/




























































































































































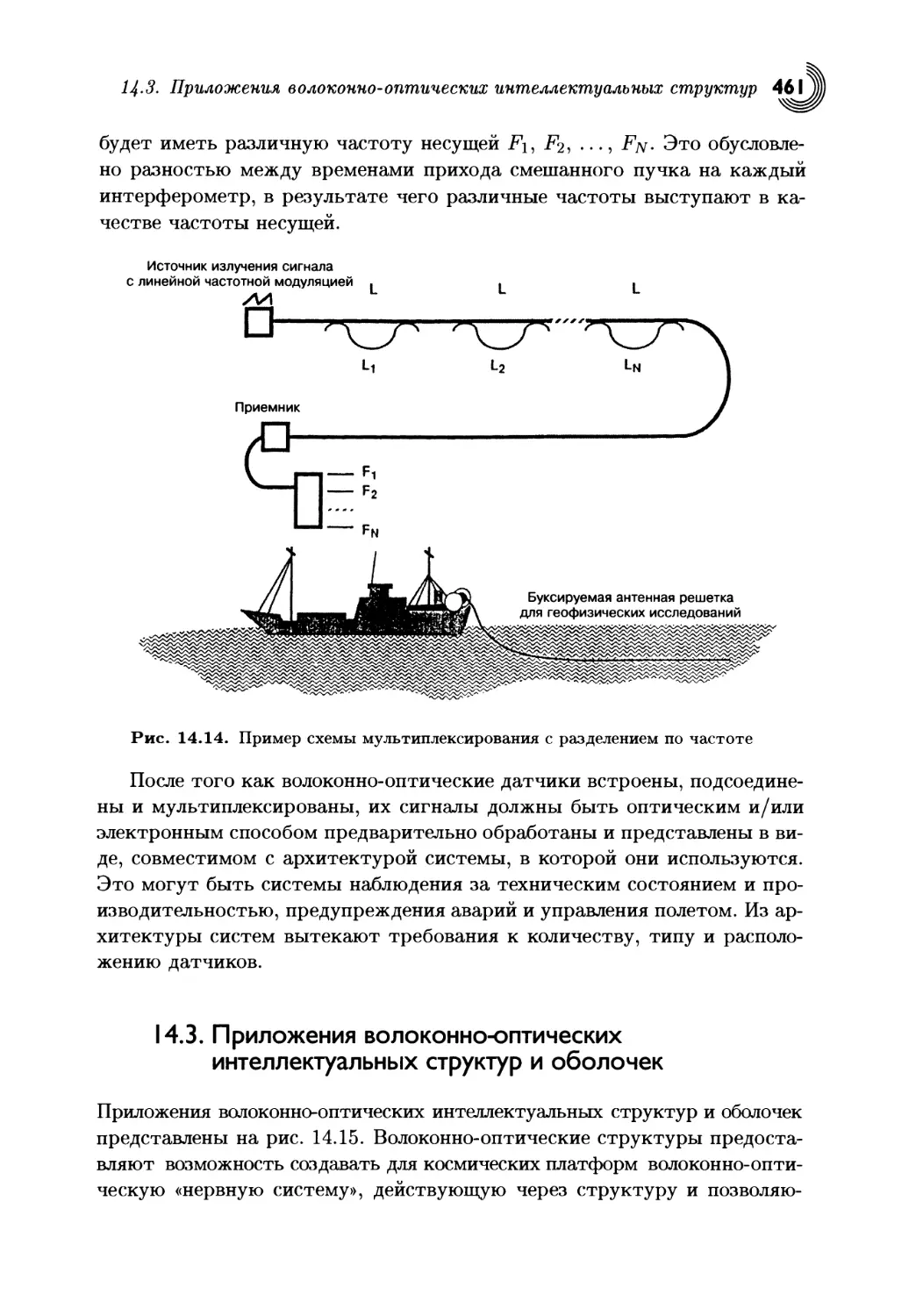

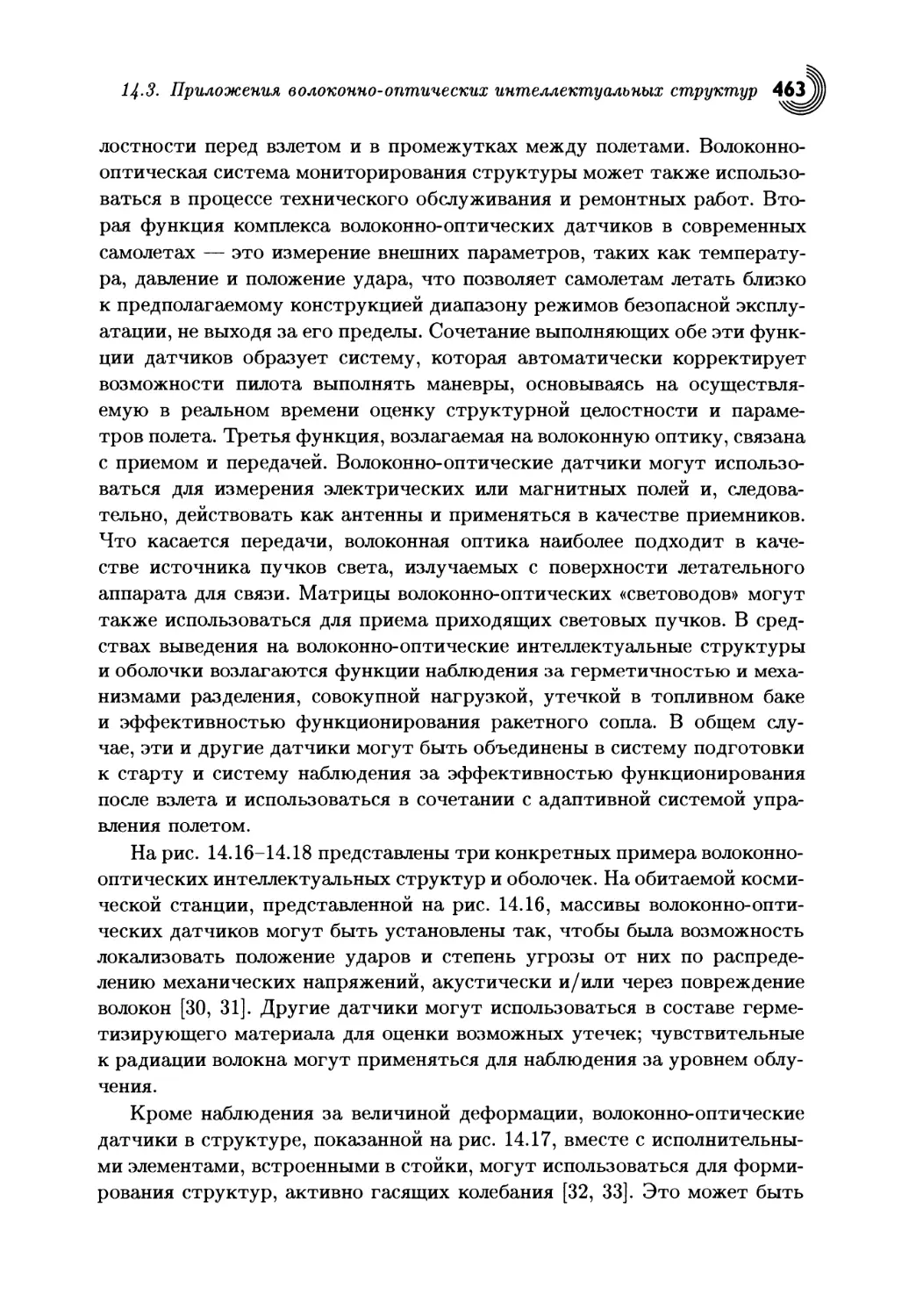




















Автор: Удд Э.
Теги: датчики переводная литература издательство техносфера оптические волокна оптоволокно
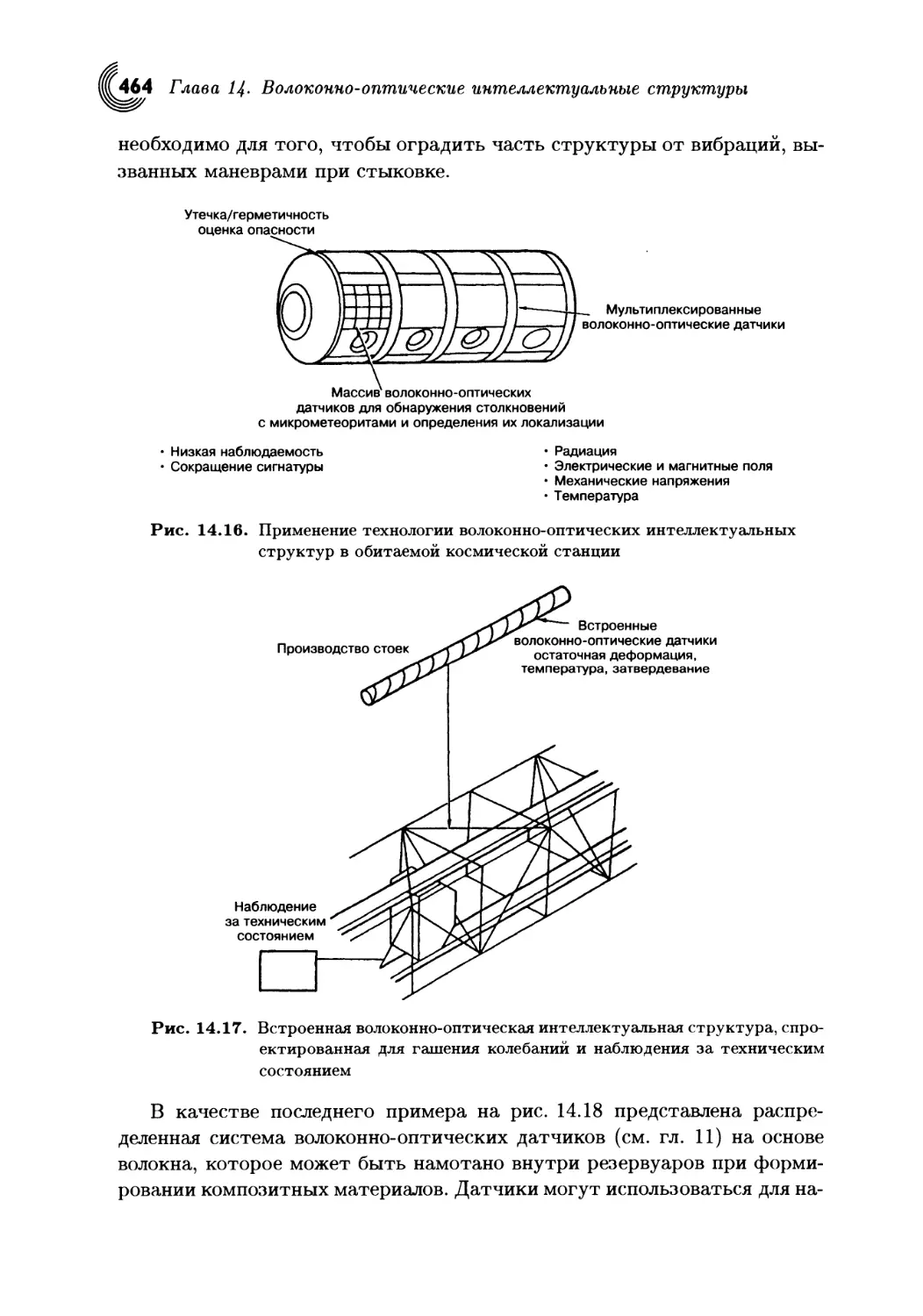
ISBN: 978-5-94836-191-8
Год: 2008




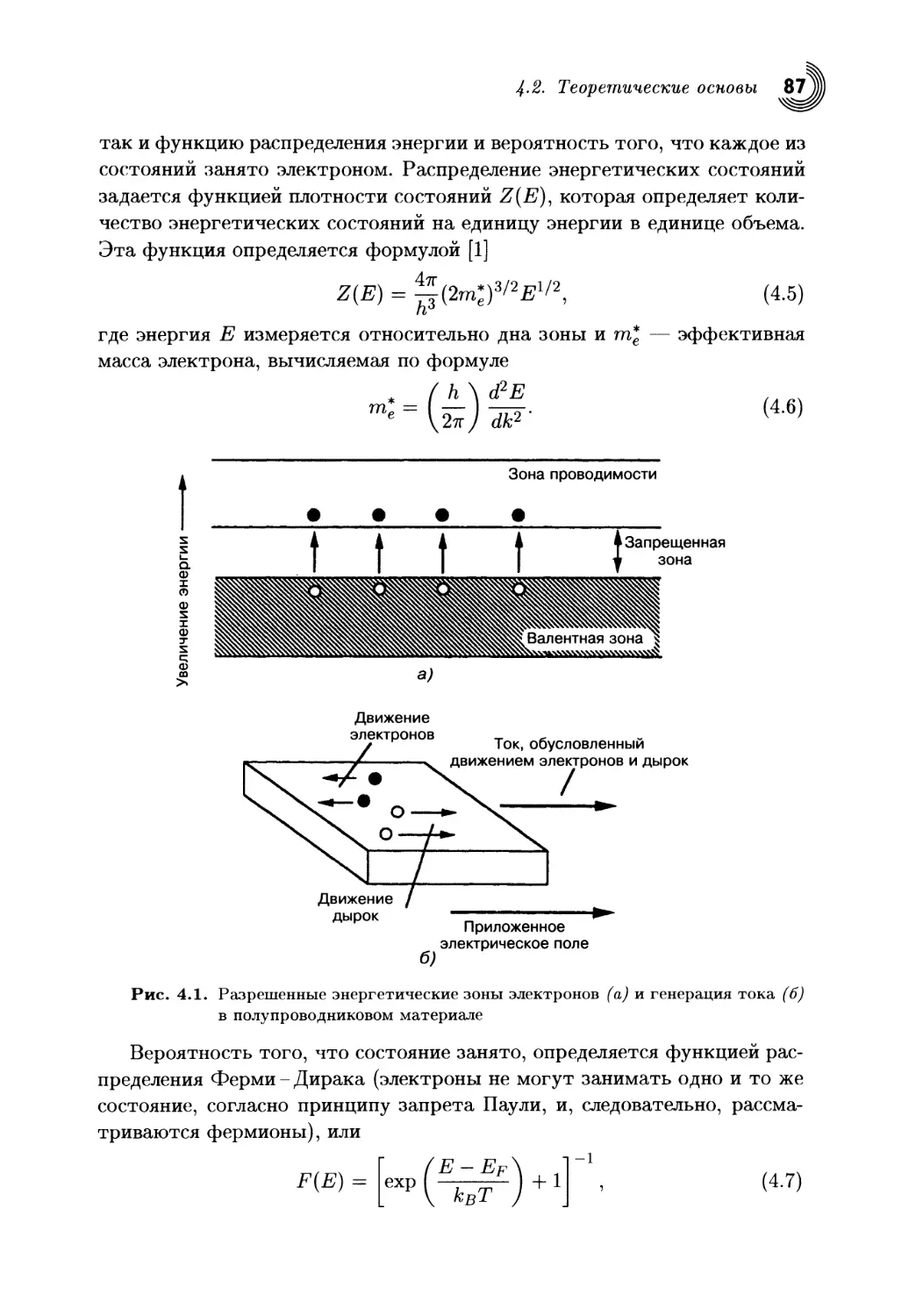
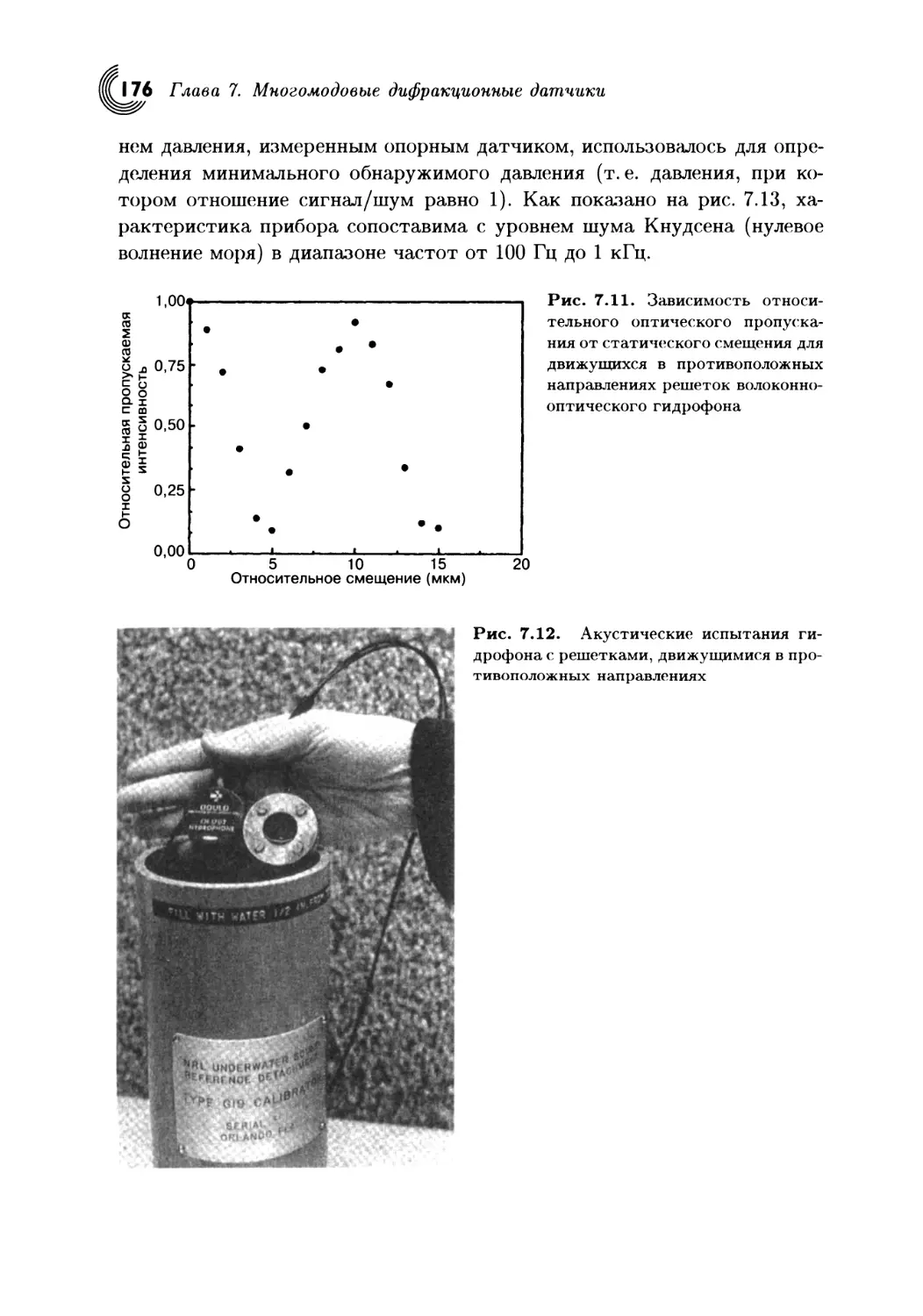
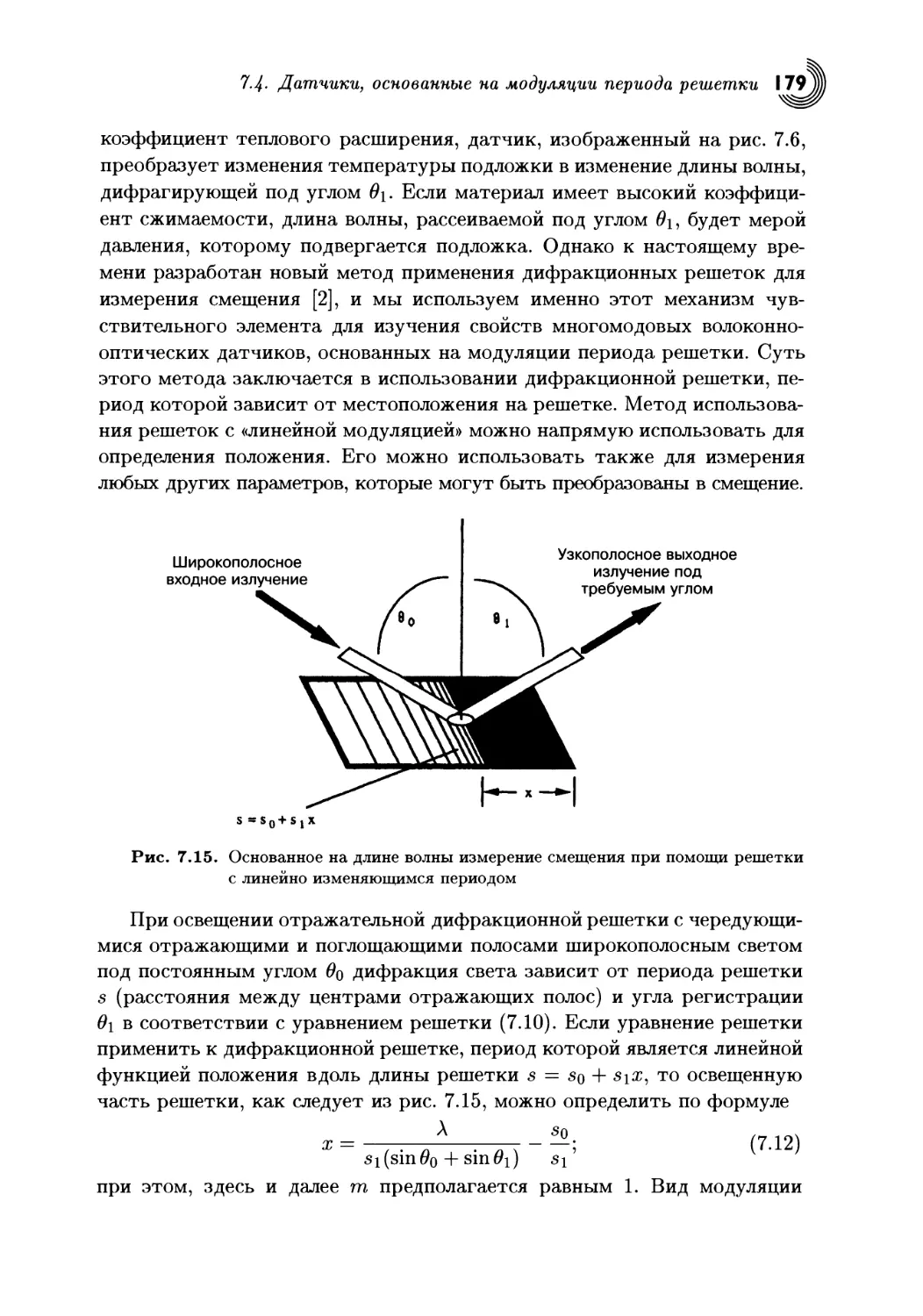
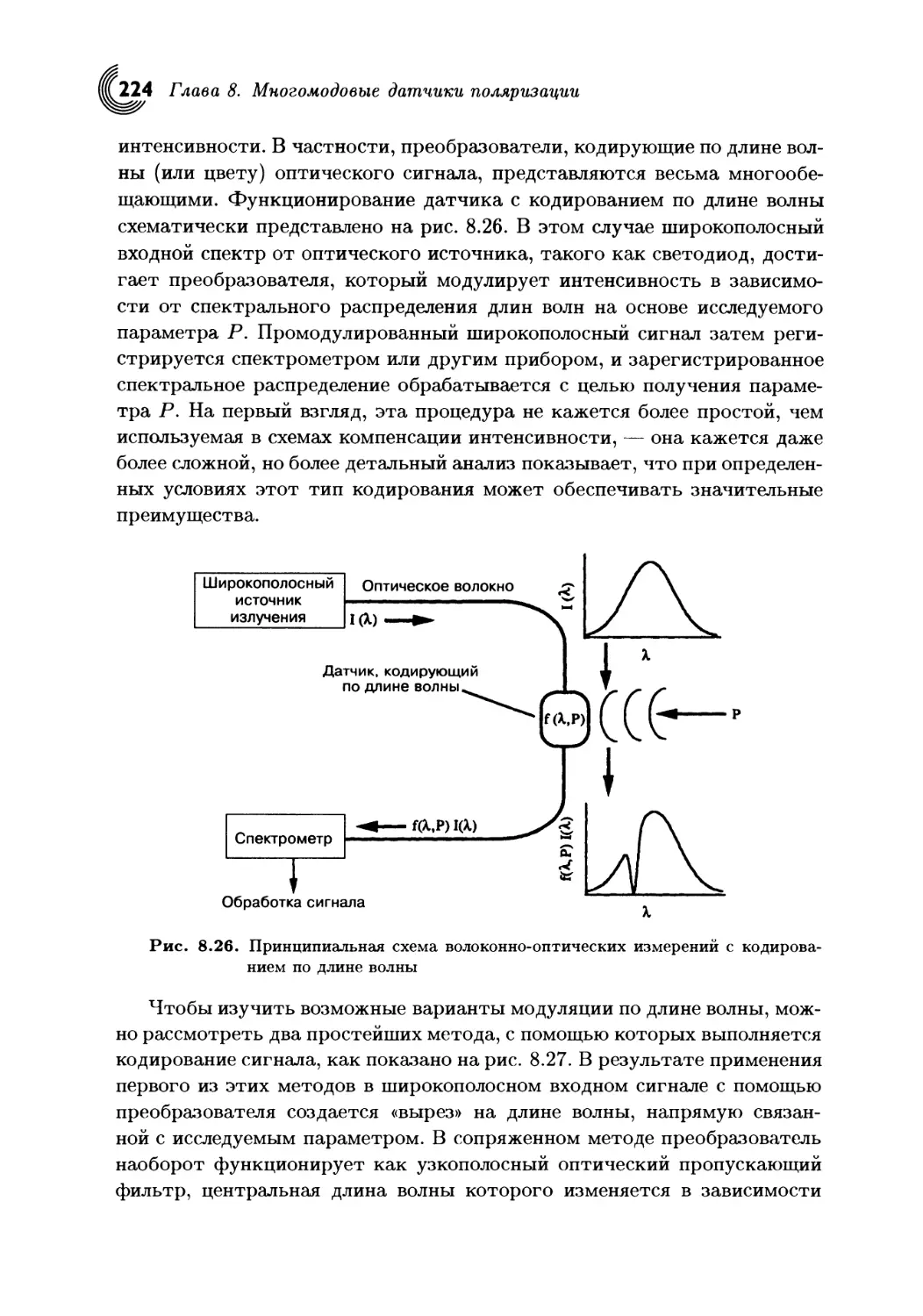
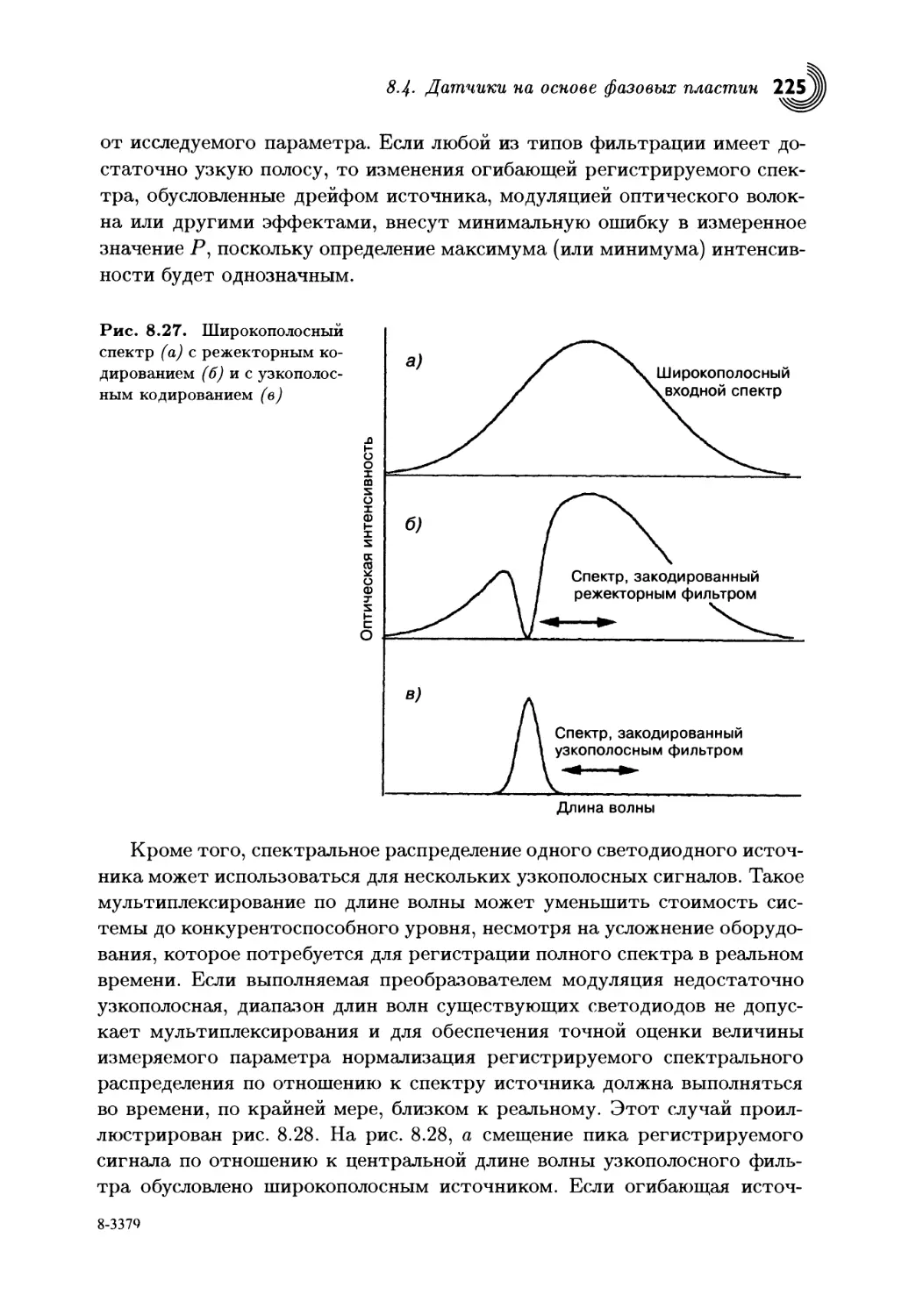
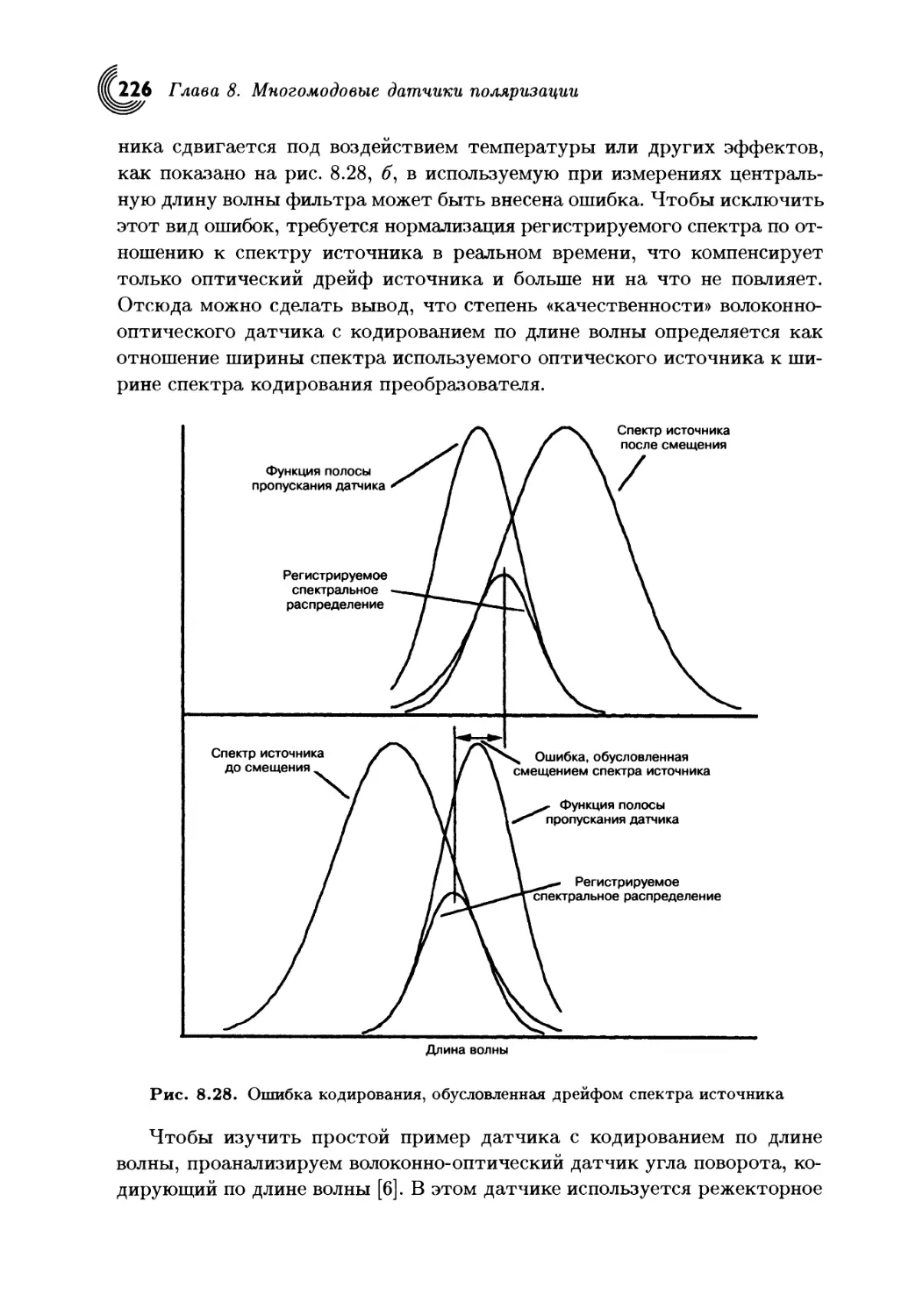
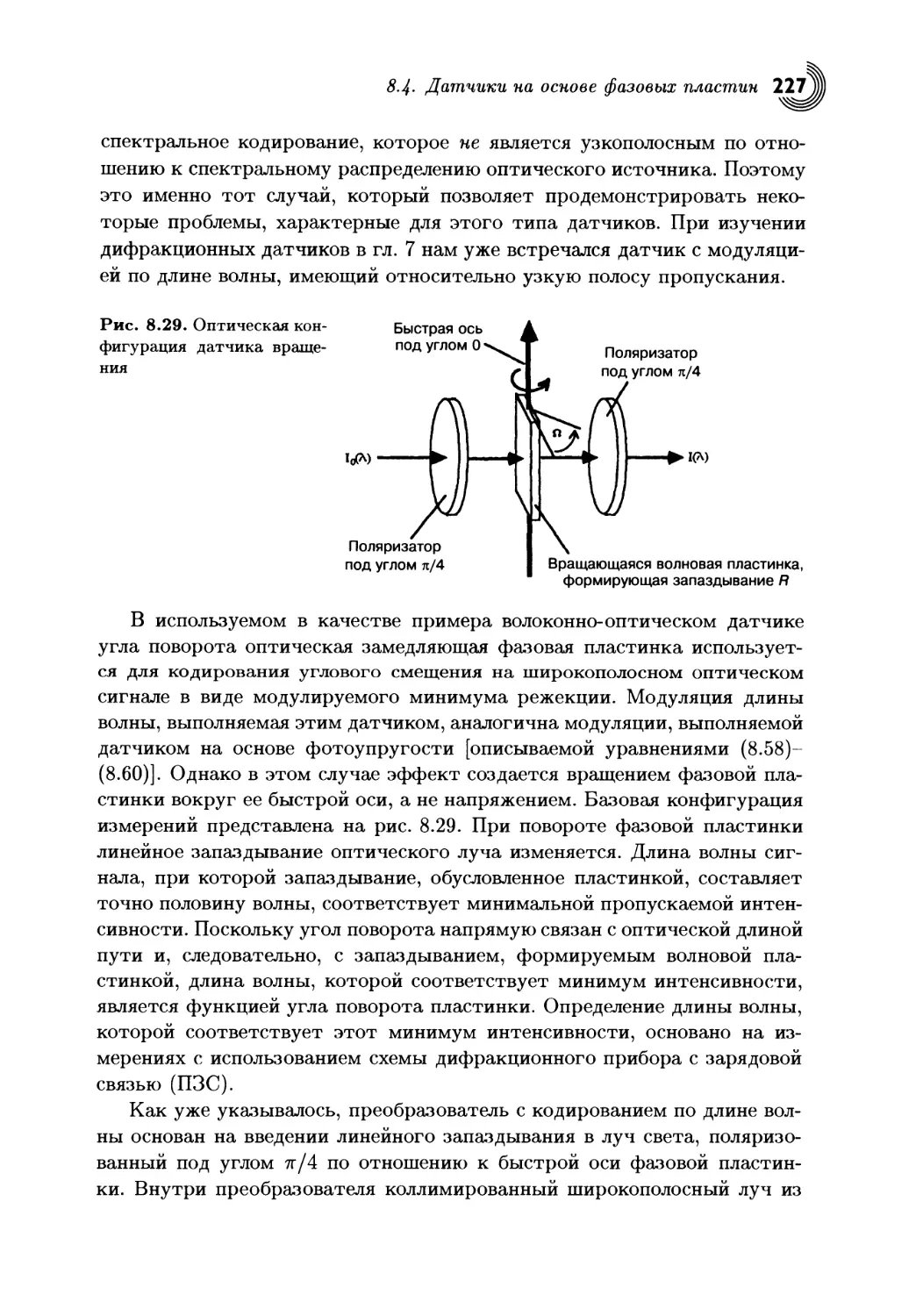
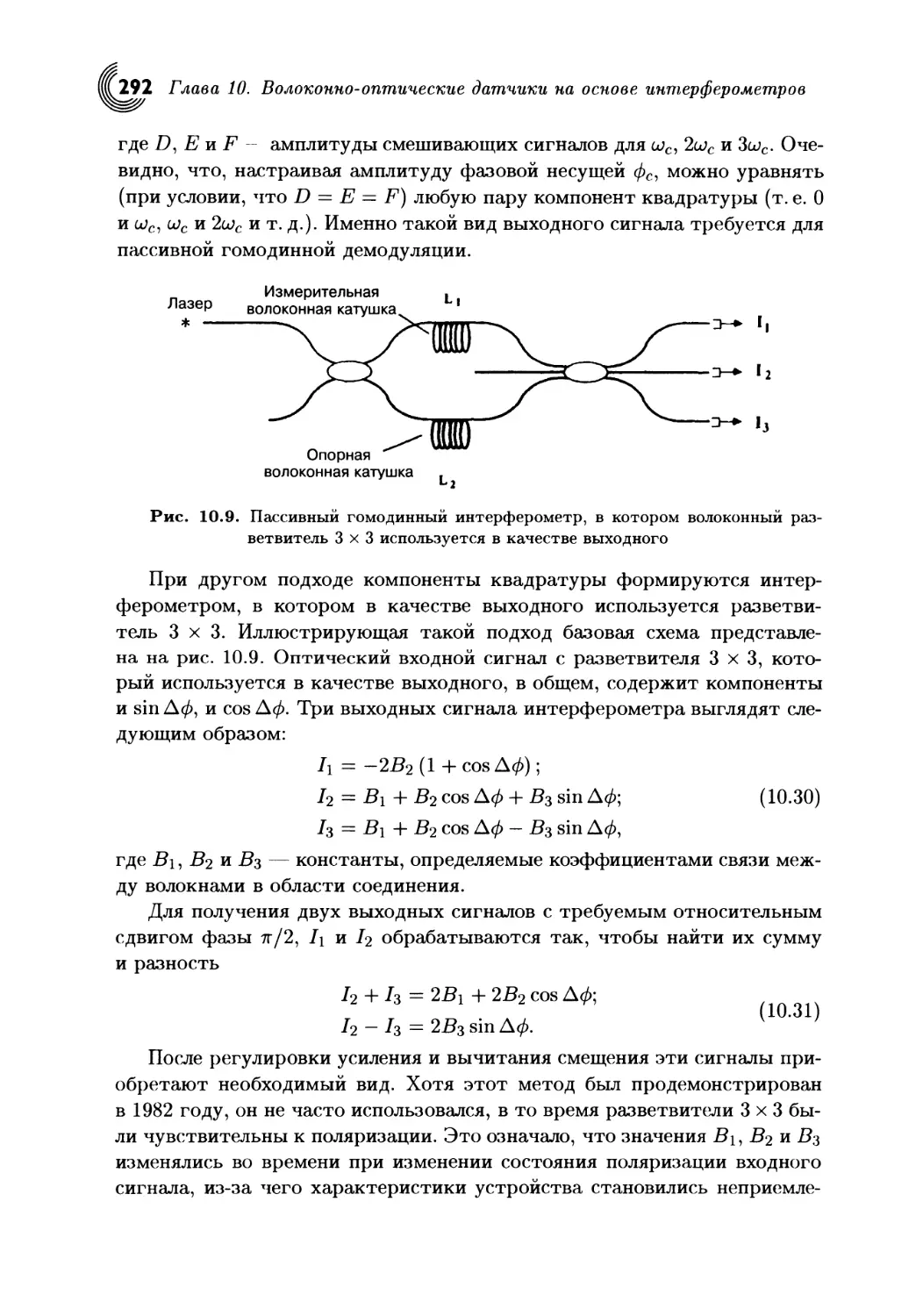
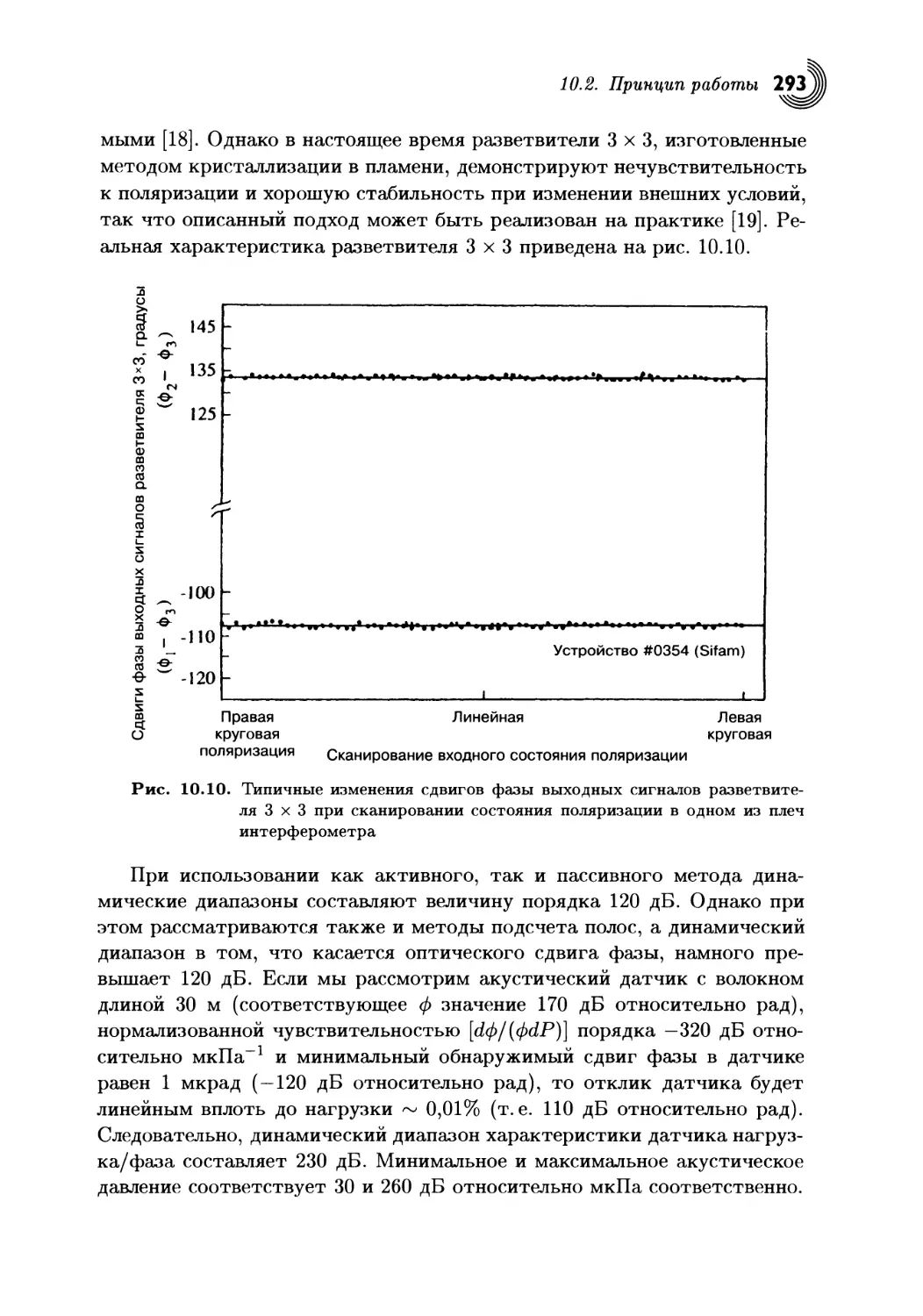
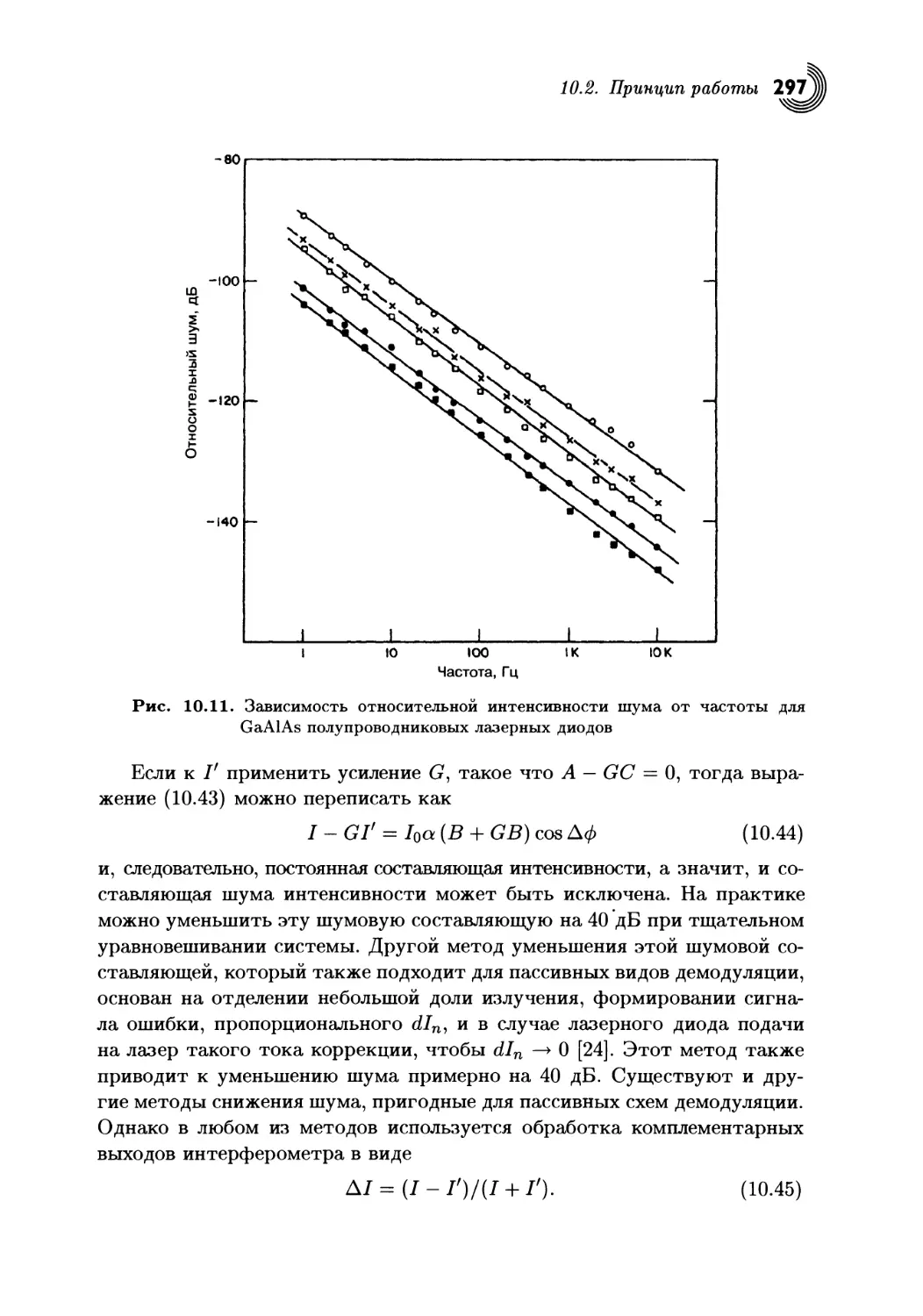
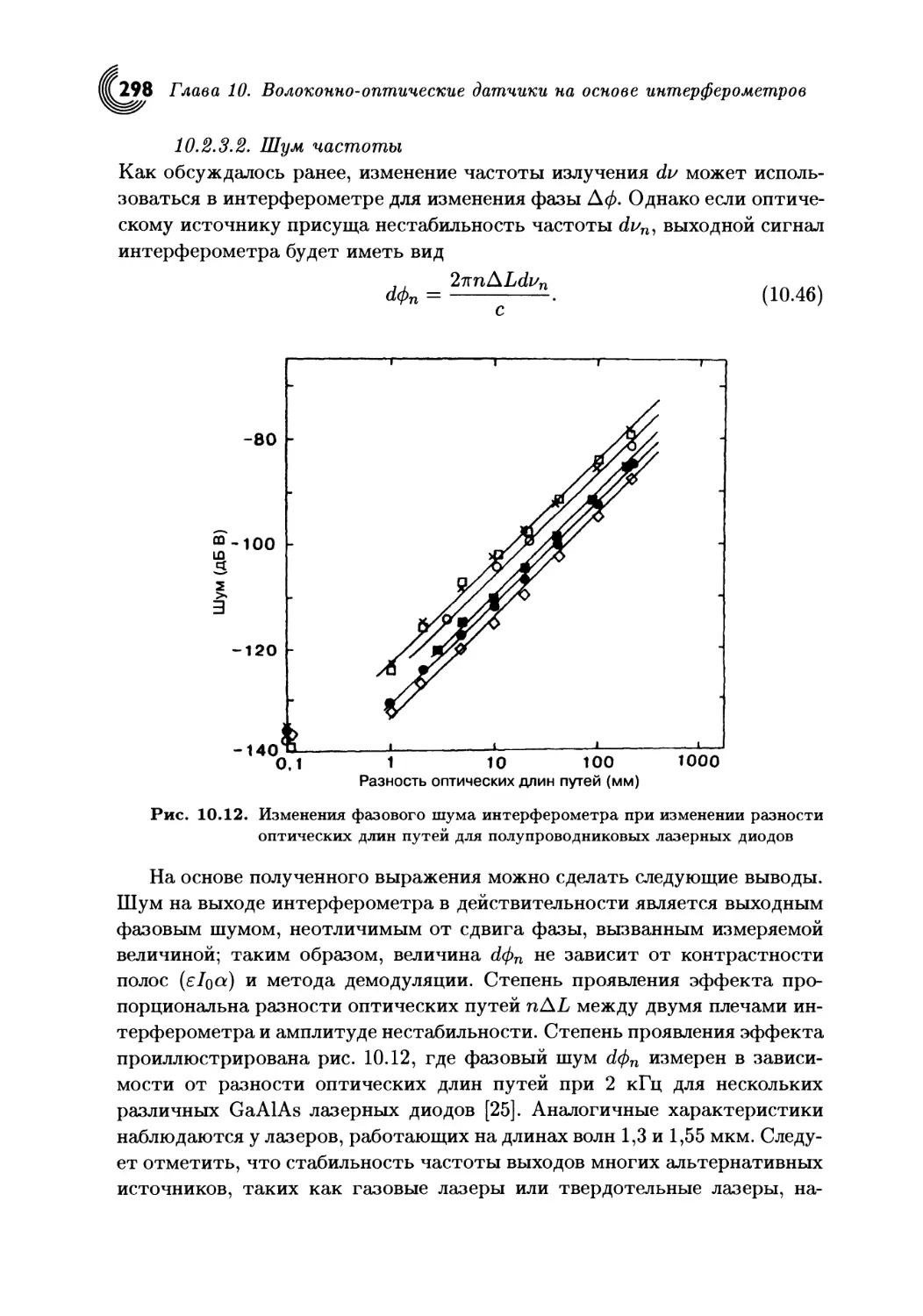
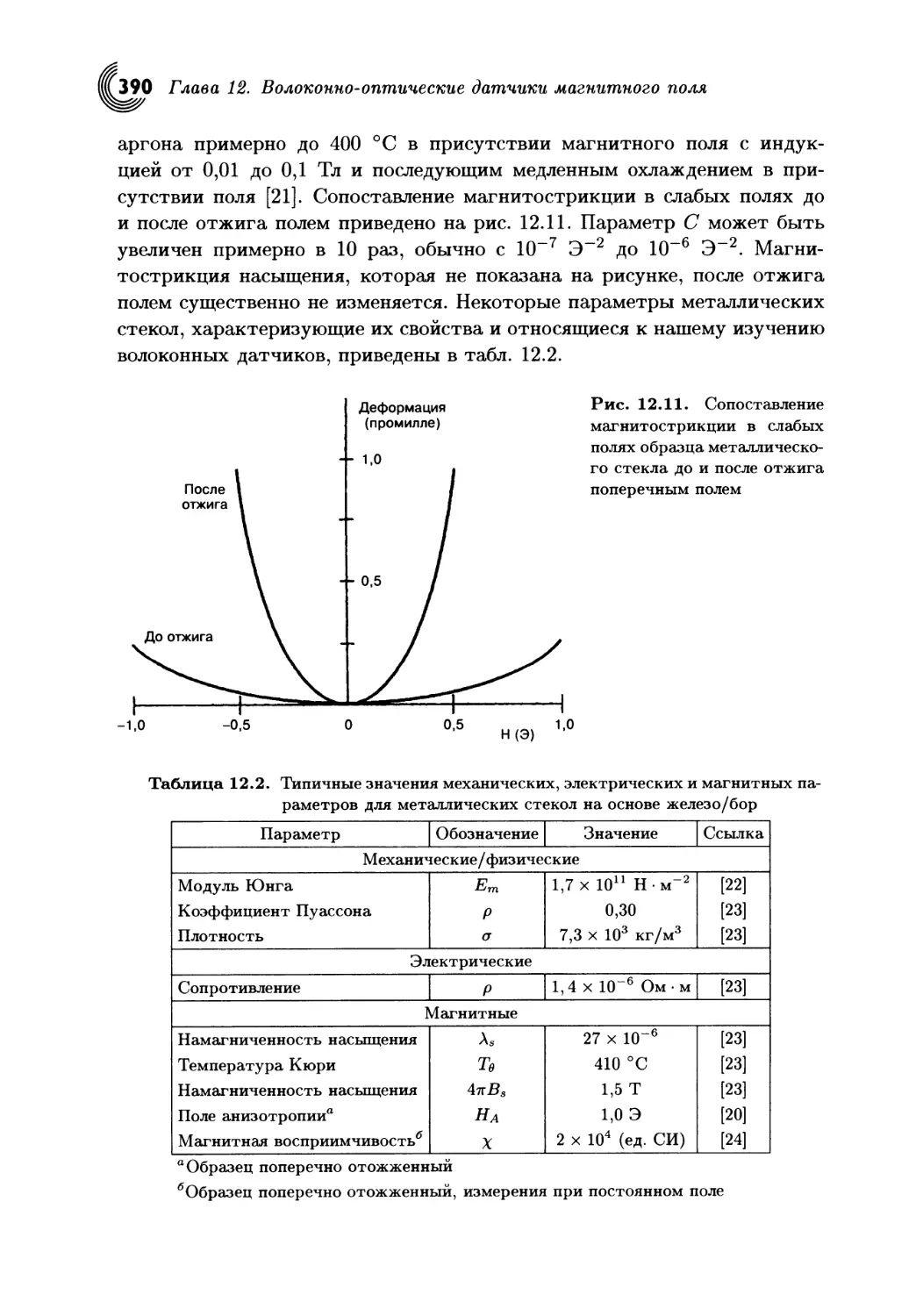
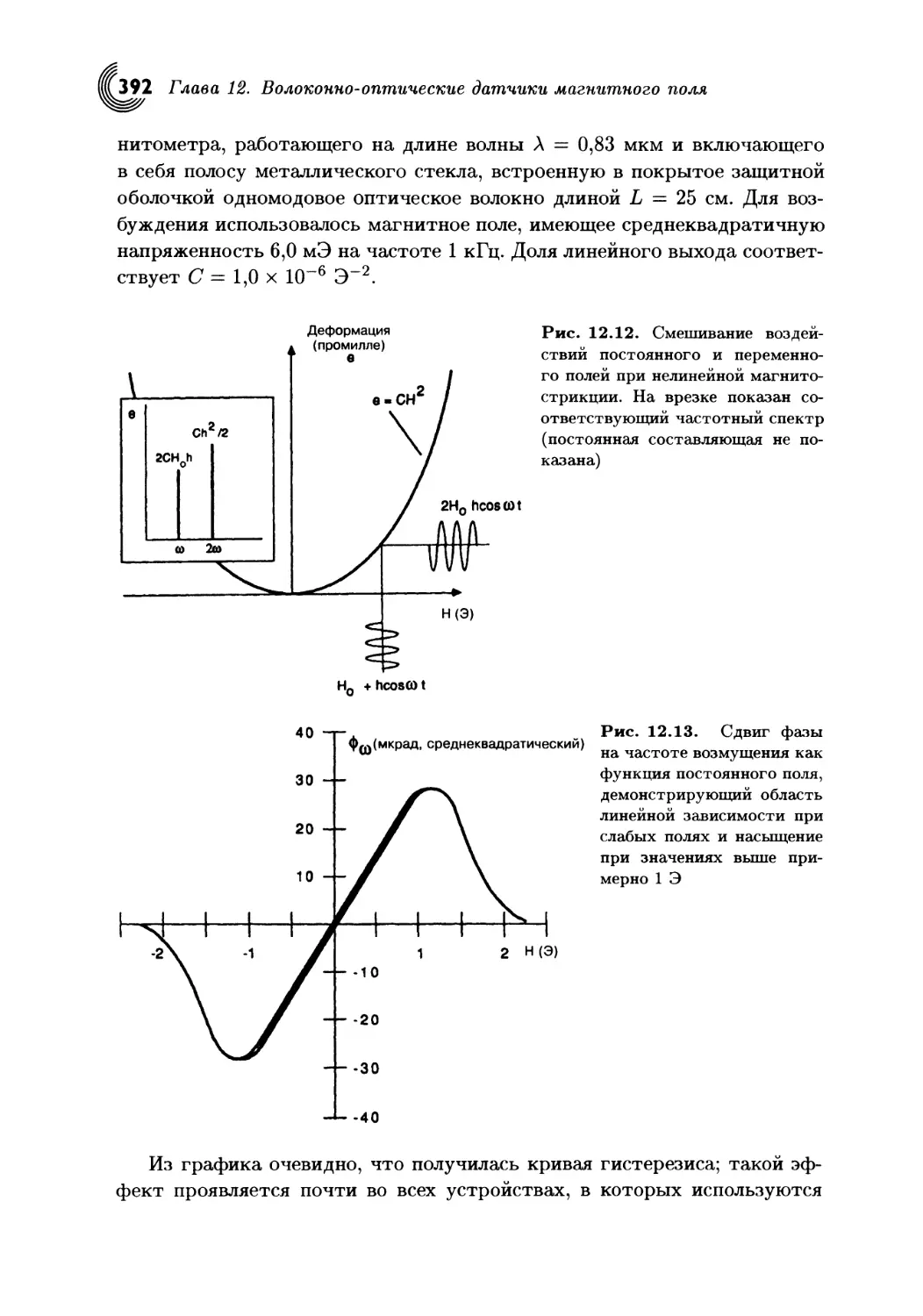
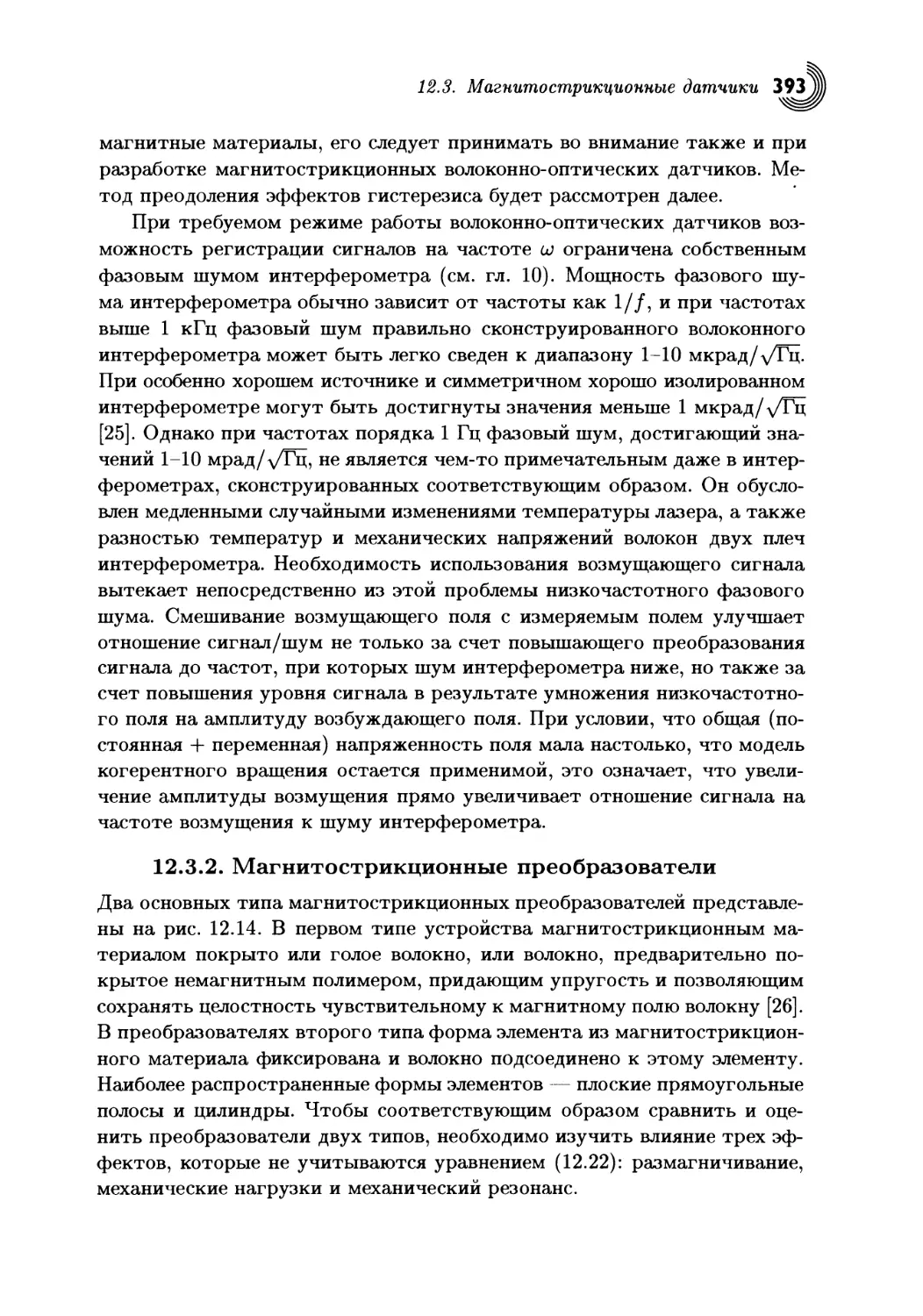
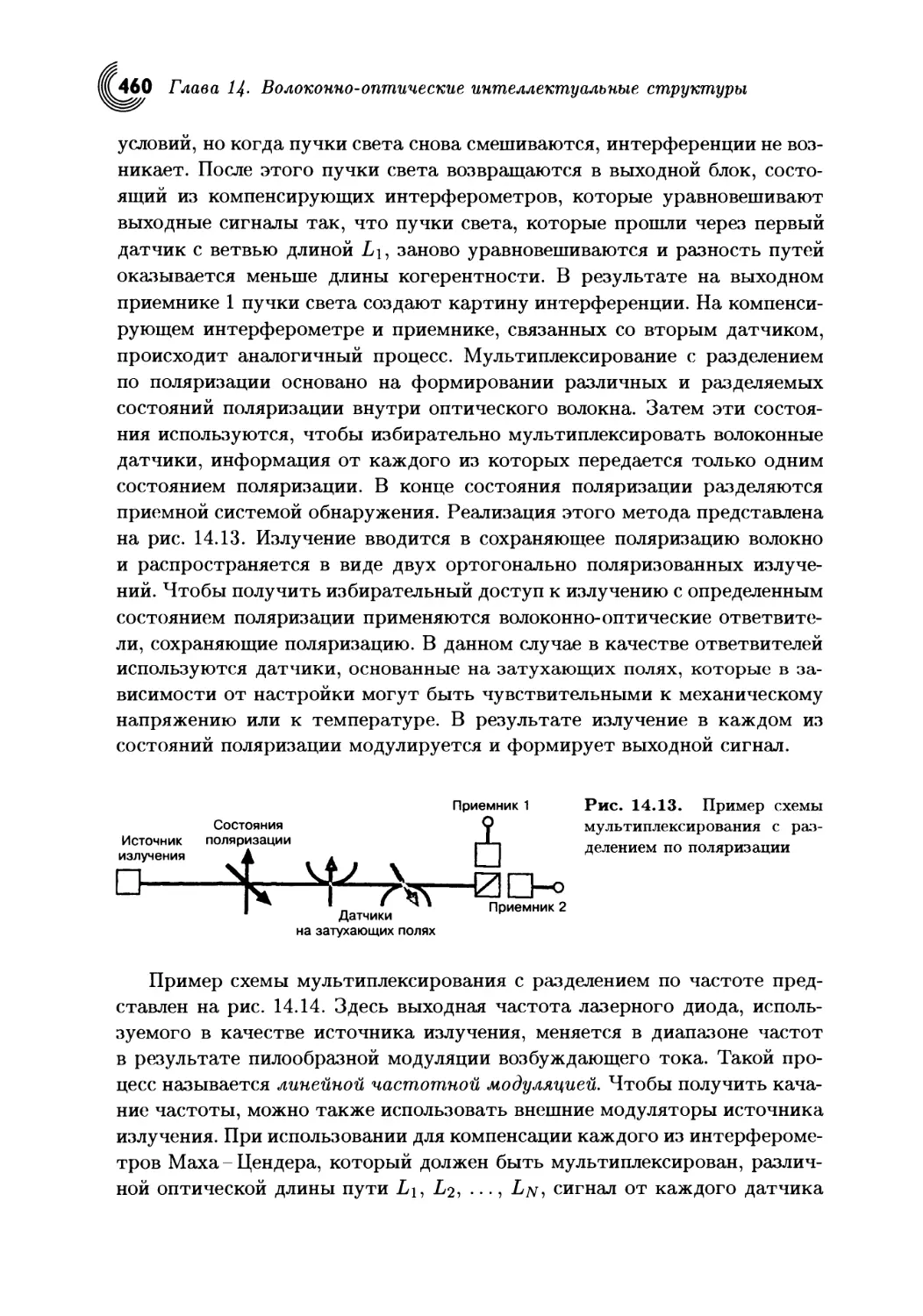
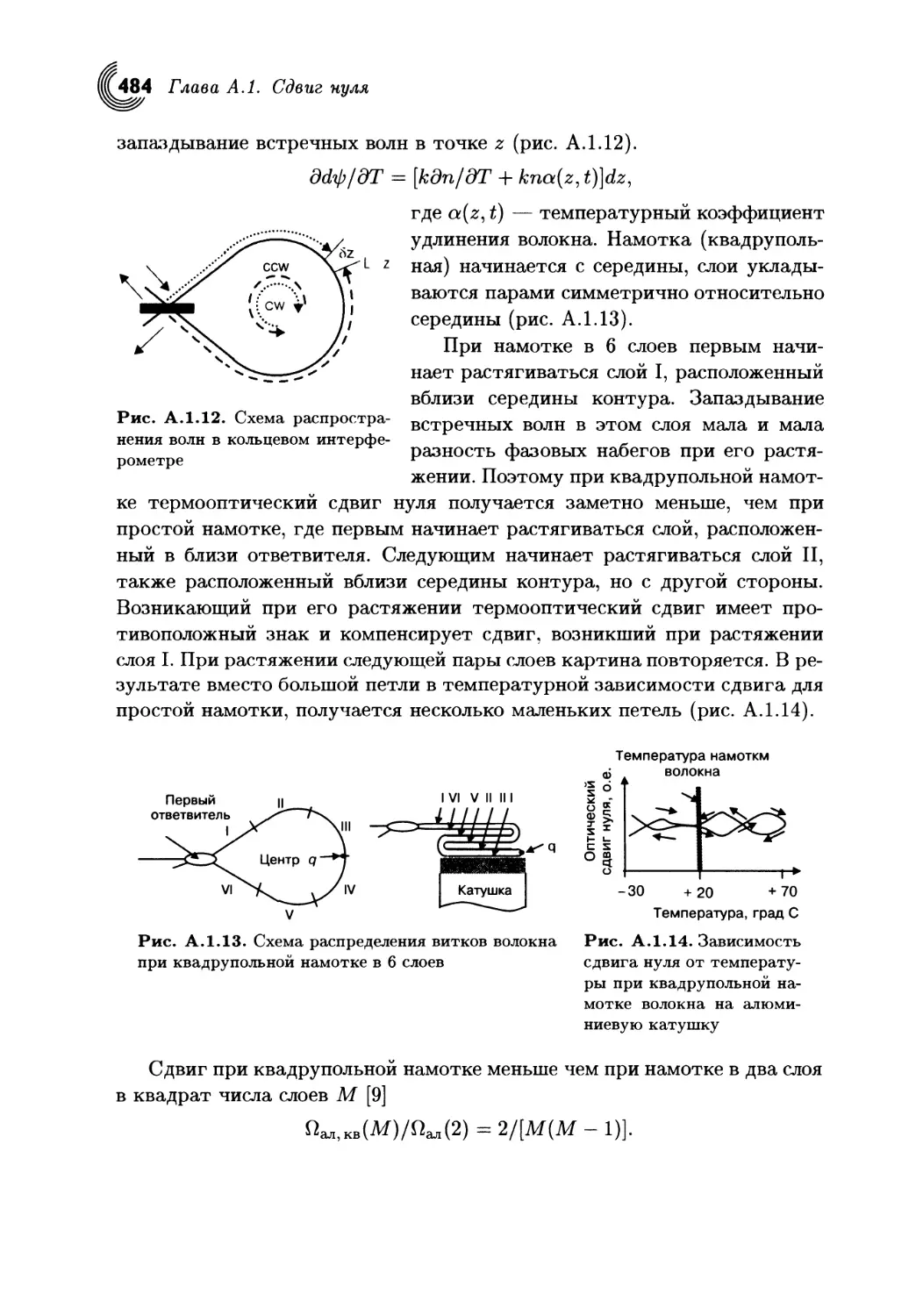
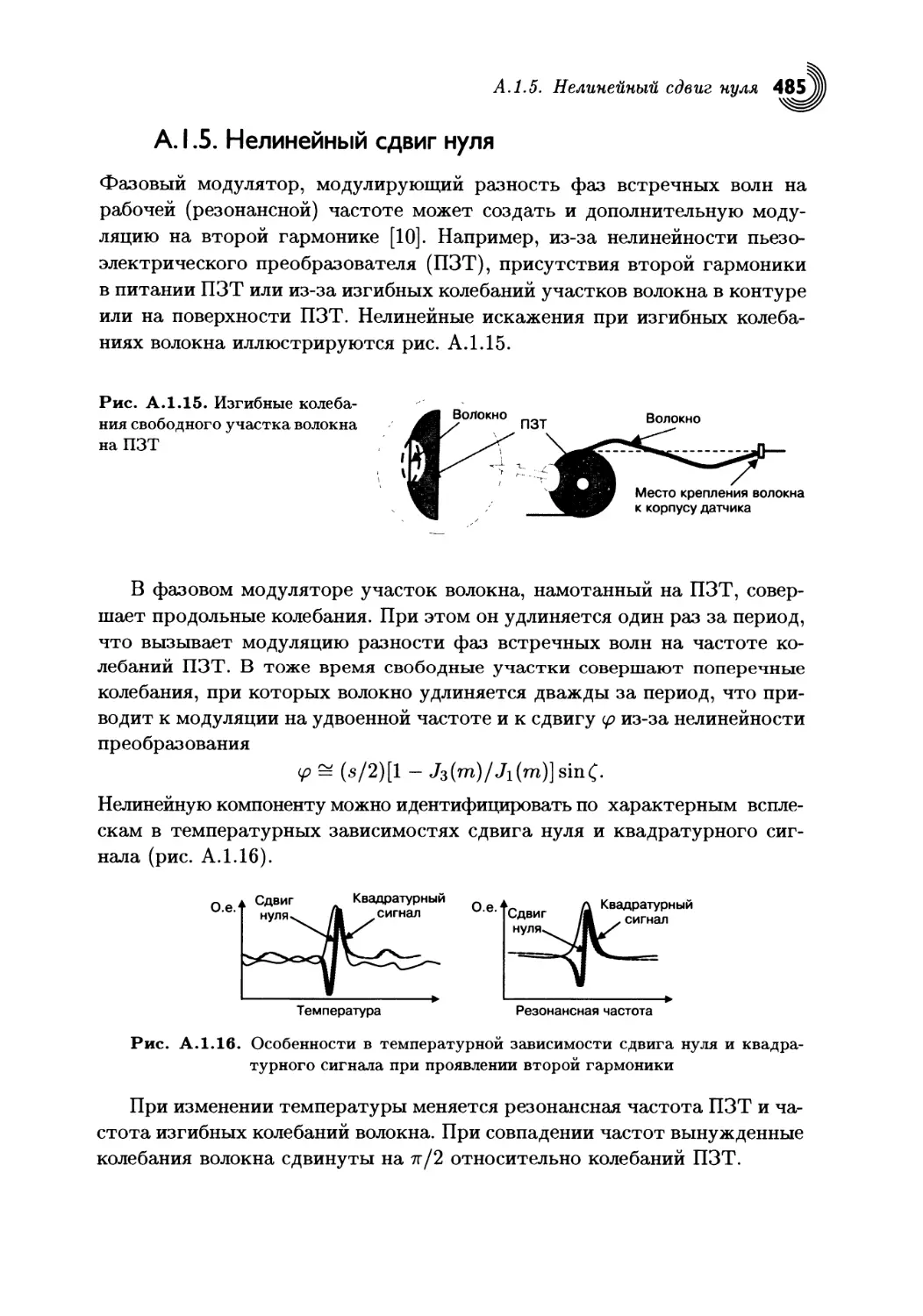
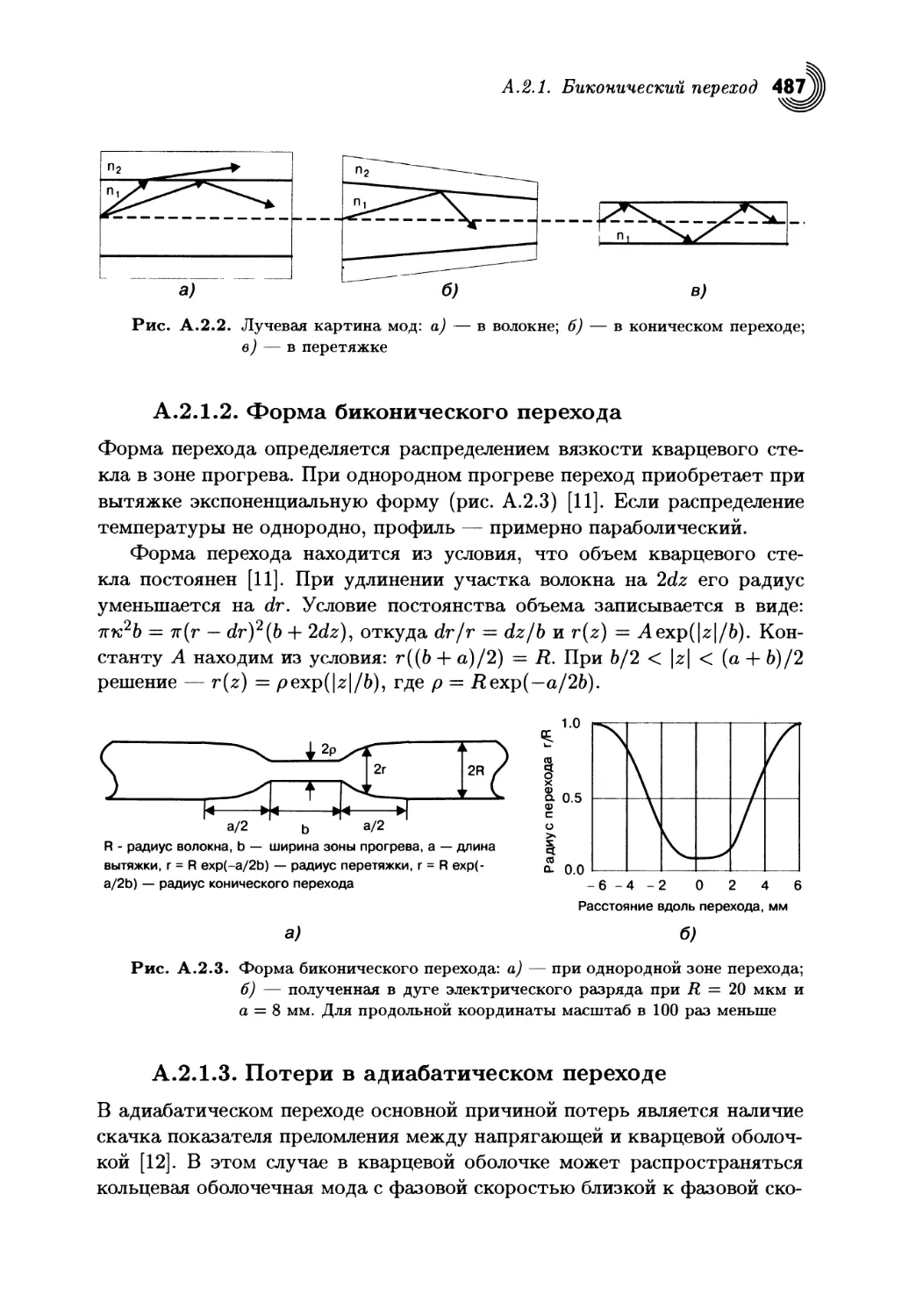
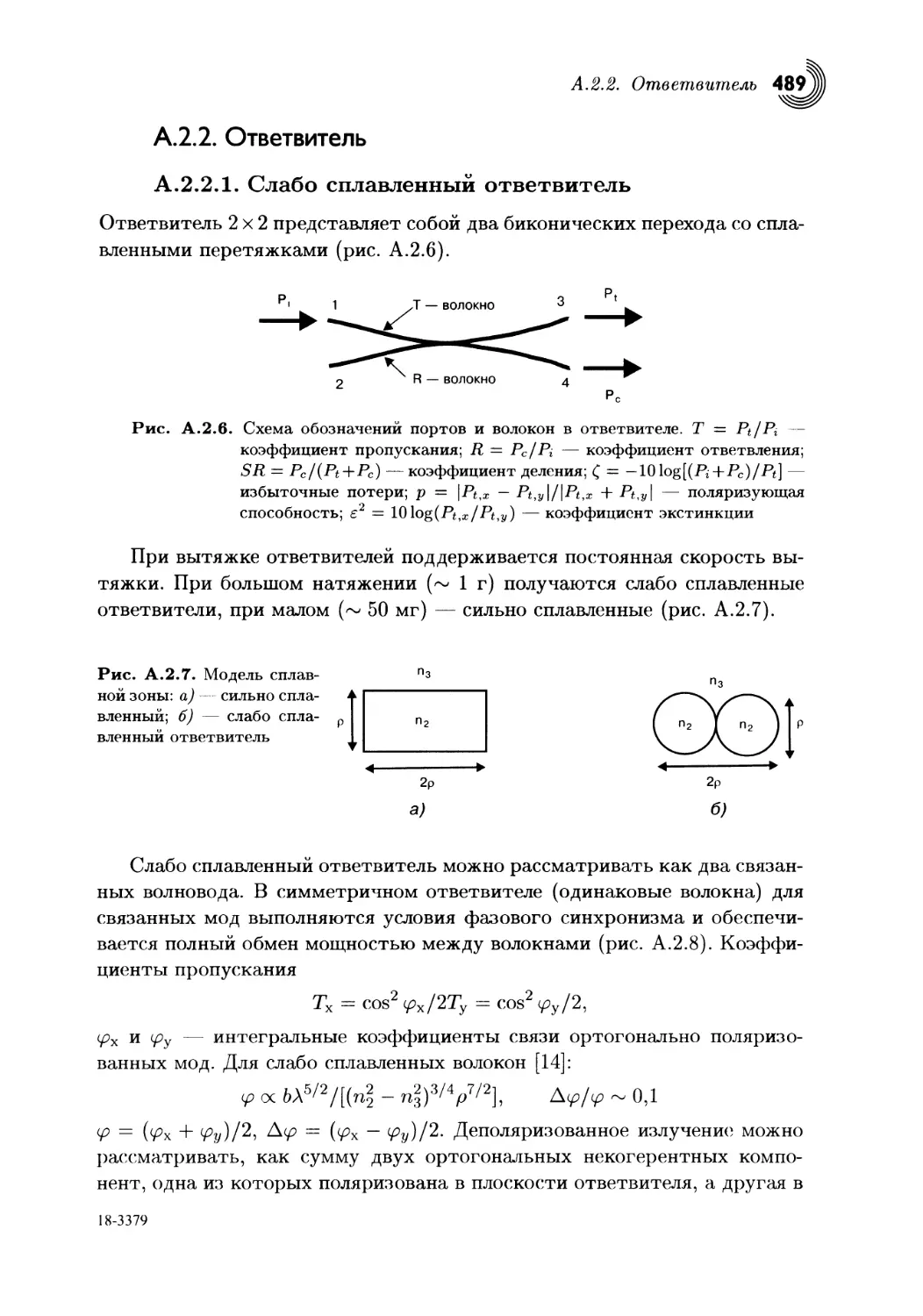
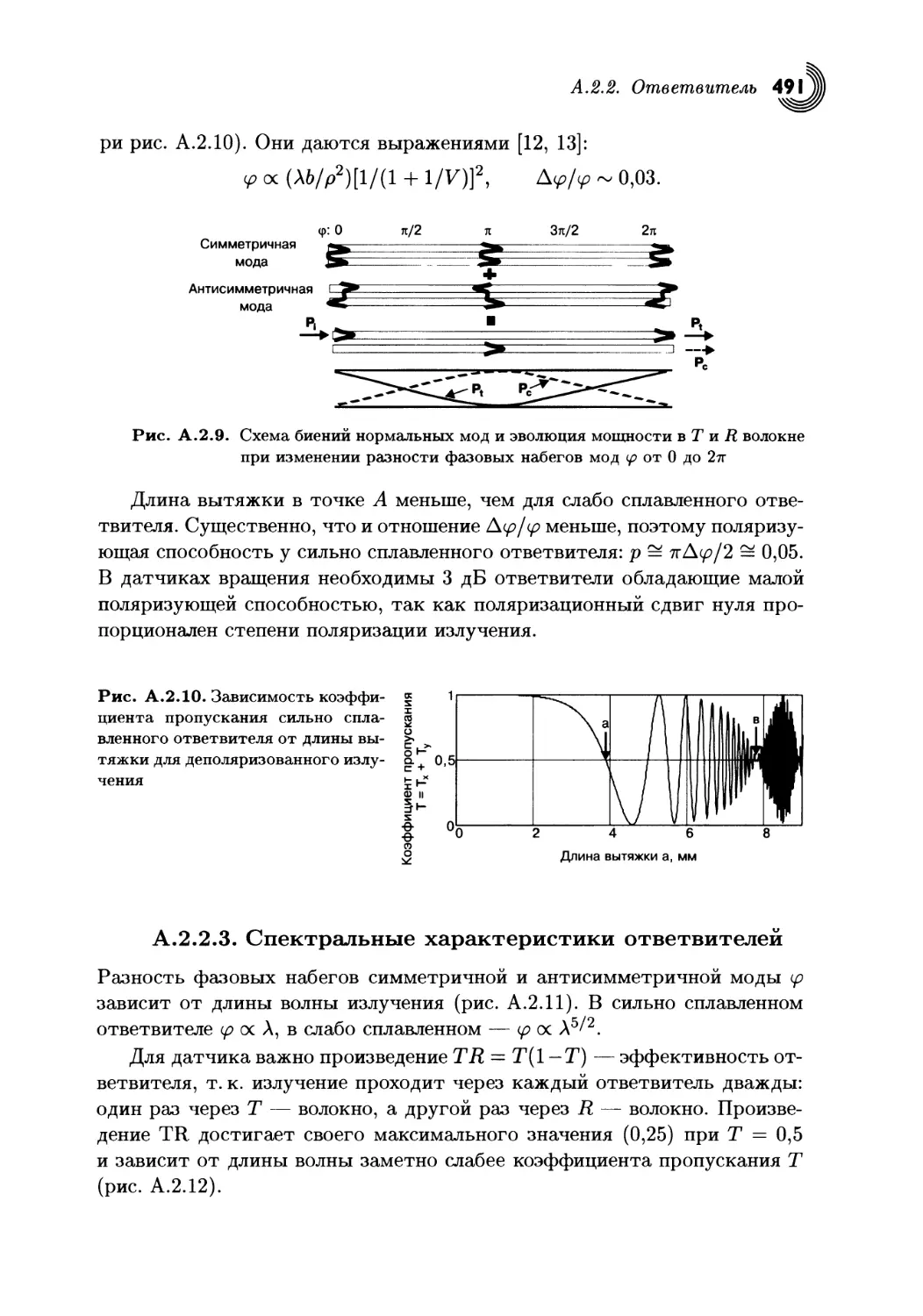
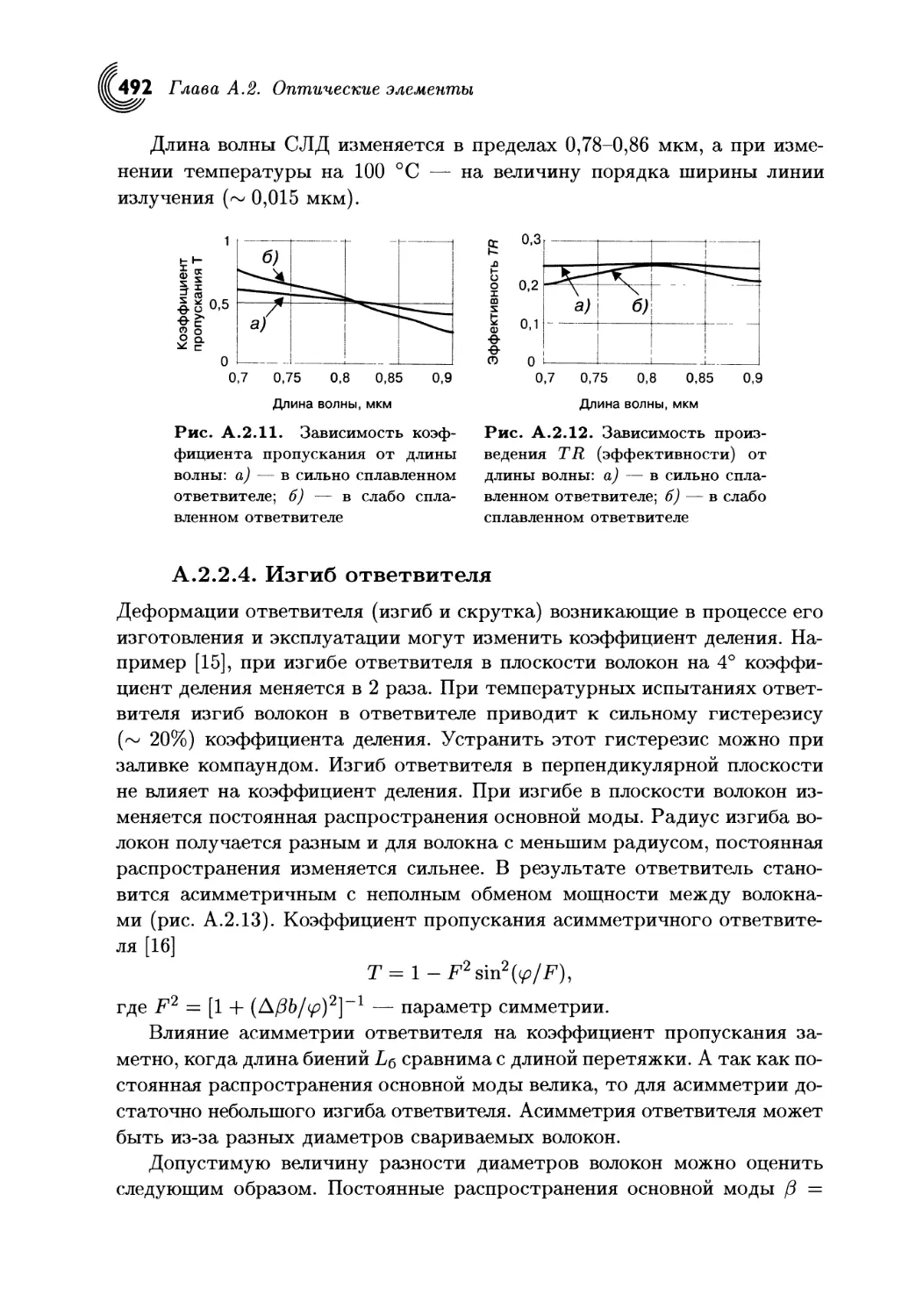
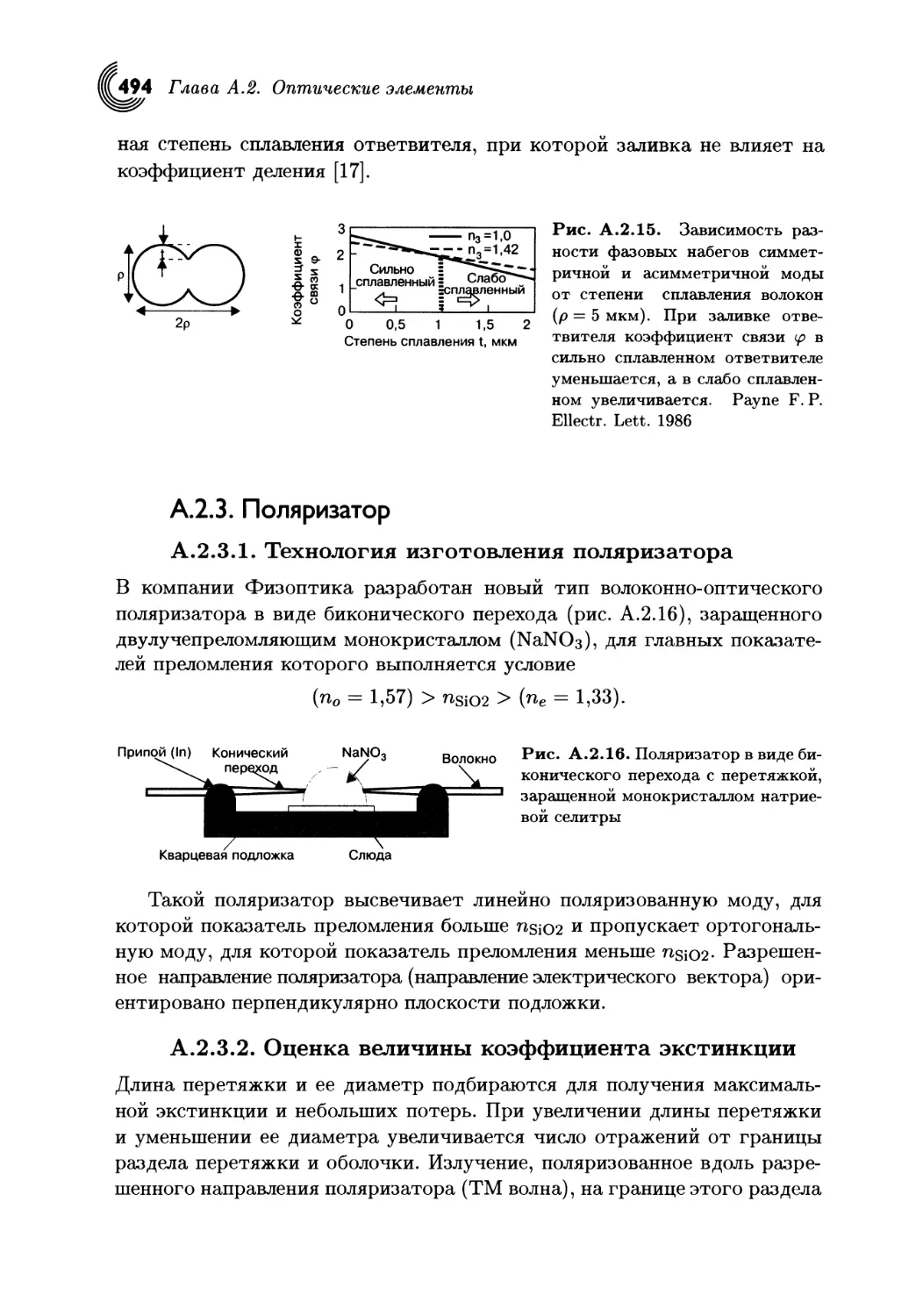
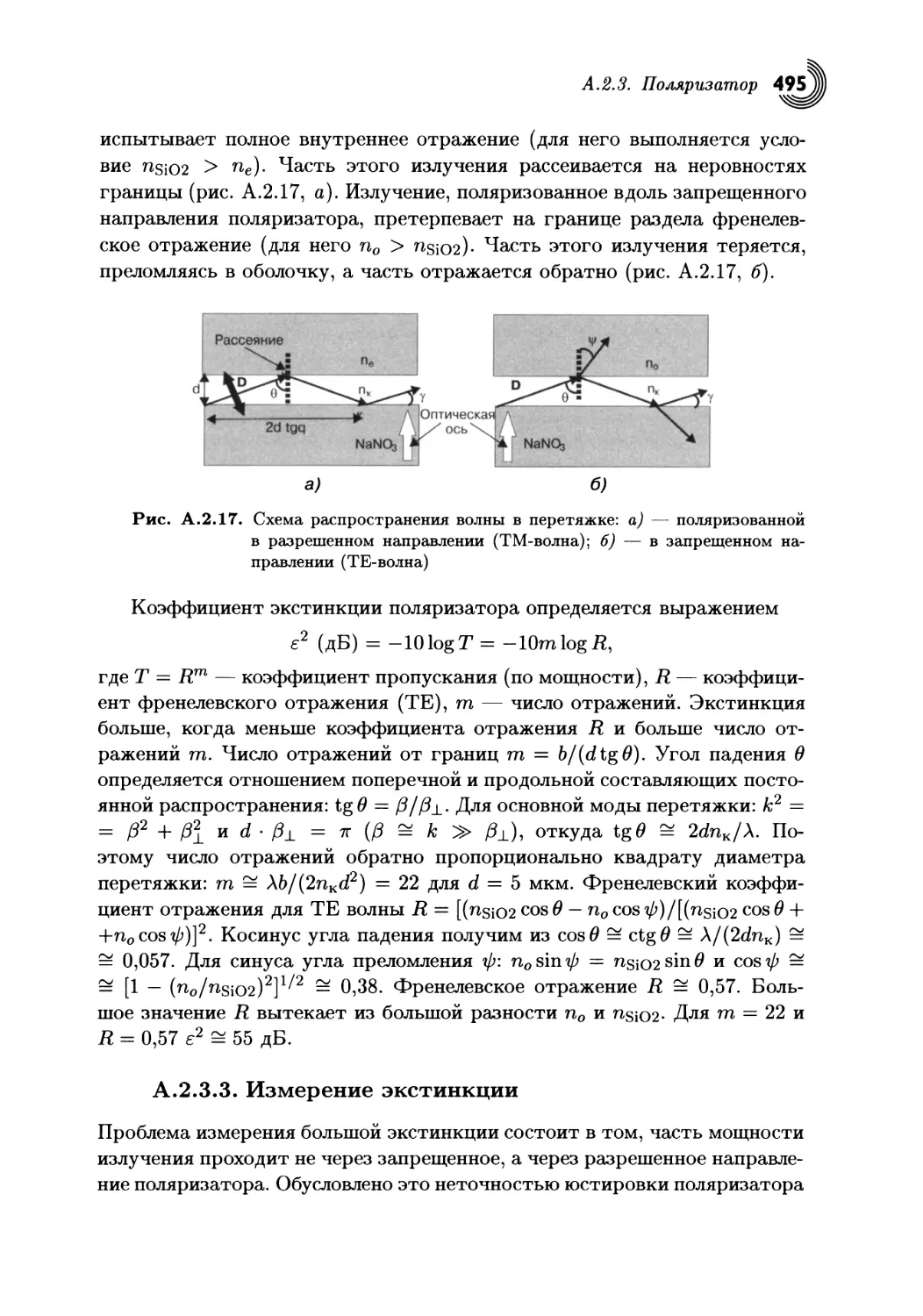
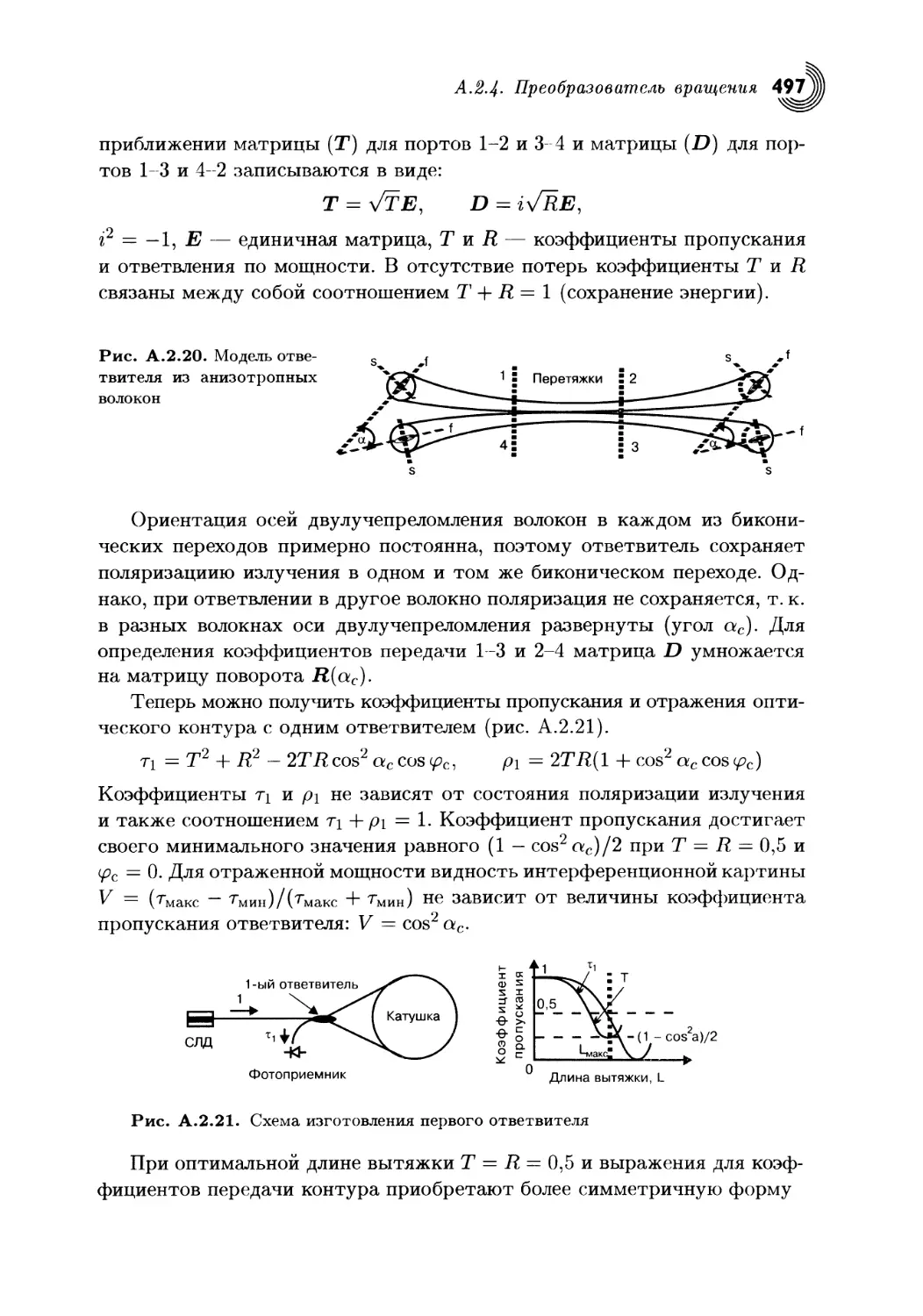
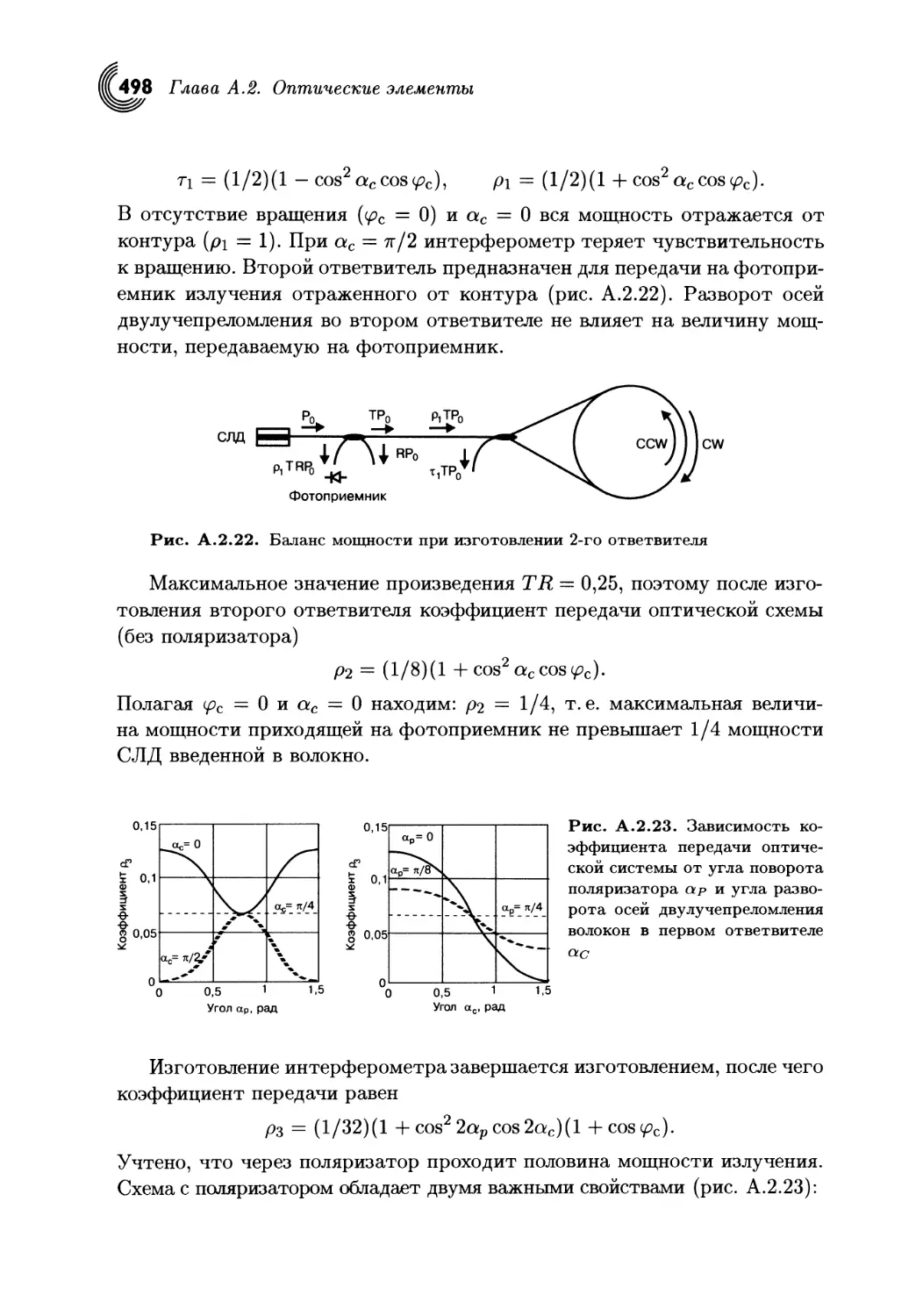
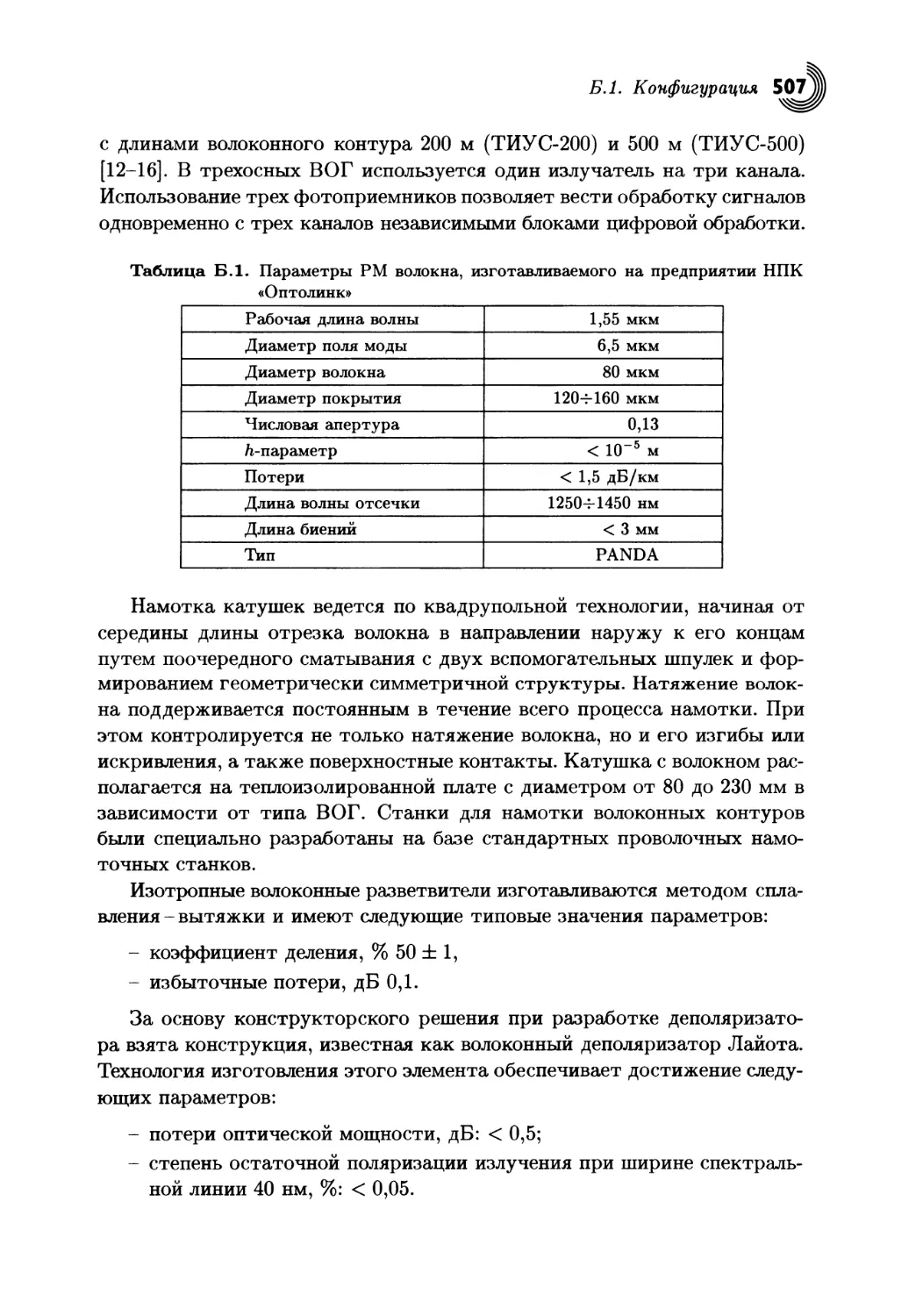
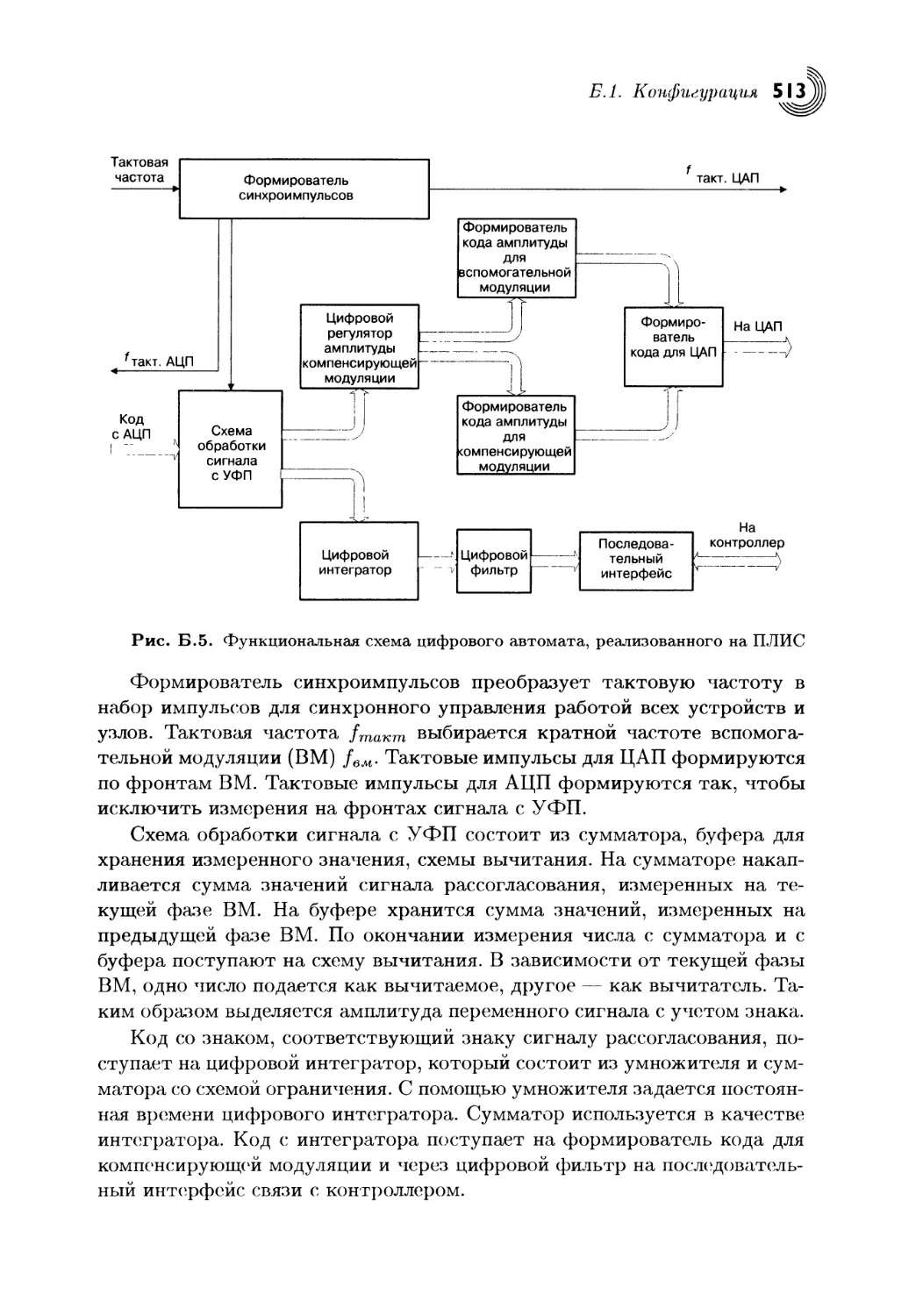
Текст
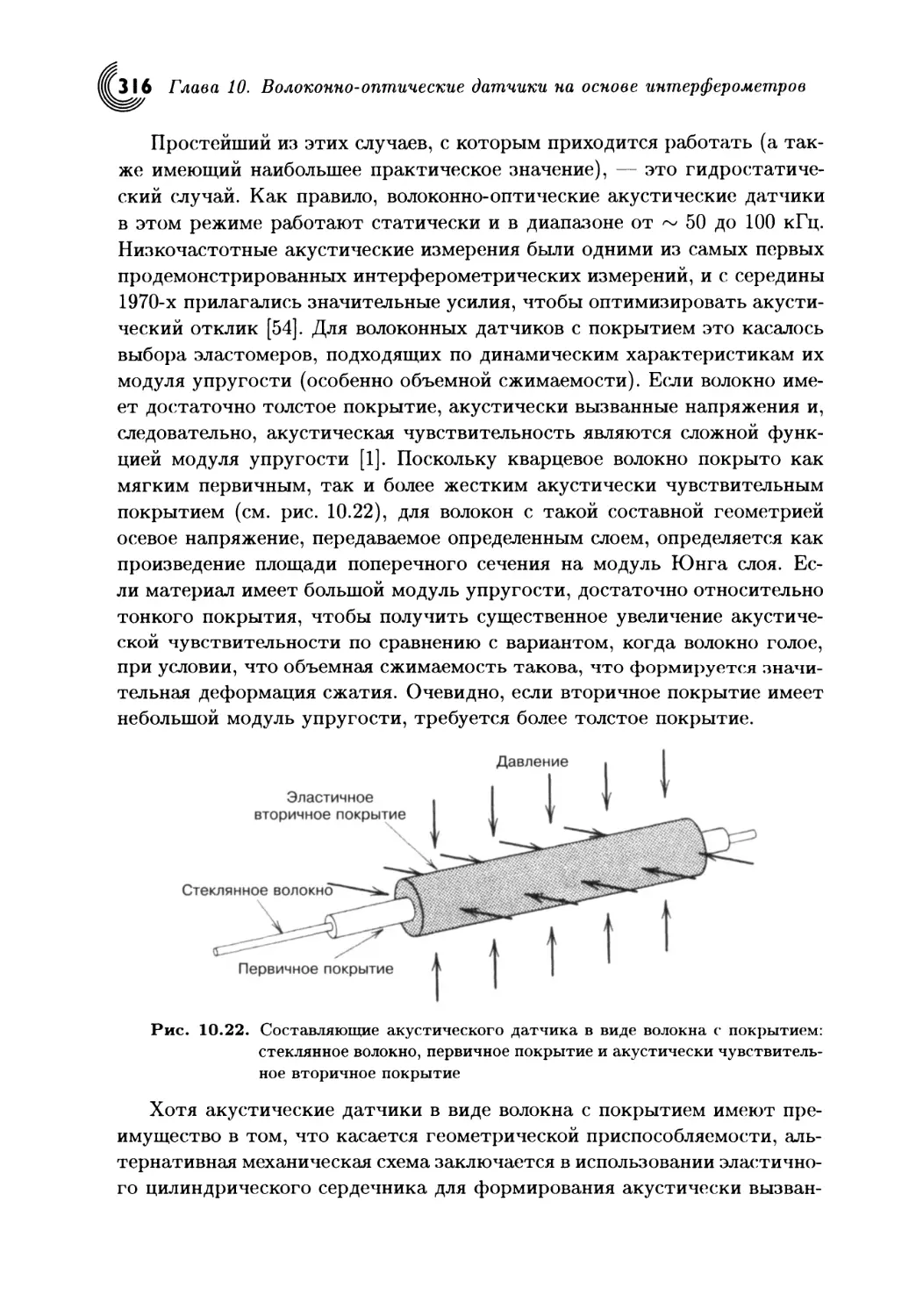
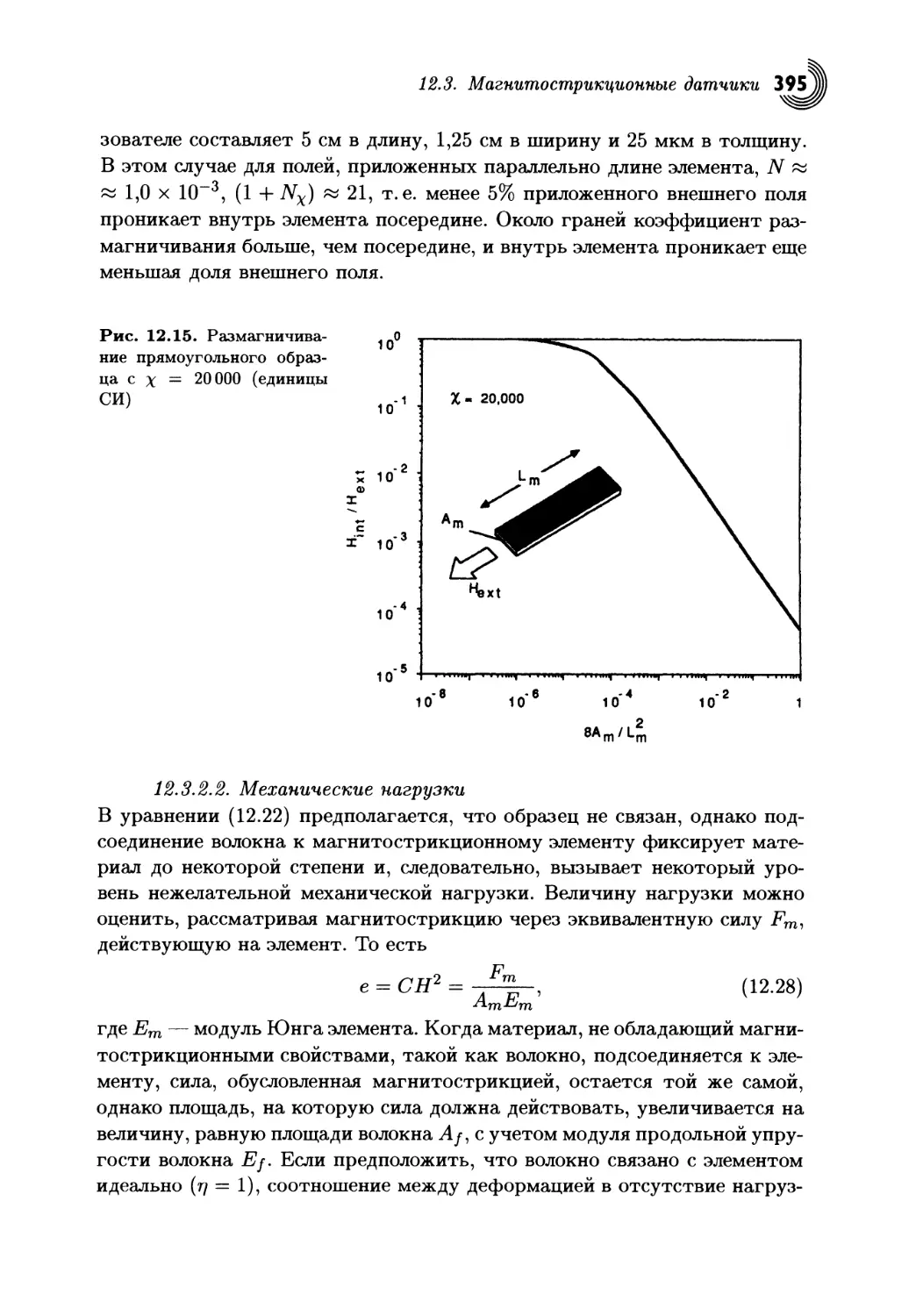
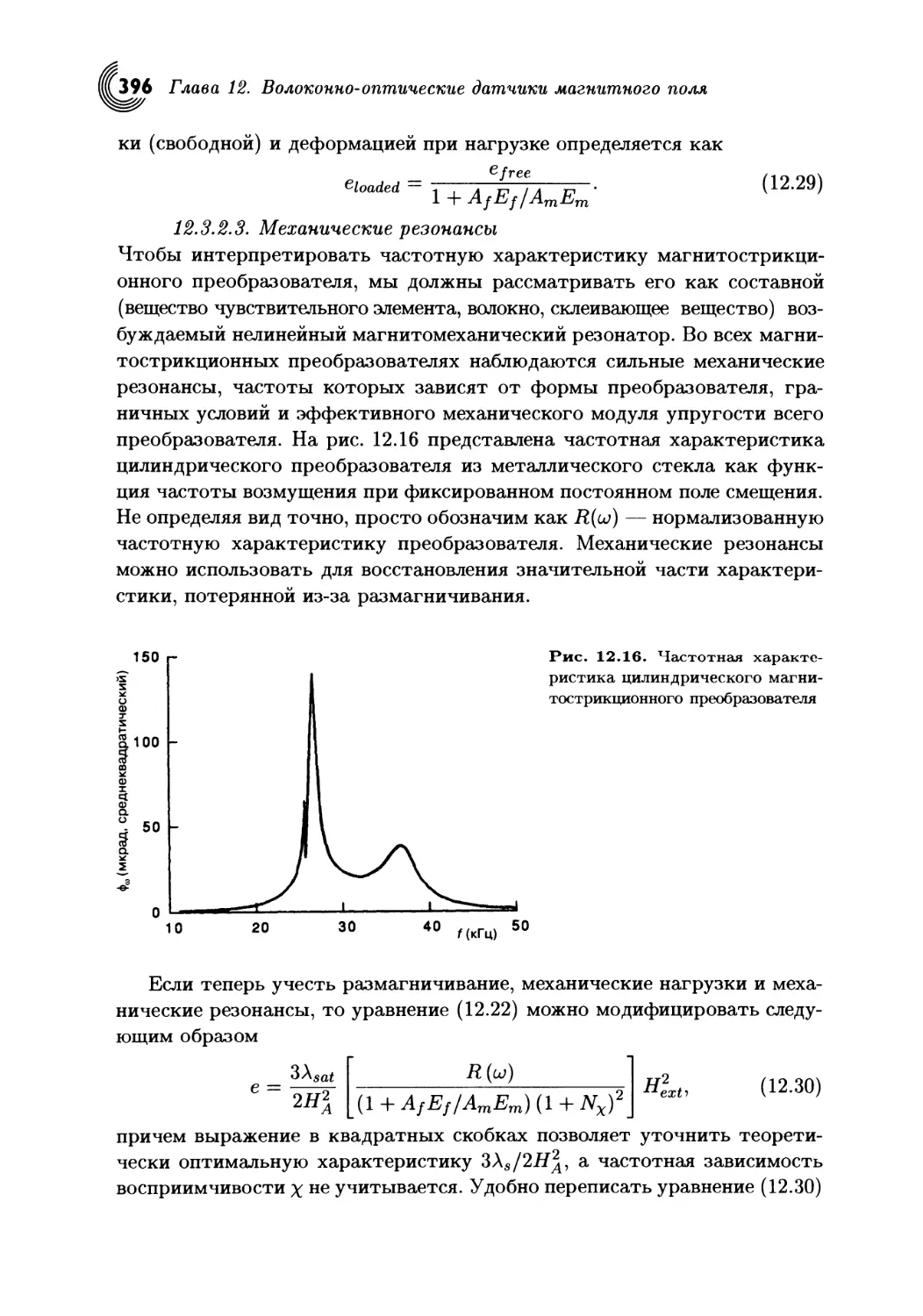
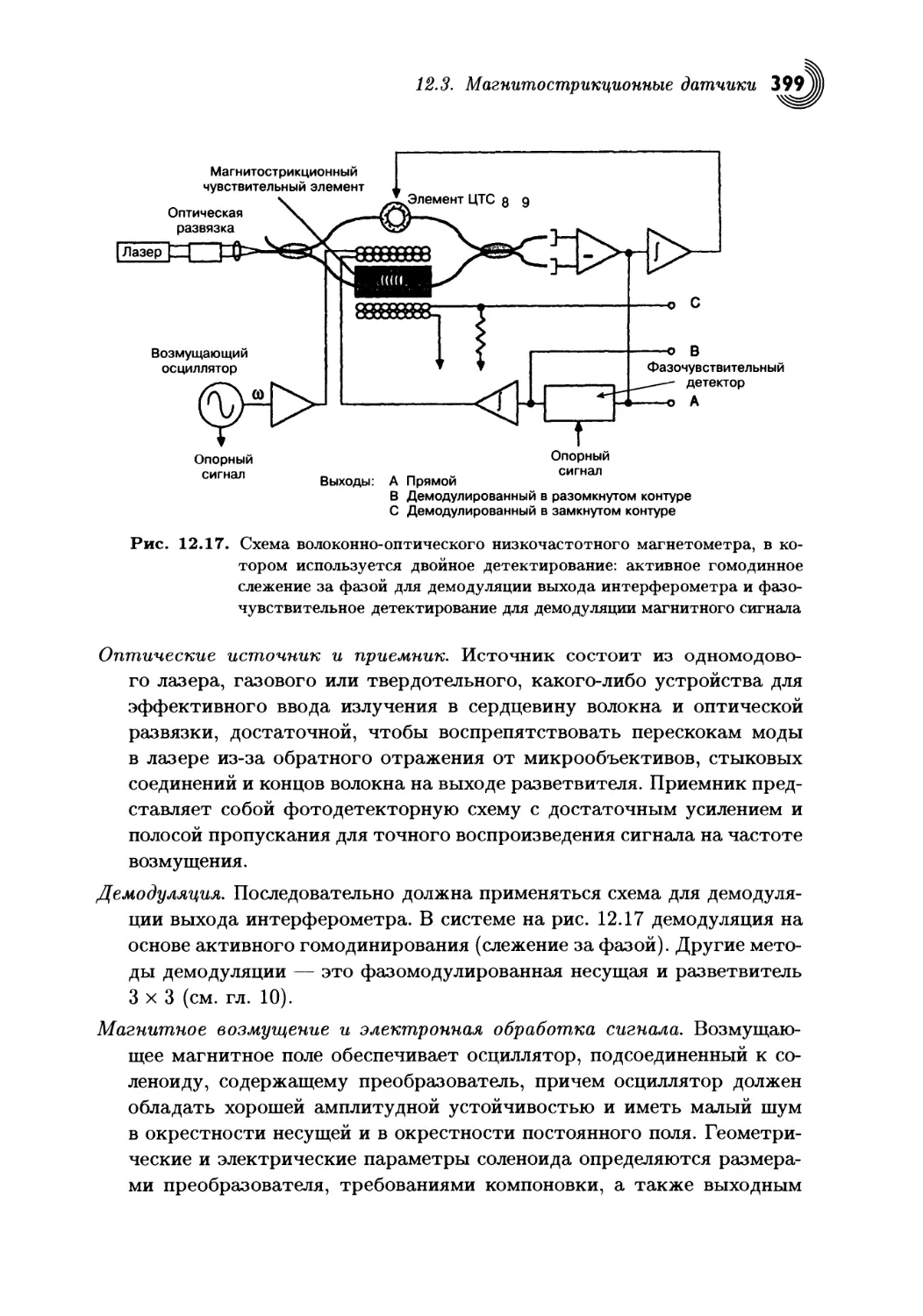
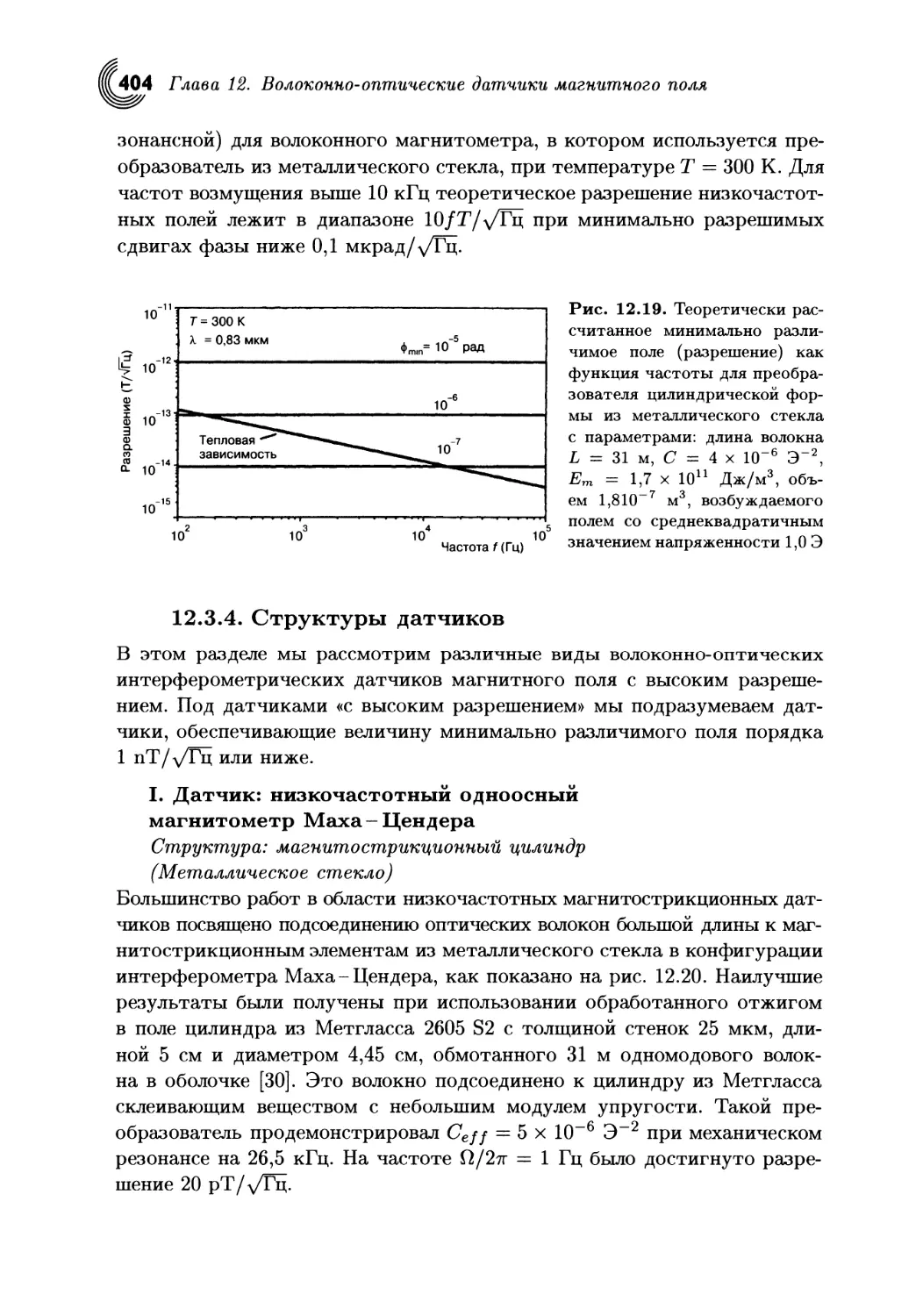
м
электр
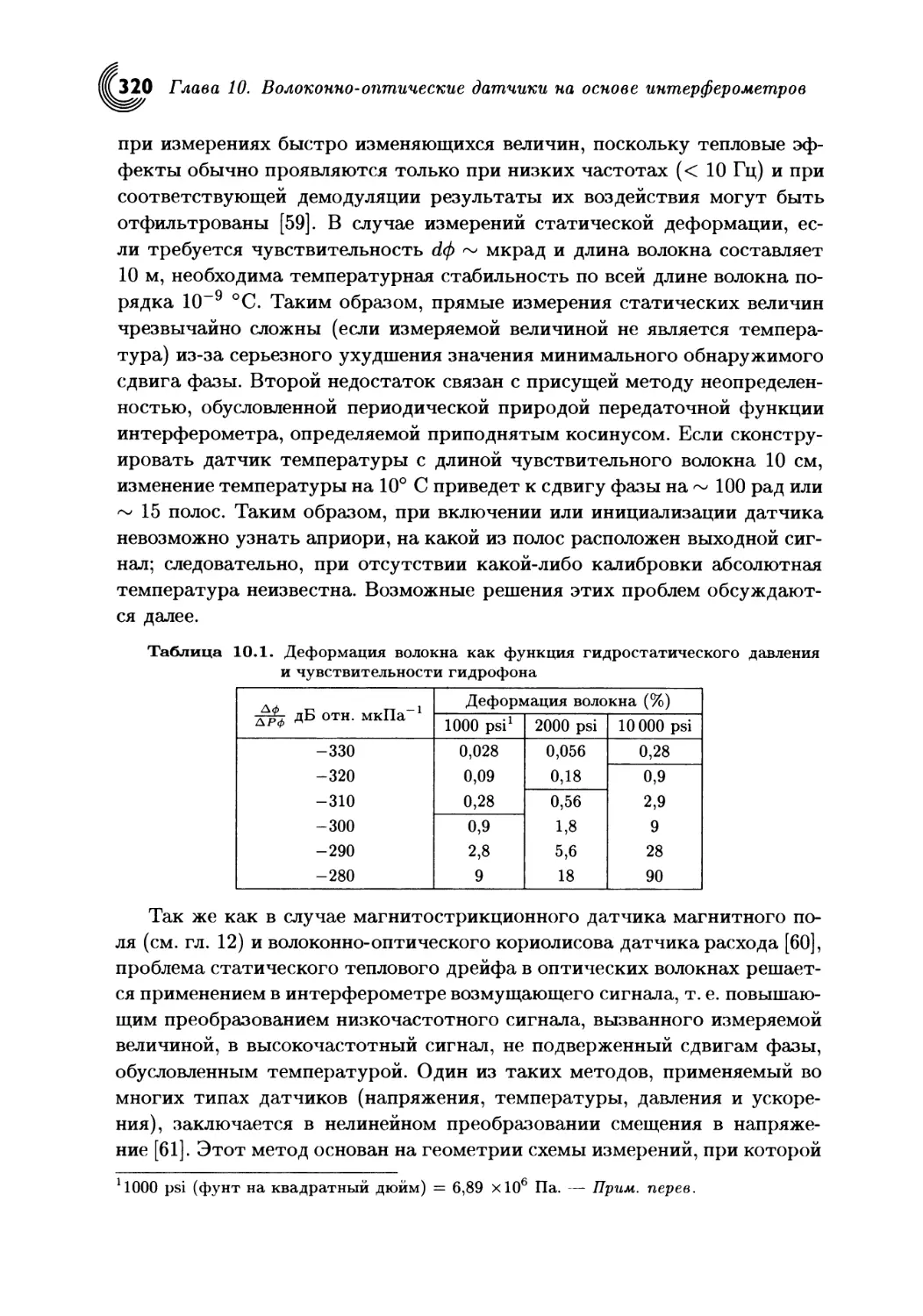
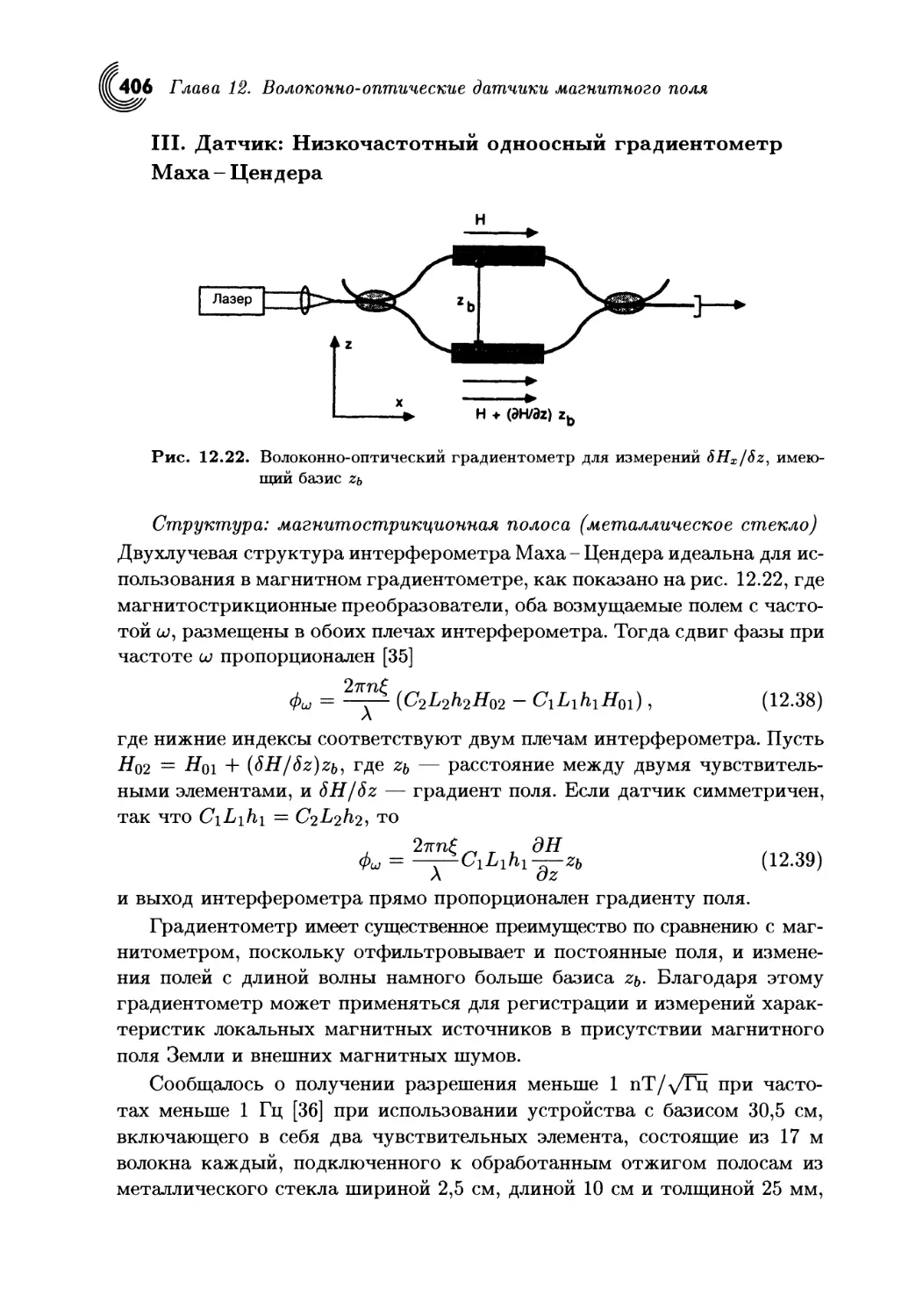
Волоконно-
оптические
датчики
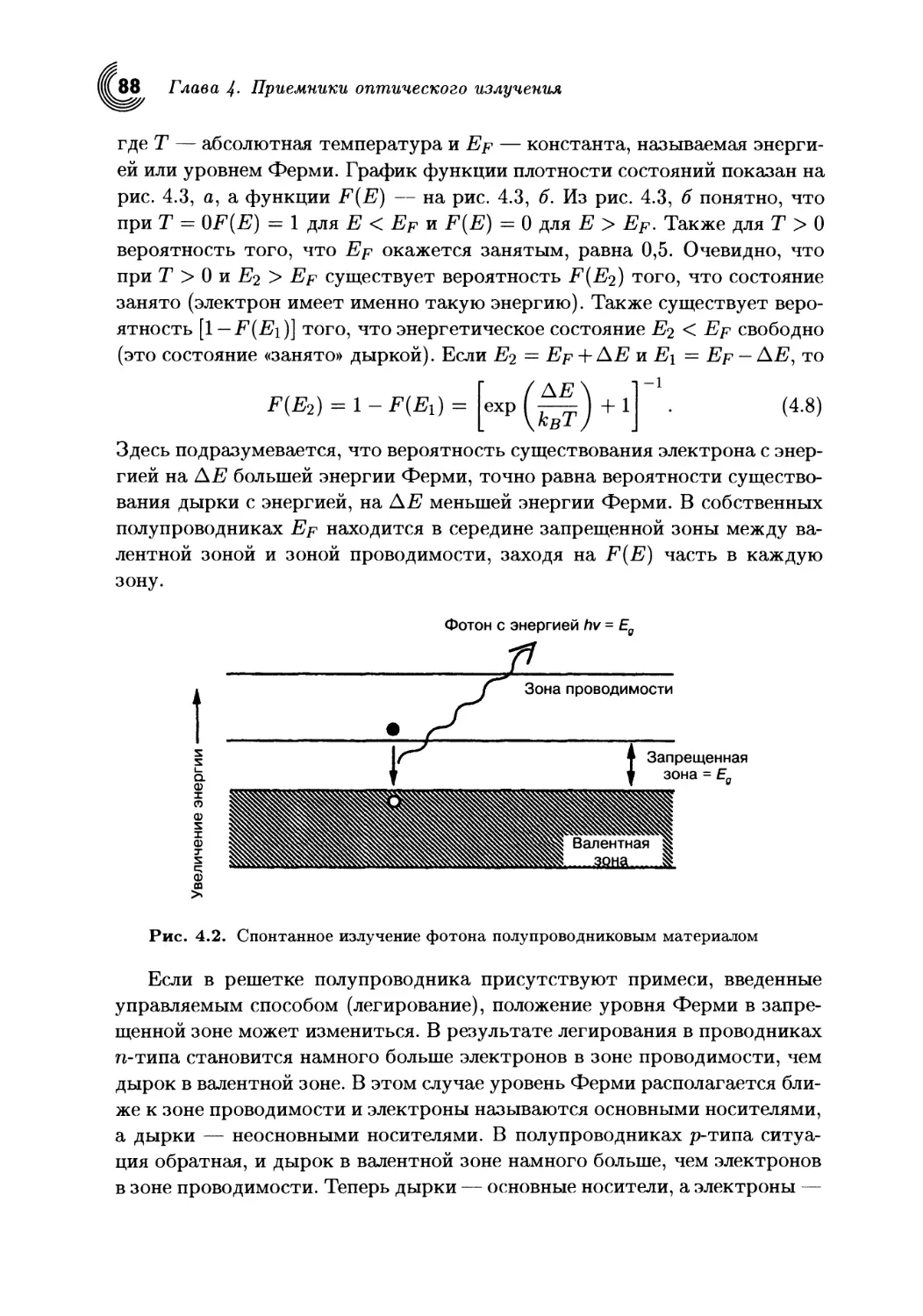
ПОД РЕД. Э. УДДА
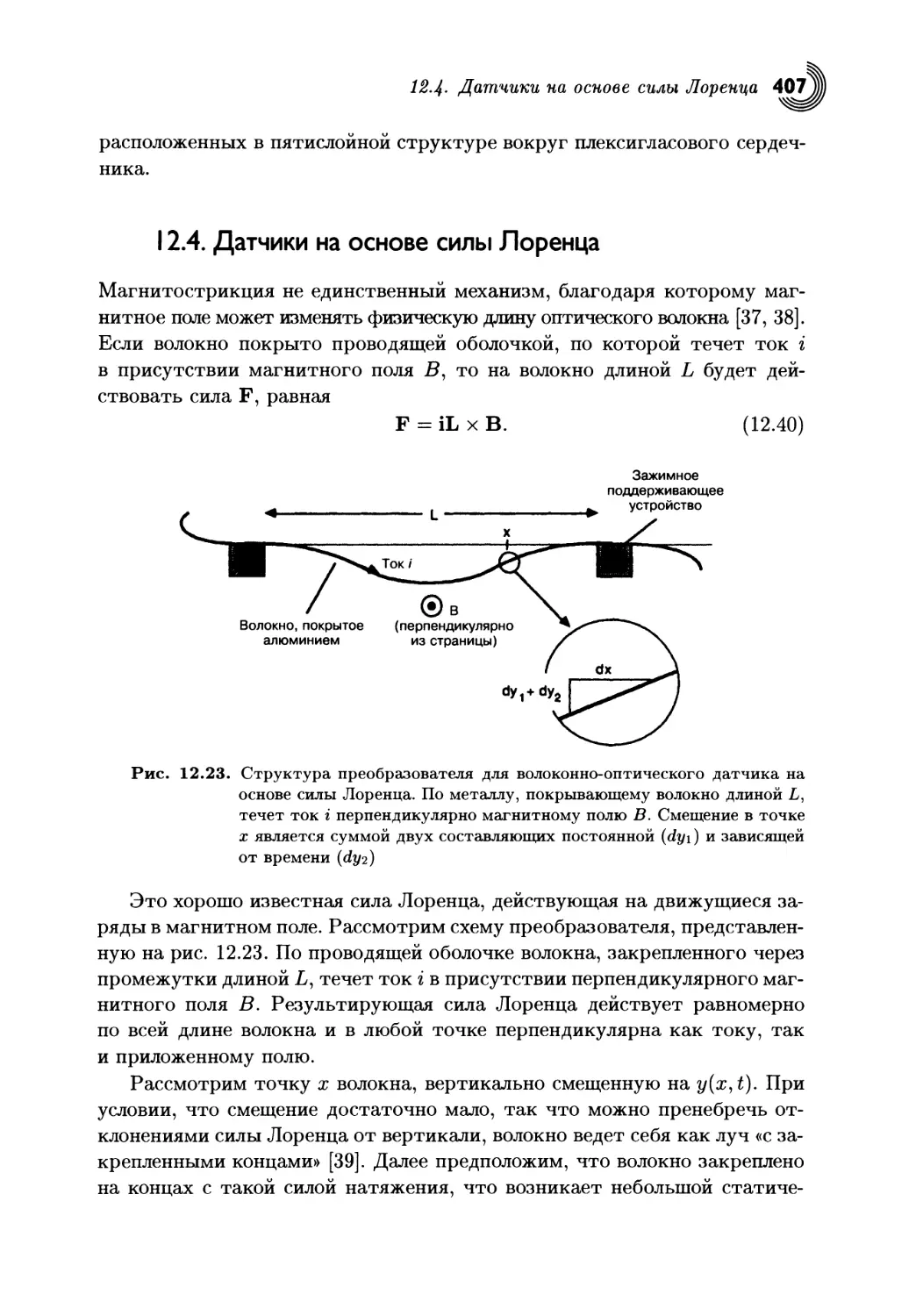
ТЕХНОСФЕРА
я
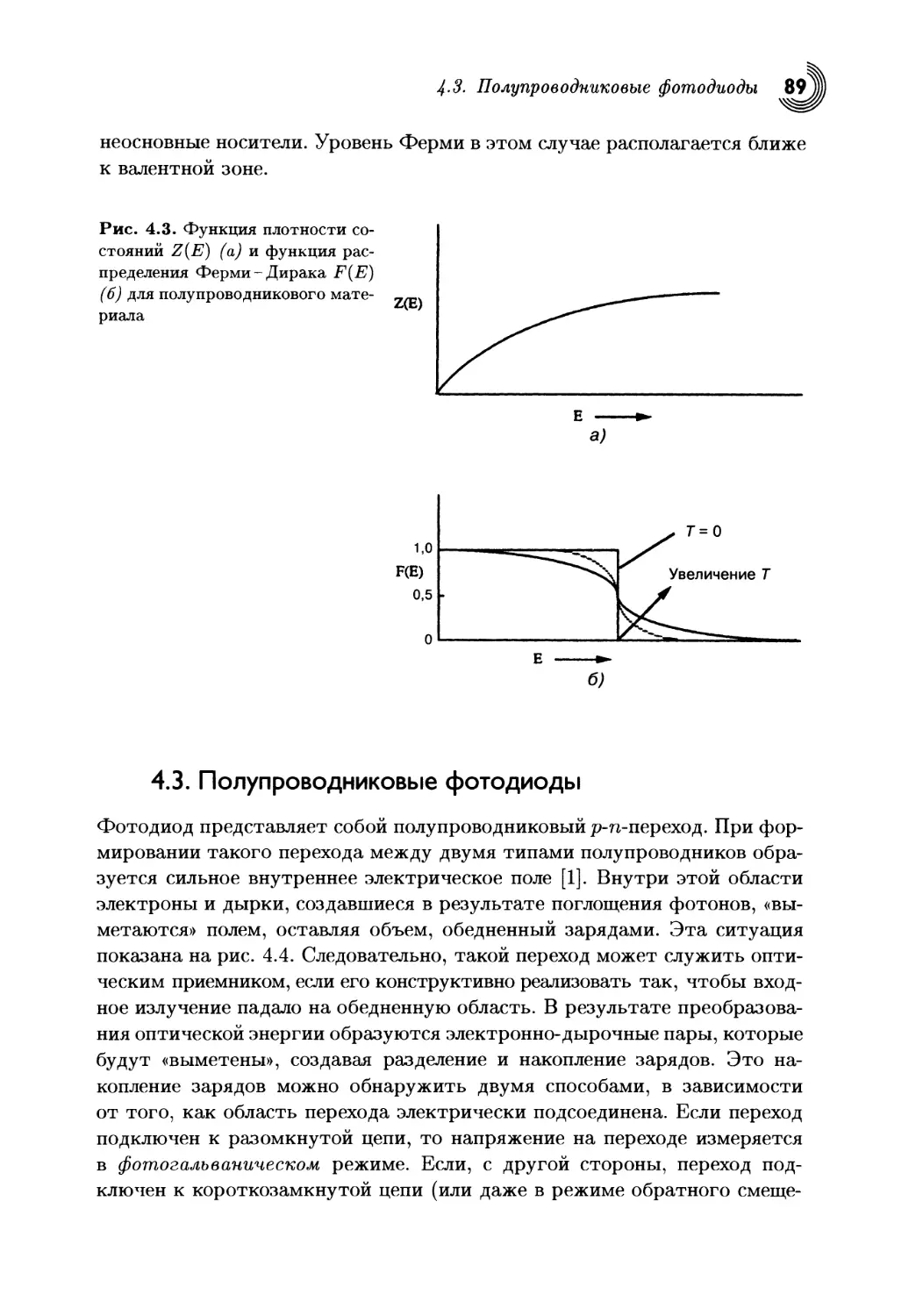
Волоконно-
оптические
датчики.
