор в измерительной системе неоднороден и d4 ф О, то
возникнет расщепление собственной частоты, равное
2π
22s0U dA sin 2<рэ
π2ά^Ηρω
(3.5)
Например, для h = 1.25 мм, d0 = 100 мкм, d4 = 5 мкм, ρ =
2,2· 103 кг/м3 (кварцевое стекло), U= 50 В, <р± = 20 град, ω = 5-104 с"1 по
формуле (3.5) получаем Af= 0.012 Гц.
Сделанные оценки показывают, что основное внимание при сборке
следует уделить равномерности зазора кольцевого электрода и зазора
измерительной системы.
При сборке ВТГ
классической конструкции,
показанной на рис. В.1,
величина двух зазоров
контролируется одновременным
измерением емкости всех
датчиков, расположенных
снаружи и внутри
резонатора. Это достаточно сложная
процедура, так как емкость
каждого датчика составляет
единицы пикофарад и
паразитные емкости оказывают
существенное влияние на
точность измерения зазора.
Измерения емкостей датчи-
Выход
Генератор
400-600 кГц
—ι—
Рис. 3.1. Схема измерения емкости датчика
на переменном токе: 1 — стенка резонатора;
2 — металлическое покрытие; 3 - электрод
ков удобнее проводить на переменном токе. Схема измерений,
приведенная на рис. 3.1, иллюстрирует этот подход.
К металлическому покрытию резонатора прикладывается
переменное напряжение, а к емкостному электроду подключают
преобразователь ток-напряжение. Выходное напряжение такого преобразовате-
104
3. Сборка и вакуумирование чувственных элементов волнового твердотельного гироскопа
ля прямо пропорционально емкости датчика. Потенциал на самом
электроде при этом близок к 0 («кажущаяся земля»), благодаря чему
влияние паразитных емкостей на результат измерения минимально.
Для установки и выравнивания зазоров необходимо прецизионно
перемещать три детали (резонатор и две платы) друг относительно
друга. Эти высокоточные взаимные передвижения деталей выполняют
механическими или пьезоэлектрическими устройствами
микроперемещений.
3.2. Соединение деталей ВТГ
Надежное соединение частей ВТГ представляет собой непростую
задачу, которая может решаться различными способами. Так, фирма
General Motors (США) первоначально использовала при сборке ВТГ
пайку индием. Эта технология обеспечивает надежное соединение
деталей, но является технически сложной. Для хорошего смачивания
поверхности кварцевого стекла индием, спаиваемые детали после
выставки зазоров необходимо нагревать до температуры 150...160°С. Кроме
того, расплавленный индий легко окисляется, поэтому пайка должна
проводиться в бескислородной среде. Надо также отметить, что низкая
температура плавления индия ограничивает температуру прогрева
собранного прибора при обезгаживании - она не должна превышать
90...100°С. В этих условиях скорость десорбции существенно
уменьшается, что требует значительного увеличения времени обезгаживания.
Прочные соединения деталей из стекла и металлов можно
получить при использовании хлористого серебра. В расплавленном виде
хлористое серебро представляет собой низковязкую жидкость, которая
хорошо смачивает поверхности этих материалов. Однако высокая
температура плавления требует нагревать соединяемые детали до ~500°С,
что не всегда возможно [37].
Достаточно высокая температура нагрева соединяемых деталей
необходима и при использовании легкоплавких стеклоприпоев и стек-
локристаллических цементов, которые также позволяют получать
герметичные соединения деталей из стекла, керамики и металлов. Стекло-
припои в твердом состоянии представляют собой стеклообразную
структуру, их недостаток состоит в достаточно большой разнице
(70...100°С) между температурой расплавления и максимальной
температурой службы. В качестве основы большинства легкоплавких
(температура плавления 280.. .330°С) стеклоприпоев используют систему РЬО-
ZnO-B203 [55, 81].
В стеклокристаллических цементах стекло вначале расплавляется,
а затем происходит кристаллизация, и структура шва из стеклообразной
превращается в кристаллическую. Разница между температурой кри-
105
Волновой твердотельный гироскоп. Теория и технология
сталлизации и максимальной температурой службы в них значительно
меньше - 10...20°. В состав стеклокристаллических цементов входят
окислы PbO, ZnO, В203, Si02, A1203, CuO, BaO, Na20 и другие.
Температура кристаллизации составляет в зависимости от состава 420.. .570°С.
Термический коэффициент линейного расширения (ТКЛР) стеклопри-
поев и стеклокристаллических цементов обычно лежит в пределах
(30...120)·10~7 град"1 и может регулироваться добавлением инертного
наполнителя. В табл. 3.2 приведены характеристики некоторых марок
низкотемпературных стеклоприпоев.
Таблица 3.2. Характеристики некоторых марок низкотемпературных
стеклоприпоев
Марка
БС-60
БС-70
БС-80
БС-90
БС-100
G 018-223
G 018-224
G 018-228
G 018-229
Температура начала
размягчения, °С
428
406
400
385
360
325
324
311
310
Температура
пайки, °С
560
550
530
500
480
430
430
400
410
ТКЛР, °С1
6-106
7-10"6
8-10"6
9-106
МО-5
3,14-Ю-6
4,35· 10"6
7,6106
8,7· Ю-6
Источник
[81]
[81]
[81]
[81]
[81]
[36]
[36]
[36]
[36]
Применение клея при сборке вибрационных гироскопов гораздо
технологичнее и дешевле. Недостатком клеевых соединений является
повышенное газоотделение в вакууме, которое связано с диффузией и
десорбцией растворенных летучих компонент и продуктов реакций,
протекающих в клее. Поэтому низкое газоотделение является одним из
основных требований, предъявляемым к клею, используемому при
сборке ВТГ. Кроме того, такой клей должен иметь хорошую адгезию к
кварцевому стеклу и металлам, иметь достаточно высокую термическую
стойкость, подходящую вязкость и низкий ТКЛР.
В настоящее время в мире выпускается большое число клеев,
различающихся между собой составом, свойствами и т. д. Так, например,
приведенный в базе данных NASA список клеев с малым
газоотделением насчитывает около 1000 наименований [208].
Рассмотрим особенности применения различных клеев на примере
склейки полусферического резонатора ВТГ и измерительной платы.
Конфигурация такого клеевого соединения приведена на рис. 3.2. При
106
3. Сборка и вакуумироваше чувственных элементов волнового твердотельного гироскопа
выборе клея следует учитывать необходимую механическую и
термическую прочность соединения, газовыделение из клея в вакууме и
технологичность процесса
склеивания.
Механическая и
термическая прочность клеевых
соединений. Выбор клея для
сборки ВТГ следует начинать с
рассмотрения механической и
термической прочности
клеевого соединения. Пусть Е\}2,з и
«1,2,3 - модуль упругости и
ТКЛР соответственно материала
платы, ножки резонатора и клея
(для кварцевого стекла Ε =
7-1010 Па и а= 4-Ю-7 °С1). При
вибрации и ударах возникают
н
А
и
R> ,
\к
]Е2
\а2
ν*-*
—7
Е3 «з
/
я, «, j*
Рис. 3.2. Конфигурация клеевого
соединения ножки резонатора
с измерительной платой
механические напряжения, вызванные действием сил инерции. В общем
случае задача определения касательных и нормальных напряжений в
клеевом шве является очень сложной и требующей знания многих
параметров (см. например, [76]). Однако в данном случае задачу можно
существенно упростить, считая, что изгибающие моменты,
приложенные к стержню, а также перерезывающие силы отсутствуют. Тогда
механическое воздействие сводится к действию на ножку резонатора
продольной силы F (рис. 3.2). Ее максимальная величина равна
произведению массы резонатора на максимальное ускорение, которое должен
выдержать собранный гироскоп. Если, например, масса резонатора
составляет 10 г, а максимальная перегрузка - 500g, то F « 50 Н. В
результате действия этой силы будет создаваться касательное напряжение,
средняя величина которого равна
F
στ= . (3.6)
Т 2nR2H
Для низкомодульных клеев напряжения в клеевом соединении
распределены равномерно, и величина среднего касательного
напряжения соответствует максимальному напряжению. В клее с высоким
значением модуля упругости касательные напряжения распределены
неравномерно, и максимальное напряжение будет выше, чем это следует
из (3.6). В этом случае для расчета σΤτΆ^ можно воспользоваться
формулами [29, 83]
FA-cthAH,
'Ттяк
2nR,
107
Волновой твердотельный гироскоп. Теория и технология
где
л =
2G,
d0R2E2
В (3.7) G3 - модуль сдвига клея:
π
(3.7)
(3.8)
2(1 +/ι,)
где μ3 - коэффициент Пуассона для клея.
В качестве иллюстрации в табл. 3.3 приведены значения среднего
и максимального касательных напряжений в рассмотренном клеевом
соединении, выполненном клеем К-400, для различных величин радиуса
ножки резонатора, толщины платы и зазора. В расчете принято:
Еъ = 1980 МПа, //3=0,4, F = 50 Н. Из полученных оценок видно, что
даже при значительных перегрузках максимальное касательное
напряжение в рассмотренном клеевом соединении в общем невелико.
Кроме механических напряжений клеевое соединение испытывает
нормальное и касательное термоупругие напряжения, связанные с
различием ТКЛР клея и соединяемых деталей.
Таблица 3.3. Касательные напряжения в клеевом соединении (МПа)
R2, мм
1
2,5
d0 = 20 мкм
Н= 2 мм
о?
4
1,6
ОГтах
8Д
2,3
Н= 5 мм
(Г?
1,7
0,6
^Г max
7,8
2
d0 = 100 мкм
Н=2 мм
СТт
4
1,6
^Гтах
4,9
1,7
Н=5 мм
Of
1,7
0,6
°Гтах
3,6
1
Нормальное термоупругое напряжение возникает из-за
расширения (или сжатия) клея при изменении температуры. Если считать, что в
нормальных условиях клеевое соединение не напряжено, то при
изменении температуры на величину AT возникает сжимающее или
растягивающее нормальное напряжение, в общем случае равное:
^ATE^d^-R^+R^)
NT d0(l + a3AT) ' ^ ' }
Если материал платы и резонатора одинаковый, то ах = а2 = ос и
(3.9) упрощается:
™ (\ + а3АТ)
Как видно из (3.10), этот вид напряжений главным образом
зависит от свойств клея. Сделаем оценку напряжений, возникающих в клее-
108
3. Сборка и вакуумирование чувственных элементов волнового твердотельного гироскопа
вом шве, соединяющем детали из кварцевого стекла, для клеев с
различными параметрами в диапазоне температур, равном 100 град:
1) для клея ВК-21Т (производство РФ) (а3 = 4,9 10"60С1,
Еъ = 2000 МПа) а^=0,9 МПа;
2) для клея К-400 (производство РФ) (а3 = 62-10"б0С"1,
Еъ = 1980 МПа) ат= 12,2 МПа;
3) для клея-герметика ВГО-1 (производство РФ) («г3 = 2-10"40С"1,
Еъ = 1,6 МПа) σΝΤ= 0,03 МПа.
Эти оценки показывают, что при склеивании деталей
высокомодульным клеем с высоким ТКЛР, в клеевом шве возникает значительное
нормальное термоупругое напряжение, а наилучший результат
достигается при использовании низкомодульного клея. Надо отметить, что при
склеивании деталей из разнородных материалов с различными ТКЛР
нормальные термоупругие напряжения могут быть велики даже в том
случае, если ТКЛР клея мал. Кроме того, в соответствии с (3.9) будет
иметь место зависимость этого напряжения, как от диаметра ножки, так
и от зазора dQ между ножкой резонатора и измерительной платой.
Касательное термоупругое напряжение возникает только при
склеивании разнородных материалов с неодинаковым ТКЛР. В этом
случае касательное термоупругое напряжение может быть рассчитано
по формуле [29,83]
σττ = АТ°3 ^2 ~ ai\sh АН + (l-ch ЯН) cth ЯН~]. (3.11)
а0Я
Таким образом, при склеивании деталей из кварцевого стекла
согласно рис. 3.2 касательное термоупругое напряжение отсутствует, а
нормальное термоупругое напряжение невелико при использовании
клея либо с низким ТКЛР, либо с низким модулем упругости.
Выбранный клей должен обеспечивать прочность соединения на сдвиг и на
сжатие с превышением расчетных значений, по крайней мере, на 50%.
Газовыделение из клея в вакууме. Количественно газовыделение
обычно характеризуют удельной скоростью газовыделения -
количеством газа, выделяющимся с единицы площади клеевого соединения в
единицу времени, с размерностью [м-Па/с]. Общее количество
выделившихся летучих компонентов пропорционально массе клея, а
скорость газовыделения - поверхности клея. Для уменьшения этих
параметров необходимо максимально уменьшать зазор между склеиваемыми
деталями. Скорость газовыделения зависит также от величины
коэффициента диффузия и от распределения летучих компонент в клеевом шве.
Температурная зависимость коэффициента диффузии D достаточно
хорошо описывается уравнением Аррениуса:
109
Волновой твердотельный гироскоп. Теория и технология
Z) = A,exp(^j, (3.12)
где UD- эффективная энергия активации коэффициента диффузии.
При термообработке распределение летучих компонент в клеевом
шве изменяется. Для расчета относительной локальной концентрации
летучих компонент с/с0 по сечению клеевого соединения можно
воспользоваться следующей формулой [35]:
с=4у(-1Г
ехр
-Ρ(2η + \)2π2ίλ
L1
(2η + \)πχ
cos- —, (3.13)
d0
где с0 - начальная концентрация; d0 - толщина клеевого соединения;
t - время термообработки; D - коэффициент диффузии для температуры
термообработки; расстояние χ отчитывается от середины клеевого шва.
С одной стророны, чем выше температура термообработки, тем
интенсивнее идет процесс диффузии, и тем меньше будет остаточное
газовыделение. С другой стороны, при слишком высокой температуре
клей будет разлагаться, образуя летучие компоненты, поэтому для
каждого клея существует оптимальная температура обезгаживания.
Заметим также, что процесс диффузии летучих компонент в твердом теле
протекает практически одинаково, как в вакууме, так и в атмосфере,
поскольку обратный поток, направленный из атмосферы в твердое тело
очень мал. Поэтому термообработка, проводимая с целью уменьшения
газовыделения, может выполняться, например, в среде инертного газа
или азота (для исключения окисления металлических поверхностей
прибора). Финишная термообработка, в ходе которой удаляются
молекулы, адсорбированные на поверхности деталей, должна проводиться в
вакууме.
В справочной литературе обычно приводится значение потери
массы клея при термообработке (ПМТ), по величине которого можно
приближенно судить о газовыделении. Следует отметить, что более
термостойкие клеи обладают пониженным газовыделением.
Весьма существенным фактором является состав выделяемых
клеем летучих компонент. Процесс газовыделения продолжается в течение
всего срока службы прибора, и после отпайки вакуум в корпусе
поддерживается специальным газопоглощающим элементом - геттером.
Как будет показано ниже, подавляющее большинство геттеров хорошо
поглощают активные газы (кислород, азот, водород, окись и двуокись
углерода, водяной пар), но практически не поглощают неполярные
углеводороды. Поэтому клеи, выделяющие СХНУ, обеспечивают
значительно меньший срок службы вакуумных приборов, по сравнению с
клеями, выделяющими только активные летучие компоненты.
110
3. Сборка и вакуумирование чувственных элементов волнового твердотельного гироскопа
Данные по различным клеям приведены в обширной справочной
литературе [24, 38].
Существуют различные типы клеев: эпоксидные, элементоорга-
нические, цианокрилатные, неорганические и др. В табл. 3.4 в качестве
примера приведены данные по некоторым маркам термостойких клеев с
малым газовыделением, которые могут быть использованы для склейки
деталей из кварцевого стекла [14, 24, 30, 57, 85, 86, 91, 209-216].
Таблица 3.4. Характеристики некоторых марок теромостойких клеев
Марка
1
Epotek
Н72
Ablebon
d84-
1LMIT
OK-
72ΦΤ15
ВКП-7-
1
К-400
Master
Bond
350
Ана-
терм-
106
Тип
2
сидный
сидный
сидный
Эпок-
сидно-
каучу-
ковый
Эле-
мен-
тоор-
гани-
ческий
Циа-
нокри-
лат-
ный
Анэро
бный
Диапазон
температур,^
3
-55...
+250
-65...
+250
-170...
+140
-60...
+85
-196...
+300
-50...
+120
-60...
+200
Вязкость,
мПа-с
4
20000
27000
22000
Паста
Паста
Паста
100
2000...
2500
ТКЛР,
oc-i
5
29· 10"6
50-Ю"6
62-10"6
(1...10>10^
Режим
отверждения
6
100°С
(20 мин)
125°С
(2 ч)
60°С
(3 ч)
65°С
(4 ч)
22°С
(48 ч)
22°С (1
мин.)
22°С
(6 ч)
способность
7
2ч
2нед.
30 мин
30 мин
0,5-1 ч
60 с
3 мин
пмт,
%
8
0,28
(250°С)
0,16
(300°С)
6-8
(250°С)
6-8
(200°С)
Прочность,
МПа
9
43,5 (на
сжатие)
12,8 (на
сдвиг)
15,5 (на
отрыв)
10-13
(на
отрыв)
5,5 (на
сдвиг)
20 (на
сдвиг)
17,3 (на
отрыв)
30 (на
отрыв)
20 (на
сдвиг)
(Окончаниетабл. 3.4-см. с. 112)
111
Волновой твердотельный гироскоп. Теория и технология
(Окончание табл. 3.4)
1
RTV-
566
Durasea
11533
ВК-21К
АФК-
11
Fortafix
LQ/S6
Cerastil
V336Ge
πι
Ceramb
ond
618N
2
RTV-
СИЛИ-
KOH
RTV-
СИЛИ-
KOH
ганический
ганический
катный
мический
мический
3
-115...
+260
-57...
+290
-60...
1600
-60...
+1200
До 1000
До 1500
До 1650
4
42700
2900
Паста
Паста
Паста
Паста
Паста
5
20· 10"5
1,4-Ю"*
(1...17)10-6
(3...5)10"6
9,4· 10"6
5,910"7
6
22°С
(24 ч)
22°С
(15 мин)
22°С
(72ч) +
170°С
(1ч)
22°С
(10ч) +
300°С
(1ч)
80°С
(0,3 ч) +
140°С
(Зч) +
200°С
(5 ч)
22°С
(7 ч)
22°С
(14 ч) +
90°С
(2ч) +
260°С
(2ч) +
370°С
(2 ч)
7
1,5 ч
1-5 мин
20 мин
1,5-2 ч
15 мин
1ч
3-5 ч
8
0,5
(260°С)
10
(300°С)
0,2
5 (250°С)
9
5,5
3,7 (на
отрыв)
2,8 (на
сдвиг)
9
(на
отрыв)
35 (на
сжатие)
Особенности склеивания деталей вибрационных гироскопов.
Заполнение зазора клеем является одной из основных операций при
склеивании. Существует тесная взаимосвязь между размером зазора и
вязкостью клея. Высоковязкий состав трудно равномерно распределить
в малом зазоре, в таком клеевом соединении возможны воздушные
включения. С другой стороны низковязкий состав не будет
удерживаться в широком зазоре и вытечет до отверждения. В табл. 3.5 приведены
рекомендуемые размеры зазора для клеев с различной вязкостью [24].
Необходимо отметить, что практически все клеи с малым ТКЛР
содержат большое количество наполнителя и имеют пастообразную
консистенцию. Наполнители, входящие в состав большинства клеев, могут
112
3. Сборка и вакуумирование чувственных элементов волнового твердотельного гироскопа
иметь размер гранул в пределах 1...200 мкм, этот размер иногда
оговорен в технических характеристиках клея. Минимальный размер зазора
при этом будет определяться максимальным размером гранул
наполнителя.
