/





































































































































































































































































Текст
ш
S
3
ш
СП
о
I
S
п-
$
элект
Р. Г. ДЖЕКСОН
Новейшие
датчики
ТЕХНОСФЕРА
ики
АРЗАМАС
МОСКВА
ВОЛОКОННО-ОПТИЧЕСКИЕ ДАТЧИКИ ВРАЩЕНИЕ
СЕРИИ ВГ(910.941, 949' 95||йн разработка произволе—
МИНИАТЮРНЫЕ РАЗМЕРЫ
ВЫСОКАЯ ТОЧНОСТЬ
УНИКАЛЬНЫЕ ТЕХНОЛОГИИ
Наши приборы являются одгеыи
из самы> на летяги» в икре
Размер позволяет обратить
эиерг опотреблетые.
Приборы обладают высотой
точностью и удобством
жсплуаташ* (быстрое
включение, лоостой
интерфейс)
При производстве применяются
vrwa«*>Tt>e технолог»*, что
.лттнчес»-ж потери и
>.*тп»ызи(>хатг иен> |
VG035 PARAMETERS
нечувствительностью х электромагнитным полям, что
обуславливает значительно лучшую помехоустойчивость
оптических измерительны» устройств. Более того, используемое
Input range 100 deg/s
Scale Factor 20 mWdeg/s
Frequency range 0 450 Hz
Noise 0.01 mVl/Hz
Bias variation- 0 005 mV
SF variation’ 005%
SF temp change 0 05 % par °C
Readiness time 01s (analog)
Is (digital)
’ RMS steady state
Temperature operatong -30X... *T0*C
MTBF 50,000 hours
Power 1.5 Watt
Weight 300 gram
129626, Москва, Проспект Мира, 100
тел.: +7 495 728 42 18, факс: +7 495 728 42 19
e-mail: info@fizoptika.ru www.Fizoptika.com
Р.Г. ДЖЕКСОН
Новейшие
датчики
Перевод с английского
под редакцией
В.В. Лучинина
ТЕХНОСФЕРА
Москва
2007
Джексон Р. Г.
Новейшие датчики
Москва:
Техносфера, 2007. - 384 с. ISBN 978-5-94836-Ш-6
Стремительный рост разработок и применения датчиков на
основе ранее не использовавшихся физических принципов и
внедрения новых технологий для реализации известных эффек-
тов стимулирует появление современных руководств.
В учебнике-монографии изложены многие недавно сформи-
ровавшиеся или обновившиеся направления сенсорики, вклю-
чая измерительную микромеханику, датчики на ПАВах, опти-
ческие, ионизационные и магнитные, химические микросен-
соры, оптико-волоконные и интеллектуальные измерительные
системы, расходометрию для нестационарных потоков и ряд
других.
Series io Sensors
Novel Sensors and Sensing
R G Jackson
ЬР
Institute of Physics Publishing
Bristol and Philadelphia
©2004, Taylor&Francis Group LLC. Перевод с английского
языка издания Института Физики, входящего в состав
Taylor&Francis Group LLC. Все права защищены
© 2006, ЗАО "РИЦ "Техносфера", перевод на русский язык,
оригинал-макет, оформление
ISBN 978-5-94836-111-6
ISBN: 0-7503-0989-Х (англ.)
ООО “ЭКМ”, 109029, г. Москва, ул. Нижегородская, д. 32
www.ecw.com.ru, тел./факс: (495) 788-87-14
Содержание
Предисловие к изданию на русском языке.......... 23
Предисловие......................................... 25
Глава 1
Измерительные системы............................... 26
1.1. Введение....................................... 26
1.2. Философия измерений............................ 29
1.2.1. Случайные погрешности...................... 29
Стандартная погрешность измерений ($) ..... 31
Стандартная погрешность среднего (sm) ..... 32
Комбинирование среднеквадратических отклонений. 32
1.2.2. Систематические погрешности................ 32
1.2.3. Внешние помехи............................. 33
Сдвиг нуля, или эффект приращения.......... 33
Изменение чувствительности, или эффект коррекции ... 34
1.2.4. Проектирование системы и вклад погрешностей.... 34
Сложение/вычитание......................... 35
Умножение/ деление......................... 35
Простое определение общей погрешности...... 35
1.3. Обобщенное понятие измерительной системы....... 37
1.4. Полная передаточная функция.................... 39
1.5. Динамическая характеристика сенсора............ 40
Передаточная функция датчика температуры....... 41
1.6. Измерительная система как последовательность много-
полюсников ......................................... 43
Литература..................................... 47
Ссылки......................................... 47
Упражнения..................................... 47
Глава 2
Резонансные сенсоры................................. 51
2.1. Введение....................................... 51
2.2. Генератор затухающих гармонических колебаний....... 52
2.2.1. Свободные колебания системы................ 53
2.2.2. Возбужденный генератор..................... 53
2.2.3. Добротность............................... 56
2.2.4. Способы управления......................... 59
Программы Matlab........................... 60
НИИФИ
предлагает датчики, преобразователи, системы
для ракетной, космической, авиационной техники,
АЭС, железнодорожного транспорта
и других отраслей промышленности
Россия, 440026, г. Пенза, ул. Володарского, 8/10
Телефон: (841-2) 565-563, 562-616: факс: (841-2) 551-499
E-mail: niifi@sura.ru, http:// www.niifi.ru
Содержание
2.3. Сенсоры на вибрирующем проводе.................. 61
2.4. Крутильно-вибрационный стержень................. 62
2.5. Продольно вибрирующая пластина.................. 63
2.6. Резонаторы на изгибающихся структурах........... 64
Изгибающаяся пластина....................... 64
Изгибающаяся труба.......................... 64
Изгибающаяся трубка......................... 65
2.7. Вибрирующий цилиндр............................. 66
2.8. Колеблющееся разветвление....................... 67
2.9. Структура на основе двойного разветвления....... 68
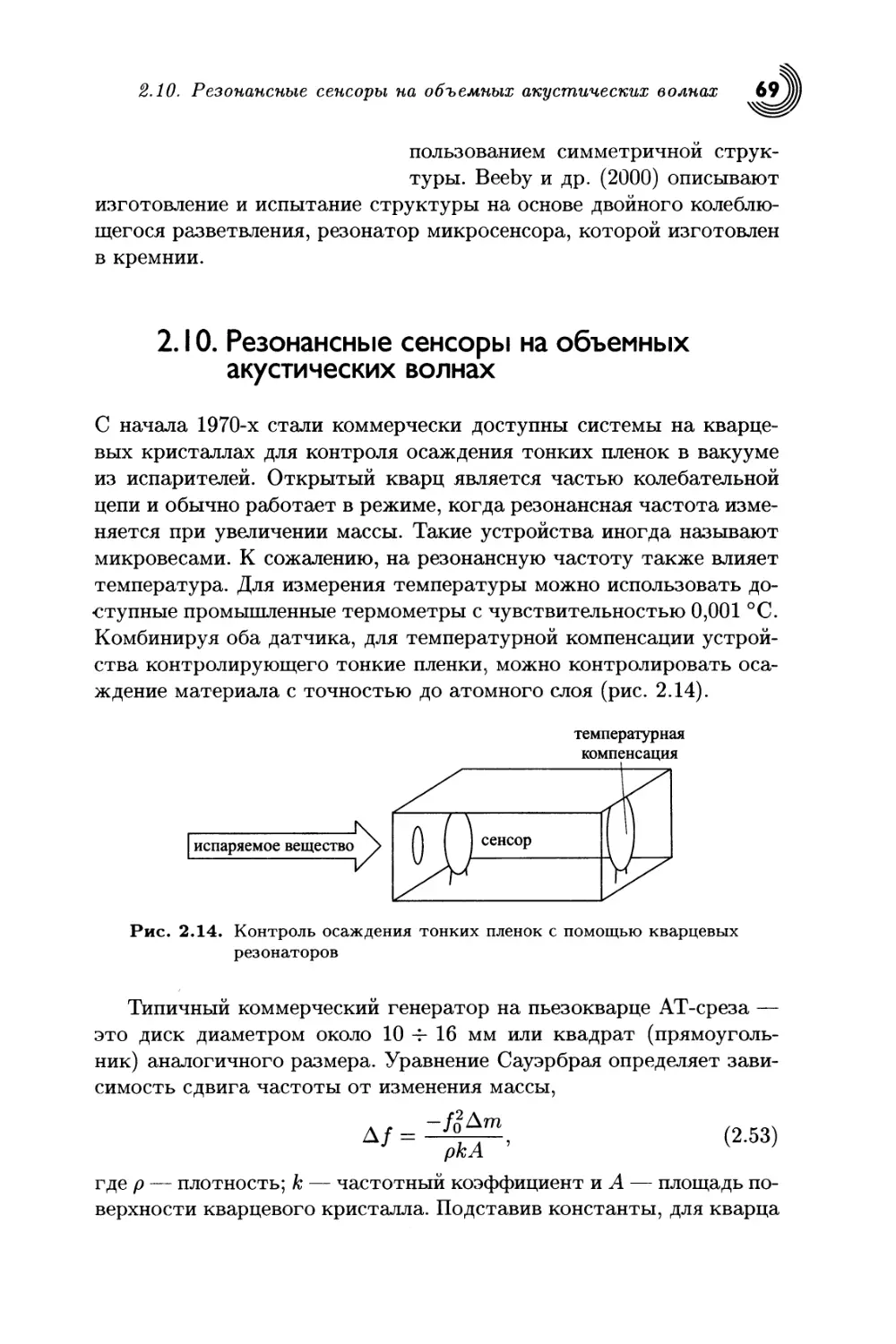
2.10. Резонансные сенсоры на объемных акустических волнах ... 69
2.11. Толстые пленки................................. 70
Литература...................................... 72
Упражнения...................................... 73
Глава 3
Датчики на основе полупроводников.................... 75
3.1. Введение........................................ 75
3.2. Механические микросенсоры....................... 76
3.2.1. Применение кремния для измерения деформации.. 78
Устройства на основе р-п-переходов.......... 78
Тензорезистивные приборы.................... 78
3.2.2. Датчики давления............................ 79
3.2.3. Акселерометры............................... 82
Тензорезистивный метод...................... 84
Емкостной метод............................. 85
Пьезоэлектрический метод.................... 86
Резонансный метод........................... 86
Метод уравновешивающей силы................. 86
3.2.4. Датчики потока.............................. 87
Термические................................. 87
Резонансные датчики......................... 88
Емкостные................................... 88
3.2.5. Датчики угловой скорости.................... 89
3.3. Датчики на поверхностных акустических волнах (ПАВ) ... 90
Резонаторные датчики на ПАВ................. 91
Датчики на основе линий задержки на ПАВ...... 92
3.3.1. Датчики массы, газовые сенсоры и датчики влаж-
ности............................................. 93
3.3.2. Датчики температуры......................... 94
ОАО «Элпа»
124460 г. Москва, Зеленоград, РФ
Телефоны: (495) 530-00-31,
(495) 530-13-10
(495) 534-22-67
info@elpapiezo.ru
www.elpapiezo.ru
Факс:
Датчик ускорения
Приемо-излучающий
датчик
Г ироскопы
Трехкоординатные
сейсмодатчики
Г идрофон
Разработка и производство пьезокерамических
материалов и устройств на их основе:
датчики различных типов и различного назначения,
пьезокерамические элементы (диски, цилиндры,
кольца и пр.),
микроактюаторы (многослойные, пленочные,
армированные),
микродвигатели,
гироскопы различного назначения,
трансдьюсеры,
пьезокерамические трансформаторы,
пьезокерамические фильтры,
изделия на основе пьезопленок,
гидроакустические модули,
изделия акустоэлектроники:
фильтры и резонаторы на ПАВ,
генераторы на ПАВ с ФАПЧ,
датчики различного назначения,
8 Содержание
3.3.3. Датчики деформации........................... 95
3.3.4. Датчики магнитного поля...................... 95
3.3.5. Заключение................................... 96
3.4. Химические микросенсоры.......................... 96
3.4.1. Ионы в растворах............................. 97
3.4.2. Измерение pH................................. 98
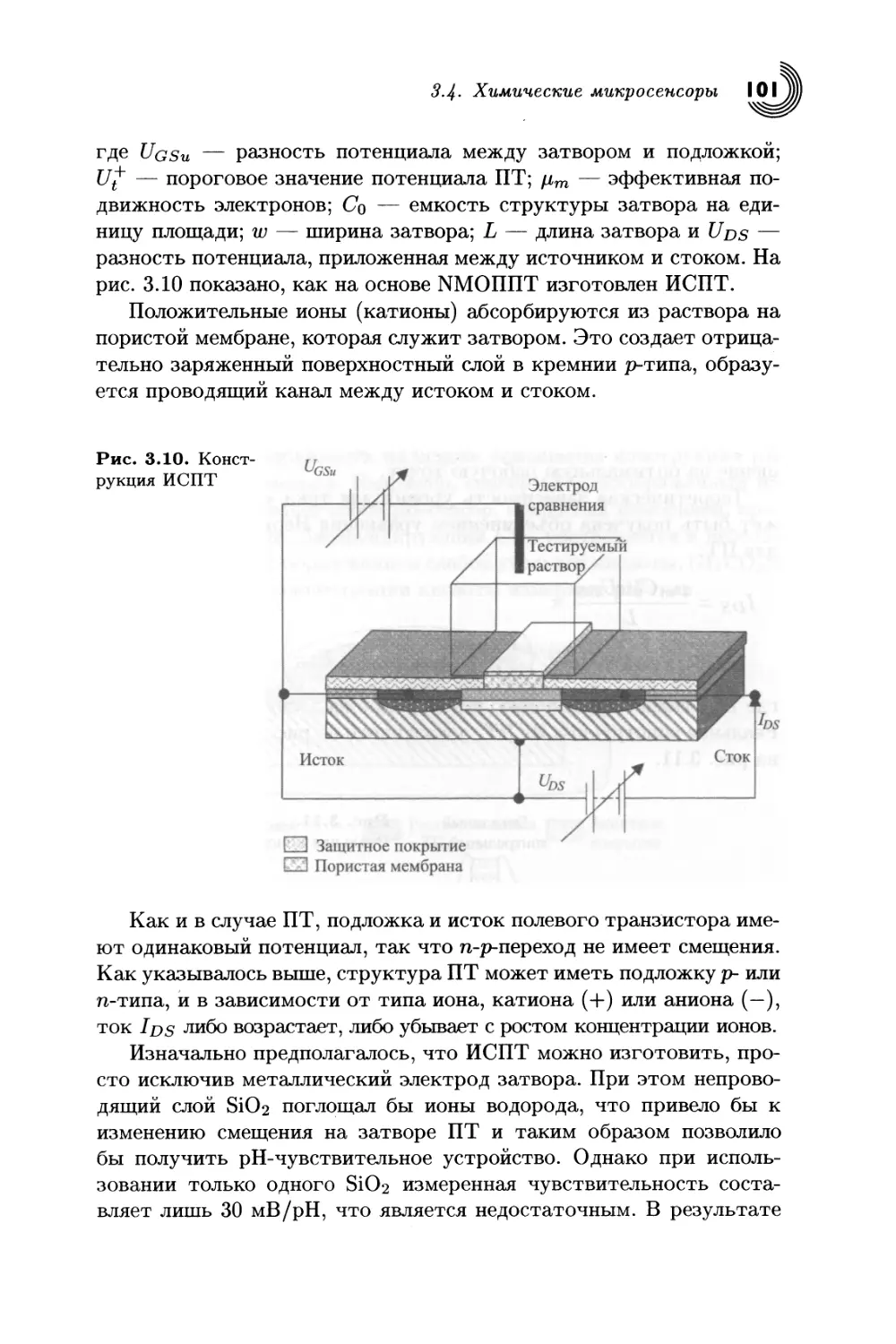
3.4.3. Ионно-селективные полевые транзисторы........ 99
3.4.4. Газовые сенсоры на основе ПТ.................103
3.4.5. Биосенсоры...................................104
3.4.6. Заключение...................................104
3.5. Оптические сенсоры...............................105
3.5.1. Корпускулярно-волновой дуализм...............105
3.5.2. Определения и единицы........................106
Фотометрические единицы системы СИ...........107
Сила света (I) — кандела (кд)................107
Световой поток (99) — люмен (лм).............107
Освещенность — люкс (лк).....................108
Яркость (кд/м2}..............................108
Чувствительность глаза.......................108
Практические фотометрические единицы.........108
Энергетическая спектральная интенсивность
источника S(A)...............................109
Яркость В....................................109
Поток излучения R............................110
Диффузный источник...........................110
3.5.3. Источники света...............................ПО
Тепловые самосветящиеся объекты...............ПО
Газоразрядные лампы..........................112
Светодиоды (СД)..............................113
Лазеры.......................................115
3.5.4. Типы сенсоров................................116
а) Детекторы с поверхностным фотоэффектом.....117
Фотоумножитель...............................117
б) Полупроводниковые фотодетекторы...........118
Фотосопротивления............................118
Фотодетекторы с р-п-переходом................119
Фотодиоды....................................119
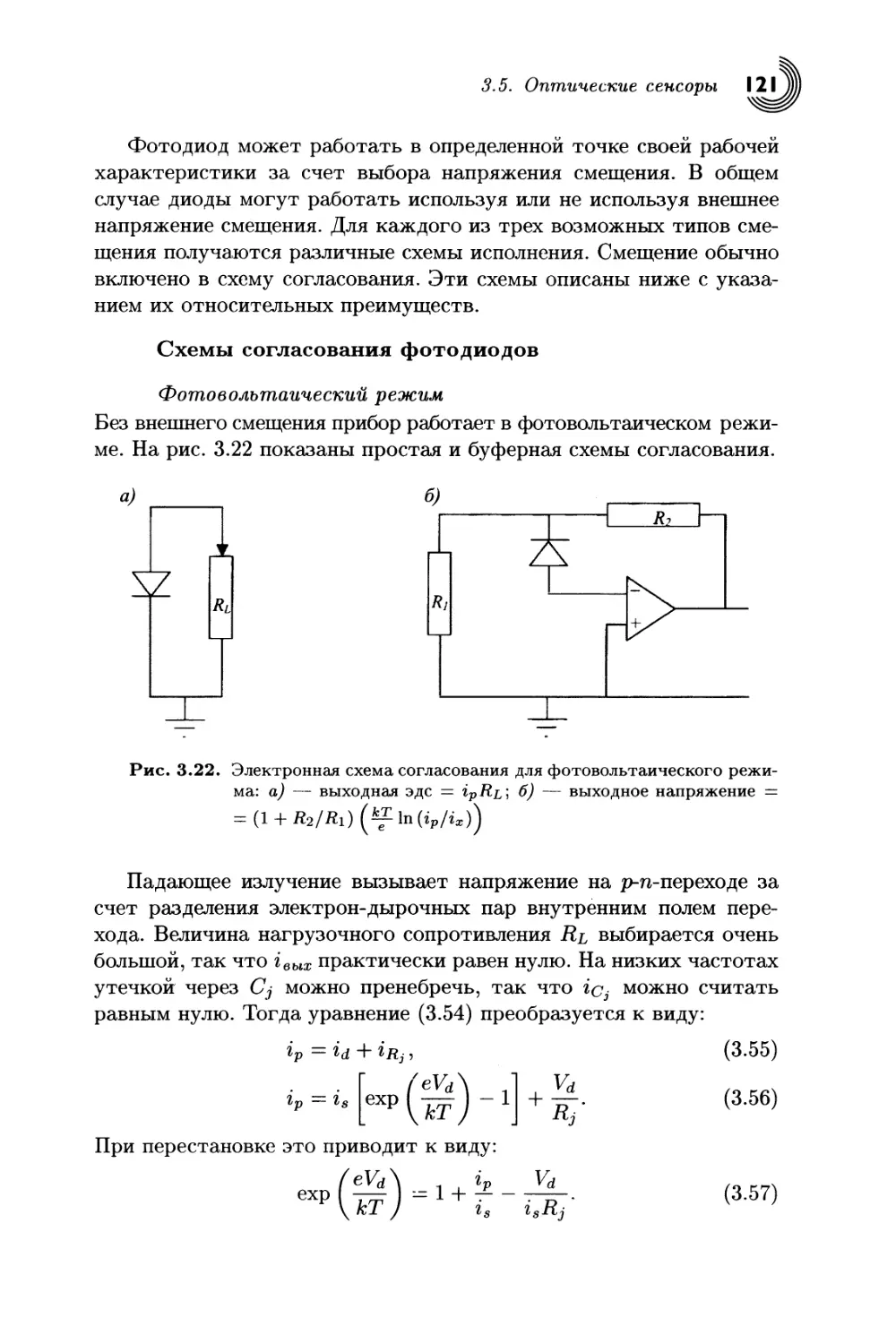
Схемы согласования фотодиодов................121
Фотовольтаический режим.................... 121
Режим фотопроводимости и фотоамперный режим.... 123
ФГУП “НИИ физических проблем
им. Ф. В. Лукина”
Универсальный кристалл к датчикам расхода,
выполненный по микросистемной технологии
• Принцип работы:
калориметрический;
термоанемометрический.
• Конструкция: многослойная
диэлектрическая мембрана
(толщина ~1 мкм) на кремниевой
рамке-основании.
Размер мембраны 756 х 1200 мкм.
Размер кристалла 3.1 х 4 мм.
• Чувствительные и нагревательные
элементы: тонкопленочные
платиновые резисторы
• Номиналы резисторов: 100-2000 Ом
• Воспроизводимость номиналов: 2%
• Способ нагрева: прямой; косвенный
• Температура нагрева: 2ОО...5ОО'С
Разрез кристалла • Предполагаемый объем выпуска:
Топология
Вид кристалла
на держателе
100 тыс. шъ/год
Характеристики, которые обеспечивает кристалл в датчике:
Минимальный расход, м3/ч 0,003
Максимальный расход, м3/ч 16
Точность, % ± 2
Рабочий диапазон температур, иС -10... +50
Время отклика, мс 5
Планируемые области применения
Счетчик расхода
газа и жидкости
для топливных
магистралей
и ЖКХ
Датчик контроля
расхода осушенного
воздуха
в телефонных
кабелях
Счетчик расхода
газа для ЖКХ
Датчик массового
расхода воздуха
для автомобилей
124460, Москва, Зеленоград, пр. 4806, д. 6
Тел.:531-02-76 Факс:531-55-92
Web: www.niifp.ru E-mail: admin@niifp.ru
Содержание
Фотодиод с р-п-переходом.....................124
PIN-фотодиод.................................124
Диод Шоттки..................................125
Лавинный фотодиод............................125
Фототранзисторы..............................125
Коммерчески доступные приборы................126
Приборы с зарядовой связью как оптические сенсоры... 126
Чувствительность.............................127
Зарядовая связь..............................128
Оптический ПЗС-прибор........................128
Тройная ПЗС-система..........................131
Прерыватель светового пучка..................131
Фильтры на пикселях..........................132
Фотоячейки переменной глубины................132
3.6. Датчики температуры..............................133
3.6.1. Тепловой датчик инфракрасного излучения......133
Термоэлементы и термопары....................133
Болометры....................................134
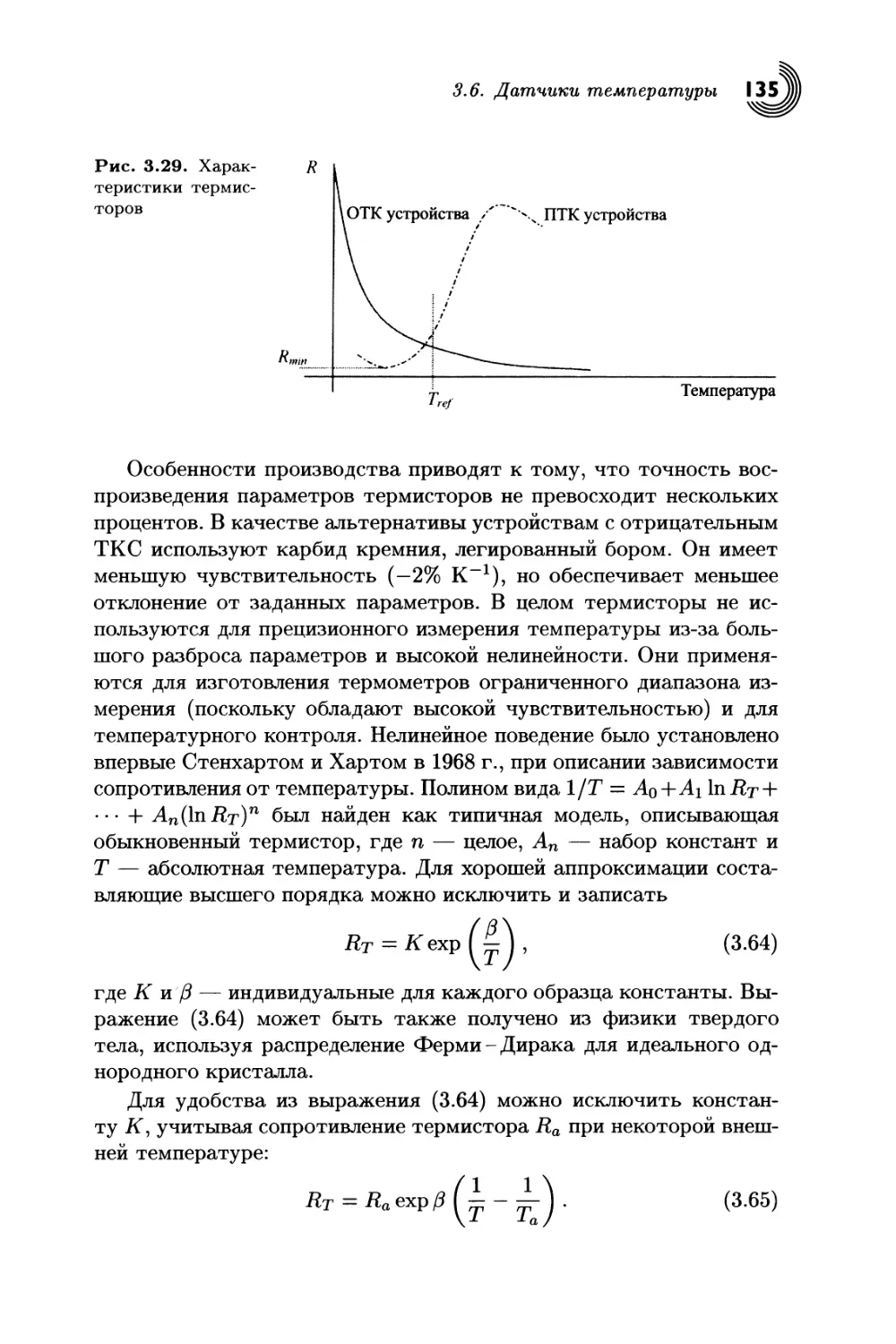
3.6.2. Термисторы...................................134
3.6.3. Температурные сенсоры в интегральных микросхемах... 137
3.7. Детекторы ионизирующего излучения................138
3.7.1. Радиоактивность..............................138
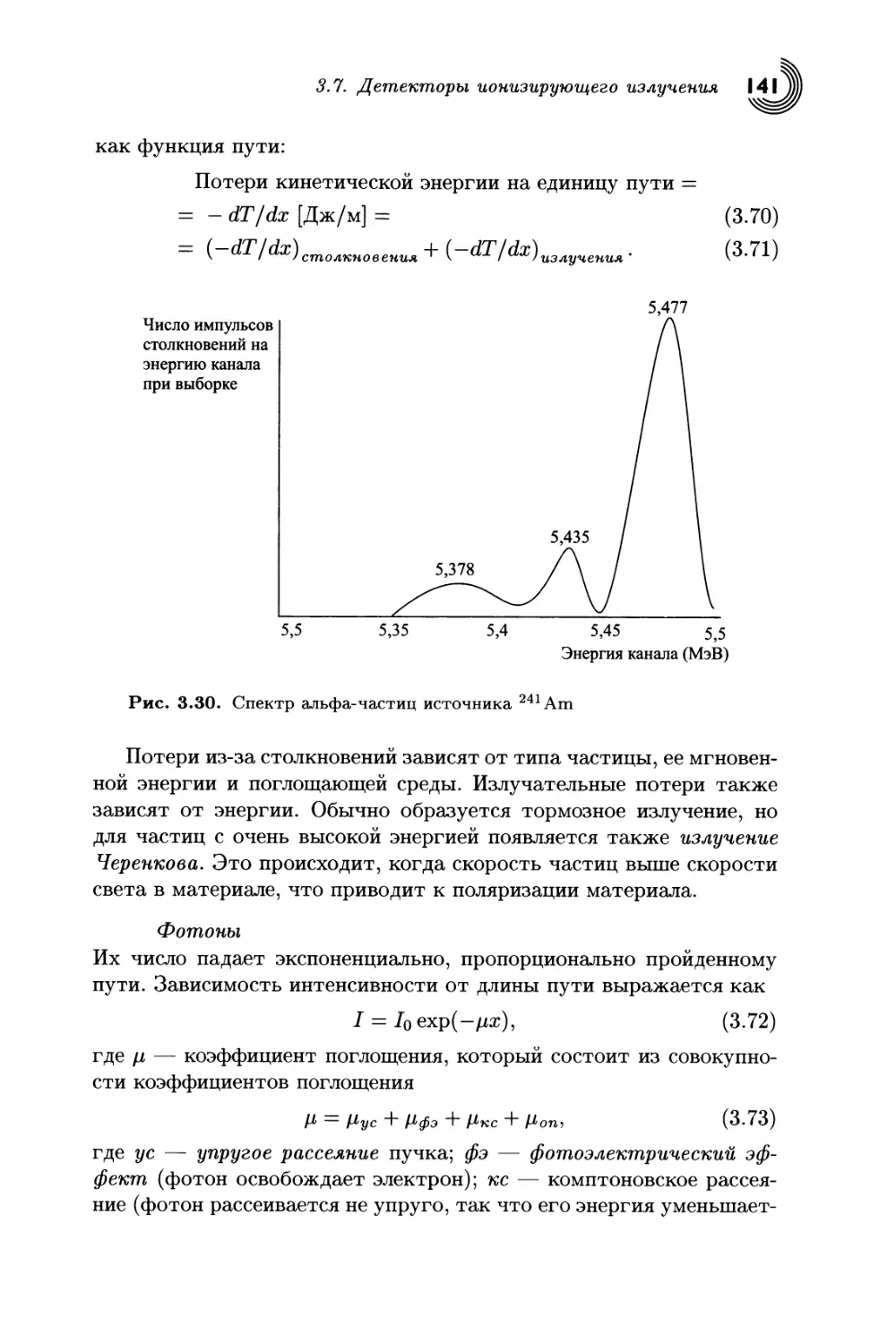
3.7.2. Регистрация и спектры........................140
3.7.3. Процессы поглощения..........................140
Заряженные частицы...........................140
Фотоны.......................................141
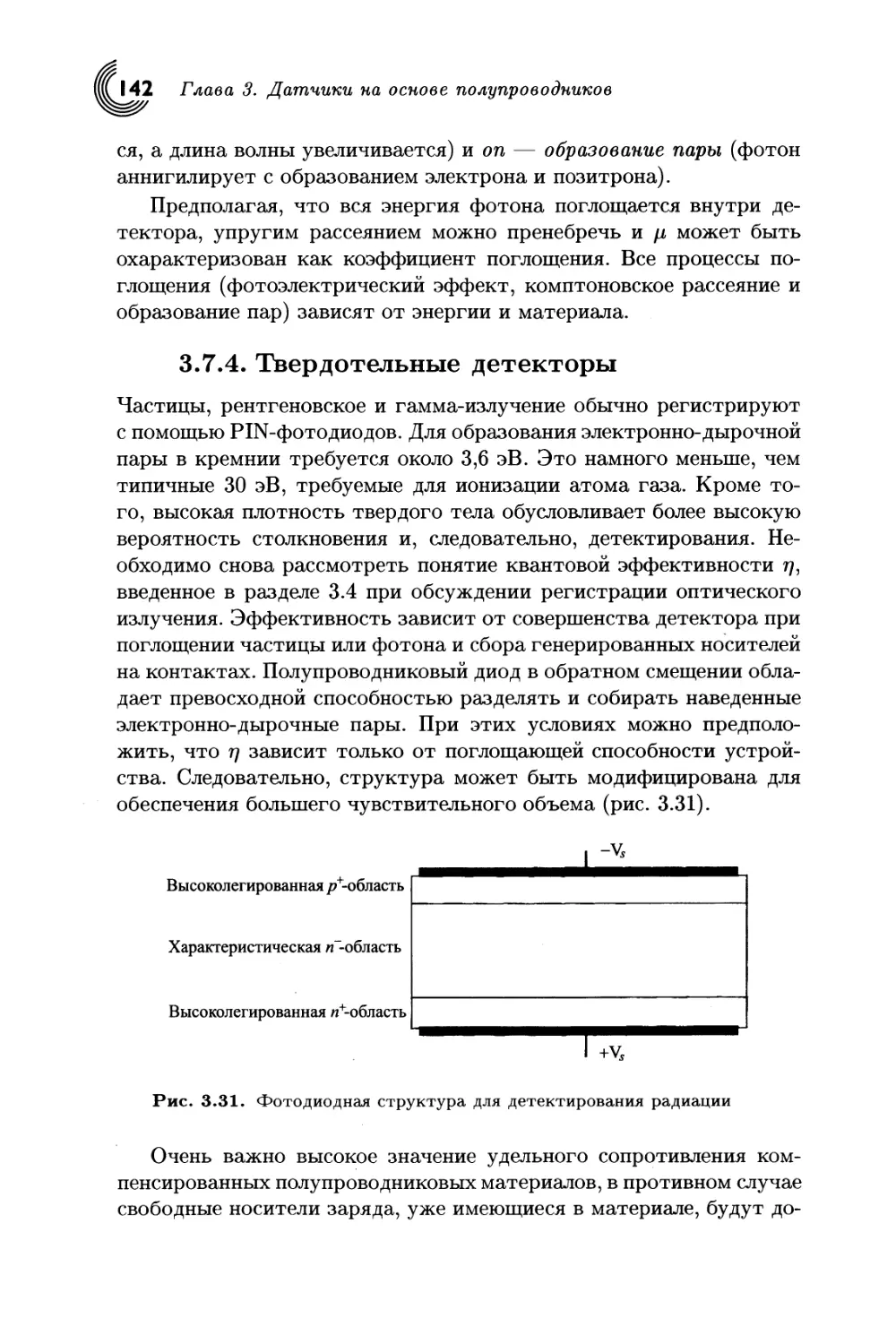
3.7.4. Твердотельные детекторы......................142
Детектирование частиц........................143
Детектирование фотонов.......................143
ПЗС-камеры для рентгеновского излучения......144
3.8. Магнитные датчики................................145
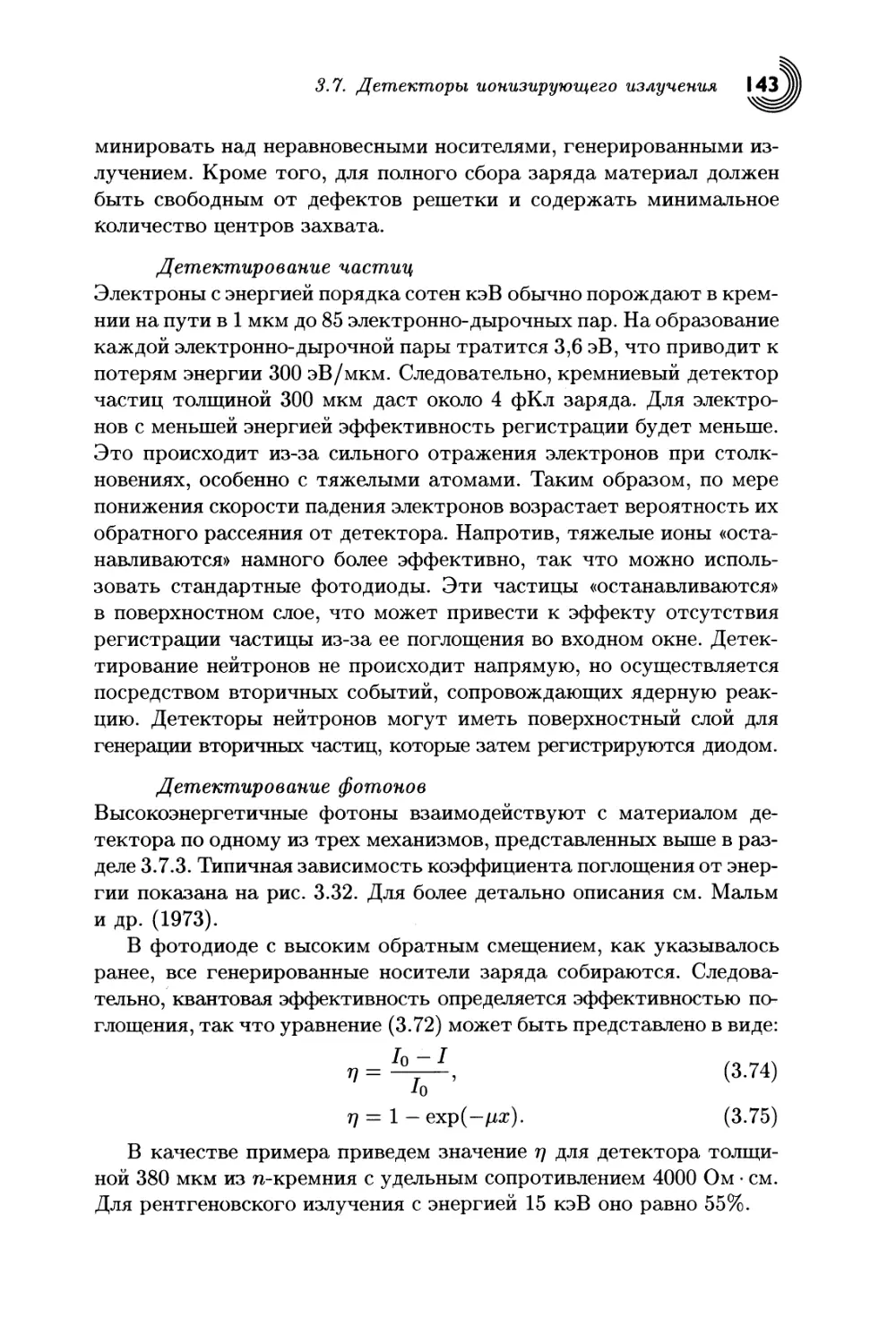
3.8.1. Эффект Холла.................................146
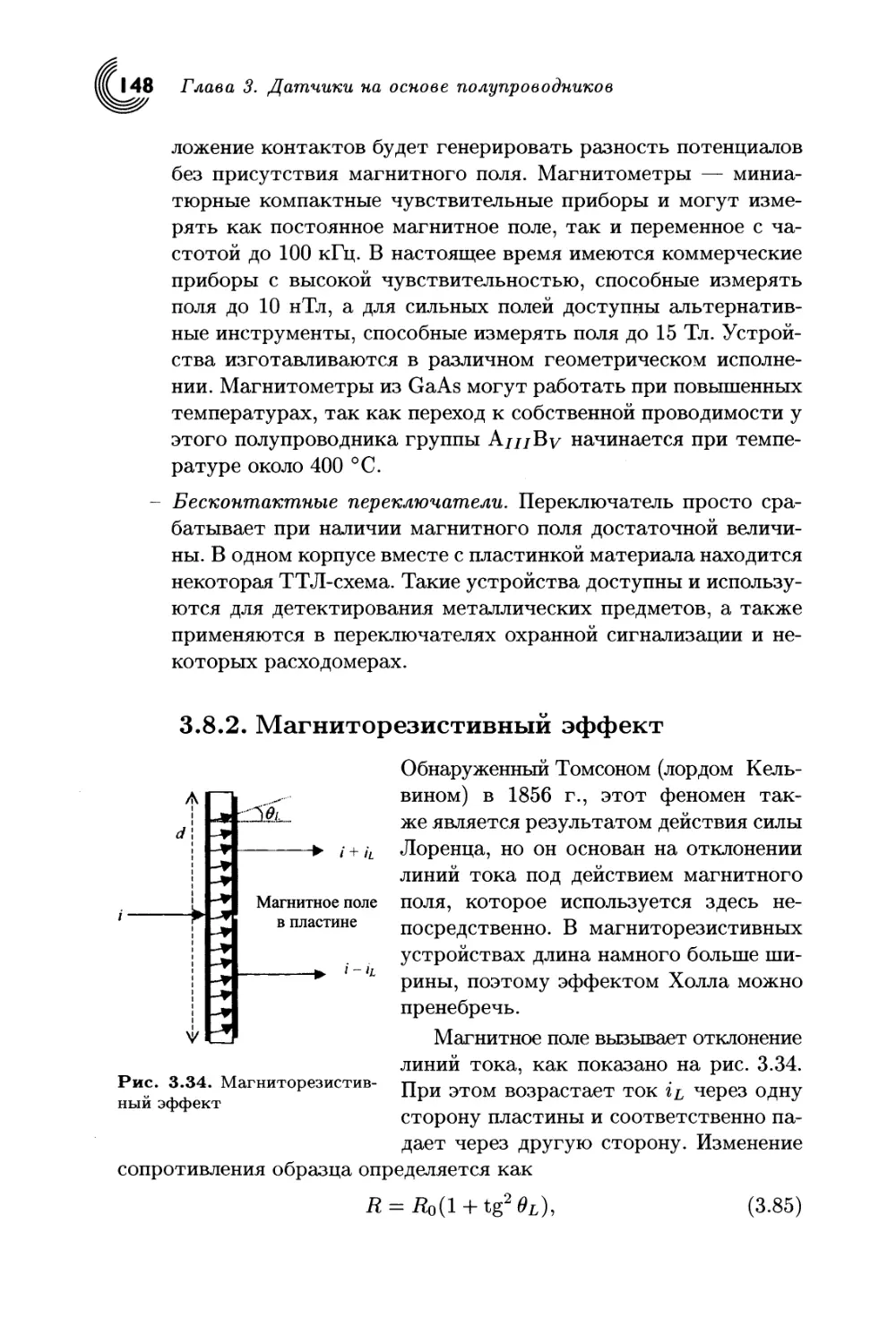
3.8.2. Магниторезистивный эффект....................148
3.8.3. Магнитодиод..................................149
3.8.4. Магнитотранзистор............................150
Литература.......................................151
Ссылки...........................................152
Упражнения.......................................153
ЗОЛОТОЙ ШАР
представляет
торговую марку
KLASCHKA
Elektronik + Automation
ДАТЧИКИ:
импульсные, емкостные, пути и расстояния,
считыватели кода, индуктивные, оптические,
акустические, мощности, числа оборотов,
угла поворота, линейные.
КОНТРОЛЛЕРЫ
МОДУЛИ УПРАВЛЕНИЯ
БЛОКИ АВТОМАТИКИ
PACON
СО ВСТРОЕННОЙ
ЭВМ SERAB
ЦЕНТРАЛЬНЫЙ ОФИС:
Москва
Лубянский пр-д, 27/1
Тел.:(495)234-0110
Факс:(495) 956-3346
E-mail: sales@zolshar.ru
http://www.zolshar.ru
• www.zolshar.ru ,z
7.4'.'.
Содержание
Глава 4
Оптические волоконные сенсоры.........................157
4.1. Введение.........................................157
4.2. Оптический волновод..............................158
4.2.1. Принципы распространения света...............160
Теорема Гаусса...............................160
Закон Фарадея................................162
Теорема Ампера...............................162
Уравнения Максвелла..........................163
Ориентация полей в электромагнитной волне....164
Законы отражения и преломления...............165
Волна утечки.................................169
4.2.2. Ухудшение пропускания в оптических волокнах..171
Ослабление...................................171
Поглощение...................................171
Утечка моды..................................173
Рассеяние....................................173
Дисперсия....................................174
4.2.3. Технологии производства......................175
4.2.4. Сравнение оптических волокон
с электрическими линиями.....................176
4.3. Оптоволоконные сенсоры на основе внешних эффектов ... 176
4.3.1. Датчики перемещения..........................177
4.3.2. Позиционно-кодирующие устройства.............181
4.3.3. Сенсоры на основе эффекта поглощения.........183
4.3.4. Люминесцентные сенсоры.......................186
Флюоресцентные сенсоры.......................186
Фосфоресцентные сенсоры......................188
4.3.5. Сенсоры на основе полного внутреннего отражения.... 188
Торцевые сенсоры.............................189
Сенсор с боковой связью......................190
4.3.6. Пирометры....................................192
4.4. Оптоволоконные сенсоры на основе внутренних эффектов... 193
4.4.1. Физическая деформация........................193
Микроизгибы..................................193
4.4.2. Изменение длины оптического пути.............194
Магнитострикционный магнитометр..............197
Гидрофон.....................................198
Эффект Саньяка...............................198
ДЗТЧИКИ ДАВЛЕНИЯ
датчики влажности
датчики рясмода газа
датчики температуры
датчики усилия
ДАТЧИКИ ДЛЯ АВТОМАТИЗАЦИИ
Sens*rica
Москва 1и Щемиловским пер.
Д17/19. стр2
ТВЛ./ФОКС 4952230038
E-mail. Htfo&seasortca га
Содержание
4.4.3. Вращение поляризации.........................200
Поляризация с помощью стеклянной пластинки....200
Поляризация за счет двулучепреломления.......201
Поляризация за счет селективного поглощения..201
Магнитооптический эффект Фарадея.............203
Эффект Керра.................................205
Фотоупругий эффект...........................206
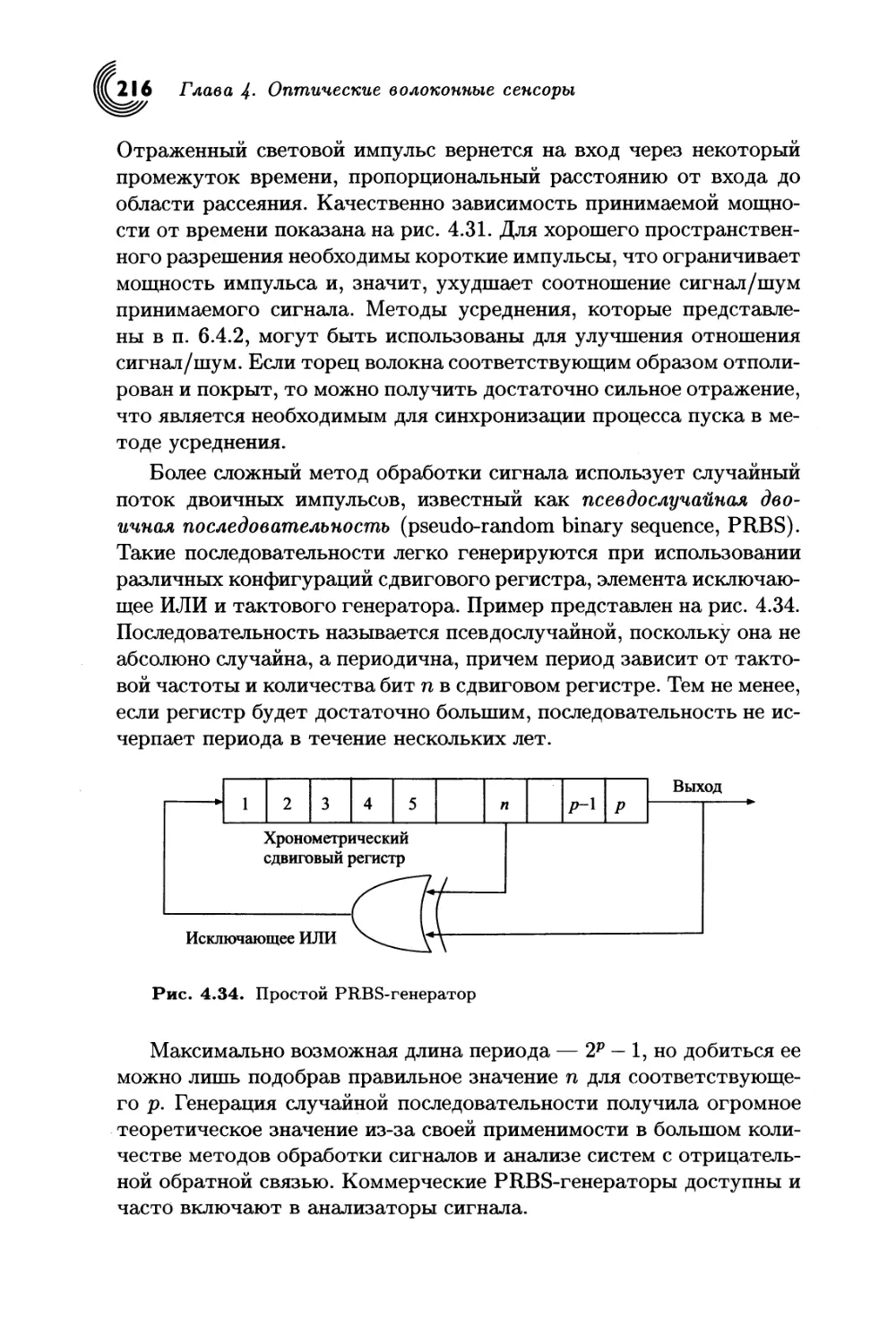
4.5. Распределенное зондирование......................210
4.5.1. Механизм регистрации.........................211
Рэлеевское рассеяние.........................211
Рамановское рассеяние........................212
Брюллиэновское рассеяние.....................214
Поляризация..................................215
Квазираспределейное зондирование.............215
4.5.2. Мультиплексирование..........................215
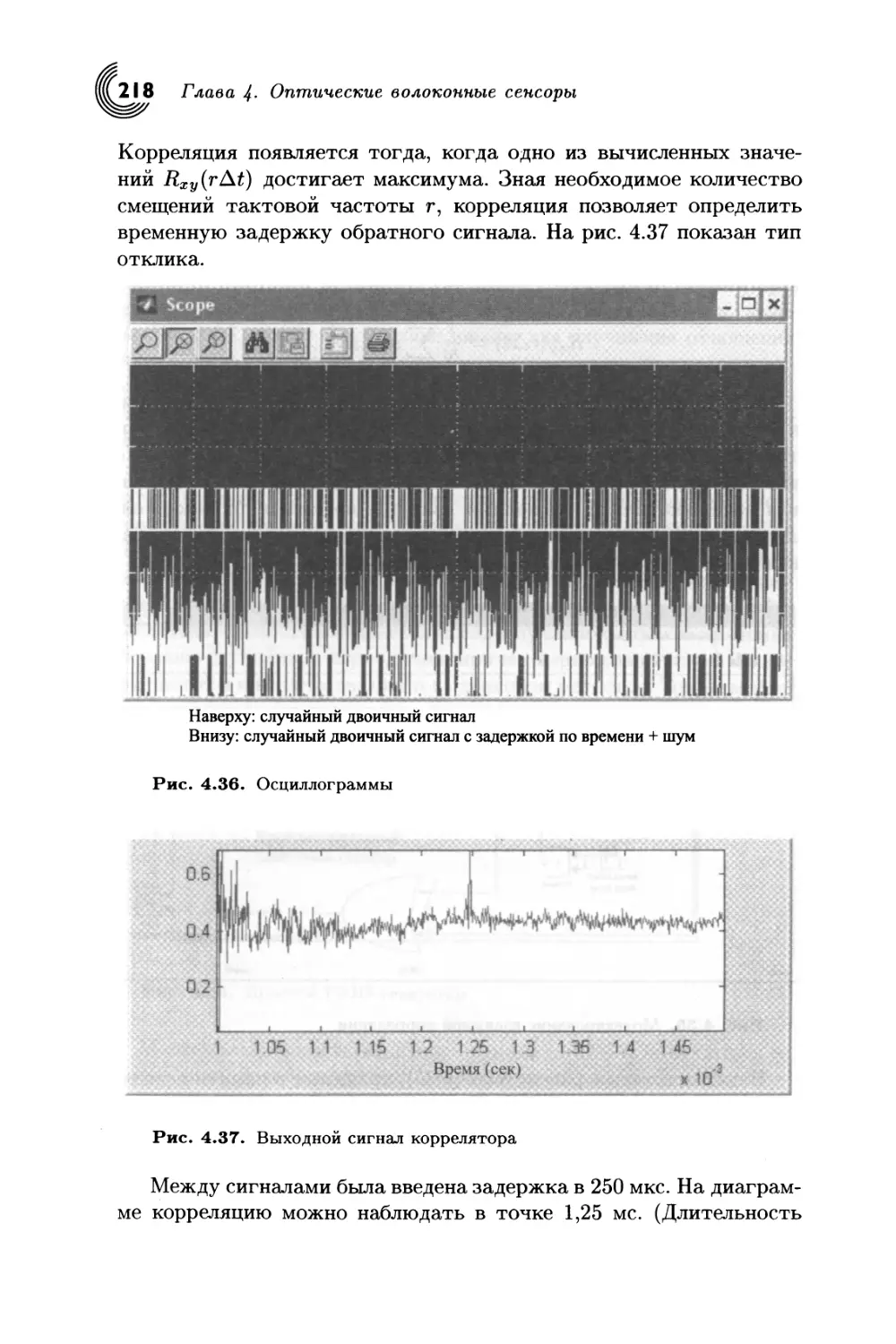
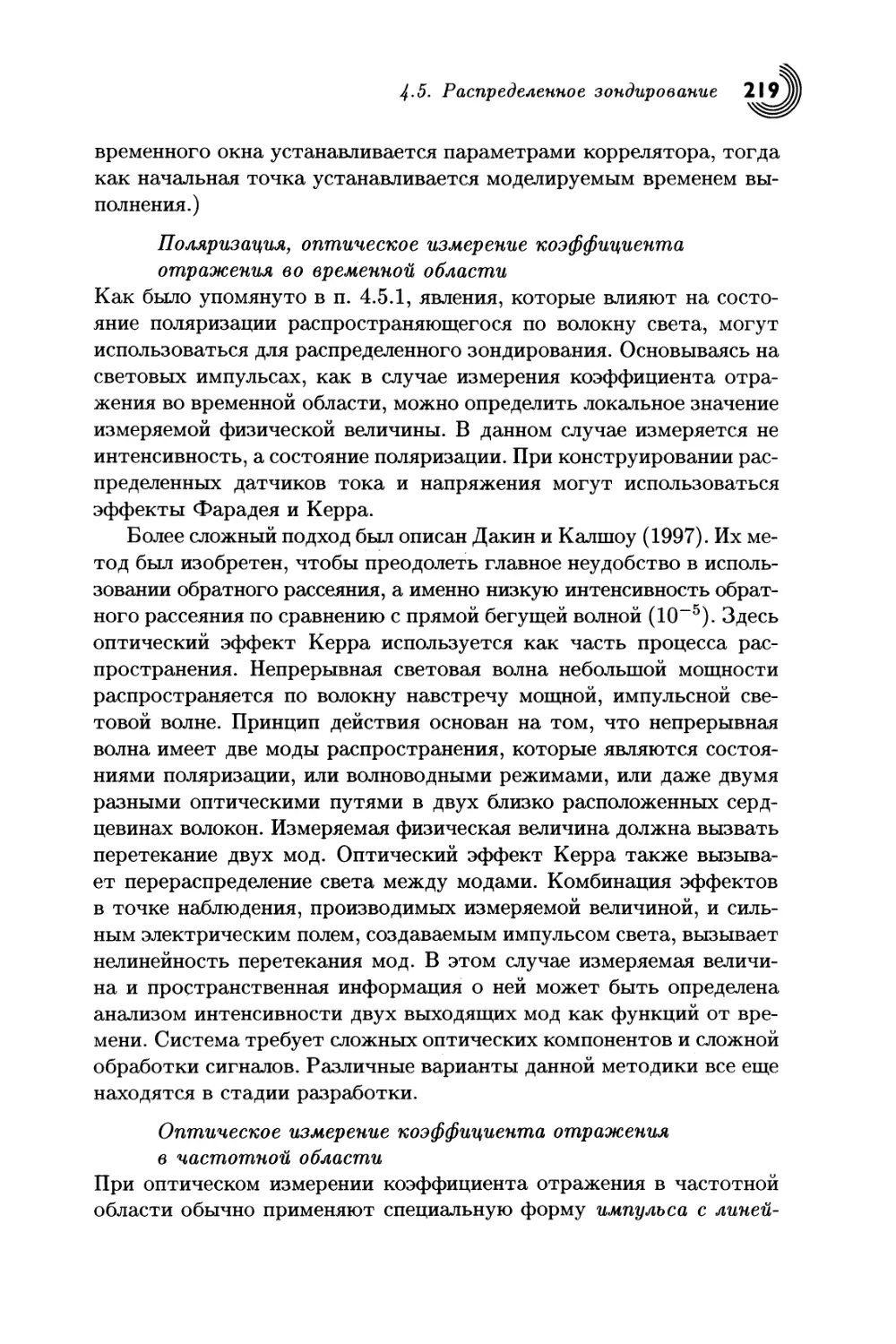
Оптическое измерение коэффициента отражения во
временной области............................215
Поляризация, оптическое измерение коэффициента
отражения во временной области...............219
Оптическое измерение коэффициента отражения
в частотной области..........................219
4.6. Методы эталонирования............................220
Двойное детектирование.......................221
Линия задержки...............................222
Модуляция длины волны........................222
Амплитудная модуляция........................223
Оптический мост..............................223
Ссылки...........................................225
Упражнения.......................................226
Глава 5
Интеллектуальные измерения............................229
5.1. Введение.........................................229
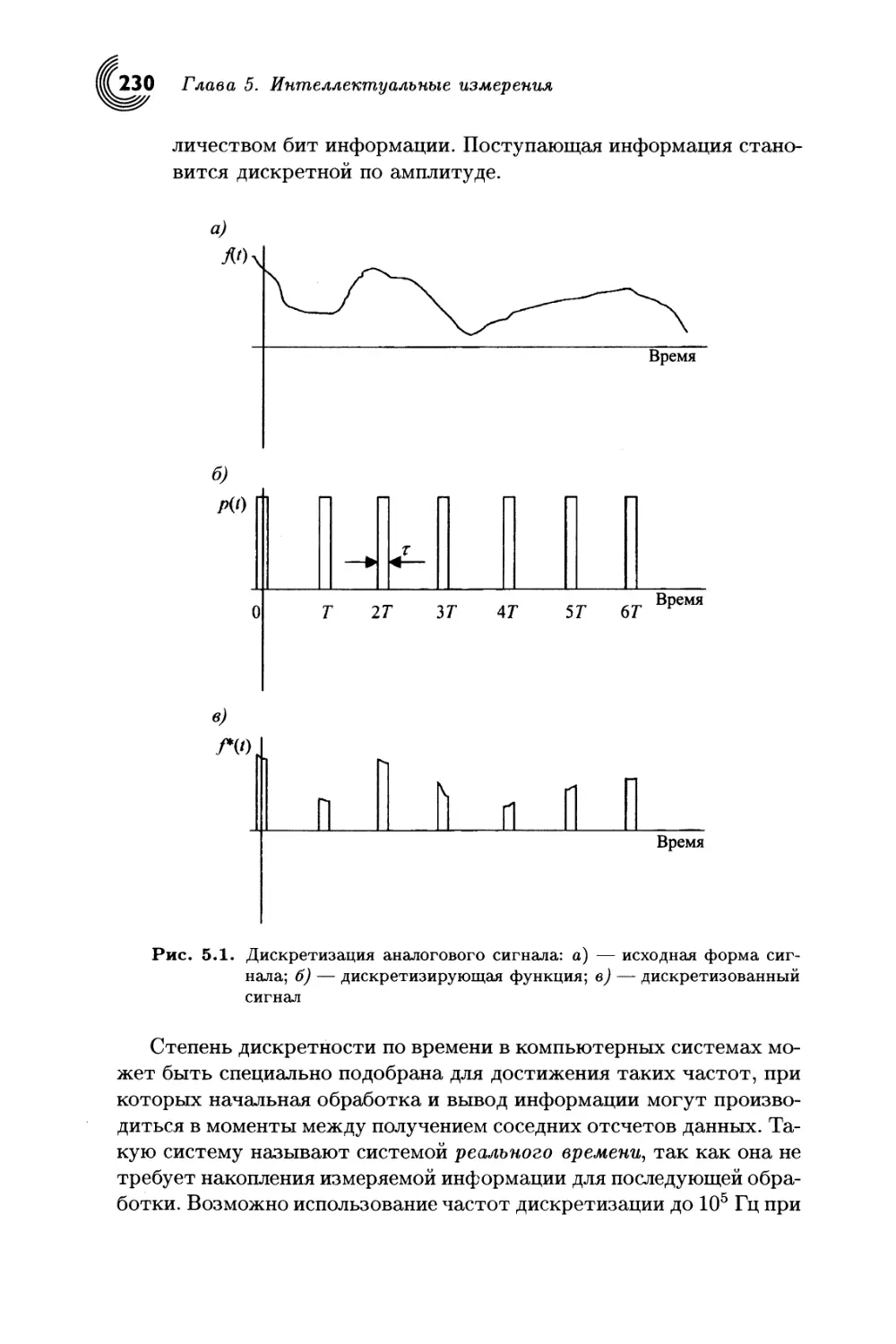
5.2. Разрывная дискретизация..........................231
5.3. Квантование измеряемой величины..................233
5.3.1. Цифро-аналоговый преобразователь.............234
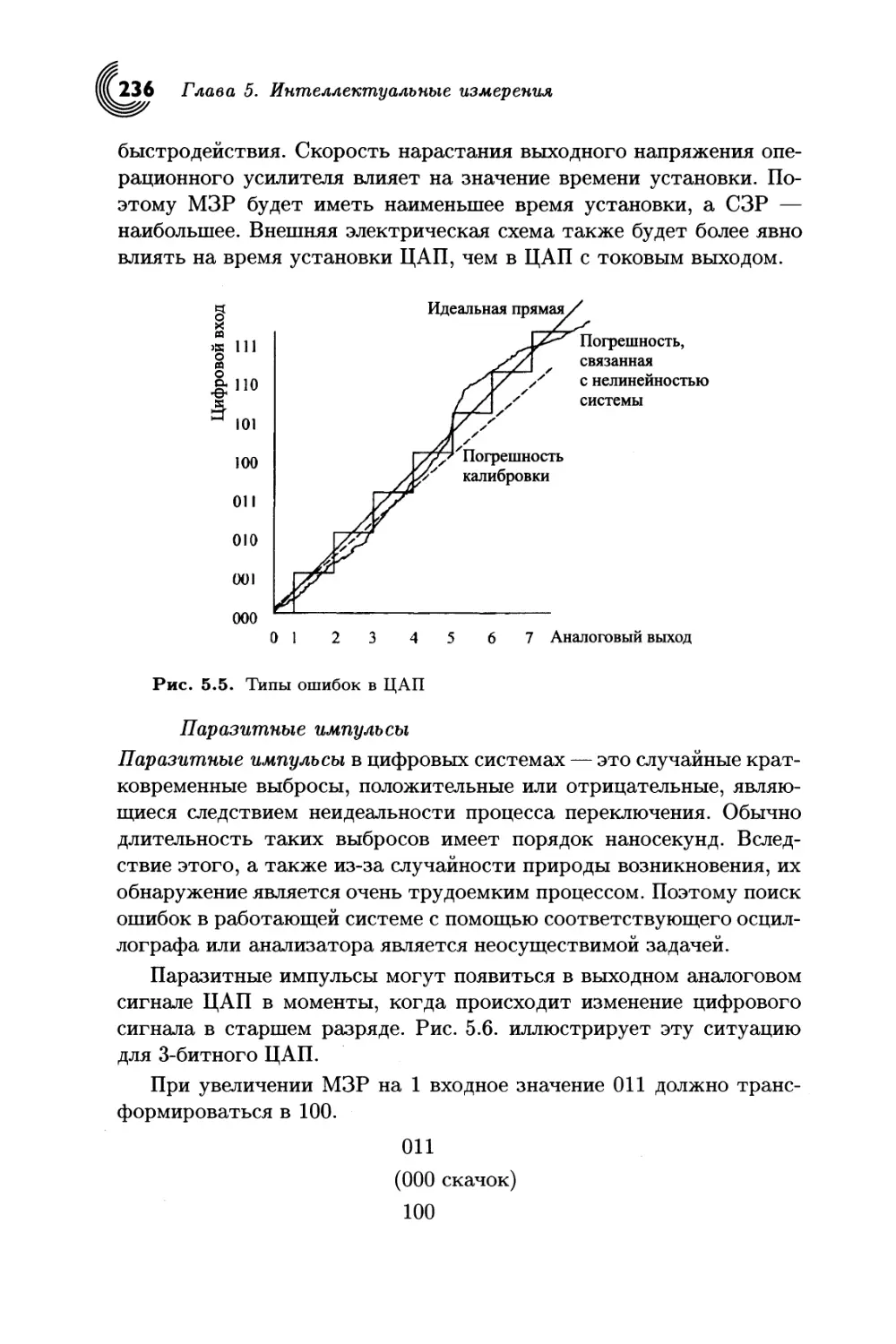
Время установки..............................235
Паразитные импульсы..........................236
5.3.2. Аналого-цифровое преобразование..............238
1. Параллельные, или мгновенно преобразующие АЦП... 239
www.sktbelpa.ru
СКТБ ЭлПА
Кварцевые резонаторы и датчики
РАЗРАБОТКА и
произаоАстао
дЯ1
Высокая точность, разрешающая
способность и долговременная
стабильность. \
Частотный выход,
позволяющий управляй
сигналом с помощью4^
микропроцессора. .ail
&
1I3*1 - - < Низкая стоимость
сравнению с зарубежными
0V аналогами.
Давление
Температура
Усилие
Ускорение
Влажность
152613 Ярославская обл., г. Углич, Рыбинское шоссе, 206.
Тел./факс (48532)54674, 53353. E-mail:info@sktbelpa.ru
Интернет: www.sktbelpa.ru
Содержание
2. АЦП с двойным интегрированием............239
3. Преобразователи с обратной связью........242
За. Преобразователь с последовательным приближе-
нием .......................................242
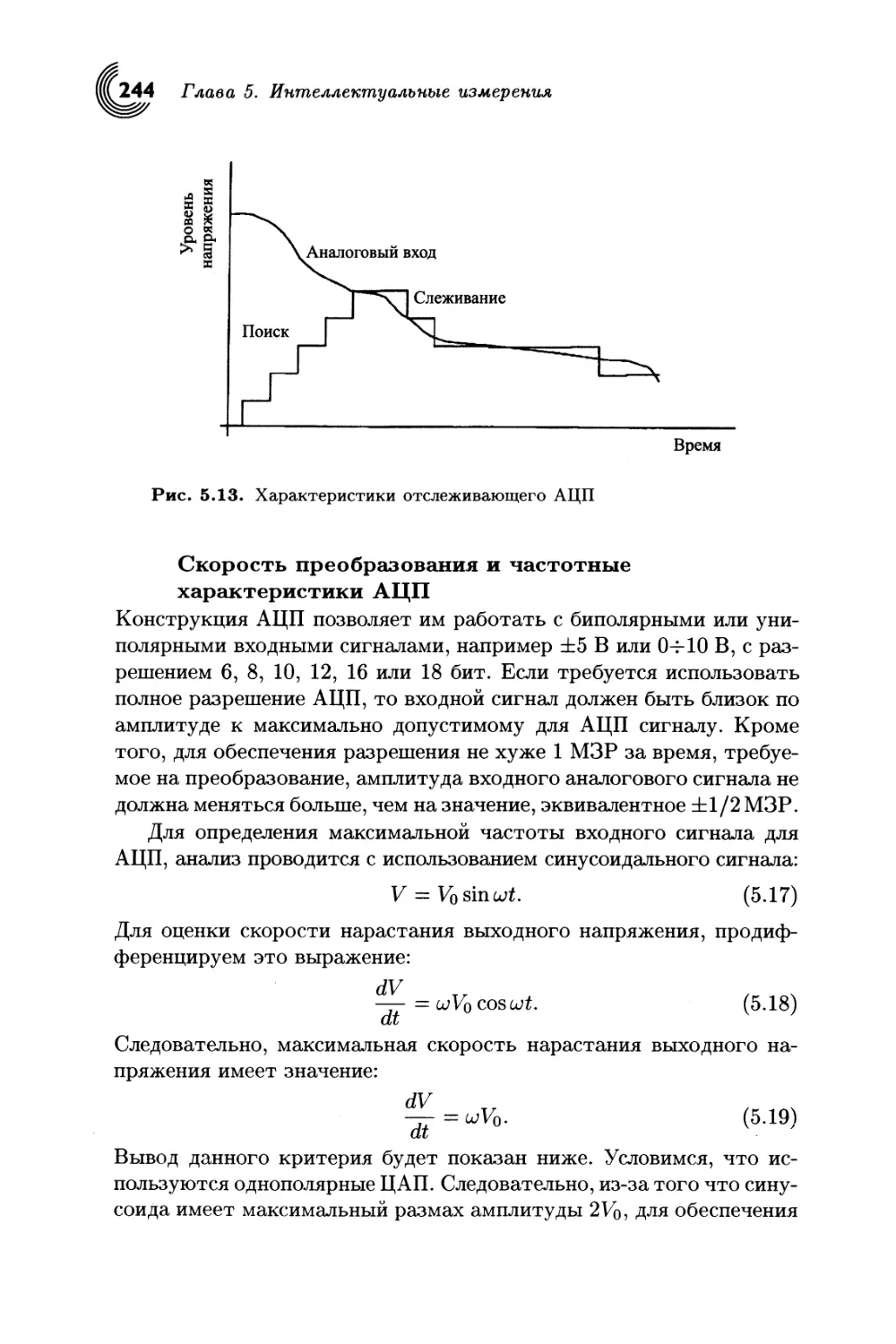
36. Отслеживающий преобразователь...........243
Скорость преобразования и частотные характери-
стики АЦП...................................244
Устройство дискретизации и хранения.........247
5.4. Платы сбора информации для ПК...................248
Критерий выбора.............................251
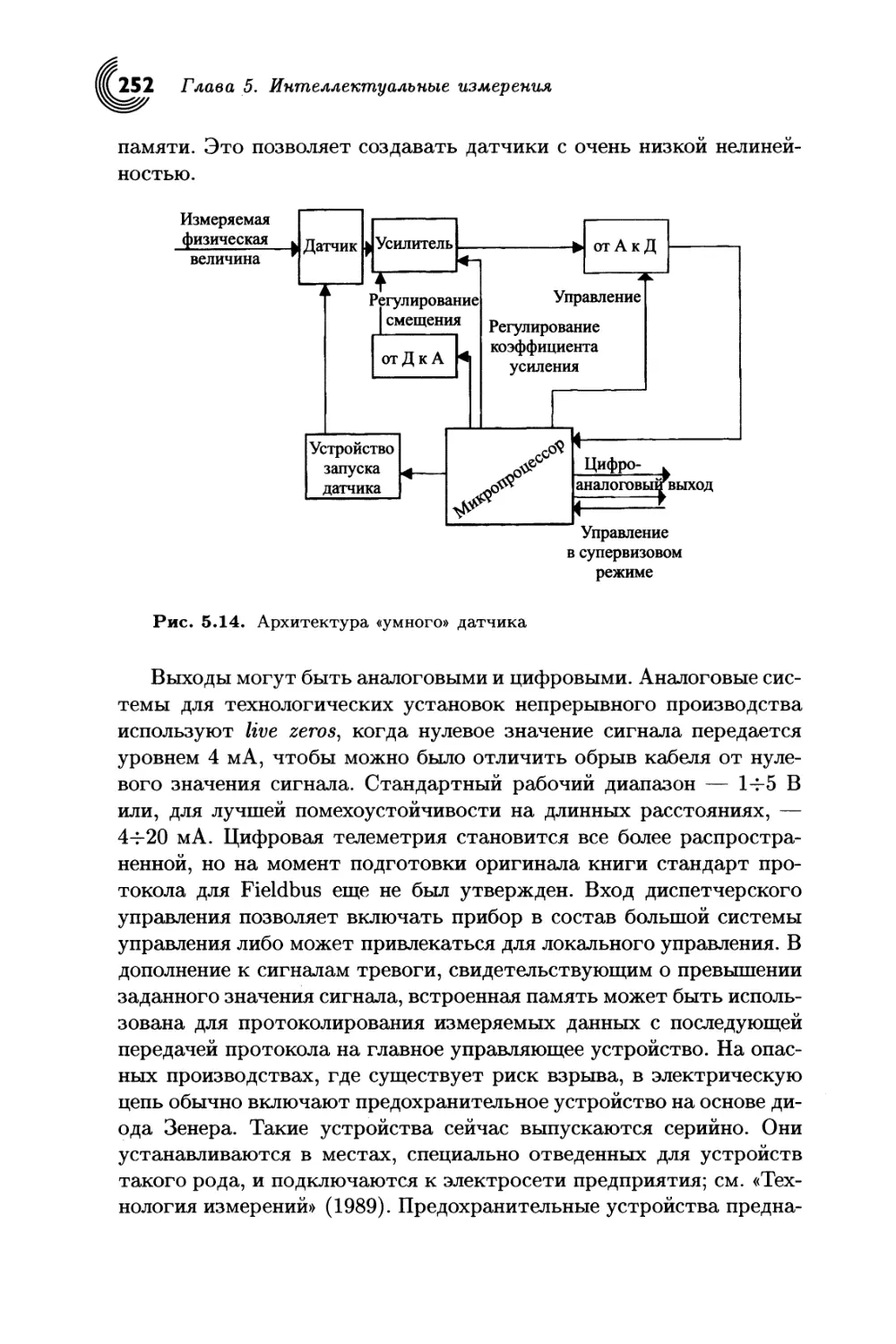
5.5. «Умные» датчики.................................251
Развитие микропроцессоров...................253
5.6. Искусственный интеллект в измерениях............255
5.6.1. Экспертные системы, основанные на правилах..255
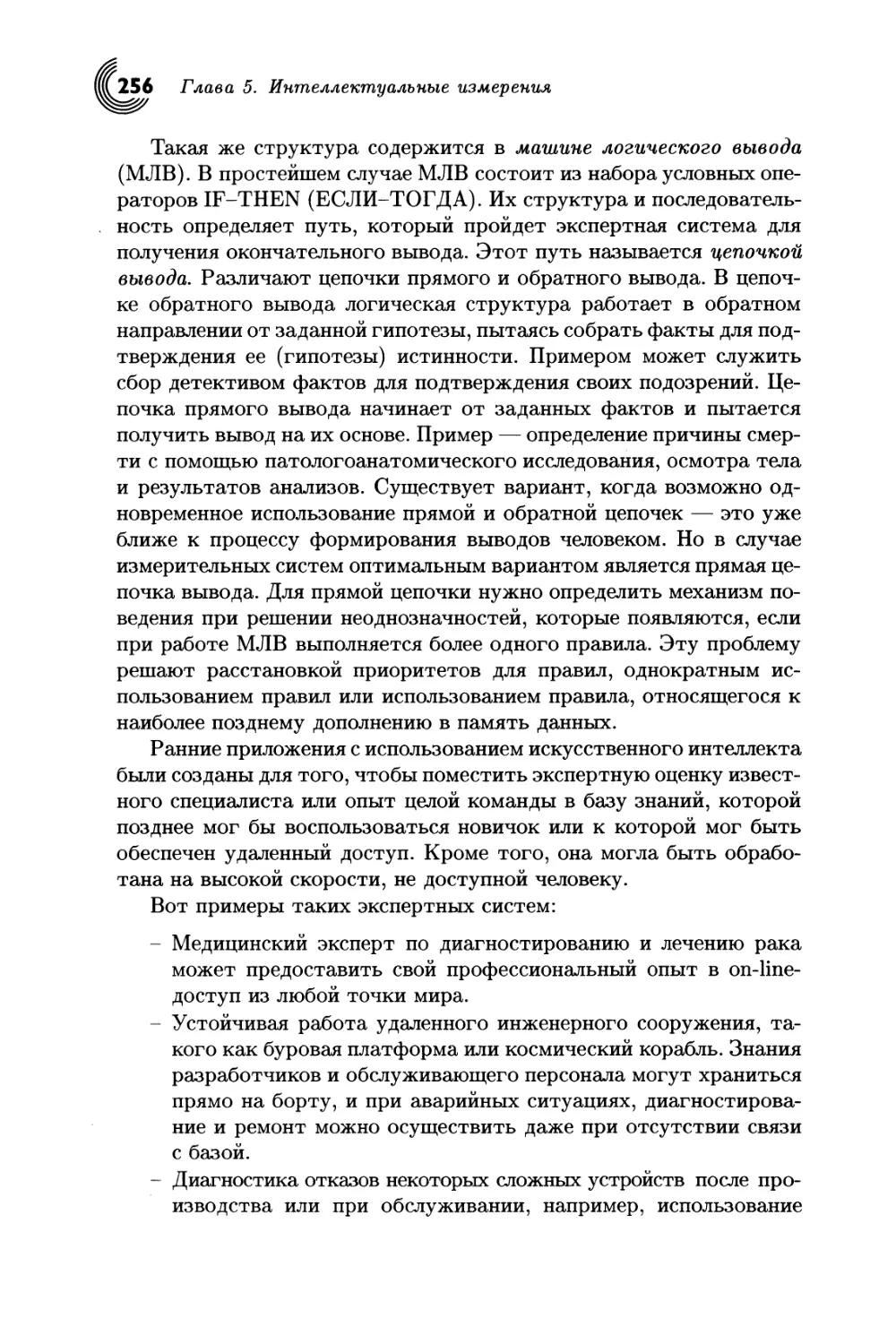
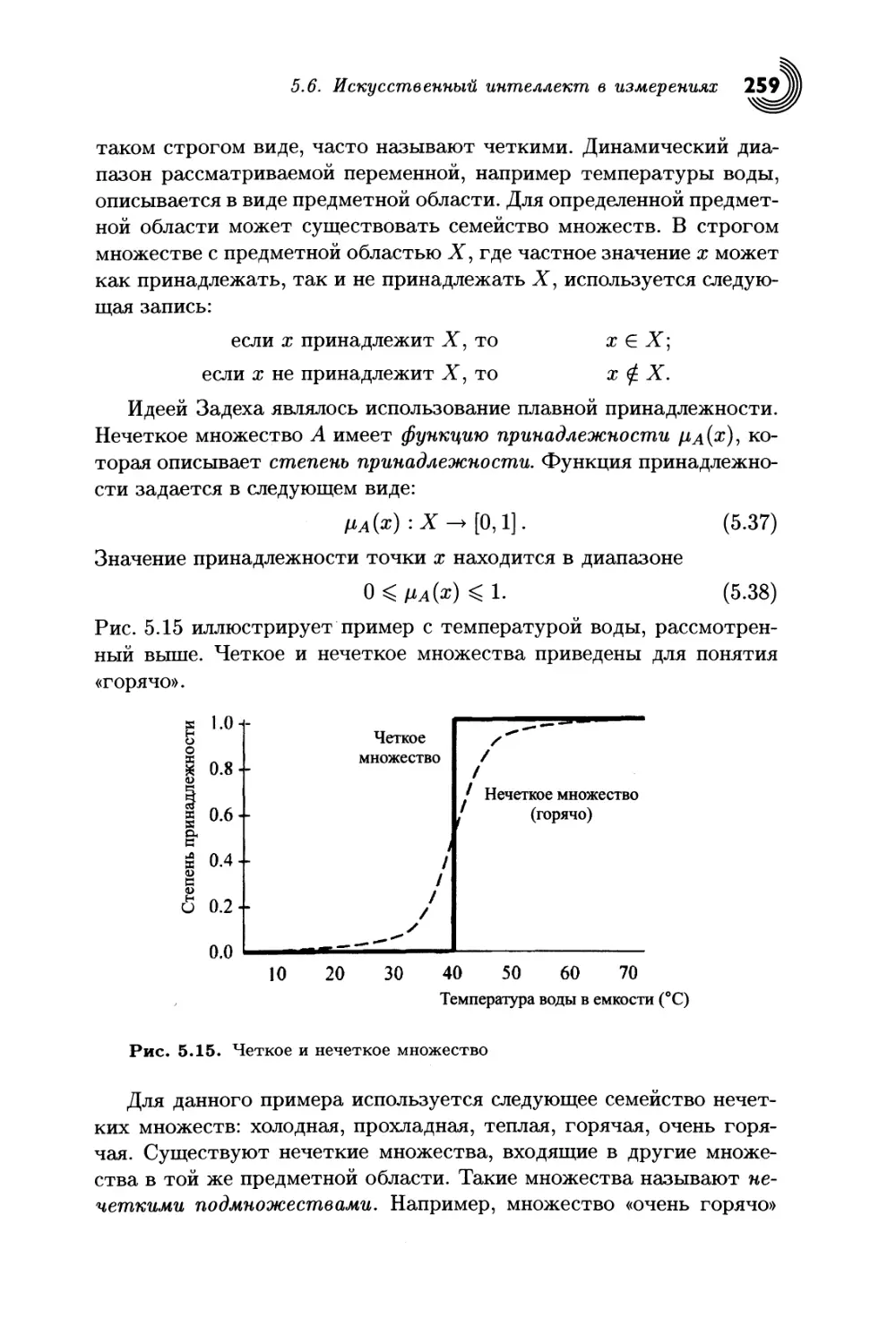
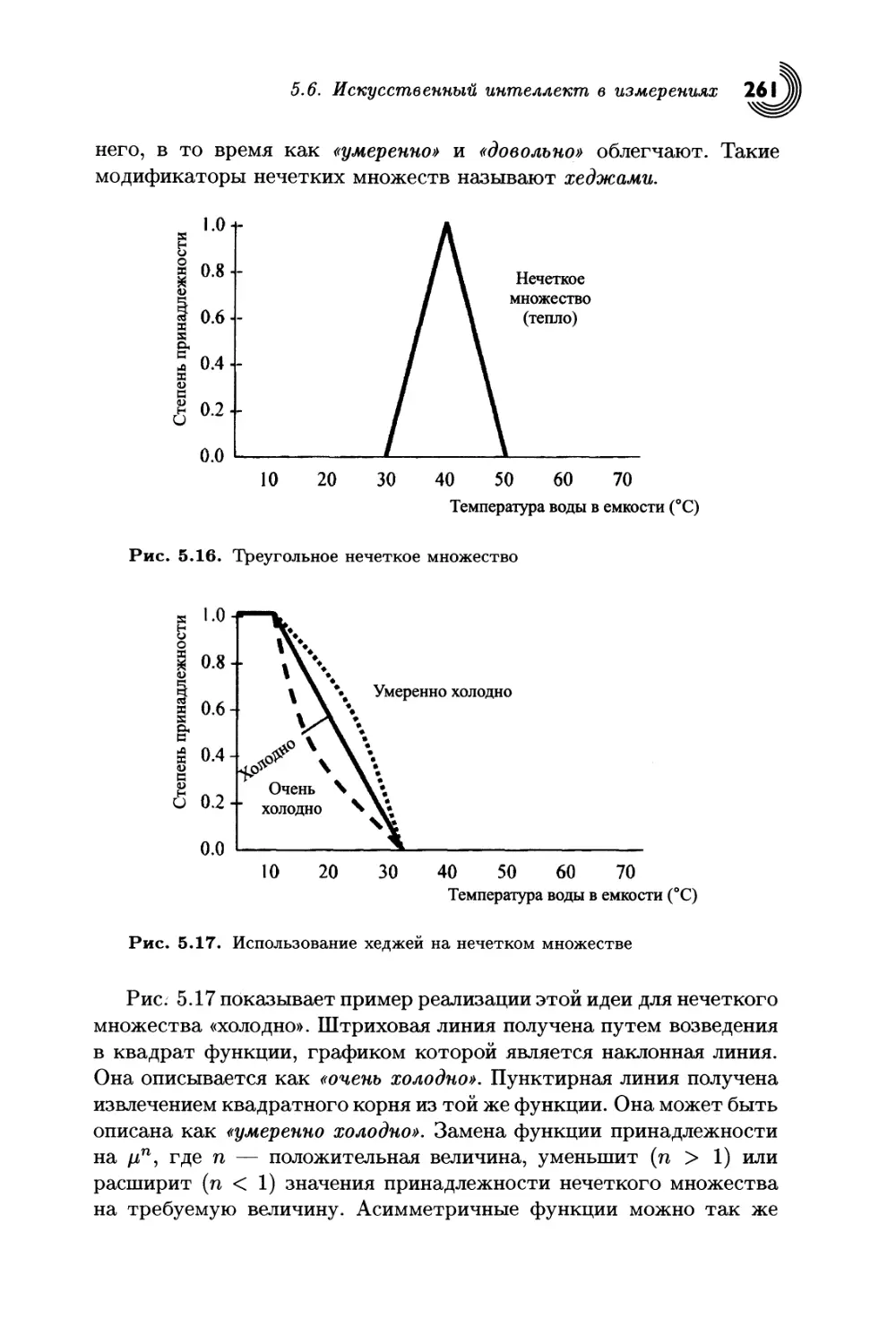
5.6.2. Нечеткая логика.............................258
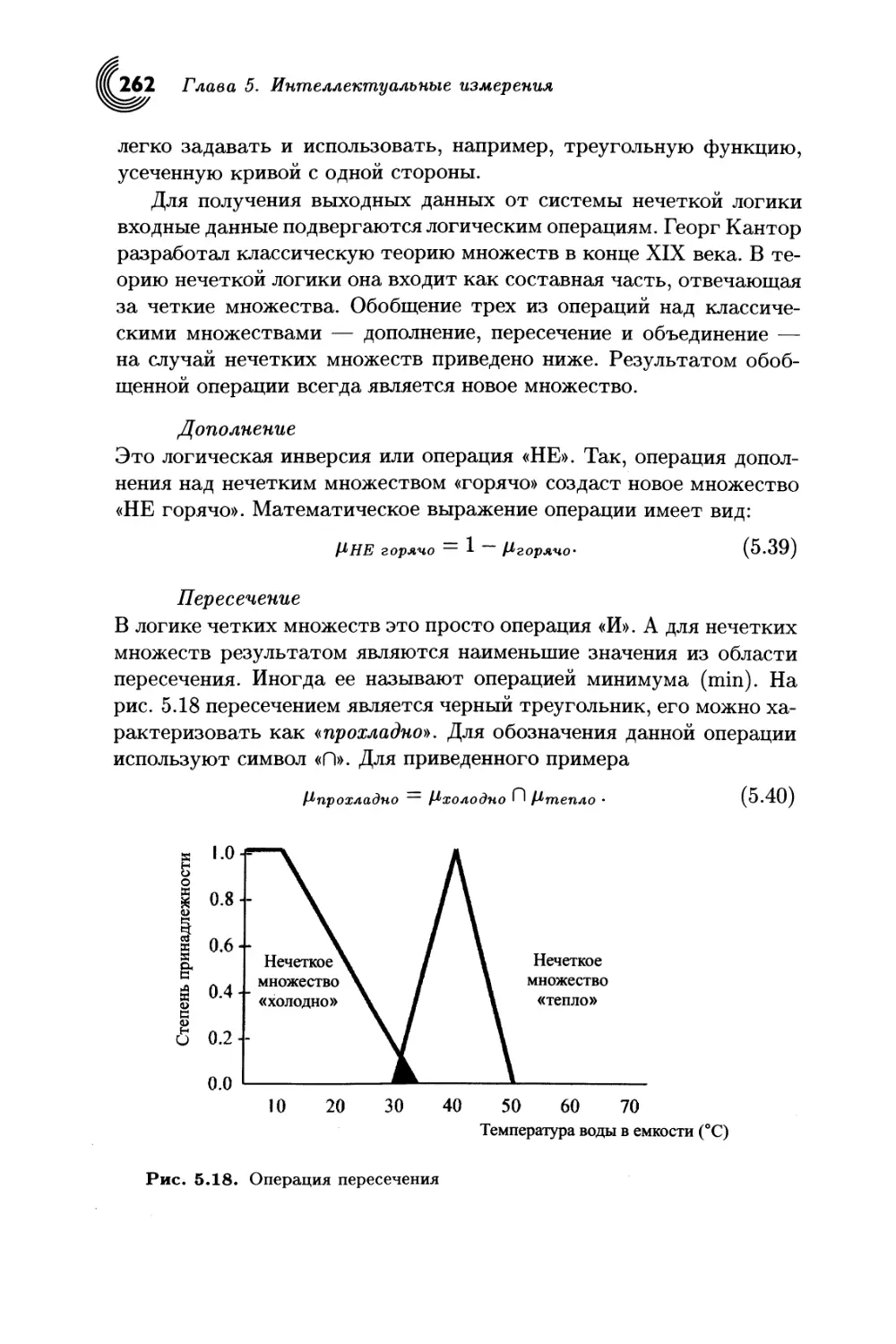
Дополнение..................................262
Пересечение.................................262
Объединение.................................263
(1) Фазификация.............................263
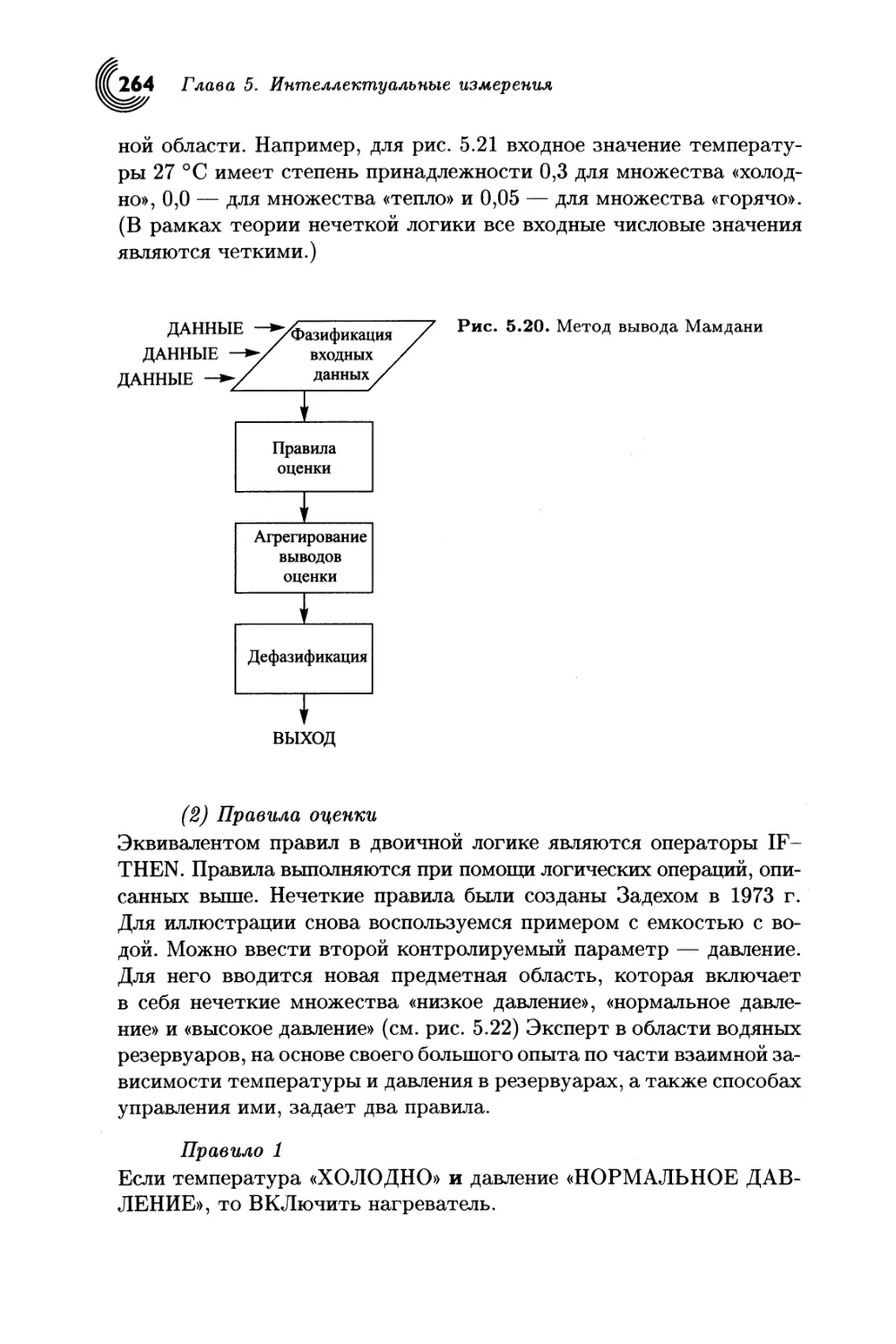
(2) Правила оценки..........................264
Правило 1 ..................................264
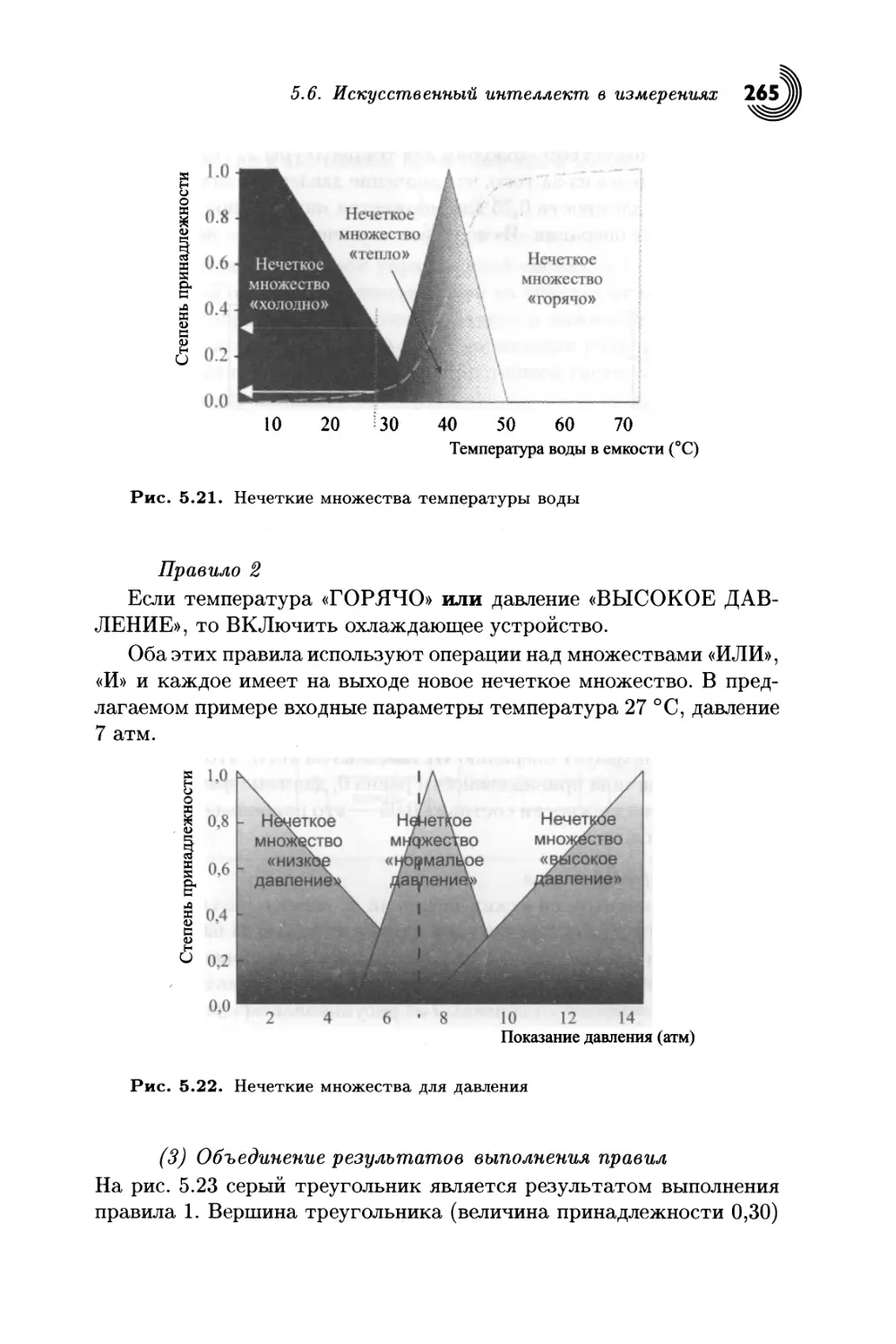
Правило 2...................................265
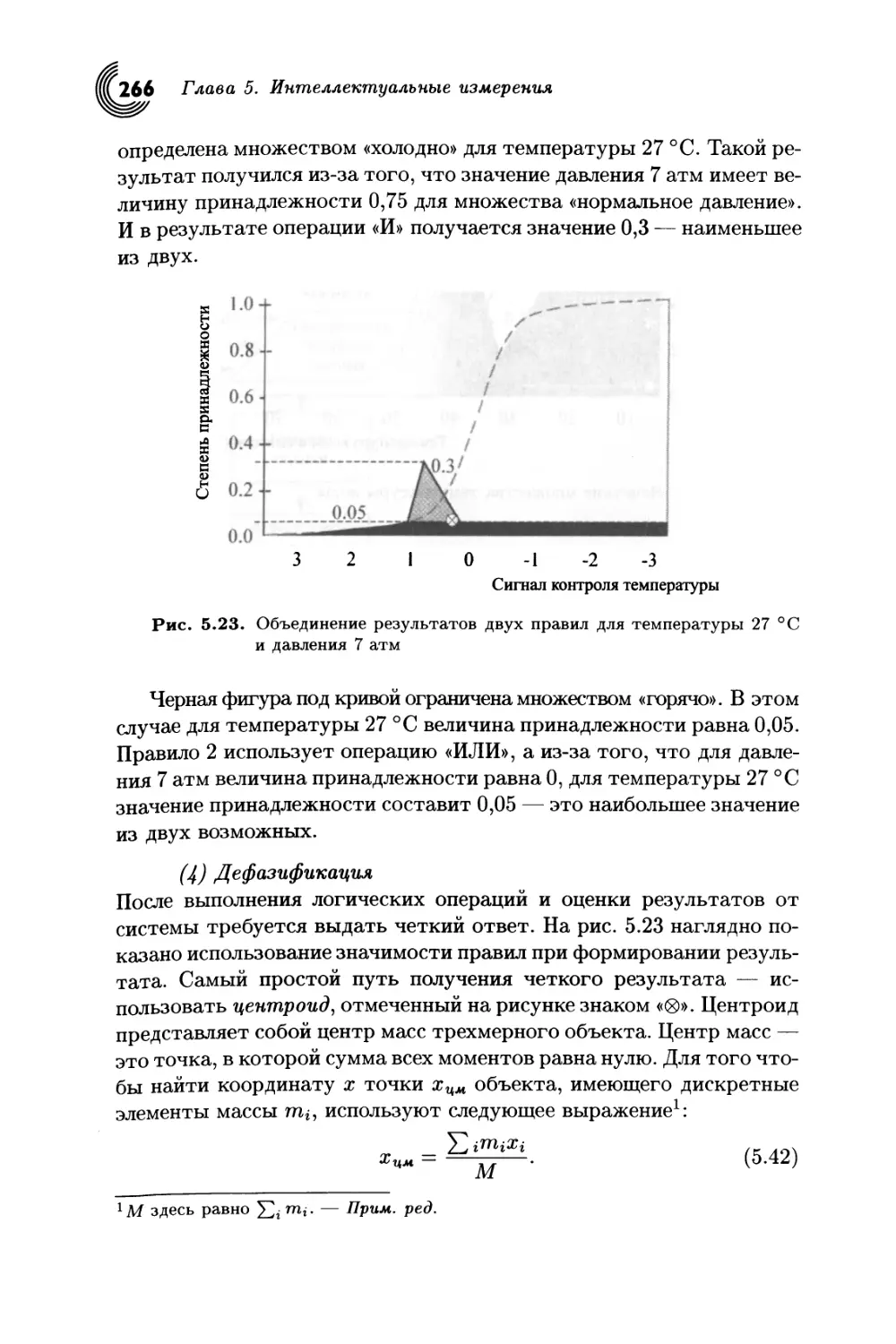
(3) Объединение результатов выполнения правил.265
(4) Дефазификация...........................266
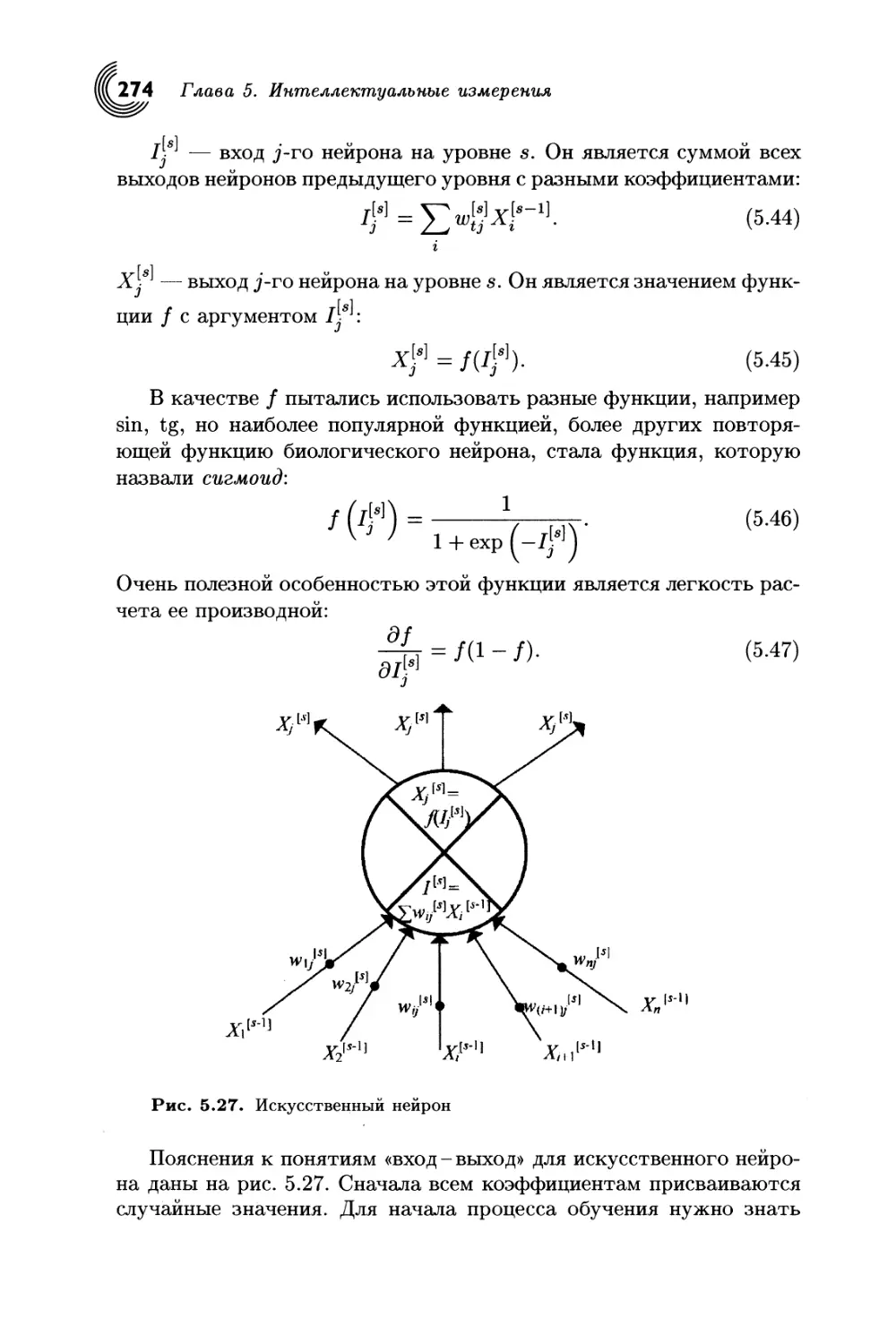
5.6.3. Искусственные нейросети.....................268
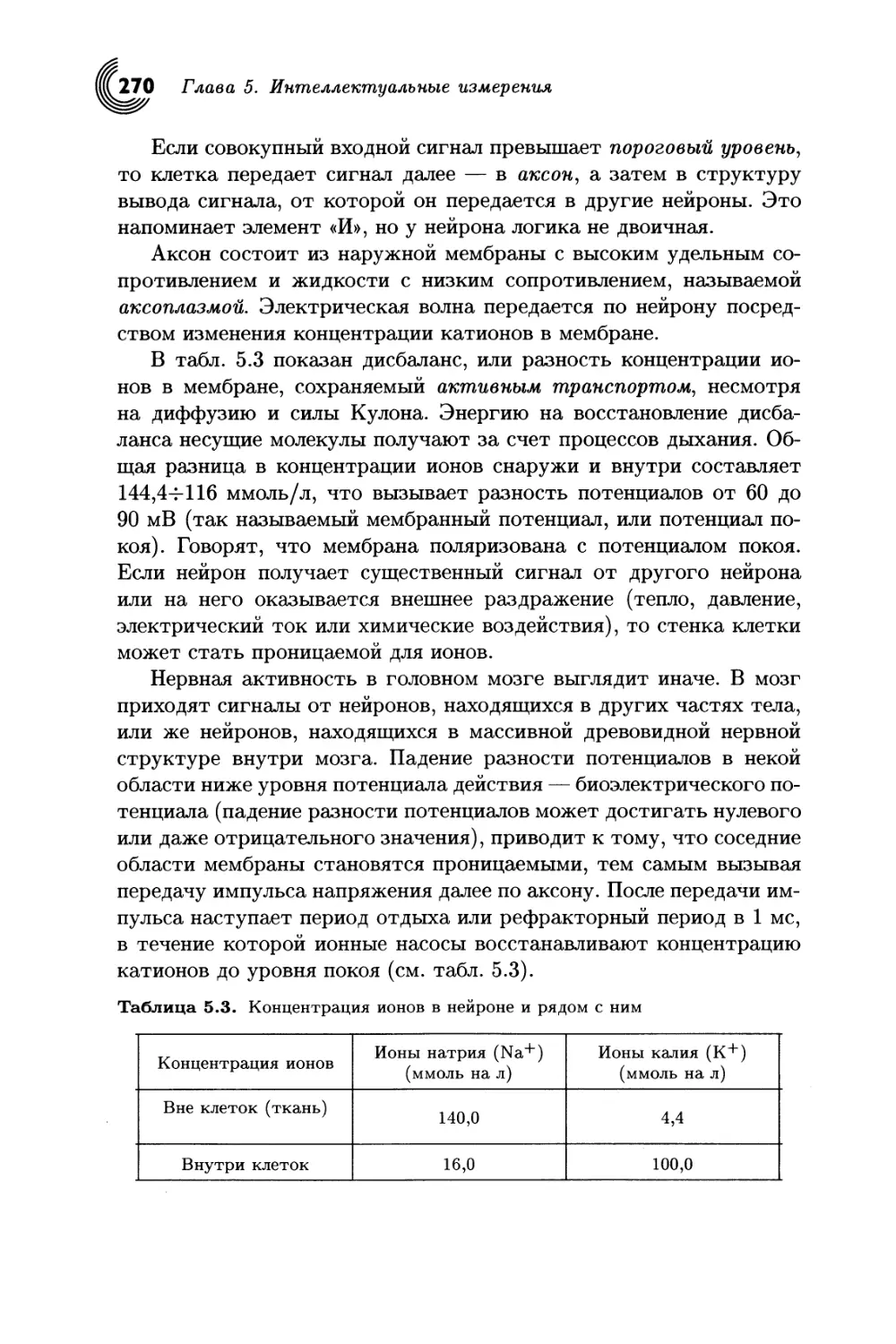
Биологический нейрон........................269
История развития искусственных нейросетей...271
Проблема присваивания коэффициентов доверия...272
Математическая структура метода обратного рас-
пространения ...............................273
Ссылки..........................................280
Упражнения......................................281
Глава 6
Характеристики и восстановление
информационных сигналов..............................286
6.1. Введение........................................286
6.2. Классификация информационных сигналов...........287
6.2.1. Детерминированные информационные сигналы......287
датчики ":;Хиил[нных
{ изолированные
датчики тока
±0,04...±1200 А
{датчики влажности
0...100% RH
«датчики расхода газа
0,03...200 л/мин
{датчики-детекторы
взрывоопасных
и отравляющих газов
о...1оо% ьа
{датчики температуры
-200. 540С
{ датчики
на эффекте Холла
±20...±2500 ГС
{ датчики давления
250 Па...4000 атм
{ датчики
магниторезистивные
2...6ГС
{ датчики ускорения
±1,5... ±2000 g
{ датчики усилия
25 г..,1000 т
Honeywell СХТИЮП ’ ’ Lnita ; freescafe
Ф КолшэЛ
www.compel.ru
- стационарные датчики тока (до 3000 А) уни-
версальные. на постоянный и переменный тог.
