/










































































































































































































































Автор: Бабаков И.М.
Теги: колебания тел колебания тел с распределенными массой и упругостью возбуждение колебаний механика физика
ISBN: 5-7107-7397-2
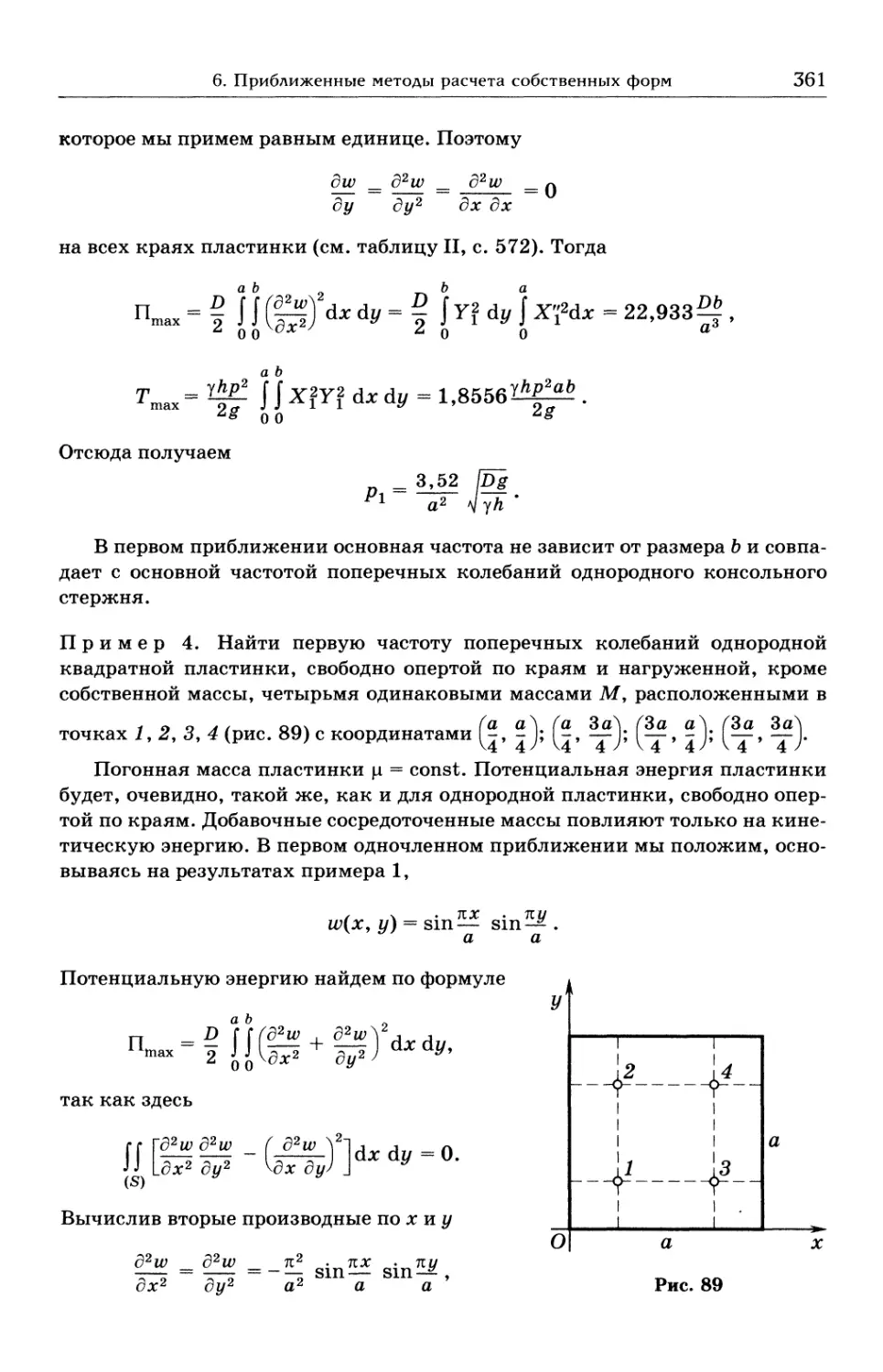
Год: 2004




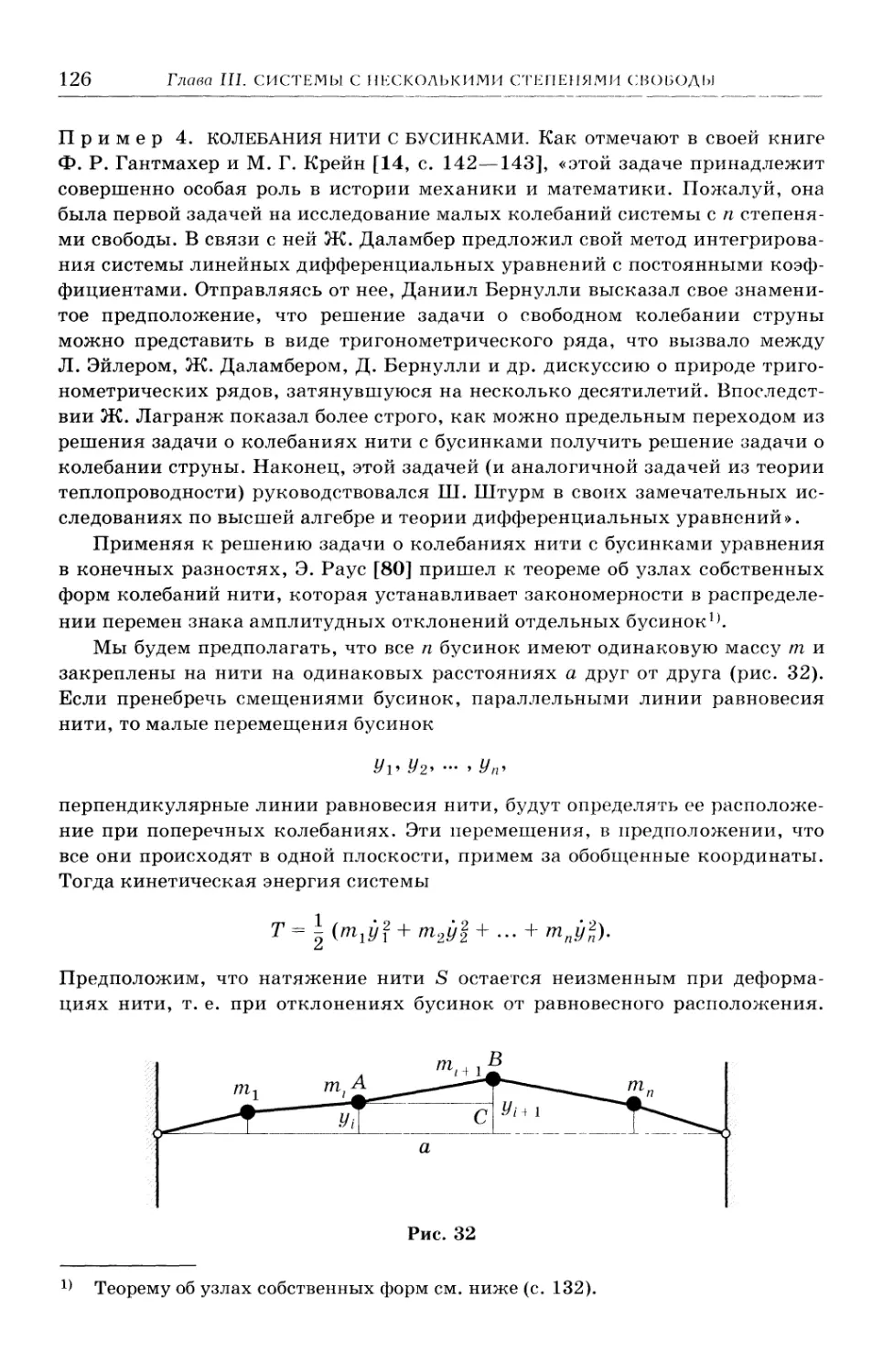
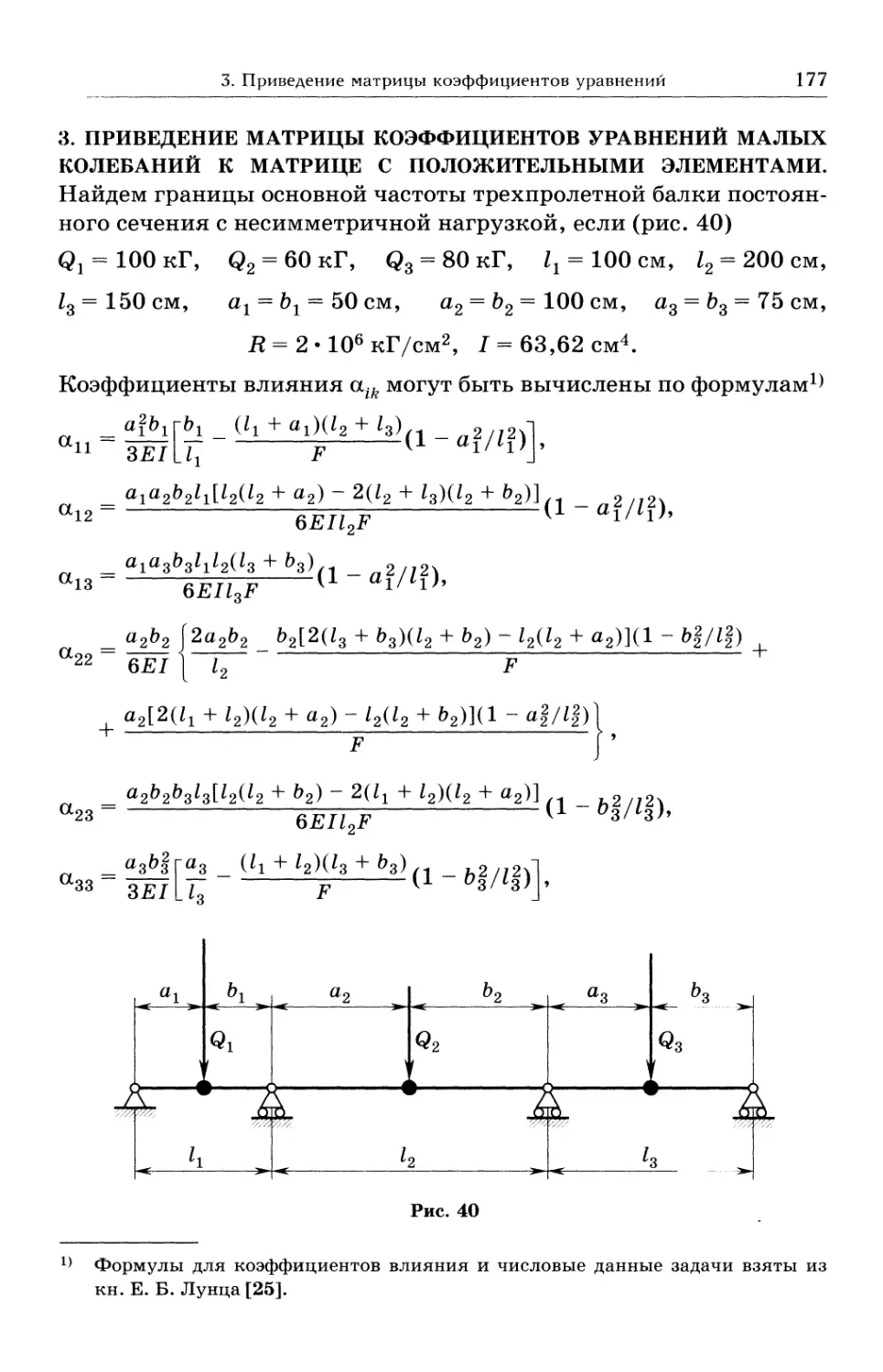
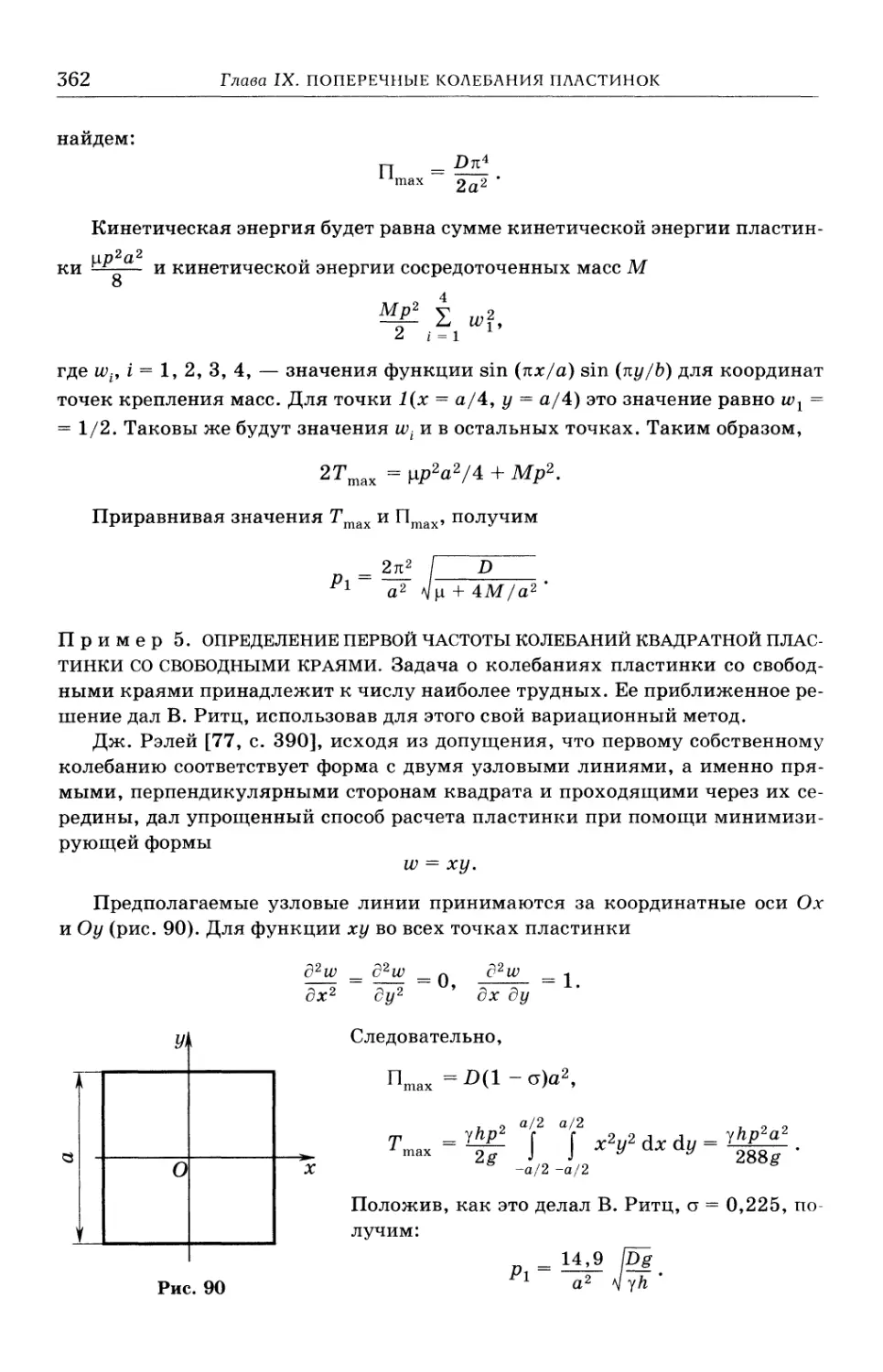
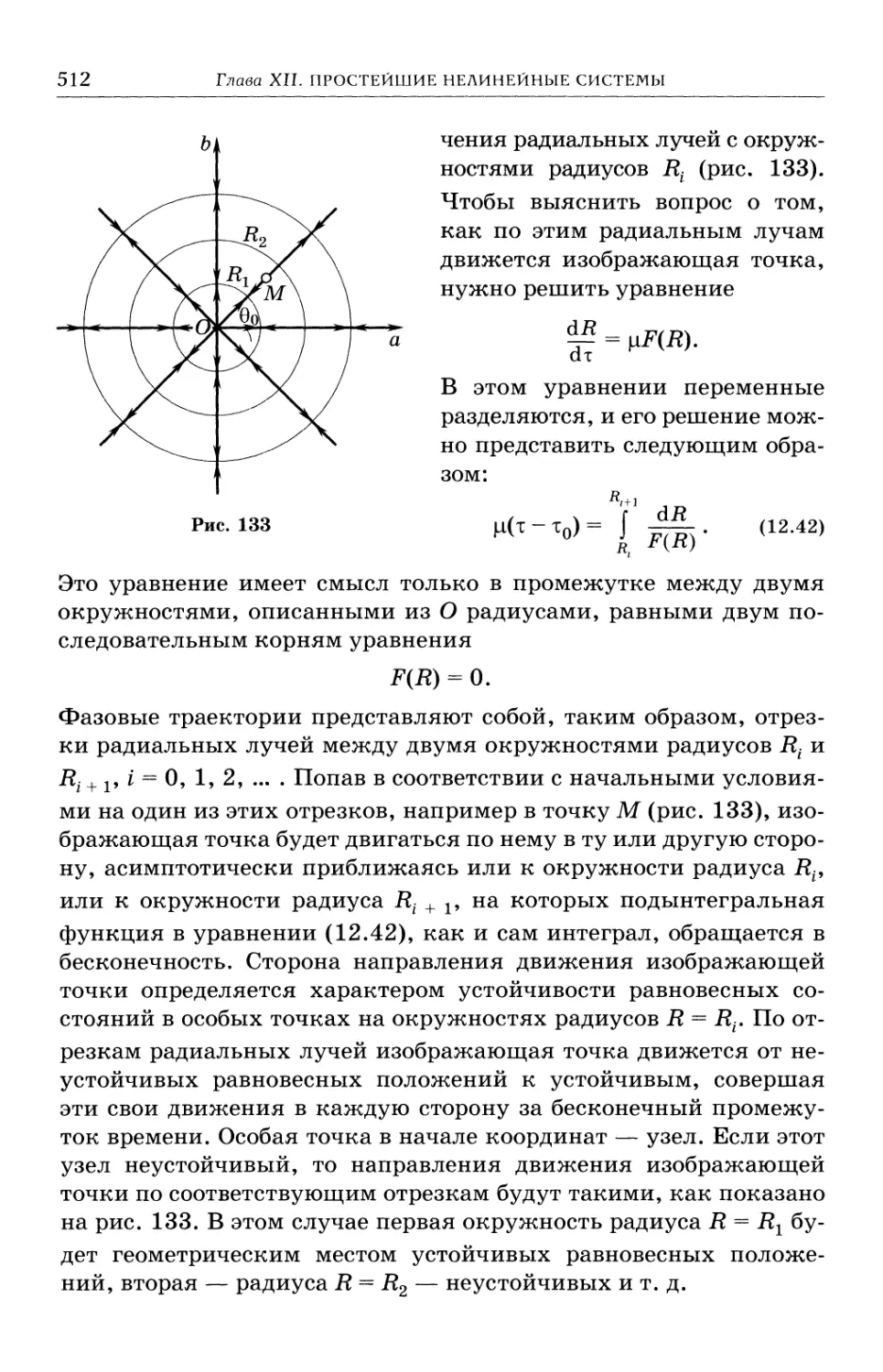
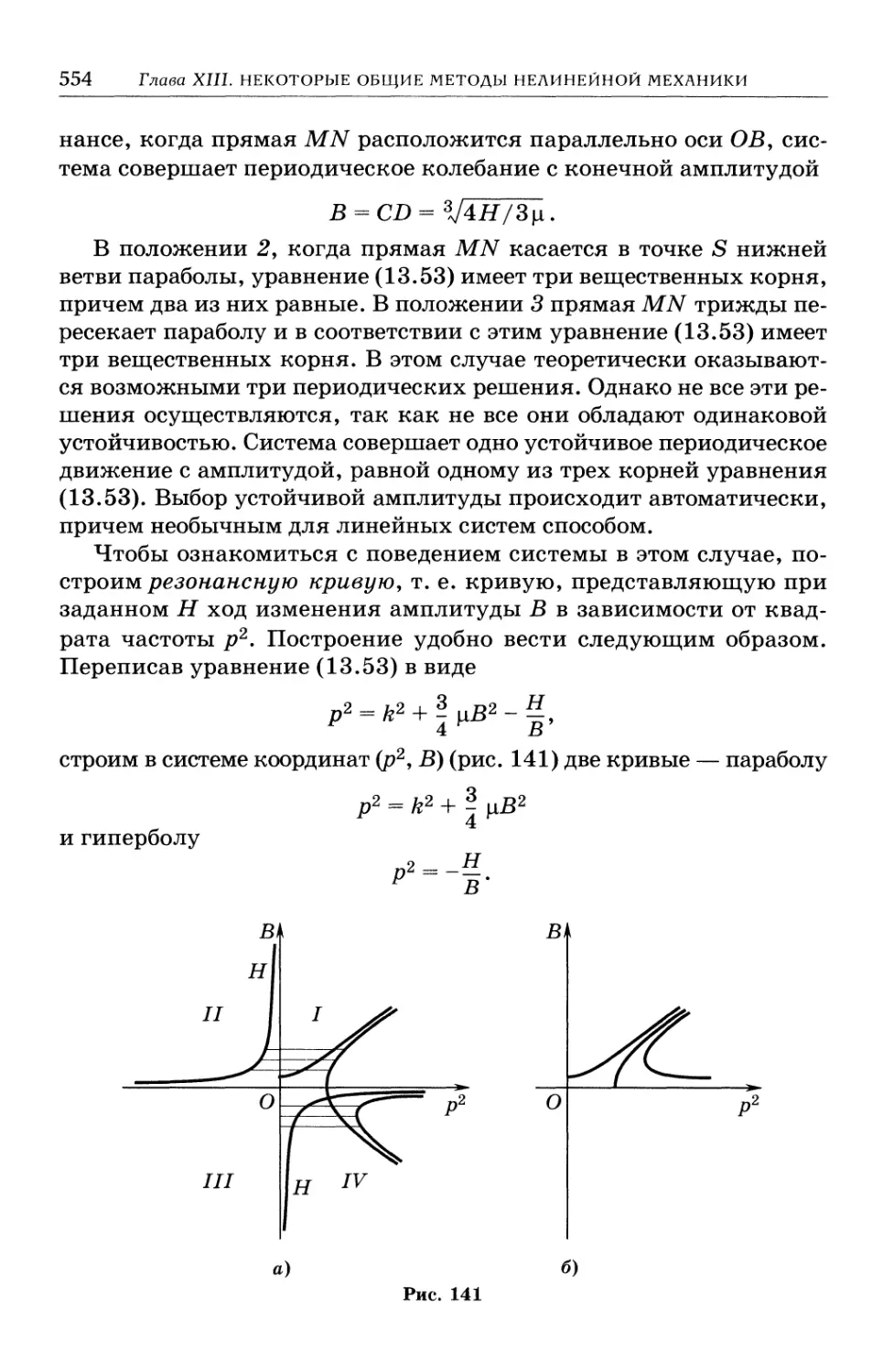
Текст
Высшее образование
Классики отечественной науки
И. М. Бабаков
ТЕОРИЯ
КОЛЕБАНИЙ
Классики отечественной науки
(§каэ)
ЕСТЕСТВЕННЫЕ
ТЕХНИЧЕСКИЕ
ГУМАНИТАРНЫЕ
НАУКИ
Р^
Брофа
Классики отечественной науки
И. М. Бабаков
ТЕОРИЯ
КОЛЕБАНИЙ
Издание четвертое, исправленное
Допущено
Министерством образования
Российской Федерации
в качестве учебного пособия
для студентов высших учебных заведений,
обучающихся по техническим направлениям
и специальностям
МОСКВА 2004
Брофа
УДК 534.1@75.8)
ББК 22.213я73
Б12
Серия «Классики отечественной науки» основана в 2003 году
Рецензенты:
академик РАН, д-р техн. наук Р. Ф. Ганиев
(директор Научного центра нелинейной волновой механики и технологии РАН);
д-р техн. наук А. С. Сидоренко
(проф. кафедры машиноведения и деталей машин МАИ)
Бабаков, И. М.
Б12 Теория колебаний : учеб. пособие /И. М. Бабаков. — 4-е изд.,
испр. — М.: Дрофа, 2004. — 591, [1] с.: 130 ил., 15 табл. — (Классики
отечественной науки).
18ВЫ 5-7107-7397-2
В книге C-е изд. — 1968 г.) содержатся традиционные разделы теории колебаний:
колебания систем с конечным числом степеней свободы, колебания распределенных систем
(стержней и пластин), колебания нелинейных систем. Изложены основы теории
устойчивости движения. Для описания колебаний используются преимущественно классические
методы, развитые Дж. Рэлеем и А. Н. Крыловым. Приводится большое число пояснительных
примеров, имеющих самостоятельную прикладную ценность и служащих справочным
материалом. Даны сведения из аналитической механики, матричного и операционного
исчисления, не входящие в обычные вузовские программы. В приложениях приводятся
данные, позволяющие получать численные решения.
Для студентов вузов и втузов, инженеров, аспирантов и научных работников.
УДК 534.1@75.8)
ББК 22.213я73
Учебное издание
Бабаков Иван Михайлович
ТЕОРИЯ КОЛЕБАНИЙ
Учебное пособие для вузов
Зав. редакцией Б. В. Понкратов. Редактор Е.А.Волъмир
Художественное оформление Ю. В. Христич. Технические
редакторы Н. И. Герасимова, И. В. Грибкова. Компьютерная
верстка А. В. Маркин. Компьютерная графика
О. И. Колотова. Корректор Г. И. Мосякина
Санитарно-эпидемиологическое заключение № 77.99.02.953.Д.006315.08.03 от 28.08.2003.
Подписано к печати 27.08.04. Формат 60x90 1/\б. Бумага типографская. Гарнитура «Школьная».
Печать офсетная. Усл. печ. л. 37,0. Тираж 3 000 экз. Заказ № 10450.
ООО «Дрофа». 127018, Москва, Сущевский вал, 49.
По вопросам приобретения продукции издательства «Дрофа»
обращаться по адресу: 127018, Москва, Сущевский вал, 49.
Тел.: @95) 795-05-50, 795-05-51. Факс: @95) 795-05-52.
Торговыйдом «Школьник». 109172, Москва, ул. Малые Каменщики, д. 6, стр. 1А.
Тел.: @95) 911-70-24,912-15-16,912-45-76.
Магазины «Переплетныептицы»: 127018, Москва, ул. Октябрьская, д. 89, стр. 1.
Тел.: @95) 912-45-76; 140408, Московская обл., г. Коломна, Голутвин,
ул. Октябрьской революции, 366/2. Тел.: @95) 741-59-76.
Отпечатано в полном соответствии с качеством
предоставленных диапозитивор в ОАО 'Тульская типография".
300600,г. Тула,пр. Ленина, 109.
18ВМ 5-7107-7397-2 © ООО «Дрофа», 2004
ВСТУПЛЕНИЕ
Настоящая книга представляет собой один из немногих
примеров многолетней популярности учебника по достаточно
сложной и постоянно развивающейся отрасли механики. Она
создавалась как учебное пособие для студентов, обучающихся по
специальности динамика и прочность машин, но, помимо этого, в
течение сорока лет широко использовалась студентами,
аспирантами и специалистами в различных отраслях механики и
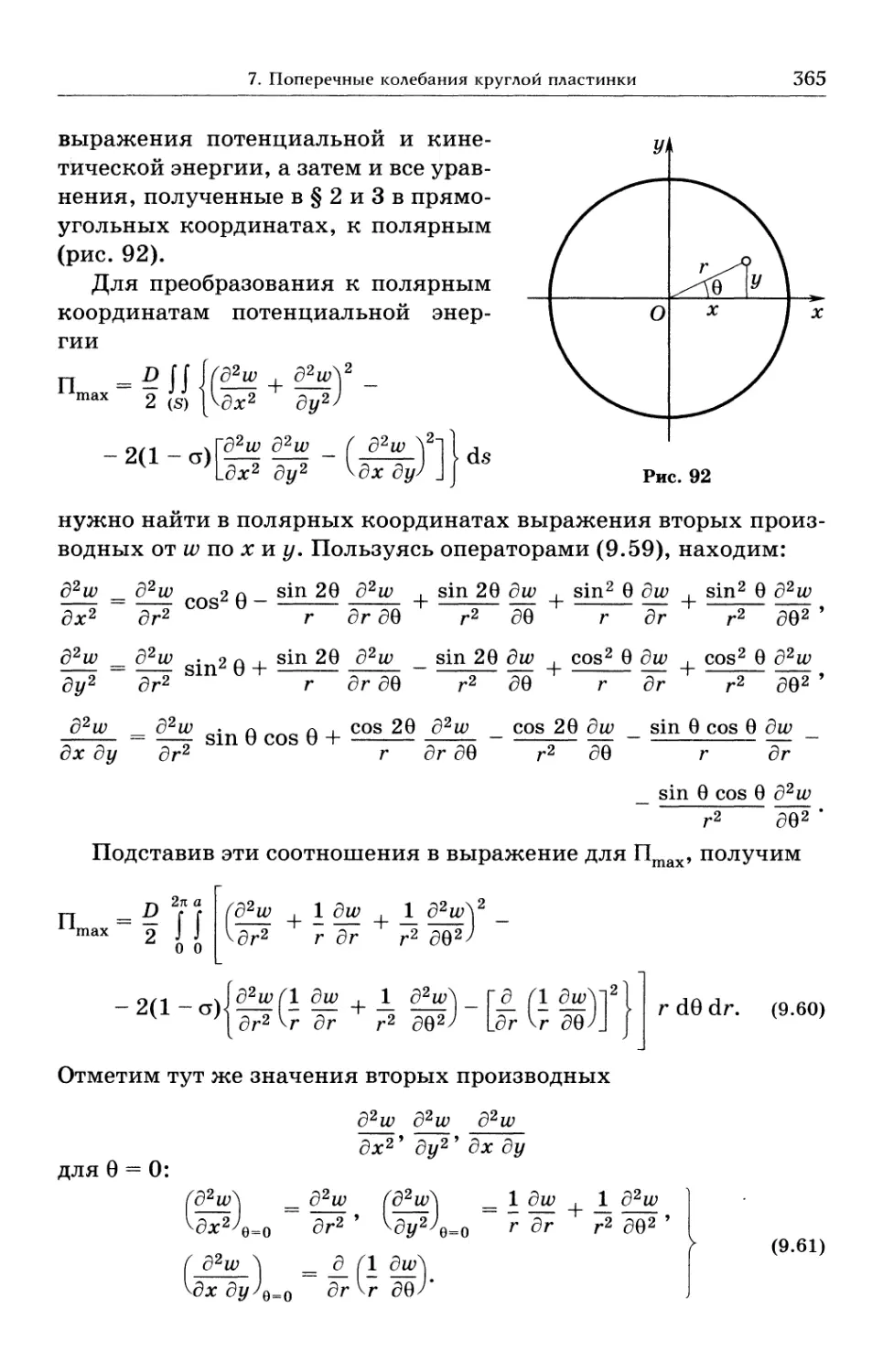
выдержала три издания. Преимуществом данного учебного пособия
является первоклассный методический уровень, обусловленный
тем, что его основой послужили лекции автора по курсам теории
колебаний и устойчивости движения, отработанные в течение
многих лет. В то же время материал книги изложен на высоком
теоретическом уровне и сопровождается рассмотрением
большого числа конкретных примеров и задач.
Выпуск после долгого перерыва четвертого издания пособия
был необходим, потому что за последнее время образовался
существенный дефицит классической учебной и научной литературы
в данной области и, вместе с тем, не появились равноценные или
более высокие по качеству книги. Несмотря на то, что в
настоящее время широкое распространение получили численные
методы исследований колебаний и устойчивости машин и
конструкций, реализованные в виде программных систем для ПЭВМ,
аналитические методы расчета не потеряли своей актуальности. Они
во многих случаях позволяют получать удовлетворительные по
точности количественные оценки характеристик движения,
оценивать корректность результатов численных решений.
Во вводной главе книги даны сведения из аналитической
механики, матричного и операционного исчисления, не входящие в
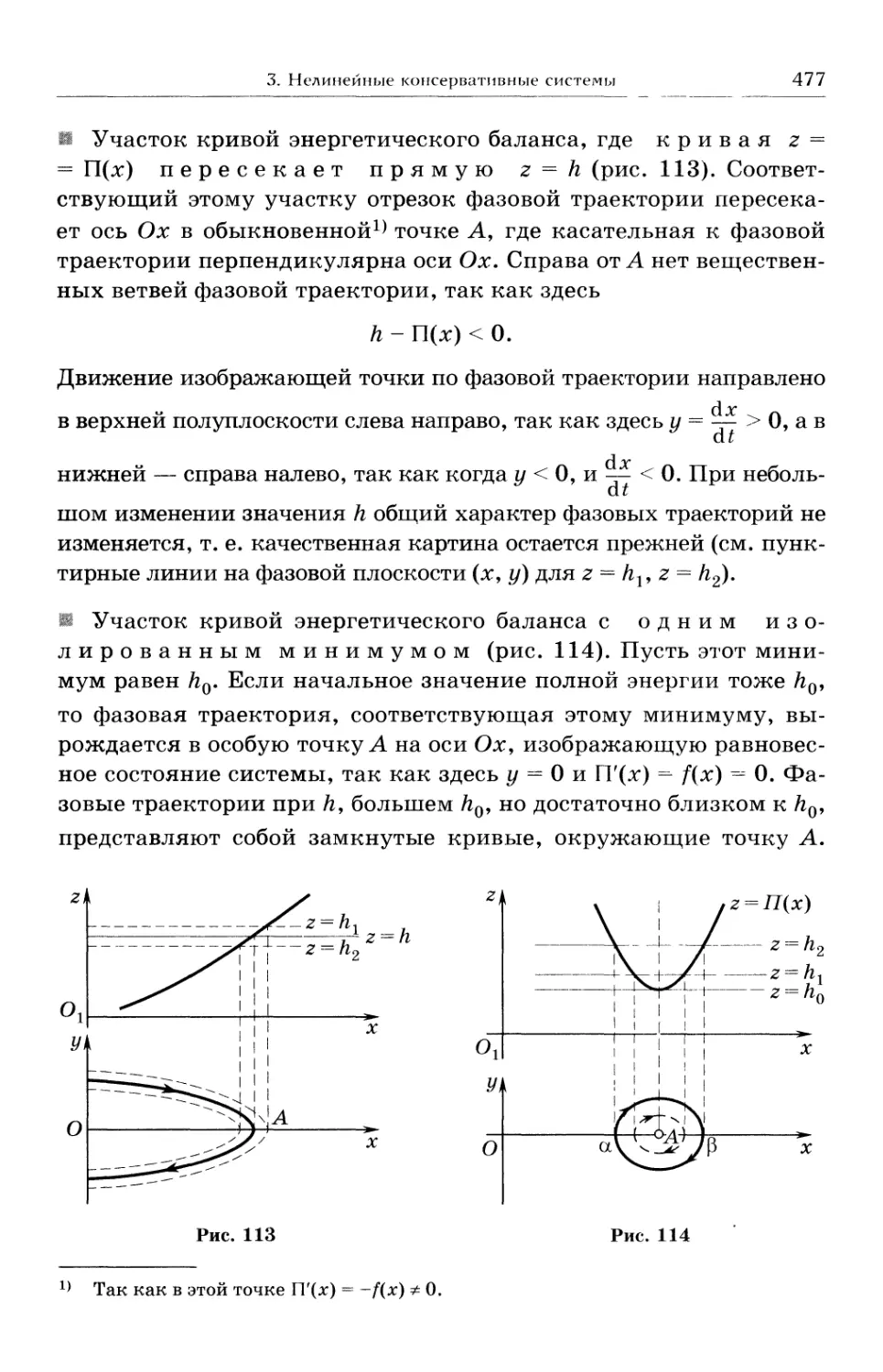
обычные вузовские программы для машиностроительных
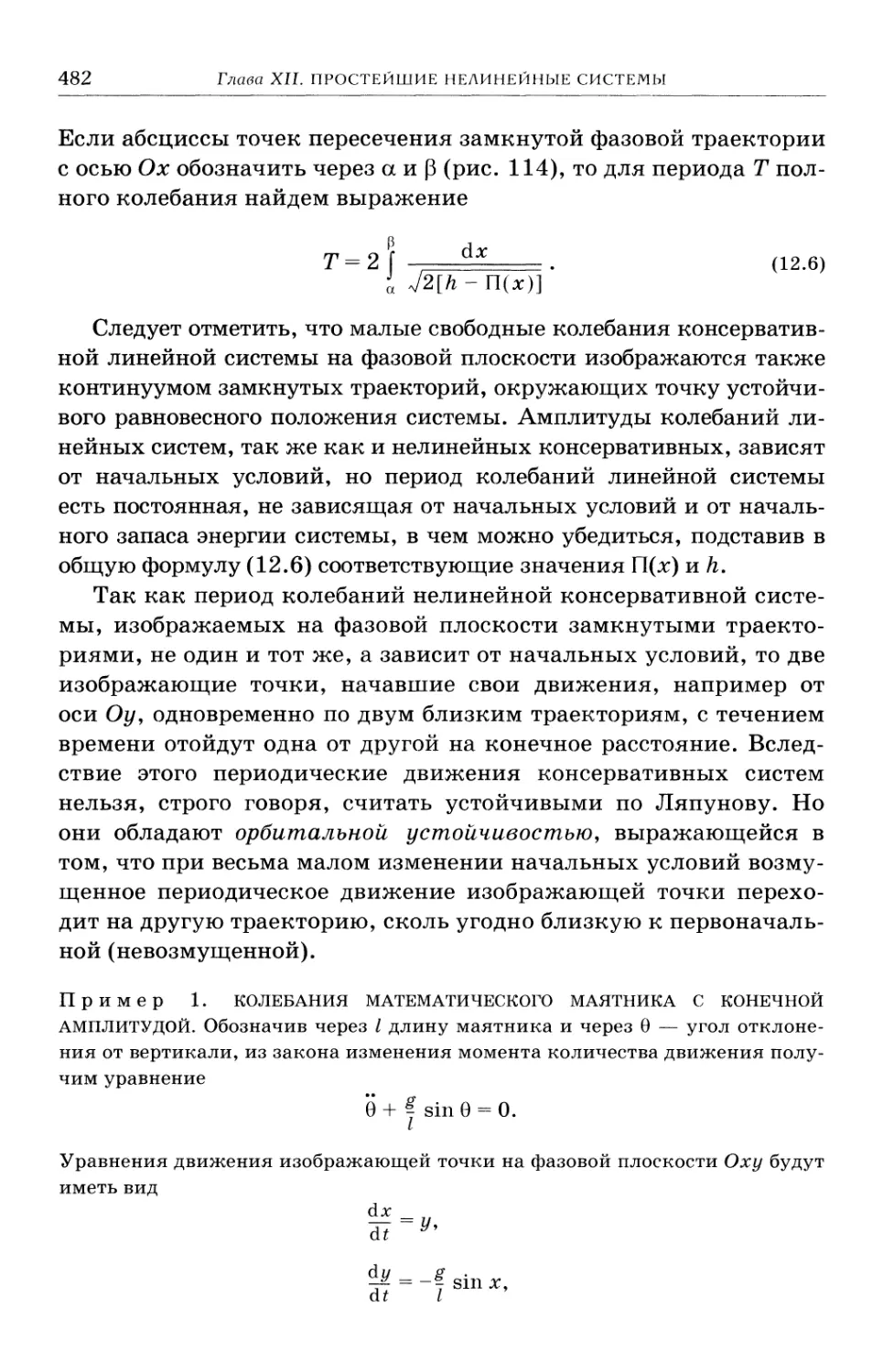
специальностей, но используемые при изложении основного материала.
Центральная часть книги содержит традиционные разделы
теории колебаний: колебания систем с конечным числом степеней
свободы, колебания распределенных систем (стержней и
пластин), колебания нелинейных систем. Приведены также основы
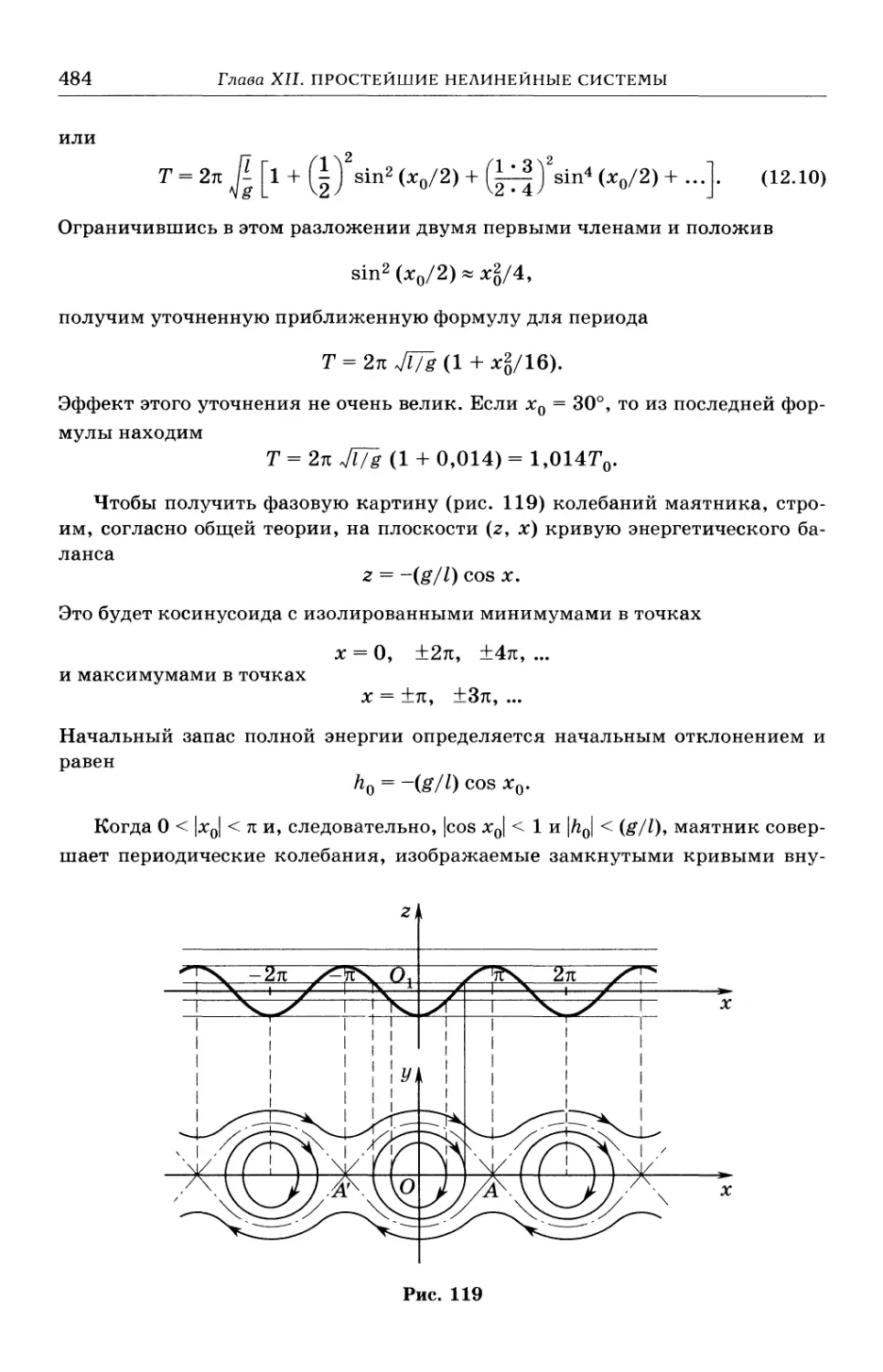
теории устойчивости движения. Для описания колебаний
используются преимущественно классические методы, развитые
Рэлеем и А. Н. Крыловым. Изложение теоретических основ
сопровождается большим количеством пояснительных примеров,
которые имеют самостоятельную прикладную ценность и могут
служить справочным материалом.
Наибольший интерес для практических расчетов имеют
главы, посвященные колебаниям систем с конечным числом
степеней свободы и приближенным методам определения собственных
частот. Поэтому в книге эти главы имеют достаточно большой
объем.
Особенностью книги является наличие приложения, в
котором помещены справочные данные, позволяющие при
необходимости получать численные решения для отдельных задач.
Выпуск в свет нового издания книги И. М. Бабакова «Теория
колебаний» восполнит дефицит высококачественной учебной и
научной литературы в области колебаний и устойчивости
механических систем. Она представляется полезной для всех
читателей, интересующихся этими вопросами.
Академик РАН
Р. Ф. Ганиев
*п^
ъЛ-—'
Оглавление
Из предисловия к первому изданию 15
Предисловие ко второму изданию 17
Часть первая
ЛИНЕЙНЫЕ СИСТЕМЫ
С КОНЕЧНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ
Глава I. Введение
НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ АНАЛИТИЧЕСКОЙ МЕХАНИКИ
1. Связи механической системы 19
2. Виртуальные перемещения 20
3. Независимые или обобщенные координаты 22
4. Обобщенные силы 23
5. Уравнения Лагранжа 26
6. Циклические координаты и уравнения Рауса 29
7. Принцип Остроградского — Гамильтона 35
ЭЛЕМЕНТЫ ТЕОРИИ МАТРИЦ
8. Определения 38
9. Обратная матрица 42
10. Собственные значения матрицы 43
11. Квадратичные формы 48
НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ОПЕРАЦИОННОГО ИСЧИСЛЕНИЯ
12. Определение изображения функции 51
13. Изображения некоторых функций
и действий над ними 53
14. Простейшие правила построения начальной функции
по данному изображению 60
15. Начальные функции целых положительных степеней
оператора р 65
Оглавление 9
Глава II. Системы с одной степенью свободы
1. Системы с одной степенью свободы 67
2. Малые свободные колебания системы около
устойчивого равновесного состояния 68
3. Уравнения малых свободных колебаний
линейной системы 71
4. Вынужденные колебания линейной системы
с одной степенью свободы 78
5. Разложение возмущающей силы в ряд Фурье 94
Глава III. Малые колебания систем с несколькими
степенями свободы
1. Системы с конечным числом степеней свободы 99
2. Кинетическая и потенциальная энергия малых
свободных колебаний консервативной системы 103
3. Уравнения малых колебаний системы около состояния
устойчивого равновесия 106
4. Уравнения крутильных колебаний приведенного вала
с пятью дисками 110
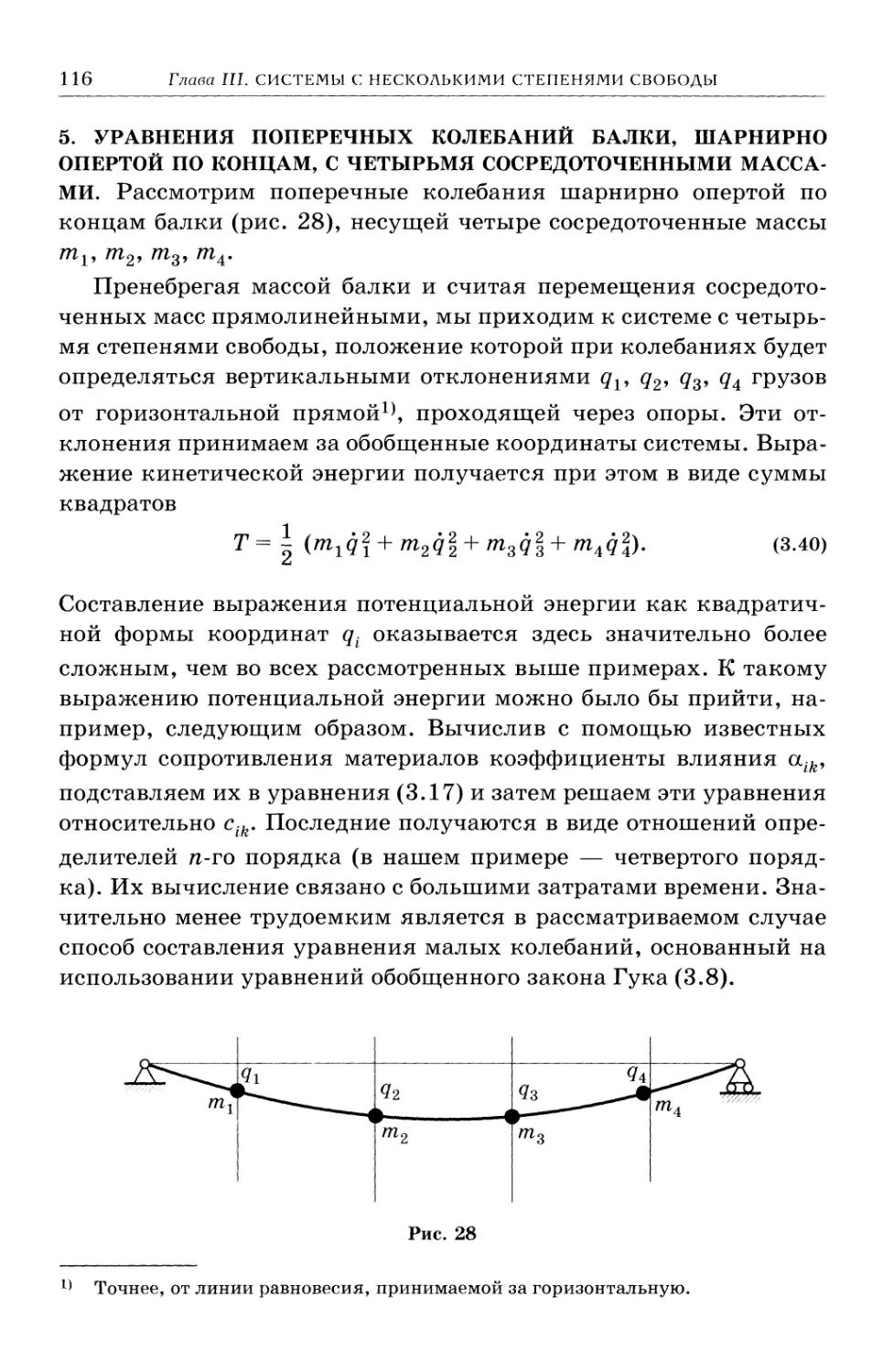
5. Уравнения поперечных колебаний балки, шарнирно
опертой по концам, с четырьмя сосредоточенными
массами 116
6. Нормальные координаты и главные колебания 119
7. Уравнение частот, или вековое уравнение 122
8. Теорема о положительности и разделении корней
векового уравнения 124
9. Собственные формы колебаний и их свойства 129
10. Общий интеграл дифференциальных уравнений
малых колебаний и теорема о разложении 135
11. Разложения коэффициентов уравнений малых
колебаний по собственным формам 137
12. Свободные колебания с сопротивлением 141
13. Теоремы об изменении частот системы
при наложении связей 146
14. Функция Рэлея 148
15. Теоремы об экстремальных свойствах собственных
частот 151
16. Теоремы о влиянии на частоты изменений масс
и жесткостей системы 153
10
Оглавление
17. Уравнения вынужденных колебаний 156
18. Гармонические коэффициенты влияния 160
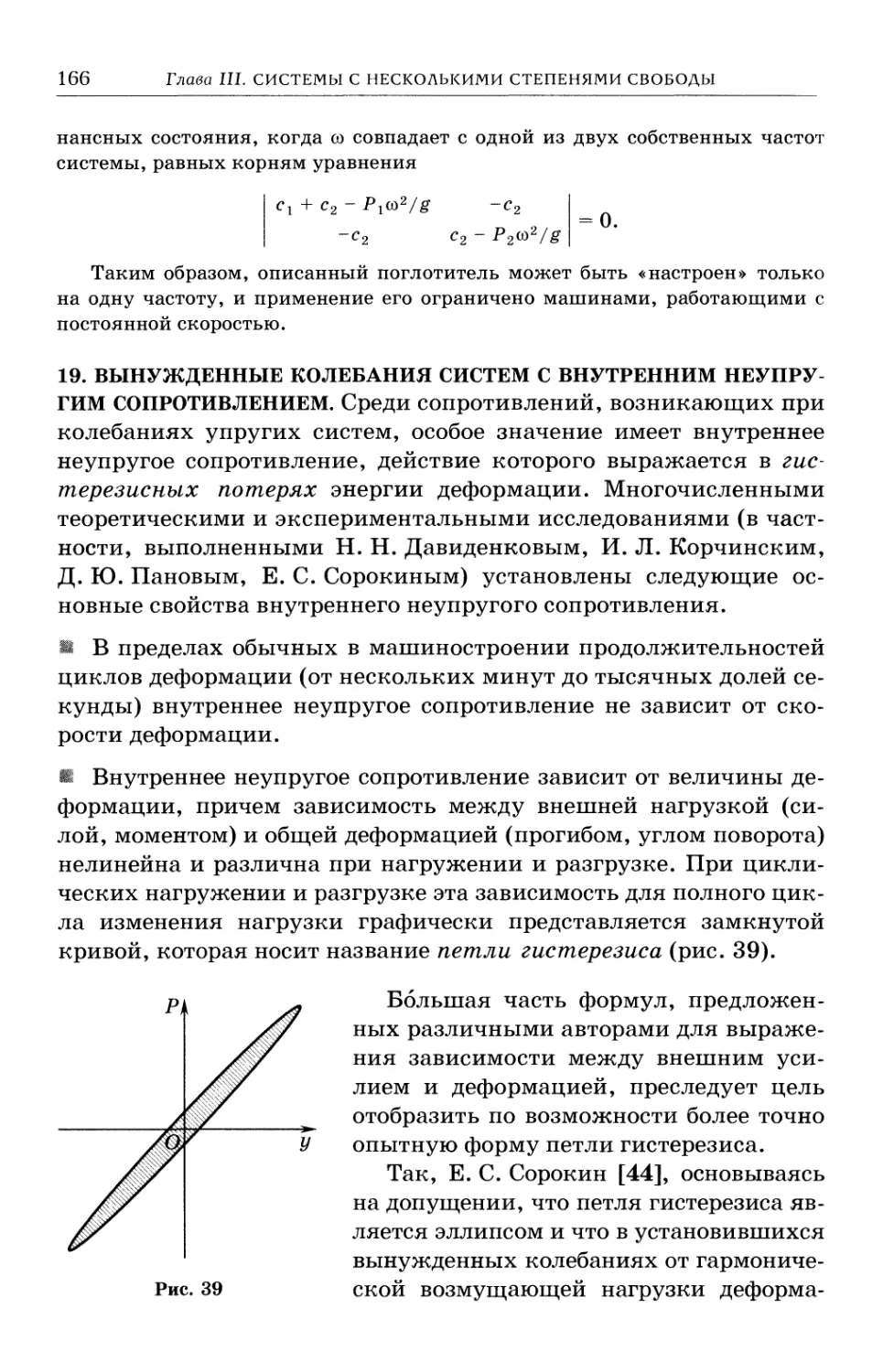
19. Вынужденные колебания систем с внутренним
неупругим сопротивлением 166
Глава IV. Приближенные методы определения собственных
частот систем с конечным числом степеней свободы
ОСНОВНАЯ ЧАСТОТА
1. Метод последовательных приближений формами
колебаний 170
2. Теоремы о границах основной частоты 173
3. Приведение матрицы коэффициентов уравнений малых
колебаний к матрице с положительными элементами . . 177
4. Графическая форма метода последовательных
приближений формами колебаний — метод Стодолы .... 182
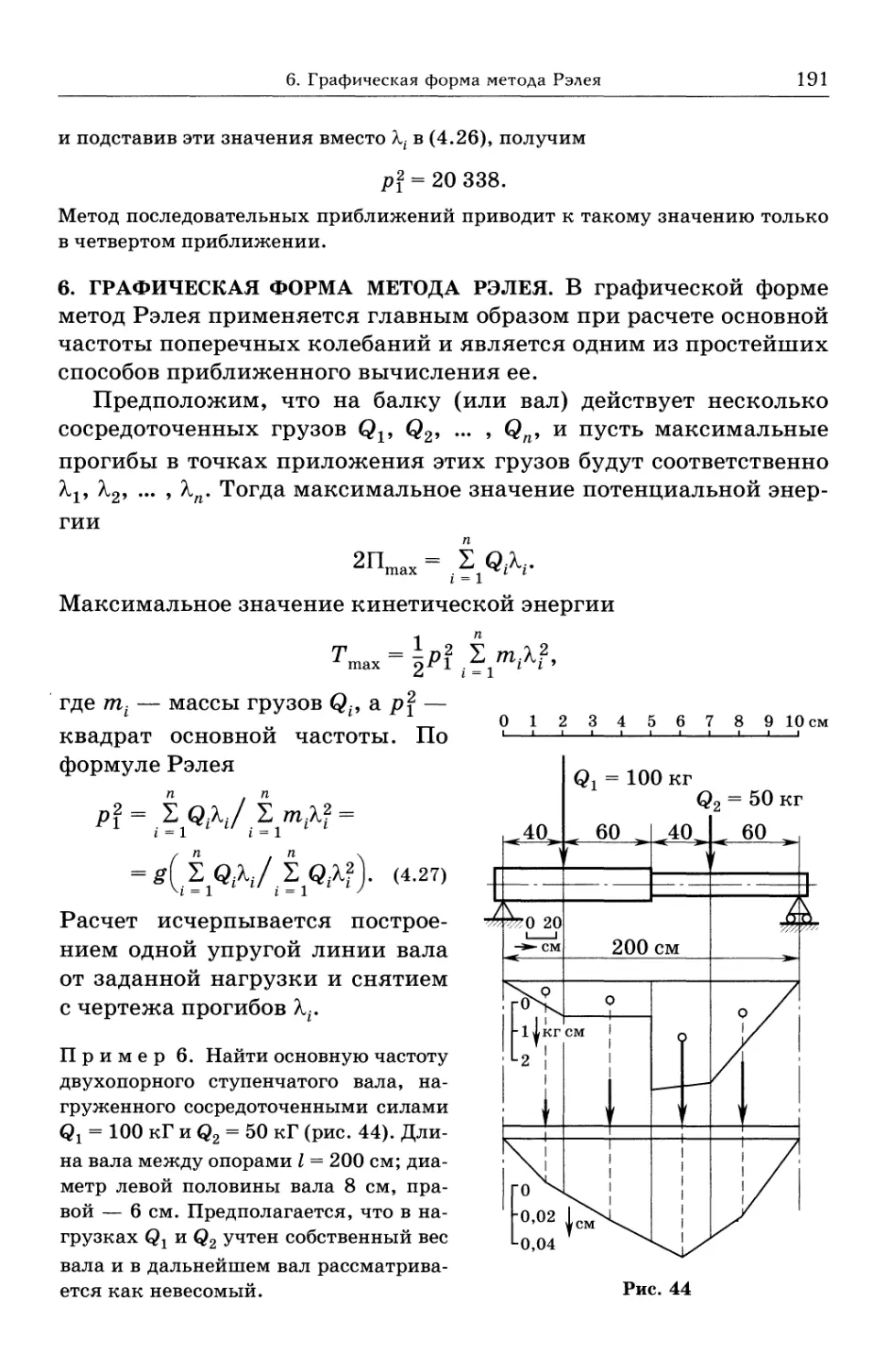
5. Метод Рэлея 188
6. Графическая форма метода Рэлея 191
ВЫСШИЕ ЧАСТОТЫ
7. Общие замечания 192
8. Метод последовательных приближений формами
колебаний — метод итераций 193
9. Метод исключения первой формы 198
10. Метод гармонических коэффициентов влияния 201
Глава V. Явления резонанса в машинах
1. Критические числа оборотов прямых валов 205
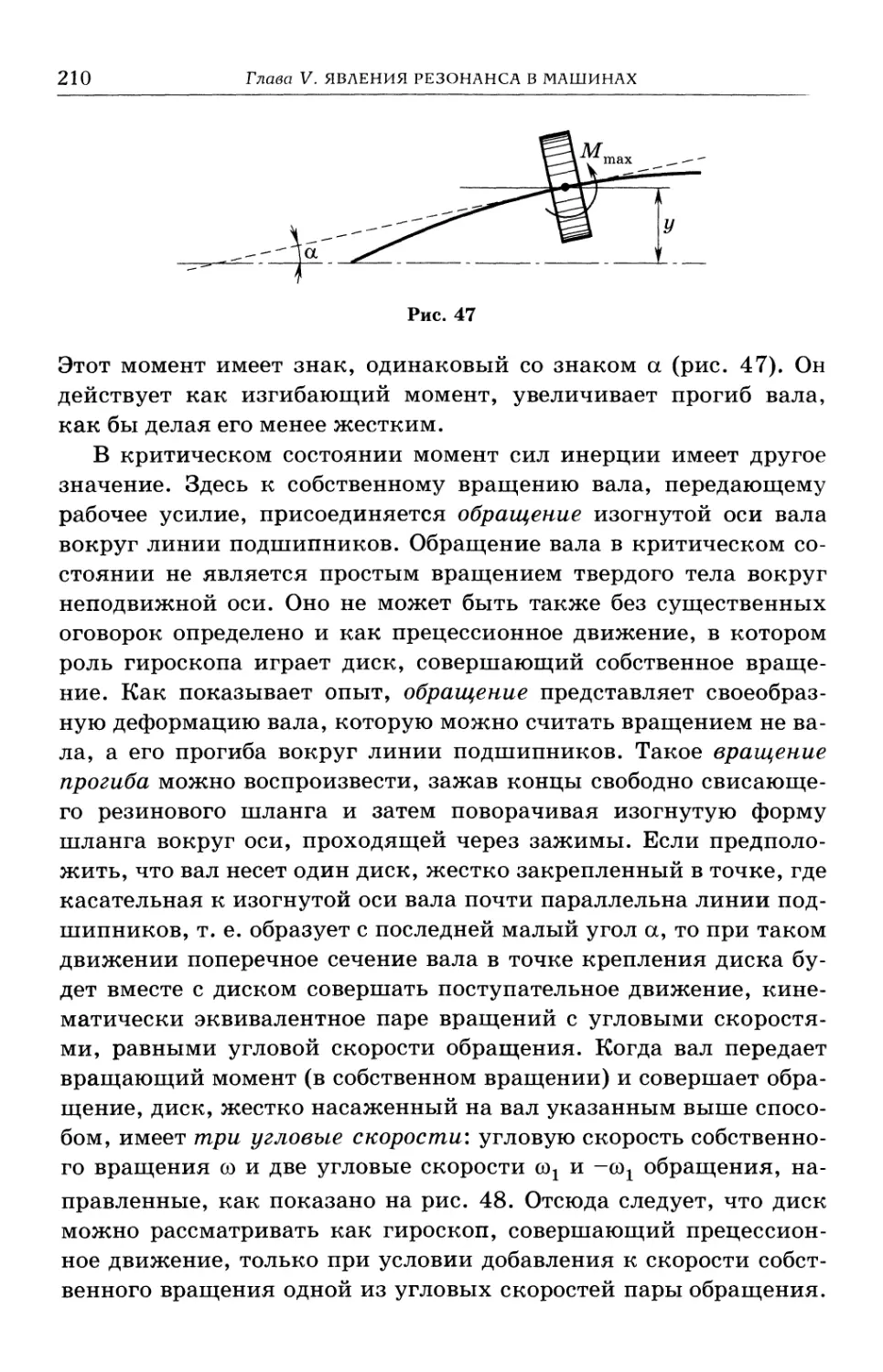
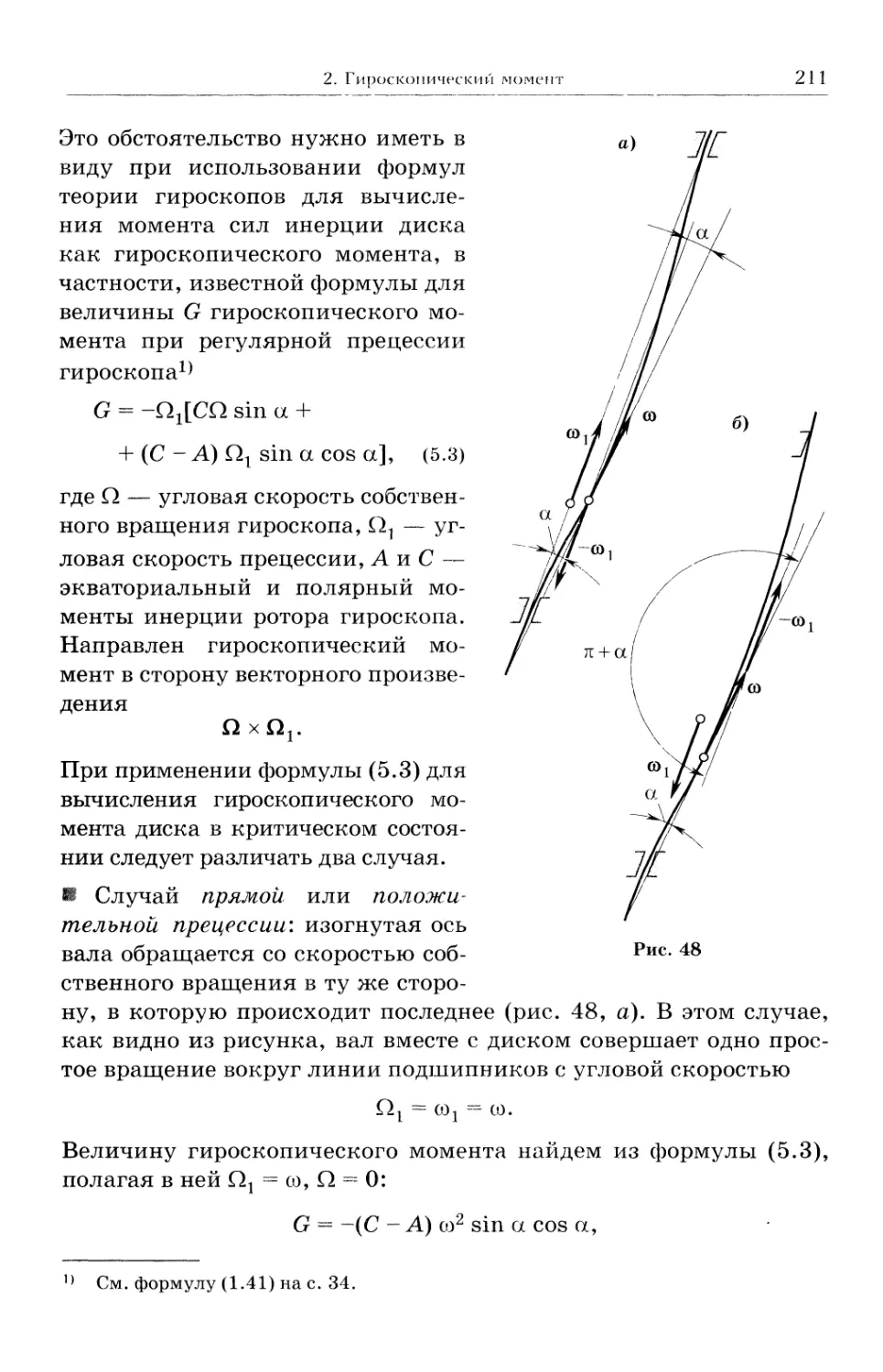
2. Гироскопический момент 209
3. Уравнения для критической скорости вала
со многими дисками 212
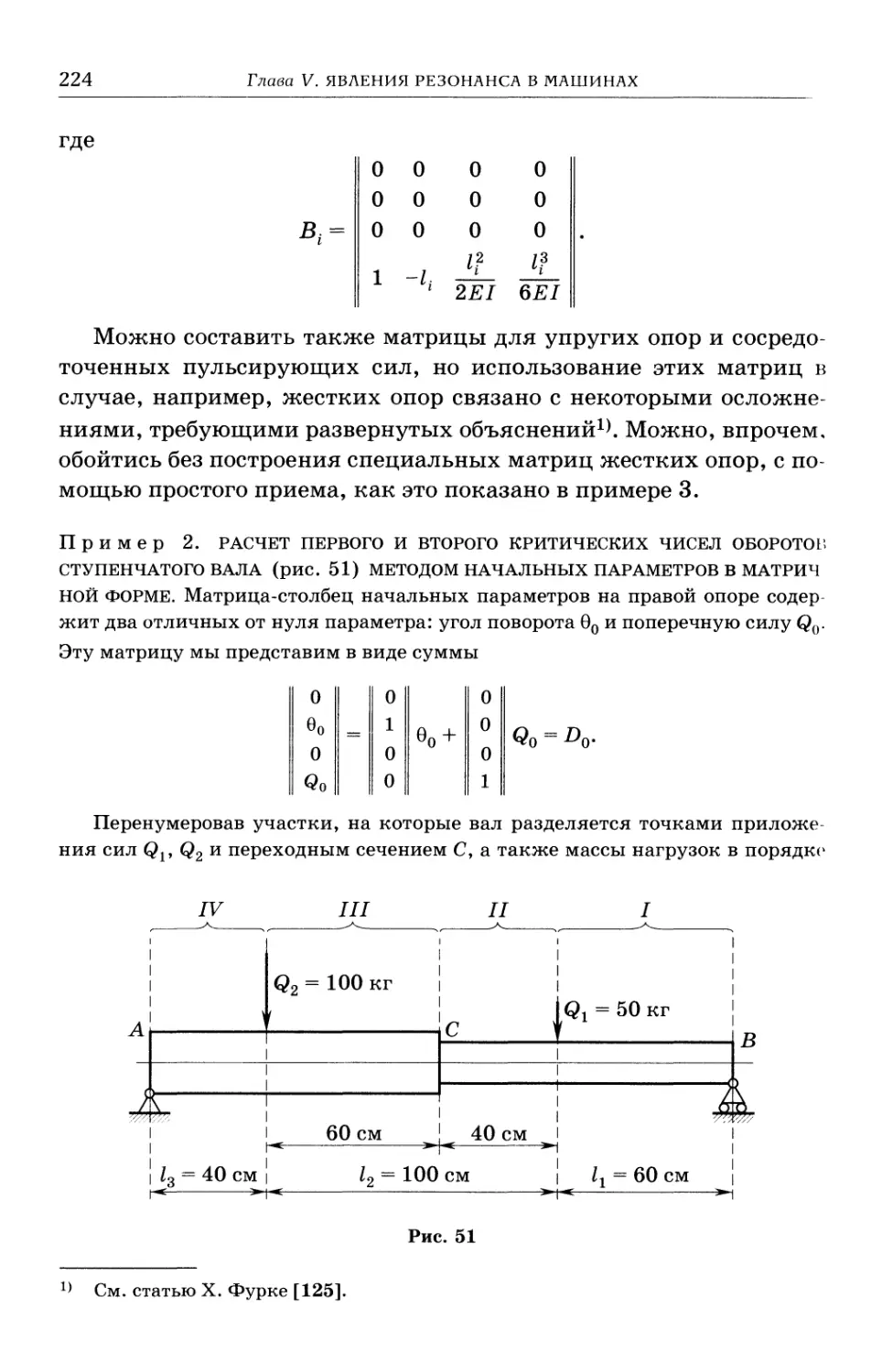
4. Метод начальных параметров 218
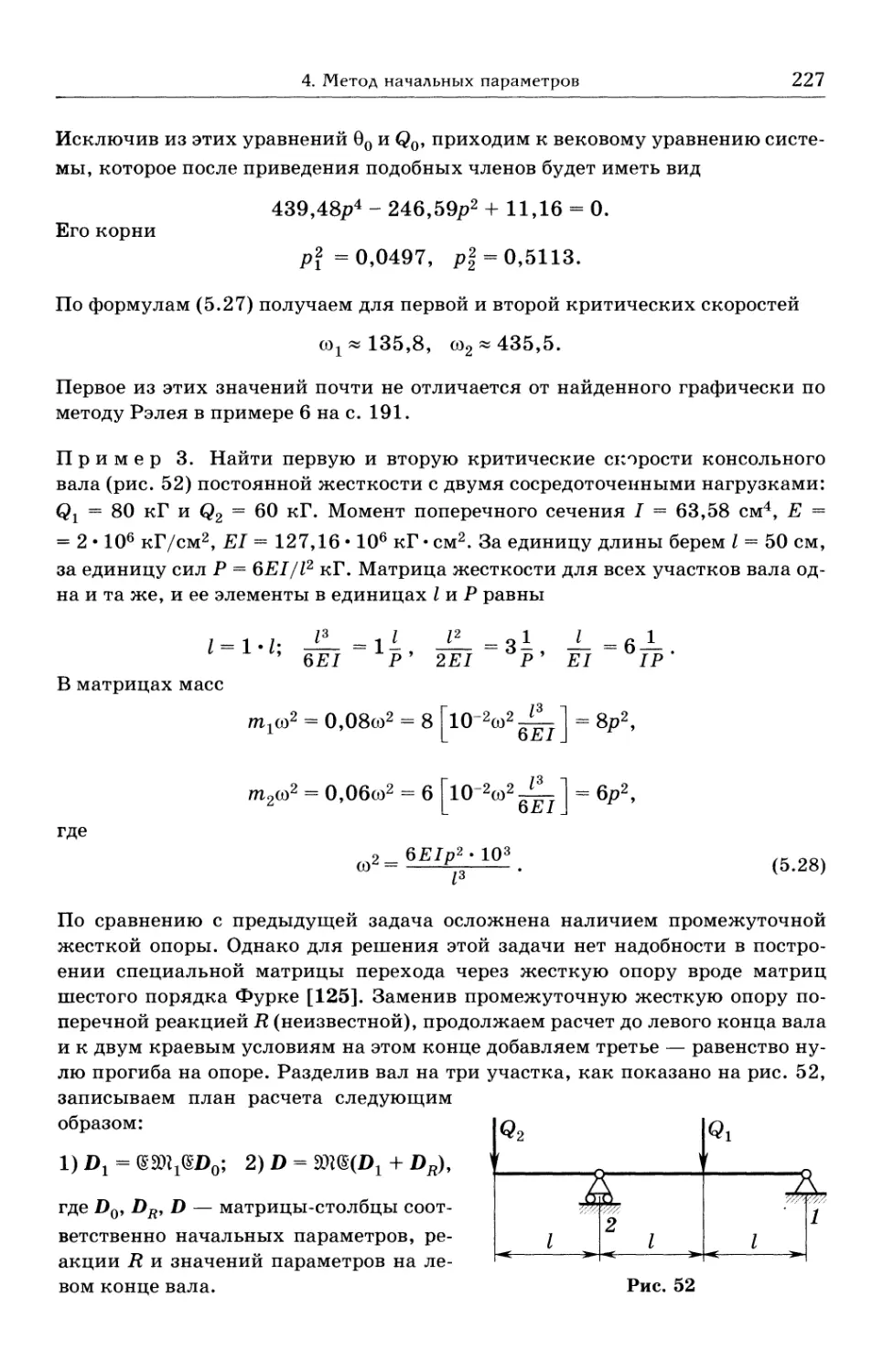
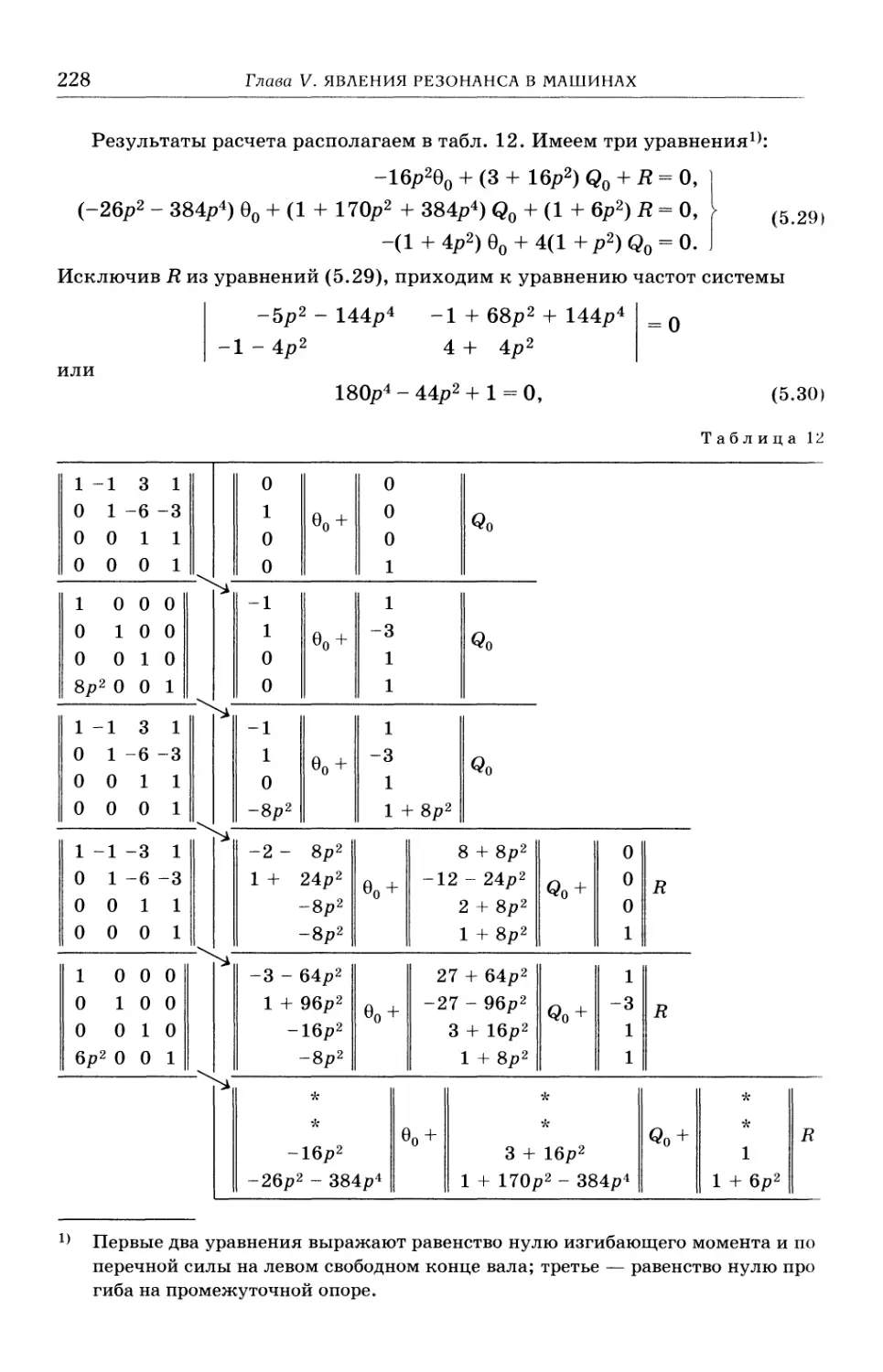
5. Крутильные колебания коленчатых валов 229
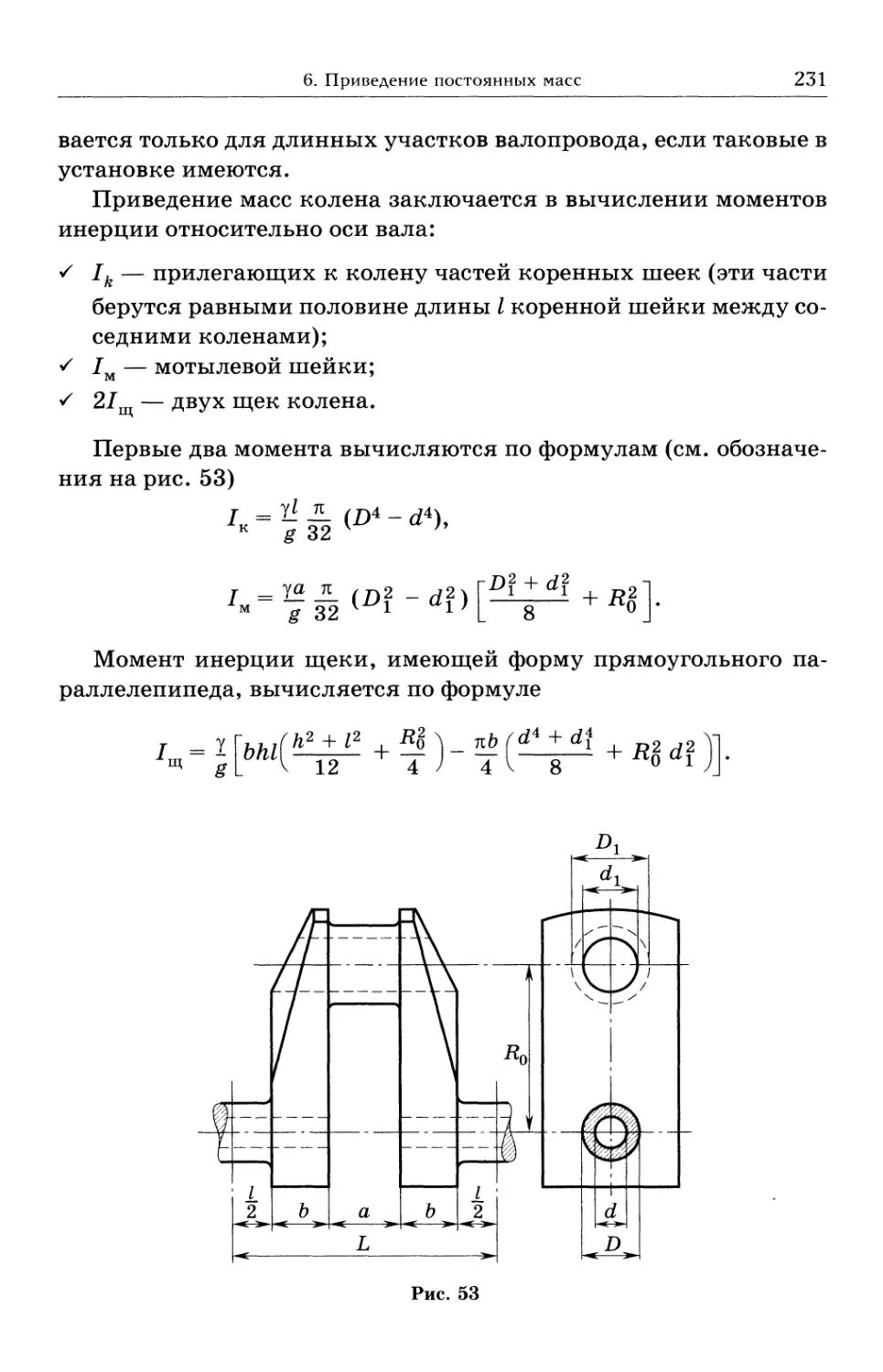
6. Приведение постоянных масс 230
7. Приведение масс кривошипно-шатунного механизма . . 232
8. Вычисление податливостей участков вала 234
9. Приведенная схема 236
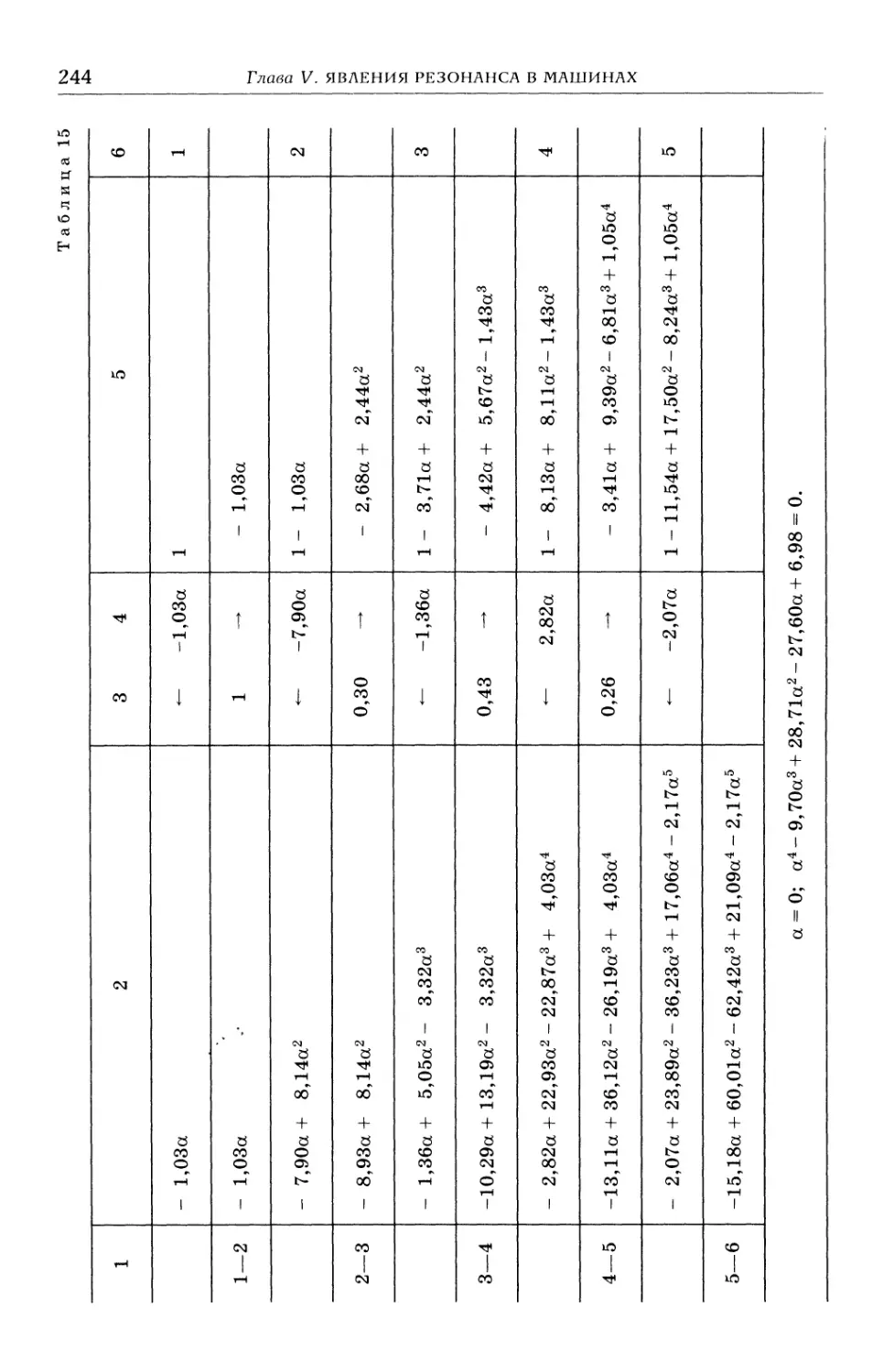
10. Матричная форма таблиц Толле — метод начальных
параметров 240
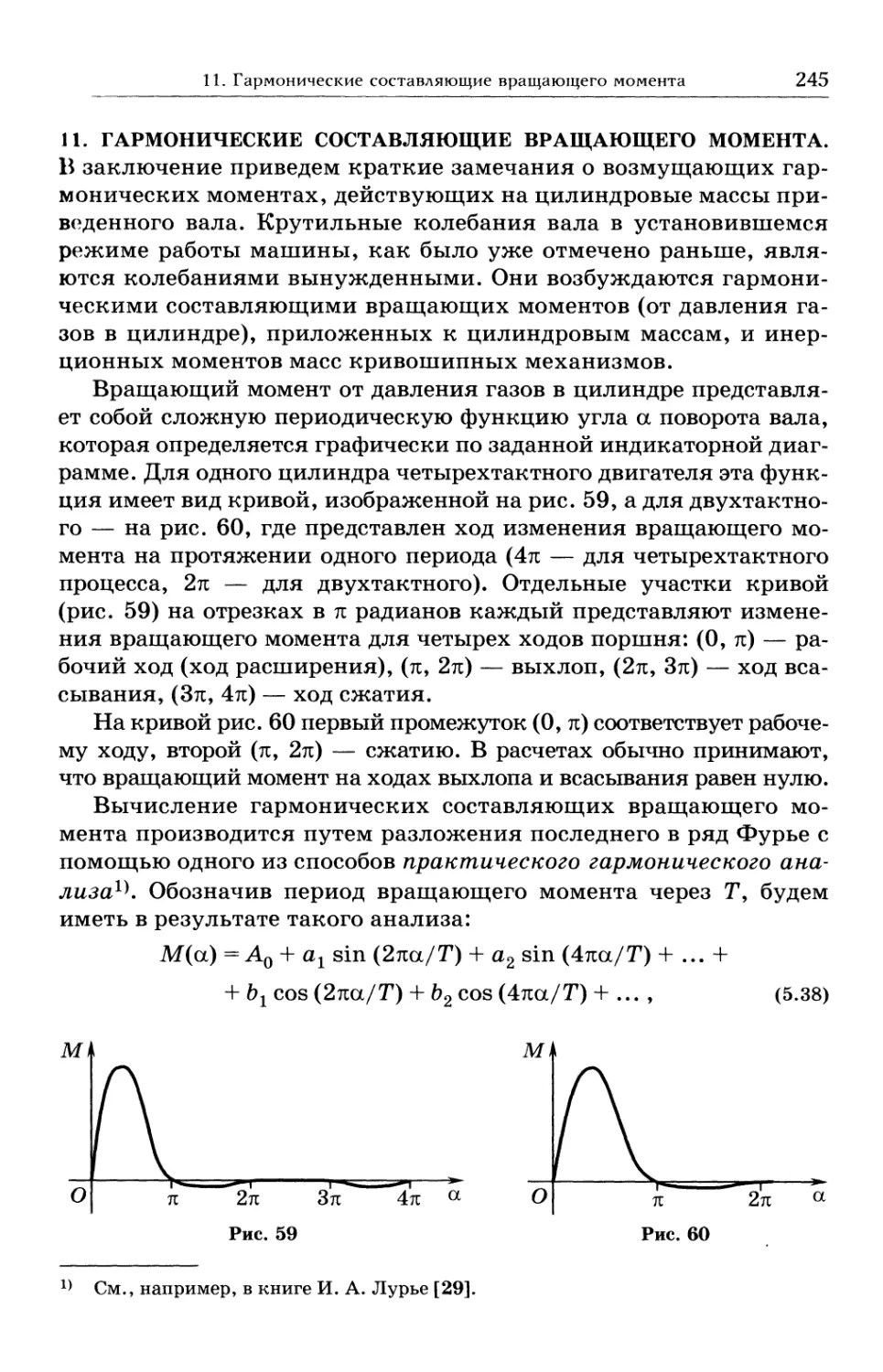
11. Гармонические составляющие вращающего
момента 245
Оглавление 11
Часть вторая
ЛИНЕЙНЫЕ СИСТЕМЫ
С БЕСКОНЕЧНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ
Глава VI. Продольные и крутильные колебания прямых стержней
1. Уравнения продольных и крутильных колебаний
прямого стержня 250
2. Свободные колебания стержня с линейным
сопротивлением 259
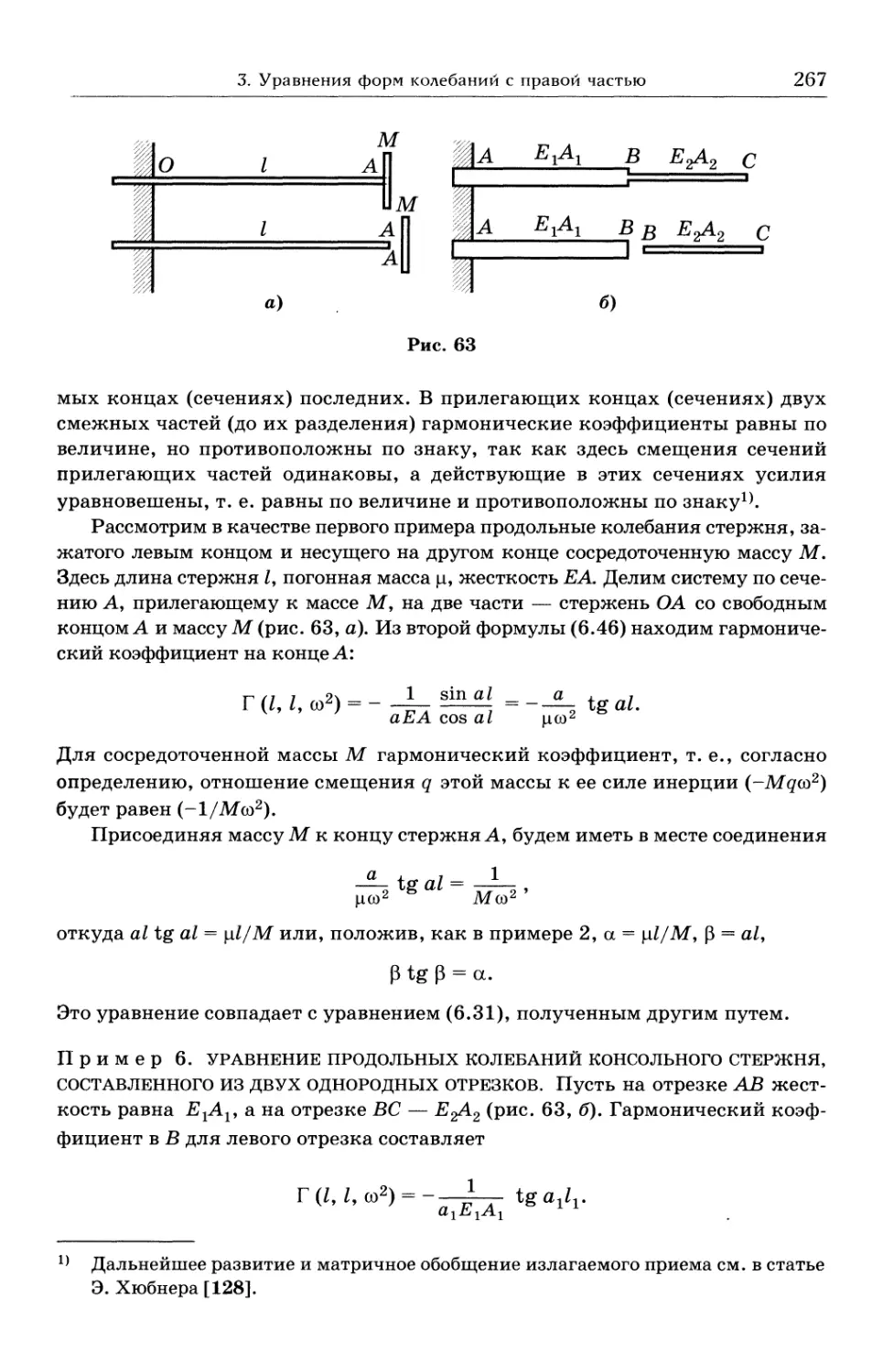
3. Уравнения форм колебаний с правой частью 261
4. Метод начальных параметров в матричной форме 268
Глава VII. Поперечные колебания прямых стержней
1. Основные допущения и уравнение поперечных
колебаний прямого стержня 271
2. Краевые и начальные условия 274
3. Собственные формы колебаний стержня и функции,
их определяющие 275
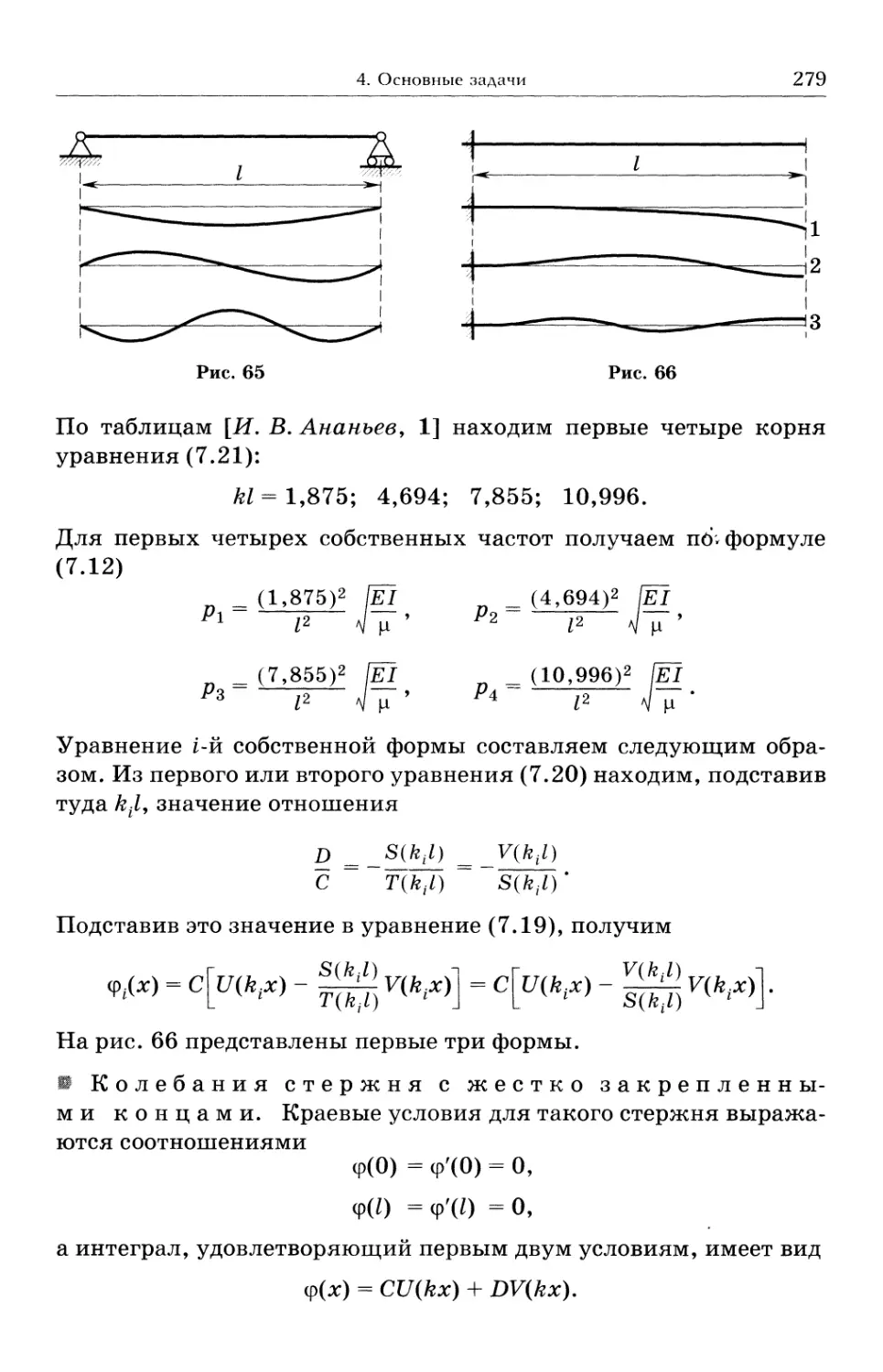
4. Основные задачи 277
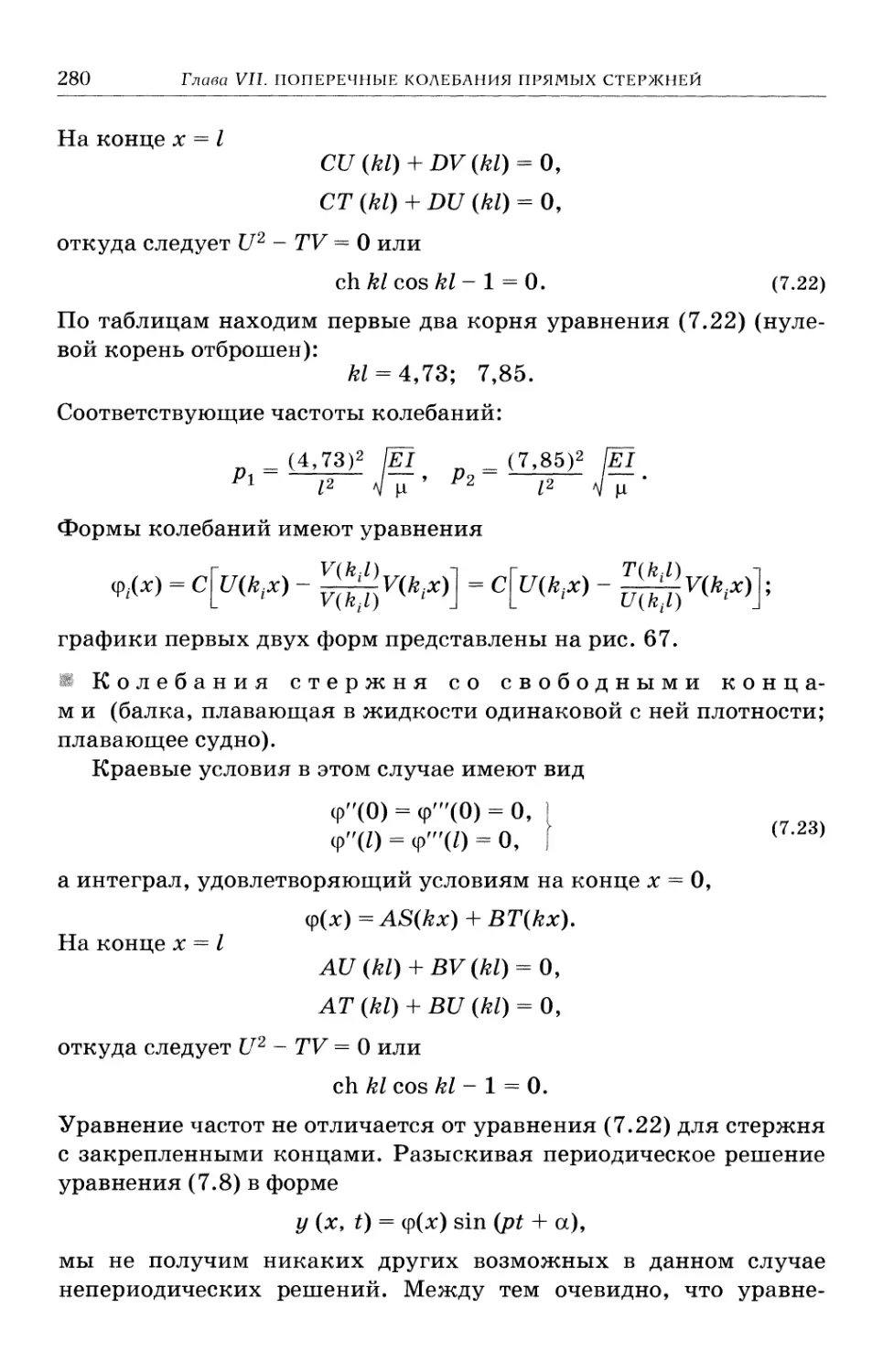
5. Уравнения форм колебаний с правой частью 288
6. Гармонические коэффициенты влияния 291
7. Критические числа оборотов прямого вала с дисками . . 298
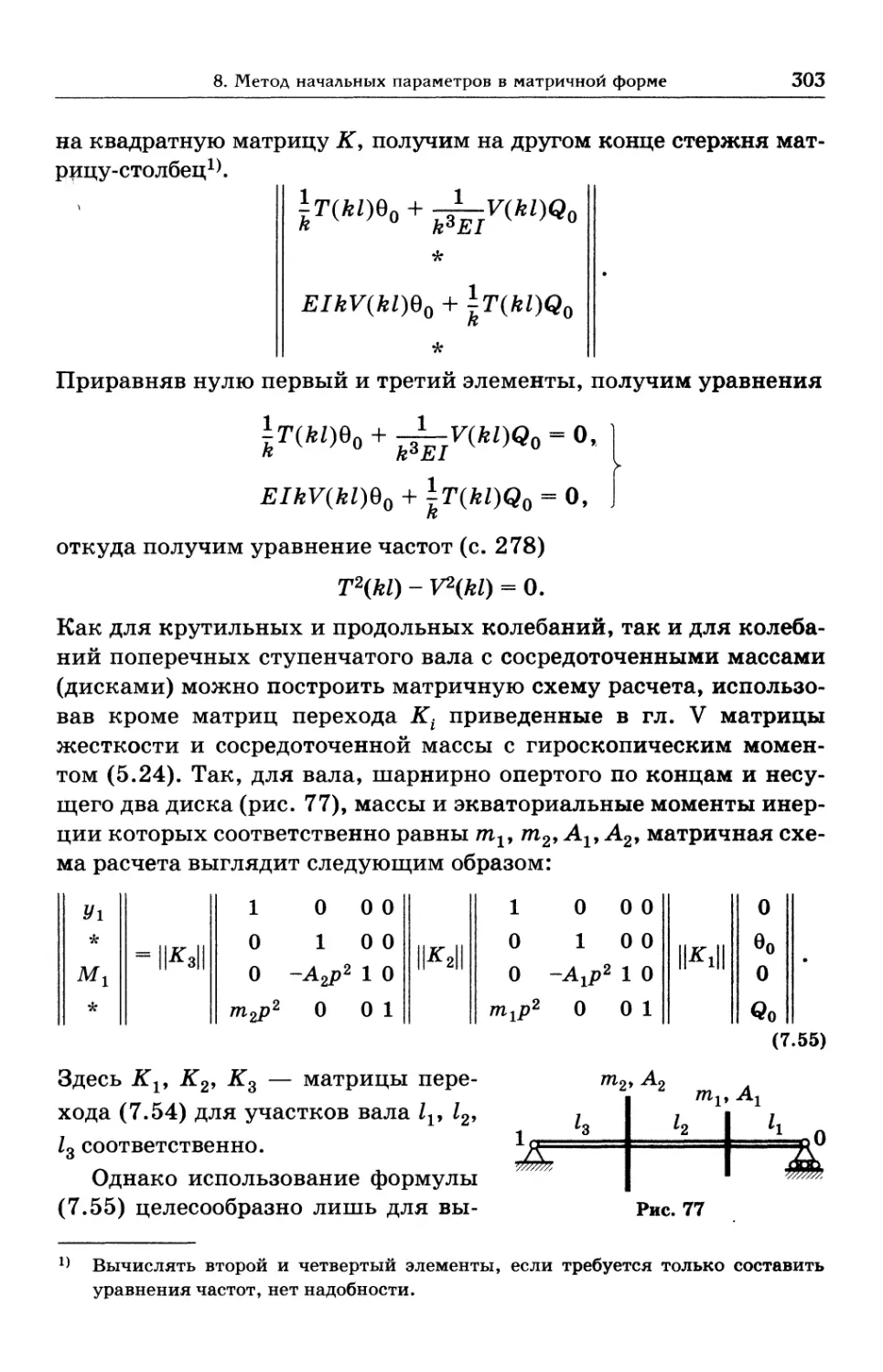
8. Метод начальных параметров в матричной форме 301
9. Поперечные колебания прямых стержней с внутренним
неупругим сопротивлением 304
Глава VIII. Некоторые приближенные методы расчета колебаний
прямых стержней переменного сечения
1. Вариационные методы 310
2. Метод Ритца 313
3. Метод Рэлея . 317
4. Метод Галеркина 328
5. Об оценке погрешности расчета основной частоты 334
6. Метод последовательных приближений формами
колебаний 338
Глава IX. Поперечные колебания пластинок
1. Основные допущения и формулы 343
2. Потенциальная и кинетическая энергия пластинки. . . . 345
12 Оглавление
3. Вариационное уравнение поперечных колебаний
пластинки 347
4. Дифференциальное уравнение форм поперечных
колебаний пластинки и краевые условия 350
5. Некоторые свойства собственных форм колебаний
пластинки 352
6. Приближенные методы расчета собственных форм
и частот поперечных колебаний пластинки — методы
Ритца и Галеркина 357
7. Уравнения поперечных колебаний круглой пластинки . 364
8. Формы колебаний однородной круглой пластинки .... 366
9. Аксиальные колебания дисков паровых турбин 374
10. Экспериментальные исследования аксиальных
колебаний диска по Кэмпбеллу 376
11. Критическое число оборотов диска 379
Часть третья
УСТОЙЧИВОСТЬ ДВИЖЕНИЯ
И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ
Глава X. Введение в общую теорию устойчивости движения
1. Предварительные замечания 380
2. Определение устойчивости равновесного состояния
системы 381
3. Функции Ляпунова 386
4. О функциях, обладающих бесконечно малым
высшим пределом 392
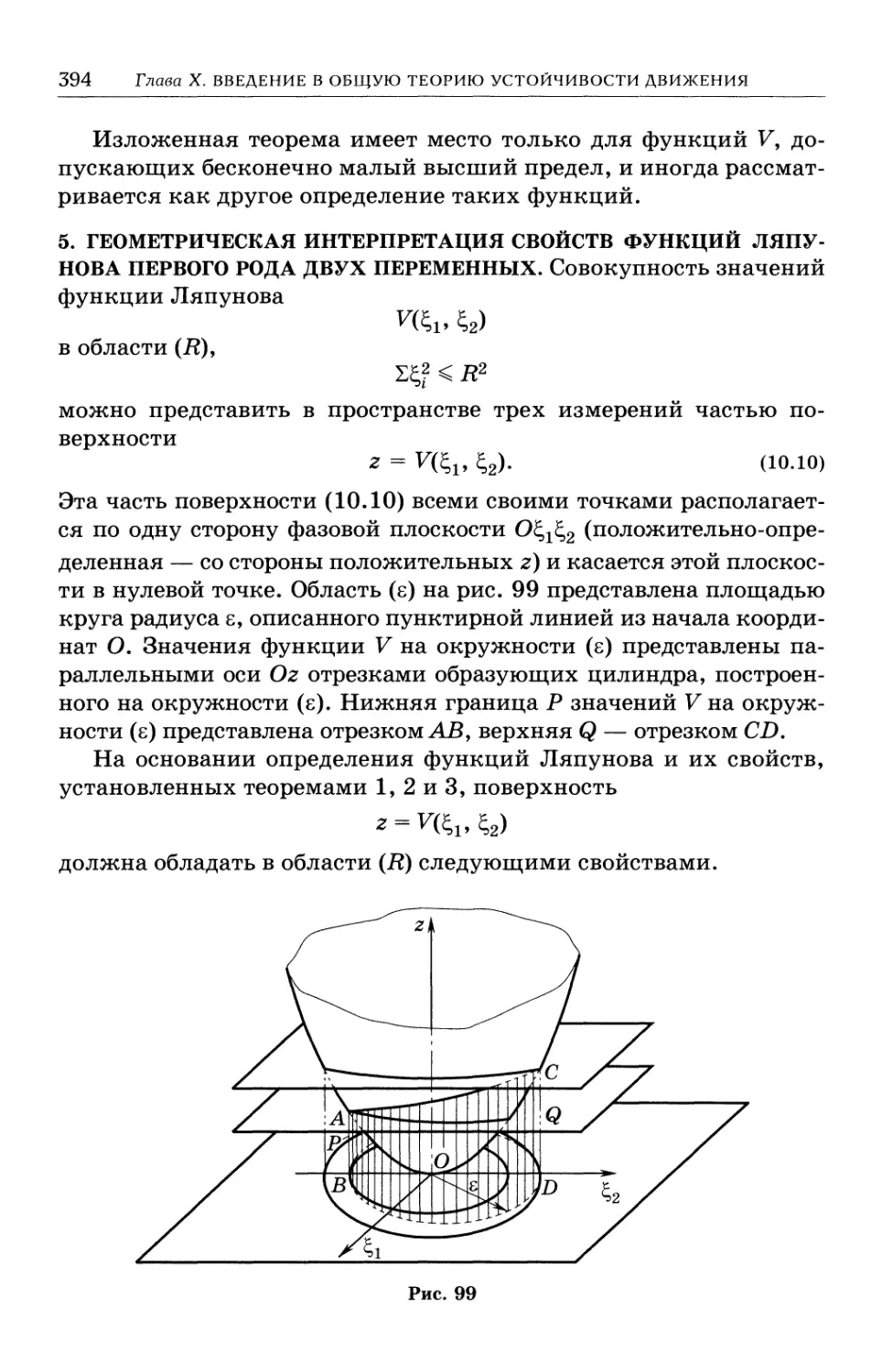
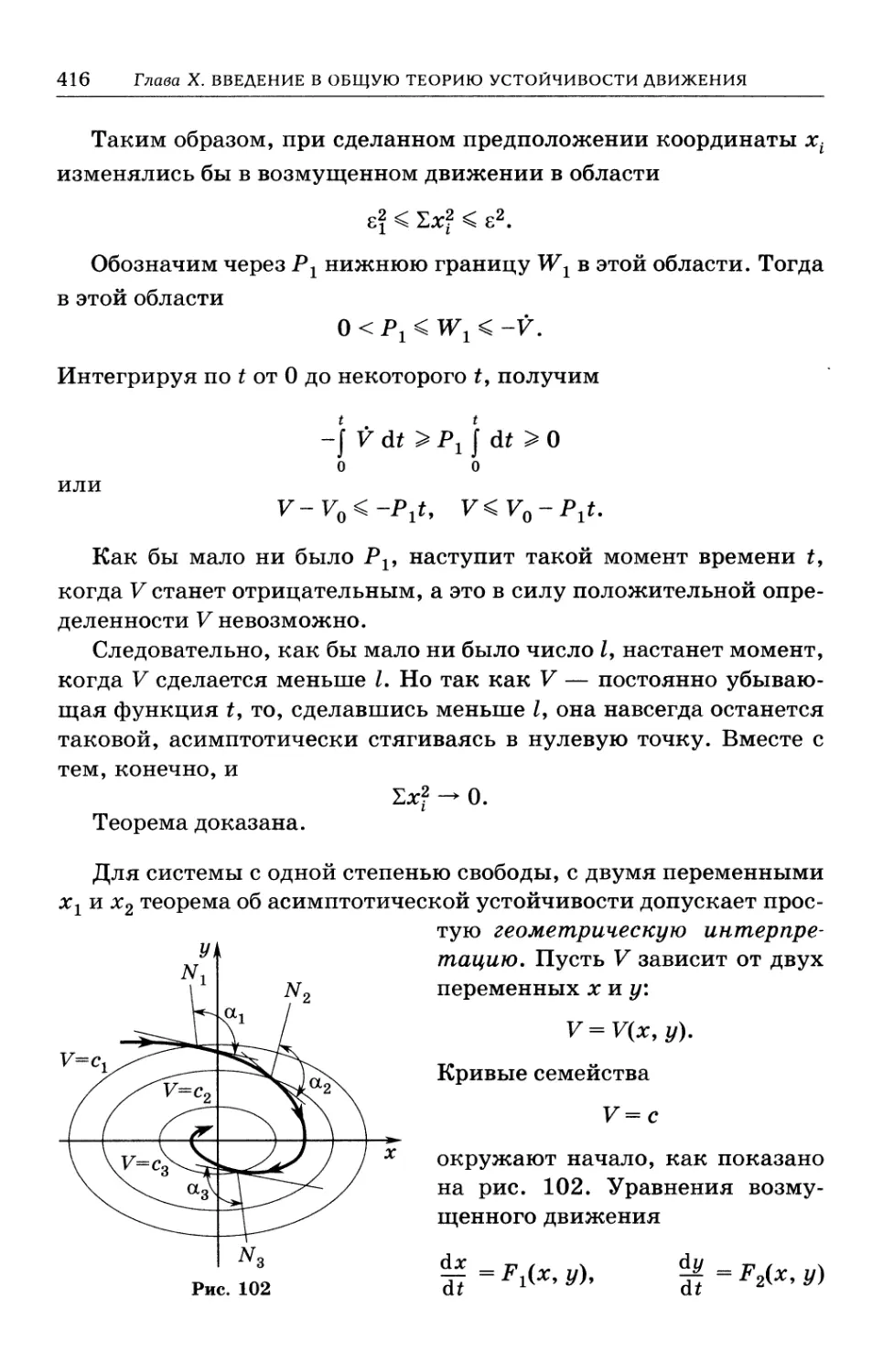
5. Геометрическая интерпретация свойств функций
Ляпунова первого рода двух переменных . 394
6. Теорема об устойчивости равновесного состояния системы 395
7. Теорема Лагранжа—Дирихле об устойчивости
равновесия консервативной системы 397
8. Определение устойчивости движения 402
9. Уравнения возмущенного движения
в относительных координатах. 405
Оглавление
13
10. Функции Ляпунова второго рода 406
11. Теорема Ляпунова об устойчивости неустановившегося
движения 412
12. Теорема Ляпунова об асимптотической устойчивости .. 416
13. Об устойчивости стационарного движения системы
с циклическими координатами — теорема Рауса 419
14. Теорема Ляпунова о неустойчивости движения 422
Глава XI. Об устойчивости по первому приближению
1. Предварительные замечания 424
2. Каноническая форма уравнений первого приближения 426
3. Случай кратных корней характеристического
уравнения 428
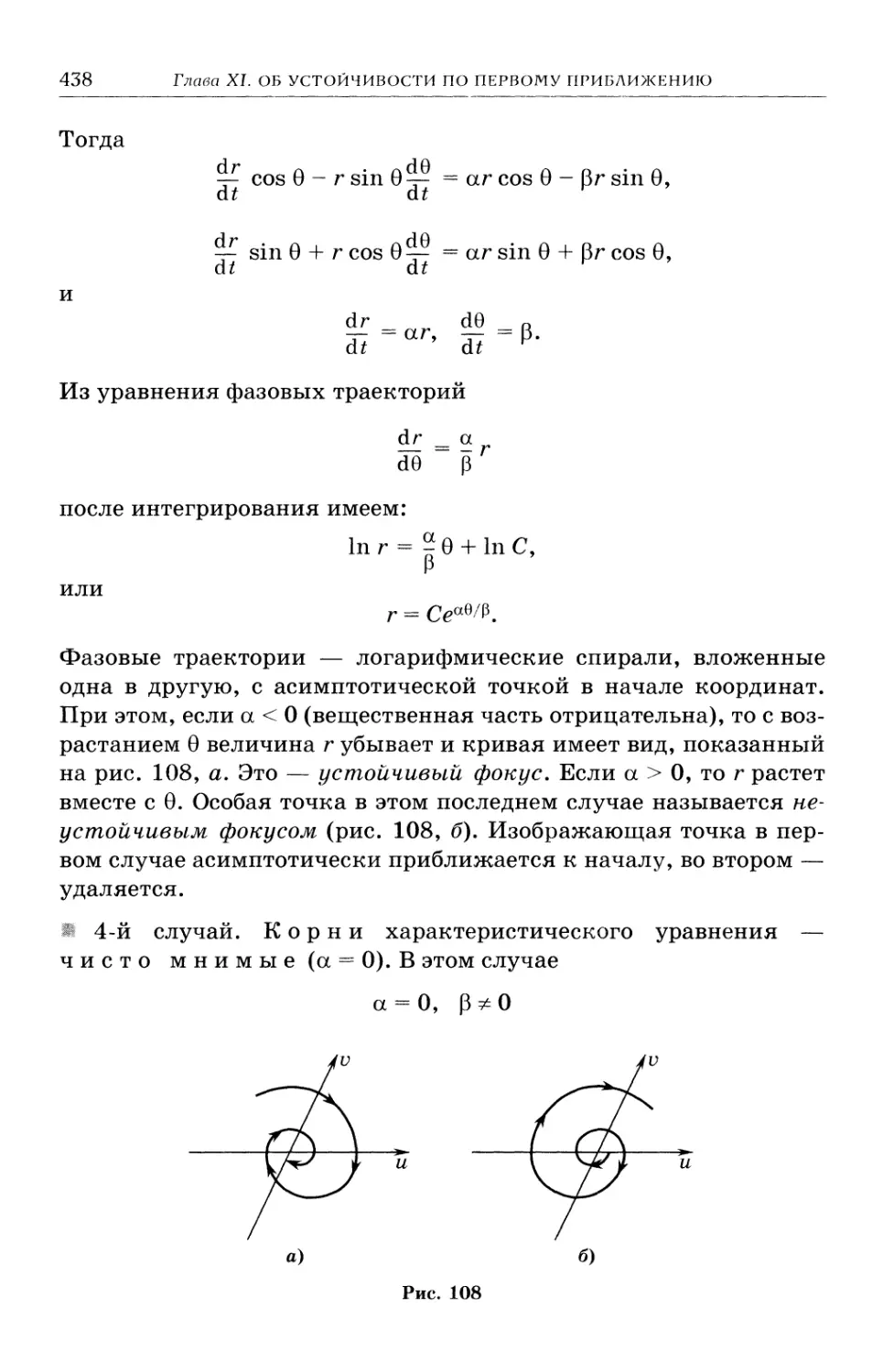
4. Система с одной степенью свободы 432
5. Теорема Ляпунова об устойчивости по первому
приближению 441
6. Теорема Ляпунова о неустойчивости по первому
приближению 446
7. Критерии отрицательности вещественных частей
корней характеристического уравнения 451
8. Критерий Рауса 451
9. Критерий Гурвица 457
10. Влияние возмущающих диссипативных
и гироскопических сил на устойчивость равновесия
консервативной системы 459
Глава XII. Простейшие нелинейные системы
1. Нелинейные системы 467
2. Метод изоклин 472
3. Нелинейные консервативные системы
с одной степенью свободы 473
4. Периодические движения нелинейных
консервативных систем 481
5. Формулы прямой линеаризации 490
6. Диссипативные системы 491
7. Метод Льенара построения фазовых траекторий 494
8. Автоколебательные системы 500
9. Метод Ван-дер-Поля 508
10. Устойчивость предельных циклов 516
14
Оглавление
Глава XIII. Некоторые общие методы нелинейной механики
1. Предварительные замечания 523
2. Теорема Пуанкаре. Случай вынужденных колебаний . . 524
3. Теорема Пуанкаре. Случай свободных колебаний
автономных квазилинейных систем 531
4. Метод А. Н. Крылова 538
5. Метод П. М. Крылова и Н. Н. Боголюбова 542
6. Системы А. М. Ляпунова 545
7. Вынужденные колебания нелинейных систем —
метод осреднения 549
8. Вынужденные колебания нелинейных систем —
метод Галеркина 552
9. Линейные уравнения с периодическими
коэффициентами и задача об устойчивости
периодических решений нелинейных систем 559
10. Устойчивость периодических решений 562
Приложение
Таблица I. Значения параметров Х1 и коэффициентов Аь, Вь
и С7 балочных функций 572
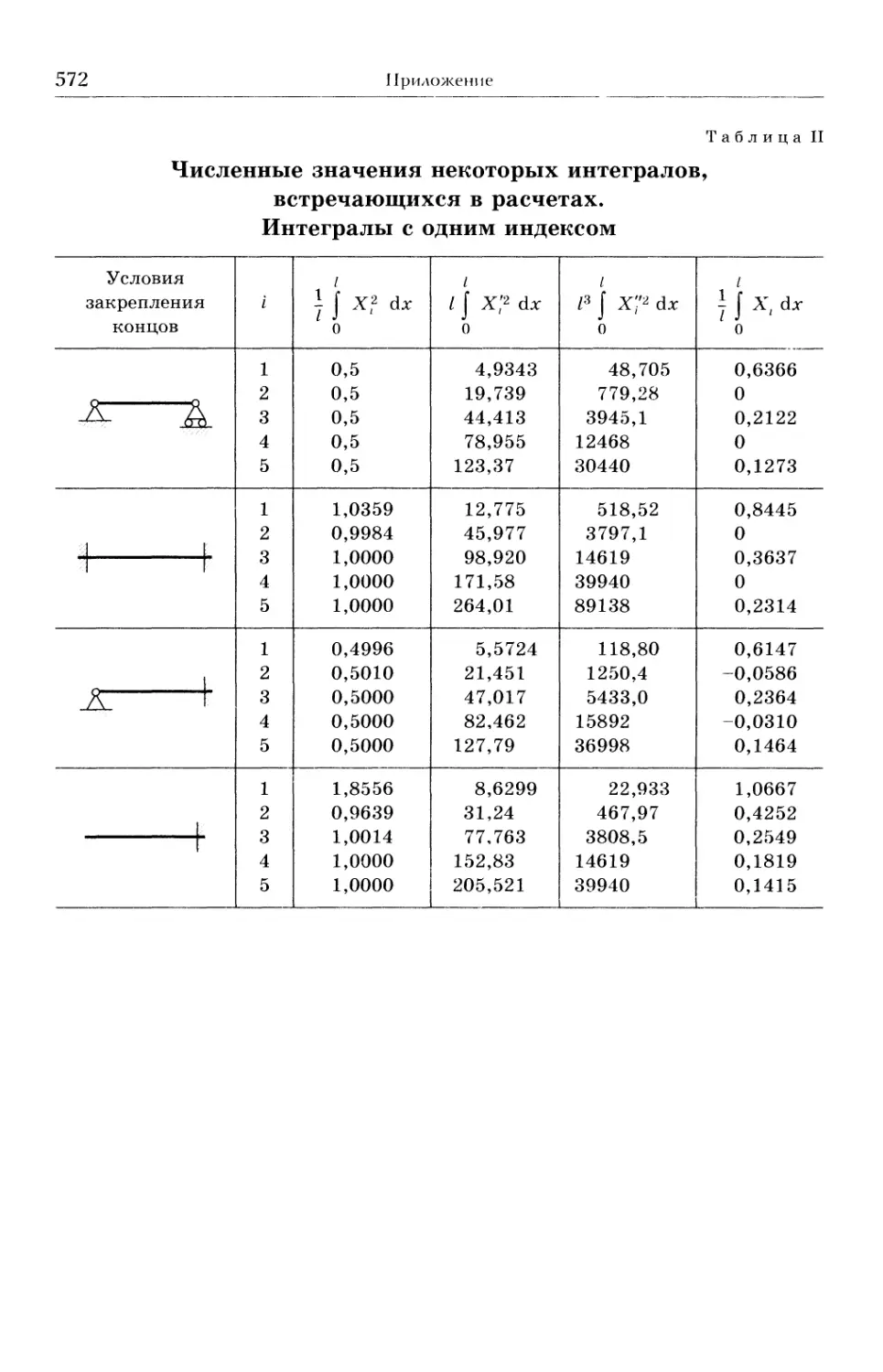
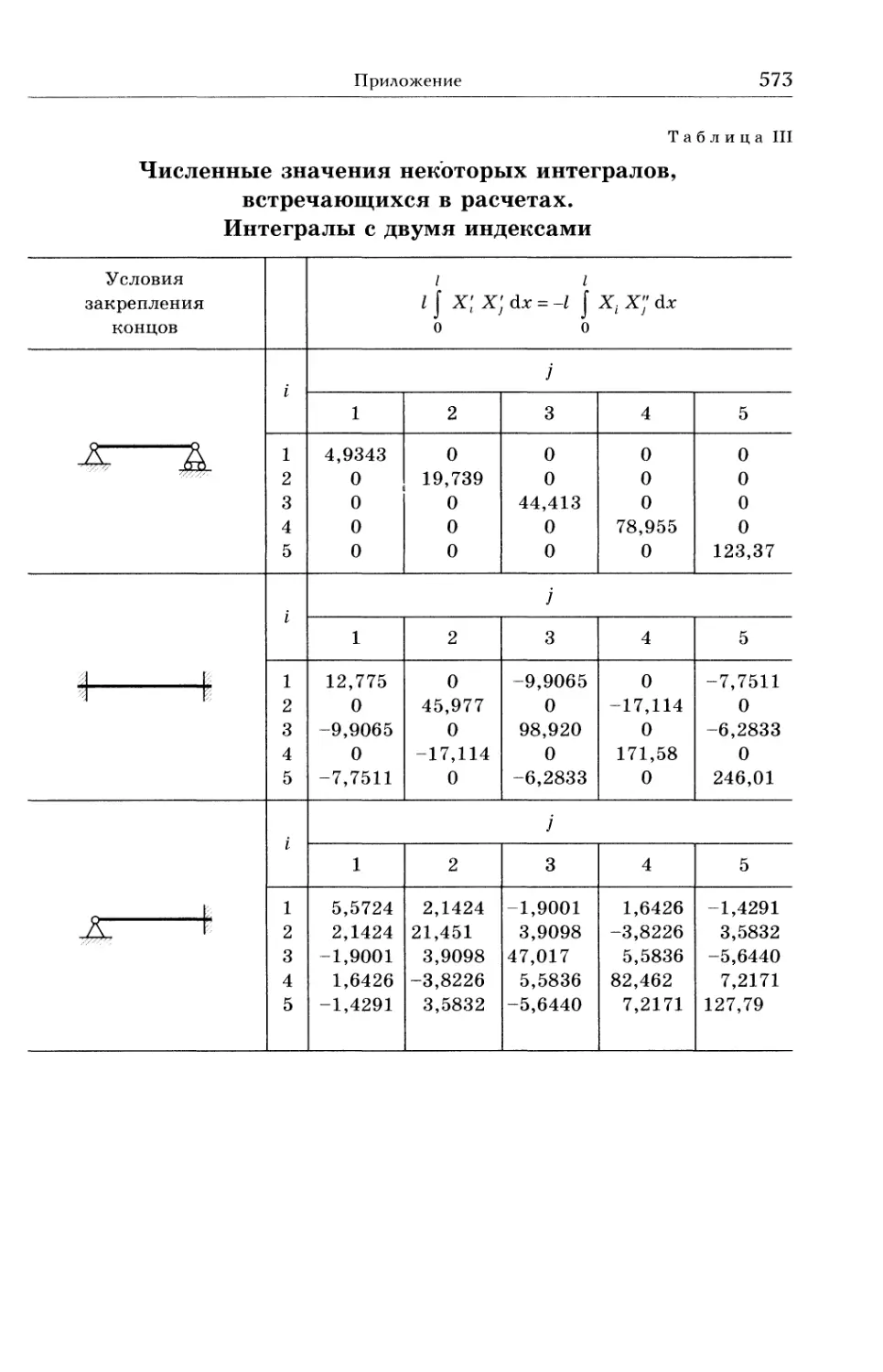
Таблицы II, III. Численные значения некоторых интегралов,
встречающихся в расчетах 573
Таблица IV. Некоторые тригонометрические формулы,
встречающиеся в расчетах 575
Литература 576
Именной указатель 583
Предметный указатель 585
Об авторе 590
ИЗ ПРЕДИСЛОВИЯ К ПЕРВОМУ ИЗДАНИЮ
Настоящая книга воспроизводит с некоторыми дополнениями
лекции автора по специальным курсам теории колебаний и
устойчивости движения, которые он читал в течение многих лет
студентам отделения динамика и прочность машин
инженерно-физического факультета Харьковского машиностроительного, а затем
Харьковского политехнического института имени В. И. Ленина1).
Она была задумана как учебное пособие по теории колебаний для
студентов указанной специальности, чем и определился в
основном первоначальный отбор материала и общий характер его
изложения. Внесенные в процессе работы над книгой дополнения
значительно расширили ее содержание, так что некоторые
разделы в их окончательном виде вышли за пределы программного
учебного материала. Но и в таком расширенном объеме она
никак не может претендовать на сколько-либо исчерпывающее
изложение даже тех немногих вопросов теории, которые нашли в
ней место. Теория колебаний в настоящее время представляет
собой столь обширную и разностороннюю отрасль науки и
техники, что уже при изложении основных ее положений приходится
делать среди них определенный выбор, ограничиваться
рассмотрением только некоторых, опуская многие другие не менее
важные и интересные.
Книга состоит из трех частей. В первой излагается теория
колебаний упрощенных {приведенных) систем с конечным числом
степеней свободы. Вторая часть посвящена изложению основ
теории колебаний систем с распределенными параметрами (систем с
бесконечным числом степеней свободы). Третья часть содержит
В настоящее время — Национальный технический университет
«Харьковский политехнический институт». — Ред.
16
элементарные сведения из учения об устойчивости движения и
теории нелинейных колебаний.
Выдвижение на первый план теории колебаний систем с
конечным числом степеней свободы и несколько расширенный объем
этого раздела объясняются тем значением, какое имеет расчет
упрощенных (приведенных) систем в практических вибрационных
расчетах. Несмотря на неточность результатов, получаемых в
расчетах приведенных систем, теория колебаний линейных систем с
конечным числом степеней свободы сохраняет и в настоящее
время значение основного раздела общей теории колебаний.
Колебания систем с распределенными параметрами во второй
части курса трактуются преимущественно в духе классических
методов Рэлея и А. Н. Крылова. Попытка добиться
методического единства приемов вибрационных расчетов линейных
механических систем выразилась в книге главным образом в
систематическом использовании методов А. Н. Крылова: метода
разложения по собственным формам колебаний и метода, основанного на
применении универсальной формулы упругой линии.
Операционное исчисление используется в книге не как
систематически применяемый метод, а только как весьма удобное
вспомогательное средство при составлении общих решений
некоторых уравнений (например, универсальной формулы упругой
линии).
В третьей части дано элементарное изложение второго метода
А. М. Ляпунова исследования устойчивости движения и
приведены некоторые сведения о нелинейных колебаниях (главы XVI
и XVII).
Предполагается, что читатель знаком с основами высшей
математики и теоретической механики в объеме обычных
втузовских программ для машиностроительных специальностей.
Теоретические обоснования и доказательства сходимости
некоторых излагаемых в книге методов по возможности упрощены,
а там, где подобные упрощения могли бы дать неправильное
представление о сущности проблемы или о трудностях ее
решения, эти доказательства просто опущены со ссылками на
первоисточник или заменены более или менее подробным описанием
вытекающих из их содержания приемов решения проблемы.
И. Бабаков
17
ПРЕДИСЛОВИЕ КО ВТОРОМУ ИЗДАНИЮ
Второе издание несколько сокращено по сравнению с первым.
В нем опущены разделы и параграфы, содержавшие изложение
некоторых теоретических положений, не получивших в книге
дальнейшего развития и приложений (например, раздел об
интегральных уравнениях малых колебаний). Необходимые
сведения из аналитической механики, матричного и операционного
исчислений, которые в первом издании давались по ходу
изложения курса в различных главах, во втором издании
сконцентрированы в первой вступительной главе. Это дало возможность более
компактно расположить материал по отдельным главам, придав
последним большую законченность и некоторую относительную
независимость.
Существенной переработке подверглись разделы, относящиеся
к приближенным методам расчета на колебания систем с
конечным и бесконечным числом степеней свободы, с широким
использованием вариационных методов. В основу практических приемов
вибрационных расчетов стержней и валов с дискретным и
непрерывным распределением масс и жесткостей положены методы
начальных параметров в матричной форме. Применение матричных
алгоритмов в сочетании с подходящим выбором масштабов для
сил (моментов) и длин делают необходимые вычисления не только
весьма удобными при программировании для электронных
вычислительных машин, но и вообще значительно упрощают эти
вычисления, позволяя даже в сравнительно сложных задачах
выполнять их с помощью элементарных счетных устройств
(арифмометр, счетная линейка). Состав примеров несколько обновлен.
Числовые расчеты заново проверены, и в тексте страниц,
оставшихся без особых редакционных изменений, исправлены
замеченные опечатки.
Автор считает своим долгом принести глубокую благодарность
профессорам Н. В. Бутенину и И. М. Глазману и редактору
В. В. Крементуло, просмотревшим рукопись и сделавшим ряд
ценных замечаний и рекомендаций, которые учтены автором при
переработке книги.
И. Бабаков
18
ОТ РЕДАКТОРА
В предыдущем A968 г.) издании ссылки на цитированную
литературу были даны в сносках и отчасти непосредственно в
тексте. Многие из этих монографий, учебников, статей с тех пор
не переиздавались и в настоящее время труднодоступны, поэтому
здесь они сведены в общий список литературы в конце книги.
Ссылки на литературу, выходившую в свет после 1968 г.,
сохранены в прежнем виде с добавлением ссылки на последнее
переиздание.
В подготовке настоящего издания большая помощь была
оказана докт. техн. наук проф. Г. И. Львовым (заведующим
кафедрой динамики и прочности машин Национального технического
университета «Харьковский политехнический институт»),
заслуженным деятелем науки и техники Украины, докт. физ.-мат.
наук проф. И. Т. Селезовым, докт. техн. наук М. С. Герштейном
и дочерью автора канд. техн. наук О. И. Бабаковой. Особенно
много времени и внимания уделила книге доцент кафедры
машиноведения и деталей машин Московского авиационного института
(государственного технического университета) канд. техн. наук
Г. Н. Хромова.
Час т ь п е р в а я
ЛИНЕЙНЫЕ СИСТЕМЫ
С КОНЕЧНЫМ ЧИСЛОМ
СТЕПЕНЕЙ СВОБОДЫ
Г -л а в а I
Введение
НЕКОТОРЫЕ СВЕДЕНИЯ
ИЗ АНАЛИТИЧЕСКОЙ МЕХАНИКИ
1. СВЯЗИ МЕХАНИЧЕСКОЙ СИСТЕМЫ. Связями механической
системы называются ограничения, стесняющие движение системы и
осуществляемые какими-либо другими материальными телами.
Обычно это различного рода закрепления системы: подшипники
для валов поршневых и ротативных машин, шарнирные опоры,
жесткие или упругие заделки концов стержней и балок, опорные
поверхности, по которым должна перемещаться или на которых
должна оставаться в покое система, и т. п. В дальнейшем
предполагается, что, каковы бы ни были устройства, осуществляющие
связи, их действия на систему выражаются силами,
приложенными к системе и определенным образом направленными. Эти
силы называются реакциями связей. Предполагается также, что
связи могут быть аналитически представлены уравнениями,
которым должны удовлетворять координаты точек системы и
производные от координат по времени. При этом связи,
представленные уравнениями1*
4 (х19 у19 гг; х2, у2, 22; ... ; хм, ум, гм; 0 = 0, A.1)
к = 1, 2, ... , пг; пг < ЗЫ,
] Такие связи называются иногда «удерживающими» или «двусторонними»
связями. Связи «неудерживающие» (или «односторонние»), выражающиеся
неравенствами, дальше не рассматриваются.
20 Глава I. ВВЕДЕНИЕ
не содержащими производных координат по времени (Ы — число
точек системы; х[9 у19 г{ — их координаты), или уравнениями,
содержащими производные, но интегрируемыми и приводящимися к
виду A.1), называются голономными связями. Такие связи
ограничивают главным образом выбо^ возможных положений системы.
Связи, представленные уравнениями, содержащими производные
координат и неинтегрируемыми, называются неголономными. Не-
голономные связи, не налагая, как правило, ограничений на выбор
положений системы, большей частью вынуждают последнюю
двигаться из данного положения в некотором определенном
направлении, т. е. ограничивают выбор величины и направления скоростей
точек системыХ).
В задачах механики реакции связей являются обычно
неизвестными. Задаются или описываются лишь способы осуществления
связей. Полное определение реакций связей, т. е. определение их
точек приложения, направления и величины, производится с
помощью некоторых допущений из условий равновесия или
уравнений движения системы, причем в последнем случае — после того,
как будет найдено движение системы. Реакции, полученные из
условий равновесия с учетом других приложенных к системе сил2),
называются статическими реакциями; реакции связей во время
движения системы — реакции, определяемые из уравнений
движения, — называются динамическими реакциями. Определение
динамических реакций, возникающих в колеблющихся системах, и
связанные с этим расчеты вибрационной прочности деталей машин —
одна из важнейших прикладных задач учения о колебаниях.
Когда в уравнения связей A.1) время явно не входит, связи
называются стационарными (неизменяемыми) или
склерономными. В противном случае их называют нестационарными или
реономными.
2. ВИРТУАЛЬНЫЕ ПЕРЕМЕЩЕНИЯ. Виртуальными
перемещениями называются воображаемые бесконечно малые перемещения
системы из одного ее положения в данный момент времени в
другое положение, допускаемое связями в тот же момент
времени, — перемещения без освобождения от связей.
Х) В дальнейшем рассматриваются только голономные системы, т. е. системы,
подчиненные голономным связям.
2) Все другие силы, приложенные к системе, кроме реакций связей, называются
дальше заданными или активными силами.
2. Виртуальные перемещения
21
Виртуальным перемещениям соответствуют изменения
координат, происходящие в результате изменения формы зависимости
их от времени, в частности от изменения параметров,
определяющих эту зависимость, при фиксированном I. Такие
изменения.координат называются изохронными вариациями^ координат и
обозначаются через 5х, 5г/, Ъг в отличие от обозначения
дифференциалов с!х, сЦ/, 6.2. Последние — тоже бесконечно малые изменения
координат, но изменения, происходящие за бесконечно малый
промежуток времени д.1, под действием приложенных к системе
сил. Операции дифференцирования и варьирования являются,
таким образом, операциями, независимыми одна от другой.
Поэтому имеет место равенство
8(<1/) = <1(8/), A.2)
где / — какая-либо непрерывная функция координат, скоростей
и времени.
Различие между дифференцированием и варьированием
обнаруживается также при вычислении бесконечно малых изменений
функции Дх, у, г, О» с одной стороны, вследствие бесконечно
малых приращений координат в действительном движении за
промежуток времени М, с другой — вследствие вариаций координат
при виртуальных перемещениях системы, относящихся к одному
и тому же моменту времени. В первом случае с точностью до
бесконечно малых второго порядка
Дх + их, у + йу, г + &г,1 + &1) - Дх, I/, 2, О =
= &йх+У-йу+&&г+дГы = йГ(х,у,г,Ъ, A.3)
дх ду дг ^
во втором
Дх + бх, у + ду, 2 + Ьг, г) - /(х, г/, 2, о =
= IЪх+%Ъу+1Ъг=Щх> у> *> *>¦ A-4)
Изменение функции /от вариаций координат, т. е. 5Дх, у, 2, г),
называется вариацией функции /. Из сопоставления формул A.3)
и A.4) следует, что вариация функции Дх, у, 2, I) вычисляется по
тому же правилу, что и ее дифференциал при фиксированном
значении аргумента I.
Здесь изохронные — относящиеся к одному и тому же моменту времени.
22
Глава I. ВВЕДЕНИЕ
Связи называются идеальными, если сумма элементарных
работ их реакций К1 на всех виртуальных перемещениях системы
равна нулю, т. е. если
Е#.5г. = 0, A.5)
/ = 1
где 5г- — вариации радиусов-векторов точек приложения Еь; или
в проекциях реакций Е1х, Е} , Е1г и перемещений Ъх19 5*/., Ъгь на
оси прямоугольной системы координат:
Е (Д;ж8хг + ^ + Л^) = 0. A.6)
I = 1 ^
Идеальными связями будут, например, абсолютно гладкие (без
трения) опорные поверхности; нерастяжимые, несжимаемые и
несгибаемые стержни; нерастяжимые абсолютно гибкие нити и т. п.
Большей частью это все те тела и все те связи, упрощенные
(идеализированные) представления о которых (как абсолютно
гладких, абсолютно твердых и т. д.) входят в состав основных
допущений теоретической механики в первоначальных ее
исследованиях, представляющих первое приближение к действительности.
3. НЕЗАВИСИМЫЕ ИЛИ ОБОБЩЕННЫЕ КООРДИНАТЫ.
Предположим, что система из N частиц (точек), ЗЫ координат которых
определяют ее положение в момент 19 подчинена т, т < ЗтУ, голоном-
ным связям:
?к(х19 уг, г19 ... , Хд,, уМ9 гю 0 = 0» & = 1, 2, ... , т. A.7)
В этом случае т координат могут быть выражены через
остальные (ЗЛ^ - т) независимые координаты, которым можно
давать любые (достаточно малые) изменения без нарушения связей.
Вариации этих независимых координат однозначно определяют
вариации остальных зависимых координат. Число независимых
координат системы, подчиненной только голономным связям
A.7), определяет число степеней свободы системы.
Вместо декартовых координат в качестве независимых
координат выбирают обычно другие, связанные с ними величины,
иногда другой физической природы и другой размерности. Эти
независимые величины называются обобщенными
координатами. Далее они обозначаются через дх, д2, ... , дд, где п = ЗЫ - т.
Число обобщенных координат должно быть равно числу
независимых величин, однозначно определяющих положение системы,
4. Обобщенные силы
23
и через них должны выражаться все декартовы координаты
системы в форме, например, уравнений
*,. = *;(*, дг1? ... ,<?„), |
Уг = У\ (*» Яг> - , <?„)> [> * = 1, 2, ... , N. A.8)
2; = *;(*, GХ, ... , дл), |
Эти уравнения являются уравнениями тех же связей A.7),
представленными в параметрической форме.
4. ОБОБЩЕННЫЕ СИЛЫ. К понятию обобщенных сил приходим,
преобразуя к обобщенным координатам выражение виртуальной
работы заданных (активных) сил Р19 т. е. сумму
I Г^г, = I (Х,5х,. + У.8^ + 2^), A.9)
I =-- 1 / = 1
где Х(, Уп %1 — проекции Р1 на оси координат. Из уравнений A.8)
находим
п дх-
дхч = X —^ бег,,
1 к = 1ддк к
8у.= I ^бд„
п дг-
Подставив эти выражения в A.9), получим
X (Х1Ьх1 + У!6у1 + 2,$>гх
A.10)
/г = 1 1_/ - 1 ч G<7/,
с^* 'одй
Коэффициент при Ъцк в последнем выражении, т. е. сумма
I (^+У/^+^) = вк, A.11)
/ = Л 1ддк 1ддк 1 ддк )
и есть обобщенная сила, соответствующая координате дкг\
1) Размерность обобщенной силы не всегда совпадает с размерностью силы [кГ].