Таблица 3.5. Рекомендуемые размеры зазора для клеев с различной
вязкостью
Вязкость,
мПа-с
Зазор, мкм
10...40
до 70
200...300
100...150
300...600
50...200
1000...1600
60...250
2000...6000
100...350
6000...10000
100...450
>10000
250...600
Введение таких паст в малый зазор представляет собой непростую
задачу. Ее можно решить путем использования ультразвуковой
обработки, которая позволяет одновременно удалить пузырьки воздуха из
клеевого шва.
Коротко остановимся на процедуре подготовки поверхности
склеиваемых деталей. Некоторая шероховатость улучшает адгезию клея к
подложке, вместе с тем наличие микротрещин и полостей в
поверхностном слое приводит к снижению прочности соединения из-за разрушения
материала при расклинивании трещин. Наибольшая прочность
соединения достигается при механической полировке склеиваемых
поверхностей с последующей химической обработкой. Для обработки
поверхностей используют растворы кислот с обязательной промывкой деталей до
нейтральной реакции промывной воды. После химической обработки
детали сушат и их можно хранить до склеивания в течение нескольких
суток [24].
Старение клеевых соединений. При эксплуатации клеевых
соединений происходит ухудшение их свойств в результате старения клея и
разрушения адгезионных связей при воздействии окружающей среды и
механической нагрузки.
Окружающая среда очень сильно влияет на свойства клея. Принято
считать, что основной вклад в процесс старения клея вносится
химическим взаимодействием клея с атмосферной водой [13]. С этой точки
зрения рассматриваемое клеевое соединение деталей ВТГ находится в
хороших эксплуатационных условиях. Что касается влияния
температуры, то сама по себе температура не вызывает значительного снижения
прочности. Это связано с тем, что обычно деструкция клея при
тепловом старении связана с диффузией кислорода и паров воды в клеевой
шов, а в данном случае (в вакууме) такой эффект отсутствует. Вместе с
тем колебания температуры приводят к периодическим изменениям
величин нормальных и касательных термоупругих напряжений и к
старению клея. Стойкость к термической деструкции определяется природой
клея и характером связей, образующихся при отверждении. По терми-
113
Волновой твердотельный гироскоп. Теория и технология
ческой стойкости клеи можно расположить в следующей
последовательности (от более стойких к менее стойким):
неорганические —> элементоорганические —> эпоксидные.
Технология склеивания, подготовка поверхностей под склеивание
и равномерность шва существенно влияют на работоспособность
клеевых соединений. Наличие клиновидности шва приводит к снижению его
прочности и долговечности из-за неравномерного распределения
напряжений по площади склеивания.
На поведение клеевых соединений при эксплуатации влияют и
упруго-эластичные свойства клея. Наиболее высокие напряжения в
клеевом шве возникают у краев. В случае хрупкого клея именно там
начинается трещинообразование. Поэтому эластичные клеи, несмотря на
более низкую исходную прочность при сдвиге, как правило, имеют в 2
раза более высокую длительную прочность по сравнению с соединениями
на хрупком клее. Разрушение клеевых соединений при статической и
динамической нагрузке происходит в результате возникновения трещин
и других дефектов. Чем больше напряжение, тем меньше долговечность
клеевого соединения.
Зависимость долговечности клеевого соединения τ от
приложенной нагрузки Ρ и температуры Г выражается уравнением Журкова [99]:
/ = ,0е*рЗ^, (3.14)
где Uq - энергия активации процесса разрушения соединения; R -
универсальная газовая постоянная; t0 и γ- постоянные коэффициенты.
Прогнозирование долговечности клеевых соединений,
эксплуатирующихся под нагрузкой, основано на построении опытных
зависимостей в координатах Ρ - \gt. Имея такие зависимости, можно определить
неизвестные величины, входящие в (3.14), и спрогнозировать срок
службы клеевого соединения при заданных условиях.
3.3. Вакуумирование чувствительных
элементов
Влияние остаточного газа на характеристики ВТГ. Газовое
демпфирование, обусловленное наличием газа в корпусе ВТГ,
объясняется двумя причинами.
Первая причина- обычное газовое трение: молекулы
остаточного газа соударяются с колеблющимся резонатором, в результате чего
возникает тормозящая сила, вызывающая потерю энергии Q~^ упругих
колебаний. Этот процесс описывается (2.13) и оценки показывают, что
114
3. Сборка и вакуумирование чувственных элементов волнового твердотельного гироскопа
влияние газового трения на добротность резонатора незначительно.
Например, для полусферического резонатора из кварцевого стекла
ρ = 2,2· 103 кг/м3, h = 1 мм,/= 5 кГц, V= 500 м/с (средняя тепловая
скорость молекул азота при комнатной температуре) и Р= 1,33*10'3 Па
(Ю-5 мм рт. ст.) получаем Q~^ =3,4·10"η.
Вторая причина дополнительного демпфирования колебаний
связана с истечением газа сквозь зазоры между резонатором и
датчиками ВТГ. Этот процесс происходит с фазовым запаздыванием
относительно колебаний резонатора и сопровождается необратимым
превращением энергии колебаний в тепло. Степень влияния этого процесса на
характеристики резонатора зависит от конкретной конструкции
гироскопа и может быть рассчитана методом конечных элементов. В
качестве примера на рис. 3.3 приведены экспериментальные и расчетные
результаты, демонстрирующие степень влияния остаточного газа в ВТГ.
Экспериментальные данные получены для ВТГ с 60-миллиметровым
резонатором, конструктивно аналогичном ВТГ фирмы Delco Electronics
(см. рис. В.1).
О)
S 15
Ρ, Па
Рис. 3.3. Графики зависимости газового демпфирования от давления
остаточного газа в ВТГ. Сплошная линия - результаты конечноэлементного
моделирования; пунктир - экспериментальные данные
Толщина стенки резонатора составляла 2 мм, частота колебаний -
3600 Гц, зазор между резонатором и наружными блоками - 100 мкм.
Сплошная линия показывает результаты расчета, выполненного мето-
115
Волновой твердотельный гироскоп. Теория и технология
дом конечных элементов. Эти данные позволяют оценить необходимый
уровень вакуума в приборе. Пусть, например, добротность резонатора в
вакууме составляет Q0 = 1,5-107, газовое трение не должно уменьшать
ее более, чем на 1%. Линейная аппроксимация точек на рис. 3.3 дает
зависимость Q~^ = 1,7 10~6Р. Следовательно, максимальное давление
остаточного газа в рассматриваемом ВТГ не должно превышать 3,9· 10"4
Па (~ 3-Ю"6 мм рт. ст.).
Если зазор между резонатором и внешними корпусами однороден
по окружному углу (d = const), то влияние газового демпфирования
сводится лишь к снижению добротности резонатора. Если же зазор
неоднороден, то газовое демпфирование также вызывает расщепление
добротности и, как следствие этого, систематический дрейф стоячей
волны. Пусть величина зазора d зависит от окружного угла φ согласно
(3.1), и пусть d4 ^0. Тогда в резонаторе возникает расщепление
добротности [36], причем ось максимальной добротности gmax резонатора
ориентирована под углом (ртах = φ4 ± π 12 (в этом направлении зазор
максимален и газовое демпфирование минимально), а ось минимальной
добротности gmin - под углом φηήη =π/4 + φ4±π/2 (это направление
соответствует минимальному зазору и соответственно максимальному
газовому демпфированию).
Разнодобротность резонатора приводит к появлению
систематического дрейфа стоячей волны, скорость которого равна
dt~ 4
1 1 Λ
ft.
sin4(0-<z>4) =
^(Спах-<Гпш>Ь4(0-р4). (3.15)
Учитывая, что d4 «d0, в первом приближении можно полагать
газовое демпфирование обратно пропорциональным величине зазора
[157]. Тогда (3.15) можно переписать в виде
^ = ^4^>п4(*-^)> (3.16)
dt 2 d0
ГДе Саз = °> 5(£пах + Cmin) -
Вместе с тем, конечноэлементное моделирование газового
демпфирования показывает, что зависимость ζΤ2β{ά) нелинейна. На рис. 3.4
представлена эта зависимость для упомянутого выше ВТГ при давлении
остаточного газа 3,9-10"4 Па. Тогда скорость дополнительного
систематического дрейфа
116
3. Сборка и вакуумирование чувственных элементов волнового твердотельного гироскопа
άθ KfdA άζη
-sin4(0-^4)·
ТНУ (3.17)
dt 2 dd
При этом значение производной ζΤ3ί3 по d вычисляется для точки
d = d0. Отметим, что обе формулы дают близкий результат. Выберем
do= 100 мкм и б/4 = 1 мкм и определим значение производной ζΓ33 по d
из графика на рис. 3.4.
18
16
14
12
10
от
8 h
6 h
40 60 80 100 120 140 160 180 200
d, МКМ
Рис. 3.4. График зависимости газового демпфирования от величины зазора
в ВТГ Delco Electronics
Тогда получим из (3.16) амплитуду скорости дополнительного
систематического дрейфа 0,008 град/ч, а (3.17) дает 0,0066 град/ч. Эти
оценки показывают, что вносимый газовым демпфированием
систематический дрейф мал и может быть скомпенсирован калибровкой прибора.
Однако при изменении давления внутри ВТГ (например, за счет
газовыделения) величина скорости дрейфа будет меняться. Поэтому,
чтобы сделать влияние остаточного газа на характеристики ВТГ
пренебрежимо малым, его давление понижают до уровня 10"7... 10"8 мм рт.ст.
путем применения внутреннего газопоглотителя (геттера) [59,202].
Требования к атмосфере внутри вибрационных гироскопов с
низкодобротными металлическими резонаторами значительно ниже. Если
для возбуждения и измерения колебаний резонатора используются пье-
зоэлементы, то узкие зазоры снаружи резонатора отсутствуют и для
117
Волновой твердотельный гироскоп. Теория и технология
расчета газового демпфирования можно использовать (2.13). Например,
в ВТГ фирмы Innalabs [135] при добротности металлического
резонатора 5104 газовое трение уменьшит ее на 1% при давлении ~4 Па
(3-10"2ммрт. ст.). Однако следует учитывать, что такие приборы, как
правило, содержат клеевые соединения, которые могут выделить
большое количество летучих компонентов. Пусть, например, вакуумируе-
мый прибор содержит 0,01 г клея и пусть содержание летучих
компонент в клее составляет 0,1%. Примем для определенности, что основной
летучей примесью клея является водяной пар, тогда его количество
составит 3-10"7моль. При экстракции этого количества водяного пара в
течение срока службы в объем прибора (25 см3) давление в нем составит
~30 Па (~0,2 мм рт. ст.), что значительно превышает допустимое
значение и требует применения геттера.
Достаточно высокое разряжение должно поддерживаться и в
микромеханических гироскопах (МГ), так как размеры и масса резонаторов
в них малы, а зазоры в большинстве случаев составляют единицы-
десятки микрон. Согласно [84] для обеспечения функционирования
микромеханической колебательной системы с подвесом торсионного
типа необходимо вакуумирование рабочей полости гироскопа до уровня
не хуже 0,01 мм рт. ст. Учитывая малый объем корпуса и развитую
поверхность внутренней структуры МГ, использование геттера
представляется необходимым и в этом случае.
Классификация и характеристики геттеров. Рассмотрим
свойства наиболее распространенных геттерных материалов и некоторые
вопросы применения геттеров для обеспечения необходимого уровня
вакуума в ВТГ.
Геттеры представляют собой высоковакуумные насосы,
основанные на свойстве некоторых веществ поглощать газы за счет сорбции
или химического взаимодействия. По способу получения активной
поверхности геттеры делят на две большие группы - распыляемые и
нераспыляемые.
Распыляемые (испаряемые) геттеры основаны на переводе газо-
поглощающего вещества (обычно бария) в паровую фазу и
последующей его конденсации в виде пленки. Высокая эффективность
распыляемых геттеров связана с большой площадью поверхности и активностью
этой пленки.
Нераспыляемые (неиспаряемые) геттеры представляют собой
смесь ряда металлов (обычно Ti, Zr, Та, Th, Nb, Cd), которые образуют
активную поверхность и способны растворять свои окислы при высокой
температуре. Нераспыляемые геттеры делят на компактные (объемные)
и поверхностные (пленочные). В свою очередь в каждой подгруппе су-
118
3. Сборка и вакуумирование чувственных элементов волнового твердотельного гироскопа
ществует деление по технологии изготовления (прессование, спекание в
форме, плазменное напыление и т.д.).
Эффективность геттеров оценивается по ряду параметров:
1. Скорость сорбции - объем газа, поглощаемый геттером,
отнесенный к единице его площади или массы при рабочем давлении за
единицу времени.
2. Удельный поток газопоглощения - количество газа, удаляемого
геттером из объема, отнесенное к единице его площади или массы за
единицу времени.
3. Сорбционная емкость - количество газа, которое может
поглотить геттер, отнесенное к единице его площади или массы.
4.Температура активации - температура, при которой происходит
активирование геттера.
5. Предельное давление - минимальное давление, которое
достигается в вакуумируемом объеме при использовании геттера.
Выбранный геттер должен иметь, с одной стороны,
соответствующие кинетические характеристики (удельный поток газопоглощения
должен превышать удельную скорость газовыделения со всех
внутренних поверхностей вакуумируемого объема), а с другой - достаточную
сорбционную емкость. Кроме того, геттер должен иметь по
возможности низкую температуру активации и хорошую механическую
прочность.
Распыляемые геттеры используются с 1930-х гг. для обеспечения
вакуума в радиолампах, кинескопах и других вакуумных приборах.
Обычно в качестве активной поверхности используется тонкая пленка
бария, которая формируется при пиролизе сплава BaALt либо смесей
BaALp-Ni, BaAl4-Ni-Fe4N и др. Выделяющиеся пары бария
конденсируются на свободной внутренней поверхности вакуумируемого
прибора, образуя пористую пленку, которая хорошо реагирует со многими
активными газами - 02, СО, С02, N2, H20, Н2 [181,182]. Гораздо более
слабая активность бария наблюдается в отношении ацетилена и этилена.
Метан, этан, инертные газы с барием не реагируют.
В ВТГ использование распыляемых геттеров затруднительно,
ввиду отсутствия в них подходящей свободной поверхности для бариевой
пленки.
Нераспыляемые геттеры, представляющие собой смеси Zr, V, Ti,
циркония, титана, редкоземельных металлов и сплавы на их основе,
получили большее распространение в современном приборостроении. Они
также поглощают активные газы и некоторые углеводороды, образуя в
поверхностной зоне твердые растворы оксидов, нитридов и карбидов
циркония. После насыщения этой зоны геттерный материал теряет
активность, однако, при нагревании его до температуры 500...1000°С эти
твердые растворы диффундируют вглубь геттерного материала, восста-
119
Волновой твердотельный гироскоп. Теория и технология
навливая при этом сорбционные свойства поверхности. Нагревание
(активация) необходимо и перед началом использования геттера, так как
открытая металлическая поверхность всегда окислена атмосферным
кислородом. Известны свойства многочисленных геттерных материалов
[53 54, 80, 96, 125, 140, 141, 144, 154, 217], которые отличаются друг от
друга по сорбционной способности, диапазону рабочих температур,
механической прочности и другим параметрам. Составы и температуры
активации некоторых из них приведены в табл. 3.6.
Таблица 3.6. Состав и температура активации некоторых нераспыляемых
геттерных материалов
Состав
ZrAl
Ti-Zr3Al2
Ti-Zr(Vo.85Feo.i7)2
Zr-C
Zr-Zr(Vo.85Feo.i7)2
Ti-Mo
Ti-V
ZrV2
Zr2Fe
Zr2Ni
Zr(V0.85Fe0.n)2
V-Zr(Vo.85Feo.i7)2
Ti
Ti-Zr-Al
Ti-Zr-Al-Ta
Th-Al-P3M
Th-CeLaAl2
Торговая марка
8Т101,Циаль
ST121
ST122
ST171
ST172
ST175
ST185
ST197
ST198
ST199
ST707
ST2002
-
спн-з
СПН-4
Ceralloy-400
Ceto
Температура
активации, °С
900... 1000
600...900
350...500
700...1000
200...950
500...750
500
500...800
600...900
600...900
450...500
350
700...1200
800
900...1000
900...950
900
Все нераспыляемые геттеры могут быть регенерированы после
насыщения путем повторного нагревания. Число регенераций зависит
от структуры и состава геттерного материала и в большинстве случаев
120
3. Сборка и вакуумирование чувственных элементов волнового твердотельного гироскопа
не превышает 30...40 циклов. На базе этих сплавов промышленно
выпускаются различные по конструкции и характеристикам геттерные
насосы (см., например, [217]), которые с успехом могут быть
использованы в ВТГ. Например, подходящими параметрами обладают объемные
геттеры на сплавах ST171, ST172, выпускаемые фирмой SAES
GETTERS. Конструктивно они могут быть выполнены с осевыми и
торцевыми выводами, с внутренним нагревателем или без него.
Для улучшения сорбции углеводородов геттерная масса также
может быть подогрета до температуры 400°С (ST171) или 200°С (ST172).
Обе марки геттеров могут быть регенерированы десятки раз.
В ВТГ геттер может быть расположен, например, на крышке
вакуумного корпуса с подводкой электропитания нагревателя через гермо-
выводы. К недостаткам такой конструкции следует отнести
возможность повреждения деталей прибора при нагреве геттера до высокой
температуры во время активации. Кроме того, если прибор проходит
откачку и обезгаживание при повышенной температуре, то может иметь
место преждевременная активация геттера и его насыщение
выделяющимися газами.
Другое техническое решение связано с использованием в ВТГ
нерегенерируемых геттеров с высокой сорбционной емкостью. Такие
геттеры изготавливают, активируют, герметизируют и в таком виде
устанавливают в прибор [202]. Вскрытие геттера выполняется с
помощью специального механизма, когда процесс откачки и обезгаживания
завершен, прибор отсоединен от откачной системы и вакуумно
герметичен. Это позволяет избежать преждевременного уменьшения емкости
геттера при обезгаживании и разлетания случайно отколовшихся частиц
геттерного материала.
121
4. Электроника волнового
твердотельного гироскопа
Вопросам обработки информации и управления стоячей волной
ВТГ посвящено множество работ, например, [40, 51, 142, 143, 176, 183].
Рассмотрим основные принципы обработки сигнала ВТГ в различных
режимах работы.
4.1. Общие принципы построения электронных
систем управления ВТГ
Волновой твердотельный гироскоп может функционировать в двух
режимах - датчика угла (ДУ) и датчика угловой скорости (ДУС).
Рассмотрим работу ВТГ в этих режимах.
Режим ДУ. В режиме ДУ информация об угловом движении ВТГ
определяется на основании перемещения стоячей волны относительно
резонатора.
Датчики измерительной системы ВТГ выделяют сигналы Ес и Es,
пропорциональные амплитуде колебаний резонатора вдоль двух
ортогональных осей:
Ес = Есс cos 2Θ cos(tftf -ψ)- Ε sin 2Θ sm(cot - ψ),
(4.1)
Es = Esc sin 2Θ cos(tftf - ψ) + Esq cos 2Θ ύη(ωί - ψ).
Множители Есс, Esc характеризуют синфазные составляющие
колебаний, a Ecq, Esq - квадратурные. В случае стоячей волны
Ecq = 0; Esq = 0. (4.2)
Тогда ориентация стоячей волны определяется по формуле
0 = Iarctg^. (4.3)
2 Есс
Кроме того, амплитуда стоячей волны должна быть постоянной, т. е.
^E2CC+E2SC= const. (4.4)
Для реализации процедур (4.2) - (4.4) ВТГ имеет несколько
контуров управления. Рассмотрим их работу по функциональной схеме,
приведенной на рис. 4.1.