• датчики напряжения (до 1000 В) универсальные,
на постоянное и переменное напряжение.
• датчики мощности (на 20 и 200 кВт).
• датчики малых токов (до 400 мА),
датчики больших токов (на 10. 20 и 25 кА);
разъемные датчики тока (до 3000 А);
клещи токоиэмерительные (до 5000 А);
мультиметры (до 1000 А) могут также измерять
Основная часть продукции внесена в Гэсреестр средств измерений РФ
Приборы выпускаются в различных модификациях
• с токовым выходом (0/20 и 4/20 мА);
• с выходом TRUE-RMS;
* на выходе мгновенное значение измеряемого тока.
Диапазон рабочих температур от -4О*С до ♦ТО’С.
Возможно изготовление других модификаций
приборов с учетом требований заказчика
143500, Московская обл.. г Истра, ул. Панфилова, д. 10, ФГУП НИИЭМ
Тел.: (495) 994-51-88, факс: (495) 975-49-17; http://www.niiem.nj; e-mail: sensor@istra rj
Содержание
Периодический синусоидальный информационный
сигнал.......................................288
Сложный периодический информационный сигнал.... 288
Квазипериодический информационный сигнал.....289
Переходный информационный сигнал.............289
6.2.2. Случайные сигналы данных.....................290
Стационарный случайный процесс...............291
Эргодический случайный процесс...............292
Нестационарные случайные процессы............293
6.3. Характеристика случайных сигналов данных.........294
6.3.1. Среднее значение и дисперсия.................294
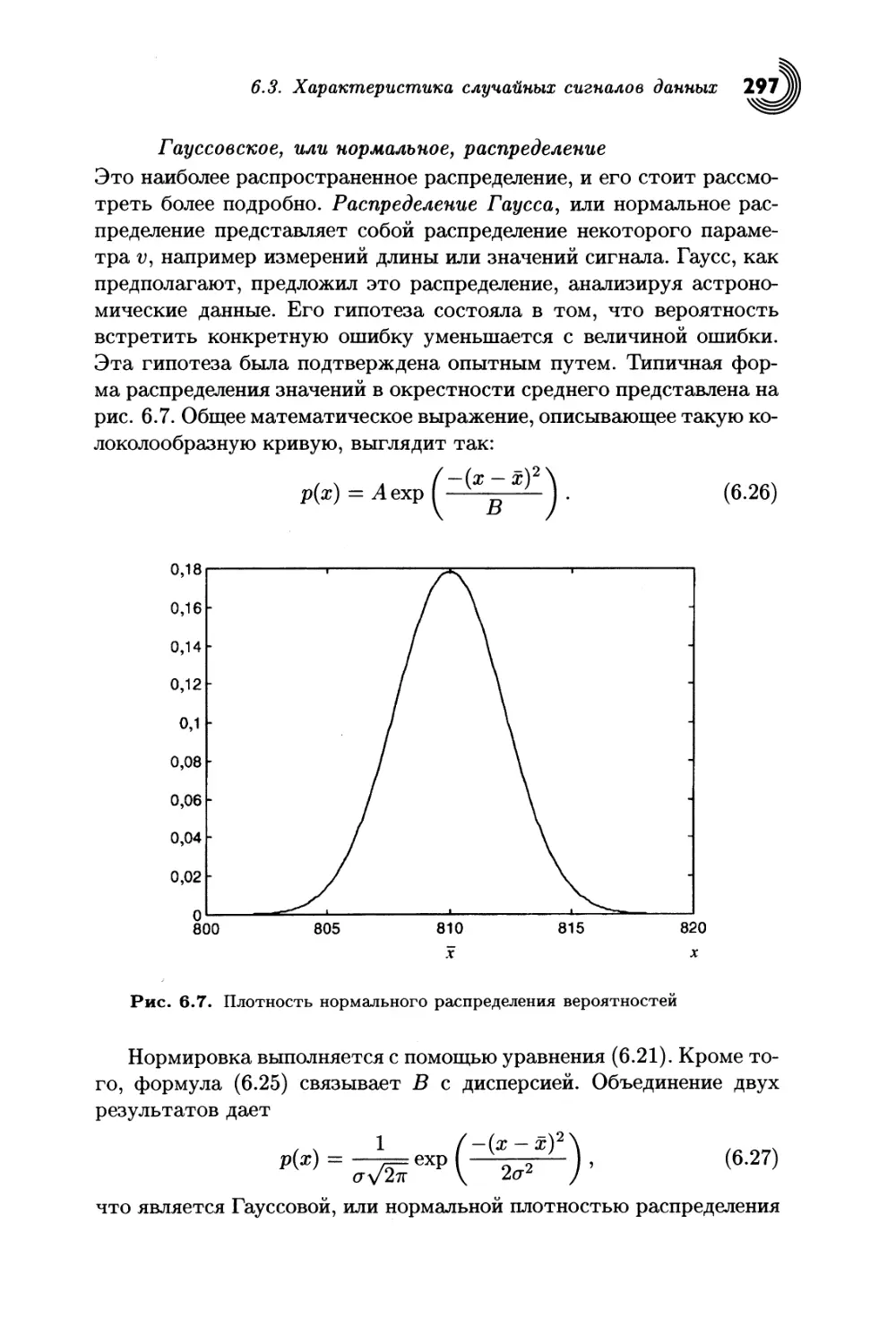
6.3.2. Плотность распределения вероятностей.........295
Гауссовское, или нормальное, распределение...297
Дисперсия и среднеквадратическое отклонение..298
6.3.3. Многомерные вероятности, ковариация и корреляция.... 299
6.3.4. Понятие корреляции для временно-зависимых сиг-
налов ..............................................302
6.3.5. Автокорреляция и спектральные функции плотности ... 302
Спектр мощности и корреляция.................302
Практическое использование спектральной плотно-
сти мощности.................................305
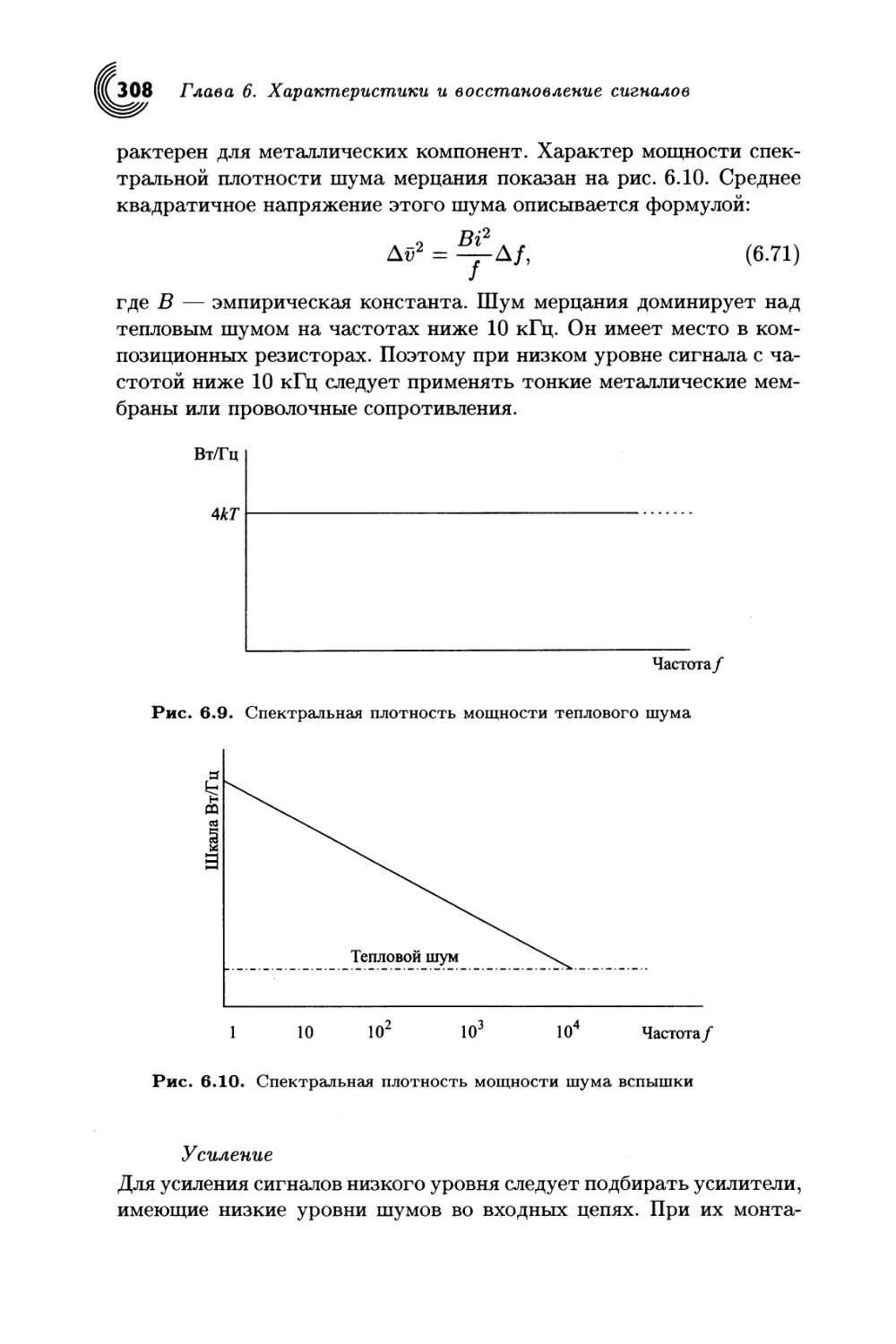
6.4. Шум..............................................307
6.4.1. Происхождение шума...........................307
а) Тепловой шум..............................307
б) Дробовый шум..............................307
в) Шум мерцания..............................307
Усиление.....................................308
6.4.2. Способы уменьшения шума......................310
Фильтрование.................................310
Простое временное усреднение.................310
Сложное усреднение по времени................312
Многоканальный счетчик.......................312
Синхронизирующий усилитель...................315
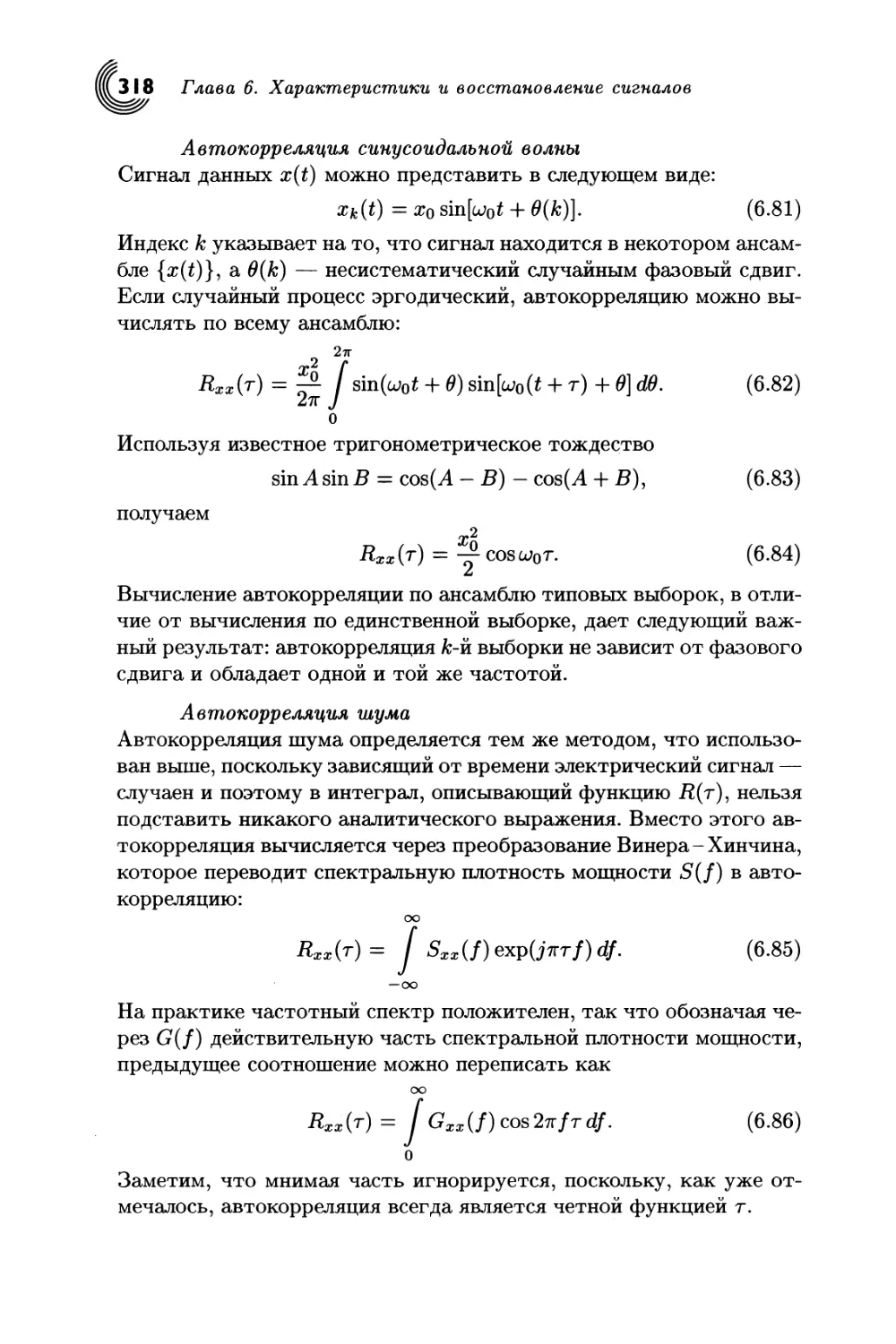
Автокорреляция............................. 316
Автокорреляция суммы двух сигналов...........317
Автокорреляция синусоидальной волны..........318
Автокорреляция шума..........................318
6.5. Интерференция....................................321
6.5.1. Источники интерференции и механизмы взаимодей-
ствия ..............................................321
СЕНСОРИКА ЭЛЕКТРИЧЕСКИХ ПОЛЕЙ НА
ПОВЕРХНОСТИ МИКРО- И НАНО-
РАЗМЕРНЫХ ОБЪЕКТОВ
распределение электрического
потенциала
морфология поверхности без записи информации после записи информации
мнкроэлек гронный наносенсер потенциала вдазь
объект исследования линии скана
/Чувствительность не хуже 100 мВ
/Локальность не хуже 10 S0 ни
/Неразрушающий контрол»
/Динамический контроль
ЦЕНТР МИКРОТЕХНОЛОГИИ И ДИАГНОСТИКИ
Санкт-Петербургский государственный электротехнический университет “ЛЭТИ"
197376, Россия, Санкт-Петербург, ул. Проф. Попова, д.5
Тел. (812)234-27-57, факс (812)234-16-82, e-mail: cmid@eltech.ru
Содержание
Индуктивная связь...........................321
Емкостная связь.............................322
Линии циркулярной связи.....................323
Многократные заземления.....................323
Плата с печатной схемой.....................325
Коаксиальный кабель.........................325
6.5.2. Техника снижения интерференции..............325
Геометрическая изоляция.....................325
Экранирование (shielding) ..................326
Экранирование (screening)...................327
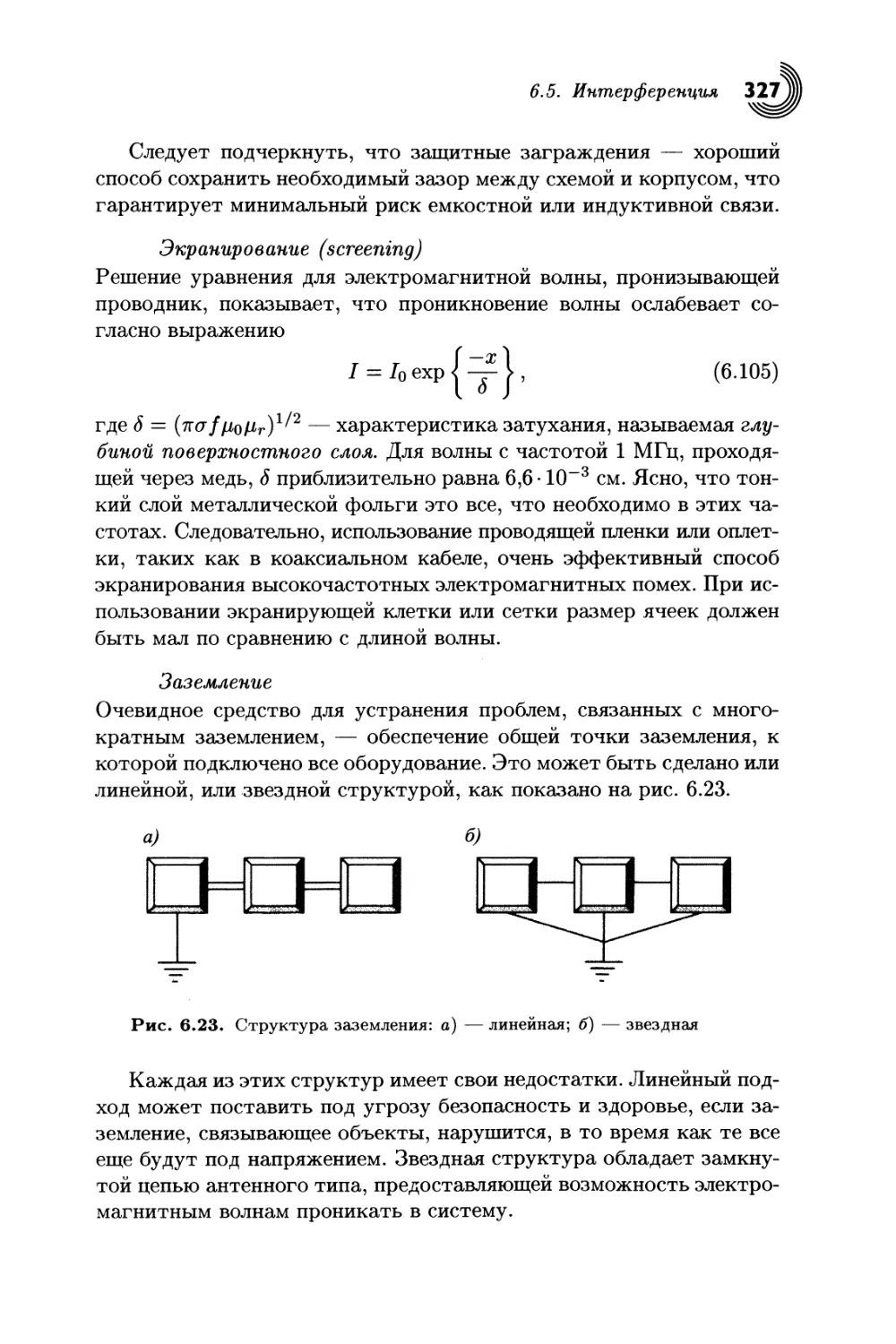
Заземление..................................327
а) Развязывающий трансформатор..............328
б) Балансировка.............................328
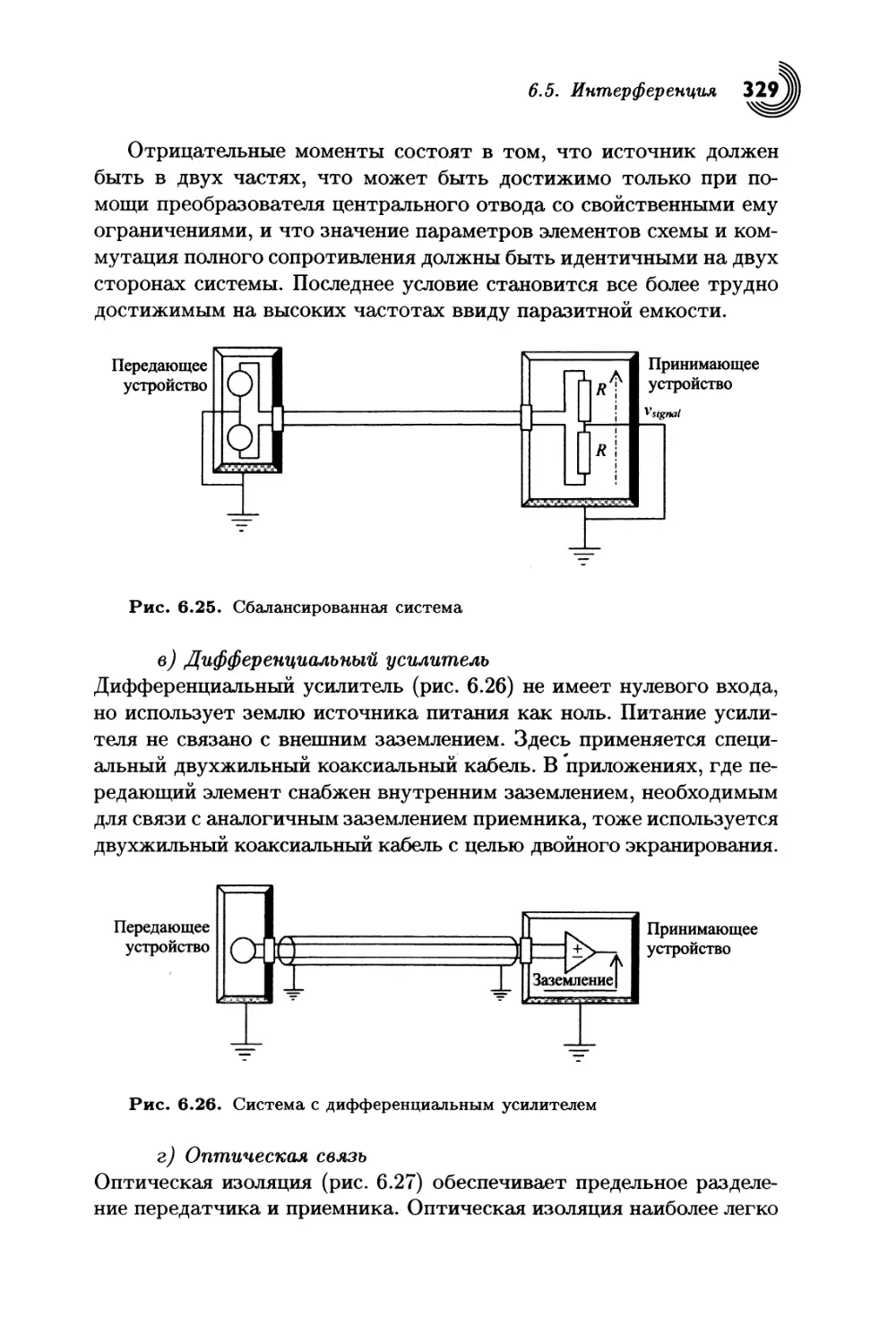
в) Дифференциальный усилитель............. 329
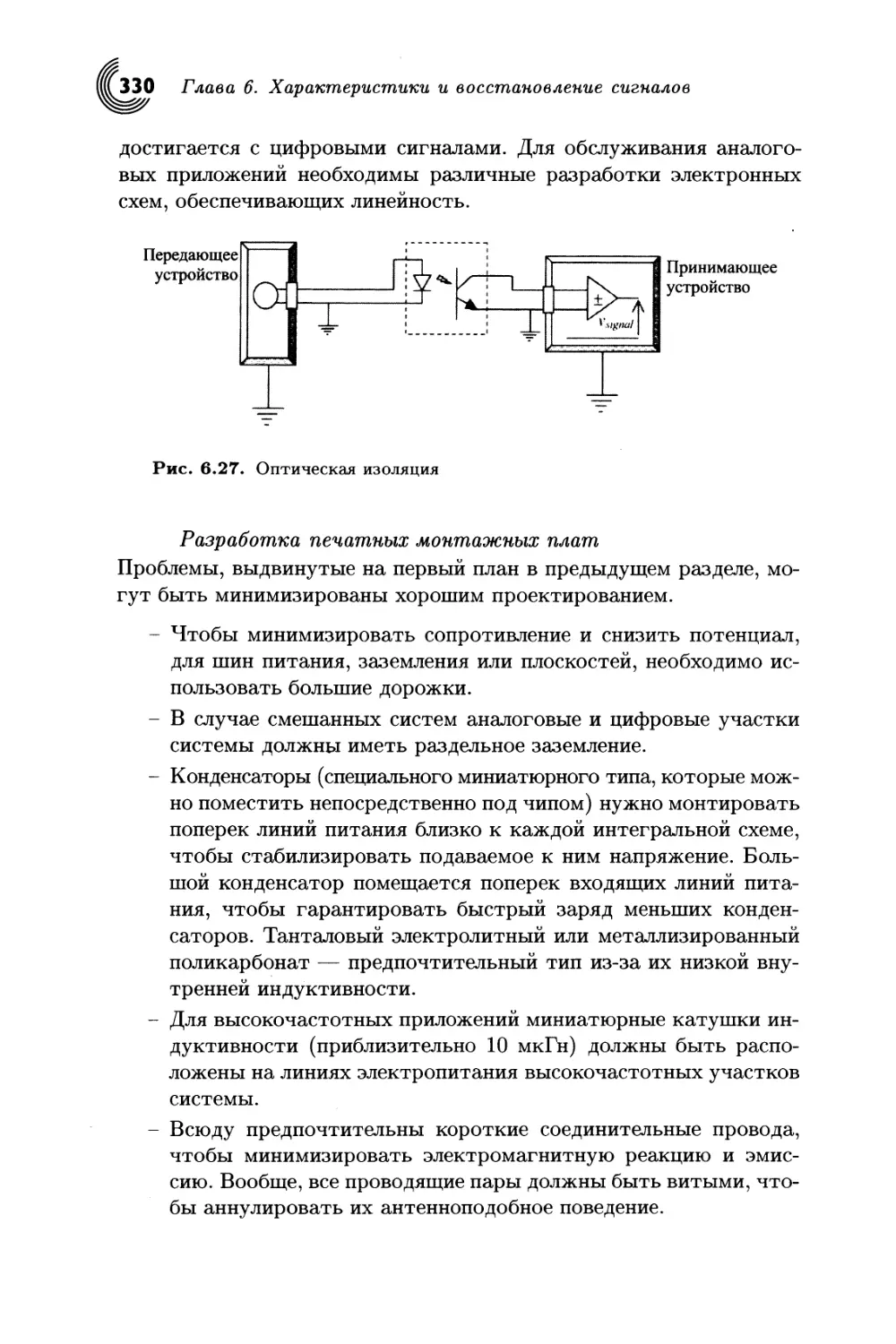
г) Оптическая связь.........................329
Разработка печатных монтажных плат..........330
Фильтрование................................331
Ссылки..........................................332
Упражнения......................................332
Глава 7
Современные разработки систем измерения
параметров гидрогазо динамического потока ....336
7.1. Введение........................................336
Измерение параметров гидрогазодинамического
потока.......................................336
Гидрогазодинамика............................337
Жидкие частицы...............................337
Вязкость.....................................337
Траектория...................................338
Линия тока...................................338
Трубка тока..................................338
Стационарный поток...........................339
Объемный расход (Q)..........................339
Среднерасходная скорость (и).................339
Равномерное поле скоростей...................339
Уравнение неразрывности......................339
Теорема Бернулли.............................340
7.2. Типы полей скорости (типы движения жидкости или газа).. 342
7.2.1. Ламинарный поток.............................342
ТЕЕЖЦфЖКЕв
Наука
Т ЕХНОЛОГИЯ
[Бизнес
Журнал "ЭЛЕКТРОНИКА: Наука, Технология, Бизнес" издается с 1996 года.
Издатель РИЦ "ТЕХНОСФЕРА".
Периодичность с 2003 года - 8 номеров в год. Тираж 17 тыс. экземпляров.
подписка
Среди многочисленных изданий по электронике журнал "ЭЛЕКТРОНИКА: НТВ”
занимает особое место Это единственный в России журнал свыше
двадцати рубрик которого посвящены проблемам всей электроники
в целом - от электронных компонентов до вычислительной техники
и радиоэлектронных систем различного назначения,
а также вопросы экономики и бизнеса.
Журнал "ЭЛЕКТРОНИКА НТБ" выступает информационным
спонсором и активно участвует в отечественных и международных
выставках и форумах по связи, информатике
и другим направлениям электроники.
26037—
now.: (495)257-9000
потея.: (495)234-0110
НЯМ
Новое издание издательского дома “Техносфера' -
журнал “ПЕЧАТНЫЙ МОНТАЖ”
Рассчитан на специалистов в сфере высоких
технологий и электроники
Распространяется по подписке
(с журналом ЭЛЕКТРОНИКА НТБ) по всей России,
странам СНГ, на выставках, семинарах и презентациях.
На 2006 год можно оформить бесплатную подлиску.
Тираж 4 000 экз.
Аудитория: от20 до 50 лет, руководители, специалисты,
научные работники, греподаватели технических ВУЗов и др.
Для писем: 125319, Москва, а/я 594, ЗАО ’РИЦ ТЕХНОСФЕРА"
Тел.: (495) 234-0110 Факс: (495) 956-3346
E-mail: journal@electronics.ru Http:\\www.electronics.ru
Содержание
7.2.2. Турбулентное течение......................344
7.2.3. Нестационарное течение....................344
Режимы течения и расходомеры..............345
7.3. Корреляционный расходомер.....................346
7.4. Ультразвук....................................348
Передатчик ультразвука....................349
Времяпролетные расходомеры................350
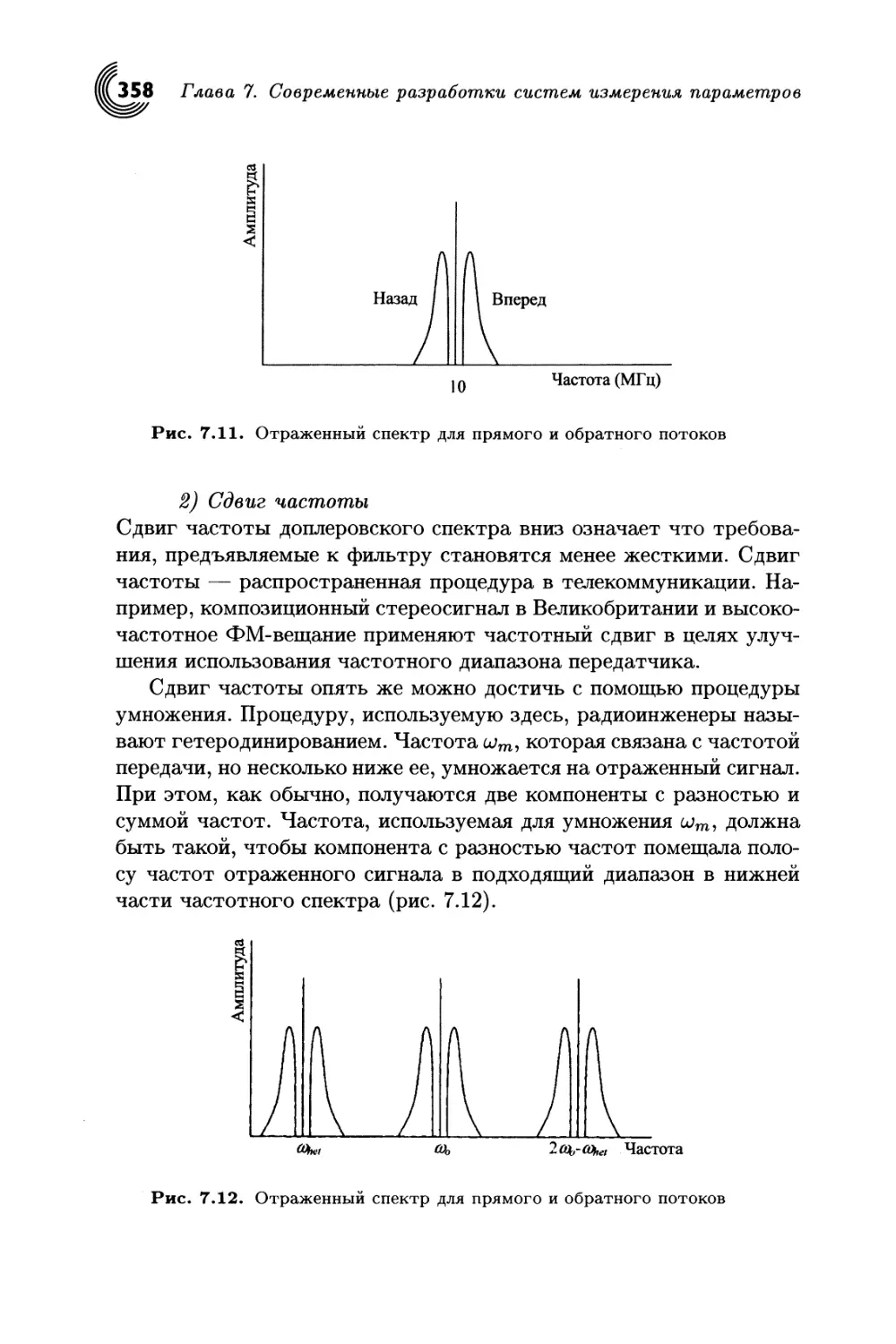
7.5. Эффект Доплера................................352
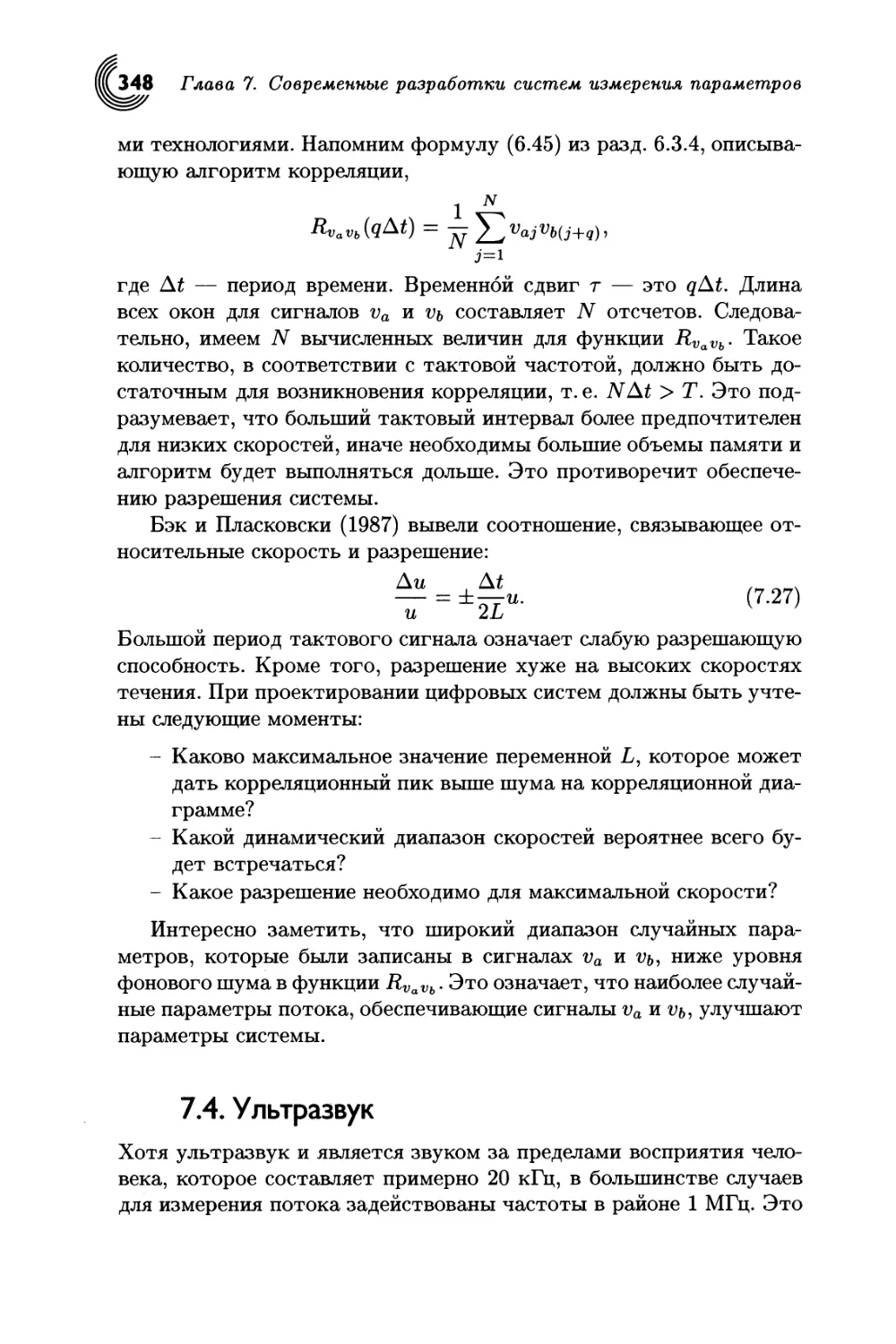
7.5.1. Спектр отраженного сигнала................354
7.5.2. Прямой и обратный поток...................357
1) Разделение с помощью прямой фильтрации.357
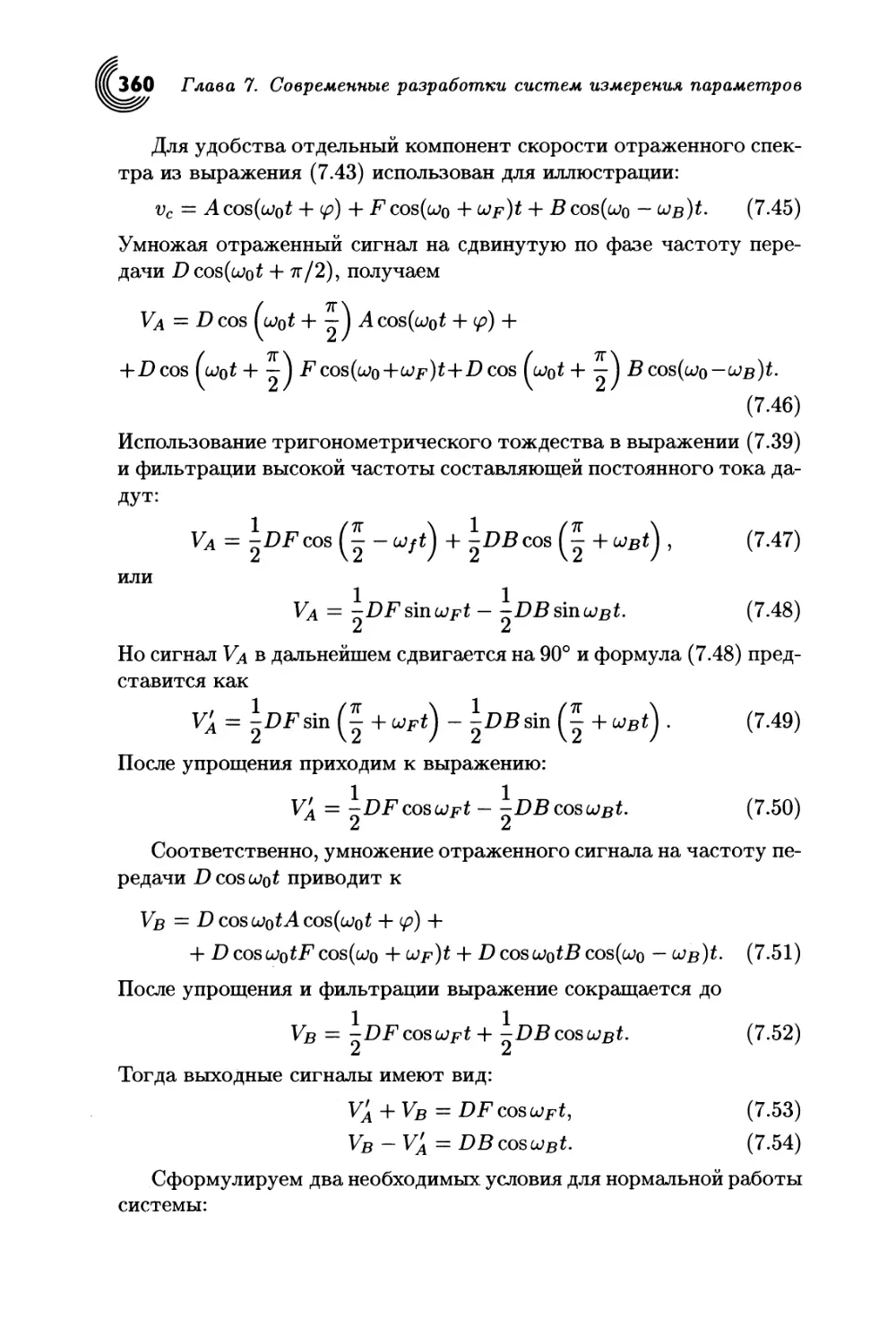
2) Сдвиг частоты..........................358
3) Вращение фазы..........................359
7.5.3. Измерение потока крови....................361
Заключение................................364
Ссылки........................................365
Упражнения....................................366
Ответы к упражнениям...............................368
Предметный указатель...............................375
Предисловие к изданию на русском языке
На первый взгляд может показаться, что предлагаемая отечествен-
ному читателю книга Р.Г. Джексона «Новейшие датчики» является
эклектичной, и ее относительно небольшой объем не создает пред-
посылок к глубокому рассмотрению широкого круга сложнейших
вопросов из различных областей знаний: физики конденсированных
сред, схемотехники, теории измерений, методов обработки сигна-
лов. Однако, целенаправленное, последовательное и достаточно глу-
бокое изложение автором ключевых вопросов, связанных с получе-
нием информации с помощью сенсоров, позволяет с уверенностью
сказать, что данный труд может безусловно рассматриваться как
одно из первых системных изложений современной сенсорики.
Взятое за основу при переводе на русский язык английское на-
звание книги не совсем точно отражает её содержание, в рамках
которого представлены не только традиционно рассматриваемые
в книгах по сенсорике физические и материаловедческие пробле-
мы функционирования и создания первичных преобразователей ин-
формации, но и современные подходы к сбору, обработке и пред-
ставлению информации в форме, необходимой как для восприятия
и оценки человеком, так и в виде сигналов в системах управления
и контроля объектами различной природы.
Следует отдать должное автору данной книги, что ему, в пер-
вую очередь, удалось посмотреть на сенсорику с позиций метро-
логии и информатики. Это потребовало дать не только физико-
математическое описание явлений и эффектов, используемых в чув-
ствительных элементах сенсоров, но и представить наиболее эф-
фективные модели проведения процессов измерений, реализуемых
на основе данного типа датчиков. Заслуживает особого внимания
«бережное» обращение автора с информационными сигналами в от-
ношении их сохранения и выделения на уровне шумов, а также глава,
посвященная так называемым интеллектуальным измерениям, ко-
торые тесно связаны с такими понятиями, как «умные» датчики,
экспертные системы, сенсорные сети.
Среди «физических» глав, рассматривающих явления, эффекты и
процессы, используемые в современных сенсорах, следует особо от-
метить главу, посвященную волоконно-оптическим сенсорам. По пол-
ноте изложения, с точки зрения возможности применения оптово-
локна в сенсорике, и оригинальности разнообразных методов изме-
рений данной главе нет равной среди аналогичной литературы по
Предисловие к изданию на русском языке
сенсорике, представленной на отечественном рынке книжной про-
дукции. Это особенно важно в связи с тем, что оптоволоконные
сети стали составной частью современных информационных систем,
обеспечивая устойчивую передачу огромных массивов информации
практически без потерь. При этом наблюдается резкий рост разно-
образия комплектующих изделий для оптоволоконных сетей, включая
элементную базу на основе интегральной оптики, а также сниже-
ние ее стоимости в условиях повышения общего уровня инженерной
культуры «общения» с оптоволокном.
Следует также отметить, что книга изобилует примерами, взя-
тыми из практики решения конкретных задач, что значительно рас-
ширяет кругозор читателя в отношении эффективности применения
полученных знаний.
Перевод такой разноплановой, но системной книги был крайне
труден и потребовал при его реализации привлечения целой сово-
купности специалистов, преимущественно сотрудников Центра ми-
кротехнологии и диагностики Санкт-Петербургского Государствен-
ного электротехнического университета, за что им, как редактор
перевода, выражаю большую признательность и благодарность.
Книгу Р.Г. Джексона можно рассматривать как междисципли-
нарное учебное пособие для широкого круга специалистов, аспиран-
тов и студентов, посвятивших себя сенсорике — быстро прогрес-
сирующему, чрезвычайно востребованному высокотехнологичному
инженерному направлению, во многом определяющему эффектив-
ность работы технических систем, экологическую и медико-биоло-
гическую безопасность окружающей среды и человека.
Директор
Центра микротехнологии и диагностики,
профессор кафедры микроэлектроники
Санкт-Петербургского Государственного
электротехнического университета,
д.т.н. В.В. Лучинин
Предисловие
В течение последних двадцати лет наблюдается впечатляющий про-
гресс в научных исследованиях и изобретениях в области датчиков
и связанных с ними систем обработки сигналов. Цель данной кни-
ги — обеспечивать понимание общих принципов новых достижений.
Здесь мы не будем обсуждать традиционные темы, такие как, на-
пример, датчики металлических деформаций, процесс производства
термоэлементов и водомеров. Им посвящено довольно много хорошо
написанных и легко доступных книг.
Некоторые из описываемых здесь датчиков пока еще не посту-
пили в серийное производство да, может, никогда и не поступят.
Однако принципы инженерной физики, использованные при их раз-
работке, очень интересны и оправдывают их упоминание. Зачастую
законы коммерции делают нерентабельные ранее устройства вне-
запно более привлекательными. Это же обеспечивается разработкой
новых материалов и революционных технологий производства.
Книга такого сорта отличается от стандартных тем, что отра-
жает опыт и интересы автора. В ее основу положен базовый курс
лекций, прочитанный автором студентам, уже знакомым с тради-
ционными разделами. Поэтому книга должна представлять интерес
студентам физических и инженерных специальностей, а также тем
инженерам-практикам, кто хочет знать принципы работы нового
поколения датчиков, и что им можно ожидать в этой области в бли-
жайшем будущем.
В литературу, список которой приводится в конце каждой главы,
включены научно-исследовательские статьи. Они предназначены не
для того, чтобы познакомить читателя с последними достижениями,
поскольку любая такая публикация устаревает к дате своего выхода.
Их цель — осветить исторический контекст книги.
ГЛАВА I
ИЗМЕРИТЕЛЬНЫЕ
СИСТЕМЫ
1.1. Введение
Вопрос о том, является ли человечество частью животного мира
или оно уникально по своей природе, занимал умы философов на
протяжении поколений. Такие человеческие черты, как способность
к самоанализу, сочувствие, нравственность — все, что составляет
разум и творческое начало, стали частью современной полемики во-
круг создания искусственного разума. Что не подлежит сомнению,
так это неутолимая жажда человечества познать себя и окружаю-
щую вселенную. Научные наблюдения проводились с незапамятных
времен, и инструменты, использовавшиеся для этого, существуют
уже тысячелетия. Тем не менее во второй половине XX века разви-
тие измерительных технологий и в связи с этим, теории управления
было стремительным.
Для отечественной1 отрасли измерительных систем является пер-
востепенной задачей остаться в лидирующем положении на расширя-
ющихся рынках сенсоров. Вдобавок к общему усовершенствованию
традиционных сенсорных устройств в течение последних двадцати
лет появился ряд специфических областей, сконцентрировавших в
себе новейшие измерительные технологии и материалы. Мировой
рынок всех сенсорных устройств оценивается в 15-30 млрд евро/год.
Текущий рост продаж обычных датчиков составляет примерно 4% в год
в сравнении с 10% для сенсоров новейших конструкций. (Источник:
UK Foresight Programme.)
Изначально лидерами коммерческого использования новых науч-
ных разработок были японцы. Однако сейчас промышленно разви-
тые страны Запада принимают, как на государственном, так и на
корпоративном уровне, участие в стратегических программах по со-
зданию сенсоров. Финансовые ведомства регулярно выбирают наи-
более перспективные области в целях поощрения научных исследо-
ваний и содействия коммерческому использованию результатов. 1
1 английской. — Прим, перев.
1.1. Введение
Следствием усовершенствования датчиков будет улучшение ка-
чества и увеличение производительности в промышленности и дру-
гих областях. Например, считается, что в настоящее время про-
гресс в автоматизации технологических процессов лимитируется
качеством измерительных систем и, в частности, интерфейсом про-
мышленного оборудования. В медицине новейшие разработки для
диагностического оборудования уменьшат стоимость и время, не-
обходимое для ответа, повысят пропускную способность. Бескон-
тактные датчики и инвазивные микросенсоры сделают медицин-
ское вмешательство менее травматичным для пациентов. В сфере
транспорта следует отметить наличие большого количества дат-
чиков безопасности, контроля эффективности работы двигателя,
систем глобального позиционирования в современном автомобиле.
Применение сенсоров в медицине, экологии и транспорте обеспечит
потенциально огромный рост рынка.
Для любого нового устройства важно, чтобы технические, а точ-
нее переходные характеристики были правильно определены и ста-
бильны. Часто именно это становится наиболее сложной для решения
задачей при переходе от лабораторного прототипа к коммерческо-
му продукту. Поступала информация о значительном количестве
микросенсоров-прототипов новейших конструкций, измерявших те-
кущую координату, скорость потока, влажность, ускорение, уровень
жидкости, концентрацию ионов, температуру, давление и концен-
трацию растворенного кислорода. Несмотря на это, доля устройств,
которые действительно появились на рынке, относительно невелика.
Однако те из них, которые все-таки были выпущены, производятся
в больших объемах, что обеспечивает общий рост индустрии новей-
ших сенсоров.
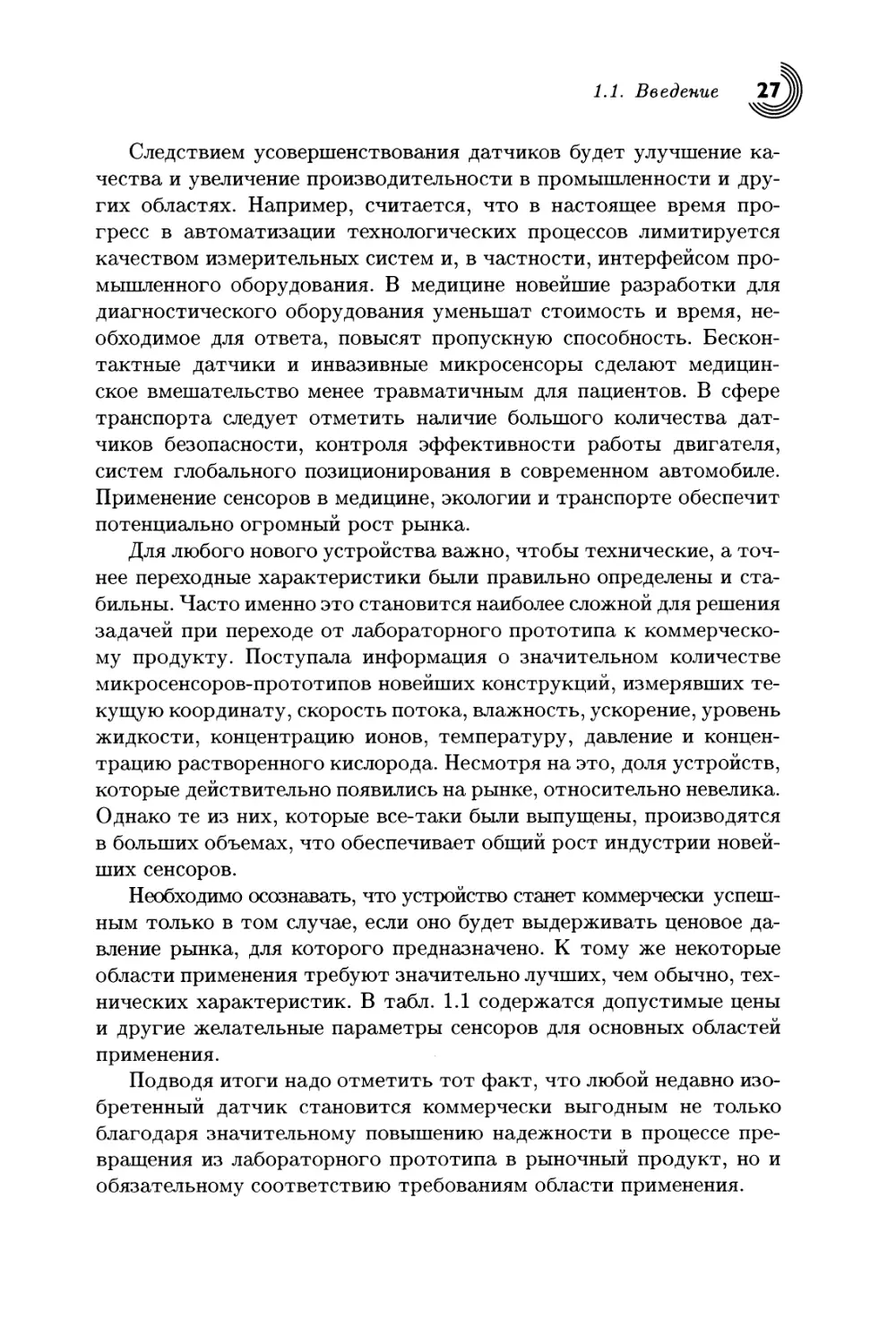
Необходимо осознавать, что устройство станет коммерчески успеш-
ным только в том случае, если оно будет выдерживать ценовое да-
вление рынка, для которого предназначено. К тому же некоторые
области применения требуют значительно лучших, чем обычно, тех-
нических характеристик. В табл. 1.1 содержатся допустимые цены
и другие желательные параметры сенсоров для основных областей
применения.
Подводя итоги надо отметить тот факт, что любой недавно изо-
бретенный датчик становится коммерчески выгодным не только
благодаря значительному повышению надежности в процессе пре-
вращения из лабораторного прототипа в рыночный продукт, но и
обязательному соответствию требованиям области применения.
Таблица 1.1. Сенсоры, доступные в некоторых основных областях
Бытовые нужды Промышленность Медицина Автомобиле- строение Экология
Допустимая цена (£) 1 500 Одноразовые 10, многоразовые 250 5 Одноразовые 10, многоразовые 250
Допустимая ошибка (%) 10,0 0,1-5,0 0,1-2,0 1,0-5,0 1,0-10,0
Среднее время между отказами (часов) 103 в течение 10 лет перио- дической экс- плуатации. 105 в течение 10 лет непрерыв- ной эксплуатации. Одноразовые 150 в течение 1 недели непрерывной экс- плуатации, многоразовые 5 • 103 в течение 5 лет пери- одической эксплуатации. 1,5- 104 в течение 10 лет периоди- ческой эксплу- атации. Одноразовые 150 в течение 1 неде- ли непрерывной эксплуатации, многоразовые 104 в течение 10 лет периодической эксплуатации.
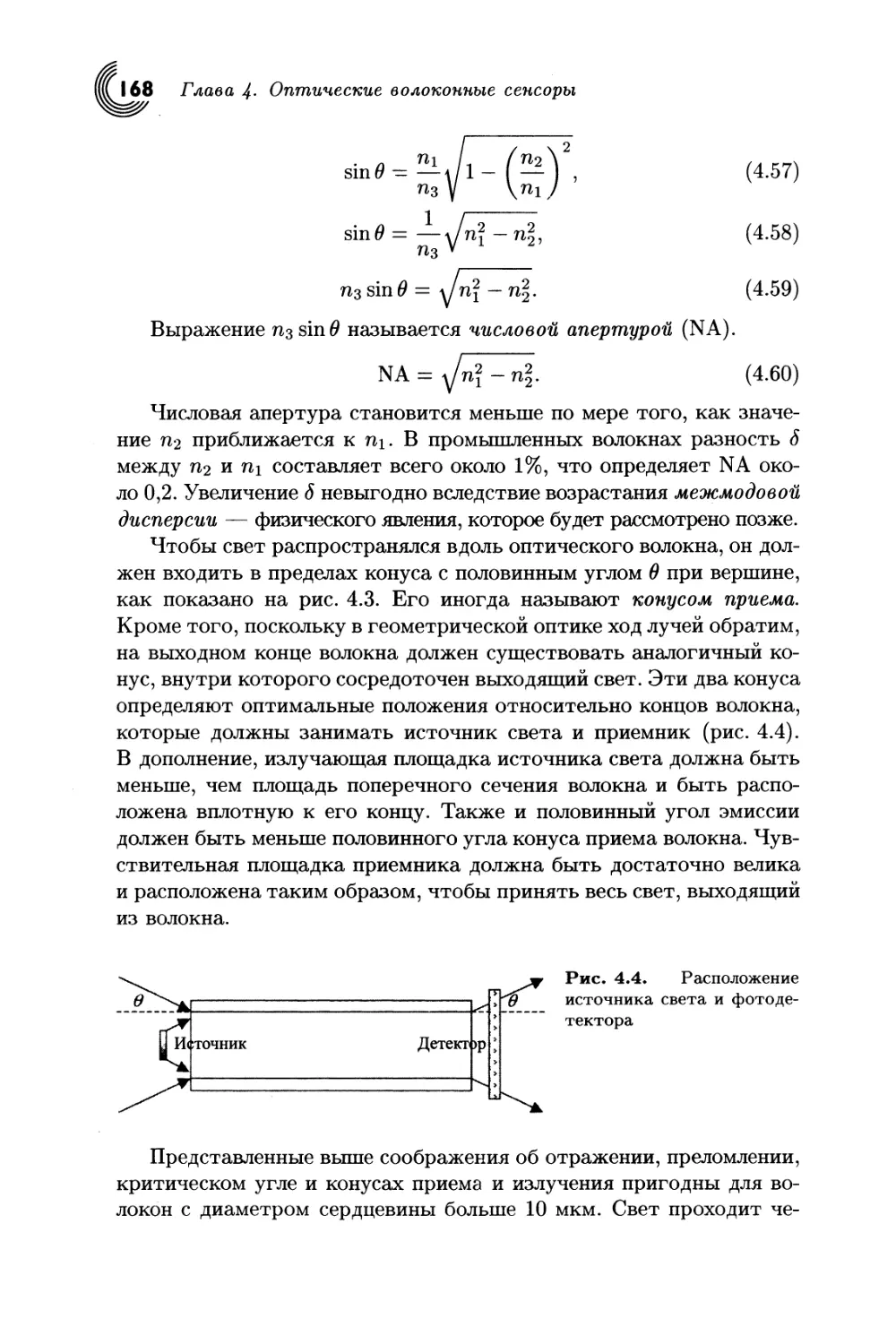
Температурный диапазон (0 °C) -20 4- 400 -200 4-1500 Одноразовые 10 4- 50, многоразовые 0 4- 250 -30 4- 400 -30 4-100
Быстродействие (с) f 1 0,1-10 1 10—3-1,0 100
Глава 1. Измерительные системы
1.2. Философия измерений
1.2. Философия измерений
Лорду Кельвину приписывают следующее изречение:
Когда вы можете измерить то, о чем говорите, и можете за-
писать это в цифрах, вы знаете, о чем говорите; но когда вы
не можете это измерить, не можете записать в цифрах, ваши
знания скудны и неудовлетворительны.
Экспериментальные данные являются основой для нашего познания
окружающего мира. В науке и инженерном искусстве все гипотезы и
теории до того, как они становятся правилами и законами, должны
быть тщательно проверены для подтверждения их справедливости
и степени соответствия истине. Универсальные константы и пара-
метры, связанные с материалами и структурами, а также другие
признаки — все должно быть скрупулезно выверено для получе-
ния максимально достоверных данных. Хорошим примером является
задача по измерению скорости света, занимавшая многих талан-
тливейших экспериментаторов и в особенности А. А. Майкельсон
(1852-1931), посвятившего ей значительную часть жизни, и которо-
му она принесла Нобелевскую премию за 1907 г.
Философия измерений заключается в стремлении получить не-
кую воображаемую точную или истинную величину. Чем больше
усилий прилагается, тем выше точность измерений и меньше по-
грешность.
1.2.1. Случайные погрешности
Всякий раз, когда проводятся измерения некоего параметра или ве-
личины, обязательно возникают ошибки. Измеренная величина или
значение будет иметь погрешность вследствие естественных флук-
туаций других физических величин. Гаусс постулировал, что такие
отклонения с одинаковой вероятностью будут больше или меньше
среднего значения. Эта случайная погрешность не должна прини-
маться во внимание, если измерительная система невосприимчива к
ней, но должна учитываться в некоторых прикладных задачах. Тем
не менее на микроуровне свойства объекта не бывают постоянными
и очень чувствительные инструменты обнаружат эти флуктуации.
Измерительная система является частью физического мира, и сама
по себе будет вносить заметную ошибку в любое проводимое измере-
ние. Все подобные случайные погрешности должны обрабатываться
статистически.
Глава 1. Измерительные системы
Наилучшей оценкой истинного значения X для некоей величины
или параметра х является среднее выборочное (или просто сред-
нее) х. Обычно используется следующая формула:
1 N
* = (L1>
i=l
для N наблюдений. Для больших значений N среднее х X. Меж-
ду прочим, утверждается, что при подсчете среднего выборочно-
го численное значение, полученное на основе большого количества
наблюдений, может иметь на одну значащую цифру больше после
округления, чем точность используемого оборудования.
Величина дисперсии или разброс значений параметра вокруг сред-
него может быть очень полезна в качестве показателя воспроизво-
димости измерения. Отклонение величины от среднего — это х^ — х.
Так как отклонение может быть как положительным, так и отрица-
тельным, сумма отклонений для большого ряда значений вероятнее
всего будет равна нулю. Как следствие используется квадрат от-
клонения. Среднее значение квадратов отклонений называется дис-
персией. Для получения значения дисперсии в той же размерности,
что и исходные измерения, требуется взять квадратный корень. Эта
величина называется среднеквадратическим отклонением. Оно лег-
ко вычисляется по формуле:
(1-2)
Среднеквадратическое отклонение (СКО) также известно под
названием стандартной погрешности. Это мера случайности или от-
клонения полученных результатов. Как видно из выражения (1.2)
проведение многочисленных повторных измерений не уменьшает зна-
чение s, а просто увеличивает точность оценки.
Интуиция подсказывает, что увеличение количества измерений
должно улучшить среднее значение в количественном отношении,
«больше должно быть лучше». Предположим, что для обеспечения
увеличения точности, вместо исходного ряда из N результатов, был
взят другой ряд измерений, набор, который был повторен р раз при
идентичных условиях, при этом каждая выборка содержала N ре-
зультатов. Как показано ранее, каждый из р наборов даст свое
среднее значение и среднеквадратическое отклонение. В данной си-
туации эти средние значения р могут быть преобразованы таким
образом, чтобы получить среднее от средних значений:
1.2. Философия измерений
= 1А 1 ₽ /1 " \
х ~ vZ-^Xk ~ п У I N ^Xi/
*k=l 1 к=1 \ i=l /
Итог не является чем-то неожиданным. Это тот же результат,
как если бы изначально было проведено pN наблюдений:
1 PN
f = * = (L4)
Наибольший вклад вносит СКО р средних выборочных. Средне-
квадратическое выборочное отклонение sm характеризует диапазон
отклонения среднего и точность среднего средних выборочных. Тео-
ретически это можно рассчитать, используя следующее выражение:
$т —
1 р
*к=1
На практике формула (1.5) не используется. Можно
(см. Скуарес 1968), что:
1
S - ±
т - ~
(1-5)
показать
(1-6)
N
Таким образом, для больших N:
1 N
(1-7)
Как видно из (1.7) оценка sm может быть улучшена путем уве-
личения числа сделанных наблюдений. «Больше-лучше» справедливо
для данного случая. Тем не менее это правило начинает плохо рабо-
тать при уменьшении объема выборки. Увеличение количества N
может не стоить усилий, прилагаемых для их получения. Лучше
почувствовать разницу между s и sm. могут помочь следующие при-
меры.
Стандартная погрешность измерений (s)
Рассмотрим поточную линию производства резисторов номиналом
10 кОм. Каждый день 100 образцов может быть изъято из техно-
логического процесса для определения значения s. Это дает рас-
пределение результатов относительно среднего значения и показы-
вает руководителю производства, находятся ли номиналы партии
Глава 1. Измерительные системы
в заданных для нее пределах, например ±10%. Вероятность выхо-
да номинала одного из резисторов за пределы ±10% связана с s.
В разделе 6.3.2 это представлено более подробно в рамках вопро-
са о вероятностных распределениях. Статистически маловероятно
(примерно 2,7 на 103), что величина будет отличаться от средне-
го значения больше чем на утроенную стандартную погрешность.
Если s принимается равной приблизительно 3%, благодаря использо-
ванию хороших производственных технологий, большинство сделан-
ных резисторов будет иметь отклонение номинала в пределах 10%
от заявленного значения в 10 кОм.
Принцип «3s» также может быть применен для выявления оши-
бочных результатов. Если значение члена ряда идентичных измере-
ний отличается от среднего больше чем на 3 стандартных погреш-
ности, оно может быть признано сомнительным и отброшено.
Стандартная погрешность среднего (sm)
В экспериментах по определению параметров, таких как скорость
света, например, указывается значение зт. Таким образом, это да-
ет возможность сделать оценку точности данной величины и учесть
усилия, затраченные на получение повторяющегося ряда измерений.
Были случаи, когда исследователи при повторении эксперимента
получали результаты за пределами стандартной погрешности, за-
данной заранее. Это привело к обнаружению систематической по-
грешности.
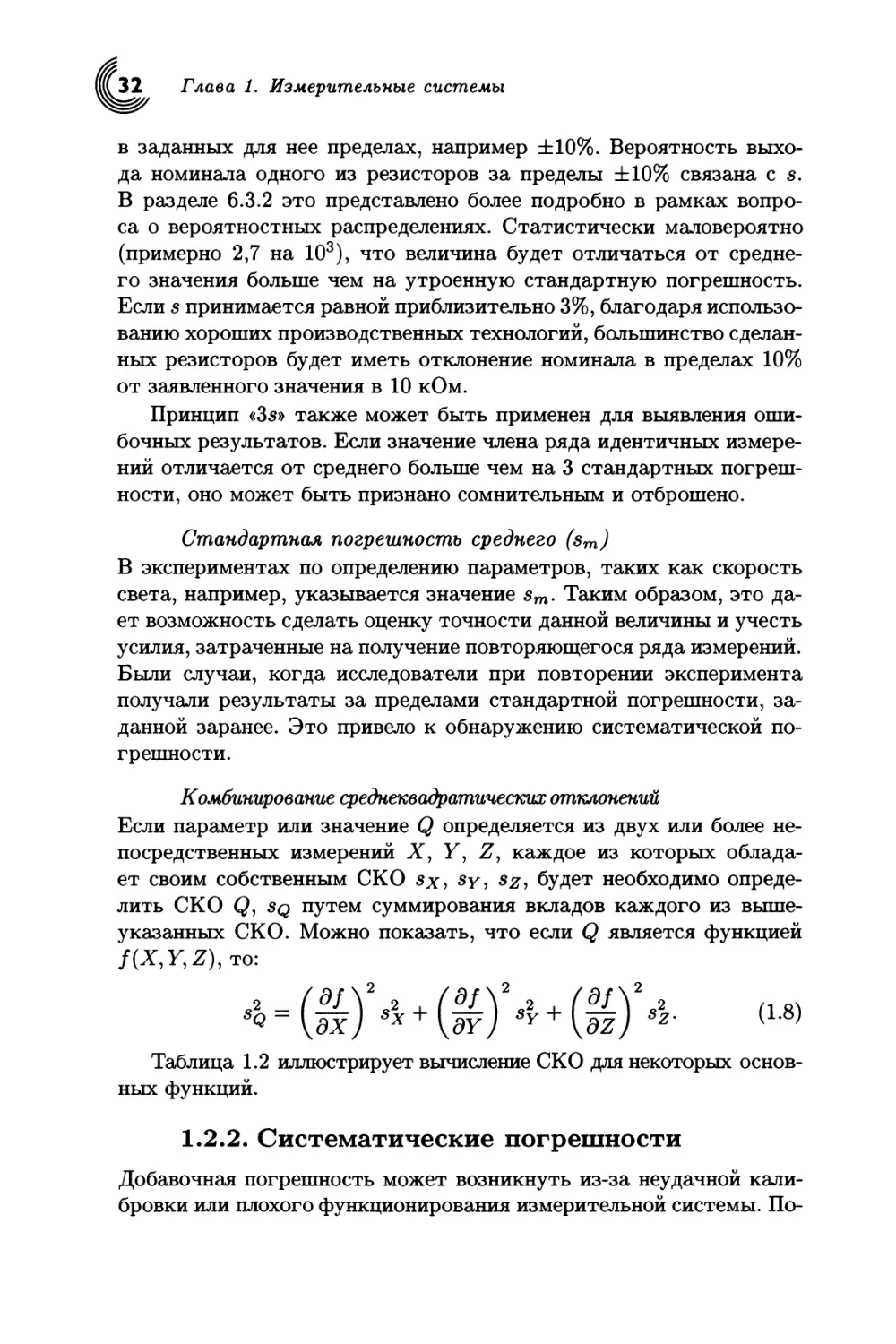
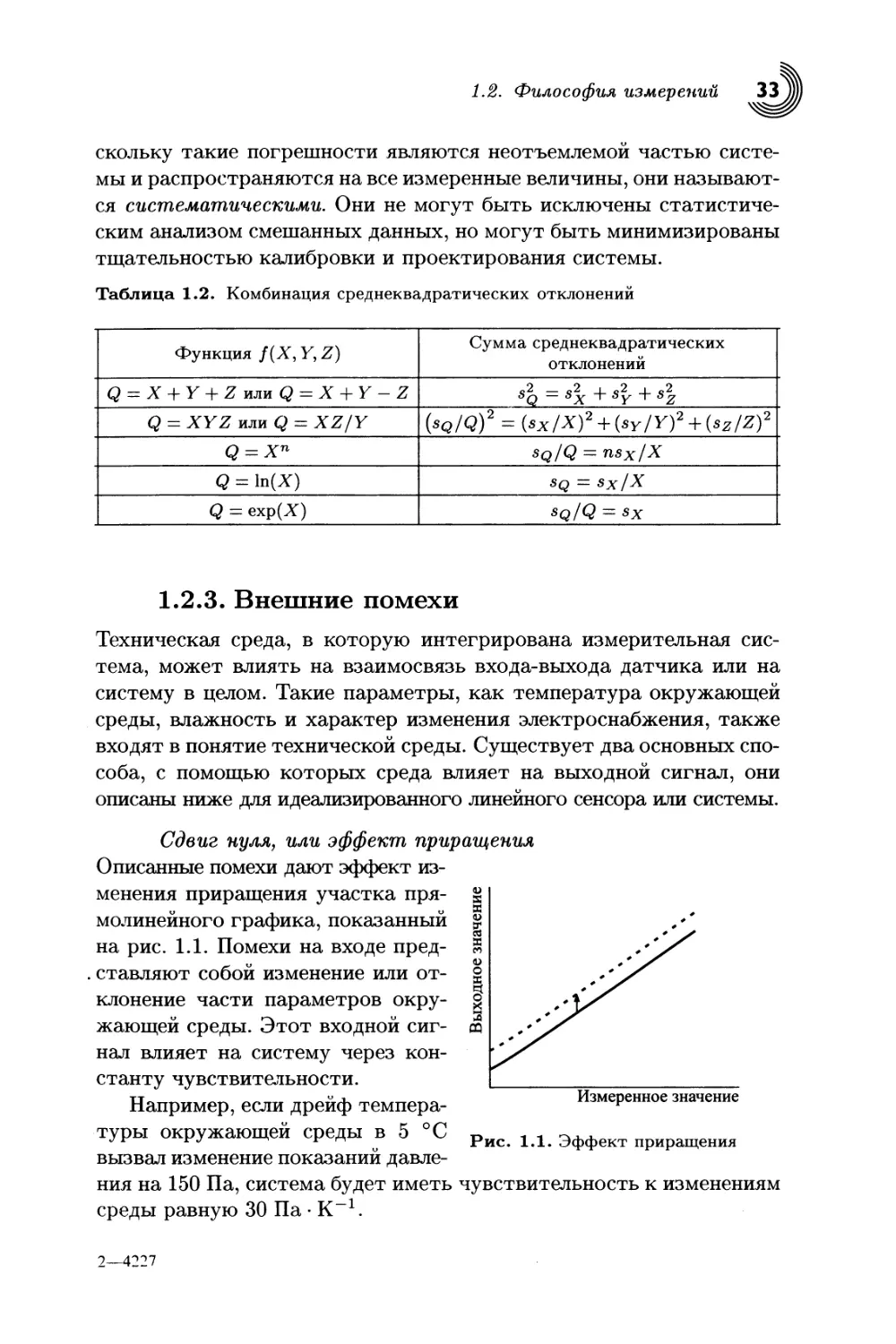
Комбинирование среднеквадратических отклонений
Если параметр или значение Q определяется из двух или более не-
посредственных измерений X, У, Z, каждое из которых облада-
ет своим собственным CKO $х, sy, sz, будет необходимо опреде-
лить CKO Q, sq путем суммирования вкладов каждого из выше-
указанных СКО. Можно показать, что если Q является функцией
/(Х,У,7), то:
s2 -(ЁГ\282 .(df\2s2 .(df\2s2 z18)
Sq ~ VdxJ x + J Sy + \dzJ z' (L8)
Таблица 1.2 иллюстрирует вычисление CKO для некоторых основ-
ных функций.
1.2.2. Систематические погрешности
Добавочная погрешность может возникнуть из-за неудачной кали-
бровки или плохого функционирования измерительной системы. По-
1.2. Философия измерений
скольку такие погрешности являются неотъемлемой частью систе-
мы и распространяются на все измеренные величины, они называют-
ся систематическими. Они не могут быть исключены статистиче-
ским анализом смешанных данных, но могут быть минимизированы
тщательностью калибровки и проектирования системы.
Таблица 1.2. Комбинация среднеквадратических отклонений
Функция f(X,Y,Z) Сумма среднеквадратических отклонений
Q = X + Y + Z или Q = X + У - Z SQ = + SY + SZ
Q = XYZ или Q = XZ/Y (sq/<?)2 = (sx/X)2 + (sy/У)2 + (sz/Z)2
Q = Xn sq/Q — nsx/X
Q = 1п(Х) SQ =Sx/X
Q = ехр(Х) sq/Q — Sx
1.2.3. Внешние помехи
Техническая среда, в которую интегрирована измерительная сис-
тема, может влиять на взаимосвязь входа-выхода датчика или на
систему в целом. Такие параметры, как температура окружающей
среды, влажность и характер изменения электроснабжения, также
входят в понятие технической среды. Существует два основных спо-
соба, с помощью которых среда влияет на выходной сигнал, они
описаны ниже для идеализированного линейного сенсора или системы.
Сдвиг нуля, или эффект приращения
Описанные помехи дают эффект из-
менения приращения участка пря-
молинейного графика, показанный
на рис. 1.1. Помехи на входе пред-
ставляют собой изменение или от-
клонение части параметров окру-
жающей среды. Этот входной сиг-
нал влияет на систему через кон-
станту чувствительности.
Например, если дрейф темпера-
туры окружающей среды в 5 °C
вызвал изменение показаний давле-
ние. 1.1. Эффект приращения
ния на 150 Па, система будет иметь чувствительность к изменениям
среды равную 30 Па К-1.
2—4227
Глава 1. Измерительные системы
Изменение чувствительности, или эффект коррекции
Внешние помехи изменяют значение
Рис. 1.2. Эффект коррекции
чувствительности системы, наклон
линии графика (рис. 1.2). Примером
этого эффекта может служить по-
плавковый датчик уровня жидкости,
обыкновенно используемый в авто-
мобилях. Потенциометр, связанный с
поплавком, выдает значение сопро-
тивления в зависимости от уровня
жидкости, которое в свою очередь
меняет скорость потока через мил-
лиамперметр датчика бензина. Если
меняется напряжение источника пи-
тания, меняются и показания. Обычно, если работают генератор
переменного тока и стабилизатор, напряжение автомобильного ис-
точника питания держится на уровне 14 В. Тем не менее, когда
двигатель заглушен, напряжение снижается до уровня 12 В от акку-
мулятора. Константа чувствительности к изменениям среды может
быть определена в следующих единицах л • мА-1/В (л — литр).
Простой способ контроля внешних помех — повторение первого
измерения, сделанное после завершения регистрации ряда показа-
ний. Можно посоветовать более сложные методы. Например, для
линейной системы, определяемой уравнением у = тх 4- с, постро-
ение у — тх от х даст постоянное значение, если с — константа (нет
эффекта приращения). Аналогично построение (у — с)/х от х даст
константу, если т фиксировано (нет эффекта коррекции).
1.2.4. Проектирование системы
и вклад погрешностей
В разделе 1.2 было показано, как стандартные погрешности неко-
торого количества случайных величин комбинируются для получе-
ния стандартной погрешности выведенной величины Q. В процессе
планирования эксперимента или проектирования системы полезно
оценить способ комбинирования погрешностей. Было бы интересно
проследить, какой вклад в итоговый результат вносят погрешно-
сти измеренных значений определяемого параметра и любые другие
погрешности дополнительных элементов системы. Таким образом,
особое внимание должно быть уделено тем компонентам, которые
дают наибольший вклад в общую погрешность.
1.2. Философия измерений
Как и ранее предположим, что величина Q вычисляется на основе
одного или нескольких прямых измерений. Вдобавок другие эле-
менты измерительной системы такие, как фильтр или усилитель
также могут вносить погрешности. Опять предположим, что Q —
это функция где X и Y представляют собой измерения,
a Z — коэффициент усиления. Значениям X, Y и Z соответствуют
погрешности JX, 6Y, 6Z, которые в результате комбинирования да-
дут значение неопределенности SQ для Q. Соотношение между 6Q
и 6Х, SY, 6Z можно найти, используя уравнение для частных про-
изводных
<19>
В табл. 1.3 содержатся примеры некоторых стандартных функций.
Таблица 1.3. Простое комбинирование погрешностей
Функция f(X,Y,Z) Комбинатор стандартных погрешностей
Q = X + Y ± Z SQ = SX + SY ± SZ
Q = XYZ или Q = XZ/Y (<5Q/Q) = (SX/X) + (SY/Y) + (SZ/Z)
Q = Xn SQ/Q = nSx/X
Q = ln(X) Sq=Sx/X
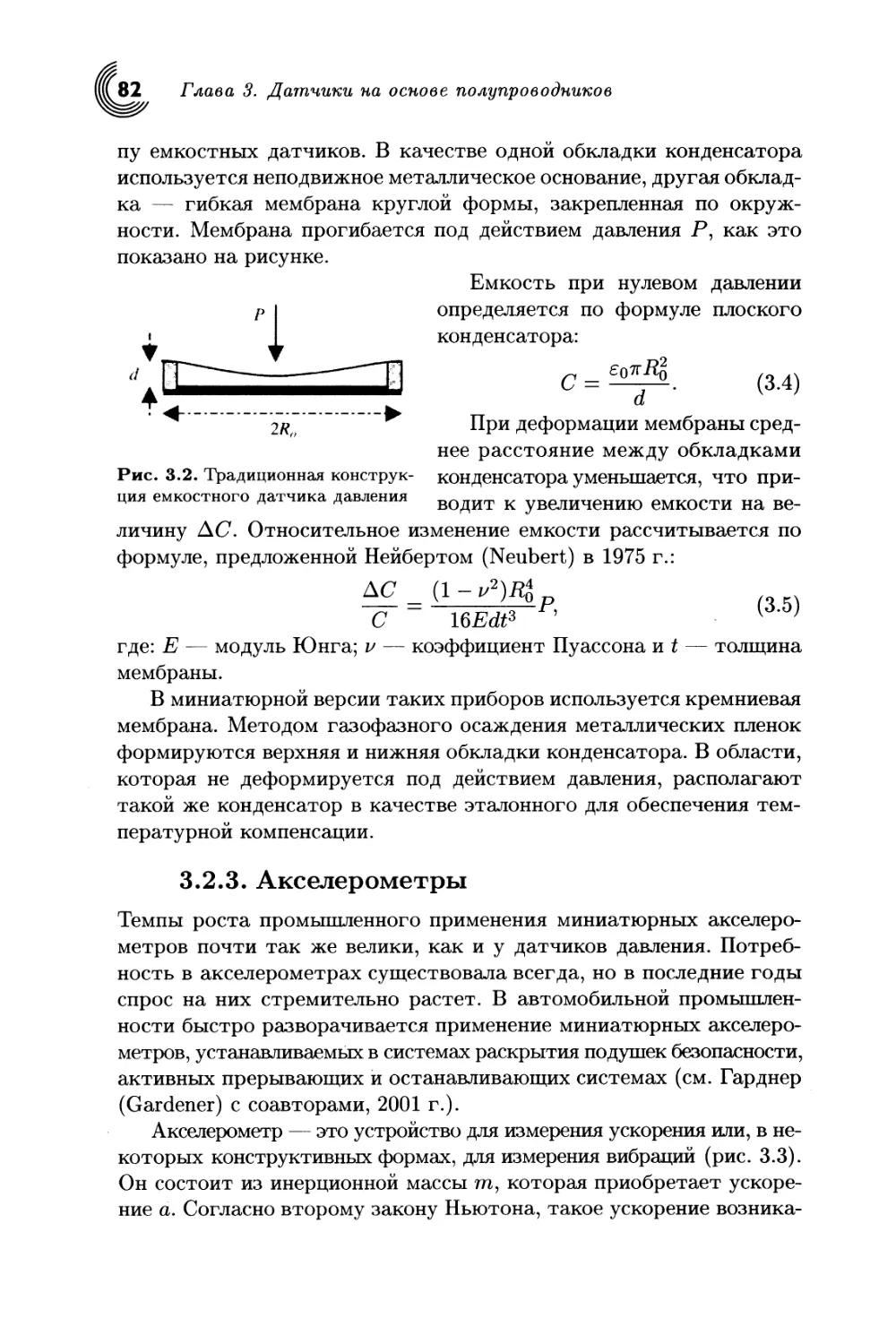
Q = exp(X) Sq/Q = $x
Сложение/вычитание
За исключением случаев, когда есть предварительная информация о
поведении системы, предполагается наихудшая ситуация и все абсо-
лютные погрешности складываются. Все оценки погрешностей долж-
ны быть в одинаковых единицах, как и SQ.
Умножение/деление
Опять предполагаем наихудшую ситуацию, в этом случае складыва-
ют все относительные погрешности. Они безразмерны и могут быть
дробными или выражены в процентах. Относительные погрешности
также используются для логарифмических функций.
Простое определение общей погрешности
Соотношения из табл. 1.3 или аналогичные, выведенные по фор-
муле (1.9), могут использоваться для простой оценки погрешности
величины, рассчитанной либо на основе ряда измерений, либо в каче-
стве выходного значения измерительной системы. Свой вклад дают
погрешности, возникающие из-за:
Глава 1. Измерительные системы
- грубой приблизительной оценки случайных погрешностей;
- оценки систематических погрешностей;
- ограничений калибровки;
- отклонения компонентов;
- оценки возможных внешних помех;
- ограничений разрешения;
- гистерезиса, или эффекта «мертвой зоны»;
- оценки нелинейностей;
- погрешностей дискретизации.
В предыдущем параграфе в выражении (1.9) использовался тер-
мин неопределенность, при описании 6Х, 6Y, 6Z. Работая с вы-
шеуказанными величинами предпочтительнее использовать именно
его, а не понятие погрешности, так как это не итоговое значение в
вычислениях. Такие элементы, как пределы калибровки и допусти-
мые отклонения, дают свой вклад, хотя, строго говоря, не являются
погрешностями.
Пример. Необходимо вычислить плотность материала проволоч-
ного образца через массу и объем, используя простейший метод для
оценки неопределенности полученного результата. Плотность опре-
деляется как:
_ т
Tt(d/2)2h'
Из выражения (1.9) видно, что
т
р
6т ,^6d 6h
d + h
Учитывая, что относительная погрешность диаметра d — наиболее
чувствительный член расчета плотности, к измерению этой величи-
ны надо подойти с наибольшим вниманием.
Масса образца определена как 1,25 • 10~3 кг, а использованные
для этого весы откалиброваны с точностью ±1 мг. Длина составила
0,1845 м, в то время как приборная погрешность линейки 0,5 мм.
Толщина измерялась 10 раз на различных участках и в разных направ-
лениях микрометром с разрешением ±10-5 м, результат — 0,984 мм
при стандартной погрешности в среднем ±0,024 мм. Плотность равна:
1,25 • 10~3
я- (9,84 • 10-4/2)2 -0,1845
= 8,909 • 103 кг/м3'
1.3. Обобщенное понятие измерительной системы
Относительная погрешность определяется следующим образом:
6р 1(Г6 п 0,024 0,5
р 1,25 • 10-3 0,984 184,5
= 8 • 10-4 + 0,04878 + 2,71 • 10-3 = 0,05229.
Погрешность определения р имеет вид:
6р = р • 0,05229 = 459 кг/м3.
Обычно результат представляют в следующей форме:
р = 8,909 ± 0,4659 • 103 кг/м3.
Вопрос о достаточном количестве значащих цифр требует допол-
нительного обсуждения. Можно использовать стандартный подход.
Для примера, рассмотренного выше, неопределенность находится
на уровне 5% (главным образом из-за погрешности в измерении
диаметра). Таким образом бессмысленно записывать больше двух
значащих цифр в окончательном результате р = 8,9±0,5-103 кг/м3.
Неопределенность, или стандартная погрешность обычно округля-
ется до одной значащей цифры или до двух, если первая цифра
равна 1 или 2. □
В заключение необходимо отметить, что способ простого ком-
бинирования погрешностей не является статистически строгим в
отличие от метода комбинирования стандартных погрешностей в
соответствии с выражением (1.8). Это вызвано тем, что погреш-
ности в данной ситуации не принадлежат распределению вероятно-
стей, а являются совокупностью неопределенностей. Тем не менее в
некоторых случаях можно допустить, что неопределенность принад-
лежит Гауссовому распределению. Тогда неопределенность может
быть интерпретирована как стандартная погрешность и суммиро-
вана с другими стандартными погрешностями по формуле (1.8).
Преимуществом является тот факт, что обработанная стандарт-
ная ошибка дает точный статистический вес величины как меру ее
достоверности. В разделе 6.3.2 проиллюстрирован метод подсчета
сходных вероятностей.