Вводный курс
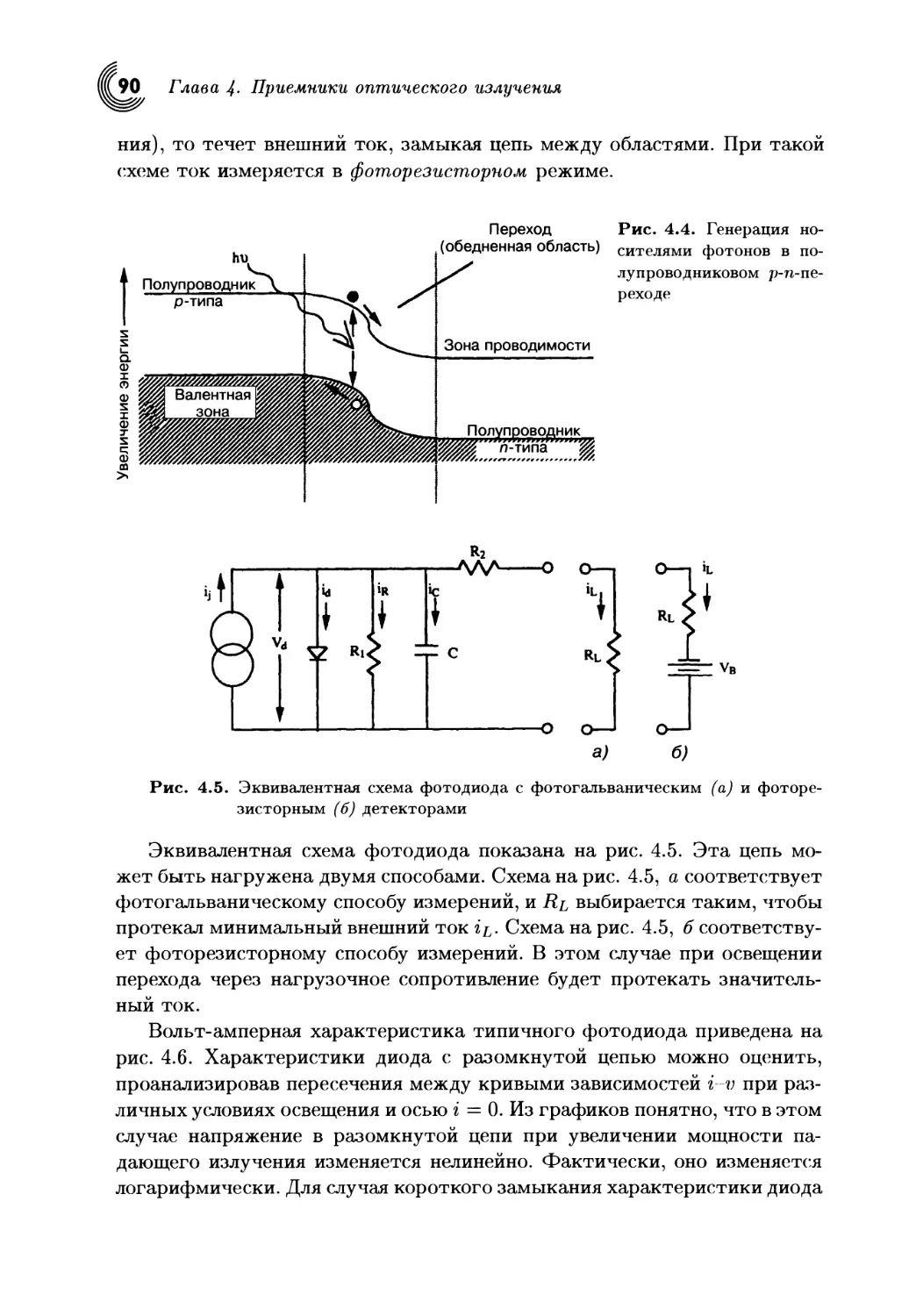
для инженеров
и научных
работников
Под ред. Эрика Удда
Перевод с английского
И.Ю. Ш кади ной
ТЕХНОСФЕРА
Москва
2008
Волоконно-оптические датчики.
Вводный курс для инженеров и научных работников
Под ред. Э. Удда
Москва: Техносфера, 2008. - 520 с. ISBN 978-5-94836-191-8
Книга, написанная всемирно известными специалистами, представляет собой
вводный курс в быстро развивающуюся и охватывающую новые сферы прило-
жений область волоконно-оптических датчиков. В каждом из трех разделов —
«Основные компоненты», «Технология» и «Приложения» — приводятся отдель-
ные примеры основных достижений в этой области. Вместе они предоставляют
инженерам, научным работникам, студентам старших курсов и аспирантам воз-
можность составить полное впечатление о волоконно-оптических датчиках.
Книга может использоваться в качестве пособия при чтении учебных курсов,
а также на промышленных семинарах по волоконно-оптическим датчикам.
Fiber Optic Sensors
An Introduction for Engineers
and Scientists
EDITED BY ERIC UDD
Kf^WILEY-
Vj/INTERSCIENCE
A JOHN WILEY Л SONS. INC. PUBLICATION
© 1991, 2006 by John Wiley & Sons, Inc
Все права защищены. Авторизованный перевод с английского из-
дания John Wiley & Sons
© 2008, ЗАО «РИЦ Техносфера», перевод на русский язык, ориги-
нал-макет, оформление
ISBN 978-5-94836-191-8
ISBN 978-0-470-06810-6 (англ.)
Содержание
Предисловие.............................................. 10
Глава 1
Возникновение технологии волоконно-оптических дат-
чиков.................................................... 14
Глава 2
Оптоволокно.............................................. 24
2.1. Введение............................................ 24
2.2. Типы оптических волокон............................. 25
2.2.1. Закон преломления Снеллиуса (Спелля) и полное внутрен-
нее отражение.......................................... 26
2.2.2. Многомодовое оптоволокно со ступенчатым профилем
(со ступенчато изменяющимся показателем преломления). 30
2.2.3. Одномодовое оптоволокно со ступенчатым профилем по-
казателя преломления................................... 33
2.2.4. Уширение импульса............................... 34
2.2.5. Оптоволокно с градиентным профилем показателя пре-
ломления .............................................. 35
2.2.6. Одномодовое волокно, сохраняющее поляризацию излуче-
ния ................................................... 36
2.3. Технологии изготовления оптических волокон.......... 38
2.3.1. Модифицированный метод химического осаждения из га-
зовой фазы............................................. 38
2.3.2. Метод внешнего химического осаждения............ 40
2.3.3. Метод осевого осаждения (VAD)................... 41
2.3.4. Стеклянные стержни.............................. 41
2.3.5. Затухание в оптоволоконных волноводах........... 41
2.4. Использование свойств оптических волокон для создания дат-
чиков.................................................... 45
2.4.1. Изгиб........................................... 45
2.4.2. Связь на основе затухающих колебаний и построенный
на этом принципе датчик................................ 46
2.4.3. Направленные разветвители и их использование для по-
строения датчиков................................ 47
2.5. Резюме.............................................. 49
Литература............................................... 49
4 Содержание
Глава 3
Источники света.......................................... 52
3.1. Введение............................................ 52
3.2. Фундаментальные свойства источников света........... 52
3.2.1. Спонтанное излучение............................ 56
3.2.2. Вынужденное излучение........................... 60
3.2.3. Сверхизлучение.................................. 61
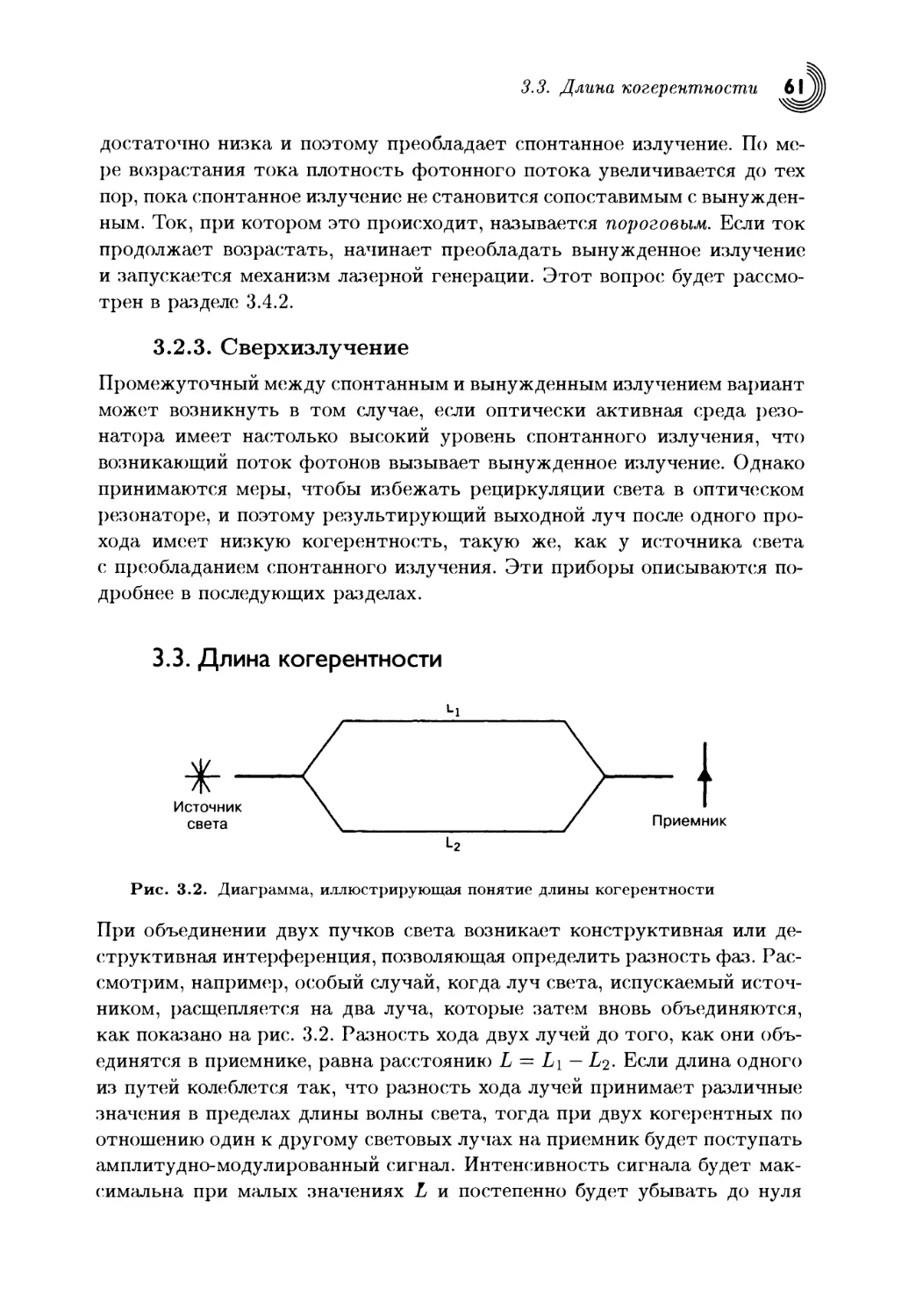
3.3. Длина когерентности................................. 61
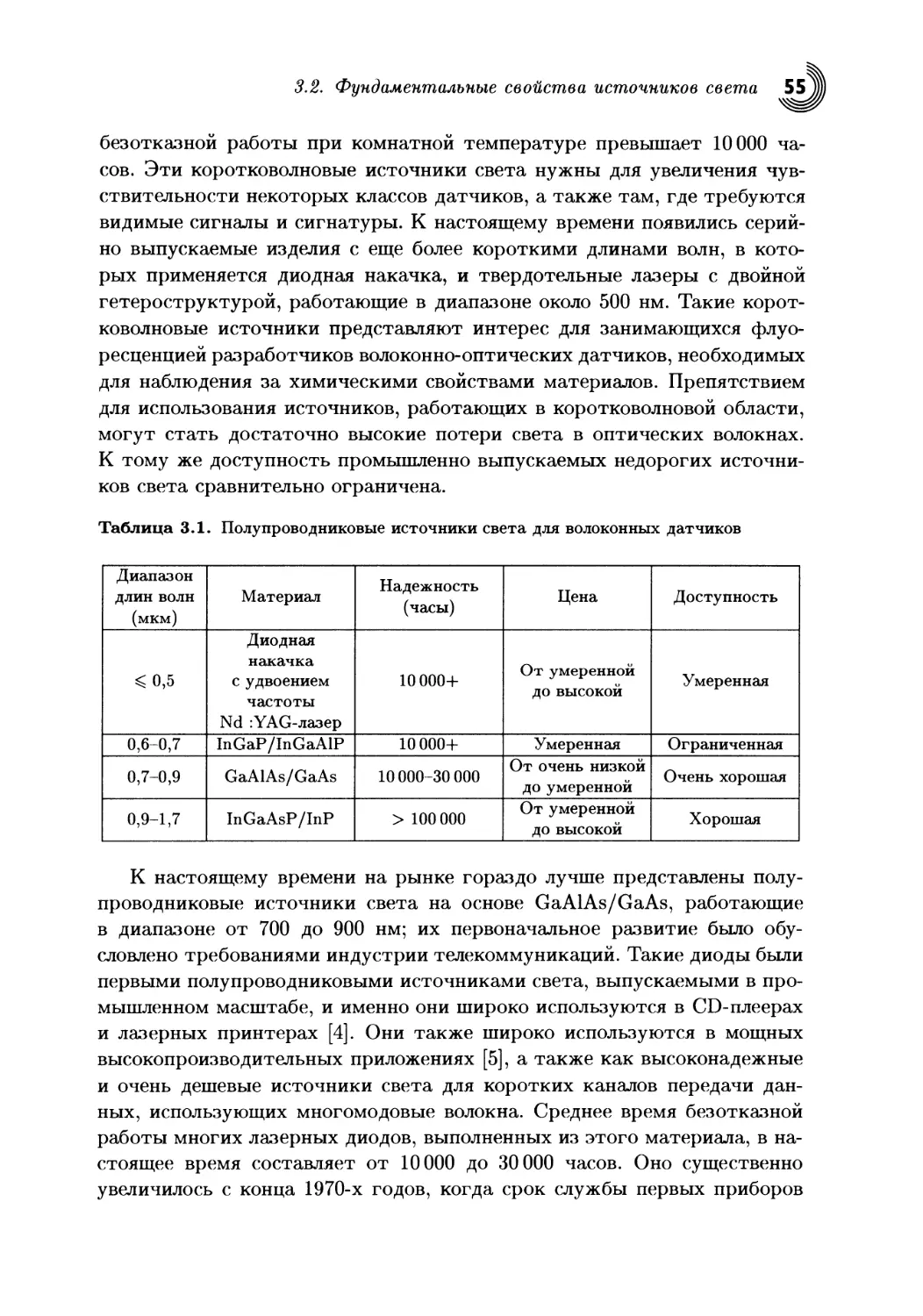
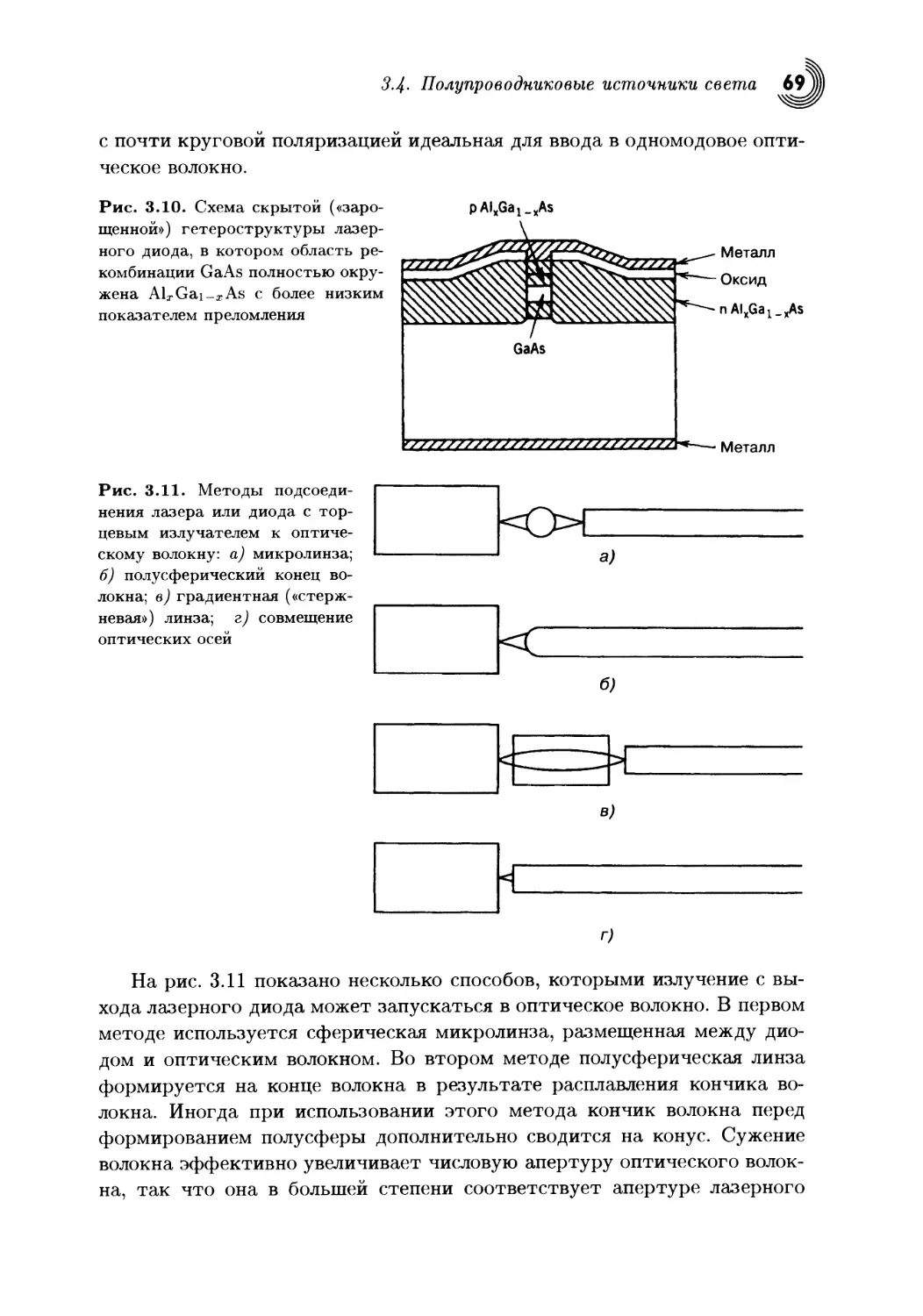
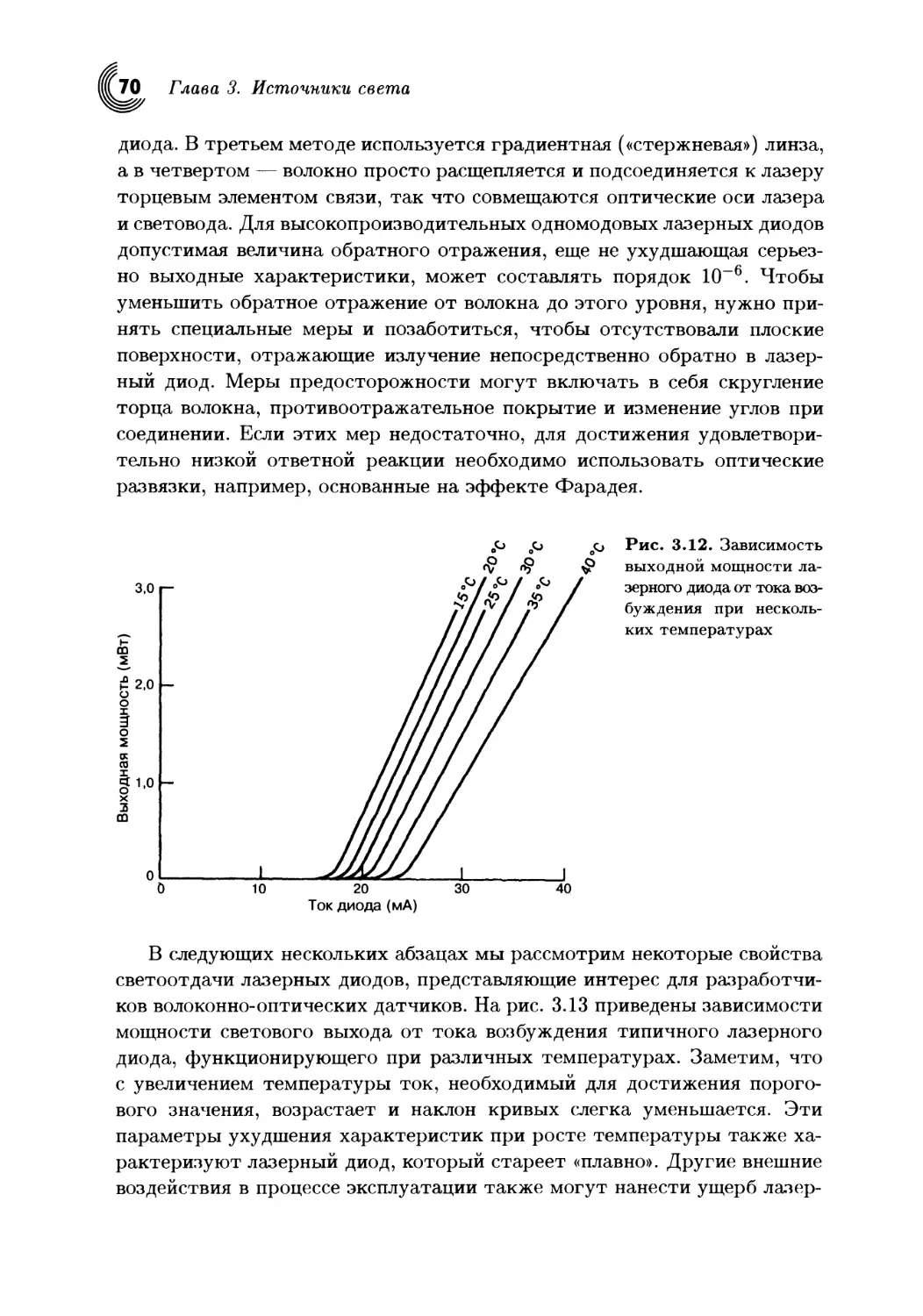
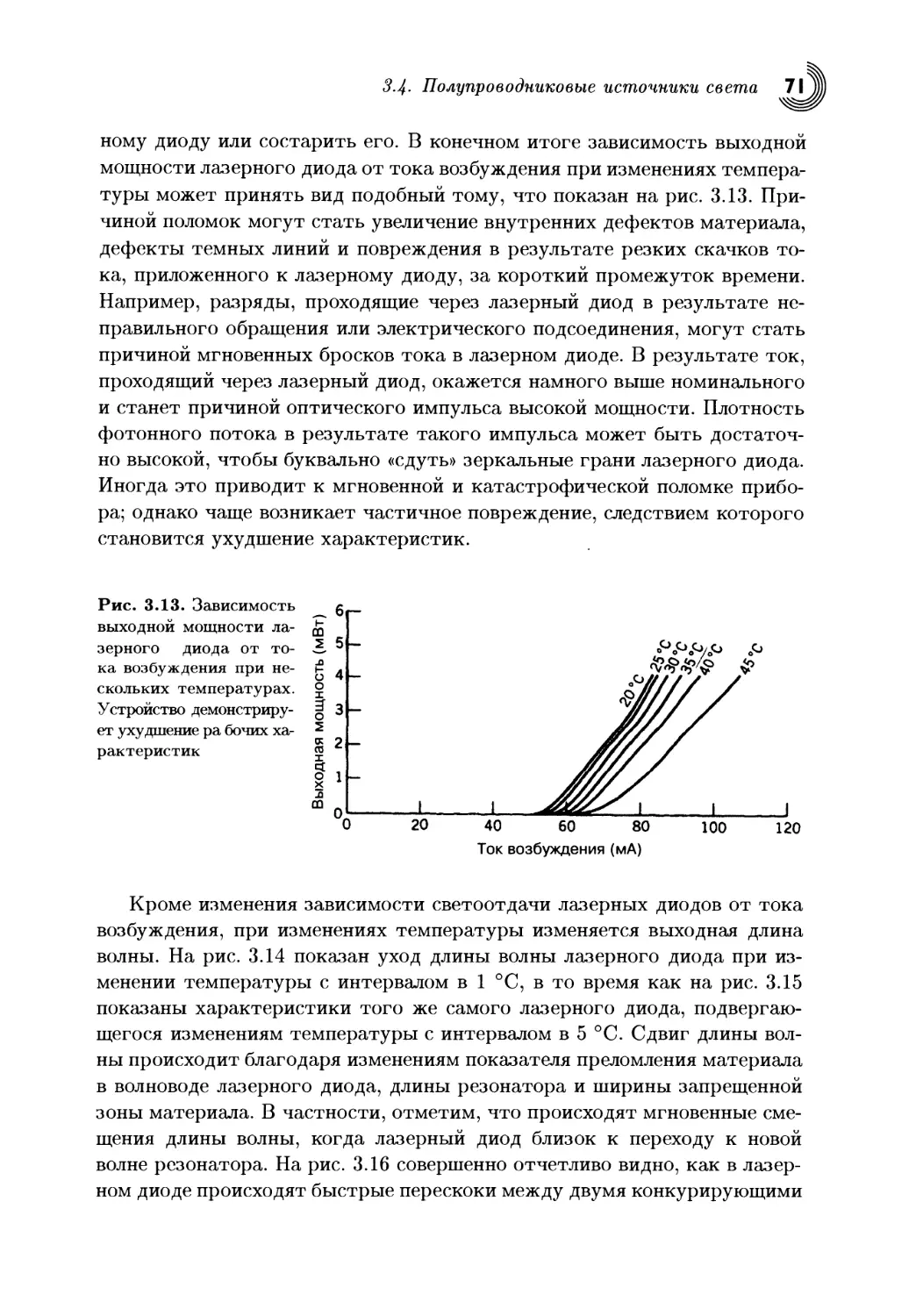
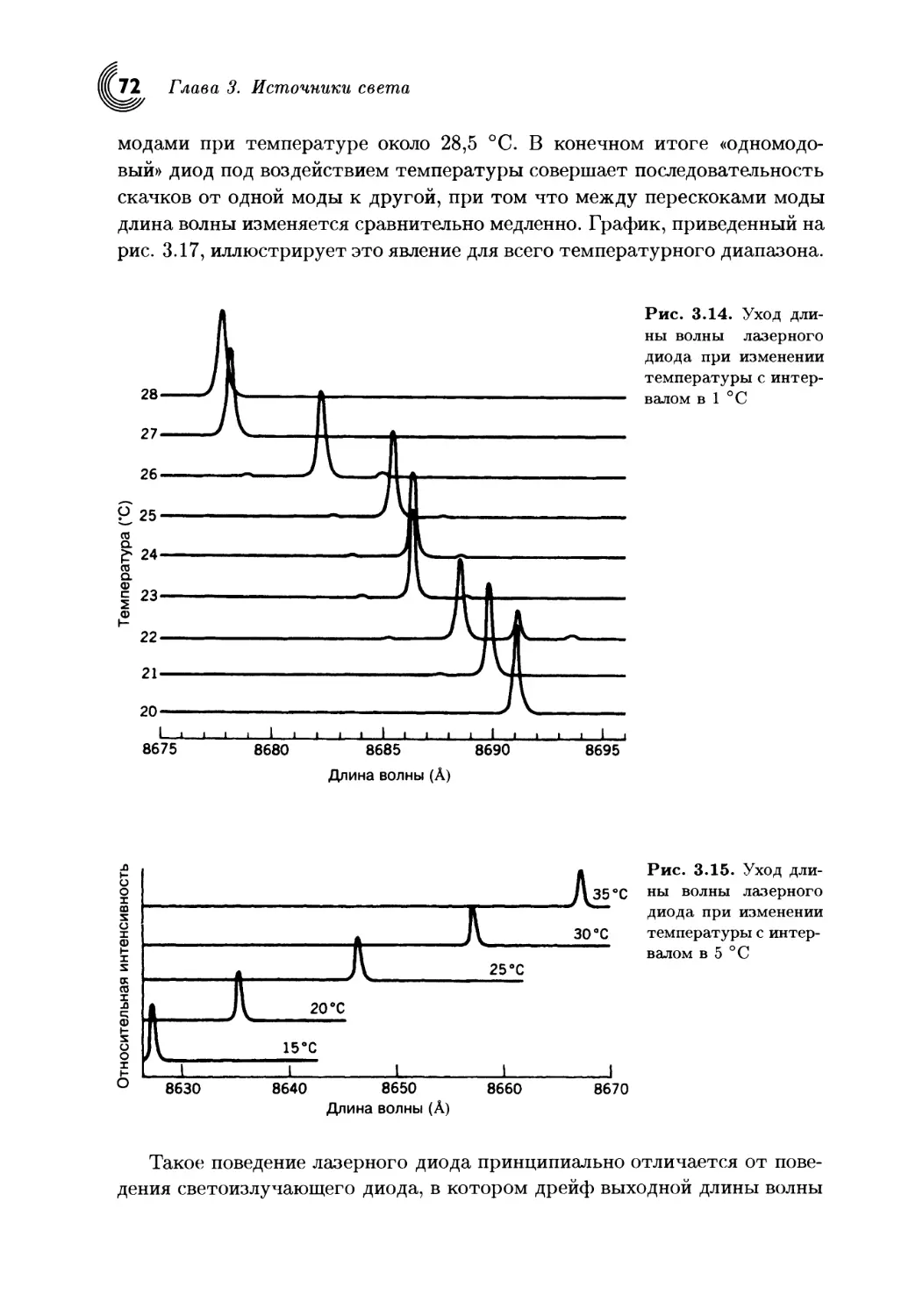
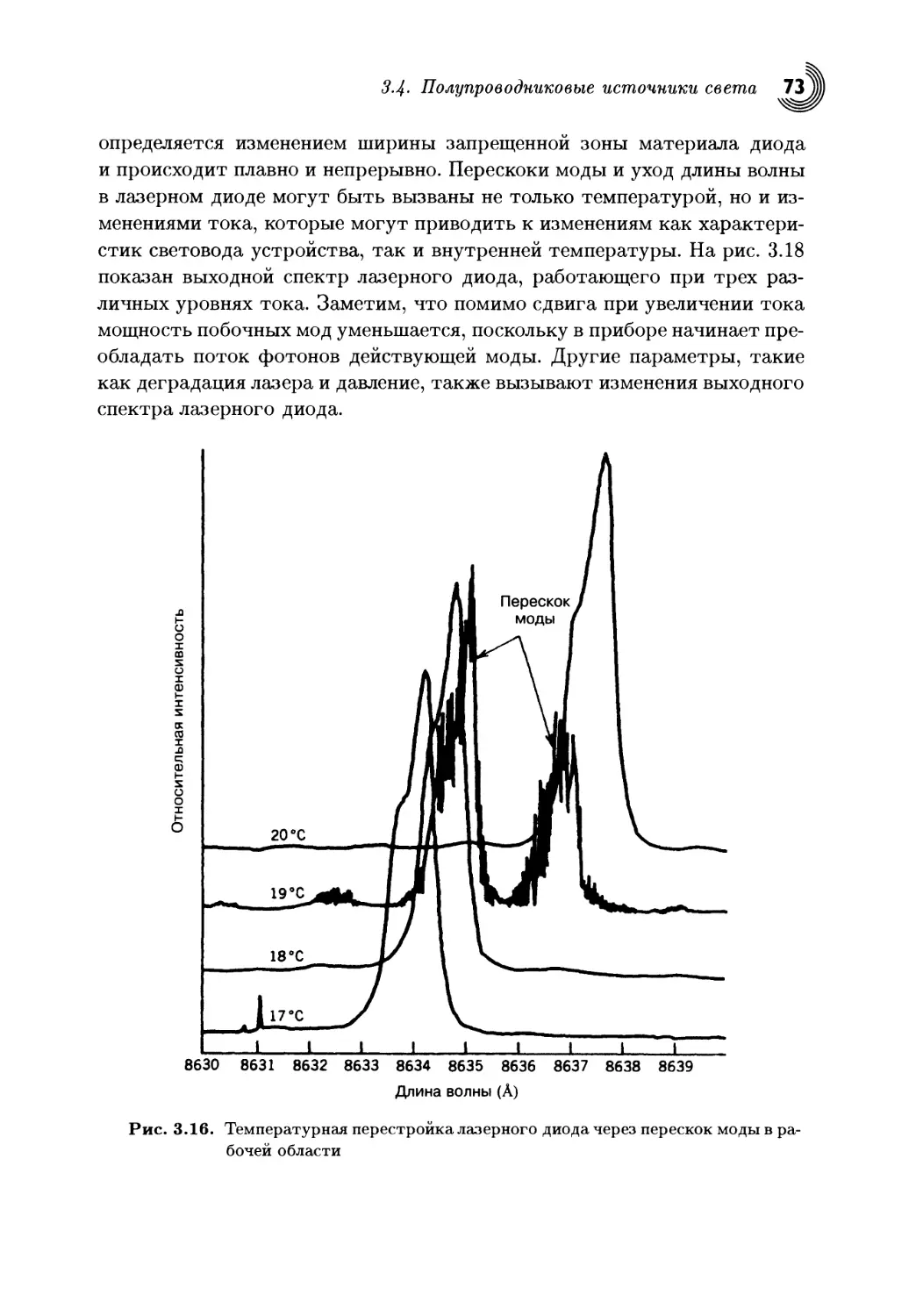
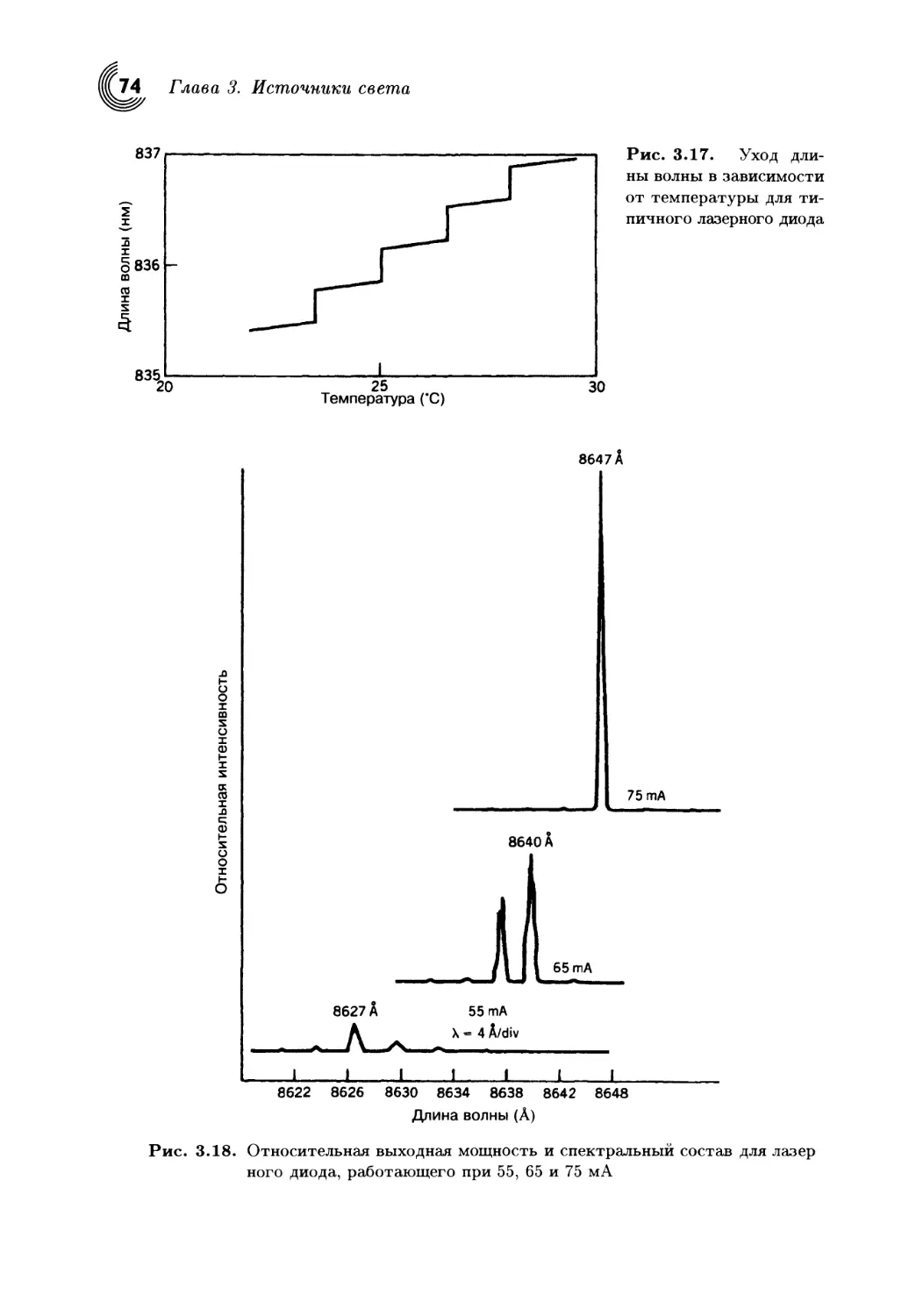
3.4. Полупроводниковые источники света................... 62
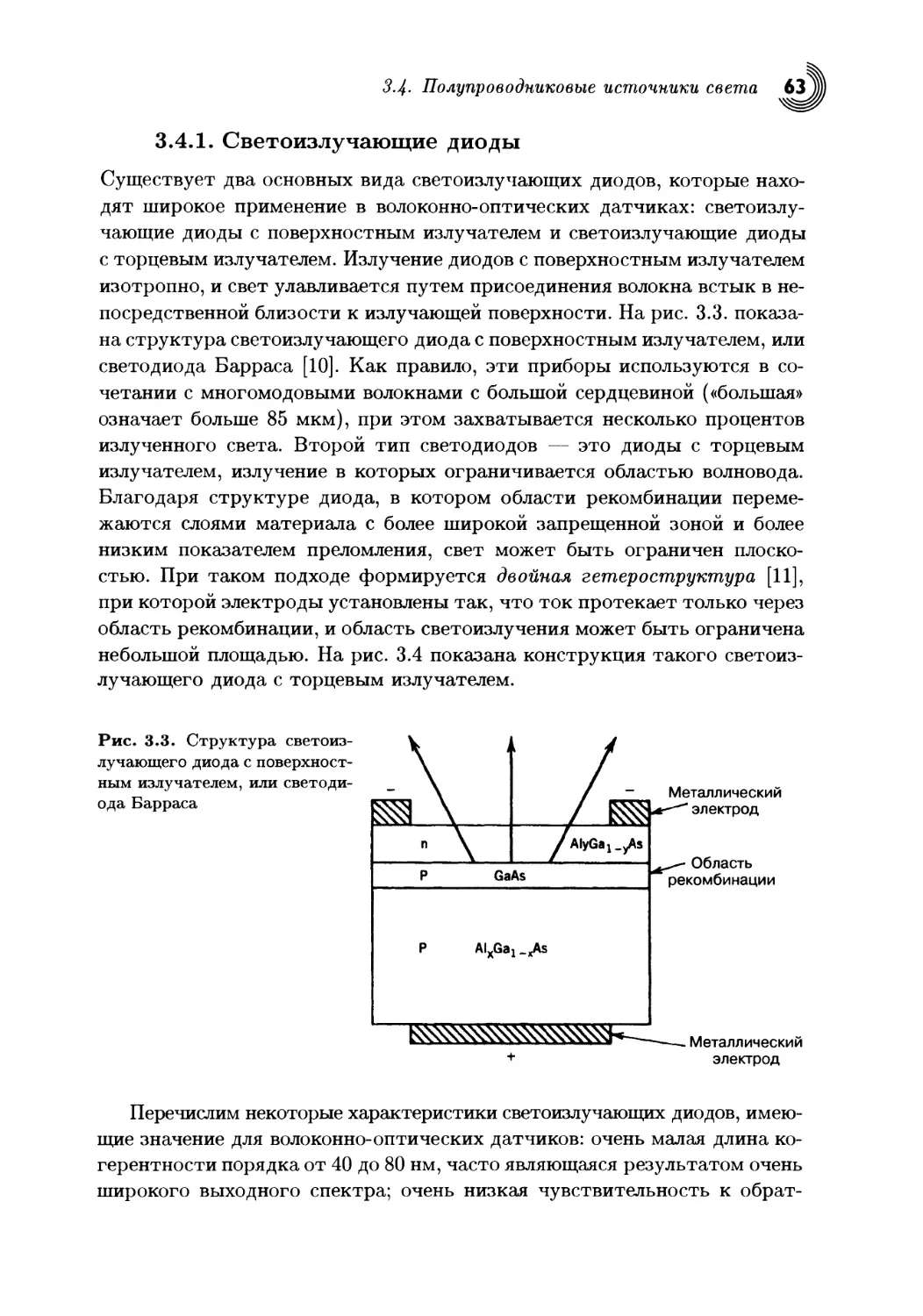
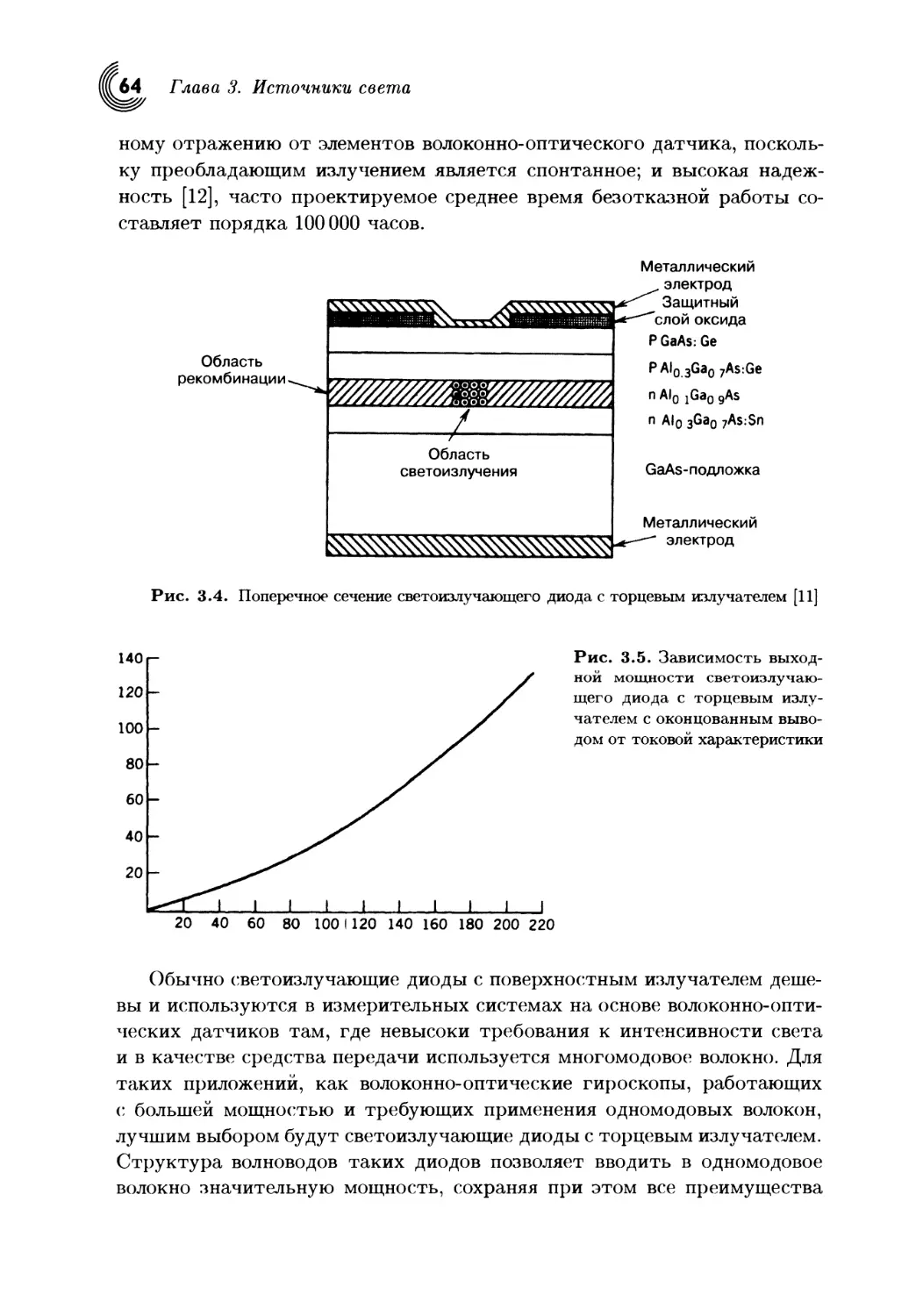
3.4.1. Светоизлучающие диоды........................... 63
3.4.2. Лазерные диоды.................................. 65
3.4.3. Сверхизлучающие диоды........................... 75
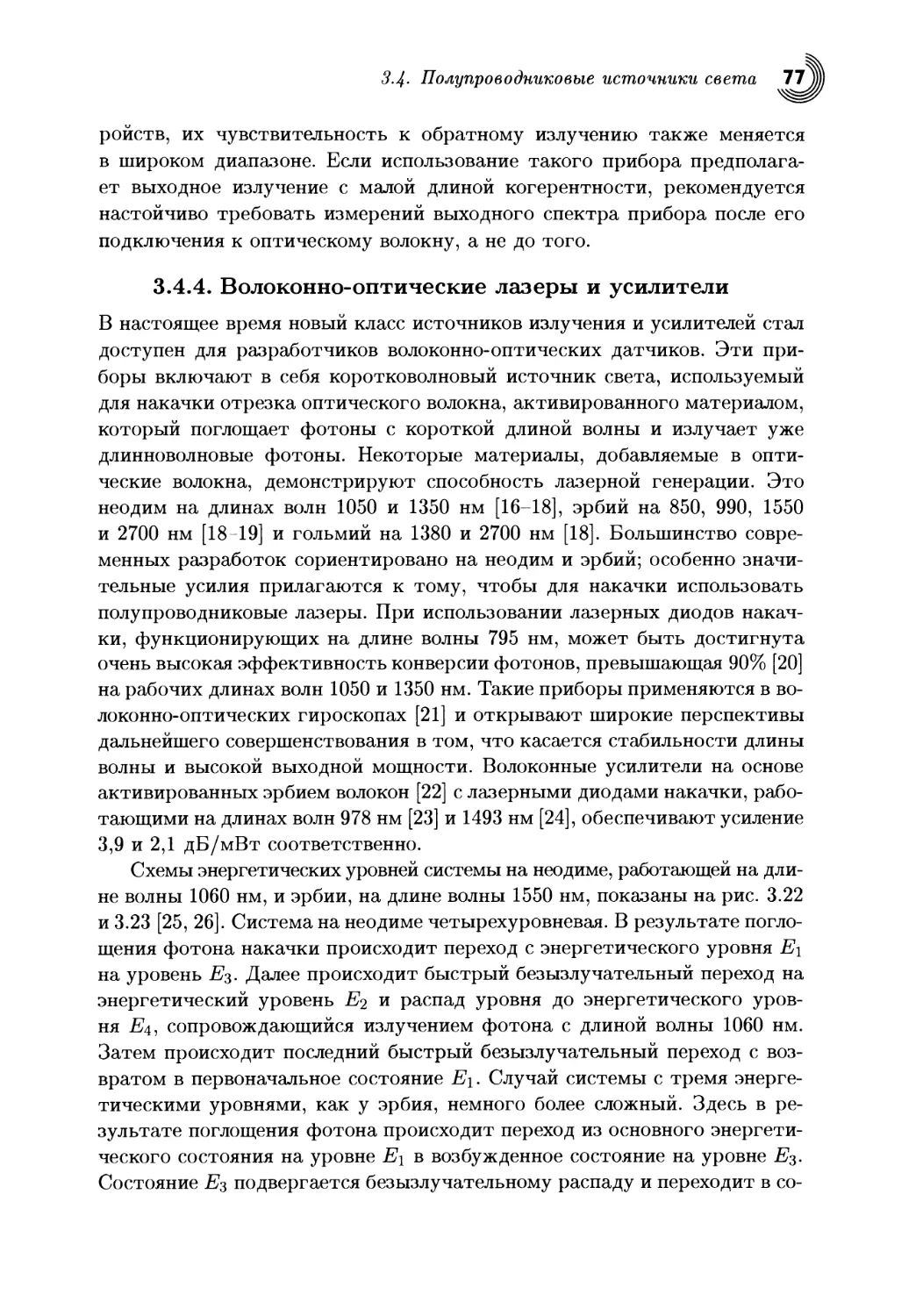
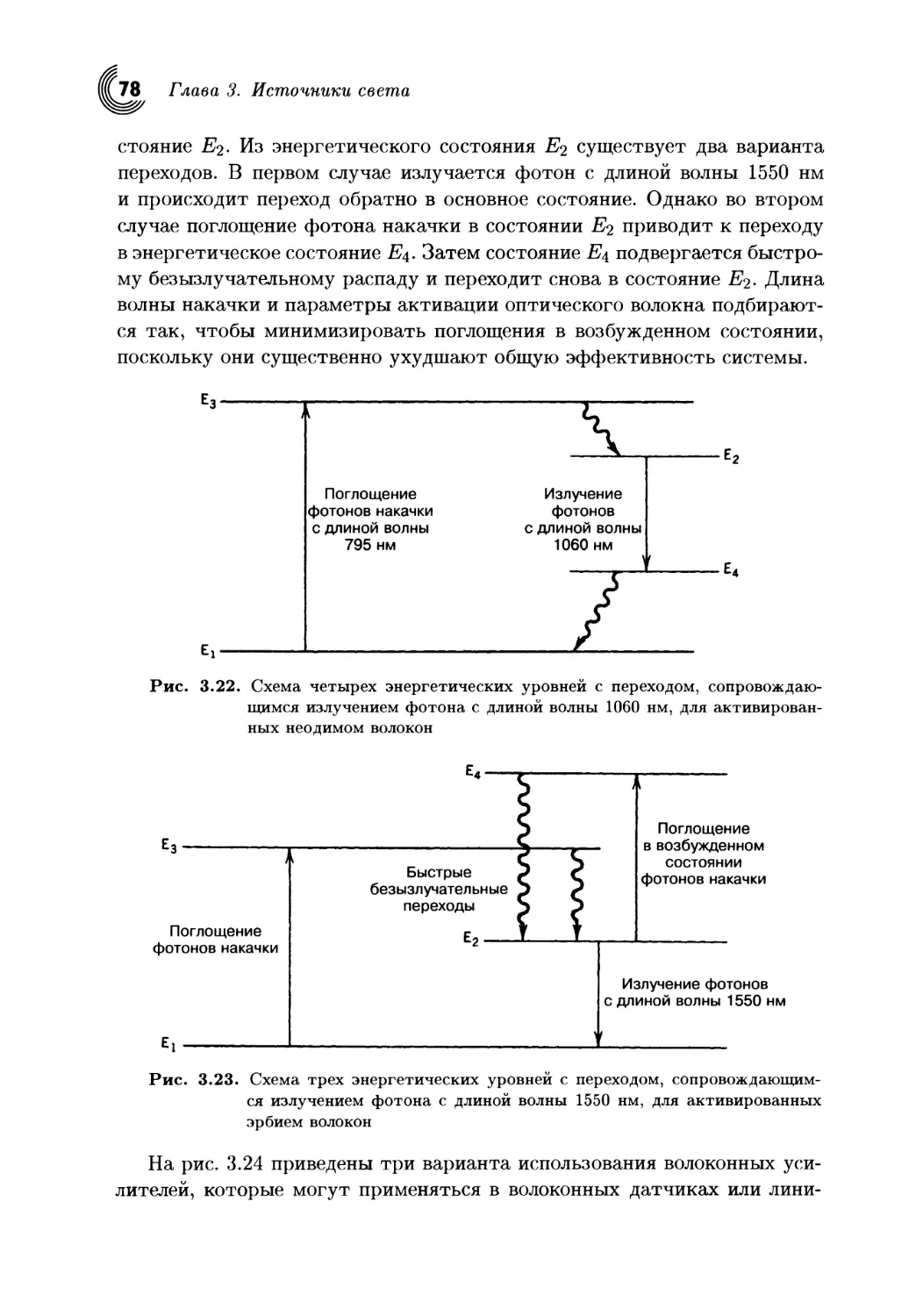
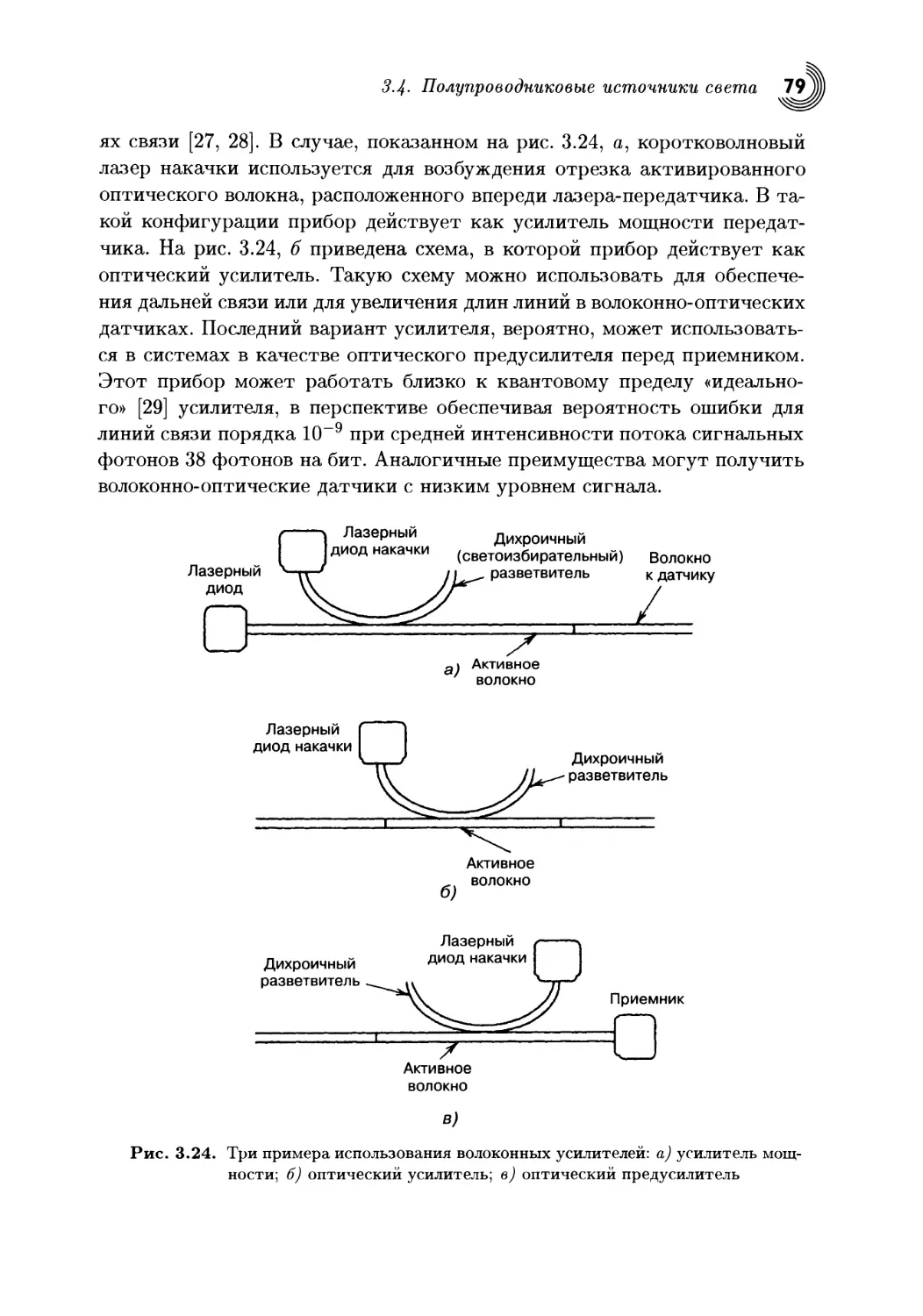
3.4.4. Волоконно-оптические лазеры и усилители......... 77
3.5. Резюме.............................................. 81
Литература............................................... 81
Глава 4
Приемники оптического излучения.......................... 84
4.1. Введение............................................ 84
4.2. Теоретические основы................................ 84
4.2.1. Статистика регистрации оптического излучения.... 84
4.2.2. Основные принципы функционирования полупроводников 85
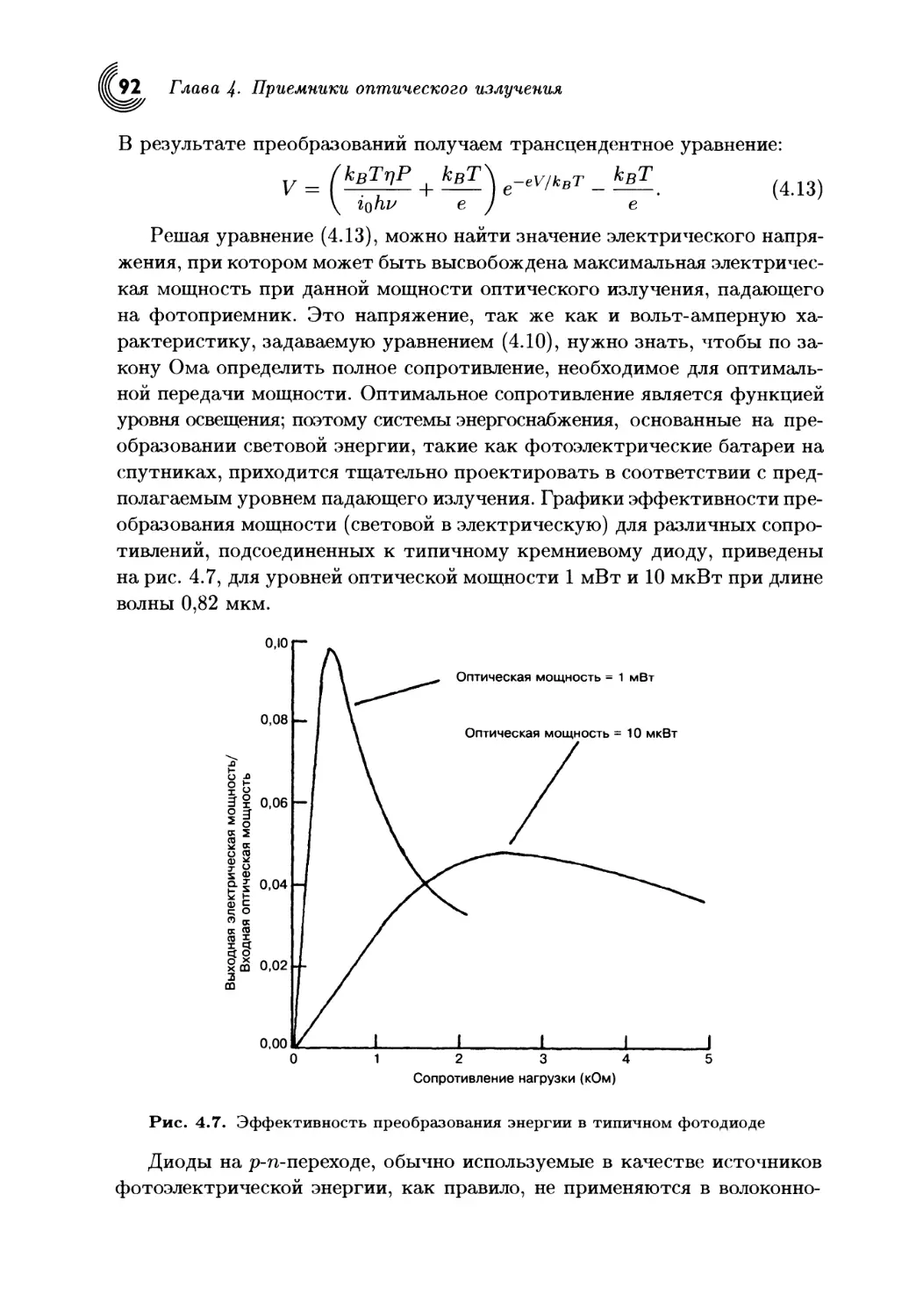
4.3. Полупроводниковые фотодиоды......................... 89
4.4. Лавинные фотодиоды.................................. 96
4.5. Шум................................................. 97
4.5.1. Математические основы........................... 97
4.5.2. Шум, обусловленный протеканием постоянных токов
в детекторной цепи..................................... 100
4.5.3. Шум, обусловленный тепловыми эффектами........... 101
4.5.4. Отношение сигнал/шум ............................ 103
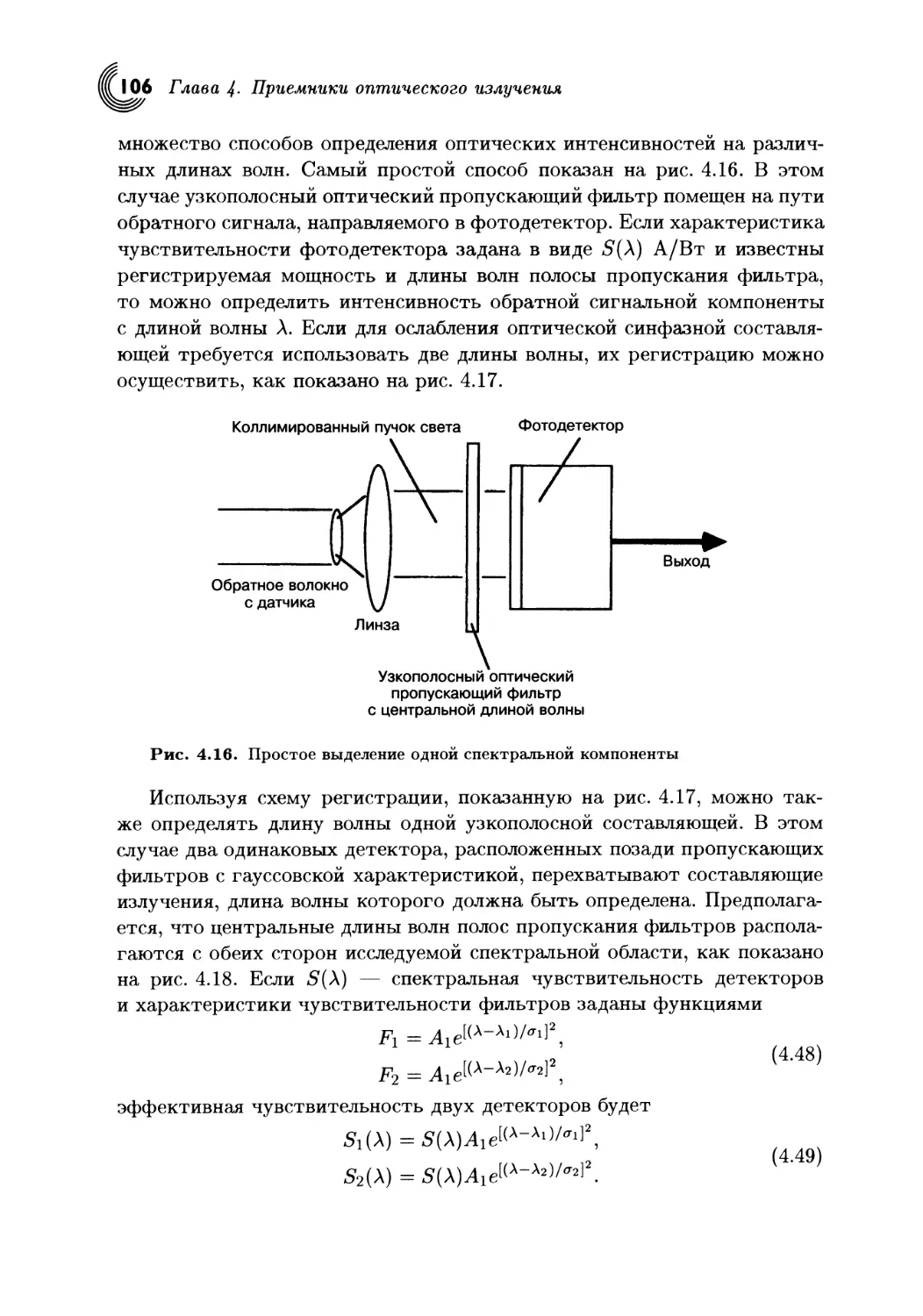
4.6. Регистрация спектра.................................. 105
4.7. Резюме............................................... 110
Литература................................................110
Глава 5
Оптические модуляторы для волоконно-оптических
датчиков.................................................111
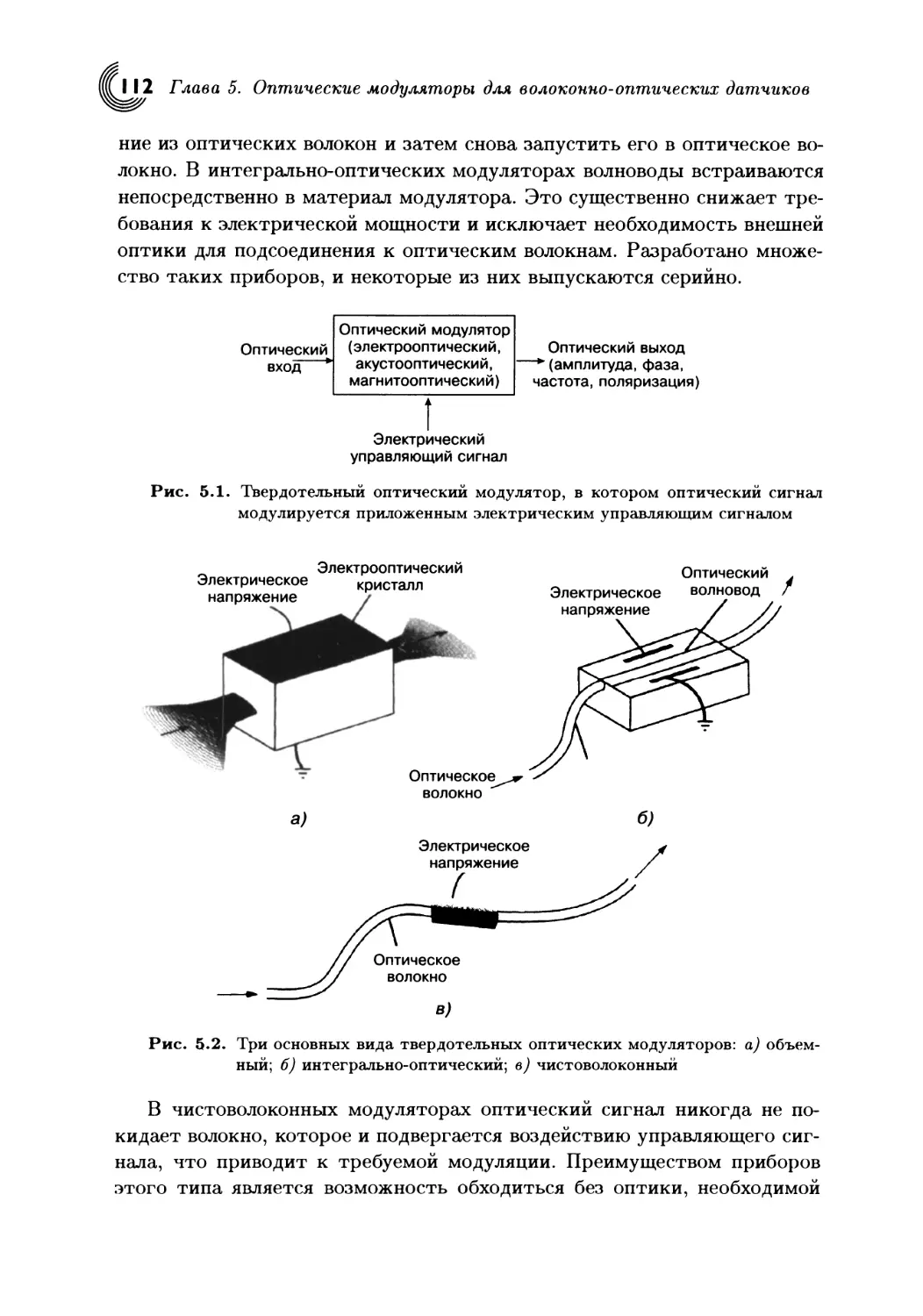
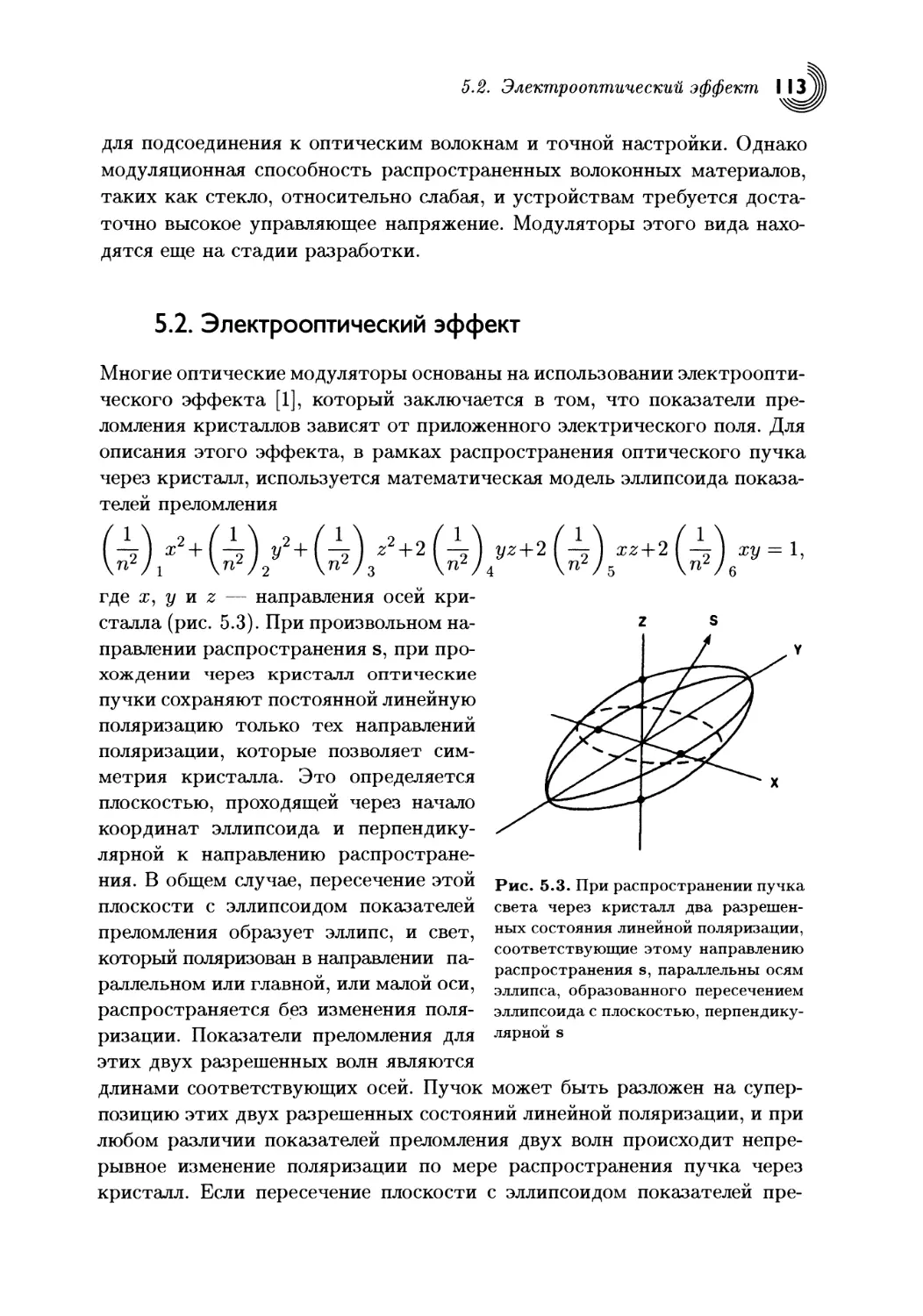
5.1. Введение........................................... 111
5.2. Электрооптический эффект........................... 113
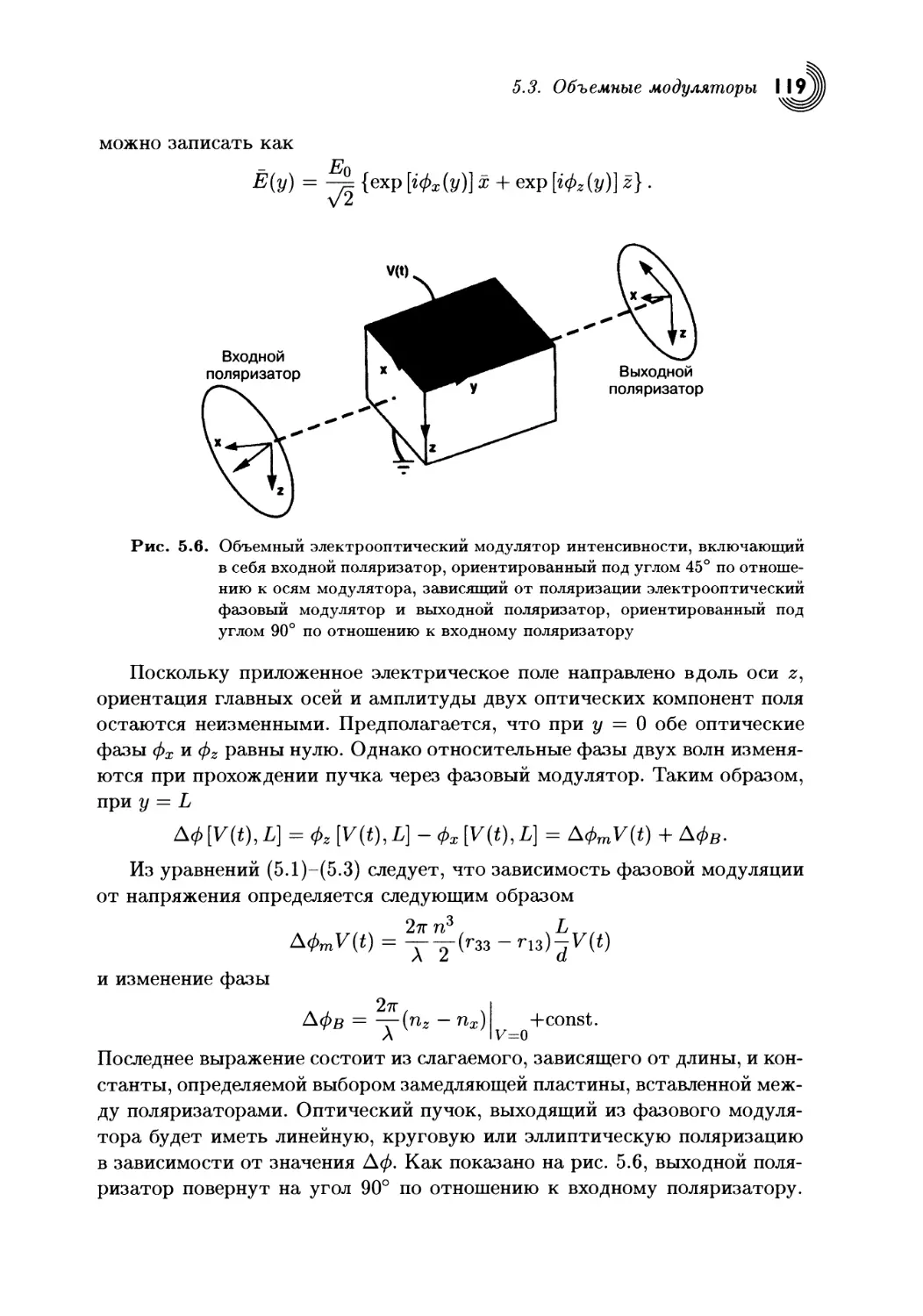
5.3. Объемные модуляторы................................ 115
Содержание
5.3.1. Электрооптическая фазовая модуляция............ 116
5.3.2. Электрооптическая модуляция интенсивности...... 118
5.3.3. Объемный акустооптический сдвиг частоты........ 120
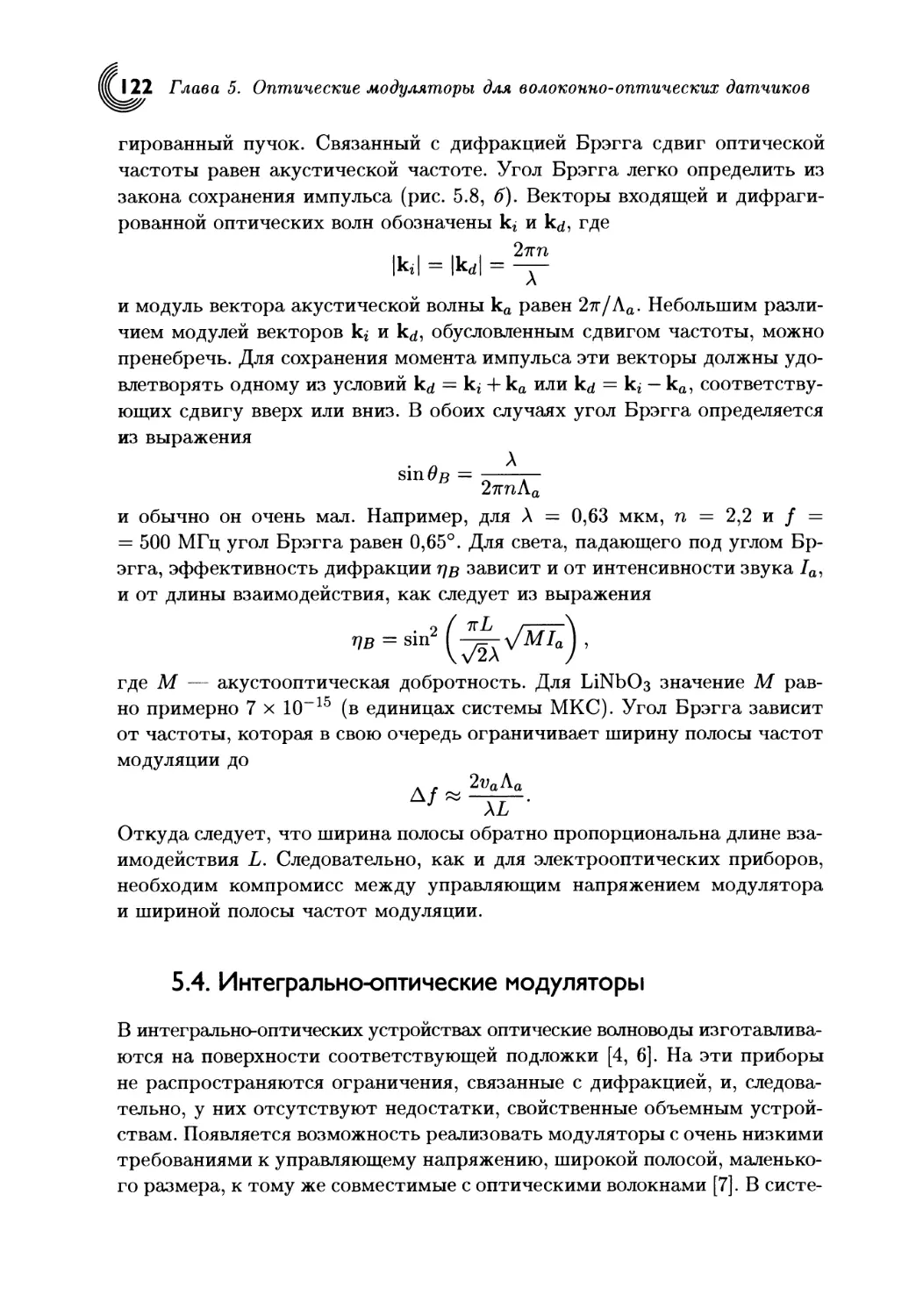
5.4. Интегрально-оптические модуляторы.................. 122
5.4.1. Фазовая модуляция.............................. 125
5.4.2. Интерферометрическая модуляция интенсивности... 127
5.4.3. Интегрально-оптические преобразователи частоты. 135
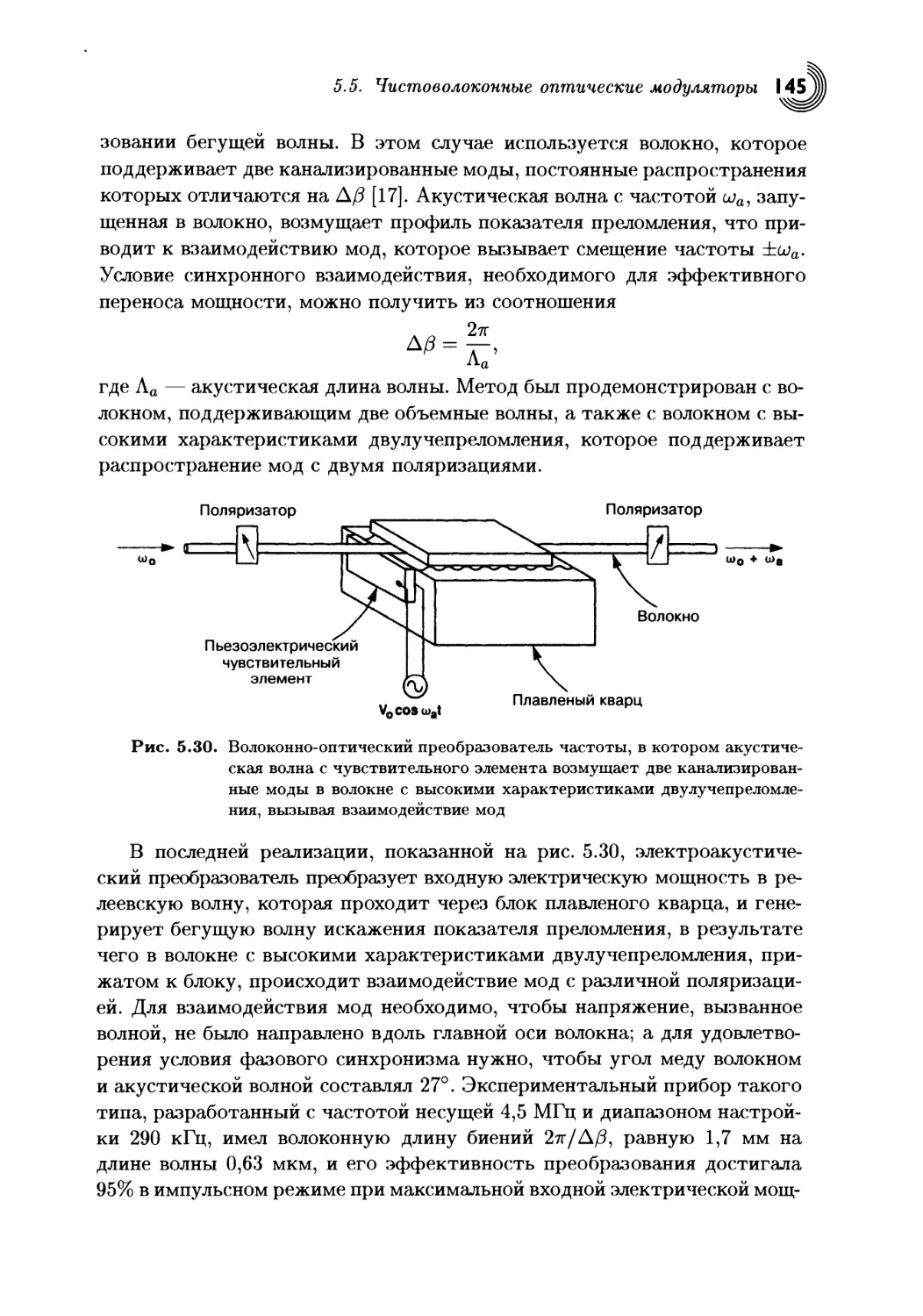
5.5. Чистоволоконные оптические модуляторы.............. 142
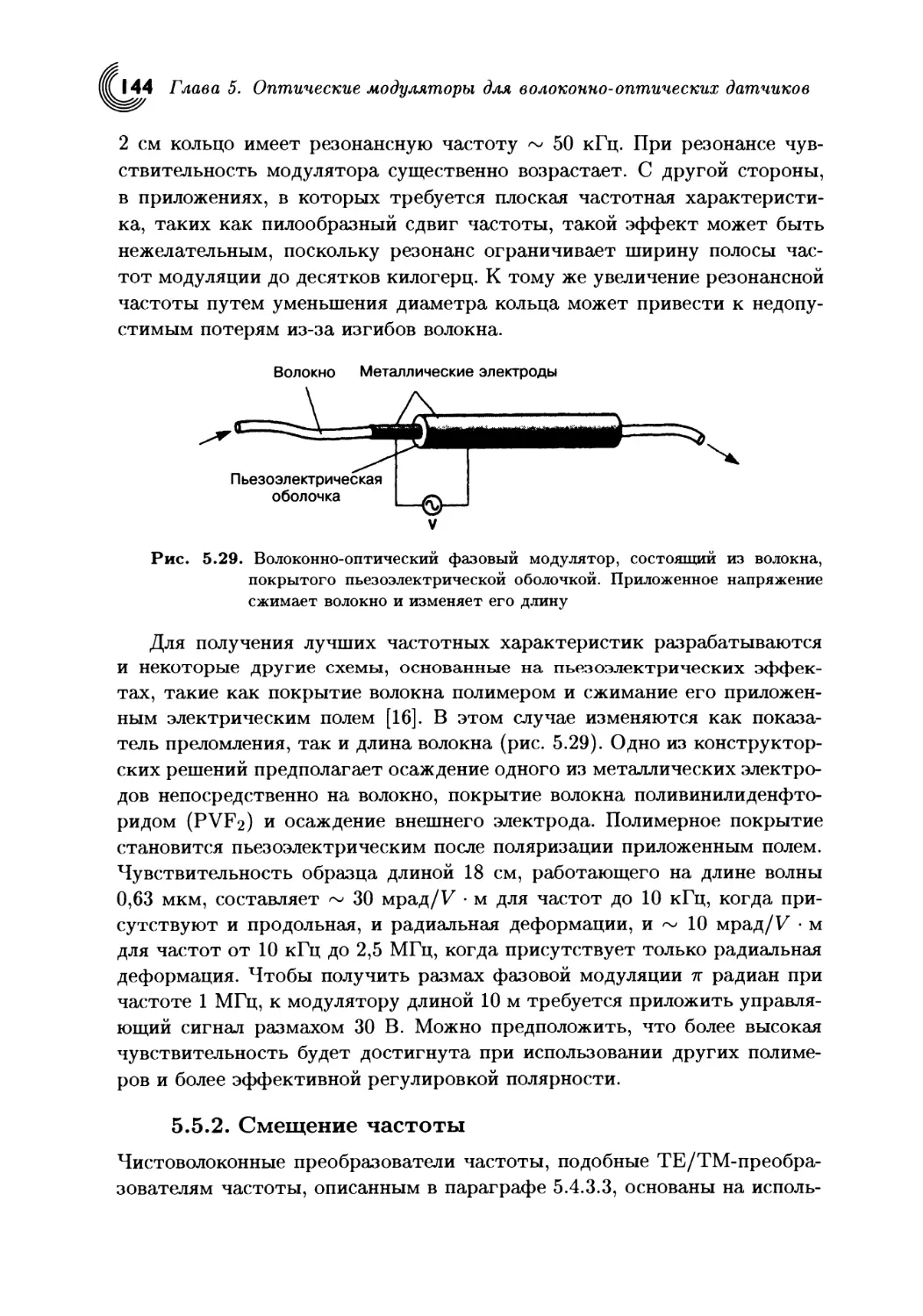
5.5.1. Фазовая модуляция.............................. 143
5.5.2. Смещение частоты............................... 144
Литература...............................................146
Глава 6
Датчики на основе измерения интенсивности и интер-
ферометра Фабри-Перо.....................................147
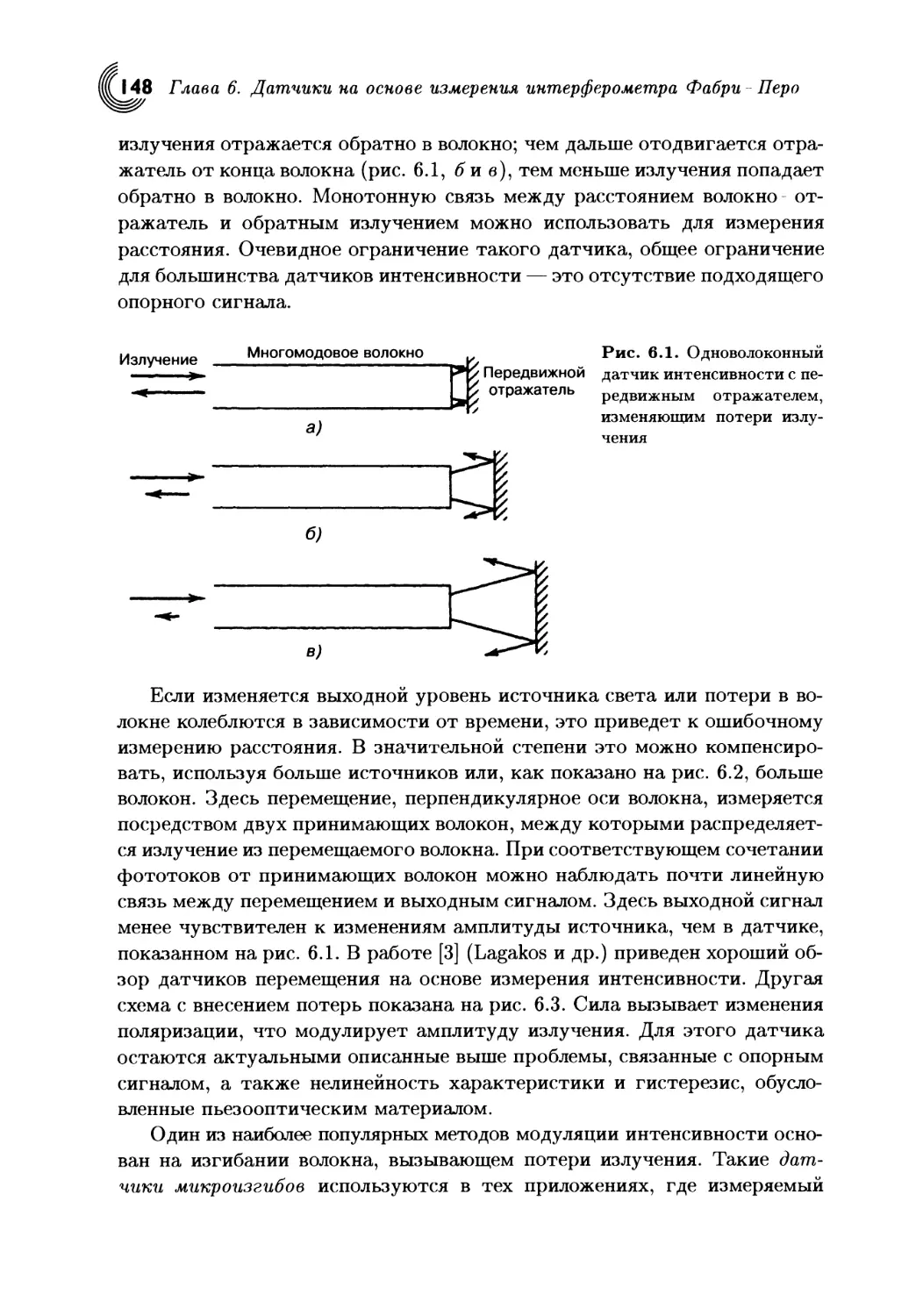
6.1. Датчики интенсивности.............................. 147
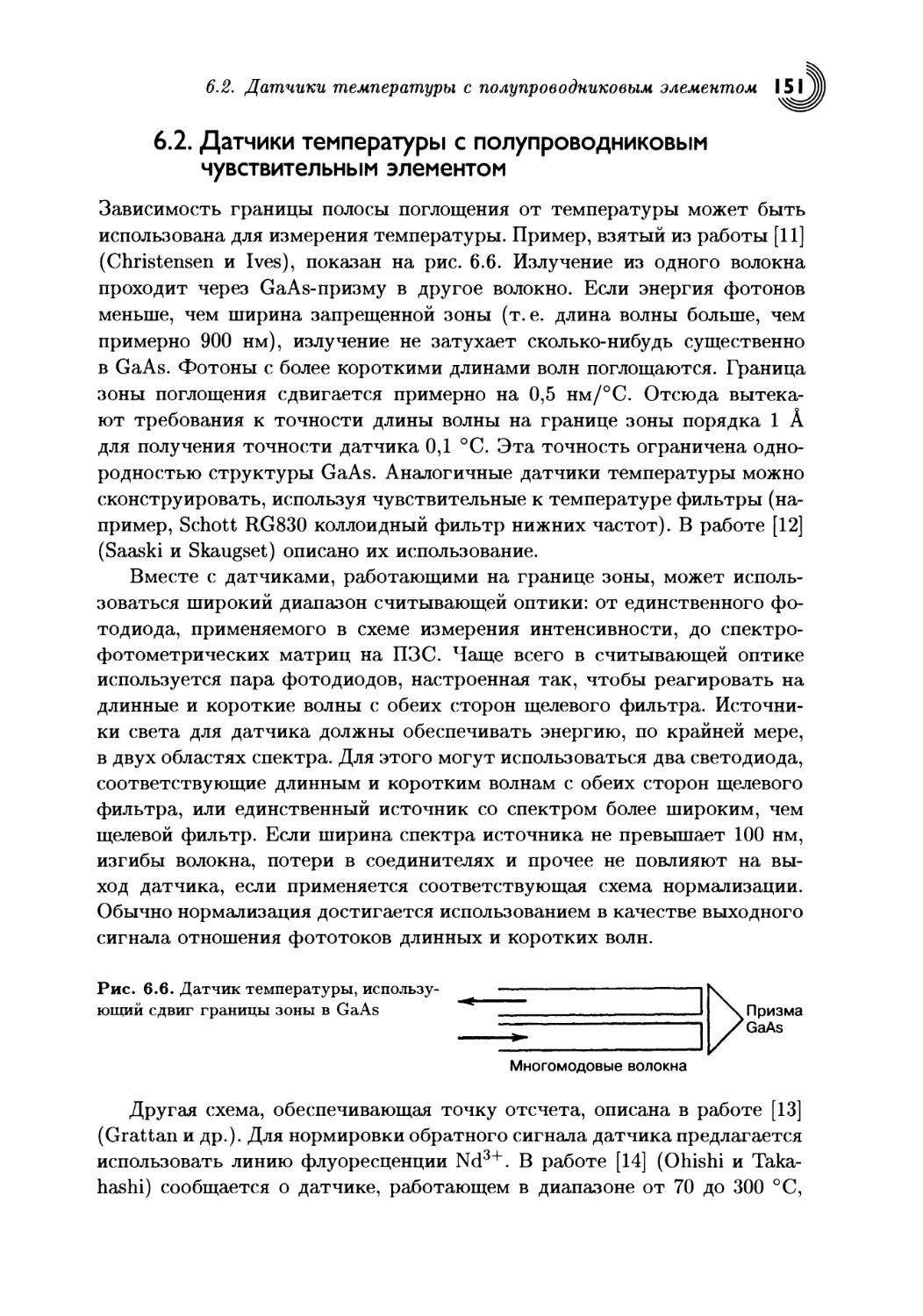
6.2. Датчики температуры с полупроводниковым чувствительным
элементом.......................................... 151
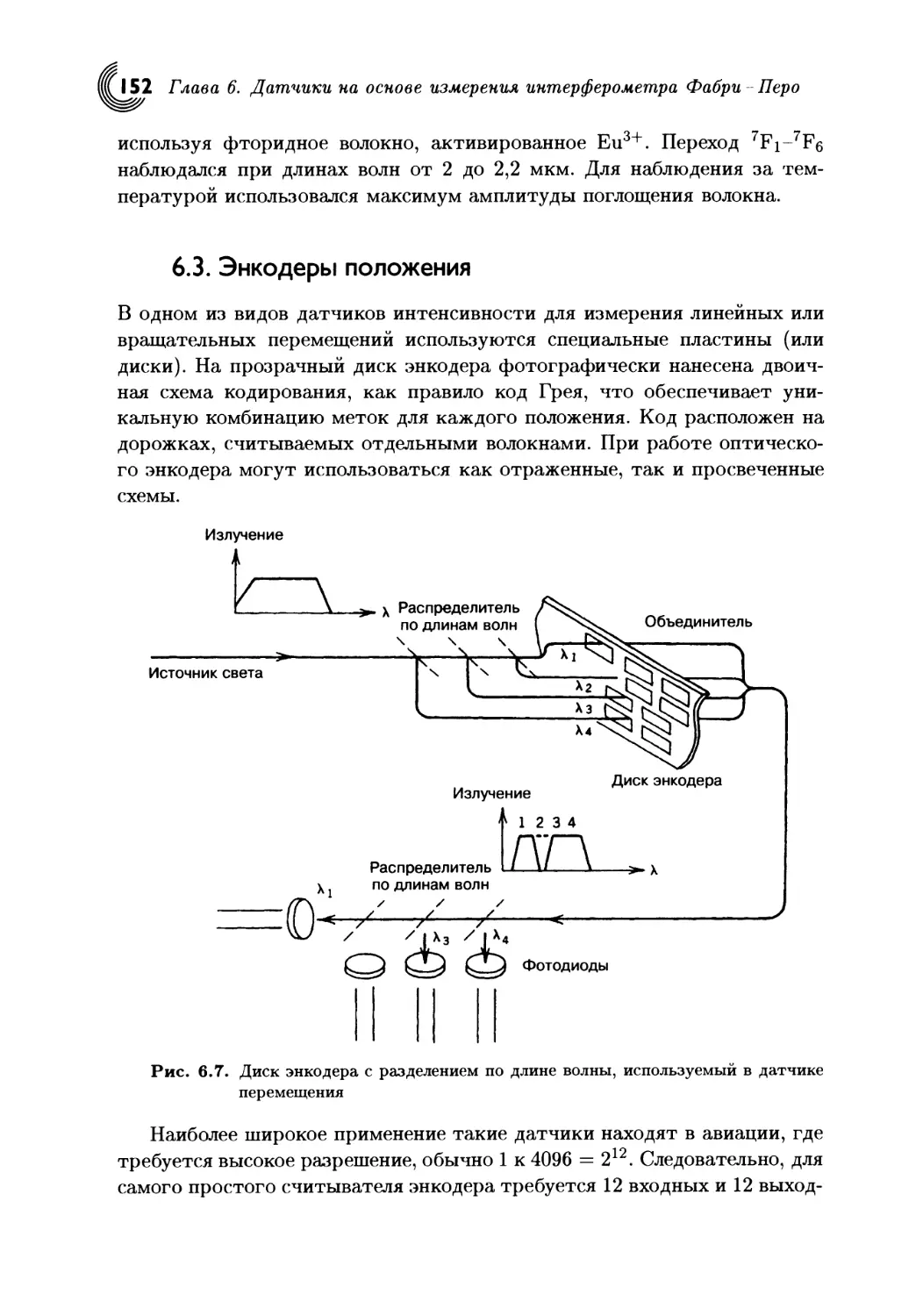
6.3. Энкодеры положения................................. 152
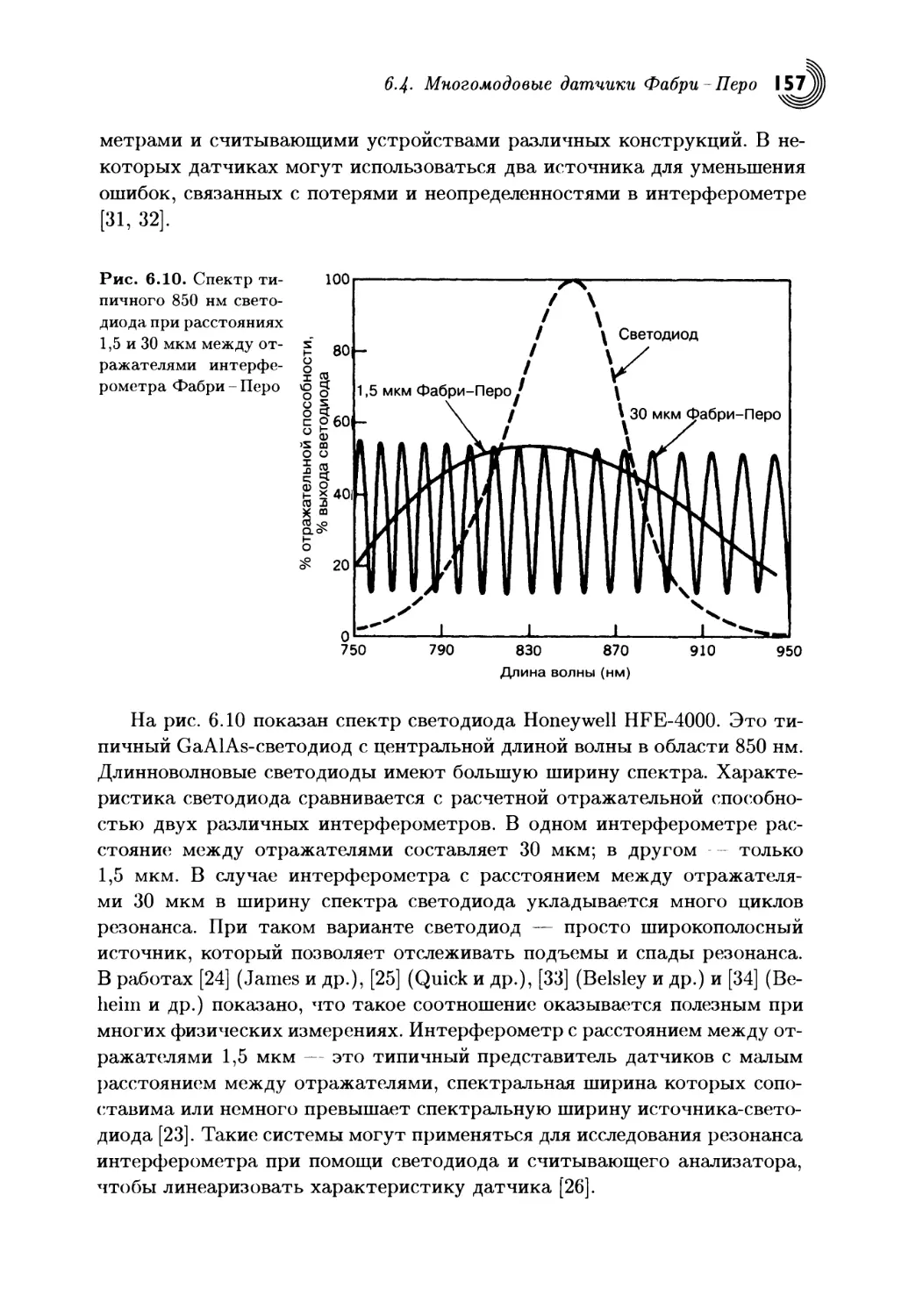
6.4. Многомодовые датчики Фабри - Перо.................. 154
6.4.1. История развития многомодовых датчиков Фабри - Перо.155
6.4.2. Принципы работы................................ 155
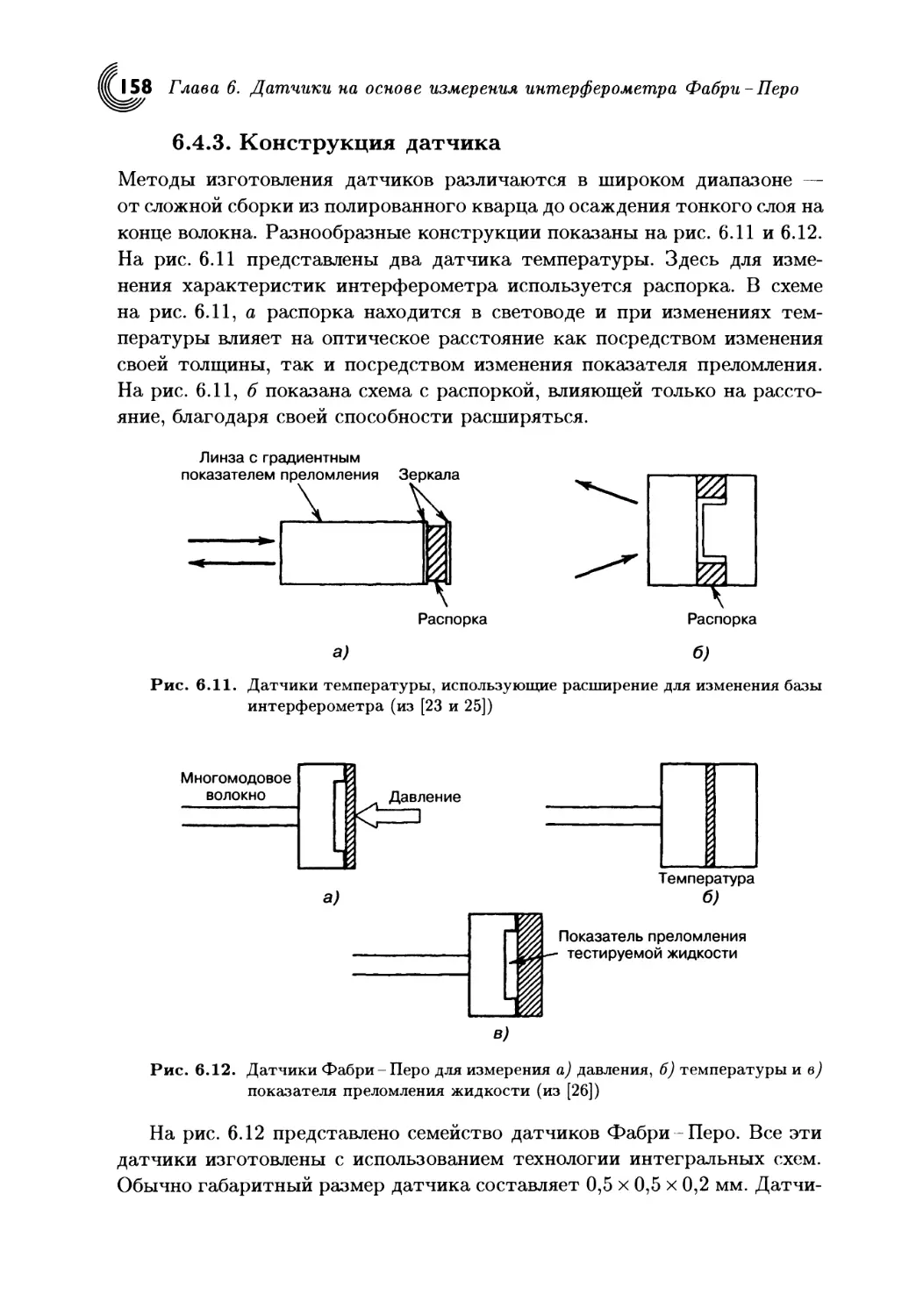
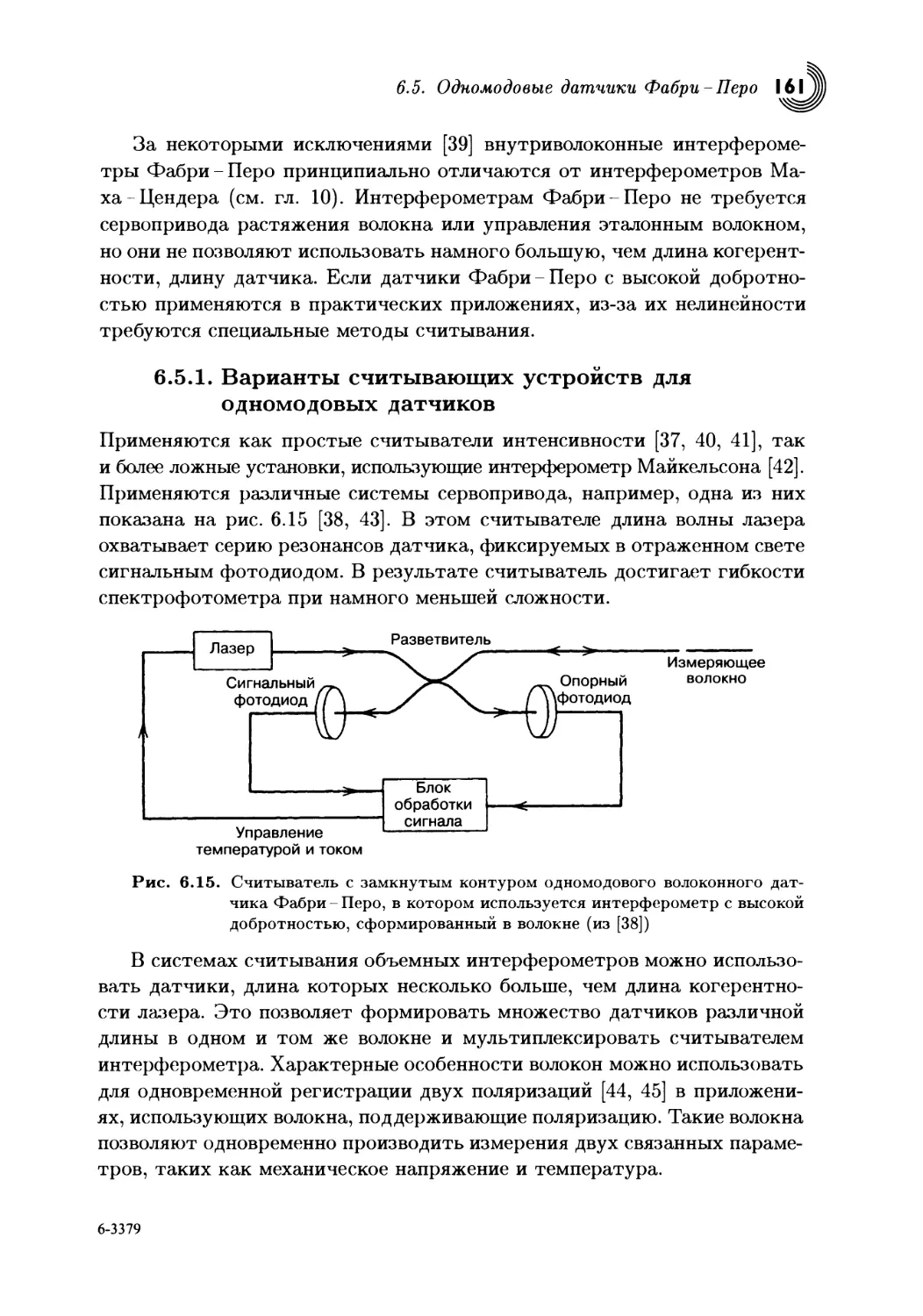
6.4.3. Конструкция датчика............................ 158
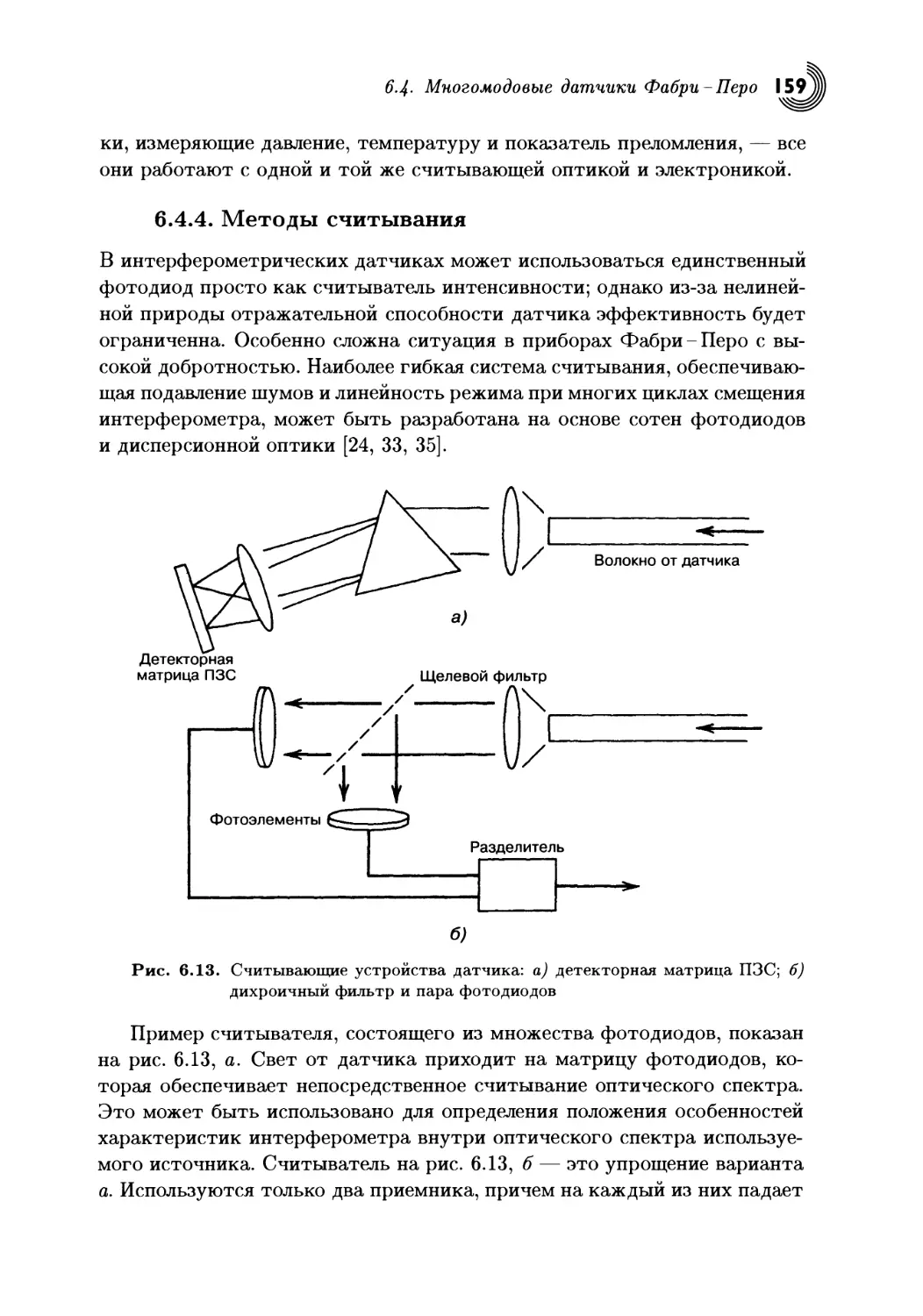
6.4.4. Методы считывания.............................. 159
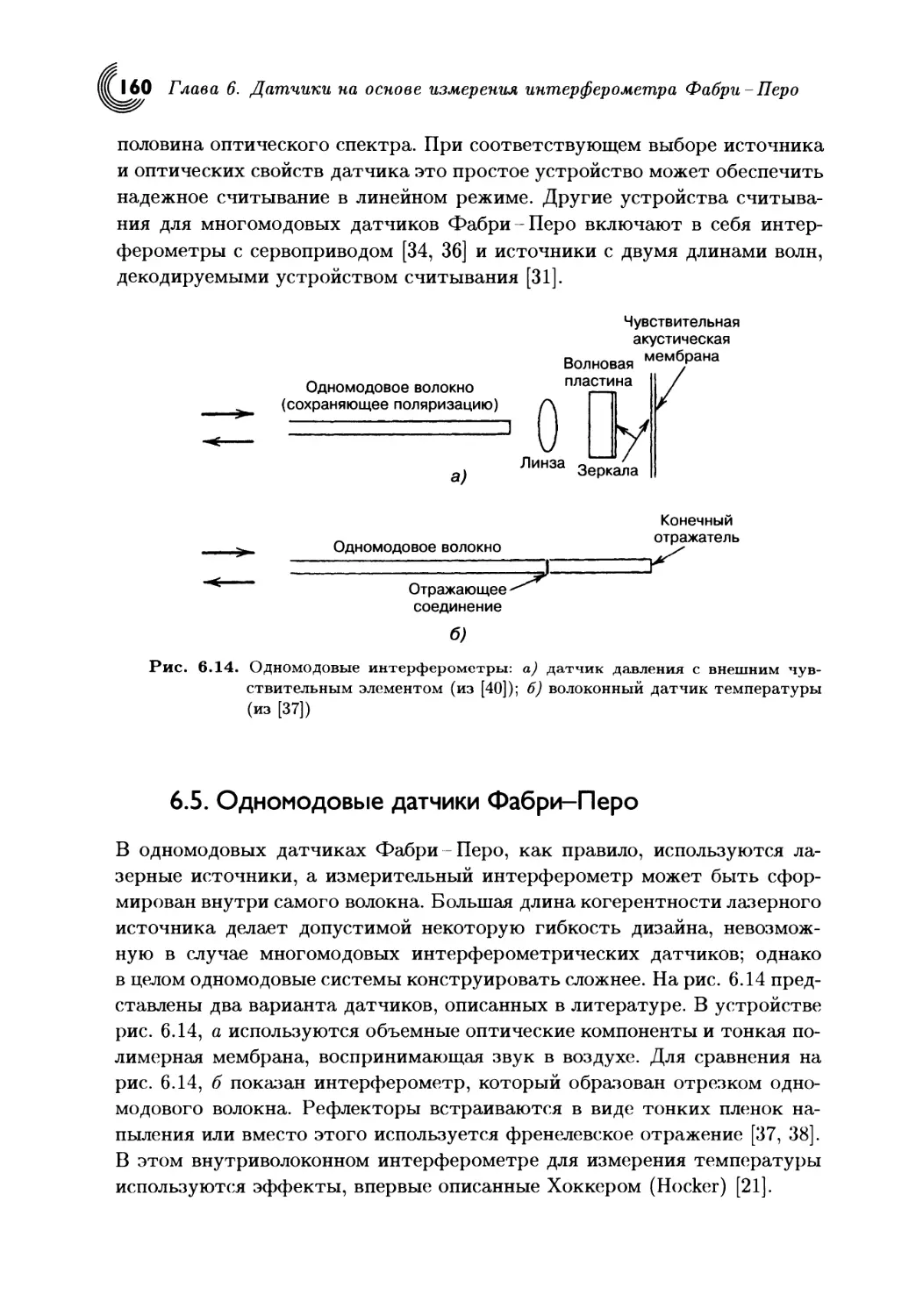
6.5. Одномодовые датчики Фабри-Перо..................... 160
6.5.1. Варианты считывающих устройств для одномодовых
датчиков............................................. 161
Литература...............................................162
Глава 7
Многомодовые дифракционные датчики.......................165
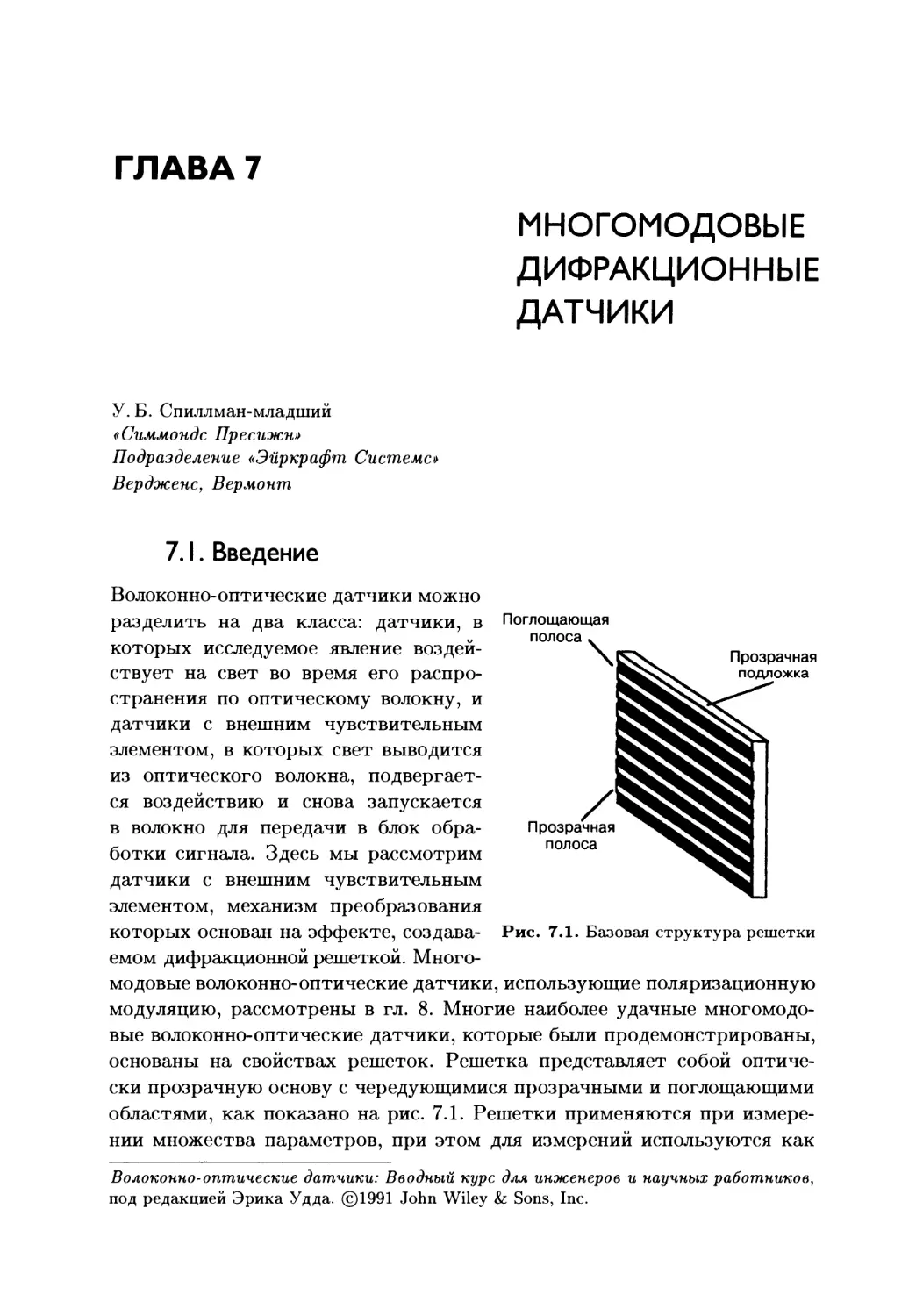
7.1. Введение........................................... 165
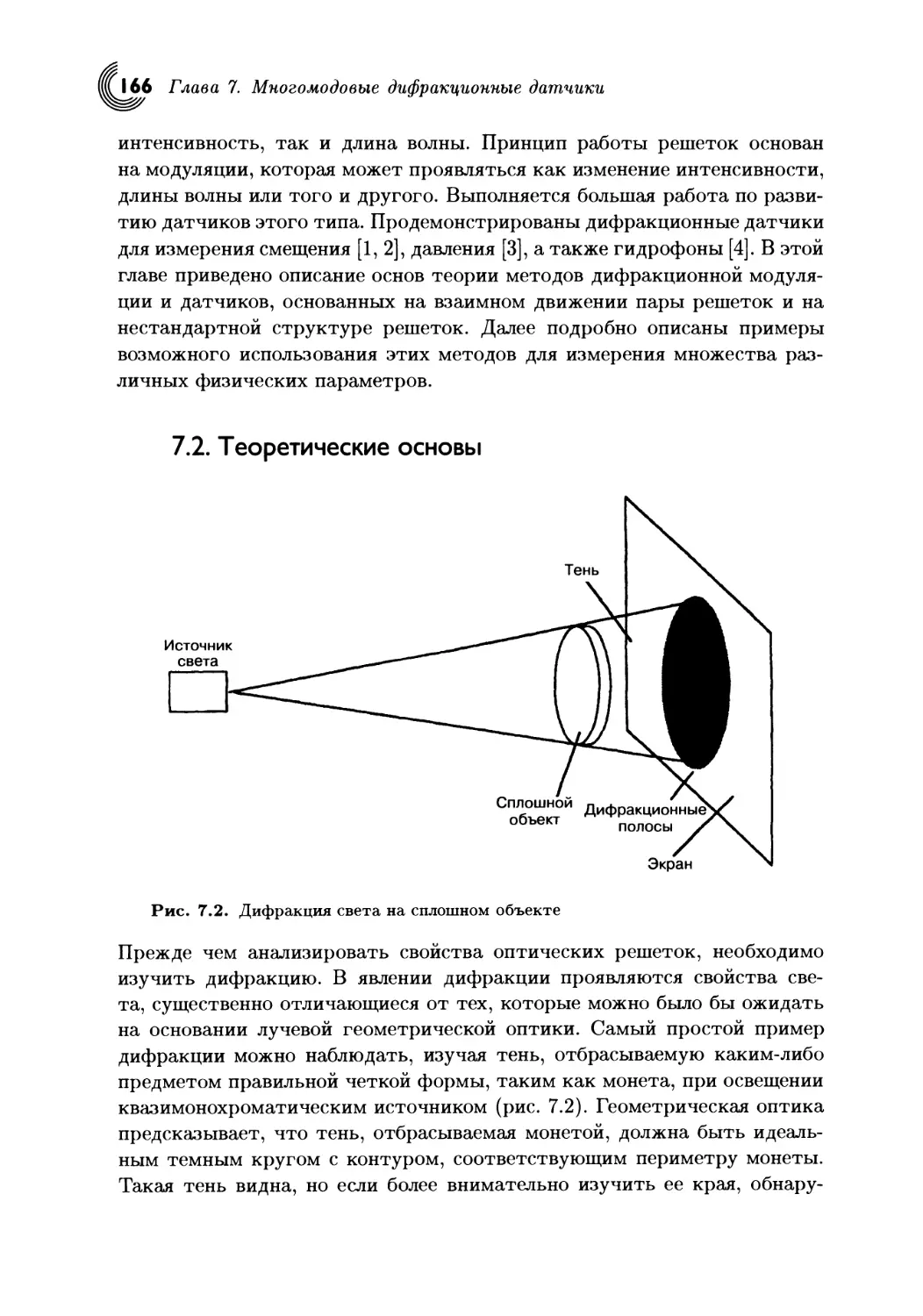
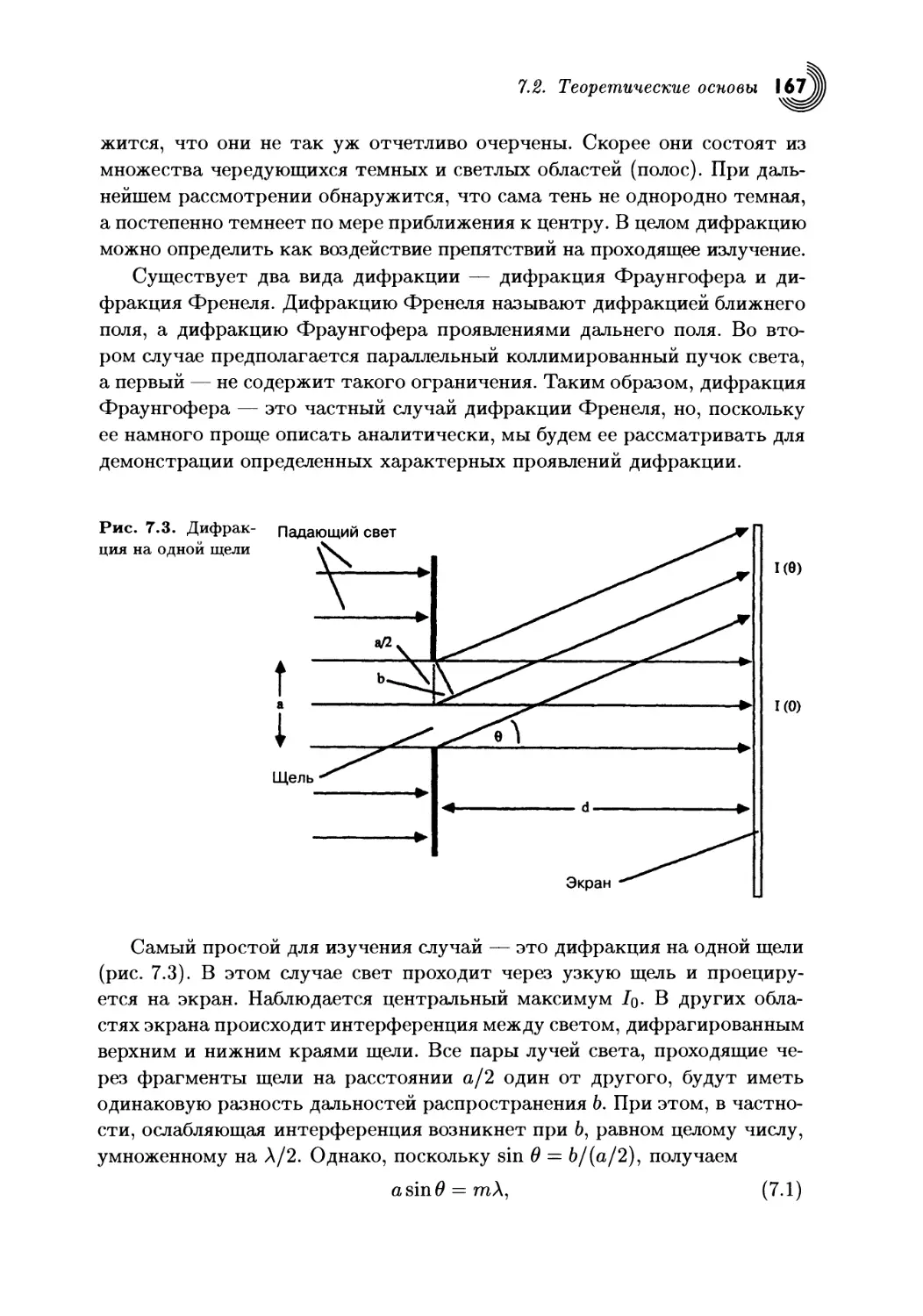
7.2. Теоретические основы............................... 166
7.2.1. Оптические методы кодирования.................. 170
7.3. Датчики, основанные на относительном движении находящих-
ся одна напротив другой решеток......................... 172
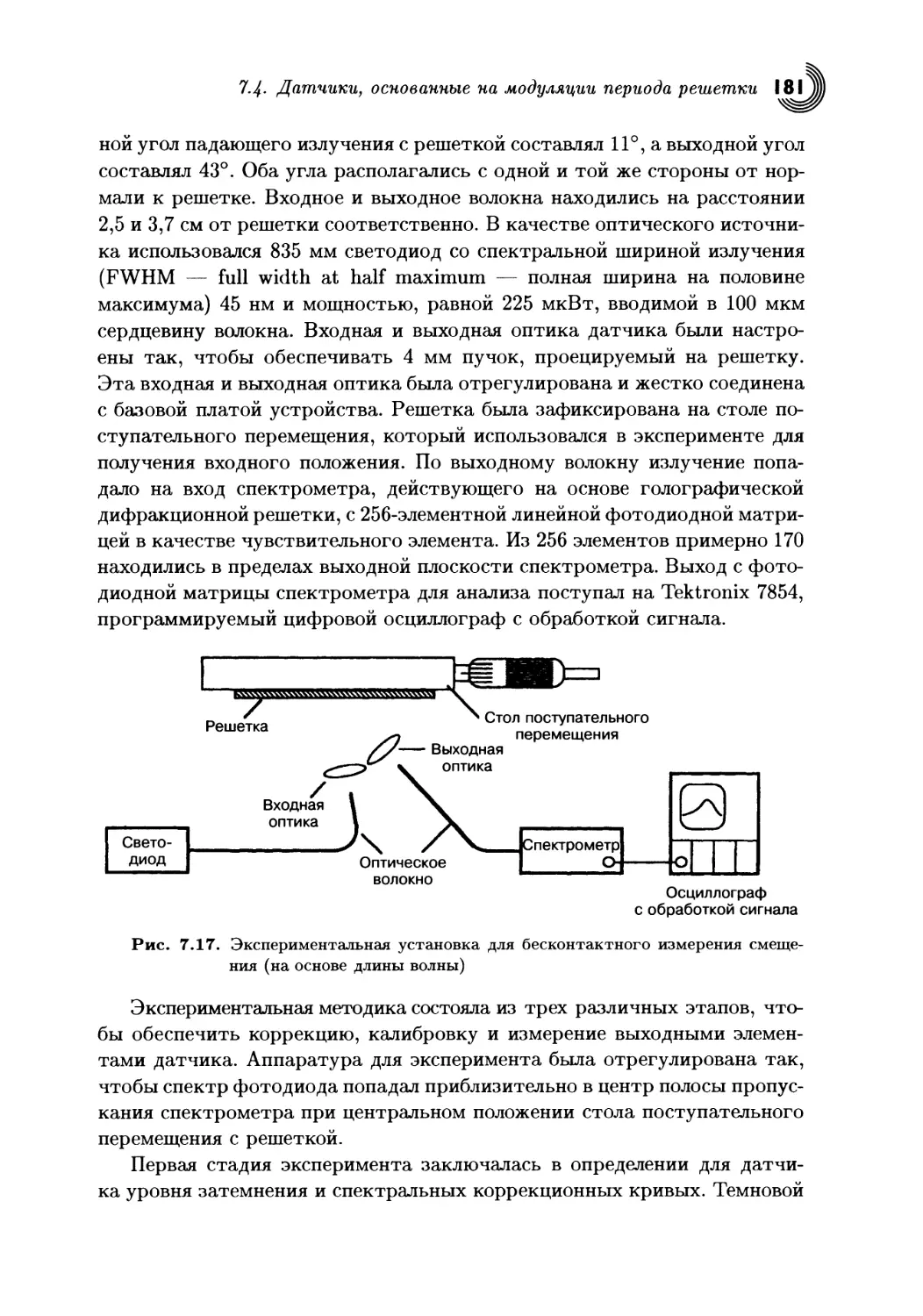
7.4. Датчики, основанные на модуляции периода решетки... 178
7.5. Состояние разработки датчиков...................... 185
7.6. Резюме............................................. 186
Литература...............................................186
Содержание
Глава 8
Многомодовые датчики поляризации.........................188
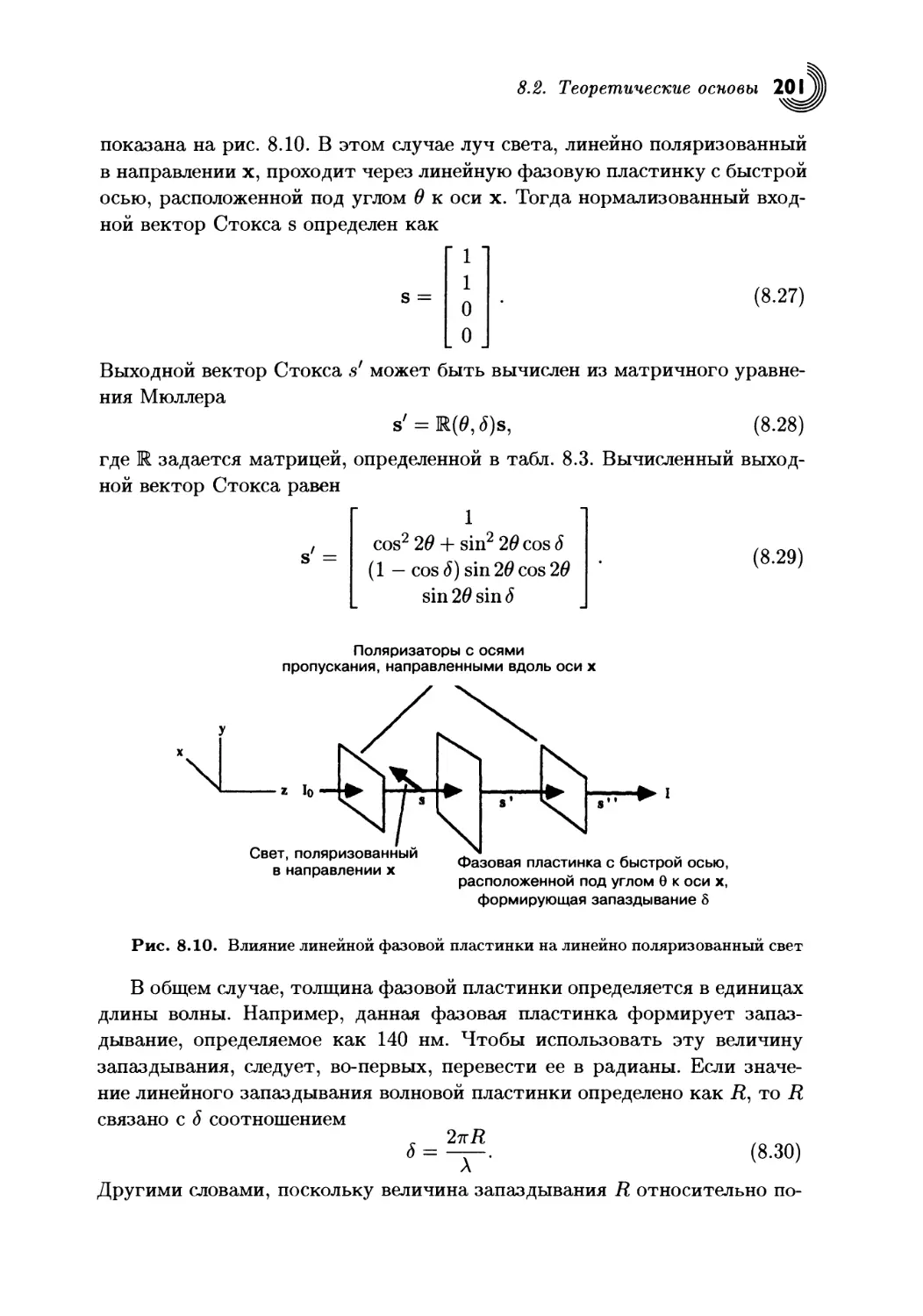
8.1. Введение........................................... 188
8.2. Теоретические основы............................... 188
8.2.1. Феноменологическое описание поляризации и запаздыва-
ния................................................... 188
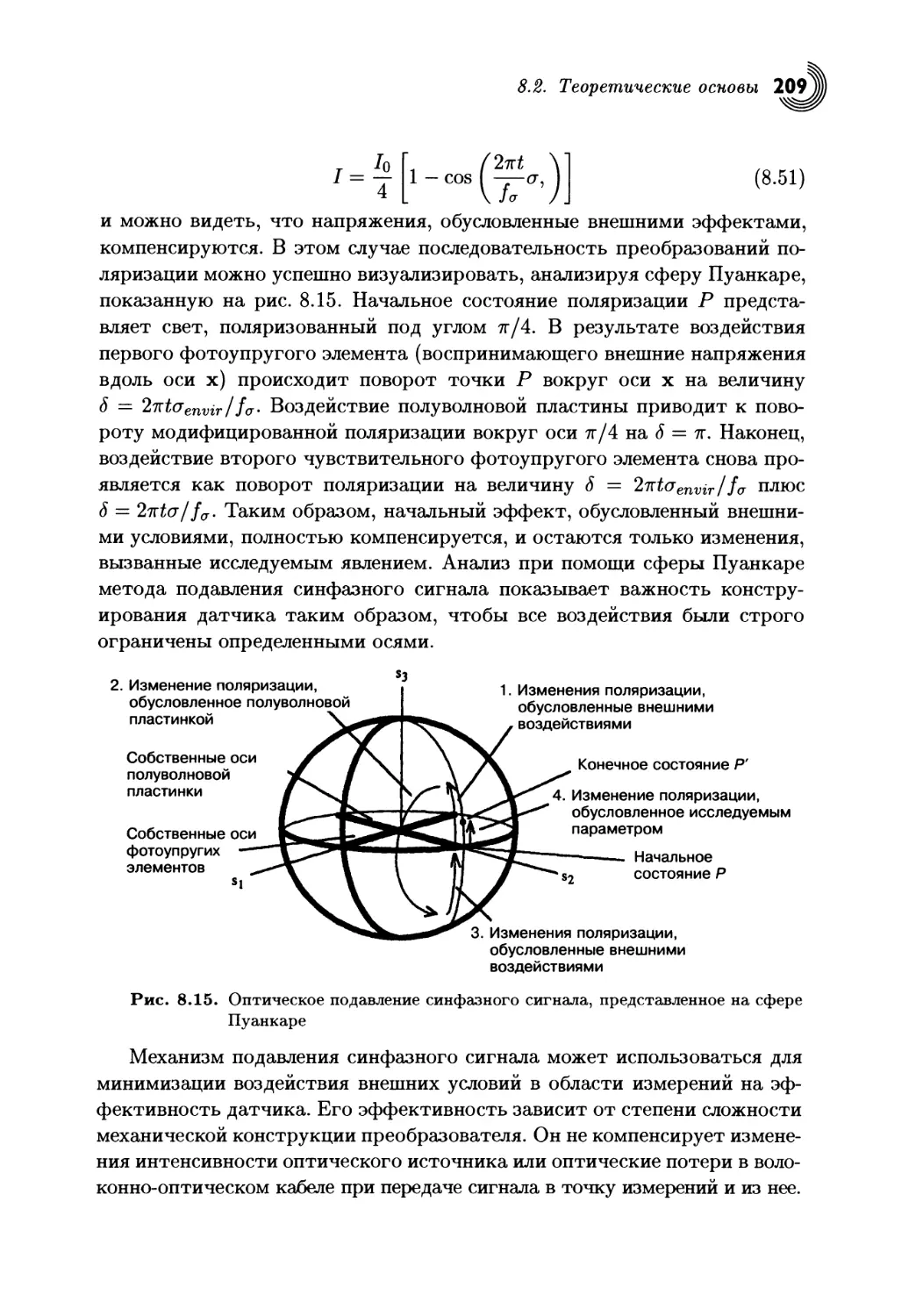
8.2.2. Сфера Пуанкаре................................. 196
8.2.3. Формализмы Мюллера и Джонса.................... 198
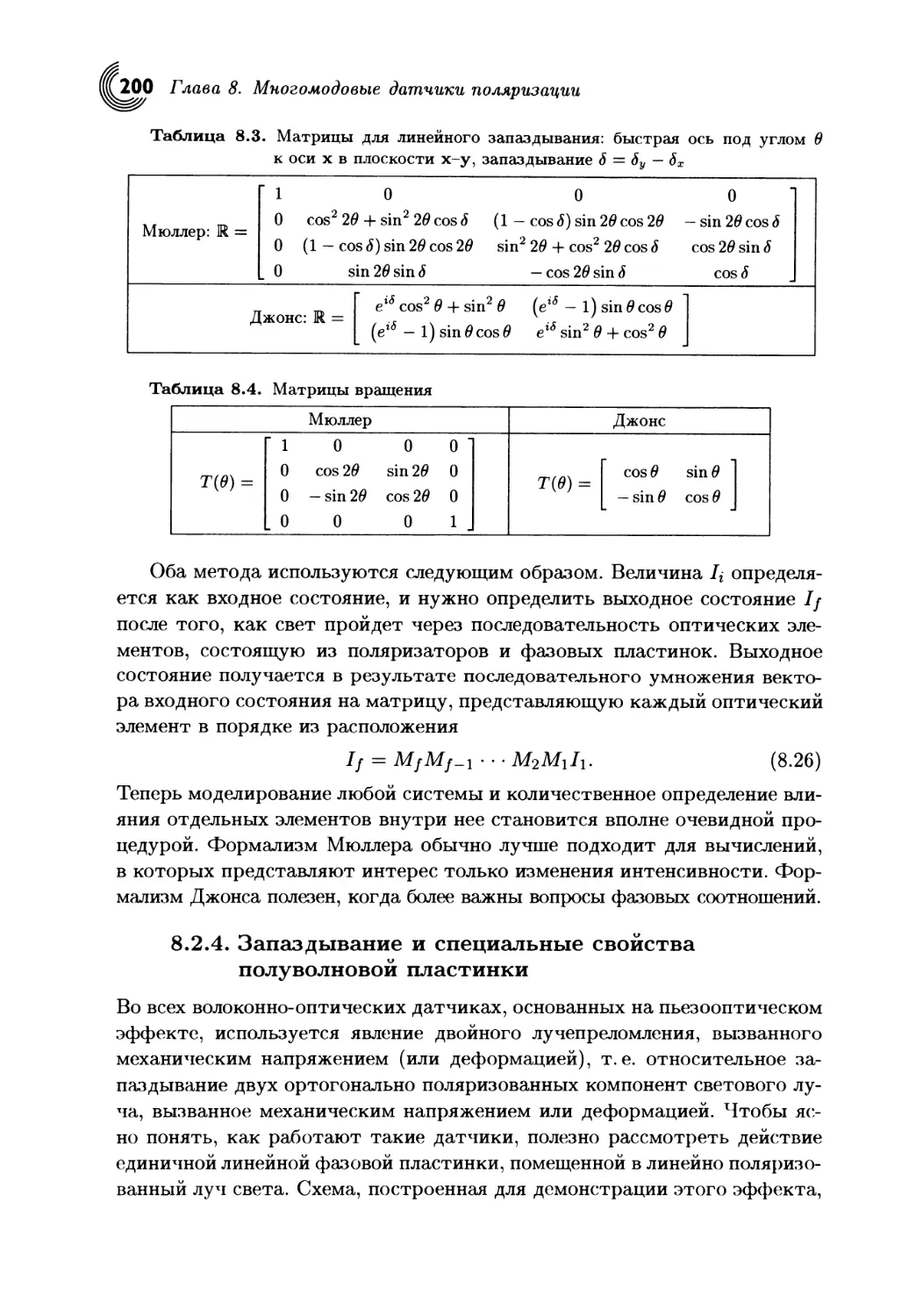
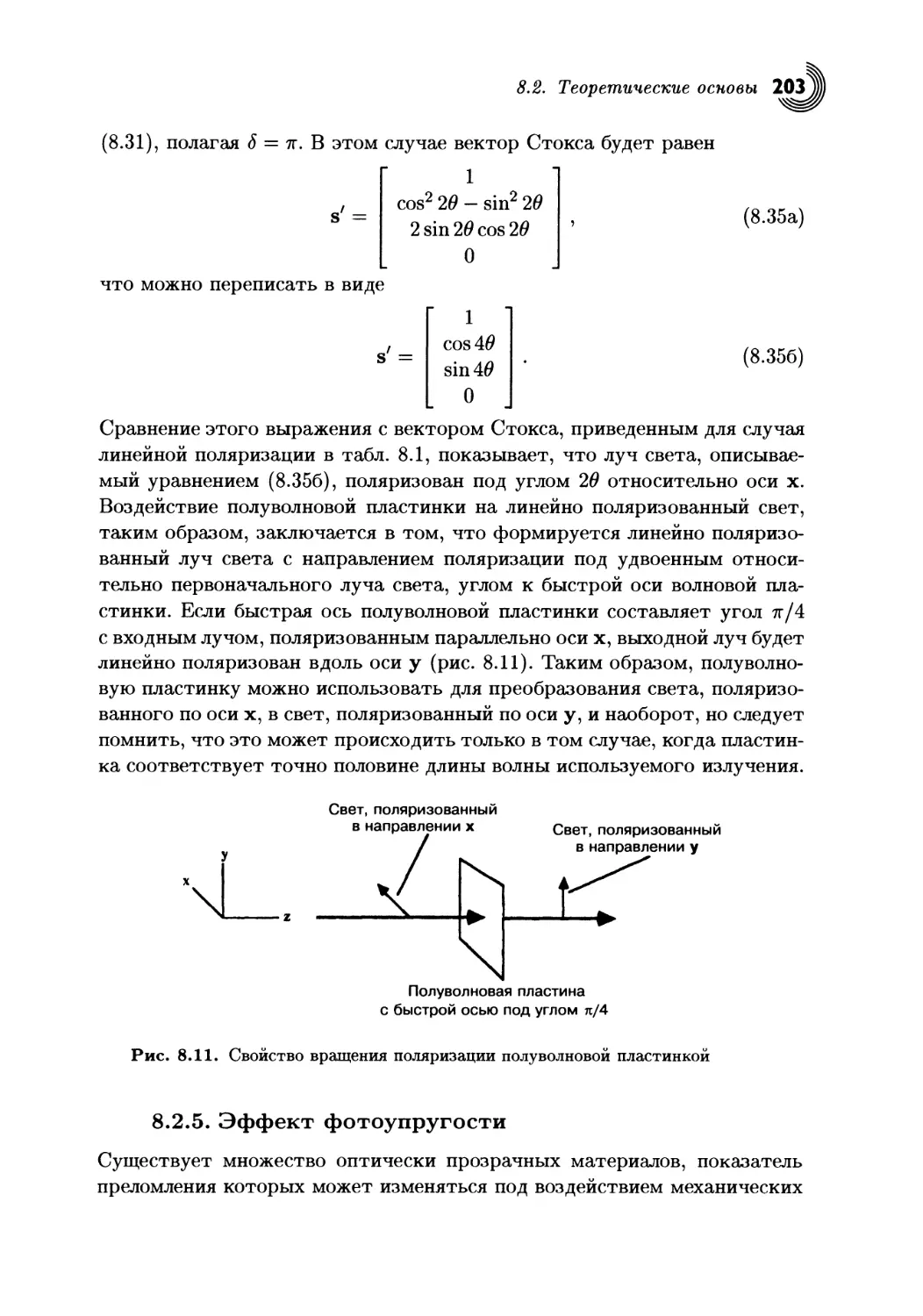
8.2.4. Запаздывание и специальные свойства полуволновой пла-
стинки.................................................200
8.2.5. Эффект фотоупругости............................203
8.2.6. Оптическое подавление синфазного сигнала...206
8.2.7. Методы оптического кодирования..................210
8.2.8. Разрешение и шум................................213
8.3. Датчики на основе эффекта фотоупругости.............214
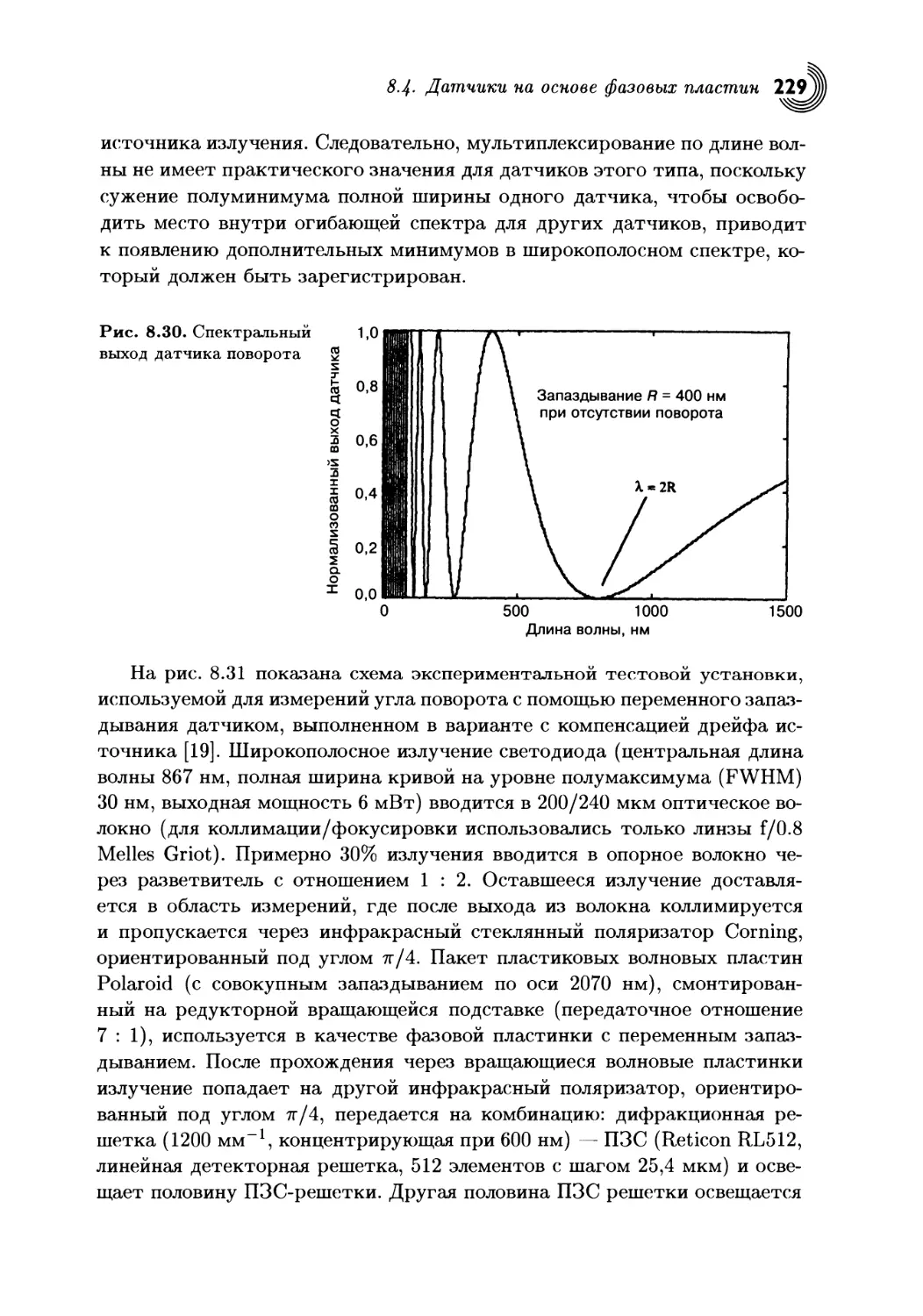
8.4. Датчики на основе фазовых пластин...................223
8.5. Состояние разработки датчиков.......................232
Литература...............................................233
Глава 9
Волоконно-оптические датчики на основе интерферо-
метра Саньяка и пассивного кольцевого резонатора.........235
9.1. Введение............................................235
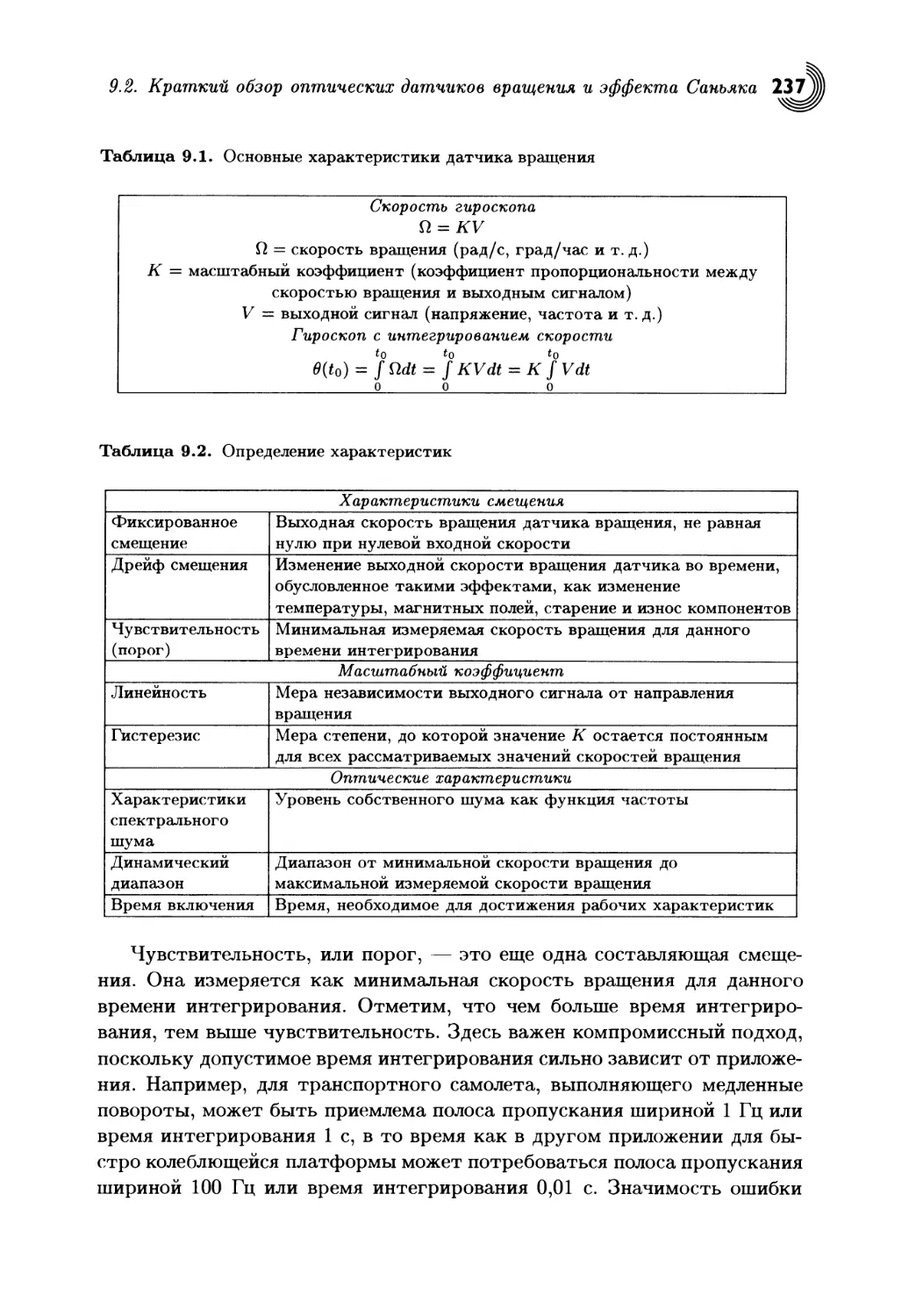
9.2. Краткий обзор оптических датчиков вращения и эффекта Са-
ньяка....................................................236
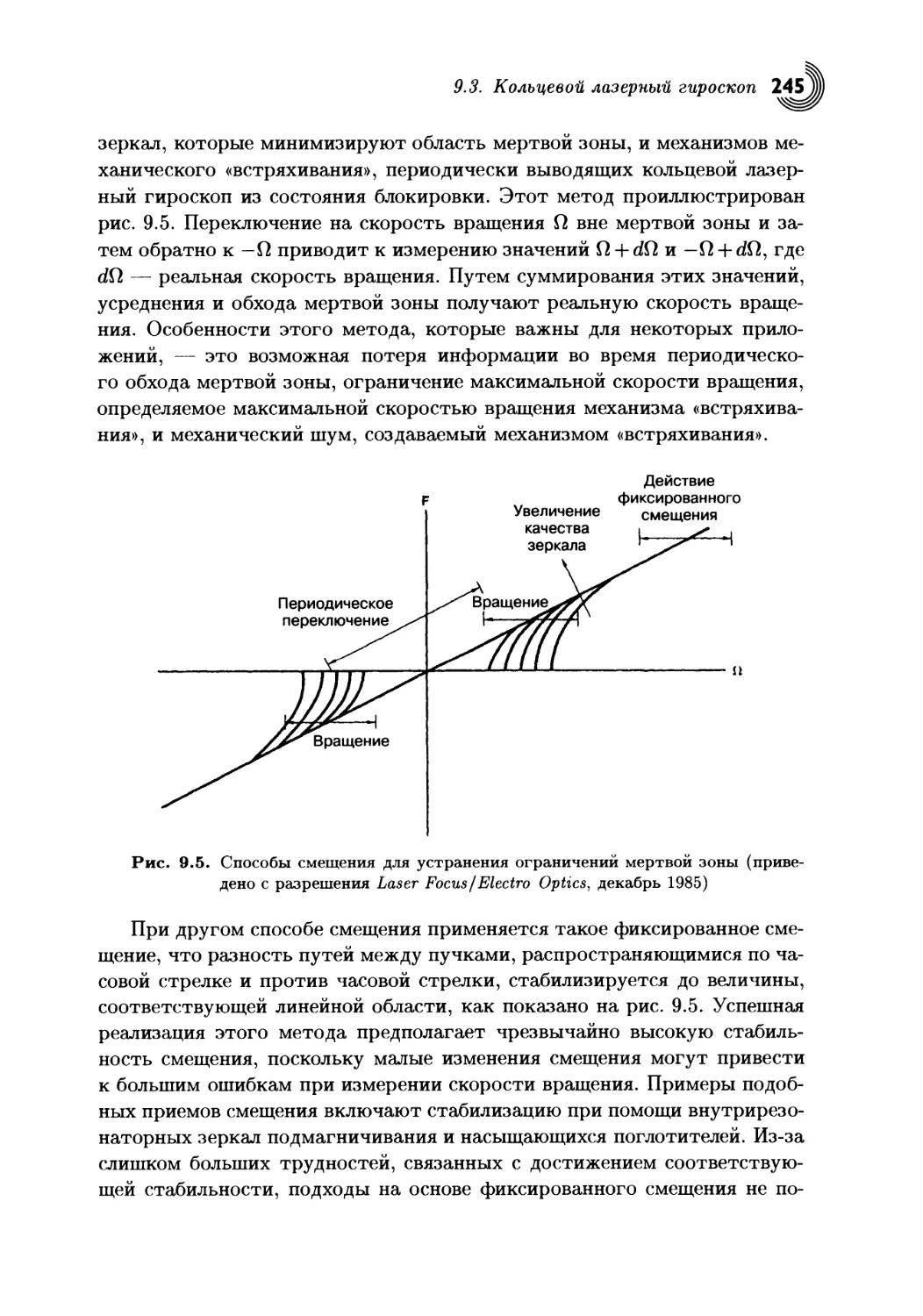
9.3. Кольцевой лазерный гироскоп ........................242
9.3.1. Решение проблемы блокировки ....................244
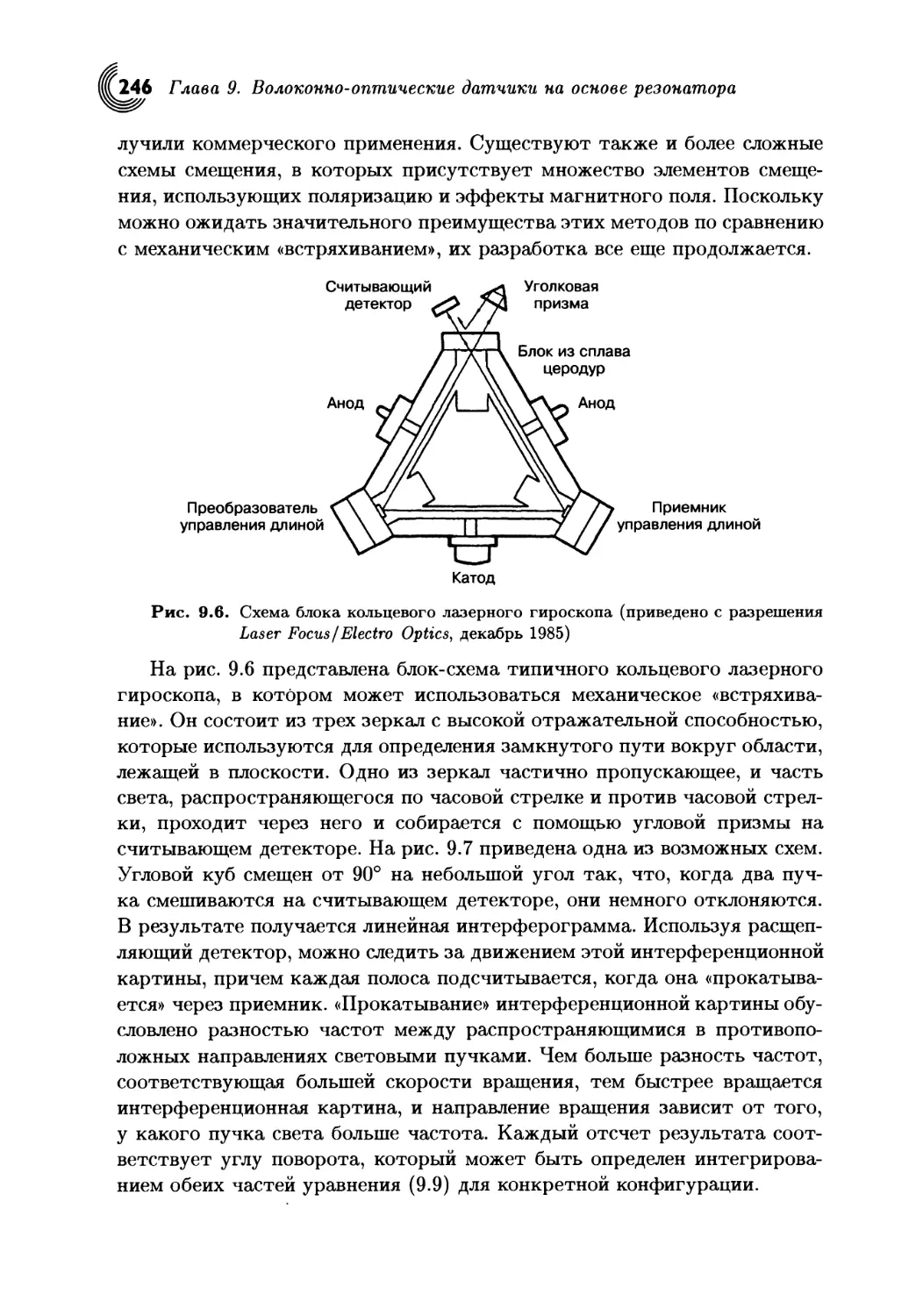
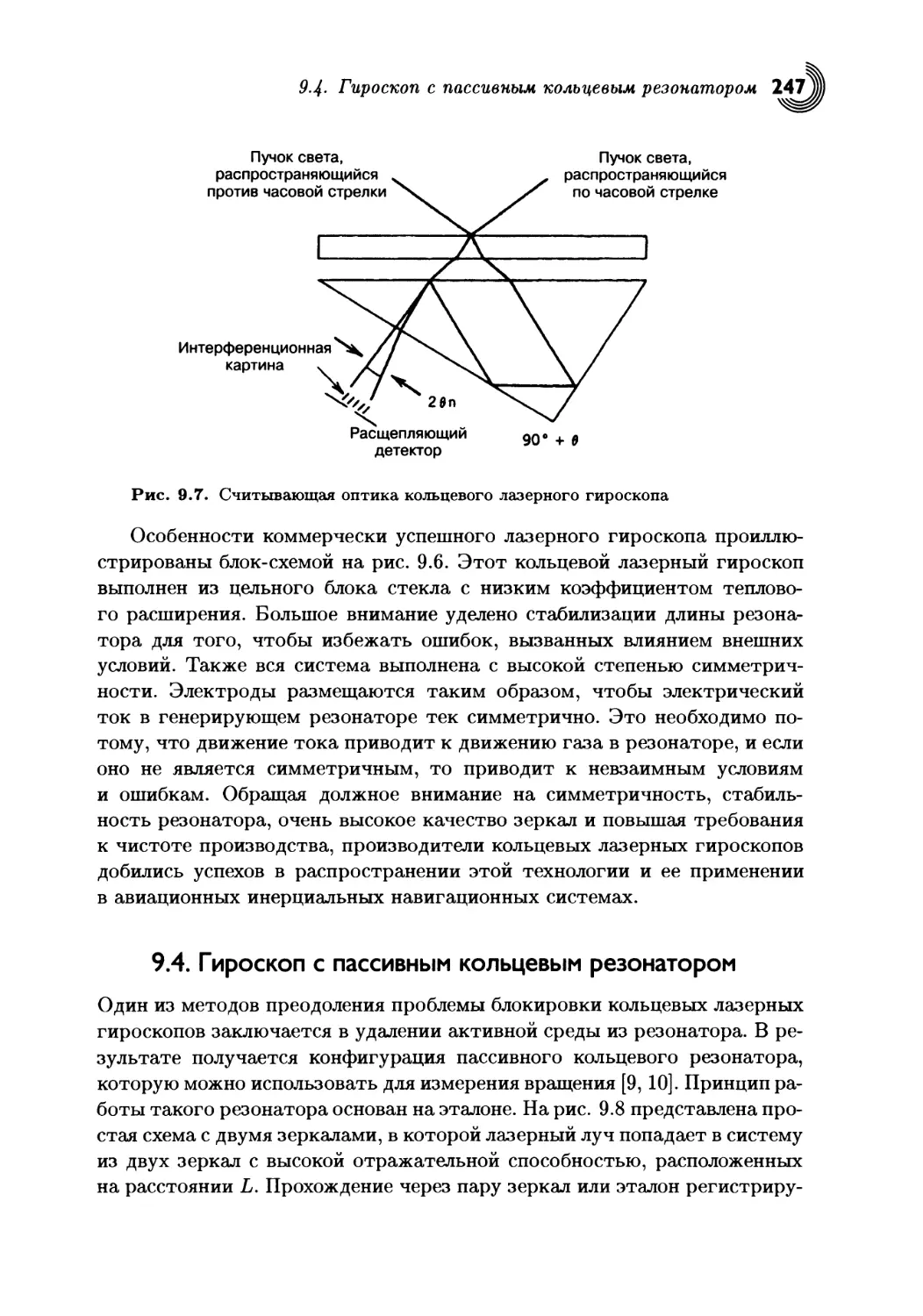
9.4. Гироскоп с пассивным кольцевым резонатором..........247
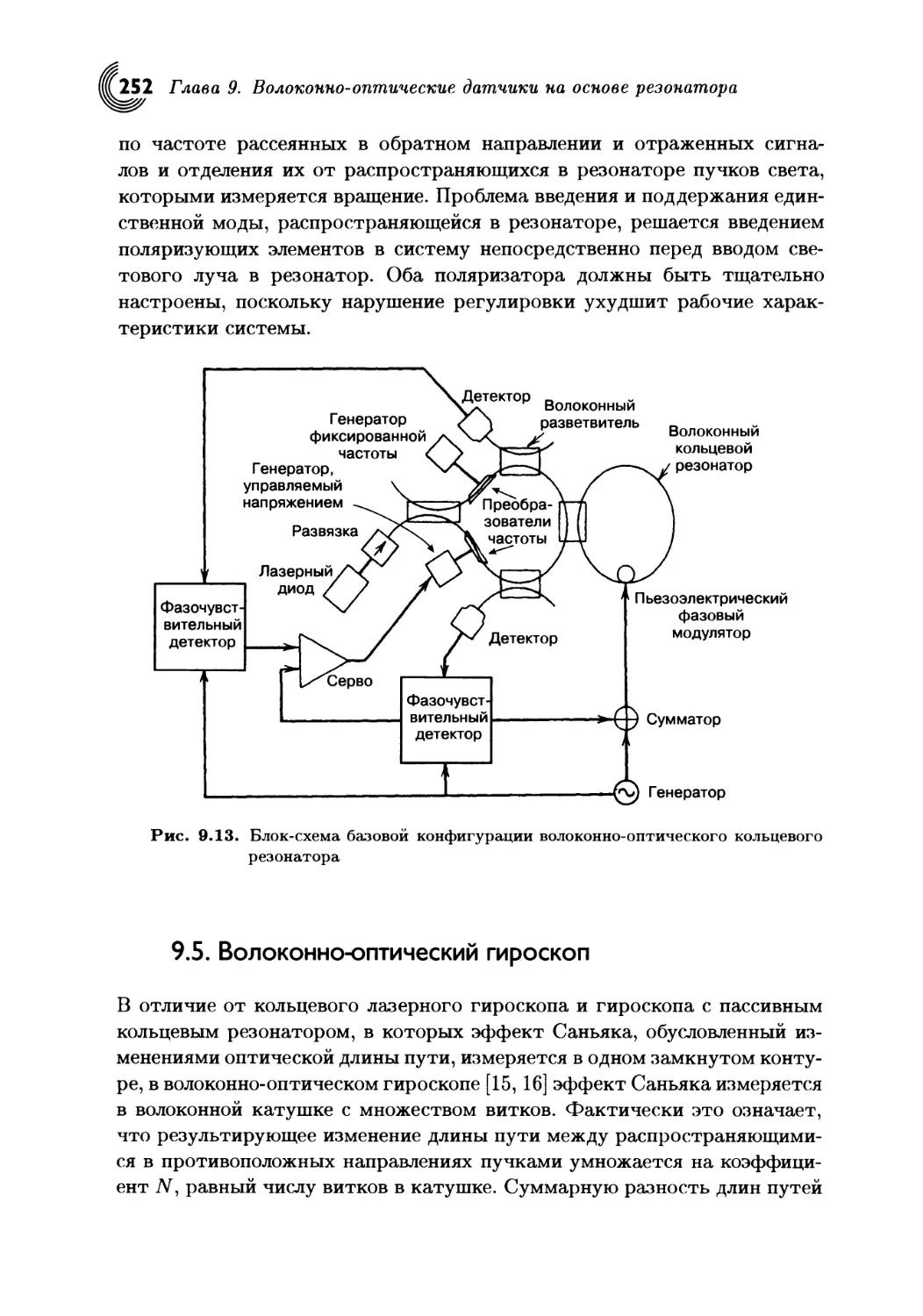
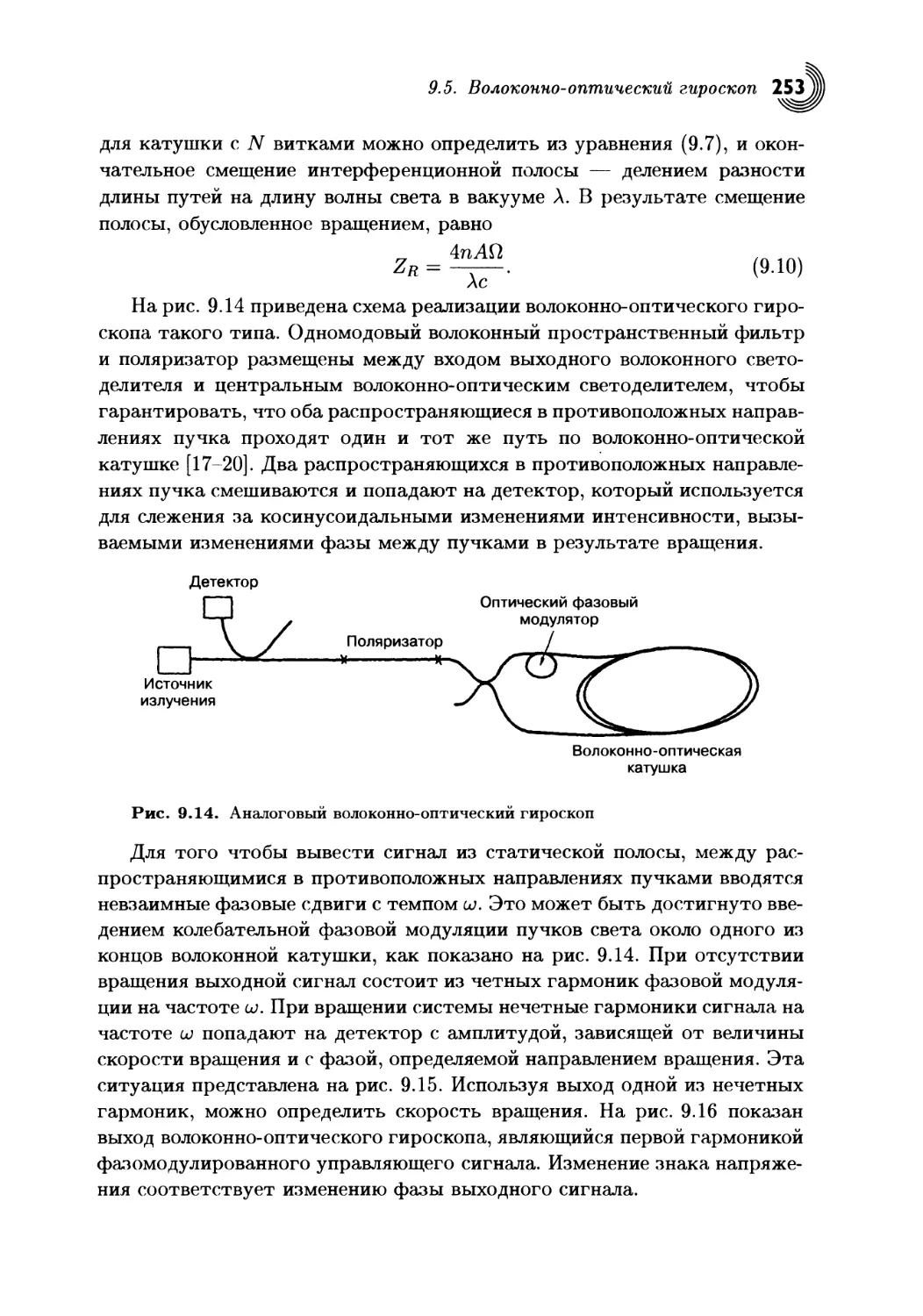
9.5. Волоконно-оптический гироскоп.......................252
9.6. Компромисс между кольцевым лазером, пассивным кольце-
вым резонатором и волоконно-оптическим интерферометром
при использовании их в качестве датчиков вращения..256
9.6.1. Возможности компоновки и производства...........259
9.6.2. Вопросы надежности и приложения.................260
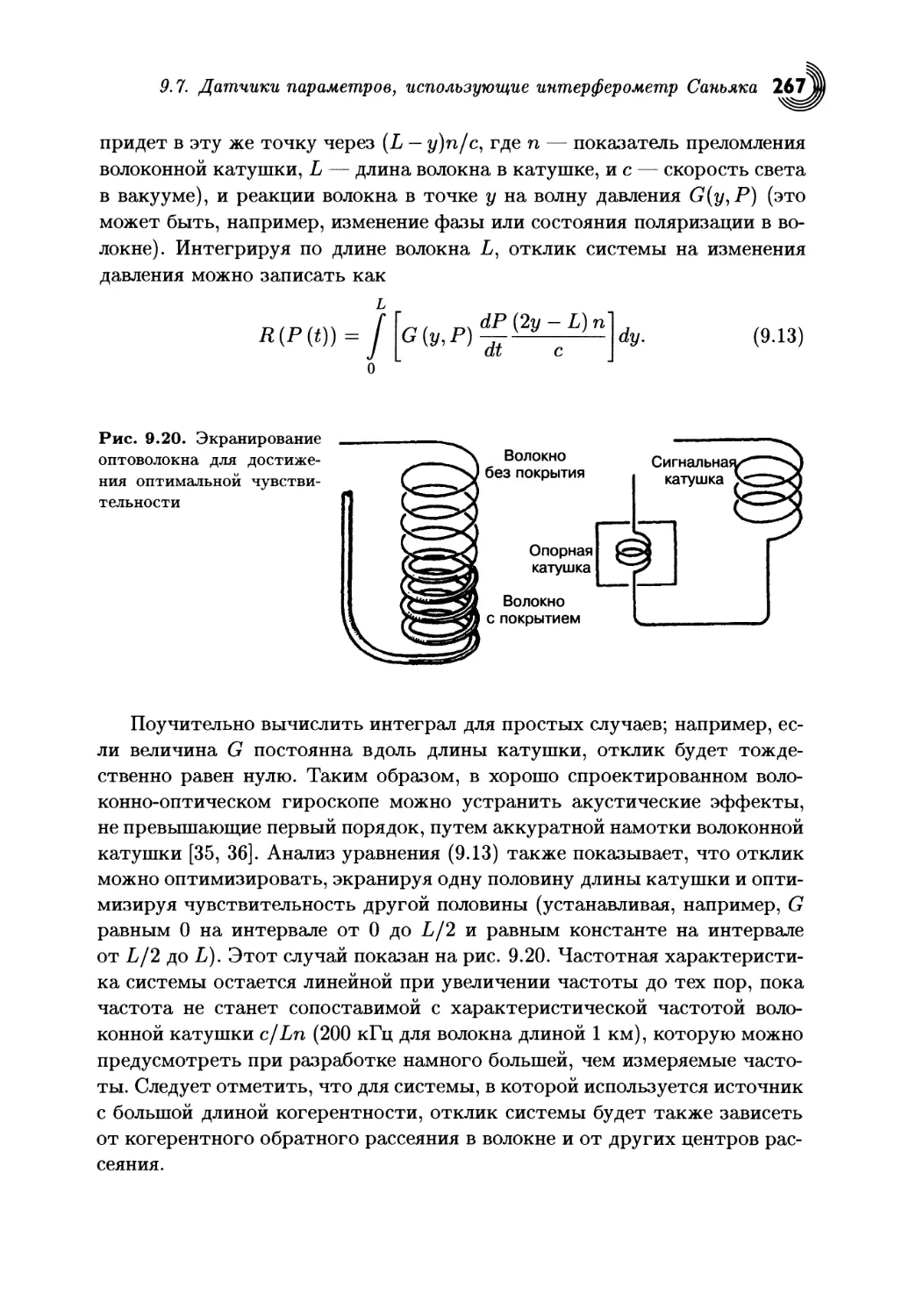
9.7. Датчики параметров внешней среды, использующие интерфе-
рометр Саньяка...........................................263
9.7.1. Быстро изменяющиеся явления внешней среды: обнару-
жения акустических колебаний...........................264
9.7.2. Акустический датчик на основе интерферометра Санья-
ка, использующий источник света в качестве усилителя ... 264
Содержание
9.7.3. Конфигурации волоконно-оптической катушки......265
9.7.4. Модуляция фазы и поляризации...................268
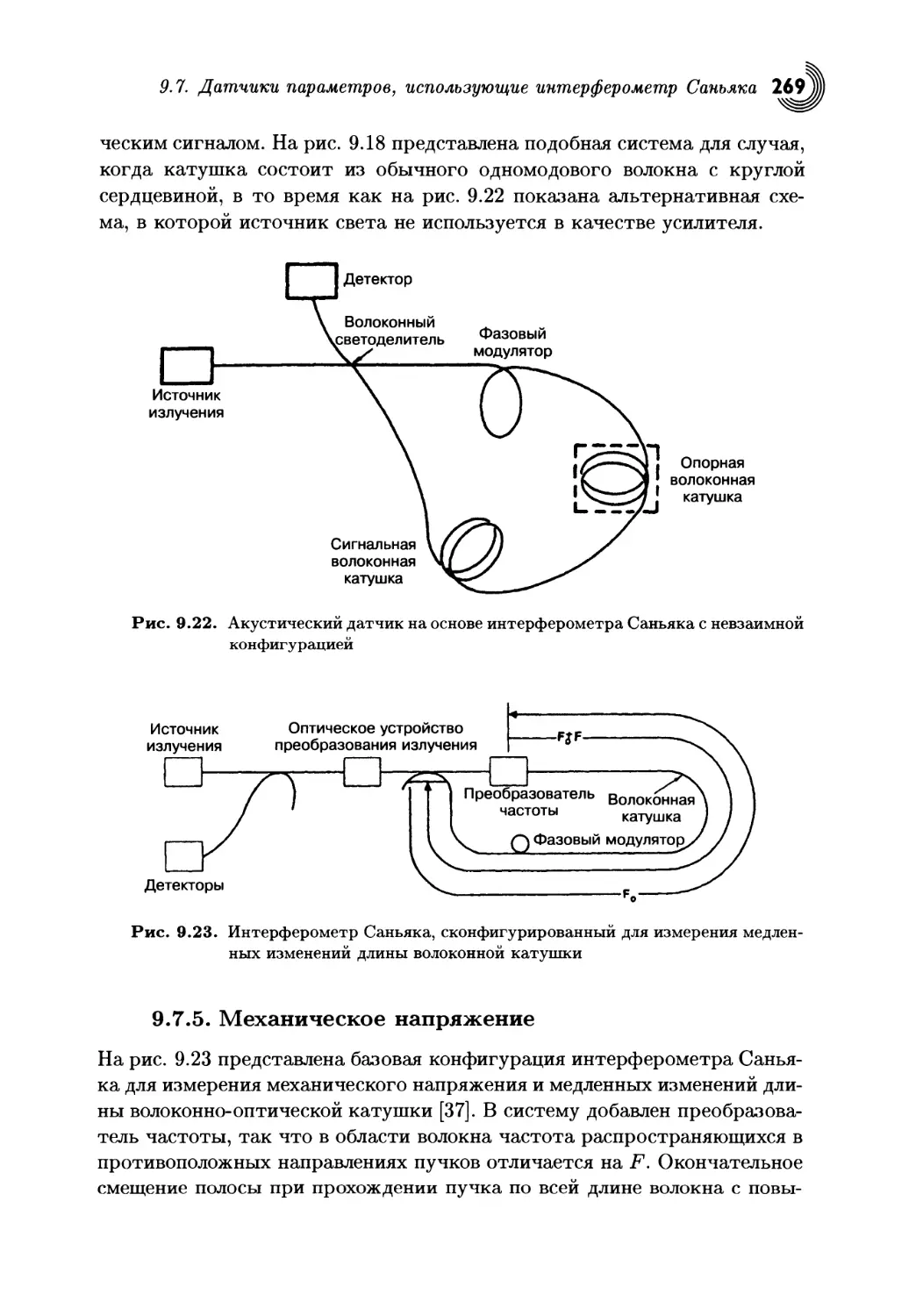
9.7.5. Механическое напряжение........................269
9.7.6. Измерение длины волны..........................270
9.7.7. Выводы.........................................271
Литература................................................271
Глава 10
Волоконно-оптические датчики на основе интерферо-
метров Маха - Цендера и Майкельсона.......................274
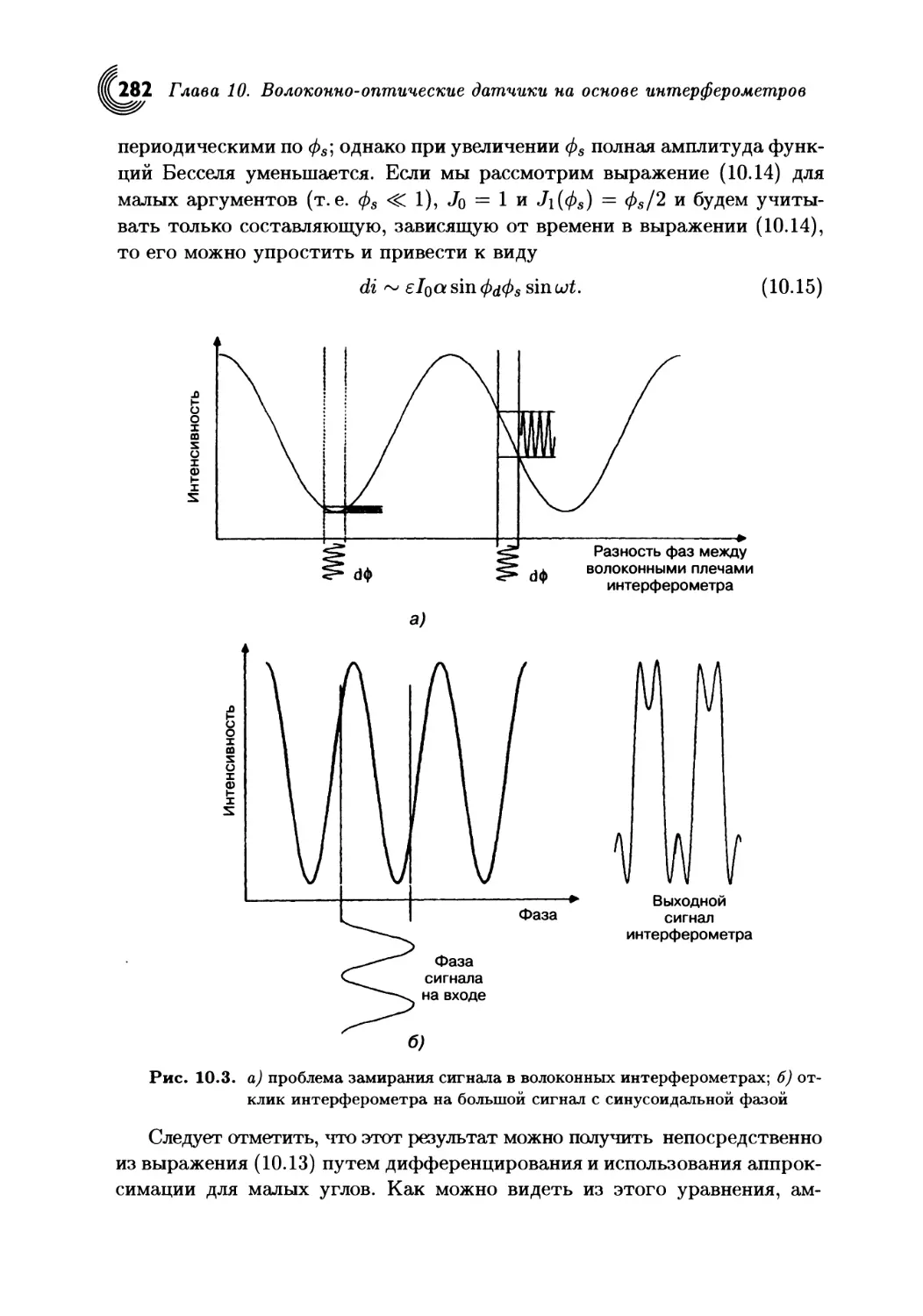
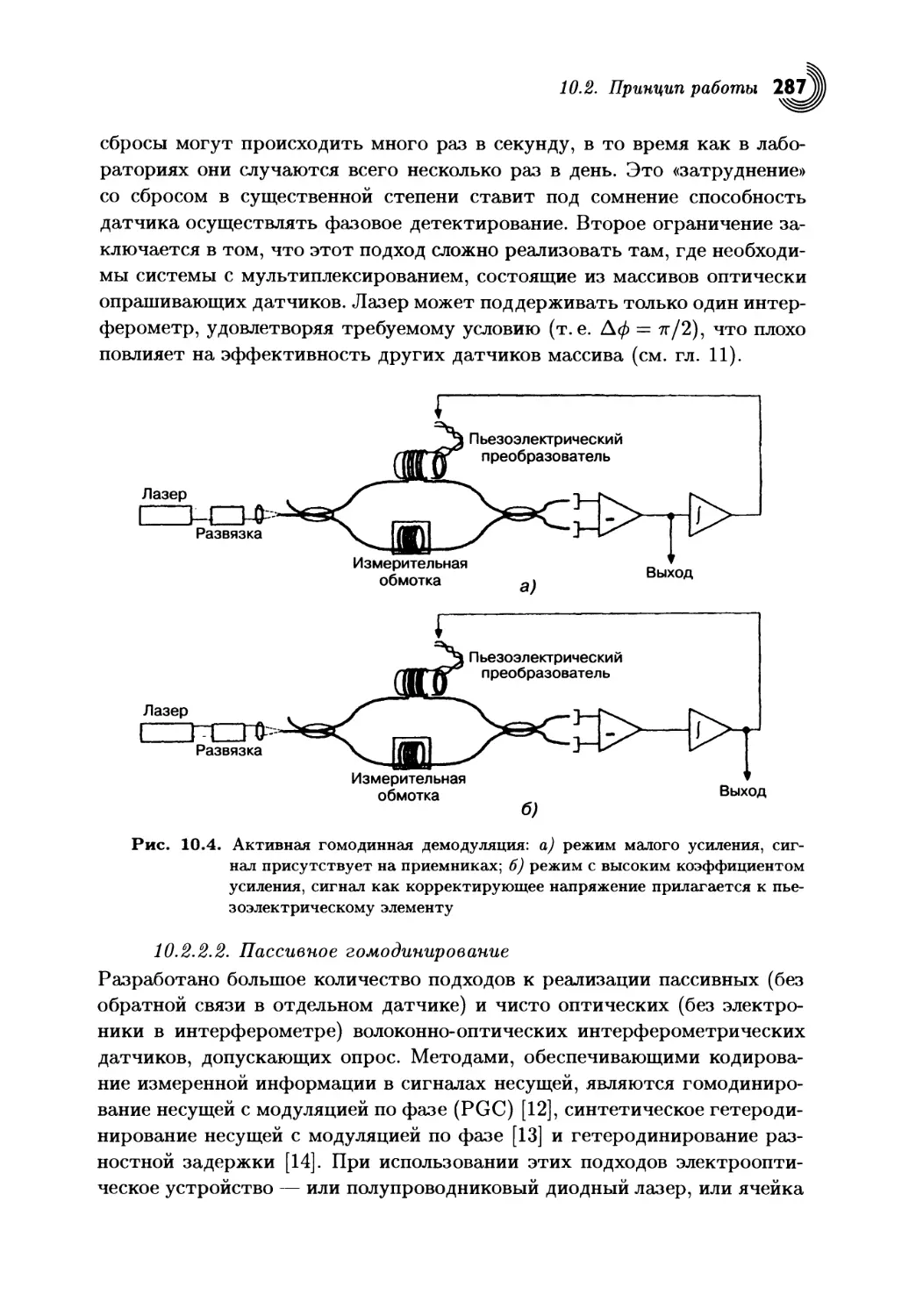
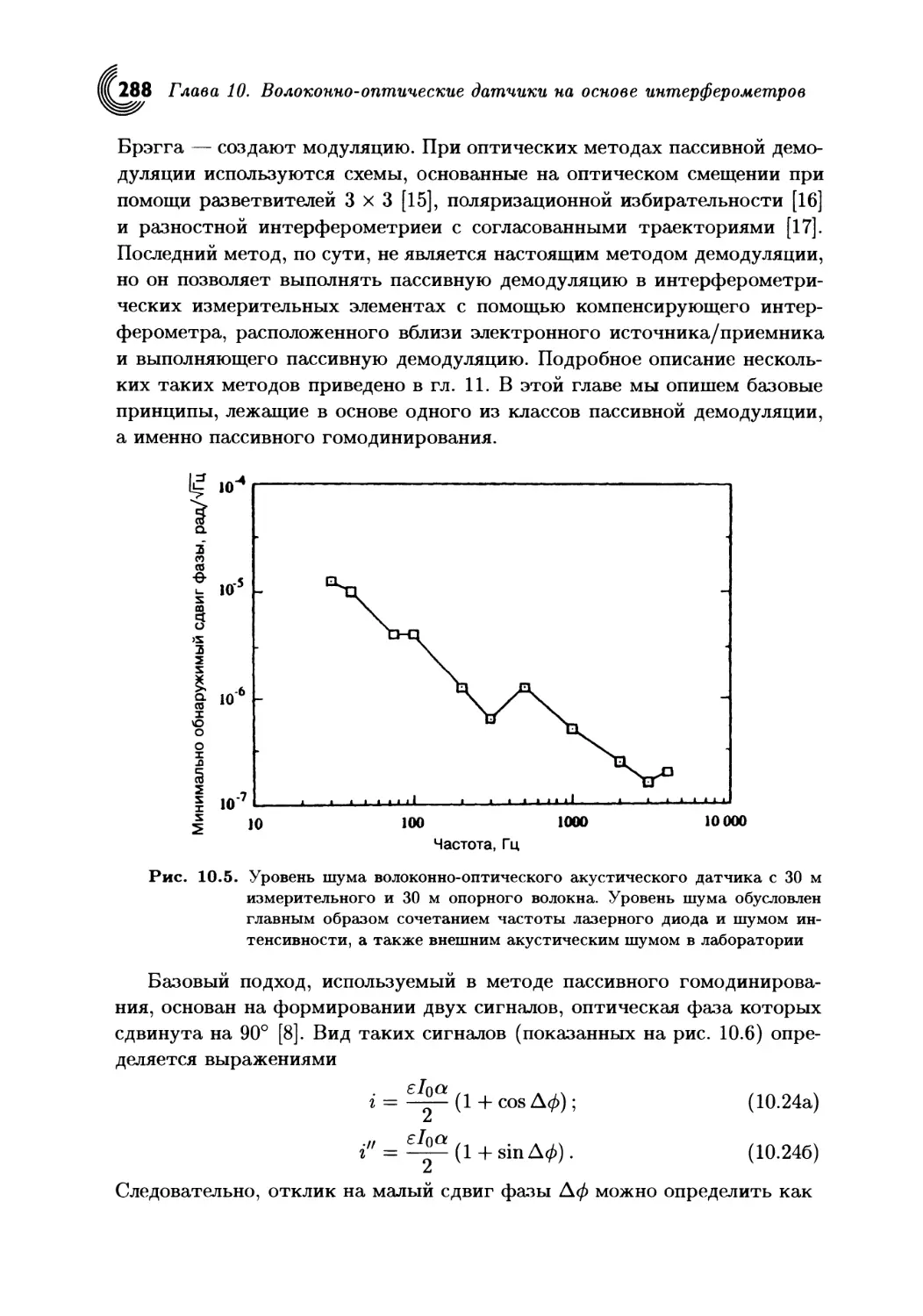
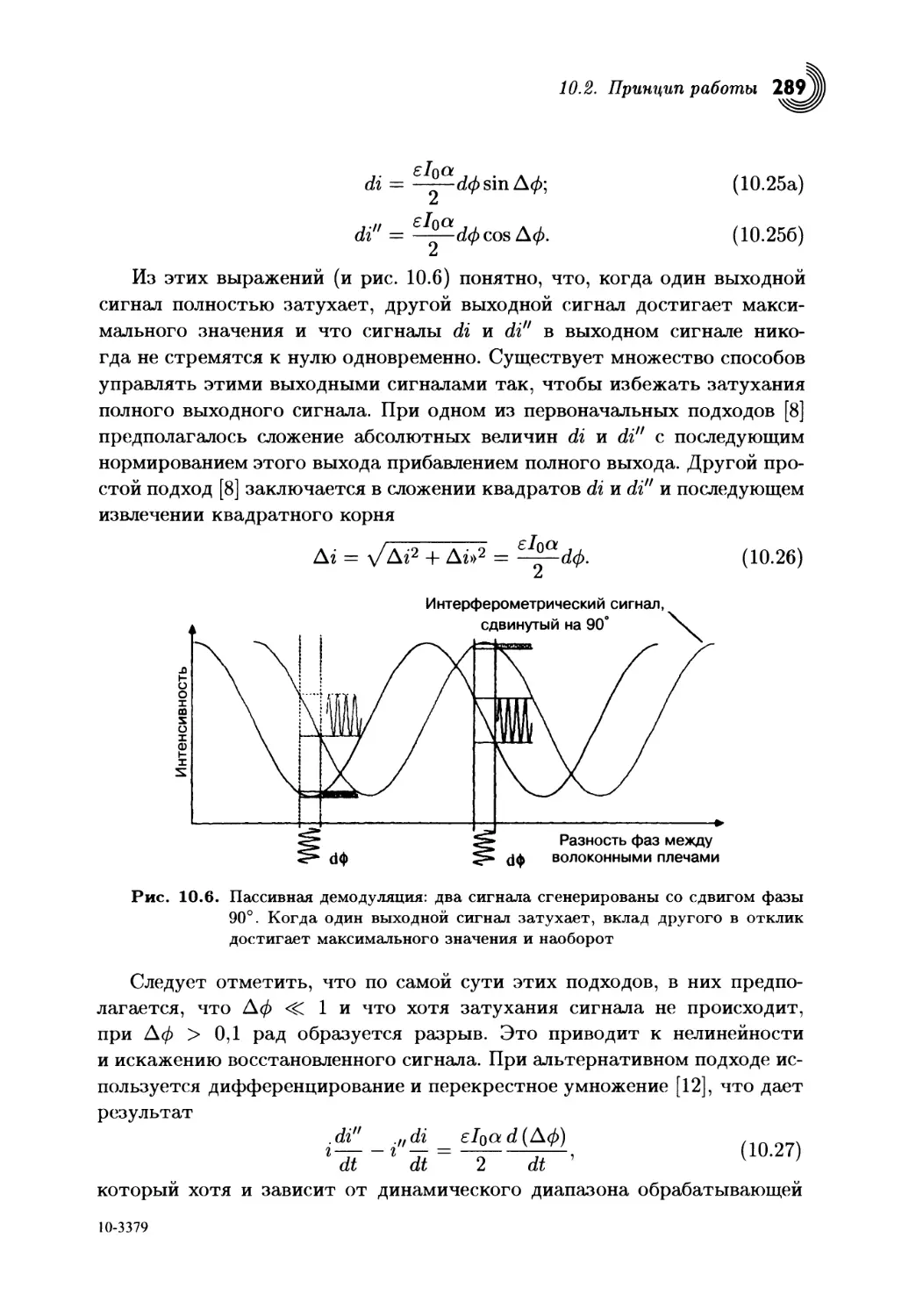
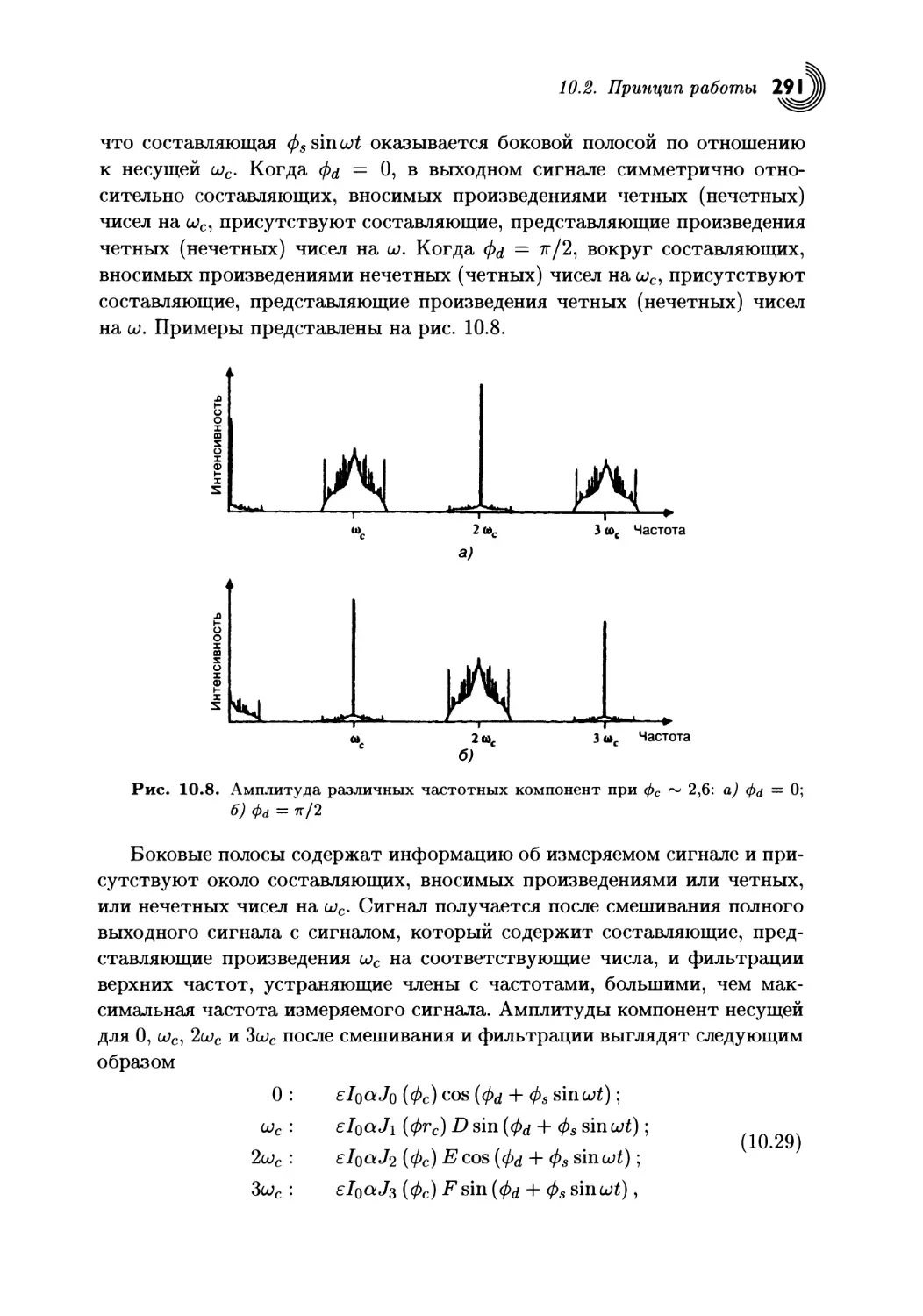
10.1. Введение............................................274
10.2. Принцип работы......................................276