Обобщенная сила часто имеет размерность момента [кГ • м] или размерность
какой-либо другой механической или геометрической величины.
24
Глава I. ВВЕДЕНИЕ
В изложенном определении обобщенной силы содержится
указание и на другой способ ее вычисления. Чтобы получить
обобщенную силу С2к, соответствующую координате дк, даем
последней (мысленно) бесконечно малое изменение и на
перемещении системы, соответствующем этому изменению 5^, при
фиксированных значениях других координат, вычисляем работу всех
активных сил, приложенных к системе. Коэффициент при ддк в
выражении этой работы и будет обобщенной силой,
соответствующей координате дк.
Еще один способ вычисления обобщенных сил относится к
силам стационарного потенциального силового поля.
Стационарным потенциальным силовым полем называется часть
пространства, в каждой точке которого на находящуюся в ней (или на
проходящую через нее) материальную частицу системы действует
сила, зависящая только от положения этой точки, причем работа
силы не зависит от пути, по которому перемещается точка
приложения силы, а определяется начальным и конечным
положениями точки. Потенциальное силовое поле можно еще определить
как поле сил, элементарная работа которых представляет точный
дифференциал некоторой функции П от координат системы. Для
одной силы это определение выражается равенством
Х&х + У &у + 2&г = -о1П, A.12)
где знак минус означает, что работа силы поля Р связана с
убыванием функции П. В этом случае, действительно, работа силы Р на
любом перемещении не зависит от пути, по какому движется
система, а определяется значениями П в начальном и конечном
положениях системы. Обозначив через (А) и (В) начальное и конечное
положения точки приложения силы Р, из равенства A.12) находим
(В)
| (X &х + У йу + 2 йг) = ПА - Пв, A.13)
(А)
где ПА и Пв — значения функции П соответственно в положениях
(А) и (В).
Равенством A.12) функция П определена до произвольного
постоянного слагаемого. Отсюда следует, что начало отсчета П
можно выбрать в любом месте поля, в частности, например, считать,
что начало отсчета П совпадает с началом отсчета координат и,
таким образом, положить П @, 0, ... , 0) = 0.
4. Обобщенные силы
25
После того как выбрано начало отсчета, каждому положению
системы в поле будет однозначно соответствовать определенное
значение П. Если в равенстве A.13) положение (В) совпадает с
началом отсчета П., то
(В)
I (X о!х + У &у 4- ^ йг) = ПА. A.14)
(А)
Таким образом, значение П в каком-либо положении (А) системы
равно работе силы поля на перемещении (по любому пути) из
этого положения до нулевого (т. е. до выбранного начала отсчета).
Функция П с указанными свойствами определяет так
называемую потенциальную энергию системы в положении (А). При
фиксированном начале отсчета потенциальная энергия системы
определяется только ее положением в силовом поле.
Потенциальная энергия является, как иногда говорят, энергией положения
системы в силовом поле.
Из равенства A.12)следует
Поэтому
X о!х + У &у + % йг = -20 Ах - ^ Лу - ^ Лг.
* дх ду •* дг
Х = -™ У=-?П,Я = -2П. A.15)
дх оу дг
С помощью последних равенств мы получаем следующую
формулу для вычисления обобщенных сил потенциального силового поля:
<2 =-^1, к =1,2, ... ,л, A.16)
где потенциальная энергия П предполагается выраженной через
обобщенные координаты.
Согласно принципу виртуальных перемещений необходимым
и достаточным условием равновесного состояния или покоя1)
системы2), определяемого постоянными значениями координат и ну-
Здесь и в дальнейшем различается положение системы в некоторый момент
времени, определяемое соответствующими значениями координат цк, от
состояния движения ее в тот же момент, определяемого значениями в этот
момент координат (/й и скоростей дй (например, положение равновесия от
состояния равновесия, или покоя). В связи с этим одновременные значения «^ и цк
называются иногда координатами состояния системы.
Подчиненной идеальным связям.
26
Глава 1. ВВЕДЕНИЕ
левыми значениями скоростей д х, д2, ... , д п, является равенство
нулю суммы элементарных работ заданных сил на всех
виртуальных перемещениях системы из этого состояния.
Преобразованное к обобщенным силам, это условие выражается равенством
или, так как Ъдк — независимые величины:
^ = 0, А =1,2, ... , я. A.17)
Для консервативной системы условия A.17) имеют вид
|П =о, А = 1,2, ... , п. A.18)
Последние равенства свидетельствуют, что в состоянии
равновесия потенциальная энергия имеет стационарное значение.
5. УРАВНЕНИЯ ЛАГРАНЖА. Теоретической основой большей части
исследований колебаний голономных систем с конечным числом
степеней свободы служат уравнения Лагранжа в обобщенных
координатах. Составленные в предположении, что связи,
наложенные на систему, идеальные, эти уравнения не содержат реакций
связей, и входящие в них величины, определяющие движение
системы (обобщенные координаты и их производные по времени),
непосредственно связаны с заданными (обобщенными) силами.
Обозначим обобщенные координаты рассматриваемой системы
с п степенями свободы через дх, г/2, ... , дп. Пусть связи системы
представлены уравнениями A.8). Обозначим через т1 массы частиц
(точек) системы; приложенные к ним заданные силы — через Рь; их
проекции на оси координат — через Х19 У/? ^; проекции на те же
оси реакций связей К1 — через В1х, К1 , Е-12. Из выражений
производных по 1 от координат х{, уп г;, записанных в виде A.8)
Л ОХ: . дХ; }
Уг= Е Н~^ + 77' ) *=1,2,...,ЛГ A.19)
к = 10Чк 11
5. Уравнения Лагранжа
27
следует, что
д*1 _ дхг- # д_У± __ ду{ # 2^1 = дг1
д$к д<1к9 дЯк дЧъ' дЯк ддк'
С помощью этих формул можно представить производную от
кинетической энергии
Г = ± 2 тЛ х? + г/? + 22 Aш20)
^ / = 1 ^ у
по обобщенной скорости дд следующим образом:
ддк 1 = 1 К одк с1дк одк
Взяв от обеих частей последнего равенства производную по 1,
получим
А (Ё1) = Е т (х ^ + и ^ + г ^
С дх- ди- д%- \
+ 1тД^^+^^+2^ . A.21)
* = 1 ' V * ддА ддк ддк )
Принимая во внимание уравнения движения
т1*1 ^ Х/ + Я1х> тгУ1 = У1 + ^, /П^* / = ^ + Д.,,
равенство A.21) можно переписать в следующем виде:
а* чз<у с)дА ,- = 1V 'э^ 'э<?А '<здА
/ = 1 V ** адк 1у ддк 1г ддк
Первая сумма справа — обобщенная активная сила Як A.11),
соответствующая координате дк> вторая — обобщенная реакция
связей, равная нулю в силу того, что связи, наложенные на
систему, по предположению, идеальные.
Таким образом,
&1 Щк) дд
Т-Л^)- ^Г -Як = °> к =1,2,... ,71. • A.22)
Полученные равенства и представляют собой уравнения
Лагранжа в обобщенных координатах.
28
Глава I. ВВЕДЕНИЕ
Для консервативной системы с потенциальной энергией П
уравнения A.22) запишутся следующим образом:
й(|Г)_|Г+аПи.0 *=1,2,...,л, A.23)
<** ^Як' дAк дЯк
или, если ввести функцию Лагранжа Ь = Т7 - П:
,+ ,я. , . О, А =1,2, ... ,71. A.24)
Перед подстановкой в уравнения Лагранжа функции 7\ ^, П, Ь
должны быть выражены в обобщенных координатах.
Если связи, наложенные на систему, стационарные, то в
формулах A.19) частные производные от координат х19 уь> гь по
времени отсутствуют и кинетическая энергия Т будет однородной
квадратичной формой обобщенных скоростей дх, д2> ••• > Яп- ^ этом
случае полная механическая энергия системы сохраняет свою
величину во все время движения1*. Для доказательства умножим
каждое уравнение A.23) на соответствующую (по индексу)
производную с[к и просуммируем по к:
Первую сумму можно заменить разностью
и затем переписать по теореме Эйлера об однородных функциях
[Б. И. Смирнов, 41, т.1, с. 367] следующим образом:
после чего из выражения A.25) получаем
2) В связи с этим силы потенциального поля называются консервативными
силами.
б. Циклические координаты и уравнения Рауса
29
ИЛИ
^ (Г+П) = 0
и
Т + П = сопз1. A.26)
Равенство A.26) представляет первый интеграл уравнений
движения A.23) — именно интеграл сохранения полной
механической энергии.
6. ЦИКЛИЧЕСКИЕ КООРДИНАТЫ И УРАВНЕНИЯ РАУСА.
Циклическими координатами называются координаты, не входящие явно
в выражение функции Лагранжа Ь = Т - П. Такими
координатами будут, например, координаты, изменения которых при
сохранении значений остальных координат соответствуют
перемещениям системы, не изменяющим относительного распределения ее
масс, например, как это имеет место в твердом теле, обладающем
полной материальной симметрией относительно некоторой оси и
вращающемся вокруг этой оси. Угол поворота такого тела будет
его циклической координатой.
Каждой циклической координате соответствует первый
интеграл уравнений Лагранжа, называемый циклическим интегралом.
Пусть рассматриваемая система с п степенями свободы имеет
/п, т <п, циклических координат дк, к = 1, 2, ... , т, и (п - т)
нециклических да, а = т + 1, ... , п. Из уравнений Лагранжа,
соответствующих циклическим координатам
г, (Ц) = 0- * = 1-2 "'•
находим т циклических первых интегралов, соответствующих
координатам дк\
|^ =рл, /г =1,2, ... ,т, A.27)
где р^ — постоянные, определяемые из начальных условий.
Если из равенств A.27), рассматривая их как уравнения
относительно циклических скоростей, можно найти последние как
функции нециклических координат и скоростей и постоянных $к:
A.28)
к = 1, 2, ... , т,
30
Глава I. ВВЕДЕНИЕ
то в таком случае из оставшихся п - т уравнений Лагранжа
Л ,,. , , 0, а = т + 1, ... , п A.29)
си ^ддаУ сс]а
можно исключить все циклические скорости и привести таким
образом решение задачи к интегрированию (п - т) уравнений,
содержащих только нециклические координаты и скорости и
постоянные р^. Можно показать, что эти уравнения будут иметь
форму уравнений Лагранжа, но вместо функции Лагранжа в них
будет фигурировать другая функция — так называемая функция
Рауса [81, гл.VIII]
т
к = 1
В самом деле, найдем производные от Е по нециклическим
координатам и скоростям, предполагая, что в выражение для Е
A.30) подставлены дк из A.28):
ЁК = Ёк + X — — - I В д^к
ЁИ = Ёк + 2 — ^ - ХВ^
тп + 1, ... , я,
откуда
аь ал аь ал , -, ,, 01Ч
— =—,—-=—-, а = /и + 1, ... , /г. A.31)
д<7а дда дда дда
Теперь уравнения A.29) перепишутся следующим образом:
|т(Р)-|^-0, а = т+1,...,/г. A.32)
Эти уравнения называются уравнениями Рауса с
игнорированными (т. е. с исключенными) циклическими координатами и
скоростями.
После того как из уравнений A.32) будут найдены #т+1, ... , цп
как функции I и 2 (п - т) постоянных, из формул
9* = -|г> *=1,2,...,т
67 Р*
найдутся циклические координаты д1, ... , дт с добавочными т
постоянными.
6. Циклические координаты и уравнения Рауса
31
Уравнения Рауса находят применение в исследованиях
стационарных движений систем с циклическими координатами (в
частности, в исследованиях устойчивости движения таких систем).
При этом под стационарным движением системы с
циклическими координатами разумеется движение, в котором
нециклические координаты и циклические скорости сохраняют постоянные
значения.
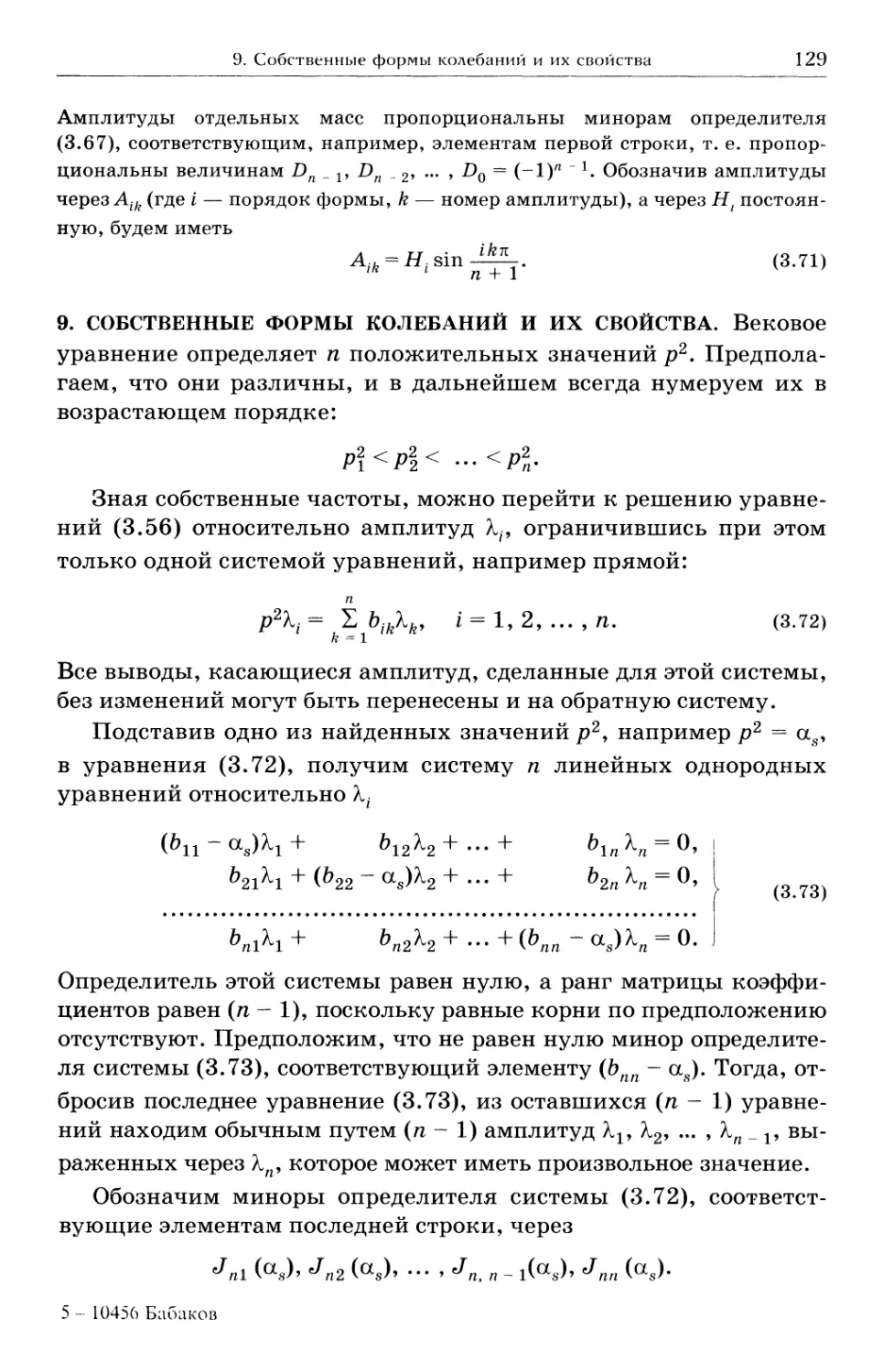
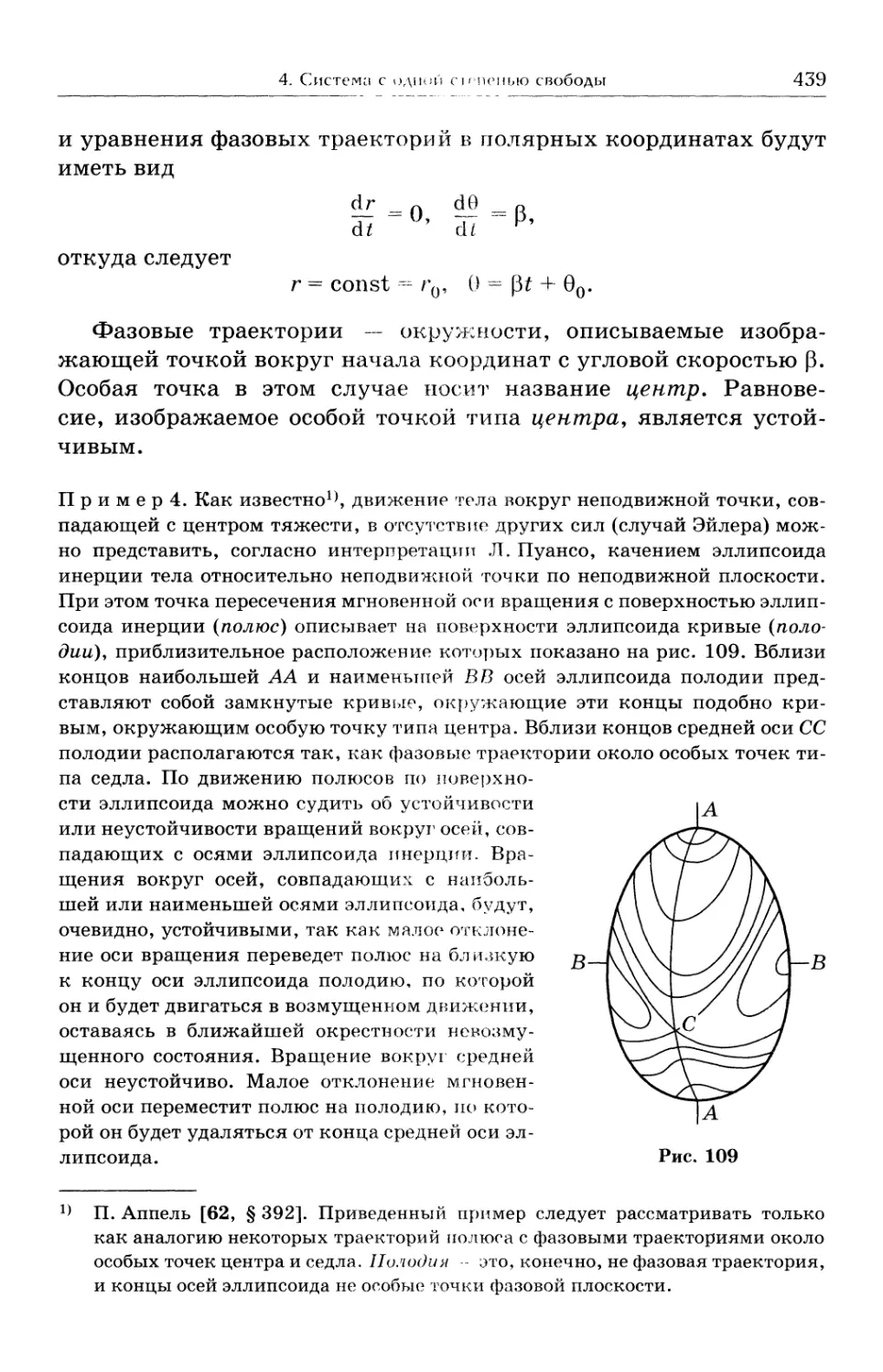
Пример 1. СТАЦИОНАРНЫЕ ДВИЖЕНИЯ ОДНОДИСКОВОГО ГИБКОГО ВАЛА. В
качестве примера стационарного движения системы с циклическими
координатами рассмотрим так называемое обращение1^ вертикального гибкого вала с
насаженным на него посередине, между опорными подшипниками, диском
(рис. 1, а). При изгибе вала в вертикальной плоскости диск перемещается в
горизонтальной плоскости, вынесенной на рис. 1, б в плоскость чертежа.
Пусть т — масса диска; / = тр2 — момент
инерции относительно центра тяжести О (р — радиус
инерции); е = РО — эксцентриситет (Р — место
крепления диска на валу); О — точка пересечения линии
подшипников с диском (на рис. 1, б эта точка служит
началом координат неподвижной системы Оху).
Кинетическая энергия системы в переменных
г = ОО, ф, у, если пренебречь массой вала, равна
Т=±т(г2 + г2ц2) + 1 тр2 (ф + уJ;
потенциальная энергия —
П = )¦ с • ОР2 = ^ (г2 + е2 + 2ге созу),
где с = т\х — жесткость вала на прогиб; функция
Лагранжа —
Ь = - т (г2 + г2ф2) + - тр2 (ф + уJ -
- - т\1 (г2 + е2 + 2ге сову).
Циклической координатой оказывается здесь угол
Ф (угол поворота вала относительно оси О). Этой
координате соответствует циклический интеграл
—г = -г-г = тг*<р + тр* (ф + у) = р = ту,
б)
Рис. 1
1) Под обращением вала здесь разумеется вращение изогнутой оси АРВ вала
вокруг линии подшипников АОВ. Обращение следует отличать от вращения
вала, передающего вращающий момент на рабочий орган.
32
Глава I. ВВЕДЕНИЕ
из которого
Функция Рауса
Ф=Ч1Й- A-33)
р2 + г2
Е = Ь - —- ф
дф
после исключения циклической скорости ф имеет вид
Л = 5 т \р - НГГ-5 + -г^-2 V2 + -Р& V - И (^ + е2 + 2ге сову)]. A.34)
2 |_ р2 + г2 р2 + г2 р2 + г2 ]
В стационарном движении системы г и у сохраняют постоянные
значения и г = ф — 0. Поэтому в уравнениях Рауса
А (^) - Ш = о — (—) - — = о
„ дя ал
первые слагаемые равны нулю. Положив в производных —— и —- значения
дг су
г — ф = 0, получим уравнения стационарного движения
О 1
цг - \хе соз у = 0,
(р2 + г2J ^ ^ ' ^ A.35)
Г 8Н1 \ф^ == 0. ]
Из этих уравнений, введя обозначение
ф = со= ? ,
р2 + г2
найдем
г=Н^08ч,; з1пу = 0. A.36)
со2 - ц
Таким образом, имеются два стационарных движения вала,
соответствующих двум решениям системы A.36):
• у = 0, г= -Р—\ A.37)
со2 - \х
• у = я, г= -^. A.38)
ц - со2
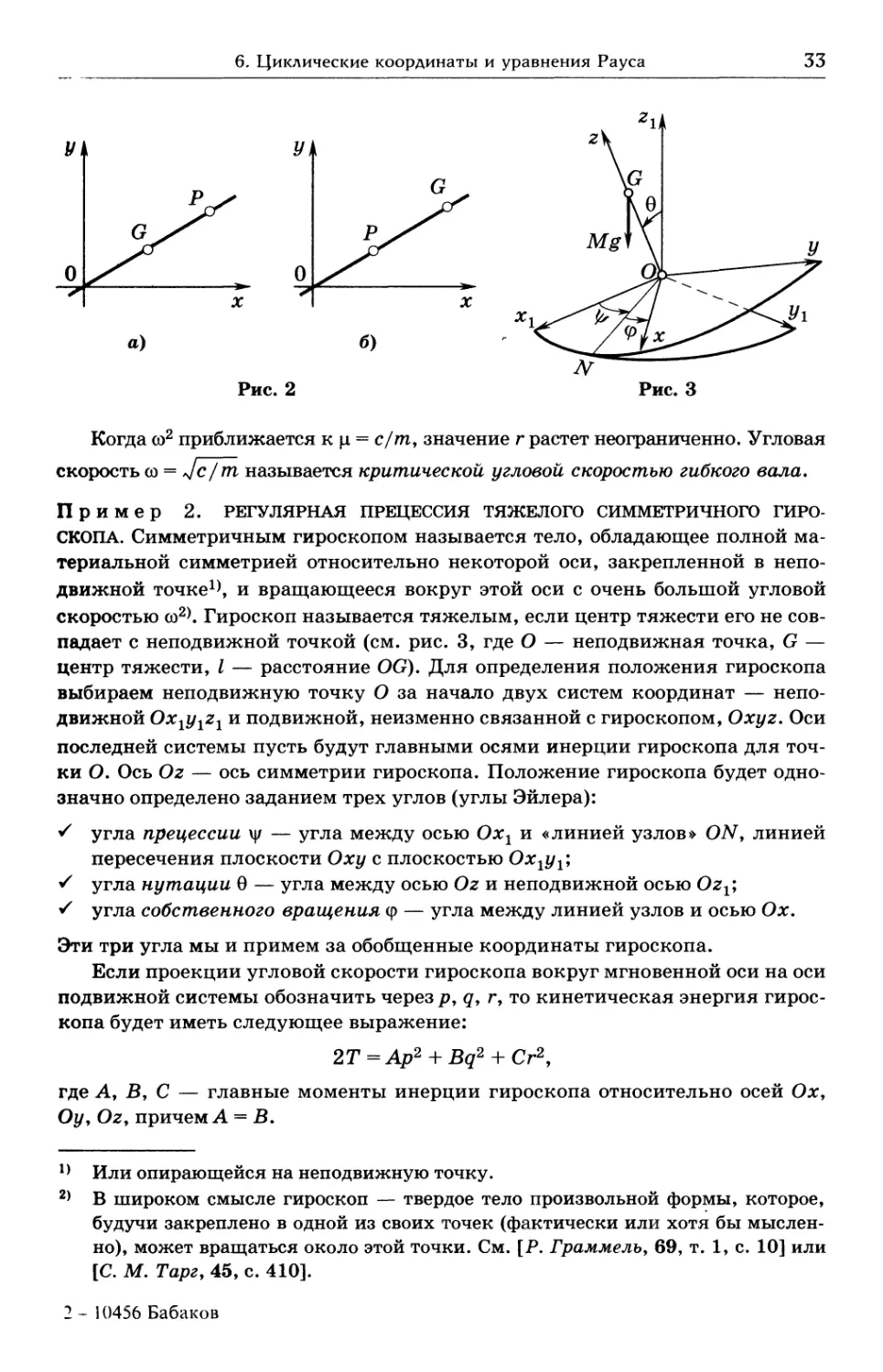
В движении A.37) точки О, B, Р располагаются на одной прямой, причем
центр тяжести лежит между О и Р (рис. 2, а). Когда со, оставаясь все время
больше ц, неограниченно увеличивается, то
г-0,
т. е. центр тяжести приближается к точке О. Происходит, как говорят,
«самоцентрирование» диска. Диск совершает при этом вместе с Р простое
вращательное движение вокруг линии подшипников.
В движении A.38) точки О, Р, О располагаются также на одной прямой, как
показано на рис. 2, б: центр тяжести диска лежит на продолжении отрезка ОР.
6. Циклические координаты и уравнения Рауса
33
Когда со2 приближается к \х — с/т, значение г растет неограниченно. Угловая
скорость со = 4с/ т называется критической угловой скоростью гибкого вала»
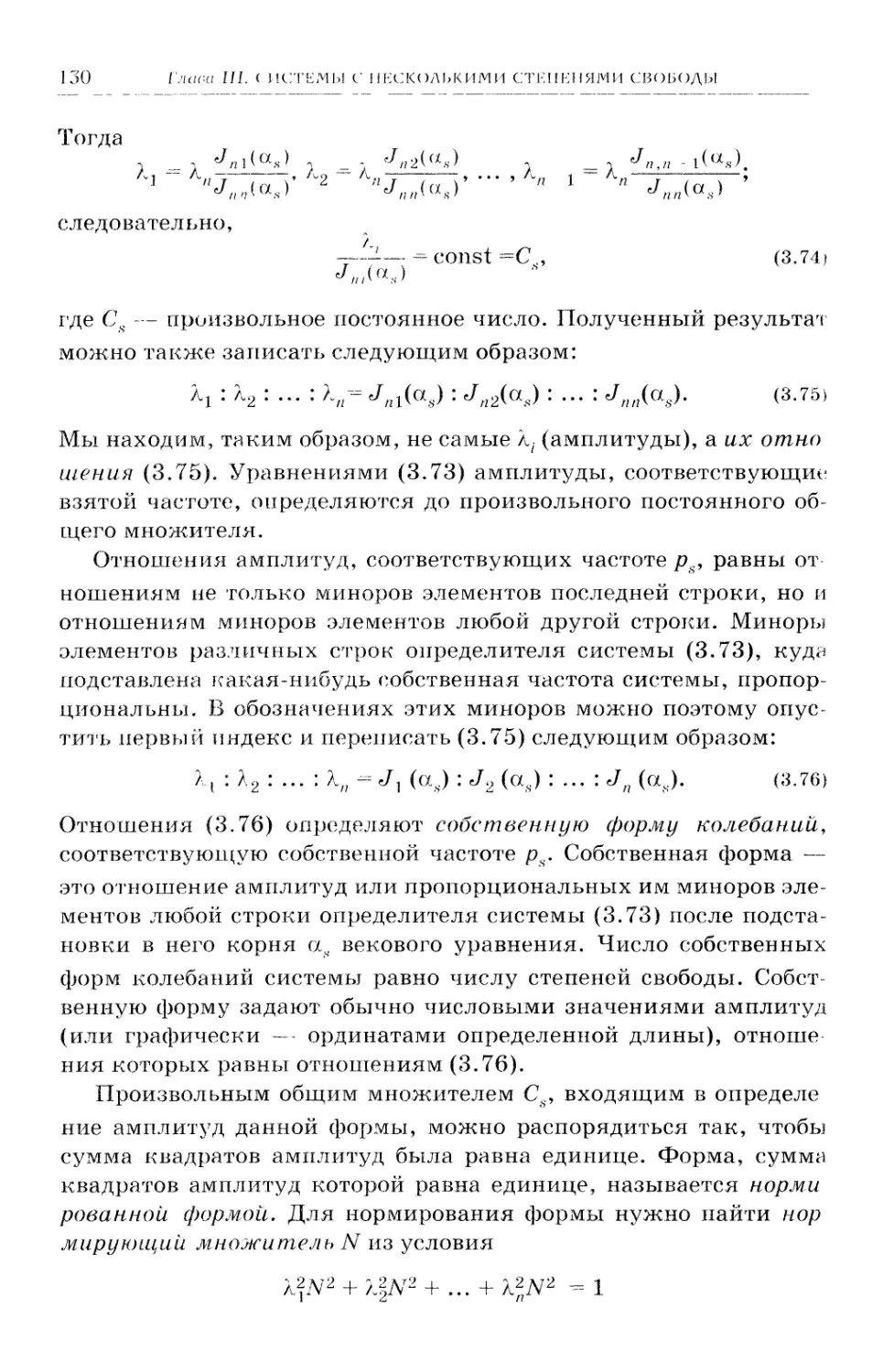
Пример 2. РЕГУЛЯРНАЯ ПРЕЦЕССИЯ ТЯЖЕЛОГО СИММЕТРИЧНОГО
ГИРОСКОПА. Симметричным гироскопом называется тело, обладающее полной
материальной симметрией относительно некоторой оси, закрепленной в
неподвижной точке1 \ и вращающееся вокруг этой оси с очень большой угловой
скоростью со2). Гироскоп называется тяжелым, если центр тяжести его не
совпадает с неподвижной точкой (см. рис. 3, где О — неподвижная точка, О —
центр тяжести, / — расстояние 00). Для определения положения гироскопа
выбираем неподвижную точку О за начало двух систем координат —
неподвижной Ох1у1г1 и подвижной, неизменно связанной с гироскопом, Охуг. Оси
последней системы пусть будут главными осями инерции гироскопа для
точки О. Ось Ог — ось симметрии гироскопа. Положение гироскопа будет
однозначно определено заданием трех углов (углы Эйлера):
^ угла прецессии у — угла между осью Охх и «линией узлов» ОЫ, линией
пересечения плоскости Оху с плоскостью Олс11/1;
^ угла нутации 0 — угла между осью Ог и неподвижной осью Огг;
^ угла собственного вращения ф — угла между линией узлов и осью Ох.
Эти три угла мы и примем за обобщенные координаты гироскопа.
Если проекции угловой скорости гироскопа вокруг мгновенной оси на оси
подвижной системы обозначить через/?, д, г, то кинетическая энергия
гироскопа будет иметь следующее выражение:
2Т=Ар2 + Вд2 + Сг2,
где А, В, С — главные моменты инерции гироскопа относительно осей Ох,
Оу, Ог, причем А = В.
1) Или опирающейся на неподвижную точку.
2) В широком смысле гироскоп — твердое тело произвольной формы, которое,
будучи закреплено в одной из своих точек (фактически или хотя бы
мысленно), может вращаться около этой точки. См. [Р. Граммелъ, 69, т. 1, с. 10] или
[С. М. Тарг, 45, с. 410].
2- 10456 Бабаков
34
Глава I. ВВЕДЕНИЕ
С помощью известных формул
Р = \|/ 8И1 0 81П ф + 0 С08 ф,
д = \|/ 8И1 0 С08 ф ~ 0 8111 ф,
Г = \|/ С08 0 + ф
этому выражению можно дать такой вид:
2Т = А(ф2 8Ш2 0 + 02) + С(у сое 0 + фJ.
Обозначив через М массу гироскопа, запишем выражение функции Лаг-
ранжа следующим образом:
Ь=\ \А(Ч>2 зт2 0 + 02) + С(\|/ соз 0 + \|/J] + М§1A - сое 0).
Система обладает только одной нециклической координатой 0, две другие —
\|/ и ф — являются циклическими. Последним соответствуют два
циклических интеграла
Ау 8И1 0 + С(\|/ соз 0 + ф) соз 0 = рх,
С(ф С08 0 + ф) = Р2.
Функция Рауса имеет здесь вид
Я=1 №(У2 ЗИ12 0 + 02) + С(\|/ соз 0 + фJ] + М§1A - соз 0) - р^ - р2ф.
A.39)
Стационарное движение определяется постоянными значениями
нециклической координаты 0 и циклических скоростей \|/ и ф. Это стационарное
движение и есть регулярная прецессия тяжелого гироскопа: гироскоп
вращается вокруг своей оси с постоянной угловой скоростью ф = со, в то время
как его ось (ось Ог), образуя с неподвижной осью Огх постоянный угол 0,
вращается вокруг нее с постоянной угловой скоростью \|/ = со^
Уравнение регулярной прецессии гироскопа получим как уравнение
стационарного движения
30 '
которое в силу A.39) будет иметь вид
со! 8И1 0[Ссо + (С -А) сох соз 0] = Мд1 зт 0. A.40)
Выражение
К = -сох зт 0 [Ссо + (С -А) сог соз 0] A.41)
называется гироскопическим моментом тяжелого гироскопа, совершающего
регулярную прецессию.
7. Принцип Остроградского —Гамильтона
35
Гироскопический момент является моментом сил инерции гироскопа
относительно неподвижной точки О. Уравнение A.40) можно поэтому
трактовать, согласно принципу Даламбера, как условие равновесия между
моментом внешних сил и моментом сил инерции относительно точки О при
регулярной прецессии гироскопа.
Гироскопический момент направлен по линии узлов в сторону,
противоположную моменту М§1 зт 0. В приближенных расчетах, когда со весьма
велика в сравнении сш^ в выражении гироскопического момента можно
пренебречь вторым слагаемым в квадратных скобках, приняв
К = -С(о1Ы8тд, A.42)
или в векторной форме
К = [(ох<й1]. A.43)
Формула A.42) лежит в основе так называемой элементарной теории
гироскопов и выражает известное правило Жуковского [18, с. 216]:
«Если какое-нибудь тело вращения вращается около своей оси с угловой
скоростью © и мы будем повертывать ось этого тела около некоторой оси,
образующей с осью тела угол 0, с угловой скоростью ©р то явится пара с
Моментом, равным произведению сосо181П 0 на момент инерции тела,
стремящаяся повернуть ось тела к оси сообщаемого вращения так, чтобы при
совпадении осей вращения со и сох совершались бы в одну сторону».
7. ПРИНЦИП ОСТРОГРАДСКОГО—ГАМИЛЬТОНА. Отметим два
положения движущейся системы: в момент %х положение (А) и в
момент 1г положение (Б); 12 > 1Х. Действительное перемещение
системы из (А) в (Б) за промежуток времени 12 - 1Х определяется
уравнениями
9* = ?*(*)> А = 1, 2, ... , п,
которые с надлежащим числом постоянных представляют
решения дифференциальных уравнений движения A.23)
рассматриваемой системы. Наряду с действительным перемещением
системы из (А) в (Б), для сравнения с ним, рассмотрим воображаемые
бесконечно близкие к нему перемещения из (А) в (Б) за тот же
промежуток 12- 1х, определяемые уравнениями
9* (О = Чъ @ + 8д* @> * = 1, 2, ... , п, A.44)
где Ъ^к — изохронные вариации координат дг, д2, ... , ^п, т. е.
бесконечно малые величины, на какие координаты дк в
действительном движении отличаются от координат дй в движениях,
привлекаемых для сравнения, в один и тот же момент времени %.
Перемещения системы, происходящие согласно уравнениям
A.44), назовем окольными перемещениями. Все перемещения —
36
Глава I. ВВЕДЕНИЕ
и действительное, и привлекаемые для сравнения с ним
окольные — начинаются одновременно из положения (А) и
заканчиваются одновременно в положении (В), так что в этих положениях
8?*(*1) = &Ъ(*2) = 0- A-45)
На построенной таким образом совокупности (или классе)
перемещений, совместимых со связями, рассмотрим интеграл
ч
5=1 Ь(И, A.46)
где Ь = (Т - П) — функция Лагранжа. Числовые значения этого
интеграла зависят от вида подставляемых в Ь функций ^к{к)9
определяющих какое-либо перемещение системы из построенной
нами совокупности. Этот интеграл является, таким образом,
функционалом от функций дД*) и С[кA).
Функционал 5 имеет размерность произведения работы на
время [кГ • м • с]. Величины с такой размерностью называются в
физике действиями. Функционал 8 представляет специальный
вид действия, которое называется действием по Остроградско-
му — Гамильтону. Сравним значения действия 5 на
действительном перемещении с его значениями на окольных
перемещениях A.44), для чего построим разность
Я («1 + 8?1> Ч2 + 6<?2> — > Чп + 39п> Яг + 801 > — > Чп + 8<^> *) "
-«($!, ...', д„, дх, ... , д„, *)-
Совокупность членов первого порядка в разложении этой
разности по степеням 8дл и Ьс[к по определению есть первая вариация 5:
Проинтегрировав по частям первое слагаемое подынтегрального
выражения, будем иметь
| ^ НАг = ^, 8 |'« _ |2 й Г|Ь M9аA*.
Первое слагаемое правой части в силу A.46) равно нулю и, таким
образом,
7. Принцип Остроградского — Гамильтона
37
Но на действительном пути
*(|*)-|Ь«0, кжв19299тт9Пт
и* Уддк; ддк
Следовательно, на этом пути вариация действия 5 равна нулю:
55 = 0. A.47)
Обращение в нуль первой вариации функционала есть
необходимое условие его стационарности [Л. Э. Элъсголъц, 58, с. 22].
I Таким образом, действие 8 A.46) на действительном
перемещении имеет стационарное значение по сравнению с его значениями
на окольных путях, переводящих систему из одного начального
положения в одно и то же конечное за один и тот же
промежуток времени 12 - 1г. В этом и заключается содержание принципа
I Остроградского — Гамильтона для консервативной системы.
Принцип Остроградского — Гамильтона может быть
распространен и на неконсервативные системы. В этом случае он
выражается следующим равенством:
ч
\ Ыт + хеЛ8дЛ) <а = о, A.48)
где Т —кинетическая энергия системы, Bк — обобщенные
неконсервативные силы, так что сумма 2Ф&&7& не является точным
дифференциалом [П. Аппель, 62, т.II, с. 386].
Принцип Остроградского — Гамильтона часто называют
принципом наименьшего действия. Такое наименование может быть
присвоено этому принципу только с некоторыми существенными
оговорками. Дело в том, что наименьшее значение действие 5
имеет не между двумя любыми положениями, а только тогда,
когда начальное положение (А) и конечное (В) достаточно близки
друг к другу1*. На перемещениях, превышающих некоторую
границу, действие 5, оставаясь стационарным, может не иметь
минимума и даже оказаться максимумом. Впрочем, для
приложений принципа Остроградского — Гамильтона в теории колебаний
достаточно установленного факта — обращения в нуль первой
вариации 5 на действительном перемещении. Поэтому другие
свойства действия 8 здесь не рассматриваются [Ф. Р. Гантмахер, 12].
*> См. [А И. Лурье, 26, с. 649], [К. Якоби, 72, лекция 8].
38
Глава I. ВВЕДЕНИЕ
В изложенном выводе принципа Остроградского — Гамильтона
уравнения Лагранжа выступают в новой роли — необходимых и
достаточных условий стационарности функционала 5 на
действительном пути системы. Тем самым устанавливается
эквивалентность задачи об интегрировании дифференциальных уравнений
при заданных краевых условиях с вариационной задачей
нахождения экстремума функционала и, таким образом, открывается
возможность привлечения к решению вибрационных задач методов
вариационного исчисления.
Как необходимые условия экстремума функционала
уравнения Лагранжа A.24) были получены Л. Эйлером A744 г.). В
вариационном исчислении их называют поэтому уравнениями
Эйлера — Лагранжа.
Подынтегральная функция функционала 5 может зависеть не
только от производных первого порядка, но и от производных
второго и высших порядков. Для таких функционалов
необходимые условия экстремума будут выражаться уравнениями в
частных производных четвертого и более высоких порядков. Так,
если подынтегральная функция зависит от двух переменных I и х,
а также от первых и вторых производных по этим переменным,
т. е. если, например, функционал имеет вид
^о ^ дг дх дг2 дгдх дх2;
то уравнение, соответствующее уравнению Эйлера — Лагранжа,
запишется следующим образом [Л. Е. Элъсголъц, 58, с. 47]
дЬ__ д_(дЬ\_ д (дЬЛ+ д2ГдЬЛ + д2 ГдЬЛ + д2 (дЬ)_0
ди дАдъ) дхУда) г)*2Удг) д1дх^дз) дх2Уди)
A.49)
ду дЪ^др; дх^дду д^^дг; д1дх\дз; дх2^ди^
где
п = дМ- п=дУ- г=^М- «.-¦ д2У - и - д2У
р ы* д дх' а*2' дгдх9 дх2'
ЭЛЕМЕНТЫ ТЕОРИИ МАТРИЦ1)
8. ОПРЕДЕЛЕНИЯ. Матрицами называются системы чисел,
расположенных в виде прямоугольных таблиц, над которыми,
пользуясь определенными правилами, можно производить различные
Х) См. [Ф. Р. Гантмахер, 13], [В. Дункан, Р. Фрезер, А. Коллар, 68].
8. Определения
39
алгебраические действия. Матрица, таким образом, представляет
нечто большее, чем просто таблицу, и ее элементы должны
поэтому рассматриваться как единое целое в заданном расположении.
В дальнейшем мы будем иметь дело главным образом с
квадратными матрицами, матрицами-столбцами и
матрицами-строками. В квадратной матрице число1* строк равно числу столбцов,
и она имеет следующий вид и обозначение:
^-11 ^-12 ••• Аы
Л.пл А-оо ... Ао„
Ап\ Ап2
..Ая
Часто матрица ||А|| обозначается просто через А. Матрица-столбец
состоит из п элементов, расположенных в одном столбце, например:
Матрицу-столбец называют также вектором, а ее элементы
х19 х2, ... , хп — составляющими этого вектора, что и отмечено в ее
обозначении через х. Матрица-строка состоит из одной строки и
имеет вид
У = \\Уг> У2> ••• > УпЬ
Квадратной матрице А сопоставляется ее определитель
Ал
А = \А\ =
^¦11 ^-12 ••
^21
^•22 ••• А2п
Ап\ Ап2
A.50)
Когда этот определитель не равен нулю, матрица называется
неособенной; матрица, определитель которой равен нулю,
называется особенной или вырожденной.
Квадратная матрица, все элементы которой, за исключением
элементов главной диагонали, равны нулю, называется
диагональной. Диагональная матрица порядка п, все элементы кото-
Х) Это число определяет порядок квадратной матрицы.
40
Глава I. ВВЕДЕНИЕ
рой, расположенные на главной диагонали, равны единице,
называется единичной порядка п и обозначается буквой Е.
Нулевой называется матрица, все элементы которой равны
нулю; она обозначается через 0.
Матрицы одного и того же порядка считаются равными, если
равны их соответствующие элементы. Суммой двух матриц А и В
называется матрица
С=А + В,
общий элемент которой Ськ = Аьк + Вш. Разность матриц А и В
В^А-В
есть матрица, общий элемент которой В1к = Аьк - В1к. Сложение
матриц подчиняется тем же общим законам, что и сложение
скалярных величин.
Умножение матрицы на число I (которое можно записать как
справа, так и слева матрицы) эквивалентно умножению на /
каждого элемента этой матрицы: если
1А=А1 = С,
то
Произведение двух матриц согласованных1^ порядков Р = АВ
определяется следующим образом: Ь-й элемент к-то столбца
произведения равен сумме произведений соответствующих
элементов 1-й строки матрицы А и к-го столбца матрицы Б, начиная с
левой стороны и сверху2*:
п
Л*=ДАуЯ;*. A.51)
Умножение матриц, вообще говоря, не коммутативно: ВА^АВ.
Например, произведение матрицы-столбца на матрицу-строку
есть матрица
*1У1 Х1У2 •" Х\Уп II
Х2У\ хъУг ••• хгУп
ХпУ\ ХпУ2 "• ХпУп
Х) Согласованных по правилу: число строк правого множителя равно числу
столбцов левого.
2) Сокращенно: «строки левой матрицы на столбцы.правой».
И*/1> */2> — »М = '
8. Определения
41
Произведение той же матрицы-строки на ту же матрицу-столбец
равно выражению
И*/1> У2>
у Л
*1У1 + Х2у2 + ...+Хпуп,
которое представляет скалярное произведение векторов хну с
составляющими х19 х2, ... , хп и у19 у2, ... , уп и обозначается
простыми скобками (х, у).
В том случае, когда В А =АВ, матрицы В к А называются
перестановочными или коммутирующими. Умножение матриц
ассоциативно. Это значит, что при сохранении порядка умножения
матрицы можно группировать как угодно. Наконец, умножение
матриц дистрибутивно относительно сложения, так что имеет
место равенство
Р(А + БK = ГАЗ + ГВ8.
Матрица А', строками которой служат столбцы матрицы А,
называется транспонированной по отношению к А.
Если Аш = Аы, то матрица называется симметричной; такая
матрица совпадает со своей транспонированной.
Матрица А называется ортогональной, если произведение ее
на транспонированную А' равно единичной матрице, т. е. если
АА'=АА = Е.
В ортогональной матрице элементы любых двух строк и любых
двух столбцов ортогональны между собой и сумма квадратов
элементов каждой строки и каждого столбца равна единице:
,?Л^ = 8у. 1,7 = 1.2,
п,
где
1, 1 = ]>
О, I*].
Матрица, транспонированная по отношению к матрице,
составленной из алгебраических дополнений (миноров со знаками)
элементов определителя |А|, называется взаимной1* к матрице А. Если
обозначить алгебраические дополнения элементов Аш через аш, то
** Или присоединенной.
42
Глава I. ВВЕДЕНИЕ
матрицей, взаимной к А, будет матрица а = ||а^||. Произведение
определителей \А\ и |а| матриц А и а, как легко видеть, равно \А\п
и, следовательно, |а| = \А\п~ Ч Отсюда получаем следующее
соотношение между минорами определителей \А\ и |а|, которое мы
запишем для определителей четвертого порядка:
41
1
0
^¦31
1 ^-41
0 0
1 0
^32 ^33
^¦42 ^-43
0
0
^34
А44
43
44
*23 ^33
МЗ
*-24
А34
с12
0
0
а22
0
0
а32
\А\
0
а4
0
\А
из которого следует
^33 Л34
А43 А44
42
Л22
A.52)
Эта формула может быть распространена на миноры любого
порядка.
9. ОБРАТНАЯ МАТРИЦА. Для каждой неособенной матрицы А
можно однозначно определить обратную матрицу А'1,
произведение которой на А (справа или слева) равно единичной матрице
А-1А=АА~1 = Е.
Обратной матрице А-1 можно дать следующее выражение:
-1 =
А21
кп2
а
А'
A.53)
где а — матрица, взаимная к А; Д = \А\ — определитель матрицы А.
В самом деле, составим произведение
АА-1 = ^.
А
В матрице Аа отличными от нуля будут только суммы
произведений элементов 1-й строки А на элементы 1-го столбца матрицы
а, / = 1, 2, ... , п. Эти произведения, равные каждое определителю
Д, расположатся по главной диагонали матрицы-произведения.
Разделив эту последнюю на А, получим единичную матрицу Е.
Обратная матрица разрешает систему линейных
алгебраических уравнений
п
Ъ^Ашхк = В1, г=1,2,..., п,
10. Собственные значения матрицы
43
которую в матричной форме можно записать так:
^11 А12
^•21 ^22
Ащ
А2п
Апп
•
хх
х2
'
хп
!=
\ВЛ
в2\
1в»1
A.54)
или сокращенно
Ах = В. A.55)
В самом деле, умножив обе части этого уравнения на А, получим
Х=А1В. A.56)
Существуют многочисленные методы обращения неособенных
матриц. С этими методами можно ознакомиться в книгах по
высшей алгебре и вычислительной математике, в частности Щ. К.
Фаддеев, В. Н. Фаддеева, 50].
10. СОБСТВЕННЫЕ ЗНАЧЕНИЯ МАТРИЦЫ. Уравнение
Ах = Хх9
где X — скаляр, представляет сокращенную матричную запись
системы п линейных однородных уравнений относительно
составляющих вектора х (х19 х2, ... , хп):
(Аи - Х)хг + А12х2 + ... + А1пхп = 0,
А21хг + (А22 - Х)х2 + ... +А2пхп = 0,
A.57)
Ап1*1 + Ап2*2 + - + (Апп ~ Х)Хп = 0.
Условием, при котором не все х1 одновременно равны нулю,
является обращение в нуль определителя системы A.57):
... АЛп
А(Х)
Ап X А12
*21
*22
*-2п
Апп~Х
0.
A.58)
*-п1 ^п2
Это условие представляет характеристическое уравнение
матрицы А, а определитель Д (X) — ее характеристический
определитель. Корни характеристического уравнения называются
собственными значениями или характеристическими числами
матрицы А, Каждому собственному значению матрицы Хк соот-
44
Глава I. ВВЕДЕНИЕ
ветствует совокупность п определяемых до произвольного
постоянного множителя из уравнений A.57) значений хь, или так
называемый собственный вектор, соответствующий А^1*.
В теории колебаний приходится иметь дело главным образом с
симметрическими матрицами с вещественными элементами.
Некоторые свойства собственных значений и собственных векторов
таких матриц можно установить, не решая характеристического
уравнения. Из таких свойств отметим здесь следующие:
¦ Если матрица А симметрична, то для двух любых векторов х и
у с составляющими хг, х2, ... , хп и у19 у2, ... , уп имеет место
очевидное равенство2*
(х,Ау) = (Ах,у). A.59)
¦ Все характеристические числа вещественной симметрической
матрицы вещественны.
В самом деле, переписав уравнения A.57) в виде
п
КХ^ — 1а А^Х^, I — 1, А, ... , 71,
к = 1
умножим каждое из них на соответствующее комплексно
сопряженное хь и затем все уравнения сложим. Тогда получим
п п
X 2, хьхь = Ъ А1кхкхь,
I = 1 I, к = 1
или
п п п
к Е \х1\2= Е А;|хг|2 + I\А1к (Х1хк + х„х},
1 = 1 1 = 1 1^к
что и доказывает вещественность X.
¦ Собственные векторы вещественной симметрической
матрицы, соответствующие различным собственным значениям,
ортогональны между собой. Это означает, что их скалярные
произведения равны нулю.
Запишем уравнения A.57) в сокращенной форме для двух
векторов хну, соответствующих различным собственным
значениям X и \х:
Хх = Ах, \щ =Ау.
Так как А — симметрическая матрица, то (Ах, у) = (х, Ау) и,
следовательно, Х(х, у) = 1х(у, х), что при Хф\х возможно, только когда
(Х,у) = 0. A.60)
х) Здесь и дальше, кроме случаев особо оговоренных, предполагается, что корни
уравнения A.58) простые.
2) Скобки обозначают скалярные произведения.
10. Собственные значения матрицы
45
При изучении устойчивости движения по первому
приближению приходится для определения всех корней
характеристического уравнения развертывать характеристический определитель,
превращая уравнение A.58) в обыкновенное алгебраическое
уравнение п-й степени относительно X. Для п > 5 это развертывание
становится сложной (по числу операций) задачей.
Для некоторого упрощения решения этой задачи были
разработаны специальные методы. Из этих методов наиболее
эффективными являются методы, предложенные А. Н. Крыловым [105]1*,
А. М. Данилевским [97] и Ш. Е. Микеладзе [112].
В технических задачах теории колебаний, где приходится
иметь дело главным образом с вещественными симметричными
уравнениями типа A.58) и вычислять небольшое число их
корней, последние, вместе с соответствующими собственными
векторами, могут быть найдены с любой заданной точностью с помощью
простых итерационных расчетов без развертывания определи-
теля2).
Пример 5. Требуется развернуть определитель уравнения
4,53 - а 5,59 5,05 3,99
5,59 8,33-а 7,99 6,48
5,05 7,99 8,33-а 7,09
3,99 6,48 7,09
= 0,
A.61)
6,61 -а
а = Ю5/Р2,
по методу А. М. Данилевского; здесь сущность метода заключается в
приведении уравнения A.61) к форме Фробениуса
Ни
- а
1
0
^12
-а
1
Н13 .
0 .
-а .
• ^1(п-1)
0
0
Н\п
0
0
= 0.
A.62)
0 0 0 ... 1 -а
Приведение может быть выполнено самыми простыми средствами,
причем с вполне достаточной для практических приложений точностью3*.
Чтобы обратить в единицу предпоследний элемент четвертой строки,
делим все элементы третьего столбца на 7,09, а чтобы не вводить дробных ко-
Кроме метода самого А. Н. Крылова, в этой статье даны описание и
сравнительная оценка методов Лагранжа, Леверье, Якоби и Лапласа.
См. гл. V. Здесь имеются в виду так называемые вековые уравнения.
Матричный способ приведения к форме Фробениуса см. в [Б. П. Демидович,
И. А. Марон, 16].
46
Глава I. ВВЕДЕНИЕ
эффициентов при а, на то же число 7,09 умножаем все элементы третьей
строки; получим
= 0.
Далее умножаем третий столбец последовательно на 3,99; 6,48; 6,61 и
вычитаем его из первого, второго и четвертого столбцов. В результате приходим к
определителю, в котором последняя строка имеет требуемую форму:
4,53 -
5,59
35,80
3,99
а 5,59
8,33-
56,65
6,48
0,71
а 1,13
3,99
6,48
8,33-а 50,27
1
6,61
1,70-а
1,08
2,56 + 3,99а
0
0,99 0,71
1,01-а 1,13
2,67 +6,48а 8,33-
0 1
а
-0,70
-0,99
-4,79
-а
6,61а
= 0.
Чтобы закончить первый цикл преобразований, нужно в полученном
определителе избавиться от слагаемых с а в первом, втором и четвертом элементах
третьей строки. Для этого умножаем первую строку на 3,99; вторую на 6,48,
четвертую на 6,61 и прибавляем их к третьей, после чего имеем:
1,70 -
1,08
6,34
0
-а 0,99
1,01 -
13,16
0
0,71
а 1,13
25,09 -
1
- а
-0,70
-0,99
-14,00
-а
Этим заканчивается первый цикл приведения уравнения A.61) к форме Фро-
бениуса. Отметим, что сумма диагональных коэффициентов в последнем
определителе должна быть равна сумме таковых в определителе A.61I).
Второй цикл должен привести третью строку последнего определителя к
виду
0 1 -а 0.
Он выполняется аналогично первому и приводит к уравнению
= 0.
Третий и четвертый циклы заканчивают приведение уравнения A.61) к
форме Фробениуса
0,39-
4,08
0
0
-а 0,08
27,41 -
1
0
- а
-1,30
-45,71
-а
1
0,42
7,97
0
-а
27,80-а 56,07
1 -а
0 1
0 0
20,50 1,40
0 0
-а 0
1 -а
Х) В методе Данилевского это — контрольное правило.
10. Собственные значения матрицы
47
Ио последнего уравнения получаем
а4 - 27,80а3 + 56,07а2 - 20,50а + 1,40 = 0. A.63)
Решение уравнения A.63) проведем по методу Лобачевского —
Греффе. Этот метод не требует предварительного отделения
корней и дает возможность получить все корни с любой точностью.
Исходя из уравнения A.63), составляем ряд уравнений, из
которых каждое имело бы корнями квадраты корней предыдущего,
руководствуясь следующим правилом.
В уравнении, корни которого равны квадратам корней
предыдущего, коэффициент любого члена равняется квадрату
коэффициента члена с той же степенью неизвестного данного уравнения
минус удвоенное произведение коэффициентов тех двух членов,
между которыми этот член заключается, плюс удвоенное
произведение коэффициентов, между которыми заключаются эти два,
минус и т. д. ..., пока не дойдем до крайнего (с той или другой
стороны) члена данного уравнения.
В табл. 1 расчет проведен до уравнения с четвертыми
степенями корней а, т. е. до восьмых степеней р. Через А0, А19 А2, А3, А4
обозначены коэффициенты уравнений.
Приближенные значения а = 105/р2 находим по формулам
Гл /"^2 1"^3 /"^4
а1*4л/А1' а2*4АТ-, а3«4—, а4*4—,
А/^-1 Н^2 1^3
Таблица 1
а
а2
а4
А)
1
1
1
А
-27,80
А2 = 772,84 - 2А2 =
= -112,14
660,70
А2 = 436524,49 -
- 2А2 = -4013,68
432510,81
А2
56,07
А2 = 3143,84 -
-2А1А3 =-1139,80
2А4 = 2,80
2006,84
А2 = 4027406,79 -
-2А1А3 =-347858,55
2А4 = 3,92
3679552,16
А
-20,50
А2 = 420,25 -
- 2А2А4 = -157,00
263,25
А2 = 69300,56 -
- 2А2АА = -7866,82
61433,74
^4
1,40
А|=1,96
1,96
А2 = 3,84
3,84
48
Глава I. ВВЕДЕНИЕ
откуда
рг = 8
1020
432510,81
62,46;
432510,81 • 1020 ОЛЛ ак.
Р* = ^ 3679552,16 =241>95>
л _ „/3679552,16-1020_ копг лк.
Р* ~ Щ 61433Д4 527'45'
'И33^ ^ - 1060,49,
11. КВАДРАТИЧНЫЕ ФОРМЫ. Квадратичной формой называется
однородный многочлен второй степени
1/(х19 х2, ... , хЛ) = А11х1 + А22х2 ~*~ ••• ~^~Аппхп +
+ (Аг-1,*+А*,*-1К-1**- С1'64)
В дальнейших приложениях коэффициенты формы большей
частью удовлетворяют условию симметрии А1к = Акг В этом
случае форма запишется так:
17(хг, х2, ... , хп) = А11х1 + А22х2 + ... + Аппхп +
+ гЛ^х^ + 2А13хгх3 + ... + 2А„_1? д *„_! хл A.65)
или
{/(*!, х2, ... , хп) - 2 А1кхьхк.
I, к = 1
A.66)
Определитель, составленный из коэффициентов формы I/,
^¦11 ^-12
^21 ^-22
х2п
называется дискриминантом формы. В дальнейшем
предполагается, что дискриминант формы A.66) не равен нулю.
Всякая квадратичная форма 11(х19 х2, ... , хп) с помощью
линейного преобразования
У\~ х\ + Ь\2Х2 ~*~ 3*3 + ••• + ^1пХп9 \
у2= х2~^~ 'г23х3 + ... 4- к2пхп,
A.67)
Уп
11. Квадратичные формы
49
может быть приведена к каноническому виду
Щх19 х2, ... , хп) = аху{ + а2г/| + ... + апу*.
A.68)
В самом деле, определитель преобразования A.67) равен
единице. Следовательно, дискриминанты форм A.68) и A.66) и их
главные диагональные миноры равны между собой:
ах 0 ... 0
0 а2 ... 0
0 0 ... а,
=
А
А
11 ^12 ••• -^1*
ь21 ^-22 ••• А21
Ац Аь2 ... Аи
>
или, если ввести обозначения
с,-
^11 ^12 ••• ^11
^21 ^22 ••• А21
Ац А12 ... Аи
то
0
4 е
а2-... *а^ = С
1'
1=1,2,
п,
A.69)
A.70)
Отсюда следуют равенства
ал
С1? а2
«3=7^
аи
Сг' ~» С2
С помощью этих равенств форма A.68) запишется следующим
образом (в предположении, что все СХФ 0):
к = с1У1 + ^у1 + ^у1 + ...+
VI
A.71)
'1 ^2 °л-1
Практически приведение формы A.66) к виду A.71)
осуществляется путем выделения в A.66) полных квадратов некоторых
линейных форм, совпадающих (с точностью до постоянных
множителей) с правыми частями преобразования A.67). В этом легко
убедиться, рассмотрев числовой пример.
Пример 6. Пусть дана форма
V = 6х$ + 11л:| + 22х| + \2ххх2 + 22x^3 + 28х2х3,
A.72)
которую нужно привести к каноническому виду.
Чтобы избежать дробных коэффициентов, умножаем обе части A.72) на 6
и затем дополняем до полного квадрата члены, содержащие хг:
6*7 = F*! + 6х2 + 11х3J + 30х| + 11х| + 36х2хг.
50
Глава I. ВВЕДЕНИЕ
Далее умножаем обе части последнего равенства на 30 и дополняем до
полного квадрата члены, содержащие (вне скобок) х2:
30 • 6 • II = 30 Fхг + 6х2 + 11х3J + C0х2 + 18х3J + 6*|.
Подстановка, соответствующая преобразованию A.67),
6г/х = 6х1 + 6х2 + 11х3,
6-30*/2 = 30х2 + 18х3,
30г/з = х3
приводит форму A.72) к каноническому виду
V = 6*/2 + 1801/| + 30у|.
Квадратичная форма называется
положительно-определенной, если она принимает только положительные значения,
обращаясь в нуль, когда все переменные х19 х2, ... , хп равны нулю.
Для того чтобы форма была положительно-определенной,
необходимо и достаточно, чтобы все коэффициенты формы после
приведения ее к каноническому виду были положительны. Этому
условию можно дать следующее выражение. Как мы знаем,
квадратичная форма может быть приведена к виду
С„
и = с1у{ + с7±У1 + ...+
У п '
A.73)
'1 ^л-1
где С. равны A.69). Эта форма положительно-определенная, если
все ее коэффициенты больше нуля. В частности, Сг должен быть
больше нуля. Следовательно, все С- положительны. Таким
образом, форма тогда и только тогда будет
положительно-определенной, когда дискриминант формы и все его последовательные
главные диагональные миноры больше нуля, т. е. когда
Ап > 0;
^-11 ^12 ^13
^¦21 ^-22 ^23
^31 ^32 ^-33
>0;
^¦11 ^12
^¦21 ^-22
^-11 ^12
^•21 ^-22
>0;
Ап\ Ап2
A.74)
>0.
Неравенства A.74) выражают критерий положительной
определенности квадратичной формы, известный под названием
критерия Сильвестра.
12. Определение изображения функции
51
Две квадратичные формы
п п
I, Л = 1 I, А = 1
из которых одна, например II х, положительно-определенная,
могут быть приведены к каноническому виду одним и тем же
линейным преобразованием координат. В самом деле,
положительно-определенную форму II г можно, например, путем
последовательного выделения полных квадратов привести к
каноническому виду
^1=г/? + у| + .- + ^- A-75)
В новых переменных ух, у2, ... , уп вторая форма будет иметь вид
п
172 = . .2 Ъ1ку#к.
I, к = 1
Всегда найдется ортогональная подстановка, которая приведет
форму II2 к виду
сохранив при этом канонический вид формы II х, так как
я п
ЪУ?= 2 &?. A.77)
г = 1 1 = 1
Выразив переменные д1, #2, ... , дп через ух, г/2, ... , г/д, а
последние — через ^1? ^2, ••• » %Л> мы получим то единственное линейное
преобразование, которым обе формы II х и С/2 приводятся к
каноническому виду. Отметим, что постоянные являются
собственными значениями матрицы коэффициентов формы II2.
НЕКОТОРЫЕ СВЕДЕНИЯ
ИЗ ОПЕРАЦИОННОГО ИСЧИСЛЕНИЯ
12. ОПРЕДЕЛЕНИЕ ИЗОБРАЖЕНИЯ ФУНКЦИИ. В операционном
исчислении функции, входящие в состав дифференциальных
уравнений, заменяются их изображениями, построенными с помощью
функционального преобразования Лапласа или Карсона.
Действиям дифференцирования и интегрирования сопоставляются
некоторые простые алгебраические действия над изображениями
52
Глава I. ВВЕДЕНИЕ
этих функций. Задача операционного исчисления заключается в
построении изображений функций и действий над ними и в
последующем истолковании полученных операционных
выражений, т. е. в переходе от изображения к так называемой начальной
функции (оригиналу).
Операционное исчисление вносит значительные упрощения в
решение задач на вынужденные колебания в тех случаях, когда
возмущающие силы имеют характер импульсов или сил, закон
действия которых представляется в различные промежутки
времени различными аналитическими выражениями. Кроме того,
операционный метод дает возможность сразу составлять
решения, удовлетворяющие начальным условиям, что делает его
особо ценным в исследованиях переходных режимов, т. е. движений
системы непосредственно после ее возмущения, когда начальные
условия имеют существенное значение.
Изображением функции /(*) по Карсону называется интеграл
оо
р\ е-Рг1Ц)(Ы9 A.78)
о
где р — комплексный параметр с положительной вещественной
частью, достаточно большой для того, чтобы интеграл A.78)
сходился. Относительно начальной функции, или оригинала, /(*) мы
предполагаем, что это — кусочно-непрерывная функция,
заданная в интервале 0 < I < + оо, равная тождественно нулю для I < О
и удовлетворяющая условию
в-(Кер)*дг)_>о при г_+ + 0о. A.79)
Изображение /(*) есть функция параметра р. Мы обозначим эту
функцию через Р{р):
оо
Р(Р) =Р\ е~Р*№) А*. A.80)
о
Для записи зависимости между /(*) и Р(р), выражаемой
последним равенством, мы будем пользоваться обозначением
Р(Р) ~^-> Л*).
Это — символическая запись обыкновенного равенства A.80),
представляющего собой карсоново преобразование функции /(*).
Преобразование A.80) линейно, т. е. изображение суммы двух
функций равно сумме изображений каждой функции в отдельности
13. Изображения некоторых функций и действий над ними 53
и умножению функции на постоянный множитель соответствует
умножение на тот же множитель изображения. Поэтому если Аь —
некоторые постоянные (I = 1, 2, ... , п) и Рь(р) —т—> /ДО, то
A.81)
13. ИЗОБРАЖЕНИЯ НЕКОТОРЫХ ФУНКЦИЙ И ДЕЙСТВИЙ НАД НИМИ.
¦ Изображение единицы. Введем единичную
функцию а0(*), которая имеет следующее определение:
_ [0 при *<0,
ао^ = 11 при г > 0.
A.82)
График этой функции представлен на рис. 4. Изображением
единичной функции а0@ будет единица:
1 -т-> а0(*). A.83)
Это следует из очевидного равенства
оо
р\е-Р*о0Ц)<И = 1.
Так как в промежутке от 0 до +оо имеем а0(^) = 1, то в этом
промежутке изображение единицы равно единице:
1 -т-> 1.
¦ Изображение производной и
дифференцирования. Если
и /(О) = 0, то
рР(р) -т-> ^Л*).
A.84)
В самом деле, интегрируя по
частям в правой части равенства
оо
рР(р)=р1ре-Р*№Ы,
о
получим:
ОО , р
рр(р)=р[-е->*нт +р] е~рг%ы-
1
1
0
Рк
[с. 4
1
°о(*)
1
*
54
Глава I. ВВЕДЕНИЕ
Выражение в скобках равно нулю в силу A.79) и предположения,
что /@) = 0. Следовательно,
о
или
о аг
р?(р)-^±ГЦ). A.85)
Дифференцирование начальной функции «изображается»
умножением ее изображения на параметр р.
Если /@) Ф 0, то
о
оо , »
р2?,(р)=р/@)+р|в-^5{A*
п си
или
р[Р(р)-/@)]-г->^/(*). A.86)
Чтобы найти изображение я-й производной /(*), интегрируем
по частям я раз в правой части равенства
оо
рп Р(р) = р\ рпе-Р*№)И.
о
Тогда получим:
рпР{р) = рд/@) + рл "х/' @) + ... + р/*я - !) @) + р| «г/*/**) @ и*,
о
откуда следует
Рп[Р(Р) ~ /@) " - Г @) " ... —^Ц /<*- !> @)] -г-> /<*>(*)• A.87)
Если для I = 0 функция /@ обращается в нуль вместе со своими
/1-1 первыми производными, то
рпР(р) -г-> /^(О- A-88)
^ Изображение интеграла и
интегрирования. Переписав A.80) в виде
.| ОО
±Др) = 1е-Р*№И
Р о
и выполнив в правой части интегрирование по частям, получим
. I
\ е-Р*№) й*=р\е~Р* Г/ /(т)Aт1 <И.
о о 1-о -I
13. Изображения некоторых функций и действий над ними 55
Таким образом,
или
±Р(р)=р]е-Р*\1ГШ'*]ы,
Р 5 1-0-1
1^(р)-т->//(х)Aх.
A.89)
Интегрирование функции «изображается» делением ее
изображения на параметр р.
Из A.89) находим
г
I ***=*•
откуда
откуда
->*,
*2
-» _
2!' У
о (з - 1)! в!
откуда
A.90)
Формулы A.90) определяют оригиналы целых отрицательных
степеней параметра р.
¦ Теорема смещения. Если
г(р) -т-> №,
то
-^— Р(р + а) Ч-> е-°'/@.
р + а ^ ' ч '
Доказательство. В соотношении
Р{р)=р1е-**№&
о
заменим р нар + а и перепишем его в виде
A.91)
—2_ ^(р + а) = р I е-Р*[е-а*№)] М.
р + а о
Отсюда следует:
-^— Р(р + а) -Ч-> е-а'/@-
р + а
Из теоремы смещения можно получить изображения
некоторых часто встречающихся в приложениях функций.
56
Глава I. ВВЕДЕНИЕ
Так, для изображения функции е±а* находим, полагая в A.91)
/(*) = 1 и принимая во внимание, что 1 .* > 1:
р + а
-г-> е±аК A.92)
Так как
, . еа* + е~аг , . еаг - е~а*
сп а* = , зпа^= .
то
—^— -Н> сп а*, -^— -г-> зп а*. A.93)
рг - аг рг - а*
Заменяя в A.93) а на га, получим:
—^—- -=-» соз а*, -ИгЧ "^ 81п а*' A,94)
рг + аг рг + аг
откуда по той же теореме смещения можно найти изображения
произведений соз а* и зт а1 на е~$г:
Р(Р + ^ Н-> е~&* соз а*, ^ 5 "^ *~р* з1п а'- С1-95)
0? + рJ + а2 (р + рJ + а2
Из формулы
/? + а
на основании теоремы об изображении интегрирования имеем
р р + а
или
о
1 ' »± A-*Га*). A.96)
р + а а
Полагая здесь а = ио, получим
-Ит-з ~^ ~ 81п ю'> БГТ—2 "^ ~ <Х ~ с°8 <»*)• <Ь97>
р2 + со2 со Р2 + со2 со
¦ Теорема запаздывания. Рассмотрим функцию
ао(* ~ т)» которая по определению равна нулю для Кти единице
для 1> х. График этой функции сдвинут вправо на расстояние т
(рис. 5) по сравнению с графиком функции а0(*) (рис. 4).
13. Изображения некоторых функций и действий над ними 57
Найдем изображение этой функции:
X со оо
Р(р)=р\ е~Р* а0 (* - т) (И +р\е~Р* а0 (* - т) <М=р\е~Р1 И = «г**.
О х т
Таким образом,
е-рх _^_> ^ ^ _ т)# ц 98)
Сопоставляя полученное соотношение с формулой
1 -г-> а0 (О,
заключаем, что умножение изображения на е~?х сдвигает график
функции а0(*) вправо на т.
Это заключение остается верным для любой функции /(*). Если
то
Р(Р) -т-> №,
е~Рх Р(р) —г-> /(* - т). A.99)
В самом деле, умножив обе части равенства
оо
о
на е~Рх, получим, положив % + т = *':
оо
X
Прибавим к правой части интеграл
X
р\ е~Р*' /(*' - т) йГ.
о
Этот интеграл равен нулю, так как в пределах изменения V от 0 до т
*'-т<0, ДГ-т) = 0.
Опуская штрих у V', окончательно
получим
оо
е~Рх Р(р) =р\е~Р* /(* - т) а*,
или
1
0
,
т
1
о0(*-т)
1
'
1
«г^(р)-Н>/(*-т).
A.100)
Рис. 5
58
Глава I. ВВЕДЕНИЕ
/(*-т)
Рис. 6
Умножение изображения на е~рх сдвигает график функции /(*)
вправо на т (рис. 6).
Теорема запаздывания дает простой способ построения
изображений разрывных функций, например функций, определяющих
интенсивность нагрузки, распределенной по отдельным участкам
балки. В этом последнем случае переменная I обозначает не
время, а расстояние (абсциссу) и ее целесообразно заменить буквой х.
Рассмотрим сначала случай равномерно распределенной на
участке (х0, хг) нагрузки интенсивностью д. Такую нагрузку
можно представить наложением двух скачков одной и той же
высоты д, начинающихся в точках х0 и хх и направленных в
противоположные стороны (рис. 7). Аналитическое выражение этой
нагрузки можно построить с помощью единичной функции а0(х):
Дх) = да0(х - х0) - да0(х - хг).
Ее изображение, согласно теореме запаздывания, будет
де
-рх0
де
-рх1
-> /(X).
A.101)
Предположим теперь, что интенсивность нагрузки /(х) задана
следующим образом:
[ 0 при х < х0,
Дх) = \ ё(х) при х0 < х < хг,
I 0 при хх < х,
'/
Х- *о|~
*!
д|1 ШПШНПШПП
X
Рис. 7
13. Изображения некоторых функций и действий над ними 59
ё(х)
ёх(х)
Рис. 8
где функция &(х) определена для всей положительной части оси
Ох (рис. 8). Полагая
ё0(х) = §(х0 + х),
получим для всех х > 0 ту ветвь функции §(х), которая
начинается от х = х0. Помещая в эту точку начало координат, построим
изображение функции #0(х):
ед
Й0(х).
Чтобы вернуться к заданному расположению нагрузки Дх),
нужно сдвинуть график функции #0(х) вправо на отрезок х0. В
соответствии с теоремой запаздывания для х > х0
е~рх° О0(р) -Ч-> д0 (х - х0) = ё(х).
Точно так же, полагая
8х (*) = ё(хх + х), Ог(р) -=-> ёх (х),
приходим для х > хх к соотношению
е~рх1 Ог(р) -г-> *! (х - хг) = §{х).
Изображение нагрузки Дх) представится формулой
е~рх° О0(Р) ~ е~рХ1 Ог(р) -=-> /(х). A.Ю2)
В качестве одного из приложений формулы A.102)
рассмотрим задачу о построении изображения периодической функции.
Пусть /(*) — периодическая функция с периодом т:
т = т + х).
60
Глава I. ВВЕДЕНИЕ
Введем вспомогательную функцию у@, которая равна /(*) для
всех 1:, удовлетворяющих неравенству 0 < I < т, и равна нулю для
К0и^>т:
[ 0 при I < х0,
Ч>@ = ] /(*) при 0 < г < т,
[ 0 при ^ > х.
Изображение этой функции по формуле A.102):
Ч(р) = е-р**Р0(р) - е~р*1 Гг(р) -г-> у(*), AЛ03)
где в рассматриваемом случае следует положить
*0 ~ "' *1 == ^'
ВД -^* Л*), ЗД) Н-> /(* + Т).
ЯО - Л* + т),
ВД - *» = **(р)-
*(р) = 2?(рК1 - е~П
Полученная формула дает изображение периодической
функции /(г) через изображение вспомогательной функции \|/@>
совпадающей с /(*) на протяжении периода и равной нулю вне его.
Существует и обратная теорема, которую мы приведем без
доказательства [А. И, Лурье, 28].
Теорема. Начальная функция, изображение которой имеет
вид A.104), причем числитель ^(р) представляет изображение
функции \|/@, равной нулю при I > т, является периодической
периода т; эта периодическая функция /(*) для 0 < I < травна
начальной функции \|/(г) изображения Ч*(р) в формуле A.104).
14. ПРОСТЕЙШИЕ ПРАВИЛА ПОСТРОЕНИЯ НАЧАЛЬНОЙ ФУНКЦИИ
ПО ДАННОМУ ИЗОБРАЖЕНИЮ. К таким правилам относятся
прежде всего теорема свертывания и теорема о разложении.
Теорема свертывания дает возможность построить начальную
функцию произведения изображений двух заданных функций и
заключается в следующем.
Так как
то
Поэтому
или
14. Правила построения начальной функции
61
Теорема свертывания. Если
*1 (?)-г-> ш, ?2(р)-^т,
тох'
1^ (р) ^(р) -=-> 1 ^(т) /2(* - т) ат = I /^ - т) /2(т) ат. а.нвд
р о о
Доказательство. В самом деле, по теореме
запаздывания
<г^2(р) -г-> /2 (* - т)
или
оо
Умножим обе части этого равенства на /хA:)йх и проинтегрируем
по т в пределах от 0 до +°°:
со оо оо
Р2(рI е~Р* ^(т) Ах = р\ Гг (т) Ах I е~г* Г2 (* ~ т) Ы,
о о о
или
оо оо
1 ^2 (р) *\(р) = р| <П* [[ Г2И ~ т) /х(т) <1т]<1* =
оо г
= рЬ-^[1/2(^-т)/1(х)с1т]а^
так как /(* - т) = О для т > I. Отсюда следует:
I
± Рг (р) Р2(р) Н"> 1 /2(* - X) /!(Т) ЙТ. A.106)
Таким же путем можно получить и второе выражение теоремы
свертывания
± Р1 (р) Р2(р) -г~> | /!<* - т) /2(Х) ИХ. A.107)
Теорема о разложении. Предположим, что
функция Р(р) представляет собой рациональную дробь
Р(п) = М(Я) = аоРт + а1Рт~1 + -+ат
Х(р) Ь0р" + 61р"-Ч-... +Ьп '
х) Интегралы в соотношении A.105) называются свертками функций /5(<) и /@-
62
Глава I. ВВЕДЕНИЕ
причем п > т. Обозначим через р19 р2, ... , рп корни знаменателя.
Можно построить начальную функцию для такого изображения,
если предварительно разложить Р(р) на элементарные дроби. Здесь
могут встретиться два случая: 1) корни рк знаменателя Ы(р) —
простые и не равные нулю; 2) корни знаменателя А^(р) — кратные.
1-й случай. Корни знаменателя А^(р) — простые и среди них
нет нулевого корня. В этом случае разлагаем на элементарные
дроби функцию
М(р)
рЩр)'
полагая сначала формально
^=^+1_^ AЛ08)
рН(р) р ъР-Рк
Чтобы найти коэффициент С0, умножаем обе части равенства
A.108) нар и полагаем/? = 0. Тогда
г -М@)
0 N@) '
Умножив обе части A.108) на (р - рк), найдем коэффициент Вк
как предел отношения
М(р)(р-рк)
рМ(р)
при р —* рк. По правилу Лопиталя:
_ М(рк)
к Рк*'(Рк) '
Таким образом,
М(р) = М@) + у М(рк) 1
рЩр) рЩО) ^ркМ\Рк)р-рк
или
Щр) = Щ0) +у М(рк) р
М(р) N@) ^ркМ'(рк)р-рк'
Так как
Р~Рк
-> еРк\
то
М(р) . > М@) , у М(рк)
+ у Н^1_вРй*. A.110)
Щр) N@) ГРкМ'(рк) 1 )
14. Правила построения начальной функции
63
Если знаменатель Л^(р) имеет один нулевой корень р = рп, то,
положив Ы(р) = рЛ^(р), где Л/\@) ф О, будем иметь ([А. И. Лурье,
28, с. 47]) вместо A.110)
Щр) -^\±Щр1] + м@) -у1 м(рк)
щР) • ир лг^^.о ^1@) Др^'Ср*) '
2-й случай. Корни знаменателя А^(р) — кратные. Пусть корни
знаменателя рг, р2, ... , рк, среди которых нет нулевых, имеют
кратности, соответственно равные иг, и2, ... , ик, причем
V1 + V2 + ... + ик = п.
Разложение дроби
М(р)
рЩр)
на простейшие будет иметь вид
РМ(р) Р +ДЛ(Р-Л)Г ( }
Корню р8 кратности V;, соответствует в этом разложении группа
членов
С""8 + ^'^ , +...+ -2И-. A.113)
(Р-Ре)"° (Р-ЛH' Р-Л
Для определения коэффициентов С, 8 умножаем обе части A.112)
на высшую степень (р - р8) 8. Введем обозначение
Тогда
С,(р)=С1><>в+С„4_1>в(р-р,) + ...+
+ Си(р - р,)"- ^ +К(р- рв)"« , A.114)
где .ЙГ обозначает совокупность членов, в знаменатели которых не
входит кореньр8 и которые при р = р8 остаются конечными.
Положив р = р8, получим
С„„. = С$(р3).
64
Глава I. ВВЕДЕНИЕ
Дифференцируя A.114) один раз пор и полагая затем/? =/?5,
получим
С(°8~Х)(р )
сV8-^,8 = с;(рв>,... ,сх>в= 8A;8-х)! •
Коэффициент С0 определяется, как и в случае простых корней,
С -М@)
С° N@) •
Теперь разложение A.112) можно записать следующим образом:
М(р) __ М@) * ^ Ф~Х)(ра) 1
р#(р) />ЛГ@) ДА (и.-Х)! (р-р,)*
или
N(р) Щ0) Ах-1 К-^)! (Р-Р.)
С помощью соотношения1)
Л'
A.115)
приходим к выражению теоремы о разложении для случая
кратных корней знаменателя 2У(р):
Щр) _,_> Щ0) * ^ С<р'-ц(р.Ьь-у.«
*(р) • ЛГ@) ДД («,-Я.)! (Х-1)Г AЛ1Ь)
Теорема о разложении является весьма эффективным
средством построения начальной функции операторного выражения,
имеющего вид рациональной дроби. Теорема может быть
обобщена на случай, когда Е(р) — мероморфная функция с простыми
полюсами рь* 0. Такую функцию можно представить в виде
отношения двух целых трансцендентных функций:
В этом случае
Р(р) = щи.
Щр) ^ М@) Л М(рк)
Ы(р) ^ N@) + ё1РкМ'(рк)е к • AД17)
Х) Это соотношение можно получить из формул A.90) с помощью теоремы
смещения.
15. Начальные функции степеней оператора р.
65
Если полюсырг, р2, — —простые, то, обозначая вычеты Р(р)
относительно этих полюсов соответственно через Ъг, Ь2, ... и принимая
во внимание известную формулу
Ьк Шп(р рк) Щр) м,(рк),
представим формулу A.117) в следующем виде:
Р(Р) ~т-> Р@) + 2 Л<?к%-
A.118)
15. НАЧАЛЬНЫЕ ФУНКЦИИ ЦЕЛЫХ ПОЛОЖИТЕЛЬНЫХ СТЕПЕНЕЙ
ОПЕРАТОРА р. Рассмотрим функцию о{^, Н), которая равна 1/Н
для 0 < I < Н и нулю для 1> Н (рис. 9):
,., , ч | у при 0 < I < Л,
а{(*, /г) - 1 /г
I 0 при 1> Н.
Изображение этой функции найдем, вычислив интеграл
A.119)
откуда
р\е~Р1 ст? (*, Н)<И=Р-\ е~Р* № = у A - е ^/г),
о Л о /^
1 A-в-рЛ) _^ а* (*,/*).
A.120)
В полученном соотношении полагаем Н = 0. Предел левой части
будет изображением предела правой. Но предел левой части (по
правилу Лопиталя)
1 ~ е-рп
пт—; = р.
/г - о /г
Предел правой части принимаем за
определение импульсивной функции первого
порядка ах@. Таким образом,
аг(*) = Цта}'(^, /г)
A.121)
р-т^а^). A.122)
По теореме об изображении интегрирования
1
1 аг(г)И
СТГ*
1
н
1
11'
'
о
1ш
*
Рис. 9
* 10456 Бабаков
66
Глава I. ВВЕДЕНИЕ
или
{ агШг.
С другой стороны, 1
-» а0@- Следовательно,
^@ = ^@.
A.123)
A.124)
Функция а1(^) равна нулю для всех I, кроме I = 0, где она
обращается в оо. На основании A.123) ее можно истолковать как мгновенную
силу, импульс которой равен единице. Мгновенную силу,
сообщающую массе т в начальный момент 1 = 0 начальную скорость у0,
можно представить с помощью функции ах(^) выражением огA;)ти0.
Если I — время, то размерность функции агЦ) будет [1/с].
Рассмотрим теперь функцию ст2(*, п), определяемую
следующим образом (рис. 10):
ст2(*> н)
к2
'к2
0
при
при
при
Изображение этой функции
Л A " %е~рН + *~2рН)
к2
Предел левой части A.125) равен
0 < I < к,
г> 2Л.
а2(*, Л>-
A.125)
а2|
1
1
к2
\
№
и1
11!
г.1|1
1
к 2к
тпт
\\к
±1
1 ~*
НтЛ A - 2е-*Л + е~2Рн)=р2.
к - ок2
Предел правой части есть
импульсивная функция второго порядка,
обозначаемая дальше через ст2@:
а2(*) = Нт а|(*, /г). A.126)
/г - - 0
Таким образом, при к = 0 из A.126)
имеем:
-» а2@-
A.127)
Рис. 10
Из последней формулы находим
I
р -=-> 1 а2(*)A*, а2(*) = а{(*).
о
Размерность а2(*)> как следует из ее
определения, есть [1/с2].
1. Системы с одной степенью свободы
67
Функция Р = тх0<з2A;), полученная умножением функции ст2@
на массу т и длину х0, приобретает размерность силы [кГ],
причем, когда т = 1 и х0 = 1,
Р = а2@-
На этом основании функцию а2(^) можно трактовать как
мгновенную силу, которая единичной массе сообщает единичное
перемещение.
С помощью функций аг(х) и а2(х), где вместо времени
независимой переменной служит абсцисса х, можно определять
интенсивность сосредоточенных нагрузок и таким образом включать в
состав распределенной по балке нагрузки сосредоточенные силы
и моменты. В самом деле, размерность функции, которой
задается закон распределения нагрузки вдоль балки и которая
фигурирует, например, в правой части уравнения упругой линии
есть размерность интенсивности нагрузки [кГ/м]. Произведения
сосредоточенной силы Р [кГ] и сосредоточенного момента М
[кГ • м] соответственно на функции аг(х - х0), а2(х - х0)
Рсуг(х - х0), Ма2(х - х0)
имеют ту же размерность [кГ/м]. Эти произведения можно, таким
образом, рассматривать как величины, определяющие
интенсивность сосредоточенной в точке х = х0 нагрузки силой или моментом.
Г л а в а П
Системы с одной степенью свободы
1. СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ. Механической
системой с одной степенью свободы называется система, положение
которой в пространстве однозначно определяется заданием одной
обобщенной координаты д, а движение системы под действием
приложенных к ней сил — изменением этой координаты с течением
времени. Такой системой является, например, маятник часов,
колеблющийся в вертикальной плоскости, перпендикулярной к его
68
Глава П. СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
оси О (рис. 11). Положение такого маятника
однозначно определяется одной обобщенной
координатой — углом 6 между вертикалью Оу и плоскостью,
проходящей через ось и центр тяжести С.
Простейшим колебательным движением
системы с одной степенью свободы является
гармоническое колебание, в котором обобщенная координата
<7 изменяется с течением времени по закону синуса
(или косинуса)
#@ =^.зш(со^ - а). B.1)
Коэффициент А — значение координаты д,
соответствующее максимальному отклонению
системы в одну сторону, — называется амплитудой
колебания. Аргумент синуса — величина (со^ + а) — называется
фазой колебания; а — начальной фазой.
Множитель со представляет так называемую собственную
круговую частоту колебания. Обозначим через т [с] наименьший
промежуток времени, за который система, выйдя из некоторого
состояния д, с), снова возвращается в него с теми же значениями
#, д, совершив одно полное колебание. Этот промежуток времени
называется периодом колебания. С круговой частотой со период
связан соотношением
С0 = 27Т/Т, B.2)
из которого следует, что круговая частота равна числу полных
колебаний системы за 2к с. Вместе с тем, очевидно,
B.3)
д(* + т) = д@> 1
д(* + т) = $(*). I
Последние равенства являются необходимыми и достаточными
условиями периодичности состояний движения системы.
2. МАЛЫЕ СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ ОКОЛО
УСТОЙЧИВОГО РАВНОВЕСНОГО СОСТОЯНИЯ. Условимся отсчитывать
«координаты состояния» системы ди д от равновесного ее состояния,
предполагая, что в этом состоянии не только д, но и д равны
нулю. Тогда отличные от нуля значения координат #, с/ будут
определять отклонения системы от этого состояния или возмущения ее
равновесного состояния. Получив некоторое начальное
возмущение и предоставленная затем самой себе, система будет совершать
2. Малые свободные колебания системы
69
возмущенное движение. Равновесное состояние, определяемое
нулевыми значениями координат д и д, называется устойчивым,
если, задавшись сколь угодно малым положительным числом 8 > О,
мы сумеем подобрать по нему другое положительное число л > О,
зависящее от с, такое, что во время возмущенного движения дид
не превзойдут по абсолютной величине 8, если их начальные
значения д0, д0 были выбраны согласно неравенствам
1?о1<тЪ ^оКл- B.4)
Это значит, что, получив достаточно малое начальное возмущение,
система в дальнейшем движении пребывает в ближайшей
окрестности невозмущенного равновесного состояния или возвращается в
равновесное состояние, совершая около него более или менее
быстро затухающие колебания. Ни одна координата состояния — ни д,
ни # — в этих колебаниях не превзойдет по абсолютной величине
числа 8: колебания системы будут, как говорят, малыми
колебаниями около состояния устойчивого равновесия.
При исследовании малых колебаний около устойчивого
равновесного состояния во многих случаях можно (не совершая
большой погрешности) сохранять в выражениях, зависящих от
координат и скоростей, только члены низшего (относительно этих
величин) порядка, отбрасывая все другие как бесконечно малые
высших порядков. Такая операция приводит обычно решение
задачи о малых колебаниях к интегрированию линейных
дифференциальных уравнений с постоянными коэффициентами. Она
называется линеаризацией уравнений движения системы.
Колебания, описываемые линеаризованными дифференциальными
уравнениями, называются линейными колебаниями.
Линеаризация уравнений малых колебаний может иногда оказаться
результатом некоторых конструктивных изменений в рассматриваемой
или проектируемой системе, что до известной степени служит
основанием ее допустимости.
В соответствии с изложенными замечаниями о линеаризации
составим выражения кинетической и потенциальной энергии
малых колебаний консервативной системы, подчиненной
стационарным связям, около устойчивого состояния равновесия,
предполагая, что оно определяется нулевыми значениями координат
G = ф = 0. Для такой системы уравнения связей A.8) имеют вид
70 Глава II. СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Подставив в выражение кинетической энергии системы
Т=\Ъ /^ (*? + $? + *?)
*/ = 1
производные
дХ: . . ду} . . дг-. .
1 дц 1 сщ 1 дд
получим
Ограничиваясь в разложении коэффициента А(д) по степеням д
первым членом, т.е. положив приближенно
А(д)*А@) = а,
придем к следующему выражению кинетической энергии
линеаризованной системы:
Т==-ад2. B.5)
Здесь а — существенно положительная величина, так как
кинетическая энергия отрицательных значений иметь не может1).
Что касается потенциальной энергии П, то в случае
стационарных связей она является функцией только координаты д:
П = Щд)
и может принимать как положительные, так и отрицательные
значения. Если за начало отсчета потенциальной энергии
выбрано равновесное состояние системы, в котором д = 0, то
П@)= 0.
В этом состоянии равна нулю и первая производная — . Поэтому
разложение Щд) по степеням д в области д = 0 начинается с членов
не ниже второй степени относительно д, т. е. будет иметь вид
Щд) - \сд* + ... ,
где с = —- . Для малых колебаний
1_с1д2_1<7-о ^
Щя)=\сд2. B,6)
Г) Обычно а — масса или момент инерции.
2) См. A.18).
3. Уравнения малых свободных колебаний 71
В рассматриваемых дальше линейных системах с > О, так что
нулевое значение потенциальной энергии в устойчивом
равновесном состоянии является ее минимальным значением для всех д,
не превосходящих по абсолютной величине некоторой
достаточно малой границы. В равновесном состоянии равна нулю и
кинетическая энергия системы. Таким образом, равенство нулю
потенциальной энергии в равновесном состоянии влечет за собой
равенство нулю полной энергии системы в этом состоянии и
наоборот.
3. УРАВНЕНИЯ МАЛЫХ СВОБОДНЫХ КОЛЕБАНИЙ ЛИНЕЙНОЙ
СИСТЕМЫ. Колебания системы называются свободными, если
скорость изменения состояния системы определяется только
состоянием самой системы, а именно восстанавливающей равновесное
состояние силой, зависящей от величины д, которая определяет
отклонение системы из этого состояния, и сопротивлением,
пропорциональным скорости д. Такую систему мы называем дальше
линейным осциллятором.
Если не учитывать сопротивлений, то уравнение колебаний
линейного осциллятора будет иметь вид
ад = -сд. B.7)
Введя обозначение с/а = к2, найдем
д = В соз Ы + С 8П1 Ы. B.8)
Заменив произвольные постоянные В и С другими А и а по
формулам В = А 81П а, С = А соз а, представим решение B.8) в
следующем виде:
д^ А 8Ш (Ы + а). B.9)
Если в начальный момент, когда I = О,
то
в = <7о> С= ~к' I
\ ТЛ ка | B.10)
V к2 д0 ]
Таким образом, амплитуда и начальная фаза свободных
колебаний определяются начальными условиями, а круговая частота
к = /с/а B.11)
72
Тлава П. СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
и период
т = 2к/к = 2п 4&1 с
от начальных условий не зависят.
Предположим теперь, что кроме восстанавливающей силы на
систему действует сопротивление, обобщенная сила которого В
пропорциональна скорости д (здесь а > 0):
В = -ад.
В этом случае уравнение колебаний системы, составленное по
схеме уравнения Лагранжа, будет иметь вид
ад + сд = -ад
или, если ввести обозначения а/а = 2п, с/а = к2:
д + 2дд = /г2д = 0. B.12)
Решение уравнения B.12) будет иметь различную форму в
зависимости от соотношений между пик.
1°. Случай малого сопротивления: п < к.
Характеристическое уравнение
22 + 2п2 + к2 = 0 B.13)
при п < к имеет комплексные корни
гх = -п + 1кх, 22 = -п- 1кг,
где кг = 4к2 - п2, Ь = л/-Т. В этом случае
У = е-П1 ^1 С08 ^ _(_ B^ 8^п %^ =
- е~пг (д0 сой кх1 4- Яо пд° зш кг*), B.14)
к1
где д0 и д0 — начальные значения координат д и д, когда * = 0.
Введя вместо постоянных Вх и Сг другие А и Р по формулам
Вг=А 81П C, Сх = А С08 Р,
представим решение B.14) в виде
д=Ае~пг 81П {к{Ь + Р). B.15)
Сравнивая последнее уравнение с уравнением B.9), приходим к
следующим заключениям.
3. Уравнения малых свободных колебаний
73
Рис. 12
¦ Отклонения Ае~п* системы с
сопротивлением с течением времени
убывают по экспоненциальному
закону, асимптотически
приближаясь к нулю (рис. 12):
колебания, как говорят, затухают.
В этом затухании и выражается
прежде всего влияние
сопротивления на свободные колебания.
¦ Из уравнения B.15) видно,
что д меняет знак периодически,
т. е. система проходит положение равновесия через одинаковые
промежутки времени. Промежуток времени тх между двумя
последовательными прохождениями системы через положение
равновесия с одинаковым направлением скорости называется периодом
затухающих колебаний. Это наименование является условным, так
как для затухающих колебаний условия периодичности B.3), за
исключением моментов прохождения через равновесное
положение, не выполняются. В таком же смысле затухающие колебания
могут быть названы изохронными колебаниями, поскольку
промежуток времени между прохождением через положение равновесия
(с одинаковым направлением скорости), т. е. период колебания,
остается постоянным, как бы малы ни были отклонения системы.
Величина периода тх вычисляется по формуле
2п т0
Лг2- п2 ^^(п/кJ
B.16)
где т0 = 2п/к — период свободных колебаний той же системы без
сопротивлений. При достаточно малом п период хг можно
вычислять по приближенной формуле
¦ Отношение двух последовательных амплитудных отклонений
системы от равновесного положения в одну сторону называется
коэффициентом затухания \|/:
Ае~п1 _ пхЛ
У:
B.17)
Так как у — величина постоянная, то значения амплитудных
отклонений убывают в геометрической прогрессии.
74
Глава П. СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Коэффициент затухания используют для характеристики
быстроты убывания амплитуд. Однако более подходящим для этой
цели является натуральный логарифм коэффициента затухания у,
называемый логарифмическим декрементом колебаний
5 = 1п 1|/ = ПХ1 = П — . B.18)
^(к/пJ- 1
Из формул B.16) и B.18) следует, что
т0 А/ 4я2
Как видно из последней формулы, сопротивление значительно
больше влияет на убывание амплитуд, чем на изменение периода
колебаний. Так, при т1/х0 = 1,1, что соответствует увеличению
периода на 0,1т0, значения 8 « 2,879 ир 17,80. За два полных
колебания амплитуда уменьшится почти в 316 раз, т. е.
практически колебания прекратятся.
Для опытного определения декремента 5 часто пользуются
еще одной приближенной формулой. Обозначим через у и ух два
последовательных (через период) отклонения, и пусть
у-ух = Ау.
Тогда
5 = 1П -У— = 1пГ1 + ^ + (Щ2 + ... ] - ** . B.19)
у - Ду I у [- у } ^ у
Отношение Ау/у можно найти, например, путем замеров на
осциллограмме изменений отклонения за один или несколько
периодов колебаний (рис. 12).
2°. Случай большого сопротивления: п > к.
В этом случае оба корня характеристического уравнения
B.13) вещественны и отрицательны:
гг = -п + к2, г2 = ~п ~ &2>
где к2 = *]п2 _ &2- Общий интеграл уравнения B.12) будет иметь
вид
д = е-п*(С1ек2' +С2в"*2'). B.20)
Постоянные СЛ и С2 находятся из начальных условий. Если при I = 0
3. Уравнения малых свободных колебаний
15
ТО
Сг =
д0(к2 + п) +
Г =
_ <7о(^2 - л) - <7о
2к2 г 2к2
B.21)
= , гд0(Ь2 + п) + д0 ь2г д0(к2 - п) - д0 _*2*
1 V 2к2 2/г2
Отклонение д обращается в нуль, т. е. система проходит через
положение равновесного состояния в моменты времени,
определяемые уравнением
{к.
+ 71)* Г
д0(к2 + п) + д0 2к2г , д0(к2
— е * -г
п)-д0
2к9
2к9
0. B.23)
Каковы бы ни были значения выражения в квадратных скобках,
левая часть последнего уравнения стремится к нулю, когда I —> °°.
Следовательно, при любых начальных условиях система
асимптотически приближается к невозмущенному равновесному
состоянию. Но это приближение может происходить по-разному.
Второй множитель B.23) может обратиться в нуль еще и в
момент времени 0 < I < °°, т. е. система может пройти через
равновесное состояние и отклониться в
другую сторону, если
е2к21 = др + (п - к2)д0
д0 + (п + к2)д0
0, B.24)
что при д0 > 0 возможно, если д0 < 0
и 1Gо1 > (п + ^2)^о- Найдется,
таким образом, единственный момент,
в который система совершит
переход через равновесное положение,
отклонившись от него один раз в
другую (по отношению к
начальному) сторону, после чего система с
этой другой стороны
возвращается в равновесное положение.
График изменений д в этом случае
будет иметь вид рис. 13, е. Во всех
других случаях д будет все время
такого же знака, что и д0: система
а)
б)
76 Глава П. СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
будет асимптотически приближаться к равновесному состоянию
с одной стороны, не переходя на другую сторону (рис. 13, а и б).
Итак, в случае, когда п > /г, возмущенное движение системы
не будет колебательным. Оно носит название апериодического
движения.
3°. Случай п = к.
Корни характеристического уравнения в этом случае будут
вещественными, равными и отрицательными, а общий интеграл
уравнения B.11) будет иметь вид
д = е-т(С1г + С2). B.25)
Возмущенное движение, как и в предыдущем случае, будет апе-
риодическим1), и ход изменения д графически представится
кривыми, подобными кривым на рис. 13.
Пример 1. МАЛЫЕ КОЛЕБАНИЯ МАТЕМАТИЧЕСКОГО МАЯТНИКА ДЛИНОЙ / И
МАССОЙ т (рис. 14). За обобщенную координату возьмем угол 6. Координаты
массы т равны
X = / 8111 0, у = / СОЗ О,
а ее кинетическая энергия
Т = \ гп(х2 + у2) = | /п/292.
Потенциальная энергия маятника в указанном на рисунке положении равна
работе, которую совершит вес те на перемещении маятника из этого
положения в положение устойчивого равновесия (на вертикали О у)
П = т§1A -С08б).
Для малых колебаний
П = 1 т§Ш2.
Из уравнения малых колебаний гармонического осциллятора B.7), которое в
данном случае примет вид
9 + (ё/1H = О,
найдем частоту к и период Т колебаний маятника
к=4§Т1, Т = 2пЛ7ё- B.26)
Пример 2. Найти частоту малых крутильных колебаний диска,
прикрепленного к нижнему концу невесомого упругого стержня, верхний конец
которого жестко закреплен (рис. 15).
¦) Его называют предельным апериодическим движением.
3. Уравнения малых свободных колебаний
77
1)|=
А^Х
\ ° 1
-=
II
р
В
З^Е
II
1г
Рис. 14
Рис. 15
Рис. 16
Задача решается аналогично предыдущей. Пусть масса диска М, радиус
инерции относительно оси стержня р; жесткость стержня на кручение равна
01п
где О — модуль сдвига [кГ/см2]; I — момент инерции поперечного сечения
стержня [см4]. Кинетическая энергия диска равна
т= ^мР2е2,
где 6 — угол отклонения от положения равновесия. Потенциальная энергия
для малых отклонений в пределах действия закона Гука выражается в виде
Из уравнения
П= ^сЭ2.
мр2е + се = о
находим частоту малых крутильных колебаний
Шр2 '
Пример 3. УПРОЩЕННЫЙ РАСЧЕТ ГИДРАВЛИЧЕСКОГО ДЕМПФЕРА ИЛИ
КАТАРАКТА. Его принципиальная схема представлена на рис. 16.
Демпфер состоит из наполненного вязкой жидкостью цилиндра I), в
котором движется поршень Р, снабженный отверстиями Л. Поршень штоком В
соединен с грузом О, подвешенным пружиной С к неподвижной точке О. Сопро-
78 Глава П. СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
тивление, встречаемое поршнем при движении его в цилиндре, называемое
вязким трением, пропорционально первой степени скорости
К = -ад,
причем д есть расстояние центра тяжести системы {Р — В — О} от
положения равновесия. Наиболее сложной частью расчета является определение
величины коэффициента а, зависящего от многих факторов. Мы
воспользуемся здесь следующим выражением этого коэффициента [Л. Г. Лойцянский,
А И. Лурье, 24, т. II, с. 85]:
п = 128ц/а2
а ТЕ*** '
где ц — коэффициент вязкости, выраженный в технической системе единиц
[кГ • см2], / — длина отверстий А, а1 — диаметр отверстий, а — площадь
поршня, г — число отверстий. Если Я — вес всей колеблющейся системы {груз,
поршень и поршневой шток}, Н — диаметр поршня, то
п = 64ц/а2^ = 4п§\х1 (НL
Пользуясь этой формулой, можно подсчитать размеры основных деталей
конструкции и выбрать жидкость для заполнения демпфера под заданное
торможение. Пусть, например, г = 100; длина отверстий / = 5 см; отношение Н/а1 =
= 10; коэффициент вязкости (для толуола) 59 • 10 6 кГ • см2. При таких данных
п « 0,365/$ 1/с. Если Я = ОД кГ, статическое удлинение пружины ОД см, то
к = 31 1/с и п = 3,65 1/с. Мы имеем, таким образом, дело со случаем малого
сопротивления и затухания колебаний. Логарифмический декремент § = 0,37.
Заполнив цилиндр жидкостью большей вязкости, например глицерином,
можно будет получить и апериодическое движение.
4. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ ЛИНЕЙНОЙ СИСТЕМЫ С ОДНОЙ
СТЕПЕНЬЮ СВОБОДЫ. Вынужденные колебания возникают в
механической системе в результате воздействия на нее внешних
(обычно периодических) возмущающих сил или ударов (импульсов).
Мы начнем с разбора простейшего случая, когда внешняя
возмущающая сила изменяется по гармоническому закону
где Н — максимальное значение или амплитуда возмущающей
силы; р — число полных циклов изменения силы за 2я секунд.
Уравнение колебаний линейного осциллятора в предположении,
что, кроме силы ©, на него действует восстанавливающая сила,
пропорциональная отклонению д, и сопротивление отсутствует,
запишем следующим образом:
ад + сд = Н зтр^
4. Вынужденные колебания линейной системы
79
ИЛИ
'о' + к2д = к ътрг, B.27)
где к = Н/а, к2 = с/а.
Общее решение этого уравнения при р ф к получится как
сумма общего решения однородного уравнения
д + к2д = О
и частного решения уравнения B.27):
д = Сг С08 Ы + С2 81П Ы + — 8111/7^;
А.
/г2 ->
здесь С1иС2 — произвольные постоянные.
Пусть <7 = <7ои^ = (?о ПРИ ^ ^ 0. Тогда
с2
к(к
_ <7о _
к
кр
2~-р2)
к(к2 ~ р2)
дп С08 Ы + — 81П М - -2 _ 81П Й* + —~—0 8Ш^. B.28)
/г /г(/г2 - /И) /г2 - р2
Первые два слагаемых правой части уравнения B.28)
соответствуют свободным колебаниям с собственной частотой к, т. е.
колебаниям, какие совершал бы осциллятор в отсутствие
возмущающей силы. При называемых нулевыми начальных условиях,
когда д0 = д0 = 0 при I = 0, такие колебания во все время
действия возмущающей силы не возникают.
Третье слагаемое — гармоническое колебание, происходящее с
собственной частотой ^, но с амплитудой, зависящей от
возмущающей силы. Это колебание также относится к свободным
колебаниям. Оно всегда сопровождает вынужденные колебания, при
любых начальных условиях, от которых оно вообще не зависит.
Его мы будем называть свободным сопровождающим колебанием.
Четвертое слагаемое
к
к2- р
8111 р1 = д3 B.29)
представляет чисто вынужденные колебания осциллятора.
Таким образом, колебания линейного осциллятора в
рассматриваемом случае представляют линейное наложение трех
гармонических колебаний: свободных; сопровождающих свободных и
чисто вынужденных.
80
Глава П. СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Отметим свойства вынужденных колебаний, вытекающие из
уравнения B.29).
Вынужденные колебания происходят с частотой
возмущающей силы.
Вынужденные колебания в отличие от свободных ни в чем не
зависят от начальных условий. Поэтому для изменения,
например, амплитуды вынужденных колебаний необходимы (при
заданной возмущающей силе) существенные изменения
параметров системы: ее жесткости, распределения масс, тогда как в
свободных колебаниях для этого достаточно изменения начального
отклонения или начальной скорости.
Если к > р, то знак отклонения д3 будет совпадать со знаком
силы B, т. е. сила и вызванные ею вынужденные перемещения
будут находиться в одной фазе. Если к < р, то знак силы будет
противоположен знаку отклонения. Переписав для этого случая
уравнение B.29) следующим образом:
?3 = ^4р 81П № + Л)'
мы можем сказать, что при к < р возмущающая сила и
вызванные ею колебания находятся в противоположных фазах.
Когда к = р, выражение B.29) теряет смысл. Теряет смысл
также и слагаемое общего решения B.28), соответствующее
свободным сопровождающим колебаниям. Однако рассматриваемые
совместно, оба названные слагаемые при к = р дают только
неопределенность
к(к2-р2) к2-р2 и I к(к2-р2) _|* = о 0'
которую можно раскрыть по правилу Лопиталя, заменив дробь в
квадратных скобках пределом при р —* к отношения
производных пор от числителя и знаменателя:
, Г-р 8И1&* + к зтр!1 _,. у Г-зт/г^ + Ы созр^
I к(к2-р2) \ /Л 1 |_ ~12кр
= 81П Ы - — СОЗ Ы.
2к2 2к
4. Вынужденные колебания линейной системы
81
Таким образом, общий интеграл
B.28) будет иметь вид
д = д0 соз Ы + ~ зги Ы +
+ -Д- 81П Ы - ^ С08 Ы.
2к2 2к
B.30)
И здесь, как в B.28), движение ос- рис> Х7
циллятора представляет линейное
наложение трех колебательных движений, но с одним
существенным отличием от B.28): вынужденные колебания
представлены в нем непериодическим членом
~^Т С08 Ы,
2к
в коэффициент которого входит множителем время I. Такой член
называется вековым. С течением времени он растет по
абсолютной величине безгранично, причем определяемые им колебания
происходят с возрастающими по линейному закону
отклонениями, как показано на рис. 17. Совпадение частоты возмущающей
силы с собственной частотой системы и сопровождающие его
явления носят название резонанса.
При наличии сопротивления, которое мы, как и раньше,
примем пропорциональным первой степени скорости д, положив
К = -ад,
мы найдем только одно решение, годное для любых значений р, в
частности, и для резонансного р = к.
В самом деле, уравнение колебаний линейного осциллятора в
прежних обозначениях будет в этом случае иметь вид
'4 + 2п([ + к2д = к зшр^. B.31)
Его общее решение найдется как сумма общего решения
уравнения без правой части:
§ + 2пд +&2д = 0, B.32)
и частного решения уравнения B.31) с правой частью. Решения
уравнения B.32) при различных соотношениях между п и к нам
известны. В частности, при п < к решение этого уравнения
дг = е~пг
(Сх соз кхХ + С2 8Н1 кх1), кх = ^к2 - п2,
определяет свободные затухающие колебания.
82
Глава П. СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Частное решение ^2 уравнения B.31) мы будем искать, положив
<72 = А 8111 (р1 - С)
и подбирая величины А и г так, чтобы это выражение, будучи
подставлено в уравнение B.31), обратило его в тождество. Из
уравнений
А(к2-р2) = к соз е,
2Апр — к 8Ш г,
получающихся при сравнении коэффициентов при зт р1 и со8 р1
в обеих частях уравнения B.31), находим
А= / Н =, 1*е--|йЦ.
7(/г2-/?2J + 4/г2р2 ^2 - Р2
Общий интеграл уравнения B.31), таким образом, имеет вид
а = е'пЬ (С, соз кЛ + С9 зш й^) + , зт (р1 - е).
1121 7(/г2-р2J + 4тг2р2
Если д = д0ид = д0в начальный момент ^ = 0, то
д = е-т ^^ С08 А^ + д° дд° 8ш ь^ +
1 B.33)
+ Ае~п* (з1п 8 сое V + Я81п8~рс°88 зт А^) + А зт (р* - г).
Первые два слагаемых полученного решения соответствуют
свободным и свободным сопровождающим колебаниям. И те, и
другие с течением времени затухают, так что через более или менее
продолжительный промежуток времени ими можно будет вообще
пренебречь и считать, что в дальнейшем движении система
совершает только чисто вынужденные колебания согласно уравнению
зт [р% - г). B.34)
7(/г2-/?2J + 4л2р
Этим уравнением будет определяться установившийся
колебательный режим линейного осциллятора и при других
отношениях между пик: когда п > к или п = к.
На рис. 18 представлен общий ход установления
колебательного режима системы с сопротивлением при действии на нее
гармонической возмущающей силы.
4. Вынужденные колебания линейной системы
83
Из уравнения B.34) можно
сделать несколько выводов.
Свободные колебания
«* Вынужденные колебания и при
наличии сопротивлений
происходят с частотой возмущающей
силы. Это всеобщий закон
вынужденных колебаний
линейного осциллятора, имеющий место
независимо от условий, в каких
происходят его вынужденные
колебания, в частности, независимо
от того, имеются ли в системе
сопротивления или нет.
Амплитуда вынужденных
колебаний от начальных условий и
времени не зависит. С течением
времени она не изменяется и,
следовательно, вынужденные
колебания, в отличие от свободных,
от сопротивлений не затухают.
При резонансе, когда р = /г,
амплитуда вынужденных колебаний
остается конечной и притом не
самой большой из возможных ее значений для данной системы.
В самом деле, разыскивая значение р, при котором амплитуда
Рис. 18
7(/г2-р2J + Ап2р2
B.35)
достигает максимума, найдем, что это случится, когда
р2 = к2- 2п2,
т. е. до наступления резонанса, прир < к.
'- В вынужденных колебаниях с сопротивлением всегда имеет
место сдвиг фазы колебания по сравнению с фазой возмущающей
силы. Величина 8 этого сдвига определяется формулой
2пр
*ее =
к2-р2
B.36)
Максимальное значение, равное тг/2, сдвиг фазы имеет при
резонансе, когда р = к.
84
Глава П. СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Амплитудой вынужденных колебаний определяются
максимальные динамические напряжения, возникающие в упругих
системах от воздействия на них гармонических возмущающих сил.
В высшей степени важно заметить, что величина этих
напряжений, как и амплитуды А, зависит не столько от величины
возмущающей силы, сколько от частоты ее изменений во времени. При
одном и том же значении Н амплитуда и возникающие в системе
напряжения могут значительно изменяться в зависимости от
изменений частоты р. Для оценки этих изменений их сравнивают со
статическим отклонением А0 системы при действии на нее силы Н
а0^=А. B.37)
Отношение амплитуды А к А0, равное
~ = ч = * , B.38)
Ао 7A - а2J + Аа2Ъ2
где а = р/к, Ъ = п/к, называется коэффициентом динамичности.
Коэффициент динамичности показывает, во сколько раз
максимальное динамическое отклонение при вынужденных
колебаниях от силы Н 8Ш р1 больше максимального статического
отклонения от постоянной силы Н. На рис. 19 резонансными кривыми
представлен ход изменения абсолютной величины коэффициента
динамичности л в зависимости от частоты возмущающей силы
(от а = р/к) для некоторых значений коэффициента
сопротивления Ъ = п/к. Пунктиром показана резонансная кривая для я = Ов
отсутствие сопротивления, когда коэффициент динамичности
* ~ 1 B.39)
' 1-а2 1~р2/к2
Эта кривая имеет разрыв в точке а = 1.
Из рассмотрения резонансных кривых на рис. 19
обнаруживается следующий факт, имеющий значение в приближенных
расчетах амплитуд вынужденных колебаний. В областях,
достаточно далеких от резонанса, амплитуды при относительно малом
сопротивлении почти не отличаются от соответствующих
амплитуд вынужденных колебаний без сопротивления, определяемых
более простой формулой
4. Вынужденные колебания линейной системы
85
Ж
СЮН
д
ж
Рис. 19
Рис. 20
В этих областях при вычислении амплитуд можно совсем не
учитывать сопротивлений, которые вообще с трудом поддаются
точному определению.
Хотя амплитуды вынужденных колебаний с сопротивлением
остаются конечными и при резонансе, однако при более или менее
продолжительной работе деталей машин в резонансных условиях
всегда имеется опасность полного или частичного их разрушения
от усталостных напряжений. При проектировании конструкции,
подверженной воздействиям возмущающих сил, стараются
поэтому подобрать соотношения размеров и прочности ее деталей так,
чтобы по возможности отодвинуть условия нормального режима
работы ее от резонансных условий1*. Для той же цели служат
специальные устройства, как, например, нелинейные муфты, вибро-
гасители и т. п.
Пример 4. ЭЛЕМЕНТАРНАЯ ТЕОРИЯ ВИБРОГРАФА ДЛЯ ЗАПИСИ
ВЕРТИКАЛЬНЫХ КОЛЕБАНИЙ ФУНДАМЕНТА. Схема устройства вибрографа показана на
рис. 20. Груз Я подвешен на пружине, прикрепленной к раме прибора. Рама
жестко соединяется с фундаментом и таким образом участвует в колебаниях
последнего — так же, как и вращающийся барабан Б, на котором груз ф,
перемещаясь вверх и вниз, с помощью пера Р записывает колебания фундамента.
Вертикальные перемещения груза ф являются относительными
перемещениями по отношению к раме и барабану. Уравнение этих относительных
перемещений можно составить как уравнение абсолютного движения, если к
заданным силам, действующим на груз, добавить переносную силу инерции его
¦) О некоторых явлениях резонанса в машинах см. гл. V.
86
Глава П. СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
массы. Предположим, что фундамент вместе с вибрографом совершает
гармонические колебания с амплитудой а и частотойр, т. е. согласно уравнению
х = а зтр*. Переносная сила инерции груза Я в этом движении равна
Я •• Я 2 •
-- х = а-рг 81П р1.
§ ё
Уравнение относительных колебаний груза будет поэтому
<1 + &2д = ар2 8гп р1,
где к2 = с§/Я, с — жесткость пружины.
Установившиеся вынужденные колебания груза Я относительно
барабана, если пренебречь свободными колебаниями, будут происходить согласно
уравнению
Амплитуда этих колебаний
(к/рJ - 1
не будет точно равна амплитуде колебаний фундамента, но ее искажение
будет тем меньше, чем меньше собственная частота прибора к сравнительно с/?,
т. е. чем меньше будет жесткость пружины и чем больше ма^са груза.
Например, если к/р = 0,1, то
\А\= -±- =1,01 а.
1 ' 0,99
Ошибка прибора в этом случае не будет превосходить 1 % .
Пример 5. КОЛЕБАНИЯ ГРУЗА, ПОДВЕШЕННОГО НА ПРУЖИНЕ, ПОД
ДЕЙСТВИЕМ ВОЗМУЩАЮЩЕЙ СИЛЫ, ЗАВИСЯЩЕЙ ОТ ВРЕМЕНИ. Если за начало отсчета
отклонений принять положение равновесия груза, то уравнение движения
будет иметь вид
тх + сх = /(*), B.40)
где т — масса груза, ас — жесткость пружины. Полагая в начальный
момент х@) — х0 и х@) = и0 и введя обозначения
Х(р)-г-> л**), .Р(Р)-Н> ДО,
составим изображение уравнения B.40):
тр* [Х(р) -х0- и0/р] + сХ(р) = Р(р),
из которого
Х(р)=^+^+-Ц^±. B.41)
тр1 + с трг + с тр1 Л- с
Начальную функцию первого слагаемого находим по теореме свертывания:
тр2 + с ткр ^'р2 + к2 тк * К ' '
здесь к = 4с I т.
4. Вынужденные колебания линейной системы
87
Второе слагаемое дает
тр2 + с к рА + кг к
а третье
<>п2 4-Ь2 ' "О
> хп соз /г*.
тр2 + с "р2 + &2
Начальная функция всего выражения B.41), т. е. искомое решение
уравнения B.40), имеет вид
I
Х@ = Х0 С08 &* + у 3111 &* + ~- | Дх) 31П & (* - х) ИХ B.42)
ИЛИ
I
х{1) = а 81П (/г* + а) + у- \ Дх) зт /г [г ~ х) с!х,
где
Изображение уравнения B.40) можно было бы получить еще и таким
образом. Можно считать, что в начальный момент х@) = 0, х@) = 0, а к грузу в
этот момент, кроме силы ДО, приложены две мгновенные силы
ти0о1 @* тх0а2 @,
где а-ДО и о2@ — импульсивные функции первого и второго порядков.
Исходное дифференциальное уравнение B.40) теперь запишется в виде
тх + сх = ДО + /шHо1 @ + тх0СJ (I).
Построив изображение этого уравнения с помощью формул A.122) и A.127),
мы снова придем к выражениям B.41) и B.42).
Решение B.42) при произвольных х0 и о0 не является периодическим.
Однако в том случае, когда возмущающая сила ДО — периодическая функция с
известным периодом х, можно подобрать начальные значения х@) = х0 и х@) =
= о0 так, что соответствующее этим начальным значениям решение уравнения
B.40) будет периодическим с тем же периодом х. Оно определит при таких
условиях чисто вынужденные колебания системы. Пусть, например,
ДО = Л 81П со*, со = 2тс/т.
Тогда
р2 + со2
и изображение уравнения B.40) будет иметь вид
(тр* + с) Х(р) = -^_ + тР€0 + тр2х0.
88 Глава И. СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Отсюда
и
1
Х(р) =
хA) =
т(к
к
2 _
к
со2
Г сор
) 1р2 + со2
- 8Ш 00^ '
кр2 + к2\ к(р2 + к2) р2 + к2
^ 81П Ы) + Хп С05 Ы + ^ 81П Л*. B.43)
Функция #@ будет периодической с периодом т = 2тг/со, если х0 и 1?0 будут
удовлетворять условиям периодичности
х(т) - *@) = 0, х(т) - х@) = О,
которые, после подстановки в них B.43), обратятся в уравнения
^0 „•« и _ ЛС081П &Т
х0 A - соз кх) - -7 31П &т = -
/г кт(к2 - со2)
Х0 81П ЛТ + ^ A - С08 *Т> = /г(°A'С08^Т) .
0 /г V ' кт(к2 - со2)
Из этих уравнений находим
Х° "' ^° ш^-со2)' -
При таких начальных условиях система под действием возмущающей силы
/г 81П Ы будет совершать чисто вынужденные гармонические колебания с
периодом т = 2 л/со, определяемые уравнением
х^ = ~7Г^ ^ 81п Ш'
т(кг - со2)
В приложениях получение периодического частого решения
уравнения B.40), соответствующего чисто вынужденным
колебаниям, является большей частью единственной целью расчета.
Иногда такое решение легко построить с помощью условий
периодичности, как в только что рассмотренном примере. В других
случаях более удобным оказывается использование обратной
теоремы об изображении периодических функций (с. 60), что дает
возможность уже в изображении общего решения выделить
изображение решения периодического и таким образом получить
периодическое решение без предварительного составления общего
решения.
Пример 6. КОЛЕБАНИЯ ГРУЗА, ПОДВЕШЕННОГО НА ПРУЖИНЕ, ПОД
ДЕЙСТВИЕМ ПОВТОРЯЮЩИХСЯ С ПЕРИОДОМ т ИМПУЛЬСОВ. Уравнение
движения груза можно представить так:
х + к2х = 8 [о1 @ + ах (* - т) + ах (* - 2т) + ... ]. B.44)
4. Вынужденные колебания линейной системы
89
Здесь к2 = с/т — квадрат собственной частоты колебаний груза, 8 —
отнесенный к единице массы импульс, огЦ) — импульсивная функция первого
порядка, х — отклонение центра тяжести груза от положения равновесия. Из
изображения уравнения B.44) при начальных условиях х@) = х0 и х@) = ь>0
р2[х(р)-х()-^] + ^Х(р)=г^_
находим изображение искомой функции — общего решения уравнения B.44)
Х(п) = 8р + р2х0+ри0
^; (р2 + А2)A-е-/») р2 + к2 '
Чтобы выделить отсюда изображение периодического решения периода х,
представим Х(р) в виде дроби
1 - еРТ '
положив
Ч» = Т^Г* + Р2Х2\+Г° A - е~П, B.45)
р1 + кг рг + й2
и подберем значения х0, (;0 так, чтобы оригинал ц/(^) функции Ч'(р) был равен
нулю для * > х. Но для 1> х
\цA) = - 8Н1 /г^ + х0 соз &г - соз к {I - х)\ + -^ зт /г^ - зт к (I - х) =
= 81П &И т _ ^о 8Ш ^Х + Т ^ ~ С°8 ^ +
+ С08 Ы Х0 A - СОЗ кх) + -^ 81П кх\.
Чтобы это выражение равнялось нулю для I > х, необходимо и достаточно,
чтобы выполнялись условия
Х0 8111 кх - -^ A - С08 кх) = - ,
откуда
х0 A - соз кх) + -2 зт кх = 0,
Х° 2/г С^ 2 ' Т 2& '
Подставив эти значения в B.45), получим изображение искомого
периодического решения уравнения B.44)
90
Глава И. СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Этому изображению соответствует оригинал
\|/@ = — Г81п Ы + сое Ы оХ% -~ + 81П к (I - т) - соз к {I ~ х) с!§;
кх-
2 .
Периодическое решение в промежутке 0 < I < т получим, отбросив в
выражении \|/(*) последние слагаемые
81П Л (* - т), соз к{1 - х) с1ё (кх/2),
как равные нулю для I < т. В результате приходим к следующему уравнению
вынужденных колебаний груза:
х(г) = ^г (зт &* + сое Ы с1ё у ), B.46)
определяющему движение в течение первого периода 0 < I < т. Чтобы найти
отклонения груза для I > т, нужно периодически подвинуть график функции
B.46) на промежуток, содержащий это значение I.
Общее решение уравнения B.44) получим, построив оригинал изображения
гJ Л
Х(р) = р^ + р"° + §5
Оригинал первого слагаемого есть
Хп С08 Ы + -^ 81П Ы.
Оригинал второго слагаемого1) найдем с помощью теоремы о разложении
Щр) _^ Щ0) + у „МШ-еРК, B.47)
М[р) N@) }^1РнЫ\рн)
где
М(р)-8р, М(р) = (р2 + к2) A - е~Рх).
Знаменатель И(р) имеет простые корни
¦2)
±1к;±^±, /г = 0, 1, 2, ... .
Первое слагаемое правой части B.47)
М@) = цтМЧр) ^ А
N@) р-оАГ'(Р) Л2*'
Х) Второе слагаемое является мероморфной функцией с простыми полюсами.
Здесь оно трактуется как рациональная дробь, причем используется теорема о
разложении дроби, когда знаменатель ее имеет простые корни.
2) Нуль является простым корнем и знаменателя, и числителя, а потому в число
полюсов функции не входит.
4. Вынужденные колебания линейной системы
91
Корням ±1к знаменателя соответствуют два слагаемых под знаком суммы:
8 . еш 8 я е~ш
2Ы ' 1 - е1кх ' 2Ы * 1 - е1кх '
где I = V—1 . Объединив эти слагаемые, получим
2йЛ1 - б1~1*т х _ в*/гт ; 2/г V &2^
Слагаемые, соответствующие другим корням знаменателя, имеют вид
_^-в._^1_, Л-...,-8,-2.-1.0, 1.2. 8,....
Ра# (Ра) т А2 _ 4/*2^2
т2
Объединив под знаком суммы в правой части B.47) слагаемые с
одинаковыми по абсолютной величине индексами, получим
+оо 2/гкИ
8 V"* е х 28 1
?!
4/г2тг2
2Ъп1
СОЗ
X
4^
8
/г2-
Н = -оо х2 /г = -°° т2
Окончательно для общего решения уравнения B.44) имеем
8 (^ ь+ _ ™0 ы- „+„Ьх ^25 V соз {2пЫ/х) ,
Л К \ Сл ' X шш^
к2 -4/127Г2/х2
Л =0
+ Хп СОЗ Ы + -? 81П &*.
и /г
Периодическое решение с периодом возмущающих импульсов может
быть найдено и более простыми средствами. В самом деле, получив в
начальный момент удар 8, груз в течение промежутка времени х до следующего
удара движется под действием только упругой восстанавливающей силы -сх,
так что в течение этого промежутка уравнение движения его имеет вид
х + к2х = 0, к2 = сд/Сд = с/т
с общим решением
X = А С08 Ы + В 8И1 Ы.
В этом решении нужно подобрать постоянные А и В так, чтобы для х были
выполнены условия периодичности B.3), которые в рассматриваемом случае
следует написать так:
х@) - х(х) = 0,
*@)-Гх(т)+ |П =0.
Подставив сюда общее решение, получим для постоянных А й В уравнения
А A - сое кх) - В зт кх = 0,
А зт кх + В A - соз кх) = ^8/кт.
92
Глава П. СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Из этих уравнений находим
А = 2Ш °^ У ' В = 2Ш '
Искомое частное периодическое решение для значений 1; в пределах первого
периода 0 < I < т будет иметь вид
1/ 2/П/Л & 2 / 2Ь 5111 (Ь/2)
Чтобы получить отклонения для I > т, нужно периодически продолжить
график х{1) на соответствующий участок оси I.
Резонанс будет иметь место, когда
кх/2 = пп, к = 2пп/ху
где п — целое число, т. е. при совпадении собственной частоты с кратным
частоты ударов.
Пример 7. СИСТЕМЫ С СОПРОТИВЛЕНИЕМ, ПРОПОРЦИОНАЛЬНЫМ СКОРОСТИ.
Уравнение вынужденных колебаний с сопротивлением, пропорциональным
скорости, может быть приведено к форме
х + 2ах + п2х = /A), B.48)
где 2а — отнесенный к единице массы коэффициент сопротивления, /(^) —
отнесенная к единице массы возмущающая сила, п2 = с/т — квадрат
собственной частоты системы. Если
Р(Р) -т-> ДО,
Х(р) -+-> х(г),
то при начальных условиях д:@) = х0, х@) = 1>0 изображение уравнения
B.48) будет иметь вид
р2 [Х(р) -х0- и0/р] + 2ар [Х(р) - х0] + п*Х(р) = Р(р).
Изображение искомой функции —
Х(п) = Р№ + хоР2 + ^о + 2ахо)Р
{Р) р2 4- 2ар + п2 р2 + 2ар + п2 '
Рассмотрим отдельные случаи.
1°.Случай малого сопротивления:а</г. Положив
п\ = п2 - а2,
представим изображение Х(р) в таком виде:
р ^} {р + аJ + п\ (р + аJ + п\ (р + аJ + п\ '
4. Вынужденные колебания линейной системы
93
Начальную функцию первого слагаемого находим по теореме свертывания.
Так как
-Ц- 5 *. > е~аг 31П пЛ,
(р 4- аJ 4- п\ х
то
- Р(Р) = , ^ * 2 -Г-> - I /(*) е"а« - Х) 81П И! (* ~ Т) ИХ.
р (р 4- аJ 4- п^ /1Х о
Второе и третье слагаемые изображают функции
0 (р + аJ 4- п\
00 + аХ0 А2!Р
~г-> х0е а* сое п1^,
Ч
Искомая функция
*(*) = е-"* (х0 соз пх1 4- ^° + а*° 8Ш пхг] + — I /(х) е~а <*" т> 81П дх (* - т) с1т.
B.49)
2°.Случай большого сопротивления: а> п. Положив
п\ = а2 - /г2,
находим изображение искомой функции
Х(р)= I дР) = е__ + ^<р + «> + ("°+ а*°>*.
^' р ^' (р 4 аJ - д2 (р 4 аJ - п\ (р 4- аJ - п\
Оригиналы второго и третьего слагаемых строим с помощью теоремы смещения:
(р4-аJ-д| °(р 4- х) (р4 аJ - д| ° 2'
(ц0 4 ах0)р = у0 4- ах0 р п2(р 4- а) . > у0 4- ах0 ^„а^ з^
(р 4 аJ - /г| д2 р 4 а (р 4- аJ - п\ * п2 2
Оригинал первого слагаемого находим по теореме свертывания:
р ^' (р4-аJ-п| п2^ 2'
Таким образом, при а > п
хA) = е-«* (х0 сп п2% 4- "° + ах° зп пА + -1 { Дх) е-*«-^ зп тг2 (* - х) <1т.
B.50)
94
Глава П. СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
3°. Случай предельного апериодического
движения: а = тг, п1 = п2 = 0. Тогда
Х(р)=±Р(р)—1!—2 +
*оР , (*>о + «*о)Р
р {р + аJ р + а (р + аJ
По формулам A.92) и A.90) находим
р + а * (р 4- аJ
По теореме свертывания
* Др) —^— -г-> | «т) (* - т) е-^ - х) йх#
Р (Р + «J о
Таким образом, в случае а = п
г
хA) = е~аг [х0 + (у0 + ах0) *] + / /(т) (* - т) е~а('-т> Aт. B.51)
о
5. РАЗЛОЖЕНИЕ ВОЗМУЩАЮЩЕЙ СИЛЫ В РЯД ФУРЬЕ. В этом
разделе мы рассмотрим более общий случай вынужденных
колебаний, когда возмущающая сила — периодическая функция
времени. Для нахождения чисто вынужденных колебаний системы в
установившемся ее колебательном режиме иногда эффективным
является метод разложения возмущающей силы в ряд Фурье. Мы
изложим этот метод применительно к уравнению
д + к2д = /(*), B.52)
где /@ — отнесенная к единице массы или момента инерции
периодическая возмущающая сила с периодом т.
При известных условиях [В. И. Смирнов, 42, гл. VI], которые
мы будем считать выполненными, функция /(^) разлагается в
конечный или бесконечный тригонометрический ряд (ряд Фурье)
оо
/@ = Ь0 + 2 (аг зги гсо^ + Ьг соз гсо^), B.53)
г = 1
где
г
ю = ^, ь0 = 11 до а*,
х то
т
аг=-] /@ 8Н1 гсо^ оХ 6Г=-] /(Осоз гы1 &1. ]
B.53')
то то
5. Разложение возмущающей силы в ряд Фурье
95
С помощью преобразования
Вт гЫ = ^ (е1гЫ - еЧгШ), соз гЫ = ^ (е1гЫ + е-*™')»
где I = л/-1, ряд B.53) приводится к комплексной форме,
которая во многих случаях оказывается более пригодной для
рассматриваемой здесь задачи, чем обычная B.53). В комплексной
форме ряд Фурье имеет вид
/(*) = 2 Сге1гШ, B.54)
г = —оо
где
т
т о
Перепишем теперь уравнение B.52) следующим образом:
+ оо
'4 + к2д= I Сге1поК B.55)
г = -оо
Опираясь на известное свойство линейных
дифференциальных уравнений, в силу которого решение уравнения B.55) может
быть получено как линейная сумма частных решений,
соответствующих каждому отдельному слагаемому правой части, будем
искать функцию д(^), удовлетворяющую уравнению B.55), также
в форме комплексного ряда
+оо
д@= 2 Аге1шК B.56)
Г = -оо
Подставив B.56) в уравнение B.55) и приравняв коэффициенты
при одинаковых е1гШ, получим
г
А =
и тогда B.56) перепишется в виде
^>= Е ьа'' 2 2- B-57>
Чтобы получить разложение д(^) в вещественной форме, нужно в
выражении B.57) отделить действительную часть от мнимой и
сохранить в качестве решения одну из них (в зависимости от
условий задачи).
96
Глава П. СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Как видно из B.57), для получения функции ^{^),
определяющей чисто вынужденные колебания, достаточно умножить
каждый член ряда
+ 00
I Сге1™*
Г — —со
на соответствующий (по индексу) множитель
к* - г^со^
Этот множитель мы назовем гармоническим коэффициентом
влияния частоты гсо. Гармонический коэффициент равен
амплитуде установившихся вынужденных колебаний системы от
единичной возмущающей силы частоты гсо.
Ряд B.57) теряет смысл, если при каком-либо г
гсо = к,
так как тогда соответствующий такому г член ряда обращается в
бесконечность. Это — случай резонанса с г-й гармонической
составляющей гармоникой возмущающей силы /(^). Таких резонан-
сов теоретически может быть бесконечное число. В практических
расчетах ряд B.57) ограничивают конечным числом членов, так
как они обычно довольно быстро убывают (по абсолютной
величине). Впрочем, опасность той или иной гармоники в
резонансном отношении определяется не столько величиной ее
коэффициента, сколько близостью ее частоты к собственной частоте
системы, т. е. величиной разности к2 - г2со2. Когда эта разность для
некоторого г достаточно мала, в приближенном расчете можно
иногда ограничиться одной г-й гармоникой, отбросив все
остальные, как не влияющие существенно на величину динамических
отклонений (напряжений) системы.
Пример 8. ОПРЕДЕЛЕНИЕ ВЫНУЖДЕННЫХ КОЛЕБАНИЙ ГРУЗА МАССЫ т,
ПОДВЕШЕННОГО НА ПРУЖИНЕ, ПОД ДЕЙСТВИЕМ СИЛЫ
/(*) = /о V8111 <°* + —з— У
Обозначим жесткость пружины через с. Дифференциальное уравнение
колебаний, если пренебречь сопротивлением, можно записать следующим образом:
д + к2д = л(8т со* + ^Н^ ), B.59)
5. Разложение возмущающей силы в ряд Фурье
97
где к — /0/#г, к2 = с/т. Чтобы получить решение этого уравнения,
соответствующее чисто вынужденным колебаниям, находим по формуле B.58)
гармонические коэффициенты частот со и Зсо:
А^ = 1^—2 > АCм) = иг ^ 2 •
кА - ыг кг - 9осг
Искомое решение будет
аA) = А(со) к 81П со^ + А(Зсо) - зт Зсо* = — зт со* + —————- зт Зсо^.
3 кг - со^ 3(кг - 9со2)
Оно имеет смысл только для к, не равного со или Зсо, т. е. в отсутствие
резонанса. Если бы к равнялось со, то решение уравнения B.59) имело бы вид
9@ = -|1 С08^-^ 8111 3@*.
Периодическая функция /(*) часто задается графически или
таблицей равноотстоящих числовых значений на протяжении
одного периода. В таких случаях ее разложение в ряд Фурье
производится приближенно одним из способов практического
гармонического анализа. Так, например, разлагается в ряде Фурье
вращающий момент от давления газов в цилиндре, приложенный
к одному из колен вала двигателя внутреннего сгорания. Этот
момент представляет сложную периодическую функцию угла
поворота вала а, которая строится известным образом по
экспериментальной индикаторной диаграмме. Для одного цилиндра
двухтактного двигателя эта функция на протяжении одного периода
2 л; (соответствующего одному обороту вала) имеет вид кривой,
представленной на рис. 21, где первая половина периода @ - тс)
соответствует сжатию, а вторая (к - 2тс) — рабочему ходу.
О к 2тг
4 11L56 Ьабаков
Рис. 21
98 Глава П. СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
В практических расчетах большей частью достаточно бывает
получения небольшого числа первых членов — гармоник — ряда,
иногда только одной гармоники. В зависимости от требуемой
точности разложение выполняется по 6, 12, 24 и т. д.
равноотстоящим значениям, или ординатам функции /(а). Так, при
разложении по 12 ординатам снимают с графика функции /(а)
значения ее для 12 равноотстоящих значений аргумента а (через
каждые 30°):
5,25,3=,... ,11= 12=.
6 6 6 6 6
Пусть эти значения / будут
'1' '2> /3> ••• > '12"
Тогда вместо интегралов B.53') будем иметь суммы
1 12
6°^12;?Л B'60)
1 12 -и л 12 и
&^6,Е/'С°8Т2' а^6,?^31ПТ2- B-61)
Коэффициенты Ак и фазовые углы у^ гармоник ряда Фурье
вычисляются по формулам
А = Ы + Ч > №к = аи/Ьи- B-62)
Для вычисления нескольких гармоник функции /(а) прибегают к
одной из вычислительных схем, описание которых можно найти
в любом достаточно полном курсе математического анализа или в
курсах приближенных вычислений1^
Пример 9. Формулами B.61) можно пользоваться непосредственно, когда
требуется вычислить только одну какую-либо, например так называемую
«опасную» в резонансном отношении, гармонику. Для такого вычисления
можно построить следующую элементарную схему. Разделив окружность (рис. 22)
на 12 равных частей, выписываем значения синуса для 12 углов рядом с
делениями, в направлении от С против часовой стрелки. Различных по абсолютной
величине значений синуса будет всего лишь четыре: 0; 0,500; 0,866; 1.
Значения 8И1 2а, Вт За, ... получим, беря написанные числа через 2, 3, 4, ...
интервала. Умножив затем эти значения на рядом стоящие в таблице 2 значения Яа;)>
]) См. также книгу И. А. Лурье [29, с. 187].
1. Системы с конечным числом степеней свободы
99
-0,500
-0,866
Рис. 22
0,866
0,500
складываем полученные произведения
и, разделив сумму на 6, получаем
приближенное значение ак. Для
вычисления Ьк обходим окружность на рис. 22
от точки В по часовой стрелке, беря
написанные числа через 2, 3, 4, ...
интервала; умножаем эти числа на
соответствующие значения /(а,.) и сумму
полученных произведений делим на 6. По
формуле B.62) вычисляем
коэффициент Ак искомой гармоники и ее
фазовый угол ук. Вычислим, например,
вторую гармонику вращающего момента,
ход изменения которого за один период представлен на рис. 21.
В табл. 2 приведены результаты вычисления коэффициентов а2 и Ь2.
Таблица 2
а°
30
60
90
120
150
180
210
240
270
300
330
360
/(а)
-0,9
-2,3
-4,5
-7,1
-8,1
0
22,7
18,0
10,2
4,8
11,5
0
соз 2 а
+0,5
-0,5
-1
-0,5
0,5
1
0,5
-0,5
-1
-0,5
0,5
1
/(а) сов 2а
-0,45
1,15
4,50
3,55
4,05
0
11,35
-9,00
10,20
-2,40
0,75
0
Ь2 = 0,80
81П 2а
0,866
0,866
0
-0,866
-0,866
0
0,866
0,866
0
-0,866
-0,866
0
/(а) 81П 2а
-0,9-0,866
-2,3-0,866
0
7,1-0,866
8,1-0,866
0
22,7-0,866
18,0-0,866
0
-4,8-0,866
-1,5-0,866
0
а2 = 7,73
Глава III
Малые колебания систем
с несколькими степенями свободы
1. СИСТЕМЫ С КОНЕЧНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ.
Механические системы, расчет колебаний которых составляет
содержание многих практических задач, являются большей частью слож-
100 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
ными упругими системами. Это балки и стержни постоянного и
переменного сечений; прямые (ступенчатые) валы с насаженными
на них дисками; коленчатые валы двигателей внутреннего
сгорания; лопатки, диски турбин и т. п. Для полного определения
деформаций, возникающих в таких системах при колебаниях,
необходимо знать перемещения всех точек системы; иначе говоря,
нужно найти в виде некоторых функций времени и положения
точек бесконечное число величин (координат), определяющих эти
перемещения в любой момент времени. Упругие системы
являются, таким образом, системами с бесконечным числом степеней
свободы.
Во многих случаях изучение колебаний сплошных упругих
систем, как систем с бесконечным числом степеней свободы,
связано с большими затруднениями. Такие затруднения
встречаются, например, при исследовании крутильных колебаний
коленчатого вала с движущимися вместе с ним различными
присоединенными системами (кривошипные механизмы, зубчатые передачи и
пр.). Здесь возможность математической трактовки задачи о
колебаниях становится осуществимой только при условии введения в
расчет решительных упрощений. Техническая практика
выработала много различных приемов целесообразного построения
упрощенных схем устройств, для которых приходится выполнять
вибрационные расчеты.
Одним из таких приемов, особенно широко используемым в
машиностроении, является замена данной сложной системы другой,
более простой, с другим распределением масс и жесткостей, но
«близкой» к данной в том смысле, что ее расчет приводит к
значениям искомых величин, не слишком сильно отличающимся от
действительных для данной системы. Такая упрощенная система
носит название приведенной или эквивалентной приведенной
системы. Существуют специальные правила приведения сплошных
упругих систем, которые рассматриваются в разделах,
относящихся к частным случаям колебаний упругих тел. Сейчас ограничимся
описанием только одного из возможных его результатов: замены
данной системы с бесконечным числом степеней свободы
эквивалентной системой с конечным числом степеней свободы. Именно
этот результат приведения или упрощения сложной системы
кладется обычно в основу первоначальных исследований теории
колебаний. На нем построена первая часть настоящей книги — о
колебаниях систем с конечным числом степеней свободы.
1. Системы с конечным числом степеней свободы
101
\А А
В
^ у
Рис. 23 Рис. 24
Рассмотрим несколько простых примеров такого
приведения. Груз, подвешенный к неподвижной точке А на пружине АВ
(рис. 23), если учитывать распределенную массу пружины,
представляет систему с бесконечным числом степеней свободы. Но
когда масса груза значительно превышает массу пружины, при
нахождении наименьшей (основной) частоты колебаний без большой
погрешности можно пренебречь массой пружины, сохраняя все ее
свойства упругости. Если, кроме того, предположить, что груз
совершает прямолинейные (вертикальные) колебания, то
рассматриваемая система обращается в приведенную систему с одной
степенью свободы. Для определения движения такой системы
достаточно найти только одну величину в функции времени — именно,
отклонение х центра тяжести груза от положения равновесия О.
При определении основной (наименьшей) частоты
крутильных колебаний диска, прикрепленного к концу В круглого
стержня АВ (рис. 24), другой конец которого закреплен
неподвижно в точке А, можно пренебречь моментом инерции
стержня, если он достаточно мал по сравнению с моментом инерции
диска. Тогда заданная система с бесконечным числом степеней
свободы приведется к простой системе с одной степенью свободы.