1.3. Обобщенное понятие
измерительной системы
Измерительная система может быть легко поделена на нижеследу-
ющие основные составляющие. Не все системы содержат полный
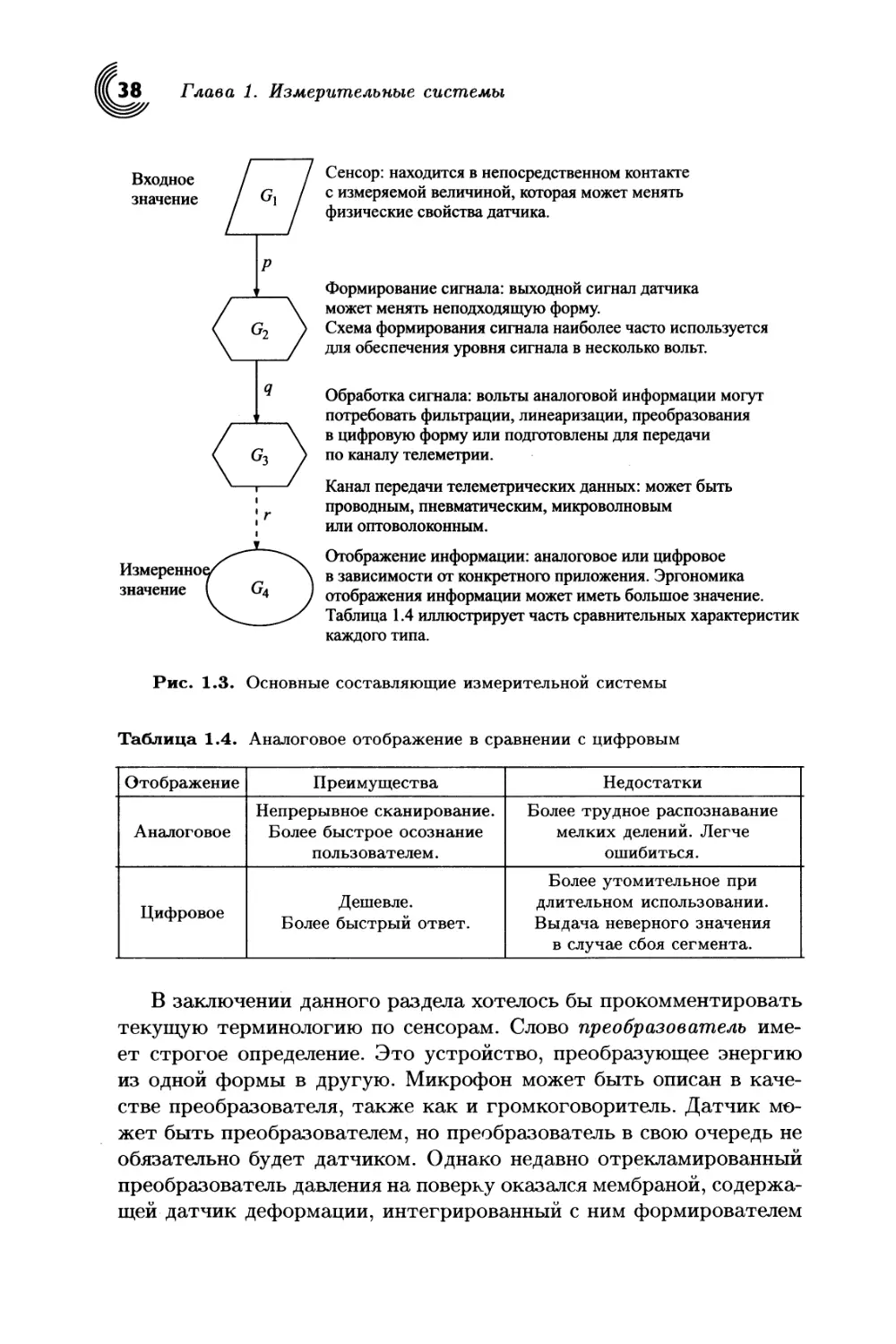
набор компонентов (см. рис. 1.3).
Глава 1. Измерительные системы
Входное
значение
Сенсор: находится в непосредственном контакте
с измеряемой величиной, которая может менять
физические свойства датчика.
Формирование сигнала: выходной сигнал датчика
может менять неподходящую форму.
Схема формирования сигнала наиболее часто используется
для обеспечения уровня сигнала в несколько вольт.
Обработка сигнала: вольты аналоговой информации могут
потребовать фильтрации, линеаризации, преобразования
/ \ в цифровую форму или подготовлены для передачи
\ &з / ПО каналу телеметрии.
'—।----' Канал передачи телеметрических данных: может быть
i г проводным, пневматическим, микроволновым
[ или оптоволоконным.
Отображение информации: аналоговое или цифровое
Измеренное/ X в зависимости от конкретного приложения. Эргономика
значение I О4 J отображения информации может иметь большое значение.
Таблица 1.4 иллюстрирует часть сравнительных характеристик
каждого типа.
Рис. 1.3. Основные составляющие измерительной системы
Таблица 1.4. Аналоговое отображение в сравнении с цифровым
Отображение Преимущества Недостатки
Аналоговое Непрерывное сканирование. Более быстрое осознание пользователем. Более трудное распознавание мелких делений. Легче ошибиться.
Цифровое Дешевле. Более быстрый ответ. Более утомительное при длительном использовании. Выдача неверного значения в случае сбоя сегмента.
В заключении данного раздела хотелось бы прокомментировать
текущую терминологию по сенсорам. Слово преобразователь име-
ет строгое определение. Это устройство, преобразующее энергию
из одной формы в другую. Микрофон может быть описан в каче-
стве преобразователя, также как и громкоговоритель. Датчик мо-
жет быть преобразователем, но преобразователь в свою очередь не
обязательно будет датчиком. Однако недавно отрекламированный
преобразователь давления на поверку оказался мембраной, содержа-
щей датчик деформации, интегрированный с ним формирователем
1.^. Полная передаточная функция
сигнала. Электроснабжение осуществлялось по двухпроводной ли-
нии, также как и снятие выходного сигнала. Естественно, такое
устройство не является преобразователем в буквальном смысле.
Следующим примером вводящей в заблуждение терминологии бу-
дет использование в промышленности слова «датчик». Датчик да-
вления, например, — это устройство, которое измеряет требуемое
давление и выдает информацию по двухпроводной линии в про-
мышленном диапазоне токов 4-4-20 мА. Такие передатчики являются
датчиками, осуществляющими формирование сигнала и его передачу.
Четкое определение и сохранение терминов имеет первостепен-
ную важность для науки и инженерного искусства. История изоби-
лует несчастными случаями, вызванными недопониманием инжене-
рами друг друга. В настоящее время имеется тенденция использо-
вать слово «сенсор» для устройства ввода и «актюатор» для устрой-
ства вывода, пытаясь обеспечить хоть какие-нибудь отличил между
измерительной системой и заводом. Слово «преобразователь» тща-
тельно избегается. Сенсоры могут быть подразделены на активные,
в которых преобразование энергии вызывает генерацию сигнала, и
пассивные, в которых требуется электроснабжение для получения
выходного электрического сигнала. Например, термопара является
активным сенсором, в то время как термосопротивление — пас-
сивным. Это различие может быть значительным при работе во
взрывоопасных средах, где в пределах опасной зоны энергия должна
жестко контролироваться.
1.4. Полная передаточная функция
Выходной сигнал измерительной системы — это совокупность вход-
ного сигнала и воздействия различных узлов внутри системы. Ана-
лизируя работу системы в целом, полезно математически смодели-
ровать каждый блок. Данный подход к измерительным приборам
сформулировали Финкельштейн и Уоттс (1971). Для каждого блока
передаточная функция равна
выходной сигнал
входной сигнал
Например, если в качестве сенсора используется термосопротивле-
ние, тогда
Gi =---------------Ом/°С. (1.10)
входное значение
Отдельные блоки могут иметь цепи обратной связи, но они учте-
Глава 1. Измерительные системы
ны в G. Полная передаточная функция может быть рассчитана как
последовательное произведение отдельных передаточных функций
измеренное значение , .
------------------= G1G2G3G4G5. (1.11)
входной сигнал
Полная передаточная функция — это чувствительность системы.
Ясно, что в этом случае
измеренное значение = входной сигнал х G1G2G3G4G5. (1-12)
Однако эта формула не подходит для случая нулевого значения
на одном из блоков. Например, обычный платиновый датчик сопро-
тивления обладает внутренним сопротивлением 100,0 Ом при 0 °C.
Для его компенсации вводится формирователь сигнала с целью по-
лучить ноль на выходе при наличии 100 Ом на входе. На практике
принято реализовывать в системе возможность коррекции нуля на
самой ранней стадии. Игнорирование этого может привести к зна-
чительным по величине сигналам в схеме, которые могут вызвать
насыщение усилителя или неэффективное использование диапазо-
на АЦП. Так же выражение (1.12) не учитывает приложенную к
внутренним узлам нагрузку. Правильной является конструкция с ис-
пользованием элементов, обладающих низким выходным и высоким
входным сопротивлениями для минимизации нагрузочных эффек-
тов. Применение высокоэффективных операционных усилителей в
буферной схеме упрощает выполнение поставленных задач. Описа-
ние нагрузки внутренних блоков представлено далее в разделе 1.6.
1.5. Динамическая характеристика сенсора
Моделирование сенсора может включать в себя большее число эле-
ментов, чем предлагается в выражении (1.10). Например, нагрев или
охлаждение датчика температуры может быть представлено в ви-
де линейного дифференциального уравнения первого порядка. Это
означает, что из-за неалгебраической формы уравнения передаточ-
ная функция не может быть записана просто. В общем, элементы
схемы, связанные с хранением и передачей энергии, описываются
моделями на основе нестационарных уравнений. Как следствие, ес-
ли входное значение меняется, измеренное значение будет иметь
динамическую ошибку. Чтобы иметь возможность использовать ме-
тод последовательного произведения передаточных функций, удоб-
но провести преобразование Лапласа для уравнений, описывающих
различные элементы. Это дает возможность перехода от дифферен-
1.5. Динамическая характеристика сенсора
циального исчисления к алгебраическому. Нижеследующий пример
иллюстрирует динамические характеристики сенсора.
Передаточная функция датчика температуры
На начальном этапе измерений сенсор будет иметь температуру,
отличную от температуры жидкости, в которую он погружен. Меж-
ду жидкостью и датчиком будет происходить перераспределение
энергии до того момента, когда температуры сравняются. Перво-
начально:
время — t = 0, температура датчика = 0^
температура жидкости = Of.
Во время перераспределения тепла температура датчика будет ме-
няться непрерывно и иметь значение 0s (t). Чтобы поднять темпера-
туру некоторого материала, требуется следующее количество тепла:
Q = mc(05-0o), (1.13)
где т — это масса материала, ас — удельная теплоемкость. Если
считать, что жидкость теплее датчика, интенсивность роста тем-
пературы датчика будет:
dQ d(08 - Оо)
—— = тс------:----
dt dt
(1.14)
Теплопередача может происходить в виде конвекции, теплопровод-
ности или излучения. Интенсивность потери тепла жидкостью опре-
деляется с помощью уравнения конвекции:
^ = UAtff-0s), (1.15)
где А — это площадь поверхности, a U — коэффициент формы.
При использовании преобразования Лапласа удобно, чтобы на-
чальные условия были нулевыми. Это означает, что все переменные
в уравнении имеют нулевые начальные значения. Для этого прово-
дится замена переменных:
М = 08- 0о.
Выражение (1.14) принимает вид:
dQ dA0
—— — тс—:—
dt dt
а уравнение (1.15) —
(1-16)
(1-17)
(1-18)
Глава 1. Измерительные системы
Выражение (1.18) может быть записано в более удобной форме,
если принять Д6»/ = ^-6»о, (1.19)
тогда = ГЛ4(Д0, - Д0). (1.20)
Теперь
тепло, полученное датчиком, — тепло, потерянное жидкостью.
Приравнивание уравнений (1.17) и (1.20) дает
тс^- = UA(A0f - Д0), (1.21)
а последующее преобразование
(1.22)
«Научные» и «инженерные» уравнения должны быть однородны
по размерностям. Коэффициент перед производной должен иметь
размерность времени. Постоянную времени г можно ввести следую-
щим образом
(ОЗ)
Подстановка т в уравнение (1.22) дает
T^- + A0 = Aef. (1.24)
Это выражение можно преобразовать, используя таблицы преобра-
зований Лапласа.
ts№(s) + A0(s) = Д0/(s), (1-25)
Д0($)(т$ + 1) = Д0/($), (1.26)
Д0(з) = (1.27)
v ’ 1 + st v ’
Таким образом, передаточная функция сенсора, преобразованная
по Лапласу имеет вид
А^'(^) 1 (1281
Д0,(з) 1 + зт’ )
Специалисты по автоматическому управлению обычно использу-
ют системный подход в проектировании и традиционно выражают
передаточные функции в преобразованном по Лапласу виде. Чер-
1.6. Измерительная система как многополюсники
точка над символами указывает на преобразование по Лапласу1, так
что уравнение (1.28) будет записано следующим образом
ад =
Д0(«)
дад
1
1 + ST
(1-29)
1.6. Измерительная система
как последовательность многополюсников
Финкельштейн и Уоттс (1971) предложили описывать блоки измёри-
тельной системы как четырехполюсники. Анализ четырехполюсни-
ков — метод исследования электрических схем, когда часть схемы
рассматривается как некий обобщенный элемент с входной и выход-
ной парой полюсов или зажимов. Входные/выходные переменные на-
зывают потенциальными и потоковыми переменными (Краус 1991).
Из четырех величин, определяю-
щих режим четырехполюсника, две
величины заданы, а остальные —
являются откликами на эти воздей-
ствия. В зависимости от сделанного
выбора можно получить шесть ка-
нонических форм соотношений вход-
ных и выходных переменных. Система уравнений выводится при
использовании частного закона, дающего обобщенное описание. Эти
И
Рис. 1.4. Четырехполюсник
уравнения могут включать соотношения в интегрально-дифферен-
циальной форме. Из шести канонических форм наиболее использу-
емым является уравнение характеристики импеданса. Для рис. 1.4
они будут выглядеть следующим образом:
Vi — гцД + 2:12/2,
V2 = 221/1 + 222/2-
Эти уравнения удобно записать в матричной форме:
(1.30)
(1-31)
(1-32)
211 212 Г /1
221 222 /2
У1 А
v2 J [ /2
где Z представляет собой матрицу значений импеданса. Изобра-
зив элементы системы как набор четырехполюсников, описываемых
соответствующими линейными уравнениями, можно использовать
ХВ российской традиции образ функции 0(t) при преобразовании Лапласа обо-
значается через 0(р)- — Прим. ред.
Глава 1. Измерительные системы
матричную алгебру или программные средства типа Matlab для
определения суммарного отклика системы.
Финкельштейн и Уоттс выдви-
Процесс,
подлежащий
измерению
Потоковая
переменная х
* потенциальная
: переменнаяу
Рис. 1.5. Процесс как двухполюсник
нули предположение, согласно ко-
торому процесс измерения величи-
ны может трактоваться как двух-
полюсник. Процесс должен иметь
правильным образом определенные
потенциальные (у) и потоковые (х)
переменные.
Бентли (1995) описывает данный подход более подробно. Неко-
торые примеры потенциальных и потоковых переменных показаны
в табл. 1.5.
Таблица 1.5. Потенциальные и потоковые переменные для некоторой
общей системы
Перемен- ная Электри- ческая Тепловая Жидкая среда Поступатель- ное движение Вращательное движение
потенци- альная У разность потенциа- лов (В) разница темпера- тур (°C) разность давлений (Па) сила (Н) крутящий момент (Н • м)
потоковая X сила тока (А) тепловая мощность (Вт) объемная скорость течения (м3/с) скорость м/с угловая скорость (рад./с)
X заряд (Кл) тепловая энергия (Дж) объем (м3) перемещение (м) угловое перемещение (рад.)
X скорость измене- ния силы тока (А-с-1) ускорение (м/с2) угловое ускорение (рад./с2)
сопроти- вление Z сопроти- вление (Ом) тепловое сопроти- вление (°С/Вт) давление/ объемная скорость течения сила/ коэффициент затухания скорости (Н • с/м) крутящий момент/коэф- фициент затухания угловой скорости (Н • м/рад)
Сравнение процессов зарядки конденсатора и нагрева тела дает
простой пример аналогии, которую можно провести между физиче-
1.6. Измерительная система как многополюсники
скими системами. В простом ЯС-контуре выходное напряжение Vs
получается путем преобразования исходного напряжения Vf от по-
стоянного источника (рис. 1.6).
Рис. 1.6. Аналогия между заряжаемым кон-
денсатором и нагреваемым телом
Нестационарное дифференциальное уравнение выведено ниже.
Для конденсатора:
CVS = q. (1.33)
Дифференцируя уравнение (1.33), имеем:
C^ = i dt ’ (1-34)
dVs _Vf — Vs dt R ’ (1.35)
=Vf~ Vs' (1.36)
RC^ + Vs = Vf- (1-37)
Сравнивая с уравнением (1.22) можно заметить, что
T4 = Ra LA (1.38)
Таким образом
С = тс теплоемкость,
R = термосопротивление.
Понятия, подобные этим, помещены в табл. 1.3.
Рис. 1.7. Представление
процесса и датчика двух- и
четырехполюсниками
Потоковая
Если процесс контролируется, то добавляется двухполюсник для
связи с датчиком (см. рис. 1.7). Если, например, процесс — это
Глава 1. Измерительные системы
измерение температуры нагретого резервуара термометром сопро-
тивления, то использование сетевого анализа требует принять во
внимание приложенную нагрузку. Нагрузка, влияющая на датчик,
может возникнуть при последующем формировании сигнала схемой.
Тем не менее ее появление может быть вызвано и самим датчи-
ком, оказывающим влияние на измерительный процесс. В данном
примере подобное может произойти из-за нагрева схемой форми-
рования сигнала чувствительного элемента, в результате за счет
теплоемкости чувствительного элемента может измениться темпе-
ратура нагретого резервуара. Принцип согласования импедансов
может быть использован для согласования процесса и датчика для
получения наилучшего отклика (рис. 1.8).
Рис. 1.8. Согласование импе-
дансов процесса и датчика
Если требуется передать максимум энергии от процесса к дат-
чику, то стандартным условием является равенство:
Zp = Zs. (1.39)
Если, как это часто бывает, переменная процесса ур не должна испы-
тывать влияние датчика, то налагается другое условие. Принимая
потоковую переменную постоянной в системе, имеем
потоковая переменная т - Ур (1-40)
потенциальная переменная ys = iZs. (1-41)
Исключение х дает
yPzs Vs~ zp + zs' (1-42)
Так что для ys = ур справедливо Zp Zs.
Если потоковая переменная х является требуемой величиной, то
обязательным требованием будет максимально низкий импеданс дат-
чика, чтобы х не имела ограничений. Для процесса, не оказываю-
щего влияние, из выражения (1.42) может быть выведено условие
Zp Zs.
Использование матричной методики расчета импеданса позволя-
ет смоделировать всю измерительную систему как взаимосвязанную
группу элементов, управляемую процессом. Этим способом можно
определить динамические характеристики системы в зависимости
Литература
от изменяющейся во времени измеряемой величины до момента по-
строения, делая проектирование комплексных систем более эффек-
тивным.
Литература
В этой главе были намечены в общих чертах структура и основ-
ные принципы работы измерительной системы. Последующие главы
представляют некоторые последние достижения в области создания
сенсоров. Традиционные датчики, такие как термопары, термоме-
тры сопротивления, диафрагмовые расходомеры не были включены
в рассмотрение в связи с достаточным освещением в литературе.
Для читателей, желающих узнать больше о традиционных видах сен-
соров, можно рекомендовать следующую литературу.
Bentley J. Р. 1995 Principles of Measurement Systems 3rd edition (Long-
man)
Considine D. M. (ed) 1999 P rocess/ Industrial Instruments and Controls
Handbook 5th edition (McGraw-Hill)
Johnson C. D. 1988 Process Control Instrumentation Technology 3rd
edition (New York: Wiley)
Sensors: A Comprehensive Survey 1992 (Cambridge: UCH)
Usher M. J. 1985 Sensors and Transducers (Macmillan)
Ссылки
Bentley J. P. 1995 Principles of Measurement Systems 3rd edition (Long-
man)
Finkelstein L. and Watts R. D. 1971 «Systems analysis of instruments».
Measurement and Control 4 September
Kraus A. D. 1991 Circuit Analysis (West Publishing Company)
Squires G. L. 1968 Practical Physics (London: McGraw-Hill)
Упражнения
1.1. Миниатюрная камера укомплектована телеметрическим радио-
каналом. Она имеет цилиндрическую форму, 8 мм в диаметре,
10 мм длиной, питание от батарей. Зонд стоит £300, а прием-
ная система £2000 для диапазона 10 м. Предложите варианты
применения.
Глава 1. Измерительные системы
1.2. Предложите подходящее устройство визуального отображения
для панели управления в машинном зале подлодки.
1.3. Были проделаны следующие измерения сопротивления витка
провода,
Сопротивление Я (Ом) 5,615 5,622 5,624 5,618 5,620 5,633 5,628 5,624 5,613
Оцените наиболее достоверное значение величины сопротивле-
ния. Посчитайте среднеквадратическое отклонение измерений
($) и среднеквадратическое выборочное отклонение (sm). Ка-
кое значение среднеквадратического отклонения должно быть
указано вместе со значением R и почему?
1.4. Расходомер дает на выходе ток, пропорциональный квадра-
ту скорости потока. При постоянных условиях течения зна-
чения выходного тока имеют среднеквадратическое отклоне-
ние в ±5%. Каково среднеквадратическое отклонение значения
скорости потока?
1.5. Период колебания математического маятника задан уравне-
нием Т — ^y/l/g. Проведено некоторое количество экспери-
ментов и найдено значение стандартной погрешности среднего
значения периода колебания Т — ±0.7%, длины I — ±0.4%. По-
считайте стандартную погрешность среднего от д.
1.6. Если погрешности, указанные в пункте 1.5 на самом деле не
стандартные погрешности, а оценки неопределенности кали-
бровки или аналогичные, какова будет оценка полной неопре-
деленности? Почему данные оценки менее удобны для стати-
стики, чем стандартные погрешности, получаемые более стро-
го в пункте 1.5?
1.7. Некий датчик усилия может быть смоделирован как пружина,
масса и демпфер, чье динамическое уравнение выглядит сле-
дующим образом:
d2x . dx
F - + ^Х,
dtz dt
где F — прикладываемая сила, тп — эффективная масса, А —
постоянная демпфирования, а к — коэффициент жесткости
пружины. Используя преобразование Лапласа и считая началь-
ные условия нулевыми, докажите, что передаточная функция G(s)
будет равна:
y(s) (l/w2)s2 + (2£/адп)з + Г
Упражнения
где собственная частота незатухающих колебаний wn — у/к/т,
а декремент £ — Х/Ъу/кт.
1.8. Финкельштейн и Уоттс предположили, что измерительная сис-
тема может быть описана последовательностью четырехполюс-
ников.
i) Нарисуйте блок-схему общей измерительной системы с ука-
занием различных блоков.
ii) Что является потенциальной, а что потоковой переменной
в электрическом четырехполюснике?
iii) Что является потенциальной, а что потоковой переменной
в температурном четырехполюснике?
iv) Измерительный процесс может быть представлен в виде
двухполюсника. Что является потенциальной, а что пото-
ковой переменной для разогретого резервуара с жидко-
стью, температуру которого измеряют?
1.9. Существует возможность использования программных паке-
тов, наподобие матричного Matlab, для моделирования изме-
рительной системы. Произвольный четырехполюсник может
быть представлен в виде схемы.
*11 I *2
У11 +У1
Рис. 1.9.
i) Напишите уравнения для нахождения значений двух импе-
дансов.
ii) Запишите полученные уравнения в матричной форме.
1.10. Температура небольшого объема горячей жидкости должна быть
померена термометром с импедансом Zt.
i) Что означает выражение «сенсор может задерживать про-
цесс»?
ii) Блок-диаграмма такой системы может быть представлена
как на рис. 1.10, где 1п — скорость подачи тепловой энер-
гии в процесс с тепловым импедансом Zp, R — тепловое
сопротивление внутри процесса, a Vo — измеряемая темпе-
Глава 1. Измерительные системы
ратура. Покажите, что
Vo _ Zt
In ((R +Zt)/Zp) +1'
Рис. 1.10.
iii) Покажите, что преобразование Лапласа приведенного вы-
ше уравнения имеет следующий вид:
Ш =____________1________
Ш CpCtRs2 + (Ср + Cty
где Ср и Ct — теплоемкости процесса и термометра.
iv) Используйте инструментальную панель Simulink пакета
Matlab при моделировании передаточной функции из ча-
сти (iii). (Указание: используйте импульсный источник под-
ходящей амплитуды и длительности, чтобы обеспечить по-
ставку некоторого тепла Q.)
Р; capacitor *
Fie Edt View Smuiabon Format Tods
0 fiS Q & X ife P ' i ' - i ► • В
TfiMki Fen ScopH
] Generator!
Ready ode45
Рис. 1.11.
ГЛАВА 2
РЕЗОНАНСНЫЕ
СЕНСОРЫ
2.1. Введение
Резонансные сенсоры — это механические устройства, использую-
щие собственную резонансную частоту. Сенсорная структура устро-
ена таким образом, что измеряемый параметр изменяет резонансную
частоту, или частотный спектр, или то и другое вместе. К сожа-
лению, резонансная частота, как правило, имеет не линейную за-
висимость от измеряемой величины и подвержена температурному
дрейфу. К тому же математическое моделирование для всех, за ис-
ключением простейших структур, носит сложный характер. Однако
высокая чувствительность резонансных сенсорных структур в ря-
де случаев позволяет пренебречь указанными недостатками. Пред-
ставление выходного сигнала, в виде изменения частоты, является
преимуществом при наличии электромагнитных помех. Однако это
требует применения сложной обработки сигнала для определения
значения измеряемой величины.
Хотя идея резонансных сенсоров не нова, с появлением современ-
ных материалов, технологий и возможностей моделирования, были
разработаны миниатюрные и элегантные модели. Сенсоры могут
быть использованы для измерения массы, потока жидкости, плотно-
сти, вязкости, угла поворота, усилия, давления и ускорения. В связи
с развитием полупроводниковых технологий возник огромный ин-
терес к микросенсорам, использующим резонансный метод. Такие
сенсоры предполагают не только миниатюризацию, но и дешевое
серийное производство. Некоторые из них представлены в разделе 3.1.
Как правило, используемыми элементами являются провода, стерж-
ни или цилиндры. Поскольку выходным сигналом является частота,
то проблемы с шумом и помехами значительно уменьшаются прямой
обработкой сигнала. Потребляемая энергия мала, поскольку устрой-
ство работает на резонансной частоте. Основным недостатком явля-
ется температурный дрейф резонансной частоты, что приводит к
Глава 2. Резонансные сенсоры
нелинейной зависимости выходного сигнала от измеряемой величины.
Колебательный процесс может быть реализован двумя способами:
- гармонический: энергия переносится от одного накопителя к
другому в течение цикла; потери компенсируются источником
питания, или
- релаксационный: используется только один накопитель энер-
гии; энергия запасается во время импульса и выделяется между
импульсами в виде колебаний.
Чувствительная часть колебательной структуры может находить-
ся в одной точке или малой области (сосредоточенная), как в случае
пружины, груза и демпфера, или распределяться по всей структуре
(распределенная), как в продольно вибрирующем цилиндре.
В этой главе представлены устройства, которые были созданы
в течение прошлых 25 лет в виде прототипов или серийно выпус-
каемых изделий. Это не микросенсоры, хотя возможно некоторые
структуры далее будут адаптированы для использования в миниа-
тюрной форме при разработке соответствующей технологии изго-
товления.
2.2. Генератор затухающих
гармонических колебаний
Как правило, резонансные системы могут быть описаны, в неко-
торой или всей области, линейным дифференциальным уравнением
второго порядка. Для расчета любой линейной затухающей систе-
мы второго порядка обычно используется стандартное уравнение
следующего вида:
1 d2x
oj2^ dt2
2£ dx
----33 + x
dt
(2.1)
= У,
где: y(t) — действующая сила, x(t) — результирующее отклонение,
— циклическая частота свободных колебаний системы и £ —
коэффициент затухания (если £ < 1, то при воздействии импульса
реакцией системы являются колебания).
Уравнение вида (2.1) удобно потому, что значения и £ могут
быть легко установлены. Решив уравнение для некоторой реальной
системы, можно быстро определить, произойдет ли генерация и ка-
кова будет частота свободных собственных колебаний. Например,
система, состоящая из простой пружины, груза и демпфера, может
2.2. Генератор затухающих гармонических колебаний
быть описана следующим уравнением
сРж dx
+ +I = F’ (2'2)
где т — эффективная колебательная масса, 7 — постоянная зату-
хания, к — коэффициент упругости пружины и F — приложенная
сила. Сравнив уравнения (2.1) и (2.2), получим коэффициенты для
данной системы
/Т
Шп~\т’
2\/кт
(2-3)
(2-4)
Решение уравнения может быть двух типов, в зависимости от
того воздействует ли на систему в настоящее время движущая сила у
или энергия, которую она имела в начальный момент времени t = О,
рассеивается.
2.2.1. Свободные колебания системы
Существуют три типа решений уравнения в зависимости вида сис-
темы: слабозатухающая (£ < 1), критически затухающая (£ — 1) или
сильнозатухающая (£ > 1).
Для случая слабозатухающей системы с х = xq при t =• 0, и х = О
при t = 00, решение будет следующим
x(t) = х0 ехр(—£o?n£) cosc^ + ——, sintctf , (2.5)
(1 — s ) '
где cj = cjn(l - £2)1/2.
При проектировании резонансных сенсоров, когда £ 1, допу-
стима аппроксимация
x(fy = жо ехр(—£cjn£) coscjnZ, (2.6)
ж(£) = хоехр(—t/2r) cos(2.7)
где г = l/(2£cun) иногда называют временем затухания. Эту вели-
чину нельзя путать с понятием, применяемым для релаксационного
генератора, где время затухания, т. е. рассеяния сохраненной энер-
гии, определяет частоту генерации. График для выражения (2.7)
показан на рис. 2.1.
2.2.2. Возбужденный генератор
Важно понять, что при синусоидальном возбуждении генератора,
единственно допустимым решением уравнения (2.1) будет совпаде-
Глава 2. Резонансные сенсоры
ние частоты генератора с частотой возбуждения (не верно для не-
линейной системы). Это означает, что, при использовании обратной
связи, частота управляющей схемы будет следовать за изменением
резонансной частоты сенсора и может быть использована в качестве
выходного сигнала.
Рис. 2.1. Реакция свободной колебательной системы
Общее решение для управляемого генератора незатухающих ко-
лебаний,
у = yosincjt. (2.8)
может быть представлено в виде:
х = xq sin(cjZ + </>), (2.9)
где х — отклонение точки в структуре при входном воздействии у,
фаза ср — угол смещения под воздействием внешней силы. Для пол-
ного описания уравнения (2.9) найдем две первые его производные:
dx
— = ujxq cos (cot + ip), (2.10)
dt
d2r
-7- = -(jj2xq sin (wt + ip) (2-11)
2.2. Генератор затухающих гармонических колебаний
и подставим их в уравнение (2.1):
—си2хо . . х 2£ . х
-------8П1(сЛ Ч" (/?) Ч-COS((j£ + (/?) = Уо smart.
Приведем подобные члены:
А О72 \ . / . 2£
1----т sin (art Ч- ip) Ч-cjxo cos (art Ч- р>) = Уо smart.
\ ^nJ Мп
Используя тригонометрические соотношения
sin(art Ч- ^) = sin wt cos ip Ч- cos cot sin (/?,
cos(art 4- </?) — cos cot cos cp — sin cot sin ip,
преобразуем уравнение (2.12) к виду:
А О72 \ 2£о7 . I
1----т cos ip-------sm ip xo sin cot 4-
Л “nJ
Г A a?2 \ . 2£a> I
4- 1----7 sm <p 4----cos (p xq cos cot = yo sm cut.
L\ “J
(2-12)
(2-13)
(2-14)
(2-15)
(2-16)
Уравнение (2.16) имеет решение, только если коэффициент при
Xq cos cot равен нулю:
/ О72 \ 2£
1------ sin <р Ч---cos (/? = 0.
\ ^nJ
В результате получаем
sin a? — 2£cjcjn
W =---------=
COS(p
Из чего может быть получено
[H-a;2)2 + (2ea;wn)2]1/2’
2^07 (л)п
[(W2-a;2)2 + (2^n)2]1/2’
(2-17)
(2-18)
(2-19)
(2.20)
Перепишем уравнение (2.16) в следующем виде
a;2 \ 2£cv .
1------ I cos р)----sm (р
^п/
Xq sin cot = уо sin cot.
Подстановка (2.19) и (2.20) в уравнение (2.21) дает
_____________________________________________
[(W2_W2)2 + (2^n)2]1/2‘
(2-21)
(2.22)
Глава 2. Резонансные сенсоры
Следовательно, полное решение для х
х —-----------—-----------— sin (ut + arctg . (2.23)
[(0,2 _ Ш2)2 + (2^Wn)2]l/2 0,2 - W2 )
Зависимость (р от ш показана на рис. 2.2. Управляющая сила все-
гда обеспечивает смещение.
Рис. 2.2. Зависимость фазы
от угловой частоты
Резонаторные сенсоры обычно вносят незначительные затуха-
ния, поэтому резонансная частота примерно равна шп. Для поддер-
жания работы системы на этой резонансной частоте (чтобы упра-
вляющая частота си всегда была равна сип) используют обратную
связь. Следовательно, значение р будет удерживаться равным — тг/2.
Однако в сложной структуре могут происходить колебания на той
же частоте, но с другой фазой. Это дает возможность использовать
соотношение фаз для индикации значения измеряемой величины.
2.2.3. Добротность
Полезным параметром при работе с резонансными системами явля-
ется добротность Q. Добротность может быть определена как:
средняя накопленная энергия
— 2 7Г X .
средняя энергия, затраченная за один цикл
Для механического резонатора накопленная энергия будет варьи-
роваться между потенциальной и кинетической формами. Накоплен-
ная энергия будет находиться полностью в потенциальной форме,
если скорость равна нулю и отклонение максимально. Из уравнения
(2.6), для свободной колебательной системы с малым затуханием,
установив значение косинуса максимальным, получим
x(t) = Хо ехр(—£cunf). (2.24)
2.2. Генератор затухающих гармонических колебаний
Потенциальная энергия Е линейной системы с постоянным ко-
эффициентом упругости К будет равна 1/2К(отклонение)2, или
суммарная накопленная энергия = ехр(—2£cvn£). (2.25)
Продифференцировав уравнение (2.25), получим оценка диссипа-
ции энергии —dE/dt'.
dE
— =&nKxoexp(-2&nt). (2.26)
at
Подставив полученное выражение в данное выше определение до-
бротности, получаем
q 2тг х |К^ехр(-2^п*)
&nKxQ ехр(—2£cjnt) х период’
Q~^nx^/^ny (2’28)
Q=^- (2-29)
Кроме того, учитывая соотношение (2.22), можно заметить, что
амплитуда в резонансе _ т/о/2£
амплитуда на частоте, близкой к нулю у о
Это показывает, что для системы с высокой добротностью ам-
плитуда на резонансной частоте будет в Q раз больше амплитуды
колебаний на низкой частоте.
Q. 2.30
Добротность также полезна для изучения поведения потребляе-
мой мощности при изменении управляющей частоты. Проверка мощ-
ности, потребляемой колебательной системой, которая используется
в качестве сенсора, может быть полезной при определении значе-
ния измеряемой величины, для контроля ее текущего состояния.
Потребляемую мощность Р можно вычислить как произведение си-
лы на скорость:
Р = У^- (2-31)
Подставив в уравнение (2.31) вместо у правую часть равенства
(2.8) и вычислив dx/dt из соотношения (2.23), получаем:
Р — уо sin cot--------cos(cot + <р). (2.32)
[Н-^)2 + (2^„)2]1/2
Опираясь на формулу косинуса суммы:
cos(cj£ + <£>) = cos wt cos 92 — sin wt sin (2.33)
Глава 2. Резонансные сенсоры
приходим к следующему соотношению:
2 2
Р =-----------Уошп-------- ш [sin wt coswt cos w — sin2 wt sin cel .
[(W2-W2)2 + (2^n)2]1/2
(2.34)
Среднее значение sin wt cos cot за период равно нулю, a sin2 cut — 0,5.
В связи с этим уравнение (2.32) можно представить в виде:
г_ -|^2a>siny [Н - о,2)2 + (2^Wn)2]1/2' Подставляем siii^ из (2.20) и имеем: (2.35)
р . Уо“п&2 [Н-о;2)2 + (2^п)2]- (2.36)
На рис. 2.3 показана частотная зависимость поглощения энергии
колебательной системой. Для определения полосы пропускания на
частотной зависимости отмечают точки, в которых происходит па-
дение мощности наполовину. Для определения этих точек использу-
ется формула (2.36) с удвоенным знаменателем. Чтобы определить
их значения, вначале нужно рассмотреть мощность в максимуме, где
ш = (л)п. Знаменатель [(си2 — о;2)2 -I- (2£cjo?n)2] упрощается до (2£lj2)2.
Таким образом, для половины мощности, знаменатель будет равен
двум (2£ш2)2:
[(w2 _ w2)2 + (2^)2] = 2(2^2)2. (2.37)
Преобразуем,
(о?2 - с.2)2 = 2(2^2)2 - (2^шп)2. (2.38)
Рис. 2.3. Частотная зависимость
поглощения энергии колебатель-
ной системой имеющей высокую
добротность
Данное равенство может быть переписано как
(cvn-W)2(W„+W)2= 2(2^2)2-(2^п)2. (2.39)
2.2. Генератор затухающих гармонических колебаний
Обозначив Деи = шп — ш и считая, что соп = ш (но Деи 0), из
равенства (2.39) получаем:
Aw2wn= 2^2, (2.40)
Да; = &п. (2.41)
Используя теперь уравнение (2.29), находим, что
Д^ = ^. (2.42)
Благодаря этому, можно выразить Q как
О = (2-43>
где 2До; — полоса пропускания частотной характеристики в точках,
соответствующих половине мощности.
В завершение параграфа перечислим преимущества высокой до-
бротности:
- низкие потери энергии за цикл, в силу чего для поддержания
колебаний требуется небольшая мощность;
- высокое разрешение сенсора благодаря тому, что резонанс воз-
никает в узкой полосе частот;
- «чувствительная» и «задающая» схемы слабо подвержены вли-
янию нагрузки.
Надо отметить, что некоторые колебательные сенсоры работают
в небольшом диапазоне частот вблизи резонанса. В некоторых слу-
чаях сенсор может сканировать диапазон частот для сбора инфор-
мации об измеряемой величине. В таких системах предпочтительно
снизить добротность, чтобы в рабочем диапазоне частот была по-
стоянная амплитуда.
В разделе 2.3 и далее представлены конструкции некоторых ре-
зонансных сенсоров и рассматривается их применение.
2.2.4. Способы управления
Как было ранее сказано, измеряемая величина изменяет собствен-
ную частоту резонансного сенсора, и это может быть представлено
в виде выходного сигнала, отражающего значение измеряемой вели-
чины. Для поддержания колебаний во время изменения резонансной
частоты применяют петлю обратной связи. Детекторное устройство
должно измерить некоторый параметр, отражающий состояние сен-
сора. Управляющее устройство определяет, находится ли сенсор в
резонансе, и выдает соответствующий управляющий сигнал на за-
Глава 2. Резонансные сенсоры
дающий генератор. Генератор подает необходимую для управления
энергию на сенсор и обеспечивает выходной сигнал.
Существуют три способа применения обратной связи.
а) Контроль амплитуды на выходе резонатора и подстройка упра-
вляющей частоты для поддержания ее в максимуме.
б) Контроль разности фаз между управляющим сигналом и сме-
щением сигнала сенсора. В резонансе управляющий сигнал име-
ет опережение по фазе на тг/2.
в) Контроль потребляемой резонатором мощности, которая в ре-
зонансе максимальна.
Для построения системы могут быть использованы легко до-
ступные интегральные схемы. Обычно она состоит из компаратора,
управляемого напряжением генератора, блока фазовой автоматиче-
ской подстройки частоты (ФАПЧ) и логических схем.
Измеряемая величина
Рис. 2.4. Блок-схема управля-
ющей системы резонансного сен-
сора
Программы Matlab
Следующая м-программа была использована для построения рис. 2.1.
clear, elf
wn=3000; dampratio=0.01; T=l/(2*wn*dampratio);
c=(l-dampratio 2) 0.5;
w=wn*c;
time= [0:0.0001:0.1];
for j=l:length(time);
t=time(j);
A=exp(-dampratio*wn*t);
cosine=cos(w*t);
sine=sin(w*t);
B=dampratio/c;
G(j,:)=A*(cosine+B*sine);
end
figure(l), plot(time,G,‘k‘)
2.3. Сенсоры на вибрирующем проводе
Следующая м-программа была использована для построения рис. 2.2
(отмечено цифрой (1)) и рис. 2.3 (отмечено цифрой (5)).
clear, elf
wn=3000; darapratio=0.01; T=l/(2*wn*dampratio);
FREQ= [2900:1:3100];
for j=1:length(FREQ);
w=FREQ(j);
A=(wn'42-w*2) ;
B=w/T;
D1=A.~2;
D2=B~2;
D3=(D1+D2);
D=D3~0.5;
cosine=A./D;
sine=-B./D;
tangent=-B./A;
G(j,:)=acos(cosine);
H(j,:)=asin(sine);
K(j,:)=atan(tangent);
M(j,:)=cosine;
power(j,:)=-0.199*wn 2*sine./D;
end
figure(l), plot(FREQ,-G*180/pi)
figure(2), plot(FREQ,H*180/pi)
figure(3), plot(FREQ,K*180/pi)
f igure(4), plot(FREQ,M)
figure(5), plot(FREQ,power)
2.3. Сенсоры на вибрирующем проводе
Это самые простые резонансные сенсоры. Предположим, что жест-
кость провода незначительна и частота поперечных колебаний опре-
деляется как
Wn = 7\/1’ (2-44)
где: Т — натяжение, д — масса на единицу длины и I — длина
провода.
Для сенсоров могут использоваться провода, сделанные из вольф-
рама, индия или высокоэластичной стали, а также таких сплавов,
Глава 2. Резонансные сенсоры
как «Элинвар».
При прохождении переменного тока через провод, установлен-
ный в постоянном магнитном поле, возникает возбуждение. Вбли-
зи резонанса будет сильно изменяться выходной импеданс, поэтому
управляющая схема должна генерировать необходимую для выпол-
нения этого условия частоту.
Область применения — измерение
Рис. 2.5. Дифференциальная
ячейка давления
усилия, массы, натяжения и давления.
При точном проектировании и защи-
те провода от загрязнений, точки не-
стабильности и гистерезис могут быть
низкими, примерно ±0,02%. Темпера-
турное расширение провода приводит к
ошибкам порядка 10 промиль/0С. Ис-
пользование вибрирующего провода для
измерения давления представили Мар-
шал и Хантер (1980). Промышленные
устройства были выпущены Foxboro. На
рис. 2.5 показана структура двойной мем-
браны.
2.4. Крутильно-вибрационный стержень
Рис. 2.6. Вращающийся стержень
сенсора плотности жидкости
Сенсор плотности жидкости был раз-
работан Лэнгдоном (Langdon) в GEC
для использования в свинцовых акку-
муляторах. В верхней части устрой-
ства расположен пьезоэлектрический
генератор возбуждающих импульсов,
вызывающий вибрацию в стеклян-
ном стержне. Для питания исполь-
зуется сама батарея, что делает уст-
ройство замкнутым. Точность изме-
рения была установлена такая же,
как у поплавковых ареометров, с ошиб-
кой ±0,2%.
Для вращающейся системы второго порядка уравнение (2.2) мо-
жет быть переписано в следующем виде
(Р0 d0
dt?+xdt
(2-45)
2.5. Продольно вибрирующая пластина
где I — момент инерции стержня; у — коэффициент затухания; с —
крутильная жесткость стержня иг — приложенный вращательный
момент. При сравнении условий с уравнением (2.3) циклическая ча-
стота свободных собственных колебаний может быть найдена как
(2-46)
2.5. Продольно вибрирующая пластина
Как правило, для непосредственного измерения вязкости нерезо-
нансным методом используется колебательная сфера, управляемая
фиксированной частотой 200 Гц (Matusik и Scania 1981).
Более компактный сенсор для измерения вязкости был создан с
помощью тонкой прямоугольной пластины, закрепленной в центре
(Боровиков 1976) (рис. 2.7), которая может управляться и контро-
лироваться магнитострикционным устройством, имеющим продоль-
ный резонанс. Для определения вязкости используется затухание,
измеренное при выключении мощности или с помощью измерения
потерь, кроме того, может быть использовано смещение фазы у за-
дающего воздействия, равное
2шпос , .
Ч> = arctg -5-~ (2.47)
с а, примерно равным квадратному корню динамической вязкости.
Рис. 2.7. Измерение вязкости с по-
мощью продольно резонирующей плас-
тины
Главный недостаток сенсора — это низкое проникновение волно-
вого движения в жидкость. Для типичной задающей частоты 20 кГц
проникновение имеет величину менее 10 мкм, поэтому необходимо
Глава 2. Резонансные сенсоры
обеспечить чистоту поверхности датчика. Применение нерезонанс-
ных устройств, действующих на более низкой частоте, не допустимо
из-за недостаточного проникновения.
2.6. Резонаторы на изгибающихся структурах
Существует множество конструкций для измерения потока с помо-
щью изгибающейся структуры.
Изгибающаяся пластина
Рис. 2.8. Гибкая пластина сенсора
потока
МакДональд (1983) предложил ус-
тройство (рис. 2.8), состоящее из
небольшой пластины (из металла
или керамики), продольно устано-
вленной в трубе. Оно возбуждалось
расположенным в центре преобра-
зователем на резонансной частоте
приблизительно 1 кГц. Для опреде-
ления величины потока жидкости
использовалась разность фаз меж-
ду чувствительными элементами на концах пластины. В компании
«Дженорал Электрик Ко» были созданы прототипы с размерами пла-
стины 150x20 мм, что позволяло производить линейное измерение
потока массы для скоростей 0 4- 4 ± 0,02 м/с. Как и в других по-
добных системах, здесь важным является защита чувствительных
элементов от прилипания загрязняющих веществ. Попавший в жид-
кость газ тоже может влиять на показания.
Изгибающаяся труба
В этой конструкции в резонансе находится целая секция трубы. Про-
цесс резонанса примерно такой же, как в сенсоре на вибрирующем
проводе. Циклическая частота свободных колебаний шп будет иметь
вид уравнения (2.3). Резонансная частота будет определяться общей
массой устройства (включая массу трубы). Это дает возможность
применения сенсора в многофазных или многокомпонентных прило-
жениях. Компания Саросота (Sarosota) разработала измеритель плот-
ности (рис. 2.9, а), в котором выражение для плотности задано как
А В „
р — — ------Н С.
Другой подход — использование эффекта Кориолиса. Кориолис
показал, что при перемещении объекта в неинерциальной системе
(2.48)
2.6. Резонаторы на изгибающихся структурах
отсчета на него действует сторонняя сила. Неинерциальная систе-
ма отсчета в этом приложении — колеблющаяся труба. Векторное
уравнение силы Кориолиса:
Fc = , (2.49)
у at J
где т — масса объекта, перемещающегося с угловой скоростью си,
вызванной изменением радиус вектора г. Fc перпендикулярна г.
Устройство служит для измерения массового потока. Поскольку необхо-
димы большие длины, часто трубы изгибают U-образно (рис. 2.9, б).
Среди множества компаний, торгующих прямыми и U-образными
системами, такие как: «Шлюмберже» и «Микро Моушн».
а)
б)
собственные колебания
будут перпендикулярны
плоскости трубы
поперечные собственные колебания
Рис. 2.9. Примеры сенсоров потока жидкости на вибрирующей трубе
Кориолисова сила вызывает небольшое искривление трубы, кото-
рое может быть определено сенсорной парой или датчиком дефор-
маций.
Сенсор уровня жидкости был создан на основе изгибающейся труб-
ки (рис. 2.10) длиной 300 мм и диаметром 6 мм (Langdon 1983).
Эффективная изгибающаяся масса трубки меняется окружающей ее
жидкостью. При этом резонансная частота будет находиться около
5 кГц и уменьшаться при увеличении уровня жидкости. Характери-
стика линейная за исключением случаев, когда жидкость достигает
узловых точек трубы. Эту проблему можно преодолеть:
3—4227
Глава 2. Резонансные сенсоры
- управляя устройством последовательно на разных резонанс-
ных частотах;
- используя лопасти на трубе, чтобы колебания имели «плоскопо-
ляризованную» форму, при этом возбуждая колебания на двух
разных частотах одновременно.
В каждом методе узлы появляются в других точках. Нелиней-
ность может быть удалена комбинированием выходных характери-
стик.
Эти устройства являются массовыми сенсорами уровня, и, так
как на выходную величину влияет плотность жидкости, может пона-
добиться ее отдельное измерение. Тем не менее они находят приме-
нение в некоторых приложениях, как, например, заправка топливом
самолета.
2.7. Вибрирующий цилиндр
Для измерения плотности жидкости используется тонкий металли-
ческий цилиндр, установленный внутри трубы соосно с ней (рис. 2.11)
(Agar 1967, 1976). Жестко закрепленный на одном конце цилиндр,
сделанный из ферромагнитного материала, может возбуждаться элек-
тромагнитным полем внешних катушек. Если жидкость агрессив-
ная, то используется керамическая трубка с расположенным в ней
пьезоэлектрическим устройством. Так как трубка тонкая, она не
ограничивает поток. Жидкость проходит через обе поверхности,
поэтому перепад радиального давления минимален. Для низкой аку-
стической связи размеры сенсора должны быть значительно меньше
длины волны. При выполнении этого ограничения жидкость не сжи-
мается и не влияет на cjn.
Кроме того, вибрирующий цилиндр используется в конструкции
гироскопа (рис. 2.12). В 1890 году G. Н. Bryan отметил, что колеба-
ния структуры в вибрирующем бокале запаздывают при повороте.
Это является примером эффекта Кориолиса. Сенсор, использовав-
ший этот феномен, был разработан Лэнгдоном (1982). Металличе-
ский или керамический цилиндр возбуждался на своей основной ча-
стоте пьезоэлектрическими преобразователями, образующими сим-
метрично вокруг него четыре узла. При вращении перемещение уз-
лов и их угловое изменение преобразовывалось пьезоэлектрическими
преобразователями в выходную величину пропорциональную углу
вращения.
2.8. Колеблющееся разветвление
Рис. 2.11. Вибрирующий цилиндр Рис. 2.12. Вибрирующий цилиндр
измерителя плотности жидкости
гироскопа
GEC Marconics Avionics разработало коммерческое устройство с
чувствительностью 0,01°/с, работающее до 480°/с. Автомобильная
версия была разработана фирмой Bosch (см. Reppich и Willig 1995).
Джонсон (1995) представил аналогичное устройство, разработанное
British Aerospace, для использования в автомобильной промышлен-
ности, которое было запущено в промышленное производство.
2.8. Колеблющееся разветвление
Сенсор плотности агрессивной жидкости, предложенный Шлюмбер-
гером, сделан на основе колеблющегося вилкообразного ответвле-
ния. Сенсор может применяться в статических резервуарах или в
трубопроводах, где расходы ниже 3 м/с. Разветвление возбуждает-
ся, и информация считывается пьезоэлектрическими устройствами.
Условие резонанса поддерживается с помощью контроля фазы. Со-
отношения между плотностью р и собственной частотой имеют вид
р = К0 + К1т + К2т2, (2.50)
где Ко, Ki и К2 — константы; г — период резонансной частоты.
Ичиносэ и Терада (1995) сообщили о разработке датчика угла
для автомобильных приложений. Миниатюрная структура развил-
ки была разработана с помощью высокотехнологичных элементов.
Резонансная частота приблизительно равна
= ’ (2-51)
Глава 2. Резонансные сенсоры
где а характеристическое число; t — толщина; I — длина; Е —
модуль Юнга и р — плотность. Сила Кориолиса, действующая на
резонирующее разветвление, измеряется пьезоэлектрическими дат-
чиками. Полученный сигнал усиливается синхронным обнаружением.
2.9. Структура на основе
двойного разветвления
Структуры этого типа были разработаны для непосредственного из-
мерения плотности (рис. 2.13). Трубопровод, разветвляясь, форми-
рует двойную развилку. Противофазное движение боковых секций
компенсирует изгибающую силу, которая возникала бы при другом
расположении. Тем не менее осевое напряжение при монтаже может
повлиять на резонансную частоту, поэтому должны использовать-
ся гибкие крепления. Резонансная частота связана с плотностью р
следующим соотношением
(2.52)
V Ро + р
где ро — константа. Могут быть достигнуты ошибки не более 0,1%
(Dress 1983). Коммерческий датчик давления, использующий струк-
туру на основе двойного разветвления, представлен японской фир-
мой Yokogawa. Вибрирующий элемент сделан из твердого сплава
Элинвар. В этой конфигурации коэффициент эластичности Е из-
меняется пропорционально осевой силе. Силу создает диафрагма,
расположенная в одном конце колебательной структуры. Зависи-
мость резонансной частоты от давления нелинейная, поэтому для
вывода линейного ответа микропроцессор использует таблицу пре-
образования. Значение Q > 104, и типичная ошибка при считыва-
нии — ±0,02%. При хорошей температурной компенсации (большая
часть ошибки обусловлена тепловым расширением диафрагмы), ноль
и дрейф чувствительности могут быть снижены до ±0,001% на 1 °C
во всем диапазоне.
Рис. 2.13. Измерение плотности с
помощью раздвоенной трубы
Интерес к колеблющимся струк-
турам разветвляющегося типа все
еще возрастает. Рэндалл и др. (1997)
представил датчик давления, исполь-
зующий металлическую трехлучевую
структуру. Отмечено, что потеря энер-
гии из-за сужения минимизирована ис-
2.10. Резонансные сенсоры на объемных акустических волнах
пользованием симметричной струк-
туры. Beeby и др. (2000) описывают
изготовление и испытание структуры на основе двойного колеблю-
щегося разветвления, резонатор микросенсора, которой изготовлен
в кремнии.
2.10. Резонансные сенсоры на объемных
акустических волнах
С начала 1970-х стали коммерчески доступны системы на кварце-
вых кристаллах для контроля осаждения тонких пленок в вакууме
из испарителей. Открытый кварц является частью колебательной
цепи и обычно работает в режиме, когда резонансная частота изме-
няется при увеличении массы. Такие устройства иногда называют
микровесами. К сожалению, на резонансную частоту также влияет
температура. Для измерения температуры можно использовать до-
ступные промышленные термометры с чувствительностью 0,001 °C.
Комбинируя оба датчика, для температурной компенсации устрой-
ства контролирующего тонкие пленки, можно контролировать оса-
ждение материала с точностью до атомного слоя (рис. 2.14).
Рис. 2.14. Контроль осаждения тонких пленок с помощью кварцевых
резонаторов
Типичный коммерческий генератор на пьезокварце АТ-среза —
это диск диаметром около 10 4- 16 мм или квадрат (прямоуголь-
ник) аналогичного размера. Уравнение Сауэрбрая определяет зави-
симость сдвига частоты от изменения массы,
= (2-53)
где р — плотность; к — частотный коэффициент и А — площадь по-
верхности кварцевого кристалла. Подставив константы, для кварца
Глава 2. Резонансные сенсоры
получим
= (2.54)
А
где А в м2 и т в кг. Рабочие частоты обычно равны 5,9 или 10 МГц.
При частоте 10 МГц достижима чувствительность 0,3 Гц на нано-
грамм. Разработаны покрытия для избирательной адсорбции опре-
деленного газа или пара. Таким образом, микровесы становятся
качественным и количественным сенсором для конкретного хими-
ческого вещества. Сложностью является нахождение высокоселек-
тивных покрытий.
Разработаны биологически активные покрытия для создания спе-
цифических биосенсоров, использующихся для работы в газах или
парах, а также в растворах. Привлекательная характеристика био-
логических реагентов — это их специфичность. Тем не менее тех-
нология построения биологических систем гораздо более сложна и
часто сенсор может быть использован только один раз.
2.11. Толстые пленки
Во многих сенсорах, представленных выше, в качестве управляюще-
го и чувствительного элементов используются пьезоэлектрические
преобразователи. Как правило, процесс изготовления этих компо-
нентов является частью технологического процесса формирования
толстых пленок. Пленки могут быть классифицированы по толщи-
не как ультратонкие (<0,1 мкм), тонкие (0,14-1,0 мкм), толстые
(1,04-100,0 мкм).
При производстве тонких пленок обычно используют технологии
интегральных схем. Как будет представлено в гл. 3, это идеально
подходит для случая, когда сенсор и электроника объединены на
чипе. Тем не менее некоторые покрытия не выдерживают приме-
няющихся грубых производственных процессов. Кремниевое про-
изводство слоев дорого и не всегда подходит для мелкосерийной
продукции. В этих случаях для производства как тонких, так и
толстых пленок более подходят другие методы. Такие, как электро-
химическое осаждение, технология Ленгмюра-Блоджетт, нанесение
центрифугированием и трафаретная печать.
Трафаретная печать была одним из самых первых методов, ада-
птированных для производства толстых пленок. Вскоре были разра-
ботаны сенсоры, изготовленные методом трафаретной печати (см.
Brignell и др. 1987). Пьезоэлектрический датчик деформации, ко-
2.11. Толстые пленки
торый поступил в продажу около двух десятилетий тому назад,
пользовался коммерческим успехом.
На основе трафаретной печати была разработана шелкография,
использующаяся в изобразительном искусстве для создания послой-
ных шаблонов. На рамку натягивается синтетическая ткань (шелк
уже не используют). На ткань художник накладывает шаблон, ко-
торый заливается горячим воском для образования участков ткани
непроницаемых для печатающей краски. Как только воск застыл,
шаблон может быть удален, на его месте остаются проницаемые
области, через которые краска может достигать заготовки. Затем
трафарет жестко устанавливается на заготовке с помощью печатно-
го станка. Краска равномерно распределяется по ткани роликом и
таким образом проникает на заготовку, формируя желаемый рису-
нок. Процесс может быть повторен с другими шаблонами и цветами
чернил, чтобы производить смешивание.
Для сенсорного приложения желаемая топология химически ак-
тивного вещества формируется на трафаретном материале. Мас-
ка создается с использованием фотолитографии. Это может быть,
например, конфигурация мостовой схемы. «Чернила» выдавленные
через маску, формируют пленку, обычно имеющую толщину в диа-
пазоне 25-100 мкм. Пленка затем сушится с помощью низкотемпера-
турной термической обработки. На следующей стадии используются
высокие температуры, чтобы вызвать спекание компонентов пасты
и смачивание подложки для хорошего прилипания. Обжигание кон-
тура является критичным для качества изделия.
Технология трафаретной печати не так точна, как системы крем-
ниевой микротехнологии, поэтому такие сенсоры будут иметь бо-
лее низкие технологические нормы. Исследователи и производители
разрабатывают рецепты печатающих паст, технологию изготовле-
ния которых иногда засекречивают. Химически активное вещество
должно оставаться в нужных местах трафаретного материала после
обработки в органическом растворителе (см. Baudry 1987 и Morton
и др. 1991). Пьезоэлектрическая пленка может быть получена на
основе титаната цирконата свинца (PZT). Будучи поляризованны-
ми, также могут использоваться и некоторые другие материалы, не
являющиеся натуральными пьезоэлектриками. Поляризация обычно
достигается осторожным нагревом пленки и последующим охлажде-
нием в сильном электрическом поле.
Интерес к сенсорам на толстых пленках все еще высок, в основ-
ном из-за более низкой стоимости малых партий, гибридных устройств
и, так как рабочая температура приборов может быть выше, чем
Глава 2. Резонансные сенсоры
у сенсоров на тонких пленках. Развитие материаловедческой базы
пленок, а также и других типов сенсоров, представленных в гл. 3,
зависит от достижений органической и физической химии.
Литература
Agar J. 1967, 1976 Apparatus for Measuring the Density of a Fluid UK
Patents 1175586, 1542564
Baudry H. 1987 «Screen printing piezoelectric devices» Proc. 6th Euro-
pean Microelectronics Conference (Bournemouth) pp 456-463
Beeby S. P., Ensell G. and White N. M. 2000 «Microengineered silicon
double-ended tuning-fork resonators» Engineering Science and Educa-
tion J. December
Borovikov A. P. 1976 «Measurement of viscosity of media by means of
shear vibration of plane resonators» Inst. Exp. Tech. 19(2) 223-224
Brignell J. E., White N. M. and Cranny A. W. J. 1987 «Sensor applica-
tions of thick film technology» Proc. IEE I 135(4) 77-84
Dress W. B. 1983 «А high resolution ultrasonic densitometer»./### Ul-
trasonics Symposium pp 287-290
Ichinose T. and Terada J. 1995 «Angular rate sensor for automotive
application» Sensors and Actuators SP-1066 pp 49-56
Johnson B. 1995 «Vibration rotation sensors» Sensors and Actuators SP-
1066 pp 41-47
Langdon R. M., 1980 «Liquid level measurement» UK Patent GB 2067756A
Langdon R. M. 1982 Marconi Review Fourth Quarter pp 231-249
Langdon R. M. 1983 «Vibrating transducers in measurement» Chem.
Engineer 397 33-35
MacDonald 1983 «А vibrating vane mass flow meter» 1st Euro. Conf.
Sensors and their Applications, UM 1ST pp 58-59
Marshall J. K. and Hunter P 1980 Strain (GB) 1 37-40
Matusik F. J. and Scania P. C. 1981 «Latest instrument makes on-line
viscosity control of slurries possible» Control Engineering 28 116-118
Morton B., De Cicco G., Gandolfi A. and Tonelli C. 1991 «Advances in
ferreleclric thick film materials and sensors» Proc. 8th European Micro-
electronics Conference (Rotterdam) pp 392-399
Randall D. S., Rudkin M. J., Cheshmchdoost A. and Jones В. E. 1997
«А pressure transducer using a metallic triple-beam tuning fork» Sensors
and Actuators A: Physical 60(1-3) 160-162
Упражнения
Reppich A. and Wiliig R. 1995 «Yaw rate sensor for vehicle dynamics
control system» Sensors and Actuators SP-1066 pp 67-76
Sarosota Automation Instrumentation Division 1985 Technical Informa-
tion on FD 800 series density meters
Упражнения
2.1. i) Назовите два преимущества и два недостатка резонансных
сенсоров.
ii) Чем отличается релаксационный осциллятор от гармониче-
ского осциллятора?
iii) Приведите три примера, в которых высокая добротность Q
в резонаторных системах обеспечивает определенные пре-
имущества.
2.2. i) Опишите три метода определения резонансной частоты.
ii) Разработайте системы для этих трех различных концепций
определения, используя функциональные блоки.
2.3. Общее уравнение затухающей системы второго порядка имеет
вид:
1 сРх 2£ dx
+ —“37 + % = У-
dtz шп dt
Покажите, используя преобразование Лапласа или аналогич-
ный метод, что решением для слабо затухающей, неуправляе-
мой системы с нулевыми начальными условиями является
x(t) = Х\ exp(-£o>n£) cosvt + ——1 /о sincutf .
L (1 — q ) '
2.4. Для некоторого резонансного датчика при отключении пита-
ния отклонение снижается как
x(t} — xq ехр(—&nt) cos wnt.
Дано, что накопленный запас потенциальной энергии имеет ве-
личину ^Кх2. Определите максимальную потенциальную энер-
гию как функцию времени t и тем самым покажите, что Q =
= 1/(2£).
2.5. Резонансный детектор определенного типа для оперативного
замера плотности жидкости может быть смоделирован урав-
нением
1,12.10-7^ + 7,4-10-7^+а: = 2/.
dtz dt
Глава 2. Резонансные сенсоры
i) Определите циклическую частоту свободных колебаний cun,
коэффициент затухания £ и добротность Q.
й) Выражение для плотности жидкости через резонансную ча-
стоту имеет вид:
2.6.
2.7.
а /3
Р= — + — + 7,
где о, (3 и 7 — постоянные величины. Выведите математи-
ческое выражение чувствительности.
Сконструирован струнный датчик давления. Дано, что частота
струны / определяется как / — \/(21)у/Т / р. Требуется опре-
делить сдвиг частоты при понижении температуры на 15 °C.
Первоначальная частота равна 50 кГц, коэффициент линейного
расширения струны равен 1,4 • 10-5 К-1. Примем, что изме-
нение напряжения струны линейно связано с ее длиной и что
фактическая длина струны остается фиксированной.
i) Объясните эффект Кориолиса с помощью диаграммы, ука-
зав ориентацию участвующих параметров.
ii) В жидкостных расходомерах Кориолиса используются либо
прямые, либо U-образные трубки. Начертите диаграммы
для каждого из этих типов, указав направление силы. Как
можно измерить эту силу?
ГЛАВА 3
ДАТЧИКИ
НА ОСНОВЕ
ПОЛУПРОВОДНИКОВ
3.1. Введение
Развитие полупроводниковой технологии во второй половине два-
дцатого века, бесспорно, оказало огромное влияние на жизнь обще-
ства в целом. Компоненты, изготовленные на основе кремния, можно
найти в любом электронном устройстве. Создание таких устройств,
в свою очередь, вызвало резкое ускорение развития новых технологий
и их практическую реализацию. Хотя новые полупроводниковые ма-
териалы и находят все большее применение, огромное большинство
приборов все еще изготавливается на основе кремния. Хорошо от-
работанная кремниевая технология обеспечивает относительно де-
шевый способ производства широкого круга приборов от простейших
дискретных компонентов до сложных структур СБИС. Стремитель-
но расширяется использование устройств силовой электроники, так
же как и применение цифровых приборов. Лавинообразный рост коли-
чества сотовых телефонов вызывает развитие производства СВЧ-уст-
ройств.
Развитие технологии производства цифровых компонентов уже
не является передним краем исследований. Новые задачи ставятся в
области создания миниатюрных сенсоров для обеспечения непосред-
ственного взаимодействия компьютеров с реальным миром. В так
называемых умных сенсорах (см. раздел 5.5) уже успешно исполь-
зуются микропроцессоры совместно с сенсорами. В дальнейшем эта
тенденция приведет к совмещению сенсора и электронной схемы на
одном кристалле. Для многих приложений концепция совмещения в
одном миниатюрном корпусе сенсора и связанных с ним цепей со-
гласования и обработки сигнала является очень привлекательной.
Хотя структуры на основе монокристаллического кремния мож-
но использовать для регистрации света, деформации, температуры,
Глава 3. Датчики на основе полупроводников
магнитного и электрического полей, чувствительность таких сенсо-
ров не может быть такой же высокой, как у большинства традици-
онных сенсоров. В качестве примера можно привести использование
эффекта Холла для измерения магнитного поля. Дискретные датчи-
ки можно создать на основе соединений например, таких
как арсенид индия, антимонид индия или арсенид галлия. Магнето-
метры, изготовленные на основе кремния с применением технологии
биполярных транзисторов, обладают меньшей чувствительностью.
Однако в последнее время, в связи с развитием технологии п-каналь-
ных МОП приборов, создание ультратонких структур, размеры ко-
торых порядка 10 нм, позволило получить большую разность потен-
циалов. Хотя в таких устройствах подвижность носителей заряда
ниже, чем в биполярных приборах, чувствительность увеличивает-
ся в 20 раз.
При разработке конструкции полупроводниковых сенсоров мо-
гут возникать значительные проблемы. Например, для высокочув-
ствительных элементов необходимо предусматривать на входе филь-
тры, отсекающие все воздействия, кроме измеряемой величины. Для
зконструкторов представляют проблему и экстремальные условия окру-
жающей среды, такие как высокие температуры, вибрации или да-
вление, а также присутствие веществ, способных отравлять сенсор.
Для конструирования, отработки и производства сенсоров необхо-
димо создание междисциплинарных коллективов. Если чувствительный
элемент изготавливается непосредственно в кремниевой подложке,
это можно делать одновременно с созданием других компонентов
на кристалле, используя те же самые маски и этапы производства.
Однако для производства сложных гибридных устройств требуется
уже разработка нестандартных технологий, а не адаптация линий
кремниевой технологии. В этом случае стоимость производства мо-
жет быть такой, что оно становится экономически выгодным только
при возможности продавать большие партии приборов.
3.2. Механические микросенсоры
В механических сенсорах находят применение разнообразные но-
вые материалы. В течение нескольких десятилетий использовался
кремний. Этот материал до сих пор остается привлекательным, так
как хорошо отработанная технология позволяет получать сверхчи-
стые монокристаллы кремния больших размеров. Их можно леги-
ровать, подвергать травлению или обрабатывать механически. Для
3.2. Механические микросенсоры
конструкторов датчиков также привлекательны механические свой-
ства кремния. К их числу относятся:
- высокий предел прочности при растяжении;
- высокая усталостная прочность;
- большой модуль Юнга, близкий к модулю Юнга стали;
- хорошее соотношение прочности и веса;
- хорошая твердость;
- высокое сопротивление пластической деформации (эффекты
удлинения и гистерезиса минимальны).
Конструкторы чаще всего используют монокристаллический крем-
ний. Однако поликристаллический кремний обладает большей гиб-
костью, так что иногда его использование более предпочтительно
для деформируемых структур, которые в свою очередь создают-
ся на монокристаллической подложке. Недостатком в этом случае
является то, что поликремний более подвержен удлинению и гисте-
резису.
Первые образцы сенсоров, изготовленных по технологии объем-
ной микромеханики, появились в начале 1960-х годов. Подложки мо-
нокристаллического кремния подвергались селективной обработке
травителями для создания объемных структур. Этот способ позво-
ляет получать конструкции с размерами менее 1 мкм или, с учетом
толщины подложки, до ~ 500 мкм. В настоящее время наибольшее
количество коммерчески доступных сенсоров изготавливается имен-
но по технологии объемной микромеханики.
С начала 1980-х годов большое внимание привлекает техноло-
гия поверхностной микромеханики. Как видно из названия, чув-
ствительный элемент располагается в тонком слое на поверхности
подложки. Преимущества этой технологии заключаются в уменьше-
нии размеров чувствительного элемента на порядок по сравнению
с устройствами объемной микромеханики и относительной простоте
интеграции регистрирующей схемы с чувствительным элементом.
Недостаток состоит в том, что из-за малых размеров приборов их
чувствительность ниже, чем у приборов объемной микромехани-
ки. Следовательно, для усиления сигнала требуется дополнительная
электрическая схема.
В промышленных масштабах производятся механические микро-
сенсоры для измерения деформаций, давления, ускорения и потока
газа. Принцип действия таких приборов основан на том, что из-
меряемая величина изменяет какую-либо механическую характери-
стику первичного преобразователя. Это изменение преобразуется
Глава 3. Датчики на основе полупроводников
с использованием определенных физических эффектов (емкостно-
го, тензорезистивного или реже применяемого пьезоэлектрическо-
го) в электрический сигнал.
3.2.1. Применение кремния
для измерения деформации
Устройства на основе р-п-переходов
Как известно, р-п-переход обладает чувствительностью к давлению.
Ширина запрещенной зоны изменяется пропорционально действую-
щему давлению. Основываясь на этой закономерности, можно ис-
пользовать диоды, биполярные транзисторы и МОП полевые тран-
зисторы для создания миниатюрных датчиков давления. Однако с их
помощью можно измерять лишь относительно высокие давления и
пока еще сложно получитьвоспроизводимые характеристики. На мо-
мент написания этой книги не было создано прибора, пригодного
для коммерческого применения.
Тензорезистивные приборы
В полупроводниковых преобразователях наблюдается эффект, по-
добный используемому в металлических датчиках деформаций, в
которых при деформации меняется сопротивление. Этот эффект
называют тензорезистивным эффектом. Коэффициент тензочув-
ствительности G тензодатчика определяется выражением:
G — 1 4- 2р 4-(3-1)
реь
где и — коэффициент Пуассона; р — уррлъъое сопротивление и еь —
продольная деформация.
Относительное изменение сопротивления при единичной дефор-
мации Др/реь называют тенз о сопротивлением. У металлов тензо-
эффект примерно равен 0,3, и при типичном значении коэффициента
Пуассона 0,5 получается значение тензочувствительности около 2.
Однако у кремния тензоэффект может быть больше 100. Слагае-
мое, учитывающее тензоэффект, становится доминирующим в вы-
ражении для определения тензочувствительности. При использова-
нии полупроводниковых тензодатчиков можно увеличить значение
тензочувствительности до 150. У полупроводниковых тензодатчи-
ков имеются следующие достоинства:
- чувствительные элементы легко могут быть сконструированы
для определенных применений так, чтобы обеспечить макси-
мальную чувствительность;
3.2. Механические микросенсоры
- несложно произвести подгонку чувствительных элементов, не-
обходимую для измерений по мостовой схеме;
- просто решаются задачи миниатюризации;
- можно организовать массовое производство на базе кремние-
вой технологии;
- используя легирование, можно получить устройства на осно-
ве кремния р- и n-типов, имеющие противоположные знаки
тензоэффекта. Также стоит отметить, что различные кристал-
лографические ориентации обладают разным по величине тен-
зоэффектом.
Наибольшим недостатком полупроводниковых пьезорезистивных
приборов является их значительная температурная чувствительность.
На тензоэффект влияет температура. Эта зависимость уменьшается
при увеличении уровня легирования, но при сильном легировании
ослабляется и само пьезосопротивление. Необходимо также помнить,
что полупроводниковые материалы характеризуются большим тем-
пературным коэффициентом сопротивления, что служит причиной
флуктуаций сопротивления чувствительного элемента в недефор-
мированном состоянии. Оба эти эффекта можно минимизировать,
используя компенсаторные схемы, например мостовую. Положение
нуля может смещаться в результате температурозависимого дрей-
фа из-за механических напряжений, возникающих в процессе изго-
товления. Для минимизации этих эффектов необходимо тщательно
продумывать конструкцию.
3.2.2. Датчики давления
В последние годы скорость роста применения миниатюрных дат-
чиков давления феноменальна. В автомобильной промышленности
наблюдается увеличение на 20% в год в течение последнего деся-
тилетия. Наиболее раннее сообщение о применении миниатюрных
датчиков давления для контроля циркуляции выхлопных газов отно-
сится к 1989 г. В дальнейшем создавались устройства для измерения
давления в трубопроводах, покрышках горючих газов и жидкостей
в гидравлических системах.
Датчики давления классифицируются в зависимости от выбора
опорного давления:
- датчики абсолютного давления', давление измеряется относи-
тельно вакуума;
- дифференциальные датчики давления: измеряют разность да-
влений в двух точках системы;
Глава 3. Датчики на основе полупроводников
- манометры: измеряют давление, избыточное по отношению к
атмосферному.
Рассмотренное выше явление пьезосопротивления широко исполь-
зуется при создании чувствительного элемента. Для получения в
монокристаллическом кремнии мембран прямоугольной или круг-
лой формы толщиной порядка 10 мкм используется технология объ-
емной микромеханики. Тензорезисторы создаются на поверхности
мембраны, площадь которой составляет порядка 1 мм2. Располо-
жение тензорезисторов определяется распределением деформаций
мембраны под действием давления. Для круглой мембраны должны
быть учтены деформации в двух направлениях. Одна — в радиаль-
ном направлении, вторая — возникающая в результате кольцевого
напряжения перпендикулярно радиусу (рис. 3.1). Соотношения для
обоих напряжений являются функцией радиуса. Дэли и Рилей (1978)
представили следующие выражения для деформации мембран:
„ ЗР(1 —I/2), 2 о 2\ /о 9\
радиальное воздействие ег =--------т-зт-й-(л0 - Зг ), (3.2)
о ЗР(1 — г/2) о 2\ /о
тангенциальное воздействие — —Qr? 2-------(Pq ~r )•> (3.3)
где Е — модуль Юнга, и — коэффициент Пуассона, t — толщина
мембраны, Ro — радиус мембраны, г — координата точки, в ко-
торой определяется деформация, отсчитываемая вдоль радиуса, и
Р — разность давлений по обе стороны мембраны.
Можно заметить, что ег меняет знак в
Сточке, где Rq = Зг2, в то время как е*, по-
> всюду положительна. При тщательно рас-
считанном расположении тензорезисторов,
два — в местах сжатия мембраны, два — в
Рис. 3.1. Направление де- местах растяжения, можно получить высо-
формаций в простой мем- кую чувствительность и обеспечить хоро-
бране шую температурную компенсацию.
Пьезорезистивные датчики давления дос-
тупны в промышленных масштабах, начиная с 1980-х годов. Типич-
ные параметры таких датчиков:
диапазон измеряемых давленийОч-ЮО кПа;
чувствительность 3 мВ/кПа при напряжении
питания 10 В;
рабочая частота 100 кГц;
нелинейность и гистерезис ±0,5%.
3.2. Механические микросенсоры
Эти датчики не могут быть использованы без защиты в систе-
мах, работающих при высоких температурах или давлениях, а также
в присутствии химически активных веществ.
Кресс (Kress) с соавторами в 1995 г. описал интегрированный
кремниевый датчик давления, разработанный для применения в ав-
томобильной промышленности в качестве измерителя давления в труб-
ках для впрыскивания топлива, баках для горючего и гидравличе-
ской тормозной магистрали. Создаются приборы, предварительное
формирование сигнала в которых осуществляется не только в руч-
ном режиме, но также и с использованием электронной системы под-
гонки. Процесс подгонки используется для корректировки произ-
водственных допусков, в том числе чувствительности, и осуществля-
ется воздействие на чип корректирующего цифрового сигнала. Ве-
личина прикладываемого напряжения такова, что характеристики
сенсора сохраняются на все время жизни прибора. Более ранние кон-
струкции предусматривали более дорогостоящую технологию лазер-
ной подгонки. При использовании напряжения питания 5 В дости-
гается диапазон измеряемых давлений (абсолютных) 20-115 кПа, и
величина выходного сигнала варьируется от 0,4 до 4,65 В. Исполь-
зование соответствующей технологии изоляции элементов позволяет
принять датчики во всем диапазоне рабочих температур автомоби-
ля, т. е. от —40 °C до 125 °C.
О создании датчиков с более высокой чувствительностью, ис-
пользующих явление резонанса, в 1988 г. сообщил Гринвуд (Green-
wood). В монокристаллическом кремнии была создана челночная
структура. Маятник жестко соединялся с мембраной. При дефор-
мации мембраны изменяющиеся напряжения в подвесах маятника
вызывали изменение резонансной частоты механической системы.
Такие датчики обладают высокой долговременной стабильностью.
Результаты недавних работ, посвященных другим вариантам кон-
струкции подобных приборов, показывают, что возможно достиже-
ние высокой точности измерений. Это делает датчики резонансного
типа привлекательными для организации поточного производства.
Однако их стоимость довольно велика из-за высокой сложности про-
изводственного процесса.
В датчиках давления используются также вторичные преобразо-
ватели емкостного типа. Этот подход использовался в традицион-
ных сенсорах с тех пор, как возникло массовое производство измери-
тельной техники. В таких устройствах вся поверхность мембраны
действует как обкладка конденсатора. Изображенный на рис. 3.2
чувствительный элемент датчика давления относится к такому ти-
Глава 3. Датчики на основе полупроводников
пу емкостных датчиков. В качестве одной обкладки конденсатора
используется неподвижное металлическое основание, другая обклад-
ка — гибкая мембрана круглой формы, закрепленная по окруж-
ности. Мембрана прогибается под действием давления Р, как это
показано на рисунке.
Рис. 3.2. Традиционная конструк-
ция емкостного датчика давления
Емкость при нулевом давлении
определяется по формуле плоского
конденсатора:
С = ^^0, (3.4)
d
При деформации мембраны сред-
нее расстояние между обкладками
конденсатора уменьшается, что при-
водит к увеличению емкости на ве-
личину ДС. Относительное изменение емкости рассчитывается по
формуле, предложенной Нейбертом (Neubert) в 1975 г.:
АС (1 - р2)Др
С 16Edt3 (3’5'
где: Е — модуль Юнга; v — коэффициент Пуассона и t — толщина
мембраны.
В миниатюрной версии таких приборов используется кремниевая
мембрана. Методом газофазного осаждения металлических пленок
формируются верхняя и нижняя обкладки конденсатора. В области,
которая не деформируется под действием давления, располагают
такой же конденсатор в качестве эталонного для обеспечения тем-
пературной компенсации.
3.2.3. Акселерометры
Темпы роста промышленного применения миниатюрных акселеро-
метров почти так же велики, как и у датчиков давления. Потреб-
ность в акселерометрах существовала всегда, но в последние годы
спрос на них стремительно растет. В автомобильной промышлен-
ности быстро разворачивается применение миниатюрных акселеро-
метров, устанавливаемых в системах раскрытия подушек безопасности,
активных прерывающих и останавливающих системах (см. Гарднер
(Gardener) с соавторами, 2001 г.).
Акселерометр — это устройство для измерения ускорения или, в не-
которых конструктивных формах, для измерения вибраций (рис. 3.3).
Он состоит из инерционной массы т, которая приобретает ускоре-
ние а. Согласно второму закону Ньютона, такое ускорение возника-
3.2. Механические микросенсоры
ет под действием силы F:
F = та. (3.6)
Сила действует на массу через соединение, связывающее массу с
автомобилем. Если соединение выполнено в форме гибкого элемен-
та, деформация которого происходит в линейной области, смещение
массы будет пропорционально ускорению. Измеряя смещение в этом
случае, можно оценить ускорение. В качестве основного элемента та-
ких приборов используется миниатюрный кремниевый кантилевер.
Рис. 3.3. Простой акселерометр в форме кантилевера
Если упругие свойства материала сохраняются постоянными, сис-
тема может быть представлена в виде линейных уравнений и при-
менимы основные соотношения, приведенные в разделе 2.2. Чтобы
в системе не возникали колебания и быстро достигалась максималь-
ная деформация, коэффициент затухания £ должен быть близок к 1.
Этого добиваются подбором подходящей геометрии кантилевера с
учетом вязкости окружающего пространства (воздуха). Тогда ре-
шение уравнения (2.1) для воздействия в форме ступеньки имеет
вид:
/з
x = [l-(l + wnf)e-^]—-F, (3.7)
ОП/1
где: Е — модуль Юнга; I — длина балки и I — второй момент
чувствительной области bd3 /12, где bnd — ширина и толщина балки
соответственно. Для кантилевера можно показать, что
/ЗЕ1 _ 1 I Ebd3
у mF 2 V mF
(3-8)
где т — эффективная масса, в качестве которой можно взять массу
конечного блока кантилевера в том случае, если она больше массы
балки примерно в 30 раз.
Кроме простейших кантилеверов разрабатываются другие кон-
струкции, напоминающие по форме гамак или крабовые ножки, а
также различные варианты гибких подвесов (Гарднер с соавт., 2001).
Ниже представляются методы детектирования деформаций. Наибо-
лее популярны в настоящее время пьезорезистивный и емкостной
способы.
Глава 3. Датчики на основе полупроводников
Тензорезистивный метод
С середины 1980-х в промышленных объемах стали доступны акселе-
рометры с тензорезистивным преобразованием. Самые ранние кон-
струкции были подобны датчикам давления, представленным выше,
с дополнительной массой в центре мембраны. В современных кон-
струкциях миниатюрная инерционная масса подвешивается с помо-
щью опор, в структуру которых входит тензорезистивный элемент.
Если в качестве «пружин» используется кремний, свойства кото-
рого в обычном состоянии нелинейны, существенным становится
очень тщательный выбор геометрии устройства, особенно если тре-
буется получить линейный выходной сигнал. Как было отмечено
выше, пьезорезистивные устройства чувствительны к загрязнени-
ям и их характеристики испытывают температурный дрейф. Для
обеспечения стабильной работы датчика его необходимо помещать
в корпус и применять схему температурной компенсации, которая
может быть выполнена с использованием нерабочего эталонного эле-
мента.
Как и в случае с тензорезистивными датчиками давления хо-
рошей альтернативой использованию эталонного элемента, является
применение нескольких чувствительных элементов. Это легко про-
иллюстрировать на примере простого кантилевера. Чувствительные
элементы размещаются на верхней и нижней поверхностях кантиле-
вера, которые подвергаются действию напряжений противополож-
ного знака. При соединении этих элементов в мостовую схему, как
показано на рис. 3.4, можно увеличить чувствительность, также как
и компенсировать температурный дрейф. Еэкв — разность потен-
циалов на концах разомкнутой цепи.
Рис. 3.4. Мостовая схема с четырьмя активными сенсорами
3.2. Механические микросенсоры
Емкостной метод
В этом случае нижняя сторона инерционной массы покрывается тон-
кой пленкой металла, которая действует как одна из обкладок плос-
кого конденсатора. Для получения второй обкладки подложка об-
рабатывается таким же образом. Емкость С плоского конденсатора
определяется выражением:
где: А — площадь обкладок; во — диэлектрическая проницаемость
вакуума; ег — диэлектрическая проницаемость материала, находя-
щегося между обкладками конденсатора; d — расстояние между
обкладками.
Изменение d приводит к изменению емкости С. Так как отно-
шение между ними нелинейно, применяется линеаризация, для че-
го используется соединение по мостовой схеме или микропроцессор
(см. раздел 5.5, посвященный «смарт»-сенсорам). Емкость очень чув-
ствительна к изменениям температуры, так как термическое рас-
ширение влияет на величину d. Этот эффект можно уменьшить,
применив конструкцию дифференцирующего двойного конденсато-
ра, показанную на рис. 3.5. Дальнейшего улучшения этой системы
можно добиться, включив ее в два плеча мостовой схемы постоян-
ного тока, что приведет к линеаризации выходного сигнала Еэкв —
— (Vs/2d)x, где 2d — расстояние между крайними обкладками кон-
денсатора, а х — смещение центральной обкладки.
Рис. 3.5. Дифференцирующая
емкостная система
Такие устройства стали выпускаться в промышленных масшта-
бах вскоре после пьезорезистивных датчиков. Об их применении в
автомобилях сообщают Рейдемейстер и Джонсон (Reidemeister и
Johnson) (1995). Температурная стабильность достигается подбо-
ром материалов с близкими коэффициентами теплового расшире-
ния для кантилевера, несущей опоры и подложки. Кроме этого для
улучшения характеристики используется защитный электрод. Эта
структура была усовершенствована с применением метода конеч-
Глава 3. Датчики на основе полупроводников
ных элементов настолько, что с ее помощью можно измерять малые
ускорения.
Один из первых коммерческих емкостных акселерометров был
выпущен фирмой «Аналог Дивайс». Его подробное описание будет
дано ниже.
Пьезоэлектрический метод
Как известно, в кремнии пьезоэффект не наблюдается. Следова-
тельно, для получения пьезоэффекта сенсоры на основе кремния
необходимо покрыть тонкой пленкой пьезоэлектрика, например ок-
сида цинка. Достоинством пьезоэлектрических сенсоров является
их способность работать в более широком температурном диапа-
зоне и меньшие размеры. Однако существенным недостатком таких
сенсоров являются большие токи утечки. Это проявляется в том,
что, при измерении установившегося значения ускорения, показания
датчика становятся нулевыми через несколько секунд. Указанный
недостаток ограничивает область применения пьезоэлектрических
акселерометров измерением вибраций. Они к тому же более доро-
гие, чем датчики, описанные ранее.
Резонансный метод
В дальнейшем конструирование акселерометров развивалось в на-
правлении использования эффекта резонанса. Основная концепция
подобна представленной ранее для датчиков давления. Измеряется
не отклонение инерционной массы, а изменение модуля упругости
материала подвеса, связанное с изменением механических напря-
жений. Изменение упругости приводит к изменению собственной
частоты миниатюрной гибкой структуры. Пьезоэлектрические воз-
буждающие и чувствительные элементы используются в цепи обрат-
ной связи для сохранения состояния резонанса. Резонансная частота
является выходным сигналом, по которому определяют ускорение.
Метод уравновешивающей силы
В последнее время появляются конструкции датчиков, использую-
щие метод уравновешиваюших сил. Суть метода заключается в ис-
пользовании магнитного или электрического поля для противодей-
ствия силе, вызывающей ускорение. При этом инерционная масса
практически не перемещается. Следовательно, достигается линей-
ность характеристики независимо от геометрии системы. Выходной
сигнал выделяется из сигнала в цепи обратной связи, который гене-
рируется в электрическом или магнитном поле.
Первая коммерческая модель ADXL-50 производства «Аналог Ди-
вайс» появилась в 1991 г. и предназначалась для измерения ускоре-
3.2. Механические микросенсоры
ний порядка 50g (Пател (Patel), 1992). Этот прибор изготавливался
по технологии поверхностной микромеханики. Для детектирования
перемещения в нем используется переменная емкость системы. Не-
подвижная обкладка конденсатора имеет форму двойной гребенки,
закрепленной на высоте 1 мкм над поверхностью подложки с двух
сторон маятника. Маятник с обеих сторон имеет выступы, которые
образуют подвижную обкладку конденсатора и чередуются с высту-
пами неподвижных гребенок. Полная емкость двойной гребенчатой
структуры всего лишь 1 пФ и размеры менее 1 мм2. Обкладки под-
ключены по дифференцирующей схеме, как это представлено выше.
Остальную часть кристалла занимают усилитель, демодулятор ко-
лебаний и фильтр. Постоянное напряжение на выходе схемы прямо
пропорционально ускорению. Общий размер кристалла около 9 мм2.
Для предотвращения значительных перемещений маятника исполь-
зуется метод уравновешивающих сил. К обкладкам конденсатора
прикладывается напряжение, так что возникают электростатиче-
ские силы, направленные противоположно силам, вызвавшим ускоре-
ние. Эти силы препятствуют движению маятника. Дополнительным
преимуществом является то, что устройство можно тестировать, не
подвергая его механическому воздействию.
3.2.4. Датчики потока
Термические
С. С. Томас (Thomas) в 1911 г. впервые предложил использовать
для измерения потока перенос тепла от нагретого элемента теку-
щей жидкостью. Самое простое применение это явление нашло в
так называемом анемометре с горячей проволокой, используемом
для измерения скорости ветра. Два саморазогревающихся сенсора
расположены на гибком мостике. Один из них защищен от ветра и
используется как эталонный. Таким образом, осуществляется ком-
пенсация влияния изменений температуры окружающей среды.
Измерение потока жидкости в трубах с использованием немини-
атюрных или миниатюрных сенсоров является более трудоемким.
Для измерений необходимы два сенсора, расположенные выше и ни-
же по течению и разделенные нагревателем. В миниатюрных сенсо-
рах вся система размещается на одной кремниевой подложке. В 1987 г.
Джонсон и Хигаши создали прибор, в котором два одинаковых ре-
зистивных термометра располагались на двух микромостиках над
подложкой. Поскольку теплопроводность кремния довольно высо-
ка, происходит передача теплоты в подложку. Это приводит к уве-
Глава 3. Датчики на основе полупроводников
личению потребления энергии устройством. Для создания мости-
ков может быть использован нитрид кремния, обладающий меньшей
теплопроводностью. Нагревательный элемент располагается между
двумя резисторами на одинаковом расстоянии от них, а газовый
поток протекает по специальному каналу, расположенному ниже.
Маленькие размеры микромостиков обеспечивают низкое потребле-
ние энергии прибором (обычно мощности 10 мВт достаточно для
повышения температуры на 100 °C) и высокое быстродействие (око-
ло 3 мс). Сообщается о конструкциях, способных измерять скорость
потока до 30 м/с. В промышленных объемах доступны датчики для
измерения потока воздуха фирмы «Хонейвелл». Хотя нет принци-
пиальных ограничений для применения той же методики для изме-
рения потоков жидкости, большой проблемой становится влияние
загрязнений на точность измерения. Любые загрязнения на поверх-
ности приводят к изменению теплопроводности и нарушению кали-
бровки.
Резонансные датчики
Боувстра с соавторами в 1990 г. сообщили о создании структуры с
микромостиками из нитрида кремния, размеры которой составля-
ют 600x200x21 мкм. Резонансная частота предложенной структуры
85 кГц. Колебания возбуждались при нагреве с помощью тонкопле-
ночных резисторов. Превышение над температурой окружающей
среды составляло 20 °C. Выходной сигнал снимался с пьезорезистив-
ного сенсора. Для потоков в диапазоне 0-=-10 мл/мин наблюдался
сдвиг резонансной частоты на 800 Гц.
Достоинствами резонансных систем, как уже говорилось в гл. 2,
являются высокая чувствительность, быстродействие и хорошая ста-
бильность. Наибольшее препятствие в применении таких приборов
заключается в изменении их массы в результате загрязнения. По-
этому они могут использоваться только для измерений в «чистых»
жидкостях.
Емкостные
Чо и Вайс (Cho и Wise) в 1993 г. сообщили о создании датчика
потока, действие которого основано на измерении разности давле-
ний. Геометрия предложенной куполообразной структуры такова,
что разность давлений между впускным и выпускным отверстиями
пропорциональна скорости потока вещества. Эта разность давле-
ний используется для регулирования расстояния между обкладками
размещенного внутри потока кремниевого микроконденсатора. Зна-
чение емкости конденсатора составляет 5dwl5 пФ. При измерении
3.2. Механические микросенсоры
с помощью схемы, состоящей из емкостных комплементарных «ме-
тил - окисел - полупроводник» (КМОП) преобразователей, достига-
лось разрешение 1 фФ. Сообщалось, что изменение емкости на 1 фФ
соответствует разности давлений 0,13 Па.
Недостатком этого прибора, так же как и емкостных приборов
в целом, является температурный дрейф и значительные токи утеч-
ки. Хорошо продуманная конструкция позволяет уменьшить влия-
ние этих недостатков.
Применение миниатюрных измерителей потока увеличивается с
каждым годом благодаря растущей важности микропневмоники в
MEMS (микро-электро-механических системах) (Гарднер и соавто-
ры, 2001).
3.2.5. Датчики угловой скорости
В разделе 2.7 мы привели описание скоростного гироскопа как дат-
чика угловой скорости, использующего эффект Кориолиса (см. раз-
дел 2.6). В полупроводниковых конструкциях наиболее часто исполь-
зуются структуры в виде вращающейся вилки, резонаторов цилин-
дрической или кольцевой формы.
Конструкция в виде вращающейся вилки предложена Бернштей-
ном (Bernstein) с соавторами в 1993 г. Это микромеханическое устрой-
ство, в структуру которого входят перемещающиеся гребенки. Ми-
ниатюрные сенсоры этого типа создаются на основе конструкции
миниатюрного скоростного гироскопа в форме вращающейся вилки,
рассмотренной в разделе 2.8. Принцип действия цилиндрических и
кольцевых устройств такой же, как и у вибрационного трубчатого
гироскопа, представленного в разделе 2.7.
Джонсон с соавторами (1995) сообщили о создании скоростного
кольцевого гироскопа, изготовленного по технологии «поверхност-
ной микромеханики». Металлическое кольцо создавалось на подлож-
ке кремния p-типа с использованием гальванического осаждения и
фотолитографии. Для приведения в действие и считывания отклика
на подложке, вокруг кольца, сформированы 32 электрода (схемати-
чески показаны на рис. 3.6). В подложке также была сформирована
электрическая цепь на основе КМОП приборов для предварительно-
го преобразования и усиления сигнала. Интегральная схема вторич-
ного преобразователя содержит схему контроля, программируемый
ЦАП для корректировки ошибок, возникающих в результате ухода
параметров и усиления сигнала, а также эталонный источник на-
пряжения для электростатической поляризации кольца.
Для датчиков угловой скорости существует объемный рынок сбы-
та. Большое число производителей выпускают скоростные гироско-
Глава 3. Датчики на основе полупроводников
пы, размеры которых около 25x25 мм в плоскости и около 18 мм
в высоту. Однако при этом конструкции и характеристики датчи-
ков могут значительно отличаться. Приборы, представленные выше,
можно отнести к твердотельным датчикам. Однако в некоторых
гибридных структурах первичный преобразователь может быть вы-
полнен в виде отдельного кольца, цилиндра или даже равносторон-
ней призмы, изготовленной из «Элинвара» — сплава с нулевым тем-
пературным коэффициентом упругости, которые помещаются в кор-
пус с интегральной схемой.
Рис. 3.6. Миниатюрный датчик угловой скорости
3.3. Датчики на поверхностных акустических
волнах (ПАВ)
В разделе 2.10 описывались датчики, действие которых основано на
механическом резонансе в объеме кристаллического кварца. Такие
колебания относят к объемным волнам (объемной моде). Поверх-
ностные акустические волны (первоначально известные как волны
Рэлея) — это также механические волны, но, как это можно за-
ключить из названия, распространяющиеся только вблизи поверхно-
сти прибора. Эти волны возбуждаются на поверхности и затухают
при распространении в глубь кристалла, эффективно проникая лишь
на глубину порядка длины волны. Хотя скорость распространения
волны примерно такая же, как у объемной моды и лежит в диапазо-
не 3,8 4- 4,2 • 102 м/с, частота колебаний значительно выше. Можно
создавать приборы, работающие на частотах вплоть до 5 ГГц. По-
скольку чувствительность обычно зависит от относительного изме-
нения частоты А///, возможность работать на высоких частотах
является очевидным преимуществом. Еще одно достоинство работы
в диапазоне СВЧ заключается в возможности создания беспровод-
ных сенсоров для дистанционных измерений. Мощность к тонкому
сенсору, снабженному антенной, может подаваться с падающей элек-
тромагнитной волной, а обратная волна может переносить данные
3.3. Датчики на поверхностных акустических волнах (ПАВ) 91
об измеряемом параметре (см. Варадан (Varadan) в книге Гарднера
и соавторов, 2001).
Принцип действия датчиков на основе ПАВ заключается в том,
что измеряемый параметр влияет на скорость распространения вол-
ны, что в свою очередь вызывает изменение временного интервала
между входным и выходным сигналами. Размеры прибора обычно
составляют несколько квадратных миллиметров. Явление пьезоэф-
фекта используется для активации устройства и получения отклика
от воздействия измеряемой величины. Вся конструкция может быть
выполнена в едином кристалле. Активные, чувствительные компо-
ненты и подложка могут быть изготовлены из одного пьезоэлек-
трического материала. В другом варианте предполагается использо-
вать полупроводниковые подложки из кремния или арсенида галлия.
Поскольку эти полупроводники не обладают пьезоэлектрическими
свойствами, для возбуждения волны, ее распространения и реги-
страции необходимо на поверхность полупроводниковой подложки
наносить слои пьезоэлектрического материала. Наиболее широко ис-
пользуются покрытия из ZnO, A1N или Pb(Zr,Ti)O3 (ЦТС) толщиной
около 5 • 10-7 м (0,05А) для наилучшего сочетания ZnO-SiCb-Si. Ис-
пользование полупроводниковой подложки дает возможность фор-
мировать в едином технологическом цикле чувствительный элемент
и цепи обработки сигналов, что очень привлекательно. Однако в
этом случае изменяется физика распространения волн. Скорость
распространения волн в этом случае будет зависеть от частоты.
Существующие процессы осаждения слоев, такие как газофазное
осаждение или особенно плазменное распыление, позволяют созда-
вать, как правило, не монокристаллические слои со значительной
шероховатостью, что приводит к нарушению взаимодействия волн
в подложке.
Электроды на поверхности пьезоэлектрического материала чаще
всего образуют встречно-штыревую структуру, по форме напомина-
ющую гребенку, с количеством электродов до 20 на каждой стороне.
Рисунок электродов создается методом фотолитографии. Расстоя-
ние между электродами одинаковой полярности задается равным
длине акустической волны (примерно 10 мкм). Устройство констру-
ируется либо в виде линии задержки, либо в форме резонатора стоя-
чей волны. Структура этих двух типов приборов представлена ниже.
Резонаторные датчики на ПАВ
В конструкции резонаторных датчиков на ПАВ (рис. 3.7) на конце
активной поверхности с каждой стороны формируется эшель (отра-
жательная дифракционная решетка, концентрирующая излучение в
Глава 3. Датчики на основе полупроводников
спектрах высокого порядка). От нее происходит отражение волны
по направлению к центру прибора, в результате чего формирует-
ся стоячая волна. Чувствительный и активный электроды вместе
с усилителем, имеющим автоматический контроль коэффициента
усиления, образуют цепь положительной обратной связи, которая
позволяет сохранять условие резонанса.