Входная информация поступает с измерительной системы на
сумматоры 1, где, после дифференциального сложения формируются сиг-
4. Электроника волнового твердотельного гироскопа
налы Εс и Es. Выделение синфазных и квадратурных составляющих этих
сигналов выполняется с помощью демодуляторов 2 и устройства
управления 3. Синфазные составляющие Есс, Esc используются в вычислителе
4 для определения ориентации стоячей волны по (4.3). Необходимо
отметить, что точность выходной информации определяется точностью
измерения амплитуд сигналов Есс и Esc. Так, при необходимости
получить точность определения угла # равную 0,001 град, точность
определения амплитуд Есс и Esc должна составлять ~0,001%. Если для
измерения этих сигналов используют аналого-цифровой преобразователь
(АЦП), то он должен обеспечивать 19...20-разрядную точность
преобразования.
Рис. 4.1. Функциональная схема ВТГ в режиме ДУ
Эта задача может быть решена и с помощью АЦП меньшей
точности, но тогда необходимо использовать интегрирующий вычислитель
[201]. Принцип его работы поясняется рис. 4.2. Синусоидальные
напряжения Есс и Esc подаются на входы ключей 1 и 2, работающих под
управлением блока логики. С помощью этих ключей напряжения Есс и
Esc выпрямляются и подаются на дифференциальные входы
интегратора. Напряжение ии на выходе интегратора зависит от амплитуд и
количества полуволн, поступающих на его входы. Оно измеряется АЦП, и
блОК ЛОГИКИ управляет КЛЮЧаМИ 1 И 2 Так, ЧТОбы i/min<i/H<^max.
Пусть, например, в течение некоторого периода времени ключ 1
пропустил Νχ полуволн, а ключ 2 - N2. Тогда £/и = NXESC - N2ECC, откуда
^ = Jk_3. (4.5)
Кс N,ECC Nx
Из (4.5) следует, что точность определения соотношения EJECC
растет с увеличением периода интегрирования. Например, если
iVi= 100, то EJECC = N2IN\ с точностью 1%. Второе слагаемое в (4.5)
представляет собой поправку, причем погрешность этой поправки про-
123
Волновой твердотельный гироскоп. Теория и технология
порциональна 1/iVi. Например, если напряжения С/и и Есс, входящие в
эту поправку, измеряются 14-разрядным АЦП, то точность отношения
Esc/Ecc, вычисленная по (4.5) (при iVi = 100), составит ~10~6, что
эквивалентно использованию 20-разрядного АЦП.
Е«с
КЛЮЧ1
К компьютеру
*сс
t
Ιίγγγγγγγγγγγγγγγϋ,
БЛОК
ЛОГИКИ
\
ключ
I ш
2
ШЛШЛг
+
ИНТЕГРАТОР
Ц
АЦП
К компьютеру f
Рис. 4.2. Функциональная схема интегрирующего вычислителя
На точность определения угла θ существенно влияет точность
расположения емкостных датчиков измерительной системы. Пусть,
например, угол между измерительными осями А -А и В - В в ВТГ-ДУ
отличается от 45 град на величину а. Предположим также, что
коэффициенты передачи Кс и Ks емкостных преобразователей по каналам Ес и Es
различаются. Тогда при вычислении угла ориентации стоячей волны,
реально расположенной под углом Θ, возникает ошибка определения
угла, равная
Kssm(29-a)
A<9 = <9-0,5arctg-
(4.6)
Кс cos 2Θ
На рис. 4.3 приведены результаты расчета ошибки определения
угла для некоторых значений а и соотношения KJKC. Из-за этой ошибки
зависимость скорости систематического дрейфа от углового положения
стоячей волны имеет более сложную зависимость: θ « sin 4(θ + Δ#).
Так, например, если в ВТГ а = 20 и KJKC = 0,95, то при реальной
угловой зависимости скорости систематического дрейфа стоячей волны
<9 = l-sin4#, измеряемая этим ВТГ зависимость θ = /(θ) будет иметь
вид 0 = 0,999 sin 4(0 + 0,009) + 0,033 sin 4(0 + 0,15). Это отклонение в -3%
может быть учтено калибровкой ВТГ. Наличие квадратурных колебаний
приводит к появлению различных видов дрейфа волновой картины, по-
124
4. Электроника волнового твердотельного гироскопа
этому они должны подавляться системой управления. В режиме ДУ для
этого используют систему электростатической коррекции.
Δ0, град
1.4 у
1,2 у
1.0 у
0.8 у
0,6 L
0.4 к
0.2 ι
0.0 к
-0,2 Ρ
-0.4 Ρ
-0.6 ρ
-0.8 Ρ
Ι Ι ι ! 1 1 1 1 1 1 1 Ι
0 20 40 Θ0 80 100
θ, град
Рис. 4.3. Ошибка определения угла ориентации стоячей волны: 1 ~KJKC = 1; а
= 0,5 град; 2 - KJKC = 0,95; а = 0,5 град; 3 - KJKC = 0,95; а = 0
Сущность этого метода подавления квадратуры состоит в
управляемом силовом воздействии на жесткость резонатора таким образом,
чтобы совместить ориентацию собственных осей резонатора с
ориентацией волновой картины. Тогда волновая картина будет представлять
собой стоячую волну, хотя неидеальность резонатора в этом случае
сохраняется, то есть расщепление его собственной частоты не равно нулю.
Для создания управляемого силового воздействия на резонатор
используют 16 корректирующих электродов, равномерно
расположенных по окружности резонатора. Они соединены друг с другом
крестообразно и образуют четыре группы, формирующие электростатические
силы, деформирующие резонатор по 4-й форме. Подавая на эти
электроды медленно меняющиеся напряжения U\ и С/г, можно управлять
азимутальной жесткостью резонатора и поворачивать собственные оси
резонатора. Согласно [200] наиболее эффективно прикладывать
управляющие силы под углом 22,5 град к положению стоячей волны Θ. Для
формирования U\ и С/2 система управления должна содержать
специальный аналоговый или цифровой вычислитель 6 (см. рис. 4.1), который
вырабатывает напряжения:
125
Волновой твердотельный гироскоп. Теория и технология
Ц ={k^E2cq+E2sq +\k2^q+EfqdtU
U2 =(*1>/4+4+|*2>/4+4Л)
sin 46»
sin4<9|
cos 4Θ
(4.7)
4
cos 40
В (4.7) kh k2 - коэффициенты. Напряжение U\ может подаваться на
группу корректирующих электродов, расположенную под углом 0 либо
45 град (в качестве условного 0 принято положение электрода 1).
Соответственно напряжение t/2 может подаваться на группу
корректирующих электродов, расположенную под углом 22,5 или 67,5 град. Задавая
в (4.7) угол Θ, можно формировать электростатические силы,
деформирующие резонатор по 4-й форме в любом направлении. Амплитуда этих
напряжений изменяется системой управления до момента, когда
квадратурные составляющие обратится в 0. Это соответствует совмещению
собственных осей резонатора с ориентацией волновой картины.
Для подержания постоянной амплитуды стоячей волны
используется кольцевой электрод. На этот электрод с выходного усилителя 5
(см. рис. 4.1) подаются импульсы напряжения с частотой в 2 раза выше
частоты колебаний. На рис. 4.4 показана фаза следования этих
импульсов относительно
перемещения стенки
резонатора. Напряжение на
кольцевой электрод
подается в моменты ωί = 0 и
ωί = π, когда резонатор
не деформирован. В
течение следующей четверти
периода зазор между
кольцевым электродом и
резонатором становится
несимметричным. В
результате притягивающая
сила в области меньшего
V
Г3
"а
V
У
—►
Απ
2π Зтг
Рис. 4.4. Графическое представление
параметрического возбуждения колебаний
резонатора ВТГ
зазора увеличивается, а в области большого - уменьшается, так как эта
сила обратно пропорциональна квадрату величины зазора.
Результирующая сила приводит к еще большей деформации резонатора и
действует в направлении пучностей стоячей волны. Затем напряжение на
кольцевом электроде обнуляется, и резонатор возвращается в недеформиро-
ванное состояние. Амплитуда импульсов параметрического
возбуждения Щ зависит от отклонения напряжения yJE^ + E2SC от за-
126
4. Электроника волнового твердотельного гироскопа
данного значения и регулируется пропорционально-интегральным
звеном в амплитудном контуре управления.
Режим ДУС. В режиме ДУС стоячая волна удерживается в одном
и том же положении относительно резонатора. Как правило, ориентация
пучностей колебаний совпадает с одной из осей измерительной
системы. Если в результате вращения в узловых точках возникают колебания,
то они подавляются электрическими силами, формируемыми
дополнительным контуром управления, при этом интенсивность электрических
сил пропорциональна угловой скорости вращения. Хотя режим ДУС
требует наличия в ВТГ еще одного контура управления, его техническая
реализация оказывается проще, чем режима ДУ, так как:
для определения угловой скорости вращения необходимо измерять
величину только одного сигнала, используемого для подавления
колебаний в узлах вместо вычисления положения волны по (4.3) в режиме ДУ;
ориентация стоячей волны совпадает с осями измерительной
системы, поэтому процедура определения квадратуры колебаний значительно
упрощается;
ориентация стоячей волны постоянна, поэтому для поддержания
постоянной амплитуды колебаний можно использовать позиционное
возбуждение вместо параметрического;
квадратурные колебания могут подавляться электрическими
силами, формируемыми в узлах без использования системы
электростатической коррекции, что уменьшает число электродов, необходимых
для управления;
линейность измерительной системы в режиме ДУС может быть
существенно ниже, чем в режиме ДУ, т. к. динамический диапазон
изменения сигналов в пучностях и узлах невелик.
В результате конструкция и схема управления ВТГ-ДУС может
быть существенно проще, чем в случае ВТГ-ДУ. На рис. 4.5 приведена
функциональная схема ВТГ для режима ДУС. Как и в режиме ДУ,
измерительная система ДУС выделяет сигналы Ес и Е5, пропорциональные
амплитуде колебаний резонатора вдоль двух ортогональных осей.
Демодуляция выполняется в демодуляторах 2 совместно с устройством
управления 3. Однако в отличие от режима ДУ сигнал £с является
опорным, т. е. Ecq — 0.
Стоячая волна ориентирована вдоль оси А - А, и ее амплитуда
должна быть постоянной, т. е. Есс= const. Поддержание постоянной
амплитуды обеспечивается поочередной подачей импульсов возбуждения
на электроды 1, 5, 3, 7, которые формируются модулятором 4.
127
Волновой твердотельный гироскоп. Теория и технология
Рис. 4.5. Функциональная схема ВТГ в режиме ДУС
fl
|l,5
I
13, 7
Г\
_1
V
1_
J
\
ί
_ J
l_
ωί
-►
Рис. 4.6. Фазы следования импульсов
позиционного возбуждения в режиме ДУС
Диаграмма на
рис. 4.6 показывает фазы
следования импульсов
позиционного возбуждения.
Длительность импульсов
τ может достигать
половины периода колебаний.
В узлах синфазные и
квадратурные
составляющие колебаний должны
подавляться. Для
формирования сигналов
подавления, напряжения Е5С и
Ещ проходят через
пропорционально - интегральные цепочки в 5 и б, после чего они
используются для амплитудной модуляции импульсов.
Фазовая диаграмма на рис. 4.7 показывает фазы следования
импульсов подавления. Импульсы для подавления Esc и Esq имеют разную
амплитуду (она зависит от величины Esc и Esq), но они поступают на
одни и те же электроды. Для суммирования этих импульсов служит
сумматор 7.
128
4. Электроника волнового твердотельного гироскопа
Отметим, что можно использоваться не только амплитудную, но и
широтно-импульсную модуляцию, что более удобно при построении
электроники ВТГ на основе микроконтроллера.
Следует отметить
также, что подавление
квадратурных
составляющих колебаний в
режиме ДУС может
выполняться и с помощью 16-
электродной системы
электростатической
коррекции. В этом случае
напряжение коррекции
V = KEsq+\k2Esqdt,
подается на электроды
коррекции,
расположенные под углом +22,5 град,
либо -22,5 град (в
зависимости от знака квадра- Рис. 4.7. Фазы следования импульсов
туры) для совмещения подавления в режиме ДУС
собственных осей резонатора с ориентацией волновой картины.
С точки зрения теории оба метода подавления квадратуры
эквивалентны.
Отметим, что подача импульсов возбуждения и подавления на
электроды 1-8 приводит к появлению помехи на измерительных
электродах Α, Α,Β,Β. Однако в приведенной схеме частота этой помехи
вдвое выше частоты сигналов Ес и Es, что позволяет избавиться от
помехи методами аналоговой или цифровой фильтрации.
Выходной информацией ВТГ в режиме ДУС является сигнал
Ε „А,
<HJ
пропорциональный угловой скорости вращения ВТГ, которая может
быть определена по формуле
άθ_
Л '
К,
ДУС
El
βο
(4.8)
где Кдус- постоянный коэффициент;/- частота колебаний.
Как и для режима ДУ, ошибка в выставке емкостных электродов
ведет к ошибкам определения угловой скорости. Неодинаковость
коэффициентов передачи по каналам Ес и Es учитывается коэффициентом
£дус при калибровке ВТГ и в дальнейшем не влияет на его работу.
Однако ошибка в угловом расположении электродов возбуждения приво-
129
Волновой твердотельный гироскоп. Теория и технология
дит к возбуждению колебаний не только вдоль оси А -А, но и вдоль оси
В - В, что будет восприниматься прибором как наличие угловой
скорости. Этот дрейф стоячей волны можно рассматривать как
систематический, однако следует иметь в виду, что он зависит от амплитуды
стоячей волны.
Согласно (4.8) изменение амплитуды колебаний приводит к
пропорциональному изменению U^, то есть к изменению чувствительности
ВТГ (для одной и той же угловой скорости вращения ВТГ). Из этого
следует, что стабильность амплитуды колебаний ВТГ в режиме ДУС
должна быть очень высокой. Кроме того, существует максимальное
значение амплитуды узловых колебаний, которое может быть
подавлено до нуля. Оно соответствует максимальной угловой скорости, которая
может быть измерена данным ВТГ. Для увеличения предела измерения
угловой скорости можно уменьшить амплитуду колебаний, но это
приведет к снижению чувствительности ВТГ. Для расширения диапазона
измеряемых угловых скоростей в патенте [197] предложено ввести
дополнительную цепь, которая уменьшает амплитуду колебаний
пропорционально измеряемой угловой скорости. Это усовершенствование
позволяет увеличить верхний предел измерения ВТГ от ~100 град/с до
~ 10000 град/с без ухудшения характеристик ВТГ в области малых
угловых скоростей.
Существуют и другие варианты построения ВТГ-ДУС. Например,
в патенте [206] для одновременного возбуждения колебаний по оси А -
А и подавления колебаний по оси В - В предложено использовать
электроды, расположенные под углами ±22,5 град к этим осям. Такое
решение не дает выигрыша в характеристиках ВТГ, но в некоторых случаях
может оказаться более удобным при технической реализации.
Большие возможности для совершенствования ВТГ-ДУС
открываются при использовании измерительных систем, работающих на
переменном токе. Это позволяет осуществить возбуждение колебаний в
резонаторе и их измерение одними и теми же емкостными электродами,
сокращая их общее число до восьми. Этот подход нашел успешное
применение в ряде современных конструкций ВТГ-ДУС [124, 151, 162].
Выбор режима работы (ДУ или ДУС) обычно осуществляют,
исходя из назначения ВТГ. Режим ДУ характеризуется отсутствием
ограничений по входной угловой скорости, высокой стабильностью
масштабного коэффициента, но вместе с тем сложной моделью
компенсации дрейфа и значительным угловым шумом из-за погрешностей
определения ориентации стоячей волны. Режим ДУС имеет гораздо
лучшие шумовые характеристики и более простую модель компенсации
дрейфа, однако в этом режиме существует ограничение по
максимальной входной угловой скорости. Кроме того, в режиме ДУС
стабильно
4. Электроника волнового твердотельного гироскопа
ность масштабного коэффициента определяется стабильностью
электронных компонент, и она, как правило, гораздо ниже, чем для
режима ДУ.
4.2. Измерительные системы ВТГ
Измерительные системы ВТГ, как правило, включают восемь
датчиков линейных перемещений, размещенных по окружности резонатора
с периодом 45 град. В большинстве случаев используют емкостные
датчики, в которых обкладки конденсатора образуются проводящей
поверхностью резонатора и внешним электродом, нанесенным на
поверхность специальной платы и отделенным от резонатора небольшим
зазором. В некоторых случаях, в упрощенных конструкциях вибрационных
гироскопов также используют пьезоэлектрические датчики,
приклеенные в определенных местах резонатора. Сигналы, поступающие с
датчиков 0, 90, 180 и 270 град, дифференциально складываются и
образуют, так называемый, косинусный канал информации Ес.
Дифференциально сложенные сигналы датчиков 45, 135, 225 и 315 град образуют
синусный канал информации Es. Формирование этих сигналов
осуществляется с помощью специальных усилителей, которые могут
работать как на постоянном, так и на переменном токе.
В измерительных
системах, работающих
на постоянном токе, на
проводящую
поверхность резонатора
подается постоянное
напряжение величиной
несколько десятков или
сотен вольт, а вторые
обкладки емкостных
датчиков подключены к
буферным усилителям с
единичным
коэффициентом усиления (рис.
4.8).
Если входное
сопротивление усилителей
велико (порядка 10l °
Ом), то датчики работают в режиме постоянного заряда и переменное
напряжение на них практически пропорционально амплитуде колебаний
резонатора.
Рис. 4.8. Схема измерительной системы на
постоянном токе
131
Волновой твердотельный гироскоп. Теория и технология
Буферные усилители являются наиболее ответственными
элементами системы съема, они должны обеспечить точную передачу
амплитуды и фазы входных сигналов при малом уровне шума. Рассмотрим
более подробно особенности их построения.
Для достижения высокого входного сопротивления буферный
усилитель строится по схеме повторителя напряжения и дополнительно
охватывается положительной обратной связью - этот подход был
использован уже в первых конструкциях ВТГ [203]. Рассмотрим работу
такого усилителя по схеме, приведенной на рис. 4.9.
С внешней обкладки емкостного датчика О сигнал поступает на
вход усилителя. Другая обкладка датчика - проводящая поверхность
резонатора - подключена к ЭДС Е.
Усилитель А\ включен по схеме повторителя напряжения и
напряжение на выходе практически равно напряжению в точке А:
UA^UoCosojt. Напряжение в точке В формируется цепочкой R2C2 и
отличается от Uа по амплитуде и фазе. Если R2 »{соС2)Л, то
действующее значение тока через резистор RI определяется разностью UahUbh
приближенно равно
- ^ ^2ϋ0φ „ аЕфу/2
Rl* 2RI
2d0Rl
(4.9)
фазовый сдвиг
Выход
где а - амплитуда колебаний стенки резонатора; φ
между Uа и UB\ d0 - зазор емкостного датчика.
Согласно (4.9) введение
в усилитель обратной связи
привело к возрастанию
полного входного сопротивления
в ф~1 раз. При RI = 5,1 МОм,
R2 = 82 кОм и С2 = 1 мкФ
фазовый сдвиг составляет
φ = 0,0004, а полное входное
сопротивление усилителя по
Рис. 4.9. Схема буферного усилителя
переменному току равно ~13 ГОм. Отметим, что протекание тока через
резистор RI приводит к рассеиванию на нем активной мощности Р:
1
аЕф
2RI
VMo У
Это внесет дополнительные потери энергии в осциллятор:
1
ГЕф^2
co3MRl
(4.10)
(4.11)
V"o J
где М- приведенная масса резонатора.
132
4. Электроника волнового твердотельного гироскопа
Численная оценка показывает, что эти потери очень малы. Так, при
Ε = 100 В, Μ = 1 г, ω = 9π·103 с"1, Rl = 5,1 МОм, d0 = 100 мкм,
Φ = 0,0004, gWo12.