При определении основных частот поперечных колебаний
горизонтальной балки, шарнирно закрепленной на двух опорах
(рис. 25), массу, распределенную по тому или иному закону вдоль
длины балки1*, заменяют несколькими сосредоточенными
массами (на нашем рисунке четырьмя), величина и положение которых
определяются особыми правилами. Рассматривая малые
колебания балки, обычно пренебрегают незначительными горизонталь-
Это распределение на рис. 25 показано заштрихованной площадью.
102 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
т2 т3
Рис. 25
ными смещениями масс. При таких условиях для определения
поперечных перемещений приведенной системы достаточно найти
в функции от времени только четыре величины, именно,
вертикальные отклонения дх, д2, д3> #4 сосредоточенных масс т19 т2,
т3, т4 от положения равновесия системы. Этими величинами
будут определяться прогибы отдельных масс при колебаниях, а
вместе с ними и форма упругой линии балки в наибольшем ее
отклонении. Здесь мы имеем случай замены упругой системы
эквивалентной системой с четырьмя степенями свободы.
При расчете крутильных колебаний коленчатого вала
последний приводится к круглому валу постоянного сечения.
Движущиеся вместе с ним массы (маховика, генератора, пропеллера,
кривошипных механизмов) приводятся к сосредоточенным на
определенных местах дискам с постоянными моментами
инерции. Если не учитывать массы отрезков вала между дисками, то
угловые отклонения дисков полностью определят деформацию
системы при крутильных колебаниях. Мы снова приходим к
упрощенной приведенной системе с конечным числом степеней
свободы.
Само собой разумеется, что расчет, основанный на подобных
упрощениях, может дать только приближенные значения
искомых величин (например, частот или периодов колебаний), вернее,
более или менее тесные границы их возможных значений. При
этом значительная часть возможных значений искомых величин
для заданной системы вообще выпадает. Но найденные таким
путем границы значений величин, характеризующих основные
колебания (колебания с наименьшими частотами), почти всегда
являются одновременно и границами соответствующих значений
2. Кинетическая и потенциальная энергия
103
тех же величин для заданной неупрощенной системы. С другой
стороны, пользование приведенными системами дает
значительную экономию труда и времени. Поэтому при всех своих
недостатках в отношении точности результатов приведение упругих
систем к системам с конечным числом степеней свободы является
одним из наиболее распространенных методов практических
вибрационных расчетов.
2. КИНЕТИЧЕСКАЯ И ПОТЕНЦИАЛЬНАЯ ЭНЕРГИЯ МАЛЫХ
СВОБОДНЫХ КОЛЕБАНИЙ КОНСЕРВАТИВНОЙ СИСТЕМЫ. Кинетическую
энергию Т системы с конечным числом степеней свободы мы
получим, подставив в формулу
вместо х[9 у ь, г/ их выражения A.19) через обобщенные
координаты и скорости. В случае стационарных связей кинетическая
энергия будет квадратичной формой обобщенных скоростей
п
2Т = Апд* + ... + Аппц\ + 2А12д,д2 + ... = 2 А/Л,<Ь> <зл>
I, к = I
где А1к = Аы. Коэффициенты А1к зависят от обобщенных
координат. В случае малых колебаний около положения устойчивого
равновесия, в котором
Ял - Я2 = - = Чп = °>
в разложениях коэффициентов А1к по степеням координат дк
Л* = (Л*)о + 2(^) 9. + ... C-2)
можно ограничиться лишь постоянными членами (А1кH, полагая
А/г ~ (А/г)о = а1к-
(дА ¦ \
Здесь (АыH; (——) , ... — значения величин, стоящих в скобках,
при дл = д2 = ... = дп = 0. Тогда выражение кинетической энергии
малых колебаний системы около положения равновесия, в
котором дк = 0, к = 1, 2, ... , я, будет иметь вид
п
*Т = «П91 + о22д| + ... + аппя2п + 2а12<7 ^2 + ... = I а,Ад^.
г, /г = 1
C.3)
104 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
Таким образом, кинетическая энергия малых колебаний системы
около положения равновесия может быть представлена
положительно-определенной квадратичной формой от обобщенных
скоростей с постоянными коэффициентами.
Что касается потенциальной энергии, то, как и для систем с
одной степенью свободы, в случае стационарных связей она
является функцией только координат
П = П (<?!, д2, ... , дп).
В положении равновесия она имеет стационарное значение, так
как здесь равны нулю частные производные от нее по всем
обобщенным координатам.
Так как далее потенциальная энергия определяется с точностью
до произвольного постоянного слагаемого, то этим
обстоятельством можно распорядиться так, чтобы в положении равновесия, где
все дк равны нулю, потенциальная энергия также равнялась нулю:
П @, 0, ... , 0) = 0.
В силу указанных обстоятельств разложение функции П (дх, ... , дл)
в области пулевого положения начнется с членов не ниже второго
порядка относительно д^. При достаточно малом начальном
возмущении в разложении потенциальной энергии по степеням дк
можно ограничиться только членами второго порядка. Мы
приходим к следующему выражению для потенциальной энергии
системы, совершающей малые колебания около положения
устойчивого равновесия, в котором дх = д2 = ... = дп = 0:
п
2П = сид? + с2^\ + ... + сп^1 + 2с12(?1<72 + ... = Е с№адк. C.4)
I, к = 1
Составление выражения потенциальной энергии в виде
квадратичной формы от обобщенных координат для системы с
конечным числом степеней свободы иногда затруднительно. В таких
случаях оказываются полезными другие выражения
потенциальной энергии.
Обозначим через Р19 Р2, ... , Рп обобщенные силы, которые
нужно приложить к системе, чтобы удержать ее в равновесном
положении, определяемом не равными нулю значениями
обобщенных координат д^, д2, ... , дл. В этом положении силы Р.
должны уравновешивать восстанавливающие силы
в* = ~5Г' 1 = 1,2, ...,71. C.5)
2. Кинетическая и потенциальная энергия 105
Следовательно,
Р; + 0; = 0, 1=1,2, ...,71.
Отсюда, принимая во внимание C.4) и C.5), получаем
Р1 = СП°1 + С12°2 + — + С1п°п> 1==1>2> — > Л. C-6)
Равенства C.6) являются условиями равновесия системы в
положении, определяемом координатами ^1, #2, ... , дд. Представив
выражение C.4) потенциальной энергии в виде
1,к = 1 1 = 1
и воспользовавшись затем соотношениями C.6), получим
2П = Р1дг1 + Р2д2+...+Р^. C.7)
Таково выражение удвоенной потенциальной энергии системы,
удерживаемой в равновесном положении (д1, #2, ... , дп) силами
Р19 Р2, ... , Рп.
Так как в положении устойчивого равновесия потенциальная
энергия имеет, согласно сделанным предположениям, равный нулю
изолированный минимум, то определитель уравнений C.6) не равен
нулю. Эти уравнения можно разрешить относительно координат д.:
01 = а11Р1 + а12Р2 + — + а1,Л> |
°2 = а21Р1 + а22^2 + — + <*2пРп> {
Яп = ^п1р1 + ап2Р2 + ... + аппРп. \
Уравнения C.8) представляют собой выражения обобщенного
закона Гука для системы с п степенями свободы. Их также можно
рассматривать как условия равновесия между силами Р1 и
восстанавливающими силами (}р записанные в так называемой обратной форме.
Если каждое из уравнений C.8) умножить на
соответствующее Р- и затем сложить, то получится еще одно выражение для
потенциальной энергии
П=|«.?-1(Х'*Р*Р*- C-9)
В этом выражении потенциальная энергия представлена
квадратичной формой обобщенных сил Р..
Коэффициенты сш называются статическими
коэффициентами жесткости. Если в уравнениях C.6) положить
01 = -» = ?1-1 = 0/ + 1 = -" = 0л==О, д,= 1,
106 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
ТО
Следовательно, коэффициенты си равны силам Р., которые нужно
приложить к системе, чтобы удержать ее в равновесном
положении, где координата д/ = 1, а все остальные равны нулю.
Коэффициенты жесткости удовлетворяют условию симметрии
-кР
C.10)
выражающему принцип взаимности сил.
Коэффициенты аш в уравнениях C.8) называются
статическими коэффициентами влияния. Если положить в уравнениях
C.8) все силы Р., кроме Рр равными нулю, а Р1 сделать равной
единице, то
аи = Ъ> *^ *> 2> «. » п.
Коэффициент а^ определяет перемещение или конфигурацию
равновесного положения системы, когда к ней будет приложена
только одна единичная сила Р/ = 1. Иначе говоря, а^ — это изменения
координат д[ от единичной обобщенной силы, соответствующей
координате д{. И здесь, как и для коэффициентов жесткости сш,
имеет место симметрия
а/А = аА/, C.11)
выражающая принцип взаимности перемещений.
Указанные свойства коэффициентов сш и аш известны из курса
сопротивления материалов и потому приведены здесь без
доказательства.
3. УРАВНЕНИЯ МАЛЫХ КОЛЕБАНИЙ СИСТЕМЫ ОКОЛО СОСТОЯНИЯ
УСТОЙЧИВОГО РАВНОВЕСИЯ. Подставив в уравнения Лагранжа
A.23) выражения кинетической и потенциальной энергии
2Г=1а^гдА, 2П - I\сшдлдк C.12)
I, к I, к
ОТ
и приняв во внимание, что -— =0, к = 1, 2, ... , /г, мы придем к
с'Чк
следующей системе дифференциальных уравнений малых
свободных колебаний:
а11$1 + ^12^2+ - + <*>\тАтГ ^М^Х' С12Я2~~ ••• ~ С1гДп,
а2\ЯЛ + а22§2+ ... + а2пдп= -с2^- с22д2- ... - с2пдп, V
C.13)
аш'A1 + ап2д2+ ... + аппдп= ~сп1дл- сп2д2- ... - сппдп.
3. Уравнения малых колебаний системы
107
Это — система п линейных, однородных дифференциальных
уравнений 2-го порядка относительно координат д1? д2, ... , дп с
постоянными коэффициентами. Общее решение этих уравнений
определяет малые линейные колебания системы около состояния
устойчивого равновесия.
Приведением одной из квадратичных форм — кинетической
или потенциальной энергии — к каноническому виду
достигается значительное упрощение как основной системы C.13), так
и других, связанных с ней уравнений общей теории колебаний.
ш Если к сумме квадратов приведена кинетическая энергия и
2Г = в?+ «! + ...+ «2, 2П=1бй8Л
/, к
C.14)
(в/ — новые обобщенные координаты, линейно связанные с д.), то
система C.13) переходит в эквивалентную систему уравнений,
разрешенных относительно вторых производных обобщенных
координат:
81 = ~^1181~ ^1282~
8г
^2181 ^2252~
Ь1п8п>
^2п8п'>
Кп8п'
C.15)
5п=-Ьп181-Ьп282-'
Это — прямая форма уравнений малых колебаний.
Ш Если к сумме квадратов приведена потенциальная энергия и
мы имеем
2Т= X й/Д-й.., 2П= у? + VI
и у = 1
VI
где V} — новые обобщенные координаты, то система C.13)
переходит в систему уравнений, разрешенных относительно
обобщенных координат:
ог = -йцй!- к12ь\-... - н1пип9 |
у2= -*21В1- *22У2 ~ — ~ ^А>
*ЛЛ^Л-
Это — обратная форма уравнений колебаний
C.16)
Приведение системы C.13) к прямой или обратной форме
может быть выполнено и другими способами. Для упругих колеба-
108 Тлава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
ний обратную систему уравнений можно, например, составить,
исходя из уравнений C.8):
?2 = а21Р1+ а22Р2+ — + <*2пРп>
Чп= ап1Р1+ ап2Р2+ - + <*ппРп-
C.17)
Эти уравнения, как уже было отмечено, выражают условия
равновесия между внешними силами Р- и восстанавливающими
силами, возникающими при отклонении системы из положения
устойчивого равновесия. Когда система совершает малые
свободные колебания, можно считать, что к ней в качестве внешних сил
приложены обобщенные силы инерции:
Р<—й©' '-1.2, ...,». C.18)
Согласно принципу Даламбера во время движения эти силы
вместе с упругими восстанавливающими силами удовлетворяют
условиям равновесия. Уравнения Лагранжа для малых
колебаний, записанные следующим образом:
как раз и являются условиями этого равновесия. Подставив
поэтому в уравнения C.8) вместо Р; обобщенные силы инерции
C.18), мы получим уравнения свободных колебаний системы
^=Аа4-Щ)]' *=1.2,....». C.20)
Эти уравнения совпадают с уравнениями обратной системы
C.16). В самом деле,
Подставив эти выражения в C.19) и положив
п
кь1 = X ааа1}, и ] = 1, 2, ... , я, C.21)
приведем уравнения C.20) к виду
д1 = - I А^д., 1 = 1,2, ... , п.
C.22)
3. Уравнения малых колебаний системы
109
Коэффициенты кь- уравнений C.22)
зависят от коэффициентов влияния аЬ: и
коэффициентов кинетической энергии а-
(коэффициентов инерции). Для их вычисления
и, следовательно, для составления
уравнений C.22) нет надобности в
предварительном построении выражения потенциальной
энергии в виде квадратичной формы от
обобщенных координат. Эго обстоятельство
особенно важно для расчета поперечных
колебаний балок или стержней, где построение
такого выражения потенциальной энергии
представляет некоторые затруднения.
Пример 1. УРАВНЕНИЯ МАЛЫХ КОЛЕБАНИЙ Рис. 26
ДВОЙНОГО МАЯТНИКА ОКОЛО ВЕРТИКАЛЬНОГО
ПОЛОЖЕНИЯ УСТОЙЧИВОГО РАВНОВЕСИЯ (рис. 26). Двойной маятник состоит из
двух однородных стержней одинаковой длины АВ = ВС = 21 и одного веса
Рх= Р2 = Р> связанных шарниром В. Маятник совершает малые колебания в
вертикальной плоскости около равновесного положения Аг/, причем
стержень АВ вращается вокруг оси А, а стержень ВС — вокруг шарнира В.
Если стержни абсолютно твердые, то рассматриваемая система имеет две
степени свободы. Примем за обобщенные координаты углы 61 и 92,
образуемые стержнями АВ и ВС с вертикалью. В положении устойчивого
равновесия, когда оба стержня располагаются по Ауу
в1 = е2 = о.
Выберем оси координат, как показано на рисунке. Кинетическая энергия
двойного маятника равна сумме кинетических энергий каждого стержня.
Стержень АВ вращается вокруг оси А. Следовательно, его кинетическая энергия
1 2 А 1 3 §
где 1А — момент инерции стержня относительно оси А. Стержень ВС
совершает сложное движение; его кинетическая энергия Т2 по известной теореме
равна кинетической энергии центра инерции (если предположить, что в нем
сосредоточена вся масса стержня), сложенной с кинетической энергией
стержня в относительном вращении его вокруг центра инерции:
где хв, ув — координаты середины В стержня ВС, а 1В
носительно I). Подставив в это выражение
Хв = 1B 8И1 6Х + 81П 92), ув = 1B С08 02 + С08 02),
момент инерции от-
т = Р12
1в *з'
ПО Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
получим:
2Г2 = Ц- \Щ + Ц + 4в1в2 соз @, - 92)] + ^ Ц.
& 8 о
Кинетическая энергия всей системы составляет
Т = Ц1- [Щ + 0| + 30г02 сов @! - 92)]. C.23)
Если маятник совершает малые колебания, то в разложении соз @1 - 02)
можно ограничиться одним первым членом, положив
сов@г-02)~ 1.
Тогда
ор/2 • • •
Г=^-[4в? + 01 + Зв1О2).
Потенциальная энергия равна работе весов стержней при перемещении
системы из некоторого положения @1? 02) в вертикальное положение
равновесия. Работа веса первого стержня на этом перемещении будет равна
П1 = Р1A -соз 0^.
Работа веса второго стержня ВС
П2 = Р1 [2A - соз 02) + A - соз 02)].
Потенциальная энергия всей системы равна
П = Р1 D 3 соз 0г - соз 02]. C.24)
Разложение П по степеням 01 и 02 начнется с членов второго порядка
относительно 0] и 02 и будет для малых 0г и 02 иметь вид
2П = Р/(ЗО2 + 0|).
Уравнения колебаний запишутся здесь в обратной форме, так как в
выражение потенциальной энергии входят только квадраты координат:
2ГА 41'А { C-25)
01 ~з5е
4. УРАВНЕНИЯ КРУТИЛЬНЫХ КОЛЕБАНИЙ ПРИВЕДЕННОГО ВАЛА С
ПЯТЬЮ ДИСКАМИ (рис. 21)х\ Обозначим моменты инерции
дисков относительно оси вала через /. [кГ • м • с2], 1= 1, 2, 3, 4, 5, и
погонную жесткость на кручение участков вала между двумя
последовательными дисками через с/? / = 1, 2, 3, 4, причем
С-Т
сь= —2- [кГ-м].
*> Приведенные ниже формулы и уравнения без труда обобщаются на случай п
дисков.
4. Уравнения крутильных колебаний вала
111
О /1
©/« о/ч от, ©/.
Рис. 27
Здесь О — модуль сдвига; I — полярный момент поперечного
сечения вала, постоянный по всей длине его; /• — длина
соответствующего участка. Пренебрегая массой вала, получим систему с
пятью степенями свободы. Деформированная конфигурация
такой системы может быть определена угловыми отклонениями 6-
дисков от положения равновесия вала, в котором участки вала
между дисками не закручены. Эти угловые отклонения обычно
принимаются за обобщенные координаты системы. Кинетическая
энергия системы в этих координатах представится выражением
т = \ Aхь\ + /2е22 + /Зе23 +/4е2 + /5й§).
C.26)
Потенциальная энергия
П = | [*1 (91 - 92J + С2 (в2 ~ 9зJ + ^3 (93 - Э4J + С4 (94 - 05J]. C.27)
Подставив C.26) и C.27) в уравнения C.13), приходим к
следующей системе уравнений крутильных колебаний вала в угловых
отклонениях дисков:
/2ё2= с1(в1-в2)-с2(в2-в8) *
/Зё8 = * с2 (в2 - е8) -с8 (б8 - е4)
1А= * * с8(в8-е4)-с4(в4-в5)
/5ё5= * * * с4(е4-е5).
C.28)
Принятая в этих уравнениях система координат не является
ни единственной, ни самой удобной в данном случае.
112 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
Некоторое неудобство представляет то обстоятельство, что в
угловых отклонениях дисков потенциальная энергия C.27) не
является положительно-определенной формой, как это должно
быть согласно изложенной выше общей теории. Колебания
системы, описываемые изменениями координат 0., происходят не
около положения устойчивого равновесия системы, а около общего
вращательного движения последней. Представляется
целесообразным поэтому перейти к другой системе координат, именно к
системе, в которой роль обобщенных координат выполняют углы
кручения участков вала между дисками, определяемые
относительными угловыми отклонениями дисков [И. М. Бабаков, 92]
а; = е/-е/ + 1> г=1,2,3,4. C.29)
В относительных угловых отклонениях исключено общее
вращение вала, одинаковое для всех дисков, а вместе с тем
уменьшено на единицу число степеней свободы системы. Соответственно
уменьшается и число уравнений колебаний вала. Чтобы
получить эти уравнения, умножим первое уравнение C.28) на /2,
второе на 1Х и вычтем последнее из первого. Далее, третье уравнение,
умноженное на /2, вычтем из второго, умноженного на /3» и т- Д-
После элементарных преобразований получим следующие
уравнения крутильных колебаний в относительных угловых
отклонениях дисков (или в углах кручения участков вала):
_ _ СгЦ, + /2) с,
а, /Л аг+/2а2
а = С-1 п - С2^2 + 7з) , ^3 *
12 1213 23
* с2 сгAг + *4> , с4
<*з = * г а2 " —П аз + г а4
^3 1314 ^4
а4 т а3 т т а4
14 141§
C.30)
Одно из преимуществ координат а- заключается в том, что в
этих координатах может быть составлена не только прямая, но и
обратная система уравнений, чего нельзя сделать, пользуясь
координатами 0^ причем это составление не потребует обращения
матриц, а может быть выполнено более простыми средствами.
В самом деле, потенциальная энергия получается из C.27)
сразу в виде суммы квадратов координат
П = - {сха\ + с2а| 4- с3а| 4- с4а|). C.31)
4. Уравнения крутильных колебаний вала
113
Чтобы найти кинетическую энергию в координатах о^,
воспользуемся законом сохранения момента количества движения,
выражение которого можно получить из уравнений C.28). Складывая
эти уравнения почленно, получим
г А + *А + Мз + 'А + *А = °>
откуда
/А + 12®2 + Мз + 7А + Мб = С°П8*- C-32)
Сумма, стоящая в левой части C.32), представляет собой момент
количества движения приведенного вала относительно его оси.
Этот момент сохраняет постоянное значение, так как внешние
силы, моменты которых могли бы вызвать изменение момента
количества движения, здесь отсутствуют. Если предположить, что
в начальный момент диски повернуты на углы в., 1=1,2, 3, 4, 5,
и затем без начальных скоростей предоставлены самим себе, то
постоянная в правой части уравнения C.32) будет равна нулю,
и будем иметь
/А + ^А + 7з63 + 7А + Мб = °- <3-33)
С помощью уравнения C.33) и осуществляется преобразование
выражения кинетической энергии C.26) к координатам а-.
Умножим и разделим удвоенную кинетическую энергию
/10? + 12е! + /,6§ + 14е2 + 15е§
на сумму моментов инерции
и затем из числителя полученной дроби вычтем равное нулю
выражение
A& + /202 + 1303 + /А + 1505J.
После несложных преобразований получим
2Т = I [1,A, + 13 + 14 + 1Ъ) а\ + (I, + 12)(/3 + 14 + 16) Ь.\ +
+ (I, + 12 + /3)G4 + 15) а| + Aу + 12 + 13 + 14) 15а24 +
+ 2/^/д + /4 + 15) аха2 + 21,A4 + /5) а^ + Щ1Ь а^ +
+ 2A\ + 12)A4 + 15) а2а3 + 2AХ + 12) /5й2а4 +
+ 2A, + 12+ 13) 15 а3а4]. C.34)
114 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
Правило составления коэффициентов правой части можно
изложить следующим образом. Коэффициент при б^а-1*, I ^ у, равен
произведению (когда I = у) или удвоенному произведению (когда
I < у) суммы моментов инерции дисков, лежащих слева от
участка Ь на сумму моментов инерции дисков, лежащих справа от
участка у.
Теперь остается подставить выражения C.31) и C.34) в
уравнения Лагранжа, чтобы получить уравнения крутильных
колебаний в обратной форме:
*!<*! = -\ [Ч12 + - + 7б] «1 + 1г V* + 1а + № +
с2а2 = Л [^(/д + /4+ 7б] «1 + (А + ^Х'з + 74 +
+ /5)а2 + (/х + /2)(/4 + /5)а3 + (/х + /2]/5а4],
СЗаЗ = "| [ВД + 7б1 Й1 + (*1 + 12) + <74 + Тъ\ Й2 + I <3'35)
+ Aг + /2 + /3)(/4 + /5) а3 + (/! + 12 + /3)/5а4]»
*4а4 = "| СА^! + G1 + *2O5й2 + G1 + 72 + *зO5аз +
+ (/1 + ...+/4)/5а4]. ]
Для приведения уравнений C.30) к симметричной форме (для
их симметризации) следует применить подстановку
Ф* = а*л/^» ^=1,2,3,4.
В новых координатах уравнения примут вид:
х2
*
с2('2 + *з)
СЛAл + /о) л/<?1С9
М-* 2
Ф2 = V- Ф1
Фз =
Ф4 =
'2'з
Ф2 +
Ф2
Фз
¦*з
с3(^з + I*)
ЛЛ
Фз +
СоСл
Ф4
с%Са
Фз
С4(^4 + *5)
^5
Ф4-
C.36)
¦' Начиная с диагональных членов.
4. Уравнения крутильных колебаний вала
115
Такая же подстановка приведет уравнения C.35) к виду
/1(/2 + ... + /5) .. __ 1ХA3 + 1А + /5)
ф] - 7= Ф2
Ас л
^•л/С1С2
Л^4 +^б)
А Ус, с.
Фз
' Ф4>
¦^л/^ 1 ^*4
/1(/3 + /4 + /5) GХ + /2)(/8 + 74 + /5)
ф1" АсТ ^
^7С2С1
(/, + /2)(/4 + /5) .. (/!+/2)/5 »
— 7= ~ Фз" Р=~ Ф4>
^л/С2сЗ
^7С2С4
Фз
7^4 + /5) ;• (/1+/2)(/4 + ^5) »
р=— Фг - Г7= ^2 '
^7С3С1 ^-а/С2С3
G1 + /2 + /3)G,4 + /5) (/1 + /2 + /3)/5
Фз ~ т= ^4'
Ф4
^лЯ,С,
Ас3
- (Г, +/2)/5 ••
Ф] ~ . г—Г Ф2
А^с
(/1+/2 + ^з)^5 ;• (/1+... + 14)*5 ;-
ФЗ" Т7 Ф4-
^/с4с3
Ас4
C.37)
Если коэффициенты в аналогичных уравнениях для системы с п
степенями свободы обозначить через В •, то, начиная с элементов
главной диагонали,
ЕЛ I Ь
/ - 1
C.38)
Отметим очевидное соотношение между коэффициентами,
значительно облегчающее их вычисление:
ВГ = В1}^9 * = 2,3... ,л-1; ; = *, *+1, ... , л - I1). C.39)
Х) По формулам C.38) и C.39) можно вычислять элементы матрицы, обратной
матрице коэффициентов уравнений C.36), непосредственно по данным
моментам инерции и жесткостям, не прибегая к специальным методам
линейной алгебры.
116 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
5. УРАВНЕНИЯ ПОПЕРЕЧНЫХ КОЛЕБАНИЙ БАЛКИ, ШАРНИРНО
ОПЕРТОЙ ПО КОНЦАМ, С ЧЕТЫРЬМЯ СОСРЕДОТОЧЕННЫМИ
МАССАМИ. Рассмотрим поперечные колебания шарнирно опертой по
концам балки (рис. 28), несущей четыре сосредоточенные массы
т19 т2, т3, т4.
Пренебрегая массой балки и считая перемещения
сосредоточенных масс прямолинейными, мы приходим к системе с
четырьмя степенями свободы, положение которой при колебаниях будет
определяться вертикальными отклонениями д1? д2, д3> Я4 гРУзов
от горизонтальной прямой1), проходящей через опоры. Эти
отклонения принимаем за обобщенные координаты системы.
Выражение кинетической энергии получается при этом в виде суммы
квадратов
(тгд1 + т2д\ + га3д| + тп4д|)
C.40)
Составление выражения потенциальной энергии как
квадратичной формы координат д. оказывается здесь значительно более
сложным, чем во всех рассмотренных выше примерах. К такому
выражению потенциальной энергии можно было бы прийти,
например, следующим образом. Вычислив с помощью известных
формул сопротивления материалов коэффициенты влияния а1к,
подставляем их в уравнения C.17) и затем решаем эти уравнения
относительно сш. Последние получаются в виде отношений
определителей п-го порядка (в нашем примере — четвертого
порядка). Их вычисление связано с большими затратами времени.
Значительно менее трудоемким является в рассматриваемом случае
способ составления уравнения малых колебаний, основанный на
использовании уравнений обобщенного закона Гука C.8).
Рис. 28
г) Точнее, от линии равновесия, принимаемой за горизонтальную.
5. Уравнения поперечных колебаний балки
117
Обобщенные силы инерции, как следует из выражения
кинетической энергии C.40), равны силам инерции масс т.,
совершающих прямолинейные перемещения д.:
с1 (дТ\
Подставив их вместо Р- в уравнения
Ъ = аПР1 + а12Р2 + — + аЫРп> 1= 1» 2> — > П>
сразу получаем уравнения поперечных колебаний балки (в
обратной форме)
дх = -а11тп^х - а12т2<?2- а13т3<73- ос14т4д4,
д2 = -а21тп1С[1 - а22ш242- а23т3'43- а24т4§4,
% = -а31^1^1 - а32^2^2 ~ «ЗЗ^З^З ~ а34т4?4>
д4 = -а41/п1§1 - а42т2'42- а43лг3#з- а44т4§4,
или, сокращенно, для системы с п степенями свободы
<?; = - 2 аут;.§;., 1= 1, 2, ... , /г.
Для симметризации уравнений C.42) полагаем
*/* =9/ л/^Ь» 1= 1, 2, ... , п.
C.41)
C.42)
Тогда
или
где
уь = - I а^га-га^., 1 = 1,2, ... , л, C.43)
п
у^-Ъ кь.у.у 1=1,2, ... ,п, C.44)
;' = 1 ^ ^
Лу = ^ = аи^т1т], *, ; = 1, 2, ... , и. C.45)
Пример 2. СОСТАВИТЬ УРАВНЕНИЯ КРУТИЛЬНЫХ КОЛЕБАНИЙ
ПРИВЕДЕННОГО ВАЛА С ПЯТЬЮ МАХОВЫМИ МАССАМИ (дисками) в прямой и обратной форме.
Даны моменты инерции дисков /• [кГ • м • с2] и жесткости с1 [кГ • м] участков
вала.
7"! = 10,78 сг = 10,48 • 104
/2 = 82,82 с2 = 34,80 • 104
13 = 14,27 с3 = 24,40 • 104
/4 = 29,56 с4 = 40,60-104
/5 = 21,66
118 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
Коэффициенты прямой системы вычисляем по формулам для
коэффициентов уравнений C.36). Положив а =/?2'10~4 (р — собственная частота
колебаний), получим1*
аХг = 1,0987^ - 0,23П2
аХ2 = -
аХ3 =
0,231^ + 2,859^2 - 2,042^3,
- 2,042П2 + 2,535^ - 1,065^4
-1,065^ + 3,248^.]
C.46)
Симметризованную обратную систему получим, вычислив
коэффициенты Б- по формулам C.38) и C.39). Матрица коэффициентов обратных
уравнений будет иметь вид
*«. =
95,89
23,23
21,70
7,12
23,23
110,72
103,41
33,90
21,70
103,41
143,52
46,50
7,12
33,90
46,50
46,08
10~6.
C.47)
Пример 3. СОСТАВИТЬ УРАВНЕНИЯ ПОПЕРЕЧНЫХ КОЛЕБАНИЙ ОДНОРОДНОЙ
БАЛКИ, ШАРНИРНО ОПЕРТОЙ ПО КОНЦАМ, С ЧЕТЫРЬМЯ СОСРЕДОТОЧЕННЫМИ
ГРУЗАМИ Рг = 100 кГ; Р2 = Р3 = 60 кГ; Р4 = 80 кГ. Расположение грузов
показано на рис. 29. Длина балки / = 240 см; момент инерции поперечного
сечения / = 100 см4 (одинаковый по всей длине балки); модуль упругости Е =
= 2-106кГ/см2.
Симметризованные уравнения поперечных колебаний балки имеют вид
Х>=р2 I а1к^щпГкХк9 /=1,2, ... ,л,
к — 1
где аш — коэффициенты влияния; т1 — массы грузов; Х1 — амплитуды2*
колебаний грузов. Коэффициенты влияния вычисляются по формулам
_а2A -аJ
1 31Е1
_аЪ{12- а2 - Ь2)
6ЕП
C.48)
40 см
9 Я
60 см
?2
1 4
9 \
40 см
^3
1 1
9 Я
40 см
Ра
*
А
60 см
Рис. 29
Х) В этих уравнениях, так же как и в уравнениях C.36), Х1 = <7/л/^» где ^^ —углы
кручения отрезков вала.
2) Здесь Х1 = #/Л//п";, где дЛ — прогибы под массами тг
6. Нормальные координаты и главные колебания 119
где расстояния а и Ь показаны на рис. 30. Положив а :
тему уравнений
105/р2, получим сис-
оцЦ = 4,53^ + 5,59Х2 + 5,05А,3 + 3,99Х4,
аХ2 - 5,59Х1 + 8,33^2 + 7,99^3 + 6,48^4,
а^3 - 5,05а.! + 7,99^2 + 8,ЗЗА,3 + 7,09^4,
а)ч = 3,99лт + 6,48л2 + 7,09л3 + 6,61А.4.
Так же могут быть составлены уравнения поперечных колебаний балки и
при других способах закрепления ее концов, например, когда оба конца
жестко заделаны или один конец жестко заделан, а другой свободен.
Формулы для коэффициентов влияния будут уже другие. Например, для балки
(или стержня), заделанной одним концом и свободной на другом (рис. 31),
прогиб в точке х от единичной силы, приложенной в точке а, будет равен
6Е7
(Зх - а),
6Е1
а3
ЗЕ1 '
(За - х),
а<х</,
х < а < I,
C.49)
6. НОРМАЛЬНЫЕ КООРДИНАТЫ И ГЛАВНЫЕ КОЛЕБАНИЯ. Как
известно, две квадратичные формы, из которых одна
положительно-определенная, одним линейным преобразованием могут быть
приведены к каноническому виду. В частности, построив
надлежащим образом^ линейное преобразование
?2 = Ь21^1 + &22^2+- + Ь2л^
Чп
!ЬЛ1^ + ЬП2^2+"-+ЬпЛ|>
C.50)
А-
1 а
1^.
)
Р - 1 кг
1_
А
ъ
^.
Рис. 30
Рис. 31
!) См. с.51.
120 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
можно две квадратичные формы — кинетическую и
потенциальную энергию —
из которых, во всяком случае, одна — кинетическая энергия —
положительно-определенная, привести к виду
Координаты %., в которых кинетическая и потенциальная
энергии выражаются суммами квадратов, называются
нормальными координатами системы. В нормальных координатах
уравнения малых колебаний приобретают особенно простую форму.
В самом деле, подставив выражения ТиПв уравнения Лагранжа,
получим
11 = -^1. 12 = -^2,..., \П = -К^п- C-51)
Переменные в этих уравнениях разделены, и интегрирование
каждого уравнения может быть выполнено независимо от
других. Найдем решение &-го уравнения. Так как все Хк
положительны1), то корни характеристического уравнения
4 + К = о
мнимые, и решение к-то уравнения C.51) имеет вид
^ = ук 81П {ркг + еА), к= 1, 2, ... , /г, C.52)
где рк = 1^кк. Постоянные ук и гк определяются известным
образом из начальных условий.
Так как изменения нормальных координат происходят
независимо одна от другой, то, подбирая надлежащим образом
начальные условия, можно сделать все ук9 кроме одной, например
уг, равными нулю. Тогда во все время движения системы
^ = уг 81П (рх* + вх), ^2 = ^3 = ... = ^ = 0,
) Это следует из положительности формы П.
6. Нормальные координаты и главные колебания
121
т. е. будет изменяться только одна координата 2^, все же
остальные будут постоянно равны нулю. На основании формул
C.50):
а\ = Ьпуг 8Ш (р^ + гх) = Хп зт (рх1 + ег), ]
°2 = &21У1 81п (Р1* + 81> = ^21 б1п (Р^ + 81>> I C 53)
°п = Ьп1У1 з1п (Р1* + 81> = ^л1 81п 0>1* + 81>' '
Обобщенные координаты дк, а следовательно, и определяемые
ими перемещения системы будут изменяться по одному и тому
же гармоническому закону, с одной частотой рг. Система в этом
случае совершает гармоническое колебание, и все точки ее
одновременно достигают положений наибольшего отклонения и
одновременно проходят через положения равновесия.
Колебания системы, определяемые изменением только одной
нормальной координаты, называются главными колебаниями.
Система с п степенями свободы в общем случае может совершать п
независимых гармонических главных колебаний, каждому из
которых соответствует определенное значение частоты рк. В
обычных условиях при колебаниях системы изменяются все ее
нормальные координаты и тогда
°1 ^ ^11 8Ш (/V + 81) + ^12 8*П (/V + Е2) + ... + ^1п 81П (рп1 + 8Д), 1
д2 = Х21 81П (ргг + 8Х) + Х22 81П (р2г + 62) + ... + Х2п 8Н1 (р„* + 8„), I
?« = ^Л1 8Ш (?1* + 81> + К2 81п 0>2* + 82> + — + Кп 8Ш (РЛ* + 8гс>' ^
Таким образом, приходим к следующему выводу.
I Малые колебания системы с п степенями свободы около
положения устойчивого равновесия, определяемые изменениями
обобщенных координат C.54), представляют собой линейное нало-
I жение п главных гармонических колебаний.
В этом разложении колебательного процесса, совершаемого
системой, на ряд простых гармонических колебаний и
заключается, в применении к нашей задаче, физический смысл
приведения кинетической и потенциальной энергии к нормальным
координатам.
Главные колебания системы чаще называют собственными
колебаниями, а их частоты — собственными частотами систе-
122 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
мы. Система с п степенями свободы имеет п> в общем случае
различных, собственных частот. Из выражений C.54) следует, что
колебания системы, определяемые изменениями обобщенных
координат ^к^ представляют сложное движение, которое может и не
быть периодическим. Но оно всегда составлено линейно из
гармонических колебаний. Поэтому выражения частота или период
колебаний для системы, у которой число степеней свободы
больше единицы, имеют определенный смысл только по отношению к
отдельным главным колебаниям системы.
Как видно из вышеизложенного, приведение одной линейной
подстановкой кинетической и потенциальной энергии к суммам
квадратов полностью решает задачу об определении колебаний
системы. Однако этот способ решения, несмотря на кажущуюся
простоту, на самом деле столь же сложен, как и обычный, т. е. способ
непосредственного интегрирования уравнений колебаний. В
технических расчетах он нашел некоторое применение в методе
последовательной диагонализации, разработанном К. Якоби [105] и
используемом в некоторых задачах квантовой механики [98].
7. УРАВНЕНИЕ ЧАСТОТ, ИЛИ ВЕКОВОЕ УРАВНЕНИЕ. В
практической постановке задача об интегрировании системы
дифференциальных уравнений малых колебаний сводится к нахождению
частных решений, соответствующих главным колебаниям. Именно с
этими колебаниями связаны критические (резонансные)
состояния системы. В предыдущем разделе была установлена форма
таких частных решений: когда система совершает одно из главных
колебаний, все координаты д1 изменяются по одному и тому же
гармоническому закону
^ = Х1 8гп (р1 4- с), г =1,2, ... , я. C.55)
Подставив эти выражения в уравнения C.13), приходим к
следующей системе алгебраических уравнений с неизвестными Хк ир:
(аир2 - сп) Хг + (а12р2 - с12) Х2 + ... + (а1пр2 - с1п) Хп = 0, ]
(а21р2 - с21) Хг + (а22р2 - с22) А,2 + ... + (а2пр2 - с2п) Хп = 0, ^
( C.56)
(атР2 ~ спг) К + (ап2Р2 ~ сп2) Ь2 + - + (апУ - спп) К = 0. \
Эти уравнения дальше называются основными уравнениями
малых колебаний системы с п степенями свободы.
7. Уравнение частот, или вековое уравнение
123
Условие, при котором не все Хк равны нулю одновременно,
выражается равенством нулю определителя системы C.56)
апр
2 _
0-12Р*
а2\Р ~ С21 а22Р
'12
-22
а1пР"
а2пР2
'1/1
-2п
ап1Р2~сп1 ап2р2~сп2
ЯппР'
= 0.
C.57)
Из уравнений C.56) и C.57) могут быть найдены неизвестные
в нашей задаче: частота колебаний/? и соответствующие этой
частоте амплитуды Хк, к = 1, 2, ... , п.
Уравнение C.57) называется уравнением частот или
вековым уравнением. Последнее наименование связано с тем, что в
теоретической астрономии аналогичные уравнения служат для
определения периодов вековых неравенств в движении планет1*.
Вековое уравнение C.57) представляет собой уравнение п-й
степени относительно р2. При условии положительности
потенциальной энергии оно определяет п положительных2*, в общем
случае различных значений квадратов собственных частот системы.
Если кинетическая (или потенциальная) энергия приведена к
сумме квадратов, то вековое уравнение имеет диагональную
форму: члены с р2 располагаются по главной диагонали. Так, для
уравнений в прямой форме
р%= Е Ь1кХк, *=1, 2, ... ,п
к = 1
C.58)
вековое уравнение имеет вид
и-Р2 ъ\2
... ь1п
Р2 ...Ъ2п
Ьпп-Р2
= 0,
C.59)
а для уравнений в обратной форме
Хг=р2 X к1кХк, 1=1,2, ... ,/1
к = 1
C.60)
Х) Вековые неравенства — это периодические отклонения движения планет от
эллиптического, имеющие периоды, исчисляемые сотнями лет.
2) См. ниже теорему о положительности и разделении корней векового
уравнения.
124 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
вековое уравнение имеет вид
РЛ
... НЛ
г22 — ... Н2п
C.61)
*"п2
8. ТЕОРЕМА О ПОЛОЖИТЕЛЬНОСТИ И РАЗДЕЛЕНИИ КОРНЕЙ
ВЕКОВОГО УРАВНЕНИЯ. Некоторые заключения о свойствах корней
векового уравнения можно сделать, не раскрывая его
определитель. К таким заключениям относится, в частности, следующая
теорема [Э. Раус, 80, р. 49].
Теорема. Если потенциальная энергия системы является
положительно-определенной функцией обобщенных координат,
то корни^ векового уравнения положительны и разделяются
корнями минора, соответствующего первому элементу.
Доказательство. Вековое уравнение возьмем в прямой
форме
ЪЛ0
Д(а) =
Ьп-а
^22
... ъ
а ... Ь
Ьп\ Ьп2 ••• Ьпп~а
= 0.
C.62)
Обозначим через Дх, Д2, ... , Ап_ х последовательные главные
диагональные миноры определителя Д. Положив Ап = 1, составим ряд
А,А1,А2,...9Ап__1,Ап. C.63)
Для а = 0 все члены этого ряда положительны, так как они
совпадают в этом случае с дискриминантом и его последовательными
главными минорами положительно-определенной квадратиче-
ской формы — потенциальной энергии. Для а = 0 ряд C.63) не
имеет перемен знака. Для а = + °о ряд C.63) имеет п перемен
знака. Таким образом, при изменении а от 0 до + °о рЯд C.63)
приобретает п перемен знака.
Х) Под корнями векового уравнения здесь подразумеваются квадраты частот р2,
которые обозначены в уравнении C.62) через а.
8. Теорема о корнях векового уравнения
125
При изменении а от 0 до + °° могут обращаться в нуль и
менять знаки разные члены ряда C.63), кроме, естественно, /\п = 1.
Однако каждая потеря или приобретение рядом C.63) перемены
знака может произойти только за счет перемены знака Д, т. е.
первого члена ряда C.63), при переходе Д через нуль. Когда в
нуль обращается один из промежуточных членов ряда, например
Д/? два соседние Дь _ х и Дм х будут противоположных знаков.
Поэтому перемена знака Д • (при переходе через нуль) не увеличит и
не уменьшит числа перемен знака ряда C.63) в целом. Только
переход через нуль первого члена Д может увеличить или
уменьшить число перемен знака ряда C.63).
Первую перемену знака ряд C.63) получит при переходе Д
через наименьший нуль (а = ах). Эта перемена знака, однако,
пропадет при переходе Д через следующий нуль а = а2, а2 > а1? если
в промежутке между аг и а2 не обратится в нуль второй член ряда
C.63), т. е. Дх. Значит, для приобретения второй перемены знака
Д должен пройти через свой второй нуль а2 и между первыми
двумя нулями Д должен лежать первый нуль Дг Продолжая
аналогичные рассуждения, придем к заключению, что п перемен знака
ряда C.63) для а = +оо приобретены им в результате того, что Д,
при изменении а от 0 до +°°, п раз обращается в нуль, т. е. имеет в
промежутке от 0 до +°о все п своих корней и между этими
корнями лежат корни уравнения Дх = 0. Таким образом, п - 1 корней
последнего уравнения разделяют п корней векового уравнения Д = 0.
Изложенное доказательство предполагает, что корни векового
уравнения Д = 0 различны. В практических задачах на
колебания это предположение почти всегда осуществлено. Поэтому
случая равных корней мы не рассматриваем.
Утверждение, что при Д• = 0 соседние миноры Д. _ х и Д. + г
имеют противоположные знаки, вытекает из формулы A.52).
Если в определителе уравнения C.62) мы обозначим через ^12 =
= ^21 и е/22 миноры элементов Ь12, Ь21 и Ь22 - а, то формулу A.52)
можно будет записать для миноров второго порядка следующим
образом:
АА2 = Д1С/22 - 3\2
(Д, Дх, Д2 имеют прежнее значение). Когда Дх = 0,
ДД2 = -</22,
т. е. Д и Д2 имеют противоположные знаки.
126 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
Пример 4. КОЛЕБАНИЯ НИТИ С БУСИНКАМИ. Как отмечают в своей книге
Ф. Р. Гантмахер и М. Г. Крейн [14, с. 142—143], «этой задаче принадлежит
совершенно особая роль в истории механики и математики. Пожалуй, она
была первой задачей на исследование малых колебаний системы с п
степенями свободы. В связи с ней Ж. Даламбер предложил свой метод
интегрирования системы линейных дифференциальных уравнений с постоянными
коэффициентами. Отправляясь от нее, Даниил Бернулли высказал свое
знаменитое предположение, что решение задачи о свободном колебании струны
можно представить в виде тригонометрического ряда, что вызвало между
Л. Эйлером, Ж. Даламбером, Д. Бернулли и др. дискуссию о природе
тригонометрических рядов, затянувшуюся на несколько десятилетий.
Впоследствии Ж. Лагранж показал более строго, как можно предельным переходом из
решения задачи о колебаниях нити с бусинками получить решение задачи о
колебании струны. Наконец, этой задачей (и аналогичной задачей из теории
теплопроводности) руководствовался Ш. Штурм в своих замечательных
исследованиях по высшей алгебре и теории дифференциальных уравнений».
Применяя к решению задачи о колебаниях нити с бусинками уравнения
в конечных разностях, Э. Раус [80] пришел к теореме об узлах собственных
форм колебаний нити, которая устанавливает закономерности в
распределении перемен знака амплитудных отклонений отдельных бусинок Ч
Мы будем предполагать, что все п бусинок имеют одинаковую массу т и
закреплены на нити на одинаковых расстояниях а друг от друга (рис. 32).
Если пренебречь смещениями бусинок, параллельными линии равновесия
нити, то малые перемещения бусинок
г/1» У2> •» > Уп>
перпендикулярные линии равновесия нити, будут определять ее
расположение при поперечных колебаниях. Эти перемещения, в предположении, что
все они происходят в одной плоскости, примем за обобщенные координаты.
Тогда кинетическая энергия системы
Г=|(т1у? + т2у|+... + щпу2).
Предположим, что натяжение нити 5 остается неизменным при
деформациях нити, т. е. при отклонениях бусинок от равновесного расположения.
1 л т*+1л
т1 т12^^ ^
\^—Т ч^ с
Г а
1
*—" 2*
У1 + 1 "*-^^^
Рис. 32
Х) Теорему об узлах собственных форм см. ниже (с. 132).
8. Теорема о корнях векового уравнения
127
Если это равновесное расположение принять за нулевое для потенциальной
энергии, то в деформированном расположении она будет равна
П = ЗА/,
где А1 — общее удлинение нити. Чтобы найти Д/, рассмотрим удлинение Д^
участка нити между массами ^ит| + 1.Из треугольника АВС (рис. 32)
Л*! = Лу,+1-У1J + а* ~ а = а \ 1 +
(гл + 1 -уд2
-']¦
Разлагая выражение Д^ в ряд по степеням (уь + х — у^) и ограничиваясь в этом
разложении только первым членом, получим
А/*= 2а" (У1 + 1~У1J> 1==0> Х>2' ••* 'Л; Уо==Уп + 1==0-
Так как
Д/ = 1А^,
потенциальная энергия всей системы
п=±Ы + (у2-у1J + ... + (уп-уп.1J + у*\.
C.64)
Найденные выражения кинетической и потенциальной энергии подставляем
в уравнения Лагранжа. Тогда
та •• о I
— I/! =-2^+ у2,
та
У1-2у2 + Уг>
— I/
:</„
</д-2~2 Уп-\ + Уп>
Уп-
2.
C.65)
Если система совершает одно из главных колебаний, то
Ух = А- 81П (р1 + 8), /¦ = 1, 2, ... , П.
Коэффициенты А1 и частота р удовлетворяют уравнениям
— Ах — 2 Ах А2,
— А2 А! + 2А2 А3,
-Ап_1 + 2Ап.
C.66)
128 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
Здесь через Ъ обозначено Ъ = 8/ат. Вековое уравнение системы C.66)
г>2
-1
О
О
-1
2 -*
2-Ц-
может быть развернуто по рекуррентным формулам:
= 0
C.67)
П = 2 - 2-
Х>,
2-^^-1,
Ьк
[2-РТ)о,!_1-Ок_2.
C.68)
и, следовательно,
Можно поэтому положить
C.69)
Так как все корни векового уравнения положительны,
2-р2/Ь>0
0<р2/2Ъ< 1.
1 -р2/2Ь = соз а.
Тогда к-е уравнение C.68) будет выполнено тождественно, если
Бк = В зт (& + 1) а, 1)Л _ х = В зт &а, Бк_2 = В зт (/г - 1) а.
В самом деле, для таких значений Бк, Вк _ х, Эк _ 2 оно обращается в тождество
зт (к + 1) а + зт (& - 1) а = 2 соз а зт ка.
Постоянную В найдем, положив к = 1, т. е. воспользовавшись первым
уравнением C.68):
В зт 2а = 2 соз а,
откуда
В = 1/зт а.
Теперь вековое уравнение системы C.67) будет иметь вид
81П (п + 1)а _
о,
откуда
а.
/ = 1,2, ... , п.
п + 1
Из формулы C.69) получаем затем все частоты системы
р =2-2- зш Ы
1 Л/ т п
2(п + 1)
1, 2, ... , п.
C.70)
9. Собственные формы колебаний и их свойства
129
Амплитуды отдельных масс пропорциональны минорам определителя
C.67), соответствующим, например, элементам первой строки, т. е.
пропорциональны величинам Оп _ х, 1)п _ 2, ... , 1H = (-1)л х. Обозначив амплитуды
через А^ (где / — порядок формы, к — номер амплитуды), а через Н1
постоянную, будем иметь
А^ = я*81п;гтт C-71)
9. СОБСТВЕННЫЕ ФОРМЫ КОЛЕБАНИЙ И ИХ СВОЙСТВА. Вековое
уравнение определяет п положительных значений р2.
Предполагаем, что они различны, и в дальнейшем всегда нумеруем их в
возрастающем порядке:
р\<р\< ... <р2п.
Зная собственные частоты, можно перейти к решению
уравнений C.56) относительно амплитуд Хг, ограничившись при этом
только одной системой уравнений, например прямой:
п
р% = X Ъ1кХк, I = 1, 2, ... , п. C.72)
к = 1
Все выводы, касающиеся амплитуд, сделанные для этой системы,
без изменений могут быть перенесены и на обратную систему.
Подставив одно из найденных значений р2, например р2 = а8,
в уравнения C.72), получим систему п линейных однородных
уравнений относительно Х1
(Ьп - а8)Хг + Ь12Х2 + ... + Ь1л Хп = О,
Ъ21Х1 + (Ъ22 - а8)Х2 + ... + Ъ2пХп = 0, (з ^
Ь„А+ Ъп2Х2+...+(Ъпп-а8)кп = 0. I
Определитель этой системы равен нулю, а ранг матрицы
коэффициентов равен (п - 1), поскольку равные корни по предположению
отсутствуют. Предположим, что не равен нулю минор
определителя системы C.73), соответствующий элементу (Ьпп - а8). Тогда,
отбросив последнее уравнение C.73), из оставшихся (п - 1)
уравнений находим обычным путем (п - 1) амплитуд Хг, Х2, ... , Хп _ х,
выраженных через Хп, которое может иметь произвольное значение.
Обозначим миноры определителя системы C.72),
соответствующие элементам последней строки, через
<Гп1 Ю» с1п2 Ю, ... , <Зп, л- 1(а8), 3Ш1 (а8).
5 - 10456 Бабаков
130 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
следовательно,
2— = СОП81 =С.., C.74)
где С8 — произвольное постоянное число. Полученный результат
можно также записать следующим образом:
Хг : Х2 : ... : ХгГ ^п1(а8) : ^п2(а8) : ... : е/лл(ав). C.75)
Мы находим, таким образом, не самые Х[ (амплитуды), а их
отношения C.75). Уравнениями C.73) амплитуды, соответствующие
взятой частоте, определяются до произвольного постоянного
общего множителя.
Отношения амплитуд, соответствующих частоте р8, равны
отношениям не только миноров элементов последней строки, но и
отношениям миноров элементов любой другой строки. Миноры
элементов различных строк определителя системы C.73), куда
подставлена какая-нибудь собственная частота системы,
пропорциональны. В обозначениях этих миноров можно поэтому опус-
тить первый индекс и переписать C.75) следующим образом:
Хх : Х2 : ... : Хп = ,1Х (сх8) : 3 2 (а8) :...:</„ (а8). C.76)
Отношения C.76) определяют собственную форму колебаний,
соответствующую собственной частоте р8. Собственная форма —
это отношение амплитуд или пропорциональных им миноров
элементов любой строки определителя системы C.73) после
подстановки в него корня ач векового уравнения. Число собственных
форм колебаний системы равно числу степеней свободы.
Собственную форму задают обычно числовыми значениями амплитуд
(или графически — ординатами определенной длины),
отношения которых равны отношениям C.76).
Произвольным общим множителем С8, входящим в
определение амплитуд данной формы, можно распорядиться так, чтобы
сумма квадратов амплитуд была равна единице. Форма, сумма
квадратов амплитуд которой равна единице, называется
нормированной формой. Для нормирования формы нужно найти нор
мирующий множитель N из условия
Ц№ 4- Х1М2 + ... + Ц^2 - 1
9. Собственные формы колебаний и их свойства 131
и иптсм на этот множитель умножить все амплитуды Х1 данной
формы.
Н дальнейшем нормированные амплитуды собственных форм
обозначаются буквами и1к, с двумя индексами, из которых
перцы и / означает порядок формы, второй к — номер амплитуды.
Свойства собственных форм выражаются следующими теоре-
мами.
ш Т е о р е м а. Собственные формы не зависят от
начальных условий.
.г)то ясно из состава миноров, входящих в отношения C.76):
миноры ^к(с^8) зависят только от коэффициентов Ъ[к и от значения
ин р2.. Никакие другие величины в состав этих миноров не
входят. Собственная форма существенным образом связана с
колеблющейся системой и, аналогично собственной частоте, может
быть изменена только в результате изменений параметров
системы: изменений масс или жесткостей отдельных ее частей и их
распределения в системе.
* Теорема об о р т о г о н алъности с о б с т-
венных фор м. Если
- система амплитуд, соответствующая 8 и собственной
форме, и
--- система амплитуд у-й формы колебаний, причем
то
Ы81и\1 "*" и82и\2 + •*• + изпи\'п = ^* C.77)
Равенство C.77) называется условием ортогональности.
В записанном виде оно имеет место, только когда Ь[к = Ък1, т. е.
для симметризованных систем.
Доказательство. Для доказательства выпишем
систему уравнений малых колебаний (в прямой форме) для 8-й
собственной формы и 8-й собственной частоты:
п
рЫ^. - I Ь1ки.„ I = 1, 2, ... , п. C.78)
132 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
Умножим каждое из этих уравнений на соответствующую ампли
туду у-й формы и просуммируем по I:
п п п п п п
2 РХ;"« = 2 "« 2 Ъ1киЛ = I и8к I Ъыиу1 = I р?ц и
г = 1 1 = 1 & = 1 /г = 1 г = 1 /г = 1
Так как I и /г пробегают один и тот же ряд значений, то
п п
1 = 1 1 = 1
Отсюда при условии р23^р1 следует:
И и и ¦ = 0.
. -, 81 VI
I = 1
Для несимметризованных форм условия ортогональности
выражаются равенствами:
^ для крутильных колебаний приведенного вала
п
2 САА« = °>
1 = 1
где с^ — погонная жесткость на кручение /-го участка вала;
^ для поперечных колебаний стержня с сосредоточенными
массами т1
п
1 = 1
Эти выражения получаются из C.77) с помощью формул
и81 = К^ и81 = Х81^т19 1 = 1,2, ...,л.
- Теорема об узлах собственных форм.
Из условия ортогональности C.77) следует, что амплитуды форм
главных колебаний различных порядков (соответствующих
различным собственным частотам) не могут быть все одного и того
же знака. Если, например, все амплитуды первой формы
положительны, то амплитуды остальных форм для выполнения
условия C.77) должны иметь по крайней мере по одной перемене
знака каждая. Существует закономерность в распределении числа
перемен знака амплитуд собственных форм, устанавливаемая
теоремой об узлах собственных форм.
Число перемен знака (число «узлов») собственной формы
к-го порядка равно к - 1,
9. Собственные формы колебаний и их свойства
133
Доказательство. Докажем эту теорему для форм
колебаний системы, вековое уравнение которой имеет вид
«и -
«21
0
0
- а
-«12
«22 ~
0
0
- а
0 ..
-а23 ••
0 ..
0 ..
. 0
. 0
• ап~1,п-
• ~ап,п ~ 1
1 "
- а
Миноры элементов первой строки имеют следующие выражения:
^п = Дх(а); <3Х2 = а12Д2(а); ^13 = а12а23Д3(а); ... ;
^1п-1 = а12а23— аЯ-2,п-1АЛ-1(аM <11п = а12а23 • •• ап.- 1,п ' *•
Они пропорциональны амплитудам собственной формы,
соответствующей корню а уравнения C.79). Множители
Д^а), Д2(а), ... , Дл_!(а), Дл(а)= 1 C.80)
совпадают с последовательными главными диагональными
минорами определителя C.79), и ряд C.80) обладает всеми свойствами
ряда главных миноров, установленными при доказательстве
теоремы о разделении корней векового уравнения. Только этот ряд
начинается не с определителя векового уравнения Д(а), а с первого
главного минора этого определителя. Для а = 0 все члены этого
ряда положительны. Приобретение или потеря этим рядом перемены
знака возможны только при прохождении через нуль первого
члена Дх(а). Первый нуль Дх(а), как это следует из упомянутой
теоремы, больше ах = р\ и меньше а2 = р\. Следовательно, для аг = р\ все
члены ряда C.80) продолжают оставаться положительными.
Первая собственная форма, таким образом, не имеет перемен знака.
После перехода через первый нуль полинома Дх(а) ряд C.80)
приобретает одну перемену знака и сохранит одну перемену до
второго нуля Дх(а), и так как а2= р\ — вторая собственная
частота системы — лежит между первым и вторым нулем полинома
Д2(а), то для а2 = р\ ряд имеет одну перемену знака.
Продолжая аналогичные рассуждения, можно убедиться, что
для а3 = р% ряд C.80) имеет две перемены знака и т. д.
Последняя, п-я форма будет иметь (п — 1) перемену знака.
134 1'лива III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
Мы изложили доказательство
теоремы об узлах для частной
формы векового уравнения, имен
но для векового уравнения
крутильных колебаний приведенного
вала. Теорема остается в силе для
форм колебаний других линейных
систем с конечным числом
степеней свободы, в частности для
поперечных колебаний однопролет-
ных стержней и балок.
Доказательство этой теоремы в общей
форме дано Ф. Р. Гантмахером и
М. Г. Крейном [14].
Содержание теоремы можно
иллюстрировать следующим
примером. Предположим, что речь
идет о поперечных колебаниях балки, шарнирно опертой на концах
и несущей три сосредоточенные массы т1, т2, гп3 (рис. 33). Когда
эта система совершает первое главное колебание, собственная форма
не имеет перемен знака и все массы т1 отклоняются в одну сторону
(рис. 33, а). Когда система совершает второе главное колебание, со
ответствующая форма имеет одну перемену знака. В этом случае
одна или две массы слева отклоняются в одну сторону, а остальные —
в другую. Сколько масс отклоняется здесь слева или справа в одну
сторону, две или одна, зависит каждый раз от их величины,
расположения и от упругих свойств балки. На рис. 33, б представлен вид
кривой прогиба (упругой линии). Одна из точек балки А остается
при таких колебаниях неподвижной. Она называется узлом второй
формы колебаний. Форма колебания третьего порядка имеет две
перемены знака; следовательно, соответствующая этой форме
линия прогиба пересекает линию ММ в двух точках В и С (рис. 33, в):
форма колебаний имеет два узла. Следует иметь в виду, что
неподвижные точки стержня на опорах в счет узлов не входят1*.
В примере нити с бусинками собственные формы колебаний
определяются отношениями амплитуд
А7, == Н. 81П -^-, *, А = 1, 2, ... , п,
!) Условии закрепления стержня, например неподвижные точки на опорах,
входят в краевые условия задач.
10. (Nи|ий интеграл дифференциальных уравнений 135
(формула C.71)). Здесь / — порядок формы, к — номер
амплитуды. Когда / = 1, а к пробегает значения 1, 2, ... , я, значение
остается положительным, так как его аргумент изменяется в
пределах первых двух четвертей. Первая форма, таким образом, не
имеет перемен знака. В случае, когда I = 2, а к пробегает
значения 1, 2,..., /г, аргумент синуса изменяется в пределах четырех
четвертей и синус в этих пределах будет иметь одну перемену
знака. Вторая собственная форма будет иметь один узел. Когда
/ = п, число перемен знака равно п - 1.
10. ОБЩИЙ ИНТЕГРАЛ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ МАЛЫХ
КОЛЕБАНИЙ И ТЕОРЕМА О РАЗЛОЖЕНИИ. Частное решение
уравнений C.13), соответствующее 8-й собственной частоте, как это
установлено выше, имеет вид
цн1 = н8/ 8П1 (рч* + е8), /=1,2,..., п, C.81)
где ин1 — амплитуды нормированной 8-й собственной формы;
здесь / = 1,2,..., п. Общий интеграл представляет линейную
сумму частных решений
п
С11 = Е ДА/ 8^п (Рз* + с«)» '- г" 1» 2> ••* > п> C.82)
где А8 и г — произвольные постоянные, здесь 8 = 1, 2, ... , п. Они
определяются из начальных условий, которые в данном случае
выражаются заданием для начального момента I = 0 значений
обобщенных координат
и обобщенных скоростей
^10' ^20> — > Я пО'
Подставив в C.82) / = 0, получим систему 2п уравнений
п
?т= Х А„ия, зт е„, (
*У > C.83)
п.; которых могут быть найдены все 2п постоянных Ач и еч; здесь
/ 1,2, ... ,п.
136 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
Уравнения C.83) можно использовать для доказательства
теоремы о разложении, имеющей большое значение для обосно
вания приближенных методов расчета собственных частот и
форм колебаний. Сформулируем эту теорему.
Теорема. Любую форму колебаний можно разложить по
собственным формам колебаний некоторой системы с п степе
нями свободы.
Это значит, что любую заданную совокупность п амплитуд
Л-р К2, ••• > А*п
можно представить следующими линейными выражениями:
Х1=а1ип + а2и21 + ...+апип1,
Х2 = аги12 + а2и22 + ... + апип2,
К = а1и1п + а2и2п.+ — + *пипп>
C.84)
где иш — амплитуды собственных форм колебаний системы;
здесь I, к = 1, 2, ... , п.
Доказательство. Справедливость теоремы
непосредственно вытекает из первых п уравнений C.83)
п
#ю= ЕА8^8ШС8, 1= 1,2, ... , П. C.85)
8 = 1
Эти уравнения изменением только обозначений
переводятся в уравнения C.84). Достаточно, таким образом,
посчитать заданную совокупность Хь за начальные значения
амплитуд, чтобы тем самым, опираясь на известную теорему
существования общего интеграла системы дифференциальных уравнений,
обосновать справедливость соотношений C.84I*.
Коэффициенты а3 вычисляются с помощью теоремы об
ортогональности собственных форм. Запишем разложения C.84) в
сокращенном виде:
п
Хь= X а8из1, 1=1,2, ... , п. C.86)
8 = 1
Х) Справедливость теоремы следует также из неравенства нулю определителя,
составленного из ортонормированных амплитуд и1к — коэффициентов
уравнений C.84).
I I. Разложения коэффициентов уравнений малых колебаний 137
Чтобы найти коэффициент а19 умножим обе части C.86) на ии и
Просуммируем по г.
п п
2 х1ии = Л иа 2,аЛ/ = 2 ав 2 иаиа = а1 Ъи%
/1 / = 1 8=1 5=1 / = 1 г = 1
откуда следует
п п
аГ.Ъ\ии/2и%. C.87)
I. = 1 г = 1
Если м,,. нормированы, то Е и| = 1 и
/ = 1
п
а{= I ^^, /=1,2,..., п. C.88)
/ = 1
11. РАЗЛОЖЕНИЯ КОЭФФИЦИЕНТОВ УРАВНЕНИЙ МАЛЫХ
КОЛЕБАНИЙ ПО СОБСТВЕННЫМ ФОРМАМ. Выпишем систему уравнений
для /-го собственного колебания в прямой форме:
п
Р21ии = ^*ци»> * = !' 2— ' п- <3-89>
к = 1
Положив
ьш = 2" А*- C-9°)
б* = 1
умножим обе части этого равенства на и1к и просуммируем по к:
п п п п п
2 Ъшиш = Е и№ 1«а = 1о, I ц№ц„л = аи.
к = 1 & = 1 8 = 1 8 = 1 /г = 1
Таким образом,
или на основании C.89)
аи= ^ЪиРш
аи = ииР1
Подставив найденное выражение аи в C.90), получим
разложение коэффициентов прямых уравнений по собственным формам
1к
= %р*и81изк, *=1,2,... ,/1. C.91)
Таким же способом, но исходя из системы уравнений,
записанной для /-го главного колебания в обратной форме
п
"(Г/'/^.^А- 1 = 1, 2,... ,71,
138 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
получим разложения по собственным формам коэффициентов /г/А
Н}к = Е ^ф^, I = 1, 2,... , /г. C.92
8 = 1 Р*
С помощью формул C.91) и C.92) можно найти разложения итт
раций коэффициентов Н1к любого порядка, т. е. сумм
//. п
МО) = и /7A) = V /,@I, Миг) = V и(т 1) и
п 1к п1к"> п 1к н^г п1кп8к1 •* > п 1к ^ и 1я пякЛ
Из формул C.92) находим
и „и . _
C.93
^.?(~^
Для итераций коэффициентов прямых уравнений
Ы$ = X из1и8кр*т+1К ик=1, 2,... , /г. C.9ь
Пример 5. ОПРЕДЕЛЕНИЕ СОБСТВЕННЫХ ФОРМ ПОПЕРЕЧНЫХ КОЛЕБАНИИ
ОДНОРОДНОГО СТЕРЖНЯ. Разделим стержень на три равные части и
сосредоточим их массы в серединах частей (рис. 34). Обозначим длину стержня через /
массу единицы длины через \х. Массы сосредоточенных грузов равны
т 1 = т2 =" тз = Ц^/3.
Обозначим модуль упругости через Е |кГ/см2] и момент инерции поперечно
го сечения (постоянный по всей длине стержня) через I [см1]. С помощь.**.)
формул C.48) найдем коэффициенты влияния
25 /3
3888 Е1 '
сх12,
сх13,
39 1*
С1]2 3888 Е1 '
81 /3
СХ22 3888 Е7" '
а32 ^ а23>
а13 =
а23 =
азз "
17 /з
3888 Я/ '
39 Iя
3888 Е/ '
25 /3
3888 Я/ '
а31 - а
Уравнения колебаний запишутся в обратной форме
\,=р*Ц 1«А- »= 1,2,3.
о /? = 1
Подставив сюда значения а1к и полагая для сокращения письма
Е1 1 _ 11 664-Е/
со2 = 3888
/з р2\х1/3 р2\\14
П. Разложения коэффициентов уравнений малых колебаний
139
приходим к системе уравнении
>чо.J = 25^ + 39^+ 17А,3,]
л2со2 - 39лт + 8Щ + 39л3, \ C.95)
А,.,<о2 = 17^ +39Х2 + 25Х3. 1
Вековое уравнение этой системы
_ЯГ
25 - со2 39 1 7
39 81 - (о2 39
17 39 25 - (о2
О
после развертывания имеет вид
(о6 - 131ш4 + 1344аJ - 2880 = 0.
Оно легко разлагается на множители:
(со2 - 1.20) (со2 - 8) (со2 - 3) = 0.
Квадраты его корней равны со2 = 120,
со2 = 8, со2 = 3, а соответствующие
собственные частоты колебаний стержня
_ 9,859 Е1 38,184 \Е1
рх - __ ^_ , р2 - __ ^_
Рис. 34
а)
Рз
62,354 /Е/
/2
И
Для нахождения собственных форм отберем из системы C.95) два
уравнения, например
B5-(о2)?„, Ч- 39л2 = - 1 7Л.3,
39 Хх Ч- (81 -(о2)Х2 = - 39/,3.
Подставив сюда со2 = 120, со2 = 8, со| --= 3, получим соответственно:
^ \х : к2 : А-з = 1 : 2 : 1 (первая форма);
^ Х} : Х2 : л3 = 1 : 0 : -1 (вторая скорма);
^ Л-! : Л.2 : Л-з = 1 : -1 : 1 (третья форма).
Графическое изображение форм представлено на рис. 35. Условия
ортогональности здесь выполнены. Выполнено также и правило перемен знака для
амплитуд собственных форм.
Нормирующие множители для первой, второй и третьей форм
соответственно равны
1 _ 1 л г 1 л г _ 1
#1 =
,/12 4- 22 Ч- 14
-1, /у^-1,
л/О л/^
*я "
Л
140 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
Амплитуды нормированных собственных форм:
первой второй
_1_ . _2_ . _1_ .
л/6 а/6 а/6
третьей
}_ . _\_ . \_
л/О л/О л/О
Пример 6. ОПРЕДЕЛЕНИЕ СОБСТВЕННЫХ ЧАСТОТ И ФОРМ КОЛЕБАНИЙ
ДВОЙНОГО МАЯТНИКА. Для симметризации уравнений малых колебаний двойного
маятника
39,
16/ п 2/ а
" —— 01 ~' \Э<).
^/ А 4/ /л
_ — у — у
которые были составлены в примере 1, полагаем
04 = 01 л/3 , а2 = 62.
В переменных 04 и а2 эти уравнения перепишутся следующим образом:
16/ •• 2/ ••
04 = --— 04 - —- а2,
2/ •• _ 4/ ••
2 |г7з ' з§ 2
Предполагая, что система совершает одно из главных колебаний и,
следовательно,
а! = ?4 81П (р1 + е), а2 = Х2 зш (р1 + с),
получим для амплитуд \х, Х2 однородную систему
'16/ 1 ь ,
2а/3/
3^
^2=0,
2 УЗ/
3*
^(Ё-^)^о
з#
C.96)
Из уравнения частот
представив его в виде
Ш-1. 2а/3/
9§ р2 3§
2а/3/ 4/ _ _1_
3^ 3^ р2
1-28/1+ М1!
/?4 9# р2 27^г2
о,
о,
находим
Р! = 0,61 */§/1, Р2 = 1,62 л/^//
12. Свободные колебания с сопротивлением
141
Подстанив в первое уравнение C.70)
сначала значение р1? затем р2, получим
собственные формы колебаний двойного маятника:
^ первая форма: А,1:А,2 = Зл/3 : 4,29;
^ вторая форма: Х1:Х2 = Зл/3 : -6,29.
Условие ортогональности здесь
выполнено11. Следует заметить, что в симметризо-
11и и пых координатах оно имеет вид
апа21 + а12а22 = 0;
п координатах 6Х и 92
ЗЭ11621 + Э12Э22 = 0,
где ()у1, 0-2 — угловые амплитуды стержней маятника в первом и втором
главных колебаниях; здесь / = 1, 2. Как следует из пропорций
еп:612 = 3:4,29,
022 = 3 : -6,29,
первая и вторая собственные формы двойного маятника имеют общий вид,
показанный на рис. 36.
12. СВОБОДНЫЕ КОЛЕБАНИЯ С СОПРОТИВЛЕНИЕМ. В классической
теории линейных колебаний исследование влияния
сопротивлений на свободные и вынужденные колебания основывалось на
допущении, что силы сопротивления, действующие на
колеблющуюся систему, являются линейными функциями обобщенных
скоростей. Хотя такое допущение не оправдывается в
действительности, тем не менее разработанные на его основе приемы
некоторых расчетов и результаты этих расчетов имеют и в
настоящее время большое практическое значение. Прежде всего,
принимая такое допущение, мы остаемся в пределах линейной
теории, а это приводит к значительному упрощению задачи в
отношении математической ее трактовки, причем большей частью
без существенного искажения качественной стороны общего
направления вносимых сопротивлением изменений. Далее,
уравнения с линейным сопротивлением получаются во многих случаях
в результате линеаризации2) некоторых реальных систем, а не
каких-либо предположений о физической природе сопротивления.
1' В пределах точности вычислений.
:;) Под линеаризацией здесь, как и в первой главе, мы понимаем отбрасывание
нелинейных членов.
142 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
Решение таких линеаризованных задач дает иногда возможности
сделать правильные заключения об истинном характере движс
ния исходной неупрощенной системы.
Сохраняя прежние предположения относительно начала коор
динат и прежние обозначения для кинетической и потенциаль
ной энергии, примем, что обобщенные силы сопротивления явля
ются линейными функциями обобщенных скоростей
Е1 = ьпЯ\ + Ь12д2 + ... + Ь/лдл, / = 1, 2, ... , п.
Большей частью коэффициенты Ъ1к удовлетворяют условию сим
метрии
При этом условии силы Е[ равны частным производным о'\
квадратичной функции
по соответствующим обобщенным скоростям:
Предположим, что Е — положительная квадратичная
функция обобщенных скоростей. В этом случае ее можно истолковать
как меру интенсивности или скорости рассеяния механической
энергии системы. Она называется поэтому функцией рассеяния
или диссипативной функцией. В самом деле, написав уравнение
свободных колебаний системы в виде
с! (дТ\ дП дР ¦ -, о
~~ — = - — - — , г = 1, 2, ... , п, C.98)
умножим каждое из них на соответствующее д, и просуммируем
по /:
Д а (дТ\ . , А дП . " дР .
Принимая во внимание соотношения
" с! (дТ\ . A ( Д дТ . А A /грл
12. Свободные колебания с сопротивлением 143
найдем
А(Т + П) = -2^. C.99)
Из этого уравнения следует, что при положительном Р полная
анергия системы убывает и скорость этого убывания по
абсолютной величине равна 2Р.
Подставим в уравнения C.98) функцию Р C.97), а также
выражения функций П, Т. Если коэффициенты в выражениях Т и П
имеют прежние обозначения, то после подстановки мы получим
систему уравнений
("/1</1 + Ь1\Я\ + СпЯл) + («72^2 + &/2?2 + ^/2^) + ••• +
+ (аЛп + ьыЯп + с///я) = 0, 1=1, 2, ... , п. (З.юо)
Решение уравнений C.100) будем искать, положив
ц.^АрР1, 1= 1,2, ... , л, C.101)
после чего эти уравнения запишутся в виде
(апр2 + 6пр + си) Ах + (а12р2 + 612р + с12) Л2 ! ... 1 ;
+ (аи1р2 + Ь1пр + с[п)Ап = 0, |
(а21р2 + Ь21р + с21) А1 + (а22р2 + 522р 4- с22) Л2 +¦ ... I- \
+ (<*2пР2 + Ь2пр + С2п)А„ = 0, ; C.102)
(ап1Р2 + ЬщР + Сп0А\ + (ал2Р2 + &Л2Р + С,12>^2 + - ;
+ (аппР2 + ЬппР + Спп)^- °' ]
Чтобы не все А7- одновременно обращались в нуль, значение р
должно быть корнем характеристического уравнения
«ИР2 + ЬПР + С11 «12Р2 + &12Р + ^12 — 01лр2 + &Ь|Р + Сь, I
1Р2 + Ь21р + с21 а22р2 + Ь22р + с22 ... а2пр2 + Ь2пр 1- с2/? | _ ^
а/ПР2 + Ьп\Р + Сн1 ««2Р2 + &/12Р + Сл2 ••• а„цР2 + ЪппР + Спп \
C.103)
Некоторые заключения об общем направлении изменений
координат можно сделать, не решая этого уравнения1*.
" См. Дж. Рэлея [77, V.!], Э. Рауса [79]; о решении уравнения C.103) см. также
Л. Н. Крылова [106, с. 69--70].
144 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
Из уравнений C.102) для каждого корня р
характеристического уравнения найдем систему отношений
А1:А2: ... : Ап,
причем для вещественного р все А- будут также вещественны, для
комплексного р коэффициенты А- будут комплексными.
Подставим в уравнения C.102) один из вещественных корней. Умножив
затем первое уравнение на А1? второе — на А2 и т. д. и сложив
почленно, получим:
р2Т (А) + рР (А) + П (А) = 0, C.104)
где через Т(А), П(А), Р(А) обозначены результаты подстановки в
Т, П, Р вместо обобщенных координат ^ и скоростей д •
соответствующих амплитуд А..
Умножим теперь уравнения C.102), написанные для корня р,
на значения А[, соответствующие другому корню р\ и почленно
сложим. Введя обозначения
получим
2Т (А, А') = апАгА[ + ... + аппАпА +
+ а12 (АгА'2 + А[А2) + ... ,
2П (А, А') = спАгА[ + ... + сппАпА'п +
+ с12(А1А2+А;А2) + ...,
2Р (А, А') = ЪпАгА[ + ... + ЪппАпА'п +
+ ь12(а1а2 + а;а2) + ...,
р2Т (А, А') + /*Р (А, А') + П (А, А') = 0.
C.105)
Вследствие симметрии выражений C.105) относительно А и А'
имеет место также и уравнение
р'2Т (А, А') + р'Р (А, А') + П (А, А') - 0.
Таким образом, р и р' удовлетворяют одному и тому же
квадратному уравнению
р2Т (А, А') + рР (А, А') + П (А, А') = 0.
Следовательно,
Р+Р'
Р(А, А')
Т(А, А') '
РР
П(А, А')
Т(А, А') '
C.106)
12. Свободные колебания с сопротивлением
145
Пусть р и р' — два сопряженных комплексных корня уравнения
C.103):
р = а + ф, р' = а - ф.
Соответствующие этим корням А и А' пусть имеют вид
А = Р + 1Я, А' = Р-1Я.
Тогда
2Т(А, А') = 2Т(Р) + 2Т@),
22?(А, А') = 2Р(Р) + 21?^),
2П(А, А') = 2П(Р) + 2П(ф),
и формулы C.106) перепишутся в виде
2а__р(р)+па) а2 + В2-ЩР) + щ(?)
^а г(Р) + г(с?)' а + р т(Р) + г@)' (ЗЛ07)
Теперь можно ответить на вопрос о том, как будут изменяться
координаты системы в возмущенном движении. Предположим,
что все три формы Т, Р, П положительны. Из C.104) заключаем,
что при вещественных Аь и положительных Т(А), Р(А), П(А)
вещественные значения р отрицательны. Каждому вещественному
отрицательному корню р = -т2 соответствует частное решение
дк=Аке~т2* C.108)
с вещественным Ак. Такие координаты дк с течением времени
убывают, асимптотически приближаясь к нулевым значениям.
Если все корни уравнения C.103) вещественны и отрицательны,
то система в возмущенном движении будет асимптотически
приближаться к положению равновесия (апериодическое движение).
Из первой формулы C.106) при тех же предположениях
относительно Т, Р, П заключаем, что вещественные части комплексных
корней отрицательны. Каждой паре комплексных корней
р = а + ф, р' = а + ф
будет соответствовать решение
дк = еаг (Вк соз р* + Ск зш C0 C.109)
с отрицательным а. Это решение определяет затухающие
колебания. Поскольку Вк и Ск неодинаковы для различных к> изменения
координат дк не однофазны.
Общее решение получится как результат линейного
наложения частных решений C.108) и C.109).
146 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
13. ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ ЧАСТОТ СИСТЕМЫ ПРИ НАЛОЖЕНИИ
СВЯЗЕЙ. Связь, наложенную на систему, совершающую малые
линейные колебания около положения устойчивого равновесия и
не смещающую этого положения, можно выразить линейным
однородным уравнением относительно координат системы. В самом
деле, пусть связь задана уравнением
/(^,02, ... , д„) = 0.
Так как она не должна смещать положения равновесия, в
котором по предположению все <7? = 0, то
/(О, 0, ... , 0) = 0.
Разложение функции /(дх, ... , дп) по степеням координат дь
начнется поэтому с членов первого порядка. Ограничиваясь, в
соответствии с основными допущениями теории малых линейных
колебаний, только этими членами, мы представим уравнение связи
следующим линейным уравнением:
А11д1+А12д2 + ...+А1л9л = 0,
(ЗЛЮ)
гдеА11, А12, ... , А1п — постоянные числа.
Произведем в заданной системе (до наложения на нее связи)
подстановку:
г1 = АиЯл +А\гЧг + - + АА> ]
?2>
Гп = Яп-
C.111)
От такой подстановки собственные частоты системы не
изменятся. Кинетическая и потенциальная энергии в новых координатах
гь, I = 1, 2, ... , я, будут иметь выражения
1
2 /, к = 1 *
П
1 у , . .
а вековое уравнение получит вид
апР2 -
«21Р2 "
-си
' С21
«1'2Р2 -
а22^2 ~
С12 *
~ С22 *
.. а^2-
.. а2>2 -
~^
-*2„
ап\Р2 - С'п\ ап2Р2 - Сп2 ¦¦¦ аппР2 - Сп
О.
C.112)
13. Теоремы об изменении частот системы
147
Предположим теперь, что на систему наложена связь C.110).
В новых координатах г- эта связь имеет уравнение
гх = 0.
Вековое уравнение связанной системы получится из векового
уравнения C.112) вычеркиванием в последнем первой строки и
первого столбца. Согласно теореме о разделении корней векового
уравнения, (п - 1) корней р[, связанной системы располагаются
между корнями рк векового уравнения данной системы:
?! < Р[ < Р2 ^ Р2 < - < Рп -1^Рп-1^ Рп>
Таким образом, справедлива следующая теорема.
Т е о р е м а. Если на систему с п степенями свободы
наложена линейная связь, то частоты полученной системы с п - 1
степенью свободы располагаются между частотами
первоначальной.
Теорема может быть обобщена на случай наложения на
систему нескольких линейных связей.
Теорема. Если на систему с п степенями свободы
наложены к линейных связей
Ав (<?) = Ан1цх КА,2д2 + ... + А8Гдп = 0, з = 1, 2, ... , к, C.113)
то частоты связанной системы
п{A) -- пAг) <- <- п{п)
Р \ Р 2 *•• Рп - к
удовлетворяют н е равен с швам
рк< р<*> <рк + н, й = 1, 2, ... ,п-к, C.114)
где рк — частоты заданной системы с п степенями свободы.
Д о к а з а т е л ь с т в о. Связи C.113) можно всегда
представить уравнениями
Ап91+А12<?2 + ...+А1лдл = 0, ]
В99д9+ ... +В9лG„ = 0,
НкнЯь+ ••-Нкп°п=0 \
и налагать их на заданную систему не сразу все, а
последовательно одну за другой.
148 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
Переход к координатам г-, связанным с #г соотношениями
C.111), не изменит уравнений остальных связей. Положив г. = О,
получим систему с (п - 1) степенью свободы, собственные
частоты /?ф которой удовлетворяют неравенствам
^^ РФ^Ра + 1» * = 1,2, ... , л- 1. C.116)
Эту последнюю мы преобразуем к координатам $., связанным с г.,
/ = 2, 3, ..., я, уравнениями
82 = Б22Г2 + 523Г3 + - + Я2лГл,
83 = Г3>
Полагая $2 = 0, получим систему с (д - 2) степенями свободы,
частоты которой р(р будут удовлетворять неравенствам
рф<р<!><р<1>+1, А = 1,2,...,/»-2
или, на основании неравенств C.116),
рк<р^<рк + 2, А=1,2, ... ,п-2.
Продолжая аналогичные рассуждения и вводя последовательно
связи C.115), мы придем к неравенствам C.114), которые будут
иметь место для частот системы после наложения на нее всех к
связей C.115).
14. ФУНКЦИЯ РЭЛЕЯ. Когда система совершает свободные
колебания в отсутствие сопротивлений, полная механическая энергия
ее остается неизменной. В свободных колебаниях система
предоставлена самой себе и начальный запас ее энергии не может
увеличиться. Но он и не уменьшается, так как сопротивления, на
преодоление которых расходовалась бы энергия, по
предположению, отсутствуют. Мы можем поэтому, пользуясь прежними
обозначениями, написать
Т + П = к = сопз*.
Если система совершает одно из главных колебаний, то все
точки ее одновременно достигают положений наибольшего
отклонения (в этот момент все обобщенные скорости равны нулю) и
14. Функция Рэлея
149
одновременно проходят через положение равновесия (в этот
момент равны нулю все обобщенные координаты). В положении
наибольшего отклонения кинетическая энергия обращается в нуль,
и, следовательно, потенциальная достигает своего
максимального значения:
Птах = А-
В положении равновесия, наоборот, обращается в нуль
потенциальная энергия и достигает своего максимума кинетическая
энергия. Этот максимум равен, очевидно, той же постоянной к:
Т = к
1 тах п'
Таким образом, когда система совершает одно из главных
колебаний, справедливо
Гтах = Птах. C.117)
Это равенство выражает принцип сохранения энергии для
главных колебаний системы.
Если в выражения кинетической и потенциальной энергии
т = \ . ? а^ЧЯ» п = \ . ? лсмЯАк
6 I, /г = 1 & I, к =* 1
подставить, предполагая, что система совершает 8-е главное
колебание, выражения обобщенных координат и скоростей
Чъ = ивг 81п (Рз* + *8У> Ь = из1Р8 СОЗ (р8г + 88),
1=1,2, ... п,
то
1 п
Т=-р28 соз2 (р81 + ев) . ,Е а1ки81и8к,
1 п
П = - 8Ш2 (р8г + ев) I с1ки81иак.
& I, к = 1
Отсюда для рассматриваемого главного колебания максимальные
значения кинетической и потенциальной энергии составляют
^шах = \р1 . 2_ аьки81и8к, Птах = | _ 2= **»*»*- C.118)
Подставив эти выражения в C.117), найдем
Р% = . ? леи,и*и.к /. .2 ««"./».*• (З.И9)
I, й = 1 I, Л == 1
150 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
Формула C.119) дает точное значение 5-й собственной частоты
только при подстановке в правую часть соответствующей точной
8-й формы колебаний. Если же в правую часть этой формулы
подставить вместо и81 произвольную совокупность п чисел
Х19Х2> ... Дд, C.120)
то ее значение не будет равно ни одному из квадратов
собственных частот данной системы. По ряду соображений, которые
далее подробно разъясняются, представляется целесообразным
рассматривать соотношение C.119) как определение некоторой
функции п независимых переменных Хь (или отношений
переменных Х1 к одной из них):
Е (Хг, Х2, ... , Хп) = 2 с1кХьХк/ 2 а1кХьХк. C.121)
I, к = 1 I, к = 1
Эту функцию будем в дальнейшем называть функцией Рэлея.
Запишем функцию Рэлея, предполагая, что квадратичная
форма, стоящая в знаменателе, в координатах Х1 имеет вид
суммы квадратов:
Е (Х19 Х2, ... Лп) = 2 6;Лла/ ^ Хг C-122)
/*, к = 1 / = 1
Подставим вместо Х1 их разложения по собственным формам
данной системы:
п
Х1 = 2 а8м8/, 1=1,2, ... , /г. C.123)
_ 8 = 1'
Тогда
а? /г п п
. ? , 6***А = 2А (&;А + ••• + ьыЮ = .2 ^ 2, аЯи» =
I, к =- 1 I = 1 г = 1 8 = 1
/г я я /г
8 = 1 1 = 1 / = 1 8 = 1
2 Х|= 2 а?,
/ = 1 ' 8-1 *
и мы придем к следующему выражению:
%»,.~.^-В^,"!!!Р;. C.124)
Это — выражение функции Рэлея в нормальных координатах,
каковыми, таким образом, оказываются коэффициенты а8
разложений Х- по собственным формам.
15. Теоремы об экстремальных свойствах собственных частот 151
15. ТЕОРЕМЫ ОБ ЭКСТРЕМАЛЬНЫХ СВОЙСТВАХ СОБСТВЕННЫХ
ЧАСТОТ. Из формулы C.124) можно сделать следующие заключения.
Если форма C.120) точно совпадает с первой собственной
формой данной системы, то значение Е, определяемое формулой
C.124) или C.122), точно равно квадрату первой (основной)
частоты. В этом случае
ал - 1, а2=... -ап = Ъ,
и из формулы C.124) мы имеем
К==р\.
Кели форма C.120) не совпадает с первой формой, то значение Е
будет во всяком случае не меньше квадрата первой частоты р\ и
не больше квадрата наивысшей частоты р2п. Это следует из того,
что значение дроби, стоящей справа в C.124), всегда лежит
между наименьшей и наибольшей из положительных дробей
и, следовательно,
Таким образом, квадрат первой частоты является минимумом
функции Рэлея при любом выборе формы C.120).
-¦'¦ Если форма C.120) ортогональна первой собственной форме
данной системы, т. е, если
II
X Я^и^О, C.125)
. 1
то а1 = 0 и
р1< В<р2п,
причем Е = р§> когДа форма >./ точно совпадает со второй
собственной формой; здесь I = 1, 2, ... , п.
Таким образом, квадрат второй собственной частоты является
относительным минимумом функции Е при условии C.125).
Аналогичным образом можно доказать, что квадрат третьей
собственной частоты р\ является относительным минимумом
функции Рэлея при наличии двух условий ортогональности
формы C.120)
п п
X \:ЫЛ; = 0, X \;и91 = 0
152 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
с первой и второй собственными формами. Квадрат четвертой
частоты будет, очевидно, минимумом функции В при условиях
п п п
I = 1 г = 1 г = 1
и т. д. Таким образом, приходим к теореме о минимальных свой
ствах собственных частот.
Теорема. Квадрат Н-й собственной частоты р\ может
быть получен как относительный минимум функции Рэлея
р\ = ппп В,
если привлекаемые для сравнения формы колебаний подчинены
условиям:
п п п
ЛХ1ии = 0, X А,ги2г = 0, ... , ЪХ1ин_11 = 0. C.126)
/ = 1 / = 1 г' = 1 '
Относительный минимум достигается только для формы,
точно совпадающей с Н-й собственной формой.
Из изложенного следует, что собственные частоты системы
могут быть найдены как решение минимум-задачи. Те же
частоты, начиная со второй, могут быть получены и как решение
некоторой минимум-максимум задачи на основании теоремы Куранта
[66] о минимаксимальных свойствах собственных частот.
Предположим, что на заданную систему, собственные частоты
которой мы обозначим через р1У I = 1, 2, ... , п, наложены (Н - 1)
линейных связей
Аз1Хг +А82Х2 + ... +АтХп = О, 8 - 1, 2, ... , А - 1. C.127)
Заданная система, после наложения на нее связей C.127),
обратится в систему с (п - Н + 1) степенями свободы. Квадрат
наименьшей частоты этой системы [р[н ~ ХЦ2 будет минимумом
функции Рэлея для системы, полученной после наложения связей, что
мы запишем следующим образом:
[р(*-1)]2 = ттЛ(А./;А1/,Л2(,...,АА_1>().
Изменяя произвольно А8[, мы будем получать различные
значения для ппп В(Х^ Аи, ... , Ан _ г /). Среди этих минимумов будет и
р\. Его мы получим, когда
А8Ь = из1> * = !> 2' - > п'> 8 = 1, 2, ... , А - 1,
16. Теоремы о влиянии на частоты изменений масс
153
т. е. когда уравнения связей C.127) совпадут с условиями
ортогональности формы А./5 г = 1, 2, ... , пу с (к - 1) первыми
собственными формами заданной системы.
Этот минимум будет наибольшим из всех минимумов
функции Е при условиях C.127), так как на основании предыдущей
теоремы при любом выборе А81
Р1<Р^_1)<РА.
Таким образом, можно сформулировать теорему.
Теорема. Квадрат частоты р\ данной системы совпадает
с наибольшим из минимальных значений, какие принимает
функция Рэлея, когда формы А,/? I = 1, 2, ... , /г, удовлетворяют
(Н - 1) линейным связям:
Л,Л + А^2 + — + АА = 0, з=1,2, ... А - 1,
где А8Ь могут принимать какие угодно значения.
В дальнейшем содержание этой теоремы мы будем записывать
сокращенно следующим равенством:
р1 = та^[ттЕ(Х1;Аи, ... ,АА_М)] . C.128)
16. ТЕОРЕМЫ О ВЛИЯНИИ НА ЧАСТОТЫ ИЗМЕНЕНИЙ МАСС И ЖЕСТ-
КОСТЕЙ СИСТЕМЫ1*. Если в результате каких-либо изменений
кинетической и потенциальной энергии системы функция Рэлея
увеличивается, то собственные частоты системы могут только
возрастать. В самом деле, обозначим через Е функцию Рэлея
исходной системы, через Е — измененной системы, и пусть Е < Е.
Но тогда
ПИП Е < ПИП Е ,
и так как
р\ = тт Е, р\ = тт Е,
то
р\<рЬ
Чтобы найти, как изменяются высшие частоты, наложим на
системы — исходную и измененную — (Н - 1) линейных связей вида
1 > См. книгу Р. Ф. Гантмахера и М. Г. Крейна [14].
154 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
C.127). По теореме о минимаксимальных свойствах собственны
частот
р\ = тах [тт Е (^; Ан, ... , Ан _ х ,)],
р \ = тах [тт К (А,,.; Аи, ... , Ал х /)].
Так как
тт Л (^; Ах/, ... , Ан . у ;.) < 1I111 Я (л.,.; Аи, ... , Ал _ ь,),
то
тах [тт # (Х(; Аи, ... , А/г _ 1? ,)] < тах [тт К (Х-; Ап, ... , А/г... 1?,.)]
и, следовательно,
р1^р\. C.129»
Изменение жесткости системы связано с изменением
потенциальной энергии. Если жесткость системы увеличивается без
изменения кинетической энергии, то частоты системы
увеличиваются или по крайней мере не уменьшаются. Изменение массы
системы связано с изменением ее кинетической энергии. Если
масса системы увеличивается без изменения потенциальной
энергии, то частоты системы убывают или по крайней мере не
возрастают.
Более определенные утверждения о действии на частоты
системы изменений жесткости и массы содержатся в следующих
теоремах, которые мы приводим без доказательства.
Теорема 1. Если функция Рэлея растет вследствие при
бавления к максимальной потенциальной энергии г квадратов
вида
х1 (Ю = (ЯкгК + — + <1кпЮ2> к = !> 2' - > г>
без изменения кинетической энергии, то частоты данной сие
темы рн и частоты измененной р1г связаны неравенствами
рн < р,г, 1г = 1, 2, ... , п;
C.130)
Рн <Ра + г» Л = 1, 2, ... , п- г.
Теорема 2. Если функция Рэлея убывает вследствие при
бавления к максимальной кинетической энергии г квадратов
вида
Ч &г) = (ЧыК + - + ЯМ2* к = *> 2> - > г>
16. Теоремы о влиянии на частоты изменений масс 155
то частоты рк исходной системы и частоты рн измененной
удовлетворяют неравенствам
рн<рн, Н = 1, 2, ... , п;
C.131)
Рн-г^ Рн> Ъ = г + 1 ... , п.
Теоремы Рэлея об эффекте наложения связи и изменений
жесткости и масс системы имеют многочисленные приложения в
практических расчетах. Они позволяют во многих случаях с
достаточной уверенностью следить за направлением изменений частот
системы при различных конструктивных изменениях, связанных с
изменениями масс и жесткостеи отдельных ее частей. На этих
теоремах основаны методы варьирования масс и жесткостеи, с
помощью которых в проектируемой машине обеспечивается
достаточная удаленность рабочего режима от критических или
резонансных зон. Этими теоремами в некоторых случаях молено
пользоваться для разделения корней векового уравнения.
Пример 7. Рассмотрим вековое уравнение крутильных колебаний
приведенного вала однородной машины с двумя присоединенными на левом конце
массами при следующих данных относительно моментов инерции 11 [кГ • м • с2]
и погонных жесткостеи с, [кГ • м]г):
/1 = 684-102,
/2 = 2196-102,
/3 = /4=...=/10 = / =
= 195,5 -102,
Наложив на систему связь
20,68 -106,
2970 -106,
2810-106.
0,
C.132)
будем иметь систему с восемью степенями свободы, вековое уравнение
которой получим из векового уравнения первоначальной системы, если в нем
вычеркнем вторую строку и второй столбец. Тогда левая часть векового
уравнения распадется на произведение двух множителей:
2с
I
с
1
I
2с
I
0 ... 0
... 0
2с
1) Числовые данные примера взяты из статьи П. Функа [ 127].
156 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
Таким образом, корни первоначального уравнения будут разделяться
корнями двух уравнений:
1) уравнения первой степени
с решением х = 396,51;
2) уравнения седьмой степени, соответствующего однородной части, где
с = 2810 • 106 и / = 195,5 • 102. Все корни последнего уравнения получаются
из одной формулы (см. с. 128)
Х.-41ВШ2Д, «-1,2,....7.
В частности, наименьший корень равен 21847,57. Таким образом, квадрат
второй частоты лежит между 396,51 и 21847,57.
Наложением связей типа C.132) можно разделять корни вековых
уравнений не только однородных машин. Вообще можно было бы доказать, что
корни векового уравнения крутильных колебаний
разделяются корнями уравнений
^ = 0, XX»-*-!> = 0,
где Иь — главный минор определителя Ип9 получаемый вычеркиванием в Вп
всех последних строк и столбцов, начиная с {I + 1)-х; Х>(/г - * - 1) — главный
минор Х>д, получаемый вычеркиванием в Х>ге всех первых строк и столбцов до
(/ + 1)-х включительно [101].
17. УРАВНЕНИЯ ВЫНУЖДЕННЫХ КОЛЕБАНИЙ. Обозначим через
B19 ф2> — > ®п обобщенные возмущающие силы, соответствующие
координатам системы д1У д2, ••• > Я.п* Пусть в этих координатах
уравнения вынужденных колебаний системы могут быть
записаны в прямой форме:
'4Ь = - 2 Ьь1дк - Я19 1 = 1, 2, ... , д. (злзз)
к = 1
Такую форму имеют, например, уравнения вынужденных
крутильных колебаний приведенного вала от возмущающих крутящих
моментов, приложенных к участкам вала. Предположим сначала, что
силы Яь — гармонические, одной и той же частоты и фазы:
ф; = Р. 8Ш (ш* + а), I = 1, 2, ... , д.
В отсутствие сопротивлений частное решение системы C.133),
определяющее вынужденные колебания, имеет вид
д1 = Хг 8И1 (со* + а), I = 1, 2, ... , /г. C.134)
17. Уравнения вынужденных колебаний
157
Здесь искомыми являются амплитуды Хг Подставив выражения
C.134) в уравнения C.133), получим систему алгебраических
уравнений
п
ш2А,. = - X Ъ1ккк -Р., 1 = 1, 2, ... , п. C.135)
/г = 1
Самым простым способом нахождения амплитуд Хг является
решение уравнений C.135) по правилам элементарной алгебры. Чтобы,
однако, иметь возможность сделать некоторые общие заключения о
формах вынужденных колебаний, мы воспользуемся для решения
этих уравнений предложенным в 1905 г. А. Н. Крыловым [107]
методом разложения искомых амплитуд по собственным формам
соответствующей однородной задачи. Обозначим через и81, из2, ... , и8П
ортонормированные амплитуды 8-й собственной формы
рассматриваемой системы, удовлетворяющие однородным уравнениям
(уравнениям свободных колебаний системы)
рХ/ = 2 Ь1ки8к, * = 1, 2, ... , п. C.136)
Положив
Хь= X а8и81, 1 = 1,2, ... , д, C.137)
8=1
подберем коэффициенты а8 этого разложения так, чтобы были
выполнены уравнения C.135). Подставим выражения C.137) в
уравнения C.135). Приняв во внимание уравнения C.136), получим
п п
ю2 2 а,ия. = Ъа8р*ив1 - Р,, 1 = 1,2, ... , п,
8 = 1 8 = 1
откуда следует
п
I а3ич1 (р28 - со2) = Рь, г = 1, 2, ... , п. C.138)
8 = 1'
Заменим теперь в уравнениях C.138) возмущающие силы Рь
их разложениями по собственным формам и8[
п
Рь= X В8и81, 1 = 1,2, ... , п, C.139)
8 = 1
где
п
В8 = X Рьи81, 8 = 1,2, ... , п.
I = 1
Тогда
п п
^«А( (?5 " ю2) = 2А"8«> » = 1, 2, ... , п,
8=1 8=1
158 Тпава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
откуда получим
а8 = В8/(р*-(о2), 8 = 1,2, ... , п.
Таким образом, искомые амплитуды равны
" Вм„, . л п
Х1= X 9 9» 1 = 1,2, ...,П, C.140)
а частное решение системы уравнений C.133) имеет вид
п Вм,
я.\= У! -^-^ 8^п ((°* + а)» * ^ 1» ^> •••> я-
8 = 1Рз - <**
Следует отметить аналогию между выражением C.140) и
формулой B.57).
I Коэффициенты разложений по собственным формам амплитуд
вынужденных колебаний получаются из соответствующих
коэффициентов разложений возмущающих сил умножением
последних на множители -—-—-.
р- - о2
Предположим теперь, что уравнения вынужденных
колебаний системы в обобщенных координатах </3, д2, ... , дп имеют вид
п
д{ = - I й/Л#А + ф, г' = 1, 2, ... , п. A.141)
/г = 1
К такой форме могут быть приведены уравнения
вынужденных поперечных колебаний стержня или балки от возмущающих
сил, приложенных к сосредоточенным на балке массам. В самом
деле, пусть на массы пгь действуют силы Р/? г = 1, 2, ... , п.
Уравнения поперечных колебаний такой балки, в соответствии с C.42),
запишутся в виде
п
уь = X аш(-ткук + Рк), /=1,2, ... , я,
к = 1
где а//г — статические коэффициенты влияния, г// — поперечные
смещения масс т.. Полагая в этих уравнениях
п
получим
п
У1 = - 2 а1кткук + ©., /= 1, 2, ... , п. C.142)
/г = 1
17. Уравнения вынужденных колебаний
159
После подстановки
Ъ = У г №ь
приходим к симметризованной системе C.141)
п
?« = ~ 2Л*#* + в<' * = 1. 2, ... ,п,
где Нш = а1к ^тьтк, <Э/ - Яь/^т19 Ь,к=1, 2, ... , п.
Размерность величин (^ в уравнениях C.142) совпадает с
размерностью координат у1 — это перемещения сосредоточенных
масс т1 от одновременного действия на балку всех сил Р.. Можно
сказать, что вынужденные колебания системы, определяемые
уравнениями C.141), возникают в результате сообщаемых
массам т1 возмущающих перемещений.
Полагая, что возмущающие перемещения ^/ происходят по
одному и тому же гармоническому закону
(?; = Е1 81П (со* + а), I = 1, 2, ... , п,
будем искать частное решение уравнений C.141) в форме
дг = Хь 81П (со* + а), I = 1, 2, ... , п.
Подставив эти выражения в уравнения C.141), придем к системе
алгебраических уравнений для Х1
п
>^ = со2 Ък^ь + Кр 1=1,2, ... , п. C.143)
к = 1
Полагая далее
п п
Хь = Ъ а8и8[, Е1 = I А8и8(9 /=1,2, ... , /I, C.144)
8 = 1' 8 = 1"
способом, аналогичным изложенному для прямых уравнений,
получим разложения амплитуд вынужденных колебаний по
собственным формам
Х1 = Е 7 Л^/ 2 > /=1'2, ... , П, C.145)
^ 1 - со2/Р82
где коэффициенты А8 имеют значения
п
А8 = X -Н^81-» 5 = 1,2, ... , п. C.146)
/ = 1
160 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
Из формул C.140) и C.145) можно сделать следующие
заключения.
¦ Когда частота со возмущающей силы равна одной из
собственных частот системы, например р8, соответствующий член
разложения C.140) или C.145) с течением времени растет
неограниченно. Происходит явление резонанса. Частота возмущающей
силы называется в этом случае критической частотой. В
системе с п степенями свободы при действии на нее гармонических сил
одной частоты и фазы возможны п резонансных состояний, так
как частота возмущающей силы может оказаться равной каждой
из п собственных частот. Определение возможных для системы
резонансных состояний, так называемая проверка системы на
резонанс, составляет одну из важнейших задач технических
расчетов на колебания.
¦ Когда частота со возмущающей силы близка к одной из
собственных частот системы, соответствующий член в разложениях
C.140) и C.145) значительно превышает все остальные и форма
вынужденных колебаний почти совпадает с соответствующей
собственной формой. Вынужденные колебания системы в этом
случае почти точно воспроизводят форму одного из собственных
главных колебаний системы.
18. ГАРМОНИЧЕСКИЕ КОЭФФИЦИЕНТЫ ВЛИЯНИЯ. Значительные
упрощения в решение задач на вынужденные колебания от
гармонических возмущающих сил вносит метод гармонических
коэффициентов влияния. Применительно к уравнениям в обратной
форме и, в частности, к поперечным колебаниям балки с
сосредоточенными массами гармонические коэффициенты влияния
можно определить следующим образом.
I Гармоническим коэффициентом влияния Аш частоты со
называется амплитуда массы I в установившихся вынужденных
колебаниях от единичного гармонического возмущающего пере-
I мещения той же частоты со, сообщаемого массе к.
Изложим определение гармонических коэффициентов для
уравнений в прямой форме и, в частности, для крутильных колебаний
приводного вала.
18. Гармонические коэффициенты влияния
161
Гармоническим коэффициентом влияния Вш частоты со
называется амплитудный угол кручения участка I от единичного
гармонического крутящего момента той же частоты со,
приложенного на участке к1\
Из формул C.146), полагая в них Вк= 1,11} = О, I* к, находим:
В аналогичном случае и
в8 = изк-
Для таких значений возмущающего усилия из формул C.145) и
C.140) находим
ия!ияк Л " иа!ия
йи8к А _ Хр и81и8к
В[к ^^^' Аш ^ I
№-<»* ш ^,1-^/р,
2/п2
C.147)
Формулы C.147) дают разложения гармонических
коэффициентов влияния по собственным формам соответствующей
однородной задачи.
Из формул C.147) следует, что
А/г = АЫу Вш = Вк1,
т. е. гармонические коэффициенты удовлетворяют условию
симметрии. Симметрия гармонических коэффициентов выражает
обобщенный принцип взаимности Рэлея [77].
Предположим, что ко всем массам (или дискам) приложены
гармонические возмущающие перемещения (или моменты) с
одинаковыми фазами
Яь = Р. вш (со^ + а), 1=1,2, ... , лг.
Согласно принципу линейного наложения, вынужденная
амплитуда 1-й массы от одновременного действия всех ()к будет равна
Аь = АаРг +А12Р2 + ... + А1пРп, /=1,2, ... , п C.148)
и соответственно
В1 = ВаР1 + В12Р2 + ... + В1пРа, * = 1, 2, ... , п.
1) В симметризованных уравнениях Вш — это угол кручения участка I,
умноженный на ^/с,.
6 - 10456 Бабаков
162 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
Если требуется вычислить только одну амплитуду А-, то для
получения гармонических коэффициентов, входящих в выражение
C.148), достаточно решить одну систему уравнений поперечных
колебаний, приложив единичное перемещение или момент к 1-й
массе, так как
А1к = АЫ"
Если фазы перемещений или моментов С?; неодинаковы, то
амплитуда 1-й массы от одновременного действия на все массы
возмущающих перемещений или моментов будет равна
геометрической сумме
Аг =АПР1 + А12Р2 + - + АтРп' C-149)
При построении этой суммы векторы Рк, умноженные на
соответствующие гармонические коэффициенты, откладываются в
векторном многоугольнике под углами (относительно, например,
оси Ох), равными начальным фазам (дк.
В самом деле, приложив к к-й массе обобщенную силу 1 • еш,
I = л/-1, мы получим для амплитуды 1-й массы в установившихся
вынужденных колебаниях гармонический коэффициент А1к.
Если теперь ко всем массам приложены возмущающие силы
Ркеш, /г=1,2,... , я,
то амплитуда 1-й массы будет, как в уже рассмотренном случае,
А1 = А11Р1 + А12Р2 + ••• + А1пРп*
Пусть теперь ко всем массам будут приложены обобщенные силы
Р^™**^ =Рке1у*ё**.
По предыдущему
Аг =АаРге^ +А12Р2е1^ + ... + А1пРпе1^
или, что то же,
А1 =А11Р1 ~^А12Р2 + ••• + А1пРп'
Абсолютную величину (модуль) вектора А1 можно найти по
его проекциям на две оси подходящим образом выбранной
прямоугольной системы координат. Пусть, например, на к масс
системы действуют одинаковые по величине, но смещенные по фазе
гармонические силы (или моменты)
Як = Р зш (со* + рА), А = 1, 2, ... , к.
18. Гармонические коэффициенты влияния
163
Такой случай встречается при расчете вынужденных колебаний
коленчатого вала, к коленам которого приложены одинаковые по
величине, но смещенные по фазе касательные усилия от
давления газов в цилиндрах. В этом случае
А= Н 2>/*С08рА
ХА*81ПРЛ -Р.
Ч = 1
C.150)
Начальная фаза ук колебаний к-й массы найдется из формулы
к
I
I = 1
п п
*8УЛ= 2 Аызт ^ I 2 Аысов р,.
C.151)
Пример 8. Найти амплитуды вынужденных крутильных колебаний
приведенного вала с пятью дисками от единичного гармонического момента,
приложенного на первом участке. Числовые данные те же, что и в примере 2
(с. 117). Частота возмущающего момента со = 100 1/с.
Решение задачи сводится к обращению матрицы коэффициентов при Хк
в неоднородной системе уравнений вынужденных колебаний
со%= 10
987^- 2306^2 * *
со% = -2306 ?4 + 28589?12 - 2042П3 *
со2;Ц * 2042П2 + 25350^ - Ю643^4
сА4 * * _ Ю643^3 + 32474^4
щы (после подстановки со2 = 104)
987 -2306 * *
-2306 18589 -20421 *
* -20421 15350 -10643
* * -10643 22474
+1
C.152)
Выполнив обращение этой матрицы, получим
81,27 -8,58 -16,91 -8,04
-8,58 -3,67 -7,24 -3,45
-16,91 -7,24 -4,66 -2,22
-8,04 -3,45 -2,22 3,39
10-
C.153)
Элементы первого столбца и будут искомыми амплитудами. Остальные
столбцы будут амплитудами вынужденных колебаний от единичных
гармонических моментов, приложенных на других участках вала. Одновременно
эти амплитуды являются и гармоническими коэффициентами частоты со.
Пример 9. Найти амплитуды вынужденных поперечных колебаний
балки с четырьмя сосредоточенными грузами (рис. 29) от единичного
гармонического смещения частоты со = 200 1/с, приложенного к первой слева массе.
Числовые данные взять из примера 3 (с. 118).
164 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
Вычисление амплитуд по предыдущему сводится к решению системы не
однородных уравнений
2,5^ = 4,53^ + 5,59?.2 + 5,05А.3 + 3,99Х4 + 2,5,1
2,5^2 = 5,59^ + 8,ЗЗА,2 + 7,99^3 + 6,48Х4,
2,5А,3 = 5,05^ + 7,99?12 + 8,33^3 + 7,09^4
2,5^4 = 3,99^ + 6,48А.2 + 7,09Я.3 + 6,6П4,
т. е. к обращению матрицы
2,03 5,59 5,05 3,99
5,59 5,83 7,99 6,48
5,05 7,99 5,83 7,09
3,99 6,48 7,09 4,11
C.154)
и последующему умножению всех ее элементов на 2,5.
Матрица амплитуд вынужденных колебаний или гармонических
коэффициентов от единичных гармонических смещений частоты 200 1/с будет
иметь вид
1,92
0,14
0,62
1,02
-0,14
-0,91
0,43
0,72
0,62
0,43
-0,82
-0,03
1,02
0,72
-0,03
-1,56
Пример 10. ДИНАМИЧЕСКИЙ ПОГЛОТИТЕЛЬ КОЛЕБАНИЙ1 >.
Принципиальную схему динамического поглотителя колебаний можно представить в виде
двух грузов Рх и Р2, подвешенных последовательно с помощью пружин АВ и
ВС к неподвижной точке А (рис. 37). Жесткости пружин обозначим через сг
и с2. К грузу Рх приложена вертикальная гармоническая возмущающая сила
ф 81П со*. Описанная схема является, таким образом, последовательным
соединением двух линейных осцилляторов — первого (основного) с грузом Рх и
жесткостью сх и второго — с грузом Р2 и жесткостью с2. Пренебрегая
массами пружин, получим систему с двумя степенями свободы, положение
которой при колебаниях будет определяться отклонениями хх и х2 грузов от
положения равновесия. Уравнения вынужденных колебаний системы будут
иметь вид:
— ХЛ + С
и 1
р
—- х2 + с2 (х2 — X}) = 0.
С2 (Х2 - Хг) = Я 81П СО*,
C.155)
В установившихся вынужденных колебаниях
Хг = Аг 81П СО*, Х2 = А2 8ГП СО*.
х> См. С. П. Тимошенко [85].
18. Гармонические коэффициенты влияния
165
Амплитуды Аг и А2 найдутся из уравнений
(сг + с2~ Р1ы2/§)А1 - с2А2 = С,
-с2А1 + (с2 - Р2оJ/§)А2 - О,
Д =
с2 --Р1ю2/^
с2 - Р2т2/§
*0,
т. е. если частота ю возмущающей силы не
совпадает ни с одной из собственных частот
системы. В этом случае
л ^Я(с - ^ со21 А = Я с
C.156)
Из первого уравнения C.156) видно, что
амплитуду Ах груза Рх можно сделать равной ну- Рис. 37
лю, т. е. устранить его колебания, если
выбрать вес Р2 второго груза и жесткость с2 таким образом, чтобы
с2-Р2со2/# = 0,
или
@= ^ё7Т2 =р2,
C.157)
C.158)
где р2 — собственная частота добавочного осциллятора.
Аналогичное явление имеет место в крутильной системе, состоящей из
двух маховых масс, когда к одной из них присоединяется добавочная
система, состоящая из вала с крутильной жесткостью с0 и маховика с моментом
инерции /0 (рис. 38). Колебания массы /2 (например, приведенной массы
генератора) будут устранены, если жесткость с0 и момент инерции /0 выбрать
так, чтобы
с0//0 = со2,
т. е. чтобы собственная частота присоединенной системы была равна частоте
возмущающего момента, приложенного к массе 12.
Полное устранение колебаний
основного осциллятора в силу
соотношения C.158) возможно только в том 1\ /9
случае, когда частота со возмущающей
силы будет равна собственной частоте
колебаний добавочного осциллятора.
Если это условие не выполнено, то
присоединение второго осциллятора не
устранит колебаний первого. В
последнем случае будут возможны два резо- Рис. 38
166 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
нансных состояния, когда со совпадает с одной из двух собственных частот
системы, равных корням уравнения
I с1 + с2 - Рха2/§ -с2 I
| ~с2 с2-Р2со2/#|
Таким образом, описанный поглотитель может быть «настроен» только
на одну частоту, и применение его ограничено машинами, работающими с
постоянной скоростью.
19. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ СИСТЕМ С ВНУТРЕННИМ НЕУПРУ
ГИМ СОПРОТИВЛЕНИЕМ. Среди сопротивлений, возникающих при
колебаниях упругих систем, особое значение имеет внутреннее
неупругое сопротивление, действие которого выражается в гис-
терезисных потерях энергии деформации. Многочисленными
теоретическими и экспериментальными исследованиями (в
частности, выполненными Н. Н. Давиденковым, И. Л. Корчинским,
Д. Ю. Пановым, Е. С. Сорокиным) установлены следующие
основные свойства внутреннего неупругого сопротивления.
¦ В пределах обычных в машиностроении продолжительностей
циклов деформации (от нескольких минут до тысячных долей
секунды) внутреннее неупругое сопротивление не зависит от
скорости деформации.
¦ Внутреннее неупругое сопротивление зависит от величины
деформации, причем зависимость между внешней нагрузкой
(силой, моментом) и общей деформацией (прогибом, углом поворота)
нелинейна и различна при нагружении и разгрузке. При
циклических нагружении и разгрузке эта зависимость для полного
цикла изменения нагрузки графически представляется замкнутой
кривой, которая носит название петли гистерезиса (рис. 39).
Большая часть формул,
предложенных различными авторами для
выражения зависимости между внешним
усилием и деформацией, преследует цель
отобразить по возможности более точно
опытную форму петли гистерезиса.
Так, Е. С. Сорокин [44], основываясь
на допущении, что петля гистерезиса
является эллипсом и что в установившихся
вынужденных колебаниях от
гармонической возмущающей нагрузки деформа-
Рис. 39
19. Системы с внутренним неупругим сопротивлением
167
ции упругой системы происходят по гармоническому закону,
приходит к заключению, что внутреннее неупругое сопротивление К
пропорционально упругой восстанавливающей силе, но сдвинуто
относительно последней по фазе на тс/2. Математическим
выражением такого сопротивления является формула
Я = *^-8, C.159)
АТС
где I = л/-1 — мнимая единица, умножение на которую
соответствует повороту вектора 8 на угол л/2, осуществляющему сдвиг
фазы Е на этот угол; 8 — упругая восстанавливающая сила (или
момент); ц/ — коэффициент поглощения, равный отношению
энергии ДТ^, поглощенной материалом за один цикл
деформации, к полной механической энергии Ж системы:
У=-^Г. C.160)
Приближенное значение коэффициента поглощения, которым
обычно пользуются в практических расчетах, дается формулой
у = 25, C.161)
где 5 — логарифмический декремент колебания. В соответствии с
формулами C.159) и C.161) суммарная внутренняя сила
сопротивления 8*, включающая упругую восстанавливающую силу
(или момент) и неупругое сопротивление, может быть
представлена следующими выражениями:
8* = (\ + ш. )з * (г + - )з. C.162)
Существенным свойством этих выражений является их
линейность относительно 8, что дает возможность вести расчеты
вынужденных колебаний систем с внутренним неупругим
сопротивлением, оставаясь в пределах линейной теории.
Силы 8 для различных упругих систем и различных
напряженных состояний определяются методами теории упругости.
Если, например, на упругую систему действует сосредоточенная
нагрузка (сила или момент), то
8 = су,
где у — упругое перемещение в месте приложения нагрузки, ас —
соответствующий коэффициент жесткости. Если на упругую систе-
168 Глава III. СИСТЕМЫ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
му действует несколько сосредоточенных нагрузок С$х, ф2, ... , С2/2,
то восстанавливающая сила, соответствующая нагрузке <^к, равна
8А = Ск1У1 + Ск2У2 + — + СкпУп> (ЗЛ63)
где у19 ... , уп — перемещения в точках приложения внешних сил;
ск1 — коэффициенты жесткости.
Переходим к составлению уравнений вынужденных
колебаний с учетом внутреннего неупругого сопротивления.
Предположим, что масса системы приведена к п сосредоточенным массам и
пусть на эти массы действуют гармонические возмущающие
силы (или моменты) ~Якеш; здесь к = 1, 2, ... , п; Ь = ^~Л .
Уравнения малых колебаний системы без учета внутреннего
сопротивления имели бы в этом случае вид (прямая форма):
п
ук = -^1СЫУ1 ~ Якеш, к = 1,2, ... , п.
С учетом внутреннего сопротивления эти уравнения запишутся
следующим образом:
У к = Ч1 + ^ ) Ас*^ ~ ®ьеШ> к=1>2> ••• > п- (злб4>
Частное решение этих уравнений, определяющее вынужденные
колебания, будем искать, согласно сделанным допущениям, в виде
Ук=АкеШ> Ь=1,2,...9п. C.165)
Подставив эти выражения в C.164), получим
Ак(В2 = A + ^)/?1СкЛ + в*. * = 1,2,...,/»
ИЛИ
п
рАк= Ес^ + Р^, к = 1, 2, ... , /г, C.166)
где
р-(о2A + 18/кГ\ Рк = ЯкA + 1Ь/к)-К
Система уравнений C.166) не отличается по форме от уравнений
вынужденных колебаний без сопротивлений. Результаты
исследований последних могут быть поэтому без существенных
изменений перенесены и на рассматриваемый случай вынужденных
колебаний с сопротивлением. В частности, с помощью формул
19. Системы с внутренним неупругим сопротивлением
169
C.140) можно сразу написать решение уравнений C.166), т. е.
выражения вынужденных амплитуд Ак в виде разложений по
собственным формам
Ак= A + ^Т1 2 ^^ , * = 1, 2, ... , я, C.167)
где Б8 — коэффициенты разложений по собственным формам
сил Як:
п
Як= X В8гг8/г, /г = 1, 2, ... , п.
8 = 1
Подставив в C.167) значение/?, найдем
А = у ^8^8*:
* ДР2A + /5/71) -0J*
Полученное выражение для Ак можно представить еще и в форме
где
Ак= I Ваиаке1*'9
8 =¦ 1
*,= ^=1=_, .8ф,- «
7(р62 - со2) + 82р84/тс2 ' 8 ^(Р,2 - ^2) '
8 = 1, 2, ... , п.
Искомое частное решение будет в этом случае иметь вид
п
8 = 1
Взяв в качестве решения вещественную часть этого выражения,
получим
п
ук= X Еик сов (ю* + ф ). C.168)
з = 1
При резонансе с первой собственной частотой (со =рх)
т __я р _Б1*
Подставив эти значения в C.168) и выделив первый член, получим
Ук= тЬ * 81п^ + ?, Д.и«* С°8 0>1* + Ф,)-
170
Глава IV. ПРИБЛИЖЕННЫЕ МЕТОДЫ
При малом 5 и достаточно большом промежутке между первой и
второй собственными частотами можно иногда в полученном вы
ражении отбросить справа все члены, кроме первого, и, таким
образом, посчитать, что резонансные амплитуды пропорциональны
амплитудам первой собственной формы.
Глава IV
Приближенные методы определения
собственных частот систем с конечным
числом степеней свободы
ОСНОВНАЯ ЧАСТОТА
1. МЕТОД ПОСЛЕДОВАТЕЛЬНЫХ ПРИБЛИЖЕНИЙ ФОРМАМИ
КОЛЕБАНИЙ. Метод последовательных приближений формами
колебаний, или метод итераций, является одним из наиболее
распространенных приближенных методов определения основной
(наименьшей) частоты систем с конечным числом степеней свободы.
В графической форме он широко используется в расчетах первых
критических чисел оборотов ступенчатых валов. С помощью
некоторых предварительных преобразований исходной системы уравнений
метод последовательных приближений формами колебаний
позволяет найти и любую высшую частоту, причем с наперед заданной
точностью и без предварительного определения низших частот1*.
При расчете методом последовательных приближений
наименьшей частоты мы будем исходить из уравнений малых
колебаний, составленных в обратной форме:
п
\ = р2 I й^А, 1 = 1,2,..., п. D.1)
к = 1
Содержание метода заключается в выполнении следующих
операций. Задаемся исходной формой — произвольной системой п чисел
х> См. метод гармонических коэффициентов влияния, с. 201.
1. Метод последовательных приближений
171
и вычисляем первое приближение по формулам
Х^= ^НШХ^\ 1=1,2, ... ,п. D.2)
С помощью тех же формул, но исходя из системы амплитуд
только что найденного первого приближения, вычисляем второе
приближение, по второму — третье и т. д.; наконец, по (т - 1)-му
приближению т-е:
Цт^ = Е к1к№ " !>, 1 = 1,2, ... , п. D.3)
I к = 1 1К К
При достаточно большом т отношения соответственных
амплитуд двух последовательных приближений стремятся к квадрату
основной частоты:
Цт) Р\ '
а отношения амплитуд одного и того же приближения — к
отношениям амплитуд первой собственной формы:
А.(»> : *.<"»> :...:Х(Г^ип:и12:...:иы.
Для доказательства найдем разложения последовательных
приближений по собственным формам, начиная с исходной формы.
Пусть разложение последней будет
Х<°> = Ъа8и81, 1=1,2, ... , я.
Подставим в D.2) эти разложения вместо Х^ ; тогда
п п п п
Х(^ = 2 Ни 2 а и и — 2 а 2 Нии и%
I г. а 1& л 8 8& *-*' 8 , , *1к"8к>
к = 1 8 = 1 8 = 1 к = 1
откуда на основании D.1) следует
М1} - 2 ^, . = 1,2,..., п.
8 = 1 р|
Таково разложение по собственным формам первого приближения.
Аналогичным путем найдем разложение второго
приближения и последующих и, наконец, тп-го:
*.(»>= I Ц^, 1=1,2, ...,п. D.4)
172
Глава IV. ПРИБЛИЖЕННЫЕ МЕТОДЫ
Так как
Р\ <Р1 <••• <Р%>
первый член суммы правой части D.4) при достаточно большом т
превосходит все остальные. Можно поэтому при достаточно
большом т положить
1 р'(т-1)
и
Чт)*^ёг' г =1,2,..., л.
Из последних соотношений находим
Ит-1)
Мл
~р1,
D.5)
у (га) . \ (т) . . у (га) ^ ,. . 7. . . ,.
Если в формулу D.4) подставить значения коэффициентов
п
а8= Т,Х{к0)и8к, 8=1,2, ... ,п,
то
^с/ ^ л/П\ ^ *т\ ХЧ ^е,^о
Х(т)== 2-^-1 Ч°Ча= 2 Ч°} 2 ^12* = Е ^Мга-!) D б)
где, согласно формулам C.93) на с. 138,
й(»-1)= Е ^*, » = 1,2,...,п.
*« я = 1 п2т
Амплитуды Атг-го приближения являются, таким образом,
линейными функциями (т - 1)-х итераций коэффициентов Н1к. Когда в
исходной форме одна из амплитуд Х^ равна единице, а все
остальные — нули,то
Х(т)= й^), 1= 1, 2, ... , П.
I II 7 7 7
Возможность получить значения первой частоты и первой формы
колебаний основана существенным образом на том, что при
вычислении последовательных приближений мы пользуемся
обратными уравнениями D.1). Итерации форм с помощью прямых
уравнений можно использовать для расчета наибольшей частоты
способом, аналогичным описанному автором [89].
2. Теоремы о границах основной частоты
173
2. ТЕОРЕМЫ О ГРАНИЦАХ ОСНОВНОЙ ЧАСТОТЫ [90]. Установим
неравенства, с помощью которых можно оценить погрешность
каждого отдельного приближения и, таким образом, выполнить
расчет с любой наперед заданной точностью. Для этого докажем
теоремы о границах основной частоты применительно к обратным
уравнениям в предположении1*, что
Нш>0, Н1к>Ны, Ч0)>0. D.7)
Теорема 1. Точное значение квадрата первой частоты
лежит между наименьшим и наибольшим из отношений Цт ~ 1)Д}т):
Х{.т ~ 1) Х^т ~ Х)
Ш1П * . , < р? < шах * . . D.8)
Доказательство. В самом деле, записав уравнения
D.1) для первой частоты и первой собственной формы
п
«и = Р? ЕД*И1*> » = 1, 2, ... ,п,
к = 1
умножим каждое из них на соответствующее \\т ~ ^ и затем
сложим. Тогда
,?1«1Л(т)=Р12|?1М,"L|1Лй* =
= р? Е ии Е А^}"-1) =р1 Е и1кХ\т>,
к = 1 1 = 1 к = 1
Е ии[Х\т ~У) - р\ \\т)] = 0. D.9)
/ = 1
Если бы р\ при положительных ии было больше наибольшего из
отношений Х\т ~ 1^/Х\т\ то все слагаемые суммы D.9) были бы
отрицательными; если бы р\ было меньше наименьшего из
отношений Х\т ~ ^/Х^, то все слагаемые суммы D.9) были бы
положительными. Следовательно, р\ должно быть меньше
наибольшего и больше наименьшего из отношений
Х\т-1)/Х\т\ 1=1,2, ...,71. -D.10)
Х) При выполнении первого из условий D.7) амплитуды первой формы во всех
последовательных приближениях, начиная с первого, положительны.
174
Глава IV. ПРИБЛИЖЕННЫЕ МЕТОДЫ
Теорема 2. С увеличением т наименьшее из отношений
D.10) возрастает, а наибольшее убывает, так что разность
между ними при достаточно большом т может быть сделана
как угодно малой.
Доказательств о. В самом деле,
л (т - 1) п п
?1МГ2,/1?1^Г1). D.Н)
Значения дроби
Е А^т~2)/ X Н^Ц?-", 1=1,2, ...,л
лежат между наименьшей и наибольшей из положительных дробей:
х[т~2^ х[т - 2> А41»-2)
>(ш-1)» л(т-1)' "• ' 1(ш-1)" D.12)
Значит, наименьшее из отношений D.11) больше наименьшего из
отношений D.12), а наибольшее из отношений D.11) меньше
наибольшего из отношений D.12):
Х(т-2) ХСп-1) Х^-1) Х(т-2)
пип -* гч < пип 1 . Л < р? < тах * , Л < тах -* Гч.
Так как, далее, верхняя граница наименьших отношений и
нижняя граница наибольших отношений одна и та же, именно р\, то
разность между этими отношениями при достаточно большом т
может быть сделана как угодно малой.
Теорема 3. Точное значение квадрата основной частоты р\
удовлетворяет неравенству^
^(т- 1) Ь "-1 'Ч
г = 1
Выбирая подходящим образом исходную форму, мы можем
придать правой части неравенства D.13) более простой вид. Так,
если в исходной форме Х^ = Ц0) = ... = Х^ = 1, то
X Цт~и
Х(т)
Х(т-1)
тт -Ц-^г- < р? < -— . D.14)
I = 1
-) Доказательство неравенства D.13) см. в статье автора [93].
2. Теоремы о границах основной частоты
175
Другие неравенства для оценки нижней и верхней границ
основной частоты даны П. Ф. Папковичем [117], С. А. Бернштей-
ном [3] и другими авторами.
Пример 1. ОПРЕДЕЛЕНИЕ ГРАНИЦЫ ОСНОВНОЙ ЧАСТОТЫ КРУТИЛЬНЫХ
КОЛЕБАНИЙ ВАЛА С ПЯТЬЮ ДИСКАМИ. Числовые данные взять из примера 2 гл. III.
Для уравнений обратной формы матрица коэффициентов, вычисленных
по формулам C.38) (с. 115):
95,89 23,23 21,70 7,12 II
23,23 110,72 103,41 33,904
21,70 103,41 143,52 46,53 *
7,12 33,904 46,53 46,085 ||
Приняв исходную форму
в первом приближении получим
Х[^ = 147,94 • 10; к™ = 271,26 • 10~6;
Ц1* = 315,16 • 10~6; Х[г) = 133,64 • 10~6.
о 4
Делением всех А,?1) на первую Х[ ) = 147,94 • 10~6 приводим полученную
форму к виду
Х[^ = 1; ^ = 1,834; А,*,1) = 2,130; Л.^> = 0,903.
1 ^ о 4
После подстановки этих значений в формулы D.2) находим второе
приближение и т. д. Результаты вычисления пяти приближений приведены в табл. 3.
Отношения соответственных амплитуд последовательных приближений,
минимальные значения этих отношений, а также дроби
X Мт_1)/ 2 Мт)
1 = 1 1 = 1
Таблица 3
2
№ амплиту
1
2
3
4
Последовательные приближения
А<?>
1
1
1
1
Щ> х 106
147,94
271,25
315,16
133,64
1
1,834
2,130
0,903
Х^х
х Ю6
191,14
477,17
559,07
210,03
1
2,50
2,93
1,10
Х^х
хЮ6
225,16
640,32
750,73
278,48
1
2,844
3,334
1,24
х Ю6
243,15
724,83
851,86
315,68
1
2,931
3,504
1,30
Х^х
х 106
250,42
759,65
893,26
331,05
Х^
1
3,034
3,551
1,322
1М =
176
Глава IV. ПРИБЛИЖЕННЫЕ МЕТОДЫ
и границы первой частоты приведены в табл. 4.
Таблица 4
1
Х^/Х(}]
х™№
1
6759,5
5231,8
4441,3
4113,2
2
3636,4
3843,5
3898,4
3923,7
3
3172,9
3809,9
3896,1
3913,8
4
7462,7
4299,4
3946,2
3918,5
тт
3172,9
3809,9
3896,1
3913,8
4608,3
4081,7
3968,9
3940,5
Границы
основной
частоты
56,32 <р1 <67,9
61,6 <р1<63,8
62.4 </?1<62,9
62.5 </?х<62,7
Для практических надобностей точность второго приближения более чем
достаточна. Расчет, впрочем, можно еще более сократить, если с самого
начала, при выборе исходной формы, учесть возможные отношения углов
кручения отдельных участков вала, обычно легко определяемые по
расположению и относительной величине масс и жесткостей.
Пример 2. Найти границы основной частоты поперечных колебаний
балки с четырьмя сосредоточенными нагрузками. Числовые данные взять из
примера 3 гл. III.
Матрица коэффициентов Н1к:
|| 4,53 5,59 5,05 3,99 II
,, ,,5,59 8,33 7,99 6,48
" //г"~ 5,05 7,99 8,33 7,09
II 3,99 6,48 7,09 6,61 ||
Последовательные приближения приведены в табл. 5, составленной
аналогично табл. 3.
Таблица 5
№
амплитуды
1
2
3
4
хар
1
1
1
1
Последовательные приближения
А^-105
19,16
28,39
24,46
24,17
1
1,482
1,485
1,261
^B) • 105
25,34
37,98
38,20
32,46
1
1,50
1,51
1,281
Я??*'
25,53
38,42
38,66
32,85
105
1
1,50
1,51
1,282
Отношения соответственных амплитуд и границы приближенных
значений первой частоты приведены в табл. 6.
Таблица 6
1
х^/х'Р
х{1]/х(^
^B)дC)
1
5219,2
3945,3
3901,7
2
3522,3
3902,1
3901,6
3
3513,7
3887,4
3898,1
4
4137,3
3884,8
3899,5
ППП
3513,7
3884,8
3898,1
3992,8
3902,1
3900,1
Границы
основной
частоты
59,3 <рх <63,2
62,3 <рг <62,4
3. Приведение матрицы коэффициентов уравнений
177
3. ПРИВЕДЕНИЕ МАТРИЦЫ КОЭФФИЦИЕНТОВ УРАВНЕНИЙ МАЛЫХ
КОЛЕБАНИЙ К МАТРИЦЕ С ПОЛОЖИТЕЛЬНЫМИ ЭЛЕМЕНТАМИ.
Найдем границы основной частоты трехпролетной балки
постоянного сечения с несимметричной нагрузкой, если (рис. 40)
Яг = 100 кГ, Я2 = 60 кГ, ф3 = 80 кГ> к = 10° см> к = 20° см>
/3 = 150см, ах = Ъг = 50 см, а2 = Ъ2 = 100 см, а3 = Ь3 = 75 см,
Е = 2 • 106 кГ/см2, / = 63,62 см4.
Коэффициенты влияния а1к могут быть вычислены по формулам1*
а1Ъ1гЪ1 AХ + аг)A2 + /3).
ап Ш1ТХ
-Ц-а2//2)],
_ а1а2Ь211[12A2 + а2) - 2A2 + *3)(*2 + &2>]/-, _ о п2\
0^19 тттттт-^; V1 а1/^1Л
П2
6ЕП2Р
0113 6Ё71^ и а1/11>'
а2Ъ2 \2а2Ъ2 _ Ъ2[2A3 + Ь3)(/2 + Ь2) - 12A2 + а2)]A - Ь|/ф
0122 6Ё7 177" ^
+
а2[2(/х + /2)(/2 + а2) - 12{12 + Ь2)]A - аЦЩ)
_ «г^г^з^зЕ^С^ + &г) ~ 2(*1 + ^)(^2 + а2>] п _ 1,2 //2ч
<*23 оЩр Ц ^з/'з)'
а
а3Ь§га3 (/х + *2)(/3 + Ь3)
зз
ЗЕ1Ц
A"Ь|/Ф].
О!
<?2
вз
Рис. 40
Х) Формулы для коэффициентов влияния и числовые данные задачи взяты из
кн. Е. Б. Лунца [25].
178
Глава IV. ПРИБЛИЖЕННЫЕ МЕТОДЫ
где
1? = 4A1 + 12)A2 + 13)-1$.
В рассматриваемом примере
аи = 129,80 • 10~6; а12 = -96,95 • 10; а13 = 21,81 • 10~6;
а21 = а12» а22 = 611,7 • 10; а23 = -174,5 • 10;
а31 = а13; а32 = а23; а33 = 405,4 • 10~6.
Уравнения колебаний после подстановки
где Хь, — прогибы под нагрузками, запишутся в виде
Хг=р2 A3,231*.!- 7,655 А,2 + 1,988А,3) • Ю-6, 1
^2 =Р2 (-7,655^ + 37,412А,2 - 12,323А.3) • 10~6, D.15)
Х3=р2( 1,988^-12,323X2 + 33,060^)-10~6. |
Первая форма колебаний (соответствующая основной
наименьшей частоте) для трехпролетной балки имеет вид кривой,
изображенной на рис. 41.
Амплитуды этой формы имеют две перемены знака, т. е.
столько же и на тех же местах, что и коэффициенты уравнений D.15).
Полагая
1хг = Х19 \л2 = -Х2, \л3 = Х3, D.16)
мы получим для \1Ь систему уравнений с положительными
коэффициентами:
\хг = р2 A3,231^ 4- 7,655ц2 + 1,988ц3) • 10~6, |
ц2 = р2 G,655^ + 37,412ц2 + 12,323ц3) • 10~6, I D.17)
ц3=р2A,988ц1 + 12,323|и2 + 33,060ц3)-10-6. I
Коэффициенты этой системы удовлетворяют условиям
симметрии и все больше нуля. К ней, следовательно, применимы тео-
Рис. 41
3. Приведение матрицы коэффициентов уравнений
179
ремы о границах основной частоты. Если в качестве исходной
формы возьмем |л^0) = |1^0) = ц^0) = 1, то получим:
^ в первом приближении
^ = 22,874 • ЮЛ ц41} = 57,390 • ЮЛ ц^ - 47,371 • 10~6
с отношением амплитуд 1 : 2,509 : 2,071;
^ во втором приближении
ц<2> =36,554 -ЮЛ ц^2) =127,043-ЮЛ ^3) = 101,373 • Ю6
с отношением амплитуд 1 : 3,475 : 2,773;
^ в третьем приближении
и^ =45,345-Ю, ц^3) =171,834-ЮЛ ц^3) = 136,485-10
с отношением амплитуд 1 : 3,789 : 3,010.
Основная частота во втором приближении
140,5 <р1< 145,1,
в третьем
142,2 <рх< 143,2.
Приведение уравнений D.15) с помощью преобразования
D.16) к системе D.17) с положительными коэффициентами без
изменения корней векового уравнения оказалось возможным
вследствие наличия определенного соответствия между, с одной
стороны, числом и местом перемен знака коэффициентов Н1к и, с
другой стороны, числом и местом перемен знака амплитуд
первой формы колебаний. Такое соответствие имеет место всякий
раз, когда в разложениях коэффициентов Н1к по собственным
формам
Й/А = 2 ^, *, А =1,2, ...,л
8 = 1 Р1
доминируют слагаемые, соответствующие наименьшей частоте,
так что знаки коэффициентов Нш определяются этими
слагаемыми, т. е. знаками амплитуд первой собственной формы. Большей
частью так бывает, когда вторая частота значительно
превосходит первую. Если первые частоты близки друг к другу, то
соответствие между знаками коэффициентов Нш и амплитуд первой
формы может нарушиться. В этом случае использованный в пос-
180
Глава IV. ПРИБЛИЖЕННЫЕ МЕТОДЫ
леднем примере способ приведения к системе уравнений с
положительными коэффициентами не может быть непосредственно
применен к заданным уравнениям. Однако и здесь можно
выявить надлежащее соответствие знаков, заменив уравнения D.1)
уравнениями, коэффициенты которых равны итерациям
коэффициентов к1к некоторого порядка т - 1 (т принимает значения
1, 2, 3, ... , причем к$ = кш), т. е. уравнениями
^=р2™ 2 МГ}^, 1 = 1,2,... , п.
D.18)
При достаточно большом т в разложениях
л<Г"'1) = ^
Чк
1,к = 1, 2, ...
члены с наименьшей частотой будут определять знаки
коэффициентов уравнений D.18), и подстановкой, аналогичной D.16),
мы сможем привести их к уравнениям с положительными
коэффициентами. Для этих уравнений будут выполнены условия D.7)
и при итерациях формами с положительными амплитудами
можно будет пользоваться всеми теоремами о границах основной
частоты. Следует только иметь в виду, что таким образом будут
получены основная частота в степени 2т и абсолютные значения
амплитуд первой формы.
Рассмотрим, например, систему уравнений с матрицей
коэффициентов
-1,94 0,15 -0,57 -20,13
-0,15 0,90 -0,89 -0,03
-0,57 -0,89 1,01 -0,21
-20,13 -0,03 0,21 -0,16
II А/* 11 =
Она приводится к эквивалентной системе с положительными
коэффициентами с помощью подстановки
^ =
ъ*ч9>
Для системы
А2 Ц2' ^3
81,30 -8,58
-8,58 -3,67
16,91 -7,24
-8,04 -3,45
~Из' К
-16,91
-7,24
-4,56
-2,22
= -ц4-
-8,04
-3,45
-2,22
3,39
Ю
3. Приведение матрицы коэффициентов уравнений
181
такой способ приведения непосредственно неприменим. Но
достаточно вычислить первую итерацию коэффициентов по формулам
М2)== 2АЛ*» *¦ * = 1,2, ... ,п,
чтобы получить систему с коэффициентами
и*}*41
7033,99 -575,89
-575,89 151,41
-1216,01 213,06
-613,77 86,01
-1216,01 -613,77
213,06 86,01
365,02 163,76
163,76 92,96
10
-10
которую подстановка
Хг = щ; Х2 = ~И2» ^з = ~Из' ^4 = "~М-4
превратит в эквивалентную систему с положительными
коэффициентами.
Дальнейшим обобщением теорем о границах основной частоты
является переход от заданной системы с коэффициентами Ньк к
системе с абсолютными значениями этих коэффициентов1*. За
исключением отмеченного выше случая, система, полученная из
заданной простой заменой отрицательных коэффициентов их
абсолютными значениями, не будет эквивалентна последней.
Однако метод итераций с неотрицательными амплитудами исходной
формы и в применении к измененной таким образом системе
приведет к квадрату основной частоты заданной системы. В самом
деле, предположим для простоты, что в исходной форме одна
амплитуда равна единице, а все остальные нулю, например
^°>
1;
40)
Ц°> = 0.
В этом случае, как уже отмечалось, амплитуды
последовательных приближений в заданной (неизмененной) системе будут
равны соответствующим итерациям2* коэффициентов кш
А<т>
*(--!>,
1,2,
п.
Х) См. статью автора [91].
2) При другом выборе исходной формы амплитуды последовательных
приближений будут линейными функциями соответствующих итераций
коэффициентов Нш.
182
Глава IV. ПРИБЛИЖЕННЫЕ МЕТОДЫ
В разложениях коэффициентов и их итераций по собственным
формам заданной системы, как видно из формул C.93) и C.94),
фигурируют только члены вида
и81и8к/Р2Ш>
содержащие каждый только одну частоту. Члены с
произведениями частот в знаменателях при образовании каждой
последующей итерации, начиная со второй, в неизмененной системе
выпадают в силу условий ортогональности. Когда мы меняем знаки
некоторых коэффициентов заданной системы, общая структура
разложений этих коэффициентов сохраняется. Но знаки
слагаемых в этих разложениях изменяются на обратные. Вследствие
этого при образовании последующих итераций условия
ортогональности в измененной системе не везде будут выполнены, и в
разложениях последовательных итераций появятся члены,
содержащие в знаменателях произведения квадратов нескольких
частот, причем сумма показателей частот во всех членах будет
одна и та же, именно 2т (где т — порядок итерации). При
достаточно большом т и в таких разложениях, как и в неизмененной
системе, доминирующими будут члены, содержащие
наименьшую частоту в степени 2т, и к этим членам будут
асимптотически приближаться амплитуды последовательных приближений.
Таким образом, и здесь отношения соответственных амплитуд
двух последовательных приближений будут стремиться к
квадрату основной частоты. Однако форма, соответствующая этой
частоте, не будет, вообще говоря, совпадать с первой собственной
формой колебаний заданной системы.
4. ГРАФИЧЕСКАЯ ФОРМА МЕТОДА ПОСЛЕДОВАТЕЛЬНЫХ
ПРИБЛИЖЕНИЙ ФОРМАМИ КОЛЕБАНИЙ — МЕТОД СТОДОЛЫ [82].
Применение метода итераций к определению основной частоты в
изложенной аналитической форме предполагает известными числовые
значения коэффициентов Н1к уравнений D.1). Для крутильных
колебаний приведенного вала или поперечных колебаний прямых
стержней постоянного сечения вычисление этих коэффициентов
особых затруднений не представляет. Однако большинство
практических задач на поперечные колебания относится к стержням
переменного сечения. Вычисление коэффициентов влияния,
входящих в состав к1к, для таких стержней, особенно
многопролетных, представляет большие трудности и обычно в практических
4. Метод Стодолы
183
расчетах заменяется приближенным графическим построением
линии прогибов (упругой линии). Возможность применения и в
этих случаях метода последовательных приближений формами
колебаний для нахождения основной частоты может быть
обоснована следующей простой интерпретацией формул D.3).