Рис. 3.7. Датчик на ПАВ резо-
наторного типа
Изменение времени распространения между излучающим и при-
емным электродами приводит к изменению резонансной частоты соп.
Резонансная частота вычисляется по формуле:
2тгп — р
—
(3.10)
где: р — сдвиг фазы усилителем, п — номер возбуждаемой моды,
г — время задержки, которое зависит от воздействия измеряемой
величины.
Датчики на основе линий задержки на ПАВ
В этом типе датчиков на ПАВ (рис. 3.8) частота возбуждаемых ко-
лебаний фиксирована, а измеряется фазовый сдвиг, возникающий
в результате задержки. Конструкция линии задержки включает в
себя два одинаковых элемента, что делает возможным добавлять в
конструкцию эталонную структуру, расположенную вблизи от чув-
ствительной структуры на той же самой подложке. Из двух пред-
ставленных вариантов приборов линия задержки используется чаще
в случаях, когда необходимо наличие эталонного устройства.
Фазовый сдвиг между излучаемым и принимаемым сигналами,
возникающий при распространении ПАВ, определяется выражением:
р = 2тг fot, (3.11)
где t — время распространения волны в подложке между электро-
дами. Можно преобразовать это выражение к виду:
<^ = 27г/о-, (3.12)
V
3.3. Датчики на поверхностных акустических волнах (ПАВ)
где I — длина пути и v — скорость, меняющаяся под действием
измеряемой величины. Для устройств с двойной линией задержки
величина /о фиксирована. Разность фаз для двух путей описывается
выражением:
(3.13)
фдат Фэт —
1дат
U дат
Рис. 3.8. Датчик на ПАВ на основе линии задержки
Для сложения выходных сигналов эталонного и чувствительного
каналов обычно используется аналоговый умножитель. Известное
тригонометрическое тождество
sin A sin В = cos(A — В) — cos(A + В) (3.14)
дает
sin(27r/o^ + А<р) sin 2тг/о£ = cos(A^) — cos(4?rfat + Д<р). (3.15)
Фильтр низких частот на выходе выделяет только слагаемое
1/2 cos(A</>). В некоторых случаях используются линии задержки без
эталонного устройства. В этом случае производится умножение сиг-
нала излучателя и сигнала, полученного на выходе линии задержки,
что дает значение 1/2 cos(A</?).
3.3.1. Датчики массы, газовые сенсоры
и датчики влажности
Простейший датчик массы или микровесы, можно создать, исполь-
зуя принцип распространения ПАВ. Изменения массы, вызванные,
например, процессом испарения, влияют на скорость распростра-
Глава 3. Датчики на основе полупроводников
нения волны, что в свою очередь приводит к изменению частоты.
Изменение частоты описывается выражением:
д/ = (fci + £2)/о2Дд, (3-16)
где /z — масса на единицу площади, к± и к? — константы материала.
Для кварца Y-среза к± = —9,8-10~8 и къ — —4,18-Ю-8 м2с/кг. Можно
проводить измерения массы в 1 пикограмм.
Концепция конструирования газовых сенсоров заключается в на-
несении покрытия, селективно абсорбирующего молекулы того га-
за, который нужно обнаружить. Это поглощение изменяет свойства
интерфейса между покрытием и подложкой, что приводит к измене-
нию времени распространения волны. При использовании этого эф-
фекта в резонансных датчиках происходит изменение резонансной
частоты. Впервые о создании газового сенсора сообщалось в работе
Вольтера и Дези (Wohltjers и Dessy) в 1979 г. Ведутся интенсивные
исследования и разработки в этой области. Преимущества газовых
сенсоров на ПАВ по сравнению с сенсорами на объемных волнах
заключаются в следующем:
- повышение рабочей частоты на два порядка позволяет повы-
сить чувствительность;
- жесткое закрепление обратной стороны подложки с планарной
структурой позволяет получить лучшую стабильность, чем у
объемных резонаторов;
- маленькие размеры позволяют размещать несколько сенсоров
на одном кристалле для детектирования нескольких величин и
температурной компенсации.
В настоящее время основные усилия сконцентрированы на поис-
ке химических составов для покрытий, позволяющих детектировать
определенные вещества. Работа датчиков влажности основывается
на тех же принципах, что и работа газовых сенсоров, хотя чаще
используется влияние изменения массы на резонансную частоту.
Сообщается о создании сенсоров для определения наличия взры-
воопасных газов, лекарственных препаратов (наркотических средств),
водяных паров и других газов, таких как: SO2, Щ, NH3, H2S, NO2,
СО2 и СН4.
3.3.2. Датчики температуры
В 1990 г. Ньюмейстер (Neumeister) с соавторами сообщили о созда-
нии датчика температуры на ПАВ на подложке LiNbOs. Это прибор
резонаторного типа, в котором резонансная частота wn зависит от
3.3. Датчики на поверхностных акустических волнах (ПАВ)
температуры. В результате теплового расширения подложки про-
исходит увеличение времени распространения ПАВ. Температурная
зависимость частоты определяется выражением:
Деи
---^(«1-а2)ДТ, (3.17)
где «1 и о2 — коэффициент теплового расширения и температурный
коэффициент скорости соответственно. Прибор работает на часто-
те около 40 МГц в интервале температур от —50 °C до -1-150 °C с
постоянной чувствительностью 4 Гц/°С. Достигается разрешение
равное 0,001 °C и воспроизводимость ±0,2 °C.
3.3.3. Датчики деформации
Линии задержки на ПАВ могут использоваться для измерения де-
формации. Если напряжения в материале не влияют на скорость
распространения ПАВ, изменения фазы волны происходят только
из-за изменения физической длины пути распространения волны под
действием напряжений. На основании выражения (3.12) можно по-
лучить:
V = Т- <3'18>
Так как отношение Д//2 определяет деформацию при растяже-
нии е, получаем, что Ду? пропорционально е.
Размещая датчик деформации на миниатюрном кантилевере или
подобной структуре, можно получить акселерометр. Аналогично с
использованием кварцевой мембраны можно создать датчик давле-
ния. Датчики деформаций размещают на защищенной стороне мем-
браны так, чтобы жидкость не могла контактировать с областью
расположения устройства на ПАВ, поскольку это тоже может вы-
звать изменение частоты.
3.3.4. Датчики магнитного поля
Магнитоупругий эффект, или магнитострикция был обнаружен
Джоулем (Joule) в 1842 г. Магнитоупругие материалы изменяют
свою длину при помещении в продольное магнитное поле. Это не-
значительный эффект, примерно 10 промилей (10 • 10~6) в среднем
по величине магнитном поле.
Если тонкая пленка материала, обладающего магнитоупругими
свойствами, помещается на прибор ПАВ, то при наличии магнитно-
го поля вдоль границы слоев возникает механическое напряжение,
Глава 3. Датчики на основе полупроводников
поскольку изменяется длина магнитоупругой пленки. Эти напряже-
ния влияют на скорость распространения ПАВ.
Хана (Hanna) (1987) сообщает о создании датчиков магнитного
поля на ПАВ резонансного типа. Хотя отношение между резонанс-
ной частотой и величиной магнитного поля в таких структурах
нелинейно, была получена высокая чувствительность.
3.3.5. Заключение
Большое количество датчиков на ПАВ уже создано и исследования
в этой области продолжаются. В заключение перечислим привлека-
тельные свойства этих приборов:
- высокое разрешение;
- возможность объединить чувствительную структуру и элек-
тронику на одном кристалле;
- возможны дистанционные измерения;
- потенциально пригодны для массового производства с исполь-
зованием единой технологии.
Недостатки таких приборов:
- невысокая долговременная стабильность;
- большая чувствительность к влиянию температуры и влажно-
сти.
Использование «компенсаторных» схем поможет преодолеть некото-
рые из этих недостатков в будущем.
3.4. Химические микросенсоры
Традиционно растворы анализируют с помощью стеклянных элек-
тродов для pH-метрии и ион-селективных электродов (ИСЭ) для ио-
нов К+, Са2+, С1~ и Вг~. Ферментные сенсоры и биосенсоры также
коммерчески доступны. Однако в процессе исследований и разработ-
ки полупроводниковых материалов в течение последних 40 лет было
отмечено, что на свойства поверхности влияют различные загрязне-
ния. В начале 1960-х годов в Японии полупроводники были впервые
использованы для детектирования газов в атмосфере, а позднее для
анализа растворов. Для разработки подобных устройств прилага-
лись большие усилия, и работы над ними продолжаются до сих пор.
В последние годы рост продаж химических сенсоров по всему ми-
ру не пострадал в той же мере, как в ряде других областей мировой
3.4- Химические микросенсоры
экономики. Ожидается, что в области производства сенсоров для
медицины и экологического контроля будет наблюдаться наиболь-
ший подъем. Из-за того, что химические микросенсоры изначально
имели ограниченное применение, для них предсказывают больший
рост годового производства, чем для обычных сенсоров. Оценки ро-
ста производства химических микросенсоров дают от 9,5 до 10,5%
в год на 2006 г.
Хотя в некоторых разработках использовались диодные структу-
ры, такие как диоды Шоттки, большинство устройств основано на
полевых транзисторах (ПТ). Функциональной частью ПТ является
область затвора. Полевые транзисторы - сенсоры можно классифи-
цировать в зависимости от детектируемого вещества. Для разных
типов существуют следующие обозначения:
ИСПТ ион-селективный ПТ
СПТ сравнительный ПТ
ХИМПТ химически чувствительный ПТ
ФПТ ферментный ПТ
ИМПТ ИСПТ с иммунологическим реагентом
БИОПТ ИСПТ с биологически активным покрытием
поверхности
Наиболее часто неорганические устройства относят к ИСПТ с ука-
занием их области применения. Для понимания принципа их дей-
ствия будет полезным рассмотреть некоторые химические аспекты.
3.4.1. Ионы в растворах
Когда электрод помещают в раствор ионов, между электродом и
расплавом происходит реакция, вследствие чего появляется равно-
весная разность потенциалов. Разница потенциалов между электро-
дом и раствором зависит преимущественно, но не полностью, от
активности определенных ионов а. (В некоторых случаях присут-
ствие сходных ионов может влиять на желаемое взаимодействие
электрода с ионом.) Активность иона а в растворе зависит от кон-
центрации с,
а = Кс. (3.19)
Однако К является не константой, а функцией с и концентрации
других присутствующих ионов. При низких концентрациях, менее
10-4 моль/л, К = 1. Модифицированное уравнение Нернста устана-
вливает взаимоотношение а и потенциала Еэкв,
F — F
-^экв — + гп
zF
1п(аж + kayY
(3.20)
4—4227
Глава 3. Датчики на основе полупроводников
где Eq — константа, зависящая от конструкции и материала элек-
трода; R — универсальная газовая постоянная (8,314 Дж/К); z —
заряд иона (1, 2 или 3); Т — абсолютная температура; F — число
Фарадея (96493 Кулон); ах — активность измеряемого иона х; ау —
активность иона у (если он присутствует) и fc — селективность элек-
трода по отношению к у (0 < k < 1).
ЕЭкв — разница потенциалов, возникающая между отдельным
активным электродом и раствором, в который он погружен. Еще
один электрод должен быть помещен в раствор, чтобы обеспечить
электрическую замкнутость цепи. Разность потенциалов, создава-
емая вторым электродом, должна быть постоянной независимо от
измеряемого раствора. Он по своему действию подобен электроду
сравнения, внося постоянную разность потенциалов в цепь.
3.4.2. Измерение pH
Одна из наиболее часто измеряемых активностей ионов, особенно в
промышленности и при мониторинге окружающей среды, является
активность ионов водорода. Это измерение кислотности/щелочности
раствора (pH), которая вычисляется по формуле:
pH --1g ан, (3.21)
где ан — активность иона водорода. В чистой воде диссоциация
молекулы воды протекает в незначительной мере:
Н2О<—>Н+ + ОН“. (3.22)
Концентрация ионов водорода при 25 °C составляет 10-7 моль/л.
При увеличении температуры число диссоциированных молекул уве-
личивается, что приводит к повышению концентрации ионов водо-
рода. Может возникнуть впечатление, что при этом раствор стано-
вится более кислым. Однако, пока концентрации ионов Н+ и ОН-
равны, раствор остается нейтральным. Следовательно, чтобы рН-метр
показывал pH = 7 (нейтральная среда), необходима температурная
корреляция. Поэтому обычно pH-метры имеют ту или иную систему
компенсации температуры.
В табл. 3.1 приведены величины pH для трех типов ионных рас-
творов.
pH раствора можно определить, используя электроды и применяя
уравнение Нернста. Учитывая, что электрод — высокоселективный
и реагирует только на ан, уравнение (3.20) можно записать как:
= Eq Ч--=- In ан- (3.23)
3.4 • Химические микросенсоры
Поскольку ион водорода имеет единичный заряд (г = 1), то
НТ
Еэкв = Е0 + — \пан, (3.24)
Г
НТ
Еэкв = Е0 + —1п1(ГрН, (3.25)
Г
НТ
Еэке = Е0 - 2,303—pH, (3.26)
Г
что при 25 °C дает
Еэкв — Eq — 0,0592рН Вольт. (3.27)
Таблица 3.1. Концентрация ионов водорода и величины pH
Ионнный раствор Концентрация ионов водорода (моль/л) pH
Чистая вода при 25 °C 10“7 7
Сильная кислота Стремится к 10° Стремится к 0
Сильное основание Стремится к 10“14 Стремится к 14
Уравнение (3.27) в течение многих лет использовали при изме-
рении pH. Традиционная система включает в себя чувствительный
электрод, заключенный в проницаемую стеклянную мембрану. Как
указывалось выше, для измерения разности потенциалов между элек-
тродом и раствором необходим еще один электрод, Еэкв которого
не зависит от природы раствора.
Разность потенциалов на этом электроде Eref включают в кали-
бровку. Устройства со стеклянными электродами при соответству-
ющей настройке обычно работают хорошо, однако они громоздки,
хрупки и имеют высокую стоимость.
Новый тип рН-микросенсоров на базе полевых транзисторов МДП
(МОППТ) в настоящее время имеется в продаже. Существуют так-
же сходные устройства для измерения концентраций других ионов в
растворе. Сенсоры этого семейства называются ион-селективными
ПТ или ИСПТ.
3.4.3. Ионно-селективные
полевые транзисторы
ИСПТ — первая попытка использования ПТ как сенсора предприня-
та Бергвальдом в 1970 г. для измерения pH растворов. Для лучшего
понимания принципа работы ИСПТ полезно будет ознакомиться с
МОППТ, на основе которых они были разработаны.
Аббревиатура МОП означает, что устройство ПТ имеет сэнд-
вичевую структуру, «металл-окисел-полупроводник» (рис. 3.9). По-
Глава 3. Датчики на основе полупроводников
лупроводник может быть р- или n-типа, в связи с чем его относят
к РМОП- или NMOII-устройствам. NMOII-устройства, обладающие
п каналами (NMOIIIIT), имеют большую скорость переключения,
поскольку электроны в них более подвижны. Это обычно не име-
ет большого значения в технологии сенсоров, но важно для высо-
кочастотных электронных устройств. NMOII-транзисторы также
предпочтительнее для больших интегральных схем (very large scale
integrated circuit devices (VLSI)), поскольку при этом можно увели-
чить плотность монтажа.
Конструкция п-канального NMOII-транзистора приведена ниже.
Рис. 3.9. п-каналь-
ный МОП-транзистор
Подложка •
Кремниевая подложка
/2-типа
I Металлические
электроды
□ Двуокись кремния
if -область □ Канал
- Подложка p-типа легирована незначительно, так что ее сопро-
тивление велико.
- Электронно-дырочный п-р-переход исток - подложка имеет со-
противление порядка. 1О10 Ом, если к телу не приложено пря-
мое смещение.
- Обычно контакты истока и подложки, изображенные на ри-
сунке, замкнуты.
Когда к затвору приложен положительный по отношению к под-
ложке потенциал, электроны притягиваются к поверхности подлож-
ки p-типа, образуя канал с низким сопротивлением порядка 1 кОм.
Таким образом, потенциал затвора управляет током между исто-
ком и стоком. Сопротивление между затвором и подложкой очень
велико, так что ток через затвор пренебрежимо мал. Величина тока
«сток-исток» Ips рассчитывается по формуле:
/ds = \uGSu - u+ - icbsl , (3.28)
Lj Л
3-4- Химические микросенсоры
где UGSu — разность потенциала между затвором и подложкой;
Ui~ — пороговое значение потенциала ПТ; цт — эффективная по-
движность электронов; Со — емкость структуры затвора на еди-
ницу площади; w — ширина затвора; L — длина затвора и Uds —
разность потенциала, приложенная между источником и стоком. На
рис. 3.10 показано, как на основе NMOnnT изготовлен ИСПТ.
Положительные ионы (катионы) абсорбируются из раствора на
пористой мембране, которая служит затвором. Это создает отрица-
тельно заряженный поверхностный слой в кремнии p-типа, образу-
ется проводящий канал между истоком и стоком.
Рис. 3.10. Конст-
рукция ИСПТ
ЕЗ Пористая мембрана
Как и в случае ПТ, подложка и исток полевого транзистора име-
ют одинаковый потенциал, так что n-р-переход не имеет смещения.
Как указывалось выше, структура ПТ может иметь подложку р- или
n-типа, и в зависимости от типа иона, катиона (+) или аниона (—),
ток Ids либо возрастает, либо убывает с ростом концентрации ионов.
Изначально предполагалось, что ИСПТ можно изготовить, про-
сто исключив металлический электрод затвора. При этом непрово-
дящий слой SiO2 поглощал бы ионы водорода, что привело бы к
изменению смещения на затворе ПТ и таким образом позволило
бы получить pH-чувствительное устройство. Однако при исполь-
зовании только одного SiO2 измеренная чувствительность соста-
вляет лишь 30 мВ/pH, что является недостаточным. В результате
Глава 3. Датчики на основе полупроводников
обычно дополнительно применяется слой нитрида кремния (SisN^
поверх SiO2 в качестве абсорбирующей мембраны. Это дает повыше-
ние чувствительности до 50 мВ/pH и линейную зависимость от 1,8
до 10 pH. Чувствительность может изменяться в зависимости от
толщины и производственного процесса. В качестве активных по-
верхностных мембран были испытаны и другие окислы. В основном
более экзотичных металлов, и некоторые из них показали чувстви-
тельность выше 50 мВ/pH. Окисел алюминия, AI2O3, также был
испытан, но показал результат ниже, чем кремнийсодержащие со-
единения.
В начале семидесятых годов считалось, что электрод сравнения
не нужен. Однако это не так. Электрод сравнения гарантирует сме-
щение на оптимальную рабочую точку.
Теоретическая зависимость уровня для тока «сток-исток» мо-
жет быть получена объединением уравнения Нернста и уравнения
для ПТ:
Ids —
х
где Еэт является разностью потенциалов на электродах сравнения.
Реальная конструкция ИСПТ, показанного на рис. 3.10, изображена
на рис. 3.11.
/imCowUDS х
L
Ugsu -U? ±(^ In^ + kay)~
\ Zr
\uDS , (3.29)
Эталонный
контрольный ПТ
Эпоксидное
покрытие
Буферный
раствор
Рис. 3.11.
Реальная конструкция ИСПТ
Нанесение различных электрохимически активных материалов
поверх нитридов кремния позволяет обнаружить другие ионы. На-
пример, алюмосиликат натрия служит датчиком для обнаружения
ионов Na+.
3.4- Химические микросенсоры
3.4.4. Газовые сенсоры на основе ПТ
МОППТ, имеющие покрытый палладием или платиной затвор, мо-
гут быть использованы для создания газовых сенсоров. На поверхно-
сти палладия происходит диссоциация молекулы водорода Щ. Ато-
мы водорода диффундируют через палладий, и граница «металл-
диэлектрик» становится заряженной. При этом создается электри-
ческое поле, которое смещает пороговое напряжение ПТ. К сожа-
лению, скорость диффузии мала и для ее увеличения используют
внешний нагреватель. Слой металла работает при температуре до
150 °C.
Работа над созданием устройств для определения более слож-
ных веществ продолжается на основе усложнения конструкции pH
и водородных сенсоров. Например, сенсор СО2, изображенный на
рис. 3.12 представляет собой pH-сенсор, покрытый мембраной, про-
ницаемой для СО2. Диффундирующий СО2 растворяется в неболь-
шом объеме геля с образованием слабой угольной кислоты, (Н2СО3).
Для определения концентрации кислоты измеряют pH геля.
Проницаемая
мембрана
в воде гель
Защитное
покрытие
Рис. 3.12. Сенсор СО2 на основе ион-селективного полевого транзистора
При определенном подборе материалов, толщин, структуры ме-
таллического затвора и даже включении схемы измерения рабочей
температуры, были созданы газовые сенсоры для следующих газов:
водород н
аммиак NH3
сероводород H2S
диоксид углерода СО2
углеводороды cnH2n
пары спиртов СпН2п_г(ОН)г
104 Глава 3. Датчики на основе полупроводников
3.4.5. Биосенсоры
Для создания биосенсоров используются ИСПТ, содержащие селек-
тивную мембрану, через которую проходят только анализируемые
частицы. Формирование высокоселективных мембран возможно с
помощью метода Ленгмюра-Блоджетт. Для этого необходимо ис-
пользовать органические, в том числе полимерные молекулы, состо-
ящие из гидрофобной и гидрофильной части и обладающие спо-
собностью образовывать на поверхности воды мономолекулярный
слой. Наличие в подобных молекулах гидрофобной и гидрофильной
части обуславливает их ориентацию в монослое на поверхности во-
ды. Один монослой может быть нанесен на поверхность ИСПТ при
поднятии его из воды. В процессе осаждения монослоя поверхност-
ное давление в монослое поддерживается постоянным с помощью
подвижного барьера. Это необходимо для предотвращения образо-
вания разрывов и складок в монослое. Сформированное с помощью
метода Ленгмюра-Блоджетт покрытие может быть также много-
слойным и состоять из молекул разного типа. Таким способом может
быть получено высокоселективное «молекулярное сито».
Подобная мембрана образует рабочее покрытие на ИСПТ. Это
покрытие содержит реагент, предназначенный для реакции с био-
логическими частицами с целью образования промежуточного про-
дукта.
Биосенсоры такого типа были разработаны для исследования мо-
чевины, глюкозы и пенициллина. Следует отметить, что биосенсо-
ры гораздо более избирательны, чем обычные химические сенсоры.
Это очевидное преимущество биологических систем перед механиче-
скими. К сожалению, срок действия подобных сенсоров измеряется
днями. (Ферментный ПТ для пенициллина сохраняет активность
в течение двух месяцев.)
Привлекательной особенностью биосенсоров является их исполь-
зование «на живом организме». Тем не менее нужно принимать во
внимание, что при работе сенсоров внутри кровяных сосудов проте-
ины могут оказывать обратное влияние на первоначальное назначе-
ние сенсоров. Другой, более серьезный момент заключается в том,
что сенсоры могут также вызвать «закупорку» сосудов.
3.4.6. Заключение
Очень малое количество сенсоров, базирующихся на ПТ, имеются
сегодня в продаже. Конечно, это только начало целой индустрии, но
пока выбор сенсоров ограничен, поскольку необходима разработка
3.5. Оптические сенсоры
подходящих мембран с требуемой долговечностью. Преимущества
ПТ-сенсоров над традиционными со стеклянными электродами:
- малое выходное сопротивление, упрощающее передачу сигнала;
- малый размер, позволяющий локализовать измерение, исполь-
зовать очень малое количество реагента, а также создающий
предпосылку их применения в катетерах при медицинских ис-
следованиях;
- производство ПТ-сенсоров опирается на хорошо развитую ин-
дустрию полупроводников, возможно наличие множества сен-
соров, предназначенных для различных целей, в одном чипе,
где встроен электрод сравнения, а для компенсации имеется
температурный или световой сенсор;
- быстрая реакция;
- возможность производства партиями.
3.5. Оптические сенсоры
3.5.1. Корпускулярно-волновой дуализм
Обычно электромагнитное излучение классифицируют, исходя из
его длины волны. Свет — это видимая часть электромагнитного
спектра, в которой длины волн лежат в диапазоне 4004-700 нм. Ближ-
ним инфракрасным диапазоном считается диапазон 0,74-1,7 мкм,
основным инфракрасным — 1,74-30 мкм и далеким инфракрасным —
304-1000 мкм. Для ультрафиолетового излучения длины волн лежат
в диапазоне 104-400 нм. Примыкающий к видимому и более корот-
коволновый участки ультрафиолетового спектра иногда называют
«мягким» и «жестким» или вакуумным ультрафиолетом соответствен-
но. Однако, в зависимости от обстоятельств, электромагнитная энер-
гия может рассматриваться либо как распространение непрерывной
волны, либо как поток частиц. Эта двойственность относится к лю-
бым частицам вне зависимости от того, имеют они массу или нет,
и известна как корпускулярно-волновой дуализм.
Исаак Ньютон (1642-1727) верил в дискретную, или корпускуляр-
ную теорию света, но эксперименты по дифракции и интерферен-
ции, проведенные Томасом Юнгом (1773-1829), укрепили позиции
волнового представления. Однако в 1899 г. Люмьер и Приншейм про-
вели некоторые эксперименты, результаты которых не могли быть
объяснены в рамках классической волновой модели. При различ-
ных температурах была измерена спектральная плотность мощно-
106 Глава 3. Датчики на основе полупроводников
сти излучения идеального источника, или абсолютно-черного тела
(см. рис. 3.13).
Спектральная
плотность
мощности G
(Вт м-2/м)
Рис. 3.13. Энергетический спектр излучения абсолютно черного тела
Теоретические исследования Вина (1896) и Релея (1900), основан-
ные на классических законах статистической физики Максвелла и
Больцмана, не смогли дать полного расчета этих кривых. Именно
Планк в 1901 г. постулировал, что энергия может поглощаться или
излучаться абсолютно черным телом только некоторыми дискрет-
ными количествами, которые он назвал квантами. Он предположил,
что передаваемая квантами энергия Е определяется как
Е = hf, (3.30)
где h — постоянная Планка, a f — частота излучения. Эйнштейн
в 1907 г. расширил эту концепцию до утверждения о том, что энер-
гия в любой системе передается дискретными порциями. Он также
дал квантам света наименование «фотоны».
3.5.2. Определения и единицы
На первый взгляд могло бы показаться целесообразным использо-
вать выражения, подобные приведенным выше, и вектор Пойнтин-
3.5. Оптические сенсоры
га (см. п. 4.4.4),
Р = ЕЛН [В/м2], (3.31)
где Е — напряженность электрического поля в В/м и Н — напря-
женность магнитного поля в А/м, для определения световых единиц
измерения. Однако дело обстоит более сложным образом, посколь-
ку глаз, подобно уху, имеет неравномерную спектральную чувстви-
тельность. Так, например, свет от аргонового лазера (зеленый) бу-
дет казаться ярче, чем свет неоновой газоразрядной лампы (крас-
ный) той же интенсивности. Следовательно, сравнение интенсивно-
стей имеет смысл только в том случае, если его проводят в узком
спектральном диапазоне. Исторически фотометрия основывается на
стандартах, предполагающих определенный источник света. Спек-
тральные особенности источника не принимаются во внимание и
просто предполагается, что он равномерно излучает во всем ви-
димом диапазоне спектра. Определения и единицы системы СИ в
области фотометрии, приводимые ниже, были разработаны исходя
из этих исторических методов.
Фотометрические единицы системы СИ
Сила света (I) — кандела (кд)
Кандела — это сила света, излучаемого в перпендикулярном напра-
влении поверхностью тонкого излучателя в виде абсолютно черного
тела. Определено, что этот излучатель имеет площадь поверхности
| • 10-5 м2 и находится при температуре затвердевания платины при
давлении 101325 Н/м2 (это соответствует температуре 2045 К).
Световой поток (<р) — люмен (лм)
Поток света от гипотетического точечного источника называется
изотропным, т. е. он излучает свет равномерно во всех направлени-
ях. (Реальные источники света не являются изотропными излуча-
телями.) Количество света, излучаемого в заданном направлении в
некотором телесном угле, называется световым потоком. Люмен —
это световой поток, испускаемый определенным точечным источни-
ком с силой света в 1 кд внутри конуса с телесным углом в один
стерадиан (Q):
V? = УI dQ, [лм]. (3.32)
В общем случае для изотропного точечного источника это вы-
ражение определило бы полный поток как
Фполн — [лм]. (3.33)
108 Глава 3. Датчики на основе полупроводников
Освещенность — люкс (лк)
Освещенность — это количество света, падающего на поверхность.
Один люкс — это освещенность, создаваемая световым потоком в
один люмен, падающим на поверхность площадью в один квадрат-
ный метр, т. е.
1 лк — 1 лм/м2. (3.34)
Типичные значения освещенности, рекомендуемые для освети-
тельного оборудования, лежат в пределах от 5004-600 лк для офисов
и до 100 лк для входных подъездов при измерении в горизонтальной
плоскости на уровне 1 м от пола.
Яркость (кд/м2)
Блеск или сияние поверхности, самосветящейся либо освещенной,
называется яркостью. Единицей яркости в системе СИ является кан-
дела на квадратный метр.
Чувствительность глаза
Как упоминалось выше, чувствительность глаза зависит от длины
волны и несколько различна у разных людей. С большим количе-
ством испытуемых были проведены эксперименты по фотометриче-
скому согласованию с целью определения соотношения воспринима-
емого светового потока и реального спектрального распределения
принимаемой мощности срр. Это соотношение может быть выражено
как
сю
<p = Kmj y>pV(X)dX, (3.35)
О
где V (Л) — относительная световая эффективность глаза, а Кт —
константа. Международная комиссия по освещению (МКО) реко-
мендовала согласованную совокупность значений V(A). Эти значе-
ния иногда называют чувствительностью стандартного фотометри-
ческого наблюдателя. Форма кривой У(А) показана на рис. 3.14.
Практические фотометрические единицы
Исследователи в различных областях оптоэлектроники стараются не
ссылаться на фотометрические единицы системы СИ из-за неудоб-
ства, связанного с необходимостью иметь стандартные источники
излучения и фотоприемники со стандартным спектральным откли-
ком. Кроме того, поскольку большинство оптических исследований
проводятся в узких спектральных диапазонах и зачастую в неви-
димых областях спектра, использование фотометрических единиц
неуместно. Следовательно, исследователи, работающие в некоторой
3.5. Оптические сенсоры
узкой полосе длин волн, будут просто измерять электрический вы-
ходной сигнал фотоприемника. Затем, зная площадь светочувстви-
тельной поверхности и эффективность приемника на этих длинах
волн, можно определить интенсивность света в Вт/м2.
Длина волны X (нм)
Рис. 3.14. Принятая относительная спектральная чувствительность глаза
Исследователи обычно используют следующие единицы, основан-
ные на см2 в качестве единицы площади. (Они, конечно, не соответ-
ствуют единицам СИ.)
Энергетическая спектральная интенсивность
источника S(A)
Это мощность, излучаемая с единичной площади источника в диапа-
зоне длин волн от Л до А+ДА в конусе единичного телесного угла. На
практике для S(A) обычно используют единицы Вт/(см2 -мкм-стер).
Яркость В
Это полная мощность, излучаемая источником на всех длинах волн с
единичной площади источника в конусе единичного телесного угла:
оо
В = у* S(A)dA [Вт/(см2 - стер)]. (3.36)
о
I 10 Глава 3. Датчики на основе полупроводников
Поток излучения R
Это общая мощность, излучаемая источником в диапазоне длин волн
от А до Л + 5А в конусе единичного телесного угла,
R = AsS(X) [Вт/(мкм • стер)], (3.37)
где S(A) предполагается постоянной по площади поверхности As ис-
точника.
Диффузный источник
Протяженный диффузный источник — это источник, излучающий
как совокупность точечных источников и поэтому имеющий одина-
ковую яркость при наблюдении с любого угла. Такой протяженный
источник иногда называется ламбертовым. Однако, вследствие та-
кой совокупности точечных источников, световой поток более не
остается постоянным во всех направлениях. Вместо этого возника-
ет косинусная зависимость, которая называется законом Ламберта,
Ia = Io cos о [кд]. (3.38)
Кроме того, если фотоприемник D расположен под некоторым
углом в к этому направлению, то освещение, которое он принимает,
будет еще уменьшено на множитель cos#, как показано на рис. 3.15.
Рис. 3.15. Закон косинуса
Ламберта
3.5.3. Источники света
Существует большое количество оптических сенсоров, каждый из
которых имеет свои особенности: спектральную чувствительность,
быстродействие, физический размер и стоимость. Прежде чем иссле-
довать оптические сенсорные устройства, имеет смысл рассмотреть
типы и природу имеющихся источников света. Таким путем можно
сделать правильный выбор подходящего сенсора.
Тепловые само светящиеся объекты
Такие тела, как солнце, лампы накаливания и расплавленные ме-
таллы, дают излучение непрерывного спектра подобно излучению
абсолютно черного тела (см. рис. 3.13).
3.5. Оптические сенсоры I I I
Однако, особенно при низких температурах, степень подобия их
эмиссии к излучению абсолютно черного тела может быть невелика.
Следовательно, можно ввести корректирующий множитель, называ-
емый излучательной способностью е. Он зависит и от температуры,
и от длины волны:
_ действительное излучение
’ излучение абсолютно черного тела
Излучательная способность некоторых материалов проиллюстриро-
вана на рис. 3.16.
Рис. 3.16. Излучатель-
ные способности некото-
рых материалов
Абсолютно черное тело при всех температурах
ОкисьникелялцлИЗООК ‘ -
\ Титан при 1000 К
Железо при ПРИ *
0.1
10.0 Гмкм
Раскаленная нить в лампах накаливания обычно изготовлена из
вольфрама. Следует учитывать, что спектр излучения раскаленного
вольфрама после прохождения стеклянной или кварцевой оболочки
лампы изменится. Кроме того, в процессе работы вольфрам посте-
пенно испаряется, осаждаясь в виде тонкой пленки на внутренней
поверхности колбы лампы. Эта пленка также поглощает свет. В кол-
бу ламп накаливания высокого качества обычно добавляют неко-
торое количество галогена, например йода. Вольфрам-галогеновые
соединения летучи и, в свою очередь, испаряются с поверхности сте-
кла в процессе работы лампы. Эти материалы также оказывают
влияние на спектральный состав излучения.
Для построения идеализированной модели нагретого источника
излучения могут быть полезны следующие соотношения:
а) Уравнение Планка задает мощность, излучаемую абсолютно
черным телом, с единицы поверхности в единичном спектраль-
ном интервале при абсолютной температуре Т,
G = [ехр{С2/т) - 1/А5 ^Вт ’ М 2/м1’ (3'40)
где Ci = 3,7418 10“16 Вт м2 и С2 = 1,4388 • 1СГ2 м • К. Кривые
I 12 Глава 3. Датчики на основе полупроводников
спектральной плотности излучения абсолютно черного тела,
определяемые этим уравнением, приведены на рис. 3.13.
Мощность Р, излученная с единицы поверхности во всем спек-
тральном диапазоне, равна интегралу от G по всем длинам
волн:
оо
Р = У GdX. (3.41)
О
Можно показать, что интегрирование приводит к формуле:
Р = аТ4 [Вт/м2]. (3.42)
Выражение <тТ4 — это закон Стефана - Больцмана для абсо-
лютно черного тела.
б) Закон Стефана-Больцмана задает излучаемую мощность Р
с единицы поверхности источника. Присутствие вблизи источ-
ника другого тела (окружающей среды) с температурой, от-
личной от абсолютного нуля, приводит к поглощению мощно-
сти источником. Кроме того, для поглощения излучения реаль-
ным веществом также необходимо брать в расчет константу
излучательной способности. Тогда полную излучаемую мощ-
ность можно представить как:
Р = £а(Т4в-Т4) [Вт/м2], (3.43)
где s(A, Т) — излучательная способность; а — постоянная Сте-
фана-Больцмана (5,670 • 10-8 Вт/(м2 - К4)), Тв — абсолют-
ная температура излучателя, а То — абсолютная температура
окружающей среды.
в) Закон смещения Вина описывает сдвиг спектрального макси-
мума Ар функции G в зависимости от абсолютной температу-
ры Т:
Ар - а/Т, (3.44)
где а — константа, имеющая численное значение 2,892-10-3 м/К.
Функция спектрального распределения мощности S(A) для не-
которого нагретого источника может быть выражена через функ-
цию G для абсолютно черного тела. Если источник равномерно из-
лучает во всей полусфере, то
S = — • 1О~10 [Вт/(см2 • мкм • стер)]. (3.45)
2тг
Газоразрядные лампы
3.5. Оптические сенсоры
При излучении света отдельными атомами, ионами или молекулами
спектр излучения состоит из отдельных линий или полос. Они имеют
точные характеристические частоты, мало зависящие от температу-
ры. Примерами таких излучателей являются неоновые и натриевые
лампы. В газоразрядной лампе возбуждение газа происходит за счет
столкновений со свободными электронами. При возбуждении ио-
нов и атомов их внешние электроны переходят на более высокие
орбитали. Молекулы, кроме того, могут получать вращательную
и колебательную энергии. Когда ионы, атомы или молекулы воз-
вращаются в свое основное состояние, излучаются кванты света
с определенной длиной волны. В дуговых лампах высокого давле-
ния возможно весьма большое число возбужденных состояний, что
приводит к возникновению широких спектральных полос излучения
в отличие от узких спектральных линий. Спектральное распределе-
ние света таких ламп в большей или меньшей степени приближается
к спектру абсолютно черного тела при наличии дополнительных ли-
ний спектра. Содержание ультрафиолета в излучении дуговых ламп
высокого давления выше, чем в спектре абсолютно черного тела.
Конкретный вид спектрального распределения света таких ламп за-
висит от состава газовой смеси, ее давления, типа газового разряда
и геометрии лампы.
Светодиоды (СД)
Светодиодами называются такие диоды с электронно-дырочным пе-
реходом, которые при приложении напряжения испускают оптиче-
ское излучение. Дырки и электроны в зоне перехода рекомбинируют,
переходя из зоны проводимости в валентную зону. Испускаемый
фотон соответствует этому уменьшению энергии. Этот процесс на-
зывается инжекционной люминесценцией, так как вызывается ин-
жекцией носителей заряда в зону рекомбинации при приложении
прямого смещения. Шокли вывел уравнения для идеального диода:
ток id задается как
id = is ехр(^) - 1 , (3.46)
где is — обратный ток насыщения; е — заряд электрона; к — посто-
янная Больцмана; Т — абсолютная температура и Vd — напряжение
смещения. При прямом смещении выражение (3.34) может быть при-
ближенно определено как
. . (eVd
Id = is exp I —
(3-47)
I 14 Глава 3. Датчики на основе полупроводников
Сила света приблизительно пропорциональна прямому току. Основ-
ная часть разработанных СД сконструирована путем комбинаций
полупроводниковых материалов и материалов на основе алюминия (А1),
галлия (Ga), мышьяка (As), фосфора (Р) и индия (In). Каждый СД
имеет собственное спектральное
длине волны Хр:
GaP Хр
GaAsP Хр
GaAlAs Хр
InGaAsP Хр
« 0,560 мкм
« 0,655 мкм
~ 0,84-0,9 мкм
~ 1,34-1,6 мкм
распределение с максимумом на
зеленый
красный
ближний инфракрасный
ближний инфракрасный
Длина волны X (нм)
Рис. 3.17. Спектр излучения GaAlAs-светодиода
С точки зрения геометрии существуют два основных типа СД:
излучение с поверхности и с торца. Торцевые излучатели дают более
узкий пучок. Типичное время переключения СД — примерно 10 нс,
что обеспечивает полосу модуляции вплоть до 108 Гц. Их сила све-
та — порядка 10 мкд. Инфракрасные диоды предпочтительней для
волоконно-оптических применений вследствие лучшего, по сравне-
нию с видимым светом, распространения в кварце. Этот вопрос бу-
дет рассмотрен далее в разделе 4.2.2. Типичными условиями эксплуата-
ции являются ток/d около 20 мА и напряжение смещения Vd около 1,6 В;
полный выход света лежит в пределах 14-10 мВт. На рис. 3.17 пока-
зан спектр излучения GaAlAs светодиода. Яркость В определяется
площадью под кривой и равна приблизительно 102 Вт/(см2 • стер).
3.5. Оптические сенсоры
Лазеры
В первом лазере (LASER — Light Amplification by the Stimulated
Emission of Radiation) средой, используемой для генерации оптиче-
ского излучения, был кристалл рубина в форме стержня. Импульсная
накачка производилась лампой — вспышкой. Современные лазеры
основаны на генерации в таких средах, как газ, раствор красителя
или полупроводник. Ионы, атомы или молекулы среды, используе-
мой для генерации оптического излучения, должны быть подверг-
нуты инверсии заселенности. Это означает, что они переведены в
нестабильное высокоэнергетическое состояние. Они могут спонтан-
но вернуться в свое основное состояние, испустив фотон. Но они
могут быть вынуждены или стимулированы сррлыгь это таким же
фотоном, как тот, что должен быть испущен. Следовательно, может
возникнуть лавинный эффект. Для обеспечения требуемой продол-
жительности этого малоэффективного процесса на обоих концах ла-
зерного резонатора установлены высокоотражающие зеркала. Фо-
тоны возникают синфазно и в одном направлении, давая интенсив-
ный, монохроматический, когерентный пучок. В газовых лазерах
линии генерации могут быть уже чем 10-5 нм. Линии генерации
полупроводниковых лазеров не столь узки. Кроме того, общий све-
товой выход может быть того же порядка, как и у обычного СД
вследствие меньшей излучающей области. Яркость В на рис. 3.18
равна приблизительно 105 Вт/(см2 • стер).
Рис. 3.18. Спектр излучения GaAlAs-инжекционного лазерного диода
Глава 3. Датчики на основе полупроводников
Важно помнить, что все светодиоды подвержены неблагоприят-
ному влиянию температуры. Изменение интенсивности равно
I = /оехр(-а0), (3.48)
где а — температурный коэффициент интенсивности, а в — темпе-
ратура в градусах Цельсия. Кроме того, положение спектрального
максимума Ар смещается с температурой в соответствии с выраже-
нием
Ар(0) = Ар(О)+М (3.49)
где Ар(0) — положение спектрального максимума при О °C. У GaAsP-све-
тодиодов, например, а = 10-3 К-1 и /3 = 0,193 нм/К. Полупро-
водниковые лазеры, в дополнение, подвержены вредному влиянию
изменения геометрии оптического резонатора вследствие колебаний
температуры. Это приводит как к изменению Ар, так и к перескоку
моды, изменению состояния стоячей волны внутри объемного резо-
натора.
3.5.4. Типы сенсоров
При проектировании оптической измерительной системы необходи-
мо принимать во внимание следующие критерии:
- чувствительность на соответствующей длине волны,
- собственные шумы сенсора,
- линейность,
- - скорость отклика для желаемой полосы частот,
- стабильность,
- совместимость с системой в целом, особенно по геометрии
оптики.
Наиболее широко фотодетекторы могут быть разделены на две
группы: термо детекторы и квантовые детекторы. В термодетек-
торах поглощение фотонов приводит к нагреванию объема сенсора.
Эти сенсоры имеют очень широкий диапазон рабочих длин волн, они
относительно медленные и имеют малую чувствительность (см. 3.6).
В квантовых детекторах отдельные фотоны должны обладать до-
статочной энергией для преодоления некоторого порога, чтобы мог
возникнуть электрический заряд, т. е. фотоэлектрический эффект.
Существуют две группы квантовых детекторов.
Приборы с внешним, или поверхностным фотоэффектом, основ-
ным примером которых является фотоумножитель.
3.5. Оптические сенсоры
Приборы с внутренним фотоэффектом; двумя типами полупро-
водниковых фотодетекторов являются фотосопротивление и детек-
торы фотонов с р-п-переходом (фотодиод и фототранзистор).
а) Детекторы с поверхностным фотоэффектом
Фотоумножитель
Фотоумножители — крайне чувствительные приборы, используе-
мые в основном в научных исследованиях. Они имеют вид вакууми-
рованной трубки (см. рис. 3.19) и требуют стабилизированного вы-
соковольтного источника постоянного напряжения в несколько кВ.
Фотон, пройдя стеклянное окно, ударяется о катод и может высво-
бодить электрон с его поверхности (фотоэлектрический эффект).
Внутри трубки расположена серия последовательных электродов,
называемых динодами, находящихся под последовательно возраста-
ющим напряжением. Фотоэлектрон ускоряется по направлению к
первому диноду и при соударении с его поверхностью имеет ки-
нетическую энергию, достаточную для высвобождения нескольких
дополнительных электронов. Затем они ускоряются к следующему
диноду и процесс повторяется. Происходит лавинообразное умноже-
ние. Результирующий фототок собирается анодом. Фотоактивная
поверхность изготавливается из сложных сплавов щелочных метал-
лов. Диноды также покрыты подобными материалами. Фотоумно-
жители изготавливают с различным общим усилением и спектраль-
ной чувствительностью и, как правило, слишком чувствительны,
чтобы работать при дневном свете. Некоторые из них достаточно
чувствительны, и обеспечивают регистрацию одиночных фотонов.
Они имеют высокую линейность, очень широкую полосу частот и
малый темновой ток. Их преимуществами по сравнению с полу-
проводниковыми приборами также являются чувствительность к
ультрафиолету и большой размер фоточувствительной области.
Рис. 3.19. Схематическое представление устройства фотоумножителя
Глава 3. Датчики на основе полупроводников
б) Полупроводниковые фотодетекторы
Полупроводниковые фотодетекторы — это приборы, в которых фо-
тон из падающего светового пучка возбуждает электрон, переходя-
щий из валентной зоны в зону проводимости. Этот детектор будет
реагировать только на фотоны, энергия которых превышает
Eg > hf или hc/X, (3.50)
где Eg — энергетический барьер между валентной зоной и зоной
проводимости. Ниже описаны два основных типа таких детекторов.
Фотосопротивления
Как следует из названия, эти приборы работают подобно перемен-
ным резисторам и иногда называются фотозависимыми резисто-
рами. Когда материал освещен и падающий фотон имеет энергию
больше Eg, то образуется электронно-дырочная пара. Электрон и
дырка дрейфуют к соответствующим электродам под влиянием при-
ложенного электрического поля. Результирующий фототок воздей-
ствует на проводимость материала, за счет чего возрастает ток
через прибор. Соотношение между сопротивлением R и полной мощ-
ностью падающего света крайне нелинейно
lg R — а - b 1g РА,
(3.51)
где Р — интенсивность; А — площадь чувствительной поверхности
и а, b — константы. Три наиболее употребительных фотосопроти-
вления и длины волн их максимальной чувствительности Хр приве-
дены ниже:
сульфид кадмия
сульфид свинца
сульфид индия
CdS Хр « 0,53 мкм
PbS Хр « 3,0 мкм
InS Ар ~ 5,3 мкм
видимый,
инфракрасный,
инфракрасный.
Времена отклика велики, типичное значение — 50 мс. Темновое
сопротивление — порядка 1 МОм и падает нелинейно с возрастани-
ем освещенности до приблизительно 1 кОм. Температурная стабиль-
ность невелика и зависит от состава, метода изготовления и уровня
освещенности. Кроме того, нулевое значение меняется со временем
в пределах до 20% за 1000 часов. Поэтому применение этих прибо-
ров ограничено, так как они непригодны для быстрого отклика или
точного измерения. Они тем не менее достаточно чувствительны.
CdS-фотосопротивления, например, имеют усиление около 103.
Усиление определяется как отношение
число протекающих электронов
число электронов, образованных в единицу времени
3.5. Оптические сенсоры 119
(Дырки имеют короткое время жизни, поэтому ими можно прене-
бречь.) Фотосопротивления используются в системах оптического
переключения, световой охранной сигнализации и фотографических
экспонометрах.
Фотодетекторы с р-п-переходом
Существуют два класса полупроводниковых фотодетекторов с р-п-пе-
реходом: фотодиод и фототранзистор. Наиболее распространен-
ный тип — фотодиод; PIN-фотодиод — наиболее широко использу-
емый прибор.
Фотодиоды
При взаимодействии фотона, обладающего достаточной энергией,
с веществом детектора образуется электрон-дырочная пара. Поле
р-п-перехода разделяет эти носители заряда в направлении соответ-
ствующих электродов. Уравнение идеального диода, справедливое
для любого диода с р-п-переходом, было приведено выше и имеет
вид:
id = is exp [ ) - 1 . (3.52)
Рис. 3.20. Эквивалентная схема фотодиода
Эквивалентная схема для фотодиода показана на рис. 3.20; ис-
точники внутреннего шума опущены. Фототок гр, возникший вслед-
ствие поглощения фотонов, может быть выражен как
(число пришедших фотонов/сек) х
х (эффективность преобразования) х (заряд электрона),
а через мощность падающего света его можно выразить в виде:
120 Глава 3. Датчики на основе полупроводников
(мощность падающего света) х
(эффективность преобразования) х (заряд электрона)
энергия фотона
Алгебраически это можно записать в виде формулы:
ip — ег]РА-^-, (3.53)
he
где: т) — квантовая эффективность, число возникших электронов на
один падающий фотон, е — заряд электрона, Р — интенсивность
падающего света в Вт • м“2, А — площадь поверхности в м2, h —
постоянная Планка и с — скорость света.
Но не весь генерируемый фототок ip достигает электродов дио-
да. Из структуры эквивалентной схемы диода (рис. 3.20) по закону
Кирхгофа для токов следует
ip = id + iRj + icj + (3.54)
Отметим, что прямой выходной ток смещения есть — гвЬ1Ж, так
что возрастание интенсивности света, вызывающее увеличение гр,
приводит к уменьшению прямого выходного тока. Освещение при-
водит к «понижению» вольтамперной характеристики, как показано
на рис. 3.21.
режим
Рис. 3.21. Вольтамперная
характеристика фотодиода
Преимуществами фотодиодов по сравнению с фотосопротивле-
ниями являются более высокая чувствительность, быстрое время
отклика, меньший размер, лучшая стабильность и, при приложении
смещения, превосходная линейность.
3.5. Оптические сенсоры
Фотодиод может работать в определенной точке своей рабочей
характеристики за счет выбора напряжения смещения. В общем
случае диоды могут работать используя или не используя внешнее
напряжение смещения. Для каждого из трех возможных типов сме-
щения получаются различные схемы исполнения. Смещение обычно
включено в схему согласования. Эти схемы описаны ниже с указа-
нием их относительных преимуществ.
Схемы согласования фотодиодов
Фотовольтаический режим
Без внешнего смещения прибор работает в фотовольтаическом режи-
ме. На рис. 3.22 показаны простая и буферная схемы согласования.
Рис. 3.22. Электронная схема согласования для фотовольтаического режи-
ма: а) — выходная эдс = ipRb'i б) — выходное напряжение =
= (1 + R2/R1) (^ln(ip/ix))
Падающее излучение вызывает напряжение на р-п-переходе за
счет разделения электрон-дырочных пар внутренним полем пере-
хода. Величина нагрузочного сопротивления Rl выбирается очень
большой, так что ieblx практически равен нулю. На низких частотах
утечкой через Cj можно пренебречь, так что ic, можно считать
равным нулю. Тогда уравнение (3.54) преобразуется к виду:
При перестановке это приводит к виду:
122 Глава 3. Датчики на основе полупроводников
Типичные значения фототока имеют величины порядка 10 мкА, то-
гда как обратный ток насыщения — порядка 10-8 А, так что ip is.
Кроме того, Vd будет приблизительно той же величины, что и про-
изведение isR], так что выражение (3.57) можно переписать в виде:
ЧЖн- (з-58)
Ч'"(Н <“9>
kT, /ет)РАХ\ .
Vd = — In -z- •• , 3.60
e \ ishc J
где Vd — выходное падение напряжения на сопротивлении Rl, ло-
гарифмически зависящее от Р и А. Рис. 3.23 показывает выходное
соотношение при использовании операционного усилителя.
Рис. 3.23. Простые схемы согласования для фотодиодов со смещением:
а) — выходное напряжение при режиме фотопроводимости =
= —ipRf, б) — выходное напряжение при фотоамперном режи-
ме = ipRf
При фотовольтаическом режиме работы быстродействие неве-
лико, однако уровень шума низок и сам шум в основном тепловой
с равномерной частотной характеристикой. Таким образом, этот
тип смещения предпочтительнее для низкочастотных малошумящих
применений. На частотах ниже 100 кГц фотовольтаический режим
обеспечивает лучшее соотношение сигнал/шум по сравнению с ре-
жимом фотопроводимости со смещением, представленном ниже, а на
частотах ниже 1 кГц он вне конкуренции вследствие отсутствия 1//
шума. Недостаток в том, что выходное напряжение логарифмически
зависит от интенсивности, как показывает уравнение (3.60). Однако
это может оказаться полезным, например, при определении глубины
жидкости. Поглощение имеет экспоненциальный характер, поэтому
логарифмический отклик сенсора в результате мог бы дать линей-
ный выходной сигнал. Еще одно весьма важное применение диодов в
фотовольтаическом режиме — солнечная батарея. Однако физиче-
ская структура солнечных элементов иная, так как нужны большие
площади и требуется передача мощности.
Режим фотопроводимости и фотоамперный режим
С обратным внешним смещением прибор работает в режиме фо-
топроводимости. Поле р-п-перехода усиливается, уменьшая времена
переноса носителей заряда. Емкость перехода также уменьшает-
ся вследствие расширения обедненной зоны. Таким образом, улуч-
шаются высокочастотные свойства. Присутствуют термический и
дробовой шумы, так же как и 1/f шум, который становится преоб-
ладающим на частотах ниже 1 кГц.
Если приложено смещение в ноль вольт, такой режим называется
фотоамперным. Этот режим характеризуется весьма малым током
утечки фотодиода, но он более медленный по сравнению с режимом
фотопроводимости. Чувствительность фотодиода линейна в обоих
этих режимах.
При обратном смещении диода током id является фактически
ток утечки типичное значение которого 10 “8 А. (Если смещение
равно нулю, то и id равен нулю.) Обратное приложенное напряже-
ние будет порядка 10 В и, поскольку rs мало, таким же будет и Vj.
Типичное значение Rj составляет около 108 Ом. Следовательно, iR.,
который равен Vd/Rj, будет приблизительно 10~7 А. Ток icj будет
мал вследствие уменьшения емкости, и поэтому хорошей аппрокси-
мацией уравнения (3.54) служит соотношение:
гр = 10-8 + 10~7 + геыа;. (3.61)
Таким образом, для типичного значения фототока 10 мкА, внеш-
ний ток будет практически равен фототоку:
геых = ецРА^-, (3.62)
Г1С
который линейно зависит от Р и А и иногда представляется в виде
1вых = аРА, (3.63)
где а = (er)X)/hc и называется чувствительностью, измеряемой в
A/Вт. Спектральная характеристика чувствительности показана на
Глава 3. Датчики на основе полупроводников
рис. 3.24. Существуют четыре основных типа фотодиодов. Они крат-
ко рассмотрены ниже.
Рис. 3.24. Спектральная чувствительность фотодиодов в режиме фотосо-
противления
Фотодиод с р-п-переходом
Описания в предыдущих параграфах относились к фотодиоду с р-п-пе-
реходом. Наиболее часто полупроводниковым материалом является
кремний или GaAsP.
PIN-фотодиод
Этот диод имеет внутренний слой крем-
ния между внешними р- и n-слоями, что
уменьшает емкость прибора и увеличивает
быстродействие по сравнению с фотодио-
дом с р-п-переходом, которое составляет
обычно 0,4 мкс. Другая причина его по-
пулярности заключается в возможности
формирования его внутреннего слоя так,
чтобы оптимизировать желаемую квантовую эффективность и по-
лосу частот.
3.5. Оптические сенсоры
Диод Шоттки
Предельно тонкая пленка металла (тол-
щиной порядка 10-8 м) образует барьер
Шоттки с полупроводником n-типа, при
этом расширяет отклик до ультрафио-
летовой границы спектра. Для умень-
шения потерь существенную роль игра-
ет антиотражающее покрытие. При пра-
вильном подборе металла и покрытия
квантовая эффективность может дости-
гать 70%, а время отклика составлять
около 1 нс.
Лавинный фотодиод
Этот прибор работает при высоком напря-
жении обратного смещения. Высвобожден-
ные электрон-дырочные пары ускоряются
до таких кинетических энергий, что при
соударении с атомами образуются вторич-
ные носители заряда. Лавинные фотодио-
ды имеют сверхбыстрый отклик и могут
работать вплоть до гигагерцовых частот.
Разрушающее напряжение для этих прибо-
ров, изготовленных на основе кремния, около 100 В. При работе
в условиях такой разности потенциалов фототоки могут дости-
гать 1 мА. Лавинное усиление может быть от 100 до 10000 раз и
эквивалентная мощность шума может быть существенно снижена,
поскольку усиление достигается внутри прибора, а не с использова-
нием какой-либо усилительной схемы. Это дает таким фотодиодам
значительное преимущество перед другими типами. Однако для
поддержания постоянного усиления напряжение питания должно
быть стабилизировано не хуже ±20 мВ.
Фототранзисторы
Фототранзисторы детектируют фотоны та-
ким же образом, как и фотодиоды, исполь-
зуя в качестве светочувствительной обла-
сти переход «коллектор-база». В случае п-
р-п-транзисторов, если база отключена, то
дырки создаются прямым смещением пере-
хода база-эмиттер. У биполярных тран-
зисторов, включенных по схеме с общим
Фотон
126 Глава 3. Датчики на основе полупроводников
эмиттером, коэффициент усиления по току hpE увеличивает фо-
тоток. Общий ток тогда равен (1 4- ЬрЕ)Ър- Таким образом, фото-
транзисторы более чувствительны, чем фотодиоды, но их отклик
не является линейным. Кроме того, емкость эмиттерного перехо-
да, смещенного в прямом направлении, обуславливает медленный
отклик (обычно 1-=-5 мкс), т.е. быстродействие невелико. Кроме
того, из-за температурной чувствительности коллекторного то-
ка термостабильность фототранзисторов меньше, чем фотодиодов.
Фототранзисторы, изготовленные в виде трехполюсников, могут
обеспечивать смещение и работать в обычной биполярной схеме,
обеспечивая большую гибкость при системном проектировании.
По этой причине, для некоторых применений, фототранзисторы мо-
гут быть предпочтительнее фотодиодов. Они часто используются
в системах чтения, записи и кодирования. Имеются и каскадные
схемы. В этом случае эмиттерный ток фототранзистора передается
на базу обычного биполярного транзистора, обеспечивая мульти-
пликативное усиление тока. Обычно каскадные приборы в десять
раз более чувствительны, но проигрывают в десять раз по быстро-
действию.
Коммерчески доступные приборы
В табл. 3.2 представлены некоторые приборы с указанием их цены по
состоянию на начало 2002 г. Цена также зависит и от других харак-
теристик, кроме тех, что приведены в таблице. К ним относятся:
размер чувствительной области, эффективность, дополнительные
оптические фильтры или линзы, угол обзора, уровень темнового
тока и специфическая спектральная характеристика. Все эти пара-
метры различны у разных производителей. Потребителям следует
внимательно изучать технические описания конкретных приборов.
Приборы с зарядовой связью как оптические сенсоры
Приборы с зарядовой связью (ПЗС) — это семейство кремниевых по-
лупроводниковых приборов, способных выполнять основные функ-
ции обработки аналоговых сигналов и имеющие цифровую или ана-
логовую память. ПЗС-концепция была разработана в 1969 г. в ла-
боратории фирмы «Белл» Джорджем Смитом и Виллардом Бойлем
в ходе исследовательского поиска новых форм компьютерной па-
мяти. Вскоре после этого была создана комбинация ПЗС-прибора
и линейки оптических приемников с целью получения многофунк-
ционального оптического сенсора. За годы, прошедшие после изо-
бретения таких приборов, разработки в этой области бурно раз-
вивались. Ниже представлены две составные части — оптическая
чувствительность и процесс зарядовой связи.
3.5. Оптические сенсоры
Таблица 3.2. Выбор полупроводниковых фотодетекторов
Прибор / Изготовитель Тип Спектральный диапазон Время отклика Цена (£)
NORP12 Фотосопротивление (CdS) Ар 530 нм быстрое 18 мс медленное 120 мс 1,51
VT935G / «EG&G Вактек» Фотосопротивление Ар 550 нм быстрое 5 мс медленное 35 мс 0,67
SFH213 / «Сименс» Si р-п Ар 850 нм 5 нс 0,47
АЕРХ65 / «Ситроник» Si р-п Ар 800 нс 1 нс 14,49
ВРХ65 / «Ситроник» Si PIN Ар 850 нс 3,5 нс 6,11
BPW34 / «Сименс» Si PIN Ар 850 нс 20 нс 0,73
ОР993 / «Оптек» Si PIN Ар 890 нс 5 нс 1,57
С30902Е / EG&G Si лавинный 400-100 нм 0,5 мкс 120,36
SDP8405 / «Хоней» Фототранзистор Ар 850 нс 15 мкс 0,71
BPV1I / TFK Фототранзистор Ар 950 нс 3,8 мкс 0,35
SFH309FA-4 / «Инфинеон» Фототранзистор Ар 900 нс 1 мкс 0,42
BPW38 / «Фейрчайлд» Фототранзистор Дарлингтона Ар 850 нс 250 мкс 1,30
Чувствительность
Чувствительность достигается за счет фотоэлектрического эффек-
та. Свободные электроны возникают в областях кремния, освещае-
мых фотонами в спектральном диапазоне от 300 до 1100 нм. Макси-
мум спектральной чувствительности находится около 800 нм. При-
бор сконструирован в виде матрицы фотоячеек, обычно имеющих
поперечный размер 10 мкм. Число свободных электронов, образу-
ющихся в каждой ячейке, прямо пропорционально интенсивности
света, падающего на эту ячейку. Если распределение интенсивно-
сти излучения, падающего на матрицу ячеек, представляет собой
резкое изображение, то количество заряда, или зарядовые пакеты,
образующиеся в каждой ячейке, будут отображать наблюдаемый
объект. Каждый зарядовый пакет соответствует элементу карти-
ны, или пикселю. Матрица смежных ячеек может быть одномерной
или двумерной.
128 Глава 3. Датчики на основе полупроводников
Зарядовая связь
Специальные участки, называемые элементами хранения, создают-
ся в кремнии p-типа за счет асимметричного легирования в соче-
тании с электрическим полем пары электродов затвора, располо-
женных вблизи поверхности кремния. Рис. 3.25 иллюстрирует при-
бор двухфазного типа. Элементы хранения и электроды разделяет
изолирующий слой диоксида кремния. Смежные элементы хранения
образуют линейную матрицу. Различные концентрации примесных
элементов n-типа формируют требуемую конфигурацию электриче-
ского поля.
Потенциалы на электродах затвора могут попеременно повы-
шаться и понижаться таким образом, что находящиеся под ними
отдельные зарядовые пакеты будут перемещаться от одного эле-
мента хранения к другому. Это показано на рис. 3.25, а для трех
ячеек А, В, С в составе матрицы. Две дополнительные временные
диаграммы напряжений <pi и <р2 (рис. 3.25, б) связаны с чередующи-
мися на поверхности тонкого изолирующего слоя оксида кремния
рядом расположенными электродами затвора.
В начале цикла напряжение велико и зарядовый пакет элек-
тронов в элементе хранения А удерживается в потенциальной яме
под электродом 2 затвора. В следующем полуцикле глубина потен-
циальной ямы под электродом 2 уменьшается, так как 921 делается
малым. В то же время соседний электрод 3, соединенный с <р2, ока-
зывается под большим напряжением. Следовательно, электронный
зарядовый пакет перетекает в новую потенциальную яму под элек-
тродом 3. В следующем полу цикле глубина потенциальной ямы под
электродом 3 уменьшается вследствие уменьшения <р2 и электронный
пакет перемещается в новую потенциальную яму под электродом 4,
который имеет более высокий потенциал.
Последовательность элементов хранения, таким образом, работа-
ет, как аналоговый сдвиговый регистр и, поскольку передача заряда
от одного элемента хранения к другому осуществляется весьма эф-
фективно, величина заряда в каждом зарядовом пакете остается
постоянной. Сейчас существуют сдвиговые регистры с числом по-
следовательных элементов до 4096.
Оптический ПЗС-прибор
Рис. 3.26 иллюстрирует оба процесса — оптическую чувствитель-
ность и зарядовую связь — в одном оптическом ПЗС-сенсоре. В те-
чение времени экспозиции падающий свет высвобождает в каждой
фотоячейке электроны, число которых пропорционально времени
экспозиции и интенсивности света. Необходимое время экспозиции
устанавливается за счет обратной связи.
Изолирующий слой из диоксида кремния
I F 1 Участки кремния л-типа, отличающиеся уровнем легирования
tSXXl Подложка р-типа
б)
Рис. 3.25. Двухфазный ПЗС-сдвиговый регистр: а) — физическая струк-
тура и изменение распределения зарядовых пакетов в потенци-
альных ямах; б) — временные диаграммы напряжений
При низких уровнях освещенности время интегрирования уве-
личивается. В условиях сильной засветки величина образующегося
5—4227
130 Глава 3. Датчики на основе полупроводников
заряда может быть настолько велика, что вызовет утечку в со-
седние фотоячейки. Когда происходит подобное насыщение, время
Рис. 3.26. Схематический план оптического ПЗС-сенсора
После соответствующего времени экспозиции все зарядовые пакеты
в каждой фотоячейке одновременно перебрасываются в ПЗС-сдви-
говый регистр, расположенный параллельно фотоячейкам. Этот пе-
ревод также осуществляется с помощью зарядовой связи. Для воз-
буждения переключающего поля, обеспечивающего переход зарядов,
используется единый длинный электрод. Этот длинный электрод на-
зывается затвором сдвига. После завершения процесса переброски
затвор сдвига сразу же возвращается в закрытое состояние, так
что фотоячейки могут начать интегрирование следующего кадра
изображения. В течение времени интегрирования света ПЗС-транс-
портный регистр, в котором теперь содержатся данные элементов
предыдущего кадра, быстро опрашивается, чтобы перевести инфор-
мацию в выходную цепь прибора. Выходным сигналом является им-
пульсная последовательность аналоговых напряжений (рис. 3.27).
Полезными свойствами оптических ПЗС-приборов являются:
- возможность работы при низких уровнях освещенности,
- широкий интервал рабочих температур от —55 до 70 °C,
- широкий спектральный диапазон,
- малая потребляемая мощность,
- малые управляющие напряжения,
- скорость выхода данных до 20 МГц,
- система автоматической установки экспозиции.
Эти приборы производятся целым рядом компаний как в одно-
мерном (линейном), так и в двумерном (матричном) исполнении с
различным числом ячеек и интервалов между ними. Для проектных
3.5. Оптические сенсоры 131
работ можно недорого купить небольшое исследовательское устрой-
ство с линейкой из 256 ячеек, дешевыми линзами и схемой упра-
вления. В настоящее время среднего класса матрицы, содержащие
512x512 элементов (пикселей), могут выдавать 25 кадров в секунду.
Приборы с более высоким разрешением 4096x4096 пикселей могут
давать только 0,5 кадра в секунду. Существуют и некоторые высо-
коскоростные приборы (1000 кадров/сек) при соответственно малом
разрешении (80 х 80 пикселей). Цветное изображение может быть по-
лучено несколькими способами.
Рис. 3.27. Временная диаграмма выходного сигнала оптического ПЗС
Тройная ПЗС-система
Пучок света разделяется призмами таким образом, чтобы сфор-
мировать три отдельных изображения. Каждый из пучков прохо-
дит через красный, зеленый или голубой фильтры, прежде чем по-
пасть на свой отдельный ПЗС-приемник. Камеры, использующие
этот принцип, обеспечивают полноцветное высококачественное изо-
бражение с высоким разрешением, но они объемны, дороги и по-
требляют много энергии.
Прерыватель светового пучка
Используется один ПЗС-приемник. Изображение проходит через вра-
щающийся диск, содержащий красный, зеленый и голубой фильтры.
Это малораспространенный способ, поскольку информация о цвете
формируется последовательно и поэтому высокоскоростное получе-
ние изображений невозможно.
на основе полупроводников
Фильтры на пикселях
Рис. 3.28. Распределение филь-
тра Байера
Каждая отдельная фотоячейка содер-
жит свой красный, зеленый или го-
лубой фильтр, покрывающий входное
окно. Расположение фильтров пред-
ставляет собой мозаичную картину.
В большинстве случаев используется
распределение Байера (рис. 3.28).
В этом случае фотоячейки в раз-
ных рядах содержат красный и зе-
леный либо голубой и зеленый филь-
тры. Большее количество зеленых эле-
ментов обусловлено спектральной чув-
ствительностью глаза. При обработке потока данных используется
так называемый демозаикинг-алгоритм (demosaicing, интерполяция
байеровских шаблонов), при котором результирующий цветовой тон
каждого пикселя получается путем усреднения его ближайших со-
седей. При таком подходе разрешение не теряется. Эта система
цветного изображения наиболее популярна в отечественных1 каче-
ственных камерах.
Фотоячейки переменной глубины
Последние разработки в этой области используют физическое явле-
ние разной глубины проникновения в кремний фотонов различных
цветов. Голубые фотоны проникают наименее глубоко, а красные —
наиболее глубоко. Фотоячейки пакетируются.
Такое разнообразие качества разрешения и соответствие его сто-
имости означало, что ПЗС-приборы (CCDs) в настоящее время на-
шли широкое применение в различных областях.
- Устройства факсимильной передачи информации, использую-
щие одномерные устройства.
- Высокоскоростная сортировка писем.
- Высокочувствительный бесконтактный контроль качества.
- Компьютерный контроль погрузочно-разгрузочных операций,
транспортировки материалов и деталей.
- Небольшие, прочные, потребляющие мало энергии ТВ-камеры
для скрытного использования и удаленного систем контроля.
- Цифровая фотография.
- Высококачественные видеокамеры.
1 английских. — Прим, перев.
3.6. Датчики температуры
3.6. Датчики температуры
Измерение температуры само по себе является важной функцией.
Тем не менее возможно измерять и другие величины, используя те-
пловой поток. Такие устройства называют тепловыми датчиками.
Первый датчик имеет собственный источник тепла, обеспечиваю-
щий пониженную или повышенную температуру относительно из-
меряемой величины, а второй датчик измеряет результирующую
температуру. Примером такого устройства является вакуумметр.
Охлаждение нагреваемого элемента путем передачи тепла за счет
теплопроводности в окружающий остаточный газ ведет к пониже-
нию его температуры. Температура элемента зависит от давления
и сорта газа. Другие тепловые датчики были разработаны для из-
мерения потока инфракрасного излучения, анализа газа, среднеква-
дратичной мощности, влажности и точки росы. Два типа инфра-
красных устройств представлены ниже.
3.6.1. Тепловой датчик
инфракрасного излучения
Эти устройства основаны на эффекте разогрева от падающего из-
лучения, что отличает их от таких устройств, как фотодиод, где ис-
пользуется квантовый эффект от каждого обнаруженного фотона.
Хотя они реагируют на заданную величину медленнее и чувстви-
тельность у них ниже, чем у квантовых устройств, но они имеют
чувствительность в широком спектре длин волн. Тепловые датчики
обычно используются для дистанционного контроля температуры
чрезвычайно горячих объектов. Энергия, поглощенная датчиком,
приводит к повышению температуры сенсора, что в свою очередь
может быть сопоставлено, используя закон Планка, с температурой
горячего объекта. Два распространенных типа тепловых детекто-
ров даны ниже.
Термоэлементы и термопары
Термоэлементы образуют с помощью последовательного соедине-
ния термопар. Все «горячие переходы» термопар плотно скомпо-
нованы вместе впереди или в центре головки сенсора, а «холодные
переходы» расположены на тыльной части или по периметру. Так
называемый «черный слой» является основой чувствительного эле-
мента. Первоначально объемные приборы не были очень точными и
дорогими. Были разработаны миниатюрные версии на основе полу-
проводников. Устройства, доступные на рынке, используют термо-
134 Глава 3. Датчики на основе полупроводников
пару висмут - сурьма (Элбел и др., 1985) или кремний - алюминие-
вую термопару (из «Ксенсор интегрейшн»). Термопары, основанные
на кремнии, также привлекательны для применения в интегральной
технологии потому, что используется при этом стандартная инте-
гральная технология. Монокристалл, кремний p-типа с алюминием
генерирует приблизительно 1 мВ/K. Отличительной чертой термо-
электрического эффекта в сравнении с другими способами измере-
ния температуры является то, что измеряется разница температур.
«Холодный переход» необходимо размещать на чипе осмотрительно.
Тем не менее разница температур — это переменная, которая может
быть использована для другого типа сенсоров, например газового
потока, как описано в п. 3.2.4.
Болометры
Это устройства, использующие температурно-чувствительное сопро-
тивление. Как и в предыдущих датчиках, черный слой является основ-
ной частью сенсора. Материалом сопротивления может быть тонкая
пленка, или слой металла, или полупроводниковый материал, кото-
рый размещают на непроводящей подложке, например керамике. Ис-
пользуемые металлы: платина, висмут, теллур. Типичное значение
номинала — 100 Ом. Чтобы достичь этого, слои наносят на подлож-
ку испарением, стремясь получить пленки с максимальной протя-
женностью рабочего элемента. Для получения высококачественных
параметров каждый датчик измеряют и калибруют по заданному
допуску. Для защиты на поверхность наносят покрытие из стекла.
3.6.2. Термисторы
Термисторы — это термически чувствительные резисторы. Первые
устройства, появившиеся в 1940 г., были изготовлены из смеси окси-
дов металлов. Пропорции компонентов не являются строго фикси-
рованной величиной и, следовательно, относятся к веществам несте-
хиометрического состава. Обладают отрицательным температур-
ным коэффициентом сопротивления, который может быть чрезвы-
чайно высоким (—5% К-1) по сравнению с металлами (см. рис. 3.29).
Значение температурного коэффициента сопротивления зависит от
смеси используемых оксидов. Изготавливают термисторы нагревом
спрессованных порошков оксидов металлов при температуре доста-
точной для спекания в однородный твердый поликристалл. Оксиды
марганца и никеля, меди, кобальта, ванадия, хрома, титана и вольф-
рама используются наряду с оксидами железа.
3.6. Датчики температуры
Рис. 3.29. Харак-
теристики термис-
торов
Особенности производства приводят к тому, что точность вос-
произведения параметров термисторов не превосходит нескольких
процентов. В качестве альтернативы устройствам с отрицательным
ТКС используют карбид кремния, легированный бором. Он имеет
меньшую чувствительность (—2% К-1), но обеспечивает меньшее
отклонение от заданных параметров. В целом термисторы не ис-
пользуются для прецизионного измерения температуры из-за боль-
шого разброса параметров и высокой нелинейности. Они применя-
ются для изготовления термометров ограниченного диапазона из-
мерения (поскольку обладают высокой чувствительностью) и для
температурного контроля. Нелинейное поведение было установлено
впервые Стенхартом и Хартом в 1968 г., при описании зависимости
сопротивления от температуры. Полином вида 1/Т = Aq+^i In Rt +
••• + Ап(\пЯт)п был найден как типичная модель, описывающая
обыкновенный термистор, где п — целое, Ап — набор констант и
Т — абсолютная температура. Для хорошей аппроксимации соста-
вляющие высшего порядка можно исключить и записать
Яг = Кехр(0, (3.64)
где К и Д — индивидуальные для каждого образца константы. Вы-
ражение (3.64) может быть также получено из физики твердого
тела, используя распределение Ферми-Дирака для идеального од-
нородного кристалла.
Для удобства из выражения (3.64) можно исключить констан-
ту К, учитывая сопротивление термистора Ra при некоторой внеш-
ней температуре:
RT = Ra exp /3 . (3.65)
136 Глава 3. Датчики на основе полупроводников
Для устройств с положительным ТКС сравнительно недавно был
открыт керамический титанат бария с дополнительной примесью,
который обеспечивает четкий положительный ТКС. Другие матери-
алы были разработаны на основе композиций из бария - стронция-
свинца и титана. Кремниевые устройства с положительным ТКС
доступны с немного лучшими параметрами. Температурная зависи-
мость ведет себя не также хорошо, как у устройств с отрицательным
ТКС, поэтому аналитическое решение может быть сформулирова-
но только для ограниченного диапазона температур. При некото-
рых температурах устройства с положительным ТКС могут быть
использованы как устройства с отрицательным ТКС. В основном
устройства с положительным ТКС применяют для температурной
и токовой защиты. Для обеспечения температурной защиты выби-
рают устройства с положительным ТКС, у которых значение Rmin
достигается при температуре ниже температуры перегрева. Уста-
новка устройства осуществляется таким образом, чтобы оно было
в хорошем тепловом контакте с наблюдаемой системой. Для тем-
пературы выше Тэф повышение сопротивления может составлять
100%/°С.
Характеристики, опубликованные предприятиями, производящи-
ми устройства с положительным ТКС, часто включают разброс со-
противлений относительно некоторого значения при температуре в
точке Тэф.
Контур на операционном усилителе может быть сконструиро-
ван для преобразования и усиления переключающего воздействия.
Аналогично, для низковольтных приложений устройства с положи-
тельным ТКС могут быть установлены прямо в силовой цепи элек-
тропередачи (цепь высокого напряжения) системы для ее защиты.
Тепло, возникшее от перегрева системы, приведет к резкому огра-
ничению тока. После охлаждения устройств с положительным ТКС
нормальная работа возобновляется.
Защита системы по току обеспечивается включением устройства
в линию электропередачи.
Саморазогрев происходит тогда, когда система потребляет ток
выше нормы. Титанат бария, как наиболее распространенный мате-
риал для таких приложений, применяют в форме керамического дис-
ка. Комбинация обычных резисторов, обладающих положительным
ТКС, может быть использована для модификации характеристики.
Более подробное описание характеристик и способов применения
термисторов см. Хайд (1971), а также данные, предоставляемые
предприятиями-изготовителями.
3.6. Датчики температуры 137
3.6.3. Температурные сенсоры
в интегральных микросхемах
Вольт-амперная характеристика р-п-перехода является температу-
ро-чувствительной. Выражение для идеального диода, представлен-
ное ранее в п. 3.4.3, воспроизведено ниже.
id = is exp (- 1 . (3.66)
\К1 J
Преобразование дает
Vd = — In f — + 1Y (3.67)
e Vs J
Таким образом, если используется источник тока, обеспечивающий
постоянно id, то напряжение Vd будет пропорционально температу-
ре. Из экспериментальных данных установлено для температурной
зависимости прямого падения напряжения на переходе (приблизи-
тельно 0,7 В при 25 °C для кремниевого прибора), что реальный
отклик отличается от предсказанного. Из выражения (3.67) можно
определить температурную чувствительность:
&Vd k fid /q ~Q\
~ ln Г + 1 ’ (3-68)
dl € \ s /
Если взять прямой ток в 103 раз больше обратного тока на-
сыщения, то получим теоретическую температурную чувствитель-
ность порядка +0,6 мВ/K. Эмпирический результат — это кон-
станта —2 мВ/K в диапазоне от 50 до 400 К. Данное несовпаде-
ние является следствием зависимости обратного тока насыщения от
температуры.
Переход база-эммитер в биполярном транзисторе может быть
использован так же, как диод. И он обладает лучшими характе-
ристиками. На практике транзистор с «закороченными» выводами
коллектора и базы является наилучшим прибором. В целом приборы
на р-п-переходе относят к температурно-зависимым устройствам,
пропорциональным абсолютной температуре.
Для улучшения характеристик два идентичных транзистора фор-
мируются на одном чипе и они работают в режиме постоянного зна-
чения отношения плотности коллекторного тока г. При этих усло-
виях разница между падением напряжения база-эммитер каждого
транзистора может быть представлена в виде
/ кТ\
^Уве = ( — ) In г (3.69)
у е )
138 Глава 3. Датчики на основе полупроводников
(см. Зи, 1994 для типовых конфигураций цепей). Температурно-зави-
симые устройства обычно ассоциируются с таким типом конструкций.
Коммерчески доступную интегрированную схему AD590 выпус-
кает компания «Аналог Девайс». Тонкопленочные резисторы с низ-
ким температурным коэффициентом сопротивления конвертируют
напряжение в ток с помощью устройств «пропорциональной абсо-
лютной температуры».
Линейный выход по току в 1 мкА/K соответствует диапазо-
ну от —55 до 150 °C. Компания «Нэшионал Семикондактор» также
продает микросхему измерения LM135. Он описан как «двухвывод-
ной стабилитрон» с напряжением стабилизации пропорциональным
абсолютной температуре как 10 мВ/K. Ошибка в устройствах с по-
ложительным температурным коэффициентом может быть 0,25 °C
при комнатной температуре и 0,75 °C во всем остальном диапазо-
не. Эти устройства изготавливаются в металлических или пласти-
ковых 8-ми выводных корпусах. Это делает их пригодными при
установке на плату для обеспечения температурной компенсации
или сигнализации. Они также могут быть установлены на трубы
и жилые помещения, используя термопроводящий цемент. Устрой-
ства использовались также для измерения потоков, анемометрии и
измерения уровня жидкости. Защита от влаги осуществляется про-
стой влагозащитной оплеткой. Для более жестких условий может
понадобиться обшивка или покрытие.
3.7. Детекторы ионизирующего излучения
3.7.1. Радиоактивность
Ионизирующее излучение встречается в природе в космических лу-
чах и при изменении структуры атомного ядра. Расщепление атомно-
го ядра называется радиоактивным распадом и происходит это обычно
с тяжелыми элементами. Некоторые нестабильные атомы образу-
ют цепочки радиоактивных превращений. Цепочка — это после-
довательность нестабильных материнских-дочерних изотопов. Су-
ществуют четыре таких радиоактивных семейства: три являются
естественными и одно искусственным. Три серии оканчиваются ста-
бильными изотопами свинца, а четвертая оканчивается висмутом.
В течение процесса радиоактивного распада испускаются альфа-
и бета-частицы, избыточная энергия освобождается в виде гамма-
фотонов. Также могут испускаться другие менее ионизирующие ча-
стицы, например нейтроны и нейтрино. Нейтроны могут быть обна-
3.7. Детекторы ионизирующего излучения 139
ружены с помощью вторичных процессов, таких как ядерное рассея-
ние или ядерное превращение (трансмутация). Изменение атомного
ядра также может происходить при синтезе двух более легких ядер
и образовании более тяжелого ядра. Такой процесс происходит в
звездах, водородных бомбах и, возможно, будет использоваться в
будущем в контролируемой форме для производства электрической
энергии. Ускорители частиц и рентгеновские установки тоже могут
создавать ионизирующее излучение.
Ионизирующее излучение можно упрощенно разделить на два
типа: фотоны, являющиеся частью электромагнитного спектра, и
частицы. Такие как бета-частицы — электроны с высокой энерги-
ей (е“) и альфа-частицы — ядра атомов гелия (^Не24-).
Ионизирующая способность и, следовательно, ослабление/погло-
щение максимальны для тяжелых частиц и минимальны для фото-
нов. Как правило, это означает, что детектирование и измерение
фотонов является более сложной задачей.
Радиоактивность была открыта Беккерелем в Париже в 1896 г.,
и с тех пор было найдено много способов измерения ионизирую-
щего излучения. Открытие само по себе было сделано в силу того,
что образцы соли урана, люминесцентные свойства которых иссле-
довались, засветили фотографические пластинки, хранящиеся в све-
тонепроницаемом контейнере. До настоящего времени фотопленка
все еще используется для формирования изображения рентгеновско-
го излучения и для пленочных дозиметров. Ионизационная камера
(1898) контролирует ток, проходящий через воздушные или газовые
ячейки, ионизованные радиацией, и может быть откалибрована для
измерения энергии частицы или фотона. Счетчик Гейгера-Мюл-
лера — это вариант ионизационной камеры низкого давления. Он
является счетчиком событий и выполнен более чувствительным за
счет лавинного эффекта. Тем не менее он не дает информации об
энергии частицы или фотона. Эффективность регистрации фото-
нов составляет всего лишь 1%. Детектируемые фотоны поглоща-
ются материалом стенок, которые в свою очередь испускают вто-
ричные электроны, детектируемые обычным путем. В камере Виль-
сона перенасыщенный пар конденсируется на молекулах воздуха,
ионизованных по пути поглощения излучения. Водородные пузырь-
ковые камеры (1952) содержат перегретый жидкий водород в баках
высокого давления со стеклянным верхом. Вдоль пути поглощения
ионизирующего излучения образуются пузырьки водорода. Перво-
начальный сцинтилляционный счетчик (1900), использованный Ре-
зерфордом и другими исследователями, представлял собой экран,
140 Глава 3. Датчики на основе полупроводников
покрытый сульфидом цинка (ZnS). Вспышки света, излучаемые при
бомбардировке альфа-частицами, подсчитывались вручную в тем-
ной комнате в течение многих часов. Современные, более удобные,
устройства представляют собой детектор из Nal, активированного
таллием. Для регистрации вспышек света, генерированных гамма-
излучением, используется фотоумножитель. Также находит приме-
нение йодид цезия, он менее гигроскопичен и поэтому может ис-
пользоваться для регистрации альфа-частиц с применением соот-
ветствующего светонепроницаемого покрытия. Иодид цезия имеет
более высокий коэффициент поглощения по сравнению с Nal, по-
этому могут быть установлены более тонкие слои. Материал ме-
ханически более прочен, следовательно, пригоден к применению в
космических аппаратах. Для использования в качестве сцинтилля-
торов было разработано большое количество материалов, включая
пластиковые листы. Наиболее современные исследования касаются
фторида лития (LiF), который при поглощении высокоэнергетич-
ных фотонов образует метастабильные состояния в решетке. При
дальнейшем нагревании эта энергия высвобождается в виде света
(эффект термолюминесценции). Область применения — многора-
зовые индивидуальные дозиметры.
3.7.2. Регистрация и спектры
Обычно материал с большей плотностью обладает большей «тормо-
зящей» способностью к радиации. Если необходимо измерить энер-
гию падающего фотона или частицы, а не просто определить ко-
личество актов поглощения в секунду (активность), то излучение
должно полностью поглотиться. Измерение числа образовавшихся
пар ионов при каждом событии может быть использовано для рас-
чета начальной энергии частицы или фотона. Пока активность не
экстремально высока, не будет происходить наложения импульсов,
так как время акта детекторования равно 10“10 с. Подобная про-
цедура называется спектроскопией, и спектр на рис. 3.30 является
типичным суммированием по времени актов поглощения. Расшире-
ние спектральных линий определяется искажениями спектрометри-
ческой системы.
3.7.3. Процессы поглощения
Заряженные частицы
Кинетическая энергия теряется на столкновения, которые могут
приводить к ионизации, и излучение. Потери энергии выражаются
3.1. Детекторы ионизирующего излучения
как функция пути:
Потери кинетической энергии на единицу пути =
= - dT/dx [Дж/м] = (3.70)
( /dx) столкновения /dx) излучения ’ (3.71)
Рис. 3.30. Спектр альфа-частиц источника 241 Ат
Потери из-за столкновений зависят от типа частицы, ее мгновен-
ной энергии и поглощающей среды. Излучательные потери также
зависят от энергии. Обычно образуется тормозное излучение, но
для частиц с очень высокой энергией появляется также излучение
Черенкова. Это происходит, когда скорость частиц выше скорости
света в материале, что приводит к поляризации материала.
Фотоны
Их число падает экспоненциально, пропорционально пройденному
пути. Зависимость интенсивности от длины пути выражается как
I = 10 exp(-/ix), (3.72)
где /л — коэффициент поглощения, который состоит из совокупно-
сти коэффициентов поглощения
// — Р'ус Р'фэ "Ь Р>кс Цоп-) (3.73)
где ус — упругое рассеяние пучка; фэ — фотоэлектрический эф-
фект (фотон освобождает электрон); кс — комптоновское рассея-
ние (фотон рассеивается не упруго, так что его энергия уменьшает-
Глава 3. Датчики на основе полупроводников
ся, а длина волны увеличивается) и on — образование пары (фотон
аннигилирует с образованием электрона и позитрона).
Предполагая, что вся энергия фотона поглощается внутри де-
тектора, упругим рассеянием можно пренебречь и р может быть
охарактеризован как коэффициент поглощения. Все процессы по-
глощения (фотоэлектрический эффект, комптоновское рассеяние и
образование пар) зависят от энергии и материала.
3.7.4. Твердотельные детекторы
Частицы, рентгеновское и гамма-излучение обычно регистрируют
с помощью PIN-фотодиодов. Для образования электронно-дырочной
пары в кремнии требуется около 3,6 эВ. Это намного меньше, чем
типичные 30 эВ, требуемые для ионизации атома газа. Кроме то-
го, высокая плотность твердого тела обусловливает более высокую
вероятность столкновения и, следовательно, детектирования. Не-
обходимо снова рассмотреть понятие квантовой эффективности ту,
введенное в разделе 3.4 при обсуждении регистрации оптического
излучения. Эффективность зависит от совершенства детектора при
поглощении частицы или фотона и сбора генерированных носителей
на контактах. Полупроводниковый диод в обратном смещении обла-
дает превосходной способностью разделять и собирать наведенные
электронно-дырочные пары. При этих условиях можно предполо-
жить, что rj зависит только от поглощающей способности устрой-
ства. Следовательно, структура может быть модифицирована для
обеспечения большего чувствительного объема (рис. 3.31).
Очень важно высокое значение удельного сопротивления ком-
пенсированных полупроводниковых материалов, в противном случае
свободные носители заряда, уже имеющиеся в материале, будут до-
3.7. Детекторы ионизирующего излучения
минировать над неравновесными носителями, генерированными из-
лучением. Кроме того, для полного сбора заряда материал должен
быть свободным от дефектов решетки и содержать минимальное
количество центров захвата.
Детектирование частиц
Электроны с энергией порядка сотен кэВ обычно порождают в крем-
нии на пути в 1 мкм до 85 электронно-дырочных пар. На образование
каждой электронно-дырочной пары тратится 3,6 эВ, что приводит к
потерям энергии 300 эВ/мкм. Следовательно, кремниевый детектор
частиц толщиной 300 мкм даст около 4 фКл заряда. Для электро-
нов с меньшей энергией эффективность регистрации будет меньше.
Это происходит из-за сильного отражения электронов при столк-
новениях, особенно с тяжелыми атомами. Таким образом, по мере
понижения скорости падения электронов возрастает вероятность их
обратного рассеяния от детектора. Напротив, тяжелые ионы «оста-
навливаются» намного более эффективно, так что можно исполь-
зовать стандартные фотодиоды. Эти частицы «останавливаются»
в поверхностном слое, что может привести к эффекту отсутствия
регистрации частицы из-за ее поглощения во входном окне. Детек-
тирование нейтронов не происходит напрямую, но осуществляется
посредством вторичных событий, сопровождающих ядерную реак-
цию. Детекторы нейтронов могут иметь поверхностный слой для
генерации вторичных частиц, которые затем регистрируются диодом.
Детектир о в ание фотонов
Высокоэнергетичные фотоны взаимодействуют с материалом де-
тектора по одному из трех механизмов, представленных выше в раз-
деле 3.7.3. Типичная зависимость коэффициента поглощения от энер-
гии показана на рис. 3.32. Для более детально описания см. Мальм
и др. (1973).
В фотодиоде с высоким обратным смещением, как указывалось
ранее, все генерированные носители заряда собираются. Следова-
тельно, квантовая эффективность определяется эффективностью по-
глощения, так что уравнение (3.72) может быть представлено в виде:
Т] = 1 — ехр(—рх). (3.75)
В качестве примера приведем значение г] для детектора толщи-
ной 380 мкм из n-кремния с удельным сопротивлением 4000 Ом • см.
Для рентгеновского излучения с энергией 15 кэВ оно равно 55%.
Глава 3. Датчики на основе полупроводников
Энергия фотона (МэВ)
Рис. 3.32. Процессы поглощения фотонов
Германиевые и кремниевые детекторы используются с 1960-х го-
дов, и технология производства больших и чистых кристаллов хо-
рошо разработана. Германий необходимо охлаждать до температур
ниже 150 К для устранения шума, связанного с токами утечки. Про-
должаются исследования по улучшению технологии производства
исходного материала и детекторов. В последнее время привлекли
к себе внимание устройства из теллурида кадмия (CdTe) и йоди-
да ртути (Hgl2). Их высокий атомный номер приводит к высокому
коэффициенту поглощения ионизирующего излучения, однако про-
изводство больших кристаллов без дефектов весьма сложно.
Энергетическое разрешение фотодиодов превышает разрешение
сцинтилляционных детекторов больше чем на порядок, при этом по-
лучаются более аккуратные энергетические спектры. Тем не менее
сцинтилляционные детекторы имеют более низкое время отклика и,
следовательно, могут давать меньшую ошибку счета.
ПЗС-камеры для рентгеновского излучения
ПЗС-камеры для регистрации рентгеновского излучения в насто-
ящее время разрабатываются для спутников и медицинского при-
3.8. Магнитные датчики 145
менения. Высокая чувствительность делает их привлекательными,
особенно для снижения дозы облучения пациентов. Например, ма-
ленькие размеры стимулируют рост популярности у ортодонтов.
Они лучше всего подходят для применения в области энергии фо-
тонов до 10 кэВ. Их структура аналогична представленной в п. 3.5.4.
JFET (полевые транзисторы с изолированным затвором) монтиру-
ют на подложку ПЗС для снижения емкости соединений. Высокий
входной импеданс означает хорошее согласование с низкими выход-
ными токами ПЗС. Также JFET относительно устойчивы к радиа-
ционным повреждениям.
3.8. Магнитные датчики
Магнитометры использовались с ранних дней электричества и маг-
нетизма. Первые инструменты были основаны на отклонении стрел-
ки компаса или на отклонении баллистического гальванометра от
ЭД С., генерируемой поисковой катушкой. До сих пор широко ис-
пользуется феррозондовый магнитометр. В последнее время стали
доступны более экзотичные и чувствительные устройства. К ним
относятся протонные магнитометры, способные измерять 1 нТл,
а также сверхпроводящие интерференционные устройства или SQUID,
используемые в биомагнитных исследованиях для измерения полей
порядка 1 пТл.
Для лабораторного применения доступны магнетометры для из-
мерения полей от 0,1 мкТл до нескольких Тл. В табл. 3.3 приведен
порядок амплитудных значений различных источников магнитного
поля.
Таблица 3.3. Значение магнитного поля для некоторых распространенных
источников магнитного поля
Источник магнитного поля Порядок амплитуды
Геомагнетизм 10 мкТл
Устройства хранения данных 1 мТл
Проводник с током 1 мТл
Маленький постоянный магнит 10 мТл
Магнит из сверхпроводника 10 Тл
Среди полупроводниковых устройств, представленных ниже, наи-
более популярными являются приборы на эффекте Холла.
Глава 3. Датчики на основе полупроводников
3.8.1. Эффект Холла
Этот эффект был открыт Холлом в 1879г. В то время даже не был
еще объяснен механизм электропроводности в металлах (электрон
сам по себе был открыт только в 1897 Дж. Дж. Томсоном), но эф-
фект оказался весьма поучительным.
Холл заметил, что проводник
Рис. 3.33. Эффект Холла
с током, перпендикулярным маг-
нитному полю, генерирует ЭДС во
взаимно перпендикулярном напра-
влении, как показано на рис. 3.33.
ЭДС должна измеряться вольтме-
тром с высоким входным сопроти-
влением. Объяснение эффекта мо-
жет быть получено из уравнения
Лоренца,
F = q(E + v Л В).
(3.76)
При выводе формулы использовано предположение, что длина
пластины много больше d. Магнитное поле заставляет носители за-
ряда двигаться к верхней поверхности преобразователя. Если заряд
не может пройти через края пластины, устанавливается равновесное
состояние, при котором F = 0, что дает
Ен = -v К В, (3.77)
где Ен — электрическое поле Холла поперек пластины.
Динамическое равновесие достигается там, где выполняется ра-
венство:
электростатическое отталкивание = электромагнитная сила
Напряжение Холла Vh может быть получено из следующей фор-
мулы
Ен = (3.78)
d
Объединяя уравнения (3.77) и (3.78) получаем
VH = —vBd. (3.79)
Теперь ток, текущий в материале может быть представлен в
терминах концентрации п носителей заряда, площади поперечного
сечения А и дрейфовой скорости v заряда носителя q:
i = nAqv. (3.80)
3.8. Магнитные датчики 147
Подстановка v в уравнение (3.79) и замена А на wd дает
VH = —B^—d, nAq VH = ndwq VH = -B—, nwq VH = RhB-, w (3.81) (3.82) (3.83) (3.84)
где Rh — коэффициент Холла. На практике в уравнение (3.84) не-
обходимо добавлять корректирующие члены ввиду рассеяния носи-
телей заряда и геометрических эффектов. См. Балте и Кастагнетти
в работе Сзе (1994) для более детального теоретического анализа.
Во времена открытия эффекта было установлено, что на боль-
шинстве металлов получается ожидаемый результат, но некоторые
дают противоположный знак Vh- По мере развития квантовой ме-
ханики и зонной теории проводимости было показано, что эти ано-
мальные результаты обусловлены переносом заряда дырками.
Величина Vh в металлах очень мала и поэтому не имеет прак-
тического значения за исключением исследования материалов. Од-
нако в полупроводниках амплитуда эффекта больше на несколь-
ко порядков из-за гораздо более низкого значения концентрации.
Чувствительность носителя заряда п находится в пределах от 5
до 500 В/АТл. При этом InSb более чувствителен чем Si. По мере
развития технологии производства полупроводников, полупровод-
никовые датчики на эффекте Холла стали продаваться как магни-
тометры.
Существует несколько полезных применений эффекта Холла:
- Исследование и производство полупроводников. Эффект Хол-
ла может быть использован для измерения п и идентификации
знака носителей заряда для определения типа проводимости
(дырочная или электронная). Поскольку проводимость а опре-
делена как nqv, измеряя ее можно определить и.