Необходимо отметить, что высокое полное входное сопротивление
буферного усилителя может быть достигнуто лишь при условии
компенсации всех паразитных емкостей. Для компенсации емкостей,
создаваемых экранами входных цепей, на экраны подается выходное
напряжение. При этом потенциалы входных проводников и их экранов
оказываются одинаковыми, и ток через эти емкости не протекает, что
эквивалентно их отсутствию. Необходимо и минимизировать
распределенную емкость затвора входного полевого транзистора в
операционном усилителе А\. Эта емкость может приводить к заметному
снижению (на ~10...30%) коэффициента передачи входного усилителя.
Измерительные системы на переменном токе обладают худшей
линейностью, однако частотное разнесение позволяет использовать для
возбуждения и измерения колебаний резонатора одни и те же
электроды, то есть конструкция ВТГ при этом существенно упрощается.
На рис. 4.10 приведена функциональная схема измерительной
системы ВТГ на переменном токе [142].
Рис. 4.10. Схема измерительной системы ВТГ на переменном токе
Для косинусного канала используется напряжение частотой F\, a
для синусного - частотой F2 (например, в [142] F\«600 кГц, а
^2«400кГц).
133
Волновой твердотельный гироскоп. Теория и технология
Все сигналы усиливаются единственным буферным усилителем
переменного тока и подаются на демодуляторы, где и выделяются
выходные переменные напряжения Ес и Es. Так как несущие частоты F\ и
F2 достаточно велики, то внутреннее сопротивление емкостных
датчиков оказывается гораздо меньше, чем для системы съема на постоянном
токе, поэтому требования к характеристикам буферного усилителя
значительно снижаются. Выходная информация может быть легко
преобразована в двоичный код при использовании АЦП вместо
демодуляторов (рис. 4.11). Хорошо видно возникновение погрешности
восстановления огибающей при дробном соотношении этих частот.
Рис. 4.11. Схема цифровой измерительной системы ВТГ на переменном токе
При выборе величин частот опроса АЦП (F0i и F02) следует иметь
в виду, что они должны быть меньше несущих частот F\ и F2 в целое
число раз, иначе выходной сигнал будет демодулирован некорректно.
Рис. 4.12 поясняет процедуру восстановления огибающей для
различного соотношения несущей частоты и частоты опроса АЦП.
Низкочастотные напряжения возбуждения и подавления колебаний {U\-U^)
могут быть приложены к тем же самым электродам 1-8, которые
используются в измерительной системе (см. рис. 4.10). Благодаря
большому частотному разнесению эти сигналы не создают взаимных помех.
134
4. Электроника волнового твердотельного гироскопа
Такое совмещение функций позволяет ограничиться восемью
емкостными электродами и значительно упростить общую конструкцию
ВТГ.
Рассмотрим еще
один вариант
измерительной схемы на
переменном токе с
отслеживанием угла,
разработанный для режима ДУ
А. Мэттьюсом [204,
205].
В этом варианте
(рис. 4.13) на электроды
синусного и
косинусного каналов подается
комбинация
напряжений с частотами F\hF2:
{Ех = Е0 [cos θτ cos (lnFxt + (f\ ) + sin θτ cos {lnF2t -
E2 = E0 [sin#r cosfaFj + <fil) + cos9T cos(lKF2t + ^)].
0,2 0,3
Время, мс
Рис. 4.12. Выделение огибающей сигнала при
целом и дробном соотношении несущей частоты F
и частоты опроса АЦП F0
(o-F/Fo = 3;-F/F0 = 3,l)
(4.12)
Н>*1
НХ
Рис. 4.13. Схема следящей измерительной системы ВТГ на переменном токе
В (4.12) Е0 - амплитуда, a <j\ 2 - фазы входных переменных
напряжений с частотами Fx и F2. Угол θτ соответствует расчетной ориентации
135
Волновой твердотельный гироскоп. Теория и технология
стоячей волны. Этот угол формируется в управляющем устройстве и
может отличаться от реального угла ориентации Θ.
Демодулируя выходное напряжение относительно cos(2^i71i + ^)
и cos{lnF2t + ф2), получаем выходные напряжения ΑχπΑ^
[Α2=-^Εΐ+Ε^8Ϊη(θ-θτ)οο8ωί-^Ε^+Ε^οο8(θ-θτ)8\ηω^
Если квадратурные колебания подавляются, то
I Ах = ^Е2СС + E2SC cos [θ - 3τ) cos ωί,
, = -yJEl + El sin (θ - 3τ) cos ωί.
(4.13)
(4.14)
Теперь видно, что, если расчетная угловая ориентация стоячей
волны соответствует реальной (т. е. θτ = θ), то Аг = 0. В противном
случае угол θτ изменяют так, чтобы обнулить напряжение А2. Определение
ориентации стоячей волны путем вариации угла θτ избавляет от
описанных выше проблем, связанных с определением угла θ по формуле
(4.3), но требует использования прецизионных перемножителей для
формирования сигналов Ех иЕ2.
Измерительные системы ВТГ на переменном токе также вносят в
резонатор дополнительное затухание. На рис. 4.14 приведена
эквивалентная схема измерительной цепи на переменном токе где U-
высокочастотное напряжение
41-
Ф*
г
>
Рис. 4.14. Эквивалентная схема
измерительной цепи на переменном токе
внешнего генератора; Яг -
выходное сопротивление
этого генератора; С -
емкость датчика; г -
сопротивление металлического
покрытия резонатора; R -
входное сопротивление
буферного усилителя.
Ток в цепи равен
/(*)=-
и
hR+Rj+rf +
ί Λ Ι Τ λ2
l + x/d0
cohC
U
xU
V <°hc
(4.15)
136
4. Электроника волнового твердотельного гироскопа
где соь - частота высокочастотных колебаний; d0 - зазор емкостного
датчика; χ - смещение стенки резонатора при колебаниях: χ = a cos ωΐ.
Внутреннее трение, вносимое одним высокочастотным
измерительным электродом
Я-- ^С**") .. (4.16)
^Ч2м1^2С2(7? + ^+г)2+1|
Как и ранее, в формуле (4.16) М- приведенная масса резонатора и
ω - круговая частота колебаний. Численные оценки вносимого
внутреннего трения, сделанные по (4.16), показывают, что оно становится
малым при значении входного сопротивления буферного усилителя
порядка 100 МОм. Так, при R = 5-Ю5 Ом, #ζ = 103 Ом, г = 104 Ом, U= 10 В,
(Oh = 106π с"1, ω = 104π с"1, d0 = 100 мкм, М= 1 г, С = 5 пФ, получаем
Qh~l = 1,6·10"10. Таким образом, даже при умеренных требованиях к
величине входного сопротивления усилителя, внутреннее трение,
вносимое измерительной системой переменного тока, очень мало.
4.3. Применение цифровых сигнальных
процессоров в электронике ВТГ
Электроника ВТГ может быть реализована различными способами.
Все контуры управления, показанные на рис. 4.1 и 4.5, могут быть
построены на аналоговых микросхемах (например, на операционных
усилителях), реализующих необходимые преобразования входных сигналов
Ес и Es, и вырабатывающих соответствующие сигналы управления
волновой картиной в ВТГ. Построенная таким образом электроника
содержит несколько десятков микросхем, трудоемка в сборке и достаточно
сложна в настройке. Кроме того, из-за старения радиокомпонентов и
влияния окружающей среды возможно появление дрейфов нулей
операционных усилителей, фазовых задержек и т.п., что негативно влияет на
точность работы прибора. Другой подход к построению электроники
ВТГ предполагает аналого-цифровое преобразование входных сигналов
Ес и Es, цифровую обработку информации и формирование цифровых
либо аналоговых управляющих сигналов. Очевидно, что в этом случае
стабильность электроники определяется лишь стабильностью входных
АЦП. Кроме того, упрощается процедура настройки, которая в этом
случае выполняется программным способом.
Особенно большие возможности при проектировании такой
цифровой электроники открываются при использовании цифровых
сигнальных процессоров. Эти устройства содержат в одном корпусе входные
АЦП, микропроцессор, тактовый генератор, память, выходной
интерфейс и др. Т. е. основная часть электроники ВТГ может быть реализова-
137
Волновой твердотельный гироскоп. Теория и технология
на всего лишь на одной микросхеме, которая дополняется входными и
выходными усилителями. В настоящее время выпускается ряд типов
цифровых сигнальных процессоров, отличающихся друг от друга
архитектурой, быстродействием, набором периферийных узлов. Рассмотрим
в качестве примера цифровой сигнальный процессор фирмы Motorola
DSP56F805 [82, 218]. На рис. 4.15 приведена блок-схема этого
контроллера.
Рис. 4.15. Блок-схема цифрового сигнального процессора DSP56F805
Архитектура 16-разрядного ядра процессора обеспечивает
производительность до 40 млн. операций в секунду (MIPS) и включает четыре
вычислительных устройства, способных работать параллельно:
арифметико-логическое устройство данных (Data ALU), устройство генерации
адреса (Address Generation Unit), программный контроллер (Program
Controller) и устройство для выполнения битовых операций (Bit
Manipulation Unit). Каждое из них имеет свой собственный набор регистров и
управляющую логику. Эти вычислительные устройства
взаимодействуют между собой, с блоками памяти и с регистрами периферийных
устройств при помощи трех внутренних адресных шин и четырех шин
данных. DSP56F805 имеет несколько периферийных узлов: два четы-
рехканальных АЦП (ADC), два выходных модуля формирования ши-
ротно-модулированных импульсов (PWMA, PWMB), дешифраторы
квадратурной импульсной последовательности (Quadrature Decoder),
138
4. Электроника волнового твердотельного гироскопа
последовательные асинхронные интерфейсы (SCI), последовательный
периферийный интерфейс (SPI), порты ввода-вывода, контроллер
прерываний.
Сдвоенный модуль АЦП содержит два мультиплексора на 4 входа,
два устройства выборки и хранения (со временем выборки 0.2 мкс) и
два 12-разрядных АЦП со временем преобразования 1,2 мкс. Набор
регистров позволяет одновременно хранить результаты преобразования
восьми измерений. Диапазон входных напряжений: 0...3 В.
Имеется возможность задавать последовательный или
одновременный режимы работы двух АЦП. Независимо от этого, схемотехника
входных цепей позволяет каждую пару соседних аналоговых входов
рассматривать или как два отдельных сигнала, или как один
дифференциальный. Программно можно задавать различные режимы
сканирования аналоговых входов, например, осуществлять последовательную
выборку восьми аналоговых сигналов или иметь четыре
дифференциальных сигнала и при помощи двух АЦП одновременно опрашивать сразу
два из них. Результат преобразования может быть представлен как
число со знаком или без знака и автоматически скорректирован путем
вычитания заданного смещения. Имеется возможность синхронизировать
запуск АЦП с работой модуля формирования управляющих ШИМ-
сигналов и между собой. Для каждого аналогового канала отведено по
три компаратора, которые позволяют аппаратно, без участия
процессора, определять момент, когда сигнал меняет знак или выходит за
границы заданного диапазона.
Квадратурные декодеры могут использоваться для дешифрации
квадратурных импульсных сигналов.
Модули широтно-импульсной модуляции (ШИМ) (PWMA,
PWMB) предназначены для управления различными типами
исполнительных устройств. Каждый модуль позволяет формировать шесть
независимых ШИМ-сигналов или три пары комплементарных ШИМ-
синалов. Модули позволяют формировать ШИМ-сигналы, выровненные
как по фронту, так и по центру синхронизирующего импульса.
Два последовательных асинхронных интерфейса (SCIO, SCI1)
позволяют выполнять обмен данными с использованием стандартного
формата NRZ.
Последовательный периферийный интерфейс (SPI) позволяет
осуществлять синхронный дуплексный последовательный обмен данными
с использованием четырех стандартных SPI выводов. Любой из этих
интерфейсов может быть использован как порт ввода-вывода общего
назначения (GPIO).
Нагрузочная способность большинства линий ввода-вывода
составляет 10 мА.
139
Волновой твердотельный гироскоп. Теория и технология
Контроллер прерываний (Interrupt controls) принимает запросы на
прерывания от периферийных узлов. Система прерываний DSP56F805
обладает следующими возможностями:
число источников прерываний - 64;
число приоритетных уровней прерывания - 7;
каждому источнику прерывания может быть назначен любой из
семи уровней приоритета.
За каждым источником прерывания жестко закреплен вектор
прерывания, который определяет приоритет внутри уровня.
Каждый периферийный узел сам отвечает за маскирование своих
прерываний, и, кроме того, имеется один общий регистр, при помощи
которого можно разрешать или запрещать прерывания группами,
принадлежащими к определенному уровню.
Организация вычислений строится на основе прерываний,
вырабатываемых устройствами цифрового сигнального процессора.
Программное обеспечение состоит из модулей программ, реализующих
конкретные задачи и объединенные в группы по функциональному
назначению. Можно выделить следующие группы программных
модулей:
модули стандартных программ;
модули программ функциональных алгоритмов;
модули, организующие обмен и вычисления в реальном времени.
Выдача выходной информации ВТГ осуществляется по
последовательному интерфейсу. В качестве программного обеспечения фирма
Metrowerks предлагает пакет CodeWarrior v.5.0, включающий
интегрированную среду для создания проекта, ассемблер, оптимизированный
компилятор C/C++, компоновщик, отладчик. Отладчик поддерживает
связь с целевой платой через LPT-πορτ или USB-πορτ компьютера для
загрузки и отладки программы в рабочей системе по JTAG-интерфейсу.
Для работы с CodeWarrior разработана библиотека Embedded Software
Development Kit (SDK v.2.4.1), которая содержит математические
функции, DSP-подпрограммы и драйверы периферийных устройств.
Минимально необходимым аппаратным отладочным средством для
DSP56F805 является программирующий JTAG-кабель позволяющий
под управлением отладчика CodeWarrior вести внутрисхемную отладку
программы непосредственно в системе, а также программировать
встроенные блоки энергонезависимой памяти.
Кроме DSP56F805 для построения электроники ВТГ могут быть
использованы и другие цифровые сигнальные процессоры, например,
ADSP-21992 (Analog Devices Inc.), PIC24HJ256GP610 (Microchip
Technology Inc.), TMS320F240 (Texas Instruments) и другие.
140
4. Электроника волнового твердотельного гироскопа
4.4. Надежность ВТГ
Надежность - это способность прибора выполнять заданные
функции в определённых условиях в течение определенного времени. В
качестве параметра надежности используют интенсивность отказов или
среднее число отказов прибора в единицу времени (Я). Среднее время
наработки на отказ (англ. Mean time between failures, MTBF) может быть
определено по формуле
ΜΊΒΈ=\ίλ-λίάί = \Ιλ.
(4.17)
Средняя частота отказов:
/,=Ij*e-* = i(l-e-*).
(4.18)
Полагая λί < 1, е »1 - λί, получим f (t)« λ .
Таким образом, в период работы после окончания процесса
приработки и до начала физического износа прибора средняя частота отказов
равна интенсивности отказов. Для большинства элементов
радиоэлектронной аппаратуры зависимость λ от времени имеет вид,
представленный на рис. 4.16. В начальный отрезок времени выходят из строя
элементы, имеющие грубые
дефекты, не обнаружен- i Я
ные при контроле. После §
выявления этих элементов |
интенсивность отказов л
уменьшается и далее о
остается постоянной, т. е. 3
о
наступает период нор- «
мальной работы. i
По мере износа
элементов интенсивность от- Рис. 4.16. График зависимости изменения
казов вновь возрастает, интенсивности отказов от времени
начинается период старения элементов. Для количественного
определения надежности используются расчетные параметры надежности или
статистическая обработка результатов испытаний партии приборов.
Рассмотрим подробнее эти методы.
Период
нормальной работы
Период
приработки |
Период
старения
f
141
Волновой твердотельный гироскоп. Теория и технология
4.4.1. Предварительный расчет надежности
Этот метод используют на стадии разработки прибора. Пусть η -
число различных типов компонент прибора, Яь Л2,..., λη - средняя
интенсивность отказов компонентов, a s\, s2,...9 sn - число элементов данного
типа в приборе. Тогда для прибора в целом
A = A[sl+ ?^s2 +... + ληΞη . (4.19)
На практике при расчёте надёжности составляют перечень
используемых элементов и определяют интенсивность отказов каждого вида
элементов. Затем интенсивности отказов элементов суммируют и
определяют MTBF.
Далее вводят коэффициенты, учитывающие влияние режима и
условий работы. Для учёта воздействий, определяемых средними
условиями эксплуатации, обычно вводят коэффициент жёсткости,
учитывающий степень сокращения MTBF при воздействии неблагоприятных
факторов внешней среды.
Рассмотрим в качестве примера расчет надежности волоконно-
оптического гироскопа ВГ941-ЗАМ, который содержит оптический
блок и электронный блок [219]. Сведения о надежности электронных
компонентов взяты из американского стандарта MIL-HDBK-217F,
который часто используется для таких расчетов. Расчет надежности
проводим для нормальных условий окружающей среды. Табл. 4.1 и 4.2
содержат данные по интенсивности отказов различных компонентов
оптического и электронного блоков, а также число этих компонентов в
гироскопе.
Таблица 4.1. Интенсивность отказов компонентов оптического блока
Наименование
Фотоприемник
Излучатель
Катушка с волокном
Волокно между компонентами
Поляризатор
Ответвитель
Модулятор
Число
компонентов
2
1
Интенсивность отказов /^
на 1 млн. ч работы
1,5
20
0,5
1,5
10
1
2,5
Используя эти данные, по формуле (4.19) получаем для
оптического блока Лоб = 37 [10-6/ч], а для электронного блока Лэб = 2,91 [10-6/ч].
Сопоставление найденных интенсивностей отказа Лоб и Лэб показывает,
что надежность волоконно-оптического гироскопа определяется в
основном надежностью электроники.
142
4. Электроника волнового твердотельного гироскопа
Среднее время наработки на отказ этого прибора для нормальных
условий составляет
MTBF = -
l(f
Л)Б +УЛЭБ
- = 25000ч.
Таблица 4.2. Интенсивность отказов компонентов электронного блока
Наименование
Диод
Транзистор
Микросхема
Конденсатор
Резистор
Фотодиод
Пайки
Число
компонентов
1
8
17
60
80
1
350
Интенсивность отказов Л„
на 1 млн. ч работы
0,008
0,12
0,024
0,016
0,005
0,03
0,0004
Если условия работы отличаются от нормальных, то найденное
MTBF надо разделить на поправочный коэффициент К (для
нормальных условий К = 1). Стандарт США MIL-HDBK-217F рекомендует
следующие значения этого коэффициента:
для наземного оборудования К = 2;
для наземного подвижного транспорта К = 4;
для морского оборудования К = 4;
для оборудования самолетов К = 5;
для оборудования вертолетов К = 8;
для космических аппаратов К = 0,5;
для ракет К = 5;
для ракет-носителей К = 12.
Например, среднее время наработки на отказ ВОГ при установке
его на вертолет следует считать равным: 25000:8 = 3125 ч. Расчетный
метод используется достаточно широко при расчете надежности
приборов, когда известна интенсивность отказов его компонентов. Для ВТГ
интенсивность отказов механического блока неизвестна, что может
привести к ошибке.
4.4.2. Экспериментальная оценка MTBF
Оценка MTBF может быть сделана при испытании партии
приборов в течение достаточно большого времени при повышенной
постоянной температуре, либо при циклически меняющейся температуре. Для
обработки результатов можно использовать модель Коффина-
Мэнсона [108], при этом интенсивность отказа определяется так:
Л =
2tAF
(4.20)
143
Волновой твердотельный гироскоп. Теория и технология
где t - общее время испытаний; AF - ускоряющий фактор; ^(α,β) -
распределение Пирсона (см. Приложение), а - вероятность, β - степень
свободы, равная числу отказов плюс 2 (т. е., если отказов при
испытаниях не было, то β = 2, если был один отказ, то β = 3 и т.д.).