Обозначим массы сосредоточенных грузов через т19 т2, ... , тп.
Уравнения поперечных колебаний вала можно представить в виде
Хг =-р2 (ацт^! + а12т2Х2 4- ... + а1птпХп),
^2=Р2 (а21^А + а22^2 + — + а2птпЮ>
К=Р2 (атт1К + ал2т2А,2 + ... + апптпХп),
D.19)
где аш = аы — статические коэффициенты влияния. Для 1-го
приближения по формулам D.3) найдем
Х21) =а21т1А.<1'-1> +а22т2^-1> + ... + а2„т„^-1)),
4° =а»1«1^~1) +ап2/п2^-1> + ... + а,тт„^'-1>).
Сопоставляя эти выражения с формулами
D.20)
Ъ
^аЛ. /:== !> 2> — > л»
где д; — прогибы в точках I от сосредоточенных грузов Рк,
приходим к следующему истолкованию формы /-го приближения.
Амплитуды формы 1-го приближения равны статическим
прогибам в точках I от нагрузки
т\^\
^Г1'-
, т
Л''.
т. е. от нагрузки, численно равной амплитудам предыдущего
(I - 1)-го приближения, умноженным на соответствующие
массых\
Х) Чтобы придать этим нагрузкам размерность сил, их умножают на квадрат
некоторой (произвольно выбранной) угловой скорости <а>$, от которой в
окончательном результате расчета можно освободиться изменением масштаба.
184 Глава IV. ПРИБЛИЖЕННЫЕ МЕТОДЫ
Амплитуды 1-го приближения можно, следовательно, найти
построением линии прогибов вала от указанной нагрузки. На
этом основан следующий метод графического определения
наименьшей частоты.
На схематическом чертеже вала проводим от руки кривую,
достаточно близкую к первой форме и удовлетворяющую условиям
закрепления вала (рис. 42). Эту кривую принимаем за исходную
форму колебаний. Сняв с чертежа прогибы Х|0) под грузами,
умножаем их на массы т1 соответствующих грузов и на квадрат
произвольной угловой скорости со^ и произведения тьХ^ со$
принимаем за нагрузку, для которой по известным правилам
строим упругую линию. Прогибы А,|1) под грузами в построенной
таким образом упругой линии дадут первое приближение формы
колебаний, а отношения Х\0) /Х\1>> — первое приближение
квадрата основной частоты. Если исходная форма была выбрана
достаточно близкой к первой форме, то эти отношения будут почти
одинаковыми. Если этого нет, то по нагрузкам т^1^ сод строим
еще одну упругую линию так же, как по нагрузкам /тг/Я|0) оо$
была построена предыдущая, и т. д. В обычных случаях достаточно
бывает одного, редко двух построений упругой линии, чтобы по-
Рис. 42
4. Метод Стодолы
185
лучить основную частоту с допустимой в практических расчетах
погрешностью. Само собою разумеется, для ускорения расчета
можно и здесь пользоваться установленными выше теоремами о
границах основной частоты.
Пример 3. Найти основную частоту поперечных колебаний консольного
вала на двух опорах (рис. 43, а). Нагрузка на вал приведена к семи
сосредоточенным грузам, в которых учтен собственный вес отдельных участков
вала1*:
Яг = 5 кГ, Я2 = Я3 = Я4 = в5 = 25 кГ, в6 = 4 кГ, <Э7 = 15 кГ.
0123456789 10 см
I I I 1 1 I I I I I I
Рис. 43
•) Числовые данные примера взяты из кн. И. Холбы [71, 8. 124].
186
Глава IV. ПРИБЛИЖЕННЫЕ МЕТОДЫ
Решение задачи в первом приближении сводится к построению упругой
линии вала от 7 сосредоточенных сил Р1 = т^Х^оу^, I = 1, 2, ... , 7, где т1 —
массы грузов B;; ?^0) — прогибы под грузами, снятые с исходной формы; со$ —
квадрат произвольно выбранной в качестве масштабного множителя угловой
скорости (например, со0 = 10 1/с). Для исходной формы, построенной от руки
на рис. 43, б, прогибы под грузами и соответствующие значения сил Р.
приведены в табл. 7. Поместив начало координат в левой опоре, рассмотрим
дифференциальное уравнение упругой линии:
Е1 = ^=-М(х), D.21)
их2
где Е1 — жесткость на изгиб, а М(х) — изгибающий момент в сечении х от
нагрузки силами Р.. В валах переменного сечения жесткость Е1 изменяется
вместе с моментом / [см4]. Умножив обе части уравнения F.27) на отношение /0//,
где 10 — некоторый постоянный момент, т. е., представив это уравнение в виде
Е1от^=-м^т> D-22)
мы приведем задачу построения упругой линии вала переменного сечения к
построению упругой линии вала постоянной жесткости Е10, но от нагрузки
М1(х)-М^). D.23)
Тем самым изменения жесткости вала будут отнесены к соответствующим
изменениям изгибающего момента. Эпюра изгибающих моментов М^х)
представлена на рис. 43, в, причем ее построение выполнено в масштабах1*
10 см длины 1 см
1 кГ силы 1 см
10 кГ полюсного расстояния 10 см
Таблица 7
1
1
2
3
4
5
6
7
<Э, (кг)
5
25
25
25
25
4
15
гп1 (кг «см1 *с2)
0,0051
0,0255
0,0255
0,0255
0,0255
0,0041
0,0153
А.(?> (см)
1,20
1,84
2,00
1,92
1,97
1,01
-0,90
Р1 - т.^^1 (кг)
0,612
4,69
5,10
4,90
4,26
0,413
-1,38
Х) Силовые многоугольники с полюсными расстояниями Н1 и Н2 на рис. 43 не
приведены.
4. Метод Стодолы
187
В качестве момента 10 выбран наибольший поперечный момент вала
/о = Е^г = 201см4-
Полагая
Ф(Р) -Н~> Чх), Р(р) -Н» Мг (х),
с помощью теоремы свертывания найдем интеграл уравнения D.22):
1 х
Е10Х(х) = ^\{1-^) М^) (Ц - | (х - у Мх (у <^, D.24)
1 о о
где I — расстояние между опорами.
Первый интеграл правой части
/
1 о
представляет собой момент относительно сечения х левой опорной реакции
при нагрузке, интенсивность которой равна Мх(^); второй интеграл
х
о
момент относительно сечения х части той же нагрузки, расположенной слева
от х. Вся правая часть D.24) — это изгибающий момент в сечении х от мо-
ментной нагрузки Мх{х). Таким образом, упругая линия
У = Чх)
представляет собой веревочный многоугольник для нагрузки плотности
жг0ММ)-
Чтобы построить этот веревочный многоугольник, делим моментную
площадь на 12 частей, как показано на рис. 43, в, находим центр тяжести и
площадь Д5/ каждой части:
1
А81 [см2]
1
0,434
2
1,56
3
1,76
4
3,26
5
4,06
6
4,29
7
3,93
8
4,14
9
1,33
10
0,73
11
0,19
12
0,10
Согласно принятым масштабам один квадратный сантиметр моментной
площади Мх(^) соответствует 1000 кГ • см. Величины
Д^-ЮООкГ-см
принимаем за нагрузки, которые располагаем на вертикалях, проходящих
через центры тяжести площадок Дб^. Если линейный масштаб для
изображения этих нагрузок (во втором силовом многоугольнике) выбран так, что
соответствует 1 см = 1000 кГ«см2, то приведенные значения Д$. [см2] будут
188
Глава IV. ПРИБЛИЖЕННЫЕ МЕТОДЫ
равны этим нагрузкам. Полюсное расстояние во втором силовом
многоугольнике целесообразно взять равным
2,1 • 106-201
NA
кГ-см2,
где й — масштаб длин, N — целое число. Тогда ординаты упругой линии
получатся в N раз увеличенными против натуральной величины, что облегчит
их измерение. На рис. 43 имеем й = 10 и N = 2000, так что
V Т
Я2=2ШГ211°°КГ-СМ2'
что в принятом для моментной нагрузки масштабе составляет 21,1 см.
Результаты расчета приведены в табл. 8.
Границы первой частоты представляются следующим образом:
л. 1} со,
р!
1М
@I2
2575 • 102 < р1 < 2658,6 • 102,
507,4 <рг< 515,6.
5. МЕТОД РЭЛЕЯ. Метод Рэлея является одним из вариационных
методов определения приближенных значений собственных
частот. Его обоснованием могут служить теоремы об экстремальных
свойствах частот, изложенные в § 15 гл. III. В частности, задача о
нахождении основной (наименьшей) частоты может быть решена
как задача об абсолютном минимуме функции Рэлея
I, к = 1 I, к = 1
как функции амплитуд Х19 т. е. форм колебаний.
D.25)
Таблица 8
1
1
2
3
4
5
6
7
хр • ю4
4,100
7,000
7,700
7,500
6,356
3,606
-2,908
х^/хр
2850
2590
2580
2573
2670
2890
3220
[^0)]2
1,44
3,39
4.00
3,69
2,79
1,02
0,81
1=17,14
^0).^A).104
4,92
12,88
15,40
14,40
10,61
3,64
6,62
1 = 64,47
5. Метод Рэлея
189
Формула Рэлея дает точное значение квадрата основной
частоты, когда подставляемые в правую часть амплитуды Х1 точно
совпадают с амплитудами первой собственной формы колебаний.
Для других амплитуд значение Е больше квадрата первой
частоты. Формула D.25) определяет, таким образом, верхнюю границу
квадрата первой частоты. Эта верхняя граница будет тем ближе к
истинному значению квадрата первой частоты, чем ближе будет
взятая форма к первой собственной форме.
Первое предложение о способе выбора формы, близкой к
первой собственной форме колебаний, было сделано Дж. Рэлеем [77,
V. I]. Дж. Рэлей предложил брать в качестве формы, близкой к
первой основной форме колебаний, форму статической
деформации системы от нагрузки, приложенной к системе или
приблизительно с этой нагрузкой совпадающей. Такая форма является
физически возможной формой первого собственного колебания,
удовлетворяющей условиям закрепления системы.
В дальнейшем совокупность значений А,-, реализующая
минимум функции Е, называется минимизирующей формой. Дж.
Рэлей, таким образом, предложил способ построения
минимизирующей формы для прямого решения задачи о нахождении
минимального значения функции Е. Вместе с теоремой о минимальных
свойствах собственных частот, это предложение составляет
содержание принципа Рэлея. Основанный на этом принципе способ
приближенного определения основной частоты называется
методом Рэлея. Точность получаемого по методу Рэлея значения
первой частоты даже при весьма упрощенном выборе
минимизирующей формы и возможность применения этого метода в
графической форме сделали его одним из наиболее употребительных
способов определения основной частоты в технических расчетах.
Его недостатком является отсутствие каких-либо данных для
суждения о допускаемой при пользовании той или иной формой
статической деформации погрешности в определении основной
частоты. Впрочем, когда имеется возможность построения
некоторой закономерной последовательности форм, приближающихся
к основной форме, вместе с тем может быть установлена и верхняя
граница погрешности определения основной частоты по методу
Рэлея1).
> См. в статье автора [93].
190
Глава IV. ПРИБЛИЖЕННЫЕ МЕТОДЫ
Пример 4. ОПРЕДЕЛЕНИЕ ОСНОВНОЙ ЧАСТОТЫ ПОПЕРЕЧНЫХ КОЛЕБАНИЙ
ОДНОРОДНОЙ БАЛКИ, ОПЕРТОЙ ПО КОНЦАМ (см. пример 5 гл. III). Уравнения
малых колебаний приведенной системы с тремя степенями свободы имеют вид
Хг = р2 B5кХг + 39кХ2 + 17кХ3),
Х2=р2 C9кХг + 81кХ2 + 39кХ3),
Х3=р2 {17кХ1 + 39кХ2 + 25ккв),
/г = |а/4/П66Е/.
где
По формуле Рэлея
п п
Е= I X2/ X к^К, D.26)
I, 8 = 1
где к1з равны соответственно коэффициентам при ^5 в правых частях
записанных выше уравнений. Подставляя их значения в D.26), получим
о _ Хх + Х2 + Х3
к 25^2 + 81^1 + 25Я,| + 78^ + 34Я,1А,3 + 78А.2А,3 '
В качестве минимизирующей формы возьмем совокупность статических
прогибов в точках, где сосредоточены массы, от единичной нагрузки A кГ),
приложенной к середине балки:
Хх = 39р, Х2 = 81[3, ^з = 39Р>
где
C: '"
Рг =
1x1/3 3888Е1'
После подстановки получим
9,8607 Щ
I2 V Ц
Пример 5. В условиях п. 3 настоящей главы (с. 177) найти основную
частоту колебаний трехпролетной балки с несимметричной нагрузкой (рис. 40).
Несмотря на то, что в уравнениях D.15)
к1=р2A39231Х1- 7,655Х2 + 1,988^)-10,
Х2=р2 (-7,655^ + 37,412А,2 - 12,323Х3) • Ю 6,
Х3=р2( 1,988^ - 12,323?12 + 33,060^3) • Ю
не все коэффициенты положительные, формула D.26) остается столь же
хорошо применимой здесь, как и в случае однопролетной балки. Взяв для
минимизирующей формы второе приближение, найденное в § 3 (методом
итераций),
^' = 1, ц(!>=-3,5, ц<§>=2,8,
б. Графическая форма метода Рэлея
191
и подставив эти значения вместо Хь в D.26), получим
/^ = 20 338.
Метод последовательных приближений приводит к такому значению только
в четвертом приближении.
6. ГРАФИЧЕСКАЯ ФОРМА МЕТОДА РЭЛЕЯ. В графической форме
метод Рэлея применяется главным образом при расчете основной
частоты поперечных колебаний и является одним из простейших
способов приближенного вычисления ее.
Предположим, что на балку (или вал) действует несколько
сосредоточенных грузов (}19 B2> — > Яп> и ПУСТЬ максимальные
прогибы в точках приложения этих грузов будут соответственно
Хг, Х2, ... , Хп. Тогда максимальное значение потенциальной
энергии
2ГТ
I = 1
Максимальное значение кинетической энергии
где ть — массы грузов С?;, а р\ —
квадрат основной частоты. По
формуле Рэлея
I = 1 1 = 1
^(ДеЛ/ДвЛ?)- D.27)
Расчет исчерпывается
построением одной упругой линии вала
от заданной нагрузки и снятием
с чертежа прогибов Хг
Пример 6. Найти основную частоту
двухопорного ступенчатого вала,
нагруженного сосредоточенными силами
Фх = 100 кГ и ^2 = 50 кГ (рис. 44).
Длина вала между опорами / = 200 см;
диаметр левой половины вала 8 см,
правой — 6 см. Предполагается, что в
нагрузках фх и Я2 учтен собственный вес
вала и в дальнейшем вал
рассматривается как невесомый.
0123456789 10 см
Ях = 100 кг
Рис. 44
192
Глава IV. ПРИБЛИЖЕННЫЕ МЕТОДЫ
Построение упругой линии вала от нагрузок ($1 и ф2 выполнено в масштабах:
Длина 1 см ~ 20 см
Сила 1 см ~ 50 кГ
Первое полюсное расстояние Н1 3 см ~ 150 кГ
Моментная площадь 1 см2 ~ 20 • 3000 = б • 104 кГ • см2
Моментная нагрузка 1 см ~ 6 • 104 кГ • см2
Ординаты моментнои площади на правой половине вала умножены на
отношение 1г/12 = 3,16, где
/ = Е1%1 = 201 см4, /2 = Ц^ = 63,58 см4.
1 64 ^64
Моментная площадь разделена на четыре части, площади которых
соответственно равны
Д5; (см2) =1,3; 3,7; 7,3; 5,25,
что в принятых масштабах соответствует следующим значениям моментнои
нагрузки:
$! = 7,8 х 10 кГ • см2, 82 = 22,5 х 10 кГ • см2,
83 = 43,8 х 10 кГ • см2, 84 = 31,5 х 10 кГ • см2.
Второе полюсное расстояние Н2 принято равным
Я = -М- = 422 • 103 кГ • см2 ~ 7 см,
Л 20 • 50
для того чтобы ординаты второй моментнои площади были равны
действительным прогибам, увеличенным в 50 раз.
Подставив снятые с чертежа прогибы Хх = 3,8 • 10~2, Х2 = 7 • 10~2 см в
формулу D.27), найдемрг = 135,7 1/с.
ВЫСШИЕ ЧАСТОТЫ
7. ОБЩИЕ ЗАМЕЧАНИЯ. Почти все рассматриваемые в этой главе
методы расчета высших частот — алгебраические. В них
использованы некоторые общеизвестные вычислительные методы
линейной алгебры, обоснованием которых служат теоремы о
разложении по собственным формам, в частности теоремы о
разложении коэффициентов прямых (Ъ1к) и обратных (Н1к) уравнений:
Ъш= 2Рв2м м й = I ^2*. D.28)
8. Метод итераций
193
Графические варианты некоторых из рассматриваемых
дальше методов в применении к расчету высших частот требуют
обычно больших затрат труда и времени и при этом недостаточно
надежны в отношении точности результатов. В дальнейшем по
поводу этих методов делаются лишь краткие замечания, без
подробного рассмотрения1*.
8. МЕТОД ПОСЛЕДОВАТЕЛЬНЫХ ПРИБЛИЖЕНИЙ ФОРМАМИ
КОЛЕБАНИЙ — МЕТОД ИТЕРАЦИЙ. Чтобы выяснить условия, при
которых метод итераций может быть использован для расчета высших
частот, рассмотрим еще раз состав разложений последовательных
итераций по собственным формам, несколько видоизменив форму
этих разложений. Возьмем за исходную форму совокупность
амплитуд
х.(°>,Ц0),...,Ч°>
и составим первое приближение по формулам
X™ = Д^Ч0)> 1=1,2, ... , п9 D.29)
где Ньк — коэффициенты обратных уравнений. Подставив сюда
и — "V и&^и8к
8 = 1 Рз
получим
А = 1 8 = 1 г8 8 = 1Р8 к = 1
Аналогичные соотношения будут иметь место между двумя
любыми последовательными приближениями:
к = \ к=*1 гз 8 = 1^8/г = 1
Формы Х\т^ при достаточно большом т будут приближаться ко
второй собственной форме, если первое слагаемое, содержащее
первую частоту р\ в разложениях всех приближений, будет
отсутствовать, т. е. если при т > 1
2Ч",-1)^-^Ё»1*Ч",-1)-0. D.31)
¦> Весьма обстоятельное изложение некоторых графических методов расчета
высших частот вместе с примерными расчетами можно найти в кн. И. Холбы [71].
7- 10456 Бабаков
194
Глава IV. ПРИБЛИЖЕННЫЕ МЕТОДЫ
В противном случае мы неизбежно придем к основной частоте,
так как первый член, с наименьшей частотой в знаменателе, как
бы мал ни был его коэффициент, при итерациях растет
значительно быстрее, чем все остальные.
Условие D.31) будет выполнено, если первая собственная
форма будет ортогональна как исходной форме, так и всем
последующим, т. е. если для любого т > 1
Л = 1 1К П
а также если перед вычислением итераций из разложения
каждого коэффициента Нш будет изъято первое слагаемое
П1и1к
р!
I) гС ±, ^, ... , ТЬ»
Аналогично выражаются условия, при которых метод
итераций приведет к третьей собственной форме и соответственно к
третьей собственной частоте. Это случится, если для любого тп > 1
Ц Е и1Нху ~ !> + Щ X и2кХ[т " *> = О, D.32)
т. е. если в разложениях последовательных итераций будут
отсутствовать первые два слагаемых, содержащих в знаменателях
р\ и /?|. Это будет иметь место, когда итерируемая форма в
любом приближении будет ортогональна первой и второй
собственным формам или когда в разложениях коэффициентов Нш с
самого начала будут изъяты первые два члена
и\1и\к и21и2к
р! ' р1
В практических расчетах следует иметь в виду, что условия
ортогональности форм различных приближений первой собственной
форме и изъятие первых членов из разложений коэффициентов Нш
могут быть выполнены только приближенно, с некоторой
неизбежной погрешностью. При этом погрешность, с которой выполнено
изъятие первых членов из Н1к> не увеличивается вместе с порядком
итераций, так как при вычислении итераций любого порядка мы
остаемся, как это видно из формул D.30), в тех же условиях, как и
8. Метод итераций
195
при вычислении первой итерации. Иначе обстоит дело с другим
условием — условием ортогональности приближенных форм первой
собственной форме. Неточное выполнение этого условия означает,
что член с р* в разложениях последовательных итераций не
исключен полностью. В этом случае вместе с порядком итераций будет
расти в этих разложениях и относительное значение члена с р\ (по
сравнению с другими членами, содержащими высшие частоты).
Здесь будет, таким образом, иметь место своего рода накопление
погрешности. Избежать такого накопления можно, подвергая
каждую приближенную форму проверке на ортогональность
первой собственной форме и исправляя обнаруженные отклонения от
ортогональности.
Пусть, например, в качестве исходной формы выбрана
совокупность амплитуд
Р1<»;й&°>;„.;Д(°>
с одной переменой знака и притом так, что
I = 1
т. е. условие ортогональности первой собственной форме
выполнено. Подставив д|0) в D.29), вычислим первое приближение
пA). пA). . пA)
Так как первая собственная форма и1к9 найденная
предварительным, также приближенным расчетом, определена с некоторой
погрешностью, форма \х^ не будет точно ортогональна первой
форме. Подвергаем поэтому форму ц[1) исправлению, вычитая из
каждой амплитуды первый член разложения по собственным формам,
т. е. составляя выражения (черточка над обозначением амплитуды
обозначает исправленную указанным способом амплитуду)
рA) = цA) -а[^ии, 1=1,2, ... , я,
где
По исправленному первому приближению вычисляем второе
приближение \х[2\ Ь = 1, 2, ... , п, которое подвергаем аналогично-
196
Глава IV. ПРИБЛИЖЕННЫЕ МЕТОДЫ
му исправлению, вычитая из каждой амплитуды первый член
разложения ее по собственным формам
п
и т. д. Делая такие исправления, мы при удачном выборе
исходной формы ц(°) после небольшого числа итераций можем
ожидать с достаточной уверенностью, что отношения исправленных
амплитуд двух последовательных приближений дадут значения
квадрата второй частоты с погрешностью, допустимой в
практических расчетах.
Важной частью такого способа расчета второй частоты
является выбор исходной формы с надлежащим местом перемены знака
ее амплитуд. Если первая форма и первая частота вычислены
методом итераций, то результаты этого предварительного расчета
можно использовать для получения некоторых данных
относительно величин и знаков амплитуд второй формы. Обозначим
через Х\т^ амплитуды т-то приближения первой формы и составим
форму
ц(т) = Цт) _ р2 Цт + 1)^ { = ^ 2? _ ^ ^ D 33)
где р\ — квадрат первой частоты. Можно доказать, что форма
D.33) при всяком целом и положительном т ортогональна
первой собственной форме и при достаточно большом т
асимптотически приближается ко второй собственной форме.
В самом деле, ортогональность формы D.33) первой
собственной форме была установлена при доказательстве первой теоремы
о границах основной частоты.
Подставив в D.33) разложения Х(т^ и Х^т + Х) по собственным
формам, получим
Г1 1а п2т ^1 1а п2т + 2 1а и8из1 { 2т п2т + 2 )
8 = 1 Г8 8 = 1^8 5 = 1 Рз Р§
П п2 — 712
= V аи Рз Рх
1а и8и81 п2т + 2 '
8=2 V8
Если т —> °°, то
Щ ~ а2Ы21 от + 2
Г 8
8. Метод итераций
197
И
ц^> : цЦ» : ... : ц</»> - ип : и22 : ... : и2п.
Таким образом, составив для достаточно большого т разности
Цт)-р2Цт + 1)9 * = 1, 2, ... , /I,
получим амплитуды второй формы с высокой точностью, причем
для этого не требуется никаких других расчетов, кроме уже
выполненного для определения первой формы.
Свойства формы D.33) можно было бы использовать
непосредственно для определения второй частоты, для чего пришлось бы
вычислить отношения
И"
Щ
(т+ 1),
I = 1, 2, ... , п.
Однако при большом т в состав этих отношений входят разности
между весьма близкими друг к другу величинами. Расчет поэтому
требует весьма высокой точности вычислений, которая не может
быть достигнута в обычных технических задачах на колебания.
Графический вариант изложенного метода представляет
собой распространение на случай второй частоты метода Стодолы
(§ 4 гл. IV).
Предварительным, также графическим, расчетом
определяется с возможно большей точностью первая собственная форма.
Далее, от руки, на чертеже вала (или балки) строится кривая с
одним узлом, удовлетворяющая условиям закрепления (рис. 45).
Рис. 45
198
Глава IV. ПРИБЛИЖЕННЫЕ МЕТОДЫ
Снятые с чертежа прогибы \л@^ под массами должны быть
предварительно исправлены путем вычитания из каждого величины
а@)„ =и у .,@)
Амплитуды исправленной формы
р<°> = ц^ - а<°4;, 1 = 1,2,...,п,
умноженные на соответствующие массы т{, рассматриваются
далее как нагрузки на вал. Для этих нагрузок строится упругая
линия. Прогибы ц|1) этой линии под массами, исправленные по
вышеуказанному способу, т. е. величины
Щ^ = ^-а[^ии, 1=1,2, ... , п,
где
A) = V A)
1 к = 1^к ПУ
дадут первое приближение искомой второй формы. Первое
приближение второй частоты найдем, составив отношения
Р/0)
—-тт, I — 1, А, ... , п,
или, что всегда дает более точный результат, воспользовавшись
формулой Рэлея
д- 1ы*ЪЧ Ъ&'Ч" ~р1- D-34)
к = 1 к = 1
Изложенный графический прием определения второй частоты
является также одним из наиболее простых способов расчета
второй частоты вала переменного сечения.
9. МЕТОД ИСКЛЮЧЕНИЯ ПЕРВОЙ ФОРМЫ. Другим способом
выполнения условия D.31) при вычислении второй частоты является
исключение из разложений коэффициентов Н1к первого слагаемого
иии1к
2 »
Рг
или, как мы будем дальше говорить, исключение первой формы.
После исключения первой формы разложения всех
приближенных форм будут начинаться со слагаемого, содержащего в знаме-
9. Метод исключения первой формы 199
нателе вторую частоту, независимо от выбора исходной формы.
Процесс итераций с произвольной исходной формой приведет
автоматически, т. е. без направляющих поправок, ко второй
собственной форме и соответственно ко второй частоте. Этот способ
однако мало пригоден для практических расчетов, так как требует
обширных и точных вычислений.
Мы изложим здесь более удобный вариант этого метода,
иногда называемый также методом понижения [В. Н. Фаддеева, 51].
Обозначим нормированные амплитуды первой собственной
формы через
^11' ^12' ^13» иЫ'
Искомая вторая форма ортогональна первой. Следовательно,
амплитуды второй формы
^1> Ц2> ^3> ^4
удовлетворяют условию ортогональности
ИЦ^1 + Ц12^2 + ^13^3 + ^14^4 = °- <4'35)
С помощью этого условия мы можем исключить из уравнений
п
^=р2 ^ кш^к, 1=1,2, ...,/1 D.36)
одну из амплитуд, например ц1, и, таким образом, привести
данную систему к новой с меньшим на единицу числом степеней
свободы. Основная частота этой системы будет совпадать со второй
частотой данной системы. Чтобы убедиться в этом, достаточно
составить разложения коэффициентов приведенной системы по
собственным формам данной (исходной) системы. После
исключения первой амплитуды уравнения D.36) будут иметь вид1)
п
Ъ =р2 .?,(*» " Л'1 7гУ» *= *» 2» " ' п- D-37>
к = 1 ч и\1
Разложения коэффициентов этих уравнений легко найдутся по
известным разложениям коэффициентов исходной системы:
н,к~На ^ ~&~7Г~ ^Д^Г '2^*' ^ 81)-
} Первое уравнение D.36) можно отбросить, так как первая амплитуда не
входит в правые части уравнений D.37) и ее величина не будет влиять на
значения амплитуд [12, ц3, ц4.
200
Глава IV. ПРИБЛИЖЕННЫЕ МЕТОДЫ
Когда 8=1,
*,*- :Г-Ч1 = 0,
иоЪ -
и, следовательно,
ъ - Ь ^1* = V !^ Гм - и1ки
Вычисление коэффициентов уравнений D.37) можно
расположить в матричную схему, представив матрицу этих
коэффициентов в виде произведения
\Н1Ь ~ Л*1
нп
^21
7*31
\НШ
н12 .
^22 •
^32 •
К* ¦
•• ъ1п1
•• ъ2А
- Л3п
•• Нпп\
0
0
0
II °
_^12
"и
1
0
0
_^13
0 ..
1 ..
0 ..
и
и
. 0
. 0
. 1
D.38)
Первую строку произведения вместе с первой колонкой следует
опустить и, начав умножение со второй строки первого
множителя, построить матрицу (п - 1)-го порядка. С полученной
матрицей можно дальше вычислять последовательные итерации по
общему правилу, взяв за исходную произвольную матрицу столбец
(например, матрицу-столбец с единичными элементами). После
того как будут найдены с достаточной точностью амплитуды
ц2, ц3> — » ЦЛ» первую амплитуду \хг мы получим из условия
ортогональности D.35).
Пример 7. Найти вторую частоту системы, рассмотренной в примере 1
(с. 175),
Взяв из указанного примера амплитуды первой формы в пятом
приближении 1; 3,03; 3,55; 1,32 (последний столбец табл. 3), найдем из условия
ортогональности D.35)
цх = -3,03ц2 - 3,55ц3 - 1,32ц4.
Второй множитель произведения D.38) здесь будет
0 -3,03 -3,55 -1,32
0 1 0 0
0 0 1 0
0 0 0 1
10. Метод гармонических коэффициентов влияния
201
Если умножить его слева на матрицу коэффициентов ||Л^||, опуская при этом
первую строку и первый столбец, получим матрицу 3-го порядка
40,24 20,92 3,19
37,57 66,46 17,84
12,30 21,25 36,68
10~6.
С этой матрицей вычисляем дальше последовательные приближения, взяв в
качестве исходной формы
Во втором приближении получим
ц2 = 1, 113 = 2,21, ц4=1,11.
Вторая собственная форма всей системы имеет
1^ = 1, ц2 =-0,08, ц3 = -0,18, ц4 = -0,09.
Границы для второй частоты во втором приближении будут
102,2 <р2< 105,2.
10. МЕТОД ГАРМОНИЧЕСКИХ КОЭФФИЦИЕНТОВ ВЛИЯНИЯ.
Изложенные выше методы определения высших частот требуют
предварительного нахождения собственных форм и частот,
предшествующих по порядку искомым. Во многих практических задачах,
например в исследованиях безопасности работы двигателя на
заданном числе оборотов, где требуется лишь оценка отклонения
рабочего числа оборотов от ближайшего «критического», расчет
предшествующих частот является лишней, осложняющей дело,
процедурой. Здесь важно иметь способ, позволяющий находить
любую промежуточную частоту независимо от других и, в
частности, предшествующих частот системы. Одним из таких
способов является излагаемый далее метод гармонических
коэффициентов1^. Этот метод дает возможность найти отклонение от
заданного числа ближайшего к нему квадрата собственной частоты
системы, а вместе с тем и сам квадрат этой частоты.
Напомним определения гармонических коэффициентов
влияния. В случае поперечных колебаний стержня (вала или балки)
гармоническим коэффициентом влияния Аш называется
максимальный (амплитудный) прогиб в точке I от единичного
гармонического возмущающего перемещения, сообщаемого точке &, в ус-
Х) См. статью автора [91].
202
Глава IV. ПРИБЛИЖЕННЫЕ МЕТОДЫ
тановившихся вынужденных колебаниях системы. Разложения
коэффициентов А1к по собственным формам имеют вид
Аш = X Л ^"Л 2> 1,Ь=1, 2, ... , /г, D.39)
где ю2 — квадрат частоты возмущающего гармонического
перемещения, причем со2 ф р2. В применении к крутильным
колебаниям приведенного вала гармоническим коэффициентом Вш
называется угол кручения участка Ь от единичного возмущающего
гармонического момента, приложенного на участке к в
установившихся вынужденных крутильных колебаниях системы.
Разложения коэффициентов В1к по собственным формам в этом
случае имеют вид
вш = X 4^> *,й = 1,2,...,л, D.40)
где со2 —квадрат частоты возмущающего единичного момента
[оз2 ф рв2].
Коэффициенты А1к> В1к, обладают свойством симметрии:
А/г = Аы, Вш = Вы
и могут иметь как положительные, так и отрицательные
значения. Линейное преобразование
Ц<*> = ЪВШ^\ 1=1,2, ...,П D.41)
можно рассматривать, аналогично D.29), как совокупность
формул1), с помощью которых по исходной форме
„(О) „@) „@)
Н-1 » М-2 > ••• > Ия
вычисляется первое приближение, т. е. форма
мA) мA) мA)
М-1 » Н2 > ••• » Гп •
Пусть разложение амплитуд исходной формы по собственным
формам имеет вид
п
н|0)= 2 а8и8/, 1= 1, 2, ... , п.
.9 = 1
Х) Вместо коэффициентов Вш в этих формулах могут быть взяты также и
коэффициенты А1к.
10. Метод гармонических коэффициентов влияния
203
Тогда для разложений первого приближения, принимая во
внимание формулы D.40), будем иметь
П П 11 -г! П П л П П П п 7/
^ = 15 = 1^8 ш / = 1 8-1^8 ш / = 1 А = 1 8 = 1^8 Ш
Для второго приближения по формулам
»12)=ЛвМ1]> *= 1,2, ...,/»
получим:
Продолжая вычисления, найдем для т-го приближения
^)=ЕТ7Г37^' /-1,2,..., п. D.42)
а8Ц
При достаточно большом т
^1 Гп2-гл2\т-1' р*
где р2 — квадрат ближайшей к со собственной частоты системы.
При достаточно большом т отношения соответственных
амплитуд двух последовательных приближений будут стремиться к
наименьшей разности р2 - со2: при т —> °°
Лт- 1)
ц(ш)
Р82 "СО,2, D.43)
а отношения амплитуд одного и того же приближения — к
отношениям амплитуд собственной формы, соответствующей этой
ближайшей к со собственной частоте р8.
Таким образом, может быть построен сходящийся процесс
итераций, результатом которого будет получение 8-й собственной
формы и наименьшей по абсолютной величине разности р2 - со2.
При этом число перемен знака амплитуд \л\т\ 1 = 1, 2, ... , я,
определит порядок частотыр8, т. е. значение 8. Знак разности р2 - со2 и
частота р8 определяются подстановкой в исходные уравнения
найденной 8-й формы колебаний.
Заменив в уравнениях D.41) коэффициенты Вш их
абсолютными значениями, мы получим возможность судить и о
погрешности расчета.
204
Глава IV. ПРИБЛИЖЕННЫЕ МЕТОДЫ
Пример 8. ОПРЕДЕЛЕНИЕ ВТОРОЙ ЧАСТОТЫ КРУТИЛЬНЫХ КОЛЕБАНИЙ
ПРИВЕДЕННОГО ВАЛА С ПЯТЬЮ ДИСКАМИ. Это тот же вал, о котором шла речь в
примерах 2 и 8 гл. III (с. 117, 163). В расчете второй частоты мы будем
исходить из уравнений:
D.44)
Гармонические коэффициенты от единичного гармонического момента
частоты со =100 1/с, приложенного к различным участкам вала, будут (см. с. 163):
Р2^1 =
Р2^2 =
л=
Р2Ц4 =
10 987^ - 2 306
-2 306^ +28 589
* -20 421
* *
^2
|12-20 421
ц2 + 25 350
-10 643
±
¦ 1 *
Из
ц3- Ю643 ц4
Цз+32 474 ц4
ЦБ,
81,30 -8,58 -16,91 -8,04
-8,58 -3,67 -7,24 -3,45
-16,91 -7,24 -4,66 -2,22
-8,04 -3,45 -2,22 3,39
10 5.
D.45)
100 среди частот
Не делая никаких предположений относительно места со
системы, возьмем в качестве исходной формы
Такую форму никак нельзя назвать близкой ко второй форме уже
потому, что она не имеет перемен знака. Тем не менее и при такой форме мы
получим из уравнений D.45) ответ на все вопросы, которые здесь вообще могут
возникнуть. Неудачный выбор исходной формы только удлинит расчет.
Вычислив но формулам D.41), где Вьк имеют значения D.45), первые
пять приближений, получим табл. 9.
Подставив в первое уравнение D.44) отношение ц2/И1 = -0,079, получим,
чтор2 = 105,6.
Для определения погрешности расчета мы используем свойства матрицы
абсолютных значений коэффициентов В1к, которая в рассматриваемом
примере имеет вид
10
81,30
8,58
16,91
8,04
8,58
3,67
7,24
3,45
16,91
7,24
4,66
2,22
8,04
3,45
2,22
3,39
Таблица 9
1
2
3
4
,,@)
Я/
1
1
1
1
и(,1}*
хЮ5
47,82
-22,94
-31,03
-10,32
ц<*>
№
1
-0,480
-0,649
-0,216
Ц?} х
хЮ5
98,13
-1,37
-9,93
-5,67
№
А2)
1
-0,014
-0,101
-0,058
№ х
хЮ5
83,60
-7,60
-16,21
-7,97
И<3)
Л3)
1
-0,091
-0,194
-0,095
ц<4> х
хЮ5
86,12
-6,52
-15,14
-7,62
№
№
1
-0,076
-0,176
-0,088
ц<«>х
хЮ5
85,64
-6,73
-15,34
-7,69
№
№
1
-0,079
-0,179
-0,090
1. Критические числа оборотов прямых валов
205
Таблица 10
1
1
2
3
4
ц<?>
1
1
1
1
цA).Ю5
114,81
22,94
31,03
17,10
№
№
1,00
0,20
0,27
0,15
^2) • 105
88,78
11,78
19,95
9,82
Л2)
Л2)
1,00
0,13
0,22
0,11
Границы р| - со2
В первом приближении
871,0 <(р|- со2) < 2151,93
Во втором приближении
1126,36 < (р| - со2) < 1242,81
Значения амплитуд в первом и втором приближениях при исходной форме
|1г@) =1, *=1,2,...,л,
а также границы разности р\ - со2 приведены в табл. 10.
Так как
Р\ > со2,
для второй частоты во втором приближении будем иметь
105,5 <р2< 106,0.
Глава V
Явления резонанса в машинах
1. КРИТИЧЕСКИЕ ЧИСЛА ОБОРОТОВ ПРЯМЫХ ВАЛОВ. Расчеты
критических скоростей или чисел оборотов прямых валов ротатив-
ных машин представляют собой одно из главных практических
приложений теории, изложенной в предыдущих главах. В
обычном словоупотреблении критическими скоростями принято
называть все скорости, при которых наступают разного рода
нарушения нормального хода машины, выражающиеся большей
частью в появлении биений вала или вибраций всей установки в
целом. Не все, однако, такие критические скорости имеют
непосредственное отношение к теории колебаний вообще и, в
частности, к линейным задачам последней. Некоторые критические
состояния вала связаны со сложными (большей частью,
нелинейными) процессами, и их исследование, составляющее важный
206
Глава V. ЯВЛЕНИЯ РЕЗОНАНСА В МАШИНАХ
раздел учения об упругой устойчивости и конструктивной
прочности деталей машины, выходит за рамки линейной механики.
Мы ограничимся кратким изучением главных критических
скоростей, расчет которых приводит к задачам об определении
собственных значений линейных систем, аналогичным задачам об
определении собственных частот колебаний систем с конечным
числом степеней свободы.
Первые теории критических состояний вала и первые
определения главных критических скоростей были построены в связи с
опытами над балансировкой роторов паровых турбин с большим
числом оборотов1*. Из этих теорий практическое значение
получила главным образом теория Стодолы, которую мы и положим в
основу наших исследований [82, § 191].
Согласно теории Стодолы, хорошо согласующейся с опытом,
общий характер поведения вала в критическом состоянии можно
описать следующим образом.
Точно сбалансированный вертикальный2) вращающийся вал в
некритических условиях сохраняет прямолинейную форму,
которая в этих условиях является формой его устойчивого упругого
равновесия. Небольшие изгибные колебания вала, возникающие
от случайных воздействий, быстро затухают, не вызывая
заметных нарушений нормальной работы машины. При некоторых
определенных скоростях вращения прямолинейная форма
перестает быть формой устойчивого равновесия. Получив при одной из
таких скоростей прогиб, вал не возвращается в прямолинейное
расположение: его изогнутая ось, сохраняя свою форму,
начинает обращаться вокруг линии подшипников, обычно в ту же
сторону и с той же скоростью, с какой совершается вращение вала,
передающее вращающий момент на рабочий орган машины
(случай прямого или положительного обращения)^. Скорость или
число оборотов, при которых происходит описанное явление, на-
Х) В частности, в связи с известными опытами шведского инженера Г. Лаваля,
изобретателя турбины Лаваля. Вал турбины Лаваля делал свыше 30 000
оборотов в минуту.
2) Рассматривая точно сбалансированный вертикальный вал, мы можем не
учитывать при определении критических скоростей его собственного веса.
3) Термин вращение (или собственное вращение) мы сохраняем для вращения,
передающего вращающий момент; обращение относится к движению
изогнутой оси вала вокруг линии подшипников в критическом состоянии. В
дальнейшем обращение называется также прецессионным движением или прецессией.
1. Критические числа оборотов прямых валов
207
зываются критическими. А. Стодола установил также
возможность обращения изогнутой оси вала в сторону, противоположную
собственному вращению вала (обратное или отрицательное
обращение). При отрицательном обращении изогнутая ось вала
располагается по кривой двоякой кривизны, и вал подвергается
дополнительному кручению1*. При весьма большой жесткости на
кручение, которой обычно обладают ступенчатые валы турбин, и при
наличии эксцентриситета насадки дисков такое обращение само по
себе возникнуть не может. Этим объясняется значительно
меньшая вероятность критических состояний с отрицательным
обращением по сравнению с критическими состояниями прямого
обращения. Для возникновения отрицательного обращения необходимо
наличие условий, редко осуществляющихся в промышленных
машинах: полное отсутствие неуравновешенности (статической и
динамической), малая крутильная жесткость вала и, наконец,
наличие возмущающей периодической силы (не вызванной
неуравновешенностью) [К. Б. Бицено, Р. Граммель, 63].
Основываясь на результатах теоретических и
экспериментальных исследований критического состояния прямых валов,
выполненных А. Стодолой, можно сформулировать определение
критической скорости вращающегося вала.
I Критической угловой скоростью вращающегося вала
называется такая скорость его вращения, при которой упругие
восстанавливающие силы и моменты, возникающие при прогибе вала,
уравновешиваются силами инерции и моментами сил инерции
сосредоточенных масс в их обращении вокруг линии подшип-
I никое.
В обычных расчетах на критическое число оборотов жестких
валов2) рассматривают в первом приближении массы
сосредоточенных нагрузок как точечные и не учитывают моментов сил
инерции этих масс (и соответственно упругих
восстанавливающих моментов). Для таких расчетов определение критической
скорости можно изложить следующим образом.
Х) Кроме кручения, вызванного передачей вращающего момента.
2) Жестким называется вал, рассчитанный так, что его наименьшее
критическое число оборотов выше нормального рабочего числа оборотов. Вал,
наименьшее критическое число оборотов которого ниже нормального рабочего,
называется гибким валом.
208
Глава V. ЯВЛЕНИЯ РЕЗОНАНСА В МАШИНАХ
т
Критической угловой скоростью называется
угловая скорость вращения вала, при которой упругие
восстанавливающие силы, возникающие при прогибе вала,
уравновешиваются силами инерции сосредоточенных
масс в их обращении вокруг линии подшипников.
т Легко видеть, что задача о вычислении таких
критических скоростей приводится к нахождению
собственных частот поперечных колебаний рассматриваемого
#2 1 вала. Рассмотрим, например, вал на двух опорах с
тремя сосредоточенными массами тг, т2, т3,
вращающийся с угловой скоростью со 1/с. При обращении изогнутой
Уз[ оси вала вокруг линии подшипников возникают
центробежные силы
га^со2, т2у2ы2, т3у3ы2,
где у19 у2, у3 — отклонения1* оси вала (рис. 46) от линии
подшипников в местах крепления сосредоточенных масс.
В критическом состоянии эти силы должны уравнове-
Рис. 46 шиваться упругими восстанавливающими силами,
возникающими при деформации вала. Условия такого
равновесия могут быть записаны в форме уравнений C.8)
обобщенного закона Гука, если заменить в них силы Р. на яг-г/.оо2:
п
уь = ю2 Е ашткук, 1=1,2, ...,п E.1)
к = 1
(а^ — статические коэффициенты влияния). Исключив отсюда уь,
приходим к уравнению для критической скорости со
апт1 - 1/со2 а12т2 а13/п3
а21т1 а22т2 - 1/со2 а23т3
аг\т\ ^Ъ2т2 а3з^з " 1/с°2
0, E.2)
которое ничем не отличается от уравнения частот (векового
уравнения) поперечных колебаний того же вала.
Вал, масса которого (вместе с дисками) приведена к
сосредоточенным точечным массам, представляет собой систему с п степе-
Х) Эти отклонения предполагаются прямолинейными и перпендикулярными
линии подшипников.
2. Гироскопический момент
209
нями свободы и имеет п собственных частот. Каждой из этих
частот соответствует особое значение критической скорости. Число
критических скоростей приведенного вала в первом
приближении равно, таким образом, числу его степеней свободы.
Из изложенного следует, что все рассмотренные в
предыдущих разделах способы приближенного определения частот и
форм поперечных колебаний стержней и балок могут быть
использованы без особых изменений в качестве способов расчета
критических скоростей в первом приближении1).
2. ГИРОСКОПИЧЕСКИЙ МОМЕНТ. При определении критической
скорости в первом приближении рассматриваем расположенные
по валу массы как точечные и учитываем только центробежные
силы этих масс. Но обычно последние представляют собой диски
иногда значительных поперечных размеров. При прогибе вала
плоскость диска поворачивается вокруг одного из своих
диаметров. Возникающие при этом силы инерции будут приводиться
не только к главному вектору (приложенному в месте крепления
диска), но и к главному моменту, который, смотря по
обстоятельствам, может действовать на вал и как изгибающий, и как
восстанавливающий, соответственно уменьшая или увеличивая
критическое число оборотов.
Отметим прежде всего, что когда главный момент сил
инерции сосредоточенных на валу масс (дисков) отличен от нуля,
критические скорости не равны собственным частотам
поперечных колебаний вала. В самом деле, при плоских поперечных
колебаниях вала диск поворачивается вокруг оси,
перпендикулярной плоскости прогиба, и момент сил инерции равен
М = -А§,
где 0 — угол поворота касательной к оси вала в месте крепления
диска, А — экваториальный момент инерции диска (момент
инерции относительно диаметра, перпендикулярного плоскости
прогиба). Когда вал совершает одно из главных колебаний
9 = а виг (р1 + у),
максимальный момент сил инерции равен
Мтах=^Р2<*'
Х) Большое число расчетных схем приведено в книгах М. И. Яновского [59] и
И. Холбы [71].
210
Глава V. ЯВЛЕНИЯ РЕЗОНАНСА В МАШИНАХ
Рис. 47
Этот момент имеет знак, одинаковый со знаком а (рис. 47). Он
действует как изгибающий момент, увеличивает прогиб вала,
как бы делая его менее жестким.
В критическом состоянии момент сил инерции имеет другое
значение. Здесь к собственному вращению вала, передающему
рабочее усилие, присоединяется обращение изогнутой оси вала
вокруг линии подшипников. Обращение вала в критическом
состоянии не является простым вращением твердого тела вокруг
неподвижной оси. Оно не может быть также без существенных
оговорок определено и как прецессионное движение, в котором
роль гироскопа играет диск, совершающий собственное
вращение. Как показывает опыт, обращение представляет
своеобразную деформацию вала, которую можно считать вращением не
вала, а его прогиба вокруг линии подшипников. Такое вращение
прогиба можно воспроизвести, зажав концы свободно
свисающего резинового шланга и затем поворачивая изогнутую форму
шланга вокруг оси, проходящей через зажимы. Если
предположить, что вал несет один диск, жестко закрепленный в точке, где
касательная к изогнутой оси вала почти параллельна линии
подшипников, т. е. образует с последней малый угол а, то при таком
движении поперечное сечение вала в точке крепления диска
будет вместе с диском совершать поступательное движение,
кинематически эквивалентное паре вращений с угловыми
скоростями, равными угловой скорости обращения. Когда вал передает
вращающий момент (в собственном вращении) и совершает
обращение, диск, жестко насаженный на вал указанным выше
способом, имеет три угловые скорости: угловую скорость
собственного вращения со и две угловые скорости ыг и -(ог обращения,
направленные, как показано на рис. 48. Отсюда следует, что диск
можно рассматривать как гироскоп, совершающий
прецессионное движение, только при условии добавления к скорости
собственного вращения одной из угловых скоростей пары обращения.
2. Гироскопический момент
211
Это обстоятельство нужно иметь в
виду при использовании формул
теории гироскопов для
вычисления момента сил инерции диска
как гироскопического момента, в
частности, известной формулы для
величины О гироскопического
момента при регулярной прецессии
гироскопа1*
О = -П^СО 81П а +
+ (С - А) Г2г 81П а сое а], E.3)
где С1 — угловая скорость
собственного вращения гироскопа, С1г —
угловая скорость прецессии, А и С —
экваториальный и полярный
моменты инерции ротора гироскопа.
Направлен гироскопический
момент в сторону векторного
произведения
При применении формулы E.3) для
вычисления гироскопического
момента диска в критическом
состоянии следует различать два случая.
¦ Случай прямой или
положительной прецессии: изогнутая ось
вала обращается со скоростью
собственного вращения в ту же
сторону, в которую происходит последнее (рис. 48, а). В этом случае,
как видно из рисунка, вал вместе с диском совершает одно
простое вращение вокруг линии подшипников с угловой скоростью
С1г = оо1 = со.
Величину гироскопического момента найдем из формулы E.3),
полагая в ней С1, = со, О. = 0:
Рис. 48
О = -(С - А) со2 8И1 а соз а,
1} См. формулу A.41) на с. 34.
212
Глава V. ЯВЛЕНИЯ РЕЗОНАНСА В МАШИНАХ
или приближенно
О = -(С -А) со2а. E.4)
Когда С > А, гироскопический момент имеет знак,
противоположный знаку угла а. Он действует в этом случае как
восстанавливающий момент, увеличивая жесткость вала и повышая
критическую угловую скорость.
¦ Случай обратной пли отрицательной прецессии, изогнутая
ось вала обращается с той же угловой скоростью, с какой
происходит собственное вращение, но в сторону, противоположную
последнему. В этом случае, как видно из рис. 48, б,
^ = 2со, 0.х = сох = + со.
Отсюда, принимая во внимание, что теперь угол между О и С1г
равен а + л, из формулы E.3) получаем
О = со [2Ссо зги а - (С - А) со зт а соз а],
или приближенно
<3 = (С+А)со2а. E.5)
Знак гироскопического момента совпадает со знаком угла а; этот
момент действует, таким образом, как изгибающий момент,
увеличивая прогиб вала, как бы уменьшая его жесткость, а вместе с
ней и критическую угловую скорость.
3. УРАВНЕНИЯ ДЛЯ КРИТИЧЕСКОЙ СКОРОСТИ ВАЛА СО МНОГИМИ
ДИСКАМИ. В уточненных расчетах критической скорости гибких
валов учитываются не только силы инерции дисков, но и
гироскопические моменты последних, так что уравнения для
определения критических скоростей, прогибов и углов поворота
составляются как уравнения равновесия между центробежными силами и
гироскопическими моментами — с одной стороны и упругими
восстанавливающими силами и моментами — с другой. И здесь мы
снова приходим к задаче об определении собственных значений
линейной системы. Однако эта задача уже не совпадает с задачей
об определении собственных частот поперечных колебаний (как
это имело место в первом приближении).
Мы ограничимся случаем прямой прецессии и для упрощения
расчетов предположим, что
С = 2А.
В этом случае гироскопический момент
О = -Асо2а.
3. Уравнения для критической скорости вала
213
Обозначим через а1к и р^ соответственно прогибы и углы поворота
в точках I от единичных сил, приложенных в точках /г. Пусть
далее а-д, и р-^ будут соответственно прогибы и углы поворота в
точках I от единичных моментов, приложенных в точках к.
Величины а1к9 Р^, а[к, р^ удовлетворяют условиям симметрии, причем
а1к = Р-д,. Прогибы уь и углы поворота 6- в точках I от совместного
действия сил Ек и моментов Ок> приложенных в точках к,
определяются соотношениями
E.6)
к = 1 /е = 1
Эти соотношения являются одновременно уравнениями
равновесия между силами Кк, моментами Ок и упругими
восстанавливающими силами и моментами, возникающими при прогибе
вала. В критическом состоянии вала этим уравнениям
удовлетворяют центробежные силы и гироскопические моменты дисков.
Положив поэтому
Кк = тка2ук, Ок = -АкыЧк,
приходим к системе уравнений
п п
\ п У E.7)
1_^1кткУк' к^^1кА^к\' \
Условие, при котором прогибы уь и углы поворота 0^ не равны
нулю (что как раз и имеет место в критическом состоянии),
запишется в виде равенства нулю определителя системы E.7):
Ч1"Ч
^1птп
апАг
а1п^п
ап1т1
апптп ~ —2 ап1А1
... аппАп
Р1п^п РиА + ~2 -• ^пАп
КхА1
- РпЖ +
0. E.8)
214
Глава V. ЯВЛЕНИЯ РЕЗОНАНСА В МАШИНАХ
В рассматриваемом случае (прямая прецессия) это уравнение
имеет п положительных корней. Остальные п корней этого
уравнения — отрицательные. Таким образом, в случае прямой
прецессии система имеет п вещественных критических скоростей1*.
В практических расчетах уравнением E.8) можно
пользоваться, когда число дисков не превышает двух. В других случаях
приходится прибегать к построению специальных
приближенных способов. Такой способ дает, например, формула Рэлея
C.119), надлежащим образом приспособленная к
рассматриваемой задаче. Чтобы получить эту формулу, умножим каждое из
первых п уравнений E.7) на соответствующие тп0 = Bьш сложим
все уравнения почленно. После суммирования получим
п п п п п
§1 тпу^оу2 2 Я{ 2 а1кткУк - со2 I Я1 2 а'1кАквк =
1 = 1 1 = 1 к = 1 1 = 1 к = 1
п п п п
= ш2 2 в^Ео^-со2 I Аквк Еа^, E.9)
к=1 1=1 к=1 1=1
Суммы
1 = 1 1 = 1 1 = 1
представляют: первая (?к) — статический прогиб в точке к от
совместного действия всех нагрузок (?•; вторая (<рк) — угол поворота
в точке к от совместного действия тех же нагрузок. Подставив эти
обозначения в E.9), получим
п п п
1 = 1 1=1 1 = 1
откуда следует
ё^гпьуь
со2 = —- 1- . E.10)
I I
Если принять в соответствии с принципом Рэлея, что прогибы
пропорциональны статическим прогибам /., а углы 0^
пропорциональны статическим углам поворота ф^, то из E.10) получится
Х) В случае обратной прецессии уравнение E.8) определяет 2п положительных
значений со2, как в системе с 2п степенями свободы. То же имеет место и при
С < А. См. Е. Л. Николаи [38].
3. Уравнения для критической скорости вала
215
следующая формула для квадрата первой (наименьшей)
критической скорости при прямой прецессии:
*Х>«Л
со.
]>>*/? - ЕЛф?
E.11)
или, если обозначить через со критическую угловую скорость,
вычисленную без учета гироскопических моментов
то
^кр ^кр
1 I I
1
1-1А4ф2/1/п,7?
E.12)
Применение формулы E.12) не требует дополнительных
построений, кроме тех, которые необходимы для нахождения основной
частоты без учета гироскопических моментов. С построенной
один раз статической упругой линии нужно снять вместе с
прогибами /• углы поворота касательных ср;., причем последние только в
местах крепления дисков1).
Пример 1. Найти критическое число оборотов гибкого консольного вала с
одним диском (рис. 49) при следующих данных:
Я = 60 см, с* = 10 см, Н = 8см, * = 100 см, / = 491 см4, у = 7,8 Г/см3,
Е = 2 • 106 кГ/см2, т = 0,18 ^1211^19 А = 40,5 кГ • см • с2, С = 81 кГ • см - с2.
Вал укреплен в обыкновенном (не
поворачивающемся) подшипнике,
который можно рассматривать как
жесткое закрепление.
Вычислим коэффициенты
влияния по формулам
I3 Г3
ЗЕГ
ЕГ
гг
1
/
*^
~
к
_ _1
\н
, и«е—
Рис. 49
Х) При очень больших А, из формулы E.12) для (о может получиться мнимое
значение. В этом случае гироскопические моменты делают вал настолько
жестким, что совершенно устраняют возможность появления критических
состояний.
216
Глава V. ЯВЛЕНИЯ РЕЗОНАНСА В МАШИНАХ
= 0,
В рассматриваемом случае
ап = 0,34-10-3, а11 = р11 = 0,51-10-5, р{х = 1,02 • 10~7,
ацр^-а^ОДЮ-Ю0.
Уравнение E.8) для критической скорости прямой прецессии запишется
следующим образом:
I а11т - 1/со2 а'цА
I рпт р'пА + 1/ео2
или
со4 + ап^-Ар{1 ш2_ 1 =()
Ат(апр^ - ай) Агп(ап^{1 - а{\)
После подстановки числовых значений получим
со4 + 8,3934 • 105со2 - 1,5242 • 1010 = 0.
Это уравнение имеет один положительный корень со2 ~ 0,1776 • 105, которому
соответствует одна вещественная критическая скорость сокр = 133 1/с.
Критическая скорость, вычисленная без учета гироскопического момента
диска из уравнения
а11тсо2 - 1 = 0,
составляет около 128 1/с. Гироскопический момент прямой прецессии
повышает критическое число оборотов.
В случае обратной прецессии уравнение, аналогичное уравнению E.8),
имело бы в рассматриваемом случае вид
- За[хА
риш
ЗРпА--^
0,
откуда следует
со4 - 3,7393 • 105со2 + 0,5081 • 1010 = 0.
Это уравнение имеет два положительных корня для со2, которым
соответствуют два вещественных значения критической скорости обратной
прецессии
ю1кр « 119 1/с, ш2кр « 600 1/с.
Таким образом, для однодискового консольного вала возможны три
критических состояния при скоростях вращения 119 1/с, 133 1/с, 600 1/с. Из этих
возможных для консольного вала критических состояний критические
состояния обратной прецессии возникают в специальных условиях, о которых
речь шла раньше.
3. Уравнения для критической скорости вала
217
Жесткий консольный вал можно рассчитывать на критическое число
оборотов по одной массе диска, не принимая во внимание гироскопического момента.
Отметим, что критическое число оборотов без учета гироскопического момента
всегда лежит между двумя критическими числами обратной прецессии.
Когда С < А, однодисковый вал имеет две вещественные критические
скорости и при прямой прецессии, в чем легко убедиться в нашем примере,
подобрав подходящим образом численные значения моментов А и С. Однако в
этом случае оба значения критической скорости лежат выше критической
скорости без учета гироскопического момента, причем область между двумя
критическими скоростями прямой прецессии является областью
неустойчивых движений вала. Аналогичное явление имеет место также в случае, когда
на вал насажен не диск, а тело с неодинаковыми главными поперечными
моментами (например, пропеллер или ротор генератора).
В заключение приводим таблицу коэффициентов влияния для однодис-
кового вала (при различных способах закрепления).
Схема
Ри
«11011
м
ЗЕ1
I2
2Е1
Е1
I4
12(Е1J
а2Ъ2
31Е1
аЬ(Ь - а)
31Е1
а3 + Ь3
312Е1
а3Ь*
912(Е1J
а3Ь3
313Е1
а2Ь2(Ь - а)
213Е1
аЬ(а3 + Ь3)
а*Ь4
1*Е1
\21\Е1J
а3Ъ2(За +46)
а2ЬBЬ2- а2)
аDЬ3 + а3)
а*Ъ3
\213Е1
А13Е1
и3Е1
1213(Е1J
218
Глава V. ЯВЛЕНИЯ РЕЗОНАНСА В МАШИНАХ
4. МЕТОД НАЧАЛЬНЫХ ПАРАМЕТРОВ. Метод начальных
параметров в матричной форме является одним из весьма эффективных
приемов расчета динамических напряжений в сечениях вала при
любых сосредоточенных или распределенных гармонических
нагрузках. В окончательных результатах расчета этот метод
приводит к развернутому вековому уравнению, что дает возможность
использования его для нахождения всех собственных частот (или
критических чисел оборотов) вала. С помощью введения
подходящих масштабов для длин и нагрузок расчеты по этому методу
становятся легко выполнимыми даже ручными счетными
приспособлениями, не говоря уже о быстродействующих цифровых
машинах, где итеративная природа метода начальных
параметров оказывается особенно приспособленной для
программирования и выполнения вычислений.
Имея в виду применения метода начальных параметров к
расчету критических чисел оборотов прямых (безмассовых) валов,
нагруженных сосредоточенными силами и моментами, мы будем
исходить в обосновании метода из универсальной формулы упругой
линии, формулы, представляющей общий интеграл уравнения
6.x2
Е1(х)±-Ц= М(х) E.13)
при различных предположениях относительно моментной
нагрузки М и жесткости Е1 (см. А. Н. Крылов, [102]).
Обозначим через СЭ0 и М0 соответственно поперечную силу и
изгибающий момент на левом конце вала (х = 0).
Пусть в точках а-, / = 1, 2, 3, ..., на вал действуют
сосредоточенные силы Р- и моменты М). Уравнение упругой линии E.13) в
этом случае будет иметь вид
с\2и Ян* М() /3,(х - а,) _ М,
^-Л = -22 + 5_ + V — - + V — E 14)
6х2 Е1(х) Е1(х) ^ Е1(х) ^ЕЦх)' К' }
где в суммы, стоящие справа, входят только силы и моменты,
расположенные слева от сечения х. Чтобы найти решение
уравнения E.14), составим его изображение по правилам
операционного исчисления. Положив
У(р) -т-> у(х),
Рг(р) -:-> т4-, р2(р) -^ -етп^ • р№ "^
Е1(х) 1УГ' Е1(х)
4. Метод начальных параметров
219
найдем изображение уравнения E.14):
р2 [у(р) - у@) - |г/'@)] = ЯоР.ф) + М0Р2(р) + 1Р;ад + 1МЛ(Р)-
Отсюда изображение искомой функции у(х):
У(р) = у@) + 1 г/'@) + ^ «о^1(Р) + р Мо-Р2(Р) +
+ 2Р,1^(Р)+2:м/1р2(р).
Применяя к слагаемым, содержащим сосредоточенные силы и
моменты, теорему свертывания, получим
*,> - ,@) + * @) + Я, [ Ь^&р + м011^И +
Такова универсальная формула упругой линии вала переменного
сечения1*.
В суммы справа входят только слагаемые, в которых х больше
а19 и следовательно, для различных отрезков, на которые вал
разделяется точками аь, функция у(х) имеет различные
аналитические выражения. Аналогичным путем может быть построена
универсальная формула и для более сложных видов нагрузки.
Для ступенчатых валов интегралы, входящие в формулу
E.15) и содержащие в промежутках интегрирования точки, в
которых момент инерции 1(Ь) скачком меняет одно конечное
значение на другое, также конечное значение, вычисляются просто
как суммы интегралов, взятых по участкам с постоянным 1(%).
В других случаях эти интегралы находятся приближенно —
графически или по одной из квадратурных формул.
Для вала постоянного сечения по всей длине интегралы в
формуле E.15) легко вычисляются и формула приобретает более
простой вид:
у(х) = у@) + у'@) х + |°^ + ^^ +
+ ёШ^Р>{х " а'K + Ш^Щх " а<J' EЛ6)
!) Вывод универсальной формулы упругой линии при помощи ряда Маклорена
см. в ст. Н. К. Снитко [118]; другой вывод — в кн. Ш. Е. Микеладзе [34].
220
Глава V. ЯВЛЕНИЯ РЕЗОНАНСА В МАШИНАХ
Величины 1/@), у'@), М0, ф0, обозначающие соответственно
прогиб, угол поворота, изгибающий момент и поперечную силу
на одном из концов вала, называются начальными параметра
ми. В простейших случаях закрепления концов вала два
параметра на каждом конце равны нулю и формулы E.15) и E.16)
содержат только по два неизвестных параметра. Так, например,
если на одном конце вала шарнирная опора, то на этом конце
у = М0 = 0.
Если этот конец жестко закреплен, то
У = У' = 0,
если свободен, то
м0 = Я0 = о.
Два других параметра определяются из условий закрепления
другого конца вала.
В критическом состоянии на вал, совершающий прямое
обращение, действуют сосредоточенные центробежные силы тьуь(^2 и
гироскопические моменты (-А^со2), где уь, у\ — прогибы и углы
поворота в точках а-; /п., А- — соответственно массы и
экваториальные моменты инерции дисков; со — критическая угловая
скорость. Выражения для этих сил и моментов следует подставить
вместо Рь и М- в формулы E.15) и E.16), после чего последние
принимают вид: формула E.15)
X X
М - „@) + ч,чо) + е„} (*-у + м„ [ <^М5 +
формула E.16)
«0 „3 4- М0Г2
у(х) = 1/@) + ху'@) + ^ ** + ^ ж* +
+ ем ? т^ю2 (х ~ а*K ~ ш ? А^*(°2 (* ~ а<J- EЛ8)
Вычислив по правилу дифференцирования по параметру
последовательно первую, вторую и третью производные от у(х).
4. Метод начальных параметров
221
приходим к основным уравнениям метода начальных
параметров"
у(х) = 1/@) + у'@) х + М0 / (* \^ + $0 / (ХГГ%^ +
о ДЩ)
ЕЩ)
ЕР,!
(*-<;)(!;
ЯД5) + ; Ч И(У :
У^-^) + мАеЖ)+ЯЛШ) +
+
1Р,1
ЕМ Л
Е1(%)
E.19)
($-а,)а!;
Я/D)
М(х) = М0 + ф0х + 1Рг (х - а;) + ХМ;,
С помощью этих уравнений можно найти прогиб, угол
поворота, изгибающий момент и поперечную силу в любом сечении вала
по значениям этих величин (параметров) в сечении, принятом за
начальное (обычно на одном из концов вала), т. е. по начальным
значениям этих параметров.
Знаки отдельных членов в формулах E.19) ставятся в
соответствии с принятыми направлениями осей координат, прогибов,
угла поворота, изгибающего момента и поперечной силы.
Соотношения между начальными параметрами и их
значениями в каком-либо сечении вала можно представить в виде
произведения некоторой квадратной матрицы на матрицу-столбец. Это
произведение строится следующим образом. Рассмотрим
участок вала между /-м и (I + 1)-м сечениями (ведя счет индексов
справа налево), состоящий из
безмассового отрезка стержня
длиной /•, жесткостью Е11 и
сосредоточенной массой т1 (рис. 50).
Обозначим параметры в сечении I через
у., 6^, Мр ф., в сечении (Ь 4- 1) —
через 1//+х, 9/+1, М1 + 1,Я1 + 1. Между
этими параметрами в силу E.19)
; + 1
Рис. 50
Х) См. статью Н. И. Безухова [94, с. 172].
222
Глава V. ЯВЛЕНИЯ РЕЗОНАНСА В МАШИНАХ
при принятом порядке нумерации сечении и масс имеют место
соотношения
0,4-1 -У1-^г11 + М1Ум^Я1Уя.^ \
м^^м^я^
E.20)
где
УМ;
Ум,
= 'г ^ - & ^
= 1^
0 Е1; '
У<?;
'Г (*, - ^ <^
1
я/,
о Е1,
Подставив в четвертое уравнение вместо у1 + г его выражение из
первого, получим систему уравнений, в которых параметры в
сечении (г + 1) выражены через параметры в сечении г:
У 1+\ = У1 - еЛ + м;.1/м, + $/«/<?,>
9, + 1 =%-М,умГЯ1у1д1,
<2, + ] = т-ю2г/, - т,<о2/,0,. + щ;ю2М;г/м. + [1 + т-со2^.] ф;.
Принимая во внимание правило умножения матриц,
последние соотношения можно записать следующим образом:
У1 + 1
е; + 1
м1 + 1
в/+1
=
1
0
0
~1'
1
0
Ум,
~Ум!
1
Уа.
~Уя
1;
У-1
E.21)
т7оз2 -т-оJ/, /п,-со 2 г/м 1 + т^уд
Если жесткость .Б/, рассматриваемого участка постоянна, то
уравнение E.21) будет иметь вид
I?
Уь + 1
м,.
«1 + 1
1
0
0
т,со2
1
0
*?
2Е11
_±_
1
6Е1{
_ I?
2ЕЦ
I,
-т,(я211 т,ш
1}
2 1
2Е1,
1 + ^;со2—
6ЕЕ
Уг
E.22)
4. Метод начальных параметров
223
Значения параметров в сечении (* 4- 1) будут начальными для
следующего слева участка вала и т. д. до левого конца вала, где,
приравняв нулю два параметра, в соответствии с условиями
закрепления этого конца получим уравнение частот системы.
Квадратную матрицу в уравнении E.22), руководствуясь тем
же правилом умножения, можно представить произведением
двух матриц более простой структуры:
О
О
-и
1
О
-т,со2/7-
I?
2Е1(
_к_
Е1,
1
1}
0
1
0
0
0
0
1
0
0
0
0
1
2Е1,
1 -/
-А
2Е1Ь
/?
6ЕГ
+ 1
I?
0
0
0
1
0
0
2Е11
Е1ь
1
0
6Я7;
2Е1
1ь
1
1
II II - 'Ай1ь Ъи1ь ||
I I2
О 10 0 0 1 —1- —1— . E.23)
Е11 2Е1Ь
0
тьа>2
Первый множитель в этом произведении называется матрицей
массы; дальше он обозначается через 2)?; второй — матрицей
жесткости @.
Если нужно учесть гироскопический момент (-А^со2)
сосредоточенной массы, то в матрице 5ДО появится еще один отличный
от нуля элемент, и она будет иметь вид
ж-
1 0 0 0
0 10 0
0 -А;»2 1 0
тп,со2 0 0 1
E.24)
Произведению Шг% можно дать и другое выражение, удобное для
некоторых числовых расчетов:
ЗМ^ = тьы2В1 + %, E.25)
224
Глава V. ЯВЛЕНИЯ РЕЗОНАНСА В МАШИНАХ
где
Д
0
0
0
1
0
0
0
-и
0
0
0
1?
2Е1
0
0
0
1?
6Е1
Можно составить также матрицы для упругих опор и
сосредоточенных пульсирующих сил, но использование этих матриц в
случае, например, жестких опор связано с некоторыми
осложнениями, требующими развернутых объяснений1*. Можно, впрочем,
обойтись без построения специальных матриц жестких опор, с
помощью простого приема, как это показано в примере 3.
Пример 2. РАСЧЕТ ПЕРВОГО И ВТОРОГО КРИТИЧЕСКИХ ЧИСЕЛ ОБОРОТОВ
СТУПЕНЧАТОГО ВАЛА (рис. 51) МЕТОДОМ НАЧАЛЬНЫХ ПАРАМЕТРОВ В МАТРИЧ
НОЙ ФОРМЕ. Матрица-столбец начальных параметров на правой опоре сод ер
жит два отличных от нуля параметра: угол поворота Э0 и поперечную силу ($0.
Эту матрицу мы представим в виде суммы
0
во
0
#0
=
0
1
0
0
0О +
0 1
0
0
1 1
Яо " А>-
Перенумеровав участки, на которые вал разделяется точками
приложения сил (?!» Я2 и переходным сечением С, а также массы нагрузок в порядке1
IV
III
II
<Э2 = 100 кг
Ю^бОкг
В
60 см 40 см
>^< ^
13 = 40 см
12 = 100 см
1г = 60 см
Рис. 51
Х) См. статью X. Фурке [125].
4. Метод начальных параметров
225
их следования от Б к А (т. е. справа налево), запишем план расчета в таком
виде:
# = ©4 ЗЯ4 ®3 ®2 2Й! ©1 А) ^> (^-26)
где ^ — матрица-столбец значений параметров на левом конце. За единицу
длины I принимаем длину первого участка вала 1Х = 60 см, за единицу силы
Р = 6Е1г/1\ кГ, где 1г — момент поперечного сечения первой половины вала,
/х = 63,58 см4, Е = 2,1 • 106 кГ/см2.
В этих единицах элементы матриц 6* и ЭЭТ будут иметь числовые
значения:
на первом участке
/ = 1 ./ 1* = 1.1 ** = ч! -Ь- = (\— •
1 ' 6Е1, Р' 2Е1, Р' Е1Х 1Р '
на втором участке
*»=?/ = 0,67/, Л_=о,зо1, Л_=1,зз±, _^_=4^
2 3 ' 6Е1г ' Р' 2Е11 ' Р' Д/2 /Р'
на третьем участке
*о = 1-/, -А. =0,321, _М_=о,9б1, -^-=1,90-1-;
3 ' 6Е12 ' Р' 2Е/2 ' Р' Д/2 ' 1Р'
на четвертом участке
^=о'б7г' ей-,-0'09?- ш;-0,42?- йг1-26^-
Буквы / и Р — это названия новых единиц длин и сил. В расчете
фигурируют только числовые коэффициенты при этих названиях. В единицах / и Р
элементы матриц массы т^2 и га2оо2 имеют следующие выражения:
т1ш2 = 5[10-2со2^-] = 5р2,
/п2со2 = 10 Гю-2ю2 -4Ь" 1 = 10Р2'
где
со2=6д/118°8^2 =370 881р2. E.27)
ч
ч
Самые вычисления в соответствии с планом E.26) располагаем в виде
схемы (табл. 11), построенной по правилу: умножив вектор И0 на @х,
произведение Й^о располагаем под /H. Так же поступаем с произведениями
30?1@1^>о» @23)?1@1^05 ®з®2^1®1-^о - и т* д-> они на схеме располагаются
каждое под предыдущим.
N 10456 Бабаков
226
Глава V. ЯВЛЕНИЯ РЕЗОНАНСА В МАШИНАХ
1 г _1
0 1
0 0
1 о о
1 * °
0 1
0 0
I 5р2 0
I 1 -0,67
0 1
0 0
1 ° °
II 1 -1
0 1
0 0
|| 0 0
1 г °
0 1
0 0
|| Юр2 0
1 1 -0,67
0 1
0 0
1 ° °
3
-6
1
0
0
0
1
0
1,33
-4
1
0
0,95
-1,90
1
0
0
0
1
0
0,42
-1,26
1
0
Таблиц
1 I
-3
1
1 II
0 1
0
0
1 1
0,30 |
-1,33
0,67
1 1
0,32 |
-0,95
1
1 ||
0 1
0
0
1 1
0,09 |
-0,42
0,67
1 1
1 °
1
0
II о
1 _1
1
0
|| 0
II _1
1
0
1 ~5
е0 +
е0 +
е0 +
0
0
0
— 3
а 1 1
Я0
я0
— 3
| 1 + 5р2
| -1,67 - 1,5р2
1 + 6,65р2
-3,35р2
-5р2
| -2,67 - 12,93р2
1 + 17,77р2
-8,35р2
1 -5р2
ко
бп +
е° 1
II -2,67 - 12,93/?2 |
1 + 17,77р2
-8,35р2
1 -31,7р2 - 129,Зр4|
о0 +
4,64 + 1,5/?2
-8,33 - 6,65р2
1,67 + 3,35р2
1 + 5р2
14,88 + 12,93р2
-12,45 - 17,77р2
2,67+ 8,35р2
1 + 5р2
к>п
**о
Яо
|| 14,88 + 12,93р2
-12,45 - 17,76р2
2,67+ 8,35р2
|| 1 + 153,8р2 + 129,Зр4
#0
в =
-3,34- 31,20р2- 11,66р4
-29,59р2-86,63р4
24,43 + 42,18р2 + 11,64р4
3,34 + 111,4р2-86,63р4
Яо
Отмеченные звездочками элементы последних матриц вычислять не нуж
но, так как они в условия на левом конце (шарнирная неподвижная опора)
не входят. Таким образом, на левом конце
(-3,34 - 31,20р2 - 11,66р4) 90 + B4,43 + 42,18р2 + 11,64р4) <Э0 = 0,
(-29,59р2 - 86,63р4) 90 + C,34 + 111,40р2 + 86,63р4) Я0= 0.
4. Метод начальных параметров
227
Исключив из этих уравнений 60 и ф0, приходим к вековому уравнению
системы, которое после приведения подобных членов будет иметь вид
Его корни
439,48р4 - 246,59р2 + 11,16 = 0.
р\ =0,0497, р| = 0,5113.
По формулам E.27) получаем для первой и второй критических скоростей
0)^135,8, со2« 435,5.
Первое из этих значений почти не отличается от найденного графически по
методу Рэлея в примере 6 на с. 191.
Пример 3. Найти первую и вторую критические скорости консольного
вала (рис. 52) постоянной жесткости с двумя сосредоточенными нагрузками:
фх = 80 кГ и (?2 = 60 кГ. Момент поперечного сечения / = 63,58 см4, Е =
= 2 • 106 кГ/см2, Е1 = 127,16 • 106 кГ • см2. За единицу длины берем / = 50 см,
за единицу сил Р = 6Е1/12 кГ. Матрица жесткости для всех участков вала
одна и та же, и ее элементы в единицах / и Р равны
I3
вЕ1
= 1^,
Р'
I2
2Е1
= я1,
р9
1
Е1
= 6^-
1Р
1 = 1-1;
В матрицах масс
т^2 = 0,08со2 = 8 Гю-2(о2^1 = 8р2,
т2ы2 = 0,06ю2 = 6 ^Ю-2©2^! = 6р2,
2 6Е1р2 • 103
где
E.28)
По сравнению с предыдущей задача осложнена наличием промежуточной
жесткой опоры. Однако для решения этой задачи нет надобности в
построении специальной матрицы перехода через жесткую опору вроде матриц
шестого порядка Фурке [125]. Заменив промежуточную жесткую опору
поперечной реакцией К (неизвестной), продолжаем расчет до левого конца вала
и к двум краевым условиям на этом конце добавляем третье — равенство
нулю прогиба на опоре. Разделив вал на три участка, как показано на рис. 52,
записываем план расчета следующим
образом:
1) Вх = (Ш^Яо; 2) В = ЭЯЩВг + Вя),
где В0, Вк, В — матрицы-столбцы
соответственно начальных параметров,
реакции Н и значений параметров на
левом конце вала.
1^2
1
1^
—*>
г
¦^
^
—*-
Яг
1
1
-«
1
—^-
Рис. 52
228
Глава V. ЯВЛЕНИЯ РЕЗОНАНСА В МАШИНАХ
Результаты расчета располагаем в табл. 12. Имеем три уравнения1*:
-1бр20о + C + 16р2) Я0 + Е = 0У)
(-26р2 - 384р4) 90 + A + 170р2 + 384р4) Я0 + A + 6р2) В = оА
-A + 4р2)ео + 4A+р2H0 = 0. \
Исключив Е из уравнений E.29), приходим к уравнению частот системы
-5р2 - 144р4 -1 + 68р2 + 144р4
-1-4р2 4+ 4р2
180р4 - 44р2 + 1 = 0,
E.29)
0
E.30)
Таблица 12
II 1 -1 3 1
0 1-6 -3
0 0 11
10 0 0 1
| 1 0 0 0 1
0 10 0
0 0 10
1 8р2 0 0 1 1
1-13 1
0 1-6 -3
0 0 11
1 0 0 0 1
| 1-1-3 1
0 1-6 -3
0 0 11
1 0 0 0 1
1 1 0 0 0
0 10 0
0 0 10
| 6р2 0 0 1
^
-\
V.
¦^~
^~
^~
^"
0
1
0
0
-1
1
0
0
-1
1
0
-8р2
\% +
к +
е0 +
-2 - 8р2 1
1 + 24р2
-8р2
-8р2 1
-3 - 64р2
1 + 96р2
-16р2
-8р2
0
0
0
— о
—3
1 + 8р2
е0 +
е0 +
\Яо
#0
#0
8 + 8р2
-12 - 24р2
2 + 8р2
1 + 8р2
27 + 64р2
-27 - 96р2
3 + 16р2
1 + 8р2
$0 +
ко +
0
0
0
1
1
-3
1
1
К
\в
-16р2
-26р2 - 384р4
3 + 16р2
1 + 170р2 - 384р4
Яо +
6р2
:) Первые два уравнения выражают равенство нулю изгибающего момента и по
перечной силы на левом свободном конце вала; третье — равенство нулю про
гиба на промежуточной опоре.
5. Крутильные колебания коленчатых валов
229
откуда
р\ = 0,025, р| = 0,219.
Из формулы E.28) находим значения ш2 и со:
со|-15268,80, со| = 133754,70,
со1*124, со2*365.
Изложенный прием легко обобщается на случай вала с любым числом
промежуточных жестких опор.
5. КРУТИЛЬНЫЕ КОЛЕБАНИЯ КОЛЕНЧАТЫХ ВАЛОВ. Крутильные
колебания коленчатых валов поршневых машин возникают
вследствие периодических изменений усилий, передаваемых на
вал кривошипными механизмами от давления газов в
цилиндрах. Так как вал — упругая система, то вызываемые этими
изменениями периодические колебания угловой скорости вращения
наступают в различных его частях не одновременно. Отдельные
участки вала получают периодические относительные угловые
смещения. Эти периодические угловые смещения участков вала
и представляют собой крутильные колебания1*.
В работающей машине установившиеся крутильные
колебания вала являются вынужденными. В условиях резонанса при
совпадении частоты какой-либо из гармонических
составляющих возмущающего момента с одной из собственных частот
свободных колебаний относительные угловые смещения участков
вала могут выйти за пределы допускаемых, что может привести к
поломке вала. Числа оборотов вала, при которых наступают
указанные явления, называются критическими. Критические
состояния коленчатого вала при резонансных крутильных
колебаниях представляют собой, таким образом, явление,
принципиально отличное от критических состояний прямого вала ротативных
машин (по крайней мере, в стодоловской трактовке этих
состояний).
Задачей расчета коленчатого вала на крутильные колебания
является определение критических скоростей, вычисление
резонансных амплитуд и максимальных динамических напряжений,
возникающих на валу двигателя. Эти расчеты обычно ведутся по
Г) Если бы вал был абсолютно жестким, то от изменений вращающего момента
появились бы только незначительные колебания угловой скорости вращения
вала в целом, так называемая периодическая неравномерность хода, для
выравнивания которой служит маховое колесо.
230
Глава V. ЯВЛЕНИЯ РЕЗОНАНСА В МАШИНАХ
упрощенной схеме действительного вала, которая строится с
помощью специальных правил приведения вала. Все связанные с
валом и движущиеся с ним массы заменяются эквивалентными
маховыми массами, иначе говоря, сосредоточенными в
определенных местах дисками постоянных моментов инерции. Такая
операция называется приведением масс. Делая такое
приведение, мы пренебрегаем периодическими изменениями моментов
инерции масс кривошипно-шатунных механизмов, в результате
чего уравнения крутильных колебаний вала становятся
линейными уравнениями с постоянными коэффициентами.
Далее, при составлении дифференциальных уравнений
крутильных колебаний собственной массой отрезков вала между
дисками обычно пренебрегают. В результате получается система
сосредоточенных масс, связанных между собою упругими, но
безынерционными отрезками круглого вала. Такая система имеет
конечное число степеней свободы.
При таких решительных упрощениях мы не можем
рассчитывать на получение точных значений искомых величин для
заданной системы. Приходится ограничиваться нахождением
более или менее тесных границ для основных критических
скоростей, на которые эти упрощения оказывают сравнительно малое
влияние.
6. ПРИВЕДЕНИЕ ПОСТОЯННЫХ МАСС1). Приведение масс или
замена масс, движущихся с валом, массами сосредоточенных в
определенных местах дисков производится по следующему общему
принципу: кинетическая энергия эквивалентных дисков должна
равняться средней (за один оборот) кинетической энергии
движущихся масс.
Когда движущиеся с валом массы совершают вращательное
движение, их приведение заключается просто в вычислении
моментов инерции относительно оси вала. Такие массы называются
постоянными: их приведенные моменты инерции при вращении
вала не изменяются. Сюда относятся прежде всего собственная
масса вала; затем — колена, маховик, ротор генератора, гребной
винт, пропеллер и т. п. При этом собственная масса вала учиты-
г) Мы предполагаем, что читатель знаком в общих чертах с устройством
поршневого двигателя и в дальнейшем пользуемся наименованиями отдельных
частей его без особых пояснений.
6. Приведение постоянных масс
231
вается только для длинных участков валопровода, если таковые в
установке имеются.
Приведение масс колена заключается в вычислении моментов
инерции относительно оси вала:
' 1ъ
прилегающих к колену частей коренных шеек (эти части
берутся равными половине длины / коренной шейки между
соседними коленами);
^ 1Ш — моты левой шейки;
^ 21щ — двух щек колена.
Первые два момента вычисляются по формулам (см.
обозначения на рис. 53)
7-= ~§ й {1L ~ а4)-
Момент инерции щеки, имеющей форму прямоугольного
параллелепипеда, вычисляется по формуле
Рис. 53
232
Глава V. ЯВЛЕНИЯ РЕЗОНАНСА В МАШИНАХ
Если щека не имеет правильной геометрической формы и нет
возможности воспользоваться для ее момента инерции готовой
формулой из справочника, то прибегают к одному из приближенных
аналитических или графических способов. Щеку разбивают на
части цилиндрическими поверхностями, описанными вокруг оси
вала (рис. 54) на достаточно малых расстояниях АЕ одна от
другой и по возможности так, чтобы высота Н каждой из этих
поверхностей была постоянной. Если у — вес единицы объема
материала щеки, то момент инерции одной такой части относительно
оси вала равен
д/= 1^-НК3АЕ.
§ 180
Момент инерции всей щеки
Угол а = 360° для цилиндрических частей, радиус которых Е < с;
во всех других случаях а < 360°. Так, для части АВ
цилиндрической поверхности а = аг. Если же цилиндрическая поверхность
разрезает щеку на более чем две части, как, например, е/тп на
рис. 54, то
а = а2 + а3 + а4.
Если имеются противовесы, то их рассматривают как части
соответствующих щек.
Рис. 54
7. Приведение масс кривошипно-шатунного механизма
233
7. ПРИВЕДЕНИЕ МАСС КРИВОШИПНО-ШАТУННОГО МЕХАНИЗМА.
Кривошипно-шатунный механизм представляет собой систему с
переменным моментом инерции. В приближенных расчетах
пользуются обычно постоянным средним значением этого момента за
один оборот вала1). Достаточно близкую к среднему значению
величину приведенного момента можно получить следующим
образом. Масса шатуна разносится на мотылевую шейку (в
количестве от 3/5 до 2/3 всей массы) и на крейцкопф (остальная часть).
Момент инерции первой, вращающейся части вычисляют в
предположении, что ее масса сосредоточена на оси мотылевой шейки
на расстоянии от оси вала, равном радиусу колена. Момент масс,
совершающих вместе со второй частью шатуна
возвратно-поступательное движение (крейцкопф, порпгень), принимается равным
моменту инерции полусуммы этих масс в предположении, что все
они сосредоточены также на оси мотылевой шейки.
Пусть момент инерции колена будет /0, масса шатуна М,
суммарная масса частей, совершающих возвратно-поступательное
движение, Мг. Тогда момент инерции всего
кривошипно-шатунного механизма
I = /0 + \аМ + \ [A - а) М + М^Щ ,
где а — правильная дробь, определяющая часть массы шатуна,
отнесенную на мотылевую шейку. Иногда применяется
уточненная формула:
7 = /0 + |аМ+|[A-а)М + М1]A + ^2)|л2,
где К0/Ь — отношение длины кривошипа (расстояние между
осью вала и осью мотылевой шейки) к длине Ь шатуна (между
центрами цапф). Необходимо отметить, что хотя изменения
момента инерции кривошипного механизма в общем невелики,
однако в некоторых машинах наличие таких изменений весьма
заметно сказывается на критических скоростях. Вместо отдельных
(дискретных) значений критической скорости появляются
сплошные зоны значений последней, т. е. целые области, в
пределах которых может колебаться критическая скорость работаю-
> Этот момент называется дальше моментом цилиндровой массы.
234
Глава V. ЯВЛЕНИЯ РЕЗОНАНСА В МАШИНАХ
щей машины. Определение этих критических зон представляет
сложную задачу, решение которой связано с интегрированием
системы дифференциальных уравнений с периодическими
коэффициентами1^
8. ВЫЧИСЛЕНИЕ ПОДАТЛИВОСТЕЙ УЧАСТКОВ ВАЛА. Приведенны-
ми массами (дисками) вал разделяется на ряд безынерционных
участков, упругие свойства которых в крутильных колебаниях
характеризуются упругой податливостью или упругой жестко
стью на кручение. Податливостью участка вала длиной /
называется угол е, на который закручивается этот участок от
приложенного к нему единичного крутящего момента. Если
обозначить через а угол кручения участка от момента М, а через О и /
соответственно модуль сдвига [кГ/см2] и полярный момент
инерции поперечного сечения вала [см4], то
^Ш^Мк^} E'31)
Величина, обратная податливости, представляет собой
жесткость на кручение
-гт[кГ<с4
Закручивание участка на некоторый угол а осуществляется
обычно приложенными к крайним сечениям участка парами
равных, но противоположных по знаку моментов М и -М,
абсолютное значение которых и есть крутящий момент М на участке.
Приведенной длиной 10 участка вала длины / называется
длина отрезка круглого вала с постоянным моментом инерции /0,
податливость которого равна податливости данного участка.
Согласно формуле E.31)
Вычисление податливостей, которое иначе называют приведением
длин вала, производится по готовым, большей частью
эмпирическим, формулам. Подробнейшую сводку этих формул с
многочисленными графиками и номограммами можно найти в справочном
пособии по расчету крутильных колебаний В. П. Терских [47, 48].
х> См. статью Н. Е. Кочина [100].
8. Вычисление податливостей участков вала
235
Достаточно подробные сведения о приведении коленчатых валов
можно найти также в книге И. А. Лурье [29]. Здесь мы
ограничимся небольшим числом формул, наиболее часто встречающихся
в расчетах податливостей участков вала.
¦ Податливость цилиндрического круглого участка
длиной I с осевым сверлением вычисляется по формуле
32 1
ко я4 - ^4'
где 2) — диаметр вала, й — диаметр осевого сверления.
Ш Податливость конического участка длиной Ь с
диаметрами крайних сечений Ох < Б2
где 12 — момент инерции крайнего сечения диаметра Б2, а
3 Иг 1Л1У Бх \
¦ Податливость галтели (рис. 55, а)
вычисляется по формуле
32 \1\ + Х , 12 ->Ч
где буквы 119 12> X, 1I, ^2 имеют указанное
на рисунке значение. Увеличение
податливости галтели здесь выражено удлинением
X участка с меньшим диаметром за счет
участка с большим диаметром. Величина X
зависит от отношения 1I/1J. Если,
например, радиус галтели г < 0,11I, то Х/Б
убывает от 0,1 до 0,04, когда Вх/В2 растет от
0,5 до 0,9. Формула податливости
галтели применяется и для фланцевых
соединений (рис. 55, б). В этом случае диаметр
И2 берется равным диаметру болтового
кольца.
а)
Г
:3+-
"^
б)
Рис. 55
236
Глава V. ЯВЛЕНИЯ РЕЗОНАНСА В МАШИНАХ
ш Для приведения колен (рис. 53) чаще всего пользуются
формулой Картера
е=Ц.\1 + *>*Ъ +0,75 / 4+1Д5Л1
и формулой С. Зиманенко1)
9. ПРИВЕДЕННАЯ СХЕМА. Приведение масс и вычисление подат-
ливостей участков вала завершаются построением приведенной
схемы заданной системы. Для этого выбирается некоторая
жесткость О10 (например, жесткость коренной шейки вала) и на нее
умножаются податливости участков вала. В результате
получается круглый вал сплошь одного и того же диаметра В0 (диаметр
приведения), разделенный сосредоточенными маховыми массами
на безынерционные участки длиной
11 = е1О10, 1=1,2, ... ,п- 1.
Таким образом, мы получаем приведенную схему вала,
заменяющую действительный вал при расчете на колебания (рис. 56).
Именно такая схема была положена в основу вычисления
кинетической и потенциальной энергии крутильных колебаний вала
и вывода уравнений колебаний в прямой и обратной форме,
приведенных в гл. П. В гл. IV изложены методы расчета собственных
частот такой схемы. Это были методы приближенного решения
системы однородных линейных уравнений специального типа.
Существуют, однако, методы расчета собственных частот
крутильных колебаний, не требующие ни вычисления кинетической
и потенциальной энергии системы, ни предварительного
составления уравнений. Эти методы являются самыми
распространенными в расчетной практике. Из них мы рассмотрим только метод
последовательных проб, известный под названием метода Толле,
вместе с матричным оформлением этого метода.
-) Формула Картера применяется при расчете валов авиационных двигателей,
формула Зиманенко — для двигателей стационарных.
/ + 0,6
0,8а+ 0,2/*^
+
в\
Л\ ~ Ьк*Л>\'
9. Приведенная схема
237
Ф
'з и ч и
© © © ©
ф
© © ф
к
к
«^—*•
ч
Рис. 56
Рис. 57
В основе метода Толле лежат рекуррентные формулы для
амплитудных угловых отклонений маховых масс приведенного вала
е2 = ех - е1Рч^
е3 = е2-в2р2(/1е1 + ^2^
е =е„
E.32)
1-е/г_1р2(/1е1 + -..+ ^-А-1>.
Способ приближенного расчета собственных частот
заключается в последовательном вычислении числовых значений левой
части векового уравнения системы
для пробных значений квадрата частоты р2. Эти вычисления
выполняются по приведенной ниже схеме, которая носит название
таблицы Толле.
Задавшись некоторым значением квадрата частоты р2,
например р2 = у19 и положив 6Х = 1, вычисляем по формулам E.32)
последовательно значения углов 62, 63, ... , 0Я. Эти значения
подставляем в левую часть последнего уравнения. При произвольно
выбранном значении/J это уравнение не будет выполнено: левая
часть его будет иметь некоторое отличное от нуля числовое
значение, которое мы обозначим через
А(У1)
и будем называть остаточным моментом. Давая р2 другие
значения у2, у3, ... и т. д., получим ряд остаточных моментов
Д(у2), Д(у3), ....
Пары соответствующих значений А, у отмечаем точками в
координатной системе Д, у. По этим точкам строим кривую
остаточных моментов (рис. 57). Абсциссы точек пересечения этой кри-
238
Глава V. ЯВЛЕНИЯ РЕЗОНАНСА В МАШИНАХ
вой с осью у дадут приближенные значения искомых частот. Вы
числение остаточных моментов можно расположить в удобные
расчетные схемы. Одна из таких схем приведена ниже (табл. 13).
В основной своей части она состоит из шести столбцов. Два край
них содержат нумерацию участков (столбец 1) и маховых масс
(столбец 6), причем строки участков чередуются со строками
масс. Столбцы 3 и 4 содержат соответственно податливости еь (или
жесткости с.) и произведения моментов инерции 1Ь на квадрат
выбранного значения частоты/?2. Эти столбцы заполняются с самого
начала, причем податливости помещаются в строках участков, а
произведения 1ьр2 — в строках маховых масс. В столбцах 5 и 2
располагаются вычисленные по формулам E.32) амплитуды
маховых масс и крутящие моменты на участках вала. Заполнение
этих столбцов производится в следующем порядке. Записав
амплитуду первой массы 0Х = 1 в первую клетку 5-го столбца,
умножаем ее на -1гр2 и результат записываем в первой клетке 2-го
столбца. Это — крутящий момент на первом участке; его без
изменений переписываем в том же столбце в строку первого
участка A—2). Далее умножаем этот момент на податливость ех и
произведение подписываем (в той же строке 1—2) под первой
амплитудой. Сумма первой амплитуды и только что полученного
произведения (-11р2е1), согласно первой формуле E.32), даст
амплитуду 2-й массы. С этой амплитудой поступаем так же, как и с
первой; только, получив произведение (~12р2в2), мы его не просто
переписываем в строку второго участка B—3), а прибавляем к
Таблица 13
(М)
1
1—2
2-3
3—4
4—5
2
М
-'Ар2
3 4
е -1р2
- -11Р2
е1 -*
- 12Р2
е2 -*
- 1,Р2
ез ~+
^ 1,Р2
- 1,Р2
5
0
01 = 1
Д(у) =
6
1
2
3
4
5
F)
9. Приведенная схема
239
предыдущему (в том же столбце 2) моменту Мх и в строке второго
Участка B—3) ставим полученную сумму. Дальнейшие
вычисления ведутся в аналогичном порядке. При этом в 5-м столбце, в
строках масс, получаются амплитуды, а в строках участков —
произведения
которые согласно уравнениям E.32) нужно прибавить к
предыдущей амплитуде, чтобы получить следующую. Остаточный момент
получится в дополнительной строке, которую можно было бы
считать относящейся к 5-му, не существующему в рассматриваемой
системе участку. Для контроля вычисление остаточного момента
следует провести еще один раз с тем же значением р2, но в
обратном порядке, т. е., начиная с амплитуды последней (пятой) массы,
приняв эту амплитуду за единицу. Результаты такого
контрольного расчета — амплитуды масс и моменты на участках —
размещаются в дополнительных столбцах @) и (М) справа и слева основной
таблицы, заполняемых снизу вверх аналогично столбцам 5 и 2.
Остаточный момент в этом обратном расчете должен совпадать с
остаточным моментом в прямом.
Из табл. 13, составленной только для одного пробного
значения квадрата частоты, можно сделать ряд важных выводов.
¦ Подсчитав число перемен знака величин, стоящих в строках
участков (во втором столбце), мы определим место пробного
значения среди частот заданной системы. Следует при этом иметь в
виду, что число перемен знака указанных величин здесь1)
совпадает с порядком соответствующей собственной формы или
частоты, так что, например, первая форма имеет одну перемену знака,
вторая — две и т. д. Это, однако, не противоречит теореме о
переменах знака амплитуд собственных форм, изложенной в гл. III.
Дело в том, что частота, называемая здесь первой, является,
строго говоря, второй. Первая частота равна нулю, и соответствующее
ей главное колебание представляет общее вращение вала.
¦ Заполнив несколько таблиц для разных значений р2, можно
разделить корни векового уравнения и затем с помощью простого
интерполирования найти все частоты системы с достаточно
хорошим приближением.
) В координатах Эг
240
Глава V. ЯВЛЕНИЯ РЕЗОНАНСА В МАШИНАХ
# Выполнив действия, показанные в таблице с неопределенным
значением р2, придем к развернутому вековому уравнению рас
сматриваемой системы (см. пример 5). Этот способ развертыва
ния векового уравнения крутильных колебаний является,
по-видимому, одним из простейших, особенно если надлежащим
образом подобрать масштабы для податливостей и произведений 1ьр2-
Ш Используя некоторые промежуточные результаты расчета
таблицы Толле, мы можем получить гармонические коэффициенты
влияния частоты, равной взятому пробному значению р, и вместе с тем
вычислить собственную частоту, ближайшую к этому значению1*.
Ш Простой перестройкой таблицы Толле без изменения порядка
и содержания последовательных вычислений мы можем
представить ее в матричной форме. В своем первоначальном виде схема
таблицы Толле отличается от матричного расчета только иным
расположением отдельных операций (см. табл. 15).
10. МАТРИЧНАЯ ФОРМА ТАБЛИЦ ТОЛЛЕ — МЕТОД НАЧАЛЬНЫХ
ПАРАМЕТРОВ. Начальными параметрами здесь будут угол
поворота 92 и момент Мг (внешний или инерционный) на одном из
концов вала. Матрица жесткости или податливости и матрица массы
(моментов инерции) будут матрицами второго порядка. Чтобы
построить эти матрицы, рассмотрим систему, состоящую из двух
дисков с моментами инерции 1г и /2, соединенных валом с
податливостью ех (рис. 58). Концы вала — свободны. Матрица-столбец
начальных параметров на правом конце2)(до перехода через диск 1г) будет
II 01 II-
II 0 В
Диск /х, совершающий крутильные колебания с частотой р,
создает инерционный момент на правом конце, равный -11р2в1.
С учетом этого момента матрица параметров на правом конце
будет
записать в виде
91 II
0 I
х) См. статью автора [91].
2) Счет моментов инерции и податливостей отрезков вала ведется справа налево.
е„м2
е1,м1
Рис. 58
-1ХР'\
Эту матрицу можно
произведения
1 0
-1гР2 1
10. Матричная форма таблиц Толле
241
Таким образом, переход через массу с моментом 1г
осуществляется матрицей
II г °1 «™
II ~Т1Р2 1 II
Эту матрицу по аналогии с матрицей E.23) можно назвать
матрицей массы.
Из первого уравнения E.32) находим
В сечении перед диском 12 угол поворота и момент, если не
учитывать собственной массы вала, будут элементами
матрицы-столбца
Ц^^гР^гЦ E.34)
II -^Р20! II
которая получается из матрицы E.33), если умножить ее слева
на матрицу
1 вх I E.35)
II 0 1 ||
Эту последнюю матрицу мы назовем матрицей податливости.
Для перехода через диск /2 нужно матрицу E.34) умножить
слева на матрицу массы
1 ° . E.36)
II ~^Р2 г II
Таким образом, переход от начальных параметров на
свободном правом конце, несущем массу с моментом /х, к значениям
этих параметров на свободном левом конце с массой /2 можно
представить следующей матричной схемой:
E.37)
I М2\ I -12р2 1 II 0 1 II -1гР2 1 ||| 0 ||
Положив М2 = 0, получим уравнение частот
1^A-1^4^ + 1^ = 0,
из которого находим два значения/?2:
Р\ и> Рг Р т т '
е\1\12
Первое соответствует общему вращению вала с дисками: второе
дает собственную частоту крутильных колебаний.
242
Глава V. ЯВЛЕНИЯ РЕЗОНАНСА В МАШИНАХ
Если левый конец вала жестко закреплен, то 02 = 0 и
уравнение частот будет иметь вид
1-/^ = 0,
из чего следует
Р2 = сх11х.
Распространение схемы E.37) на многомассовые приведенные
валы не требует дополнительных замечаний.
Пример 4. КРУТИЛЬНЫЕ КОЛЕБАНИЯ ПРИВЕДЕННОГО ВАЛА С ПЯТЬЮ
ДИСКАМИ. Даны моменты инерции [кГ • м • с2] и погонные жесткости [кГ • м]
участков вала.
1Х = 10,78 сх = 10,48 • 104
12 = 82,82 с2 = 34,80 • 104
/3 = 14,27 с3 = 24,40-104
14 = 29,56 с4 = 40,60 -104
/5 = 21,66
Для упрощения вычислений выбираем за единицу податливости
податливость первого участка
10,48
[_кГ • м] '
С помощью этой единицы, положив для дальнейшего упрощения
р2 = а-104,
получим вместо 1±р2 безразмерные произведения
/^ос-Ю4^, / = 1,2,3,4,5.
Пересчитав данные примера на новые единицы, будем иметь:
1хр2 = 1,03 а, ег = 1,
12р2 = 7,90 а, е2 = 0,30,
13р2 = 1,36 а, б3 = 0,43,
14р2 = 2,82 а, е4 = 0,26.
1ьр2 = 2,07 а,
Расчет с неопределенным значением^2 проводим, как показано в табл. 14,
располагая матрицы-множители и результаты отдельных умножений так
же, как и в табл. 13.
10. Матричная форма таблиц Толле
243
Таблица 14
II 1 0 |
1 -1,03а 1
1
1 1 |
0 1 |
1 0 |
1 -7,90а 1
1 0,30
|| 0 1 |
|| 1 0 1
-1,36а 1
1 0,43
0 1
II * ° 1
|| -2,82а 1
1 0,26
0 1
II 1 °
-2,07а 1
и
| -1,03а [
| 1 ~ 1,03а |
1 ,03а 1
II 1 - 1,03а
1 -8,93а +
|| 1 - 3,71а +
|| -8,93а +
| 1 - 3,71а +
1 -10,29а +
8,14а2 1
2,44а2 I
8,14а2 1
2,44а2
13,19а2 -
| 1 - 8,13а + 8,11а2 -
|| -10,29а + 13,19а2 -
| 1 - 8,13а + 8,11а2 -
| -13,11а + 36,12а2-
| 1 - 11,54а + 17,50а2 -
1 -13,11а + 36,12а2 -
3,32а3 1
1,43а3 |
3,32а3
1,43а3
26,19а3 +
8,24а3 +
26,19а3+
4,03а4 |
1,05а4 |
4,03а4 ||
*
-15,18а + 60,01а2 - 62,42а3 + 21,09а4 - 2,17а5
Приравняв нулю, в соответствии с условиями на левом конце, второй
элемент последней матрицы-столбца, получим вековое уравнение системы
а (а4 - 9,74а3 + 28,91а2 - 27,83а + 7,04) = 0.
Корни этого уравнения, вычисленные по методу Лобачевского — Греффе (до
четвертых степеней а), дают д,ляр1 следующие значения:
р1 = 62,6, р2 = 105,4, Рз = 175>8> ^4 = 229,1,
и один нулевой корень, соответствующий общему вращению вала.
Пример 5. Чтобы продемонстрировать тождественность схемы Толле с
матричной схемой (табл. 14), для той же системы составлено вековое
уравнение по методу Толле (табл. 15), исходя из тех же безразмерных величин, что
и в предыдущем примере.
Таблица 15
1
1—2
2—3
3—4
4—5
5—6
2
- 1,03а
- 1,03а
- 7,90а + 8,14а2
- 8,93а 4- 8,14а2
- 1,36а + 5,05а2- 3,32а3
-10,29а + 13,19а2- 3,32а3
- 2,82а + 22,93а2 - 22,87а3 + 4,03а4
-13,11а + 36,12а2-26,19а3 + 4,03а4
- 2,07а + 23,89а2 - 36,23а3 + 17,06а4 - 2,17а5
-15,18а + 60,01а2 - 62,42а3 + 21,09а4 - 2,17а5
3 4
— -1,03а
1 —
— -7,90а
0,30 —
- -1,36а
0,43 -*
— 2,82а
0,26 —
— -2,07а
5
1
- 1,03а
1 - 1,03а
- 2,68а + 2,44а2
1- 3,71а + 2,44а2
- 4,42а + 5,67а2-1,43а3
1- 8,13а + 8,11а2-1,43а3
- 3,41а + 9,39а2-6,81а3 + 1,05а4
1 - 11,54а + 17,50а2- 8,24а3 + 1,05а4
6
1
2
3
4
5
а = 0; а4- 9,70а3 + 28,71а2 - 27,60а + 6,98 = 0.
11. Гармонические составляющие вращающего момента
245
11. ГАРМОНИЧЕСКИЕ СОСТАВЛЯЮЩИЕ ВРАЩАЮЩЕГО МОМЕНТА.
В заключение приведем краткие замечания о возмущающих
гармонических моментах, действующих на цилиндровые массы
приведенного вала. Крутильные колебания вала в установившемся
режиме работы машины, как было уже отмечено раньше,
являются колебаниями вынужденными. Они возбуждаются
гармоническими составляющими вращающих моментов (от давления
газов в цилиндре), приложенных к цилиндровым массам, и
инерционных моментов масс кривошипных механизмов.
Вращающий момент от давления газов в цилиндре
представляет собой сложную периодическую функцию угла а поворота вала,
которая определяется графически по заданной индикаторной
диаграмме. Для одного цилиндра четырехтактного двигателя эта
функция имеет вид кривой, изображенной на рис. 59, а для
двухтактного — на рис. 60, где представлен ход изменения вращающего
момента на протяжении одного периода Dл; — для четырехтактного
процесса, 2 л — для двухтактного). Отдельные участки кривой
(рис. 59) на отрезках в л радианов каждый представляют
изменения вращающего момента для четырех ходов поршня: @, тс) —
рабочий ход (ход расширения), (л, 2л) — выхлоп, Bл, Зл) — ход
всасывания, (Зл, 4 л) — ход сжатия.
На кривой рис. 60 первый промежуток @, л) соответствует
рабочему ходу, второй (л, 2л) — сжатию. В расчетах обычно принимают,
что вращающий момент на ходах выхлопа и всасывания равен нулю.
Вычисление гармонических составляющих вращающего
момента производится путем разложения последнего в ряд Фурье с
помощью одного из способов практического гармонического
анализа1^. Обозначив период вращающего момента через Т, будем
иметь в результате такого анализа:
М(а)=А0 + ах зш Bла/Т) 4- а2 зт Dла/Т) + ... +
+ Ъг соз Bла/Т) + Ь2 соз Dла/Т) 4-... , E.38)
М4
МА
Рис. 59
Х) См., например, в книге И. А. Лурье [29].
246
Глава V. ЯВЛЕНИЯ РЕЗОНАНСА В МАШИНАХ
где
т
А) = 4 / М(а) = аа E.39)
То
есть среднее значение вращающего момента за один период:
т т
а = || М(а) зт ^^ с!а; Ьк = 11 М(а) соз ^-^ Да.
* Го Т * Го Г
Объединяя члены с синусами и косинусами одинаковых
аргументов, можно представить разложение E.38) для одного цилиндра
двухтактного двигателя (Т = 2л) в виде
М(а) =А0 +Аг зт (а + 8Х) + А2 зт Bа + 82) + ... , E.40)
а предположив, что угловая скорость вращения вала со = 2п/Т
постоянна, —
М(Ш) = А0 + Аг зт (со* + 5Х) + А2 зт Bсо* + 52) + ... E.41)
Отдельные слагаемые этого разложения
Ак зт (ка + 8к)
и являются гармоническими составляющими вращающего
момента М, которые называются также гармоническими
моментами или гармониками момента М. При этом
Аь= Ы + ЪЬ *е8к = Ьк/ак. E.42)
В двухтактном двигателе порядок гармоники, обозначаемый
индексом к, совпадает с числом полных ее изменений за один
оборот вала, так как время одного оборота вала совпадает с периодом
вращающего момента. В четырехтактном двигателе время одного
оборота вала составляет половину периода Т = 4тт. Разложение
вращающего момента в этом случае будет иметь вид
М(а) = А'0 + А[ зт (а/2 + 8{) + А2 зт (а + 52) + ...
Число полных изменений гармонических составляющих за один
оборот вала здесь может быть и целым, и дробным. Тем не менее и
для четырехтактного двигателя порядок гармоник принято
считать, как и в случае двухтактного, равным числу полных
изменений гармоники за один оборот вала. В разложении вращающего
момента четырехтактного двигателя будут вследствие этого
встречаться гармоники и целых, и дробных порядков. Сохраняя соот-
11. Гармонические составляющие вращающего момента
247
ветствие между нумерацией коэффициентов Ак и порядком
гармоник, пишут разложение вращающего момента E.40) для одного
цилиндра четырехтактного двигателя следующим образом:
М(а) = А0 + А1/2 зт (а/2 + 5Х) + Аг зт (а + 52) + ... E.43)
Ряды E.41) и E.43), представляющие разложения вращающих
моментов, заданных графически, бесконечны. Но обычно
коэффициенты Ак гармоник высоких порядков невелики и можно
поэтому, оставаясь в пределах допускаемых в практических расчетах
погрешностей, ограничиться некоторым конечным числом
первых гармоник, например шестью, двенадцатью или двадцатью
четырьмя, отбросив все остальные, как не имеющие существенного
влияния на амплитуды вынужденных колебаний1*.
Можно считать, что в пределах периода моменты,
приложенные к различным цилиндровым массам, изменяются одинаково и
именно так, как изменяется момент, действующий на крайнюю
слева цилиндровую массу (с которой обычно начинается
нумерация цилиндровых масс — см. рис. 61). Так как колена
расположены на валу под некоторыми неизменными углами друг к другу
и поскольку моменты зажигания газовой смеси,
соответствующие началу рабочих ходов, чередуются в различных цилиндрах в
определенном порядке, то вращающие моменты, приложенные к
различным цилиндровым массам, смещены по фазе. Фазовые
смещения вращающих моментов определяются расположением
колен и принятым порядком зажиганий. Условимся отсчитывать
эти смещения от момента вспышки (зажигания) в первом ци-
1
2
3 4
© ©
5
6
ф
& & © © © ©
Рис. 61
щ
Х) Вопрос о том, сколько гармоник следует оставить в разложении вращающего
момента, решается в каждом конкретном случае особо, в зависимости от того,
какие гармоники попадают в резонанс и насколько могут быть опасны
возникающие при этом резонансные колебания.
248
Глава V. ЯВЛЕНИЯ РЕЗОНАНСА В МАШИНАХ
линдре. Тогда фазовое смещение вращающего момента на Ь-м
колене (на 1-й цилиндровой массе) будет равно углу, на который
повернется вал от момента вспышки в первом цилиндре до момента
вспышки в 1-м цилиндре. Подсчет фазовых смещений при
известном расположении колен и заданном порядке чередования
вспышек не представляет затруднений. Рассмотрим, например,
шестицилиндровый четырехтактный двигатель, схема
расположения колен которого показана слева на рис. 61 (в проекции на
плоскость, перпендикулярную оси вала). Внешней стрелкой
указано направление вращения вала; угол |3 = 120°. Чередование
зажиганий здесь возможно в четырех вариантах1):
1°. 1—3—5—6—4—2;
2°.1—3—2—6—4—5;
3°.1—4—5—6—3—2;
4°.1—4—2—6—3—5.
Фазовые смещения для каждого из четырех вариантов
приведены в табл. 16.
Аналогичным образом определяются фазовые смещения и в
двухтактном двигателе.
Из разложений E.41) или E.43) и только что сделанных
замечаний о фазовых смещениях вращающих моментов можно
вывести правило фазовых смещений гармоник одного и того же
порядка, приложенных к различным цилиндровым массам.
I Фазовое смещение гармоники к-го порядка момента,
приложенного к 1-й цилиндровой массе, равно углу, на который
повернется вал от момента вспышки в первом цилиндре до момента
I вспышки в 1-м цилиндре, умноженному на к.
Таблица 16
Вариант
1°
2°
3°
4°
1
0
0
0
0
2
600°
240
600
240
№ цилиндра
3
120°
120
480
480
4
480°
480
120
120
5
240°
600
240
600
6
360°
360
360
360
Х) Цифры на рис. 61 и в таблице вариантов зажиганий обозначают номера
цилиндров (или цилиндровых масс).
11. Гармонические составляющие вращающего момента
249
Чтобы учесть изменения вращающего момента от
инерционных моментов движущихся масс кривошипного механизма, эти
моменты также представляют в виде разложений по
гармоническим составляющим, ограничиваясь в разложениях, самое
большее, первыми четырьмя членами. Достаточно хорошее
приближение представляет следующая формула1* для момента О
инерционных сил масс т, совершающих возвратно-поступательное
движение (сюда относятся масса поршня, крейцкопфа,
поршневого штока и части шатуна, присоединяемой по известному
правилу к крейцкопфу):
О = тЯ2со2 @,25^ зш а - 0,5 зт 2а - 0,75^ зт За - 0,25^2 зт 4а),
E.44)
где К — радиус кривошипа, X = В/1 — отношение длины
кривошипа к длине шатуна, со — угловая скорость. В формулу E.44)
входят четыре синусных члена, так что поправка на силы
инерции коснется только первых четырех коэффициентов а- в
разложении E.38).
Сведения о других поправках, например от дополнительного
инерционного момента шатуна, крутящего момента веса
кривошипного механизма и т. д., можно найти в специальной литературе.
1) См. книгу Я. Ден-Гартога [67, с. 219].
Часть вторая
ЛИНЕЙНЫЕ СИСТЕМЫ
С БЕСКОНЕЧНЫМ ЧИСЛОМ
СТЕПЕНЕЙ СВОБОДЫ
Глава VI
Продольные и крутильные колебания
прямых стержней
1. УРАВНЕНИЯ ПРОДОЛЬНЫХ И КРУТИЛЬНЫХ КОЛЕБАНИЙ ПРЯ
МОГО СТЕРЖНЯ. Обозначим через \х(х) погонную массу стержня
[кГ • с2/м2]; 1(х) — погонный момент инерции относительно осиХ)
стержня [кГ • с2]; через А{х) — площадь поперечного сечения [м2];
I — экваториальный момент поперечного сечения [м4]; Е —
модуль Юнга [кГ/м2]; О — модуль сдвига [кГ/м2]. Пусть у(х, I) и
в(х, Ь) — соответственно продольное смещение и угол поворота
какого-либо сечения стержня в момент ^. Обозначим далее через
С?(х, О интенсивность внешней нагрузки — продольной,
направленной по оси стержня, в случае продольных колебаний и мо-
ментной — в случае колебаний крутильных. Уравнения
продольных и крутильных колебаний стержня мы получим как
необходимые условия экстремума функционалов:
для продольных колебаний и
5«= \ 11 [/(х) ©2 -01^2 -яе) «х * F-2)
для крутильных.
Х) Под осью стержня здесь подразумевается линия, соединяющая центры
тяжести поперечных сечений стержня, — линия прямая в недеформированном
состоянии стержня. Здесь предполагается, что она совпадает с упругой осью
стержня. См. с. 271.
1. Уравнения продольных и крутильных колебаний
251
Интегралы по х, взятые в пределах от 0 до / (/ — длина
стержня) от первого и двух последних слагаемых в квадратных
скобках, представляют соответственно кинетическую и
потенциальную энергию рассматриваемой системы.
Согласно A.49) необходимое условие экстремума
функционала 81 будет иметь вид
необходимое условие экстремума функционала 82 —
Условия F.3) и F.4) и будут уравнениями продольных и
крутильных колебаний соответственно.
Когда (?(х, О = 0 и жесткости ЕА и 01 постоянны по всей
длине стержня, уравнения свободных колебаний (продольных и
крутильных) однородного стержня имеют вид
т г^-о, ,в.в,
а*2 ' дх2
где с2 = ЕА/^х; у2 = 01 /I. Уравнения F.5) и F.6) — линейные
уравнения в частных производных второго порядка с
постоянными коэффициентами. Для продольных и крутильных колебаний
однородного стержня они имеют одинаковую форму. Можно
поэтому в общей теории ограничиться рассмотрением одного из
них, например, второго, т. е. уравнения крутильных колебаний.
При этом рассмотрении мы будем опираться на общий принцип
линейной теории колебаний — принцип суперпозиции малых
колебаний, который был положен в основу изучения колебаний
систем с конечным числом степеней свободы. Мы будем
предполагать, что малые колебания системы с бесконечным числом
степеней свободы также представляют собой линейное наложение
главных гармонических колебаний.
Руководствуясь этим принципом, мы будем искать главные
гармонические крутильные колебания стержня в виде
у(х, г) = 0(х) 8Ш (рг + а), F.7)
где 0(х) — функция, определяющая непрерывную совокупность
амплитудных угловых отклонений сечений стержня от их равно-
252 Глава VI. ПРОДОЛЬНЫЕ И КРУТИЛЬНЫЕ КОЛЕБАНИЯ СТЕРЖНЕЙ
весных положений. В дискретных системах с конечным числом
степеней свободы эта функция вырождается в конечную совокуп
ность амплитудных смещений сосредоточенных масс.
Подставив F.7) в F.6), получим уравнение собственных форм
С1рв"(х) +/?2/6(х) = 0 F.8)
или
в"(х) + аЩх) = О,
где а2 = р21/С1р.
Уравнение собственных форм продольных колебаний будет
иметь аналогичную форму
ф"(х) + а2ф(х) = 0, F.9)
где а2 = р2\х/ЕА.
Величины р21д(х) и р2\мр(х) называются иногда собственными
нагрузками стержня. Применив к этим нагрузкам обобщенный
принцип взаимности Рэлея [77], выражающийся здесь в
равенстве работы нагрузки р^д^х) на перемещении &к(х) работе
нагрузки р%1вк(х) на перемещении 6-(х), получим условие
ортогональности собственных форм крутильных колебаний. В самом деле,
из равенства этих работ
р2 \ Щх) дк(х) йх = р2\) 1вк(х) Цх) Ах,
если р? * р%, получим
I /0.(х) вк(х) их = 0. F.10)
Для продольных колебаний условие ортогональности запишется
аналогичным образом:
} цф,(х)фДх)с1л: = 0. F.11)
о
Задача о собственных формах и частотах колебаний приводится
к интегрированию обыкновенных дифференциальных уравнений
второго порядка с постоянными коэффициентами. Общий
интеграл уравнения F.8) для крутильных колебаний будет иметь вид1*
0^ (х) = В соз а{х + В 81П аьх, F.12)
Х) Штрих везде обозначает производную по х, производные по времени I обозна
чаются точками.
1. Уравнения продольных и крутильных колебаний
253
ИЛИ
6'
6; (х) = 90 соз аьх + — 8Ш а-х, F.12)
где 60 и 00 — значения угла поворота и производной от него по х
для х = 0. Постоянные Б и I) или 60 и 6^, а также собственные
значения а^ определяются из краевых условий задачи, т. е. из
условий закрепления концов стержня. В простейших случаях концы
стержня (один или оба) свободны или жестко закреплены. Эти
способы закрепления выражаются следующими соотношениями:
* для крутильных колебаний на свободном конце
С1рв'(х) = 0; F.13)
^ на закрепленном
9(х) = 0; F.14)
^ в случае продольных колебаний на свободном конце
ЕАу'(х) = 0; F.15)
^ на закрепленном
ф(х) = 0. F.16)
Другие свойства собственных форм аналогичны свойствам
форм систем с конечным числом степеней свободы. Так, остается
в силе теорема об узлах собственных форм: число узлов
собственной формы тг-го порядка равно п - 1; при этом узлы двух
последовательных форм перемежаются1*. Остается также в силе и
теорема о разложении любой формы по собственным формам
однородной задачи.
Общее решение уравнения F.8) мы получим как бесконечную
линейную сумму главных колебаний
оо
у(х, 0=2 Нкдк (х) Вт {рк1 + ак) F.17)
к = 1
или
оо
у(х, 0 = X 9Л (х) (Мк соз рЛ + Ык атрЛ). F.18)
к = 1
Постоянные Нк, акУ Мк, Ык определяются из начальных
условий, которые в случае крутильных колебаний выражаются
заданием в начальный момент (^ = 0) распределения по стержню
угловых отклонений
у(х, 0) = Г(х)
1) См. книгу Ф. Р. Гантмахера, М. Г. Крейна [14].
254 Глава VI. ПРОДОЛЬНЫЕ И КРУТИЛЬНЫЕ КОЛЕБАНИЯ СТЕРЖНЕЙ
и их производных по I
у(х, 0) = л(х),
где /(х) и г|(х)—некоторые заданные функции переменной х.
Само вычисление постоянных производится следующим
образом. Прежде всего находим из F.18I)
Мк сов ркг + Ык втркг = I/(8, *) вк (з) Аз. F.19)
Положив здесь I = 0, получим
мк= 1" б*(«) Л»)Й5- F-2°)
Взяв производную от F.19) по I, найдем
/
А^-^ООЛООЙЗ. F.21)
Рко
Как видно из последних формул, постоянные Мк и Ык являются
коэффициентами разложения заданных функций /(х) и л(х) по
собственным формам дк(х).
Частоты главных колебаний стержня образуют бесконечный
дискретный ряд значений. Перенумерованные в порядке
возрастания, они вместе с порядковым номером растут до бесконечности.
Пример 1. Рассмотрим продольные колебания однородного стержня с
одним жестко закрепленным (х = 0) и другим свободным (х = I) концами.
В этом случае краевые условия выражаются равенствами
ф@) = о, ф'@ = о.
Из этих условий находим значения постоянных В и I) общего решения
ф(х) = В соз ах + В 81П ах.
Имеем:
В = 0, И сое а1 = 0.
Постоянная 2) не может, очевидно, равняться нулю, так как в противном
случае ц>(х) = 0. Нетривиальное решение получится при условии
соза/ = 0. F.22)
Из этого условия находим
а4 = <**^; Рк={Ы_1)Ер, А» 1,2,3 F.23)
Х) Имея в виду однородный стержень.
1. Уравнения продольных и крутильных колебаний 255
Таким образом, уравнение F.22) отбирает собственные значения параметра
а и вместе с тем определяет собственные частоты системы. Оно называется
характеристическим уравнением или уравнением частот и соответствует
вековому уравнению систем с конечным числом степеней свободы.
Для собственных форм получаются выражения
ц>к(х) = Вк БтBк~21)пх , А = 1, 2, 3, ... . F.24)
Общее решение можно выписать сразу по формуле F.18):
сю
у(х,*)= Е (Мк созр^ + Ык втркг) з1п Bк ~})пх . F.25)
к = 1 &*>
Постоянные Мк и Ик определяются из начальных условий. Чтобы найти Мк,
полагаем X = О, затем умножаем обе части F.25) на зт акх и интегрируем по
х в пределах от 0 до /. Вследствие ортогональности форм зт акх
I I
^ у(х, 0) зт акх 6.x = Мк) зт2 акх 6х = Мк-
о о 2
и
/
Мк = - ] у(х, 0) зт ак1 6.x.
I 0
Так же найдется Ык по заданному значению производной у(х> 0):
I
Ык = -— } у (х, 0) зт акх 6х.
1Рк 0
Пусть, например, в начальный момент (I = 0) стержень растянут
приложенной в конце его продольной1* силой 8 и затем без начальной скорости
предоставлен самому себе. В этом случае
у(х'0) = т> у(*,о) = о,
I
а* 28 Г . т 25 зш ак1 ЛТ Л
В выражении для Мк значение зт ак1 = ±1; +1 для к нечетного и -1 для
четного. Общее решение F.25) запишем поэтому следующим образом:
оо
у (*,*)= 28 X (-1)»-'со»Р»*вм«»* , F26)
1ЕА н = 1 а1
!) В исследованиях продольных колебаний, излагаемых в этой главе, всегда
предполагается, что действующие на стержень силы направлены по оси
стержня.
256 Глава VI. ПРОДОЛЬНЫЕ И КРУТИЛЬНЫЕ КОЛЕБАНИЯ СТЕРЖНЕЙ
Для проверки подставим в F.26) I = 0. Мы должны получить справа 8х/ЕА.
При г = о
г Лч 28 Г8Ш а1х 8Ш а2х I 8Ш азх 1
_ 25 422Г„- кх _ аЩЗпх/21) , 8шEтсл;/20 _ 1
Ряд в квадратных скобках является рядом Фурье для функции
Следовательно,
ппх _ п^х
Ж'
8х
4 21
ЕА
Пример 2. КОЛЕБАНИЯ СТЕРЖНЯ С ГРУЗОМ НА КОНЦЕ1* (рис. 62, а). Обозна
чим массу груза, прикрепленного к нижнему свободному концу стержня, че
рез М; отношение массы стержня к массе груза — через а, так что
а = /ц/М;
через / — длину стержня в равновесном положении, около которого происходят
колебания системы и в котором вес груза уравновешен статической упругой
силой (поэтому вес груза в уравнение колебаний около положения равновесия не
войдет); через 8 — расстояние от нижнего конца стержня до центра тяжести гру
за. Считая груз точечным, можно пренебречь его размерами и положить в « 0.
Для других величин сохраняем прежние обозначения. Относя действие
груза к краевому условию на нижнем конце, будем считать, что продольное
натяжение стержня при колебаниях уравновеше
но здесь силой инерции груза. Это приводит к сле-
I —I—^ дующему условию на нижнем конце стержня:
'4Ж
В
ЕА
---т.
На верхнем закрепленном конце
У@,*) = 0.
F.27)
F.28)
В начальный момент стержень растянут
приложенной к нижнему концу продольной силой 8 и
затем без начальной скорости предоставлен
самому себе, так что
а)
б)
Рис. 62
г/(*,о) = |^, у(*,о) = о.
F.29)
Х) Рассматриваемый пример представляет одну из существенных частей расчета
на колебания поршня индикатора паровой машины. См. книгу А. Н.
Крылова [21, с. 278].
1. Уравнения продольных и крутильных колебаний
257
Решение задачи сводится к вычислению постоянных В и В и значений
параметра а в уравнении форм колебаний
ц)(х) = В сое ах + В 81П ах
в соответствии с краевыми условиями F.27) и F.28), которые для
собственных форм ф(х) выражаются соотношениями
Ф@) = 0, ЕАу'{I) = Мр2ц>A)
F.30)
и постоянных общего решения F.18) в соответствии с начальными
условиями F.29). После этого из второго условия получается уравнение частот
где
Р^Р = а, F.31)
Р = а/, а = 1\х/М.
Таким образом, уравнение собственных форм колебаний стержня имеет вид
Р**
Ф,(х) = Вк 8Ш ^- , А = 1,2,3,...
F.32)
где Р/, — корни уравнения F.31). Уравнение F.31) часто встречается в
задачах на продольные колебания прямых стержней. Решается оно проще всего
графическим путем; в частности, такое решение можно найти в книге
А. Н. Крылова [21, с. 284]. Приводим наименьшие корни этого уравнения
для некоторых значений отношения массы стержня к массе груза:
а
Р1
0,01
0,10
0,10
0,32
0,30
0,52
0,50
0,65
0,70
0,75
1
0,86
1,50
0,98
2
1,08
оо
те/2
Соответствующие этим значениям р] наименьшие частоты вычисляются по
формуле
„ _ р. т
F.33)
Переходим к составлению решения
Ра*
У(Х, 0=2 [Мк СОЗ рк1 + Ык 81П р^] 81П ~
т. е. к подбору постоянных Мк и Nк согласно условиям F.29). Из второго
условия находим
N, = 0.
Из первого условия следует:
8х
э п
F.34)
9- 10456 Бабаков
258 Глава VI. ПРОДОЛЬНЫЕ И КРУТИЛЬНЫЕ КОЛЕБАНИЯ СТЕРЖНЕЙ
Для вычисления коэффициентов Мк воспользуемся условием
ортогональности собственных форм. В рассматриваемой задаче условие ортогональности
F.11) нужно записать следующим образом:
/
\ [\1 + М<5г (X ~ I)] = 8Н1 ^ 81П ^ &Х = О,
О II
где ах(х - I) — импульсивная функция первого порядка. Из этого условия
находим
I
\ 31П Ё^ 81П ^ ^ = ~- 31П |к 8111 &. F.35)
О I I ос
Умножим теперь обе части F.34) на зт ф^х/1) 6.x и проинтегрируем от 0 до I:
\ |* 8Щ Ъ1 йх = 1 МЛ ВН1 ^ 8Ш ^ ИХ.
О ЕА I к=1 Ло * *
Интегрируя по частям левую часть полученного уравнения, найдем
/
Г 8х Ч1л Р'ХНг= 8/2 Г-С°8 Р< 4- 81П Р<
& ЁА8Ш~Т аХ ЁА V ~рГ "рГ
Интегралы в правой части, в которых I * /г, по F.35) равны
^ 81П ^- 81П 4-С-Х = -- 81П В*, 81П В,.;
о / / а К Г1
интеграл, в котором / = к, равен
I
Г . о М А И Л 81п 2Р*
Следовательно1*,
|^г совр, зшр, N и ЙП2Р, Л 1 ^
ЯА^ р. рг ; ^2^ 2р; ^ а 4 = 1 * *
Из уравнения F.34), положив в нем х = /, будем иметь
оо
Отсюда, принимая во внимание F.31), находим
45/втр,
М,
ЕАРД2Р, + зт2р,)
Х) Штрих у знака суммы здесь означает, что сумма распространяется на все
значения к от 1 до оо, кроме к — I. Соответствующее этому индексу слагаемое
записано отдельно.
2. Колебания стержня с линейным сопротивлением
259
Искомое решение имеет вид
( +\ = *§1 V 81пР*81п(Р/х/0созр^
У {Х' } АЕ .^ р,Bр, + зтгр^) '
Когда груз велик сравнительно со стержнем и массой последнего можно
пренебречь, из уравнения F.31), полагая для наименьшей частоты 1% рх « рх,
найдем
р?=а.
В этом случае основная частота
= р1 Ща = Ща = [§_
Р1 I V ц 4М1 а/5ст '
где 5СТ = М§1/ЕА — статическое удлинение стержня от груза М§у
подвешенного к нижнему концу стержня. Мы приходим таким образом к известной
элементарной формуле для частоты колебаний груза на пружине, массой
которой можно пренебречь.
Если, наоборот, масса груза исчезающе мала сравнительно с массой
стержня, то, положив в уравнении F.31) а = °°, найдем рг = я/2. В этом
случае для наименьшей частоты получим значение
л Ща
совпадающее со значением основной частоты свободных колебаний стержня
(пример 1).
2. СВОБОДНЫЕ КОЛЕБАНИЯ СТЕРЖНЯ С ЛИНЕЙНЫМ
СОПРОТИВЛЕНИЕМ. Уравнение свободных колебаний стержня с
сопротивлением Нду/д1, пропорциональным скорости смещения его
элементов, запишем в виде:
обозначив
Я/ц = 2й, ЕА/[х = с2.
Решение уравнения будем искать в виде разложения искомой
функции у(х, I) по собственным формам <рк(х) главных колебаний
однородного стержня без сопротивления, т. е. по формам,
удовлетворяющим уравнению
(р;'(х) + а%ук(х) = 0, F.37)
где
ак = Рк\ь/ЕА'
260 Глава VI. ПРОДОЛЬНЫЕ И КРУТИЛЬНЫЕ КОЛЕБАНИЯ СТЕРЖНЕЙ
Положив
оо
у(х^) = X Тк(*)<рк(х), F.38)
к = 1
получим, подставив это выражение в F.36):
оо
2 [тк @ Фл (х) + 2Л тА @ фа (х) - с2 тк (г) Ф;' (*)] = о.
/г = 1
Последнее равенство, приняв во внимание F.37), можно
представить в форме:
со
X [Тк (*) + 2А Т, <*) + р|ГЛ (*)] Фа (х) = 0,
к = 1
откуда следует
При Л <рА, & = 1, 2, 3, ..., получаем
Тк (*) = <ГЛ< (Мк соз дЛ* + ЛГЛ 81П ЯкЦ
где
Теперь решение F.38) будет иметь вид
со
у (х, 0 = е~ы Е [Мк соз дА* + Ык зт д^] фА (х). F.39)
Л = 1
Постоянные МЛ и Ык найдутся из начальных условий. Так, если в
начальный момент
г/(х,0) = |^, у(х,0) = 09
то
/ /
(хц>к(хN.х \хц)к(хN.х
8 о дг _ 8Н о
ЕА I к ЕАдк I
|ф|(х)с!л: |ф|(х)Aх
М^ ^ " ' *ь = ^ГГ ~ • F-40)
Для стержня, жестко закрепленного на конце х = 0 и свободного
на конце х = /,
2к — 1
ц>к (х) = зт акх, ак1 = —-—п, к = 1, 2, 3, ... .
В этом случае
* /ЯАа| 1 1ЕАа1 к дк к
3. Уравнения форм колебаний с правой частью
261
От уравнения F.25) свободных колебаний без сопротивления
решение F.39) отличается множителем е~ы. Колебания стержня
затухают, и он асимптотически приближается к равновесному
положению.
3. УРАВНЕНИЯ ФОРМ КОЛЕБАНИЙ С ПРАВОЙ ЧАСТЬЮ. Такими
уравнениями определяются прежде всего формы вынужденных
колебаний стержня от гармонической возмущающей силы. Пусть,
например, на стержень действует продольная гармоническая
сила Я 81П со^, приложенная в точке х = хх. Уравнение колебаний
стержня в этом случае можно записать следующим образом:
цЦ| - ЕА^р- = Я 81П 0>*СТ1 (X - Хг),
д12 дхг
где ах(х - хх) — импульсивная функция первого порядка. Чисто
вынужденные колебания в отсутствие сопротивлений будут
происходить по закону
г/(х, I) = ф(х) зги со^,
где ф(х) — форма вынужденных колебаний. Подставив это
выражение для у(х, О в предыдущее уравнение, приходим к
дифференциальному уравнению с правой частью для формы колебаний
ср" (х) + а\ (х) = -^ аг (х - хг); F.41)
здесь а2 = \аы2/ЕА.
Правую часть будет иметь и уравнение собственных форм
свободных колебаний стержня, несущего сосредоточенные массы.
Силы инерции этих масс в каком-либо из главных колебаний
стержня изменяются по гармоническому закону с частотами
главных колебаний. Формально они ведут себя так же, как и
сосредоточенные возмущающие силы. Так, сила инерции массы т,
расположенной в точке х = х1?
д2у(х19г)
т д*2
для главного колебания
у (хх, О = ф (хх) зги <М
имеет выражение
тсо2ф (хх) зги Ш,
262 Глава VI. ПРОДОЛЬНЫЕ И КРУТИЛЬНЫЕ КОЛЕБАНИЯ СТЕРЖНЕЙ
и уравнение собственных форм ф(х) будет уравнением с правой
частью, аналогичным уравнению F.41):
,, / ч , 9 , ч /ПС02ф(Х1)
<р" (х) + а2ф (х) = -—-~^- аг (х - хг). F.42)
Нужно только помнить, что в уравнении вынужденных
колебаний частота возмущающей силы со — наперед заданная,
известная величина, в уравнении же F.42) она является наряду с ф(х)
искомой величиной.
Обозначим правую часть уравнения F.41) через /(х) и будем
искать его общий интеграл операционным методом. Положив
Р(р) -г-> /(*); х(р) -г-> ф(*),
получим
р2 [Х(р) - Ф@) - ± <р'@)] + а*Х(р) = Ш ,
откуда
ЕА(рг + а2) р2 + а2 р2 + а2
ф(х) = ф@) соз ах + ^-^ зт ах + ——- } /(%) зт а (х - %) сЩ. F.43)
а аЕА о
В частности, когда /(^) = C(^B; - хх),
ф(х) = Б соз ах + I) зт ах + —^- зт а (х - хх), F.44)
где В = ф@), 2) = A/а) ф'@). Такой вид имеет форма колебаний
при всех х > хг. Для х < х19 т. е. на участке стержня до точки
приложения силы или массы, ф(х) = В соз ах + I) зт ах. Таким
образом, в рассматриваемом случае форма колебаний представлена
двумя выражениями:
^ ф(х) = В соз ах + В зт ах при х < хг,
^ ф(х) = В соз ах + X) зт ах + —^— зт а (х - хх)
аЕА
при х > хх.
F.45)
Постоянные В и Б найдутся из краевых условий задачи.
Предположим, что в точке х = хх к стержню приложена
продольная единичная гармоническая возмущающая сила 1 • зт со*
3. Уравнения форм колебаний с правой частью 263
так, что функция ф(х) — форма вынужденных колебаний
системы. Пусть левый конец х = 0 стержня жестко закреплен, правый
X = I — свободен. Тогда В = 0; вторую постоянную Б найдем из
условия ф'@ = 0:
2У_ _ 1 сов аA - хг)
аЕА сое а/
Формулы F.45) будут теперь иметь вид1*
у т- / 2ч 1 С08 а(/ - Хг) .
* Г (х, хг; аг) = -—— г—1- 8ш ах при х < х19
аЕА сов а/
^ , 9ч 1 зт ахп . .
^ Г (х, хл; аг) = - ——¦ г зт аA - х) при х> хл.
1 аЕА сое а/ 1
F.46)
Если оба конца стержня свободны, то из условий (для
крутильных колебаний)
9' @) = 6' @ = 0
найдем
у т,, 2\ 1 соз а{1 - хг) .
^ Г (х, хп; от) = - —— —- зт ах при х < хл,
1 яб^р С08 а^
^ т- / 2ч 1 соз ах1 |
^ Г (х, х,; от) = -——1 : г соз аA - х) при х > хл.
1 а<2^ 81П а^ ^
Формулы F.46) и F.47) дают простой способ вычисления
динамических напряжений в любом сечении стержня или вала при
действии на него сосредоточенной возмущающей силы или
момента. Впервые такие формулы были найдены А. Н. Крыловым
[21, с. 240].
Пример 3. Сохраняя обозначения примера 2 и замечания, сделанные там
по поводу расстояния 8, предположим, что на верхний конец вертикального
стержня, к которому прикреплен покоящийся в начальный момент груз
(рис. 62, б), действуют периодически повторяющиеся с периодом т импульсы 5.
Требуется найти установившиеся вынужденные колебания груза.
Задача приводится к нахождению частного решения уравнения
% - с2Ш= I [Ст1 (()+ст* ((-т)+•••] °1(х -1) F-48)
1} Г(х, хг; со2) обозначает гармонический коэффициент влияния (продольное
смещение) в сечении х от единичной продольной гармонической силы частоты со,
приложенной в сечении хх. Сокращенно Т{хЬУ хк; со2) = Гш.
264 Глава VI. ПРОДОЛЬНЫЕ И КРУТИЛЬНЫЕ КОЛЕБАНИЯ СТЕРЖНЕЙ
при краевых условиях
МШ1гЕА(Ш~г у{0'г)=0 F-49)
и начальных условиях
у(х,0) = у(х,0) = 0. F.50)
Это решение будем искать в виде разложения
оо
У(х,*)= X Тк{г)ук(х) F.51)
к = 1
по собственным формам свободных колебаний стержня с грузом на конце
(пример 2):
ФЛ(*) = 31п(рЛх//), F.52)
где $к — корни уравнения
Р 1ё Р = а.
Подставив F.51) в уравнение F.48) и обозначив
о1(*) + о1(*-т)+...=/@,
получим
оо
** _ 5
Е Г, + р| ГЛ) Вт ^ = 2 /(О ах (х - /), F.53)
где р| = с2р|//2 — квадраты собственных частот главных колебаний
системы. Взяв производную от F.53) по х, умножим обе части на соз р^// и
проинтегрируем в пределах от 0 до /. Тогда
оо 1 1
X (тк + р1Тк)Ц\ соз^ со8^ Aх= -/(О/ а{(х-/)соз Ь± ах.
к==1у к гн к) 1 0 1 1 Ц 0 /
Интегрируя, получим1*
I
\ о{ (X - I) С08 ^у- <1Х = у 81П р..
Что касается левой части, то здесь
I
^ соз ^— соз ^— си; = 0, г * к
о * *
и
1соИ^«1х-,BР'Ч;?п2Р').
о / 4р^
*> См. книгу И. М. Гельфанда, Г. Е. Шилова [15, с. 32].
3. Уравнения форм колебаний с правой частью 265
Следовательно,
Последнее уравнение будем решать операционным методом. Положив
^(р)-Н>Г,(*),
найдем при нулевых начальных условиях
р ( V = 4Р»81П Р^ . 5Р
*^; ц/BC, + зт2р,) A-^х)(р2+р2)-
Начальная функция, соответствующая чисто вынужденным колебаниям с
периодом возмущающих импульсов т, для значении I в пределах первого
периода, т. е. для 0 < I < т, на основании формулы B.46) будет иметь вид
Г* (() = ц^Bр7+81п2Р>) 181ПР^ + С1ё X С08^>
Из формулы F.51) теперь находим:
оо '2а
что с помощью равенства
после деления числителя и знаменателя дроби под знаком суммы на зт2 $к
можно представить еще и в форме
УУ> } Мс Ъ рЛA + а + рЛс*в Р*) '
к = 1
Пример 4. КОЛЕБАНИЯ СТЕРЖНЯ ОТ ВНЕЗАПНО ПРИЛОЖЕННОЙ
ПОСТОЯННОЙ СИЛЫ. Колебания, возникающие в стержне от силы Р, внезапно
приложенной к свободному концу в начальный момент, можно формально
отнести к категории вынужденных колебаний, так как расчет таких
колебаний приводится к интегрированию уравнений с правой частью.
В самом деле, уравнение колебаний в этом случае будет иметь вид
Нужно найти частное решение этого уравнения при краевых условиях
,@,0 = 0; ^) -0
266 Глава VI. ПРОДОЛЬНЫЕ И КРУТИЛЬНЫЕ КОЛЕБАНИЯ СТЕРЖНЕЙ
и начальных условиях у(х, 0) = у(х, 0) = 0. Положив
у(х, 0= 2 га@ф*D
/г = 1
где, как и в примере 1,
получим для ТкAI>>
2к — 1
Фа (*) = в* з1п акх' ак = —2Т-" я>
П@ + Р|^@=^з1па,г
Тк @ = М» соз рк1 + Я, 8Ш р.* + —^г- •
При нулевых начальных условиях
Следовательно,
2Рзт аА/
2Рзт а*,/
1№к
П@=^Е^A"СО8^).
Таким образом, искомое решение будет
п а{
~Bк - 1)
, Лч 8Р1 ^ 81п ай/зт акх .
^^()%1й1 BЕ-1J Ц ~ С°8^)-
& = 1
С его помощью, положив х — I, найдем перемещение конца стержня
^' ' л2ЕА ^ Bй- IJ '
/е = 1
так как зт2 ак1 = 1. Максимальное отклонение конца будет иметь место, когда
соз рк1 = -1.