- Магнитометры. Для схемы, приведенной на рис. 3.33, при про-
пускании постоянного тока через пластинку напряжение Хол-
ла будет прямо определять величину магнитного поля. Боко-
вые контакты должны быть малого размера и правильно рас-
положены, поскольку вдоль пластины существует градиент по-
тенциала, вызывающий протекание тока. Неправильное распо-
Cl48 Глава 3. Датчики на основе полупроводников
ложение контактов будет генерировать разность потенциалов
без присутствия магнитного поля. Магнитометры — миниа-
тюрные компактные чувствительные приборы и могут изме-
рять как постоянное магнитное поле, так и переменное с ча-
стотой до 100 кГц. В настоящее время имеются коммерческие
приборы с высокой чувствительностью, способные измерять
поля до 10 нТл, а для сильных полей доступны альтернатив-
ные инструменты, способные измерять поля до 15 Тл. Устрой-
ства изготавливаются в различном геометрическом исполне-
нии. Магнитометры из GaAs могут работать при повышенных
температурах, так как переход к собственной проводимости у
этого полупроводника группы А/цВу начинается при темпе-
ратуре около 400 °C.
- Бесконтактные переключатели. Переключатель просто сра-
батывает при наличии магнитного поля достаточной величи-
ны. В одном корпусе вместе с пластинкой материала находится
некоторая ТТЛ-схема. Такие устройства доступны и использу-
ются для детектирования металлических предметов, а также
применяются в переключателях охранной сигнализации и не-
которых расходомерах.
3.8.2. Магниторезистивный эффект
Рис. 3.34. Магниторезистив-
ный эффект
Обнаруженный Томсоном (лордом Кель-
вином) в 1856 г., этот феномен так-
же является результатом действия силы
Лоренца, но он основан на отклонении
линий тока под действием магнитного
поля, которое используется здесь не-
посредственно. В магниторезистивных
устройствах длина намного больше ши-
рины, поэтому эффектом Холла можно
пренебречь.
Магнитное поле вызывает отклонение
линий тока, как показано на рис. 3.34.
При этом возрастает ток II через одну
сторону пластины и соответственно па-
дает через другую сторону. Изменение
сопротивления образца определяется как
r = Ло(1 + tg2 oL),
(3.85)
3.8. Магнитные датчики 149
где: 0ь — угол Лоренца, показывающий отклонение линий тока.
Может быть показано, что tg#£ = //В, где /1 — эффективная по-
движность носителей; см. Балте и Кастагнетти в работе Сзе (1994)
для более полного описания.
Магниторезистивные датчики изготавливаются несколькими ком-
паниями. Типовое изделие выполнено из тонких полосок пермаллоя
(20% железа, 80% никеля) на кремниевой подложке, соединенных
по мостовой схеме. Это облегчает реализацию заказной топологии
в рамках технологии интегральных схем. Типичный диапазон чув-
ствительности датчиков — ±5 мТл с разрешением 10 нТл, а измене-
ние сопротивления достигает 3% в максимальном по величине поле.
Частотная характеристика аналогична датчикам на эффекте Холла
на десятках кГц.
В настоящее время привлекают большое внимание материалы,
проявляющие так называемый гигантский магниторезистивный эф-
фект (ГМЭ), открытый Бэйбичем и др. (1988). Этот эффект осно-
ван на зависимости рассеяния электронов от спина в очень тонких
слоистых структурах. Изготавливают структуры из периодических
слоев Fe-Cr или Си-Со толщиной около 10 атомов. Сопротивление
падает до 15% в полях ±30 мТл, и диапазон рабочих частот прости-
рается от постоянного поля до 1 МГц. Датчики, основанные на ГМЭ,
стали доступны в середине 1990-х гг. ГМЭ-материалы используют
во многих устройствах хранения информации.
3.8.3. Магнитодиод
Магнитодиод представляет со-
бой длинный тонкий PIN-диод
(рис. 3.35). В центральную г-об-
ласть осуществляется двойная
инжекция из и областей.
Носители дрейфуют в электри-
ческом поле Е вдоль горизон-
тальной оси. Присутствие маг-
нитного поля В, ортогонально-
го Е, приводит к собиранию
нижней поверхности в зависимости от направления В. Этот эффект,
открытый Зулем в 1949 г. и называемый магнитоконцентр аци-
ей, приводит к образованию градиента концентрации носителей
поперек пластины. Темп рекомбинации на двух сторонах пласти-
ны различен, что достигнуто полировкой одной стороны и грубым
Рис. 3.35. PIN-структура магнитодиода
носителей заряда на верхней или
шлифованием другой. Общий эффект заключается в достижении
диодной вольтамперной характеристики, модифицированной маг-
нитным полем. К сожалению, этот эффект не является линейным и
чувствителен к изменению температуры. Достигнута чувствитель-
ность в 5 В/мАТл при токе смещения 5 мА, а последние варианты,
изготовленные по технологии КМОП, показали 25 В/мАТл. Частот-
ный отклик меньше чем 10 кГц.
К сожалению, до сих пор в промышленном производстве наблю-
дается низкий контроль качества покрытия поверхности листа. Ча-
стота рекомбинации носителей изменяется таким образом, что вос-
производимость остается очень низкой, что приводит к отсутствию
коммерческой заинтересованности в магнитодиодах.
3.8.4. Магнитотранзистор
Это транзистор с физической структурой, созданной таким обра-
зом, что коллекторный ток оптимально чувствителен к приложенно-
му магнитному полю. Отметим следующие явления, вносящие вклад
в работу магнитотранзистора:
- отклонение носителей под действием силы Лоренца,
- магнитоконцентрация,
- модуляция инжекции носителей.
Относительный вклад этих явлений зависит от особенностей кон-
струкции.
Первоначальное устройство, изготовленное Дэйвис и Веллз (1970),
представляло собой горизонтальную структуру с двумя электрода-
ми и дрейфовым сбором заряда. Структура является биполярным
р-п-р-транзистором и показана на рис. 3.36.
Входной
контакт
базы
Эмиттер
База л-типа
Коллектор 1
Коллектор 2X/
Выходной
контакт
базы
Рис. 3.36. Горизонтальный
магнитотранзистор с дву-
мя коллекторами
Основным процессом здесь является отклонение носителей заря-
да. В базе протекает ток между двумя контактами, напоминающими
Литература 151
преобразователь Холла. Образующееся холловское поле отклоняет
носители тока так, что через два коллектора протекает разный ток.
Разница в коллекторных токах Дгс определяется выражением:
Дгс = к^п + pp)Bie, (3.86)
где: к — геометрический фактор, pn и /лр — подвижности электро-
нов и дырок, ie — ток эмиттера.
Разработано несколько вариантов конструкции магнитотранзи-
сторов. Роуменин (1990) провел классификацию и обзор различных
типов. В некоторых устройствах ток течет вертикально к поверхно-
сти, в отличие от горизонтального исполнения, показанного выше.
Тогда измеряется магнитное поле в плоскости структуры.
Недавно было опубликовано значение чувствительности 0,25 Тл-1
для биполярного устройства, использующего как отклонение носи-
телей, так и модуляцию инжекции. В этом случае чувствительность
определяется в соответствии с (3.86) как kic/^Bie).
В дополнение к стандартной биполярной конструкции может быть
использована КМОП-технология. Типичная чувствительность для
горизонтального КМОП-устройства равна 1,5 Тл-1.
Структуры канальных полевых МОП-транзисторов — MOSFET —
могут быть модифицированы таким образом, чтобы канал действовал
подобно преобразователю Холла или использовал отклонение носите-
лей. Такие устройства называют магнитными полевыми МОП-тран-
зисторами — MAGFET. Сообщается о чувствительности 640 В/АТл
для n-канального МОП магнитотранзисторов MAGFET с эффектом
Холла, работающих при 5 В с током стока 0,5 мА.
Несмотря на более высокую чувствительность, магнитотранзи-
сторы не конкурентоспособны по сравнению с недорогими и просты-
ми интегральными структурами с датчиками Холла. Для различ-
ных структур магнитотранзисторов это может быть связано с более
высоким уровнем шумов, нелинейностью, температурной зависимо-
стью и большим значением разбаланса, определяемого незначитель-
ными производственными неточностями совмещения.
Литература
В этой главе представлены различные конструкции новых полупро-
водниковых датчиков. Тем не менее приводится мало информации о
технологии производства. Представленные ниже книги могут быть
полезны читателям, желающим узнать больше об этой высокоспеци-
ализированной технологии полупроводников.
152 Глава 3. Датчики на основе полупроводников
Gardener J W, Varadan V К, Awadelkarim О О 2001 Microsensors,
MEMS and Smart Devices (Wiley)
Kovacs G T A 1998 Micromachined Transducers Sourcebook (McGraw-
Hill)
Maluf N 1999 An Introduction to Microelectromechanical Systems Engi-
neering (Artech House)
Sze S M 1994 Semiconductor Sensors (Wiley)
Ссылки
Baibich R et at 1988 Phys. Rev. Lett. 61(21) 2472-2475
Bernstein J et at 1993 ’A micromachined comb-drive tuning fork rate
gyroscope’ Proc. IEEE Micro Electromechanical Systems Workshop, Fort
Lauderdale, EL, February 1993, pp 143-148
Bouwstra S, Legtenberg R, Tilmans НАС and Elwenspeek M 1990 ’Res-
onating micro-bridge mass flow sensor’ Sensors and Actuators A21-A23
332-335
Cho S T and Wise К T 1993 ’A high-performance microflowmeter with
built-in self-test’ Sensors and Actuators A 36 47—56
Dailey J W and Riley W F 1978 Experimental Stress Analysis (New
York: McGraw-Hill)
Davies L W and Wells M S 1970 ’Magnetotransistor incorporated in
a bipolar IC’ Proc. ICMCST, Sydney, Australia, pp 34-43
Elbel T, Muller J E and Volklein F 1985 ’Miniaturisierte thermische
Strahlungsensoren: die neue Thermosaule TS-50. 1’ Feingeratetechnik
Berlin) 34 113-115
Fairchild Weston CCD Sensors 1989 Systems and Development Technol-
ogy, Databook Gardner J W, Varadan V К and Awadelkarim О О 2001
Microsensors, MEMS and Smart Devices (Wiley)
Gardner J W 1994 Microsensors: Principles and Applications (Wiley)
Greenwood J C 1988 ’’Silicon in mechanical sensors’ J. Phys. E: Sci.
lustrum. 21 1114-1128 Hanna S M 1987 ’Magnetic field sensors based on
SAW propagation in magnetic thin films’ IEEE Trans. UFFC 34 191-194
Johnson J D, Zarabadi S R and Sparks D R 1995 ’Surface micromachined
angular rate sensor’ Sensors and Actuators SP-1066 77-83
Johnson R G and Higashi R E 1987 ’A highly sensitive chip microtrans-
ducer for air flow and differential pressure sensing applications’ Sensors
and Actuators II 63-72
Упражнения 153
Kovacs G Т А 1998 Micromachined Transducers Sourcebook (McGraw-
Hill)
Kress H-J, Marek J, Mast M, Schatz О and Muchow J 1995 ’Integrated
silicon pressure sensor for automotive application with electronic trim-
ming’ Sensors and Actuators pp 35-40
Malm H L, Raudorf T W, Martini M and Zanio К R 1972,Gamma ray
efficiency comparisons for Si (Li), Ge, CdTe and Hgl2 detectors IEEE
Trans. Niicl. Sci. 20 500-509
Maluf N 1999 An Introduction to Microelectromechanical Systems Engi-
neering (Boston: Artech House)
Neubert H К P 1975 Instrumentation Transducers: An Introduction to
their Performance and Design 2nd edition (London: Oxford University
Press) pp 237-238
Neumeister J, Thum R and Liider E 1990 ’A SAW delay-line oscillator
as a high-resolution temperature sensor’ Sensors and Actuators A 21-23
670-672
Patel H 1992 ’Silicon that moves’ IEE Review July/August pp 268, 269
Reidemeister E P and Johnson L К 1995 ’Capacitive acceleration sensor
for vehicle applications’ Sensors and Actuators SP-1066 pp 29-34
Roumenin C S 1990 ’Bipolar magnetotransistor sensors. An invited re-
view’ Sensors and Actuators A24 83
Spark D R, Zarabadi S R, Johnson J D, Jiang Q, Chia M, Larsen Q,
Higdon W and
Castillo-Borelley P 1997 ’A CMOS integrated surface micromachined
angular rate sensor: its automotive applications’ Proc. Transducers ’97,
Int. Con/, on Solid State Sensors and Actuators, Chicago, IL, 16-19
June, pp 851-854
Sze S M 1981 Physics of Semiconductor Devices 2nd edition (Wiley)
Sze S M 1994 Semiconductor Sensors (Wiley)
Wilson J and Hawkes J F В 1983 Oploelectrics: An Introduction (Pren-
tice-Hall) Xensor Integration, Delft, the Netherlands, Data sheet XMR3774
Infrared sensor, 91.083774
Упражнения
3.1. Объясните, почему датчики на основе полупроводников нахо-
дятся в центре исследовательских программ и программ под-
держки разработок. Опишите некоторые трудности в приме-
нении таких устройств в различных областях измерений.
Глава 3. Датчики на основе полупроводников
3.2. Обсудите преимущества и недостатки при использовании крем-
ния как конструкционного материала для микромеханических
приборов.
3.3. Миниатюрный газовый сенсор сконструирован с использовани-
ем нитрид-кремниевой мостовой структуры, работающей как
резонансная система.
i) Опишите принцип работы.
ii) Тензорезистивная балка присоединена к структуре, что-
бы наблюдать за колебаниями. Нарисуйте функциональную
блок-схему для иллюстрации поддерживания резонанса.
3.4. Датчик давления в настоящее время доступно изготавливается
из кремниевой пластины. Диск выполняет функцию мембраны,
на которой сформированы тензорезистивные дорожки.
i) Установите два ограничения, которые лимитируют такие
устройства.
ii) Радиальные и круговые напряжения в диске описываются
так:
3F(l-v2), п 2Ч
Радиальное напряжение ег = — ---(/to — Зг ) ;
ЗР(1 — и2) / 2 2А
1ангенциальное напряжение et — —gjffi— — г ) •
Изобразите форму взаимосвязи этих напряжений как функ-
цию радиуса, считая, что давление фиксировано. Где на
диаграмме находится точка с нулевым напряжением?
iii) Нарисуйте любой контур формирования сигнала и объяс-
ните, как в него включить тензорезистивные элементы,
чтобы обеспечить температурную компенсацию и макси-
мальную чувствительность.
3.5. i) Объясните феномен поверхностных акустических волн (ПАВ),
приведя типичные числовые значения связанных с ними
параметров. Объясните, как может быть сконструирован
датчик на поверхностных акустических волнах, чтобы из-
мерить: (а) давление, (б) магнитное поле.
ii) Некоторые виды сенсоров на основе ПАВ для измерения
массы имеют чувствительность представленную в виде
= (&1 + k2)fo [Гц • кг-1 • м2].
Упражнения 155
Примем частоту резонанса в 109 Гц и
кг = -9,8 • 10“8, к2 = -4,18 • 10“8 [м2 • с/кг].
Определите разрешающую способность измерения массы,
если система обработки сигнала может измерять с разре-
шением от 5 до 108.
Объясните значение составляющих в модифицированном вы-
ражении Нернста
RT
ЕЭКв — Eq + 1п (ах 4- кау).
Примем что pH = — 1g ан- Объедините эти зависимости, чтобы
показать, что ЕЭКв — Eq — 0,0592 pH [В].
Опишите принцип работы полевого транзистора, адаптирован-
ного для использования в качестве биосенсора, с помощью диа-
граммы. Приведите преимущества и недостатки использова-
ния этого датчика при контакте с пациентом.
i) Нарисуйте схему включения фотодиода и его характери-
стику в условиях функционирования в фотоэлектрическом
режиме. Покажите, что в этом режиме
кТ (ет]РАХ\
К/ = — In I ——— ) .
е у igibc J
Каковы преимущества и недостатки этого режима работы?
ii) а) Фотодиоды могут использоваться как детекторы рент-
геновского излучения. Поглощение определяется зависимо-
стью:
I = Iq ехр(—цх).
Покажите, что
т) = 1 — ехр(—/лх).
б) Некоторые фотодиоды для обнаружения радиации имели
толщину датчика 300 мкм и значение /1, равное 2 • 103 м-1.
Определите фототок, приняв, что 85 электронно-дыроч-
ных пар генерируется в микрометре и что поток фотонов
составляет 105 в секунду.
i) Опишите производство и параметры термисторов с поло-
жительный и отрицательным ТКС. Представьте качествен-
ные графики и области применения.
ii) Используя, идеализированное выражение для диода, пока-
жите, что прямое напряжение смещения, когда диод прово-
дит электрический ток, соответствует ПТК-устройствам.
156 Глава 3. Датчики на основе полупроводников
iii) р-п-переход в приборах с положительным температурным
коэффициентом обычно конструируется как транзистор-
ный переход «база-эмиттер», а не диод. Почему так?
iv) Спроектируйте прибор с ПТК, используя два идентичных
транзистора, размещенных на одной подложке. Определено
фиксированное соотношение 7 их коллекторных токов гС1
и гС2. Используя выражение из пункта ii), покажите, что
разница базовых токов ПТК-устройств с положительным
температурным коэффициентом составит
. _ кТ
ЪУбт = —In 7.
е
3.10. Некоторые коммерчески доступные магниторезисторы имеют
сопротивление Rq — 500 Ом и чувствительность 2,5 кОм/Тл.
i) Нарисуйте мостовую схему, схожую с тем, что предста-
влена на рис. 3.4 таким образом, чтобы четыре резистора
могли быть использованы для измерения магнитного поля.
ii) Покажите, что для небольших изменений в сопротивлении
SR и напряжении питания Vs оптимальный эквивалентный
разностный потенциал имеет вид:
F
^ЭКв — Т-» iii) * VS‘
iii) Приняв, что уровень шума в контуре может быть пример-
но 50 мкВ, оцените минимальное магнитное поле, которое
может быть измерено.
ГЛАВА 4
ОПТИЧЕСКИЕ
ВОЛОКОННЫЕ
СЕНСОРЫ
4.1. Введение
Первые патенты на оптические волоконные сенсоры появились в се-
редине 1960-х годов. С тех пор наблюдалось их значительное раз-
витие от первых простых световодных устройств до современных
сложных и высокотехнологичных систем, чему способствовал бы-
стрый прогресс в использовании оптических волокон в области те-
лекоммуникаций. Это привело к появлению высококачественных и
дешевых оптических волокон. Кроме того, значительный рост ко-
личества проигрывателей компакт-дисков, лазерных принтеров и
инфракрасных пультов дистанционного управления сделал широко
доступными дешевые оптические компоненты.
Применение оптических волокон в телекоммуникационных лини-
ях стимулировало их использование для телеметрии в некоторых
отраслях промышленности. В химических, ядерных, нефтехимиче-
ских и других производственных процессах их начали использовать
для управления, контроля и сбора данных в основном благодаря та-
ким преимуществам, как:
- относительно низкая стоимость установки;
- присущая им безопасность, ввиду электрической изоляции и
малой мощности света;
- устойчивость и надежность, определяющие малые эксплуата-
ционные затраты;
- нечувствительность к электромагнитным помехам и возмуще-
ниям;
- химическая инертность;
- отсутствие электромагнитной передачи;
- термостойкость;
- широкая полоса рабочих частот.
158 Глава 4- Оптические волоконные сенсоры
Такие отрасли, как электроэнергетика, автомобилестроение и
авионика также заинтересованы в оптоволоконных сенсорах, рав-
но как и инженеры в области робототехники и медицины.
Область приложения оптических волокон в измерительных сис-
темах можно разбить на три группы:
- световоды для освещения при дистанционном наблюдении и в
труднодоступных местах;
- системы обзора, такие как эндоскопы, экраны и увеличители;
- сенсоры, использующие само оптическое волокно или неболь-
шие дополнительные компоненты.
Именно к этой последней категории постоянно привлечено наи-
большее внимание. Она и является темой данной главы. Идея включе-
ния в единую систему оптического волоконного сенсора и линии
передачи данных весьма привлекательна, в особенности для инже-
неров по промышленным измерениям. Перечисленные выше преиму-
щества для оптических линий связи тогда будут справедливы и для
всей измерительной системы в целом. Кроме того, малый вес и раз-
мер оптических волоконных сенсоров — привлекательные свойства
во многих задачах измерения.
Обычные параметры, которые необходимо измерять в промыш-
ленных процессах, — это температура, скорость потока, давление,
смещение/положение, уровень жидкости в танках и емкостях. Ма-
ловероятно, что сразу можно будет внедрить сложные и дорогие
устройства. Промышленность традиционно весьма консервативна и
требует убедительных доказательств. Суровые условия промышлен-
ного завода могут сделать чувствительные к внешним воздействи-
ям устройства непрактичными. Скорее всего, эта технология будет
развиваться путем внедрения простых сенсорных систем, которые
относительно дешевы и надежны либо весьма специфичны и уни-
кальны. Для многосенсорных систем будет использоваться простая
радиальная сеть линий в контрольное помещение, хотя кольцевая
магистраль данных и предусматривается для будущих более пер-
спективных систем.
4.2. Оптический волновод
Телеметрия, основанная на металлических проволочных парах, хо-
тя и является сегодня гораздо более распространенной технологией,
сталкивается с растущим вызовом со стороны оптических волокон
4-2. Оптический волновод 159
во всех областях применения. Свет, без сомнения, — одно из наи-
более важных физических явлений во вселенной. В библейской исто-
рии сотворения мира описано сотворение света как одно из самых
первых действий Бога. Не вызывает сомнений и то, что свет был
изначальным историческим методом передачи информации на рас-
стояние. Это могло осуществляться отражением солнечного света,
лампами или факелами. В конце VI века до н. э. Ахил записал, что
новости о падении Трои были переданы из Малой Азии в Аргос
чередой огненных сигналов. Во II веке до н.э. Полибий описал ме-
тод, которым буквы греческого алфавита могли бы передаваться
огненными сигналами посредством двузначного пятиуровнего кода.
В 1870 г. Джон Тиндаль продемонстрировал, что свет может рас-
пространяться вдоль изогнутой струи воды, а позже Дж. Л. Бэрд
получил патент на распространение света в стеклянных стержнях.
В 1950-х годах были разработаны волоконно-оптические устройства
для контролирующих инструментов. И наконец, в 1966 г. Чарльз
Као и Джордж Хокман из «Стандарт телекоммуникейшн лэборато-
ри» Харлоу предложили принцип передачи информации через про-
зрачный диэлектрик. Последовавшее за этим развитие технологии
высококачественных оптических волокон привело к их теперешнему
широчайшему применению в телекоммуникациях в настоящее время.
Последние достижения в методах сжатия данных сделали воз-
можным передачу цифровых видеоизображений стандартного каче-
ства в реальном масштабе времени. Это достижение, в сочетании с
внутренне присущими оптическим волокнам преимуществами, уско-
рило феноменальный рост международной индустрии по передаче
информации, которая борется за сохранение высоких темпов ро-
ста спроса на информационную емкость. Недавним достижением по
увеличению информационной емкости без прокладки дополнитель-
ных линий связи является использование света различных длин волн
в одном волокне, что позволяет создавать дополнительные каналы
связи, т. е. происходит мультиплексирование в области оптических
частот. Этот прием обычно называют плотным мультиплексирова-
нием по длинам волн (dense wavelength division multiplexing, DWDM).
Достигнутый на момент подготовки книги максимум при коммер-
ческом использовании — 100 различных длин волн на волокно. При
скорости передачи 10 Гбит/с это дает общую скорость передачи на
волокно 1 терабит (1012)/с. Гупта и др. (2002) сообщили о достиг-
нутой в лабораторном эксперименте скорости в 3,2 терабит/с при
использовании 40 лазеров в диапазоне длин волн 15314-1563 нм. Ско-
рость передачи на канал была 80 Гбит/с на дальности 100 км.
Сотовая сеть связи для мобильных телефонов использует оптиче-
ские волокна для межузловых соединений. Мобильные сотовые теле-
фоны имеют небольшой радиус действия и связаны с гигагерцовой
антенной системой местной ячейки сети. Использование мобильных
телефонов для игр и передачи видеоизображений еще больше увели-
чивает спрос на информационную емкость. Очевидно, что уровень
использования волоконно-оптических телекоммуникаций будет зна-
чительно возрастать и в будущие десятилетия.
4.2.1. Принципы распространения света
Оптическое волокно представляет собой волновод, как правило, круг-
лого сечения. Волокно изготавливается из определенных диэлектри-
ческих материалов, таких как полимер или стекло. Понимание про-
цесса распространения света в волноводе требует знания классиче-
ской теории электромагнитных волн. В 1864 г. Джеймс Максвелл
убедительно доказал, что свет имеет электромагнитную природу.
Первоначально эта идея была высказана Майклом Фарадеем. Макс-
веллу удалость показать, что, комбинируя известные уравнения для
магнитного и электростатического полей (с важным дополнением),
можно получить пару дифференциальных уравнений, решениями ко-
торых будут поперечные волны. Более того, скорость этих волн —
такая же, как и скорость света в свободном пространстве. Это бы-
ло подтверждением того, что электромагнитный спектр (в совре-
менной терминологии) на самом деле состоит из электрических и
магнитных полей. Вывод уравнений Максвелла можно найти во мно-
жестве книг, а мы приведем лишь его набросок.
Теорема Гаусса
В дифференциальной форме уравнение Гаусса для электрического
поля в свободном пространстве в декартовых координатах может
быть записано как
дЕ^,дЕу.дЕ^=Р_
дх ду dz е0’
где р — плотность свободного заряда. Для удобства часто использу-
ется выражение в более общей форме, основанной на дифференци-
альном операторе V, называемом оператором набла. Набла можно
определить в любой трехкоординатной системе. Для декартовой сис-
темы координат он выражается как
7=(М+^+С1’ (4-2)
4.2. Оптический волновод 161
где г, j и k — орты координатных осей х, у и z соответственно.
Набла может быть применен как к скалярной, так и к векторной
функции. Скалярной операцией над скаляром </? будет
_ (. д . д . д\ z.
\ дх ду dz)
Эта скалярная операция называется градиентом <р и иногда запи-
сывается как grade/?. Когда производится операция над векторной
функцией, произведение может иметь две формы — скалярную и
векторную. Скалярное произведение обозначается знаком «•>>, а век-
торное — знаком «х». Скалярное произведение набла на некоторый
вектор Y в декартовых координатах записывается как
V-У = + (4.4)
\ дх ду dz J
Результат этой операции обычно называют дивергенцией Y и обо-
значают как div У. Результатом скалярного произведения является
скаляр. Другой вид произведения — векторное, которое выражается как
_ f. д . д . д \ __ 'гЧ
V х Y = г— + J— + к— х Y. (4.5)
\ дх ду dz /
Вектор V х У также называют ротором Y и обозначают символом
rot У. Результатом здесь будет вектор, перпендикулярный плоско-
сти, в которой лежат исходные векторы.
Следуя этим обозначениям, уравнение (4.1) может быть перепи-
сано в виде
divE=^~. (4.6)
£о
При наличии диэлектрической среды при расчете Е следует учи-
тывать присутствие индуцированного заряда. Эта проблема реша-
ется введением вектора D, называемого электрической индукцией,
которая зависит только от присутствия свободного заряда и опре-
деляется как
D — £г£()Е или еЕ. (4.7)
Тогда уравнение (4.6) преобразуется в следующий вид:
div D — р. (4.8)
В отсутствие свободного заряда, как это имеет место в случае
оптического волокна, имеем:
divZ> = 0. (4.9)
Подобное же выражение можно записать и для магнитного поля В:
&nB = {). (4.10)
6—4227
Глава 4- Оптические волоконные сенсоры
Дивергенция магнитного поля div В всегда равна нулю, посколь-
ку свободных магнитных полюсов не существует. Магнитное поле В
относится к напряженности магнитного поля Н как
В — църьгН или fiH. (4.11)
Вектор Н, в отличие от В, не изменяется в присутствии какого-
либо материала. Он сходен с вектором D, который зависит только
от наличия реальных зарядов, а не от заряда, индуцированного в
веществе.
Закон Фарадея
Фарадеевский закон электромагнитной индукции может быть вы-
ражен в векторной форме как
VxE = -^. (4.12)
Знак «минус» следует из закона Ленца. Используя определение рото-
ра, данное в (4.5), уравнение (4.12) можно переписать в виде:
rotE = -^-. (4.13)
Теорема Ампера
Теорема Ампера связывает магнитную напряженность Н с действи-
тельным током I при помощи интегрирования вдоль некоторого
замкнутого контура s\
<j)Hds = I, (4.14)
s
что может быть выражено в виде дифференциального уравнения
через плотность свободного тока J как
rotH = J. (4.15)
Однако, как было упомянуто выше, Максвелл ввел дополнитель-
ный член, чтобы учесть ток, возникающий вследствие электрическо-
го смещения D. Уравнение (4.15) тогда преобразуется к виду
rot Н — + J. (4.16)
dt
Так как в оптическом волокне нет свободных зарядов, формула (4.16)
сокращается до
rr dD
rot H = .
dt
(4.17)
4.2. Оптический волновод 163
Уравнения Максвелла
Четыре уравнения, названные уравнениями Максвелла, получены
подстановками D и В в уравнения (4.7) и (4.11), так что уравне-
ние (4.9) стало выглядеть как
div Е = 0; (4.18)
уравнение (4.10) трансформировалось в
div 77 = 0; (4.19)
уравнение (4.13) преобразовалось в
ЭН
rot Е = (4.20)
а уравнение (4.17) — в
ЭЕ
rotH^s—. (4.21)
Окончательная стадия решения заключается в комбинировании
этих четырех уравнений для нахождения Е и Н. Для этого требу-
ется следующее стандартное соотношение:
V х (V х У) = V(V • У) - V2(y), (4.22)
где V2 — д2/Эх2 4- д2/ду2 + д2/dz2 — скалярный квадрат операто-
ра V, обычно называемый оператором Лапласа Д. Таким образом,
взятие ротора от ротора Е дает
rot rot Е — grad div Е — АЕ, (4.23)
rot = grad 0 - ДТ?, (4.24)
d(rotH)
} = &Е, (4.25)
d(dE/dt) Л (A
№ ' = ДЯ, (4.26)
(Jv
E
= (4-27)
В то же время общее выражение для волны амплитуды У в диф-
ференциальной форме будет иметь вид:
1 d2Y
ЛУ = (4.28)
v2 dt2
где vp — фазовая скорость волны, т.е. скорость, с которой дви-
жутся вперед максимумы волны. Из почленного сравнения можно
видеть, что выражение (4.27) описывает волну, и фазовая скорость
определяется как
vp = —}=. (4.29)
Для свободного пространства равенство (4.29) преобразуется в
с = —=. (4.30)
Подстановка значений //о и So в уравнение (4.30) дает скорость
света для свободного пространства, что служит дополнительным
подтверждением теории Максвелла.
Если проделать аналогичные преобразования с вектором Н, то
получается похожее выражение для уравнения (4.27):
д2Н
= (4.31)
Общим решением уравнения (4.28) является синусоидальная волна:
Y — Уоехр j(wt — к • s), (4.32)
где: к — волновой вектор, as — перемещение. Абсолютная величина
к определяется выражением
\к\ = к=^. (4.33)
Ао
Здесь к — так называемое волновое число для свободного простран-
ства. Из уравнения (4.32) получаем:
Е = Eq exp j(wt — к • s), (4.34)
Н = Hoexpj(cjt — к • з). (4.35)
Ориентация полей в электромагнитной волне
Подстановка уравнений (4.34) и (4.35) в четыре уравнения Максвел-
ла приводит к
к • Е = 0, (4.36)
к • Н - 0, (4.37)
к х Е = ршН, (4.38)
к х Н = —ешЕ. (4.39)
Формулы (4.36) и (4.37) показывают, что электрическое и маг-
нитное поля перпендикулярны к направлению распространения. Ра-
венство (4.38) говорит о том, что вектор Н нормален к плоскости
векторов к и Е, а уравнение (4.39), что вектор Е нормален к плос-
кости, в которой лежат векторы к и Н. Чтобы все эти условия
4.2. Оптический волновод 165
выполнялись, вектора fc, Н и Е должны быть взаимно ортогональ-
ны, как показано на рис. 4.1.
Рис. 4.1. Взаимная ортогональность элек-
трического и магнитного полей и напра-
вления их распространения
Законы отражения и преломления
Выведенные выше уравнения могут быть использованы для анали-
за физического явления, которое возникает, когда волна пересекает
границу между двумя различными диэлектрическими материалами.
Это имеет большое значение для оптических волокон, поскольку во-
локно должно иметь диэлектрическую внешнюю оболочку для своей
защиты и поддержки. Рис. 4.2 иллюстрирует волну, распространя-
ющуюся со скоростью Vi в первой среде и со скоростью v% — во
второй.
Рис. 4.2. Прохождение световой волны через границу двух сред
Три волны, распространяющиеся в двух средах, имеют волновые
векторы ki для падающей волны, котр для отраженной волны и кпре
для преломленной волны. Волновыми уравнениями будут являться:
Y = Yо — ki • s), (4.40)
Y = Yoexpj(wt - komp s), (4-41)
Y = Yoexpj(Ljt - knpe s), (4.42)
где Y представляет E или H.
Глава 4. Оптические волоконные сенсоры
В плоскости границы все три компоненты волны должны быть в
фазе для обеспечения непрерывности. Это справедливо для любых
волновых явлений. Поэтому
• S — komp * & ~ ^пре * (4.43)
что преобразуется в
ki sin а - komp sin /3 - knpe sin 7. (4.44)
Величины ki и komp одинаковы, так как они лежат в одной среде
и поэтому будут иметь одинаковую длину волны А. Следовательно,
Zq - Z./3. (4.45)
Это один из законов отражения. Записав также уравнение (4.33) как
|fc| = к = (4.46)
Ад с
выражение (4.44) можно представить в виде
2тг/ . 2тг/ .
----sin а —-----sm 7. (4.47)
Vi v2
Частота не изменяется при пересечении границы во избежание
разрыва, как установлено выше. Следовательно, уравнение (4.47)
преобразуется в
sin a
—---- = — — 1^2,
sin 7 v2
что является законом Снеллиуса, где ]П2 — показатель преломле-
ния при переходе от среды 1 в среду 2. Если среда 1 — свободное
пространство, то уравнение (4.48) принимает вид
sin а с
-----= — = п2,
sm 7 v2
где п2 — абсолютный показатель преломления среды 2. Часто бы-
вает более удобно иметь дело с абсолютными показателями прелом-
ления. Уравнение (4.48) тогда может быть переписано
sitlQ; = Ф2=П2 /4 5())
sin 7 c/vi ni
Если мы хотим, чтобы волна распространялась в оптическом
волокне без потерь, то угол падения на стенки а должен быть до-
статочно велик для осуществления полного внутреннего отражения.
Наименьший угол, при котором это происходит, определяется усло-
вием:
4-2. Оптический волновод 167
sin7=l, (4.51)
7 = ?- (4-52)
Из уравнения (4.50) видно, что это особенное значение а, назы-
ваемое критическим углом, равно arcsin(n2/ni).
Требование, чтобы световые волны отражались внутри сердце-
вины волокна под углом, большим критического, накладывает свои
условия на входящий и исходящий свет на концах волокна, что от-
ражено на рис. 4.3.
Рис. 4.3. Числовая апертура
На входе в волокно закон Снеллиуса (уравнение (4.48)) принима-
ет вид:
= !!•, (4.53)
Sin ф Пз
где пз — показатель преломления среды, смежной с концом волокна.
Преобразование уравнения (4.53) дает
sin 0 = — sin р. (4.54)
Но из рис. 4.3 можно видеть, что sin(£ — cos а. Поэтому уравне-
ние (4.54) переписывается как
sin 0 = — cos а. (4.55)
пз
Если а — критический угол, то sin а — п^/пх. Используя основ-
9 ч -2
ное тригонометрическое тождество: cos а = 1 — sin а, уравнение
(4.55) можно преобразовать следующим образом:
sin# — — д/1 — sin2 а, (4.56)
пз
Глава 4- Оптические волоконные сенсоры
/ / \ 2
• Z1 I П2 \ /А ГГТ\
sin# - —4/1 — ( — I , (4.57)
п3 у \п1/
sin# = -—yjriy — n|, (4.58)
П3 sin # = \Jn\ — п^. (4.59)
Выражение nssin# называется числовой апертурой (NA).
NA = у/п2 - п2. (4.60)
Числовая апертура становится меньше по мере того, как значе-
ние П2 приближается к п±. В промышленных волокнах разность 6
между П2 и ni составляет всего около 1%, что определяет NA око-
ло 0,2. Увеличение 6 невыгодно вследствие возрастания межмодовой
дисперсии — физического явления, которое будет рассмотрено позже.
Чтобы свет распространялся вдоль оптического волокна, он дол-
жен входить в пределах конуса с половинным углом # при вершине,
как показано на рис. 4.3. Его иногда называют конусом приема.
Кроме того, поскольку в геометрической оптике ход лучей обратим,
на выходном конце волокна должен существовать аналогичный ко-
нус, внутри которого сосредоточен выходящий свет. Эти два конуса
определяют оптимальные положения относительно концов волокна,
которые должны занимать источник света и приемник (рис. 4.4).
В дополнение, излучающая площадка источника света должна быть
меньше, чем площадь поперечного сечения волокна и быть распо-
ложена вплотную к его концу. Также и половинный угол эмиссии
должен быть меньше половинного угла конуса приема волокна. Чув-
ствительная площадка приемника должна быть достаточно велика
и расположена таким образом, чтобы принять весь свет, выходящий
из волокна.
Рис. 4.4. Расположение
источника света и фотоде-
тектора
Представленные выше соображения об отражении, преломлении,
критическом угле и конусах приема и излучения пригодны для во-
локон с диаметром сердцевины больше 10 мкм. Свет проходит че-
4-2. Оптический волновод 169
рез такие волокна различными путями, испытывая разное число
отражений. Такие волокна относятся к многомодовым. Для волокон
меньшего размера, чьи диаметры приближаются к длине волны пе-
редаваемого света, существенную роль начинают играть эффекты
интерференции. Это приводит к уменьшению числа передаваемых
мод. В наименьших из используемых волокон возможно существова-
ние лишь одной передаваемой моды. При этом волна распространя-
ется вдоль центральной оси волокна и называется меридиональным
лучом. Эти одномодовые волокна предпочтительнее для телеметрии
на больших расстояниях, поскольку импульс света будет уширяться
во времени при распространении света по множеству путей различ-
ной длины. Уширение импульса, или дисперсия, определяет верхний
предел битовой скорости передачи данных. Существуют и другие
причины дисперсии, поэтому данный ее вид называют межмодо-
вой или модовой дисперсией. Альтернативой одномодовому волокну
является волокно с градиентом показателя преломления. Оно имеет
тот же диаметр, что и многомодовое, но свет, идущий по краям серд-
цевины, распространяется с большей скоростью, чем осевые лучи,
за счет чего достигается компенсация дисперсии. Такой тип волокна
менее распространен.
Для оптоволоконных систем были разработаны линзы с гради-
ентом показателя преломления (стержневые, или GRIN линзы). Они
часто используются при разработке сенсоров. Линзы имеют форму
стержней, похожих на оптические волокна, но с диаметром от 1 до
5 мм, в то время как многомодовые и градиентные волокна могут
быть диаметром до 100 мкм, хотя диаметр 50 мкм более типичен.
Волна утечки
Хотя при превышении критического угла не существует никакой
преломленной волны, это не означает, что не существует никакого
возмущения в материале оболочки. Если снова рассмотреть прелом-
ленную волну (рис. 4.2), описываемую уравнением (4.42) и предпо-
ложить, что она плоско поляризована в направлении х, то решения
для координат х и z дают
Y = Yoexpj(cut - (knpexCOS7 + knpezsin7)). (4.61)
Теперь, перегруппировав уравнение (4.50), получим выражение для
sin 7:
П1 . .
sin 7=—sin а. (4.62)
П2
Но уравнение (4.62) означает, что для углов а, больших, чем кри-
170 Глава 4- Оптические волоконные сенсоры
тический угол, sin 7 > 1, что невозможно. Для продолжения анализа
поэтому целесообразно заменить sin 7 и cos 7 в уравнении (4.61)
У = yoexpj — ^knpeX\J 1 — sin2 7 + knpez — sin . (4.63)
Но когда sin 7 > 1, квадратный корень становится мнимым и его
форма — комплексной
^/1 — sin2 7 = ± j yj sin2 7 — 1.
(4.64)
Уравнение (4.61) принимает вид:
У = Уоехр j ( wt - ( ±jknpex (sin2 7 — 1)1/2 + knpez— sin о ) ) .
\ \ n2 / /
(4.65)
Решение получает больший физический смысл при выборе знака
«минус», что означает экспоненциальное убывание по х:
Y = Уо ехр(—knpex(sin2 7 — I)1/2 exp j (cut — knpez— sin о ) . (4.66)
\ n2 /
Последнее может быть представлено как
У = Yoexp(—x/x) expj [ wt — knpez— sin о ) , (4.67)
\ n2 J
где
fcnpe(sin 7 — I)1/2 [(п^/пз) sin2 о — l]1/2
или
Y —______^2П2____. (4.69)
2л(п2 sin2 a — n2)1/2
Член A2 — это длина волны в среде 2. Последнее лучше выразить че-
рез длину волны свободного пространства, используя соотношение:
/= V* (4.70)
Ло
Аналогично для среды 2
/ -р=(«1)
Л2 Л2
Комбинация уравнений (4.70) и (4.71) дает
г = C-TL- <4'72>
Ло Л2
откуда
^2^2 — Aq. (4.73)
4.2. Оптический волновод
(4-74)
Выражение (4.69) теперь может быть представлено как
_____________________________Ао________
* 2тг(п2 sin2 а — п^)1/2
Значение х есть мера глубины проникновения электромагнитных
полей в запрещенную область.
Если эти вычисления провести отдельно для векторов Е и Н,
включив граничные условия для нормальных компонент на грани-
це раздела, между двумя волнами появляется фазовый сдвиг тг/2.
Далее, вектор Пойнтинга N для потока энергии задается как N =
= Е х Н. Поэтому вследствие фазового сдвига отсутствует поток
энергии в среду 2. Эта выходящая за границу раздела волна назы-
вается волной утечки.
4.2.2. Ухудшение пропускания
в оптических волокнах
В настоящее время расстояние между регенерационными станция-
ми в оптоволоконных телекоммуникационных линиях, определяемое
пропусканием волокна, превышает 100 км. Это достижение оказа-
лось возможным благодаря двум факторам:
- высокому качеству методов и технологий производства волокна;
- материалам, из которых изготовлены сердцевина и оболочка
волокна.
Пропускание в волокне ухудшается из-за ослабления и дисперсии.
Ослабление
Существуют три механизма, из-за которых может уменьшаться ин-
тенсивность распространяющегося света.
Поглощение
Материал волокна может поглощать фотоны. Электроны в молеку-
лах, из которых сделано волокно, имеют дискретные энергетические
уровни. Поглотив квант энергии, электрон может перейти в состоя-
ние с более высокой энергией. Таким образом, если фотон, имеющий
нужную для перехода энергию, проходит через область такой моле-
кулы, то он может быть поглощен. Эта энергия переводит молекулу
в возбужденное состояние и высвобождается некоторое небольшое
время спустя, когда молекула возвращается в свое основное состо-
яние. Общий эффект состоит в увеличении тепловой энергии ве-
щества. Электронные энергетические уровни в кварцевых волокнах
соответствуют энергиям фотонов в ультрафиолетовой области.
Глава 4- Оптические волоконные сенсоры
Кроме того, молекулы вещества, из которого состоит волокно,
могут колебаться относительно своих положений равновесия. Кине-
тическая энергия колебаний имеет дискретные значения. И опять,
если поблизости находится фотон, энергия которого равна энергии,
необходимой для увеличения кинетической энергии, он может быть
поглощен. В этом процессе уровни энергии соответствуют энергиям
фотонов в инфракрасной области 84-12 мкм.
Спектр поглощения на рис. 4.5 иллюстрирует оба этих процес-
са. Существует минимум поглощения около 1,55 мкм, образуя окно
прозрачности. Теоретически установленный уровень минимума по-
глощения в кварцевых волокнах составляет 0,2 дБ/км (Охаши и др.
1990).
Рис. 4.5. Изображение спектра поглощения кварцевого оптического волокна
Гораздо более высокие потери из-за поглощения могут возник-
нуть ввиду малых следов примеси металлов в стекле, таких как медь
и железо. Они могут содержаться в исходном сырье или быть внесе-
ны в процессе производства. Современные технологии производства
практически устранили эту проблему. Однако оказалось очень труд-
ным избавиться от влияния присутствия радикала -ОН. Кроме того,
если в процессе эксплуатации волокно подвергается воздействию
водорода, число радикалов -ОН может возрастать, вызывая рост
поглощения. Максимумы этого поглощения существуют на длинах
волн 0,725, 0,825, 0,875, 0,950, 1,380 и 2,73 мкм. См. Кек и др. (1973).
4.2. Оптический волновод 173
Известно, что воздействие на волокно ионизирующей радиации
или ультрафиолета вызывает увеличение поглощения. Ионы, образу-
ющиеся в стекле, становятся центрами поглощения. Можно исполь-
зовать эти физические явления для разработки сенсоров.
Утечка моды
Ослабление может возникнуть вследствие утечки света из сердцеви-
ны в оболочку. Как описано в предыдущем разделе, свет, вошедший
в волокно внутри конуса приема и в плоскости его оси, будет ис-
пытывать полное внутреннее отражение. Однако внеосевые лучи,
называемые косыми лучами, могут войти и распространяться за
счет отражений под углом чуть меньше критического. Они могут
пройти по спирали сотни метров, но в конце концов будут поте-
ряны. Может оказаться, что при разработке волоконно-оптических
сенсоров этот тип передачи излучения необходимо принимать во
внимание.
Если волокно изогнуто, лучи будут падать на внутреннюю по-
верхность под углом меньше критического и частично выходить в
оболочку. Производители волокна обычно устанавливают минималь-
ный радиус изгиба своего волокна, который следует выдерживать
при монтаже с целью минимизации потерь. Кроме того, в процес-
се изготовления волокна могут возникнуть микроизгибы вследствие
механических неоднородностей на границе «сердцевина-оболочка».
Рассеяние
В процессе производства, по мере затвердевания волокна, возни-
кают небольшие неравномерности в показателе преломления. Они
вызваны флуктуациями плотности и концентрации примесных эле-
ментов. Эти неравномерности имеют размер порядка десятой части
длины волны распространяющегося света. В результате часть света
рассеивается за пределы волокна. В соответствии с законом Рэлея
рассеяние пропорционально А-4. Таким образом, короткие длины
волн испытывают значительно большее рассеяние. Для современных
высокотехнологичных волокон рассеяние — наиболее значительная
причина потерь. Для кварцевых волокон оно вызывает ослабление
в 1,7 дБ/км на длине волны 820 нм.
Суммарно вышеперечисленные механизмы ослабления могут быть
описаны выражением:
I = 10ехр(—ах). (4-75)
ГДе а — СН-атомн О^молек “Ь ^изгибн “Ь ^рассеян'
Оконцовки и соединения оптического волокна тоже вызывают
поглощение и рассеяние. Когда волна проходит через область со
Глава 4- Оптические волоконные сенсоры
скачком показателя преломления, она частично отражается. Для нор-
мального падения это френелевское отражение вызывает четырех-
процентную потерю пропускания, что составляет 8% или 0,35 дБ
на соединение. Для согласования показателя преломления можно ис-
пользовать жидкость или клей. Однако стандартным методом до-
стижения наименьших потерь является сплавление (сварка) концов
волокна, предварительно соединенных в специальном юстировочном
приспособлении. Потери снижаются до величин от 0,1 до 0,3 дБ.
Существуют и разъемные соединители (коннекторы). Они особенно
полезны при научных исследованиях, но для достижения высокого
качества требуется очень высокий класс механической точности.
Линзы также могут быть полезны при вводе излучения в волокно,
поскольку они уменьшают влияние осевой разъюстировки и пыли.
Их недостатком является то, что большее влияние начинает ока-
зывать угловая разъюстировка. Типичные потери на один коннек-
тор — 1 дБ1.
Дисперсия
Считается, что сэр Исаак Ньютон совершил открытие, говорящее о
том, что призма может разлагать белый свет на составные цвета,
последующая призма — объединять эти цвета, восстанавливая бе-
лый свет. Это показывает, что показатель преломления зависит от
длины волны, из чего следует, что скорость распространения элек-
тромагнитной волны в веществе зависит от ее длины.
Следовательно, поскольку ни один из реальных источников света
не является монохроматическим, длительность импульса света, вве-
денного в оптическое волокно, увеличивается по мере распростране-
ния. Это явление называется хроматической (цветовой) дисперсией.
Она существует для любой отдельной моды и поэтому классифици-
руется как внутримодовая дисперсия. Групповая скорость распро-
странения импульса зависит от второй производной показателя пре-
ломления dPn/dX2. Разработчики оптических волокон иногда назы-
вают это явление (в веществах, в которых этот член не равен нулю)
материальной дисперсией (см. Сеньор (1985), стр. 81). Еще один,
менее важный, вид дисперсии может возникнуть из-за зависимости
длины волны от угла, который луч каждой моды составляет с осью
волокна. Такую дисперсию иногда называют волноводной. В этом
случае также происходит уширение импульса, однако в многомодо-
вых волокнах упомянутый эффект пренебрежимо мал по сравнению
с материальной дисперсией.
10,14-0,3 для высококачественных коннекторов. — Прим, перев.
4.2. Оптический волновод 175
Уширение импульса в процессе его распространения на большие
расстояния имеет те же последствия, что и при межмодовой диспе-
рсии, представленной ранее. Чтобы свести эту проблему к миниму-
му, в телекоммуникационных линиях большой длины применяются
квазимонохроматические источники света (лазерные диоды).
Ямада и др. (1980) определили, что суммарный эффект мате-
риальной и волноводной дисперсий имеет минимум на длине волны
1,32 мкм в одномодовых волокнах.
4.2.3. Технологии производства
Ранние технологии изготовления волокон использовали высокока-
чественные оптические стекла того же типа, что и используемые
при изготовлении линз. В течение многих лет применялся метод
стержня и трубки. В этом методе материал сердцевины в форме
стержня вкладывался в трубку, состоящую из материала оболоч-
ки. Они оба нагревались для образования стержня, называемого
преформой, который затем вытягивался в тонкое волокно. Такая
технология до сих пор используется при производстве специальных
волокон, профиль показателя преломления которых асимметричен.
Множество стержней различного диаметра и с разным показателем
преломления вкладываются в трубку, состоящую из материала обо-
лочки, перед нагреванием для образования преформы. Одномодовые
волокна, изготовленные по этой технологии, могут сохранять на-
правление поляризации в процессе распространения света. Другой
ранней разработкой был метод двойного тигля. При этом методе
два нагретых концентрических платиновых тигля, содержащих рас-
плавленные стекла сердцевины и оболочки, образуют единый источ-
ник, из которого выходит преформа. Преимуществом этого метода
является его непрерывность при условии регулярного возобновления
количества стекла.
Система вытяжки волокна является общей для всех разработан-
ных технологий производства волокон. Это высокоточный процесс.
Преформа нагревается в экструзионной печи и диаметр вытягива-
емого волокна тщательно контролируется. Система отрицательной
обратной связи регулирует скорость вытяжки. Волокно покрыва-
ется внешней полимерной оболочкой прежде намотки на приемный
барабан. Должное качество конечной продукции может также под-
держиваться регулируемым усилием натяжения при намотке на при-
емный барабан.
Современные технологии производства оптического волокна ис-
пользуют различные виды химического газового осаждения, займ-
176 Глава 4- Оптические волоконные сенсоры
ствованные из технологии производства полупроводников. В моди-
фицированном процессе химического газового осаждения (modified
chemical vapour deposition, MCVD) газофазные реагенты, такие как
тетрахлорид германия и «кислород», сжигаются вместе внутри на-
гретой кварцевой трубки. Продукты реакции под влиянием нагре-
ва диффундируют в глубь внутренней поверхности кварца. Затем
трубка «схлопывается» и формируется преформа. Путем варьиро-
вания типа и концентрации реагентов можно формировать области
как сердцевины, так и оболочки, равно как и градиент показателя
преломления. Аналогичной технологией является процесс внешне-
го химического газового осаждения (outside chemical vapour depo-
sition, OCVD). В нем используется вращающийся вспомогательный
или затравочный стержень, на который осаждаются материалы,
аналогичные получаемым в MCVD-процессе. Вначале осаждаются
материалы сердцевины, а затем — оболочки. Затравочный стер-
жень удаляется и слои стекла схлопываются для получения твер-
дой преформы. Усовершенствование этой технологии обеспечивает
непрерывное, а не разовое производство. При этом вращающийся
затравочный стержень протягивается через зону химической реак-
ции. Горелка установлена вокруг стержня, обеспечивая равномерное
осаждение продуктов реакции.
4.2.4. Сравнение оптических волокон с
электрическими линиями
В табл. 4.1 сравниваются различные характеристики передающих
сред в обычных линиях передачи данных.
4.3. Оптоволоконные сенсоры на основе
внешних эффектов
Оптоволоконные сенсоры внешнего типа имеют какую-либо внеш-
нюю насадку, присоединенную к волокну, которая изменяет свои
свойства в процессе измерений. Волокно само по себе не участвует
в процессе измерения, а служит лишь линией передачи данных и, в
некоторых случаях, мощности. Большинство разработанных опто-
волоконных сенсоров принадлежат именно к этому типу. Удд (1991)
приводит подробный перечень всех типов оптоволоконных сенсоров.
Некоторые из опубликованных методов измерения, использующихся
в системах внешнего типа, описаны ниже.
4-3. Оптоволоконные сенсоры на основе внешних эффектов
Таблица 4.1. Сравнение телеметрических линий
Характеристика Витая пара Коаксиальный кабель Оптическое волокно
Ослабление (дБ/км) 3 2 1 (кварц) 150 (полимер)
Произведение «расстояние- ширина полосы» (МГц-км) 1 102 105
Дистанция регенерации (км) 1 5 100
Стоимость системы малая средняя средняя
Время жизни (годы) Одинаковое время жизни 25-i-40 лет
Перекрестные помехи высокие малые нет
Нечувствительность к шумам малая средняя высокая
Электрическая изоляция нет нет полная
Вес и размер большие большие малые
Технология соединений Пайка Пайка со стандартными разъемами Соединение сваркой отъюстированных концов
Контроль производства Слабый Умеренный Точный
4.3.1. Датчики перемещения
Простой оптический переключатель можно сделать, с помощью за-
твора для прерывания пучка (рис. 4.6) (см. Джонс, 1985). S и D —
передающее и приемное оптические волокна. Доработанное в даль-
нейшем, это устройство обеспечивало непрерывное позиционирова-
ние, используя решетку муаровых полос. Решетка Муара переме-
щается поперек зазора между торцами передающего и приемного
волокон и затем подсчитываются муаровые полосы.
Рис. 4.6. Двоичный оптический переключатель
Глава 4- Оптические волоконные сенсоры
Для перемещения светового пучка поперек сечения волокна мо-
жет быть использована сферическая линза (см. Доч и др. 1983).
Принятая волокном интенсивность меняется в зависимости от пе-
ремещения линзы (рис. 4.7). Два приемных волокна, расположенные
рядом друг с другом, служат для получения дифференциального из-
менения световых сигналов по мере поперечного перемещения линзы
(или передающего волокна). Этим способом устраняется проблема
вариаций в яркости источника света.
В/
J>2
Рис. 4.7. Сенсор перемещения со сферической линзой
Ранее в п. 4.2.1 было показано, что свет, падающий на торец
оптического волокна, способен распространяться по нему лишь в
том случае, если угол падения луча по отношению к оси волокна
лежит внутри конуса приема. Как было отмечено, это означает,
что передающее волокно излучает свет внутри такого же конуса.
Изменение расстояния между волокнами приводит к изменению ин-
тенсивности принятого света (рис. 4.8).
Рис. 4.8. Волоконно-оптический сенсор перемещения
С использованием такой конфигурации были разработаны система
измерения механических напряжений и гидрофон. Киссинджер (1967)
получил патент на датчик перемещения, использующий эту методи-
ку применительно к пучку волокон в режиме отражения. Франк (1966)
запатентовал датчик давления, использующий только два волокна.
Обобщенная конфигурация для передаваемого и принимаемого пуч-
ков в двухволоконной системе показана на рис. 4.9.
4-3. Оптоволоконные сенсоры на основе внешних эффектов
Рис. 4.9. Сенсор перемещения отражательного типа: а) — минимальное
физическое смещение; б) — максимальное физическое смещение
Когда отражатель установлен от плоскости торцов волокон на
расстоянии меньшем чем xmin, свет в приемное волокно не попадает.
Это условие может быть выражено через радиусы передающего и
приемного волокон г$, гр и расстояние у между ними:
y-rs -rD = 2xmin tg0A- (4.76)
Если отражатель перемещается таким образом, что промежуток
превышает xmin, то интенсивность принятого света возрастает при-
близительно линейно и становится максимальной, когда
у - rs + гр) = 2х max (4.77)
Дальнейшее увеличение промежутка приводит к уменьшению ин-
тенсивности принимаемого света по закону, асимптотически близ-
кому к обратной квадратичной зависимости. Диапазон от xmin до
хтах определяется выбором rs, td И расстоянием между волокна-
ми у. Форма передаточной функции была рассчитана Джонсом и
Филипом (1983). Рис. 4.10 показывает зависимость «принятой» мощ-
180 Глава 4- Оптические волоконные сенсоры
ности для двух разных приемных волокон на различных расстояниях
от отражателя.
Рис. 4.10. Зависимость «принятой» мощности от смещения для двух раз-
личных геометрий сенсора: а) — г в ~ 184 мкм, у = 400 мкм;
б) — г и = 100 мкм, у — 450 мкм
В дальнейшем Джонс и Филип (1983) усовершенствовали этот
метод, используя три волокна. За счет соответствующего выбора ра-
диусов волокон и расстояний до отражателя одно приемное волокно
могло использоваться как опорное, а другие — как измерительные
(рис. 4.11). Сигнальное волокно дает приблизительно линейный от-
клик в рабочем диапазоне расстояний, в то время как выходной
сигнал опорного волокна приблизительно постоянен, как показано
на рис. 4.10. В этом случае могут быть учтены любые изменения в
характеристиках источника света.
Рис. 4.11. Ступенчатая трехволокон-
ная конфигурация
Этот сенсор был разработан для измерения давления. В общем
случае устройства, которые могут измерять малые перемещения,
также могут быть приспособлены для измерений давления, темпе-
ратуры, механических напряжений, вибрации и ускорения.
4-3. Оптоволоконные сенсоры на основе внешних эффектов
4.3.2. Позиционно-кодирующие устройства
С помощью прозрачной кодирующей пластины или диска могут быть
построены высокоточные сенсоры линейного или углового положе-
ния. Для минимизации ошибки считывания используется код Грея,
описанный в п. 5.3.1 и табл. 5.1. Двоичная кодирующая матрица
обычно изготавливается фотолитографическим способом. Для 8-би-
товой системы, дающей разрешение 1 к 256, необходимо исполь-
зовать восемь оптических волокон. На рис. 4.12 показана линейная
кодирующая пластина, перекрывающая диапазон 0-15 позиций для
восьмибитовой системы.
Рис. 4.12. Кодирование по-
зиции кодом Грея
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Были разработаны и мультиплексные системы, имеющие только
одну приемо-передающую пару волокон. Мультиплицирование мож-
но реализовать путем применения источника белого света, который
делится на цвета спектра с помощью фильтров, дифракционных ре-
шеток или призм. По сути, это мультиплицирование в частотной
области, хотя в волоконной оптике обычно его называют мульти-
плицированием по длинам волн. Рис. 4.13, а иллюстрирует такую
схему с использованием призм.
В качестве альтернативы частотному может быть реализова-
но временное мультиплицирование. В этом случае в системе рас-
пространяются короткие импульсы монохроматического света. Все
приемные волокна отличаются друг от друга по длине, и, таким
образом, создается временная задержка между принятыми инфор-
мационными импульсами. Рис. 4.13, б показывает соответствующую
схематическую диаграмму. Длине оптического волокна 0,2 м соот-
ветствует временная задержка около 1 нс. Каждое волокно должно
быть по крайней мере настолько длиннее соседнего, чтобы обеспе-
чить уверенное разделение импульсов в тракте передачи данных.
Недостатки этих методов заключаются в том, что технология
мультиплицирования по длинам волн требует высокоточного опти-
ческого технического исполнения, в то время как временное мульти-
плицирование нуждается в сложной быстродействующей электрон-
ной схемотехники.
182
Глава 4- Оптические волоконные сенсоры
Принимающее
волокно
Рис. 4.13. Мультиплексирование по длине волны (а) и по времени (д’)
J.3. Оптоволоконные сенсоры на основе внешних эффектов
Для измерения перемещения успешно применяются и дифракци-
онные решетки с использованием либо изменения интенсивности,
либо перемены цвета. Были разработаны макетные образцы для из-
мерения перемещения и давления, а также для гидрофонов — см.
гл. 7 книги Удда (1991).
4.3.3. Сенсоры на основе эффекта поглощения
Множество различных сенсоров было сконструировано на основе ис-
пользования процессов поглощения света. Необходимый элемент —
наличие входного и выходного волокон. Предпочтительным физиче-
ским воплощением являются одноволоконные структуры чувстви-
тельного элемента, так как они обеспечивают более компактную
конструкцию, подходящую для использования в качестве зонда.
Опалесценция некоторых жидких
кристаллов имеет температурную за-
висимость. Использование конфигу-
рации, подобной представленной на
рис. 4.14, позволяет реализовать про-
стой датчик температуры. К сожа-
лению, жидкие кристаллы устойчи-
вы лишь при умеренных температу-
рах, поэтому температурный диапа-
зон оказывается ограниченным.
Такая конфигурация наиболее пригодна для использования в ка-
честве температурного переключателя, поскольку зависимость опа-
лесценции от температуры нелинейна и диапазон ее узок. Несколько
слоев жидких кристаллов, каждый из которых переключается при
своей температуре, могли бы служить термометром, хотя и со сту-
пенчатым откликом.
Поглощение света, проходящего через газ или жидкость, может
служить средством для измерения их концентрации. Поглощение
описывается законом Ламберта - Бэра
1 (
поглощение = 1g I — I = есх.
Рис. 4.14. Измерительная ячей-
ка со считыванием параллельным
пучком света
(4-78)
где Iq — интенсивность принятого света в отсутствие растворимого
вещества; I — интенсивность принятого света, прошедшего через
раствор; х — расстояние между передающим и приемным волокнами
в метрах; с — концентрация раствора в молях на кубический метр.
После преобразования уравнение (4.78) принимает вид:
I =
(4-79)
Глава 4- Оптические волоконные сенсоры
причем предполагается параллельный ход света через измеритель-
ную ячейку (рис. 4.15). Размеры измерительной ячейки и интен-
сивность источника света следует выбирать применительно к кон-
кретной задаче. Для создания компактного устройства могут быть
использованы GRIN-стержневые линзы.
Рис. 4.15. Односторонний сенсор поглощения с зеркалом
Динамический диапазон принятого света должен быть около двух
порядков по амплитуде. На нижней границе диапазона выходной
сигнал должен быть выше уровня шума. Общим подходом в сенсорах
этого типа является использование двух длин волн: одной чувстви-
тельной к измеряемым образцам, а другой — нет. В этом случае
может быть учтено изменение свойств источника света, также как
и присутствие других веществ, отличающихся от измеряемых.
Если химические образцы сами по себе не являются хорошими по-
глотителями, иногда оказывается возможным использовать реаген-
ты, чья поглощательная способность меняется в зависимости от кон-
центрации измеряемых образцов. Примером этого могут служить
pH-чувствительные индикаторы, такие как фенолфталеин, применя-
емый для измерения уровня кислотности (см. Дакин и Калшоу (1988)).
Может быть использовано и изменение цвета реагента, хотя в этом
случае оптическая схема и становится более сложной, требующей
спектрального анализа.
В тех случаях, когда необходимо привлечение реагента, может
оказаться предпочтительнее реагент, абсорбированный на мембра-
не, проницаемой для измеряемого вещества. Один из возможных
приемов — использование оптически белого (что означает отра-
жение в рабочем диапазоне длин волн, близкое к стопроцентному)
4-3. Оптоволоконные сенсоры на основе внешних эффектов
диффузного отражателя (рис. 4.16) (см. Граттан и Меггит, 1995).
Мембрана же, по сути, служит покрытием белой поверхности.
Для определения связи коэффици-
ента отражения с концентрацией из-
меряемого вещества (в предположении
полубесконечной рассеивающей среды)
служит соотношение Ку белки - Мунка:
F(R) = f, (4.80)
где R — коэффициент отражения,
S — коэффициент рассеяния и F(R) —
функция Кубелки - Мунка, или функ-
ция ослабления. Нелинейность соотно-
Рис. 4.16. Сенсор поглощения
с диффузным отражением
шения между си R вызывает необходи-
мость подробной калибровки или интерполяции между калибровоч-
ными точками во избежание появления грубых ошибок.
Наконец, традиционный подход к построению абсорбционных
сенсоров — использование рассеяния в исследуемом образце, а не
применение каких-либо отражателей для усиления принятого сигна-
ла (рис. 4.17). Поскольку обратное рассеяние не столь эффективно
с точки зрения возврата света в приемное волокно по сравнению с
отражателем, это может быть легко скомпенсировано увеличением
интенсивности источника света. Рассеяние обеспечивает эффектив-
ную засветку исследуемой ячейки. Частицы вещества обычно име-
ют размеры около 1 мкм. Как правило, такие частицы получают
из полистиролового латекса. Возможна также связь с частицами
вспомогательного реагента, в том случае, если не окажется более
практичным его использование в виде раствора. При изготовлении
pH-индикатора для физиологических исследований были использо-
ваны полиакриламидные микросферы с фенолфталеином (см. Кирх-
брайт и др. (1984)).
Рис. 4.17. Сенсор поглощения с использованием обратного рассеяния
на инертных частицах
186 Глава 4- Оптические волоконные сенсоры
Конструкция каждой из измерительных ячеек, представленных
на рис. 4.14-4.17, может быть дополнена селективной мембраной,
которая не препятствует проникновению в ячейку исследуемого ве-
щества, но удерживает в ней реагент. Для водных растворов при-
меняются трубки, полученные диализом целлюлозы, тогда как для
газовых систем более пригодна силиконовая резина.
Были разработаны и чувствительные элементы, содержащие не-
сколько реагентов, для выявления специфических веществ в ходе
двух и более химических реакций. Единственное ограничение для
развития таких датчиков — подбор подходящих реагентов, кото-
рые, в идеале, были бы многоразовыми. Для таких оптических чув-
ствительных элементов становится популярным название оптрод.
4.3.4. Люминесцентные сенсоры
Люминесценция — это излучение света предварительно возбужден-
ной молекулой в процессе ее возврата в состояние с низкой энерги-
ей. Интенсивность излучаемого света экспоненциально спадает со
временем. Для объемного образца можно показать, что постоянная
времени спада т равна среднему времени существования молекулы в
возбужденном состоянии. Обычно эту величину называют временем
жизни. Различают два класса люминесценции — флюоресценцию и
фосфоресценцию. Флюоресценцией называют излучение с коротким
временем жизни, порядка 10-9 с. Она происходит в различных газах,
жидкостях и твердых телах. Фосфоресценция наблюдается толь-
ко в твердых телах, и, поскольку переход в низшее энергетическое
состояние относится к запрещенным, испускание света может длить-
ся многие минуты. При фосфоресценции интенсивности излучения
гораздо ниже и в общем случае требуются более чувствительные
приемники или время накопления сигнала, либо и то и другое вме-
сте. Более подробно о флюоресценции см. Лаковиц (1983).
Флюоресцентные сенсоры
Свет испускается передающим волокном и поглощается в среде в со-
ответствии с абсорбционным соотношением, заданным выше урав-
нением (4.79). Наблюдается отклик от флюоресцентного материала.
Существует несколько механизмов возникновения флюоресценции
(см. Шеги и Балдини (1993)).
1. Исследуемое вещество само по себе является флюоресцентным
материалом.
2. Молекулы исследуемого вещества соединены с молекулами флю-
оресцентного реагента, называемого флюофором, и стимули-
4-3. Оптоволоконные сенсоры на основе внешних эффектов
руют его флюоресценцию. Эту методику иногда называют мар-
кировкой.
3. Исследуемое вещество вступает в химическую реакцию с ре-
агентом, образуя новые комплексы или композицию, которые
являются флюоресцентными.
4. Исследуемое вещество взаимодействует с флюофором таким
образом, что изменяется интенсивность или время жизни флю-
оресценции.
Разновидность этого последнего механизма — явление гашения.
Исследуемые вещества либо предотвращают поглощение флюофором
распространяющегося света (статическое гашение), либо видоиз-
меняют процесс излучения возбужденного флюофора (динамическое
гашение). В любом случае интенсивность флюоресценции уменьша-
ется. Для обоих типов гашения взаимоотношение между интенсив-
ностью флюоресценции I и гасителем Q, описываемым концентра-
цией [Q], дается выражением
где /0 — интенсивность флюоресценции в отсутствие гасителя. Для
статического гашения К — постоянная диссоциации реакции между
флюофором и исследуемым веществом. Для динамического гашения
это константа Стерна-Вольмера, которая включает в себя время
жизни чистого флюофора и бимолекулярную константу гашения.
Для динамического гашения флюофоров альтернативой измере-
ния интенсивности может служить измерение времени жизни. Время
жизни флюофора в отсутствие исследуемого вещества то служит
эталоном. Время жизни уменьшается до величины г вследствие того,
что заселенность возбужденного состояния флюофора уменьшает-
ся безызлучательным образом в дополнение к обычному процессу
испускания света. Время жизни определяется соотношением, подоб-
ным уравнению (4.81):
7 ~ 1 = (4.82)
где Ksv — константа Стерна-Волъмера (см. Дакин и Калшоу
(1997)).
Преимущество этой методики заключается в том, что началь-
ная интенсивность света Iq не влияет на результат измерений. Это
делает систему нечувствительной к вариациям интенсивности ис-
точника света или загрязнению оптических элементов.
При люминесцентных методиках длины волн излучаемого и воз-
буждающего света различны. Это обстоятельство может обеспечить
выигрыш по чувствительности до 10 раз по сравнению с прямым ме-
тодом поглощения. Однако абсорбционные методы зачастую менее
чувствительны к присутствию посторонних примесей.
Появляются и коммерчески доступные приборы. Интересным при-
мером служит прибор для анализа крови, измеряющий как кислот-
ность pH, так и парциальные давления О2 и СО2.
Фосфоресцентные сенсоры
Фосфоресценция некоторых композиций на основе редких земель
экспоненциально убывает с температурой. Это явление может быть
использовано для создания датчика температуры. Структура тако-
го устройства — просто приемо-передающее волокно, торец которо-
го покрыт активным веществом. Этот торец находится в термоди-
намическом равновесии с окружающей средой, температуру которой
надо измерить. Указанные материалы работоспособны в интервале
температур от —200 до +400 °C. Испускание света L может быть
выражено как
L — Lq exp ( — j , (4.83)
\ т /
где Lq — начальная интенсивность фосфоресценции при выключе-
нии возбуждающего светового импульса. Измеряется значение по-
стоянной времени, а затем по калибровочным таблицам определяет-
ся температура. С ростом температуры величина постоянной време-
ни уменьшается, обычно в диапазоне от 5 с при —200 °C до около 1 с
при +400 °C. Поскольку для определения измеряемой величины ис-
пользуется постоянная времени, как и в случае флюоресценции, ва-
риации интенсивности источника света или ослабления в оптической
системе не влияют на калибровку. Коммерческий прибор такого ти-
па предлагается фирмой «Лакстрон».
4.3.5. Сенсоры на основе полного
внутреннего отражения
При использовании 90-градусных призм были сконструированы сен-
соры уровня жидкости (рис. 4.18). Угол падения в них составля-
ет 45°, что больше критического угла для границы стекло-воздух.
Однако при покрытии призмы жидкостью свет не будет полностью
отражаться, и приемник зафиксирует сильно ослабленный сигнал.
Линейка таких сенсоров вдоль стенки резервуара с жидкостью обес-
печивает дискретное измерение уровня (Джонс, 1981).
4-3. Оптоволоконные сенсоры на основе внешних эффектов
Рис. 4.18. Сенсор уровня жидкости
Более усложненное применение полного внутреннего отражения
заключается в использовании волны утечки. Это явление было опи-
сано в конце п. 4.2.1. Следуя уравнениям (4.67) и (4.74), амплиту-
да электрической компоненты электромагнитного поля может быть
представлена как
Е - Ео ехр(-х/х), (4.84)
где х, согласно равенству (4.74), имеет вид:
__________Ар________
2тг(П1 sin2 а — п^)1/2
и а — угол падения, который должен быть больше критического
угла, а Ар — длина волны света в свободном пространстве.
Уравнение (4.74) при подстановке в него типичных значений ni,
П2 и в дает величину х около одной длины волны. Так как векторы Е
и Н находятся в противофазе, никакого переноса энергии не про-
исходит. В результате энергия рассеивается в течение полу цикла и
возвращается обратно за время следующего.
Чтобы использовать это явление для построения сенсоров, не-
обходимо вывести энергию из первой среды через волну утечки.
Таким образом, связующий элемент должен располагаться на рас-
стоянии около длины волны от первой среды. Когда это происходит,
мощность волны после полного внутреннего отражения уменьшает-
ся. Возможны два способа создания сенсоров, использующих волну
утечки.
Торцевые сенсоры
В этом случае волна утечки проникает в вещество, расположенное на
расстоянии в пределах длины волны от косого среза переднего конца
волокна. При использовании тестового раствора, контактирующего
Глава 4- Оптические волоконные сенсоры
с концом волокна, удалось осуществить количественный химический
анализ. Изменение концентрации раствора меняет его показатель
преломления, что приводит к изменению %.
Существуют описания измерений температуры и механического
напряжения при использовании двух волокон. Одно волокно непо-
движно, а другое перемещается под воздействием измеряемой вели-
чины, за счет чего меняется проникновение света во второе волок-
но (рис. 4.19). Этот эффект иногда называют нарушенным полным
внутренним отражением. Спиллман и МакМахон (1980) привлекли
этот метод для построения гидрофона.
Рис. 4.19. Нарушенное полное внутреннее отражение
Сенсор с боковой связью
При этом принципе действия сенсора с некоторого участка волокна
удаляется оболочка, что приводит к формированию волны утечки
на боковой поверхности волокна. Такое же волокно устанавливает-
ся параллельно вдоль первого на расстоянии около длины волны
с целью приема волны утечки. Если воздействие измеряемой ве-
личины приводит к изменению расстояния между волокнами, то
можно построить датчик температуры или механического напря-
жения, аналогичный торцевому сенсору, представленному выше.
Более сложный альтернативный способ — покрыть волокно, осво-
божденное от оболочки, каким-либо химическим или биологическим
реагентом, показатель преломления которого будет изменяться в за-
висимости от концентрации измеряемого вещества. С применением
этой методики было получено большое количество патентов на био-
логические сенсоры. Их преимуществами является следующее:
- Волна утечки настолько локализована, что на сенсор оказыва-
ет воздействие лишь изменение связанного с волокном реаген-
та, а не раствора в целом, что обеспечивает высокую селектив-
ность.
- Применение структуры открытого капилляра, показанной на
рис. 4.20, обеспечивает проникновение внутрь сенсора строго
определенного объема исследуемого раствора. Зона чувстви-
тельности содержит соответствующий реагент для измерения
4.3. Оптоволоконные сенсоры на основе внешних эффектов
концентрации некоторых химических веществ, либо антите-
ла для измерения концентрации соответствующего антигена.
В любом случае волна утечки по-разному поглощается под воз-
действием изменений реагента, т.е. можно осуществить аб-
сорбционную спектроскопию. Или же реагентом является флю-
оресцентное вещество, это дает возможность флюоресцентно-
го спектроскопического анализа отраженного сигнала.
Рис. 4.20. Сенсор на вол-
не утечки с открытым за-
полняемым капилляром
Большое количество сенсоров на принципе волны утечки были
выполнены в гибридном миниатюрном исполнении на единой под-
ложке. Типичная структура содержит интерферометр Маха- Ден-
дера, рассматриваемый в п. 4.4.1. Примером может служить водо-
родный сенсор, рассмотренный Нишизавой и др. (1986). Такие или
подобные структуры иногда называют интегралъно-оптическими
устройствами или интегрально-оптическими контурами (Нишиза-
ва, 1989).
Глава 4- Оптические волоконные сенсоры
4.3.6. Пирометры
Пирометрия — это измерение температур самосветящихся объек-
тов по их цвету. Спектр излучения абсолютно черного тела при-
веден на рис. 3.13. Традиционный пирометр — это дистанционный
ручной прибор, дающий изображение горячего объекта на прозрач-
ном экране. Оно рассматривается через окуляр совместно с набором
цветных шаблонов, калиброванных по температуре. Пользователь
добивается наилучшего совпадения цвета и затем считывает тем-
пературу с шаблона. По причине различий в излучательной способ-
ности объектов, которые не являются абсолютно черными телами,
шаблоны калибруются для специальных применений, как, например,
для жидкой стали в доменной печи.
*
Фильтр (Х2)
Рис. 4.21. Волоконно-оптический пирометр
Для разработки волоконно-оптического пирометра требуется ма-
териал для изготовления зонда, способный выдержать температуру
раскаленной печи. Подходящим материалом оказался монокристалл
сапфира. Он покрыт металлом с высокой температурой плавления,
который служит защитой от любого видимого света и действует,
как стенки полости абсолютно черного тела (рис. 4.21). Хорошо за-
рекомендовал себя иридий, который, несмотря на трудности в об-
работке, наиболее устойчив к химическим воздействиям. Сапфир
оптически присоединен к кварцевому волокну за пределами горя-
чей зоны. Поскольку полость абсолютно черного тела встроена в
инструмент, можно включить в аппаратуру корректировку на не-
идеальность излучательной способности. Также могут быть учтены
потери на соединения и поглощение в оптической системе. Для это-
го используют относительные интенсивности двух разных участков
спектра, выделенных узкополосными фильтрами. Измерения темпе-
ратуры возможны с разрешением 0,5 °C и погрешностью ±0,0025%
в диапазоне 500-2000 °C. Коммерческие волоконно-оптические пи-
рометры предлагаются фирмой «Лакстрон».
4-4- Оптоволоконные сенсоры на основе внутренних эффектов 193
4.4. Оптоволоконные сенсоры на основе
внутренних эффектов
Строгое определение внутреннего эффекта — изменение за счет
измеряемого воздействия некоторого параметра или свойства опти-
ческого волокна. Измерение происходит внутри волокна. Преимуще-
ствами оптоволоконных сенсоров с внутренним эффектом по срав-
нению с сенсорами внешнего типа являются:
- большее геометрическое разнообразие,
- более широкий динамический диапазон,
- гораздо более высокая чувствительность,
- более низкая инерционность.
Недостатками оптоволоконных сенсоров с внутренним эффектом
по сравнению с сенсорами внешнего типа являются:
- повышенная сложность,
- требуется более сложный процесс обнаружения и обработки
сигнала,
- повышены требования к точности и стабильности оптических
элементов,
- необходим стабильный источник света с заданными характе-
ристиками,
- повышенная чувствительность к параметрам окружающей сре-
ды снижает селективность и приводит к дрейфу нуля, что
затрудняет проведение измерений постоянных или медленно
меняющихся величин.
Оптикофизическими явлениями, используемыми для измерений,
являются:
- ослабление или фазовый сдвиг вследствие физической дефор-
мации волокна,
- вращение плоскости поляризации,
- рассеяние.
4.4.1. Физическая деформация
Микроизгибы
В п. 4.2.1 рассмотрено распространение света по оптическому во-
локну и необходимость полного внутреннего отражения на его гра-
ницах. Расчеты производились в предположении, что ось волокна
7—4227
194 Глава 4. Оптические волоконные сенсоры
прямая и не имеет изгибов. При построении сенсоров на микроизги-
бах кривизна оси волокна изменяется под воздействием измеряемой
величины, за счет чего возникают потери при пропускании света.
Структура сенсора показана на рис. 4.22.
Рис. 4.22. Сенсор на основе микроизгибов: а) — общая структура;
б) — механизм потерь
Метод микроизгибов был использован при построении сенсоров
положения, силы, давления, механического напряжения, ускорения и
вибрации. Достигнута нелинейность менее 1%.
4.4.2. Изменение длины оптического пути
В п. 4.2.1 волновое уравнение (4.32) было записано в виде:
Y — Yq expj(ut — k • s).
Член (cjf — к • s) полностью описывает фазу волны при любой ко-
ординате и в любой момент времени. Для простоты, предполага-
ем, что волна распространяется вдоль оси z. Тогда фазовый член
может быть переписан как (wt — kz), где к — волновое число сво-
бодного пространства 2тг/Ао- В процессе распространения света в
каком-либо веществе его длина волны становится короче, посколь-
ку скорость распространения света в среде меньше скорости в
вакууме с.
с = /А0, (4.85)
V! = /Ai (4.86)
и взяв их отношение имеем:
с Ао
— = П! = —.
Vi А1
Следовательно, фазовый член для распространения волны в веще-
стве выражается как (wt — n±kz), где ni — абсолютный показатель
преломления. Член n±z — физический путь умноженный на показа-
тель преломления, называется оптической длиной пути.
Если световая волна была разделена и ее составные части про-
шли различные пути, а затем она вновь соединилась, то возникнет
4-4- Оптоволоконные сенсоры на основе внутренних эффектов
некоторый фазовый сдвиг равный
ip = n±kz — n2kz2- (4.88)
Если обе части распространялись в одной и той же среде, то имеем:
ср = nk(zi — Z2) — nkSz. (4.89)
Так как эти фазовые сдвиги отражают составные части вол-
ны света, существует возможность проведения тонких измерений
смещений либо изменений в показателе преломления. Конструкция
сенсора должна быть такой, чтобы измеряемая физическая величина
вызывала некоторое изменение разности оптических путей. Эти фа-
зовые сдвиги измеряются интерференционным методом с помощью
интерферометра какого-либо типа. К сожалению, изменение интен-
сивности в зависимости от разности оптических путей — функция
нелинейная.
D
Рис. 4.23. Интерферометр Маха-Цендера
Существуют три исторически сложившихся типа интерфероме-
тров, которые были приспособлены для создания волоконно-опти-
ческих датчиков. К ним относятся интерферометр Маха-Цендера
(рис. 4.23), интерферометр Фабри-Перо и интерферометр Май-
кельсона. На рисунках они показаны в традиционной и волоконно-
оптической формах. Чувствительный элемент может быть выполнен
на некоторой подложке в виде оптического волновода. Технологию
с использованием материала подложки часто называют интеграль-
ной оптикой, см. Гопел и др. (1992). Наиболее часто при построении
Глава 4- Оптические волоконные сенсоры
волоконно-оптических датчиков используется интерферометр Ма-
ха-Цен дера.
Преимуществом интерферометра Фабри-Перо (рис. 4.24) явля-
ется то, что свет много раз проходит через область измерения, что
важно для некоторых применений.
Мода в линии
Рис. 4.24. Интерферометр Фабри-Перо
Интерферометр Майкельсона (рис. 4.25) имеет много общего с
интерферометром Маха-Цендера. Сравнительный анализ различ-
ных типов интерферометров можно найти в работе Удда (1991).
Существенной проблемой, стоящей перед разработчиками сен-
соров интерферометрического типа, является трудность измерения
постоянных или медленно меняющихся величин, вызванная темпера-
турным дрейфом разности оптических путей. Временной масштаб
такого дрейфа — более 0,1 с. Следовательно, интерферометрические
сенсоры наиболее пригодны для проведения измерений на частотах
выше 10 Гц. Другая сложность заключается в измерении длин, боль-
ших чем длина волны, поскольку одинаковые интенсивности интер-
ференции повторяются с периодом 2тг фазового сдвига. Установка
нуля также становится затруднительной. Таким образом, оказыва-
ется возможным измерение только малых относительных смещений,
если не используются более сложные конструкции с автоматической
установкой нуля и дополнительной обработкой сигнала.
Были разработаны волоконно-оптические интерферометры для
измерения показателя преломления, ускорения, электрических и аку-
стических полей, электрического тока, температуры, механических
напряжений и давления. Показатель преломления, используемый при
химическом анализе, измерялся либо на конце волокна в интеграль-
4-4- Оптоволоконные сенсоры на основе внутренних эффектов
но-оптической структуре по типу интерферометров Майкельсона
или Фабри-Перо, либо через боковую поверхность волокна через
волну утечки в структуре интегрально-оптического интерфероме-
тра Маха-Цендера. Ниже описаны три устройства, получившие не-
которое коммерческое применение.
Рис. 4.25. Интерферометр Малькейсона
Магнитострикционный магнитометр
Ферромагнитные вещества проявляют магнитострикцию, и до до-
стижения насыщения продольное механическое напряжение вызы-
вает удлинение е, определяемое как 6z/z^ которое в общем случае
равно
е = СЯ2, (4.90)
где С — константа вещества; см. Ливингстон (1982).
Магнитометр может быть сконструирован путем прямого нане-
сения вещества, обладающего магнитострикционными свойствами,
на поверхность оптического волокна. В присутствии магнитного
поля волокно будет либо сжато, либо растянуто, что вызовет изме-
нение фазы света, распространяющегося по волокну. Из уравнения
(4.89) имеем
ip = nkTj£zCH2)
(4.91)
Глава 4. Оптические волоконные сенсоры
где г] — эффективность передачи механического напряжения и £ —
корректирующий множитель для изменения к вследствие продоль-
ного напряжения в сердцевине волокна. При возбуждении систе-
мы в области механического резонанса чувствительность повыша-
ется. Наиболее подходящая для магнитометра интерферометриче-
ская схема — интерферометр Маха-Цендера. Дагенайз и др. (1988)
получили разрешение 20 пТуФц в полосе 1 Гц при механическом
резонансе на частоте 26,5 кГц.
Гидрофон
С начала 1970-х годов происходило быстрое развитие разработок
в области гидрофонов, преимущественно для военных целей. Гидро-
фоны на основе оптических волокон привлекают внимание разработ-
чиков благодаря своей структурной гибкости и относительно низкой
цене.
Были достигнуты уровни
а) 6) к собственных шумов, по край-
к ней мере, на 10 дБ ниже уров-
\ ] 1 ня фонового подводного шу-
\ ма при чувствительности в
—300 дБ • мк/Па.
Существуют конструкции
Рис. 4.26. Волоконно-оптические гидро- двух ТИПОВ. ВОЛОКНО либо про-
Ф°ны сто помещается в гибкую обо-
лочку и устанавливается пер-
пендикулярно оси вибрации, как на рис. 4.26, а, либо обвивается во-
круг упругой нитью для повышения чувствительности (рис. 4.26, б).
Эффект Санъяка
На протяжении последних тридцати лет было затрачено огромное
количество усилий для разработки волоконно-оптического гироско-
па, основанного на эффекте Саньяка, открытом в 1913 г. Объясне-
ние эффекта Саньяка можно найти в книге Поста (1967).
Оптическая схема для наблюдения эффекта Саньяка приведена
на рис. 4.27. Оптическая среда представляет собой кольцо радиу-
са R, вращающееся вместе с приемником с некоторой угловой ско-
ростью Q. Вследствие вращения время распространения от А до В
будет больше, чем время распространения от В до А. Следователь-
но, если пучок света разделен на два и один из них распространяется
в направлении вращения, а другой — против направления вращения,
между ними возникает разность фаз, которая обусловлена различи-
ем в длинах оптических путей. Простое классическое объяснение
4-4- Оптоволоконные сенсоры на основе внутренних эффектов
предполагает два пути света, вращающихся в противоположных на-
правлениях.
Когда кольцо неподвижно, время рас-
пространения света Д£ на один оборот ----
вдоль кольца равно
(4.92)
где v — скорость света в стекле. J , У ;
Если кольцо вращается, то за время vA / //
Д£ оно повернется на 9Д£ радиан. Сле- /я
довательно, путь света АВ увеличится на
RQAt, а путь В А уменьшится на 7?0Д£.
Поэтому разность хода будет 4
Az = 27ШДг = 2Ж1—, (4.93) I
Q
Дг = 4А —, (4.94) Рис. 4.27. Эффект Саньяка
V
где А — площадь кольца. Разность фаз р,
согласно уравнению (4.89), равна nkAz, т.е.
cp = nk4A—, (4.95)
v
что в результате дает
— п28тгЛ-^-. (4.96)
сАо
Однако Пост (1967) показал, что экспериментальные наблюде-
ния, проведенные различными исследователями, свидетельствуют о
том, что в случае вращения вместе с интерферометром среды при-
сутствие этой среды не оказывает влияния на интерференционные
полосы. Поэтому в уравнении (4.96) эффективное значение показа-
теля преломления — единица, что приводит к
Q
ip = 8тгА——. (4.97)
сАо
Пост также обосновал, что эффект Саньяка не зависит от формы
геометрической фигуры, образующей замкнутый контур, а также не
зависит от положения центра вращения.
Из уравнения (4.97) следует, что фазовый сдвиг прямо пропор-
ционален Q, и поэтому этот метод весьма удобен для построения
инерциальных систем управления. Наилучшие из разработанных на
данный момент устройств могут обнаруживать вращение со скоро-
стью до 0,00001 градусов в час.
200 Глава 4- Оптические волоконные сенсоры
4.4.3. Вращение поляризации
Первоначально представляется полезным дать обзор поляризации
как физического явления. В §4.2 было показано, что электрическое
и магнитное поля в электромагнитной волне перпендикулярны друг
другу и направлению распространения (см. рис. 4.1). Для описа-
ния направления поляризации было принято считать им направление
вектора электрического поля. Волна, сохраняющая в процессе рас-
пространения некоторую постоянную ориентацию вектора Е, назы-
вается плоскополяризованной, при этом вектор электрического поля
лежит в плоскости, проходящей через направление распростране-
ния. Фотоны, излучаемые обычным источником света, имеют все
возможные ориентации Е вблизи направления распространения. Та-
кой свет называется неполяризованным. Суперпозиция пучков по-
ляризованного света исследовалась Френелем и Араго (см. Лонг-
харст, 1970). Ими были открыты три закона, которые здесь приво-
дятся для облегчения понимания природы поляризованного света.
1. Плоскополяризованные пучки с ортогональными плоскостями
поляризации не интерферируют.
2. Два плоскополяризованных пучка света интерферируют, если
они имеют одинаковую ориентацию плоскости поляризации и
эти пучки испущены одним и тем же плоскополяризованным
источником или одной и той же плоскостью поляризации не-
поляризованного источника.
3. Два плоскополяризованных пучка света, испущенных перпен-
дикулярно поляризованными компонентами неполяризованно-
го источника света, никогда не интерферируют, даже если
затем их плоскости поляризации повернуты таким образом,
чтобы они совпадали.
Известно большое число способов, которыми можно разделить или
отфильтровать световые волны в соответствии с их поляризацией.
Поляризация с помощью стеклянной пластинки
Поляризацию света можно получить с помощью оптической поверх-
ности. Когда неполяризованный пучок пересекает оптическую по-
верхность раздела двух сред под косым углом, происходит частич-
ная поляризация отраженной и преломленной волн. Эти волны ста-
новятся поляризованными перпендикулярно плоскости падения и па-
раллельно ей соответственно. Степень возникающей поляризации
зависит от угла падения. Отраженная волна полностью поляризует-
ся при угле падения, равном углу Брюстера. Угол Брюстера равен
4-4- Оптоволоконные сенсоры на основе внутренних эффектов
а,гс1^ппреЛомления/ппаденил)\ см. Блини и Блини (1965). Этот эффект
иногда используется в лазерах. Свет лазера поляризован, но если
в лазерном резонаторе нет какого-либо элемента, наподобие сте-
клянной пластинки, наклоненной под углом Брюстера, ориентация
поляризации случайным образом флюктуирует со временем поряд-
ка 1 мс.
Поляризация за счет двулучепреломления
Одним из физических явлений, имеющим место в оптически актив-
ных веществах, является то, что скорость распространения волны
зависит от ее поляризации. На практике это означает, что вещество
имеет различные показатели преломления для различных ориента-
ций поляризации. Указанное свойство называется двулучепрелом-
лением. Примерами природных двулучепреломляющих материалов
служат кристаллы кварца и кальцита (исландского шпата). Если
неполяризованный луч света падает на монокристалл под нужным
углом, то образуются две плоскополяризованные волны, причем их
плоскости поляризации ортогональны друг другу (из чего легко
понять, почему первоначально это явление называлось двойным пре-
ломлением). Для понимания эффекта необходимо напомнить, что,
как отмечено выше, неполяризованный луч содержит все возможные
ориентации поляризации в равной мере. Поэтому можно разложить
электромагнитные поля пучка по двум ортогональным направлени-
ям в плоскости, перпендикулярной направлению распространения.
Если эти оси соответствующим образом наклонены к оптическим
осям кристалла, то две части пучка будут преломляться по-разному
и, таким образом, будут разделены.
Поляризация за счет селективного поглощения
Поляризацию можно также получить с помощью дихроичных ве-
ществ. Дихроизм — это селективное поглощение одной из ортого-
нальных поляризаций неполяризованной световой волны. Это явле-
ние, открытое Био в 1815 г., наблюдается в некоторых минералах,
наиболее известным из которых является турмалин, а также в неко-
торых органических веществах. Пионером в разработке поляриза-
ционных пленок был Лэнд, получивший первый патент в 1932 г. (см.
Лэнд (1951) для обзора ранних разработок). Корпорация «Полароид»
была основана Лэндом и Вилрайтом в 1933 г. Отношение поляриза-
ций после прохождения через поляризующую пленку достигает 105.
Свет, распространяющийся по оптическому волокну, может пре-
терпевать изменение поляризации вследствие различных внешних
воздействий, что используется при создании сенсоров.
Глава 4- Оптические волоконные сенсоры
Полезно рассмотреть различные состояния поляризации, кото-
рые может приобрести выходящая волна вследствие двулучепрелом-
ления. Наличие двулучепреломления может быть свойством стекла
или возникнуть под воздействием измеряемой физической величи-
ны. Плоскополяризованная волна, входящая в волокно, может быть
разложена на две идентичных ортогональных компоненты с плоско-
стями поляризации, например, Ех и Еу, которые распространяются
вдоль двулучепреломляющего волокна в направлении z.
В предположении отсутствия ослабления при достижении прием-
ника электрическое поле волны, образованное векторным сложени-
ем Ех и Еу, приобретает одну из трех возможных форм (рис. 4.28).
Рис. 4.28. Состояния поляризации (Ех опережает Еу)
Если задержка одной волны относительно другой равна нулю
или кратна тг, то результирующий вектор электрического поля будет
иметь постоянную во времени ориентацию. Такое состояние называ-
ется линейной поляризацией. (Линейная поляризация и плоская по-
ляризация по сути своей одно и то же состояние, но слово «линейная»
объединяет это явление с другими, рассмотренными далее.) Если за-
держка одной волны относительно другой равна нечетному числу,
умноженному на тг/2, то конец результирующего вектора электриче-
ского поля будет описывать круг. Этот случай называется круговой
поляризацией. При всех остальных величинах задержки, и этот слу-
чай наиболее общий, конец вектора электрического поля описывает
эллипс, и поэтому такая поляризация называется эллиптической.
В обоих последних случаях вращения векторов происходят с опти-
Оптоволоконные сенсоры на основе внутренних
ческой частотой и не могут наблюдаться непосредственно. Кроме
того, если, как и предполагалось ранее, отсутствует ослабление, то
линейно поляризованный луч выйдет с тем же углом поляризации,
как и у входной плоской волны. Если существует ослабление, также
как и воздействие на этот угол, круговая поляризация невозможна.
Вместо этого будет образован эллипс с большою и малой осями, ори-
ентированными по осям х и у. Ясно, что для построения сенсоров
внутреннее состояние поляризации в оптическом волокне должно
быть стабильным, с тем, чтобы можно было обнаружить измене-
ние, вызванное измеряемым воздействием. Для достижения этого
берется одномодовое волокно, которое удовлетворяет одному из сле-
дующих критериев:
1. Не имеет двулучепреломления. Добиться этого трудно, требу-
ются специальные материалы и высокоточная технология про-
изводства.
2. Имеет высокое двулучепреломление вдоль оси за счет специ-
ально создаваемого в процессе производства внутреннего на-
пряжения. Различающиеся показатели преломления для двух
ориентаций делают возможной такую конфигурацию. Одна из
них теряется в оболочке, а распространяться будет лишь вто-
рая поляризация. Оболочечная мода отсекается в приемнике.
3. Обладает тонкой сердцевиной эллиптического сечения. Поля-
ризованный свет, введенный в волокно таким образом, чтобы
его поляризация совпадала с главной осью эллипса, будет рас-
пространяться без изменения поляризации.
Ниже представлены некоторые из поляризационных явлений, по-
ложенных в основу при разработке сенсоров.
Магнитооптический эффект Фарадея
В 1845 г. Майкл Фарадей обнаружил, что, когда плоскополяризован-
ный свет проходит через стекло, к которому приложено сильное маг-
нитное поле вдоль направления распространения света, плоскость
поляризации поворачивается. Этот эффект — результат взаимо-
действия магнитных полей света и электронных орбиталей. Угол
поворота определяется уравнением
6 = V^Hdl, (4.98)
где dl — инкремент замкнутого кольцевого пути вдоль линии поля
Н, а V — постоянная Верде для величины эффекта в данном веще-
стве. Постоянная V зависит от длины волны, а вот температура
Глава 4. Оптические волоконные сенсоры
мало влияет на величину эффекта. Типичное значение этой кон-
станты для ближней инфракрасной области в плавленом кварце —
5 • 10~6 рад/А. Время отклика магнитооптических сенсоров гораз-
до меньше, чем магнитострикционных. Достигнута ширина полосы
частот в 1 ГГц.
Наиболее полезное применение этой технологии — разработка
волоконно-оптического сенсора тока (рис. 4.29). Пионерская работа
в этом направлении была выполнена Роджерсом (1979) для исследо-
вательского центра британских энергосистем на электростанции в
Фавли. Сенсор был создан навивкой оптического волокна на токо-
проводящую шину. По закону Ампера
1= (4.99)
поэтому уравнение (4.97) преобразуется в
0 = nVI, (4.100)
где п — количество оборотов волокна. Поскольку размер и положе-
ние шины не фигурируют в расчете, вибрации проводника не важны.
Однако было обнаружено, что вибрация волокна влияет на поляри-
зацию.