10.2.1. Двухлучевая интерферометрия....................276
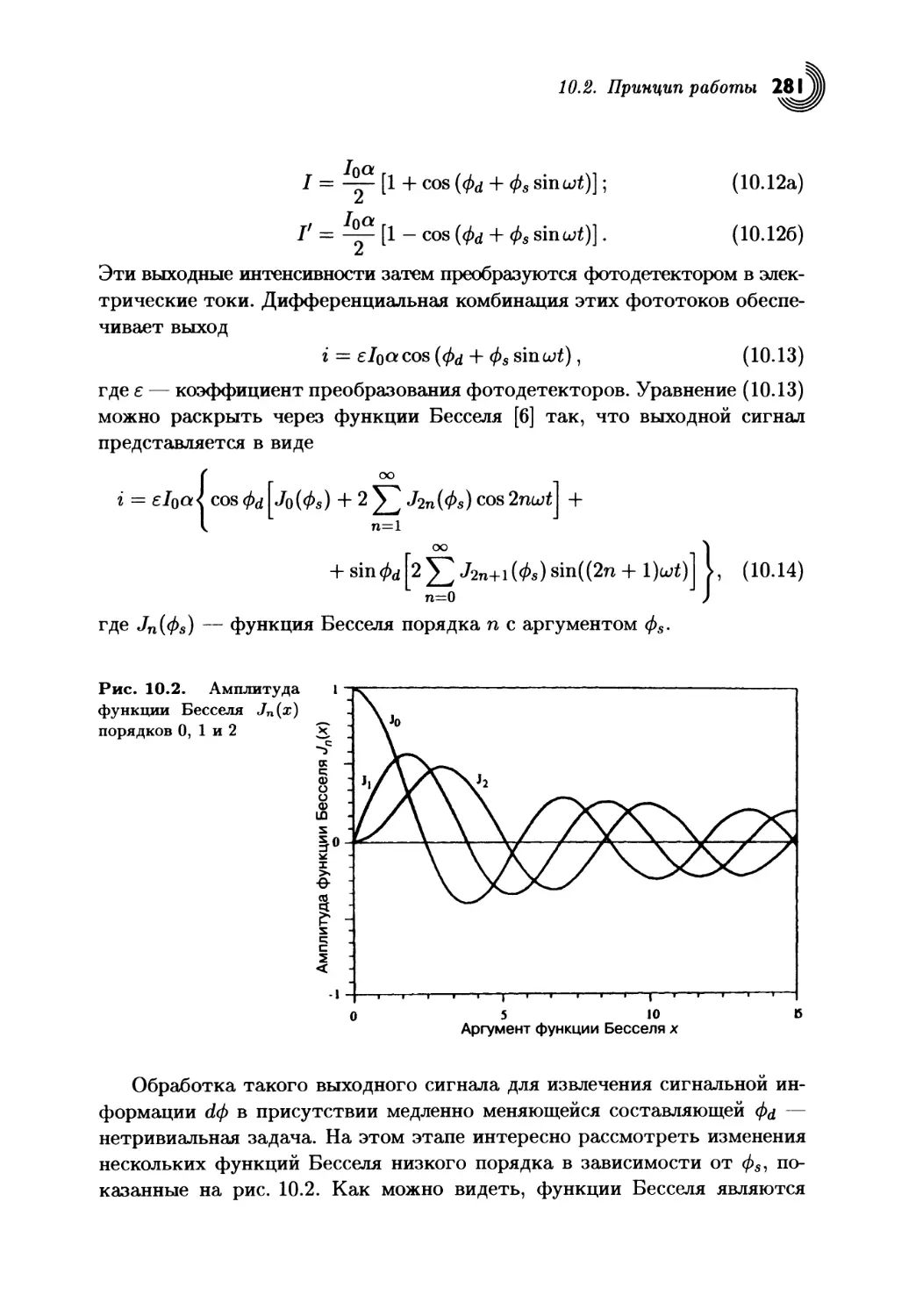
10.2.2. Демодуляция....................................283
10.2.3. Шум............................................294
10.2.4. Поляризация....................................301
10.3. Схемы волоконных интерферометров....................307
10.4. Приложения..........................................314
10.4.1. Динамические приложения........................315
10.4.2. Статические приложения ........................319
10.5. Резюме..............................................324
Литература................................................324
Глава 11
Распределенные и мультиплексированные
волоконно-оптические датчики..............................328
11.1. Введение............................................328
11.2. Распределенные измерения............................331
11.2.1. Оптическая дальнометрия в волоконных системах....331
11.2.2. Методы измерения обратного рэлеевского рассеяния.334
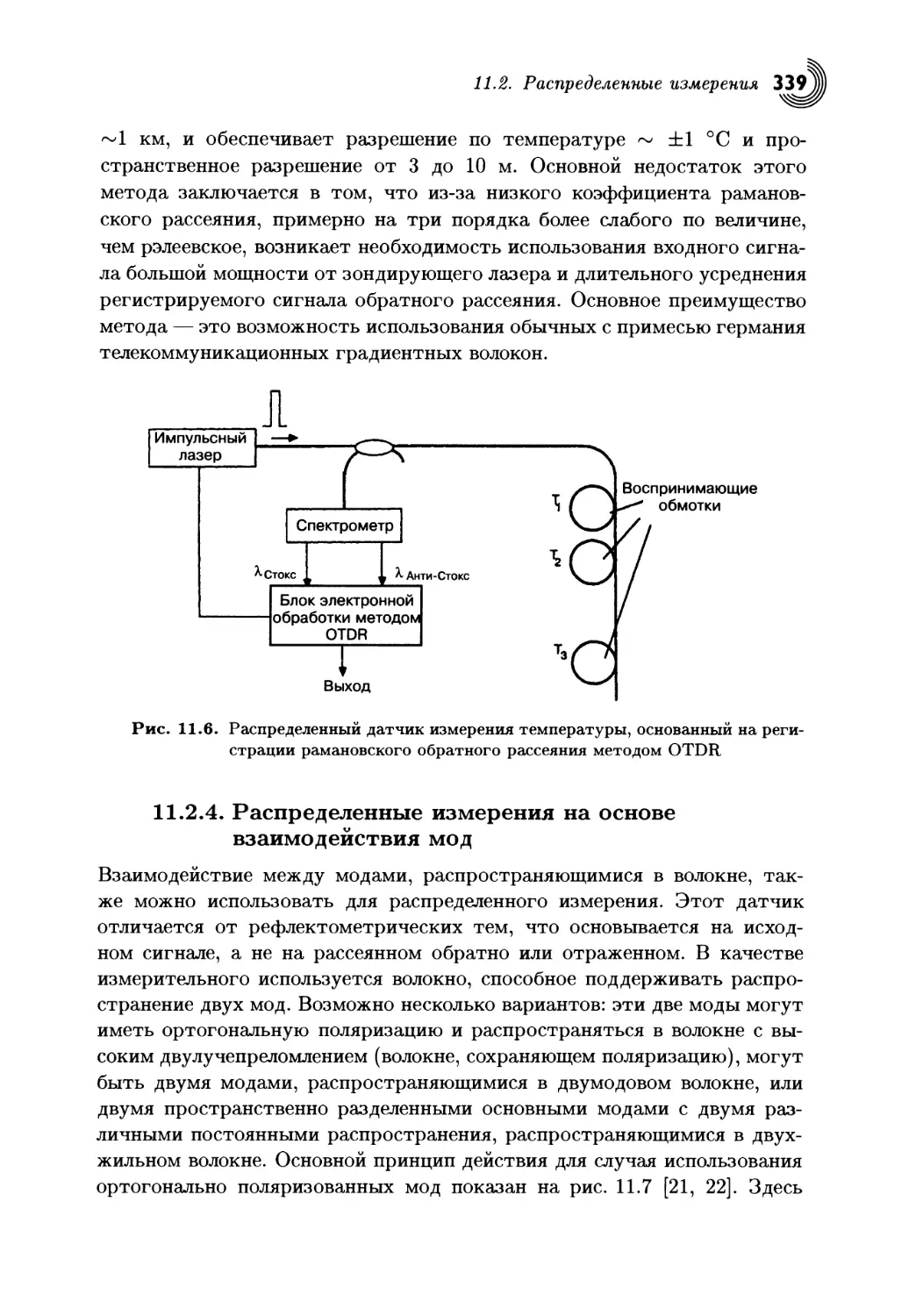
11.2.3. Измерение температуры на основе рамановского обрат-
ного рассеяния.........................................338
11.2.4. Распределенные измерения на основе взаимодействия мод 339
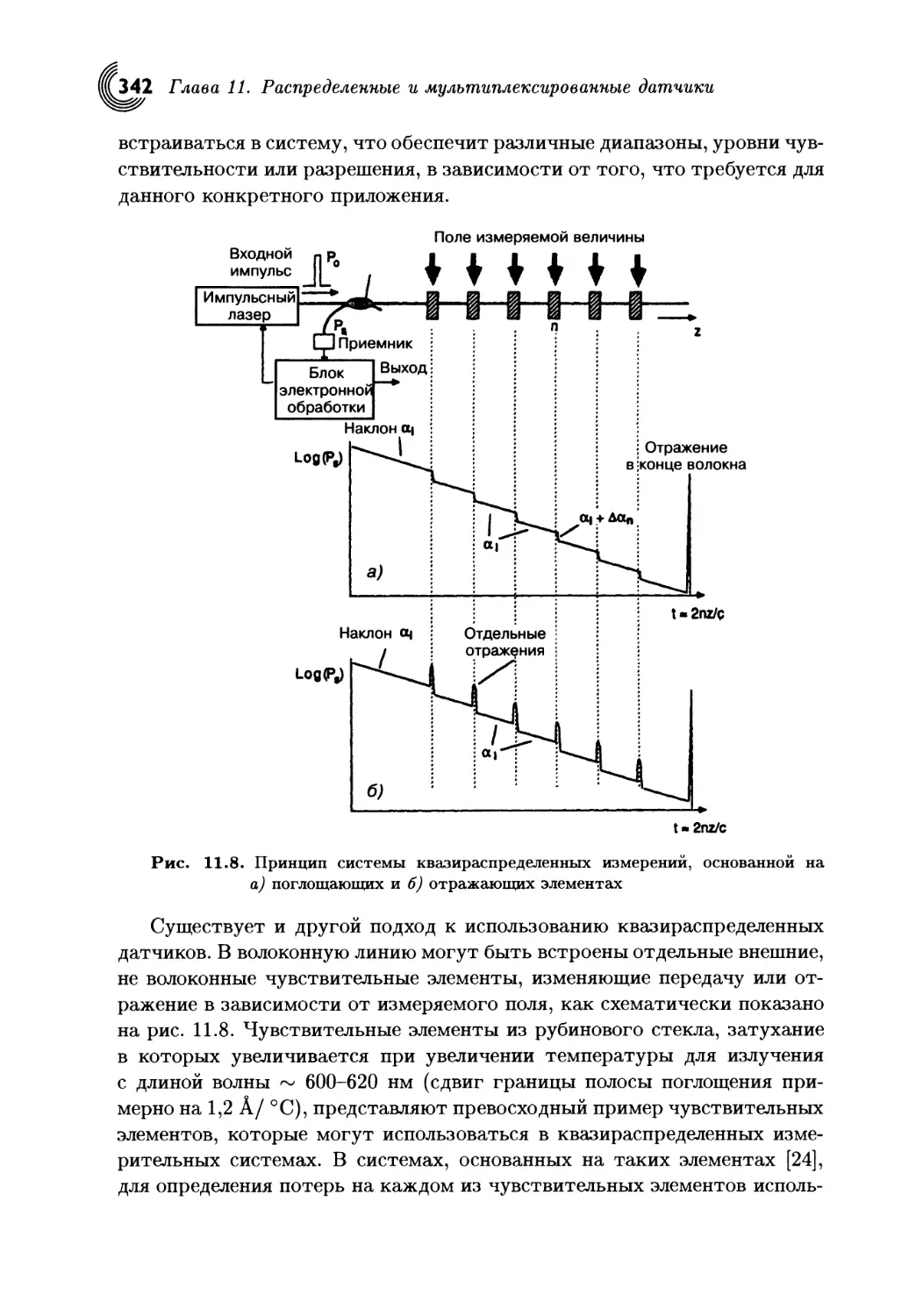
11.2.5. Квазираспределенные датчики....................341
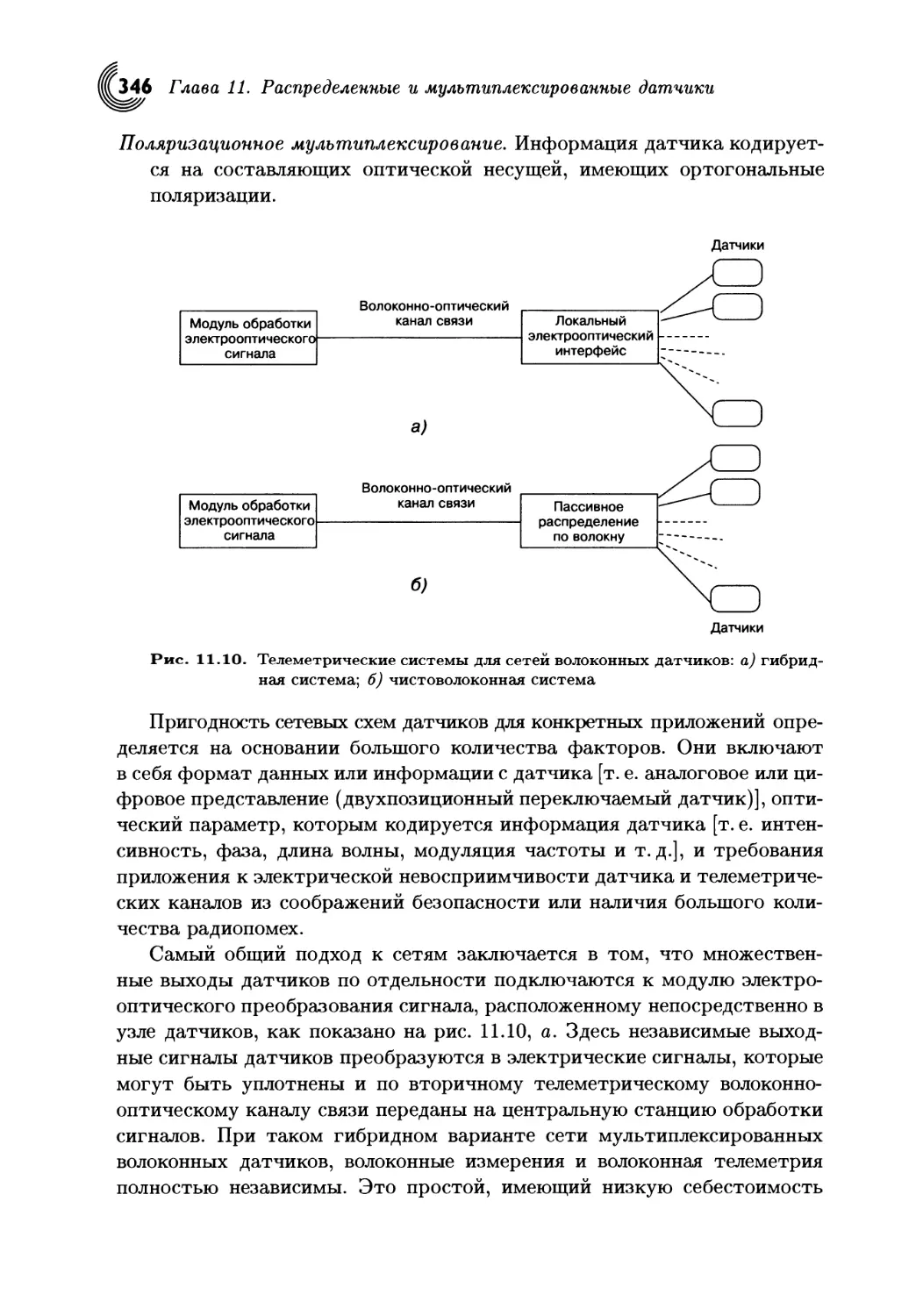
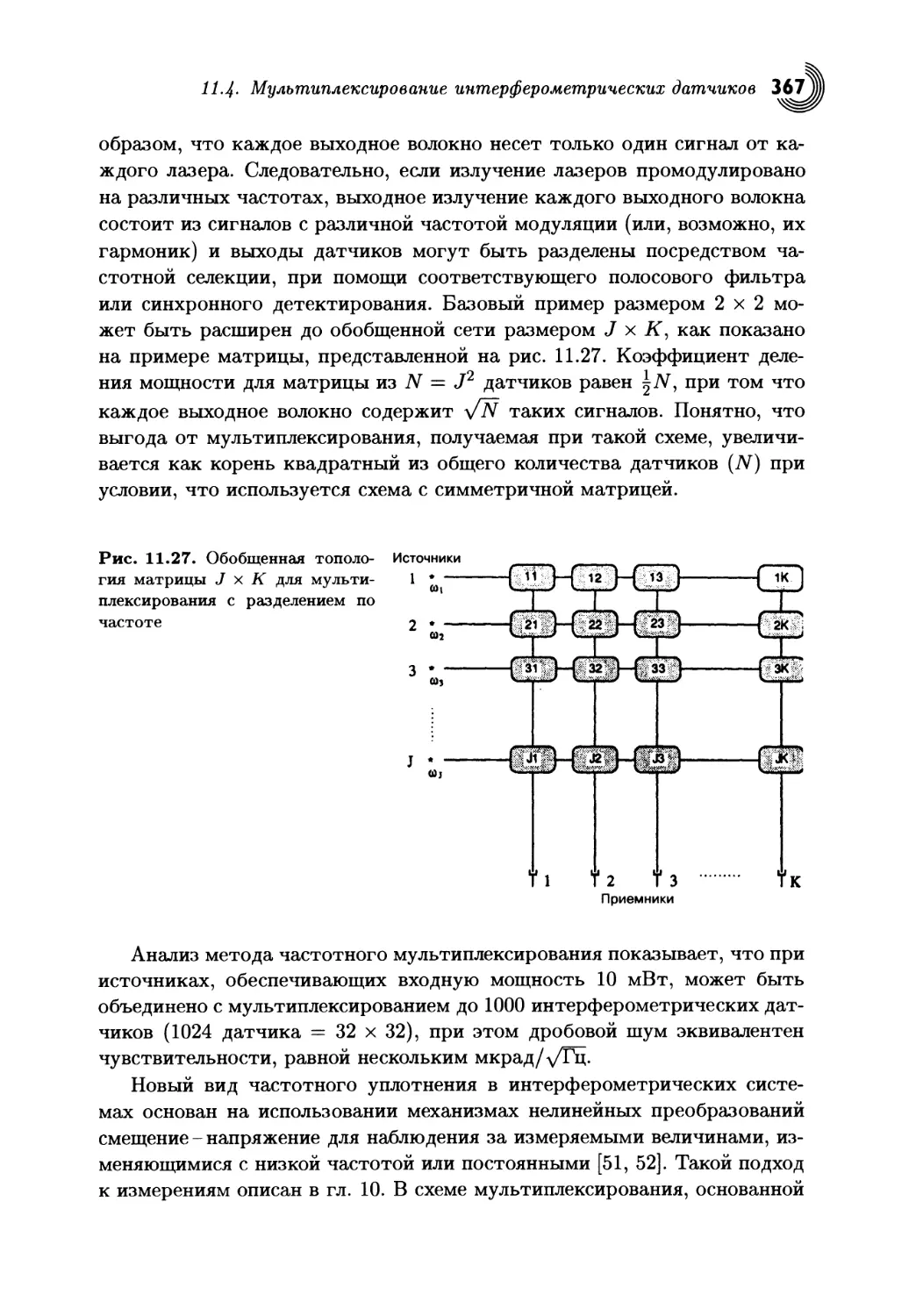
11.3. Основные принципы мультиплексирования датчиков......345
11.3.1. Основные принципы телеметрии: сети ............345
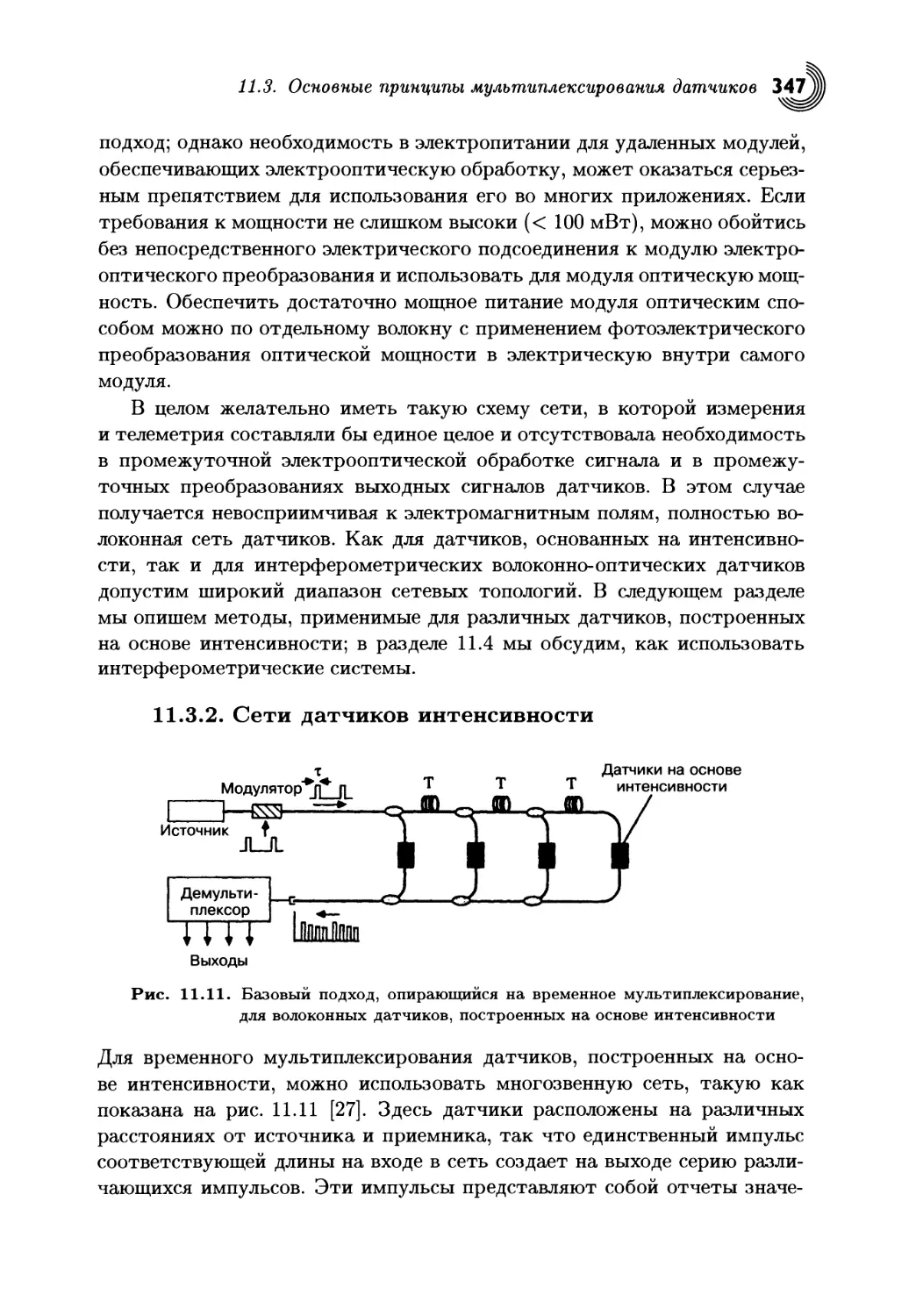
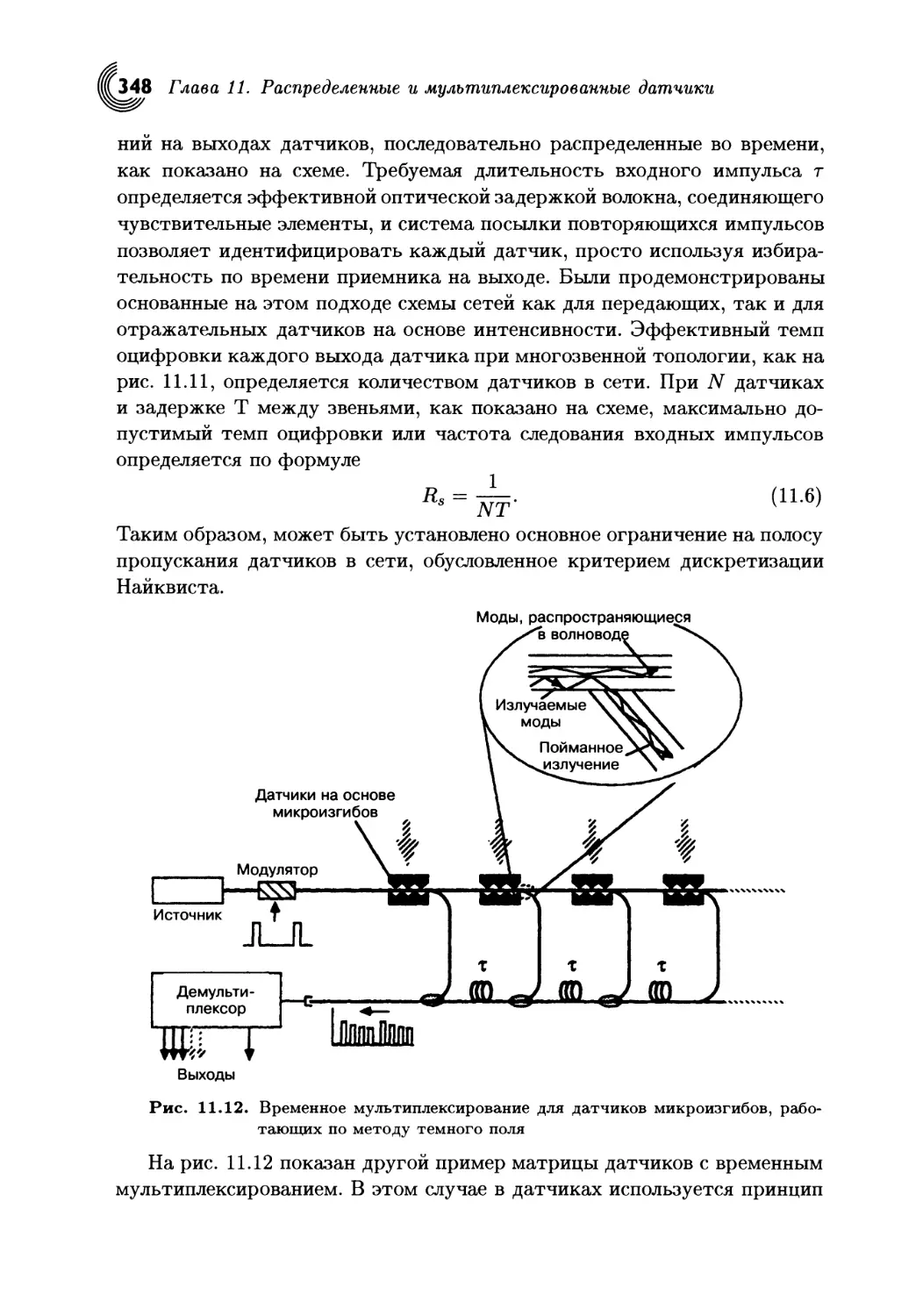
11.3.2. Сети датчиков интенсивности....................347
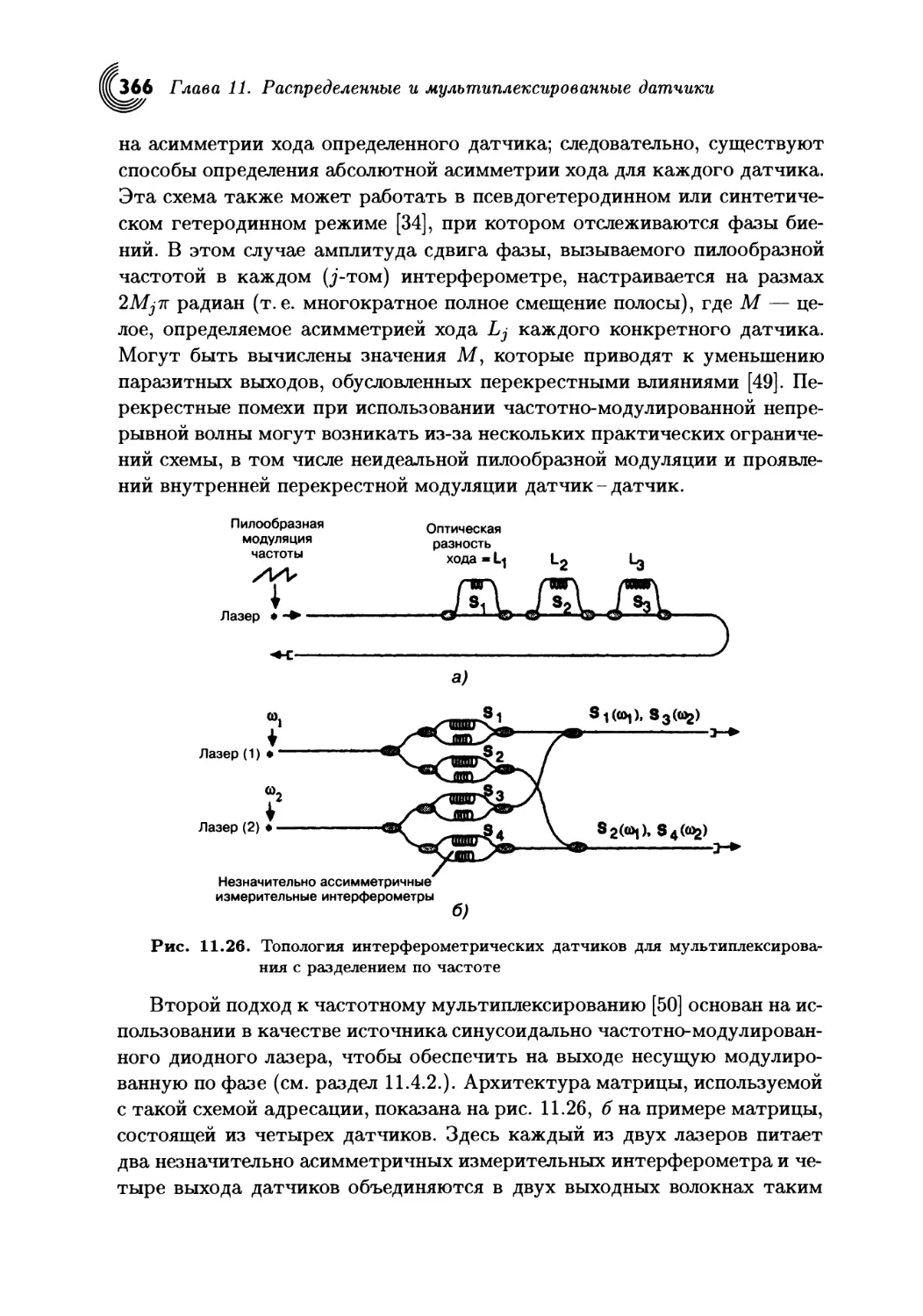
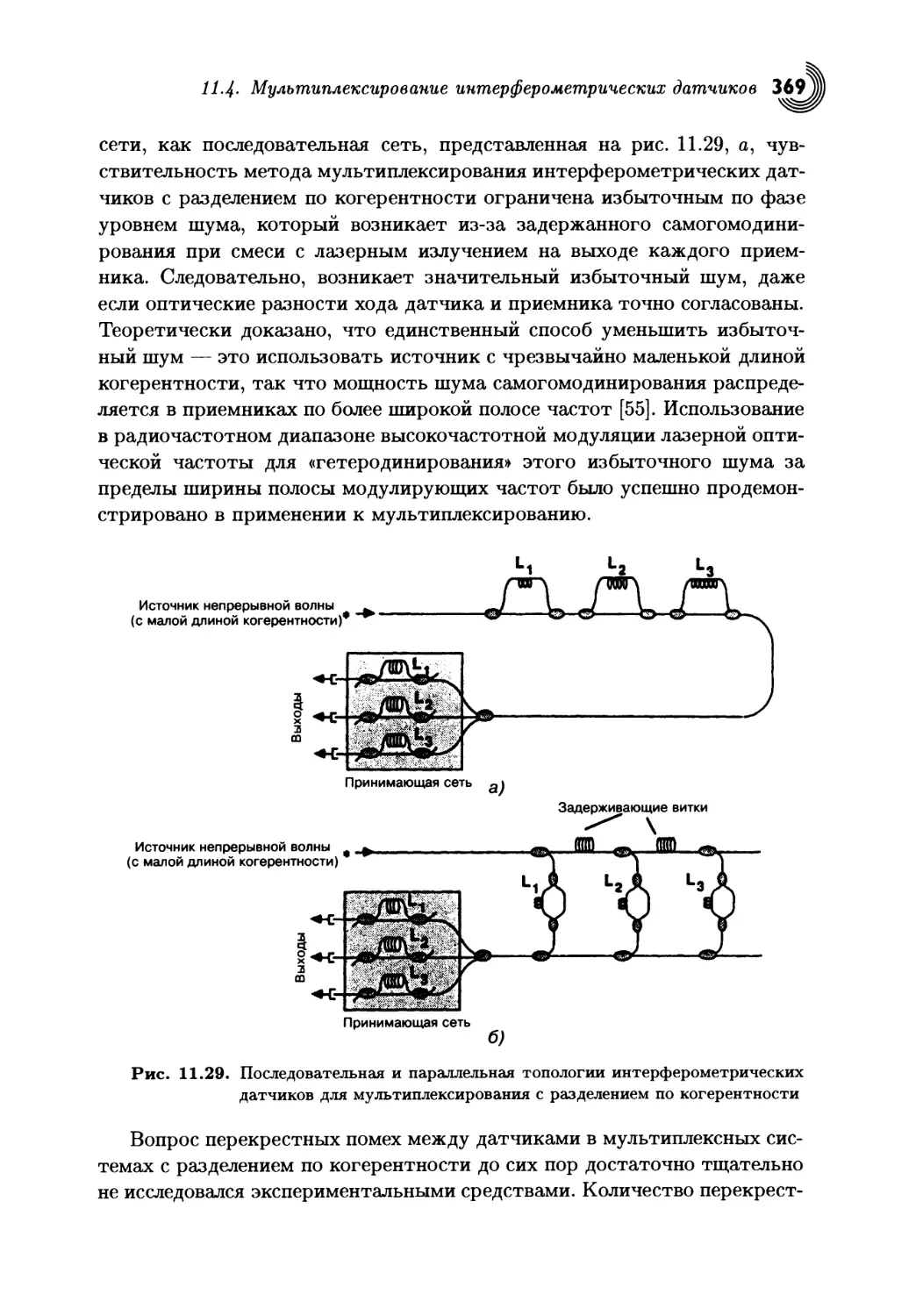
11.4. Мультиплексирование интерферометрических датчиков.....351
11.4.1. Методы интерферометрической демодуляции для объеди-
ненных с использованием мультиплексирования датчиков.... 352
8 Содержание
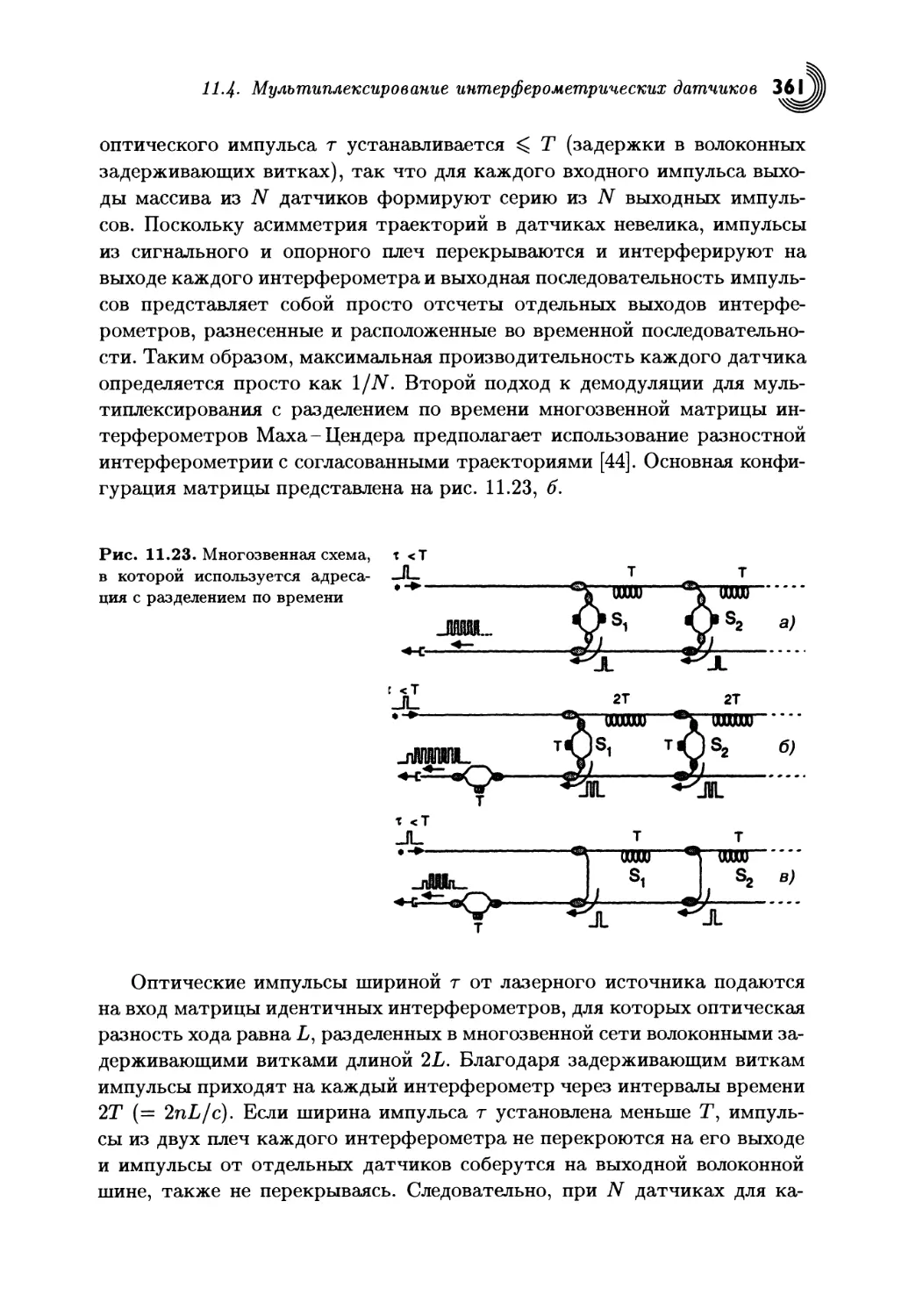
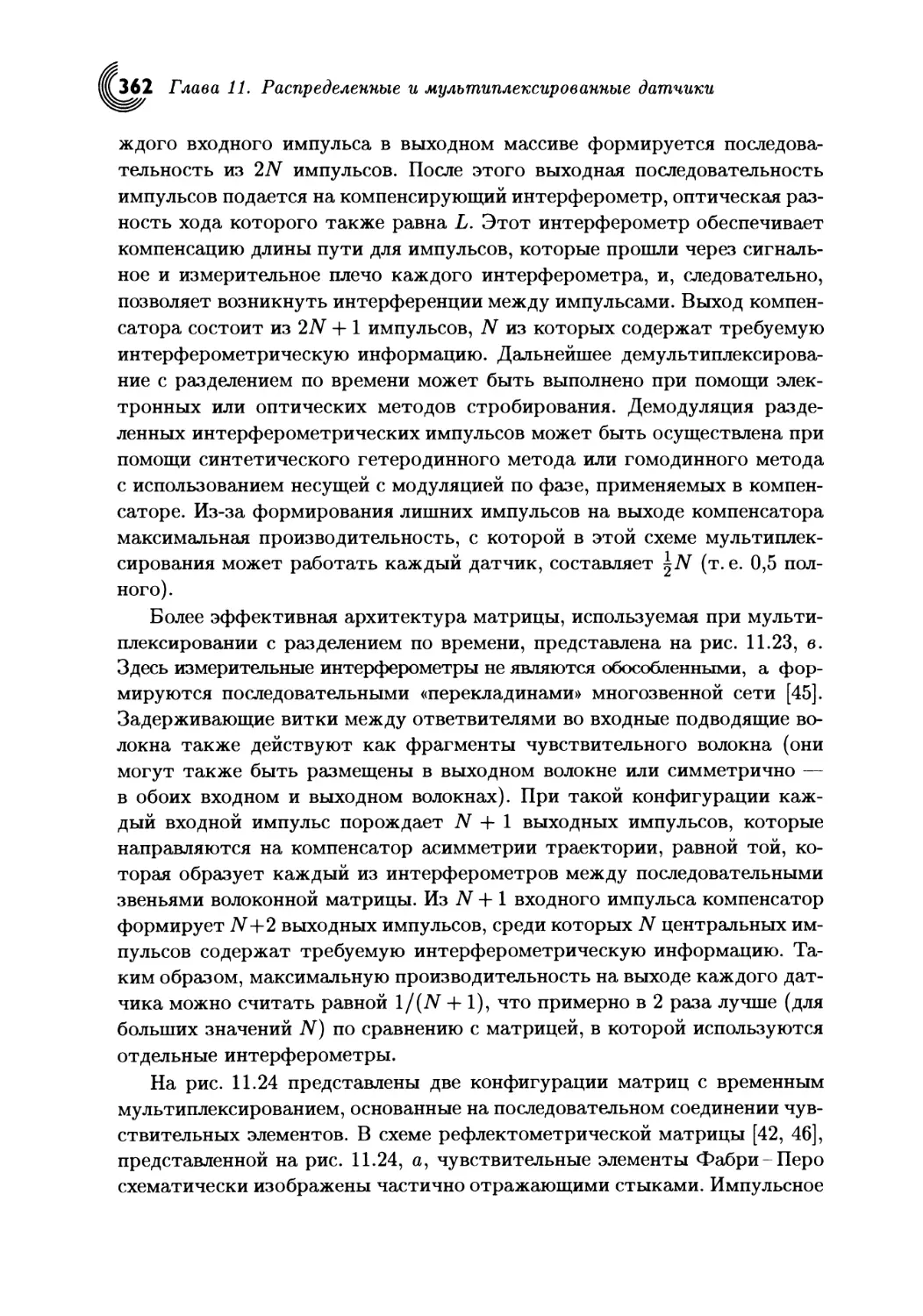
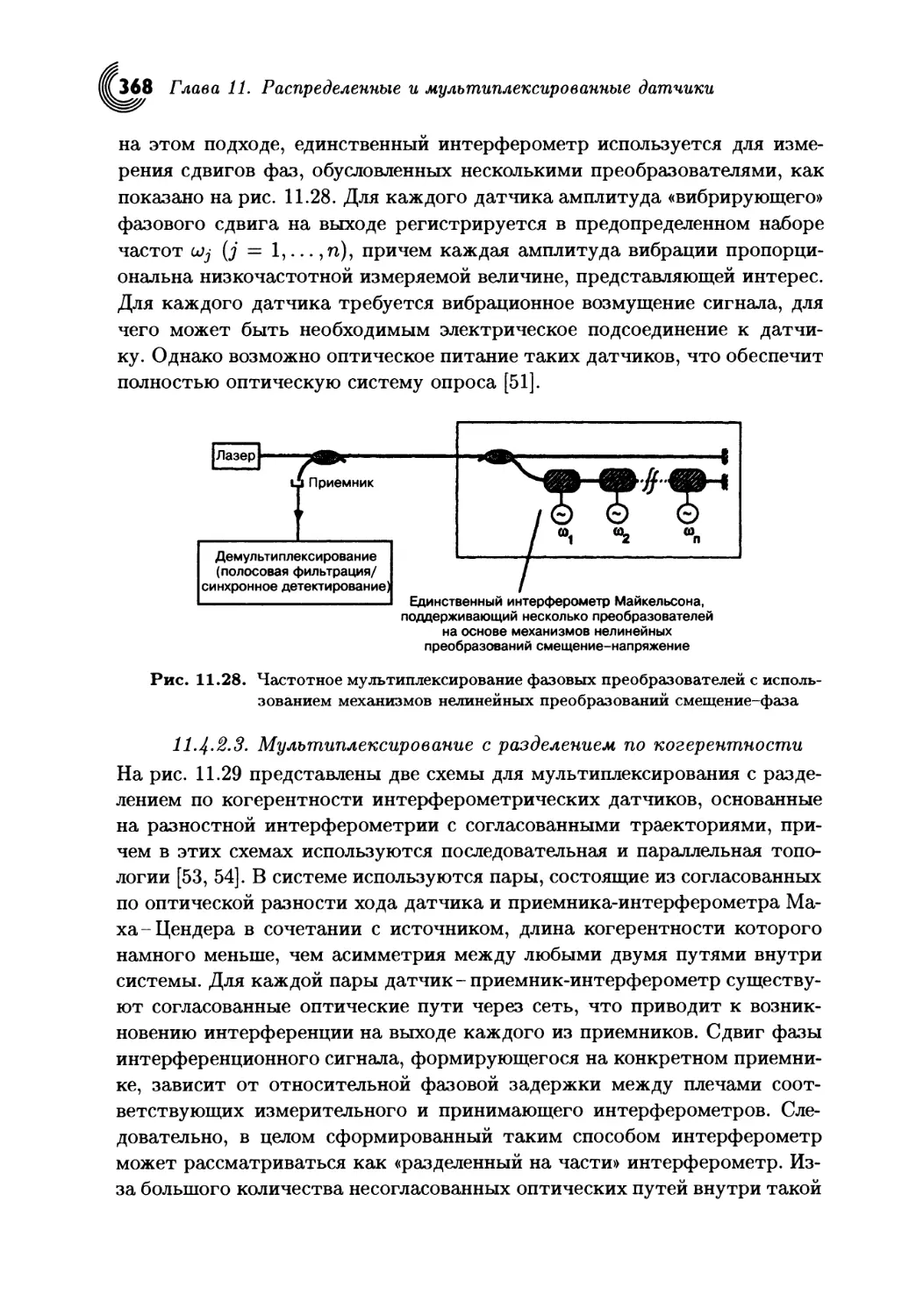
11.4.2. Топология мультиплексирования интерферометрических
датчиков.............................................360
Литература.............................................370
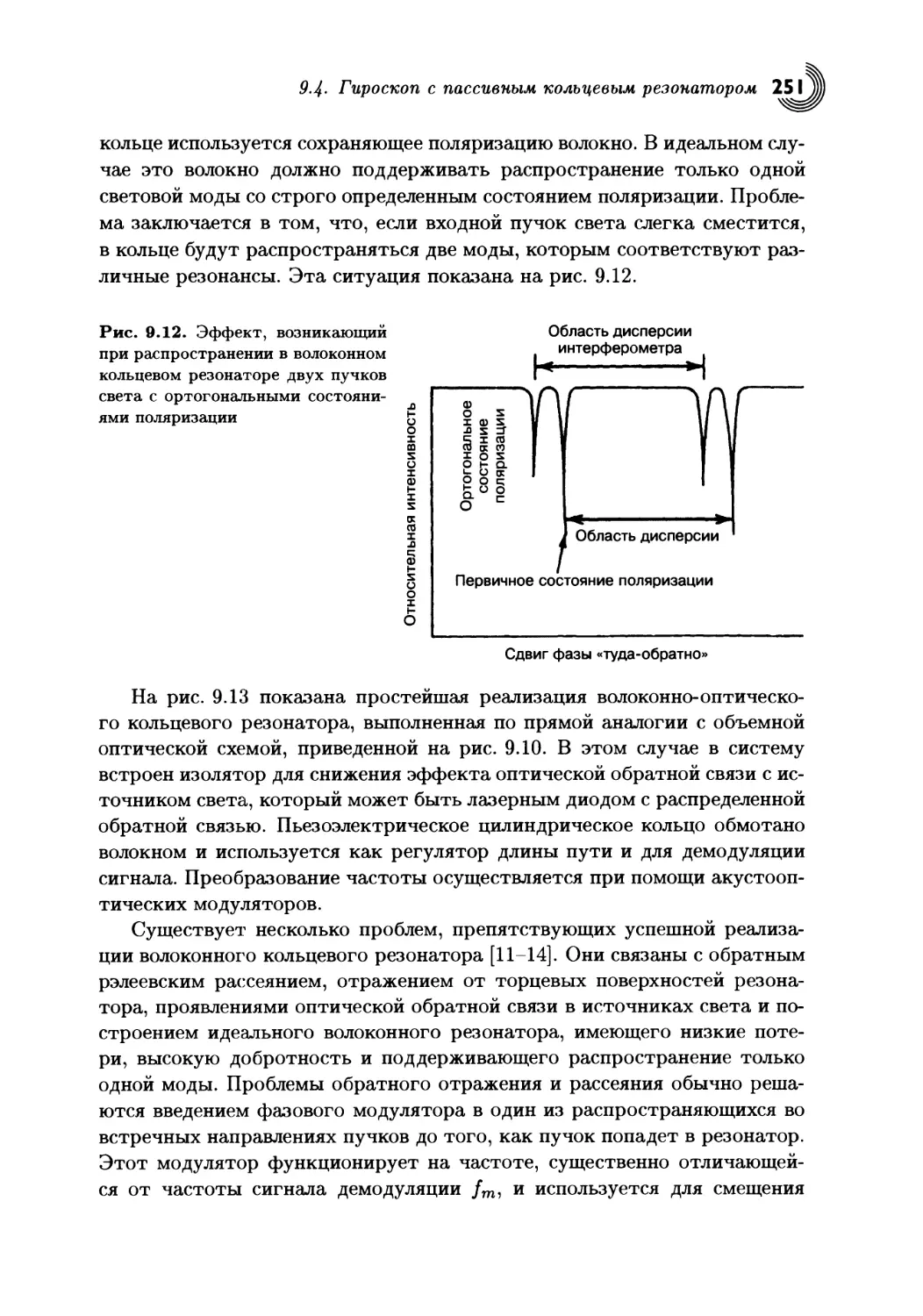
Глава 12
Волоконно-оптические датчики магнитного поля.......374
12.1. Введение.........................................374
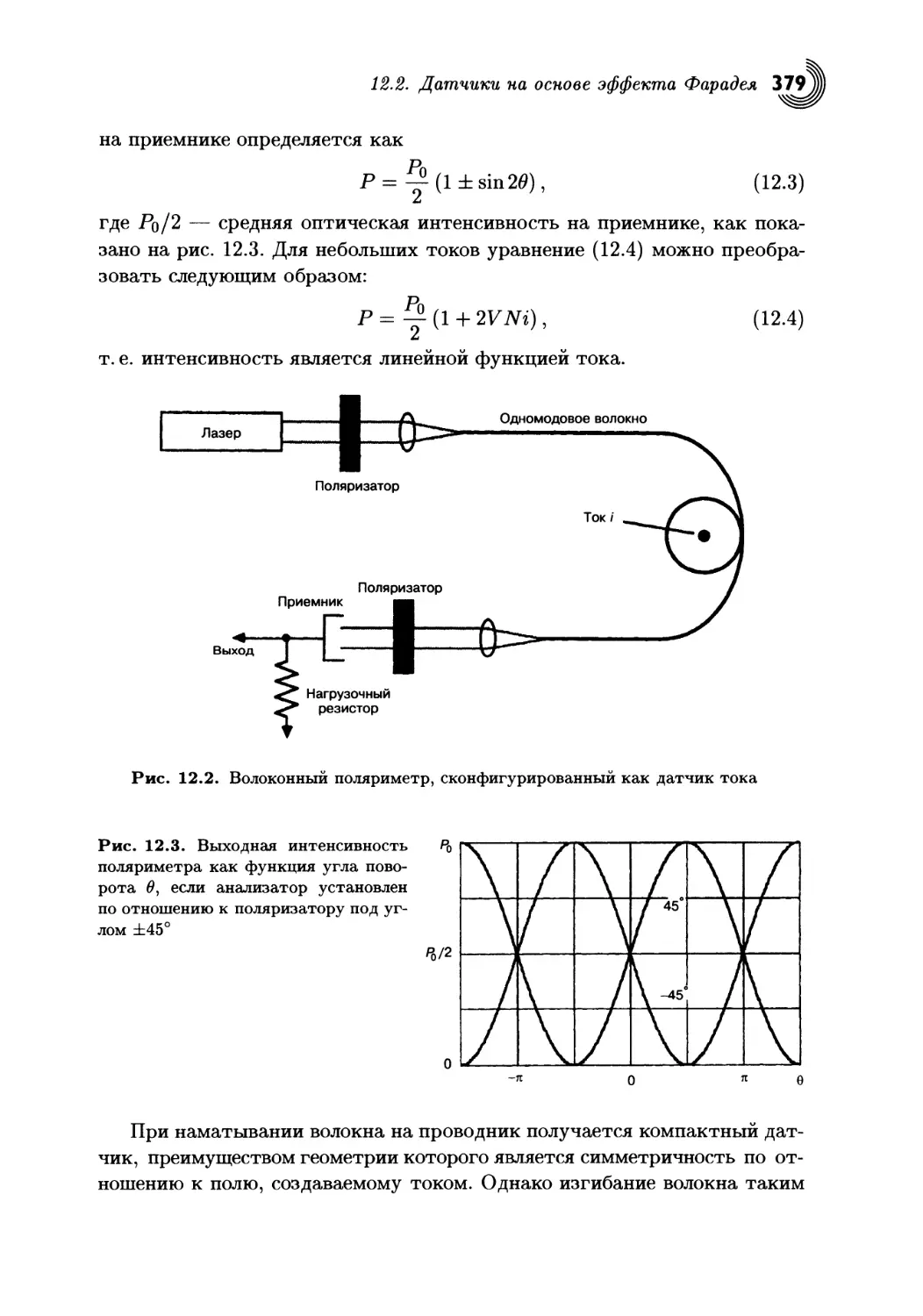
12.2. Датчики на основе эффекта Фарадея................376
12.2.1. Эффект Фарадея в оптических волокнах.........378
12.2.2. Шум..........................................382
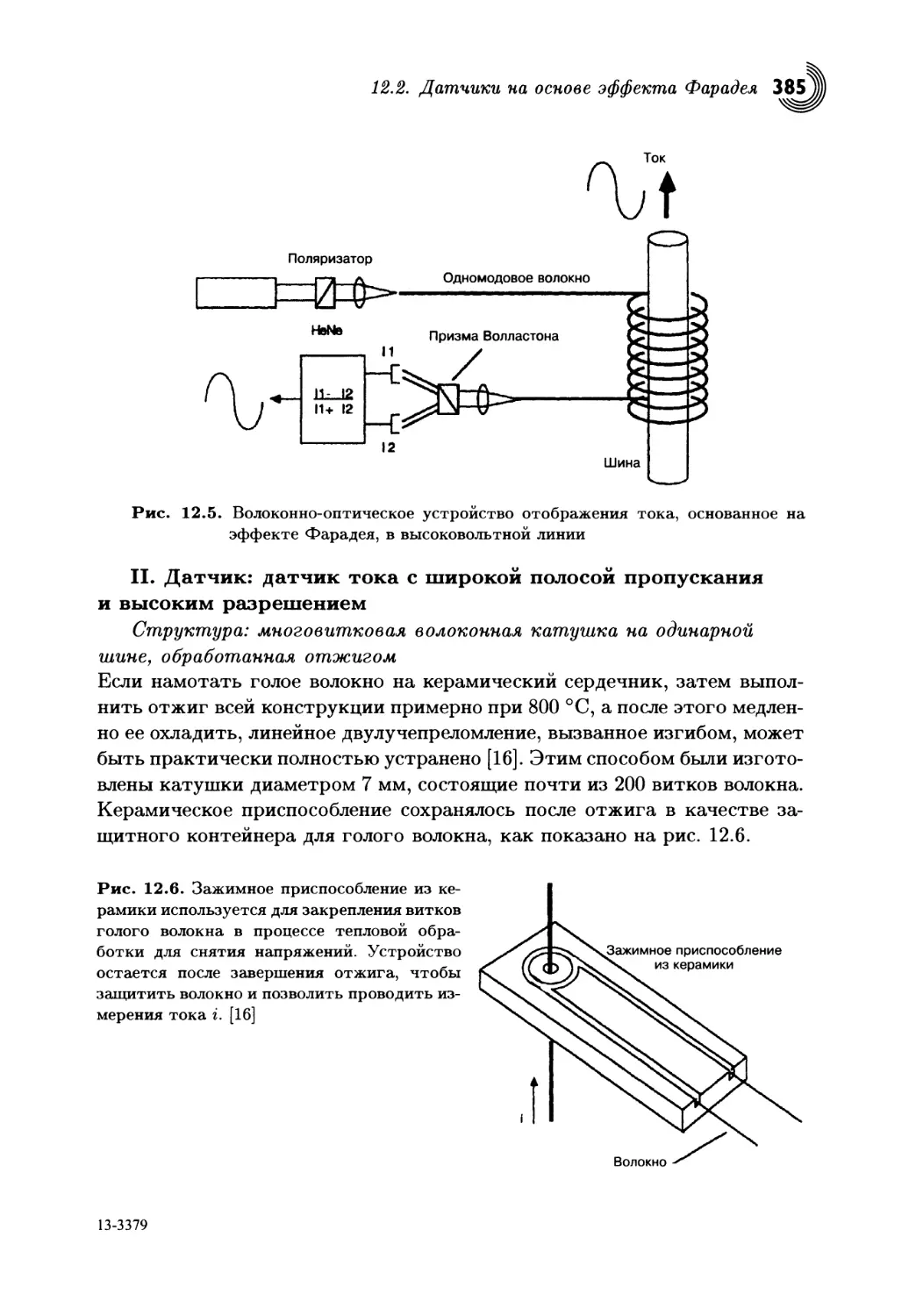
12.2.3. Структуры датчиков...........................384
12.3. Магнитострикционные датчики......................387
12.3.1. Магнитострикция..............................388
12.3.2. Магнитострикционные преобразователи..........393
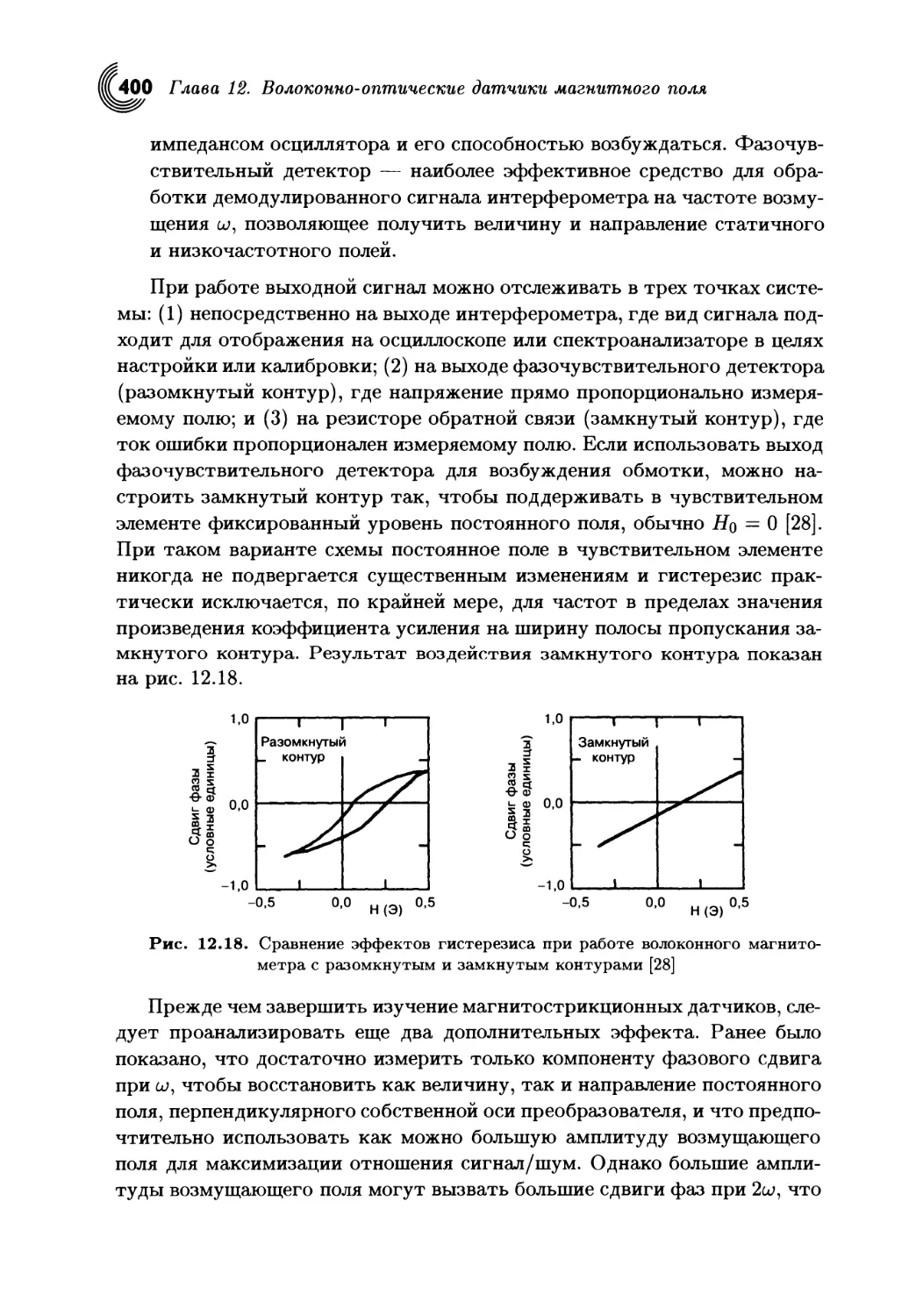
12.3.3. Шум в магнитострикционных датчиках...........402
12.3.4. Структуры датчиков...........................404
12.4. Датчики на основе силы Лоренца...................407
Литература.............................................409
Глава 13
Индустриальные приложения оптоволоконных датчиков .... 412
13.1. Введение.........................................412
13.2. Основы...........................................414
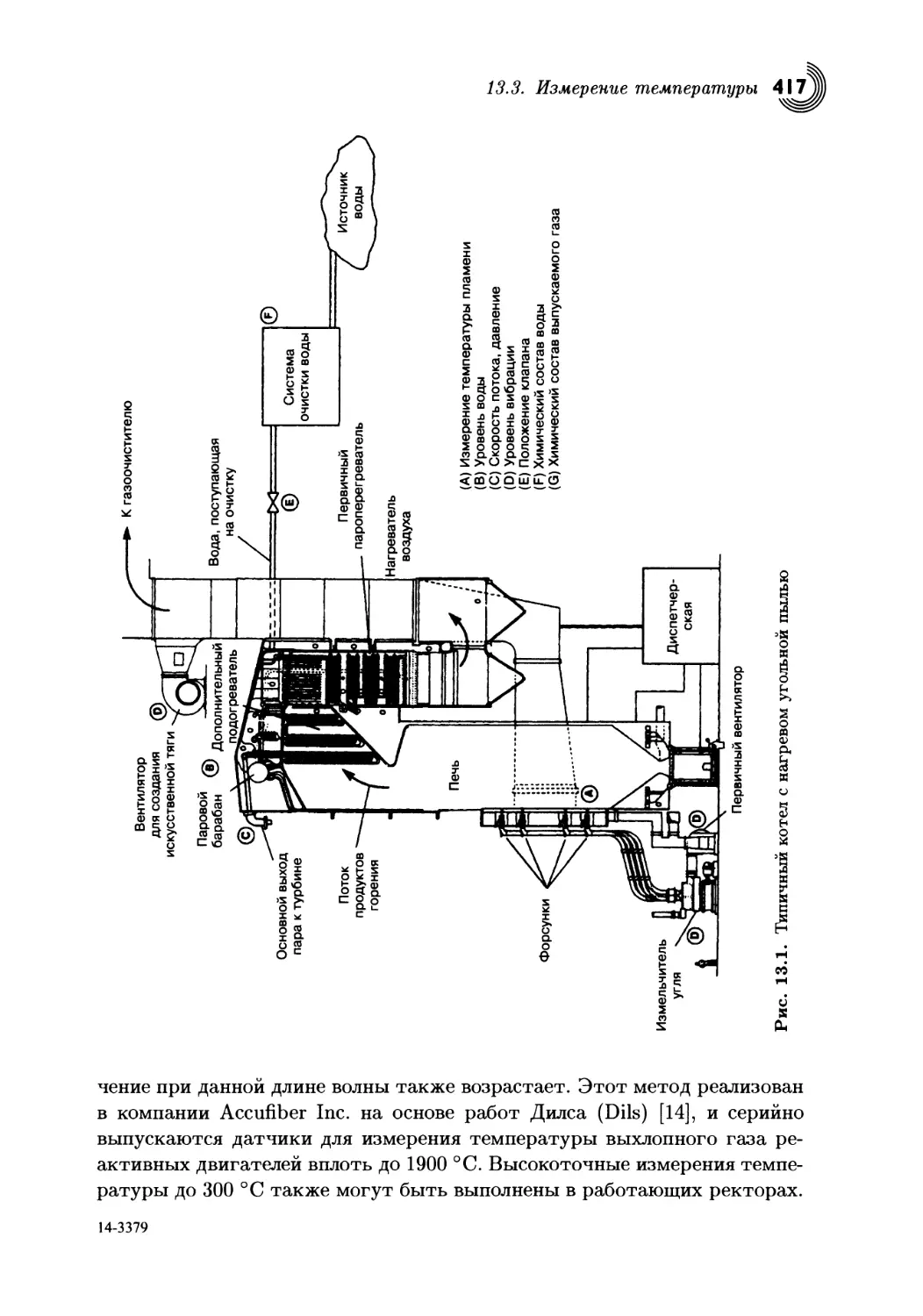
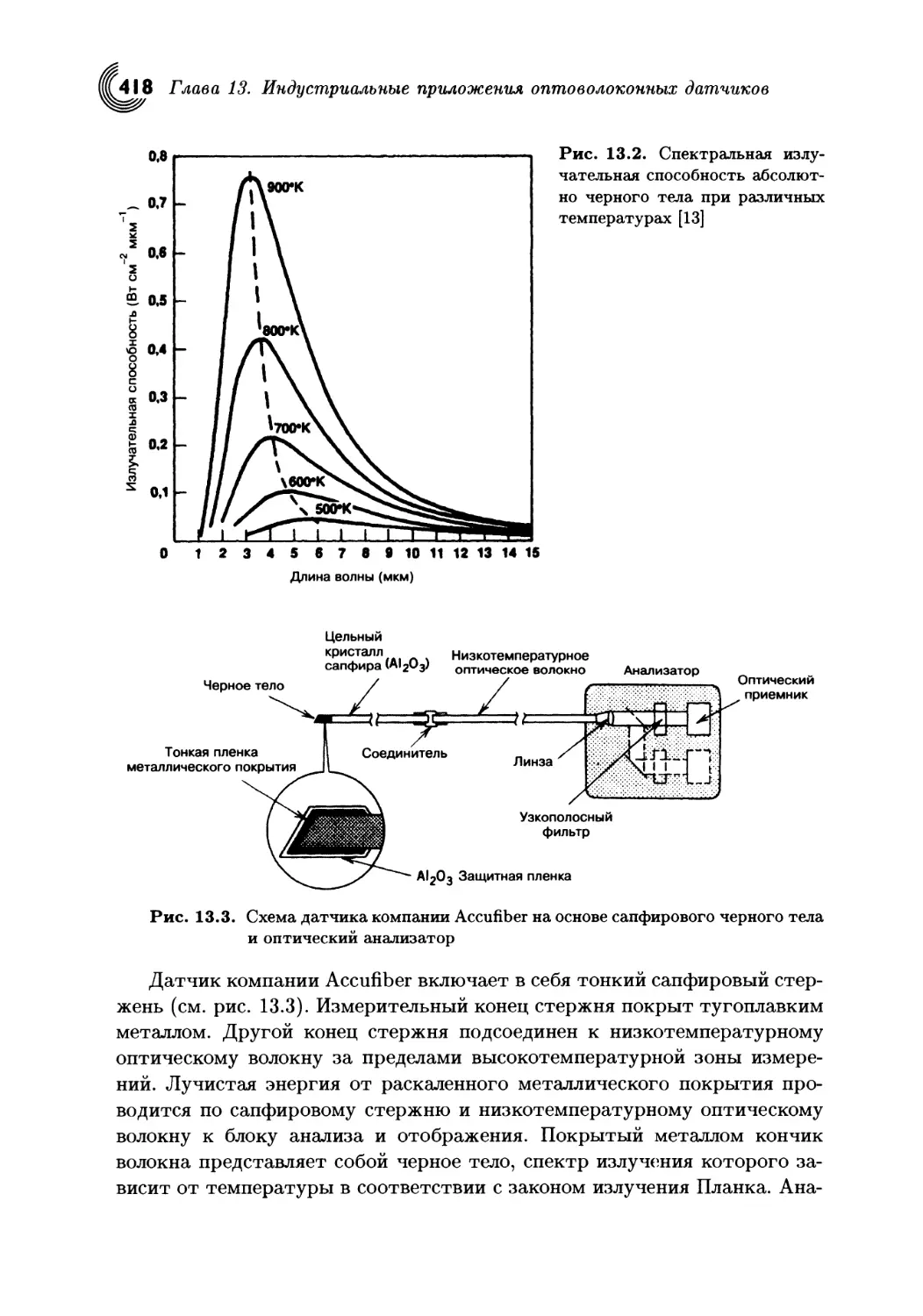
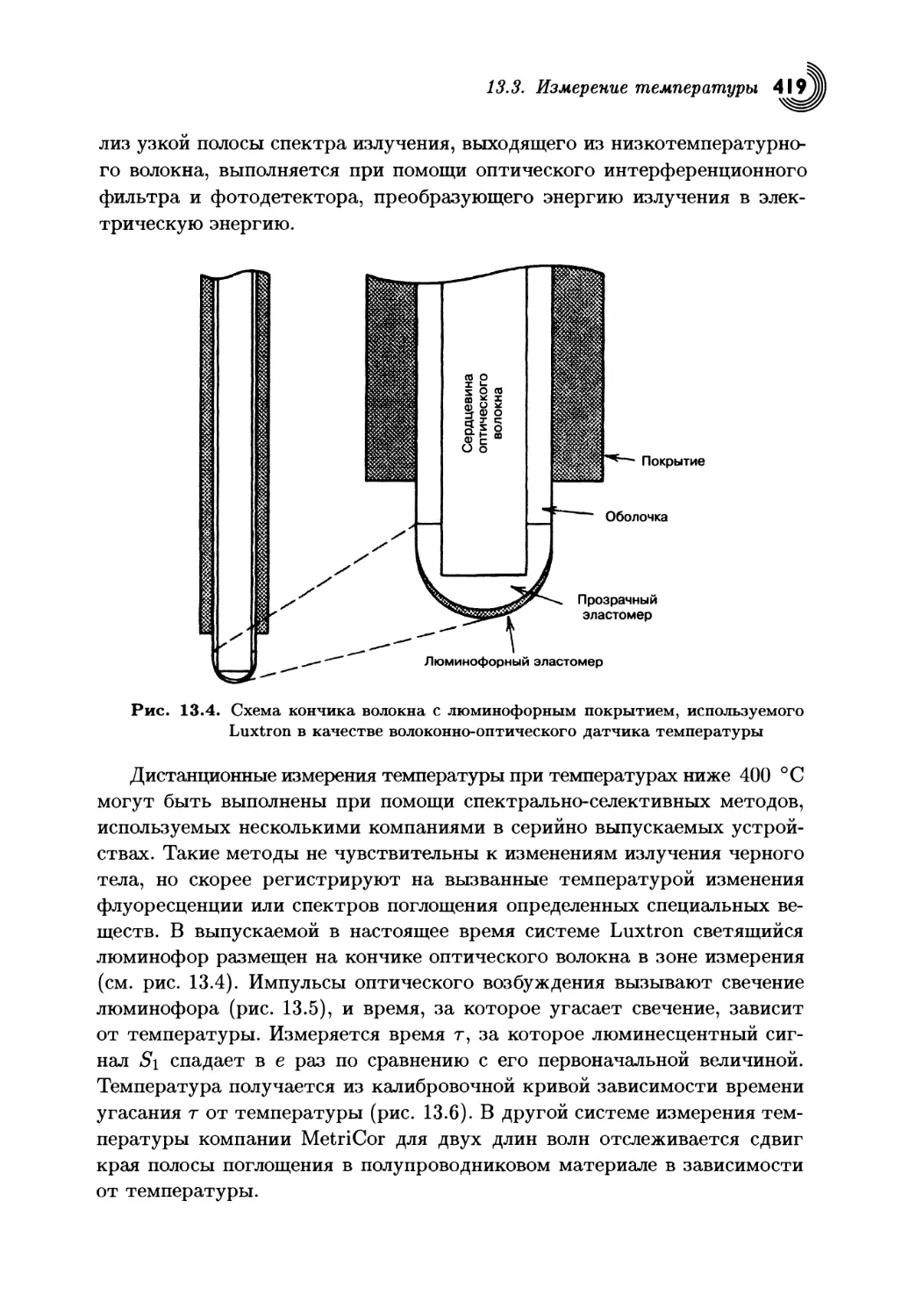
13.3. Измерение температуры............................416
13.4. Измерение давления...............................423
13.5. Измерение уровня жидкости........................426
13.6. Измерение скорости потока........................428
13.7. Измерение положения..............................431
13.8. Измерение вибрации...............................432
13.9. Химический анализ................................435
13.10. Измерение тока и напряжения.....................437
13.11. Важные замечания для индустриальных приложений..439
13.12. Резюме..........................................441
Литература.............................................441
Глава 14
Волоконно-оптические интеллектуальные структуры.........444
14.1. Введение..........................................444
14.2. Системы оптоволоконных датчиков...................446
Содержание 9
14.3. Приложения волоконно-оптических интеллектуальных струк-
тур и оболочек.....................................461
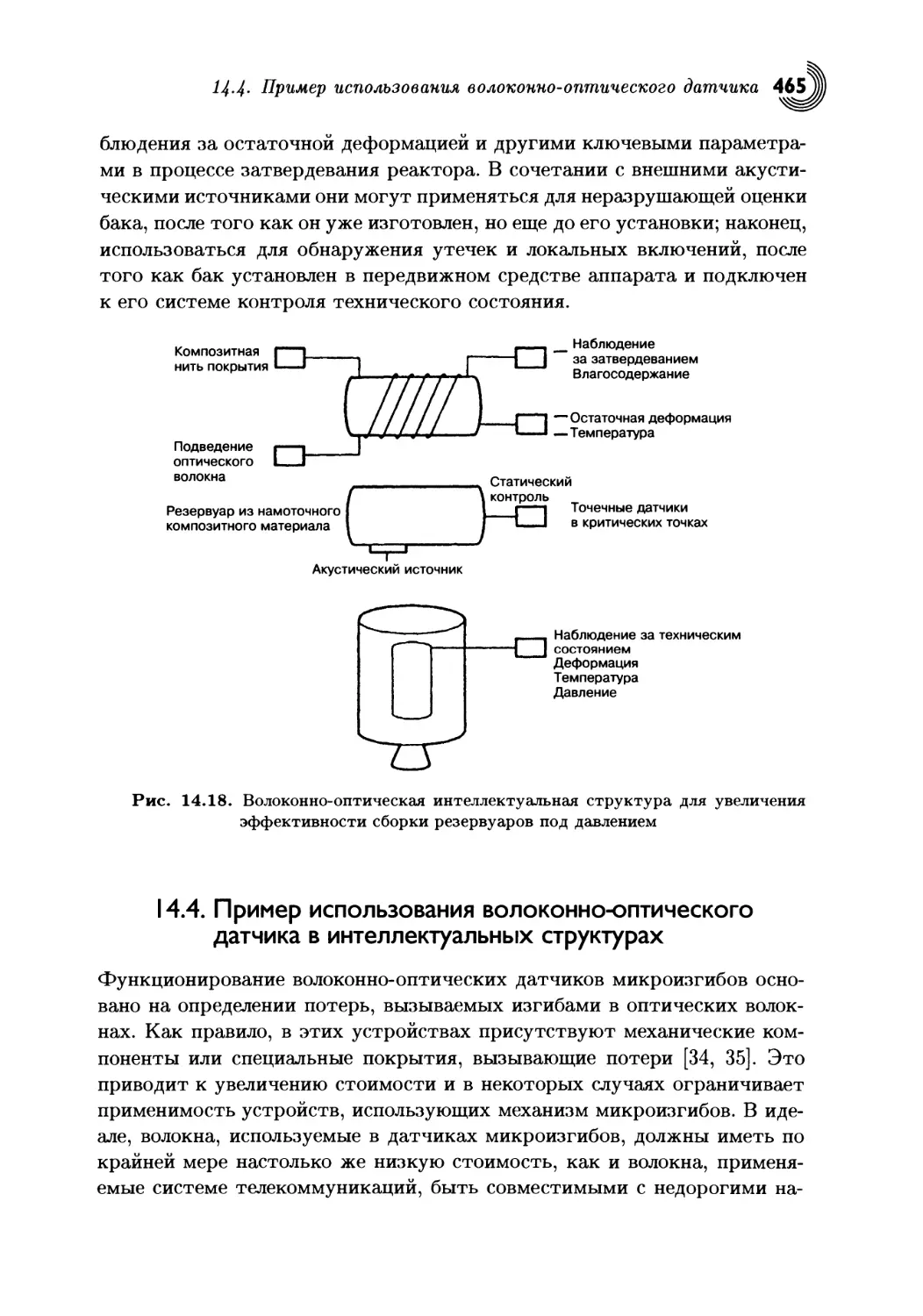
14.4. Пример использования волоконно-оптического датчика в ин-
теллектуальных структурах..........................465
14.5. Заключение...................................473
Литература.........................................473
Дополнение А.......................................476
Глава А.1
Сдвиг нуля.........................................477
Глава А.2
Оптические элементы................................486
Приложение.........................................499
Литература.........................................502
Дополнение Б.......................................503
Литература.........................................517
Предисловие
Идеальные для использования во многих приложениях датчики должны
обладать такими свойствами, как малый вес, небольшой размер, малая
мощность, устойчивость к воздействиям внешней среды и электромаг-
нитная помехозащищенность, хорошие показатели производительности
и низкая стоимость. С развитием технологий необходимость в датчи-
ках с подобными характеристиками резко возрастает в таких областях,
как аэрокосмическая и оборонная промышленность, производство мате-
риалов, медицина и строительство. Проникновение волоконно-оптических
технологий, которые в 1970-е и 1980-е годы быстро развивались благодаря
индустрии телекоммуникаций, на коммерческие рынки для производи-
телей CD-плееров, персональных копировальных устройств и лазерных
принтеров, в сочетании со снижением стоимости оптоэлектронных компо-
нентов, позволило технологии волоконно-оптических датчиков раскрыть
свои потенциальные возможности по отношению ко многим приложениям.
Книга представляет собой вводный курс в быстро развивающуюся
область волоконно-оптических датчиков для инженеров, ученых, аспи-
рантов и студентов старших курсов. Я начал работать над этой книгой
в 1981 году. Однако из-за быстрого увеличения количества активно рабо-
тающих в этой области специалистов, от нескольких на весь мир в конце
1970-х до тысяч — в конце 1980-х, одному человеку стало невероятно
трудно самостоятельно написать книгу, которая была бы одновременно
и современной, и достаточно глубоко раскрывала тему. Поэтому в начале
1987 года я принял решение обратиться за помощью к моим коллегам, ра-
ботающим в области волоконно-оптических датчиков. Я попросил их на-
писать для этой книги главы по тем областям, в которых они специализи-
руются. Я чрезвычайно им признателен. Все, к кому я обратился в первую
очередь, откликнулись положительно и с энтузиазмом. Каждый из авто-
ров глав интенсивно работает в области волоконно-оптических датчиков
и является автором множества признанных во всем мире публикаций по
этим вопросам. Насколько это возможно, каждый из авторов стремился
сделать свою главу независимой, поэтому книгой можно пользоваться как
доступным справочником. В то же время книга следует плану предвари-
тельно подготовленного мной оригинального текста, который, в свою оче-
редь, я использовал при чтении пользовавшихся большим успехом кратких
курсов в Калифорнийском университете в Лос-Анджелесе, на Конферен-
ции по технической оптике в «Макдоннел-Дуглас». Таким образом, книга
может использоваться в качестве пособия при чтении курсов студентам,
Предисловие I I
аспирантам, инженерам, а также на промышленных семинарах по воло-
конно-оптическим датчикам.
Книга начинается с введения и обзора наиболее важных элементов, ис-
пользуемых в волоконно-оптических датчиках. В этой части книги, включа-
ющей пять первых глав, рассматриваются вопросы, связанные с оптиче-
скими волокнами, источниками излучения, приемниками и оптическими
модуляторами. Эти главы преследуют двойную цель — в них не только
излагаются основы знаний по волоконно-оптическим датчикам, но и уста-
навливаются многочисленные связи между описываемыми элементами и
технологией волоконно-оптических датчиков. Эти связи укрепляются и рас-
ширяются в последующих разделах книги. Многие вопросы, рассматрива-
емые в этих главах, могут быть интересны также читателям, желающим
расширить свои знания в области телекоммуникаций, поскольку базовые
компоненты являются ядром большинства традиционных и передовых те-
лекоммуникационных систем. В гл. 1 Эрик Удд предлагает краткий обзор
истории появления технологии волоконно-оптических датчиков и предска-
зывает направления их развития. Написанная Паулем Блашиком, Даном
Ноланом и Эриком Уддом гл. 2 по оптическим волокнам — это базовый
вводный курс, в котором описаны виды волокон, используемые в воло-
конно-оптических датчиках, и физические процессы, связанные с опти-
ческими волокнами, используемыми для измерений. В гл. 3, написанной
Эриком Уддом, приведен краткий обзор источников излучения с точки
зрения разработчика волоконно-оптических датчиков. В гл. 4 Билл Спил-
лман описывает оптические приемники, рассматривая их с аналогичной
точки зрения. В гл. 5 по оптическим модуляторам, написанной Леном
Джонсоном, рассматриваются как объемные, так и интегрально-оптиче-
ские модуляторы, используемые для сдвига фазы и частоты.
Второй раздел этой книги охватывает волоконно-оптические датчи-
ки. Раздел начинается с обсуждения внешних или гибридных волоконно-
оптических датчиков. В этих типах волоконно-оптических датчиков во-
локно служит средством доставки сигнала к оптическим черным ящикам,
в которых пучки света преобразуются под воздействием информации,
часто подвергаясь модуляции по амплитуде или поляризации. Для переда-
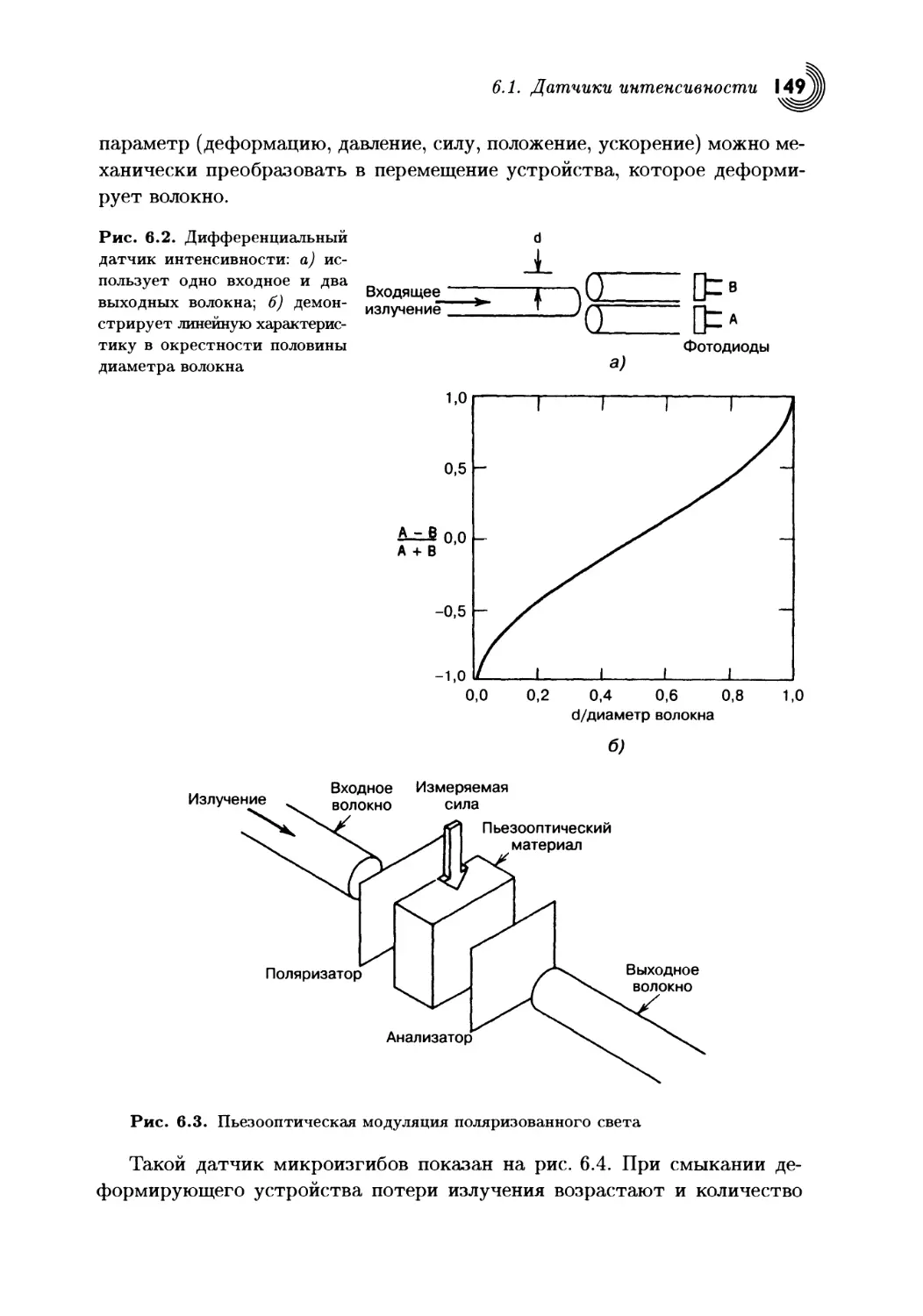
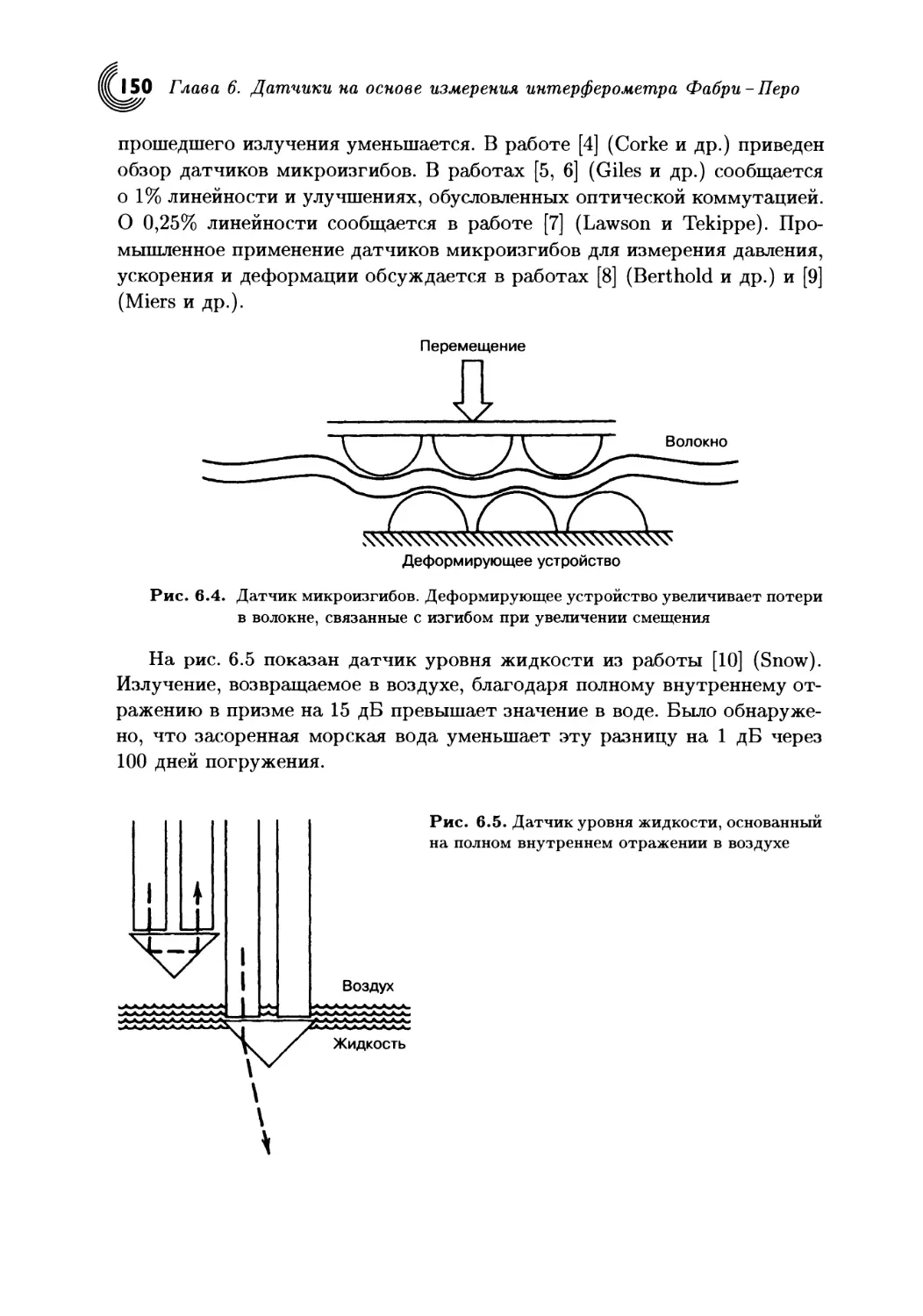
чи измененного сигнала снова используются оптические волокна. Глава 6,
написанная Гордоном Митчеллом, начинается с обзора датчиков на осно-
ве интенсивности, предназначенных для наблюдения за температурой,
положением и другими параметрами внешней среды, и продолжается бо-
лее подробным описанием волоконно-оптического датчика, основанного
на интерферометре Фабри-Перо и являющегося одним из первых во-
локонно-оптических датчиков, которые начали успешно производиться
и эксплуатироваться в промышленных масштабах. В гл. 7 Билл Спил-
12 Предисловие
лман обсуждает волоконно-оптические датчики, основанные на дифрак-
ционных решетках, применяемые в гидрофонах и датчиках перемещения.
Далее следует гл. 8, также написанная Биллом Спиллманом и посвященная
датчикам, основанным на изменении поляризации. В ней прекрасно опи-
сана эффективность такого подхода, позволяющего реализовать мощный
класс волоконно-оптических датчиков. Главы с 9 по 11 охватывают «чи-
стоволоконные» датчики, в которых волокно выступает в качестве чув-
ствительного элемента, измерение происходит при взаимодействии пучка
света с возмущенным внешней средой оптическим волокном. Воздействие
внешней среды на этот тип датчиков обычно основано на изменении
эффективной длины оптического пути пучка света вследствие его вза-
имодействия с оптическим волокном. Получившийся в результате сдвиг
фазы может быть измерен с высокой степенью точности при помощи
интерферометрических методов. Производительность таких волоконных
датчиков может быть чрезвычайно высокой, и они могут заменить целый
класс дорогостоящих датчиков, используемых в настоящее время.
В гл. 9 Эрик Удд описывает интерферометр Саньяка и класс датчиков
на основе пассивного кольцевого резонатора, которые могут использо-
ваться в качестве датчиков вращения, заменив применяемые в настоящее
время гироскопы. Это может стать одним из наиболее дорогостоящих
приложений волоконно-оптических датчиков, рынок которого оценива-
ется в сотни миллионов долларов. Подобные датчики могут также ис-
пользоваться для измерения других параметров внешней среды; в главе
приведен обзор таких методов. В гл. 10 Тони Дэндридж описывает интер-
ферометры Маха-Цендера и Майкельсона, имеющие большое значение
для приложений, связанных с подводными акустическими измерениями.
Такие датчики имеют высочайшую чувствительность, и путем мульти-
плексирования их можно объединять в массивы, состоящие из сотен дат-
чиков. В гл. 11 Алан Керси продолжает описывать применяемые методы
мультиплексирования, а также распределенные волоконно-оптические из-
мерения, во многих приложениях представляющие реальную альтернати-
ву массивам датчиков.