При этом
#тах „2дА\, З2 52 V ЯА
Максимальное отклонение конца стержня от внезапно приложенной силы
оказывается в два раза большим статического отклонения от той же силы,
равного Р1/ЕА.
Пример 5. Формулы А. Н. Крылова F.45), F.46) и F.47) могут быть
использованы для составления уравнений колебаний сложных систем,
составленных из простых частей, по гармоническим коэффициентам на соединяе-
Х) Дальше Вк принято равным единице.
3. Уравнения форм колебаний с правой частью
267
_ш
м
о
Ща ЕгАг в Е,А2 С
I И 1
м
А ДА В в Е^2 с
I I =1
а)
б)
Рис. 63
мых концах (сечениях) последних. В прилегающих концах (сечениях) двух
смежных частей (до их разделения) гармонические коэффициенты равны по
величине, но противоположны по знаку, так как здесь смещения сечений
прилегающих частей одинаковы, а действующие в этих сечениях усилия
уравновешены, т. е. равны по величине и противоположны по знаку1*.
Рассмотрим в качестве первого примера продольные колебания стержня,
зажатого левым концом и несущего на другом конце сосредоточенную массу М.
Здесь длина стержня /, погонная масса ц, жесткость ЕА. Делим систему по
сечению А, прилегающему к массе М, на две части — стержень ОА со свободным
концом А и массу М (рис. 63, а). Из второй формулы F.46) находим
гармонический коэффициент на конце А:
Г (/, /, со2) = -
1 8И1 а\
аЕА соз а1
= -—9 Ца1.
ЦСО^
Для сосредоточенной массы М гармонический коэффициент, т. е., согласно
определению, отношение смещения д этой массы к ее силе инерции (-Мдсо2)
будет равен (-1/Мсо2).
Присоединяя массу М к концу стержня А, будем иметь в месте соединения
цосг
1ё а1
Мсо2 '
откуда а11% а1 = \х1/М или, положив, как в примере 2, а = ц//М, р = а/,
Р 48 Р = а.
Это уравнение совпадает с уравнением F.31), полученным другим путем.
Пример 6. УРАВНЕНИЕ ПРОДОЛЬНЫХ КОЛЕБАНИЙ КОНСОЛЬНОГО СТЕРЖНЯ,
составленного из двух однородных отрезков. Пусть на отрезке АВ
жесткость равна ЕХАХ, а на отрезке ВС — #2^2 (Рис- 63, б). Гармонический
коэффициент в В для левого отрезка составляет
Г (/, /, со2) = -
а1Е1А1
1ёаг1г.
Х) Дальнейшее развитие и матричное обобщение излагаемого приема см. в статье
Э. Хюбнера[128].
268 Глава VI. ПРОДОЛЬНЫЕ И КРУТИЛЬНЫЕ КОЛЕБАНИЯ СТЕРЖНЕЙ
Гармонический коэффициент в В для правого отрезка
Из уравнения
Г @, 0, со2)
1
1
1« VI =
с1ё а212.
а% а212
а^^] а2Е2А2
находим уравнение частот колебаний рассматриваемого составного стержня
и^А
Приведенные примеры легко решаются также изложенным в
следующем разделе методом начальных параметров в матричной
форме.
4. МЕТОД НАЧАЛЬНЫХ ПАРАМЕТРОВ В МАТРИЧНОЙ ФОРМЕ.
Расчет крутильных или продольных колебаний стержня с
непрерывным или кусочно-непрерывным распределением массы и
жесткости можно представить в матричной форме с помощью матриц
сосредоточенных масс (см. формулу E.33)) и матриц перехода для
участков стержня. Начальными параметрами здесь будут: для
крутильных колебаний угол поворота и крутящий момент на одном из
концов стержня, для продольных — продольное смещение и
натяжение на одном из концов стержня. Имея в виду крутильные
колебания, обозначим через 63 угол поворота, через М1 — момент на
правом конце отрезка стержня длиной /. Для угла поворота и
момента на левом конце отрезка будем иметь (из уравнения F.9)I)
МЛ 1
Э(/) = дг соз а1 + „Т Вт а.1,
или
а01р
01рв'A) = -01рвга 81п а\ + М\ соз а/,
М-
F.54)
Э2 = 6Х сое а/ +
а01,
81П а/,
М2 = -01 авг 8гп а1 + М3 соз а1.
Полученные соотношения можно представить в матричной форме
1
е9
м9
сов а1
-аСг/ 8И1 а/
аО!
¦81П а/
р
соз а/
М1
F.55)
Х) Счет — справа налево.
4. Метод начальных параметров в матричной форме 269
Аналогичное матричное уравнение можно выписать для
продольных колебаний стержня:
1
соз а1
-аЕА&т а\
„ -8И1 а1
аЕА
соз а1
«1
F.56)
где хх и х2 — продольные смещения соответствующих сечении;
8Х и $2 — продольные натяжения в этих сечениях.
Уравнения F.55) и F.56) могут быть использованы прежде
всего для динамического расчета колеблющихся систем, т. е. для
определения динамических деформаций и напряжений в сечениях
стержня при продольных или крутильных колебаниях. Эти
уравнения можно также использовать для определения собственных
частот колебаний однородных стержней при заданных краевых
условиях. Так, например, для стержня с грузом на конце (пример 2)
можно записать, взяв за начало верхний закрепленный конец:
-8111 а1
аЕА
сое а/
Смещение нижнего конца равно
соз а1
аЕАзт а1
81П а1
аЕА
соз а\
<Р@ =
зт а/.
аЕА '
натяжение на этом конце —
Мр2 ф(/) = соз а/.
Исключив из этих уравнений ср(/) и введя, как раньше,
обозначения а = \х1/М, р = а/, получим прежнее уравнение частот F.31)
Р 1« Р = а-
Если груз на конце стержня отсутствует (М = 0), то уравнение
частот будет иметь вид (как в примере 1)
соз а1 = 0.
С помощью уравнений F.55) и F.56)
можно составлять уравнения частот и
для более сложных систем. Рассмотрим
вал со свободными концами, несущий
три сосредоточенные маховые массы с
моментами инерции /1, /2, /3 (Рис- 64).
Обозначим через Аг и А2 матрицы
перехода для первого и второго участков со-
О"
/
1
2222
-77Т,
I.
X
г
222^
^7Т
'з
Рис. 64
270 Глава VI. ПРОДОЛЬНЫЕ И КРУТИЛЬНЫЕ КОЛЕБАНИЯ СТЕРЖНЕЙ
ответственно. Тогда порядок вычислений при составлении
уравнения частот или при расчете напряжений в каком-либо сечении
вала можно представить следующей матричной схемой:
МЛ
1 0
>2 1
А*
1 0
-12Р2 1
Л1
о
-11Р* 1
Эп
0
F.57)
Приравняв Мх = 0, получим уравнение частот рассматриваемой
системы1*.
Во многих случаях непосредственное использование общих
формул F.45) для гармонических коэффициентов представляет
более простой путь составления уравнений крутильных
(продольных) колебаний стержней, несущих сосредоточенные массы. Для
приведенного на рис. 64 вала, несущего в точках О, х, I
сосредоточенные маховые массы с моментами инерции 119 /2, 13, отнеся
инерционные моменты крайних масс /1са2ф@) и /3(о2ф(/) к
граничным условиям, получим из формул F.45) следующие уравнения:
из условий на левом свободном конце, несущем маховую массу /1:
из условий на правом свободном конце, несущем маховую массу /3:
ф@) соз а\ + ^^ 8Ш а1 + 2^ФГ зт а (I - х) - ср@ = 0, F.58)
аС1п
а01„
х^ч . 7 /1С02ф@) 7 /осо2ф(л:) ., ч /осо2ф(х)
-ф@) зт а1 + \^тк ' соз а1 + 2 ^/ } соз а A-х)- 3 _ ; = 0.
а01п
аС1п
аО!п
F.59)
Наконец, для углового смещения массы 12 из первого уравнения
F.45) находим
ф@) соз ах +
/1со2Ф@) .
аО!п
зт ах - ф(х) = 0.
F.60)
1) Матрицу сосредоточенной маховой массы E.33) и матрицу жесткости E.35)
для безмассового участка вала можно получить из матрицы F.55), полагая в
ней или 1-+ 0, II -+ I (для матрицы массы), или / —> 0 (для матрицы
жесткости) — см. статьи X. Фурке [126], а также С. Фалька [124].
1. Основные допущения
271
Мы получаем, таким образом, три уравнения F.58), F.59) и
F.60) с тремя неизвестными ф@), ф(х), ф(/)- Исключив последние
из этих уравнений, приходим к уравнению частот системы
соз ах +
сое а\ +
/1ш25т ах
аОК
-1
/1со28т а\ 12ы2зт аA - х)
аО!п
аО!п
-8111 а1 +
/1со28т а1 /2оJсо8 аA - х)
аО!п
аО!п
0
-1
/зОЗ2
а01„
Разворачивать определитель этого уравнения нет надобности,
хотя такое разворачивание легко можно было бы выполнить по
рекуррентным формулам В. Я. Натансона [115]. Проще
вычислять значения этого определителя для ряда пробных значений
частоты с последующим интерполированием.
Глава VII
Поперечные колебания
прямых стержней
1. ОСНОВНЫЕ ДОПУЩЕНИЯ И УРАВНЕНИЕ ПОПЕРЕЧНЫХ
КОЛЕБАНИЙ ПРЯМОГО СТЕРЖНЯ. При выводе уравнения поперечных
колебаний стержня (или балки) мы будем предполагать, что в неде-
формированном состоянии упругая ось1) стержня прямолинейна
и совпадает с линией центров тяжести поперечных сечений
стержня. Эту прямолинейную ось мы примем за координатную
ось х и от нее будем отсчитывать отклонения элементов стержня
при поперечных колебаниях. При этом мы будем считать, по
крайней мере на первых порах, что отклонения отдельных точек
Х) Упругая ось стержня — это геометрическое место точек {центров
жесткости), к которым должны быть приложены внешние силы, чтобы вызвать изгиб
стержня без кручения. Если упругая ось не совпадает с линией центров
тяжести, то, как известно, стержень, изгибаясь, будет закручиваться.
272 Глава VII. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПРЯМЫХ СТЕРЖНЕЙ
оси стержня происходят перпендикулярно прямолинейному, не-
деформированному ее направлению, пренебрегая смещениями
этих точек, параллельными оси.
Далее, мы предполагаем, что отклонения точек оси стержня
при поперечных колебаниях происходят в одной плоскости
(плоскость колебаний) и являются малыми отклонениями в том
смысле, что возникающие при этом восстанавливающие силы
остаются в пределах пропорциональности.
При таких предположениях отклонения точек оси стержня
при поперечных колебаниях однозначно определяются одной
функцией двух переменных — координаты х и времени ^:
у = у(х, г).
Эта функция удовлетворяет линейному дифференциальному
уравнению в частных производных четвертого порядка, которое
может быть построено следующим образом.
Обозначим через ц(х) [кГ • с2/см2] массу единицы длины
стержня, через Е1 — жесткость на прогиб (Е [кГ/см2] — модуль
упругости, / [см4] — момент инерции поперечного сечения стержня
относительно нейтральной оси сечения, перпендикулярной
плоскости колебаний), /0 [кГ • см • с2/см] — момент инерции единицы
длины стержня относительно центральной оси,
перпендикулярной плоскости колебаний. На стержень действует распределенная
поперечная нагрузка, интенсивность которой мы обозначим через
/(х, ^), а также продольная сила (растягивающая или
сжимающая), направленная по оси стержня с интенсивностью Р(х, I). Эти
нагрузки могут зависеть не только от положения элементов
стержня, но и от времени.
Кинетическая энергия колеблющегося стержня
складывается из кинетической энергии поперечных смещений элементов
стержня
Т1=\{ И(*)(§?JA* GЛ)
и кинетической энергии вращений элементов стержня вокруг
осей, перпендикулярных плоскости колебаний,
1. Основные допущения
273
Потенциальная энергия равна сумме трех слагаемых:
^ потенциальной энергии упругой деформации (работа
восстанавливающих упругих сил)
п^НЕ1&^ G-3)
^ потенциальной энергии прогиба от поперечной нагрузки /(х, *)
П2 = \\ К*> О У <**; G.4)
^ о
^ потенциальной энергии растяжения1^ от продольной силы Р(х, I)
I
П8=|{ Р(х, <) (|J Ах. G.5)
Функционал Остроградского — Гамильтона 8 имеет здесь вид
8-ШИЧЗ),+'*>®"-»(Ё0,+
+ Дх, г)у + Р(х, г) (^J1 Аг Ах. G.6)
Уравнение поперечных колебаний стержня мы получим,
составив для функционала 8 уравнение Эйлера по формуле A.49)
^ сП2 дх2 V дх2 ) дх V дх
- Дх, г) + & Г/0^й. ") = 0. G.7)
Это линейное уравнение четвертого порядка, составленное при
самых общих предположениях относительно действующих на
стержень сил, жесткости и распределения массы.
В стержнях, длина которых значительно превосходит
поперечные размеры, можно пренебречь инерцией вращения и
опустить в левой части уравнения G.7) последний член.
^ Вычисляемой так же, как и потенциальная энергия продольных натяжений
в продольных колебаниях.
274
Глава VII. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПРЯМЫХ СТЕРЖНЕЙ
Положив /(х, *) = 0 и р(х, I) = О, мы рассмотрим сначала
свободные колебания однородного стержня с постоянными
жесткостью Е1 и погонной массой ц. Обозначим с = *]Е1 /\\.. Тогда для
таких колебаний уравнение G.7) будет иметь вид
2. КРАЕВЫЕ И НАЧАЛЬНЫЕ УСЛОВИЯ. В простейших случаях,
когда конец стержня свободен, или жестко закреплен, или шарнир-
но оперт, краевые условия выражаются следующими
соотношениями:
^ конец стержня свободен; на таком конце равны нулю
изгибающий момент и поперечная сила; следовательно,
Ё!й =0, ^ =0;
дх2 ' дхг
^ конец стержня жестко закреплен; на таком конце равны
нулю прогиб и угол поворота, т. е.
»-0. |=0;
^ конец стержня свободно оперт (или закреплен шарниром);
в этом случае равны нулю прогиб и изгибающий момент, т. е.
Краевые условия, ограничивающие свободу перемещений концов
стержня, называются геометрическими условиями. Таковы,
например, условия, в силу которых равны нулю прогиб и угол
поворота, т. е. условия
, = о, 1=0.
Условия, налагающие ограничения на изгибающий момент и
поперечную силу, например, условия, выражающиеся равенствами
дх2 дх3
мы будем называть динамическими условиями.
3. Собственные формы колебаний стержня
275
В других случаях условия закрепления концов стержня
выражаются более сложным образом. Например, при упругом
закреплении конца стержня соответствующее такому закреплению
краевое условие должно учитывать характер возможных
смещений конца и возникающих при этом упругих
восстанавливающих сил. Так будет, например, в случае закрепления, упругого
для поперечных смещений конца и жесткого для поворота или,
наоборот, жесткого для поперечных смещений и упругого для
поворота и т. д. С такими упругими закреплениями приходится
встречаться при расчете на колебания турбинных лопаток,
концы которых связаны бандажом, а также при учете упругой
податливости заделки хвоста в ободе диска. С некоторыми видами
упругих закреплений мы встретимся в разобранных дальше
примерах. Отметим, что, оставаясь в пределах линейной теории, мы
ограничиваемся рассмотрением краевых условий,
выражающихся уравнениями, линейными относительно величин
ду д2у дгу
дх9 дх2' дх3'
Начальные условия выражаются соотношениями
у(х, 0) = и(х), у(х, 0) = о(х),
имеющими место в момент I = 0, где и(х) и и(х) — некоторые
заданные функции переменной х, определяющие начальное
распределение по оси стержня поперечных отклонений и скоростей
отдельных его элементов.
3. СОБСТВЕННЫЕ ФОРМЫ КОЛЕБАНИЙ СТЕРЖНЯ И ФУНКЦИИ, ИХ
ОПРЕДЕЛЯЮЩИЕ. Простейшим периодическим решением
уравнения свободных колебаний стержня
является главное колебание, в котором у(х, I) изменяется с
течением времени по гармоническому закону
у(х, I) = ф(х) 8Н1 {р1 + а). G.10)
Функция ф(х), устанавливающая закон распределения
максимальных (амплитудных) отклонений точек оси стержня от
равновесного расположения, называется формой главного колебания
или собственной формой. Собственных форм колебаний прямого
стержня бесконечное множество. Каждой собственной форме со-
276 Глава VII. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПРЯМЫХ СТЕРЖНЕЙ
ответствует определенное значение частоты р — собственная
частота. Отбор собственных частот и соответствующих им
собственных форм осуществляется с помощью уравнения
собственных форм и краевых условий задачи.
Чтобы получить уравнение собственных форм однородной
задачи, подставим G.10) в G.9). После сокращения на зш (р^ + а)
будем иметь1*
Е1ц>™(х) - р2ихр(*) = 0
или
ф1У(х) - А4ф(*) = 0, G.11)
где
к4 = \хр2/Е1. G.12)
Уравнение G.11) имеет следующие четыре независимых
частных решения:
соз кх, 81П кх, сп кх, зп кх,
его общий интеграл
ф(х) = А соз кх + В зш кх + С сп кх + В зп кх. G.13)
Он содержит четыре произвольные постоянные^!, В, С, I), которые
должны быть подобраны так, чтобы для функции ф(х)
выполнялись краевые условия, т. е. условия закрепления концов стержня.
В обычных случаях число краевых условий равно числу
произвольных постоянных— по два на каждом конце. Все они
выражаются равенствами нулю двух из следующих четырех величин:
ф(х), <р'(*), <р"(*), Ф'"(*)>
пропорциональных соответственно прогибу, углу поворота,
изгибающему моменту и перерезывающей силе в точках х = 0 или х = 1.
Выполняя эти условия, мы получим четыре однородных
уравнения, из которых найдутся отношения постоянных А, В, С, В и
уравнение для определения собственных частот системы.
Во многих отношениях более удобной оказывается следующая
система частных решений уравнения G.11):
8(х) = A/2) (сп кх + соз кх), ]
Т(х) = A/2) (зп кх + зш кх), I
Щх) = A/2)(сп/гх-соз/г.г), ( G,14)
У(х) = A/2) (зп кх - зш кх). )
Функции 5, Т, II, V называются функциями А. Н. Крылова.
1) Применив принцип взаимности к собственным нагрузкам р2\мр(х)>
соответствующим двум главным колебаниям с различными собственными частотами, придем
к условию ортогональности собственных форм поперечных колебаний, условию,
которое запишется так же, как и условие F.11) для продольных колебаний.
4. Основные задачи
277
G.15)
Найдем значения этих функций и их производных по
аргументу кх до третьего порядка включительно при х = 0:
8@)^1, 8'@) = 0, 8"@) = 0, 8"'@) = 0,
Т @) = 0, Г @) =¦ 1, Т" @) = 0, Г" @) = 0,
V @) = 0, V @)= 0, V @)= 1, Vм @)= О,
^@) = 0, Т^@) = 0, У"@) = 0, У"@) = 1.
Определитель, составленный из этих величин, равен единице.
Поэтому функции Крылова называют иногда функциями с
единичной матрицей, а систему G.14) — нормальной или
фундаментальной системой интегралов уравнений G.11).
Приведем выражения последовательных производных по х от
функций 8(х), Т(х), V(х), У(х) до четвертого порядка включительно.
ад
Т(х)
Щх)
ад
Первая
производная
ЪУ{х)
к8(х)
кТ(х)
кЩх)
Вторая
производная
к2Щх)
к2У(х)
к28(х)
к2Т(х)
Третья
производная
кгТ(х)
квЩх)
к3У(х)
к38(х)
Четвертая
производная
&4ад
к4Т(х)
кЩх)
к4У(х)
G.16)
Одним из преимуществ функций Крылова является то, что с
помощью этих функций можно сразу записать выражение
общего интеграла уравнения G.11), удовлетворяющего условиям на
конце х^Ои содержащего только две постоянные, которые
определяются из условий на другом конце х = I.
4. ОСНОВНЫЕ ЗАДАЧИ
Колебания однородного стержня, шарнир-
но опертого по концам. В этом случае интеграл,
удовлетворяющий условиям на левом конце ср@) = ф"@) = 0, должен
содержать функции, обращающиеся для х = 0 в нуль вместе со
своими вторыми производными.
Как видно из G.15), такими функциями являются Т шУ.
Следовательно,
Ф(х) = ВТ(кх) + ВУ(кх).
Постоянные В и I) найдутся из условий на правом конце (х = /).
Если этот конец также шарнирно оперт, то
Ф(/) - ВТ(к1) + БУОгЬ) = 0,
Ф"@ = к2[ВУ(Ы) + 2Щ*0] = 0,
278
Глава VII. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПРЯМЫХ СТЕРЖНЕЙ
откуда
Т2(Ы) - Щк1) = 0.
В элементарных функциях
8Н1 Ы = 0.
Это уравнение и является для рассматриваемого случая
уравнением частот. Из него находим
кь1 = 1п, /=1,2, 3, ... ,
и так как к^ = \лр?/Е19 то
Ъ-ьгШ-ЫШ, ,- 1,2,3,.... G.17)
Таковы собственные частоты системы. Для собственных форм из
G.13) получаем уравнения
Ф/(*) = 5,8111^, /=1,2,3,.... G.18)
Первые три собственные формы представлены на рис. 65. Общее
решение имеет вид
со
у (*,*) = X (М- созр^ + Л^8Н1р.0зт ^,
/ = 1 /
где постоянные Мь, Л^ находятся известным образом из
начальных условий.
¦ Колебания стержня, жестко закрепленного
концом х = 0 и свободного на конце х = I. Краевые
условия в этом случае
<р@) = <р'@) = 0,
ф"@ = ф'"@ = о.
Интеграл уравнения G.11), удовлетворяющий условиям на
конце х = 0, имеет вид
ф(х) = СИ (кх) + ВУ(кх). G.19)
Условия на конце х = I выражаются уравнениями
С5 (Ы) + ИТ (Ы) = 0,
С^(А/) + 2M(*0 = 0,| G'20)
откуда следует 82 - ТУ = 0 или
сЬ. Ы соз Ы 4- 1 = 0. G.21)
4. Основные задачи
279
Рис. 65
Рис. 66
По таблицам [И. В. Ананьев, 1] находим первые четыре корня
уравнения G.21):
М = 1,875; 4,694; 7,855; 10,996.
Для первых четырех собственных частот получаем пб* формуле
G.12)
Р\
A,875J /Ё7
/2
-. Р2
D,694J Щ
I2 А/ ц
_ G,855J Ш
= A0,996J /Ё7
Р4 ~~1^ 4Т'
Уравнение 1-й собственной формы составляем следующим
образом. Из первого или второго уравнения G.20) находим, подставив
туда кЛ, значение отношения
2
С
8A1,1)
У(к11)
Г(М) 3{кг1)
Подставив это значение в уравнение G.19), получим
Ф,(ж) = С[щкьх) - Щ^У^х)] = с[Щкгх) - Щ1у(к1Х)].
На рис. 66 представлены первые три формы.
¦ Колебания стержня с жестко
закрепленными концами. Краевые условия для такого стержня
выражаются соотношениями
<р@) = ср'(О) = 0,
Ф@ = Ф'@ = о,
а интеграл, удовлетворяющий первым двум условиям, имеет вид
ц>(х) = СЩкх) + ВУ(Ъх).
280
Глава VII. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПРЯМЫХ СТЕРЖНЕЙ
На конце х = I
С11(Ы) + ВУ(Ы) = 0,
СТ (Ы) + БИ (Ы) = 0,
откуда следует II2 - ТУ = 0 или
сп Ы соз Ы - 1 = 0. G.22)
По таблицам находим первые два корня уравнения {Ч .22)
(нулевой корень отброшен):
/г/= 4,73; 7,85.
Соответствующие частоты колебаний:
_ D,73J РЕ] __ G>85J Щ
Формы колебаний имеют уравнения
Ф/(х) = с[Щк{х) - Щ2у(к1Х)] = с[Щкр) - Щйу^х)]-,
графики первых двух форм представлены на рис. 67.
* Колебания стержня со свободными конца-
м и (балка, плавающая в жидкости одинаковой с ней плотности;
плавающее судно).
Краевые условия в этом случае имеют вид
Ф"@) = ф"'@) = 0, 1
ф"@ = ф'"(/) = о, [ G-^
а интеграл, удовлетворяющий условиям на конце х = 0,
ф(х) =А8(кх) + ВТ(кх).
На конце х = I
А17(к1) + ВУ(к1) = 0,
АТ (Ы) + В1Г (Ы) = 0,
откуда следует 11г - ТУ = 0 или
сп Ы соз Ы— 1 = 0.
Уравнение частот не отличается от уравнения G.22) для стержня
с закрепленными концами. Разыскивая периодическое решение
уравнения G.8) в форме
у (х, 1) = ф(х) 8Н1 (р* + а),
мы не получим никаких других возможных в данном случае
непериодических решений. Между тем очевидно, что уравне-
4. Основные задачи
281
Рис. 67 Рис. 68
нию G.8) при тех же краевых условиях G.23) удовлетворяют
функции
у(х, 0 = соп8*=А, 1 G 24)
у (х, /) =Ах + В. \
Первая определяет поступательное перемещение, одинаковое для
всех точек стержня; вторая — вращательное вокруг некоторой оси,
положение которой находится из начальных условий. Первая
частота колебаний стержня со свободными концами соответствует
значению Ы = 4,73. Подставив это значение в уравнение форм колебаний
Ф(х)=а[5(Аж)-П|^Г(Адг)],
приведем его к виду
ф(х)=А[5(^р*)-0,98г(^р*)].
На протяжении от 0 до I функция ф(х) дважды меняет знак.
Таким образом, форма колебаний, соответствующая первой
отличной от нуля частоте, имеет два узла. Согласно теореме об узлах
собственных форм, таким количеством узлов может обладать
третья форма колебаний. Это видимое противоречие легко
устраняется, по крайней мере формально, если за первую и вторую
формы считать выражения G.24), соответствующие
поступательному и вращательному перемещениям стержня. Тем не менее,
первой формой колебаний в рассматриваемом случае называется
двухузловая форма, соответствующая частоте
п _ D,73J Ш
Графики первых трех форм колебаний стержня со свободными
концами представлены на рис. 68.
282 Глава VII. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПРЯМЫХ СТЕРЖНЕЙ
¦ Колебания стержня, жестко закрепленного
концом х = 0 и шарнирно опертого концом х = I.
Краевые условия задачи:
ф@) = ф'@) = 0,
Ф@ = <р"@ = О,
и интеграл, удовлетворяющий условиям на конце х = 0, имеет вид
Ф(х) = СЩкх) + ОУ(кх).
На конце х = I
С11(Ы) + ВУ(к1) = 0,
С8 (Ы) + ОТ (Ы) = О,
откуда следует
ЩЫ) Т(Ы) - 8(к1) У(к1) = О,
или
СП Ы 81П Ы - 8П Ы С08 Ы = О,
По таблицам находим наименьшие корни этого уравнения
(отбросив нулевой)
А/= 3,93; 7,07; 10,21.
Уравнение форм колебаний
Ф(х) = с[Щкх) - Щ^ У(кх)] = с[Щкх) - |^ ПА*)].
Графики первых трех форм приведены на рис. 69.
Пример 1. Рассмотрим колебания балки с жестко закрепленным левым
концом х = 0 и упруго закрепленным относительно поперечных
перемещений правым концом х = I (рис. 70); здесь через с обозначена жесткость опоры
на сжатие или растяжение. Граничные условия
^ на левом конце: (р@) = ф'@) = 0;
^ на правом конце: <р"@ = 0, Е1(р'"A) = сц>A).
Интеграл, удовлетворяющий условиям на левом конце:
<р(*) - СЩкх) + БУ(кх);
на правом конце (а = Ы):
С8(а) + 2Ща) = 0,
Е1 [СУ(а) + #5(а)] к3 = с [СС/(а) + 2Ж(а)]
или
С3(а) + 2Ща) = 0,
с[а3 Па) ~ ^С/(«)] + л[а35(а) - ^(а)] = 0,
4. Основные задачи
283
<1
_.,,!
1
¦7//Ц////1
<с
>
^ X
>с
^^
Рис. 69
Рис. 70
откуда
Е1
УТ
или в элементарных функциях
с13
ти - зу'
з спасоз а + 1
спазгп а - зпасоз а
Если с = 0, то наименьший корень ах = 1,875, как у консольного стержня со
с13 с13
свободным правым концом. Если — = 20, то ах « 3; если —- = 65, то ах « 3,5.
Е1 ЕI
При дальнейшем увеличении жесткости упругой заделки аг стремится к 3,93,
как в случае д).
Пример 2. ТАНГЕНЦИАЛЬНЫЕ КОЛЕБАНИЯ ЛОПАТОК ТУРБИНЫ, СВЯЗАННЫХ
БАНДАЖОМ. Свободная лопатка с жестко заделанным в ободе диска хвостом
колеблется, поворачиваясь каждым сечением вокруг главной оси АВ
сечения, соответствующей минимальному поперечному моменту (рис. 71). Мы
предположим, что лопатка не закручена и что площадь поперечного сечения
и погонная масса по всей ее длине
одинаковы. В таком случае ось лопатки О
при колебаниях будет изгибаться в
одной плоскости, именно в плоскости
ММ, образующей некоторый угол у с
срединной плоскостью диска КЬ.
Тангенциальными колебаниями лопаток
называются составляющие колебаний
лопаток в направлении КЬ, т. е. в
направлении, параллельном срединной
плоскости диска
1)
В дальнейшем предполагается, что соз у*1и, следовательно, тангенциальные
колебания лопатки происходят параллельно срединной плоскости диска.
284
Глава VII. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПРЯМЫХ СТЕРЖНЕЙ
Мы предположим далее, что лента бандажа, скрепляющего головки
лопаток, не имеет разрывов и все лопатки находятся в одинаковых условиях
закрепления. Каждую лопатку мы рассматриваем как однородный стержень,
жестко закрепленный одним концом х = 0 и связанный на другом конце х = I
бандажом. Эта последняя связь приводит к особым условиям на конце
лопатки х = I, которыми и учитывается влияние бандажа на колебания лопатки.
Для свободного конца изгибающий момент и поперечная сила равны нулю.
Для конца, закрепленного в бандаже, изгибающий момент и поперечная
сила отличны от нуля. Их значения мы найдем, сделав некоторые простейшие
предположения относительно характера деформации бандажа в месте
крепления. В случае, соответствующем первому собственному колебанию
лопаток так называемого «типа А»Х), когда все лопатки отклоняются в одну
сторону, в серединах свободных участков бандажа в максимальном отклонении
лопаток образуются точки перегиба (рис. 72). Если в этих точках разрезать
бандаж, выделив отрезок й («шаг бандажа»), прилегающий к
рассматриваемой лопатке, то действие на вырезанный шаг со стороны других частей
бандажа сведется только к силам Р, -Р, приложенным к концам вырезанного
шага, равным по величине и направленным в противоположные стороны,
т. е. образующим пару (рис. 73). Предполагая, что соединение головки
лопатки с бандажом абсолютно жесткое, мы можем написать для отклонения С,
концов шага от прямолинейного расположения по АВ:
<; =
РЛ3
24Е1,
где Е1б — жесткость на изгиб бандажа. С другой стороны, из чертежа, в
предположении, что углы отклонения касательных к бандажу и лопатке в точке
Схб = тл2)малы, имеем
С = (а/2) тб = (а/2) тл.
С -р
Рис. 72
Рис. 73
А> См. книгу А. В. Левина [23].
2) Индексы «л» и «б» относятся соответственно к лопатке и бандажу.
4. Основные задачи
285
Следовательно,
или
м = 1М1» т.
л й л
Но изгибающий момент лопатки в сечении х — I равен
Мл = -Е/лФ"@.
Сравнивая два полученных выражения для одного и того же момента,
получим первое краевое условие на головке лопатки
я/дф"@ = -^-вФ'@.
Второе условие получим, составив выражение для поперечной силы в месте
крепления лопатки в бандаже. Для свободных колебаний эта сила
принимается равной силе инерции массы шага бандажа тб в предположении, что эта
масса сосредоточена в головке лопатки. Для главных колебаний с частотой р
эта сила равна
тбр2<рA).
Так как, с другой стороны,
0Л = -Д/дф'"@,
то
Е7лф"'@ = ~т6р\A).
Таким образом, мы приходим к задаче интегрирования уравнения
Ф1У(х) - к\(х) - О
при краевых условиях
Ф@) = ф'@) = О,
1 2 V Т
Д/дФ"@ = -_^-ую, Я/дф'"@ = -ШвРМО.
Интеграл, удовлетворяющий условиям на конце х = 0, будет иметь вид
<р(х) = СЩкх) + ВУ(кх).
На конце х = /, если обозначить а = Ы, то
ЕТк2 [С8(а) + ОТ(а)] = - ^^р /г[СГ(а) + 1)С7(а)],
й \ G.25)
Я/л/г3 [С^(а) + 1)8(а)] = -лг^С^а) + 2Ж(а)]. ]
Введем следующие обозначения: 12Е1б1/с1Е1Л = р; тб/тпл = а —
отношение массы шага бандажа к массе лопатки. Тогда
™ьР2 = т6рЧЕ1л1 = те
Е1лк* Е1Л»1Р* тл* °а'
286
Глава VII. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПРЯМЫХ СТЕРЖНЕЙ
и уравнения G.25) можно будет представить в виде:
С 1к8(а) + б Г(аI + Б 1кТ(а) + 2 ща)\ - О,
С [^(а) + аа?7(а)] + I) [5(а) + ааУ(а)] = О,
откуда
к[82(а) - Т(а) У(а)] + В аа [Т(а) ^(а) - *У2(а) + В [3(а) Г(а) - Ща) У(а)] +
+ коа [8(а) У(а) - Т(а) Ща)] = О,
или в элементарных функциях
к(сЪ. а соз а + 1) + ^ аа (сп а соз а - 1) + ^ (сп а зт а + зп а соз а) =
= каа (сп а зт а - зп а соз а),
из чего следует
_ &(спасоза 4- 1) + (Р//)(спазша + зпасоза) („ ?~,
а[&(спа зша - зпа соза) - (р//)(спа соза - 1)] *
Это уравнение решается путем последовательных проб. В выражение для р
вводится обычно поправочный множитель Н « 0,3, учитывающий степень
ослабления жесткости крепления головки лопатки в бандаже.
Пример 3. КОЛЕБАНИЯ КОНСОЛЬНОГО СТЕРЖНЯ С ГРУЗОМ НА КОНЦЕ. Пусть
на верхнем конце однородного стержня, нижний конец которого жестко
заделан, находится точечная масса т, равная половине массы стержня, т. е.
т = ц7/2, где \л — масса единицы длины стержня.
Краевые условия задачи:
<р@) = <р'@) = 0,
Е/ф-(/) = -|^2Ф@ = о, ф"@ = о,
а интеграл, удовлетворяющий условиям для х = 0, имеет вид
<р(х) = СЩкх) + БУ(кх).
Из условий на конце х = I получаем, положив Ы = а:
С8(а) + 2Ща) = 0,
Е1к3 [СУ(а) + 1>8(а)] = ~(и7/2)р2 [СЩа) + 2Ж(а)]
или, так как
\х1р2 _ а
2Е1к3 2 '
4. Основные задачи
287
то
С8(а) + Х)Т(а) = О,
с\У(а) + (а/2I7(а)~| + Х>Гз(а) 4- (а/2)Г(аI = 0.
Исключив С и И, придем к уравнению частот, которое представим
следующим образом:
Л(а) = а- 2A + сЬасо8а) = 0 G 27)
спа зта - зпа сова
Для вычисления корней уравнения G.27) весьма важно иметь с самого начала
некоторые ориентировочные данные о расположении по крайней мере первых
частот системы. С помощью таких данных можно выбрать для искомых
корней хорошие исходные приближения. В рассматриваемой задаче такой выбор
исходных приближений можно сделать, руководствуясь следующими
соображениями. Собственные частоты поперечных колебаний консольного стержня
без груза на верхнем конце нам известны (см. с. 279); для первых двух
соответствующие значения а составляют
04 = 1,875, а2 = 4,694.
Если к концу стержня прикреплен груз, то кинетическая энергия
стержня увеличивается вследствие прибавления к ней одного квадрата ти2/2 (без
изменения потенциальной энергии). На основании известной теоремы,
приведенной в гл. III, § 16, собственные частоты р. стержня без груза и
частоты рь стержня с грузом на конце удовлетворяют неравенствам
рь<рь, / = 1,2,3,...,
р1_1 <рр 1 = 2, 3, ... ,
которые для корней с^ уравнения G.27) будут иметь вид
04 < 1,875 < а2 < 4,694 < а3 < 7,855 < ... .
Возьмем в качестве исходного значения для определения наименьшего
корня уравнения G.27) 04 = 1,4. По таблицам находим
АA,4) =+0,21686.
Взяв 04 = 1,5, найдем
АA,5) =-0,96105.
Отсюда заключаем, что искомый корень лежит между 1,4 и 1,5. Взяв для
третьей пробы 04 = 1,42, найдем
ДA,42) = -0,00039.
Если ограничиться двумя десятичными знаками, то можно приближенно
положить 04 « 1,41. Первая частота в этом случае составляет
_A,41J Щ = 1,90 Щ
Рх I2 А/ |д /2 V ц *
288
Глава VII. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПРЯМЫХ СТЕРЖНЕЙ
5. УРАВНЕНИЯ ФОРМ КОЛЕБАНИЙ С ПРАВОЙ ЧАСТЬЮ. Такими
уравнениями определяются или формы вынужденных
колебаний, или собственные формы свободных колебаний стержня с
сосредоточенными массами, а также с промежуточными опорами.
Оба эти случая, несмотря на существенные различия между
свободными и вынужденными колебаниями, можно рассматривать
совместно, относя инерционные действия сосредоточенных масс
на стержень к возмущающим силам (см. § 3 гл. VI).
Пусть к стержню в точке х = хг приложена сосредоточенная
гармоническая сила
ф 8И1 (Ш + а).
Уравнение вынужденных колебаний от такой силы запишется
следующим образом:
&Ж + с2^Ц =0-<5Л(х-ХЛ) 81П (СО* + а). G.28)
д12 дхА \х
Установившиеся вынужденные колебания так же, как и
главные свободные колебания, происходят согласно одному и тому же
закону
у (X, О = (р(х) 81П (СО^ + а), G.29)
где ф(х) — форма колебаний, а со — или известная (заданная)
частота возмущающей силы, или искомая собственная частота
главного колебания стержня. Подставив G.29) в G.28), придем к
уравнению форм колебаний с правой частью
Ф1У (х) - к\(х) = О- <зг (х - хг). G.30)
Е1
Аналогичный вид будет иметь уравнение форм колебаний
стержня, нагруженного в некоторой точке х = хг возмущающим
или инерционным моментом О. Только вместо импульсивной
функции первого порядка будет стоять импульсивная функция
второго порядка
Ф1У (х) - к4ц)(х) = ^- а2 (х - хг). G.31)
Е1
Чтобы найти общий интеграл уравнения форм колебаний с
правой частью, которое мы запишем в несколько более общей форме
ф1У (X) - &4ф(х) = /(X), G.32)
5. Уравнения форм колебаний с правой частью
289
воспользуемся операционным методом. Для этого нам
понадобятся изображения функций Крылова 8, Т, V, V, которые мы и
составим с помощью известных изображений функций
зт кх, соз кх, зп кх, сп кх.
G.33)
Так как
Р2 _
р2 + к2
кр
р2 + к2
то
Р* _
/?4-/г4
к2р2
р*-к*
Положив
-г-> соз кх,
—> 8111 кХ,
т-> 3 (кх),
т-> II (кх),
Р2 _
р2-к2
кр _
р2-к2
кр*
р±-к*
к3р
р4-к*
т—> сп кх,
т—> зп кх,
т-> Т (кх),
++У(кх).
Г(р)-^№, у(р) н-> Ф(х),
найдем изображение уравнения G.32)
р*- [у(р)-ф@)- ^ - ада _ 2П°2] -А4У(р) = 2?(р))
откуда получим
У(р) = 5(Р), + ф@) -г^-: + ф'@) /3 , +
G.34)
+ ф"@) —Е-- + ф'"@) Ар А
Ф(х) = ф@) 8(кх) + 2^ Г(йх) + 2^ 17(й*) + 2^ ^(/гх) +
к кл к6
+ ±\№УЩх-%)№. G.35)
к о
Что касается интеграла
Ф(х)= ±\о№У[к(х-®]^,
G.36)
представляющего частное решение уравнения G.32) и
называемого частным интегралом Крылова, то для х = 0 он равен нулю
10- 10456 Бабаков
290
Глава VII. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПРЯМЫХ СТЕРЖНЕЙ
вместе со своими первыми тремя производными и потому,
каковы бы ни были условия для х = 0, он им всегда удовлетворяет.
Для сосредоточенной гармонической силы — инерционной или
возмущающей, — а также и для сосредоточенного момента
значения интеграла G.36) можно получить, подставив вместо /(^)
соответствующее данной нагрузке выражение. Можно эти
значения получить и как частные решения дифференциального
уравнения. Так, из уравнения форм вынужденных колебаний от
гармонической силы, сосредоточенной в точке х = хг,
^{х)-кМх)-§-1о1(х-х1),
положив
У(р) -г-> Ф(х),
найдем изображение частного интеграла
у(р)- Яе-рх*Р
ГаФ) Е1(р*-к*У
откуда следует
Ф(х)--^-1У[к(Х-Х1)]. G.37)
Точно так же при нагрузке сосредоточенным моментом О из
уравнения
^(х)-кМх)=§1о2(х-х1)9
построив изображение частного интеграла
Ф(х)^-^1и[к(х-Х1I G.38)
получим
Так как Ф(х) в выражениях G.37) и G.38) равно нулю для х < хг,
то формы колебаний от сосредоточенных силы или момента будут
иметь разные выражения на промежутках от 0 до хг и от хх до I.
Для стержня, жестко закрепленного концом х = 0, функция ср(х)
будет иметь выражения
ц>(х) = СЩкх) + НУ (кх) при 0 < х < хг,
ц>(х) = СЩкх) + БУ (кх) + Ф(х) при *х < х < /.
6. Гармонические коэффициенты влияния
291
Для стержня, свободно опертого концом х = О,
ф(х) = ВТ(кх) + ВУ (кх) при 0 < х < х19
ц>(х) = ВТ(кх) + ВУ (кх) + Ф(х) при *!<*</.
Для стержня, свободного на конце х = О,
ф(х)=А8(Ад:) + ВТ (Ал:) при 0<х<х19
<р(х) = А8(кх) + ВТ (Ал:) + Ф(х) при ^ < * < I.
Когда в точке х — л^ на стержень действует одновременно
сосредоточенная сила и сосредоточенный момент, форма колебаний
стержня, закрепленного концом х = 0, будет иметь выражения
<р(х) = СЩкх) + ВУ (кх) при 0<л:<л:1,
ф(х) - СС/(Ах) + ВУ (кх) + -^- У[к (х - л^)] +
17[к(х - д^)] при хг < л: < /.
к2Е1
Если на стержень действуют п сосредоточенных сил Я19 ф2, — >
приложенных в точках х19 х2, ... , и л сосредоточенных в тех же
точках моментов Сг, G2, ... > то форма колебаний будет иметь
выражения
> G.39)
<р(х) = СЩкх) + ВУ (кх) при 0 < х < л:х,
ф(#) = СЩкх) + 2Ж (Ах) + Фг(х) при л^ < х < *2,
ф(*) = СЩкх) + 2Ж (Ах) + Фг(х) + Ф2(х) при х2 < х < х3,
ф(х) - СЩкх) + 1Ж(Ах) + Фг(х) + Ф2(х) + ... + ФЛ(*)
при хп < л: < I,
где
<ВД - ^ ПЬ (х - х,)] + ^ С/[А (х - *,)], 1=1,2, .... , п. G.40)
в. ГАРМОНИЧЕСКИЕ КОЭФФИЦИЕНТЫ ВЛИЯНИЯ. Исключив С
помощью условий на конце х = / постоянные из форм колебаний от
сосредоточенной гармонической силы, мы получим явные
выражения гармонических коэффициентов влияния. Вместе с тем
будет установлен простой способ вычисления гармонических
коэффициентов влияния, по крайней мере для стандартных случаев
закрепления концов стержня.
292
Глава VII. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПРЯМЫХ СТЕРЖНЕЙ
Для стержня, шарнирно опертого по концам, форма
вынужденных колебаний от единичной гармонической сосредоточенной
силы, приложенной в точке х = а, имеет следующие выражения:
ф(х) = ВТ(кх) + ВУ (кх) при 0 < х < а, 1
1 ттг../- -41 ^.^, Г G.41)
ф(х) = ВТ(кх) + ВУ (кх) +
кгЕ1
У[к (х - а)] при а < х < /.
Чтобы найти прогиб в какой-либо точке х < а, нужно решить
относительно ф(#) (исключив Б и В) систему уравнений
-ф(х) + ВТ(кх) + ВУ(кх) = О,
1
ВТ(Ы) + ВУ(к1) =
ВУ(Ы) + ЯГ (Ы) = -
кгЕ1
1
ПЬ (I ~ а)],
Г[й (I - а)].
G.42)
/г3Я/
Определитель этой системы имеет вид
-1 Т(кх) У{кх)
О Т(Ы) У{Ы)
О У(к1) Т(Ы)
Из уравнений G.42) для х < а, а = &/, ах = /га, находим
О Г(Л*) У(кх)
V2 (Ы) - Г2 (Ы) = -вЬ /г/ 81П А/.
ф(х) = -
Д/г3#/
G.43)
У(а - аг) Г(а) ^(а)
Г(а - ах) К(а) Г(а)
Для прогиба в точке х > а аналогичным путем, исходя из второго
выражения G.41), находим,
У{кх - аг) Т(кх) У(кх) \
У(а-ах) Г(а) У(а)
Т(а-а1) У(а) Г(а)
Развернув определители G.43) и G.44) и перейдя к
элементарным функциям, получим для амплитуд вынужденных колебаний
от единичной гармонической силы, т. е. для гармонических
коэффициентов, следующие выражения:
1 гзт (а - а1)зт кх зЬ (а - а1)8Ь кх~\
ф(*) = ¦
Ак3Е1
G.44)
Г (х, а; со2) =
Г (х, а; со2)
2к3Е1
1
2кгЕ1
зт а зЬ а ]
О < х < а,
зт (а - &лг)зт ах зЬ (а - &х)зЬ ах-
>
зт а
']•
зЬ а
а < х < /.
G.45)
Формулы G.45) были выведены другим путем А. Н. Крыловым
[21]. Дифференцируя выражения для ф(х) надлежащее число раз,
6. Гармонические коэффициенты влияния
293
мы легко получим из этих формул значения угла поворота,
изгибающего момента и поперечной силы в любом сечении балки.
Аналогичные формулы можно составить и для других случаев
закрепления стержня. Так, для стержня, закрепленного концом
х = О и свободного на конце х = I, гармонические коэффициенты
имеют выражения
Г (х, а; со2)
Г (х, а; со2):
АкгЕ1
Ак3Е1
0
Т(а-
8(а-
У(а-
Т(а-
8(а-
" «1)
-0Ц)
- кх)
~ ^)
-0Ц)
Щкх)
5(а)
У(а)
17 (к х)
8(а)
У(а)
У(кх)
Т(а)
8(а)
^(/гх)
Т(а)
8(а)
при 0 < х < а,
при а < х < /,
>
G.46)
здесь через Л обозначено
Д = Г(а) ^(а) - 32(а) = -A/2) A + сп а соз а).
Так же как в случае продольных и крутильных колебаний,
гармонические коэффициенты для поперечных колебаний G.45)
и G.46) и получающиеся из них путем дифференцирования по х
гармонические коэффициенты для углов поворота, изгибающих
моментов и поперечных сил могут быть использованы для
составления уравнений поперечных колебаний сложных систем путем
расчленения таких систем на простые части. Нужно, однако,
иметь в виду, что в поперечных колебаниях геометрия
деформаций в сечениях стержня имеет более сложный характер, чем в
колебаниях продольных или крутильных. Как правило, здесь
приходится вычислять гармонические коэффициенты не только
для прогибов от поперечных сил или изгибающих моментов, но
и углы поворота от тех же усилий и составлять, таким образом,
для одного сечения несколько уравнений. Все такие уравнения и
все нужные для их составления формулы гармонических
коэффициентов могут быть получены из формул Крылова G.39),
G.40), G.45) и G.46I*. Мы не останавливаемся здесь на выводе
этих уравнений, так как излагаемый дальше в § 8 метод
начальных параметров дает возможность гораздо быстрее находить
гармонические прогибы и углы поворота от любых приложенных к
стержню усилий.
¦) Сводку таких формул см. также в ст. В. Дункана [123], где эти формулы
приведены без ссылок на более ранние труды А. Н. Крылова.
294 Глава VII. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПРЯМЫХ СТЕРЖНЕЙ
Пример 4. Двухопорная балка совершает вынужденные колебания под
действием гармонически изменяющейся поперечной сосредоточенной силы,
приложенной в точке х = 1/2 и имеющей амплитуду Р = 500 кГ и
частоту 1200 колебаний в минуту. Пролет балки / — 4,35 м. Погонный вес балки
^ = 26,3 кГ/м; / = 2,14-10~5 м4, Е = 2,15-105 кГ/м2. Требуется вычислить
амплитуды прогиба и изгибающего момента в середине балки1*.
Находим:
& = 0,551 1/м; &2 = 2,4; Е1 = 4,601 кГ-м2.
Подставив эти величины в первую из формул G.45), получим амплитуду
прогиба в середине балки
фГЛ = 500 1П5[^| " Щг№\ = 324>82 * °>86926 *10 = °>00282 м-
^42/ 1,53931» ЮЧзш 2,4 зп 2,4]
Продифференцировав дважды ср(#), найдем значение амплитуды
изгибающего момента в середине балки по формуле
Так же просто могут быть найдены амплитуды реакций и угла поворота
опорных сечений.
Пример 5. КОЛЕБАНИЯ КОНСОЛЬНОГО СТЕРЖНЯ С ПРОМЕЖУТОЧНОЙ
ШАРНИРНОЙ ОПОРОЙ (рис. 74). Промежуточная шарнирная опора, как и
другие виды промежуточных закреплений, действует на стержень своей
реакцией, которую можно рассматривать как промежуточную сосредоточенную
нагрузку. В главных колебаниях стержня она изменяется по гармоническому
закону, как и в случае гармонической возмущающей силы или момента.
Обозначив неизвестную реакцию шарнира через В, получим следующие
выражения формы колебаний стержня:
ср(х) - СЩкх) + БУ(кх) при 0 < х < 1/2,
Ф(ж) = СЩкх) + ИУ(кх) + -^- у[к(х - 1/2)] при 1/2 < х < /.
На свободном конце
С5(а) + 1)Г(а) + ^7г(|) = 0, 1
СУ(а) + ^5(а) + ^я(|) = 0, [ GЛ7)
где а = Ы. К этим уравнениям, содержащим три неизвестных С, I), К, нужно
добавить еще одно уравнение, а именно, уравнение, получающееся из
условия равенства нулю прогиба на опоре:
СЩа/2) + ВУ(а/2) = 0. G.48)
*> Числовые данные взяты из ст. Н. И. Безухова [94, с. 179].
6. Гармонические коэффициенты влияния
295
Рис.74
Рис.75
Из G.47) и G.48) получим уравнение частот системы
5(а) Г(а) Г(а/2)
^(а) 5(а) 8(а/2)
С/(а/2) У(а/2) О
-0.
В элементарных функциях
8Ш а сЬ а - 8п а сое а :
: зп а - 81П а.
Корни а этого уравнения на основании теоремы о наложении на систему
одной линейной связи лежат между корнями консольного стержня без опор,
так что имеют место неравенства
1,875 < осх < 4,694 < а2 < 7,855 < ... .
Взяв в качестве первой пробы для расчета основной частоты аг — 3,2,
получим Д = -0,79648; при аг = 3,1 — соответственно Д = +0,49443. Искомый
первый корень лежит, следовательно, в границах
3,1 <ах<3,2.
Дальнейшие уточнения не требуют каких-либо дополнительных разъяснений.
Большое количество примеров на вычисление частот поперечных
колебаний стержней при различных способах их закрепления можно найти в
справочнике И. В. Ананьева [1].
Пример 6. ОПРЕДЕЛЕНИЕ ФОРМЫ ВЫНУЖДЕННЫХ КОЛЕБАНИЙ СТЕРЖНЯ,
ЗАДЕЛАННОГО В ГОРИЗОНТАЛЬНОЕ ОСНОВАНИЕ, СОВЕРШАЮЩЕГО
ПРЯМОЛИНЕЙНЫЕ ГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ С АМПЛИТУДОЙ а И ЧАСТОТОЙ ю (рис. 75).
Колебания стержня относительно основания можно рассматривать как
абсолютные, если к собственной нагрузке стержня присоединить нагрузку
силами инерции поступательного переносного движения, интенсивность которой
^ = |Д@2а 81П 00*.
Уравнение форм вынужденных колебаний стержня будет иметь вид
ср1У - к4<р - Л4а,
296
Глава VII. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПРЯМЫХ СТЕРЖНЕЙ
где к4 = \10J/Е1. Положив
ф(х) = и(х) - а,
приведем уравнение к виду
и1У - к4и = 0.
Выбрав начало на свободном конце стержня, будем иметь в качестве краевых
условий
и" @) = и'" @) = 0, и (/) = а; и' (/) = 0.
Интеграл, удовлетворяющий условиям на конце х = 0, будет иметь вид
и(х)-А8(кх) + ВТ(кх).
Постоянные АиВ найдутся из уравнений
А8(а) + ВТ(а) = а, АУ(а) + В8(а) = 0,
откуда
л = а8(а) В - - аУ(а)
82(а) - Т(а)У(а) ' 82(а) - Т(а)У(а) '
Форма вынужденных колебаний имеет вид
(П(х^ = п[8(а)8(кх)-У(а)Т(кх) _ .
Решение имеет смысл пока 82(а) - Г(а) У(а) ф 0. Когда 82(а) - Т(а) У(а) = 0,
частота возмущающей силы совпадает с одной из частот свободных
колебаний стержня: в этом случае имеет место явление резонанса.
Пример 7. КОЛЕБАНИЯ ЛОПАТОК, СКРЕПЛЕННЫХ ПРОВОЛОКОЙ. Будем
считать, что прилегающий к лопатке шаг йп проволоки действует на лопатку в
месте крепления А так же, как шаг бандажа на головку лопатки в примере 2.
При таком предположении задача приводится к расчету свободных
колебаний однородного стержня, жестко закрепленного концом х = 0 в ободе диска
и свободного на конце х = I (рис. 76), нагруженного в месте крепления
проволоки х = хх гармонически изменяющимися с собственной частотой лопатки
сосредоточенными силой и моментом:
Я0 = тп(^^хх), 1
Г - 12Е1П г„'(у \ [
Ц) ~~ ~Й ^ 1*1''
ап >
где ти — масса шага проволоки, йп — шаг проволоки, Е1п — жесткость на
изгиб проволоки.
Форма колебаний будет иметь здесь следующие выражения:
Ф(х) = СЩкх) + ЛУ(кх) + ]^г У[Ых - х,)] + ^- Щк(х - хг)]
<р(х) = СЩкх) + ВУ(кх) при 0 < х < хх, 1
'- Щк(х-Х1)]
при хг < х < I, \
6. Гармонические коэффициенты влияния
297
1
1
р
1
1
л
-^
Яо
*1 ,„
1
аГ
1
В
'
1
! |
ан
Рис. 76
где
^0 тпю2 , ч тп
Р^ = к^ЁГл Ф(Х1) = ^ Ы^Х1> = апаф(^1) = СТпа^1»
Со _ 12Д/Д фЧт)_ Рп фЧг)-Рп ,
ап = ^» Л/ = а, ^х1 = а1, рп = __^/, ф^-у!, ц>'(х1) = у[.
Условия на свободном конце х = I:
ф"@ = ф'"@ = о.
Записав, как обычно, уравнения
СЩа1) + ВУ(а1)-у1 = 0,
СТ(аг) + БЩа,) - Ц = 0,
С8(а) + 2)Т(а) + опаугТ (а - ах) + ^-у[& (а - ах) = 0,
СУ(а) + 1>5(а) + с^са/^ (а - 04) + ^-у[У(а - аг) = 0,
приходим к следующему уравнению частот:
Щаг) У(аг) - —
Г(а0 Ща,)
0
= 0.
8(а) Т(а) Т(а - аг) 8(а - ах)
У(а) 5(а) 8(а - ах) Т(а - ах)
Из анализа результатов расчетов, выполненных для нескольких
значений ап и Рп при различных положениях места крепления проволоки [1], мож-
298 Глава VII. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПРЯМЫХ СТЕРЖНЕЙ
но сделать вывод, что крепление лопаток проволокой в общем повышает
собственные частоты их колебаний, причем частоты различных порядков
в различной степени. Повышение первой частоты достигает максимального
значения для хг = 0,6/; при колебаниях второго тона максимум имеет место
приблизительно для хг = 0,8/.
Выбор наивыгоднейшего расположения проволоки зависит от многих
факторов, для изучения которых следует обратиться к специальной
литературе, в частности, к книге А. В. Левина [23]. В ней рассмотрены также
случаи крепления лопаток несколькими проволоками и бандажом и даны
все необходимые сведения относительно приемов расчета таких сложных
систем.
7. КРИТИЧЕСКИЕ ЧИСЛА ОБОРОТОВ ПРЯМОГО ВАЛА С ДИСКАМИ.
Как известно, в критическом состоянии вращающийся
вертикальный вал, сохраняя изогнутую форму, обращается вокруг
линии подшипников обычно в ту же сторону и с той же угловой
скоростью, с какой происходит собственное вращение,
передающее рабочее усилие. В этом прямом обращении центробежные
силы и гироскопические моменты элементов вала
уравновешиваются упругими восстанавливающими силами и моментами,
возникающими при прогибе вала. Пренебрегая инерционными
гироскопическими моментами элементов вала, мы найдем
критические скорости как частоты собственных поперечных колебаний
вала.
Когда вал несет сосредоточенные массы, например диски,
действие последних на критические числа оборотов можно учесть,
рассматривая развиваемые ими при обращениях вала
инерционные силы и гироскопические моменты как внешние
возмущающие гармонические силы и моменты, изменяющиеся с
частотами, равными критическим скоростям вала.
Пусть на валу в точках хг и х2 насажены два диска, массы
которых тг и т2> полярные моменты инерции С( [кГ • см • с2], а
экваториальные А1 [кГ*см*с2], Ь = 1, 2, причем С1 = 2АГ
Уравнения упругой линии для отрезков вала между сосредоточенными
массами запишутся аналогично G.39), где в случае прямой
прецессии
т^2^) А^соУС*;) ,--19
Ф* - к*Е1 ПЧХ" *Л" кЧЕ1) Щк(Х" *<)]' 1 ~ 19 2-
Предполагая, что вал закреплен концами в
поворачивающихся подшипниках, будем иметь для прогибов ц>(х) = у и углов пово-
7. Критические числа оборотов прямого вала
299
^Ьта ц>'(х) = у' в местах крепления дисков, а также для
постоянных Б и I) уравнения:
Б5(а1) + 1)С/(а1)-^ = 0,
БГ(а2) + 1Ж(а2) + ^^ Г(а2
Б3(а2) + #17(а2) +
к3Е1
т1ы2у1
к3Е1
^-^Й^^2-а!)--у2-0,
Ща2 - ах) -
к2Е1
к2Е1
Т(а2-04)-Й-0»
БГ(а) + 2)У(а) + ЛтЛ ^(а - ах) - * /* Ща - ах) +
к3Е1
к2Е1
+ Л-- ^(а - а2) - * / С/(а - а2) = О,
/г3Я1
/г2Д/
ВЩа) + 1Ща) + -±^± Г(а - ах) - -±^- 5(а - ах) +
+ -^т(а-а^--р#5(а-а^=0- ,
G.49)
Последние два уравнения выражают условия закрепления
правого конца вала.
Исключив из G.49) Б, Х>, уг, у2, у\9 у2, придем к уравнению для
со2. Общая структура этого уравнения остается такой же, как и в
случае, когда собственная масса вала не учитывалась. Однако
теперь элементами векового определителя являются функции 5, Г,
II, V, зависящие не только от координат точек крепления масс,
но и от частоты колебаний. Единственным практически
приемлемым способом вычисления корней такого уравнения является
способ последовательных проб, т. е. вычисление численных
значений векового определителя для ряда пробных значений со2.
Если не учитывать гироскопических моментов, т. е.
рассматривать закрепленные на валу массы как точечные, то вековое
уравнение рассматриваемой системы будет иметь вид
= 0,
Т(аг)
Т(а2)
Па)
Ща)
У(аг)
У(а2)
У(а)
Па)
а
У(аг - аг)
У(а - ах)
Г(а - ах)
^(а
Т(а
0
а
-а2)
~а2)
300
Глава VII. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПРЯМЫХ СТЕРЖНЕЙ
где дь = \11/ть — отношение массы вала к соответствующей
сосредоточенной массе. В этом случае при выборе пробных значений со2,
по крайней мере для вычисления низших частот, можно
руководствоваться теоремой о смещении частот системы от увеличения ее
кинетической энергии (без изменения потенциальной).
Вековое уравнение для вала, закрепленного концами в
поворачивающихся подшипниках и несущего п точечных масс т19 т2,... , тп,
можно составить с помощью гармонических коэффициентов
G.45). Пользуясь сокращенными обозначениями Г. (с. 263),
запишем вековое уравнение системы следующим образом:
/п1со2Г11 - 1 га2со2Г12 ... тпоз2Г1л
/П1С02Г91 #г9со2Г99 ~ 1 ••• ^а>2Г9„
1 21 2 22 2п , _ ^ (? 5())
т1со2Гя1 т2а2Гп2 ... тпы2Гпп - 1
Уравнениями типа G.50), как и соображениями, положенными в
основу их вывода, пользовался С. А. Гершгорин в своих
исследованиях влияния наложения дополнительных масс на колебания
материальной системы [96]. В этих исследованиях им установлен
критерий, с помощью которого можно отделять корни уравнения G.50),
когда известны частоты колебаний вала без сосредоточенных масс.
Уравнение G.50) по форме не отличается от векового
уравнения поперечных колебаний безмассового стержня, несущего п
точечных масс /п1, ... , тп. Из гармонических коэффициентов
влияния Г-у уравнение G.50) составлено так же, как уравнение D.19)
из статических аш. Эта замечательная аналогия открывает
возможность построения рационального метода разноса собственной
массы вала по закрепленным на нем сосредоточенным массам, что
обычно выполняется по недостаточно обоснованным правилам1*.
Если вал имеет промежуточную опору и эта опора типа
шарнирной (вращающийся подшипник), то, обозначив реакцию этой
опоры через В, присоединяем ее к внешним (в данном случае —
инерционным) силам, а к исходным уравнениям G.49) добавляем
уравнение
Ф(а) = 0, G.51)
Некоторые правила приведения ступенчатых валов имеются у Е. Б. Лунца
[25], С. П. Тимошенко [85], С. Д. Пономарева и др. [40, с. 208], а также
С. А. Бернштейна [4, с. 98].
8. Метод начальных параметров в матричной форме 301
где а — абсцисса точки, в которой находится опора. Если
промежуточная опора в точке х = а — неподвижный подшипник, то,
отнеся реакцию Е и момент М, развиваемые такой опорой, к
внешним силам и моментам, присоединяем к исходным
уравнениям два следующих:
ф(а) = 0, ф'(а) = 0, G.52)
так как в такой опоре равны нулю прогиб и угол поворота.
Неподвижный подшипник, или связь типа G.52), делит вал на две
независимо колеблющиеся части.
8. МЕТОД НАЧАЛЬНЫХ ПАРАМЕТРОВ В МАТРИЧНОЙ ФОРМЕ. Из
уравнения упругой линии вала, нагруженного сосредоточенными
силами ($ь и моментами М-1*, присоединив к нему первую, вторую
и третью производные функции ф(х), получим основные
уравнения метода начальных параметров2):
у(х) = Уо8(кх) + %1 Т(кх) + ^ Щкх) + ^ Щкх) + А
М- О
+ ? Р^7 Щк(х ~ х*)] + ? Ш1 ПЦх ~ х&
0(*) = -у0кУ(кх) + %8(кх) - ^ Т(кх) + -^ Щкх) -
-1.ШТ ПНх-х,)] +1.Щ1 ^х~Х^
•кЕ1
Оо
М(х) = Е1у0к2Щкх) + Е1%кУ(кх) + М08(кх) + -^ Т(кх) +
+ Ъ Мь8[к(х - хьУ\ + 2 Т Т^х ~ ХЯ>
I . К
Я{х) = -Е1у0к3Т(кх) + Е1д0к2Щкх) - М0кУ(кх) + <208(кх) -
- I кМу[к(х - хь)] + X Яь8[к(х - *,)].
G.53)
Х) См. уравнение G.40).
2) О методе начальных параметров в применении к стержневым системам, кроме
цитированной литературы, см. также книгу В. Г. Чудновского [56].
302
Глава VII. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПРЯМЫХ СТЕРЖНЕЙ
Уравнения G.53) можно представить в матричной форме.
Построим такое представление для одного /-го отрезка
(постоянной жесткости Е1}) ступенчатого вала без сосредоточенных
нагрузок.
Матричное уравнение для такого участка будет иметь вид
Уь+1
&1+1
М<+1
II «1+1
=
$(<*,)
кУ(щ)
Е1к2И(а1)
1 Д/*3!Г(а;)
1т(в|)
8(а,)
Е1кУ(а1)
Е1к2Щщ)
Р!/^
шГ(а<>
5(а<)
кУ(щ)
ш?™
шры
\пщ)
Я(о,)
У1
е'
мч
1 «'
»
G.54)
где аг - Ц иЛ4 = ^р2/Е11\
Формулы G.53) и их матричное представление G.54)
являются самыми общими выражениями параметров, определяющих
динамические напряжения в сечениях ступенчатого вала, когда
учитывается его собственная масса [130]. Из этих формул могут
быть получены все установленные раньше упрощенные
расчетные соотношения для приведенных валов и однородных
стержней и балок. Так, например, полагая ^ -* 0 при к —> 0 и используя
первые слагаемые известных разложений функций зЬ, сЬ, зш,
соз в ряды, мы легко получим из квадратной матрицы уравнения
G.54) матрицу жесткости E.23). Положив 1^0и 1^ —> ш^
таким же путем придем к матрице сосредоточенной массы E.24).
Задаваясь граничными условиями для однородных стержней, мы
получим из матричной формы G.54) уравнения частот,
приведенные в основных задачах. Так, для однородного стержня с
шарнирными опорами по концам, умножив столбец начальных
параметров
0
е0
о
«о!
*> Дальше квадратная матрица из уравнения G.54) для краткости обозначается
через К у
8. Метод начальных параметров в матричной форме
303
на квадратную матрицу К, получим на другом конце стержня мат-
рицу-столбец1*.
Е1кУ(к1)в0 + ±Т(к1)Я0
*
Приравняв нулю первый и третий элементы, получим уравнения
-ЩМ)Я0 = 0,
\т{М)% + -±- .
А ° к3Е1
Е1кУ(к1)в0 + 1т(к1)Я0 = 0,
откуда получим уравнение частот (с. 278)
Т2(Ы) - ^(Ы) = 0.
Как для крутильных и продольных колебаний, так и для
колебаний поперечных ступенчатого вала с сосредоточенными массами
(дисками) можно построить матричную схему расчета,
использовав кроме матриц перехода Кь приведенные в гл. V матрицы
жесткости и сосредоточенной массы с гироскопическим
моментом E.24). Так, для вала, шарнирно опертого по концам и
несущего два диска (рис. 77), массы и экваториальные моменты
инерции которых соответственно равны тг, т2, А19 А2, матричная
схема расчета выглядит следующим образом:
*
\Ко
1
0
0
т2р2
0 0 0
1 0 0
-А2р* 1 0
0 01
11*2||
1
0
0
тхр2
0 0 0
1 0 0
Ахр2 1 0
0 0 1
11^11
0 I
00
0
1 во 1
G.55)
Здесь К19 К2, К3 — матрицы
перехода G.54) для участков вала 119 129
т2> А2
13 соответственно.
Однако использование формулы
G.55) целесообразно лишь для вы-
т1,А1
и
и
Рис. 77
Х) Вычислять второй и четвертый элементы, если требуется только составить
уравнения частот, нет надобности.
304
Глава VII. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПРЯМЫХ СТЕРЖНЕЙ
числения собственных частот способом последовательных проб, а
также напряжений в сечениях вала при заданных значениях
квадрата частоты. Самые вычисления производятся по таблицам
функций Крылова 5, Г, V, ^[104], [1].
9. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПРЯМЫХ СТЕРЖНЕЙ С ВНУТРЕННИМ
НЕУПРУГИМ СОПРОТИВЛЕНИЕМ. Как отмечалось раньше,
исследования колебаний упругих систем с внутренним сопротивлением,
принимаемым за главное или доминирующее сопротивление1*, в
пределах линейной теории связаны с решительными
упрощениями представлений о его природе и источниках, упрощениями, во
многих случаях значительно снижающими ценность
количественных результатов расчета, на этих представлениях основанного.
В обширной литературе, посвященной исследованиям внутреннего
сопротивления, имеются многочисленные рекомендации по поводу
способов его учета, предлагаемые большей частью в виде формул,
выражающих зависимость сил внутреннего сопротивления от
величин деформаций, их скорости, от характера и способа нагруже-
ния и других обстоятельств2*. Как правило, эти формулы имеют в
виду более или менее точное описание внешних проявлений
внутреннего сопротивления, а не раскрытие сущности механизма их
возникновения, который до сих пор остается невыясненным. Мы
отметим только те из этих формул, использование которых
допустимо по тем или иным соображениям в линейных задачах.
К числу таких формул относится прежде всего формула Фохта,
согласно которой сила внутреннего сопротивления принимается
пропорциональной первой степени скорости деформации или
скорости изменения упругой восстанавливающей силы. В уравнении
поперечных колебаний однородного стержня
Е1р1 + ^
дх4 дг2
упругая восстанавливающая сила представлена первым
слагаемым, содержащим четвертую производную у по х. Скорость
изменения восстанавливающей силы равна
дг1 дх4] дгдх4
Х) То есть сопротивление, в сравнении с которым другими сопротивлениями
можно пренебречь.
2) Сводку таких формул см. у Е. С. Сорокина [44].
9. Стержни с внутренним неупругим сопротивлением
305
и сила Е внутреннего сопротивления по Фохту принимается равной
В-НЕ!^, G.56,
где к — постоянный коэффициент. При таком предположении
относительно внутреннего сопротивления уравнение колебаний
будет иметь вид
д4*/ +^ д6у + ц д2у _ 0
Эх4 дгдх4 Е1 Ы2
Оно остается, таким образом, линейным уравнением. Однако
лежащее в основе формулы G.56) предположение о
пропорциональности внутреннего сопротивления скорости деформации опытом
не подтверждается, и использование этой формулы в задачах на
упругие колебания имеет в основном теоретический интерес.
Более обоснованным представляется применение в линейных
расчетах уже не раз встречавшейся нам формулы Е. С. Сорокина.
Согласно этой формуле полное внутреннее сопротивление 5* при
циклических деформациях стержня складывается из упругого
сопротивления 8, равного упругой восстанавливающей силе, и
неупругого сопротивления К, пропорционального упругой
восстанавливающей силе, но сдвинутого по фазе относительно
последней на тс/2. Такое полное сопротивление может быть представлено
формулой (см. гл. III § 19)
8* = 8 + Д = 8A + *\|//271), G.57)
в которой I = л/-1 .
Коэффициент поглощения \|/, равный отношению
поглощенной за один цикл энергии АТУ^ к полной энергии системы \У, в
первом приближении можно считать не зависящим от размеров и
формы стержня, а также от интенсивности напряженного
состояния. Когда последнее изменяется по гармоническому закону,
коэффициент поглощения имеет постоянное значение. Это
постоянное значение \|/ приблизительно равно удвоенному декременту
свободных колебаний стержня, как это легко вывести из
формулы B.19). Предположим, что стержень совершает первое главное
колебание. Все точки его оси одновременно достигают
наибольших отклонений, и в этом амплитудном отклонении
потенциальная энергия стержня равна его полной энергии ^Г.
Пусть у — амплитуда конца стержня. Можно записать, что
№ = Ъу2, где Ъ — постоянная, зависящая от формы колебания
306
Глава VII. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПРЯМЫХ СТЕРЖНЕЙ
стержня. За один период амплитуда у уменьшится на Аг/. Новое
значение полной энергии будет
УГ-АУГ=Ъ(у- АуJ = Ъ[у2- 2уАу + (АуJ].
Вычтя это выражение из Ж = Ъу2, получим, отбросив (АуJ,
АТ^ = 2ЬуАу,
откуда
^ = ^ = 5 G58)
2УГ у Ь G*58)
и
Поэтому формула G.57) для однородного стержня,
совершающего изгибные колебания, примет вид
8* = A + $)еА G.60)
V к; дх4
Формула G.60) применима в практических расчетах (с
относительно небольшой погрешностью), только когда 5 весьма мало.
В этом случае результаты расчета по этой формуле совпадают с
результатами, полученными другими методами (например,
энергетическим). Кроме того, область применения формулы G.60)
должна быть, по-видимому, ограничена вынужденными
колебаниями от гармонической возмущающей силы, поскольку при
выводе формулы существенным образом предполагается, что
колебания системы происходят по гармоническому закону.
Недостаточно обоснованное применение G.60) к свободным колебаниям
приводит к выводам, противоречащим общеизвестным фактам.
Так, например, формула G.60) дает для частоты затухающих
свободных колебаний значение, превышающее частоту
собственных колебаний системы без сопротивлений.
В одной из работ Е. С. Сорокина [119] формула G.60)
подверглась существенным усовершенствованиям, учитывающим между
прочими и пластические деформации при наличии в теле
начальных напряжений. Исходя из полученного статистическим
методом уравнения петли гистерезиса, Е. С. Сорокин получил
следующее выражение для суммарной силы $*:
8* = &(и + ш), G.61)
где при 5/тг = у
и = ±ллУА9 „ = у .
1+у2/4 1+у2/4
9. Стержни с внутренним неупругим сопротивлением
307
Этой формулой устраняется только что отмеченное
несовершенство формулы G.60), и она, т. е. формула G.61), оказывается
одинаково хорошо применимой как для вынужденных, так и для
свободных колебаний. В рассматриваемых дальше задачах на
вынужденные колебания мы будем, однако, пользоваться упрощенной
формулой G.60), отбрасывая у2/4 как весьма малую величину1*.
Пример 8. При составлении уравнения колебаний стержня с
комплексным сопротивлением гармоническую возмущающую силу следует брать
также в комплексной форме, полагая, например,
Р* = Е(х)еш.
В этом случае уравнение вынужденных колебаний будет иметь вид
^3+A+?)Е/8=^)е(ю(- G-б2)
Установившиеся вынужденные колебания стержня будем искать в виде
разложения
оо
у(х, 0=2 акц>к(х)еш
к = 1
по собственным формам соответствующей однородной задачи без
сопротивления, т. е. по функциям ук(х), удовлетворяющим уравнению
Е/ФР(х) = №Ы*)-
Функцию Р(х) также представим в виде разложения по функциям ук(х):
оо
к = 1
где
\Р(х)ук(х)&х
**-°-——
|ф2(*)йх
о
Подставив эти разложения в уравнение G.62), получим
оо оо
Приравнивая коэффициенты при одинаковых <рк(х) справа и слева, найдем
ц[A + *8/я)р2-ю*]-
Х) Другие формулы приведены в книге А. П. Филиппова [52]. Нелинейная
теория неупругого сопротивления дана в монографии Г. С. Писаренко [39].
308
Глава VII. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПРЯМЫХ СТЕРЖНЕЙ
Это выражение для ак можно представить еще и в форме
где
Ек = I 5 *2 Ф* :
Л /У . О ОЧО.ОО /(/О «-» ¦ «
Л2 •
7(Р| - СО2J + 52р|/7Г2 Я - СО2
В этих обозначениях у(х, I) получит следующее выражение:
й = 1И
Вещественная часть последнего выражения представит искомое решение
уравнения G.62):
оо и
у(х, 0 = X) - Д*Ф*(*) соз (ю* + ц>к). G.63)
Л = 1 ^
При резонансе с первой собственной частотой, когда со =р1,
Фх = -я/2, Е1 = тс/5р|,
сумма G.63), если выделить в ней первое слагаемое, запишется в виде
У(Х, г) = -~^-2 ф^*) 8111 р^ + У ~ Д*Ф*(*) СОЗ (рЛ* + фА). G.64)
Если 5 мало (как обычно и бывает) и вторая частота значительно
превышает первую, то приближенно можно положить для формы колебаний
м(х)«-^Ф1(л:), G.65)
т. е. считать, что форма резонансных вынужденных колебаний совпадает с
первой собственной формой. Только в этом случае является до некоторой
степени оправданным обычно принимаемое в практических расчетах
допущение, что при резонансе за форму вынужденных колебаний можно брать
собственную форму, соответствующую резонирующей частоте.
Пример 9. однородная лопатка со свободным концом. В этом
случаеХ)
/ф2(*)A*=|ф2(/). G.65')
о
Первая собственная форма колебания
Фх(х) = С[Щкх) - 0,734 У(кх)], G.66)
Х) См. таблицу IV в конце книги, формула 18.
9. Стержни с внутренним неупругим сопротивлением
309
где к4 = \хр\/Е1. Постоянную С можно выразить через прогиб на свободном
конце, т. е. через ф1@- В самом деле, положив х = / в G.66), найдем
Таким образом,
С = 1,00003 ф^О^ф^/).
Ф1(*) = ФхСО [Щкх) - 0,734 У(кх)].
Пусть Е(х) = /0/2 = сопзЪ. Тогда
] Р(х)ц>1(х)йх = 0,394 1^A)
G.67)
ь и
1 2ф1(/)-0,635'
G.68)
Воспользовавшись формулой G.65), найдем абсолютную величину
амплитуды колебаний свободного конца лопатки (х — I)
иA) =
л/о
28р2ц. о,635
G.69)
Формулой G.69) можно воспользоваться для приближенного расчета
дополнительных напряжений турбинной лопатки от резонансных колебаний.
Если считать, что давление пара на лопатку изменяется по закону
0(^0 = (Л>/2)A + со8р*),
то
*"(*) = /0/2
и для амплитуды свободного конца имеет место формула G.69).
Максимальное напряжение в каком-либо сечении лопатки при изгибе определяется по
приближенной формуле
&2и
а = ЕН
их29
где Е — модуль упругости, к — расстояние от нейтральной оси сечения до
крайнего (наиболее удаленного) волокна (рис. 78).
Из формулы G.65), принимая во внимание G.68), находим
А2и _ Ьгп/[1 т<*2Ф1 _ /0лй2
&х2
Ър2
•ФхГО
&х2 2рр25-0,635
[8(кх) - 0,734Г (&х)]. G.70)
Для х = 0, где изгибающий момент
имеет наибольшее значение
й2и
/>^2
V(^x2А=о 2цр25-0,635
максимальное напряжение
_ Ек?0пк2
Ф1@,
Нейтральная
ось
1,27ц5р2
Фх@
G.71)
Рис. 78
310
Глава VIII. ПРЯМЫЕ СТЕРЖНИ ПЕРЕМЕННОГО СЕЧЕНИЯ
или, принимая во внимание формулы
/г4=^, &2/2 = A,875J,
-0,703^-. G.72)
тах 1,27A,875J/5 ' /5
Формулу G.72) можно получить и другим способом, исходя из
энергетических соображений, а именно, из допущения, что в установившихся
вынужденных колебаниях при резонансе работа возмущающей гармонической
нагрузки за один цикл колебаний равна работе сопротивления1*.
Глава VIII
Некоторые приближенные методы расчета
колебаний прямых стержней переменного сечения
1. ВАРИАЦИОННЫЕ МЕТОДЫ. Принцип Остроградского —
Гамильтона использовался в предыдущих главах для вывода уравнений
продольных, крутильных и поперечных колебаний стержня —
уравнений, которые затем решались при заданных краевых
условиях известными методами дифференциального исчисления.
Этим, однако, далеко не исчерпывается значение принципа в
теории колебаний. Устанавливая эквивалентность решения краевых
задач дифференциального исчисления с решением задачи об
экстремуме функционала, принцип Остроградского — Гамильтона
открывает возможность привлечения к вибрационным расчетам
некоторых специальных методов вариационного исчисления.
Сюда относятся прежде всего так называемые прямые методы
вариационного исчисления, применение которых оказывается
эффективным в приближенных расчетах собственных частот и
форм колебаний стержней переменного сечения с
неравномерным распределением жесткости и массы, иногда заданных
графически. Из таких методов наибольшее распространение в расчет-
!> См. работы А. Кимбэла [73] и Я. И. Шнее [122].
1. Вариационные методы
311
ной практике получили методы Рэлея [77], Ритца [129, 8. 135] и
Галеркина [95]1*. Мы изложим основное содержание этих методов
в применении к расчету поперечных колебаний неоднородного
стержня, для которого функционал Остроградского — Гамильтона
имеет вид
Те соображения, которые лежат в основе применения прямых
методов к расчету поперечных колебаний, остаются в силе без
существенных изменений и для колебаний продольных и крутильных
с функционалами
гх о
для продольных колебаний и
в«-|И[^)(|I-С^>а* (8-3)
для колебаний крутильных2*.
Имея в виду определение собственных частот и форм главных
колебаний, подставим в функционал (8.1)
у(х, *) = ф(х) 81П (р1 + а). (8.4)
После интегрирования по I в пределах одного периода 2к/р получим
5 = ^ \ Ы*)Р*Ч>Чх) - Е1 {ср"(*)}21 <1*. (8.5)
Делая подстановку (8.4), мы ограничиваем класс
привлекаемых для сравнения движений гармоническими колебаниями
одного и того же периода с различными, но достаточно близкими
Х) Метод Галеркина следует называть методом Бубнова — Галеркина. Й. Г.
Бубнов раньше Б. Г. Галеркина (в 1913 г.) дал описание этого метода в отзыве на
работу СП. Тимошенко «Об устойчивости упругих систем». [Подробно о
работах И. Г. Бубнова см. очерк А. С. Вольмира о жизни и деятельности
И. Г. Бубнова в [8, с. 373]. — Ред.].
2) Входящие в состав функционалов обозначения сохраняют прежние значения
(см. гл. VI и VII).
312 Глава VIII. ПРЯМЫЕ СТЕРЖНИ ПЕРЕМЕННОГО СЕЧЕНИЯ
друг другу формами колебаний. Уравнения таких «окольных»
колебаний будут иметь вид
у + ду = (ф 4- 5ф) 8И1 (р1: + а), (8.6)
где Ъу и 5ф обозначают соответственно изохронные вариации
функций у(ху I) и ц)(х). Варьированные формы колебаний
Ф(х) = Ф(х) + 5ф (8.7)
должны удовлетворять условиям закрепления стержня, т. е.
наложенным на систему связям. При этом большей частью
достаточно, чтобы эти формы удовлетворяли только геометрическим
условиям, так как выполнение динамических условий в этом
случае будет следовать из обращения в нуль первой вариации
соответствующего функционала. В самом деле, вычислив первую
вариацию функционала (8.5)
53 = - [ Мх)р2 ф(х) 5ф(х) - Е1<р"(х) 5ф"(*)] Ах (8.8)
и выполнив дважды интегрирование по частям во втором
слагаемом подынтегрального выражения, приведем (8.8) к виду
55 = - | [-(Е1<р")" + №2ф] 5Ф их + - {(Е1у"У 5Ф - Я/ф'^ф'}^.
Р о Р
Если ф(х) — форма действительного главного колебания, то
|[№2Ф ~ (Е1ц>")"] 5ф их = 0
о
и из обращения в нуль вариации 55, т. е. из уравнения
/[№2Ф - (Я/ф")"] 5ф Ах + {(Е1у"У 5ф - Д/ф'^ф'}^ = 0
о
будет следовать, что
{(Е1у"У 5ф - Д/ф'^ф'}^ = 0. (8.9)
Теперь нетрудно убедиться, что в силу (8.9) выполнение
геометрических условий автоматически влечет за собой выполнение и
динамических условий.
Рассмотрим некоторые простейшие случаи закрепления
стержня.
2. Метод Ритца
313
Пусть, например, левый конец (х = 0) стержня жестко
закреплен, а правый (х = /) свободен. В этом случае уравнение (8.9)
будет иметь вид
[(Д/ср")' 5Ф - Я/фф']^ = 0 (8.10)
и так как 5ф и 8ф' произвольны на конце (х = I), то из (8.10)
следует, что на этом конце равны нулю и поперечная сила (Е/ф")', и
изгибающий момент Е1у".
Пусть стержень опирается концами на шарнирные опоры.
Геометрические краевые условия имеют вид
(&р)х_0 = Eф)х_, = 0.
Первый член в уравнении (8. 9) выпадает, и оно обращается в
следующее:
Я1фф'|о = 0.
При произвольном 8ф' на левом и правом концах из последнего
равенства следует обращение в нуль на тех же концах
изгибающего момента.
Если оба конца стержня свободны, то 5ф и 8ф' произвольны и
для х = 0, и для х = I. Из условия (8.9) следует, что на свободных
концах стержня равны нулю (Е1у")г и (Е1ц>"), т. е. выполнены и
динамические условия.
2. МЕТОД РИТЦА. Сущность метода заключается в приведении
вариационной задачи к задаче на разыскание экстремума функции
многих независимых переменных. Такое приведение
осуществляется путем отбора из всех возможных допустимых функций,
на которых рассматриваются значения функционала, некоторого
специального класса функций, зависящих от конечного числа
сначала неопределенных параметров. Подстановка таких
функций в выражение функционала превращает его в функцию этих
параметров, экстремум которой может быть найден известными
элементарными способами.
По Ритцу значения функционала (8.5) рассматриваются на
совокупности выражений вида
п
\|/(*)= I а^(х), (8.11)
I = 1
где аь — параметры, варьируя которые мы получаем нужный
класс допустимых функций, а \|/Дх) — базисные или
координатные функции — специально выбираемые или задаваемые извест-
314
Глава VIII. ПРЯМЫЕ СТЕРЖНИ ПЕРЕМЕННОГО СЕЧЕНИЯ
ные функции, удовлетворяющие по крайней мере
геометрическим краевым условиям рассматриваемой задачи. На
совокупности функций (8.11) соответствующий функционал обращается
в функцию п независимых переменных с^, I = 1, 2, ... , д,
8(у) = 8 (аг, а2, ..., ап)
и его первая вариация
Найдя значения параметров а/ из уравнений
|^ = 0, * = 1,2, ...,д (8.12)
и подставив их в (8.11), мы получим приближенное решение
поставленной задачи.
Так как функционалы, соответствующие дифференциальным
уравнениям малых колебаний прямых стержней, являются
квадратичными относительно \\!(х), уравнения (8.12) линейны
относительно ах, а2, ... , ап. Они имеют вид, аналогичный уравнениям
малых колебаний системы с конечным числом степеней свободы.
Приравнивая нулю определитель системы (8.12), мы получим
уравнение, из которого найдутся приближенные значения
первых частот системы, определение которых в большинстве
случаев и является целью расчета. Это уравнение мы будем называть
уравнением частот Ритца.
Для более подробного ознакомления с этим уравнением,
составим его для поперечных колебаний стержня. Функционал,
первая вариация которого должна обращаться в нуль для
действительной формы <р(х), здесь будет
« = 1ЫФ2<рЧх) - .Е/(ф"J] Aх.
о
Подставив сюда минимизирующую форму
п
\|/(л:)= Иад(ж),
I = 1
обратим 5 в квадратичную форму параметров а^
п п
5(сц а„) =р2 . X Т1кар.к -2 #ма,ак, <8ЛЗ>
I, к = 1 I, к = 1
2. Метод Ритца
315
где
тьк = \ ПУЛУ* &*> иш = \ Е1у'№&х.
о о
Уравнения (8.12) будут иметь вид
(р*Тп - С/п) а, + ... + (р*Т1п - С71в) а„ = О,
(р2т21 - 1/21) «! + ...+ (р2Г2га - Щп) а„ = О,
(8.14)
(р2Тщ - ищ) «1 + - + (р2тпп - ^пп) а„ = о.
Условие, при котором не все а^ одновременно равны нулю,
запишется следующим образом:
Тпр* - [7П ... т1пР2 _ ^
Т21р2-[/21 ... Г2„р2_С2в
Г»1Р2-^»1- Г»»Р2
С/„
= 0.
(8.15)
Таково уравнение частот Ритца. Для продольных и крутильных
колебаний это уравнение будет иметь тот же общий вид;
коэффициентами при аь будут разности
^ш~Р2Т1к,
где для продольных колебаний
Т11к = \ ЕАц,укйх, 1,к = 1, 2, ..
о
п,
и для крутильных
СЛ;
] 01р\ц[\ц'к&х, Ь,к=1, 2, ... , п.
Чтобы составить некоторое представление о расположении
корней уравнения (8.15) по отношению к собственным частотам
рассматриваемой системы, заметим прежде всего следующее.
Формы, входящие в состав функции (8.13), —
положительно-определенные. Следовательно, корни уравнений (8.15)
вещественны и положительны. Перенумеруем квадраты этих корней в
порядке возрастания и расположим их в ряд
Р1 <р1 <•
<р1,
(8.16)
316 Глава VIII. ПРЯМЫЕ СТЕРЖНИ ПЕРЕМЕННОГО СЕЧЕНИЯ
Значок (п) указывает, что в состав принятой минимизирующей
формы входят п слагаемых. Если в определителе (8.15)
вычеркнуть последний столбец и последнюю строку, то корни нового
уравнения
Рг < Рг < — < Рп (8.17)
будут соответствовать минимизирующей форме с (п - 1)
слагаемым. Как известно, между корнями (8.16) и (8.17) имеют место
соотношения
Рк ^ Рк > к=1,2, ... 9 п- 1.
Г К(п) ^К(п-1)
Из этих соотношений заключаем, что последовательность
р1 , р1 , ... , р^ (8.18)
— монотонно убывающая (точнее — не возрастающая). Ни один
из членов этой последовательности не может стать меньше
квадрата первой частоты заданной системы. Таким образом,
последовательность (8.18) ограничена снизу.
Наложив на базисные формы \|/Дх) некоторые дополнительные
ограничения, из которых главным является полнота системы
функций уДх), можно доказать [36], что при безграничном
увеличении т последовательность (8.18) стремится к точному
значению квадрата собственной частоты р\, оставаясь все время
больше последнего. Можно поэтому утверждать, что корни уравнений
(8.15) дают приближенные значения квадратов первых п
собственных частот рассматриваемой системы с избытком, иначе
говоря, определяют верхние границы этих частот.
Что касается выбора базисных форм \|/Дх), то кроме сделанных
выше замечаний о краевых условиях, которым они должны
удовлетворять, приводим еще некоторые рекомендации
практического характера.
Во многих случаях базисные формы удобно брать в виде
простых многочленов, задавая последние сначала с неопределенными
коэффициентами и затем определяя эти коэффициенты из
краевых условий задачи. Когда, например, для одночленного
приближения нужно построить многочлен, удовлетворяющий только
геометрическим условиям, полагаем
цг(х) = 1 + Ахх + А2х2
и вычисляем коэффициенты из условий равенства нулю прогиба
или угла поворота на одном из концов стержня.
3. Метод Рэлея
317
Расчет, как правило, уточняется и сокращается, если удается
подобрать базисные формы, удовлетворяющие не только
геометрическим, но и динамическим условиям. Хотя базисные формы в
остальном произвольны, однако для ускорения расчета
целесообразно выбирать их, до некоторой степени сообразуясь с
возможными деформациями стержня при колебаниях, например с
симметрией деформаций, если таковая имеет место.
Во многих случаях хорошие результаты получаются с
использованием в качестве базисных функций собственных форм
колебаний однородного стержня при тех же условиях закрепления,
что и в данной задаче [Е. С. Сорокин, 43].
Задавая эти формы выражениями
К;Х . К^Х _^ , К:Х _, , К;Х
\|/.(х) = зш-р +Аг соз-у- + Б. 8п-^- + С. сп-^- ,
где Хь = кь1, Щ = [хр2/Е19 а. г — порядок собственной формы, и
подбирая постоянные Аь, В., Сь в соответствии с условиями
закрепления стержня, можно строить минимизирующие формы,
удовлетворяющие не только геометрическим, но и динамическим
краевым условиям задачи, что необходимо в расчетах собственных
частот методом Галеркина.
3. МЕТОД РЭЛЕЯ. Когда ряд (8.11) содержит только одну базисную
функцию, уравнение частот (8.15) имеет вид
П11-Р2Г11 = °> <8Л9>
где П11, р2Ти представляют максимальные значения
потенциальной и кинетической энергии для одночленной минимизирующей
формы1*
\|/(х) = уг(х).
Таким образом, приходим к уже известной формуле Рэлея
Д=^; (8.20)
тах
здесь Птах — максимальная потенциальная энергия, Т'тах —
максимальная кинетическая энергия без множителя р2.
1) Коэффициент ах писать не нужно, так как в одночленных формулах он везде
сокращается.
318
Глава VIII. ПРЯМЫЕ СТЕРЖНИ ПЕРЕМЕННОГО СЕЧЕНИЯ
В зависимости от вида колебаний формула (8.20) имеет
различные выражения. Так, для поперечных колебаний она будет
иметь вид (в обозначениях гл. VII, с. 272)
I I
В= $ Е1\\г"Чх/1 \ху2(х) Ах. (8.21)
о о
для продольных колебаний (в обозначениях гл. VI, с. 250)
Е = $ ЕАу'2(х) Ах/ $ \1\ц2(х) Ах, (8.22)
о о
для крутильных (в обозначениях гл. VI) —
Д= / СИру'2(х)йх/\ 1у2(х)Ах. (8.23)
о о
Если в эти формулы подставить разложение функции у(х) по
собственным формам
оо
ц(х) = агц>г(х) + а2ц>2(х) + ... = I а^х), (8.24)
I = 1
то для формул (8.21), (8.22) и (8.23) получим одно выражение
а? + а1 + ... 1 = 1 1 11 1 = 1 1
(8.25)
в котором р1 — собственные частоты системы. Можно считать
(8.25) представлением формулы Рэлея в нормальных
координатах, роль каковых здесь играют коэффициенты аг, а2, а3, ...
разложения (8.24).
Из формулы (8.25) можно сделать ряд важных заключений,
обобщающих известную теорему Рэлея о минимальных
свойствах собственных частот (см. гл. III § 15) на системы с
бесконечным числом степеней свободы.
Примем, что
р\<р1<р1<-'
Значение дроби (8.25) больше наименьшей из частных дробей
а2р2ь/а2,
каковой, очевидно, является дробь
а\р\/а\=р\.
3. Метод Рэлея
319
Следовательно, квадрат наименьшей основной частоты является
абсолютным минимумом дроби (8.25) для любой формы \|/(х).
Если минимизирующая форма \|/(х) будет выбрана так, что
/
|цЛ|/ (X) фх (х) ИХ = О,
о
т. е. будет ортогональна первой собственной форме, то а^ — О и
формула (8.25) примет вид
В
аЫ + аЫ + —
а| + а| + ...
*2 ¦ "з
При таком выборе формы \|/(х) минимумом функции Рэлея будет
квадрат второй частоты. Если функция \|/(х) будет удовлетворять
двум условиям
I I
Г |и\|/ (х) фх (х) их = 0, | ц\|/ (х) ф2 (х) Aх = О,
о о
т. е. будет одновременно ортогональна первой и второй
собственным формам, то
<*Ы + а\р\ 4- ...
В-
+ а| + ...
а3 | 1*4
и минимумом 7? будет квадрат 3-й собственной частоты и т. д.
Квадрат к-й собственной частоты будет относительным
минимумом функции Рэлея для всех форм ц/(х), удовлетворяющих (к - 1)
условиям ортогональности первым (к - 1) собственным формам
| ЦЛ|/ (X) фх (X) ЙХ = О,
|иЛ|/ (X) ф2 (X) AХ = 0, ... ,
о
I
| ц\|/ (х) фл-1 (х) с!х = 0.
Пример 1. ОПРЕДЕЛЕНИЕ ОСНОВНОЙ ЧАСТОТЫ ПОПЕРЕЧНЫХ КОЛЕБАНИЙ
КОНСОЛЬНОГО КЛИНА ДЛИНОЙ I И ШИРИНОЙ 1 М СО СВОБОДНЫМ ОСТРЫМ
И ЖЕСТКО ЗАКРЕПЛЕННЫМ КОНЦАМИ
(рис. 79). Расположив оси координат,
как показано на рисунке, находим:
^ площадь поперечного сечения
Л(*) = 2Ь|=^|,
площадь основа-
где А0 = 2Ь • 1
ния клина;
Рис. 79
320
Глава VIII. ПРЯМЫЕ СТЕРЖНИ ПЕРЕМЕННОГО СЕЧЕНИЯ
^ погонную массу
Ц(Х)=^=2Ь5 1 =ц0:
где у — удельный вес [кГ/см3], ц0 = 2Ьу/§;
^ момент инерции поперечного сечения
Кх) = 2и-\-у- = 2ЬЗх3 = /Л—
где /0 = B/3N3.
Краевые условия на левом (х = 0) и правом (х = /) концах соответственно:
Ф"@) = Ф'"@) = о, (р@ = фчо = о.
Имея в виду применить к решению задачи метод Ритца, мы должны
подобрать в качестве базисных форм функции, удовлетворяющие только
геометрическим условиям. Такими будут, например, функции
уДх) = A-|J^, /=1,2
Минимизирующая форма, составленная из таких функций, будет иметь вид
у(х) = сф - |J + а2A - |J| + а,A - |)^ + ... .
В первом одночленном приближении полагаем в формулах (8.14)
щ{х) = A - ж/02.
Тогда
Тп = }ц(*) у2(ж) их = |цо|A - *)'йх = ^, Пп = \Е1 Ы{(х)]Ых = Щ± .
0 0 0
Из уравнения частот
Пц-Р^п-О
находим верхнюю границу первой частоты
< 5,48 1ЁТ0
I2 V Ц0 '
Приняв
5,48 Д^
/2 а/ Цо
Л' /2
получим значение, на 3% превышающее значение
„ _ 5,315 Шо
найденное Г. Кирхгоффом [С. Л. Тимошенко, 85].
3. Метод Рэлея
321
Для второго приближения берем
\|/(*) = 0^A - х/1J + <х2A - х/1J • (х/1)
и вычисляем по формулам (8.14) величины
2Е1п
П,
/3 '
гр = Но*
'п 30'
Из уравнения частот Ритца
т — Т — ^
^12 ^21 Хо5^
п9
2ЕГ,
5/3
280'
2Д/П
5/3
2Д/п
^ 30
3^
105
92^
280
5/3 ^ 105 5/3
находим для меньшего корня значение
п _ 5,319 !ШГ0
всего лишь на 0,1% превышающее полученную Г. Кирхгоффом первую частоту.
Пример 2. Найти первую и вторую частоты колебаний балки с двумя
сосредоточенными массами, каждая из которых равна массе всей балки, и с
массой, равномерно распределенной на средней трети длины балки1*.
Расположение масс показано на рис. 80. Балка опирается концами на
шарнирные опоры. Обозначим через ц постоянную погонную массу балки.
Пусть ц0 = ц — погонная масса нагрузки среднего участка; М = ц7 — масса
каждого сосредоточенного груза. Тогда для максимальной кинетической и
потенциальной энергии будем иметь выражения
2//3
1/г
2Гтах = №2Мф2(*)с1х+ \ Ф2(*) Ах + *Ф2Ц) + ^2{тI
о
2П
(8.26)
Рис. 80
Х) См. работу Е. С. Сорокина [43].
11 - 10456 Бабаков
М
322
Глава VIII. ПРЯМЫЕ СТЕРЖНИ ПЕРЕМЕННОГО СЕЧЕНИЯ
В качестве базисных форм берем собственные формы колебаний
однородной балки, свободно опертой по концам
М//(х) = 8ш^, /=1,2,...,
а в качестве минимизирующей формы — конечный ряд
у(х) = а^т^ + а28т?Н + ... + а^т^ .
Для первого одночленного приближения, положив \|/г- = зтGгл://), находим по
формулам (8.26)
Тп = Ц^ВШ2^ &Х + \ 8Ш2Н их + / 8П12? + I 8Ш2|] = ^ ,
Пп-^/вш'На*
Е1к4
2/3 '
после чего из уравнения
Гцр2 - Пп = О
получаем для верхней границы основной частоты
Р1
5,38 Е1
/2
Ц
При вычислении второго приближения основной частоты следует взять в
качестве минимизирующей формы
\|/(х) = ах 81П (пх/1) + а3 зт (Зпх/1),
(8.27)
так как первая форма симметрична относительно середины балки. Взяв
вместо второго слагаемого в (8.27) зт Bпх/1), мы, как показывают вычисления,
не улучшим первое приближение. Подставив (8.27) в выражения для Тп,
^12» Т22> П11> П12> П22> ПОЛуЧИМ
гр _ 5/ц
п,
Я/л4
11 2/3 '
Уравнение частот
' Е1к4
^12 ^21 Н^>
п12 = п21 = о,
гр _ 5/ц
122~~ Т '
1122 2/з
№г
9Ы
2/з ^ 3
-цр2/
-цр2/
81Е/тс4 25/
~27^ - №
= 0,
если положить
Д/тг4
ц/4р2
= х,
3. Метод Рэлея
323
будет иметь вид
@,5* - 5/3) D0,Ъх - 5/3) -1 = 0
или
х2- 3,374х + 0,088 = 0.
Отсюда получаем
^ = 3,347; х2 = 0,027
и, следовательно,
5,36 Щ
Второе приближение мало отличается от первого, и потому искать
следующие приближения нет надобности.
Для вычисления второй частоты в выражении минимизирующей формы
следует взять слагаемые с четными аргументами. Так, имея в виду первое
приближение второй частоты, полагаем \\12(х) = зт Bпх/1). Тогда
Гп = 1,299ц*; Пп = ^
и из уравнения
ГцР2-Пи = 0
находим
р2* 17,31 л/ЁТ/ц.
Вычислив второе приближение для р2, найдем, что в пределах первых
трех десятичных знаков оно совпадает с первым, на котором и следует
закончить расчет.
Пример 3. МЕТОД РЭЛЕЯ В ПРИМЕНЕНИИ К РАСЧЕТУ ОСНОВНОЙ ЧАСТОТЫ
ОДНОРОДНЫХ СТЕРЖНЕЙ. Как известно, одно из первых предложений по
поводу выбора минимизирующих форм было сделано Рэлеем. Рэлей предложил
брать в качестве минимизирующей функции при расчете первой частоты
стержня форму статической деформации от заданной нагрузки или от
нагрузки более или менее близко воспроизводящей общий вид деформации
стержня в первом главном его колебании. Эта рекомендация оказывается,
как правило, весьма эффективной и при сравнительно малых затратах
времени приводящей к замечательно точным результатам. Чтобы иметь
возможность сравнить результаты применения метода Рэлея с известными
точными решениями, рассмотрим некоторые из разобранных в гл. VI и VII
примеров на колебания однородного стержня.
Статический прогиб однородного консольного стержня от равномерно
распределенной нагрузки интенсивностью ^ (например, от собственного веса
стержня) определяется формулой
ЩХ) 24ЕП1* /з °1*Г
Подставив это выражение в формулу (8.21), получим для первой частоты
значение
п _ 3,530 [ЁТ§
324 Глава VIII. ПРЯМЫЕ СТЕРЖНИ ПЕРЕМЕННОГО СЕЧЕНИЯ
отличающееся на +0,4% от «точного»
= A,875J Щ ^ 3,516 Щ
Рг I2 а/ ц I2 V ц '
Если бы в рассматриваемом примере в качестве минимизирующей
функции мы взяли статический прогиб стержня от груза Р, сосредоточенного на
свободном конце
^-т(^-^)- (8-28)
то по той же формуле (8.21) нашли бы
3,567 \Е1
Рг
I2
с ошибкой около +1,45% против приведенного выше «точного» значения.
Для первой частоты консольного стержня с грузом, равным половине
веса стержня, было найдено (см. пример 3 гл. VII) значение
1,99 Щ
По формуле Рэлея (8.21), взяв в качестве минимизирующей формы
(8.28), после недолгих и совершенно элементарных вычислений находим:
2Т = ц1у2(х) Aх + ^ у2(/) = Л°д3/2/7^ , 2П = Е1\у"Нх) их = ^г
>ЧТ1' 2УЧ' 1260(Е/J ^у *' 2Е1
и
„ 2,02 Щ
Это значение только на 1,5% больше приведенного выше.
Столь же эффективно вычисление основной частоты по методу Рэлея и в
более сложных задачах. Рассмотрим, например, продольные колебания
стержня с грузом на конце (пример 2 гл. VI). Приняв в качестве
минимизирующей функции статическое удлинение стержня от груза ф, т. е. положив
найдем по формуле (8.22):
**>-М-
2Гтах = р2[ц) уНх) Ах + МуЧЪ] = ^ [ц| + МР], 2Птах = |^
И
2 ^ ЗЕА = ЕА 1
Рх~ ц/2A +зм/цо г м + ц//з*
Пусть масса груза М в два раза больше массы стержня \й. Тогда
Р> = I
0,65 гл
3. Метод Рэлея
325
Как видно из формулы F.33) и из приведенных там же значений
наименьшего корня уравнения
Р^|3 = а=^, (8.29)
основная частота, найденная по формуле Рэлея, в пределах первых
десятичных знаков не отличается от ее «точного» значения, вычисленного по
уравнению (8.29).
Пример 4. ВЛИЯНИЕ НА ЧАСТОТУ КОЛЕБАНИЙ ЛОПАТКИ ЦЕНТРОБЕЖНЫХ
СИЛ. Динамическая частота колебаний лопатки, т. е. частота в случае,
когда лопатка вращается вместе с диском, выше частоты колебаний
неподвижной лопатки (ее иногда называют статической частотой).
Повышение частоты вызывается увеличением жесткости лопатки на изгиб от
растягивающего действия на лопатку центробежных сил элементов лопатки. При
этом происходит увеличение потенциальной энергии лопатки без изменения
ее кинетической энергии. Пусть диск радиуса а, в ободе которого жестко
закреплена лопатка, вращается с угловой скоростью со [1/с]. Продольная
центробежная сила, действующая на лопатку, в сечении, расположенном на
расстоянии х от обода диска, равна
/
со21 ц(х)(а + х) дх = <3(х). (8.30)
х
Дифференциальное уравнение колебаний лопатки с учетом
центробежных сил составим как уравнение Эйлера для функционала
5 - \ ?) И1Т - Ч9J - <М1)> *• <8-з1>
где кинетическая энергия лопатки
I }«*>(§?)'«*
о
потенциальная энергия деформации прогиба
\1«&*
2} \},
и потенциальная энергия деформации растяжения лопатки от
центробежных сил
о
Последнее выражение составляется заменой ЕА на ф(х) аналогично
потенциальной энергии растянутого стержня
2>о \дх)
326
Глава VIII. ПРЯМЫЕ СТЕРЖНИ ПЕРЕМЕННОГО СЕЧЕНИЯ
Составив с помощью формулы (8.31) уравнение Эйлера A.49), получим
Для форм колебаний после подстановки у = ср(х) зт (р1; + а) оно примет вид
СЕ/ср'Т - [<Э(х)<рТ - Р2ЦФ = 0.
Из этого уравнения находим
/ I I
р2( цф2 их = Г [Е/ф"]"ф с1лг — Г (фф')'ф их,
откуда
о о
|Е/фс1х |фф'2с1г
р2 = -? + - . (8.32)
ГцфМдг Гцф2с1#
о о
Первое слагаемое правой части представляет собой квадрат частоты лопатки
без учета центробежных сил, или квадрат статической частоты р2т.
Формуле (8.32) можно дать другой вид, воспользовавшись известным
преобразованием двойного интеграла
/ / I У
\&х ]7(х, у)ду = \ду ]7(х, у)йх.
Ох 0 0
В применении к интегралу
I
\ (}(х)(р'2(х)д.х
о
после подстановки в него значения Я(х) из (8.30) указанное преобразование
приводит к соотношению
со21 [ф'(*)]2 их \ ц(У(а + у ^ = со2} ц(х)(а + х) &х ] [<?Ш2 &*,.
Ох 0 0
Введя обозначение
С(х)={[ф'(^)№ (8.33)
о
представим формулу (8.32) в виде
{Е1ц)6.х Г|и(а + х)С,(х) 6.x
) , 9 0
+ ОСТ
/ /
Гцф2A;с Ы(р2(хN.х
р2=-? + оз2^ . (8.34)
3. Метод Рэлея
327
Рис. 81
Числитель второго слагаемого правой части можно истолковать как
работу центробежных сил элементов лопатки на их радиальных перемещениях к
оси диска. Такое истолкование подтверждается следующим элементарным,
хотя и не вполне строгим рассуждением. При отклонении лопатки, когда ее
ось располагается по кривой (рис. 81)
Ф = Ф(*),
элемент 6.x смещается в радиальном направлении к ободу диска на величину,
равную разности между х и суммой проекций на ось Ох элементов дуги ВВ
(часть изогнутой оси лопатки от корневого сечения до рассматриваемого
элемента):
х - [ соз а 6-Х = - Г а2 6.x = - [ ср'2 (х) Aх = - С,{х).
О 0 0
Взятая со знаком минус работа центробежных сил всех элементов лопатки
или, что то же, потенциальная энергия центробежных сил равна поэтому
Пц=|ф(а + *К(*)с1*.
о
Обычно формулу (8.34) записывают следующим образом:
Рдин = л/Рст + БС°2 •
(8.35)
Для лопатки постоянного сечения, совершающей первое главное
колебание, коэффициент В имеет следующее приближенное значение
В = 0,8^ -0,85,
где Х)ср — диаметр по серединам лопаток.
Для лопатки переменного сечения при вычислении основной частоты
можно пользоваться аналогичной эмпирической формулой [А. В. Левин, 23]
В = 0,72^ -1.
328 Глава VIII. ПРЯМЫЕ СТЕРЖНИ ПЕРЕМЕННОГО СЕЧЕНИЯ
4. МЕТОД ГАЛЕРКИНА. Метод Галеркина в применении к
консервативным системам можно трактовать, подобно методу Ритца,
как один из способов прямого решения задачи на экстремум
функционала 8 (8.5). В самом деле, рассматривая значения $ на
совокупности главных свободных поперечных колебаний одного
и того же периода, различающихся только формой колебания,
мы получим для вариации 5
I
Ъ8 = |[|ир2ф - (Е/ф")"] $ф Ах + {(Е1ц>")' 5ф - Е1<р"ду'}10.
о
Уравнение
будет выполнено, если, подчинив минимизирующую форму ф(х)
всем краевым условиям задачи, мы потребуем дальше обращения
в нуль интеграла
I [№2Ф - СЕ/<р"П 5ф Ах. (8.36)
о
Последнее равенство будем называть вариационным уравнением
Галеркина.
Вариационное уравнение Галеркина можно обосновать и
независимо от принципа Остроградского — Гамильтона, именно как
выражение общего уравнения динамики в применении к
поперечным колебаниям системы с бесконечным числом степеней
свободы. Для систем с конечным числом п степеней свободы это
уравнение в обобщенных координатах имеет, как известно, вид
В таком истолковании первоисточником метода Галеркина
является принцип виртуальных перемещений, согласно которому
сумма работ приложенных к стержню сил [в случае (8.36) —
собственной нагрузки цр2ф(х) и упругих восстанавливающих сил
(Е1(р")"] на виртуальных перемещениях 5ф бесконечно малых
элементов стержня должна равняться нулю. Так как при
составлении уравнения (8.36) мы исходим непосредственно из
уравнения движения системы, метод Галеркина оказывается
применимым ко всяким системам, а не только к консервативным. В этом
важнейшее преимущество метода в сравнении с методом Ритца.
4. Метод Галеркина
329
Что касается формы колебания \|/(х), которую мы будем, как и
раньше, называть минимизирующей формой, то она строится в
виде линейной суммы
п
\|/(х) = X ЯЛКД*) (8.37)
I = 1
конечного числа функций \|/-(х), аналогичных базисным
функциям в методе Ритца, но удовлетворяющим всем краевым условиям
(и геометрическим, и динамическим). Параметры аь находятся из
условия обращения в нуль интеграла (8.36I*.
Подставив (8.37) в уравнение (8.36), приведем его к виду
откуда
\[\хр2 ЬЛ(х)- X аДДЛ}/;')''] 15аЛс1х = 0,
•I 1 = 1 1 = 1 & = 1
п I п
2 Ъак \ 2 аДцр2\(/;уА - (ЕЩУ'уД Ах = 0.
к = 1 •: I = 1
Так как Ъак — произвольные вариации независимых
параметров ак, из последнего равенства следуют п уравнений:
X а1 /[цр2\|//Ул " СБЛ1'")'>*] й* = 0, к = 1, 2, ... , п.
(8.38)
Введем обозначения
Т1к = (ита <**> ^ = ЦЕЩГщ Ах.
(8.39)
В этих обозначениях уравнения (8.38) перепишутся в виде
(Тпр2 - Щг)а1+ (Т12р2 - МГ12)а2+ ... + (Т1пр2 - Щп)ап=0, }
(Т21р* - Ж21)а1+ (Т22р2 - Щ2)а2+ ... + {Т2у - Щп)ап= 0,
Г (8.40)
(Тп1р* - Цгп1)а1+ (Тп2р2 - Шп2)а2+ ... + (Тппр* - ^пп)а= 0,
Так как не все а1 равны нулю, равен нулю определитель
ТПР2 ~ ^11 Т12р* ~ Т^12 ... Т1пР* + УГ1п
Т21Р2~^21 Т22р*-Ж22 ... Т2пр*-Щп
Тп1Р2-^П1 Тп2р2-^п2... Тппр*
№„
0. (8.41)
1) О методе Галеркина, кроме книги С. Г. Михлина [36], см. статью М. В.
Келдыша [99].
330
Глава VIII. ПРЯМЫЕ СТЕРЖНИ ПЕРЕМЕННОГО СЕЧЕНИЯ
Полученное уравнение есть уравнение частот в форме Галерки-
на. Из этого уравнения можно найти приближенные значения
первых частот рассматриваемой системы, причем значения с
избытком.
Аналогичные уравнения можно составить и для продольных и
крутильных колебаний прямого стержня. Так, исходя из
уравнения
и положив
}[]ыр2Ф + (АЕу')'] 5ф о!х = 0
о о
(8.42)
получим уравнение частот для продольных колебаний стержня
тпр2 + Щ1 т12р2 + ^{2 ... т1пР* + щп
Тп1Р2 + МГ'пг Тп2р* + Ъ'п2 ... Тппр* + ^'пп
Дальнейшим развитием метода Галеркина является метод,
предложенный В. М. Фридманом [120] для приближенного
расчета поперечных колебаний стержней переменного сечения,
удачно сочетающий простоту вычислений с высокой точностью
результатов. Мы ограничимся лишь самым кратким описанием
содержания этого метода, отсылая за подробностями к
цитированной работе В. М. Фридмана.
В методе Фридмана уравнение четвертого порядка форм
поперечных колебаний стержня с переменной жесткостью Е1(х) и
погонной массой \х(х)
^[д/(ж)<*М]-р2ц(ж)ф(д) = 0
(8.44)
с помощью введения вспомогательной функции — изгибающего
момента М(х) — заменяется эквивалентной системой двух
уравнений второго порядка
Е1(х)(р"(х) - М(х) = 0,
М"(х)-р2\х(х)<р(х) = 0.
(8.45)
4. Метод Галеркина
331
Минимизирующие функции строятся для каждого уравнения в
виде конечных сумм
п л
Ф(х)= Е а^х),
п У (8.46)
М(х) = Е ^т-(х),
1 = 1 )
где фДх) и гаДх) — формы колебаний и формы изгибающих
моментов, удовлетворяющие линейным уравнениям
т'/(х) = у.ф.(х), 1
Ф|'(*) = у,т,(х). ) (8'47)
Эти последние уравнения эквивалентны одному уравнению
поперечных колебаний однородного стержня
ф}У(х) - У|ф.(х) = 0 (8.48)
с жесткостью Е1 = 1 и массой ц = 1. Краевые условия для
уравнений (8.47) те же, что и для уравнений (8.45). Дальнейшие
операции аналогичны операциям метода Галеркина: левые части
уравнений (8.45) умножаются соответственно на ф(х) и М(х)Х)и после
умножения интегрируются в пределах от 0 до /; / — длина
стержня. После некоторых преобразований приходим к линейной
системе п алгебраических уравнений, из которой находится искомая
частота колебаний.
Пример 5. ОПРЕДЕЛЕНИЕ ОСНОВНОЙ ЧАСТОТЫ ПОПЕРЕЧНЫХ КОЛЕБАНИЙ
ДВУХОПОРНОИ БАЛКИ ПЕРЕМЕННОЙ ЖЕСТКОСТИ (рис. 82). Высота балки к и ее
погонная масса ц изменяются по гармоническому закону
к = к0 A + 81п (пх/1)), \х = ц0 A + 81П (кх/1)),
а момент инерции поперечного сечения
/ = /0A + 8т(тсх/0K,
где 10, к0 — момент инерции и высота крайних сечений балки; \л0 — погонная
масса однородной балки постоянной высоты к0.
При вычислении одночленного приближения по методу Галеркина в
качестве базисной функции возьмем функцию
\\?г = 81П (пх/1),
удовлетворяющую всем четырем
краевым условиям задачи
V! @) = V" @) = 0,
^@ = ^@ = 0. рис_82
Х) Из уравнений (8.46).
332
Глава VIII. ПРЯМЫЕ СТЕРЖНИ ПЕРЕМЕННОГО СЕЧЕНИЯ
Подставив эту функцию в выражения (8.39) для Ти и ИЛ11, получим
1 г \
Тп = ц0 | [1 + 31П ™) зт2™ их = 0,924 ц0/,
о
^п - -^ | [A + -п^K 81пН]"81пН ах - 3,238 *&
откуда следует
Для вычисления второго приближения первой частоты берем в качестве
базисных функций
ц/х(х) = 8Н1 (пх/1), 1|/2(х) == зт (Зпх/1).
Подставляем минимизирующую форму с двумя параметрами
\|/(лг) = аг 81П (пх/1) + а2 зт (Зпх/1)
в формулы (8.39) и вычисляем значения
Гп = 0,924ц0/; Г12 = Т21 = -0,085ц0/; Г22 = 0,828}д0/;
Т^п = 3,238^я4; И^12 = Щг = -6,98^тг4; Ж22 = 199,83^|^-
Уравнение частот будет иметь вид
I 0,924 - 3,238^ 0,085 - 6,98^ I _
I 0,085 - 6,98^ 0,828 - 199,83^ | ~ °'
где
^ |и/4р2 '
отсюда
В третьем приближении мы получили бы для первой частоты значение
весьма мало отличающееся от предыдущего, второго, приближения,
которым и следует поэтому закончить расчет.
Пример 6. Найти первую и вторую частоты продольных колебаний
консоли, площадь поперечного сечения А и погонная масса ц которой
изменяются по линейному закону
А(х) = А0A + х/1), \х(х) = ЦоA + х/1),
где А0 — площадь сечения х = 0. Ширина консоли равна 1 м (рис. 83).
4. Метод Галеркина
333
В качестве минимизирующей
формы возьмем выражение
\|/(*) = аг A - х2//2) + а2 A - х3/13)
(8.49)
с двумя параметрами и соответственно
двумя базисными функциями. Легко
видеть, что форма (8.49) удовлетворяет
всем краевым условиям задачи, так как
11/@-0, у'@) = 0.
Для первого одночленного приближения вычисляем интегралы
О
-<—
X
1
^»
|
%
¦'А
| Х
|
Рис. 83
Г11 = Ио1A + 7111
^ 10 '
Тогда из уравнения
ГиР2 + ^и = 0
7ЕАо
3/
найдем
Рг
1,826 #А0
*
Но
Для второго приближения, кроме уже найденных Ти> №'ц, необходимо
дополнительно вычислить по формулам (8.42) интегралы
'и-^МХ'-»'-?)*'-^-
т«-м.A» + 7Х1-^)"»-
243ц0/
~280~ '
^[2=ЕА:\[{1^11-Щ{1-^Х-.
Щ2 = ЕА0![A^11-$']
%) I [1-%)йх-
2,7ЕА0
' I '
г,%ЕА0
Уравнение частот (8.43) будет здесь иметь вид
0,7^-2,3 §§5-2,7
163 V. 0 „ 243 - о о
2104 2,? 280* ~8,3
= 0,
334
Глава VIII. ПРЯМЫЕ СТЕРЖНИ ПЕРЕМЕННОГО СЕЧЕНИЯ
если через Ь, обозначить
ЕА0 *>•
Его корни ^ = 3,2185; \2 = 25,334, и, следовательно,
Подставив значения ^ и %2 в одно из уравнений
( 7 , 7Л , Д63 V. 27А Л
A63. _ 27^ +Г243^_ 33>| =()
найдем приближенные выражения для форм колебаний. Так, для первой
формы, соответствующей меньшему корню ^ = 3,2185, из (8.49) находим:
у(*) = а, @,6-^+0,4^).
5. ОБ ОЦЕНКЕ ПОГРЕШНОСТИ РАСЧЕТА ОСНОВНОЙ ЧАСТОТЫ.
Вопрос об оценке погрешности приближенного расчета собственных
частот методами Ритца, Рэлея, Галеркина принадлежит к
трудным вопросам теории колебаний и освещен в литературе
недостаточно. Обширные исследования в этой области были выполнены
Н. М. Крыловым [61], которому принадлежат некоторые
формулы для оценок погрешностей расчета собственных значений
краевых задач второго порядка. В сочетании с методом
последовательных приближений формами колебаний эффективной в
отдельных случаях является формула Дж. Темпля [84, р. 85], хотя
использование этой формулы осложнено необходимостью
предварительной оценки нижней границы второй частоты. Мы сделаем
сначала краткие замечания о некоторых элементарных приемах
оценки погрешности расчета основной частоты с помощью
одночленных формул Ритца и Галеркина.
Как мы знаем, эти формулы дают верхнюю границу квадрата
основной частоты. Следовательно, вопрос о погрешности
практически сводится к определению достаточно близкой нижней
границы этой частоты. Часто такую границу можно получить с
помощью известных теорем о влиянии на частоты изменений
жесткости и массы системы.
5. Об оценке погрешности
335
Так, заменив в консоли, рассмотренной в примере 6,
переменную погонную массу
ц = ц0A + х/1)
постоянной, равной 2ц0, переменную площадь поперечного
сечения
А = А0A + х/1)
— постоянной, равной А0, получим консоль постоянного сечения,
жесткость которой будет уменьшена, а масса увеличена по
сравнению с жесткостью и массой заданной консоли. Из уравнения
продольных колебаний такой однородной консоли
ЯА0ф" + 2ц0(рр2 = О
при условиях (р'@) = ф(/) = 0, находим для квадратов частот
значения
Они будут меньше квадратов частот заданной системы и,
следовательно, ими можно будет воспользоваться для оценки нижних
границ последних. Так, например, для первой частоты
рассматриваемой консоли формула (8.50) дает значение
существенно заниженное по отношению к действительному,
равному с точностью до двух десятичных знаков
1,79 [ЁАр
I ^ ц0
Другим элементарным приемом оценки точности расчета
частоты по вариационным формулам является сравнение
результатов, полученных для двух или трех последовательных
приближений. Из такого сравнения можно иногда заключить, на каком
приближении следует закончить расчет, приняв его результат за
достаточно точное решение задачи. Таким сравнением мы
руководствовались, останавливаясь в примерах 2 и 5 на втором
приближении.
336 Глава VIII. ПРЯМЫЕ СТЕРЖНИ ПЕРЕМЕННОГО СЕЧЕНИЯ
Когда известно уравнение форм колебаний системы и есть
возможность хотя бы грубо оценить нижнюю границу второй
частоты, границы основной частоты можно найти с помощью формулы
Темп ля, которая хотя и приводит иногда к сложным расчетам, но
большей частью дает близкую нижнюю границу первой частоты,
особенно, если вторая частота значительно превосходит первую.
Формулу Темпля запишем в виде
Р2/ак+1 х
обозначив через р\ нижнюю границу квадрата второй частоты
заданной системы; ак, а^+1 — два последовательных, приведенных
далее соотношения (8.62), вычисленные из уравнений (8.61) для
подходящим образом выбранной исходной формы \|/0(х).
Пример 7. Для ознакомления с некоторыми деталями применения
формулы (8.51) найдем с ее помощью границы основной частоты колебаний
консольного клина примера 6. Уравнение для вычисления первой итерации
\|/1(х), которой мы и ограничимся в нашем расчете, при исходной форме ц0(х)
имеет здесь вид:
ЕА0 [A + х/1)у[(х)]' = -\1о A + х/1)щ(х). (8.52)
Исходная функция у0(х) может быть какой угодно непрерывной функцией,
но для ускорения расчета подчиним ее одному из краевых условий задачи,
например
щA) = 0.
Для упрощения и уточнения вычислений целесообразно использовать
следующий прием, несколько отличающийся от обычного и изложенный в
книге Л. Коллатца [65]. Составим сперва функцию ц/1(х), исходя из всех
краевых условий задачи, затем из уравнения (8.52) найдем функцию у0(х).
Положив
и подставив это выражение в уравнения
VI @) = 0, ух@-0,
найдем
аг = 0, 1 + а2 + а3 = 0.
Коэффициенты а2 и а3 получим из уравнения
ЕА0 [±у[ + A + |)ч/'1'] = -Но A + у)ч>о(*)>
5. Об оценке погрешности
337
записав которое для х = I и учтя, что у0@ = 0, будем иметь
2Bа2 + 6а3) + 2а2 + За3 = О,
1 + а2 + а3 = О,
откуда следует
Таким образом,
а2 = -5/3, а3 = 2/3.
ЧМ*) =|C-5^+20 (8.53)
Теперь по найденной функции ц/1(х) из уравнения (8.52) легко получается
функция
ЕА
где с2 = ^ . С функциями у0(х) и \|/1(л:) вычисляем входящие в первые два
отношения (8.62) интегралы
| (\ + ^^2 &х = Ц с4 (б4 1П 2 - 30,25) = 6,2704 /с4,
} A + 7)^1 ах = Iс2 Ж = 1?94811с2>
о
I
о
I
о
и самые отношения
ах = 3,2183^4;; а2 = 3,2184^4? .
Чтобы получить нижнюю границу квадрата второй частоты, используем
формулу (8.50) для однородного клина постоянного сечения, частоты
которого заведомо ниже частот заданного. Из этой формулы
Подставив значения ах, а2, р| в (8.51), найдем для квадрата первой частоты
^8,2188 <й< 3,2184^.
338
Глава VIII. ПРЯМЫЕ СТЕРЖНИ ПЕРЕМЕННОГО СЕЧЕНИЯ
6. МЕТОД ПОСЛЕДОВАТЕЛЬНЫХ ПРИБЛИЖЕНИЙ ФОРМАМИ
КОЛЕБАНИЙ. Метод последовательных приближений формами
колебаний в применении к расчету поперечных (а также продольных и
крутильных) колебаний неоднородных стержней является
естественным обобщением метода итераций для систем с конечным
числом степеней свободы. Рассмотрим, например, уравнение
форм поперечных колебаний стержня переменного сечения
[Е1(х)ц"(х)]" - ц(лг) р\(х) = 0. (8.55)
Выбрав в качестве исходной формы непрерывную функцию
\|/0(х), удовлетворяющую по крайней мере некоторым краевым
условиям (что, впрочем, необязательно), вычисляем первое
приближение по формуле
[Е1(х)^(х)]п = \хщ(х). (8.56)
Постоянные интегрирования находим из краевых условий
задачи. Первое приближение будет, таким образом, удовлетворять
всем краевым условиям задачи. Далее по первому приближению
находим второе из уравнения
ЦЕ1(х)у%(х)]" = 1хщ(х)
и т. д., наконец, т-е приближение ут(х) — по формуле
[Е1(хШх)]" = ру^х).
При достаточно большом т отношение двух
последовательных приближений будет стремиться к квадрату первой частоты,
а форма ут(х) — к первой собственной форме колебаний
рассматриваемой системы:
т т\х)
В самом деле, пусть разложение исходной формы у0(х) по
собственным будет
оо
щ(х) = X ^срДх), (8.58)
I = 1
разложение первого приближения —
оо *
щ(х) = X Ъ^Лх).
I = 1
6. Метод последовательных приближений
339
Найдем зависимость между а1 и Ъг Подставив разложения \|/0(х) и
у1(х) в (8.56), получим
откуда
Е1(х){ X Ь^(х) " " = ц X а.Ф/,
оо
X (б.р? - а.) фДх) = о
и, следовательно,
Это равенство устанавливает зависимость между
коэффициентами разложений двух последовательных итераций. Исходя из
разложения первой итерации (т. е. считая ее за исходную), таким
же путем получим разложение второй итерации
I = 1 р1
и т. д. и, наконец, т-й:
уЛх) = 1 ~^4— •
Ш 1 = 1 /?,2т
При достаточно большом т можно считать, что
а^^х) алул(х)
Р\ Р\
и, следовательно,
Ч'т-1<*)
^т(Х)
ър{, \\>т(х)*к<рг(х). (8.59)
Подчинив исходную форму и ее последующие итерации
условию ортогональности с первой собственной формой, можно
вычислить вторую частоту и вторую собственную форму. Для этого,
выбрав некоторую форму \|/0(х), исключаем из ее разложения
\|/0(*)= Е а^(х)
\ = 1
первое слагаемое, содержащее первую форму, составив функцию
\]/0(х) = \\10(х) - агуг(х),
где
а1 = | \|/0(х) фх(х) о1х.
о
340
Глава VIII. ПРЯМЫЕ СТЕРЖНИ ПЕРЕМЕННОГО СЕЧЕНИЯ
Функция 1|/0(х) будет ортогональна первой собственной форме,
так как
/ / /
| Фх(х) у0(х) Ах = | \|/0(х) ф1(х) Ах - ах $ \у\(х) 6.x = 0.
оо о
Функцию у0(х) принимаем за исходную для вычисления второй
частоты. Из уравнения (8.56) находим первое приближение
\|/1(х). Прежде чем идти дальше, необходимо испробовать у1(х) на
ортогональность первой собственной форме, так как
вычисленная приближенно, она наверное будет содержать в своем
разложении член с первой формой, хотя, быть может, и с очень малым
коэффициентом. Испробование на ортогональность производится
путем вычисления интеграла
I
| уг(х) ц>г(х) Ах.
о
Если этот интеграл не равен нулю, то за первое приближение
следует взять функцию
\\гг(х) = х\гг(х) - ц>г(х) I \\1г(х) Ц)г(х) Ах.
о
Таким же образом вычисляются и проверяются на
ортогональность первой собственной форме и последующие приближения.
При достаточно большом т
^-0^р1; фт(*)-йф2(х).
Построение и обоснование метода последовательных
приближений для продольных и крутильных колебаний ничем не
отличается от изложенного для поперечных колебаний.
Вычислив первую, вторую и т. д. итерации форм колебаний,
мы можем значительно повысить точность расчета по формуле
Рэлея, подставляя в нее в качестве минимизирующих форм
последовательные приближения форм колебаний. Так, уже
использование первого приближения при любой исходной форме часто
заканчивает расчет с высокой точностью. В самом деле,
вычислив с помощью уравнения
[ЕЩ{х)Т = \х(х) щ(х)
по заданной \|/0(х) первое приближение 1|/1(х), мы подчиним его
всем краевым условиям, определив надлежащим образом произ-
6. Метод последовательных приближений
341
вольные постоянные интегрирования. Работа нагрузки \х(х)\\!0(х)
на перемещении \|/1(х), или максимальная потенциальная
энергия стержня, будет равна
1 *
Птах = о \ И(*) Щ(х) Ч>1(*) ^Х.
20
Максимальная кинетическая энергия равна
Ттах = %|ц(*)^(*)Aх.
Формула Рэлея запишется в виде
I
|ц(х)\|/0(х)\1/1(х) их
Ег = ; . (8.60)
}ц(л:)\|/?(х) их
о
Последняя формула дает более точную верхнюю границу, чем
формула (8.25). Это легко доказать, подставив в (8.60)
разложения форм \у0(х) и \|/х(х) по собственным формам
ОО ОО / \
у0(х)= Е ^срДх), \|/1(х)= 2 2 ,
1 = 1 I = 1 р(
после чего получаем
«1
откуда в силу неравенства Буняковского — Коши имеем
Вычислив ряд функций
Щ(х)> ^М*)» ^2(Х)> •••
из уравнений
[ЕЭД*)]" = »(х) \|/л_х(л:), (8.61)
где А = 1, 2, 3, ... , и составив затем отношения
|ц\|/$(х)с1* |ц\|/0(х)\|/1(л) их
а, = — , а? = , ... , ' (8.62)
I I
\\1Щ(Х)У1(Х) АХ \\*>УКХ) &Х
о о
342
Глава VIII. ПРЯМЫЕ СТЕРЖНИ ПЕРЕМЕННОГО СЕЧЕНИЯ
можно установить, что эти отношения идут, убывая, слева
направо и каждое из них не меньше квадрата первой частоты, так что
имеют место неравенства
аг> а2> ... "> р\.
Для доказательства достаточно подставить в каждые два соседних
отношения разложения функций \\гк(х) по собственным формам и
затем воспользоваться неравенством Буняковского — Коши.
Пример 8. Найти первую частоту продольных колебаний консольного
клина, рассматривавшегося в примере 6 (рис. 83).
Дифференциальное уравнение собственных форм колебаний такого
клина запишем в виде
[A + х/1)<р'(х)]' = -со2A + х//)ф(х),
где со2 = -?—. В качестве исходной формы возьмем функцию
ЕА0
\|/0(*) = 1 - х/1,
удовлетворяющую на конце х = / условию
у0@ = о.
Первое приближение уг(х) найдется из уравнения
[A + */0фК*)]' = -A + х2/12).
Интегрируя один раз и принимая во внимание, что (р{@) = 0, находим
ф1(Х) 1 + х/1 '
откуда при условии у1@ = 0
Отношение \|/0/У1» вычисленное для х = 0, даст первое приближение
основной частоты
„2= 3,8431 ЯА0. п 1,96 ША0
Это значение хуже всех найденных раньше по одночленным формулам Рэлея
и Галеркина.
Воспользовавшись приемом построения двух последовательных
приближений, описанным в примере 7 настоящей главы, мы получили бы для
исходного и первого приближений
щ(х) , 2E + 4х,1+-9х*/1*)с*у щ(х) = 1C _ Ъхгцг + 2х2/1%
Их отношение для х = 0 было бы равно
^-^=3,3333* с*-™*,
1|/!@) 3 \Х012
1. Основные допущения и формулы
343
откуда для первой частоты мы имели бы значение
п _ 1,83 1ЁА0
почти точно совпадающее с найденным по одночленной формуле Галеркина
(пример 6).
Г л а в а IX
Поперечные колебания пластинок
1. ОСНОВНЫЕ ДОПУЩЕНИЯ И ФОРМУЛЫ. В этой главе
рассматриваются поперечные колебания главным образом однородных
пластинок постоянной толщины /г, ограниченных простым
контуром (прямоугольных или круглых). При этом в основу
исследования кладутся следующие допущения.
¦ Изгибные деформации пластинки при колебаниях
предполагаются малыми упругими деформациями, подчиняющимися
закону Гука.
*' Предполагается, что в пластинке существует нейтральный
слой, расстояния между точками которого при малых прогибах
пластинки не изменяются. В однородной пластинке этот слой
совпадает со срединной поверхностью, разделяющей высоту
пластинки пополам. Плоскость, совпадающую с нейтральным
слоем в недеформированном состоянии пластинки, примем за
координатную плоскость Оху, от которой будем отсчитывать
отклонения отдельных элементов пластинки. Ось О г направляем вниз,
как показано на рис. 84.
/ Г * У 'Ч<У ' '
\ / /-
У ' ^
V /
/
У
/ У \
у Г
1
I
'2
>*!€. 84
--_--
У-/-?
/ X
к
X
344
Глава IX. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПЛАСТИНОК
Далее, предполагается, что при прогибе пластинки все точки
нейтрального слоя перемещаются параллельно оси Ог и что
частицы, лежащие на одной нормали МЫ к нейтральному слою Ох
(рис. 85), остаются на этой нормали и при прогибе пластинки,
поворачиваясь вместе с нормалью вокруг точки А пересечения ее с
нейтральным слоем (на рис. 85 точки М, Ы, А переходят
соответственно в М\ ЛГ, А').
Предполагается, наконец, что перемещения всех точек,
лежащих на одной нормали к нейтральному слою, параллельные оси
Ог, одинаковы и равны перемещениям соответствующих (т. е.
лежащих на той же нормали) точек нейтрального слоя.
Из приведенных допущений следует, что если обозначить
через и, V, ю составляющие перемещения точки М(х, г/, г)
соответственно по осям Ох, Ог/, Ох через и0, и0, ю0 — составляющие по
тем же осям перемещения соответствующей точки А
нейтрального слоя,то
и0 = и0 = 0, и> = щ, (9.1)
где ю = иH = /(х, у, 0 не зависит от координаты г. Что касается и и
V, то, как видно из рис. 85,
Рис. 85
2. Потенциальная и кинетическая энергия пластинки
345
(здесь ф и \|/ — углы наклона касательных в точке А'
соответственно к осям х и у). По известным из теории упругости формулам
составляющие деформации
е =дЛ = -г?2щ
Р - ди -~2д2ц)()
уу ду ду2 '
е22 = О,
_ ди , ду
ху ду дх
-2г?т*
(9.3)
дх ду '
еуг = <>-
Соответствующие компоненты напряжения Хх, У , X = Ух
равны1*
Х„
I,
(ехх + <*0
2 у хх
уу
Е
(еии + °ехх) = ~
Ег (д^Щ
Ег Гд2и>о
+ а
I _ а2 - УУ хх, г_ а2
1 + а дх ду ХУ
ду2
+ а-
д^щ
ду2
д2и)с
дх2
(9.4)
где Е — модуль упругости, О — модуль сдвига, а — коэффициент
Пуассона.
2. ПОТЕНЦИАЛЬНАЯ И КИНЕТИЧЕСКАЯ ЭНЕРГИЯ ПЛАСТИНКИ.
Потенциальная энергия, накопляемая элементарным объемом при
упругой деформации пластинки, согласно с вышеуказанными
допущениями, имеет следующее выражение:
йп = \ (ххехх + Ууеуу + ХуехУ) их Ау &г
или после подстановки сюда значений компонент деформации и
напряжения (9.3) и (9.4):
ап = - Г Ег2 д2ш° (д2]Шо + а—
211-а2 дх2 ^дх2 ду2
о) + Ег2 д2ш0 (д2ш0 +^д2щ\
1 - а2 ду2 ^ ду2
дх2
1 + а Удх ду) \ *
Х) Нормальная компонента %2 внутри пластинки при поперечном изгибе мала в
сравнении с Хх, У , и потому мы ею везде пренебрегаем, полагая 2г = 0.
346 Глава IX. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПЛАСТИНОК
Потенциальная энергия всей пластинки
Ег2 Г((^ш0у , (и*и}{
2П = Шг^И^°) +('^т) +2а
^о <?2*"о
о г/2 у дх2 ду
2A "ЧйЛ^^2-
Для пластинки постоянной толщины к
ЯЬдх2 ду2 > У ' дх2 ди2 ^дх ду) N *"
где
Т}у2 ! | дх2 ду2 ^дх дуу
(9.5)
В = _Я*!Ц_ (9.6)
12A -а2)
— цилиндрическая лсесткость на изгиб. Если на пластинку
действует распределенная внешняя нагрузка с поверхностной
интенсивностью д(х, у; (), то
21| д(х, у; 1) щ Ах &у. (9.7)
Двойные интегралы в (9.6) и (9.7) берутся по поверхности (в)
нейтрального слоя.
Кинетическая энергия элемента пластинки Нйхйу массой
где у — вес единицы объема [кГ/см3], равна
Кинетическая энергия всей пластинки составляет
Т=&Ц№)'йхйу. (9.8)
Когда пластинка совершает одно из главных колебаний,
ш0(х, у; I) = ш(Ху у) 81П {рЬ + а).
3. Вариационное уравнение
347
Для таких колебаний максимальные значения потенциальной
и кинетической энергии будут иметь выражения
(9.9)
3. ВАРИАЦИОННОЕ УРАВНЕНИЕ ПОПЕРЕЧНЫХ КОЛЕБАНИЙ
ПЛАСТИНКИ. Рассматривая функционал-действие по Остроградскому —
Гамильтону
8=1(т-п)<а (9.Ю)
'а
на совокупности главных колебаний одного и того же периода
2к/р и выполнив на промежутке 1Е - 1А = 2к/р интегрирование по
времени, придем к уравнению
8(Гтах-Птах) = 0, (9.11)
которому должны удовлетворять собственные формы
действительных главных колебаний пластинки. Подставим в это
уравнение максимальную кинетическую и потенциальную энергию
(9.9) и вычислим вариацию их разности.
Начинаем с вычисления вариации потенциальной
^Г-"я и»®+»(й)] - о - •&$)+
ду2 'А \_дх2 ^ду2
, д2ю ?(д2и>Л_ о д2ю с*( д2ш
] Уйхйу,
ду2 ^дх2' дх ду ^дх ду
где через А обозначен оператор Лапласа.
Выполнив дважды интегрирование по частям в каждом
слагаемом подынтегральной функции, получим1*:
+ Ив^1?6и"Ъ:йу- I9'12,
где первые два интеграла в правой части являются контурными
интегралами, взятыми по внешнему контуру пластинки.
*> См. у Л. С. Лейбензона [110].
348
Глава IX. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПЛАСТИНОК
Пс
Я
> аналогии с
д2ш
<Ц)
(9.12
их йу
):
_ Г 82и>
У дуг
¦и*?
«©*-
§
^—п дю 6.x Ли.
ди2 У
д3ьи
дх ду2
8и> йу 4-
(9.13)
Из формул (9.12) и (9.13) путем простой перемены обозначений
находим:
я и «© «*«* - *& <ё)«- - §1?«• *+
+ |Л^ 8и; их йу, (9.14)
+ Г[^ 5^с1хс1г/. (9.15)
Точно так же
11 дх ду Удхду) * 11 дх ду дх У ду) *
- * Ш О» - * 83% 6" "* + Я 5?Ь 6" а* ^ <м"
это выражение можно было бы получить, исходя из равенства
Ндхду ^дх ду) * 11 дх ду ду \ дх) *
С помощью вышеприведенных формул находим
- $ Ди*^) их - | (^йу - ^ Ах)дю + \\&ю би; их йу, (9.17)
где
Д2Ц; = ^+2^Ц+^. (9Л8)
дх4 дх2ду2 ду
4
3. Вариационное уравнение
349
Подставим теперь (9.17), (9.12), (9.13) и (9.16) в выражение
для 5Птах. После перегруппировки членов получим
В тах У 1Лдх2 ду2' * 'дхду \ УдхУ
" [Лд*/2 дх2^ 'дхду *\ Уду;
- | (^ йу-Ц^ Ах) 8и> + Л Д2^ 5ш их а!г/. (9.19)
Обозначим через 6 угол между внешней нормалью п и осью Ох
и направим касательную / к контуру, как показано на рис. 86.
Тогда на контуре пластинки
Ах = -А1 виг Э, Ау = А1 соз 6,
4- =С08 9|- -8Шб|7,
дх дп д1
^ =81ПеА +С08 9|7.
ду дп д1
При помощи этих формул выражение (9.19) может быть
приведено к виду
15Пт = [[ &ю Ьш йв - Ь 8-^ Ьи> 61 + | \(Щ + Стасов* 9 +
С тах ^ 3 дп 3 \Удх2 ду2'
(9.20)
^ +а^)8т26 + A-а) с'^
ду2
-д1
дх2
*2'" зт2е1б(^1с1г +
дх ду ^ ^опу
I 1Г/1 \ (д2ш 52^8ш20 , д2ю сюЛ^(ди)\А1
+ *Г "а) IV " ^~2- + шщС082е]5Ый1>
где $ — поверхность пластинки, о!$ — элемент поверхности
нейтрального слоя.
Как известно из теории
упругости, выражение
+ A-а)^-31п2в] = Мг
4 'дх ду ] ь
представляет собой изгибающий
момент на контуре пластин-
Рис. 86
350 Глава IX. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПЛАСТИНОК
ки. Выражение, стоящее под знаком третьего контурного
интеграла, умноженное на 2),
2)A-а)Г& - ^)81песо8б+ #^-со8 2е]-Я,, (9.22)
[Уду2 дх2' ох су ^ ь
есть крутящий момент на контуре пластинки. Наконец,
-В<им ^м (9.23)
СП
означает поперечную силу на контуре пластинки.