При испытаниях при постоянной повышенной температуре
ускоряющий фактор может быть рассчитан по формуле
^=ехр ^f-L-1]]. (4.21)
_ * U98 Т)\
При испытаниях с циклически меняющейся температурой (не
менее 6 циклов в сутки) для расчета ускоряющего фактора можно
использовать формулу:
А? =
Г \1.9
Δ7;
и
RHt
RH
ехр
1
298
1
*тах /
(4.22)
В (4.21) и (4.22): Τ - температура при испытаниях (К); Гмах -
максимальная температура при испытаниях (К); ΔΓ - разность между
максимальной и минимальной температурой при циклических испытаниях;
ΑΤι - разность между температурой внутри прибора во включенном и
выключенном состоянии; RH - влажность воздуха при нормальных
условиях; RHt - влажность воздуха при испытаниях; Еа - энергия
активации; к - постоянная Больцмана.
Рассмотрим применение этого метода на конкретных примерах.
Пример 4.1. Пусть испытывалось десять приборов в течение
одной недели непрерывной работы. Предположим, что два прибора за
это время вышли из строя. Температуру при испытаниях считаем
постоянной и равной 50°С. Сделаем оценку MTBF на основе этих данных.
Рассчитаем ускоряющий фактор. Значение энергии активации
примем равным Еа = 0,1 эВ/град (такое значение рекомендуется
стандартом MIL-HDBK-217F для микросхем), к = 8,617-10'5 эВ/град. Тогда
из (4.21) Ар =1,352. Определим значение распределения Пирсона для
данного случая. Для двух отказов параметр β = 2+2 = 4. Величина
а представляет собой вероятность, того, что реальная
интенсивность отказа не будет превышать найденную. Примем а = 0,9 и
находим значение распределения Пирсона (см.
Приложение): ?f(0,9, 4) = 7,7794. Согласно (4.20) при t = 1680 ч имеем: λ =
0,0017125, MTBF = 584 ч.
Пример 4.2. Пусть испытывалось десять приборов в течение
одной недели непрерывной работы. Предположим, что 1 прибор вышел
из строя за это время. Температура при испытаниях менялась
циклически (шесть циклов в сутки) от -50°С до +50°С, а влажность воздуха
144
4. Электроника волнового твердотельного гироскопа
составляла 85%. Перепад температуры внутри прибора во включенном
и выключенном состоянии, примем равным, 10 К. Сделаем оценку MTBF
на основе этих данных.
Рассчитаем ускоряющий фактор по формуле (4.22), подставляя:
ΔΤ = 100 К, ATj = 10 К, RH, = 85%, RH = 70%, Тмах = 323 К. Тогда
АрТ= 192,2. Определим значение распределения Пирсона для данного
случая. Для одного отказа β = 1+2 = 3, пусть также а = 0,9. Из
Приложения находим 2^(0,9, 3) = 6,2514. Следовательно: λ = 9,68-10'6 и
MTBF = 103304 ч (или 11,8 года).
Сделанные в этих примерах оценки MTBF относится к случаю,
когда прибор будет эксплуатироваться при нормальных условиях. В
других случаях MTBF надо разделить на поправочный коэффициент.
Приведенные примеры показывают, что время испытаний для оценки MTBF
может быть достаточно коротким (одна неделя), если температура
окружающей среды меняется циклически. Именно такой режим
испытаний и следует использовать.
4.5. Обработка выходной информации ВТГ
методом вариации Аллана
Чувствительность ВТГ к внешней угловой скорости в большой
мере зависит от решения задачи выделения информационного сигнала на
фоне шумов измерительного канала. На практике выходной сигнал
обычно представляет собой последовательность численных значений jq
со случайным разбросом, то есть выборки некоторой случайной
величины. В качестве показателя нестабильности в статистике широко
используется дисперсия σ2 (или стандартное отклонение σ)
^=-L£(*,.-X)2, X=l-±Xi, (4.23)
где η - число измерений; X - среднее значение.
Если измеряемый параметр содержит несколько источников шума,
то использование классической процедуры измерения дисперсии не
всегда позволяет идентифицировать источник погрешности и
количественно оценить его вклад в общую ошибку. Поэтому в последние годы для
решения подобных задач применяется метод вариации Аллана,
рекомендованный Комиссией по гироскопам и акселерометрам
американского института радиоинженеров (ШЕЕ) для определения характеристик
акселерометров и кориолисовых вибрационных гироскопов [148].
Сущность метода вариации Аллана состоит в вычислении
дисперсии не самих отклонений случайного процесса, а разницы средних
значений двух соседних выборок. Пусть имеется массив из η измерений,
145
Волновой твердотельный гироскоп. Теория и технология
^(г) = ф(/)^^#. (4.25)
сделанных через равные промежутки времени Δ/. Разобьем его на К
групп, каждая из которых будет содержать Μ измерений, сделанных в
течение времени τ = MAt (М= 1, 2, 3, 4,..., М< nil).
Для каждой группы можно определить среднее значение
измеряемого параметра Хк, усредняя все xh попавшие в эту группу. Время τ
будет тогда представлять собой время осреднения измеренных
значений Xf в группе с размером М. Вычисление вариации Аллана σ\ состоит
в определении дисперсии разницы средних значений Хк двух соседних
групп:
^λ=1^^Σ[^κΑΜ)-Χκ(Μ)']2. (4.24)
АА ч κ=ι
Варьируя размер группы Μ (и, соответственно, время
осреднения г), вычисляют зависимость σ2Α{τ). Вариация Аллана однозначно
связана со спектральной плотностью выходного сигнала S(f):
t sin4 (π/τ)
(π/τ)
Из (4.25) следует, что вычисление вариации Аллана может быть
интерпретировано как прохождение входных данных через
перестраиваемый полосовой фильтр. Меняя полосу фильтра (т. е. г), можно
выделить, идентифицировать и количественно оценить различные шумовые
составляющие, входящие в эти данные. Различные виды шумов
приводят к различным зависимостям σ\ и S(f). Рассмотрим подробно
некоторые из них [148].
Случайное блуждание угла. К этому виду шумов относят
высокочастотные шумы, которые имеют время корреляции короче времени
выборки At. В спектре выходного сигнала гироскопа они проявляются в
виде «белого шума». Спектральная плотность при этом постоянна
S(f) = N2,sl вариация Аллана равна
N2
σ2Α(τ) = — , (4.26)
τ
где Ν- коэффициент случайного блуждания угла.
В логарифмических координатах зависимость σΑ(τ) представляет
собой прямую линию с наклоном -1/2 к оси абсцисс (рис. 4.17).
Отметим, что Ν = σΑ(1), т. е. N соответствует ординате точки графика с τ = 1.
Если г выражено в часах, то Сбудет иметь размерность град/чш, а если
τ выражено в секундах, то размерность N - град/ч/Гц1/2. Для перевода
этой размерности в град/ч1/2 следует воспользоваться формулой
146
4. Электроника волнового твердотельного гироскопа
N [град/ 7ч] =—N [град / ч / л]Тц].
60
(4.27)
101Л/х
10°Л/
ю-1 л/
Рис. 4.17. Вариация Аллана для случайного блуждания угла
Нестабильность смещения нуля. Эти шумы обычно связаны с
электроникой, приводя к флуктуациям нуля в данных.
Спектральная плотность шума в этом случае равна
/
S(f) =
ίΒ2Λ
при />/0;
(4.28)
2π
0 при /</0,
где В - коэффициент нестабильности смещения нуля;/0 - частота среза.
Подставляя (4.28) в (4.25) и выполняя интегрирование, получим
вариацию Аллана для этого случая:
*5М =
Ж
π
In2 v У0/х
(4.29)
2(^/0r)2
χ (sin(^/0r) + 4(яг/0г) cos(;r/0r) + Ο(2π/0τ) - Cz(4/r/0r))]
(в этой формуле С/ - интегральный косинус).
На рис. 4.18 показана зависимость (4.29) в логарифмических
координатах. Видно, что вариация Аллана для нестабильности смещения
нуля становится постоянной при г, значительно превышающих l/f0, и эту
область можно использовать для определения коэффициента В.
Отметим, что эта область соответствует оптимальному времени осреднения
выходных данных в ВТГ.
147
Волновой твердотельный гироскоп. Теория и технология
100Бх
10"1S
tT
10"2S
φ
ί σΑ=ο,664Β
Ι ./наклон 1
■Ι 1—ι μ μ η
1 1 Ι Η III
наклон 0
1 1 Ι 1 I Mil
ίο-2
ю-1
τ, с
10°
ю1
Рис. 4.18. Вариация Аллана для нестабильности смещения нуля
Случайное блуждание угловой скорости. К этому виду шумов
относят шумы неопределенной природы с большим временем корреляции.
Спектральная плотность шума и вариация Аллана при этом составляют
s(f) =
к
1
(4.30)
Л*) f2
где К - коэффициент случайного блуждания угловой скорости. В
логарифмических координатах вариация Аллана в этом случае является
прямой линией с наклоном 1/2 (рис. 4.19).
101Кг-
Рис. 4.19. Вариация Аллана для случайного блуждания скорости
Величина коэффициента К определяется по значению этой
функции при τ - 3. Если τ выражено в часах, то К будет иметь размерность
148
4. Электроника волнового твердотельного гироскопа
[град/час372], если τ выражено в секундах, то размерность К:
[град / Чд/Гц]. Для перевода размерности следует использовать формулу
К [град / ч3/2] = 60К [(град / ч^Гц].
Тренд входной скорости. При больших временах осреднения
проявляются различные детерминированные погрешности. Они могут быть
связаны, например, с ускорением испытательной платформы,
действующим продолжительное время. Это выглядит как появление входной
скорости Ω = Rt. Спектральная плотность шума и вариация Аллана в
этом случае имеют вид
s(f)=-
R1
г- σ>) =
R2t2
(2π/γ' "ЛК"- — - (431)
В логарифмических координатах вариация Аллана будет иметь вид
прямой линии с наклоном, равным 1 (рис. 4.20). Коэффициент R равен
а^при τ= л/2 .
101R~
10°Я? i.
^
^
10-1Rt
10"2R
ю-2 ю-1 ю° ю1
τ, с
Рис. 4.20. Вариация Аллана для тренда входной скорости
Шум квантования. Если в приборе используются АЦП, то сигнал
измеряется с ограниченной точностью. Это эквивалентно присутствию в
сигнале случайной переменной составляющей. Спектральная плотность
такого шума и вариация Аллана соответственно имеют вид
S(f) = {2Kf?btQ2; σ2(τ) =
ЪО1
(4.32)
где Q - коэффициент квантования шума.
149
Волновой твердотельный гироскоп. Теория и технология
В логарифмических координатах вариация Аллана будет иметь вид
прямой линии с наклоном, равным -1 (рис. 4.21). Коэффициент Q равен
σΑ при τ= 31/2. Размерность Q - [утл. с /Гц172].
1043 =
101Q i
-5.10°Q έ*
Рис. 4.21. Вариация Аллана для шумов квантования
Марковский шум. Этот шум имеет спектральную плотность
\2
s(f)-
ш
(4.33)
1 + (2*A)
где qc - амплитуда шума; tc - время корреляции.
Подстановка (4.33) в (4.25) и интегрирование приводит к
следующему выражению для вариации Аллана марковского шума:
\2 I
<ГА(т)
-Ш
1-А-
2τ
Г — — Π
3-4е /с + е tc . (4.34)
ν )\
На рис. 4.22 приведена вариация Аллана марковского шума в
логарифмических координатах.
Из рисунка видно, что, если r»tc, то
σ\{τΥ
(ял)2
(4.35)
Видно, что выражение (4.35) совпадает с (4.26) при qctc = Ν, т. е.
при малых временах корреляции tc марковский шум идентичен
случайному блужданию угла. При очень больших временах корреляции tc
вариация Аллана совпадает с выражением, полученным для случайного
блуждания угловой скорости (4.30):
2
σ2Α(τ)--
- τ при tc » τ
(4.36)
150
4. Электроника волнового твердотельного гироскопа
"УЯсЛГсТ
О
™'яЖ
Рис. 4.22. Вариация Аллана для марковского шума
Синусоидальный шум. Источником синусоидального шума могут
быть, например, медленные низкочастотные движения испытательной
платформы. Его спектральная плотность характеризуется наличием, по
крайней мере, одной ярко выраженной частоты fQ:
S(f) = О,5Ω* [S(f - /о) + ί(/ + Л)] · (4.37)
В формуле (4.37) Ω0- амплитуда шума; δ- дельта-функция.
Многочастотный синусоидальный шум может быть описан суммой
выражений (4.37), где каждое из слагаемых описывает шум,
создаваемый отдельной частотной компонентой. Для одночастотного
синусоидального шума вариация Аллана имеет вид
2 Ν°
sin π/0τ
Рис. 4.23 показывает вариацию Аллана синусоидального шума в
логарифмических координатах. Для идентификации и оценки шумового
компонента необходимо проводить касательную с наклоном -1 к
нескольким пикам. Как видно из этого рисунка, амплитуды следующих
друг за другом пиков быстро уменьшаются и могут быть искажены
пиками более высоких порядков других частот, что делает сложной
обработку данных. В общем случае в выходных данных могут
присутствовать все описанные процессы. Опыт показывает, что в большинстве
случаев различные шумовые компоненты проявляются при различных
временах осреднения г, что позволяет их сравнительно легко
идентифицировать.
σ2Α(τ) = Ω20
(4.38)
151
Волновой твердотельный гироскоп. Теория и технология
О ф.
1°-Ч|
ιο-2ω,
10-3Ω,
Рис. 4.23. Вариация Аллана для синусоидального шума
На рис. 4.24 приведен типичный график вариации Аллана для
выходного сигнала ДУС. Как правило, шумовые процессы в гироскопах
статистически независимы друг от друга, поэтому вариацию Аллана для
любого τ можно представить как сумму вариаций отдельных шумовых
процессов для того же г и определить графически характеристики этих
шумовых компонентов.
IU '
ю-2
СО
о.
ь* ю-3
ю-4
\-1
шум ^w
квантования^
случайное^
блуждание
угла
марковский
ι шум
синусоидальный
шум
I
0
нестабильность
смещения куля
+1/2 i<^
^^^лучайное блуждание
^^^ угловой скорости
+1х
/тренд
X входной
X скорости
0,01
0,1
10 102
τ, с
103
104
105
Рис. 4.24. Типичный график вариации Аллана для выходного сигнала ДУС
В качестве конкретного примера рассмотрим применение метода
вариации Аллана к обработке сигнала микромеханического волнового
твердотельного гироскопа (МВТГ) с кольцевым резонатором,
работающего в режиме ДУС (рис. 4.25) [40].
152
4. Электроника волнового твердотельного гироскопа
Экспериментальные данные, полученные с МВТГ при неподвижном
основании и вращении 500 град/с, показаны на рис. 4.26. Частота
дискретизации сигнала составляла/= 1 кГц. Время измерения - 56 мин.
а)
6
7 /~
\1 U ι
vv
7
и
вых
^
б)
Рис. 4.25. Внешний вид (а) и функциональная схема (б) МВТГ: 1 - резонатор;
2, 3, 4, 5- электроды возбуждения и съема информации; 6 - блок возбуждения;
7 - блок съема информации; 8 - буферные усилители
Как видно из рисунка, информация, полученная с гироскопа,
сопровождается шумовым процессом. В начальной стадии наблюдается
переходный процесс из-за прогрева элементов прибора в процессе работы.
Перейдем от выходного напряжения к рабочей размерности прибора
[град/с]. Для этого воспользуемся следующим приемом. В
установившемся режиме для неподвижного и вращающегося основания выделяем
область данных не имеющую артефактов с длительностью 1000 с ({wf}/=:1 # ?
N = 1000/). Выполним расчет математического ожидания и среднеквад-
ратического отклонения:
153
Волновой твердотельный гироскоп. Теория и технология
1 N 11 Ν
l=\ \ 1=1
Для этих режимов работы гироскопа
Мио =2,479 В, σ„ο = 4,150 мВ,
^500 = 3,466 В, ^ = 4,085 МВ.
Тогда масштабный коэффициент имеет следующее значение:
^м500 ~ "и0
(4.39)
К = -
Ω
= 1,973 [мВ/град/с].
(4.40)
3.4
3.21-
2.8
2.6
2.4
^.
ф0шттт
Перепроцесс
W..,
2
Установившийся
режим
ί |
^^РЩИИИ···!**
■ «•u*|iimpn^w^^4i
(У, мВ
2530
2520
2510
2500
2490
С
U, мВ
3460
3450
3440
'■\:
)
Ω-
3430 И
|τ|--·Ω·=|θ%·-|
нвд^п
-г*Ш-^
; ^Шя^^шЛ
100 200 300
=500°/с.Ы|
|
Л^рррщ::.]
Г
1000
2000
3000 f, С
в)
100 200 300 f, C
б)
Рис. 4.26. Выходные сигналы МВТГ в различных режимах (а)
и переходный процесс при запуске (б): 1 - неподвижное основание;
2 - вращение основания с угловой скоростью Ω =500 град /с
Графическое представление измеренной угловой скорости
({Ω0}/=1ΛΜ{Ω500}ί=1ΛΓ, N = 1000/) для неподвижного и подвижного
основания (Ω = 0 град /с и Ω = 500 град /с) показано на рис. 4.27. При этом
полагалось
Ω0=^^·
^500 -
W500 Мщ
^ К
Статистические параметры следующие:
μΩο = -9,8494248687· 10~12 град /с; σΩο = 3,25144 град/с;
Μω500 =499,999999999998 град/с; σΩ5θο = 2,07002 град/с.
(4.41)
154
4. Электроника волнового твердотельного гироскопа
Размах варьирования для рассматриваемых временных рядов
значений угловой скорости:
*ω500 =Ω5οοπ» -^500mm =17,53 град/с.
Ω, град/с
Ω, град/с
510
£05
500
495
4S0J
0 200 400 600 800 1000
U
"О 200 400 600 800 1000
t,c
а) б)
Рис. 4.27. Отсчеты угловой скорости при неподвижном (а)
и вращающемся основании (б)
На рис. 4.28 приводится диаграмма Аллана исследуемого сигнала.
С помощью вычисленных значений временного распределения
измеренных данных определяются различные показатели шума.
σΑ(τ), град/с
Рис. 4.28. Диаграмма Аллана сигнала МВТГ при неподвижном основании
Так, уровень углового случайного дрейфа определяется значением
построенной диаграммы при τ = 1. Он соответствует 0,1846 град /с / д/Гц .
155
Волновой твердотельный гироскоп. Теория и технология
В качестве показателя нестабильности смещения нулевого уровня на
практике берут минимальное значение диаграммы. Оно равно
0,0818 град/с.
На рис. 4.29 приводятся изображения, на которых показан исходный
сигнал с выхода гироскопа и отфильтрованные данные, которые
получены с помощью применения фильтров высоких частот (ФВЧ), полосового
(ПФ) и низких частот (ФНЧ).
Ω, град/с
10
кол-во отсчетов
иии
800
600
400
200
0
1 :
Jllllli
Ш Ilk
—ΛηΙΙΙΙ llllfth^
-10
Ω, град/с
кол-во отсчетов
1000
Ω, град/с
кол-во отсчетов
1000
Ω, град/с
ю
156
Рис. 4.29. Обработка сигнала ФВЧ (а), ПФ (б), ФНЧ (в) и
соответствующие гистограммы распределения
4. Электроника волнового твердотельного гироскопа
Для частот среза границ участков диаграммы Аллана получаем
следующие соотношения.
Фильтр высоких частот соответствует области белого шума:
fc = 0,17784 Гц, μΩο = 0,00016834 град /с, σΩο = 1,9097 град /с.