В заключительном разделе книги потенциальные возможности тех-
нологий волоконно-оптических датчиков проиллюстрированы примерами
конкретных приложений. В гл. 12 Франк Бухольтц подробно описыва-
ет и приводит примеры магнитных датчиков, основанных на эффекте
Фарадея, магнитострикции и силе Лоренца. Такие датчики уже приме-
няются для наблюдения за током на электрических коммунальных пред-
приятиях и имеют широкую перспективу применения в промышленных
и военных целях. Джон Бертхольд в гл. 13 предлагает обзор множества
применений технологий волоконно-оптических датчиков в промышленно-
Предисловие 13
сти. В этой главе приведены примеры измерения температуры, давления,
уровня жидкости, скорости потока, положения, вибрации, химического
состава, и тока-напряжения, а также обсуждаются вопросы, связанные
с промышленным применением технологий волоконно-оптических датчи-
ков. Книгу завершает гл. 14, в которой Эрик Удд приводит обзор недав-
но появившегося направления волоконно-оптических интеллектуальных
структур. В этой области технологии волоконно-оптических датчиков
объединяются с механикой и материаловедением, образуя одно из наи-
более многообещающих и быстро развивающихся направлений.
Эта книга не была бы создана без усилий и поддержки множества
людей. Прежде всего, я хочу поблагодарить моих соавторов, которые
своевременно предоставили высококачественные материалы для выпуска
этой книги. Я также хочу поблагодарить моих терпеливых редакторов
в John Wiley & Sons и особенно миссис Беатрис Шуб (Shube) за по-
мощь, оказанную в начале написания этой книги, и мистера Джорджа
Телецки (Telecki), помогавшего мне ее завершить. Компания «Макдоннел-
Дуглас» постоянно поддерживает мои усилия, направленные на разви-
тие волоконно-оптических технологий, и я хочу выразить ее руководству
признательность за поддержку и особенно моему другу и наставнику
Ричарду Кахиллу (Cahill), доктору Роджеру Робертсу, Джералду Джон-
стону (Johnston), Уильяму Бранчу (Branch), Чарли Марвину (Marvin),
Дейву Карнесу (Karnes), Кену Френсису (Francis), Дану Грину (Green)
и многим другим. Я также чрезвычайно признателен моим сотрудникам
по компании «Макдоннел-Дуглас», особенно Джону Полю Терье (The-
riault), Стюарту Хигли (Higley), доктору Стиву Ватанабу (Watanabe),
доктору Уилу Отагуро (Otaguro), Дейву Тьюббзу (Tubbs), доктору Джо-
ну Галладжеру (Gallager), Алу Джозефу, доктору Хербу (Herb) Смиту,
Джеффу Руссому (Jeff Russom), Рику Балдини (Baldini), Тиму Кларку,
Тому Уиверу (Weaver), Джиму Муру (Moore), Джону Марсину (Marcin),
Рэю Вагонеру (Wagoner) и почти двум сотням других членов команды ра-
бочей группы по оптическим волокнам компании «Макдоннел-Дуглас».
Я благодарю мою жену Холли и дочерей Эмилию и Ингрид за проявленное
ими терпение в процессе моих усилий.
Наконец, я хочу посвятить мой вклад, внесенный в выпуск этой кни-
ги, памяти доктора Вольфганга К. Шубеля (Schuebel) с Wright-Patterson
базы военно-воздушных сил, который лидировал в развитии волоконно-
оптических гироскопов в США.
Хантингтон-Бич, Калифорния
Эрик Удд
ГЛАВА I
ВОЗНИКНОВЕНИЕ
ТЕХНОЛОГИИ
ВОЛОКОННО-ОПТИЧЕСКИХ
ДАТЧИКОВ
Эрик Удд
Компания «Макдоннел-Дуглас Электроник Системе»
Санта-Ана, Калифорния
Волоконно-оптические технологии совершили революцию в области
телекоммуникаций. Революция началась с ограниченного применения опти-
ческих волокон в системах, требующих сверхвысокой производительно-
сти. Переворот совершился, когда массовое производство в совокупности
с техническими усовершенствованиями смогло обеспечить сверхвысокую
производительность, требуя меньших издержек, чем любой другой аль-
тернативный подход. Одновременно происходящие усовершенствование
и снижение себестоимости в сочетании с массовым коммерческим произ-
водством привели как к вытеснению аналогов, так и к появлению новых
областей применения и выпуску новых товаров, таких как CD-плееры,
персональные копировальные устройства и лазерные принтеры. Третья
революция произошла благодаря разработчикам, использовавшим дости-
жения быстро растущей области оптоволоконной связи вместе с оптоэлек-
тронными приборами и создавшим волоконно-оптические датчики.
Открываются ошеломляющие перспективы, включающие как возмож-
ность замены большинства датчиков состояния окружающей среды, су-
ществующих в настоящее время, так и появление на рынке принципиально
новых датчиков, предоставляющих не существовавшие ранее возможно-
сти. На рис. 1.1-1.3 представлен обзор видов волоконно-оптических дат-
чиков, разработанных к настоящему времени, и приведены параметры,
для измерения которых чаще всего используется каждый тип датчиков.
Волоконно-оптические датчики: Вводный курс для инженеров и научных работников,
под редакцией Эрика Удда. ©1991 John Wiley &: Sons, Inc.
Возникновение технологии волоконно-оптических
Также указаны главы этой книги, соответствующие типам датчиков.
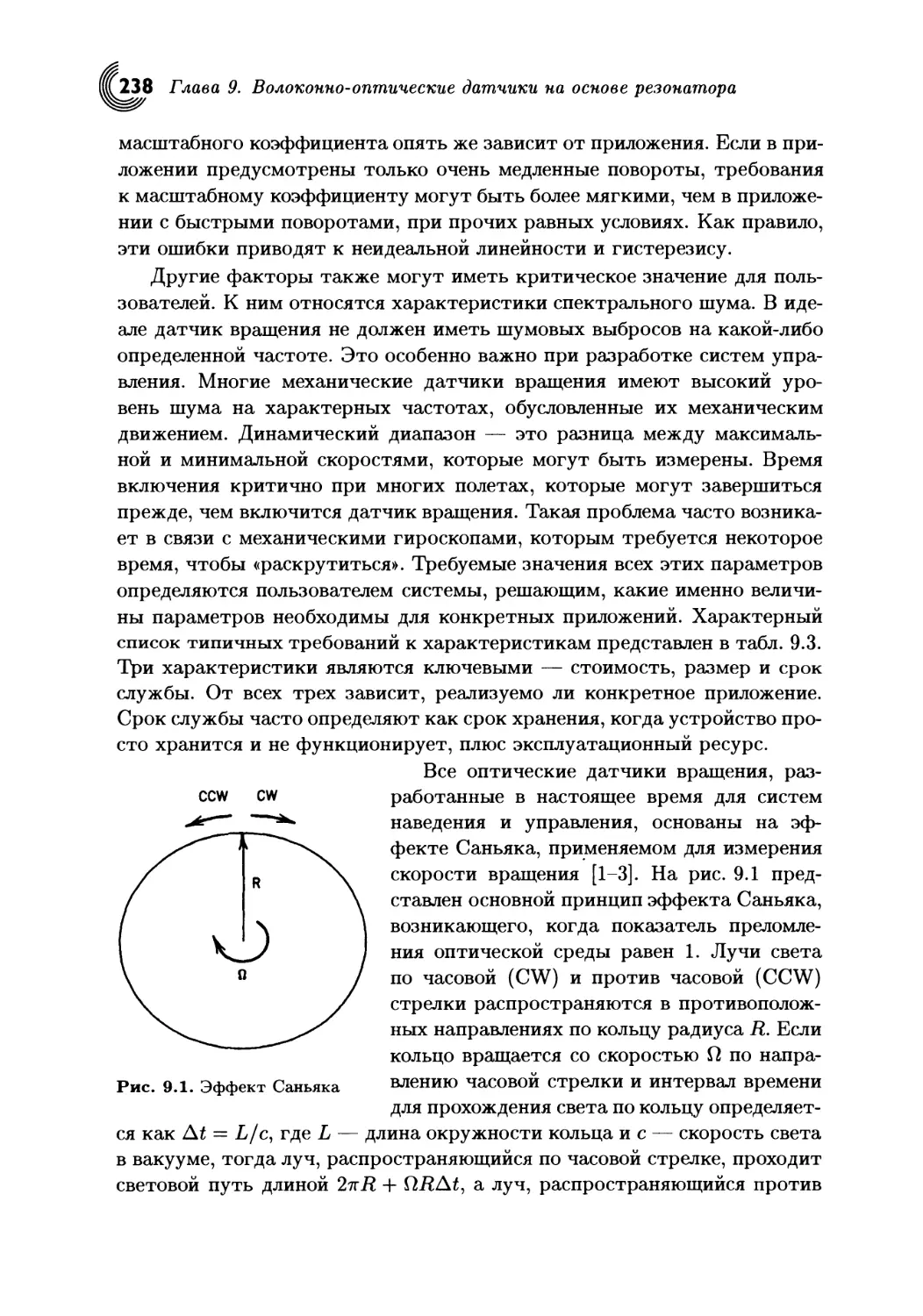
На рис. 1.1 представлены различные типы волоконно-оптических датчи-
ков с внешним чувствительным элементом или гибридных. В волоконно-
оптических датчиках с внешним чувствительным элементом измерение
параметров производится в области за пределами волокна. То же от-
носится и к гибридным волоконно-оптическим датчикам. Сами датчики
можно рассматривать как «черные ящики», при этом оптические волокна
используются для переноса света к «ящикам» и данных — в обратном на-
правлении. В большинстве случаев понятия датчиков с внешним чувстви-
тельным элементом и гибридных датчиков взаимозаменяемы. Основное
различие возникает в случае использования энергии светочувствитель-
ных элементов, когда луч света используется для приведения в действие
электронного датчика и данные возвращаются обратно по волоконно-
оптическому каналу. В этом случае термин «гибридные» является более
подходящим.
Главы 2, 14
• Температура
• Деформация
Главы 6, 13
Температура
Главы 8, 12
Давление
Ускорение
Вибрация
Круговое
перемещение
Глава 13 Глава 13
Измерение скорости «Температура
потока
Рис. 1.1. Волоконно-оптические датчики с внешним чувствительным элементом
или гибридные: свет передается на вход чувствительного элемента
и принимается с его выхода с помощью волокна
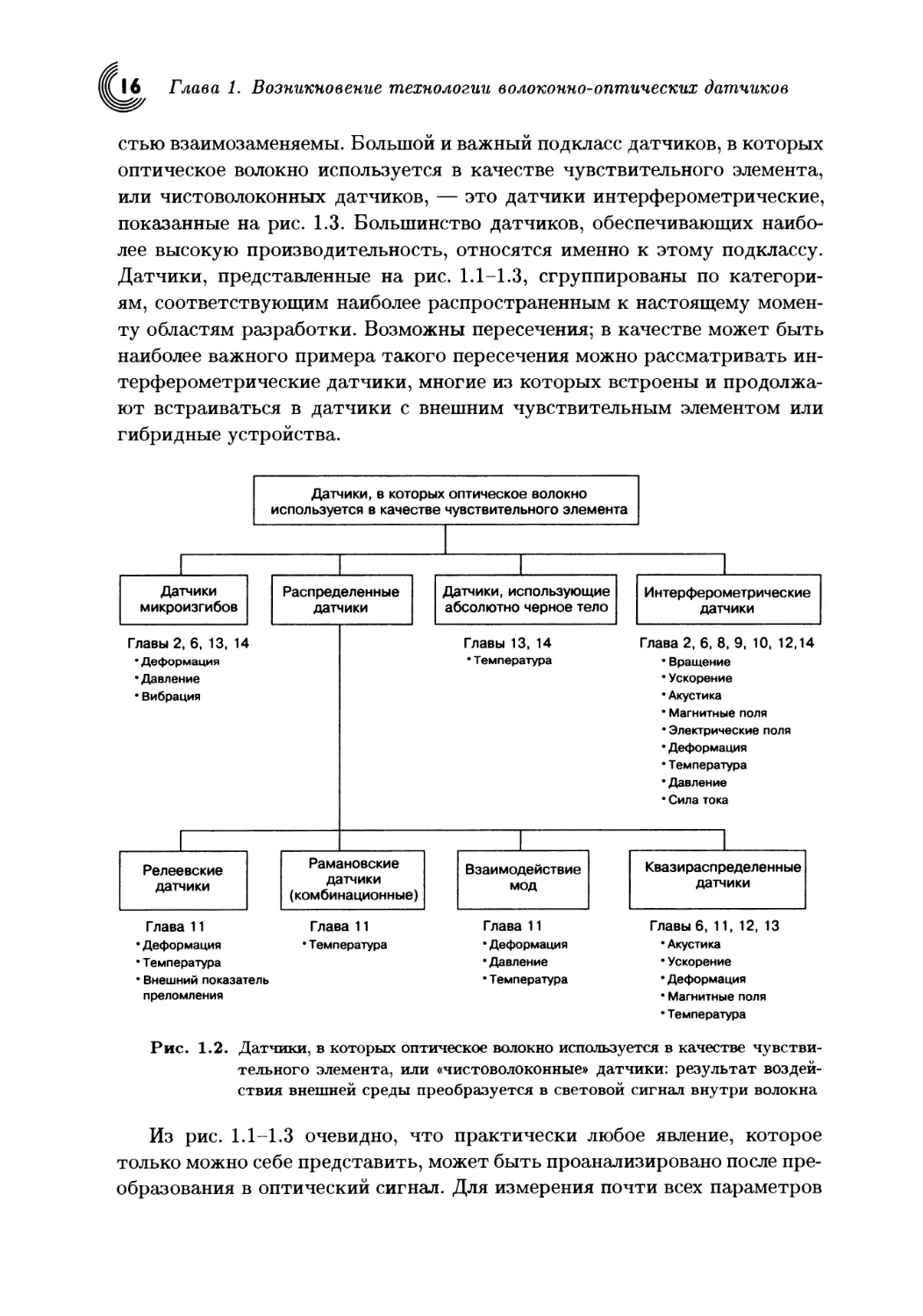
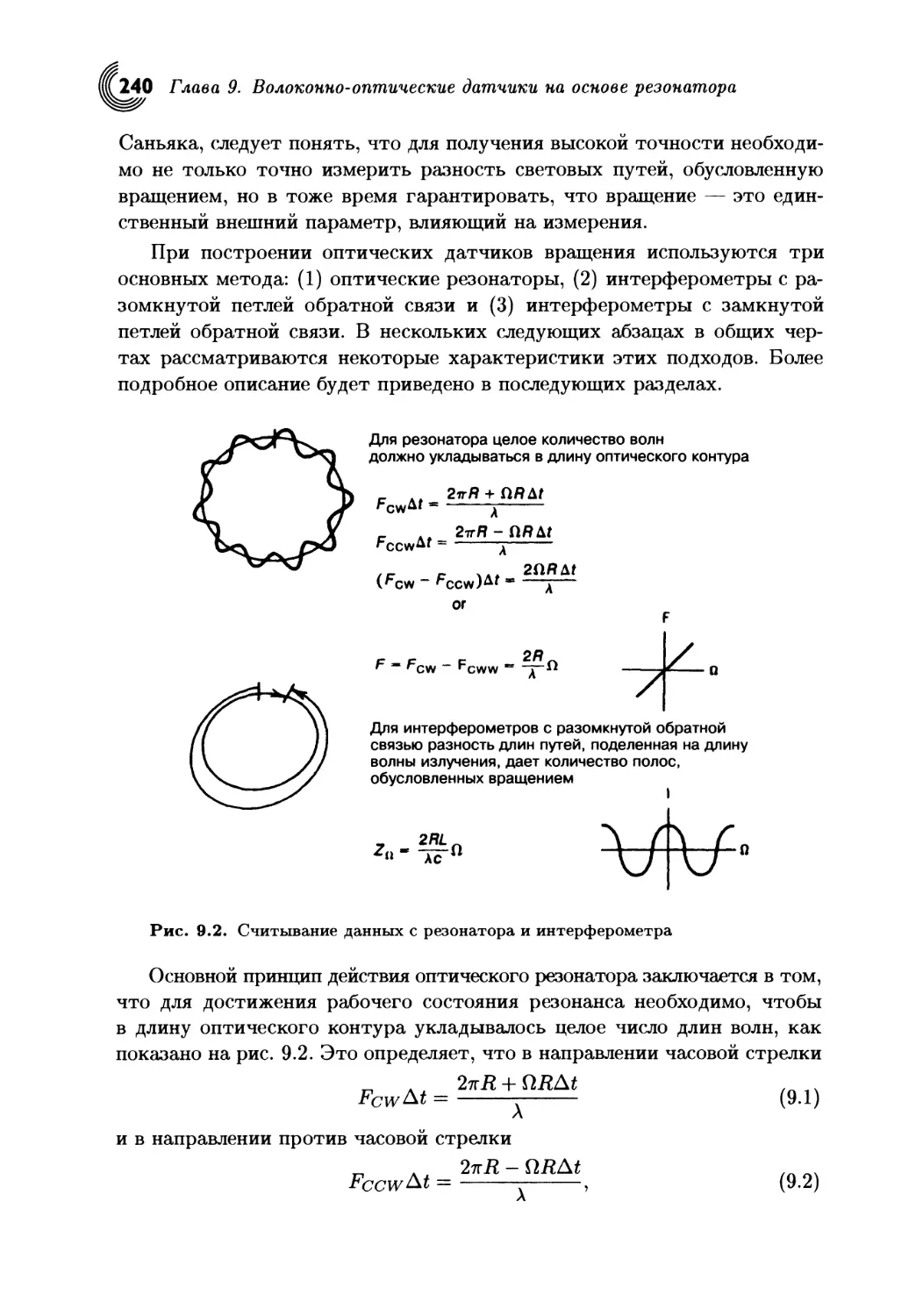
На схеме, приведенной на рис. 1.2, показана большая часть «чистоволо-
конных» датчиков, т. е. датчиков, в которых оптическое волокно исполь-
зуется в качестве чувствительного элемента. Используемое иногда на-
звание «чистоволоконные» указывает на то, что измерение производится
внутри самого волокна. В этом случае оба названия, как правило, полно-
Глава 1. Возникновение технологии волоконно-оптических датчиков
стью взаимозаменяемы. Большой и важный подкласс датчиков, в которых
оптическое волокно используется в качестве чувствительного элемента,
или чистоволоконных датчиков, — это датчики интерферометрические,
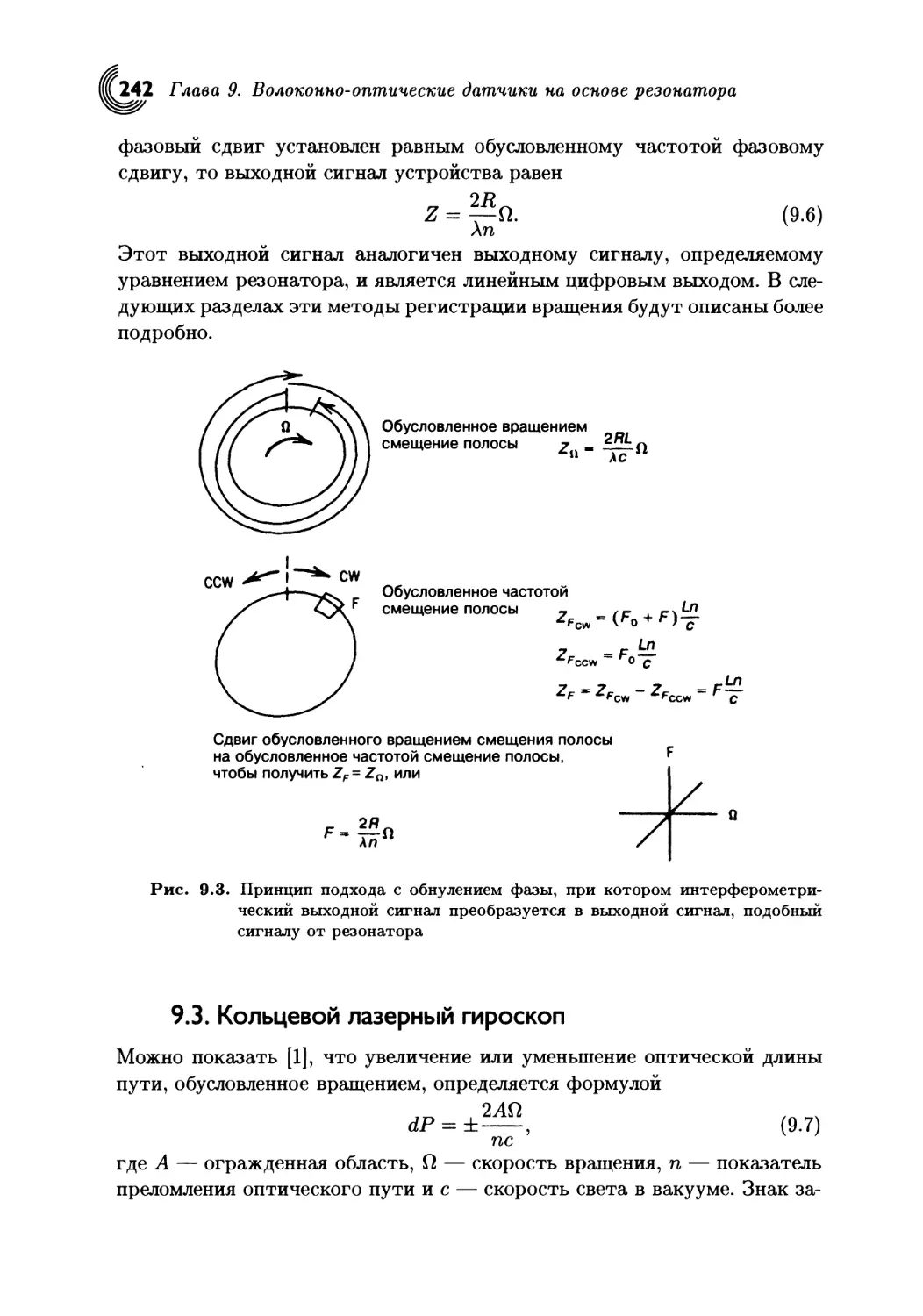
показанные на рис. 1.3. Большинство датчиков, обеспечивающих наибо-
лее высокую производительность, относятся именно к этому подклассу.
Датчики, представленные на рис. 1.1-1.3, сгруппированы по категори-
ям, соответствующим наиболее распространенным к настоящему момен-
ту областям разработки. Возможны пересечения; в качестве может быть
наиболее важного примера такого пересечения можно рассматривать ин-
терферометрические датчики, многие из которых встроены и продолжа-
ют встраиваться в датчики с внешним чувствительным элементом или
гибридные устройства.
Датчики, в которых оптическое волокно
используется в качестве чувствительного элемента
Датчики
микроизгибов
Распределенные
датчики
Датчики, использующие
абсолютно черное тело
I__________
Интерферометрические
датчики
Главы 2, 6, 13, 14
• Деформация
• Давление
• Вибрация
Главы 13, 14
• Температура
Глава 2, 6, 8, 9, 10, 12,14
* Вращение
• Ускорение
• Акустика
* Магнитные поля
• Электрические поля
* Деформация
•Температура
• Давление
• Сила тока
Релеевские
датчики
Глава 11
• Деформация
•Температура
• Внешний показатель
преломления
Рамановские
датчики
(комбинационные)
Глава 11
•Температура
Взаимодействие
мод
Глава 11
• Деформация
• Давление
•Температура
Квазираспределенные
датчики
Главы 6, 11, 12, 13
• Акустика
• Ускорение
• Деформация
• Магнитные поля
• Температура
Рис. 1.2. Датчики, в которых оптическое волокно используется в качестве чувстви-
тельного элемента, или «чистоволоконные» датчики: результат воздей-
ствия внешней среды преобразуется в световой сигнал внутри волокна
Из рис. 1.1-1.3 очевидно, что практически любое явление, которое
только можно себе представить, может быть проанализировано после пре-
образования в оптический сигнал. Для измерения почти всех параметров
Возникновение технологии волоконно-оптических датчиков 17
внешней среды может применяться множество волоконно-оптических дат-
чиков, использующих различные подходы. Часто проблема заключается
в разработке датчика, который оценивал бы только требуемый параметр.
Интерферометрические
волоконно-оптические датчики
Взаимодействие
мод
Главы 11, 14
* Деформация
•Температура
Саньяк
Мах-Цендер
Майкельсон
Главы 9, 12, 14
• Вращение
• Ускорение
• Деформация
• Акустика
• Измерение длины
волны
• Магнитные поля
• Сила тока
Главы 10, 12, 14
• Акустика
• Магнитные поля
• Электрические поля
• Ускорение
• Деформация
•Температура
• Сила тока
Главы 2, 10, 14
• Акустика
• Магнитные поля
• Электрические поля
•Температура
• Деформация
Главы 6, 10
• Акустика
• Температура
•Давление
Глава 6
Температура
Давление
Показатель преломления
Рис. 1.3. Интерферометрические волоконные датчики
Первоначально проникновение волоконно-оптических датчиков на рынок
было обусловлено их преимуществом по производительности. В табл. 1.1
перечислены все преимущества таких датчиков по сравнению с традици-
онными электронными датчиками. Элементы, используемые в волоконно-
оптических датчиках, являются абсолютно пассивными по отношению
к электричеству (не излучают и не проводят электрический ток), что час-
то оказывает решающее влияние на успешное применение их в некоторых
областях. В медицине это позволяет изолировать пациентов от электри-
Глава 1. Возникновение технологии волоконно-оптических датчиков
ческих приборов, в области высокого напряжения исключить проводящие
пути, а при размещении обеспечивается совместимость с любыми матери-
алами. Весогабаритные характеристики датчиков являются критичными
при их использовании в таких областях, как аэрокосмическая, и здесь,
благодаря своим небольшим весу и размеру, волоконно-оптические датчи-
ки получают существенное преимущество по сравнению со многими дру-
гими изделиями. К тому же такие датчики невосприимчивы к электро-
магнитным помехам. Традиционные электрические датчики часто при-
ходится размещать в тяжелой экранирующей оболочке, что значительно
увеличивает их стоимость, размер и вес. Устойчивость к воздействи-
ям внешней среды является определяющей при использовании волоконно-
оптических датчиков в условиях высокой температуры, а твердотельная
структура позволяет им выдерживать предельные уровни вибрационных
и ударных нагрузок. К перечисленным выше свойствам можно добавить
высокую чувствительность и широкополосность. При объединении кана-
лов матрицы датчиков широкая полоса пропускания самих оптических
волокон позволяет передавать получающиеся в результате данные и тем
самым обеспечивает определенное преимущество.
Таблица 1.1. Преимущества волоконно-оптических датчиков
Пассивность (датчики полностью диэлектрические)
Легкость
Малогабаритность
Невосприимчивость к электромагнитной интерференции
Способность работать при высоких температурах
Широкая полоса пропускания
Устойчивость к вибрации и ударам
Высокая чувствительность
Возможность уплотнения электрических и оптических сигналов
Стоимость компонент определяется крупным телекоммуникационным
и оптоэлектронным рынком сбыта
Ранние работы по волоконно-оптическим датчикам, как правило, мож-
но отнести к двум основным категориям. Относительно простые воло-
конно-оптические датчики быстро стали серийно выпускаемыми издели-
ями, часто благодаря небольшим начинающим фирмам, и сформирова-
ли специализированный рынок средств измерений. В качестве одного из
первых таких примеров можно рассматривать измерение температуры
в области высокого напряжения. Более сложными волоконно-оптическими
датчиками, такими как волоконно-оптические гироскопы или гидроаку-
стические приемные антенные решетки, занимались большие производ-
ственные фирмы при поддержке правительственных программ, стараясь
Возникновение технологии волоконно-оптических
выйти на потенциально большие высокоплатежеспособные рынки. Перво-
начальное проникновение на рынок в период с 1980 по 1990 год в усло-
виях постоянной конкуренции с традиционными технологиями датчиков
происходило медленно в значительной степени из-за высокой стоимости
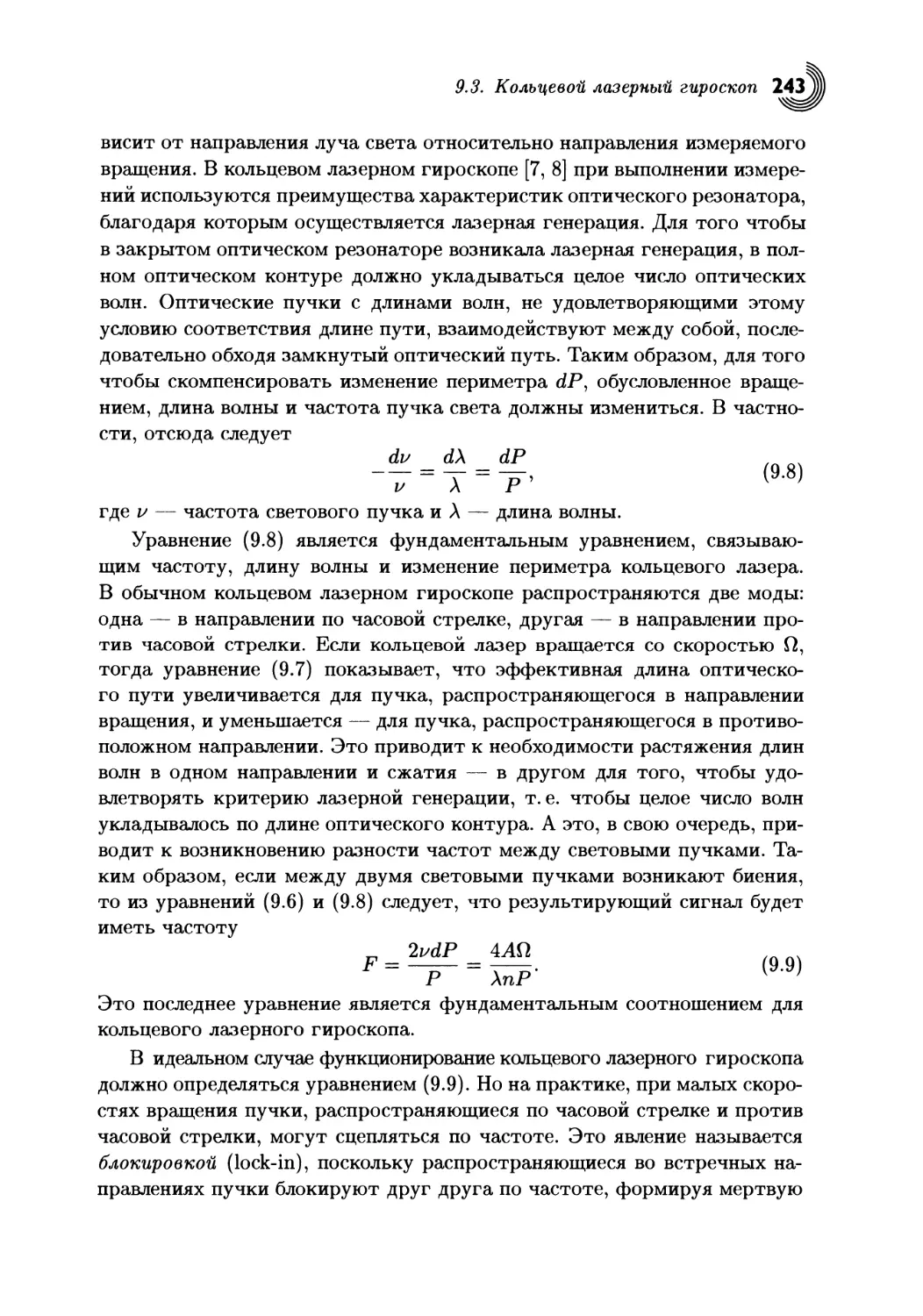
ограниченного количества подходящих компонент. Но ситуация быстро
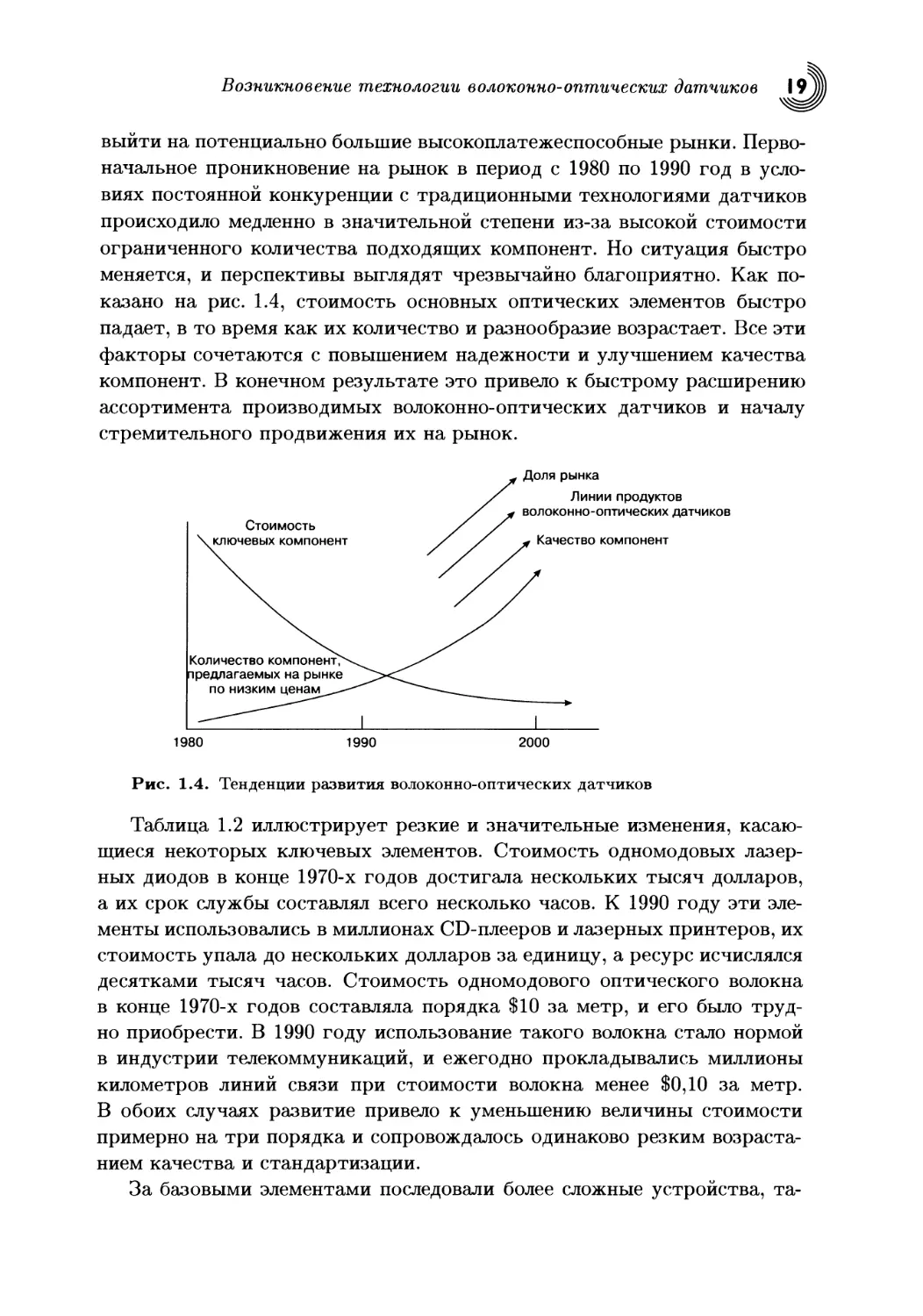
меняется, и перспективы выглядят чрезвычайно благоприятно. Как по-
казано на рис. 1.4, стоимость основных оптических элементов быстро
падает, в то время как их количество и разнообразие возрастает. Все эти
факторы сочетаются с повышением надежности и улучшением качества
компонент. В конечном результате это привело к быстрому расширению
ассортимента производимых волоконно-оптических датчиков и началу
стремительного продвижения их на рынок.
Рис. 1.4. Тенденции развития волоконно-оптических датчиков
Таблица 1.2 иллюстрирует резкие и значительные изменения, касаю-
щиеся некоторых ключевых элементов. Стоимость одномодовых лазер-
ных диодов в конце 1970-х годов достигала нескольких тысяч долларов,
а их срок службы составлял всего несколько часов. К 1990 году эти эле-
менты использовались в миллионах CD-плееров и лазерных принтеров, их
стоимость упала до нескольких долларов за единицу, а ресурс исчислялся
десятками тысяч часов. Стоимость одномодового оптического волокна
в конце 1970-х годов составляла порядка $10 за метр, и его было труд-
но приобрести. В 1990 году использование такого волокна стало нормой
в индустрии телекоммуникаций, и ежегодно прокладывались миллионы
километров линий связи при стоимости волокна менее $0,10 за метр.
В обоих случаях развитие привело к уменьшению величины стоимости
примерно на три порядка и сопровождалось одинаково резким возраста-
нием качества и стандартизации.
За базовыми элементами последовали более сложные устройства, та-
Глава 1. Возникновение технологии волоконно-оптических датчиков
кие как интегральные оптические модуляторы, которые в конце 1970-х
годов были лабораторными диковинками, крайне далекими от серийно
выпускаемых изделий. К 1990 году эти изделия в небольших количествах
появились на рынке, при этом стоимость каждого из них составляла не-
сколько тысяч долларов. И можно с полной уверенностью предсказать,
что к 2000 году1 их стоимость упадет по крайней мере, до уровня $50,
а на их основе в будущем появятся такие серийно выпускаемые продук-
ты, как волоконно-оптические гироскопы. Этот датчик, который в конце
1970-х годов сам по себе был редким лабораторным прибором, выпол-
ненным на интегральных оптических фазовых модуляторах, являющихся
его ключевым элементом. В 1990 году эти устройства предлагались на
рынке в ограниченном количестве по цене $20000 за единицу. Чтобы
обеспечить проникновение на рынок, стоимость устройств со средними
характеристиками должна упасть примерно до $500-1000. А для этого
в свою очередь требуется, чтобы стоимость фазовых модуляторов снизи-
лась примерно до $50 за единицу.
Таблица 1.2. Необходимые компоненты для волоконно-оптических датчиков су-
щественно дешевеют
1980 1990 2000
Лазерные диоды $3000/шт. (опытные образцы) $3/шт. (CD-плееры) —
Одномодовое волокно $5—10/м (ограниченное предложение на рынке) $0,1/м (стандартная связь) —
Интегрированные оптические модуляторы Лабораторные образцы $7000/шт. (опытные образцы) $50/шт. (волоконно- оптические гироскопы)
Волоконно- оптические гироскопы Лабораторные образцы $20000/шт. (опытные образцы) $500-1000/шт. (недорогие навигационные приборы)
С появлением каждого нового успешного продукта стоимость суще-
ствующих и вновь внедряемых компонент продолжает снижаться, что
открывает дорогу наплыву новых серийно выпускаемых волоконно-опти-
ческих датчиков. Эту ситуацию иллюстрирует рис. 1.5. В 1980 году до-
ступно было очень мало компонент и их стоимость была относительно
высокой, а это приводило к тому, что приложения на основе волоконно-
1 Первое издание книги — 1996 год. — Прим. ред.
1990
1980
• Источники
света
Оптоволокно
• Детекторы
0D • Микрооптика
• Низкая стоимость
- Источники света
- Детекторы
- Оптоволокно
2000
• Волоконные ответвители
• Фильтры
• Компоненты спектрального
мультиплексирования
Низкая стоимость
- Волоконные разветвители
- Несложные интегральные
оптические приборы
- Источники света/детекторы
с оконцованными волоконными
выводами
Небольшое количество компонент
Высокая стоимость
Несложные интегральные
оптические приборы
Высокая стоимость
• Специализированное оптоволокно
по низкой цене, предназначенное
для волоконно-оптических датчиков
• Сложные интегральные
оптические приборы
I - Незначительная
ниша на рынке
- Начальное
проникновение
на рынок
© О ©
Радиочастотные
измерения температуры
• Опытные образцы
волоконно-оптических
гироскопов
• Системы измерения
мощности
• Промышленные
и лабораторные
измерительные
приборы
—I-------------------
• Волоконно-оптические
гироскопы по низкой цене
• Гидроакустические антенные
решетки
• Промышленные системы
на базе волоконно-оптических
датчиков
• Интеллектуальные системы
на базе волоконно-оптических
датчиков
- В аэрокосмической области
- В строительстве
Рис. 1.5. По мере увеличения количества компонент и снижения их стоимости возможности выбора для разработчиков воло-
конно-оптических датчиков многократно возрастают
Возникновение технологии волоконно-оптических датчиков 21
22 Глава 1. Возникновение технологии волоконно-оптических датчиков
оптических датчиков занимали очень небольшую нишу на рынке и предло-
жение сводилось буквально к нескольким пунктам. К 1990 году стоимость
волоконных компонент, источников света и волоконных разветвителей
резко упала, а мультиплексные элементы стали легко доступны в продаже
по умеренным ценам. На рынке появились также некоторые новые изде-
лия, такие как интегральные оптические приборы, цена на которые была
относительно высока. Эти разработки позволили начать использование
волоконно-оптических датчиков в качестве измерительной аппаратуры
в промышленности и электроэнергетике, а также приступить к внедре-
нию ограниченного количества более сложных опытных образцов воло-
конно-оптических датчиков, таких как волоконно-оптические гироско-
пы. Можно ожидать, что к 2000 году существенно возрастет количество
устройств, доступных на рынке по низким ценам, что позволит разра-
ботчикам в области оптических волокон выпустить широкий диапазон
устройств, обеспечивающих высокую производительность по значитель-
но более низким ценам, чем допускают существующие технологии. При
этом появится возможность использования датчиков в совершенно но-
вых областях науки и техники. В частности, новейшие разработки позво-
лят заменить традиционные вращающиеся инерционные датчики воло-
конно-оптическими гироскопами, шире использовать волоконно-оптиче-
ские датчики в процессах управления и производства, а также применять
их для мониторинга состояния систем и оборудования в аэрокосмической
и строительной промышленности.
Все эти разработки повлекут за собой возникновение все больших и бо-
лее сложных систем на базе слияния телекоммуникаций и технологий при-
менения волоконно-оптических датчиков. При строительстве новых зда-
ний будут использоваться волоконно-оптические системы, которые обес-
печат объединение в сеть всех обитателей и позволят создать службы
обработки важнейших эксплуатационных характеристик. Такие службы
будут выполнять двойную функцию: контролировать температуру, влаж-
ность и энергопотребление и передавать наиболее существенную инфор-
мацию на центральный пункт управления. Полоса пропускания и изме-
рительные возможности оптических волокон предоставят возможности,
далеко выходящие за пределы современного технического уровня. Анало-
гичные службы способны обеспечить всеобщую связь, благодаря которой
исчезла бы необходимость вручную проверять газовые и электрические
счетчики. По такому же принципу могут быть построены централизо-
ванные системы безопасности и пожарной защиты, а также координация
неотложной помощи.
Чтобы воплотить эти мечты в жизнь, необходимо совершенствовать
технические приемы и методы преобразования сырья в оптические компо-
Возникновение технологии волоконно-оптических датчиков
ненты, оптических компонент — в волоконно-оптические датчики и соз-
дания на основе волоконно-оптических датчиков полезных систем. Осталь-
ная часть этой книги посвящена обзору избранных тем по каждой из обла-
стей и описанию полезных и многообещающих подходов. Мы надеемся,
что читатели этой книги найдут в ней много полезного для построения
нового лучшего будущего.
ГЛАВА 2
ОПТОВОЛОКНО
Д. А. Нолан и П. Е. Блашик
Корнинг, Inc.
Исследования, разработка & Инженерно-технический отдел
Корнинг, Нью-Йорк
и
Эрик Удд (Eric Udd)
Компания «Макдоннел-Дуглас Электроник Системе»
Санта-Ана, Калифорния
2.1. Введение
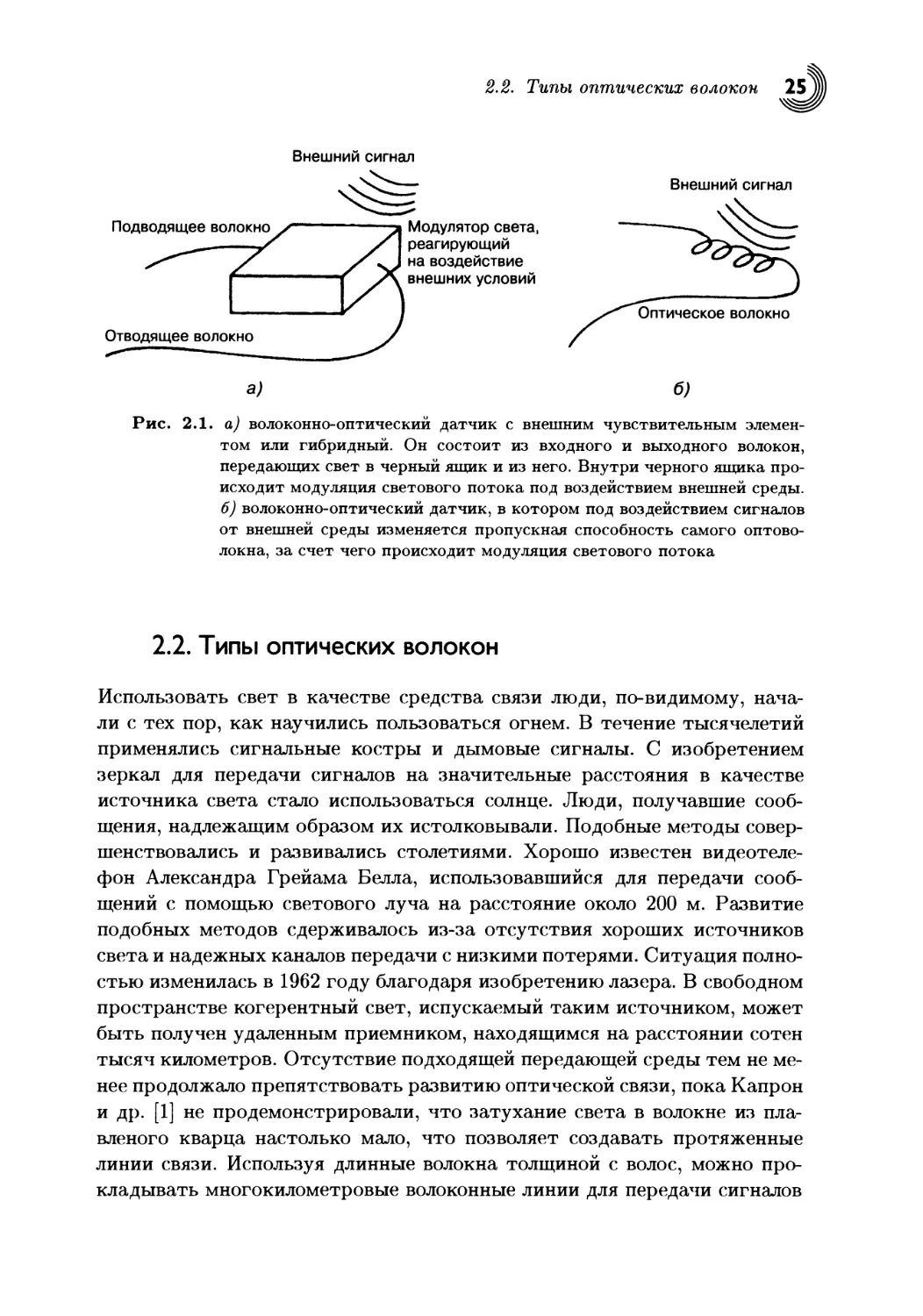
Оптические волокна используются для оценки явлений внешней среды
двумя различными способами. Иногда используются внешние чувстви-
тельные элементы, а иногда само оптоволокно выступает в качестве чув-
ствительного элемента. Принципы этих способов показаны на рис. 2.1.
В первом случае оптоволокна используются исключительно в качестве
носителей информации, входящей в черный ящик и выходящей из него
в виде луча света, который затем передается на удаленный приемник
по другому, а в некоторых случаях по тому же самому, что и входящий
сигнал, оптоволокну. Черный ящик может содержать зеркала, жидкост-
ные или газовые ячейки, консольные механизмы, а также множество дру-
гих устройств, способных генерировать, модулировать или преобразо-
вывать световой поток. Во втором типе волоконно-оптических датчиков
воздействия внешней среды осуществляют модуляцию проходящего через
оптоволокно светового потока и используют непосредственно свойства
самого оптоволокна. Этот второй класс может быть далее разделен на
подклассы в зависимости от способа модуляции светового потока по ин-
тенсивности, фазе или поляризации. В этой главе свойства оптических
волокон будут рассмотрены и проанализированы на простых примерах
волоконно-оптических датчиков, которые более подробно и основательно
описаны в следующих главах.
Волоконно-оптические датчики: Вводный курс для инженеров и научных работников,
под редакцией Эрика Удда. ©1991 John Wiley & Sons, Inc.
2.2. Типы оптических волокон 25
Рис. 2.1. а) волоконно-оптический датчик с внешним чувствительным элемен-
том или гибридный. Он состоит из входного и выходного волокон,
передающих свет в черный ящик и из него. Внутри черного ящика про-
исходит модуляция светового потока под воздействием внешней среды.
б) волоконно-оптический датчик, в котором под воздействием сигналов
от внешней среды изменяется пропускная способность самого оптово-
локна, за счет чего происходит модуляция светового потока
2.2. Типы оптических волокон
Использовать свет в качестве средства связи люди, по-видимому, нача-
ли с тех пор, как научились пользоваться огнем. В течение тысячелетий
применялись сигнальные костры и дымовые сигналы. С изобретением
зеркал для передачи сигналов на значительные расстояния в качестве
источника света стало использоваться солнце. Люди, получавшие сооб-
щения, надлежащим образом их истолковывали. Подобные методы совер-
шенствовались и развивались столетиями. Хорошо известен видеотеле-
фон Александра Грейама Белла, использовавшийся для передачи сооб-
щений с помощью светового луча на расстояние около 200 м. Развитие
подобных методов сдерживалось из-за отсутствия хороших источников
света и надежных каналов передачи с низкими потерями. Ситуация полно-
стью изменилась в 1962 году благодаря изобретению лазера. В свободном
пространстве когерентный свет, испускаемый таким источником, может
быть получен удаленным приемником, находящимся на расстоянии сотен
тысяч километров. Отсутствие подходящей передающей среды тем не ме-
нее продолжало препятствовать развитию оптической связи, пока Капрон
и др. [1] не продемонстрировали, что затухание света в волокне из пла-
вленого кварца настолько мало, что позволяет создавать протяженные
линии связи. Используя длинные волокна толщиной с волос, можно про-
кладывать многокилометровые волоконные линии для передачи сигналов
Глава 2. Оптоволокно
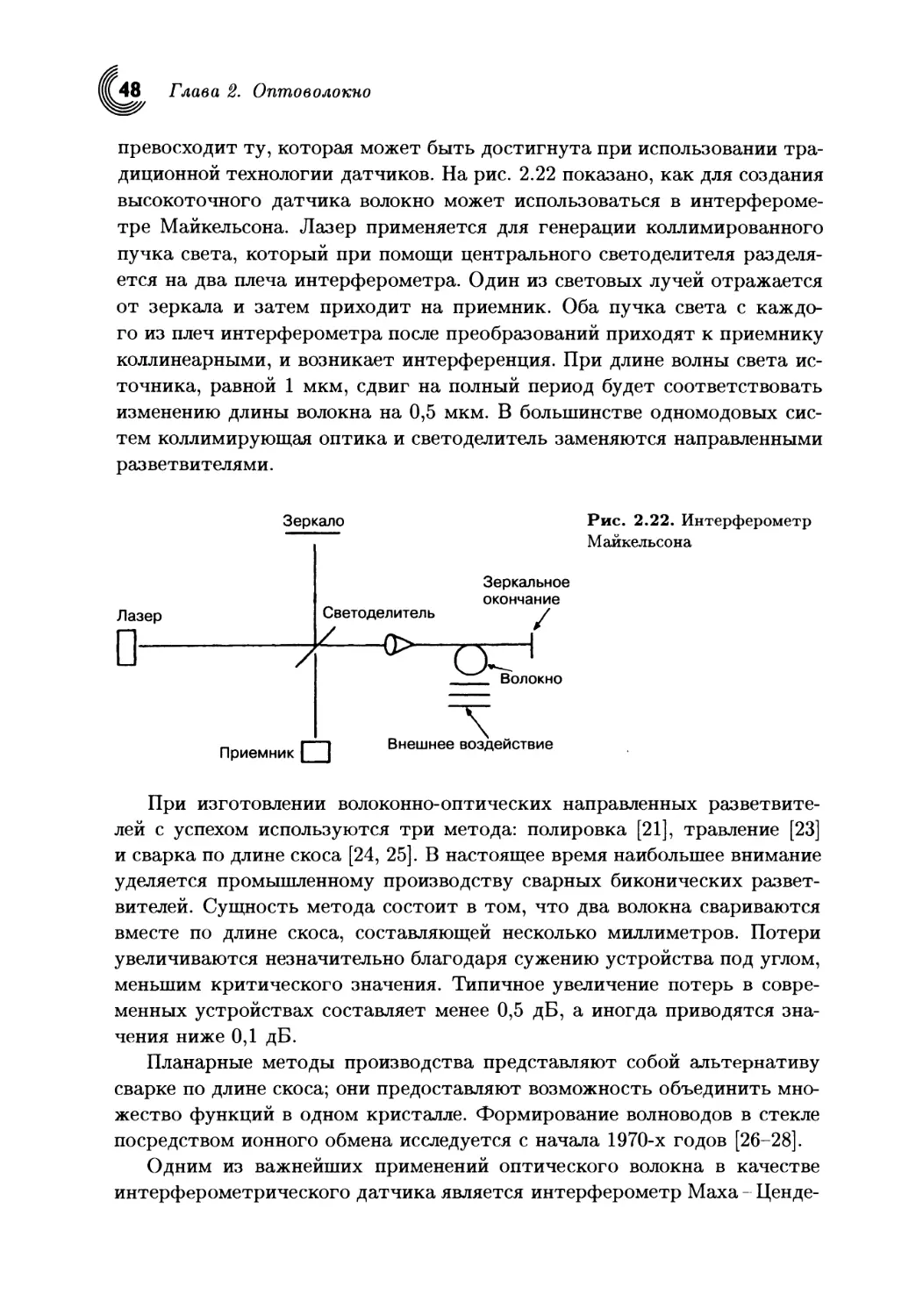
с помощью модулированного лазерного излучения. На рис. 2.2 показа-
но, как свет передается по волокну. Рассмотрим пловца на дне водоема.
Если он посмотрит на поверхность воды под достаточно малым углом,
дно водоема полностью отразится на поверхности раздела вода-воздух.
Примерно то же происходит внутри волокна; свет передается благода-
ря множеству внутренних отражений. Внутри волокна свет отражается
от материала оптической оболочки, имеющей меньший коэффициент пре-
ломления, снова в сторону сердцевины. Таким образом, непрерывные вну-
тренние отражения позволяют свету распространяться по ходу движения.
Одновременное начало производства компаниями Corning Inc. и Bell Labs
волокна с низкими потерями открыло дверь оптической связи и дешевым
волоконно-оптическим датчикам, способным обеспечить высокую произ-
водительность.
ВОЗДУХ Лвоздуха
Вода
Лводы
Дно водоема
Рис. 2.2. Дно водоема отражается на границе воздух-вода для пловца, смотря-
щего вверх под достаточно малым углом к поверхности
2.2.1. Закон преломления Снеллиуса (Снелля)
и полное внутреннее отражение
Чтобы понять, как распространяется свет в волокне, рассмотрим процесс
с точки зрения геометрической оптики, предоставляющей удобные понят-
ные средства для описания многих черт этого феномена. Представление
плоской гармонической волны имеет вид [2]
^(K-r-cut), (2Д)
где |К| = 2л/А, А — длина волны светового потока и направление К со-
впадает с направлением распространения светового потока; г — вектор,
определяющий положение точки в рассматриваемой координатной систе-
ме, си — частота колебаний светового луча, t — время. Если продифферен-
цировать выражение (2.1) по времени и пространственным координатам,
получится
2.ег(Кг-ш«) =
dt
(2-2)
2.2. Типы оптических волокон 27
Ve»(K-r-wt) _ _^ег(Кт-о>«)
(2-3)
Уравнения (2.2) и (2.3) показывают, что получить производную по вре-
мени d/dt выражения (2.1) можно, умножая первоначальное выражение
на —геи, а пространственную производную V — умножая (2.1) на iK. За-
писав уравнение Максвелла [2] для случая отсутствия свободных зарядов
и тока, получим:
V х Е = —> К х Е = /2а;Н, (2.4)
V х Н = К х Н = -ешЕ, (2.5)
V-E = 0—*К-Е = 0, (2.6)
VH = 0-*KH = 0. (2.7)
Из уравнения (2.6) очевидно, что вектор К перпендикулярен Е, в то же
время из уравнения (2.7) понятно, что вектор К перпендикулярен Н.
Из (2.4) вытекает, что вектор Н перпендикулярен К и Е, а из (2.5) —
что вектор Е перпендикулярен Н и К. Чтобы удовлетворялись все эти
условия, векторы электрического и магнитного полей вместе с направле-
нием распространения должны образовать ортогональную триаду, как
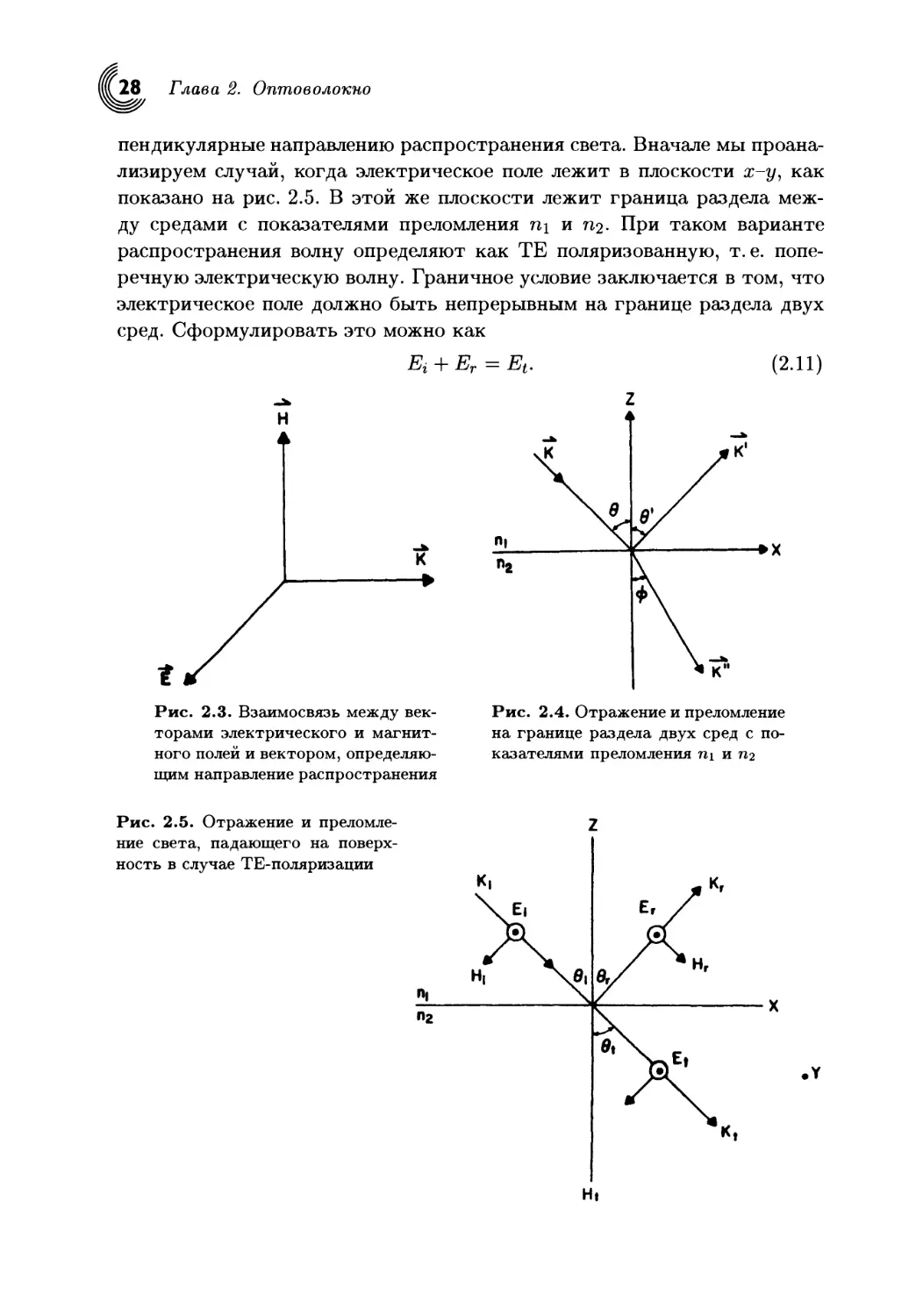
показано на рис. 2.3.
Рассмотрим следующий случай, представленный на рис. 2.4. Здесь па-
дающая плоская волна обозначена через ег(кг-г-^). отраженная волна —
ег(К'г-r-ixjt) и прошедшая волна — ег(к/ Отражение и преломление
волны происходит на границе двух материалов, показатели преломления
которых соответственно п\ и П2- Требование идентичности трех волн на
границе раздела (т.е. непрерывности волны) в любой момент времени
можно сформулировать следующим образом:
г = К; г - К'/ г, (2.8)
для оси х в соответствии с рис. 2.4 из выражения (2.8) следует
Ki sin 0 = Kr sin О' = К" sin ф. (2.9)
В среде, имеющей показатель преломления тц, Ki = К’г, откуда сле-
дует, что в = О', и мы получили закон отражения. В законе Снеллиуса
утверждается, что преломленная волна лежит в той же плоскости, что
и падающая, и они связаны соотношением [3]
4^ = ^ = ^. (2.10)
sin^> Ki Hi
Дополнительную информацию о природе отражения и преломления
можно получить, рассматривая электрические и магнитные поля, пер-
Глава 2. Оптоволокно
пендикулярные направлению распространения света. Вначале мы проана-
лизируем случай, когда электрическое поле лежит в плоскости х-у, как
показано на рис. 2.5. В этой же плоскости лежит граница раздела меж-
ду средами с показателями преломления и При таком варианте
распространения волну определяют как ТЕ поляризованную, т. е. попе-
речную электрическую волну. Граничное условие заключается в том, что
электрическое поле должно быть непрерывным на границе раздела двух
сред. Сформулировать это можно как
Рис. 2.3. Взаимосвязь между век-
торами электрического и магнит-
ного полей и вектором, определяю-
щим направление распространения
Рис. 2.5. Отражение и преломле-
ние света, падающего на поверх-
ность в случае ТЕ-поляризации
Рис. 2.4. Отражение и преломление
на границе раздела двух сред с по-
казателями преломления ni и П2
2.2. Типы оптических волокон 29
Граничное условие требует также непрерывности тангенциальных со-
ставляющих Н на границе раздела двух сред, откуда следует
—Hi cos Oi + Hr cos 0r — —Ht cos 0t- (2.12)
Используя закон отражения, подставим в (2.12) 0i0r = 0 и получим
—Hi cos# + Hr cos 0 = —Ht cos 0t- (2.13)
Учитывая уравнение (2.4), Hi = (1//ки)7<гЕ^, Hr = (1//ш)КгЕг и Ht =
= (1//jw)KtEt и уравнение (2.13), получаем
—KiEi cos 0 + KrEr cos 0 = —KtEt cos 0t. (2-14)
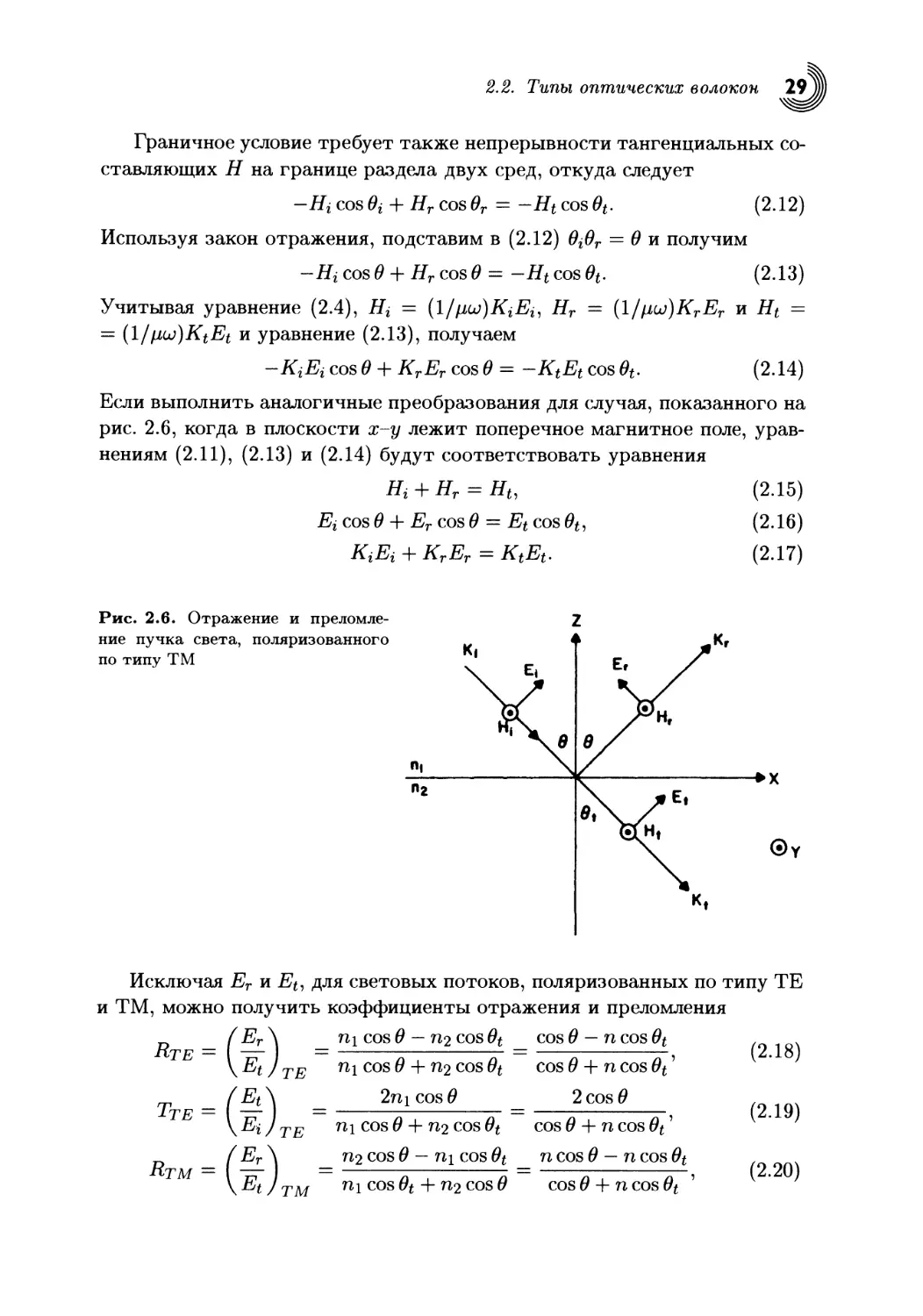
Если выполнить аналогичные преобразования для случая, показанного на
рис. 2.6, когда в плоскости х-у лежит поперечное магнитное поле, урав-
нениям (2.11), (2.13) и (2.14) будут соответствовать уравнения
Н{ + Нг = Ht,
(2-15)
Ei cos 0 + Er cos 0 = Et cos 0t, (2.16)
Рис. 2.6. Отражение и преломле-
ние пучка света, поляризованного
по типу ТМ
KiEi + KrEr — KtEt-
Исключая Ег и Et, для световых потоков, поляризованных по типу ТЕ
и ТМ, можно получить коэффициенты отражения и преломления
Rte =
Rtm =
Er' \ П1 COS 0 — П2 COS 0t cos 0 — n COS 0t
/ TE П1 COS 0 4- П2 COS 0t cos 0 + n COS 0t ’
Et> _ 2nicos0 _ 2 cos 0
Eiy 1 ТЕ П1 COS 0 + n2 COS 0t cos 0 4- n cos 0t ’
Er' \ П2 COS 0 — П1 COS 0t n cos 0 — n COS 0t
/ Щ COS 0t 4- П2 cos 0 cos 0 4- n cos 0t
(2.18)
(2.19)
(2.20)
Глава 2. Оптоволокно
ТМ
2п1 cos 0 2 cos 0
П1 COS 0t 4- П2 COS 0 COS 0f 4- n cos 0
(2.21)
Важно отметить, что коэффициенты отражения и преломления для двух
состояний поляризации существенно отличаются, и, следовательно, после
серии отражений в пучке света в большей степени начнет преобладать
одно из состояний поляризации за счет уменьшения другого.
Используя закон Снеллиуса [уравнение (2.10)], можно преобразовать
уравнения (2.18) и (2.20) следующим образом
' Er \ cos 0 — п2 — sin2 0
/ те cos 0 + л/n2 — sin2 0
Er \ n2 cos 0 — nyn2 — sin2 0
Et / тм n2 cos 0 4- n\/n2 — sin2 0
(2.22)
(2.23)
Заметим, что при n = sin# (предельный угол) возникает явление пол-
ного внутреннего отражения, и для значений #, больших предельного
угла, доля отраженного света удовлетворяет следующим условиям:
/ Er \ _ cos 0 — гд/sin2 0 — п2 24)
\Et / те cos0 4- гд/sin2 0 — п2
(Ег\ п2 cos# — in уsin2 0 — п2
= ------------7- (2.25)
/ тм п2 cos # 4- г v sin2 # — п2
2.2.2. Многомодовое оптоволокно со ступенчатым
профилем (со ступенчато изменяющимся
показателем преломления)
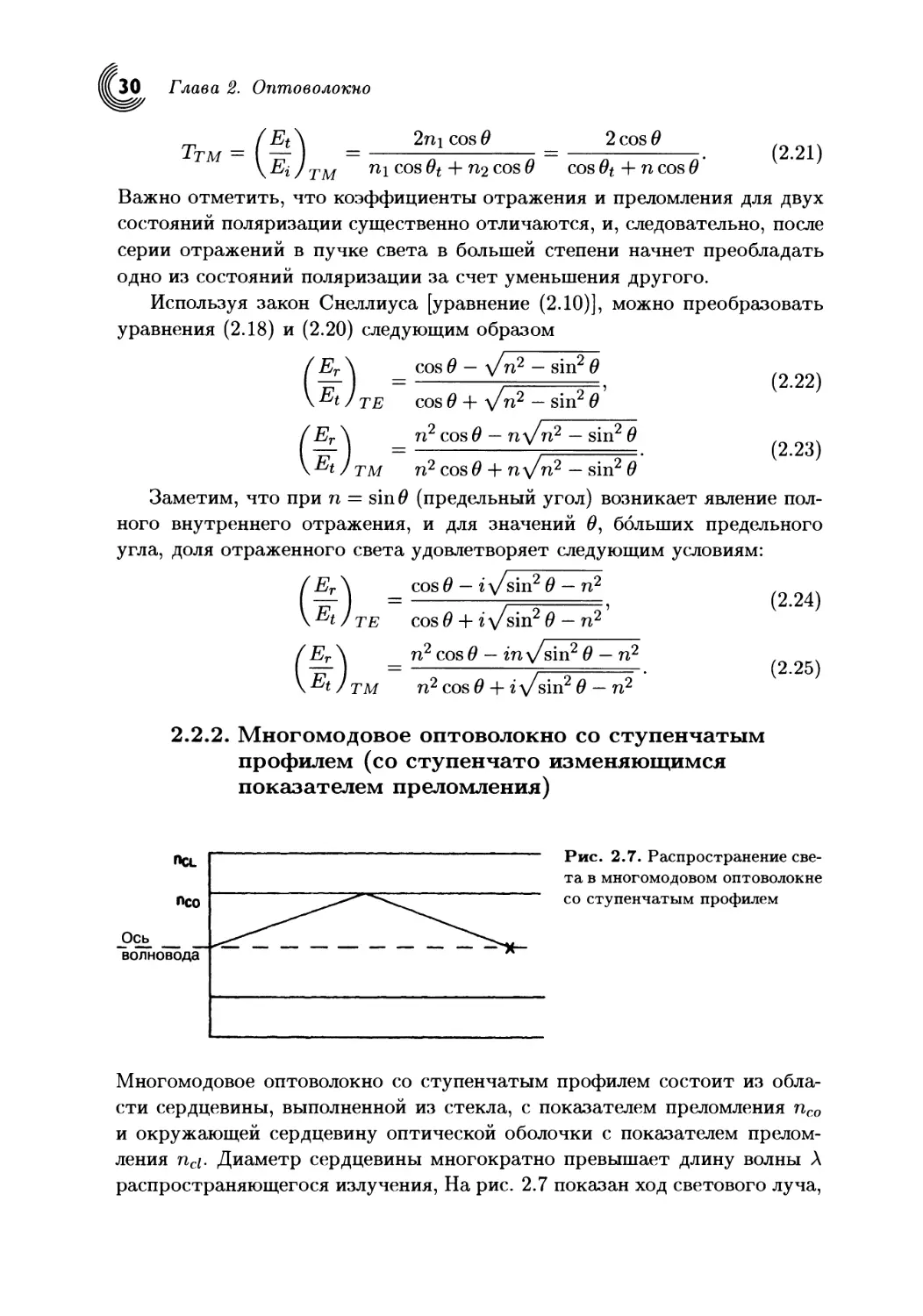
Рис. 2.7. Распространение све-
та в многомодовом оптоволокне
со ступенчатым профилем
Многомодовое оптоволокно со ступенчатым профилем состоит из обла-
сти сердцевины, выполненной из стекла, с показателем преломления псо
и окружающей сердцевину оптической оболочки с показателем прелом-
ления nci. Диаметр сердцевины многократно превышает длину волны А
распространяющегося излучения, На рис. 2.7 показан ход светового луча,
2.2. Типы оптических волокон 31
попадающего из среды с показателем преломления например из возду-
ха, в многомодовое оптоволокно. Заметим, что пока угол луча по отноше-
нию к оси волновода меньше предельного угла 0С, который в соответствии
с формулами (2.22) и (2.23) равен
sin0c = (п2со-п2с1)1/2. (2.26)
Таким образом, лучи света, входящие в волокно под углами меньше пре-
дельного могут распространяться, и оптоволокно имеет характерный угол
связанной моды1, который называется числовой апертурой и определя-
ется по формуле
NA = sinOc. (2.27)
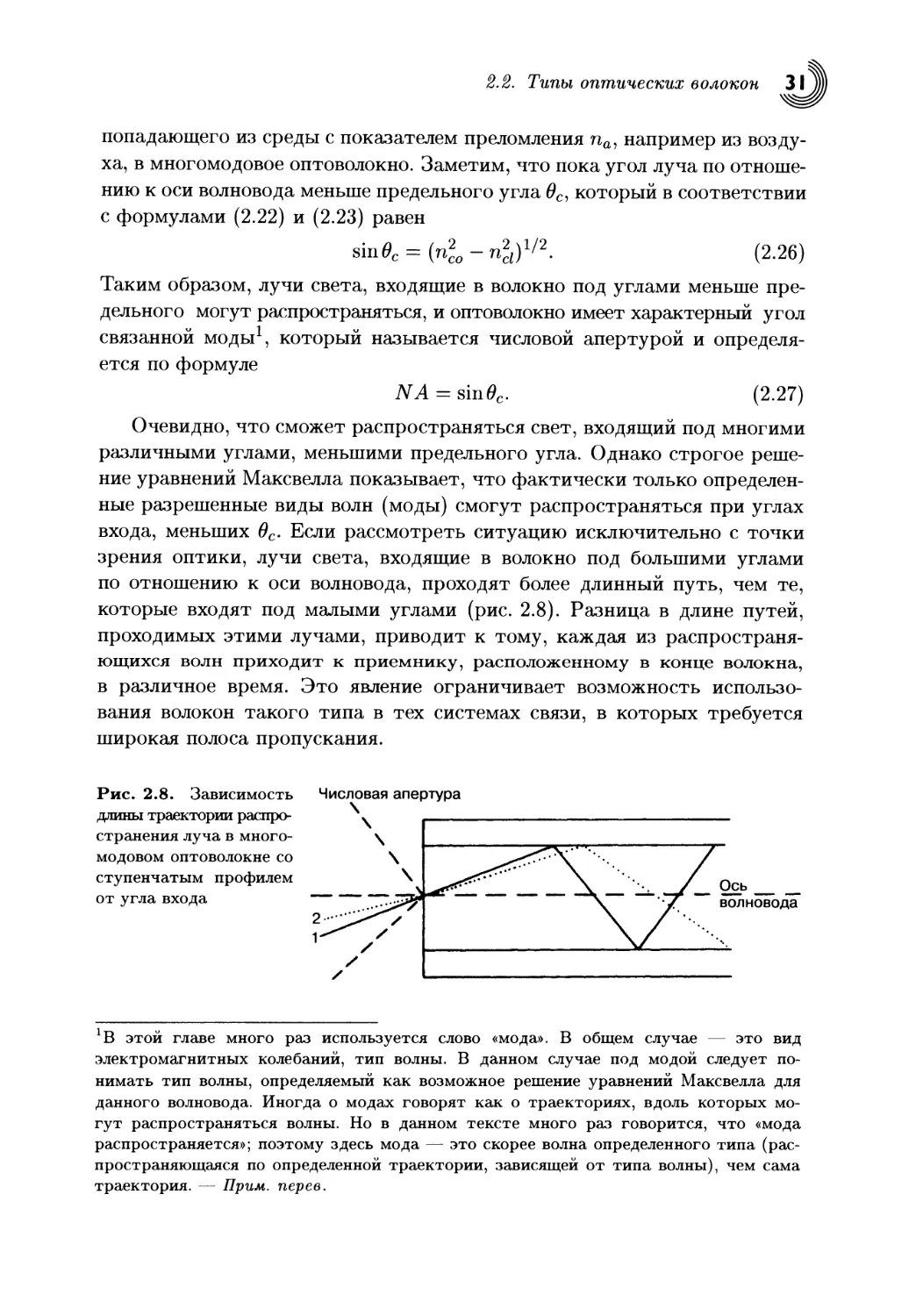
Очевидно, что сможет распространяться свет, входящий под многими
различными углами, меньшими предельного угла. Однако строгое реше-
ние уравнений Максвелла показывает, что фактически только определен-
ные разрешенные виды волн (моды) смогут распространяться при углах
входа, меньших вс. Если рассмотреть ситуацию исключительно с точки
зрения оптики, лучи света, входящие в волокно под большими углами
по отношению к оси волновода, проходят более длинный путь, чем те,
которые входят под малыми углами (рис. 2.8). Разница в длине путей,
проходимых этими лучами, приводит к тому, каждая из распространя-
ющихся волн приходит к приемнику, расположенному в конце волокна,
в различное время. Это явление ограничивает возможность использо-
вания волокон такого типа в тех системах связи, в которых требуется
широкая полоса пропускания.
Рис. 2.8. Зависимость
длины траектории распро-
странения луча в много-
модовом оптоволокне со
ступенчатым профилем
от угла входа
Числовая апертура
ХВ этой главе много раз используется слово «мода». В общем случае — это вид
электромагнитных колебаний, тип волны. В данном случае под модой следует по-
нимать тип волны, определяемый как возможное решение уравнений Максвелла для
данного волновода. Иногда о модах говорят как о траекториях, вдоль которых мо-
гут распространяться волны. Но в данном тексте много раз говорится, что «мода
распространяется»; поэтому здесь мода — это скорее волна определенного типа (рас-
пространяющаяся по определенной траектории, зависящей от типа волны), чем сама
траектория. — Прим, перев.
Глава 2. Оптоволокно
Наоборот, распространение света в оптических волокнах можно рас-
смотреть с точки зрения оптики, анализирующей распространение волн
(волновой оптики), что предоставит нам более удобный механизм для
изучения модовых свойств волокна. Электромагнитные поля в оптиче-
ском волокне распределяются в соответствии с уравнениями Максвелла и,
следовательно, могут быть определены в виде математических решений
волнового уравнения. Волновое уравнение может быть выведено непо-
средственно из уравнений (2.4) — (2.7). Уравнение (2.5) можно переписать
следующим образом
<ЭЕ
VxH = s—. (2.28)
at
В результате пространственного дифференцирования обеих частей урав-
нения (2.28) получим
VxVxH = £a^. (2.29)
dt
Теперь подставим уравнение (2.4) в правую часть уравнения (2.29) и по-
лучим
V х V х Н = -е
ду дН
dt dt
(2.30)
Используя свойства оператора ротора, левую часть уравнения (2.30) мож-
но переписать следующим образом
VxVxH = VV-ff-V - VH.
(2-31)
Так как свободные заряды и токи отсутствуют, то V-H = 0, и уравне-
ние, описывающее распространение волны, выглядит следующим образом:
/?2Н
V • VH = (2.32)
Аналогичное уравнение может быть получено для электрического поля.
Компоненты волнового уравнения для электрического и магнитного
полей, представленные в цилиндрических координатах, могут быть раз-
делены и выражены следующим образом [4]
1 d d У2 2 2 / /->2
-—Г-----------7 -I- k2n2(r = - (З2
г ar ar rz
г / г \ Q_|
f (-) v> =
L\а/ J
д2,ф
(2.33)
где у — азимутальное число и f [(r/a)Q] — функция, описывающая измене-
ния показателя преломления в зависимости от радиуса. В уравнении (2.33)
а — это радиус сердцевины, /3 — постоянная распространения и V назы-
вают модовым объемом.
(2.34а)
2.2. Типы оптических волокон
2 2
д=(2-346>
Количество основных мод (М) или модовых групп внутри оптического
волокна определяется количеством конечных решений уравнения (2.33).
Для волновода со ступенчатым профилем а = оо и количество основ-
ных мод для больших значений V приблизительно равно V. Для волокна
с показателем преломления, изменяющимся в поперечном сечении по па-
раболическому закону, а = 2 и М = V/2. Модовые группы состоят из
нескольких вырожденных мод. Вырождение определяется через азиму-
тальное число и и радиальное число /х:
т = 2/z -I- v + 1. (2.35)
2.2.3. Одномодовое оптоволокно со ступенчатым
профилем показателя преломления
По мере того как диаметр волокна, показанного на рис. 2.8, становит-
ся меньше и меньше, размер сердцевины начинает приближаться к длине
волны света, распространяющегося по волокну. Когда это происходит,
дифракционные эффекты преобладают до тех пор, пока распростране-
ние света не ограничивается пространственно только направлением вдоль
оси волновода. Критическое условие [5], когда только одна мода может
распространяться по волноводу, определяется формулой
V < 2,405, (2.36)
где а — это радиус сердцевины волокна и Л — длина волны пучка света,
распространяющегося по волноводу. При увеличении числа V дополни-
тельные моды получают возможность распространения и в волокне по-
являются моды более высокого порядка.
Точные решения уравнения (2.33) существуют для волновода со сту-
пенчатым профилем (а = оо). В этом случае электрическая и магнитная
составляющие поля могут быть выражены через функции Бесселя. Мода
самого низкого порядка обозначается как НЕц (/z = 1, и = 1) и имеет
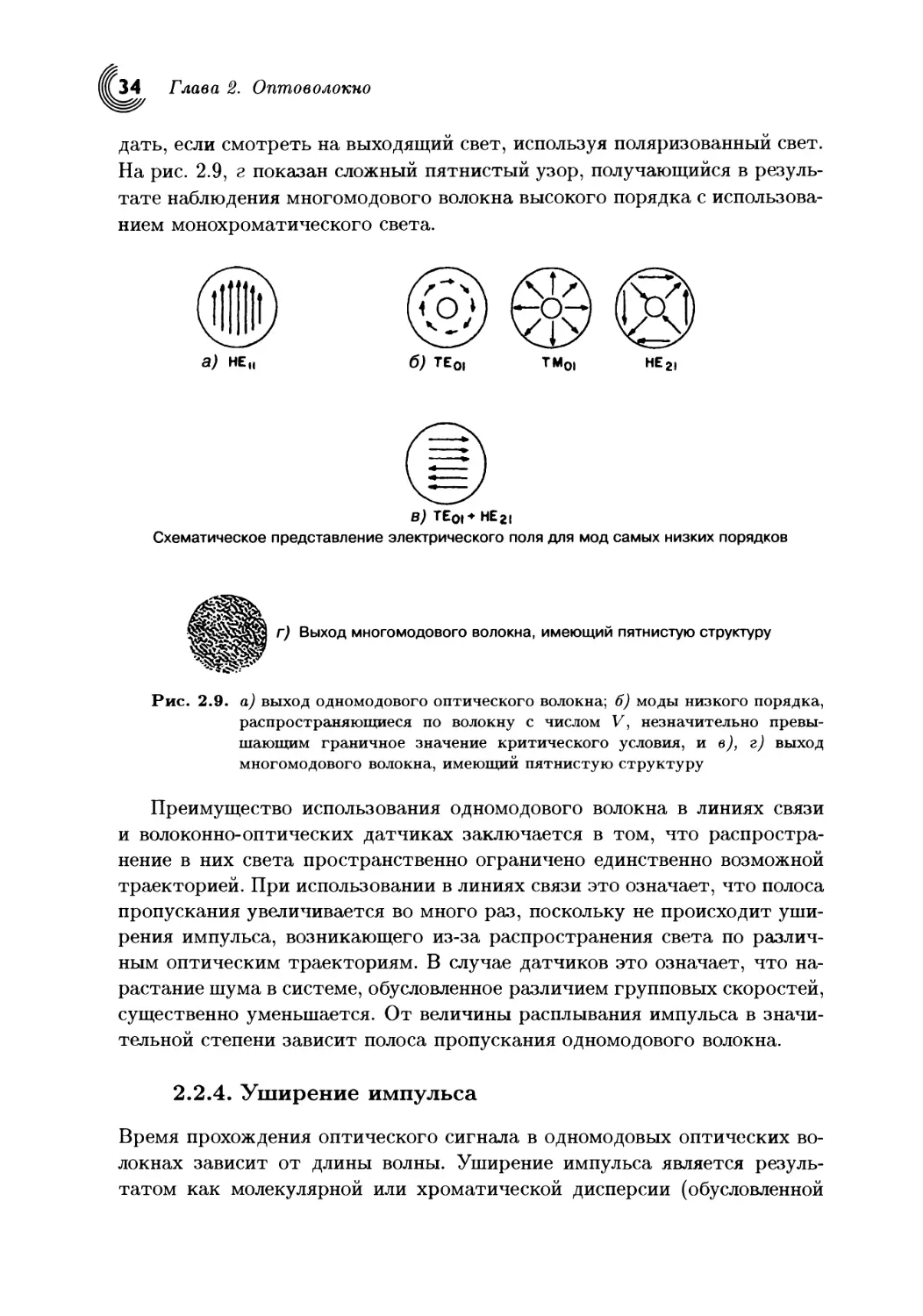
ненулевые составляющие Ez и Hz (рис. 2.9, а). Следующие три моды —
это поперечная электрическая TEqi, поперечная магнитная TMoi, а так-
же НЕ21 (рис. 2.9, б). Направленная вдоль оси электрическая компонента
поперечной электрической моды равна нулю. Обозначение НЕ или ЕН
используется в зависимости от того, какое поперечное поле — электриче-
ское или магнитное — больше. На рис. 2.9, в схематически представлено
распределение электрического поля, полученного в результате сочетания
TEqi-моды и НЕ21-МОДЫ. Такую лепестковую структуру можно наблю-
2-3379
Глава 2. Оптоволокно
дать, если смотреть на выходящий свет, используя поляризованный свет.
На рис. 2.9, г показан сложный пятнистый узор, получающийся в резуль-
тате наблюдения многомодового волокна высокого порядка с использова-
нием монохроматического света.
В) TEoi* НЕ 21
Схематическое представление электрического поля для мод самых низких порядков
Выход многомодового волокна, имеющий пятнистую структуру
Рис. 2.9. а) выход одномодового оптического волокна; 6) моды низкого порядка,
распространяющиеся по волокну с числом V, незначительно превы-
шающим граничное значение критического условия, и в), г) выход
многомодового волокна, имеющий пятнистую структуру
Преимущество использования одномодового волокна в линиях связи
и волоконно-оптических датчиках заключается в том, что распростра-
нение в них света пространственно ограничено единственно возможной
траекторией. При использовании в линиях связи это означает, что полоса
пропускания увеличивается во много раз, поскольку не происходит уши-
рения импульса, возникающего из-за распространения света по различ-
ным оптическим траекториям. В случае датчиков это означает, что на-
растание шума в системе, обусловленное различием групповых скоростей,
существенно уменьшается. От величины расплывания импульса в значи-
тельной степени зависит полоса пропускания одномодового волокна.
2.2.4. Уширение импульса
Время прохождения оптического сигнала в одномодовых оптических во-
локнах зависит от длины волны. Уширение импульса является резуль-
татом как молекулярной или хроматической дисперсии (обусловленной
2.2. Типы оптических волокон 35
свойствами материала), так и волноводной дисперсии (определяемой про-
филем) [3, 6]. Молекулярная дисперсия(материала) возникает просто по-
тому, что показатель преломления стекла различается для разных длин
волн. Свет, состоящий из волн различной длины, распределяется в одно-
модовом волноводе различно по самому волокну, причем составляющие
света с большей длиной волны распространяются в значительной степе-
ни по оптической оболочке. Это происходит потому, что свет с большей
длиной волны может эффективно распространяться в среде с меньшим
показателем преломления. Общее среднеквадратичное уширение для од-
номодового волновода можно определить по формуле [7]
_ L d ( d(}\
°t°t саХdX \dk;
где a\ — ширина спектра источника.
Молекулярную дисперсию (материала) можно записать как
L d2n
<Tmat = -^-^2
и волноводную составляющую дисперсии как
_Lax .„d?(Vb)
с х щДУ dy2 ,
где V — это модовый объем
V = nikaV2&
и b связано с постоянной распространения моды как
где
U = а2(п2к2 - /32)2.
(2.37)
(2.38)
(2.39)
(2.40)
(2.41)
(2.42)
2.2.5. Оптоволокно с градиентным профилем
показателя преломления
Чтобы уменьшить количество мод и временное уширение мод при рас-
пространении по волокну, применяются оптические волокна, показатель
преломления в которых не является постоянным, а изменяется при уда-
лении от центральной оси. В этом случае оптоволокно действует как
совокупность линз, которые периодически фокусируют пучок света в про-
цессе его продвижения по волокну. Такой подход, проиллюстрированный
рис. 2.10, может применяться для уменьшения количества отдельных мод,
распространяющихся по волокну, приблизительно от 10000, что типич-
но для многомодовых волокон со ступенчатым профилем, примерно до
300 мод, что типично для многомодовых волокон с градиентным профи-
Глава 2. Оптоволокно
лем. Плавное изменение показателя преломления приводит к тому, что
моды, распространяющиеся на большем расстоянии от центра, прохо-
дят вблизи границы сердцевина - оболочка по среде с меньшим показа-
телем преломления, чем показатель преломления в центре. Фактически
эти моды более высокого порядка проходят такой же оптический путь,
как и моды более низкого порядка, поскольку более низкий показатель
преломления среды, расположенной на большем расстоянии от централь-
ной оси, уравновешивает более длинную пространственную траекторию.
Трудности, связанные с модовым шумом, чувствительностью к изгибам
и, в конечном счете, с полосой пропускания, являются причиной того,
что в области телекоммуникаций преимущественно используются одно-
модовые оптические волокна. То же самое относится и к использованию
волокон в высокопроизводительных волоконно-оптических датчиках.
Рис. 2.10. Изменяя показатель преломления п симметрично относительно цилин-
дра, можно имитировать показатель распределения потерь. При этом
многомодовое оптическое волокно с градиентным профилем действует
на пучок света, распространяющийся по нему, как совокупность линз
2.2.6. Одномодовое волокно, сохраняющее
поляризацию излучения
По одномодовому волокну, описанному в разделе 2.2.3, в действительно-
сти может распространяться не единственная мода, а две моды с вы-
рожденной поляризацией. Некоторые одномодовые волокна разработа-
ны специально для того, чтобы устранить вырождение, и по ним может
распространяться свет в состоянии единственной линейной поляризации.
Существует несколько подходов к изготовлению таких волокон и сохра-
нению поляризации. Самый простой метод заключается в изготовлении
оптического волокна, имеющего эллиптическую сердцевину чрезвычайно
малых размеров (двулучепреломляющая форма). Из-за достаточно боль-
шого различия между показателями преломления сердцевины и оболочки
запущенный в такой волновод свет с линейной поляризацией, выровнен-
ной по главной оси, сохранит свое состояние поляризации. Недостатком
такого подхода является то, что из-за чрезвычайно малого требуемо-
2.2. Типы оптических волокон 37
го диаметра сердцевины усложняется процесс подачи волны в волновод
и возникают проблемы при соединении оптических элементов. А боль-
шая разница показателей преломления сердцевины и оболочки еще бо-
лее усложняет производство волокна с низкими потерями. Для решения
этой проблемы были разработаны волокна с внутренним напряжением
(двулучепреломляющее напряжение). Напряжение обуславливает разни-
цу показателей преломления вдоль главной и малой осей, и запущенный
в волновод свет с поляризацией, выровненной по главной оси, сохранит
свое состояние поляризации. Различные разработанные типы волокон по-
казаны на рис. 2.11.
Можно также изготавливать
волокно, по которому будет рас-
пространяться свет только с од-
ной поляризацией. В таком во-
локне потери составляющих све-
та с нежелательной поляризацией
намного больше, чем у составля-
ющих с поляризацией, разрешен-
ной для распространения. Такой
тип волокна называется поляри-
зующим. Он особенно подходит
для класса волоконно-оптических
датчиков, предназначенных для
контроля состояния поляризации
в системе.
а) б) в)
Рис. 2.11. Типы одномодовых оптических
волокон, сохраняющих поляризацию: а) во-
локно с эллиптической сердцевиной; б) дву-
лучепреломляющее волокно под воздействием
напряжения в виде треугольников (волокно
типа «бабочка»); в) двулучепреломляющее во-
локно под воздействием напряжения в виде
полос (волокно типа «панда»)
Как указано выше, поляризация в оптических волокнах возникает бла-
годаря двулучепреломлению, являющемуся результатом механического
напряжения и/или специальной формы волокна. Напряжение создается
в волокне путем вставления в заготовки стержней (вносящих искусствен-
ную анизотропию) с высоким коэффициентом термического расширения
и последующего введения их в волокно. В результате получается сложное
распределение напряжений и показателей преломления. Взаимосвязь меж-
ду показателем преломления и напряжением материала формально можно
описать, используя тензор напряжений в общем виде [8]
&хх ~ Q11Pт:х 4“ q.Y2.Pyy 4“ 4"" QlA^yz 4“ Q^b^xyi (2.43)
£х
<Хух ~ Q^\Pxx 4“ q^Pyy 4" 4“ Q^Pyz 4“ Q45^zx 4“ ^46-^vy- (2.44)
В уравнении (2.43) qij — коэффициенты оптической чувствительности
по напряжениям, — составляющая тензора диэлектрической проницае-
мости и Pij — компонента напряжения. Расчет поля напряжений типично-
Глава 2. Оптоволокно
го волокна, сохраняющего поляризацию, требует применения численных
методов решения. Численные методы, например, такие как метод ко-
нечных элементов [9], позволяют определить поле, и затем оптические
постоянные на всем протяжении волокна даже в случае сложной геоме-
трии [10].
Вид двулучепреломления в волокнах является следствием не обладаю-
щих круговой симметрией изменений показателя преломления. Например,
распространение в эллиптической сердцевине волокна зависит от поля-
ризации входящей волны, поскольку существует больше одного решения
волнового уравнения, и в результате численной аппроксимации [11] мож-
но найти одно решение — для случая поляризации, параллельной главной
оси, и одно — для случая поляризации, перпендикулярной ей. Как в случае
формы, так и в случае напряжения, приводящих к двулучепреломлению,
длина биений равна разности обратных значений постоянных распро-
странения, умноженной на 2л [11]. Эта величина характеризует двойное
лучепреломление волокна. Типичное ее значение и в случае формы, и в слу-
чае напряжения, приводящих к двулучепреломлению, равно нескольким
сантиметрам:
А^ = 27г(1-Т\ (2.45)
\Р|| Р±/
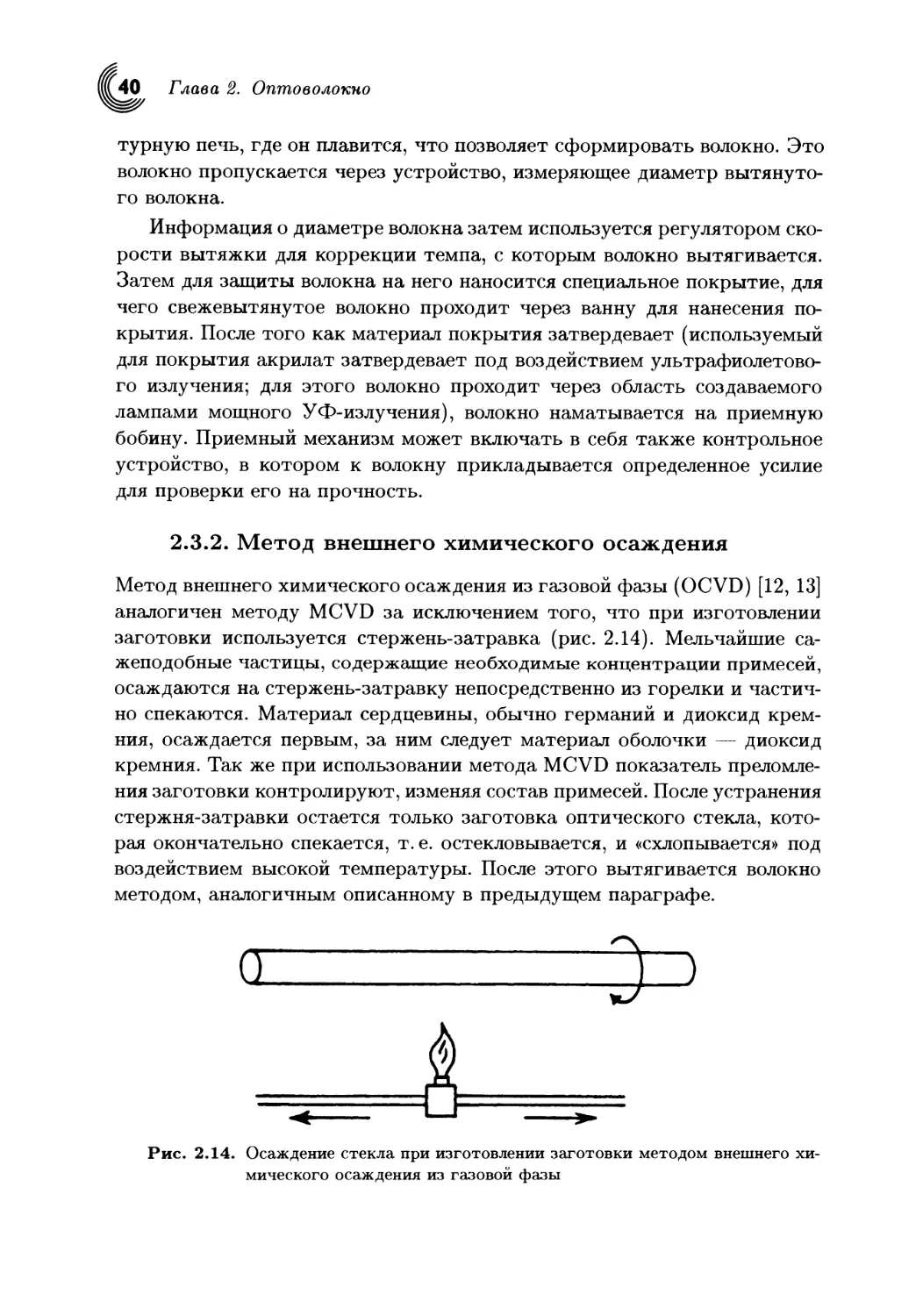
2.3. Технологии изготовления оптических волокон
Существует несколько способов изготовления оптических волокон с низ-
кими потерями. В этом разделе мы кратко рассмотрим методы, исполь-
зуемые при изготовлении волокна, и затем обсудим механизмы потерь
в волокнах.
2.3.1. Модифицированный метод химического
осаждения из газовой фазы
Модифицированный метод [12, 13] химического осаждения из газовой фа-
зы (MCVD) был разработан на основе технологии производства полупро-
водников. Хлоридные реагенты в газовой фазе и кислород впрыскиваются
во вращающуюся трубку с диоксидом кремния. Перемещаемая горелка
нагревает трубку, вызывая гомогенную реакцию, в результате которой
образуются мельчайшие сажеподобные частицы окиси. Под воздействи-
ем механизма термофореза эти частицы перемещаются в менее нагретую
область впереди горелки и откладываются на стенках. При дальнейшем
движении горелка сплавляет частицы, и они образуют на внутренних
стенках трубки стеклянное покрытие высокой чистоты. Изменение тол-
2.3. Технологии изготовления оптических волокон 39
щины и показателя преломления стеклянного слоя достигается изменени-
ем концентрации таких реагентов, как тетрахлорид кремния и тетрахло-
рид германия. Схема этого метода приведена на рис. 2.12.
Рис. 2.12. Модифицирован-
ный метод химического оса-
ждения из газовой фазы
Г азорасп редел ительная
Рис. 2.13. Башня для вытяжки волокна
После осаждения необходимого количества слоев, удовлетворяющих
требованиям изготовления волокна, к трубке подают дополнительное те-
пло, что приводит к ее «схлопыванию» и образованию твердого стержня
или заготовки. Эту заготовку затем помещают в башню для вытяжки,
как показано на рис. 2.13. Конец заготовки опускают в высокотемпера-
турную печь, где он плавится, что позволяет сформировать волокно. Это
волокно пропускается через устройство, измеряющее диаметр вытянуто-
го волокна.
Информация о диаметре волокна затем используется регулятором ско-
рости вытяжки для коррекции темпа, с которым волокно вытягивается.
Затем для защиты волокна на него наносится специальное покрытие, для
чего свежевытянутое волокно проходит через ванну для нанесения по-
крытия. После того как материал покрытия затвердевает (используемый
для покрытия акрилат затвердевает под воздействием ультрафиолетово-
го излучения; для этого волокно проходит через область создаваемого
лампами мощного УФ-излучения), волокно наматывается на приемную
бобину. Приемный механизм может включать в себя также контрольное
устройство, в котором к волокну прикладывается определенное усилие
для проверки его на прочность.
2.3.2. Метод внешнего химического осаждения
Метод внешнего химического осаждения из газовой фазы (OCVD) [12, 13]
аналогичен методу MCVD за исключением того, что при изготовлении
заготовки используется стержень-затравка (рис. 2.14). Мельчайшие са-
жеподобные частицы, содержащие необходимые концентрации примесей,
осаждаются на стержень-затравку непосредственно из горелки и частич-
но спекаются. Материал сердцевины, обычно германий и диоксид крем-
ния, осаждается первым, за ним следует материал оболочки — диоксид
кремния. Так же при использовании метода MCVD показатель преломле-
ния заготовки контролируют, изменяя состав примесей. После устранения
стержня-затравки остается только заготовка оптического стекла, кото-
рая окончательно спекается, т. е. остекловывается, и «схлопывается» под
воздействием высокой температуры. После этого вытягивается волокно
методом, аналогичным описанному в предыдущем параграфе.
а
Рис. 2.14. Осаждение стекла при изготовлении заготовки методом внешнего хи-
мического осаждения из газовой фазы
2.3. Технологии изготовления оптических волокон
2.3.3. Метод осевого осаждения (VAD)
В третьем методе изготовления заготовок, аналогичном методу OCVD,
используется осевое осаждение из газовой фазы [14]. При использовании
этого метода мельчайшие сажеподобные частицы сердцевины и оболочки
осаждаются из горелки в осевом направлении, формируя стержнеобраз-
ную заготовку. Заготовка остекловывается, превращаясь в оптическое
стекло, тем же способом, что и при методе OCVD. Преимуществом этого
метода является возможность непрерывного изготовления волокна. Схе-
ма этого метода приведена на рис. 2.15.
Рис. 2.15. Осевое
осаждение из газо-
вой фазы
2.3.4. Стеклянные стержни
При четвертом методе изготовления заготовок в трубку вводятся сте-
клянные стержни. Стержни отличаются показателями преломления или
коэффициентами оптической чувствительности по напряжениям. Этот
метод особенно подходит для производства одномодовых волокон, сохра-
няющих поляризацию. Схема этого метода приведена на рис. 2.16. После
введения стеклянных стержней в соответствующие положения, получив-
шееся изделие спекают и формируют заготовку, пригодную для вытяжки
волокна.
Рис. 2.16. Стеклянные стержни вво-
дятся в трубку заготовки. Получивша-
яся заготовка спекается и «схлопывает-
ся», образуя заготовку, пригодную для
вытяжки волокна
Стеклянные стержни в трубке,
после спекания они
формируют заготовку
Поперечное
сечение заготовки
2.3.5. Затухание в оптоволоконных волноводах
Существуют три причины затухания при распространении света по опти-
ческим волокнам: (1) потери, связанные с видом оптической волны, рас-
пространяющейся по волокну, (2) поглощение света материалом волокна
Глава 2. Оптоволокно
и (3) рассеяние пучка света за пределы волновода. Все эти проблемы были
решены к тому моменту, когда протяженность линий связи с использо-
ванием кварцевых волокон значительно превысила 100 км. Существует
возможность еще намного увеличить их протяженность, если использо-
вать галоидное стекло. Хотя все эти механизмы потерь ограничивают
предельную производительность интерферометрических волоконно-опти-
ческих датчиков и магистральных линий связи, во многих случаях именно
они позволяют оптическим волокнам выступать в качестве датчиков.
Потери, связанные со структурой
самого волновода, часто обусловлены
^оболочки
Рис. 2.17. Недостаточно равномер-
ная вытяжка волокна может приве-
сти к образованию негладкой грани-
цы между сердцевиной и оболочкой,
и неровное покрытие, например [15],
может, в первую очередь, стать при-
чиной увеличения потерь из-за рассе-
яний света из области сердцевины в
оболочку
недостатками процесса вытяжки, свя-
занными с внешними воздействиями,
и приводящими к тому, что волновод
получается не идеальным. Например,
рассмотрим волокно, которое было вы-
тянуто при непостоянной скорости. По-
скольку для вытяжки любого реального
волокна используется неидеальная уста-
новка, возможны некоторые колебания
диаметра волокна. На рис. 2.17 пока-
зана граница раздела в таком волокне
между областями сердцевины и оболоч-
ки. Следует отметить, что на грани-
це между соседствующими материала-
ми возникла периодическая волна.
Из рассмотрения простой геометрической модели, видно, что пучок
света, запущенный в однородный волновод, может быть направлен под
углом, превышающим критический угол, что приведет к его уходу в
область оболочки и потере. Если рассматривать моды, распространяющи-
еся по оптическому волокну, то структура волновода может действовать
как преобразователь мод, превращая разрешенные для данного волно-
вода моды в неразрешенные. Уровень потерь в неоднородном волноводе
зависит от того, какая часть света на границе раздела преобразуется из
разрешенной моды в неразрешенную. В случае, когда размах отклонений
диаметра и период удовлетворяют определенным условиям, может воз-
никнуть взаимодействие мод [16]. В общем случае, чем больше размах
отклонений и чем меньше период, тем больше потери. Однако в много-
модовых волокнах потери могут возникать, даже если условия взаимо-
действия мод не удовлетворяются. В этом случае распространение моды
в областях с меньшим диаметром приобретает характер вытекающей или
излучаемой волны [17].
2.3. Технологии изготовления оптических волокон 43
Такие потери существенно увеличиваются при увеличении разницы
между показателями преломления в областях сердцевины и оболочки. Уве-
личение разницы между показателями преломления можно считать повы-
шением отражательной способности границы, т. е. увеличением отраже-
ния от границы раздела, так что метр за метром эффект усиливается.
В совокупности все эти особенности объясняют, почему сложно обеспе-
чить распространение с малыми потерями мод высоких порядков в волок-
нах с очень высокой числовой апертурой. Кроме того, неоднородности
волокна, возникающие в процессе вытяжки, могут также изменить све-
топроводящие свойства волокна при изгибе волновода [18]. На рис. 2.18
показано, как пучок света, распространяющийся по волокну, выходит за
пределы критического угла и не полностью отражается от одной из по-
верхностей, что приводит к потерям в области оболочки. Потери, связан-
ные с изгибами, часто встречаются в тех случаях, когда волоконно-опти-
ческий датчик должен быть расположен в ограниченном пространстве,
что приводит к необходимости плотного сматывания волокна и возник-
новению резких изгибов из-за большой кривизны; а также в тех случаях,
когда волоконный волновод в недостаточной степени защищен от ми-
кроизгибов защитным материалом, окружающим волокно. Микроизгибы
часто обусловлены дефектами в защитном покрытии волокна, такими
как пустоты, крупицы примесей или неоднородности покрывающего ма-
териала. На рис. 2.19 показан результат использования волокна с плохо
выполненным защитным покрытием. При наматывании такого волокна
с увеличенным натяжением проявление дефектов имеет тенденцию уси-
ливаться, что приводит к высоким потерям. Второй часто встречающейся
причиной микроизгибов может стать наматывание волокна на предметы
с грубой поверхностью.
Рис. 2.18. Потери в волокон-
ном волноводе, обусловленные
изгибом
Второй важный механизм потерь в оптическом волокне обусловлен по-
глощением фотонов при электронных или колебательных переходах в во-
локне. В кварцевых волокнах электронные переходы возникают в ультра-
Глава 2. Оптоволокно
фиолетовой области спектра; а при длинах волн, больших, чем примерно
600 нм, увеличение потерь составляет менее 1 дБ/км, причем потери
быстро уменьшаются при увеличении длины волны. Колебательные пе-
реходы относятся к области спектра 8-12 мкм и оказывают существен-
ное влияние именно в этой области. Наибольшие потери, обусловленные
поглощением, возникают из-за загрязняющих включений, появляющихся
в волокне в процессе его изготовления. Ионы металлов, таких как железо
и медь, встречающиеся даже в чрезвычайно низкой концентрации, могут
приводить к очень высоким потерям. На практике очищение в процессе
производства производится до тех пор, пока концентрация включений, за
исключением ОН-радикалов, не снижается до уровня, при котором уве-
личение потерь пренебрежимо мало. Основному переходу этих радикалов
соответствует длина волны 2,73 мкм, и высшие гармоники с длиной вол-
ны 725, 825, 875 и 950 нм часто ограничивают передачу по волокну в этой
области.
Неоднородности Защитный
Рис. 2.19. Дефекты в защитном
материале, окружающем волокно,
приводят к возникновению обла-
стей локальных изгибов, называе-
мых микроизгибами
Пустота Крупица примеси
Еще одна проблема, связанная с потерями, обусловленными поглоще-
нием, может возникнуть, если только что изготовленное волокно подвер-
гается воздействию излучения. Обычно при изготовлении волокна для
управления относительным показателем преломления между областями
сердцевины волокна и его оболочкой используется германий. В результа-
те ионизации германия под воздействием интенсивного излучения могут
образовываться пары свободных дырок с переходным излучением в ра-
бочей полосе частот. Достижения в защите волокон от радиоактивно-
го излучения сводят к минимуму процесс создания центров поглощения
в требуемой полосе пропускания.
Минимизация потерь, связанных с несовершенством волноводов и пог-
лощением, позволяет свести собственные потери оптических волокон к соб-
ственному рассеянию в волокне. Собственное рассеяние волокна обусло-
влено изменениями плотности и, следовательно, показателя преломления,
2.4- Использование свойств оптических волокон для создания датчиков
заложенного в процессе изготовления волокна. Эти изменения возникают
прежде всего из-за тепловых флуктуаций плотности и изменения кон-
центрации примесей непосредственно перед переходом стекла в твердое
состояние. За исключением волокон с большой численной апертурой и,
следовательно, изготавливаемых с большими концентрациями примесей,
обычно преобладают потери, вызванные тепловыми флуктуациями, и в ре-
альных волокнах именно на них приходится максимум потерь. Потери на
рассеяние называются релеевским рассеянием и определяются по форму-
ле [19]
о 3
а= ЗД4("2~1)А:Ж (2-46)
где (3 — изотермическая сжимаемость. Для кварцевого стекла с перехо-
дом в твердое состояние при температуре 1500 °C потери составляют
порядка 1,7 дБ/км при длине волны 820 нм. Отметим, что потери быстро
снижаются при увеличении длины волны.
Во многих волоконно-оптических датчиках преобладает релеевское рас-
сеяние. Однако когда интенсивность света, распространяющегося по во-
локну, достигает очень высоких уровней, начинают преобладать нели-
нейные процессы и возникают комбинационное рассеяние и рассеяние
(Мандельштама-Бриллюэна п) [20].
2.4. Использование свойств оптических волокон
для создания датчиков
В предыдущих разделах были кратко рассмотрены основные свойства
оптических волокон. Многие свойства этих волокон могут непосредствен-
но использоваться для построения волоконно-оптических датчиков. В за-
ключение этой главы мы рассмотрим некоторые простые волоконно-опти-
ческие датчики, иллюстрирующие различные аспекты использования ха-
рактеристик волокон.
2.4.1. Изгиб
В разделе 2.3.5 были кратко обсуждены потери в оптических волокнах,
обусловленные изгибами. Как показано на рис. 2.20, можно легко создать
простой волоконно-оптический датчик, положив в его основу увеличение
потерь при изгибе. Свет от источника запускается в оптическое волок-
но. Какой-либо свет, непреднамеренно запущенный в оболочку волокна,
устраняется в области фильтрации мод. Этого можно достичь, покры-
вая волокно иммерсионным маслом, так что свет, попавший в оболочку,
выходит в масло или другой материал покрытия, показатель преломле-
ния которого достаточно точно равен показателю преломления оболочки.
Глава 2. Оптоволокно
Некоторые волокна покрывают акрилатом, который выводит свет из обо-
лочки. Когда свет через область фильтрации мод приходит на датчик
микроизгибов, количество света, связанного в оболочке, зависит от то-
го, насколько сильно волокно изогнуто. По мере того как радиус изгиба
волокна изменяется из-за движения изгибающей пластины, аналогично
изменяется количество света, распространяющегося по оболочке. Затем
луч света выходит из области микроизгибов и проходит через вторую
область фильтрации мод, в которой устраняется свет, распространяю-
щийся по оболочке. Амплитуда света, который, наконец, достигает при-
емника, промодулирована величиной, напрямую зависящей от движения
пластин.
Колеблющиеся в результате
внешнего воздействия
изгибающие пластины
Приемник
Область
фильтрации мод
Рис. 2.20. Датчик микроизгибов, реагирующий на вызванное внешними причи-
нами движение изгибающих пластин
2.4.2. Связь на основе затухающих колебаний
и построенный на этом принципе датчик
В одномодовом оптическом волокне распространение света не ограничи-
вается областью сердцевины; свет распространяется также по окружаю-
щей стекло области оболочки. Это явление используется при изготовлении
направленных разветвителей, на основе одномодовых оптических воло-
кон [21]. Волокно вклеивается в щель кварцевого блока. Волокно и блок
полируют в пределах микрометров от сердцевины. В результате разме-
щения в контакте двух аналогичных блоков возникает связь на основе
затухающих колебаний. Если волокна окружены иммерсионным маслом,
свет будет распространяться также и в масле. Компланарность полиро-
ванных поверхностей обеспечивается двумя опорными плоскостями из
2.4- Использование свойств оптических волокон для создания датчиков
эпоксидной смолы, наносимой в конце процесса полировки на соприкасаю-
щиеся поверхности [22]. Для получения соответствующего коэффициента
связи между оптическими волокнами к области оптического контакта
двух волокон прикладывается давление, что позволяет воздействовать на
расстояние между их сердцевинами. Схема основанного на этом прин-
ципе волоконно-оптического датчика показана на рис. 2.21. Излучение
вводится в одно из волокон и распространяется в ту область, где оба
волокна расположены в непосредственной близости. Интенсивность из-
лучения, переходящего из волокна в волокно зависит от расстояния, 2d,
между ними [22]
Р = sin2 CZ,
где
2 п2 - п2 К° [2(° + (27rrf/AWni~n£
(«2 - «2)5 К2 [ау/п? - «2|
И
2тга
а =
а Ко — модифицированная функция Бесселя.
(2.47)
(2.48)
(2.49)
Рис. 2.21. Связь на осно-
ве затухающих колебаний
между близко прилегаю-
щими волокнами исполь-
зуется для создания аку-
стического датчика
Если внешнее воздействие, такое как акустическая волна или подъем
температуры, приводит к изменению расстояния (2d), изменяется и ко-
личество излучения, переходящего во второе волокно. Для наблюдения за
вызванными внешними воздействиями изменениями амплитуды излуче-
ния во втором волокне используется приемник.
2.4.3. Направленные разветвители и их использование
для построения датчиков
Под воздействием внешних возмущений длина и показатель преломления
оптического волокна изменяются. Для оценки этих изменений можно ис-
пользовать интерферометрические методы, точность которых равна или
Глава 2. Оптоволокно
превосходит ту, которая может быть достигнута при использовании тра-
диционной технологии датчиков. На рис. 2.22 показано, как для создания
высокоточного датчика волокно может использоваться в интерфероме-
тре Майкельсона. Лазер применяется для генерации коллимированного
пучка света, который при помощи центрального светоделителя разделя-
ется на два плеча интерферометра. Один из световых лучей отражается
от зеркала и затем приходит на приемник. Оба пучка света с каждо-
го из плеч интерферометра после преобразований приходят к приемнику
коллинеарными, и возникает интерференция. При длине волны света ис-
точника, равной 1 мкм, сдвиг на полный период будет соответствовать
изменению длины волокна на 0,5 мкм. В большинстве одномодовых сис-
тем коллимирующая оптика и светоделитель заменяются направленными
разветвителями.
Зеркало
Рис. 2.22. Интерферометр
Майкельсона
Лазер
□-
Светоделитель
Зеркальное
окончание
Внешнее воздействие
Приемник | |
При изготовлении волоконно-оптических направленных разветвите-
лей с успехом используются три метода: полировка [21], травление [23]
и сварка по длине скоса [24, 25]. В настоящее время наибольшее внимание
уделяется промышленному производству сварных биконических развет-
вителей. Сущность метода состоит в том, что два волокна свариваются
вместе по длине скоса, составляющей несколько миллиметров. Потери
увеличиваются незначительно благодаря сужению устройства под углом,
меньшим критического значения. Типичное увеличение потерь в совре-
менных устройствах составляет менее 0,5 дБ, а иногда приводятся зна-
чения ниже 0,1 дБ.
Планарные методы производства представляют собой альтернативу
сварке по длине скоса; они предоставляют возможность объединить мно-
жество функций в одном кристалле. Формирование волноводов в стекле
посредством ионного обмена исследуется с начала 1970-х годов [26-28].
Одним из важнейших применений оптического волокна в качестве
интерферометрического датчика является интерферометр Маха - Ценде-
2.5. Резюме
pa [8]. Как показано на рис. 2.23, световой входной сигнал (L) разделяется
между двумя волокнами и затем вновь объединяется при помощи второ-
го 3 дБ разветвителя. Световод измерительного волокна чувствителен
к внешним воздействиям, например к температуре. Сдвиг по фазе между
двумя объединенными сигналами приводит к возникновению усиливаю-
щей или ослабляющей интерференции. Преобразователь в опорном волок-
не позволяет осуществлять настройку, чтобы количественно определить
величину сдвига фазы и затем связанный с ней измеряемый параметр,
например температуру.
Рис. 2.23. Интерферометр
Маха - Цен дера на основе оп-
тических волокон
2.5. Резюме
За последнее десятилетие пройден значительный путь в направлении осмыс-
ления и осуществления практических реализаций волоконно-оптических
датчиков. Многочисленные свойства волоконных световодов были изуче-
ны, описаны и использованы для создания реальных датчиков, которые
в качестве чувствительных элементов используют оптические волокна.
Чтобы усилить и оптимизировать свойства волоконных световодов, свя-
занные с применением их в качестве чувствительных элементов, были
разработаны новые типы волокон. При современных перспективах раз-
нообразия применений волокон в приборах можно ожидать, что развитие
технологий повлечет за собой организацию поточного производства и во-
локна, разработанные специально для использования в датчиках, станут
абсолютно доступными
Литература
1. F. Р. Kapron, D. В. Keck, and R. D. Maurer, Radiation Losses in Glass Optical
Waveguides, Appl. Phys. Lett. 17, 423 (1970).
2. See, for example, L. D. Landau and E. M. Lifshitz, The Classical Theory of Fields,
Pergamon Press, Oxford, 1980.
3. D. Gloge, Dispersion in Weakly Guiding Fibers, Appl. Opt. 10, 2442 (1971).
Глава 2. Оптоволокно
4. D. Gloge and Е. A. J. Marcatilli, Multimode Theory of Graded Core Fibers, Bell
Syst. Tech. J. 52, 1563 (1973).
5. C Pask, A. W. Snyder, and D. J. Mitchell, Number of Modes on Optical Waveg-
uides, J. Opt. Soc. Am. 65, 356 (1975).
6. F. P. Kapron and D. B. Keck, Pulse Transmission Through a Dielectric Waveg-
uide, Appl. Opt. 10, 1519 (1971).
7. R. Olshansky, Propagation in Glass Optical Waveguides, Rev. Mod. Phys. 51,
341-367 (1979).
8. M. Born and E. Wolf, Principles of Optics, Pergamon Press, Oxford, 1980.
9. О. C Zienkiewicz, The Finite Element Method in Engineering Science, McGraw-
Hill, London,1971.
10. C Yeh, K. Ha, S. B. Dong, and W. P. Brown, Single-Mode Optical Waveguides,
Appl. Opt. 18, 1490-1504 (1979).
11. A. W. Snyder and J. D. Love, Optical Waveguide Theory, Chapman & Hall, New
York, 1983.
12 P. C. Schultz, in Recent Advances in Fiber Optics, S. S. Mitra and B. Bendow,
Eds., Plenum Press, New York, 1979.
13. P. C Schultz, in Process in Optical Waveguides Process and Materials, С. K. Kao,
Ed., IEEE Press, New York, 1980.
14. T. Izawa et al., Preparation of Fiber Optic Preforms by Vapor Phase Axial
Deposition, Tech. Dig., Japanese National Convention of Electronic Communi-
cations Engineers, March 1979.
15. D. Gloge, Optical-Fiber Packaging and Its Influence on Fiber Straightness and
Loss, Bell Syst. Tech. J. 54, 245-262 (1975).
16. D. Marcuse, Theory of Optical Waveguides, Academic Press, New York, 1974.
17. R. Olshansky and D. A. Nolan, Mode Dependent Attenuation of Optical Fibers:
Excess Loss, Appl. Opt. 15, 1045-1047 (1976).
18. E. A.J. Marcatilli and S.E. Miller, Improved Relations Describing Control in
Electromagnetic Wave Guidance, Bell. Syst. Tech. J. 48, 2161 (1969).
19. D.B. Keck, in Optical Fiber Waveguides, M. K. Barnoski, Ed., Academic Press,
New York, 1980.
20. R. G. Smith, Optical Power Handling Capacity of Low Loss Optical Fibers as
Determined by Raman and Brillouin Scattering, Appl. Opt. 11, 2489 (1972).
21. R. A. Bergh, G. Kotler, and H.J. Shaw, Single-Mode Fiber Optics Directional
Coupler, Electron. Lett. 16, 260-261 (1980).
22. P.D. McJntyre and A. W. Snyder, J. Opt. Soc. Am. 63, 1518 (1973).
23. S.K. Sheem and T.G. Giallorenzi, Single-Mode Fiber Optical Divider: Encap-
sulating Etching Technique, Opt. Lett. 4, 29-31 (1979).
24. B. S. Kawaski and К. O. Hill, Low Loss Access Coupler for Multimode Optical
Fiber Distribution Networks, Appl. Opt. 16, 1974-1975 (1977).
25. С. M. Truesdale and D. A. Nolan, Core Clad Mode Coupling Mode in a New
Multiple Index Waveguide Structure, Proc. Em. Conf. Opt. Commun., 181 184
(1986).
26. T.J. Giallorenzi, E.J. West, R. Kirk, R. Linther, and R. A. Andrews, Opti-
cal Waveguides Formed by Thermal Migration of Ions in Glass, Appl. Opt. 12
(1973).
Литература
27. A. Beguin, Т. Dumas, М. Hackert, R. Jansen, and C Nissim, Fabrication and
Performance of Low Loss Optical Components Made by Ion Exchange in Glass,
J. Lightwave Technot. 6, 1483-1487 (1988).
28. R. V. Ramaswamy and R. Srivastava, Ion-Exchanged Waveguides: A Review,
Special Joint Issue on Integrated Optics by IEEE J. Quantum Electron, and
J. Lightwave Technol. 6, 984-10,002 (1988).
ГЛАВА 3
ИСТОЧНИКИ
СВЕТА
Эрик Удд
Компания «Макдоннел Дуглас Электроник Системе»
Санта-Ана, Калифорния
3.1. Введение
Появление лазера открыло для исследователей-оптиков новые миры, позво-
лив создавать приборы и оптические схемы, которые ранее могли суще-
ствовать только в воображении. Громадные усилия прилагались и продол-
жают прилагаться в наше время в области полупроводниковых источников
света для того, чтобы их можно было применять там, где стоимость,
размер, мощность и надежность являются критичными. Эта технология
является одной из ключевых технологий, успешное развитие которых при-
вело к повсеместному распространению оптических систем связи, CD-пле-
еров, автоматических устройств считывания штрихового кода, лазерных
принтеров и основных элементов других приборов, оказывающих влияние
на образ жизни современного человека. Эта глава начинается с обзора не-
которых фундаментальных свойств источников света, которые особенно
важны для волоконно-оптических датчиков. Далее описываются различ-
ные типы источников света, а также их выходные характеристики.
3.2. Фундаментальные свойства источников света
Источники света, используемые в волоконно-оптических датчиках, созда-
ют индуцированное излучение, которое часто преобладает над спонтан-
ным излучением. Сочетание обоих типов излучения является промежу-
точным вариантом, важным для определенных классов волоконно-опти-
ческих датчиков, основанных на сверхизлучении. Различия между этими
Волоконно-оптические датчики: Вводный курс для инженеров и научных работников,
под редакцией Эрика Удда. ©1991 John Wiley & Sons, Inc.
3.2. Фундаментальные свойства источников света
типами излучения света обсуждается в следующих разделах. Как пра-
вило, при включении источника света тепловая энергия, энергия хими-
ческих реакций, электрического тока или поступающая от источника
накачки используется для создания возбужденного состояния в матери-
але, способном излучать свет. В газовых лазерах в состояние электрон-
ного возбуждения переходят атомы, как в случае гелий-неоновых, так
и в случае аргоновых лазеров. В лазерах на углекислом газе и фтори-
стом метиле (CH3F) соответственно в колебательно- или вращательно-
возбужденное состояние переходят молекулы. Энергия, необходимая для
перехода атомов в более высокое электронное состояние, может быть
получена благодаря движущемуся через газ наведенному потенциалом
потоку электронов. Необходимая энергия передается в результате столк*
новений электронов с атомами или молекулами газа.
Полупроводниковый материал может быть приведен в возбужденное
светоизлучающее состояние созданием избытка дырок и электронов, вы-
званного напряжением смещения в прямом направлении V, приложенным
к п- и p-областям полупроводникового материала. В возбужденном со-
стоянии могут происходить рекомбинации, как излучательные, сопрово-
ждающиеся испусканием фотона с энергией /ш, так и безызлучательные
с рассеянием энергии в форме тепла. Эффективность излучения света
полупроводником зависит от того, сколько времени занимает переход из
возбужденного состояния обратно в основное. Если тг — время, которое
занимает излучательная рекомбинация, а тп — время безызлучательной
рекомбинации, то внутреннюю эффективность устройства rj можно вы-
числить по формуле [1]
Безызлучательное время жизни зависит от таких факторов, как плот-
ность безызлучательных центров рекомбинации 7V, поперечное сечение ст
и скорость теплового движения электронов v, так что
тп = (Nav)-1 (3.2)
Из этого уравнения очевидно, что примеси в полупроводниковом мате-
риале, создаваемые электрические центры повреждения и нагревание —
все влечет за собой уменьшение безызлучательного времени жизни в воз-
бужденном состоянии и, как следует из уравнения (3.1), снижение вну-
тренней эффективности устройства и, следовательно, потерю мощности
светоизлучения. Эта ситуация показана на рис. 3.1. Здесь среда перехо-
дит из основного состояния, характеризующегося энергетическим уров-
нем в возбужденное состояние на уровень Е3, благодаря активирую-
щей энергии накачки, которую несет электронный поток. Возвращение
Глава 3. Источники света
в основное состояние Е\ может произойти через излучательную реком-
бинацию с испусканием фотона с энергией hv и, соответственно, переход
в более низкое энергетическое состояние Е^ с последующим безызлуча-
тельным переходом в основное состояние Ец а может — через последо-
вательность безызлучательных переходов в различные промежуточные
возбужденные состояния Е^. Чем быстрее идет в материале излучатель-
ный процесс по сравнению с процессом безызлучательного выделения
энергии, тем выше эффективность светоизлучения материала.
состояния с энергетическим уровнем Ei на более высокий энергетиче-
ский уровень Ез- Возврат из более высокого энергетического состояния
в основное может сопровождаться излучательным или безызлучатель-
ным переносом энергии
Выбор подходящего материала для светоизлучения и лазерных дио-
дов определяется в значительной степени излучательным временем жизни
в возбужденном состоянии тг, которое для достижения высокой эффек-
тивности, как следует из уравнения (3.1), должно быть как можно короче.
Для этой цели хорошо подходят материалы с прямозонной энергетиче-
ской структурой, такие как GaAs, InAs, InP, AlGaAs и GaAsP, в которых
переход в невозбужденное состояние происходит в результате прямой
рекомбинации, сопровождающейся испусканием фотона. Излучательное
время жизни таких материалов очень короткое и составляет порядка
10“8-10"10 с, и именно эти материалы широко применяются в полупро-
водниковых лазерах. Другими важными характеристиками полупровод-
никовых материалов являются их рабочая длина волны и надежность.
В табл. 3.1 приведены типичные рабочие длины волн полупроводнико-
вых материалов, широко используемых в источниках света для работы
с волоконно-оптическими датчиками.
Лазеры InGaP/InGaAlP [2, 3] были разработаны специально для воло-
конно-оптических датчиков, которым необходимы коротковолновые ис-
точники света, работающие в видимой области спектра или рядом с ней.
Длина волны таких лазеров составляет около 680 нм и среднее время
3.2. Фундаментальные свойства источников света 55
безотказной работы при комнатной температуре превышает 10000 ча-
сов. Эти коротковолновые источники света нужны для увеличения чув-
ствительности некоторых классов датчиков, а также там, где требуются
видимые сигналы и сигнатуры. К настоящему времени появились серий-
но выпускаемые изделия с еще более короткими длинами волн, в кото-
рых применяется диодная накачка, и твердотельные лазеры с двойной
гетероструктурой, работающие в диапазоне около 500 нм. Такие корот-
коволновые источники представляют интерес для занимающихся флуо-
ресценцией разработчиков волоконно-оптических датчиков, необходимых
для наблюдения за химическими свойствами материалов. Препятствием
для использования источников, работающих в коротковолновой области,
могут стать достаточно высокие потери света в оптических волокнах.
К тому же доступность промышленно выпускаемых недорогих источни-
ков света сравнительно ограничена.
Таблица 3.1. Полупроводниковые источники света для волоконных датчиков
Диапазон длин волн (мкм) Материал Надежность (часы) Цена Доступность
0,5 Диодная накачка с удвоением частоты Nd :УАС-лазер 10 000-Ь От умеренной до высокой Умеренная
0,6-0,7 InGaP/InGaAlP 10 000-Ь Умеренная Ограниченная
0,7-0,9 GaAlAs/GaAs 10 000-30 000 От очень низкой до умеренной Очень хорошая
0,9-1,7 InGaAsP/InP > 100 000 От умеренной до высокой Хорошая
К настоящему времени на рынке гораздо лучше представлены полу-
проводниковые источники света на основе GaAlAs/GaAs, работающие
в диапазоне от 700 до 900 нм; их первоначальное развитие было обу-
словлено требованиями индустрии телекоммуникаций. Такие диоды были
первыми полупроводниковыми источниками света, выпускаемыми в про-
мышленном масштабе, и именно они широко используются в CD-плеерах
и лазерных принтерах [4]. Они также широко используются в мощных
высокопроизводительных приложениях [5], а также как высоконадежные
и очень дешевые источники света для коротких каналов передачи дан-
ных, использующих многомодовые волокна. Среднее время безотказной
работы многих лазерных диодов, выполненных из этого материала, в на-
стоящее время составляет от 10000 до 30 000 часов. Оно существенно
увеличилось с конца 1970-х годов, когда срок службы первых приборов
56 Глава 3. Источники света
часто измерялся только десятками часов. Запроектировано еще большее
среднее время безотказной работы светоизлучающих диодов, основанных
на этих материалах; оно превысит 100 000 часов. Благодаря низкой стои-
мости, раннему появлению на рынке и наличию исчерпывающих данных
о надежности, первоначально именно такие источники света использова-
лись в первых волоконно-оптических датчиках, разработанных для изме-
рения температуры, давления и плотности (см. гл. 7 и 13). Совместимость
этих устройств с многомодовыми оптическими волокнами с относительно
малыми потерями на коротких расстояниях и простота соединения с во-
локнами с большой сердцевиной еще больше усиливают эту тенденцию.
За последние несколько лет интерес индустрии дальних коммуникаций
сместился от лазеров GaAlAs/GaAs к лазерам InGaAsP/InP, преимуще-
ством которых является рабочая длина волны в диапазоне от 900 до
1700 нм. В этом диапазоне кварцевые волокна не только обеспечивают
высокую производительность каналов передачи данных, но и функциони-
руют с наименьшими потерями и наименьшей дисперсией. Эти материалы
также гарантируют более высокую надежность; предполагаемый срок
службы проектируемых лазерных диодов превышает 1000 000 часов [6].
Поскольку технология производства таких приборов отработана и объ-
емы их выпуска возрастают, растет и конкурентоспособность лазеров
InGaAsP/InP по сравнению с лазерами, основанными на технологии GaAs.
И можно ожидать, что они получат широкое распространение благодаря
своей высочайшей надежности.
3.2.1. Спонтанное излучение
При включении источника света формируется населенность высокоэнер-
гетических уровней активной среды источника. В отсутствие внешних
воздействий на атомы в возбужденном состоянии испускание ими перво-
начального света обусловлено спонтанным излучением. При спонтанном
излучении все события, заключающиеся в переходах атомов из возбужден-
ного состояния в низкоэнергетическое с излучением фотона, происходят
независимо. Для источника света с преобладающим спонтанным излуче-
нием низка вероятность того, что излученный фотон вступит во взаи-
модействие с другим атомом в возбужденном состоянии и стимулирует
испускание второго фотона. По этой причине спектральная линия источ-
ников света этого типа, как правило, достаточно широка и определяется
эффектами уширения. Точную ширину линии можно определить, учиты-
вая механические воздействия, а также влияние температуры и давления.
Использование в волоконно-оптических датчиках источников с преобла-
данием спонтанного излучения дает существенные преимущества. Такие
приборы характеризуются «низким шумом» и относительно невосприим-
3.2. Фундаментальные свойства источников света
чивы к оптическим эффектам обратной связи. Низкая оптическая мощ-
ность, циркулирующая в активной области, способствует чрезвычайно
высокой надежности.
Самая простая модель естественного уширения, которая может быть
применена для случая изолированного атома в возбужденном состоянии,
например в среде, близкой к вакууму, это классический электронный
осциллятор. Для спектральной линии частоты форма спектра опре-
деляется через интенсивность как [7]
I(") = Jo---------------------
(v - ио)2 + (7о/4тг)2
где
87г2е2д/д
Зтс3 ’
(3.3)
(3.4)
причем е — электрический заряд и т — масса электрона. Полуширина
определяется как Д1/1/2 = 7о/2тг и время жизни т = 1/7о- Часто случается,
что простые теории дают хорошие результаты. Например, в атомар-
ном натрии при оптической накачке 95% поглощения в спектральном
диапазоне от ближнего инфракрасного до мягкого рентгеновского из-
лучения приходится на Д-линии натрия; следовательно, можно предполо-
жить, что простая теория даст хорошие результаты. Для А = 5900 А или
17 = 5,1 х 1014 с-1 получается Д^1/2 = 1,02 х 10-7 с-1 и т = 1,56 х 10-8 с-1.
Измеренные значения Ai/^ = 0,99 х 10-7 с-1 и т = 1,61 х 10-8 с.
При альтернативном квантовомеханическом подходе, предложенном
Дираком [7], дискретные уровни энергии заменяются непрерывным рас-
пределением энергии. Полуширина распределения Д£^ связана с временем
(3-5)
жизни в соответствующем состоянии Tj как
д ~ ~ ~ ZnAyj = У Aji,
3 i
где Aij — коэффициент Эйнштейна А для переходов из более высоких
состояний j в более низкие состояния i. Естественная ширина перехода
с уровня j на уровень i равна сумме ширин уровней j и i. При переходе
в основное состояние естественная ширина равна просто ширине возбу-
жденного состояния уровня, следовательно, формула (3.5) для атомарной
Д-линии сводится к
. 1
Ala = -----,
7 27TTJ
где Al/* — полуширина распределения частоты спектральной линии. Урав-
нение (3.6) имеет вид классической зависимости, но в этом случае зна-
чения Tj и Az/Z определяются измерением других параметров. Во мно-
гих случаях влияние естественного уширения намного меньше влияния
(3.6)
Глава 3. Источники света
других видов уширения, присутствующих во многих источниках света.
В качестве примера мы далее рассмотрим уширение под воздействием
температуры и давления в газах. Аналогичные и намного более ярко
выраженные эффекты проявляются в твердотельных и особенно в по-
лупроводниковых источниках света.
Для случая температурного или доплеровского уширения в газе рас-
пределение отдельной компоненты скорости vy, направленной к наблюда-
телю, определяется законом распределения Максвелла
dN (г?ц) — a exp <
МVu '
(3.7)
где Af, R и Т — молекулярная масса, универсальная газовая постоян-
ная и абсолютная температура соответственно. Это можно записать как
функцию зависимости интенсивности от частоты, т. е.
I (l/) = Io exp <
Me2 {v — уо)2
2RT Уо
Из уравнения (3.8) можно найти полуширину
Л 2р0 /ZRT In 2
— \ ------77—•
с V М
Для натрия при длине волны 5889 А получается
Дд/р = 7,57 х 107^Т Гц,
(3.10)
где Т — температура в кельвинах. Даже при очень низких температурах
натуральное уширение, как правило, мало по сравнению с доплеровским
уширением.
Когда атомы в возбужденном состоянии, как, например, атомы на-
трия при оптической накачке, смешиваются с примесным газом, происхо-
дящие столкновения возмущают процесс энергетических переходов, что
приводит к изменениям в спектральном профиле. В соответствии с тео-
рией Лоренца [7] можно рассматривать влияние атомов примесного газа
как воздействие столкновений, разрушающих невозмущенный в других
отношениях волновой пакет. Следовательно, ширина линии определяется
не временем жизни т, как при натуральном уширении, а средним време-
нем между столкновениями тс. Таким образом, используя анализ Фурье,
можно показать, что ширина пропорциональна 1/тс.
В частности, из кинетической теории газов следует, что частоту столк-
новений между атомами натрия и атомами примесного газа можно рас-
считать по формуле:
/ 8тгкТ /«-.-.X
Fc = nsng(TLJ-----, (З.И)
3.2. Фундаментальные свойства источников света
где ns и пд — плотность атомов натрия и примесного газа соответственно;
— сечение соударения и // — приведенная масса атомов натрий газ.
Теперь введем допущение, что относительная плотность атомов на-
трия по сравнению с примесным газом такова, что столкновениями на-
трий-натрий можно пренебречь; тогда уширение не зависит от плотно-
сти натрия, а зависит только от интенсивности столкновений, приходя-
щихся на один атом натрия. Получается
F' 18тгкТ
Fc — — ^g^L\
П8 у /2
В соответствии с теорией Лоренца полуширину уширения, определяе-
мого давлением, можно вычислить по формуле
a 2Fc „
Az/p — —
или, если выразить давление в торрах,
(3-12)
8kT
М
(3.13)
Дрр = 1,93 X 1019p<TLJ
у тгрТ
Если рассмотреть конкретные примеры натрия, смешанного с гелием
или азотом, получается [8] для гелия
Дрр.Яе = 4,52 X 108-^= Гц
(3-14)
(3.15)
и для азота
Д1/Р)Лг2 = 3,32 х 108-^ Гц.
(3.16)
Как правило, полный выходной спектр спонтанного излучения зависит
более чем от одного типа уширения. Например, подставляя естественную
полуширину Az/дг = в уравнение (3.3), получим
г ( \ ^0
(3-17)
2
для интенсивности на частоте v в отсутствие доплеровского эффекта.
Чтобы вычислить интенсивность для значения и — 6 нужно просто уравне-
ние (3.17) умножить на доплеровскую функцию (экспоненциальную часть)
уравнения (3.8). Таким образом, для результирующей функции интенсив-
ности получаем
d6
/ 1 + [(2/pn) (р - р0 - <
—ОО
где Az/p определяется так же как в уравнении (3.9).
(3.18)
Глава 3. Источники света
Примеры, приведенные выше, показывают, почему благодаря взаимо-
действию нескольких факторов источники света с преобладающим спон-
танным излучением имеют уширенный спектр. Для полупроводниковых
источников света, так же как для светоизлучающих диодов, уширение
может иметь порядок от 50 до 200 А.
3.2.2. Вынужденное излучение
В разделе 3.2.1 было рассмотрено спонтанное излучение и спектраль-
ное уширение, обусловленное столкновениями, а также температурное
уширение. Если плотность потока фотонов, проходящего через возбу-
жденную среду, достаточно велика и превышает пороговую величину,
существует высокая вероятность того, что возбужденная среда будет «вы-
нуждена» излучать под воздействием проходящих фотонов. Более того,
вновь созданный фотон будет иметь ту же самую фазу и длину волны,
что и индуцирующий фотон, в результате чего световой пучок будет ко-
герентным. Эта ситуация аналогична ядерной реакции. Пока скорость
спонтанного распада достаточно мала, низка и вероятность того, что
нейтрон вызовет вторичную ядерную реакцию, прежде чем будет погло-
щен. Когда вероятность того, что нейтрон вызовет вторичную ядерную
реакцию, превышает единицу, уровень энергии быстро возрастает и стре-
мится к новому равновесному состоянию, при котором высвобождаемая
энергия выделяется в результате ядерных реакций и ее выделение огра-
ничено поглощением быстрых нейтронов.
Аналогично, вынужденное излучение становится преобладающим, когда
поток фотонов настолько плотный, что высвобождение фотона в резуль-
тате вынужденного излучения становится более вероятным, чем погло-
щение фотона. В зависимости от настройки системы в результате может
сформироваться или короткий высокоэнергетический импульс, или не-
прерывный пучок света. Чтобы устройство могло работать в непрерыв-
ном режиме с преобладанием на выходе вынужденного излучения, потери,
обусловленные излучением света и поглощением, должны быть уравнове-
шены генерацией новых фотонов. В этом процессе часто применяются
зеркала, устанавливаемые вокруг активной среды, приведенной путем на-
качки в возбужденное состояние. В случае полупроводниковых источни-
ков света торцевые грани полупроводникового материала, образующего
лазерный диод, просто разъединяются. При этом создаются отражающие
поверхности, поскольку показатель преломления материала примерно ра-
вен 3. Электрический ток накачки, пропускаемый через активную среду,
размещенную в полупроводниковом материале, формирует возбужденное
состояние, что в свою очередь приводит к излучению фотонов. При низ-
ких токах плотность фотонного потока, циркулирующего в резонаторе,
3.3. Длина когерентности
достаточно низка и поэтому преобладает спонтанное излучение. По ме-
ре возрастания тока плотность фотонного потока увеличивается до тех
пор, пока спонтанное излучение не становится сопоставимым с вынужден-
ным. Ток, при котором это происходит, называется пороговым. Если ток
продолжает возрастать, начинает преобладать вынужденное излучение
и запускается механизм лазерной генерации. Этот вопрос будет рассмо-
трен в разделе 3.4.2.
3.2.3. Сверхизлучение
Промежуточный между спонтанным и вынужденным излучением вариант
может возникнуть в том случае, если оптически активная среда резо-
натора имеет настолько высокий уровень спонтанного излучения, что
возникающий поток фотонов вызывает вынужденное излучение. Однако
принимаются меры, чтобы избежать рециркуляции света в оптическом
резонаторе, и поэтому результирующий выходной луч после одного про-
хода имеет низкую когерентность, такую же, как у источника света
с преобладанием спонтанного излучения. Эти приборы описываются по-
дробнее в последующих разделах.
3.3. Длина когерентности
Рис. 3.2. Диаграмма, иллюстрирующая понятие длины когерентности
При объединении двух пучков света возникает конструктивная или де-
структивная интерференция, позволяющая определить разность фаз. Рас-
смотрим, например, особый случай, когда луч света, испускаемый источ-
ником, расщепляется на два луча, которые затем вновь объединяются,
как показано на рис. 3.2. Разность хода двух лучей до того, как они объ-
единятся в приемнике, равна расстоянию L — L\ — L^. Если длина одного
из путей колеблется так, что разность хода лучей принимает различные
значения в пределах длины волны света, тогда при двух когерентных по
отношению один к другому световых лучах на приемник будет поступать
амплитудно-модулированный сигнал. Интенсивность сигнала будет мак-
симальна при малых значениях L и постепенно будет убывать до нуля
по мере увеличения L. Длина когерентности определяется как разность
хода, за которое амплитуда модуляции уменьшается до произвольно за-
данной доли полной амплитуды модуляции (1/2, 1/10, 1/е и т.п., т.е.
в определенное количество раз).
Определим длину когерентности [9] как
Lc = (3.19)
df
где с — скорость света в вакууме и df — спектральная ширина источника
света. Спектральная ширина зависит от воздействия уширений, напри-
мер, таких как описанные в разделе 3.2, в сочетании с особенностями
оптического резонатора источника света. Дифференцируя соотношение
с = Xf, получаем
df = -с^. (3.20)
Эту формулу можно использовать для определения длины когерентно-
сти источника света на основании спектральных измерений. Например,
гелий-неоновый лазер, работающий на 6328 А, со спектральной шириной
линии 1 МГц имеет длину когерентности около 300 м, в то время как
светоизлучающий диод со спектральной шириной 1 нм, работающий на
1 мкм, имеет длину когерентности около 100 мкм.
Длина когерентности имеет большое значение для волоконно-оптиче-
ских датчиков по нескольким причинам. Прежде всего, от нее зависят
обратное рассеяние волокна и взаимодействие в измерительной системе
датчика. Часто бывает крайне необходимо уменьшить длину когерентно-
сти для уменьшения уровня собственных шумов волоконно-оптического
датчика. Особенно это касается интерферометра Саньяка, описанного
в гл. 9. Источники с короткой длиной когерентности также используются
в волоконно-оптических датчиках, предназначенных для точного измере-
ния длин, поскольку интерференция возникает, только когда длины двух
оптических путей практически равны.
3.4. Полупроводниковые источники света
Для большинства волоконно-оптических датчиков выбор полупроводни-
ковых источников света оказывается предпочтительным, поскольку они
превосходят альтернативные источники света по таким показателям, как
потребляемая мощность, надежность, размер и стоимость. В этом разделе
приводится краткий обзор некоторых наиболее распространенных полу-
проводниковых источников света, используемых в датчиках.
3.4- Полупроводниковые источники света 63
3.4.1. Светоизлучающие диоды
Существует два основных вида светоизлучающих диодов, которые нахо-
дят широкое применение в волоконно-оптических датчиках: светоизлу-
чающие диоды с поверхностным излучателем и светоизлучающие диоды
с торцевым излучателем. Излучение диодов с поверхностным излучателем
изотропно, и свет улавливается путем присоединения волокна встык в не-
посредственной близости к излучающей поверхности. На рис. 3.3. показа-
на структура светоизлучающего диода с поверхностным излучателем, или
светодиода Барраса [10]. Как правило, эти приборы используются в со-
четании с многомодовыми волокнами с большой сердцевиной («большая»
означает больше 85 мкм), при этом захватывается несколько процентов
излученного света. Второй тип светодиодов — это диоды с торцевым
излучателем, излучение в которых ограничивается областью волновода.
Благодаря структуре диода, в котором области рекомбинации переме-
жаются слоями материала с более широкой запрещенной зоной и более
низким показателем преломления, свет может быть ограничен плоско-
стью. При таком подходе формируется двойная гетероструктура [11],
при которой электроды установлены так, что ток протекает только через
область рекомбинации, и область светоизлучения может быть ограничена
небольшой площадью. На рис. 3.4 показана конструкция такого светоиз-
лучающего диода с торцевым излучателем.