Линия
Рис. 4.29. Волоконно-оптический сенсор тока
Поляризацию можно измерить с помощью призмы Волластона,
Из нее выходят два ортогональных линейно поляризованных выход-
ных пучка. Измеряются интенсивности двух пучков Д и /2, и при
помощи дробного соотношения определяется
е = к1'-1* (4.Ю1)
h + h
где К — постоянная данного волокна. Использование такого под-
хода устраняет проблемы нестабильности источника света и из-
менения длины пути. Подобные исследования проводились также
Сименсом в Мюнхене и Кема в Голландии.
4-4- Оптоволоконные сенсоры на основе внутренних эффектов 205
Эффект Керра
В 1875 г. Керр открыл, что при приложении электрического поля
к изотропному диэлектрику он становится двулучепреломляющим.
Плоскополяризованная световая волна с вектором электрического
поля, направленным вдоль приложенного внешнего поля, замедляет-
ся этим полем. В рассмотренном выше магнитооптическом эффекте
Фарадея магнитное поле световой волны взаимодействует с вра-
щательным движением электронных орбиталей. В эффекте Керра
электрическое поле света взаимодействует с линейной компонен-
той движения электронов по орбиталям. Эффект Керра численно
оценивается изменением показателя преломления, вызванного элек-
трическим полем, и зависит от квадрата этого поля:
Дп = КХ0Е2, (4.102)
где К — коэффициент Керра. Результирующая разность фаз р, по-
лученная волной вследствие приложенного поля, определяется через
уравнения (4.89) в виде:
р = 27vKE2dz. (4.103)
Время отклика эффекта Керра — порядка 1 пс, что позволяет
его использовать в высокоскоростных оптических затворах.
Наблюдая изменения в поляризации, можно измерять напряжен-
ность электрического поля. Плоскополяризованная волна под углом 45°
к измеряемому полю вводится в оптическое волокно и становится эл-
липтически поляризованной вследствие замедления ее компоненты,
направленной вдоль внешнего поля. Затем форма эллипса анализи-
руется для измерения напряженности поля.
В исследовательском центре британских энергосистем были раз-
работаны сенсоры как тока, так и напряжения. Для измерения на-
пряжения электрическое поле должно быть приложено поперек во-
локна. Это достигалось установкой волокна в форме спирали и пере-
дачей импульса света при высоком напряжении в линии, а отражение
его обратно в приемник — при нулевом потенциале. Состояние поля-
ризации зависит от квадрата электрического поля, как показывает
уравнение (4.103). Вследствие этой нелинейности, устройства изме-
рения напряжения оказалось создать гораздо труднее, чем измери-
тели тока, по причине локальных вариаций электрического поля,
возникающих в поперечном сечении волокна. Они могли появить-
ся из-за пыли, влажности или вибрации. Было предположение, что
разработка специального волокна с кристаллической структурой,
имеющего линейный, а не квадратичный отклик, могла бы решить
206 Глава 4- Оптические волоконные сенсоры
эту проблему. С другой стороны, применение оптической поляри-
зационной рефлектометрии, которая изложена в п. 4.5.2, могло бы
предотвратить накопление ошибки, возникающей вследствие нели-
нейности.
Эффект Керра также может возникать за счет взаимодействия
с электрическим полем другой световой волны внутри диэлектрика.
Он называется оптическим эффектом Керра.
Фотоупругий эффект
Вещество считается обладающим фотоупругими свойствами, если
его показатель преломления можно изменить некоторым приложен-
ным механическим напряжением а или деформацией е. Фотоупру-
гость была открыта Брюстером в 1816 г. Световая волна с плоско-
стью поляризации в том же направлении, что и напряжение, распро-
страняется быстрее, чем волна ортогональной поляризации. Обыч-
ные вещества, проявляющие фотоупругие свойства — желатин, сте-
кло и поликарбонат. Инженерами, занимающимися исследованием
механических напряжений, это явление использовалось на протяже-
нии нескольких десятилетий. Обычно из поликарбоната или подоб-
ного фотоупругого материала строится модель структуры, подле-
жащей исследованию. Белый свет поляризуется, проходит через ис-
следуемую модель и наблюдается через другой поляризатор. Напря-
жения в фотоупругом материале, как говорят, вызывают задержку
между ортогонально поляризованными компонентами световой вол-
ны. Это приводит к деструктивной интерференции на определенной
длине волны. Наблюдатель видит дополнительные цвета в местах ло-
кализации напряжений. Плотность этих интерференционных полос
показывает величины напряжений.
Далее описано, как можно осуществить количественный анализ
напряжения или деформации. Рис. 4.30 иллюстрирует волну, рас-
пространяющуюся в направлении z через фотоупругое вещество,
испытывающее напряжение в направлении х. Задержку характери-
зует следующее соотношение:
задержка = напряжение х
х оптический коэффициент напряжения х оптический путь.
Задержку обычно приводят в величине физической длины, например
150 нм, что можно выразить как фазовый сдвиг:
фазовый сдвиг = напряжение х
и . v 2тг
х оптический коэффициент напряжения х оптический путь х —-
Оптоволоконные сенсоры на основе внутренних эффектов 207
или
27Г
¥> = axCanz —. (4.104)
А
В некоторых случаях оказывается предпочтительным работать
с деформацией. Тогда задержка определится как
задержка = деформация х
х оптический коэффициент деформации х оптический путь.
Уравнение (4.104) в этом случае принимает вид
27Г
9? = exC£nz —(4.105)
л
Рис. 4.30. Фотоупругий эффект
В обычной конфигурации перед фотоупругим материалом распо-
ложен поляризационный фильтр. Его плоскость поляризации ориен-
тирована под углом 45° к оси х. Свет от неполяризованного источни-
ка, пройдя поляризатор, будет иметь равные плоскополяризованные
компоненты в направлениях х и у. Свет после образца проходит еще
через один поляризатор, расположенный на его пути, и, наконец,
фотоприемник просто измеряет оптическую мощность.
Опираясь на уравнения для электрической и магнитной энер-
гий, заключенных в электромагнитной волне, можно показать, что
мгновенная скорость потока энергии через единицу площади Р —
векторное произведение Е и Н:
Р—^ЕхН. (4.106)
Р известен как вектор Пойнтинга и его направление — это на-
правление потока энергии. Средняя скорость потока энергии через
единицу площади, обычно называемая интенсивностью, определяет-
Глава 4. Оптические волоконные сенсоры
ся среднеквадратическими значениями Е и Н. Для плоской волны
полезным соотношением является отношение ЕкН, оно называется
внутренним импедансом среды Zq. Для плоской волны, поляризован-
ной в направлении х, импеданс равен
z» = = Д (4107)
Комбинация уравнений (4.106) и (4.107) для плоской волны, по-
ляризованной в направлении х, дает
Рх = (4.108)
Обобщая, можно сказать, что уравнение (4.108) показывает, что
для плоской волны, поляризованной в любой плоскости, интенсив-
ность пропорциональна квадрату амплитуды электрического поля в
этой плоскости.
Теперь, поскольку приемник из рис. 4.30 будет воспринимать об-
щую интенсивность совокупности двух ортогонально поляризован-
ных компонент, для расчета интенсивности необходимо векторно
сложить амплитуды этих компонент. Изменение электрического поля
волны, поляризованной в направлении х, может быть выражено как
Ех = Еах -h (^), (4.109)
где Еах — пиковая амплитуда. Аналогичное выражение использует-
ся для Еу, но без фазового сдвига <р.
Окончательно, если второй поляризатор ориентирован под неко-
торым углом 0 к оси х, результирующее электрическое поле будет
Ерезулът - Еах sin(otf + (/>) cos в + Еау sino^ sin#. (4.110)
Но, как установлено ранее, средняя интенсивность, измеренная
приемником, будет определяться квадратом результирующего элек-
трического поля, поэтому, возводя в квадрат уравнение (4.110), по-
лучим
Ерезулът = [Еах sin(o;f + (/?) cos# + Еау sinutsin#]2. (4.Ill)
После усреднения за один период и в предположении, что Еах =
= Еау, уравнение (4.111) дает следующее значение
Е^
Ерезулът = ^(1 + sin20COS^). (4.112)
Вывод этого уравнения был проведен для двух ортогонально по-
ляризованных волн. Однако, как показано на вышеприведенной диа-
грамме, для получения двух ортогональных волн используется пло-
4-4- Оптоволоконные сенсоры на основе внутренних эффектов 209
скополяризованная волна, ориентированная под углом 45° к оси х.
Если интенсивность этой исходной волны равна Iq, то каждая орто-
гональная компонента будет иметь интенсивность 1о/2. (Эта про-
верка осуществляется разложением электрического поля исходной
волны Ео на х и у составляющие: Ех = Еу = E0cos45°, при этом
напомним, что интенсивность пропорциональна Е2.) Итак, если вы-
разить уравнение (4.112) в величинах интенсивности, получим ин-
тенсивность на приемнике в виде:
I = ^(1 + sin20cos</j). (4.113)
Угол в обычно устанавливают равным 45°, так что при нулевой
задержке I равняется нулю. Еще один полезный прием — введе-
ние предварительной задержки одной из ортогональных компонент
с помощью четвертьволновой пластинки. Возрастание разности фаз
на 7г/2 превращает косинус в уравнении (4.113) в синус. Подстановка
значения <р приводит к
т Pi । • ( 2тг
1 = — 1 + SHI I (Tx—Canz
(4.114)
4
Если значение ср мало, такое превращение имеет два преимуще-
ства. Во-первых, вблизи нуля функция синуса изменяется быстрее,
чем косинус, что делает систему более чувствительной. Во-вторых,
при малых значениях синус фазы и сама фаза, выраженная в ради-
анах, практически равны. После этих изменений уравнение (4.114)
можно переписать как
(4.115)
т ^0 ( -< . \
I - — 1 + СГЖ— Canz .
4 у А /
Таким образом, что выходной сигнал сенсора становится линейной
функцией от сгж, что гораздо удобнее. Преобразование уравнения
(4.115) приводит к
(4.116)
2X1_________A
x TrCanzlQ 2tvC(Ttiz'
Разработка волоконно-оптических сенсоров с использованием фо-
тоупругости началась поколение тому назад. Спиллман (1982), на-
пример, применил их как датчик давления. Кроме того, в различ-
ных исследовательских учреждениях были разработаны гидрофоны
и акселерометры. Американская Военно-морская исследовательская
лаборатория проявляла интерес к подобным устройствам в нача-
ле восьмидесятых годов. Однако только несколько систем достигли
коммерческого уровня и в настоящее время интерес к ним несколько
снизился.
Глава 4. Оптические волоконные сенсоры
4.5. Распределенное зондирование
Измерение некоторой переменной по широкому физическому диа-
пазону — привлекательная идея для множества областей науки и
техники. Разработки в этом направлении ведутся давно. Инженеры-
электрики на протяжении нескольких десятилетий используют ко-
роткий импульс напряжения, чтобы обнаружить разрывы в под-
земных кабелях. В месте разрыва кабеля происходит отражение
импульса, а задержка импульса позволяет оценить расстояние до
разрыва. Для решения этой задачи уже существуют промышленно
выпускаемые приборы. Однако результат измерений может быть
не точен из-за изменения диэлектрической постоянной кабеля вслед-
ствие повреждений или старения кабеля, что влияет на скорость рас-
пространения импульса. В области телекоммуникаций этот метод
был приспособлен для определения разрывовшли плохого соединения
в волоконно-оптических линиях. Радиолокационная или ультразву-
ковая акустоскопия — дальнейшие примеры распределенных систем
датчиков. Оптоволоконные датчики вызывают интерес разработ-
чиков распределенного зондирования не только из-за преимуществ,
перечисленных в п. 4.1, но также из-за лучших характеристик, и,
в случае использования сенсоров с внутренним эффектом, из-за про-
стоты и компактности сенсорных линий.
В настоящее время большое количество производителей предла-
гают свои системы волоконно-оптических распределенных датчи-
ков. Раньше всех появившиеся и, вероятно, наиболее популярные —
системы для измерения температуры.
Оптоволоконные системы считаются распределенными, когда из-
мерение происходит непрерывно по длине волокна. Для систем, где
измерение происходит дискретно в различных местах, применяется
термин квазираспределенные. Наиболее привлекательными в обла-
сти распределенных волоконно-оптических сенсоров считаются сле-
дующие возможности их использования:
- Температурное измерение в технологических установках для
непрерывного процесса производства, электростанциях, мор-
ских системах и объектах гражданского строительства напо-
добие длинных туннелей.
- Измерение механических напряжений в гражданском строи-
тельстве и области авиации.
- Обнаружение утечек в трубопроводах, в основаниях и систе-
мах каналов, и для морских применений.
4.5. Распределенное зондирование 21 I
- Контроль композиционных материалов и связующих веществ
заглубленными распределенными датчиками как на начальных
(термообработка или отверждение) стадиях, так и при даль-
нейшем использовании.
- Контроль электротехнических инженерных систем.
- Гидрофонные массивы для применения на подводных лодках.
В некоторых приложениях, типа пожарной сигнализации, тре-
буется только констатация факта. Информация о том, насколько
высока температура, или где на линии находится очаг возгорания,
требуется не всегда.
Криогенный датчик утечки может быть реализован на основе
изменения показателя преломления в зависимости от температуры,
что вызывает утечку света из сердцевины волокна в оболочку. Во-
локно просто обернуто вокруг основания криогенного резервуара
либо вокруг трубопровода. Когда температура в любой точке вдоль
волокна падает ниже —60 °C, включается сигнал тревоги. Слож-
ной мультиплексирующей схемы не требуется, необходимо только
непрерывное наблюдение за интенсивностью распространяющегося
по волокну света.
Проблемы, с которыми сталкиваются проектировщики действи-
тельно распределенных волоконно-оптических систем, в общих чер-
тах следующие:
1. Подбор соответствующего физического эффекта для измере-
ния нужной физической величины.
2. Выбор подходящего стиля мультиплексирования для того, что-
бы значения данных, принятых из различных точек измери-
тельной линии, являлись независимыми.
4.5.1. Механизм регистрации
Известно много разработок в сфере регистрации в распределенных
системах, но не все применения были коммерциализированы. Неко-
торые из них представлены ниже. Более полная информация может
быть найдена в работах Уд да (1991) и Граттана и Меггита (1995).
Рэлеевское рассеяние
Эта форма рассеивания и его происхождение рассмотрены в п. 4.2.2.
Обратное рассеяние, регистрируемое внутри приемного конуса, со-
ставляет лишь малую часть общего рассеяния. Кроме того, свет,
распространяющийся по волокну в обоих направлениях, затухает
Глава 4- Оптические волоконные сенсоры
по экспоненте. Следовательно, отраженный сигнал (рис. 4.31) слаб,
и для улучшения отношения сигнал/шум необходимо использовать
методы восстановления сигнала.
Градиент на участках излома кривой на рис. 4.31 указывает на
увеличение потерь, что отмечено на рисунке в двух точках. Потери
вызваны измеряемыми величинами, они могут быть связаны с про-
явлением множества механизмов, таких как:
- температурная зависимость обратного рассеяния,
- микроизгибы,
- потери за счет волны утечки,
- температурная зависимость поглощения, вызванная примеся-
ми в кварцевом волокне,
- изменение двулучепреломления в одномодовом волокне из-за
фотоупругого эффекта, или эффекта Керра,
- вращение плоскости поляризации вследствие эффекта Фарадея.
Рамановское рассеяние
В 1928 г. Раман обнаружил, что при молекулярном рассеянии имеет
место не только Рэлеевское рассеяние, происходящее без изменения
длины волны, но также и более слабое рассеяние со смещенными
длинами волн. Подобный эффект наиболее ярко наблюдался в жидко-
стях, слабее в твердых телах и газах. Другие длины волн возникают
из-за колебаний молекул, а в газах — из-за вращательного дви-
жения молекул. Падающий фотон заставляет молекулу перейти в
возбужденное виртуальное состояние. Слово виртуальный исполь-
зуется здесь, чтобы определить возбужденное состояние, которое не
J. 5. Распределенное зондирование
является ни одним из энергетических состоянии молекулы непосред-
ственно. Рэлеевское рассеяние наблюдается при непосредственном
переходе молекулы в основное состояние. Происходит абсолютно
упругое столкновение. Излучаемый фотон имеет ту же энергию, что
и падающий фотон, а эмиссия, в данном случае, изотропна. Если,
однако, молекула переходит в промежуточное возбужденное состо-
яние, соответствующее вибрационному или вращательному движе-
нию, излучаемый фотон имеет меньшую энергию. В этом случае
излучаемый фотон называют стоксовым. Он имеет большую дли-
ну волны (меньшую частоту), чем падающий фотон. Вероятность
Рамановского рассеяния на несколько порядков меньше, чем Рэле-
евского, и оно является неупругим процессом. Дальнейшая, еще ме-
нее вероятная, возможность состоит в том, что падающий фотон
сталкивается с молекулой, уже находящейся в колебательном или
вращательном возбужденном состоянии. Когда молекула возвраща-
ется в исходное состояние, испускается фотон с энергией большей,
чем энергия падающего фотона. Такой фотон называют антисток-
совым. Рис. 4.32 иллюстрирует перечисленные случаи в виде энер-
гетической диаграммы. Вероятность нахождения молекулы в воз-
бужденном состоянии до столкновения описывается распределением
Максвелла-Больцмана с шириной ехр{—ДЕ/йТ}, где ДЕ — раз-
ность энергий (Ei — Eq).
Рис. 4.32. Диаграмма уровней энергии молекулы, имеющей одно (колеба-
тельное) возбужденное состояние
Частота колебания молекулы модулируется электрическим полем
падающего фотона. Частоты испускаемых Рамановских фотонов
могут быть получены из тригонометрического тождества, приве-
денного в гл. 3. Если частота вибрации молекулы — fm, & частота
Глава 4- Оптические волоконные сенсоры
фотона — /о? уравнение (3.14) «даст» стоксов фотон с частотой
/о — fm и антистоксов фотон с частотой /о + fm- Это показано на
рис. 4.33 в виде спектральной диаграммы, чаще используемой опти-
ками, чем частотные зависимости.
Рис. 4.33. Изображение спектра рассеяния
Сдвиг в длинах волн в кварцевых волокнах, легированных гер-
манием, достаточен для того, чтобы компоненты рассеянного света
могли быть разделены высококачественными узкополосными филь-
трами.
Оказалось, что чувствительность антистоксовой компоненты спек-
тра рассеяния к температуре максимальна и составляет приблизи-
тельно 0,8%/К при температуре 300 К. Наиболее часто измеряют
уровни стоксова и антистоксова обратного рассеяния при помощи
методов усреднения по времени при очень слабых интенсивностях.
Вычисление соотношения между ними позволяет проводить темпе-
ратурные измерения. Коммерческие устройства, существующие в
настоящее время, позволяют обеспечить высокую линейность в диа-
пазоне 200-4-400 К. Температурное разрешение составляет ±1 °C,
а пространственное разрешение — несколько метров на 1 км.
Брюллиэновское рассеяние
Брюллиэновское рассеяние является схожим явлением с Раманов-
ским рассеянием за исключением того, что рассеяние происходит
от группы молекул, находящихся в движении, а не от отдельной
молекулы. Из-за акустических колебаний в материале группа мо-
лекул перемещается в объеме вещества. Передача энергии при этом
значительно хуже, чем при Рамановском рассеянии, что делает спек-
4-5. Распределенное зондирование
троскопический анализ получившихся длин волн затрудненным. По-
явилось несколько разработок сенсоров, но все же Брюллиэновское
рассеяние выглядит менее обещающим, чем другие формы рассеяния.
Поляризация
В п. 4.4.2 были представлены некоторые из явлений, воздействующих
на степень поляризации света в волокне. В принципе каждое из этих
явлений может быть использовано при разработке распределенного
датчика. Но требуются более сложные оптические компоненты и
волокна, чем те, что используются в обычной амплитудной системе.
Квазираспределенное зондирование
В принципе любой из методов построения сенсоров с внешним или
внутренним эффектом, представленных в предыдущих разделах, мо-
жет использоваться вместе с оптоволоконной линией. Недостатки
этого подхода заключаются в допустимых габаритах, хрупкости и
стоимости такой заранее заданной распределенной системы. Кро-
ме того, всякое соединение волокон приведет к потере интенсивно-
сти распространяющегося света. Преимуществом является то, что
такой системой можно измерять различные физические величины,
а также иметь произвольную шкалу расположения «зонда» или раз-
личную чувствительность в разных точках. К тому же простран-
ственная разрешающая способность может быть достаточно высо-
кой и ограничиваться только мультиплексирующей системой. На-
личие небольшого числа датчиков позволяет увеличить точность
измерения за счет большой полосы пропускания волокна, что не-
достижимо при большом количестве датчиков.
4.5.2. Мультиплексирование
Методы обработки сигналов, хорошо известные из радиолокации,
были применены и в области распределенного волоконно-оптическо-
го зондирования. Как и в радаре, регистрируемый сигнал может
быть очень слабым, даже сопоставимым с уровнем шума в системе.
В данном случае уместно использовать усилитель с варьируемым ко-
эффициентом усиления. Коэффициент усиления делают зависимым
от времени таким образом, чтобы скомпенсировать потери на зату-
хание сигнала с расстоянием.
Оптическое измерение коэффициента отражения
во временной области
Оптическое измерение коэффициента отражения во временной обла-
сти в своей самой простой форме является эхо-импульсным методом.
Г116 Глава 4‘ Оптические волоконные сенсоры
Отраженный световой импульс вернется на вход через некоторый
промежуток времени, пропорциональный расстоянию от входа до
области рассеяния. Качественно зависимость принимаемой мощно-
сти от времени показана на рис. 4.31. Для хорошего пространствен-
ного разрешения необходимы короткие импульсы, что ограничивает
мощность импульса и, значит, ухудшает соотношение сигнал/шум
принимаемого сигнала. Методы усреднения, которые представле-
ны в п. 6.4.2, могут быть использованы для улучшения отношения
сигнал/шум. Если торец волокна соответствующим образом отполи-
рован и покрыт, то можно получить достаточно сильное отражение,
что является необходимым для синхронизации процесса пуска в ме-
тоде усреднения.
Более сложный метод обработки сигнала использует случайный
поток двоичных импульсов, известный как псевдослучайная дво-
ичная последовательность (pseudo-random binary sequence, PRBS).
Такие последовательности легко генерируются при использовании
различных конфигураций сдвигового регистра, элемента исключаю-
щее ИЛИ и тактового генератора. Пример представлен на рис. 4.34.
Последовательность называется псевдослучайной, поскольку она не
абсолюно случайна, а периодична, причем период зависит от такто-
вой частоты и количества бит п в сдвиговом регистре. Тем не менее,
если регистр будет достаточно большим, последовательность не ис-
черпает периода в течение нескольких лет.
Рис. 4.34. Простой PRBS-генератор
Максимально возможная длина периода — 2Р — 1, но добиться ее
можно лишь подобрав правильное значение п для соответствующе-
го р. Генерация случайной последовательности получила огромное
теоретическое значение из-за своей применимости в большом коли-
честве методов обработки сигналов и анализе систем с отрицатель-
ной обратной связью. Коммерческие PRBS-генераторы доступны и
часто включают в анализаторы сигнала.
4.5. Распределенное зондирование
В распределенном волоконно-оптическом датчике PRBS исполь-
зуется для определения корреляции по времени между исходящим
и входящим сигналами. В гл. 6 приведены формальные математи-
ческие соотношения для корреляции. Алгоритм корреляции, при-
веденный в п. 6.3.4, в случае взаимной корреляции определяется
выражением (6.45):
1 N
Rxy(r^t) = — Xjyj+r.
Исходящая импульсная последовательность х хранится в памяти,
а возвращающаяся импульсная последовательность у усиливается и
тоже помещается в память. На рис. 4.35 показана модель системы с
использованием инструментов Simulink в среде Matlab. Целочислен-
ная задержка между сигналами является временем прохождения.
Для моделирования реального волокна к исходному сигналу доба-
вляют шум, как показано на осциллограмме (рис. 4.36).
Рис. 4.35. Моделирование взаимной корреляции
В соответствии с равенством (6.45), хранимые в памяти исходя-
щая и возвращенная двоичные последовательности поточечно умно-
жаются и дают множество величин, которые затем складываются
и определяют точное значение Rxy. Затем между двумя хранимыми
импульсными последовательностями делают временной сдвиг так-
тового импульса At, и процесс умножения - сложения повторяется.
Глава 4. Оптические волоконные сенсоры
Корреляция появляется тогда, когда одно из вычисленных значе-
ний Rxy(r^t) достигает максимума. Зная необходимое количество
смещений тактовой частоты г, корреляция позволяет определить
временную задержку обратного сигнала. На рис. 4.37 показан тип
отклика.
Наверху: случайный двоичный сигнал
Внизу: случайный двоичный сигнал с задержкой по времени + шум
Рис. 4.36. Осциллограммы
0.6
0.4
0.2
1 105 11 1 15 12 1 25 1.3 1 35 1 4 1 45
Время (сек)
Рис. 4.37. Выходной сигнал коррелятора
Между сигналами была введена задержка в 250 мкс. На диаграм-
ме корреляцию можно наблюдать в точке 1,25 мс. (Длительность
4.5. Распределенное зондирование
временного окна устанавливается параметрами коррелятора, тогда
как начальная точка устанавливается моделируемым временем вы-
полнения.)
Поляризация, оптическое измерение коэффициента
отражения во временной области
Как было упомянуто в п. 4.5.1, явления, которые влияют на состо-
яние поляризации распространяющегося по волокну света, могут
использоваться для распределенного зондирования. Основываясь на
световых импульсах, как в случае измерения коэффициента отра-
жения во временной области, можно определить локальное значение
измеряемой физической величины. В данном случае измеряется не
интенсивность, а состояние поляризации. При конструировании рас-
пределенных датчиков тока и напряжения могут использоваться
эффекты Фарадея и Керра.
Более сложный подход был описан Дакин и Калшоу (1997). Их ме-
тод был изобретен, чтобы преодолеть главное неудобство в исполь-
зовании обратного рассеяния, а именно низкую интенсивность обрат-
ного рассеяния по сравнению с прямой бегущей волной (10-5). Здесь
оптический эффект Керра используется как часть процесса рас-
пространения. Непрерывная световая волна небольшой мощности
распространяется по волокну навстречу мощной, импульсной све-
товой волне. Принцип действия основан на том, что непрерывная
волна имеет две моды распространения, которые являются состоя-
ниями поляризации, или волноводными режимами, или даже двумя
разными оптическими путями в двух близко расположенных серд-
цевинах волокон. Измеряемая физическая величина должна вызвать
перетекание двух мод. Оптический эффект Керра также вызыва-
ет перераспределение света между модами. Комбинация эффектов
в точке наблюдения, производимых измеряемой величиной, и силь-
ным электрическим полем, создаваемым импульсом света, вызывает
нелинейность перетекания мод. В этом случае измеряемая величи-
на и пространственная информация о ней может быть определена
анализом интенсивности двух выходящих мод как функций от вре-
мени. Система требует сложных оптических компонентов и сложной
обработки сигналов. Различные варианты данной методики все еще
находятся в стадии разработки.
Оптическое измерение коэффициента отражения
в частотной области
При оптическом измерении коэффициента отражения в частотной
области обычно применяют специальную форму импульса с линей-
Глава 4- Оптические волоконные сенсоры
ной частотной модуляцией. Импульс с линейной частотной моду-
ляцией — синусоида с изменяющейся частотой. Такие импульсы
уже давно используются специалистами, занимающимися обработ-
кой сигналов для различных приложений, включая радиолокацию.
Изменение частоты импульса может быть любой желаемой функци-
ей: линейной, логарифмической или ступенчатой. Применительно к
оптоволокну, как правило, используют полупроводниковые лазерные
диоды в непрерывном режиме излучения, амплитуда которого моду-
лируется ЛЧМ-импульсом. Поскольку выходной сигнал меняется по
частоте, то частота модуляции возвращенного импульса будет ниже
в ближайших точках и выше в более удаленных. Фурье-преобразова-
ние выходного сигнала детектора позволяет получить информацию
о частоте и амплитуде ЛЧМ-импульса.
4.6. Методы эталонирования
Большинство волоконно-оптических сенсоров используют изменение
интенсивности света для определения значения измеряемой величи-
ны. Следовательно, для получения точных измерений необходимо
высокоточное измерение интенсивности света. Однако величина вы-
ходного сигнала фотоприемника, кроме воздействия измеряемой фи-
зической величины, может изменяться и по другим причинам. Ниже
они представлены в порядке их значимости.
1. Интенсивность излучения источника света изменяется в зави-
симости от температуры и срока службы. Светодиоды (LED)
имеют срок службы более десяти лет, но их интенсивность зна-
чительно изменяется от температуры, обычно на 0,7% °C-1.
Галогенные лампы имеют срок службы около одного года при
постоянной работе, но он значительно уменьшается, если лам-
пу включают время от времени или она подвергается встряске.
Старение нити накаливания было представлено в п. 3.4.3. Кро-
ме того, десятипроцентное изменение напряжения питания мо-
жет быть причиной четырехпроцентного изменения так назы-
ваемой цветовой температуры, т.е. спектрального распреде-
ления, представленного на рис. 3.13, а также соответствующе-
го уменьшения интенсивности излучения в максимуме спектра
приблизительно на 3%. Это может повлиять не только на изме-
рение интенсивности, но и изменить относительные интенсив-
ности спектральных компонент, делая невозможным сравни-
тельные измерения отношений цветов. Наконец, ослабление в
4.6. Методы эталонирования 221
волокне зависит от используемой длины волны и его спектраль-
ная неравномерность равна приблизительно 0,015 дБ/нм-1
(см. рис. 4.5). Изменение длины волны на 1 нм может привести
к изменению интенсивности на приеме на 0,2%.
2. На оптические компоненты схемы может воздействовать окру-
жающая обстановка. Чрезмерный изгиб оптических волокон в
процессе монтажа может повлиять на распределение мод в во-
локне и вызвать утечку света. Ослабление в соединительных
элементах (коннекторах) может изменяться на ±0,2 дБ. Все
это приводит к вариации общего пропускания схемы вплоть
до 5%.
3. Чувствительность приемника меняется вследствие температур-
ных флюктуаций, а также в пределах допуска на данный эле-
мент. PIN-фотодиоды имеют срок службы более десяти лет.
Их чувствительность к свету меняется на ±0,4% °C-1, и так-
же зависит и от длины волны.
(Обзор свойств источников света и фотоприемников приведен в
п. 3.5.3 и 3.5.4)
Возможна любая комбинация вышеперечисленных источников оши-
бок. Следовательно, для достижения высоких характеристик тре-
буется некоторый способ сравнения или эталонирования, чтобы из-
бежать постоянной калибровки сенсора. Для минимизации перечи-
сленных ошибок были разработаны некоторые сложные системы. Но,
в общем, чем сложнее система, тем она становится дороже и бо-
лее громоздкой. Некоторые из наиболее распространенных методов
перечислены ниже. Список использованных источников приведен в
работе Граттана и Меггита (1995). Системы, как правило, исполь-
зуют для эталонирования какой-либо вид измерения отношений.
Двойное детектирование
Для отслеживания режима работы источника излучения можно ис-
пользовать два фотоприемника, как показано на простой системе,
изображенной на рис. 4.38.
Интенсивность, зарегистрированную фотоприемниками, можно
выразить как
Di = aMS, D2 = $S, (4.117)
где а и /3 — калибровочные постоянные, учитывающие свойства
оптических линий передачи. Исключение из этих выражений мощ-
ности источника S дает
м=^-. (4.118)
222 Глава 4- Оптические волоконные сенсоры
Этот метод предполагает, что постоянные а, /3 и чувствитель-
ности фотоприемников неизменны. С целью уменьшения влияния
различий в оптических путях и фотоприемниках могут быть исполь-
зованы Y-разветвители. Однако применение Y-разветвителей может
вносить дополнительные ошибки, увеличивать стоимость, а также
потребовать привлечения некоторых методов мультиплексирования,
представленных ниже.
Измеряемая физическая величина (М)
Сенсор
>Z>i
*02
Рис. 4.38. Эталонирование для компенсации дрейфа источника излучения
Линия задержки
Один из простых методов мультиплексирования основан на исполь-
зовании линии задержки, как показано на рис. 4.39. Источник света
испускает короткий импульс, который достигает фотоприемника в
виде двух импульсов. Для измерения амплитуды каждого импуль-
са требуется высокоскоростная электронная схема обработки сиг-
налов. Этот метод, по существу, является мультиплексированием
с разделением по времени.
Измеряемая физическая величина (А/)
X »| Сенсор ~|~
1—I Линия задержки}-
Рис. 4.39. Мультиплексирование с использованием линии задержки
Модуляция длины волны
Если воздействие измеряемой физической величины на интенсив-
ность принимаемого света зависит от длины волны, это может быть
использовано как форма мультиплексирования. В телекоммуника-
ционной области техники это называлось бы мультиплексированием
с разделением по частоте. Отношение принятых длин волн обеспе-
чивает нормализацию. Можно использовать один широкополосный
4-6. Методы эталонирования 223
источник света, как показано на рис. 4.40, а, или два различных ис-
точника, как видно на рис. 4.40, б.
Измеряемая физическая величина (М)
S-----------1 Сенсор ]
z A(^i)
Оптические
фильтры
б)
Измеряемая физическая величина (М)
Сенсор
Оптические
фильтры
Рис. 4.40. Двухволновая система эталонирования: а) — широкополосный
источник; б) — два источника
Амплитудная модуляция
При использовании двух источников света альтернативным мето-
дом, позволяющим избежать применения оптических фильтров, явля-
ется модуляция источников на различных частотах (рис. 4.41). Для
разделения сигналов после фотоприемника используются электрон-
ные фильтры.
л—5А)
Л—
Частоты возбуждения
Измеряемая физическая величина (М)
--------1 Сенсор |------------► D(k[ + Х2) —
Электронные фильтры
Рис. 4.41. Двухволновая система эталонирования с электронными фильт-
рами
Оптический мост
Оптически более сложным методом является так называемый опти-
ческий мост (см. рис. 4.39). Он получил свое наименование по ана-
логии с электрической мостовой схемой и содержит два источника
света и два фотоприемника. Если два источника света излучают
последовательно друг за другом, то
Di = aMSu D2 = xSi (4.119)
и, спустя короткое время,
П1=Д52, D2 = SS2, (4.120)
224 Глава 4- Оптические волоконные сенсоры
где а, /3, х и 6 — калибровочные постоянные оптических трактов.
Комбинируя эти уравнения с целью устранения Si, S2, Di и Z>2*
Di _ аМ Di _ /3
D2 X ’ Р2 <5 ’
получаем
м =
ад
(4.121)
(4.122)
Таким образом, М зависит только от стабильности оптических трактов.
Рис. 4.42 показывает источники света с разными длинами волн.
При мультиплексировании с разделением по времени, которое рас-
смотрено выше, были бы пригодны лишь идентичные источники
света и фотоприемники. Безусловно, можно было бы использовать и
модуляцию с различными частотами двух одинаковых источников,
с последующей фильтрацией сигналов от двух идентичных фотопри-
емников электронными фильтрами.
Рис. 4.42. Система этало-
нирования в форме оптиче-
ского моста
Наконец, следует отметить, что присутствие фоновой засвет-
ки могло бы также вносить свой вклад в сигнал(ы). Это влияние
можно легко устранить, применяя амплитудно-модулированный ис-
точник света. Использование частоты модуляции порядка 1 кГц
дает возможность устранить влияние солнечного света и света ламп
на частотах источников питания и их гармониках. Требуемый сиг-
нал выделяется узкополосным электронным фильтром на частоте
модуляции с помощью последетекторной электронной схемы обра-
ботки сигнала.
Ссылки 225
Ссылки
Bleaney В 1 and Bleaney В 1965 Electricity and Magnetism 2nd edition
(Oxford University Press)
Dagenais D M, Bucholtz F and Koo К P 1988 ’Elimination of residual
signals and reduction of noise in a low-frequency magnetic fibre sensor’
Appl. Phys. Lett. 53 1417-1476
Dakin J and Culshaw В 1988 Opical Fiber Sensors: Principles and Com-
ponents vol 1 (Boston: Artech House)
Dakin J and Culshaw В 1997 Opical Fiber Sensors: Applications, Anal-
ysis and Future Trends vol 4 (Boston: Artech House)
Dotsch H, Martens G and Meyer W 1983 Fibre Optic Components for
Industrial Control, 1EE Conf. pub. 221, Optical Fibre Sensors (London:
IEE) pp 67-71
Frank W E 1966 ’Detection and measurement devices having a small,
flexible fiber transmission line’ US Patent 3,273,447 September
Gopel W, Hesses J and Zemel J N 1992 Sensors: a Comprehensive Survey
vol 6 Optical Sensors (New York: VCH
Grattan К TV and В T Meggitt (eds) 1995 Optical Fiber Sensor Tech-
nology (Chapman and Hail)
Gupta G C 2002 Optical Fiber Communication Conf., Anaheim, CA,
paper TuA5 Jones В E 1981 ’Simple optical sensors for the process
industries using incoherent light’ Symp. Optical Sensors and Optical
Techniques in Instrumentation, London, UK (London: IMC) p 15
Jones В E 1985 ’Optical fibre sensors and systems for industry’ /. Phys.
E: Sci. lustrum. 18 770-782
Jones В E and Philp G S 1983 fibre optic pressure sensor using reflective
techniques’ Proc. Int. Conf. Optical Techniques in Process Control, The
blague, Netherlands (Crantield: BHRA Fluid Engineering) pp 11-25
Keck D B, Maurer R D and Schultz P C 1973 Appl. Phys. Lett. 22 307
Kirkbrighl G F, Narayanaswamy R and Welti N A 1984 ’Fibre-optic pH
probe based on the use of an immobilised colorimetric reagent’ Analyst
109 1025
Kissinger C D 1967 ’Fibre optic proximity probe’ US Patent 3,327,584,
June
Lakowicz J R 1983 Principles of Fluorescence Spectroscopy (New York:
Plenum Press)
226 Глава 4- Оптические волоконные сенсоры
Land Н Е 1951 ’Some aspects of the development of sheet polarizers’/.
Opt. Soc. Am. 41(12) 957
Livingston J D 1982 ’Magnetomechanical properties of amorphous met-
als’ Phys. Status Solidi 70 591-596
Longhurst R S 1970 Geometrical and Physical Optics 2nd edition (Long-
mans)
Nishihara H, Haruna M and Suhara T 1989 Optical Integrated Circuits
(New York: McGraw-Hill)
Nishizawa K, Sudo E, Yoshida M and Yamasaki T 1986 ’High sensitivity
waveguide type hydrogen sensor’ 4th Int. Conf. Optical Fibre Sensors,
Tokyo p 131
Ohashi M, Shiraki К and Tajima К 1992 ’Optical loss property of silica-
based single mode fibers’ IEEE J. Lightwave Technol. 10(5) 539-543
Perot A and Fabry С H 1898 ’Sur un voltmetre electrostatique interfer-
entiel pour etalonnage’ /. de Phys. 7 650-659
Post E J 1967 ’Sagnac effect’ Rev. Mod. Phys. 39 475
Rogers A J 1979 ’Optical measurement of current and voltage on power
systems’ IEE J. Electronics and Power Appl. 2(4) 120-124
Scheggi A M and Baldini F 1993 ’Chemical sensing with optical fibres’
Int. J. Optoelectronics 8(2) 133-156
Senior J M 1985 Optical Fibre Communications, Principles and Practice
(Prentice-Hall)
Spillman W В jnr 1982 ’Multimode fibre-optic pressure sensor based on
the photoelastic effect’ Opt. Lett. 7 388
Spillman W В jnr and McMahon D H 1980 ’Frustrated-tot al-internal
reflection multimode fibre-optic hydrophone’ Appl. Opt. 19 113-117
Udd E (ed) 1991 Fiber Optic Sensors, An Introduction for Engineers
and Scientists (Wiley-Interscience)
Yamada J I, Saruwatari M, Asatani K, Tsuchiya H, Kawana A, Sugiya-
ma К and Kimura T 1980 ’High speed optical pulse transmission at
1.29 /jlltj wavelength using low-loss single-mode fibers’ IEEE J. Quan-
tum Electronics QE-14 791
Упражнения
4.1. Сравните свойства металлических линий передачи данных с
их волоконно-оптическими аналогами. Перечислите причины,
вызывающие интерес к волоконно-оптическим сенсорам.
Упражнения
4.2. Объясните важность числовой апертуры при работе с оптиче-
скими волокнами и выведите ее формулу.
4.3. i) Ослабление в оптическом волокне может быть вызвано по-
глощением и рассеянием. Объясните природу этих физиче-
ских явлений и приведите эскизный график.
ii) Необходимо построить испытательную установку для ис-
следования зависимости ослабления в оптических волокнах
от длины волны.
а) Нарисуйте принципиальную схему установки, предло-
жив подходящий источник излучения и фотоприемник.
б) Нарисуйте электронную схему обработки сигнала для
вашего фотоприемника и объясните ее работу. (Указание:
см. гл. 3.)
в) Как можно было бы осуществить эталонирование для
устранения влияния дрейфа в системе?
4.4. Объясните, как излучение абсолютно черного тела может быть
использовано для измерения температуры с помощью оптиче-
ского волокна.
i) Нарисуйте схему такого устройства, перечислив ее мате-
риалы и составные части.
ii) Дрейф в фотоприемнике и оптических соединениях может
быть учтен с помощью измерения отношений. Используя
формулу Планка, приведенную в 3.5.3, определите отноше-
ние интенсивностей света с длинами волн 50 и 450 нм при
температуре 700 °C, а затем при 725 °C. (Можете пред-
положить, что ослабления в фильтрах нет и они имеют
одинаковую очень узкую полосу пропускания.
iii) Головка сенсора не является абсолютно черным телом. Как
может быть решена эта проблема?
4.5. Два оптических волокна расположены рядом друг с другом,
образуя сенсор перемещения отражательного типа на осно-
ве измерения интенсивности. Радиусы их сердцевин равны
и 02, а расстояние между центрами — D.
i) Объясните с помощью диаграммы, как перемещение от-
ражателя может привести к почти линейному изменению
интенсивности в зависимости от смещения. Выведите два
выражения для Dmin и Dmax для предельных значений это-
го квазилинейного диапазона перемещений.
Глава 4- Оптические волоконные сенсоры
ii) Как можно было бы такое устройство использовать для из-
мерения температуры? Нарисуйте эскиз.
4.6. Нужно разработать волоконно-оптический химический сенсор,
основанный на принципе поглощения.
i) Сформулируйте закон поглощения Ламберта-Бэра.
ii) С помощью эскиза опишите структуру пригодной для из-
мерений чувствительной ячейки.
iii) Соответствующим выбором схемы обработки сигнала по-
сле фотодиода можно было бы добиться линейного откли-
ка устройства в зависимости от концентрации. Объясните
это, приведя соответствующие формулы. (Указание: см. па-
раграф о фотодиодах в гл. 3.)
4.7. Сконструируйте датчик перемещений с использованием вол-
ны утечки с конца оптического волокна, подобный сенсору,
изображенному на рис. 4.19. Определите подходящий угол на-
клона переднего конца волокна, используя типичные значения
показателей преломления и т. д. Определите чувствительность
сконструированного вами устройства в виде градиента «ин-
тенсивность-смещение», т.е. dl/dx.
4.8. Магнитооптический эффект Фарадея и эффект Керра могут
быть использованы для измерения электрического тока и элек-
трического поля. Нарисуйте эскизную схему, в которой оба
этих физических явления были бы использованы в одном во-
локонно-оптическом сенсоре таким образом, что, в принципе,
можно было бы построить сенсор электрической мощности для
использования в высоковольтных линиях электропередач. Ка-
кова главная трудность, которую необходимо было бы преодо-
леть?
ГЛАВА 5
ИНТЕЛЛЕКТУАЛЬНЫЕ
ИЗМЕРЕНИЯ
5.1. Введение
Создание микропроцессора, а затем и персонального компьютер (ПК)
IBM в 1980-х гг. привело к развитию аппаратно-программных средств
обработки данных. Стало доступно множество плат для сбора дан-
ных, подключаемых к шине IBM с комплексным программным обес-
печением (ПО) для сбора, обработки, анализа и отображения инфор-
мации. Такие инструменты были названы «интеллектуальными». Ча-
ще стали появляться датчики с встроенными микропроцессорами,
которые позволяют производить обработку информации непосред-
ственно в самом датчике. Устройства с микропроцессором получили
название «умные датчики» и будут рассмотрены в 5.5. Программное
обеспечение с использованием искусственного интеллекта (ИИ) так-
же находит приложение в измерительных системах и применяется
для интерпретации данных, полученных от одного или нескольких
датчиков. Некоторые разработки с использованием ИИ будут крат-
ко рассмотрены в 5.6.
Перед обсуждением возможных вариантов применения интеллек-
туальных датчиков важно понять ограничения, накладываемые на
результаты измерений вследствие использования цифровых систем.
Обычно информация, получаемая с датчика - аналоговая, плавно ме-
няющаяся функция времени. Однако при использовании в цифровой
системе она должна удовлетворять двум ограничениям:
- Сигнал должен быть дискретизирован по времени. Иногда это
называется дискретной выборкой по времени, или просто дис-
кретизацией. Во время обработки полученных значений изме-
рений, система находится в выключенном состоянии, при этом
часть измеряемой информации может быть потеряна.
- Разрешение измеряемой информации будет уменьшено из-за
того, что цифровая система работает с фиксированным ко-
Глава 5. Интеллектуальные измерения
личеством бит информации. Поступающая информация стано-
вится дискретной по амплитуде.
Рис. 5.1. Дискретизация аналогового сигнала: а) — исходная форма сиг-
нала; б) — дискретизирующая функция; в) — дискретизованный
сигнал
Степень дискретности по времени в компьютерных системах мо-
жет быть специально подобрана для достижения таких частот, при
которых начальная обработка и вывод информации могут произво-
диться в моменты между получением соседних отсчетов данных. Та-
кую систему называют системой реального времени, так как она не
требует накопления измеряемой информации для последующей обра-
ботки. Возможно использование частот дискретизации до 105 Гц при
5.2. Разрывная дискретизация 231
условии, что алгоритм обработки измерений не слишком ресурсо-
емкий. Однако графическое отображение информации на мониторе
является медленным процессом, и если требуется визуализация из-
меряемой информации, то скорость съема информации должна быть
существенно снижена при условии, что система остается в реальном
времени.
Дискретизованные данные нужно перевести в цифровой формат,
с помощью аналого-цифрового преобразователя (АЦП). В простых
системах этот процесс контролируется ПК. Однако в системах, ра-
ботающих на частотах, недостижимых для ПК, используется специ-
альная плата со своим микропроцессором. АЦП и дополнительная
память управляются с помощью платы. Также на плате может про-
водиться процесс обработки информации. Специализированные ми-
кропроцессоры цифровой обработки сигналов (ЦОС) применяются
для цифровой фильтрации, Фурье-анализа и т. д. (см. 5.4). Поэтому
можно обрабатывать и сохранять большие объемы информации, по-
лученной на высоких скоростях. Обработанная информация затем
передается в ПК с меньшей скоростью для последующей обработ-
ки и отображения. Такая система считается «системой реального
времени», если данные проходят все ее разделы с одинаковой скоро-
стью.
Проблемы, касающиеся разрывного, или дискретного получения
информации, будут рассмотрены в следующих параграфах.
5.2. Разрывная дискретизация
Когда волна f(t) подвергается процессу дискретизации на некото-
рой частоте, получается новый сигнал, который по сути является
амплитудно-модулированной версией первоначального сигнала:
fs=p(t)f№- (5.1)
Функция p(t) — это последовательность коротких импульсов на ча-
стоте cjs (t). У данного процесса есть эффект возникновения боковых
полос на частотном спектре, как показано на рис. 5.2.
Боковые полосы сосредотачиваются на частотах, кратных ча-
стоте дискретизации. Для предотвращения наложения боковых по-
лос на оригинал частота дискретизации должна быть выбрана в
зависимости от максимальной частоты1 штах из функции /(£). В со-
ответствии с диаграммой, чтобы центральный спектр не перекры-
1 Частоты Найквиста. — Прим. ред.
Глава 5. Интеллектуальные измерения
вался боковыми полосами, необходимо соблюдение условия:
ujs 2сотах. (5.2)
Г(й>)
~2бУ$ “СУтах 0 /Ушах Зо)$
Частота (<у)
Рис. 5.2. Частотный спектр идеально дискретизованной функции
Это неравенство независимо открыто Шенноном и Найквистом2.
Ниже будет показано, как его формально проверить. Используя ком-
плексное представления ряда Фурье, функцию p(t) можно записать:
оо
p(t) = Ck exp jku)st, (5.3)
к=—оо
где
т зт(ктгт/Т) (с. 41
к Т ктгт/Т '
ИЛИ3
Т — период дискретизации, т — длительность дискретизирующего
импульса. В результате дискретизации получаем
Ш = = (5.6)
= f(t) 57 ckexpjkwst. (5.7)
к——оо
Преобразование Фурье функции fs(t) имеет вид:
f 22 Ск exp(jkwst)f(t) exp(-jajt) dt = (5.8)
«/ —OO 1
k= — oo
= 5? ck [ f(t)exp(-j(u}-kus)t)dt = (5.9)
2И Котельниковым. — Прим. ped.
3По определению sincx = (sin x)/x. — Прим. ped.
5.3. Квантование измеряемой величины 233
оо
= 52 ~ ки>,)]. (5.10)
к= — оо
Смысл выражения (5.10) заключается в том, что преобразование
Фурье дискретной версии fs (t) является Фурье-преобразованием ори-
гинала /(£), повторенным на частотах, кратных и масштабиро-
ванным коэффициентами q. Это подтверждает зависимость (5.1),
которая дополнительно показывает, что для дискретизирующей функ-
ции, не состоящей из импульсов бесконечно малой длительности, бо-
ковые полосы ослабляются по закону sine.
Если система создана для обработки частот, не превышающих штах ,
и (jjs — 2и}тах, а частота входного сигнала увеличивается до штах +
то на выходе системы появляются низкочастотные составляющие
с частотой штах — Этот эффект наложения спектров называ-
ется алайсингом. Алайсинг — это появление в выходном сигнале
низкочастотных составляющих, созданных самой системой. В сис-
темах с фиксированной частотой дискретизации могут применяться
анти-алайсинг-фильтры для ограничения сверху частоты входного
сигнала значением Из-за того что реальные фильтры не облада-
ют резкими частотами отсечки, необходимо максимально разносить
полезный спектр и боковые полосы. Высокоточные системы исполь-
зуют частоты дискретизации порядка бситаж.
5.3. Квантование измеряемой величины
Любое цифровое слово ограничено старшим значащим разрядом (СЭР),
имеющим наибольшее значение, и младшим значащим разрядом (МЗР),
имеющим наименьшее значение. Из этого следует, что наилучшее
разрешение, которое может быть достигнуто при переводе аналого-
вой величины в цифровой вид, равно 1/2 МЗР. Иногда это значение
называют ошибкой квантования и оно может достигать ±1/2 МЗР,
что проиллюстрировано на рис. 5.3.
В связи с этим при разработке системы сбора данных задаются
требуемым разрешением для определения нужного количества бит
в цифровом слове. Например, 8-битный АЦП, способный измерять
аналоговые величины в диапазоне 04-10 В, будет иметь разрешение:
±-±В или ± 0,01961 В.
2 255
Как видно из рис. 5.3, при квантовании с шагом 1/2МЗР на всем
диапазоне возникает ошибка нуля на 1/2МЗР.
Глава 5. Интеллектуальные измерения
5.3.1. Цифро-аналоговый преобразователь
Цифро-аналоговые преобразователи (ЦАП) рассматриваются перед
АЦП, поскольку некоторые АЦП используют в своей структуре ЦАП.
Обычно ЦАП применяют для преобразования цифрового сигнала,
полученного от компьютерной системы, в аналоговый вид. В изме-
рительных системах ЦАП применяют, когда требуется передать или
обработать данные с цифровых датчиков в аналоговом виде. При-
мером цифровых датчиков может служить двоичный диск для коди-
рования положения вращающегося вала и многоконтактный датчик
для измерения уровня жидкости.
Рис. 5.3. Кривая АЦП
Цифровое слово может быть переведено в аналоговый ток или
напряжение множеством переключательных схем. Наиболее часто
используемый вариант — ступенчатая R—2R схема. На рис. 5.4 по-
казана схема, которая использует операционный усилитель в ка-
честве выходного буфера, суммирующего подключенные токи для
обеспечения напряжения на выходе. Без операционного усилителя
схема будет вести себя как источник тока.
Схема R—2R обеспечивает деление тока пополам на каждой вет-
ви. Токи переключаются между землей и виртуальной землей опе-
рационного усилителя. Таким образом, при обеспечении источни-
ка опорного напряжения Уэт и сохранении номинала сопротивле-
ний, суммирование токов в операционном усилителе будет давать
5.3. Квантование измеряемой величины 235
соответствующее значение аналогового сигнала. Конечно же, этот
сигнал будет ступенчатым, а не плавно меняющимся. Если это не
желательно, то низкочастотный фильтр на выходе устранит этот
эффект.
СЗР МЗР
Рис. 5.4. Схема типа R—2R
Существуют два основных типа ошибок, присущих АЦП. Их лег-
ко оценить, используя график, представленный на рис. 5.5. Если
ступенчатая кривая неправильно расположена относительно прямой
(что возможно вследствие флуктуации напряжения внутреннего ис-
точника напряжения V3m), то на всем диапазоне будет иметь место
ошибка калибровки. Максимальное значение этой ошибки может
равняться 1 МЗР. Другой тип ошибки связан с нелинейностью (из-за
низкой точности или ухода значения сопротивлений). Такие ошибки
возникают на всем диапазоне и могут равняться 1/2 МЗР и более.
Время установки
Время переключения элементов ЦАП не бесконечно мало. Время
установки — это время, требуемое на установку нового значения
±1/2 МЗР на выходе ЦАП при изменении входного сигнала.
В ЦАП с токовым выходом выходной сигнал преобразуют в на-
пряжение добавлением нагрузочного резистора. В ЦАП данного ти-
па время установки регулируется временной константой, зависящей
от нагрузочного резистора, емкости вывода ЦАП и паразитной ем-
кости, включенной параллельно нагрузочному резистору.
В ЦАП с выходом по напряжению буфер операционного усилите-
ля обеспечивает низкое выходное сопротивление ценой уменьшения
236 Глава 5. Интеллектуальные измерения
быстродействия. Скорость нарастания выходного напряжения опе-
рационного усилителя влияет на значение времени установки. По-
этому МЗР будет иметь наименьшее время установки, а СЗР —
наибольшее. Внешняя электрическая схема также будет более явно
влиять на время установки ЦАП, чем в ЦАП с токовым выходом.
Рис. 5.5. Типы ошибок в ЦАП
Паразитные импульсы
Паразитные импульсы в цифровых системах — это случайные крат-
ковременные выбросы, положительные или отрицательные, являю-
щиеся следствием неидеальности процесса переключения. Обычно
длительность таких выбросов имеет порядок наносекунд. Вслед-
ствие этого, а также из-за случайности природы возникновения, их
обнаружение является очень трудоемким процессом. Поэтому поиск
ошибок в работающей системе с помощью соответствующего осцил-
лографа или анализатора является неосуществимой задачей.
Паразитные импульсы могут появиться в выходном аналоговом
сигнале ЦАП в моменты, когда происходит изменение цифрового
сигнала в старшем разряде. Рис. 5.6. иллюстрирует эту ситуацию
для 3-битного ЦАП.
При увеличении МЗР на 1 входное значение 011 должно транс-
формироваться в 100.
011
(ООО скачок)
100
5.3. Квантование измеряемой величины
и больший выброс может произойти при ООО, если все единицы об-
нуляться раньше, чем нуль превратиться в единицу.
011
010
001
000
Паразитный
импульс
0 12 3 4 5 6 7
Аналоговый выход
Рис. 5.6. Пример паразитного импульса в 3-битном ЦАП
Двоичные коды были разработаны для минимизации возможной
переходной ошибки. Код Грэя, упомянутый в связи с датчиком вра-
щения, является одним из них. При каждом перемещении изменяется
всего один бит и это приводит к наименьшей ошибке при неправиль-
ном считывании значения. Несколько примеров значений показано
в табл. 5.1.
В системах с быстрым переключением выбросы появляются ре-
же. Если это необходимо, выбросы можно устранить, привлекая схе-
му экстраполятора нулевого порядка (ЭНП), которая не изменяет
полученных значений. Другие подобные схемы пытаются вводить
поправку на изменения, происходящие в устройстве, в то время по-
ка оно неактивно.
ЭНП показан на рис. 5.7. ЦАП подключен к конденсатору вплоть
до момента окончания преобразования. Затем цепь разрывается и
ЦАП изолируется, а уровень выходного сигнала обеспечивается кон-
денсатором. По истечении требуемого на релаксацию времени цепь
опять замыкается и значения на конденсаторе и на выходе обновля-
ются. Этот процесс вносит сверхзадержку и тем самым замедляет
полный темп преобразования.
Глава 5. Интеллектуальные измерения
Таблица 5.1. Код Грэя
Десятичное число Обычный двоичный код Код Грэя
0 0000 0000
1 0001 0001
2 0010 ООП
3 ООН 0010
4 0100 0111
5 0101 0111
6 ОНО 0101
7 0111 0100
8 1000 1100
9 1001 1101
10 1010 1111
11 1011 1110
12 1100 1010
13 1101 1011
14 1110 1001
15 1111 1000
Рис. 5.7. Экстраполятор нулевого порядка
5.3.2. Аналого-цифровое преобразование
На рынке представлено огромное множество АЦП. Диапазон их цен
достаточно широк. Самыми дорогими являются АЦП с высоким
разрешением и быстродействием. Цены на АЦП постоянно падают,
тем самым обеспечивая их широкое применение. Примером могут
послужить АЦП, применяемые в видеосистемах — это высокоско-
ростные АЦП и они достаточно дешевы. Далее будут рассмотрены
5.3. Квантование измеряемой величины 239
три большие группы АЦП, разделенные по принципу работы, про-
изводительности и цене.
1. Параллельные, или мгновенно преобразующие АЦП
Эти устройства являются самыми быстрыми и наиболее дороги-
ми АЦП. При высоком разрешении цена такого АЦП повышает-
ся. В преобразователе используется источник опорного напряже-
ния, подключенный к цепочке делителей, для обеспечения набора
опорных напряжений. Входной сигнал сравнивается с этим набором
напряжений при помощи компараторов или схем сравнения. Схемы
сравнения работают на высокой скорости и имеют время отклика
обычно менее 30 нс. Выходы компараторов кодируются в п-битное
цифровое слово. Для 8-битного АЦП требуется 255 компараторов.
Схема 3-битного устройства показана на рис. 5.8.
Если для очень, высокоскоростных систем сбора данных такой
АЦП не подходит из-за недостаточной скорости работы, сигнал мо-
жет быть мультиплексирован на несколько АЦП, так что время
преобразования не будет влиять на скорость сбора информации.
2. АЦП с двойным интегрированием
Преобразование с двойным интегрированием — медленная проце-
дура. Несмотря на это, устройства с высоким разрешением стоят
очень дешево (см. рис. 5.9.).
Интегратор подключается к аналоговому входу на определенный
промежуток времени t\, Затем блок управления подключает вход
интегратора к опорному напряжению другого знака и замеряется
время ^21 требуемое на разряд конденсатора. Измерения временных
интервалов производят таймером, логическим блоком и счетчиком.
За время t\ конденсатор приобретает разность потенциалов V:
V = -tA^, (5.11)
1 = /./«" (512)
где fc — тактовая частота, а No — количество тактов на установку
времени заряда t±.
Во время интегрирования опорного напряжения конденсатор дол-
жен получить такую же разность потенциалов, но обратного знака,
чтобы полностью разрядиться. Это значит, что
v = t2^, (5.13)
Глава 5. Интеллектуальные измерения
^зт
TcRC"
(5-14)
где п — переменная, равная количеству тактов для разряда конден-
сатора.
Рис. 5.8. АЦП параллельного преобразования
5.3. Квантование измеряемой величины 241
Рис. 5.9. Упрощенная схема АЦП с двойным интегрированием
Приравняем выражение (5.12) к (5.14) для полного разряда:
No Vex _ Т1 Уэт
Trc~7cRc
(5.15)
ИЛИ
n = N0^. (5.16)
*эт
Таким образом, значение п прямо пропорционально аналоговой ве-
личине Vex. Высокая точность номиналов R и С, как и других ком-
понентов, неважна. Однако существенна стабильность изменения
сопротивления ключа и величины опорного напряжения, которые
сильно влияют на точность. Главным недостатком является то, что
время преобразования (ti + £2) велико (обычно > 40 мс) и зависит
от уровня входного сигнала.
Разность
потенциалов
на выходе
интегратора
Рис. 5.10. Временная диаграмма работы АЦП с двойным интегрированием
Такой относительно простой метод преобразования позволяет
получать дешевые АЦП с высоким разрешением. Они широко ис-
пользуются в цифровых электронных инструментах, таких как ци-
Глава 5. Интеллектуальные измерения
фровые мультиметры и фазометры. Из-за широкого использования,
именно в этой области, АЦП-чипы, кроме того, часто обладают
дополнительными возможностями, такими как, например, автоуста-
новка нуля. В тех приложениях, где возможно негативное влияние
интерференции, значение ti может быть задано равным целому чи-
слу периодов интерферирующей частоты. Интегрирование Vex по
такому промежутку позволит снизить влияние интерференции до
нуля.
3. Преобразователи с обратной связью
По скорости преобразования АЦП с обратной связью находятся меж-
ду параллельными АЦП и преобразователями с двойным интегри-
рованием. Они являются наиболее популярными АЦП, имеющими
очень широкий диапазон характеристик, и доступны большинству
производителей. Из названия ясно, что сигнал преобразуется, затем
подается на ЦАП и полученный аналоговый сигнал сравнивается с
входным аналоговым сигналом. Различные типы преобразователей
с обратной связью можно классифицировать по последовательности
действий, требуемых для получения выходного сигнала.
За. Преобразователь с последовательным приближением
Это один из самых широко используемых типов АЦП (рис. 5.11).
Процедуру преобразования сигнала в нем часто называют двоичным
поиском. Битам в создаваемом двоичном слове последовательно при-
сваивается высокий логический уровень, и при каждом изменении
значение слова сравнивается с входной величиной.
Рис. 5.11. АЦП по-
следовательного при-
ближения
В начале преобразования логическая схема присваивает МЗР зна-
чение 1 и ожидает решения компаратора. Если полученное слово
больше входного, то значение МЗР меняется на 0.
5.3. Квантование измеряемой величины 243
Если полученное слово получилось меньше входного слова, то
МЗР остается равным 1 и процесс повторяется со следующим разря-
дом. Каждый шаг оценивает половину предыдущего. Поэтому такое
преобразование часто называют методом деления интервалов. Для
получения n-битного слова потребуется п сравнений. Это означает,
что для такого конвертора время преобразования будет постоянно,
независимо от воздействий на аналоговый вход.
36. Отслеживающий преобразователь
В таком АЦП цифровое значение получается с помощью реверсив-
ного счетчика (рис. 5.12). Компаратор отслеживает входной сигнал
и сигнал обратной связи и в соответствии с этим управляет ревер-
сивным счетчиком.
Рис. 5.12. Отслеживающий АЦП
Если цифровое значение слишком велико, то счетчик уменьшает
свое значение на 1 МЗР, а если слишком мало, то увеличивает. Обыч-
но компаратор работает ступенчато, поэтому цифровое значение не
изменяется, если ошибка меньше чем ±1/2 МЗР. Время преобразо-
вания равно одному циклу.
Конвертор будет выдавать правильные цифровые значения до
тех пор, пока изменение входного сигнала за один цикл не превысит
±1МЗР (рис. 5.13).
Типы АЦП и их производительность приведены в табл. 5.2. Суще-
ствует еще несколько других типов АЦП. Такие, как преобразова-
тель с двойным интегрированием, основаны на выравнивании заря-
да; примером могут служить система с подключаемым конденсато-
ром или дельта-сигма система. Другие типы используют одноша-
говое интегрирование или преобразование «напряжение-частота».
Более подробно этот вопрос рассматривается в работе Горовица и
Хилла (1989).
Глава 5. Интеллектуальные измерения
Рис. 5.13. Характеристики отслеживающего АЦП
Скорость преобразования и частотные
характеристики АЦП
Конструкция АЦП позволяет им работать с биполярными или уни-
полярными входными сигналами, например ±5 В или 04-10 В, с раз-
решением 6, 8, 10, 12, 16 или 18 бит. Если требуется использовать
полное разрешение АЦП, то входной сигнал должен быть близок по
амплитуде к максимально допустимому для АЦП сигналу. Кроме
того, для обеспечения разрешения не хуже 1 МЗР за время, требуе-
мое на преобразование, амплитуда входного аналогового сигнала не
должна меняться больше, чем на значение, эквивалентное ±1/2 МЗР.
Для определения максимальной частоты входного сигнала для
АЦП, анализ проводится с использованием синусоидального сигнала:
V = Vo sin wt. (5.17)
Для оценки скорости нарастания выходного напряжения, продиф-
ференцируем это выражение:
= wVq cos cot. (5.18)
Следовательно, максимальная скорость нарастания выходного на-
пряжения имеет значение:
± = wV0. (5.19)
at
Вывод данного критерия будет показан ниже. Условимся, что ис-
пользуются однополярные ЦАП. Следовательно, из-за того что сину-
соида имеет максимальный размах амплитуды 2Vo, для обеспечения
5.3. Квантование измеряемой величины
лучших характеристик необходимо, чтобы выполнялось равенство:
2 Vo = Vmax, (5.20)
где Vmax — максимально допустимое входное напряжение.
Таблица 5.2. Сравнение некоторых типов АЦП
Аналого-цифровой преобразователь Цена Скорость Примечание
Параллельный (flash) Высокая Очень высокая (30 нс) Используется в высокоскоростных системах. Существуют 10-битные преобразователи, но широко распространены 8-битные
Двойного интегрирования Низкая Низкая (40 мс) Переменное время преобразования. Может быть настроен для уменьшения влияния интерференции. Хорошая точность преобразования. Существуют 10- и 18-битные версии с расширениями.
С обратной связью Выше средней Высокая, от 25 мкс до 400 нс Существуют версии с 16-битным разрешением
Обычно АЦП параллельного или следящего типов способны изме-
нять выходной сигнал с частотой 1 МЗР за такт. Но, как уже было
сказано, корректное преобразование сигнала возможно лишь в том
случае, когда изменение входного сигнала не превышает 1/2 МЗР за
такт. Следовательно, максимально допустимая скорость нарастания
сигнала —
£ =. (5.21)
at период тактовых импульсов
Таким образом,
1 МЗР = (5.22)
где 2П — число инкрементов, составляющих Кроме того, мож-
но выразить период тактовых импульсов через частоту fc:
период тактовых импульсов = —. (5.23)
fc
После подстановки в (5.21) получаем:
dV = ^Vnax
dt 2n J v 7
Глава 5. Интеллектуальные измерения
W<5-25>
Приравнивая две скорости нарастания из (5.19) и (5.25), находим:
= ^fc. (5.26)
Заменим Vmax, используя (5.20), тогда
"И. = л- <5-27)
Выражение для максимального значения частоты wmax входного
сигнала имеет вид:
^тах — 2^- (5.28)
Для 8-битного АЦП с тактовой частотой 1 МГц, используя выраже-
ние (5.28), получим
fmax = 621,7 Гц. (5.29)
В приведенном примере обновление выходного сигнала АЦП про-
исходит один раз за 1 мкс. При этом частота входного сигнала
не должна превышать 621,7 Гц. И конечно же, во входном сигнале
не должны присутствовать скачки или перепады напряжения. Это
накладывает еще большие ограничения по частоте, чем те, что пред-
ставлены в теореме Шеннона-Найквиста (см. 5.2). Теорема утвер-
ждает, что fmax < ‘Zfs, где f8 — частота дискретизации. В данном
примере частота дискретизации является тактовой частотой и рав-
на 106 Гц, что определяет fmax равной 500 кГц.
Аналогичный анализ может быть проведен для преобразователя
с последовательным приближением. Как уже отмечалось, для завер-
шения преобразования n-битному устройству требуется п тактов.
При этом в течение преобразования входной сигнал не должен изме-
няться более чем на величину, эквивалентную ±1/2 МЗР. Выражая
скорость нарастания как и ранее
dt п циклов тактовых импульсов ’
получаем уменьшение максимальной частоты до
Штах = п2"' (5’31)
Используя те же числовые значения, что и в предыдущем приме-
ре, получим выражение для разрешения в 8 бит и периода тактов 1 мкс:
106
fmax = или 77,71 Гц. (5.32)
Хтг
5.3. Квантование измеряемой величины 247
Время преобразования составляет 8 мкс, тем самым максималь-
ная частота дискретизации может быть не больше 125 000 выборок
в секунду. Для такой частоты дискретизации по теореме Шеннона-
Найквиста максимальная частота входного сигнала будет 62,5 кГц.
Очевидно, что ограничение изменения входного сигнала за время
преобразования величиной, эквивалентной ±1/2 МЗР, для обеспе-
чения лучшего разрешения, ухудшает частотные характеристики
АЦП. Это ограничение можно обойти, если перед АЦП поставить
устройство, которое будет производить дискретизацию аналогово-
го сигнала и выдавать на АЦП дискретные значения, сохраняя их в
течение всего времени преобразования. Такая методика сохранения
значения сигнала будет рассмотрена ниже.
Устройство дискретизации и хранения
Экстраполятор нулевого порядка, представленный на рис. 5.7, и уст-
ройство дискретизации и хранения (УДХ) очень похожи. Потреб-
ность в использовании УДХ определяется частотами, присутству-
ющими во входном аналоговом сигнале и требуемым разрешени-
ем. УДХ имеют конечное быстродействие, но апертурная задержка
очень мала (до 0,3 пс). Это эффективно повышает скорость нара-
стания напряжения до
dV _ |МЗР
dt апертурная задержка
(5.33)
Приравнивая это выражение к значению максимальной скорости на-
растания синусоиды из выражения (5.19), получим
тг 2(2 ПУтах) /г
cjVo =----------------------• (5.34)
апертурная задержка
Если, как и ранее, используется весь диапазон изменения входного
Сигнала АЦП 2У0 = Утах, то
2П (апертурная задержка)
Даннбе выражение похоже на предыдущие для сишаж, только апер-
турная задержка заменена периодом тактовых импульсов. Если ис-
пользовать предыдущий пример 8-битного преобразователя и положить
значение апертурной задержки равным 0,3 пс, то в соответствии с
выражением (5.35) fmax примет значение 2072 МГц! Очевидно, что
отмеченное улучшение повышает максимальную частоту входного
сигнала.
Максимальная частота входного сигнала теперь ограничена толь-
ко теоремой Шеннона - Найквиста. АЦП требуется некоторое вре-
248 Глава 5. Интеллектуальные измерения
мя т на преобразование сигнала. В течение этого времени все при-
влеченные АЦП находятся в неактивном состоянии и, значит, имен-
но это время определяет частоту дискретизации. При использовании
УДХ время дискретизации немного увеличивается. Теорема Шенно-
на-Найквиста определяет максимально допустимую частоту вход-
ного сигнала как
fmax < 7Г7 Т V (5.36)
2(т + апертурная задержка)
Очевидно, что использование УДХ позволяет достичь предела
частоты дискретизации, определенного теоремой дискретизации, без
ухудшения разрешения АЦП.
5.4. Платы сбора информации для ПК
В настоящее время на рынке представлено большое количество плат
сбора данных и необходимо определить характеристики, по кото-
рым осуществляется выбор. Цена таких устройств может быть от
сотен до нескольких тысяч фунтов. Такая разница в цене обусло-
влена разницей в скорости, разрешении и сложности сбора данных.
Простая плата обычно использует 12-разрядный АЦП, с временем
преобразования 1 мс, без возможности обработки измеряемой ин-
формации, кроме как передачи в компьютер. В то же время плата
известного производителя высшей ценовой категории будет иметь
собственную память и средства обработки измеряемой информации.
Кроме того, возможно, что обработанная информация записывает-
ся непосредственно на жесткий диск. И все же характеристика, в
наибольшей степени влияющая на цену устройства, — это скорость
съема информации.
Высокоскоростная плата может включать в себя 16-разрядный
АЦП со временем преобразования менее 10 мкс. Такие АЦП сами
по себе стоят более 100 фунтов. На плате может использоваться
по одному АЦП на канал, поскольку мультиплексирование входных
каналов через один АЦП снижает частоту дискретизации. По этой
причине высокоскоростные платы обычно имеют мало каналов. При
ознакомлении с техническими характеристиками плат сбора данных
важно различать частоту преобразования АЦП и реальную частоту
считывания информации с входного канала. Очевидно, что плата с
одним АЦП и 16 входными каналами будет работать в 16 раз мед-
леннее, чем сам АЦП. Некоторые платы сбора позволяют отключать
мультиплексирование, так что один входной канал Оудет работать
на полной скорости АЦП.
5.4- Платы сбора информации для ПК 249
Чтобы понять, как микропроцессор ПК взаимодействует с пла-
тами сбора информации, потребуются небольшие знания архитекту-
ры микропроцессорных систем и механизма ввода/вывода данных.
По сути, микропроцессор использует две области памяти, одну для
хранения программы, а другую для обрабатываемых данных. В мо-
мент включения компьютера программа загружается в память ми-
кропроцессора из энергонезависимой памяти (сохраняющей инфор-
мацию при выключении электропитания) — такой же, как жесткий
диск. Электронная память размещена как в самом микропроцессоре,
так и во внешних чипах памяти. Эта память используется вслед-
ствие того, что она обладает лучшими показателями по скорости
доступа, нежели память, используемая для длительного хранения
информации. Для доступа к различным участкам памяти в микро-
процессоре существует система адресации. Адреса участков памяти
задаются на этапе проектирования микропроцессора и его перифе-
рии. Эта система называется картой памяти. В памяти существу-
ют несколько адресов, которые на самом деле являются портами
ввода/вывода. Во время работы программы, в момент чтения или
записи данных по этим адресам, происходит обмен информацией
между микропроцессором и внешними устройствами.
Программное обеспечение для передачи цифровых данных через
порты ПК может быть написано на языках программирования вы-
сокого уровня, таких как Паскаль или некоторые версии Си. Это не
всегда необходимо, поскольку обычно коммерческие платы сбора и
обработки данных комплектуются собственным ПО. Приведенный
ниже пример демонстрирует использование mZme-процедуры для до-
ступа к данным, поступающим на порт ввода ПК от платы сбора
и обработки информации. Префикс «inline» обозначает часть кода,
написанного на Ассемблере, вместе с программой, созданной с по-
мощью языка высокого уровня. Это требует прямого обращения
к ряду инструкций микропроцессора, созданных его разработчи-
ками. Из-за того что необходимо отдельно описывать каждое дей-
ствие, процесс написания такой программы очень утомителен и тре-
бует много времени. Преимущество же программы заключается в
том, что после компиляции (превращения инструкций в двоичный
код, понятный микропроцессору) время ее выполнения минимально.
В программе, представленной ниже, ПК ожидает получения блока
из 128 значений, который может быть, например, частотным спек-
тром, являющимся результатом быстрого преобразования Фурье.
Эти значения получены отдельным микропроцессором, находящим-
ся на специализированной плате обработки. (Плата должна иметь
свои собственные алгоритмы и память.)
250 Глава 5. Интеллектуальные измерения
pascal instruction
pascal instruction
pascal instruction
inline(
$ВА/$0294/ { MOV DX.294H}
$ВЗ/$20/ { MOV BL,32}
$ЕС/ {LOOP 1: IN AL,DX}
$84/$СЗ { TEST AL,BL}
$74/$FB { JZ LOOP!}
);
N: =1;
REPEAT
inline(
$BA/$0294/{ MOV DX,294H}
$B3/$02/ { MOV BL,2}
$EC/ {LOOP 2: IN AL,DX}
$84/$C3 { TEST AL,BL}
$74/$FB { JZ L00P2}
);
DATA[N]:=P0RTW [$290];
CLEAR:=(PORT[$294] AND 2);
N:=N+1;
UNTIL N=129;
pascal instruction
pascal instruction
pascal instruction................
В первом цикле проверяется порт ввода ПК 294Н на готовность
платы сбора к передаче данных. Плата выставит флаг (специаль-
ное двоичное значение) на этом порту после того, как она завершит
работу алгоритма генерации 128 значений. После появления флага
ПК переходит ко второй проверке (1оор2). Каждый раз, когда плата
пересылает очередное значение на вход ПК, она выставляет флаг.
Обнаружение флага инициирует считывание информации с порта
ввода 290. После считывания информации ПК сбрасывает флаг и
ждет его очередного появления. После считывания 128 значений ПК
возвращается к циклу 1 и ожидает завершения обработки платой
следующей порции данных. Передача данных осуществляется парал-
лельным интерфейсом для достижения максимальной скорости.
5.5. «Умные» датчики 251
Критерий выбора
При выборе платы сбора или обработки информации важно обра-
щать внимание на следующие параметры:
- Требуемая частота сбора данных. Она должна быть как ми-
нимум в 2 раза больше, чем максимальное значение частоты
измеряемого сигнала.
- Требуемое разрешение по напряжению и, следовательно, раз-
рядность.
- Количество измеряемых каналов.
- Диапазон измеряемого напряжения.
- Возможность изменения диапазона измерения напряжения на
плате.
- Тип измеряемого сигнала — однополярный или биполярный.
- Использование дифференциального входа при измерениях.
- Возможность выбора между измерением постоянного и пере-
менного тока.
- Необходим ли цифровой вход/выход?
- Нужен ли аналоговый выход?
- Уровни шумов.
- Линейность.
- Температурная стабильность.
- Стоимость.
5.5. «Умные» датчики
В настоящее время продается множество датчиков со встроенным
микропроцессором. Такие датчики принято называть «умными». Об-
работка измерений непосредственно в самом датчике позволяет улуч-
шить его характеристики. Общая схема таких датчиков, предложен-
ная Бригнелем и Дори (1983), показана на рис. 5.14.
Сам датчик находится под управлением микропроцессора, это
позволяет менять уровни возбуждения так, что переключение меж-
ду диапазонами происходит автоматически. Кроме того, могут от-
слеживаться температура окружающей среды и другие параметры,
а также производиться коррекция показаний датчика с использова-
нием аналогового усилителя или данных, сохраненных в памяти. Са-
мая ценная возможность, предоставляемая микропроцессорной об-
работкой, — возможность получения линейного сигнала от нели-
нейного датчика при помощи таблицы соответствия, хранящейся в
252 Глава 5. Интеллектуальные измерения
памяти. Это позволяет создавать датчики с очень низкой нелиней-
ностью.
в супервизовом
режиме
Рис. 5.14. Архитектура «умного» датчика
Выходы могут быть аналоговыми и цифровыми. Аналоговые сис-
темы для технологических установок непрерывного производства
используют live zeros, когда нулевое значение сигнала передается
уровнем 4 мА, чтобы можно было отличить обрыв кабеля от нуле-
вого значения сигнала. Стандартный рабочий диапазон — 14-5 В
или, для лучшей помехоустойчивости на длинных расстояниях, —
4ч-20 мА. Цифровая телеметрия становится все более распростра-
ненной, но на момент подготовки оригинала книги стандарт про-
токола для Fieldbus еще не был утвержден. Вход диспетчерского
управления позволяет включать прибор в состав большой системы
управления либо может привлекаться для локального управления. В
дополнение к сигналам тревоги, свидетельствующим о превышении
заданного значения сигнала, встроенная память может быть исполь-
зована для протоколирования измеряемых данных с последующей
передачей протокола на главное управляющее устройство. На опас-
ных производствах, где существует риск взрыва, в электрическую
цепь обычно включают предохранительное устройство на основе ди-
ода Зенера. Такие устройства сейчас выпускаются серийно. Они
устанавливаются в местах, специально отведенных для устройств
такого рода, и подключаются к электросети предприятия; см. «Тех-
нология измерений» (1989). Предохранительные устройства предна-
5.5. «Умные» датчики 253
значены для ограничения подачи электроэнергии на опасный уча-
сток до такого уровня, при котором не возможно искрообразование.
Сейчас многие производители предлагают «умные» преобразо-
ватели. Примером может служить серия Smart Deltapi KS датчи-
ков относительного давления, производимая «АВВ Кент-Тейлор».
В дальнейшем масштабы внедрения микропроцессорной обработки
в датчики будут возрастать вследствие высокой эффективности и
конкурентоспособности таких систем.
Развитие микропроцессоров
Для увеличения производительности микропроцессоров сейчас при
их разработке уменьшают количество доступных программных ин-
струкций, которые формируют очередь операций процессора и ис-
пользуют аппаратное обеспечение, способное выполнять этот усе-
ченный набор инструкций быстро и эффективно. Такие микропро-
цессоры с усеченным набором инструкций называются микропро-
цессорами с RISC-архитектурой. Обычно RISC-процессор имеет ме-
нее 40 инструкций, в то время как обычный микропроцессор —
несколько сотен. Следующая возможность увеличения производи-
тельности — включение большего объема памяти, ЦАП и АЦП в чип
микропроцессора, что позволяет легко создавать новые устройства
с использованием минимума дополнительных компонентов. Такие
чипы называют микроконтроллерами. Производители предоставля-
ют системы проектирования для облегчения процесса разработки
и отладки (на встроенном симуляторе) программ. Такие системы
предназначены для использования на ПК. После того как програм-
ма безошибочно проработает на симуляторе, ее можно загрузить
в память микроконтроллера. Это можно сделать с помощью пла-
ты разработки, подключаемой к порту ПК. Затем микроконтроллер
можно поместить на предназначенную для него печатную плату, тем
самым получив новое специализированное устройство.
В настоящее время микроконтроллеры предлагает ряд произ-
водителей. В этой области широко известны «Моторола», которая
производит несколько серий микроконтроллеров, и «Микрочип Тек-
нолоджи» с семейством PIC. Микроконтроллеры находят множество
различных применений. Например, они используются в измеритель-
ной технике, в «умных» датчиках или для управления платами рас-
ширения ПК, а также регистраторами данных и специализирован-
ными измерительными системами.
Несмотря на удобство использования и сравнительную дешевиз-
ну микроконтроллеров ведутся разработки новых специализирован-
(254
Глава 5. Интеллектуальные измерения
ных микропроцессоров для ЦОС. «Техас Инструменте» уже давно
известен своей серией ЦОС-микропроцессоров TMS320. Набор ин-
струкций ЦОС-микропроцессора содержит специальные функции для
реализации ЦОС-алгоритмов. При использовании ЦОС-микропро-
цессоров в реальном времени могут быть произведены расчеты для
высококачественной цифровой фильтрации, быстрого преобразова-
ния Фурье, корреляции и т. д.
В заключение этого раздела приведем краткий обзор текущих
направлений в философии и технологии разработки микропроцес-
соров. Полностью цифровые логические схемы, в которых возмож-
но задание их структуры, уже доступны в течение последнего де-
сятка лет. Это программируемые логические интегральные схемы
(ПЛИС), которые используются для разработки сравнительно про-
стых устройств. Недорогие в производстве чипы содержат порядка
100 логических элементов или ячеек. Среда разработки предназна-
чена для небольших рабочих станций. Пользователь создает тре-
буемую логическую структуру и после отладки на симуляторе за-
писывает ее в чип. Таким способом небольшая компания способна
производить цифровые микропроцессоры прямо на месте. Приме-
ром такого чипа может служить процессор системы охранной сиг-
нализации. Программируемые пользователем аналоговые чипы на
момент подготовки данной публикации только начинали появлять-
ся на рынке. Они содержат некоторое количество аналоговых ячеек,
которые соединяются между собой при «прожиге» структуры, опре-
деляемой пользователем.
Более сложные структуры, использующие композицию аналого-
вых и цифровых сигналов, могут быть созданы с применением за-
казных интегральных схем (ASIC). Их структура разрабатывается
пользователем с помощью программного обеспечения, поставляемо-
го производителем интегральных схем (ИС). Затем, на стадии про-
изводства, разработанная структура переносится в чип. Это намно-
го более дорогая процедура, и она оправдывает себя только в случае,
если требуется произвести большое количество чипов. Обычно при
изготовлении печатной платы, на которой присутствуют цифровые
и аналоговые сигналы, их стараются изолировать друг от друга, ис-
пользуя отдельные земляные шины, стремясь разводить проводники
так, чтобы высокочастотные тактовые импульсы и цифровые сиг-
налы не проникали в аналоговые цепи. Такие наводки могут создать
большую проблему при проектировании чипа со смешанными сигна-
лами. Кроме того, библиотеки элементов, поставляемые производи-
телями ASIC, не содержат специализированных микропроцессоров
5.6. Искусственный интеллект в измерениях 255
и операционных усилителей. Радиочастотные аналоговые компонен-
ты также недоступны.
Сейчас при разработке высококачественной измерительной сис-
темы (высокопроизводительной, с высоким разрешением, способной
осуществлять комплексную обработку сигнала с низким уровнем
шума и помех) рекомендуется использовать дискретные специали-
зированные чипы.
5.6. Искусственный интеллект в измерениях
В некоторых случаях требуется обрабатывать и анализировать ин-
формацию, поступающую от нескольких датчиков. Такая потреб-
ность может появиться из-за того, что оператор не способен оцени-
вать приходящую информацию с требуемой скоростью. Примером
служит ситуация с пилотом истребителя, данные к которому по-
ступают после первичной обработки экспертной системой. Другая
проблема может возникнуть, когда требуется анализ информации,
поступающей от нескольких источников, причем данные должны
находиться в строго заданных диапазонах, которые зависят от зна-
чений данных других каналов. Хорошим примером может служить
оценка качества пищевого продукта, когда такие показатели, как
цвет, pH, запах и содержание сахара, должны находиться в задан-
ных диапазонах, зависящих друг от друга. Например, чем больше
содержание сахара, тем выше допустимое значение pH. Задачи по-
хожего типа стимулировали развитие систем с искусственным ин-
теллектом на основе нечеткой логики и искусственных нейронных
сетей.
Определение понятия искусственный интеллект, впервые пред-
ложенное Джоном Маккарти в 1950-х годах, несколько расплывчато.
Также как и при изучении человеческого интеллекта, с ростом по-
нимания и новыми открытиями были созданы новые разделы в этой
области. Далее будут кратко рассмотрены некоторые аспекты ис-
кусственного интеллекта в приложении к измерительным системам.
5.6.1. Экспертные системы,
основанные на правилах
Эксперт — это человек, обладающий большими познаниями в не-
которой области. Познания делятся на факты и правила. Правила
определяют структуру, которая позволяет делать выводы на основе
фактов.
256 Глава 5. Интеллектуальные измерения
Такая же структура содержится в машине логического вывода
(МЛВ). В простейшем случае МЛВ состоит из набора условных опе-
раторов IF-THEN (ЕСЛИ-ТОГДА). Их структура и последователь-
ность определяет путь, который пройдет экспертная система для
получения окончательного вывода. Этот путь называется цепочкой
вывода. Различают цепочки прямого и обратного вывода. В цепоч-
ке обратного вывода логическая структура работает в обратном
направлении от заданной гипотезы, пытаясь собрать факты для под-
тверждения ее (гипотезы) истинности. Примером может служить
сбор детективом фактов для подтверждения своих подозрений. Це-
почка прямого вывода начинает от заданных фактов и пытается
получить вывод на их основе. Пример — определение причины смер-
ти с помощью патологоанатомического исследования, осмотра тела
и результатов анализов. Существует вариант, когда возможно од-
новременное использование прямой и обратной цепочек — это уже
ближе к процессу формирования выводов человеком. Но в случае
измерительных систем оптимальным вариантом является прямая це-
почка вывода. Для прямой цепочки нужно определить механизм по-
ведения при решении неоднозначностей, которые появляются, если
при работе МЛВ выполняется более одного правила. Эту проблему
решают расстановкой приоритетов для правил, однократным ис-
пользованием правил или использованием правила, относящегося к
наиболее позднему дополнению в память данных.
Ранние приложения с использованием искусственного интеллекта
были созданы для того, чтобы поместить экспертную оценку извест-
ного специалиста или опыт целой команды в базу знаний, которой
позднее мог бы воспользоваться новичок или к которой мог быть
обеспечен удаленный доступ. Кроме того, она могла быть обрабо-
тана на высокой скорости, не доступной человеку.
Вот примеры таких экспертных систем:
- Медицинский эксперт по диагностированию и лечению рака
может предоставить свой профессиональный опыт в on-line-
доступ из любой точки мира.
- Устойчивая работа удаленного инженерного сооружения, та-
кого как буровая платформа или космический корабль. Знания
разработчиков и обслуживающего персонала могут храниться
прямо на борту, и при аварийных ситуациях, диагностирова-
ние и ремонт можно осуществить даже при отсутствии связи
с базой.
- Диагностика отказов некоторых сложных устройств после про-
изводства или при обслуживании, например, использование
5.6. Искусственный интеллект в измерениях
25?)
компьютера для диагностики неисправностей в автомобилях.
Компании, занимающиеся дальними перевозками, имеют воз-
можность отслеживать состояние автомашин в пути. После
возвращения на базу эти данные проанализируются и диагно-
стируются возможные неполадки, что приводит к снижению
количества поломок автомобилей на трассе.
- Сложность конструкции современных самолетов приводит к
тому, что экипаж не всегда способен своевременно отреаги-
ровать на предупреждения об атаке или не всегда обладает
достаточными навыками, чтобы оценить значимость неполад-
ки или уровень требуемого ремонта, основываясь на значени-
ях аварийных сигналов. Использование экспертных систем на
коммерческих авиалайнерах позволило уменьшить количество
экипажа.
В работе Дуркина (1994) содержится обзор областей приложения
экспертных систем.
Считается, что экспертные системы, основанные на правилах,
являются наилучшим выбором для производства систем баз знаний
(см. Негневитский, 2002). Экспертные системы отличаются друг от
друга в зависимости от их назначения. Но их основой, как было
сказано выше, является большая база знаний, с помощью которой
делаются соответствующие выводы. Иногда может потребоваться
ввод дополнительных данных пользователем, но при этом введенные
данные должны соответствовать понятиям и структуре базы дан-
ных. Также можно оценить вероятность совпадения. В некоторых
приложениях возможна автоматическая выдача управляющих сиг-
налов. Например, когда радары быстро и низколетящего истребите-
ля обнаруживают гору на своем пути. Но это скорее управляющее
приложение, нежели измерительное. Сейчас, как и раньше, ведут-
ся исследования в области применения искусственного интеллекта в
теории управления, особенно в робототехнике.
Для экспертных систем были разработаны специализированные
языки программирования. Наиболее известные из них — LISP, PRO-
LOG и OPS. Язык LISP был создан Джоном Маккарти и является
старейшим из всех языков. Появление легкодоступных вычислитель-
ных мощностей, которые возникли с приходом в 1980-х годах ПК и
рабочих станций, подтолкнуло многих разработчиков программно-
го обеспечения к созданию компьютерных программ для разработки
экспертных систем. То есть пользователю уже не требовалось быть
опытным программистом для использования этих языков. Среду
9—4227
258 Глава 5. Интеллектуальные измерения
разработки стали называть оболочкой (shell). Это пакет программ,
содержащий все необходимые инструменты, а разработка структу-
ры системы сводится лишь к вводу пользователем фактов и правил.
5.6.2. Нечеткая логика
Система принятия решений редко нужна для того, чтобы выносить
строгие решения типа «черное» или «белое», чаще от нее требуется
более тонкая оценка значений — типа «градации серого». Напри-
мер, говоря о температуре воды, используют понятия «холодная»,
«прохладная», «теплая», «горячая», «очень горячая». Это отличается
от простого машинного подхода, когда выбирается некий уровень
температуры, и если температура выше этого уровня, то вода счи-
тается горячей, а ниже — то холодной.
При попытке внедрить лингвистические описания в математи-
ческое представление польский логик и философ Ян Лукашевич в
1930 г. предложил понятие многозначной логики. Логические пере-
менные в ней могут принимать любое значение в промежутке меж-
ду 0 и 1. Значение, которое принимает величина, отражает степень
вероятности ее истинности. Это легло в основу теории вероятно-
сти. Макс Блэк (1937) предложил, чтобы значения, присваиваемые
уровням в дискретной системе многозначной логики, задавались на
основе мнения группы людей. Он первый задал простейшее нечет-
кое множество. В работе Лотфи Задеха (1962), профессора элек-
тротехники в Беркли, была обоснована потребность в новом типе
математики для использования в области нечетких величин. В до-
полнение к этому он доказал, что традиционные распределения ве-
роятностей не подходят для внедрения лингвистических структур
в теорию систем. Три года спустя Задех (1965) опубликовал рабо-
ту, определявшую формальную систему математической логики для
теории нечетких множеств. Раньше он считал, что нечеткая логика
может быть использована только в гуманитарных науках, но в этой
работе он уже говорит о том, что она будет играть важную роль в
системах автоматического управления.
Множество — это объединение классификаций. В обычном язы-
ке классификация происходит по принадлежности чего-либо к ка-
кому-то определенному множеству. Например, Ролс-Ройс принадле-
жит к множеству машин. В традиционной теории множеств элемент
может либо принадлежать множеству («истина»), либо нет («ложь»).
Принадлежность к множеству кодируется логической 1, а проти-
воположная ситуация — логическим 0. Множества, определенные в
5.6. Искусственный интеллект в измерениях 259
таком строгом виде, часто называют четкими. Динамический диа-
пазон рассматриваемой переменной, например температуры воды,
описывается в виде предметной области. Для определенной предмет-
ной области может существовать семейство множеств. В строгом
множестве с предметной областью X, где частное значение х может
как принадлежать, так и не принадлежать X, используется следую-
щая запись:
если х принадлежит X, то х е X;
если х не принадлежит X, то х X.
Идеей Задеха являлось использование плавной принадлежности.
Нечеткое множество А имеет функцию принадлежности ко-
торая описывает степень принадлежности. Функция принадлежно-
сти задается в следующем виде:
цА(х):Х^ [0,1]. (5.37)
Значение принадлежности точки х находится в диапазоне
0Оа(*К1- (5.38)
Рис. 5.15 иллюстрирует пример с температурой воды, рассмотрен-
ный выше. Четкое и нечеткое множества приведены для понятия
«горячо».
s l.Ot
о
0.8-
I 0.6-
S3
Ри
е
Й 0.4-
<D
К
О)
5 0.2--
Четкое
множество
Нечеткое множество
(горячо)
0.0 I—
10
20 30 40 50 60 70
Температура воды в емкости (°C)
Рис. 5.15. Четкое и нечеткое множество
Для данного примера используется следующее семейство нечет-
ких множеств: холодная, прохладная, теплая, горячая, очень горя-
чая. Существуют нечеткие множества, входящие в другие множе-
ства в той же предметной области. Такие множества называют не-
четкими подмножествами. Например, множество «очень горячо»
260 Глава 5. Интеллектуальные измерения
может иметь подмножество «очень, очень горячо». Четкое подмно-
жество должно полностью находиться в том множестве, которому
оно принадлежит. В свою очередь, нечеткое подмножество может
принадлежать нескольким множествам.
При работе с подмножествами иногда упоминают «родительское
супермножество». Все значения Xi в этом супермножестве должны
иметь степень принадлежности, равную 1. Другими словами, это
супермножество является четким множеством, где = 1 для
всех элементов.
Для описания нечеткого множества необходимо задать функ-
цию принадлежности //. Если предметная область дискретна, то
для каждой ее точки должна быть задана вероятность принадлеж-
ности множеству. Экспертную систему можно создать, попросив
специалиста задать степень принадлежности значений предметной
области к интересующему нечеткому множеству. Полученные зна-
чения могут быть введены в компьютер в виде вектора. Например,
для приведенного случая с температурой воды значения будут та-
кие:
Х = 10,20,30,40,50,60,70 [°C],
тогда нечеткое множество «горячо» будет иметь следующие значе-
ния функции принадлежности:
горячо = (0,15 0,17 0,19 0,5 0,9 0,93 0,95).
Обычно векторы нечеткого множества записываются так, чтобы ка-
ждое значение функции принадлежности было записано рядом со
своим значением из предметной области. Символ «/» используется
для отделения величины принадлежности от значения переменной.
Для данного примера
горячо = (0,15/10 0,17/20 0,19/30 0,5/40 0,9/50 0,93/60 0,95/70).
Функция принадлежности может быть введена в программу нечет-
кой логики и как непрерывная математическая функция. Для этого
часто используют сигма-, Гауссову и пи-функции. Для множеств
среднего размера обычно выбирают треугольную форму (рис. 5.16).
Коммерческие ПО для проектирования систем с нечеткой логикой
обычно уже имеют эти функции в стандартных библиотеках. Поль-
зователь просто вводит несколько значений для более точного зада-
ния функции.
Возможно и дальнейшее формирование заданного нечеткого мно-
жества с внедрением в него лингвистики человеческого языка. Так,
определения «очень» и «чрезвычайно» «отягощают» значение сред-
5.6. Искусственный интеллект в измерениях
него, в то время как «умеренно» и «довольно» облегчают. Такие
модификаторы нечетких множеств называют хеджами.
10 20 30 40 50 60 70
Температура воды в емкости (°C)
Рис. 5.16. Треугольное нечеткое множество
Рис. 5.17. Использование хеджей на нечетком множестве
Рис. 5.17 показывает пример реализации этой идеи для нечеткого
множества «холодно». Штриховая линия получена путем возведения
в квадрат функции, графиком которой является наклонная линия.
Она описывается как «очень холодно». Пунктирная линия получена
извлечением квадратного корня из той же функции. Она может быть
описана как «умеренно холодно». Замена функции принадлежности
на /1п, где п — положительная величина, уменьшит (n > 1) или
расширит (n < 1) значения принадлежности нечеткого множества
на требуемую величину. Асимметричные функции можно так же
Глава 5. Интеллектуальные измерения
легко задавать и использовать, например, треугольную функцию,
усеченную кривой с одной стороны.
Для получения выходных данных от системы нечеткой логики
входные данные подвергаются логическим операциям. Георг Кантор
разработал классическую теорию множеств в конце XIX века. В те-
орию нечеткой логики она входит как составная часть, отвечающая
за четкие множества. Обобщение трех из операций над классиче-
скими множествами — дополнение, пересечение и объединение —
на случай нечетких множеств приведено ниже. Результатом обоб-
щенной операции всегда является новое множество.