Полосовой фильтр соответствует участку фликер-шума:
fd = 0,05623 Гц, fc2 = 0,17784 Гц, μ^ = -0,00010737 град/с,
σΩο =0,62513 град/с;
Фильтр низких частот соответствует низкочастотным шумам
случайного дрейфа угловой скорости:
fc = 0,05623 Гц, μΩο = -0,0005215 град /с, σΩο = 0,53229 град /с.
Из рис. 4.29,uf видно, что участок, соответствующий
высокочастотным шумам (белый шум), имеет амплитуду, соизмеримую с уровнем
самого сигнала.
При вращении датчика происходит ухудшение характеристик
выходного сигнала. Это иллюстрирует рис. 4.30 при угловой скорости
500 град /с. На нем отражено увеличение уровня смещения сигнала и
повышение низкочастотной составляющей шума угловой скорости.
σΑ(τ), град/с
ю"2 ю"1 ю° ю1 ю2 т, с
Рис. 4.30. Диаграмма Аллана гироскопа при неподвижном (I) и
вращающемся (II) основании (500 град /с)
Таким образом метод вариации Аллана позволяет проанализировать
поведение гироскопа в ходе испытаний и выявить источники его
погрешностей.
157
Заключение
Выбрав теорию и технологию волновых твердотельных
гироскопов темой для написания книги, авторы ставили целью привлечь
внимание инженерно-технических специалистов, аспирантов и студентов
старших курсов к этому перспективному прибору, и в доступной форме
рассказать о физических принципах функционирования, основных
технических и теоретических проблемах в этой области, а также методах
их решения. Занимаясь этими вопросами более 25 лет, авторы считают
необходимым подходить комплексно к разработке этого типа приборов,
используя современные механические и химические технологии,
достижения микроэлектроники, а также современные математические
методы для обработки информации и моделирования различных
процессов. При написании этой книги авторы стремились реализовать именно
такой подход. Многообразие технических и теоретических вопросов не
дает возможности дать их детальное описание в небольшой
монографии, тем более что быстрое развитие современных технологий
предлагает совершенно новые варианты их решения. Поэтому авторы
ограничились освещением ключевых вопросов теории и технологии, надеясь,
что любознательный читатель найдет необходимые детали в
цитируемой литературе.
Если эта книга позволит Вам, уважаемый читатель, по-новому
взглянуть на волновые твердотельные гироскопы или станет стимулом
для работы в этой области, то авторы будут считать цель достигнутой.
158
Литература
Монографии
1. Альтах О.Л., Саркисов Π Д. Шлифование и полирование стекла и стеклоизде-
лий.- М.: Высшая школа, 1988.
2. Ардамацкий АЛ. Алмазная обработка оптических деталей. - Л.:
Машиностроение, 1978.
3. Басараб М.А., Кравченко В. Ф., Матвеев В.А. Математическое моделирование
физических процессов в гироскопии. - М.: Радиотехника, 2005.
4. Басараб Μ.Α., Кравченко В.Φ., Матвеев В.А. Методы моделирования и
цифровой обработки сигналов в гироскопии. - М.: Физматлит, 2007.
5. Брагинский В.Б., Митрофанов В.П., Панов В.И. Системы с малой
диссипацией.-М.: Наука, 1981.
6. Винокуров В.М. Исследование процесса полировки стекла. - М.:
Машиностроение, 1967.
7. Грабченко A.M. Расширение технологических возможностей алмазного
шлифования. -Харьков: Изд-во харьковского государственного университета, 1985.
8.Данилин Б.С., Сырчин В.К. Магнетронные распылительные системы. - М.:
Радио и связь, 1982.
9.Джашитов В.Э., Панкратов В.М., Голиков А.В. Общая и прикладная теория
гироскопов с применением компьютерных технологий / Под ред. В.Г. Пешехо-
нова. - СПб.: ГНЦ РФ ОАО «Концерн ЦНИИ «Электроприбор», 2010.
10. Джашитов В.Э., Панкратов В.М. Математические модели теплового дрейфа
гироскопических датчиков инерциальных систем. - СПб.: Изд-во ЦНИИ
Электроприбор, 2001.
11. Джашитов В.Э., Панкратов В.М. Датчики, приборы и системы
авиакосмического и морского приборостроения в условиях тепловых воздействий / Под
ред. В.Г. Пешехонова. - С.-Пб.: Изд-во ЦНИИ Электроприбор, 2005.
12. Журавлев В.Ф., Климов Д.М. Волновой твердотельный гироскоп. - М.:
Наука, 1985.
13. Кардашов Д.А., Петрова А.П. Полимерные клеи. -М.: Химия, 1983.
14. Копейкин В.А., Петрова А.П, Рашкован И.Л. Материалы на основе метал-
лофосфатов. -М.: Химия, 1976.
15. Леко В.К, Мазурин О.В. Свойства кварцевого стекла. - Л.: Наука, 1985.
16. Лунин B.C. Физико-химические основы разработки полусферических
резонаторов волновых твердотельных гироскопов. - Москва: Изд-во МАИ, 2005.
17. Матвеев В.Α., Липатников В.И., Алехин А.В. Проектирование волнового
твердотельного гироскопа. -М.: Изд-во МГТУ им. Н.Э. Баумана, 1997.
18. Матвеев В.А., Лунин B.C., Басараб М.А. Навигационные системы на
волновых твердотельных гироскопах. - М.: Физматлит, 2008.
159
Волновой твердотельный гироскоп. Теория и технология
19. Матвеев В.В., Распопов В.Я. Основы построения бесплатформенных инер-
циальных навигационных систем. - СПб.: ГНЦ РФ ОАО «Концерн ЦНИИ
«Электроприбор», 2009.
20. Матвеев В.А. Гироскоп — это просто. - М.: Изд-во МГТУ им. Н.Э. Баумана,
2012.
21. Меркурьев КВ., Подалков В.В. Динамика микромеханического и волнового
твердотельного гироскопов. -М.: Физматлит, 2009.
22. Никольский СМ. Курс математического анализа. - Т.2. М.:Наука, 1991.
23. Ориентация и навигация подвижных объектов: современные
информационные технологии / Под ред. Б.С. Алешина, К.К. Веремеенко, А.И. Черноморского.
-М.: Физматлит, 2006.
24. Петрова А.П. Клеящие материалы. Справочник. - М.:К и Р.,2002.
25. Распопов В.Я. Микромеханические приборы: учебное пособие. - М.:
Машиностроение, 2007.
26. Северов Л.А. Механика гироскопических систем. - М.: Изд-во МАИ, 1996.
27. Стрэтт Дж. В. (лорд Рэлей) Теория звука. Т.1. - М.: ГИТТЛ, 1955.
28. Тимошенко СП., Янг Д.Х., Уивер У. Колебания в инженерном деле. - М.:
Машиностроение, 1985.
29. Фрейдин А.С Прочность и долговечность клеевых соединений. - М.: Химия,
1981.
30.Харитонов Н.И, Веселое П.А., Кузинец А.С Вакуумплотные
композиционные материалы на основе полиорганосилокеанов. - Л.: Наука, 1976.
31. Ходаков Г. С, Кудрявцева Н.Л. Физико-химические процессы полирования
оптического стекла. -М.: Машиностроение, 1985.
32. Хрульков В.А. Алмазные инструменты в прецизионном приборостроении. -
М.: Машиностроение, 1977.
33. Худобин Л.В. Смазочно-охлаждающие средства, применяемые при
шлифовании. -М.: Машиностроение, 1971.
34. Шестов С.А. Гироскоп на земле, в небесах и на море. - М.: Знание, 1989.
35. Crank J. The mathematics of diffusion.-Oxford: Clarendon Press, 1975.
36. Egarmin N.E., Yurin V.E. Introduction to the theory of vibratory gyroscopes. -
Moscow: BinomCo., 1993.
37. Roth A. Vacuum Technology. - Amsterdam: Elsevier, Science Publishers B.V.,
1990.
38. Shields J. Adhesives Handbook. - 3rd ed. - Butterworth, 1984.
Статьи, доклады, диссертации
39. Ачильдиев В.Μ., Басараб М.А., Лунин Б.С, Матвеев В.А. Особенности
применения волновых твердотельных гироскопов в бесплатформенной инерциаль-
ной навигационной системе беспилотных летательных аппаратов. // Тезисы
докладов научно-технической конференции «Системы управления беспилотными
космическими и атмосферными летательными аппаратами». - М.: МОКБ
«Марс», 2010, с. 60-62.
40. Ачильдиев В.М., Басараб М.А. Бедро Н.А. и др. Методы первичной цифровой
обработки сигналов микромеханического волнового твердотельного гироскопа
// Информационно-измерительные и управляющие системы. 2011. Т. 9. №2.
С. 39-55.
160
Литература
41. Басараб Μ.Α., Матвеев В.А. Идентификация осей жесткости и величины
расщепления частоты неидеального упругого кольца // Информационно-
измерительные и управляющие системы. - 2005. -Т.З. - № 4-5. - С. 95-103.
42. Басараб М.А., Карапетян ДР. Глобальные оптимизационные алгоритмы
балансировки резонатора волнового твердотельного гироскопа //
Электромагнитные волны и электронные системы. 2007. - Т. 12. - №11. - С.8-15.
43. Басараб Μ.Α., Ивойлов М.А. Балансировка волнового твердотельного
гироскопа с помощью нейронных сетей Хопфилда // Тезисы докладов XIV
Всероссийской научно-технической конференции «Нейроинформатика-2012», Москва,
23-27 января 2012 г.
44. Басараб М.А., Кравченко В. Ф., Матвеев В.Α., Пустовойт В.И. Атомарные
функции в задаче определения функций Рэлея и коэффициента прецессии
резонатора волнового твердотельного гироскопа // Доклады РАН. - 2001. - Т. 376,
№4.-С. 474-479.
45. Басараб М.А., Матвеев В.А. Численное моделирование тепловых полей в
резонаторе волнового твердотельного гироскопа с использованием метода R-
функций // Электромагнитные волны и электронные системы. - 2002. - Т.7. -
№8. - С.26-37.
46. Батов КВ., Бодунов Б.П., Данчевская М.Н., Лопатин В.М., Лунин Б.С.,
Филатов В.В., Шаталов М.Ю., Юрин В.Е. Прецессия упругих волн во
вращающемся теле. Изв. АН СССР. Механика твердого тела. - 1992. - №4. - С.3-6.
47. Беднова Е.В. Математические модели температурных погрешностей
полусферического резонатора как элемента измерителя угловой скорости. Дис. ...
канд. физ.-мат. наук. - Москва, 2002.
48. Белкин А.А. Разработка технологии и оборудования для балансировки
полусферического резонатора волнового твердотельного гироскопа лазерным
излучением. Дис. ... канд. техн. наук. - Москва, 2000.
49. Боганов А.Г., Руденко B.C., Семов М.П. Модифицированная система для
получения кварцевого стекла с высокой прозрачностью в УФ, видимой и близкой
ИК областях спектра// Сб.: Получение веществ для волоконной оптики.//
Горький: Изд-во Горьковского ун-та, 1980. С.82-84.
50. Бодунов СБ. Математические модели и алгоритмы функционирования
инклинометра забойной телеметрической системы на базе твердотельного
волнового гироскопа. Дис. ... канд. техн. наук. -Москва, 2003.
51. Бонштедт А.В., Зайцев В.Α., Мачехин П.К, Тонкое Е.Л. Оптимизация
управления твердотельным волновым гироскопом // Вестник Удмуртского
университета. - 2005. - №1. - С.189-214.
52. Бонштедт А.В., Кузьмин СВ., Мачехин П.К Восьмиточечная модель
твердотельного волнового гироскопа // Вестник Удмуртского университета. - 2007.
-№1.-С.135-214.
53. Боярина М.Ф. Сорбционные характеристики пористых нераспыляемых
газопоглотителей СПН //Электронная техника. Сер.1. Электроника СВЧ. 1970. №11.
С.124-132.
54. Быков Д.В., Вислоух В.Е., Глебов Г.Д., Шугалей О.И. Низкотемпературный
геттер //Вопросы атомной науки и техники. Сер. Общая и ядерная физика. 1978.
№4. С.43-45.
55. Варшал Б.Г., Калмановская М.А. Стеклокристаллические цементы и их
применение для спаивания деталей оболочек электровакуумных приборов
//Электронная техника. Серия 10. Технология и организация производства. 1966.
Вып.9. С.223-238.
161
Волновой твердотельный гироскоп. Теория и технология
56. Воробьев В.А., КВ.Меркурьев И.В., Подалков В.В. Погрешности волнового
твердотельного гироскопа при учете нелинейности колебаний резонатора. // Ги-
роскопия и навигация, №1, т.48, 2005. С. 15-21.
57. Гуров А. А. Анаэробные герметизирующие материалы «Анатерм» // Клеи.
Герметики. Технологии. 2004. №5. С. 14-17.
58. Джанджгава Г.И., Бабиченко А.В., Требухов А.В., Некрасов А.В. Нейросете-
вой алгоритм калибровки волнового твердотельного гироскопа // Инженерная
физика, №9, 2010.
59: Джанджгава Г.И., Бахонин К.А., Виноградов Г.М., Требухов А.В.
Бесплатформенная инерциальная навигационная система на базе твердотельного
волнового гироскопа // Гироскопия и навигация. 2008. №1. С.22-32.
60. Джаиштов В.Э., Панкратов В.М., Барулина М.А. Температурные и
технологические погрешности волновых твердотельных гироскопов // Гироскопия и
навигация. - 2010.- Т.68. - №1. - С.47-62.
61. Джашитов В.Э., Панкратов В.М., Голиков А.В. Анализ и управление
температурными полями волнового твердотельного датчика инерциальной
информации // Мехатроника, автоматизация, управление. - 2010.-№.4 (109)- С.62-68.
62. Дзама М.А., Егармин Н.Е. Прецессия упругих волн при вращении некоторых
классов осесимметричных оболочек // Изв. АН СССР. Механика твердого тела.
-1991.-№1.-С. 170-175.
63. Донник А. С. Влияние геометрической неоднородности и упругой
анизотропии материала на точностные характеристики волнового твердотельного
гироскопа. Дис. ... канд. техн. наук. - Москва, 2006.
64. Егармин Н.Е. О прецессии стоячих волн колебаний вращающейся осесим-
метричной оболочки // Изв. АН СССР. Механика твердого тела. - 1986. — JV» 1. -
С. 142-148.
65. Егармин Н.Е. Динамика неидеальной оболочки и управление ее
колебаниями. // Изв. РАН. Механика твердого тела. - 1993. - №4. - С.49-59.
66. Жбанов Ю.К, Журавлев В. Φ. О балансировке волнового твердотельного
гироскопа // Изв. РАН. Механика твердого тела. - 1998. - №4. - С. 4-16.
67. Жбанов Ю.К., Каленова Н.В. Поверхностный дебаланс волнового
твердотельного гироскопа // Изв. РАН. Механика твердого тела. -2001. - №3. - С.11-
18.
68. Журавлев В.Ф., Климов ДМ. О динамических эффектах в упругом
вращающемся кольце // Изв. АН СССР. Механика твердого тела. - 1983. - № 5. - С. 17-
23.
69. Журавлев В.Ф., Попов А.Л. О прецессии собственной формы колебаний
сферической оболочки при ее вращении // Изв. АН СССР. Механика твердого тела.
-1985.-№1.-С. 147-151.
70. Журавлев В. Ф. Теоретические основы волнового твердотельного гироскопа
(ВТГ) // Изв. РАН. Механика твердого тела. 1993. -№ З.-С. 6-19.
7Х.Журавлев В.Ф., Линч Д.Д. Электрическая модель волнового твердотельного
гироскопа // Известия РАН. Механика твердого тела. - 1995. - №5. - С. 12-24.
12. Журавлев В. Φ. Управляемый маятник Фуко как модель одного класса
свободных гироскопов // Изв. РАН. Механика твердого тела. - 1997.- №6. -
С.27-35.
73. Збруцкий А.В., Минаев Ю.К. Влияние неперпендикулярности оси
полусферического резонатора к плоскости закрепления на точностные характеристики
твердотельного волнового гироскопа // Гироскопия и навигация. 1999. Т. 24.
№1.С. 106-111.
162
Литература
74. Землянский B.C. Поляризационно-оптические методы диагностики физико-
химического состояния поверхности оптических элементов из силикатных
стекол // Дис. ... канд. техн. наук. - С-Петербург. 2009.
75. Зинер К. Упругость и неупругость металлов // Вонсовский СВ. Упругость и
неупругость металлов. - М., 1954. - С.9-168.
76. Ивченко Н.К. Расчет клеевых соединений приборных конструкций. Дис. ...
докт. техн. наук. Тверь. 1999.
77. Киреенков А.А. Алгоритм расчета собственной частоты волнового
твердотельного гироскопа (ВТГ) // Изв. РАН. Механика твердого тела. - 1997. - №3. -
С.3-9.
78. Киреенков А.А. Расчет спектра полусферы на ножке // Изв. РАН. Механика
твердого тела. - 1998. - №4. - С.23-29.
79. Киселев А.В., Лыгин В.И. Применение инфракрасной спектроскопии для
исследования строения поверхностных химических соединений и адсорбции
//Успехи химии. 1962. Т.31. №3. С.351-384.
80. Коган B.C., Шулаев В.М. Адсорбционно-диффузионные вакуумные насосы
(вакуумные насосы с нераспыляемым геттером). Обзор. М.: ЦНИИатоминформ.
1990.67 с.
81. Корякова 3., Битт В. Легкоплавкие стекла с определенным комплексом
физико-механических свойств //Компоненты и технологии. 2004. №5. С. 126-128.
82. Кривченко Т. DSP56F800 компании MOTOROLA: новые идеи объединения
DSP и MCU //Компоненты и технологии. 2002. №3. С.88-91.
83. Куковякин В.М., Скорый И.А. Оценка напряженности клеевых
цилиндрических соединений //Вестник машиностроения. 1972. №4. С.41-44.
84. Кучерков С.Г. Определение необходимой степени вакуумирования рабочей
полости осциллятора микромеханического гироскопа //Гироскопия и навигация.
2002.№1.С.52-56.
85. Левинок В.Е. Бездеформационное склеивание кварца с инваром
//Оптический журнал. 1995. №10. С.69-72.
86. Лукина Н.Ф., Петрова АЛ. Свойства и применение клеев в приборной
технике //Клеи.Герметики.Технологии.2005.№11.С. 11-15.
87. Лунин Б.С., Данчевская М.Н. Волновой твердотельный гироскоп //
Конверсия. - 1994. - №6. - С.24-26.
88. Лунин Б. С. Научно-технологические основы разработки полусферических
резонаторов волновых твердотельных гироскопов // Дисс... докт. техн. наук. -
2006.
89. Лунин Б.С, Харланов А.Н. Релаксация структуры кварцевого стекла КУ-1
при отжиге //Вестн. Моск.Ун-та. Серия 2. Химия. 2011. Т.52. №6. С.403-405.
90. Лунин Б.С, Харланов А.Н., Козлов СЕ. Дегидроксилирование и образование
дефектов поверхности кварцевого стекла КУ-1 при отжиге // Вестн. Моск.Ун-та.
Серия 2. Химия. 2010. Т.51. №1. С.43-47.
91. Лунин Б.С, Захарян Р.А. Применение клеев для сборки вакуумных
электронно-механических приборов. М.: 2013. 24 с. Деп. ВИНИТИ 18.01.2013. №18-
В2013.
92. Матвеев В.А., Басараб М.А., Ивойлов М.А. Генетические алгоритмы
балансировки миниатюрного волнового твердотельного гироскопа. // Труды Девятого
Международного Симпозиума «Интеллектуальные системы» INTELS'2010,
Россия, Владимир, 28 июня - 2 июля 2010г., с. 516-519.
93. Матвеев В.Α.. Нарайкин О.С, Иванов И.П. Расчет полусферического
резонатора на ЭВМ // Изв. АН СССР. Машиностроение. - 1987. - № 7. - С. 6-9.