Рис. 3.3. Структура светоиз-
лучающего диода с поверхност-
ным излучателем, или светоди-
ода Барраса
Р A^Gaj -xAs
----Металлический
электрод
Перечислим некоторые характеристики светоизлучающих диодов, имею-
щие значение для волоконно-оптических датчиков: очень малая длина ко-
герентности порядка от 40 до 80 нм, часто являющаяся результатом очень
широкого выходного спектра; очень низкая чувствительность к обрат-
Глава 3. Источники света
ному отражению от элементов волоконно-оптического датчика, посколь-
ку преобладающим излучением является спонтанное; и высокая надеж-
ность [12], часто проектируемое среднее время безотказной работы со-
ставляет порядка 100000 часов.
Металлический
cv\\\\\\\\v
электрод
Защитный
слой оксида
Р GaAs: Ge
Область
рекомбинации
Р AIq 3Ga0 7As:Ge
П AIq }GaQ gAs
Область
светоизлучения
n AIq 3Ga0 7As:Sn
GaAs-подложка
Металлический
Рис. 3.4. Поперечное сечение светоизлучающего диода с торцевым излучателем [11]
Рис. 3.5. Зависимость выход-
ной мощности светоизлучаю-
щего диода с торцевым излу-
чателем с оконцованным выво-
дом от токовой характеристики
Обычно светоизлучающие диоды с поверхностным излучателем деше-
вы и используются в измерительных системах на основе волоконно-опти-
ческих датчиков там, где невысоки требования к интенсивности света
и в качестве средства передачи используется многомодовое волокно. Для
таких приложений, как волоконно-оптические гироскопы, работающих
с большей мощностью и требующих применения одномодовых волокон,
лучшим выбором будут светоизлучающие диоды с торцевым излучателем.
Структура волноводов таких диодов позволяет вводить в одномодовое
волокно значительную мощность, сохраняя при этом все преимущества
3.4- Полупроводниковые источники света
светоизлучающих диодов, такие как малая длина когерентности, высокая
надежность и устойчивость к ответной реакции. На рис. 3.5 показана ти-
пичная зависимость выходной мощности от токовой характеристики для
высококачественного светоизлучающего диода с торцевым излучателем
с оконцованным выводом для одномодового волокна. Следует отметить,
что оптическая мощность увеличивается при увеличении уровня тока
медленно, что приводит к значительно более высоким требованиям к мощ-
ности, чем у тех полупроводниковых устройств, которые обсуждаются
в последующих разделах.
3.4.2. Лазерные диоды
Если проводник устроен таким образом, что распространение света ограниче-
но областью волновода, так что его уровень в диоде превышает необхо-
димый для возникновения вынужденного излучения, тогда это лазерный
диод. Это можно осуществить, используя волноводную структуру [13],
аналогичную показанной на рис. 3.4, если разъединить края структуры,
так чтобы образовались отражательные зеркала (поскольку материал,
обычно используемый в полупроводниковых лазерных диодах, имеет по-
казатель преломления около 3, это операция легко выполнима), и увели-
чивать проходящий через прибор ток до тех пор, пока плотность возни-
кающего потока фотонов, циркулирующего в резонаторе, не превысит
уровень, необходимый для появления вынужденного излучения.
На рис. 3.6 показаны характеристики выходного спектра светоизлу-
чающего и лазерных диодов. В случае светоизлучающего диода выходной
спектр широкий и плотность потока фотонов, циркулирующего в обла-
сти рекомбинации, всегда ниже порогового значения, требующегося для
возникновения вынужденного излучения. Конечный результат состоит
в том, что на выходе полностью преобладает спонтанное излучение. В мно-
гомодовом лазерном диоде зеркала, образованные разъединенными кра-
ями структуры, создают условия возникновения нескольких резонансных
мод с промежутком с/21п, где с — скорость света в вакууме, I — длина
резонатора, образованного двумя разъединенными торцевыми гранями,
и п — показатель преломления световодной структуры. Когда уровень то-
ка в диоде возрастает до значения, при котором часть огибающей спектра
активной среды превышает пороговое значение, необходимое для лазер-
ной генерации, лазерный диод переходит в режим осцилляции и, по мере
того как мощность возрастает и все большая часть огибающей превышает
пороговое значение, количество спектральных линий (т. е. мод) увеличи-
вается.
Во многих приложениях волоконных датчиков требуется одночастот-
ный источник излучения, допускающий только одну продольную моду
3-3379
Глава 3. Источники света
колебаний. Существует множество методов достижения одномодовой ра-
боты. Один из подходов заключается в том, что резонатор в лазерном
диоде делается настолько коротким, что только один резонанс, способный
пройти через структуру эталона, может возникнуть в той части огибаю-
щей спектра активной среды, которая находится над порогом.
а)
Рис. 3.6. Характеристики вы-
ходного спектра: а) светоизлуча-
ющего; б) многомодовый лазер-
ный диод; в) одномодовый лазер-
ный диод с продольной модой
Огибающая,
определяемая спектральными
элементами резонатора
Огибающая
усиления
в)
б)
Рис. 3.7. Методы возбуждения в ла-
зерном диоде единственной устойчи-
вой продольной выходной моды: а)
лазер с распределенным брэгговским
отражателем с обратной связью; б)
устройство со связанными резонато-
рами
Альтернативный подход — ввести
в резонатор чувствительные к спектру
элементы, выбирающие и поддержива-
ющие только одну моду в той части
огибающей спектра активной среды, ко-
торая находится над порогом. Два ис-
пользуемых подхода проиллюстрирова-
ны рис. 3.7. На первом рисунке показан
резонатор с распределенной обратной
связью; периодическая структура раз-
мещена на одном из концов волновода.
Брэгговский отражатель настроен так,
что отражает только очень узкую поло-
су спектра, и через него проходит един-
3.4- Полупроводниковые источники света 67
ственный тип колебаний. При втором подходе используются связанные
резонаторы — два активных волновода расположены последовательно.
Два резонатора взаимодействуют, и необходимость для обоих резона-
торов находиться в резонансе эффективно сужает полосу спектра для
лазерной генерации, результатом чего становится одномодовая лазерная
генерация.
До некоторой степени подобный и построенный на тех же принци-
пах подход заключается в использовании для выбора единственной мо-
ды внешнего пассивного резонатора. Основной мотивацией для работы
в одномодовом режиме служит то, что при очень узком спектре свет,
излучаемый источником, обладает высокой когерентностью. Источники
излучения, функционирующие в таком режиме, необходимы для высо-
копроизводительной работы волоконно-оптических датчиков, требующих
большой и стабильной длины когерентности. Это относится к пассивному
кольцевому резонатору и интерферометрам Маха - Цендера и Майкельсона.
Рис. 3.8. Выходная мощность лазерно-
го диода в зависимости от тока возбу-
ждения
Ток (мА)
Одна из проблем, связанных с работой лазерных диодов, заключается
в том, что их выход часто чувствителен к ответной реакции. Отчасти это
можно понять, изучив график зависимости выходной мощности от тока
возбуждения (рис. 3.8). При низком токе возбуждения выход лазерного
диода определяется преимущественно спонтанным излучением. При по-
вышении уровня тока и преодоления им порогового значения световое
излучение начинает зависеть главным образом от вынужденного излу-
чения. В отличие от характеристики светоизлучающего диода кривая
зависимости лазерного диода имеет крутой излом, и в режиме выну-
жденного излучения при увеличении тока уровень выходного излучения
возрастает очень резко. Когда свет отражается обратно в лазерный ди-
Центральная мода
IIIII I
Побочные моды
а) б)
Рис. 3.9. а) многомодовый и б) одно-
модовый объемный выходы лазерных
диодов
од, работающий в около- или над пороговом режиме, эффективный поток
фотонов в резонаторе изменяется в зависимости от соотношения фаз
и степени когерентности обратно отраженного излучения и излучения,
циркулирующего в резонаторе. В конечном итоге выход источника излу-
чения модулируется обратно отраженным излучением. Проблема особен-
но актуальна для источников света с высокой когерентностью, которые
внутри волоконно-оптических датчиков часто подвергаются воздействию
нескольких отраженных световых потоков, взаимодействующих с источ-
ником света очень сложным образом.
Первым источником излучения, обрат-
но отраженного в лазерный диод, обыч-
но является вывод для подсоединения
волокна. Высокопроизводительные во-
локонно-оптические датчики часто не-
обходимо подсоединять к одномодовому
лазеру, используя одномодовое волок-
но. Чтобы такое подсоединение было
эффективным, выход лазерного диода
должен представлять собой единствен-
ную поперечную моду. На рис. 3.9 по-
казан выход лазерного диода, состо-
ящий из нескольких поперечных мод:
центральной, содержащей некоторую часть выходной мощности, и не-
скольких побочных. У лазерных диодов, работающих таким способом,
перераспределение мощности между поперечными модами может зави-
сеть от тока, деградации (старения), температуры и других внешних
воздействий. Поскольку только одна из поперечных мод может быть за-
пущена в одномодовое волокно, лазерные диоды этого типа обладают
крайне нежелательными свойствами. В идеале диод должен иметь на
выходе устойчивую единственную поперечную моду. По мере развития
технологии для большинства лазерных диодов с одной продольной модой
становится общепринятым иметь на выходе единственную поперечную
моду. Для лазерных диодов, имеющих прямоугольную активную область,
типична единственная эллиптическая поперечная мода. Для оптимального
подключения к одномодовому волокну крайне желателен выход с симме-
тричной круговой поляризацией. На рис. 3.10 показана схема устройства
лазерного диода со скрытой гетероструктурой. В этом случае активная
область почти квадратна и окружена материалом с более низким показа-
телем преломления, действующим как волновод. В результате получается
структура, которая при соответствующей настройке функционирует та-
ким образом, что на выходе получается единственная поперечная мода
3.4- Полупроводниковые источники света
с почти круговой поляризацией идеальная для ввода в одномодовое опти-
ческое волокно.
Рис. 3.10. Схема скрытой («заро-
щенной») гетероструктуры лазер-
ного диода, в котором область ре-
комбинации GaAs полностью окру-
жена AU Gai-я As с более низким
показателем преломления
pA^Ga^As
Металл
Оксид
n AlxGa^ _xAs
GaAs
Рис. 3.11. Методы подсоеди-
нения лазера или диода с тор-
цевым излучателем к оптиче-
скому волокну: а) микролинза;
б) полусферический конец во-
локна; в) градиентная («стерж-
невая») линза; г) совмещение
оптических осей
toZZ2ZZZZZZZZZZZZZZZZZ2ZZZZZZh^ Металл
На рис. 3.11 показано несколько способов, которыми излучение с вы-
хода лазерного диода может запускаться в оптическое волокно. В первом
методе используется сферическая микролинза, размещенная между дио-
дом и оптическим волокном. Во втором методе полусферическая линза
формируется на конце волокна в результате расплавления кончика во-
локна. Иногда при использовании этого метода кончик волокна перед
формированием полусферы дополнительно сводится на конус. Сужение
волокна эффективно увеличивает числовую апертуру оптического волок-
на, так что она в большей степени соответствует апертуре лазерного
Глава 3. Источники света
диода. В третьем методе используется градиентная («стержневая») линза,
а в четвертом — волокно просто расщепляется и подсоединяется к лазеру
торцевым элементом связи, так что совмещаются оптические оси лазера
и световода. Для высокопроизводительных одномодовых лазерных диодов
допустимая величина обратного отражения, еще не ухудшающая серьез-
но выходные характеристики, может составлять порядок 10-6. Чтобы
уменьшить обратное отражение от волокна до этого уровня, нужно при-
нять специальные меры и позаботиться, чтобы отсутствовали плоские
поверхности, отражающие излучение непосредственно обратно в лазер-
ный диод. Меры предосторожности могут включать в себя скругление
торца волокна, противоотражательное покрытие и изменение углов при
соединении. Если этих мер недостаточно, для достижения удовлетвори-
тельно низкой ответной реакции необходимо использовать оптические
развязки, например, основанные на эффекте Фарадея.
Рис. 3.12. Зависимость
выходной мощности ла-
зерного диода от тока воз-
буждения при несколь-
ких температурах
В следующих нескольких абзацах мы рассмотрим некоторые свойства
светоотдачи лазерных диодов, представляющие интерес для разработчи-
ков волоконно-оптических датчиков. На рис. 3.13 приведены зависимости
мощности светового выхода от тока возбуждения типичного лазерного
диода, функционирующего при различных температурах. Заметим, что
с увеличением температуры ток, необходимый для достижения порого-
вого значения, возрастает и наклон кривых слегка уменьшается. Эти
параметры ухудшения характеристик при росте температуры также ха-
рактеризуют лазерный диод, который стареет «плавно». Другие внешние
воздействия в процессе эксплуатации также могут нанести ущерб лазер-
3.4- Полупроводниковые источники света
ному диоду или состарить его. В конечном итоге зависимость выходной
мощности лазерного диода от тока возбуждения при изменениях темпера-
туры может принять вид подобный тому, что показан на рис. 3.13. При-
чиной поломок могут стать увеличение внутренних дефектов материала,
дефекты темных линий и повреждения в результате резких скачков то-
ка, приложенного к лазерному диоду, за короткий промежуток времени.
Например, разряды, проходящие через лазерный диод в результате не-
правильного обращения или электрического подсоединения, могут стать
причиной мгновенных бросков тока в лазерном диоде. В результате ток,
проходящий через лазерный диод, окажется намного выше номинального
и станет причиной оптического импульса высокой мощности. Плотность
фотонного потока в результате такого импульса может быть достаточ-
но высокой, чтобы буквально «сдуть» зеркальные грани лазерного диода.
Иногда это приводит к мгновенной и катастрофической поломке прибо-
ра; однако чаще возникает частичное повреждение, следствием которого
становится ухудшение характеристик.
Рис. 3.13. Зависимость
выходной мощности ла-
зерного диода от то-
ка возбуждения при не-
скольких температурах.
Устройство демонстриру-
ет ухудшение ра бочих ха-
рактеристик
Кроме изменения зависимости светоотдачи лазерных диодов от тока
возбуждения, при изменениях температуры изменяется выходная длина
волны. На рис. 3.14 показан уход длины волны лазерного диода при из-
менении температуры с интервалом в 1 °C, в то время как на рис. 3.15
показаны характеристики того же самого лазерного диода, подвергаю-
щегося изменениям температуры с интервалом в 5 °C. Сдвиг длины вол-
ны происходит благодаря изменениям показателя преломления материала
в волноводе лазерного диода, длины резонатора и ширины запрещенной
зоны материала. В частности, отметим, что происходят мгновенные сме-
щения длины волны, когда лазерный диод близок к переходу к новой
волне резонатора. На рис. 3.16 совершенно отчетливо видно, как в лазер-
ном диоде происходят быстрые перескоки между двумя конкурирующими
72 Глава 3. Источники света
модами при температуре около 28,5 °C. В конечном итоге «одномодо-
вый» диод под воздействием температуры совершает последовательность
скачков от одной моды к другой, при том что между перескоками моды
длина волны изменяется сравнительно медленно. График, приведенный на
рис. 3.17, иллюстрирует это явление для всего температурного диапазона.
Рис. 3.14. Уход дли-
ны волны лазерного
диода при изменении
температуры с интер-
валом в 1 °C
Рис. 3.15. Уход дли-
ны волны лазерного
диода при изменении
температуры с интер-
валом в 5 °C
Такое поведение лазерного диода принципиально отличается от пове-
дения светоизлучающего диода, в котором дрейф выходной длины волны
3.4- Полупроводниковые источники света
определяется изменением ширины запрещенной зоны материала диода
и происходит плавно и непрерывно. Перескоки моды и уход длины волны
в лазерном диоде могут быть вызваны не только температурой, но и из-
менениями тока, которые могут приводить к изменениям как характери-
стик световода устройства, так и внутренней температуры. На рис. 3.18
показан выходной спектр лазерного диода, работающего при трех раз-
личных уровнях тока. Заметим, что помимо сдвига при увеличении тока
мощность побочных мод уменьшается, поскольку в приборе начинает пре-
обладать поток фотонов действующей моды. Другие параметры, такие
как деградация лазера и давление, также вызывают изменения выходного
спектра лазерного диода.
Длина волны (А)
Рис. 3.16. Температурная перестройка лазерного диода через перескок моды в ра-
бочей области
74 Глава 3. Источники света
Рис. 3.17. Уход дли-
ны волны в зависимости
от температуры для ти-
пичного лазерного диода
Длина волны (А)
Рис. 3.18. Относительная выходная мощность и спектральный состав для лазер
ного диода, работающего при 55, 65 и 75 мА
3.4- Полупроводниковые источники света
3.4.3. Сверхизлучающие диоды
Рис. 3.19. Зависимость выходной мощности от тока, типичная для лазерного ди-
ода, сверхизлучающего диода и светоизлучающего диода с торцевым
излучателем
Класс приборов, называемых сверхизлучающими диодами, по своим рабо-
чим характеристикам является промежуточным между светоизлучающи-
ми и лазерными диодами. На рис. 3.19 на одном графике для сравнения
приведены характеристики светоотдачи лазерного диода, сверхизлучаю-
щего диода и светоизлучающего диода. Сверхизлучающий диод устроен
так, что при высоких уровнях тока его выходное излучение представля-
ет собой смесь спонтанного и вынужденного излучений. Он предназначен
для таких приложений, как волоконно-оптические гироскопы, где требу-
ется мощное излучение с низкой когерентностью. Для этого структура
лазерного диода изменяется таким образом, что резонатор, вызывающий
рециркуляцию фотонного потока, ликвидируется, но в то же время допус-
кается настолько сильное возбуждение активной среды, что вынужденное
излучение может возникнуть за один проход света через активную сре-
ду, благодаря высокому уровню спонтанного излучения. Для разработки
приборов, обладающих такими свойствами, используются различные ме-
тоды, включая противоотражательное покрытие сторон, бомбардировку
протонами, чтобы сделать один конец резонатора поглощающим, и меха-
ническое разрушение торцевой грани. В конечном результате получается
устройство с зависимостью выходной мощности от тока, аналогичной
той, которая показана на рис. 3.20, с мягким изломом при переходе из
области с преобладающим спонтанным излучением в область со значи-
тельной долей вынужденного излучения.
Выходной спектр этого вида приборов показан на рис. 3.21. В целом
выходные параметры идеального сверхизлучающего диода аналогичны
параметрам светоизлучающего диода при высоких уровнях тока. Однако
Глава 3. Источники света
это не относится ко многим реальным приборам, выходной спектр кото-
рый «промодулирован» остаточными эффектами внутреннего резонатора
устройства. Глубина модуляции характеризует длину когерентности из-
лучения устройства и для некоторых волоконных датчиков коррелирует
с уровнем производительности.
Ток возбуждения (мА)
Рис. 3.20. Зависимость выходной мощности сверхизлучающего диода от тока воз-
буждения
Рис. 3.21. Выходной спектр
сверхизлучающего диода
Одна из проблем, связанных со сверхизлучающими диодами, заключа-
ется в том, что из-за значительной величины вынужденного излучения
и некоторых остаточных эффектов, связанных с резонатором, они под-
вержены воздействию обратного излучения. Обратное излучение влияет
на них существенно в меньшей степени, чем на лазерные диоды, и в боль-
шей степени, чем на светоизлучающие диоды. Из-за широкого разнообра-
зия геометрических форм, используемых при конструировании таких уст-
3.4- Полупроводниковые источники света 77
ройств, их чувствительность к обратному излучению также меняется
в широком диапазоне. Если использование такого прибора предполага-
ет выходное излучение с малой длиной когерентности, рекомендуется
настойчиво требовать измерений выходного спектра прибора после его
подключения к оптическому волокну, а не до того.
3.4.4. Волоконно-оптические лазеры и усилители
В настоящее время новый класс источников излучения и усилителей стал
доступен для разработчиков волоконно-оптических датчиков. Эти при-
боры включают в себя коротковолновый источник света, используемый
для накачки отрезка оптического волокна, активированного материалом,
который поглощает фотоны с короткой длиной волны и излучает уже
длинноволновые фотоны. Некоторые материалы, добавляемые в опти-
ческие волокна, демонстрируют способность лазерной генерации. Это
неодим на длинах волн 1050 и 1350 нм [16-18], эрбий на 850, 990, 1550
и 2700 нм [18-19] и гольмий на 1380 и 2700 нм [18]. Большинство совре-
менных разработок сориентировано на неодим и эрбий; особенно значи-
тельные усилия прилагаются к тому, чтобы для накачки использовать
полупроводниковые лазеры. При использовании лазерных диодов накач-
ки, функционирующих на длине волны 795 нм, может быть достигнута
очень высокая эффективность конверсии фотонов, превышающая 90% [20]
на рабочих длинах волн 1050 и 1350 нм. Такие приборы применяются в во-
локонно-оптических гироскопах [21] и открывают широкие перспективы
дальнейшего совершенствования в том, что касается стабильности длины
волны и высокой выходной мощности. Волоконные усилители на основе
активированных эрбием волокон [22] с лазерными диодами накачки, рабо-
тающими на длинах волн 978 нм [23] и 1493 нм [24], обеспечивают усиление
3,9 и 2,1 дБ/мВт соответственно.
Схемы энергетических уровней системы на неодиме, работающей на дли-
не волны 1060 нм, и эрбии, на длине волны 1550 нм, показаны на рис. 3.22
и 3.23 [25, 26]. Система на неодиме четырехуровневая. В результате погло-
щения фотона накачки происходит переход с энергетического уровня Ei
на уровень Е%. Далее происходит быстрый безызлучательный переход на
энергетический уровень Е% и распад уровня до энергетического уров-
ня £/4, сопровождающийся излучением фотона с длиной волны 1060 нм.
Затем происходит последний быстрый безызлучательный переход с воз-
вратом в первоначальное состояние Е±. Случай системы с тремя энерге-
тическими уровнями, как у эрбия, немного более сложный. Здесь в ре-
зультате поглощения фотона происходит переход из основного энергети-
ческого состояния на уровне Ei в возбужденное состояние на уровне Е%.
Состояние Е% подвергается безызлучательному распаду и переходит в со-
Глава 3. Источники света
стояние Е2. Из энергетического состояния Е? существует два варианта
переходов. В первом случае излучается фотон с длиной волны 1550 нм
и происходит переход обратно в основное состояние. Однако во втором
случае поглощение фотона накачки в состоянии Е? приводит к переходу
в энергетическое состояние Е4. Затем состояние Е± подвергается быстро-
му безызлучательному распаду и переходит снова в состояние 2?2. Длина
волны накачки и параметры активации оптического волокна подбирают-
ся так, чтобы минимизировать поглощения в возбужденном состоянии,
поскольку они существенно ухудшают общую эффективность системы.
щимся излучением фотона с длиной волны 1060 нм, для активирован-
ных неодимом волокон
Ед
Ез
Поглощение
фотонов накачки
Быстрые
безызлучательные
переходы
Л
Поглощение
в возбужденном
состоянии
фотонов накачки
е2
Излучение фотонов
с длиной волны 1550 нм
Е1
Рис. 3.23. Схема трех энергетических уровней с переходом, сопровождающим-
ся излучением фотона с длиной волны 1550 нм, для активированных
эрбием волокон
На рис. 3.24 приведены три варианта использования волоконных уси-
лителей, которые могут применяться в волоконных датчиках или лини-
3.4- Полупроводниковые источники света
ях связи [27, 28]. В случае, показанном на рис. 3.24, а, коротковолновый
лазер накачки используется для возбуждения отрезка активированного
оптического волокна, расположенного впереди лазера-передатчика. В та-
кой конфигурации прибор действует как усилитель мощности передат-
чика. На рис. 3.24, б приведена схема, в которой прибор действует как
оптический усилитель. Такую схему можно использовать для обеспече-
ния дальней связи или для увеличения длин линий в волоконно-оптических
датчиках. Последний вариант усилителя, вероятно, может использовать-
ся в системах в качестве оптического предусилителя перед приемником.
Этот прибор может работать близко к квантовому пределу «идеально-
го» [29] усилителя, в перспективе обеспечивая вероятность ошибки для
линий связи порядка 10-9 при средней интенсивности потока сигнальных
фотонов 38 фотонов на бит. Аналогичные преимущества могут получить
волоконно-оптические датчики с низким уровнем сигнала.
Лазерный Дихроичный
диод накачки (светоизбирательный) Волокно
/разветвитель к датчику
Лазерный
диод
Активное
' волокно
Лазерный
диод накачки
Активное
волокно
б)
Дихроичный
разветвитель
Дихроичный
разветвитель
Лазерный
диод накачки
Активное
волокно
Приемник
в)
Рис. 3.24. Три примера использования волоконных усилителей: а) усилитель мощ-
ности; б) оптический усилитель; в) оптический предусилитель
Глава 3. Источники света
Зеркало с высокой
1,06 мкм
отражательной
способностью на 1,06 мкм
Противоотражательное покрытие на 795 нм
Рис. 3.25. Резонансный волоконный лазер, основанный на принципе резонатора
Фабри - Перо
Пример волоконного лазера, предназначенного для работы на длине
волны 1060 нм, показан на рис. 3.25. Здесь активированное волокно осна-
щено зеркальными торцами с высокой отражательной способностью на
длине волны 1060 нм и в то же время прозрачными для длины волны ла-
зера накачки 795 нм. Волоконные лазеры также можно сконструировать,
используя различные схемы интерферометров (см. гл. 9 и 10) с волоконны-
ми разветвителями вместо зеркал, как показано на рис. 3.26. Эти схемы
могут иметь преимущества по сравнению со схемой Фабри-Перо, при-
веденной на рис. 3.25, поскольку в них отсутствуют зеркала, требующие
подсоединения, и для которых существует вероятность повреждения при
циркуляции слишком большой оптической мощности.
Волоконный
Рис. 3.26. Резонаторы волоконных интерферометров: а) кольцевой резонатор;
б) отражатель Саньяка; в) отражатель Маха-Цен дера
Для волоконных источников сверхизлучения крайне желательно иметь
однопроходную систему без обратного отражения. Этого можно добить-
ся, скашивая под углом концы волокна, как показано на рис. 3.27 [21].
3.5. Резюме
Здесь приведены примеры схем, в которых лазерный диод накачки распо-
ложен на одной продольной оси с активированным оптическим волокном.
Но возможно также осуществлять накачку волокна сбоку или через двой-
ную оболочку [30], используя мощные диодные матрицы.
Скошенные под углом, чтобы предотвратить
обратное отражение, концы волокна
Лазерный
диод накачки
Активное волокно
Выход
Рис. 3.27. Схема однопроходного волоконного источника излучения
Применимыми на практике волоконные лазеры стали благодаря воз-
растанию доступности мощных лазерных диодов и лазерных диодных
матриц, обеспечивающих выходную мощность порядка 50-100 мВт. Ис-
пользуя такие приборы в сочетании с одномодовыми активированными
волокнами, можно увеличить выходную мощность примерно на 10 мВт.
Можно ожидать, что с развитием технологии волоконно-оптические лазе-
ры и усилители станут неотъемлемой составной частью высокопроизво-
дительных систем волоконно-оптических датчиков.
3.5. Резюме
В этой главе приведен обзор источников света, используемых обычно
в составе волоконно-оптических датчиков. Дополнительные особенности
требований конкретных волоконно-оптических датчиков к источникам
света приведены в последующих главах.
Литература
1. Н. Kressel, Electroluminescent Sources for Fiber Systems, in Fundamentals of
Optical Fiber Communication, M. K. Barnoski, Ed., Academic Press, New York,
1976.
2. H. Okuda, M. Ishikawa, H. Shiozawa, Y. Watanabe, K. Itaya, K. Nitta, G. Hata-
koshi, Y. Kokubun, and Y. Uematsu, Highly Reliable InGaP/In-GaAlP Visible
Light Emitting Inner Stripe Lasers with 667 nm Lasing Wave length, IEEE J.
Quantum Electron. QE-25, 1477 (1989).
3. A. Gromyo, K. Kobayashi, S. Kawata, I. Hino, and T. Suzuki, Aging Charac-
teristics of AlGaJnP/GaJnP Visible Light Lasers, Electron. Lett. 23, 85 (1987).
4. M. Kume, M. Hirose, N. Yoshikawa, H. Shimizu, M. Wada, K. Itoh, G. Kano,
and I. Teramoto, A New Monolithic Dual GaAlAs Laser Array for Read/Write
Optical Disk Applications, IEEE J. Quantum Electron. QE-23, 898 (1987).
82 Глава 3. Источники света
5. S. Takigawa, Т. Uno, М. Ките, К. Hamada, N. Yoshikawa, Ff. Shimizu, and
G. Kano, 50 mW Stable Single Longitudinal Mode Operation of a 789 nm
GaAlAs DFB Laser, IEEE J. Quantum Electron. QE-25, 1489 (1989).
6. O. Fujita, Y. Nakano, and G. Iwane, Reliability of Semiconductor Lasers for
Undersea Optical Transmission Systems, IEEE J. Lightwave Technol. LT-3,
1211 (1985).
7. A. Mitchell and M. Zemansky, Resonance Radiation and Excited Atoms, Cam-
bridge University Press, Cambridge, 1971.
8. S. Chen and P. Henry, Pressure Shift and Broadening of the Resonance Lines of
Singly Ionized Akaline-Earth Atoms and Some Alkali Atoms in Hot Compressed
Ar and He, J. Quant. Spectrosc. Radiat. Transfer 13, 385 (1973).
9. M. Born and E. Wolf, Principles of Optics, Pergamon Press, Emlsford, N. Y.,
1975.
10. C. A. Burrus and R. W. Dawson, Small-Area, High-Current-Density GaAs Elec-
troluminescent Diodes and a Method of Operation for Improved Degradation
Characteristics, Appl. Phys. Lett. 17, 97 (1970).
11. H. Kressel, Ed., Semiconductor Devices for Optical Communication, vol. 39,
Topics in Applied Physics, 2nd ed., Springer-Verlag, New York, 1982.
12. M. Ettenberg, G. H. Olson, and F. Z. Hawryle, On the Reliability of 1.3 Micron
InGaAsP Edge Emitting LEDS for Optical Communication, IEEE J.Lightwave
Technol. LT-2, 1016 (1984).
13. I. Hayashi, M.B. Panish, and F.K. Reinhart, GaAs-AUGai-^As Double Het-
erostructure Injection Lasers, J. Appl. Phys. 42, 1929 (1971).
14. M. Okuda, K. Murata, and K. Oonaka, Optimum Design of a Distributed Bragg
Reflector Laser with Optical Loss in the Corrugated Waveguide, Opt. Commun.
16, 30 (1976).
15. T. Tsukada, GaAs-Gai_xAlx As Buried Heterostructure Injection Lasers, J. Ap-
pl. Phys. 45, 4899 (1974).
16. M.C. Brierley and P. W. France, Neodymium-Doped Fluoro-Zirconate Fiber
Laser, Electron. Lett. 23, 815 (1987).
17. W. J. Miniscalo, L.J. Andrews, B.A. Thompson, R. S. Quimby, L.J. В Vasha,
and M.G. Drexage, 1.3 Micron Fluoride Fibre Laser, Electron. Lett. 24, 28
(1989).
18. P. W. France and M. C Brierley, Fluoride Glass Fiber Lasers and Amplifiers,
Proc. SPIE 1171, 65 (1989).
19. W. J. Miniscalco, L.J. Andrews, B.A. Thompson, T. Wei, and B.T. Hall, The
Effect of Glass Composition on the Performance of Erbium Fiber Amplifiers,
Proc. SPIE 1171, 93 (1989).
20. M. C. Brierly and M. H. Hunt, Efficient Semiconductor Pumped Fluoride Fiber
Lasers, Proc. SPIE 1171, 157 (1989).
21. K.A. Fesler, R. F. Kalman, M.J.F. Digonnet, B.Y. Kim, and H. J. Shaw, Be-
havior of Broadband Fiber Sources in a Fiber Gyroscope, Proc. SPIE 1171,
346 (1989).
22. R. I. Laming, W. L. Barnes, L. Reekie, P. R. Morkel, D.N. Payne, and R. S.
Vodhanel, Erbium Doped Fibre Lasers and Amplifiers, Proc. SPIE 1171, 82
(1989).
Литература 83
23. R. I. Laming, V. Shah, L. Curtis, R. S. Vodhanel, F.J. lavire, W.L. Barnes,
J. D. Minelly, D. P. Bour, and E. J. Tarbox, Highly Efficient 978 nm Diode
Pumped Erbium Doped Fibre Amplifier with 24 dB Gain, Paper 20PDA-4,
IOOC’89, Kobe, 1989.
24. E. Desuvire, C.R. Giles, J.R. Simpson, and J.L. Zyskind, Efficient Erbium
Doped Fibre Amplifier at 1530 nm with High Output Saturation Power, Paper
PD20, CLEO’89, Baltimore, 1989.
25. M. J. Digonnet, Theory of Operation of Three- and Four-Level Fiber Amplifiers
and Sources, Proc. SPIE 1171, 9 (1989).
26. A. Bjarklev, S. L. Hansen, and J. H. Povlsen, Large Signal Modeling of an Er-
bium Doped Fiber Amplifier, Proc. SPIE 1171, 119 (1989).
27. P. Urquhart, Review of Rare Earth Doped Fiber Lasers and Amplifiers, Proc.
IEE J. 135, 385 (1988).
28. P. Urquhart, Device Aspects of Fiber Lasers and Amplifiers, Proc. SPIE 1171,
27 (1989).
29. C.R. Giles, E. Desurvire, and J.L. Zyskind, Erbium-Doped Fiber Amplifiers
for High Speed Fiber-Optic Communication Systems, Proc. SPIE 1171, 319
(1989).
30. H. Po, E. Snitzer, R. Rummineli, L. Zeneno, F. Hakami, N. M. Cho, and T. Haw,
Double Clad High Brightness Nd Fiber Laser Pumped by GaAlAs Phased Array,
Proc. Optical Fiber Communications Conference, Houston, Feb. 6-9, 1989.
ГЛАВА 4
ПРИЕМНИКИ
ОПТИЧЕСКОГО
ИЗЛУЧЕНИЯ
У. Б. Спиллман-младший
Симмондс Пресижн
Подразделение «Эйркрафт Системе»
Вердженс, Вермонт
4.1. Введение
В волоконно-оптических датчиках в качестве приемников чаще всего ис-
пользуются полупроводниковые фотодиоды и лавинные фотодиоды. Эти
типы приемников, как правило, используются (в конечном счете) для
контроля выходной мощности датчика. Такие приемники в сочетании
с соответствующими оптическими компонентами, такими как дифракци-
онные решетки или фильтры, могут также применяться для слежения за
интенсивностью отдельных составляющих спектра. Для получения спек-
трального распределения, что необходимо для работы датчиков положе-
ния, основанных на длине волны, или для некоторых схем мультиплек-
сирования, матрица фотодетекторов обычно используется в сочетании
с дифракционной решеткой. Мы начнем обзор регистрации оптическо-
го излучения со статистики регистрации, затем рассмотрим основные
принципы функционирования полупроводников, фотодиодов, лавинных
фотодиодов, проанализируем шум и изучим методы исследования спектра.
4.2. Теоретические основы
4.2.1. Статистика регистрации оптического излучения
Процесс регистрации оптического излучения предполагает преобразова-
ние оптической энергии в виде фотонов в электрический сигнал в виде
электронов, который может быть обработан обычными электронными
Волоконно-оптические датчики: Вводный курс для инженеров и научных работников,
под редакцией Эрика Удда. ©1991 John Wiley & Sons, Inc.
4-2. Теоретические основы 85
способами обработки сигнала. Если вероятность того, что под воздей-
ствием фотона с энергией hv в приемнике образуется электрон, равна ту,
то темп генерации электронов (г) для падающего луча с оптической мощ-
ностью Р определяется по формуле
Т]Р
hv
(4-1)
Генерация электронов под воздействием падающих с постоянным тем-
пом фотонов (г) распределена по случайному закону во времени и подчи-
няется статистике Пуассона, так что вероятность генерации т электро-
нов за некоторый период измерений т определяется по формуле
Р(тп,т) = ((г)т)те-^т. (4.2)
Это распределение применимо при регистрации нестационарных опти-
ческих сигналов, если период измерения т короток по сравнению с пе-
риодом оптического сигнала. Кроме того, средний квадрат отклонения
количества событий за интервал, усредненный по количеству равных пе-
риодов времени, определяется как
((п - Н)2) = (п2) - (2n(n)) + Н2 = (п2) - Н2 = (п). (4.3)
Статистика, связанная с регистрацией оптического излучения, чрез-
вычайно важна для определения минимального уровня обнаружимого сиг-
нала и, следовательно, предельной чувствительности волоконных датчиков.
В настоящий момент, однако, достаточно отметить, что электрический
ток пропорционален падающей на приемник оптической мощности, так что
i = (г)е = (4.4)
Изменение входной оптической мощности ДР приводит к изменению
выходного тока Дг. Поскольку электрическая мощность пропорциональ-
на г2, то мощность выходного электрического сигнала приемника связана
квадратичной зависимостью с входной оптической мощностью, и получа-
ется «квадратичный» приемник.
4.2.2. Основные принципы
функционирования полупроводников
Понятие полупроводник относится к классу материалов, чья способность
проводить электричество находится где-то между диэлектриками (таки-
ми как стекло) и проводниками (такими как медь или серебро). Наиболее
важными представителями материалов этого типа являются кремний,
германий и химические соединения, такие как арсенид галлия и фосфид
индия (так называемые соединения III—V групп периодической системы).
В полупроводниках может быть или избыток носителей-электронов (ма-
териал n-типа), или избыток носителей-«дырок» (материал p-типа), где
«дырка» — это отсутствие электрона в разрешенной энергетической обла-
сти. Электроны в полупроводниках имеют разрешенные энергетические
уровни, расположенные близко один к другому, и образуют разрешен-
ную зону. Низкоэнергетические зоны заполняются первыми, и в резуль-
тате только высокоэнергетические ненаселенные зоны определяют элек-
трические свойства полупроводника. В этом отношении наиболее важны
две энергетические зоны — валентная зона и зона проводимости, меж-
ду которыми располагается запрещенная энергетическая область, или
просто запрещенная зона Ед. Валентная зона представляет собой наибо-
лее высокоэнергетическую зону внутри материала, в которой электроны
еще находятся в связанном состоянии. Зона проводимости — это наи-
более низкоэнергетическая зона, в которой электроны могут свободно
перемещаться внутри кристаллической решетки полупроводника. Полу-
проводники, в которых максимуму валентной зоны и минимуму зоны
проводимости соответствует одно и то же значение импульса электро-
на или волнового вектора к, называются прямозонными. Арсенид галлия
является примером прямозонного полупроводника. В непрямозонных по-
лупроводниках максимум валентной зоны и минимум зоны проводимости
находятся при различных значениях к. Кремний — непрямозонный по-
лупроводник. Если полупроводниковый материал не содержит примесей
и не имеет дефектов кристаллической решетки — это собственный, или
чистый полупроводник. При низких температурах в таких материалах
валентная зона заполнена и зона проводимости пуста. Ширина запрещен-
ной зоны в таких материалах часто мала (~ 1 эВ), так что термиче-
ское возбуждение электронов при повышении температуры обеспечивает
достаточно энергии для перехода некоторых электронов в зону прово-
димости. В результате перехода электронов в валентной зоне остаются
положительно заряженные «дырки». Если приложить электрическое поле,
то может потечь ток (см. рис. 4.1).
В собственных полупроводниках при постоянной температуре концен-
трация носителей неизменна. Хотя носители возникают при термическом
возбуждении в результате генерации электронно-дырочных пар, они так-
же разрушаются в результате электронно-дырочных рекомбинаций. Это
происходит, когда электрон из зоны проводимости совершает переход
в дырку незаполненного состояния валентной зоны. При этом высвобо-
ждается некоторое количество энергии, примерно равное Ед, в виде света
(излучение фотона) или колебания кристаллической решетки (порожде-
ние фонона). Пример спонтанного излучения фотона показан на рис. 4.2.
Чтобы вычислить количество рекомбинаций в полупроводнике, необ-
ходимо знать как распределение энергетических состояний в данной зоне,
Jt.2. Теоретические основы 87
так и функцию распределения энергии и вероятность того, что каждое из
состояний занято электроном. Распределение энергетических состояний
задается функцией плотности состояний Z(E*), которая определяет коли-
чество энергетических состояний на единицу энергии в единице объема.
Эта функция определяется формулой [1]
Z(E) = ^(2т*)3/2Е^2, (4.5)
где энергия Е измеряется относительно дна зоны и т* — эффективная
масса электрона, вычисляемая по формуле
* / h \ d2E
— I п ) л 9 '
\ 2л J dk2
(4-6)
Зона проводимости
Рис. 4.1. Разрешенные энергетические зоны электронов (а) и генерация тока (б)
в полупроводниковом материале
Вероятность того, что состояние занято, определяется функцией рас-
пределения Ферми - Дирака (электроны не могут занимать одно и то же
состояние, согласно принципу запрета Паули, и, следовательно, рассма-
триваются фермионы), или
Г(£?)-
ехр
Е — Ер
квТ
(4-7)
оптического излучения
где Т — абсолютная температура и Ер — константа, называемая энерги-
ей или уровнем Ферми. График функции плотности состояний показан на
рис. 4.3, а, а функции F(E) — на рис. 4.3, б. Из рис. 4.3, б понятно, что
при Т = 0F(E) = 1 для Е < Ер и F(E) = 0 для Е > Ер. Также для Т > О
вероятность того, что Ер окажется занятым, равна 0,5. Очевидно, что
при Т > 0 и £?2 > Ер существует вероятность F(E*2) того, что состояние
занято (электрон имеет именно такую энергию). Также существует веро-
ятность [1 — F(Ei)] того, что энергетическое состояние Е^ < Ер свободно
(это состояние «занято» дыркой). Если £2 = Ер + Д£ и Е\ = Ер — АЕ, то
F(£2) = l-F(Ei) =
exp
-1
(4.8)
Здесь подразумевается, что вероятность существования электрона с энер-
гией на Д£ большей энергии Ферми, точно равна вероятности существо-
вания дырки с энергией, на Д£ меньшей энергии Ферми. В собственных
полупроводниках Ер находится в середине запрещенной зоны между ва-
лентной зоной и зоной проводимости, заходя на F(E) часть в каждую
зону.
Рис. 4.2. Спонтанное излучение фотона полупроводниковым материалом
Если в решетке полупроводника присутствуют примеси, введенные
управляемым способом (легирование), положение уровня Ферми в запре-
щенной зоне может измениться. В результате легирования в проводниках
n-типа становится намного больше электронов в зоне проводимости, чем
дырок в валентной зоне. В этом случае уровень Ферми располагается бли-
же к зоне проводимости и электроны называются основными носителями,
а дырки — неосновными носителями. В полупроводниках p-типа ситуа-
ция обратная, и дырок в валентной зоне намного больше, чем электронов
в зоне проводимости. Теперь дырки — основные носители, а электроны —
4.3. Полупроводниковые фотодиоды
неосновные носители. Уровень Ферми в этом случае располагается ближе
к валентной зоне.
Рис. 4.3. Функция плотности со-
стояний Z(E) (а) и функция рас-
пределения Ферми-Дирака F(E)
(б) для полупроводникового мате-
риала
а)
4.3. Полупроводниковые фотодиоды
Фотодиод представляет собой полупроводниковый р-п-переход. При фор-
мировании такого перехода между двумя типами полупроводников обра-
зуется сильное внутреннее электрическое поле [1]. Внутри этой области
электроны и дырки, создавшиеся в результате поглощения фотонов, «вы-
метаются» полем, оставляя объем, обедненный зарядами. Эта ситуация
показана на рис. 4.4. Следовательно, такой переход может служить опти-
ческим приемником, если его конструктивно реализовать так, чтобы вход-
ное излучение падало на обедненную область. В результате преобразова-
ния оптической энергии образуются электронно-дырочные пары, которые
будут «выметены», создавая разделение и накопление зарядов. Это на-
копление зарядов можно обнаружить двумя способами, в зависимости
от того, как область перехода электрически подсоединена. Если переход
подключен к разомкнутой цепи, то напряжение на переходе измеряется
в фотогальваническом режиме. Если, с другой стороны, переход под-
ключен к короткозамкнутой цепи (или даже в режиме обратного смеще-
Глава 4. Приемники оптического излучения
ния), то течет внешний ток, замыкая цепь между областями. При такой
схеме ток измеряется в фоторезисторном режиме.
Рис. 4.4. Генерация но-
сителями фотонов в по-
лупроводниковом р-п-пе-
реходе
Рис. 4.5. Эквивалентная схема фотодиода с фотогальваническим (а) и фоторе-
зисторным (б) детекторами
Эквивалентная схема фотодиода показана на рис. 4.5. Эта цепь мо-
жет быть нагружена двумя способами. Схема на рис. 4.5, а соответствует
фотогальваническому способу измерений, и Rl выбирается таким, чтобы
протекал минимальный внешний ток Схема на рис. 4.5, б соответству-
ет фоторезисторному способу измерений. В этом случае при освещении
перехода через нагрузочное сопротивление будет протекать значитель-
ный ток.
Вольт-амперная характеристика типичного фотодиода приведена на
рис. 4.6. Характеристики диода с разомкнутой цепью можно оценить,
проанализировав пересечения между кривыми зависимостей i-v при раз-
личных условиях освещения и осью i = 0. Из графиков понятно, что в этом
случае напряжение в разомкнутой цепи при увеличении мощности па-
дающего излучения изменяется нелинейно. Фактически, оно изменяется
логарифмически. Для случая короткого замыкания характеристики диода
4.3. Полупроводниковые фотодиоды
можно оценить, проанализировав пересечения с осью v = 0. В этом случае
в соответствии с уравнением (4.7) можно увидеть линейную зависимость
при увеличении оптической мощности. Вольт-амперная характеристика
диода определяется формулой [2]
i = io(eeV^keT — 1) — is, (4.9)
где zq — обратный «темновой ток», обусловленный генерацией электрон-
но-дырочных пар под воздействием термического возбуждения, и is —
ток, обусловленный регистрируемым оптическим сигналом. Подставляя
в уравнение (4.9) уравнение (4.4), получаем
i = i0(eeV/kBT (4-10)
Это уравнение описывает полную вольт-амперную характеристику при
освещении фотодиода.
Рис. 4.6. Вольт-амперная характеристика типичного фотодиода
Интересно оценить эффективность преобразования энергии в фотодио-
де. Это можно сделать, используя уравнение (4.10). Пусть мощность пада-
ющего оптического излучения равна Р. Электрическая мощность Ре, от-
даваемая фотодиодом при некоторой нагрузке, определяется по формуле
Ре = iV = i0V(eeV/keT - 1) - (4.11)
hu
Максимум электрической энергии будет высвобождаться на несме-
щенном переходе, когда значение i отрицательно, а значение V — по-
ложительно, и можно найти значения, при которых первая производная
электрической мощности равна нулю, т. е.
= о = i0(eeVlkBT - 1) - + iJ^LeeVlkBT. (4.12)
dv riv кв-L
оптического излучения
В результате преобразований получаем трансцендентное уравнение:
у = (квТт1Р I квТ\ с-еУ/квТ квТ
у i^hu е J е '
Решая уравнение (4.13), можно найти значение электрического напря-
жения, при котором может быть высвобождена максимальная электричес-
кая мощность при данной мощности оптического излучения, падающего
на фотоприемник. Это напряжение, так же как и вольт-амперную ха-
рактеристику, задаваемую уравнением (4.10), нужно знать, чтобы по за-
кону Ома определить полное сопротивление, необходимое для оптималь-
ной передачи мощности. Оптимальное сопротивление является функцией
уровня освещения; поэтому системы энергоснабжения, основанные на пре-
образовании световой энергии, такие как фотоэлектрические батареи на
спутниках, приходится тщательно проектировать в соответствии с пред-
полагаемым уровнем падающего излучения. Графики эффективности пре-
образования мощности (световой в электрическую) для различных сопро-
тивлений, подсоединенных к типичному кремниевому диоду, приведены
на рис. 4.7, для уровней оптической мощности 1 мВт и 10 мкВт при длине
волны 0,82 мкм.
Рис. 4.7. Эффективность преобразования энергии в типичном фотодиоде
Диоды на р-п-переходе, обычно используемые в качестве источников
фотоэлектрической энергии, как правило, не применяются в волоконно-
4.3. Полупроводниковые фотодиоды
оптических приложениях для регистрации излучения. Вместо этого при-
меняются диоды с тремя областями проводимости, в которых между
областями р- и n-типа присутствует внутренний слой из материала с вы-
соким удельным сопротивлением. Схематическое представление такого
PIN-фотодиода показано на рис. 4.8. Такое устройство прибора нужно
для того, чтобы в обедненной области поглощалось как можно больше
фотонов. Это желательно, поскольку в результате усиливается электри-
ческое поле в этой области и, следовательно, происходит максимально
возможное разделение зарядов. На рис. 4.9 видно, что поле в этой области
существенно выше, чем с обеих сторон от нее в областях р- и n-типа. Ес-
ли фотоны поглощаются за пределами этой области, разделение зарядов
менее вероятно, что может привести к рекомбинации электрон - дырка.
hv
Рис. 4.8. Схематическое представление такого PIN-фотодиода
Глубина, на которую фотон проникает в фотодиод, является функ-
цией длины волны. График спектральной дисперсии чувствительности
прибора, приведенный на рис. 4.10, показывает, что за максимальным
значением эффективности следует общее снижение эффективности пре-
Глава 4- Приемники оптического излучения
образования энергии фотонов в энергию электронов. Фотоны с длиной
волны, соответствующей пику эффективности, поглощаются сразу же на
входе в устройство, в то время как фотоны с большей длиной волны пе-
ред поглощением проходят слой материала большей толщины. Из этих
соображений следует, что слой материала p-типа должен быть тонким,
чтобы коротковолновые фотоны могли проходить в обедненную область,
а обедненная область — широкой, чтобы удерживать длинноволновые фо-
тоны.
Длина волны (нм)
Рис. 4.9. Распределение элек-
трического поля в PIN-полу-
проводнике
Рис. 4.10. Характеристика
типичного кремниевого фо-
тодиода (в фотогальваниче-
ском режиме)
Ширина обедненной области зависит от удельного сопротивления основ-
ного вещества и от приложенного поля обратного смещения. Чтобы обед-
ненная область была широкой при низких значениях напряжения смеще-
ния, между материалами р- и n-типа с низким удельным сопротивлени-
4-3. Полупроводниковые фотодиоды 95
ем вводится внутренний слой материала с высоким удельным сопроти-
влением. Благодаря областям с низким удельным сопротивлением общее
сопротивление согласовывается с внешними электрическими соединени-
ями, а внутренний слой обеспечивает большой размер обедненной обла-
сти. В результате приемники на основе PIN-фотодиодов имеют хорошую
спектральную чувствительность. Такие приемники на кремниевых дио-
дах наиболее эффективны в видимой и ближней инфракрасной областях,
в то время как устройства на основе германия охватывают область 1 2 мкм.
Наконец, предельная скорость реакции фотодиода определяется тре-
мя факторами: емкостью перехода С, временем прохода носителей через
обедненную область и временем диффузного переноса носителей, обра-
зовавшихся за пределами обедненной области, в эту область. Если рас-
сматривать только электрический аспект, граничная предельная частота
для эквивалентной схемы фотодиода, показанной на рис. 4.5, может быть
определена как частота, при которой полное сопротивление с реактивной
емкостной составляющей и сопротивление цепи равны, или
2^fc = R^ + (R2 + RLrl. (4.14)
Как правило, R\ Rl /?2 ? так что
/с = ^ttRlC)-1- (4.15)
Следовательно, для достижения высокого быстродействия должны ис-
пользоваться небольшие нагрузочные сопротивления и маленькая пло-
щадь приемника с небольшой емкостью перехода. Кроме того, емкость
перехода — убывающая функция обратного смещения, поэтому увеличе-
ние смещения также увеличивает быстродействие прибора.
Второй фактор, определяющий время реакции фотодиодов, это вре-
мя, которое требуется носителям, вновь образовавшимся с одной стороны
обедненной области, чтобы полностью пересечь всю область. При уровне
собственного поля в кремнии скорость носителей имеет насыщение поряд-
ка 105 м/с. Для устройств с шириной обедненной области порядка 20 мкм
максимальное время перехода составляет около 0,2 нс, что ограничива-
ет верхний предел частоты 5 ГГц. У приборов с более узкой обедненной
областью этот верхний предел выше.
Последний фактор, ограничивающий время реакции фотодиодов, это
время, которое требуется носителям, образовавшимся за пределами обед-
ненной области, чтобы диффундировать в эту область через области
материала р- и n-типа с низким уровнем поля. Этот процесс по своей
сути очень медленный, поэтому при разработке приборов прилагаются
значительные усилия, чтобы минимизировать влияние этого эффекта.
Использование широкой обедненной области и большого тока смещения
позволяет уменьшить влияние ограничений, связанных с диффузией.
оптического излучения
4.4. Лавинные фотодиоды
Чтобы обеспечить быстродействие, приходится использовать нагрузку
с малыми значениями сопротивления. Однако это приводит к значитель-
ному снижению напряжения сигнала. Поэтому для достижения приемле-
мого уровня сигнала часто применяются фотодиодные детекторы, ин-
тегрированные в одном корпусе с высокоскоростными предусилителями.
Существует другой способ усиления сигнала без снижения быстродей-
ствия с помощью приборов, которые называются лавинными фотодиода-
ми (APD).
Если к р-п-переходу приложено высокое обратное смещение, носители,
образующиеся под воздействием освещения, благодаря полю будут уско-
ряться, достигая высоких энергий. Энергии этих носителей достаточно
для создания дополнительных носителей в результате переходов из зоны
валентности в зону проводимости. Первоначальные носители при этом
сохраняют достаточно энергии, чтобы оставаться в зоне проводимости.
Таким образом, ток, генерируемый одним оптическим поглощением, «ла-
винообразно» приумножается — отсюда и название прибора. На рис. 4.11
показан график зависимости коэффициента усиления тока в зависимости
от напряжения смещения для типичного APD. Можно видеть, что эта
зависимость нелинейная.
Рис. 4.11. Типичная за-
висимость усиления в ла-
винных фотодиодах от на-
пряжения обратного сме-
щения
Во многих приложениях лавинные фотодиоды предлагают привлека-
тельное решение проблемы регистрации очень маленьких оптических сиг-
налов при высоком быстродействии. Такие приборы очень подвержены
4.5. Шум 97)
уходу сигнала из-за колебаний температуры и напряжения смещения. По-
этому при их использовании в высокоточных приложениях требуется как
термостабилизация, так и очень хорошая подстройка напряжения смещения.
4.5. Шум
Проблема шума в оптических приемниках связана с разрешением, точ-
ностью и динамическим диапазоном регистрируемого сигнала. Шум —
это составляющая сигнала, которая меняется непредсказуемым образом
(внутри используемой полосы частот) и, следовательно, непригодна для
передачи информации. В твердотельных детекторах, которые обычно
применяются в волоконно-оптических датчиках, может присутствовать
несколько видов шумов. Это дробовой шум, шум темнового тока и те-
пловой шум. Вначале мы изучим математические основы шума, а затем
по очереди обсудим различные виды шумов.
4.5.1. Математические основы
Математический аппарат, необходимый для описания шума, включает
в себя преобразование Фурье. Если дана вещественная функция зависи-
мости от времени /(£), то ее распределение в частотной области F(cj)
определяется по формуле
(X)
F(w) = у f(t)e~iujtdt (4.16)
— (X)
и наоборот
(X)
/(<) = у F(w)e+^dw. (4.17)
— (X)
Однако для практических целей функциональная зависимость во вре-
менной области определяется только на конечном интервале времени Т.
В этом случае предполагается, что за пределами этого диапазона функ-
ция равна нулю, и уравнение (4.16) можно переписать как
Т/2
F(w) = у (4.18)
-Т/2
Поскольку /(f) — вещественная функция, комплексно сопряженной функ-
цией распределения из уравнения (4.16) будет
Т/2
F*(w) = У f(t)e+iutdt. (4.19)
-Т/2
4-3379
98 Глава 4- Приемники оптического излучения
В данном случае нас интересует конкретная функция, выражающая
ток i(i)> возникающий в фотоприемнике, под воздействием падающего
оптического сигнала, как показано на рис. 4.12. Если вычислить среднюю
мощность, выделяемую на некоторой нагрузке Rl за некоторый интервал
времени Т при токе, возникшем в фотоприемнике, получим
Т/2
Мощность = J i2(t)RLdt. (4.20)
-Т/2
Это уравнение можно переписать, подставляя вместо функции i(t) ее пре-
образование Фурье 1(си), или
Мощность =
(4.21)
Т/2 оо
У i(t) J
-Т/2 |—оо
Рис. 4.12. Рассеяние мощности на нагрузке при оптическом сигнале, падающем
на фотоприемник
Если теперь поменять порядок интегрирования,
мощность =
eib}tdw.
(4.22)
Согласно уравнению (4.19) интеграл в скобках — это просто /*(о>), так
что выражение сводится к следующему:
(X)
мощность = [ |I(cj)|2cLj. (4.23)
7ГТ /
4.5. Шум W)
В соответствии с уравнением (4.23) функция спектральной плотности
5(си) для i(t) определяется как
= 1^. (4.24)
Функция спектральной плотности, умноженная на величину нагрузки
Rl и интервал частоты Аси, определяет частотное распределение мощно-
сти, выделяемой при токе г(£), то есть доля средней мощности, выделя-
емой током i(t) при частоте си в интервале си «-> си + Аси, определяется
как 7?£5(cj)Acj. Если функцию спектральной плотности выразить через и
(в герцах), а не через си (в радианах), то получится
9
ЭД = 2тгЭД) = -IZMI2. (4.25)
Далее мы рассмотрим ситуацию, когда единственный носитель, обра-
зовавшийся в приемнике, проходит по цепи соединения и, в конце концов,
достигает точки заземления. Ток течет только в течение очень коротко-
го промежутка времени переноса носителя. Обозначим этот промежуток
времени т. Пусть среднее значение скорости носителя равно v, тогда
время переноса можно определить как т = x/v (где х — расстояние
от приемника до точки заземления), и частотное распределение для един-
ственного носителя может быть вычислено как
т/2 т/2
I(w) = У i(t)e~iaitdt — У |e~^=eSinj^2). (4.26)
-т/2 -т/2
Уравнение (4.26) позволяет вычислить 5(^), т.е.
= 2е/ sin(a>-r/2)
v ’ Т шт/1! v ’
Когда т в пределе стремится к нулю, это уравнение превращается просто
в S(v) = 2е2/Т. Понятно, что единственный носитель порождает сиг-
нал, содержащий распределение частот, при прохождении через приемник
и присоединенную цепь.
В любой реальной ситуации в течение любых, хотя бы даже и самых
коротких временных интервалов, под воздействием излучения образует-
ся большое количество носителей, перемещающихся по цепи приемника,
показанной на рис. 4.12. Среднее количество носителей или импульсов
тока за период измерения Т определяется статистикой Пуассона, как сле-
дует из уравнения (4.2). Если среднее количество импульсов в единицу
времени равно (п), общее количество импульсов, возникших за интер-
вал времени Т, будет равно (п)Т. Если i — общий ток, складывающийся
из импульсов тока, возникающих в течение рассматриваемого интерва-
Глава 4. Приемники оптического излучения
ла, и его составляющими являются отдельные импульсы, начинающиеся
в случайные моменты времени tm внутри интервала, то
г = efe(t — tm\ (4.28)
m=l
где /е определяет динамику перемещения каждого из носителей по прием-
нику и внешней цепи. Тогда частотное распределение носителей в течение
периода Т можно вычислить как сумму преобразований Фурье отдельных
слагаемых, полученных из уравнения (4.28), т.е.
(4.29)
/М = Ее / fe(t - tm)e-^dt = ^eFe^)e-^
m—l _rp/2 m=l
Абсолютное значение квадрата уравнения (4.29) можно вычислить по фор-
муле
|/« =
ЮГ
22 eFe*(w)e+iu,tm
тп—\
Ют
22 eFe(w)e~iujtk
к=1
(4.30)
Если предположить, что только слагаемые, удовлетворяющие условию
m = j, вносят вклад в произведение двух сумм, можно переписать урав-
нение (4.30) следующим образом
1ВДI2 = 22 eFe eFe(w) = e2|Fe(w)|2((n)T). (4.31)
m=l
Однако (n)e — всего лишь средний ток, если же вычислить функцию
спектральной плотности по формуле (4.25), в результате получится
5(0 = 2тгЗД = |Т(ш)|2 = 2e2dc|Fe(W)|2; (4.32)
при этом мощность в интервале частот и и+^и определяется формулой
Мощность = /?£5(<j)Acj = RlS(v)(1v = 2ez\/c/?£|Fe(cd)|2Ai/. (4.33)
4.5.2. Шум, обусловленный протеканием
постоянных токов в детекторной цепи
Если по цепи приемника протекает постоянный ток г^с, с неизменяющим-
ся средним значением, в него вносят вклад ток, наведенный сигналом г5,
темновой ток приемника id и любой фоновый ток is- Конкретно, это
означает
i'dc = i's 4” i'd “Ь i'B- (4.34)
Если полагать, что временной интервал между моментом образования
носителя и моментом его прихода в точку заземления достаточно мал,
4.5. Шум IО О
то, как указано в примечании к уравнению (4.27), значение выражения
(sinZ)/Z стремится к 1. Это означает, что уравнение (4.33) можно перепи-
сать в виде
Мощность = 7?ь5(а?)Аа; = RiS(v)dv = 2eidcRb^- (4.35)
Мощность шума, обусловленного складывающимся из различных ком-
понент idc постоянным током, проходящим по детекторной цепи, рав-
на i2NRb- Тогда квадрат эквивалентного шумового тока определяется как
i2N = 2eis£±v + 2ег^Дг/ + 2егвДг/. (4.36)
Первое слагаемое этого выражения обычно называют дробовым шумом,
в то время как два последующих называют соответственно фоновым шу-
мом и шумом темнового тока. Поскольку сигнальный ток можно связать
с оптической мощностью Р в соответствии с уравнением (4.4), то урав-
нение (4.36) можно переписать следующим образом
= 2е2 Ai/ + 2е2 Др + 2eid Др, (4.37)
hi/ hv
где Ps — это мощность оптического сигнала, падающего на детектор,
и Рв — мощность фонового оптического излучения, падающего на де-
тектор одновременно с сигналом.
4.5.3. Шум, обусловленный тепловыми эффектами
Тепловой шум, или шум Джонсона, — понятие, определяющее ток, вы-
званный термически или в результате колебаний напряжения на рассеи-
вающем элементе цепи, таком как нагрузочный резистор Существует
множество способов получить соответствующее выражение для числен-
ной оценки этого шума [1-3]. Для наших целей мы используем статисти-
ческий вывод, приведенный в работе [3]. Рассмотрим физическую модель
резистивного элемента, показанную на рис. 4.13. Резистор смоделирован
в виде цилиндра с площадью поперечного сечения А, длиной х и объ-
емом V — Ах. В этом объеме электроны-носители заряда имеют среднюю
кинетическую энергию, обусловленную случайным тепловым движением,
равную
3 1
(Энергия) = -квТ = -me ((ух)2 + {vy)2 + (v2)2) , (4.38)
где T — это абсолютная температура в кельвинах, кв — постоянная
Больцмана и тпе — масса электрона. Внутри объема отдельный электрон
может сталкиваться с другими электронами, атомами (ионами) и взаимо-
действовать с колебаниями кристаллической решетки (фононами). Пусть
т — среднее время между столкновениями электрона. Если N — коли-
чество электронов в единице объема материала резистора, то удельная
102 Глава 4- Приемники оптического излучения
электропроводность резистора а определяется по формуле
Ne2r
а =--------------------------------
те
и в результате сопротивление равно
—7-
Ne2rA
(4.39)
(4.40)
Рис. 4.13. Физическая
модель резистора для
вывода формулы оцен-
ки теплового шума
Вернемся к уравнению (4.26) для единственного импульса тока и рас-
смотрим преобразование Фурье импульса за период времени между ак-
тами рассеяния, т. е.
(4-41)
т/2 т/2
I(u,r,vx) = j i(t)e~iutdt = У
—т/2 -т/2
Если преобразовать это выражение и возвести в квадрат его абсолютную
величину, то получится
9^,2 2
|/(а>,т,иЕ)|2 = —2~f(l -cosarr).
В результате усреднения уравнения (4.42) по т и vx, используя урав-
нения (4.31) и (4.32), найдем
. 4NVe2rkBT
тпех'
Подставляя уравнения (4.40) и (4.43)
чаем
(4.42)
(4.43)
и используя уравнение (4.33), полу-
i2N = S(v)Av
—-—Дг/
Rl
(4.44)
в пределе при малых значениях сот.
4-5. Шум I оз)
4.5.4. Отношение сигнал/шум
Основываясь на уравнениях (4.37) и (4.44), мы можем теперь вычислить
отношение сигнал/шум (SNR) для простого фотодиода. Это отношение
определяется по формуле
г2
SNR = 4- =
lN
_____________________________[rjePs/hv]2_________________________
(2e2r)/hi')(Ps + Рв)Дг/ + 2e?dAi/ + (4A:b7,/7?l)Ap + [a(r]ePs/hv)]2'
(4.45)
Это выражение получено в предположении, что шум не содержится вну-
три самого сигнала. Когда некоторая часть сигнала а содержит шум
в частотном диапазоне измерений, уравнение (4.45) выглядит следующим
образом
г2
SNR = ^- =
_____________________________[rjePs/hv]2_________________________
(2e2ri/hi/)(Ps + Рв)Др + 2ег</Д1/ + (4fcB7’/7?L)Ap + [а(т)еР3 / hi/)]2'
(4.46)
Рис. 4.14. Регистрируемое отноше-
ние сигнал/шум при преобладании
различных составляющих шума
10LogPs(BT)
График функции (4.46) при двух различных предельных значениях по-
казан на рис. 4.14. В этом случае предполагалась длина волны 820 нм
при т/ = 0,8, Дг/ = 1, Рв = 0, id = 70 нА и Д/ = 1 кОм. На рисунке
совмещены два графика, один при коэффициенте амплитудного шума а,
равном нулю, и другой при а = 10“6. При очень низких уровнях мощности
преобладает вклад теплового шума (постоянный для данной мощности
сигнала). В этой области отношение сигнал/шум возрастает как квадрат
Глава 4. Приемники оптического излучения
регистрируемой оптической мощности. Однако при Р$ ~ 10 мкВт начи-
нает преобладать вклад или дробового, или амплитудного шума. В пер-
вом случае отношение сигнал/шум продолжает возрастать, но теперь уже
пропорционально величине оптического сигнала, а не ее квадрату. В слу-
чае преобладания амплитудного шума увеличение мощности оптического
излучения, падающего на приемник, не приводит более к улучшению от-
ношения сигнал/шум, поскольку любое увеличение оптической мощности
влечет за собой соответствующее увеличение шума, поэтому, как показа-
но на рисунке, отношение сигнал/шум остается постоянным.
Шум лазера
Шум светодиода
Шум светодиода
при 10-кратном
базовом уровне
мощности
50 Hr '
BUl 300 кН л <
Шум светодиода
при базовом уровне
мощности
б)
Рис. 4.15. Сравнение уровней шума светоизлучающего и лазерного диода (а)
и уровней шума светоизлучающего диода при уровнях мощности, от-
личающихся в 10 раз (б)
На рис. 4.15 показаны уровни оптического шума, измеренные непо-
средственно при помощи фотодиода RCA С30808 и спектроанализатора
HP 3582А. Использовались два оптических источника — светодиод Hi-
tachi HLP30RG, излучающий на 830 нм, и лазерный диод Sharp LT026MDO,
излучающий на 780 нм. На рис. 14.15, а представлены уровни шума в диа-
4.6. Регистрация спектра 105
пазоне частот от 0 до 50 Гц, причем верхняя линия записи — для лазер-
ного диода, а нижняя — для светодиода. В обоих случаях оптическая
мощность была отрегулирована так, что на нагрузке 100 кОм постоян-
ное напряжение составляло 4 В. На иллюстрации видно, что уровень шума
лазерного диода примерно на 30 дБ больше шума светодиода при часто-
те 10 Гц. Это указывает на то, что в этом диапазоне частот лазерный
диод ограничен амплитудным шумом. На рис. 14.15, б показаны уровни
шума светодиода, измеренные при оптических мощностях, отличающихся
в 10 раз. В этом случае нижняя линия записи представляет сигнал 0,2 В
на нагрузке 200 кОм, а верхняя линия записи — сигнал 2,0 В на нагрузке.
Видно, что увеличение оптической мощности в 10 раз приводит к увеличе-
нию уровня шума также в 10 раз, указывая на то, что сигнал светодиода
ограничен дробовым шумом.
Из рис. 4.15 следует, что для датчиков с большим динамическим диа-
пазоном там, где это возможно, предпочтительны источники-светодиоды
из-за их низкого амплитудного шума. Если приходится использовать ла-
зерный диод, следует применять некоторые методы коррекции амплитуд-
ного шума. Это относится ко многим волоконно-оптическим датчикам.
Если рассматривать шум в лавинных фотодиодах, выражение, опи-
сывающее зависимость отношения сигнал/шум от мощности падающего
оптического излучения, очень похоже на выражение (4.46):
г2
SNR = ^- =
=_______________________[M(r/ePs/fw)]‘2____________________
[(2e2r///ii/)(Ps + PB)Ai/ + 2e?dAp]M2/(M) + (UBT/RL)bi/ 1 J
Здесь пропущен член, связанный с амплитудным шумом. Следует обра-
тить внимание на два отличия. Во-первых, любой ток, генерируемый в
процессе регистрации, умножается на коэффициент усиления APD, а имен-
но М. Во-вторых, лавинный процесс усиления дополнительно увеличивает
вклад шума за счет величины на которую умножается постоянный
ток. Значение f(M) может колебаться от 1 до М в зависимости от ис-
пользуемого материала проводника и величины М.
4.6. Регистрация спектра
Для узкополосных волоконно-оптических датчиков требуется определение
спектральных компонент оптического сигнала, передаваемого в сигналь-
ный процессор. Определение оптических интенсивностей на разных дли-
нах волн требуется также для датчиков, в которых сигналы на этих дли-
нах волн используются для ослабления синфазных сигналов. Существует
Глава 4- Приемники оптического излучения
множество способов определения оптических интенсивностей на различ-
ных длинах волн. Самый простой способ показан на рис. 4.16. В этом
случае узкополосный оптический пропускающий фильтр помещен на пути
обратного сигнала, направляемого в фотодетектор. Если характеристика
чувствительности фотодетектора задана в виде S(A) A/Вт и известны
регистрируемая мощность и длины волн полосы пропускания фильтра,
то можно определить интенсивность обратной сигнальной компоненты
с длиной волны А. Если для ослабления оптической синфазной составля-
ющей требуется использовать две длины волны, их регистрацию можно
осуществить, как показано на рис. 4.17.
Коллимированный пучок света Фотодетектор
Узкополосный оптический
пропускающий фильтр
с центральной длиной волны
Рис. 4.16. Простое выделение одной спектральной компоненты
Используя схему регистрации, показанную на рис. 4.17, можно так-
же определять длину волны одной узкополосной составляющей. В этом
случае два одинаковых детектора, расположенных позади пропускающих
фильтров с гауссовской характеристикой, перехватывают составляющие
излучения, длина волны которого должна быть определена. Предполага-
ется, что центральные длины волн полос пропускания фильтров распола-
гаются с обеих сторон исследуемой спектральной области, как показано
на рис. 4.18. Если S(A) — спектральная чувствительность детекторов
и характеристики чувствительности фильтров заданы функциями
Fi = Aie[(A-A1)/<71]2,
(4 48)
F2=Aie^-x^\
эффективная чувствительность двух детекторов будет
S1(A) = S(A)Aie«A-A*^]2,
52(А) = 5(A)Aie[(A-A2)/<T2]2.
4.6. Регистрация спектра 107
Рис. 4.17. Простое
выделение двух спек-
тральных компонент
Узкополосный оптический пропускающий фильтр
Узкополосный оптический пропускающий фильтр
с центральной длиной волны Х1
Рис. 4.18. Графики удельных коэффициентов пропускания для двух фильтров
с гауссовской характеристикой
Если предположить, что доли мощности компонент с неизвестной дли-
ной волны падающего на каждый детектор оптического излучения рав-
ны Д и /2, то будут генерироваться фототоки и
й = /i5(A)Aie[(A-A1)/ai]2,
г2 = .
Существует множество методов обработки, позволяющих после этого
получить требуемое значение Л на основании значений двух фототоков.
В частности, если взять натуральный логарифм отношения двух фотото-
(4.50)
оптического излучения
ков Sr, то получится
Q 1 /А-АА2 (Л Г1\
SR = In —— + --------— - -------- . (4.51
/2Л2 \ a2 J \ сг1 J
В этом случае для вычисления Sr используется отношение (Ц Ai)/(/2A2),
известное из характеристик фильтров и принципов устройства прибора,
и значения <71 и сг2, также известные из характеристик фильтров. Следо-
вательно, выражение (4.51) — это просто квадратное уравнение, которое
можно решить относительно А. Ситуацию можно еще больше упростить,
если выбрать фильтры таким образом, чтобы выполнялось а = = сг2,
и так настроить устройство, чтобы IiA\ = /2Л2. Тогда получится
2(А1 - Л2) X2 - А}
or ------х---А Н-----— (4.52)
или
+ <4-53>
2(Ai - Л2) 2
Как можно видеть из уравнения (4.53), значение А можно найти из
простого линейного уравнения, измерив только величину Sr и используя
всего три постоянные характеристики применяемых фильтров. В тща-
тельно разработанных приемниках может быть предусмотрена непосред-
ственная обработка сигнала для определения длины волны узкополосно-
го сигнала независимо от его величины. Кроме того, однокристальные
фотодетекторы, разработанные к настоящему времени (Sharp, Incorpo-
rated, часть PD153), содержат два фотодетектора на одной подложке,
расположенные в соседних вертикальных слоях. Выходной сигнал таких
«спектральных датчиков» может быть обработан способом, аналогичным
описанному выше, поскольку отдельные смежные фотодетекторы имеют
характеристики чувствительности, похожие на те, что описаны уравне-
ниями (4.49). Использование такого способа неэффективно, когда одно-
временно нужно найти мощности или длины волн не одной, а нескольких
узкополосных спектральных компонент. В таких случаях следует приме-
нять другие способы измерений.
Для регистрации многих или всех спектральных составляющих сиг-
нала практически в реальном времени применяется множество методов.
Здесь мы рассмотрим только два. В первом используется схема детек-
тирования, аналогичная той, что показана на рис. 4.16. Однако в этом
случае оптический фильтр, настроенный на постоянную длину волны,
заменен адаптивным оптическим фильтром, длина волны полосы про-
пускания которого может быть промодулирована электрическим сигна-
лом. Примером такого адаптивного фильтра может служить резонатор
Фабри-Перо, одно из зеркал которого вмонтировано в ЦТС-кристалл.
4.6. Регистрация спектра 109
Такой подход, показанный на рис. 4.19, положен в основу многих серий-
но выпускаемых оптических спектроанализаторов. В типичном устрой-
стве предусмотрен диапазон областей сканирования длин волн вплоть
до ~ 15 нм. Принципиальными недостатками таких систем детектирова-
ния являются высокая стоимость и ограниченный диапазон длин волн.
Кроме того, по самой своей сути такие устройства являются механиче-
скими, что ограничивает срок их службы при использовании в системах
волоконно-оптических датчиков, работающих в непрерывном режиме.
Фиксированное частично
ЦТС (цирконат-титанат свинца)
кристалл с цилиндрическим
частично отражающее зеркало
Рис. 4.19. Адаптивный узкополосный пропускающий фильтр, основанный на ре-
зонаторе Фабри-Перо
Дифракционная
решетка
Разделенные спектральные компоненты,
распространяющиеся под разными углами
Обратное
оптическое
волокно
Матрица фотодетекторов
Линза
Широкополосный
входной сигнал
Обработка
* сигнала
Рис. 4.20. Анализ спектра выходного сигнала оптического волокна при помощи
дифракционной решетки и матрицы фотодетекторов
Наиболее широко распространенный метод анализа спектральной плот-
ности оптических сигналов показан на рис. 4.20. В этом случае колли-
мированный обратный сигнал подвергается спектральному разделению
оптического излучения
по углу с помощью оптического компонента, такого как дифракционная
решетка. После этого различные спектральные компоненты по отдель-
ности регистрируются матрицей фотодетекторов, такой как камера на
приборе с зарядовой связью (ПЗС-матрица). Существуют высокочувстви-
тельные двумерные матрицы такого типа, состоящие из тысяч отдельных
чувствительных элементов, что позволяет создавать датчики с высоким
разрешением, основанные на обработке длины волны.
В общем, существует возможность регистрировать одну или несколь-
ко спектральных компонент обратного оптического сигнала волоконно-
оптического датчика простыми экономичными способами. Однако уве-
личение стоимости и сложности, необходимые для регистрации большого
количества спектральных компонент, ограничивает практическое исполь-
зование таких систем регистрации узкоспециализированными приложе-
ниями, которым они обеспечивают существенные преимущества.
4.7. Резюме
При осуждении оптических приемников для волоконно-оптических дат-
чиков внимание в основном было сосредоточено на базовых технологи-
ях, применяемых для преобразования энергии фотонов в энергию элек-
тронов. Чтобы на практике использовать такие технологии, требуется
сочетание элементов, описанных здесь, с разнообразными оптическими,
электрическими компонентами и методами обработки сигналов, позволя-
ющими преобразовать обратный сигнал датчика или датчиков в полезную
информацию. Следовательно, рекомендуется внимательно изучить мето-
ды регистрации и обработки сигнала отдельно для каждого типа раз-
личных волоконно-оптических датчиков, поскольку множество различных
методов можно использовать не только в их собственных приложениях.
Вероятно, в предсказуемом будущем полупроводниковые приборы, ана-
логичные описанным здесь, будут полностью осуществлять все основные
фотоэлектронные преобразования в волоконно-оптических датчиках.
Литература
1. J. Wilson and J.F.B. Hawkes, Optoelectronics: An Introduction, Prentice-Hall,
London,1983.
2. J.T. Verdeyen, Laser Electronics, Prentice-Hall, Englewood Cliffs, N. J., 1981.
3. A. Yariv, Introduction to Optical Electronics, Holt, Rinehart and Winston, New
York, 1976.
4. C Kittel, Introduction to Solid State Physics, 4th ed., Wiley, New York, 1971.
5. S. E. Miller and A. G. Chynoweth, Optical Fiber Telecommunications, Academic
Press, New York, 1979.
ГЛАВА 5
ОПТИЧЕСКИЕ МОДУЛЯТОРЫ
ДЛЯ ВОЛОКОННО-ОПТИЧЕСКИХ
ДАТЧИКОВ
Леонард М. Джонсон
Лаборатория Линкольна1
Массачусетский технологический институт
Лексингтон, Массачусетс
5.1. Введение
Оптические модуляторы являются ключевыми составляющими элемен-
тами волоконно-оптических систем, выполняющими различные функции,
в том числе модуляцию амплитуды, фазы, частоты и поляризации. В боль-
шинстве случаев применяются твердотельные устройства, в которых свет
модулируется путем изменения оптических свойств материала устройс-
тва при воздействии управляющего электрического сигнала. Механизм
связи управляющего сигнала со свойствами материала может быть элек-
трооптическим, акустооптическим или магнитооптическим (рис. 5.1). Хо-
тя многие оптические модуляторы все еще изучаются в исследователь-
ских лабораториях, высокоэффективные устройства начинают чрезвы-
чайно широко применяться в волоконно-оптических датчиках.
Существует три вида твердотельных оптических модуляторов. Это объ-
емные, интегрально-оптические и чистоволоконные устройства (рис. 5.2).
Объемные модуляторы, в которых сигнал проходит через сплошной блок
материала, относительно давно разработаны и выпускаются серийно в те-
чение многих лет. Однако в них отсутствует волновод, и требуются высо-
кое управляющее напряжение и внешняя оптика, чтобы получить излуче-
1 Лаборатория осуществляет открытые и секретные исследования по заказам фе-
дерального правительства в области полупроводников, инфракрасной и оптической
технологии, радаров. — Прим, перев.
Эта работа финансировалась Министерством военно-воздушных сил. Волоконно-опти-
ческие датчики: Вводный курс для инженеров и научных работников, под редакцией
Эрика Удда. ©1991 John Wiley & Sons, Inc.
Глава 5. Оптические модуляторы для волоконно-оптических датчиков
ние из оптических волокон и затем снова запустить его в оптическое во-
локно. В интегрально-оптических модуляторах волноводы встраиваются
непосредственно в материал модулятора. Это существенно снижает тре-
бования к электрической мощности и исключает необходимость внешней
оптики для подсоединения к оптическим волокнам. Разработано множе-
ство таких приборов, и некоторые из них выпускаются серийно.
Оптический модулятор
Оптический (электрооптический,
вход * акустооптический,
магнитооптический)
Оптический выход
► (амплитуда, фаза,
частота, поляризация)
I
Электрический
управляющий сигнал
Рис. 5.1. Твердотельный оптический модулятор, в котором оптический сигнал
модулируется приложенным электрическим управляющим сигналом
Рис. 5.2. Три основных вида твердотельных оптических модуляторов: а) объем-
ный; б) интегрально-оптический; в) чистоволоконный
В чистоволоконных модуляторах оптический сигнал никогда не по-
кидает волокно, которое и подвергается воздействию управляющего сиг-
нала, что приводит к требуемой модуляции. Преимуществом приборов
этого типа является возможность обходиться без оптики, необходимой
5.2. Электрооптический эффект
для подсоединения к оптическим волокнам и точной настройки. Однако
модуляционная способность распространенных волоконных материалов,
таких как стекло, относительно слабая, и устройствам требуется доста-
точно высокое управляющее напряжение. Модуляторы этого вида нахо-
дятся еще на стадии разработки.
5.2. Электрооптический эффект
Многие оптические модуляторы основаны на использовании электроопти-
ческого эффекта [1], который заключается в том, что показатели пре-
ломления кристаллов зависят от приложенного электрического поля. Для
описания этого эффекта, в рамках распространения оптического пучка
через кристалл, используется математическая модель эллипсоида показа-
телей преломления
ж2+Г~2^ ^2 + 2
71/ / ] \п / 2 \п / 3
xz+2
5
где ж, у и z — направления осей кри-
сталла (рис. 5.3). При произвольном на-
правлении распространения s, при про-
хождении через кристалл оптические
пучки сохраняют постоянной линейную
поляризацию только тех направлений
поляризации, которые позволяет сим-
метрия кристалла. Это определяется
плоскостью, проходящей через начало
координат эллипсоида и перпендику-
лярной к направлению распростране-
ния. В общем случае, пересечение этой
плоскости с эллипсоидом показателей
преломления образует эллипс, и свет,
который поляризован в направлении па-
раллельном или главной, или малой оси,
распространяется без изменения поля-
ризации. Показатели преломления для
Рис. 5.3. При распространении пучка
света через кристалл два разрешен-
ных состояния линейной поляризации,
соответствующие этому направлению
распространения s, параллельны осям
эллипса, образованного пересечением
эллипсоида с плоскостью, перпендику-
лярной s
этих двух разрешенных волн являются
длинами соответствующих осей. Пучок может быть разложен на супер-
позицию этих двух разрешенных состояний линейной поляризации, и при
любом различии показателей преломления двух волн происходит непре-
рывное изменение поляризации по мере распространения пучка через
кристалл. Если пересечение плоскости с эллипсоидом показателей пре-
JJ4 Глава 5. Оптические модуляторы для волоконно-оптических датчиков
ломления образует окружность, разрешено любое направление линейной
поляризации.
Электрооптические свойства материала определяют связь между раз-
мерами эллипсоида показателей преломления и приложенным электриче-
ским полем. Тензор электрооптических коэффициентов математически
характеризует, как именно размеры эллипсоида зависят от величины при-
ложенного поля. Составляющие тензора задаются уравнением,
з
Д (1/п2). = rTjjEj,
j=i
где и — ж, у и z компоненты приложенного поля соответствен-
но. Из этого определения очевидно, что приложенное электрическое поле
изменяет размер, форму и ориентацию эллипсоида показателей прелом-
ления, поэтому проанализировать результат в общем случае достаточно
сложно. Однако в большинстве случаев проблема значительно упрощает-
ся, если воспользоваться преимуществом такого свойства кристалла, как
симметрия. Для большинства классов кристаллов многие электрооптиче-
ские коэффициенты равны нулю и некоторые ненулевые коэффициенты
могут иметь равные абсолютные значения. Схемы, показывающие, как
выглядят электрооптические тензоры для различных классов кристаллов,
можно найти в работе [1].
Ниобат лития (ЫЫЬОз) — один из наиболее широко применяемых
в электрооптических устройствах материалов. Это диэлектрический кри-
сталл, имеющий большие электрооптические коэффициенты и прозрач-
ный для длин волн в диапазоне 0,4-4,5 мкм. В отсутствие приложенного
электрического поля этот кристалл двулучепреломляющий и его эллипсо-
ид показателей преломления описывается формулой
+ У2/п2о + z2/n2e = 1,
где по и пе — его обыкновенный и необыкновенный показатели прелом-
ления. Для света, распространяющегося вдоль осей х или ?/, два разре-
шенных состояния линейной поляризации направлены параллельно двум
другим осям. В особом случае распространения света вдоль оси z любое
состояние линейной поляризации останется неизменным.
Поскольку класс симметрии кристалла ЫЫЬОз — 3m, его тензор элек-
трооптических коэффициентов имеет вид
0 Г12 Из
0 ~Г12 Из
0 0 Гзз
0 Г51 0
Г51 0 0
. Г12 0 0
5.3. Объемные модуляторы 115
При длине волны 1,3 мкм показатели по и пе равны соответственно 2,224
и 2,144; выбранные электрооптические коэффициенты имеют следующие
значения: из = 9,6 х 10-12 м/В, Г33 = 30,9 х 10-12 м/В, г51 = 32,6 х
х10-12 м/В, Г12 = 6,8 х10-12 м/В. При модуляции линейно поляризованно-
го света максимальным электрооптическим коэффициентом является Г33.
Если к кристаллу LiNbOs приложено направленное вдоль оси z элек-
трическое поле Ez, позволяющее использовать электрооптический коэф-
фициент Г33, уравнение эллипсоида показателей преломления будет вы-
глядеть следующим образом
4- r^Ez ) (ж2 4- у2) 4- ( ~2 4- r^Ez ) z2 — 1.
J \пе J
Ориентация эллипсоида не изменилась, и, следовательно, разрешенные
состояния линейной поляризации для света, распространяющегося вдоль
главных осей, остаются неизменными, но изменяются индексы преломле-
ния. Для света, распространяющегося в направлении у и поляризованного
вдоль г, показатель преломления nz определяется из уравнения
которое при небольших изменениях показателя преломления имеет при-
ближенное решение
722
nz = ne- ~-r33Ez, (5.1)
£
откуда следует, что показатель преломления линейно зависит от величи-
ны приложенного поля. Аналогично можно найти показатель преломления
для волны, поляризованной вдоль оси ж,
п3
пх = по - -^-ri3Ez. (5.2)
£
При других сочетаниях направления распространения света и прило-
женного электрического поля проявляются другие, принципиально отли-
чающиеся свойства кристалла LiNbOs. Например, использование коэффи-
циента Г51 приводит к изменению ориентации эллипсоида. В этом случае
направления разрешенных состояний линейной поляризации для света,
распространяющегося вдоль оси ?/, являются функциями приложенного
поля. Этот эффект может быть использован для вращения плоскости по-
ляризации.
5.3. Объемные модуляторы
Объемные модуляторы широко применяются в оптических системах, в том
числе в волоконно-оптических датчиках. Эти устройства широко доступ-
Отппические модуляторы для волоконно-оптических датчиков
ны, и их характеристики вполне сформировались. В этом разделе об-
суждаются объемные модуляторы, основанные на электрооптическом и
акустооптическом эффектах. Большинство модуляторов базируются на
использовании одного из этих двух механизмов.
5.3.1. Электрооптическая фазовая модуляция
В объемном электрооптическом фазовом модуляторе (рис. 5.4) оптиче-
ская модуляция фазы ф(£) является результатом изменения показателя
преломления кристалла на An(f). Это изменение приводит к изменению
оптической длины пути, что можно описать как [1-3]
</>(£) = ^-LAn(t), (5.3)
А
где L — длина устройства. Поскольку оптическая длина волны А намного
меньше L, незначительные изменения показателя преломления влекут за
собой возникновение заметной фазовой модуляции. В устройствах, име-
ющих длину L = 5 мм, работающих на длине волны А = 1,3 мкм, сдвиг
фазы на 7г радиан происходит при изменении показателя преломления
всего лишь на Ап = 1,3 х 10-4.
Рис. 5.4. Фазовая модуля-
ция в объемном электро-
оптическом модуляторе до-
стигается путем приложе-
ния напряжения V(t) меж-
ду двумя электродами
В электрооптических модуляторах изменение показателя преломле-
ния достигается приложением электрического поля поперек кристалла.
Электрооптическое изменение показателя преломления кристалла прямо
пропорционально приложенному электрическому полю Е, как было пока-
зано в разделе 5.2, и может быть определено по формуле
з
а / ч м г „
Ап(0 =
где г электрооптический коэффициент. Напряжение V(f), с помощью
электродов приложенное поперек кристалла (рис. 5.4), создает однород-
ное поле V(t)/</, где d - толщина кристалла, и, таким образом, </>(£) можно
5.3. Объемные модуляторы 117
записать как
, z ч 2тг n3r .
л 2 а
откуда следует, что фазовая модуляция прямо пропорциональна напря-
жению, электрооптической добротности п3/г и геометрическому факто-
РУ L/d.
Общая добротность фазового модулятора определяется как изме-
нение напряжения, необходимое для сдвига фазы на л радиан. Формулу
для ее вычисления можно получить из предыдущего уравнения
Кг = 3 (объемный фазовый модулятор).
Из формулы видно, что увеличение отношения L/d уменьшает значе-
ние , что требуется в большинстве приложений. Однако из-за отсут-
ствия оптических волноводов в объемных модуляторах отношение L/d
ограничено дифракцией пучка и не может превышать 50. Такое же огра-
ничение накладывается на отношение L/W, где W — ширина кристалла.
Если пучок плотно сфокусирован, для того чтобы минимизировать d
и максимизировать приложенное поле при данном напряжении на элек-
тродах, длина модулятора L должна быть достаточно короткой, чтобы
избежать блокирования быстро расходящегося пучка. Таким образом, для
объемных электрооптических модуляторов на основе LiNbOa типичное
значение Vn достигает как минимум 50 В.
Рис. 5.5. Модель электроопти-
ческого модулятора в виде экви-
валентной схемы с сосредото-
ченными параметрами. Напря-
жение на конденсаторе соответ-
ствует напряжению на электро-
дах модулятора
RS I I Rm
электрического
напряжения
Поведение электрооптических модуляторов в составе электрической
сети обычно можно проанализировать, используя простую эквивалентную
схему. В схеме с сосредоточенными параметрами, показанной на рис. 5.5,
моделью модулятора служит конденсатор с параллельными электродами
с емкостью С, определяемой как
„ eLW
d ’
где е — диэлектрическая проницаемость кристалла модулятора. Типич-
ный модулятор включает в себя небольшое последовательное сопроти-
Глава 5. Оптические модуляторы для волоконно-оптических датчиков
вление Кроме того, эта модель содержит сопротивление источника
питания и согласующее сопротивление, оба равные Rs. Напряжение на
конденсаторе соответствует напряжению на модуляторе и предполага-
ется однородным между электродами. Эффекты конечности времени пе-
реноса электрического заряда не учитываются. Такое приближение мож-
но использовать, если произведение частоты на длину fL удовлетворяет
условию
Ln < 7Г
“с 2‘
В частности, для LiNbOa значение fL должно быть < 30 ГГц • мм. В тех
случаях, когда произведение частоты на длину не удовлетворяет этому
условию, следует использовать модель бегущей волны, которая будет об-
суждена в параграфе 5.4.2.3.
Модель с сосредоточенными параметрами, показанная на рис. 5.5, обес-
печивает ширину полосы частот модуляции, начиная с постоянного тока
и до ширины полосы на уровне 3 дБ /здв, где
f - 1 11
J3aB 2ttRsC 2tt£Rs (L/d)W
при условии Rm Rs. и /здв обратно пропорциональны отношению
L/d, что при разработке приводит к необходимости компромисса между
широкой полосой пропускания и низким значением Рассматриваемый
в качестве примера типичный модулятор на основе ЫКЬОз с характе-
ристиками е = 32so, Rs — 50 Ом, и3/г — 3 х 1О-10 м/В, L = 2 см,
W = d = 2 мм и А = 1,3 мкм будет иметь емкость С порядка 6 пФ
при полосе пропускания /здв, равной 500 МГц, и добротности 14, рав-
ной 425 В.
5.3.2. Электрооптическая модуляция интенсивности
Объемный электрооптический модулятор интенсивности может быть лег-
ко реализован, если воспользоваться преимуществами зависимости фазо-
вого модулятора от поляризации. Простой вариант модулятора интен-
сивности на основе LiNbOs включает в себя зависящий от поляризации
фазовый модулятор, размещенный между скрещенными поляризаторами
(рис. 5.6). При изменении напряжения V(t) на фазовом модуляторе из-
меняется поляризация пучка, падающего на выходной поляризатор, что
в свою очередь приводит к изменению интенсивности. При такой струк-
туре оптический пучок разлагается на обыкновенную и необыкновенную
волны, линейно поляризованные вдоль осей х и z кристалла LiNbOs со-
ответственно. Входной поляризатор ориентирован под углом 45° по от-
ношению к этим осям, поэтому поле, распространяющееся вдоль оси у,
5.3. Объемные модуляторы 119
можно записать как
Eq
Е(у) = -у= {ехр [гфх (у)] х + exp [гфг (у)] z} .
V "
Рис. 5.6. Объемный электрооптический модулятор интенсивности, включающий
в себя входной поляризатор, ориентированный под углом 45° по отноше-
нию к осям модулятора, зависящий от поляризации электрооптический
фазовый модулятор и выходной поляризатор, ориентированный под
углом 90° по отношению к входному поляризатору
Поскольку приложенное электрическое поле направлено вдоль оси г,
ориентация главных осей и амплитуды двух оптических компонент поля
остаются неизменными. Предполагается, что при у = 0 обе оптические
фазы фх и фг равны нулю. Однако относительные фазы двух волн изменя-
ются при прохождении пучка через фазовый модулятор. Таким образом,
при у = L
Д0 [V(t),L] = фг [V(t),L] - фх [V(t),L] = АфтУ(ф) + Афв.
Из уравнений (5.1)—(5.3) следует, что зависимость фазовой модуляции
от напряжения определяется следующим образом
Д</>тУ(/) = ^^(гзз-г13)^Г(4)
Л Z и>
и изменение фазы
а / 2тг у v I
Афв = —r(nz — Пх)\ 4-const.
A IV=0
Последнее выражение состоит из слагаемого, зависящего от длины, и кон-
станты, определяемой выбором замедляющей пластины, вставленной меж-
ду поляризаторами. Оптический пучок, выходящий из фазового модуля-
тора будет иметь линейную, круговую или эллиптическую поляризацию
в зависимости от значения А0. Как показано на рис. 5.6, выходной поля-
ризатор повернут на угол 90° по отношению к входному поляризатору.
MW) _ . 2 Д0В +
2 "Sm 2
120 Глава 5. Оптические модуляторы для волоконно-оптических датчиков
Оптическая передача второго поляризатора является функцией прило-
женного напряжения и может быть определена как
~ [V(i)] = sin2
Iin
и, следовательно, изменяется синусоидально от 0 до 1. Добротностью мо-
дулятора интенсивности обычно называют напряжение, необходимое
для полной амплитудной манипуляции. Конкретно для этого модулятора
получается
= —-z-— ----(объемный амплитудный модулятор).
™3(г33 - Из) L
Для устройства на основе LiNbO3 при L = 2 см и d — 2 мм, работающего
на длине волны А = 1,3 мкм, результат составляет примерно 630 В.
5.3.3. Объемный акустооптический сдвиг частоты
В волоконно-оптических датчиках акустооптические приборы часто ис-
пользуются в качестве оптических преобразователей частоты и намного
реже в качестве модуляторов интенсивности. В акустооптических моду-
ляторах [1, 2] оптический пучок, распространяющийся через кристалл,
взаимодействует с созданной акустически бегущей волной возмущения
показателя преломления. Возмущение возникает в результате проявления
эффекта фотоупругости, благодаря которому изменение механическо-
го напряжения в виде бегущей волны в дифракционной решетке вызы-
вает линейные изменения показателя преломления. Эти изменения при
определенных условиях могут эффективно отклонять оптический пучок
(рис. 5.7). Реализованы устройства, в которых поверхностная акустиче-
ская волна (ПАВ) взаимодействует с оптической волной, заключенной
в пластинчатый волновод [4]. Однако, хотя эффективность таких при-
боров выше, чем объемных модуляторов, их более сложно реализовать.
Акустооптические приборы часто изготавливаются из таких матери-
алов, как LiNbO3 и кварц, поскольку частотный диапазон волн, которые
можно запускать в такие кристаллы, очень широк — от десятков мега-
герц до нескольких гигагерц. Скорость звука va в LiNbO3 примерно равна
6 х103 м/с, и, следовательно, акустическая волна частотой 1 ГГц имеет
длину волны Ла около 6 мкм, что сопоставимо с оптической длиной волны.
Амплитуда возникающего возмущения показателя преломления пропор-
циональна корню квадратному из интенсивности звука.
Акустооптические модуляторы работают в одном из двух режимов [5].
При короткой длине взаимодействия, когда L Ла/А, прибор работает
в так называемом режиме Рамана - Ната, создавая множество дифрагиро-
ванных пучков (рис. 5.7), относительные интенсивности которых зависят
5.3. Объемные модуляторы 121
от акустической мощности и длины взаимодействия. Однако в волоконно-
оптических датчиках чаще используется режим Брэгга, когда Ка/Х
и возникает только один дифрагированный пучок (рис. 5.8, а).
Рис. 5.7. Объемный акустооптический модулятор, работающий в режиме Ра-
мана -Ната, при котором акустическая волна возмущает оптический
пучок, что приводит к возникновению многих дифрагированных пучков
Рис. 5.8. а) Объемный акустооптический модулятор, работающий в режиме Бр-
эгга, при котором возникает только один дифрагированный пучок;
б) условие фазового синхронизма для дифракции Брэгга
Чтобы дифракция Брэгга была эффективной, угол падения оптиче-
ского пучка по отношению к направлению акустической волны должен
быть равен или близок к углу Брэгга вв- Когда угол падения равен
углу 9в, можно получить полное преобразование в единственный дифра-
Глава 5. Оптические модуляторы для волоконно-оптических датчиков
тированный пучок. Связанный с дифракцией Брэгга сдвиг оптической
частоты равен акустической частоте. Угол Брэгга легко определить из
закона сохранения импульса (рис. 5.8, б). Векторы входящей и дифраги-
рованной оптических волн обозначены к? и кб/, где
|к.1 =
и модуль вектора акустической волны ка равен 2тг/Ла. Небольшим разли-
чием модулей векторов кг и к^, обусловленным сдвигом частоты, можно
пренебречь. Для сохранения момента импульса эти векторы должны удо-
влетворять одному из условий к</ — кг 4- ка или кб/ = кг — ка, соответству-
ющих сдвигу вверх или вниз. В обоих случаях угол Брэгга определяется
из выражения
sin 6* в - ---—
27Г7?>/\.д
и обычно он очень мал. Например, для А — 0,63 мкм, п = 2,2 и f =
= 500 МГц угол Брэгга равен 0,65°. Для света, падающего под углом Бр-
эгга, эффективность дифракции r/в зависит и от интенсивности звука Д,
и от длины взаимодействия, как следует из выражения
Т)в = sin2
где М — акустооптическая добротность. Для LiNbOa значение М рав-
но примерно 7 х 10“15 (в единицах системы МКС). Угол Брэгга зависит
от частоты, которая в свою очередь ограничивает ширину полосы частот
модуляции до
д г 21?аЛа
J ~ XL ’
Откуда следует, что ширина полосы обратно пропорциональна длине вза-
имодействия L, Следовательно, как и для электрооптических приборов,
необходим компромисс между управляющим напряжением модулятора
и шириной полосы частот модуляции.
5.4. Интегрально-оптические модуляторы
В интегрально-оптических устройствах оптические волноводы изготавлива-
ются на поверхности соответствующей подложки [4, 6]. На эти приборы
не распространяются ограничения, связанные с дифракцией, и, следова-
тельно, у них отсутствуют недостатки, свойственные объемным устрой-
ствам. Появляется возможность реализовать модуляторы с очень низкими
требованиями к управляющему напряжению, широкой полосой, маленько-
го размера, к тому же совместимые с оптическими волокнами [7]. В систе-
5.4- Интегрально-оптические модуляторы
мах волоконно-оптических датчиков особенно часто используются такие
интегрально-оптические устройства, как фазовые модуляторы, модуля-
торы интенсивности и оптические преобразователи частоты. К тому же
многочисленные компоненты могут быть собраны на одной подложке, что
упрощает компоновку. Достаточно сложные схемы канальных волноводов
могут быть реализованы как единое целое, и, следовательно, такие при-
боры более разнообразны, чем объемные. В качестве примера на рис. 5.9
приведена схема многофункционального интегрально-оптического кри-
сталла для волоконных гироскопов. Кристалл содержит Y-образный раз-
ветвитель мощности, фазовый модулятор и оптический преобразователь
частоты.
Интегрально-
оптический кристалл
Рис. 5.9. Многофункциональный интегрально-оптический кристалл для волокон-
ных гироскопов
Рис. 5.10. Канальный волно-
вод с показателем преломле-
ния пз, большим, чем пока-
затели преломления п± и П2
окружающих областей
П1
п2
п3>п2 - п-|
Канальные волноводы — основные составляющие интегрально-опти-
ческих приборов. Схематически простой волноводный канал — это область
с показателем преломления пз, окруженная областями с более низкими
показателями преломления и п? (рис. 5.10). Из-за полного внутрен-
него отражения оптический пучок ограничен областью с показателем
преломления пз, где он распространяется в одной или нескольких кана-
лизированных модах в зависимости от параметров волновода (рис. 5.11).
Одномодовый волновод поддерживает только моду с поляризациями ТЕ
и ТМ, или с одной из них при типичном размере моды < 10 мкм.
Оптические волноводы на основе ГЖЬОз, с примесью титана для уве-
личения показателя преломления кристалла широко применяются в ин-
Глава 5. Оптические модуляторы для волоконно-оптических датчиков
тегрально-оптических приборах [8]. Они изготавливаются стандартным
методом обратной фотолитографии. На подложку из LiNbOa наносится
фотошаблон; сверху производится электронно-лучевое напыление слоя ти-
тана; фоторезист удаляется растворителем и остается рисунок волновода,
прорисованный слоем титана; затем осуществляется спекание и под воздейст-
вием высокой температуры титан диффундирует в подложку (рис. 5.12).
В результате такого процесса формируется переменный профиль рас-
пределения показателя преломления, который достигает максимума на
поверхности, примерно на 0,1% превышая объемное значение, и глубиной
диффузии в несколько микрон.
Рис. 5.11. Профили интенсивности канализированных мод канальных волново-
дов. Fi,i — основная мода
Диффузия II
В)
Рис. 5.12. Процесс фотолитографического изготовления титан-диффузного LiNbOa
волновода: а) нанесение фотошаблона на подложку из LiNbCh; б) элек-
тронно-лучевое напыление слоя титана на заготовку; в) удаление
фоторезиста растворителем; г) диффузия титана в подложку путем
спекания
5.4- Интегрально-оптические модуляторы 125
Свет запускается в волноводы через полированные торцевые поверх-
ности. Потери в точке соединения одномодовых оптических волокон и вол-
новодов LiNbOa можно минимизировать, выбирая параметры волновода
так, чтобы его профиль моды наиболее точно соответствовал профилю
моды волокна. Типичные потери в точке соединения составляют 0,5 -1 дБ
на соединение, и потери, обусловленные рассеиванием и поглощением,
составляют примерно 0,2 и 0,8 дБ/см при длинах волн 1,3 и 0,85 мкм
соответственно.
5.4.1. Фазовая модуляция
Рис. 5.13. Интегрально-оптический фазовый модулятор, состоящий из волновода
и двух электродов, изготовленных на одной подложке
Простой интегрально-оптический фазовый модулятор [7] состоит из од-
номодового волновода и двух электродов длины L, расположенных на
расстоянии d один от другого (рис. 5.13). Поле, приложенное между двумя
электродами, накладывается на оптическое поле и вызывает изменение
показателя преломления, в результате чего возникает фазовая модуля-
ция ф(1) (рис. 5.14). Выходной оптический сигнал Eout(t) можно опреде-
лить как
Eout{t) = Ео ехр {г [uot + в + ,
где Ео и о)0 — амплитуда и частота входного оптического сигнала, 6 —
постоянный сдвиг фазы, соответствующий оптической длине пути при
нулевом напряжении. Фазовая модуляция пропорциональна напряжению
на электродах и их длине и вычисляется по формуле
<Ж) =
которая верна в режиме элементов с сосредоточенными параметрами,
когда произведение частоты на длину < 30 ГГц • мм. Параметр Г, опре-
деляющий степень перекрытия между приложенным полем и оптической
модой, в хорошо спроектированных приборах может принимать значения
в диапазоне между 0,5 и 1.
Рис. 5.14. Напряжение, при-
ложенное к канальному вол-
новоду фазового модулятора,
создает поле, накладывающе-
еся на оптическую канализи-
рованную моду
Основное преимущество фазового модулятора с волноводом заключа-
ется в том, что достаточно низкое напряжение на электродах может
привести к значительной фазовой модуляции. Напряжение необходи-
мое для сдвига фазы на л радиан, определяется по формуле
^7г — □ / »\ (интегральный оптический фазовый модулятор).
пдгГ(£/а)
Так же как в случае объемных модуляторов, значение V* обратно
пропорционально отношению L/d. Однако, поскольку не происходит рас-
хождения пучка, значение отношения L/d может достигать 1000 и соот-
ветственно значение Vn может составлять несколько вольт по сравнению
с минимальным значением 50 В для объемных устройств. В частности,
для фазового модулятора на основе LiNbOa с канальным волноводом,
работающего на длине волны 1,3 мкм, используя электрооптический ко-
эффициент гзз, при d = 8 мкм и Г = 0,5 произведение VnL составляет
~ 70 В • мм, при условии что приложенное вдоль оси z электрическое
поле взаимодействует с z-поляризованным (ТЕ) оптическим полем. Одна-
ко, как и в случае объемных модуляторов, необходим компромисс между
управляющим напряжением и шириной полосы частот модуляции, что об-
суждалось в разделе 5.3.2.
Важно отметить, что характеристики фазовых модуляторов с каналь-
ным волноводом часто зависят от поляризации. Например, в фазовом
модуляторе на основе LiNbOs, описанном выше, при ТЕ-поляризации ис-
пользуется коэффициент Г33. При фазовой модуляции излучения с ТМ-по-
ляризацией используется меньший электрооптический коэффициент из,
в результате чего значение произведения V^L становится ~ 210 В • мм.
5.J. Интегрально-оптические модуляторы 127
Следовательно, чтобы получить вполне определенную фазовую моду-
ляцию, часто необходимо управлять входной поляризацией. Для этого
в волоконно-оптических системах следует использовать волокна, сохра-
няющие поляризацию. Устройства, не зависящие от поляризации, также
могут быть реализованы при соответствующих ориентациях кристалла
и конфигурациях электродов, и, хотя у них обычно значение произведе-
ния VnL больше, во многих приложениях их использование предпочти-
тельнее.
5.4.2. Интерферометрическая модуляция
интенсивности
Фазовые модуляторы с волноводами могут сочетаться с другими эле-
ментами на подложке, в результате чего получаются такие устройства,
как простой и полезный интерферометрический модулятор интенсивно-
сти [7], показанный на рис. 5.15, а. Как видно на приведенной схеме, вход-
ной волновод расщепляется на два одномодовых плеча, причем электроды
параллельны каждому из них, а затем снова объединяется в выходную
ветвь. Все фрагменты волновода одномодовые.
Оптическая передача POut/Pin изменяется синусоидально в зависимо-
сти от разности фазы между двумя воссоединенными сигналами Д</>, в со-
ответствии с соотношением
= |(1 + cosA0).
Рассмотрим два случая, приведенные на рис. 5.15, б. Когда Д^> = О,
объединенные сигналы возбуждают основную моду до максимального зна-
чения передачи канализированной моды, а когда Д^> — л, они формируют
антисимметричный профиль поля, похожий на канализированную моду
второго порядка. При постепенном уменьшении ширины волновода, когда
он сходит на конус, излучение запускает несвязанную волну подложки,
что приводит к нулевому значению передачи канализированной моды.
Для управления сдвигом фазы Д<^> обычно применяется двухтактная
схема расположения электродов, создающая равную, но противоположную
по фазе модуляцию в каждом из плеч. Оптическую передачу, как функ-
цию приложенного напряжения, можно найти по формуле
Pout If., ,,,n
“р- = 9 1 1 + COS “V“ + вв ( ’ (5-4)
Ггп I I. чг JJ
где т.е. напряжение, необходимое для полной амплитудной модуля-
ции, определяется как
ТЛ A d
V* = 2п3гГ L (интерферометр).
Глава 5. Оптические модуляторы для волоконно-оптических датчиков
Для установки рабочей точки прибора может быть задан постоянный
сдвиг фазы вв.
Рис. 5.15. а) Интерферометрический модулятор интенсивности с канальным
волноводом; б) когда разность фаз Дф = 0, выходное излучение за-
пускается в волновод, при Дф = 7г оно излучается в подложку
Высокочувствительные интерферометрические модуляторы на основе
LiNbOa обычно изготавливаются на подложках Х-среза с волноводным
распространением в направлении У. При ТЕ-поляризации используется
большой электрооптический коэффициент Г33. При работе на длине вол-
ны 1,3 мкм, d = 8 мкм и Г = 0,5 значение произведения V^L составляет
около 35 В • мм. Такой результат достигается благодаря двухтактной
схеме расположения электродов. Для сравнения, это значение для экви-
валентных фазовых модуляторов составляет 70 В • мм и 105 В • мм при
ТМ-поляризации в том же самом волноводе и при таком же распростра-
нении электродов. Описаны устройства на основе ЬЖЬОз, обеспечиваю-
щие функционирование, не зависящее от поляризации [9], но они имеют
или более низкую чувствительность, или большую емкость, чем те уст-
5.4- Интегрально-оптические модуляторы 129
ройства, которые работают с единственной поляризацией ТЕ. В хорошо
спроектированных интерферометрических модуляторах, в которых угол
Y-образного тройника достаточно мал и составляет величину ~ 1°, мо-
гут быть достигнуты высокий коэффициент экстинкции (контрастности)
~ 30 дБ и низкие потери затухания.
Напряжение (V/VJ
Рис. 5.16. Оптическая передача как функция напряжения для интерфероме-
трического модулятора со встроенным сдвигом фазы — тг/2 радиан.
Максимальная линейность достигается при нуле напряжения
5.4- 2.1. Аналоговая модуляция интенсивности
Для аналоговой модуляции интенсивности весьма желательна линейная
зависимость выходной мощности от управляющего напряжения. Однако,
хотя фазовые модуляторы с высокой линейностью легко доступны, моду-
лятор интенсивности с линейной характеристикой все еще не разработан.
Таким образом, общий подход к получению максимальной линейности за-
ключается в использовании интерферометрического модулятора со сдви-
гом фазы —тг/2 радиан, что обеспечивает характеристику, показанную
на рис. 5.16. При нулевом напряжении выход модулятора находится на
уровне половинной мощности и при небольшой глубине модуляции ха-
рактеристика практически линейна. Если глубина модуляции возрастает,
эффекты нелинейности модулятора проявляются сильнее.
Стандартный способ оценки линейности аналогового модулятора заклю-
чается в следующем. Представим входное управляющее напряжение V(t)
как суперпозицию двух синусоид с одинаковой амплитудой и частота-
ми и что можно записать как
V (t) = Vm(sinwit + sincj2^)« (5.5)
5-3379
Глава 5. Оптические модуляторы для волоконно-оптических датчиков
Частотные составляющие спектра выходной мощности модулятора
являются линейной комбинацией и и могут быть выражены с помо-
щью ряда
оо
-fou«(0 = Ро,о + Pi,o(sinwi< + sinw2<) + ^r^Pkfilsinkwit + sinfca^) +
k=2
oo oo oo oo
+ Pkj sin(kwi + + У^ y^ Pk,i sin(A:a;i - Zcj2)^ (5.6)
k=i 1=1 k=i1=1
Здесь первое и второе слагаемые соответствуют уровню сдвига постоян-
ным полем и требуемой основной выходной частотой, а три суммируемых
члена соответствуют гармонике, суммарной частоте и разностной час-
тоте интермодуляционных искажений, возникающих из-за нелинейности
модулятора. Из уравнений (5.4)-(5.6) можно получить выражения для Р^,
некоторые из них:
Л,о ~ -Piо(Афт) sinвв]
р2,о — Р1о^(Афт)Ч2(Афт) созвв]
А,2 = АоЛ(А^т)Л(А<^т) sin^B,
где Афт — лУт/Уп и вв и Jn — угол сдвига фазы модулятора и функция
Бесселя n-го порядка соответственно. Многие нежелательные спектраль-
ные компоненты можно устранить или выбирая соответствующий сдвиг
фазы, или электрической фильтрацией сигнала после его приема. При
сдвиге фазы на 0в — ±тг/2 достигается максимум чувствительности на
основной частоте и устраняются гармоники четного порядка и интер-
модуляционные слагаемые четного порядка. Как показано на графике
с логарифмическим масштабом на обеих осях для вв — —к/2 (рис. 5.17),
основной Fi,o и главный интермодуляционный Fi/2 члены имеют наклон 1
и 3 порядка соответственно, в зависимости от управляющей мощности
модулятора.
5.4-2.2. Частотная характеристика элемента
с сосредоточенными параметрами
Частотную характеристику модуляторов с канальным волноводом мож-
но смоделировать, используя простую эквивалентную схему, такую, как
показана на рис. 5.18, включающую в себя источник электрического на-
пряжения, согласующую схему и модулятор. В модели с сосредоточенны-
ми параметрами электроды модулятора представляют собой конденсатор
с последовательным сопротивлением и напряжение на конденсаторе
соответствует напряжению на электродах. Последовательная индуктив-
ность электродов также учитывается в модели.
5.4- Интегрально-оптические модуляторы 131
Рис. 5.17. График с логарифмическим масштабом на обеих осях зависимости
выходной мощности интерферометрического модулятора от управля-
ющей электрической мощности на основной частоте (Pi,о) и главной
частоте интермодуляционного искажения (Pi,2)
Рис. 5.18. Модель электрооптического модулятора в виде эквивалентной схемы
с сосредоточенными параметрами. Напряжение на конденсаторе соот-
ветствует напряжению на электродах модулятора
Чтобы проиллюстрировать основные черты модели с сосредоточенны-
ми параметрами, предположим, что напряжение, ток и Д<£(£) изменяются
синусоидально с одинаковой частотой f и амплитудами 1т и Афт
соответственно. Амплитуда разности фазы пропорциональна произведе-
нию VnL. и емкость С пропорциональна длине электродов, и, следователь-
но, фт пропорциональна заряду электродов Qm — CVm и может быть
рассчитана как
Д / _ T^Qm _ ___________Im_____ /г 7\
~ (C/L)^L) ~ mC/L^LY
Параметры С/L и V^L не зависят от длины, поэтому характеристи-
ка пропорциональна только Qm и никакой другой зависимости от дли-
ны не существует; и при синусоидальной модуляции Qm максимально,
когда максимально 1т. Следовательно, при фиксированной входной элек-
трической мощности характеристика модулятора оптимизируется путем
согласования источника электрического напряжения с модулятором при
помощи согласующей схемы без потерь на сопротивление, так что вся
номинальная электрическая мощность рассеивается на последовательной
модулятору нагрузке Rm.
Рис. 5.19. Модель в виде эквивалентной схемы элемента с сосредоточенными па-
раметрами, демонстрирующая а) трансформаторное согласование на
полосе пропускания и 6) резистивное согласование на модулирующей
частоте
Частотная характеристика модулятора зависит от разработки как мо-
дулятора, так и согласующей схемы. Если вся согласованная мощность
вводится в модулятор на всей требуемой ширине полосы частот моду-
5-4- Интегрально-оптические модуляторы 133
ляции, частотную характеристику можно получить из уравнения (5.7).
Характеристика согласованного модулятора ухудшается при увеличении
частоты, поскольку при фиксированном 1т амплитуда заряда Qm связана
с частотой обратно пропорциональной зависимостью.
На практике может оказаться достаточно сложно добиться оптималь-
ной характеристики для модулятора, согласованного на всей требуемой
ширине полосы частот модуляции, поэтому часто необходим компромисс
между частотной характеристикой модулятора и шириной полосы. В мо-
дуляторах с сосредоточенными параметрами часто применяются рези-
стивное согласование на модулирующей частоте и трансформаторное со-
гласование на полосе пропускания, как показано на рис. 5.19. При первом
максимальная характеристика достигается при постоянном токе и шири-
на полосы на уровне 3 дБ может быть выражена как
л/ _ 1 1
2tt(C/L)RsI/
где Rs — сопротивление источника. Следовательно, ширина полосы обрат-
но пропорциональна длине электродов, и, поскольку согласующая цепь
в данном случае диссипативна, оптимальная характеристика при согла-
совании не может быть получена. Для модулятора с С/L — 0,6 пФ/мм,
Rs = 50 Ом и L = 4 мм ширина полосы на уровне 3 дБ равна 880 МГц.
При трансформаторном согласовании на полосе пропускания согласую-
щая цепь не диссипативна. Следовательно, длина электродов не влияет
на максимум характеристики, которая оптимальна при средней частоте
несущей, где она выше, чем при резистивном согласовании на модулиру-
ющей частоте. Однако длина влияет на ширину полосы (рис. 5.20).
5.4’2.3. Работа на бегущей волне
Для модуляции на частотах выше нескольких гигагерц лучше исполь-
зовать модуляторы на бегущей волне (рис. 5.21, а). В этих устройствах
электрический сигнал распространяется вместе с оптическим сигналом,
и в конце прибора установлены электроды, чтобы минимизировать элек-
трическое отражение. Полоса пропускания и частотная характеристи-
ка ограничены несоответствием скоростей электрической и оптической
волн, поскольку фаза волны напряжения, выглядящая как волновой па-
кет, проходящий через модулятор, непрерывно изменяется вдоль длины
электродов. При определенных длинах прибора конечная модуляция пол-
ностью исчезает (рис. 5.21, б). В общем случае характеристика опреде-
ляется формулой
L
Д</>(£) = [ cos(27rfc — a)mt)dz, (5.8)
J VmL
о
Глава 5. Оптические модуляторы для волоконно-оптических датчиков
Рис. 5.20. Частотные характеристики при резистивном согласовании на модулиру-
ющей частоте и трансформаторном согласовании на полосе пропуска-
ния, показывающие влияние длины электродов на ширину полосы во
втором случае. При 100 МГц обе полосы пропускания, приведенные
в примере, совпадают
где Vm и и)т — амплитуда и частота электрического сигнала. При помощи
величины 6 учитывается различие скоростей. Эта величина определена как
s VQ - ve
2тг vQve
где v0 и уе — оптическая и электрическая скорости. Если взять интеграл
и преобразовать уравнение (5.8), получим
2 _ ,7lVm>sin2 TlSL
> (тгбьу ’
где фт — амплитуда A0(i). При малых значениях 6L частотная характе-
ристика эквивалентна характеристике модулятора с сосредоточенными
параметрами, и, если 6L — ненулевое целое, частотная характеристи-
ка стремится к нулю. Для устройств с волноводом на основе LiNbOa
<5 « Шт/кс, в результате чего произведение длины на ширину полосы
составляет 64 ГГц • мм, так что при 8 мм длине электродов ширина поло-
5.4- Интегрально-оптические
сы на уровне 3 дБ равна 8 ГГц независимо от длины волны оптического
излучения. Разработаны интерферометрические модуляторы на бегущей
волне с шириной полосы, доходящей до 20 ГГц [10].
Рис. 5.21. а) Интерферометрический модулятор на бегущей волне; б) эффект вза-
имной компенсации из-за неравенства оптической скорости vo и элек-
трической скорости Ve
5.4.3. Интегрально-оптические
преобразователи частоты
Преобразователи частоты с канальными волноводами представляют ин-
терес, поскольку они совместимы с волоконно-оптическими системами
и им требуется низкое управляющее напряжение. Приложение периодиче-
ского модулирующего сигнала к одночастотной непрерывной волне опти-
ческого сигнала порождает дискретный спектр с составляющими, распо-
ложенными на равных расстояниях, разделенных на величину основной
частоты управляющего сигнала. Основные характеристики эффективно-
сти, такие как эффективность преобразования и подавление боковых полос,
зависят от устройства прибора и параметров управляющего сигнала. Да-
лее описаны три метода преобразования частоты интегрально-оптиче-
скими модуляторами: метод пилообразного сдвига частоты, метод сину-
соидальной фазовой модуляции и метод на бегущей волне, основанный
Глава 5. Оптические модуляторы для волоконно-оптических датчиков
на взаимодействии между ТЕ и ТМ поляризованными волнами. Первый
почти идеален для небольших изменений частоты, а последние два имеют
преимущества, когда необходим очень широкий диапазон преобразуемых
частот.
5.4-3.1. Пилообразный сдвиг частоты
Метод пилообразного сдвига частоты [11] основан на эквивалентности
линейного изменения оптической фазы ф(Г) = Awt и смещении оптической
частоты Д/ = Дси/2тг (рис. 5.22). Выходной оптический сигнал, который
может быть получен при использовании линейного электрооптического
фазового модулятора, можно записать как
Eout(t) = Eq exp {г [w0< + </>(<)]} = Ео exp [(г(ш0 + Дш)<)],
где Ео и и)0 — амплитуда и частота входного оптического пучка. Не-
прерывное увеличение напряжения невозможно, но аналогичный эффект
может быть достигнут, если прикладывать пилообразный сигнал для фа-
зовой модуляции. Идеальная «пила» имеет бесконечно малое время спада,
и ее амплитуда равна точно ш2тг радиан, где т — целое. Такая пила
обеспечивает 100% эффективность преобразования при отсутствии пара-
зитных боковых полос и смещение частоты, равное т/Т, где Т — период
пилы. Неидеальная пила образует гармоники, кратные целому Д/ = 1/Г.
Ео exp(icuot)
Фазовый модулятор
4>(t) = Л<Л
Ео ехр J W +
= Ео вхр[1(<оо + A w)t]
Рис. 5.22. Пилообразный
сдвиг частоты достигается
приложением к оптическо-
му сигналу пилообразного
сигнала для фазовой моду-
ляции
Как показано на рис. 5.23, при условии идеальной линейности каждого
фрагмента пилы и идеального наклона пилы уровень мощности паразит-
ных боковых полос стремится к нулю по мере стремления к нулю времени
спада. Чтобы поддерживать полное подавление боковых полос на уров-
не > 40 дБ, нужно уменьшить время спада до значения, составляющего
менее 1% от периода. Таким образом, диапазон пилообразного смеще-
ния частоты обычно ограничен шириной полосы фазового модулятора
и электронной схемы формирования, что делает его пригодным для сме-
щения только до десятков мегагерц. Подавление боковых полос до уровня
5.4- Интегрально-оптические модуляторы 137
40 дБ может быть достигнуто при использовании фазовых модуляторов
на основе LiNbOs с канальными волноводами [12].
Рис. 5.23. Влияние конечности времени спада пилы на пилообразный сдвиг частоты
5.4.3.2, Интерферометрическое смещение частоты
Методы синусоидальной фазовой модуляции не могут обеспечить иде-
ального смещения частоты, сопоставимого с тем, который в принципе
достижим при использовании метода пилообразного сдвига. Однако их
преимуществами являются уже продемонстрированная возможность сме-
щения частоты до 2 ГГц и самое широкое использование любых типов
устройств с канальными волноводами [13]; в дальнейшем может появить-
ся возможность сдвига во всем диапазоне частот интерферометрических
модуляторов, доходящем до десятков гигагерц.
Двухполосный преобразователь частоты, состоящий из одного интер-
ферометрического модулятора, показан на рис. 5.24, а. Двухполосный вы-
Глава 5. Оптические модуляторы для волоконно-оптических датчиков
ход часто является недостатком, но он не создает проблем для таких
приложений, как гетеродинные датчики, поскольку нежелательные спек-
тральные компоненты могут быть устранены фильтрацией. При завися-
щей от времени фазовой модуляции Д0(£), приложенной к устройству,
и постоянном сдвиге фазы 0 в, модулированный оптический сигнал мож-
но записать как
I? i+\ г? ( 4\ Г вв . Д</>М . в в
Eout(t) = Eq ехр(гсиоч cos —-— cos —— sin —-— sin — .
и L Lu
Если Д0(/) = фхп cos Деи/ и 0в — 7г, выход можно выразить как
00 /а \
PoutW = Ео V (-1)^-1 ( X
fc=l ' '
х {cos [wo + (2k — 1)Дш] t + cos [wq — (2k — 1)Дш] t} , (5.9)
— _.A._ ——. JL д 1. — x - J .
-3Aw -2Aw -Aw 0 Aw 2Aw 3Aw w - wo
6)
Рис. 5.24. а) Двухполосный интерферометрический преобразователь частоты; б)
в случае, когда 0в = тг радиан, несущая и четные гармоники подавлены
где 7п(ж) — функция Бесселя n-го порядка. Как показано на рис. 5.24, 5,
выходной сигнал состоит из дискретных спектральных компонент. Они
симметричны относительно несущей си0, отстоящих от нее на нечетное
число Деи. Если значение 0в не равно нечетному числу, умноженному
на 7г радиан, то будут видны компоненты, сдвинутые по частоте на четное
число Деи. Относительная мощность различных спектральных компонент
показана на графике зависимости 2Olog[Jn(0m/2)] от фт/2 для п = 1,3,5
(рис. 5.25). Как можно видеть, максимальная эффективность преобразо-
вания в первую боковую полосу составляет 34% при фт — 3,6 радиан.
При такой амплитуде модуляции почти все излучение, частота которого
не сдвинута на ±Дси, выходит за пределы волновода и излучается в под-
ложку. Только небольшая доля излучения в паразитных боковых полосах
5.4- Интегрально-оптические модуляторы
остается ограниченной в волноводе. Самая высокая паразитная боковая
полоса, третья гармоника, подавляется на 15 дБ по отношению к основной
боковой полосе.
Рис. 5.25. Уровни спектральной выходной мощности двухполосного интерфе-
рометрического преобразователя частоты, изображенные в масштабе
201og[Jn(</>m/2)] в зависимости от фт/Ъ для п = 1,3, 5
Для реализации однополосного преобразователя частоты использова-
ны два интерферометра, выходы которых объединены, для уничтожения
мнимых сигналов боковых полос каждой гармоники (рис. 5.26, а). Оба ин-
терферометра работают со сдвигом фазы 0#, равным л радиан, но фазы
входного сигнала и модулирующие напряжения отличаются на тг/2 ради-
ан. Применяя уравнение (5.9), для выходного сигнала получаем
= (У)*
2 к=1 ' '
х {cos [cjo + (2А; — 1)До>] t 4- cos [cjq — (2fc — 1)Леи] t} ,
= (Y)
X
x {cos [o>o 4- (2к — 1) Леи] t — cos [cjq — (2& — 1) Acu] t} .
После воссоединения в выходной ветви получаются ненулевые выходные
спектральные составляющие
Глава 5. Оптические модуляторы для волоконно-оптических датчиков
EqJ\ ( J cos(w0 + Aw)t
EqJ$ ( ) cos(wo — 3Aw)i
^0^5 ( ) cos(cjo + 5Acj)/
\ £t J
(первая гармоника);
(третья гармоника);
(пятая гармоника).
Выходной спектр показан на рис. 5.26, б. Эффективность преобразо-
вания такая же, как у прибора с одним интерферометром, но мнимые
боковые полосы подавлены. Хотя при существующей технологии этот
прибор можно использовать для генерации сдвигов частоты вплоть до де-
сятков гигагерц, сохранение необходимой 90° разности фаз между упра-
вляющими сигналами по всей ширине частотного диапазона может пред-
ставлять собой проблему.
- Фтсо1 ZW
-3Aw О Aw 5Aw w uiq
б)
Рис. 5.26. а) Схематическое представление однополосного преобразователя час-
тоты, состоящего из двух интерферометров; 6) мощность выходного
спектра при 0в = тг радиан. Несущая частота и четные гармоники по-
давлены соответствующими мнимыми составляющими боковых полос
каждой нечетной гармоники
5.4.3.3. ТЕ/ТМ-смещение частоты
Преобразователи частоты с канальными волноводами, основанные на бе-
гущей волне взаимодействия между канализированными волнами с ТЕ-
и ТМ-поляризацией, обеспечивают достаточно широкий диапазон пре-
образования частот, а устройство их канального волновода совместимо
5-4- Интегрально-оптические модуляторы
с оптическими волокнами [14]. В некоторых отношениях эти приборы
аналогичны акустооптическим преобразователям частоты. В реализации,
показанной на рис. 5.27, канальный волновод изготовлен из двулучепре-
ломляющего оптического материала, так что ТЕ и ТМ-моды поляризова-
ны вдоль обыкновенной и необыкновенной осей соответственно.
ТЕ-вход
Решеточный электрод
Канальный
ТМ-выход
vn = vocos(u8t + п2тг/3)
(л = 1, 2, 3) волновод
а)
л 1
б)
Рис. 5.27. а) Схематическое представление ТЕ/ТМ смещения частоты, при ко-
тором решеточный электрод, управляемый трехфазным напряжением
располагается над двулучепреломляющим волноводом; б) простран-
ственная синхронизация компоненты поля, приложенного под электро-
дами
Предполагается, что входной сигнал — это полностью ТЕ-мода, и обыч-
но не происходит переноса излучения из моды в моду. Однако, если соот-
ветствующим образом направленная бегущая волна электрического поля
с частотой cjs, приложенная вдоль волновода, вызывает возмущение пока-
зателя преломления посредством смещения осей электрооптических коэф-
фициентов, происходит взаимодействие мод и смещение частоты на ws.
100% эффективность преобразования в ТМ-моду возможна, если удовле-
творяется условие фазового синхронизма
I м /эш+Дш I _
\РТЕ ~ РТМ | - ’
где Л — период возмущения показателя преломления и Д т? и —
волновые векторы ТЕ- и ТМ-мод соответственно, для которых
2тг
\^те - ^тм\ —-т\пе-по\. (5.10)
Л
Это условие фазового синхронизма эквивалентно условию Брэгга для аку-
стооптического модулятора. Бегущая волна электрического поля генери-
Глава 5. Оптические модуляторы для волоконно-оптических датчиков
руется приложением трехфазного электрического управляющего напря-
жения к решеточному электроду, как показано на рис. 5.27. Простран-
ственный период волны зафиксирован и определяется разреженностью
электрода, и, следовательно, фазовый синхронизм не зависит от частоты.
При структуре электрода с сосредоточенными параметрами можно полу-
чить смещение частоты, начиная с постоянного тока до нескольких гига-
герц. Было продемонстрировано несколько вариантов таких устройств.
Недостатком ТЕ/ТМ-преобразователя моды является узкая оптиче-
ская ширина линии, что обусловлено зависимостью выполнения условия
фазового синхронизма от длины волны, что следует из уравнения (5.10).
Примерно оптическую ширину линии можно выразить следующим образом
ДА _ Л
А “ Z’
где L — полная длина взаимодействия. Для устройства на основе LiNbOa,
работающего на длине волны А = 0,85 мкм,
Л = -------- — 9,9 мкм.
|пе -По|
Таким образом, управляющее напряжение ~ 10 В, требующееся при
длине взаимодействия 5 мм, обеспечивает оптическую ширину линии, рав-
ную только 17 А, что полезно для фильтрующих приложений, но, как пра-
вило, нежелательно в случае преобразования частоты. Чтобы получить
больший период решетки и большую ширину линии, можно использовать
волноводы с более низким двулучепреломлением.
5.5. Чистоволоконные оптические модуляторы
Модуляция оптического сигнала непосредственно внутри оптического во-
локна особенно привлекательна для применения в волоконных датчиках,
поскольку исключает необходимость подсоединения волокна, что в свою
очередь существенно уменьшает вносимые оптические потери, а также
упрощает компоновку. Реализация чистоволоконных приборов — это до-
статочно сложная задача, поскольку такой наиболее распространенный
волоконный материал, как стекло, является некристаллическим, что де-
лает непосредственное воздействие приложенного электрического поля на
показатель преломления невозможным. Таким образом, для изменения по-
казателя преломления приходится использовать такое механическое воз-
действие, как сдавливание. Эффективность чистоволоконных модулято-
ров к настоящему моменту относительно невысока, и их применение огра-
ниченно по сравнению с устройствами дискретного действия, но такие
модуляторы представляют значительный интерес и быстро развиваются.
5.5. Чистоволоконные оптические модуляторы
В этом разделе рассматриваются чистоволоконные фазовые модуляторы
и преобразователи частоты.
5.5.1. Фазовая модуляция
Фазовая модуляция в чистоволоконных приборах осуществляется путем
растяжения или сдавливания волокна с помощью каких-либо внешних при-
способлений, что математически можно выразить как
2тг
</>(/) = — (£ДП(<) + пД£(*)],
А
где Дп(/) и Д£(/) — изменение показателя преломления и длины уст-
ройства соответственно. По сравнению с объемными и интегрально-опти-
ческими приборами, в которых эффект изменения длины пренебрежимо
мал, даже небольшое относительное изменение длины длинных волокон
в чистоволоконных модуляторах может привести к значительной фазо-
вой модуляции.
Наиболее широко применяются чистоволоконные фазовые модулято-
ры, состоящие из оптического волокна, обычно изготовленного из по-
ляризованного цирконата титаната свинца, намотанного на пьезоэлек-
трическое кольцо, (рис. 5.28) [15]. Напряжение, приложенное к кольцу,
изменяет длину окружности кольца и длину волокна. Чувствительность
модулятора зависит от схемы расположения электродов, частоты моду-
ляции и диаметра кольца. Чувствительность ~ 50 мрад/V виток обычно
достигается для модуляции на длине волны 0,63 мкм при диаметре кольца 2 см.
Рис. 5.28. Волоконно-оптический
фазовый модулятор, состоящий из
волокна, намотанного на пьезоэлек-
трическое кольцо. Приложенное на-
пряжение изменяет диаметр кольца
и длину волокна
Ключевая особенность частотной характеристики модулятора — это
акустический резонанс, который определяется геометрией кольца и режи-
мом работы. В так называемом кольцевом режиме, когда устройство функ-
ционирует за счет изменений длины окружности кольца (15) (рис. 5.28),
резонансная частота изменяется обратно пропорционально диаметру коль-
ца. Типичное значение постоянной частоты равно 100 кГц • см, так что
Глава 5. Оптические модуляторы для волоконно-оптических датчиков
2 см кольцо имеет резонансную частоту ~ 50 кГц. При резонансе чув-
ствительность модулятора существенно возрастает. С другой стороны,
в приложениях, в которых требуется плоская частотная характеристи-
ка, таких как пилообразный сдвиг частоты, такой эффект может быть
нежелательным, поскольку резонанс ограничивает ширину полосы час-
тот модуляции до десятков килогерц. К тому же увеличение резонансной
частоты путем уменьшения диаметра кольца может привести к недопу-
стимым потерям из-за изгибов волокна.
Рис. 5.29. Волоконно-оптический фазовый модулятор, состоящий из волокна,
покрытого пьезоэлектрической оболочкой. Приложенное напряжение
сжимает волокно и изменяет его длину
Для получения лучших частотных характеристик разрабатываются
и некоторые другие схемы, основанные на пьезоэлектрических эффек-
тах, такие как покрытие волокна полимером и сжимание его приложен-
ным электрическим полем [16]. В этом случае изменяются как показа-
тель преломления, так и длина волокна (рис. 5.29). Одно из конструктор-
ских решений предполагает осаждение одного из металлических электро-
дов непосредственно на волокно, покрытие волокна поливинилиденфто-
ридом (PVF2) и осаждение внешнего электрода. Полимерное покрытие
становится пьезоэлектрическим после поляризации приложенным полем.
Чувствительность образца длиной 18 см, работающего на длине волны
0,63 мкм, составляет ~ 30 мрад/V • м для частот до 10 кГц, когда при-
сутствуют и продольная, и радиальная деформации, и ~ 10 мрад/V • м
для частот от 10 кГц до 2,5 МГц, когда присутствует только радиальная
деформация. Чтобы получить размах фазовой модуляции тг радиан при
частоте 1 МГц, к модулятору длиной 10 м требуется приложить управля-
ющий сигнал размахом 30 В. Можно предположить, что более высокая
чувствительность будет достигнута при использовании других полиме-
ров и более эффективной регулировкой полярности.
5.5.2. Смещение частоты
Чистоволоконные преобразователи частоты, подобные ТЕ/ТМ-преобра-
зователям частоты, описанным в параграфе 5.4.3.3, основаны на исполь-
5.5.
Чистоволоконные оптические
зовании бегущей волны. В этом случае используется волокно, которое
поддерживает две канализированные моды, постоянные распространения
которых отличаются на Д/3 [17]. Акустическая волна с частотой сиа, запу-
щенная в волокно, возмущает профиль показателя преломления, что при-
водит к взаимодействию мод, которое вызывает смещение частоты ±сиа.
Условие синхронного взаимодействия, необходимого для эффективного
переноса мощности, можно получить из соотношения
2тг
v
где Ла — акустическая длина волны. Метод был продемонстрирован с во-
локном, поддерживающим две объемные волны, а также с волокном с вы-
сокими характеристиками двулучепреломления, которое поддерживает
распространение мод с двумя поляризациями.
Рис. 5.30. Волоконно-оптический преобразователь частоты, в котором акустиче-
ская волна с чувствительного элемента возмущает две канализирован-
ные моды в волокне с высокими характеристиками двулучепреломле-
ния, вызывая взаимодействие мод
В последней реализации, показанной на рис. 5.30, электроакустиче-
ский преобразователь преобразует входную электрическую мощность в ре-
леевскую волну, которая проходит через блок плавленого кварца, и гене-
рирует бегущую волну искажения показателя преломления, в результате
чего в волокне с высокими характеристиками двулучепреломления, при-
жатом к блоку, происходит взаимодействие мод с различной поляризаци-
ей. Для взаимодействия мод необходимо, чтобы напряжение, вызванное
волной, не было направлено вдоль главной оси волокна; а для удовлетво-
рения условия фазового синхронизма нужно, чтобы угол меду волокном
и акустической волной составлял 27°. Экспериментальный прибор такого
типа, разработанный с частотой несущей 4,5 МГц и диапазоном настрой-
ки 290 кГц, имел волоконную длину биений 2тг/Д/3, равную 1,7 мм на
длине волны 0,63 мкм, и его эффективность преобразования достигала
95% в импульсном режиме при максимальной входной электрической мощ-
146 Глава 5. Оптические модуляторы для волоконно-оптических датчиков
ности 25 Вт. Подавление боковых полос составляло 40 дБ и подавление
несущей — 25 дБ.
Литература
1. A. Yariv, Optical Electronics, 3rd ed., Holt, Rinehart and Winston, New York,
1985.
2. H. A. Haus, Waves and Fields in Optoelectronics, Prentice-Hall, Englewood
Cliffs, N.J. 1984.
3. I. P. Kaminow, An Introduction to Electrooptic Devices, Academic Press, New
York, 974.
4. H. Nishihara, M. Haruna, and T. Suhara, Optical Integrated Circuits, McGraw-
Hill, New York, 1989.
5. A. Korpel, Proc. IEEE 69, 48 (1981).
6. R. G. Hunsperger, Integrated Optics: Theory and Technology, 2nd ed., Springer-
Verlag, New York, 1984.
7. R. C. Alferness, IEEE Trans. Microwave Theory Technol. MTT-30, 1121 (1982).
8. S.K. Korotky and R. C Alferness, Ti: LiNbOa Integrated Optic Technology:
Fundamentals, Design Considerations, and Capabilities, in Integrated Optical
Circuits and Components, L. D. Hutcheson, Ed., Marcel Dekker, New York,
1987.
9. W. K. Burns, T.G. Giallorenzi, R. P. Moeller, and E. J. West, Appl. Phys. Lett.
33, 944 (1978).
10. R.A. Becker, Appl. Phys. Lett. 45, 1168 (1984).
11. K.K. Wong and R.M. De La Rue, Opt. Lett. 7, 546 (1982).
12. L. M. Johnson and C.H. Cox III, J. Lightwave Technol. 6, 109 (1988).
13. M. Izutsu, S. Shikama, and T. Sueta, IEEE J. Quantum Electron. QE-17, 2225
(1981).
14. F. Heismann and R. Ulrich, Appl. Phys. Lett. 45, 490 (1984).
15. S. A. Kingsley, Electron. Lett. 14, 419 (1978).
16. J. Jarzynski, J. Appl. Phys. 55, 3243 (1984).
17. W.P. Risk, G. S. Kino, and H. J. Shaw, Opt. Lett. 11, 115 (1986).
ГЛАВА 6
ДАТЧИКИ НА ОСНОВЕ
ИЗМЕРЕНИЯ ИНТЕНСИВНОСТИ
И ИНТЕРФЕРОМЕТРА ФАБРИ-ПЕРО
Гордон Л. Митчелл
Корпорация «МетриКор»
Вудинвилъ, Вашингтон
6.1. Датчики интенсивности
Первые волоконно-оптические датчики были разработаны даже раньше,
чем в 1970-е годы стали доступны волокна с малыми потерями. В них
для измерения света, отраженного или пропущенного объектом, исполь-
зовались жгуты или одиночные волокна. Эта технология, простейшая по
современным стандартам, тем не менее, обеспечила преимущества воло-
конной оптики в ограниченном количестве приложений. По мере появле-
ния новых волокон эффективность датчиков повышалась. Доступность
надежных моноволоконных оптических кабелей позволила реализовать
эффективные оптические системы и миниатюрные датчики. В дополне-
ние к простым отражающим и передающим системам были разработаны
методы, использующие слежение за интерференционными полосами, ми-
кроизгибы, полное внутреннее отражение и фотоупругость. Движение
к практическому применению волоконно-оптических датчиков происхо-
дило быстро [1, 2].
Датчики интенсивности по своей сути просты, и для них требуется
достаточно ограниченный электронный интерфейс. На рис. 6.1 показано,
как работает одноволоконный отражательный датчик. В этом приме-
ре свет проходит по волокну слева направо, в конце покидает волокно,
расходясь в виде конуса, и попадает на передвижной отражатель. Если ре-
флектор расположен близко к концу волокна (рис. 6.1, а), большая часть
Волоконно-оптические датчики: Вводный курс для инженеров и научных работников,
под редакцией Эрика Удда. ©1991 John Wiley & Sons, Inc.
Глава 6. Датчики на основе измерения интерферометра Фабри Перо
излучения отражается обратно в волокно; чем дальше отодвигается отра-
жатель от конца волокна (рис. 6.1, б и в), тем меньше излучения попадает
обратно в волокно. Монотонную связь между расстоянием волокно от-
ражатель и обратным излучением можно использовать для измерения
расстояния. Очевидное ограничение такого датчика, общее ограничение
для большинства датчиков интенсивности — это отсутствие подходящего
опорного сигнала.
Рис. 6.1. Одноволоконный
датчик интенсивности с пе-
редвижным отражателем,
изменяющим потери излу-
чения
Если изменяется выходной уровень источника света или потери в во-
локне колеблются в зависимости от времени, это приведет к ошибочному
измерению расстояния. В значительной степени это можно компенсиро-
вать, используя больше источников или, как показано на рис. 6.2, больше
волокон. Здесь перемещение, перпендикулярное оси волокна, измеряется
посредством двух принимающих волокон, между которыми распределяет-
ся излучение из перемещаемого волокна. При соответствующем сочетании
фототоков от принимающих волокон можно наблюдать почти линейную
связь между перемещением и выходным сигналом. Здесь выходной сигнал
менее чувствителен к изменениям амплитуды источника, чем в датчике,
показанном на рис. 6.1. В работе [3] (Lagakos и др.) приведен хороший об-
зор датчиков перемещения на основе измерения интенсивности. Другая
схема с внесением потерь показана на рис. 6.3. Сила вызывает изменения
поляризации, что модулирует амплитуду излучения. Для этого датчика
остаются актуальными описанные выше проблемы, связанные с опорным
сигналом, а также нелинейность характеристики и гистерезис, обусло-
вленные пьезооптическим материалом.
Один из наиболее популярных методов модуляции интенсивности осно-
ван на изгибании волокна, вызывающем потери излучения. Такие дат-
чики микроизгибов используются в тех приложениях, где измеряемый
параметр (деформацию, давление, силу, положение, ускорение) можно ме-
ханически преобразовать в перемещение устройства, которое деформи-
рует волокно.
Рис. 6.2. Дифференциальный
датчик интенсивности: а) ис-
пользует одно входное и два
выходных волокна; б) демон-
стрирует линейную характерис-
тику в окрестности половины
диаметра волокна
0,0 0,2 0,4 0,6 0,8 1,0
d/диаметр волокна
б)
Рис. 6.3. Пьезооптическая модуляция поляризованного света
Такой датчик микроизгибов показан на рис. 6.4. При смыкании де-
формирующего устройства потери излучения возрастают и количество
Глава 6. Датчики на основе измерения интерферометра Фабри-Перо
прошедшего излучения уменьшается. В работе [4] (Согке и др.) приведен
обзор датчиков микроизгибов. В работах [5, 6] (Giles и др.) сообщается
о 1% линейности и улучшениях, обусловленных оптической коммутацией.
О 0,25% линейности сообщается в работе [7] (Lawson и Tekippe). Про-
мышленное применение датчиков микроизгибов для измерения давления,
ускорения и деформации обсуждается в работах [8] (Berthold и др.) и [9]
(Miers и др.).
Перемещение
Рис. 6.4. Датчик микроизгибов. Деформирующее устройство увеличивает потери
в волокне, связанные с изгибом при увеличении смещения
На рис. 6.5 показан датчик уровня жидкости из работы [10] (Snow).
Излучение, возвращаемое в воздухе, благодаря полному внутреннему от-
ражению в призме на 15 дБ превышает значение в воде. Было обнаруже-
но, что засоренная морская вода уменьшает эту разницу на 1 дБ через
100 дней погружения.
Рис. 6.5. Датчик уровня жидкости, основанный
на полном внутреннем отражении в воздухе
6.2. Датчики температуры с полупроводниковым элементом I SjT)
6.2. Датчики температуры с полупроводниковым
чувствительным элементом
Зависимость границы полосы поглощения от температуры может быть
использована для измерения температуры. Пример, взятый из работы [11]
(Christensen и Ives), показан на рис. 6.6. Излучение из одного волокна
проходит через GaAs-призму в другое волокно. Если энергия фотонов
меньше, чем ширина запрещенной зоны (т. е. длина волны больше, чем
примерно 900 нм), излучение не затухает сколько-нибудь существенно
в GaAs. Фотоны с более короткими длинами волн поглощаются. Граница
зоны поглощения сдвигается примерно на 0,5 нм/°С. Отсюда вытека-
ют требования к точности длины волны на границе зоны порядка 1 А
для получения точности датчика 0,1 °C. Эта точность ограничена одно-
родностью структуры GaAs. Аналогичные датчики температуры можно
сконструировать, используя чувствительные к температуре фильтры (на-
пример, Schott RG830 коллоидный фильтр нижних частот). В работе [12]
(Saaski и Skaugset) описано их использование.
Вместе с датчиками, работающими на границе зоны, может исполь-
зоваться широкий диапазон считывающей оптики: от единственного фо-
тодиода, применяемого в схеме измерения интенсивности, до спектро-
фотометрических матриц на ПЗС. Чаще всего в считывающей оптике
используется пара фотодиодов, настроенная так, чтобы реагировать на
длинные и короткие волны с обеих сторон щелевого фильтра. Источни-
ки света для датчика должны обеспечивать энергию, по крайней мере,
в двух областях спектра. Для этого могут использоваться два светодиода,
соответствующие длинным и коротким волнам с обеих сторон щелевого
фильтра, или единственный источник со спектром более широким, чем
щелевой фильтр. Если ширина спектра источника не превышает 100 нм,
изгибы волокна, потери в соединителях и прочее не повлияют на вы-
ход датчика, если применяется соответствующая схема нормализации.
Обычно нормализация достигается использованием в качестве выходного
сигнала отношения фототоков длинных и коротких волн.