Дополнение
Это логическая инверсия или операция «НЕ». Так, операция допол-
нения над нечетким множеством «горячо» создаст новое множество
«НЕ горячо». Математическое выражение операции имеет вид:
Р'НЕ горячо — 1 /^горячо- (5.39)
Пересечение
В логике четких множеств это просто операция «И». А для нечетких
множеств результатом являются наименьшие значения из области
пересечения. Иногда ее называют операцией минимума (min). На
рис. 5.18 пересечением является черный треугольник, его можно ха-
рактеризовать как «прохладно». Для обозначения данной операции
используют символ «П». Для приведенного примера
/^прохладно — Р'холодно Г1 р>тпепло •
(5.40)
Температура воды в емкости (°C)
Рис. 5.18. Операция пересечения
5.6. Искусственный интеллект в измерениях
Объединение
Результатом этой операции являются значения одного или обоих не-
четких множеств, что соответствует логической операции «включа-
ющее ИЛИ». В этом случае используют максимальное значение и
из-за этого ее иногда называют операцией максимума (max). Как
уже говорилось, результатом является новое множество. Его мож-
но охарактеризовать как «не прохладно». Математический символ
операции — «и».
(5-41)
Мне прохладно — [^холодно U Р'тепло •
10 20 30 40 50 60 70
Температура воды в емкости (°C)
Рис. 5.19. Операция объединения
Итак, объяснив понятия нечетких множеств и логических опе-
раций, рассмотрим процедуру нечеткого вывода. Задача системы
нечеткой логики — создать четкий результат на основе комбинации
входных данных. В нечеткой логике процесс получения результата
из входных данных называется выводом. В 1975 Мамдани и Ассил-
лиан опубликовали работу, посвященную системе нечеткой логики,
управляющей котлом и паровым двигателем. Использованный ими
метод вывода получил название метод Мамдани и является сейчас
наиболее распространенным методом логического вывода в нечет-
ких системах. На рис. 5.20 показана последовательность действий
этого метода.
(1) Фазификация
Первым этапом является получение данных и определение их функ-
ции принадлежности для каждого нечеткого множества. Как уже
было сказано, эти функции должны быть заданы экспертом в дан-
264 Глава 5. Интеллектуальные измерения
ной области. Например, для рис. 5.21 входное значение температу-
ры 27 °C имеет степень принадлежности 0,3 для множества «холод-
но», 0,0 — для множества «тепло» и 0,05 — для множества «горячо».
(В рамках теории нечеткой логики все входные числовые значения
являются четкими.)
ДАННЫЕ ^/«Газификация
ДАННЫЕ —входных
ДАННЫЕ -*/ данных/
Рис. 5.20. Метод вывода Мамдани
ВЫХОД
(2) Правила оценки
Эквивалентом правил в двоичной логике являются операторы IF-
THEN. Правила выполняются при помощи логических операций, опи-
санных выше. Нечеткие правила были созданы Задехом в 1973 г.
Для иллюстрации снова воспользуемся примером с емкостью с во-
дой. Можно ввести второй контролируемый параметр — давление.
Для него вводится новая предметная область, которая включает
в себя нечеткие множества «низкое давление», «нормальное давле-
ние» и «высокое давление» (см. рис. 5.22) Эксперт в области водяных
резервуаров, на основе своего большого опыта по части взаимной за-
висимости температуры и давления в резервуарах, а также способах
управления ими, задает два правила.
Правило 1
Если температура «ХОЛОДНО» и давление «НОРМАЛЬНОЕ ДАВ-
ЛЕНИЕ», то ВКЛючить нагреватель.
5.6. Искусственный интеллект в измерениях
§
(V
В 06
д и.о
S
о.
Е
« 04
о
5
5 01
0.0
Нечеткое
множество
«горячо»
Рис. 5.21. Нечеткие множества температуры воды
Правило 2
Если температура «ГОРЯЧО» или давление «ВЫСОКОЕ ДАВ-
ЛЕНИЕ», то ВКЛючить охлаждающее устройство.
Оба этих правила используют операции над множествами «ИЛИ»,
«И» и каждое имеет на выходе новое нечеткое множество. В пред-
лагаемом примере входные параметры температура 27 °C, давление
7 атм.
Показание давления (атм)
Рис. 5.22. Нечеткие множества для давления
(3) Объединение результатов выполнения правил
На рис. 5.23 серый треугольник является результатом выполнения
правила 1. Вершина треугольника (величина принадлежности 0,30)
Глава 5. Интеллектуальные измерения
определена множеством «холодно» для температуры 27 °C. Такой ре-
зультат получился из-за того, что значение давления 7 атм имеет ве-
личину принадлежности 0,75 для множества «нормальное давление».
И в результате операции «И» получается значение 0,3 — наименьшее
из двух.
Сигнал контроля температуры
Рис. 5.23. Объединение результатов двух правил для температуры 27 °C
и давления 7 атм
Черная фигура под кривой ограничена множеством «горячо». В этом
случае для температуры 27 °C величина принадлежности равна 0,05.
Правило 2 использует операцию «ИЛИ», а из-за того, что для давле-
ния 7 атм величина принадлежности равна 0, для температуры 27 °C
значение принадлежности составит 0,05 — это наибольшее значение
из двух возможных.
(4) Дефазификация
После выполнения логических операций и оценки результатов от
системы требуется выдать четкий ответ. На рис. 5.23 наглядно по-
казано использование значимости правил при формировании резуль-
тата. Самый простой путь получения четкого результата — ис-
пользовать центроид, отмеченный на рисунке знаком «0». Центроид
представляет собой центр масс трехмерного объекта. Центр масс —
это точка, в которой сумма всех моментов равна нулю. Для того что-
бы найти координату х точки хцм объекта, имеющего дискретные
элементы массы используют следующее выражение1:
_ 52 im-iXi
цм~ М
(5-42)
1М здесь равно mi. — Прим. ред.
5.6. Искусственный интеллект в измерениях 267
Применительно к значениям, представленным на рис. 5.23
- = Li=a±ivi, (5.43)
а Hi
где v — четкий выходной управляющий сигнал, a i — значение из
предметной области v, существующей на участке от а до Ь.
Таким образом, предсказание Задеха о важности нечеткой ло-
гики для систем автоматического управления полностью сбылось.
На рис. 5.24 показана блок-схема простейшей системы автоматизи-
рованного управления.
Внедрение опыта и умений экспертов в механизм функциониро-
вания устройств позволило успешно учитывать нелинейность, иска-
жения, нестабильность и деградацию датчиков. Благодаря особен-
ностям нечеткой логики опыт и умения экспертов могут быть вве-
дены в систему с использованием лингвистических терминов. Нет
необходимости в строгой математической модели. Другим преиму-
ществом систем управления с нечеткой логикой является то, что
правила можно менять прямо во время работы системы.
>s
Рис. 5.24. Схема простейшей системы автоматического управления
МакНейл и Фрайберг (1993) представляют историю первых про-
мышленных приложений с использованием нечеткой логики. Пер-
вой системой автоматического управления с использованием нечет-
кой логики была система управления печью для обжига цемента
(см. Холмблад и Остергаард, 1982). Цемент — это смесь, содер-
жащая глинозем, силикат кальция, алюмо-феррит кальция. Глина,
известняк, песок и железная руда добавляются в виде смеси. Печь
представляет собой барабан примерно 5 м в диаметре и 140 м в
длину, вращающийся со скоростью 1 оборот в минуту. Процесс об-
жига идет при температуре 1300 °C в течение примерно трех часов.
Глава 5. Интеллектуальные измерения
Контролируемыми параметрами являются подача топлива, подача
смеси и скорость вращения барабана. Контроль значения темпера-
туры важен для формирования качественных гранул, называемых
клинкеры. Предыдущие попытки контролировать процесс с помо-
щью компьютера закончились неудачей. На привлечение нечеткой
логики с заданием правил в лингвистическом виде разработчиков
натолкнуло то, что они обнаружили 27 правил «если-тогда» в мето-
дическом пособии для оператора печи. Правила были такого сорта:
Если содержание кислорода довольно высоко и скорость враще-
ния барабана нормальная, следует уменьшить количество по-
даваемого газа и немного уменьшить количество подаваемого
топлива.
Испытания системы в 1978 г. оказались успешными. Это была
первая, примененная в промышленности экспертная система с упра-
влением по замкнутому циклу. В наши дни в значительной части
цементных печей используется устройство управления с нечеткой
логикой.
В принципе возможно создание систем с любым количеством вхо-
дов и выходов. Но в них возможно будет очень сложная структура
правил. Для таких систем наилучшим решением является использо-
вание отдельного контроллера на основе нечеткой логики для упра-
вления каждой подсистемой.
Другие области, в которых применяется нечеткая логика, это:
- сбор информации,
- навигационные системы,
- системы учета расписания при перевозках,
- некоторые области робототехники,
- системы обработки изображений,
- метеорологический анализ,
- системы предсказания при управлении поездами,
- бытовые электроприборы.
5.6.3. Искусственные нейросети
В пункте 5.6.1 были рассмотрены экспертные системы на основе
правил. Они основаны на формальной логике и используют опе-
раторы «если-тогда». Далее в пункте 5.6.2 обсуждались системы
нечеткой логики, которые, в свою очередь, основаны на обобщении
5.6. Искусственный интеллект в измерениях 269
«двоичной» логики. А искусственные нейросети не используют ло-
гику вообще. Для работы им не требуется ввод опыта и умения
эксперта. Такие системы пытаются подражать процессу обучения
мозга человека, например, в случае нахождения зависимости меж-
ду входными и выходными данными. Их даже можно назвать «ра-
зумными». Но в отличие от экспертных систем их «разумность» не
задается разработчиками.
Главным элементом таких систем является математическая мо-
дель биологического нейрона. Эти искусственные нейроны группи-
руются в определенные структуры, которые затем подвергаются
процессу обучения с использованием наборов данных. Программное
обеспечение вычисляет зависимость, требуемую для получения вер-
ных данных, и может применять ее в дальнейшем для обработки
новых данных. После процесса обучения можно создать схемную
реализацию алгоритма. Далее будут рассмотрены некоторые осо-
бенности искусственных нейросетей, связанные с их созданием, обу-
чением и использованием.
Биологический нейрон
Нейрон является важнейшим элементом клеток нервной системы и
строительным материалом мозга (рис. 5.25). Нейроны существуют
в нескольких формах, в зависимости от их назначения и дислокации,
но в целом они схожи по структуре.
Рис. 5.25. Биологический нейрон
Каждый нейрон является устройством обработки информации,
которое получает сигналы от других нейронов через специальную
структуру ввода, состоящую из дендритов.
Глава 5. Интеллектуальные измерения
Если совокупный входной сигнал превышает пороговый уровень,
то клетка передает сигнал далее — в аксон, а затем в структуру
вывода сигнала, от которой он передается в другие нейроны. Это
напоминает элемент «И», но у нейрона логика не двоичная.
Аксон состоит из наружной мембраны с высоким удельным со-
противлением и жидкости с низким сопротивлением, называемой
аксоплазмой. Электрическая волна передается по нейрону посред-
ством изменения концентрации катионов в мембране.
В табл. 5.3 показан дисбаланс, или разность концентрации ио-
нов в мембране, сохраняемый активным транспортом, несмотря
на диффузию и силы Кулона. Энергию на восстановление дисба-
ланса несущие молекулы получают за счет процессов дыхания. Об-
щая разница в концентрации ионов снаружи и внутри составляет
144,4ч-116 ммоль/л, что вызывает разность потенциалов от 60 до
90 мВ (так называемый мембранный потенциал, или потенциал по-
коя). Говорят, что мембрана поляризована с потенциалом покоя.
Если нейрон получает существенный сигнал от другого нейрона
или на него оказывается внешнее раздражение (тепло, давление,
электрический ток или химические воздействия), то стенка клетки
может стать проницаемой для ионов.
Нервная активность в головном мозге выглядит иначе. В мозг
приходят сигналы от нейронов, находящихся в других частях тела,
или же нейронов, находящихся в массивной древовидной нервной
структуре внутри мозга. Падение разности потенциалов в некой
области ниже уровня потенциала действия — биоэлектрического по-
тенциала (падение разности потенциалов может достигать нулевого
или даже отрицательного значения), приводит к тому, что соседние
области мембраны становятся проницаемыми, тем самым вызывая
передачу импульса напряжения далее по аксону. После передачи им-
пульса наступает период отдыха или рефракторный период в 1 мс,
в течение которой ионные насосы восстанавливают концентрацию
катионов до уровня покоя (см. табл. 5.3).
Таблица 5.3. Концентрация ионов в нейроне и рядом с ним
Концентрация ионов Ионы натрия (Na+) (ммоль на л) Ионы калия (К+) (ммоль на л)
Вне клеток (ткань) 140,0 4,4
Внутри клеток 16,0 100,0
5.6. Искусственный интеллект в измерениях
270
Гельмгольц в 1850 г. первым измерил скорость передачи сигнала
по нервным волокнам. Изначально считалось, что скорость переда-
чи таких сигналов равна скорости передачи электрических сигналов
по проводам. Но вместо ожидаемого значения скорости 2-108 м/с из
опытов он получил значение 25 м/с. У некоторых нейронов, особенно
участвующих в двигательных функциях, аксон покрыт изолирую-
щей оболочкой, называемой миелин. Для обеспечения реполяризации
в оболочке по всей ее длине имеются отверстия. В нейронах такого
типа скорость передачи сигналов может достигать 100 м/с.
Передача сигналов между нейронами идет по синапсам. Биохи-
мические вещества, под названием нейропередатчики, испускаются
аксоном передающего нейрона и принимаются дентриями прини-
мающих нейронов. Если приходящий сигнал достаточен, то нейрон
передает импульс в следующие нейроны. У нейрона может быть от
103 до 104 синапсов.
Человеческий мозг содержит 1011 нейронов. Последние исследо-
вания показали, что рост мозга подростка происходит не вследствие
увеличения числа нейронов, а из-за увеличения количества связей
между ними. В течение жизни при получении мозгом новой инфор-
мации образуются новые связи между нейронами. Для содействия
этому процессу в момент обучения меняется синоптическая эффек-
тивность. Если процесс обучения повторяется несколько раз с под-
ходящим интервалом, то изменение синапса сохраняется на долгое
время. Из-за этого феномена у человека существует различие между
длительной и кратковременной памятью.
История развития искусственных нейросетей
История развития искусственных нейросетей началась в 1940-х го-
дах. В то время исследователи пытались понять принцип, по которо-
му происходит процесс обучения биологического нейрона. Дональд
Хебб предположил, что в тот момент, когда синоптический вход и
выход нейрона активны, входящий сигнал усиливается. МакКаллох
и Питтс (1943) создали математическую модель клетки мозга, в ко-
торой вероятность активации зависела от уровня входного сигнала
и порогового значения синапса.
В 1951 г. Минский и Эдмондз, вдохновленные идеями МакКалло-
ха и Питтса, сконструировали обучающуюся машину, состоящую из
ламп с термокатодом, моторов, сцепления и гирокомпаса. Устрой-
ство довольно успешно обучалось перемещению по лабиринту. После
этого Фрэнк и Розенблатт разработали концепцию персептрона.
Это была попытка смоделировать способность глаза распознавать
te2
Глава 5. Интеллектуальные измерения
образы. Выводы с матрицы сенсоров были сведены в массив, чтобы
было возможно распознать образы.
В начале 1960-х годов Видроу разработал адалайн (адаптивный
линейный нейрон) — логическое устройство на пороговых элемен-
тах. Он вместе с Хоффом разработал систему обучения, базиру-
ющуюся на настройке значений коэффициентов связей нейронами.
Так же был создан многослойный адалайн — мадалайн. Минский
и Пейперт (1969) опубликовали книгу о персептронах, в которой
утверждали, что персептроны не смогут самообучаться. Интерес к
искусственным нейросетям на некоторое время угас.
В 1978 г., во время сотрудничества с MIT (Массачусетский ин-
ститут технологии), Джон Хопфилд из Лаборатории Бэлла заинте-
ресовался вычислительными способностями биологических систем.
После изучения нейрофизиологии садового слизняка Хопфилд раз-
работал сеть. Как физик он понимал, что стабильность в структуре
обратной связи может быть рассмотрена в понятиях состояния ми-
нимальной энергии. Принцип обучения в сети Хопфилда заключался
в том, что соединения между искусственными нейронами усилива-
ются, если сигнал на выходе обрабатывающего элемента такой же,
как и на входе, и наоборот, соединения ослабляются, если сигна-
лы отличаются. Сети Хопфилда, будучи широко изученными, нашли
применение в оптических системах распознавания образов.
Проблема присваивания коэффициентов доверия
Как было упомянуто вначале, искусственные нейросети в отличие
от экспертных систем способны к накоплению опыта в момент обу-
чения на примерах. При работе с новыми данными они способны
применять этот опыт для получения правильного результата.
В процессе обучения усиление или ослабление связей между ней-
ронами используют процедуру присваивания коэффициентов дове-
рия. Основной проблемой являлась разработка метода изменения
эффективности синапсов всех нейронов искусственной нейросети на
стадии обучения. Некоторые считали это неосуществимой задачей.
Так называемая проблема присваивания коэффициентов доверия за-
ключается в определении влияния величины коэффициента конкрет-
ной связи на общую ошибку системы. Присваивание коэффициентов
доверия в простом массиве нейронов не является проблемой, так
как легко проследить зависимость между входным и выходным сиг-
налами при изменении коэффициентов. Трудность возникает, когда
сотни или тысячи нейронов объединяют в большую сеть. В этом
случае очевидно влияние лишь нескольких соединений, находящихся
5.6. Искусственный интеллект в измерениях 273
у входа и выхода системы. Главной проблемой является определе-
ние метода изменения коэффициента связи, находящейся глубоко в
структуре сети, используя лишь значение глобальной ошибки.
Среди большого количества методов решения проблемы присваи-
вания коэффициентов доверия наиболее популярным является метод
обратного распространения. Его создание приписывают Румельхар-
ту и МакКледланду (1986), а также Паркеру (1985). Этот метод
популярен по той причине, что он успешно работает в нелиней-
но разделяемых системах. С появлением недорогих вычислительных
мощностей успех метода оживил интерес к искусственным нейросе-
тям. Алгоритм метода обратного распространения будет описан в
следующем разделе. Более подробно о нем можно узнать из работы
Чаувина и Румельхарта (1995).
Математическая структура метода обратного
распространения
Набор формул для описания структуры сети представляет собой
довольно объемную запись, приведенную ниже. На рис. 5.26 предста-
влена структура искусственной нейросети, причем искусственные
нейроны обозначены знаком 0, а коэффициенты связей между ни-
ми — w. Все нейроны взаимосвязаны, начиная от входа и далее по
структуре сети, но для удобства чтения на рисунке это отображено
неполностью. Путь через пропущенные слои обозначен как г-й к j-y
и к k-у нейронам с коэффициентами связи Wij vLWjk. В разных слоях
показано разное количество нейронов, чтобы подчеркнуть, что ша-
блонная комбинация не требуется. Было установлено, что лучшим
верхним пределом являются три слоя. Добавление большего количе-
ства слоев не ведет к улучшению показателей, а только увеличивает
время обучения.
Рис. 5.26. Структура простейшей искусственной нейросети
Глава 5. Интеллектуальные измерения
— вход j-ro нейрона на уровне s. Он является суммой всех
выходов нейронов предыдущего уровня с разными коэффициентами:
4,] = <5-44)
i
— выход j-ro нейрона на уровне з. Он является значением функ-
ции f с аргументом 1^:
x\s] = f$8]Y (5.45)
В качестве f пытались использовать разные функции, например
sin, tg, но наиболее популярной функцией, более других повторя-
ющей функцию биологического нейрона, стала функция, которую
назвали сигмоид:
f f/W) =------------
3 ' 14- exp (-{^)
(5.46)
Очень полезной особенностью этой функции является легкость рас-
чета ее производной:
(5.47)
Рис. 5.27. Искусственный нейрон
Пояснения к понятиям «вход - выход» для искусственного нейро-
на даны на рис. 5.27. Сначала всем коэффициентам присваиваются
случайные значения. Для начала процесса обучения нужно знать
5.6. Искусственный интеллект в измерениях 275
некое отношение, связывающее значение коэффициента w со значе-
нием общей ошибки Е. Тогда возможно изменение значения коэффи-
циента на некоторую величину Aw. Для этого привлекли известное
правило градиентного спуска:
AwW — —Icoef -- (5.48)
Qw
где Icoef — коэффициент обучения. Уравнение (5.48) определяет
сущность процесса обучения и показывает, как общая ошибка сис-
темы зависит от всех коэффициентов связей. Частная производная
отражает зависимость общей ошибки от конкретного коэффициента
связи. Чем больше влияние коэффициента, тем больше он меняется
в процессе обучения. Значение коэффициента обучения выбирается
произвольно в диапазоне от 0 до 1. Если значение слишком велико,
система может перейти в процесс автогенерации во время обучения.
Если изменение коэффициента происходит слишком резко, то систе-
ма не может прийти в состояние с минимальной ошибкой Е. Если
же значение коэффициента слишком мало, то время обучения будет
велико, и существует вероятность, что система придет к какому-то
значению ошибки, которое не является минимальным.
Из уравнения (5.48) видно, что ошибка Е должна быть функцией,
дифференцируемой по каждому коэффициенту связей сети. Поэтому
берется квадратичная функция:
Е = ± £ (Xd-X^)2, (5.49)
выходные
нейроны
следуя методу наименьших квадратов, где Xd и — желаемое и
рассчитанное значения выхода нейрона выходного слоя. (Индекс [о]
обозначает выходной уровень.) Коэффициент 1/2 введен из сообра-
жений нормализации и после дифференцирования становится рав-
ным 1. Для успешного выполнения алгоритма обратного распро-
странения ошибки сначала нужно вычислить ошибку в выходном
слое и затем соответственно присвоить значение всем скрытым ней-
ронам в сети. Вклад каждого нейрона в общую ошибку определяет-
ся частной ошибкой нейрона, которая рассчитывается из частной
производной Е. Частная ошибка 6 для j-ro нейрона на уровне s опре-
деляется выражением: 4
4s1 = (5.50)
3 di\s]
Частная производная означает, что <5, по сути, является чувстви-
тельностью общей ошибки Е ко входу I определенного нейрона.
Глава 5. Интеллектуальные измерения
(5.51)
Полезность этого определения для установления частной ошибки
можно увидеть, раскрыв второй множитель в уравнении (5.48) по
правилу дифференцирования сложной функции:
дЕ _ дЕ dl'f] _
lJ J 4
3
lJ
Подставим значение в выражение (5.44):
д (У w[.s]x!s-11
дЕ = W 1
Вычисление частной производной приводит выражение к виду:
11 <5-54)
dw\
Это означает, что (5.48) можно теперь представить как
Дад!*] =lcoef<Sjs]x!s-11. (5.55)
(5.52)
(5.53)
Для реализации выражения (5.55) в виде алгоритма нужно опре-
делить выражение для oj J.
Определение значения 6 для каждого нейрона выходного уровня
является несложной задачей. Перепишем выражение (5.50) в виде:
Используя правило дифференцирования сложной функции, его мож-
но представить как
_ BE axf
3 дХ1°] д1[°]
А реальная ошибка Xj — для каждого выходного нейрона из-
вестна. Поэтому первый множитель в правой части уравнения (5.57)
может быть представлен следующим образом:
дЕ =д^У(Ха-Х[°]У)
дХр дх\о]
(5.58)
5.6. Искусственный интеллект в измерениях 277
= —(Xjd — X^), (5.59)
где Xjd — требуемое значение j-ro выходного нейрона.
Кроме того, из формулы (5.45) можно заметить, что второй мно-
житель в равенстве (5.57) является частной производной /:
df _ дх\о]
~ 01[°] '
(5.60)
Если объединить теперь выражения (5.59) и (5.60), то <5^ в уравне-
нии (5.57) можно выразить как
= (5.61)
Частная производная df /81^ может быть заменена числовым
приближением, основываясь на уравнениях (5.46) и (5.47).
Определение частной ошибки нейронов в скрытых слоях является
более сложной операцией. Для этого требуется общее выражение ,
которое включало бы s + 1 слоев. После получения такого выражения
становится возможным определение ошибки между значениями на
выходе системы и эталонными значениями по способу, представлен-
ному выше. Но тогда значение коэффициента можно будет менять
в последнем и предпоследнем слоях с помощью Повторение
этой процедуры возможно и для последующих слоев, при использо-
вании 5^, и т. д. — до входного слоя. Поскольку этот процесс
идет начиная с последнего слоя и заканчивая первым, то процедура
получила название обратного распространения.
Адаптируя выражение (5.57) для произвольного уровня $, полу-
чим:
= __ЭЕ_дх"
3 дХ{.} д![-]
(5.62)
Снова применяя производную сложной функции, первый множитель
в уравнении (5.62) можно представить в следующем виде:
дЕ дЕ д[*+11
дх^ - V dxjs]
J Л к J
(5.63)
При этом осуществляется суммирование к элементов, так как все
нейроны уровня s + 1, а значит и Е, подвержены влиянию Вос-
278 Глава 5. Интеллектуальные измерения
пользовавшись определением 6 выражение (5.63) можно записать как
1 М1.' - А ( г) Г \ <5И)
к (5.65) дх^ J
Поскольку второй множитель в уравнении (5.65) является част-
ной производной в а в случае, когда i = j, производная рав-
на нулю, то уравнение (5.65) может быть представлено следующим
образом:
^г = Е4'+,,4+ч- м
И уравнение (5.62) приобретает вид:
4s1 = Л У 4*+1Ч71] • (5-67)
j к
Как и ранее, частную производную df /д!^ можно заменить чи-
сленным приближением, используя выражения (5.46) и (5.47).
Все элементы равенства (5.66) теперь определены, так что ста-
новится возможным изменение коэффициентов для каждого нового
примера в процессе обучения сети. На практике файлы, содержа-
щие данные для обучения, содержат сотни пар значений примеров.
Они подаются на обучаемую систему случайным образом. Случай-
ный характер выдачи данных позволяет использовать один и тот
же пример по нескольку раз, при этом снижается вероятность то-
го, что система установится в каком-то значении, превышающем
минимальную общую ошибку. Несколько сотен примеров позволя-
ет производить десятки тысяч циклов обучения. В зависимости от
размера сети и используемого ПК процесс обучения может занять
несколько часов. Алгоритм процесса обучения показан на рис. 5.28.
После завершения процесса обучения все коэффициенты запоми-
наются и система готова для обработки новых данных. Ошибки в
эффективности малы и обычно не превышают нескольких процен-
тов. Очевидно, что при работе с системой, в которой зависимость
между данными случайная, эффективность будет небольшой. Тем
не менее преимущество искусственных нейросетей состоит в том,
что не требуется находить эту случайную зависимость.
Сеть обучается с целью определения зависимости между дан-
ными на входе и выходе, чтобы в последующем использовать эту
5.6. Искусственный интеллект в измерениях 279
зависимость для обработки новых входных данных и получения пра-
вильных значений на выходе. Неизвестная зависимость даже может
быть нелинейной.
Рис. 5.28. Блок-схема метода обратного распространения для обучения
нейросети
280 Глава 5. Интеллектуальные измерения
Возможна схемная реализация обученной системы с использова-
нием операционных усилителей и резисторов. Сравнительно недавно
появились интегральные схемы, имитирующие искусственные ней-
росети. Эти схемы могут работать на очень большой скорости, так
как являются аналоговыми. Еще одно их преимущество — отказо-
устойчивость. На удаленных системах, таких как спутниковые, где
существует воздействие радиации, схемно реализованная нейросеть
будет медленно деградировать по причине отказа отдельных нейро-
нов. В это же время в таких же условиях микропроцессорная система
просто перестанет функционировать при повреждении памяти или
процессора.
На данном этапе ведутся исследования в области методов обу-
чения систем, разрабатываются новые структуры сетей, содержа-
щие под циклы и внутренние обратные связи. Некоторые програм-
мно реализованные системы, такие как программы автоматическо-
го управления, периодически обновляют свои коэффициенты связей
для учета изменения характеристик оборудования, обусловленных
старением. Кроме того, рассматриваются комбинированные систе-
мы искусственного интеллекта, например комбинация системы не-
четкой логики и экспертной системы.
Некоторые области применения нейросетей представлены ниже:
- преобразование текстовой информации в речевую;
- сжатие изображений;
- распознавание почерка;
- классификация объектов для распознавания образов и контро-
ля на производстве;
- прогнозы на рынке акций и погоды;
- моделирование систем;
- удаление шума;
- изменение параметров для повышения точности в роботизиро-
ванных системах;
- синтез функций.
Ссылки
Black М 1937 «Vagueness: An exercise in logical analysis» Phil. Sci. 4
427-455
Brignell J E and Dorey A P 1983 «Sensors for microprocessor-based
applications» J. Phys. E 16(10) 952-958
Упражнения 281
Chauvin Y and Rumelhart D E eds 1995 Backpropagation: Theory, Ar-
chitectures, and Applications (Lawrence Erlbaum Associates)
Durkin J 1994 Expert Systems Design and Development (Englewood
Cliffs, NJ: Prentice Hall)
Holmblad L P and Ostergaard J J 1982 Control of a Cement Kiln by
Fuzzy Logic, Fuzzy Information and Decision Processes (Amsterdam,
North-Holland) pp 398-399
Horowitz P and Hill W 1989 The Art of Electronics 2nd edition (Cam-
bridge University Press)
Mamdani E H and Assilian S 1975 «An experiment in linguistic synthesis
with a fuzzy logic controller» Int. J. Man-Machine Studies 7(1) 1-13
McCulloch W S and Pitts W H 1943 «А logical calculus of the ideas
immanent in neural nets» Bull. Math. Biophys. 5 115-133
McNeill D and Freiberger P 1993 Fuzzy Logic (New York: Simon and
Schuster) Measurement Technology Ltd 1989, Application Note AN9003,
A Users Guide to Intrinsic Safety, Luton, Bedfordshire, England
Minsky M L and Papert S S 1969 Perceptrons (Cambridge, MA: MIT
Press)
Negnevitsky M 2002 Artificial Intelligence: a Guide to Intelligent Sys-
tems (Addison Wesley) Neuralware Inc. 1989 NeuralWorks Professional
II User’s Guide
Parker D В 1985 Learning Logic Report TR-^7 (Cambridge, MA: MIT)
Rumelhart D E and McClelland J L (eds) 1986 Parallel Distributed Pro-
cessing: Explorations in the Microstructure of Cognition, 1, Foundations
(MIT Press)
Zadeh L 1962 «From circuit theory to system theory» Proc. Radio Engi-
neers
Zadeh L 1965 «Fuzzy sets» Information and Control 8(3) 338-353
Zadeh L 1973 «Outline of a new approach to the analysis of complex
systems and decision processes» IEEE Trans. Systems, Man and Cyber-
netics SMC-3(1) 28-44
Упражнения
5.1. Необходимо преобразовать сигнал аналогового сенсора в ци-
фровой вид. Какая разрядность АЦП обеспечит разрешение
0,5%? Какая должна быть частота дискретизации, если сиг-
нал содержит частоты до 1,5 кГц? Объясните ваш выбор.
Глава 5. Интеллектуальные измерения
5.2. Выберите АЦП для следующих применений и объясните свой
выбор:
i) цифровая звукозаписывающая студия,
ii) мультиметр,
iii) вибродатчик для двигателя в самолете.
5.3. Производитель переносных микшерских пультов решает заме-
нить тяжелый, многопроводной кабель, соединяющий пульт и
сцену, на оптическое волокно. Рассчитайте требуемое значе-
ние скорости передачи по волокну, учитывая, что требуется
передавать 32 информативных канала, каждый с разрешением
18 бит и максимальной частотой 20 кГц.
5.4. Монохромный датчик видеокамеры имеет разрешение 512x512
пикселей. Какая требуется разрядность АЦП, чтобы обеспе-
чить разрешение по яркости около 2%? Определите скорость
потока данных, если камера снимает 25 кадров в секунду. Пред-
ложите подходящий тип АЦП.
5.5. Требуется создать интеллектуальный датчик давления с ис-
пользованием диафрагмы из нержавеющей стали и тензопре-
образователей (см. уравнения (3.2) и (3.3) в пункте 3.2.2). На-
рисуйте блок-схему, подобную представленной нарис. 5.14, ото-
бражающую параметры, которые вы выберете для устройства,
чтобы общая ошибка была менее 0,1%. (Воспользуйтесь фазо-
чувствительным детектором из пункта 6.4.2.)
5.6. Торговый автомат по продаже горячих напитков должен упра-
вляться экспертной системой. В емкости с водой поддержива-
ется температура 70 °C при помощи электрического нагрева-
тельного элемента и термостата. Бак подключается к источ-
нику воды и уровень воды регулируется клапаном с датчиком
уровня. Можно выбрать ЧАЙ, КОФЕ, ГОРЯЧИЙ ШОКОЛАД
и ТОМАТНЫЙ СУП. Дополнительно можно выбрать САХАР,
ДВОЙНОЙ САХАР и ЗАМЕНИТЕЛЬ САХАРА. Разработай-
те логическую последовательность, необходимую для обеспе-
чения следующих возможностей автомата:
- Если все системы в рабочем состоянии, но не задействована ни
одна из функций, загорается индикатор ГОТОВ.
- Когда система выключена (ОШИБКА СИСТЕМЫ), устрой-
ство для получения денег не должно удерживать деньги.
- Датчик уровня воды должен выключить нагревательное устрой-
ство и прекратить работу автомата в случае низкого уровня
Упражнения 283
воды в емкости. Кроме того, он должен включить лампочку
СБОИ СИСТЕМЫ для информирования покупателей.
- Если температура воды низкая, то должен включиться индика-
тор ПОЖАЛУЙСТА, ПОДОЖДИТЕ. Больше никакие функ-
ции не доступны.
- Если температура воды превышает 100 °C, то отключается пи-
тание от нагревательного устройства и система выключается.
Зажигается индикатор СБОЙ СИСТЕМЫ.
- Если заканчиваются чашки, система выключается. Зажигается
индикатор СБОЙ СИСТЕМЫ.
- В контейнерах с ингредиентами имеются датчики. Если кон-
тейнер пуст, то зажигается соответствующая информацион-
ная лампа. Если недоступен один из напитков, то должна вы-
ключиться кнопка его выбора, а устройство для приема денег
должно вернуть деньги.
- Если датчик количества денег определяет, что была внесена
достаточная сумма, то деньги помещаются в хранилище до
момента выдачи напитка. В противном случае деньги возвра-
щаются.
- Если деньги для сдачи закончились, то зажигается лампоч-
ка НЕТ СДАЧИ. Если получена сумма, больше требуемой, то
лишние деньги возвращаются.
- Если деньги помещены в хранилище, то становится доступна
процедура выбора напитка.
- Покупатель может выбрать только один напиток. Кнопки вы-
бора напитка отключаются после завершения выбора.
- Кнопки выбора сахара и заменителя включаются только в слу-
чае, если выбранный напиток не является супом.
- Если датчик определяет наличие чашки, то начинается ее на-
полнение напитком. В противном случае зажигается индика-
тор СБОЙ СИСТЕМЫ, деньги возвращаются и система вы-
ключается.
- После успешно завершенной операции отпуска напитка выда-
ется сдача.
- Снова зажигается индикатор ГОТОВ.
5.7. Автопроизводитель собирается сконструировать автоматиче-
скую четырехскоростную коробку переключения передач с элек-
тронным управлением. Ожидается, что использование электро-
ники устранит все сложности, которые существуют в гидрав-
лических коробках передач, а также увеличит плавность хода
284 Глава 5. Интеллектуальные измерения
машины. Контроллер коробки передач должен быть построен
на основе нечеткой логики. Ваша задача — разработать нечет-
кие множества для:
- характеристики отношения передачи и скорости,
- положения педали ускорения (газа),
- значения тормозного усилия,
- оборотов двигателя.
Следующие правила должны быть использованы при выборе
передач:
(а) Если машина стоит, то включить 1 передачу.
(б) Если скорость в пределах 54-20 миль/час, то включить вторую
передачу.
(в) Если скорость в пределах 154-40 миль/час, то включить тре-
тью передачу.
(г) Если скорость выше 35 миль/час, то включить четвертую пе-
редачу.
(д) Если педаль газа ускоренно выжата чуть дальше половины
хода, то изменения в пунктах (а)-(г) должны сместиться в сто-
рону больших скоростей.
(е) Если педаль газа полностью выжата, то включить следующую
меньшую передачу, исключая первую; включать более высокую
передачу, только если частота вращения двигателя превысит
4000 об/мин.
(ж) Если педаль газа снова нажата примерно до половины, то вклю-
чить более высокую передачу.
(з) Если педаль газа отпущена и тормоза слегка нажаты, но ав-
томобиль не уменьшает скорость, то после нескольких секунд
включить любую пониженную передачу, кроме первой.
(и) Если стала активной АБС, включить следующую более высо-
кую передачу.
5.8. i) Объясните функционирование искусственного нейрона на
основании биологического нейрона.
ii) Приведите состояние на выходе искусственного нейрона в
зависимости от состояния на входе.
iii) Что имеется в виду под выражением полная погрешность?
Приведите формулу.
Упражнения 285
iv) Так называемое правило градиентного спуска может быть
использовано для изменения весов. Объясните этот про-
цесс.
5.9. Температура в камере сгорания и коллекторе выхлопных газов
в авиационном двигателе достигла 854-150 °C во время поле-
та. Такая температура свидетельствует об отказе двигателя.
Решено использовать искусственную нейронную сеть для пре-
дупреждения о неисправности двигателя.
i) Предполагая наличие аналогового сигнала от каждой из де-
сяти систем измерения температуры, предложите структу-
ру искусственной нейронной сети, которую можно научить
выдавать три возможных сигнала: НОРМА, ПРЕДУПРЕ-
ЖДЕНИЕ, НЕИСПРАВНОСТЬ.
ii) С помощью блок-схемы опишите процесс обучения, требу-
емый для правильного функционирования нейронной сети.
ГЛАВА 6
ХАРАКТЕРИСТИКИ
И ВОССТАНОВЛЕНИЕ
ИНФОРМАЦИОННЫХ
СИГНАЛОВ
6.1. Введение
Если сигнал от датчика или измерительной системы слишком слаб
по причине малости измеряемой величины и низкого качества вы-
ходного сигнала или ввиду его затухания в линии телеметрии, вос-
становление информации может быть достаточно трудной задачей.
Фактически, интересующий нас сигнал часто имеет величину по-
рядка значения помехи или шума.
Если измеряемая величина имеет устойчивое значение, процесс
восстановления относительно прост. Однако, если измеряемая ве-
личина меняется со временем, восстановление становится не такой
простой задачей. Наиболее трудная ситуация имеет место, когда
данные случайны и сигнал слаб.
Как информационные, так и нежелательные сигналы могут быть
классифицированы как случайные или детерминированные. Значе-
ние случайного сигнала предсказать невозможно. И не существует
способа узнать или вычислить очередное его значение. Единствен-
ный путь — охарактеризовать сигнал с помощью частотного анали-
за или статических параметров. Все значения детерминированного
сигнала могут быть в принципе вычислены заранее. На практике
формула, зависящая от времени, не может быть полностью ясна
или даже известна, но принцип процесса является упорядоченным
и соответствующий сигнал можно отнести к детерминированным.
В табл. 6.1 представлены некоторые примеры простых сигналов.
Нежелательные периодические сигналы, которые обычно идут от
линий электропитания, называются помехами, или интерференцией.
Происхождение шума более разнообразно и описано в разделе 6.4.
6.2. Классификация информационных сигналов 287
Для количественного описания уровня шумов и помех служит
отношение сигнал/шум. Соотношение мощностей представляется в
формате децибелов:
_ Л, / мощность сигнала данных \
101g ----------------------------------- =
у мощность нежелательного сигнала /
= 101g ") ’ (6Л)
\ ''шума/**' /
где R — выходное сопротивление схемы формирования сигнала. Су-
ществует более общее выражение в формате напряжения, так как
мощность сигнала обычно не измеряется. Принимая, что R остается
постоянной величиной, выражение (6.1) представим в виде:
201g ГдБ. (6.2)
\ *шума /
Таблица 6.1. Примеры случайных и детерминированных сигналов
Сигналы Случайный Детерминированный
Информационный сигнал Звуки, рождаемые машинами Выход сигнала от тахогенератора
Нежелательный сигнал Шум Помехи
6.2. Классификация информационных сигналов
Информационные сигналы могут быть подразделены на две катего-
рии: детерминированные и случайные, что определяется реальными
процессами. Вероятностные процессы иногда называют стохасти-
ческими. При этом природа сигнала может не совпадать с видом
процесса. Например, движение молекул в газе случайно, но изме-
ренное давление и переданный сигнал будут детерминированы, если
газ находится в устойчивом состоянии.
6.2.1. Детерминированные
информационные сигналы
Как показано выше, детерминированные сигналы идут от датчиков,
измеряющих процессы, которые имеют некоторую временную зави-
симость. Например, температура горячего объекта, находящегося
на стадии охлаждения. Данное явление можно описать как пере-
ходное. Резонирующая приборная доска на транспортном средстве
288 Глава 6. Характеристики и восстановление сигналов
является примером сложного периодического процесса; сигнал от
датчика вибрации содержит гармоники и, возможно, другие несвя-
занные частоты. Выходной сигнал датчика резонатора, который
измеряет некоторую устойчивую переменную, — пример синусои-
дального сигнала с некоторыми гармониками меньшей амплитуды.
Детерминированные сигналы данных могут быть классифициро-
ваны в соотвествии с диаграммой, представленной на рис. 6.1 (см. Бен-
дат и Пирсол, 1986).
Периодический синусоидальный информационный сигнал
В этом сигнале присутствует единственная частота, поэтому его
легко задать формулой:
vt — Vq sin(cj£ + (6.3)
Рис. 6.1. Детерминированные сигналы
Сложный периодический информационный сигнал
Форма волны такого сигнала повторяется и точно воспроизводится
каждый период. Период времени — это число, связанное с основ-
ной частотой, обозначаемой Фурье показал, что волны различ-
ной формы можно синтезировать суммированием рядов синуса и
косинуса, частоты которых кратны основной, а амплитуда масшта-
бируется коэффициентами q. Частоты, кратные основной обычно
называют гармониками, первая из них — основная частота. Адди-
тивная константа обеспечивает любое смещение:
сю
v(t) = — + (ап совпав -I- bn sinned), (6.4)
П=1
Т
ап = f v(t) cos nwtdt, (6.5)
о
6.2. Классификация информационных сигналов 289
Т
bn = sinnwtdt, (6.6)
о
где п — неотрицательное целое число и Т = 1/ f = 2k/ш. Сложные
периодические сигналы являются достаточно общими.
Квазипериодический информационный сигнал
Ряд Фурье (уравнение (6.4)) показывает, как комбинации гармоник
могут воспроизвести любую форму повторяющейся периодической
волны. Сложив три или более синусоиды, частоты которых не крат-
ны основной, получим апериодическую функцию. Общее выражение
для такой формы волны имеет вид:
оо
= 52Vn +^n)- (6-7)
n=l
Частотные компоненты cun, вообще говоря, — любые числа, а не
только рациональные.
Переходный информационный сигнал
Этот тип сигнала не является непрерывным во времени. Переход-
ные сигналы часто встречаются в начале или в конце некоторых
стабилизирующихся (затухающих) процессов. Имеются следующие
соотношения для общих переходных процессов:
v(t) = vo ехр(—at); (6.8)
v(t) = vo exp(-at) cos bt. (6.9)
Эти функции не содержат индивидуальной частоты, как в преды-
дущих случаях.
Преобразование Фурье
оо
У(ц?)= v(t) ехр(— jut) dt (6.10)
— оо
иллюстрирует тот факт, что сигнал v(t) может иметь континуум
разных частот.
Нужно помнить, что дискретизация устойчивого процесса имеет
начало и конец записи отсчетов, пытаясь отражать при этом ре-
альный непрерывный процесс. В связи с этим в дискретной версии
сигнала появятся частоты, которых не было в начальном процес-
се. Этот эффект похож на наложение спектров, алайсинг, о котором
шла речь в разделе 5.2. Чтобы минимизировать эффект, необходимо
брать достаточно большое число отсчетов в записи.
10—4227
Г190 Глава 6. Характеристики и восстановление сигналов
6.2.2. Случайные сигналы данных
Существует много примеров, когда данные измерений некоторого
явления, случайны. Это может быть следствием того, что перемен-
ная измеряется независимым образом. Пример — сигнал от тем-
пературного датчика в некоторой экологической камере, который
колеблется, потому что иногда дверь камеры открывается. Другой
пример случайного данных — выходной сигнал от датчика вибрации
на опоре двигателя, поскольку для полного описания этого явления
необходимо бесконечное снятие результатов.
Следующий класс случайных явлений — хаотические системы.
В настоящее время проявляется большой интерес к теории хаоса.
Математические соотношения этих систем могут быть описаны че-
рез нелинейные, зависящие от времени дифференциальные уравне-
ния. К сожалению, на современном этапе развития математики та-
кие уравнения решаются только численно. Критерием, позволяю-
щим классифицировать явления как хаотические, является то, что
бесконечно малое изменение начальных условий значительно вли-
яет на результат. В реальной системе это фактически означает,
что вследствие неопределенности начальных условий, установлен-
ных естественными пределами точности, определенный результат
получить невозможно.
Примеры хаотических систем — буря в потоке жидкости, ста-
бильность выходной мощности лазера, и, конечно же, погода. Для
того чтобы полностью описать процесс хаотического явления, не
только снятие результатов должно быть непрерывным и стремя-
щимся к бесконечности, но необходимо знать и все другие возмож-
ные факторы, а их число устремлено в бесконечность.
Рис. 6.2. Классификация случайных процессов
Типы случайных процессов представлены на рис. 6.2 (см. Бен дат
и Пирсол, 1986).
6.2. Классификация информационных сигналов 291
Форма, в которой хранится сигнал, описывающий случайное явле-
ние, называют типовой выборкой v(t). Как уже говорилось, для
более полного описания случайного процесса число отсчетов долж-
но стремиться к бесконечности. Если явление — слишком хаотично
для полного описания случайного процесса, все возможные типовые
выборки должны объединяться в ансамбль — {?;(£)}.
Стационарный случайный процесс
Рассмотрим некоторое количество выборок г?1, ..., vn, которые по-
казаны на рис. 6.3. Если имеется бесконечное число типовых выбо-
рок, то может быть определено среднее значение v для некоторого
времени t±. Это значение находят как предел при N —> ос:
1 N
v(*i) = lira (6.11)
N—>oo TV
k=l
Среднее значение типовой выборки также называют первым момен-
том.
Рис. 6.3. Ансамбль сигналов данных случайного процесса
292 Глава 6. Характеристики и восстановление сигналов
Еще один ее параметр называют корреляцией или смешанным
моментом. Он может быть определен по двум значениям типовой
выборки с последующим усреднением по всему ансамблю:
1 N
Rvvttiti +т) = lim — + т). (6.12)
Поскольку корреляция зависит от двух различных значений одного
и того же сигнала, Rvv называют автокорреляцией.
Заметим, что и v и Rvv, строго говоря, действительно характе-
ризуют случайный процесс, если используется весь ансамбль, т. е.
7V —> оо.
Если значения v и Rvv не зависят от момента времени ti, в ко-
торый они вычисляются, то процесс называют стационарным. При
этих условиях Rvv является функцией т. Для стационарного в пол-
ном смысле этого слова процесса все моменты и смешанные моменты
высших порядков также не зависят от времени. Если это не так,
процесс называют слабо стационарным (см. Баер, 1991).
Пример стационарного процесса — шум от опоры двигателя са-
молета, управляемого на некоторой устойчивой скорости. При этом
все составляющие ансамбля сигналов, идущих от датчика, практи-
чески одинаковы.
Пример нестационарного процесса — выходной сигнал от дат-
чика давления, контролирующего последовательные взрывы в дви-
гателе внутреннего сгорания. Каждый взрыв обеспечивает разный
набор данных для ансамбля. В этом случае значения v и Rvv зависят
от значения t±.
Эргодический случайный процесс
Описанные выше вычисления могут быть выполнены для отдельной
k-й типовой выборки. Чтобы получить полное описание сигнала, вы-
числения необходимо проводить для бесконечного отрезка времени
(Г оо):
т
v(k) => цк = Пт [ Vk(t)dt. (6.13)
Т-юо1 J
О
Символ /1 здесь показывает, что среднее значение было получено из
теоретической функции, а не из дискретного набора эмпирических
результатов.
т
RVv(r,k)= lim [ vk(t)vk(t + т) dt. (6.14)
Т->схэ 1 J
О
6.2. Классификация информационных сигналов
Если случайный процесс стационарен, a, p,k и Rvv(r,k) из со-
отношений (6.13) и (6.14) не зависят от номера выборки, процесс
называют эргодическим. Таким образом,
v(k) -+v и Rvv(r,k) —> Rvv(r).
Большинство реально встречающихся процессов можно рассма-
тривать как эргодические. Тогда параметры, описывающие случай-
ный процесс, могут быть получены из единственной типовой выборки.
В примере, описанном выше, рассматривается двигатель с дат-
чиками вибрации. Если каждый датчик фиксирует сигнал с одинако-
выми значениями статистических параметров, то процесс является
эргодическим, и ясно, что в этом случае достаточно только одного
датчика. Однако если датчики расположены в разных местах дви-
гателя и фиксируют статистически различные сигналы, то каждый
датчик выдает уникальные данные о процессе. При этом процесс
будет стационарным, в том смысле, что значения v и R не зависят
от временного момента вычисления, если определяются по одной и
той же типовой выборке, но меняются от выборки к выборке.
Нестационарные случайные процессы
Статистические данные, полученные от ансамблей нестационарных
случайных процессов, вряд ли представляют практический интерес.
Но такие ансамбли часто необходимы, чтобы обеспечить достаточ-
ное число данных.
Возвратимся снова к примеру с опорой двигателя самолета. Для
полного описания текущего процесса необходимо снимать показания
датчиков в течение всего полета, так как уровни сигнала и спектры
постоянно изменяются. В некоторых исследованиях, как отмечено в
работе Бен дата и Пирсола (1986), рассматриваются отдельные мо-
менты нестационарного поведения, которые после их оценки могут
быть статистически проанализированы. Например, некоторый слу-
чайный процесс ансамбля {?;(£)} может иметь выборочную функцию
вида:
vfc(«) = A(t)uk(t), (6.15)
где {и (£)} — стационарный случайный процесс и A(t) — детер-
минированный множитель. Если этот процесс можно распознать,
усреднение ансамбля, возможно, не понадобится, и вполне достаточ-
но одной типовой выборки, как в случае эргодического процесса.
Г194 Глава 6. Характеристики и восстановление сигналов
6.3. Характеристика случайных
сигналов данных
Поскольку из-за непредсказуемости случайных данных точное их
описание во временной области невозможно, необходимо привлекать
статистические методы. Обычно используют четыре статистиче-
ские функции, которые представляют количественную характери-
стику случайных величин:
- средние значение и дисперсия,
- плотность вероятностей,
- автокорреляция,
- спектральная плотность автокорреляции.
6.3.1. Среднее значение и дисперсия
Наиболее часто используемый статистический параметр — среднее
значение, или математическое ожидание. Для зависящего от вре-
мени сигнала статистические вычисления необходимо производить
в пределах одного цикла. Если же это нелегко осуществить, то,
очевидно, необходимо задействовать большое количество циклов,
чтобы минимизировать ошибки, вызванные включением части из
них. Вычислить среднее значение можно с помощью формулы (6.11):
т
liv = 1 У v(f) dt. (6.16)
О
Мощность в любой электрической или механической системе опре-
деляется как квадрат амплитуды. Следовательно, в некоторых слу-
чаях удобнее использовать среднее квадратичное:
т
ev = ^/v4t)dt. (6.17)
О
Следующий полезный параметр — дисперсия а2. Этот параметр
определяется как среднее квадратичное отклонения случайного сиг-
нала от математического ожидания:
т
a2v = ^ j (v(t) - v)2dt. (6.18)
О
Положительный корень из а2 называют среднеквадратическим от-
клонением.
6.3. Характеристика случайных сигналов данных
6.3.2. Плотность распределения вероятностей
Плотность распределения вероятностей необходима, если требу-
ется определить вероятность появления конкретного значения. Рас-
смотрим сигнал v(t\ показанный на рис. 6.4.
Рис. 6.4. Форма волны в определенных пределах напряжения
Вероятность Р(у) того, что v лежит в пределах указанного на
рисунке диапазона, от Vi до 4-Av, может быть оценена с помощью
дробного временного интервала:
ДТ1 + ДТ2 + ДТ3 + ДТ4 = £f=1 ATfc
P(v)
Рис. 6.5. Вероятность попадания сигнала v, в интервал Av
Такие вычисления, выполненные для каждого интервала из обла-
сти значений v, дают гистограмму вероятностей.
Когда Av —> 0 эти гистограммы превращаются в плотность рас-
пределения вероятностей p(v), представленную на рис. 6.6.
Теперь, чтобы вычислить вероятность Р попадания значения v
в интервал [vi,vi + Av], берем интеграл:
vi+Av
Р= [ p(v)dv. (6.20)
296 Глава 6. Характеристики и восстановление сигналов
Плотность распределения вероятностей естественно нормализуется
следующим условием:
сю
f p(v)dv = 1.
—сю
(6-21)
Другие обычные статистические параметры можно вычислить
через плотность распределения вероятностей следующим образом:
среднее значение
среднее квадратичное
сю
v — J vp(v)dv, (6.22)
— сю
сю
v2 = J v2p(v) dv. (6.23)
—сю
Рис. 6.6. Плотность распределения вероят-
ностей v
Расчет среднего квадратичного можно обобщить на более высо-
кие порядки:
оо
mn = У vnp(v) dv, (6.24)
—оо
где тп обозначает n-й момент. Если в расчете учитывается среднее
значение, то определяется центральный момент:
оо
тп — J (v — v)np(v) dv. (6.25)
—оо
Моменты имеют следующие свойства:
1. Если график p(v) симметричен по форме, то 3-й, 5-й, 7-й и
т. д. моменты равны нулю, что является хорошим признаком
симметрии.
2. Моменты высшего порядка позволяют определить экстремумы
сигнала.
3. Второй центральный момент совпадает с дисперсией.
6.3. Характеристика случайных сигналов данных
Гауссовское, или нормальное, распределение
Это наиболее распространенное распределение, и его стоит рассмо-
треть более подробно. Распределение Гаусса, или нормальное рас-
пределение представляет собой распределение некоторого параме-
тра v, например измерений длины или значений сигнала. Гаусс, как
предполагают, предложил это распределение, анализируя астроно-
мические данные. Его гипотеза состояла в том, что вероятность
встретить конкретную ошибку уменьшается с величиной ошибки.
Эта гипотеза была подтверждена опытным путем. Типичная фор-
ма распределения значений в окрестности среднего представлена на
рис. 6.7. Общее математическое выражение, описывающее такую ко-
локолообразную кривую, выглядит так:
р(х) = Аехр
(6.26)
Рис. 6.7. Плотность нормального распределения вероятностей
Нормировка выполняется с помощью уравнения (6.21). Кроме то-
го, формула (6.25) связывает В с дисперсией. Объединение двух
результатов дает
Р(®) = еХР ( ’ (6‘27)
ау/2тг у to J
что является Гауссовой, или нормальной плотностью распределения
298 Глава 6. Характеристики и восстановление сигналов
вероятностей. Кривая на рис. 6.7 была получена с помощью про-
граммы Matlab:
clear, elf
mean=810; variance=5;
x= [800: . 1 : 820] ; A=l/(2*pi*variance).0.5;
B=(x-x)."2;
Y=A*exp(-B/(2*variance));
plot(x,y);
В соответствии с уравнением (6.20), чтобы найти вероятность
попадания х между значениями а и 6, надо выполнить интегрирование:
ь
Р(ха < х < хь) — у*р{х) dx. (6.28)
а
Существуют стандартные таблицы, позволяющие оценить такие ве-
роятности. В таблице содержатся значения интегралов
а
Р(а) = У р(х) dx.
— оо
Поэтому для вычисления интеграла (6.28) достаточно найти таблич-
ные значения Р(6) и Р(а), а затем вычесть второе из первого.
На рис. 6.8 представлен график, полученный на основе сведенных
в таблицу значений Р(х). Заметим, что функция Р(х) представляет
собой вероятность того, что значение случайной величины не пре-
восходит х и называется распределением вероятностей.
Рис. 6.8. Распределение вероятностей
Дисперсия и среднеквадратическое отклонение
В разделе 6.3.1 дисперсия определялась как квадрат среднеквадра-
тического отклонения. Это не совсем верно. Как описано в 1.2.1,
среднеквадратическое отклонение s — параметр, определяемый из
6.3. Характеристика случайных сигналов данных 299
ограниченного набора эмпирических значений, а не вычисляемый
через распределение вероятностей:
s =
г=1
(6.29)
Однако с теоретической точки зрения предел s при стремлении N
к оо, конечно должен совпасть с д.
Отметим, что своего максимального значения плотность нор-
мального распределения (рис. 6.7) достигает в среднем значении, а
ширина колокола — удвоенная дисперсия, что легко иллюстрируется
стандартным исследованием плотности нормального распределения
вероятностей (для удобства среднее значение положено равным нулю):
1 / —х2 \ рЫ = ^ехрМ’ (6.30)
dp —х dx ~ а2 (6.31)
d2p —р х2 dx2 а2 + (6.32)
Отсюда видно, что точка максимума (первая производная обраща-
ется в нуль) совпадает с нулем, а точки перегиба (выпуклость вверх
кривой меняется на выпуклость вниз), т. е. точки, в которых вторая
производная обнуляется — это х — ±сг.
Полезность среднеквадратического отклонения проявляется в оце-
нивании вероятности попадания экспериментальных данных в окрест-
ность среднего значения. Действительно, вероятность того, что х
окажется на расстоянии па от среднего равна:
± 1(7, Р(х) = 0,683,
± 2(7, Р(х) = 0,954,
± За, Р(х) = 0,9973.
Таким образом, вероятность того, что результат вычисления будет
отличаться от среднего больше чем на ±3(7, не превышает 2,7 на
1000.
6.3.3. Многомерные вероятности,
ковариация и корреляция
Вычисление корреляции сигналов, зависящих от времени, имеет мно-
го приложений в анализе сигнала. Например, она используется при
измерении глубины эхолотом, идентификации систем и в инструмен-
300 Глава 6. Характеристики и восстановление сигналов
тальных исследованиях. Чтобы найти математические соотношения
на корреляцию, полезно сначала рассмотреть совместное распреде-
ление вероятностей, двух случайных величин.
Предположим, что случайные величины х и у подчиняются рас-
пределениям вероятностей Р(х) и Р(у). Если случайные величины
независимы, то совместное распределение вероятностей Р(х, у) рав-
но произведению их распределений:
Р(х,у) = Р(х)Р(у) (6.33)
b d
Р[а < х < Ь,с < у < d\ = Jp(x)dx р(у) dy. (6.34)
а с
Однако, если случайные величины зависимы, их совместное распре-
деление вероятностей, как и его плотность, уже не раскладывается
в произведение. Примером может служить распределение веса и ро-
ста населения. В этой ситуации вероятность события вычисляется
по формуле* 1:
ь d
Р[а < х < b,c < у < d\ = J J p(x,y)dxdy. (6.35)
а с
При этом говорят, что случайные величины х и у зависят друг от
ДРУга.
Аналогично дисперсии из формулы (6.18) можно определить ко-
вариацию Сху двух случайных величин:
оо оо
CXy=f У (ж - х)(у - у)р(х, у) dxdy, (6.36)
— оо —оо
где х и у — их средние значения.
Если эти случайные величины «абсолютно зависимы», т.е. совпа-
дают, то уравнение (6.36) принимает вид:
оо оо
Сху — (х — х)(х — х)р(х,у) dxdy. (6.37)
—оо —оо
4-оо 4-сю 4-оо
1 Известны соотношения: f f р(х,у) dxdy = 1; f р(х,у) dy = р(х);
— оо—оо —оо
4-оо
f р(х,у) dx = р(у). — Прим. ред.
6.3. Характеристика случайных сигналов данных
Значит, в этом случае2 3
СХу = = 4 (6.38)
С другой стороны, если переменные независимы, то
оо оо
Сху = У {х- х)р(х) dx j (у- у)р(у) dy, (6.39)
— оо —оо
что приводит к результату*5
Сху - о • 0. (6.40)
Следовательно,
0 \Сху| (гхау, (6.41)
в зависимости от степени коррелирования случайных величин х и у.
Коэффициент корреляции определяется как:
р = ^~.
Его модуль не превосходит 1.
Независимые случайные величины являются некоррелированны-
ми4. Обратное утверждение, что некоррелированные случайные ве-
личины независимы, не обязательно верно, но, как правило, справед-
ливо в физической системе.
2Можно сделать преобразования:
(х — х)(х — х)р(х, у) dxdy =
= У (х — х)2 У р(ж, у) dy dx =
— оо L —оо
4-оо
= У (х — х)2р(х) dx = а2.
3Проделаем преобразования:
J (х — х)р(х) dx = у* хр(х) dx — х J р(х) dx = х — х = 0.
— Прим. ред.
— Прим. ред.
4По определению случайные величины не коррелируют друг с другом, если их
коэффициент корреляции равен 0. — Прим. ред.
^302 Глава 6. Характеристики и восстановление сигналов
6.3.4. Понятие корреляции
для временно-зависимых сигналов
Как уже говорилось, корреляция сигналов — важный инструмент
при их анализе. Если x(i) и y(t) — сигналы, изменяющиеся во вре-
мени, то понятие корреляции, представленное выше, применимо и
здесь с небольшими уточнениями:
1. Для интегральных пределов должен быть выбран соответству-
ющий промежуток времени.
2. Поскольку рассматриваемые сигналы зависят от времени, кор-
реляция также становится функцией времени.
Корреляция бывает двух видов: автокорреляция:
т
= X У x(t)x(t + т) dt (6.43)
-т
и взаимная корреляция:
т
RxV(r) = X У x(t)y(t + т) dt. (6.44)
-т
График функции Я(т) называют коррелятограммом (для авто-
или взаимной корреляции). Он показывает, насколько коррелирует
отрезок сигнала временной длины 2Т и его сдвинутая по времени
на т версия. Легко можно определить и дискретизованную версию
корреляции:
1 N
Rxx(rAt) — ~jy XjXj+r, (6.45)
j=i
где rAZ представляет собой дискретные кратные т, AZ — период
дискретизации, аг — целое число, начинающееся с нуля.
Если пик корреляции приходится на некоторое значение г, то с
помощью формулы, аналогичной равенству (6.42), можно оценить
уровень корреляции.
6.3.5. Автокорреляция и спектральные
функции плотности
Спектр мощности и корреляция
Часто необходимо знать, как распределена мощность в сигнале или
колеблющейся системе по спектру частоты. Функция спектральной
6.3. Характеристика случайных сигналов данных 303
плотности мощности G показывает распределение мощности в сиг-
нале и измеряется в ваттах на радиан или ваттах на герц. Средняя
мощность W в пределах некоторой полосы пропускания может быть
получена из функции G:
fa
W = ^Gdf. (6.46)
Л
Автокорреляция напряжения сигнала v(t) определяется в В2, что
составляет мощность, рассеянную в единичном резисторе. Интуи-
тивно понятно, что существует довольно слабая зависимость меж-
ду автокорреляцией и спектральной плотностью мощности. Что-
бы найти зависимость, необходимо начать с преобразования Фурье
автокорреляции. Для некоторого сигнала напряжения v(t) уравне-
ние (6.43) записывается как
т
= / v(t)v(t + т) dt. (6.47)
-т
Поскольку Rvv является функцией г, для вычисления преобразо-
вания по формуле (6.10) ее нужно умножить на «ехр (— jwr) dr»:
оо
^[Rvv(t,T)] = J
—ОО
Т
Гт/
-т
v(t)v(t + г) dt
ехр(— jwr) dr. (6.48)
Чтобы выровнять пределы интегрирования, необходимо взять
большой период времени, т. е. устремить Т к бесконечности:
оо оо
:F[Rvv(t,T)] = X У У v(t)v(f + г) exp(-jwr) dfdr. (6.49)
— оо —оо
Преобразовав, получим формулу:
:r[Rvv(T,n] =
оо
— оо
оо
J v(^) exp(jojZ) dt
— оо
v(t + т) exp(-jcj(£ + r)) dr,
(6.50)
которая, по существу, является двойным преобразованием Фурье.
Обозначив Фурье-образ функции v(f) (интеграл в квадратных скоб-
ках) через V(—jcj), придем к выражению:
^[Rvv(.t,T)] = X У V(-jw)v(t + г) exp(-jw(t + т)) dr. (6.51)
Глава 6. Характеристики и восстановление сигналов
Сделав подстановку Л = t + т:
оо
= У v(X)exp(—jwX)dX, (6.52)
—ОО
получим еще одно преобразование Фурье. Таким образом,
^[Rvv(r,T)] = XV^jLJ>)V^y (6.53)
что можно записать как:
7[JU(t,T)] = |V(ja;)|2. (6.54)
Смысл формулы (6.54) далеко не очевиден. Чтобы его увидеть, по-
лезно начать с выражения полной энергии, рассеянной на единичном
резисторе за интервал времени от — Т до Т. Для сигнала напряже-
ния v(t) энергия, рассеянная в течение промежутка 2Т оценивается
следующим образом:
т
Е= У v2(t)dt. (6.55)
-т
Другое выражение для Е можно получить с помощью теоремы
Парсеваля, которая гласит:
полная энергия сигнала равна сумме энергий каждой его частот-
ной компоненты.
В случае единичного резистора это можно записать как
оо
Е= у |V(jw)|2 dcj. (6.56)
—ОО
Разделив уравнение (6.56) на 2Т, получим среднюю мощность:
оо
W = У |V(^)|2^. (6.57)
— ОО
Однако уравнение (6.57) — это интеграл от правой части соот-
ношения (6.54). Их можно приравнять, если уравнение (6.57) сначала
продифференцировать по со:
dW 1
^- = ^|V(^)|2 = 5w(W), (6.58)
асо
где dW/duo — спектральная плотность мощности, обозначенная здесь
6.3. Характеристика случайных сигналов данных 305
как Svv. Сравнив уравнения (6.58) и (6.54), получим:
^[Rvv(t,T)] = SM. (6.59)
Итак, преобразование Фурье автокорреляции совпадает со спек-
тральной ПЛОТНОСТЬЮ МОЩНОСТИ. ПО ЭТИМ Причинам фуНКЦИЮ Svv((jJ)
еще называют спектральной плотностью автокорреляции. Спек-
тральная плотность автокорреляции — четвертая статистическая
функция из перечисленных в разделе 6.3.
Преобразование Фурье автокорреляции, вычисленное выше, и его
обращение известны как соотношение Винера - Хинчина. Общее вы-
ражение преобразования выглядит так:
сю
Sxx(ui) = f Rxx(r)exp(-jwT) dr (6.60)
—ОО
и может быть переписано в виде:
оо
(6.61)
—ОО
Выражение — jsincctf исчезает, потому что Sxx и Rxx — веществен-
ные, а не комплексные функции. Далее, так как косинус — четная
функция, область интегрирования можно ограничить положитель-
ным лучом:
оо
SXx(^) = 2 / Rxx(r) cos шт dT. (6.62)
о
Обратные соотношения имеют вид:
оо
Rxx(t) = 77- [ Sxx(w) exp(jut) dw (6.63)
2-тг J
— ОО
ИЛИ
оо
Rxx(t) — Sxx(cj) cos шт duj. (6.64)
0
Винер (США) и Хинчин (СССР) независимо получили эти соот-
ношения в начале 1930-х годов.
Практическое использование спектральной плотности
мощности
Внимательный читатель заметит, что в этом разделе применялись
два отдельных символа для обозначения спектральной плотности
Глава 6. Характеристики и восстановление сигналов
мощности, — G и Svv. Такое разделение объясняется попыткой дать
отдельные обозначения для теоретического и практического исполь-
зования. Функция Svv(w) взята из преобразования Фурье, а так
как сигнал предполагался непрерывным на бесконечном промежут-
ке времени от — оо до оо, то полученный частотный диапазон имеет
те же пределы. Отрицательные частоты диапазона подходят только
для теории, когда мы имеем дело с интегралами. На практике на-
ходит применение только односторонняя G спектральная плотность
мощности, функция G. Теперь, поскольку 7?vv(a>) определяется че-
рез произведение копий г>(£), которые сами должны быть четными
функциями, т. е. их графики симметричны относительно оси орди-
нат, можно записать:
Rvv(t) = Rvv(-r). (6.65)
Отсюда вытекает, что функция плотности спектральной мощности
Svv(w) тоже должна быть четной. Следовательно, G(w) может быть
получена из Svv (cj) только через положительные частоты:
G(o>) = 25vv(cu) = 2Jr[Rvv(r,Т\] для 0 ы оо. (6.66)
Кроме того, из выражения (6.58) получаем:
G(w) = |V(jw)|2 для О^ш^оо. (6.67)
Такая запись удобна для осуществления спектрального анали-
за сигнала, меняющегося во времени. Автокорреляция и преобра-
зование Фурье функций из уравнений (6.66) и (6.67) могут быть
эффективно вычислены с помощью алгоритмов ЦОС-микропроцес-
соров (подробнее см. работу Брука и Винна, 1988). По мнению Бру-
ка и Винна, уравнение (6.66) использовалось вначале для определе-
ния частотного спектра, так как дискретное преобразование Фурье
(ДПФ), использовавшееся в алгоритмах вычисления, на обработку
формулы затрачивает 47V2 умножения и 27V2 сложения, где N — чи-
сло спектральных коэффициентов. Однако открытие Кули и Таки в
1965 г. быстрого преобразования Фурье (БПФ) позволяет обсчи-
тывать формулу (6.67) непосредственно. Интересно, что некоторые
анализаторы сигнала теперь определяют автокорреляцию, сначала
вычисляя БПФ сигнала и находя Svv(cu), а затем уже из уравнения
(6.63) получают Rvv(r\ используя обратное БПФ.
6Д. Шум 307)
6.4. Шум
6.4.1. Происхождение шума
Как объяснялось в разделе 6.1, шум — это случайный сигнал, кото-
рый исследуется только статистически. Различают три вида шумов.
а) Тепловой шум
Тепловое движение в любой схеме производит крошечные случай-
ные столкновения. Математическое ожидание этих случайных дви-
жений равно нулю. Однако среднее квадратичное как тока, так и
напряжения отличны от нуля и становятся заметными, когда сиг-
нал, который нужно восстановить, слаб. Тепловой шум иногда также
называют шумом Джонсона или Найквиста. Объединив квадраты
средних напряжений в полосе частоты Д/, получим:
Ди2 = 4/гТЯД/, (6.68)
где к — постоянная Больцмана, Т — абсолютная температура и
R — сопротивление источника шума. Спектр является плоским и по
аналогии с белым светом иногда называется белым шумом. Уравне-
ние (6.68) может быть переписано в виде спектральной плотности
мощности:
1 Л?)2
= 4fcT [Вт/Гц]. (6.69)
Я
Спектральная плотность мощности для теплового шума показана
на рис. 6.9.
б) Дробовый шум
Дробовый шум возникает за счет случайного появления флуктуаций
напряжений в электрической цепи и заметен, когда сила тока мала.
Привлекая статистический анализ Пуассона, можно показать, что
среднее квадратичное тока описывается формулой:
Дг2 = 2ег0Д/, (6.70)
где е — заряд электрона, г‘о — среднее тока. Спектральная плот-
ность мощности является спектрально плоской функцией (см. рис. 6.9).
в) Шум мерцания
Данный тип шума появляется в полупроводниках и некоторых ком-
позитных материалах. Распределение мощности уменьшается с ча-
стотой, поэтому такой шум часто называют как one-over-f («еди-
ница на эф», т.е. 1//) шум или шум мерцания в полупроводниках
(см. Николлиан и Брюс, 1982). Устройства на германии более под-
вержены шуму мерцания, чем на кремнии. Данный вид шума не ха-
308 Глава 6. Характеристики и восстановление сигналов
рактерен для металлических компонент. Характер мощности спек-
тральной плотности шума мерцания показан на рис. 6.10. Среднее
квадратичное напряжение этого шума описывается формулой:
В?2
Av2 = -у-Д/, (6.71)
где В — эмпирическая константа. Шум мерцания доминирует над
тепловым шумом на частотах ниже 10 кГц. Он имеет место в ком-
позиционных резисторах. Поэтому при низком уровне сигнала с ча-
стотой ниже 10 кГц следует применять тонкие металлические мем-
браны или проволочные сопротивления.
Вт/Гц
4кТ
Частота f
Усиление
Для усиления сигналов низкого уровня следует подбирать усилители,
имеющие низкие уровни шумов во входных цепях. При их монта-
64- Шум 309)
же следует проявлять внимание, особенно если требуется входной
импеданс. Сейчас продается большое количество малошумящих уси-
лителей, причем иногда изготовители прилагают к усилителям спе-
циальные рекомендации по компоновке схемы.
Однако измерение слабой установившейся величины добавляет
проблемы. Это происходит потому, что внутренние каскады систе-
мы соединены друг с другом напрямую и любое усиление нулевой
погрешности или сдвига вносит свой вклад в измеряемую величину.
Рис. 6.11. Схема усилителя со стабилизацией нуля
Чтобы уменьшить эффекты сдвига (дрейфа), необходим пере-
ключающий усилитель, или усилитель со стабилизацией нуля, устрой-
ство, обобщающее усилитель постоянного тока с модуляцией и де-
модуляцией сигнала (УПТ). Усилитель со стабилизацией нуля пре-
образует цифровой сигнал в аналоговый, в этом виде его усиливает,
а затем вновь переводит в цифровую форму. Преимуществом уси-
лителя является то, что он работает в режиме реального времени.
На рынке электронных устройств в настоящее время предлагает-
ся несколько версий КМОП-структур, смонтированных в виде ин-
тегральной схемы. Как показано на рис. 6.11, это устройство по-
стоянно контролирует и исправляет свой собственный дрейф. Вход
на вспомогательный усилитель В заземлен, а выход используется
для постоянной корректировки нуля. Реакция усилителя В на син-
хронизирующий сигнал совпадает с откликом основного усилите-
ля А, который вычитается из выходного сигнала усилителя В. Та-
ким образом, используется любое несоответствие в сигналах, чтобы
вернуть усилитель А в нулевое положение. Обратите внимание, что
усилитель А работает в режиме реального времени, что способ-
ствует уменьшению индуцированных синхронизатором помех. Ста-
310 Глава 6. Характеристики и восстановление сигналов
бильность нуля — фактор обеспечивающий лучшую точность для
эксплуатационных усилителей, использующих биполярную техноло-
гию. Недостатками данных устройств являются:
- требуются внешние конденсаторы для хранения напряжения
исправления ошибки;
- рабочее переменное напряжение ограничено диапазоном от 3,5
до 5 В;
- выходной ток ограничен 5-ю мА;
- если выход насыщается, то восстановление будет идти медленно,
- напряжение питания от V+ до V~ ограничено 18-ю В.
6.4.2. Способы уменьшения шума
Каким бы образом ни возникали шумы, разработано множество до-
ступных методов улучшения отношения «сигнал/шум».
Фильтрование
Шумовые спектры, показанные выше, расширены по частоте. Ес-
ли измерять вместе сигнал и шум, большой вклад в полученный
результат будет вносить именно шум. Простой фильтр, помещен-
ный на входе схемы, может быть очень эффективен, если сигнал
ограничен по спектру. В зависимости от положения спектра сигна-
ла используются фильтры нижних, верхних частот или полосовые
(см. рис. 6.12).
Вт/Гц
Шум
Характеристика
полосы пропускания
фильтра
Спектр
информационного
сигнала
Частота f
Рис. 6.12. Фильтрование шума
Простое временное усреднение
Для уменьшения шума может использоваться простое усреднение,
если переменная является статической или медленно изменяется со
временем, например как температура жидкости в большом объеме.
Фильтр нижних частот в действительности является аналоговым
усредняющим устройством.
С появлением чипов памяти усреднение стало возможным осуще-
ствлять более сложной цифровой техникой. Для большинства типов
шума колебание амплитуды тока или напряжения сигнала со вре-
менем x(t) описывается Гауссовским распределением. Определение
среднего значения х и его среднеквадратического отклонения бы-
ло дано в разделе 6.3.1 (см. формулы (6.16) и (6.18)). На практике
используются дискретные версии этих функций:
1 N
Х = (6-72)
г=1
где N — число отсчетов, взятых в пределах «окна» Т. N обычно
берут равным 1024. Среднеквадратическое отклонение отсчетов —
это мера разброса сигнала вокруг среднего значения и представляет
уровень шума. Когда х равно нулю, как в случае белого шума s,
среднеквадратичное отклонение от х вычисляется по формуле:
=\
(6.73)
Как обсуждалось в 1.2.1, для более точного вычисления средне-
го выборочного х нужно взять несколько типовых выборок, найти
их среднее хт, а затем определить среднее х этих средних. Мож-
но показать, что среднеквадратичное отклонение sm по ансамблю
средних значений, найденных в р окнах, вычисляется следующим
образом:
8тп
(6-74)
Очевидно, что с увеличением N или р уменьшается sm (размах рас-
пределения), следовательно, достигается наилучшая оценка измеря-
емой величины. Например, увеличение N или р в 10 раз улучшает
соотношение сигнал/шум на —10 дБ. Очевидно, что при этом все
необходимое для усреднения время, рТ, обязательно должно быть
меньше времени изменения переменной.
Усовершенствованием этой методики является нахождение сколь-
зящего среднего. Здесь среднее значение, вычисленное по последне-
му «окну», усредняется с ранее вычисленными средними, хранящи-
мися в памяти, и получается очередное среднее значение. При этом,
312 Глава 6. Характеристики и восстановление сигналов
конечно, последнему окну придается наибольшее значение. Были раз-
работаны различные варианты скользящего среднего, в которых
средние значения из р окон перед усреднением умножались на ве-
совые коэффициенты, зависящие от удаленности конкретного окна
от текущего. При этом использовался широкий ряд весовых функций.
Если шум подчиняется распределению с ненулевым средним зна-
чением, простые процедуры усреднения неприменимы, поскольку
это среднее значение будет добавляться к измеряемой величине.
Сложное усреднение по времени
Как показано выше, существуют ограничения на использование про-
стого процесса усреднения. Во-первых, величина, подлежащая изме-
рению, должна быть виртуально стационарной, а во-вторых, мощ-
ность шума на нижних частотах должна увеличиваться как 1/f.
Приведенные далее методы представляют собой более сложные про-
цессы усреднения, требующие, чтобы сигнал был повторяющимся.
Это достигается либо движением датчика по некоторой периоди-
ческой траектории, либо таким его расположением, что измеряемая
величина будет периодически появляться в радиусе его действия.
Такие методы позволяют эффективно разместить информационный
сигнал в разных областях частотного спектра. Еще одно преиму-
щество состоит в том, что любой усилитель можно подсоединить
последовательно, уменьшив проблемы дрейфа.
Многоканальный счетчик
Для периодических или повторяющихся переходных сигналов усред-
нение может быть выполнено с помощью многоканального счетчика.
Это цифровое устройство состоит из множества каналов, например
1024, которые хранят сигнал. Если Т — это период повторения, то
достигается временное разрешение At, равное 7^/1024. Необходи-
мо соблюдать точность включения, чтобы производить выборку в
одной и той же точке волны при каждом просмотре. С помощью
этого устройства можно сохранить и усреднить до 106 просмотров.
Коммерческие системы часто используют метод подсчета. Отсче-
ты сигнала подаются в конвертер напряжение-частота, где частота
«обсчитывается» за время At. Вычисленное значение сохраняется в
соответствующем канале. Вычисления от последующих просмотров
или добавляются, или вычитаются в зависимости от полярности
отсчета. Канал действует подобно сумматору реверсивного счетчи-
ка. После большого количества просмотров шум имеет тенденцию
усредняться к нулю, что делает нежелательным любой повторяю-
щийся сигнал, имеющий период, отличный от Т. Полоса пропускания
6.4- Шум 313)
здесь обратно пропорциональна общему времени дискретизации и
сканирования.
Фазочувствительный детектор
Фазочувствительное детектирование — это общая технология,
которая может быть реализована разными способами. Во всех случа-
ях происходит регулирование фазы между опорным и информацион-
ным сигналами. Первые коммерческие разработки таких устройств
были полностью аналоговые. Но цифровые дифференциальные сис-
темы обеспечивают лучшую стабильность. Основной принцип фазо-
чувствительного детектирования показан на рис. 6.13. Отклонение
мостовой схемы, происходящее по синусоиде, которое наблюдается в
датчике деформации, служит полезным примером (см. Вилмсхерст
(1990)). Фазовращатель в детекторе служит для компенсирования
любого сдвига фазы, индуцированного системой. Сглаживающий
фильтр на выходе выполняет функцию усреднителя и суживает по-
лосу пропускания системы. Он должен пропускать медленно меняю-
щийся информационный сигнал и отсечь наведенные гармоники.
Датчик
Фазовращатель Контрольный
выключатель
Генератор
сигнала
Рис. 6.13. Фазочувствительное детектирование
Анализ в частотной области — полезный метод, позволяющий
оценить относительные преимущества различных вариантов исполь-
зования фазочувствительного детектора. Для проведения анализа
на место переключателя вставляется аналоговый умножитель. В ре-
зультате получается общая модель фазочувствительного детектора,
схематически изображенного на рис. 6.14, которая позволяет моде-
лировать различные экспериментальные конфигурации.
Чтобы проиллюстрировать излагаемую концепцию, ниже описа-
ны три типа умножения с подходящими примерами применения.
1. Биполярный меандр1. Это — эквивалент системы, изображен-
ной на рис. 6.13, — примера, иллюстрирующего мост датчи-
1 Прямоугольное колебание. — Прим. ред.
Глава 6. Характеристики и восстановление сигналов
ка деформаций. Биполярная форма волны выполняет функции
инвертора. Для того чтобы его работа была эквивалентна си-
стеме из рис. 6.13, генератор опорного сигнала должен произ-
водить два выходных сигнала: синусоидальный и биполярный.
Цель генерирования прямоугольного сигнала — создание гар-
моник. Информационный сигнал получается как боковые со-
ставляющие гармоники, которые также увеличивают шумы.
Рис. 6.14. Обобщенный фазочувствительный детектор
2. Униполярный меандр. В некоторых оптических экспериментах,
чтобы использовать фазочувствительный детектор, вместо ге-
нерирования сигнала луч света прерывают оптическим моду-
лятором, вращающимся с высокой скоростью. Делается это для
того, чтобы частота повторения импульса света формирова-
ла необходимую частоту. Опорный сигнал при этом берется
из вращающегося диска через отдельный фотодиод. Информа-
ционный сигнал имеет униполярный формат, причем в одной
половине цикла присутствуют как данные, так и шум, а в
другой — только шум. Униполярный формат обладает замет-
ным недостатком по сравнению с биполярным. В него входят
те же самые гармоники, но, кроме них еще и некоторая по-
стоянная компонента, что происходит из-за начального сдви-
га и (1//)-шума. Причина, по которой униполярный формат
все же применяют в оптических экспериментах, заключает-
ся в удобстве модулирования луча света прерывателем. Бо-
лее общим преимуществом, имеющим отношения и к другим
приложениям, является то, что верхние частоты аналоговых
мультиплексоров ограничиваются мегагерцами, в то время как
переключательные схемы могут работать на гигагерцевых ча-
стотах.
3. Синусоидальный сигнал. Недостатки, описанные выше, кото-
рые появляются при использовании прямоугольных колебаний,
6J>. Шум 3lj)
не возникают, если умножить друг на друга две синусоидаль-
ные волны. В этом случае отсутствуют дополнительные гар-
моники. Результатом произведения синусоид служат две но-
вые синусоиды: частота первой из них — сумма частот со-
множителей, а второй — разность (см. формулу (6.83)). Если
частоты перемножаемых сигналов совпадают, то рождается
только одна синусоида, частота, которая равна удвоенной ис-
ходной частоте. Указанная технология успешно применяется
в спектроскопии. Материал, подлежащий исследованию, облу-
чают в некотором диапазоне длин волн. При какой-то кон-
кретной длине волны возникает всплеск (или впадина), что
показано на рис. 6.15, i. Чтобы локализовать этот пик, дли-
на волны облучающего сигнала в течении эксперимента по-
степенно увеличивается, колеблясь с небольшой амплитудой
(рис. 6.15, и). В результате генерируется сигнал, модулиро-
ванный на частоте генерации, амплитуда которого зависит от
крутизны пика (рис. 6.15, ш). В добавок между сигналами на
верхней и нижней сторонах пика возникает сдвиг фаз. Умно-
жение с колеблющимся сигналом дает несимметричную волну,
центрированную над пиком (рис. 6.15, w). После сглаживаю-
щей фильтрации искомый всплеск виден отчетливо рис. 6.15, v.
Полученная кривая эффективно указывает на пик спектро-
скопии из рис. 6.15, г. Для корректной работы системы вре-
менная константа выбирается большей, чем период колебаний,
но меньше времени развертки. Если развертка слишком бы-
страя для данной схемы сглаживания, искомый пик сместится.
В общей ситуации, независимо от сигнала используемого в фа-
зочувствительном детекторе, два полупериода должны иметь абсо-
лютно одинаковую продолжительность, иначе уровень восстанавли-
ваемого сигнала будет снижен.
Синхронизирующий усилитель
Фазочувствительные детекторы можно построить из дискретных
элементов, но обычно более рентабельно использовать коммерчески
доступные системы, которые называются усилители синхронизиру-
ющими усилителями (подробнее см. Мид, 1983).
Коммерческие устройства состоят из генератора сигнала пере-
менной частоты со следящим фильтром, малошумного усилителя
широкого динамического диапазона, высокоэффективного линейно-
фазового детектора и фильтра с выбором констант времени. Пред-
Глава 6. Характеристики и восстановление сигналов
почтительно использование внешнего генератора сигнала. Чтобы
добиться наилучшего выходного сигнала, регулирование фазы про-
изводится вручную оператором.
Рис. 6.15. Спектроскопия с фазочувствительным детектированием. Свер-
ху вниз: (i) — пик передачи (для сравнения показано то же
время сканирования, что и для остальных случаев); (ii) — скани-
рующий сигнал; (iii) — выходной сигнал оптического датчика;
(iv) — выходной сигнал мультиплексора; (v) — сглаженный вы-
ходной сигнал
Автокорреляция
Одно из главных приложений корреляции лежит в области восста-
новления информации, переносимой сигналом, с помощью автокор-
6Д. Шум 317)
реляции. Автокорреляция обсуждалась нами в разд. 6.2.2 и 6.3.4.
Коррелируя сигнал с самим собой, возможно получить следующее:
(i) получить статистическую информацию из случайного сигнала;
(ii) выделить отдельные гармоники случайного сигнала;
(iii) определить период несинусоидальных повторяющихся сигналов.
Статистическое приложение описано в разд. 6.3. В следующих
параграфах показано, как синусоидальный сигнал восстанавливает-
ся при большой зашумленности и как аналогичный прием позволяет
определить период несинусоидальных колебаний.
Автокорреляция суммы двух сигналов
Предположим, что сигнал z(t) состоит из двух частей:
z(f) = x(t) + y(t), (6.75)
где x(t) — необходимые нам данные, a y(t) — шум. По формуле
(6.14) автокорреляция определяется как
т
Rw(r) = / v(t)v(t + г) dt. (6.76)
-т
Так что автокорреляция сигнала (6.75) может быть выражена через
интеграл:
т
Rzz = ^f / + ^-1 +г) + У& +т)]dT (6-77)
-т
т
Rzz = + т) +
-т
+ x(t)y(t + г) + y(t)x(t + т) + y(t)y(t + г)] dr, (6.78)
RzZ = R'XX + Rxy + Ryx + Ryy- (6.79)
Члены Rxy, Ryx — взаимная корреляция слагаемых я, и у. Если
составные части сигнала не коррелируют, то оба этих члена рав-
ны нулю. Заметим, что, если шумовая компонента — действительно
случайный шум, она не будет коррелировать с информационной.
Следовательно,
— Rxx Ryy- (6.80)
318 Глава 6. Характеристики и восстановление сигналов
Автокорреляция синусоидальной волны
Сигнал данных x(t) можно представить в следующем виде:
Xk(t) = xq sinfcjo^ + #(&)]. (6.81)
Индекс к указывает на то, что сигнал находится в некотором ансам-
бле {x(t)}, а 0(к) — несистематический случайным фазовый сдвиг.
Если случайный процесс эргодический, автокорреляцию можно вы-
числять по всему ансамблю:
27Г
X2 f
Rxx(t) = ^~ sin(a>o£ + 0) sin[cuo(£ + т) + 0] d0. (6.82)
27Г J
о
Используя известное тригонометрическое тождество
sin A sin В = cos(A — В) — cos(A + В), (6.83)
получаем
х2
Rxx(t) = у- cos^ot. (6.84)
Вычисление автокорреляции по ансамблю типовых выборок, в отли-
чие от вычисления по единственной выборке, дает следующий важ-
ный результат: автокорреляция fc-й выборки не зависит от фазового
сдвига и обладает одной и той же частотой.
Автокорреляция шума
Автокорреляция шума определяется тем же методом, что использо-
ван выше, поскольку зависящий от времени электрический сигнал —
случаен и поэтому в интеграл, описывающий функцию Д(т), нельзя
подставить никакого аналитического выражения. Вместо этого ав-
токорреляция вычисляется через преобразование Винера - Хинчина,
которое переводит спектральную плотность мощности S(/) в авто-
корреляцию:
оо
Rxx(t) = У 5жж(/)ехр0’тгт/)(//. (6.85)
—ОО
На практике частотный спектр положителен, так что обозначая че-
рез G(f) действительную часть спектральной плотности мощности,
предыдущее соотношение можно переписать как
оо
Rxx(t) = У Gxx(f)cos2TrfTdf. (6.86)
о
Заметим, что мнимая часть игнорируется, поскольку, как уже от-
мечалось, автокорреляция всегда является четной функцией т.
64- Шум 319)
В случае спектра истинного белого шума все частоты предста-
влены с равными амплитудами, так что Gxx(f) = а. Опираясь на
равенство Sxx(f) = |а, формулу (6.85) можно переписать как
оо
Rxx(r) = ^ У ехр(;2тг/т) df. (6.87)
— ОО
Но это выражение можно легко оценить с помощью преобразо-
вания Фурье дельта-функции 6(t). Напомним, что дельта-функция
представляет собой бесконечный пик в нуле и имеет нулевые зна-
чения вне нуля, причем площадь под ее графиком равна единице.
Поэтому
оо
.F[(J(Z)] = у* 6(t) exp(j2irft) dt — 1. (6.88)
— оо
Обратное преобразование Фурье единицы имеет вид:
оо
У exp(j27r/0d/ = <5(f). (6.89)
— ОО
Таким образом, сравнивая выражения (6.87) и (6.89), можно заме-
тить, что
Rxx(r) = ^(т). (6.90)
Рис. 6.16. Автокорреляция
чистого белого шума
г
На рис. 6.16 условно показан график сосредоточенной в нуле дель-
та-функции. Конечно, на практике шум не может достигать беско-
нечных значений ввиду ограниченной полосы пропускания системы.
Поэтому для адаптации соотношения (6.86) для реальной системы,
будем предполагать, что шум ограничен по полосе частот. График
спектральной плотности мощности приведен на рис. 6.17.
320 Глава 6. Характеристики и восстановление сигналов
G(f)
Ширина
диапазона В
fQ-B/2 /0 + В/2 Частота/
Рис. 6.17. Спектральная плотность мощности ограниченного по полосе
шума
Подставляя эту функцию в формулу (6.86), получим
/о+1/2В
Rxx(r) = У асо8(2тг/т)<// =
Л-1/2В
Г8т27г/т1/о+1/2В
= а -------- —
2ТГТ
— — (эттгтВ) cos 2тт for =
7ГТ
sin тттВ ] Л .
COS 2тг JqT.
тгтВ
(6.91)
(6.92)
(6.93)
(6.94)
= ab
В специальном случае, когда полоса частот простирается от 0 до
В, так что /о — В/2, можно воспользоваться тригонометрическим
тождеством:
sin 0 cos 0 = sin 20 (6.95)
и получить следующее равенство:
Rxx (т) — аВ
sin 2тттВ
2тттВ
(6.96)
Функцию (sin х)/х иногда обозначают символом sine х. Ее график
показан на рис. 6.18.
Наконец, можно заметить, что если комбинированный с шумом
синусоидальный сигнал автокоррелирован, то его автокоррелограм-
ма разобьется на две части. Причем разделение увеличивается с
удалением от нуля.
6.5.
Рис. 6.18. Функция sine я
6.5. Интерференция
6.5.1. Источники интерференции
и механизмы взаимодействия
Как объяснялось в разд. 6.1, интерференция — детерминированное
явление. Практически всегда ее источник — электромагнитные вол-
ны, производимые:
- локальными силовыми кабелями, либо подводящими напряже-
ние к системе, либо плохо проложенными внутри нее;
- постоянными токами, которые переключаются и, следователь-
но, индуцируют электромагнитный переходный процесс;
- электрическими разрядами на клеммах высокого напряжения
(линии переменного тока индуцируют интерференцию, а высо-
ковольтные коронные разряды постоянного тока генерируют
шум);
- искрением электрооборудования;
- люминесцентным свечением, производимым волнами на удво-
енной частоте линии электропередач;
- цифровой схемой;
- радиопередачами;
- микроволновым оборудованием.
Индуктивная связь
По закону Фарадея, наведенная ЭДС в некотором вторичном элемен-
те схемы может быть выражена в терминах силы тока в первичном
11—4227
322 Глава 6. Характеристики и восстановление сигналов
элементе:
М —
(6.98)
ется
тор,
ния,
ЭДС = &А (6.97)
dt
Величина М зависит от геометрии системы. Общее выражение для
М впервые было выведено Нейманом (см. Блини и Блини (1965)):
dsi • ds2
г
где dsi и ds2 — элементы тока, ат — расстояние. Его аналитическое
решение трудно во всех случаях, кроме самых простых геометриче-
ских форм. Например, в случае двух коаксиально смонтированных
плоских катушек с п\ и П2 витками, расстояние z между которыми
больше, чем их радиусы а и Ь, имеет место соотношение:
м = (6.99)
ZZ6
Обычная причина возникновения такого типа соединения заключа-
в том, что магнитное поле, окружающее силовой трансформа-
взаимодействует с некоторой схемой предварительного усиле-
содержащей слабые сигналы.
Емкостная связь
Переменные электрические поля могут индуцировать движение за-
ряда. Чередование электрических областей может вызвать движе-
ние заряда на соседних проводниках, что эффективно создает ем-
костное сопротивление в зазоре между ними. И в этой ситуации
аналитическое определение емкостного сопротивления может быть
крайне затруднено. Самый простой случай — это две параллельные
пластины. Здесь
С = (6.100)
а
где d — расстояние между пластинами; А — площадь перекрытия.
Другое полезное выражение — емкость на единицу длины между
двумя параллельными длинными проволоками:
С = ^-[Ф/м].
1п(а/а)
где d — расстояние между их центрами; а — радиусы проволок.
Когда провод расположен близко к большой проводящей пластине и
работает параллельно ей, аналогичное выражение имеет вид:
с = мад [ Z 11
где h — расстояние. Простой пример того, как могло бы произойти
взаимодействие, показан на рис. 6.19.
(6.101)
(6.102)
6.5. Интерференция 323
Линия высокого напряжения, l7s
Сигнальная линия ' * I
с2
Заземление ;
Рис. 6.19. Взаимодействие через паразитную емкость
Паразитная емкость формирует потенциальный разделитель по-
перек линий поля. Линия сигнала эффективно насыщает электриче-
скую область поперек промежутка, дающего дополнительный сиг-
нал:
У _ 1/juCi v _ С2 v
+ Х2 s 1/juCi + l/jcjC2 s C\+C2S'
(6.103)
Линии циркулярной связи
Замкнутые линии циркулярной связи могут быть созданы по не-
досмотру соединением проводов на печатной схеме или заземлением,
как показано на рис. 6.21. Такие цепи могут действовать как антен-
ны и, следовательно, вводить электромагнитные волны в систему.
Следующие два явления, строго говоря, не являются механизма-
ми взаимодействия, скорее это процессы подпитки.
Многократные заземления
Полезно сначала познакомиться с некоторыми тер-
минами. Слово «earth» является синонимом слова
«ground»1. Первый из них чаще используется в Ве-
ликобритании, чем в Северной Америке. Существу-
ют даже два различных схематических символа
(рис. 6.20), один обозначает замыкание на землю,
другой — на корпус прибора. Британский стан-
дарт — BS 3939, EN 60617-2.
Отт (1988) дает стандартное определение зем-
ли как «эквипотенциальной точки или плоскости,
служащей опорным потенциалом для схемы или
системы, с неизменным напряжением независимо
дится ли к ней ток или берется от нее». Отт подчеркивает, что это
определение, скорее, соответствует теории, чем практике, поэтому
он предлагает другую формулировку: «низкое полное сопротивление
току по направлению обратно к источнику».
гОба переводятся с английского как «земля» или «заземление». — Прим. ред.
а)
Рис.
волы
б)
1
6.20. Сим-
заземления:
а) — на
б) — на
прибора
ОТ того,
землю,
корпус
подво-
324 Глава 6. Характеристики и восстановление сигналов
Существуют две цели заземления: для безопасности и для опорно-
го сигнала. Ни реальная земля, ни заземленная проводка, ни зазем-
ленная плоскость не имеют совершенно нулевую разность потенциа-
лов. Сопротивление почвы может измениться на несколько порядков
из-за изменения в составе и водном содержании (см. Кодали (1996)).
Значение 1 Ом на метр можно взять в качестве номинального по-
рядка оценки сопротивления. В отличие от этого, медный кабель
диаметром 2 мм имеет сопротивление приблизительно 5 мОм на
метр. Следовательно, если ток проходит через землю или по за-
земляющему кабелю, то между любыми выбранными точками будет
существовать разность потенциалов. Сложные электрические меха-
низмы и неисправное оборудование, ошибка которого ниже уровня
отключения, могут вызвать утечку на землю. Кроме того, побоч-
ные магнитные поля могут через индукцию вызвать вихревые токи
в землю.
Эти дефекты привносят дополнительную разность потенциалов
в любые сигнальные линии, использующие заземляющий кабель как
часть схемы, такие как с обычным коаксиальным кабелем или как
часть некоторой системы безопасности соединения (рис. 6.21).