163
Волновой твердотельный гироскоп. Теория и технология
94. Матвеев В.Α., Кравченко В.Ф., Басараб М.А. Численное моделирование
динамических процессов в упругом кольце с помощью сплайн-аппроксимации //
Dynamical Systems Modeling and Stability Investigation (DSMSI'2001), Thesis of
Conference Reports, May 22-25, 2001, Kiev.
95. Матвеев В.Α., Басараб М.А. Приближение атомарными функциями и
численное решение краевых задач динамики резонатора волнового твердотельного
гироскопа // Материалы Всероссийской научно-технической конференции
"Приборы и приборные системы", 26-27/10, 2001. - Тула: ТГУ. - С.34-42.
96. Маханов В.И. Сорбционная активность высокопористого титана // Обзоры
по электронной технике. Сер. Электроника СВЧ. 1987. №3. С.58-62.
97. Некрасов А.В. Нейросетевой алгоритм калибровки волнового
твердотельного гироскопа. Дис. ... канд. техн. наук. - Москва, 2010.
98. Омелъчук С. Дослщжуння перехщних процес1в коливань б1морфного п'езо-
керам1чного стержня та цил1ндрично'1 п'езокерам1чно'1 оболонки як типовых
елемент1в хвильового ripocKona, Матер1али М1жн. наук. конф. «Сучаст пробле-
ми мехашки i математики», 25-28/05, 1998, ΙΠΠΜΜ, Львов, с.71.
99. Пекарскас В.-П.В., Раяцкас В.Л. Прогнозирование долговечности клеевых
соединений под нагрузкой методом температурно-временной аналогии //
Механика полимеров. 1974. №5. С.937-940.
100. Подалков В.В. Погрешности волнового твердотельного гироскопа,
вызванные нелинейными деформациями резонатора // Гироскопия и навигация. 1999.
Т. 24. № 1.С. 111-115.
101. Постников B.C., Золотухин КВ., Белоногое В.К. Затухание механических
колебаний в пленках меди и алюминия, полученных конденсацией в вакууме //
Физика металлов и металловедение. 1968. Т.26. Вып.5. С.957-959.
102. Постников B.C., Золотухин КВ., Милошенко В.Е. Внутреннее трение в
поликристаллических конденсатах меди, никеля, алюминия и серебра в интервале
4,2-77 К//Физика металлов и металловедение. 1972. Т.ЗЗ. Вып.1. С.210-212.
103. Сарапулов С Α., Киселенко СП. Влияние маятниковых колебаний на
точность твердотельного волнового гироскопа // Механика гироскопических
систем. - 1991. - №10. - С.50-53.
104. Сарапулов С.Α., Киселенко СП., Иосифов А.О. Влияние вращения на
динамику неидеального полусферического резонатора // Механика гироскопических
систем. - 1993. - №12. - С.59-66.
105. Смирнов А.Л. Колебания вращающихся оболочек вращения // Сб.
«Прикладная механика», вып. 5. -Л.: Изд-во ЛГУ, 1981. - С. 176-186.
106. Товстик П.Е. Низкочастотные колебания выпуклой оболочки вращения //
Изв. АН СССР. Механика твердого тела. - 1975. - №6. - С. 110-116.
107. Улшко I. Гармон1чн1 коливання та поширення хвиль в пружному niapi i
nienpocTopi, що знаходяться в обертовому pyci, Матер1али М1жн. наук. конф.
«Сучасш проблеми механики i математики», 25-28/05, 1998, ШПММ, Львов,
с.70.
108. Чиковани В.В., Маляров СП. Методика и расчет среднего времени
наработки на отказ по результатам испытаний кориолисового вибрационного гироскопа
// Вшського техшчний зб1ршк. - Л., Академк сухопутних вшек ϊμ
П.Сайгадачного. 2011. №2(5). С.119-124.
109. Шуб Э.К Численное исследование термонапряженного состояния
крупногабаритного кварцевого диска в процессе отжига // Физика и химия стекла.
1990.Т.16.№З.С.450-457.
164
Литература
110. Юрин В.Ε. Устойчивость колебаний волнового твердотельного гироскопа //
Изв. РАН. Механика твердого тела. 1993. - № 3. - С. 20-31.
111. Andersson S.B., Krishnaprasad P.S. The Hannay-Berry Phase of the Vibrating
Ring Gyroscope // Technical Research Report CDCSS TR 2004-2. - University of
Maryland.
112. Apostolyuk V.A. Demodulated dynamics and optimal filtering for Coriolis
vibratory gyroscopes // Proc. of XVII International Conference on Integrated Navigation
Systems (31 May - 2 June 2010. St.-Petersburg). - St.-Petersburg: "ElektroPribor".
2010.-P.57-60.
113. Ayazi F., Najafi K. A HARPSS Polysilicon Vibrating Ring Gyroscope // Journal
of Microelectromechanical Systems. -2001. - V. 10. -N.2. -P. 169-179.
114. Bryan G.H. On the beats in the vibrations of a revolving cylinder or bell // Proc.
Camb. Phil. Soc. Math. Phys Sci. - 1890. -V. 7. -P. 101-111.
115. Basarah M.A., Matveev V.A., Ivoilov M.A. Genetic Algorithms for Balancing the
Solid-State Wave Gyro // Proc. of the 16th Saint Petersburg International Conference
on Integrated Navigation Systems, 25-27 May, 2009, Saint-Petersburg, Russia.
P. 103-104.
116. Basarah M.A., Ivoilov M.A., Matveev V.A. Application of the Hopfleld Neural
Network for Ring Balance Optimization // Information Technology Applications. -
2012.-N.1.-P.26-35.
117. Basarah M.A., Ivoilov M.A., Matveev V.A. Balancing the solid-state wave
gyroscope with the neural network algorithm // Proc. of the 19th Saint Petersburg
International Conference on Integrated Navigation Systems, 28-30 May, 2012, Saint-
Petersburg, Russia.
118. Basarah M.A. Balance of the hemisphere resonator gyroscope by the neural
network algorithm // Abstracts, Int. Conference "Days on Diffraction" (DD'2012), May
28 - June 1, 2012, St.-Petersburg. P.24-25.
119. Basarah M.A., Kravchenko V.F., Matveev V.A. Numerical Investigation of
Dynamic Elastic Processes in the Solid State Wave Gyro by Means of Atomic Functions
// Telecommunications and Radio Engineering. - 2000. - V.54, №12. - P.72-84.
120. Basarah M.A., Kravchenko V.F., Matveev V.A. Atomic Functions in Numerical
Solving the Problem of a Determination of the Rayleigh Functions for the Solid State
Wave Gyro Resonator // Abstracts, Int. Seminar "Days on Diffraction" (DD'2001),
May 29-31, 2001, St.-Petersburg. P.70-71.
121. Basarah M.A., Matveev V.A. Application of the R-functions Method for
Modelling Physical Processes in the Solid-State Wave Gyro Resonator // International
Anniversary Workshop Solid-State Gyroscopy, Yalta, Crimea, Ukraine, 19-21 May, 2008.
P.12.
122. Basarah M.A. Solving Problems of Elastic Ring Dynamics by the Generalized
Method of Eigenoscillations // Days on Diffraction, St.-Petersburg, June 8-11, 2010.
P. 17.
123. Bodunov B.P., Lopatin V.M., Lunin B.S., Lynch D.D., Voros A.R. Low-cost
hemispherical resonator for use in small commercial HRG-based navigation systems //
Proc. 4th Int. Conf. on Integrated Navigation Systems. - May 26-28, 1997. - Saint-
Petersburg - P.41-47.
124. Bodunov B.P., Bodunov S.B., Lopatin V.M., Chuprov VP. Development and Test
of the Hemispherical Resonator Gyro for Use in an Inclinometer System // Proc. 8th
International Conference on Integrated Navigation Systems. - May 28-30, 2001. -
Saint-Petersburg. - P.75-81.
165
Волновой твердотельный гироскоп. Теория и технология
125. Boffito С, Ferrario В., Porta P., Rosai L. A nonevaporable low temperature ac-
tivable material // Journal of Vacuum Science and Technology. 1981. V. 18, No. 3. P.
1117-1120.
126. Branger V, Pelosin V, BadawiK.F. Study of the mechanical and microstructural
state of platinum thin film // Thin Solid Films. 1996. V.275. No.1-2. P.22-24.
127. Bruckner R. Properties and structure of vitreous silica.I // J. Non-Crystalline
Solids. 1970. V.5. No.2. P.123-175.
128. Bruckner R. Properties and structure of vitreous silica.II // J. Non-Crystalline
Solids. 1971. V.5. No.3. P.177-216.
129. Carre Α., Rosellini L, Prat O. HRG and North finding // Proc. of XVII
International Conference on Integrated Navigation Systems (31 May - 2 June 2010. St-
Petersburg). - St.-Petersburg: "Elektropribor". 2010. -P.31-39.
130. Chang C.-O., Chou C.S., Lai W.-F. Vibration Analysis of a Three-Dimensional
Ring Gyroscope // Bulletin of the College of Engineering, N.T.U. - 2004. - N.91. -
P.65-73.
131. Chia-Ou Chang, Guo-En Chang, Chan-Shin Chou, Wen-Tien Chang Chien, Po-
Chih Chen. In-plane free vibration of a single-crystal silicon ring // International
Journal of Solids and Structures. -2008. -V.45. -P.6114-6132.
132. Chikovani V.V., Yatsenko Yu.A., Kovalenko V.A., Scherban V.I. Digitally
Controlled High Accuracy Metallic Resonator CVG // Proc. Symposium Gyro
Technology. - 2006. - Stuttgart. - Ρ.4.0-4.7.
133. Chikovani V.V., Yatsenko Yu.A., Barabashov A.S., et al. Improved accuracy
metallic resonator CVG // Proc. of XV International Conference on Integrated
Navigation Systems (26-28 May 2008. St.-Petersburg). - St.-Petersburg: "ElektroPribor".
2008.-P.28-31.
134. Chikovani V.V., Yatsenko Yu.A., Mikolishin IT. Shock and vibration sensistivity
test results for metallic resonator CVG // Proc. of XVI International Conference on
Integrated Navigation Systems (25-27 May 2009. St.-Petersburg). - St.-Petersburg:
"Elektropribor". 2009. - P.88-92.
135. Chikovani V.V., Yatsenko Yu.A., Barabashov A.S., Kovalenko V.A., Scherban
V.I., Marusyk P.I. Metallic Resonator CVG Thermophysical Parameter Optimization
and Temperature Test Results // Proc. of XIV International Conference on Integrated
Navigation Systems (28-30 May 2007. St.-Petersburg). - St.-Petersburg:
"Elektropribor". 2007.-P.74-77.
136. Chikovani V.V., Yatsenko Yu.A. Investigation of azimuth accuracy measurement
with metallic resonator Coriolis vibratory gyroscope // Proc. of XVII International
Conference on Integrated Navigation Systems (31 May - 2 June 2010. St.-
Petersburg). - St.-Petersburg: "Elektropribor". 2010. -P.25-30.
137. Chunlei Yu, Basarab M.A., Qingshuang Zeng. Application of the Atomic
Function in the Field of HRG Dynamics // 1st Int. Symp. Systems and Control in
Aerospace and Astronautics (ISSCAA), 2006. P. 115-117.
138. Djandjgava G.I., Vinogradov G.M., Lipatnikov V.I. Development and Testing of
Hemispherical Resonator Gyroscope // Proc. 5th International Conference on
Integrated Navigation Systems. - May 25-27, 1998. - Saint-Petersburg. - P.218-221.
139. Dzhandzhgava G.I., Bakhonin K.A., Vinogradov G.M., Trebukhov A.V
Hemispherical resonance gyro-based strapdown inertial navigation system // Proc. of XIV
International Conference on Integrated Navigation Systems (28-30 May 2007. St.-
Petersburg). - St.-Petersburg: "ElektroPribor". 2007. -P.l 16-124.
140. Doucette E.J. The characterization of Ceralloy 400 getter // Vacuum. 1961.
V.I 1. No.2. P.100-108.
166
Литература
141. Ferrario В., Figini Α., Borghi Μ. A new generation of porous non-evaporable
getters // Vacuum. 1985. V.35. No.l. P.13-18.
142. GaiberA., Geiger W., Link T. et ah New digital readout electronics for capacitive
sensors by the example of micro-machined gyroscopes //Sensors and Actuators A 97-
98. 2002. P.557-562.
143. Gavrilenko A.B., Merkwyev I.V., Podalkov V.V. Algorithms for the control of
oscillations of the wave solid-state gyroscope resonator // Proc. of XV International
Conference on Integrated Navigation Systems (26-28 May 2008. St.-Petersburg). -
St.-Petersburg: "Elektropribor". 2008. -P.34-36.
144. Giorgi T.A., Ferrario В., Boffito С High-porosity coated getter // Journal of
Vacuum Science and Technology. 1989. V.7, No. 2. P. 218-222.
145. Harms U., Klose F., Neuhauser H., Fricke K., Peiner E., Schlachetzki A. Anelas-
tic properties of aluminium thin films on silicon cantilevers // J. Alloys and
Compounds. 2000. V.310. P.449-453.
146. Heraeus Quartz Glass for Optics. Optical Properties. Hanau. Heraeus Quarzglas
GmbH, 1994. 6 p.
147. Hetherington G., JackK.H., Ramsay M.W. The high-temperature electrolysis of
vitreous silica // Phys. Chem. Glass. 1965. V.6. No.l. P.6-15.
148. IEEE Recommended Practice for Inertial Sensor Test Equipment,
Instrumentation, Data Acquisition and Analysis. IEEE Std 1554-2005.
149. Izmailov Ε.Α., Tchesnokov G.I., Troizkiy V.A., Gordasevich A.A. Highly Reliable,
Low-cost, Small-Size Inertial Navigation System // Proc. 2nd International Conference
on Gyroscopic Technology and Navigation. - May 24-25, 1995. - Saint-Petersburg. -
Part I.-P. 139-149.
150. Izmailov Ε. Α., KolesnikM.M., Osipov A.M., Akimov A.V. Hemispherical
Resonator Gyro Technology. Problems and Possible Ways of Their Solutions // Proc. 6th
International Conference on Integrated Navigation Systems. - May 24-26, 1999. -
Saint-Petersburg. - P.6.
151. Jeanroy Α., Featonby P., Caron J.-M. Low-cost miniature and accurate IMU
with vibrating sensors for tactical applications //10th Saint Petersburg International
Conference on Integrated Navigation Systems. Saint Petersburg, May 26-28, 2003.
Proc.P.286-293.
152. Kozlowski M.R., Carr J., Hutcheon L, Torres R., Sheehan L, Camp D., Yan M.
Depth profiling of polishing-induced contamination on fused silica surfaces // Preprint
UCRL-JC-128355 (1997).
153. Leger P. QUAPASON - a New Low-cost Vibrating Gyroscope // Proc. 3rd
International Conference on Integrated Navigation Systems. - May 28-29, 1996. - Saint-
Petersburg. - Part I. P.143-150.
154. Lichtman D., Hebling A. Specific gas reactions of Ceralloy 400 getter
//Vacuum. 1961. V.ll. No.2. P.109-113.
155. Loper E.J., Lynch D.D. Projected system performance based on recent HRG test
results // IEEE/AIAA 5th Digital Avionics Systems Conf. Seattle. WA October 31-
November 3, 1983. Proc. P.18.1.1-18.1.6.
156. Loper E.J., Lynch D.D. Hemispherical resonator gyros report and test results //
Proceeding of the National Technical Meetings of Institute of Navigation. - New
York, 1984.-P.105-107.
157. Loper E.J., Lynch D.D., Stevenson KM. Projected Performance of Smaller
Hemispherical Resonator Gyros // Position Location and Navigation Symposium
(PLANS'86), November 4-7, 1986. - Las Vegas, NV, USA. - Proc. P.61-64.
167
Волновой твердотельный гироскоп. Теория и технология
158. Lunin B.S., Shatalov M.Yu. Balancing of thin-walled metal resonators for low-
cost solid-state gyroscopes // Proc. of XV International Conference on Integrated
Navigation Systems (26-28 May 2008. St.-Petersburg). - St.-Petersburg: "Elektro-
pribor".2008.-P.32-33.
159. Lynch D.D. Hemispherical resonator gyro // IEEE Trans. Aerosp. Electron.
System. 1984.-№17. -P. 432-433.
160. Lynch D.D. HRG development at Delco, Litton, and Northrop Grumman // Proc.
of Anniversary Workshop on Solid-State Gyroscopy (19-21 May 2008. Yalta,
Ukraine). - Kyiv-Kharkiv. ATS of Ukraine. 2009.
161. Lynch D.D. Hemispherical Resonator Gyro // EOS Technical Journal. - 1995. -
V.3.-N0.1.-P.11-22.
162. Lynch D., Matthews Α., Varty G.T. Innovative Mechanizations to Optimize Iner-
tial Sensors for High or Low Rate Operations // Proc. Symposium Gyro Technology.
- 1997. - Stuttgart, Germany. - P.9.0-9.21.
163. Lynch D.D. Vibration-induced drift in the hemispherical resonator gyro // Proc.
of the Annual Meeting of the Institute of Navigation, 23-25 June, 1987. - Dayton,
Ohio.-P.34-37.
164. Marshall D.В., Evans A.G. Measurement of adherence of residually stressed thin
films by indentation. I. Mechanism of interface delamination // J. Appl. Phys. 1984.
V.56.NO.10.P.2632-2638.
165. Martynenko Yu.G., Merkuryev I. V., Podalkov V. V. Dynamics of a ring microme-
chanical gyroscope in a mode of the forced oscillations // Proc. of XVI International
Conference on Integrated Navigation Systems (25-27 May 2009. St.-Petersburg). -
St.-Petersburg: "Elektropribor". 2009. -P.73-82.
166. Martynenko Yu.G., Merkuryev I.V., Podalkov V.V. Calibration of parameters of
small viscoelastic anisotropy of the resonator of a wave solid-state gyroscope by the
results of bench tests // Proc. of XVII International Conference on Integrated
Navigation Systems (31 May - 2 June 2010. St.-Petersburg). - St.-Petersburg:
"Elektropribor". 2010. - P.40-47.
167. Matthews Α., RybakFJ. Comparison of hemispherical resonator gyro and optical
gyros // - IEEE AES Mag. - 1992. - V.7. - No.5. - P.41-46.
168. Matveev, V.A., Basarab M.A. Numerical Modeling of Heat Diffusion Processes
in the Solid-state Wave Gyro Resonator by the R-function Method // VESTNIK,
Journal of the Bauman Moscow State Technical University, Natural Science and
Engineering. - 2005. - P. 98-110.
169. Prieler M., Bohn KG., Schilling W., Trinkaus H. Grain boundary sliding in thin
substrate-bonded Al films // J.Alloys and Compounds. 1994. V.211-212. P.424-427.
170. Primak W. The annealing of vitreous silica//Phys. Chem. Glass. 1983. V.24.
No.l.P.8-17.
171. Rozelle D.M. The hemispherical resonator gyro: from wineglass to the planets //
Spaceflight Mechanics. 2009, v. 134. AAS09-176.
172. Sarapuloff S.A. 15 Years of solid-state gyrodynamics development in the USSR
and Ukraine: results and perspectives of applied theory // Proc. of the National
Technical Meeting of Institute of Navigation (Santa Monica, Calif, USA. January 14-16,
1997).-P.151-164.
173. Sarapuloff S.A., Lytvynov L.A., Bakalor Т.О. Particularities of designs and
fabrication technology of high-Q sapphire resonators of CRG-1 type solid-state gyroscopes
// Proc. of XIV International Conference on Integrated Navigation Systems (28-30
May 2007. St.-Petersburg). - St.-Petersburg: "ElektroPribor". 2007. - P.47-48.