Рис. 6.6. Датчик температуры, использу-
ющий сдвиг границы зоны в GaAs
________________—... \ Призма
--/ GaAs
Многомодовые волокна
Другая схема, обеспечивающая точку отсчета, описана в работе [13]
(Grattan и др.). Для нормировки обратного сигнала датчика предлагается
использовать линию флуоресценции Nd3+. В работе [14] (Ohishi и Taka-
hashi) сообщается о датчике, работающем в диапазоне от 70 до 300 °C,
Глава 6. Датчики на основе измерения интерферометра Фабри Перо
используя фторидное волокно, активированное Еи3+. Переход 7Fi-7Fg
наблюдался при длинах волн от 2 до 2,2 мкм. Для наблюдения за тем-
пературой использовался максимум амплитуды поглощения волокна.
6.3. Энкодеры положения
В одном из видов датчиков интенсивности для измерения линейных или
вращательных перемещений используются специальные пластины (или
диски). На прозрачный диск энкодера фотографически нанесена двоич-
ная схема кодирования, как правило код Грея, что обеспечивает уни-
кальную комбинацию меток для каждого положения. Код расположен на
дорожках, считываемых отдельными волокнами. При работе оптическо-
го энкодера могут использоваться как отраженные, так и просвеченные
схемы.
Рис. 6.7. Диск энкодера с разделением по длине волны, используемый в датчике
перемещения
Наиболее широкое применение такие датчики находят в авиации, где
требуется высокое разрешение, обычно 1 к 4096 = 212. Следовательно, для
самого простого считывателя энкодера требуется 12 входных и 12 выход-
ных волокон. Чтобы сэкономить и обеспечить вход и выход через одно
или два волокна, применяются методы мультиплексирования. Одна из
типичных схем показана на рис. 6.7. Здесь представлена схема с разде-
лением по длине волны (WDM — Wavelength Division Multiplexing). Свет
из широкополосного источника вводится в волокно. В показанном на схе-
ме датчике линейных перемещений различные спектральные компоненты
разделяются при помощи дихроичных расщепителей пучка или чувстви-
тельных к длине волны разветвителей. Отдельные волокна с излучением
различных длин волн подходят к дорожкам диска энкодера. Если диск
перед волокном прозрачен, свет проходит в собирающее волокно и далее
в объединитель. Излучение с интегральным спектром переносится к рас-
пределителю по длинам волн. Отдельные фототоки в делителе соответ-
ствуют составляющим излучения, прошедшим диск энкодера. Например,
на рис. 6.7 прозрачны все дорожки диска энкодера за исключением одно-
го, соответствующего длине волны, обозначенной 2. В работе [15] (Fritsch)
сообщается о 10 дБ отношении сигнал/шум в 10-битном WDM-энкодере.
Рис. 6.8. Диск энкодера с временным разделением, используемый в датчике пере-
мещения
Распределители по длинам волн могут быть сконструированы на осно-
ве многослойных фильтров, призмы или дифракционной решетки. Был
продемонстрирован прием излучения дискретными фотодиодами или ма-
трицами ПЗС. Часто эти элементы объединяются (например, с GRIN-лин-
зами) [16]. Во втором методе считывания энкодера используется вре-
менное уплотнение коротких импульсов. Схема приведена на рис. 6.8.
Глава 6. Датчики на основе измерения интерферометра Фабри Перо
Системы этого типа используются в авиации [17] в составе различных
оптических устройств. Отдельные каналы разделяются задержками до-
статочно большими, чтобы отделить перекрывающиеся импульсы излу-
чения.
6.4. Многомодовые датчики Фабри-Перо
История датчиков Фабри - Перо началась с использования интерфероме-
тра с параллельными пластинами на рубеже девятнадцатого-двадцатого
веков. Датчики напряжения и давления были описаны Фабри и Перо [18];
Меггер и Петерс [19] измеряли показатель преломления. Конечно, в кон-
струкциях всех этих датчиков не использовались преимущества оптиче-
ских волокон или твердотельных источников света.
Многомодовые датчики имеют ряд основных преимуществ по сравне-
нию с одномодовыми: (1) возможность эффективного введения света с не-
дорогих долговечных источников-светодиодов; (2) использование легко-
доступных соединителей и других оптоволоконных компонентов и (3) удоб-
ное окончание волокон. В датчиках Фабри-Перо можно воспользоваться
дополнительными преимуществами применения многомодовых волокон:
(4) дешевыми чувствительными элементами и (5) возможностью для раз-
нообразных типов датчиков использовать одну и ту же считывающую
оптику.
Многомодовые интерферометрические датчики имеют меньшую чув-
ствительность, чем их одномодовые эквиваленты; но при измерениях в про-
мышленных условиях это часто не является проблемой. Например, мно-
гомодовые датчики температуры, выпускаемые MetriCor («МетриКор»)
[20], имеют разрешение порядка 0,1 °C. Одномодовый интерферометри-
ческий датчик температуры десятисантиметровой длины может иметь
разрешение 10-5 °C при использовании значения Хокера (Hocker) для чув-
ствительности волокна к температуре 100 рад °С-1м-1, если предполо-
жить, что чувствительность интерферометра составляет 10-4 рад. Отно-
сительно невысокая чувствительность многомодовых датчиков не имеет
принципиального значения, поскольку динамический диапазон всех дат-
чиков с разомкнутым контуром имеет один и тот же порядок величины.
В этой ситуации большее, чем необходимо, разрешение только уменьша-
ет эффективный рабочий диапазон датчика. Ограничение динамического
диапазона можно преодолеть, если реализовать в устройстве подсчет ин-
терференционных полос или эквивалентный метод. При использовании
метода подсчета интерференционных полос, как правило, возникают про-
блемы, связанные с неопределенностью при считывании, когда внезапно
6.4- Многомодовые датчики Фабри-Перо 155
обрывается электропитание, поэтому этот метод невозможно использо-
вать в практических приложениях.
6.4.1. История развития многомодовых
датчиков Фабри-Перо
В ранней работе, посвященной датчикам Фабри-Перо [22] (Christensen,
Вашингтонский университет), приведено значение с точностью 0,5% для
датчика температуры с диапазоном 150 °C. Были разработаны разно-
образные датчики, использующие эталоны как с низкой, так и с высо-
кой добротностью. Популярные в настоящее время ключевые понятия,
связанные с датчиками Фабри - Перо, были всеобъемлюще описаны в ра-
боте [23] (Сох и Jones). Организация серийного производства датчиков
Фабри - Перо быстро продвигалась от поштучно собираемых лаборатор-
ных образцов к приборам, которые могли работать в широком диапа-
зоне температур [8, 24, 25]. Другие усовершенствования в конструкции
датчиков позволили начать выпуск семейства датчиков, производимых
с использованием технологии интегральных схем, с низкой стоимостью
и единообразных [26, 27]. Разработаны датчики температуры, которые
могут быть размещены на конце волокна просто напылением кремниево-
го слоя толщиной 0,7 мкм.
6.4.2. Принципы работы
Интерферометры Фабри-Перо состоят из двух отражателей, располо-
женных с каждой стороны оптически прозрачной среды. Подробный об-
зор теории этих приборов можно найти в работах [29] (Born и Wolf)
и [30] (Hernandez). При соответствующем расстоянии между отражате-
лями коэффициента пропускания интерферометра высок. Изменение рас-
стояния приводит к падению коэффициент пропускания. При высокой от-
ражательной способности отражателей коэффициент пропускания очень
чувствителен к изменениям длины волны или расстояния между отража-
телями. В целом эффективность интерферометра часто характеризуют
добротностью
F = 472/(1 - R)2,
где R — коэффициент отражения зеркал при отсутствии потерь. Зави-
симость коэффициента пропускания от расстояния между отражателями
для различных значений добротности показана на рис. 6.9. Интерфероме-
тры с высокой добротностью полезны, поскольку позволяют точно опре-
делить особенности спектра; интерферометры с низкой добротностью
допускают линейный режим в широком диапазоне измеряемого параме-
тра без сложных схем с обратной связью.
Рис. 6.9. Коэффициент пропускания интерферометра Фабри-Перо при различ-
ных значениях добротности (из [29])
Интерферометры Фабри - Перо привлекательны для использования в дат-
чиках, поскольку позволяют легко установить связь с измеряемыми фи-
зическими или химическими величинами. В случае датчика температуры
это можно проиллюстрировать, изучив, сколькими способами изменения
температуры могут быть связаны с расстоянием между отражателями
интерферометра. В последующем списке каждый пункт представляет со-
бой отдельный оптический параметр, через который можно связать изме-
нение температуры с оптическим резонансом интерферометра: (1) линейное
расширение распорного кольца; (2) изменение показателя преломления
среды между отражателями; (3) расширение среды между отражателя-
ми; (4) изменение кривизны отражателей; (5) изменение поглощения или
отражательной способности отражателя и (6) изменение спектрального
поглощения или рассеяния в среде между отражателями. К счастью, мож-
но конструировать интерферометры для измерения только одного или
двух параметров из перечисленных выше, исключив реакцию на вмеша-
тельство остальных. Это позволяет, например, разрабатывать датчики
температуры, не чувствительные к давлению.
В датчиках Фабри Перо с многомодовыми волокнами используют-
ся различные источники излучения. Как правило, спектральная ширина
источника — основной параметр, имеющий значение и обусловленный
выбором конкретной схемы считывания. Замкнутый контур считывания
допускает использование интерферометров с высокой добротностью и ла-
зерных источников. В этом примере длина волны лазера сопровождает
сдвиг резонанса интерферометра. Белые источники света могут исполь-
зоваться, если в наличии имеется спектрофотометр или его эквиваленты.
Светодиоды наиболее распространены и могут применяться с интерферо-
6.4- Многомодовые датчики Фабри-Перо
метрами и считывающими устройствами различных конструкций. В не-
которых датчиках могут использоваться два источника для уменьшения
ошибок, связанных с потерями и неопределенностями в интерферометре
[31, 32].
Рис. 6.10. Спектр ти-
пичного 850 нм свето-
диода при расстояниях
1,5 и 30 мкм между от-
ражателями интерфе-
рометра Фабри - Перо
Длина волны (нм)
На рис. 6.10 показан спектр светодиода Honeywell HFE-4000. Это ти-
пичный GaAlAs-светодиод с центральной длиной волны в области 850 нм.
Длинноволновые светодиоды имеют большую ширину спектра. Характе-
ристика светодиода сравнивается с расчетной отражательной способно-
стью двух различных интерферометров. В одном интерферометре рас-
стояние между отражателями составляет 30 мкм; в другом - только
1,5 мкм. В случае интерферометра с расстоянием между отражателя-
ми 30 мкм в ширину спектра светодиода укладывается много циклов
резонанса. При таком варианте светодиод — просто широкополосный
источник, который позволяет отслеживать подъемы и спады резонанса.
В работах [24] (James и др.), [25] (Quick и др.), [33] (Belsley и др.) и [34] (Ве-
heim и др.) показано, что такое соотношение оказывается полезным при
многих физических измерениях. Интерферометр с расстоянием между от-
ражателями 1,5 мкм — это типичный представитель датчиков с малым
расстоянием между отражателями, спектральная ширина которых сопо-
ставима или немного превышает спектральную ширину источника-свето-
диода [23]. Такие системы могут применяться для исследования резонанса
интерферометра при помощи светодиода и считывающего анализатора,
чтобы линеаризовать характеристику датчика [26].
Глава 6. Датчики на основе измерения интерферометра Фабри-Перо
6.4.3. Конструкция датчика
Методы изготовления датчиков различаются в широком диапазоне —
от сложной сборки из полированного кварца до осаждения тонкого слоя на
конце волокна. Разнообразные конструкции показаны на рис. 6.11 и 6.12.
На рис. 6.11 представлены два датчика температуры. Здесь для изме-
нения характеристик интерферометра используется распорка. В схеме
на рис. 6.11, а распорка находится в световоде и при изменениях тем-
пературы влияет на оптическое расстояние как посредством изменения
своей толщины, так и посредством изменения показателя преломления.
На рис. 6.11, б показана схема с распоркой, влияющей только на рассто-
яние, благодаря своей способности расширяться.
Линза с градиентным
показателем преломления Зеркала
Распорка
а) б)
Рис. 6.11. Датчики температуры, использующие расширение для изменения базы
интерферометра (из [23 и 25])
Температура
б)
Показатель преломления
L- тестируемой жидкости
В)
Рис. 6.12. Датчики Фабри-Перо для измерения а) давления, 6) температуры и в)
показателя преломления жидкости (из [26])
На рис. 6.12 представлено семейство датчиков Фабри - Перо. Все эти
датчики изготовлены с использованием технологии интегральных схем.
Обычно габаритный размер датчика составляет 0,5 х 0,5 х 0,2 мм. Датчи-
6.4- Многомодовые датчики
ки, измеряющие давление, температуру и показатель преломления, — все
они работают с одной и той же считывающей оптикой и электроникой.
6.4.4. Методы считывания
В интерферометрических датчиках может использоваться единственный
фотодиод просто как считыватель интенсивности; однако из-за нелиней-
ной природы отражательной способности датчика эффективность будет
ограниченна. Особенно сложна ситуация в приборах Фабри-Перо с вы-
сокой добротностью. Наиболее гибкая система считывания, обеспечиваю-
щая подавление шумов и линейность режима при многих циклах смещения
интерферометра, может быть разработана на основе сотен фотодиодов
и дисперсионной оптики [24, 33, 35].
б)
Рис. 6.13. Считывающие устройства датчика: а) детекторная матрица ПЗС; б)
дихроичный фильтр и пара фотодиодов
Пример считывателя, состоящего из множества фотодиодов, показан
на рис. 6.13, а. Свет от датчика приходит на матрицу фотодиодов, ко-
торая обеспечивает непосредственное считывание оптического спектра.
Это может быть использовано для определения положения особенностей
характеристик интерферометра внутри оптического спектра используе-
мого источника. Считыватель на рис. 6.13, б — это упрощение варианта
а. Используются только два приемника, причем на каждый из них падает
Глава 6. Датчики на основе измерения интерферометра Фабри-Перо
половина оптического спектра. При соответствующем выборе источника
и оптических свойств датчика это простое устройство может обеспечить
надежное считывание в линейном режиме. Другие устройства считыва-
ния для многомодовых датчиков Фабри-Перо включают в себя интер-
ферометры с сервоприводом [34, 36] и источники с двумя длинами волн,
декодируемыми устройством считывания [31].
Чувствительная
акустическая
Одномодовое волокно
(сохраняющее поляризацию)
.........
а)
Волновая “ембрана
пластина /
Линза Зеркала
Одномодовое волокно
Конечный
отражатель
Отражающее
соединение
б)
Рис. 6.14. Одномодовые интерферометры: а) датчик давления с внешним чув-
ствительным элементом (из [40]); б) волоконный датчик температуры
(из [37])
6.5. Одномодовые датчики Фабри-Перо
В одномодовых датчиках Фабри - Перо, как правило, используются ла-
зерные источники, а измерительный интерферометр может быть сфор-
мирован внутри самого волокна. Большая длина когерентности лазерного
источника делает допустимой некоторую гибкость дизайна, невозмож-
ную в случае многомодовых интерферометрических датчиков; однако
в целом одномодовые системы конструировать сложнее. На рис. 6.14 пред-
ставлены два варианта датчиков, описанных в литературе. В устройстве
рис. 6.14, а используются объемные оптические компоненты и тонкая по-
лимерная мембрана, воспринимающая звук в воздухе. Для сравнения на
рис. 6.14, б показан интерферометр, который образован отрезком одно-
модового волокна. Рефлекторы встраиваются в виде тонких пленок на-
пыления или вместо этого используется френелевское отражение [37, 38].
В этом внутриволоконном интерферометре для измерения температуры
используются эффекты, впервые описанные Хоккером (Hocker) [21].
6.5. Одномодовые датчики Фабри-Перо 161
За некоторыми исключениями [39] внутриволоконные интерфероме-
тры Фабри - Перо принципиально отличаются от интерферометров Ма-
ха -Цендера (см. гл. 10). Интерферометрам Фабри-Перо не требуется
сервопривода растяжения волокна или управления эталонным волокном,
но они не позволяют использовать намного большую, чем длина когерент-
ности, длину датчика. Если датчики Фабри-Перо с высокой добротно-
стью применяются в практических приложениях, из-за их нелинейности
требуются специальные методы считывания.
6.5.1. Варианты считывающих устройств для
одномодовых датчиков
Применяются как простые считыватели интенсивности [37, 40, 41], так
и более ложные установки, использующие интерферометр Майкельсона [42].
Применяются различные системы сервопривода, например, одна из них
показана на рис. 6.15 [38, 43]. В этом считывателе длина волны лазера
охватывает серию резонансов датчика, фиксируемых в отраженном свете
сигнальным фотодиодом. В результате считыватель достигает гибкости
спектрофотометра при намного меньшей сложности.
Рис. 6.15. Считыватель с замкнутым контуром одномодового волоконного дат-
чика Фабри - Перо, в котором используется интерферометр с высокой
добротностью, сформированный в волокне (из [38])
В системах считывания объемных интерферометров можно использо-
вать датчики, длина которых несколько больше, чем длина когерентно-
сти лазера. Это позволяет формировать множество датчиков различной
длины в одном и том же волокне и мультиплексировать считывателем
интерферометра. Характерные особенности волокон можно использовать
для одновременной регистрации двух поляризаций [44, 45] в приложени-
ях, использующих волокна, поддерживающие поляризацию. Такие волокна
позволяют одновременно производить измерения двух связанных параме-
тров, таких как механическое напряжение и температура.
6-3379
162 Глава 6. Датчики на основе измерения интерферометра Фабри-Перо
Литература
1. D. A. Khron, Fiber Optic Sensors in Industrial Applications: An Overview,
Instrument Society of America International Conference, Philadelphia, Oct. 18-
21, 1982.
2. S. K. Yao and С. K. Asawa, Fiber Optical Intensity Sensors, IEEE J. Sei. Areas
Commun. SAC-1(3) (1983).
3. N. Lagakos, T. Litovitz, P. Macedo, and R. Mohr, Multimode Optical Fiber
Displacement Sensor, Appl. Opt. 20, 167-168 (1981).
4. M. Corke, F. Gillham, A. Hu, D. W. Stowe, and L. Sawyer, Fiber Optic Pressure
Sensors Employing Reflective Diaphragm Techniques, Proc. SPIE 985, 164-171
(1988).
5. I. P. Giles et al., Self-Compensating Technique for Remote Fibre Optic Intensity
Modulated Transducers, Proc. SPIE 522, 233-239 (1985).
6. I. P. Giles, S. McNeill, and B. Culshaw, A Stable Remote Intensity Based Optical
Fibre Sensor, J. Phys. E (GB) 18(6), 502-504 (1985).
7. С. M. Lawson and V. J. Tekippe, Environmentally Insensitive Diaphragm Re-
flectance Pressure Sensor, Proc. SPIE 412, 96-103 (1983).
8. J. W. Berthold, W. L. Ghering, and D. Varshneya, Design and Characterization
of a High-Temperature, Fiber-Optic Pressure Transducer, IEEE J. Light wave
Technol. LT-5, 1-6 (1987).
9. D. R. Miers, D. Raj, and J. W. Berthold, Design and Characterization of Fiber-
Optic Accelerometers, Proc. SPIE 838, 314-317 (1987).
10. J. W. Snow, A Fibre Optic Fluid Level Sensor: Practical Considerations, Proc.
SPIE 954, 88 (1983).
11. D. A. Christensen and J.T. Ives, Fiberoptic Temperature Probe Using a Semi-
conductor Sensor, Proc. NATO Advanced Studies Institute, Dordrecht, The
Netherlands, 1987, p. 361-367.
12. E. W. Saaski and R. L. Skaugset, An Optical Temperature Sensor for High
Voltage Applications, Proc. 7th IEEE/PES Transmission and Distribution Con-
ference and Exhibition, 1979, p. 208-212.
13. К. T. V. Grattan, R. K. Selli, and A. W. Palmer, A Miniature Fluorescence Ref-
erenced Glass Absorption Thermometer, Proc. 4th International Conference on
Optical Fiber Sensors, Tokyo, 1986, p. 315.
14. Y. Ohishi and S. Takahashi, Optical Temperature Sensor Using Eu3+-Doped
Fluoride Glass, Appl. Opt. 25(5), 720-723 (1986).
15. K. Fritsch and G. Beheim, Wavelength-Division Multiplexed Digital Optical
Position Transducer, Opt. Lett. 11, 1-3 (1986).
16. K. Kobayashi and M. Seki, Microoptic Grating Multiplexers and Optical Iso-
lators for Fiber-Optic Communications, IEEE J. Quantum Electron. QE-16,
11 22, 1980.
17. W. L. Glomb, Jr., and D. Varshneya, Optic Multiplex for Aircraft Sensors: Issue
and Options, United Tech. Research Ctr., East Hartford, Conn.
18. A. Perot and С H. Fabry, Sur un Voltmetre Electrostatique Interferentiel pour
Etalonnage, J. Phys. 7, 650-659 (1898).
19. W. F. Meggers and C. G. Peters, Measurements on the Index of Refraction of Air
for Wavelengths from 2218 to 9000A, Bull. Bur. Stand. 14, 697-740 (1918).
20. Data Sheet for Model 1400 Multisensor System, Metricor, Inc., Woodinville,
Wash., 1988.
21. G.B. Hocker, Fiber-Optic Acoustic Sensors with Increased Sensitivity by Use
of Composite Structures, Opt. Lett. 4, 320-321 (1979).
22. D. A. Christensen, Fiber Optic Temperature Sensing Using Spectroscopic De-
tection, Annual Meeting of the Optical Society of America, Oct. 1974.
23. E. R. Cox and B.E. Jones, Fibre Optic Colour Sensors Based on Fabry-Perot
Interferometry, Proc. First International Conference on Optical Fibre Sensors,
London, Apr. 1983.
24. K. A. James, W. H. Quick, and V. H. Strahan, Analysis and Preliminary Design
of Optical Sensors for Propulsion Control, NASA Technical Report C-81-341/
201, 1981.
25. W. H. Quick, K.A. James, and J.E. Coker, Fiber Optics Sensing Techniques,
Proc, First International Conference on Optical Fibre Sensors, London, Apr.
1983.
26. E. W. Saaski, J. C Hartl, G. L. Mitchell, R. A. Wolthuis, and M. A. Afroraowitz,
A Family of Fiber Optic Sensors Using Cavity Resonator Mi-croshifts, Proc. 4th
International Conference on Optical Fiber Sensors, Tokyo, 1986.
27. J.C. Hartl, E. W. Saaski, and G.L. Mitchell, Fiber Optic Temperature Sensor
Using Spectral Modulation, Proc. SPIE 838, 257-261 (1988).
28. L. Schultheis, H. Amstutz, and M. Kaufmann, Fiber-Optic Temperature Sensing
with Ultrathin Silicon Etalons, Opt. Lett. 13, 782-784 (1988).
29. M. Born and E. Wolf, Principles of Optics, Pergamon Press, Oxford, 1964.
30. G. Hernandez, Fabry-Perot Interferometers, Cambridge University Press, Cam-
bridge, 1986.
31. J.P. Dakin, C. A. Wade, and P. B. Withers, An Optical Fibre Pressure Sensor,
Int. J. Opt. Sensors 2, 191-199 (1987).
32. J.P. Dakin, C. A. Wade, and P. B. Withers, An Optical Fibre Pressure Sensor,
Proc. SPIE 734, 194-201 (1987).
33. K.L. Belsley, D.R. Huber, and J. Goodman, All-Passive Fiber-Optic Pressure
Sensor, Paper 86-2801, Instrument Society of America Annual Meeting, 1986.
34. G. Beheim, K. Fritsch, and D. J. Anthan, Fiber-Optic Temperature Sensor Using
a Spectrum-Modulating Semiconductor Etalon, Proc. SPIE O-E/Fibers ’87, San
Diego, Calif., Aug. 1987.
35. E. R. Cox and В. E. Jones, Fibre Optic Color Sensors Based on Fabry-Perot
Interferometry, Proc. First International Conference on Optical Fiber Sensors,
London, 1983, p. 122-126.
36. K. Fritsch and G. Beheim, Wavelength-Division Multiplexed Digital Optical
Position Transducer, Opt. Lett. 11, 1-3 (1986).
37. С. E. Lee and H. F. Taylor, Interferometric Optical Fibre Sensors Using Internal
Mirrors, Electron. Lett. 24, 193-194 (1988).
38. P. A. Leilabady and M. Corke, All-Fiber-Optic Remote Sensing of Temperature
Employing Interferometric Techniques, Opt. Lett. 12, 772-774 (1987).
164 Глава 6. Датчики на основе измерения интерферометра Фабри Перо
39. A. D. Kersey, D. A. Jackson, and М. Corke, A Simple Fibre Fabry-Perot Sensor,
Opt. Commun. 45, 71-74 (1983).
40. M. Matsumoto, K. Fujimura, K. Hattori, and H. Naono, Fiber-Optic Acoustic
Sensor Based on Fabry-Perot Interferometer, Proc. 4th International Conference
on Fiber Optic Sensors, Tokyo, 1986.
41. С. E. Lee, R. A. Atkins, and H. F. Taylor, Performance of a Fiber-Optic Tem-
perature Sensor for —200 to 1050 °C, Opt. Lett. 13, 1038-1040 (1988).
42. F. Farahi, T. P. Newson, J.D.C. Jones, and D. A. Jackson, Coherence Multi-
plexing of Remote Fibre Optic Fabry-Perot Sensing System, Opt. Commun. 65,
319-321 (1988).
43. P. A. Leilabady, J.D.C. Jones, and D.A. Jackson, Monomode Fibre Optic In-
terferometric Techniques in Flow Velocity Measurement, Opt. Acta 32, 233-240
(1985).
44. P. A. Leilabady, J. D. C. Jones, and D. A. Jackson, Monomode Fiber-Optic Strain
Gauge with Simultaneous Phase- and Polarization-State Detection, Opt. Lett.
10, 576-578 (1985).
45. J.N. Blake, Q. Li, and B. Y. Kim, Elliptical Two-Mode Fiber Strain Gage with
Heterodyne Detection, Proc. 5th International Conference on Fiber Optic Sen-
sors, New Orleans, Jan. 1988.
ГЛАВА 7
МНОГОМОДОВЫЕ
ДИФРАКЦИОННЫЕ
ДАТЧИКИ
У. Б. Спиллман-младший
«Симмондс Пресижн»
Подразделение «Эйркрафт Системе»
Вердженс, Вермонт
7.1. Введение
Волоконно-оптические датчики можно
разделить на два класса: датчики, в
которых исследуемое явление воздей-
ствует на свет во время его распро-
странения по оптическому волокну, и
датчики с внешним чувствительным
элементом, в которых свет выводится
из оптического волокна, подвергает-
ся воздействию и снова запускается
в волокно для передачи в блок обра-
ботки сигнала. Здесь мы рассмотрим
датчики с внешним чувствительным
элементом, механизм преобразования
которых основан на эффекте, создава-
емом дифракционной решеткой. Много-
Рис. 7.1. Базовая структура решетки
модовые волоконно-оптические датчики, использующие поляризационную
модуляцию, рассмотрены в гл. 8. Многие наиболее удачные многомодо-
вые волоконно-оптические датчики, которые были продемонстрированы,
основаны на свойствах решеток. Решетка представляет собой оптиче-
ски прозрачную основу с чередующимися прозрачными и поглощающими
областями, как показано на рис. 7.1. Решетки применяются при измере-
нии множества параметров, при этом для измерений используются как
Волоконно-оптические датчики: Вводный курс для инженеров и научных работников,
под редакцией Эрика Удда. ©1991 John Wiley & Sons, Inc.
Глава 7. Многомодовые дифракционные датчики
интенсивность, так и длина волны. Принцип работы решеток основан
на модуляции, которая может проявляться как изменение интенсивности,
длины волны или того и другого. Выполняется большая работа по разви-
тию датчиков этого типа. Продемонстрированы дифракционные датчики
для измерения смещения [1,2], давления [3], а также гидрофоны [4]. В этой
главе приведено описание основ теории методов дифракционной модуля-
ции и датчиков, основанных на взаимном движении пары решеток и на
нестандартной структуре решеток. Далее подробно описаны примеры
возможного использования этих методов для измерения множества раз-
личных физических параметров.
7.2. Теоретические основы
Рис. 7.2. Дифракция света на сплошном объекте
Прежде чем анализировать свойства оптических решеток, необходимо
изучить дифракцию. В явлении дифракции проявляются свойства све-
та, существенно отличающиеся от тех, которые можно было бы ожидать
на основании лучевой геометрической оптики. Самый простой пример
дифракции можно наблюдать, изучая тень, отбрасываемую каким-либо
предметом правильной четкой формы, таким как монета, при освещении
квазимонохроматическим источником (рис. 7.2). Геометрическая оптика
предсказывает, что тень, отбрасываемая монетой, должна быть идеаль-
ным темным кругом с контуром, соответствующим периметру монеты.
Такая тень видна, но если более внимательно изучить ее края, обнару-
7.2. Теоретические основы
жится, что они не так уж отчетливо очерчены. Скорее они состоят из
множества чередующихся темных и светлых областей (полос). При даль-
нейшем рассмотрении обнаружится, что сама тень не однородно темная,
а постепенно темнеет по мере приближения к центру. В целом дифракцию
можно определить как воздействие препятствий на проходящее излучение.
Существует два вида дифракции — дифракция Фраунгофера и ди-
фракция Френеля. Дифракцию Френеля называют дифракцией ближнего
поля, а дифракцию Фраунгофера проявлениями дальнего поля. Во вто-
ром случае предполагается параллельный коллимированный пучок света,
а первый — не содержит такого ограничения. Таким образом, дифракция
Фраунгофера — это частный случай дифракции Френеля, но, поскольку
ее намного проще описать аналитически, мы будем ее рассматривать для
демонстрации определенных характерных проявлений дифракции.
Рис. 7.3. Дифрак-
ция на одной щели
Самый простой для изучения случай — это дифракция на одной щели
(рис. 7.3). В этом случае свет проходит через узкую щель и проециру-
ется на экран. Наблюдается центральный максимум Iq. В других обла-
стях экрана происходит интерференция между светом, дифрагированным
верхним и нижним краями щели. Все пары лучей света, проходящие че-
рез фрагменты щели на расстоянии а/2 один от другого, будут иметь
одинаковую разность дальностей распространения Ь. При этом, в частно-
сти, ослабляющая интерференция возникнет при 6, равном целому числу,
умноженному на Л/2. Однако, поскольку sin в = 6/(а/2), получаем
asin0 = mA, (7.1)
Глава 7. Многомодовые дифракционные датчики
где т — целое, с абсолютной величиной, равной или большей 1. Уравнение
(7.1) — это уравнение для минимумов дифракции Фраунгофера на одной
щели. Изучение этого уравнения позволяет обнаружить два существенных
момента. Во-первых, при уменьшении а (сужении щели) минимумы по-
являются при большем значении в. Во-вторых, при постоянном значении
ширины щели а в увеличивается вместе с длиной волны (т. е. красный свет
преломляется сильнее, чем синий). Это противоположно тому, что проис-
ходит при преломлении, когда это явление обусловлено общим уменьше-
нием показателя преломления в оптических материалах при уменьшении
длины волны (хроматическая дисперсия).
Разрешающая способность оптических систем часто ограничена ди-
фракцией. Примером этого может служить проблема, возникающая при
попытке с помощью телескопа разделить изображения двух отдельных
звезд, расположенных в непосредственной близости. Дифракционные кар-
тины света двух звезд, создающиеся в телескопе, перекрывают одна дру-
гую. Если центральные максимумы расположены достаточно близко, они
выглядят, как один. Если максимум, созданный светом одной звезды, со-
впадает с первым минимумом, созданным светом другой, — достигнуто
предельное разрешение. Если картины раздвигать дальше, то разреше-
ние между двумя звездами будет более отчетливо. Условие предельного
разрешения называется критерием Рэлея. Для данной линзы критерий
Рэлея позволяет вычислить минимальный угол разрешения [5]. Если лин-
за имеет диаметр D и полностью освещена светом с длиной волны А, то
минимальный угол разрешения
0min = 1,22-^. (7.2)
С практической точки зрения наиболее полезное устройство, основан-
ное на дифракции, это дифракционная решетка (рис. 7.4). В этом случае
решетка пропускает свет через совокупность щелей шириной а каждая,
отстоящих на расстояние s одна от другой. Это расстояние называет-
ся периодом решетки. Простой анализ для света, падающего на решетку
перпендикулярно, позволяет получить уравнение решетки
ssin# = mA, (7.3)
определяющее положение максимумов для света с длиной волны А. Более
строгий анализ, принимающий во внимание количество щелей N и шири-
ну щелей, позволяет получить угловое распределение оптической мощно-
сти /(0), падающей на экран. В этом случае нормализованное распреде-
ление оптической мощности задается формулой
sin2 Al sin2 NA2
~ A2sin2A2 "
(7-4)
7.2. Теоретические основы
где Ai и А2 определены как
л па sin в
7TSSin0
А2 =------т—. (7.5)
А
Рис. 7.4. Дифракция на множестве щелей
Величина Ai представляет влияние дифракции на одной щели, —
интерференцию от множества щелей. Изучение уравнения (7.4) показы-
вает, что положение главных максимумов решетки связано с квадратом
количества щелей. Следовательно, увеличение количества щелей приводит
к усилению центральных максимумов различных порядков и подавлению
вторичных эффектов дифракции между ними. Это показано на рис. 7.5.
Наконец, две другие характеристики решетки, представляющие инте-
рес, это угловая дисперсия и разрешающая способность. Угловую диспе-
рсию можно вычислить непосредственно из основного уравнения решетки
(7.3), если взять производную от обеих частей, полагая s и т постоянны-
ми. Получится
Можно видеть, что изменение угла при изменении длины волны увели-
чивается при увеличении порядка. Более сложный анализ требуется для
определения разрешающей способности или наименьшего отличия длины
волны АЛ, которое может быть обнаружено при данной длине волны А
Глава 7. Многомодовые дифракционные датчики
и порядке
лой [5]
т решеткой с N щелями. Эта величина определяется форму-
(7-7)
д х А
ДА = .
Nm
Рис. 7.5. Влияние количества щелей на дифракционную картину
7.2.1. Оптические методы кодирования
Ключевые характеристики дифракционной решетки представлены на рис. 7.4.
Это период решетки s и прозрачный фрагмент каждого периода а. Общее
количество энергии, проходящей через решетку (ближнее поле), пропор-
ционально отношению a/s. Если это отношение сделать зависящим от не-
которого представляющего интерес параметра F, в то время как период
останется постоянным, интенсивность прошедшего света будет промоду-
лирована в соответствии с формулой
/(Р) = 1о—. (7.8)
S
Такой вид модуляции можно получить как результат относительного дви-
жения двух дифракционных решеток, расположенных в непосредственной
близости одна к другой.
Дифракционные решетки можно также использовать как устройства,
реагирующие на длину волны. Если отношение a/s остается постоянным,
а период решетки модулируется некоторым представляющим интерес па-
раметром Р, угловое спектральное распределение излучения, проходяще-
7.2. Теоретические основы
го через решетку, будет модулироваться в соответствии с уравнениями
(7.4) и (7.5). Например, при постоянном угле регистрации 0, постоян-
ном входном угле и однородном распределении энергии по длинам волн
во входном сигнале регистрируемый цвет будет непосредственно связан
с Р. Пример такого устройства показан на рис. 7.6. В этом случае решет-
ка или встроена, или прикреплена к подложке, выбранной для измерения
деформации, обусловленной исследуемым параметром. Если, например,
выбрана подложка с большим коэффициентом теплового расширения (на
рис. 7.6 показан датчик температуры, основанный на изменении длины
волны), тогда период решетки будет определяться по формуле
S = so[1 + а(^ “ Ш
(7.9)
где а — коэффициент теплового расширения подложки и sq — период
решетки при температуре То-
Рис. 7.6. Узкополосная дифракция с помощью дифракционной решетки
При освещении отражательной дифракционной решетки с чередующи-
мися отражающими и поглощающими полосами широкополосным светом
под постоянным углом во дифракция света зависит от периода решетки s
(расстояния между центрами отражающих полос) и угла регистрации 0]
в соответствии с уравнением решетки [5]
s(sin0o + sin 01) = mA, (7.10)
где углы измеряются в плоскости падения света, нормальной к решетке.
Величина т — это порядок дифракции, задаваемый целым числом. По-
лосы решетки перпендикулярны плоскости падения. Ось отсчета перпен-
дикулярна плоскости решетки и проходит через точку, в которой падаю-
щий свет пересекает плоскость решетки. Угол падения определяется как
Глава 7. Многомодовые дифракционные датчики
положительный угол относительно оси отсчета, в то время как угол ди-
фракции определяется как положительной с той же стороны оси отсчета,
что и падающий пучок, и отрицательный в противном случае. Если при-
менить уравнение решетки к дифракционной решетке, период которой
изменяется в соответствии с измеряемым параметром Р (т. е. s = /(Р)У
то можно сделать выводы о величине Р, когда известно s (предполага-
ется, что функция существует и однозначно определена). В этом
случае
Р = /-1-----. (7.11)
J sin0o + sin0i 1 ’
Разработаны и продемонстрированы дифракционные датчики, реа-
лизованные как на основе измерения интенсивности, так и на основе
измерения длины волны. Далее мы обсудим их более подробно.
7.3. Датчики, основанные на относительном движении
находящихся одна напротив другой решеток
Рис. 7.7. Модуляция интенсивности парой решеток
В многомодовых волоконно-оптических датчиках, использующих дифрак-
ционные решетки и основанных на схемах изменения интенсивности, как
правило, применяются чувствительные элементы на основе двух располо-
женных в непосредственной близости одинаковых решеток, одна из кото-
рых неподвижна, а другая может перемещаться, как показано на рис. 7.7.
Если решетки расположены достаточно близко одна к другой, по отно-
шению к падающему свету они проявляют себя как одна решетка, период
7.3. Датчики, основанные на относительном движении решеток
которой остается постоянным, но доля пропускающей площади может
изменяться от 0,5 до 0 в зависимости от положения перемещаемой решет-
ки. Легко понять, что 100% модуляция интенсивности достигается, когда
решетки сдвинуты одна относительно другой точно на величину а. При
этом подразумевается, что чувствительность к смещению и динамиче-
ский диапазон регулируются вместе, и высокая чувствительность может
быть получена за счет динамического диапазона или наоборот.
Рис. 7.8. Схематическое представление волоконно-оптического гидрофона на
основе структуры дифракционных решеток
Волоконно-оптические датчики с движущимися решетками могут при-
меняться для измерения любого параметра, изменение которого может
проявляться через относительное движение двух решеток. Одним из са-
мых первых приборов, работающих по этому принципу, был волокон-
но-оптический гидрофон [4]. В дальнейшем этот гидрофон был всесто-
ронне изучен [6]. Схематическое представление гидрофона показано на
рис. 7.8. Свет из многомодового оптического волокна (Dupont PiFax S120,
тип 30, 200 мкм, сердцевина со ступенчато изменяющимся показателем
преломления PCS) коллимируется стержневой микролинзой с градиент-
ным показателем преломления (GRINRod) и проходит через структуру
дифракционных решеток (рис. 7.9), после чего фокусируется на входе
выходного волокна второй микролинзой. Дифракционные решетки при-
соединены к двум гибким мембранам, расположенным сверху и снизу
корпуса гидрофона. Прогиб мембран под воздействием переменного аку-
стического давления приводит к относительному перемещению решеток,
и, таким образом, модулирует количество излучения, проходящего меж-
ду входным и выходным волокнами. В приборе использовался период
решетки s, равный 10 мкм, с 50% периода (5 мкм), доступными для мо-
дуляции. Оптическая пропускная способность может быть описана как
Глава 7. Многомодовые дифракционные датчики
произведение трех множителей: (1) доля света, первоначально запущен-
ного во входное волокно, доходящая до выходного волокна в отсутствие
структуры дифракционных решеток; (2) доля света, падающего на струк-
туру дифракционных решеток и проходящая через нее (функция s и от-
носительного расположения решеток); и (3) доля света, проходящая через
структуру решеток при нулевом порядке дифракции по отношению к об-
щему количеству прошедшего света. Вид гидрофона в разрезе показан на
рис. 7.10.
Рис. 7.9. Структура дифрак-
ционных решеток в собранном
виде
Рис. 7.10. Вид в разрезе ги-
дрофона на основе структуры
дифракционных решеток
1.3. Датчики, основанные на относительном движении решеток 175
Ключевой элемент гидрофона, модулятор на основе движущихся в про-
тивоположных направлениях дифракционных решеток, состоит из двух
кусков покровного стекла размером 9x3 мм, 0,7 мм толщиной каж-
дый, образующих подложки для 1,6 мм2 решеток. Они были изготовлены
из 5 мкм полос с помощью маски из фоторезиста методом обратной
литографии и 120 нм напылением хрома. Две решетки сведены вместе
и выровнены так, чтобы их полосы были параллельны, и смещены одна
относительно другой на половину ширины полосы для достижения макси-
мума чувствительности. Иммерсионное масло (Cargille Immersion Liquid,
п = 1,624) было введено между двумя решетками под действием капил-
лярности. Масло уменьшает трение между решетками, препятствует их
схлопыванию под давлением и уменьшает оптические потери, обусловлен-
ные отражением. Перекрывающиеся области двух стеклянных подложек
были скреплены эпоксидным клеем холодного отверждения (RTV). По-
скольку этот клей эластичен, он допускает относительные смещения ре-
шеток и упругую возвращающую силу. После отверждения эпоксидного
клея для полного завершения структуры дифракционных решеток с обо-
их концов подложек были прикреплены две плексигласовые крышки 3 мм
в диаметре и 1 мм толщиной. Затем структура была установлена внутри
корпуса гидрофона на пути света между входным и выходным волокнами,
чтобы обеспечить максимум оптической пропускной способности. После
этого плексигласовые крышки на концах были присоединены к двум ре-
зиновым мембранам гидрофона (2 см в диаметре и 1,5 мм толщиной).
После изготовления прибор был протестирован в лаборатории для
определения его рабочих характеристик. В качестве источника света ис-
пользовался гелий-неоновый лазер Hughes 2 мВт. Свет запускался во вход-
ное волокно через 10-кратный микрообъектив. Свет из выходного во-
локна регистрировался фотодиодом большой площади RCA С30808 с на-
грузочным резистором сопротивлением 200 кОм. На рис. 7.11 показана
измеренная в воздухе зависимость относительной оптической мощности,
пропущенной гидрофоном, от статического смещения. При 50% модуля-
ции оптическая мощность излучения, падающего на детектор, составила
30 мкВт. Вычисленное после этого минимальное обнаружимое смещение
составило ~ 2,5 х 10-4 мкм при условии, что оптический дробовой шум
преобладает в шуме источника при данном уровне мощности. Чувстви-
тельность прибора исследовалась для акустических сигналов различных
частот при помощи акустического калибратора NRL G19 и эталонного
электрического гидрофона Gould CH-17UT, как показано на рис. 7.12.
Прибор тестировался в диапазоне частот от 100 Гц до 2,5 кГц. Величи-
на регистрируемого сигнала измерялась спектроанализатором Hewlett-
Packard 3580А. Затем измеренное отношение сигнал/шум вместе с уров-
Глава 7. Многомодовые дифракционные датчики
нем давления, измеренным опорным датчиком, использовалось для опре-
деления минимального обнаружимого давления (т. е. давления, при ко-
тором отношение сигнал/шум равно 1). Как показано на рис. 7.13, ха-
рактеристика прибора сопоставима с уровнем шума Кнудсена (нулевое
волнение моря) в диапазоне частот от 100 Гц до 1 кГц.
1,00<
си
о Л 0,75
Е о
2 о
о. х
с m
я о 0,50
5 ф
н
О 0,25
X
6
0,00
0 5 10 15 20
Относительное смещение (мкм)
Рис. 7.11. Зависимость относи-
тельного оптического пропуска-
ния от статического смещения для
движущихся в противоположных
направлениях решеток волоконно-
оптического гидрофона
Рис. 7.12. Акустические испытания ги-
дрофона с решетками, движущимися в про-
тивоположных направлениях
7.3. Датчики, основанные на относительном движении решеток I
Рис. 7.13. Зависимость ми-
нимального регистрируемо-
го давления от частоты для
волоконно-оптического гид-
рофона с решетками, дви-
жущимися в противополож-
ных направлениях
Рис. 7.14. Гидрофон с решетка-
ми, движущимися в противопо-
ложных направлениях, подгото-
вленный для испытаний на ис-
пытательном стенде для гидро-
локаторов фирмы «Сперри»
Следующие лабораторные испытания прибора были проведены на ис-
пытательном стенде для гидролокаторов фирмы «Сперри» в Great Neck,
Нью-Йорк. На рис. 7.14 показаны два гидрофона, подготовленные для
исследования в испытательном бассейне. При испытаниях рабочие ха-
рактеристики прибора были подтверждены (т. е. динамический диапазон
178 Глава 7. Многомодовые дифракционные датчики
порядка 125 дБ и минимальное обнаружимое давление на уровне шума
Кнудсена). Кроме того, приборы продемонстрировали, что их характе-
ристики не зависят от направления.
Эти гидрофоны с решетками, движущимися в противоположных на-
правлениях, стали одними из первых многомодовых волоконно-оптиче-
ских датчиков, продемонстрировавших характеристики, сопоставимые
с существующими электрическими приборами. К тому же благодаря за-
ложенному в конструкции сообщению с забортной водой они оказались
относительно невосприимчивы к уровню статического давления и отли-
чались простотой изготовления, поскольку были применены модульные
компоненты, собираемые отдельно. Однако этот конкретный тип датчи-
ка не имел собственной точки отсчета, и ошибки в определении уровня
давления могли возникать из-за различных потерь при передаче в соеди-
нителях и волокнах, а также при колебаниях оптической интенсивности
источника. Был продемонстрирован датчик постоянного давления с ре-
шетками, движущимися в противоположных направлениях [3], в котором
была сделана попытка решения этой проблемы. В этом случае поглоща-
ющие полосы первой из пары решеток поглощали свет на одной длине
волны и были прозрачны для определенной опорной длины волны. Поло-
сы второй решетки поглощали обе длины волны. Тогда опорный сигнал
уменьшался на величину всех оптических потерь в системе, за исключе-
нием обусловленных относительным смещением решеток. Потери другого
сигнала составляли потери в системе, умноженные на модуляцию чувстви-
тельного элемента. В результате вычислением отношения двух сигналов
можно обеспечить для датчика точку отсчета. Этот метод обеспечива-
ет высокую точность только в том случае, если длины волн опорного
и модулированного сигнала близки между собой, поскольку известно,
что потери в самом оптическом волокне изменяются в зависимости как
от длины волны, так и от температуры [7].
Использование чувствительных элементов на основе движущихся в про-
тивоположных направлениях решеток позволяет производить датчики сме-
щения, датчики давления и гидрофоны. Все они основаны на модуляции
ширины прозрачной полосы а. Теперь мы вернемся к датчикам, чувстви-
тельные элементы которых модулируют период решетки.
7.4. Датчики, основанные на модуляции периода решетки
Как указывалось ранее, решетка, изготовленная из определенного мате-
риала или прикрепленная к нему, растягивается и сжимается при изме-
нениях размеров материала, обусловленных изменениями внешних усло-
вий, к которым материал чувствителен. Если материал имеет высокий
7.Датчики, основанные на модуляции периода решетки
коэффициент теплового расширения, датчик, изображенный на рис. 7.6,
преобразует изменения температуры подложки в изменение длины волны,
дифрагирующей под углом 0\. Если материал имеет высокий коэффици-
ент сжимаемости, длина волны, рассеиваемой под углом в\, будет мерой
давления, которому подвергается подложка. Однако к настоящему вре-
мени разработан новый метод применения дифракционных решеток для
измерения смещения [2], и мы используем именно этот механизм чув-
ствительного элемента для изучения свойств многомодовых волоконно-
оптических датчиков, основанных на модуляции периода решетки. Суть
этого метода заключается в использовании дифракционной решетки, пе-
риод которой зависит от местоположения на решетке. Метод использова-
ния решеток с «линейной модуляцией» можно напрямую использовать для
определения положения. Его можно использовать также для измерения
любых других параметров, которые могут быть преобразованы в смещение.
Рис. 7.15. Основанное на длине волны измерение смещения при помощи решетки
с линейно изменяющимся периодом
При освещении отражательной дифракционной решетки с чередующи-
мися отражающими и поглощающими полосами широкополосным светом
под постоянным углом во дифракция света зависит от периода решетки
5 (расстояния между центрами отражающих полос) и угла регистрации
01 в соответствии с уравнением решетки (7.10). Если уравнение решетки
применить к дифракционной решетке, период которой является линейной
функцией положения вдоль длины решетки 5 = sq + si#, то освещенную
часть решетки, как следует из рис. 7.15, можно определить по формуле
_ A so
si(sin#o + sin 0i) si
при этом, здесь и далее т предполагается равным 1. Вид модуляции
(7-12)
Глава 7. Многомодовые дифракционные датчики
длины волны широкополосного источника (узкополосная фильтрация) по-
казан на рис. 7.16.
Рис. 7.16. Зависимость передачи узкополосного сигнала датчиком с решеткой
с линейно изменяющимся периодом от смещения
Применимость метода измерения смещения при помощи решетки с ли-
нейно изменяющимся периодом была изучена для двух различных методов
изготовления решеток. Первая отражательная решетка была изготовлена
Applied Image, Inc. традиционным фотолитографическим методом, и ее
период изменялся от 10 до 20 мкм при общей длине решетки 3,175 см. Од-
нако неприемлемая эффективность решетки и множественное перекрытие
порядков сделали невозможной интерпретацию заложенной в спектре ин-
формации о смещении. Затем была предпринята попытка изготовления
решетки с линейно изменяющимся периодом голографическим способом.
Обычные голографические решетки, имеющие постоянный период, изго-
тавливаются интерферирующими плоскими волновыми фронтами. Голо-
графические решетки с линейно изменяющимся периодом были изготовлены
на обычной фотографической пластинке. Использовался гелий-неоновый
лазер с интерферирующими плоским и сферическим волновыми фронта-
ми. Период решетки, сформированной таким образом, изменяется как
функция положения благодаря изменению угла пересечения между вол-
новыми фронтами вдоль ширины подложки. Вычисленная нелинейность
изменения периода решетки в этом эксперименте составила 0,16% при ис-
пользовавшемся 10 мм диапазоне. После того как открытая поверхность
подложки была обработана, созданная решетка была металлизирована
для использования ее на отражение. Такой метод позволяет изготавли-
вать «линейно-модулированные» решетки с высоким разрешением.
После этого пригодность решетки, изготовленной голографическим
способом, для использования в качестве элемента датчика была исследо-
вана при помощи устройства, схема которого показана на рис. 7.17. Вход-
Датчики, основанные на модуляции периода решетки
ной угол падающего излучения с решеткой составлял 11°, а выходной угол
составлял 43°. Оба угла располагались с одной и той же стороны от нор-
мали к решетке. Входное и выходное волокна находились на расстоянии
2,5 и 3,7 см от решетки соответственно. В качестве оптического источни-
ка использовался 835 мм светодиод со спектральной шириной излучения
(FWHM — full width at half maximum — полная ширина на половине
максимума) 45 нм и мощностью, равной 225 мкВт, вводимой в 100 мкм
сердцевину волокна. Входная и выходная оптика датчика были настро-
ены так, чтобы обеспечивать 4 мм пучок, проецируемый на решетку.
Эта входная и выходная оптика была отрегулирована и жестко соединена
с базовой платой устройства. Решетка была зафиксирована на столе по-
ступательного перемещения, который использовался в эксперименте для
получения входного положения. По выходному волокну излучение попа-
дало на вход спектрометра, действующего на основе голографической
дифракционной решетки, с 256-элементной линейной фотодиодной матри-
цей в качестве чувствительного элемента. Из 256 элементов примерно 170
находились в пределах выходной плоскости спектрометра. Выход с фото-
диодной матрицы спектрометра для анализа поступал на Tektronix 7854,
программируемый цифровой осциллограф с обработкой сигнала.
Рис. 7.17. Экспериментальная установка для бесконтактного измерения смеще-
ния (на основе длины волны)
Экспериментальная методика состояла из трех различных этапов, что-
бы обеспечить коррекцию, калибровку и измерение выходными элемен-
тами датчика. Аппаратура для эксперимента была отрегулирована так,
чтобы спектр фотодиода попадал приблизительно в центр полосы пропус-
кания спектрометра при центральном положении стола поступательного
перемещения с решеткой.
Первая стадия эксперимента заключалась в определении для датчи-
ка уровня затемнения и спектральных коррекционных кривых. Темновой
Глава 7. Многомодовые дифракционные датчики
ток вычислялся как среднее по результатам 10 измерений спектрометра
при выключенном светодиоде. Спектральная калибровочная кривая сис-
темы была получена измерениями распределения спектральной интенсив-
ности при каждом смещении на миллиметр перемещаемого стола во всем
диапазоне его перемещений. Поскольку спектр, измеренный при каждом
положении смещения, представлял собой узкополосную фильтрованную
компоненту спектра входного сигнала, создаваемую конкретной позици-
ей на поверхности решетки, сумма спектров позволила построить кривую
нормировки интенсивность/длина волны.
Затем была построена передаточная функция датчика, путем реги-
страции длин волн нормализованных максимумов датчика при смещениях
на 0,25 мм и интерполяции полученных данных. Эта функция использова-
лась при тестировании чувствительного элемента датчика для определе-
ния положения смещения на основании известной длины волны максимума
датчика. На этой стадии испытаний пригодный для эксплуатации диапа-
зон был определен как 10,25 мм.
Фактическое положение (мм)
Рис. 7.18. Соотношение измеренно-
го и фактического положений решет-
ки и ошибка измеренного положения
в процентах от всего диапазона изме-
рений
Третья стадия эксперимента состояла в сопоставлении положения, по-
лучаемого на выходе системы после коррекции и калибровки, с факти-
ческим смещением положения дифракционной решетки в случайно вы-
бранную точку внутри диапазона калибровки. Соотношение между изме-
ренным положением и фактическим, а также ошибки, полученные в ре-
зультате типичной серии измерений, показаны на рис. 7.18. Максималь-
ная наблюдаемая ошибка составила 30 мкм (0,3% всего диапазона), в то
время как средняя наблюдаемая ошибка равна 10 мкм (0,1% всего диа-
пазона). Разрешение было определено как 10 мкм (предел дискретизации
осциллографа с цифровой сигнальной обработкой). Серия измерений была
повторена несколько раз с повторяющимися результатами (в некоторых
7Д. Датчики, основанные на модуляции периода решетки 183
случаях наблюдалась максимальная ошибка, равная 0,1% всего диапазо-
на — теоретическому пределу измерений в эксперименте).
Из этих лабораторных результатов понятно, что этот метод допуска-
ет возможность проведения высокоточных измерений линейных смещений
при помощи волоконной оптики. Если нанести дифракционную решетку
по окружности поворотного вала, этот метод можно также очень просто
применить для определения положения при вращении. Измерения можно
выполнять, по сути, бесконтактным способом, используя исключительно
дифракционную решетку с линейно изменяющимся периодом, прикреп-
ленную к смещаемому объекту.
Практическая реализация метода тем не менее требует температур-
ной коррекции дрейфа оптического источника, теплового расширения
дифракционной решетки и связанных с переменной длиной волны эф-
фектов, обусловленных волоконно-оптическим кабелем. Чтобы оценить
влияние дрейфа источника на эффективность датчика, рассмотрим из-
лучение широкополосного светодиода 1ДХ). После прохождения области
измерений, излучение проходит через выполняющую функции чувстви-
тельного элемента решетку, на которой огибающая спектра модулируется
в соответствии с Т(Х,х), и затем возвращается к месту расположения
оптического источника по второму волокну. Регистрируемое спектраль-
ное распределение интенсивности /(Л) определяется формулой
/(A)=T(A,x)/0(A). (7.13)
Максимум регистрируемого сигнала обнаруживается при длине вол-
ны Атах, при которой первая производная Z(A) по А равна нулю. Таким
образом, величину Атах можно определить из соотношения
[dT~\ . _/Л ч \dlQ~
= 0.
<тах
Если 1о(А) и Т(Х,х) представить в виде функций Гаусса
Т(А,х) = ехр —(----------------------------------а2
Л) ( Атах
dX
4" ^(Ащах, ж)
<шах
dX
70(А) = 70ехр -(-——'2
<70
то
Ар(^) ~ ^max Н 2 Д’
а0
(7-14)
(7-15)
(7-16)
где Д = Amax —Aq. Из уравнения (7.16) следует, что при достаточно узкой
полосе пропускания (сгд —* 0), Хд(х) и, следовательно, получаемые значе-
ния х не зависят от флуктуаций центральной длины волны оптического
источника, Ао(гг), но непосредственно связаны с тем, насколько точно мо-
Глава 7. Многомодовые дифракционные датчики
жет быть определено Дтах. Для светоизлучающего диода с До = 835 нм
и полной шириной на половине максимума 45 нм (ао ~ 32 нм) и полосой
пропускания чувствительного элемента с полной шириной на половине
максимума 10 нм (ад ~ 7 нм), смещение До на а + 10 нм приведет к ошиб-
ке, составляющей только 0,1% от измеренного значения Д^(ж)(при условии
Д^(д?) = 800 нм до начала дрейфа). Таким образом, достаточно узкая
полоса пропускания датчика позволяет эффективно исключить дрейф
оптического источника и не рассматривать его в качестве источника
ошибок, вносимых в измеренное значение параметра.
Проблема теплового расширения самой дифракционной решетки мо-
жет быть решена, как показано на рис. 7.19. В этом случае широкополос-
ный зондирующий сигнал падает одновременно и на решетку с линейно
изменяющимся периодом, и на решетку с постоянным периодом. Можно
показать, что, хотя длины волн обоих отраженных сигналов будут из-
меняться при изменении температуры, разность длин волн между ними
останется абсолютной мерой расстояния исследуемой оптически точки
от конца решетки. К тому же измерение абсолютной длины волны сигнала
при помощи решетки с постоянным периодом одновременно обеспечивает
измерение температуры.
Рис. 7.19. Температурная коррекция датчиков смещения с решеткой с линейно
изменяющимся периодом
Наконец, проблему изменения передачи по кабелю в зависимости от
длины волны и температуры можно свести к минимуму, сужая полосу
пропускания длин волн чувствительного элемента, путем точного проек-
тирования как решетки, так входной и выходной оптической конфигу-
рации чувствительного элемента. Если полоса пропускания достаточно
узка, модуляция входного спектрального распределения, обусловленная
дрейфом оптического источника или вызванными внешними воздействи-
7.5. Состояние разработки датчиков
ями изменениями характеристик потерь оптического волокна, не влияет
на точность датчика, благодаря сущности метода кодирования, осно-
ванного на цветовой (частотной) модуляции. После этого потребуется
только минимальная коррекция датчика, чтобы устранить «шум» длин
волн. В разработках, выполняемых в настоящее время, исходная поло-
са пропускания переменной длины волны датчика (FWHM) уменьшена
с ~ 20 нм до 4 нм [8].
Хотя по своей сути механизм преобразования в многомодовом воло-
конно-оптическом датчике с решеткой с линейно изменяющимся перио-
дом основан на смещении, его можно использовать для измерения любых
параметров, если результатом их изменения является какой-либо вид сме-
щения. Нелинейную передаточную функцию, связывающую измеряемый
параметр со смещением, можно преобразовать в линейную модуляцию
длины волны путем соответствующей модификации пространственной
зависимости решетки с линейно изменяющимся периодом. Этот метод
также совместим мультиплексированием по длине волны. Существую-
щий датчик продемонстрировал способность измерять смещение во всем
полезном диапазоне при использовании единственного серийно выпуска-
емого источника-светодиода. Диапазон шкалы измерений можно увели-
чивать или уменьшать, модифицируя способ изменения периода решет-
ки; при этом модификация сигнала, определяемого оптоэлектронными
устройствами, не требуется.
7.5. Состояние разработки датчиков
Датчики с амплитудной модуляцией (или затворные) на основе дифрак-
ционных решеток, рассмотренные в этой главе, не продвинулись намно-
го дальше стадии лабораторных испытаний. Отсутствие эффективных
способов коррекции изменений регистрируемой оптической мощности,
не обусловленных реакцией чувствительного элемента, препятствует ис-
пользованию конкретных отдельных методов, хотя представляется, что
ранее описанный двухволновый подход [3] позволяет разрабатывать дат-
чики с достаточной точностью и низкой себестоимостью. Работа над
датчиками на основе дифракционных решеток, работающих по прин-
ципу определения длины волны, продолжается [8], и опытные образцы
датчиков («Симмондс Пресижн» подразделение «Эйркрафт Системе» Вер-
дженс, Вермонт) уже могут оценить потенциальные потребители. Линей-
ный диапазон измерений этих опытных образцов датчиков равен 5 см,
переход через крайнее положение ±1 см, разрешение 0,1% всего диапазо-
на и точность 0,25% в температурном диапазоне от —55 до 85 °C. Ширина
полосы пропускания для этих датчиков составляет ~ 4 нм. Продвижение
Глава 7. Многомодовые дифракционные датчики
от макета датчика до образца, оцениваемого потребителями этого типа
датчика, показано на рис. 7.20.
Рис. 7.20. Развитие датчиков линейного положения (предоставлено «Симмондс
пресижн» (Simmonds Precision)
7.6. Резюме
В этой главе были рассмотрены методы измерения с помощью многомо-
довых волоконно-оптических датчиков, основанные на механизмах пре-
образования с помощью дифракционных решеток. Рассмотренные здесь
датчики представляют собой не весь спектр многомодовых волоконно-
оптических датчиков, а скорее выступают в качестве примеров, иллю-
стрирующих методы анализа и способы производства, необходимые при
разработке датчиков. Надеемся, что эти примеры предоставят опреде-
ленный объем знаний и вдохновят тех, кто собирается разрабатывать
применимые на практике многомодовые волоконно-оптические датчики
в будущем.
Литература
1. В. Е. Jones and R. A. Spooncer, Optical Sensor with Fibre-Optic Links: A Shut-
ter Modulator, Proc. SPIE 376, NPL/Sira Seminar on Optical Sensing Tech-
niques, Benefits, Costs, Teddington, 1982, p. 29.
2. W. В. Spillman, Jr., D. R. Patriquin, and D. H. Crowne, Fiber Optic Linear Dis-
placement Sensor Based upon a Variable Period Diffraction Grating, Appl. Opt.
28(17), 3550 (1989).
3. В. E. Jones and R. A. Spooncer, An Optical Fibre Pressure Sensor Using a Holo-
graphic Shutter Modulator with Two Wavelength Intensity Referencing, Proc.
2nd International Conference on Optical Fibre Sensors, Stuttgart, 1984.
4. W. B. Spillman, Jr., and D. H. McMahon, Schlieren Multimode Fiber-Optic Hy-
drophone, Appl. Phys. Lett. 37(2), 145 (1980).
5. J. R. Meyer-Arendt, Introduction to Classical and Modern Optics, Prentice-Hall,
Englewood Cliffs, N. J., 1984.
6. W.B. Spillman, Jr., Multimode Fiber-Optic Hydrophone Based on a Schlieren
Technique, Appl. Opt. 20(3), 465 (1981).
7. L.A. Johnson and S. C Jensen, Problems and Approaches for Remote Fiber
Optic Absolute Sensors, Proc. SPIE 45, Fiber Optic and Laser Sensors III,
San Diego, Calif., 1985.
8. D.H. Crowne, D.R. Patriquin, and W.B. Spillman, Jr., Wavelength Encoded
Fiber Optic Position Sensor, Proc. SPIE 1169, Fiber Optic and Laser Sensors
VII, Cambridge, 1989, p. 442.
ГЛАВА 8
МНОГОМОДОВЫЕ
ДАТЧИКИ
ПОЛЯРИЗАЦИИ
У. Б. Спиллман-младший
«Симмондс Пресижн»
Подразделение «Эйркрафт Системе»
Вердженс, Вермонт
8.1. Введение
В этой главе рассматриваются волоконно-оптические датчики с внешним
чувствительным элементом, механизм преобразования которых связан
с модуляцией поляризации. Как и в случае датчиков на основе дифракци-
онной решетки, рассмотренных в гл. 7, состояние измеряемого параметра
может быть преобразовано датчиком в изменение амплитуды, длины вол-
ны или в то и другое. Проведена значительная работа по разработке
этого типа датчиков. Показана возможность использования многомодо-
вых модулирующих поляризацию датчиков в качестве гидрофонов [1, 2],
акселерометров [3], датчиков давления [4, 5] и датчиков угла поворо-
та [6]. В этой главе приведено базовое теоретическое описание методов
модуляции поляризации, за которым следуют подробные примеры, пока-
зывающие, каким образом можно использовать эти методы для измерения
множества различных физических параметров.
8.2. Теоретические основы
8.2.1. Феноменологическое описание поляризации
и запаздывания
Одним из наиболее важных свойств светового луча является тип его по-
ляризации. Разрешенными видами поляризации являются линейная, эл-
липтическая или круговая. Любое электромагнитное излучение можно
Волоконно-оптические датчики: Вводный курс для инженеров и научных работников,
под редакцией Эрика Удда. ©1991 John Wiley & Sons, Inc.
8.2. Теоретические основы 189
представить как совокупность составляющих, каждая из которых обла-
дает определенным состоянием линейной поляризации. На рис. 8.1 пред-
ставлен «мгновенный снимок» электрического поля с одной из основных
плоских волновых компонент светового луча. Направление поляризации
определяется как направление электрического поля, связанного с компо-
нентой, которое перпендикулярно направлению распространения. Резуль-
татом усреднения по времени большого числа компонент, поля которых
накладываются друг на друга, в дополнение к разрешенным видам по-
ляризации, могут проявиться неполяризованные или частично поляризо-
ванные.
Распространяющаяся
Рис. 8.1. «Мгновенный снимок» распространяющейся электромагнитной волны
Энергия, переносимая плоской волной, напрямую связана с квадратом
электрического поля, связанного с волной. Это можно показать, вычисляя
вектор Умова - Пойнтинга, определяющий энергию, переносимую волной.
Решение плоской волны начинается с рассмотрения волнового уравнения
Максвелла
1 д2 Г Е ‘
[ H
(8-1)
где Е электрическое поле и Н — магнитное поле, связанные с волной.
Решение этого уравнения для распространения в однородной среде [7]:
Е
Н
Ео
Но
^i — (cui—kz+6)
(8-2)
где для удобства принято, что волна распространяется вдоль оси z. Те-
перь для определения энергии волны может быть использован вектор
Умова - Пойнтинга Р = |Е х Н. Если вектор Е направлен по оси х, а Н —
по оси у, вектор Умова - Пойнтинга равен
1 / е \ 1/2
p=2ExH=4d
поскольку для случая плоской волны Н = где г — диэлек-
трическая постоянная и // — магнитная постоянная среды. Для анализа
(8-3)
Глава 8. Многомодовые датчики поляризации
рассмотрим такие псевдоэлектрические поля, связанные с лучами света,
абсолютная величина которых в квадрате равна интенсивности луча. Эти
псевдополя равны реальным полям с точностью до коэффициента пропор-
циональности
( г \1/4
е = — Е, (8.4)
так что
/ г \ 1/2
I = е • е* = — Eq, (8.5)
\4/2 /
где I — энергия на единицу площади светового пучка.
Для того чтобы описать различные состояния поляризации, возмож-
ные для луча света, рассмотрим две линейно поляризованные плоские
волновые компоненты, каждая из которых распространяется в направле-
нии z. Векторы амплитуд их электрических полей направлены соответ-
ственно вдоль осей х и у. Соответствующие псевдополя можно предста-
вить в виде
ei = у.ахе-^~кг+^\ е2 = уауе~г(ш,-кг+^}, (8.6)
где Sx и Sy представляют соответствующую фазу каждой из волн по от-
ношению к некоторой опорной точке на оси z. Уравнения (8.6) можно
переписать в виде
ei = хАхег(0), е2 = уАуег6. (8.7)
Комплексные пространственные и временные изменения полей теперь вклю-
чены в Ах и Ау, и опорная точка на оси z смещена так, что 6Х = 0 и 6у = S.
Теперь можно сказать, что величина ei запаздывает на S относительно е2.
Возможные состояния поляризации теперь можно построить, рассма-
тривая сумму векторов ei и е2:
ет = *АХ + уАув1*5. (8.8)
Если Ах = Ау = А и S = 0, то
ет (6 = 0) = А (х + у). (8.9)
Здесь луч поляризован в направлении тг/4, когда наблюдатель, стоя лицом
к оптическому источнику, видит луч, как показано на рис. 8.2, а. Если
8 = %, тогда
ет(<5 = я) = Л(х-у), (8.10)
т.е. свет поляризован в направлении — тг/4, как показано на рис. 8.2, б.
Если выполнить »мгновенный снимок» электрического поля (f = 0),
можно увидеть, что поля в уравнениях (8.9) и (8.10) изменяются в зависи-
мости от положения на оси z, как компонента cos kz, входящая в А. Если,
с другой стороны, выбрана определенная точка на оси z, изменения в этой
8.2. Теоретические основы
точке будут пропорциональны costetf. Оба этих случая представляют со-
бой линейную поляризацию.
Рис. 8.2. Векторы поляриза-
ции и электрического поля для
линейно поляризованного из-
лучения при а) — 7г/4, J = О
[и = z = 0]; б) -7г/4, 5 = 7Г
[и = z — 0]
Теперь рассмотрим случай 8 = к/2, или четвертьволновое запаздыва-
ние. В этом случае сумма векторов ер становится равной
ер = a (xcos (tctf — kz) — у sin (cot — kz)). (8.11)
При t = 0 вектор поля остается постоянным по величине, но вращается
вокруг оси z при изменении положения z. Аналогично, при z — 0 полу-
ченный вектор вращается вокруг оси z с течением времени. Этот тип
поляризации называется круговой поляризацией, поскольку конец век-
тора поля описывает окружность. Величина запаздывания тг/2 создает
левую круговую поляризацию; т. е. для наблюдателя, смотрящего прямо
на источник, вектор поля вращается влево, против часовой стрелки. При
8 = —тг/2 вектор поля вращается по часовой стрелке, что определяет пра-
вую круговую поляризацию.
Для величин 5, не равных штг/2, где т — целое, конец вектора электри-
ческого поля описывает эллипс, и, следовательно, этот тип поляризации
называется эллиптической поляризацией. Она может быть левой или пра-
вой эллиптической, как и в случае круговой поляризации. Движение конца
вектора поля при различных состояниях поляризации показано на рис. 8.3
для случая постоянного положения (z = 0) и наблюдения при изменении
времени.
Обобщенное выражение для суммарного поля с произвольным запаз-
дыванием определяется как
ет = a _ ye-i^t-kz+S)
Это тем не менее весьма редкий случай для измеряемого вектора поля.
Обычно измеряется оптическая мощность, переносимая при конкретной
(8.12)
Глава 8. Многомодовые датчики поляризации
поляризации. Эта ситуация представлена на рис. 8.4. Чтобы вычислить
получаемую оптическую мощность как функцию оси пропускания поля-
ризатора (угол в относительно оси х), следует вычислить квадрат скаляр-
ного произведения единичного вектора в направлении в и вектора поля
I = |(xcos0 + у sin0) • ет|2 . (8.13)
Рис. 8.3. Разрешен-
ные состояния поля-
ризации
Световой луч
Рис. 8.4. Экспериментальная установка для измерения оптической мощности све-
та, поляризованного под разными углами
Объединяя уравнения (8.12) и (8.13), получаем
I — а2 (1 + sin 20 cos J). (8.14)
Графики оптической энергии прошедшего излучения 7, при различных
ориентациях оси пропускания поляризатора и запаздываниях приведе-
8.2. Теоретические основы
ны на рис. 8.5, причем угол полярных координат соответствует в и по-
лярный радиус соответствует I.
Рис. 8.5. Интенсивность света в зависимости от угла для нескольких различных
состояний поляризации
Из анализа уравнения (8.8) можно видеть, что возможные состояния
поляризации луча света описываются тремя параметрами Ах, Ау и 6.
Однако часто бывает полезно связать эти параметры с формой элли-
пса, который конец вектора поля описывает в конкретной точке луча
с течением времени. Параметры эллипса показаны на рис. 8.6, а так-
же представлена их взаимосвязь с Ах и Ау. Тригонометрический анализ
этого эллипса позволяет установить взаимосвязь между видами предста-
вления с помощью соотношений, приведенных ниже
<z( + а2 = А2х + А2
1 X у >
tg 27 = tg Oi cos J,
(8.15)
(8.16)
где Oi = arctg(Ay/Ax),
2 2\i/2 | '
x +..-y- ) [1 ± (cos2 20; + sin2 20; cos2 <5)]1/2 > , (8.17)
sin 27 = sin 20i sin 6.
(8.18)
7-3379
Глава 8. Многомодовые датчики поляризации
Рис. 8.6.
Параметры эллипса
8.19
Наиболее распространенный метод определения состояния поляриза-
ции — это представление в виде четырех компонент вектора Стокса.
Четыре компоненты вектора определяются соотношениями
so = -h Ау,
S1 - А2 - А2,
S2 = 2АхАу cos
S3 = 2АхАу sin S.
Легко заметить, что из четырех компонент только три являются незави-
симыми, благодаря связи
Sg — Sj + S2 S3. (8.20)
Компоненты вектора Стокса можно связать с азимутом и мерой эл-
липтичности 7 и определить эллиптическое состояние поляризации в об-
щем виде
si = so cos 27 cos 2^,
S2 = so cos 27 sin 2'ф, (8.21)
S3 = so sin 27.
В принципе, сравнительно просто определить компоненты вектора
Стокса экспериментально. Для этого потребуются фотодетектор, чув-
ствительный к рассматриваемой длине волны, линейный поляризатор и че-
твертьволновая пластинка. Схема измерительной установки приведена
на рис. 8.7. Ось пропускания поляризатора ориентирована под углом 0
относительно оси х, в то время как быстрая ось волновой пластинки
8.2. Теоретические основы 195
направлена вдоль х. Интенсивности света /(0,5) измеряются фотодетек-
тором, и значение 6 может быть равным 0 или тг/2 в зависимости от того,
присутствует ли на пути луча волновая пластинка. Компоненты вектора
Стокса связаны с конкретными измерениями следующим образом:
so = Z(O,O) + zg,o),
si = Z(O,O)+z(£,o),
(8.22)
(7Г 7Г \ / ЗТГ 7Г \
2’2/ \Т’2/
Четвертьволновая пластинка устанавливается на пути луча только
при измерении S3. Анализ уравнения (8.22) показывает, что so — это
полная интенсивность светового луча.
Х/4 пластинка с быстрой осью,
направленной вдоль оси х
Поляризатор с осью оптической
пропускания под углом 0 мощности
Рис. 8.7. Экспериментальная установка для определения всех четырех компонент
вектора Стокса
(8.23)
Параметры эллиптичности можно также связать с этими интенсивно-
стями в соответствии с уравнениями (8.22) следующими соотношениями
• о 5з
sin 27 = —,
^0
tg2^ = —,
si
е = tg7,
где е определено как показатель эллиптичности эллипса поляризации.
Компоненты вектора Стокса можно определить качественно следую-
щим образом. Величина so представляет собой интенсивность луча, si —
Глава 8. Многомодовые датчики поляризации
разность интенсивностей между вертикальной и горизонтальной компо-
нентами поляризации, s? — разность интенсивностей между компонента-
ми поляризации, соответствующими л/4 и Зтг/4, и S3 представляет раз-
ность между компонентами левой и правой круговой поляризации. Когда
si > 0, преобладает горизонтальная (х) поляризация, а когда si < О, пре-
обладает вертикальная (у) поляризация. Аналогично, > 0 указывает
на преобладание тг/4 поляризации, в то время как S2 < 0 - - на преоблада-
ние Зтг/4 поляризации. Наконец, S3 > 0 свидетельствует о преобладании
правой круговой поляризации, а S3 < 0 — левой круговой поляризации.
8.2.2. Сфера Пуанкаре
Рис. 8.8. Сфера Пуанкаре
Возможные для луча света состо-
яния поляризации можно предста-
вить через однозначное отображе-
ние этих состояний на поверхность
сферы. Сферическое представление
поляризации называется сферой Пу-
анкаре. Радиус сферы эквивалентен
компоненте sg вектора Стокса, а для
представления si, S2 и S3 компонент
вектора используются оси декарто-
вой системы координат с началом
координат в центре сферы. Как по-
казано на рис. 8.8, каждую точку
сферы можно спроецировать на оси,
чтобы получить соответствующие ей компоненты вектора Стокса. До-
полнительно параметры эллиптичности г/> и 7 представлены поворотами
в плоскости si — S2 ив ортогональной плоскости, проходящей через начало
координат, соответственно.
Анализ различных участков сферы в свете определения компонент
вектора Стокса позволяет идентифицировать рассмотренные ранее со-
стояния поляризации. Экватор сферы представляет линейные состояния
поляризации; причем пересечением положительного направления оси х со
сферой представлена чистая ^-поляризация, а пересечением отрицатель-
ного направления оси х представлена чистая ?/-поляризация. Северный
и южный полюсы сферы представляют свет с правой и левой круговой
поляризацией соответственно. Далее, точки на северной полусфере пред-
ставляют свет с правой эллиптической поляризацией, в то время как
точки на южной полусфере представляют состояния левой эллиптиче-
ской поляризации. Наконец, точки на одном меридиане постоянно)
представляют все эллиптические состояния поляризации с одинаковой
8.2. Теоретические основы 197
ориентацией, а точки на одной параллели (7 постоянно) представляют
все эллиптические состояния поляризации с одинаковой эллиптичностью.
Благодаря тому что все возможные состояния поляризации можно
отобразить на поверхность сферы, можно легко увидеть, что любое состо-
яние может быть преобразовано в любое другое состояние посредством
двух вращений сферы: одного — на соответствующее 2*ф и последую-
щего второго вращения — на 27. Вращение вокруг оси z представляет
вращение эллипса поляризации без изменения его эллиптичности. Вра-
щение вокруг ортогонального направления представляет изменение элли-
птичности эллипса без изменения его ориентации. Первый эффект можно
получить с помощью оптически активного материала, в то время как
второй — с помощью линейной фазовой пластинки. Теперь любые пре-
образования поляризации могут быть представлены вращением вокруг
оси z и соответствующим образом ориентированной линейной фазовой
пластинкой. Поскольку любые два состояния могут быть связаны подоб-
ным образом, результат любого количества преобразований поляризации,
выполненных последовательно, можно представить в виде одного враще-
ния и одного линейного запаздывания. Этот факт будет очень важен при
рассмотрении функционирования поляриметрических одномодовых воло-
конно-оптических датчиков.
Наконец, полезно рассмотреть, как конкретный оптический элемент
воздействует на конкретное состояние поляризации в рамках формализма
сферы Пуанкаре. Во-первых, необходимо определить собственные состо-
яния элемента. Обычно их два, на противоположных сторонах сферы.
Тогда линия, соединяющая эти две точки и проходящая через центр сфе-
ры, представляет собственную ось или ось вращения элемента. Если раз-
ность фаз между двумя элементами равна воздействие элемента на
любое входное состояние поляризации будет состоять в повороте сферы
Пуанкаре вокруг собственной оси на угол в то время как начальная
точка останется неподвижной. Новое положение точки на сфере в этом
случае будет представлять состояние поляризации света, выходящего из
элемента. Пример подобного процесса можно наблюдать при рассмотре-
нии линейной фазовой пластинки. Собственными состояниями линейной
фазовой пластинки являются поляризации — параллельная ее быстрой
оси и перпендикулярная к ней. Если быстрая ось расположена в направле-
нии 51, медленная ось будет направлена вдоль — 51 и собственной осью
будет Если данное состояние поляризации отображается на сферу
в точку Р, воздействие фазовой пластинки будет заключаться в повороте
сферы от Р на угол, равный запаздыванию так что выходное состо-
яние поляризации будет соответствовать Р'. Эта ситуация показана на
рис. 8.9. Анализ рисунка позволяет установить два важных факта. Во-
первых, если Р представляет собой свет, линейно поляризованный вдоль
быстрой или медленной оси фазовой пластинки, она на него не повлияет.
Во-вторых, фазовая пластинка создаст наибольший эффект при свете,
поляризованном под углом тг/4 к быстрой оси.
S3 Северный и южный полюсы
представляют круговую
поляризацию
Рис. 8.9. Изменение состо-
яния поляризации из Р в Р'
благодаря воздействию ли-
нейной фазовой пластинки,
быстрая ось которой распо-
ложена по оси х, а запазды-
вание составляет 6
Si
S2
Собственные оси
фазовой пластинки
Экватор представляет
линейную поляризацию
Сфера Пуанкаре делает возможной качественную визуализацию воздей-
ствия одного или большего количества оптических элементов на заданное
состояние поляризации. Поэтому достаточно просто можно понять, как
работает оптическая система. Однако процесс получения количественно-
го определения выходного состояния поляризации может оказаться до-
статочно громоздким, особенно при большом количестве элементов.
8.2.3. Формализмы Мюллера и Джонса
Разработано множество различных вычислительных приемов, позволя-
ющих справиться с громоздкими количественными методами, которые
приходится применять для определения выходных состояний поляриза-
ции при помощи формализма сферы Пуанкаре. Наиболее удачными из них
являются формализмы Мюллера и Джонса [8]. В обоих случаях пробле-
ма преобразования поляризации сводится к использованию матричной
алгебры. В формализме Мюллера состояние поляризации представляет-
ся четырехкомпонентным вектором Стокса s и оптические элементы —
в виде матриц размерностью 4x4. Все величины при таком подходе
являются действительными числами. С другой стороны, в формализме
Джонса состояние поляризации представляется двухкомпонентным ком-
плексным числом в виде
’ Ахегдх
Ауегду
и оптические элементы — матрицами размерностью 2 х 2 с комплекс-
ными компонентами. Несмотря на их структурные различия, оба метода
используются одинаково.
a =
(8.24)
8.2. Теоретические основы
В табл. 8.1 представлены векторы Стокса и Джонса для различных
типов поляризованного света, в табл. 8.2 — матрицы, представляющие по-
ляризующие элементы, и в табл. 8.3 — матрицы элементов запаздывания.
Матричное представление произвольного оптического элемента с углом
О + можно связать с матрицей для того же самого элемента с углом ф
соотношением
М (в + ф) = Т (-в) М (0) Т (в), (8.25)
в котором Т представляет матрицу вращения, определенную в табл. 8.4.
Таблица 8.1. Поляризация вектора света Е при Ех = Ахег6х, Еу = Ахег6у,
8 = 6х — бу, А2 = А2 + А2
Мюллер Джонс
Линейная поляризация', ось пропускания под углом 0 к оси х
s = А2 A2 cos 20 A2 sin 20 0 а = Axeib* _ ±АуегЬ»
Правая (+) и левая (—) круговые поляризации: Ах = Ау = А/2, 8 = ±/2
s = А2 0 0 ±А2 а=[ ] _А_ i(b.±./2) L J
Эллиптическая поляризация:
s = А2 + А2 А2 - А'2у 2АХАУ cos 6 2АХАУ sin£ а = Ахе'ь* Ауе'ь*
Таблица 8.2. Матрицы s для линейного поляризатора: ось пропускания под углом
О к оси х в плоскости х-у
Мюллер Джонс
Р= | 1 cos 20 sin 20 0 cos 20 cos2 20 sin 20 cos 20 0 sin 20 sin 20 cos 20 sin2 20 0 0 0 0 0 . __ cos2 0 sin 0 cos 0 P= 2 sin 0 cos 0 sin 0
Глава 8. Многомодовые датчики поляризации
Таблица 8.3. Матрицы для линейного запаздывания: быстрая ось под углом О
к оси х в плоскости х-у, запаздывание 6 = 6У — 6Х
Мюллер: R = "10 0 0 0 cos2 20 + sin2 20 cos £ (1 — cos 6) sin 20 cos 20 —sin 20 cos 6 0 (1 — cos 6) sin 20 cos 20 sin2 20 -1- cos2 20 cos 6 cos 20 sin 6 0 sin 20 sin 6 —cos 20 sin 6 cos 6
etS cos2 0 -I- sin2 0 (ег<5 - 1) sin 0cos0
Таблица 8.4. Матрицы вращения
Мюллер Джонс
T(0) = 1 0 0 0 0 cos 20 sin 20 0 0 — sin 20 cos 20 0 . 0 0 0 1 . т(в)= cos6* sin(? — sin 0 cos 0
Оба метода используются следующим образом. Величина Ц определя-
ется как входное состояние, и нужно определить выходное состояние If
после того, как свет пройдет через последовательность оптических эле-
ментов, состоящую из поляризаторов и фазовых пластинок. Выходное
состояние получается в результате последовательного умножения векто-
ра входного состояния на матрицу, представляющую каждый оптический
элемент в порядке из расположения
If = MfMf-i • • • M2M1I1. (8.26)
Теперь моделирование любой системы и количественное определение вли-
яния отдельных элементов внутри нее становится вполне очевидной про-
цедурой. Формализм Мюллера обычно лучше подходит для вычислений,
в которых представляют интерес только изменения интенсивности. Фор-
мализм Джонса полезен, когда более важны вопросы фазовых соотношений.
8.2.4. Запаздывание и специальные свойства
полуволновой пластинки
Во всех волоконно-оптических датчиках, основанных на пьезооптическом
эффекте, используется явление двойного лучепреломления, вызванного
механическим напряжением (или деформацией), т.е. относительное за-
паздывание двух ортогонально поляризованных компонент светового лу-
ча, вызванное механическим напряжением или деформацией. Чтобы яс-
но понять, как работают такие датчики, полезно рассмотреть действие
единичной линейной фазовой пластинки, помещенной в линейно поляризо-
ванный луч света. Схема, построенная для демонстрации этого эффекта,
8.2. Теоретические основы 201
показана на рис. 8.10. В этом случае луч света, линейно поляризованный
в направлении х, проходит через линейную фазовую пластинку с быстрой
осью, расположенной под углом в к оси х. Тогда нормализованный вход-
ной вектор Стокса s определен как
1
1
0
0
(8.27)
Выходной вектор Стокса s' может быть вычислен из матричного уравне-
ния Мюллера
s' = R(0,<5)s, (8.28)
где R задается матрицей, определенной в табл. 8.3. Вычисленный выход-
ной вектор Стокса равен
1
, _ cos2 20 + sin2 20 cos 6 , .
S (1 — cos 5) sin 20 cos 20 ’ ( • )
sin 20 sin 6
Поляризаторы с осями
пропускания, направленными вдоль оси х
S*
Фазовая пластинка с быстрой осью,
расположенной под углом 0 к оси х,
формирующая запаздывание 8
Рис. 8.10. Влияние линейной фазовой пластинки на линейно поляризованный свет
В общем случае, толщина фазовой пластинки определяется в единицах
длины волны. Например, данная фазовая пластинка формирует запаз-
дывание, определяемое как 140 нм. Чтобы использовать эту величину
запаздывания, следует, во-первых, перевести ее в радианы. Если значе-
ние линейного запаздывания волновой пластинки определено как 7?, то R
связано с 8 соотношением
5 = (8.30)
Другими словами, поскольку величина запаздывания R относительно по-
Глава 8. Многомодовые датчики поляризации
стоянка в некотором диапазоне длин волн, запаздывание 8, создаваемое
волновой пластинкой, будет являться точной функцией длины волны. Из это-
го факта следуют важные выводы, оказывающие влияние на конструиро-
вание датчиков, основанных на эффектах запаздывания. Если подставить
уравнение (8.30) в (8.29), получим
1
, _ cos2 20 4- sin2 20 cos (2лВ/А) , .
S [1 — cos (2л7?/А)] sin 20 cos 20 ’ ( • /
sin 20 sin (2л7?/А)
Далее рассмотрим эффект прохождения луча света, модифицирован-
ного элементом запаздывания s' через поляризатор с осью пропускания,
направленной вдоль оси х. Это может быть выражено матричным урав-
нением Мюллера
s" = Р (0) s' = Р (0) R (0,8) s, (8.32)
где матрица Р получена из табл. 8.2 при условии 0 = 0. Решая это урав-
нение относительно s", получаем
1 + cos2 20 + sin2 20 cos (2л7?/А)
„ _ 1 + cos2 20 4- sin2 20 cos (2л7?/А) , .
s — . (8.33)
0
Можно видеть, что этот вектор Стокса представляет свет, поляризо-
ванный в направлении х, интенсивность которого по отношению к пер-
воначальному лучу, определяется как
I = f 1 4- cos2 20 4- sin2 20 cos —г—•
(8.34)
Следовательно, в случае, представленном на рис. 8.10, оптическая интен-
сивность при прохождении луча через два параллельных поляризатора
с линейной фазовой пластинкой между ними может быть промодулиро-
вана (1) изменением угла быстрой оси фазовой пластинки по отношению
к осям двух параллельных поляризаторов; (2) изменением величины запаз-
дывания пластинки или (3) изменением длины волны оптического источ-
ника. Анализ уравнения (8.34) показывает, что максимальное влияние,
обусловленное воздействием запаздывания и длиной волны, происходит
при 0 = л/4 и что влияние, обусловленное изменением этих параметров,
отсутствует при 0 = 0, л/2 и т. д. (т. е. когда ось быстрого запаздывания
или параллельна, или перпендикулярна к осям пропускания поляризаторов).
Из волновых пластинок особый интерес представляет полуволновая
пластинка. Для некоторой заданной длины волны величина 2 лR/А рав-
на л. Выходной вектор Стокса s' в этом случае можно найти из уравнения
8.2. Теоретические основы 203
(8.31), полагая 6 = л. В этом случае вектор Стокса будет равен
1
cos2 20 — sin2 20
2 sin 20 cos 20
0
что можно переписать в виде
1
z _ cos 40
S ~~ sin 40
0
(8.35а)
(8.356)
Сравнение этого выражения с вектором Стокса, приведенным для случая
линейной поляризации в табл. 8.1, показывает, что луч света, описывае-
мый уравнением (8.356), поляризован под углом 20 относительно оси х.
Воздействие полуволновой пластинки на линейно поляризованный свет,
таким образом, заключается в том, что формируется линейно поляризо-
ванный луч света с направлением поляризации под удвоенным относи-
тельно первоначального луча света, углом к быстрой оси волновой пла-
стинки. Если быстрая ось полуволновой пластинки составляет угол тг/4
с входным лучом, поляризованным параллельно оси х, выходной луч будет
линейно поляризован вдоль оси у (рис. 8.11). Таким образом, полуволно-
вую пластинку можно использовать для преобразования света, поляризо-
ванного по оси х, в свет, поляризованный по оси у, и наоборот, но следует
помнить, что это может происходить только в том случае, когда пластин-
ка соответствует точно половине длины волны используемого излучения.
Свет, поляризованный
Свет, поляризованный
в направлении у
Полуволновая пластина
с быстрой осью под углом л/4
Рис. 8.11. Свойство вращения поляризации полуволновой пластинкой
8.2.5. Эффект фотоупругости
Существует множество оптически прозрачных материалов, показатель
преломления которых может изменяться под воздействием механических
Глава 8. Многомодовые датчики поляризации
напряжений или деформации. Такие материалы называются фотоупру-
гими. Их можно использовать в оптических системах как волновые пла-
стинки, чувствительные к механическим напряжениям (или деформаци-
ям). Существует множество видов таких материалов, начиная от стекла,
имеющего низкую чувствительность к напряжению, но высокую — к де-
формации, и заканчивая желатином, имеющего очень высокую чувстви-
тельность к деформации, но низкую — к напряжению. Список наибо-
лее распространенных фотоупругих материалов и их свойств приведен
в табл. 8.5.
Таблица 8.5. Свойства основных фотоупругих материалов
Свойство Желатин PSM-4: полиуретан PSM-1: поликарбонат Стекло
Плотность (кг/м3) ~ 1000 1300 1190 2500-4500
Модуль Юнга (МПа) 0,08 ~3 2300 6900
Коэффициент Пуассона 0,5 0,5 0,4 0,4
Коэффициент фотоупругости fa при 589 нм (кН/полоса-м) 0,002 0,18 7 175-350
Пример использования фотоупругого материала в качестве волновой
пластинки представлен на рис. 8.12. В этом случае линейное напряжение
ах или одноосная деформация ех приложены параллельно оси х к фото-
упругому материалу, ориентированному так, чтобы его пересекал луч
света, проходящий в направлении z.
Рис. 8.12. Эффект
фотоупругости
Фотоупругий элемент действует как фазовая
пластинка, с быстрой осью, направленной вдоль
оси х и запаздыванием 5 , а = £х
Л Л
приложенные вдоль оси х
Под воздействием приложенного напряжения (или деформации), фо-
тоупругий материал ведет себя как волновая пластинка, чувствительная
к напряжению (или деформации), с быстрой осью, параллельной оси х,
8.2. Теоретические основы 205
и запаздыванием равным
г 2тгС'(7£ 2тгС'££
s =
Л л
(8.36)
где Са — коэффициент оптической чувствительности по напряжениям,
С£ — коэффициент оптической чувствительности по деформациям, t —
оптическая длина пути внутри материала и А — длина волны. Часто
ссылаются на величины С^/А и Се/Х для данной длины волны, опреде-
ляемые как
fa А ’ А А ’
(8.37)
В элементарных руководствах по сопротивлению материалов соотно-
шение между напряжением (сила на единицу площади) и деформацией
(относительное изменение длины) для случая линейного напряжения опре-
деляют как
&х
£У
г 1 Е —у Е —у “ Е &х
—у 1 —у
Е Е Е СУу
—у —у 1
L Е Е Е J
(8.38)
где главная деформация е и главное напряжение су связаны модулем Юн-
га jE, коэффициентом Пуассона и для рассматриваемого материала. Эта
взаимосвязь свидетельствует о том, что коэффициенты оптической чув-
ствительности по напряжениям и по деформациям связаны соотношением
А = Ц^А- (8.39)
Любое явление, которое можно использовать для создания напряжения
или деформации в фотоупругом материале, можно измерить, анализируя
воздействие материала на проходящий сквозь него поляризованный свет.
В волоконно-оптических датчиках этот эффект применяется для удален-
ного наблюдения за изменениями рассматриваемого явления.
Закон фотоупругости в первоначальной формулировке основывался
на эмпирических методах. Физическая величина в фотоупругом матери-
але, которая изменяется под воздействием механических напряжений или
деформаций, представляет собой действительную часть диэлектрической
постоянной (т.е. показателя преломления). Если коэффициент преломле-
ния невозмущенной среды равен п, то
п
п
п
пх
пу
nz
bi
^2
^2
^2
Ь1
^2
(8.40)
Зависимость от напряжения этих показателей преломления определяется как
Глава 8. Многомодовые датчики поляризации
пх П Си С22 С22 ох
Пу — п + С22 сц С22 <7у , (8.41)
nz п . С22 С22 СЦ
где
ci = — (bi — 2рЬг), С2 = — (&2 - ^(&1 + Ьг)) • (8.42)
П/ П/
Тогда, предполагая, что b — Ь\ — 62 и с = ci — С2, получаем зависимость
между двойным лучепреломлением и напряжениями
ПХ Пу = С (°Х (Jy) — b (Сд; 8у} ,
Пу -nz = с (сгу - (Jz) =Ь (гу - ez), (8.43)
nz - пх = с (az -ах) = b (ez - £х).
Если к фотоупругому материалу приложено некоторое разностное да-
вление Асг = ах — а у (<yz = 0), то для плоской волны, распространяющейся
в направлении z,
е = (х + у) Ле~^"(27Гп/Л)2+5°1
(8.44)
(где 2тт/Х = к для среды), между двумя ортогональными компонента-
ми по осям х и у формируется различие во времени прохождения или
изменение фазы при перемещении на расстояние z — L в фотоупругом
материале, равное
= 2тг£ . (8 45)
Л
Используя уравнение (8.43), уравнение (8.45) можно переписать в виде
с 2тг£ . 2тг£ .
6 = —~c/X(j = ——b&e,
Л Л
(8.46)
что при замене Дет = <ух, Ас = ех, L = £, с — Са и с = С£ в точности
соответствует уравнению (8.36).
8.2.6. Оптическое подавление синфазного сигнала
Волоконно-оптические датчики, как и любые другие датчики, должны
демонстрировать чувствительность к явлению, для измерения которо-
го они созданы, и оставаться нечувствительными к изменениям других
параметров внешней среды. Основные усилия при конструировании во-
локонно-оптических датчиков направлены на механические или другие
приемы, способные уменьшить или устранить посторонние сигналы помех.
В волоконно-оптических датчиках, основанных на эффекте фотоупруго-
сти, явление оптического подавления синфазного сигнала можно исполь-
зовать, наряду с другими методиками проектирования, позволяющими
получить требуемый результат.
8.2. Теоретические основы
монохроматическое излучение lQ с Хо
Рис. 8.13. Основная схема измерения фотоупругого напряжения
Чтобы продемонстрировать эту концепцию, рассмотрим простую схе-
му для измерения механического напряжения, показанную на рис. 8.13.
Если монохромный свет с интенсивностью /о и длиной волны До прохо-
дит через систему оптических элементов, то выходная интенсивность I
может быть определена из матричного уравнения Мюллера
S'=p(4)r((W«>Os,
/ пъ / ттъ (0-47)
з- = р(-)к(-,ф(5>
Решение этих уравнений для оптической интенсивности прошедшего из-
лучения дает
'4
1р
4
1 + COS I -1—СГу
(8.48)
Как можно увидеть, интенсивность прошедшего излучения увеличива-
ется при приложении сжимающего напряжения вдоль оси х и уменьшается
при приложении сжимающего напряжения вдоль оси у (если следовать
соглашению, что сжимающее напряжение положительно и растягиваю-
щее — отрицательно). Если на фотоупругий блок действуют два напря-
жения одновременно, интенсивность прошедшего излучения снова может
быть определена с помощью формализма Мюллера
Io L
— < 1 - cos
4 I
2тг£
~г~ — ау
Jcr
(8.49)
Уравнение (8.49) показывает, что единственный элемент из фотоупру-
гого материала действует как дифференциальный датчик напряжения
(при ортогональной оси под углом тг/4 к скрещенным осям пропуска-
Глава 8. Многомодовые датчики поляризации
ния поляризаторов). Если датчик сконструирован так, чтобы основным
результатом изменений внешней среды было создание эквивалентных на-
пряжений вдоль ортогональных осей, происходит оптическая компенса-
ция внешнего «шума» или сигнала ошибки. Это называется оптическим
подавлением синфазного сигнала (OCMR). Подавление синфазного сиг-
нала принципиально зависит от конструкции преобразователя, в котором
изменения исследуемого явления проявляются в неэквивалентных напря-
жениях (или деформациях) вдоль ортогональных осей, в то время как
изменения побочных параметров проявляются в виде эквивалентных ор-
тогональных напряжений (или деформаций). И только в этом случае про-
исходит компенсация.
Фотоупругий
Рис. 8.14. Оптическое подавление синфазного сигнала
Другой метод, позволяющий использовать подавление синфазного сиг-
нала в датчиках, основанных на фотоупругости, предполагает установку
полуволновой пластины между двумя фотоупругими чувствительными
элементами идентичных размеров и формы [9] (рис. 8.14). Один из элемен-
тов воспринимает напряжения вдоль главной оси, обусловленные исследу-
емым явлением плюс внешние воздействия, в то время как другой элемент
воспринимает напряжения, обусловленные только внешними воздействи-
ями. Матричное уравнение Мюллера для такой комбинации оптических
элементов выглядит следующим образом
s' = Р (-£) R (о, (аепшг + a)) R (р И R (о, (aenvir)} Р Q) .
' \ Ja / '4 ' \ Ja / ^4/
(8.50)
Решение этого уравнения для оптической интенсивности прошедшего из-
лучения дает
8.2. Теоретические основы 209
Т h Г!
1 = — 1 — cos
4
2тг£
7“^
(8.51)
и можно видеть, что напряжения, обусловленные внешними эффектами,
компенсируются. В этом случае последовательность преобразований по-
ляризации можно успешно визуализировать, анализируя сферу Пуанкаре,
показанную на рис. 8.15. Начальное состояние поляризации Р предста-
вляет свет, поляризованный под углом тг/4. В результате воздействия
первого фотоупругого элемента (воспринимающего внешние напряжения
вдоль оси х) происходит поворот точки Р вокруг оси х на величину
8 — 27F^<7envir//a. Воздействие полуволновой пластины приводит к пово-
роту модифицированной поляризации вокруг оси тг/4 на 8 = тг. Наконец,
воздействие второго чувствительного фотоупругого элемента снова про-
является как поворот поляризации на величину 8 = 27rtcrenvir/fa плюс
8 = 27г£ст//а. Таким образом, начальный эффект, обусловленный внешни-
ми условиями, полностью компенсируется, и остаются только изменения,
вызванные исследуемым явлением. Анализ при помощи сферы Пуанкаре
метода подавления синфазного сигнала показывает важность констру-
ирования датчика таким образом, чтобы все воздействия были строго
ограничены определенными осями.
2. Изменение поляризации,
обусловленное полуволновой
пластинкой
Собственные оси
фотоупругих
элементов
Собственные оси
полуволновой
пластинки
Конечное состояние Р'
Начальное
состояние Р
3. Изменения поляризации,
обусловленные внешними
воздействиями
1. Изменения поляризации,
обусловленные внешними
воздействиями
Рис. 8.15. Оптическое подавление синфазного сигнала, представленное на сфере
4. Изменение поляризации,
обусловленное исследуемым
параметром
Пуанкаре
Механизм подавления синфазного сигнала может использоваться для
минимизации воздействия внешних условий в области измерений на эф-
фективность датчика. Его эффективность зависит от степени сложности
механической конструкции преобразователя. Он не компенсирует измене-
ния интенсивности оптического источника или оптические потери в воло-
конно-оптическом кабеле при передаче сигнала в точку измерений и из нее.
Глава 8. Многомодовые датчики поляризации
8.2.7. Методы оптического кодирования
Существует два основных метода кодирования переменного оптическо-
го запаздывания, реализуемых в волоконно-оптических датчиках: моду-
ляция оптической интенсивности передаваемого сигнала или модуляция
передаваемого спектрального распределения. Как правило, модуляция ин-
тенсивности используется из-за связанной с ней простой обработки сиг-
нала. Однако для достижения желаемых характеристик в высокоточных
датчиках может потребоваться спектральное кодирование.
Оптический
источник
Оптоволокно
Коллимирующая линза
Поляризатор под углом л/4 —
Рис. 8.16. Базовая схема
датчика на основе фото-
упругости
Фазовая пластинка, формирующая запаздывание
(смещающее), с быстрой осью под углом О
Фотоупругий элемент, к которому вдоль оси х
прилагается напряжение величиной и
Поляризатор под углом пл/4 - —’
Оптический
детектор
Фокусирующая линза
Оптоволокно
Для демонстрации обоих методов можно воспользоваться единствен-
ным базовым датчиком на основе фотоупругости. Схема этого датчи-
ка приведена на рис. 8.16. Свет от оптического источника передается
по оптическому волокну в область измерений. Там он проходит через кол-
лиматор, поляризатор с осью, повернутой под углом тг/4; формирующую
постоянное смещающее запаздывание фазовую пластинку, быстрая ось
которой расположена вдоль оси х; фотоупругий элемент толщиной /, под-
вергающийся напряжению <7 вдоль оси х; второй поляризатор с осью под
углом тг/4 и вторую линзу, которая фокусирует луч и вводит его во второе
оптоволокно, передающее сигнал к оптическому детектору. При наибо-
лее общей конфигурации (без использования смещающего запаздывания)
для модуляции интенсивности используется узкополосный источник света
с простым фотодиодом в качестве оптического детектора. В этом случае
интенсивность регистрируемого оптического сигнала можно определить как
Л)
4
1 + cos
(8.52)
Тогда приложенное напряжение а может быть определено из известных
8.2. Теоретические основы 2
значений I, Iq? t и fa:
<7 = Ac°s 1 (8-53)
^TTt у J.Q J
Это уравнение хотя и позволяет определить о по зарегистрированной
интенсивности, предполагает вычисление обратного косинуса, что доста-
точно сложно для оптического детектора. Способ упростить обработку
сигнала за счет небольшого усложнения оптического преобразователя
показан на рис. 8.17. В этом случае предполагается, что формирующая
запаздывание фазовая пластинка с быстрой осью, расположенной вдоль
оси х, является четвертьволновой (5 = тг/2). Матричное уравнение Мюл-
лера для такой комбинации оптических элементов выглядит следующим
образом:
s' = Р (у) R (о, R (о, 7W7) S. (8.54)
\4/ \ fa J V 27 \4/
Рис. 8.17. Базовая схе-
ма датчика на основе фо-
тоупругости для кодиро-
вания данных о напряже-
нии через интенсивность
Оптический,
источник
Оптоволокно
Коллимирующая линза
Поляризатор под углом л/4
Четвертьволновая фазовая пластинка
с быстрой осью под углом О
Фотоупругий элемент, к которому вдоль оси х
прилагается напряжение величиной ст
Поляризатор под углом пл/4---— L.------3
Оптический
детектор
Фокусирующая линз
Оптоволокно
Уравнение (8.54) сводится к следующему:
1 + sin
(8.55)
Наконец, если предположить, что аргумент функции синуса достаточно
мал, уравнение (8.55) можно решить относительно а и получить простое
выражение
irtlo
(8.56)
Таким образом, теперь величину сг можно найти из линейного выра-
жения, которое с помощью простой электроники может быть заложено
непосредственно в оптическом детекторе, что позволит сразу получать
на выходе измеряемое напряжение.
Глава 8. Многомодовые датчики поляризации
Для того чтобы использовать спектральные методы кодирования ин-
формации о запаздывании, в комбинации оптических элементов, показан-
ной на рис. 8.16, следует использовать широкополосный источник опти-
ческого излучения совместно с некоторым типом оптического детектора,
способным определять оптическую интенсивность модулированного из-
лучения как функцию длины волны. Для анализа основное матричное
уравнение Мюллера следует записать отдельно для каждой спектральной
компоненты широкополосного оптического источника
s' = Р R (о, R (0, Р (-) s (А). (8.57)
\ 4/ у A J у A J \4/
Здесь реальное смещение рассматриваемого запаздывания зависит от дли-
ны волны рассматриваемой спектральной компоненты. Решая это уравне-
ние для интенсивности, передаваемой каждой спектральной компонентой,
получаем
Io (A) L /2тг^С 2тгЛ\'
1(A) = 1 + cos ( + "а“ J ’ (8.58)
Теперь рассмотрим нормализованный оптический сигнал, определенный как
41(A) 1 /2%/С 2тгЛ\ /оглХ
1 = Т7ТТ = 1 + cos + Т" • (8-59)
(А) \ А А /
Это выражение достигает максимума, когда аргумент косинуса равен
2Ntf (2V — целое), и минимума, когда аргумент равен (22V + 1)тг. Следова-
тельно, измерение минимума интенсивности при Amin в нормализованном
спектре, возвращаемом датчиком фотоупругости, позволяет определить
приложенное напряжение ст. Таким же способом измерение максимума
при Атах позволяет получить ту же информацию, т. е.
1 X R 1 X R /О.ПХ
2tCXm'n~ tC' ° " tCXmax ~ tC (8’60)
Можно видеть, что связь напряжения с максимумом длины волны (или
минимумом) является линейной. Эта линейность строго зависит от ис-
пользования нормализованного спектра. Это означает, что спектр опти-
ческого источника должен быть или хорошо известным и стабильным,
или непрерывно выбираемым для того, чтобы могла иметь место норма-
лизация.
При обсуждении основных методов оптического кодирования моду-
ляции интенсивности и модуляции спектра не рассматривались датчики
с внутренним опорным сигналом. В следующих двух разделах будут рас-
смотрено несколько различных многомодовых датчиков с модуляцией по-
ляризации, а также разнообразные схемы компенсации, используемые для
повышения их эффективности.
8.2. Теоретические основы 213
8.2.8. Разрешение и шум
Для определения максимально возможного разрешения измеряемого па-
раметра х, при использовании волоконно-оптического датчика следует
определить минимально обнаружимое изменение кодирующего параме-
тра. Если кодирующий параметр (интенсивность I, максимум или мини-
мум длины волны Лит. д.) обозначить £, то существует функциональная
зависимость между £ и я, т. е.
S = /(я). (8.61)
Предположим также, что существует первая производная В, такая, что
= /'М. (8.62)
Тогда разрешение датчика dx, выраженное через измеряемый параметр,
связано с минимально обнаружимым изменением кодирующего параме-
тра £ соотношением
dx = —^—d£. (8.63)
f
Рис. 8.18. Детектиро-
вание фотодиодом в фо-
торезисторном режиме
Если используется кодирование оптической интенсивности 8 — I, мы
будем иметь дело с минимально обнаружимым изменением интенсивно-
сти I оптического сигнала. Предположим, что оптический сигнал попа-
дает на фотодиод, работающий в фоторезисторном режиме с чувстви-
тельностью 5, темновым током id и нагрузочным сопротивлением Rl
(рис. 8.18). Оптический сигнал I создает фототок is = SI. Из-за оптиче-
ской интенсивности I и параметров, связанных с цепью детектора, также
создается шумовой ток г'уу. Шумовой ток определяется как [10]
ii 2N = 2eisAv + 2eid&v + Аг/, (8.64)
Rl
где Az/ — полоса пропускания измерения, кв — постоянная Больцмана
и Т — абсолютная температура в кельвинах. Составляющими шумового
Глава 8. Многомодовые датчики поляризации
(8.65)
(8.66)
тока являются дробовой шум, шум темнового тока и тепловой шум, или
шум Джонсона. Ток минимального обнаружимого оптического сигнала
^min определяется как ток, эквивалентный шумовому току, или
/ 4&вТ \1//2
^min = ( + 2eijAr/ Ч- ~
\ Rl
Тогда минимально обнаружимое изменение измеряемого параметра dx
может быть определено как
1 / ^квТ \1//2
dx = "аТн \ 2eisAv + 2eid^y + ——
Sf (х) \ Rl
Обычно на практике основным источником ошибок в датчиках с ко-
дированием интенсивности являются флуктуации интенсивности опти-
ческого источника и флуктуации интенсивности, обусловленные воздей-
ствием на систему внешней среды. Так или иначе, когда величина этих
флуктуаций интенсивности определена, можно использовать уравнение
(8.63) для численной оценки разрешения системы. Для систем, основанных
на модуляции спектра, можно провести аналогичный анализ, используя
минимально обнаружимый сдвиг длины волны. Такой анализ будет суще-
ственно зависеть от конкретного метода, используемого для регистрации
спектра.
8.3. Датчики на основе эффекта фотоупругости
Использование эффекта фотоупругости для определения распределения
напряжения имеет давнюю историю и является основой успешных ком-
мерческих предприятий в настоящее время (Measurements Group Inc.,
Роли, Северная Каролина). Первое предложение использовать фотоупру-
гость в качестве механизма преобразования волоконно-оптического дат-
чика относится к 1980 году; решение о выдаче патента на концепцию было
принято в 1983-м [5]. Этот датчик, датчик давления, имел один волокон-
ный вход и два волоконных выхода (рис. 8.19). Согласно концепции этого
датчика свет Iq от источника (101), расположенного в области обработки
сигнала, вводился в многомодовое оптическое волокно (121). Выходящий
из волокна свет в области измерений коллимировался, приобретал кру-
говую поляризацию и проходил через чувствительный к давлению фото-
упругий элемент (204), сконфигурированный для восприятия линейного
напряжения вдоль оси, повернутой на тг/4 к оси поляризации проходящего
через элемент светового луча. Затем этот свет пропускался через та-
кое устройство, как поляризующий светоделитель (205), который вводит
компоненты оптического луча, поляризованные под углами тг/4 и — л/4,
8.3. Датчики на основе эффекта фотоупругости
в отдельные выходные оптические волокна (111 и ИЗ). Свет по этим двум
волокнам поступает в область обработки сигнала, регистрируется двумя
фотодетекторами (112 и 114) и затем обрабатывается с целью получения
информации о давлении. Оптическая мощность (при отсутствии оптиче-
ских потерь), регистрируемая двумя фотодетекторами, может быть вы-
числена путем анализа оптической системы, представленной на рис. 8.19,
при помощи формализма Мюллера. Эти мощности равны
1 -I- sin
1 — sin
(8.67)
Здесь предполагается, что давление F, воспринятое датчиком, механиче-
ски преобразовано в эквивалентное линейное напряжение в области, пе-
ресекаемой световым лучом. Использование отношения разности к сумме
позволяет снизить или устранить ошибки в системе, обусловленные созда-
ваемыми источником излучения флуктуациями оптической мощности Iq.
Выходное напряжение обрабатывающей схемы определяется выражением
V = Ът-^Г = yosin
1+ +1-
(8.68)
Можно видеть, что величина Iq в уравнение не входит, и в пределе при
малых давлениях линейная взаимосвязь между выходным напряжением
и приложенным давлением существует независимо от флуктуаций опти-
ческой энергии, подаваемой на чувствительный элемент.
2^tC „
Vo—г—F в пределе для малых Р.
А
Рис. 8.19. Волоконно-оптический датчик давления на основе эффекта фотоупру-
гости [5]
Одна из первых практических демонстраций датчика давления на
основе фотоупругости состоялась в 1982 году [4]. В этом датчике в ка-
честве чувствительного элемента использовался блок натрий-кальциево-
силикатного стекла. Датчик имел только один выходной канал. Принци-
пиальная схема этого датчика приведена на рис. 8.20. В этом конкретном
датчике в качестве оптического источника применяется лазерный диод
216 Глава 8. Многомодовые датчики поляризации
с волоконными выводами, кварцевое оптическое волокно с пластмассовой
оболочкой и диаметром сердцевины 200 мкм, и стержневые градиентные
линзы (GRIN).
Приложенное)
давление ;
Оптическое
волокно <
Входящее
излучение
Поляризатор
Ве-Си-
мембрана
Стержневая
градиентная
микролинза
Выходящее
излучение
Муфта
Корпус датчика
давления
Четвертьволновая Фотоупругая
пластинка стеклянная
призма
Анализатор
Рис. 8.20. Многомодовый волоконно-оптический датчик давления на основе эф-
фекта фотоупругости [4]
Активный фотоупругий элемент представлял собой призму размером
0,6 х 0,6 х 1,2 см из пирекса (fa = 0,26 МПа/полосу/м). Давление на
него передавалось Be-Cu-мембраной, как показано на рис. 8.20. Были про-
ведены только лабораторные испытания этого прибора. Результаты те-
стирования приведены на рис. 8.21. По экспериментальной кривой, пред-
ставленной на рис. 8.21, а, экспериментально было определено минималь-
ное обнаружимое давление. Эти данные количественно определяют отно-
сительное изменение оптической интенсивности, воспринимаемое, когда
чувствительный элемент давления заполнен водой, эквивалентное измене-
нию давления на мембрану величиной 0,9 кПа. Разделив ширину выхода
в устойчивом состоянии (т. е. 0,2 ед.) на изменение сигнала для данной
разности давлений, можно определить минимальное обнаружимое давле-
ние как Fmjn = 95 Па. Это в 67 раз больше, чем минимальное обнаружи-
мое давление (1,4 Па), которое вычислено из уравнения (8.66). Различие
8.3. Датчики на основе эффекта фотоупругости
объяснялось сочетанием шума от лазерного источника и недостаточной
передачи давления от мембраны к активному элементу. На рис. 8.21, б
приведена зависимость выходного сигнала прибора от приложенного ги-
дростатического давления. Кривая демонстрирует диапазон линейности
от 0 до 0,5 МПа и диапазон измерений, превышающий 8 МПа. Измерен-
ный динамический диапазон составил 86 дБ, в то время, как вычисленный
динамический диапазон превышал 120 дБ [дБ определяется здесь как
20log(Pmax/Pmin)]- В качестве верхнего предела гистерезиса этого дат-
чика было установлено примерно ±1% от полной шкалы.
Рис. 8.21. Регистрируемые сигналы от волоконно-оптического датчика давления
на основе эффекта фотоупругости
Описание усовершенствованного варианта датчика давления на осно-
ве эффекта фотоупругости было опубликовано в 1983 году [11]. В этом
датчике (рис. 8.22) вместо лазерного диода использовался светоизлуча-
ющий диод и два оптических канала были реализованы так, что заре-
гистрированную разность/сумму сигнала можно было использовать для
компенсации амплитудного шума оптического источника. Принципиаль-
ная схема датчика приведена на рис. 8.23. Подробная схема расположе-
ния оптических элементов показана на рис. 8.24. В датчике излучение,
прошедшее по входному оптическому волокну, коллимируется стержне-
вой градиентной линзой, отражается параллельно поверхности корпуса
датчика и линейно поляризуется поляризующим светоделителем. Затем
четвертьволновая пластина преобразует луч, придавая ему круговую по-
ляризацию. После этого луч света проходит через активный чувствитель-
Глава 8. Многомодовые датчики поляризации
ный элемент (стеклянную призму), который подвергается напряжению
с помощью латунного поршня, используемого для передачи напряжения
от Be-Cu-мембраны. Затем полуволновая пластинка используется для по-
ворота осей поляризации оптического луча на тг/4, чтобы привести их
в соответствие с осями выходного поляризующего светоделителя, встро-
енного в корпус датчика.
Рис. 8.22. Датчик давления на
основе эффекта фотоупругости
с двойным выходом
Две поляризованные компоненты (соответствующие свету, поляризо-
ванному под углами ±тг/4 к оси напряжения) вводятся после этого в от-
дельные оптические волокна с помощью стержневых градиентных линз
для передачи в область расположения фотодетекторов. Анализ этой сис-
темы оптических элементов (если пренебречь потерями на отражение,
коллимацию и выравнивание) показывает, что оптические сигналы, пере-
даваемые по двум выходным волокнам, описываются уравнением (8.67).
Было установлено, что при отсутствии приложенного давления мощность
сигналов, передаваемых по двум выходным волокнам, равна 5,3 и 8,9 мВт.
Эти величины отличались от базовых значений, равных 4,8 и 4,9 мВт,
из-за остаточного напряжения, приложенного к чувствительному элемен-
ту, когда затягивалось удерживающее кольцо на Ве-Си-мембране, что-
бы обеспечить отсутствие утечки масла в корпус датчика. Для зареги-
стрированных оптических мощностей, измерения анализатором спектра
сигналов, зарегистрированных при помощи регистрирующего фотодиода
в фоторезисторном режиме с нагрузкой 200 кОм, показали, что оптиче-
8.3. Датчики на основе эффекта фотоупругости
ский дробовой шум является преобладающим источником шума. Измерен-
ные уровни шума составляли —135 и —138 дБ/д/Гц; предсказанные зна-
чения дробового шума составляли —134 и —137 дБ/д/Гц соответственно.
Измеренные значения уровней шума в сочетании с наблюдаемым изме-
нением интенсивности, вызванным приложенным давлением, определили
динамический диапазон каналов равным 123 и 118 дБ, при условии 1 Гц
полосы пропускания, при минимальных обнаружимых давлениях, равных
4,8 и 8,3 Па.
Рис. 8.23. Принципиальная схема дат-
чика давления на основе эффекта фото-
упругости с двойным выходом
Выходы двух детекторов были объединены с простой электронной схе-
мой, чтобы обеспечить выход, пропорциональный разности/сумме двух
сигналов. Типичная характеристика датчика, в котором используется та-
кой способ обработки, показана ни рис. 8.25. Однако было обнаружено,
что схема обработки увеличивает уровень выходного шума на 30 дБ/<\/Гц,
таким образом существенно снижая разрешение и уменьшая динамиче-
ский диапазон датчика. Это показывает, что схема обработки сигнала
после фотодетектора требует тщательной разработки и выбора компо-
нент.
Глава 8. Многомодовые датчики поляризации
Фотоупругий
чувствительный Приложенное
Рис. 8.24. Подробная схема расположения оптических элементов датчика давле-
ния на основе эффекта фотоупругости с двойным выходом
Рис. 8.25. Выходное электрическое
напряжение датчика давления на осно-
ве эффекта фотоупругости с двойным
выходом
Также был продемонстрирован про-
стой одноосевой волоконно-оптический
акселерометр [3], основанный на эф-
фекте фотоупругости. В этом случае
основная конфигурация измерений ана-
логична представленной на рис. 8.16.
Масса в 16 г, прикрепленная к гра-
ни х фотоупругого элемента, позволя-
ет преобразовывать силы, обусловлен-
ные ускорением, в напряжение матери-
ала. Было протестировано два различ-
ных типа чувствительного фотоупру-
гого материала: пирекс и полиуретан.
Размеры стеклянного элемента соста-
вляли 0,6 х 0,6 х 1,2 см и оптическая
длина пути 0,6 см. Полиуретановый
элемент имел размеры 1,0 х 0,6 х 1,5 см при оптической длине пути, также
равной 0,6 см. Прибор оценивался двумя способами. Во-первых, опреде-
лялся отклик чувствительного элемента на статическую нагрузку. Это
обеспечило прямое измерение коэффициента оптической чувствительно-
сти материала на рабочей длине волны лазерного диода с волоконными
8.3. Датчики на основе эффекта фотоупругости 221
выводами RCA С86007, равной 820 нм. Для элементов из стекла и по-
лиуретана, соответственно, эти коэффициенты составили: /^(стекла) =
= 0,13 МПа/полоса/м и /^(полиуретана) = 104 Па/полоса/м. При втором
измерении одновременно волоконно-оптический акселерометр и эталон-
ный акселерометр Bruel&Kjaer, типа 4371, были жестко закреплены на
вибрационном столе Cleveland, модель VP-7-2, и подвергнуты верти-
кальному ускорению с частотой 100 Гц. Измерения выходных сигналов,
проведенные спектроанализатором Tektronix 7LS, позволили определить
динамические отношения сигнал/шум так, что минимально обнаружимое
ускорение можно было вычислить из уравнения (8.66). Экспериментально
определенные минимально обнаружимые пиковые ускорения для стеклян-
ного и полиуретанового элементов составили 1,5 х 10-3 и 8,5 х 10~5 см/с2
соответственно. Теоретические минимально обнаружимые ускорения со-
ставляли 6,5 х 10~4 и 1,7 х 10-5 см/с2 для тех же элементов, что указывает
на то, что по крайней мере при частоте 100 Гц существует приемлемое
соответствие между теорией и реальными характеристиками. Источни-
ком расхождений, вероятно, стал амплитудный шум от лазерного диода,
являющегося источником излучения. Демонстрация волоконно-оптическо-
го акселерометра показала, что подобный прибор можно реализовать
сравнительно недорого и напрямую. Однако его принципиальное преиму-
щество проявляется в ситуациях когда присутствуют только линейные
ускорения. В более сложных ситуациях, силы сдвига, действующие на фо-
тоупругий элемент при ускорении прикрепленной массы, могут сделать
значение зарегистрированного сигнала неопределенным.
Наибольшее развитие волоконно-оптические датчики, на основе эф-
фекта фотоупругости получили в приложениях, связанных с акустиче-
скими измерениями [1, 2]. Измерительная конфигурация первого образ-
ца датчика такого типа [1], была аналогичной приведенной на рис. 8.19
и имела два волоконных выхода. Свет от гелий-неонового лазера мощно-
стью 2 мВт фирмы Hughes вводился в волокно со ступенчатым профилем
показателя преломления и диаметром сердцевины 100 мкм и передавался
преобразователю. Затем он коллимировался с помощью стержневой гра-
диентной линзы, приобретал круговую поляризацию и проходил через фо-
тоупругий чувствительный элемент. Компоненты (1 + sin) и (1 — sin) вы-
ходного сигнала затем разделялись поляризующим светоделителем и вво-
дились в различные выходные волокна для передачи в область обработ-
ки сигнала, где они регистрировались двумя фотодиодами RCA С30808.
Фотоупругий элемент, имеющий двутавровый профиль, был изготовлен
из Thiokol Solithane Urethane 113 и его площадь поперечного сечения
вверху и внизу составляла 0,6 х 0,6 см, а площадь поперечного сече-
ния в области, пересекаемой оптическим лучом, равнялась 0,6 х 0,2 см.
Глава 8. Многомодовые датчики поляризации
Экспериментально определенная оптическая постоянная по напряжениям
равнялась fa = 210 Па/полоса/м. Корпус акустического датчика пред-
ставлял собой полый алюминиевый цилиндр высотой 8 см с внутренним
диаметром 8,5 см и внешним диаметром 5,0 см. Активный фотоупру-
гий элемент был выровнен между входной и выходной оптикой и за-
тем присоединен к двум тонким резиновым мембранам, закрепленным
сверху и снизу корпуса с помощью алюминиевых удерживающих колец.
Преобразователь был заполнен воздухом. При отсутствии приложенно-
го давления оптическая мощность, попадающая на два фотодетектора,
составляла 41 и 17 мкВт соответственно. Для компенсации этой раз-
ницы оптических мощностей было подстроено усиление по напряжению
двух фотодетекторов, путем использования на первом детекторе нагруз-
ки 100 кОм и на втором — нагрузки 200 кОм. Эти два приблизитель-
но равных выходных напряжения затем вычитались и усиливались в 10
раз с помощью дифференциального усилителя PAR модели 113. После
этого выходной сигнал усилителя анализировался спектроанализатором
Tektronix 7LS. Прибор был протестирован на калибраторе гидрофонов
NRL G19 путем наблюдения за отношением сигнал/шум в приборе, под-
вергавшемся воздействию акустических волн известной интенсивности
и частоты. Фактические акустические интенсивности проверялись при
помощи калиброванного электрического гидрофона CH-17UT. Измере-
ния показали, что динамический диапазон прибора превышает 120 дБ
(где напряжение пропорционально давлению и дБ = 20 log V). Также бы-
ло определено минимальное обнаружимое давление 47 дБ относительно
1 мкПа/^/Гц при 500 Гц. Кроме того, было установлено, что определение
разности двух выходных сигналов обеспечивает подавление амплитудно-
го шума от 10 до 12 дБ по сравнению с одноканальной характеристи-
кой, что указывает на значительный амплитудный шум гелий-неонового
источника. Хотя из-за отсутствия компенсации статического давления
возможности применения данного акустического датчика ограниченны,
он продемонстрировал, что по своим характеристикам волоконно-опти-
ческие акустические датчики могут сравняться или превзойти существу-
ющие электрические датчики.
Первая демонстрация волоконно-оптических акустических измерений
на основе эффекта фотоупругости [1] привела к демонстрации системы
[2], в которой была реализована и протестирована волоконно-оптическая
гидроакустическая антенная решетка на основе эффекта фотоупругости
с компенсацией по температуре и статическому давлению, состоявшая из
четырех отдельных преобразователей с общим оптическим источником
и модулем регистрации. Процесс разработки, создания и тестирования
действующей системы был слишком длинным, и его невозможно здесь
8.4- Датчики на основе фазовых пластин 223
подробно описать. Но каждому желающему выполнить дополнительную
работу в этой области рекомендуется ознакомиться с заключительным
отчетом [12] по этой теме, спонсируемой лабораторией по морским ис-
следованиям, как с практической иллюстрацией проблем, которые прихо-
дится преодолевать при создании реальных систем.
Из приведенного выше описания волоконно-оптических датчиков на
основе эффекта фотоупругости понятно, что существует широкий спектр
потенциальных возможностей их применения. Как правило, эти датчики
кодируют изменения исследуемого параметра через изменения интенсив-
ности регистрируемого оптического сигнала. Чтобы исключить ошибки,
вызываемые изменениями оптической интенсивности, не обусловленными
изменениями исследуемого параметра, необходимо использовать какой-
либо внутренний опорный сигнал, а если это невозможно, то откали-
бровать датчик и поддерживать калибровку в течение всего времени
эксплуатации. Продемонстрировано множество методов использования
внутреннего опорного сигнала, часто в сочетании с мультиплексировани-
ем [13-17]. Сочетание этих методов мультиплексирования и использова-
ния внутреннего опорного сигнала с продемонстрированными датчиками
позволяет уже в настоящее время использовать датчики на основе эф-
фекта фотоупругости, если анализ отношения эффективность/стоимость
показывает, что такие системы предлагают достаточно существенные
преимущества, чтобы преодолеть инерцию применения более традици-
онных электрических систем. Кроме того, предметом исследований явля-
ются альтернативные способы кодирования измерительной информации
по длине волны, а не по интенсивности [18]. Однако работа в этой области
ограничена из-за отсутствия надежных широкополосных твердотельных
источников, совместимых с волоконной оптикой, и трудностей обеспе-
чения точной и эффективной по стоимости обработки модулированного
сигнала. Современные разработки оптических излучателей/детекторов
позволяют предположить, что спектральное кодирование может стать бо-
лее реализуемым на практике, чем в прошлом, и по этой причине сейчас
мы вернемся к анализу типа датчиков, использующих модуляцию по дли-
не волны для кодирования информации о положении.
8.4. Датчики на основе фазовых пластин
Для того чтобы снизить необходимость в сложных и дорогих методах из-
влечения необходимых данных из волоконно-оптических датчиков, иссле-
дуются методы кодирования измерительной информации, не основанные
на интенсивности, хотя можно сказать, что, в конечном итоге, преобразо-
вание оптического сигнала в электрический всегда связано с измерением
Глава 8. Многомодовые датчики поляризации
интенсивности. В частности, преобразователи, кодирующие по длине вол-
ны (или цвету) оптического сигнала, представляются весьма многообе-
щающими. Функционирование датчика с кодированием по длине волны
схематически представлено на рис. 8.26. В этом случае широкополосный
входной спектр от оптического источника, такого как светодиод, дости-
гает преобразователя, который модулирует интенсивность в зависимо-
сти от спектрального распределения длин волн на основе исследуемого
параметра Р. Промодулированный широкополосный сигнал затем реги-
стрируется спектрометром или другим прибором, и зарегистрированное
спектральное распределение обрабатывается с целью получения параме-
тра Р. На первый взгляд, эта процедура не кажется более простой, чем
используемая в схемах компенсации интенсивности, — она кажется даже
более сложной, но более детальный анализ показывает, что при определен-
ных условиях этот тип кодирования может обеспечивать значительные
преимущества.
Рис. 8.26. Принципиальная схема волоконно-оптических измерений с кодирова-
нием по длине волны
Чтобы изучить возможные варианты модуляции по длине волны, мож-
но рассмотреть два простейших метода, с помощью которых выполняется
кодирование сигнала, как показано на рис. 8.27. В результате применения
первого из этих методов в широкополосном входном сигнале с помощью
преобразователя создается «вырез» на длине волны, напрямую связан-
ной с исследуемым параметром. В сопряженном методе преобразователь
наоборот функционирует как узкополосный оптический пропускающий
фильтр, центральная длина волны которого изменяется в зависимости
8.4- Датчики на основе фазовых пластин
от исследуемого параметра. Если любой из типов фильтрации имеет до-
статочно узкую полосу, то изменения огибающей регистрируемого спек-
тра, обусловленные дрейфом источника, модуляцией оптического волок-
на или другими эффектами, внесут минимальную ошибку в измеренное
значение Р, поскольку определение максимума (или минимума) интенсив-
ности будет однозначным.
Рис. 8.27. Широкополосный
спектр (а) с режекторным ко-
дированием (б) и с узкополос-
ным кодированием (в)
Кроме того, спектральное распределение одного светодиодного источ-
ника может использоваться для нескольких узкополосных сигналов. Такое
мультиплексирование по длине волны может уменьшить стоимость сис-
темы до конкурентоспособного уровня, несмотря на усложнение оборудо-
вания, которое потребуется для регистрации полного спектра в реальном
времени. Если выполняемая преобразователем модуляция недостаточно
узкополосная, диапазон длин волн существующих светодиодов не допус-
кает мультиплексирования и для обеспечения точной оценки величины
измеряемого параметра нормализация регистрируемого спектрального
распределения по отношению к спектру источника должна выполняться
во времени, по крайней мере, близком к реальному. Этот случай проил-
люстрирован рис. 8.28. На рис. 8.28, а смещение пика регистрируемого
сигнала по отношению к центральной длине волны узкополосного филь-
тра обусловлено широкополосным источником. Если огибающая источ-
8-3379
Глава 8. Многомодовые датчики поляризации
ника сдвигается под воздействием температуры или других эффектов,
как показано на рис. 8.28, б', в используемую при измерениях централь-
ную длину волны фильтра может быть внесена ошибка. Чтобы исключить
этот вид ошибок, требуется нормализация регистрируемого спектра по от-
ношению к спектру источника в реальном времени, что компенсирует
только оптический дрейф источника и больше ни на что не повлияет.
Отсюда можно сделать вывод, что степень «качественности» волоконно-
оптического датчика с кодированием по длине волны определяется как
отношение ширины спектра используемого оптического источника к ши-
рине спектра кодирования преобразователя.
Рис. 8.28. Ошибка кодирования, обусловленная дрейфом спектра источника
Чтобы изучить простой пример датчика с кодированием по длине
волны, проанализируем волоконно-оптический датчик угла поворота, ко-
дирующий по длине волны [6]. В этом датчике используется режекторное
8.4- Датчики на основе фазовых пластин
спектральное кодирование, которое не является узкополосным по отно-
шению к спектральному распределению оптического источника. Поэтому
это именно тот случай, который позволяет продемонстрировать неко-
торые проблемы, характерные для этого типа датчиков. При изучении
дифракционных датчиков в гл. 7 нам уже встречался датчик с модуляци-
ей по длине волны, имеющий относительно узкую полосу пропускания.
Рис. 8.29. Оптическая кон-
фигурация датчика враще-
ния
В используемом в качестве примера волоконно-оптическом датчике
угла поворота оптическая замедляющая фазовая пластинка использует-
ся для кодирования углового смещения на широкополосном оптическом
сигнале в виде модулируемого минимума режекции. Модуляция длины
волны, выполняемая этим датчиком, аналогична модуляции, выполняемой
датчиком на основе фотоупругости [описываемой уравнениями (8.58)-
(8.60)]. Однако в этом случае эффект создается вращением фазовой пла-
стинки вокруг ее быстрой оси, а не напряжением. Базовая конфигурация
измерений представлена на рис. 8.29. При повороте фазовой пластинки
линейное запаздывание оптического луча изменяется. Длина волны сиг-
нала, при которой запаздывание, обусловленное пластинкой, составляет
точно половину волны, соответствует минимальной пропускаемой интен-
сивности. Поскольку угол поворота напрямую связан с оптической длиной
пути и, следовательно, с запаздыванием, формируемым волновой пла-
стинкой, длина волны, которой соответствует минимум интенсивности,
является функцией угла поворота пластинки. Определение длины волны,
которой соответствует этот минимум интенсивности, основано на из-
мерениях с использованием схемы дифракционного прибора с зарядовой
связью (ПЗС).
Как уже указывалось, преобразователь с кодированием по длине вол-
ны основан на введении линейного запаздывания в луч света, поляризо-
ванный под углом тг/4 по отношению к быстрой оси фазовой пластин-
ки. Внутри преобразователя коллимированный широкополосный луч из
Глава 8. Многомодовые датчики поляризации
оптического волокна проходит через инфракрасный поляризатор, ори-
ентированный под углом тг/4, фазовую пластинку с быстрой осью под
углом 0 и второй инфракрасный поляризатор под углом тг/4. Затем свет
поступает в область измерений, где измеряется спектральное распределе-
ние интенсивности оптического поля. Для такой оптической системы без
избыточных потерь и с начальным распределением оптической мощно-
сти Zo(А) распределение оптической энергии на выходе преобразователя
можно выразить, используя формализм Мюллера
г/хх /о (A) L 2тг7?1 ,
/(А) =—-— 1 + cos—— , (8.69)
4 L .
где R — значение запаздывания в нанометрах и А — длина волны в на-
нометрах. Это уравнение в точности эквивалентно уравнению (8.58) без
компоненты фотоупругости. Фазовая пластинка со значением запазды-
вания Ао/2 свободно вращается вокруг своей быстрой оси. Значение за-
паздывания для оптического луча определяется по формуле
= <8'70’
Теперь угловое смещение Q, являющееся исследуемым параметром, можно
определить по длине волны, которой соответствует минимальная интен-
сивность, из соотношения, полученного подстановкой уравнения (8.70)
в (8.69)
Q = cos-1-^-, (8.71)
^min
где Amin — длина волны, при которой достигается минимум интенсив-
ности. Из-за синусоидальной природы уравнения (8.69) существует мно-
жество минимумов со своими длинами волн, равными или меньшими,
чем Amin = 2/?, как показано на графике, приведенном на рис. 8.30. При
больших длинах волн минимумы отсутствуют. Конкретно, максимумы
и минимумы интенсивности достигаются (в предположении, что R не рав-
но нулю) при
Л = 5 Л — 2Д <8 721
т“ т’ 2т+1’ 18 ' '
где т — целое положительное число, не равное нулю. Приблизительный
полуминимум полной ширины между т-м и (т + 1)-м максимумами ААШ
определяется как
- Я " - А ) - (8-73)
2 m + lj 2m(m + l)
Чтобы реализовать датчик с однозначным выходом во всем рабо-
чем диапазоне, нужно, чтобы только одна длина волны соответствовала
минимуму интенсивности в спектральном распределении используемого
8.4- Датчики на основе фазовых пластин
источника излучения. Следовательно, мультиплексирование по длине вол-
ны не имеет практического значения для датчиков этого типа, поскольку
сужение полуминимума полной ширины одного датчика, чтобы освобо-
дить место внутри огибающей спектра для других датчиков, приводит
к появлению дополнительных минимумов в широкополосном спектре, ко-
торый должен быть зарегистрирован.
На рис. 8.31 показана схема экспериментальной тестовой установки,
используемой для измерений угла поворота с помощью переменного запаз-
дывания датчиком, выполненном в варианте с компенсацией дрейфа ис-
точника [19]. Широкополосное излучение светодиода (центральная длина
волны 867 нм, полная ширина кривой на уровне полумаксимума (FWHM)
30 нм, выходная мощность 6 мВт) вводится в 200/240 мкм оптическое во-
локно (для коллимации/фокусировки использовались только линзы f/0.8
Melies Griot). Примерно 30% излучения вводится в опорное волокно че-
рез разветвитель с отношением 1 : 2. Оставшееся излучение доставля-
ется в область измерений, где после выхода из волокна коллимируется
и пропускается через инфракрасный стеклянный поляризатор Corning,
ориентированный под углом л/4. Пакет пластиковых волновых пластин
Polaroid (с совокупным запаздыванием по оси 2070 нм), смонтирован-
ный на редукторной вращающейся подставке (передаточное отношение
7:1), используется в качестве фазовой пластинки с переменным запаз-
дыванием. После прохождения через вращающиеся волновые пластинки
излучение попадает на другой инфракрасный поляризатор, ориентиро-
ванный под углом тг/4, передается на комбинацию: дифракционная ре-
шетка (1200 мм-1, концентрирующая при 600 нм) — ПЗС (Reticon RL512,
линейная детекторная решетка, 512 элементов с шагом 25,4 мкм) и осве-
щает половину ПЗС-решетки. Другая половина ПЗС решетки освещается
Глава 8. Многомодовые датчики поляризации
опорным лучом, что позволяет получить информацию для нормализа-
ции спектра и интенсивности. Считывание с ПЗС решетки и нормали-
зация (по отношению к спектральному распределению светодиода) осу-
ществляется микрокомпьютером, определяющим длину волны минимума.
Все измерения выполнялись в области от 820 до 900 нм, обусловленной
диапазоном излучения светодиода. Таким образом, процедура измере-
ния включает в себя поворот волновых пластинок на известный угол,
считывание с ПЗС-решетки и определение длины волны минимума. Для
нулевого поворота уравнение (8.72) прогнозирует при заданной величине
запаздывания минимум интенсивности на длине волны 828 нм для т = 3.
Рис. 8.31. Схема экспериментальной тестовой установки
Регулировка и размещение на определенном расстоянии комбинации
дифракционная решетка/ПЗС-детектор позволяет получить разрешение
по длине волны, равное 0,1 нм, что соответствует угловому разрешению
лучше, чем 1%. Расстояние между дифракционной решеткой и ПЗС можно
изменять, чтобы получить лучшее угловое разрешение, но только за счет
уменьшения полного диапазона углового сканирования (ограниченного
конечной длиной ПЗС). На графике, приведенном на рис. 8.32, показан
выходной спектр светодиодного источника для прибора, функционирую-
щего при двух различных температурах. Очевидно, что при отсутствии
опорного сигнала систематические изменения выходного сигнала источ-
ника приведут к изменениям спектрального выхода системы, что может
быть приписано (ошибочно) вращению волновых пластин.
Наконец, на рис. 8.33 приведена зависимость угла поворота, получен-
ного в результате измерений, от действительного угла поворота при ис-
пользовании опорного сигнала (рис. 8.33, а) и без него (рис. 8.33, б). Про-
8.4- Датчики на основе фазовых пластин 231
ведены измерения в диапазоне углов поворота от 0 до 210° (7тг/6 радиан).
В процессе измерения углов поворота температура радиатора ИК-свето-
диода повысилась от начальной температуры 280 К до 301 К.
Рис. 8.32. Обусловленный темпе-
ратурой дрейф спектра светодиода
Длина волны (нм)
Рис. 8.33. Связь между измеренным
и действительным углом поворота для
датчика угла поворота с кодированием
по длине волны
Очевидно, что при больших углах поворота ошибки, вызванные дрей-
фом спектра и интенсивности источника, возникнут и будут возрастать,
если не принять мер по нормализации. Хотя былавведена компенсация
дрейфа источника по температуре, ошибки в измерении углов поворо-
та могут возникать и вследствие эффекта теплового расширения вра-
щающихся волновых пластин. Одним из вариантов компенсации этого
источника ошибок является введение постоянной неподвижной волновой
пластины и дихроичного зеркала в отражательный вариант датчика, как
показано на рис. 8.34. Теперь в зарегистрированном спектре появляется
два минимума интенсивности при длинах волн Ai и Ag. Если значения за-
паздывания стационарной волновой пластины и вращающейся волновой
пластины равны Ri и R? при некоторой температуре То, угол поворота Q
Глава 8. Многомодовые датчики поляризации
и температуру Т можно определить из соотношений
Q = arccos
Д2 Aj \
Ri Л2 — Al /
T = TQ +
Ai - 47?i
4qHi ’
(8-74)
(8.75)
где а — коэффициент теплового расширения материала волновой пласти-
ны. Можно видеть, что значение Q может быть вычислено на основании
известных значений Ai, А2, Ri и R? и оно не зависит от температуры.
Действительную температуру волновой пластинки можно определить из
уравнения (8.75) при условии, что известен коэффициент а.
пропускающий X > Хо
и отражающий X < Хо
Рис. 8.34. Оптическая конфигурация датчика поворота с компенсацией по тем-
пературе
Хотя для демонстрации кодирования длины волны мы рассматрива-
ли датчик угла поворота, проведенный анализ имеет силу по отношению
к любому оптическому преобразователю, в котором информация об ис-
следуемом параметре кодируется через оптическое запаздывание. Есте-
ственно, вращающаяся волновая пластинка должна быть заменена фо-
тоупругим элементом и проведен аналогичный анализ. Принципиальный
недостаток такого типа кодирования по длине волны состоит в сложности
обработки сигнала и в трудности одновременного мультиплексирования
множества датчиков.
8.5. Состояние разработки датчиков
Несмотря на сравнительно простую реализацию, технология многомодо-
вых волоконно-оптических датчиков на основе эффекта фотоупругости
до сих пор не вышла за пределы экспериментальной стадии. Одна из при-
чин этого заключается в том, что большие компании, создающие или
разрабатывающие конкретно эту технологию, заинтересованы главным
образом в ее использовании в единственном приложении: обнаружении
акустических сигналов с помощью перемещаемой матрицы датчиков. Эта
работа активно проводилась в начале 1980-х годов в рамках програм-
мы U.S. Navy Fiber Optic Systems (FOSS). В этой программе оценива-
лось множество концепций волоконно-оптических акустических датчиков
через контракты, финансируемые фондом развития, и, в конечном ито-
ге, для дальнейшего развития была выбрана одномодовая технология на
основе интерферометра Маха - Цен дера, разработанная Военно-морской
исследовательской лабораторией (Naval Research Laboratory). Не полу-
чая обеспечивавшего интерес финансирования, компании, занимавшиеся
технологией многомодовых датчиков на основе эффекта фотоупругости,
перенесли собственное финансирование научных исследований и опытно-
конструкторских разработок в другие области. В наши дни дальнейшее
развитие этой технологии все еще осуществляется на лабораторном уров-
не в академических институтах. Публикуются одна-две статьи в год,
посвященные уточнению новых методов компенсации влияния внешних
условий и/или методам обработки сигнала датчиков на основе эффекта
фотоупругости. Тем не менее при том уровне развития, которого достиг-
ла технология к настоящему моменту, а также благодаря возможности ре-
ализации напрямую не требуется значительных дополнительных усилий
для создания практических систем, которые удовлетворят требованиям
проведения с минимальными затратами измерений в приложениях, где
нет необходимости в очень высокой точности.
Датчик угла поворота, описанный в разделе 8.4, в настоящее время
находится на ранней стадии разработки и недалеко продвинулся от лабо-
раторно-демонстрационной стадии. Причина этого в стоимости обработ-
ки модулированного оптического спектра, необходимой для получения
требуемого углового смещения. Однако новые разработки в технологии
детекторов могут изменить эту ситуацию. В частности, изобретение так
называемого «датчика для определения цвета», который формирует спек-
тральную информацию с помощью двух полупроводниковых детекторов,
расположенных друг над другом на одной подложке, перехватывающих
один и тот же оптический сигнал, но имеющих различные частотные
характеристики, может значительно улучшить соотношение эффектив-
ность/стоимость для этого способа измерений.
Литература
1. W. В. Spillman, Jr., and D.H. McMahon, Multimode Fiber-Optic Hydrophone
Based on the Photoelastic Effect, Appl. Opt. 21, 3511 (1982).
Глава 8. Многомодовые датчики поляризации
2. D.H. McMahon et al., Fieldable Multimode Fiber Optic Hydrophone Array,
IEEE J. Lightwave Technol. LT-2(4), 469 (1984).
3. W. B. Spillman, Jr., Multimode Fiber-Optic Accelerometer Based on the Pho-
toelastic Effect, Appl. Opt. 21, 2653 (1982).
4. W. B. Spillman, Jr., Multimode Fiber-Optic Pressure Sensor Based on the Pho-
toelastic Effect, Opt. Lett. 7, 388 (1982).
5. W. H. Glenn and R. G. Tomlinson, Optical Pressure Sensor, U.S. Patent 4, 368,
645 (1983).
6. W. B. Spillman, Jr., P. L. Fuhr, and P.J. Kajenski, Fiber Optic Rotary Dis-
placement Sensor with Wavelength Encoding, Appl. Opt. 27(15), 3081 (1988).
7. J. D. Jackson, Classical Electrodynamics, Wiley, New York, 1967.
8. P. S. Theocaris and E. E. Gdoutos, Matrix Theory of Photoelasticity, Springer-
Verlag, New York, 1979.
9. W. B. Spillman, Jr., Fiber Optic Sensors with Optical Common Mode Rejec-
tion, Proc. ISA 657, 31st International Instrumentation Symposium, San Diego,
Calif., 1985.
10. A. Yariv, Introduction to Optical Electronics, Holt, Rinehart and Winston, New
York, 1976.
11. W. B. Spillman, Jr. and D. H. McMahon, Multimode Fiber Optic Sensors Based
upon the Photoelastic Effect, Proc. SPIE 110, Fiber Optic and Laser Sensors,
Arlington, Va., 1983.
12. D.H. McMahon et al., Fiber Optic Sensor System (FOSS), Final Report for
Naval Research Laboratory Contract N000H-81-C-2662, Feb. 1983.
13. A.R. Nelson and D.H. McMahon, Passive Multiplexing of Digital Fiber-Optic
Sensors, Appl. Opt. 20(6) (1981).
14. A.R. Nelson et al., Multiplexing System for Fibre Optic Sensors Using Puke
Compression Techniques, Electron. Lett. 17(7) (1981).
15. G. Adamovski, Amplitude Spectrum Modulation Technique for Analog Data
Processing in Fiber Optic Sensing System with Temporal Separation of Chan-
nels, Proc. SPIE 264, Fiber Optic and Laser Sensors V, San Diego, Calif.,
1987.
16. W. B. Spillman, Jr., and J.R. Lord, Self-Referencing Multiplexing Technique
for Fiber Optic Intensity Sensors, IEEE J. Lightwave Technol. LT-5(7) (1987).
17. W. B. Spillman, Jr., et al., Self-Referencing Frequency Domain Multiplexing
Technique for Fiber Optic Sensors, Proc. SPIE 200, Fiber Optic and Laser
Sensors V, San Diego, Calif., 1987.
18. В. E. Jones and R. A. Spoonser, Photoelastic Pressure Sensor with Optical Fibre
Links Using Wavelength Characterization, Proc. First International Conference
on Optical Fibre Sensors 173, London, 1983.
19. W. B. Spillman, Jr., and P. L. Fuhr, Self-Referencing Fiber Optic Rotary Dis-
placement Sensor, Proc. SPIE 305, Fiber Optic and Laser Sensors VI, Cam-
bridge, 1988.