Выполнив интегрирование по частям в третьем контурном
интеграле, приведем его к виду
I Нг #, (8м;) А1 = -1^ 8и> с1/. (9.24)
•' 01 1 СП
После всех преобразований представим вариацию потенциальной
энергии в следующем окончательном виде:
6Пюах = В\\ Л2ш 8и> Аз ~ §МЬ 5[|~) 61 + | (л^ ~ ^) Ъш с1/. (9.25)
Вариация кинетической энергии имеет вид
87,тах = ^~ Я Ш ЪЬ0 А8' (9'26)
ё E)
Теперь, принимая во внимание формулы (9.25) и (9.26),
запишем вариационное уравнение собственных форм поперечных
колебаний пластинки
\\ (ВА2м - ^ р2ю) Ъш Аз - § Мь 4- Eм>) с1/ +
(8) ё ОП
+ ф [Мь - ^] 5ш с1/ - 0. (9.27)
4. ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ ФОРМ ПОПЕРЕЧНЫХ
КОЛЕБАНИЙ ПЛАСТИНКИ И КРАЕВЫЕ УСЛОВИЯ. Условие (9.27)
обращения в нуль первой вариации действия по Остроградскому —
Гамильтону будет выполнено для формы ш(х, у), удовлетворяющей
уравнению
В(У^ + 2 УУ^- + УУ] - У р^и, = 0 (9.28)
4. Дифференциальное уравнение форм поперечных колебаний 351
и обращающей в нуль контурные интегралы, входящие в (9.27),
т. е. удовлетворяющей также условию
$Мь±(8и)й1-$(мь--^)&и>й1 = 0
(9.29)
Уравнение (9.28), как легко в этом убедиться, является
уравнением Эйлера для функционала
E) *
д2ю , д2т
дх2 ду2
ом ч (д2юд2ю ( д2ю У^Ъ Ао
и, следовательно, представляет собой уравнение поперечных
колебаний пластинки. Равенство (9.29) выражает в самой общей
форме краевые условия задачи. Оно будет выполнено:
^ если края пластинки жестко закреплены, так как на таких
краях
(8и0ш-бГ??) =0;
мЭтг/
(9.30)
(Ь)
^ если края пластинки свободно оперты; в этом случае
(8и;)№) = 0; Мь = 0;
^ наконец, если края пластинки свободны, так как тогда
дМ
Условия, налагающие ограничения на вариации ди> и 5
дп
называются геометрическими; условия, налагающие
ограничения на краевые моменты и поперечные силы, т. е. на величины
Мь и Ыь - дНь/д1, будем
называть динамическими.
Для прямоугольной
пластинки с краями,
параллельными осям Ох и Оу (рис. 87), на
краях, параллельных оси Оу,
по формулам (9.20)—(9.23):
9 = 0,
дх
д_
дп '
_д_
ду
д_
д\
У>
ь
о
*
)
X
1
п
= а х
Рис. 87
352 Глава IX. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПЛАСТИНОК
дх дуУ
4 ь
^дх3 дх ду2'
Если поэтому края, параллельные Оу, свободно оперты, то на
этих краях
и> = 0, р!+ор1=0. (9.31)
дх* су*
Если эти края жестко закреплены, то
и) = ^ = о. (9.32)
дх
Если края, параллельные оси Оу, свободны, то на этих краях
Й+°Й=0' Й+B-а)^2=0- (9-33)
дх* ду* дх6 дх ду*
Условия для краев, параллельных оси Ох, получаются из
приведенных заменой х на у и наоборот.
Когда на пластинку действует внешняя гармоническая
нагрузка интенсивностью
Р(х, у; г) = 1(х,у)$шр1,
уравнение форм вынужденных поперечных колебаний
пластинки запишется следующим образом:
РА2Ю - ^ IV - /(*, у) = 0.
(9.34)
5. НЕКОТОРЫЕ СВОЙСТВА СОБСТВЕННЫХ ФОРМ КОЛЕБАНИЙ
ПЛАСТИНКИ. Уравнение форм поперечных колебаний пластинки (9.28)
можно истолковать как уравнение статического прогиба
пластинки под действием собственной нагрузки
\х(х,у)р2и){х,у). (9.35)
Основываясь на принципе взаимности перемещений, можно
установить одно из важнейших свойств собственных форм
пластинки — их ортогональность. Предположим, что под действием
5. Некоторые свойства собственных форм колебаний
353
собственной нагрузки цр|г^ пластинка получает прогиб юь', под
действием нагрузки \лрки>к — прогиб и)к. Тогда работа нагрузки
р%г\хюк на перемещении юь должна быть равна работе нагрузки р21\иоь
на перемещении и>к, что можно записать следующим образом:
Я №/ Щ">к <*5 = Я №2к Щи>к &*•
(8) (8)
Отсюда
(8)
и еслир|^р|, то
II \ии1и)к&8 = 0. (9.36)
E)
Для форм поперечных колебаний пластинки также имеет
место теорема о разложении в ряд по собственным формам
однородной задачи, т. е. по функциям ю1 (х, у), удовлетворяющим
уравнениям
ЯД2^ -р21\шI = О, I = 1, 2, 3, ... .
Этот ряд имеет вид
оо
и>(х, у) = X аьи)ь(х, г/), (9.37)
I = 1
где коэффициенты а- равны
Ц^и)(х, у)и\{х, у)&8
(8)
а- = —— . (9.38)
]|цш12(х, у)йз
(8)
Для собственных форм, нормированных по правилу
II \шу\(х, у) &8 = 1,
(8)
коэффициенты а- будут иметь выражения
а1 = II \хюь(ху у) и)(х, у) й§. (9.39)
E)
Для прямоугольных пластинок собственные формы и>ь(х, у)
обычно представляют собой произведения двух функций, одна из
которых зависит только от х, другая — от у:
щк(х, у) = ХДх) Ук(у).
12- 10456 Бабаков
354
Глава IX. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПЛАСТИНОК
Ряд (9.37) будет в этом случае иметь вид
со
ю(х,у)= I ашХ{(х)Ук(у). (9.40)
I, к = 1
В главных колебаниях поверхность пластинки разделяется
линиями
щ(х9 у) = 0
на участки, колеблющиеся в одной или в противоположных
фазах. Эти линии носят название узловых линий. На квадратной
пластинке, закрепленной в одной точке (обычно в центре),
посыпанной тонким песком и приведенной в колебательное движение,
узловые линии образуют хорошо известные фигуры Хладни.
Пример 1. ОПРЕДЕЛЕНИЕ ПОПЕРЕЧНЫХ КОЛЕБАНИЙ ПРЯМОУГОЛЬНОЙ
ПЛАСТИНКИ, СВОБОДНО ОПЕРТОЙ ПО ДВУМ ПРОТИВОПОЛОЖНЫМ КРАЯМ ПРИ ЛЮБЫХ
условиях на двух других противоположных краях. Эта задача является,
по-видимому, единственной, для которой существует точное решение
уравнения (9.28). Предположим, что опертые края (х = 0, х = а) параллельны оси
Оу (рис. 87).
Будем искать решение дифференциального уравнения
где к4 = уНр2/0§у в виде ряда
оо
ш(х,у) = Е 2^K1П—, (9.42)
1 = 1 #
где Р^у) — неизвестные функции, подлежащие определению из уравнения
(9.41). Легко видеть, что функция и)(х, у) удовлетворяет условиям на
опертых краях, так как на этих краях (при х = 0 и х = а)
ш(х,у)-0, § =0-
Подставив (9.42) в (9.41), получим для Р((у) уравнение
&™ -И^1р" + (^- ь*) р, = о.
Для его решения составляем характеристическое уравнение
вычислив корни которого
(9.43)
(9.44)
г1 = -г3 = л/' Ь2п2/а2 - к2, г2 = -г4 = л/12п2/а2 + к2,
найдем общий интеграл
Рь (у) = А- 8П 2гу + В1 СП 2гу + Сь 5П 22у + ^ сЬ 22у.
5. Некоторые свойства собственных форм колебаний
355
Постоянные А19 Б., Сг, Т>1 определяются из условий на краях, параллельных
оси Ох, где
у = 0, у = Ъ.
Пусть, например, край у = О свободно или шарнирно оперт, а край у = Ъ
жестко закреплен. Тогда для у = О
откуда получаем
Для у = Ъ
из чего следует
и>(х, 0) = 0, ^ = 0,
ду2
в, = д. = о.
ю(х, Ъ) = 0, ^ = 0,
А. зЬ 2^ + С^ зп г2Ь = 0,
А^ сп ггЪ + С^2 сп 226 = 0,
8П 2ХЬ 8П 22Ь
2Х сп г1& ,г2 сп 22Ь
- На. 2ХЪ = - На 22Ь.
= 0
Это решение имеет место для вещественных гх и 22.
Когда оба края у = 0 и у = Ь свободно оперты (случай пластинки, свободно
опертой всеми краями), нетривиальное решение задачи получится при
условии, что корни характеристического уравнения (9.44) гх и г2 — мнимые.
В этом случае общий интеграл уравнения (9.43) следует взять в виде
Рь (у) = А/ 81П кху + Б. соз кгу + Сг зп 22у + I). сп 22уу
где
Из краевых условий
находим
ьи(ху 0) = 0,
ю(х, Ъ) = 0,
д2и>(х, 0) =п
ду* У'
д2ш(х, Ъ) _ ^
д^2
В^С^Б^ 0, 8Ш ЬуЬ = 0.
Последнее уравнение есть уравнение частот пластинки.
Из этого уравнения следует, что
кгЬ = уте, у = 1, 2, 3, ... ,
*Ч5 + Й>2> Рч-«
ьш
ЛЬ + Ы^ ^-1«2-8-
^.({/)=Ау8т^.
356
Глава IX. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПЛАСТИНОК
Ряд (9.42), определяющий форму колебаний пластинки, будет иметь вид
и)(х, у) = 2
и); = 1
4 а Ь
(9.45)
Случай пластинки, свободно опертой по всем краям, был рассмотрен
С. П. Тимошенко, который, исходя из представления формы колебаний в
виде (9.45), нашел решение задачи методом нормальных координат [85].
Некоторое представление о расположении узловых линий на пластинке,
свободно опертой по краям, можно получить, рассматривая отдельные
слагаемые ряда (9.45) и затем линейно налагая соответствующие им формы.
Так, первый член ряда (9.45)
ып(х, у) = ап зт (их/а)— зт (пу/Ь)
нигде внутри пластинки не обращается в нуль; и)Х1(х, у) будет нулем только
по краям пластинки. Следовательно, форма гип(х, у) не имеет узловых линий
на пластинке: все элементы пластинки, колеблющейся согласно уравнению
ш(х, у; 0 = шп(ху у) зт (р1 + а) = ап зт (кх/а) зт (пу/Ь) зт (р* + а),
будут отклоняться в одну сторону, одновременно достигая максимальных
(амплитудных) отклонений и одновременно проходя через равновесное
положение. Это будет, таким образом, первое главное или собственное колебание
пластинки; его частота
п2(а2 + Ь2) Щ§
а2Ъ2 л/ уЛ
Рп
Следующие по порядку формы мы получим, полагая I = 2, у = 1 или,
наоборот, / = 1, у = 2. В этих случаях соответствующие формы колебаний будут
иметь по одной узловой линии, параллельной оси Оу (рис. 88, а) или оси Ох
(рис. 88, б). Узловые линии для формы хю^х, у) расположатся, как показано
на рис. 88, е. Формы колебаний с узловыми линиями по диагоналям
пластинки можно получить наложением двух собственных форм, показанных на
рис. 88, а, б, подобрав для этих форм надлежащим образом постоянные аг.
У
О
у = ь
1 = 2,1-
а)
х = а
1
У = Ъ
О х = а
1=1,] = 2
б)
О х = а
в)
Рис. 88
6. Приближенные методы расчета собственных форм 357
6. ПРИБЛИЖЕННЫЕ МЕТОДЫ РАСЧЕТА СОБСТВЕННЫХ ФОРМ И
ЧАСТОТ ПОПЕРЕЧНЫХ КОЛЕБАНИЙ ПЛАСТИНКИ — МЕТОДЫ
РИТЦА И ГАЛЕРКИНА. Рассмотренная в примере 1 задача колебаний
прямоугольной пластинки, свободно опертой по двум
противоположным краям, в сущности, исчерпывает известные случаи, когда
применение точных методов приводит к полному решению. Во
всех других случаях расчет собственных частот и форм приходится
вести приближенными способами. Из таких приближенных
способов наиболее эффективными, как показывает опыт, являются
вариационные методы Ритца и Галеркина. Приближенные расчеты
пластинок или тонких плит, по терминологии Б. Г. Галеркина,
были именно теми расчетами, для осуществления которых и
создавались эти методы. В настоящее время вариационные методы
хорошо разработаны в деталях и удобно приспособлены к решению
задач на колебания пластинок с любыми краевыми условиями. Из
работ, посвященных практическому применению вариационных
методов, к расчету колебаний пластинок, кроме работ Дж. Рэлея,
Б. Г. Галеркина, Л. С. Лейбензона и В. Ритца, можно отметить
работы С. Г. Михлина [36] и Е. С. Сорокина [43]. У последнего
расчеты пластинок с довольно сложной нагрузкой доведены до простых
справок в подробно составленных таблицах.
Для решения вариационной задачи по методу Ритца, т. е. для
нахождения форм колебаний пластинки, удовлетворяющих
вариационному уравнению
§(Гтах-Птах) = 0, (9.46)
так же как и в гл. VIII, строится минимизирующая форма в виде
конечного ряда
оо
м(х, у) = Е а;Ш-(х, */), (9.47)
/ = 1
где шДх, у) — базисные функции, т. е. известные функции,
подбираемые в соответствии с краевыми условиями задачи; а- —
параметры, значения которых после подстановки (9.47) в (9.46)
определяются из условий экстремума функции Ттах - Птах, т. е. из уравнений
^G'тах-Птах) = 0, * = 1,2,...,л,
где
(8)
(9.48)
(9.49)
358
Глава IX. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПЛАСТИНОК
При выборе базисных функций можно ограничиться
выполнением лишь геометрических условий. Выбранные в соответствии с
этими последними условиями базисные функции, будучи
подчинены затем уравнению (9.46), удовлетворяют и динамическим
условиям, что можно видеть из вариационного уравнения,
записанного в форме (9.27):
E) ё п
+ §(нь-Щ±)Ьш&1 = 0. (9.50)
В самом деле, если, например, края пластинки свободны, то на них
Ъю и §(^Ч произвольны. Произвольны значения дю и внутри
контура пластинки. Если поэтому юь(х, у) удовлетворяют уравнению
(9.46) или (9.27), то для таких форм будет выполнено и уравнение
ВА2ю - \лр2ш = 0,
и динамические краевые условия
Не обязательно поэтому, пользуясь методом Ритца, выбирать
базисные функции, удовлетворяющие всем краевым условиям — и
геометрическим и динамическим, хотя для ускорения расчета
это почти всегда желательно.
Что касается самого состава базисных функций, то они, как
это было отмечено выше, обычно строятся в виде произведения
двух функций, одна из которых является функцией только х,
другая только у:
Щ]<Х,у) = Х1(х)У;(у). (9.51)
Функции Х-(х) и У](у) представляют собой простые полиномы,
или же собственные формы колебаний однородных стержней
(или балок), удовлетворяющие краевым условиям,
соответствующим способам закрепления краев пластинки (балочные
функции). Такие формы строятся с помощью функций Крылова
первого рода или элементарных функций, исходя из выражений
общего интеграла уравнения форм колебаний однородного стержня:
— ,-^ч А;Х . К;Х _^ , К;Х _, , К;Х
ХЛх) = зт— + А,- сов— + Б,. 8п^- + С, еп-Ч
1 а 1 а 1 а 1 а
У;(у) = зш-^ + А1 со8-^ 4- В; 8п-^ + С- сЬ-^,
(9.52)
6. Приближенные методы расчета собственных форм
359
где
Хь = кьа, Х; = к;Ь, кА = \лр2/Е1у
а, Ъ — длины краев, параллельных соответственно осям Ох и Оу.
Постоянные А,, В,, С7; А,, В„ С,, X,,, А,,- находятся из краевых уело-
1 1 1 3 3 3 1 3
вий для Хь и У-.
После того как выбраны базисные функции, построенную из
них минимизирующую форму нужно подставить в выражения
(9.49) для Ттах и Птах. По поводу вычисления Птах заметим, что
для пластинок, свободно опертых или защемленных по краям,
выражение
г г [^Е ^Е - ( д2ц) ?1 а я
•I 1дх2 ду2 Удх ду) \
(так называемая гауссова полная кривизна) равно нулю Щж. Рэ-
лей, 77].
Вычисление двойных интегралов, входящих в Ттах и Птах,
приводится к вычислению простых интегралов стандартной
формы. Так, для базисных форм (9.51) эти интегралы будут, как
правило, таких типов:
\Х*йх, \Х[2 их, |Х;'2о!х,
0 0 0
\х\х)&х = -\хьх';&х.
о о
Значения этих интегралов для обычных способов закрепления
краев пластинки приведены в таблицах II и III в конце книги.
Пример 2. ОПРЕДЕЛЕНИЕ ОСНОВНОЙ ЧАСТОТЫ КОЛЕБАНИЙ
ПРЯМОУГОЛЬНОЙ ПЛАСТИНКИ, ЖЕСТКО ЗАКРЕПЛЕННОЙ ПО ВСЕМ КРАЯМ. Краевые условия
задачи на краях пластинки, параллельных Оу, будут
и на краях, параллельных оси Ох, —
Для первого одночленного приближения возьмем в качестве
минимизирующей формы функцию
и>г(х, у) = Хг(х) Ух(г/),
360 Глава IX. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПЛАСТИНОК
где Хх(х) и Ух(у) — балочные функции, удовлетворяющие краевым условиям
балки, жестко закрепленной по концам:
Х^О) = Хг(а) = 0, Х[@) = Х[(а) = 0,
ух@) = уг(Ь) = о, у;<0) = г[(Ъ) = о.
Для максимальной кинетической энергии
найдем по таблице интегралов с одним индексом (таблица II в конце книги)
значение
Гтах = 1,03592^^.
Для потенциальной энергии
а Ь
о о ох °У о о
а Ь а Ь
+ 22) 1хгХ'{йх \УгУ1^у + В\Х\&Х \ У'[Чу = р>18,52 •1,0359Ь +
+ 212,7752 + 518,52- 1,0359а1д*
аЪ Ь2 }
Для упрощения расчета положим а = Ь, т. е. будем предполагать, что
пластинка квадратная. Тогда
2П = МОМТ^, 2Г =1,07311^,
У1 аМЛу
Пример 3. ОПРЕДЕЛЕНИЕ ОСНОВНОЙ ЧАСТОТЫ КОЛЕБАНИЙ
ПРЯМОУГОЛЬНОЙ ПЛАСТИНКИ, У КОТОРОЙ ОДИН КРАЙ ЖЕСТКО ЗАКРЕПЛЕН, А ОСТАЛЬНЫЕ
КРАЯ СВОБОДНЫ. Для решения задачи в первом приближении в качестве
минимизирующей формы возьмем
и>(х, у) = Хг(х) Уг(у),
где Хх(х) удовлетворяет краевым условиям стержня, заделанного на конце
х = 0 и свободного на другом, а Уг(у) удовлетворяет краевым условиям
стержня, свободного на концах. Первая частота колебаний такого стержня
равна нулю, а первая форма — постоянное число
Уг(у) = сопв1,
6. Приближенные методы расчета собственных форм 361
которое мы примем равным единице. Поэтому
дю _ д2ш _ д2ш __ л
ду ду2 дх дх
на всех краях пластинки (см. таблицу II, с. 572). Тогда
П™,-§ ЛИ'^^-1 [П^и?^ -22,988^,
2 й^вх*.
а Ъ
Г«,- ^ ПВД <*<* - 1,8556^.
Отсюда получаем
_ 3,52 /Р^
^ а2 л/у/г *
В первом приближении основная частота не зависит от размера Ь и
совпадает с основной частотой поперечных колебаний однородного консольного
стержня.
Пример 4. Найти первую частоту поперечных колебаний однородной
квадратной пластинки, свободно опертой по краям и нагруженной, кроме
собственной массы, четырьмя одинаковыми массами М, расположенными в
1 о о л/ ол\ (о- а\ (а ЗиЛ (За аЛ (За ЗаЛ
точках 1, 2, 3, 4 (рис. 89) с координатами I -, - I; I -, —); I —, - I; I —, -—I.
Погонная масса пластинки \х = сопз1. Потенциальная энергия пластинки
будет, очевидно, такой же, как и для однородной пластинки, свободно
опертой по краям. Добавочные сосредоточенные массы повлияют только на
кинетическую энергию. В первом одночленном приближении мы положим,
основываясь на результатах примера 1,
т(х9 у) = ът— зт^.
а а
Потенциальную энергию найдем по формуле
0 В ]\(д2ю , д2и>Л2 , ,
2 Ъ^дх2
так как здесь
ЯЕ
E)
д2ш д2\у _ ( д2т
дх2 ду2 ^дх ду
\&х йу = 0.
Вычислив вторые производные по х и у
д2и> _д2и> = _я* 81пН8шМ,
дх2
ду2
а<
362
Глава IX. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПЛАСТИНОК
найдем:
П„
Рк4
2а2
Кинетическая энергия будет равна сумме кинетической энергии
пластинки Ш^— и кинетической энергии сосредоточенных масс М
о
Мр2 у
и*Ъ
где ^,1=1,2, 3, 4, — значения функции зт (пх/а) зт (пу/Ъ) для координат
точек крепления масс. Для точки 1(х = а/4, у = а/4) это значение равно шх =
= 1/2. Таковы же будут значения ^ив остальных точках. Таким образом,
2Т
\лр2а2/4, + Мр2.
Приравнивая значения Т]
шах И Птах> ПОЛУЧИМ
2тт2
а2
И
АМ/а2
Пример 5. ОПРЕДЕЛЕНИЕ ПЕРВОЙ ЧАСТОТЫ КОЛЕБАНИЙ КВАДРАТНОЙ
ПЛАСТИНКИ СО СВОБОДНЫМИ КРАЯМИ. Задача о колебаниях пластинки со
свободными краями принадлежит к числу наиболее трудных. Ее приближенное
решение дал В. Ритц, использовав для этого свой вариационный метод.
Дж. Рэлей [77, с. 390], исходя из допущения, что первому собственному
колебанию соответствует форма с двумя узловыми линиями, а именно
прямыми, перпендикулярными сторонам квадрата и проходящими через их
середины, дал упрощенный способ расчета пластинки при помощи
минимизирующей формы
IV = Ху.
Предполагаемые узловые линии принимаются за координатные оси Ох
и Оу (рис. 90). Для функции ху во всех точках пластинки
д2и>
д2ю
_ &Е =0,
дх2 ду2 ' дх ду
УК
о\
Следовательно,
Птах=ДA
сг)а2,
„ а/2 а/2 „ „
УМ Г Г х2у2йхйу=уЬЕ?а*и
1 1 у ы 288я
28
Рис. 90
Т
тах г ^
-а/2 -а/2
Положив, как это делал В. Ритц, а = 0,225, по
лучим:
_ 14,9 Ш
Р1 а2 а/у^ '
6. Приближенные методы расчета собственных форм
363
В методе Галеркина минимизирующая форма, которая, так
же как и в методе Ритца, строится в виде конечной линейной
суммы базисных функций
и>(х,у) = I а^.(х, у),
I = 1
должна удовлетворять вариационному уравнению
(9.53)
\1 фД2^ - \хр2и>) Ью &з = О
E)
и выполнять все краевые условия задачи —
и динамические. В этом случае
(9.54)
и геометрические,
К8©*-* К
дН1
*]5и;Ш = 0.
(9.55)
При таких условиях функция ш(х, у) приближенно определит
действительную форму колебания пластинки.
Подставив в уравнение (9.54)
п п
и>(х, у) = 2 а-^Дх, у), Ъгю{х, у) = X щ(х, у) Ъа1У
1 = 1 1 = 1
преобразуем его в уравнение
Ё Ъ ак\\ (ВА2шк - \1р2юк) ю1 6.8 Ъаь = О,
^ .. . .- ... . ]¦
1 = 1 \-к = 1 '" (8) -1
откуда в силу произвольности вариаций да1
X ак \} (ВА2юк - \хр2Юи) IV168 = О, 1=1,2, ... , /г. (9.56)
к = 1 К (8) К К 1
Введем обозначения
Я #Д2г^ A8 = Аш, Я ъхи>кщ 68 = В1к. (9.57)
F) (<Ь)
С помощью этих обозначений уравнения (9.56) можно переписать
следующим образом:
(Аа ~р2Ва) а, + ... + (А1п -р2Вы) ап = 0, 1=1, 2, ... , п,
откуда следует
А11 -Р2В11 Аи-Р2В12 - А1п-Р2В1п
А22-р2Б22 ... А2п-р2В2п
^21 ^Б21
Аг1 ~^2Бя1 Аг2 "Р2Бя2 - ^п^Ч,
= 0.
(9.58)
364
Глава IX. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПЛАСТИНОК
Ук
о
Мы приходим таким образом к
уравнению частот пластинки в форме Га-
леркина. Из этого уравнения можно
найти п значений р2, наименьшее из
которых даст приближенное значение
первой частоты с избытком.
Рис. 91
Пример 6. Найти первую частоту колебаний
квадратной пластинки, зажатой по контуру.
Начало координат возьмем в центре
пластинки, расположив оси координат, как
показано на рис. 91.
Ограничиваясь первым одночленным приближением, выбираем в
качестве минимизирующей формы
и>(х> у) = (х2 - а2J (у2 - а2J.
Эта форма удовлетворяет всем краевым условиям задачи, так как IV, — , —-
ох ду
для х = ±а, у = ±а равны нулю.
Вычисляем Ап и Ви по формулам (9.57):
11 Д 11 ) } Кдх4 дх2 ду2 ду1) У
655361)а14
1225
в"-?^^"?]]<ж,-в">4^-в2>4й*^-5^§5?-
Из уравнения частот (9.58), которое для первого приближения будет
иметь вид
Ап-р2Вп-0,
находим:
V = *- Щ*
VI а2 л/уЛ '
7. УРАВНЕНИЯ ПОПЕРЕЧНЫХ КОЛЕБАНИЙ КРУГЛОЙ ПЛАСТИНКИ.
Поместив начало прямоугольной системы координат в центре
пластинки и обозначив радиус-вектор и полярный угол
некоторой точки нейтральной плоскости соответственно через гиб,
преобразуем с помощью операторов
= СОЗ О— — ,
дх дг г дд
5 =з1пее _созе а
дг г д$
ду
(9.59)
7. Поперечные колебания круглой пластинки
365
выражения потенциальной и
кинетической энергии, а затем и все
уравнения, полученные в § 2 и 3 в
прямоугольных координатах, к полярным
(рис. 92).
Для преобразования к полярным
координатам потенциальной
энергии
П = 5 Я 1(^Е + ^Е]2 -
тах 2 (8) [Удх2 ду2)
9М г*\№2и> д2и) ( д2и) Л2Л\л*
Рис. 92
нужно найти в полярных координатах выражения вторых произ
водных от IV по х и у. Пользуясь операторами (9.59), находим:
д2ю _ д2ю 9. п 81П 20 д2ю
дх2
-^сов*е-
дг2
, Вт 26 дю , 8Ш2 9 ац; , зш2 9 д2ю
дг дв г2 <Э9 г аг г2 592 '
д2
д2т
ду2
д2ю = д2ю
дх ду дг2
дг2 г дг 59
зш 29 дю . соз2 9 дю . соз2 9 а2ь
аг
а02 '
81П 0 С08 0 +
соз 29 д2ю
дгдв
сое 29 дю
г2 59
31П 9 соз 9 дю _
г дг
_ зш 9 соз 9 д2ю
г2 Ъд2'
Подставив эти соотношения в выражение для Птах, получим
П.
п 2яа
III
о о
д2ю + 1 дю + _1_ а2цЛ2
5г2 г 5г г2 Э92^
-2A-а)
д2ю
дг2
1 аш
г дг
+
1 ё!^
г2 д&
1дг \г д<д)\
Отметим тут же значения вторых производных
д2ю
для 0 = 0:
д2ю д2ю
дх2' ду2'
дх ду
г A0 с!г. (9.60)
(д2ю\ = а2^
( д2ю \
Удх ду)
д2ю
ду2
1 дю
г дг
\_ дЧи
г2 дд2'
= д_ A дю\
0=о аДг аеА
(9.61)
366
Глава IX. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПЛАСТИНОК
Для кинетической энергии находим
~2 2п а
1 о &п и
Т^1-^ Ци*гйейг.
2*
(9.62)
Уравнение форм свободных поперечных колебаний однородной
круглой пластинки в полярных координатах запишем
следующим образом:
1 ,10,1 д2 Л (д2и) , 1 ди> , 1 д2ьиЛ _ уНр2 = п т
д~2 + ~г ё? + ~2 оой)\^2 + г а7 72 аё2) ~щи} и (9*63)
или
где
Д(Дц;) - ХМ! и) = О,
аг2 г дг г2 ае2
(9.64)
Вариационное уравнение поперечных колебаний круглой
пластинки, приняв во внимание, что на контуре пластинки
(9.65)
запишем следующим образом:
И (дд2^ - у-^ ш) 5 ^г ае аг - | мьб(||)г ае +
На контуре пластинки
М
+
К^
1^
г ае
дюг ае = о.
(9.66)
(9.67)
1аг2 а^г аг г2 ае2
Яь = 1)A-а)#Г±^1
ь х 'дг\г д<дг
дт _ _ъ д (д2и> , 1 дю , 1 а2ш
2^ аг ^"а^2 гаг г2 аё2
8. ФОРМЫ КОЛЕБАНИЙ ОДНОРОДНОЙ КРУГЛОЙ ПЛАСТИНКИ.
Уравнение форм колебаний однородной пластинки
А2ю - г4и> = 0
будет выполнено для форм, удовлетворяющих уравнениям
Аи> + к2и) = 0, Аьи - к2ьи = 0,
8. Формы колебаний однородной круглой пластинки
367
ИЛИ
д2ю , 1 дю , 1 52
где
дг2 г дг г2 дд2
%4 - Укр2
Функцию, удовлетворяющую уравнениям (9.68I), будем
искать в форме произведения
и?(г, 6) = Д(г) Ф@) (9.69)
двух функций #(г)Ф(9), из которых первая есть функция только
г, вторая — только 6. Подставив эту функцию в уравнения (9.68),
получим
•^ + !«)ф + ^±*2лф-о,
с1г2 г <1г у г2 с192
откуда следует
—- + -—— ± кгЕ —-
Нг2 гс\г Нй2 _
-П2. (9.70)
-Д/г2 Ф
Так как первое отношение зависит только от г, а второе —
только от Э, равенство между ними возможно при условии, что
каждое из них равно одному и тому же постоянному числу. Это
последнее мы полагаем равным -п2, так как предположение, что
это число положительное, привело бы к безгранично
возрастающим Ф. Из (9.70) получаем, таким образом, два уравнения
с!г2 г <1г V гъ)
(9.71)
Из первого, выбрав надлежащим образом начальные условия,
находим
Ф@) = а8ти9. (9.72)
Второе уравнение есть уравнение Бесселя.
Рассмотрим сначала уравнение со знаком плюс перед к2:
с1Н гаг V г*;
Х) Предполагая сначала, что края пластинки свободны.
368
Глава IX. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПЛАСТИНОК
Положив х = кг, приведем это уравнение к виду
Ё!| + 1«+Г1-»!)д = о. (9.73)
6.x2 х ах V х2'
Как известно, решением этого уравнения будет функция Бесселя
первого рода п-то порядка
Е1(^) = ^п(к^).
Решением того же уравнения будет и функция Бесселя
второго рода (или функция Неймана). Но эта функция для г = 0
обращается в бесконечность и поэтому не может входить в состав
форм колебаний сплошного диска без отверстия в середине.
Рассмотрим теперь случай, когда перед к2 стоит знак минус.
Сделав тогда в уравнении
с1г2 г аг V г2)
замену переменного у = 1кг, 1 = ^-1, получим уравнение
сЦг У ау К уг^
ничем по форме не отличающееся от уравнения (9.73).
Решениями этого уравнения будут функции Бесселя 1-го рода п-го
порядка, но от мнимого аргумента
в2(^) = ^п(^к^).
Общий интеграл второго уравнения (9.71) будет поэтому
в(^)=А^п(к^) + в^п(^к^)9
где А, В — произвольные постоянные. Общий интеграл
уравнения (9.68), принимая во внимание вышеизложенное, запишем
следующим образом:
ш(г, 9) = а зт п9 Ь*п(кг) + ЫпAкг)]. (9.74)
Постоянные а и X найдутся из краевых условий, т. е. из условий
закрепления края пластинки. Таких условий здесь будет два,
поскольку речь идет о сплошном диске. Подставив в эти условия
(9.74), после исключения а и X получим одно трансцендентное
уравнение относительно к, корни которого, найденные по табли-
8. Формы колебаний однородной круглой пластинки
369
цам функций Бесселя, определят собственные частоты колебаний
пластинки.
Геометрические места нулей функции (9.74) представят собой
узловые линии на пластинке. Как видно из уравнения
81П п0 Уп(кг) + Ып(Ькг)] = О,
возможны две системы узловых линий на круглой пластинке.
Одна из этих систем имеет уравнение
8Ш Пв = О,
корням которого
0 = 0, я/2, 2Я/2, ...
будут соответствовать узловые диаметры. Число узловых
диаметров равно п.
Вторую систему узловых линий определяют корни г19 г2, г3, ...
уравнения
^п(к^) + ЫпAкг) = 0.
Эти линии представляют собой концентрические окружности
радиусов г19 г2, г3, ... (рис. 93).
Для пластинки радиуса а, закрепленной по контуру, мы
имели бы
*.-0, (|!1=0. (9.76,
Форму, не имеющую узловых диаметров (п = 0), можно было
бы найти в этом случае, положив во втором уравнении (9.71)
IV = К(Г),
так как в этом случае функция,
определяющая эту форму, от 0,
очевидно, не зависит. Такое
предположение привело бы к уравнению
б.г2 г аг
решениями которого являются
функции Бесселя первого рода нулевого
порядка. Общий интеграл этого
уравнения имеет вид
ю(г) = А^0(к^) + В^0(^к^). Рис. оз
370
Глава IX. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПЛАСТИНОК
Для г = а, т. е. на внешнем крае пластинки, жестко
закрепленном по условию, мы имели бы
А^0(ка) + В^0(^ка) = 0, А^'0(ка) + ВМ'0Aка) = 0,
или в силу известных формул
^'0(ка) = ^г(ка),
А^0(ка) + В^0(^ка) = 0,
Отсюда имеем
^0(ка) ^1(^ка) + ^0(^ка) ^1(ка) = 0.
^'0(^ка)= -М^ка), (9.76)
-А/^&а) + Ва^ъка) = 0.
(9.77)
Для наименьшего корня этого уравнения Дж. Рэлей нашел
значение ка = 3,20, откуда
_ 10,24 Ш
Р1 а2 А/уй'
Соответствующая первая форма колебаний (без узловых
диаметров) представлена на рис. 94.
В общем случае краевые условия (9.75) приводят к уравнениям
А^п(ка) + В^п(^ка) =0,
из которых с помощью формул
А^п(ка) + ВМ'пAка) = 0,
= 0. (9.78)
ЩЪг) = \к Уп-№г) + ^+1(^)]
получается уравнение частот
^п{ка) ^пAка)
Лп-ЛЬа) ~ <1п+г(ка) <7п-1Aка) + ^п+гAка)
Для каждого значения п уравнение (9.78) дает бесчисленное
множество корней, определяющих симметричные узловые
окружности. При /г = 0, как то
установлено раньше, узловыми линиями
будут только концентрические
окружности. Значения ка для первых
форм защемленной круглой
пластинки приведены в следующей таб-
Рис. 94 лице.
8. Формы колебаний однородной круглой пластинки 371
Число узловых
окружностей
т = 0
т = 1
т = 2
Число узловых диаметров
п - 0
3,19
6,30
9,43
п = 1
4,61
7,81
10,98
п = 2
5,90
9,40
12,60
На рис. 95 показаны формы колебаний пластинки для
^ п = 0, т = 1;
^ п = 1, т = 0.
Для однородного диска, жестко закрепленного на валу радиуса Ъ,
Ъ < а, по окружности заделки
(и>)гН, = 0,
= 0.
(9.79)
Общий интеграл уравнения (9.73) в этом случае будет
содержать как функции Бесселя 1-го рода, так и функции Бесселя 2-го
рода (функции Неймана), причем число произвольных
постоянных будет равно не двум, а четырем:
и>(г9 А) = а з!п пв №п{кг) + АИп{кг) + В<1 пAкг) + СМпAкгI
здесь Ып — функция Неймана д-го порядка.
Эти постоянные определяются из четырех краевых условий —
на внутреннем крае два (9.79) и на внешнем два, вид которых
будет зависеть от способа закрепления внешнего контура.
Пример 7. Найти первую частоту колебаний однородной круглой
пластинки, закрепленной по внешнему контуру (по методу Ритца).
Потенциальная энергия такой пластинки вычисляется по формуле
2л а
2П„
1
с • 0"'
(9.80)
Узловая линия
Рис. 95
372
Глава IX. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПЛАСТИНОК
В качестве минимизирующей формы с п узловыми диаметрами возьмем
выражение
ш(г, 0) = аг8 (а2 - г2J соз д0, (9.81)
где 8 — параметр, значение которого подбирается из условия минимума
квадрата первой частоты.
Подставив (9.81) в (9.80) и выполнив интегрирование по 0, получим
•п_ - л. |й? + -;§>-*_.)%_-.
где
и>0 = аг8 (а2 - г2J.
Вычислим подынтегральное выражение в скобках:
д2ш0 1 ди>0 _ п2 гп __
_____ -|- _ __— __ ц; —
дгг г ог г1
= а[а4г8~2(з2 - п2) - 2а2г8 ((§ + 2J - п2) + г8+2 (($ + 4J - п2)].
Рассмотрим сначала симметричные колебания без узловых диаметров
при п = 0. В этом случае
Г & + 1 —°12 г с!г = а2а28^ Г--- + 4(* + 2L +
+ (* + 4L - 4з2(з + 2J + 282(8 + 4J + 4(8 + 2)(з + 4J1
28 4-6 28 28 + 2 28 + 4 _]'
Кинетическая энергия равна
2Гтах = 21М! 5 н>§г иг = 51М!е! | (а4-. _ 2а*/-** + г"*)* _ йг =
й о * о
_ кур2а2Н Г 1 , 6
]
§ 128 + 2 28 + 6 28 + 10 28 + 4 28 + 8
Квадрат первой частоты найдем по формуле Рэлея
п2 — "тах
Р\ у77 *
1 тах
В него будет входить пока неопределенный параметр 8. Этот параметр
подбираем из условия минимума р2. Разыскав этот минимум, найдем, что он
имеет место, когда 8 = 0. Но в этом случае
2П = §-• Дтга2а6, 2Г = «УнР2а-2а1° .
Следовательно,
о = 320 /)# 10,33 /5^
Рх За4 Лу ' Р1 а2 а/ЛУ
8. Формы колебаний однородной круглой пластинки
373
Если л = 1, то для 8 нельзя взять значения, меньшего единицы, так как
при 8 < 1 производная
^ = [аЧг8-1 - 2а2 (з + 2)г8+1 (8 + 4)г*+1]а
для г = 0 обращается в бесконечность.
Расчет показывает, что с увеличением 8 частота возрастает. Поэтому для
вычисления частоты с одним узловым диаметром следует взять 8 = 1. При
таком значении
2Птах = 8сАОяа«, 2Гтах = 0,0167^^
и, следовательно,
р -21,9 Ш
*х а2 *1ук '
При двух узловых диаметрах (п = 2) вычисления дают следующие
значения частоты при некоторых значениях 8.
8
9 /уЛ"
1 №8
1,5
36,2
1,75
35,5
2,0
36,5
3,0
45,8
Значение частоты, наиболее близкое к точному, получается,
по-видимому, для 8 = 1,7, а именно
= 35Д Ш
Р1 а2 4уЬ'
Пример 8. Найти форму вынужденных колебаний однородной круглой
пластинки радиуса а, жестко закрепленной по краям, на которую действует
равномерно распределенная по пластинке гармоническая возмущающая
сила интенсивностью
/ = А 8111 СО*.
Дифференциальное уравнение форм вынужденных колебаний пластинки
имеет в рассматриваемом случае вид
2)Д2и;-^и;=А. (9.82)
ё
Общий интеграл уравнения без правой части —
Ег(г) = С^0(кг) + С#Г0Aкг).
Частный интеграл уравнения (9.82) равен К2 = -А/ХМе4, где к4 = ук(а2/0§.
Общий интеграл уравнения (9.82) —
ьи = Ех + Е2 = С^0(кг) + С2С/0(*/гг) - А/1>/г4. (9.83)
374
Глава IX. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПЛАСТИНОК
На внешнем контуре пластинки
ю(а) = 0, ю'(а) = 0.
Из этих условий, представив их с помощью (9.83) сначала уравнениями
С^0(ка) + С^Т0Aка) = А/Вк4,
С^'0{ка) + С2МвAка) = 0
и воспользовавшись формулами (9.76), получим:
С^0(ка) + С^Т0Aка) =А/Бк4,
-С^г(ка) + С23х{1ка) = 0,
откуда
с = _А ^1(^ка)
1 Бк4 ^0(ка)^1(^ка) + ^1(ка)^0(^ка) '
с = _А ^1(ка)
2 Бк4 ^0(ка)^1(^ка) + ^1(ка)^0(^ка) '
Форма вынужденных колебаний будет иметь уравнение
' Бк4 Ы0(каУ1Aка) + ^0(^ка)^^(ка) ] '
Когда
^0(ка)^1(^ка) + ^0(^ка)^1(ка) = 0,
частота собственных колебаний пластинки, как это следует из уравнения
(9.77), совпадает с частотой возмущающей силы. Наступает явление
резонанса, при котором амплитуды колебаний в отсутствие сопротивлений
неограниченно возрастают.
9. АКСИАЛЬНЫЕ КОЛЕБАНИЯ ДИСКОВ ПАРОВЫХ ТУРБИН.
Колебания дисков паровых турбин возникают главным образом
вследствие нарушений равномерности распределения по диску
давления пара, что происходит из-за неправильностей насадки диска,
недочетов в изготовлении сопел, а также от парциального впуска
пара. Сами по себе незначительные, эти нарушения при
критических скоростях вращения диска могут вызвать сильные
поперечные колебания диска, что иногда приводит к сносу части облопа-
чивания ударами о выступы диафрагмы.
Изучением причин аварий лопаток и дисков1 установлено, что
повреждения дисков при аксиальных вибрациях происходят от
Х) См. кигу Я. И. Шнеэ, А. В. Сахнина, Н. Н. Харитонова [57].
9. Аксиальные колебания дискос, паропых турбин 375
несимметричных колебаний (с узловыми диаметрами) и именно
при двух, трех и четырех узловых диаметрах. На такие
колебания обычно и делается расчет дисков на аксиальную вибрацию.
При определении основной частоты колебаний диска обычно
предполагается, что при прогибе диска точки, расположенные на
одном радиусе срединного круга, смещаются при колебаниях в
одну сторону и форма прогиба имеет вид кривой ОА' на рис. 96.
К такой именно форме и подбираются в расчетах по методу Рэлея
минимизирующие формы.
Согласно А. Стодоле срединная плоскость диска в положении
максимального отклонения располагаемся по поверхности
ш(г9 0) - а(г - г()У соз /гВ, (9.84)
где г0 — радиус вала, п — число узловых диаметров, п > 2, 8 —
параметр, значение которого для каждого п подбирается из условия
минимума частоты колебаний, и г радиальное расстояние
элементов диска от окружности крепления диска на валу (рис. 96).
При таком предположении относительно начала отсчета г форма
(9.84) будет удовлетворять геометрическим условиям на
внутреннем контуре диска, если крепление диска на валу жесткое, но не
будет удовлетворять условиям на свободном внешнем контуре
диска, что, впрочем, при расчете по методам Рэлея или Ритца не
является обязательным.
Форма (9.84) дает хорошие результаты для дисков, наружный
диаметр которых велик сравнительно с диаметром вала (больше
трех диаметров вала). Если отношение диаметра диска к
диаметру вала невелико (роторы барабанного тина), то в качестве
минимизирующей формы целесообразно взять функцию
ьи(г9 9) = [а}(г - г0J 4- а2(г г0)8 ~\ ... ] соз /20,
где г0 — радиус вала [40, с. 319].
Принятую форму (9.84) подставляем в выражения
максимальных значений потенциальной и кинетической энергии круглой
Рис. 96
376
Глава IX. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПЛАСТИНОК
пластинки, представив эти выражения для диска переменной
толщины предварительно в виде
2ГТ
2тс га
И В
О г0
д2ю . 1 дии , _1_ д2и)Л2
дг2 ~г дг г2 дв2;
о(Л ~\ \дги) , A дю , 1 д2иЛ
г дг
ае2^
а а а2илг
г ае2Л
г A9 с!г,
, 2лГа
2Ттах =7-?- I \ Ни;2г Ад йг.
ё о г0
Вычисление ГГ
и Т ведется по участкам диска с
приблизительно одной и той же геометрической формой радиального
сечения, например прямоугольной, конической или
гиперболической1^
10. ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ АКСИАЛЬНЫХ
КОЛЕБАНИЙ ДИСКА ПО КЭМПБЕЛЛУ [64]. Функцию, определяющую
форму колебаний диска с п узловыми диаметрами
Ю(Г, 6; I) = /(Г) 81П Пд СОЗ/?^,
можно представить в виде
и>(г, 6; *) - A/2)/(г) [8Н1 (пв + рг) + зш (пв -р1)\. (9.85)
В таком представлении главные колебания диска можно
рассматривать как наложение двух синусоидальных волн
A/2)/ 8Ш (пв + р*)9 A/2)/ 81П (пв - р*),
распространяющихся по диску в противоположные стороны с
угловыми скоростями ±р/п. Это фазовые скорости, т. е. скорости
распространения фазы колебания. Они получаются
дифференцированием по времени фазы
пд±р1 = сопя!.
Для невращающегося диска представление главного колебания
в виде наложения двух синусоидальных волн (9.85) имеет больше
формальный характер: на невращающемся диске эти волны не-
х) Подробности расчета см. в книге А. В. Левина [23].
10. Экспериментальные исследования
377
различимы. На вращающемся диске по отношению к
неподвижному наблюдателю одна волна, вперед бегущая (в сторону
вращения диска), движется со скоростью большей, чем другая, назад
бегущая. Для такого наблюдателя обе волны окажутся
разделенными и вследствие этого реально различимыми. На такой
возможности разделения волн на вращающемся диске и основан
экспериментальный способ определения частоты колебаний диска.
Пусть, со [1/с] — угловая скорость вращения диска. Тогда
абсолютная угловая скорость (по отношению к неподвижному
наблюдателю) вперед бегущей волны будет равна (р/п + со), а
абсолютная угловая скорость назад бегущей волны равна (р/п - со).
В. Кэмпбелл построил установку (кэмпбелл-машина), с
помощью которой можно не только раздельно обнаружить обе волны,
но и определить частоты и формы колебаний диска, т. е. число
узловых диаметров. Принципиальная схема устройства кэмпбелл-
машины такова. На вращающемся диске монтируется датчик Сдв
(индукционная катушка), движущийся вместе с диском (рис. 97).
Другая катушка Сн устанавливается вне диска; она играет роль
неподвижного наблюдателя. Обе катушки по определенной схеме
соединяются с осциллографом. При колебаниях диска в
катушках наводится переменный ток, регистрируемый на
осциллограммах.
Когда диск не вращается, обе катушки подают на осциллограф
одну частоту, например 50 1/с. Когда диск начинает вращаться,
постепенно увеличивая свою скорость, сразу же появляются
различия в записях частот подвижной и неподвижной катушек.
Пусть X — длина волны (как вперед, так и назад бегущей), Т0 —
период полного колебания невращающегося диска. Тогда
Х = ТЛ. (9.86)
Рис. 97
378 Глава IX. ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ ПЛАСТИНОК
На вращающемся диске длина волн остается прежней, но
число волн, проходящих михмо неподвижного наблюдателя, и,
следовательно, калсущаяся ему частота (или период) будут различны
для волн, распространяющихся в противоположных
направлениях. Абсолютная скорость распространения вперед бегущей волны
будет теперь не р, /г, а р/п + со. Поэтому соотношение (9.86)
запишем для этой волны следующим образом:
л- Г](со +р/п). (9.87)
Сопоставляя (9.86) и (9.87), находим
Р = т (Р 4-
ТЛ = Т
о
п
1 ^
откуда для периода Тг имеем
Т} = Т0/A + /гсо/р), Тг < Т0,
для частоты
2тт 2тг ^! , по}')
Я, -=^^[1 + ^) = /> + /*«,. (9.88)
Для назад бегущей волны
и, с л е д о в а т е л ь я о,
Г2 = Г0/A - лсо/р), Г2 > Т0.
Частота в этом случае будет
Щ = |^ = ^ A - ^) = р - П<й. (9.89)
Катушка, движущаяся вместе с диском, регистрирует частоту
стоячей волны. Эта частота с увеличением со растет от
центробежной силы.
С помощью специального устройства неподвижная катушка
передает на осциллограф, а последний регистрирует сразу обе
частоты: возрастающую вместе с увеличением числа оборотов диска для
вперед бегущей волны и убывающую — для назад бегущей волны.
Из формул (9.88) и (9,89) молено найти и частоту колебаний
диска, и число узловых диаметров. В самом деле из уравнений
Н { ¦¦=¦¦-- р -+- л со, II2 ¦¦=-¦ р - лоз
следует, что
Я, I Н0 Я, - Н2
р =-, --!——, П - — V ~. (9.90)
2 2@
11. Критическое число оборотов диска
379
11. КРИТИЧЕСКОЕ ЧИСЛО ОБОРОТОВ ДИСКА. Как показывает опыт,
диск теряет упругую устойчивость, когда скорость
распространения волны по диску становится равной скорости вращения
диска, т. е. когда
Эта угловая скорость называется угловой критической
скоростью диска. При условии (9.91) назад бегущая волна
останавливается для неподвижного наблюдателя и Н2 становится равным
нулю. Из формулы (9.91) для критического числа оборотов
(секундного) имеем:
N..
= ^кр = Р
КР 2 71 2КП
Наиболее опасными для диска являются колебания с двумя и
тремя узловыми диаметрами.
Критическое число оборотов диска, определяемое по формуле
(9.91), следует отличать от числа оборотов, критического для
лопаток, при котором частота возмущающей силы, действующей
на лопатку, становится равной собственной частоте колебаний
лопатки. Так как периодическая возмущающая сила за один
оборот диска пробегает целое число полных циклов своих
изменений, критическая частота будет равна целому кратному
секундного числа ЛГ оборотов диска, которое в этом случае и будет
критическим для лопатки. Из формулы (8.35)
для критического числа оборотов А^кр имеем
откуда
Во избежание возникновения опасных резонансных колебаний
лопатки рст нужно подобрать так, чтобы при двух значениях к>
отличающихся на единицу, получились бы по формуле (9.92)
значения Ы9 не совпадающие с рабочим числом оборотов диска в
секунду. Такой подбор рСТ для данной лопатки осуществляется путем
настройки лопатки (например, снятия некоторого количества
материала со спинки лопатки).
Часть третья
УСТОЙЧИВОСТЬ ДВИЖЕНИЯ
И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ
Глава X
Введение в общую теорию
устойчивости движения
1. ПРЕДВАРИТЕЛЬНЫЕ ЗАМЕЧАНИЯ. Стационарные состояния
движения нелинейных систем осуществляются обычно в виде или
состояний устойчивых периодических колебательных движений, или
устойчивых равновесных состояний, которые можно считать также
периодическими движениями с периодом, равным °о. Но наряду с
устойчивыми периодическими движениями в нелинейных
системах возможны и неустойчивые периодические движения. Только
устойчивые состояния осуществляются в действительности, и
только такие состояния могут иметь практический интерес. Понятно
поэтому, какое большое значение имеет установление признаков
устойчивости периодических движений нелинейных систем.
Иногда самое нахождение периодических движений является решением
некоторой задачи на устойчивость, как это имеет место, например,
в нелинейных системах Ляпунова1*. Именно по этим
соображениям учению о нелинейных колебаниях предпосылается краткое
введение в теорию устойчивости движения.
Изучение теории устойчивости движения мы начнем с
изложения некоторых общих теорем, установленных А. М.
Ляпуновым, ограничиваясь при этом состояниями покоя или движения
голономных механических систем с конечным числом степеней
свободы. Состояние движения таких систем кинематически
определяется заданием обобщенных координат и скоростей в виде
однозначных функций времени. В частности, состоянию покоя
Х) См. в книге И. Г. Малкина [31].
1. Предварительные замечания
381
(равновесному состоянию) соответствуют постоянные значения
координат и равные нулю скорости.
Почти всюду в исследованиях устойчивости движения и покоя
обобщенные координаты и скорости формально играют
одинаковую роль. Представляется поэтому целесообразным сразу же
ввести для них единообразные обозначения, положив, например,
^ = 9*» ^ж = <7;> 1 = 1,2,...,*.
Далее и те, и другие называются просто координатами системы
с одним счетом индексов от 1 до п, где п = 2к.
Для выражения соотношений между координатами ^. мы
будем часто прибегать к геометрическому языку. Будем говорить,
что одновременные значения величин ^, %2, ... , %Л, п = 2к,
определяют положение точки в пространстве п = 2к измерений,
подобно тому как одновременные значения координат х, у, г
определяют положение геометрической точки в пространстве трех
измерений. Пространство точек М(^, %2» — > ^>п) с координатами
^х, ^2> — > ^д> из которых первые к обозначают обобщенные
координаты, а последние к — обобщенные скорости, называется
фазовым пространством, а точка М этого пространства с
координатами %!, ^2> ••• ' ^>п — изображающей точкой или, подробнее, точкой,
изображающей состояние движения рассматриваемой системы.
Уравнения движения системы
Ъ = Ц*)> *=1, 2,... ,п, (ЮЛ)
можно в соответствии с вышеизложенным истолковать как
уравнения движения изображающей точки в фазовом пространстве.
Их можно также считать параметрическими уравнениями
траектории изображающей точки в фазовом пространстве — фазовой
траектории. Конечно, движение изображающей точки в
фазовом пространстве — это не движение заданной системы, а только
особая форма геометрической интерпретации последнего, и
фазовые траектории ничего общего не имеют с траекториями
каких-либо точек заданной системы.
Важно заметить, что состоянию движения системы в
некоторый момент времени в фазовом пространстве сопоставляется
определенное положение изображающей точки и изменению
состояния движения с течением времени соответствует в фазовом
пространстве изменение положения изображающей точки. Так,
состоянию покоя, называемому равновесным состоянием систе-
382 Глава X. ВПКДКНИЕ В ОБЩУЮ ТКОРИЮ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
мы, в котором координаты системы сохраняют постоянные зна-
ченртя, а скорости равны нулю, будет соответствовать некоторое
положение равновесия изображающей точки, и устойчивость
равновесного состояния системы будет, таким образом,
определяться устойчивостью соответствующего положения
изображающей систему точки.
Следуя той же интерпретации, будем считать уравнение
уравнением некоторой поверхности в фазовом пространстве. Так,
например, уравнение
^ + Ц + ...+%*= В2 (Ю.2)
будем называть уравнением- сферы в фазовом пространстве, а
В2 — квадратом расстояния точки М(^г, ^2, ... , ^п) от начала
координат. Неравенство
^+ $ + ... + %< к2
будем рассматривать как определение области, расположенной
внутри сферы A0.2). Такое геометрическое толкование
соотношений между п переменными часто дает возможность использовать
наглядные представления обычного трехмерного пространства для
обнаружения некоторых свойств многомерных совокупностей.
В задачах, рассматриваемых далее, дифференциальные
уравнения движения системы приводятся к виду
^ = Р,A, ар С2> ... , ^7)> / = 1, 2, ... , /г, A0.3)
си
т. е. к уравнениям первого порядка, разрешенным относительно
первых производных координат по времени.
В фазовом пространстве уравнения A0.3) определяют поле
направлений. Каждой точке этого пространства они сопоставляют
направление скорости изображающей точки или направление
касательной к фазовой траектории, проходящей через эту точку.
Когда функции Р1 явно зависят от времени, направления
касательных в точках фазового пространства изменяются с течением
времени: поле направлений будет переменным, или, как мы
будем говорить, неустановившимся.
Если же функции Г1 не зависят явно от времени, т. е.
уравнения движения имеют вид
-^ = Р&х, 42, ... , ^), / = 1, 2, ... , л, A0.4)
1. Предварительные замечания
383
то поле направлений не будет изменяться со временем, будет
установившимся, или стационарным полем направлений. Иногда
и движение системы, изображаемое стационарным полем
направлений, т. е. уравнениями A0.4), называют
установившимся движением. Системы, совершающие такое движение,
называются автономными системами.
Фазовая интерпретация движения автономной системы
приобретает особенно простой и наглядный вид для системы с одной
степенью свободы. В этом случае фазовое пространство
обращается в плоскость, фазовые траектории — в обыкновенные плоские
кривые. Так, например, уравнение гармонического осциллятора
д + к2д = 0
подстановкой
X = Чу У = Я
приводится к эквивалентной системе двух уравнений
& = -к2х.
Фазовым пространством здесь будет координатная плоскость
Оху. Фазовые траектории имеют уравнения
р-=-к2^, к2х2 + у2 = сопв1 = С.
Ах у9 у
Они представляют собой для различных значений постоянной С
вложенные друг в друга эллипсы с центром в начале координат
(рис. 98). Изображающая точка будет двигаться по эллипсу,
проходящему через точку, координаты
(х0, у0) которой определяются
начальным отклонением д = х0 и
начальной скоростью ф = у0. При
этом движение изображающей
точки в верхней полуплоскости будет
происходить всегда слева направо,
так как здесь у = Ах/А1у Ах/А1 > 0,
а в нижней полуплоскости
всегда справа налево, так как здесь
их/д.* < 0. Рис. 98
384 Глава X. ВВЕДЕНИЕ В ОБЩУЮ ТЕОРИЮ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
2. ОПРЕДЕЛЕНИЕ УСТОЙЧИВОСТИ РАВНОВЕСНОГО СОСТОЯНИЯ
СИСТЕМЫ. Будем предполагать, что в рассматриваемом нами
равновесном состоянии все
^ = 0, 1 = 1, 2, ... , п.
В фазовом пространстве это равновесное состояние системы
будет представлено нулевым положением изображающей точки,
т. е. положением изображающей точки в начале координат.
Отличные от нуля значения координат ^ будут определять
отклонения изображающей точки от нулевого положения
равновесия, называемые возмущениями равновесного состояния
системы. Получив некоторое начальное возмущение, определяемое
совокупностью начальных значений координат ^, например
^ = 4ю» 1 = !» 2> — ' д>
и предоставленная затем самой себе, система будет совершать
движение, которое мы называем возмущенным движением. Ему
отвечает некоторое возмущенное движение изображающей точки
в фазовом пространстве. В той теории, которая далее излагается,
устойчивость равновесного состояния системы определяется по
изменениям координат ^ в возмущенном движении системы,
т. е. по ее поведению после того, как, получив начальное
возмущение, она затем предоставляется самой себе.
В возмущенном движении система или удаляется от
равновесного состояния, так что квадрат расстояния изображающей
систему точки от начала растет с течением времени, или пребывает в
ближайшей окрестности равновесного состояния, так что
квадрат расстояния ЪЩ изображающей точки от начала все время
остается ограниченным, т. е. не превосходящим некоторого
заданного, достаточно малого положительного числа, или, наконец,
возвращается в равновесное состояние, совершая около него
более или менее быстро затухающие колебания. В последнем
случае 1^| -* 0. Вот эти стороны поведения системы и
изображающей ее точки в возмущенном движении и будут характеризовать
устойчивость или неустойчивость невозмущенного равновесного
состояния. С этой точки зрения естественно считать устойчивым
равновесное состояние, в ближайшей окрестности которого
пребывает система во все время возмущенного движения или в
которое она возвращается, получив некоторое начальное возмущение.
2. Определение устойчивости равновесного состояния
385
Изложенную описательную характеристику устойчивости
равновесного состояния системы мы и положим в основу точного
определения устойчивости.
I Будем считать равновесное состояние системы, определяемое
нулевыми значениями координат ^, устойчивым по
Ляпунову или просто — устойчивым, если для любого
сколь угодно малого положительного числа 8 > 0 можно будет
найти другое положительное число л(в) > 0, зависящее от еХ)
такое, что во время возмущенного движения координаты ^ будут
удовлетворять неравенствам
коль скоро их начальные значения ^ю будут выбраны согласно
условиям
I Ы<л-
Иначе говоря, равновесное состояние системы устойчиво по
Ляпунову, если для любого сколь угодно малого положительного
числа 8 можно подобрать другое положительное число л(8) так,
что во время возмущенного движения изображающая точка не
выйдет за пределы сферы
и ее расстояние от начала не превзойдет 8, если начальное
положение изображающей точки будет взято внутри сферы
% + и +...+\\=ч2,
т. е. на расстоянии от начала, не превосходящем п.
В своем классическом труде «Общая задача об устойчивости
движения» А. М. Ляпунов [30] развил два метода решения задач
об устойчивости движения: метод характеристических
показателей решений уравнений возмущенного движения и так
называемый второй метод — качественный метод определения
устойчивости, где суждения об устойчивости делаются по изменениям
в возмущенном движении системы некоторых функций ее
координат. Именно этот второй метод и рассматривается в
дальнейшем.
Х) Для обозначения этой зависимости записывают г|(г).
13- 10456 Бабаков
386 Глава X. ВВЕДЕНИЕ В ОБЩУЮ ТЕОРИЮ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
3. ФУНКЦИИ ЛЯПУНОВА. Если бы мы сумели проинтегрировать
уравнения возмущенного движения системы, которое она
совершает, получив достаточно малое возмущение равновесного
состояния, то решение вопроса об устойчивости или неустойчивости
последнего не представило бы особых затруднений. Однако большей
частью уравнения возмущенного движения нелинейны, а общих
методов интегрирования нелинейных уравнений мы не знаем.
Суждения об устойчивости по линеаризованным уравнениям
возмущенного движения, вообще говоря, возможны, но только при
соблюдении некоторых специальных условий1). Во многих
случаях линеаризация, как об этом говорил сам А. М. Ляпунов,
подменяет данную задачу новой, которая может не иметь ничего общего
с первой, и заключения об устойчивости линеаризованной
системы нельзя будет отнести к заданной. Такого рода затруднения
привели А. М. Ляпунова к созданию особого метода исследования
устойчивости, позволяющего устанавливать свойства системы в
отношении устойчивости или неустойчивости ее невозмущенного
равновесного состояния непосредственно по дифференциальным
уравнениям возмущенного движения, не интегрируя последних.
Сущность этого качественного, как его иногда называют,
метода можно было бы в упрощенной форме в применении к задаче
об устойчивости равновесного состояния описать следующим
образом. Пусть уравнения возмущенного движения имеют вид
-^ = Р^19 $2, ... , ^), I = 1, 2, ... , /г, A0.5)
причем невозмущенное равновесное состояние определяется
нулевыми значениями координат
С помощью этих уравнений можно найти скорость изменения по
времени некоторой заданной функции координат ^.
вычислив ее производную по времени
&у_ду^1 + дУ^п_ду дУ„
1) Эти условия установлены А. М. Ляпуновым в его теории устойчивости по
первому приближению (см. гл. XI).
3. Функции Ляпунова
387
В силу уравнений A0.5) эта производная будет известной
функцией координат ^19 ^2> — » ^л« Ее знак устанавливает общее
направление изменений функции V, из чего можно иногда
получить сведения об изменениях координат в возмущенном
движении системы, достаточные для суждения об устойчивости ее
равновесия.
Предположим, например, что, вычислив производную A0.6),
мы нашли бы, что она в силу уравнений A0.5) тождественно
равна нулю. Отсюда мы заключили бы, что функция V для всех
значений <^, какие только ^ могут принимать в возмущенном
движении, сохраняет постоянное значение. Пусть это значение будет
малым положительным числом. В некоторых случаях достаточно
одного этого факта, чтобы сделать вывод об ограниченности
изменений координат ^ в возмущенном движении, т. е. об
устойчивости равновесного состояния, в котором
$1 = ^2 = - = ^п = 0.
Но для возможности таких выводов функция У должна обладать
некоторыми особыми свойствами, так как из ограниченности
функции не всегда, конечно, следует ограниченность ее
аргументов. Так, из того, что функция
У=х2-у2
сохраняет для всех значений х и у постоянное значение, например
У=х2-у2 = 1,
не следует, что хиг/ ограничены. Но если бы мы нашли, что в
силу уравнений возмущенного движения функция
У=х2 + у2
сохраняет постоянное значение
У=х2 + у2 = 1,
то отсюда с определенностью следовало бы, что в возмущенном
движении ни одна из координат х и у не сделается по абсолютной
величине больше единицы.
А. М. Ляпунов установил, какими свойствами должны
обладать функции
388 Глава X. ВВЕДЕНИЕ В ОБЩУЮ ТЕОРИЮ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
чтобы по скорости изменения этих функций, определяемой
уравнениями возмущенного движения A0.5), можно было судить об
изменении координат %. и вместе с тем решать вопрос об
устойчивости невозмущенного равновесного положения изображающей
точки, в котором все
^ = ^ = ... = $„ = 0.
Для функций V, явно от времени не зависящих, эти свойства
выражаются следующими определениями.
Прежде всего функция
^1, ь. •••. и
должна быть конечной, однозначной и непрерывной функцией
всех своих аргументов ^, %2> ••• » %Л« Далее, должна существовать
область, окружающая со всех сторон нулевую точку, например
область (В),
Щ < В2,
ограниченная сферой
Щ = к2,
радиус В которой может быть весьма малым, но всегда отличным
от нуля, — область, в которой функция У(^г, ^2, ... , ^п) принимала
бы значения одного знака, обращаясь в нуль только в нулевой
точке, где все без исключения ^ равны нулю.
I Функция V, обладающая последним свойством, называется зна-
коопределенной в области (В), причем, если принимаемые ею
значения, кроме нулевого, все положительны, то функция V
называется положительно-определенной в области (В); если эти
значения отрицательны, то — отрицательно-определенной в об-
I ласти (В).
Знакоопределенные функции в области (В), конечные,
однозначные, непрерывные и явно от времени не зависящие, будем
называть функциями Ляпунова первого рода.
Знакоопределенные функции необходимо отличать от
знакопостоянных в той же области (В) функций. Знакопостоянные
функции в области (В) могут обращаться в нуль не только в
нулевой точке, где все ^ = 0, но и в других точках области, сохраняя
при этом один и тот же знак для своих ненулевых значений в
этой области. В зависимости от знака они могут быть как посто-
3. Функции Ляпунова
389
янно-положительными, так и постоянно-отрицательными.
Так, функция
\\ + % + 2^2 = (^ + у*
является постоянно-положительной, так как она может принимать
нулевые значения не только в точке ^ = ^2 = О, но и во всех точках,
где ^ = -%2> оставаясь положительной во всех других точках.
Функции, которые в пределах области (В) могут принимать
как положительные, так и отрицательные значения, называются
знакопеременными в области (В).
В дополнение к этим определениям приводим некоторые
признаки знакоопределенности и знакопеременности функций, явно
от времени не зависящих, ограничиваясь при этом только
формулировкой относящихся сюда теорем1*.
Теорема 1. Всякая форма нечетного порядка есть
функция знакопеременная.
Теорема 2. Формы четного порядка могут быть как знако-
определенными, так и знакопеременными. Для квадратичных
форм необходимый и достаточный признак определенной
положительности дает теорема Сильвестра, формулированная на с. 50.
Теорема 3. Знакоопределенность или знакопеременность
однородной формы сохраняется, если к ней добавить любую
форму от тех же переменных и того же порядка с достаточно
малыми коэффициентами.
Теорема 4. Знакоопределенность или знакопеременность
аналитических функций определяется совокупностью членов
наинизшего порядка в разложениях этих функций, за
исключением случаев, когда эта совокупность представляет собой
знакопостоянную функцию. В последнем случае вопрос о
знакоопределенности или знакопеременности решается на основании
рассмотрения членов более высоких порядков.
Теорема 5. Знакоопределенная функция должна содержать
все координаты, определяющие состояние движения системы.
Если какая- либо координата отсутствует, то функция может
быть только знакопостоянной. Такова, например, полная
энергия консервативной системы с циклическими координатами.
х> См. книги И. Г. Малкина [33], Г. Н. Дубошина [17].
390 Глава X. ВВЕДЕНИЕ В ОБЩУЮ ТЕОРИЮ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
Примеры. Рассмотрим функцию У(х1г х2, х3) трех переменных х19 х2, х3.
Эта функция будет положительно-определенной, если, например,
Функция
к(х1, х2, х3) = х1 + х2
постоянно-положительная, так как в ней отсутствует переменная х3. Функция
Хо + Х%~\- Хо
на основании теоремы Сильвестра — положительно-определенная.
Функция
V\Х 1, Хп) Хо) —— Хл \ /иХлХп I Х% + Хо
постоянно-положительная. В самом деле, ее можн^ представить следующим
образом:
V = (хг + х2J + х\.
Она обращается в нуль, не только когда хх = х2 = х3 = 0, но и когда хг = -х2 и
х3 = 0, оставаясь положительной для всех других значений переменных.
Функция двух переменных У(хх, х2) будет знакопостоянной в области
х\ + х\ < К2,
если в этой области У(хг, х2) = х\; будет знакопеременной в той же области,
если V = хх или
V = х2 - х2
Для малых значений х19 х2 функция
У=х{ + х{ + X-I Xо ~> Хп
положительно-определенная; функция
V
знакопеременная.
Функция
ТЛ=г2_Огг2_|_г4_|_г4 = /г _ г2\2 4- г4
представляет собой пример знакоопределенной функции, для суждения о
знакоопределенности или знакопеременности которой нужно привлекать к
рассмотрению члены высших порядков, так как совокупность членов наинизшего
порядка, представленная здесь х\у есть функция постоянно-положительная.
Так же и для функции
У(х1У х2) = х{ - 2хгх2 + Хп "г X-1 ~т~ ХлХп
решение вопроса о знакоопределенности или знакопеременности возможно
только с привлечением членов высших порядков. На параболе хх = х\
функция У приобретает значение х\ + х\. Она является, таким образом, для
малых значений х2 функцией знакопеременной.
3. Функции Ляпунова
391
Возможность использования функций Ляпунова для
суждения об устойчивости равновесного состояния системы,
определяемого нулевыми значениями ^-, основана на следующих теоремах,
устанавливающих важнейшие свойства этих функций.
Рассмотрим сферу (е),
Щ = е2 ,
расположенную внутри области (В), так что г < В. Пусть
— положительно-определенная функция Ляпунова в области (В).
Обозначим через Р нижний предел Т^на сфере (е). Очевидно,
Р>0.
Теорема 1. Если О < с < Р, то поверхность
Щ1,...Д„) = с
замкнутая, она окружает со всех сторон начало координат и
расположена внутри сферы (е)Х).
Доказательство, Для доказательства проследим за
изменениями V при перемещении изображающей точки вдоль
какого-либо радиуса сферы (г), начиная от нулевой точки (центра
сферы). В начале этого перемещения V = О, в конце, в некоторой
точке сферы, V > Р. Так как V — функция однозначная и
непрерывная, то при изменении ее на конечном интервале от нуля до
V > Р она обязательно пройдет через все промежуточные между
указанными пределами значения и, следовательно, в некоторой
точке между началом и концом радиуса примет значение с. В этой
точке радиус встретит и пересечет поверхность
Такая встреча произойдет на любом радиусе, проведенном из
начала координат в какую угодно сторону. Следовательно,
поверхность V = с — замкнутая; она со всех сторон окружает начало
координат и расположена внутри сферы (г) [И. Г. Малкин, 33].
Существует и аналитическое доказательство теоремы 1. С ним
можно ознакомиться, например, в книге Н. А. Кильчевского [60].
Х) Иногда касаясь изнутри сферы (г) в одной или нескольких точках.
392 Глава X. ВВЕДЕНИЕ В ОБЩУЮ ТЕОРИЮ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
Следствие. Если 0 < сх < с2 < Р, то поверхность
расположена внутри поверхности
нигде не касаясь последней.
При изменении с от нуля до Р получаем бесконечную
совокупность, целый континуум замкнутых поверхностей, вложенных
одна в другую и нигде не соприкасающихся и не
пересекающихся, окружающих начало координат, где они равномерно
стягиваются в точку.
Теорема 2. Если установлено, что функция У при всех
изменениях ^ в возмущенном движении остается меньше своего
нижнего предела на сфере (е), т. е. если для всех I > О
У(^,...,^п)<Р,
то изображающая систему точка не выйдет за пределы сферы
(е), т. е. квадрат ее расстояния от начала координат будет
удовлетворять неравенству1^
Щ < с2.
4. О ФУНКЦИЯХ, ОБЛАДАЮЩИХ БЕСКОНЕЧНО МАЛЫМ ВЫСШИМ
ПРЕДЕЛОМ.
I Функция У(^19 ... , ^лJ) обладает бесконечно малым высшим
пределом, если, как бы мало ни было заданное положительное число
(? > О, найдется такой радиус г| > 0 и такая сфера
на которой С? будет высшим пределом функции У(^г, ... , %п), так
что для всех ^, удовлетворяющих условию
Щ < л2,
будет иметь место неравенство
I У<Я. A0.7)
Х) Так как на сфере (е), через которую должна пройти изображающая точка,
чтобы выйти за пределы сферы, V > Р.
2) Функции, о которых идет речь в этом параграфе, являются функциями
Ляпунова первого рода.
4. Функции с бесконечно малым высшим пределом
393
Функция Ляпунова первого рода, явно от времени не
зависящая, обладает бесконечно малым высшим пределом в силу своей
непрерывности в нулевой точке. В самом деле, если функция
У(^г, ... , ^п) непрерывна в точке
то, как бы мало ни было наперед заданное положительное число
() > 0, найдется г| > 0 такое, что для значений %., не
превосходящих по абсолютной величине г|, т. е. удовлетворяющих
неравенству Е^2 < г|2, функция V будет не больше С?, т. е. V < ф.
Таким образом, определение непрерывности V в нулевой точке
выражается теми же соотношениями, что и условия обладания
этой функцией бесконечно малым высшим пределом.
Теорема 3. Пусть ф — высший предел функции У(^19 ... , ^п)
на сфере (е),
Е^2 = г2.
Тогда, если с > Я > 0, то сфера {г) расположена внутри
поверхности1^
^х,... ,^) = с, A0.8)
так что по крайней мере одна из координат ^.,
удовлетворяющих уравнению
К(^, ... , $п) = с, A0.9)
не сделается по абсолютной величине меньше 8.
Доказательство. Подтверждение, что по крайней мере
одна из координат, удовлетворяющих уравнению A0.9), не
сделается по абсолютной величине меньше 8, равносильно
утверждению, что на поверхности A0.9) Е^2 > 82. В самом деле, если бы
последнее неравенство не было выполнено на поверхности A0.9),
т. е. если бы на этой поверхности Е^2 < 82, то согласно
определению бесконечно малого высшего предела, которым функция V
обладает в силу своей непрерывности в нулевой точке, мы имели бы
для таких %.
У(Ъ,...,$п)<Я,
что противоречит условию теоремы.
Х) Может быть, касаясь этой поверхности изнутри в одной или нескольких точках.
394 Глава X. ВВЕДЕНИЕ В ОБЩУЮ ТЕОРИЮ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
Изложенная теорема имеет место только для функций V,
допускающих бесконечно малый высший предел, и иногда
рассматривается как другое определение таких функций.
5. ГЕОМЕТРИЧЕСКАЯ ИНТЕРПРЕТАЦИЯ СВОЙСТВ ФУНКЦИЙ
ЛЯПУНОВА ПЕРВОГО РОДА ДВУХ ПЕРЕМЕННЫХ. Совокупность значений
функции Ляпунова
в области (В),
2^? < В2
можно представить в пространстве трех измерений частью
поверхности
2 = У($19 ^2). A0.10)
Эта часть поверхности A0.10) всеми своими точками
располагается по одну сторону фазовой плоскости 0^2
(положительно-определенная — со стороны положительных г) и касается этой
плоскости в нулевой точке. Область (е) на рис. 99 представлена площадью
круга радиуса 8, описанного пунктирной линией из начала
координат О. Значения функции V на окружности (е) представлены
параллельными оси Ог отрезками образующих цилиндра,
построенного на окружности (е). Нижняя граница Р значений V на
окружности (е) представлена отрезком АВ, верхняя Я — отрезком С1).
На основании определения функций Ляпунова и их свойств,
установленных теоремами 1, 2 и 3, поверхность
должна обладать в области (В) следующими свойствами.
Рис. 99
6. Теорема об устойчивости равновесного состояния
395
ш В области (В) она является непрерывно расширяющейся
поверхностью, не загибающейся внутрь, к оси Ог. Это следует из
однозначности функции У(^19 ^2) в этой области.
¦ Кривые У(^г, %2) = с для разных значений с получаются как
проекции на плоскость 0^2 сечений поверхности г = У(^19 ^2)
плоскостями г = с, перпендикулярными оси Ог. Эти сечения
проецируются на плоскость 0^х^2 в натуральную величину. Так,
кривая
получится от сечения поверхности A0.10) плоскостью,
проходящей через А на расстоянии от начала, равном Р — нижнему
пределу V на окружности (е). Согласно теореме 1 эта кривая будет
лежать внутри окружности (г), касаясь последней в точке В.
¦ Кривая
где Я — верхняя граница Т^на окружности (е), охватывает со всех
сторон окружность (е), касаясь последней в точке И.
6. ТЕОРЕМА ОБ УСТОЙЧИВОСТИ РАВНОВЕСНОГО СОСТОЯНИЯ
СИСТЕМЫ. Если уравнения возмущенного движения системы таковы,
что можно найти знакоопределенную функцию У(^19 ... , ^Л),
производная которой по времени была бы в силу уравнений
возмущенного движения знакопостоянной функцией
противоположного знака с У или тождественно равной нулю, то
равновесное состояние системы, определяемое нулевыми значениями
координат
устойчиво по Ляпунову.
Доказательство. Нужно доказать, что при
выполнении условий теоремы, как бы мало ни было наперед заданное
число г > 0, к нему всегда можно подобрать п(е) > 0 такое, что во
время возмущенного движения (т. е. для всех ^ > 0) будет иметь
место неравенство
Щ < е2,
коль скоро начальные значения координат будут выбраны в
соответствии с условием
396 Глава X. ВВЕДЕНИЕ В ОБЩУЮ ТЕОРИЮ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
Предположим, что, задавшись сколь угодно малым числом в > О,
мы нашли функцию Ляпунова У(^19 ... , %п), удовлетворяющую
условиям теоремы в области (г),
Щ < с2.
Пусть в этой области функция У положительно-определенная, а
ее производная по времени V в силу уравнений возмущенного
движения — постоянно-отрицательная или тождественно равна
нулю, так что имеют место неравенства
У>0, У<0. A0.11)
Обозначим через Р нижнюю границу У на сфере
Щ < е2.
Число Р обязательно больше нуля. Так как ^непрерывна в
нулевой точке, явно от времени не зависит и, следовательно,
допускает бесконечно малый высший предел, то, как бы мало ни было
число Р, всегда можно найти радиус л > 0 такой и сферу
Щ < ц\
на которой Р будет высшим пределом функции V, такую, что для
всех значений ^, удовлетворяющих условию
Щ < л2.
будет иметь место неравенство
У<Р. A0.12)
Дадим нашей системе начальное возмущение, выбрав
начальные значения координат %>ю так, чтобы
Д2о<Л2. (Ю.13)
Тогда
У0 = У(^0,...,^п0)<Р.
Чтобы установить, как будет вести себя функция после того,
как, получив начальное возмущение согласно A0.13), система
начнет возмущенное движение, воспользуемся указанием теоремы о
том, что производная от Т^по времени в силу уравнений
возмущенного движения остается постоянно-отрицательной или
тождественно равной нулю. Из неравенства
^<0,
7. Теорема Лагранжа — Дирихле
397
после интегрирования по I в пределах от нуля до произвольного I
получим:
У0-У>0, У<У0<Р.
Сопоставляя полученное неравенство с A0.12), заключаем, что во
все время возмущенного движения (т. е. для 1> 0) функция У
остается меньше своей нижней границы на сфере (е).
Следовательно, при выбранных согласно условию A0.13) начальных
значениях ^ю изображающая точка не выйдет за пределы сферы (е), т. е. в
возмущенном движении координаты ^. для всех I > 0 будут
удовлетворять условию
Щ < е2.
7. ТЕОРЕМА ЛАГРАНЖА — ДИРИХЛЕ ОБ УСТОЙЧИВОСТИ
РАВНОВЕСИЯ КОНСЕРВАТИВНОЙ СИСТЕМЫ. Одним из поучительных
приложений изложенной теоремы, в котором отвлеченные свойства
функций Ляпунова получают конкретное физическое
истолкование, может служить известная теорема об устойчивости равновесия
консервативной системы, впервые сформулированная Ж. Лагран-
жем и строго доказанная Л. Дирихле1*. Эта теорема излагается
обычно следующим образом.
Теорема Лагранжа — Д и р и х л е. I. Если в
положении равновесия потенциальная энергия консервативной
системы имеет изолированный минимум, то равновесие в этом
положении устойчиво.
Мы внесем как в формулировку теоремы, так и в ее
доказательство некоторые изменения, не затрагивающие существа ее
содержания, но лучше подчеркивающие ее непосредственную
связь со вторым методом Ляпунова. Изменения будут
заключаться в том, что мы будем рассматривать устойчивость равновесного
состояния или покоя системы, предполагая, что в этом
состоянии все обобщенные координаты и скорости системы равны
нулю, и вести рассуждения, пользуясь представлением полной
энергии в фазовом пространстве.
В фазовом пространстве равновесное состояние нашей
системы будет представлено нулевым положением изображающей
точки, так что применительно к фазовому пространству речь будет
-> П. Г. Л. Дирихле. Об устойчивости равновесия. См. в кн. Ж. Лангранжа [74,
Дополнения, с. 537].
398 Глава X. ВВЕДЕНИЕ В ОБЩУЮ ТЕОРИЮ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
идти об устойчивости нулевого положения изображающей точки.
Всегда можно предполагать, что потенциальная энергия системы
в равновесном состоянии равна нулю. Равна нулю будет здесь,
конечно, и кинетическая энергия. Когда системе сообщается
начальное возмущение, она получает некоторые количества
потенциальной и кинетической энергии, т. е. некоторый запас полной
механической энергии
У0 = Т0 + П0.
В фазовом пространстве такому начальному возмущению
системы будет соответствовать начальное положение изображающей
точки. Этим начальным положением будет определяться и
начальный запас энергии изображающей точки, равный
начальному значению полной энергии системы. Полная энергия нашей
системы в фазовом пространстве будет представлена энергией
положения изображающей точки, т. е. своего рода потенциальной
энергией точки в фазовом поле. Применительно к фазовому
представлению состояния системы и ее полной энергии мы и изложим
измененную формулировку теоремы Лагранжа — Дирихле.
Теорема Лагранжа — Д и р и х л е. П. Если в
нулевом положении «энергия положения» изображающей систему
точки имеет равный нулю изолированный минимум, то
равновесие в этом положении устойчиво по Ляпунову.
Доказательство. Выражение «энергия в нулевом
положении имеет равный нулю изолированный минимум»
означает, что можно указать, может быть, весьма малое, но конечное
число г > О такое, что для всех ^, удовлетворяющих условию
Щ < в2,
полная энергия системы будет принимать положительные
значения, обращаясь в нуль только когда все без исключения ^ равны
нулю, т. е. только в нулевой точке. Другими словами, это
означает, что в области (е) полная энергия является
положительно-определенной функцией координат %.. Если к этому добавить, что
полная энергия есть также непрерывная, однозначная и
конечная функция в области (г), то в этой области она, очевидно, будет
функцией Ляпунова первого рода и ее можно использовать для
определения характера изменения координат системы в
возмущенном движении. Для этого нужно еще установить, как будет
изменяться полная энергия в возмущенном движении. Так как
7. Теорема Лагранжа — Дирихле
399
система — консервативная, вопрос об изменениях полной
энергии в возмущенном движении решается без составления
уравнений возмущенного движения: полная энергия системы сохраняет
свое значение во все время движения. Следовательно,
производная от нее по времени тождественно равна нулю:
А(Г + П) = 0.
Таким образом, существует область (с), в которой полная энергия
системы — положительно-определенная функция координат,
производная которой по времени тождественно равна нулю.
Следовательно, рассматриваемое равновесное состояние устойчиво
по Ляпунову.
Поверхности
У(^, ... , Ы = с,
о которых речь шла при исследовании свойств функций
Ляпунова, являются в случае консервативной системы поверхностями
энергетических уровней, или эквипотенциальными
поверхностями в фазовом потенциальном поле. Затрачивая на начальное
возмущение, т. е. на начальное перемещение изображающей
точки, положительную работу и сообщая ей тем самым некоторый
запас энергии, мы забрасываем изображающую точку на
некоторый энергетический уровень, с которого она в силу
консервативности системы не сойдет во все время возмущенного движения.
Этот энергетический уровень представляет эквипотенциальную
поверхность
Т + П=Т0 + П0, A0.14)
на которой и будет все время оставаться изображающая точка.
Следовательно, для доказательства теоремы достаточно
убедиться, что эквипотенциальная поверхность A0.14) при надлежащем
выборе начального возмущения целиком располагается внутри
сферы (е). Для этого, как было установлено выше, достаточно
выбрать начальное возмущение, иначе говоря, начальные
координаты %10, ... , ^п0у так, чтобы начальная энергия Т0 + П0 была
меньше нижнего предела значений энергии Т + П на сфере (г).
Теорема Лагранжа — Дирихле дает достаточное условие
устойчивости равновесного состояния консервативной системы.
Будет ли справедлива обратная теорема, т. е. можно ли
утверждать, что все равновесные состояния консервативной системы, в
400 Глава X. ВВЕДЕНИЕ В ОБЩУЮ ТЕОРИЮ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
которых потенциальная энергия не достигает минимума,
неустойчивы? Такую теорему доказалХ) А. М. Ляпунов.
Теорема. Равновесное состояние консервативной
системы, определяемое нулевыми значениями координат, в котором
потенциальная энергия системы не достигает минимума,
неустойчиво, если отсутствие минимума определяется уже
членами второго порядка в разложении потенциальной энергии по
степеням координат д^.
Другая доказанная А. М. Ляпуновым теорема о
неустойчивости равновесного состояния консервативной системы
формулируется следующим образом.
Теорема. Равновесие консервативной системы
неустойчиво, если в равновесном положении потенциальная энергия
имеет максимум, причем этот максимум обусловлен членами
наинизшего (но не обязательного второго) порядка в разложении
потенциальной энергии по степеням дг
Таким образом, обратная теорема доказана А. М. Ляпуновым
для некоторых частных случаев, которые, впрочем, наиболее
часто встречаются в приложениях.
Н. Г. Четаев [54, гл. III] дал более простое доказательство
обратной теоремы, основанное на установленной им обобщенной
теореме о неустойчивости движения.
Пример 1. Полная энергия материальной точки массой т,
притягиваемой неподвижным центром в начале координат пропорционально
расстоянию г от точки до центра, имеет выражение
х^= ти2 , кг2
где V — скорость точки, к — коэффициент пропорциональности.
Положив
/п/2 = р2, /г/2 = а2, г = ^1» » = ^2>
представим это выражение в виде
У=а%\ +р2^|. A0.15)
Пусть а2 < р2. В положении ^ = ^2 = 0 полная энергия A0.15) имеет
изолированный минимум. Следовательно, нулевое положение или равновесное
состояние системы устойчиво.
Х) Ляпунов А. М. О неустойчивости равновесия в некоторых случаях, когда
функция сил не есть максимум, 1897. См. в кн. [30].
7. Теорема Лагранжа — Дирихле
401
Как подобрать к заданному сколь угодно малому числу 8 > 0 число л > 0
так, чтобы в возмущенном движении имело место неравенство
если начальные значения %ю выбраны согласно условию ^20 + ^|о ^ Л2? Для
этого, согласно вышеизложенному, нужно, задавшись е, найти нижнюю
границу функции У на окружности:
^ + ^| = 82. (Ю.16)
Нижняя граница функции Ука. окружности A0.16) найдется по правилу
разыскания относительного экстремума У при условии A0.16), т. е. из уравнений
дУ
дУ
+ 2^ = 0, |^ + 2^2 = 0, ^ + $1 = 6*
или
а% + Х^1 - 0,
Эти уравнения имеют два решения:
• ^ = 0, Ь = -р*, ^2 = 82;
V
^2=0, ^ = -<х2, %\ = *
A0.17)
Первому решению соответствует максимум V, равный р2е2; второму
минимум V, равный а2е2.
Поверхность уровня
У=а282,
или
а2^ + р2^ = а2е2,
представляет собой эллипс с полуосями 8 и е(а/Р), расположенный внутри
окружности %2 + ^| = е2 и касающийся ее в точках А и В (рис. 100).
Чтобы изображающая точка в
возмущенном движении оставалась
внутри окружности (е), нужно начальные
значения %10, %2о выбрать внутри
окружности некоторого радиуса г|, на которой
а2е2 — нижняя граница V на (е) — была
бы верхней границей (высшим
пределом).
Согласно вышеизложенному
верхняя граница У на окружности (г|) равна
р2т]2; с другой стороны, она должна
равняться а2е2, т. е. нижней границе У на
окружности (е). Следовательно,
2п2 = «2р2
Р2Л
Рис. 100
402 Глава X. ВВЕДЕНИЕ В ОБЩУЮ ТЕОРИЮ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
откуда следует
2== ос^
Таким образом, чтобы изображающая точка не вышла за пределы
окружности (в), начальное ее положение нужно взять внутри заштрихованного
круга
?2 . Р2 = СС2в2
8. ОПРЕДЕЛЕНИЕ УСТОЙЧИВОСТИ ДВИЖЕНИЯ. Рассмотрим
материальную систему с к степенями свободы, уравнения движения
которой приведены к виду
-^ = Р.(и ^, ... , ^л), 1=1,2, ... ,п;п = 2к. A0.18)
Относительно функций Рь{1, ^, ... , <^п) предположим, что в
рассматриваемых далее областях значений переменных ^х, ... , \п и
для всех I > ^0, где ^0 — некоторый фиксированный момент,
принимаемый обычно за начальный (например, ^0 = 0), эти функции
разлагаются в равномерно сходящиеся ряды по целым степеням
переменных ^, коэффициенты которых суть вещественные
непрерывные функции I. Для краткости функции РьA, %19 ... , %п)9
обладающие такими свойствами, называются далее
аналитическими в заданной области.
Предположим, что нам известно частное решение уравнений
A0.18)
^ = 4/@, 1=1,2, ...,л, A0.19)
соответствующее начальным условиям
* = 0, ^ = ^0, /=1,2, ... ,п. A0.20)
Решение A0.19) определяет некоторое движение системы.
Сравним это движение с другими возможными для системы
движениями при тех же действующих на систему силах и,
следовательно, определяемых теми же дифференциальными
уравнениями, но при других начальных условиях. Будем называть
движение, соответствующее известному частному решению A0.19),
невозмущенным движением, а все остальные, с которыми оно
сравнивается, — возмущенными движениями.
Возмущенные движения получаются, таким образом, из
невозмущенного в результате изменения начальных условий, т. е.
8. Определение устойчивости движения
403
изменения координат и скоростей системы в некоторый момент
времени ^0, принимаемый затем за начало отсчета времени, а не в
результате непрерывного воздействия на систему каких-либо
возмущающих сил.
Дадим начальным значениям координат, соответствующим
невозмущенному движению, т. е. числам ^ю, некоторые
приращения хю. Другими словами, предположим, что в начальный
момент переменные %. имеют значения
1ю = ^о + хю, / =1,2,..., п. A0.21)
Новым начальным условиям будет соответствовать некоторое
возмущенное движение с уравнениями
^• = ^@, / = 1,2, ...,л. A0.22)
Невозмущенное движение A0.19) называется устойчивым,
если для любого сколь угодно малого положительного числа 8 > 0
можно найти другое число л (г) > 0 такое, что для всех ^ > ^0 будут
иметь место неравенства
|С/@-^(*)|<е, /=1,2 /г,
коль скоро начальные значения координат будут выбраны в
соответствии с условиями
1^*о — ^о1 < Л» / = 1,2, ... ,п.
Определение устойчивости движения можно привести к
определению устойчивости некоторого относительного равновесного
состояния рассматриваемой системы. Обозначим разности между
одновременными значениями соответствующих координат
возмущенного и невозмущенного движений через х^), положив
Ё~г(*) - Ц1) = *Д*)> / = 1, 2, ... , п. A0.23)
Эти разности называются возмущениями координат. В
частности, числа
ХЮ = ЪЮ-Ъ0, /= 1,2, ... ,71, A0.24)
равные разностям начальных значений координат возмущенного
и невозмущенного движений, представляют собой начальные
возмущения координат.
404 Глава X. ВВЕДЕНИЕ В ОБЩУЮ ТЕОРИЮ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
Введем теперь вспомогательную систему координат, оси кото^
рой сохраняют неизменные направления в фазовом пространстве, а
начало движется согласно уравнениям невозмущенного движения:
Ъ = Щ), 1=1,2,... ,п.
В такой системе координат положение изображающей точки в
возмущенном движении будет определяться относительными
координатами хь{1). Невозмущенному движению будет
соответствовать относительное равновесное состояние изображающей точки,
определяемое нулевыми значениями относительных координат
х1 = х2 = ••• = хп = 0. A0.25)
Тем самым изложенное выше определение устойчивости
невозмущенного движения
ъ-иъ 1 = 1,2,...,»
будет приведено к определению устойчивости равновесного
состояния A0.25).
В дальнейшем, однако, это относительное равновесное
состояние будем называть невозмущенным движением нашей системы.
Мы приходим, таким образом, к следующему изложению
определения устойчивости движения.
I Невозмущенное движение, определяемое нулевыми значениями
относительных координат
Х1 = Х2 = — = Хп = 0>
устойчиво по Ляпунову, если для сколь угодно малого
положительного числа 8 > 0 можно найти другое положительное число
г)(г) > 0 такое, что для всех I > 10, как бы велико ^0 ни было,
относительные координаты будут удовлетворять неравенствам
1*,('I<е,
или, что то же, неравенству
Ех? < 82,
коль скоро их начальные значения будут выбраны в
соответствии с условиями
1*ю1 < Л,
или
I 1*& < Л2-
9. Уравнения в относительных координатах
405
9. УРАВНЕНИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ В ОТНОСИТЕЛЬНЫХ
КООРДИНАТАХ. Так как функции
^-Ш, «=1,2 л
должны удовлетворять тем же уравнениям движения A0.18), что
и функции
^ = $,(*), «=1,2, ... ,п,
то
^=Р^,^,...,^п), 1=1,2,..., п.
Подставив сюда
^ = ^ + **> «=1,2, ... , 71,
получим
д, '' =РМ> ^ + х1,...,%п + хп), 1=1, 2,..., п. A0.26)
Разложим теперь правые части последних уравнений по
степеням относительных координат хг Принимая во внимание A0.18),
будем иметь
6.Х:
= X а,
- .^ а^ху+ЕРу*!1 ... хп", 1 = 1,2, ... , л, A0.27)
(II V = 1 ; '
где во второй сумме
тп^ + /7г2 + ... + #1л > 1.
Если в правой части уравнений A0.27) отбросить вторые суммы
(т. е. нелинейные члены), то получатся уравнения возмущенного
движения в первом приближении, или уравнения в вариациях
их п
—-1 = I а/уху, « = 1, 2, ... , п. A0.28)
О.Т V = 1
До тех пор, пока не будет надобности в выделении линейных
членов в правых частях уравнений A0.26), будем записывать их
следующим образом:
их
—' = ХД«, х19 ... , хп), «=1,2, ... , л, A0.29)
помня при этом, что для всех % > 0
ХД*, 0, ... , 0) = 0, «=1,2, ... , л. A0.30)
406 Глава X. ВВЕДЕНИЕ В ОБЩУЮ ТЕОРИЮ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
Пример 2. Составить уравнения возмущенного движения около
положений равновесного состояния системы, движение которой задано уравнениями
%-у-*-*. 1
Значения координат равновесных состояний получим из уравнений
у - х - х2 = 0, 1
Зх - у - х2 = 0. I
Таких состояний будет два:
хх = 0, уг = 0; х2=1, у2 = 2.
Уравнения возмущенного движения для равновесного состояния хх = ух = 0
получим, сделав подстановку:
х = х1 + Ъ), у = у1 + т\.
Уравнениями возмущенного движения будут те же уравнения, только с
другими обозначениями координат:
Уравнения возмущенного движения около равновесного состояния х2 = 1;
у2 = 2 получим после подстановки
х = 1 + ^, у = 2 + ц.
Это будут уравнения
10. ФУНКЦИИ ЛЯПУНОВА ВТОРОГО РОДА. При исследовании
устойчивости неустановившихся движений по второму методу
Ляпунова функции, скорость изменения которых в силу уравнений
возмущенного движения определяет при известных условиях
общее направление изменений координат системы, как правило,
явно зависят от времени. Такие функции будем называть в
дальнейшем функциями Ляпунова второго рода. Они зависят, кроме г, от
относительных координат х19 х2, ... , хп, обращаются в нуль для
х1 = х2 = ••• = хп = 0 и Для них» так же как и Для функций первого
рода, должна существовать область
1х2 < В2,
10. Функции Ляпунова второго рода
407
в которой для всех I > 0 эти функции конечны, однозначны,
непрерывны по всем переменным и знакоопределенны. Однако
определение знакоопределенности функций, явно зависящих
от времени, существенным образом отличается от
определения знакоопределенности функций первого рода. По Ляпунову
функция
У(г, хг,..., хп)
называется знакоопределенной в области (В), если существует в
той же области положительно-определенная функция первого
рода (явно от времени не зависящая)
такая, что для всех I > 0 и
имеет место одно из неравенств
У>\У\ -У>МГ. A0.31)
В первом случае функция УA, х:1, ... , хп) считается
положительно-определенной, во втором — отрицательно-определенной.
Положительно-определенной функцией Ляпунова второго
рода будет, например, функция
V = Ъ{х\ + х|) - 2хгх2 соз I
при любом В для I > 2. В самом деле, перепишем эту функцию в
виде
V = {Ь - \){х\ + х|) + (х\ Ч~ х| - 2ххх2 сой I).
После этого, приняв во внимание, что
Х-1 г Хо ~ ыХ1 Хо СОЬ Т >^ \3,
найдем, что для 1> 2
Ц - 1){х\ + х|) + (х2 4- х\ - 2хгх2 соз I) > х\ + х|.
Роль функции первого рода ]У(хл, ... , хп) здесь играет
положительно-определенная форма
ХА _1_ у А
408 Глава X. ВВЕДЕНИЕ В ОБЩУЮ ТЕОРИЮ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
Пример 3. В качестве другого примера рассмотрим кинетическую
энергию приведенного коленчатого вала. В приближенных расчетах коленчатого
вала на крутильные колебания кинетическая энергия системы приводится к
положительно-определенной квадратическои функции от угловых скоростей
с постоянными коэффициентами:
2Т = 11&*1+12в1 + ...+1к&1,
где 11 — моменты инерции приведенных масс. Эти моменты считаются
постоянными. В действительности приведенные моменты инерции масс кри-
вошипно-шатунных механизмов являются периодическими функциями
времени с периодом, соответствующим одному обороту вала. В простейшем
случае (бесконечно длинный шатун) можно положить
1Ь = 1Ю + а? зги2 со*, / = 1, 2, ... , га,
где т — число цилиндров, 110 = сопз!, агФ 0 для цилиндровых масс и аг = 0 —
для масс с постоянными моментами инерции, со — угловая скорость
вращения вала.
Учитывая эти изменения моментов инерции, получим для кинетической
энергии выражение
т
2Т = ^Цю + а? 8Ш2 со*] 62 + 1т+1 ё2т + х + ... = УЦ, 91; в2, ... , в4).
Эта функция, явно зависящая от времени, является
положительно-определенной функцией переменных 0-, так как можно указать
положительно-определенную, явно от времени не зависящую функцию, именно
^ = X/юё2
I = 1
такую, что для всех I > 0 и для любых 0^ будет иметь место неравенство
Определение знакоопределенности функций Ляпунова второго
рода получает простую геометрическую интерпретацию для систем
с одной степенью свободы, когда эти функции зависят, кроме
времени I, только от двух переменных хх и х2. Эта интерпретация не
только наглядно разъясняет конкретное содержание условий
знакоопределенности функций Ляпунова второго рода, но и в весьма
элементарной форме позволяет выяснить значение этих условий в
суждениях об устойчивости неустановившихся движений.
Рассмотрим прежде всего поверхность
г = \У(х1,х2),
A0.32)
10. Функции Ляпунова второго рода
409
где УУ(хг, х2) — положительно-определенная в области (К),
функция координат хх и х2, уничтожающаяся для хх = х2 = 0.
Часть этой поверхности вблизи нулевой точки представлена на
рис. 101. Эта поверхность с течением времени не изменяется.
Постоянным положительным значениям
2 = С> 0
соответствуют плоскости, перпендикулярные оси Ог и
пересекающие поверхность A0.32) по кривым Щхр х2) = с,
проецирующимся на фазовую плоскость Охгх2 в натуральную величину.
Свойства этих кривых в области определения функции Т^Г,
например в области (е),
Щ < е2 < Я2,
нам известны: это замкнутые кривые, окружающие нулевую
точку со всех сторон и вложенные одна в другую. В частности, если
Р — нижняя граница 1У(х19 х2) на окружности (е),
•/V- -I Т Л- о О ,
И
С<Р, A0.33)
то кривая
Щхр х2) = с
помещается внутри окружности (е), может быть, касаясь ее в
некоторых точках.
Рис. 101
410 Глава X. ВВЕДЕНИЕ В ОБЩУЮ ТЕОРИЮ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
Рассмотрим теперь поверхность
2 = УA, х19 х2), A0.34)
изменяющуюся с течением времени. Если для всех I > 0 в
рассматриваемой нами области (е) имеет место неравенство
У{1, хг, х2) > Щх15 х2),
то поверхность A0.34) располагается внутри поверхности
A0.32), как показано на рис. 101, так что при всех изменениях
кривой
УЦ, х19 х2) = с, A0.35)
полученной от пересечения поверхности A0.34) плоскостью
2 = С,
эта кривая остается внутри кривой
^^(х^ Х2) = С. A0.36)
Итак, если с выбрано в соответствии с условием A0.33), то
кривая A0.35) при всех своих изменениях будет оставаться, так же
как и кривая A0.36), внутри окружности (г). Можно сказать, что
условие знакоопределенности функции УA, хх, х2) налагает
ограничение на изменения координат хг и х2, соответствующие
перемещениям изображающей точки наружу, т. е. по направлению от
нулевой точки. В этом отношении функции Ляпунова второго
рода ведут себя аналогично функциям первого рода. В частности,
если каким-либо образом будет установлено, что в возмущенном
движении координаты изображающей точки удовлетворяют
условию
Щ^х19 х2)< Р
для всех I > 0, то отсюда будет следовать, что расстояние
изображающей точки в этом движении от начала координат не станет
больше 8, т. е. будет иметь место неравенство
Щ < 82.
Определение функций Ляпунова второго рода, допускающих
бесконечно малый высший предел, почти не отличается по форме
от изложенного выше определения допускающих бесконечно
малый высший предел функций первого рода.
10. Функции Ляпунова второго рода
411
I Функция второго рода V допускает бесконечно малый высший
предел, если для сколь угодно малого положительного числа С? > 0
найдется радиус л такой и сфера
1х? = Л2,
на которой (? будет верхней границей функции У{19 х19 х2), такая,
что для х19 удовлетворяющих условию
Хх2 < г|2
при всех I > 0, будет иметь место неравенство
| У{1, х19 х2) < Я.
Обладание бесконечно малым высшим пределом не является
свойством функций второго рода, вытекающим, например, из их
непрерывности, как это было у функций первого рода.
Существуют функции второго рода, не обладающие бесконечно малым
высшим пределом.
Когда же таковым пределом они обладают, из этого свойства
можно сделать выводы в отношении изменения координат хг и
х2, аналогичные изложенным в теореме 3 (с. 393). В частности,
если каким-либо образом будет установлено, что для всех 1>§
У(г,х19... ,хп)><2,
то значения координат х1 для всех 1>0 будут удовлетворять
неравенству
Хх2 > л2.
Обладание функцией УA9 х19 ... , хп) бесконечно малым
высшим пределом обеспечивает равномерное по I стягивание
поверхностей
УA9 х19 ... ,хп) = с
к нулю, когда Ех2 —> 0, налагая тем самым некоторое
ограничение на изменения координат, соответствующие перемещениям во
внутрь области к нулевой точке.
В самом деле, обращаясь к рис. 101, легко обнаружим, что
кривая
УЦ,х1,х2) = с9 A0.37)
где с > ф, лежащая внутри кривой
У У \^Х л , Хо^ С,
412 Глава X. ВВЕДЕНИЕ В ОБЩУЮ ТЕОРИЮ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
охватывающей при том же значении с окружность (в), может
пересекать эту окружность и даже целиком внутри нее
располагаться. И только обладание этой функцией бесконечно малым
высшим пределом повлечет за собой вместе с неравенством
У{19 х19 х2) = с>Я
также и условие
2х? > л2,
в силу которого, как бы мало ни было с >(?, кривая
У(Ь9 х19 х2) = с > ф
при всех своих изменениях с течением времени будет оставаться
вне некоторой достаточно малой области, определяемой
окружностью
Ъх* > л2.
11. ТЕОРЕМА ЛЯПУНОВА ОБ УСТОЙЧИВОСТИ
НЕУСТАНОВИВШЕГОСЯ ДВИЖЕНИЯ. Если уравнения возмущенного движения
дх
-7-• = Х}($9 ЛГ1, ... , Хп), 1=1,2, ... , П
таковы, что можно найти такую знакоопределенную
функцию У{19 х19 ... , хп), производная которой в силу уравнений
возмущенного движения была бы знакопостоянной функцией
противоположного знака с V или тождественно равной нулю, то
невозмущенное движение
х1 = х2 — ... = хп = О
устойчиво по Ляпунову.
Доказательство. Предположим, что условия теоремы
выполнены и найдена положительно-определенная функция
к(г, х^9 ... , хп)9
для которой в области (К)9
2*2 < В2,
для всех 1>§ имеют место неравенства
У>УГ9 Т^<0, A0.38)
где УУ(х19 ... , хп) — не зависящая явно от I
положительно-определенная в области (К) функция координат хг Требуется доказать,
11. Теорема Ляпунова об устойчивости движения
413
что, как бы мало ни было наперед заданное положительное число
г, можно подобрать другое число г|(8) > 0 такое, что с начальными
условиями
Хх20 < г|2 при I = О,
переменные хг, начавшие свои изменения в возмущенном
движении в момент I = 0 с начальных значений х10, ... , хп0, в
дальнейшем для всех I > О будут удовлетворять неравенству
Хх2<82. A0.39)
Для доказательства задаемся числом 8,
0 < 8 < Л,
и строим сферу (е),
Хх2 = 82.
Пусть Р — нижний предел функции У? на этой сфере. Очевидно,
Р > 0. Из условия теоремы
следует, что в возмущенном движении для всех % > 0 и при
начальном значении функции V, равном У0,
УA, хг, ... , хп) < У0.
Рассмотрим функцию
Ух = ^@, х19 ... , хп),
которая получается из V, если зафиксировать значение *,
положив I = 0, и изменять #. в области A0.39) произвольно.
Функция У'1, как явно от времени не зависящая, допускает
бесконечно малый высший предел и, следовательно, как бы мало
ни было Р, всегда можно найти число г\(Р) > 0 такое, что для всех
значений х-, удовлетворяющих условию
Хх2 < л2,
Ух не будет превосходить Р, т. е.
ПО, *!, ... , Хп) < Р.
Согласно этому условию выберем начальные значения
координат х10, ... , хп0, положив
1х20<г|2-
414 Глава X. ВВЕДЕНИЕ В ОБЩУЮ ТЕОРИЮ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
Тогда для выбранных таким образом начальных значений хю
У0 = У@, х10, ... , хп0) < Р
и для всех I > О
Т^ = УЦ, х19 ... , хп)<Р.
Следовательно, Хх? < с2 для всех I > 0.
Доказанная теорема содержит в себе как частные случаи и
теоремы об устойчивости равновесных состояний, рассмотренные
в предыдущих параграфах. Следует отметить, что теорема
Ляпунова, как, впрочем, все общие теоремы второго метода,
устанавливает достаточные условия устойчивости невозмущенного
движения.
12. ТЕОРЕМА ЛЯПУНОВА ОБ АСИМПТОТИЧЕСКОЙ УСТОЙЧИВОСТИ.
Определение устойчивости невозмущенного движения по
Ляпунову не предполагает обязательного возвращения системы в
невозмущенное состояние, хотя и не исключает возможности
такого возвращения. В этом отношении устойчивость по Ляпунову
отличается от общепринятого представления об устойчивости, в
котором существенным образом предполагается наличие в
возмущенном движении восстанавливающих сил, возвращающих
систему через более или менее продолжительный промежуток
времени в невозмущенное состояние. А. М. Ляпунов поведение
системы, в котором она в возмущенном движении безгранично
приближается к невозмущенному движению, рассматривал как
частный случай устойчивости и ввел для него наименование
асимптотической устойчивости.
В случае асимптотической устойчивости изображающая
систему точка при надлежаще выбранных начальных значениях
координат х10 в последующем движении будет вести себя так, что
!х* > 0.
Условия асимптотической устойчивости даны Ляпуновым в
теореме об асимптотической устойчивости. Эта теорема
формулируется следующим образом.
Теорема. Если уравнения возмущенного движения
—/ =Х/(*, *], ... , хп)9 / = 1,2, ... , п
12. Теорема об асимптотической устойчивости
415
таковы, что может быть найдена знакоопределенная функция
УA, х19 ... , хп), допускающая бесконечно малый высший предел,
производная которой по времени в силу уравнений
возмущенного движения была бы знакоопределенной функцией
противоположного знака с У, то всякое возмущенное движение,
достаточно близкое в начальный момент к невозмущенному, будет
асимптотически приближаться к последнему.
Доказательство. Если найдена
положительно-определенная функция V, удовлетворяющая условиям теоремы, то
существует область (В) значений переменных хр
Ъх\ < В2,
в которой для всех 1> § имеют место неравенства
У>\У, -У>}У19
где }У и }Уг — известные положительно-определенные в области (В)
функции координат х-, явно от времени не зависящие. Вместе с
тем выполнены, очевидно, условия первой теоремы Ляпунова и
поэтому, как бы мало ни было наперед заданное положительное
число 8 > 0, можно найти л(8) > 0 такое, что в возмущенном движении
изображающая систему точка не выйдет за пределы сферы (е),
1*2 < 82,
если начальные значения координат будут выбраны согласно
условию
Ъх% < л2.
Теперь нужно доказать, что при выбранных согласно этому
неравенству начальных значениях координат при указанных в
теореме свойствах функций V и V нельзя найти столь малого
положительного числа / > 0, меньше которого не стала бы с течением
времени функция V.
Предположим, однако, что такое число / существует. Так как
V допускает бесконечно малый высший предел, то, как бы это
число / мало ни было, к нему можно подобрать ех > О такое, что
для всех х19 для которых
У>1,
будет иметь место неравенство
X*2 < 82.
416 Глава X. ВВЕДЕНИЕ В ОБЩУЮ ТЕОРИЮ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
Таким образом, при сделанном предположении координаты хь
изменялись бы в возмущенном движении в области
г\ < Ъх\ < г2.
Обозначим через Рх нижнюю границу \Уг в этой области. Тогда
в этой области
О < Рг < У7Х < -У.
Интегрируя по I от 0 до некоторого %> получим
или
-\ У &1 > Рг ] & > О
о о
У-у0<-рг*, у<у0-рги
Как бы мало ни было Р19 наступит такой момент времени I,
когда V станет отрицательным, а это в силу положительной
определенности ^невозможно.
Следовательно, как бы мало ни было число /, настанет момент,
когда V сделается меньше /. Но так как V — постоянно
убывающая функция I, то, сделавшись меньше I, она навсегда останется
таковой, асимптотически стягиваясь в нулевую точку. Вместе с
тем, конечно, и
2*2 — 0.
Теорема доказана.
Для системы с одной степенью свободы, с двумя переменными
хг и х2 теорема об асимптотической устойчивости допускает
простую геометрическую
интерпретацию. Пусть V зависит от двух
переменных х и у:
У=У(х,у).
Кривые семейства
У=с
окружают начало, как показано
на рис. 102. Уравнения
возмущенного движения
Рис. 102
%-Чх.У).
Й-^*,,)
12. Теорема об асимптотической устойчивости
417
определяют направления касательных к фазовым траекториям в
соответствующих точках фазовой плоскости, или проекции
скорости изображающей точки на оси координат. Составим
производную V по времени
«г-аг**+яг*м A0.40)
си ох си ду си
Как видно из этой формулы, производная ^пропорциональна
косинусу угла а между направлением внешней нормали N к кривой
V = с и направлением касательной к фазовой траектории,
которую в возмущенном движении описывает изображающая точка.
Если этот косинус нигде не обращается в нуль, а это так и будет,
если V — знакоопределенная функция, то траектория
изображающей точки нигде не будет касаться ни одной из кривых V = с.
Если при этом V < 0, то косинус угла а будет отрицательным,
т. е. траектория изображающей точки будет пересекать кривые
V = с под тупыми углами. Изображающая точка переходит с
одной кривой на другую, заворачиваясь снаружи вовнутрь каждой
кривой V = с и описывая вокруг начала координат направленную
к нему кривую, имеющую форму спирали (рис. 102).
Пример 4. Исследовать устойчивость невозмущенного движения
х = у = 0,
если уравнения возмущенного движения имеют вид
^ = ~2у 8Н1 I - X3 81П2 *, ]
си 1
Ну Г A0.41)
—^ = 4Х 8Н1 I - У7 С082 I,
Хотя движение неустановившееся, здесь можно найти не зависящую
явно от времени функцию, удовлетворяющую в силу уравнений A0.41)
условиям теоремы Ляпунова. Такой функцией будет
У=2х2 + у2.
Ее производная по времени в силу уравнения A0.41)
V = 4х (~2у зт I - х3 8Н12 *) + 2у Dх зт I - у1 соз2 I) =
= -4х4 зт2 г - 2*/8 соз2 г < 0,
есть постоянно-отрицательная функция, так как при ^ = п она обращается в
нуль при у = 0 и любом х. Следовательно, невозмущенное движение х = у = 0
устойчиво.
14- 10456 Бабаков
418 Глава X. ВВЕДЕНИЕ В ОБЩУЮ ТЕОРИЮ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
Пример 5. Уравнения возмущенного движения системы имеют вид
^ =-(х- р21/)A - ах2 - Ъу2), ^ = -(у + а2х)A - ах2 - Ъу2),
где 0 < а < Ьу 0 < а < р. Доказать, что невозмущенное движение х = у = О
устойчиво асимптотически.
Функцией, удовлетворяющей условиям теоремы Ляпунова, здесь будет
У=а2х2 + $2у2.
Это положительно-определенная функция, явно от времени не зависящая.
Ее производная по времени в силу уравнений возмущенного движения равна
У=™**+™*М.= 2 2 н _ р2 )A _ 2 _ ь 2)]
+ 2$2у [-(у + а2х)A - ах2 - Ъу2)] = -2 (а2*2 + р2г/2)A - ах2 - 6г/2).
Она будет отрицательно-определенной в области (а),
х2 + у2< 1/Ъ,
так как в этом случае ах2 + Ъу2 < 1. Таким образом, существует область (а),
в которой выполняются условия теоремы, причем в этой области
У>0, V <0.
Следовательно, невозмущенное движение
х = у = 0
устойчиво асимптотически.
Пример 6. Уравнения возмущенного движения имеют вид
^ =у-Х*, ^ =-Х-У\
A* У <М *
Доказать, что движение х = у = О устойчиво асимптотически.
Функция
У=х2 + у2
и ее производная
V = -2(х4 + у4)
являются знакоопределенными функциями противоположных знаков,
причем V, как не зависящая явно от времени, допускает бесконечно малый
высший предел.
Следовательно, невозмущенное движение
х = у = 0
устойчиво асимптотически: выведенная из этого состояния система,
предоставленная затем самой себе, будет неограниченно к нему приближаться.
13. Теорема Рауса
419
13. ОБ УСТОЙЧИВОСТИ СТАЦИОНАРНОГО ДВИЖЕНИЯ СИСТЕМЫ С
ЦИКЛИЧЕСКИМИ КООРДИНАТАМИ — ТЕОРЕМА РАУСА1).
Циклическими координатами называются координаты, не входящие
явно в функцию Лагранжа Ь. Стационарным движением системы
с циклическими координатами называется движение, в котором
нециклические координаты и циклические скорости сохраняют
постоянные значения. Для такого движения Э. Раус построил
энергетический критерий устойчивости, аналогичный критерию
Лагранжа — Дирихле для равновесного состояния
консервативной системы. Этот критерий можно получить как простое
следствие теорем об устойчивости Ляпунова.
Система с п степенями свободы и с (п - з) циклическими
координатами имеет (п - з) циклических интегралов
|^- = Ра, а = 8 + 1, ...,д, A0.42)
где Ь — функция Лагранжа (Ь = Т - П).
С помощью этих интегралов можно исключить (п - з)
циклических скоростей, выразив их через нециклические координаты
и скорости. Как известно, уравнения движения с исключенными
циклическими скоростями могут быть приведены к форме
уравнений Лагранжа (см. с. 30):
где вместо функции Лагранжа Ь стоит функция Рауса
п
К = Ь- I $аР„, A0.44)
а = 8+1
куда подставлены найденные из уравнений A0.42) циклические
скорости, выраженные через нециклические координаты,
нециклические скорости и постоянные (За. Далее система уравнений
A0.43) с исключенными циклическими скоростями называется
системой (К), а первоначальная — системой (Ь).
Предположим, что при некоторых значениях постоянных Ра
уравнения A0.43) допускают частное решение
д1 = д2 = ... = д5 = 0. A0.45)
х> См. у Э. Рауса [79] и Ф. Р. Гантмахера [12, гл. VII].
420 Глава X. ВВЕДЕНИЕ В ОБЩУЮ ТЕОРИЮ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
Этому решению будет соответствовать стационарное движение
первоначальной системы (Ь), в котором будут изменяться только
одни циклические координаты ^а.
Для системы (В) это же частное решение, в котором ^^ = #2 = ... =
= д5 = сопб1 = 0, а следовательно, и с[г = д2 = ... = #5 = 0, определяет
ее равновесное состояние. Таким образом, равновесному
состоянию A0.45) системы (В) будет соответствовать стационарное
движение системы (Ь). Дадим теперь системе (В) некоторое
начальное возмущение, не изменяя постоянных Ра, и предоставим
ее самой себе. Она будет двигаться согласно уравнениям A0.43),
которые будут уравнениями ее возмущенного движения. Если
эти уравнения таковы, что можно найти знакоопределенную
функцию ^координат д1У д2, ... , #8, производная которой по I
будет знакопостоянной функцией противоположного знака с V или
тождественно равной нулю, то равновесное состояние A0.45)
устойчиво, а следовательно, будет устойчиво и соответствующее
ему стационарное движение системы (Ь).
В частном случае, когда В не зависит явно от времени, система
A0.43) имеет интеграл, выражающий закон сохранения энергии.
Чтобы его получить, умножим каждое из уравнений A0.43) на
соответствующую ф и просуммируем по у. Тогда получим
или
откуда следует
2 |Д А. -В = НП= СОП8*.
Этот интеграл можно также получить из интеграла энергии
системы (Ь), если исключить из него циклические скорости с помощью
уравнений A0.42). В возмущенном движении полная энергия Нв
будет оставаться постоянной, причем величина этой постоянной
будет определяться начальным возмущением. Обозначим полную
энергию в равновесном состоянии A0.45) через Н^. Составим
функцию
У=НЕ-Н%. A0.46)
В силу уравнений возмущенного движения A0.43)
ау _ анк = 0
с1* <И
13. Теорема Рауса
421
Равновесное состояние A0.45) устойчиво, если функция A0.46) —
знакоопределенная функция координат дх> д2» ••• » #5» #1» — » Я8- Рав_
новесному состоянию A0.45) системы (Е) соответствует
стационарное движение системы (Ь), Мы приходим таким образом к
теореме Рауса об устойчивости стационарного движения системы
с циклическими координатами. Сам Э. Раус формулировал
теорему следующим образом.
Теорема. Данное стационарное движение устойчиво
относительно нециклических координат и скоростей, если полная
энергия системы после исключения циклических скоростей для
значений нециклических координат и скоростей,
соответствующих стационарному движению, является экстремумом при
возмущениях, оставляющих неизменными постоянные
циклических интегралов ра.
Пример 7. Материальная точка массы т описывает окружность радиуса
г0 под действием центральной притягивающей силы Р, пропорциональной
п-й степени расстояния г: Р = -агп. Требуется найти условия, при которых
траектория возмущенного движения будет близка к исходной окружности.
Устойчивость движения, выражающаяся в том, что при достаточно
малом начальном возмущении точка движется по траектории, сколь угодно
близкой к невозмущенной, называется орбитальной устойчивостью. В
рассматриваемой задаче требуется, таким образом, найти условия орбитальной
устойчивости невозмущенного движения. Для нахождения этих условий
воспользуемся теоремой Рауса об устойчивости стационарного движения
системы с циклическими координатами.
Полная энергия точки т в полярных координатах составляет
#=1[тг2 + тг292] + ^^. A0.47)
Циклической координатой здесь является 9. Ей соответствует интеграл
тг^д = р. С помощью этого интеграла исключаем из Е циклическую скорость 6,
после чего
Я-1Гтг« + 11] + «^. A0.48)
2 |_ тг2] п + 1
Экстремуму Е будет соответствовать устойчивое движение точки по
орбите радиуса г0. Из условий экстремума Е находим
Р - тг2 = 0, дЛ = -1 \Ш - 2аА = 0, A0.49)
дг дг 21тг3 ]
откуда получаем
г = 0, г = сопз! = г0, аг#--й!-=0. A0.50)
" тг§
422 Глава X. ВВЕДЕНИЕ В ОБЩУЮ ТЕОРИЮ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
Эти условия являются только необходимыми. Из них еще не следует, что
найденным г0 и г соответствует действительный экстремум Е. Необходимо
дальнейшее исследование решений. Для этого найденные из последних
уравнений г0 и г нужно подставить в выражения вторых производных
д2Е д2Е д2Е
дг2 '
затем составить определитель
д2Е
дг2
д2Е
дгдг
дгдг
д2Е
дгдг
д2Е
дг2
дг2
— 1
Если А > 0, то Е имеет при
д2Е
< 0 максимум, а при
д2Е
дг2 дг2
Если А < 0, то Е не имеет ни максимума, ни минимума.
В рассматриваемом случае
>0
д2Е
дг2
= т,
д2Е
дгдг
°> р-аСп + З)^.
Следовательно,
А = ат(п + 3) г§
п-\
д2Е
дг2
= т> 0.
A0.51)
минимум.
A0.52)
A0.53)
Движение по кругу орбитально устойчиво, если А > 0, т. е. если п + 3 > 0 или
П>-3.
14. ТЕОРЕМА ЛЯПУНОВА О НЕУСТОЙЧИВОСТИ ДВИЖЕНИЯ. Если
уравнения возмущенного движения таковы, что можно найти
ограниченную функцию УA, х19 ... , хп), которая обладает в силу
этих уравнений знакоопределенной производной У{1> х19 ... , хп),
допускает бесконечно малый высший предел и, кроме того,
такова, что для I, большего некоторого предела ^0, надлежащим
выбором значений переменных х19 численно сколь угодно малых,
ее можно сделать одинакового знака с V, то невозмущенное
движение
0
неустойчиво.
Доказательство. Предположим, что найдена функция
У(*, х19 ... , хп), удовлетворяющая условиям теоремы, и ее
производная V — положительно-определенная.
14. Теорема Ляпунова о неустойчивости движения
423
Следовательно, существует область (В),
1х2 < В2,
в которой для всех I > О
У>Щ9 \У\<Ь, A0.54)
где ТУХ — положительно-определенная, явно от времени не
зависящая функция координат х., Ь — некоторая положительная
константа.
Задавшись сколь угодно малым положительным числом е < В,
рассмотрим возмущенное движение системы, для которого в
некоторый момент I = ^0 > 0, принимаемый дальше за начальный,
соответствующие значения координат (начальные значения) хю
удовлетворяют неравенствам
Хх20 < в2, У(*0, х10, ... , хп0) > 0. A0.55)
По условиям теоремы такой выбор начальных значений хю
возможен для достаточно малого с.
Требуется доказать, что в рассматриваемом возмущенном
движении изображающая точка выйдет за пределы области
1х2 < В2.
Допустим, однако, что изображающая систему точка не
покинет области (В). Тогда в силу первого неравенства A0.54),
поскольку в этой области производная У остается все время
положительной,
У(*, х19 ... , хп) > У(*0, х10, ... , хп0) > 0.
Так как V = УA0, х10, ... , хп0) допускает бесконечно малый
высший предел, то, как бы мало ни было У0 > 0, найдется гг > 0 такое,
что по крайней мере наибольшая из координат х1 не сделается во
время возмущенного движения меньше (по абсолютной величине)
числа 81# Таким образом, при сделанном нами допущении
изображающая систему точка будет двигаться в области
82< 2х2<#2. A0.56)
Обозначим через Рг нижнюю границу \Уг в области A0.56). Тогда
0<Р1<Ж1<^.
424 Глава XI. ОБ УСТОЙЧИВОСТИ ПО ПЕРВОМУ ПРИБЛИЖЕНИЮ
Интегрируя по I в пределах от ^0 до произвольного I, из
последних неравенств получим
или
У>У0 + Р1A~10), A0.57)
что невозможно, так как V — функция ограниченная, а правая
часть A0.57) вместе с % растет неограниченно. Нельзя поэтому
допустить, что точка не покинет области (В), и, следовательно,
движение хг = ... = хп = 0 неустойчиво.
Пример 8. Исследовать устойчивость движения
х = у = 0,
если уравнения возмущенного движения имеют вид
~ = Зу + 4х3 + х5, ^ = -5х + Зу5.
Рассмотрим функцию
У=Ьх2 + Зу2.
Ее производная по I в силу уравнений возмущенного движения
<&. = Юх^ + 6г/^ = 10хCг/ + 4х3 + х5) + 6г/(-5х + З*/5) =
= 40х4 + 10х6 + 18г/6 > 0.
При любых х и у функции V и V обе положительно-определенные, т. е.
имеют одинаковые знаки. Следовательно, движение
х = у = 0
неустойчиво.
Г 71 а в а XI
Об устойчивости
по первому приближению
1. ПРЕДВАРИТЕЛЬНЫЕ ЗАМЕЧАНИЯ. Теоремы Ляпунова об
устойчивости движения, изложенные в гл. X, составляют содержание
качественной теории устойчивости. С помощью этих теорем
можно судить об устойчивости движения на основании уравне-
1. Предварительные замечания
425
ний возмущенного движения, не интегрируя последних. Однако
построение нужных для таких суждений функций Ляпунова в
большинстве случаев затруднительно. Общих правил построения
подобных функций до настоящего времени не существует1*.
В связи с этим в практических инженерных расчетах, в
частности, в теории автоматического регулирования, большое
распространение получили приближенные методы, одним из
основоположников которых стал профессор Петербургского
Технологического института И. А. Вышнеградский A831—1895). В 1876 г.
И. А. Вышнеградский впервые применил свой приближенный
метод к задаче об устойчивости регуляторов прямого действия.
Основной предпосылкой метода Вышнеградского было
допущение, что свойства системы в отношении устойчивости
установившегося ее движения обнаруживаются уже в тех малых
возмущенных движениях, которые возникают около невозмущенного
движения в течение небольшого промежутка времени вслед за
моментом сообщения системе достаточно малого начального
возмущения. На этом основании при решении вопросов об
устойчивости движения в уравнениях возмущенного движения
отбрасывались все члены выше первого порядка (относительно координат
и скоростей) и по форме интегралов линеаризованных уравнений
делались заключения об устойчивости невозмущенного
движения. Совокупность методов исследования устойчивости на
основании линеаризованных уравнений составляет содержание теории
первого приближения.
Однако теория первого приближения не всегда приводит к
правильным заключениям о поведении системы после возмущения ее
движения. Вот что говорит по этому поводу А. М. Ляпунов:
«Конечно, указанный сейчас прием вносит весьма существенное
упрощение, в особенности в тех случаях, когда коэффициенты
дифференциальных уравнений суть постоянные величины. Но
законность такого упрощения а ргюп ничем не оправдана, ибо дело
приводится к замене рассматриваемой задачи другою, с какою она
может не находиться ни в какой зависимости. Во всяком случае
очевидно, что если решение новой задачи и может давать ответ на
первоначальную, то только при известных условиях, а последние
обыкновенно не указываются» [30, с. 10].
Х) Некоторые указания по этому поводу см. в книгах Н. Г. Четаева [55],
Г. Н. Дубошина [17], А. И. Лурье [27].
426 Глава XI. ОБ УСТОЙЧИВОСТИ ПО ПЕРВОМУ ПРИБЛИЖЕНИЮ
Выяснение условий, при которых первое приближение
действительно решает вопрос об устойчивости, и составляет
содержание настоящей главы. Эти условия были установлены А. М.
Ляпуновым. Им же были в связи с этим указаны способы,
позволяющие решать этот вопрос в некоторых случаях, когда по первому
приближению судить об устойчивости нельзя.
2. КАНОНИЧЕСКАЯ ФОРМА УРАВНЕНИЙ ПЕРВОГО ПРИБЛИЖЕНИЯ.
Будем предполагать, что уравнения возмущенного движения в
первом приближении суть линейные дифференциальные уравнения
первого порядка, однородные, с постоянными коэффициентами:
6.хг _
-^- — а11х1 + а12х2 + ... + а<1кхк9
> (ИЛ)
6.x
к _
ак1Х1 + ак2Х2 + ••• + аккХк'
Чтобы найти форму всех интегралов, не делая о ней никаких
предварительных предположений, попытаемся привести
уравнения A1.1) сначала к возможно более простому виду. Таким
простейшим видом будет тот, в котором в каждое уравнение будет
входить только одна переменная. Такую форму уравнений
А. М. Ляпунов называл канонической формой.
Будем искать такие координаты ^., связанные с х1 линейными
соотношениями
Ъ = Ул*1 + — + Ък*к> *=1*2, ... , 71, A1.2)
чтобы в этих координатах уравнения возмущенного движения
имели вид
-^=А,&, 1=1,2,...,*. A1.3)
Подставим выражения A1.2) в уравнения A1.3). Тогда,
принимая во внимание A1.1), найдем
Уп-^7 + - + Уьк-& = \ (Уа*1 + - + ЪЛ>> * = 1, 2, ... , к
или
У И (а11*1 + - + а1кХк) + - + Угк (ак1Х1 + — + аккХк) =
= \ (упхг + ... + у1кхк), 1 = 1,2, ... , к.
2. Каноническая форма уравнений
427
Сравнивая коэффициенты при одинаковых хь, получим
(ап - ^) У а + а21У/2 + — + <*к1Уиг °> 1
а1кУп + а2*Уй + - + (акк ~ \) Уиг °-
A1.4)
Если эти уравнения имеют отличные от нуля решения для у1,, то
приведение системы A1.1) к виду A1.3) возможно. Но уравнения
A1.4) имеют отличные от нуля решения, когда определитель
ОД =
1Ц ^ а21
*Л1
42
*22
А, ... а
к2
Пк
12к
1кк
X
= 0.
A1.5)
Это уравнение называется характеристическим уравнением.
Предположим, что характеристическое уравнение имеет к
различных (простых) корней. Каждому из этих корней будет
соответствовать система значений
Уа>У;2>
У*л»
получаемых из A1.4) при подстановке корня Хг Мы найдем
таким образом к линейных относительно х/ форм ^. Если эти
формы ^ принять за новые координаты, то уравнения A1.1) будут
иметь вид
^1^1»
^ = ХЕ
^ = хе
A1.6)
Такая система интегрируется непосредственно. Умножим каж-
-\л
дое из уравнений A1.6) на соответствующее е 1 . Получим из
A1.6) систему
или
1, ^, ... , /2,
1,2,..., к.
428 Глава XI. ОБ УСТОЙЧИВОСТИ ПО ПЕРВОМУ ПРИБЛИЖЕНИЮ
Отсюда
е 1 ^ = сопз!; = С-, 1= 1, 2, ... , к
и, следовательно,
^ = С,е~^', *= 1,2, ...,*. A1.7)
Приведение уравнения A1.1) к каноническому виду, когда
корни характеристического уравнения кратны, весьма сложно.
Ограничимся поэтому изложением окончательных результатов,
отсылая за подробностями к специальным курсам, в частности к
книге Н. Г. Четаева [54].
3. СЛУЧАЙ КРАТНЫХ КОРНЕЙ ХАРАКТЕРИСТИЧЕСКОГО
УРАВНЕНИЯ. Предположим, что определитель В(к) имеет кратный
корень к0 кратностью /. Наибольшая степень двучлена (к - к0), на
которую делится В(к), равна I. Пусть наибольшая степень
двучлена (к - А,0), на которую делятся все миноры (к - 1)-го порядка Х>(А,),
будет (к - к0)г; наибольшая степень (к - к0), на которую делятся
все миноры (к - 2)-го порядка, будет (к - к0J и т. д.; наибольшей
степенью (к - А,0), на которую делятся все миноры (к - ц + 1)-го
порядка, является (к - к0) ^_1, и пусть по крайней мере один из
миноров (к - ц)-го порядка не делится на (к - к0), т. е. не
обращается в нуль при к = к0. Очевидно,
I > 1Х > 12 > ... > I г > 0.
Положим
^ ~ Ч = в1> ^1 ~ ^2 ^ ^2» ••' » ^ц-2 ~ ^~1 = бц-1' 'ц-1 = в\х'
Числа е[ не возрастают:
Р*. ^ РП^ ^ Р Л ^ Р .
Тогда
(Ь - V = (к - к0р • (X - к0)е* •... • (к - ^.
Множители
(^ - \/М^ ~ ^о)'2>-.. , (^ - Ч)'ц
называются элементарными делителями 0(к),
соответствующими корню ^0. Каждому корню Б(к) соответствует по крайней мере
один элементарный делитель: простому — один простой,
кратному — несколько простых или кратных элементарных делителей.
3. Кратные корни характеристического уравнения
429
Предположим, что В(Х) имеет только простые элементарные
делители. В этом случае корни уравнения
В(Х) = О
являются или простыми (неравными), или же среди корней
имеются кратные, но этим кратным корням соответствуют
несколько простых элементарных делителей. И в том, и в другом случае
каноническая форма уравнений возмущенного движения
одинакова — это форма, установленная для простых корней:
где теперь некоторые Х1 могут повторяться.
Предположим, что В(Х) имеет кратные корни с кратными
элементарными делителями:
(к - хгГ\ (х - х2)\ ..., (х - хт)Ч ^ + ц2 + ... + Цт = к,
где Хг, ... , Хт не обязательно различны.
Каждому такому кратному элементарному делителю,
например (X - ^.)Ц/, будет соответствовать группа канонических
уравнений числом ц/ вида:
а*
: ^п>
3?-<« + »А
</2>
(П.8)
—^ = А,,. + Х&. .
Чтобы найти интегралы группы уравнений A1.8), умножим
все уравнения на одно и то же е 1 . Тогда всю группу A1.8)
можно привести к виду:
<И
(Г^Ча) = 0,
-хл
хл,
^(е л'Чй)=^ 'Ча
й (? ^'&. )= е ***'&.
а*
430 Глава XI. ОБ УСТОЙЧИВОСТИ ПО ПЕРВОМУ ПРИБЛИЖЕНИЮ
или, опуская индекс I,
(е-*-%) = 0,
Из этих уравнений находим
е ^2 = с1^ ~^~ с2>
с^2
е'х%
\ СрГ ~т" Со,
или
-хг
^2 = (с^ + с2)^,
A1.9)
Из рассмотрения формы интегралов A1.7) и A1.9) можно
сделать следующие заключения об условиях устойчивости
линеаризованной системы A1.1).
¦ Если все корни характеристического уравнения
имеют отрицательную вещественную часть, то невозмущенное
движение линеаризованной системы асимптотически устойчиво,
независимо от того, будут ли эти корни простые или кратные (с
простыми или кратными элементарными делителями). В этом случае
еи = е(а + ро* = еаг (соз р* + I зш C0-
¦ Если хотя бы один из корней Х8 имеет положительную
вещественную часть, то движение линеаризованной системы неустойчиво.
3. Кратные корни характеристического уравнения
431
ш Если некоторые корни имеют равную нулю вещественную
часть (при не равной нулю и отрицательной вещественной части
других корней), то движение будет устойчиво, когда корням с
нулевой вещественной частью будут соответствовать простые
элементарные делители В(Х), и неустойчиво, когда этим корням
будут соответствовать кратные элементарные делители 1)(А,).
Пример 1Х). Уравнения возмущенного движения системы с одной
степенью свободы имеют вид
6.x
ей
61
= 2ху - х + у,
= 5х4 + у3 + 2х - Зу.
Будет ли устойчивым невозмущенное движение х = у = О?
Характеристическое уравнение этой системы имеет вид
О
-1-Х 1
2 -3-^
X2 + 4А. + 1 = 0.
Его корни X, 2 = -2 + вещественны и отрицательны. Следовательно,
невозмущенное движение х = у = 0 асимптотически устойчиво.
Пример 2. Тот же, что и в примере 1, вопрос об устойчивости
невозмущенного движения х = у = 0, если уравнения возмущенного движения имеют вид
^ = 1п Dг/ + е~гх), ±И = 2у-1 + 3Л - 6х .
си си
Разложив правые части в ряды по степеням хну и ограничившись
линейными частями этих разложений, получим систему
Характеристическое уравнение
6.x
а7
61;
-3
-2
= -Зх + 4*/,
= 2у- 2х.
-X 4
2-Х\
= 0
имеет корни -1/2 ± I л/3/2. Невозмущенное движение х = у = 0 устойчиво
асимптотически.
Х) В примерах 1, 2, 3 имеется в виду устойчивость линеаризованных систем,
получаемых из заданных путем отбрасывания нелинейных членов.
432 Глава XI. ОБ УСТОЙЧИВОСТИ ПО ПЕРВОМУ ПРИБЛИЖЕНИЮ
Пример 3. Уравнения возмущенного движения имеют вид
2х + х2 + у2, ^ = -х + Зу + Зх2.
^ = -2х + х2 + ^
Характеристическое уравнение
?. - 1. О I
О
-2-Я. О
-1 3 — Л, |
имеет корни Хг = -2; Х2 = +3. Невозмущенное движение л: = у = 0 неустойчиво.
4. СИСТЕМА С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ. Уравнения
возмущенного движения системы с одной степенью свободы могут быть
приведены к виду
^=ах + Ъу,
)>. A1.10)
^ = СХ + йу.
Будем предполагать, что
а Ъ
*0.
с а
Исследование различных случаев, которые могут встретиться
при интегрировании линейных систем, в случае системы с одной
степенью свободы допускает замечательную геометрическую
интерпретацию, наглядно демонстрирующую поведение системы в
возмущенном движении вблизи исследуемого невозмущенного
состояния.
Уравнения A1.10), как об этом говорилось ранее, можно
истолковать как уравнения, определяющие проекции скорости
изображающей систему точки, движущейся в фазовой плоскости
Оху. Невозмущенному движению х = у = 0 на этой плоскости
соответствует равновесное состояние изображающей точки в
начале координат, так как х = у = 0, когда х = у = 0.
Исключая из уравнений A1.10) время, мы получим
дифференциальное уравнение фазовой траектории
д.у = сх + йу
&х ах + Ъу
A1.11)
Начало координат, изображающее равновесное состояние, есть
особая точка фазовой траектории, так как здесь —^ = -. Это
единая 0
ственная особая точка уравнения A1.11) на плоскости Оху.
4. Система с одной степенью свободы
433
Следуя общей теории, будем искать линейную подстановку
% = Уи* + У12*/>
л= у21* + У22г/ 1 A1Л2)
для приведения системы A1.10) к каноническому виду. Чтобы не
все у; одновременно обращались в нуль, необходимо, чтобы был
равен нулю определитель
щку
0. A1.13)
а - X с
ъ а-х
Это — характеристическое уравнение для системы A1.10). Корни
уравнения A1.13) определяют форму интегралов уравнений
A1.10) и вместе с тем дают возможность судить об устойчивости
невозмущенного движения нашей системы.
Если уравнение A1.13) имеет простые корни или один
кратный, но с простыми элементарными делителями, то уравнения
A1.10) могут быть приведены к каноническим уравнениям вида
а С A1.14)
Если корень A1.13) X — двойной и ему соответствует двойной
элементарный делитель, то каноническая система будет иметь вид
Нп ^ A115)
Координаты %, л, связанные с прямоугольными координатами
ху у линейными соотношениями A1.12), будут, вообще говоря,
косоугольными. Поэтому определяемые каноническими
уравнениями A1.14) и A1.15) фазовые траектории построены далее в
косоугольной системе координат.
Возможны четыре случая, каждому из которых будет
соответствовать особый тип расположения фазовых траекторий около
особой точки — начала координат, — изображающей
невозмущенное равновесное состояние системы. Этими типами
расположения фазовых траекторий около начала и будет геометрически
определяться характер устойчивости невозмущенного состояния
линейной системы с одной степенью свободы.
434 Глава XI. ОБ УСТОЙЧИВОСТИ ПО ПЕРВОМУ ПРИБЛИЖЕНИЮ
%' 1-й случай. Корни уравнения A1.13) Хг, Х2
вещественны и разных знаков. В этом случае каноническая
система и ее решения имеют вид
§ = осе * , г| = р^ 2 .
A1.16)
Уравнение фазовых траекторий получим, исключив I из
первых двух уравнений:
с!г| = ^П
1п |л| = а 1п |^| + 1п С, л = ±С^а,
где а = Х2/'к1, ^ < О, С — постоянная.
Фазовые траектории будут кривыми, похожими у точки О на
гиперболы (рис. 103), в которые они и обращаются, когда а = -1.
Попав на одну из этих траекторий, изображающая точка будет в
конце концов удаляться от начала, которое представит, таким
образом, неустойчивое равновесное состояние. Особая точка такого
типа называется седлом.
* 2-й случай (узел). Корни уравнения A1.13) Х19 Х2
знака. Предположим, что
-..2
-и|, причем ц| < ц|.
вещественны и одного
корни Х19 Х2 отрицательные: Хг = -п|, Х2
Канонические уравнения имеют ту же форму, что и в первом
случае:
Их решения можно записать следующим образом:
5 = ае~ц1', л==рв-ц1*#
Исключив из этих уравнений /,
получим уравнения фазовых траекторий
с1г}
аЗ, л
±С$а,
Рис. 103
где а = Х2/Хг, а > 0, С — постоянная.
Фазовые траектории имеют форму
полупарабол и группируются около начала ко-
4. Система с одной степенью свободы
435
ординат, как показано на рис. 104, а и б. При этом, если
I —> °°, то
с!г|
о,
т. е. все кривые касаются оси 0%, Когда ц| < ц|, оси координат по
отношению к фазовым траекториям меняются ролями и фазовые
траектории касаются оси г|, располагаясь около начала
координат, как показано на рис. 105. Особая точка с таким
расположением фазовых траекторий носит название узла. При этом, если
Хг< 0, Х2 < 0» то изображающая точка будет двигаться к узлу, как
показано стрелками на рисунках, и изображаемое началом
координат равновесное состояние будет асимптотически
устойчивым. Если Хг > 0, Х2 > 0, то имеет место неустойчивость.
Каноническая форма уравнения A1.14) сохраняется в одном
случае равных корней, когда
а = о\ Ь =¦-¦ с = 0.
Это случай простых элементарных делителей определителя
эд=
X - а
0
0
X
= 0,
соответствующих двойному корню л 1
а, В самом деле,
наивысшая степень (X - а), на которую делится 1)(^), равна 2,
наивысшая степень (X - а), на которую делятся все миноры 1-го
порядка, равна 1. Следовательно, е} ^ е2 = 1.
В последнем случае непосредственно из уравнений A1.10),
которые будут иметь вид
с1х йи
— = ах, -^
:Щ>
Рис. 104
Рис. 105
436 Глава XI. ОБ УСТОЙЧИВОСТИ ПО ПЕРВОМУ ПРИБЛИЖЕНИЮ
получим
1п у = 1п х + 1п а,
или
у = ах.
Фазовые траектории — прямые, заканчивающиеся (рис. 106, а)
или начинающиеся (рис. 106, б) в начале координат. Особая
точка — устойчивый или неустойчивый узел.