Источник
сигнала I
Приемное
устройство
Ток потерь <<--
Реальная земля _или
подземный кабель
Рис. 6.21. Введенная помеха от многократных заземлений
Такие токи утечки присущи промышленной частоте. Эти конту-
ры заземления могут быть ответственными за гул в студии аудиоси-
стем. Интересный пример — электрический локомотив или трамвай,
который использует рельсы как схему возвращения. Без применения
клетки Фарадея, покрывающей основание рельсов, десятки вольт
могут возникнуть в почве возле путей после прохода транспортного
средства.
Контур заземления может также действовать как антенна, как
это было описано выше, посредством линий циркулярной связи. При
этом возникают более высокие частоты, чем частоты в линиях элек-
тропередачи.
6.5. Интерференция 325
Плата с печатной схемой
Результат, сходный вызываемому многократным заземлением, опи-
санный выше, может произойти с «земляным» слоем платы с печат-
ной схемой. Причина, впрочем, та что сигнал и/или заземление не
могут оставаться всюду с нулевым напряжением, если токи, возвра-
щаемые по проводнику оказываются слишком большими для размера
полосовой меди. Любая разность потенциалов, встречающаяся меж-
ду различными частями «земляного» слоя эффективно вносит сигнал
в систему.
Общий опыт разработчиков монтажных плат свидетельствует,
что сигналы, произведенные в некоторой части системы, проникают
через шину питания в другие части, что доставляет особенно много
хлопот на верхних частотах. В результате шина питания неспособна
обеспечить мощность, требуемую секцией, при устойчивом напря-
жении, но напряжение слегка колеблется с частотой переключения.
Это оказывает влияние на остальные части системы, куда вносятся
помехи с той же частотой. КМОП-компоненты более подвержены
этой проблеме, чем двухполюсные.
Коаксиальный кабель
Первые коаксиальные кабели страдали чувствительностью к дви-
жению (см. Перле (1952)). Изгиб кабеля вызывает трение между
слоями, что может создавать заряд на поверхностях слоев. Если в
процессе изгиба потерян контакт между малыми частями изоляции
и проводника, заряд не сможет далеко перетечь. В результате на
концах кабеля возникает дополнительная ЭДС. Начальное решение
проблемы состояло в том, чтобы покрыть изоляцию порошком гра-
фита и поддержать тем самым электрическую целостность. Однако
современные производственные методы позволили провести улуч-
шения физической связи между проводниками и изоляцией.
Тем не менее все еще необходимо заботиться о том, чтобы не
давать коаксильным кабелям свободно двигаться и индуцировать
этим перенос крошечных сигналов.
6.5.2. Техника снижения интерференции
Геометрическая изоляция
Индукционные и емкостные механизмы, описанные выше, значи-
тельно зависят от физических параметров схемы. Простое увели-
чение физического разделения компонентов уменьшит взаимосвязь.
С инверсией расстояния интерференция уменьшится или станет лучше.
Глава 6. Характеристики и восстановление сигналов
Экранирование (shielding)
Исключение устойчивой или нижней частоты магнитных и электри-
ческих полей может быть достигнуто помещением чувствительной
схемы внутрь металлических экранов.
Используя теорему Гаусса, можно показать, что электростати-
ческий заряд должен находиться на внешней стороне проводника.
Стабильные электрические поля не могут присутствовать внутри
металлов, так как любая напряженность электрического поля вы-
тесняет заряд в область с нулевым полем. Следовательно, внешняя
поверхность проводника становится эквипотенциальной, где нахо-
дятся все наведенные или переносимые заряды. Данные заключения
верны также для полого металлического проводника. Значит, метал-
лическое замкнутое пространство — эффективный экран, стабили-
зирующий внешние электрические поля. В качестве экрана можно
брать и металлическую сетку, если ее ячейки достаточно малы по
сравнению с расстоянием между сеткой и защищаемой схемой.
Течение магнитного потока зависит от магнитного сопротивле-
ния линии магнитного потока. Для конкретного материала оно рас-
считывается следующим образом:
R = —Ц-, (6.104)
Ро[1гА
где А — это площадь поперечного сечения и I длина пути внутри
материала. Самое низкое магнитное сопротивление у пути в мате-
риале с высокой относительной проницаемостью рг. Если закрытый
контейнер сделан из такого материала, то линии магнитного поля
остаются в его пределах, защищая таким образом внутреннюю схе-
му (рис. 6.22).
Рис. 6.22.
Магнитное
экранирование
Обычно в качестве материала для экрана используется сплав
мю-металла. Его часто применяют при защите электронно-лучевых
трубок.
6.5. Интерференция 327
Следует подчеркнуть, что защитные заграждения — хороший
способ сохранить необходимый зазор между схемой и корпусом, что
гарантирует минимальный риск емкостной или индуктивной связи.
Экранирование (screening)
Решение уравнения для электромагнитной волны, пронизывающей
проводник, показывает, что проникновение волны ослабевает со-
гласно выражению
I = 1о ехр / —|, (6.105)
( о )
где 6 = (TraJ/io/^r)1/2 — характеристика затухания, называемая глу-
биной поверхностного слоя. Для волны с частотой 1 МГц, проходя-
щей через медь, 5 приблизительно равна 6,6 • 10-3 см. Ясно, что тон-
кий слой металлической фольги это все, что необходимо в этих ча-
стотах. Следовательно, использование проводящей пленки или оплет-
ки, таких как в коаксиальном кабеле, очень эффективный способ
экранирования высокочастотных электромагнитных помех. При ис-
пользовании экранирующей клетки или сетки размер ячеек должен
быть мал по сравнению с длиной волны.
Заземление
Очевидное средство для устранения проблем, связанных с много-
кратным заземлением, — обеспечение общей точки заземления, к
которой подключено все оборудование. Это может быть сделано или
линейной, или звездной структурой, как показано на рис. 6.23.
Рис. 6.23. Структура заземления: а) — линейная; 6) — звездная
Каждая из этих структур имеет свои недостатки. Линейный под-
ход может поставить под угрозу безопасность и здоровье, если за-
земление, связывающее объекты, нарушится, в то время как те все
еще будут под напряжением. Звездная структура обладает замкну-
той цепью антенного типа, предоставляющей возможность электро-
магнитным волнам проникать в систему.
328 Глава 6. Характеристики и восстановление сигналов
Обязательным требованием безопасности при подключении элек-
трического оборудования к магистрали является наличие заземле-
ния, использующего подходящий по размеру провод для ожидаемого
условия отказа и привязки установки в целом к земле. Эквипотенци-
альное соединение — это соединение через электропроводку точки
заземления электрической магистрали, во до- и газопроводов, лю-
бых других систем каналов или трубопроводов в точках входа в
аппаратуру и любых незащищенных металлических частей структу-
ры здания. Ввиду этих условий может оказаться невозможным или
нежелательным использование стратегий, показанных на рис. 6.23.
Существует множество таких технических приемов, что даже при
заземлении датчика и приемника, линии сигналов защищены от не-
желательного замыкания на землю и внесения разности потенциалов
в данные.
а) Развязывающий трансформатор
Для оптимального функционирования системы необходим экран меж-
ду первичными и вторичными обмотками (рис. 6.24), уменьшающий
паразитную емкостную связь. Возможно также ограничить переда-
чу мощности, управляя сердечником вблизи магнитного насыщения,
что может дать дополнительную выгоду.
Рис. 6.24. Развязывающий трансформатор
Это решение эффективно, но в нем есть и недостатки: физиче-
ский размер, изоляция постоянного тока и плохие частотные харак-
теристики.
б) Балансировка
Использование центрального отвода на исходном сигнале и в схеме
приемника создает эффективную дифференциальную систему, неза-
висимую от потенциала Земли. Поскольку оба проводника являются
частями сбалансированной системы (рис. 6.25), любая интерферен-
ция синфазного сигнала будет одинаковой на обоих участках и тем
самым аннулируется в приемнике.
6.5. Интерференция
Отрицательные моменты состоят в том, что источник должен
быть в двух частях, что может быть достижимо только при по-
мощи преобразователя центрального отвода со свойственными ему
ограничениями, и что значение параметров элементов схемы и ком-
мутация полного сопротивления должны быть идентичными на двух
сторонах системы. Последнее условие становится все более трудно
достижимым на высоких частотах ввиду паразитной емкости.
Рис. 6.25. Сбалансированная система
Принимающее
устройство
^signal
в) Дифференциальный усилитель
Дифференциальный усилитель (рис. 6.26) не имеет нулевого входа,
но использует землю источника питания как ноль. Питание усили-
теля не связано с внешним заземлением. Здесь применяется специ-
альный двухжильный коаксиальный кабель. В приложениях, где пе-
редающий элемент снабжен внутренним заземлением, необходимым
для связи с аналогичным заземлением приемника, тоже используется
двухжильный коаксиальный кабель с целью двойного экранирования.
Передающее
устройство
Принимающее
устройство
Рис. 6.26. Система с дифференциальным усилителем
г) Оптическая связь
Оптическая изоляция (рис. 6.27) обеспечивает предельное разделе-
ние передатчика и приемника. Оптическая изоляция наиболее легко
330 Глава 6. Характеристики и восстановление сигналов
достигается с цифровыми сигналами. Для обслуживания аналого-
вых приложений необходимы различные разработки электронных
схем, обеспечивающих линейность.
Передающее
устройство
Принимающее
устройство
Рис. 6.27. Оптическая изоляция
Разработка печатных монтажных плат
Проблемы, выдвинутые на первый план в предыдущем разделе, мо-
гут быть минимизированы хорошим проектированием.
- Чтобы минимизировать сопротивление и снизить потенциал,
для шин питания, заземления или плоскостей, необходимо ис-
пользовать большие дорожки.
- В случае смешанных систем аналоговые и цифровые участки
системы должны иметь раздельное заземление.
- Конденсаторы (специального миниатюрного типа, которые мож-
но поместить непосредственно под чипом) нужно монтировать
поперек линий питания близко к каждой интегральной схеме,
чтобы стабилизировать подаваемое к ним напряжение. Боль-
шой конденсатор помещается поперек входящих линий пита-
ния, чтобы гарантировать быстрый заряд меньших конден-
саторов. Танталовый электролитный или металлизированный
поликарбонат — предпочтительный тип из-за их низкой вну-
тренней индуктивности.
- Для высокочастотных приложений миниатюрные катушки ин-
дуктивности (приблизительно 10 мкГн) должны быть распо-
ложены на линиях электропитания высокочастотных участков
системы.
- Всюду предпочтительны короткие соединительные провода,
чтобы минимизировать электромагнитную реакцию и эмис-
сию. Вообще, все проводящие пары должны быть витыми, что-
бы аннулировать их антенноподобное поведение.
6.5. Интерференция 331
Фильтрование
Функционирование некоторых датчиков нуждается в переменном
токе или микросхеме, работоспособность которой тоже зависит от
переменного тока. Для этих систем возможно принять меры, удач-
но устраняющие частотные помехи переменного тока. Здесь полезен
подходящий фильтр, пропускающий только полезный сигнал. По-
дробное обсуждение фильтров приведено в предыдущих разделах.
Когда помехи имеют очень специфические частоты, например,
те, которые образуются в линиях питания, применяются узкополосные,
задерживающие фильтры или фильтры-пробки. Простая пассивная
версия устройств такого типа — Т-образный фильтр (рис. 6.28).
Каждая из двух частей буквы «Т» сдвигает фазу на 90°, что дает
результирующий сдвиг фазы частоты настройки фильтра-пробки
в 180°, т.е. обеспечивает теоретически бесконечное затухание. На
практике затухание варьируется в пределах допуска. Для сравнения
типов фильтров можно обратиться к Горовиц и Хилл (1989). Анало-
говые фильтры доступны как интегральные схемы. Они имеют луч-
шие характеристики. Т-образный, например, может обеспечивать
уровень —60 дБ. Спад его АЧХ — только —10 дБ на /2 f граничная и
граничная-) И —3 дБ на ^- / граничная и ^/граничная-
Если система содержит микропроцессор, тогда цифровой фильтр
мог бы обеспечивать оптимальные характеристики, устраняя про-
блемы дрейфа и устойчивости. Могут быть сделаны более совре-
менные фильтры, способные отслеживать любые дрейфы частотных
помех.
Рис. 6.28. Т-образный фильтр
332 Глава 6. Характеристики и восстановление сигналов
Ссылки
Baher Н 1991 Analog and Digital Signal Processing (Chichester: Wiley)
Beck M S and Plaskowski A 1987 Cross-correlation Flowmefers (Adam
Hilger)
Bendat J S and Piersol A G 1986 Random Data Analysis and Measure-
ment, Procedures 2nd edition (Wiley)
Bleaney В I and Bleaney В 1965 Electricity and Magnetism 2nd edition
(Oxford University Press)
Brook D and Wynne R J 1988 Signal Processing: Principles and Appli-
cations (Edward Arnold)
Cooley J W and Tukey J W 1965 ’An algorithm for the machine calcu-
lation of complex Fourier series’ Math, of Computation 19 297-330
Horowitz P and Mill W, 1989 The Art of Electronics 2nd edition (Cam-
bridge University Press)
Kodali V P 1996 Engineering Electromagnetic Compatibility (New York
Institute of Electrical and Electronics Engineers)
Meade M L 1983 Lock-in Amplifiers; Principles and Applications (Lon-
don: Peter Peregrinus) Nicollian E H and Brews J R 1982 MOS Physics
and Technology (New York: Wiley)
Ott H W 1988 Noise Reduction Techniques in Electronic Systems 2nd
edition (Wiley-Inter-science)
Peris T A 1952 J, Appl. Phys. 23 674
Wilmshurst T H 1990 Signal Recovery from Noise in Electronic Instru-
mentation 2nd edition (Adam Hilger)
Упражнения
6.1. Чем отличаются
i) детерминированные и случайные сигналы;
ii) шум и интерференция?
6.2. Набор из десяти одинаковых термометров, каждый из которых
имеет разрешение 0,1 °C, помещен в большой термоизолиро-
ванный резервуар воды, которая непрерывно размешивается.
Резервуар равномерно нагревают.
i) К какому классу относится эта система?
ii) К какому классу ее можно было бы отнести, если бы резер-
вуар не нагревался?
6.3. Максимальное значение сигнала — 2 В. Вычислите его средне-
квадратичное значение, если сигнал
i) синусоидальный,
ii) пилообразный,
iii) прямоугольный с коэффициентом последовательности им-
пульсов 40%.
В каждом случае предполагают, что сигнал униполярный, а
период равен 20 мс.
6.4. На диаграмме (рис. 6.29) показана плотность распределения
вероятностей р(у) уровня амплитуды случайного сигнала v(t).
i) Выразите Ь через Vo так, чтобы p(v) было правильно нор-
мализовано.
ii) Определите среднее значение и среднее квадратическое от-
клонение сигнала.
iii) Начертите график функции распределения вероятностей.
iv) Оцените вероятность того, что v > Vq/T..
6.5. Спектральная плотность автокорреляции представлена на рис. 6.30.
Найдите автокорреляцию.
6.6. Один из подшипников ротора в вертолете подозревается в из-
носе. Нормальный выходной сигнал вибро датчика в гнезде под-
шипника — это ограниченный по полосе белый шум. Если из-
нос имеет место, в выходном сигнале вибро датчика появится
дополнительный периодический сигнал намного меньшей ам-
плитуды, чем у шумового. Объясните, как можно зафиксиро-
вать износ и оценить его размеры по полученной амплитуде
сигнала.
Глава 6. Характеристики и восстановление сигналов
6.7. Преобразователь имеет на выходе синусоидальный сигнал ам-
плитудой 0,1 В. Сигнал искажается ограниченным по поло-
се белым шумом, занимающим диапазон 0 до 200 рад.-с-1,
с амплитудой 5 мВт • рад./с. Частота синусоидального сигна-
ла находится в центре полосы пропускания шума. Определите
автокорреляцию сигнала и шума.
6.8. Почему при выборе коаксильного кабеля, соединяющего ми-
крофоны системы публичных выступлений, предпочтительнее
двухжильный кабель, а не одножильный?
6.9. Некоторый термоэлемент вырабатывает 39,4 мкВ/K. Учиты-
вая, что входное сопротивление усилителя — 10,0 Мом, а его
полоса пропускания — 100 Гц, оцените минимально регистри-
руемое изменение температуры, если температура окружаю-
щей среды 300 К.
6.10. Объясните как с помощью усреднения можно увеличивать от-
ношение сигнал/шум. Опишите цифровой и аналоговый подхо-
ды к усреднению сигнала. Что такое синхронизирующий уси-
литель?
6.11. Телеметрический сигнал от эффекта Холла искажается из-за
расположенного поблизости электродвигателя переменного то-
ка. Опишите спектр этого электромагнитного загрязнения и
предложите некоторые методы улучшения относительной ин-
тенсивности сигнала.
6.12. Сейсмометр помещен на трамвайные пути для контроля вибра-
ции от проходящего транспорта. К трамваю поступает пере-
менный ток через провода, металлические рельсы замыкают
цепь. Сейсмометр состоит из блока бескорпусного источни-
ка массы и детектора изменения магнитного сопротивления.
Упражнения
335)
Одножильный магнитопроводящий коаксиальный кабель не-
сет информационный сигнал к прибору, регистрирующему ход
процесса, помещенному в землю на глубину 10 м. Когда прохо-
дит трамвай, кроме ожидаемого сейсмического сигнала, также
существуют другие, случайные и детерминированные сигналы,
i) Объясните происхождение этих нежелательных сигналов,
ii) Опишите методы, которыми могла бы быть увеличена от-
носительная интенсивность сигнала.
ГЛАВА 7
СОВРЕМЕННЫЕ РАЗРАБОТКИ
СИСТЕМ ИЗМЕРЕНИЯ
ПАРАМЕТРОВ
ГИДРОГАЗОДИНАМИЧЕСКОГО
ПОТОКА
7.1. Введение
В предыдущих главах было рассмотрено проектирование измери-
тельных систем, новых типов сенсоров, а также вопросы восста-
новления и обработки сигналов. В данной главе представлена одна
из прикладных областей, объединяющая некоторые из ранее рас-
смотренных вопросов, в особенности обработка восстановленного
сигнала. Надеемся, что изучающий эту область читатель почувству-
ет различие в подходах, которые используются при проектировании
полной системы и ее отдельных элементов. Это так называемый
нисходящий принцип. Вопросы, которые подлежат рассмотрению на
первом этапе проектирования, включают:
- диапазон измеряемой переменной;
- необходимую точность конечного результата;
- блок-схему системы (см. 1.3);
- численные параметры каждого блока;
- полную передаточную функцию (см. 1.4);
- оценку погрешности — внесенной и полной;
- электромагнитную совместимость и другие вопросы безопас-
ности.
Измерение параметров гидрогазодинамического потока
Типовые измеряемые величины — это масса, температура, длина, а
также объемный расход, давление и уровень в резервуарах и бун-
7.1. Введение 337^
керах. Измерение параметров гидрогазодинамического потока ис-
ключительно важно с коммерческой точки зрения. Существует бо-
лее 100 различных методик, используемых для измерения скорости
потока. В Великобритании имеется более 200 поставщиков обору-
дования для мониторинга потока. Сервисное обслуживание и ре-
монт устройств, измеряющих параметры потока, является доста-
точно крупной областью индустрии. Исключая бытовые расходоме-
ры, ежегодные продажи составляют:
Великобритания 30 000 шт.
Западная Европа 150 000 шт.
США 220000 шт.
Остальной мир 180000 шт.
В этой сфере по всему миру эксплуатируется около 15 миллионов
приборов. Годовые продажи в Великобритании оцениваются в 90
миллионов фунтов стерлингов, а для всего мира в один миллиард
фунтов стерлингов.
Гидрогазодинамика
Чтобы осознать необходимость применения различных методик об-
работки сигнала в современных расходомерах, сначала полезно по-
нять физические принципы, на которых эти расходомеры основаны.
Проектирование расходомеров невозможно без понимания гидрога-
зодинамики, дисциплины происходящей от классической динамики
и термодинамики. В данном разделе представлены терминология
и определения, часто используемые в гидрогазодинамике, а далее
достаточно поверхностно изложены варианты встречающихся рас-
пределений скоростей и давления в потоке.
Жидкие частицы
Часто используется так называемая концепция жидких частиц. Это
не атом и не молекула потока, а скорее некоторый его малый объем
потока, который остается опознаваемым и неизменным вдоль всего
потока.
Вязкость
В отличие от твердого тела, в жидкости в состоянии покоя нет
касательных напряжений. Жидкость может быть определена как
состояние материи, которая не может поддерживать касательные
напряжения в состоянии покоя. Экспериментально было обнаруже-
но, что все жидкости, насколько бы не были малы их вязкости,
смачивают ограничивающую их емкость, и образуют стационарную
Глава 1. Современные разработки систем измерения параметров
поверхность, или пограничный слой, прилегающий к стенке. Если
другой слой жидкости скользит против этого пограничного слоя,
начинается трение из-за вязкости потока, являющееся причиной ка-
сательных напряжений поперек некоторого элемента потока, как
показано на рис. 7.1.
Пограничная стена
Рис. 7.1. Напряжение силы вязкости в одномерном потоке
Касательные напряжения появляются каждый раз, когда различ-
ные слои вязкой жидкости скользят относительно друг друга. Для
одномерного потока напряжение силы вязкости т между прилегаю-
щими слоями определяется с помощью уравнения
где du/dy — градиент скорости в рассматриваемой точке, а р —
абсолютная динамическая вязкость. Если р не зависит от du/dy,
поток называют Ньютоновым,
Траектория
Это траектория выбранной жидкой частицы потока.
Линия тока
Так называется некоторая линия, нарисованная в данный момент
времени в потоке, показывающая локальное направление потока во
всех точках начала и конца течения. Хорда, зафиксированная в нача-
ле течения, обозначает линию тока. Можно построить бесконечное
множество линий тока.
Трубка тока
Это замкнутая поверхность, сформированная в некоторый момент
времени соединением нескольких соседних линий тока. В замкнутом
трубопроводе, граничные стенки являются набором трубок тока,
которые могут быть нарисованы. Поток, по определению, не может
двигаться через поверхность трубки тока, что является полезной
теоретической концепцией.
7.1. Введение 339^
Стационарный поток
Если скорость и параметры потока в любом месте не зависят от вре-
мени — поток называют стационарным. Линии тока в стационар-
ном потоке не меняют своего положения со временем. Траектории и
линии тока становятся одинаковыми.
Объемный расход (Q)
Это объем жидкости прошедшей через поперечное сечение за секун-
ду. Измеряется в м3/с.
Среднерасходная скорость (й)
Это объемный расход Q, разделенный на площадь поперечного се-
чения. Измеряется в м/с.
Равномерное поле скоростей
Если скорость во всем потоке постоянна и не зависит от времени
или от чего-либо еще, поток называют равномерным. Поток может,
быть стационарным и неравномерным. Примером течения служит
стационарный поток в конической трубе.
Уравнение неразрывности
Уравнение неразрывности получается дифференцированием зако-
на сохранения массы. Если масса где-то изменилась, то удельный
массовый расход должен везде оставаться постоянным, что можно
записать в простой форме:
pQ = const, (7.2)
или
(7-4)
рАи = const. (7.3)
Дифференциальная форма уравнения неразрывности может быть
представлена как
др д(ри) d(pv) d(pw) =
dt дх ду dz
где и, v и w — компоненты скорости для направлений ж, у и z
соответственно (см. Фокс и др. (2004)). Для случая несжимаемой
жидкости (р — const), выражение (7.4) упрощается:
ди dv dw
тг- + тг- + = 0.
дх ду dz
Никакие параметры стационарного потока не зависят от времени.
Поэтому выражение (7.4) для стационарного потока принимает вид:
д(ри) д(ру) д(рш) =
дх ду dz
(7-5)
(7.6)
Теорема Бернулли
Дэниэл Бернулли опубликовал свою работу о динамике потока в
1738 г. Считая, что поток идеален, т. е. несжимаем и обладает нуле-
вой вязкостью, и предполагая, что поток стационарен и не имеет ви-
хрей, теорему Бернулли можно сформулировать следующим образом:
Сумма давления, кинетической энергии в единице объема и по-
тенциальной энергии единицы объема в точке линии тока явля-
ется константой.
Рис. 7.2. Изменение энергии для элемента потока в трубке тока
Теорему можно доказать, если учесть изменение механической
энергии, испытываемое жидкими частицами, текущими в некото-
рой трубке тока, и принять условие отсутствия потерь энергии.
Совершаемая работа при протекании потока через 6ха в точке а
(см. рис. 7.2) равна
FaSxa = PaAaua6t, (7.7)
где dt — время необходимое для пересечения 6х. Точно так же, те-
чение через бхъ в точке b совершает работу:
Еьдхь = —PbAbUbdt. (7.8)
Здесь Рь — это давление на выходе трубки тока, действующее про-
тив движения потока, которое представлено через отрицательное
7.1. Введение
значение. Следовательно, общая работа может быть определена так:
ДЕ = PaAaua6t - PbAbUbSt, (7.9)
что является эквивалентом изменения потенциальной и кинетиче-
ской энергии в элементе потока.
Изменение кинетической энергии =
- ^mbul - ^таи2а = ^рАьдхьи2ь - ^рАа6хаи2а. (7.10)
Изменение потенциальной энергии —
= mbghb - magha = pAb6xbghb - pAa6xagha. (7.11)
Складывая равенства (7.10) и (7.11) и приравнивая сумму к (7.9),
а также учитывая, что для несжимаемого жидкости Ааиа = Аьщ,
получим
Ра + pgha + ^ри2а = Pb + pghb + ^ри2ь. (7.12)
В более общем случае может быть установлено, что для любой
точки линии тока
Р + pgh + |pu2 = const, (7.13)
что называется уравнением Бернулли. Более строгое рассмотрение
включает уравнение Эйлера (см. Фокс и др., 2004).
Давление Р иногда рассматривают как статическое давление,
а ^ри2 — как динамическое. Вразрез с интуитивным ощущением,
выражение (7.13) утверждает, что при уменьшении давления в го-
ризонтальном потоке скорость возрастает.
Эта простая взаимосвязь может быть использована для объяс-
нения распространенных явлений таких, как понижение давления
внутри вагона поезда при въезде в тоннель, аэродинамической подъ-
емной силы, траектории вращающегося мяча и дуговой волны, воз-
никающей впереди движущегося судна. Это явление также можно
считать основным рабочим принципом при конструировании таких
типовых расходомеров, как измерительная диафрагма, трубка Вен-
тури, трубка Пито-Прадля (см. Бентли (1995)).
342 Глава 1. Современные разработки систем измерения параметров
7.2. Типы полей скорости
(типы движения жидкости или газа)
Иногда дым от сигареты демонстрирует два различных типа движе-
ния потока. Рядом с источником струя дыма спокойная и регуляр-
ная. Последующие удаленные участки в пределах потока становятся
отдельно распознаваемыми, струя становится не регулярной, изви-
листой и вращающейся.
Осборн Рейнольдс детально исследовал эти два типа потока впрыс-
киванием красителя в прозрачную трубу. При относительно низких
скоростях потока полосы красителя следовали линиям, параллель-
ным стенкам трубы. Такой характер течения называют — ламинар-
ным. При высоких скоростях потока частицы обладали произволь-
ной, флуктуирующей скоростью и это называют — турбулентным
течением. В 1883 г. Рейнольдс заметил, что изменение между типа-
ми течения связано не только со скоростью потока, но и с параме-
трами, входящими в эмпирически выведенное выражение:
(7.14)
где d — диаметр трубы; г] — кинематическая вязкость (определя-
емая как т] = р/р) и Re число Рейнольдса. Хотя число Рейнольдса
было введено для характеристики режимов потока в трубе, оно мо-
жет быть адаптировано и для других задач. В сущности, это мера
преобладания внутренней силы или силы вязкости над инерционны-
ми силами потока.
7.2.1. Ламинарный поток
Говоря о ламинарном потоке, имеют в виду, что частицы движутся
послойно, или ламинарно. Частицы потока, близкие к большой пла-
стине, перемещаются в плоскости, параллельной поверхности пла-
стины и параллельно друг другу. Их скорость зависит от расстояния
до пластины. В трубе круглого сечения такой ламинарный поток из
коаксиальных цилиндров простирается от центра симметрии трубы
до ее стенок. Его часто называют течением Пуазеля. Чтобы по-
лучить ламинарный поток в трубе, число Рейнольдса должно быть
меньше 2300. Когда преобладает сила вязкости, поток обычно ла-
минарен.
Профиль скорости в трубе с круглым сечением может быть опре-
делен, исходя из поперечных сил. При равновесии градиент давления
достигнет постоянной величины. Цилиндрический участок, приве-
1.2. Типы полей скорости 343
денный на рис. 7.3, иллюстрирует взаимодействие между градиен-
том давления и поперечной силой
При равновесии сила, создаваемая градиентом давления вдоль
поверхности цилиндра, равна равнодействующей поперечных сил на
сторонах цилиндра:
ДРтгг2 = 2тгг Джт.
(7-15)
Выражение (7.15) может быть объединено с выражением (7.1), что
даст
du г ДР
dr 2/1 Дх
(7-16)
Дх
Рис. 7.3. Поперечная сила и градиент давления
Допустим, что цилиндр мал, т.е. Дх —> dx, тогда интегрируя
по радиусу R трубы с граничными условиями и = 0 на стенках, из
(7.16) получим
Поскольку профиль потока осесимметричен и максимальная ско-
рость находится на оси симметрии, это выражение можно перепи-
сать следующим образом:
— Umax
(7-18)
Для режима осесимметричного потока средняя скорость может
быть определена при помощи выражения:
R
Q = Au = j u(r)27rrdr.
о
(7-19)
U
Для ламинарного течения может быть получено полезное соотноше-
ние: й =
Глава 1. Современные разработки систем измерения параметров
7.2.2. Турбулентное течение
Если число Рейнольдса для трубы превышает 2300, течение ста-
новится турбулентным. Поток обычно становится турбулентным,
когда силы инерции преобладают над силами вязкости. В этой ситу-
ации жидкие частицы движутся хаотично, а линии тока постоянно
меняют свою конфигурацию. Выражение (7.1) при турбулентном
течении становится неверным. Теоретически анализ турбулентных
потоков труден и используемые расчетные формулы обычно полуэм-
пирические. Для большинства турбулентных режимов усредненная
по времени скорость й внутри трубы в некоторых точках г на осе-
вой линии неизменна. Фокс и др. (2004) утверждают, что й можно
вычислить по формуле:
11 / т
1-р , (7.20)
11 J
где т зависит от числа Рейнольдса. Это выражение моделирует
поведение скорости почти всех частиц, за исключением тех, что на-
ходятся на оси симметрии или вблизи стенок. Примем, что сечение
меняется от г = 0 до R, тогда из выражения (7.20) получим
— ^Апах
2т2
(т -h l)(2m + 1)
(7.21)
В случае полностью турбулентного течения в качестве констан-
ты обычно выбирают число 7. При таком выборе из формулы (7.21)
находим и = 0,82Uma,x. Переписав выражение (7.20), получим:
ад = «((’в + 1))(2г'л + 1)) [1 - . (7.22)
у 2тпг J L /iJ
Таким образом, если число Рейнольдса находится около 2300,
режим течения будет флуктуировать между ламинарным и тур-
булентным. Необходимо отметить, что при экспериментах с очень
гладкими поверхностями и изолированными возмущениями лами-
нарный поток наблюдался и тогда, когда число Рейнольдса превы-
шало 100000. Но для обыкновенного применения величина 2300 —
достоверный индикатор для предсказания режима течения потока
в трубе.
7.2.3. Нестационарное течение
Теоретическое моделирование нестационарного потока является слож-
ным. Уомерсли (1957) разработал теорию для колеблющегося потока
и пульсирующего переноса. Изучение проведено для анализа кровя-
1.2. Типы полей скорости 345
ного потока в артериях млекопитающих и было не первой попыткой
теоретического описания такого типа процесса.
Работа Уомерсли начинается с анализа вязкости жидкости, те-
кущей в прямой строго круглой трубе. Он предположил, что нет
радиального движения, т. е. и не является функцией координаты х
вдоль трубы, а является только функцией радиального расстояния
частицы от оси. Это означает, что градиент давления дР/дх также
не зависит от х. Ускорение выражается следующим образом:
ди _ 1 дР / д2и 1 ди \
dt р дх \ дг2 + г dr J ’
(7.23)
В первой части работы Уомерсли использовал пульсирующий гра-
диент давления в виде
—— = Acosfwt — р).
дх
(7.24)
Тогда решение уравнения (7.23) включает в себя функции Бесселя.
Обозначив амплитуду и фазу через и Со, Уомерсли нашел выра-
жение для и:
AR2 Mq . ,
и =--------£ smkctf - р + So),
р а2.
(7-25)
где R — радиус трубы на — безразмерный параметр. Величина а
считается полезной в описании потока. Она определяется из выра-
жения:
а = R
(7.26)
Скорость потока снижается за счет вязкости, но зависит также от а.
В следующей части работы Уомерсли проанализировал поток
в свободно перемещающейся эластичной трубе и затем продолжал
выяснять изменения для дополнительной массы, константы эластич-
ности и вязкой диссипации. В заключительной части его работы
обсуждается тема наличия тонкого пограничного слоя низкой вязко-
сти. ЭФа работа являлась значимой публикацией в области изучения
течения крови в малых сосудах. Более подробное описание механиз-
ма потока крови изложено в работе Эванса и др. (1989).
Режимы течения и расходомеры
Ламинарные потоки характеризуются малыми сопротивлениями про-
текания и, соответственно, предпочтительнее для длинных трубо-
проводов с целью обеспечения большей эффективности насоса. В те-
плообменниках и при транспортировке кислорода в потоке крови,
турбулентность дает хорошее перемешивание и таким образом улуч-
Глава 1. Современные разработки систем измерения параметров
шает процесс переноса. Некоторые расходомеры не будут функцио-
нировать в турбулентных потоках и поэтому необходимо обращать
на это особое внимание. Другие хорошо работают только в турбу-
лентных течениях, потому что турбулентность уменьшает воздей-
ствие вязкости. Для турбулентного потока изменение только пара-
метра т оказывает слабое воздействие на оценку й из в то
время как ламинарного потока это может привести к тридцатипро-
центной ошибке. Расходомеры, которые могут работать в любом
типе потока обычно калибруются для одного из режимов. Это озна-
чает, что если режим сменился, то получаемый результат неверен.
Ряд расходомеров не может функционировать во вращающихся
или пульсирующих потоках. Для таких случаев предприятия дают
дополнительные рекомендации по установке расходомеров, такие,
например, как установка длинного прямого трубопровода до и после
измерителя или размещения стабилизирующих (винтовых) структур
внутри потока.
7.3. Корреляционный расходомер
Корреляционное решение используется там, где наиболее традици-
онные расходомеры не могут работать хорошо. Концепция корреля-
ции была представлена в п. 6.3.4. В нынешнем контексте она исполь-
зуется для определения скорости потока. Корреляционные расходо-
меры были разработаны для задач, где традиционные расходомеры
не будут функционировать или могут быть повреждены. Измерения
скорости были выполнены во время так называемой конвейерной до-
ставки материалов, таких как расплавленный шоколад, гидросмеси,
порошки, текстиль и поток сточных вод.
L
<----------------->
Скорость и
Va vb
Рис. 7.4. Сенсоры расположены вдоль некоторого поля скоростей
Использовались два сенсора, расположены по направлению скоро-
сти, как показано на рис. 7.4. Здесь может быть использован любой
тип сенсора в зависимости от характера потока.
Необходимое требование состоит в том, чтобы процесс обладал
произвольно изменяющимся параметром, таким как температура,
7.3. Корреляционный расходомер
проводимость, нерегулярность, электростатический заряд, диэлек-
трическая проницаемость или плотность. В идеале, локальные зна-
чения этого параметра в окрестностях сенсоров не должны сильно
различаться. В противном случае сенсоры будут генерировать оди-
наковые случайные сигналы уа и Уь, сдвинутые друг относительно
друга во времени. Фиксируемый образ показан на рис. 7.5.
Va Vb
Рис. 7.5. Выходные сигналы сенсоров
При процедуре корреляции сигналов уа и Уь пик в корреляцион-
ной функции RVaVb возникает в том месте, где переменная т равна
времени пути Т между сенсорами (рис. 7.6).
Скорость определяется отношением L/Т. Очевидно, чем больше
величины Т и L, тем более точную оценку скорости потока можно
сделать. Однако при этом высота корреляционного пика снижается,
поскольку уменьшается корреляция между сигналами двух сенсоров,
что устанавливает предел на расстояние L между ними.
Рис. 7.6. Диаграмма взаимной корреляции сигналов va and уъ
Ранние корреляционные системы были аналоговыми и, как след-
ствие, имели дрейф нуля. Предпочтительнее пользоваться цифровы-
Глава 7. Современные разработки систем измерения параметров
ми технологиями. Напомним формулу (6.45) из разд. 6.3.4, описыва-
ющую алгоритм корреляции,
(7.27)
1 N
7=1
где Д£ — период времени. Временной сдвиг г — это qAt. Длина
всех окон для сигналов va и иъ составляет N отсчетов. Следова-
тельно, имеем N вычисленных величин для функции RVavb- Такое
количество, в соответствии с тактовой частотой, должно быть до-
статочным для возникновения корреляции, т. е. NAt > Т. Это под-
разумевает, что больший тактовый интервал более предпочтителен
для низких скоростей, иначе необходимы большие объемы памяти и
алгоритм будет выполняться дольше. Это противоречит обеспече-
нию разрешения системы.
Бэк и Пласковски (1987) вывели соотношение, связывающее от-
носительные скорость и разрешение:
Ди , Д£
— =
и 2L
Большой период тактового сигнала означает слабую разрешающую
способность. Кроме того, разрешение хуже на высоких скоростях
течения. При проектировании цифровых систем должны быть учте-
ны следующие моменты:
- Каково максимальное значение переменной L, которое может
дать корреляционный пик выше шума на корреляционной диа-
грамме?
- Какой динамический диапазон скоростей вероятнее всего бу-
дет встречаться?
- Какое разрешение необходимо для максимальной скорости?
Интересно заметить, что широкий диапазон случайных пара-
метров, которые были записаны в сигналах va и ниже уровня
фонового шума в функции RVaVb • Это означает, что наиболее случай-
ные параметры потока, обеспечивающие сигналы va и улучшают
параметры системы.
7.4. Ультразвук
Хотя ультразвук и является звуком за пределами восприятия чело-
века, которое составляет примерно 20 кГц, в большинстве случаев
для измерения потока задействованы частоты в районе 1 МГц. Это
1.4. Ультразвук 349
необходимо для того, чтобы достичь пространственного разреше-
ния в 1 мм. Для любой волновой системы разрешение не может
быть выше, чем длина используемой волны. Из-за того, что скорость
механических вибраций в твердом теле и воде составляет порядка
3 км/с и 1,5 км/с, соответственно, требуется небольшая длина вол-
ны, означающая высокую частоту. Это не удобно, так как воздух
для ультразвука на этих частотах непроницаем. Вследствие чего,
между передатчиком и объектом используются «соединительные»
гели или компаунды. Любые пузыри или газовые полости на пути
луча ухудшают качество измерений. (Эта особенность используется
также для обнаружения трещин в сварных швах и литье.)
Передатчик ультразвука
Существует ряд материалов, которые пригодны для создания пе-
редатчика. Из-за относительно высокой частоты наиболее подходя-
щими являются материалы, обладающие пьезоэлектрическими свой-
ствами. Это кварц, керамика из цирконат-титанат свинца, ниобата
свинца, титаната бария, а также полимерные пленки поливинили-
денфторида (ПВДФ). В настоящее время кварц уже менее распро-
странен. ПВДФ обладает близким со стенкой кровеносного сосуда
механическим сопротивлением, что позволяет получить лучшее со-
гласование по сравнению с другими материалами; см. 1.6 (статья
О’Донелла и др. (1981) содержит информацию о различных пьезо-
электрических материалах). По этой причине, а также из-за гибко-
сти, ПВДФ может быть использован для прямого контакта с телом
человека без необходимости в связующем геле. К сожалению, такие
устройства являются более слабыми передатчиками по сравнению с
керамическими устройствами, работающими на резонансе. Поэтому
высокочастотные передатчики обычно производят на основе крем-
ния. Согласующая среда может быть использована для согласования
сопротивлений и обычно замещает воздух между передатчиком и
объектом.
Для ультразвуковых приложений передатчики используются как
в импульсном, так и в непрерывном режимах (незатухающая волна
(НВ)). Эквивалентный контур, представляющий передатчик, пока-
зан на рис. 7.7. В п. 2.2.2. была описана концепция управляемого ко-
лебательного контура и в п. 2.2.3 множитель Q (добротность). Ранее
также было отмечено, что приборы с высокой добротностью имеют
узкую полосу частот, низкие потери за цикл и большую устойчи-
вость к перегрузкам. Для НВ-систем узкая полоса частот является
полезным свойством, позволяющим частотный анализ по отраженно-
350 Глава 7. Современные разработки систем измерения параметров
му сигналу, что будет обсуждаться позже. В импульсных системах
высокая добротность из-за малых потерь служит причиной «возбу-
ждения» передатчика после прекращения импульса. Это уменьшает
временное разрешение. Имеется возможность, изменять механиче-
скую добротность передатчика, нагрузив выходной сигнал электри-
ческим сопртивлением.
Рис. 7.7. Эквивалентный контур пьезо-
электрического передатчика
В разд. 1.5 было рассказано об анализе динамического отклика
системы. Таким же образом может быть промоделирован пьезо-
электрический элемент, изображенный на рис. 7.7, с добавочным
сетевым электрическим сопротивлением, а длительность импуль-
са может быть получена с помощью такого пакета, как Mat lab.
Определенное неудобство при уменьшении Q проявится в неболь-
шом снижении амплитуды сигнала.
Времяпролетные расходомеры
Измерение потока с помощью ультразвука стало стандартным тех-
ническим решением в добывающих отраслях (рис. 7.8). Времяпро-
летное приближение использует отдельный передатчик и приемни-
ки, расположенные внутри потока на разных сторонах трубы. Аку-
стическое соединение с трубой не является проблемой, а заранее
намеченные места установки означают, что угол наклона известен
точно.
Ультразвук передается попеременно от Р к Q и затем от Q к Р,
Скорость и меняется вдоль всей длинны I в соответствии с некото-
рым профилем. В результате для корректного измерения ДТ должно
использоваться среднее значение скорости й. При условии, что ульт-
развуковой луч узконаправлен, а средняя скорость й поперек трубы
ЧД. Ультразвук 351
определяется из выражения:
и =
(7.28)
Выбранная функция и(г) будет зависеть от типа потока. Выраже-
ние (7.18) справедливо в случае ламинарного потока, а формула
(7.21) — в случае турбулентного. Время распространения опреде-
ляется как
TPQ = —д (7-29)
с + и cos в
И
Tqp =------т----(7.30)
с — и cos v
Объединив эти два выражения, получим
ДТ = [----------------------] , (7.32)
sine/ [с —и cost) с и cos V
где 2R — диаметр трубы. Обычно скорость ультразвука с й,
поэтому
. 4Ru cot в
ДТ =-----.---
cz
(7.33)
Рис. 7.8. Времяпролетный расходомер
Для измерения й с разрешением 1% в трубе диаметром 0,1 м
при скорости потока 1м/с, требуется измерение ДТ с точностью
< 1 нс. Разработка контура для решения этой проблемы — задача
нетривиальная, вне зависимости от того, будет ли включен контур
как система реального времени, или как система измерения сдви-
га фазы принятого сигнала в сравнении с излучаемым, или как
корреляционная система, использующая псевдослучайную двоичную
последовательность. Для устранения этой трудности первый про-
352 Глава 1. Современные разработки систем измерения параметров
даваемый ультразвуковой расходомер относился к типу sing-around
(см. Хэмп (1981)). Он основывался на частотном контуре, а не на
временном контуре. Здесь использовались сигналы по потоку и про-
тив потока, чтобы обеспечить временной период для двух отдель-
ных осцилляторов. Разница частот двух осцилляторов составляла
. Л й sin 20
А/ = (7-34)
Большое преимущество такой техники заключается в том, что
она не учитывает скорость ультразвука с.
Следовательно, любой дрейф, возникающий из-за изменения тем-
пературы или состава жидкости, несущественен. Как бы там ни
было, пузырьки в потоке могут привести к потере сигнала и заста-
вить схему обработки сигнала повторно провести измерения. Скотт
в 1984 году впервые осуществил сравнение параметров двух прибо-
ров с двумя разными типами колибровки.
7.5. Эффект Доплера
Относительное движение передатчика и приемника дает хорошо
известный сдвиг частоты, эффект Доплера. Можно бесконтактно
измерять скорость потока, с помощью ультразвука в поле с последу-
ющей регистрацией сдвига частоты эха, т. е. отраженного сигнала.
Для нормального функционирования системы необходим разброс
частиц в потоке жидкости (газа). Частота сдвигается дважды. Пер-
вый раз частицы получают «сдвинутую» частоту Д как движущийся
«наблюдатель» стационарного передатчика частоты /о:
(v \
1 + -), (7.35)
с/
где v — скорость рассеянных частиц, с — скорость звука в среде.
Второй частотный сдвиг получается вследствие того, что разбро-
санные частицы ведут себя как вторичные движущиеся излучатели
и излучают обратно на стационарный приемник, расположенный вне
трубы. Доплеровский сдвиг для движущегося передатчика и стаци-
онарного приемника представляется выражением:
/2 = (7.36)
с — V
которое немного отличается от формулы (7.35). Это происходит из-
за того, что в первом случае передатчик и среда находятся в покое,
а во втором передатчик движется в среде. Объединение обоих до-
7.5. Эффект Доплера 353
плеровских сдвигов дает:
А = (—) /о- (7.37)
\с — V J
Если ультразвуковой луч находится под некоторым углом 0 к по-
току, тогда v записывается как t>cos(0). Поскольку с^> v, разность
частот можно аппроксимировать следующим образом:
Д/ = 2/,^. (7.38)
Например, передатчик, работающий на частоте 10 МГц, устано-
вленный под углом в 30° к направлению потока, в потоке воды с
обыкновенной скоростью в 0,9 • 10-2 м/с создаст сдвиг частоты в
100 Гц.
Технические разработки в области телекоммуникаций часто ис-
пользуют для систем обработки отраженного доплеровского сиг-
нала. Этот сигнал, соответствующий односторонней передающей
системе в полости на частоте в 10 МГц, модулируется на часто-
те 100 Гц. Простой путь восстановления сигнала частоты 100 Гц на
фоне 10 МГц состоит в том, чтобы умножить отраженный сигнал с
помощью исходной частоты передачи. Это легко можно сделать, ис-
пользуя аналоговое умножение. Из тригонометрического тождества
cos A cos В = cos(A - В) + | cos( А + В) (7.39)
получаем соотношение:
cos 2тг/1^ cos 2тг/2£ = cos 2тгД/ 4- cos 2?r(/i -I- /2)t (7.40)
Высокочастотная составляющая /1 + /2 — 20 МГц может быть легко
устранена с помощью фильтрации. Аналоговые умножители легко
доступны в виде интегральных схем.
Некоторые ранние устройства, основанные на бесконтактном под-
ходе Доплера, не соответствовали заявленным спецификациям фирм-
производителей. Пользователи столкнулись с двумя проблемами.
Во-первых, размещение прибора на внешней стороне трубы с помо-
щью геля или компаунда приводило к несоответствию получавшего-
ся угла между ультразвуковым лучом и осью трубы тому, который
был установлен при калибровке. Это имело место по причине нека-
чественной установки или вследствие дополнительного преломления
сигнала от внутренних стенок трубы. Кроме того, волны от пере-
датчика могут распространяться и в твердом теле со скоростями,
отличными от скоростей поперечных волн. Использование неверной
скорости влияет на рассчитываемый угол преломления волны, вхо-
12—4227
354 Глава 7. Современные разработки систем измерения параметров
дящей в поток. Во-вторых, если режим потока менялся, как было
описано в конце разд. 7.2, оценка средней скорости на основе макси-
мального доплеровского сдвига частоты была некорректна. Гиснер
(1969) оценивает ошибки, которые можно ожидать, когда профиль
трубы меняется. Коузинс (1978) опубликовал результаты калибров-
ки для различных размеров труб и режимов потока. Был предложен
запрос профиля через умножение ультразвуковых лучей как сред-
ство получения более реальной оценки средней скорости.
Другой подход — это использование импульсного режима или
«стробированного» луча. Этот прием позволяет определить сред-
нюю скорость небольшой зоны течения и, следовательно, среднюю
скорость вдоль линии луча всего потока. Тем не менее импульсные
системы требуют больше энергии, ограничены дальностью передачи
и максимальной скоростью потока, см. Сандерсон и Хэмп (1981).
7.5.1. Спектр отраженного сигнала
Другой способ решения проблемы неопределенности профиля ско-
рости — это частотный анализ эха (отраженного сигнала). Здесь,
на основе интенсивности спектральных линий, может быть оценен
диапазон скоростей и установлено их распределение. Эта процедура
стала очень популярной в клинической практике. Тип частотного
спектра, показанный на рис. 7.9, просто получен использованием
быстрого преобразования Фурье (БПФ) низкой чатсоты Д/ ^смо-
дулированного) эхо-сигнала. Далее Д/ будем обозначать через /р.
Рис. 7.9. Типичный спектр доплеровского расходомера
7.5. Эффект Доплера 355
Пример. Некоторый сигнал имеет частотный диапазон 04-10 кГц.
Требуется провести частотный анализ и применить БПФ. Предпо-
лагая, что частотное разрешение составляет около 80 Гц, определите
требуемую частоту дискретизации входного сигнала, длину вре-
менного окна и необходимый размер БПФ.
Учитывая теорему о дискретизации, описанную в разд. 5.2, ча-
стота дискретизации должна быть как минимум равна удвоенной
наибольшей частоте, чтобы избежать наложения спектров. (Систе-
му, спроектированную для приема 10 кГц, необходимо снабдить внеш-
ним фильтром верхних частот. Кроме того, потребуется фильтр для
уменьшения эффекта «кадрирования».) Следовательно, частота дис-
кретицации должна быть 2 • 104 с-1.
Длина кадрирующего окна определяет частотное разрешение.
В разд. 5.2 было показано, что эффекты дискретизации в частот-
ной области порождают функцию sine. Схожий эффект происходит
во всем кадрирующем окне. Преобразование Фурье временного ин-
тервала дает функцию sine, определяющую остроту спектральных
линий. Ширина частотной области функции sine примерно составля-
ет l/Tiv, где Tw — временная ширина окна. Чтобы спектральные
линии стали различимы, нужно частотное разрешение в 80 Гц, для
чего временную ширину окна следует выбрать в 12,5 мс или более.
Частота дискретизации составит 2 • 104 с-1, так что в течение этого
времени для применения БПФ будет записано 250 отсчетов. Как бы
там ни было, число отсчетов, вводимых в алгоритм БПФ, должно
быть степенью двойки 2N (см. Рэбинер и Голд (1975)). Поэтому в ре-
альности должно быть взято 256 = 28 отсчетов. 256-точечное БПФ
генерируют 128 уникальных частотных точек на выходе (в дальней-
шем можно вычислить 128 сопряженных точек).
Таким образом, время БПФ-дискретизации составит 256/2-104 с,
что дает временную ширину окна в 12,8 мс. Подводя итог, можно
сказать, что количество отсчетов, равное степени двойки, приводит
к реальной частотной разрешимости в 78 Гц. □
Среднюю частоту из рис. 7.9 можно просто определить, исполь-
зуя формулу:
оо N
f pUb)fDdfD ^WifDi
f~D = ----;-----= > (7-41)
f p(fD)dfD
0 i=l
Глава 7. Современные разработки систем измерения параметров
где p(Jd) — распределение интенсивности и Wi — вес г-го элемента
спектра из TV-го числа частот.
Средняя скорость может быть оценена, если сделано допуще-
ние, что интенсивность полученного частотного компонента просто
пропорциональна количеству частиц, движущихся с одинаковой ско-
ростью. Используя выражение (7.38) имеем,
N
52 WifDi о п
fD = (7.42)
Е wi с
г=0
Броди (1974) установил, что при таких идеализированных условиях,
знание поперечной площади А выражения (7.42) должно дать значе-
ние расхода Q, где Q = Ай, что не подразумевает априорного знания
формы сечения потока.
Как бы там ни было, данная оценка средней скорости потока
не вполне адекватна, как могло показаться сначала. Рис. 7.10 для
ламинарного течения иллюстрирует сложность проблемы. При более
тщательном анализе должны быть продуманы следующие вопросы:
- эффект наличия не параллельности луча;
- неопределенность угла распределения;
- эффект множественного рассеивания;
- распределение рассеивающих объектов;
- ослабление луча при передаче в поток и на пути получения
отраженного сигнала.
Рис. 7.10. Профиль распределения скорости
Энгелсен (1980) провел теоретический анализ проблемы. Иване
и другие (1989) также представили работы в этой области.
Однако вопреки теоретическим трудностям разработки моделей
процесса рассеивания было найдено, что частота спектра эмпириче-
7.5. Эффект Доплера 357
ски может быть соотнесена со средней скоростью. При этом была
установлена хорошая воспроизводимость.
7.5.2. Прямой и обратный поток
Доплеровский сдвиг частот полезен также для определения параме-
тров движения жидкости или газа по направлению к передающей
системе или от нее. В обрабатывающих отраслях данное требова-
ние не является распространенным. Однако в области медицины это
чрезвычайно актуально. Например, обратный поток может возник-
нуть около сердечного клапана.
Отраженный сигнал можно представить как:
Vc Ai COS((J0* + <£г) + + UFj)t+ Bk COS(CJ0 ~ UBk)t,
i j k
(7.43)
где Ai — амплитуда отраженного сигнала передатчика с частотой
cuo; Fj — амплитуда отраженного сигнала, полученного от рассе-
ивающих объектов, двигающихся к приемнику; Bk — амплитуда
отраженного сигнала от частиц, двигающихся в обратном напра-
влении. На практике отраженный сигнал будет непрерывным, но в
представлении БПФ, как было описано выше, получатся отдельные
спектральные линии.
Как уже отмечалось, прием частотно сдвинутых компонентов
является относительно правильным, если только сдвигается тре-
буемая частота. Для определения сдвига частоты вверх или вниз
необходима более детальная обработка сигнала. Ниппа и др. (1975)
предложили для этого несколько способов, которые будут рассмо-
трены ниже. Для 10 МГц, при скорости потока от 0,9 • 10-2 до
9 • 10-2 м • с-1, частотный сдвиг будет находиться между 100 Гц и
10 кГц. Спектр для прямого и обратного потоков, представленный
на рис. 7.11, хотя и не подходит для измерений, отражает характер
процесса.
1) Разделение с помощью прямой фильтрации
Можно предположить, что простая фильтрация входного отражен-
ного спектра является подходящим решением. Частота отраженных
компонент сигнала в 10 МГц будет лежать в пределах от 10,0001 4-
10,001 МГц до 9,9999 4- 9,99 МГц. Однако, как отмечает Ниппа с со-
авторами, разделение частот в диапазоне от 10 МГц до 10,0001 МГц
при 40 дБ — неразрешимая задача, если использовать фильтры, осо-
бенно когда исследуемая частота дрейфует.
358 Глава 7. Современные разработки систем измерения параметров
Рис. 7.11. Отраженный спектр для прямого и обратного потоков
2) Сдвиг частоты
Сдвиг частоты доплеровского спектра вниз означает что требова-
ния, предъявляемые к фильтру становятся менее жесткими. Сдвиг
частоты — распространенная процедура в телекоммуникации. На-
пример, композиционный стереосигнал в Великобритании и высоко-
частотное ФМ-вещание применяют частотный сдвиг в целях улуч-
шения использования частотного диапазона передатчика.
Сдвиг частоты опять же можно достичь с помощью процедуры
умножения. Процедуру, используемую здесь, радиоинженеры назы-
вают гетеродинированием. Частота cum, которая связана с частотой
передачи, но несколько ниже ее, умножается на отраженный сигнал.
При этом, как обычно, получаются две компоненты с разностью и
суммой частот. Частота, используемая для умножения о>т, должна
быть такой, чтобы компонента с разностью частот помещала поло-
су частот отраженного сигнала в подходящий диапазон в нижней
части частотного спектра (рис. 7.12).
Рис. 7.12. Отраженный спектр для прямого и обратного потоков
7.5. Эффект Доплера 359
Для генерирования можно привлечь систему фазовой синхро-
низации (см. Хоровиц и Хил (1989)). Выразим значение следую-
щим образом:
ит=ш0- Whet, (7.44)
где Uhet генерируется фиксированным низкочастотным осциллято-
ром. Поскольку шт выведена из никакой дрейф о>о не приведет к
дрейфу восстановленного сигнала. Ясно, что cjhet должна быть выше
самой высокой ожидаемой частоты при доплеровском эффекте.
После отбрасывания высокой частоты здесь будет две спектраль-
ные полосы,
Wftet - UF> И Uhet + X ШВк
j k
и линия спектра ^het-
В дальнейшем может быть использован очень строгий узкопо-
лосный режектовый фильтр для удаления но при современном
техническом подходе предпочтение отдается процессорной обработ-
ке, нежели аналоговой технике. БПФ позволяет вычислять спектр
напрямую и игнорирует Whet>
3) Вращение фазы
По причине требований, сформулированных в двух предыдущих ме-
тодах, основная часть статьи Ниппа и др. (1975) посвящена фа-
зовращающей системе. Техника, на основе которой сконструирова-
на эта система, аналогична фазо-квадратурному детектированию
(рис. 7.13), применяемому в телекоммуникационной инженерии. Она
включает в себя два элемента, сдвигающих фазу ровно на 90°, как
показано ниже.
Рис. 7.13. Фазово-квадратурное детектирование
360 Глава 7. Современные разработки систем измерения параметров
Для удобства отдельный компонент скорости отраженного спек-
тра из выражения (7.43) использован для иллюстрации:
vc — A cos(cuot + </?)+ Fcos(cjo + wf)1 + В cos(cjq - (7.45)
Умножая отраженный сигнал на сдвинутую по фазе частоту пере-
дачи Dcos(wot + 7г/2), получаем
(7Г \
cu°Z -I- — J A cos(u^ + <р) +
(7Г \ / 7Г \
+ — j Fcos(o?o+^f)1+Dcos + x) Bcos(o?o-^b)^
(7-46)
Использование тригонометрического тождества в выражении (7.39)
и фильтрации высокой частоты составляющей постоянного тока да-
ДУт:
ИЛИ
VA = }:DF cos
Z
тг А
2+ШвФ
(7-47)
Va = ^-DF sinwrt —
z z
Но сигнал Va в дальнейшем сдвигается на 90° и формула (7.48) пред-
ставится как
— ^-DF sm \ - ^-DBsm + cjbA •
После упрощения приходим к выражению:
V'A = ^DF coscjpt — ^DBcososbI-
Соответственно, умножение отраженного сигнала на частоту пе-
редачи Dcosuiot приводит к
(7-48)
(7-49)
(7.50)
Vb = D coscjQtA cos(o>o£ + <р) +
+ D coswotF cos(cjq + + D coswotB cos(cuq — с<в)£. (7.51)
После упрощения и фильтрации выражение сокращается до
Vb = }rDF coswpt + ^DB coscub^.
z z
Тогда выходные сигналы имеют вид:
Va + Vb = DF cosujpt,
Vb — Va = DB coscjb^-
(7-52)
(7.53)
(7-54)
Сформулируем два необходимых условия для нормальной работы
системы:
7.5. Эффект Доплера
36Q
- Амплитуды DB в сигналах Уд и Vg должны быть одинаковы
по абсолютной величине для корректности процедур суммиро-
вания и вычитания в выражениях (7.53) и (7.54). Аналогичное
требование имеет место и для амплитуд DF. Это потребует
некоторые параметры настройки усилителя сигнала, располо-
женного в системе. Сигнал в системе, разработанной Ниппом
и др. (1979), различается менее чем на 0,2 дБ.
- Два 90-градусных фазовращателя должны хорошо функциони-
ровать во всем частотном диапазоне. Высокочастотный фа-
зовращатель имеет относительно невысокую частоту распро-
странения, поэтому он менее требователен к проектированию.
Второй низкочастотный фазовращатель перекрывает широ-
кий диапазон. Согласно Ниппу и др. (1975), проектирование,
использованное в их системе, было восьмиполярным. Фильтр
на транзисторе, который осуществляет поворот на 90° ±0,6° во
всем диапазоне от 50 Гц до 7,5 кГц. Контур, опубликованный
Диккеем (1975), использует операционные усилители, чтобы
сгенерировать 90-градусный фазовый сдвиг для диапазона от
100 Гц до 10 кГц.
По причине преимущества цифровых устройств, в современном
исполнении низкочастотная часть системы: фильтрация, фазовый
сдвиг, сложение и вычитание выполняются цифровым способом. Ци-
фровые системы более перспективны для проектирования и очень
стабильны в работе, поскольку настройки не зависят от значения
компонентов системы, в отличие от аналоговых систем, параметры
которых дрейфуют с возрастом и температурой.
7.5.3. Измерение потока крови
Измерение скорости потока крови занимает важное место в ряде ме-
дицинских областей. Тем не менее измерение прямым методом этой
скорости затруднительно. Некоторые медицинские области, где ин-
формация о скорости потока полезна, перечислены ниже.
- Для того чтобы оценить параметры сердца, требуется знать
скорость потока крови. В настоящее время используется метод
разбавления (см. Кхандпур (1987)). Холодная вода впрыскива-
ется в артерию и изменяет среднюю температуру, с помощью
чего можно вычислить степень разбавления крови и тем самым
ее объем. Очевидно, что как и любая инвазивная процедура,
она вызывает неприятные ощущения, и к тому же проходит не
без риска для пациента.
Глава 7. Современные разработки систем измерения параметров
- Для исследования обеспечения внутренних органов плода ки-
слородом необходимо определение проходимости пуповины. При
повреждении пуповины повышается давление у матери. Высо-
кое давление — признак состояния, известного как преэклам-
псия, и может быть опасно для матери и ребенка. С помощью
ультразвука можно определить скоростные составляющие, но
не полное значение скорости потока.
Некоторые области измерения потока крови, где не требуется
значения объемной скорости течения, а нужны лишь отдельные по-
казатели изменения в скоростном профиле.
- Частичная блокада, вызванная тромбом, может привести к уве-
личению скоростей потока рядом с преградой. В самом про-
стом варианте, портативный ультразвуковой передатчик с ау-
диочастотным выходом может быть использован для обнару-
жения местоположения кровяного сгустка.
- Рост опухоли отмечен стадией, когда, для того чтобы под-
держивать рост, сосудистая система внутри опухоли должна
развиваться. Веле и др. (1977) опубликовали работу о доплеров-
ском сдвиге сигнала, увеличивающемуся от микро-циркуляций
внутри злокачественной опухоли груди. Структура новых со-
судов в опухоли отличается от нормальных тканей, в своем
диаметре она много больше, стенки тоньше и ощущается недо-
статок сжимающих элементов. Бернс и др., (1982) сообщают,
что доплеровский сдвиг спектра от течения крови рядом и
в грудной опухоли имеет разный характер, и на этом можно
спроектировать полезную диагностическую процедуру.
В настоящее время ультразвуковые системы формирования изо-
бражения очень хорошо развиты. Дуплексные системы не только
воспроизводят изображение, но также могут представлять изме-
рение доплеровского сдвига на изображении в выбранном месте с
помощью наложения курсора на изображение, отображаемое на мо-
ниторе. Некоторые дуплексные системы кодируют изображение цве-
том так, чтобы поток, обнаруженный по доплеровскому сдвигу, по-
являлся как оттенки красного или синего на других монохромных
изображениях. В дополнение зеленый цвет может быть использо-
ван как функция для варианта сигнала (см. Намекава и др. (1982)).
Таким способом медики могут видеть, где поток течет от места
пробы или к нему, а также, если турбулентности представлены зе-
леным цветом, примесь красного и синего дает желтое или голубое
затенение, соответственно.
7.5. Эффект Доплера 363
Кто-нибудь может подумать, что с использованием сложных ду-
плексных систем возможна достоверная оценка значения расхода
потока с помощью измерения диаметра сосуда и измерения средней
скорости потока на основе доплеровского сдвига. К сожалению, в
добавление к проблемам для получения достоверной оценки средней
скорости из отраженного сигнала, как описывалось выше, существу-
ет некоторое количество других проблем:
- сосуды могут быть не круглыми;
- диаметр сосуда может варьироваться вдоль систолы и диастолы;
- тип режима потока может меняться во время сердечного ци-
кла, поэтому оценки средней скорости могут быть ошибочными;
- оценка среднего поперечного сечения и средней скорости во
время сердечного цикла не дадут правильного измерения сред-
него значения расхода потока потому, что обе величины нели-
нейны. Попытки одновременного измерения средней скорости
и поперечного сечения сложны по причине ограничений обра-
ботки сигнала.
Многие современные дуплексные системы имеют алгоритмы для
расчета значения расхода крови, и обоснованные оценки могут быть
получены на сосудах диаметром от 4 до 8 мм (Иване и др., 1989).
С другой стороны, получили популярность некоторые оценки ве-
личины потока, которые можно проводить способом, подходящим
для медицинских целей. Измерение максимального частотного сдви-
га — относительно прямой метод и может быть полезен для про-
никновения в суть ненормальностей потока. Рис. 7.14 показывает
тип изменений, возможных за один сердечный цикл, представленный
только для прямого потока. Мо и др. (1988) сравнивают различные
методы оценки максимальной частоты.
Хотя «водопадное» отображение иногда используется в иссле-
дованиях, большинство современных доплеровских анализов пото-
ка крови отображает спектр БПФ, изображенного на рис. 7.9, как
следствие вертикально ориентированных кадров (фреймов). Место-
нахождение простого кадра показано на рис. 7.14. Эти изображения
получены в скользящем формате на мониторе и соответствуют со-
нограммам. Информация об интенсивности располагается на оси z
(вне рисунка) и показана как цветовой код в этом типе анализа.
Понимание собираемых данных становится задачей систем рас-
познавания. За годы в попытке автоматизировать будущий процесс
извлечения информации было изобретено множество алгоритмов.
Привлекаются следующие параметры измерения:
Глава 1. Современные разработки систем измерения параметров
- расход S/D-,
- индекс пульсаций:
S-D
средняя скорость ’
- индекс сопротивления Парселота:
S-D
S ’
(7.55)
(7.56)
Рис. 7.14. Типичная максимальная частота доплеровского смещения в сер-
дечном цикле
Для получения значения S некоторые пороговые значения долж-
ны быть приняты изначально. При использовании фильтров нижних
частот необходимо обращать внимание на то, чтобы значения D не
подверглись влиянию внешних вибраций. Средняя скорость оцени-
вается за весь период сердечного цикла, что удобно осуществить
через скользящее среднее и алгоритм БПФ.
Заключение
Хотя измерением параметров потока занимались тысячелетие, здесь
все еще остается много исследовательской работы. В этой главе
были очерчены некоторые приложения обработки сигналов в наи-
более перспективных областях применения потоков. Кроме того,
мы убедились, что конструирование работающих устройств требует
экспертных оценок во всем диапазоне инженерной физики.
Ссылки 365
Ссылки
Angelscn A J В 1980 ’A theoretical study of the scattering of ultrasound
from blood’ IEEE
Trans. Biomed. Engineering BME-27(2) February
Beck M S and Plaskovvski A 1987 Cross-correlation Flowmeters (Adam
Hilger)
Bentley J P 1995 Principles of Measurement Systems 3rd edition (Long-
man)
Brody W R 1974 ’’Theoretical analysis of the CW Doppler ultrasonic
Flowmeter’ IEEE Trans. Biomed. Engineering BME-21(3) May
Burns P N, Halliwcll M, Wells P N T and Webb A J 1982 -Ultrasonic
Doppler studies of the breast” Ultrasound Med. Biol. 8(2) 127-143
Cousins T 1978 The Doppler Ultrasonic Flow meter: Flow Measurement
of Fluids (Amsterdam: North-Holland)
Dickey R К 1975 ’Outputs of op-amps have fixed phase-difference’ De-
signer’s Casebook, Electronics, pp 82—83, 21 August
Evans D 11, McDicken W N, Skidmore R and Woodcock .1 P 1989
Doppler Ultrasound Physics: Instrumentation and Clinical Applications
(Wiley)
Fox R W, McDonald A T and Prilchard P .) 2004 Introduction to Fluid
Mechanics 6th edition (Wiley)
Gessner U 1969 ’’The performance of the ultrasonic flow meter in com-
plex velocity profiles” IEEE Trans. Biomed Engineering BME-16(2)
Horowitz P and Hill W 1989 The Art of Electronics 2nd edition (Cam-
bridge University Press)
Khandpur R S 1987 Handbook of Biomedical Instrumentation (New Del-
hi: McGraw-Hill)
Mo L Y L, Yun L С M and Cobbold R S C 1988 ’’Comparison of four dig-
ital maximum frequency estimators for Doppler ultrasound’ Ultrasound
Med. Biol. 14(5) 355-363
Namekawa K, Kasai C, Tsukamolo M and Koyano A 1982 ’’Real-time
blood flow imaging system utilizing autocorrelation techniques’ Ultra-
sound ’82, ed Lerski and Morley (New York: Pergamon)
Nippa .111, llokanson D E, Lee D R, Sumner D S and Strandness D E jr.
1975 ’’Phase rotation for separating forward and reverse blood velocity
signals’ IEEE Trans
Гзбб Глава 1. Современные разработки систем измерения параметров
Sonics and Ultrasonics SU-22(5) September
O’Donnell M, Busse L J and Miller J G 1981 Piezoelectric Transducers
Methods of Experimental Physics vol 19 (Academic Press)
Rabiner L R and Gold В 1975 Theory and Application of Digital Signal
Processing (Prentice-Hall)
Sanderson M L and Hemp J 1981 ’’Ultrasonic Flow meters—a review of
the slate of the art’ Int. Con/. Advances in Flow Measurement, Warwick
University. 9-11 September, sponsored by BHRA Fluid Engineering
Scott C 1984 ’’Sounding out ultrasonic flow meters Control and Instru-
mentation August
Wells P N T, Halliwell M, Skidmore R, Webb A J and Woodcock J P 1977
’’Tumour detection by ultrasonic Doppler blood-flow signals’ Ultrasonics
September
Womersley .1 R 1957 ” An elastic tube theory of pulse transmission and
oscillatory flow in mammalian arteries’ Wright Air Development Centre,
WADC Technical Report, TP 56-614
Упражнения
7.1. Когда воздух втягивается в легкие, давление внутри трахеи
на 2,5 Па ниже атмосферного. Считая что плотность воздуха
около 1,25 кг/м3, оцените скорость воздуха в трахеи. Трахея
разделяется на две части, каждая из которых ведет к своему
легкому. Какова скорость воздуха в одной части трахеи, ес-
ли площадь ее поперечного сечения составляет 0.65 площади
сечения всей трахеи? (Предполагайте, что стенки трахеи не-
подвижно закреплены, а воздух не сжимаем.)
7.2. Площадь поперечного сечения трубы равна Ai, а скорость жид-
кости в ней — vi. Если труба сузится до площади сечения
с соответствующем повышением скорости потока до то в
идеальных условиях при несжимаемой жидкости справедливо
следующее соотношение:
/ 2ДР
V1 - у р[(Аг/А2у -1]’
где ДР — разность давлений между двумя секциями трубы.
Поэтому расход потока Q можно представить в виде:
Q = Л2
2ДР
р^-^/АгУ]'
Упражнения 367
7.3.
Для ламинарного потока известно, что
— ^Лпах
Г \2
RJ
Покажите, что и = |С7тах-
7.4. Предположим, что число тактовых импульсов q достаточно для
вычисления корреляции в корреляционном расходомере. Пока-
жите, что
Аи _ 1
и 2q
7.5. В некоторых корреляционных расходомерах было найдено, что
максимально возможное разделение датчиков без потери кор-
реляции составляет 0,45 м. При измерении скорости требуется
разрешение в 2%. Определите
i) Период тактовых импульсов для измерения максимальной
скорости в 0,35 м/с.
ii) Минимальную скорость, поддающуюся измерению, если объ-
ем каждого буфера памяти — 256 значений.
Ответы к упражнениям
Глава 1
1.1. Смотри стр. 26-28.
1.2. Смотри табл. 1.4.
1.3. 5,622 Ом; s = ±0,006Q Ом; sm = ±0,002Q Ом. Среднеквадра-
тическое выборочное отклонение следует приводить вместе с
R, потому что это указывает надежность оценки среднего.
1.4. ±2,5%.
1.5. ±1,5%.
1.6. ±1,8%. Ошибки, приведенные в задаче 1.5, не являются стан-
дартными погрешностями, поскольку формальный вывод суммар-
ной погрешности здесь невозможен. Следовательно, результат,
полученный для суммарной погрешности, нельзя использовать
для оценки вероятности попадания результата в какую-то кон-
кретную полосу.
1.8. i) Смотри стр. 38.
ii) Потенциальная переменная — разность потенциалов, пото-
ковая — сила тока.
iii) Потенциальная переменная — разность температур, пото-
ковая — тепловая мощность.
iv) Потенциальная переменная — избыток температуры ре-
зервуара по сравнению с температурой датчика, а пото-
ковая — тепловая мощность, перетекаемая от резервуара
к датчику.
1.9. i) У! = ZnXi ± £12^2, У2 = ^21^1 ± 222^2-
... ( У1 \ 7 Ml 1 ( *П *12 \ ( #1 А
п) I I = Z I I — I II |
\ У2 J \ Х2 J \ 221 222 / \ Х2 J
1.10. i) Если горячая жидкость имеет небольшую теплоемкость,
ввиду чего ее запасы тепловой мощности ограничены, то по-
мещение в резервуар датчика может привести к тому, что
значение потенциальной переменной (температура) умень-
шится.
Ответы к упражнениям 369
Глава 2
2.1. i) Смотри стр. 51.
ii) Смотри стр. 52.
iii) Смотри стр. 59
2.2. Смотри стр. 59-61.
2.3. Смотри J. Р. Benlley. 1995. Principles of Measurement Systems
3rd edition (Longman).
2.4. Смотри разд. 2.2.3.
2.5. i) wn = 2,988 • 103 рад/с; £ = 1,106 • 10“3; добротность выра-
жается как Q = (l/2£), что дает Q = 452.
ii) Чувствительность определяется производной: - В этом
примере выход — а вход — плотность р. продифферен-
цировав, получаем:
d^n _
dp 2а + '
2.6. Д/ = 5,25 Гц.
Глава 3
3.1. Смотри начальные страницы главы.
3.2. Смотри начальные страницы главы.
3.3. i) Смотри разд. 3.2.4.
ii) Смотри разд. 3.2.4 и задачу 2.2.
3.4. i) Большие давления и загрязненность.
ii) Радиальное напряжение равно нулю в точке г = x/3Ro,
а тангенциальное — на краю.
iii) Смотри рис. 3.1.
3.5. i) Смотри стр. 90 и 96.
ii) Разрешение детектора масс на ПАВ составляет р = 3,577 х
хЮ-10 кг/м2.
3.6. Смотри стр. 98 и 99.
3.7. Смотри стр. 104.
3.8. Смотри стр. 121. Малый шум, но нелинейная (логарифмиче-
ская) характеристика и не очень хорошая частотная характе-
ристика.
Ответы к упражнениям
i) (а) Из формулы (3.74) следует, что
, = = ! _ ехр(_^).
Л) h
(б) ip = 1,841 • 1О-10 А.
Рис. 3.1.
3.9. Смотри стр. 134-138.
3.10. ii) Мостовая схема формирует два делителя потенциалов, так
что
Еэкв = VS ( ——--------——) .
ЭКв 4^1 +Й4 R2+R3J
Принимая равенства: R<i — R3 — Rq + 5R и R% = Ra —
— Rq — 6R, получаем, что
iii) Приблизительно 2 мкТл, используя электропитание в 5,0 В.
Глава 4
4.1. Смотри стр. 157 и 158 и табл. 4.1.
4.2. Смотри стр. 166 и 168.
4.3. i) Смотри разд. 4.2.2.
ii) Есть два способа. Или через набор пар источник-детектор
для конкретных длин волн из желаемого диапазона, или че-
рез источник белого света и широкополосный приемник(и).
Ответы к упражнениям 371
Если используется источник белого света, то нужно при-
менять призму или дифракционную решетку, чтобы вы-
делить конкретные длины волн. Перед тем, как в волокно
пропустить луч, источник и детектор калибруются под ну-
левое затухание.
4.4. i) Смотри разд. 4.3.6.
ii) 143,9; 124,4.
iii) Либо систему можно откалибровать для одного конкретно-
го приложения, либо нужно использовать умный датчик с
таблицей данных для корректировки значений.
4.5. Смотри разд. 4.3.1. Температурный датчик можно сконструи-
ровать, прикрепив расширяющийся элемент к рефлектору.
4.6. Смотри разд. 4.3.3. Поскольку поглощение подчинено логариф-
мическому закону, подходит датчик с логарифмической харак-
теристикой, такой, например, как фотодиод, используемый в
фотоэлектрическом режиме.
4.7. Из формул (4.84) и (4.74) получаем, что Е = Eq ехр(—х/х), где
_ Ао_______
* 2тг(П1 s^n2 а ~
Теперь, интенсивность имеет порядок Е2, поэтому из (4.84)
следует, что Е2 = ехр(—2ж/х) = I- Так что чувствитель-
ность будет определяться соотношением:
di _ 2^
dx ~ х '
4.8. Смотри стр. 203-206. Основная трудность заключается в нели-
нейности эффекта Керра.
Глава 5
5.1. Восьмибитовый АЦП; большая, чем ЗЮ3 бит/с, ввиду теоремы
Шеннона - Найквиста.
5.2. i) АЦП с обратной связью (высокая скорость и разрешение),
ii) АЦП с двойным интегрированием (его можно кнофигури-
ровать так, что АЦП будет отсекать помехи, возникающие
в электропроводах).
iii) АЦП с обратной связью (существует возможность коррек-
тировать частотную характеристику и разрешение при от-
носительно низкой цене).
Ответы к упражнениям
5.3. 2,304 • 107 бит/с.
5.4. 6 бит; 3,932 • 107 бит/с; параллельный АЦП.
5.5. Необходим десятибитовый АЦП. На стр. 251-254 приведены
полезные детали.
5.6. Смотри разд. 5.6.1. Структуру логических утверждений можно
организовать несколькими относительно прямыми способами.
Трудность заключается в понимании всех возможных сценари-
ев и написании подходящих откликов машины.
5.7. Смотри разд. 5.6.2. Для формирования функции принадлежно-
сти нечетких множеств субъективные оценки операций необ-
ходимо снабдить весами.
5.8. Смотри разд. 5.6.3.
5.9. Смотри разд. 5.6.3.
Глава 6
6.1. Смотри стр. 286 и 287.
6.2. i) Нагревание воды в резервуаре относится к стохастическим
процессам. Ансамбль данных, снимаемых с термометров,
отражает нестационарный случайный процесс. В зависимо-
сти от точных условий его тем не менее можно рассматри-
вать как стационарный случайный процесс, умноженный
на детерминированный множитель (см. формулу (6.15)).
ii) Если резервуар не подогревается, показания всех термо-
метров не будут зависеть от времени. Таким образом, ан-
самбль данных можно отнести к детерминированным не-
периодическим процессам.
6.3. 1,414 В; 1,155 В; 1,265 В.
6.4. 1/VO; 0; Vo/V6; 1/8.
6.5. R(T) = ^sinc (200т).
6.6. Отделить шум от периодического сигнала можно с помощью
автокорреляции сигнала, поступающего от вибродатчика. Ам-
плитуда периодического сигнала определяется из последней ча-
сти автокоррелограммы (см. стр. 318-320).
6.7. Rvv (т) = 0,005 cos 100т -I- sine 200tau.
6.8. Для защиты от интерференции нужен экранированный кабель.
Однако, поскольку относительно слабый сигнал меняется в ло-
кальном поле электропотенциала Земли, в основные частоты
Ответы к упражнениям 373
выходного сигнала может проникнуть приглушенный шум. Про-
исходит это из-за того, что разность потенциалов Земли на
двух концах кабеля индуцирует ток в экране, что дает до-
полнительное напряжение сигнала в приемнике. Применение
двухжильного коаксиального кабеля позволяет обойтись без
экранирования сигнала.
6.9. 0,103 К.
6.10. Смотри стр. 310-316.
6.11. Смотри разд. 6.5.2.
6.12. i) Нежелательные случайные сигналы могут возникать из-за
периодического искрения электрических контактов трам-
вая; вибраций в земле, вызванных иными причинами, не-
жели трамвай; шума внутри сейсмометра или кабеля, элек-
трического шума в самой земле или прохождения других
транспортных средств. Возможные причины детермини-
рованных нежелательных сигналов — электромагнитные
волны, исходящие из токоприемника или электрооборудо-
вания трамвая. Внешние радиоволны могут поступать из
мобильных телефонов и аналогичных устройств. Силовая
цепь замыкается через рельсы, что дает эффект локально-
го заземления и оказывает влияние на экран одножильного
коаксиального кабеля.
ii) Смотри разд. 6.4.2 и 6.5.2.
Глава 7
7.1. 2,0 м/с; 1,54 м/с.
7.2. В случае идеального горизонтального потока уравнение Бер-
нулли выглядит следующим образом:
Pi + ^Pvi = const,
так что для двух точек потока
Р1 + = Р2 +
После преобразований, получаем:
= Р2-Р1 + = -ДР + (7Л)
Zi
Разность ДР отрицательна, поскольку из уравнения Бернулли
следует, что при > Vi имеет место неравенство: Р2 < Pi.
Уравнение неразрывности в данной ситуации можно записать
Ответы к упражнениям
как — P2^2V2- В предположении несжимаемости возду-
ха оно сводится к соотношению: А± Vi = A2V2. Выражая отсюда
V2 и подставляя полученное значение в равенство (7.1), придем
к выражению:
1 2 лп 1 Ml V
-pV1=-^P+-p^-V1j .
Выразим из последнего равенства :
Учитывая, наконец, что Q = A1V1, приходим к ответу:
7.3. Из формулы (7.19) следует, что
R R
Q = j u(r)2-irrdr = У Umax
о о
2тгг dr =
— 27vUmax
47?2J 0 ZnUmax[ 2 4R\
p2 1
— ^Ufnax-^- — ~AUmax-
По определению Q = Au, так что и — Umax/^-
7.4. Используйте формулу (7.27).
7.5. i) 50 м • с.
ii) 0,035 м/с.
Предметный указатель
NMOn, 100
NMOnilT, 100
PIN-фотодиод, 124
РМОП, 100
RISC-процессор, 253
АЦП
параллельные, или мгновен-
но преобразующие, 239
с двойным интегрировани-
ем, 239
ИС, 254
МЗР, 233
МЛВ, 256
МОП, 99
МОППТ, 99
ПЗС-прибор оптический, 128
СЗР, 233
УДХ, 247
ЦОС, 231
автокорреляция, 292
адалайн, 272
аксон, 270
аксоплазма, 270
актюатор, 39
акустоскопия, 210
алайсинг, 233
альфа-частицы, 139
анализ четырехполюсников, 43
ансамбль, 291
бета-частицы, 139
болометр, 134
вакуумметр, 133
вектор Пойнтинга, 107, 207
волна
плоскополяризованная, 200
утечки, 169, 171
волокно
многомодовое, 169
одномодовое, 169
время
жизни, 186
установки, 235
время затухания, 53
вязкость, 337
газоразрядная лампа, 112
гармоники, 288
гашение
динамическое, 187
статическое, 187
гидрофон, 198
градиент, 161
датчик, 39
давления
абсолютного, 79
дифференциальный, 79
на ПАВ
на основе линий задерж-
ки, 92
резонаторный, 91
потока
емкостный, 88
Предметный указатель
резонансный, 88
термический, 87
тепловой, 133
двулучепреломление, 201
демозаикинг-алгоритм, 132
дендрит, 269
детектирование
двойное, 221
фотонов, 143
частиц, 143
детектор
квантовый, 116
фазочувствительный, 313
дивергенция, 161
динамическая ошибка, 40
динод, 117
диод Шоттки, 125
дискретизация, 229
дисперсия, 30, 169, 174, 294
внутримодовая, 174
волноводная, 174
материальная, 174
межмодовая, 168
модовая, 169
хроматическая, 174
дихроизм, 201
добротность, 56
жидкие частицы, 337
жидкость, 337
закон
Ампера, 204
Ламберта, 110
Ламберта-Бэра, 183
Снеллиуса, 166
Стефана-Больцмана, 112
Фарадея, 162, 321
отражения и преломления,
165
смещения Вина, 112
зарядовый пакет, 127
затвор сдвига, 130
зондирование квазираспреде-
ленное, 215
изгибающаяся пластина, 64
изгибающаяся труба, 64
изгибающаяся трубка, 65
излучение Черенкова, 141
изменение чувствительности, 34
импеданс, 43
импульс
паразитный, 236
с линейной частотной мо-
дуляцией, 220
инверсия заселенности, 115
индукция электрическая, 161
инжекционная люминесценция,
113
интегральная оптика, 195
интерференция, 286
интерферометр
Майкельсона, 195
Маха-Цендера, 195
Маха-Цендера, 191
Фабри-Перо, 195
волоконно-оптический, 196
искусственный интеллект, 255
камера
Вильсона, 139
ПЗС, 144
водородная пузырьковая,
139
ионизационная, 139
кандела, 107
каноническая форма
соотношений, 43
кантилевер, 83
квант, 106
код Грэя, 237
Предметный указатель 377
колебательный процесс
гармонический, 52
релаксационный, 52
константа Стерна-Воль-
мера, 187
конус приема, 168
корпускулярно-волновой
дуализм, 105
корреляция, 292
коэффициент
доверия, 272
корреляции, 301
обучения, 275
критический угол, 167
лазер, 115
линия задержки, 222
линия тока, 338
логика многозначная, 258
люкс, 108
люмен, 107
люминесценция, 186
магнитоконцентрация, 149
магнитометр,145
протонный, 145
магнитострикция, 95
мадалайн, 272
манометр, 80
маркировка, 187
меридиональный луч, 169
метод
Мамдани, 263
двойного тигля, 175
деления интервалов, 243
пьезоэлектрический, 86
резонансный, 86
стержня и трубки, 175
уравновешивающей силы, 86
эхо-импульсный, 215
миелин, 271
микроконтроллер, 253
множество, 258
нечеткое, 258
модуляция длины волны, 222
мультиплексирование плотное,
по длинам волн, 159
мультиплицирование
временное, 181
по длинам волн, 181
нейрон
биологический, 269
искусственный, 269
неопределенность, 35, 36
образование пары, 142
объемный расход, 339
оператор
Лапласа, 163
набла, 160
оптическая длина пути, 194
оптический мост, 223
оптоволокно, 160
оптоволоконная система
квазираспределенная, 210
распределенная, 210
оптрод, 186
освещенность, 108
отношение сигнал/шум, 287
отражение френелевское, 174
передаточная функция, 39
переменная
потенциальная, 43
потоковая, 43
перескок моды, 116
персептрон, 271
пирометрия, 192
плотность распределения веро-
ятностей, 295
Предметный указатель
погрешность систематическая,
33
подмножество нечеткое, 259
поляризация, 215
за счет селективного
поглощения, 201
за счет двулучепреломле-
ния, 201
круговая, 202
линейная, 202
с помощью стеклянной
пластинки, 200
эллиптическая, 202
помехи, 286
последовательность псевдослу-
чайная двоичная, 216
постоянная Верде, 203
поток
Ньютонов, 338
ламинарный, 342
стационарный, 339
турбулентный, 342
правило градиентного спуска,
275
преобразование Лапласа, 42
преобразователь, 38
АЦП, 231
ЦАП, 234
прерыватель светового пучка,
131
преформа, 175
прибор
с зарядовой связью (ПЗС),
126
тензорезистивный, 78
призма Волластона, 204
протяженный диффузный
источник,110
равномерное поле скоростей, 339
распределение
Гаусса, 297
Максвелла-Больц-
мана, 213
распределение Байера, 132
распределение вероятностей,
298
рассеяние, 173
Брюллиэновское, 214
Рамановское, 212
Рэлеевское, 211
комптоновское, 141
упругое, 141
режим
фотоамперный, 123
фотовольтаический, 121
фотопроводимости, 123
резонансные сенсоры, 51
решетка Муара, 177
родительское супермножество,
260
ротор, 161
световой поток, 107
светодиоды, 113
сдвиг нуля, 33
сенсор, 39
активный, 39
ион-селективный ПТ
(ИСПТ), 99
пассивный, 39
с боковой связью, 190
торцевой, 189
флюоресцентный, 186
фосфоресцентный, 188
сигмоид, 274
сигнал
детерминированный, 286
квазипериодический, 289
переходный, 289
синусоидальный периоди-
ческий, 288
Предметный указатель 379
сложный периодический,
288
случайный, 286, 290
синапс, 271
система реального времени,
230
случайный процесс
нестационарный, 293
слабо стационарный, 292
стационарный, 292
эргодический, 292
соотношение Кубелки-Мунка,
185
спектроскопия, 140
среднее выборочное, 30
среднее квадратичное, 294
среднеквадратическое откло-
нение, 294
среднеквадратическое откло-
нение (СКО), 30
среднерасходная скорость, 339
стандартная
погрешность измерений,
31
погрешность среднего, 32
степень принадлежности, 259
схема R—2R, 234
счетчик
Гейгера-Мюллера, 139
сцинтилляционный, 139
тензосопротивление, 78
теорема
Ампера, 162
Бернулли, 340
Гаусса, 160
Парсеваля, 304
тепловой самосветящийся объ-
ект, 110
термистор, 134
термо детектор, 116
термопара, 39, 133
термосопротивление, 39
термоэлемент, 133
технология
КМОП, 151
объемной микромеханики,
77
поверхностной микроме-
ханики, 77
течение Пуазеля, 342
типовая выборка, 291
транзисторы МОП, 151
тройная ПЗС-система, 131
трубка тока, 338
угол Брюстера, 200
уравнение
Бернулли, 341
Лоренца, 146
Максвелла, 160
непрерывности, 339
характеристики импедан-
са, 43
уравнения Максвелла, 163
уровень пороговый, 270
усилитель
синхронизирующий, 315
со стабилизацией нуля, 309
устройство на основе р-п-пере-
ходов, 78
утечка моды, 173
фильтр на пикселях, 132
флюоресценция, 186
флюофор, 186
фосфоресценция, 186
фотодетектор, 116
полупроводниковыей, 118
с р-п-переходом, 119
фотодиод, 119
лавинный, 125
Предметный указатель
с р-п-переходом, 124
фотон, 106, 141
антистоксовый, 213
стоксовый, 213
фотосопротивление, 118
фототранзистор, 119, 125
фотоячейка переменной глуби-
ны, 132
функция
ослабления, 185
принадлежности, 259
хедж, 261
центроид, 266
цепочка вывода, 256
частота дискретизации, 231
четырехполюсник, 43
число Рейнольдса, 342
числовая апертура, 168
шум, 286
белый, 307
дробовый, 307
мерцания, 307
тепловой, 307
эксперт, 255
элемент хранения, 128
энергетическая спектральная
интенсивность источника, 109
эффект
Доплера, 352
Керра, 205
Саньяка, 198
Фарадея магнитоопти-
ческий, 203
гигантский магниторе-
зистивный (ГМЭ), 149
коррекции, 34
лавинный, 115
магнитоупругий, 95
приращения, 33
термолюминесценции, 140
фотоупругий, 206
фотоэлектрический, 141
тензорезистивный, 78
яркость, 108, 109
КНИГИ ИЗДАТЕЛЬСТВА "ТЕХНОСФЕРА" МОЖНО ПРИОБРЕСТИ В ГОРОДАХ:
ЧЬ Москва
Торговый дом "Библио-Глобус", м. Лубянка, ул. Мясницкая, 6
тел.: 928-35-67, 924-46-80
Торговый дом книги "Москва", м. Тверская, ул. Тверская, 8
тел.: 229-64-83
"Московский дом книги", м. Арбатская, ул. Новый Арбат, 8
тел.: 789-35-91
"Дом технической книги", м. Ленинский проспект, Ленинский проспект, 40
(весь ассортимент литературы)
тел.:137-60-19
"Молодая гвардия", м. Полянка, ул. Б. Полянка, 28
тел.: 238-50-01
"Дом книги на Ладожской", м. Бауманская, ул. Ладожская, д. 8, стр. 1
в городах России
ЧЬ г. Санкт-Петербург
"Санкт-Петербургский дом книги", Невский пр., д. 62
"Дом технической книги", Пушкинская пл., д. 2
"Новая техническая книга", Измайловский пр., д.29
• г. Новосибирск
сеть магазинов "Топ книга" www.top-kniga.ru
г. Воронеж
"Книжный мир семьи", пр. Революции, д. 58
ул. Героев Сибиряков, д. 33/2
ул. Плехановская, д. 22
ул. Лизюкова, д. 38а
наложенным платежом
(заказы принимаются по e-mail, по почте)
по безналичному расчету
(заказы принимаются по e-mail, по факсу с указанием полных реквизитов
юридического лица)
ИНФОРМАЦИЯ О НОВИНКАХ: www.technosj
ЗАКАЗ КНИГ: sales@technosphera.ru '
Тел.: (495) 234-0110, факс: (495) 956-3346
рлу/а.ги
DEPA
(Ж ИЗДАТЕЛЬСТВО "ТЕХНОСФЕРА"
xJliZ ГОТОВИТ К ВЫПУСКУ КНИГУ:
Клаус Бойт
ЦИФРОВАЯ ЭЛЕКТРОНИКА
Книга представляет собой курс цифровой электроники - полностью и в
доступном виде. Материал изложен последовательно и понятно, начиная с
основ. Особое внимание уделено взаимосвязям между разделами. Все это
делает книгу не только превосходным учебным пособием, но и справоч-
ником по основам современной цифровой электроники. Она представит
безусловный интерес как для студентов электротехнических и машино-
строительных специальностей, так и для инженеров-практиков, а также
всех, кто интересуется современной цифровой техникой.
СОДЕРЖАНИЕ
1. Основные понятия
2. Алгебра логики. Основные положения
3. Анализ схем
4. Основные законы алгебры логики
5. Синтез схем
6. Семейства схем
7. Бинарные схемы с временной зависимостью
8. Двоичные коды и системы счисления
9. Преобразователи кодов и уровней
10. Счетчики и делители частоты
11. Цифровые схемы выборки и связи
12. Регистры и запоминающие устройства
13. Цифроаналоговый преобразователь, аналого-цифровой преобразователь
14. Счетные схемы
15. Микропроцессоры и микрокомпьютеры
16. Программируемые логические схемы
17. Решения заданий контрольных тестов
Как заказать наши книги?
По почте: 125319 Москва, а/я 594
По факсу: (495) 9563346 •
E-mail: knigi@technosphera.ru
sales@technosphera.ru
w™, ИЗДАТЕЛЬСТВО "ТЕХНОСФЕРА"
xJliZ ГОТОВИТ К ВЫПУСКУ КНИГУ:
Роберт А. Пис
ОБНАРУЖЕНИЕ НЕИСПРАВНОСТЕЙ В АНАЛОГОВЫХ СХЕМАХ
СОДЕРЖАНИЕ
1. Начало начал: философия поиска неисправностей
2. Выбор необходимого оборудования
3. Неисправности на уровне компонентов. Резисторы и катушки
индуктивности
4. Неисправности на уровне компонентов. Проблемы с емкостями
5. Защитные материалы. Неисправности сборки и монтажа. Неисправности
в печатные платах, разъемах, реле и переключателях
6. Неисправности схем из-за проблем с диодами
7. Обнаружение и предотвращение неисправностей транзисторов
8. Операционные усилители как главные активаторы
9. Подавление паразитных колебаний
10. Неопределенность границы между аналоговой и цифровой частями
схемы
11. Значение опорного сигнала. Неисправности в регуляторах
12. Неустойчивые неисправности
13. Примеры обращений к автору с вопросами о неисправностях
14. Примеры реальных схем и неисправностей в них
Приложения
А. Цифровые интегральные схемы с нестандартными выводами
В. Операционные усилители с нестандартными выводами
С. Подавление шумов в трехвыводных регуляторах
D. Тестирование смещения напряжения в быстродействующих
компараторах
Е. Зависимость напряжений оттоков в различных диодах
G. Возможности программы SPICE
Н. Перечень статей автора по проблемам обнаружения неисправностей,
опубликованных ранее
Как заказать наши книги?
По почте: 125319 Москва, а/я 594
По факсу: (495) 9563346
E-mail: knigi@technosphera.ru
sales@technosphera.ru
Заявки на книги присылайте по адресу:
125319 Москва, а/я 594
Издательство «Техносфера»
e-mail: knigi@technosphera.ru
sales@technosphera.ru
факс: (495) 956 33 46
В заявке обязательно указывайте
свой почтовый адрес!
Подробная информация о книгах на сайте
http: //www.technosphera.ru
Р.Г. Джексон
Новейшие датчики
Компьютерная верстка — С.А. Кулешов
Корректор — З.В. Пономарева
Дизайн книжных серий - С.Ю. Биричев
Дизайн — И.А. Куколева
Выпускающий редактор — О.Н. Кулешова
Ответственный за выпуск — С.В. Зинюк
Формат 60x90/16. Печать офсетная.
Гарнитура Computer modern LaTeX.
Печ.л. 24. Тираж 1000 экз. Зак. № 4227
Бумага офсет № 1, плотность 65г/м2
Издательство «Техносфера»
Москва, Лубянский проезд, дом 27/1
Диапозитивы изготовлены ООО «Европолиграфик»
Отпечатано в ООО ПФ «Полиграфист»
160001, г. Вологда, ул. Челюскинцев, дом 3
мир
электроники
Р. Г. ДЖЕКСОН
Новейшие
датчики
МЕЖДИСЦИПЛИНАРНОЕ
УЧЕБНОЕ ПОСОБИЕ
ДЛЯ ШИРОКОГО КРУГА
СПЕЦИАЛИСТОВ.
АСПИРАНТОВ И СТУДЕНТОВ.
ПОСВЯТИВШИХ СЕБЯ
СЕНСОРИКЕ
ТЕХНОСФЕРА
ЦЕЛЕНАПРАВЛЕННОЕ,
ПОСЛЕДОВАТЕЛЬНОЕ
И ГЛУБОКОЕ ИЗЛОЖЕНИЕ
КЛЮЧЕВЫХ ВОПРОСОВ,
СВЯЗАННЫХ С ПОЛУЧЕНИЕМ
ИНФОРМАЦИИ С ПОМОЩЬЮ
ДАТЧИКОВ