ГЛАВА 9
ВОЛОКОННО-ОПТИЧЕСКИЕ
ДАТЧИКИ НА ОСНОВЕ
ИНТЕРФЕРОМЕТРА САНЬЯКА
И ПАССИВНОГО КОЛЬЦЕВОГО
РЕЗОНАТОРА
Эрик Удд
Компания «Мак Доннел дуглас Электроник Системе»
Санта-Ана, Калифорния
9.1. Введение
Интерферометры Саньяка и пассивные кольцевые резонаторы можно ис-
пользовать для определения широкого диапазона параметров окружающей
среды. Волоконно-оптические гироскопы, построенные на этих принци-
пах, открывают широкую перспективу для всех твердотельных компактных
инерциальных измерительных устройств в навигационных приложениях,
о которых несколько лет назад можно было только мечтать. Применение
подобных датчиков выходит за пределы измерения вращения; их уни-
кальные преимущества открывают перспективу широкого использования
в измерениях акустических, магнитного поля, температурных, ускорения
и механических напряжений. Эти устройства могут также найти при-
менение в исследовании характеристик источников света и оптических
волокон.
Эта глава начинается с введения, описывающего использование интер-
ферометра Саньяка и пассивного кольцевого резонатора для измерения
вращения. Она включает в себя описание эффекта Саньяка и продолжа-
ется обсуждением его первой промышленной реализации в форме кольце-
вого лазерного гироскопа. Далее следует описание волоконно-оптического
Волоконно-оптические датчики: Вводный курс для инженеров и научных работников,
под редакцией Эрика Удда. ©1991 John Wiley &: Sons, Inc.
гироскопа как в конфигурации интерферометра Саньяка, так и пассивно-
го кольцевого резонатора для работы с разомкнутой и замкнутой петлей
обратной связи. Основной проблемой при разработке волоконно-оптиче-
ского гироскопа была необходимость изолировать этот датчик от всех,
кроме вращения, воздействий внешней среды. Тем не менее чувствитель-
ность сконфигурированного соответствующим образом интерферометра
Саньяка и пассивного кольцевого резонатора к акустическим колебани-
ям, электрическим и магнитным полям, температуре, давлению, ускоре-
нию и механическому напряжению делает эти приборы идеальными для
использования во многих приложениях. В главе приведен обзор таких дат-
чиков и их приложений, а также рассмотрена возможность использования
датчиков для исследования свойств источников света и оптических волокон.
9.2. Краткий обзор оптических датчиков вращения
и эффекта Саньяка
Оптические датчики вращения стали причиной существенного прогрес-
са, заменяя общепринятые механические датчики вращения, основанные
на принципе инерции вращающихся масс. В инерциальных системах на-
ведения традиционно используются два основных класса существующих
датчиков вращения: (1) скоростной прецессионный гироскоп, скорость
вращения которого пропорциональна выходному сигналу (напряжению
или частоте); и (2) скоростной интегрирующий гироскоп, выход которого
определяется углом поворота. Как показано в табл. 9.1, оба этих выхо-
да связаны коэффициентом пропорциональности К, который называют
масштабным коэффициентом. Качество датчика вращения определяет-
ся несколькими параметрами, перечисленными в табл. 9.2. К наиболее
важным параметрам смещения относятся постоянное смещение, дрейф
смещения и чувствительность, или порог. Постоянное смещение опреде-
ляется как выходной сигнал датчика вращения при нулевой скорости на
входе. Если этот параметр смещения в действительности постоянен, по-
стоянное смещение для датчика вращения можно откалибровать без сни-
жения производительности прибора. На практике может оказаться, что
это достаточно сложно осуществить для смещений большой величины,
а также в том случае, когда фиксированное смещение существенно изме-
няется от прибора к прибору. Более серьезную систематическую ошибку
вносит дрейф смещения. В этом случае выходной сигнал датчика враще-
ния случайным образом изменяется со временем. Подобные проявления
часто связаны с параметрами внешней среды, такими как температура
и давление, но могут также быть обусловлены старением или другими
изменениями в самом датчике вращения.
9.2. Краткий обзор оптических датчиков вращения и эффекта Саньяка 237
Таблица 9.1. Основные характеристики датчика вращения
Скорость гироскопа
О. = KV
Q = скорость вращения (рад/с, град/час и т. д.)
К = масштабный коэффициент (коэффициент пропорциональности между
скоростью вращения и выходным сигналом)
V — выходной сигнал (напряжение, частота и т. д.)
Гироскоп с интегрированием скорости
to to to
o(t0) = jadt = f KVdt = k fvdt
0 0 0
Таблица 9.2. Определение характеристик
Характеристики смещения
Фиксированное смещение Выходная скорость вращения датчика вращения, не равная нулю при нулевой входной скорости
Дрейф смещения Изменение выходной скорости вращения датчика во времени, обусловленное такими эффектами, как изменение температуры, магнитных полей, старение и износ компонентов
Чувствительность (порог) Минимальная измеряемая скорость вращения для данного времени интегрирования
Масштабный коэффициент
Линейность Мера независимости выходного сигнала от направления вращения
Гистерезис Мера степени, до которой значение К остается постоянным для всех рассматриваемых значений скоростей вращения
Оптические характеристики
Характеристики спектрального шума Уровень собственного шума как функция частоты
Динамический диапазон Диапазон от минимальной скорости вращения до максимальной измеряемой скорости вращения
Время включения Время, необходимое для достижения рабочих характеристик
Чувствительность, или порог, — это еще одна составляющая смеще-
ния. Она измеряется как минимальная скорость вращения для данного
времени интегрирования. Отметим, что чем больше время интегриро-
вания, тем выше чувствительность. Здесь важен компромиссный подход,
поскольку допустимое время интегрирования сильно зависит от приложе-
ния. Например, для транспортного самолета, выполняющего медленные
повороты, может быть приемлема полоса пропускания шириной 1 Гц или
время интегрирования 1 с, в то время как в другом приложении для бы-
стро колеблющейся платформы может потребоваться полоса пропускания
шириной 100 Гц или время интегрирования 0,01 с. Значимость ошибки
Глава 9. Волоконно-оптические датчики на основе резонатора
масштабного коэффициента опять же зависит от приложения. Если в при-
ложении предусмотрены только очень медленные повороты, требования
к масштабному коэффициенту могут быть более мягкими, чем в приложе-
нии с быстрыми поворотами, при прочих равных условиях. Как правило,
эти ошибки приводят к неидеальной линейности и гистерезису.
Другие факторы также могут иметь критическое значение для поль-
зователей. К ним относятся характеристики спектрального шума. В иде-
але датчик вращения не должен иметь шумовых выбросов на какой-либо
определенной частоте. Это особенно важно при разработке систем упра-
вления. Многие механические датчики вращения имеют высокий уро-
вень шума на характерных частотах, обусловленные их механическим
движением. Динамический диапазон — это разница между максималь-
ной и минимальной скоростями, которые могут быть измерены. Время
включения критично при многих полетах, которые могут завершиться
прежде, чем включится датчик вращения. Такая проблема часто возника-
ет в связи с механическими гироскопами, которым требуется некоторое
время, чтобы «раскрутиться». Требуемые значения всех этих параметров
определяются пользователем системы, решающим, какие именно величи-
ны параметров необходимы для конкретных приложений. Характерный
список типичных требований к характеристикам представлен в табл. 9.3.
Три характеристики являются ключевыми — стоимость, размер и срок
службы. От всех трех зависит, реализуемо ли конкретное приложение.
Срок службы часто определяют как срок хранения, когда устройство про-
сто хранится и не функционирует, плюс эксплуатационный ресурс.
Все оптические датчики вращения, раз-
работанные в настоящее время для систем
наведения и управления, основаны на эф-
фекте Саньяка, применяемом для измерения
скорости вращения [1-3]. На рис. 9.1 пред-
ставлен основной принцип эффекта Саньяка,
возникающего, когда показатель преломле-
ния оптической среды равен 1. Лучи света
по часовой (CW) и против часовой (CCW)
стрелки распространяются в противополож-
ных направлениях по кольцу радиуса R. Если
кольцо вращается со скоростью Q по напра-
влению часовой стрелки и интервал времени
для прохождения света по кольцу определяет-
ся как At — L/с, где L — длина окружности кольца и с — скорость света
в вакууме, тогда луч, распространяющийся по часовой стрелке, проходит
световой путь длиной 2тг7? + Q7?At, а луч, распространяющийся против
CCW CW
Рис. 9.1. Эффект Саньяка
9.2. Краткий обзор оптических датчиков вращения и эффекта Саньяка
Таблица 9.3. Требования к гироскопу Срок службы (лет) > 1 1. ___ > 1 > 1 3-5 3-5 5-10 ।
Размер Средний- болыпой Средний Средний- м аленький Средний- маленький Маленький Маленький Маленький
Стоимость Высокая Средняя Высокая Низкая Очень низкая От низкой до средней Очень низкая
Время готовности (сек) о о ео А о о ео А о о ео А I 09 1/4-10 ।
Стабильность смещения (град/час) 0,01 1 ОД 0,1-0,001 10-100 <0,1 10-50 ।
Стабильность масштабного коэффициента (промилле) ю CN о ю о ю 2 100-500 500 > 1000 ।
Полная шкала (град/с) 100 1 10-30 о г—1 400 100-200 200-500 > 500
Приложения Воздушная навигация Ракета-носитель Космический аппарат Торпеды Тактические ракеты класса «земля-воз дух» Управляемые радаром ракеты класса «земля-воздух» Артиллерия
часовой стрелки, проходит путь 2тгВ — Q7?At Полная разность между
оптическими путями распространяющихся навстречу один другому лучей
света, обусловленная вращением, равна 2£lRL/c. Чтобы сконструиро-
вать эффективный оптический датчик вращения, основанный на эффекте
Глава 9. Волоконно-оптические датчики на основе резонатора
Саньяка, следует понять, что для получения высокой точности необходи-
мо не только точно измерить разность световых путей, обусловленную
вращением, но в тоже время гарантировать, что вращение — это един-
ственный внешний параметр, влияющий на измерения.
При построении оптических датчиков вращения используются три
основных метода: (1) оптические резонаторы, (2) интерферометры с ра-
зомкнутой петлей обратной связи и (3) интерферометры с замкнутой
петлей обратной связи. В нескольких следующих абзацах в общих чер-
тах рассматриваются некоторые характеристики этих подходов. Более
подробное описание будет приведено в последующих разделах.
Для резонатора целое количество волн
должно укладываться в длину оптического контура
_ . . 2ттЯ + ПЯДГ
FcwA* в -----д----
_ А. 2тгЯ-ПЯДГ
^CCwA*-------д
.. р АЛ. 2ПЯДГ
(Tew ~ rccw)ar *--д
ог
F
F F 2ЯО
rcw ~ rcww “ "д"12
Для интерферометров с разомкнутой обратной
связью разность длин путей, поделенная на длину
волны излучения, дает количество полос,
обусловленных вращением
I
Ztt-
Рис. 9.2. Считывание данных с резонатора и интерферометра
Основной принцип действия оптического резонатора заключается в том,
что для достижения рабочего состояния резонанса необходимо, чтобы
в длину оптического контура укладывалось целое число длин волн, как
показано на рис. 9.2. Это определяет, что в направлении часовой стрелки
„ А 2тгД 4- ttRAt
Fcw^t =--------;----
и в направлении против часовой стрелки
Fccw^t =
(9-1)
(9-2)
2тг7? - QflAi
А
9.2. Краткий обзор оптических датчиков вращения и эффекта Саньяка
где Л — длина волны светового пучка. Сложение (9.1) и (9.2) приводит
к соотношению
2R
F = Few ~ Fccw = —Q.
(9-3)
Это уравнение является характеристическим уравнением кольцевого
лазерного гироскопа и пассивного оптического кольцевого резонатора.
В результате интегрирования частоты выходной сигнал получается как
количество полос на угол поворота, что типично для интегрирующего
гироскопа.
Для волоконно-оптических интерферометров, функционирующих на
основе петли с разомкнутой обратной связью, как показано на рис. 9.2,
разность длин путей, поделенная на рабочую длину волны, определяет
количество полос, возникающих из-за обусловленной вращением разности
фаз между распространяющимися в противоположных направлениях пуч-
ками света,
(9-4)
7 -2RLO
Zq — х
АС
Этот подход применим для широкого диапазона приложений, кото-
рым достаточно ограниченных динамического диапазона и точности мас-
штабного коэффициента, таких как наведение и сопровождение, стабили-
зация, робототехника и построение гирокомпасов. Ограниченный дина-
мический диапазон обусловлен потерями чувствительности при проходе
по полосе. Разработано несколько методов, основанных на обработке вы-
ходного сигнала волоконно-оптических гироскопов с разомкнутой петлей
обратной связи, позволяющих улучшить характеристики динамического
диапазона и масштабного коэффициента [4-6].
Волоконно-оптические интерферометрические датчики вращения мо-
гут быть сконструированы с рабочими характеристиками, аналогичными
характеристикам интегрирующего гироскопа, при использовании прие-
ма обнуления фазы, принцип которого показан на рис. 9.3. В этом случае
вызванный вращением сдвиг фазы обнуляется соответствующим искус-
ственно введенным уравновешивающим сдвигом фазы. Один из спосо-
бов достичь этого — использовать вызванный частотой фазовый сдвиг.
В этом случае один из лучей, например, распространяющийся по часовой
стрелке, сдвигается по частоте перед вводом в волоконную петлю, в то
время как другой луч сдвигается по частоте после выхода из волокон-
ной петли. Результирующее смещение полосы, обусловленное разностью
частот F, равно
ry FLn
Zf =-----
с
где п — показатель преломления волокна. Если обусловленный вращением
(9-5)
Глава 9. Волоконно-оптические датчики на основе резонатора
фазовый сдвиг установлен равным обусловленному частотой фазовому
сдвигу, то выходной сигнал устройства равен
9 о
Z = y-Q. (9.6)
\Tl/
Этот выходной сигнал аналогичен выходному сигналу, определяемому
уравнением резонатора, и является линейным цифровым выходом. В сле-
дующих разделах эти методы регистрации вращения будут описаны более
подробно.
Обусловленное вращением
смещение полосы
лс “
Обусловленное частотой
смещение полосы - . С\^п
e v о +
zf-zFcw-zFccw-f^
Сдвиг обусловленного вращением смещения полосы
на обусловленное частотой смещение полосы,
чтобы получить ZF= Zn, или
АЛ
Q
Рис. 9.3. Принцип подхода с обнулением фазы, при котором интерферометри-
ческий выходной сигнал преобразуется в выходной сигнал, подобный
сигналу от резонатора
9.3. Кольцевой лазерный гироскоп
Можно показать [1], что увеличение или уменьшение оптической длины
пути, обусловленное вращением, определяется формулой
. 2AQ
dP — ±----, (9.7)
пс
где А — огражденная область, Q — скорость вращения, п — показатель
преломления оптического пути и с — скорость света в вакууме. Знак за-
9.3. Кольцевой лазерный гироскоп 243
висит от направления луча света относительно направления измеряемого
вращения. В кольцевом лазерном гироскопе [7, 8] при выполнении измере-
ний используются преимущества характеристик оптического резонатора,
благодаря которым осуществляется лазерная генерация. Для того чтобы
в закрытом оптическом резонаторе возникала лазерная генерация, в пол-
ном оптическом контуре должно укладываться целое число оптических
волн. Оптические пучки с длинами волн, не удовлетворяющими этому
условию соответствия длине пути, взаимодействуют между собой, после-
довательно обходя замкнутый оптический путь. Таким образом, для того
чтобы скомпенсировать изменение периметра dP, обусловленное враще-
нием, длина волны и частота пучка света должны измениться. В частно-
сти, отсюда следует
dv dX dP
= Т = ~р ’ ()
где у — частота светового пучка и Л — длина волны.
Уравнение (9.8) является фундаментальным уравнением, связываю-
щим частоту, длину волны и изменение периметра кольцевого лазера.
В обычном кольцевом лазерном гироскопе распространяются две моды:
одна — в направлении по часовой стрелке, другая — в направлении про-
тив часовой стрелки. Если кольцевой лазер вращается со скоростью Q,
тогда уравнение (9.7) показывает, что эффективная длина оптическо-
го пути увеличивается для пучка, распространяющегося в направлении
вращения, и уменьшается — для пучка, распространяющегося в противо-
положном направлении. Это приводит к необходимости растяжения длин
волн в одном направлении и сжатия — в другом для того, чтобы удо-
влетворять критерию лазерной генерации, т. е. чтобы целое число волн
укладывалось по длине оптического контура. А это, в свою очередь, при-
водит к возникновению разности частот между световыми пучками. Та-
ким образом, если между двумя световыми пучками возникают биения,
то из уравнений (9.6) и (9.8) следует, что результирующий сигнал будет
иметь частоту
2ydP 4AQ
Р ХпР
(9-9)
Это последнее уравнение является фундаментальным соотношением для
кольцевого лазерного гироскопа.
В идеальном случае функционирование кольцевого лазерного гироскопа
должно определяться уравнением (9.9). Но на практике, при малых скоро-
стях вращения пучки, распространяющиеся по часовой стрелке и против
часовой стрелки, могут сцепляться по частоте. Это явление называется
блокировкой (lock-in), поскольку распространяющиеся во встречных на-
правлениях пучки блокируют друг друга по частоте, формируя мертвую
Глава 9. Волоконно-оптические датчики на основе резонатора
зону, в которой эффективный выходной сигнал кольцевого лазерного ги-
роскопа равен нулю.
9.3.1. Решение проблемы блокировки
Считается, что механизмы, приводящие к блокировке, обусловлены малы-
ми величинами обратного рассеяния от зеркальных поверхностей или са-
мой активной среды, а также сжатием (например, апертур) или периоди-
ческой модуляцией активной среды. Использование высококачественных
зеркал с низким рассеянием и совершенствование методов конструиро-
вания позволили сузить интервал мертвой зоны от нескольких градусов
в секунду в 1960-е годы до примерно 1000 градусов в час в 1970-е и для
длин резонатора порядка 8 см или более до нескольких градусов в час
в 1980-е. На рис. 9.4 представлены рабочие характеристики кольцевого
лазерного гироскопа при его блокировке. Отметим, что в области бло-
кировки выходной сигнал кольцевого лазерного гироскопа тождественно
нулевой. Когда кольцевой лазер начинает деблокироваться, частотный
выход возвращается к идеальной характеристике, пропорциональной ско-
рости вращения, по параболической кривой.
Рис. 9.4. Область блокировки
Чтобы преодолеть проблемы, связанные с блокировкой кольцевого ла-
зерного гироскопа, работающего при малых скоростях вращения, необхо-
димо некоторое смещение, позволяющее обойти мертвую зону. Наиболее
эффективный способ, применяемый в настоящее время, и единственный,
используемый в производстве, основан на сочетании высококачественных
9.3. Кольцевой лазерный гироскоп 245
зеркал, которые минимизируют область мертвой зоны, и механизмов ме-
ханического «встряхивания», периодически выводящих кольцевой лазер-
ный гироскоп из состояния блокировки. Этот метод проиллюстрирован
рис. 9.5. Переключение на скорость вращения Q вне мертвой зоны и за-
тем обратно к — Q приводит к измерению значений Q + dQ и — Q + dQ, где
dQ — реальная скорость вращения. Путем суммирования этих значений,
усреднения и обхода мертвой зоны получают реальную скорость враще-
ния. Особенности этого метода, которые важны для некоторых прило-
жений, — это возможная потеря информации во время периодическо-
го обхода мертвой зоны, ограничение максимальной скорости вращения,
определяемое максимальной скоростью вращения механизма «встряхива-
ния», и механический шум, создаваемый механизмом «встряхивания».
Рис. 9.5. Способы смещения для устранения ограничений мертвой зоны (приве-
дено с разрешения Laser Focus/Electro Optics, декабрь 1985)
При другом способе смещения применяется такое фиксированное сме-
щение, что разность путей между пучками, распространяющимися по ча-
совой стрелке и против часовой стрелки, стабилизируется до величины,
соответствующей линейной области, как показано на рис. 9.5. Успешная
реализация этого метода предполагает чрезвычайно высокую стабиль-
ность смещения, поскольку малые изменения смещения могут привести
к большим ошибкам при измерении скорости вращения. Примеры подоб-
ных приемов смещения включают стабилизацию при помощи внутрирезо-
наторных зеркал подмагничивания и насыщающихся поглотителей. Из-за
слишком больших трудностей, связанных с достижением соответствую-
щей стабильности, подходы на основе фиксированного смещения не по-
Глава 9. Волоконно-оптические датчики на основе резонатора
лучили коммерческого применения. Существуют также и более сложные
схемы смещения, в которых присутствует множество элементов смеще-
ния, использующих поляризацию и эффекты магнитного поля. Поскольку
можно ожидать значительного преимущества этих методов по сравнению
с механическим «встряхиванием», их разработка все еще продолжается.
Преобразователь
управления длиной
Рис. 9.6. Схема блока кольцевого лазерного гироскопа (приведено с разрешения
Laser Focus/Electro Optics, декабрь 1985)
На рис. 9.6 представлена блок-схема типичного кольцевого лазерного
гироскопа, в котором может использоваться механическое «встряхива-
ние». Он состоит из трех зеркал с высокой отражательной способностью,
которые используются для определения замкнутого пути вокруг области,
лежащей в плоскости. Одно из зеркал частично пропускающее, и часть
света, распространяющегося по часовой стрелке и против часовой стрел-
ки, проходит через него и собирается с помощью угловой призмы на
считывающем детекторе. На рис. 9.7 приведена одна из возможных схем.
Угловой куб смещен от 90° на небольшой угол так, что, когда два пуч-
ка смешиваются на считывающем детекторе, они немного отклоняются.
В результате получается линейная интерферограмма. Используя расщеп-
ляющий детектор, можно следить за движением этой интерференционной
картины, причем каждая полоса подсчитывается, когда она «прокатыва-
ется» через приемник. «Прокатывание» интерференционной картины обу-
словлено разностью частот между распространяющимися в противопо-
ложных направлениях световыми пучками. Чем больше разность частот,
соответствующая большей скорости вращения, тем быстрее вращается
интерференционная картина, и направление вращения зависит от того,
у какого пучка света больше частота. Каждый отсчет результата соот-
ветствует углу поворота, который может быть определен интегрирова-
нием обеих частей уравнения (9.9) для конкретной конфигурации.
9.4- Гироскоп с пассивным кольцевым резонатором 247
Рис. 9.7. Считывающая оптика кольцевого лазерного гироскопа
Особенности коммерчески успешного лазерного гироскопа проиллю-
стрированы блок-схемой на рис. 9.6. Этот кольцевой лазерный гироскоп
выполнен из цельного блока стекла с низким коэффициентом теплово-
го расширения. Большое внимание уделено стабилизации длины резона-
тора для того, чтобы избежать ошибок, вызванных влиянием внешних
условий. Также вся система выполнена с высокой степенью симметрич-
ности. Электроды размещаются таким образом, чтобы электрический
ток в генерирующем резонаторе тек симметрично. Это необходимо по-
тому, что движение тока приводит к движению газа в резонаторе, и если
оно не является симметричным, то приводит к невзаимным условиям
и ошибкам. Обращая должное внимание на симметричность, стабиль-
ность резонатора, очень высокое качество зеркал и повышая требования
к чистоте производства, производители кольцевых лазерных гироскопов
добились успехов в распространении этой технологии и ее применении
в авиационных инерциальных навигационных системах.
9.4. Гироскоп с пассивным кольцевым резонатором
Один из методов преодоления проблемы блокировки кольцевых лазерных
гироскопов заключается в удалении активной среды из резонатора. В ре-
зультате получается конфигурация пассивного кольцевого резонатора,
которую можно использовать для измерения вращения [9, 10]. Принцип ра-
боты такого резонатора основан на эталоне. На рис. 9.8 представлена про-
стая схема с двумя зеркалами, в которой лазерный луч попадает в систему
из двух зеркал с высокой отражательной способностью, расположенных
на расстоянии L, Прохождение через пару зеркал или эталон регистриру-
Глава 9. Волоконно-оптические датчики на основе резонатора
ется с помощью детектора. Результат прохождения представляет собой
последовательность пиков, расположенных с промежутками, соответству-
ющими частоте c/2L. На рис. 9.9 показана конфигурация кольцевого ре-
зонатора, которую можно использовать для измерения вращения. В этом
случае четыре зеркала объединены в кольцо. Луч от источника излучения,
введенный в резонатор, циркулирует в направлении по часовой стрелке,
и эффективное расстояние между зеркалами изменяется при вращении.
Это приводит к изменению характеристик прохождения через эталон.
Рис. 9.8. Свойства эталона с двумя зеркалами
Зеркало с высокой
отражательной способностью
Рис. 9.9. В пассивном кольцевом резонаторе, имеющем форму квадрата, эффек-
тивная длина изменяется как функция скорости вращения Q
Для того чтобы использовать эту схему в качестве эффективного дат-
чика вращения, необходимо управлять частотой падающего света так,
чтобы оптимизировать прохождение. Этого можно достичь, используя
частотный преобразователь, например, такой как акустооптический мо-
дулятор, размещенный перед монохромным источником излучения. Пред-
положим, что начальная частота акустооптического модулятора устано-
влена так, что прохождение оптимизировано. Когда резонатор враща-
ется, характеристики прохождения через него изменятся и уровень све-
та, падающего на детектор, упадет. Если ввести в систему сервоконтур,
9.4- Гироскоп с пассивным кольцевым резонатором
соответствующим образом подстраивающий частоту акустооптического
модулятора, можно поддерживать оптимальное прохождение и результи-
рующая частота будет соответствовать скорости вращения.
Генератору Фазочувствительный
управляемый детектор/серво
напряжением
Рис. 9.10. Лазерный гироскоп с пассивным резонатором
На рис. 9.10 более подробно показано устройство лазерного гироско-
па с пассивным резонатором, предназначенного для измерения вращения.
Высококогерентный источник света используется потому, что пучок све-
та должен сохранять когерентность в течение многих проходов по ре-
зонаторному кольцу. Пучок света расщепляется на два пучка, один из
которых сдвигается по частоте на /1 перед вводом в резонаторное коль-
цо — в этом случае он распространяется по часовой стрелке. Оптическая
длина пути резонатора регулируется пьезоэлектрическим зеркалом, ко-
торое оптимизирует прохождение светового пучка. Это осуществляется
при помощи осцилляции пьезоэлектрического зеркала на частоте /ш, что
приводит к появлению второй гармоники /ш, появляющейся на входе де-
тектора, когда прохождение оптимизировано. Когда точка оптимального
прохождения смещена, появляется первая гармоника сигнала, амплитуда
которой пропорциональна смещению, а фаза указывает на направление
Глава 9. Волоконно-оптические датчики на основе резонатора
смещения. Для оптимизации прохождения этот сигнал может использо-
ваться фазочувствительным детектором, который корректирует напря-
жение, приложенное к пьезоэлектрическому зеркалу. Более подробно этот
метод описан в разделе 9.5. Другой пучок света сдвигается по частоте
на /2 и вводится в резонатор в направлении против часовой стрелки.
Поскольку резонатор «заблокирован» на оптимальную длину для прохо-
ждения пучка, распространяющегося по часовой стрелке, оптимальное
прохождение этого пучка может быть достигнуто изменением сдвига
частоты /2- Это осуществляется при помощи того же самого приема
отслеживания частоты модуляции резонатора fm и использованием ее
в качестве сигнала коррекции для управляемого напряжением генерато-
ра 2, который, в свою очередь, корректирует частоту /2 для достижения
оптимального прохождения. Когда резонатор вращается, эффективная
длина резонатора изменяется и разность между частотами распростра-
няющихся в противоположных направлениях пучков света, прохождение
которых оптимизировано, как описано выше, пропорциональна скорости
вращения.
Рис. 9.11. Блок-схе-
ма волоконно-оптиче-
ского кольцевого ре-
зонатора
Для того чтобы, используя описанные приемы, построить волоконно-
оптический датчик, зеркальный резонатор заменяют волоконным этало-
ном, который состоит из волоконной петли, сформированной при помо-
щи волоконного светоделителя, имеющего очень малое отношение пере-
крестного взаимодействия, как показано на рис. 9.11. Когда входящий
пучок света соответствует резонансной частоте волоконного кольца, свет
вводится в волоконный резонатор и уровень интенсивности выходящего
пучка света падает из-за затухания пучка в резонаторном кольце. Эта
ситуация еще более усложняется возможностью распространения в воло-
конном кольце множества мод. Например, предположим, что в волоконном
9.4- Гироскоп с пассивным кольцевым резонатором 251
кольце используется сохраняющее поляризацию волокно. В идеальном слу-
чае это волокно должно поддерживать распространение только одной
световой моды со строго определенным состоянием поляризации. Пробле-
ма заключается в том, что, если входной пучок света слегка сместится,
в кольце будут распространяться две моды, которым соответствуют раз-
личные резонансы. Эта ситуация показана на рис. 9.12.
Рис. 9.12. Эффект, возникающий Область дисперсии
На рис. 9.13 показана простейшая реализация волоконно-оптическо-
го кольцевого резонатора, выполненная по прямой аналогии с объемной
оптической схемой, приведенной на рис. 9.10. В этом случае в систему
встроен изолятор для снижения эффекта оптической обратной связи с ис-
точником света, который может быть лазерным диодом с распределенной
обратной связью. Пьезоэлектрическое цилиндрическое кольцо обмотано
волокном и используется как регулятор длины пути и для демодуляции
сигнала. Преобразование частоты осуществляется при помощи акустооп-
тических модуляторов.
Существует несколько проблем, препятствующих успешной реализа-
ции волоконного кольцевого резонатора [11-14]. Они связаны с обратным
рэлеевским рассеянием, отражением от торцевых поверхностей резона-
тора, проявлениями оптической обратной связи в источниках света и по-
строением идеального волоконного резонатора, имеющего низкие поте-
ри, высокую добротность и поддерживающего распространение только
одной моды. Проблемы обратного отражения и рассеяния обычно реша-
ются введением фазового модулятора в один из распространяющихся во
встречных направлениях пучков до того, как пучок попадет в резонатор.
Этот модулятор функционирует на частоте, существенно отличающей-
ся от частоты сигнала демодуляции /ш, и используется для смещения
Глава 9. Волоконно-оптические датчики на основе резонатора
по частоте рассеянных в обратном направлении и отраженных сигна-
лов и отделения их от распространяющихся в резонаторе пучков света,
которыми измеряется вращение. Проблема введения и поддержания един-
ственной моды, распространяющейся в резонаторе, решается введением
поляризующих элементов в систему непосредственно перед вводом све-
тового луча в резонатор. Оба поляризатора должны быть тщательно
настроены, поскольку нарушение регулировки ухудшит рабочие харак-
теристики системы.
Рис. 9.13. Блок-схема базовой конфигурации волоконно-оптического кольцевого
резонатора
9.5. Волоконно-оптический гироскоп
В отличие от кольцевого лазерного гироскопа и гироскопа с пассивным
кольцевым резонатором, в которых эффект Саньяка, обусловленный из-
менениями оптической длины пути, измеряется в одном замкнутом конту-
ре, в волоконно-оптическом гироскопе [15, 16] эффект Саньяка измеряется
в волоконной катушке с множеством витков. Фактически это означает,
что результирующее изменение длины пути между распространяющими-
ся в противоположных направлениях пучками умножается на коэффици-
ент 7V, равный числу витков в катушке. Суммарную разность длин путей
9.5. Волоконно-оптический гироскоп 253
для катушки с N витками можно определить из уравнения (9.7), и окон-
чательное смещение интерференционной полосы — делением разности
длины путей на длину волны света в вакууме А. В результате смещение
полосы, обусловленное вращением, равно
ZR = (9.10)
Ас
На рис. 9.14 приведена схема реализации волоконно-оптического гиро-
скопа такого типа. Одномодовый волоконный пространственный фильтр
и поляризатор размещены между входом выходного волоконного свето-
делителя и центральным волоконно-оптическим светоделителем, чтобы
гарантировать, что оба распространяющиеся в противоположных направ-
лениях пучка проходят один и тот же путь по волоконно-оптической
катушке [17-20]. Два распространяющихся в противоположных направле-
ниях пучка смешиваются и попадают на детектор, который используется
для слежения за косинусоидальными изменениями интенсивности, вызы-
ваемыми изменениями фазы между пучками в результате вращения.
Рис. 9.14. Аналоговый волоконно-оптический гироскоп
Для того чтобы вывести сигнал из статической полосы, между рас-
пространяющимися в противоположных направлениях пучками вводятся
невзаимные фазовые сдвиги с темпом со. Это может быть достигнуто вве-
дением колебательной фазовой модуляции пучков света около одного из
концов волоконной катушки, как показано на рис. 9.14. При отсутствии
вращения выходной сигнал состоит из четных гармоник фазовой модуля-
ции на частоте со. При вращении системы нечетные гармоники сигнала на
частоте со попадают на детектор с амплитудой, зависящей от величины
скорости вращения и с фазой, определяемой направлением вращения. Эта
ситуация представлена на рис. 9.15. Используя выход одной из нечетных
гармоник, можно определить скорость вращения. На рис. 9.16 показан
выход волоконно-оптического гироскопа, являющийся первой гармоникой
фазомодулированного управляющего сигнала. Изменение знака напряже-
ния соответствует изменению фазы выходного сигнала.
Глава 9. Волоконно-оптические, датчики на основе резонатора
а?
Рис. 9.15. Модуляция регистрирующего сигнала: а) при отсутствии вращения;
б) при вращении
Относительная фаза
б)
Входная скорость (град/с)
Рис. 9.16. Выходной сигнал
аналогового волоконно-опти-
ческого гироскопа с разомк-
нутой петлей обратной связи
Этот тип волоконно-оптического гироскопа считается минимальной
конфигурацией. Такой волоконно-оптический гироскоп с разомкнутой пе-
тлей обратной связи представляет собой небольшое дешевое устройство
для измерения вращения, подходящее для приложений с умеренными тре-
бованиями к динамическому диапазону и масштабному коэффициенту
(динамический диапазон от 3000 до 10000 при точности масштабного
коэффициента от 1 до 3% можно полагать типичными). В качестве при-
меров использования гироскопа этого типа можно привести измерения
угла рыскания и тангажа, стабилизацию положения и в качестве гиро-
компаса. Проводятся работы по расширению динамического диапазона
волоконно-оптических гироскопов с разомкнутой обратной связью, или
9.5. Волоконно-оптический гироскоп 255
аналоговых, посредством обработки одновременно четных и нечетных
гармоник и допущения областей нелинейности [4, 5, 21, 22]. Основным
ограничением остается ограничение по точности масштабного коэффи-
циента. Для преодоления этих трудностей разработан волоконно-оптиче-
ский гироскоп с замкнутой петлей обратной связи, или с обнулением фазы
[23, 24], предоставляющий средства, позволяющие исключить эти ограни-
чения в принципе. В приложениях, требующих высокой производительно-
сти и широкого динамического диапазона, таких как ракеты и самолеты,
можно использовать подход с замкнутой обратной связью. При этом в си-
стему вводится невзаимный фазовый сдвиг, который используется для
обнуления фазовых сдвигов, вызываемых вращением. Блок-схема воло-
конно-оптического гироскопа с замкнутой обратной связью с обнулением
фазы приведена на рис. 9.17.
Рис. 9.17. Цифровой волоконно-оптический гироскоп с замкнутой обратной свя-
зью и обнулением фазы
Основное различие между оптическими структурами с разомкнутой
и замкнутой обратной связью состоит в том, что через механизм сдвига
частоты вводится разность частот F между распространяющимися в про-
тивоположных направлениях пучками в волоконной катушке. Два пучка
достигают детектора с одинаковой частотой. Смещение полос, вызванное
разностью частот между двумя лучами в волоконной катушке, равно
FLn
ZF —-----
с
где L — длина волокна в волоконной катушке и п — показатель прелом-
ления. Чтобы система была выведена на нуль, смещение полос, обусло-
(9.И)
FBonoKOHHO- и интегрально-оптические элементы
Оптическое волокно, сохраняющее состояние поляризации,
для применения в гироскопии и сфере телекоммуникаций
Характеристики
Тип
Длина волны
Длина волны отсечки 680
Числовая апертура С
Диаметр поля моды 4.5 г
| | ' Оптические потери
Длина поляризационных биений
Наружный диаметр (волокна)
Коэффициент перекрестной
поляризационной связи (h-параметр)
• \ Т
Волоконно - Оптические Элементы
• Волоконно-оптические разветвители (изотропные, анизотропные)
• Деполяризаторы (Лайотта)
• Волоконно-оптические соединители и патчкорды
Интегрально - Оптические Элементы
• Фазовые и амплитудные электрооптические модуляторы
• Многофункциональные интегрально-оптические элементы для волоконно-оптических гироскопов
• Высокоскоростные переключатели
• Нелинейно-оптические PPLN приборы
Волноводные структуры на кристаллах LiNbO3 и LiTaO3 формируются методом
высокотемпературного протонного обмена (НПК Оптолинк является патентообладателем
метода). Модуляция излучения в интегрально- оптических элементах основана на
использовании линейного электрооптического эффекта Поккельса.
Многофункциональные Интегрально-Оптические Элементы
МИОЭ - герметичное изделие, выполняющее функции
поляризатора.У-образного разветвителя и пары двухплечевых
электрооптических фазовых модуляторов.
/.=830 нм /=1550 нм
полуволновое напряжение: коэффициент <ЗВ <5 В
поляризационной экстинкции: >50 дБ >50 дБ
амплитудная модуляция: <0.1 % <0.1%
вносимые оптические потери "волокно-волокно”: < 7 дБ <6 дБ
(для деполяризованного излучения)
Амплитудные модуляторы
__ РЧ сигим _
fl I
ZZZ:.
Электро-оптические переключатели
^нпк оптолинк _
ООО НПК ОПТОЛИНК, 124498, Москва. Зеленоград, проезд 4806, дом 5
Тел. (495) 536-9957. 536-9932, факс. (495) 536-9934 www.optolink.ru , e-mail: Opto@optolink.ru
9.6. Компромисс между лазером, резонатором и интерферометром
Таблица 9.4. Сравнение эксплуатационных характеристик
Кольцевой лазерный гироскоп Аналоговый волоконно- оптический гироскоп Цифровой волоконно- оптический гироскоп
Выход п = 1; частота пропорциональна скорости или отсчетам на угол поворота Напряжение пропорционально скорости п = 1,5; частота пропорциональна скорости или отсчетам на угол поворота
Характеристиче- ская длина пути От 30 см до 1 м От 50 м до 5 км (возможна и большая длина) От 50 м до 5 км (возможна и большая длина)
Тепловые погрешности Компоновка; размещение электродов, управление длиной пути Компоновка; терморегулирование и компенсация Компоновка; терморегулирование и компенсация активных элементов
Критическая проблема Компенсация блокировки Снижение рассеяния управление поляризацией Снижение рассеяния управление поляризацией
Динамический диапазон > ю8 103-105 > 108
Точность масштабного коэффициента < 1 промилле 1000-10 000 промилле <100 промилле
Приведено с разрешения Laser Focus/Electro Optics, декабрь 1985
Чувствительность волоконно-оптического гироскопа зависит от дли-
ны волокна, использованного для заданной замкнутой области. Следова-
тельно, можно предположить, что большая длина волокна приведет к по-
вышению чувствительности. Можно ожидать, что с появлением волокон
с низкими потерями и высококачественных источников света чувстви-
тельность этих устройств будет улучшаться. Сделанные ранее вычисле-
ния показали, что чувствительность волоконно-оптического гироскопа
может быть сравнима или даже превышать ту, которая достижима при
существующей технологии кольцевых лазерных гироскопов. С развити-
ем прогресса эти предсказания могут быть подтверждены современны-
ми экспериментами. Чувствительность кольцевого лазерного гироскопа
ограничена главным образом необходимостью функционирования при низ-
ких уровнях усиления, чтобы избежать эффектов нелинейности, и это
приводит к зависимости чувствительности от единственного прохода по ге-
нерирующему резонатору.
Разница в чувствительной к вращению оптической длине пути также
проявляется при выполнении действий по уменьшению ошибок, связан-
9-3379
258 Глава 9. Волоконно-оптические датчики на основе резонатора
ных с дрейфом смещения. В кольцевом лазерном гироскопе применяются
такие методы, как использование оптических резонаторов с малым коэф-
фициентом расширения, активное управление длиной пути, симметричное
расположение анодов и катодов, чтобы гарантировать, что оба распро-
страняющиеся в противоположных направлениях лазерных пучка в ре-
зонаторе проходят одинаковый оптический путь. Волоконно-оптические
гироскопы основаны на элементах внешних по отношению к чувствитель-
ному оптическому пути, таких как поляризаторы и пространственные
фильтры, необходимых, чтобы гарантировать, что пучки проходят со-
ответствующие пути. Компоновка волоконной катушки является критич-
ной, поскольку зависящие от времени изменения внешних условий могут
произойти за время, сравнимое с временем прохода излучения по волокон-
ной катушке, что приведет к невзаимным эффектам и в конечном итоге
к дрейфу смещения.
Проблема масштабного коэффициента для кольцевого лазера в значи-
тельной степени связана с ограничениями из-за необходимости избегать
проявлений блокировки и колебаний частоты. Прогресс в этой области
включает внесение поправок, меньших одной миллионной. Уравнение мас-
штабного коэффициента для пассивного кольцевого резонатора идентич-
но уравнению для кольцевого лазерного гироскопа. Наиболее перспектив-
ным подходом к получению хорошего масштабного коэффициента для
волоконно-оптического гироскопа представляется использование цифро-
вого варианта. Выходному сигналу этого прибора соответствует уравне-
ние масштабного коэффициента идентичное уравнениям для кольцевого
лазерного гироскопа и для пассивного кольцевого резонатора.
Однако существуют важные различия в реализации этих приборов.
В кольцевом лазерном гироскопе обычно используется гелий-неоновый
лазер, который имеет очень стабильную длину волны и показатель пре-
ломления около 1. В пассивном кольцевом резонаторе и цифровом воло-
конно-оптическом гироскопе также можно было бы использовать гелий-
неоновый лазер в качестве источника и длину кольцевого резонатора
и волоконной катушки можно было бы контролировать, чтобы исполь-
зовать точный масштабный коэффициент.
Хотя в пассивном кольцевом резонаторе и волоконно-оптическом ги-
роскопе можно использовать газовый лазер, но тогда пришлось бы от-
казаться от преимуществ, присущих настоящим твердотельным устрой-
ствам. Чтобы получить высокую эффективность пассивного кольцевого
резонатора, необходимо использовать высокостабильный, с большой дли-
ной когерентности лазерный диод, такой как лазерный диод с распреде-
ленной обратной связью. Длина волны таких источников излучения изме-
няется при изменении таких параметров, как время, ток и температура,
9.6. Компромисс между лазером, резонатором и интерферометром 259
и часто таким образом, что результат трудно смоделировать. Необходи-
мо принимать меры для стабилизации таких источников излучения или
отслеживать и корректировать изменения выходной длины волны, чтобы
иметь приемлемый масштабный коэффициент для приложений с высо-
кими эксплуатационными характеристиками. Для волоконно-оптических
гироскопов требуются источники излучения с низкой когерентностью,
чтобы оптимизировать эффективность, минимизируя эффекты обрат-
ного рассеяния. Это осуществимо при использовании светоизлучающих
источников или суперъярких светодиодов. Снова можно предполагать,
что характеристики этих источников излучения сместятся под воздей-
ствием внешних условий, и длину волны источника излучения необходимо
или стабилизировать, или измерять.
Линейность и динамический диапазон, присущие кольцевому лазерно-
му гироскопу, зависят от блокировки и технических решений, выбран-
ных для ее преодоления. Для кольцевого лазерного гироскопа, в кото-
ром используется механическое «встряхивание», это обычно означает, что
верхний предел скорости ограничен максимальной скоростью, с кото-
рой модуль «встряхивается». Обычно для больших кольцевых лазерных
гироскопов с длиной оптического пути порядка 30 см это ограничение
предельной скорости составляет несколько сотен градусов в секунду при
типовом техническом решении. Предельные скорости пассивного коль-
цевого резонатора и цифрового волоконно-оптического гироскопа огра-
ничены динамическим диапазоном преобразователей частоты, обычно
несколькими тысячами градусов в секунду. Оба прибора могут быть на-
строены для измерений очень высоких скоростей вращения.
9.6.1. Возможности компоновки и производства
Несмотря на важность эксплуатационных характеристик, технология, ко-
торая будет реализована в конкретном приложении, часто бывает продик-
тована внешними условиями, требованиями по компоновке, питанию и на-
дежности. И кольцевой лазер, и волоконно-оптический гироскоп проде-
монстрировали способность функционировать в крайне неблагоприятных
внешних условиях, где работа механических гироскопов была бы затруд-
нена или даже невозможна. Аналогичной эффективности можно ожидать
от пассивных кольцевых резонаторов, когда эта технология окончатель-
но сформируется. Основное различие между технологиями заключается
в использовании вакуумной трубки в качестве чувствительного элемента
в кольцевом лазерном гироскопе, в то время как в волоконно-оптических
гироскопах используются твердотельные элементы.
Простота компоновки является, может быть, одним из самых важ-
ных преимуществ волоконно-оптического интерферометрического гиро-
Глава 9. Волоконно-оптические датчики на основе резонатора
скопа и пассивного кольцевого резонатора по сравнению с технологиями
кольцевого лазера и интегрально-оптического пассивного кольцевого ре-
зонатора. Симметрично чувствительной волоконной катушке можно при-
дать вид овала, квадрата и сотен других форм быстро и дешево. Без
труда может быть найден компромисс для достижения оптимальной чув-
ствительности при ограниченной геометрии. Аналогичные изменения для
интегрально-оптического пассивного кольцевого резонатора потребуют
приложения значительных усилий по разработке, поскольку повлекут за
собой изменения всей геометрии кольцевого лазерного гироскопа. Для во-
локонно-оптических датчиков вращения и датчиков вращения на основе
пассивного кольцевого резонатора также может быть предусмотрена воз-
можность удаленного размещения чувствительного к вращению элемента.
Следует также учитывать вес, связанный со сплошным стеклянным
блоком, и механизм «встряхивания», связанный с кольцевым лазером, в срав-
нении с твердотельным источником излучения и детектором, волоконной
катушкой или резонатором, волоконными разветвителями и поляризато-
рами, связанными с пассивными кольцевыми резонаторами и волокон-
но-оптическими гироскопами. Кажется, пассивные кольцевые резонато-
ры и волоконно-оптические гироскопы имеют очевидное преимущество
в том, что касается возможностей использования в чрезвычайно легких
модулях.
9.6.2. Вопросы надежности и приложения
Другая проблема, связанная с кольцевыми лазерными гироскопами, за-
ключается в необходимости компромисса между размером и весом, с од-
ной стороны, и надежностью, с другой. Самые маленькие кольцевые ла-
зерные гироскопы, которые могут быть изготовлены, составляют только
несколько сантиметров в диаметре, но их эксплуатационный ресурс огра-
ничен в лучшем случае несколькими сотнями часов. Это обусловлено отно-
сительно высоким током, необходимым для работы лазера, что приводит
к выкачиванию газовой среды из системы. Вторая проблема заключается
в утечке с низкой скоростью и может быть несущественной для боль-
ших кольцевых лазерных гироскопов, но создает серьезные проблемы,
связанные со сроком хранения для очень маленьких приборов. Большие
кольцевые лазерные гироскопы, такие как создаются для коммерческого
применения в аэронавигации, продемонстрировали безотказную работу
в течение более 30 000 часов.
По своей сути пассивные кольцевые резонаторы и волоконно-опти-
ческие гироскопы являются твердотельными устройствами, и их срок
эксплуатации не зависит от размера, поскольку используемый в них ис-
точник излучения намного меньше, чем любой реальный корпус. В насто-
9.6. Компромисс между лазером, резонатором и интерферометром
ящее время источник излучения чаще всего является причиной отказов
этих устройств, но ожидается, что дальнейшее развитие позволит им вой-
ти в категорию приборов, срок безотказной работы которых превышает
100 000 часов. Поскольку остальная часть оптики устройства может быть,
по существу, цельностеклянным блоком, можно предположить, что основ-
ной причиной отказов этих устройств, вероятно, станет вспомогательная
электроника.
Таблица 9.5. Сравнение технологий
Кольцевой лазерный гироскоп Аналоговый волоконно- оптический гироскоп Цифровой волоконно- оптический гироскоп
Элемент, определяющий срок службы Газонаполненная трубка Полупроводниковые компоненты Полупроводниковые компоненты
Точность сборки Да Нет Нет
Точность юстировки Да, зеркала Подсоединение выводов источника излучения; изготовление волоконных разветвителей Подключение к преобразователям частоты
Наличие механизма «встряхивания» для предотвращения блокировки Да Нет Нет
Требование суперчистоты при сборке Да Нет Нет
Гибкость геометрии Нет Да Да
Смежные производственные отрасли Отсутствуют Телекоммуникации; аудио- и видео- CD-плееры Телекоммуникации; аудио- и видео- CD-плееры
Приведено с разрешения Laser Focus/Electro Optics, декабрь 1985
Важной особенностью кольцевых лазеров, пассивных кольцевых ре-
зонаторов и волоконно-оптических гироскопов является их относитель-
ная экономичность, тесно связанная с технологией каждого из приборов.
В табл. 9.5 подведены итоги некоторых из приведенных выше сообра-
жений. Кольцевой лазерный гироскоп — это высоко специализирован-
ный прибор. Большую часть расходов, связанных с успешным внедрением
этой технологии, взяли на себя компании, разрабатывающие эти прибо-
ры, а также Министерство обороны США. В противоположность это-
му пассивные кольцевые резонаторы и волоконно-оптические гироскопы
являются прямым результатом работы, проделанной индустрией теле-
Глава 9. Волоконно-оптические датчики на основе резонатора
коммуникаций. Волоконно-оптический гироскоп в существенной степени
опирается на разработки первого поколения в области телекоммуникаций,
такие как светоизлучающие диоды и интегрально-оптические фазовые
модуляторы, и можно предположить, что он станет первым твердотель-
ным прибором, продающимся в массовых масштабах, а также, по крайней
мере в начале, наиболее дешевым. В этом отношении волоконно-оптиче-
ским гироскопам может очень помочь коммерческий успех CD-плееров,
результатом которого стала доступность чрезвычайно дешевых источни-
ков излучения, пригодных для использования в гироскопах.
Другим важным фактором может стать широкое распространение
локальных сетей, основанных на светоизлучающих диодах и одномодо-
вых волокнах, ключевых элементах недорогих волоконно-оптических ги-
роскопов. Основой пассивного кольцевого резонатора являются элементы
второго поколения, которые еще только начинают получать распростра-
нение. В частности, требуются лазерные диоды с узкой линией с распреде-
ленной обратной связью, так же как и изоляторы, использование которых
предполагается в телекоммуникационных устройствах, предназначенных
для передачи данных с высоким быстродействием и на большие рассто-
яния. До настоящего времени подходящие резонаторы со средним или
высоким быстродействием разрабатываются специально для пассивных
кольцевых резонаторов, и, возможно, это увеличивает время и повыша-
ет стоимость разработок. В отличие от волоконно-оптических гироско-
пов для изготовления пассивного кольцевого резонатора необходимы до-
полнительные компоненты, включая поляризатор и фазовый модулятор,
а также точная настройка в противоположность тщательно скомпонован-
ной волоконно-оптической катушке, разработанной так, чтобы минимизи-
ровать чувствительность к внешним условиям. В конечном итоге, можно
предположить, что в ближайшем будущем волоконно-оптические гироско-
пы будут более дешевыми приборами при сопоставимой эффективности,
в то время как пассивные кольцевые резонаторы станут конкурентоспо-
собными после того, как окончательно сформируется их технология.
По мере расширения серийного производства ключевых элементов и ком-
поновочных узлов волоконно-оптических гироскопов постепенно форми-
руется существенное преимущество этой технологии в том, что касает-
ся стоимости, по сравнению с кольцевыми лазерными гироскопами. Эта
тенденция в дальнейшем будет только усиливаться, благодаря возможно-
сти собирать приборы в обычных производственных условиях, тогда как
для изготовления кольцевых лазеров требуются специальные технологи-
ческие условия (суперчистота). Кольцевые лазерные гироскопы первыми
начали выпускать на полную мощность, и в этом они действительно име-
ют значительное преимущество.
9.7. Датчики параметров, использующие интерферометр Саньяка 263
Необходимо решить важные технические проблемы прежде, чем по-
явятся волоконно-оптические гироскопы с эксплуатационными характе-
ристиками, аналогичными кольцевым лазерным гироскопам для инерци-
альной навигации. В ближайшем будущем волоконно-оптические гироско-
пы начнут преобладать на рынке устройств с нестабильностью смещения
нуля, не меньшей примерно 1 град/час. Волоконно-оптические гироскопы
также доминируют на таком специализированном рынке, работающем на
индивидуальные заказы, как обслуживание нефтяных месторождений.
Кольцевые лазерные гироскопы преобладают на рынке устройств для
инерциальной навигации со стандартными характеристиками порядка
0,01 град/час или меньше. В тех приложениях, где требуется эффек-
тивность, лежащая в диапазоне между этими двумя областями, может
использоваться любая из технологий. В долгосрочной перспективе кри-
тическим станет вопрос о способности кольцевых лазерных гироскопов
конкурировать по стоимости с волоконно-оптическими гироскопами.
Хотя первоначальные работы по волоконно-оптическим гироскопам
выполнялись в университетах и в тех отраслях промышленности, которые
традиционно не выступают на рынке инерциальных датчиков, в тече-
ние нескольких последних лет эта ситуация резко изменилась. В насто-
ящее время практически каждый крупный производитель инерциальных
датчиков имеет свою программу разработки и производства волоконно-
оптических гироскопов. Это тем более показательно из-за отсутствия
более или менее сложившейся технологии по сравнению с кольцевыми ла-
зерными гироскопами. Количество компаний, занимающихся кольцевыми
лазерными гироскопами, падает, по мере того как эти датчики выходят
на рынок.
9.7. Датчики параметров внешней среды, использующие
интерферометр Саньяка
Помимо измерения вращения интерферометр Саньяка может быть скон-
фигурирован для измерения параметров практически любых явлений внеш-
ней среды, которые могут быть измерены. Это возможно при помощи
специально разработанных устройств, обладающих частотно-зависимой
и частотно-независимой чувствительностью, масштабируемой чувстви-
тельностью и другими интересными свойствами, часто присущими толь-
ко этим интерферометрам. В этом разделе мы рассмотрим несколько
методов измерения параметров внешней среды, используя конкретные
параметры внешней среды в качестве наглядных примеров. Однако, как
правило, по своей сути эти методы могут эффективно использоваться
Глава 9. Волоконно-оптические датчики на основе резонатора
рря измерения широкого диапазона разнообразных параметров внешней
среды.
9.7.1. Быстро изменяющиеся явления внешней среды:
обнаружения акустических колебаний
Интерферометр Саньяка может быть сконфигурирован для измерения
параметров быстро изменяющихся параметров внешних условий. В этом
разделе описаны некоторые из таких методов на примере акустических
измерений, однако эти методы в равной степени применимы и к другим
явлениям, таким как вибрация и ускорение. Волоконно-оптические аку-
стические датчики демонстрируют высочайшую чувствительность и в
перспективе будут иметь очень низкую стоимость, что делает их под-
ходящими для широкого диапазона приложений [27-29]. Применение дат-
чиков в военных целях предполагает формирование гидроакустических
антенных решеток, буксируемых надводными кораблями или подводными
лодками, для защиты от нападения из-под воды; установку антенн на мор-
ском дне для защиты прибрежных районов и даже встраивание акусти-
ческих датчиков в стены в качестве почти необнаруживаемых устройств
для прослушивания. Для коммерческих приложений существуют такие
возможности, как чистооптические микрофоны, сейсмические датчики
для исследования нефтяных месторождений и гитарные струны из опти-
ческих волокон, позволяющие создать оптический аналог электрогитары.
Большинство разработанных высокоэффективных акустических датчи-
ков основано на интерферометре Маха - Цендера. Они подробно описаны
в гл. 10. Использование интерферометра Саньяка является альтернатив-
ным интерферометрическим методом, особенно подходящим для реги-
страции высокочастотных сигналов. В подразделах описаны схемы аку-
стических датчиков, основанных на интерферометре Саньяка, в которых
источник излучения используется в качестве усилителя, применяется фа-
зовая модуляция акустической волной пучка света, распространяющегося
по волокну, модуляция двулучепреломления.
9.7.2. Акустический датчик на основе
интерферометра Саньяка, использующий
источник света в качестве усилителя
Базовый акустический датчик, основанный на интерферометре Санья-
ка, в котором источник излучения используется в качестве усилителя
[30], представлен на рис. 9.18. Излучение лазера или лазерного диода про-
ходит через входной-выходной светоделитель, который часть светово-
го пучка направляет на выходной детектор. Оставшийся пучок света
разделяется центральным светоделителем на пучки, которые вводятся
9.7. Датчики параметров, использующие интерферометр Саньяка 265
в противоположные концы катушки, из чувствительного к акустическим
воздействиям оптического волокна. Введенные пучки света распростра-
няются во встречных направлениях. Воздействие акустической волны на
катушку модифицирует относительную фазу и/или состояние поляриза-
ции распространяющихся во встречных направлениях пучков, так что,
когда они воссоединяются на центральном светоделителе и направляют-
ся обратно к лазерному источнику, в них уже содержится информация об
акустическом воздействии в виде изменений фазы, интенсивности и/или
состояния поляризации. Выходной сигнал лазерного источника обраба-
тывается в качестве выходного сигнала прибора.
Рис. 9.18. Акустический датчик на базе интерферометра Саньяка с источником
излучения в качестве усилителя
Обратная связь с лазером или лазерным диодом, осуществляемая с по-
мощью модулированного сигнала, приводит к усилению входного свето-
вого сигнала [3], что можно использовать для того, чтобы снизить тре-
бования к системе регистрации сигнала. На рис. 9.19 показан график, ил-
люстрирующий изменения выхода лазерного диода Hitachi HLP-1400-CSP
под воздействием светового пучка, вводимого 4% отражателем при совпа-
дении и несовпадении фазы [32]. Если этот тип лазерного диода функци-
онирует при постоянном уровне тока, он действует как усилитель, пре-
образующий колебания фазы в колебания интенсивности на приемнике.
Аналогичный результат получается при модуляции уровня интенсивно-
сти или состояния поляризации возвращающегося пучка света.
9.7.3. Конфигурации волоконно-оптической катушки
Предположим, что длина исследуемой акустической волны больше раз-
меров измерительной катушки (скорость звука в воде примерно равна
Глава 9. Волоконно-оптические датчики на основе резонатора
1500 м/с, так что при частоте 15 кГц длина волны составляет около 1 м),
чувствительность системы можно оптимизировать, изолируя одну поло-
вину катушки от акустических волн и повышая чувствительность к ним
другой половины. Это может быть выполнено множеством различных
способов, среди которых покрытие половины обмотки чувствительной
к акустическим колебаниям оболочкой и снижение чувствительности дру-
гой половины [33, 34] путем физической изоляции половины катушки от
звукового поля или намотка одной половины волоконной катушки на чув-
ствительный к акустическим колебаниям сердечник. На рис. 9.20 приве-
дены две конфигурации, оптимизирующие чувствительность.
Рис. 9.19. Выходные излучательные характеристики лазерного диода Hitachi
HLP-1400 под воздействием 4% обратного отражения от зеркала при
10 мкм [32]
Рассмотрим случай, когда давление на катушку в целом меняется как
функция времени. Чувствительность катушки зависит от темпа измене-
ния волн давления dP/dt, разности времен прихода распространяющихся
во встречных направлениях пучков в определенную точку катушки (опре-
делим как у расстояние от центрального светоделителя до этой точки
в направлении по часовой стрелке; тогда время прихода пучка, распро-
страняющегося по часовой стрелке, в точку на расстоянии у будет равно
уп/с, в то время как луч, распространяющий против часовой стрелки,
9.7. Датчики параметров, использующие интерферометр Саньяка 267
придет в эту же точку через (L — у)п/с, где п — показатель преломления
волоконной катушки, L — длина волокна в катушке, и с — скорость света
в вакууме), и реакции волокна в точке у на волну давления G(y,P) (это
может быть, например, изменение фазы или состояния поляризации в во-
локне). Интегрируя по длине волокна L, отклик системы на изменения
давления можно записать как
(9.13)
R(P(t))= f\G(y,P)^^-^\dy.
J L at с
о
Рис. 9.20. Экранирование
оптоволокна для достиже-
ния оптимальной чувстви-
тельности
Поучительно вычислить интеграл для простых случаев; например, ес-
ли величина G постоянна вдоль длины катушки, отклик будет тожде-
ственно равен нулю. Таким образом, в хорошо спроектированном воло-
конно-оптическом гироскопе можно устранить акустические эффекты,
не превышающие первый порядок, путем аккуратной намотки волоконной
катушки [35, 36]. Анализ уравнения (9.13) также показывает, что отклик
можно оптимизировать, экранируя одну половину длины катушки и опти-
мизируя чувствительность другой половины (устанавливая, например, G
равным 0 на интервале от 0 до £/2 и равным константе на интервале
от L/2 до L). Этот случай показан на рис. 9.20. Частотная характеристи-
ка системы остается линейной при увеличении частоты до тех пор, пока
частота не станет сопоставимой с характеристической частотой воло-
конной катушки с/Ln (200 кГц для волокна длиной 1 км), которую можно
предусмотреть при разработке намного большей, чем измеряемые часто-
ты. Следует отметить, что для системы, в которой используется источник
с большой длиной когерентности, отклик системы будет также зависеть
от когерентного обратного рассеяния в волокне и от других центров рас-
сеяния.
(168 Глава 9. Волоконно-оптические датчики на основе резонатора
9.7.4. Модуляция фазы и поляризации
Путем установки поляризатора между центральным и входным-выход-
ным светоделителями в сочетании с использованием в катушке волокна,
сохраняющего поляризацию, систему, показанную на рис. 9.18, можно мо-
дифицировать так, чтобы свести к минимуму поляризационные эффекты
в волоконной катушке. Далее, используя широкополосный источник све-
та, такой как сверхизлучающий лазерный диод или светоизлучающий
диод, систему можно модифицировать, значительно уменьшив когерент-
ное обратное рассеяние от внешних источников излучения. В этом случае
действие источника света как усилителя уменьшится и относительные
фазовые сдвиги можно будет измерять непосредственно, используя кон-
фигурацию, показанную на рис. 9.21, идентичную используемой в обыч-
ном аналоговом волоконно-оптическом гироскопе, за исключением того,
что волоконная катушка оптимизирована для повышения чувствитель-
ности к акустическим колебаниям. Фазовый модулятор, показанный на
рис. 9.21, применяется для генерации переменного фазового сигнала, ко-
торый используется для переноса сигнала за пределы статической обла-
сти методом, аналогичным описанному ранее в этой главе в связи с воло-
конно-оптическим гироскопом.
Рис. 9.21. Интерферометр Саньяка, оптимизированный для непосредственной ре-
гистрации фазовой модуляции
В интерферометре Саньяка для генерации невзаимных фазовых сдви-
гов между распространяющимися в противоположных направлениях пуч-
ками в волоконно-оптической катушке могут использоваться также и
поляризационные эффекты. Эти эффекты в сочетании с изменениями
относительного состояния поляризации распространяющихся в противо-
положных направлениях пучков в волоконной катушке формируют коле-
бания интенсивности, которые используются для наблюдения за акусти-
9.7. Датчики параметров, использующие интерферометр Саньяка 269
ческим сигналом. На рис. 9.18 представлена подобная система для случая,
когда катушка состоит из обычного одномодового волокна с круглой
сердцевиной, в то время как на рис. 9.22 показана альтернативная схе-
ма, в которой источник света не используется в качестве усилителя.
Опорная
волоконная
катушка
Рис. 9.22. Акустический датчик на основе интерферометра Саньяка с невзаимной
конфигурацией
Рис. 9.23. Интерферометр Саньяка, сконфигурированный для измерения медлен-
ных изменений длины волоконной катушки
9.7.5. Механическое напряжение
На рис. 9.23 представлена базовая конфигурация интерферометра Санья-
ка для измерения механического напряжения и медленных изменений дли-
ны волоконно-оптической катушки [37]. В систему добавлен преобразова-
тель частоты, так что в области волокна частота распространяющихся в
противоположных направлениях пучков отличается на F. Окончательное
смещение полосы при прохождении пучка по всей длине волокна с повы-
(9.14)
шенной чувствительностью определяется формулой
п Lri
Zp = —F
с
Если длина L изменяется на величину dL, результирующее изменение
смещения полосы будет равно
(9.15)
dZL = d-^F.
С
В системе Саньяка с обратной связью частота F может регулировать-
ся так, чтобы сводить к нулю смещение полосы, вызванное изменением
длины волокна. Изменение частоты на dF приведет к уравновешиванию
обусловленного частотой смещения полосы
dZF = dF^L + dF)n, (9.16)
С
Когда смещение полосы, обусловленное изменением длины волокна, ста-
нет равным уравновешивающему смещению полосы, dZp — dZp, то
яг LdF
dL = ~F~-
Уравнение (9.17) является фундаментальным уравнением для интер-
ферометра Саньяка, сконфигурированного для измерения медленных из-
менений длины пути. Такой интерферометр хорошо подходит для кон-
троля механического напряжения.
(9-17)
9.7.6. Измерение длины волны
Длину волны источника света можно измерить, используя преобразовате-
ли частоты в сочетании с рассеивающей волоконно-оптической катушкой
[38, 39] в конфигурации, аналогичной оптическому гироскопу с обну-
лением фазы на рис. 9.17. Это можно сделать, сместив относительную
частоту распространяющихся в противоположных направлениях свето-
вых пучков так, чтобы существовало конечное различие в нескольких
полосах разности фаз между распространяющимися в противоположных
направлениях пучками, вызванное благодаря разности частот. Путем об-
нуления положения полос, широко раздвинутых по частоте, можно отсле-
дить изменения длины волны источника света. Это является результа-
том рассеяния в волоконно-оптической катушке, вызванного разделением
между полосами для изменения частоты при изменении длины волны. Та-
кая процедура применяется для коррекции масштабного коэффициента
в волоконно-оптических гироскопах. Ее можно использовать для оценки
характеристик источников света как волоконно-оптический спектрометр.
Предполагается, что свойства волоконно-оптической катушки остаются
постоянными или может быть выполнена калибровка. С другой стороны,
можно использовать стабильный источник света и аналогичную проце-
дуру применить для определения характеристик волоконно-оптической
катушки.
9.7.7. Выводы
Интерферометр Саньяка занимает важное место в области инерциальной
навигации, и волоконно-оптический гироскоп обещает стать первым ком-
мерческим продуктом высокой стоимости среди волоконно-оптических
датчиков. Другие типы волоконно-оптических датчиков, основанных на
интерферометрах Саньяка, также могут найти в будущем применение
как в приложениях, требующих измерения быстро и медленно меняющих-
ся параметров внешней среды, так и в установках.
Благодарность
Для написания части этой главы с разрешения была использована статья
автора Fiberoptic vs. Ring Laser Gyros: An Assessment of the Technology,
опубликованная в Laser Focus/Electro Optics (декабрь 1985).
Литература
1. E. J. Post, Sagnac Effect, Rev. Mod. Phys. 39, 475 (1967).
2. E. J. Post, Interferometric Path-Length Changes Due to Motion, J. Opt. Soc.
Am. 62, 234 (1972).
3. H. J. Arditty and H. C Lefevre, Sagnac Effect in Fiber optic Gyroscopes, Opt.
Lett. 6, 401 (1981).
4. В. Y. Kim, H. C Lefevre, R. A. Bergh, and H. J. Shaw, Harmonic Feedback
Approach to Fiber Optic Gyro Scale Factor Stabilization, Optical Fiber Sensors,
IEE Conference Publication 221, 1983, p. 136.
5. N.J. Frigo, Constant Accuracy High Dynamic Range Fiber Optic Gyroscope,
Proc. SPIE 719, 155 (1986).
6. A. D. Kersey, A. Dandridge, and W. K. Burns, Two Wavelength Fibre Gyroscope
with Wide Dynamic Range, Electron. Lett. 22, 935 (1986).
7. F. Aronowitz, The Laser Gyro, in Laser Applications, Monte Ross, Ed., Aca-
demic Press, New York, p. 113-200.
8. W. W. Chow, J. Gea-Beanacloche, L. M. Pedrotti, V. E. Sanders, W. Schleich,
and M.O. Scully, The Ring Laser Gyro, Rev. Mod. Phys. 57, 61 (1985).
9. G. A. Sanders, M.G. Prentiss, and S. Ezekiel, Passive Ring Resonator Method
for Sensitive Inertial Rotation Measurements in Geophysics and Relativity, Opt.
Lett. 6, 569 (1981).
10. R. E. Meyers, S. Ezekiel, D.W. Stowe, and V. J. Tekippe, Passive Fiber-Optic
Ring Resonator for Rotation Sensing, Opt. Lett. 8, 644 (1983).
272 Глава 9. Волоконно-оптические датчики на основе резонатора
11. U.K. Iwatsuki, К. Rotate, and М. Higashiguchi, Eigenstate of Polarization in
a Fiber Ring Resonator and Its Effect in an Optical Passive Ring-Resonator
Gyro, Appl. Opt. 25, 2606 (1986).
12. K. Iwatsuki, K. Rotate, and M. Higashiguchi, Effect of Rayleigh Backscattering
in an Optical Passive Ring-Resonator Gyro, Appl. Opt. 23, 3916 (1984).
13. N. J. Frigo, Comparison of Interferometric and Resonant Ring Fiber Optic Gy-
roscopes, Proc. SPIE 985, 270 (1988).
14. R. Carroll, C. D. Coccoli, D. Cardarelli, and G. T. Coate, The Passive Resonator
Fiber Optic Gyro and Comparison to the Interferometer Fiber Gyro, Proc. SPIE
719, 486 (1986).
15. S. Ezekiel and H. J. Arditty, Eds., Fiber-Optic Rotation Sensors, Springer Series
in Optical Sciences, vol. 32, Springer-Verlag, New York, 1982.
16. E. Udd, Ed., Fiber Optic Gyros: 10th Anniversary Conference, Proc. SPIE 719
(1986).
17. R. Ulrich and M. Johnson, Fiber-Ring Interferometer: Polarization Analysis,
Opt. Lett. 4, 233 (1979).
18. R. Ulrich, Fiber-Optic Rotation Sensing with Low Drift, Opt. Lett. 5, 173 (1980).
19. E. C. Kintner, Polarization Control in Optical-Fiber Gyroscopes, Opt. Lett. 6,
154 (1981).
20. R. J. Fredricks and R. Ulrich, Phase Error Bounds of Fibre Gyro with Imperfect
Polarizer/Depolarizer, Electron. Lett. 29, 330 (1984).
21. В. Y. Kim and H. J. Shaw, All Fiber Gyroscope with Linear Scale Factor Using
Phase Detection, Proc. SPIE 478, 142 (1984).
22. B. Y. Kim and H. J. Shaw, Phase-Reading All-Fiber-Optic Gyroscope, Opt.Lett.
9, 378 (1984).
23. J.L. Davis and S. Ezekiel, Techniques for Shot-Noise-Limited Inertial Rotation
Sensing Using a Multiturn Fiber Sagnac Interferometer, Proc. SPIE 157, 131
(1978).
24. R. F. Cahill and E. Udd, Phase-Nulling Fiber-Optic Laser Gyro, Opt. Lett. 4,
93 (1979).
25. W. K. Burns, C. L. Chen, and R. P. Moeller, Fiber-Optic Gyroscopes with Broad-
Band Sources, IEEE J. Lightwave Technol. LT-1, 98 (1983).
26. S. Tai, K. Kojima, S. Noda, K. Kyuma, K. Hamanaka, and T. Nakayama, All-
Fibre Gyroscope Using Depolarized Superluminescent Diode, Electron. Lett. 22,
546 (1986).
27. T. G. Giallorenzi et al., Optical Fiber Sensor Technology, IEEE Trans. Mi-
crowave Theory Tech. MTT-30, 472 (1982).
28. J. A. Bucaro, H.D. Dardy, and E. Carome, Fiber Optic Hydrophone, I. Acoust.
Soc. Am. 62, 1302 (1977).
29. H.H. Cole, R. L. Johnson, and P. B. Bhutta, Fiber Optic Detection of Sound,
J. Acoust. Soc. Am. 62, 1136 (1977).
30. E. Udd, Fiber-Optic Acoustic Sensor Based on the Sagnac Interferometer, Proc.
SPIE 425, 90 (1983).
31. R. O. Miles, A. Daindridge, A. B. Tveten, and T. G. Giallorenzi, An External
Cavity Diode Cavity Laser Sensor, IEEE J. Lightwave Technol. LT-1, 81 (1983).
32. D. Kato, High Reflectivity Cavity Mirrors for High Performance (GaAOAs
Diode Lasers, IEEE J. Quantum Electron. QE-14, 563 (1978).
Литература 273
33. N. Lagakos, E. U. Schnaus, H. H. Cole, J. Jarzanski, and J. A. Bucaro, Optimiz-
ing Fiber Coatings for Interferometric Acoustic Sensors, IEEE Trans. Microwave
Theory Tech. MTT-30, 529 (1982).
34. N. Lagakos and J. A. Bucaro, Pressure Desensitization of Optical Fibers, Appl.
Opt. 20, 2715 (1981).
35. D. M. Schupe, Thermally Induced Nonreciprocity in the Fiber-Optic Interfer-
ometer, Appl. Opt. 19, 654 (1980).
36. N.J. Frigo, Compensation of Linear Sources of Nonreciprocity in Sagnac Inter-
ferometers, Proc. SPIE 412, 268 (1983).
37. R. J. Michal, E. Udd, and J. P. Theriault, Derivative Fiber-Optic Sensors Based
on the Sagnac Interferometer, Proc. SPIE 719, 150 (1986).
38. E. Udd, R. J. Michal, and R. F. Cahill, Scale Factor Correction in the Phase-
Nulling Optical Gyro, Proc. SPIE 478, 136 (1984).
39. S.E. Higley, E. Udd, R. J. Michal, J.P. Theriault, and D. A. Jolin, Fiber-Optic
Spectrometer, Proc. SPIE 838 (1987).
ГЛАВА IО
ВОЛОКОННО-ОПТИЧЕСКИЕ
ДАТЧИКИ НА ОСНОВЕ
ИНТЕРФЕРОМЕТРОВ
МАХА-ЦЕНДЕРА
И МАЙКЕЛЬСОНА
Энтони Дэндридж
Лаборатория по морским исследованиям, США
Подразделение оптики
Код 6574
Вашингтон, федеральный округ Колумбия
10.1. Введение
Во многих типах волоконно-оптических датчиков волокно просто пере-
дает свет удаленному оптическому датчику, расположенному на конце
волокна. Свет затем преобразуется некоторым образом и возвращается,
обычно по тому же волокну, к модулю источника, где и анализируется.
Этот тип датчика обычно называют волоконным датчиком, основанным
на интенсивности, и, как уже указывалось, волокно в нем не играет ника-
кой роли в механизме чувствительности. В таких датчиках свету обычно
приходится покидать оптическое волокно для взаимодействия с опти-
ческим датчиком на конце волокна, что во многих случаях приводит
к значительным оптическим потерям. Однако существует другой класс
волоконных датчиков, в которых волокно играет более существенную
роль в механизме измерений и при этом не требуется, чтобы свет по-
кидал волокно датчика для взаимодействия с полем, параметры которого
должны быть измерены. В приборах этого типа оптическая фаза све-
та, проходящего по волокну, модулируется полем, параметры которого
должны быть измерены. Фазовая модуляция затем определяется интер-
ферометрическими методами путем сравнения фазы света в сигнальном
Волоконно-оптические датчики: Вводный курс для инженеров и научных работников,
под редакцией Эрика Удда. ©1991 John Wiley & Sons, Inc.
10.1. Введение
волокне с фазой в опорном волокне. Такой тип датчика обладает мно-
жеством привлекательных особенностей. Так как свет остается в волок-
не, оптические потери в приборе достаточно низки; а поскольку прибор
использует интерференцию света, он является весьма чувствительным.
Но из-за существования множества механизмов влияния оптическая фаза
света, проходящего через волокно, может быть чувствительной к множе-
ству параметров. Как будет показано в гл. 11, возможно также эффек-
тивное мультиплексирование этого типа датчиков. Такой тип датчика
называется датчиком с модуляцией по фазе или интерферометрическим
волоконным датчиком.
Волоконно-оптические интерферометрические датчики в дополнение
ко всем преимуществам, свойственным волоконным датчикам, таким как
электрическая пассивность (безопасность), небольшой вес, невосприимчивость
к электромагнитным помехам (ЭМП) и возможность мультиплексирова-
ния, имеют еще и дополнительные преимущества, а именно геометриче-
скую приспособляемость чувствительного элемента, широкий динамиче-
ский диапазон и чрезвычайно высокую чувствительность. В чем состоят
некоторые из этих преимуществ, имеет смысл описать более подробно.
В акустическом датчике, для элемента которого требуется примерно 30 м
волокна, волокно можно намотать так, что получится маленький, разме-
ром с мяч для гольфа, гидрофон с круговой направленностью; или можно
использовать волокно как точно направленное устройство длиной 30 м;
а можно сконструировать устройство любого размера и направленности
между этими двумя крайностями. Как мы увидим, волоконные интерфе-
рометрические датчики могут обнаруживать деформацию от 10“13 до
10“15 — на этом основаны их высокая чувствительность и широкий ди-
намический диапазон.
Поэтому в течение последних 10 лет интенсивно проводились иссле-
довательские работы по разработке датчиков с целью извлечь максимум
выгоды из этих преимуществ. Однако некоторые из этих «преимуществ»
способны замедлить прогресс этой весьма многообещающей технологии.
Например, чувствительность волокна к множеству различных параме-
тров порождает проблему избирательности датчиков. Акустические дат-
чики становятся акселерометрами, акселерометры становятся датчиками
температуры, магнетометры становятся сейсмометрами, что для высо-
коэффективных, соответствующих современному уровню развития тех-
ники датчиков крайне нежелательно. Другое существенное затруднение
заключается в том, что, хотя связь между сдвигом оптической фазы
и регистрируемым параметром является линейной в диапазоне многих
порядков величины, выход интерферометра вследствие «приподнятого ко-
синуса интерференционных полос» требует обработки, которая может
Глава 10. Волоконно-оптические датчики на основе интерферометров
ограничить динамический диапазон, снизить эффективность и повысить
собственный уровень шума в системе. Очень высокая производительность
датчиков также накладывает строгие ограничения на мультиплексирова-
ние таких датчиков, поскольку в отношении производительности должна
сохраняться целостность системы.
В этой главе описан основной принцип, на котором основана рабо-
та таких датчиков: двухлучевая интерферометрия. Также рассмотрены
два основных метода интерферометрической демодуляции. Первый под-
ход — активное гомодинное детектирование, хотя и не применим для
большинства реальных систем, однако широко используется в лабора-
торных исследованиях и может считаться демодулятором «начального
уровня». Кстати, в лабораторных установках этот подход обычно обеспе-
чивает минимально достижимый уровень шума для датчиков этого вида.
В отличие от случая активной схемы при втором подходе к демодуля-
ции в интерферометре отсутствуют электрические компоненты, и по этой
причине, а также потому, что этот подход не предусматривает наличия
петли обратной связи в интерферометре, он называется пассивным. Этот
и другие пассивные подходы получили широкое распространение вне стен
лабораторий.
В этой главе также описаны некоторые из основных источников шума.
В том числе предлагается краткое обсуждение свойств шума полупро-
водникового лазерного диода, поскольку он является одним из наиболее
широко используемых источников для волоконно-оптических интерферо-
метрических датчиков. Кроме того, рассматривается проблема поляри-
зационного замирания и различные подходы к ее решению.
В разделе 10.3 мы обсудим различные конфигурации интерфероме-
тров: Маха - Цендера, Майкельсона, рефлектометрическую и Фабри-Пе-
ро. Также будет рассмотрено множество реализаций, таких как градиенто-
метры и двухтактные схемы. Наконец, в этой главе описаны некоторые
наиболее важные приложения этой технологии. Самая значительная груп-
па включает в себя динамические измерения таких параметров, как де-
формация, звуковые колебания и ускорение. Из-за обусловленных темпе-
ратурой фазовых сдвигов в интерферометре непосредственное измере-
ние статических параметров достаточно сложно. Также описаны методы,
позволяющие измерять статические параметры с помощью интерферометров.
10.2. Принцип работы
10.2.1. Двухлучевая интерферометрия
Двухлучевая интерферометрия позволяет осуществлять измерения край-
не малых дифференциальных фазовых сдвигов, создаваемых в оптиче-
10.2. Принцип работы
ском волокне измеряемой величиной. Оптическая фазовая задержка (в ра-
дианах) света, проходящего через волокно, определяется как
ф = nkL,
(10.1)
где п — показатель преломления сердцевины волокна, к — оптическое
волновое число в вакууме (2л/А, где А — длина волны) и L — физическая
длина волокна. Следует отметить, что величина nL называется опти-
ческой длиной пути. Также следует отметить, что обычное оптическое
волокно может поддерживать распространение двух ортогонально поля-
ризованных мод и что благодаря таким эффектам, как изгиб, волокно
становится двулучепреломляющим. Следовательно, свет, выходящий из
волокна, обычно имеет эллиптическую поляризацию. Понятно, что зна-
чение ф может зависеть от выбора поляризации выходящего излучения
(хотя Li = Z/2 = L для различно поляризованных мод, но щ П2 благо-
даря двулучепреломлению волокна). Этот эффект рассматривается более
детально в разделе 10.2.4, в котором обсуждаются свойства интерферо-
метров, связанные с поляризацией.
Небольшие изменения фазовой задержки можно определить, диффе-
ренцируя выражение (10.1):
дф dL dn dk
—у = —---1---1-у •
ф L п к
(Ю.2)
Первые два слагаемых относятся к физическим изменениям волокна, вы-
званным измеряемыми возмущениями. Соответственно, они описывают
механизм преобразования, благодаря которому волокно выступает в ка-
честве датчика. Как правило, изменения давления, температуры и маг-
нитного поля приводят к различному вкладу в dф составляющих dL и dn.
Большинство механизмов измерения низкочастотных параметров (ниже
50 кГц) основано на определенных свойствах материалов, связывающих
волокно, таких как покрытие или клеящий состав, обеспечивающих пре-
обладание вклада слагаемого dL [1]. Тем не менее, благодаря коэффици-
енту оптической чувствительности волокна по деформациям, возникает
сопутствующее изменение dn (меньшей амплитуды и противоположно-
го относительно dф знака) [2]. Методы увеличения dL и, следовательно,
dф обсуждаются в разделах 10.3 и 10.4. Последнее слагаемое учитыва-
ет любые изменения длины волны (или частоты), связанные с лазерным
источником. Это слагаемое полезно при рассмотрении вклада шума, воз-
никающего, например, из-за дрожания частоты [3], создающего фазовый
шум, а также существенно при рассмотрении некоторых подходов к де-
модуляции.
Типичная чистоволоконная конфигурация интерферометра показана
на рис. 10.1. Здесь представлены и объемный вариант интерферометра
Глава 10. Волоконно-оптические датчики на основе интерферометров
Маха-Цен дера [4], и волоконный аналог классического интерферометра
Маха - Цендера. Когерентное излучение одномодового (одновременно с по-
перечной и продольной модами) источника вводится в одномодовое (с про-
странственной модой) волокно. Затем при помощи волоконно-оптическо-
го светоделителя излучение разделяется на два пучка примерно равной
интенсивности; один пучок направляется через плечо с измерительным
волокном, в то время как другой проходит через опорное плечо. Два вы-
ходных сигнала после прохождения через измерительную и опорную воло-
конные обмотки объединяются вторым волоконным светоделителем (ко-
торый называется рекомбинатором). Таким образом, формируется интер-
ференционный сигнал между двумя лучами, который после прохождения
по выходному волокну регистрируется фотодетектором (или фотодетек-
торами). Следует отметить, что этот вид датчика может работать при
большой длине волокна (> 10 км) между модулем источника/детектора
и измеряющим интерферометром, сохраняя при этом высокую произво-
дительность.
Лазер д
Линза
Светоделитель
Сигнальный путь
Зеркало
Светодел ител ь
Опорный путь
Зеркало
Приемник
^Приемник
Рис. 10.1. Объемный оптический и волоконный варианты интерферометра Маха -
Цендера
Основным элементом интерферометра является волоконный светоде-
литель, или разветвитель. В нем сердцевины волокон, которыми огра-
ничено распространение оптической энергии, располагаются настолько
близко друг к другу, чтобы излучение могло переходить из одного во-
локна в другое [5]. Обычно этого достигают путем сведения на конус
(утонения) при высокой температуре и сплавления. Если коэффициенты
разветвления мощности двух ответвителей равны fci и &2, и предполагае-
10.2. Принцип работы
мые оптические потери составляют as и аг для измерительной и опорной
ветвей интерферометра соответственно, то оптические поля на выходах
сигнальной и опорной ветвей можно определить как
Ег = Е^у/ ark\k2 cos (а^ + фг) (10.3а)
и
Es = Eq (1 - &1) (1 - М cos (wot + <f>s). (10.36)
Выходную интенсивность интерферометра можно выразить следую-
щим образом
I={E?) + {E2s) + 2(ErEs), (10.4)
где (•) означает усреднение по времени за период, намного превышающий
значение 2tt/cjo- Воспользовавшись выражениями (10.3) и (10.4), опреде-
лим выходную интенсивность, как
I = Iq |arfcifc2 -I- as(l - fci)(l - k2) +
+ 2y/asarkik2(l - fci)(l - k2) cos(</>r - </>s)j. (10.5)
Выходная контрастность полос интерферометра задается стандартным
определением
V = (10.6)
^шах “Ь ^min
что с учетом (10.5) можно преобразовать как
у = 2у/asarkik-i (1 - fci) (1 -~fo)
arkxk2 + as (1 - fci) (1 - к2)'
Следует отметить, что в этом расчете игнорируются два эффекта:
влияние поляризации (обсуждаемой в разделе 10.2.4) и влияние длины ко-
герентности источника. Если предположить, что она имеет форму кривой
Лоренца, нормализованная функция самокогерентности 7(7-) определяет-
ся формулой 7(т) = ехр[—|т|/тс], где т — дифференциальная задержка
времени оптического распространения сигнала по сигнальному и опор-
ному путям и тс — время когерентности источника. Таким образом,
реальное значение V в 7(т) раз меньше того, которое может быть вы-
числено по формуле (10.7). По этой причине дифференциальная задержка
распространения между оптическими ветвями обычно выбирается таким
образом, чтобы ее величина была меньше времени когерентности источ-
ника (т. е. т < тс); в этом случае 7(т) —> 1 и выходная контрастность
определяется формулой (10.7).
Если теперь рассмотреть дополнительный выход интерферометра, то
понятно, что его выходной сигнал аналогичен и определяется формулой
Глава 10. Волоконно-оптические датчики на основе интерферометров
I' - Io |arfci (1 - fc2) + aa (1 - fci) fc2 +
+ 2i/aaarfcifc2 (1 — fci) (1 - fc2) cos (фа — фг)]. (10.8)
Контрастность полос выходного сигнала может быть вычислена по формуле
v = 2x/araak1k2 (1 - fci) (1 - fo)
arki (1 - fc2) + ots (1 - fci) k2 '
отличающейся от формулы (10.7). Таким образом, следует принимать
во внимание, что поскольку идеальное значение коэффициента светоде-
ления, равное 0,5, недостижимо, то контрастность полос на каждом из
выходов может существенного различаться, несмотря на то что составля-
ющая, определяющая вклад интерференции для обоих выходов интерфе-
рометра одна и та же, а именно 2у/ aTaskik2 (1 — fci) (1 — k2). Пренебрегая
влиянием составляющей, описывающей потери, рассмотрим следующие
наиболее распространенные случаи, представляющие интерес: (1) если
коэффициент светоделения одного из разветвителей равен 0,5, а коэф-
фициент другого отличается от этой величины, то контрастность полос
на каждом из выходов будет одинаковой; и (2) если оба разветвителя
имеют одинаковые коэффициенты светоделения (причем не обязательно
равные 0,5), то один из выходов имеет единичную контрастность.
Для упрощения математических операций перепишем выражения (10.5)
и (10.8) в следующем виде:
I = 1оа (А + В cos Д</>); (10.10а)
If = IQa (С-В cos Д0), (10.106)
где предполагается, что as = аг = а и А = k]k2 + (1 — &i)(l — k2), В =
= y/k]k2(l - fci)(l - fc2), C = fci (1 - fc2) + (1 - fci) k2 и Д0 = (фг - ф3).
Дальнейшее упрощение может быть сделано, если ki = к2 = 0,5, тогда
уравнения (10.10) приобретают вид
/ = (1 -I- cos Д</>); (10.11а)
Г = ^(1-со8Д$ (10.116)
и для обоих выходных сигналов V = 1.
Предположим, что дифференциальный фазовый сдвиг в интерферо-
метре может быть разделен на сигнальную составляющую с1ф с амплиту-
дой ф3 и частотой си и медленно изменяющийся фазовый сдвиг фл- Для
упрощения используем выходные сигналы интерферометра, эквивалент-
ные (10.11); таким образом
10.2. Принцип работы 281
I = [1 4- cos (фа + ф3smart)]; (10.12а)
= -у- [1 — cos (фа + </)s smart)]. (10.126)
Эти выходные интенсивности затем преобразуются фотодетектором в элек-
трические токи. Дифференциальная комбинация этих фототоков обеспе-
чивает выход
i = el^a cos (фа + ф8 sincjtf), (10.13)
где е — коэффициент преобразования фотодетекторов. Уравнение (10.13)
можно раскрыть через функции Бесселя [6] так, что выходной сигнал
представляется в виде
оо
i = eloa< cosфд [rto(<M + *^2п(<Мcos 2na^] +
< n=l
+ sin</>d[2^ J2n+i(</>s)sin((2n +l)art)j >, (10.14)
n=0 J
где Jn^s) — функция Бесселя порядка n с аргументом ф8.
Рис. 10.2. Амплитуда
функции Бесселя Jn(x)
порядков 0, 1 и 2
Обработка такого выходного сигнала для извлечения сигнальной ин-
формации с1ф в присутствии медленно меняющейся составляющей фа —
нетривиальная задача. На этом этапе интересно рассмотреть изменения
нескольких функций Бесселя низкого порядка в зависимости от </>s, по-
казанные на рис. 10.2. Как можно видеть, функции Бесселя являются
Глава 10. Волоконно-оптические датчики на основе интерферометров
периодическими по однако при увеличении ф8 полная амплитуда функ-
ций Бесселя уменьшается. Если мы рассмотрим выражение (10.14) для
малых аргументов (т. е. ф3 1), Jo — 1 и Ji(<^s) — </>s/2 и будем учиты-
вать только составляющую, зависящую от времени в выражении (10.14),
то его можно упростить и привести к виду
di ~ sin cut (10.15)
б)
Рис. 10.3. а) проблема замирания сигнала в волоконных интерферометрах; б) от-
клик интерферометра на большой сигнал с синусоидальной фазой
Следует отметить, что этот результат можно получить непосредственно
из выражения (10.13) путем дифференцирования и использования аппрок-
симации для малых углов. Как можно видеть из этого уравнения, ам-
10.2. Принцип работы 283
плитуда сигнала (1ф зависит от значения sin^- Таким образом, по ме-
ре того как фа изменяется, к примеру, из-за теплового дрейфа, когда
фа = ттг (т. е. sin</>d = 0), сигнал исчезает, в то время как в случае когда
фа = (2т + 1)л/2 (т.е. sin^ = ±1), сигнал становится максимальным.
Это так называемая «проблема замирания» интерферометрических воло-
конных датчиков. Условие баланса фаз, когда фа = (2m + 1 )тг/2, известно
как квадратурная точка. Эта проблема проиллюстрирована рис. 10.3, а.
Выделение полезной информации из интерферометрического выходно-
го сигнала еще более усложняется, когда предположение с1ф 1 более
не выполняется, т. е. приходится принимать во внимание полный вид вы-
ходного сигнала (10.14). Для сигналов в случае с1ф > 0,1 происходит
значительное искажение выхода; пример этого приведен на рис. 10.3, б.
Решению подобных проблем восстановления сигнала посвящен следующий
раздел.
10.2.2. Демодуляция
Цель демодулятора заключается в преобразовании достаточно сложно-
го выходного сигнала (10.14) в электрический выход, пропорциональный
разностной оптической фазе сигнала ф8 smwt. Для достижения этой цели
разработано множество методов. В этом разделе рассматриваются два
класса методов: (1) метод активного гомодинного детектирования, при
котором требуется некоторая обратная связь для стабилизации интерфе-
рометра [7], и (2) метод пассивного гомодинного детектирования, при
котором оптические методы используются для создания выходных сиг-
налов, которые в сочетании позволяют исключить замирание сигнала [8].
В первом случае описывается полная схема, в то время как во втором
рассматривается только формирование выходных сигналов. Деталям мно-
жества методов обработки сигнала, включая «дифференцирование и пе-
рекрестное умножение», синтетический гетеродинный метод и другие
методы гетеродинирования, посвящена гл. 11.
10.2.2.1. Активное гомодинирование
На ранних этапах волоконной интерферометрии (около 1979 г.) экспери-
ментаторы ожидали такого сдвига фа, чтобы интерферометр находил-
ся в квадратуре перед сбором данных. Приблизительно в то же время
экспериментаторы начали вводить волоконные удлинители в ветви ин-
терферометра, чтобы обеспечить в интерферометре калиброванные сиг-
налы с переменной фазой. Фазовращатель обычно представляет собой
оптическое волокно, намотанное на цилиндрический пьезоэлектрический
преобразователь, который позволяет вводить в интерферометр управля-
емый напряжением фазовый сдвиг ф8. Нетерпеливые экспериментаторы
заметили, что при приложении соответствующего постоянного напряже-
(Г184 Глава 10. Волоконно-оптические датчики на основе интерферометров
ния к преобразователю в опорной ветви интерферометр можно привести
к квадратуре и удерживать ее там вручную до тех пор, пока фа медленно
смещается, что значительно ускоряет сбор данных.
Таким образом, выходной сигнал интерферометра, удерживаемого вруч-
ную в квадратуре так, что среднее значение Аф равно (2m + 1)тг/2 (т. е.
фа — Фс = (2m + 1)тг/2 и Аф = фа~ фс + дф = [(2m + 1)тг/2)] + дф), в прибли-
жении малых углов дф [уравнение (10.13)] определяется как di = —еЦадф.
Этот подход имеет нежелательную особенность, заключающуюся в том,
что когда d</>, становится достаточно большим, то и искажения, вносимые
дф становятся достаточно большими и превышают предполагаемые, так
что полная фаза интерферометра Д</> перестает быть равной (2m + 1 )тг/2.
Предполагается, что ручная обратная связь позволяет отслеживать толь-
ко медленно меняющуюся составляющую </></, но не осциллирующий сиг-
нал Д</>. Такой подход, который может быть реализован с помощью элек-
тронных схем, называется режимом малого усиления [7]. Он имеет еще
и второе нежелательное свойство: выходной сигнал прямо пропорциона-
лен величине loot, которая не идеальна, поскольку многочисленные фак-
торы могут изменить значения Iq и/или а. Преимуществом такого под-
хода является действительно очень хорошая частотная характеристика,
ограниченная только возможностями фотодетектора, т. е. примерно обла-
стью МГц.
Для усовершенствования этого подхода можно было бы гарантиро-
вать, что Д^> = тг/2 (для ясности мы рассматриваем фазу по модулю 2тг);
т. е. Д</> — фа + дф — фс = тг/2, где фс снова задается управляемым на-
пряжением фазовращателем. Выходной сигнал интерферометра теперь
определяется как
i = eloot cos (фа + дф — фс). (10.16)
В этом случае i равно нулю в точке квадратуры, и при небольших откло-
нениях от квадратуры определяется как
Д (Отг/2 = -^o«cos (фа + дф — фс). (10.17)
Поскольку при выполнении требуемого условия квадратуры получает-
ся нуль и при проходе через квадратуру происходит изменение знака, мы
получили идеальный с точки зрения теории линейного управления сигнал
рассогласования. Если соответствующее напряжение обратной связи, за-
висящее от г, подать на пьезоэлектрический элемент, управляющий фс, то
можно полностью устранить составляющую (фа + дф), сведя сигнал рас-
согласования к нулю. Необходимый сигнал обратной связи можно сфор-
мировать как интеграл от i, соответствующим образом усиленный в g раз:
dVfb = g Ji («') dt'. (10.18)
0
10.2. Принцип работы 285
Дифференциальное уравнение для контура обратной связи выглядит как
+ gheIoaVfb = gsloa (d>d + d</> - , (10.19)
где h — константа преобразования напряжения в угол фазы пьезоэлек-
трического фазовращателя [1]. Сочетание ghsl^a — это произведение
коэффициента усиления на ширину полосы пропускания контура обрат-
ной связи. Если изменения (фа + (1ф) соответствуют частотам, намного
меньшим, чем произведение коэффициента усиления на ширину полосы
пропускания, то условие квадратуры фс = hVfb = (фа+Лф — к/2). Посколь-
ку hV/b = фс — (фа + (1ф — тг/2), информация о сигнале (1ф присутствует
в напряжении обратной связи и является линейной, так что
Vfb = h~l (фа + аф-^). (10.20)
Следовательно, (1ф может быть отделено от Д<^> соответствующей филь-
трацией. Такой подход называется подходом с высоким коэффициентом
усиления.
Вместо использования dL для получения <рс можно применить более
элегантный метод, использующий третий член в выражении (10.2) -
составляющую dk [9]. Рассматривая оптическую фазовую задержку (в ра-
дианах) излучения, проходящего по волокну, с точки зрения оптической
частоты г/, получим
, 2ттЬу
Ф=--------, (10.21)
с
где с — скорость света. Изменяя частоту излучения на di/, можно из-
менить величину оптической фазовой задержки. Теперь, поскольку ин-
терферометр включает в себя как опорное, так и измерительное плечо,
разностный сдвиг фазы пропорционален оптической разности хода пДЬ
и определяется как
(10.22)
. t 27mALAv
&ф =---------
с
Преимуществом этого метода является то, что в интерферометре не ис-
пользуются электрически активные компоненты. Неприятность же за-
ключается в том, что накладываются ограничения на оптическую раз-
ность хода, и, как будет показано в разделе 10.2.3, это может повлиять на
шумовые характеристики датчика. Простейший путь реализации тако-
го подхода состоит в изменении тока возбуждения полупроводникового
лазерного диода, являющегося источником излучения. Многие устройс-
тва, работающие при длине волны 0,83 мкм, имеют значения отношения
du/di порядка нескольких гигагерц на миллиампер [10], что позволяет ис-
пользовать для ДЛ значения порядка нескольких сантиметров, так что
источник сохраняет единственную продольную моду [9]. Анализ таких
286 Глава 10. Волоконно-оптические датчики на основе интерферометров
систем аналогичен приведенному выше, за исключением того, что ток
коррекции, связанный с фс, подается на лазер в соответствии с механиз-
мом, описываемым уравнением (10.22). Ток обратной связи имеет вид
difb = Л,'-1 (фа + <1ф- ^) , (10.23)
где hf = (du/di)27mAL/с.
Понятно, что в обеих реализациях подхода с высоким коэффициентом
усиления выходной сигнал не пропорционален величине Iq&. Изменения
значения Iq& приводят только к изменениям произведения коэффициента
усиления на ширину полосы пропускания контура обратной связи. Таким
образом, преимуществом этого метода демодуляции является его относи-
тельная нечувствительность к изменениям в выходном сигнале лазера, за-
туханию в системе и изменениям контрастности полос в интерферометре.
Другой очень важной чертой является отсутствие необходимости вводить
предположение о малости углов; и, следовательно, выходной сигнал оста-
ется линейным даже при выходе dф за пределы ограничения 0,1 радиан,
накладываемые в режиме малого усиления. Поэтому подход с высоким
коэффициентом усиления обеспечивает намного больший динамический
диапазон (> 130 дБ). Динамический диапазон определяется свойствами
элемента обратной связи и электронной схемой. К тому же электронная
схема чрезвычайно проста, и это позволяет такому подходу находить
широкое применение в высокопроизводительных датчиках для лабора-
торных исследований. Оба подхода, и режим малого усиления, и режим
с высоким коэффициентом усиления, обеспечивают очень хорошие шу-
мовые характеристики; уровень собственных шумов электроники обычно
составляет примерно от 0,1 до 1 мкрад. Такие очень маленькие изменения
фазы соответствуют ~ 10-7 оптической длины волны (1 мкрад) и, сле-
довательно, эквивалентны изменению длины ДТ порядка ~ 10-7 м (при
условии, что А ~ 1 мкм). Общая схема такого подхода представлена на
рис. 10.4. Типичная шумовая характеристика волоконного интерфероме-
тра, использующего метод активной гомодинной демодуляции, приведена
на рис. 10.5 [11], как обычно при таком подходе, минимальный уровень
шума определяется шумом лазера, а не демодулятором.
Однако существуют две фундаментальные причины, по которым ак-
тивная гомодинная демодуляция обычно используется только в лаборато-
риях и не применяется на практике. Во-первых, ограниченный динами-
ческий диапазон элемента обратной связи требует восстановления цепи
обратной связи. Это обычно влечет за собой переключение напряжения
величиной +10 В, что, как правило, отрицательно сказывается на воз-
можности системы измерять сигналы в требуемом диапазоне микровольт
(соответствующем сдвигам фазы порядка мкрад). В реальных условиях
10.2. Принцип работы 287
сбросы могут происходить много раз в секунду, в то время как в лабо-
раториях они случаются всего несколько раз в день. Это «затруднение»
со сбросом в существенной степени ставит под сомнение способность
датчика осуществлять фазовое детектирование. Второе ограничение за-
ключается в том, что этот подход сложно реализовать там, где необходи-
мы системы с мультиплексированием, состоящие из массивов оптически
опрашивающих датчиков. Лазер может поддерживать только один интер-
ферометр, удовлетворяя требуемому условию (т. е. Д</> = л/2), что плохо
повлияет на эффективность других датчиков массива (см. гл. 11).
Рис. 10.4. Активная гомодинная демодуляция: а) режим малого усиления, сиг-
нал присутствует на приемниках; б) режим с высоким коэффициентом
усиления, сигнал как корректирующее напряжение прилагается к пье-
зоэлектрическому элементу
10.2.2.2. Пассивное гомодинирование
Разработано большое количество подходов к реализации пассивных (без
обратной связи в отдельном датчике) и чисто оптических (без электро-
ники в интерферометре) волоконно-оптических интерферометрических
датчиков, допускающих опрос. Методами, обеспечивающими кодирова-
ние измеренной информации в сигналах несущей, являются гомодиниро-
вание несущей с модуляцией по фазе (PGC) [12], синтетическое гетероди-
нирование несущей с модуляцией по фазе [13] и гетеродинирование раз-
ностной задержки [14]. При использовании этих подходов электроопти-
ческое устройство — или полупроводниковый диодный лазер, или ячейка
Глава 10. Волоконно-оптические датчики на основе интерферометров
Брэгга — создают модуляцию. При оптических методах пассивной демо-
дуляции используются схемы, основанные на оптическом смещении при
помощи разветвителей 3x3 [15], поляризационной избирательности [16]
и разностной интерферометрией с согласованными траекториями [17].
Последний метод, по сути, не является настоящим методом демодуляции,
но он позволяет выполнять пассивную демодуляцию в интерферометри-
ческих измерительных элементах с помощью компенсирующего интер-
ферометра, расположенного вблизи электронного источника/приемника
и выполняющего пассивную демодуляцию. Подробное описание несколь-
ких таких методов приведено в гл. 11. В этой главе мы опишем базовые
принципы, лежащие в основе одного из классов пассивной демодуляции,
а именно пассивного гомодинирования.
Рис. 10.5. Уровень шума волоконно-оптического акустического датчика с 30 м
измерительного и 30 м опорного волокна. Уровень шума обусловлен
главным образом сочетанием частоты лазерного диода и шумом ин-
тенсивности, а также внешним акустическим шумом в лаборатории
Базовый подход, используемый в методе пассивного гомодинирова-
ния, основан на формировании двух сигналов, оптическая фаза которых
сдвинута на 90° [8]. Вид таких сигналов (показанных на рис. 10.6) опре-
деляется выражениями
г = (1 + cos Д</>); (10.24а)
г" = (1 + sin Д</>). (10.246)
Следовательно, отклик на малый сдвиг фазы Д </> можно определить как
10.2. Принцип работы 289
di = d</> sin Д</>; (10.25а)
di" — е^а d<p cos ^.ф. (10.256)
Из этих выражений (и рис. 10.6) понятно, что, когда один выходной
сигнал полностью затухает, другой выходной сигнал достигает макси-
мального значения и что сигналы di и di" в выходном сигнале нико-
гда не стремятся к нулю одновременно. Существует множество способов
управлять этими выходными сигналами так, чтобы избежать затухания
полного выходного сигнала. При одном из первоначальных подходов [8]
предполагалось сложение абсолютных величин di и di" с последующим
нормированием этого выхода прибавлением полного выхода. Другой про-
стой подход [8] заключается в сложении квадратов di и di" и последующем
извлечении квадратного корня
Рис. 10.6. Пассивная демодуляция: два сигнала сгенерированы со сдвигом фазы
90°. Когда один выходной сигнал затухает, вклад другого в отклик
достигает максимального значения и наоборот
Следует отметить, что по самой сути этих подходов, в них предпо-
лагается, что Д</> < 1 и что хотя затухания сигнала не происходит,
при Д</> > 0,1 рад образуется разрыв. Это приводит к нелинейности
и искажению восстановленного сигнала. При альтернативном подходе ис-
пользуется дифференцирование и перекрестное умножение [12], что дает
результат
. di" ,п di d (Аф)
2>--- — 2 — —-----------------
dt dt 2 dt
(10.27)
который хотя и зависит от динамического диапазона обрабатывающей
10-3379
Глава 10. Волоконно-оптические датчики на основе интерферометров
электроники, но не зависит от величины Д</>. Обычно, чтобы получить
выход линейный относительно фазы сигнала, выходной сигнал интегри-
руют. Уровень шума, исходя из углового сдвига фазы и максимального
демодулированного фазового сигнала, до того как электроникой внесены
искажения, показан на рис. 10.7.
Рис. 10.7. Эффективность волоконно-оптического демодулятора. Верхняя кри-
вая соответствует максимальному уровню сдвига фазы, до того как
электроникой внесены искажения; нижняя кривая представляет уро-
вень шума демодулятора
Описаны два подхода к формированию таких квадратурных сигна-
лов. При использовании первого подхода, который называется методом
несущей с модуляцией по фазе [12], в интерферометре добавляется высо-
кочастотная (с частотой по крайней мере в 3-10 раз большей, чем макси-
мальная частота измеряемого сигнала) синусоидальная модуляция. Этого
можно достичь или применяя пьезоэлектрический удлинитель волокна,
или модулируя частоту диодного лазера и используя неуравновешенный
интерферометр. Следовательно, теперь выходной сигнал интерфероме-
тра имеет вид
i = eZo^cos Д</> = eloacos (</></ + ф3 sintutf -I- фс cos wct), (10.28)
где Д</>с — амплитуда фазовой несущей, а — частота. В это уравнение,
так же как в уравнение (10.14), можно подставить функции Бесселя. По-
сле такой подстановки (оставим получение соответствующих выражений
читателю) понятно, что, когда фа = 0, в выходном сигнале присутствуют
только произведения на четные числа, тогда как при фа = л/2 присут-
ствуют только произведения на нечетные числа. Далее, можно видеть,
10.2. Принцип работы
что составляющая <^ssincu£ оказывается боковой полосой по отношению
к несущей сис. Когда фа — 0, в выходном сигнале симметрично отно-
сительно составляющих, вносимых произведениями четных (нечетных)
чисел на сис, присутствуют составляющие, представляющие произведения
четных (нечетных) чисел на си. Когда фа = тг/2, вокруг составляющих,
вносимых произведениями нечетных (четных) чисел на сис, присутствуют
составляющие, представляющие произведения четных (нечетных) чисел
на си. Примеры представлены на рис. 10.8.
Рис. 10.8. Амплитуда различных частотных компонент при фс ~ 2,6: а) фа = 0;
б) фа = тг/2
Боковые полосы содержат информацию об измеряемом сигнале и при-
сутствуют около составляющих, вносимых произведениями или четных,
или нечетных чисел на шс. Сигнал получается после смешивания полного
выходного сигнала с сигналом, который содержит составляющие, пред-
ставляющие произведения сис на соответствующие числа, и фильтрации
верхних частот, устраняющие члены с частотами, большими, чем мак-
симальная частота измеряемого сигнала. Амплитуды компонент несущей
для 0, сис, 2шс и 3ljc после смешивания и фильтрации выглядят следующим
образом
0 : eloaJo (фс) cos (фа + ф3 sincjtf);
cjc : (фгс) D sin (фа + ф3 sin wt);
2cuc : elvaJi (фс) E cos (фа + ф3 sincu/);
3cuc : (Фс) ^sin (фа + ф3 sin си/),
(10.29)
где D, Е и F амплитуды смешивающих сигналов для cuc, 2сис и 3ljc. Оче-
видно, что, настраивая амплитуду фазовой несущей фс, можно уравнять
(при условии, что D = Е = F) любую пару компонент квадратуры (т. е. 0
и сис, и 2сис и т. д.). Именно такой вид выходного сигнала требуется для
пассивной гомодинной демодуляции.
Рис. 10.9. Пассивный гомодинный интерферометр, в котором волоконный раз-
ветвитель 3x3 используется в качестве выходного
волоконная катушка L
При другом подходе компоненты квадратуры формируются интер-
ферометром, в котором в качестве выходного используется разветви-
тель 3x3. Иллюстрирующая такой подход базовая схема представле-
на на рис. 10.9. Оптический входной сигнал с разветвителя 3x3, кото-
рый используется в качестве выходного, в общем, содержит компоненты
и sin Д<£, и cos Дф. Три выходных сигнала интерферометра выглядят сле-
дующим образом:
Ц = —2В2 (1 + cos Аф);
I2 = Bi + В2 cos Аф + В3 sin Д<^>;
Z3 = Bi + В2 cos Аф — В3 sin Д<^,
где Bi, В2 и В3 — константы, определяемые коэффициентами связи меж-
ду волокнами в области соединения.
Для получения двух выходных сигналов с требуемым относительным
сдвигом фазы тг/2, Ц и I2 обрабатываются так, чтобы найти их сумму
и разность
(10.30)
(10.31)
I2 /3 — 2В\ + 2Т?2 cos Дф'-,
I2 — 1з — 2Вз sin Дф.
После регулировки усиления и вычитания смещения эти сигналы при-
обретают необходимый вид. Хотя этот метод был продемонстрирован
в 1982 году, он не часто использовался, в то время разветвители 3x3 бы-
ли чувствительны к поляризации. Это означало, что значения Bi, В2 и В3
изменялись во времени при изменении состояния поляризации входного
сигнала, из-за чего характеристики устройства становились неприемле-
10.2. Принцип работы
мыми [18]. Однако в настоящее время разветвители 3x3, изготовленные
методом кристаллизации в пламени, демонстрируют нечувствительность
к поляризации и хорошую стабильность при изменении внешних условий,
так что описанный подход может быть реализован на практике [19]. Ре-
альная характеристика разветвителя 3x3 приведена на рис. 10.10.
поляризация Сканирование входного состояния поляризации
Рис. 10.10. Типичные изменения сдвигов фазы выходных сигналов разветвите-
ля 3 х 3 при сканировании состояния поляризации в одном из плеч
интерферометра
При использовании как активного, так и пассивного метода дина-
мические диапазоны составляют величину порядка 120 дБ. Однако при
этом рассматриваются также и методы подсчета полос, а динамический
диапазон в том, что касается оптического сдвига фазы, намного пре-
вышает 120 дБ. Если мы рассмотрим акустический датчик с волокном
длиной 30 м (соответствующее ф значение 170 дБ относительно рад),
нормализованной чувствительностью [(1ф/(ф(1Р}\ порядка —320 дБ отно-
сительно мкПа-1 и минимальный обнаружимый сдвиг фазы в датчике
равен 1 мкрад ( — 120 дБ относительно рад), то отклик датчика будет
линейным вплоть до нагрузки ~ 0,01% (т. е. 110 дБ относительно рад).
Следовательно, динамический диапазон характеристики датчика нагруз-
ка/фаза составляет 230 дБ. Минимальное и максимальное акустическое
давление соответствует 30 и 260 дБ относительно мкПа соответственно.
Глава 10. Волоконно-оптические датчики на основе интерферометров
Такой динамический диапазон часто требуется в таких приложениях, как
подводные акустические измерения, когда датчику приходится измерять
небольшие переменные сигналы давления в присутствии значительного
гидростатического давления.
10.2.3. Шум
В типичном одномодовом полностью волоконном интерферометре в ка-
честве чувствительных элементов используются только волокна. Обычно
наибольшие проблемы с шумом в таких системах обусловлены возмуще-
ниями волоконных ветвей, приводящими к нежелательным сдвигам фазы.
Типичные проблемы, возникающие во многих типах датчиков, связаны
с воздействием температуры. Вибрация создает проблемы в магнитоме-
трах и акустических датчиках [20]. Проблемы шума обычно решаются
с помощью соответствующей компоновки и установки датчиков. Как упо-
миналось в разделах 10.2.2 и 10.4, методы демодуляции и опроса могут
существенно уменьшить воздействие нежелательных возмущений. Однако
существует один фундаментальный источник шума, связанный с датчи-
ками, — тепловой шум [20]. Он обусловлен тепловыми флуктуациями,
воздействующими на преобразователь, что формирует фундаментальное
ограничение на фазовый шум датчика. Этот источник шума, редко со-
здающий трудности в практических ситуациях, описан в гл. 12.
Обычно шум, ограничивающий эффективность интерферометрических
датчиков, связан с электрооптикой, которая применяется для опроса дат-
чика. Можно считать, что в него вносят вклад три составляющие: (1) фун-
даментальное ограничение, обусловленное фотонным шумом; (2) избы-
точный шум, связанный с источником; (3) избыточный шум, связанный
с электроникой. На практике в системах датчиков обычно преобладает
шум, связанный с источником, хотя, конечно, это не всегда имеет место.
При разработке многих систем, особенно мультиплексированных систем
(см. гл. 11), обычно учитывают ограничения по фотонному шуму, хотя
после реализации может оказаться, что вклад составляющих (2) и (3) су-
щественней снижает эффективность.
Для упрощения нашего анализа шума мы выберем самый простой
пример интерферометрической демодуляции — активное гомодинирова-
ние. Первоначально рассмотрим один выход, определяемый выражением
(10.10а) (т. е. I = Zqq(A + B cos А0)). Как и ранее, если мы рассматриваем
выходной сигнал интерферометра, ограниченный квадратурой, отклик
интерферометра на малый сдвиг фазы дф определяется как
di = 1цаВаф. (10.32)
Кроме этой небольшой переменной составляющей выходного сигнала, бу-
10.2. Принцип работы 295
дет присутствовать еще и постоянная составляющая, соответствующая
ZqqA. Прежде всего, мы рассмотрим две составляющие шума, связанные
с измерением di. Очевидно, что для преобразования этой выходной ин-
тенсивности в ток требуется фотодетектор. Для простоты рассмотрения
предположим, что используется идеальный фотодетектор, ограниченный
только током дробового шума, обусловленным уровнем постоянного то-
ка на фотодетекторе, и тепловым шумом на нагрузочном резисторе цепи
фотодетектора.
Величину производимого фотодетектором тока можно определить как
еА
is = -rOh = (Ю.ЗЗ)
he
где г] — квантовая эффективность (количество электронно-дырочных пар,
производимых в результате поглощения одного фотона), е — заряд элек-
трона, h — постоянная Планка, с — скорость света и е определяет чув-
ствительность детектора. Таким образом, сигнал, обусловленный defa опре-
деляется формулой
di sig = eIo&Bd(f). (10.34)
Однако из-за статистической природы света этот сигнальный ток со-
провождается дробовым шумом, определяемым формулой
dishot = \/2edfIoaA, (10.35)
где df — ширина полосы. Заметим, что если предположить, что отноше-
ние разделения разветвителя равно 0,5, то А = В = 0,5. Выходной сигнал
детектора содержит к тому же составляющую темнового тока г^, которая
также вызывает составляющую дробового тока did, но мы предположим,
что она достаточно мала по сравнению с dishot* Следует заметить, что при
малых уровнях излучения это предположение может быть некорректным.
Следующий шаг состоит в вычислении напряжения, падающего на
нагрузочном резисторе R. Теперь можно определить, что сигнальное на-
пряжение равно
dVsig = eloaBRdc/) (10.36)
и напряжение, обусловленное дробовым шумом, определяется как
dVshot = \/2edfeI0aAR (10.37)
и тепловой шум нагрузочного резистора dVthermal равен
dVthermal = V^TdfR, (10.38)
где к — постоянная Больцмана и Т — абсолютная температура. Посколь-
ку два источника шума не коррелированны, то
(rfVnoise)2 = (2ed/e70aA) R2 + IkTdfR (10.39)
Глава 10. Волоконно-оптические датчики на основе интерферометров
и отношение сигнал/шум определяется формулой
S = е^ВМф _
N ^2edfeI0aAR2 + 4kTdfR
Анализ этого уравнения приводит к следующим выводам. Для систем
с ограничениями по дробовому шуму наилучшее отношение сигнал/шум
достигается, когда el^a увеличивается, так как S/N пропорционально
s/eloa, и когда А = В [заметим, что из формулы (10.10а) следует, что
А В], т.е. когда V = 1. Для систем, в которых преобладает соста-
вляющая, связанная с тепловым шумом, обусловленным сопротивлением
нагрузки, значение el^a снова следует максимизировать, так как S/N
пропорционально el^a. Сопротивление нагрузки также должно быть мак-
симальным, хотя при этом необходимо сохранить требуемое время откли-
ка детектора.
Далее мы рассмотрим источники шума, обусловленного оптическим
источником, используемым в интерферометре.
10.2.3.1. Шум интенсивности
Прежде всего, рассмотрим шум интенсивности, снова предполагая, что
выходной сигнал интерферометра определяется выражением (10.10а), но
рассматривая Zq как состоящее из (1 + dx], где dx представляет относи-
тельный шум интенсивности оптического источника, т.е. dx = dln/Iq,
где In — абсолютное значение шума интенсивности в полосе df при час-
тоте /. На рис. 10.11 показаны типичные изменения величины dln/Zq
в зависимости от частоты для GaAlAs полупроводникового лазерного
диода, работающего на длине волны 0,83 мкм, для измерений, нормали-
зованных к полосе шириной 1 Гц [22]. Теперь переменная составляющая
выхода интерферометра определяется выражением
di = I^aAdx + 1$О(ВМф = Iq& (Adx + Bd$). (10.41)
Следовательно, отношение сигнал/шум можно вычислить как Bdc^/Adx.
Для отношения сигнал/шум порядка 1 минимально обнаружимый сдвиг
фазы определяется как
<#min = ^dx = (10.42)
V 1Q
Как и ожидалось, низкая контрастность полос снижает пороговое обна-
ружение интерферометра, ограниченного шумом интенсивности [23]. Это
явление также отмечается в системах, ограниченных дробовым шумом.
Простой способ уменьшить эту шумовую составляющую заключается
в вычитании двух комплементарных выходов интерферометра [уравнения
(10.10а) и (10.106)], в результате чего получается
I -Г = IQa [(А - С) + 2В cos Лф\. (10.43)
10.2. Принцип работы
Рис. 10.11. Зависимость относительной интенсивности шума от частоты для
GaAlAs полупроводниковых лазерных диодов
Если к I' применить усиление G, такое что А — GC = 0, тогда выра-
жение (10.43) можно переписать как
I-GI' = IQa (В + GB) cos Лф (10.44)
и, следовательно, постоянная составляющая интенсивности, а значит, и со-
ставляющая шума интенсивности может быть исключена. На практике
можно уменьшить эту шумовую составляющую на 40 дБ при тщательном
уравновешивании системы. Другой метод уменьшения этой шумовой со-
ставляющей, который также подходит для пассивных видов демодуляции,
основан на отделении небольшой доли излучения, формировании сигна-
ла ошибки, пропорционального dlni и в случае лазерного диода подачи
на лазер такого тока коррекции, чтобы dln 0 [24]. Этот метод также
приводит к уменьшению шума примерно на 40 дБ. Существуют и дру-
гие методы снижения шума, пригодные для пассивных схем демодуляции.
Однако в любом из методов используется обработка комплементарных
выходов интерферометра в виде
AZ =(/-/')/(/+ /'). (10.45)
Глава 10. Волоконно-оптические датчики на основе интерферометров
10.2.3.2. Шум частоты
Как обсуждалось ранее, изменение частоты излучения du может исполь-
зоваться в интерферометре для изменения фазы Д0. Однако если оптиче-
скому источнику присуща нестабильность частоты di/n, выходной сигнал
интерферометра будет иметь вид
2im£±Ldvn
d(f>n =
с
(10.46)
Рис. 10.12. Изменения фазового шума интерферометра при изменении разности
оптических длин путей для полупроводниковых лазерных диодов
На основе полученного выражения можно сделать следующие выводы.
Шум на выходе интерферометра в действительности является выходным
фазовым шумом, неотличимым от сдвига фазы, вызванным измеряемой
величиной; таким образом, величина d(f)Tl не зависит от контрастности
полос (eloa) и метода демодуляции. Степень проявления эффекта про-
порциональна разности оптических путей пДЛ между двумя плечами ин-
терферометра и амплитуде нестабильности. Степень проявления эффекта
проиллюстрирована рис. 10.12, где фазовый шум d(/)n измерен в зависи-
мости от разности оптических длин путей при 2 кГц для нескольких
различных GaAlAs лазерных диодов [25]. Аналогичные характеристики
наблюдаются у лазеров, работающих на длинах волн 1,3 и 1,55 мкм. Следу-
ет отметить, что стабильность частоты выходов многих альтернативных
источников, таких как газовые лазеры или твердотельные лазеры, на-
10.2. Принцип работы
много превышает стабильность частоты полупроводниковых лазерных
диодов (т. е. у них dvn намного меньше). Но до сих пор они применяются
только на стадии лабораторных экспериментов.
Чтобы уменьшить шум, обусловленный нестабильностью частоты, пре-
жде всего, можно уменьшить nAL, что проиллюстрировано графиком на
рис. 10.13; можно достичь значений фазового шума, меньших 1 мкрад,
при разности путей ~ 1 мм. Хотя относительно просто сконструиро-
вать интерферометр, который имеет значения длин L\ и L} несколько
десятков метров, уравновешенные с точностью до 1 мм, однако внешние
возмущения (особенно изменения температуры) приведут к разбаланси-
ровке и увеличению АЛ [26]. Опять же, тщательный выбор материалов
покрытия волокон и сердечников, а также компоновка в целом могут по-
мочь уменьшить, но, как правило, не исключить полностью проявления
эффекта.
Рис. 10.13. Изменения минимального обнаружимого сдвига фазы в зависимости
от частоты для волоконного интерферометра с разностью оптических
длин пути < 0,01 мм с лазерным диодом в качестве источни-
ка. Значения при высокой частоте близки к ограничению системы
по дробовому шуму; при более низких частотах преобладает все же
остаточный шум лазера
Другой способ уменьшить (1фп заключается в уменьшении величины
нестабильности duni сохраняя при этом значение пАЛ в разумных пре-
делах. При одном из таких подходов активная обратная связь по току
используется для привязки частоты излучения лазерного диода к ста-
бильному опорному сигналу (стабильному в используемой полосе реги-
Глава 10. Волоконно-оптические датчики на основе интерферометров
страции). Первоначально, в качестве опорных использовались объемные
интерферометры Фабри-Перо [27], но в настоящее время успешно при-
меняются волоконные интерферометры с короткими волокнами в каждом
плече, позволяющие снизить dvn более чем на 40 дБ [28, 11]. Типичный
пример показан на рис. 10.14. При другом подходе, уже не требующем
обратной связи, производится вычитание выходного сигнала опорного
интерферометра с длиной оптического пути, равной nALf, из сигнала
контрольного интерферометра с длиной оптического пути равной n&L.
Чтобы гарантировать хорошую компенсацию, усиление, соответствую-
щее (ДЬ/ДЬ'), должно быть приложено к d$m. Методы автоматической
регулировки усиления могут быть реализованы при помощи внеполосных
возмущений.
Еще один способ улучшения стабильности частоты лазерного диода
заключается в использовании оптической обратной связи в лазерном ре-
зонаторе, так чтобы сузить ширину линии лазерного источника. Приборы
этого типа выпускаются серийно. Как бы там ни было, и эксперименты,
и теория показывают, что стабильность увеличивается на Ai//Ai/narr,
где Ai/ — ширина линии в режиме свободной генерации и Дупагг — су-
женная ширина линии.
Частота, Гц
Рис. 10.14. Типичное уменьшение фазового шума при помощи неуравновешенного
опорного интерферометра, обеспечивающего обратную связь с ла-
зерным диодом-источником: верхняя кривая — без обратной связи,
нижняя кривая — с обратной связью
В то время как управляемая оптическая обратная связь может улуч-
шить характеристики лазерного диода, неуправляемая (т. е. случайная
и с переменной фазой) обратная связь может воздействовать на выход
лазера разрушающе. Известно, что оптическая обратная связь приводит
10.2. Принцип работы 301
к уширению линии, генерации побочных мод и функционированию в мно-
гомодовом режиме; все это является причиной уменьшения длины ко-
герентности источника в режиме свободной генерации, обычно равной
нескольким метрам, на ~ 30, ~ 10 и ~ 0,1 см соответственно [29]. Опти-
ческая обратная связь может также запустить в действие механизм про-
дольных перескоков моды, что увеличивает шум как интенсивности, так
и фазы более чем на 50 дБ [30]. К несчастью, лазерные диоды очень вос-
приимчивы к обратной связи; даже настолько низкие уровни, как 10-5-
10-8, становятся причиной заметных эффектов. Возникают также про-
блемы оптической обратной связи, обусловленные обратным рэлеевским
рассеянием по всей длине оптического волокна [31]. Важно уменьшать
обратную связь, используя концевую заделку волокон (угловую или через
согласование показателей преломления), и высококачественные волокна
и компоненты или, когда это необходимо, изоляторы.
Прежде чем мы завершим изучение шума, интересно исследовать раз-
меры обсуждавшихся составляющих шума. В качестве примера исполь-
зуем акустический датчик, рассмотренный в предыдущем разделе. При
условии, что оптическая мощность на детекторе умеренная и составляет
100 мкВт и нагрузочное сопротивление равно 100 кОм (т. е. МГц-отклик
с трансимпедансным усилителем), в результате вычислений [из уравнения
(10.40)] получим минимальный обнаружимый сдвиг фазы порядка ~ 6 х
10-8 рад, с преобладанием составляющей дробового шума. Это соответ-
ствует минимальному обнаружимому акустическому давлению порядка
6 дБ относительно мкПа, что является достаточно впечатляющим показа-
телем. Однако намного более вероятно, что обнаружительная способность
датчика по фазе составит ~ 1 рад из-за шума частоты лазера или шума
интенсивности (т. е. порог акустического давления будет 30 дБ отно-
сительно мкПа). Следовательно, для получения эффективности такого
уровня необходим уровень мощности всего лишь ~ 1 мкВт.
10.2.4. Поляризация
При конструировании интерферометрических волоконных датчиков обыч-
но используются стандартные одномодовые оптические волокна с низким
двулучепреломлением и такие же волоконные компоненты. В результате
такие датчики, как правило, демонстрируют изменения контрастности
полос, обусловленные случайными флуктуациями состояния поляризации
интерферирующих пучков. Этот эффект известен с первых дней развития
волоконной интерферометрии, и, поскольку фактически V может дойти
до нуля, этот эффект называется поляризационным замиранием сигна-
ла [32].
Прежде всего, мы опишем несколько простых примеров, иллюстри-
рующих некоторые обусловленные поляризацией эффекты в волоконных
Глава 10. Волоконно-оптические датчики на основе интерферометров
интерферометрах. Допустим, излучение, испускаемое источником, линей-
но поляризовано (хорошее приближение для лазерных диодов выше по-
рога) и свойства компонент (например, разветвителей) интерферометра
не зависят от поляризации (хорошее приближение для современных ком-
понент). Для простоты мы также предположим, что опорное волокно
оптически изотропно по всей его длине. Это не очень реалистичное пред-
положение, но оно позволит нам простым способом описать эффекты,
присутствующие и при анизотропном опорном волокне. Пусть физическая
длина опорного волокна равна L и показатель преломления равен п. Пред-
положим, что чувствительное волокно также имеет длину L, но у этого
волокна есть быстрая и медленная оси (т. е. различные показатели прелом-
ления) из-за таких эффектов, как, например, изгиб [33]. В этом примере
показатель преломления медленной оси равен п и показатель преломления
быстрой оси равен п' (заметим: п > п'). Теперь из уравнения (10.1) мы
можем вычислить оптическую фазовую задержку излучения, проходяще-
го по опорному плечу фг = nkL, медленной оси чувствительного плеча
ф$з — nkL и быстрой оси чувствительного плеча фрр — n'kL. В этом
примере предположим, что ф$з ~ Фрр — я радиан; т.е. чувствительное
плечо действует как А/2 фазовая пластинка, которая имеет свойство по-
ворачивать плоскость поляризации излучения, пересекающего пластинку,
на 5 градусов, когда угол между входным состоянием и осью пластинки
(волокна) равен 5/2.
Если мы запустим в волокно излучение, выровненное по быстрой или
медленной оси волокна (чувствительного), мы получим контрастность
полос 1,0 (если пренебречь прочими эффектами), поскольку состояние
поляризации излучений, выходящих из чувствительного и опорного плеч,
выровнены. Однако если излучение запущено под углом 45° к осям, выхо-
дящее из чувствительного плеча излучение будет повернуто на 90° по от-
ношению к плоскости поляризации излучения из опорного плеча. Посколь-
ку теперь пучки имеют ортогональную поляризацию, когерентного сме-
шивания не происходит и контрастность полос равна нулю. Однако если
входная поляризация сохраняется постоянной, но варьируется п! (напри-
мер, при изгибе чувствительного волокна), можно изменить п' так, чтобы
Фзз ~ Фрр — тп(2тг), где т — целое; теперь V снова равно единице.
Таким образом, понятно, что поляризационное замирание может про-
исходить из-за изменений двулучепреломления (Дп = п — п') в плечах
интерферометра, а также из-за изменений состояния поляризации излу-
чения, входящего в интерферометр.
Следует отметить еще один интересный факт. В первом случае (т. е.
Фзз — Фзр = я*), когда состояние поляризации входного излучения было
выровнено по медленной оси чувствительного плеча, сдвиг фазы интерфе-
10.2. Принцип работы 303
рометра (Д</>) был равен нулю; т. е. фг — ф$з — nkLr — nkLs = 0 (заметим:
Lr — Ls = L). Однако когда состояние поляризации входного излуче-
ния выровнено по быстрой оси, сдвиг фазы равен тг; т.е. фг — ф$г =
— nkLr — nfkLs = (n — n')kL = тг. Следовательно, при изменении состояния
поляризации излучения, входящего в интерферометр, может измениться
статический сдвиг фазы в интерферометре. Также следует отметить, что
если фзз — Фзе = т(2тг), никаких изменений статической фазы в интер-
ферометре не наблюдается.
Рис. 10.15. а) Представление поляризованного излучения на сфере Пуанкаре;
б) волоконный интерферометр Маха-Цендера и представление на
сфере Пуанкаре состояния поляризации входного излучения, вход-
ного излучения на первом разветвителе, выходного излучения из
сигнального и опорного плеч в точке воссоединения излучений на вто-
ром разветвителе и конечного выходного излучения из сигнального
и опорного плеч
Теперь мы можем перейти к более обобщенному описанию этих эффек-
тов. Как указано выше, замирание, вызванное поляризацией, происходит
в интерферометрии из-за двух источников блуждания поляризации: изме-
нений в самих плечах интерферометра и изменений во входном волокне
(т. е. изменений поляризации входного излучения) датчика. Более общий
случай поляризационных эффектов в двулучевом интерферометре проще
понять, если использовать сферу Пуанкаре для представления состояния
поляризации излучения в волокне, как показано на рис. 10.15, а [34]. Точ-
ки Н и V представляют горизонтальное и вертикальное состояния в про-
извольно зафиксированной опорной системе, точки L и R — состояния
Глава 10. Волоконно-оптические датчики на основе интерферометров
правой и левой круговой поляризации, а оставшаяся область представляет
все эллиптические состояния поляризации. На рис. 10.15, б схематиче-
ски представлен интерферометр Маха-Цендера и сфера Пуанкаре, на
которой представлены состояние поляризации излучения во входном во-
локне Ci и состояния поляризации в чувствительном (<7S) и опорном (<7Г)
плечах интерферометра в точке воссоединения излучений у выходного
разветвителя. Если теперь преобразовать уравнение (10.5) с учетом воз-
действия поляризации, то выходной сигнал получится в виде
I = /о [arkik2+a (1 - fci) (1 - fc2) +
+ 2cos T]\J a sark\k2 (1 — к\) (1 — fc2) cos (фг — ф8 + 7)j, (10.47)
где г) — угол с вершиной в центре сферы, стягивающий дугу между точ-
ками, соответствующими двум состояниям поляризации, Cs и Сг, и 7 —
составляющая сдвига фазы, которая зависит от входной поляризации [35].
Теперь контрастность полос на выходе определяется как
у — ^max ~~ Anin _ "2 COST)y/oisOirkik2 (1 — fcj) (1 — fc2) Q
^max “b Anin Olrk\k2 + Ois (1 — ) (1 — k2)
Это выражение можно упростить следующим образом:
V = Vo cost], (10.49)
где
vo = (10.50)
otrkik2 + Ois (1 - ki) (1 - k2)
— оптимальная контрастность интерферометрической системы с учетом
поляризационных эффектов (т. е. идеального соответствия поляризации
излучений в чувствительном и в опорном плечах). Таким образом, мы
можем определить нормированную контрастность V как
V = = cost]. (10.51)
И)
Это выражение определяет зависимость контрастности исключительно
от относительного состояния поляризации излучения на выходе сигналь-
ного и опорного волокон.
Угол 2т] определяет соотношение поляризаций излучений в сигнальном
и опорном плечах и зависит от координат С8 и Сг на сфере Пуанкаре, ко-
торые в свою очередь зависят от изменений поляризации, происходящих
в сигнальном и опорном плечах, и входного состояния поляризации Ci
на первом разветвителе. В результате контрастность зависит как от С$,
которое в свою очередь зависит от двулучепреломления в подводящем
входном волокне, так и от изменений состояний поляризации излучения,
происходящих в сигнальном и опорном плечах самого интерферометра,
10.2. Принцип работы 305
вызванных двулучепреломлением в этих волоконных плечах. Изменение
поляризации монохроматического светового луча, происходящее вдоль
всей длины волокна, может быть описано в общем виде через эллипти-
ческую фазовую пластинку, что обозначается здесь как оператор R?
от величины поворота (задержки фазы) Qj [обозначается как Rj(Qj)] на
сфере Пуанкаре.
st)
б)
Рис. 10.16. а) эквивалентная схема дву лучепреломления Маха - Цен дера; б) мо-
дифицированная схема двулучепреломления, используемая для моде-
лирования интерферометра
На рис. 10.16, а показана схема двулучепреломления, используемая в мо-
дели интерферометрической системы; она включает в себя четыре эл-
липтические фазовые пластинки, которые описывают результирующие
эффекты двулучепреломляющих элементов во входном и выходном во-
локнах, а также в сигнальном и опорном плечах интерферометра. Ре-
зультирующее изменение входного состояния в сигнальном и опорном
плечах, таким образом, описывается соответственно операторами RS(QS)
и Rr(Qr), имеющими вид матриц Мюллера размером 4x4, действующих
на векторы Стокса, описывающие С{. В общем случае эти операторы
не равны (т. е. Rs Rr) и состояние поляризации С{ преобразуется
в различные выходные состояния поляризации Сг и Cs. Однако важно
отметить, что входное состояние, совпадающее с собственными модами
Rs или Rr, останется неизменным при результирующих преобразованиях
Ci в Cs или Ci в Сг, соответственно. На рис. 10.16, б представлена вторая
эквивалентная схема двулучепреломления, которая может быть исполь-
зована для моделирования интерферометрической системы. Здесь выход
интерферометра в точке воссоединения излучения из сигнального и опор-
ного плеч представлен в системе координат, повернутой оператором R71;
в этой системе сигнальное плечо оказывается изотропным (результирую-
Глава 10. Волоконно-оптические датчики на основе интерферометров
R
Рис. 10.17. Разностный собственный
вектор Rr-s и величина поворота Qr_5,
которые могут быть использованы для
полного описания поляризационных
свойств двухлучевого интерферометра
щее действие Rs 1 • Rs = 1), в то время как оператор опорного плеча ста-
новится Rr_s(Qr_s) — (Rs 1 • R^). Этот оператор, в сущности, описывает
разностное двулучепреломление между волоконными плечами и является
однозначно определяемым параметром интерферометрической системы,
который можно использовать для аналитического выражения контраст-
ности на выходе интерферометра через входное состояние поляризации.
Входное состояние на первом разветвителе, совпадающее с собственной
модой Rr-s, в конечном счете, не претерпит изменений при прохождении
излучения по опорному плечу, и выходные состояния поляризации излуче-
ния из сигнального и опорного плеч должны быть идентичны (т. е. 2г) — О,
и V = 1). Для общего входного состояния поляризации на первом развет-
вителе можно показать, что нормированная контрастность определяется как
V = cost) = ^/1 - sin20sin2 (Qr_s/2), (10.52)
где 0 — угол, стягивающий дугу
Ci — Rr-s окружности большого кру-
га на сфере Пуанкаре, как показано на
рис. 10.17. Это уравнение показывает,
что если |Qr_s| < % (по модулю 2%),
то V > 0 для всех возможных входных
состояний поляризации и нормирован-
ная контрастность меняется в пределах
между Vmax = 1 и Nmin = cos(Qr_s/2),
достигаемых при 0 = 0 или тг и 0 = тг/2
соответственно. Следовательно, суще-
ствуют два ортогональных состояния
поляризации (диаметрально противо-
положные состояния на сфере Пуан-
каре), в которых может быть достиг-
нута контрастность, равная Vq. Эти
состояния совпадают с векторами соб-
ственной моды Rr-s- С другой сторо-
ны, существует целый большой круг
в плоскости, перпендикулярной к оси
Rr_s, для которого 0 = тг/2 и, сле-
довательно, для входных состояний поляризации которого V = Vmjn.
Изменения выходной контрастности зависят от величины 0, в свою оче-
редь зависящего от точного положения как С?, так и Rr_s на сфере
Пуанкаре и от величины Rr-S (т.е. Qr_s).
Существует множество подходов к решению проблемы влияния по-
ляризации на волоконные интерферометры. В том числе (1) примене-
10.3. Схемы волоконных интерферометров
ние во всей системе датчиков только сохраняющих поляризацию волокон
(см. гл. 13); (2) активное управление входным состоянием поляризации
на входе интерферометра Сг, так чтобы оно соответствовало Rr-S, таким
образом обеспечивая оптимальную контрастность полос [37]; (3) примене-
ние методов разнесения поляризации, при которых на выходе выбирают-
ся точно определенные состояния поляризации, что позволяет избежать
замирания [38, 39]; и (4) применение методов переключения или скани-
рования входного состояния поляризации, позволяющих минимизировать
эффекты, вызванные поляризацией [40].
10.3. Схемы волоконных интерферометров
Хотя в большинстве волоконных интерференционных датчиков реализо-
вана схема Маха - Цендера, другие схемы часто имеют реальные преиму-
щества по сравнению с этой схемой. Прежде чем обсуждать эти схемы,
стоит немного более глубоко проанализировать фактические возможно-
сти схемы Маха - Цендера. В общем описании интерферометра Маха-
Цендера (см. раздел 10.2.1) говорится, что он включает в себя измери-
тельное (чувствительное) плечо и опорное плечо; измеряемый оптический
сдвиг фазы создается в чувствительном плече; опорное плечо служит
только в качестве опорной оптической траектории. Это самая простая
концептуально схема интерферометра, что и объясняет, почему ее обычно
выбирают в качестве примера. Эта схема используется во многих экспе-
риментальных датчиках, и при некоторых подходах, таких как разност-
ная интерферометрия с согласованными траекториями, является един-
ственной практически реализуемой. Следует отметить, что в конфигура-
ции для разностной интерферометрии с согласованными траекториями
измерительный интерферометр расположен непосредственно в датчике
и опорный (или компенсирующий) интерферометр расположен в моду-
ле источника. Плечо, эквивалентное опорному (т. е. более длинное плечо
в опорном интерферометре), часто наматывают на фазовращатель и ис-
пользуют при демодуляции.
Можно предположить, что опорное плечо в интерферометре Маха-
Цендера, длина которого, как правило, близка к длине плеча датчика,
из-за технических характеристик источника (см. раздел 10.2.3) не очень
эффективно используется. Однако если подобрано соответствующее по-
крытие или материал сердечника, опорная катушка может уменьшить
сдвиги фазы, вызванные температурой, поскольку оба плеча будут иметь
аналогичные тепловые характеристики. Мы можем определить отклик
чувствительного волокна на измеряемую датчиком величину X как Ss
(= (ty/dX) и соответствующий отклик опорного волокна как Sr. Теперь
Глава 10. Волоконно-оптические датчики на основе интерферометров
введем нормированный параметр чувствительности 7?, равный дф/фдХ,
где с1ф — оптически вызванный сдвиг фазы, зависимый от dX и нормиро-
ванный к общей задержке по фазе в оптическом волокне ф. Это полезный
параметр, поскольку позволяет быстро обнаружить напряжение, вызван-
ное в оптическом волокне. Это важно для тех приложений, в которых
присутствуют как большие статические напряжения, так и небольшие
переменные напряжения (например, гидрофон; см. раздел 10.4). Однако
что касается чувствительности интерферометра на общую длину волок-
на в датчике Riot, для уравновешенного интерферометра Маха - Цендера
значение Rtot составляет R/2.
В двух схемах интерферометра Маха-Цендера волокно использует-
ся несколько более эффективно. Это градиентометр [41] и двухтактная
(push-pull) схема [42]. В градиентометре опорное волокно делается иден-
тичным чувствительному волокну и, следовательно, обеспечивает такой
же отклик. В однородном поле выходной сигнал датчика не формирует-
ся; однако если поле, которое должно быть измерено, изменяется в про-
странстве, разделяющем две катушки датчика, формируется сдвиг фазы,
пропорциональный градиенту. Это элегантное применение двухлучевого
интерферометра, поскольку сигналы катушек вычитаются оптическим,
а не электронным способом. Для измерения истинного градиента поля
важно, чтобы отклик Ss чрезвычайно точно соответствовал Sr- Типичные
приложения — это измерения градиента магнитного поля и акустиче-
ские датчики. В случае двухтактного интерферометра конструируется
такой датчик, чтобы если нормированный параметр чувствительности
измерительного плеча равен /?, то для опорного плеча он равен -R. Это
приводит к удвоению оптического сдвига фазы. Во многих случаях на
практике сложно получить отклик —Л, хотя акселерометр и акустический
датчик — хорошие примеры датчиков, в которых это возможно. Значение
Rtot при обоих технических решениях равно R. Соответствующие схемы
представлены на рис. 10.18.
Интерферометр Майкельсона, схема которого приведена на рис. 10.19,
это другая волоконная реализация классической схемы интерферометра.
В этом случае используется единственный светоделитель, который и раз-
деляет, и воссоединяет излучение. Излучение, приходящее от источника,
разделяется между измерительным и опорным плечами интерферометра.
Пройдя по всей длине плеч, излучение отражается рефлектором и прохо-
дит обратно через те же самые плечи, как показано на схеме. После этого
излучение воссоединяется на первом светоделителе. Так же как в слу-
чае интерферометра Маха-Цендера существует два комплементарных
выхода, один из которых соединен с четвертым выходом разветвителя,
а второй вводится обратно во входное волокно по направлению к источ-
нику [43].
10.3. Схемы волоконных интерферометров 309
Рис. 10.18. Различные конфигу-
рации волоконного интерфероме-
тра Маха-Цендера: а) стандарт-
ная; б) двухтактная; в) двухтакт-
ная (пространственно дифферен-
цированная)
а) Опорное
Лазер А
Линза
в) + чувствительное
Путь
прохождения
сигнала
Светоделитель
Зеркало
Путь прохождения
опорного сигнала
Зеркало
Зеркало
Рис. 10.19. Объемный и волоконный варианты интерферометра Майкельсона
Прежде всего, рассмотрим сходные черты между схемами интерфе-
рометров Майкельсона и Маха - Цендера. В зависимости от точки зре-
ния, интерферометр Майкельсона часто рассматривают как «сложенный»
интерферометр Маха-Цендера и наоборот. Поэтому понятно, что в от-
ношении оптических потерь, ресурс обеих схем аналогичен. Выходные
Глава 10. Волоконно-оптические датчики на основе интерферометров
сигналы, естественно, имеют такой же вид, как и у интерферометра Ма-
ха - Цендера.
Имеются следующие различия. Для схемы Майкельсона требуется толь-
ко один волоконно-оптический разветвитель. Благодаря тому факту, что
излучение проходит и через измерительное, и через опорное волокна два-
жды, оптический сдвиг фазы на единицу длины волокна удваивается.
Таким образом, по своей сути, интерферометр Майкельсона имеет значе-
ние Riot, равное Я, и при двухтактной схеме Rtot становится равным 2R.
С практической точки зрения физическая конфигурация интерферометра
Майкельсона, иногда в чем-то проще для компоновки, хотя, очевидно,
это зависит от приложения. Другое очевидное преимущество заключа-
ется в том, что датчик может опрашиваться с помощью только одного
волокна, соединяющего модуль источник/приемник с датчиком. Следует
заметить, что понадобится дополнительный разветвитель, чтобы полу-
чить доступ к излучению, требующий 12 дБ ослабления сигнала.
Если говорить о недостатках схем, в настоящее время на рынке отсут-
ствуют зеркала, размещаемые на концах волокон, в то время как развет-
вители, необходимые для обоих интерферометров, как Маха - Цендера,
так и Майкельсона выпускаются серийно. Однако интерферометр Май-
кельсона с низким коэффициентом полезного действия может быть легко
сконструирован, если использовать ~ 4% френелевское отражение на гра-
нице раздела волокно - воздух, просто расколов концы измерительного
и опорного волокон. Тем не менее такое ~ 30 дБ ослабление мощности
сигнала (и соответствующее усиление шума) компенсируется 6 дБ чув-
ствительностью к усилению из-за двойного прохода излучения по волокну.
Еще один недостаток связан с высоким уровнем излучения, создающего
обратную связь с оптическим источником вследствие наличия комплемен-
тарного выхода. Это чрезвычайно осложняет работу полупроводниковых
лазерных диодов-источников (см. раздел 10.2.3) и требует надежной опти-
ческой изоляции (> 50 дБ).
Дальнейшее увеличение значения Rtot может быть получено только
переходом к многолучевой интерферометрии. Существует два образца
таких устройств — кольцевой резонатор [44] и интерферометр Фабри-
Перо [45]. Интересно проанализировать выигрыш, получаемый от пере-
хода к таким многолучевым интерферометрам. В качестве примера мы
рассмотрим схему Фабри - Перо; схема волоконного интерферометра Фа-
бри-Перо приведена на рис. 10.20. В интерферометре такого типа, благо-
даря высокому коэффициенту отражения зеркал, свет отражается в резо-
наторе туда и обратно, многократно увеличивая, таким образом, фазовую
задержку. Колебания передаваемой в выходном сигнале мощности в зави-
симости от сдвига фазы определяются в интерферометре Фабри-Перо
10.3. Схемы волоконных интерферометров 3
как
А2Г2______________1___________
(1 - Я)2 1 + [47?/ (1 - Я)2] sin2 ф
(10.53)
Рис. 10.20. Объемный и во-
локонный варианты интер-
ферометра Фабри-Перо
Лазер А
Линза
Путь прохождения
Зеркало Зеркало Приемник
где Т и R — коэффициенты пропускания и отражения зеркал, А — ам-
плитуда входного сигнала и ф — полный сдвиг фазы за один проход
по резонатору (т.е. knL). Вид такого выходного сигнала представлен на
графике на рис. 10.21. Понятно, что максимум чувствительности к малым
изменениям ф приходится на обе стороны пика Zmax, который при усло-
вии отсутствия потерь на поглощение или рассеяние равен 1$. Используя
такие предположения, выражение для 1(ф) можно переписать как
= = (10'54>
где F = 47?/(1 — 7?)2 называется коэффициентом добротности. В правой
стороне уравнения предполагаются также только небольшие отклонения
по ф от /0 (т.е. ф = зтф). Наклон функции интенсивности можно полу-
чить в результате дифференцирования
с1Цф) _ 21^ф
d-Ф ~ (\ + F<p)2‘
(10.55)
Максимум достигается при d2/(</>)/d</>2 = 0, что соответствует ф = ±l/\/3F.