168
Литература
174. Scott V.B. Delco makes low-cost gyro prototype // Aviation week. -1982.-
V.117.-№17.-P.64-72.
175. Silica glass for fiber optics //Russ. Tech. Briefs. Sep/Oct. 1994. P.13.
176. Shatalov M., Fedotov I., Joubert S. On dynamics and control of vibratory
gyroscopes with spherical symmetry // Proc. 13th International Conference on Integrated
Navigation Systems. - May 29-31, 2006. - Saint-Petersburg.
177. Shatalov M., Fedotov L, Joubert S. Resonant vibrations and acoustic radiation of
rotating spherical structures // Proc. 13th International Congress on Sound and
Vibration. - July 2-6, 2006. - Vienna, Austria.
178. Shatalov M.Yu, Lunin B.S. Vibratory gyroscopes: Identification of Mathematical
Model from Test Data // Proc. of XIV International Conference on Integrated
Navigation Systems (28-30 May 2007. St.-Petersburg). - St.-Petersburg: "ElektroPribor".
2007.-P.68-73.
179. Shatalov M.Yu., Lunin B.S. Influence of Prestress on Dynamics of Hemispherical
Resonator Gyroscope // Proc. 6th International Conference on Integrated Navigation
Systems. - May 24-26, 1999. - Saint-Petersburg. - P.5.
180. Thurner G., Abermann R. On the mechanical properties of uhv-deposited Cr
films and their dependence on substrate temperature, oxygen pressure and substrate
material // Vacuum. 1990. V.41. No.4-6. P.1300-1301.
181. Verhoeven J., Doveren H. Interactions of residual gases with a barium getter film
as measured by AES and XPS // J. Vac. Sci. Technol. 1982. V.20. No.l. P.64-74.
182. Verhoeven J.A.Th., Doveren H. An XPS investigation of the interaction of CH4,
C2H2, C2H4 and C2H6 with a barium surface // Surface Science. 1982. V.123. P.369-
383.
183. Watson W.S. Improved Vibratory Gyro Pick-off and Driver Geometry // Proc.
Symposium Gyro Technology. - 2006. - Stuttgart. - P.5.0-5.14.
184. Weiss G.P., Smith D.O. Measurement of internal friction in thin films // Rev.
Sci. Instrum. 1963. V.34. No.5. P.522-523.
185. Wright D., Bunke D. The HRG Applied to a Satellite Attitude Reference System
// 17th Annual AAS Guidance and Control Conference. February 2-6, 1994. -
Keystone, Colorado, USA. - AAS 94-004.
186. Yatsenko Yu.A., Petrenko ST., Vovk V.V., Chikovani V.V. Technological Aspects
of Manufacturing of Compound Hemispherical Resonators for Small-Sized Vibratory
Gyroscopes // Proc. 6th International Conference on Integrated Navigation Systems. -
May 24-26, 1999. - Saint-Petersburg. - P.7.
187. Zhang Ting, Yu Bo, Jiang Chungiao, Lunin B.S. Influence of the Metallic
Coating on the Q-factor of the HRG Resonator // Proc. International Symposium on Iner-
tial Navigation Technology and Intelligent Traffic. -October 15-17, 2004. - Nanjing.
PRChina.-A18.P.l-6.
Патенты
188. Бодунов Б.П., Лопатин В.М., Лунин Б.С. Способ балансировки резонаторов
волнового твердотельного гироскопа // Патент РФ. 7G01C 19/56. RU 2147117.
(1998).
189. Измайлов Е.А., Колесник М.М., Усышкин ОТ, Кан СТ., Измайлов А.Е.
Волновой твердотельный гироскоп // Патент РФ. - 7G01C 19/56. - RU 2164006.
(1999).
190. Лунин Б.С. Чувствительный элемент волнового твердотельного гироскопа //
Патент РФ. - 7G01C 19/56. - RU 2166734. (2000).
169
Волновой твердотельный гироскоп. Теория и технология
191. Лунин Б. С, Матвеев В.Α., Басараб М.А. Чувствительный элемент
твердотельного волнового гироскопа // Патент РФ. - G01C19/56. - RU 2357213 О.
(2007).
192. Лунин Б. С, Матвеев В.Α., Басараб М.А. Резонатор // Патент РФ. -
G01C19/56. - RU 2357214 С1. (2007).
193. Лунин Б.С., Торбин С.Н., Лещев В.Т., Чуманкин Е.А. Способ балансировки
металлического зубчатого резонатора волнового твердотельного гироскопа
//Заявка на патент ΡΦ.-GOl 19/56. - 2013103755 (2013).
194. Мачехин П.К., Кузьмин СВ. Твердотельный волновой гироскоп
// Патент РФ. - 7G01C19/56. - RU 2168702. (2000).
195. Суминов В.М., Баранов П.Н., Опарин В.И. и др. Способ динамической и
статической балансировки резонатора вибрационного твердотельного гироскопа
// А.с. СССР МКИ 6 G01C 19/56 SU 1582799 (1988).
196. Ansell D.S., Treagus L.A. Solid State Vibrational Gyroscope // Патент
Великобритании. - 7G01C 19/56. - GB 2272054 (1992).
197. Fell СР., Towns end К. Control system for a vibrating structure gyroscope //
Патент США. НКИ 73/504.12 No.6651499 (2003).
198. Jeanroy Α., Leger P. Capteur gyroscopique et appareil de mesure de rotation en
comportant application // Патент Франции. - G01C 19/56. -FR 2792722 (1999).
199. Koning M.G. Vibrating Cylinder Gyroscope and Method // Патент США. -
НКИ 74-5.6. -No. 4793195. (1988).
200. Loper E.J., Lynch D.D. Sonic vibrating bell gyro // Патент США. - НКИ 73-
505.-No. 4157041. (1979).
201. Loper E.J., Lynch D.D. Vibratory rotational sensor // Патент EU. МКИ GO 1С
19/56. No.0141621(1984).
202. Loper E.D., Lynch D.D. Vibratory rotation sensor //Патент США. G01C 19/56.
No.4 951508.(1990).
203. Lynch D.D. Bell gyro and improved means for operating same // Патент США.
НКИ 73/505. No.3656354. (1972).
204. Matthews Α., Varty G.T., Lynch D.D. Vibratory rotation sensor with novel
electrode placements // Патент США. МКИ G01P 9/04. No. 6065340 (2000).
205. Matthews Α., Varty G.T., Lynch D.D. Extraction of double-oscillation-frequency
sinusoids in vibratory rotation sensors // Патент США. МКИ GO 1С 19/00. No.
6158282 (2000).
206. Putty M.W., Eddy D.S. Vibratory gyroscope controller // Патент EU. МКИ
G01C 19/56. No.0609929 (1994).
170
Литература
Электронные ресурсы
207. SCHOTT Electronic Packaging II http://www.schott.com/epackaging.
208. Outgassing data for Selecting spacecraft materials II http://outgassing.nasa.gov.
209. Epoxy Technology II http://www.epotek.com.
210. Ellsworth Adhesives /Emerson & Cuming II http://www.ellsworth.com/emerson-
curning/.
211. MasterBond.com. Adhesives, Sealants, Coatings II http://www.masterbond.com.
212. GE Sealants - Silicone Products for Glazing, Coating, and Weather sealing II
http://www.gesilicones.com.
213. High Temperature Adhesives and Epoxies, Ceramics, Insulation, Epoxies and
Epoxy II http://www.cotronics.com.
214. High Temperature, Fire and Heat Resistant Sealants and Adhesives from Sealant
and Adhesive Supplier II http://www.fortafix.com.
215. Panacol: Adhesives & More II http://www.panacol.com.
216. High Temp Epoxies, Coatings, Potting Compounds, Machinable Ceramics,
Aremco II http://www.aremco.com.
217. SAES Group II http://www.saesgetters.com.
218. DSP56F805 16-bit Digital Signal Processor. Technical Data II
http://motorola.com/semiconductors/dsp.
219'. Методика расчета основных показателей надежности волоконного дат-
чика вращения типа ВГххх II www.fizoptika.ru.
171
Приложение. Распределение
Пирсона
Таблица П.1. Распределение Пирсона χ2α
β
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
0,01
0,0002
0,0201
0,1148
0,2971
0,5543
0,8721
1,2390
1,6465
2,0879
2,5582
3,0535
3,5706
4,1069
4,6604
5,2293
5,8122
6,4078
7,0149
7,6327
8,2604
8,8972
9,5425
10,1957
10,8564
0,05
0,0039
0,1026
0,3518
0,7107
1,1455
1,6354
2,1673
2,7326
3,3251
3,9403
4,5748
5,2260
5,8919
6,5706
7,2609
7,9616
8,6718
9,3905
10,1170
10,8508
11,5913
12,3380
13,0905
13,8484
0,1
0,0158
0,2107
0,5844
1,0636
1,6103
2,2041
2,8331
3,4895
4,1682
4,8652
5,5778
6,3830
7,0415
7,7895
8,5468
9,3122
10,0852
10,8649
11,6509
12,4426
12,2396
14,0415
14,8480
15,6587
0,2
0,0642
0,4463
1,0052
1,6488
2,3425
3,0701
3,8223
4,5936
5,3801
6,1791
6,9887
7,8038
8,6339
9,4673
10,3070
11,1521
12,0023
12,8570
13,7158
14,5784
15,4446
16,3140
17,1865
18,0618
0,3
0,1485
0,7133
1,4237
2,1947
2,9999
3,8276
4,6713
5,5274
6,3933
7,2672
8,1479
9,0343
9,9257
10,8215
11,7212
12,6243
13,5307
14,4399
15,3517
16,2659
17,1823
18,1007
19,0211
19,9432
0,4
0,2750
1,0217
1,8692
2,7528
3,6555
4,5702
5,4932
6,4226
7,3570
8,2955
9,2373
10,1820
11,1291
12,0785
13,0297
13,9827
14,9373
15,8932
16,8504
17,8088
18,7683
19,7288
20,6902
21,6525
0,5
0,4549
1,3863
2,3660
3,3567
4,3515
5,3481
6,3458
7,3441
8,3428
9,3418
10,3410
11,3403
12,3398
13,3393
14,3389
15,3385
16,3382
17,3379
18,3377
19,3374
20,3372
21,3370
22,3369
23,3367
0,6
0,7083
1,8326
2,9462
4,0446
5,1319
6,2108
7,2832
8,3505
9,4136
10,4732
11,5298
12,5838
13,6356
14,6853
15,7332
16,7795
17,8244
18,8679
19,9102
20,9514
21,9915
23,0307
24,0689
25,1063
0,7
1,0742
2,4079
3,6649
4,8784
6,0644
7,2311
8,3834
9,5245
10,6564
11,7807
12,8987
14,0111
15,1187
16,2221
17,3217
18,4179
19,5110
20,6014
21,6891
22,7745
23,8578
24,9390
26,0184
27,0960
0,8
1,6424
3,2189
4,6416
5,9886
7,2893
8,5581
9,8032
11,0301
12,2421
13,4420
14,6314
15,8120
16,9848
18,1508
19,3107
20,4651
21,6146
22,7595
23,9004
25,0375
26,1711
27,3015
28,4288
29,5533
0,9
2,7055
4,6052
6,2514
7,7794
9,2364
10,6446
12,0170
13,3616
14,6837
15,9872
17,2750
18,5493
19,8119
21,0641
22,3071
23,5418
24,7690
25,9894
27,2036
28,4120
29,6151
30,8133
32,0069
33,1962
0,95
3,8415
5,9915
7,8147
9,4877
11,0705
12,5916
14,0671
15,5073
16,9190
18,3070
19,6751
21,0261
22,3620
23,6848
24,9958
26,2962
27,5871
28,8693
30,1435
31,4104
32,6706
33,9244
35,1725
36,4150
0,99
6,6349
9,2103
11,3449
13,2767
15,0863
16,8119
18,4753
20,0902
21,6660
23,2093
24,7250
26,2170
27,6882
29,1412
30,5779
31,9999
33,4087
34,8053
36,1909
37,5662
38,9322
40,2894
41,6384
42,9798
(Окончание табл. 77.1 - см. с. 173)
172
Приложение. Распределение Пирсона
(Окончание табл. П.1)
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
11,5240
12,1981
12,8785
13,5647
14,2565
14,9535
15,6555
16,3622
17,0735
17,7891
18,5089
19,2327
19,9602
20,6914
21,4262
22,1643
22,9056
23,6501
24,3976
25,1480
25,9013
26,6572
27,4158
28,1770
28,9406
29,7067
14,6114
15,3792
16,1514
16,9279
17,7084
18,4927
19,2806
20,0719
20,8665
21,6643
22,4650
23,2686
24,0749
24,8839
25,6954
26,5093
27,3256
28,1440
28,9647
29,7875
30,6123
31,4390
32,2676
33,0981
33,9303
34,7643
16,4734
17,2919
18,1139
18,9392
19,7677
20,5992
21,4336
22,2706
23,1102
23,9523
24,7967
25,6433
26,4921
27,3430
28,1958
29,0505
29,9071
30,7654
31,6255
32,4871
33,3504
34,2152
35,0814
35,9491
36,8182
37,6886
18,9398
19,8202
20,7030
21,5880
22,4751
23,3641
24,2551
25,1478
26,0422
26,9383
27,8359
28,7350
29,6355
30,5373
31,4405
32,3450
33,2506
34,1574
35,0653
35,9743
36,8844
37,7955
38,7075
39,6205
40,5344
41,4492
20,8670
21,7924
22,7192
23,6475
24,5770
25,5078
26,4397
27,3728
28,3069
29,2421
30,1782
31,1152
32,0532
32,9919
33,9315
34,8719
35,8131
36,7550
37,6975
38,6408
39,5847
40,5292
41,4744
42,4201
43,3664
44,3133
22,6156
23,5794
24,5440
25,5093
26,4751
27,4416
28,4087
29,3763
30,3444
31,3130
32,2821
33,2517
34,2216
35,1920
36,1628
37,1340
38,1055
39,0774
40,0496
41,0222
41,9950
42,9682
43,9417
44,9154
45,8895
46,8638
24,3366
25,3365
26,3363
27,3362
28,3361
29,3360
30,3359
31,3359
32,3358
33,3357
34,3356
35,3356
36,3355
37,3355
38,3354
39,3353
40,3353
41,3352
42,3352
43,3352
44,3351
45,3351
46,3350
47,3350
48,3350
49,3349
26,1430
27,1789
28,2141
29,2486
30,2825
31,3159
32,3486
33,3809
34,4126
35,4438
36,4746
37,5049
38,5348
39,5643
40,5935
41,6222
42,6506
43,6786
44,7063
45,7336
46,7607
47,7874
48,8139
49,8401
50,8660
51,8916
28,1719
29,2463
30,3193
31,3909
32,4612
33,5302
34,5981
35,6649
36,7307
37,7954
38,8591
39,9220
40,9839
42,0451
43,1053
44,1649
45,2236
46,2817
47,3390
48,3957
49,4517
50,5071
51,5619
52,6161
53,6697
54,7228
30,6752
31,7946
32,9117
34,0266
35,1394
36,2502
37,3591
38,4663
39,5718
40,6756
41,7780
42,8788
43,9782
45,0763
46,1730
47,2685
48,3628
49,4560
50,5480
51,6389
52,7288
53,8177
54,9056
55,9926
57,0786
58,1638
34,3816
35,5632
36,7412
37,9159
39,0875
40,2560
41,4217
42,5847
43,7452
44,9032
46,0588
47,2122
48,3634
49,5126
50,6598
51,8051
52,9485
54,0902
55,2302
56,3685
57,5053
58,6405
59,7743
60,9066
62,0375
63,1671
37,6525
38,8851
40,1133
41,3371
42,5570
43,7730
44,9853
46,1943
47,3999
48,6024
49,8018
50,9985
52,1923
53,3835
54,5722
55,7585
56,9424
58,1240
59,3035
60,4809
61,6562
62,8296
64,0011
65,1708
66,3386
67,5048
44,3141
45,6417
46,9629
48,2782
49,5879
50,8922
52,1914
53,4858
54,7755
56,0609
57,3421
58,6192
59,8925
61,1621
62,4281
63,6907
64,9501
66,2062
67,4593
68,7095
69,95681
71,20141
72,44331
73,68261
74,91951
76,1539
173
Сведения об авторах
Лунин Борис Сергеевич родился в 1956 г., окончил МВТУ
им. Н.Э. Баумана в 1979 г. Доктор технических наук, ведущий научный
сотрудник химического факультета МГУ имени М.В. Ломоносова.
Автор многих статей, патентов и двух монографий в области теории и
технологии ВТГ.
Матвеев Валерий Александрович родился в 1939 г. Доктор
технических наук, профессор. Руководитель Научно-учебного комплекса
«Информатика и системы управления», заведующий кафедрой
«Информационная безопасность» МГТУ им. Н.Э. Баумана. Заслуженный деятель
науки РФ, лауреат Государственных премий СССР и РФ, лауреат
премий Правительства РФ в области науки и образования. Автор более 200
научных работ, 25 патентов и ряда монографий в области теории и
технологии приборостроения.
Басараб Михаил Алексеевич родился в 1970 г., окончил Харьковский
авиационный институт им. Н.Е. Жуковского в 1993 г. Доктор физико-
математических наук, профессор кафедры ИУ-8 «Информационная
безопасность» МГТУ им. Н.Э. Баумана. Автор более 100 научных работ и
ряда монографий в области прикладной математики, информатики,
цифровой обработки сигналов, радиофизики.
About authors
Lunin B.S. (born 1956) graduated from the Bauman Moscow High Technical
School in 1979. Doctor of Science (Engineering), Leading Researcher of the
Department of Chemistry of the Lomonosov Moscow State University.
Author of a number of papers, patents, and two monographs on vibrating gyro
theory and technology.
Matveev V.A. (born 1939). Doctor of Science (Engineering), professor.
Head of the Faculty "Informatics and Control Systems", Head of the
"Information security" department of the Bauman Moscow State Technical
University. Honored scientist of Russian Federation, Laureate of the State Prizes of
USSR and Russian Federation, Laureate of the Russian Federation
Government Prize in Science and Education. Author of more than 200 papers, 25
patents, and some monographs on instrumentation theory and technology.
Basarab M.A. (born 1970) graduated from the Kharkov Aviation Institute in
1993. Doctor of Science (Phys.-Math.), professor of the "Information
security" department of the Bauman Moscow State Technical University. Author of
more than 100 publications and some monographs in the fields of applied
mathematics, informatics, digital signal processing, and radiophysics.
174
Для заметок
Научное издание
Авторы:
Борис Сергеевич Лунин
Валерий Александрович Матвеев
Михаил Алексеевич Басараб
Волновой твердотельный гироскоп
Теория и технология
Authors:
Boris S. Lunin
Valerii A. Matveev
Mikhail A. Basarab
Solid-state Wave Gyroscope
Theory and Technology
Изд. № 19. Сдано в набор 11.01.2014
Подписано в печать 10.04.2014. Формат 60x90 1/16.
Бумага офсетная. Гарнитура Тайме.
Печать офсетная
Печ. л. 11. Тираж 500 экз. Зак. №
Издательство «Радиотехника»
107031, Москва, К-31, Кузнецкий мост, д. 20/6
тел./факс: (495)621-48-37; 625-78-72, 625-92-41
e-mail: info@radiotec.ru;
www. radiotec.ru
Отпечатано
в типографии ООО «Галлея-Принт»
Рассмотрены вопросы теории и моделирования волновых
твердотельных гироскопов различной конфигурации.
Затронуты аспекты, связанные с повышением точности,
балансировкой ВТГ, освещены основные технологические
процессы, используемые при их производстве. Показаны
проблемы построения электроники и приведены методы
обработки выходной информации.
Монография представляет интерес для научных и
инженерно-технических работников, специализирующихся в
области проектирования и разработки гироскопов и
гироскопических систем. Может быть полезна в качестве
учебного пособия при изучении гироскопических систем