Может, наконец, встретиться случай равных корней 'к1 = Х2 = Х
с кратным (двойным) элементарным делителем. В этом случае
канонические уравнения и их интегралы будут иметь вид
^ = аех*, л = (а* + Р)еЧ
Если X < 0 — равновесное состояние в начале координат
устойчиво, если X > 0, то неустойчиво. Уравнения фазовых траекторий
будут
*а-а + 1, ,-<* + « шм.
Из первого уравнения следует, что при I —> °°
^П -,оо
и, следовательно, все фазовые траектории в точке О касаются оси
Ол. Каждая фазовая траектория, асимптотически
заканчиваясь или начинаясь в точке О, пересекает ось с; в точке с
координатами
Л = 0, ^ = ±е~сх
и имеет экстремум в точках, для которых
ИЗ =0,
т. е. в точках с координатами ^ = +^~(с^+ *); л = +- е~(С^ + *). Распо-
X
ложение фазовых траекторий около начала координат О для
устойчивого и неустойчивого узлов показано на рис. 107, а и б.
4. Система с одной степенью свободы
437
а)
б)
Рис. 106
а)
б)
Рис. 107
¦ 3-й случай. Корни характеристического уравнения —
комплексные с не равной нулю вещественной
частью. Каноническая система будет в этом случае иметь вид1*
(так как Щ = Х^). Положим
X = а + ф, X = а - ф,
% = и + IV, \ = и - ш.
Подставив эти выражения в каноническую систему, придем к
уравнениям
^ + ^ = (а + фК« + «у),
*?-$-(а-*РХ«-*).
Из этих уравнений следует
а7
A1;
= аи - (Зи,
= аи + Ри.
Введем полярные координаты на плоскости (и, и), положив
и = Г С08 9, V = Г 8Н1 9.
) Черточки над буквами обозначают здесь комплексно-сопряженные величины.
438 Глава XI. ОБ УСТОЙЧИВОСТИ ПО ПЕРВОМУ ПРИБЛИЖЕНИЮ
Тогда
6.г с10
— СОЗ 0 - Г 81П 0 — = аГ СОЗ 0 - Вг 81П 0,
~ 81П 0 + Г СОЗ 0^ = аГ 81П 0 + ВГ С08 0,
и
— = аг, — = В.
Из уравнения фазовых траекторий
йг = а
ае р
после интегрирования имеем:
1п г = ^ 9 + 1п С,
или
г = Сеа0/Р.
Фазовые траектории — логарифмические спирали, вложенные
одна в другую, с асимптотической точкой в начале координат.
При этом, если а < 0 (вещественная часть отрицательна), то с
возрастанием 0 величина г убывает и кривая имеет вид, показанный
на рис. 108, а. Это — устойчивый фокус. Если а > 0, то г растет
вместе с 0. Особая точка в этом последнем случае называется
неустойчивым фокусом (рис. 108, б). Изображающая точка в
первом случае асимптотически приближается к началу, во втором —
удаляется.
* 4-й случай. Корни характеристического уравнения —
чисто мнимые (а = 0). В этом случае
а-0, C*0
Рис. 108
4. Система с одной степенью свободы
439
и уравнения фазовых траекторий в полярных координатах будут
иметь вид
си и? &1 р'
откуда следует
г = сопз! = г0, 0 = $1 + 0О.
Фазовые траектории — окружности, описываемые
изображающей точкой вокруг начала координат с угловой скоростью р.
Особая точка в этом случае носит название центр.
Равновесие, изображаемое особой точкой типа центра, является
устойчивым.
П р и м е р 4. Как известно1 \ движение тела вокруг неподвижной точки,
совпадающей с центром тяжести, в отсутствие других сил (случай Эйлера)
можно представить, согласно интерпретации Л. Пуансо, качением эллипсоида
инерции тела относительно неподвижной точки по неподвижной плоскости.
При этом точка пересечения мгновенной оси вращения с поверхностью
эллипсоида инерции (полюс) описывает на поверхности эллипсоида кривые
(полодии), приблизительное расположение которых показано на рис. 109. Вблизи
концов наибольшей ЛА и наименьшей ВВ осей эллипсоида полодии
представляют собой замкнутые кривые, окружающие эти концы подобно
кривым, окружающим особую точку типа центра. Вблизи концов средней оси СС
полодии располагаются так, как фазовые траектории около особых точек
типа седла. По движению полюсов по
поверхности эллипсоида можно судить об устойчивости
или неустойчивости вращений вокруг осей,
совпадающих с осями эллипсоида инерции.
Вращения вокруг осей, совпадающих с
наибольшей или наименьшей осями эллипсоида, будут,
очевидно, устойчивыми, так как малое
отклонение оси вращения переведет полюс на близкую
к концу оси эллипсоида полодию, по которой
он и будет двигаться в возмущенном движении,
оставаясь в ближайшей окрестности
невозмущенного состояния. Вращение вокруг средней
оси неустойчиво. Малое отклонение
мгновенной оси переместит полюс на полодию, по
которой он будет удаляться от конца средней оси
эллипсоида. Рис. 109
¦) П. Аппель [62, § 392]. Приведенный пример следует рассматривать только
как аналогию некоторых траекторий полюса с фазовыми траекториями около
особых точек центра и седла. Полодия — это, конечно, не фазовая траектория,
и концы осей эллипсоида не особые точки фазовой плоскости.
440 Глава XI. ОБ УСТОЙЧИВОСТИ ПО ПЕРВОМУ ПРИБЛИЖЕНИЮ
Пример 5. Уравнения
-х + \л(ах + Ьу), ц > 0
имеют особую точку в начале координат х = у = 0 (равновесное состояние).
Характеристическое уравнение имеет здесь вид
= 0
-А 1
а\л - 1 Ъ\у - X
или
X2 - Ъ\хХ + A - ац) = 0.
При достаточно малом ц > 0 корни этого уравнения комплексные и их
вещественные части имеют знак коэффициента Ъ. Начало координат — особая
точка типа фокуса — устойчивого, когда Ъ < 0, неустойчивого, когда Ъ > 0.
Пример 6. Уравнение Ван-дер-Поля
а!| + й(х2_1)ах + х = 0; й>0
эквивалентно системе
:^"Ч"з ~х>
х.
Начало координат — особая точка. Для выяснения типа этой особой точки и
характера равновесия нужно составить характеристическое уравнение
линеаризованной системы
и найти его корни. Характеристическое уравнение здесь будет иметь вид
0
| -1 -А|
или
X2 - цА + 1 = 0.
Его корни —
ц - X +1
-1 -А
Если \1 > 2, то оба корня вещественные и положительные; если ц < 2, то оба
корня комплексные с положительной вещественной частью. Следовательно, —
начало координат — неустойчивый узел или неустойчивый фокус.
Пример 7. Найти и исследовать особую точку фазовых траекторий для
уравнений
их . Л
Ё2 = г-„-з.
а*
х-у
A1.17)
5. Теорема Ляпунова об устойчивости
441
Особой точкой будет равновесное состояние, координаты которого,
найденные из уравнений
х + у- 1 = 0,
х- у -3 = 0,
будут х = 2, у = -1. Уравнения возмущенного движения вблизи этой точки,
которые получим, подставив в A1.17)
будут иметь вид
х = 2 + ^, у =
Характеристическое уравнение
имеет корни
1-Х
1
^1,2
-1 + Л,
= 0
= ±л.
Следовательно, особая точка B, -1) — седло, и равновесное состояние
системы в этой точке неустойчиво.
5. ТЕОРЕМА ЛЯПУНОВА ОБ УСТОЙЧИВОСТИ ПО ПЕРВОМУ
ПРИБЛИЖЕНИЮ. Заключения об устойчивости, сделанные на основании
исследования линеаризованных уравнений возмущенного
движения системы, не всегда остаются в силе для исходной
(неупрощенной) системы. Устойчивость или неустойчивость последней
определяется во многих случаях как раз отбрасываемыми при
линеаризации нелинейными членами. Рассмотрим, например,
задачу об устойчивости невозмущенного состояния системы
х = у = 09
если уравнения ее возмущенного движения имеют вид
их
М
= -у + ах6,
^ = х + ш/3.
у
A1.18)
Отбросив члены с кубами хну, получим линеаризованную систему
6.x
си
A1.19)
442 Глава XI. ОБ УСТОЙЧИВОСТИ ПО ПЕРВОМУ ПРИБЛИЖЕНИЮ
решение которой имеет вид
X = а СОЗ I 4- [3 8111 I,
у = а зги I - [3 соз I.
Состояние
х = у = О
линеаризованной системы устойчиво. Получив достаточно малое
возмущение, система в возмущенном движении пребывает в
окрестности начала координат.
Рассмотрим теперь заданную неупрощенную систему A1.18).
В качестве функции Ляпунова возьмем
положительно-определенную функцию
V =¦¦= х2 + у2.
Ее производная по времени в силу уравнений A1.18) имеет вид
^ = 2х(-у + ах*) + 2у(х 4- ау3) = 2а(х4 + у4).
При а > О невозмущенное состояние
х = г/ = О
неустойчиво, при а < 0 — устойчиво асимптотически, при а = О —
просто устойчиво. Таким образом, характер устойчивости
определяется в нашем примере именно отбрасываемыми при
линеаризации нелинейными членами.
А. М. Ляпунов установил, при каких условиях заключения об
устойчивости, сделанные для линеаризованной системы,
сохраняют силу и для исходной (неупрощенной) системы.
Пусть дифференциальные уравнения возмущенного движения
имеют вид
их, __ I
— =апхг+ ... + а1кхк + Х19 ,
A1.20)
= ак1хх+ ... + аккхк + Хк,
где а — постоянные, Х8 — вещественные функции переменных
х8, разложение которых по степеням х8 начинается с членов не
ниже 2-го порядка. Уравнения A1.20) — это неупрощенные
исходные уравнения возмущенного движения. Отбросив в этих
5. Теорема Ляпунова об устойчивости
443
уравнениях Х8, получим линеаризованную систему или систему
уравнений первого приближения
Aхс
= а д-1 +
и* з1 1
с характеристическим уравнением
Л
A1.21)
1\\ ^ а21
П2
122
-А,
*Л1
*А2
*АДг
-А,
-0.
A1.22)
11к к
Теорема. Если вещественные части всех корней
Х8 = а8 + ф8, 8= 1, 2, ... , А,
характеристического уравнения A1.22) отрицательны, то
невозмущенное движение исходной системы устойчиво
асимптотически, независимо от членов выше первого порядка.
Рассмотрим сначала случай, когда элементарные делители
характеристического определителя простые. В этом случае, как
известно, можно составить к линейных форм из переменных х{\
^ = У/Л + — + У;А> * = 1, 2, ... , к,
приняв которые за новые переменные, приведем уравнения
первого приближения к виду
^_5
&1
КЪ
1,2,... ,к.
Уравнения исходной системы A1.20) в новых переменных
запишутся в виде
М
>-Л + 2в, 3=1,2, ..., к,
A1.23)
где Х3 — корни характеристического уравнения, а 28 —
результаты подстановки в Х8 вместо х8 новых переменных ^8, содержащие
^8 в степени не ниже второй.
Предположим, что вещественные части всех корней
уравнения A1.22) отрицательные:
а < 0, 8 = 1, 2, ... , к,
444 Глава XI. ОБ УСТОЙЧИВОСТИ ПО ПЕРВОМУ ПРИБЛИЖЕНИЮ
и рассмотрим функцию1*
к
У= 2 ^5, A1.24)
8 = 1
где |8 — комплексно-сопряженная к ^8. Функция V —
положительно-определенная, от времени явно не зависящая и,
следовательно, допускающая бесконечно малый высший предел. Ее
производная по времени в силу уравнений A1.23)
0.1 8 = 1 8-1
& к к
+ Е ($.2, + |,2, =2 X а,5Д, + 2 (§.2, +1,2,).
8 = 1 8 = 1 8 = 1
Второе слагаемое правой части не ниже 3-го порядка
относительно переменных ^8. При достаточно малых %8 доминирующим
будет первое слагаемое: его знак будет определять знак всего
выражения 6У/&. Поэтому если все а5 отрицательные, то форма
к
8 = 1
а вместе с нею (при достаточно малых %5) и производная 6У/&1
будут отрицательно-определенными функциями, независимо от
членов высших порядков 28. Следовательно, невозмущенное
движение исходной системы, как и линеаризованной, асимптотически
устойчиво.
Предположим теперь, что характеристический определитель
имеет кратные элементарные делители
(А.-А./', * = 1,2, ...,/п,
в которых
|д1 + ц2+... + цт = /г.
Канонические переменные группы уравнений, соответствующих
1-у элементарному делителю, обозначим через
х> См. Н. Г. Четаев [54].
5. Теорема Ляпунова об устойчивости
445
Для этих переменных группа уравнений возмущенного
движения будет иметь вид
Чп + 2ц>
^&12 + ^1 + ^/2>
A1.25)
Пусть снова все корни
имеют неравную нулю отрицательную вещественную часть
а8<0, 8 = 1, 2, ... , к.
Рассмотрим положительно-определенную функцию
У= Д ЪпЪп + а%12\п + ... + аB<^1ЧфД^).
Эта функция непрерывна, явно от времени не зависит, и,
следовательно, допускает бесконечно малый высший предел. Ее
производная по I в силу уравнений A1.25) равна
*У _ А [7. <1|а е <^Л + „2Г* <^*2 4- ? ^2
<а
<а
(И
<а
<и
... +
= Е {[^1(^1 + ^1) +
_ т _ _
+ Ы*-&2 + $п + -2/2)] + •••}= X «,{2 (^х |а + а%2112 + ... +
2(мг1)
+ аГ1 Ч/ц,^ц,)+ [«,(^2^1 + ^4*2 ) + ••• +
+ «^(^Д^ + |,ц ^ц. )]}+ I [(^а^а + |п^а) +
* 1=1
446 Глава XI. ОБ УСТОЙЧИВОСТИ ПО ПЕРВОМУ ПРИБЛИЖЕНИЮ
Вторая сумма правой части содержит переменные ^8 (а
следовательно, и х8) в степени не ниже третьей. Квадратичная форма в
фигурных скобках — положительно-определенная. В самом деле,
введем новые переменные
П/2 = а&2»
а
^¦-1
Л^ ' Ъф.'
В переменных т^ эта форма запишется в виде
2ЛаЛп = 2Л/2Л/2 + — + 2Л^. Л;,ц. 4 (ПпЛ*2 + Л;2 Лп) +
+ - + (Лф/_1Л^+Л^Л^_1).
Дискриминант этой формы равен
2 1 0 ... О
1 2 1 ... О
А
^'
О 0 0 ... 2
Все его главные диагональные миноры
Ах = 2, А2 = 3, Д3 = 4, ..., АМ/ г = ц., Д^ = ц. + 1
положительны. Следовательно, квадратичная форма в фигурных
скобках положительно-определенная. Если поэтому все а5
отрицательны, то 6У/(И для достаточно малых ^8 —
отрицательно-определенная функция, независимо от членов высших порядков в 28,
и невозмущенное состояние системы асимптотически устойчиво.
6. ТЕОРЕМА ЛЯПУНОВА О НЕУСТОЙЧИВОСТИ ПО ПЕРВОМУ
ПРИБЛИЖЕНИЮ. Если среди корней характеристического
уравнения имеется по крайней мере один с положительной
вещественной частью, то невозмущенное движение неустойчиво,
независимо от членов высших порядков.
Доказательство. Пусть вещественные части а8 всех
корней характеристического уравнения отличны от нуля.
Обозначим группу канонических переменных, соответствующих
элементарному делителю (X - ^)М/, через
6. Теорема Ляпунова о неустойчивости
447
В качестве функции Ляпунова возьмем квадратичную форму
1=1 II
От функции V предыдущей теоремы она отличается множителем
а; перед квадратными скобками. Производная по времени от этой
функции в силу нелинеаризованных уравнений возмущенного
движения будет равна
—- = X а?Ф, 4- члены высших порядков,
а^ 1=1 1 1
где Ф; — положительно-определенная форма, тождественная
аналогичной форме предыдущей теоремы. Теперь эта форма
стоит под знаком суммы с множителем а2г Следовательно, дУ/й.1
для достаточно малых %. — положительно-определенная
функция. Поскольку по крайней мере одно из сх8 положительно,
например аг > О, можно выбрать %. так, что знак Сбудет тем же, что
и знак дУ/&1. Следовательно, невозмущенное состояние
неустойчиво.
Предположим теперь, что при одном или нескольких корнях
характеристического определителя с положительной
вещественной частью среди других корней имеются корни, вещественная
часть которых равна нулю. Этот случай можно привести к
рассмотренному, если сделать подстановку
и- = х^е"гЛ,
где в — положительное число, меньшее, чем абсолютные
величины всех отличных от нуля вещественных частей корней
характеристического уравнения. При неустойчивости переменных
ц (т. е. при неограниченном возрастании и) будут неустойчивы и
переменные ху (но не наоборот). Дифференциальные уравнения
возмущенного движения после сокращения на еа будут иметь вид
-^ + ш8 = аз1иг + ... + а8кик + ее'Х8, 8 = 1,2, ... , к
или
-ТГ = азЛ + - + (а** " 8> и8 + - + азкик + еЕ*Хз> 5 = 1,2, ... , к.
448 Глава XI. ОБ УСТОЙЧИВОСТИ ПО ПЕРВОМУ ПРИБЛИЖЕНИЮ
Характеристическое уравнение имеет вид
41
42
8 - ц а21
**1
а22 -8- ц ... аЛ2
а
1/г
а
2/г
... а
кк
Ц
= 0.
Его корни равны
где А,.
корни характеристического уравнения системы:
&х8
а81хг +
+ а«Л>
1,2,..., А.
При сделанных относительно Х8 и 8 предположениях среди
корней \х8 будет по крайней мере один с положительной
вещественной частью, тогда как все другие будут иметь отличную от
нуля вещественную часть. Следовательно, невозмущенное
движение неустойчиво.
Случаи, когда один или несколько корней чисто мнимые или
равны нулю при прочих с отрицательной вещественной частью,
являются критическими в том смысле, что для этих случаев
вопрос об устойчивости или неустойчивости не может быть решен
на основании уравнений первого приближения. Исследование
вопроса об устойчивости в таких случаях представляет собой одну
из труднейших задач механики, не разрешенную полностью и в
настоящее время. Сам А. М. Ляпунов дал ее решение для двух
случаев: а) один нулевой корень; б) два чисто мнимых корня.
Рассмотрение этих критических случаев не входит в задачи
настоящей книги.
В примере
6.x
-у + ах3,
ЕЙ
61
х + ау3
мы встречаемся как раз со вторым критическим случаем:
характеристическое уравнение
-X 1
-1 -X
= X2 + 1 = 0
имеет два чисто мнимых корня. Следовательно, здесь судить об
устойчивости по первому приближению нельзя.
б. Теорема Ляпунова о неустойчивости
449
Пример 8. Тело, закрепленное в одной неподвижной точке, расположенной
в его центре тяжести, движется по инерции (случай Эйлера). Требуется
исследовать устойчивость вращения тела вокруг главных осей эллипсоида инерции.
Обозначим через /?, <?, г проекции угловой скорости тела на неизменно
связанные с ним оси координат, совпадающие с главными осями инерции
для центра тяжести, и через А, В, С — моменты инерции тела относительно
этих осей. Пусть уравнения невозмущенного движения будут
р = р0 = солей = 0, <? = #0 = 0>
Подставив в уравнения Эйлера1*
(В-С)дг,
г0*0.
В^Г(С~А)рп
С^=(А-В)рд
возмущенные значения угловых скоростей
получим уравнения возмущенного движения
А^* =(В-С)г0п+ (В-С)п;,
Аг
В первом приближении
= (С-А)г0$ + (С-А)^,
-(А-В)^ц.
А^=(В-С)г0ц,
В^ = (С-А)г0Ь
Ф =0.
Характеристическое уравнение линеаризованной системы здесь будет
В-С
A1.26)
-X
С-А
-ёгг
к АВ '0"
0
!) См. П. Аппель [62, § 387, 389, 443].
15- 10456 Бабаков
450 Глава XI. ОБ УСТОЙЧИВОСТИ ПО ПЕРВОМУ ПРИБЛИЖЕНИЮ
Если А> В > С или А < В < С, т. е. если вращение происходит вокруг оси
с наибольшим или с наименьшим моментом инерции, то
(А - С)(В - С) 2 > 0
АВ Г° °
и корни чисто мнимые. Следовательно, по первому приближению судить об
устойчивости нельзя. Однако можно доказать, что рассматриваемые
вращения — устойчивы. Возьмем в качестве функции Ляпунова выражение
(А__^2 + {ё_0)ц2 + [А^2 + Вц2 + 2Сг0С + СС2]2,
В А
составленное из двух первых интегралов1) уравнений A1.26): интеграла
А(А - С)Ъ? + В(В - С)ц2 = сета*
и интеграла сохранения энергии
АЪ2 + Вц2 + С(<; + г0J = сопз*.
При А > В > С — это положительно-определенная функция, производная
которой в силу уравнений A1.26) равна нулю. Если А < В < С, то в качестве
функции Ляпунова следует взять функцию
с^_с) ^2 + (Б~с)л2 _ [А^2 + Бг|2 + 2Сг0; + с^;2]2.
Это — отрицательно-определенная функция, производная которой в силу
уравнений A1.26) равна нулю. Если р0 = г0 = 0, д0 ф 0, т. е. если вращение
происходит вокруг оси со средним моментом инерции, то уравнения
возмущенного движения будут
А^ = (В - С) д0С, + (В - С) тК,
В^-СС-АЖ,
С^ = (А-В)д04 + (А-В)т14.
В первом приближении
а^ =(в-с)9о;,
в^=о,
С^ = (А-В)<^.
Характеристическое уравнение
х2_(л-вцв-с)д^0
имеет при А > В> С или А < В <С два вещественных корня, один из которых
положительный. Следовательно, движение неустойчиво.
!) См. Н. Г. Четаев [54].
7. Критерии отрицательности
451
7. КРИТЕРИИ ОТРИЦАТЕЛЬНОСТИ ВЕЩЕСТВЕННЫХ ЧАСТЕЙ
КОРНЕЙ ХАРАКТЕРИСТИЧЕСКОГО УРАВНЕНИЯ. Как следует из теорем
Ляпунова, для суждения об устойчивости движения по первому
приближению необходимо иметь в своем распоряжении точные
сведения о знаках вещественных частей корней
характеристического уравнения. Иначе говоря, нужно знать, как расположены
корни характеристического уравнения на комплексной плоскости
относительно мнимой оси. Когда все корни характеристического
уравнения лежат слева от мнимой оси, т. е. имеют отрицательные
вещественные части, полином, соответствующий развернутому
определителю характеристического уравнения, называется
устойчивым полиномом. Решить вопрос об устойчивости или
неустойчивости полинома можно без предварительного вычисления его
корней с помощью специальных критериев устойчивости,
предложенных Э. Раусом, А. Гурвицем, X. Найквистом, А. В.
Михайловым [113] и др. В основе этих критериев лежат известные
теоремы Коши о числе корней функции внутри замкнутого контура.
Некоторые из таких критериев дают возможность не только
установить распределение корней полинома на комплексной
плоскости, но также и определить необходимые изменения параметров
системы, для того чтобы сделать ее движение устойчивым.
Приведем краткое изложение простейшего критерия —
критерия Рауса вместе с вытекающим из него критерием Гурвица.
8. КРИТЕРИЙ РАУСА. Рассмотрим полином четной степени п с
вещественными коэффициентами, который запишем следующим
образом:
/(г) = а0гп + Ь0гп-г + аг2п~2 + Ьхгп-Ъ + ... + ап/2, а0 > 0.
Подставив г = х + 1у, I = У-1, и отделив вещественную часть от
мнимой, представим /(г) суммой
Кг) = Р + ад,
где Р и Я — полиномы п-й степени от х и у.
Согласно одной из теорем Коши число нулей полинома /(г)
внутри замкнутого контура равно половине избытка числа нулей
дроби Р/С? на контуре при обходе его в положительном
направлении^ с переменой знака плюс на минус над числом нулей с
переменой знака минус на плюс.
Х) То есть так, чтобы ограничиваемая контуром площадь была все время слева.
452 Глава XI. ОБ УСТОЙЧИВОСТИ ПО ПЕРВОМУ ПРИБЛИЖЕНИЮ
Построим замкнутый контур, состоящий из
полуокружности, описанной из начала координат и расположенной справа от
мнимой оси, и из отрезка мнимой оси, равного диаметру
полуокружности. Радиус полуокружности должен быть достаточно
большим, чтобы внутри построенного контура оказались все корни
с положительной вещественной частью (если, конечно, таковые
имеютсяI*. Подсчитаем теперь, обходя контур в положительном
направлении, число нулей дроби Р/С) как с изменением ее
знака (при переходе через нуль) плюс на минус, так и минуса на
плюс. Чтобы сосчитать нули дроби Р'/С? на полуокружности,
подставим в /(г)
2 = Гет = Г (СОЗ 6 + I 81П 0).
После этой подстановки
Р = а0гп соз пд + Ъ0гп~1 сое (п - 1) 9 4- ... ,
Я = а0гп зги я9 + Ь0гп-г 81п (п - 1) 9 + ... .
При г —> оо
Все нули дроби Р/ф на полуокружности при обходе ее в
указанном направлении будут нулями с переменой знака плюс на
минус, и число их равно числу нулей с!# пд, т. е. тг.
Число нулей дроби Р/С) при переходе по мнимой оси от +оо до
-оо можно подсчитать, построив для полиномов Р и С? по правилу
нахождения общего наибольшего делителя ряд Штурма. На оси
Оу имеем г = Ьу. Поэтому на этой оси (при п четном)
Р = (-1)»/* (а0уп - а1Уп~2 + а2уп~4 -...),
д = (-1)п/2-1(&оуп-1 - Ьгуп-3 + ^уП-5 _ _)
И
_Р = а0Уп ~ а!Уп~2 + а2Уп~4 ~ •••
О Ъоу^1 - Ь1Уп~3 + Ъ2уп~ь - ... '
Введем обозначения:
Г1 = а0у»-а1уп-2 + а&»-*-...,
и = ьоУп~1 ~ Ъ1Уп~3 + ьгУп~Ъ - - •
1) При этом предполагается, что на самом контуре нет нулей полинома /(г).
8. Критерий Рауса
453
Пусть частное от деления /х на /2 будет д19 а остаток (-/3)> частное
от деления /2 на /з будет ^2, а остаток (~/4) и т- Д- Тогда
'2 = #2' 3 /4»
У
Ряд полиномов
/л-1 Чп-^п Лг+1>
'л = Яп1п+1Л
А,/2, /3, ...,/д+1 (И.27)
обладает следующими свойствами:
^ когда один из промежуточных членов обращается в нуль, два
соседние не равны нулю и имеют противоположные знаки;
^ последний член ряда /п + г — постоянное число, не равное нулю.
Следовательно, ряд A1.27) является рядом Штурма для
функций /х и /2.
Обозначим через У(у) число перемен знака в ряду A1.27) для
некоторого фиксированного значения у и покажем, что
приобретенное этим рядом число перемен знака при переходе по мнимой
оси от +оо до —оо, т. е. разность
У(-оо) - У(+оо),
равно избытку числа нулей дроби /^//2 на мнимой оси с переменой
знака плюс на минус над числом нулей с переменой минуса на плюс.
В самом деле, изменение числа перемен знака в ряду Штурма
может произойти только при переходе через нуль первого члена
/1, так как, когда переходит через нуль какой-либо
промежуточный член, общее число перемен знака в силу указанных выше
свойств ряда не изменяется. При этом, когда дробь 1ХЦ2 переходит
через нуль с изменением знака плюс на минус, ряд Штурма
приобретает одну перемену знака, а когда дробь У^//^» проходя через
нуль, меняет знак минус на плюс, ряд Штурма теряет одну
перемену знака. Поэтому избыток числа переходов дроби /г//2 с плюса
на минус над числом переходов с минуса на плюс при изменении у
от +оо до -оо равен числу перемен знака, приобретенных рядом
A1.27). Это число равно разности
Т^-оо) - Т^+оо)
или для дроби Р/ф
^(+оо) - ^(-оо).
454 Глава XI. ОБ УСТОЙЧИВОСТИ ПО ПЕРВОМУ ПРИБЛИЖЕНИЮ
На всем контуре избыток числа перемен знака дроби Р/С} с плюса
на минус над числом перемен с минуса на плюс равен
К(+оо) - Т^(-оо) + п%
Внутри контура не будет нулей полинома /(г), если
^(+оо) - ^(-оо) + п = О,
т. е. если
^(-оо) = Г(+оо) + п.
Так как число перемен знака, приобретенное рядом A1.27), не
может быть больше п, то из последнего равенства следует, что
^(+оо) = 0.
Знаки полиномов ряда A1.27) при у = +°° определяются
знаками членов высших степеней. Следовательно, /(г) не будет
иметь внутри контура нулей, если коэффициенты при высших
степенях членов ряда A1.27) все одного знака. Отсюда получаем
критерий Рауса.
Для того чтобы вещественные части всех корней полинома
/(г) были отрицательны, необходимо и достаточно, чтобы
коэффициенты при высших степенях полиномов
Л» /2» '3» *•• » 'п+1
были все одного знака.
Коэффициенты полиномов ряда A1.27), в том числе и
коэффициенты при высших степенях г/, можно получить с помощью
следующего элементарного приема. Из равенства
Ш) = Шу) ' Ш) = РуШ - Ш = с0уп~2 - сгУ»-* + ...
ъ
о
находим коэффициенты с0, с19 с2, ... :
а^р - а0Ь1 а2Ь0 - а0Ь2
с0 - , сг - , ... .
По аналогичным формулам из коэффициентов полиномов /2 и /3
найдутся коэффициенты полинома /4(у):
Ш = %Ш - Ш = 4оУп-9 - ^У'5 + - .
с0Ь1 - Ь0сг с0Ь2 - Ь0с2
а0 - , аг - , ...
со со
и т. д.
8. Критерий Рауса
455
Из чисел а1У Ьр с0 й^ ... строим схему Рауса:
*0
с0
ё0
&1
с1
йх
Ъ2...
с2 ...
а2...
A1.28)
Числа каждой строки, начиная с третьей, получаются с помощью
перекрестного умножения первых элементов двух
предшествующих строк на все последующие члены этих строк и деления
разности соответствующих произведений на первый элемент
предшествующей строки. Например, третья строка получается по
следующей схеме:
ал а9
Соответствующие числа равны
Ь0аг
а0Ь1
Ь0а2
а0Ь2
Ь0аг
а0Ь3
°о °о °о
При этом ни один из элементов первого столбца схемы Рауса не
должен обращаться в нуль. Для случая, когда один из этих
элементов, например /г0, обращается в нуль, Э. Раус рекомендует вместо
к0 = О подставить малую величину 8 > 0 и продолжать
по-прежнему заполнение схемы. При этом последующие элементы первого
столбца схемы будут рациональными функциями от 8, знаки
которых определятся при малом 8 без затруднений.
Может случиться, что все элементы некоторой, например
(к + 1)-й, строки обратятся в нуль. В этом случае Э. Раус
рекомендует заменить (к + 1)-й нулевой полином /Л + г(у) производной к-то
полинома, т. е. ?'к(у), и продолжить заполнение схемы
по-прежнему.
Обоснование рекомендаций Э. Рауса, а также разбор других
особых случаев, которые могут встретиться при применении
критериев Рауса и Гурвица, можно найти в книге Ф. Р. Гантмахе-
ра[13].
Правило составления схемы Рауса остается тем же самым и
для полинома нечетной степени. Чтобы убедиться в этом, мы,
456 Глава XI. ОБ УСТОЙЧИВОСТИ ПО ПЕРВОМУ ПРИБЛИЖЕНИЮ
следуя Э. Раусу [80, § 298], рассмотрим вместо заданного
уравнения с нечетным п
а0гп + ахгп~х + а2гп~2 + ... + ап = 0
уравнение с четным показателем (п + 1)
а0гп+1 4- ахгп + а2гп~1 + ... + апг = -апН.
Предположив, что А — бесконечно малое положительное
число, легко убеждаемся, что добавочный корень последнего
уравнения будет также бесконечно малым и в конце концов равным -А.
Можно считать поэтому, что корни обоих уравнений, лежащие
внутри контура (Ь), одни и те же. Для полученного уравнения
четной степени (л + 1) схема Рауса составляется по прежнему
правилу и ее первые две строки будут
а0, а2, ... , #л-1> апк,
#1» #д, ••• » #л.
Вычислив некоторое число дальнейших последовательных строк,
увидим, что, кроме крайних справа, никакие другие элементы
схемы не содержат множителя А, и потому, когда А будет
положено равным нулю, эти элементы останутся конечными с тем же
самым знаком, как если бы они были вычислены до добавления апк.
В частности, два последних элемента первой колонки, если
удержать только члены с наинизшей степенью А, будут ап и апк, и так
как А > 0, перемены знака между ними не будет. Можно поэтому
опустить член апк совсем и вести построение схемы Рауса
одинаково — будет ли степень уравнения четной или нечетной.
Пример 9. 1°. Полином /(г) = г4 + Зг3 + Ъг2 + 4г + 2 устойчив. Схема Рауса
имеет вид1*
У'
У3
У2
У
У0
1
3
11
26
6
) Так как нас интересуют только знаки, а не абсолютные значения членов
первого столбца схемы Рауса, то все числа одной и той же строки этой схемы,
начиная с третьей, можно умножить или разделить на одно и то же
положительное число.
В данном примере элементы третьей строки умножены на первый элемент
предшествующей строки, т. е. на 3, а четвертой строки — на 11.
9. Критерий Гурвица
457
2°. Полином /(г) = 24 + 2хг + х2 + 1 неустойчив. Схема Рауса имеет вид
111
2
2 2
-4
2
3°. Полином /B) = 23 + б22 + 112 + 6 имеет корни -1,-2,-3. Схема Рауса
имеет вид
У*
У2
У
У0
1 11
6 6
60
|360
Полином устойчив.
4°. Полином /(г) = г* + гг + 2г2 + 22+1 неустойчив. Схема Рауса имеет вид
У*
У*
У2
У
При достаточно малом е -* 0
12 1
1 2
8 1
2е-1
28-1
2е-КО.
9. КРИТЕРИЙ ГУРВИЦА. Элементы первого столбца схемы Рауса,
т. е. величины а0, Ъ0> с0, с/0, ... , можно представить в виде
отношений главных диагональных миноров определителя Гурвица:
Н=
а0
0
0
0
и1
а1
Ь0
а0
0
и2 ...
а2 ...
Ьх ...
а1 •"
Ь0-
= Л„
A1.29)
В самом деле, положив Ах = Ъ0, найдем из формулы для
коэффициента с0:
Ъ0а1
а0Ь1 _
Ь0 Ьг
ап а.
458 Глава XI. ОБ УСТОЙЧИВОСТИ ПО ПЕРВОМУ ПРИБЛИЖЕНИЮ
Из формулы для й0 находим
_ с0Ьг - Ь0сг _
ао ~ ~~
Ь0 Ъх
*1~
Ь0 Ь2
ь0 ьг
Ьо
а0
0
*1
а1
Ьо
ь2
а2
*1
ь0 ьг
ап аЛ
A1.30)
и т. д. до
Ап
включительно.
Полином Дг) устойчив, если все элементы первого столбца
схемы Рауса одного знака, т. е. если при а0 > 0 все остальные
элементы Ь0, с0, б?0, ... положительны. Необходимые и достаточные
условия устойчивости полинома можно поэтому представить
следующими неравенствами:
Д.Х); ^>0; ^>0; ... ; ^5-
А1 А2 Ап-1
>о,
или
A1.31)
Ах>0; Л2>0; А3>0;...; Ап = Н>0.
Таким образом, для устойчивости полинома
/(г) = а0гп + Ъ0гп~1 + аг2п'2 + Ъхгп~* ...
необходимо и достаточно, чтобы при а0 > 0 определитель Гурвица
A1.29) и его главные диагональные миноры были больше нуля,
т. е. чтобы были выполнены неравенства
а0 > 0; Ъ0> 0;
ь0 ъх
а0 а1
>0;
Ь0 Ь1 Ь2
а0 ах а2
0 Ь0 Ьх
>0
и т. д. и, наконец, Ап = Н > 0. Этими неравенствами и
выражается критерий Гурвица.
Если коэффициенты полинома /(г) имеют обычные
обозначения, т. е.
1(г) = а02п + ах2п~х + а22п~2 + ... + ал,
10. Влияние возмущающих сил
459
то условия A1.31) перепишутся следующим образом:
а0 > 0; ах > 0;
ал а.
ап а?
>0,
ал ад
а9 а.
0
0
0 ах а3 ... 0
0 а
о
О
>0.
A1.32)
О 0 0 ... а
Формулы A1.30) дают простой способ вычисления
определителей Гурвица.
10. ВЛИЯНИЕ ВОЗМУЩАЮЩИХ ДИССИПАТИВНЫХ И
ГИРОСКОПИЧЕСКИХ СИЛ НА УСТОЙЧИВОСТЬ РАВНОВЕСИЯ КОНСЕРВАТИВНОЙ
СИСТЕМЫ. Если в равновесном состоянии обобщенные
координаты системы равны нулю и в этом же состоянии равна нулю
потенциальная энергия системы, т. е. П@, 0, ... , 0) = 0, то уравнения
возмущенного движения (в первом приближении) могут быть
представлены уравнениями Лагранжа, составленными в
предположении, что удвоенные потенциальная и кинетическая энергии
являются квадратичными формами
2Т = Ъ а^д,, 2П = X сМ
с постоянными коэффициентами. Кинетическая энергия — всегда
положительно-определенная форма обобщенных скоростей.
Следовательно, можно найти такие координаты ^г, ^2> ••• > %д> в
которых обе формы Т и П будут иметь канонический вид
2Г = Ц + Ц + ... Ц, 2П = \& + Х2% + ... ¦),&,
где Х1 — корни векового уравнения
аиХ- сп ... а1пХ- с1п
Б(Х) =
0.
A1.33)
ап1^-Сп1 — аппк-Спп
Уравнения Лагранжа в координатах ^. будут иметь вид
^ + А.& = 0, 1=1,2, ...,/г.
460 Глава XI. ОБ УСТОЙЧИВОСТИ ПО ПЕРВОМУ ПРИБЛИЖЕНИЮ
Эти уравнения и будут уравнениями возмущенного движения
системы. Выпишем интегралы этих уравнений:
^ = А, соз (г 7^ + Р*) при \>0;
'%1=А11 + В1 при^ = 0; A1.34)
^ = Аье^ + Вье~г^ при \ < 0.
Из формы интегралов можно сделать следующие заключения.
¦ Если все корни векового уравнения 0(к) = 0 положительны, то
равновесие устойчиво и возмущенное движение представляет
собой наложение гармонических колебаний с частотами ^Хь.
¦ Во всех других случаях равновесие неустойчиво: координаты
растут с течением времени по линейному или
экспоненциальному закону.
Влияние на устойчивость равновесия
наложения линейной связи1). Если связь Д^, %2, ... , ^п) = 0
не смещает положения равновесия, то
/@, 0, ... , 0) = 0.
В области этого положения разложение функции / начнется с
линейных членов. В первом приближении уравнение связи имеет
вид
А&1 + А2^2 + - + А&, = 0. (И.35)
Наложением связи мы уменьшаем число степеней свободы
системы. При этом частоты связанной системы располагаются между
частотами исходной. Отсюда следует:
^ если все корни \ положительны, то положительными будут
и корни характеристического уравнения связанной системы
и равновесие останется устойчивым, как и до введения связи;
^ если одно наименьшее X отрицательно, то введение новой
связи может упрочнить равновесие до устойчивого;
^ если два первых X отрицательны, то введением одной связи
нельзя упрочнить равновесия до устойчивого.
х> См. Н. Г. Четаев [54, с. 75].
10. Влияние возмущающих сил
461
Влияние на устойчивость равновесия
введения в систему диссипативных сил.
Диссипативные силы равны взятым со знаком минус частным
производным от положительной квадратичной формы
по обобщенным скоростям 4Х. Если обозначить эти силы через X., то
Хь = -§, 1-1,2,..., п.
Функция Р — мера скорости рассеяния механической энергии,
так как
А (Т + П) = -2Р. A1.36)
Когда Р содержит производные от всех ^, диссипация
называется полной; в противном случае она неполная. Уравнения
возмущенного движения системы, на которую, кроме
консервативных, действуют и диссипативные силы, могут быть приведены
к форме
^ - -1 ? - дР 7-12 л
— - \& ^-, 1-1, 2,..., п.
Г A1.37)
Диссипативные силы не меняют характера устойчивости
равновесия консервативной системы, т. е. равновесие, устойчивое или
неустойчивое при одних консервативных силах, остается таким
же и после введения диссипативных сил. Имеют место
следующие теоремы.
Теорема 1. Равновесие, устойчивое при одних
консервативных силах, остается устойчивым и после введения
диссипативных сил.
Доказательство. Когда равновесие консервативной
системы устойчиво, все Хь положительны и полная энергия
системы
Я = |Е4?+|Е^| A1.38)
462 Глава XI. ОБ УСТОЙЧИВОСТИ ПО ПЕРВОМУ ПРИБЛИЖЕНИЮ
есть положительно-определенная функция всех ^ и ^..
Производная от Н по времени в силу уравнений A1.37)
— постоянно отрицательная (так как зависит только от ^., а не
от ^ и 4г).
Теорема 2. Равновесие, устойчивое при одних
консервативных силах, введением диссипативных сил с полной
диссипацией упрочняется до асимптотически устойчивого.
Уравнениями возмущенного движения системы после
введения диссипативных сил будут уравнения A1.37), где все \ > 0.
Доказательство. Рассмотрим функцию
Положительную постоянную р можно выбрать так, чтобы 1^была
положительно-определенной функцией. Производная от 1^по I в
силу уравнений A1.37) равна
% = X 4, (-*а - |Я + 2 х& + р X D? - V* - ^|Д -
= -B2? + р I А.#) + Р (X 4? - X ^).
г! ТУ
При достаточно малой р производная — отрицательно-опреде-
ленная функция1), и следовательно, выполнены условия теоремы
об асимптотической устойчивости.
Теорема 3. Изолированное неустойчивое равновесие при
одних консервативных силах, если все Х1 ф 0, не может быть
сделано устойчивым введением диссипативных сил с полной
диссипацией.
Доказательство. Пусть одно из Х19 например Х19
отрицательно, а все остальные Х1 > 0, и следовательно, равновесие при
Х) См. признаки знакоопределенности и знакопеременности функций (с. 388, 389).
10. Влияние возмущающих сил
463
одних консервативных силах неустойчиво. Рассмотрим
функцию
V = \ 14? + \ 2 т + р X а^Д,-
Эта ограниченная функция допускает бесконечно малый высший
предел, так как не зависит явно от ^. Ее производная по I в силу
уравнений возмущенного движения
% = -BР + р Е ф?) + р [I ОД? - я& |*)].
При достаточно малой р производная сИ^/с!^ — функция
отрицательно-определенная. Так как Хг < 0, можно выбрать значения ^, ^
так, что и V станет также отрицательной. Следовательно,
равновесие и после введения диссипативных сил остается неустойчивым.
Когда какое-либо Хг равно нулю, равновесие неустойчиво.
Такая неустойчивость может быть упрочнена надлежаще
выбранными диссипативными силами, если все не равные нулю Хь
положительны. Пусть, например, Хх = 0, а все остальные Х1 > 0.
Возьмем диссипативную силу
Хг = -кЬ19 к>0.
Тогда вместо уравнения ^ = 0 с решением ^г = Ах1 + Вх будем
иметь уравнение
1х + ^1= 0
с решением
Гироскопические силы. Гироскопическими
называются силы
У,= 2 ё±9 1=1,2, ...,п,
где 8^ = -§ц. Матрица коэффициентов §^ — кососимметричная с
нулями на главной диагонали
II 0 ёп ... вХп I
#21 0 - *2в I
8п\ 8п2 - °
464 Глава XI. ОБ УСТОЙЧИВОСТИ ПО ПЕРВОМУ ПРИБЛИЖЕНИЮ
Работа гироскопических сил на действительных перемещениях
системы равна нулю. В самом деле, умножив каждое У1 на
соответствующее 4/ и сложив, получим, принимая во внимание, что
У^ + .-. + УД^О
или
У^ + .-. + У^-О.
Теорема 4. Равновесие, устойчивое при одних
консервативных силах, остается устойчивым и при введении
гироскопических сил, а также гироскопических сил совместно с дисси-
пативными.
Доказательство. При введении гироскопических и дис-
сипативных сил уравнения возмущенного движения имеют вид
^ - -1 * - дР 4- У /-12 п
A1.39)
Рассмотрим функцию
Когда все Х1 > О, функция ^положительно-определенная. Ее
производная по времени, равная в силу уравнений возмущенного
движения A1.39)
постоянно-отрицательная. Отсюда следует справедливость
утверждения следующей теоремы.
Терема 5. Равновесие, неустойчивое при одних
консервативных силах, если все А,- ф О, остается неустойчивым при
одновременном добавлении гироскопических и диссипативных
сил (с полной диссипацией).
Доказательство. Рассмотрим функцию
10. Влияние возмущающих сил 465
Эта функция при достаточно малой р имеет
отрицательно-определенную производную. Она допускает бесконечно малый высший
предел, и так как некоторые Хь отрицательны, можно подобрать ^.
и 4; так, чтобы функция V была одинакового знака с дУ/дА.
Теорема 6. Если степень неустойчивости1^ системы,
находящейся под действием одних консервативных сил, четная,
то возможна стабилизация системы введением одних только
гироскопических сил.
Если степень неустойчивости нечетная, то
гироскопическая стабилизация невозможна.
Доказательство. Уравнения возмущенного движения
системы после введения гироскопических сил можно записать
следующим образом:
?1 + ^1=*п42+-"+*1,14л>
>
A1.40)
Подстановка
1п + КЬп = $пА + .- + *щ,-14я-1-
Ъ=А1ем
приводит к системе линейных алгебраических уравнений
(к2 + Х1)А1-к§12А2-...~кё1лАп = 0,
-ке21Аг + (к2 + А,2) А2 - ... - к$2пАп= 0,
-й*яА - кёп2А2 - ... + (к2 + Хп)Ап= 0.
Условие, при котором не все А- одновременно равны нулю,
выражается равенством нулю определителя
к2 + Хг ~к§12 ... -к§1п
А(к)
-к§21 к2 + Х2
-ьеП1 -к$п2 - ь2 + хп
0.
Х) Степень неустойчивости системы определяется числом отрицательных
коэффициентов Х1 в выражении потенциальной энергии, приведенной к
каноническому виду.
466 Глава XI. ОБ УСТОЙЧИВОСТИ ПО ПЕРВОМУ ПРИБЛИЖЕНИЮ
Когда к = О, имеем
А@) = Хг-Х2-...-кп.
Когда к = +оо? —
А(+оо) > 0.
Если число отрицательных Х1 нечетно, то
Л@) < 0
и, следовательно, между 0 и +°° лежит по крайней мере один
положительный корень уравнения
Д(й) - 0.
Соответствующее этому корню значение ^ растет с течением
времени неограниченно, и равновесие неустойчиво. Если число
отрицательных Хь четное, то
Л@) > 0
и между 0 и +оо будет располагаться или четное число
положительных корней, или ни одного. В этом случае гироскопическая
стабилизация оказывается возможной. Но для ее реализации
требуется выполнение некоторых дополнительных условий. Для
системы с двумя степенями свободы эти условия можно
установить следующим образом. Уравнения возмущенного движения
A1.40) здесь будут иметь вид
1\ + ^1 = 42>
^2 + ^2 = -^1»
где § = §12 = -#21» Хх < 0, Х2 < 0 (степень неустойчивости четная).
Исключив ^2» получим одно уравнение четвертого порядка
относительно ^х:
О? + (^ + *1 + *2) 1х + 4^1 = 0.
Характеристическое уравнение
г4 + (ё2 + Хх + Х2) г2 + ХгХ2 = 0
будет иметь отрицательные корни, если
Я2 + ^ + ^2>0' {82 + Х1 + Х2J>4:\1Х2.
Гироскопическая стабилизация возможна только при отсутствии
диссипативных сил с полной диссипацией. Поскольку последние
1. Нелинейные системы
467
неизбежны, то, как бы малы они ни были, действуя достаточно
долго, они разрушат гироскопическую стабилизацию, так как
при одновременном действии гироскопических и диссипативных
сил с полной диссипацией первоначальная неустойчивость
консервативной системы сохраняется.
Устойчивость, созданная гироскопическими силами,
называется поэтому временной в отличие от вековой устойчивости
консервативной системы.
Глава XII
Простейшие нелинейные системы
1. НЕЛИНЕЙНЫЕ СИСТЕМЫ. Теория нелинейных колебаний или,
как иногда ее называют, нелинейная механика, занимается
изучением периодических колебательных движений, описываемых
нелинейными дифференциальными уравнениями. Системы,
совершающие такие движения, называются обычно нелинейными
системами1"*. Таким образом, нелинейная механика занимается
изучением периодических движений нелинейных систем. По
сравнению с линейной теорией нелинейная механика является
дальнейшим углублением наших познаний о законах
механического движения. Освобождаясь от многих искусственных
построений линейной теории, нелинейная механика дает, как правило,
более точное и полное отображение свойств колебательных
движений механических систем. Дело в том, что линейность редко
бывает свойством, присущим самой системе, вытекающим из ее
устройства или ее физической природы. В большинстве случаев
линейность есть результат упрощения реальной системы, чаще
всего осуществляемого путем пренебрежения в уравнениях
движения членами второго и высших порядков относительно
координат и скоростей. Так, например, составляются линейные
уравнения малых колебаний упругих систем около положения
устойчивого равновесия. Основываясь на допущении, что, получив
Х) Выражение нелинейная система далее употребляется еще и в смысле
системы уравнений, определяющих движение нелинейной системы.
468 Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
достаточно малое начальное возмущение, в дальнейшем
возмущенном движении система пребывает в ближайшей окрестности
невозмущенного состояния1*, в выражениях кинетической и
потенциальной энергии сохраняют только члены низшего порядка,
отбрасывая все другие, подобно бесконечно малым высших
порядков. В результате такой операции приходят к линейным
дифференциальным уравнениям движения с постоянными
коэффициентами. Изучение построенных таким искусственным способом
линейных систем дает, правда, возможность сделать заключения о
свойствах их колебаний, полезные во многих практических
расчетах. Однако в большом числе случаев линеаризация системы,
хотя и осуществляемая путем пренебрежения весьма малыми
величинами, дает грубое, упрощенное представление действительных
процессов с количественными результатами, иногда
неприемлемыми даже в ориентировочных расчетах. Во всяком случае
линеаризация ограничивает возможность полного и всестороннего
раскрытия всех колебательных свойств системы. Часто она приводит
к неправильным заключениям о поведении системы и является
вообще недопустимой.
Напомним некоторые общеизвестные факты такого рода. Как
известно, сопротивление среды (в частности, вязкое трение)
зависит от скорости и с уменьшением последней может сделаться сколь
угодно малым. Характеристика такого сопротивления имеет вид
кривой на рис. 110, а в системе координат (Р, и), где Р — сила
сопротивления, V — скорость. Для небольших скоростей, например в
пределах
р,
о
\
V
В^Х^
"О V
а) б)
Рис. 110
-) Которое принимается за начало отсчета координат и потенциальной энергии.
1. Нелинейные системы
469
где кривая почти не отличается от прямой, линеаризация
сопротивления, т. е. замена участка АВ кривой прямолинейным отрезком,
является вполне допустимой, так как прямая здесь достаточно
точно воспроизводит общий характер изменения сопротивления.
Иначе дело обстоит с сухим (кулоновым) трением, упрощенная
характеристика которого представлена на рис. 110, б.
Линеаризация уравнения с сухим трением невозможна, как бы мал ни был
промежуток, на котором рассматриваются изменения скорости
около начала координат.
Многие весьма употребительные в машиностроении
материалы не следуют закону Гука и для малых деформаций.
Характеристики растяжения или сжатия таких, например, материалов,
как кожа, резина, бетон и др. не имеют прямолинейных
участков. Их модуль упругости изменяется вместе с величиной
деформации. На рис. 111 представлены характеристики растяжения и
сжатия таких материалов. В зависимости от расположения
кривой Р(х) относительно прямой (которая соответствует линейной
характеристике), касательной к ней в начале координат О
(пунктир на рис. 111), мы будем иметь жесткую (рис. 111, а) и мягкую
(рис. 111, б) системы. Такие свойства указанных материалов,
очевидно, не могут быть учтены в линейной теории, а между тем,
именно эти свойства имеют иногда существенное значение,
например, в расчетах резонансных колебаний и динамической
прочности. Частоты колебаний деталей некоторых устройств,
включающих элементы из таких материалов, зависят от амплитуды
колебаний; в одних случаях они растут с увеличением амплитуд
(жесткие системы), в других, наоборот, убывают (мягкие
системы). Включение в колеблющиеся системы таких нелинейных
элементов может иногда в значительной степени ослабить по-
а) б)
Рис. 111
470 Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
следствия резонанса. Увеличение амплитуды вызовет изменение
частоты, а это повлечет за собой автоматический выход системы
из условий резонанса.
Замечательным примером системы, линеаризация которой
ограничивает возможности обнаружения ее важнейших
колебательных свойств, могут служить обыкновенные часы с
маятником, приводимые в движение, например, падающим грузом.
Линейная трактовка колебаний маятника предполагает, что
отклонения маятника от вертикального положения равновесия
весьма малы. Такие малые колебания маятник будет совершать,
если ему сообщить достаточно малое начальное возмущение
(отклонение). Но, как легко проверить, при малом начальном
возмущении маятник, предоставленный затем самому себе, будет
совершать затухающие колебания с быстро убывающими
амплитудами, пока не остановится в вертикальном положении. Часы от
такого малого начального возмущения «не пойдут», так как
источник пополнения расходуемой маятником энергии (падающий
груз) при таких колебаниях не включается. Таким образом,
линеаризация системы — часы с маятником — не дает возможности
обнаружить в ней те свойства, которые являются наиболее
характерными для часов как инструмента для измерения времени. Эти
свойства проявляются только при достаточно большом
начальном возмущении и при колебаниях с конечной амплитудой.
Когда маятник получит возмущение, большее некоторого предела,
в дальнейшем своем движении он ведет себя резко отлично от
привычного в линейной теории поведения систем с
сопротивлением. Амплитуды колебаний маятника начинают расти или
убывать, приближаясь в том и другом случае к одному предельному
стационарному значению, достигнув которого они дальше не
изменяются, так что маятник совершает устойчивые изохронные
колебания, обеспечивая тем самым более или менее точный
отсчет времени. Открыть существование такого устойчивого
периодического движения в системе с сопротивлением, оставаясь в
пределах линейной теории, описать средствами последней
свойства этого движения мы, конечно, не можем. Линейная трактовка
задачи о колебаниях маятника часов связана с отказом от
исследования наиболее важных с практической точки зрения
колебательных свойств системы, наиболее характерных для ее назначения и
использования.
1. Нелинейные системы
471
Можно было бы привести и другие примеры, в которых
линейная трактовка задачи о колебаниях не только не дает
возможности открыть многие важные колебательные свойства системы, но
и заметно искажает даже обнаруживаемые ею свойства. Класс
нелинейных систем бесконечно шире и многообразнее узкой
области искусственно построенных линейных систем, и была бы
безнадежной попытка перечисления всех неучитываемых
линейной теорией их особенностей. Но некоторые общие свойства
нелинейных систем, связанные с определением задач дальнейшего их
исследования, можно отметить сейчас же в предварительной
характеристике их отличий от линейных. К таким свойствам
относятся следующие.
¦ К нелинейным системам неприменим принцип линейного
наложения. Линейная суперпозиция двух или нескольких
колебательных движений нелинейной системы не будет колебанием
последней. Иначе говоря, из найденных независимых частных решений
дифференциальных уравнений нелинейной системы нельзя
составить общего решения, подобно тому, как составляется общее
решение системы линейных уравнений. Если действующая на систему
сила разложена в ряд Фурье, то действие ее на нелинейную
систему не будет равно линейной сумме действий каждого отдельного
гармонического слагаемого этого ряда.
¦ Свободные колебания линейных систем — всегда затухающие.
Это одно из основных свойств линейных колебаний: в реальных
условиях действие на линейную систему сопротивлений
выражается в убывании отклонений системы от равновесного
положения, которое, таким образом, оказывается единственным
стационарным состоянием такой системы. Строго периодические
колебания в линейных системах возможны только в форме
вынужденных колебаний, возникающих от действия внешних
возмущающих периодических сил. В нелинейных системах и при
наличии сопротивления возможны строго периодические
устойчивые свободные колебания. Потери энергии в некоторых
нелинейных системах могут иногда автоматически компенсироваться
поступлениями ее из неколебательного источника, дозировка
которых во времени и по величине регулируется самой
колеблющейся системой. Это имеет место в рассмотренном примере с
колебаниями маятника часов и в других автоколебательных
системах.
472
Глава ХП. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
В линейных системах вынужденные колебания от
гармонической возмущающей силы происходят с частотой или периодом
последней. В нелинейных системах вынужденные колебания от
гармонической возмущающей силы могут происходить не только
с периодом возмущающей силы, но и с периодами, равными
целым кратным последнего. В связи с этим в данной нелинейной
системе с одной степенью свободы, на которую действует только
одна гармоническая возмущающая сила, возможны несколько
резонансных режимов.
В линейных системах собственные частоты не зависят от
начальных условий, и, в частности, от амплитуды. Изменить
частоту линейных колебаний можно только путем существенных
изменений конструкции системы, распределения в ней масс и жест-
костей. В нелинейных системах частота большей частью зависит
от амплитуды колебаний. Эта зависимость имеет место главным
образом в нелинейных консервативных системах: такие системы
обладают целым континуумом периодических колебательных
движений с непрерывно изменяющейся частотой, получаемых от
непрерывного изменения начальных условий.
2. МЕТОД ИЗОКЛИН. В дальнейшем изложении теории
нелинейных колебаний ограничимся главным образом системами с одной
степенью свободы, наметив в общих чертах некоторые методы
общей теории нелинейных систем со многими степенями свободы.
В частности, в этой главе мы будем заниматься простейшими
нелинейными системами с одной степенью свободы, объединив их
изучение одним общим методом фазовой плоскости или
методом изоклин. Это — один из графических методов
интегрирования системы дифференциальных уравнений вида
Как мы знаем, эти уравнения определяют стационарное поле
направлений, относя каждой точке этого поля направление
касательной к проходящей через нее фазовой траектории. Линии,
проходящие через точки с одинаковым наклоном касательных,
3. Нелинейные консервативные системы
473
называются изоклинами.
Уравнение изоклин для фазовых
траекторий рассматриваемого типа
будет иметь вид
^ = ^Щ = СОП8* = А.
их Р(х, у)
Зададим ряд достаточно близких
друг к другу значений &, — тогда
получим семейство изоклин, с
помощью которых можно если не
построить точно фазовые
траектории, то во всяком случае
приближенно представить общий
характер их расположения, чего иногда достаточно для
качественного решения нелинейной задачи. На рис. 112 построено поле
направлений для уравнений
Рис. 112
их
*у.
:У>
-2ш/ - к2х,
т. е. для затухающего линейного осциллятора
х + 2пх + к2х = 0.
Из рисунка можно видеть, что фазовые траектории имеют характер
спиралей, асимптотически сходящихся к началу координат О,
которое является, таким образом, особой точкой типа фокуса.
3. НЕЛИНЕЙНЫЕ КОНСЕРВАТИВНЫЕ СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ
СВОБОДЫ. Нелинейные консервативные системы представляют
собой частный случай класса систем Ляпунова, и их исследование
входит в состав общих методов, построенных для систем
Ляпунова. Но случай консервативной системы с одной степенью свободы
допускает наглядную и важную по своим практическим
приложениям геометрическую интерпретацию, и поэтому независимо от
общей теории ляпуновских систем предварительное рассмотрение
этого частного случая имеет значение, во-первых, как
элементарное введение в теорию нелинейных колебаний вообще, и
во-вторых, как простой способ ознакомления с основами качественной
теории нелинейных систем — с методом фазовой плоскости.
474
Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
Уравнение нелинейной консервативной системы может быть
приведено к виду
X+/(*) = О, A2.1)
в котором ?(х) можно рассматривать как отнесенную к единице
массы восстанавливающую силу. Будем предполагать, что
функция /(х) разлагается в ряд по степеням х, как, например, это
имеет место в уравнении колебаний математического маятника
X + у 8111 X = О,
где роль Дх) играет функция (§/1) зт х, разлагающаяся в ряд
-!(*-И + И-->
& а ( уЗ
18ШХ I У" 3!
В простейших задачах /(х) — полином от х невысокой степени,
причем, будучи выражением восстанавливающей силы, он
меняет знак при перемене знака х.
Уравнение A2.1) интегрируется в квадратурах. В частности,
оно имеет первый интеграл
у + ]?(х)<1х = к,
о
являющийся интегралом сохранения энергии, который мы,
положив
Щх) = ] /(*) сЬс,
о
будем записывать следующим образом:
х2
-К +Щх) = к. A2.2)
Постоянная Н определяется начальным отклонением и начальной
скоростью, т. е. начальным запасом полной энергии.
На фазовой плоскости уравнению A2.1) будут соответствовать
два уравнения движения изображающей точки:
A2.3)
3. Нелинейные консервативные системы
475
При этом первый интеграл A2.2) обращается в конечное
уравнение фазовых траекторий
^ + Щх) = к. A2.4)
Этим уравнением решаются полностью все вопросы о
движении рассматриваемой нелинейной системы, и, в частности, вопрос
о периодических решениях, их существовании и устойчивости.
Тем не менее проведем исследование движений, определяемых
уравнениями A2.1), A2.3) и A2.4), еще и методом фазовой
плоскости по соображениям, изложенным выше.
Большей частью функция /(х) — нелинейная характеристика
жесткости — задается графически. В этом случае и функция Щх)
находится графическим интегрированием. Кривую
2 = П(х),
изображающую зависимость потенциальной энергии от
отклонения х, будем называть кривой энергетического баланса. В
дальнейшем эта кривая строится на той же фазовой плоскости, где
расположены и фазовые траектории, в системе координат (г, х),
ось г которой совпадает с осью у фазовой плоскости, а ось х
параллельна оси Ох фазовой плоскости. С помощью кривой
энергетического баланса легко могут быть построены фазовые
траектории рассматриваемой системы. Переходя к описанию таких
построений, отметим сначала некоторые общие свойства этих
траекторий, вытекающие из уравнений A2.3) и A2.4).
* Уравнение A2.4) не меняется при изменении знака у.
Следовательно, фазовые траектории системы A2.3) симметричны
относительно оси Ох.
^ Точки оси Ох, в которых одновременно
у = 0, Г(х) = 0,
т. е. точки оси Ох с абсциссами, равными корням уравнения
Ах) = о,
соответствуют равновесным состояниям системы, так как в этих
точках
476 Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
Эти точки обладают, кроме того, еще и следующими свойствами.
В них
П'(х) = О,
т. е. потенциальная энергия имеет стационарное значение, в
частности, достигает минимального или максимального значения,
что, как известно, определяет характер устойчивости
соответствующего равновесного состояния. Наконец, эти точки являются
особыми точками фазовых траекторий, так как в этих точках
угловой коэффициент
&х у
касательной к проходящей через эту точку траектории,
становится неопределенным.
¦ В обыкновенных точках пересечения фазовых траекторий с
осью Ох касательные к фазовым траекториям перпендикулярны
оси Ох, так как здесь у = О при /(х) ф О и, следовательно,
йУ =оо.
их
Сообщив системе некоторое начальное возмущение с
начальным запасом полной энергии к, строим в системе (г, х) кривую
энергетического баланса г = Щх) и прямую г = к. Разность
к - Щх)
определяет значения ординат фазовой траектории по формуле
4= =±Л1-Щх). A2.5)
Л
Эти ординаты вещественны на участках, где
к - Щх) > 0.
На участках, где
к - Щх) < 0,
фазовые траектории отсутствуют. Для упрощения построений
будем откладывать на фазовой плоскости ординаты фазовых
траекторий, уменьшенные в л/2 раз, что не скажется на форме кривых,
а только отразится на масштабе их размеров по вертикали.
Рассмотрим вид фазовых траекторий, соответствующих
отдельным участкам кривой энергетического баланса.
3. Нелинейные консервативные системы
477
ш Участок кривой энергетического баланса, где кривая г =
= Щх) пересекает прямую г = к (рис. 113).
Соответствующий этому участку отрезок фазовой траектории
пересекает ось Ох в обыкновенной1* точке А, где касательная к фазовой
траектории перпендикулярна оси Ох. Справа от А нет
вещественных ветвей фазовой траектории, так как здесь
к - Щх) < 0.
Движение изображающей точки по фазовой траектории направлено
в верхней полуплоскости слева направо, так как здесь у = ~ > 0, а в
нижней — справа налево, так как когда у < 0, и — < 0. При
небольшом изменении значения к общий характер фазовых траекторий не
изменяется, т. е. качественная картина остается прежней (см.
пунктирные линии на фазовой плоскости (х, у) для г = кг, г = к2).
т Участок кривой энергетического баланса с одним
изолированным минимумом (рис. 114). Пусть этот
минимум равен к0. Если начальное значение полной энергии тоже /г0,
то фазовая траектория, соответствующая этому минимуму,
вырождается в особую точку А на оси Ох, изображающую
равновесное состояние системы, так как здесь у = 0 и П'(х) = /(х) == 0.
Фазовые траектории при к, большем к0, но достаточно близком к к0,
представляют собой замкнутые кривые, окружающие точку А.
Рис. 113
Рис. 114
Так как в этой точке П'(х) = -/(х) * 0.
478
Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
Точка А является особой точкой типа центра, изображающей
устойчивое равновесное состояние системы.
¦ Участок кривой энергетического баланса с одним
изолированным максимумом. МаксимумуЩх), равному к0,
соответствуют, как видно из рис. 115, четыре ветви фазовой
траектории (так называемые усы), сходящиеся в точке А: ветви /, //
и симметричные им III и IV. Вблизи точки А усы делят фазовую
плоскость на четыре участка. При значениях к> к0 фазовые
траектории располагаются в верхнем и нижнем участках. При к < к0
фазовые траектории располагаются в левом и правом участках.
Попав на одну из таких траекторий (кроме усов I и IV),
изображающая точка с течением времени удаляется от А. Особая точка с
таким расположением около нее фазовых траекторий
называется, как мы знаем, седлом. Ей соответствует неустойчивое
равновесное состояние1).
Попав на усы I и IV, изображающая точка приближается к А.
Это, однако, не противоречит утверждению, что точка А
изображает неустойчивое равновесное состояние. Во-первых, мы не
можем в данном случае указать область около А, попав в которую,
изображающая точка не выйдет
в дальнейшем возмущенном
движении за ее пределы.
Вероятность следования по усам I и IV
(т. е. задания начальных
условий, точно соответствующих
положению точки на усах)
бесконечно мала2). Во-вторых, попав в
начальный момент на один из
усов I и IV, изображающая точка
никогда не достигла бы А, так
как на это потребовался бы
бесконечный промежуток времени.
Справедливость этого
утверждения покажем ниже на примере
Рис. 115 колебаний маятника.
Х) Изложенное рассуждение является элементарным доказательством обратной
теоремы о неустойчивости положения равновесия консервативной системы,
когда в этом положении потенциальная энергия имеет изолированный максимум.
2) Движение по усам неустойчиво и физически не осуществляется.
3. Нелинейные консервативные системы
479
Ол
г = Щх)
У,
о
1
,**—-","^""
Рис. 116
*"""" <
X
х
^ Убегающие траектории. Если прямая 2 = к нигде не
пересекает кривую энергетического баланса г = П(х) и нигде ее не
касается и если при этом прямая 2 = Н лежит ниже кривой 2 = Щх),
то движение системы не осуществляется. Если кривая 2 = Щх)
лежит всеми своими точками ниже прямой г = к, то фазовая
траектория будет состоять из двух симметричных относительно оси Ох
ветвей, уходящих в обе стороны в бесконечность (рис. 116).
Изображающая точка будет двигаться по такой траектории, не
останавливаясь, в одном направлении до бесконечности. Такое
движение изображающей точки называется убегающим движением,
а соответствующие фазовые траектории — убегающими
траекториями.
Ш Фазовые траектории на всей фазовой
плоскости. Рассмотрим сначала случай, когда прямая 2 = к0
пересекает в нескольких точках кривую 2 = Щх), нигде не касаясь ее
(рис. 117). Для тех значений х, при которых Щх) > к0, фазовые
Рис. 117
480
Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
траектории отсутствуют (участки аЪ и ей). На остальных
участках фазовые траектории — или замкнутые кривые (участки Ьс и
йе), изображающие возможные в системе периодические
движения, или убегающие в одну сторону траектории типа рис. 113
(у точки А на рис. 117). Для значений к, близких к к0, характер
расположения фазовых траекторий существенно не меняется.
¦ Прямая г = к0 пересекает и в некоторых
точках касается кривой г = Щх) (рис. 118). Фазовыми
траекториями в одном случае будут изолированные точки,
соответствующие изолированным минимумам функции Щх),
изображающие устойчивые равновесные состояния системы (точка А).
При увеличении к вокруг такой точки, как А, образуются
замкнутые траектории, изображающие периодические движения
системы.
В другом случае на изолированных конечных участках будут
замкнутые фазовые траектории, соответствующие
периодическим движениям, либо замкнутые кривые особого типа —
кривые с самопересечением (в точках Б и С) — сепаратрисы. Точки
самопересечения соответствуют изолированным максимумам
потенциальной энергии и являются особыми точками типа седла,
изображающими неустойчивые равновесные состояния.
Сепаратрисы разделяют области фазовой плоскости с фазовыми
траекториями различного типа. Сами по себе они не являются кривыми,
изображающими реальные движения. Последние всегда
отклоняются от сепаратрис или в сторону замкнутых траекторий,
заключенных в звеньях сепаратрисы, или же наружу в сторону убе-
г = к
г = к,
Рис. 118
4. Периодические движения консервативных систем
481
гающих траекторий или замкнутых траекторий, охватывающих
сразу несколько смежных звеньев сепаратрисы. Они являются
лишь граничными кривыми, разделяющими указанные два вида
траекторий. Потому им и присвоено название сепаратрис, т. е.
«разделяющих».
Как видно из рис. 118, особые точки типа центра и седла
чередуются на оси абсцисс. Это чередование является простым
следствием чередования максимумов и минимумов функции П(х).
Далее, внутри замкнутой фазовой траектории всегда находится
нечетное число особых точек, причем число центров на единицу
больше числа седел. Пусть, например, на фазовой плоскости
имеется одна замкнутая траектория, пересекающая ось Ох в
точках а и C. В этих точках функция к - Щх) обращается в нуль.
Следовательно, между а и C лежит по крайней мере одна точка
(или нечетное число таких точек), в которой обращается в нуль
П'(х). Из геометрических соображений очевидно, что если внутри
замкнутой кривой такая точка одна, то она обязательно будет
центром, соответствующим изолированному минимуму потенциальной
энергии.
4. ПЕРИОДИЧЕСКИЕ ДВИЖЕНИЯ НЕЛИНЕЙНЫХ КОНСЕРВАТИВНЫХ
СИСТЕМ. Замкнутые фазовые траектории, изображающие
периодические движения или нелинейные колебания консервативных
систем, образуют на фазовой плоскости целые континуумы,
заполняющие конечные участки, причем одна замкнутая фазовая
траектория охватывает другую, не пересекая ее (траектории как бы
вложены одна в другую). Поэтому, если в консервативной системе
возможно одно периодическое движение, то их может быть в ней
бесконечное множество и все они могут быть получены
непрерывным изменением начальных условий в пределах некоторой
ограниченной области. Амплитуды и периоды нелинейных колебаний
консервативных систем зависят от начальных условий
(начального к0). Период колебаний системы можно вычислить следующим
образом. Из уравнения
— =У
6г у
находим
Л. 6.x 6.x
У 42[к -Щх)]
16- 10456 Бабаков
482 Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
Если абсциссы точек пересечения замкнутой фазовой траектории
с осью Ох обозначить через аир (рис. 114), то для периода Т
полного колебания найдем выражение
Т = 2 Г йХ A2.6)
Следует отметить, что малые свободные колебания
консервативной линейной системы на фазовой плоскости изображаются также
континуумом замкнутых траекторий, окружающих точку
устойчивого равновесного положения системы. Амплитуды колебаний
линейных систем, так же как и нелинейных консервативных, зависят
от начальных условий, но период колебаний линейной системы
есть постоянная, не зависящая от начальных условий и от
начального запаса энергии системы, в чем можно убедиться, подставив в
общую формулу A2.6) соответствующие значения П(х) и /г.
Так как период колебаний нелинейной консервативной
системы, изображаемых на фазовой плоскости замкнутыми
траекториями, не один и тот же, а зависит от начальных условий, то две
изображающие точки, начавшие свои движения, например от
оси Ог/, одновременно по двум близким траекториям, с течением
времени отойдут одна от другой на конечное расстояние.
Вследствие этого периодические движения консервативных систем
нельзя, строго говоря, считать устойчивыми по Ляпунову. Но
они обладают орбитальной устойчивостью, выражающейся в
том, что при весьма малом изменении начальных условий
возмущенное периодическое движение изображающей точки
переходит на другую траекторию, сколь угодно близкую к
первоначальной (невозмущенной).
Пример 1. КОЛЕБАНИЯ МАТЕМАТИЧЕСКОГО МАЯТНИКА С КОНЕЧНОЙ
АМПЛИТУДОЙ. Обозначив через / длину маятника и через 0 — угол
отклонения от вертикали, из закона изменения момента количества движения
получим уравнение
0 + | 8111 6 = 0.
Уравнения движения изображающей точки на фазовой плоскости Оху будут
иметь вид
4. Периодические движения консервативных систем
483
где х = 6, у = 6. Эти уравнения имеют первый интеграл
у2/2 - (§/1) соз х = к
или
у2/2 = (#//) (соз х - соз х0), A2.7)
где х0 — начальное отклонение маятника от вертикали. Функция Щх) и
постоянная к здесь равны
Щх) = -(8/1) соз х, к = -(§/1) соз х0.
Уравнение фазовых траекторий, представленное интегралом A2.7), можно
преобразовать к следующему:
У~=Ц [зт2(х0/2) -зт2(х/2)]. A2.8)
Период полного колебания Т получим из формулы A2.6), положив в ней
к = ~(ё/1) соз х0, Щх) = -(8/1) соз х, а = -х0, C = х0.
Так как подынтегральная функция четная, имеем
Т=2 Г — ах — . A2.9)
о 7(^/0[зт2(х0/2)-8Ш2(х/2)]
Это — эллиптический интеграл, который подстановкой
зт (х/2) = I/ зт (х0/2) = ки
может быть приведен к стандартной форме
1 ,
т = 4 и г Дм
4-7—
*8 >0 7A~)AГГ^)
В линейной теории колебаний маятника, приняв
зт2 (х0/2) * х2/4, зт2 (х/2) « х2/4,
получим из A2.9) общеизвестное выражение для периода
Т0 = 2пЛ78.
Период линейных колебаний не зависит от х0, т. е. от амплитуды
колебаний (или начальных условий). В нелинейной теории период существенным
образом зависит от амплитуды. Эту зависимость можно выразить явно,
заменив в выражении A2.9) эллиптический интеграл его известным
разложением по степеням к
484
Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
Т = 2л ^ [1 + (|Jзш2 (*0/2) + (Н)*™4 (*о/2) + ».} A2.10)
Ограничившись в этом разложении двумя первыми членами и положив
8ш2(*о/2)**§/4,
получим уточненную приближенную формулу для периода
Т = 2п Л7ё A + х%/16).
Эффект этого уточнения не очень велик. Если х0 = 30°, то из последней
формулы находим
Т = 2к 4ТГ§ A + 0,014) = 1,014Т0.
Чтобы получить фазовую картину (рис. 119) колебаний маятника,
строим, согласно общей теории, на плоскости (г, х) кривую энергетического
баланса
2 = ~(ё/1) со8 х.
Это будет косинусоида с изолированными минимумами в точках
х = 0, ±2я, ±4тг, ...
X = ±71, ±3я, ...
и максимумами в точках
Начальный запас полной энергии определяется начальным отклонением и
равен
К = -(8/1) сов х0.
Когда 0 < |х0| < л: и, следовательно, |соз х0| < 1 и |Л0| < (&/1), маятник
совершает периодические колебания, изображаемые замкнутыми кривыми вну-
Рис. 119
4. Периодические движения консервативных систем
485
три звеньев сепаратрисы. Эти кривые окружают особые точки,
соответствующие устойчивым равновесным положениям маятника. Замкнутыми
кривыми, расположенными внутри участка (-я, +я), определяется полная фазовая
картина движения маятника; другие звенья просто повторяют это
изображение, так как значениям х = О, ±2я, ±4я, ... и т. д. соответствует одно и то же
устойчивое равновесное положение маятника.
Когда Л0 > (§/1), что может иметь место только если в начальный момент
маятнику вместе с отклонением х0 сообщается достаточно большая
начальная скорость у0У т. е. если
К = ~(8/1) соз х0 + у\/2,
разность
Н0 - Гц» = у2/2
будет больше нуля при условии
у*/2>(8/1)A + совх0).
Соответствующие этому случаю фазовые траектории не будут пересекать ось
Ох; это будут убегающие траектории. Маятник будет вращаться вокруг оси
подвеса в вертикальной плоскости все время в одну и ту же сторону.
Когда Н0 = (§/1), х0 = ±я, ± Зя,
к0-Щх) = (ё/1)A+созх)у
на фазовой плоскости получается сепаратриса АА. Как было указано
раньше, движение изображающей точки по сепаратрисе практически
неосуществимо, хотя теоретически возможно. Попав в силу специально подобранных
начальных условий на сепаратрису, изображающая точка будет двигаться по
ней к неустойчивому равновесному положению, но никогда не достигнет
этого положения, так как для этого потребуется бесконечный промежуток
времени. В самом деле, предположим, что маятник, находившийся в покое в
устойчивом равновесном положении (х = 0), получает начальную скорость,
достаточную для достижения вертикального неустойчивого положения
равновесия (х = я). Время, которое потребуется для этого, равное четверти
периода, найдем по формуле, аналогичной A2.9),
^ /в _ ^ I &*
?-н
*0 ^тЦх0/2)-8тЦх/2)
где теперь х0 = я и
81п2 (х0/2) = зт2 (я/2) = 1.
Следовательно,
'а/? =1 Й(*/2/9чд2 Ит 1п ** <*/4 + я/4).
у1 * соз (х/2) х — п
Из последнего соотношения видно, что I растет безгранично при приближении
л: к я. Маятник, получив надлежащую начальную скорость, будет
приближаться к неустойчивому равновесному положению, но никогда его не достигнет.
486
Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
Рис. 120
Пример 2. Тяжелая точка движется по
окружности, расположенной в
вертикальной плоскости и вращающейся с угловой
скоростью со вокруг вертикального
диаметра (рис. 120). Такое движение точки
можно трактовать как колебания
математического маятника, ось подвеса которого
вращается вокруг вертикальной оси со
скоростью со.
Относительное движение точки по
вращающейся окружности можно
рассматривать как абсолютное, если добавить к
заданной силе — весу точки т$ — силы инерции.
Силами инерции являются переносная
центробежная сила инерции Р = т^со2, где ^ —
расстояние от точки до оси вращения Оп, и кориолисова сила инерции,
которая не влияет на движение точки по окружности, так как направлена
перпендикулярно плоскости окружности; она дает добавочную реакцию, которая нас
сейчас не интересует.
За обобщенную координату примем угол 0 (рис. 120). Координаты
движущейся точки будут
^ = а 81п Э,
Г| = а A - соз 6).
Массу точки положим равной единице (т = 1). Тогда ее кинетическая
энергия равна
Потенциальная энергия П равна работе сил, приложенных к точке, на
перемещении из положения 6 в нулевое, за которое мы примем положение точки
в нижнем конце вертикального диаметра. Тогда
П = ^Щ-
^2со2
2
§а A - соз 9)
—— 81П^ 6.
Уравнение движения точки, составленное по схеме уравнений Лагранжа,
будет иметь вид
ё= со2 8П1 9 (соз 9 - А,), A2.11)
где
Х = §/аы2,
а уравнения движения изображающей точки на фазовой плоскости
д.х
-¦у>
-У- = СО2 81П X (СОЗ X - X),
A2.12)
A2.13)
4. Периодические движения консервативных систем
487
где х = 0, у = 0. Дифференциальное уравнение фазовых траекторий получим,
разделив второе уравнение A2.13) на первое:
д.у _ со2 зт х (соз х - X)
их у
A2.14)
Из последнего уравнения легко получается первый интеграл системы A2.13)
у2 + (со2/2) (соз 2х - 4Х соз х) = к. A2.15)
Рассмотрим сначала случай, когда X > 1, например X, = 1,5. Это случай
«малой» угловой скорости
ш = 4§Та.
Особыми точками, изображающими равновесные состояния, в этом случае
будут точки на оси Ох с абсциссами, удовлетворяющими уравнению
(зт х) • (соз х - X) = 0
или уравнению зт х = 0, так как соз х ф X. Абсциссы таких точек равны
X = 0, ±71, ±2Я, ... .
Им будут соответствовать изолированные минимумы и максимумы функции
П(х) = (оз2/2) (соз 2х - 4Х соз х),
производная которой
П'(х) = -2со2 зт л: (соз х - 1,5)
в этих точках обращается в нуль.
Переходим к построению фазовых
траекторий изображающей систему
точки. Кривая энергетического
баланса (рис. 121)
г = Щх) = (оз2/2) (соз 2х - 6 соз х)
складывается из двух наложенных
одна на другую косинусоид / и //:
гх = -Зсо2 соз х,
г2 = (со2/2) соз 2х.
Построив эти косинусоиды и сложив
их ординаты, получим кривую
2 = ЩХ),
представленную на рис. 121 жирной
линией.
В точках х = 0, ±2я, ... кривая
энергетического баланса имеет
изолированные минимумы, которым
соответствуют устойчивые равновесные положения.
В точках х = ±к, ±3я, ... расположатся
Рис. 121
488
Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
изображения неустойчивых равновесных положений1*. В общем картина
расположения фазовых траекторий с качественной стороны не будет отличаться
от построенной в примере 1 для колебаний маятника в вертикальной
(неподвижной) плоскости и дальнейшее обсуждение поведения изображающей
точки ничего нового не прибавит к изложенному в примере 1.
Новые явления обнаруживаются в случае, когда X < 1. Предположим для
определенности, что X = 0,5. Из уравнения фазовых траекторий
6.у _ СО2 51П X (СОЗ X - 0,5)
их у
находим первый интеграл
у2 + (со2/2) (соз 2х - 2 соз х) = к A2.16)
8И1 X — 0, С08 X — 0,5,
и уравнения
корни которых
х = 0, ±п, ±2я,...,±|, ^,...
определяют абсциссы особых точек, расположенных на оси х.
Кривую энергетического баланса
г = Щх) = (со2/2) (соз 2х - 2 сое х)
строим, складывая соответственные ординаты двух косинусоид (кривые /
и II на рис. 122):
гх = -со2 соз х,
г2 = (оо2/2) соз 2х.
В отличие от предыдущего случая здесь кривая энергетического баланса в
промежутке от -п до +я имеет два изолированных минимума и один максимум.
Минимумы соответствуют точкам с абсциссами -я/3, +я/3; максимум — точке
х = 0. Точки -я/3 и +я/3 являются особыми точками типа центра. На
вращающейся окружности этим точкам соответствуют два устойчивых
равновесных положения 6 = ±л/3. Будучи выведена из этих положений, точка
совершает около них периодические колебания, которые изображаются на
фазовой плоскости замкнутыми траекториями, окружающими центры,
соответствующие х = ±я/3. Особой точке х = 0 соответствует изолированный
максимум: это особая точка типа седла, изображающая неустойчивое
равновесное состояние в нижнем конце вертикального диаметра. В первом случае
(X > 1) здесь было единственное устойчивое равновесное положение системы.
Значение к — -со2/2 является критическим. Этому значению на фазовой
плоскости соответствует первая сепаратриса с уравнением
у2 + (ш2/2) (соз 2х - 2 сое х) = -оз2/2.
Для значений к в промежутке
-оэ2/2 < к < Зю2/2
*) Фактически в данном случае существуют два положения равновесия — одно
устойчивое (х = 0) и одно неустойчивое (х = я). Остальные повторяют эти два.
4. Периодические движения консервативных систем 489
Рис. 122
на фазовой плоскости снова появляются замкнутые траектории. Они
изображают колебания точки на окружности, в которых точка движется со столь
большой скоростью, что свободно проходит через два устойчивых положения
равновесия Э = ±я/3, совершая колебания большой амплитуды около
среднего положения х = 0.
Значение
к = +Зсо2/2
снова критическое. Ему соответствует вторая сепаратриса с бесконечным
числом звеньев и с точками самопересечения, абсциссы которых равны
X = ±71, ±371, ... .
Это — особые точки типа седла, изображающие неустойчивые положения
равновесия в верхнем конце вертикального диаметра.
Когда
Н > Зсо2/2,
точка описывает окружность, нигде не останавливаясь и не совершая при
этом никаких колебаний. На фазовой плоскости такое движение
изображается убегающими траекториями, охватывающими сверху и снизу все особые
точки и сепаратрисы.
490 Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
5. ФОРМУЛЫ ПРЯМОЙ ЛИНЕАРИЗАЦИИ1). Решение уравнения
A2.1) при условии, что /(-х) = ~/(х), и при начальных условиях
х@) = А, х@) = 0 можно получить с достаточной для
практических приложений точностью, заменив это уравнение линейным
х + к2х = 0,
где к2 — некоторое среднее взвешенное жесткости ?'(х) на
интервале @, А):
А
\Г(х)р(х)&х
к2=^~х . A2.17)
\р(х)йх
о
Удачным подбором весовой функции р(х) можно иногда
обеспечить довольно большую точность в определении частоты
колебаний нелинейной системы A2.1) при постоянной амплитуде А. По
крайней мере все предложенные для прямой линеаризации
формулы могут быть получены из формулы A2.17) при надлежащим
образом выбранной функции р(х).
Положив в формуле A2.17) р(х) = 1, получим формулу
Н. К. Куликова [108, с. 187]
Ь2 = Г(А)
П ~А~'
Графически это означает замену кривой у = /(х) хордой
Положив р(х) = 1 - х4/А4, получим формулу Я. Г. Пановко
[116, с. 113]
5 А
^2 = ~~5 I х3?(Х) ^Х'
А° 0
Эта формула найдена Я. Г. Пановко путем замены кривой у = /(х)
прямой у = к2х при условии обращения в минимум интеграла
А
{ Шх) ~ к2х]2 х2 6.x.
о
г) См. ст. И. Л. Ланцевицкого [109].
6. Диссипативные системы
491
Положив р(х) = лД _ х2/А2 в формуле A2.17), получим в
результате формулу, аналогичную формуле Н. М. Крылова и Н. Н.
Боголюбова [22]
4 А
к2 = —- [ /(А 81П х) 81П х с!х.
пА I
Наконец, полагая
A при 0 < х <А/2,
Р(х) - 11/2 при А/2 <х<Ау
приходим к формуле Я. 3. Цыпкина [121]
Формула Я. 3. Цыпкина дает, как правило, более точный
результат, чем все другие приведенные выше формулы1 \ В этом можно
убедиться, если, следуя А. Д. Мышкису [114], сравнить разложения
периода колебаний, определяемого приведенными формулами, по
степеням отклонения А с точным решением уравнения A2.1).
Так, для маятника, совершающего свободные колебания,
согласно уравнению
X + 8111 X = О,
при начальных условиях
х@) = п/2, х@)-0
точное значение частоты к2 = 0,847. Соответственно
^ по формуле Куликова к2 = 0,917 (+8,25%);
^ по формуле Пановко к2 = 0,856 (+1,06%);
^ по формуле Цыпкина к2 = 0,851 (+0,47%).
6. ДИССИПАТИВНЫЕ СИСТЕМЫ. Диссипативные системы
составляют группу неконсервативных систем, движение которых связано с
некомпенсируемыми потерями энергии и затуханием колебаний.
В диссипативных системах невозможны строго периодические
колебательные движения, чем они существенным образом
отличаются от других нелинейных неконсервативных систем, например от
автоколебательных. Движение последних также сопровождается
потерями энергии, но эти потери автоматически компенсируются
поступлениями из неколебательного источника, регулируемыми
самой колеблющейся системой. В таких системах возможны пери-
¦* При разрывах жесткости Г(х) точность ухудшается.
492 Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
одические колебательные движения. В диссипативных системах
единственными стационарными состояниями являются
равновесные состояния, обладающие асимптотической устойчивостью.
Потери энергии в нелинейных диссипативных системах
вызываются большей частью сухим (кулоновым) трением, иногда в
сочетании с вязким, а также внутренним неупругим
сопротивлением, которое возникает в материале частей системы,
деформирующихся при колебаниях. Все эти сопротивления, как правило,
нелинейны и не линеаризуемы. Расчет колебаний систем с
такими сопротивлениями представляет существенно нелинейную
задачу, которая не может быть решена методами линейной теории.
Рассмотрим некоторые простейшие диссипативные системы с
одной степенью свободы, качественное исследование которых
можно выполнить методом фазовой плоскости.
Наиболее характерным признаком диссипативных систем
является, как уже было указано, некомпенсируемое рассеяние
энергии. По этому признаку диссипативные системы и распознаются
среди других неконсервативных систем. Признаку диссипатив-
ности системы можно дать различные выражения.
Предположим, что уравнение движения системы имеет вид
где ГиП — соответственно кинетическая и потенциальная
энергия системы, ф(д, <?) — обобщенная сила сопротивления,
зависящая от координаты и скорости. Умножим обе части уравнения
A2.18) на д и перепишем его следующим образом:
3Aр)-^§?«~!?«+«-
Из этого уравнения находим:
Система будет диссипативной, если во все время движения
©<7<0, A2.19)
так как в этом случае полная энергия системы с течением
времени убывает1*.
Знак равенства только когда д = 0.
6. Диссипативные системы
493
Условие A2.19) можно иначе истолковать как условие, при
котором скорость точки д и приложенная к ней сила
сопротивления (? во все время движения направлены в противоположные
стороны.
Так, например, линейная система, описываемая
дифференциальным уравнением
х + 2ах + к2х = О
будет диссипативной, если а > 0, так как в этом случае сила
сопротивления С? = -2ах, умноженная на скорость х, во все время
движения будет меньше нуля.
Система с уравнением
х + \х(х2 - 1)х + х = О,
где ц > 0, не будет диссипативной, так как для малых х, х2 < 1,
произведение силы сопротивления
Я = -ц(х2 - 1)х
на х будет больше нуля:
-\л(х2 - 1)х2 > О,
а для больших значений х, х2 > 1 — меньше нуля:
-\х{х2 - 1)х2 < 0.
На фазовой плоскости условию диссипативности можно дать
следующую интерпретацию. Полная энергия изображающей
систему точки на фазовой плоскости в предположении, что масса
точки равна единице, выражается суммой
у2/2 + Щх).
При отсутствии сопротивлений, т. е. для консервативной системы
у2/2 + Щх) = сопз! = к. A2.20)
Это уравнение для различных к представляет семейство фазовых
траекторий консервативной системы. Для диссипативной
системы скорость изменения полной энергии изображающей точки
тЖ + Щх)]=Яу' ®у<0-
Это неравенство, положив в нем
1/2/2 + Щх) - Щх, у),
494
Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
перепишем следующим образом:
ая = ЖсЬс + Шйу (Ш <0
с1^ дх A^ дг/ A1 ' с1г
Выражение
дх с1^ 5*/ с!^
пропорционально косинусу угла между внешней нормалью к
кривой системы A2.20) в некоторой точке и касательной к
фазовой траектории, проходящей через эту точку. Так как этот
косинус меньше нуля, фазовые траектории диссипативнои системы
пересекают кривые A2.20), направляясь при этом внутрь кривых
A2.20) к началу координат, где х = у = 0 (рис. 102).
7. МЕТОД ЛЬЕНАРА ПОСТРОЕНИЯ ФАЗОВЫХ ТРАЕКТОРИЙ. Для
качественного исследования диссипативных систем удобным во
многих случаях оказывается способ построения фазовых
траекторий, предложенный А. Льенаром^для систем с уравнением
Х + ф(х) + Х = 0 A2.21)
и являющийся разновидностью метода изоклин. К виду
уравнения A2.21) могут быть приведены многие нелинейные системы,
причем не только диссипативные.
Дифференциальное уравнение фазовых траекторий системы
-ф(у)-*а
У
Чтобы получить направление
касательной к искомой фазовой
траектории в какой-либо точке А с
координатами (х, г/), строим (рис. 123)
кривую
Х = -<?(У) A2.22)
и затем проводим из А прямую,
параллельную оси Ох до встречи с
кривой A2.22) в точке В с
координатами (—ф (г/), у). Из В опускаем
&У
их
У»
о
х =
фО/)
"**^\Б
1
У
1
1
'
с
ф(#)
Ла
X
-^
А(х, у)
<|90°
Б
—^
\ X
Рис. 123
Х) См. кн. Дж. Стокера [83].
7. Метод Льенара построения фазовых траекторий
495
перпендикуляр ВС на ось Ох. Направление касательной в точке А
совпадает с проведенным через А перпендикуляром к АС. Это
следует из того, что произведение углового коэффициента
касательной к фазовой траектории
йу = -<р(у) ~ х
их у
на угловой коэффициент прямой СА
& ОБ -ОС ф(г/) + х
равно -1.
Чтобы построить фазовую траекторию, проходящую через
данную точку А, находим указанным способом направление
фазового поля в этой точке и заменяем элемент фазовой траектории
в окрестности этой точки небольшим отрезком касательной,
проведенной через точку А в надлежащем направлении. В конце
полученного отрезка снова находим тем же способом направление
поля и т. д. В результате получится приближенная фазовая
траектория в виде ломаной, которую можно построить с
необходимой точностью, беря достаточно малыми отрезки касательных.
В некоторых случаях способ Льенара дает сразу искомую
траекторию в целом и необходимость построения ломаной линии
отпадает. Например, для линейного осциллятора
х + х = О
уравнение фазовой траектории имеет вид
6.у _ __х
Ах у '
Здесь ф(г/) = 0, кривая х = -ср(у) совпадает с осью Оу и,
следовательно, точка С в построении Льенара будет для всех точек А
фазовой плоскости лежать в начале координат. Направления
фазовых траекторий будут перпендикулярны прямым, проходящим
через начало координат. Следовательно, фазовыми траекториями
будут окружности, описанные из О различными радиусами.
Пример 3. Другим примером, в котором способ Льенара дает
возможность строить фазовые траектории в целом, является система с кулоновым
трением, которую мы и рассмотрим в качестве первого примера существенно
нелинейной диссипативной системы.
496
Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
Рис. 124
правление движения. Движение массы т будет определяться уравнениями
Предположим, что масса т = 1
(рис. 124) совершает прямолинейные
колебания под действием линейной
восстанавливающей силы по
горизонтальной поверхности с сухим трением.
Сила трения постоянна по величине,
но меняет знак, когда изменяется на-
х + х = В,
когда х < О (В = К/с, где В — сила трения, с
движется справа налево, и
х + х = -Б,
жесткость), т. е. когда масса
когда х > О, т. е. когда масса движется слева направо. Оба уравнения имеют
общий вид уравнения A2.21)
X + X = (р(х),
где ф(Х) имеет при постоянной положительной В следующие определения:
ц>(х)
+В
-В
при
при
х <0,
х > 0.
Кривая A2.22) в построении Льенара обращается здесь в прямые
х = +В9 х = -В,
когда у < 0 и когда у > 0 соответственно (рис. 125). Отрезки фазовых
траекторий в нижней полуплоскости, изображающие движение массы т справа
налево, представляют собой фазовые
траектории линейного осциллятора
2+2 = 0,
в который обращается
рассматриваемая система при подстановке
х = 2 + В.
Это — полуокружности, описанные
плоскости. Фазовые траектории в
верхней полуплоскости по
аналогичным основаниям будут
полуокружностями, описанными из 82. Концы
полуокружностей нижней
полуплоскости на оси Оле, если они не
попадают на отрезок 8152, служат началом
соответствующих полуокружностей
Рис. 125
7. Метод Льенара построения фазовых траекторий
497
верхней полуплоскости. В целом фазовые траектории в нашем случае будут
иметь вид спиралей, составленных из полуокружностей, лежащих в нижней
и верхней полуплоскостях.
Фазовую картину осциллятора с кулоновым трением можно было бы
получить еще и таким способом. Строим на плоскости Оху фазовые траектории
линейного осциллятора без трения
х + х = 0.
Это будут окружности, описанные из начала О всевозможными радиусами.
Затем, разрезав рисунок вдоль оси Ох, сдвигаем верхнюю часть влево на Б, а
нижнюю вправо тоже на Б. После этого остается, как говорят, «сшить»
траектории верхней полуплоскости с соответствующими траекториями нижней
так, чтобы левый конец каждой нижней траектории (кроме концов,
попавших на отрезок (-Б, +Б)) сделался началом некоторой верхней, а правый
конец верхней — началом соответствующей нижней траектории. В результате
такого «сшивания» мы получим то же расположение фазовых траекторий,
что и на рис. 125.
Когда левый конец нижней полуокружности или правый конец верхней
полуокружности оказывается на отрезке <$2^1> дальнейшее движение
изображающей точки прекращается, так как на отрезке *82'^1 восстанавливающая
сила меньше силы трения Б и, попав на этот отрезок в какой-либо точке А (со
скоростью, равной нулю), масса т и изображающая ее точка останутся в ней
в покое. Отрезок 5281 называется полосой или областью застоя.
За каждый размах отклонение массы от начала уменьшается на 2Б и если
а — начальное отклонение (например, справа) при равной нулю начальной
скорости, то число размахов, которое совершит масса, прежде чем попадет в
полосу застоя, будет равно целой части отношения а/2В.
Пример 4. Рассмотрим теперь систему с кулоновым и вязким трением.
Сила сопротивления ф, действующая на массу т (рис. 124), имеет здесь
следующие определения
+В - ах при х < 0,
-В - ах при х > 0.
Уравнение движения массы т будет иметь вид
тх + ах + сх = ±В
или
х + 2пх + к2х = ±к2В, A2.23)
если обозначить
а/т = 2п, с/т = к2, Е/с = В.
Верхний знак, плюс, соответствует движению массы т справа налево (х < 0),
нижний, минус, — движению слева направо (х > 0).
На отрезке (-Б, +Б)
\сх\ < В.
Попав на этот отрезок, масса т дальнейшее движение прекращает. Отрезок
(-Б, +Б) представляет таким образом область застоя.
498
Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
Изображение движения на фазовой плоскости можно построить
следующим образом.
Положив х = хх + Б в уравнении
х + 2пх + к2х = к2В
(при движении справа налево), приведем его к виду
х\ + 2пх1 + /г2хх = 0.
В предположении, что п2 < к2 (случай «малого» линейного сопротивления),
можно сказать, что движение массы т справа налево происходит по закону
затухающих линейных колебаний около среднего положения, смещенного
относительно начала координат вправо на Б. Отношение двух
последовательных максимальных отклонений в противоположные стороны1^
3==е-пп/к^
где кг = 4к2 - п2.
Точно так же, положив х = х2 - В в уравнении
х + 2пх + к2х = -к2В
(при движении слева направо), получим для х2
х2 + 2пх2 + к2х2 = 0.
Таким образом, движение слева направо происходит по тому же закону
затухающих линейных колебаний, что и движение справа налево, но это будут
колебания около среднего положения, смещенного относительно начала
координат влево на В.
Отсюда вытекает следующий прием построения фазовой картины
движения массы т, аналогичный описанному в предыдущем примере. Построив
фазовые траектории линейного затухающего осциллятора
х + 2пх + к2х = 0
с асимптотической точкой в начале координат О (рис. 126, а), делаем разрез
рисунка по оси Ох и затем сдвигаем нижнюю часть вправо на Б, верхнюю
влево также на В. Фазовые траектории непрерывным образом заполняют фазовую
плоскость. Поэтому в верхней полуплоскости (сдвинутой влево) найдутся
траектории, которые будут служить продолжением соответствующих траекторий
сдвинутой направо нижней части, а траектории нижней части будут служить
продолжением траектории верхней. В результате такого «сшивания» отрезков
траекторий нижней и верхней части, смещенных одна относительно другой
вдоль оси Ох на 2Б, получится фазовая картина рассматриваемой диссипатив-
ной системы (рис. 126, б). При этом ни один из отрезков фазовых траекторий
не может начинаться из какой-либо точки полосы застоя (~Б, +Б): в полосе
застоя фазовые траектории могут только заканчиваться.
[) Здесь 8 в два раза меньше декремента 5 в формуле B.18) на с. 74.
7. Метод Льснара построении ф.кюных траекторий
499
Рис. 126
Изложенный способ построения фазовых траекторий позволяет легко
получить формулы, связывающие последовательные отклонения массы в ту и
другую сторону. Обозначим через а1 отклонение массы от начала координат,
например вправо. Тогда для абсолютной величины отклонения влево а1 + г
будем иметь
а/Ч1 - (а,- - В) о - В - а,6 - В A + 6). A2.24)
Масса т действительно перейдет на другую сторону от начала, если
а,.8- 8A + 6) > О,
а1 > В A + 1/6) - 2В.
т. е. если
Формула A2.24) дает ряд убывающих отклонений и остается верной до
значения г, при котором
О ¦¦"а1< В A + 1/6).
Если при этом
О < а, < В,
то г-е отклонение будет последним. Если
В < а- < БA И- 1/6),
то масса т продвинется к началу, но не перейдет на другую от него сторону,
остановившись в области застоя. Таким образом, масса не будет
асимптотически приближаться к положению устойчивого равновесия, как это имело
место в линейной системе с вязким трением. Колебания массы прекратятся
через сравнительно короткий конечный промежуток времени в полосе
застоя. В этом и сказывается главное отличие рассматриваемой системы от
затухающей линейной.
500 Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
8. АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ. Автоколебательные системы
относятся к системам неконсервативным, так как в составе
действующих на такие системы сил имеются сопротивления, и
движение системы сопровождается расходом энергии. В этом
отношении автоколебательные системы ведут себя аналогично диссипа-
тивным. Но в то время как в диссипативных системах энергия,
расходуемая на преодоление сопротивлений, ничем не
компенсируется и колебания таких систем затухают, в автоколебательных
системах расход энергии на сопротивление точно компенсируется
поступлениями из некоторого входящего в состав системы
неколебательного источника — поступлениями, дозировка которых по
времени подачи и по величине регулируется самой колебательной
системой. Вследствие этого в автоколебательной системе могут
возникать устойчивые периодические незатухающие колебания —
автоколебания1^. Примером таких колебаний могут служить
колебания маятника часов, в которых энергия падающего груза
передается через храповой механизм маятнику порциями, величина и
время подачи которых определяются колебаниями самого
маятника.
Способ компенсации расхода энергии является наиболее
характерным свойством автоколебательной системы, по которому
большей частью и распознаются эти системы в отличие от систем
диссипативных, или систем, совершающих вынужденные
колебания под действием периодических возмущающих сил. Таким
же характерным свойством автоколебательной системы является
наличие в ее конструктивной схеме следующих четырех частей:
^ постоянный (неколебательный) источник энергии;
^ колебательная система;
^ устройство, регулирующее поступления в колебательную
систему энергии из источника энергии;
^ обратная связь между колебательной системой и
регулирующим устройством, осуществляющая управление дозировкой
подачи энергии в колебательную систему.
Схема автоколебательной системы представлена на рис. 127.
В автоколебательной системе регулирующее устройство управляет
движением колебательной системы, а эта последняя через
обратную связь управляет работой регулирующего устройства. В этом
г) Термин «автоколебания» впервые введен А. А. Андроновым в ст. [86].
8. Автоколебательные системы
501
Источник
энергии
Регулирующее
устройство
Колебательная
система
Обратная связь
1 ^ 1
Рис. 127
двустороннем взаимодействии колебательной системы и
регулирующего устройства с помощью обратной связи и осуществляется
самоуправление энергетическим балансом системы, в результате
чего в ней могут возникнуть устойчивые незатухающие
колебания. Колебания эти, как правило, не зависят от начальных
условий. В автоколебательных системах с самовозбуждением при
любых начальных условиях система стремится к некоторому
устойчивому периодическому движению.
Принимая во внимание сделанные замечания, можно
следующим образом определить автоколебательную систему, имея в
виду главным образом ее конструктивную схему.
I Автоколебательной системой называется неконсервативная
система, способная совершать незатухающие периодические
колебания и характеризующаяся наличием следующих основных
составных частей: 1) постоянного источника энергии; 2)
колебательной системы; 3) устройства, регулирующего поступления
энергии в колебательную систему из источника энергии; 4)
обратной связи между колебательной системой и регулирующим
I устройством.
Не всегда, однако, можно легко распознать
автоколебательную систему по наличию в ней указанных частей. Механизм
обратной связи иногда совсем не очевиден, так как во многих
случаях обратная связь действует по скрытым путям, обнаружить
которые не всегда удается.
Большей частью автоколебания возникают в системах с
нелинейным сопротивлением, изменения которого, в зависимости от
положения и скорости колеблющейся системы, происходят по
особому характерному именно для автоколебаний закону.
Примером такого рода изменений сопротивления может служить
система, описываемая уравнением Ван-дер-Поля
х Н- \х(х2 - 1) х + х = 0,
A2.25)
502
Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
где ц > 0. Равновесное состояние системы в положении х = 0, как
мы знаем (пример 6 гл. XI), неустойчиво. Система выходит из этого
положения без какого-либо внешнего воздействиями, пока х2 < 1,
колеблется с возрастающими амплитудами, так как в этом случае
-~(Г + П) = -\х{х2 - 1) х • х, -\л(х2 - 1) х • х > 02)
— приток энергии превышает расход. Когда х2 > 1, система ведет
себя как диссипативная и ее колебания затухают. В этом случае
^-(Т + П) = -\х(х2 - 1) х • х9 -\л(х2 - 1) х • х < 0.
Некоторое представление таких изменений дает диаграмма
энергетического баланса (рис. 128), на которой представлен ход
изменений в зависимости от отклонений энергии Е, поступающей в
систему, и энергии В, расходуемой на преодоление сопротивлений.
Самовозбуждающаяся система на участке Оа получает энергии
больше, чем расходует, и поэтому раскачивается. На участке аЪ,
наоборот, расход энергии превышает поступление и колебания
начинают затухать. В точке А расход и поступление энергии
балансируются, и система в состоянии, изображаемом точкой А, совершает
устойчивые колебания. При небольших возмущениях система,
предоставленная затем самой себе, возвращается снова в состояние
А или от увеличения притока энергии (при отклонении влево), или
от увеличения расхода и торможения (при отклонении вправо).
В точке В поступление и расход энергии снова балансируются.
В этом состоянии система теоретически могла бы совершать
незатухающие колебания, но эти колебания оказываются
неустойчивыми и в действительности не осуществляются. Таким образом, в
некоторой области рассматриваемая система стремится к
устойчивому колебательному режиму независимо от начальных условий.
С аналогичным явлением мы встречаемся в некоторых
нелинейных системах с сухим (кулоновым) трением. Такой системой
будет, например, ленточный тормоз, схема которого
представлена на рис. 129. Ползун, прикрепленный к неподвижной точке с
помощью пружины с, лежит на шероховатой бесконечной ленте,
движущейся со скоростью и0 в сторону, показанную стрелкой.
Х) Такие системы носят название «самовозбуждающихся» или систем с
«мягким» возбуждением.
2) См. уравнение A2.19).
8. Автоколебательные системы 503
Рис. 128 Рис. 129
При некоторых значениях скорости <;0 наблюдаются
незатухающие колебательные движения: ползуна по ленте. Подробный
анализ причин возникновения этих колебаний довольно сложен1*.
Ограничимся поэтому упрощенным описанием возникающих
здесь явлений, имея в виду главным образом показать их
аналогию с автоколебаниями в системе Ван дер-Поля A2.25).
Когда лента начинает двигаться, набирая скорость и0, ползун,
растягивая пружину, движется сначала вместе с лентой до
положения, в котором сила трения К, будучи все время уравновешенной
соответствующей упругой восстанавливающей силой пружины, не
достигнет максимальной величины. В этом положении ползун
должен был бы остановиться, скачком изменив относительную
скорость (скорость сколыкеш*^ по ле*ле) оч 0 до - п0. Если бы сила
трения Е была постоянной и н;> зг^леепг. о* скорости, то это положение
было бы положением устойчивого равновесия ползуна. Но как
показывает опыт, указанное равновесие оказывается на самом деле
неустойчивым: ползун, достигнув этого положения, срывается с
него вправо2)и затем совершает незатухающие колебания.
Возникновение таких колебаний, не входя в большие
подробности, можно объяснить следующим образом. Дело в том, что
трение скольжения зависит от относительной скорости движения
ползуна по ленте. Пусть абсолютная скорость колебаний ползуна
будет |. Тогда сила трения Е во время движения груза по ленте
будет некоторой функцией от разности (и - о0):
Д = <р(^-у0).
V См. [Ю. И. Костерин, 20].
2) В сторону возрастающей относительной скорости.
504
Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
ф(^-у ) При этом, когда скорость (| - и0)
уменьшается, сила трения, не ме-
1А няя своего направления, растет и,
Ь наоборот, когда D - V0) увеличи-
В . вается, сила трения убывает. Гра-
^~ио фик силы Е в зависимости от
относительной скорости D - и0)
выглядит приблизительно так, как
показано на рис. 130. Это не пря-
Рис 130 мая, параллельная оси D - ^0),
как на рис. 110, б, а кривая с
ниспадающим участком АВ и точкой перегиба на этом участке.
Около точки перегиба можно выделить отрезок аЪ, который в нашем
приближенном рассмотрении можно принять за
прямолинейный. На этом отрезке производная от Е по D - V0)
дК _ д<р _ л
будет постоянной и отрицательной. В какой-либо точке этого
отрезка система будет вести себя как линейная с отрицательным
сопротивлением. Энергия ее будет расти в силу соотношения
А(Г + П) = /^2, А(Г + П)>0,
си си
и отклонения будут увеличиваться. Когда состояние системы
достигнет точки, лежащей на участке графика за точкой 6, трение
увеличивается, приток энергии станет меньше сопротивления, а
вместе с этим начнут убывать и амплитуды. В конце концов
устанавливается устойчивый автоколебательный режим, в котором
приход и расход энергии балансируются.
Представленная на рис. 129 схема ленточного тормоза и
приведенные объяснения возникновения автоколебаний ползуна
могут быть без существенных изменений отнесены ко многим
другим системам, сходным с тормозом по действию в них кулонова
трения. Такими системами будут, например, скрипичная струна,
совершающая автоколебания при движении по ней смычка;
маятник, подвешенный на горизонтальном валу, вращающемся с
некоторым трением о втулку (фрикционный маятник ФрудаХ)).
Х) Теория маятника Фруда рассмотрена в кн. Н. В. Бутенина [10, с. 81—86].
8. Автоколебательные системы
505
Автоколебательный характер некоторых простейших систем с
одной степенью свободы может быть иногда обнаружен из
рассмотрения уравнений движения системы. Существуют
многочисленные критерии, позволяющие по некоторым свойствам
коэффициентов дифференциального уравнения системы доказать
возможность существования в этой системе незатухающих периодических
колебаний. Ограничимся здесь формулировкой двух таких
критериев — Льенара и Бендиксона1*, сделав предварительно следующее
замечание. На фазовой плоскости периодические движения
автоколебательной системы с одной степенью свободы изображаются
замкнутыми траекториями, которые, по соображениям,
приведенным дальше, называются предельными циклами.
Критерий Льенара относится к системам, уравнение
движения которых имеет вид
X + /(х) X + #(х) = 0. A2.26)
Уравнения весьма многих нелинейных систем могут быть
приведены к такому виду, например уравнение
у + Щ) + у = 0,
для которого А. Льенар дал описанный выше способ построения
фазовых траекторий. В самом деле, продифференцировав это
уравнение по I и положив у = х, получим
х + Р'(х) х + х = 0,
т. е. уравнение A2.26), в котором /(х) = Р'(х) и §(х) = х.
Сформулируем критерий Льенара.
I Система A2.26) будет иметь один устойчивый предельный
цикл при следующих условиях, которым должны удовлетво
рятъ функции /(х) и &(х).
1°. Функция /(х) должна быть четной, а §(х) — нечетной
функцией переменной х.
2° /@) < 0.
3° х§(х) > 0 для всех х ф 0.
х
4° Е(х) = | /(х)Aх -> +оо, когда х — +оо.
о
5° Функция /(х) имеет один нуль в точке х = а, а > 0 и монотон-
I но возрастает для х > а.
г) См. кн. В. В. Немыцкого, В. В. Степанова [37].
506 Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
Нечетность функции §(х) и условие х§(х) > 0 означают, что
сила -&(х) всегда имеет знак, противоположный знаку х (знаку
отклонения), т. е. действует как восстанавливающая сила в
линейной упругой системе, всегда направленная к среднему, нулевому
положению.
Четность функции Дх) вместе с условием ДО) < 0 означает, что
коэффициент сопротивления имеет отрицательный знак для малых
значений |х|, т. е. при малых отклонениях сопротивление
раскачивает систему. График Дх) при указанных условиях вблизи
начала координат имеет вид параболической кривой (рис. 131, а).
Для больших |х| сопротивление становится положительным и
вызывает затухание колебаний.
Условия 4° и 5° выражают прежде всего, что система A2.26) не
является диссипативной вблизи нулевого положения, чем
подтверждают аналогичный вывод из условий 1 и 2°. Кроме того, из
этих условий следует, что рассматриваемая система представляет
собой систему с самовозбуждением с графиком функции ^(х),
имеющим в точке х = 0 ниспадающую часть (рис. 131, б).
Такой автоколебательной системой с самовозбуждением будет
система, описываемая уравнением Ван-дер-Поля
X + цA - X2) X -I- X = 0, A2.27)
где \л > 0. В самом деле, для уравнения A2.27) выполнены все
условия критерия Льенара.
1°. Дх) = ~цA - х2) — функция четная, а §(х) ^ х — функция
нечетная.
2°. ДО) < 0.
3° х§(х) = х2, х2 > 0 для всех х ф 0.
а) б)
Рис. 131
8. Автоколебательные системы
507
4°. Р(х) = -ц | A - х2)йх = [-\1х + Щ- ] ~> +оо, когда х — +оо
5° Функция Р(х) = 0 для х = +УЗ и для х > л растет вместе с х
монотонно, оставаясь все время положительной.
Критерий Вендиксона представляет собой достаточное
условие отсутствия предельных циклов в некоторых областях
фазовой плоскости. Предположим, что уравнения движения
изображающей систему точки на фазовой плоскости приведены к виду
А и Г A2.28)
% = <**, у). I
Сформулируем критерий Бендиксона.
Если в некоторой односвязной области (8) на фазовой плоскости
выражение
д_р_ + д_я
дх дУ
сохраняет знак и не обращается тождественно в нуль, то в этой
области не существует замкнутых фазовых траекторий.
Доказательство. Для доказательства рассуждаем от
противного. Предположим, что в области $ существует
периодическое решение уравнений A2.28). Обозначим замкнутую
траекторию, соответствующую этому решению, через Ь, а ограничиваемую
этой траекторией область, лежащую в области 5, через I). Тогда
$ (Р йу - Я ах) = [ (РЯ - ЯР) <И = 0.
ь о
Но по известной теореме Грина
$ (Р ду - Я Ах) = Я (Щ + ^) Ах &у = 0.
ь и Удх ду у
Последнее равенство возможно, когда
ар ==_зя
дх ду
или
дР + дЯ
дх ду
меняет в области I) знак, что противоречит условиям теоремы.
508
Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
9. МЕТОД ВАН-ДЕР-ПОЛЯ. Используем здесь этот метод в качестве
одного из общих приближенных способов построения
предельных циклов автоколебательных систем на фазовой плоскости.
В наглядной и простой форме этот метод дает также возможность
проследить за движением изображающей точки в переходных
состояниях системы и сформулировать законы установления
стационарных режимов. В дальнейшем своем развитии он приводит
к одному эффективному методу расчета квазилинейных
неавтономных систем — методу осреднения, первое обоснование
которого было дано Л. И. Мандельштамом и Н. Д. Папалекси1*.
Изложим метод Ван-дер-Поля применительно к уравнению
& + *ч-ил(*.Ц),
приведя его предварительно подстановкой т = Ы к уравнению
Х + Х = ± /Х(Х, кх) = ^ /(х, х), A2.29)
в котором
г = ^* у = ^-Ла
йт' с1т2*
Движение изображающей систему A2.29) точки на фазовой
плоскости (х, у) будет происходить согласно уравнениям
^=у, ^ = -Х+^ Г(Х,У). A2.30)
ат ах к1
Когда ц = 0, система A2.30) превращается в линейный осциллятор
<^=У, %> = -Х. A2.31)
с1т с1т
Фазовыми траекториями линейного осциллятора A2.31) будут
окружности
Х2 + [/2 = Г2, A2.32)
непрерывно заполняющие некоторую область около нулевой
точки (вместе с непрерывным изменением радиуса г). По одной из
этих окружностей движется изображающая систему A2.31)
точка с угловой скоростью со = 1 в направлении часовой стрелки.
Решение уравнений A2.31) можно представить выражениями
х = а соз т + Ъ 81П т, у = -а згп т + Ъ соз т, A2.33)
в которых аиЬ — произвольные постоянные.
Х) См. в кн. А. А. Андронова, А. А. Витта, С. Э. Хайкина [2].
9. Метод Ван-дер-Поля
509
Когда ц ф 0, но достаточно мало,
возникающие периодические решения
уравнения A2.29) будут мало
отличаться от решений A2.33). Б. Ван-дер-Поль
допускает, что форма решений A2.33)
для линейного осциллятора
сохраняется и для нелинейной системы A2.29), и
ищет уравнения, которым будут при
этом предположении удовлетворять
параметры а иЪ. Эти параметры для
системы A2.29), очевидно, не будут
постоянными, но изменения их при
малом ц сравнительно с изменениями
зт I и сов I в течение одного периода, Рис. 132
т. е. за 2л секунд, будут весьма
медленными. Только при этом условии форма решения A2.33) будет
сохраняться достаточно долго. Все эти утверждения будут,
конечно, тем ближе к действительности, чем меньше ц.
Обращаясь к фазовому изображению движения линейного
осциллятора, будем рассматривать уравнения A2.33) как формулы
перехода от координат (х, у) изображающей точки в
неподвижной системе Оху к координатам (а, Ъ) той же точки в системе ОаЪ,
вращающейся вокруг начала координат по часовой стрелке с
угловой скоростью со = 1 (рис. 132).
В системе координат ОаЪ точка М, изображающая линейный
осциллятор, неподвижна. Как будет двигаться в этой системе
точка, изображающая нелинейную систему A2.30) при \х ф 0?
Чтобы ответить на этот вопрос, преобразуем уравнения A2.30) к
координатам а, Ь с помощью формул A2.33), считая в них а и Ъ
некоторыми пока неизвестными функциями времени т. В
координатах а иЪ уравнения A2.30) будут иметь вид
— СОЗ X + — 81П 1=0,
ах ах
с1а
аь
-^ 81П X + — С08 X = -Ц- На СОЗ X + Ъ 81П X, -а 8Н1 X + Ъ С08 X).
ат ах к2
Из этих уравнений находим:
-г^ = --^ На соз х 4- Ъ зт х, -а зт х + Ъ соз х) зт х,
ах к2 У '
— = -^ /(а соз х + Ъ зт х, -а зт х + Ъ соз х) соз х.
ах кг
A2.34)
510 Г7Шва XII. ПРОСТКЙ1ЛИК НЕЛ\Л\1КЙ\1ЫЕ СИСТЕМЫ
Принимая во внимание в соответствии со сделанными выше
замечаниями, что при малом а функции а(т) и Ь(т) изменяются
медленно, заменяем правые части уравнений A2.34) их
интегральными средними за период 2л. Тогда придем к следующим
уравнениям движения изображающей систему A2.30) точки на
вращающейся плоскости ОаЬ:
6.а
-^ = - ^ Г /(а соз с + Ъ зт ^, -а зш с + Ь соз %) зт Ъ сЩ,
ах 2я/г^ о " "
— = ^ Г /(а СОЗ ^ + 6 8111 ч, 'и 81Л 6 + 6 СОЗ %) СОЗ ^ сЩ.
ах 2тг/^ о ' " "
С помощью еще одного перехода к полярным координатам на
плоскости ОаЬ в уравнениях A2.35) можно разделить
переменные и привести решение этих уравнений к квадратурам.
Подставим в A2.35)
а = В СОЗ О, Ь "=- В 8111 О,
где В — радиус-вектор изображающей точки, а 0 — полярный
угол. После несложных выкладок получим для Вив уравнения
ТГ = ~ЛГ2 1 № С°8 К - 0). -В 31П (I ~ 9I 8111 ($ - 9) С1^,
ах 2тт/^ *>
2п ^ A2'36)
с!х 2кВк
^ | /[Л СОЗ (^ - в), -Д 81П (Л - в)] СОЗ (% - 9) СЩ.
Рассматривая 9 в подынтегральных выражениях как параметр,
не изменяющийся при интегрировании по с, и принимая во
внимание, что подынтегральные выражения являются
периодическими с периодом 2л, перепишем уравнения A2.36), положив
^ — 9 = 1/, следующим образом:
&В = ц
~ = —*Ц- [ /(Я СОЗ Ы, -Я 8111 и) 8111 I/ ИИ,
с1т 2л/г2 (}
== —В— Г у7# соз I/, -Я 81П и) со8 и с!и.
их 2тг#/г2 , '
о
A2.37)
Введя обозначения
Р(В) = [ /(Я СОЗ II, ~В 8111 и) 8111 Ы &11,
2пк о ^ A2.38)
¦* 2л
Ф(Д) = ——- Г {(В соз и, -В 81П ы) соз и 6.и,
2ккАВ{
9. Метод Ван-дер-Поля
511
представим уравнения A2.37) в виде:
/¦ A2.39)
Полученные уравнения называются уравнениями установления
по соображениям, изложенным ниже. В них действительно
переменные Е и Э разделены в том смысле, что в первое из них входит
только Е и оно может быть проинтегрировано независимо от
второго. После того как из первого будет найдено Е и подставлено во
второе, приведется к квадратурам и вычисление 6.
О фазовых траекториях на плоскости ОаЪ можно получить
достаточно полное представление по расположению и типу особых
точек. Дифференциальное уравнение фазовых траекторий мы
получим, поделив первое из уравнений A2.39) на второе:
вЯ = Г(Е)
ае ф(Д) *
Особые точки определяются уравнениями
Д#) = 0, Ф(#) = 0. A2.40)
Здесь могут встретиться разные случаи, из которых мы
рассмотрим два.
Первый случай. Он имеет место при
Ф(Д) ^ 0.
Тогда из второго уравнения A2.39) находим
6 = сопз!; = 60.
Это означает, что особые точки лежат на радиальных прямых,
проходящих через начало координат О под углом Э0 к оси а,
определяемым начальными условиями. Положение особых точек на
этих радиальных лучах определяется корнями первого из
уравнений A2.39)
Р(Е) = 0, A2.41)
которые мы обозначим через Е0, Е1У Е2, ... , причем Е0 = 0, так что к
особым точкам относится и начало координат. Можно сказать, что
особые точки на фазовой плоскости ОаЪ являются точками пересе-
512
Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
чения радиальных лучей с
окружностями радиусов Д. (рис. 133).
Чтобы выяснить вопрос о том,
как по этим радиальным лучам
движется изображающая точка,
нужно решить уравнение
йт
= \&(В).
В этом уравнении переменные
разделяются, и его решение
можно представить следующим
образом:
Е1+1
Рис. 133
ц(т-Т0) = \
сШ
A2.42)
в, Пи)
Это уравнение имеет смысл только в промежутке между двумя
окружностями, описанными из О радиусами, равными двум
последовательным корням уравнения
Р(Н) = 0.
Фазовые траектории представляют собой, таким образом,
отрезки радиальных лучей между двумя окружностями радиусов В1 и
В1 + 1, Г=0, 1, 2, ... . Попав в соответствии с начальными
условиями на один из этих отрезков, например в точку М (рис. 133),
изображающая точка будет двигаться по нему в ту или другую
сторону, асимптотически приближаясь или к окружности радиуса Вь,
или к окружности радиуса В1 + 1? на которых подынтегральная
функция в уравнении A2.42), как и сам интеграл, обращается в
бесконечность. Сторона направления движения изображающей
точки определяется характером устойчивости равновесных
состояний в особых точках на окружностях радиусов В = Вь. По
отрезкам радиальных лучей изображающая точка движется от
неустойчивых равновесных положений к устойчивым, совершая
эти свои движения в каждую сторону за бесконечный
промежуток времени. Особая точка в начале координат — узел. Если этот
узел неустойчивый, то направления движения изображающей
точки по соответствующим отрезкам будут такими, как показано
на рис. 133. В этом случае первая окружность радиуса В = Вх
будет геометрическим местом устойчивых равновесных
положений, вторая — радиуса В = В2 — неустойчивых и т. д.
9. Метод Ван-дер-Поля
513
Такова в рассматриваемом случае фазовая картина движения
нашей системы на вращающейся плоскости ОаЬ. Каким будет
расположение фазовых траекторий на неподвижной плоскости
Оху? Чтобы ответить на этот вопрос, обращаемся к формулам
X = а С08 X + Ь 81П Т,
У = -а 8И1 X + Ь СОЗ X,
с помощью которых можно от координат (а, Ъ) вернуться снова к
координатам (х, у) на плоскости Оху. Если обратить внимание на
то, что преобразование, устанавливаемое этими формулами,
ортогональное и что, следовательно,
х2 + у2 = а2 + Ь2,
то можно будет утверждать, что окружности радиусов К = Еь при
переходе на плоскость Оху сохранят свои радиусы и свое
расположение вокруг точки О. Однако на плоскости Оху эти
окружности уже не будут изображать равновесные положения нашей
системы. Изображающая точка, неподвижная на этой окружности в
плоскости ОаЪ, в плоскости Оху будет двигаться по этой
окружности по часовой стрелке. Траектория изображающей точки,
попавшей с самого начала на такую окружность, будет замкнутой
круговой траекторией, изображающей периодическое
колебательное движение рассматриваемой нелинейной системы.
В то время как линейный осциллятор, получающийся из
заданной нелинейной системы при ц = О, обладает целым
континуумом замкнутых круговых траекторий, изображающих
множество возможных в ней периодических движений, нелинейная
система A2.29) только некоторые из этих окружностей будет
иметь в качестве фазовых траекторий, изображающих ее
периодические движения, а именно окружности радиусов ЕЬУ равных
корням уравнения
Р(Щ = 0.
Уравнения движения изображающей систему A2.30) точки по
фазовым траекториям получатся из формул
X = а С08 X + Ь 81П X,
У = -а 81П X + Ъ СОЗ X,
если в них подставить
а = К1 соз Э0, Ъ = Е1 8гп 0О.
17- 10456 Бабаков
514
Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
Этими уравнениями будут
х= Е}; соз (т - 6П),
у=-Е1зт(т-%).
Период обращения изображающей точки по окружности Е1 будет
равен 2л, как и у линейного осциллятора A2.31). Нелинейность
системы в первом приближении не влияет на частоту или период
колебаний.
Во что обращаются на плоскости Оху отрезки радиальных
лучей, представляющих на плоскости ОаЪ фазовые траектории
системы? Уравнения движения изображающей точки в координатах
(х, у) будут иметь ту же форму, что и уравнения A2.43):
х= Есоз (т - 90),
У=~Е 81П (Т - 0О),
но теперь уже Е — не постоянная величина. В промежутке между
Еь и Еь + х значение Е монотонно растет или убывает с течением
времени. Изображающая точка, очутившись в силу начальных
условий между окружностями с радиусами Еь и Е1 + 19 будет
описывать безграничную (в обе стороны) спираль. Будет ли при этом Е
возрастать или убывать, зависит от устойчивости или
неустойчивости равновесных положений на окружностях плоскости ОаЪ.
Между ^иЯ- + 1 значение Е растет, если равновесные положения
окружности радиуса Е1 неустойчивы, а на окружности Е1 + 1 —
устойчивы, и наоборот. При этом спирали наворачиваются на
окружности, соответствующие окружностям устойчивых
равновесных положений, и раскручиваются с окружностей неустойчивых.
В каком бы положении изображающая точка ни оказалась в
начальный момент, она будет стремиться к некоторому устойчивому
периодическому движению, изображаемому окружностью
радиуса, равного соответствующему корню уравнения A2.41). Именно в
связи с этими свойствами окружности, изображающие
периодические движения нелинейной системы, носят название
предельных циклов. На рис. 134 представлен пунктиром один
устойчивый предельный цикл, на который наворачиваются фазовые
траектории, расположенные как внутри, так и снаружи цикла.
¦ Второй случай. Предположим теперь, что функция Ф(Е)
не равна тождественно нулю и, в частности, не равна нулю для
корней Е1 уравнения
Г(Е) = 0.
9. Метод Ван-дер-Поля
515
Рис. 134 Рис. 135
В этом случае из уравнения
будем иметь
9 = цФ (Я,) т + в0.
Изображающая точка, попав на окружность радиуса Н19 где
Ф(#.) ф О, уже на плоскости ОаЬ будет двигаться по этой
окружности со скоростью
Прежние окружности равновесных положений становятся уже
на плоскости ОаЬ предельными циклами, по которым
изображающая точка движется согласно уравнениям
а = Вь сое [цФ (Вь) т + 0О],
Ь = Вг 81П [ЦФ (Вг) Т + 60].
Другие фазовые траектории в плоскости ОаЬ являются
сложными кривыми, которые около циклов ведут себя как спирали,
наворачивающиеся на устойчивые и раскручивающиеся с
неустойчивых (рис. 135). В областях между двумя
последовательными циклами эти кривые могут менять направления на
противоположные в точках, где Ф(В) обращается в нуль (например, в
точках А, В, С на рис. 135I*.
Х) Подробные сведения о фазовых траекториях на плоскости ОаЬ в
рассматриваемом случае можно найти в [2].
516 Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
При переходе на неподвижную плоскость Оху предельные
циклы радиусов Е1 на плоскости ОаЪ остаются предельными
циклами и на плоскости Оху, По этим циклам изображающая точка
будет двигаться согласно уравнениям
X = а С08 Т 4- Ъ 8И1 X = Е1 С08 {[1 - ЦФ (В})] Т - 60},
у = -а зги т + Ъ соз х = -В1 зги {[1 - цФ (Я-)] х - Э0}.
Остальные траектории, как и в первом случае, растягиваются
при переходе на плоскость Оху в спирали, наворачивающиеся на
устойчивые циклы, подобно спиралям на рис. 134.
Таким образом, нелинейность системы во втором случае,
помимо отбора радиусов предельных циклов, влияет также и на
частоту колебаний, которая теперь уже не совпадает с частотой
порождающего линейного осциллятора (равной 1), а отличается
от нее на величину цФ(Я-), зависящую от параметра |а.
10. УСТОЙЧИВОСТЬ ПРЕДЕЛЬНЫХ ЦИКЛОВ. Метод Ван-дер-Поля
устанавливает закон движения изображающей точки не только
по предельному циклу, но и в областях между предельными
циклами. Этот закон выражается уравнениями A2.39), которые
определяют поведение изображающей точки в неустановившемся
режиме, когда она еще не находится на устойчивом предельном
цикле, но приближается к нему. Именно это обстоятельство
подчеркнуто в наименовании, присвоенном этим уравнениям, —
уравнения установления.
С помощью уравнений установления легко решается вопрос об
орбитальной устойчивости предельных циклов. Предположим,
что изображающая точка движется по некоторому циклу радиуса
Вг Чтобы установить характер устойчивости этого цикла, дадим
радиусу В1 малое возмущение БВ. Тем самым переведем
изображающую точку в область между циклами, где ее движение будет
определяться уравнениями A2.39). В частности, в этом
движении радиус Кь + ЗВ будет изменяться согласно уравнению
А(#. + 5Я) = \хР (Я; + 5#). A2.45)
Ограничиваясь в разложении Р по степеням ЪВ только членом
первого порядка, получим для 5Я уравнение
^) = ^> (д) 5Л.
ах 1
10. Устойчивость предельных циклов
517
Отсюда следует
ЬЕ = аеи 1 .
Рассматриваемый предельный цикл будет устойчив
асимптотически, если1)
РЩ) < 0,
и неустойчив, если
ГЩ) > 0.
Пример 5. Составить уравнения установления и выяснить устойчивость
предельных циклов уравнения Ван-дер-Поля
х + х = |Д1 - х2)х.
По формулам A2.38) находим
Р(Е) = § D - Я2), Ф(Я) = 0.
о
Уравнения установления будут поэтому иметь вид
**=Н*D-Д*), ]
ае 08 ^ (^.46)
Предельные циклы имеют здесь радиусы В0 = 0 и Лх = 2. Первый цикл —
нулевая точка, изображающая равновесное состояние системы,—
неустойчив, так как
Р'@) = 1/2, 2?'@) > 0.
Второй цикл — окружность радиуса Е1 = 2 — устойчив асимптотически, так как
Р'B)=-1, *"B)<0.
Первое из уравнений A2.46) легко интегрируется, и закон изменения В,
получаемый из решения этого уравнения, подтверждает сделанное только
что заключение об асимптотической устойчивости предельного цикла
радиуса В = 2. В самом деле, разделив в этом уравнении переменные Лит, найдем
2ап
В(т)
7^ + е"*"'
где
а2 _вно1_
0 Д2@)-4'
откуда следует, что В —> 2, когда т —> °°.
Решение уравнения Ван-дер-Поля в первом приближении имеет вид
х = В соз (т + 90).
Х) Можно доказать, что движение изображающей точки по асимптотически
устойчивому предельному циклу является устойчивым и по Ляпунову. См. [2].
518 Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
Пример 6. ТЕОРИЯ ЧАСОВ1*. Всякий часовой механизм состоит из трех
основных частей.
1. Неколебательный (постоянный) источник энергии или так
называемый заводной механизм (падающий груз, пружина); на рис. 136 показана
часть этого механизма — приводимое во вращательное движение падающим
грузом или пружиной храповое колесо А.
2. Спусковой механизм, т. е. механизм, регулирующий подачу энергии из
постоянного источника (заводного механизма) в колебательную систему —
жестко связанный с маятником якорь I), снабженный двумя специальной
формы зубцами (палеттами) а и Ъ.
3. Колебательная система — маятник вместе с якорем. Обратная связь
здесь не выделена конструктивно, а объединена с колебательной системой и
выражается в управлении якорем подачей энергии из источника через
храповое колесо. Механизм этого управления осуществляется следующим образом.
Когда зубец колеса попадает на скошенный торец зубца а якоря, он
подталкивает якорь, а с ним и маятник. В это время второй зубец якоря Ъ опускается и,
скользя по боковой поверхности зубца храпового колеса, задерживает
последнее до тех пор, пока маятник, совершив отклонение вправо, не вернется в
среднее положение. Время между последовательными толчками
определяется длиной маятника и соответственно подобранными размерами зубцов
якоря. Чаще всего спусковой механизм приходит в действие два раза за полный
цикл колебания маятника: один раз, когда маятник движется справа налево,
другой — когда он движется слева направо. В этих положениях скорость
маятника сразу изменяется на конечную величину.
Обозначим восстанавливающий момент, действующий на маятник, в
предположении, что отклонения маятника невелики, через
М = -тёЮ = -с0,
где 0 — угол отклонения, т — масса маятника, / — расстояние от его центра
тяжести до оси подвеса. Можно считать, что доминирующим сопротивлением
движению маятника является кулоново трение К, которое примем равным
-сВ при 0 > О,
+сВ при 0 < О,
где В = сопз!; участок (-Б, +В) — полоса застоя.
Если бы на маятник никакие другие силы, кроме указанных, не
действовали, то он бы представлял собой диссипативную систему: часы с таким
маятником, будучи приведены в движение, через некоторое время
остановились бы. Для поддержания движения на маятник через спусковой механизм
подаются импульсы, создаваемые падающим грузом или раскручивающейся
пружиной. Допустим, что результатом действия на маятник спускового
механизма является мгновенное изменение (увеличение) на конечную
величину АН кинетической энергии маятника и что это изменение происходит два
К =
Х) См. кн. Б. В. Булгакова [9].
10. Устойчивость предельных циклов
519
Рис. 136 Рис. 137
раза за полный цикл колебания в положениях 0 = ±а; где ±а — углы
импульса. Другие допущения, например предположение, что результатом действия
спускового механизма является мгновенное изменение количества
движения на некоторую конечную величину, приводят к выводам, не
подтверждающимся на опыте.
В соответствии с принятым допущением составим уравнение
энергетического баланса для изображающей систему точки на фазовой плоскости.
Положив х — момент инерции колеблющейся системы
относительно оси О, получим:
&(У1 + !Е|!) - ТсВ их. A2.47)
Верхний знак соответствует размаху (полуколебанию) слева направо @ > 0),
а нижний — размаху справа налево @ < 0).
Из уравнения A2.47) имеем:
с(х ± ВJ + у2 = сопз!;. A2.48)
Пусть в начальный момент (I = 0) маятник отклонен вправо на угол х = 0 =
= А1и отпущен без начальной скорости (у = 0). Изображающая точка на
фазовой плоскости будет двигаться справа налево согласно уравнению
с(х - ВJ + г/2 = с(А1 - ВJ.
Фазовая траектория будет представлять собой полуэллипс, расположенный в
нижней полуплоскости и пересекающий ось Ох в двух точках, симметрично
расположенных относительно точки +Б (рис. 137).
В верхней полуплоскости мы получим полуэллипс, симметричный
относительно оси х = -В. Этот эллипс закончился бы справа в полосе застоя (-Б, +Б),
и маятник остановился бы. Но так было бы, если бы никаких пополнений
энергии маятник не получал. В действительности при значения х = а он
получает первую порцию энергии АН. Ордината в этом положении равна
520
Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
Чтобы уг было вещественным, должны выполняться условия
В самом деле, если бы было
Аг > а, Аг > 2В - а.
A2.49)
Аг < а, А1<2В- а,
то движение вообще бы не началось, так как из последних неравенств
следовало бы, что Ах < Б, т. е. маятник уже в начальном отклонении был бы в
полосе застоя.
Условия A2.49) можно заменить одним из следующих неравенств:
г -а, при а > В,
АЛ > 1 о о /о A2.50)
1 12В - а, при а < В. у '
Получив в положении Сх(а, -ух) порцию энергии АН (рис. 138),
изображающая точка сразу оказывается в положении С [(а, ~у[)> и мы имеем:
(у'2/2 + са2/2) - 0/2/2 + са2/2) = АН
или
у\ -у\ = 2АЯ.
Отсюда
Ух =~Ы + 2Л# = ~М(^1 ~ ЯJ - (а - БJ + к] , A2.51)
где Л = 2 АН/с. После этого точка будет двигаться по эллипсу
с(х - ВJ + у2 = с(а - ВJ + у'2,
уравнение которого получится из A2.48) при начальных условиях х = а, у = у[
(рис. 138I). С помощью A2.51) это последнее уравнение можно переписать в
виде
с(х - ВJ + у2 = с[(Ах - ВJ + К].
Рис. 138
Х) Пунктир на рис. 138 изображает фазовую траекторию при отсутствии толчка в С
10. Устойчивость предельных циклов
521
Положив здесь у = 0, получим отклонение А2 точки влево от начала
координат. Его абсолютная величина
А2 = ^(А^:ПВJ~Т~к - В. A2.52)
Фазовая траектория в верхней полуплоскости будет иметь аналогичное
расположение с прямолинейным, параллельным оси Оу участком с абсциссой
(-а) — место второго толчка со стороны якоря.
Последовательные отклонения маятника в противоположные стороны
будут расти, если
7(АХ - ВJ + к -В>Аг
или
(Ах - ВJ + к>(А1 + ВJ,
т. е. (учитывая, что к/4В = АН/2Вс) если
А1<Ц-С=А- <12-53>
Амплитуды будут убывать, если
Аг>А,
Докажем, что при условии
В<АХ<А
отклонения, возрастая, будут стремиться к А. В самом деле, если В <АХ<А,
то, как это следует из формул A2.52) и A2.53):
А2 < 7(А - ВJ + к - В = 7(А - ВJ + 4АВ -В=А, А2<А.
Таким образом, возрастая, отклонения остаются ограниченными сверху.
Далее
7(Аг - ВJ + к + (Ах + В)
__ к - 4АгВ __ 4В(А - Ах)
ЛА, - ВJ + Н + (Ах + В) 7(^1 - вJ + Л + (Ах + В)
и так как В < Ах < А, имеем
А -А > 4В(А-А1) = 2В(А-Аг)
2 * 7(А - ВJ + к + (А + В) А + Я
Поскольку Ах и А2 стремятся к одному и тому же пределу, разность (А2 - Аг)
стремится к нулю, а вместе с тем
ИтА! = А.
Так же можно доказать, что когда начальное отклонение больше А,
последующие отклонения стремятся к А, убывая.
Соотношение A2.52) между двумя последовательными отклонениями Ах
и А2 можно, обозначив Ах = г, А2 = и, представить в виде
_(г-ВJ + (ц + ВJ =1>
522
Глава XII. ПРОСТЕЙШИЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
В системе координат (г, и) это будет уравнение равнобочной гиперболы с
центром в точке (В, -В) и с асимптотой
и = 2 - 2В.
Построив эту гиперболу, проводим биссектрису г = и. Точка пересечения К
биссектрисы с гиперболой определяет стационарную амплитуду
периодических колебаний системы (рис. 139).
Задавшись теперь некоторым начальным отклонением гх > А, получим
следующее отклонение влево как ординату точки гиперболы МЛ^ с абсциссой
гх. С помощью прямой и = г переносим это отклонение на ось Ог в точку гг.
Ордината точки гиперболы МЫ, соответствующая абсциссе г29 даст
следующее отклонение вправо гъ и т. д. Отклонения идут убывая, приближаясь к
предельному А, изображаемому ординатой точки К. Если начальное
отклонение вправо взято меньшим А, то отклонения будут возрастать,
асимптотически приближаясь снизу к тому же пределу.
Амплитуда А не зависит от начальных условий. Однако начальные
условия здесь вообще играют известную роль в определении последующей судьбы
системы: от начальных условий зависит, будет ли система вести себя как
диссипативная или как автоколебательная.
Стационарный автоколебательный режим устанавливается, если
начальное отклонение удовлетворяет условиям
\ а при В < а,
А1 > 1 2В - а при В < а.
Периодическое движение с предельной амплитудой А асимптотически
устойчиво. При небольшом возмущении амплитуды ЛА получим отклонение,
расположенное справа или слева от А, которое будет или уменьшаться, или
увеличиваться, неизменно приближаясь к А.
Рис. 139
1. Предварительные замечания
523
Автоколебания — один из самых распространенных видов
свободных нелинейных колебаний неконсервативных систем. Часто
ими пользуются для создания автоматически действующих
незатухающих колебательных систем, как, например, в часах,
поршневых двигателях, музыкальных духовых язычковых и
смычковых струнных инструментах. Еще чаще автоколебания,
возникающие во многих аппаратах и механизмах, оказываются вредными
для нормальной работы, а иногда даже и целости последних.
Таковы, например, автоколебания в системах автоматического
регулирования. Последние уже по самому устройству своему сходны
с автоколебательными системами, так что почти всегда при
конструировании регуляторов приходится принимать специальные
меры к устранению условий, при которых возможно
возникновение автоколебаний. Весьма опасными являются автоколебания
крыльев и хвостового оперения самолета — флаттер, —
возникающие при определенных скоростях полета и приводящие
иногда к полному разрушению самолета и его гибели. Много
примеров автоколебательных систем приведено в прекрасной книге
А. А. Харкевича «Автоколебания» [53], чтение которой может
служить введением в общую теорию автоколебаний1*.
Глава XIII
Некоторые общие методы
нелинейной механики
1. ПРЕДВАРИТЕЛЬНЫЕ ЗАМЕЧАНИЯ. В дальнейшем под общими
методами нелинейной механики разумеются методы построения
периодических решений нелинейных систем с помощью рядов,
расположенных по степеням малого параметра, существенным
образом связанного с нелинейными характеристиками системы,
или по степеням малых начальных отклонений системы из
устойчивого невозмущенного состояния. Эти построения относятся
к некоторым частным видам нелинейных систем, главным обра-
Х) Об автоколебаниях см. также у Дж. Стокера [83]; К. Ф. Теодорчика [46];
И. Рокара [78].
524 Тшва XIII. НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ НЕЛИНЕЙНОЙ МЕХАНИКИ
зом к квазилинейным системам. При некоторых условиях,
которым обычно удовлетворяют уравнения движения системы для
известной области значений входящих в них параметров,
степенные ряды, представляющие периодические решения этих
уравнений, являются сходящимися на сколь угодно большом
промежутке времени. Однако в не меньшем числе случаев,
встречающихся в приложениях, ряды, представляющие периодические
решения нелинейных систем, оказываются рядами
асимптотическими, вообще говоря, расходящимися, но такими, конечное
число первых членов которых при известных условиях может
представить это решение на достаточно большом промежутке
времени с любой точностью.
В настоящее время имеется весьма обширная литература,
посвященная общим методам нелинейной механики [49]. Само
собой разумеется, дальнейшее изложение методов нелинейной
механики ни в коей мере не может претендовать на полное и везде
строго обоснованное воспроизведение относящихся сюда теорий.
Ограничимся упрощенным описанием содержания только
некоторых теорем существования и вытекающих из них приемов
построения периодических решений, достаточно простых в
практическом их применении и ограниченных, главным образом,
первым приближением. Более подробное изложение этих теорем и
надлежащее их обоснование можно найти в цитированной далее
литературе, главным образом в книгах: И. Г. Малкина [32], [31],
А. А. Андронова, А. А. Витта и С. Э. Хайкина [2], А. Н. Крылова
[21], Э. Пикара [76], Н. В. Бутенина [10], Н. Н. Боголюбова и
Ю. А. Митропольского [5].
2. ТЕОРЕМА ПУАНКАРЕ. СЛУЧАЙ ВЫНУЖДЕННЫХ КОЛЕБАНИЙ.
Теорема Пуанкаре относится к системам, уравнения движения
которых содержат малый параметр \х и обладают периодическим
решением, когда этот параметр равен нулю. Такие системы будем
называть системами Пуанкаре. Частным случаем систем
Пуанкаре являются квазилинейные системы, в которых нелинейные
члены входят умноженными на малый параметр \л и которые
обращаются при ц = 0 в линейные уравнения с постоянными
коэффициентами. Такой будет, например, система, описываемая
уравнением Ван-дер-Поля,
х + х = цA - х2)х
или уравнением более общей формы
х + к2х = и/(х, х, *)>
2. Теорема Пуанкаре. Вынужденные колебания
525
где /(х, х, I) — некоторая заданная функция, разложение
которой по степеням х и х начинается с членов не ниже второго
порядка. Квазилинейными системами мы и ограничимся в
изложении содержания теоремы Пуанкаре.
Основной факт, устанавливаемый теоремой Пуанкаре,
заключается в том, что возможные в квазилинейных системах при
достаточно малом ц периодические движения располагаются
вблизи периодических движений соответствующих линейных систем,
в которые они обращаются при ц = 0. В связи с этим линейная
система, получаемая из квазилинейной при ц = 0, и ее
периодические решения, вблизи которых возникают периодические
решения квазилинейной, называются по отношению к последней
порождающими. В применениях теоремы Пуанкаре приходится
иметь дело с двумя видами порождающих систем и решений и
соответственно с двумя методами построения периодических
решений квазилинейных систем. Первый относится к случаю, когда
порождающие уравнения являются уравнениями вынужденных
колебаний с периодической правой частью, явно зависящей от
времени, периодическое решение которых не содержит никаких
произвольных параметров. Большей частью это порождающее
решение будет единственным периодическим решением
порождающей системы, вблизи которого расположится единственное
периодическое решение квазилинейной системы, непрерывно
переходящее в порождающее, когда ц —* 0. Так будет, например,
в квазилинейной системе с уравнением
х + к2х = зт I 4- их3, A3.1)
где к не равно целому числу. При \х = 0 эта система превращается
в линейную
X + к2Х = 81П I
с единственным периодическим решением
= 8111 1
'к*-1'
не содержащим никаких произвольных постоянных.
Другой существенно отличный случай имеет место, когда
порождающее решение зависит от некоторых произвольных
параметров, т. е. когда порождающая система имеет бесчисленное
множество решений. Так будет, например, в консервативной
системе с уравнением
х + к2х = \хх3. A3.2)
526 Глава XIII. НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ НЕЛИНЕЙНОЙ МЕХАНИКИ
Порождающее уравнение
х + к2х = О
имеет решение
X = А СОЗ Ы + Б 81П &*,
зависящее от произвольных параметров А и Б. В этом последнем
случае квазилинейная система A3.2) может иметь несколько
периодических решений, которые возникнут вблизи некоторых
отобранных решений порождающей системы с особыми
значениями параметров А и Б.
Указанные два случая различаются между собой и формой
уравнений движения системы. В первом случае квазилинейная
система A3.1) содержит явно время под знаком периодической
функции с заданным или известным периодом, совпадающим с
периодом порождающего решения Bя в приведенном выше
примере). Во втором случае уравнение квазилинейной системы A3.2)
явно от времени не зависит. Период возможного в ней
периодического решения заранее не известен и может быть, вообще говоря,
каким угодно. В частности, он не будет равен периоду
порождающего решения, так как, очевидно, будет зависеть от параметра \л.
Переходим к изложению содержания теоремы Пуанкаре.
Предположим, что уравнения движения квазилинейной системы
приведены к виду
их
—1 = Рг (*, х19 ... , хп, ц), /=1,2, ... , я, A3.3)
где функции Рь явно зависят от времени, являются
периодическими функциями времени заданного известного периода,
например 2я, и аналитическими функциями координат х1У х2, ... , хп в
некоторой области значений последних и параметра для
достаточно малых его значений. Пусть далее при ц = О система A3.3)
имеет частное периодическое решение
Хь= фДО, *= 1, 2, ... , П, A3.4)
того же периода 2л, что и функции Рь.
В этом случае при начальных условиях
хДО) = фДО) + аьг\ 1=1,2, ... , п A3.5)
Х) Где а; — малые возмущения начальных условий периодического решения A3.4)
порождающей системы.
2. Теорема Пуанкаре. Вынужденные колебания
527
система A3.3) будет иметь решение
хь = х- (*, а19 ... , ап, ц), /=1,2, ... , /г, A3.6)
аналитическое относительно ах, ... , ап, ц для достаточно малых
значений этих величин, обращающееся в A3.4) при ц = 0.
Давая (X; различные значения, получим бесчисленное
множество решений системы A3.3) указанного типа. Среди этих
решений будут и периодические, если они в системе A3.3)
вообще существуют. Они будут соответствовать таким значениям
а19 а2, ... , ая, при которых функции A3.6) будут периодическими
периода 2л.
Теорема Пуанкаре. Система A3.3) имеет
периодическое решение периода 2л, разлагающееся в ряд по степеням
малого параметра \х и обращающееся в A3.4) при ц = 0, если при
выполнении всех перечисленных выше условий, наложенных на
функции Р(, можно будет определить из необходимых и
достаточных условий периодичности функций A3.6)
у. = х- Bл, а19 ... , <хл, \х) - х1 @, а19 ... , ап, ц) = 0, A3.7)
1= 1, 2, ... , п,
начальные значения а19 а2, ... , ап как такие функции ц,
которые для достаточно малых значений \х разлагаются в ряды по
степеням ц и обращаются в нули для ц = 0. В этом случае
решение A3.6) после подстановки в него найденных из A3.7)
СС-1, ССо> ... ) ^п
будет иметь вид
^ = фД0 + ЦФа@ + Ц2ф/2@ + -.., 1= 1,2, ... , п, A3.8)
где ц)п, ф-2 ... — непрерывные периодические функции периода 2л.
Доказательство. Уравнения A3.7) имеют нулевое
решение для всех а19 а2, ... , ап при ц = 0, так как при ц = 0 они
обращаются в уравнения
фД2л) - ф.@) - а- = 0, I = 1, 2, ... , п,
из которых в силу периодичности ф-(^) имеем
а; = 0, 1=1, 2, ... , п.
528 Глава XIII. НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ НЕЛИНЕЙНОЙ МЕХАНИКИ
Следовательно, левые части этих уравнений, т. е. функции ц/^,
/=1,2, ... , п, разлагаются в ряды по степеням аг, а2, ... , а^, ц,
исчезающие при аг = а2 = ... = ап = \х = 0. Линейные части этих
разложений имеют вид
Ъ = ЪПа1 + Ь12а2 + — + Ьтап + с№ + — > * = Ь 2> - > "•
Если определитель
I &11 &12 — &1л I
Ъ„л Ъ„о ... Ь««
не равен нулю, то, как известно из теории неявных функций, из
уравнений A3.7) можно найти все с^, / = 1,2, ... , п, как функции
ц, обладающие указанными выше свойствами. В квазилинейных
системах составление определителя A3.9) не представит особых
затруднений, если предварительно будет найдено общее решение
порождающей системы:
х1 = (р;(/, а19 а2, ... , а„, 0), /=1,2, ... , п.
Условия периодичности этого решения будут совпадать с
условиями периодичности решения A3.4).
Само построение периодического решения уравнений A3.3),
после того как установлена форма этого решения, не
представляет особых трудностей. Подставив в уравнения A3.3)
*.(/) = ф,(*) + цФа(*) + ц2ф.2(/) + ... ,
сравниваем коэффициенты при одинаковых степенях ц в обеих
частях уравнений. Тогда получим ряд рекуррентных
дифференциальных уравнений, из которых при выполнении одного и того
же условия периодичности последовательно найдутся все
функции фД/) и ср.й(*).
Рассмотрим в качестве примера нелинейную систему с
уравнением
х + к2х = к зт / 4- цх3, A3.10)
где к не равно целому числу. Это уравнение удовлетворяет всем
условиям теоремы Пуанкаре. Правая часть зависит явно от вре-
2. Теорема Пуанкаре. Вынужденные колебания
529
мени и является периодической функцией I с периодом 2я.
Решение этого уравнения можно поэтому искать в виде ряда
х{Ь) = ф@ + н%@ + ц2ф2@ + ... .
Подставив этот ряд в A3.10) и сравнив коэффициенты при
одинаковых степенях \х слева и справа, получим для ф@ и фЛ@
дифференциальные уравнения
ф + &2ф = к 81П I,
Фх + к2уг = ф3,
Ф2 + А2ф2 = Зф2фх,
Общее решение первого уравнения будет иметь вид
к 81П I
A3.11)
фB) = А СОЗ Ы + В 8И1 &^ +
/г2- 1 "
A3.12)
Постоянные А и Б находим из условий периодичности, которые
запишутся следующим образом:
А (сое 2/гтт - 1) + В зт 2/гтг = 0,
-А зт 2/гя + Б (соз 2/гл - 1) = 0.
A3.13)
Определитель системы A3.13) будет определителем A3.9),
неравенство нулю которого является условием возможности найти из
уравнений A3.13) такие значения постоянных А и Б, при
которых решение первого уравнения A3.11) будет периодическим с
периодом 2л;. В рассматриваемом случае этот определитель
соз 2кп - 1
-зт 2кп
зт 2кк
СОЗ 2&71
= (соз 2кп - IJ + зт2 2кп
2A-соз2/гл;)*0.
A3.14)
Следовательно, А = Б = 0 и решением первого уравнения A3.11)
будет периодическая функция
к 81П I
Ф(*) =
к2
A3.14')
не содержащая никаких произвольных параметров. Подставив ее
во второе уравнение A3.11), представим его в виде
Ф1 + &2Ф1 =
к3
Цк2- 1);
; C 8Н1 I - 8И1 30-
18- 10456 Бабаков
530 Глава XIII. НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ НЕЛИНЕЙНОЙ МЕХАНИКИ
Его общее решение
ЗЛ3 81П % к3 81П 3*
фх@ = Ах СОЗ Ы + Вг 81П Ы +
4(/г2- IL 4(/г2- 1K(к2 - 9)
Условия периодичности здесь выражаются теми же
однородными уравнениями A3.13) с неравным нулю определителем A3.14).
Следовательно, и здесь периодическое решение для (рх@
получится при Аг =В1 = 0и оно будет
х.ч З/*3 81П * Н3 81П 3^
Фх@ ¦-
4(/г2- IL 4(/г2- 1K(/г2-9)
и т. д. Условия периодичности для всех функций ф, ц>19 ф2, ...
будут одними и теми же, именно условия периодичности A3.14).
Функции ф2@» Фз@ И т- Д- найдутся аналогичным путем.
Останавливаясь на первом приближении, получим в качестве
единственного периодического решения уравнения A3.10) ряд
к 81П I , Г 3/г3 81П I к3 зт 3/
/ ,ч к 81П ^ , Г
4(/г2- IL 4(/г2- 1K(/г2-9)
Это решение при достаточно малом ц будет близким к A3.14'),
обращаясь в последнее, когда \л = 0.
Как видно из разобранного примера и как это следует из
теоремы Пуанкаре, между периодическим решением квазилинейной
системы и решением A3.4) в случае, когда А ф 0, имеет место
определенное соответствие, выражающееся в том, что первое
близко ко второму при достаточно малом ц и непрерывно
переходит во второе, когда \л —* 0. Можно сказать, что в этом случае
принципиального различия между нелинейной системой и
получающейся из последней при \л = 0 линейной нет, так что
замена первой второю при достаточно малом \л является вполне
допустимой.
Иначе обстоит дело, когда определитель А равен нулю. В этом
случае указанное выше соответствие между квазилинейной и
линеаризованной (порождающей) системами нарушается.
Линеаризованная система уже не воспроизводит достаточно точно даже
при малом ц все колебательные свойства квазилинейной
системы. Последняя является в этом случае существенно нелинейной
системой, линеаризация которой, вообще говоря, недопустима.
В условии неравенства нулю определителя А получаем, таким
образом, своего рода критерий допустимости линеаризации
квазилинейных систем.
3. Теорема Пуанкаре. Свободные колебания
531
Предположим, что определитель А равен нулю, и пусть ранг
этого определителя будет т. Тогда из уравнений A3.7) можно
найти т величин ах, ... , ат, выразив их через \х и остальные (п - т)
величин ат + 1, ... , аЛ, которые могут принимать произвольные
значения. Подставив найденные таким образом а19 ... , ат в A3.6),
получим периодические решения уравнений A3.3), зависящие от
одного или нескольких произвольных параметров. Такой случай
будет, например, иметь место, когда система A3.3) имеет первый
интеграл или когда уже в порождающее решение входят
произвольные параметры.
3. ТЕОРЕМА ПУАНКАРЕ. СЛУЧАЙ СВОБОДНЫХ КОЛЕБАНИЙ
АВТОНОМНЫХ КВАЗИЛИНЕЙНЫХ СИСТЕМ. Уравнения движения
автономных систем
-^ = РЦх19 ... , Хп, ц), 1=1,2, ... , П, A3.15)
не зависят явно от времени, а потому период возможного в таких
системах периодического решения заранее не предопределен и
может быть, вообще говоря, каким угодно. Далее, если известно
периодическое решение х^) системы A3.15), то периодическими
решениями этой системы будут также и функции хь{1 - ^1), где 1Х —
некоторый произвольный момент времени. Эти функции будут
описывать тот же периодический процесс, что и хьA), только
запаздывающий на ^1 сравнительно с хьЦ). Таким образом,
периодические решения системы A3.15) будут зависеть по крайней мере
от одного произвольного параметра.
Отмеченные свойства автономных систем существенным
образом влияют на процесс построения периодических решений
уравнений A3.15). В остальном для функций Рь сохраняются
прежние условия: функции Рь являются аналитическими функциями
координат хг, ... , хп в рассматриваемой далее области значений
последних и параметра \х для малых его значений; при ц = 0
уравнения A3.15) обращаются в линейную систему с постоянными
коэффициентами, обладающую периодическим решением с
некоторым периодом Т. Только период этот уже не будет совпадать с
периодом возможного для системы A3.15) периодического
решения. Период Тг последнего решения, когда оно существует, будет
отличаться от Т на некоторую величину аТ, зависящую от
параметра ц, что мы запишем следующим образом:
Тг = ТA + а).
532 Глава XIII. НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ НЕЛИНЕЙНОЙ МЕХАНИКИ
Принимая во внимание эти замечания, изложим теорему
Пуанкаре для автономных систем следующим образом.
Теорема Пуанкаре. Если правые части уравнений
движения системы
—* = Рг(х19 ... , хп, \х), 1=1,2, ... , п9 A3.16)
являются аналитическими функциями переменных х19 х2, — 9 хп
в некоторой области значений последних и параметра \х для
достаточно малых его значений; если уравнения A3.16) при ц = О
имеют периодическое решение
х- = (р;@, 1= 1> 2, ... , /г,
с периодом Т, то решение системы A3.16), соответствующее
начальным условиям
хДО) = срДО) + аь, 1= 1, 2, ... , /г,
и записываемое в виде
хь = хгУ, а19 а2, ... , ал, ц), 1=1,2, ... , /г,
будет
^ аналитическим относительно аг, а2, ... , ад ц ц для малых
значений этих величин;
^ периодическим с периодом Т{\ + а), если величины а, ах, ... , ап
можно найти из условий периодичности
\|/; = хь(Т{\ + а), ах, ... , ал, ц) - ф^О) - аг = О, /=1,2, ... , и,
A3.17)
положив одну из них, например ая, равной нулю, как
аналитические функции ц, которые для ц = О обращаются в нуль.
При выполнении всех условий теоремы периодическое
решение автономной системы A3.16) может быть представлено рядами
хДО = фДО + цсра(*) + |!2Ф/2@ + ... , * = 1» 2, ... , л, A3.18)
сходящимися для достаточно малых ц.
Следует обратить внимание на то, что число неизвестных
функций параметра ц
ОС, 01^, 012» •" > ^л'
3. Теорема Пуанкаре. Свободные колебания
533
которые нужно найти из условий периодичности A3.17), на
единицу больше числа уравнений. Эта неопределенность устраняется
тем, что одно из чисел о^, например ап, принимается равным
нулю. Общность решения будет восстановлена возможностью
произвольно выбирать начало отсчета времени или постоянную *х, о
которой выше шла речь.
Несмотря на то, что в рассматриваемом случае свободных
колебаний автономной системы форма искомого периодического
решения A3.18) — такая же, как и форма периодического решения
A3.8) неавтономной системы A3.3), фактическое его получение
связано с одним своеобразным затруднением. Коэффициенты
ряда A3.18) — функции ср^@ — после подстановки A3.18) в
уравнения A3.16), сравнения коэффициентов при одинаковых
степенях [I и решения получающихся таким образом
дифференциальных уравнений оказываются непериодическими, содержащими
вековые члены, несмотря на то, что ряд A3.18) в целом, т. е.
функции х-@> удовлетворяют условиям периодичности. Из
периодичности функций х-(^) здесь не вытекает периодичность
коэффициентов 9^@, к&к это имело место в неавтономных системах.
Иначе говоря, из равенства
хЦ + ТA +а)] = х-@
не следуют равенства
Ф/[* + ТA + <х)] =<р4(*),
Ф/Л[* + ТA+а)] = Ф/Л(*).
Эти последние вообще невозможны, так как их левые части
зависят от \х (через а), а правые от ц не зависят. Это обстоятельство не
должно показаться неожиданным. В разложение периодической
функции могут входить вековые члены, как это можно видеть на
примере разложения функции
81П A + Ц) I, Ц > 0.
Это периодическая функция с периодом 2я/A + ц). Разложение
этой функции по степеням ц приводит к ряду
8Н1 A + и) I = 8И1 I + уЛ СОЗ % — (\хН2/2) 8И1 * + ...,'
отдельные члены которого, содержащие I не под знаком синуса и
косинуса, растут вместе с I неограниченно. Пользоваться такими
534 Глава XIII. НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ НЕЛИНЕЙНОЙ МЕХАНИКИ
рядами, несмотря на их сходимость в целом, в практических рас-,
четах, где приходится ограничиваться конечным числом членов
разложения, нельзя. Таким конечным числом членов с вековыми
слагаемыми нельзя дать представления периодичности функции.
С такого рода затруднениями встретились астрономы XVIII в.,
когда пытались, решая при помощи рядов дифференциальные
уравнения движения планет, получить периодические
выражения для координат планеты. Тогда же в связи с этим были
предложены некоторые специальные способы освобождения решений
от вековых членов. Наиболее известные работы в этом
направлении принадлежат П. Лапласу и Ж. Лагранжу. Однако способы,
предложенные этими учеными, хотя и приводят в конце концов
к цели, весьма сложны и связаны с громоздкими выкладками.
Первое простое решение задачи о построении периодических
решений автономных систем дал М. В. Остроградский.
Учитывая, что нелинейность в автономных системах влияет на период,
М. В. Остроградский предложил строить одновременно два
разложения по степеням параметра |и: искомой функции хЦ) и ее
периода ТA + а). Прием, предложенный М. В. Остроградским, был
развит и обобщен А. М. Ляпуновым, распространившим его на
системы с п степенями свободы и установившим условия
сходимости получаемых при этом рядов. Существенные упрощения
метода сделаны А. Н. Крыловым [103].
Сущность приема Ляпунова заключается в преобразовании
уравнений автономной системы к собственному времени, в
котором единицей времени является искомый период колебаний
системы, который оказывается, таким образом, заранее известным,
что позволяет оперировать с автономными системами так же, как
и с неавтономными.
Переход к такому собственному времени х осуществляется
при помощи формулы
х = 1 и
ГA + а) '
где Т — период порождающего решения, а — зависящий от \х
поправочный множитель к периоду Т. В дальнейшем, однако,
оказывается более удобным пользоваться единицей собственного
времени, в 2л раз меньшей, так что периоду ТA 4- а) будет
соответствовать 2тг единиц собственного времени в силу соотношения
2тг .
х = 1,
ТA + <х)
3. Теорема Пуанкаре. Свободные колебания
535
Будем предполагать, что зависящая от \х поправка а(ц)
разлагается по степеням \х в ряд с постоянными коэффициентами,
исчезающий при ц = 0, в связи с чем положим
Т A + а) = Т A + кх\х + к2\12 + ...). A3.19)
Такое представление искомого периода ТA + а) дает
возможность надлежащим выбором значений коэффициентов к1
выполнять условия периодичности для функций ф.Л на каждом этапе их
определения.
Для более удобного ознакомления с деталями построения
периодического решения квазилинейной автономной системы
рассмотрим уравнение
х 4- к2х = ц/ (х, х). A3.20)
Это одно из важнейших по своим приложениям квазилинейное
уравнение, которому посвящено большое число исследований.
Общая теория периодических решений этого уравнения
разработана А. А. Андроновым и А. А. Виттом [87]. Уравнением такого
же типа является уже встречавшееся нам уравнение
Ван-дер-Поля, имеющее важные приложения в радиотехнике.
Для перехода к собственному времени в уравнении A3.20)
полагаем
Т = Т(ГГа)* = ** <Х + Н& + Л2Й2 + -Г1,
где к = 2п/Т — частота периодического решения порождающего
уравнения
х + к2х = 0.
Тогда
После подстановки в уравнение A3.20) получим
-*'[*'
к ^ A + Л1Ц + Л2ц2 + ...Г1]A + Ахц + Л2ц2 + ...J.
A3.21)
Решение этого уравнения будем искать, как и для неавтономной
системы, в виде ряда
х(т) = ф(х) + цфх(т) + ц2ф2(т) + ... ,
536 Глава XIII. НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ НЕЛИНЕЙНОЙ МЕХАНИКИ
период которого не зависит от ц и равен как для х(т), так и для
всех функций ф(т), ф1(т), Ф2(т), ••• одному и тому же числу 2п.
Подставив это выражение х(х) в A3.21), получим
Й + ^ + ^ + - +
A3.22)
йт2 с1т2 с1т2
+ (Ф + цф1 + ц2ф2 + ...) A + Н& + й2ц2 + ...J =
= ^ ^ [ф + ^1+ ^2 + —; * (Ф + м-Фх + и2Ф2 + —)х
х A + А1Ц + А2ц2 + ...Г1] A + Нх\1 + А2ц2 + ...J.
Сравнив коэффициенты при одинаковых степенях ц в левой и
правой частях последнего уравнения, получим рекуррентные
дифференциальные уравнения для ф, фх, ф2, ...
Й + ф = 0'
ахг
^ + ф1 = -2А1Ф + 1 / (ф, йф),
Из первого уравнения находим
ф = А С08 Т + Б 8И1 Т.
Одну из произвольных постоянных, а именно Б, полагаем
согласно общей теории равной нулю. Тогда
ф = А СОЗ Т.
Предположение, что Б = 0, равносильно выбору для ф(*)
начальных условий
т = 0, ф@)=А, ф@) = 0.
Так как ф(т) является периодической функцией, всегда
найдется такой момент времени хх, когда ф обратится в нуль. Этот
момент можно принять за начальный, положив хх = 0, так как
перемена начала отсчета времени, как было отмечено выше, в
автономных системах ничего не меняет ни в самом решении, ни в его
построении.
Подставив найденное значение ф во второе из уравнений
A3.22), получим для фх
а2Ф1
+ Фх = —2НгА соз т + — / (А сов т, - Ак згп т).
3. Теорема Пуанкаре. Свободные колебания
537
Решение этого уравнения можно представить в виде1*
т
ф1(х) = Аг С08 X + Вг 8И1 Т ~ 2НгА Г СОЗ Е, 81П (Т - Е) А^ +
о
+ -I Г / (А СОЗ ^, -АЛ 81П ^) 8111 (т - $) A^.
^2 о
Условия периодичности
ф1Bя) - ф1@) = О,
фгBк) - фх@) = О
приводят к уравнениям
2л -, 2л
ил 1 сп
2кгА | С08 Е, 81П ^ сЩ ~ — | / (А СОЗ ^, - АЛ 8Ш Е) 31П ^ сЩ = О,
О ^ О
2л -, 2л
2Л1А|со8Ч^-4 I /(Асо8§,-А*81п^)со8^сЩ = 0
или
2л
| / (А соз 4, - Ак 81П ^) зт % сЩ = 0,
о
ч 2л
&1~ 0, ,9 Г /(АСОЗ^, -АЙ81П^)С08^A^ = 0.
A3.23)
Первое из этих уравнений «отбирает» те значения А или те
порождающие решения
Ф = А соз т,
около которых возникают периодические решения уравнения
A3.20) при достаточно малом, но отличном от нуля \х. Второе из
уравнений A3.23) дает поправку на период или частоту
колебаний в первом приближении. Ему можно дать более удобную для
некоторых приложений форму. Полагая в первом приближении
Т1 « Т A 4- \хкг) и обозначив частоту колебаний нелинейной
системы A3.20) через со, найдем при достаточно малом \х
"-гДд"**1-^
или
2л
ы = к - -т-^—г Г /" (А соз Е, - Ак зт Е) соз Е йЕ.
2кАк *
V См. формулу B.42).
538 Глава XIII. НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ НЕЛИНЕЙНОЙ МЕХАНИКИ
С той же степенью точности последнюю формулу можно заменить
следующей:
2я
со2 = к2 - -У- [ / (А соз ^, - Ак 81П 2;) соз ^ сЩ.
кА ^
4. МЕТОД А. Н. КРЫЛОВА1*. Сущность этого метода заключается,
по выражению самого А. Н. Крылова, «в совместном и
одновременном построении разложений для искомой функции х{Ь) и
квадрата искомой частоты». Метод А.Н.Крылова с удобством
может быть применен для систем с одной степенью свободы и
приводит большей частью к асимптотическим разложениям
искомого периодического решения, которые с небольшим числом
первых слагаемых дают при достаточно малом ц хорошие
приближения, но оказываются расходящимися для I —> °о.
Содержание метода Крылова мы демонстрируем на
конкретном примере, взяв для этого систему, описываемую уравнением
х + к2х + \ххг = 0. A3.24)
Это уравнение удовлетворяет всем условиям теоремы Пуанкаре
для автономных систем, поэтому если в формально составленном
разложении
х{1) = ф@ + цф1(*) + ц2ф2@ + ... A3.25)
функции ф@, ФхСО* ФгС*)» ••• будут определены как периодические
с одним и тем же периодом, то ряд A3.25) представит
периодическое решение уравнения A3.24). Для выполнения условий
периодичности А. Н. Крылов одновременно с построением ряда
A3.25) строит разложение по малому параметру \х квадрата
искомой частоты р, полагая
р2 = к2 + кг11 + к2112 + ... .
Имея в виду получить периодическое решение уравнения
A3.24) с точностью до второй степени ц (включительно),
полагаем
х{1) = ф@ + Цф^О + Ц2Ф2@>
р2 = к2 + кх\х + к2\х2.
!) См. [103].
4. Метод А. Н. Крылова
539
Эти выражения подставляем в уравнение A3.24):
ф + цфх + ц2ф2 + (р2 - Н^ - Н2\х2) (ф + цфх 4- ц2ф2) +
+ Ц (ф + Цфх + |Ы2ф2K = 0.
Приравняв нулю коэффициенты при различных степенях ц,
получим для нахождения функций ф, фх, ф2 и постоянных Нг, Н2
уравнения
Ф +р2ф = 0,
Ф1+^2Ф1 = /г1ф-ф3,
Ф2 +Р2Ф2 = А1Ф1 + Л2<Р ~ Зф2фх.
Решение уравнения A3.24) будем искать, как и раньше, при
начальных условиях для хЦ):
1 = 0, х@)=А, х@) = 0.
Эти условия для хЦ) будут выполнены, если функции ф, фх, ф2
будут найдены так, что
Ф@)=А, ф@) = 0; 1
ф1@) = 0, ф!@) = 0; I
ф2@) = 0, ф2@) = 0. ]
Из первого уравнения находим
ф@ =А со$ р1.
Это решение подставляем во второе уравнение, которое с
помощью формулы
соз3 р! = A/4) (соз Зр1 + 3 созр!)
представляем в виде
Ф1 +Р2Ф1 = {^1А ~ \ А3) СОБр! ~ ~- СОЗ Зр1. A3.26)
Чтобы не получить векового члена, выбираем Нг так, чтобы
коэффициент при созр! в правой части был равен нулю, т. е. чтобы
НгА -C/4)А3 - 0,
откуда следует
кг = C/4)А2.
После этого решение уравнения A3.26) будет иметь вид .
А8
ф3(^) = Мг соб р! 4- Ыг 8тр1 + соз Зр1.
о Ар
540 Глава ХШ. НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ НЕЛИНЕЙНОЙ МЕХАНИКИ
При нулевых начальных условиях
и, следовательно,
1 32р2 1
А3
Фх@ = ^—2 (соз Ър1 - созрг).
Таким образом, решение уравнения A3.24) в первом
приближении имеет вид
х@ = А созр* + -^—- (соз Зр^ - созр*)>
32рг
где
р2 = к2 + C/4) иА2.
Чтобы получить второе приближение, подставляем найденные ф
и фх в третье уравнение. После некоторых элементарных
преобразований получим
Ф2 +Р2Ф2 = (^2А ~ ^ ^Й соар* " Т§8 ^ С°8 5р'"
Чтобы исключить вековой член, полагаем
^ + 128 Р2 °'
откуда находим
3 А4.
^2 128 Р2 '
затем из уравнения
для ф2 получаем
Ф2+Р2Ф2 = -з|8^2 с°8 ЪР*
А5
Ф2(*> = М2 СОЗР* + ^2 81П^ + 1(J4 4 С°8 5^*
При нулевых начальных условиях
А5
1024р4
Таким образом, во втором приближении имеем
ФгО = то, 4 (со8 5^ ~ созрО-
х(^) = А соз р1 + -^~ (соз Ър1 - соз р0 + -^ (соз 5р* - соз р*),
32р2 1024р4
п2 = ъ2 + 3 ИЛ2 --А- II2 4^
Р * 4 ^ 128 Ц р2 •
4. Метод А. Н. Крылова
541
Для вычисления р2 нужно решить второе уравнение. При этом
нет надобности решать его точно. Достаточно получить значение
р2 с точностью до второй степени ц, а для этого следует положить
справа в уравнении р2 « к2, переписав его следующим образом:
р2 = к2+- \хА2-— и2 — .
у 4 ^ 128 н р2
В самом деле, так как
а=,^+..о-.»и|^)"Чл^).
то, взяв в последних скобках кроме единицы хотя бы один
следующий член с первой степенью ц, мы все равно должны были бы
отбросить его после умножения на C/128)ц2А4.
Пример 1. КОЛЕБАНИЯ МАЯТНИКА С КОНЕЧНОЙ АМПЛИТУДОЙ. Уравнение
колебаний маятника для сравнительно небольших, но конечных отклонений
возьмем в виде1*:
х + % х = ~ х3.
Здесь к2 = ё/1 и \х = §/61. Подставив в это уравнение разложения
*(*) = Ф(*) + И>1(*)+... ,
р2 = §/1 + кх\х + к2\12 + ... ,
получим для ф, фг, ... , кг, к2, ... уравнения
ф + р2ц> = О,
Ф1 +Р2Ф1 = ^ф + ф3,
Из первого уравнения находим
Ф = А соз р1.
Подставив полученное выражение для ф во второе уравнение, получим для ф
( ЗАЗЛ1 А3
фх + ргц>1 = I кхА + —— I соз р^ + ~ сое Зр1:.
Чтобы исключить вековой член, полагаем
к1А + C/4)А3 = 0,
откуда следует, что
кх = -ЗА2/4.
Х) См. пример 1 гл. XII.
542 Глава XIII. НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ НЕЛИНЕЙНОЙ МЕХАНИКИ
Теперь для ц>г из уравнения
о А3
Фг +Р Ф1 = -г с°8 ЗР*
находим периодическое решение
ЛЗ
фх@ = Мх созр* - ^1 с°8 3Р*>
где Мх определяется из условия периодичности для (р2@- Частота в первом
приближении найдется по формуле
^ • 4 /V 8
Нелинейность уравнения в первом приближении сказывается на частоте,
которая оказывается зависящей от амплитуды, как это имеет место вообще в
консервативных системах. Период колебаний равен
г^**&
§У1 + %) = ТA+Гв)> A3-27)
где Т — период порождающего решения, что дает при А = 10°; 20°; 30°
соответственно следующие значения для Тх: Тх = 1,002 Т; 1,008 Т; 1,017 Т.
К таким же результатам мы пришли в примере 1 гл. XII, но после более
сложных расчетов.
5. МЕТОД Н. М. КРЫЛОВА И Н. Н. БОГОЛЮБОВА. Теория Ван-дер-
Поля устанавливает возможность при известных условиях
представить на достаточно большом промежутке времени решение
квазилинейной задачи в форме решения соответствующего
порождающего уравнения
X = а СОЗ Ы + Ь 8И1 Ы,
У = -а 8Н1 Ы + Ъ С08 Ы
или
X = К С08 \|/,
У = -Е 8И1 \|/,
где Ли\|/ должны удовлетворять уравнениям
A3.28)
Й-8«да+1.
A3.29)
Эту основную идею метода Ван-дер-Поля в сочетании с
некоторыми положениями общей теории квазилинейных систем
Пуанкаре можно взять за исходную в построении обобщенного
асимптотического метода Н. М. Крылова и Н. Н. Боголюбова [22], по-
5. Метод Н. М. Крылова и Н. Н. Боголюбова
543
лучившего развитие в работах Ю. А. Митропольского [5]. Не
входя в подробности и имея в виду практическую сторону дела,
приведем самое краткое изложение существа метода
применительно к уравнению
х + к2х = и/ (х, х). A3.30)
Предполагается, что функция /(х, х) является аналитической
функцией своих аргументов и что периодическое решение
уравнения A3.30) в первом приближении может быть представлено в
форме
х = Е соз у.
При выполнении этих условий решение уравнения A3.30) может
быть представлено с большой точностью при достаточно малом ц
конечным числом первых членов ряда
х@ = Е сов \|/ + Vй! (Я, у) + (ы21/2 (#, у) + ... , A3.31)
где и^Е, у) суть некоторые, сначала неизвестные, подлежащие в
дальнейшем определению функции аргументов Ди\|/, причем
относительно у — периодические периода 2тг. Эти аргументы
должны удовлетворять обобщенным уравнениям установления
^ = МА1(Д) + ц2А2(Д) + -> |
? > A3.32)
^=/е + цВ1(Д) + Ц2в2(Д)+.... |
Для однозначности решения задачи на функции и1 (Е, \|/)
налагаются еще дополнительные условия
2л 2л
Г и1 (Е, у) соз \|/ сК|/ = 0, \иь (Е, \|/) зт у о!\}/ = 0,
о о A3.33)
I — 1, А, о, ... ,
при которых первые гармоники в разложениях иь(Е, \|/) в ряд
Фурье, содержащие соз \|/ и зт \|/, выпадают, так что Е
оказывается полной амплитудой первого приближения
х = Е соз ц/.
Для определения функций и^Е, \|/), АЬ(Е) и ВЬ(Е) формально
составленные выражения A3.31) и A3.32) подставляем в
уравнение A3.30) и после разложения Дх, х) по степеням параметра ц
сравниваем коэффициенты при одинаковых степенях ц в обеих
544 Глава XIII. НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ НЕЛИНЕЙНОЙ МЕХАНИКИ
частях уравнения. Тогда для функций иь(В, у) получаются
рекуррентные дифференциальные уравнения, правые части которых
будут периодическими функциями \|/. Разложив эти функции в
ряды Фурье и сравнив затем в обеих частях рекуррентных
уравнений коэффициенты при одинаковых гармониках, получаем из
первого уравнения А19 Вх и все гармонические составляющие1)
функции иг(В, у). Сделав надлежащие подстановки во второе
уравнение, аналогичным образом найдем А2, В2 и гармонические
составляющие функции и2(В, \|/)ит. д.
Мы не приводим здесь этих расчетов, так как первое
приближение
х = В соз \|/,
построение которого легко выполняется по формулам A3.29),
приводит к результатам, по точности совпадающим с
результатами расчета методом Н. М. Крылова и Н. Н. Боголюбова для
разложений A3.31) и A3.32), содержащих только члены с первой
степенью ц:
х@ = В соз у + \шх (В, \|/),
^ = уЛг (К), ^ = к + цВх (В).
Вычисление же последующих приближений до второй степени ц
оказывается весьма громоздким и, поскольку речь идет о системе
с одной степенью свободы, менее предпочтительным, чем метод
А. Н. Крылова.
Одним из преимуществ метода Н. М. Крылова и Н. Н.
Боголюбова является доставляемая им возможность доводить расчет
до желаемой степени точности, ограничиваясь конечным числом
членов разложений A3.31) и A3.32). Являясь, как правило,
расходящимися, эти разложения обладают свойством, которое
делает их вполне пригодными для практических расчетов, причем
для расчетов, требующих иногда сравнительно большой
точности. Дело в асимптотических свойствах этих разложений, в силу
которых конечное число первых членов такого ряда при \л —* О
может дать представление периодического решения уравнения
A3.30) с высокой точностью для длительного промежутка
времени.
Х) Начиная с гармоники второго порядка, так как первые гармоники выпадают в
силу условий A3.33).
6. Системы А. М. Ляпунова
545
6. СИСТЕМЫ А. М. ЛЯПУНОВА1). В системах Ляпунова отсутствует
малый параметр, на который в квазилинейных системах
умножены нелинейные члены. Большей частью это консервативные
системы, обладающие в качестве первого интеграла интегралом
сохранения полной механической энергии. При известных
условиях такие системы допускают периодическое решение,
разлагающееся в ряды по степеням начального значения одной из
координат в предположении, что это значение достаточно мало.
Вопрос о существовании периодического решения в таких
системах был связан у Л. М. Ляпунова с вопросом об устойчивости
невозмущенного движения системы, определяемого нулевыми
значениями координат в одном из «критических случаев», именно,
когда характеристическое уравнение имеет пару чисто мнимых
корней. Устанавливая условия периодичности возмущенного
движения системы, можно, следуя Л. М. Ляпунову, получить также
в этих условиях условия устойчивости невозмущенного движения
в этом довольно часто встречающемся критическом случае.
Общая теория нелинейных систем Ляпунова вместе с обобщением
этой теории на класс систем, близких к системам Ляпунова,
развита И. Г. Малкиным. Из монографии И. Г. Малкина [31] мы и
заимствуем изложение теоремы Ляпунова о существовании и
форме периодических решений рассматриваемых систем,
приводимой без доказательства.
Теорема Ляпунова. Если уравнения нелинейной
системы (п + 2)-го порядка могут быть приведены к виду2)
|| = -Ху + Х(х9у9х19...9хп)9
Т< =**+ Г(*>У> *!>..• >*п)> } A3.з4)
~& = Ъз1Х1 + - + КпХп + Хв (*> */> *1> - > **)>
8 = 1, 2, ... , п9
где X — положительное число; Ь8к — постоянные коэффициенты;
X, У, Х8 — аналитические функции переменных х, у, хг, ... , хп
для достаточно малых их значений, начинающиеся в своих
1) См. в книге И. Г. Малкина [31].
2) Предполагается, что характеристическое уравнение системы A3.34), кроме
двух чисто мнимых корней, имеет остальные корни с отрицательными
вещественными частями.
546 Глава XIII. НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ НЕЛИНЕЙНОЙ МЕХАНИКИ
разложениях с членов не ниже второго порядка относительно
этих переменных; если, далее, уравнения A3.34) обладают
первым интегралом вида
Н = х2 + у2 + ЦТ (х19 х2, ... 9хп) + 8 (х, у, ... , хп) = сопз1,
где 1У(хг, х2, ... , хп) — квадратичная форма переменных
хг, х2, ... , хп, а 8(х, у, хг, ... , хп) — функция всех координат,
разложение которой начинается членами не ниже 3-го
порядка, то система A3.34) имеет в достаточно малой
окрестности точки х = у = хх = ... = хп = 0 периодическое решение,
разлагающееся в ряды по степеням начального значения х = А
(предполагаемого достаточно малым), которые исчезают при А = 0 и
обладают периодом, разлагающимся в ряд по степеням А и
обращающимся в 2п/Х для А = 0.
Для построения периодического решения системы A3.34)
необходимо предварительно преобразовать ее к собственному
времени т по формуле
2я.
т = —*,
где Тг — неизвестный период искомого решения, разлагающийся
согласно условию теоремы в ряд по степеням А
^
2тг
A Л-НгА Л-Н2А2 + ...).
После преобразования система A3.34) будет иметь вид
= (-у+±х)A + пхА + п2А2 + ...),
д.х
с1т
Ей
с1т
с1х
х + I У) A + НгА + Н2А2 + ...),
X
8
со1хг +
Aт
ьвЛ-AД)ЬяЛив = 1,2,
+ С8ПХП + ^ Х1
A Л-НХА + ...),
A3.35)
A3.36)
где с8к = A/К)озк и 8 = 1, /,..., п.
Решение системы A3.36) ищем согласно теореме в виде рядов,
расположенных по степеням начального значения координаты
х =Ах1(т) + А2х2(т) + ... ,
у=Ау1{т)+А2у2(т) + ... ,
х8 = Аг81(т) +А2х52(т) + ....,
A3.37)
6. Системы А. М. Ляпунова
547
Коэффициенты при А, А2, ... находятся из уравнений,
получающихся после подстановки рядов A3.37) в уравнения A3.36)
путем сравнения коэффициентов при одинаковых степенях А. Так,
например, для коэффициентов при первой степени А получим
указанным способом уравнения
&хг _ йу1 _ <1х81 _ II
~ск" ~~ ~^1' "сРГ ~~ *1' ~&1~ ~ Сз1Х11 '" СзпХп1>
8 = 1, 2, ... , п.
Искомые функции должны при этом удовлетворять начальным
условиям
хг@) = 1, х2@) = х3@) = ... = О,
у1@) = г/2@) = у3@)=..- = 0,
х81@) = х82@)=...=0,
з = 1,2, ... , п.
Коэффициенты кг, к2, ... разложения искомого периода
определяются последовательно из условий периодичности. Прием,
предложенный А. Н. Крыловым для решения квазилинейных систем,
и здесь оказывается эффективным способом быстрого построения
приближенных периодических решений систем Ляпунова, не
требующим предварительного преобразования уравнений к
собственному времени.
Нелинейные консервативные системы типа
х + к2х + /х (х) = О,
где /х(х) — функция, разложение которой по степеням
начинается с членов не ниже второй степени, как уже отмечалось выше,
относятся к ляпуновским системам. Такую систему можно
преобразовать к виду
^| + X + Г(Х) = 0, A3.38)
после чего ее можно заменить двумя уравнениями:
ах ах
Эти уравнения имеют первый интеграл — интеграл сохранения
энергии, обладающий всеми свойствами интеграла Н теоремы
Ляпунова. Отсюда следует, что уравнение A3.38) обладает
периодическим решением, разлагающимся по степеням достаточно
548 Глава XIII. НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ НЕЛИНЕЙНОЙ МЕХАНИКИ
малого начального отклонения х = А, с периодом 7\, тоже
разлагающимся по степеням А и обращающимся в 2к/к при А = 0.
Решая задачу по методу А. Н. Крылова, будем искать решение
уравнения A3.38) при начальных условиях
х@)=А, х@) = 0,
представив это решение, в предположении, что А мало, в виде ряда
х@ =АххЦ) +А2х2@ + ... ,
совместно с разложением квадрата частоты р2 искомого решения
р2= 1 + к1А+к2А2 + ... ,
определяя коэффициенты к1 из условий периодичности
функций хьA).
Пример 2. Найти периодическое решение уравнения
х + х + х3 = 0. A3.39)
Подставив в это уравнение с целью найти решение до третьего приближения
(включительно) формально составленные ряды
*(*) = АххA) +А2х2{1) + А3х3@,1 A3 40)
р2 = 1 + кгА +к2А2 + к3А3 \
и приравняв нулю коэффициенты при А, А2, А3, получим рекуррентные
уравнения
х1+ р2х1 = 0, |
х2 + р2х2 = кгхг, У A3.41)
Х-О ~I Р Х-О ТЬлХп ~1 ПпХ-Л А1 • )
Эти уравнения будем решать при начальных условиях
*!«)) = 1,^@) = 0,
х2@) = к2@) = 0,
х3@) = ^3@) = 0.
Первое из уравнений A3.41) дает
х1 = созр^
Второе уравнение теперь запишем в виде
х2 + р2х2 = кх созр*.
7. Вынужденные колебания — метод осреднения
549
Чтобы оно имело периодическое решение, Н1 должно равняться нулю. Но
тогда в силу нулевых начальных условий для х2 решение этого уравнения
будет тривиальным. Таким образом,
Нг = О, х2 = 0.
Для х3@ теперь получается уравнение
х3 + р2х3 = Н2 соз р1 - сов3 р1
или
х3 + р2х3 = (Н2 - 3/4) со8р^ - A/4) соз Зр1,
откуда следует
н2 =* \> хз = 3^2 (с°8 3Р* ~ СО8Р0-
Подставив найденные значения х19 х2, х3, Н19 Н2 в выражения A3.40),
получим для искомого решения
А3
х = А соз р% + ——г (соз Зр* - соз р1),
о2рг
р2 = 1 + C/4) А2.
7. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ — МЕТОД
ОСРЕДНЕНИЯ. Теорема Пуанкаре для неавтономных систем
содержит всю общую теорию вынужденных колебаний
квазилинейных систем. Мы возвращаемся снова к вынужденным
колебаниям с целью ознакомления с некоторыми другими методами их
расчета, которые могут быть использованы при решении более
широкого круга нелинейных задач и, в частности,
квазилинейных, со многими степенями свободы. Такими методами
являются, например, метод осреднения и метод Галеркина, которые мы
и рассмотрим в этом параграфе.
Метод осреднения с успехом применяется к расчету
вынужденных колебаний систем с малым возмущением, уравнения
движения которых имеют вид
й2х
—^ + (о2хк = \хХк.(*, хк, хк), к = 1, 2, ... , п, A3.42)
а также к исследованию устойчивости периодических решений в
первом приближении. Сущность метода легко выясняется на
примере тех преобразований, которые были выполнены при
изложении метода Ван-дер-Поля1*. Имеется в виду преобразование A2.33)
!) См. с. 508—516.
550 Глава XIII. НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ НЕЛИНЕЙНОЙ МЕХАНИКИ
координат (х, у) к координатам (а, Ъ) и переход от уравнений
A2.34) к уравнениям
да _ _ \л
—- = -~^Ц Г / (а соз % + Ъ 81П Е, -а зт Е + 6 соз 5) зт Е с1^,
ах 2ккг {
дЪ _ ц
Зт 2тт/г2
2л
| / (а соз ^ + Ь зт ^, -а зт ^ + Ъ соз ^) соз ^ сЩ,
в которых правые части являются интегральными средними за
период 2тх правых частей уравнений A2.34). Основанием для
такого перехода послужили следующие соображения.
Производные координат а и Ь по т определяют скорости их изменения с
течением времени. Эти скорости, как видно из уравнений A2.34),
малы при достаточно малом ц. Следовательно, координаты а и Ъ
суть медленно изменяющиеся величины в сравнении, например,
со скоростью изменения функции / в течение периода 2 тт. Можно
было поэтому полагать, что замена правых частей уравнений
A2.34) их средними значениями за период 2л не внесет заметных
искажений в поведение функций аибна длительном
промежутке времени, как это и было обнаружено в окончательных
результатах расчета, совпавших с результатами, полученными в первом
приближении строгими методами Пуанкаре и Ляпунова.
Сопоставляя уравнения A2.34) с A2.35), легко видеть, что
правые части последних представляют собой не что иное, как
первые члены разложений правых частей уравнений A2.34) в
ряды Фурье. Написанные без каких-либо упрощений, эти
уравнения имели бы вид
да
д
00
- = ]х Г - а0 4- X (ап соз пх + Ъп зт пх) ,
— = \х - аг0 + X (а'п соз пх + Ъ'п зт пх) ,
О.Х \_а п = 1 ^
A3.43)
где
-. 2л
а0 = -—- [ / (а соз % + Ь зт ^, -а зт ^ + Ь соз %) зт % й^,
-. 2тг
а[) = —г [ / (а соз % + Ь зт ^, -а зт Е, + Ъ соз ^) соз ^ сЩ.
> A3.44)
7. Вынужденные колебания — метод осреднения
551
Таким образом, переход от уравнений A2.34) к уравнениям A2.35)
равносилен замене точных уравнений A3.43) приближенными
йа = «о
с!т Ц2 '
с1т Ц 2 '
A3.45)
т. е. отбрасыванию в разложениях Фурье гармонических слагаемых.
Л. И. Мандельштаму и Н. Д. Папалекси принадлежит первое
обоснование утверждения, что решения уравнения A3.43) и
укороченных уравнений Ван-дер-Поля A3.45) при одних и тех же
начальных условиях сколь угодно мало отличаются друг от друга
на протяжении достаточно большого заданного промежутка
времени, если ц достаточно мало. Изложение этого обоснования
приведено в книге А. А. Андронова, А. А. Витта и С. Э. Хайкина [2].
Уравнения A3.45), как и уравнения Ван-дер-Поля, имеют
специальную форму, в этих уравнениях первые производные от
координат равны некоторым функциям, умноженным на малый
параметр ц. Такая форма уравнений называется иногда
стандартной. К стандартной форме могут быть приведены уравнения
вынужденных колебаний с малым возмущением довольно общего
вида, например, уравнения
с12х
—~ + а>2хк = \хХк(г9 хк, хк), к =1,2, ... , п. A3.46)
Приведение осуществляется с помощью подстановки,
аналогичной преобразованию Ван-дер-Поля A2.33)
хк =Ак соз <М + Вкзш со*, к = 1, 2, ... , п, A3.47)
где Ак и Вк связаны дополнительными условиями
—— соз со* + —г-^ вт со* = 0, к = 1, 2, ... , п.
№ си
Пример 3. Рассмотрим резонансные колебания системы
х + р2х = ц (х3 - ах + Н зт р1). A3.48)
Для приведения уравнения A3.48) к стандартной форме полагаем
X = А СОЗ р1 + В 8111 р1,
где
^ созр* + ^ Бшр^ = 0. A3.49)
си си
552 Глава XIII. НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ НЕЛИНЕЙНОЙ МЕХАНИКИ
В переменных А и В уравнение A3.48) запишется в виде
-р81Пр1 — + рС08р^— = \1 [(А С08 р% + В 81П /?^K -
- а (А соз р1 + В 81П /?^) + Н зт р*].
Из этого уравнения и из условия A3.49) находим
_ = - Ё [(А соз р^ + В зт рО3 ~ а (А соз р1 + В зт рО + # зт /?*] зт р^,
-г- = - [(А соз р1 + В зт р^K - а (А соз р* + Б зт р*) + Н зт р^] соз р1.
си р
Последние уравнения имеют требуемую стандартную форму. Заменяя в них
правые части интегральными средними за период 2п/р, приходим к
уравнениям
^ = - А C А2В + 3 Бз _ аВ + я I
сИ 2р Ч 4 у
с!* 2р ^4 4
A3.50)
В установившемся колебательном режиме
&А AВ
<И
й*
= 0.
Следовательно,
В [% А2 + ^ Б2 - а + Я = 0,
А Г? А2 + ? Б2 - а) = 0.
44 4 -;
8. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ — МЕТОД
ГАЛЕРКИНА. Не входя в обсуждение вопроса о применимости
вариационных методов к решению нелинейных задач и трактуя
вариационное уравнение как выражение принципа виртуальных
перемещений, ознакомимся с применением этого уравнения на
конкретном примере вынужденных колебаний системы
х + к2х + [хх3 = Н зт р^.
A3.51)
Имея в виду нахождение периодического решения уравнения
A3.51) того же периода 2п/р, что и период возмущающей силы
Н зт^, ограничим класс привлекаемых для сравнения функций
периодическими функциями того же периода, что и искомая,
различающимися формой или амплитудой колебания. При этом
промежуток времени, за который система, совершив полное ко-
8. Вынужденные колебания — метод Галеркина
553
лебание, возвратится в исходное положение на всех путях —
действительном и окольных, — выберем равным периоду 2к/р.
Тогда вариационное уравнение для нашей задачи запишем
следующим образом:
2п/р
Г (х + к2х 4- \1Х3 - Н 8тр/) 8х № = 0.
A3.52)
Решение уравнения A3.51) хЦ) будет нечетной функцией *, а
потому в минимизирующей функции следует взять только синусные
члены. Ограничиваясь одночленным приближением, положим
х = Б зш^,
ЪХ = ЪВ 8111^.
Подставив эти выражения в A3.52) и выполнив интегрирование,
придем к уравнению
(р2-к2)В- - цБ3 + Я = 0.
A3.53)
Построив в системе координат (Б, у) кубическую параболу (рис. 140)
и прямую
У=*±В*
у 4 к2
у = (р2/к2-1)В + Н/к2,
A3.54)
A3.55)
найдем амплитуды Б по абсциссам точек пересечения прямой
A3.55) с параболой A3.54).
Прямая МЫ проходит через
точку С@, Н/к2) и при р = 0
составляет с осью Б угол 135°.
Начиная от р = 0, будем
увеличивать р до +°°. Тогда прямая МЫ
будет поворачиваться вокруг С
против часовой стрелки до
совпадения с осью Оу. При небольших
значениях р прямая МЫ
пересекает параболу в одной точке,
абсцисса которой дает одну
вещественную амплитуду единственного
возможного здесь
периодического колебательного движения с
частотой^. В частности, при резо- Рис. 140
554 Глава XIII. НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ НЕЛИНЕЙНОЙ МЕХАНИКИ
нансе, когда прямая МЫ расположится параллельно оси ОВ,
система совершает периодическое колебание с конечной амплитудой
В = СВ= 374#/3ц.
В положении 2, когда прямая МИ касается в точке 5 нижней
ветви параболы, уравнение A3.53) имеет три вещественных корня,
причем два из них равные. В положении 3 прямая МЫ трижды
пересекает параболу и в соответствии с этим уравнение A3.53) имеет
три вещественных корня. В этом случае теоретически
оказываются возможными три периодических решения. Однако не все эти
решения осуществляются, так как не все они обладают одинаковой
устойчивостью. Система совершает одно устойчивое периодическое
движение с амплитудой, равной одному из трех корней уравнения
A3.53). Выбор устойчивой амплитуды происходит автоматически,
причем необычным для линейных систем способом.
Чтобы ознакомиться с поведением системы в этом случае,
построим резонансную кривую, т. е. кривую, представляющую при
заданном Н ход изменения амплитуды В в зависимости от
квадрата частоты р2. Построение удобно вести следующим образом.
Переписав уравнение A3.53) в виде
строим в системе координат (р2, В) (рис. 141) две кривые — параболу
и гиперболу
к2 + % цВ2
4
ч2 = _
н
в'
Вк
о
а) б)
Рис. 141
8. Вынужденные колебания — метод Галеркина
555
Затем абсциссы, соответствующие одному и тому же Б,
алгебраически складываем. На рис. 141, а построена гипербола с ветвями
в квадрантах II и IV. Резонансная кривая, соответствующая
ветви, расположенной в квадранте II, пойдет над осью Ор2 и над
параболой. Резонансная кривая, соответствующая гиперболе в
квадранте IV, расположится ниже оси Ор2, в области между этой
осью и нижней ветвью параболы. Так как нужны абсолютные
значения амплитуд, нижнюю резонансную кривую заменяют
обычно симметричной ей, расположенной в первом квадранте,
как показано на рис. 141, б. Для линейной системы резонансная
кривая, как известно, имела бы вид, показанный на рис. 142.
В случае \л < О, что соответствует мягкой восстанавливающей
силе, резонансная кривая загибалась бы влево к оси ОВ.
Опыт подтверждает показанное на рис. 141 расположение
резонансной кривой. Однако при непрерывном изменении частоты р
изменения амплитуды происходят не непрерывно. Для некоторых
областей значений р амплитуды колебаний становятся
неустойчивыми, что выражается в явлении сброса амплитуд —
скачкообразного перехода с одной ветви резонансной кривой на другую и
соответственно с одного колебательного режима на другой. Пусть,
например, при заданном Н резонансная кривая имеет вид рис. 143.
При непрерывном увеличении р (начиная от нуля) амплитуда
изменяется непрерывно, и каждому значению р2 отвечает одно
значение Б. Но так будет только до значений/?2, не превышающихр\,
для которого ордината касается правой ветви резонансной кривой
в точке 8. При значениях/?2, больших/?^, мы попадаем в область
неустойчивых режимов, где одному значению р2 соответствуют
три возможные вещественные амплитуды. Однако и в этой
области система будет сначала совершать колебания с амплитудами,
соответствующими участку 8'А верхней части резонансной кривой.
Рис. 142
Рис. 143
556 Глава XIII. НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ НЕЛИНЕЙНОЙ МЕХАНИКИ
В точке А, положение которой определяется в каждом частном
случае особо, амплитуда «срывается» с кривой 8'ЕА и скачком
перебрасывается на нижний участок резонансной кривой СЬ и при
дальнейшем возрастании р2 убывает, асимптотически
приближаясь к оси Ор2 (к нулю). На рисунке ход изменений амплитуды по
резонансной кривой при возрастающем р2 показан стрелками,
расположенными сверху соответствующих участков.
Если, начав с больших р2, будем непрерывно уменьшать р9
следуя сначала по участку ЬСИ влево (стрелки снизу), то в
некоторый момент снова произойдет перескок, теперь уже из
некоторой точки Б снизу вверх в точку Е, Дальнейшее изменение
амплитуд будет происходить по участку Е8'М влево, как
показывают нижние стрелки1*.
Пример 4. Рассмотрим вынужденные крутильные колебания
приведенного коленчатого вала с одним нелинейным элементом от однофазных
гармонических моментов одной частоты2*.
Предположим, что на третьем участке вала (рис. 144) расположена
нелинейная муфта М с заданной характеристикой /(а3). Уравнения крутильных
колебаний вала здесь удобно взять в обратной и несимметризованной фор-
ме3), записав их в виде:
4
с1а1 =- X Ъ1как + Н1зтр^^
к = 1
с2а2 =- X 62Д + Я28т^,
к = 1
4
Да3) = - Е Ь3как + #3 8тр*,
к = 1
4
с4а4 =- X Ъ4как + Н4&тр^у
к = 1
A3.56)
ф
Ф
М
О /(а3)
и
ф
Рис. 144
Х) См. кн. Ю. А. Митропольского [35] и Ю. И. Иориша [19, гл. VIII].
2) См. ст. А. И. Лурье и А. И. Чекмарева [111], а также М. А. Айзермана и
Ф. Р. Гантмахера [88] и И. Л. Ланцевицкого [109].
3) См. с. 114, уравнения C.35).
8. Вынужденные колебания — метод Галеркина
557
где а^ —углы кручения участков вала, ск — погонные жесткости, Нк —
амплитуды действующих на участках вала гармонических возмущающих моментов
Ьл
(I, + ... + /,)(/,
+ ...
1п)
ик = 1,2,3,4.
A3.57)
** 1г + 12 + ... + /„
В первом одночленном приближении полагаем
а^= Вь 8ш р1, 5а^= 8В1 зт р%.
Умножив каждое из уравнений A3.56) на соответствующее 5о^ и
подставив вместо 0^ их значения по A3.57), интегрируем каждое уравнение по I в
пределах одного периода от 0 до 2п/р и приравниваем нулю. Тогда получим
систему алгебраических уравнений:
(Ьпр2 - сх) Вх + Ь12р2В2 + Ь13р2В3 + Ъ14р2В4 + Нг = 0,
Ь21р2Вх + (Ъ22р2 - с2) В2 + Ъ23р2В3 + Ь24р2В4 + Н2 = 0,
Ь31р2Вх + Ъ32р2В2 + Ь33р2В3 + Ъ34р2В4 + #3 =
2к/р
= 2- [ / (Б3 зтрО зтр1; с11,
A)
B)
C)
Ь41р2Б1 + Ь42р2В2 + Ь43р2В3 + (Ь44р2 - с4) В4+Н4 = 0. D)
С помощью уравнений A), B), D) находим Б1? Б2, Б4, выражая их через Б3, и
подставляем в уравнение C). После подстановки получим для Б3 одно уравнение
2к/р
ЬВ3 + И=^- $ / (В35трг)зтр1(И.
A3.58)
Чтобы наметить дальнейший ход решения задачи, рассмотрим часто
встречающийся случай, когда нелинейная характеристика муфты задана
ломаной линией (рис. 145) с угловыми коэффициентами с' и с". На различных
участках графика /(х) будет иметь следующие определения:
Дх) = с'х при -а0 < х < а0,
Дх) = с"х + (с' - с") а0 при а0< х < +с^0,
Дх) = с"х - (с' - с") а0 при -<20 < х < -а0.
Рис. 145
558 Глава XIII. НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ НЕЛИНЕЙНОЙ МЕХАНИКИ
Обозначим через 1± наименьший корень уравнения
а0 = В 81П р!
и пусть В > а01\ Интеграл правой части уравнения A3.58) вычисляем,
разбив предварительно период — полный промежуток интегрирования — на
пять частных промежутков с различными выражениями для / на каждом:
• и < % < - - и
р
• *-*<*<* + *
р р
' -+*!<**
2тг
-и
/ (В 8Н1 р1) = с'Б 81П р1,
/ (Б 81П /#) = с"В 8гп /?^ + (с' - с") а0,
/ (В 8И1 рО = С'Б 8Н1 /?*,
/ (Б 81П р1) = с"Б 8Ш р^ - (с' - с") а0,
/ {В 81П /?*) = с'Б 81П р*.
• 2тг - ^ < ^ < 2тг
р р
Выполнив интегрирование на каждом промежутке, найдем для всего
интеграла правой части уравнения A3.58) выражение
2л/р -,
^ | / (В 8Ш рО зшр* & = с"В ±-(с'- с") \В агсзш ^ + а0 ^^Ха^ВJ •
Теперь уравнение A3.58) после деления всех членов на а0(с' - с") и
подстановки у = В/а0 будет иметь вид
Ку + Р = ± - \у агсзш - + VI - A/2J1, A3.59)
я I у ^
где
7^ =
I, - с"
77, ^ =
N
С - с" #о(с' ~ с")
Решается это уравнение графически по точкам пересечения кривой
г = ±-\у агсзш - + VI ~A/уJ
к I у
A3.60)
Рис. 146
Х) Здесь и везде дальше Б3 обозначено через В.
9. Уравнения с периодическими коэффициентами
559
с прямой
г = Ку + Р.
На рис. 146 представлено возможное расположение этих кривых. На участке
-1<г/<+1
кривая A3.60) отсутствует. Она начинается сверху от точки (+1, +1), внизу —
от точки (-1, -1). При увеличении у от 1 до +°° верхняя ветвь кривой A3.60)
асимптотически приближается к прямой, параллельной оси у и отстоящей от
нее на расстояние 4/тг, так как
у агезт - —> 1,
У
когда у —> °°. То же имеет место и для нижней ветви кривой A3.60).
Дальнейшие подробности см. в ст. А. И. Лурье и А. И. Чекмарева [111].
9. ЛИНЕЙНЫЕ УРАВНЕНИЯ С ПЕРИОДИЧЕСКИМИ
КОЭФФИЦИЕНТАМИ И ЗАДАЧА ОБ УСТОЙЧИВОСТИ ПЕРИОДИЧЕСКИХ РЕШЕНИЙ
НЕЛИНЕЙНЫХ СИСТЕМ. К линейным уравнениям с
периодическими коэффициентами приводят прежде всего задачи об
устойчивости периодических решений нелинейных систем,
рассматриваемые в первом приближении. Так, например, для
исследования устойчивости известного периодического решения
х = х{1) A3.61)
уравнения
х + к2х = и/(х, х), A3.62)
мы даем координате х{1) в некоторый момент времени I малое
возмущение 8, в результате чего система, начиная с этого
момента, будет совершать возмущенное движение
х = х{Ь) 4- 8.
Это движение определяется тем же уравнением A3.62).
Следовательно,
х + 8 + к2 (х + 5) = ц/Cс + 8, х + 8). A3.63)
Ограничившись в разложении правой части по степеням 8 и 8
членами первого порядка, получим уравнение в вариациях
где [~-) , (т-г-) — значения производных от правой части A3.63)
при 8 = 8 = 0. Эти величины являются известными периодическими
функциями времени. Если бы удалось установить ограниченность
изменений 8, то этим был бы определенным образом решен вопрос
560 Глава XIII. НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ НЕЛИНЕЙНОЙ МЕХАНИКИ
Ш А Г °^ Устоичивости рассматриваемого перио-
• » дического решения
х = хЦ).
у К уравнениям с периодическими ко-
\ эффициентами приводят и некоторые
у другие задачи. Такова, например, задача
\ о колебаниях маятника с периодически
\ изменяющейся длиной. Изменения дли-
ф ны такого маятника можно представить
' как результат действия на точку А —
конец нити МО А (рис.147) —
периодической горизонтальной силы Г.
Обозначив переменную длину маятника через /, массу через т и угол
отклонения от вертикали через 9, получим уравнение колебаний
маятника из закона изменения момента количества движения
^-(т12в) = -т§1 зш Э
си
ИЛИ
/0 + 2/0 + #зт0 = О.
Если отклонения маятника невелики, так что зш 0 ~ 0, то
приходим к уравнению
0 + 2-0 + |е = О, A3.65)
являющемуся линейным уравнением с периодическими
коэффициентами. Запишем это уравнение в более общем виде:
ё + 2\|/1е + х^е = о. A3.66)
Положив здесь
= уе ^ ,
придем к уравнению
#+Р(% = 0, A3.67)
где
Р@ =У2@-У?(*)-*!(*)•
В частности, для маятника переменной длины
№ = 8/1-1/1-
Если функцию рA) можно представить в виде
р@ = к2 + ц<р(*),
где к2 — постоянное число, ц — малый параметр, то уравнение
A3.67) будет определять движение, мало отличающееся от гар-
9. Уравнения с периодическими коэффициентами
561
монических колебаний. Такое колебательное движение
называется квазигармоническим,
В системах, движение которых определяется уравнениями
A3.66) или A3.67), могут возникать явления резонанса,
отличные по своей природе от явлений резонанса в линейных системах.
В последних резонанс имеет место, когда частота возмущающей
силы совпадает с собственной частотой свободных колебаний
системы, и выражается в значительном усилении колебаний (при
отсутствии сопротивлений — до бесконечности). Это усиление
происходит за счет притока в систему энергии, которая поглощается
системой в резонансном ее состоянии. Установившийся режим
возможен при наличии сопротивлений, когда энергия,
расходуемая на преодоление сопротивлений, становится равной энергии,
поступающей в систему за счет работы возмущающих сил.
В примере с маятником переменной длины изменения
последней вызываются силой Р. Работа этой силы положительна при
уменьшении длины маятника и отрицательна при увеличении.
Если при периодических изменениях силы Р ее положительная
работа больше отрицательной, то энергия, поглощаемая маятником,
будет расти и размахи его увеличиваться. Возникнет эффект,
аналогичный по своим внешним проявлениям явлению резонанса в
линейных системах. Так как этот резонанс вызывается
изменением одного из параметров системы — длины маятника, он
называется параметрическим резонансом.
Параметрический резонанс может возникнуть и при наличии
рассеивания энергии, т. е. в системе с сопротивлением, если
рассеивание энергии не превышает ее положительной части,
поглощаемой системой. Вызванное избытком энергии, поглощаемой
системой, увеличение амплитуды колебаний происходит
большей частью по экспоненциальному закону1). При этом могут
существовать целые области частот возмущающей силы, которым
отвечают явления параметрического резонанса. Вследствие этого
с параметрическим резонансом труднее бороться, чем с
резонансом линейных систем. Здесь необходимо применение
специальных антивибраторов, автоматически настраивающихся на
сплошные зоны спектра частот параметрического резонанса.
Другим примером может служить вал с переменной
жесткостью на прогиб в различных направлениях, например вал с
поперечным сечением в виде прямоугольника (рис. 148, а); вал с
продольными выточками (рис. 148, б) или вал двухполюсного ротора
Х) См. курс Н. А. Кильчевского [59].
19- 10456 Бабаков
562 Глава XIII. НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ НЕЛИНЕЙНОЙ МЕХАНИКИ
а) б) в)
Рис. 148
турбогенератора (рис. 148, в). Сюда же относятся колебания
спарников электровоза, крутильные колебания вала с переменными
моментами инерции маховых масс и др.
Ряд примеров такого рода рассмотрен в книгах Г. В. Бондарен-
ко [7] и Т. Хаяси [70], в курсе С. П. Тимошенко [85], статье
Н. Е. Кочина [100] и в фундаментальных работах В. В. Болотина [6]
и А. С. Вольмира [11]. Здесь эти примеры не рассматриваются.
Главная задача излагаемого краткого экскурса в область линейных
уравнений с периодическими коэффициентами — построение критериев
устойчивости периодических решений нелинейных систем.
10. УСТОЙЧИВОСТЬ ПЕРИОДИЧЕСКИХ РЕШЕНИЙ. Дальнейшие
исследования в этом направлении ограничим рассмотрением
уравнения
У+Р(*)У = 0> A3.67)
к которому могут быть приведены уравнения в вариациях для
систем с одной степенью свободы.
В приложениях функция р@ имеет большей частью вид
р@ = ь + ц<р@,
где ц — малый параметр, Ъ — постоянная, ср(*) — периодическая
функция того же периода, что и рЦ). Такие уравнения носят
общее название уравнений Хилла. Частный случай уравнения Хил-
ла представляет уравнение Матъе, в котором ф(*) —
гармоническая фуНКЦИЯ 81П I ИЛИ С08 I.
Попытаемся установить условия, при которых решение
уравнения A3.67) будет ограниченным для всех I. При этом
возмущения исследуемого периодического движения (для которого A3.67)
является уравнением в вариациях) будут также ограниченными и
невозмущенное периодическое движение системы — устойчивым.
Существуют различные приближенные способы решения
уравнения A3.67). В частности, его можно было бы трактовать как
квазилинейное и применить к нахождению решения метод Пуанкаре
10. Устойчивость периодических решений 563
или А. Н. Крылова. Однако для наших целей достаточно будет
установить только форму решения этого уравнения, что можно
сделать более простыми средствами.
Обозначим через ух{1) и у2{1) два линейно независимых
частных решения уравнения A3.67), и пусть при ^ = 0
у1@) = 1, 1/х@) = 0,
1/2@) = 0, 1/2@)=1.
Такая система частных решений называется нормальной. По
свойству линейных уравнений всякое другое решение уравнения A3.67)
выражается линейно через нормальную систему
у(г) = с1у1(г) + с2у2(г)9 аз.69)
где С1 и С2 — произвольные постоянные величины. Если со —
период функции рA)у то решениями уравнения A3.67) будут также
функции ух{1 + со) и у2A + со). Следовательно,
ухA + со) = апуг(г) + а12у2(*)9 1
у2(г + со) = а21уг(г) + а22у2(*), ( A3.70)
где коэффициенты а^ — постоянные числа, причем в силу
условий A3.68)
«11 = УгЫ, а12 = г/х(со), 1
а21 = у2((о), а22 = г/2(со). |
Прибавив к аргументу общего решения у{Ь) A3.69) период со,
получим изA3.70)
у(г + со) = С1У1Ц + со) + С2у2A + со) =
= (С1ап + С2а21) уг(г) + (Сга12 + С2а22) у2(*). A3.71)
Если постоянные Сх и С2 выбрать так, чтобы
С1а12 + С2а22 = лС2,
то равенство A3.71) перепишется в виде
^ + 0)) = ад. A3.72)
Таким образом, если Сх и С2 не равны нулю одновременно, то
можно найти такое решение уравнения A3.67), которое при
прибавлении к аргументу периода со приобретает постоянный множитель Хг\
1) Функция, которая при прибавлении к аргументу постоянного числа (периода)
умножается на некоторый постоянный множитель, называется
периодической функцией второго рода.
A3.68)
564 Глава XIII. НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ НЕЛИНЕЙНОЙ МЕХАНИКИ
Этот множитель является корнем уравнения
41
- X а
П2
21
*22
О
A3.73)
или
0.
г/2(со) у2(<о) - I
Уравнение A3.73) называется характеристическим.
Обозначим корни характеристического уравнения через Хг и
Х2 и положим
а,- = - 1п А,,.
1 СО 1
A3.74)
Числа а^ называются по Ляпунову характеристическими
показателями решения уравнения A3.67). С помощью
характеристических показателей уравнение A3.72) можно будет переписать:
уг(* + со) - еша^@> /=1,2. A3.75)
Следовательно, частные интегралы уравнения A3.67) запишутся
следующим образом:
уь(г) = еа\(*), 1=1,2, A3.76)
где фДО — периодические функции I с периодом со. В самом деле,
эти интегралы преобразуются точно по формуле A3.75)
у Л* + со) = е л >Д* + со) = е 1 е 1 <р.(*) = е 1 у^).
Таким образом, задачу о форме общего интеграла уравнения
A3.67) можно считать решенной: общий интеграл этого
уравнения имеет вид
у{1) = Сгеа^га) + С2еа*'ч>2Ц), A3.77)
где а19 а2 — характеристические показатели; С19 С2 —
произвольные постоянные; ф2@ и ф2@ — периодические функции периода со.
Как видно из A3.77), свойства решений уравнения A3.67) в
отношении устойчивости или неустойчивости определяются знаками
характеристических показателей, которые зависят от корней
характеристического уравнения A3.73).
Для составления характеристического уравнения нужно
найти нормальную систему интегралов уравнения A3.67), чего мы
делать, вообще говоря, не умеем. Но для суждения об
устойчивости нужно знать только знаки характеристических
показателей. Для этой цели достаточно иметь приближенные значения
10. Устойчивость периодических решений
565
коэффициентов уравнения A3.73). Собственно, дело идет об
одном коэффициенте характеристического уравнения. В самом
деле, развернув уравнение A3.73)
легко обнаруживаем, что
уг((д) г/2(со) - уг((о) г/2(со) = 1,
так как если
#1+Р(*)У1 = 0, У2+Р(*)У2 = °>
то
У2У1 - У1У2 = ^ (УгУ\ - У\Уд = °
и
У2У1-У1У2==СОП^:=" !•
Таким образом, характеристическое уравнение имеет вид
А,2-АА.+ 1 = 0, A3.78)
где
А = у1((й) + у2(@). A3.79)
Значением коэффициента А и определяется устойчивость или
неустойчивость решения A3.77). В самом деле, из уравнения
A3.78) находим
Хг=А/2 + 7А2/4 - 1, А.2=А/2-л/А2/4-~1,
или, положив сн а = А/2, —
Л-! = еа, А,2 = *га.
Отсюда заключаем, что если \А\ > 2, т. е. если сп а > 1, и,
следовательно, а > 0, то одно из слагаемых общего интеграла A3.77)
растет неограниченно и решение уравнения A3.67) неустойчиво.
Если \А\ < 2, то сп а < 1 и а — число чисто мнимое. В этом
случае е3' и еа'г будут выражаться через синусы и косинусы и
решение уравнения A3.67) будет ограниченным, т. е. устойчивым.
Когда \А\ = 2, уравнение A3.78) имеет один кратный корень,
равный или +1, или -1. В этом случае решение уравнения A3.67)
будет периодическим с периодом со, если X = +1, и с периодом 2со,
если X = -1. Последнее непосредственно видно по уравнению
A3.72), из которого, положив X = +1, будем иметь
у(г + со) = 1/@,
а положив X = -1, получим
</(* + 2со) = -у(* + со) = у(г).
566 Глава XIII. НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ НЕЛИНЕЙНОЙ МЕХАНИКИ
Периодические решения уравнения Матье называются
функциями Матъе. Функции Матье имеют некоторые важные
приложения в механике и электротехнике1*.
Для приближенного вычисления коэффициента А А. М.
Ляпуновым был предложен следующий прием. Рассмотрим уравнение
у = - цр(%, A3.80)
где ц — некоторый параметр. При \х = 1 уравнение A3.80)
переходит в уравнение A3.67). Будем искать интегралы этого
уравнения г/1@> #2@ ПРИ начальных условиях
^@)=1, ^@) = 0,
у2@) = 0, 1/2@)=1
в виде рядов, расположенных по степеням ц
,чо,, Г A3.81)
у2@ = * + ц^Ф + ц2у2@ + ••••'
Подставив последовательно г/х@ и г/2(*) в уравнение A3.80),
сравниваем коэффициенты при одинаковых степенях \х. Таким
образом получим систему уравнений для функций фД^) и уДО-
Подставив в A3.80) первое разложение A3.81), получим,
сравнивая коэффициенты при одинаковых степенях \х:
Ф1 = ~РA)> |
*2 = -Р(*)ф1,1 A3.82)
Ф3 = -Р(^) Ф2>
Из этих уравнений последовательно найдутся функции фДО»
причем для того, чтобы интегралы г/1(/-) и */2@ удовлетворяли
начальным условиям, функции ф-@ должны быть найдены из этих
уравнений при условиях фДО) = ФДО) = 0. При таких условиях
первое из уравнений A3.82) дает
Фх@ = -/ ЦтйЬ)**,
о о
второе —
Ф2(') = -} ({р^Фх^)^)^, A3.83)
о о
и т. д.
]) См. кн. Н. Мак-Лахлана [75].
10. Устойчивость периодических решений
567
Аналогичным путем, подставив в A3.80) второе разложение
A3.81) для у2(*), получим
о о
A3.84)
Найденные выражения для ср^) и \|/Д0 подставляем в
разложения A3.81) и находим решения уравнения A3.80), а положив в
этих последних \х = 1, получим
оо
А=2+ X [фДсо) + 1|/й(ю)]. A3.85)
к = 1
С помощью формулы A3.85) можно в некоторых случаях сделать
оценку значений А непосредственно по уравнению A3.67).
Еслир(^) — постоянно-отрицательная функция для I > 0, то из
формул A3.83) и A3.84) следует, что все срг, у,, у/ положительны.
В этом случае А > 2 и решение уравнения A3.67) неустойчиво.
Если р(^) > 0 для I > 0 и
со
(о | р@с1г< 4, A3.86)
о
то А < 2 и движение устойчиво1*. Последние условия являются
достаточными.
Приводим без доказательств некоторые другие критерии
устойчивости периодических решений нелинейных систем с одной
степенью свободы. Рассмотрим систему, уравнения движения которой
приведены к виду
^ = р(х, У), 1
си 1
Пусть известное периодическое решение этой системы периода со —
Х = ХЦ), У=уЦ). A3.87)
Положив
х = х + ^, у = у + г\,
строим уравнения в вариациях
^* = р'х{х,№ + Ру(х,т, |
^ = Я'х{х,уК + Я'у(х,уУг\,
!) См. у А. М. Ляпунова [30].
568 Глава XIII. НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ НЕЛИНЕЙНОЙ МЕХАНИКИ
в которых
Р'х(х,у), Р'у(х,у),...
— производные от Р(х, у) и $ (х, у) по х и г/, куда подставлены
вместо х и у известные периодические функции х(Ь) и у^).
Возмущения \ и л будут ограничены и движение A3.87)
устойчиво, если
-, со
± = Г [Р'Х(Х, у) + Я'(Х, у)] & < О, A3.88)
03 о
и неустойчиво, если
1 со
1 = | [р;(х, у) + <?;(х, у)] & > о.
со ^
Особого рассмотренияХ) требует случай, когда
ч СО
^ = ] [Р'х(х, у) + <Э;(х, у)] И = 0.
Для уравнения
ю о
X + к2Х = и/ (х, х) A3.89)
или эквивалентной ему системы
Aх
си
условие устойчивости периодического решения
х = хA), у = Ш)
будет на основании A3.88) иметь вид
ц | дГ(х, у) й1; < 0
«> 5 дУ
Уравнение A3.89) может быть приведено к стандартной
форме, и тогда вопрос об устойчивости возможных для него
периодических решений можно исследовать с помощью уравнений
установления, как это имело место в гл. XII, § 10.
Для неавтономной системы типа
х 4- к2х + /(х) = \хР (г, х, х)
условие устойчивости периодического решения
х = х@, у = у(г)
Х) См. кн. А. А. Андронова, А. А. Витта, С. Э. Хайкина [2].
10. Устойчивость периодических решений
569
в нерезонансном случае имеет вид
Н[^^^)AК0. A3.91)
со ^ ду
Иногда задача об устойчивости решения уравнений в вариациях
-& = Ъ81У1+... + Ьапуп, A3.92)
8= 1, 2, ... , д,
где Ь • — известные периодические функции времени, может
быть приведена к таковой же для системы линейных уравнений с
постоянными коэффициентами, соответственно равными
интегральным средним за период коэффициентов Ъ^. Устойчивость
или неустойчивость осредненной таким образом системы при
известных условиях сопровождает устойчивость или
неустойчивость решений заданной системы A3.92).
Условия, при которых такой прием действительно дает
возможность сделать правильные заключения об устойчивости
заданной (неосредненной) системы, установлены Н. Г. Четаевым
[54, § 75]. Если ограничиться первым приближением, то условия
Четаева можно изложить следующим образом.
Пусть коэффициенты Ь8к уравнений A3.92) — периодические
функции периода со. Введя обозначения
-зк
ГК^>
представим усредненную систему в виде
-д7 = С*Л + - + С*А' 8 = х' 2> - ' п- A3-93)
Предположим, что вещественные части всех корней
характеристического уравнения усредненной системы отрицательны.
Тогда в силу одной теоремы Ляпунова [30, с. 106] можно будет
найти отрицательно-определенную квадратичную форму V
такую, что
Д (*в1*1 + - + СапХп) ^ = Х\ + Х\ + ... + Х\. A3.94)
Если полная производная от V, составленная в силу
уравнений A3.92), будет положительно-определенной, то
асимптотическая устойчивость невозмущенного движения в уравнениях
A3.93) сопутствует таковой в заданных уравнениях A3.92).
570 Глава ХШ. НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ НЕЛИНЕЙНОЙ МЕХАНИКИ
Пример. Уравнения возмущенного движения заданы в виде
~ = (-1 4- \ха соз 2*) х + A- [1а зт 21) у, ]
^ A3.95)
^ =(-1 -\1азш21)х + (-^ - \ласоз2*^у, \
где а > 0, ц — некоторый параметр. Усредненными уравнениями будут
&х _ 1
л х + г/,
с1г/ 1
A3.96)
Характеристическое уравнение усредненной системы
-1/2 - Л. 1
-1 -1/2-Х
имеет корни
4
1 = -1/2 + /, А.2 = -1/2-*.
Следовательно, существует отрицательно-определенная квадратичная форма
V, разрешающая уравнение
Такой формой будет здесь V = -(х2 + у2). Составим ее производную по I в
силу уравнений A3.95):
<___ = х2ц _ 2\ш соз 21) + 4{хаху зт 21 + у2A + 2ца соз 21).
Дискриминант функции V имеет вид
«1л 9Л I
1 - 4)и2а2.
1 ~ 2\ха соз 2^ 2иа зт 21
2ца зт 2г 1 + 2\ха соз 2^
Он будет больше нуля, если \а < 1/2а. При этом будет выполнено и условие
1 - 2\ха соз 21 > 0, и, следовательно, форма V —
положительно-определенная. Таким образом, в рассматриваемом примере из асимптотической
устойчивости усредненной системы A3.96) можно сделать вывод об
асимптотической устойчивости невозмущенного движения х = у = 0 в силу заданных
уравнений A3.95).
Приложение
Таблица I
Значения параметров А,-
и коэффициентов А-, Б. и С- балочных функций1)
X,- - 81П -4- + А, соз -4- + Б,- зЬ 4- + С, сЬ -4-
/ I I I
Условия
закрепления
Д- А
1 \
1 1
Ж 1
¦ъ
1
/
1
2
3
4
5
1
2
3
4
5
1
2
3
4
5
1
2
3
4
5
1
2
3
4
5
Л,-
3,142
6,283
9,425
12,566
15,708
4,730
7,853
10,996
14,137
17,279
4,730
7,853
10,996
14,137
17,279
3,927
7,069
10,210
13,352
16,494
1,875
4,694
7,855
10,996
14,137
X!
9,869
39,479
88,83
157,91
246,74
22,373
61,670
120,91
199,86
298,56
22,373
61,670
120,91
199,86
298,56
15,421
49,971
104,24
178,28
272,02
3,516
22,034
61,701
120,91
199,86
V
31,007
248,05
837,18
1984,4
3875,8
105,82
484,29
1329,5
2825
5158,9
105,82
484,29
1329,5
2825
5158,9
60,558
353,24
1064,3
2380,3
4486,4
6,5918
103,43
484,66
1329,5
2825
К
97,409
1558,6
7890,4
24937
60881
500,55
3803,1
14620
37117
89140
500,55
3803,1
14620
37117
89140
237,81
2497,1
10867
31782
73994
12,359
485,50
3807,0
14620
37117
А
0
0
0
0
0
-1,0178
-0,999223
-1,0000335
-0,9999986
-1,0000001
-1,0178
-0,999223
-1,0000335
-0,9999986
-1,0000001
0
0
0
0
0
-1,3622
-0,98187
-1,000777
-0,999965
-1,0000015
В1
0
0
0
0
0
-1
-1
-1
-1
-1
1
1
1
1
1
0,027875
-0,0012041
0,0000520
-0,0000022
0,0000001
-1
-1
-1
-1
-1
С,
0
0
0
0
0
1,0178
0,999223
1,0000335
0,9999986
1,0000001
-1,0178
-0,999223
-1,0000335
-0,9999986
-1,0000001
0
0
0
0
0
1,3622
0,98187
1,000777
0,999965
1,0000015
г) Таблицы I, II, III заимствованы из кн. Е. С. Сорокина [43].
572
Приложение
Таблица II
Численные значения некоторых интегралов,
встречающихся в расчетах.
Интегралы с одним индексом
Условия
закрепления
концов
А А
\ \
1 (
^ 1
1
1
1
1
2
3
4
5
1
2
3
4
5
1
2
3
4
5
1
2
3
4
5
1} х? ах
0
0,5
0,5
0,5
0,5
0,5
1,0359
0,9984
1,0000
1,0000
1,0000
0,4996
0,5010
0,5000
0,5000
0,5000
1,8556
0,9639
1,0014
1,0000
1,0000
/
0
4,9343
19,739
44,413
78,955
123,37
12,775
45,977
98,920
171,58
264,01
5,5724
21,451
47,017
82,462
127,79
8,6299
31,24
77,763
152,83
205,521
/3 | X'/2 Ах
0
48,705
779,28
3945,1
12468
30440
518,52
3797,1
14619
39940
89138
118,80
1250,4
5433,0
15892
36998
22,933
467,97
3808,5
14619
39940
0
0,6366
0
0,2122
0
0,1273
0,8445
0
0,3637
0
0,2314
0,6147
-0,0586
0,2364
-0,0310
0,1464
1,0667
0,4252
0,2549
0,1819
0,1415
Приложение 573
Таблица III
Численные значения некоторых интегралов,
встречающихся в расчетах.
Интегралы с двумя индексами
Условия
закрепления
концов
^ ^
.'/..'/уу, р~р
1 1
я \
1
1
2
3
4
5
1
1
2
3
4
5
г
1
2
3
4
5
/1 х; х) их = -1 1 х1 X'; ах
0 0
У
1
4,9343
0
0
0
0
2
0
19,739
0
0
0
3
0
0
44,413
0
0
4
0
0
0
78,955
0
5
0
0
0
0
123,37
У
1
12,775
0
-9,9065
0
-7,7511
2
0
45,977
0
-17,114
0
3
-9,9065
0
98,920
0
-6,2833
4
0
-17,114
0
171,58
0
5
-7,7511
0
-6,2833
0
246,01
У
1
5,5724
2,1424
-1,9001
1,6426
-1,4291
2
2,1424
21,451
3,9098
-3,8226
3,5832
3
1,9001
3,9098
47,017
5,5836
-5,6440
4
1,6426
-3,8226
5,5836
82,462
7,2171
5
-1,4291
3,5832
-5,6440
7,2171
127,79
574
Приложение
Некоторые тригонометрические формулы,
встречающиеся в расчетах
1. зт2 а = -A - со8 2а)
2. соз2 а = -A 4- со8 2а)
3. 81П а соз а = - зт 2а
4. зт3 а = -C зт а - зт За)
5. соз3 а = -C соз а + соз За)
6. зт а соз2 а = -(зт а + зт За)
7. соз а зт2 а = - (соз а - соз За)
8. зт4 а = -C - 4 соз 2а + соз 4а)
8
9. соз4 а = -C + 4 соз 2а + зт 4а)
8
10. зт3 а соз а = -B зт 2а - зт 4 а)
8
11. зт а соз3 а = -B зт 2а + зт 4 а)
8
12. зт2 а соз2 а = ~A - соз 4а)
8
13. зт5 а = ~(8т 5а - 5 зт За + 10 зт а)
16
14. сое5 а = — (с°8 5а + 5 соз За + 10 соз а)
16
15. зт а зт р = - [соз (а - р) - соз (а + Р)]
16. зт а соз Р = - [зт (а + р) + зт (а - Р)]
17. соз а соз р = - [соз (а - Р) + соз (а + Р)]
18. | ф2(х) дх = { [2^Ш - 2-ШрП + ф2(/)]1)
^ Вывод формулы 18 см. в кн. С. П. Тимошенко [85].
Литература
Монографии, учебники
1. Ананьев И. В. Справочник по расчету собственных колебаний упругих
систем. М.—Л.: Гостехтеоретиздат, 1946.— 224 с.
2. Андронов А. А., Витт А. А., Хайкин С. Э. Теория колебаний.— 2-е изд., пере-
раб. и доп.— М.: Физматгиз, 1959.— 915 с.— То же.— 3-е изд., перераб. и
доп.— М,: Наука, 1981.— 916 с.
3. Бернштейн С. А. Новый метод определения частот колебаний упругих
систем. М.: Изд. ВИД РККА, 1939.— 120 с.
4. Бернштейн С. А. Основы динамики сооружений.— 3-е изд., перераб. и доп.—
М.—Л.: Госстройиздат, 1941.— 187 с.
5. Боголюбов Н. Н., Митрополъский Ю. А. Асимптотические методы в теории
нелинейных колебаний.— 2-е изд., испр. и доп.— М.: Физматгиз, 1958.— 408 с —
То же.— 4-е изд., испр. и доп.— М.: Наука, 1974.— 503 с.
6. Болотин В. В. Динамическая устойчивость упругих систем. М.:
Гостехтеоретиздат, 1956. — 600 с.
7. Бондаренко Г. В. Уравнение Хилла и его применение в области технических
колебаний. М.—Л.: Изд. АН СССР, 1936.— 50 с.
8. Бубнов И. Г. Труды по теории пластин. М.: Гостехтеоретиздат, 1953.— 424 с.
9. Булгаков Б. В. Колебания. М.: Гостехтеоретиздат, 1954.— 892 с.
10. Бутенин Н. В. Элементы теории нелинейных колебаний. Л.: Судпромгиз,
1962.— 195 с.— То же.— Бутенин Н. В., Неймарк Ю. И., Фуфаев Н. А.
Введение в теорию нелинейных колебаний: Учебн. пособие для втузов.— 2-е изд.,
испр.— М.: Наука, 1987.— 384 с.
11. Волъмир А. С. Устойчивость деформируемых систем. М.: Наука, 1967.—984 с.
12. Гантмахер Ф. Р. Лекции по аналитической механике.— 2-е изд., испр.— М.:
Наука, 1966.— 300 с— То же.— 3-е изд. под ред. Е. С. Пятницкого.— М.:
Физматлит, 2001.— 262 с.
13. Гантмахер Ф. Р. Теория матриц.— 3-е изд., стер.— М.: Наука, 1967.— 575 с.—
То же.— 4-е изд., доп.— М.: Наука, 1988.— 548 с.
14. Гантмахер Ф. Р., Крейн М. Г. Осцилляционные матрицы и ядра и малые
колебания механических систем.— 2-е изд., перераб. и доп.— М,—Л.:
Гостехтеоретиздат, 1950.— 360 с.
15. Гелъфанд И. М., Шилов Г. Е. Обобщенные функции и действия над ними. М.:
Физматгиз, 1958.— 439 с— То же. М.: Добросает, 2000.— 412 с.
16. Демидович Б. П., Марон И. А. Основы вычислительной математики: Учебн.
пос. для втузов.— М.: Физматгиз, 1960.— 659 с.— То же.— 4-е изд., испр.—
М.: Наука, 1970.—664 с.
576
Литература
17. Дубошин Г. Н. Основы теории устойчивости движения. М.: Изд. МГУ, 1952.—
319 с.
18. Жуковский Н. Е. Элементарная теория гироскопов: Собр. соч.: В 7 т. — Т. 1.
Общая механика. Математика и астрономия.— М.: Гостехиздат, 1948.— 656 с.
19. Иориш Ю. И. Виброметрия. Измерение вибрации и ударов. Общая теория,
методы и приборы.-— 2-е изд., перераб. и доп.— М.: Машиздат, 1963.— 771 с.
20. Костерин Ю. И. Механические автоколебания при сухом трении. М.: Изд.
АН СССР, 1960.— 76 с.
21. Крылов А. Н. Вибрация судов: Собр. соч.: В 12 т.— М.—Л.: Изд. АН СССР,
1948.—Т. X,—403 с.
22. Крылов Н. М., Боголюбов Н. Н. Введение в нелинейную механику. Киев: Изд.
АН УССР, 1937.—364 с.
23. Левин А. Н. Рабочие лопатки и диски паровых турбин. Л.—М.: Госэнерго-
издат, 1953.— 624 с.
24. Лойцянский Л. Г., Лурье А. И. Курс теоретической механики: В 2 т. М.: Физмат-
гиз, 1954, т. 2.— То же.— 6-е изд.— М.: Наука, 1983.— 640 с. То же.— 7-е изд.—
М.: Дрофа, 2005 (в печати).
25. Лунц Е. Б. О поперечных колебаниях валов. М.—Л.: Глав. ред. авиац. лит.,
1935.— 107 с.— То же.— Определение критических скоростей валов
методом динамического подобия. М.: Изд. ВВИА им. Н. Е. Жуковского, 1948.—
71с.
26. Лурье А. И. Аналитическая механика. М.: Физматгиз, 1961.— 824 с.
27. Лурье А. И. Некоторые нелинейные задачи теории автоматического
регулирования. М.—Л.: Гостехиздат, 1951.— 216 с.
28. Лурье А. И. Операционное исчисление и его приложения к задачам
механики.— 2-е совершенно перераб. изд.— Л.: Гостехтеоретиздат, 1950.— 432 с.
29. Лурье И. А. Крутильные колебания в дизельных установках. М.—Л.: Воен-
мориздат, 1940.— 220 с.
30. Ляпунов А. М. Общая задача об устойчивости движения. М.: Гостехиздат,
1950.—416 с.
31. Малкин И. Г. Методы Ляпунова и Пуанкаре в теории нелинейных колебаний.
Л.—М.: Гостехиздат, 1949.— 244 с.
32. Малкин И. Г. Некоторые задачи теории нелинейных колебаний. М.:
Гостехиздат, 1956.— 491 с.
33. Малкин И. Г. Теория устойчивости движения.— 2-е изд., испр.— М.: Наука,
1966.—530 с.
34. Микеладзе Ш. Е. Некоторые задачи строительной механики. М.— Л.:
Гостехиздат, 1948.— 267 с.
35. Митрополъский Ю. А. Проблемы асимптотической теории нестационарных
колебаний. М.: Наука, 1964.— 431 с.
36. Михлин С. Г. Вариационные методы в математической физике.— М.:
Гостехтеоретиздат, 1957.— То же.— 2-е изд., перераб. и доп.— М.: Наука, 1970.—
512 с.
37. Немыцкий В. В., Степанов В. В. Качественная теория дифференциальных
уравнений.— 2-е изд., перераб. и доп.— М.: Гостехтеоретиздат, 1949.— 550 с.
38. Николаи Е. Л. Теория гироскопов. Л.—М.: Гостехиздат, 1948.— 171 с.
39. Писаренко Г. С. Колебания упругих систем с учетом рассеяния энергии в
материале. Киев: Изд. АН УССР, 1955.— 238 с.
Литература
577
40. Пономарев С. Д., Бидерман В. Л., Лихарев К. К. и др. Основы современных
методов расчета на прочность в машиностроении / Под общ. ред. С. Д.
Пономарева.— М.: Машгиз, 1952, т. II. Расчеты при статической нагрузке.— То
же.— 2-е изд.— М.: Машгиз, 1958.— 703 с.
41. Смирнов В. И. Курс высшей математики: В 5 т.— 12-е изд., стер.— Гостехиз-
дат, 1951,1 т.— 472 с— То же.— 23-е изд.— М.: Наука, 1974.— 479 с.
42. Смирнов В. И. Курс высшей математики: В 3 т.— 5-е изд.— М: Наука, 1967,
2 т.— 655 с— То же.— 21-е изд.— М.: Наука, 1974.— 655 с.
43. Сорокин Е. С. Динамика междуэтажных перекрытий. М.—Л.: Стройиздат,
1941.—240 с.
44. Сорокин Е. С. К вопросу неупругого сопротивления строительных материалов
при колебаниях. М.: Гос. изд. лит. по строит, и арх., 1954.— 73 с.
45. Тарг С. М. Краткий курс теоретической механики.— 3-е изд., перераб.— М.:
Физматгиз, 1963.— 478 с.— То же.— 12-е изд., стер.— М.: Высш. шк.,
2002.—415 с.
46. Теодорчик К. Ф. Автоколебательные системы.— 2-е изд., доп.— М.—Л.: Гос-
техтеоретиздат, 1948.— 244 с.— То же.— 3-е изд., испр. и доп.— М.—Л.: Гос-
техтеоретиздат, 1952.— 272 с.
47. Терских В. П. Метод цепных дробей в применении к исследованию колебаний
механических систем: В 2 т.— Л.: Судпромгиз, 1955.— 1 т.— 376 с, 2 т.— 332 с.
48. Терских В. П. Расчеты крутильных колебаний силовых установок: В 3 т.—
Л.: Судпромгиз, 1953—1954. — 1 т. — 159 с, 2 т.— 215 с, 3 т.— 200 с.
49. Труды международного симпозиума по нелинейным колебаниям. Киев: Изд.
АН УССР, 1963.
50. Фаддеев Д. К., Фаддеева В. Н. Вычислительные методы линейной алгебры.—
2-е изд., доп.— М.: Физматгиз, 1963.— 734 с.— То же.— 3-е изд., стер.—
СПб.: Лань, 2002.— 736 с.
51. Фаддеева В. Н. Вычислительные методы линейной алгебры. М.—Л.: Гостех-
теоретиздат, 1950.— 240 с.
52. Филиппов А. П. Колебания упругих систем. Киев: Изд. АН УССР, 1956.— То
же.— Колебания деформируемых систем. М.: Машиностроение, 1970.— 172 с.
53. Харкевич А. А. Автоколебания. М.: Гостехтеоретиздат, 1953.— 172 с.
54. Чепгаев Н. Г. Устойчивость движения.— 2-е изд., испр.— М.—Л.: Гостехиз-
дат, 1955.— 207 с— То же.— 3-е изд.— М.: Наука, 1965.— 207 с.
55. Чепгаев Н. Г. Устойчивость движения. Работы по аналитической механике.
М.: Изд. АН СССР, 1962.— 535 с.
56. Чудновский В. Г. Методы расчета колебаний и устойчивости стержневых
систем. Киев: Изд. АН УССР, 1952.— 416 с.
57. Шнеэ Я. И., Сахнин А. В., Харитонов Н. Н. Аварии рабочих лопаток
паровых турбин. Харьков—Киев: Гос. научн.-техн. изд., 1937.— 142 с.
58. Эльсгольц Л. Е. Вариационное исчисление.— 2-е изд., испр.— М.: Гостехиз-
дат, 1958.— 163 с.— То же.— Дифференциальные уравнения и вариационное
исчисление.— 5-е изд.— М.: УРСС, 2002.—320 с.
59. Яновский М. И. Конструирование и расчет на прочность деталей паровых
турбин. М.—Л.: Изд. АН СССР, 1947.— 647 с.
60. Шлъчевский М. О. Курс теоретично! механгки: В 2 ч.— Кшв: Радяньска школа,
1952, II ч.— То же. Кильчевский Н. А. Курс теоретической механики: Учебн.
пос. для студ. ун-тов: В 2 т.— 2-е изд.— М.: Наука, 1977.— I т.— 456 с, 2 т.—
479 с.— То же. Кильчевский Н. А. и др. Основы теоретической механики.—
2-е изд.— Киев: Вища шк., 1986.— 296 с.
578
Литература
61. Крылов М. М. Основш проблемы математично! ф1зики та техшки. Кшв: Тех-
видав, 1932.— То же.— Крылов Н. М. Избр. тр. в 3-х т. Киев: Изд. АН УССР,
2 т.—307 с, 3 т.—398 с.
62. АрреИ Р. ТгаНё йе тёсашдие гаИопеПе.— 5 ёс1.— Рапз: ОаиШег—УШагз (в пе-
рев. Аппель П. Теоретическая механика: В 2 т. / Пер. с фр. И. Г. Малкина.— М.:
Физматгиз, 1960, II т. Динамика системы. Аналитическая механика.— 487 с).
63. Ыегепо С. В., ОгаттеХ Е. Теспшзспе йупапик. ВегНп: 3. 8ргт§ег, 1939.—
1056 8. (в перев. Бицено К. Б., Граммелъ Р. Техническая динамика: В 2 т.—
М.—Л.: Гостехтеоретиздат, 1953, т. П.— 630 с).
64. СатрЬеИ Ж. РгЫесИоп о!" з!еат 1игЬте сНзк лупее1з 1гот ах1а1 уШгаНоп. 1Ч.-У.:
Оепега1 е1ес1гкза1 сотрапу, 1924.— 67 р. (в перев. Кэмпбелл В. Аксиальная
вибрация дисков паровых турбин и меры защиты от нее / Пер. с англ.
С. М. Купчун. Л.—М.: ОНТИ, 1937.— 83 с).
65. Со11а1г Ь. МшпепзсЬе ВепапсИшн* уоп В111егепиа1^1е1спип^еп. ВегНп:
3. 8ргт&ег, 1951.— 458 8. (в перев. Коллатц Л. Численные методы решения
дифференциальных уравнений. М: ИЛ, 1953.— 460 с).
66. СоигаШ Е., НИЪеН И. МеШойеп с1ег таШетаизспеп Рпуз1к.— 2 уегагЪ. АиП.—
ВегНп: ^. 8ргт^ег, 1931 —1937 (в перев. Курант Р., Гильберт Д. Методы
математической физики: В 2 т. / Пер. с нем. 3. Либина, Б. Лившица и др. М.—
Л.: Гостехтеоретиздат, 1951, 1 т.— 476 с).
67. Бел НаНо§ ^. Р. Меспатса1 угЪгайопз. Ш-У.; Ьопс1оп: МсОгад^-НШ Сотрапу,
1934.— 390 р. (в перев. Ден-Гартог Я. П. Теория колебаний. М.: Гостехиздат,
1942.— 464 с.— То же.— Механические колебания. М.: Физматгиз, 1960.—
580 с).
68. Ггагег Е. А., Випкап У?. ^., Со11аг А. Е. Е1етеп1агу таШсез апс! зоте аррНса-
Попз 1о с1упаписз апо! сН11егеп11а1 едиаНопз. СатЪгМ^е [Еп§]: Тпе ГГту. Ргезз,
1938.— 416 р. (в перев. Дункан В., Фрезер Р., Коллар А. Теория матриц и ее
приложения. М.: ИЛ, 1950.— 446 с).
69. Сгатте1 Е. Бег Кге1зе1, зете Тпеопе ипс! зете Ап^епсшщгеп.— 2., пеиЬеагЬ.
АиН.— ВегНп: ^. 8ргт&ег, 1950 (в перев. Граммелъ Р. Гироскоп, его теория и
применения: В 2 т. / Пер. с нем. Г. А. Волъперта.— М.: ИЛ, 1952, 1 т.— 352 с).
70. НауазЫ СН. Гогсес! озсШаНопз т поп-Нпеаг 81з1етз. Озака: Шрроп Ргт1;. апс!
РиЬ. Со., 1953.— 164 р. (в перев. Хаяси Т. Вынужденные колебания в
нелинейных системах / Пер. с англ. В. И. Бурдиной под ред. А. И. Лурье.— М.:
ИЛ, 1957.— 204 с) — То же. ]ЧопИпеаг озсШаНопз т рпуз1са1 зузйетз. Ш-У.:
МсСга\\г-НШ, 1964.— 392 р. (в перев. Нелинейные колебания в физических
системах / Пер. с англ. Б. А. Болдова, Г. Г. Гусева под ред. В. Е.
Боголюбова.— М.: Мир, 1968.— 432 с).
71. Но1Ьа ^. ^. Вегесппш1^зуег1апгеп гиг ВезШппшп^ с1ег кг18Цзспеп БгепгаЫеп
уоп ^егас1еп УУеПеп. \У1еп: ^. 8ргт^ег, 1936.— 190 8.
72. ЗасоЫ С. О. «/. УоНезип^еп йЬег Бупаппк уоп С. О. ^. ^соЫ, пеЬз! 1йп1 пнйег-
1а8зепеп АЪпапс11ип&еп с1еззе1Ьеп. ВегНп: С Кенпег, 1866.— 578 8. (в перев.
Якоби К. Лекции по динамике/ Пер. с нем. О. И. Полосухиной под ред.
Н. С. Кошлякова.— Л.—М.: Гл. ред. общетехн. лит., 1936.— 272 с).
73. ШтЬаИ А. УгогаШп Ргеуеп1лоп т Еп^теегт^. 1М.-У.: 3. \УПеу & 8опз, 1932.—
145 р.
74. Ьа§гап§е «7. Ь. Мёсатдие апагуИдие.: 2 у.— Раг1з: Уе Соигшег, 1811 - 1815.
(в перев. Лагранж Ж. Аналитическая механика: В 2 т. / Пер. с фр. В. С. Гохмана
под ред. Л. Г. Лойцянского и А. И. Лурье.— 2-е изд.— М.—Л.:
Гостехтеоретиздат, 1950, т. I.—594 с).
Литература
579
75. МсЬасЫап N. МГ. ТЬеогу апо! аррНсаНоп о!" МаЪЫеи тлтсиопз. К.-У.: Боуег
РиЪНсаиопз, 1947.— 358 р. (в перев. Мак-Лахлан Н. В. Теория и приложения
функций Матье / Пер. с англ. В. А. Братановского под ред. И. Н. Денисова.—
М.:ИЛ, 1953.—476 с).
76. Псага1 Е. ТгаНе а!'апа1узе.: 3 V.— Раг1з: СаиШег—УШагз, 1908. V. III.
77. Кау1е1§к ^. 147. 81гиИ, Вагоп. Тпе 1пеогу о!" зоипс!.: 2 V.— ЬопсТоп: МастШап
апс! Со., 1877—1878 (в перев. Стрэтт Дж. В. (Лорд Рэлей). Теория звука: В
2 т. / Пер. с 3-го англ. изд. П. Н. Успенского и С. А. Каменецкого под общ.
ред. С. М. Рытова и К. Ф. Теодорчика.— 2-е изд.— М.—Л.: Гостехтеоретиз-
дат, 1940, т. I.— 499 с).
78. Еосагй У. Ь'тз1аЫШё еп тёсаг^ие. АиЪотоЪПез. Ауюпз. Роп1з зизрепсИз.
Раг1з: Маззоп, 1954.— 239 р. (в перев. Рокар И. Неустойчивость в механике.
Автомобили. Самолеты. Висячие мосты / Пер. с фр. В. К. Житомирского под
ред. А. Н. Обморшева.— М.: ИЛ, 1959.— 287 с).
79. КоиНг Е. ^. А 1геа1л8е оп Пае з1аЫШу 01 а §1уеп з!а!е 01 тоНоп, рагИсШаНу
81еас1у тоНоп. Ьопс1оп: МастШап апо! Со., 1877.— 108 р.
80. КоиНг Е. ^. Тпе асЬ/апсео! раг! о! а йгеаНзе оп П\е сТупаписз 01 а зуз^ет 01 гцдс!
ЪосИез.— 5-1Ь ев..— Ьопс1оп апс! М.-У.: МастШап апс! Со., 1892.— 431 р.
81. ЕоигН Е. </. ТЬе е1етеп!агу раг! 01 а 1геа1дзе оп Пае сгупаппсз ог а зузЪет о!" Г1^1с!
ЪосИез.— 64Ь ес1.— Ьопскт: МастШап апс! Со., 1897.— 424 р.
82. 8Шо1а А. Ъ1е БатрГ ипс! ОавЪигЪтеп. ВегИп: <1. 8ргт&ег, 1924.— 1111 8.
83. 81окег ^. ^. МопИпеаг уШгаНопз т теспатса1 апс! е1ес1г1са1 зузЪетз. гЧ.-У.: 1п-
1егзсЛепсе РиЪИзпегз, 1950.— 273 р. (в перев. Стокер Дж. Дж. Нелинейные
колебания в механических и электрических системах / Пер. с англ.
Н. А. Талицких под ред. А. И. Лурье.— М.: ИЛ, 1952.— 264 с— То же.— 2-е
изд.— М.: ИЛ, 1953.— 256 с).
84. Тетр1е О., ВгсЫеу \У. Кау1ег^п'8 Ргтс1р1е. Оххогс!: Охгогс! 11ту. Ргезз, 1933.
85. Ттюз/гепко 8. Р. УгЪгаИоп РгоЫетз т Еп&теегт§. Ы.-У.: Б. Уап ]Чоз1гапс1
Со. 1пс, Соп81аЫе & Со., 1928.— 351 р. (в перев. Тимошенко С. П. Теория
колебаний в инженерном деле / Пер. с англ. Н. А. Шошина.— 3-е изд.— Л.—М.:
Гостехтеоретиздат, 1934.— 344 с.) — То же. Т1тозпепко 8. Р., Уоуп§ О. Н„
^VеаVе^ Ж. УизгаНоп РгоЫетз т Еп^теегт^.— 4-о! ей.— К.-У.: Л. ДУПеу &
8опз, 1974.— 521 р. (в перев. Тимошенко С. П., Янг Д. X., Уивер У.
Колебания в инженерном деле / Пер. с англ. Л. Г. Корнейчука под ред. Э. И. Григо-
люка.— М.: Машиностроение, 1985.— 472 с).
Статьи
86. Андронов А. А. Предельные циклы Пуанкаре и теория колебаний // Собр. тр.—
М.: Изд. АН СССР, 1956.
87. Андронов А. А., Витт А. А. К математической теории автоколебательных
систем // ЖТФ.— Т. IV A934) — Вып. 1.
88. Айзерман М. А., Гантмахер Ф. Р. Об определении периодических режимов в
нелинейной динамической системе с кусочно-линейной характеристикой //
ПММ.— 1956.— Вып. 5.
89. Бабаков И. М. К определению наибольшей частоты малых колебаний //
Научи, зап. ХММИ.— Т. V A940).
580
Литература
90. Бабаков И. М. К определению погрешности приближенного расчета основной
частоты малых колебаний // Вестн. инженеров и техников.— 1939.— № 9.
91. Бабаков И. М. К расчету высших частот крутильных колебаний
приведенного вала // ПММ.— Т. V A941) — Вып. I.
92. Бабаков И. М. Обратный метод в применении к расчету собственных частот
крутильных колебаний // Научн. зап. ХММИ.— Т. II A935). — Кн. 1.
93. Бабаков И. М. О границах основной частоты // Там же.— Т. V A940).
94. Безухое Н. И. Некоторые обобщения методов строительной механики в
динамике сооружений // Сб. «Исследования по теории сооружений».— 1939.—
№3.—С. 172.
95. Галеркин Б. Г. Стержни и пластинки // Вестн. инженеров.— 1915.— № 19.—
С. 897—908.— То же.— Собр. соч.— М.: Изд. АН СССР, 1952, т. I.—
С. 168— 195.
96. Гершгорин С. А. О влиянии наложения дополнительных масс на колебания
материальной системы // ПММ.— Т. 1 A933) — Вып. I.
97. Данилевский А. М. О численном решении векового уравнения // Матем.
сб.— Т. 2/44 A937). — № 1.
98. Ельяшевич М. А., Степанов Б. И. Колебательные спектры молекул
углеводородов // ЖФХ.— Т. IX. A943). — Вып. 3.
99. Келдыш М. В. О методе Б. Г. Галеркина для решения краевых задач // Изв.
АН СССР. Сер. математ.— 1942.— № 6.
100. Кочин Н. Е. О крутильных колебаниях коленчатых валов // ПММ.— Т. II
A934). — Вып. 1.
101. Крейн М. Г. О спектре якобиевой формы в связи с теорией крутильных
колебаний вала // Матем. сб.— Т. 40 A933). — Вып. 4.
102. Крылов А. Н. Об определении критических скоростей вращающегося вала //
Изд. АН СССР, 1932.
103. Крылов А. Н. О некоторых дифференциальных уравнениях математической
физики, имеющих приложения в технических вопросах // Там же.— 1932.
104. Крылов А. Н. О расчете балок, лежащих на упругом основании // Там же.—
1931.
105. Крылов А. Н. О численном решении уравнения, которым в технических
вопросах определяются частоты малых колебаний // Там же.— № 4.
106. Крылов А. Н. Собр. соч.: В 12 т.— М.— Л.: Изд. АН СССР, 1940.— Т. X.—
С. 69—70.
107. Крылов А. Н. ЦЪег оИе еггтт^епеп 8сп^т#ип#еп уоп #1е1сп1бгпп#еп е1ази-
зсЬеп 81аЬеп // Там же.— 1937.— Т. V.
108. Куликов Н. К. Приближенное определение периода свободных колебаний
нелинейной системы с одной степенью свободы // Инж. сб.— Т. XIII A952) — С. 187.
109. Ланцевицкий И. Л. Об одном методе прямой линеаризации нелинейной
системы с помощью разрывной весовой функции // Изв. вузов СССР.— 1963.—
№12.
110. Лейбензон Л. С. Вариационные методы решения задач теории упругости.—
Собр. тр.— М.: Изд. АН СССР, 1951.— Т. I.
111. Лурье А. И., Чекмарев А. И. Вынужденные колебания в нелинейной системе с
характеристикой, составленной из двух прямолинейных отрезков // ПММ.—
Т. I. A938). — Вып. 3.
Литература
581
112. Микеладзе Ш. Е. О разложении определителя, элементами которого служат
полиномы // Там же.— Т. XII A948). — Вып. П.
113. Михайлов А. В. Метод гармонического анализа в теории автоматического
регулирования // Автоматика и телемеханика.— 1938.— № 3.
114. Мышкис А. Д. О точности приближенных методов анализа малых
нелинейных свободных колебаний с одной степенью свободы // Сб. «Вопросы
динамики и динамической прочности». — Изд. АН Латв. ССР, 1953. — Вып. 1.
115. Натансон В. Я. Формулы для вычисления определителя квадратной
матрицы одного частного вида // ПММ.— Т. XXI A957). — Вып. 4.
116. Пановко Я. Г. Способ прямой линеаризации в нелинейных задачах теории
упругих колебаний // Инж. сб.— Т. XIII A952). — С. 113.
117. Папкович П. Ф. Об одном методе разыскивания корней
характеристического уравнения // ПММ.— Т. I A933). — Вып. 2.
118. Снитко Н. К. Новый метод нахождения упругой линии // Тр. МИИТ.—
1930.— Вып. XV.
119. Сорокин Е. С. К теории внутреннего трения при колебаниях упругих тел //
Тр. ЦНИИС.— 1960.
120. Фридман В. М. Об одном приближенном методе определения частот
колебаний //Сб. «Колебания в турбомашинах».— М.: Изд. АН СССР, 1956.
121. Цыпкин Я. 3. // Автоматика и телемеханика.— 1956.— № 4.
122. Шнее Я. И. К вопросу о вибрации лопаток паровых турбин // Енергетша. —
1934.—№4.
123. Випсап №. ^. Ггее апс1 Гогсей ОзсШаИопз 01 СопШшоиз Веатз 1,геа1теп{; Ъу
Иле АйпиМапсе МеШх! // Рпу1. Ма^.— Уо1. 34 A943) — N0. 228.
124. РаШ 8. Б1е Вегесппип^ с1ез ЬеИеЫ^ &ез1дгЬ2еп БигсЫаиЙга&егз пасЬ с1ет
Кейикйопзуеггапгеп // 1п&. Агсп.— Ва. XXIV A956) — Н.З.
125. Рикгке Н. ВезИттип^ уоп Ва1кепзс1гшп&ип&еп пйЧ НШе с1ез МаШгеп-
каПипз // 1п#. Агсп. - Вй. XXIII A955) — Н. 5.
126. Рикгке Н. ВезИттип^ уоп Каптепзсптп^ип&еп тгЬ НШе с1ез МаШгеп-
ка1кй18 // 1п8. Агсп. - Вс1. XXIV A956) — Н. 1.
127. Рипк Р. ЦЬег сИе Вегесппип^ йег кгШзспеп БгепгаЫеп Ье1 пото^епеп ипс1
газ! пото^епеп МазсЫпеп // 2АММ.— ВсТ. 15 A935) — Н. 3.
128. НйЬпег Е. Ех&епзспшт^ип^згаЫеп гизаттещгезейгЪеп Зсптп^ип^зуз^ете //
1п^. Агсп.— Вс1. XXIX A960) — Н. 2.
129. НИ г №. ЦЬег ете пеие МеШосТе гиг 2бзип& ^етззег УапаНопзргоЫете с!ег
таШ. Рпуз1к // 2. I. с1. гете ипо! ап#е\у. МаЪп.— 1908.— N 1.— 8. 135; Оеза-
тте11е ЛУегке.— Раг1з, 1911.
130. Тпотзоп №. Т. // «I. от Арр1. Месп.— 1950.— N 3.
Именной указатель
Айзерман М. А. 556, 579
Ананьев И. В. 279, 295, 575
Андронов А. А. 500, 508, 515, 524,
535, 551, 568, 575, 579
Аппель П. (АрреИ Р.) 37, 439, 449, 578
Бабаков И. М. 112, 172, 174, 181, 189,
201, 240, 579, 580
Безухов Н. И. 221, 294, 580
Бендиксон И. (ВепсИхоп I.) 505, 507
Бернулли Д. (ВегпоиШ Б.) 126
Бернштейн С. А. 175, 300, 575
Бидерман В. Л. 577
Бикли {ЫсШеу Ж.) 579
Вицено {Въегепо С. В.) 207, 578
Боголюбов Н. Н. 491, 524, 543, 544, 575
Болотин В. В. 562, 575
Бондаренко И. Г. 562, 575
Бубнов И. Г. 311, 575
Булгаков Б. В. 518, 575
Бутенин Н. В. 17, 504, 524, 575
Ван-дер-Поль Б. (Уап йег Ро1 В.) 440,
503
Витт А. А. 508, 524, 535, 568, 575, 579
Вольмир А. С. 311, 562, 575
Вышнеградский И. А. 425
Галёркин Б. Г. 311, 329, 334, 342, 357,
367, 552, 580
Гамильтон (НатШоп Т^.) 35, 310
Гантмахер Ф. Р. 37, 38, 126, 134, 153,
253,419,455,575
Гельфанд И. М. 264, 575
Гершгорин С. А. 300, 580
Гильберт (НИЬеП Б.) 578
ГлазманИ. М. 17
Граммель (ОгаттеЛ В.) 33, 207, 578
Гурвиц (НигшИг А.) 451
Здвиденков Н. Н. 166
Цаламбер ф'АХетЪеП </.) 35, 108, 126
Данилевский А. М. 45, 46, 580
Демидович Б. П. 45, 576
Ден-Гартог феи НаПо§ ^. Р.) 249, 578
Дирихле (ВЫсНЫ Р. О. Ь.) 397
Дубошин Г. Н. 389, 425, 576
Дункан фипЫп №. ^.) 38, 293, 578,
581
Ельяшевич М. А. 580
Жуковский Н. Е. 35, 576
Иориш Ю. И. 556, 576
Келдыш М. В. 329, 580
Кильчевский Н. А. 391, 561, 576, 577
Кимбэл (КШЬаИ А) 310, 578
Кирхгофф {КЬгсНПоЦ О. К) 320, 321
Коллар (СоИагА. К.) 38, 578
Коллатц (Со1Шг Ь.) 336, 578
Корчинский И. Л. 166
Костерин Ю. И. 503, 576
Кочин Н. Е. 234, 562, 580
Крейн М. Г. 126, 134, 153, 253, 575,
580
Крылов А. Н. 16, 45, 143, 157, 218,
256, 257, 263, 292, 304, 534, 538,
563,576,580
Крылов Н. М. 334, 491, 542, 543, 576,
578
Куликов Н. К. 490, 580
Курант Р. {Соигапг К.) 152, 578
Кэмпбелл (СатрЬеИ №.) 376, 578
Лаваль (Ьаиа1 О.) 206
Лагранж (Ьа§гап§е ^. Ь.) 26, 29, 126,
397, 534, 578
Ланцевицкий И. Л. 490, 556, 580
Лаплас (Ьар1асе Р. 8.) 45, 534
Леверье (Ьеиегпег С.) 45
Левин А. В. 284, 298, 327, 370, 576
Лейбензон Л. С. 347, 357, 580
Лихарев К. К. 577
Именной указатель
583
Лойцянский Л. Г. 78, 576
ЛунцЕ. Б. 177,300, 576
Лурье А. И. 37, 60, 63, 78, 425, 576
Лурье И. А. 98, 235, 245, 576
Льенар (Ыёпагс1 А.) 505
Ляпунов А. М. 16, 386, 387, 400, 414,
442, 534, 545, 566, 567, 576
Мак-Лахлан Н. В. (МсЬасМап N. Нл.)
566, 579
Малкин И. Г. 389, 391, 524, 545, 576
Мандельштам Л. И. 508, 551
Марон И. А. 45, 576
Матье (МаШеи Е.) 562, 566
Микеладзе Ш. Е. 45, 219, 576, 581
Митропольский Ю. А. 524, 543, 556,
575, 576
Михайлов А. В. 451, 581
Михлин С. Г. 329, 357, 576
МышкисА. Д. 491, 581
Найквист (Агудшя{ Н.) 451
Натансон В. Я. 271, 581
Немыцкий В. В. 505, 576
Николаи Е. Л. 214, 576
Остроградский М. В. 35, 273, 310, 534
Панов Д. Ю. 166
ПановкоЯ. Г. 490, 581
Папалекси Н. Д. 508, 551
Папкович П. Ф. 175, 581
Пикар {ПсаЫ Е.) 524, 579
Писаренко Г. С. 307, 576
Пономарев С. Д. 300, 577
Пуанкаре (Роигсагё Н.) 524, 549, 562
Пуансо (Ро1п8о1 I.) 439
Раус (КоигП Е. ^.) 29, 30, 124, 126,
143, 419,451,455, 579
Ритц (КИг \\т.) 311, 313, 314, 362, 581
Рокар (Яосага1 У.) 523, 579
Рэлей {ЯауШёН г/. \\\) 16, 143, 161,
188, 189, 214, 252, 311, 323, 357,
359,362,579
СахнинА. В.374,577
Смирнов В. И. 28, 94, 577
СниткоН. К. 219, 581
Сорокин Е. С. 166, 304, 305, 306,
317, 321, 357, 571, 577, 581
Степанов Б. И. 580
Степанов В. В. 505, 576
Стодола (8Шо1а А.) 182, 206, 207,
375, 579
Стокер {81окег ^. ^.) 494, 523, 579
Стретт см. Рэлей
ТаргС. М. 33,577
Темпль (Тетр1е О.) 334, 579
Теодорчик К. Ф. 523, 577
Терских В. П. 234, 577
Тимошенко С. П. (ТЬтозкепко 8. Р.)
164, 300, 311, 320, 356, 562, 574,
579
Толле (То11е М.) 237, 240
Томсон {Ткотзоп Ж. Т.) 302, 581
Фаддеев Д. К. 43, 577
Фаддеева В. Н. 43, 199, 577
Фальк (РаШ 8.) 270, 581
Филиппов А. П. 307, 577
Фохт (УоШ Иг) 304, 305
Фрезер {Ргагег В. А.) 38, 578
Фридман В. М. 330, 581
Функ (Рипк Р.) 155, 581
Фурке (Рикгке Я.) 224, 270, 581
Фурье (Роипег ^.) 94
Хайкин С. Э. 500, 508, 515, 524, 551,
568,575
ХаркевичА. А. 523, 577
Харитонов Н. Н. 374, 577
Хаяси (НауазЫ Ск.) 562, 578
хилл (нт м. ^. м.) 562
Холба (Но1Ьа ^. ^.) 171, 193, 209, 578
Хюбнер (НйЬпег Е.) 267, 581
ЦыпкинЯ. 3.491,581
Чекмарев А. И. 556, 559, 580
Четаев Н. Г. 400, 425, 428, 450, 460,
569,577
Чудновский В. Г. 301, 577
Шилов Г. Е. 264, 575
Шнее Я. И. 310, 374, 577, 581
Эйлер Л. (Еи1ег Ь.) 28, 38, 126
Эльсгольц Л. Э. 37, 38, 577
Якоби ^асоЫ С. С. ^.) 37, 45, 122, 578
Яновский М. И. 209, 577
Предметный указатель
Аварии лопаток и дисков 374
Автоколебания 500, 523
— в музыкальных инструментах 523
— в самолете 523
Амплитуда 68, 470
— резонансная 170
Анализ гармонический 97
Балансировка роторов паровых
турбин 206
Биения 205
Вал безмассовый 218
— гибкий 31, 207, 215
— жесткий 207, 217
— коленчатый 100, 229, 408
— переменного сечения 219
— переменной жесткости 561
— приведенный 117, 155, 163, 204
— прямой 100, 205
— ступенчатый 100, 170, 191, 219,
235,303
Вариация изохронная 21
Вектор матрицы собственный 44
Взаимность перемещений 106
Вибрации 205
— аксиальные 374
Виброгаситель 85, 164
Виброграф 85
Возмущение движения 52, 68
Возмущения координат начальные
403
Время собственное 534
Гармоника 96, 98, 246
— опасная 98
Гироскоп 33, 211
Гистерезис 166
Движение апериодическое 76
— возмущенное 69, 384, 402, 405, 406,
432
Движение невозмущенное 402, 417
— неустановившееся 406
— неустойчивое периодическое 380
— убегающее 479
— установившееся 383
— устойчивое 68, 381, 403
по Ляпунову 404
Действие по
Остроградскому—Гамильтону 36
Декремент логарифмический
колебаний 74
Демпфер гидравлический 77
Диаметр приведения 236
— узловой 369, 372, 374, 375
Дискриминант формы 48
Диссипация 460
Длина приведенная участка вала 234
Жесткость упругая 234
Закон Гука 77, 469
— обобщенный 105, 112, 208
Закрепление упругое 275
Затухание колебаний 73, 82, 471, 491
Зона критическая резонансная 155
Изображение функции (по Карсону)
51, 52
Изоклина 473
Импульс обобщенный 52
Интеграл Крылова 289
— сохранения энергии 420
— уравнений движения 29
— циклический 29
Интерпретация фазовая движений
381,382
Исчисление матричное 17
— операционное 16,51,218
Катаракт 77
Колебание главное 275
Колебания 68
Предметный указатель
585
Колебания аксиальные (дисков
паровых турбинK74, 376
— вынужденные 52, 80, 83, 156, 163,
166,549
линейной системы с одной
степенью свободы 78
— гармонические 68, 121
— главные 119, 121
— груза, подвешенного на пружине
86, 88, 96, 101
— затухающие 73, 81
— изохронные 73, 470
— клина 319, 336, 342
— крутильные вала с дисками 110,
111, 117, 155, 163, 175, 190, 242
диска 76, 101
коленчатого вала 229
— линейные 69
— лопаток 283, 308, 325
— малые 68, 69, 70, 76, 99, 103, 106,
107, 121
— нелинейные 16, 381, 467, 481, 549,
552
— нити с бусинками 126, 134
— поперечные балки с
сосредоточенными массами 101, 116, 118, 134,
163, 176,321,331
однородного стержня 138, 277—
282,323
пластинки 343
прямых стержней 265, 271,
277—282, 286, 310
переменного сечения 338
— продольные прямых стержней
250, 267,310,311, 332
— резонансные 379, 469, 551
— свободные 71, 471, 531
затухающие 81, 471, 491
сопровождающие 79
с сопротивлением 141, 259, 307
— сложных систем 266
— собственные 121
— струны 126, 504
— тангенциальные лопаток турбины
283
— фундамента 85
Координаты нормальные 120
— обобщенные (независимые) 22, 380
— относительные 405
— состояния системы 25, 68
— циклические 29, 30, 419
Коэффициент влияния
гармонический 96, 160, 161,201
статический 106
— динамичности 84
— жесткости статический 105
— затухания 73
— поглощения 167
Кривая резонансная 84, 554
— энергетического баланса 475
Критерии устойчивости 419, 451
Критерий Бендиксона 505, 507
— Гурвица 451
— Льенара 505
— Рауса 451
— Сильвестра 50
Кэмпбелл-машина 377
Линеаризация 69, 141, 425, 470, 490
Линия узловая 354
Масса маховая эквивалентная 165, 230
Матрица 38—45
— жесткости 223, 268
— массы 223, 268
— перехода 268
Маятник двойной 109, 140
— математический 76, 482, 486, 541
— фрикционный Фруда 504
— часов 67, 470, 500
Метод Бубнова—Галеркина 311
— Ван-дер-Поля 508, 516, 542
— Галеркина 317, 328, 334, 549, 552
— гармонических коэффициентов
влияния 160, 170, 201
— Данилевского 45
— изоклин 472, 494
— исключения первой формы 198
— итераций 170, 182, 193
— качественный 386
— Крылова А. Н. 45, 538, 544, 563
— Крылова Н. М. и Боголюбова Н. Н.
469,542,544
— Лагранжа 45
— Лобачевского—Греффе 47
— Льенара построения фазовых
траекторий 494—499
— Ляпунова 385—414
— начальных параметров' 17, 218,
240,268,301
— осреднения 508, 549
— понижения 199
586
Предметный указатель
Метод последовательной диагонали-
зации 122
— Пуанкаре 562
— Ритца 313, 320, 334, 357, 358
— Рэлея 188, 189, 191, 311, 317, 323,
334
— Стодолы 182, 197
— Толле 237
— фазовой плоскости 492
— Фридмана 330
Методы вариационные 17, 188, 310,
334, 347, 552
, их погрешность 334
— графические 182, 193, 197
— нелинейной механики 523
— приближенные 17, 170, 182, 310,
338,424
— прямые 310
Момент гармонический 246
— гироскопический 34, 35, 209
— остаточный 237
— приведения 186
— цилиндровой массы 233
Муфта нелинейная 85, 556
Нагрузка собственная 252
Напряжения усталостные 85
Неравенство Буняковского—Коши
341,342
Оператор Карсона 52, 65
Определитель Гурвица 457
Оригинал 52
Ортогональность собственных форм
131
Осциллятор линейный 71, 78, 495
— гармонический 383
— затухающий (диссипативный) 73
Ось упругая 271
Параметры начальные 218, 268, 301
Перемещения виртуальные 20
Период колебаний 68
затухающих 73
Петля гистерезиса 166
Пластинка, ее колебания 343
— квадратная 361, 362, 364
— круглая 364
— прямоугольная 351, 354, 359, 360
Плоскость фазовая 472
Поглотитель колебаний
динамический 164
Податливость упругая 234, 275
Поле направлений 282, 472
неустановившееся 382
установившееся (стационарное)
383
Полином устойчивый 451
Потери гистерезисные энергии
деформации 166
Преобразование квадратичной
формы 48
— функции по Карсону 52
Прецессия 206
Прецессия обратная (отрицательная)
212
— прямая (положительная) 211
— регулярная 33
Приведение длины вала 230
— масс 230
— матрицы коэффициентов 177
кривошипно-шатунного
механизма 233
— системы 70
Принцип взаимности обобщенный
Рэлея 161
перемещений 106
сил 106, 276
— наименьшего действия
Остроградского—Гамильтона 35, 310
— Рэлея 189
Пространство фазовое 381
Разложение возмущающей силы 94
— по собственным формам колебаний
137, 157
Разнос массы вала 300
Рассеяние энергии некомпенсируе-
мое, см. Диссипация
Реакции связей 19
динамические 20
статические 20
Режим переходный 52
Резонанс 81, 96, 98, 160, 205
— параметрический 561
Решение периодическое 525, 559, 562
— порождающее 525
Ряд Маклорена 219
— Фурье 94
Сброс амплитуд 555
Свертка функций 61
Связи 19
— влияние на устойчивость 460
Предметный указатель
587
Связи голономные 20
— двусторонние (удерживающие) 19
— неголономные 20
— обратные 501
— реономные (нестационарные) 20
— склерономные 20
— совершенные (идеальные) 22
— стационарные 20, 70
Сдвиг фазы 83
Седло (особая точка) 434
Сепаратриса 485, 488, 489
Сила активная 20
— возмущающая 52, 78, 85, 94, 156,
160
— восстанавливающая 78, 108, 555
— гироскопическая 459, 463
— диссипативная 459, 461, 462, 463
— консервативная 28
— обобщенная 23
— центробежная (влияние на
частоты) 325
Симметризация уравнений 114
Система автоколебательная 471, 500
— автономная 383, 534
— голономная 20
— диссипативная 491—494, 518
— квазилинейная 531, 524, 525
— консервативная 26, 69, 103, 419,
459, 481
— линейная 15, 19, 71, 250
— Ляпунова 380, 545
— неконсервативная 37, 500
— нелинейная 380, 467, 481, 547
— порождающая 528
— приведенная эквивалентная 99
— Пуанкаре 524
— с бесконечным числом степеней
свободы 99, 250
— с внутренним неупругим
сопротивлением 166
— с конечным числом степеней
свободы 15, 19, 99, 170
— с одной степенью свободы 67, 432,
538
— с самовозбуждением 502, 506
— с сопротивлением,
пропорциональным скорости 92
Скорость критическая 206
— обобщенная 380
— угловая критическая вала 33, 207,
208
Скорость угловая критическая вала
с дисками 212
диска 379
— — коленчатого вала 229
— фазовая 376
Слой нейтральный в пластинке 343
Сопротивление 71
— внутреннее неупругое 166, 492
Состояние движения 25
асимптотически устойчивое 435
— критическое (резонансное) 122
— равновесное 25, 68, 76, 106, 381
неустойчивое 434
устойчивое по Ляпунову 385
Стабилизация гироскопическая 465
Степень неустойчивости 465
Схема Рауса 455
Таблица Толле 237, 240
Теорема запаздывания 56
— Лагранжа—Дирихле об
устойчивости равновесия консервативной
системы 397
— Ляпунова о неустойчивости
движения 422
по первому приближению
446
об асимптотической
устойчивости 414
об устойчивости
неустановившегося движения 412
по первому приближению
441
— о положительности и о разделении
корней векового уравнения 124
— о разложении функций 61, 64, 135
— об ортогональности собственных
форм 131
— об узлах собственных форм 132
— об устойчивости равновесного
состояния системы 395
— Пуанкаре 524, 525, 527, 531, 532,
549
— Рауса 419
— свертывания функций 61, 86, 219
— смещения 55, 64
Теоремы Ляпунова о неустойчивости
равновесия консервативных
систем 400
— о влиянии на частоты изменений
масс и жесткостей 153
588
Предметный указатель
Теоремы о границах основной
частоты 173
— об изменении частот системы при
наложении связей 146
— об экстремальных свойствах
собственных частот 151
Тормоз ленточный 504
Точка изображающая 381
Траектория убегающая 479
— фазовая 381, 432, 433, 479, 519
Трение вязкое 78, 492, 497
— сухое (кулоново) 492, 495, 497, 518
Углы прецессии 33
— фазовые 98
Узел (особая точка) 512
Упрочнение равновесия 460
Уравнение Ван-дер-Поля 440, 501,
506,517,524,535
— вариационное 328
Галеркина 328
поперечных колебаний
пластинки 347
— вековое 45, 122, 155, 208, 218
— Лагранжа 26
— Матье 562
— характеристическое 43, 255, 427,
428,564
— Хилла 562
— частот (вековое) 123, 124, 255
— — Галеркина 330
Ритца 314
Уравнения в вариациях 405, 559
— Лагранжа 29, 106, 108, 127
— основные малых колебаний 122
— первого приближения 426
— Рауса 29, 31
— с периодическими
коэффициентами 559
— укороченные Ван-дер-Поля 551
— установления 511, 516, 568
— Эйлера—Лагранжа 38
Условие ортогональности 131
Условия геометрические 274, 351
— динамические 274, 337
— краевые 274
— начальные 274
Устойчивость асимптотическая 414,
492
— неустановившегося движения 412
— орбитальная 421, 482, 516
Устойчивость периодических
решений 559, 562
— по Ляпунову 385, 398, 414
— по первому приближению 424
— предельных циклов 516
— равновесного состояния системы
384, 395, 437
— стационарного движения системы
с циклическими координатами 31
Усы фазовой траектории 478
Фаза колебаний 68, 83
Фигуры Хладни 354
Флаттер 523
Фокус неустойчивый 438
— устойчивый 438
Форма квадратичная 48
положительно-определенная
50, 315
, приведение к каноническому
виду 50, 51, 107, 119
— колебаний 170, 182, 261, 288, 338,
350,352
собственная 129, 130, 137, 157,
253, 275
для пластинки 352
для стержня 138
Формула Зиманенко 236
— Картера 236
— Куликова 490, 491
— Пановко 490, 491
— Сорокина 300, 305
— Темпля 334
— универсальная упругой линии 16,
218
— Фохта 304
— Цыпкина 491
Формулы Крылова А. Н. 263, 266,
289,292,293
— Натансона 271
— прямой линеаризации 490
Функции базисные (координатные)
313
— балочные 358, 571
— Крылова (функции с единичной
матрицей) 276, 304, 358
— Ляпунова 386, 388
Функционал Остроградского—
Гамильтона 273, 311
Функция аналитическая в области
402
Предметный указатель
589
Функция диссипативная 142
— единичная 53
— знакоопределенная 388
— знакопеременная 389
— знакопостоянная 388
— импульсивная второго порядка 66
первого порядка 65
— Лагранжа 29, 30, 419
— Ляпунова второго рода 406, 410
, геометрическая
интерпретация 394,408
знакоопределенная 407
отрицательно-определенная 407
положительно-определенная 407
первого рода 388
— Матье 566
— начальная (оригинал) 52, 60
— обладающая бесконечно малым
высшим пределом 392
— однородная 28
— отрицательно-определенная 388
— периодическая 59, 94
второго рода 563
— положительно-определенная 388,
400, 407
— постоянно-отрицательная 389
— постоянно-положительная 389
— разрывная 58
Функция рассеяния (диссипативная)
142
— Рауса 30
— Рэлея 148, 150, 152, 154, 188
Центр (особая точка) 439, 481
— жесткости 271
Цикл предельный 314, 515, 516
, устойчивость 516
Частота колебаний 59, 472
круговая 68
лопатки динамическая 325
основная 101, 173, 181
пластинки 357, 359
собственная 68, 121, 130, 151,
170, 276
, экстремальные свойства 151
Частоты высшие 182
Часы 67, 470, 518
Число оборотов критическое 170, 205,
298,379
— степеней свободы 22, 230
Член вековой 81, 533, 534
Энергия кинетическая 70, 103, 149
— полная механическая 28
— положения изображающей точки
398
— положения системы 25
— потенциальная 25, 70, 103, 149
ОБ АВТОРЕ
Иван Михайлович Бабаков, профессор, первый заведующий
кафедрой теоретической механики, образованной в Харьковском
технологическом институте в 1925 г., безусловно принадлежит к
выдающимся личностям этого учебного заведения1*, имеющего более
чем 115-летнюю историю.
Иван Михайлович Бабаков родился 18 октября 1890 г. в с. Алек-
сеевка Курской губернии, в семье священника. По окончании в
1910 г. четырех классов Курской духовной семинарии он поступил
в Харьковский университет, который окончил в 1916 г. по двум
специальностям: «теоретическая механика» и «физика», — и был
оставлен при университете для подготовки к профессорской
деятельности.
С 1916 по 1919 г. Иван Михайлович успешно сдал магистр-
ские экзамены при физико-математическом факультете
университета и вел преподавательскую деятельность в высших учебных
заведениях Харькова. С 1916 г. он был ассистентом кафедры
теоретической механики Высших Женских Курсов, а в ноябре 1917 —
принят преподавателем механики в Харьковский
технологический институт; в 1923 г. И. М. Бабаков стал профессором ХТИ.
При организации института для преподавания теоретической
механики были приглашены выдающиеся ученые — А. М.
Ляпунов и В. А. Стеклов, у которых в Харьковском университете
учился И. М. Бабаков. В эти годы они интенсивно работали над
теорией устойчивости.
Студентом Иван Михайлович увлекся этим научным
направлением механики. На объявленный в университете конкурс им
была подана научная работа «Об астатическом равновесии и ста-
Х) В настоящее время — Национальный технический университет «Харьковский
политехнический институт».
Об авторе
591
тическое учение об устойчивости равновесия». В отзыве на эту
работу, опубликованном в 1916 г. в «Записках Харьковского
Университета», профессор Н. Н. Салтыков написал:
«...рассматриваемая работа стремится объединить изучаемые
положения в одно целое учение, исходя в своем изложении из
определенных установленных положений и выводя из них
единообразными методами рассуждения все необходимые теоремы,
выводы и следствия. ...Автору удалось более тесным образом связать
классическое учение Мёбиуса об устойчивости равновесия с
изложенными выше вопросами и ... внести упрощения в
рассматриваемый сложный вопрос. ...Достоинство сочинения заключается
в ясном и простом изложении изучаемого вопроса...».
За эту конкурсную работу Иван Михайлович получил золотую
медаль.
Отмеченными качествами первого научного сочинения Ивана
Михайловича характеризуется вся его дальнейшая научная и
педагогическая деятельность в Харьковском Технологическом —
Механико-машиностроительном — Политехническом институте.
Профессор И. М. Бабаков — автор уникального учебника «Теория
колебаний», получившего мировое признание и трижды
переизданного за два десятилетия после первого выхода в свет. В 1962 г.
книга была опубликована в Китае.
Известно, что в рабочем кабинете академика С. П. Королева
книга И. М. Бабакова была настольной. Многие
фундаментальные научные результаты, полученные И. М. Бабаковым в
области теории колебаний, хорошо известны в мировой литературе и
навсегда стали связанными с его именем. Эти результаты и труды
Ивана Михайловича Бабакова до настоящего времени сохраняют
свою первоначальную ценность и широко используются в вузах
при подготовке инженеров и в научных исследованиях.
Многие поколения специалистов, воспитанных институтом, с
которым была связана вся жизнь Ивана Михайловича Бабакова,
с любовью и благодарностью вспоминали и вспоминают этого
прекрасного талантливого и требовательного педагога.
При образовании кафедры теоретической механики в
Харьковском технологическом институте в штате кафедры под
руководством И. М. Бабакова работали профессор А. В. Панченко;
ассистент В. Г. Фесенко, впоследствии ставший известным
астрономом, академиком; ассистент Я. Л. Геронимус, позже ставший
профессором, известным ученым в области механики.
592
Об авторе
В 1930 г. ХТИ был разделен на пять вузов, и кафедра
теоретической механики во главе с И. М. Бабаковым была переведена в
Харьковский механико-машиностроительный институт. В те
годы на кафедре под его руководством начали работать молодые
преподаватели А. С. Вольмир, А. И. Погорелов, С. М. Куценко,
впоследствии ставшие профессорами, выдающимися учеными и
педагогами, воспитавшими не одно поколение своих учеников.
Так через Ивана Михайловича Бабакова прошла нить,
связывающая нынешних ученых — механиков и математиков — с их
выдающимися предшественниками — А. М. Ляпуновым, В. А. Стекло-
вым, в свою очередь воспитанными П. Л. Чебышёвым.
Иван Михайлович Бабаков бессменно заведовал кафедрой
теоретической механики университета с 1925 по 1962 г., а позже,
почти до 1974 г., он весьма плодотворно работал на этой кафедре
профессором.
Умер Иван Михайлович Бабаков на 84-м году жизни в 1974 г.
До последних дней он оставался активно работающим
профессором кафедры.