Это значение можно подставить в уравнение (10.55), получится
/ max
2I0^F
а/З (4/3)2
(10.56)
Это выражение можно переписать через добротность резонатора Ffin
'-оптические датчики на основе интерферометров
( = 7Г v^/2), что дает
di
d<f>
max
______ Л JI Q 77 T
4тг^3 -°’413/W°'
(10.57)
Известно, что для интерферометра Маха - Цендера (dl/d(f>)max — ЫЪ
т.е. преимущество в чувствительности интерферометра Фабри-Перо по
сравнению с интерферометром Маха-Цендера в том, что касается фазо-
вого детектирования, определяется примерно добротностью резонатора
для систем, ограниченных шумом интенсивности и дробовым шумом.
Продемонстрирован волоконный интерферометр Фабри - Перо с резона-
тором, добротность которого превысила 100 [46].
Рис. 10.21. Передаточная функция интерферометра Фабри-Перо. Добротность —
это обратное отношение полной ширины линии на половине максиму-
ма высоты к расстоянию между максимумами
Существуют два серьезных препятствия для использования такого
подхода в датчиках на практике: (1) чувствительность к длине коге-
рентности источника и дрожанию частоты и (2) сложная форма пере-
даточной функции. Для интерферометра Фабри - Перо можно показать,
что передаточная функция проходит полный цикл при изменениях дли-
ны резонатора на А/2. Этого можно добиться изменением входной час-
тоты, так чтобы полный цикл происходил при изменении частоты на
di/ = c/nkL\ эту величину называют областью дисперсии интерфероме-
тра. Таким образом, зная добротность (см. рис. 10.21), можно вычислить,
насколько узкой должна быть линия излучения лазера, чтобы интерфе-
10.3. Схемы волоконных интерферометров 313
рометр Фабри-Перо функционировал без снижения чувствительности.
Предположим, что L = 30 м и Ffin = 50; следовательно, dv/Ffin « 70 кГц.
Большинство полупроводниковых лазерных диодов имеет ширину линии
порядка нескольких десятков МГц; таким образом, требуется источник
с намного большей длиной когерентности. Интересно посмотреть, какая
величина L могла бы использоваться, если бы источник имел ширину ли-
нии, например, равную 20 МГц (также при FflTl = 50); ответ — только
10 см (отметим, что даже такое сочетание снизило бы чувствительность
датчика). Следовательно, принимая во внимание увеличение чувствитель-
ности интерферометра Фабри-Перо (в ~ Ffin), датчик мог бы иметь
эквивалентную длину волокна (по сравнению с интерферометром Маха -
Цендера) только менее 5 м, что принципиально меньше длин от 20 до
100 м, используемых в современных датчиках с высокими эксплуатаци-
онными характеристиками на основе интерферометра Маха - Цендера.
Следовательно, при современных полупроводниковых лазерных диодах
использование схемы Фабри - Перо приведет к существенному ухудшению
характеристик датчиков. Еще более показательны аналогичные вычи-
сления, принимая во внимание дрожание частоты лазера. Для лазерных
диодов типичное значение 20 кГц/л/Г'^ при 1 кГц. Для сопоставимости
с высокоэффективными интерферометрами Маха - Цендера с порогом об-
наружения фазы 3 мкрад (что легко достижимо при полупроводниковых
лазерных диодах в качестве источников) в интерферометре Фабри - Пе-
ро пришлось бы использовать длину 0,1 мм, что соответствует эквива-
лентной длине волокна 5 мм. Таким образом, схема Фабри-Перо факти-
чески несовместима с лазерными диодами, если необходимо проводить
измерения с высокой степенью чувствительности; однако относительно
чувствительные интерферометры можно изготовить при короткой длине
волокна.
Другая проблема, связанная с интерферометрами Фабри-Перо, воз-
никает из-за формы или скорее из-за сложности, передаточной функции.
Хотя одиночные датчики могли бы работать при использовании актив-
ного гомодинирования (в режиме с большим усилением, чтобы компен-
сировать чрезвычайно маленький динамический диапазон передаточной
функции), привязывающего интерферометр к области (di/d^>)max, не раз-
работано ни одного пассивного метода для этой сложной передаточной
функции. Следует заметить, что для большинства значений статическо-
го сдвига фазы, чувствительность интерферометра Фабри - Перо равна
нулю. Анализ схемы кольцевого резонатора аналогичен анализу схемы
Фабри - Перо за исключением того, что обычный выходной сигнал имеет
передаточную функцию, похожую на зеркальное отражение передаточной
функции Фабри - Перо.
Глава 10. Волоконно-оптические датчики на основе интерферометров
Однако интересный результат получается, если рассмотреть волокон-
ный интерферометр Фабри-Перо с низкой добротностью — если, напри-
мер, в качестве зеркала используется граница раздела волокно - воздух
(т.е. R ~ 4%) [47]. Амплитуда полос на выходе мала, и контрастность
низка, но выходной сигнал приближается к передаточной функции двулу-
чевого интерферометра (из-за слишком слабых отражений более высоких
порядков). Хотя шумовая характеристика, связанная с дробовым шумом,
неудовлетворительна из-за низкой контрастности полос, однако в этом
случае можно использовать традиционные методы демодуляции. Дальней-
шее совершенствование может заключаться в использовании отраженного
выходного сигнала, который определяется как 1 — /(</>). При этом ампли-
туда полос на выходе остается низкой (как и в случае прямой передачи),
но контрастность полос повышается (т.е. улучшается шумовая харак-
теристика дробового шума). Анализ таких систем аналогичен анализу
двулучевых интерферометров, при котором обычно члены высоких по-
рядков не принимаются во внимание. Эта схема, хотя и не имеющая
таких преимуществ по чувствительности, как у многолучевых интер-
ферометров, тем не менее представляет собой простую схему датчика
с волокном в качестве чувствительного элемента, для которой не требу-
ются волоконные разветвители и в которой не возникают сложности, как
при многолучевой интерферометрии, описанной выше.
10.4. Приложения
Большинство волоконных интерферометрических датчиков основано на
двух основных механизмах формирования (1ф: непосредственной или кос-
венной передаче напряжения чувствительному волокну и тепловых эф-
фектах. Вначале рассмотрим отклик волокна на некоторое возмущение,
такое, что согласно (10.1)
(1ф — kd (nL) = k (ndL + Ldn) = kL
dL\ 1
n— ) + dn ,
L /
(10.58)
где ndL соответствует физическому изменению длины и Ldn — измене-
нию показателя преломления. В зависимости от механизма отклика может
преобладать составляющая ndL или Ldn. Величина dL/L — это дефор-
мация волокна. Можно показать, что фазовый отклик волокна на осевое
напряжение определяется как
dф = k^ndL, (10.59)
где £ — поправочный оптический коэффициент деформации, который
определяется как 1 — n2[(l — /i)pi2 — АФп]/2, здесь /1 — коэффициент
Пуассона и pij — элементы оптического тензора деформации (линейные
10.4- Приложения 315
электрооптические коэффициенты) волокна [2]. Обычно для волокон из
кварцевого стекла величина £ составляет ~ 0,78. Таким образом, измене-
ние длины волокна играет главную роль при измерении деформации.
Если теперь рассмотреть чувствительность волокна к температуре,
то из уравнения (10.58),
d<b , / dL dn\ , r /ndl dn\
= k\ n— + L— = kL - — + — . 10.60)
dT \ dT dTJ \LdT dT) v 7
Для типичного кварцевого волокна dL/(LdT) = 5х 10-7 К-1 и dn/dT =
= 10-5 К-1, поэтому понятно, что преобладает составляющая показа-
теля преломления ~ 100 радм-1К-1) [48]. Однако если рассмотреть
случай кварцевого волокна в оболочке из нейлона диаметром 1 мм, для
этой композитной структуры dL/(LdT) ~ 6,5 х 10-7 К-1 так, что теперь
в оптическом сдвиге фазы преобладает вызванное температурой измене-
ние длины.
10.4.1. Динамические приложения
Используя составляющую напряжения в уравнении (10.58), схемы воло-
конных интерферометров можно применять для регистрации множества
различных динамических параметров, таких как акустические [49], маг-
нитные [50] и электрические [51] поля, ускорение [42] и ток [52]. Темпе-
ратура [53] и ток [52] также могут быть измерены при помощи темпера-
турной составляющей в уравнении (10.58). Невозможно охватить в этой
главе специфику каждого из этих и других типов волоконных интерфе-
рометрических датчиков. Но следует обратить внимание на такие два
к настоящему времени наиболее важные приложения, использующие эту
технологию, как акустические и магнитные датчики. Полное описание
магнитострикционного волоконного датчика приведено в гл. 12, следова-
тельно, здесь мы кратко обсудим только акустический датчик.
Если рассмотреть акустическую волну, взаимодействующую с пря-
мым оптическим волокном, представляют интерес три определенных ча-
стотных режима работы. Первый, когда длина акустической волны на-
много больше длины волокна называется гидростатическим случаем. По
мере приближения длины пространственной волны акустического поля
к длине волокна, наблюдается резонанс длин, после чего волокно больше
не может динамично реагировать на осевые нагрузки. Таким образом,
реакция волокна в осевом направлении становится ограниченной, и, сле-
довательно, отклик определяется только радиальной составляющей на-
грузки, создаваемой акустическим полем. При дальнейшем возрастании
частоты пространственная длина волны, соответствующая напряжению,
приближается к радиусу волокна и вызванное радиальной деформацией
поле становится анизотропным.
'-оптические датчики на основе интерферометров
Простейший из этих случаев, с которым приходится работать (а так-
же имеющий наибольшее практическое значение), — это гидростатиче-
ский случай. Как правило, волоконно-оптические акустические датчики
в этом режиме работают статически и в диапазоне от ~ 50 до 100 кГц.
Низкочастотные акустические измерения были одними из самых первых
продемонстрированных интерферометрических измерений, и с середины
1970-х прилагались значительные усилия, чтобы оптимизировать акусти-
ческий отклик [54]. Для волоконных датчиков с покрытием это касалось
выбора эластомеров, подходящих по динамическим характеристикам их
модуля упругости (особенно объемной сжимаемости). Если волокно име-
ет достаточно толстое покрытие, акустически вызванные напряжения и,
следовательно, акустическая чувствительность являются сложной функ-
цией модуля упругости [1]. Поскольку кварцевое волокно покрыто как
мягким первичным, так и более жестким акустически чувствительным
покрытием (см. рис. 10.22), для волокон с такой составной геометрией
осевое напряжение, передаваемое определенным слоем, определяется как
произведение площади поперечного сечения на модуль Юнга слоя. Ес-
ли материал имеет большой модуль упругости, достаточно относительно
тонкого покрытия, чтобы получить существенное увеличение акустиче-
ской чувствительности по сравнению с вариантом, когда волокно голое,
при условии, что объемная сжимаемость такова, что формируется значи-
тельная деформация сжатия. Очевидно, если вторичное покрытие имеет
небольшой модуль упругости, требуется более толстое покрытие.
Рис. 10.22. Составляющие акустического датчика в виде волокна с покрытием:
стеклянное волокно, первичное покрытие и акустически чувствитель-
ное вторичное покрытие
Хотя акустические датчики в виде волокна с покрытием имеют пре-
имущество в том, что касается геометрической приспособляемости, аль-
тернативная механическая схема заключается в использовании эластично-
го цилиндрического сердечника для формирования акустически вызван-
10.4- Приложения 317
ных деформаций [55]. В варианте с сердечником (см. рис. 10.23) оптиче-
ское волокно плотно намотано на эластичный сердечник, и, следовательно,
измеряется радиальная деформация цилиндра, вызванная акустическим
полем. Деформация оптического волокна непосредственно связана с ра-
диальной деформацией сердечника, что определяется формулой
dr _ — Р
~ = ЗВ’
(10.61)
где Р — давление, г — радиус сердечника и В — модуль объемной де-
формации. Таким образом, нормированный акустический отклик датчика
с сердечником определяется как
-£
ф<1Р W
(10.62)
Следует заметить, что, если сердечник состоит из пластмассы, чув-
ствительность датчика с сердечником примерно на 6 дБ больше, чем
чувствительность волокна с покрытием из тогоже материала (при усло-
вии, что толщина покрытия равна 1 мм).
Рис. 10.23. Волоконно-опти-
ческий акустический датчик
с сердечником
Одно из основных направлений исследований в области волоконно-
оптических акустических датчиков связано с подводными измерениями.
Здесь существует множество возможностей для разработок, начиная от
улучшения соотношения стоимость/эффективность и до совершенствова-
ния геометрической приспособляемости чувствительного элемента. Что
касается схемы с сердечником, желательно максимизировать масштаб-
ный коэффициент или акустический фазовый отклик датчика; однако
также необходимо сохранять плоскую акустическую характеристику как
Глава 10. Волоконно-оптические датчики на основе интерферометров
функцию частоты во всем диапазоне температур и гидростатических
давлений, при которых должен работать гидрофон. Это опять же тре-
бует тщательного выбора материала для изготовления чувствительного
элемента-сердечника. Основная часть работ в области датчиков с сердеч-
ником сосредоточена на эластичных пластмассовых сердечниках, типич-
ным образцом которых является сердечник из нейлона. Как упоминалось,
чувствительность пропорциональна обратной величине модуля объемной
деформации, и для нейлона получается чувствительность дф/{фдР) =
= —326 дБ относительно мкПа, которая изменяется менее чем на ±0,5 дБ
в диапазоне от 0 до 1000 фунтов на квадратный дюйм и от 0 до 35 °C,
однако сердечник достаточно жесткий, так что резонанс на продольных
модах превышает 5 кГц (при типичной длине сердечника).
Рис. 10.24. Шумовая характеристика волоконно-оптического гидрофона 1981
NRL-Экспериментальный (лаборатория по морским исследованиям)
Характеристика типичного датчика с пластмассовым сердечником
(датчик 1981 NRL-Экспериментальный) показана на графике, предста-
вленном на рис. 10.24. Экспериментально наблюдаемое минимальное об-
наружимое акустическое давление здесь показано в зависимости от час-
тоты [56]. На рис. 10.24 также представлен акустический уровень шума
при нулевом волнении моря и навигационный шум (ненагруженных су-
дов). Следует отметить, что в расчетном диапазоне частот (от 100 Гц
10.4- Приложения 319
до 1 кГц) уровень шума волоконного гидрофона был всегда более чем
на 10 дБ ниже уровня шума при нулевом волнении моря и при 500 Гц
был на ~ 13 дБ ниже уровня шума при нулевом волнении моря. Воз-
растание шума при частотах менее 100 Гц обусловлено лазерным (1//)
шумом. Этот волоконный гидрофон продемонстрировал плоскую частот-
ную характеристику, не зависящую (с точностью ±1 дБ) от температуры
и давления в диапазонах от 4 до 35 °C и от 0 до 1000 фунтов на квадрат-
ный дюйм соответственно. Датчик включал в себя 30 м чувствительного
волокна (ф = 170 дБ относительно рад), а в качестве источника излучения
применялся полупроводниковый лазерный диод с длиной волны 0,83 мкм.
Аналогичный волоконно-оптический гидрофон с пластмассовым сердеч-
ником продемонстрировал уровни шума ниже уровня шума при нулевом
волнении моря, в соответствии с текущим уровнем волнения моря, в про-
цессе испытаний в море в 1983 г. [56].
В настоящее время представляет интерес увеличение акустического
отклика сердечника (т. е. повышение его эластичности); для этого исполь-
зуются сердечники без внутреннего защитного слоя с тонкими металли-
ческими стенками [57]. При таком подходе для удовлетворения типичных
требований к шумовым характеристикам ~ 10 дБ ниже уровня шума при
нулевом волнении моря нет необходимости в пороговых величинах в диа-
пазоне нескольких микрорадиан при фазовом детектировании. Датчики
без внутреннего защитного слоя позволяют экспериментаторам выходить
за пределы чувствительности ~ —320 дБ относительно мкПа-1 датчи-
ков с пластмассовыми сердечниками и переходить к чувствительностям
в диапазоне от —290 до —310 дБ относительно мкПа-1. Однако следует
помнить, что фазовая характеристика волоконно-оптических гидрофонов
продолжается до статических давлений, так что при чрезмерной чув-
ствительности гидрофонов в оптическом волокне и материале сердечника
могут развиваться неприемлемые деформации. Примеры таких ограни-
чений приведены в табл. 10.1, где представлены деформации волокон (и,
следовательно, радиальные деформации сердечника) как функция гидро-
статического давления при различных нормированных чувствительно-
стях [58]. Хотя могут быть реализованы некоторые системы компенсации
давления, это не только усложнит конструкцию датчика, но также может
ухудшить его низкочастотную характеристику.
10.4.2. Статические приложения
Два основных препятствия тормозят развитие волоконных интерфероме-
трических датчиков для измерения статических величин. Первая пробле-
ма заключается в том, что измерения деформации обычно искажаются
тепловыми эффектами. Как упоминалось ранее, это не создает проблем
Глава 10. Волоконно-оптические датчики на основе интерферометров
при измерениях быстро изменяющихся величин, поскольку тепловые эф-
фекты обычно проявляются только при низких частотах (< 10 Гц) и при
соответствующей демодуляции результаты их воздействия могут быть
отфильтрованы [59]. В случае измерений статической деформации, ес-
ли требуется чувствительность d(f> ~ мкрад и длина волокна составляет
10 м, необходима температурная стабильность по всей длине волокна по-
рядка 10-9 °C. Таким образом, прямые измерения статических величин
чрезвычайно сложны (если измеряемой величиной не является темпера-
тура) из-за серьезного ухудшения значения минимального обнаружимого
сдвига фазы. Второй недостаток связан с присущей методу неопределен-
ностью, обусловленной периодической природой передаточной функции
интерферометра, определяемой приподнятым косинусом. Если сконстру-
ировать датчик температуры с длиной чувствительного волокна 10 см,
изменение температуры на 10° С приведет к сдвигу фазы на ~ 100 рад или
~ 15 полос. Таким образом, при включении или инициализации датчика
невозможно узнать априори, на какой из полос расположен выходной сиг-
нал; следовательно, при отсутствии какой-либо калибровки абсолютная
температура неизвестна. Возможные решения этих проблем обсуждают-
ся далее.
Таблица 10.1. Деформация волокна как функция гидростатического давления
и чувствительности гидрофона
дБ отн. мкПа 1 Деформация волокна (%)
1000 psi1 2000 psi 10 000 psi
-330 0,028 0,056 0,28
-320 0,09 0,18 0,9
-310 0,28 0,56 2,9
-300 0,9 1,8 9
-290 2,8 5,6 28
-280 9 18 90
Так же как в случае магнитострикционного датчика магнитного по-
ля (см. гл. 12) и волоконно-оптического кориолисова датчика расхода [60],
проблема статического теплового дрейфа в оптических волокнах решает-
ся применением в интерферометре возмущающего сигнала, т. е. повышаю-
щим преобразованием низкочастотного сигнала, вызванного измеряемой
величиной, в высокочастотный сигнал, не подверженный сдвигам фазы,
обусловленным температурой. Один из таких методов, применяемый во
многих типах датчиков (напряжения, температуры, давления и ускоре-
ния), заключается в нелинейном преобразовании смещения в напряже-
ние [61]. Этот метод основан на геометрии схемы измерений, при которой
4000 psi (фунт на квадратный дюйм) = 6,89 х106 Па. — Прим, перев.
10.4- Приложения 321
линейная деформация первичного чувствительного элемента (или линей-
ное смещение поверхности) преобразуется в квадратичную осевую дефор-
мацию волокна и, следовательно, квадратичный оптический сдвиг фазы.
Базовая схема измерений показана на рис. 10.25. Чувствительное волок-
но жестко зафиксировано в двух точках, разнесенных на расстояние 27),
и середина волокна смещается вбок под воздействием деформации пре-
образующего элемента Т (или в результате смещения поверхности). Это
может быть реализовано непосредственно или через толкатель, как пока-
зано на рис. 10.25. Если волокно первоначально не смещено и расширение
z в Т вызывает в волокне деформацию е, определяемую как
D' — D VD2 + z2 - D
е ~ D “ D
(10.63)
при z D выражение сводится к следующему:
z2
‘=20- <10'64>
Результирующий сдвиг фазы в интерферометре может быть выражен как
,, 2тг< 27rn£z2
<1ф = 2De—± = 2 . (10.65)
Л Л17
Рис. 10.25. Геометри-
ческая иллюстрация ме-
тода нелинейного пре-
образования смещения
в напряжение
Следовательно, теперь связь между вызванным сдвигом фазы с1ф и бо-
ковым смещением волокна для малых смещений (z D) является квадра-
тичной по своей сути. Применение в системе возмущающего смещения
zq sin wt приводит к формированию сдвига фазы
с1ф = (z'2 + z% sin2 u)t + 2z'zq sincu^ , (10.66)
где z' — среднее боковое смещение. Таким образом, амплитуда компонен-
ты на основной частоте (частоте возмущения) определяется как
47rn£z'zo
(10.67)
11-3379
Глава 10. Волоконно-оптические датчики на основе интерферометров
тогда как амплитуда компоненты на частоте второй гармоники соста-
вляет (1ф2ы — TTTI^ZqKXD).
Из уравнения (10.67) понятно, что амплитуда компоненты вызванно-
го сдвига фазы на частоте си прямо пропорциональна среднему боковому
смещению z1 и амплитуде возмущающего сигнала z§. Если частота возму-
щающего сигнала умеренно высокая (> 100 Гц), низкочастотные возму-
щения в интерферометре, вызванные дрейфом под воздействием внешних
условий, не влияют непосредственно на эту связь и измерения истинно-
го статического смещения могут быть выполнены. Более того, уравнение
(10.67) позволяет системе определять абсолютное смещение.
В некоторых случаях возмущающее смещение может создаваться при-
ложением известной переменной компоненты к представляющему интерес
полю измеряемой величины; это аналогично подходу, используемому в во-
локонно-оптических магнитострикционных датчиках статического маг-
нитного поля. В качестве альтернативы для обеспечения возмущающего
смещения в схему может быть включен вторичный элемент, создающий
деформацию (например, пьезоэлектрический), настроенный так, чтобы
реагировать только на заранее известное приложенное переменное поле.
Питание элемента, формирующего возмущающее смещение, также может
осуществляться оптически [62].
Как упоминалось ранее, двулучевые интерферометрические волокон-
ные датчики Майкельсона и Маха - Цендера демонстрируют чрезвычайно
высокую чувствительность к температуре и к множеству других полей
измеряемых величин (например, давления, ускорения, смещения и т. д.),
которые могут быть преобразованы в деформацию оптического волокна.
К несчастью, выходной сигнал интерферометрических волоконных дат-
чиков неоднозначен по своей сущности, что обусловлено периодической
природой передаточной функции интерферометра. Следовательно, когда
измеряемая величина является статической, при инициализации датчи-
ка ее абсолютное значение не может быть определено. Было предложено
и продемонстрировано множество подходов к решению проблемы неод-
нозначности: (1) опрос на двух длинах волн [63, 64], (2) комбинированные
интерферометрические/поляриметрические схемы и (3) механизмы нели-
нейного фазового преобразования (см. выше).
Опрос датчика на двух длинах волн может использоваться для снятия
ограничений интерферометрического способа измерений, связанных с не-
однозначностью, в том случае если верхняя и нижняя границы диапазона
датчика вполне определены. Принцип метода заключается в следующем.
Диапазон однозначности базового интерферометрического датчика мо-
жет быть существенно расширен при использовании метода демодуляции,
основанного на определении интерферометрического отклонения фазы на
10.4- Приложения
двух длинах волн. Разность между измеренными сдвигами фаз на двух
длинах волн (Ai, А2) является функцией разности путей интерферометра
и отражает диапазон однозначности, который в зависимости от фактиче-
ской разности используемых длин волн может соответствовать более чем
±100 отдельным полосам в интерферометре. Если датчик функционирует
в этом диапазоне, возможно определение абсолютной величины измеряе-
мого параметра (например, температуры) при инициализации датчика.
Рис. 10.26. Выходной сиг-
нал интерферометра при ра-
боте с двумя длинами волн
Для интерферометра с разностью путей AL, в котором используются
два когерентных источника с длинами волн (частотами) АДгл) и ^2(^2)
(см. рис. 10.26), разности фаз между плечами интерферометра на каждой
из длин волн равны
А , ч 2тгпД£ 2тгпг71Д£ х
Д</>1 (Ai) = —;---=-----------, (10.68а)
Aj с
. . /ч ч 2тгпА£ 2'Knvo^L
Д</>2 (А2) = —г---=-----------, (10.686)
Л2 с
где п — эффективный показатель преломления сердцевины (предпола-
гается, что АЛ достаточно мало, так что дисперсией можно пренебречь)
ис — скорость света в свободном пространстве. Относительная разность
фаз, таким образом, равна
ДФ = (10.69)
С
Диапазон однозначности в AL определяется условием —тг < АФ < тг.
Однако если AL состоит из ограниченного рассогласования пути AL плюс
изменение JL, вызванное измеряемой величиной, где AL' намного больше,
чем максимум JL, определение dL через измерение AL будет принципи-
ально зависеть от стабильности частот лазера. Нестабильности длины
волны становятся важными, только когда выходной сигнал датчика АФ
приближается к ±тг рад [58].
Глава 10. Волоконно-оптические датчики на основе интерферометров
10.5. Резюме
Целью этой главы было описание основных принципов работы волокон-
ных интерферометров Маха-Цендера и Майкельсона. В ней приведены
основные сведения, касающиеся схем интерферометров, демодуляции, шу-
ма и поляризационных свойств. Невозможно описать все реализации этой
технологии, используемые для измерения статических и динамических
параметров. Вновь отсылаем читателя к гл. 12 для детального ознаком-
ления с волоконными датчиками как переменного, так и постоянного
магнитного поля; а также к гл. 11, в которой подробно описывается муль-
типлексирование двулучевых интерферометров. Как указано во введении,
одним из преимуществ этой технологии является эффективное использо-
вание оптической мощности. Если рассмотреть единичный лазерный диод
с оптической мощностью 1 мВт, запускаемой в волокно через оптиче-
ский выход диода (серийно выпускаемое изделие), при условии разумных
оптических потерь, он позволяет опрашивать свыше 10000 двулучевых
интерферометров при ограничении минимальном уровнем дробового шу-
ма < 10 мкрад/у/Гц. Такой чувствительности достаточно для многих
современных приложений.
Литература
1. Т. G. Giallorenzi, J. A. Bucaro, A. Dandridge, G. Н. Sigel, J. Н. Cole, S. С Rash-
leigh, and R.G. Priest, Optical Fiber Sensor Technology, IEEE /.Quantum
Electron. QE-18, 626 (1982).
2. C.D. Butter and G.B. Hocker, Fiber Optic Strain Gauge, Appl. Opt. 17, 2867
(1978).
3. A. Dandridge, A. B. Tveten, R. O. Miles, D. A. Jackson, and T. G. Giallorenzi,
Single-Mode Diode Laser Phase Noise, Appl. Phys. Lett. 37, 77 (1981).
4. D. A. Jackson, A. Dandridge, and S. K. Sheem, Measurements of Small Phase
Shifts Using a Single Mode Optical Fiber Interferometer, Opt. Lett. 5, 139
(1980).
5. S.K. Sheem and T.G. Giallorenzi, Single Mode Optical Fiber Power Divider:
Encapsulated Etching Technique, Opt. Lett. 4, 29 (1979).
6. M. Abramowitz and I. A. Stegun, Handbook of Mathematical Functions, Nation-
al Bureau of Standards, Washington, D.C.: 1972.
7. D. A. Jackson, R. G. Priest, A. Dandridge, and A. B. Tveten, Elimination of
Drift in a Single-Mode Optical-Fiber Interferometer Using a Piezoelectrically
Stretched Coiled Fiber, Appl. Opt. 19, 2926 (1980).
8. S.K. Sheem, T.G. Giallorenzi, and K.P. Koo, Optical Techniques to Solve the
Signal Fading Problem in Fiber Interferometers, Appl. Opt. 20, 3503 (1981).
9. Dandridge and A. B. Tveten, Phase Compensation in Interferometric Fiber-
Optic Sensors, Opt. Lett. 7, 279 (1982).
10. A. Dandridge and L. Goldberg, Current Induced Frequency Modulation in Diode
Lasers, Electron. Lett. 18, 302 (1982).
11. Unpublished data NRL.
12. A. Dandridge, A. B. Tveten, and T. G. Giallorenzi, Homodyne Demodulation
Scheme for Fiber Optic Sensors Using Phase Generated Carrier, IEEE J. Quan-
tum Electron. QE-18, 1647 (1982).
13. J. H. Cole, B. A. Danver, and J. A. Bucaro, Synthetic Heterodyne Interferometric
Demodulation, IEEE J. Quantum Electron. QE-18, 694 (1982).
14. M.L. Henning, S.W. Thornton, R. Carpenter, W. J. Stewart, J.P. Dakin, and
C. A. Wade, Optical Fibre Hydrophones with Down Lead Insensitivity, Proc.
First International Conference on Optical Fibre Sensors, London, Apr. 1983.
15. К. P. Koo, A. B. Tveten, and A. Dandridge, Passive Stabilization Scheme for
Fiber Interferometry Using (3 x 3) Fiber Directional Couplers, Appl. Phys. Lett.
41, 616 (1982).
16. A.D. Kersey, D. A. Jackson, and M. Corke, Phase Compensation Scheme Suit-
able for Use in Single-Mode Fiber Interferometers, Electron. Lett. 18, 392 (1982).
17. S. A. Al-Chalabi, B. Culshaw, and D. E. N. Davies, Partially Coherent Sources in
Interferometric Sensors, Proc. First International Conference on Optical Fibre
Sensors, London, Apr. 1983.
18. К. P. Koo, A. Dandridge, and A. B. Tveten, Performance Characteristics of
a Passively Stabilized Fiber Interferometer Using a (3 x 3) Fiber Directional
Coupler, Proc. First International Conference on Optical Fibre Sensors, Lon-
don, Apr. 1983.
19. M. A. Davis, A. D. Kersey, M. J. Marrone, and A. Dandridge, Characterization of
3x3 Fiber Couplers for Passive Homodyne Systems: Polarization and Temper-
ature Sensitivity, paper WQ2, Proc. Optical Fiber Communications Conference,
Houston, Feb. 6-9, 1989.
20. F. Bucholtz, K.P. Koo, and A. Dandridge, Effect of External Perturbations on
Fiber-Optic Magnetic Sensors, IEEE J. Lightwave Technol. LT-6, 507 (1988).
21. M. D. Mermelstein, Fundamental Limit to the Performance of Fibre-Optic Metal-
lic Glass DC Magnetometers, Electron. Lett. 21, 1178 (1985).
22. A. Dandridge, A.B. Tveten, R. O. Miles, and T.G. Giallorenzi, Laser Noise in
Fiber-Optic Systems, Appl. Phys. Lett. 37, 526 (1980).
23. A. Dandridge and A. B. Tveten, Noise Reduction in Fiber Optic Interferometer
Systems, Appl. Opt. 20, 2337 (1981).
24. A. Dandridge and A. B. Tveten, Properties of Diode Lasers with Intensity Noise
Control, Appl. Opt. 22, 310 (1983).
25. A. Dandridge and A.B. Tveten, Phase Noise of Single-Mode Diode Lasers in
Interferometer Systems, Appl. Phys. Lett. 39, 530 (1981).
26. A. Dandridge, Zero Path-Length Difference in Fiber-Optic Interferometers, IEEE
J. Lightwave Technol. LT-1, 514 (1983).
27. A. Dandridge and A.B. Tveten, Electronic Phase Noise Suppression in Diode
Lasers, Electron. Lett. 17, 937 (1981).
28. A. Dandridge, Noise Properties of Stabilized Single-Mode Lasers in Fiber Inter-
ferometers, IEEE J. Lightwave Technol. LT-1, 517 (1983).
29. L. Goldberg, H.F. Taylor, A. Dandridge, J.F. Weller, and R. O. Miles, Spec-
tral Characteristics of Semiconductor Lasers with Optical Feedback, IEEE J.
Quantum Electron. QE-18, 555 (1982).
326 Глава 10. Волоконно-оптические датчики на основе интерферометров
30. R. О. Miles, A. Dandridge, А. В. Tveten, T.G. Giallorenzi, and H. F. Taylor,
Low Frequency Noise Characteristics of CSP Laser Diodes, Appl. Phys. Lett.
38, 848 (1981).
31. A. Dandridge and R. O. Miles, Spectral Characteristics of Semiconductor Diode
Lasers Coupled to Optical Fibers, Electron. Lett. 17, 273 (1981).
32. D. W. Stowe, D. R. Moore, and R. G. Priest, Polarization Fading in Fiber Inter-
ferometric Sensors, IEEE J. Quantum Electron. QE-18, 1644 (1982).
33. A. Simon and R. Ulrich, Evolution of Polarization Along a Single-Mode Fiber,
Appl. Phys. Lett. 31, 517 (1977).
34. M. Johnson, Poincare Sphere Representation of Birefringent Networks, Appl.
Opt. 20, 2075 (1982).
35. A. D. Kersey, M. J. Marrone, and A. Dandridge, Observation of Input-Polariza-
tion-Induced Phase Noise in Interferometric Fiber-Optic Sensors, Opt. Lett. 13,
847 (1988).
36. A. D. Kersey, M. J. Marrone, A. Dandridge, and A. B. Tveten, Optimization and
Stabilization of Visibility in Interferometric Fiber-Optic Sensors Using Input-
Polarization Control, IEEE J. Lightwave Technol. LT-6, 1599 (1988).
37. A. D. Kersey, M. J. Marrone, and A. Dandridge, Input Polarization Effects on
Interferometric Fiber-Optic Sensors, Fibre Optics ’88, London, Apr. 1988.
38. N.J. Frigo, A. Dandridge, and A.B. Tveten, Technique for the Elimination of
Polarization Fading in Fiber Interferometers, Electron. Lett. 20, 319 (1984).
39. K.H. Wanser and N.H. Safar, Remote Polarization Control for Fiber-Optic
Interferometers, Opt. Lett. 12, 217 (1987).
40. A. D. Kersey and A. Dandridge, Monomode Fiber Polarization Scrambler, Elec-
tron. Lett. 23, 634 (1987).
41. К. P. Koo and G. H. Sigel, A Fiber-Optic Magnetic Gradiometer, IEEE J Light-
wave Technol. LT-1, 509 (1983).
42. A. B. Tveten, A. Dandridge, С. M. Davis, and T. G. Giallorenzi, Fibre-Optic
Accelerometer, Electron. Lett. 16, 854 (1980).
43. M. Corke, A. D. Kersey, and D. A. Jackson, All Fibre Michelson Thermometer,
Electron. Lett. 19, 471 (1983).
44. L. F. Stokes, M. Chodorow, and H. J. Shaw, All Single Mode Fibre Resonator,
Opt. Lett. 7, 288 (1982).
45. S. J. Petuchowski, T. G. Giallorenzi, and S. K. Sheem, A Sensitive Fiber-Oplic
Fabry-Perot Interferometer, IEEE J. Quantum Electron. QE-17, 2168 (1981).
46. J. Stone, Optical-Fibre Fabry-Perot Interferometer with Finesse of 300, Electron.
Lett. 21, 504 (1985).
47. A. D. Kersey, D. A. Jackson, and M. Corke, A Simple Fibre Fabry-Pcrai Sensor,
Opt. Commun. 45, 71 (1983).
48. G. B. Hocker, Fiber Optic Sensing of Temperature and Pressure, Appl. Opt. 18,
1445 (1979).
49. J. A. Bucaro, H.D. Dardy, and E. Carome, Fiber Optic Hydrophone, J. Acoust.
Soc. Am. 62, 1302 (1977).
50. A. Dandridge, A.B. Tveten, G.H. Sigel, E. J. West, and T.G. Giallorenzi, Op-
tical Fiber Magnetic Field Sensor, Electron. Lett. 16, 408 (1980).
51. K.P. Koo and G.H. Sigel, An Electric Field Sensor Utilizing a Piezoelectric
PVF2 Film in a Single-Mode Fiber Interferometer, IEEE J. Quantum Electron.
QE-18, 670 (1982).
52. A. Dandridge, A. B. Tveten, and T. G. Giallorenzi, Interferometric Current Sen-
sors Using Optical Fibres, Electron. Lett. 17, 523 (1981).
53. S. J. Petuchowski, G. H. Sigel, and T. G. Giallorenzi, Single-Mode Fibre Point
and Extended Sensors, Electron. Lett. 18, 814 (1982).
54. N. Lagakos, E.U. Schnaus, J.H. Cole, J. Jarzynski, and J.A. Bucaro, Opti-
mizing Fiber Coatings for Interferometric Acoustic Sensors, IEEE J. Quantum
Electron. QE-18, 683 (1982).
55. J. A. Bucaro, N. Lagakos, J.H. Cole, and T.G. Giallorenzi, Fiber Optic Acoustic
Transduction, Physical Acoustics, vol. XVI, W. P. Mason and R. N. Thurston,
Eds., Academic Press, New York, 1982.
56. A. Dandridge, Acoustic Sensor Development at NRL, Acoustic Society of Amer-
ica Annual Meeting, Miami, Fla., Nov. 1987.
57. G. E. McDearman, Analysis of a Push-Pull Fiber-Optic Hydrophone, IEEE J.
Lightwave Technol. LT-5, 647 (1987).
58. A. Dandridge and A. D. Kersey, Overview of Mach-Zehnder Sensor Technology
and Applications, Proc. SPIE 985, Fiber Optic and Laser Sensors VI, Boston,
Sept. 1988.
59. T. Musha, J. Kamimura, and M. Nakazawa, Optical Phase Fluctuations Ther-
mally Induced in a Single-Mode Optical Fiber, Appl. Opt. 21, 694 (1982).
60. C. A. Wade and A. Dandridge, A Coriolis Effect Optical Fiber Flowmeter, Elec-
tron. Lett. 24, 785 (1988).
61. A.D. Kersey, F. Bucholtz, and A. Dandridge, New Nonlinear Phase Transduc-
tion Method for DC Measurand Interferometric Fiber Sensors, Electron. Lett.
22, 75 (1986).
62. A.D. Kersey, F. Bucholtz, K. Sinansky, and A. Dandridge, Interferometric Sen-
sors for DC Measurands: A New Class of Fiber Sensors, Proc. SPIE 718, Fiber
Optic and Laser Sensors IV Conference, Cambridge, Mass., Sept. 1986.
63. A. D. Kersey and A. Dandridge, Two-Wavelength, Wide Dynamic Ranged Fiber
Gyroscope, Proc. SPIE 719, Fiber Optic Gyros: 10th Anniversary Conference,
Cambridge, Mass., Sept. 1986.
64. A.D. Kersey and A. Dandridge, Two-Wavelength Interferometric Fiber Tem-
perature Sensor, Proc. OFC’87, Reno, Nev., Jan. 1987.
ГЛАВА 11
РАСПРЕДЕЛЕННЫЕ
И МУЛЬТИПЛЕКСИРОВАННЫЕ
ВОЛОКОННО-ОПТИЧЕСКИЕ
ДАТЧИКИ
Алан Д. Керси
Лаборатория по морским исследованиям, США
Вашингтон, федеральный округ Колумбия
11.1. Введение
Важным преимуществом волоконно-оптических датчиков является их спо-
собность обеспечивать измерения, оставаясь невосприимчивыми к ши-
рокому диапазону физических полей. Это означает не только то, что
для работы сенсорной головки не требуется электропитание, но вся сис-
тема в целом, включая входное и выходное волокна, действующие как
телеметрические каналы связи, также электрически пассивна, и, следова-
тельно, всей системе присуща низкая чувствительность к воздействиям
электромагнитных помех (ЭМП) и электромагнитных импульсов (ЭМИ).
Свойство электрической нечувствительности и низкая восприимчивость
к ЭМП/ЭМИ приобретают первостепенное значение, когда необходим
датчик для использования его во взрывоопасной или электрически шум-
ной внешней среде. Благодаря возможности использования общего вход-
ного и выходного волокон связи для обслуживания множества волокон-
ных датчиков, может быть построена чистоволоконная сеть датчиков,
имеющая, кроме описанных выше, и дополнительные преимущества. Во-
первых, телеметрические системы, основанные на волоконной оптике, спо-
собны обеспечивать передачу выходной информации от громадного ко-
личества датчиков, не требующих очень высокой пропускной способности.
Например, для 1000 датчиков с требованиями к полосе пропускания 100 кГц
Волоконно-оптические датчики: Вводный курс для инженеров и научных работников,
под редакцией Эрика Удда. ©1991 John Wiley & Sons, Inc.
11.1. Введение 329j)
у каждого необходима ширина полосы пропускания всего лишь около
100 МГц — сравнительно немного по сравнению с шириной полосы про-
пускания, требуемой для систем, обеспечивающих передачу больших объ-
емов данных, предлагаемых и демонстрируемых в области оптоволоконных
телекоммуникаций. Во-вторых, единственное волокно или пара волокон,
обслуживающие множество датчиков, обеспечивают снижение веса и низ-
кую стоимость телеметрической связи между электрооптическим моду-
лем обработки и сетью или матрицей датчиков. Это является важным
преимуществом в тех приложениях, где уменьшение веса играет важную
роль при проектировании, например в аэрокосмической промышленности.
В-третьих, волоконно-оптические линии связи допускают чрезвычайную
гибкость при конфигурировании телеметрических систем и в топологии
систем.
В общем случае системы из многих датчиков могут быть построены
различными способами. Первый способ заключается в том, что множе-
ство дискретных датчиков, разработанных для работы в качестве точеч-
ных датчиков, объединяются в сеть или массив; при этом выходы отдель-
ных датчиков мультиплексируются в волоконной системе телеметрии при
помощи методов, широко используемых в высокочастотных/микроволно-
вых системах, таких как частотное уплотнение (FDM — Frequency Divi-
sion Multiplexing) или временное уплотнение (TDM — Time-Division Mul-
tiplexing), или при помощи более специализированных схем, разработан-
ных для уплотнения в оптических коммуникационных системах, например
уплотнения с разделением по длине волны (WDM). В качестве другого ва-
рианта датчики с оптическим волокном в качестве чувствительного эле-
мента, по самой своей сути имеющие распределенную структуру, могут
использоваться для построения уникальных видов более сложных датчи-
ков, в общем случае не имеющих аналогов среди построенных на основе
традиционных технологий. В датчиках с оптическим волокном в качестве
чувствительного элемента осуществляется модуляция, вызванная полем
измеряемой величины, в то время как излучение остается заключенным
в волоконный волновод. Этим они отличаются от датчиков с чувстви-
тельным внешним элементом, в которых, как правило, излучение выхо-
дит из волокна в область измерения, проходит через некоторый внешний
чувствительный элемент и затем вновь запускается в волокно, которое
приводит оптический сигнал к приемнику. В таких датчиках с чувстви-
тельным внешним элементом волокно служит просто «световодом», до-
ставляющим оптическую информацию к чувствительному элементу и от
него. Примером датчика, в котором оптическое волокно выступает в ка-
честве чувствительного элемента, может служить датчик микроизгибов.
В нем происходит модуляция потерь, связанных с передачей во фраг-
330 Глава 11. Распределенные и мультиплексированные датчики
менте волокна, при изменениях давления, приложенного в области меха-
низма микроизгибов. Такие датчики с оптическим волокном в качестве
чувствительного элемента по самой своей сути являются распределенны-
ми, поскольку измеряемая величина воздействует на фрагмент волокна
конечной длины. Часто это свойство используется для усиления воспри-
имчивости квазиточечных датчиков; например, в интерферометрических
акустических и магнитных датчиках и датчиках вращения (гироскопах)
большая длина волокна нужна просто для увеличения чувствительности
датчиков к измеряемой величине. Другим примером этого может слу-
жить датчик на основе фарадеевского вращения токового/магнитного
поля; здесь полный поворот плоскости поляризации излучения определя-
ется как линейный интеграл компоненты магнитного поля, параллельной
направлению распространения излучения по длине волокна. В этих приме-
рах присущая датчикам «распределенность» используется еще не в полной
мере. Однако если заимствовать радиолокационные методы обработки
сигнала, пространственно разнесенные фрагменты измеряющего волокна
могут опрашиваться по отдельности, что позволит датчику обеспечить
обработку как пространственных, так и временных изменений распреде-
ления измеряемой величины.
Использование распределенных датчиков с оптическим волокном в ка-
честве чувствительного элемента особенно привлекательно в тех прило-
жениях, где требуется отслеживание единственной измеряемой величи-
ны в большом количестве точек или непрерывно по всей длине волокна.
Примерами таких областей применения могут быть (1) мониторинг на-
пряжений в больших структурах, таких как здания, мосты, плотины,
резервуары-хранилища и пр., а также морские судна, нефтепромысло-
вые платформы, самолеты, космические корабли и т. д.; (2) наблюдение за
профилем температуры в электрических силовых трансформаторах, гене-
раторах, реакторных системах, печах, системах управления технологиче-
скими процессами и просто в системах для обнаружения пожара; (3) опре-
деление утечки в трубопроводах, диагностика неисправностей и обна-
ружение аномалий магнитного/электрического поля в энергораспреде-
лительных системах и системах охранной сигнализации; (4) встроенные
датчики в композитных материалах, используемые в реальном времени
для оценки напряжения, вибрации и температуры в структурах и корпу-
сах, особенно в аэрокосмической промышленности.
При квазираспределенных схемах датчиков измеряемая величина не ока-
зывает влияние непрерывно на всю длину волокна, а отслеживается на
ограниченном количестве фрагментов. Это достигается или повышением
чувствительности локальных участков волокна к конкретному измеряе-
мому полю, или при помощи внешних, например, объемных чувствитель-
11.2. Распределенные измерения 331
ных элементов. Такие виды систем могут использоваться в приложениях,
мониторирующих единственную измеряемую величину, но они позволя-
ют также мониторировать множество измеряемых величин, если повы-
сить чувствительность каждого элемента датчика к конкретному полю
измеряемой величины. Областями применения датчиков такого вида мо-
гут быть все перечисленные выше, а также разнообразные приложения,
в которых требуется мониторинг множества величин, необходимые в хи-
мической, энергетической и обрабатывающей промышленности.
11.2. Распределенные измерения
11.2.1. Оптическая дальнометрия
в волоконных системах
11.2.1.1. Оптическая рефлектометрия временной области
При распространении света в оптическом волокне возникают потери из-за
рэлеевского рассеяния, обусловленного случайными микроскопическими
колебаниями показателя преломления сердцевины оптического волокна.
Часть излучения, которая рассеивается под углом 180° к направлению рас-
пространения излучения (обратное рассеяние), удовлетворяет числовой
апертуре волокна и возвращается к источнику. Подавая входной оптиче-
ский сигнал импульсами в длинное оптическое волокно и отслеживая из-
менения интенсивности возвращаемого обратного рассеяния, можно опре-
делить пространственные колебания коэффициента рассеяния волокна:
или профиль, или затухание. На этом основана оптическая рефлектоме-
трия временной области (OTDR — Optical Time-Domain Reflectometry),
хорошо зарекомендовавший себя метод для определения мест поврежде-
ний/дефектов и диагностики в волоконных системах коммуникаций [1,2].
В измерительных системах OTDR может использоваться для обнаруже-
ния обусловленных измеряемой величиной локальных изменений потерь
или коэффициента рассеяния непрерывного измерительного волокна.
На рис. 11.1 показана схема, обычно применяемая для анализа в OTDR.
Здесь короткий импульс излучения лазера (обычно мощного GaAlAs по-
лупроводникового лазера или твердотельного с модуляцией добротности
Nd:Yag лазера) запускается в исследуемое волокно. Блок электронной об-
работки отслеживает изменения во времени уровня обратного излучения
по отношению к входному импульсу. Если волокно однородно и подверга-
ется постоянному воздействию внешней среды, из-за внутренних потерь
в волокне интенсивность обратного рассеяния в зависимости от време-
ни угасает по экспоненте. Если пиковая мощность входного импульса
длительности т, введенного в волокно, равна Fq, мощность обратного
излучения, регистрируемая через промежуток времени t по отношению
к началу входного импульса, можно определить как
Рис. 11.1. Принцип работы оптического рефлектометра временной области
где z — ct/2n — положение распространяющегося вперед импульса в мо-
мент генерации регистрируемого обратного сигнала Fs(£); Qi(z) — коэф-
фициент затухания в неперах (естественных экспоненциальных единицах:
1 непер = 4,34 дБ); п — групповой показатель преломления сердцевины
оптического волокна; с — скорость света; к — коэффициент разделения
мощности разветвителя входного оптического волокна; г (г) — эффектив-
ный коэффициент обратного отраженного рассеяния на единицу длины,
учитывающий коэффициент рэлеевского обратного рассеяния и числовую
апертуру волокна; D = (ст/п) — длина оптического импульса в волокне
в любой момент времени. Здесь мы предполагаем, что потери, претер-
певаемые входным импульсом и обратным излучением, равны. Наклон
логарифма регистрируемого сигнала равен коэффициенту потерь, т. е.
^(1”Рг) = -2аДг). (11.2)
OZ
Область больших потерь оц характеризуется большим наклоном графика
OTDR, что можно видеть на рис. 11.1.
11.2. Распределенные измерения 333
Пространственное разрешение оптического рефлектометра времен-
ной области — это наименьшее расстояние между двумя фрагментами
рассеяния, которые могут быть разделены. Оно определяется шириной
входной импульса и может быть вычислено по формуле
ст
A^min = * (И-З)
2п
При ширине импульса 10 нс получается пространственное разрешение ~ 1 м.
Как правило, сигналы, используемые при OTDR-анализе, слабые, для по-
лучения хорошего отношения сигнал/шум требуется существенное усред-
нение регистрируемых сигналов.
11.2.1.2. Альтернативные методы оптической далънометрии
Базовый метод OTDR — это по существу оптический локатор, и при
разработке множества разнообразных методов были обнаружены и ис-
пользованы прямые аналогии между традиционными радиолокационными
системами и оптической локацией на основе распределенных датчиков.
Другие методы оптической дальнометрии, пригодные для использования
в измерительных системах, это:
Когерентная OTDR [3]. Слабый сигнал обратного рассеяния смешива-
ется с сильным когерентным оптическим сигналом гетеродина, что
обеспечивает когерентное усиление.
Оптическая рефлектометрия частотных характеристик (OFDR) [4, 5].
Измерение дальности достигается на основании частотного распреде-
ления в обратном рассеянном сигнале, а не временного спада. Обычно
предполагается использование источника с высокочастотной внутри-
импульсной линейной частотной модуляцией.
Когерентная OFDR [5]. Частота излучения лазерного источника с уз-
кими линиями излучения (большой длиной когерентности) линейно
модулируется внутри импульса, и обратное рассеянное излучение ко-
герентно смешивается с опорным оптическим сигналом источника без
задержки.
Псевдослучайное кодирование в OTDR [6]. Применяются методы корре-
ляции в сочетании с псевдослучайной последовательностью входных
импульсов.
По сравнению с обычной OTDR использование каждого из этих ме-
тодов обеспечивает некоторое улучшение характеристик, таких как чув-
ствительность, динамический диапазон или пространственное разрешение.
11.2.2. Методы измерения обратного
рэлеевского рассеяния
Измеряемая
величина
влияет
на рассеяние
Пьезооптический эффект
напряжение, деформация
Электрооптический,
магнитооптический
эффекты
электрическое,
магнитное поля
Активированные волокна
температура,
радиоизлучение
Потери при микроизгибах
сила, давление, смещение
Взаимодействие переменных
полей затухающих колебаний
протечка жидкости,
температура
Температура
Рис. 11.2. Методы измерения, основанные на рэлеевском обратном рассеянии,
и варианты использования распределенных измерений, использующие
принципы OTDR
В распределенных датчиках с оптическим волокном в качестве чувстви-
тельного элемента, основанных на рэлеевском обратном рассеянии, для
измерений используется или зависимость потерь от измеряемой величи-
ны а(г), или механизмы рассеяния r(z) на одном отрезке оптического
волокна, образующем протяженный датчик [7-9]. Чувствительность во-
локна к определенной измеряемой величине, например, такой как темпе-
ратура, может быть увеличена. Опрос элементов такого протяженного
датчика с помощью методов OTDR позволяет на основе выходной ин-
формации определять пространственные колебания измеряемой величины
и таким образом получать распределение измеряемой величины по дли-
не волокна с точностью, допускаемой пространственным разрешением
OTDR. На рис. 11.2 представлены основные механизмы, которые могут
быть использованы в распределенных датчиках с оптическим волокном
в качестве чувствительного элемента, основанных на рэлеевском обрат-
ном рассеянии. Самый распространенный вид распределенных датчиков
с оптическим волокном в качестве чувствительного элемента основывает-
ся на регистрации областей, в которых локализованы избыточные потери,
вызванные, например, микроизгибами. В случае потерь, зависящих от из-
меряемой величины, локальный участок с увеличенными потерями (Да),
обусловленными воздействием на волокно измеряемой величины (напря-
жения, температуры, внешнего показателя преломления и т. д.), вызывает
11.2. Распределенные измерения 335
изменения наклона графика зависимости регистрируемого сигнала обрат-
ного рассеяния от времени задержки (кривая OTDR) при задержке вре-
мени, соответствующей пространственному положению возмущения (как
показано на рис. 11.1).
Поляризационная оптическая рефлектометрия временной области
(POTDR) — это вариант OTDR, который впервые был предложен именно
для использования в измерительных системах [10, 11]. При этом как функция
времени регистрируется состояние поляризации рэлеевского обратного
рассеяния в одномодовом волокне. Характеристики двулучепреломления
одномодового волокна чувствительны к множеству измеряемых величин,
таких как напряжение, давление, электрическое и магнитное поля. Сле-
довательно, состояние поляризации обратного рассеяния изменяется в за-
висимости от расстояния z вдоль волокна. Такая разновидность метода
OTDR предложена для распределенного мониторирования электрических
(электрооптический эффект Керра) или магнитных полей (магнитоопти-
ческий эффект Фарадея).
Интенсивность обратного рассеяния в системе OTDR, описываемая урав-
нением (11.1), пропорциональна коэффициенту обратного рассеяния г (г).
Если г(г) зависит от измеряемой величины, то появляется возможность
выполнять распределенные измерения. Как правило, величина г (г) одина-
кова по всей длине волокна и в незначительной степени зависит от внеш-
них возмущений, таких как изгибы под воздействием бокового давле-
ния и пр. Однако коэффициент обратного рассеяния зависит от тем-
пературы: в волокнах с твердой сердцевиной этот эффект проявляется
чрезвычайно слабо, поскольку микроскопические изменения показателя
преломления сердцевины, которые вызывают эффект, по существу, за-
фиксированы на месте. Но вот в жидкостях коэффициент рэлеевского
рассеяния и показатель преломления, как правило, в существенно большей
степени зависят от температуры. Измерение температуры, основанное на
использовании тепловой зависимости рассеяния в волокнах с жидкой серд-
цевиной, было продемонстрировано разработчиками Саутгемптонского
университета (Англия) [12] еще в самом начале исследований, связанных
с распределенными измерениями. Хотя было показано, что эта система
имеет разрешение по температуре, равное ~ ±0,5 °C, и пространственное
разрешение 1 м, существует несколько причин, препятствующих исполь-
зованию волокон с жидкой сердцевиной. Из-за теплового расширения жид-
кости, ограничивающего рабочий диапазон температуры, и зависимости
числовой апертуры волокна от температуры такие волокна не пригодны
для использования в большинстве практических приложений.
Для таких приложений, как оптические усилители и волоконные ла-
зеры [13], были разработаны специальные волокна, активированные ред-
Глава И. Распределенные и мультиплексированные датчики
поземельными элементами; также были продемонстрированы распреде-
ленные датчики температуры, основанные на зависимости поглощения
в таких волокнах от температуры. В частности, оказалось, что волок-
на, активированные неодимом и гольмием, пригодны для использования
в распределенных системах измерения температуры [14, 15]. В этих во-
локнах полосы сильного поглощения, связанные с активирующими при-
месями, при увеличении температуры расширяются и слегка сдвигаются
в сторону длинных волн, что демонстрирует показанный на рис. 11.3
спектр оптических потерь волокна, активированного гольмием.
Рис. 11.3. Спектр поглощения в во-
локне, активированном гольмием при
-196 и 20 °C
Таким образом, для распределенного измерения температуры мож-
но использовать измерение методом OTDR пространственных колебаний
потерь в волокне при длинах волн, близких к границе полосы поглоще-
ния. В продемонстрированной системе [13], основанной на низком уровне
активации Nd3-1- (5 промилле), при распределенном измерении темпера-
туры была достигнута точность 2 °C и пространственное разрешение
~ 15 м. Для волокна, активированного неодимом, при использовании
сканирования методом OTDR подходит длина волны 904 нм; при такой
длине волны потери в волокне в системе описанной выше, при комнатной
температуре составляли порядка 50 дБ/км, а температурная чувстви-
тельность оказалась равной ~ 0,2%/ °C. Максимально возможная дли-
на измерительного волокна определяется через динамический диапазон
системы OTDR и номинальные потери в волокне при его максималь-
ной рабочей температуре. Реально датчики достигают нескольких сотен
метров в длину. При работе с волокнами, более равномерно активирован-
ными гольмием, чувствительность улучшилась на порядок величины [15].
Распределенный датчик температуры на основе этого волокна показал
разрешение по температуре, равное ~ 1 °C, и пространственное разреше-
11.2. Распределенные измерения 337
ние ~ 3,5 м. Поскольку потери возрастают при увеличении температуры,
такой вид датчиков наиболее полезен и демонстрирует наилучшую чув-
ствительность при очень низких температурах, возможно находящихся за
пределами диапазона конкурирующих методов.
На практике увеличение потерь в волокне может быть вызвано не толь-
ко изменениями температуры, но и другими воздействиями, такими как
изгибы и заломы, что создает возможность получения ошибочных резуль-
татов. Следовательно, обязательно должны использоваться контрольные
средства для корректировки или компенсации таких эффектов. В дан-
ном типе датчиков для этого можно использовать при опросе OTDR
второй источник с длиной волны, достаточно далеко отодвинутой от по-
лосы поглощения, что позволит отслеживать механизмы потерь в волокне,
не зависящие от температуры.
При распределенных измерениях можно использовать и другие, са-
мые разнообразные механизмы потерь. Это потери при изгибе в квар-
цевых волокнах в пластиковой оболочке, зависящие от температуры [16];
излучательные потери поля затухающих колебаний, обусловленные изме-
нениями внешнего показателя преломления [17] (вызванными, например,
изменениями температуры в неизменной внешней среде или протечкой
жидкости); или потери, определяемые непрерывными микроизгибами во-
локна [18]. Квазинепрерывные потери при микроизгибах могут быть вы-
званы в волокне, выложенном в виде ломаной линии и прикрепленном к ис-
следуемой структуре. Можно также использовать волокно, защищенное
спиралеобразным покрытием. Это покрытие создает локальные микро-
изгибы под воздействием бокового давления, как показано на рис. 11.4.
Последний метод использовался при разработке прокладок/подушек для
регистрации давления, пригодных для применения в многочисленных про-
мышленных приложениях. Измерение деформации волокон, встроенных в
композитные материалы, также интересное приложение методов распре-
деленного измерения, основанных на локализации потерь в волокне.
Рис. 11.4. Принцип основанно-
го на непрерывных микроизгибах
датчика, в котором использует-
ся деформирующий волокно спи-
рально закрученный внутренний
элемент оболочки
Температурная зависимость флуоресценции также является средством,
позволяющим производить распределенные измерения температуры. Для
этого необходимо ввести в волокно активирующие примеси с короткой
продолжительностью флуоресценции, что позволяет добиться хорошего
пространственного разрешения, обычно получаемого в системах на осно-
ве OTDR. Для распределенных измерений на основе флуоресценции было
предложено активировать полимерные волокна путем ввода органических
лазерных красителей [19].
11.2.3. Измерение температуры на основе
рамановского обратного рассеяния
Измерение температуры распределенным волоконно-оптическим датчи-
ком на основании температурной зависимости комбинационного рассея-
ния было предложено и впервые продемонстрировано в середине 1980-х го-
дов. К настоящему времени такой датчик выпускается серийно. Процесс
комбинационного рассеяния порождает составляющие в широкой полосе
длин волн вокруг длины волны возбуждения (накачки), включая стоксово
(фотоны с энергией ниже As) и антистоксово (фотоны с энергией вы-
ше As) излучение [20]. Максимумы интенсивности рамановского спектра,
как показано на рис. 11.5, приходятся на волновые числа, сдвинутые на
~ ±400 см-1, при которых отношение Rr интенсивности стоксова и ан-
тистоксова излучения в обратном рассеянии определяется формулой
Рис. 11.5. Спектр рамановского обратного
рассеяния (Л = 514,5 нм, Т — 23° С)
где h — постоянная Планка, с —
скорость света, и — оптическая
частота возбуждающего излу-
чения, к — постоянная Больцма-
на и Т — абсолютная темпера-
тура. При длине волны накачки
514 нм, при комнатной темпера-
туре величина этого отношения
составляет ~ 0,15 и изменяется
с изменением температуры при-
мерно на 0,8%/°С в диапазоне от 0
до 100 °C. Рамановское обратное
рассеяние регистрируется при по-
мощи модифицированного метода
OTDR, в котором анализирует-
ся соотношение уровней стоксо-
ва и антистоксова излучения в обратном рассеянии, как показано на
рис. 11.6. Такой подход применим при длине волокна, превышающей
11.2. Распределенные измерения
~1 км, и обеспечивает разрешение по температуре ~ ±1 °C и про-
странственное разрешение от 3 до 10 м. Основной недостаток этого
метода заключается в том, что из-за низкого коэффициента раманов-
ского рассеяния, примерно на три порядка более слабого по величине,
чем рэлеевское, возникает необходимость использования входного сигна-
ла большой мощности от зондирующего лазера и длительного усреднения
регистрируемого сигнала обратного рассеяния. Основное преимущество
метода — это возможность использования обычных с примесью германия
телекоммуникационных градиентных волокон.
Рис. 11.6. Распределенный датчик измерения температуры, основанный на реги-
страции рамановского обратного рассеяния методом OTDR
11.2.4. Распределенные измерения на основе
взаимодействия мод
Взаимодействие между модами, распространяющимися в волокне, так-
же можно использовать для распределенного измерения. Этот датчик
отличается от рефлектометрических тем, что основывается на исход-
ном сигнале, а не на рассеянном обратно или отраженном. В качестве
измерительного используется волокно, способное поддерживать распро-
странение двух мод. Возможно несколько вариантов: эти две моды могут
иметь ортогональную поляризацию и распространяться в волокне с вы-
соким двулучепреломлением (волокне, сохраняющем поляризацию), могут
быть двумя модами, распространяющимися в двумодовом волокне, или
двумя пространственно разделенными основными модами с двумя раз-
личными постоянными распространения, распространяющимися в двух-
жильном волокне. Основной принцип действия для случая использования
ортогонально поляризованных мод показан на рис. 11.7 [21, 22]. Здесь
Глава 11. Распределенные и мультиплексированные датчики
поляризованное излучение лазера запускается в качестве одной из мод
волокна длиной L, а принятое выходное излучение анализируется при
помощи поляризатора, оси которого повернуты под углом 45° к собствен-
ным модам волокна. При отсутствии воздействий на волокно поляриза-
ция излучения не изменяется в волокне (если пренебречь низкоуровневым
внутренним взаимодействием мод, определяемым структурой волокна)
и на выходе не регистрируется никакой интерференции мод. Возмуще-
ние, возникающее в результате воздействия на волокно в точке р, приво-
дит к взаимодействию мод, и часть излучения входной моды переходит
в ортогональную моду. В результате на выходе обнаруживается явление
интерференции.
Рис. 11.7. Передающий распределенный датчик на основе взаимодействия мод
с различной поляризацией
Информация о месте воздействия может быть получена при помо-
щи опроса системы частотно-модулированной непрерывной волной. Из-за
линейной частотной модуляции сигнала лазера на регистрируемую интер-
ференцию мод выходного сигнала накладываются биения, частота кото-
рых зависит от длины (L —р) и разности констант распространения мод
(двулучепреломления). Если сигнал лазера частотно-модулирован в диа-
пазоне Ai/ с частотой повторения /с, частота биений регистрируемой
интерференции сигнала определяется по формуле
Ai//cB(L-p)
fp — > (11-5)
где В — модальное двулучепреломление. В качестве примера рассмотрим
11.2. Распределенные измерения 341
случай, когда В = 4 х 10-4 (соответствующий длине биений ~ 2 мм при
длине волны 0,8 мкм), /с = 10 кГц, Ai/ = 100 ГГц и L — 1000 м, тогда fp
изменяется от 1,33 МГц при р = 0 до ~ 27 кГц при р = 980 м (на при-
емном конце волокна требуется «смещение» длины волокна, чтобы гаран-
тировать обработку минимальных биений сигнала fp fc). Поскольку
каждая частота биений соответствует единственной локализации взаимо-
действия мод, для получения информации о положении места возмущения
на основании результата взаимодействия мод может быть применен ана-
лиз Фурье выходного сигнала; это позволяет проводить распределенные
измерения местных напряжений или оценивать другие факторы, приво-
дящие к взаимодействию мод.
11.2.5. Квазираспределенные датчики
В простейшем случае квазираспределенный датчик — это модифициро-
ванные фрагменты волокна, встроенные непосредственно («врощенные»)
в длинное волокно через определенные интервалы для создания локаль-
ных изменений потерь, интенсивности обратного рассеяния, поляризации,
интенсивности свечения и т. д. Например, фрагменты волокна, активиро-
ванного редкоземельными элементами, могут быть включены в длинное
волокно в определенных местах, в результате чего получится квазирас-
пределенный датчик температуры. В другом варианте в длинное волок-
но могут быть включены фрагменты волокна, модифицированная обо-
лочка которых с повышенной чувствительностью разработана так, что
позволяет измерять изменения внешнего показателя преломления через
изменения затухающего поля. Этот метод может применяться для изме-
рения множества величин, таких как температура, утечка жидкостей,
или в качестве химического индикатора. Другим примером использова-
ния механизма потерь для квазираспределенных измерений различных
параметров, таких как сила, давление и смещение, могут служить микро-
изгибы [23]. В этом случае потери могут быть созданы в любом требуе-
мом месте волокна, если пропустить волокно через подходящее зажимное
приспособление, деформирующее его. Такие устройства, основанные на
квазираспределенных измерениях, отличаются от встроенных датчиков
с волокном в качестве чувствительного элемента только тем, что измеряе-
мая величина в них может быть определена только в конечном количестве
позиций, а не непрерывно вдоль всей длины волокна. Однако дополнитель-
ным преимуществом такого подхода, по сравнению с распределенными
измерениями с использованием волокна в качестве чувствительного эле-
мента, является большая гибкость и многосторонность; чувствительные
элементы различной длины и/или активированные различными примеся-
ми и/или различными концентрациями примесей могут в разных местах
Глава 11. Распределенные и мультиплексированные датчики
встраиваться в систему, что обеспечит различные диапазоны, уровни чув-
ствительности или разрешения, в зависимости от того, что требуется для
данного конкретного приложения.
Рис. 11.8. Принцип системы квазираспределенных измерении, основанной на
а) поглощающих и б) отражающих элементах
Существует и другой подход к использованию квазираспределенных
датчиков. В волоконную линию могут быть встроены отдельные внешние,
не волоконные чувствительные элементы, изменяющие передачу или от-
ражение в зависимости от измеряемого поля, как схематически показано
на рис. 11.8. Чувствительные элементы из рубинового стекла, затухание
в которых увеличивается при увеличении температуры для излучения
с длиной волны ~ 600-620 нм (сдвиг границы полосы поглощения при-
мерно на 1,2 А/ °C), представляют превосходный пример чувствительных
элементов, которые могут использоваться в квазираспределенных изме-
рительных системах. В системах, основанных на таких элементах [24],
для определения потерь на каждом из чувствительных элементов исполь-
11.2. Распределенные измерения 343
зуется зондирование методом OTDR; а чтобы обеспечить температурно-
независимый опорный выходной сигнал, используется вторая длина вол-
ны, отодвинутая от края полосы поглощения.
Основным ограничением для такого типа систем, зависящих от по-
терь, основанных на обратном рассеянии, является то, что затухание
накапливается; таким образом, уровни излучения на наиболее удален-
ных датчиках зависят от измеряемой величины на каждом из датчиков
вдоль волокна. Это формирует повышенные требования к динамическо-
му диапазону системы регистрации OTDR и ограничивает количество
датчиков, которое может использоваться в практических системах.
Частично эту проблему можно разрешить, используя в квазираспреде-
ленных измерительных системах чувствительные отражательные элемен-
ты. Чувствительные отражательные элементы напрямую обеспечивают
обратный сигнал, пропорциональный измеряемой величине в месте рас-
положения каждого чувствительного элемента; и этот сигнал намного
сильнее сигналов, создаваемых фундаментальным рэлеевским обратным
рассеянием в волокне, соединяющем чувствительные фрагменты, исполь-
зуемые в схеме, описанной выше. Для таких приложений, как измерение
положения (смещения), разработаны световозвращающие чувствительные отра-
жательные элементы, которые могут быть введены в непрерывное волокно
путем изгиба волокна в каждом местоположении датчика. На рис. 11.9, а
схематически показан такой тип чувствительных элементов [25]. Излу-
чение, которое покидает волокно на крутом изгибе, снова запускается
в волокно при помощи отражающего в обратном направлении материала
и распространяется обратно. Поскольку эффективное отражение каждо-
го элемента чувствительно к смещению отражающей в обратном направ-
лении поверхности, при соответствующем подборе средств преобразования
таким способом могут быть измерены температура, давление сила и т. д.
На рис. 11.9, 5, показан другой подход к построению отражательного
датчика, основанный на изменении отражательной способности Френеля
от перпендикулярной границы между волокном и внешней средой с пе-
ременным (т.е. температурно-зависимым) показателем преломления [26].
При такой схеме принимающее волокно располагают под таким углом,
чтобы воспрепятствовать нежелательным многократным отражениям меж-
ду двумя торцевыми поверхностями волокна.
Сравнение с датчиками, основанными на потерях/обратном рассея-
нии, показывает, что при использовании чувствительных отражательных
элементов допустимо включение большего количества измерительных уз-
лов в квазираспределенную систему датчиков. Это обусловлено изначаль-
но обособленной сущностью сигнала, возвращаемого из каждого место-
положения датчика в выход OTDR, как показано на рис. 11.8, б. Для при-
Глава 11. Распределенные и мультиплексированные датчики
мера рассмотрим квазираспределенную систему, состоящую из 40 отра-
жательных чувствительных элементов с максимальным коэффициентом
отражения 0,5% (в диапазоне от 0 до 0,5%) и односторонними избыточны-
ми потерями 0,1 дБ. Если предположить, что потери в каждом фрагменте
волокна, соединяющего датчики, составляют 0,1 дБ, разброс пиков обрат-
ного отражения или эхо от датчиков составит от —23 до —40 дБ по отно-
шению к входному импульсу. Поскольку уровень рэлеевского обратного
рассеяния составляет ~ — 55 дБ на метр волокна по отношению к распро-
страняющемуся вперед импульсу при длине волны ~ 850 нм и значении
числовой апертуры 0,3, такие обособленные отражения могут быть обна-
ружены и измерены при хорошем отношении сигнал/шум, если использо-
вать обычную систему OTDR.
Отражающий
в обратном
направлении
Рис. 11.9. Чувствительные отражательные элементы для квазираспределенных
измерении: а) граничное отражение [26]; б) световозвращающий отра-
жатель [25]
Волокно
Входное
излучение
Показатель
преломления ле
Прямое отражение
от перпендикулярной
границы
Хотя квазираспределенные системы датчиков позволяют наблюдать за
измеряемой величиной только в конечном количестве положений датчи-
ков, а не непрерывно вдоль всего волокна, этот подход имеет множество
явных преимуществ по сравнению с использованием распределенных из-
мерений с волокном в качестве чувствительного элемента. Во-первых,
пространственное разрешение не играет здесь такой важной роли, как
в распределенных системах с волокном в качестве чувствительного эле-
мента, поскольку отдельные датчики отчетливо различаются. Это озна-
чает, что для зондирования в OTDR можно использовать более широкий
импульс, что повлечет за собой улучшение чувствительности и увеличе-
ние динамического диапазона. Во-вторых, чувствительность и динами-
ческий диапазон чувствительных элементов могут быть настроены так,
чтобы удовлетворять конкретным требованиям приложения; в систему
также могут быть включены датчики, предназначенные для регистрации
множества разнообразных величин.
11.3. Основные принципы мультиплексирования датчиков 345
11.3. Основные принципы мультиплексирования датчиков
11.3.1. Основные принципы телеметрии: сети
Обслуживание большого количества датчиков общим входным-выходным
волокном телеметрической связи весьма желательно в широком диапа-
зоне возможных областей приложений волоконно-оптических датчиков,
особенно там, где требуется наблюдать одновременно за большим количест-
вом различных измеряемых величин, или там, где за единственной измеряемой
величиной необходимо наблюдать в большом количестве местоположе-
ний. Использование сети позволяет получить следующие преимущества:
(1) снижение стоимости компонент, благодаря уменьшению количества
лазеров, приемников, модуляторов и т. д., требуемых для обеспечения ра-
боты необходимого количества чувствительных элементов; (2) снижение
веса и количества прокладываемых кабелей; (3) электрическая нечувстви-
тельность, низкая восприимчивость к ЭМП/ЭМИ.
Мультиплексирование — это одновременная передача двух или более
информационных каналов по общей физической линии связи, в данном
случае по оптическому волокну. Информация от чувствительных элемен-
тов в сети может быть уплотнена для передачи по телеметрической ли-
нии связи множеством различных способов, аналогичных тем, которые
применяются в традиционных электронных, высокочастотных и микро-
волновых системах и в оптических системах связи. Прежде чем перехо-
дить к более подробному обсуждению различных способов уплотнения
информации, полученной с датчиков, перечислим все разнообразные схе-
мы уплотнения/адресации, которые могут применяться в системах с во-
локонными датчиками.
Временное мультиплексирование (TDM). Информация датчика размеща-
ется в специально выделенном интервале времени внутри повторяю-
щегося периода передачи (т. е. временные отсчеты выходов датчиков
чередуются во временной последовательности, создавая серию импульсов).
Частотное мультиплексирование (FDM). Информация датчика разме-
щается в определенном интервале частот (т. е. информация датчика
кодируется на несущих (амплитудно или частотно модулированных)
различных частот).
Мультиплексирование по длине волны (WDM). Информация датчика раз-
мещается на определенной длине волны (т.е. информация датчика
кодируется на оптических несущих различных длин волн).
Когерентное мультиплексирование. Информация датчика дифференци-
ально кодируется на составляющих оптической несущей, имеющих раз-
личную степень взаимной когерентности по отношению к некоторой
опорной несущей.
Глава 11. Распределенные и мультиплексированные датчики
Поляризационное мультиплексирование. Информация датчика кодирует-
ся на составляющих оптической несущей, имеющих ортогональные
поляризации.
Датчики
Датчики
Рис. 11.10. Телеметрические системы для сетей волоконных датчиков: а) гибрид-
ная система; б) чистоволоконная система
Пригодность сетевых схем датчиков для конкретных приложений опре-
деляется на основании большого количества факторов. Они включают
в себя формат данных или информации с датчика [т. е. аналоговое или ци-
фровое представление (двухпозиционный переключаемый датчик)], опти-
ческий параметр, которым кодируется информация датчика [т. е. интен-
сивность, фаза, длина волны, модуляция частоты и т. д.], и требования
приложения к электрической невосприимчивости датчика и телеметриче-
ских каналов из соображений безопасности или наличия большого коли-
чества радиопомех.
Самый общий подход к сетям заключается в том, что множествен-
ные выходы датчиков по отдельности подключаются к модулю электро-
оптического преобразования сигнала, расположенному непосредственно в
узле датчиков, как показано на рис. 11.10, а. Здесь независимые выход-
ные сигналы датчиков преобразуются в электрические сигналы, которые
могут быть уплотнены и по вторичному телеметрическому волоконно-
оптическому каналу связи переданы на центральную станцию обработки
сигналов. При таком гибридном варианте сети мультиплексированных
волоконных датчиков, волоконные измерения и волоконная телеметрия
полностью независимы. Это простой, имеющий низкую себестоимость
11.3. Основные принципы мультиплексирования датчиков
подход; однако необходимость в электропитании для удаленных модулей,
обеспечивающих электрооптическую обработку, может оказаться серьез-
ным препятствием для использования его во многих приложениях. Если
требования к мощности не слишком высоки (< 100 мВт), можно обойтись
без непосредственного электрического подсоединения к модулю электро-
оптического преобразования и использовать для модуля оптическую мощ-
ность. Обеспечить достаточно мощное питание модуля оптическим спо-
собом можно по отдельному волокну с применением фотоэлектрического
преобразования оптической мощности в электрическую внутри самого
модуля.
В целом желательно иметь такую схему сети, в которой измерения
и телеметрия составляли бы единое целое и отсутствовала необходимость
в промежуточной электрооптической обработке сигнала и в промежу-
точных преобразованиях выходных сигналов датчиков. В этом случае
получается невосприимчивая к электромагнитным полям, полностью во-
локонная сеть датчиков. Как для датчиков, основанных на интенсивно-
сти, так и для интерферометрических волоконно-оптических датчиков
допустим широкий диапазон сетевых топологий. В следующем разделе
мы опишем методы, применимые для различных датчиков, построенных
на основе интенсивности; в разделе 11.4 мы обсудим, как использовать
интерферометрические системы.
11.3.2. Сети датчиков интенсивности
Рис. 11.11. Базовый подход, опирающийся на временное мультиплексирование,
для волоконных датчиков, построенных на основе интенсивности
Для временного мультиплексирования датчиков, построенных на осно-
ве интенсивности, можно использовать многозвенную сеть, такую как
показана на рис. 11.11 [27]. Здесь датчики расположены на различных
расстояниях от источника и приемника, так что единственный импульс
соответствующей длины на входе в сеть создает на выходе серию разли-
чающихся импульсов. Эти импульсы представляют собой отчеты значе-
Глава 11. Распределенные и мультиплексированные датчики
ний на выходах датчиков, последовательно распределенные во времени,
как показано на схеме. Требуемая длительность входного импульса т
определяется эффективной оптической задержкой волокна, соединяющего
чувствительные элементы, и система посылки повторяющихся импульсов
позволяет идентифицировать каждый датчик, просто используя избира-
тельность по времени приемника на выходе. Были продемонстрированы
основанные на этом подходе схемы сетей как для передающих, так и для
отражательных датчиков на основе интенсивности. Эффективный темп
оцифровки каждого выхода датчика при многозвенной топологии, как на
рис. 11.11, определяется количеством датчиков в сети. При N датчиках
и задержке Т между звеньями, как показано на схеме, максимально до-
пустимый темп оцифровки или частота следования входных импульсов
определяется по формуле
Я. = (11.6)
Таким образом, может быть установлено основное ограничение на полосу
пропускания датчиков в сети, обусловленное критерием дискретизации
Найквиста.
ВЫХОДЫ
Рис. 11.12. Временное мультиплексирование для датчиков микроизгибов, рабо-
тающих по методу темного поля
На рис. 11.12 показан другой пример матрицы датчиков с временным
мультиплексированием. В этом случае в датчиках используется принцип
11.3. Основные принципы мультиплексирования датчиков
микроизгибов. Последовательный способ включения датчиков аналоги-
чен тому, который используется в схеме квазираспределенных датчиков.
Однако здесь датчики работают в режиме, при котором часть излуче-
ния, переходящая в оболочечную моду из-за микроизгибов, направляется
в принимающее волокно непосредственно после каждого датчика. Та-
кой режим работы называется режимом темного поля [28], поскольку
принимаемый от микроизгибов сигнал генерируется на «темном» (при
отсутствии микроизгибов) фоне. Сигналы «темного поля» собираются на
выходной волоконной шине при помощи схемы с использованием трой-
ников или звездообразных ответвителей. Благодаря импульсному опросу
такой системы с шириной входного импульса т Г, на выходе происхо-
дит временное разделение сигналов датчиков.
Выделение сигналов отдельных датчиков в сети через разделение по вре-
мени в основном похоже на опрос OTDR в системе распределенных дат-
чиков. Аналогично, выделение сигналов отдельных датчиков в сети через
разделение по частоте и OFDR по существу достаточно близки. Для вы-
деления через разделение по частоте сигналов отдельных датчиков в се-
ти, состоящей из простых датчиков, работающих на основе изменения
интенсивности, может использоваться локационный принцип, основан-
ный на частотной модуляции непрерывной волны [29]. В этом случае для
опроса множества простых, основанных на интенсивности датчиков, рас-
положенных на различных расстояниях от источника, как показано на
рис. 11.13, применяется источник высокочастотного сигнала с линейной
частотной модуляцией, а на выходе приемник электрически смешивает
поступающий сигнал с опорным сигналом с линейной частотной модуля-
цией. Это порождает биения на частотах, связанных с каждым из чув-
ствительных элементов, что позволяет выполнить частотное демульти-
плексирование выходов. Амплитуда каждого из биений пропорционально
связана с состоянием датчика (т.е., например, с затуханием) и, следова-
тельно, с измеряемой величиной.
Применение мультиплексирования по длине волны в волоконных сис-
темах связи было многократно описано за последние годы [30]. Однако
использованию этого метода в практических приложениях с датчиками
достаточного внимания не уделялось. Принципиальная схема, показан-
ная на рис. 11.14, по существу применима как для датчиков на основе
интенсивности, так и для интерферометрических типов датчиков и те-
оретически самая эффективная из всех возможных, поскольку все из-
лучение от конкретного источника в принципе может быть направлено
к конкретному чувствительному элементу, и затем на соответствующий
фотоприемник, с минимальными избыточными потерями, благодаря ис-
пользованию соответствующих мультиплексированию по длине волны во-
Глава 11. Распределенные и мультиплексированные датчики
локонных ответвителей. Причиной отсутствия практических реализаций,
основанных на этом методе, является ограниченная доступность необхо-
димых для этого избирательных по длине волны ответвителей.
Источник высокочастотного
сигнала с линейной частотной
Рис. 11.14. Схема муль-
типлексирования по дли-
не волны
Рис. 11.13. Схема уплотнения по частоте для волоконных датчиков, основанных
на интенсивности, в которой используется локация при помощи ча-
стотно-модулированной непрерывной волны
Отражательные датчики
Выходы
Кроме того, важным недостатком такого подхода являются сложность
волоконных компонент для мультиплексирования с разделением по длине
волны (например, N х N звездообразных и 1 х N древовидных соеди-
11.4- Мультиплексирование интерферометрических датчиков
нителей), необходимых для построения системы, основанной на большом
количестве датчиков, и ограниченная избирательность по длине волны та-
ких приборов. Таким образом, варианты мультиплексирования по длине
волны большого количества датчиков на одном волокне оказались прак-
тически неприменимыми по соображениям как стоимости, так и произ-
водительности.
11.4. Мультиплексирование
интерферометрических датчиков
При мультиплексировании интерферометрических датчиков следует при-
нимать во внимание два основных вопроса. Во-первых, при мультиплекси-
ровании должно уменьшиться количество соединительных волокон между
матрицей пассивных датчиков и электрооптическим модулем обработ-
ки (т. е. должно быть обеспечено некоторое дополнительное мультиплек-
сирование) и, во-вторых, применяемый метод должен быть совместим
с методом демодуляции, используемым при обработке интерферометри-
ческих сигналов, генерируемых каждым датчиком. Все форматы адреса-
ции датчиков — с разделением по времени, частоте, длине волны, коге-
рентности и поляризации — принципиально реализуемы и пригодны для
применения с интерферометрическими датчиками. Каждая из этих схем
адресации, более подробно описанных далее, позволяет сигналы от от-
дельных чувствительных элементов массива разделить на выходе. Выход
двулучевого интерферометрического датчика — это приподнятый коси-
нус функции интерференции, что может быть представлено в виде
1= ^{1 + k cos [</>(*)]}> (И-7)
£
где 10 — входная интенсивность, к — константа, известная как контраст-
ность полос, и — разность фаз между плечами интерферометра,
включающая две составляющих — наклон или сдвиг, фи(1) и сигнал ф8(1\
Чтобы выделить полезную информацию от интерферометрического дат-
чика, передаточную функцию, описанную уравнением (11.7), нужно вос-
становить или линеаризовать для получения линейной зависимости вы-
хода от сдвига фазы </>$(£), определяемого измеряемой величиной. У схем
адресации, описанных выше, не существует собственных средств для де-
модуляции мультиплексированных интерферометрических сигналов. Сле-
довательно, при мультиплексировании интерферометрических датчиков
процесс включает в себя две стадии — разделение информации и последу-
ющая демодуляция, что схематически показано на рис. 11.15. Прежде чем
переходить к описанию топологий сети для мультиплексных интерферо-
метрических датчиков, рассмотрим методы демодуляции, совместимые
с различными схемами мультиплексирования/адресации.
Глава И. Распределенные и мультиплексированные датчики
Источник г
----1----1
Выходы
Рис. 11.15. Принципиальный подход к демультиплексированию/демодуляции, ис-
пользуемый при объединении в сеть интерферометрических волокон-
ных датчиков
11.4.1. Методы интерферометрической демодуляции
для объединенных с использованием
мультиплексирования датчиков
Для использования с интерферометрическими датчиками, объединенны-
ми с использованием мультиплексирования, подходят следующие методы
удаленной демодуляции:
Несущая с модуляцией по фазе (PGC), обрабатываемая гомодинным или
синтетическим гетеродинным методом: используется источник, излу-
чение которого модулировано по частоте, и немного асимметричные
(обычно на несколько сантиметров) измерительные интерферометры.
Разностная интерферометрия с согласованными траекториями (PMDI):
используются согласованные асимметричные измерительный интер-
ферометр и компенсирующий интерферометр (приемник).
Гетеродинирование разностной задержки (DDH): используются асимме-
тричный датчик-интерферометр и импульсный лазерный источник,
излучение которого промодулировано по частоте.
Эти методы демодуляции подробно описаны в следующих параграфах.
114.1.1. Несущая с модуляцией по фазе
При этом подходе в качестве датчика используется интерферометр с не-
большой разницей в длинах волоконных плеч [31]. Вследствие этого раз-
ность фаз между оптическими полями, формируемыми в сигнальном и опор-
ном плечах интерферометра, является функцией входной оптической частоты
(частоты лазера). Если расхождение в длинах составляет AL = L\ — £2
11.4- Мультиплексирование интерферометрических датчиков
(рис. 11.16), разность фаз для интерферометра можно вычислить как
. 2тгД£п
ф=--------V,
с
(П-8)
где п — эффективный показатель преломления моды и и — частота из-
лучения лазера:
Рис. 11.16. Принципи-
альная схема пассивно-
го метода интерферо-
метрической демодуля-
ции несущей с модуля-
цией по фазе
Измерительное
Модуляция частоты лазера Аи порождает интерферометрическую фа-
зовую модуляцию Д<Д определяемую формулой
А . 2тгД£п А
Д</> =-------Ala
с
(11.10)
В полупроводниковых диодных лазерах частота излучения может быть
промодулирована через управление инжекционным током (или током сме-
щения) прибора. Эффект, возникающий в обычных резонаторных ди-
одных лазерах Фабри-Перо, является результатом двух эффектов [32].
Во-первых, из-за изменений тока происходят небольшие изменения тем-
пературы резонатора, что приводит к модуляции эффективной длины ре-
зонатора благодаря температурной зависимости показателя преломления
и тепловому расширению. Во-вторых, концентрация носителей в области
лазерной генерации возрастает с возрастанием тока, являясь причиной
изменения показателя преломления. Вообще, при низких частотах пер-
вый эффект доминирует и демонстрирует отклик (~ 3 дБ) в области
до 100 кГц. В то же время второй, более слабый эффект имеет поло-
гую характеристику зависимости от частоты вплоть до высоких частот
(~ 1 кГц) и обычно проявляется резонансом в области частот разрыв-
ной генерации лазера. Эффективный коэффициент преобразования тока
в частоту ду/дг для полупроводниковых лазеров существенно отличает-
ся у различных лазерных структур, но, как правило, в диапазоне от 1 до
10 ГГц/мА. Например, диодный лазер Hitachi HLP 1400 GaAlAs при длине
волны 830 нм демонстрирует коэффициент 5у/6i от ~ 2,5 до 3,5 ГГц/мА
при частотах модуляции ниже 50 кГц.
12-3379
Глава 11. Распределенные и мультиплексированные датчики
Если в диодном лазере применить синусоидальную модуляцию Дг sincucZ
инжекционного тока, то сдвиг фазы на выходе ассиметричного интерфе-
рометра в соответствии с уравнением (11.10) будет равен
Аф — sincucZ = Д(^о sincucZ. (11.11)
с at
Если записать выходной фазовый сдвиг интерферометра в виде ф(Р) + Д0,
причем, как обсуждалось ранее, ф(Г) состоит из содержащего требуемую
информацию фазового сдвига сигнала </>$(£) и сдвига <^/(£), то выход фо-
тодетектора интерферометра можно записать как
F = + kcos [ф (Z) + Д(^о sinwct\|, (11.12)
где г] — эффективность детектора (Вт/А). Уравнение (11.12) можно за-
писать через гармонические составляющие сис, в результате получится
1+k
OO
Jo (Д</>о) + 2 57 ^2n (A</>o) cos (2nwtf)
n=l
cos </>(£) —
- k
OO
2 52 J2(n-i) (Д<Ао) sin (2n + l)wci)
_ П=0
COS ф (t) ,
(11.13)
где члены Ja(A<^o) — функции Бесселя первого порядка. Для выделения
информации о фазовом сдвиге сигнала ф(1) результат, полученный в виде
выражения (11.13), может быть обработан двумя различными способами,
которые называются соответственно пассивной гомодинной демодуляци-
ей несущей с модуляцией по фазе и синтетической гетеродинной демоду-
ляцией.
Синхронно выделяемые амплитуды компонент выхода интерфероме-
тра на основной (сис) частоте модуляции лазера и частоте второй гармо-
ники (2сис) порождают сигналы, определяемые формулами
Si = —T)IokJ1 (Д</>о) sin <^(£), (11.14а)
Sq = r)IokJ2 (А(^о) sin ф (t), (11.146)
где Si и Sq — синфазная (IP) и квадратурная (Q) составляющие сдви-
га по фазе </>(£) интерферометра. На рис. 11.17 представлены амплитуды
функций Бесселя от Jo Д° J4 в диапазоне от Д</>о = 0 до 4 радиан.
Можно видеть, что выполняется условие Ji(A(^o) — ^(Афп) при Д</>о =
= 2,6 рад. При этой амплитуде фазовой модуляции (или индексе моду-
ляции) максимальные амплитуды IP и Q компонент выхода интерферо-
метра [уравнение (11.14)] равны. При гомодинной демодуляции несущей
с модуляцией по фазе сигналы IP и Q подаются на демодулятор для «диф-
ференцирования и перекрестного умножения», чтобы получить выход,
пропорциональный </>(£). Структурная схема операций этого демодуля-
11.4. Мультиплексирование интерферометрических датчиков
тора показана на рис. 11.18. Продифференцированные сигналы IP и Q
перекрестно умножаются на неизмененные сигналы IP и Q. В результате
получаются следующие сигналы
Хг (/) = (т,10к)2 (Д</>0) J2 (Д</>0) sin2 ф (t), (11.15а)
С/С
х2 (<) = - Ш)2 Jr (Д</>0) Л (Д<М cos2 Ф (г), (п.156)
С/Г
которые объединяются в дифференциальном усилителе, как показано на
схеме, и порождают сигнал
Хо (t) = Xr (f) + Х2 (i) = (rjlok)2 Jr (Д</>0) J2 (Д</>о) (И-16)
После интегрирования Хо(^)
на выходе получается
Y (t) = СфЮ, (11.17)
где С — константа, которую
обычно называют масштаб-
ным коэффициентом демоду-
лятора (В/радиан). Возмож-
но также выделение выход-
ных IP и Q через обработ-
ку других нечетных/четных
гармоник выхода интерферо-
метра: например, через синхронное выделение 2сис и Зсис и т. д.
Рис. 11.17. Функции Бесселя Jn(x) в зависимости
от индекса модуляции х для п = 0, 1, 2 и 3
Рис. 11.18. Структурная схема дифференцирования и перекрестного умножения
sin/cos в интерферометрическом фазосдвигающем демодуляторе
При одном из подходов к синтетическому гетеродинному методу [33]
сигналы IP и Q [уравнение (11.14)] используются, чтобы генерировать
сигнал несущей частоты, который модулирован по фазе составляющей
фазы интерферометра 0(2). Структурная схема этого метода обработ-
ки представлена на рис. 11.19. В результате умножения (электронного
Глава 11. Распределенные и мультиплексированные датчики
смешивания) компонент IP и Q на квадратурные компоненты (синус, ко-
синус) фиксированной несущей с частотой cjq получаются сигналы в виде
Sisinutf = —rjokJ^ (Д(^о) sin<^ (Z) sincuo^, (11.18a)
SqCOSUJt = T]I$kJ2 (A<^o)c°S(^(Z)coscdot (11.186)
После сложения этих сигналов получается сигнал
So = T)Iok {J2 (Д<£о)cos Ф (£)cos (^) “ Ji (Д<£о) sin </> (£) sin (сио^)} , (11.19)
который при J2(A0o) = Ji(A<£o) сводится к
So = rjIokJi (Д</>о) cos [cuqZ + ф (£)]. (11.20)
Рис. 11.19. Структурная
схема синтетического гете-
родинного метода демоду-
ляции с использованием фа-
зовой автоматической под-
стройки частоты (ФАПЧ)
В этой формуле представлена гетеродинная несущая, промодулиро-
ванная по фазе сдвигом фазы интерферометра </>(£). В результате демоду-
ляции этой несущей при помощи частотного дискриминатора или фазовой
автоматической подстройки частоты и последующего интегрирования
получается </>(£), что схематически показано на рис. 11.18. Существует
множество вариантов основного подхода, приводящих несущую к виду,
описываемому уравнением (11.20). При этом могут использоваться раз-
личные способы модуляции лазерного излучения и обработки сигнала,
например, такие как serrodyne лазер ЧМ [34] и синусоидальная модуля-
ция в сочетании с селективным приемником [35, 36] и двойной модуляцией
гармоник [37].
11.4-1-2. Разностная интерферометрия
с согласованными траекториями
Этот метод не является собственно методом демодуляции, но он способ-
ствует демодуляции, поскольку разбивает интерферометр на две части:
одну из них мы будем называть измерительным интерферометром и дру-
гую — компенсирующим интерферометром [38]. Поскольку компенсатор
может быть расположен «близко» к приемнику/блоку обработки сигнала,
методы активной демодуляции могут применяться посредством сдвига-
ющих фазу компонентов, встроенных в компенсатор. Базовая конфигу-
11.4- Мультиплексирование интерферометрических датчиков
рация для системы с единственным датчиком представлена на рис. 11.20.
Оптическая траектория не сбалансирована между плечами интерфероме-
тров обеих компонент, но в результате компенсации вся система в целом
тщательно согласована. Как показано на рис. 11.20, существует всего
четыре оптических траектории через оптическую «цепь», образованную
измерительным и компенсирующим интерферометрами, причем относи-
тельные задержки двух траекторий тщательно согласованы (по отноше-
нию к короткому пути), так что Ts « Тс; одна из задержек составляет
(Ts + Тс) и еще одна — нулевая относительная задержка.
Относительная
задержка
0
Рис. 11.20. Базовая схема метода разностной интерферометрии с согласован-
ными траекториями, при котором используется источник с длиной
когерентности Si,2 — Lij- а) схема; б) оптические траектории
Согласованные
траектории
Когерентные свойства используемого источника таковы, что на вы-
ходе измерительного интерферометра, не происходит когерентного сме-
шивания между двумя оптическими полями. Этого можно достичь двумя
способами. Во-первых, можно использовать источник, длина когерентно-
сти которого намного короче, чем асимметрия оптических путей измери-
тельного интерферометра. При этом оптические поля, формирующиеся
в сигнальном и опорном плечах измерительного интерферометра, имеют
слабую взаимную когерентность благодаря задержке Ts. Во-вторых, мож-
но использовать стробированный (импульсный) источник с большой дли-
Глава 11. Распределенные и мультиплексированные датчики
ной когерентности, так что на выходе измерительного интерферометра
оптические импульсы, выходящие из сигнального (длинного) и опорного
(короткого) плеч интерферометра не перекрываются, что схематически
показано на рис. 11.21. Чтобы гарантировать отсутствие интерфероме-
трического смешивания между двумя оптическими полями на выходе из-
мерительного интерферометра, при втором подходе, по существу, исполь-
зуется то, что может быть описано как когерентный синтезатор. Две
оптические компоненты с выхода измерительного интерферометра по-
ступают в компенсирующий интерферометр через выходное оптическое
звено и создают четыре компоненты оптического поля на его выходе. Две
компоненты с согласованными задержками смешиваются и формируют
интерференционный сигнал, в то время как другие компоненты форми-
руют на входе приемника постоянный оптический сигнал, что просто
уменьшает видимость регистрируемой интерференционной картины. Как
описано в следующих разделах, метод разностной интерферометрии с со-
гласованными траекториями — это основной строительный блок множе-
ства методов мультиплексирования, основанных на когерентности и адре-
сации с временным разделением.
Выходной разброс (отклонение) L1L2hS1S2
после прохода перекрывающихся компонент
сигнала и
Рис. 11.21. Метод разностной интерферометрии с согласованными траектория-
ми, при котором используется импульсный источник
Для демодуляции сигнала с выхода компенсирующего интерфероме-
тра может использоваться множество различных методов. Когда метод
разностной интерферометрии с согласованными траекториями исполь-
зуется в приложении с единственным датчиком, возможна демодуляция
путем гомодинного детектирования с активным слежением за фазой при
помощи обратной связи фазовращателем в одном из компенсирующих
плеч. Как правило, в мультиплексных системах, основанных на методе
разностной интерферометрии с согласованными траекториями, актив-
ное слежение за фазой практически не применимо из-за многообразия
фаз регистрируемых сигналов. Для получения синфазной и квадратурной
составляющих интерферометрических сигналов вполне возможно исполь-
11.4- Мультиплексирование интерферометрических датчиков
зовать другие подходы, такие как метод несущей с модуляцией по фазе,
описанный выше (причем теперь фазовая несущая может быть введена
через активный элемент в компенсатор), гетеродинное детектирование
(через активный элемент в компенсаторе, сдвигающий частоту) или при-
менение детектирования с разнесением по фазе, основанного на 3 х 3
волоконном разветвителе [39].
11.4-1-3. Гетеродинирование разностной задержки
Электронный
блок демодуляции
на основе
фазовой автоматической
подстройки частоты
Рис. 11.22. Схематическое представление метода интерферометрической демо-
дуляции через гетеродинирование разностной задержки
Гетеродинирование разностной задержки [40] — это метод регистрации
фазового сдвига для использования в интерферометрических датчиках,
на выходе которых создается модулированная по фазе гетеродинная не-
сущая без применения фазосдвигающих элементов в каком-либо из плеч
интерферометра. При этом подходе, основанном на использовании асим-
метричного чувствительного интерферометра, на вход интерферометра
последовательно подаются два оптических импульса, что схематически
представлено на рис. 11.22. Разнесение этих импульсов во времени равно
разностной задержке между плечами-волокнами интерферометра. Вслед-
ствие этого составляющая первого оптического импульса, которая про-
ходит по длинному плечу интерферометра, придет на приемник одно-
временно с приходом составляющей второго импульса, которая пройдет
по короткому плечу. Если оптические частоты двух импульсов сдвинуты
(cui — cd2 = До>)> в результате смешивания двух одновременно приходя-
щих импульсов на приемник придет сигнал в виде пачки гетеродинных
биений с частотой Аси. Повторяющиеся пульсации в системе и избира-
тельное по времени стробирование выхода приемника сформируют стро-
бированную несущую. Затем можно использовать фильтрацию для вос-
становления непрерывной волны несущей, которая может подаваться на
360 Глава 11. Распределенные и мультиплексированные датчики
ЧМ-дискриминатор или блок фазовой автоматической подстройки часто-
ты и интегратор для получения демодулированной фазы (f>(t).
11.4.2. Топология мультиплексирования
интерферометрических датчиков
С технической точки зрения можно реализовать множество подходов, до-
пускающих адресацию отдельных чувствительных элементов. Среди них
есть схемы, обычно применяемые в высокочастотных/микроволновых тех-
нологиях, такие как адресация с разделением по времени или по частоте,
и схемы, рекомендуемые для использования в оптических коммуникаци-
онных системах: методы мультиплексирования по длине волны, когерент-
ности или поляризации. Исторически работы над мультиплексированием
интерферометрических датчиков начались в 1983 году [41] с исследова-
ния частотных характеристик схем, позаимствованных из основанных
на принципах радиолокации методов дальнометрии при помощи частот-
но-модулированной непрерывной волны. Принципы мультиплексирования
измерительных интерферометров по когерентности были также проде-
монстрированы в 1983 году [38] с использованием объемных интерферо-
метрических систем, связанных оптическими волокнами; а первые схемы
мультиплексирования с разделением по времени для интерферометри-
ческих элементов, основанные на схемах рефлектометрических матриц,
были предложены и продемонстрированы в 1984 году [42].
В последующих разделах описано несколько различных вариантов ар-
хитектуры сети датчиков или топологических схем системы, основан-
ных на мультиплексировании по времени, частоте или когерентности.
Мультиплексирование по длине волны и поляризации не обсуждается,
поскольку предполагается, что эти методы дают очень незначительное
преимущества в том, что касается количества адресуемых датчиков.
И.4-2.1. Мультиплексирование с разделением по времени
Наиболее прямолинейный подход к мультиплексированию интерфероме-
трических датчиков с разделением по времени предполагает опрос со-
вокупности отдельных интерферометров Маха-Цендера или, возможно,
Майкельсона при помощи импульсного источника (или стробированной
непрерывной волны) в сочетании с соответствующими оптическими за-
держками между датчиками. Это аналогично описанной в разделе 11.3.2
основной схеме с разделением по времени, используемой для датчиков
на основе интенсивности. При такой конфигурации сети могут исполь-
зоваться две схемы демодуляции. В первой используются измеритель-
ные интерферометры, которые только слегка асимметричны, в сочетании
с пассивной демодуляцией на основе несущей с модуляцией по фазе [43].
Конфигурация матрицы представлена на рис. 11.23, а. Ширина входного
11.4- Мультиплексирование интерферометрических датчиков
оптического импульса г устанавливается С Т (задержки в волоконных
задерживающих витках), так что для каждого входного импульса выхо-
ды массива из N датчиков формируют серию из N выходных импуль-
сов. Поскольку асимметрия траекторий в датчиках невелика, импульсы
из сигнального и опорного плеч перекрываются и интерферируют на
выходе каждого интерферометра и выходная последовательность импуль-
сов представляет собой просто отсчеты отдельных выходов интерфе-
рометров, разнесенные и расположенные во временной последовательно-
сти. Таким образом, максимальная производительность каждого датчика
определяется просто как 1/N. Второй подход к демодуляции для муль-
типлексирования с разделением по времени многозвенной матрицы ин-
терферометров Маха-Цендера предполагает использование разностной
интерферометрии с согласованными траекториями [44]. Основная конфи-
гурация матрицы представлена на рис. 11.23, б.
Рис. 11.23. Многозвенная схема,
в которой используется адреса-
ция с разделением по времени
Оптические импульсы шириной т от лазерного источника подаются
на вход матрицы идентичных интерферометров, для которых оптическая
разность хода равна L, разделенных в многозвенной сети волоконными за-
держивающими витками длиной 2L. Благодаря задерживающим виткам
импульсы приходят на каждый интерферометр через интервалы времени
2Т (= 2nL/c). Если ширина импульса т установлена меньше Т, импуль-
сы из двух плеч каждого интерферометра не перекроются на его выходе
и импульсы от отдельных датчиков соберутся на выходной волоконной
шине, также не перекрываясь. Следовательно, при N датчиках для ка-
362 Глава 11. Распределенные и мультиплексированные датчики
ждого входного импульса в выходном массиве формируется последова-
тельность из 2N импульсов. После этого выходная последовательность
импульсов подается на компенсирующий интерферометр, оптическая раз-
ность хода которого также равна L. Этот интерферометр обеспечивает
компенсацию длины пути для импульсов, которые прошли через сигналь-
ное и измерительное плечо каждого интерферометра, и, следовательно,
позволяет возникнуть интерференции между импульсами. Выход компен-
сатора состоит из 2N + 1 импульсов, N из которых содержат требуемую
интерферометрическую информацию. Дальнейшее демультиплексирова-
ние с разделением по времени может быть выполнено при помощи элек-
тронных или оптических методов стробирования. Демодуляция разде-
ленных интерферометрических импульсов может быть осуществлена при
помощи синтетического гетеродинного метода или гомодинного метода
с использованием несущей с модуляцией по фазе, применяемых в компен-
саторе. Из-за формирования лишних импульсов на выходе компенсатора
максимальная производительность, с которой в этой схеме мультиплек-
сирования может работать каждый датчик, составляет (т.е. 0,5 пол-
ного).
Более эффективная архитектура матрицы, используемая при мульти-
плексировании с разделением по времени, представлена на рис. 11.23, в.
Здесь измерительные интерферометры не являются обособленными, а фор-
мируются последовательными «перекладинами» многозвенной сети [45].
Задерживающие витки между ответвителями во входные подводящие во-
локна также действуют как фрагменты чувствительного волокна (они
могут также быть размещены в выходном волокне или симметрично —
в обоих входном и выходном волокнах). При такой конфигурации каж-
дый входной импульс порождает N + 1 выходных импульсов, которые
направляются на компенсатор асимметрии траектории, равной той, ко-
торая образует каждый из интерферометров между последовательными
звеньями волоконной матрицы. Из N + 1 входного импульса компенсатор
формирует N+2 выходных импульсов, среди которых N центральных им-
пульсов содержат требуемую интерферометрическую информацию. Та-
ким образом, максимальную производительность на выходе каждого дат-
чика можно считать равной 1/(7V + 1), что примерно в 2 раза лучше (для
больших значений ./V) по сравнению с матрицей, в которой используются
отдельные интерферометры.
На рис. 11.24 представлены две конфигурации матриц с временным
мультиплексированием, основанные на последовательном соединении чув-
ствительных элементов. В схеме рефлектометрической матрицы [42, 46],
представленной на рис. 11.24, а, чувствительные элементы Фабри-Перо
схематически изображены частично отражающими стыками. Импульсное
И.4- Мультиплексирование интерферометрических датчиков 363
излучение вводится в один из концов матрицы, и по мере его распро-
странения по матрице небольшие доли оптической мощности отражаются
от каждого частично отражающего соединения волокон обратно в при-
нимающий фотодетектор. Если на вход поступает пара оптических им-
пульсов, таких что задержка между ними равна времени распространения
излучения в обоих направлениях через каждый чувствительный фрагмент
волокна, отражение первого импульса от какого-либо соединения будет
получено на фотодетекторе одновременно с отражением второго импуль-
са от предыдущего соединения. При условии, что длина когерентности
источника велика, два отраженных импульса смешиваются в фотоприем-
нике и формируют интерференционную картину.
Чувствительные витки волокна Частичные
ЛИ. R R R R
_пйййШл_
Рис. 11.24. Последовательная топология для адресации с разделением по времени
Для облегчения выполнения демодуляции интерференционных сигна-
лов, относящихся к каждому датчику, оптические частоты двух входных
импульсов могут быть различными (cui — cd2 = cuq), так что на фотодетек-
тор (на частоте cjq) поступает пачка гетеродинных сигналов (гетероди-
нирование дифференциальной задержки). Для каждого входного импуль-
са на детектор возвращается последовательность из N + 1 однократных
отражений. Следовательно, сигнал на выходе фотодиода состоит из ко-
ротких пачек гетеродинного сигнала, каждая из которых соответствует
определенному фрагменту волокна в матрице; временная диаграмма при-
ведена на рис. 11.25. После этого для выделения выхода, относящегося
к конкретному датчику, может быть применено разделение по времени;
а демодуляцию можно выполнить при помощи обычного метода гетеро-
динирования (частотной селекции, фазовой автоматической подстройки
частоты).
Однако в отличие от схем мультиплексирования с разделением по вре-
мени, представленных на рис. 11.23, рефлектометрическая схема матрицы
демонстрирует собственный уровень оптических перекрестных помех,
возрастающий из-за многократных отражений, которые естественно воз-
никают в системе. Эти формирующие более слабую интерференционную
картину паразитные импульсы смешиваются с прямыми возвращаемыми
импульсами однократного отражения, что приводит к перекрестным по-
мехам между датчиками в сети. Следовательно, приходится достигать
компромисса между уровнем возвращаемой мощности (т. е. как она опре-
деляется коэффициентами отражения стыков) и перекрестными помехами.
Принимаемые
отражения:
Первый стык
Второй стык
Третий стык
Четвертый стык
о
&
щш
Время
Гетеродинные сигналы
Рис. 11.25. Временная диа-
грамма импульсов для ре-
флектометрической матрицы
интерферометрических воло-
конных датчиков на основе
мультиплексирования с раз-
делением по времени
На рис. 11.24, б представлена матрица, архитектуру которой можно
рассматривать как аналог матрицы Фабри-Перо, работающий на пе-
редачу. Особенность структуры последовательной матрицы из чувстви-
тельных элементов состоит в том, что от единственного выходного волок-
на между каждыми двумя элементами последовательно отходят отводы
(последовательная матрица с отводами) [47, 48]. Импульсное излучение
лазерного источника вводится в матрицу, образованную последователь-
ностью секций волоконных датчиков, длина каждой из которых равна Ls.
При каждом разветвлении небольшая доля излучения к проходит непо-
средственно в выходное волокно. Ширина входного импульса устанавли-
вается меньше, чем время распространения с задержкой в каждой секции
волокна, и, следовательно, выход матрицы для каждого входного им-
пульса состоит из последовательности, состоящей из N + 1 отдельных
11.4. Мультиплексирование интерферометрических датчиков 365
импульсов. Эта пачка импульсов направляется в компенсирующий интер-
ферометр с оптической разностью хода, равной Ls — Lj (задержка Т),
где Li — длина волоконной связи между двумя последовательными отве-
твителями в матрице. В результате формируется последовательность из
N + 2 выходных импульсов. Средние N импульсов этой последователь-
ности содержат информацию, переданную N датчиками. Таким образом,
максимальная выходная производительность, с которой может работать
эта схема, составляет 1/(ЛГ +1) на датчик. Временное демультиплексиро-
вание позволяет разделить выходы отдельных датчиков; а демодуляцию
можно выполнить с помощью соответствующих методов в компенсаторе,
так же как и с помощью других схем, основанных на разностной интер-
ферометрии с согласованными траекториями.
Так же как и рефлектометрическая матрица, архитектура последова-
тельной матрицы с отводами подвержена воздействию перекрестных по-
мех, возникающих из-за оптических импульсов, которые возвращаются из
выходного волокна снова в цепь датчиков и затем снова поступают в вы-
ходное волокно. Эти импульсы поступают на выход матрицы в интервалы
времени, занятые основными импульсами (что выводится непосредствен-
но из взаимосвязанных процессов в матрице). Такая перекрестная вза-
имосвязь приводит к эффектам перекрестных помех, аналогичных тем,
что возникают в рефлектометрической матрице; следовательно, требует-
ся находить компромиссное соотношение между коэффициентом связи к
и уровнем перекрестных помех.
II.4.2.2. Мультиплексирование с разделением по частоте
Основной подход к частотному мультиплексированию интерферометри-
ческих волоконно-оптических датчиков предполагает использование ла-
зерных источников с модулированным по частоте излучением в сочетании
с сетью асимметричных интерферометрических датчиков для создания
выходных сигналов с фазомодулированной несущей, амплитуда или ча-
стота которых (строго по фазе) модулированы сдвигом фазы интерфе-
рометра.
На рис. 11.26, а схематически представлен подход к мультиплекси-
рованию интерферометрических датчиков с использованием частотно-
модулированной непрерывной волны [41]. Излучение лазера модулируется
при помощи кривой тока пилообразной формы с частотой fr и размахом
отклонений оптической частоты Az/. Интерферометры с асимметрией хо-
да Lj могут быть упорядочены, формируя последовательную структуру,
как показано на рисунке, или могут быть сконфигурированы в виде мно-
гозвенной сети. Сдвиг фазы, вызванный частотной модуляцией лазера,
создает на выходе частоты биения, каждая из которых соответствует
определенному датчику. Каждая частота биений прямо пропорциональ-
Глава И. Распределенные и мультиплексированные датчики
на асимметрии хода определенного датчика; следовательно, существуют
способы определения абсолютной асимметрии хода для каждого датчика.
Эта схема также может работать в псевдогетеродинном или синтетиче-
ском гетеродинном режиме [34], при котором отслеживаются фазы бие-
ний. В этом случае амплитуда сдвига фазы, вызываемого пилообразной
частотой в каждом (j-tom) интерферометре, настраивается на размах
2Mj7r радиан (т.е. многократное полное смещение полосы), где М — це-
лое, определяемое асимметрией хода Lj каждого конкретного датчика.
Могут быть вычислены значения Л/, которые приводят к уменьшению
паразитных выходов, обусловленных перекрестными влияниями [49]. Пе-
рекрестные помехи при использовании частотно-модулированной непре-
рывной волны могут возникать из-за нескольких практических ограниче-
ний схемы, в том числе неидеальной пилообразной модуляции и проявле-
ний внутренней перекрестной модуляции датчик-датчик.
Пилообразная Оптическая
модуляция разность
Рис. 11.26. Топология интерферометрических датчиков для мультиплексирова-
ния с разделением по частоте
Второй подход к частотному мультиплексированию [50] основан на ис-
пользовании в качестве источника синусоидально частотно-модулирован-
ного диодного лазера, чтобы обеспечить на выходе несущую модулиро-
ванную по фазе (см. раздел 11.4.2.). Архитектура матрицы, используемой
с такой схемой адресации, показана на рис. 11.26, б на примере матрицы,
состоящей из четырех датчиков. Здесь каждый из двух лазеров питает
два незначительно асимметричных измерительных интерферометра и че-
тыре выхода датчиков объединяются в двух выходных волокнах таким
11.4- Мультиплексирование интерферометрических датчиков
образом, что каждое выходное волокно несет только один сигнал от ка-
ждого лазера. Следовательно, если излучение лазеров промодулировано
на различных частотах, выходное излучение каждого выходного волокна
состоит из сигналов с различной частотой модуляции (или, возможно, их
гармоник) и выходы датчиков могут быть разделены посредством ча-
стотной селекции, при помощи соответствующего полосового фильтра
или синхронного детектирования. Базовый пример размером 2x2 мо-
жет быть расширен до обобщенной сети размером J х К, как показано
на примере матрицы, представленной на рис. 11.27. Коэффициент деле-
ния мощности для матрицы из N = J2 датчиков равен при том что
каждое выходное волокно содержит таких сигналов. Понятно, что
выгода от мультиплексирования, получаемая при такой схеме, увеличи-
вается как корень квадратный из общего количества датчиков (АГ) при
условии, что используется схема с симметричной матрицей.
Рис. 11.27. Обобщенная тополо-
гия матрицы J х К для мульти-
плексирования с разделением по
частоте
1 Y 2 Y з ............... Yk
Приемники
Анализ метода частотного мультиплексирования показывает, что при
источниках, обеспечивающих входную мощность 10 мВт, может быть
объединено с мультиплексированием до 1000 интерферометрических дат-
чиков (1024 датчика — 32 х 32), при этом дробовой шум эквивалентен
чувствительности, равной нескольким мкрад/д/Гц-
Новый вид частотного уплотнения в интерферометрических систе-
мах основан на использовании механизмах нелинейных преобразований
смещение - напряжение для наблюдения за измеряемыми величинами, из-
меняющимися с низкой частотой или постоянными [51, 52]. Такой подход
к измерениям описан в гл. 10. В схеме мультиплексирования, основанной
Глава 11. Распределенные и мультиплексированные датчики
на этом подходе, единственный интерферометр используется для изме-
рения сдвигов фаз, обусловленных несколькими преобразователями, как
показано на рис. 11.28. Для каждого датчика амплитуда «вибрирующего»
фазового сдвига на выходе регистрируется в предопределенном наборе
частот ojj (j = 1,... ,п), причем каждая амплитуда вибрации пропорци-
ональна низкочастотной измеряемой величине, представляющей интерес.
Для каждого датчика требуется вибрационное возмущение сигнала, для
чего может быть необходимым электрическое подсоединение к датчи-
ку. Однако возможно оптическое питание таких датчиков, что обеспечит
полностью оптическую систему опроса [51].
поддерживающий несколько преобразователей
на основе механизмов нелинейных
преобразований смещение-напряжение
Рис. 11.28. Частотное мультиплексирование фазовых преобразователей с исполь-
зованием механизмов нелинейных преобразований смещение-фаза
11.4-2.3. Мультиплексирование с разделением по когерентности
На рис. 11.29 представлены две схемы для мультиплексирования с разде-
лением по когерентности интерферометрических датчиков, основанные
на разностной интерферометрии с согласованными траекториями, при-
чем в этих схемах используются последовательная и параллельная топо-
логии [53, 54]. В системе используются пары, состоящие из согласованных
по оптической разности хода датчика и приемника-интерферометра Ма-
ха-Цендера в сочетании с источником, длина когерентности которого
намного меньше, чем асимметрия между любыми двумя путями внутри
системы. Для каждой пары датчик - приемник-интерферометр существу-
ют согласованные оптические пути через сеть, что приводит к возник-
новению интерференции на выходе каждого из приемников. Сдвиг фазы
интерференционного сигнала, формирующегося на конкретном приемни-
ке, зависит от относительной фазовой задержки между плечами соот-
ветствующих измерительного и принимающего интерферометров. Сле-
довательно, в целом сформированный таким способом интерферометр
может рассматриваться как «разделенный на части» интерферометр. Из-
за большого количества несогласованных оптических путей внутри такой
11.4- Мультиплексирование интерферометрических датчиков 369
сети, как последовательная сеть, представленная на рис. 11.29, а, чув-
ствительность метода мультиплексирования интерферометрических дат-
чиков с разделением по когерентности ограничена избыточным по фазе
уровнем шума, который возникает из-за задержанного самогомодини-
рования при смеси с лазерным излучением на выходе каждого прием-
ника. Следовательно, возникает значительный избыточный шум, даже
если оптические разности хода датчика и приемника точно согласованы.
Теоретически доказано, что единственный способ уменьшить избыточ-
ный шум — это использовать источник с чрезвычайно маленькой длиной
когерентности, так что мощность шума самогомодинирования распреде-
ляется в приемниках по более широкой полосе частот [55]. Использование
в радиочастотном диапазоне высокочастотной модуляции лазерной опти-
ческой частоты для «гетеродинирования» этого избыточного шума за
пределы ширины полосы модулирующих частот было успешно продемон-
стрировано в применении к мультиплексированию.
Рис. 11.29. Последовательная и параллельная топологии интерферометрических
датчиков для мультиплексирования с разделением по когерентности
Вопрос перекрестных помех между датчиками в мультиплексных сис-
темах с разделением по когерентности до сих пор достаточно тщательно
не исследовался экспериментальными средствами. Количество перекрест-
Глава 11. Распределенные и мультиплексированные датчики
них взаимодействий определяется общим количеством оптических пу-
тей через волоконную сеть. Последовательная конфигурация матрицы
приводит к наиболее существенным ограничениям из-за перекрестных
взаимодействий. В результате анализа рис. 11.29, а становится очевид-
но, что, если сумма или разность путей любой комбинации оптических
разностей ходов датчиков равна разности хода какой-либо конкретной
пары датчик/приемник, перекрестные помехи между определенными дат-
чиками в сети резко возрастут. Требования к выбору относительных
оптических разностей ходов в мультиплексных системах с разделением
по когерентности были изучены в работе Blptekjaer и др. [57] (а также
в работе Sakai и др. [49] для тесно связанных с этими проблем, возника-
ющих при частотном мультиплексировании с использованием частотно-
модулированной непрерывной волны). Разности ходов датчиков при по-
следовательной архитектуре должны удовлетворять условию
п
Lj
г=1
(И.21)
п
где ci е { — 1,0,1}, 52 / 1; т. е. в системе не существует разности хода
г=1
датчиков, равной любой комбинации (сумме или разности) любого коли-
чества других разностей ходов. Например, если минимальная разность
хода, используемая в системе, равна Lq, следующая допустимая разность
хода равна 3£о, а затем 8Lq, 21Lq, 55Lq, • • • — эта последовательность
строго ограничивает применимость этого подхода в большинстве систем
с мультиплексированием. Можно сделать вывод, что мультиплексирова-
ние с разделением по когерентности пригодно к использованию прежде
всего в приложениях, в которых не требуется высокая чувствительность
при регистрации фазы и в которых объединяется только относительно
небольшое количество датчиков.
Литература
1. М.К. Barnoski and S.M. Jensen, Fiber Waveguides: A Novel Technique for
Investigating Attenuation Characteristics, Appl. Opt. 15, 2112 (1976).
2. D. Marcuse, Principles of Optical Fiber Measurements, Academic Press, New
York, 1981, Chap. 5.
3. R. I. MacDonald, Frequency Domain Optical Reflectometer, Appl. Opt. 20,1840
(1981).
4. W. Eichoff and R. Ulrich, Optical Frequency Domain Reflectometry in Single-
Mode Fiber, Appl. Phys. Lett. 39, 693 (1981).
5. D. Uttam and B. Culshaw, Precision Time Domain Reflectometry in Optical
Fiber Systems Using a Frequency Modulated Continuous Wave Ranging Tech-
nique, IEEE J. Lightwave Technol. LT-3, 971 (1985).
6. J.K. A. Everard, Novel Signal Techniques for Enhanced OTDR Sensors, Paper
05, Proc. SPIE 798, Fiber Optic Sensors II, The Hague, 1987.
7. D. E. N. Davies, Signal Processing for Distributed Optical Fiber Sensors, Proc.
2nd International Conference on Optical Fiber Sensors, Stuttgart, Sept. 1984,
p. 285.
8. A. J. Rogers, Distributed Sensors: A Review, Paper 03, Proc. SPIE 798, Fiber
Optic Sensors II, The Hague, 1987.
9. A. J. Rogers, Polarization Optical Time Domain Reflectometry, Electron. Lett.
16, 489 (1980).
10. A. J. Rogers, POTDR: A Technique for the Measurement of Field Distributions,
Appl. Opt. 20, 1060 (1981).
11. J.N. Ross, Birefringence Measurement in Optical Fibers by Polarization: Opti-
cal Time Domain Reflectometry, Appl. Opt. 21, 3489 (1982).
12. A. H. Hartog, A Distributed Temperature Sensor Based on Liquid-Core Optical
Fibers, IEEE J. Lightwave Technol. LT-1, 498 (1983).
13. S. B. Poole et al., Fabrication and Characterisation of Low-Loss Optical Fibers
Containing Rare-Earth Ions, J. Lightwave Technol. LT-4, 870 (1986).
14. M.C. Fames et al., Distributed Temperature Sensor Using Nd3-Doped Optical
Fiber, Electron. Lett. 22, 418 (1986).
15. M.C. Fames et al., Distributed Temperature Sensor Using Holmium-Doped
Fiber, Proc. OFC’87, p. 170, Reno, Nev., 1987.
16. P. Heinzmann and R. Hofstetter, Temperature Dependence of PCS Fiber Char-
acteristics, Proc. SPIE 584, Cannes, 1985.
17. P. M. Kopera et al., Modified Cladding Wavelength Dependent Fiber Optic Tem-
perature Sensor, Proc. SPIE 412, Fiber Optic and Laser Sensors, 1983, p. 82.
18. A. J. A. Briumsma et al., Fiber Optic Strain Measurement for Structural Integri-
ty Monitoring, Proc. 2nd International Conference on Optical Fiber Sensors,
Stuttgart, 1984, p. 399.
19. J. P. Dakin and D. J. Pratt, Fiber-Optic Distributed Temperature Measurement:
A Comparative Study of Techniques, Paper 10, Proc. IEE Colloquium on Dis-
tributed Optical Fiber Sensors, London, May 1986.
20. J.P. Dakin et al., Temperature Distribution Measurement Using Raman Ratio
Thermometry, Proc. SPIE 566, Fiber Optic and Laser Sensors HI, San Diego,
Calif., 1985, p. 249.
21. W. Eichoff, Measurement of the Spatial Distribution of Random Polarization
Coupling in Single-Mode Fibers, Proc. 9th European Conference on Optical
Communication, Geneva, 1983, p. 197.
22. R. B. Franks and R. C. Youngquist, A Birefringent Fiber Stress Location Sensor,
Paper 5, Proc. IEE Colloquium on Distributed Optical Fiber Sensors, London,
May 1986.
23. Mickelson et aL, Backscatter Readout from Serial Microbending Sensors, IEEE
J. Lightwave Technol. LT-2, 700 (1984).
24. E. Theochorous, Distributed Sensors Based on Differential Absorption, Pa-
per 13, Proc. IEE Colloquium on Distributed Optical Fiber Sensors (Digest
1986/74), London, May 1986.
372 Глава 11. Распределенные и мультиплексированные датчики
25. F. X. Desforges et al., Progress in OTDR Optical Fiber Sensor Networks, Proc.
SPIE 718, Fiber Optic and Laser Sensors IV, Cambridge, Mass., 1986, p. 225.
26. A. Tardy and M. Jurczyszyn, Multipoint Fiber Optic Refractive Index Sensors.
Proc. SPIE 586, Fiber Optic Sensors, Cannes, 1985, p. 65.
27. A. R. Nelson et al., Passive Multiplexing System for Fiber-Optic Sensors, Appl.
Opt. 19, 2917 (1980).
28. C.M. Davis, Fiber Optic Sensors: An Overview, Proc. SPIE 412, (1983).
29. К. I. Mallalieu et al., FMCW of Optical Source Envelope Modulation for Passive
Multiplexing of Frequency-Based Fiber-Optic Sensors, Electron. Lett. 22, 809
(1986).
30. G. Winzer, Wavelength Multiplexing Components: A Review of Single-Mode
Devices and Their Applications, IEEE J. Lightwave Technol. LT-2, 369-378
(1984).
31. A. Dandridge, A.B. Tveten, and T.G. Giallorenzi, Homodyne Demodulation
Scheme for Fiber-Optic Sensor Using Phase Generated Carrier, IEEE J. Quan-
tum Electron. 18, 1647 (1982).
32. A. Dandridge and L. Goldberg, Current-Induced Frequency Modulation in Diode
Lasers, Electron. Lett. 18, 302-304 (1982).
33. J.H. Cole et al., Synthetic-Heterodyne Interferometric Demodulation, IEEE J.
Quantum Electron. QE-18, 694 (1982).
34. D. A. Jackson, A.D. Kersey, M. Corke, and J.D. C. Jones, Pseudo-heterodyne
Detection Scheme for Optical Interferometers, Electron. Lett. 18, 1081 (1982).
35. A. C. Lewin, A. D. Kersey, and D. A. Jackson, Non-contact Surface Vibration
Analysis Using a Monomode Fiber-Optic Interferometer Incorporating an Open
Air Path, paper presented at the European Conference on Sensors and Their
Applications, Manchester, England, 1983.
36. A. D. Kersey, A. C. Lewin, and D. A. Jackson, Pseudo-heterodyne Detection for
the Fibre Gyroscope, Electron. Lett. 20, 368 (1984).
37. A.D. Kersey et al., Recent Advances in Demodulation/Multiplying Techniques
for Interferometric Fiber Sensors, Proc. SPIE 734, Fiber Optics ’87, 1987,
p. 261.
38. S. A. Al-Chalabi, B. Culshaw, and D. E. N. Davies, Partially Coherent Sources in
Interferometric Sensors, Proc. First International Conference on Optical Fibre
Sensors, London, Apr. 1983, p. 132-135.
39. K.P. Koo et al., Passive Stabilization Scheme for Fiber Interferometers Using
3x3 Fiber Directional Couplers, Appl. Phys. Lett. 41, 616 (1982).
40. M.L. Henning et al., Optical Fiber Hydrophone with Down Lead Insensitivity,
Proc. First International Conference on Optical Fiber Sensors, London, Apr.
1983, p. 23.
41. I. P. Giles, D. Uttam, B. Culshaw, and D.E. N. Davies, Coherent Optical-Fiber
Sensors with Modulated Laser Sources, Electron. Lett. 19, 14 (1983).
42. J.P. Dakin, C. A. Wade, and M.L. Henning, Novel Optical Fibre Hydrophone
Array Using a Single Laser Source and Detector, Electron. Lett. 20, 53 (1984).
43. A.D. Kersey, A. Dandridge, and A.B. Tveten, Multiplexing of Interferometric
Fiber Sensors Using Time Division Addressing and Phase Generated Carrier
Demodulation, Opt. Lett. 12, 775 (1987).
44. J.L. Brooks, M. Tur, B.Y. Kim, K.A. Fesler, and H. J. Shaw, Fiber-Optic In-
terferometric Sensor Arrays with Freedom from Source Phase-Induced Noise,
Opt. Lett. 11, 473-475 (1986).
45. J.L. Brooks et al., Time-Domain Addressing of Remote Fiber-Optic Interfero-
metric Sensor Arrays, IEEE J. Lightwave Technol. LT-5, 1014 (1987).
46. M. Henning et al., Improvements in Reflectometric Fiber Optic Hydrophones,
Proc. SPIE 586, Fiber Optic Sensors, Cannes, 1985, p. 58.
47. A. D. Kersey and A. Dandridge, Tapped Serial Interferometric Sensor Array
with Time Division Multiplexing, Proc. 5th International Conference on Optical
Fiber Sensors, New Orleans, La., Jan. 1988.
48. A. D. Kersey and A. Dandridge, Transmissive Serial Interferometric Fiber Sensor
Array, IEEE J. Lightwave Technol. LT-7, 846 (1989).
49. I. Sakai, G. Parry, and R. C Youngquist, Multiplexing Fiber-Optic Sensors
by Frequency Modulation: Cross-Term Considerations, Opt. Lett. 11, 183-185
(1986).
50. A. Dandridge, A.B. Tveten, A.D. Kersey, and A. M. Yurek, Multiplexing of
Interferometric Sensors Using Phase Generated Carrier Techniques, IEEE J.
Lightwave Technol. LT-5, 947 (1987).
51. A. D. Kersey, F. Bucholtz, K. Sinansky, and A. Dandridge, Interferometric Sen-
sors for DC Measurands: A New Class of Fiber Sensors, Proc. SPIE 718, Fiber
Optic and Laser Sensors IV, Cambridge, Mass., 1986, p. 198.
52. F. Bucholtz, A. D. Kersey, and A. Dandridge, Multiplexing of Nonlinear Inter-
ferometric Fiber Sensors, IEEE J. Lightwave Technol. LT-7, 514 (1989).
53. J.L. Brooks, R. C. Youngquist, M. Tur, B.Y. Kim, and H. J. Shaw, Coherence
Multiplexing of Fiber-Optic Interferometric Sensors, Technical Digest, 3rd In-
ternational Conference on Optical Fiber Sensors, 1985, p. 128.
54. J.L. Brooks, R. H. Wentworth, R. C. Youngquist, M. Tur, B.Y. Kim, and H. J.
Shaw, Coherence Multiplexing of Fiber-Optic Interferometric Sensors, J. Light-
wave Technol. LT-3, 1062 (1985).
55. R. H. Wentworth and H.J. Shaw, Expected Noise Levels for Interferometric
Sensors Multiplexed Using Partially Coherent Light, Proc. SPIE Conference on
Laser and Fiber Optic Sensors III, San Diego, Aug. 1985, p. 212-217.
56. A.D. Kersey and A. Dandridge, Phase Noise Reduction in Coherence Multi-
plexed Interferometric Fibre Sensors, Electron. Lett. 22(11), 616-618 (1986).
57. K. Blotekjaer et al., Choosing Relative Optical Path Delays in Series Topology
Interferometric Sensor Arrays, J. Lightwave Technol. LT-5, 229 (1987).
ГЛАВА 12
ВОЛОКОННО-ОПТИЧЕСКИЕ
ДАТЧИКИ МАГНИТНОГО ПОЛЯ
Франк Б у хольтц
Лаборатория по морским исследованиям, США
Подразделение оптики
Код 6574
Вашингтон, федеральный округ Колумбия
12.1. Введение
Датчики магнитного поля представляют собой важный класс научной
аппаратуры, области исследования и применения которой простираются
от коммерческих до военных и фундаментальных наук. Для измерения
низкочастотных (< 10 Гц) магнитных полей с уровнем ниже 10-9 Тл
(10-5 Гс) разработано пять различных технологий. На их основе могут
быть построены: (1) феррозондовые приборы [1], (2) прецессионные при-
боры [2], (3) сверхпроводящие квантовые интерферометры [3], (4) опто-
волоконные устройства [4] и (5) устройства на основе эффекта магнито-
упругости, приводимые в действие механическим напряжением [5]. Датчик
для измерения высокочастотных (> 10 Гц) магнитных полей, состоя-
щий из проволочной катушки и малошумящего предусилителя, трудно
превзойти в том, что касается простоты и эффективности. Однако при
жестких условиях эксплуатации, при наличии электромагнитных помех
или высокого напряжения, использование непроводящего датчика опре-
деленно предпочтительнее. Устройства, применимые для измерения вы-
сокочастотных (> 10 Гц) магнитных полей, это: (6) проволочная петля
(измерительная катушка) [6, 2], (7) волоконно-оптические устройства на
основе эффекта Фарадея [7] и (8) объемные устройства на основе эффекта
Фарадея [7]. Понятно, что подробное описание принципов действия всех
этих приборов выходит за пределы одной главы. Здесь мы обсудим те-
орию и принципы действия волоконно-оптических датчиков магнитного
Волоконно-оптические датчики: Вводный курс для инженеров и научных работников,
под редакцией Эрика Удда. ©1991 John Wiley & Sons, Inc.
12.1. Введение 375)
поля, в том числе магнитострикционные интерферометрические датчики,
датчики на основе эффекта Фарадея и датчики на основе силы Лоренца.
В связи с разнообразными историческими и практическими преце-
дентами литература по измерениям магнитного поля страдает от при-
водящего в замешательство количества используемых единиц измерения.
В то время как В/м — это почти универсально принятая единица из-
мерения электрического поля, магнитное поле может быть определено
в таких единицах, как гаусс, эрстед, тесла, гамма, ампер-виток/метр и,
в исключительных случаях, Вб/м2. Сложности возникают потому, что
обычно приходится выбирать между тем, чтобы (1) твердо придержи-
ваться единой системы единиц измерения или (2) смешивать системы
единиц измерения, но работать с численными значениями, которые удоб-
ны и легко распознаваемы. Правда, представления о том, какие именно
единицы удобны и легко распознаваемы, открывают широкие возмож-
ности для интерпретаций и часто создают дополнительные сложности.
Еще больше осложняет ситуацию то, что одни и те же параметры мо-
гут иметь различные основные размерности в различных системах еди-
ниц, как показано в табл. 12.1, в которой сопоставляются системы СИ
и СГС (электромагнитные единицы). Следовательно, разумно выполнять
преобразования уравнений в единой системе единиц и преобразовывать
численные значения в другую систему, если это необходимо, только в са-
мом конце. Поскольку лабораторное оборудование обычно калибруется
в вольтах и амперах, удобно выполнять все вычисления в системе СИ,
несмотря на присутствие неудобного /j,q. В этой главе мы будем придер-
живаться второго подхода к проблеме единиц измерения магнитного поля
и использовать как систему единиц СИ, так и абсолютные электромагнит-
ные единицы в системе СГС. При обсуждении разрешения измерений поля
в свободном пространстве мы будем использовать тесла (единицу СИ),
понимая, что число относится или к В, или к Я. При определении при-
меняемых лабораторных полей и конкретных параметров материалов мы
используем привычный эрстед (единицу СГС). Все уравнения приведены
в системе СИ.
Следующие три раздела посвящены обсуждению принципов действия
и основ конструирования волоконно-оптических датчиков магнитного по-
ля. Мы начнем с рассмотрения датчиков, основанных на эффекте Фара-
дея, в которых взаимодействие с измеряемым магнитным полем происхо-
дит непосредственно в самом волокне; и продолжим изучением магнито-
стрикционных датчиков и датчиков на основе силы Лоренца, в которых
с помощью волокна измеряется отклик чувствительного материала на
приложенное поле. Список литературы в конце главы следует рассматри-
вать скорее как представительный, чем как исчерпывающий.
Глава 12. Волоконно-оптические датчики магнитного поля
Таблица 12.1. Физические величины, единицы измерения, размерности и пре-
образования для систем СИ и СГС (электромагнитные единицы)
Величина си СГС
1. Напряженность магнитного поля Н ампер-виток/м L~1T~1Q эрстед М1/2£-1/2г-1
1 ампер-виток/м = 4тг х 10 3 Э
2. Магнитная индукция В тесла (вебер/м2) гаусс
1 тесла = 104 гаусс
3. Намагниченность М ампер/м L-iT-lQ абампер/см M1/2L-1/2T-1
1 ампер/м = 10 3 абампер/см
4. Магнитная проницаемость (свободного пространства) До генри/м MLQ~2 безразмерная безразмерная
д0 = 4тг х 10 7 генри/м
5. Электрический ток I ампер QT-1 абампер м1/2£1/2т-1
1 ампер = 0,1 абампер
6. Напряжение V вольт ML2T~2Q~'1 абвольт М1/2£3/2Г-2
1 вольт = 108 абвольт
7. Сопротивление R ом ML2T~lQ~2 абом LT-1
1 ом = 109 абом
М — масса, L — расстояние, Т — время, Q — заряд (только в системе СИ). Заряд
не является основной размерностью в системе СГС (электростатическая единица,
электромагнитная единица, единица системы Гаусса, единица Хевисайда-Лоренца).
В системе электромагнитных единиц заряд имеет размерность .
12.2. Датчики на основе эффекта Фарадея
Свету, распространяющемуся через любую среду, присуще свойство по-
ляризации. Состояние поляризации в любой точке характеризуется функ-
цией зависимости вектора электрического поля Е световой волны в этой
точке от времени [8]. В наиболее общем случае конец вектора поля Е
с течением времени описывает в пространстве эллипс. Такая поляризация
называется эллиптической. Можно выделить два частных случая: (1) ко-
гда эллипс становится окружностью (круговая поляризация) и (2) когда
эллипс вырождается в линию (линейная поляризация). Состояние поляри-
зации любой распространяющейся волны может быть представлено как
12.2. Датчики на основе эффекта Фарадея
суперпозиция двух волн, имеющих ортогональные состояния поляриза-
ции, например, две ортогональные линейно поляризованные волны или
две волны с круговой поляризацией, имеющие противоположные напра-
вления вращения. Если состояние поляризации некоторым образом изме-
няется при распространении излучения через вещество, такое вещество
называют двулучепреломляющим и свойства двулучепреломления можно
характеризовать по типу волн, на состояние поляризации которых среда
не влияет. Таким образом, состояние поляризации излучения с круговой
поляризацией остается постоянным в веществах, имеющих круговое дву-
лучепреломление. Однако те же самые материалы сильно влияют на состо-
яние поляризации линейно поляризованного излучения, как показано на
рис. 12.1, где плоскость поляризации линейно поляризованного излучения
поворачивается на угол 0 после прохождения через круговую двулуче-
преломляющую среду. В общем, полное изменение состояния поляризации
зависит от расстояний, проходимого излучением в двулучепреломляющем
веществе, величины и вида двулучепреломления и состояния поляризации
на входе.
Рис. 12.1. Вращение плоскости поляризации линейно поляризованного света кру-
говой двулучепреломляющей средой
Фарадей открыл, что во многих материалах круговое двулучепре-
ломление возникает под воздействием приложенного магнитного поля.
Следовательно, можно измерять магнитное поле, используя линейно по-
ляризованное излучение и измеряя величину кругового двулучепреломле-
ния, возникшего в определенных материалах под воздействием внешнего
магнитного поля. Именно этот механизм используется в волоконно-опти-
ческих датчиках магнитного поля, основанных на эффекте Фарадея.
Глава 12. Волоконно-оптические датчики магнитного поля
12.2.1. Эффект Фарадея в оптических волокнах
Статическое круговое двулучепреломление прямого отрезка круглой серд-
цевины оптического волокна обычно достаточно мало. Однако в присут-
ствии магнитного поля Н возникшее в волокне круговое двулучепрелом-
ление повернет плоскость поляризации линейно поляризованного излучения
на угол в
0 = vjHdI, (12.1)
где магнитооптическая постоянная Верде V является мерой интенсивно-
сти проявления эффекта Фарадея в волокне и интегрирование выполня-
ется по длине волокна, подвергнутого воздействию поля Н. Величина V
зависит от состава материала волокна и оптической длины волны; на-
много слабее она зависит от температуры диэлектрического вещества.
Примечательным свойством вращения под воздействием эффекта Фара-
дея является его зависимость от направления распространения. Если свет,
распространяющийся в одном направлении, подвергается вращению на
угол 0, свет, двигающийся в противоположном направлении, подвергается
вращению на угол —в. Эту зависимость можно использовать в разъедини-
телях мощности, как на оптических, так и на микроволновых частотах.
С другой стороны, она может являться помехой в таких устройствах, как
волоконно-оптические датчики вращения, основанные на исключении всех
источников такой зависимости, кроме эффекта Саньяка [9]. Паразитное
магнитное поле может действенно влиять на датчик через эффект Фара-
дея и искажать выходной сигнал.
В типичной схеме измерения тока N витков волокна намотано на про-
водник с током г. В соответствии с законом Ампера линейный интеграл
магнитного поля сводится к
0 = VNi. (12.2)
Пример 12.1. Для кварцевого волокна при Л = 0,63 мкм, V = 4,6 х 10-6 рад/м.
Для N = 100 витков независимо от радиуса витков можно ожидать проявления
чувствительности (0/г) = 460 мкрад/А.
Изменение состояния поляризации в можно измерить с помощью по-
ляриметра, как показано на рис. 12.2. На входе в волокно поляризатор
создает линейно поляризованное излучение, в то время как анализатор
(просто другой поляризатор) устанавливается под фиксированным углом
по отношению к входному поляризатору. Чтобы поддерживать строго
определенное состояние поляризации на всем протяжении, использует-
ся одномодовое волокно. Если анализатор установлен под углом ±45°
по отношению к поляризатору, мощность излучения (интенсивность) Р
12.2. Датчики на основе эффекта Фарадея 379
на приемнике определяется как
Р = ^(l±sin20), (12.3)
где Ро/2 — средняя оптическая интенсивность на приемнике, как пока-
зано на рис. 12.3. Для небольших токов уравнение (12.4) можно преобра-
зовать следующим образом:
Р = (1 + 2VNi), (12.4)
т. е. интенсивность является линейной функцией тока.
Рис. 12.2. Волоконный поляриметр, сконфигурированный как датчик тока
При наматывании волокна на проводник получается компактный дат-
чик, преимуществом геометрии которого является симметричность по от-
ношению к полю, создаваемому током. Однако изгибание волокна таким
Глава 12. Волоконно-оптические датчики магнитного поля
способом создает в нем механическое напряжение, что в свою очередь
вызывает линейное двулучепреломление Д, определяемое по формуле
= , (12.5)
где г — радиус волокна и К\ — параметр вещества, имеющий значение
К\ ~ 1.3 х 106 для кварцевого волокна при Л = 0,63 мкм. При наличии
линейного двулучепреломления уравнение (12.3) можно переписать как
Р = — (1 + — sm7z) , (12.6)
2 \ 7 /
где 72 = /З2 + Ор и /3 = fa + fa включает в себя линейное двулучепреломле-
ние /%, присущее волокну. Круговое двулучепреломление, обусловленное
эффектом Фарадея, выражается как ар = 20/L, где L = 2nNp — дли-
на волокна и р — радиус витка волокна. Если (3 ар, то получается
выражение
Р = (1 + 2Ve//M),
(12-7)
которое имеет такой же вид, как уравнение (12.4), но постоянная Верде
заменена эффективной постоянной Верде
Ve// =
(12-8)
Поскольку мы предположили, что » 1, то Veff — намного мень-
ше V и о постоянной Верде говорят, что она «подавляется» линейным
двулучепреломлением. Из уравнения (12.8) также понятно, что при такой
длине волокна L, когда /3L — птг (п — целое), постоянная Верде полно-
стью подавляется, до такой степени, что значение /3 остается постоянным
и выходное состояние поляризации никак не зависит от эффекта Фарадея.
Пример 12.2. Если N = 100 витков (пример 12.1) волокна диаметром 80 мкм
намотаны на сердечник диаметром 5 см, величина линейного двулучепреломле-
ния, вызванного изгибом, составляет fa = 3,3 рад/м. Чувствительность витка
уменьшается до в/г — 8,9 мкрад/А. Значение уменьшилось более чем в 50 раз
по сравнению с первоначальным.
Для преодоления вредного влияния линейного двулучепреломления раз-
работано три метода: скручивание волокна, отжиг волокна и использова-
ние волокон с круговым двулучепреломлением. Скручивание волокна на £
радиан на метр вызывает в оптическом волокне постоянное круговое дву-
лучепреломление аг, где
«Т = (12.9)
Параметр вещества g для кварцевого волокна равен примерно от 0,13 до
0,16 при А = 0,63 мкм. Если волокно закручено достаточно для того,
12.2. Датчики на основе эффекта Фарадея
чтобы выполнялось условие аТ /3 qf, то 7 = ar(l + /32/2ct^) и
Р= ^(l + gsin(aT + 2VM)), (12.10)
Zj
где q = 1 — (/32/2ct2). Это уравнение соответствует случаю, когда ана-
лизатор установлен так, что значение Р = Ро/2 получается при i = 0
и нескрученном волокне. Если анализатор настроен так, чтобы обеспе-
чивать такой же выход F = Fq/2 при i = 0 и скрученном волокне, для
2NVi 1 получается отклик
P=^(l + 2qVNi) (12.11)
и постоянная Верде почти полностью восстановлена: qV = V для /3 ат.
Пример 12.3. В примере 12.2 мы определили, что постоянная Верде 100-вит-
ковой катушки диаметром 5 см «подавляется» линейным двулучепреломлением,
обусловленным изгибом, до менее 2% своего первоначального значения. Если
то же самое волокно скручено на 20 оборотов на метр, чему соответствует
£ = 126 рад/м, то при g = 0,13 величина кругового двулучепреломления, вызван-
ного скручиванием, станет ат = 16,3 рад/м. Если пренебречь первоначальным
линейным двулучепреломлением, отклик витка скрученного волокна характери-
зуется величиной qV, где q = 1 — ff2/2а2 = 0,98. То есть 98% первоначальной
постоянной Верде, присущей ненапряженному волокну, восстановлено.
Второй метод преодоления эффекта линейного двулучепреломления
заключается в устранении самого механического напряжения, после то-
го как катушка уже сформирована, путем отжига волокна. Этот метод
особенно полезен при небольшом (< 3 см) диаметре витков. 200 витков
одномодового волокна диаметром 7 мм были последовательно обработа-
ны при температуре 800 °C и продемонстрировали значение эффективной
постоянной Верде, близкое к первоначальному, присущему ненапряжен-
ному волокну [7].
Волокна, которые изначально имеют высокую степень кругового дву-
лучепреломления, также могут быть эффективны при решении проблемы
двулучепреломления, вызванного изгибом. Производится множество раз-
личных волокон, обладающих этим свойством, в том числе волокна со
спиральной сердцевиной [11], крученые волокна [12] и волокна с эллипти-
ческим двулучепреломлением [13].
Ширина полосы пропускания — важная характеристика волоконно-
оптических датчиков, основанных на эффекте Фарадея. Поскольку эф-
фект Фарадея возникает в результате взаимодействия между электро-
нами в волокне и приложенным магнитным полем, такие датчики сраба-
тывают чрезвычайно быстро, особенно по сравнению с магнитострик-
ционными датчиками, основанными на механическом движении. Хотя
в коротких объемных оптических устройствах, основанных на эффекте
Фарадея, измеренная полоса пропускания намного превышает значение
1 ГГц, в волоконных датчиках она ограничена временем задержки в са-
мом волокне.
Рассмотрим датчик Фарадея, состоящий из волокна длиной L. Если
измеряемое магнитное поле быстро колеблется в то время, пока излуче-
ние распространяется по волокну, угол поворота плоскости поляризации
также подвергается множеству колебаний и только небольшая часть во-
локна в самом конце внесет вклад в конечный угол поворота. Подробные
расчеты [14] показывают, что ширина полосы пропускания Д/ на уровне
3 дБ для N витков радиусом р определяется приблизительно как
с
(7T2nNp)
где п — показатель преломления сердцевины волокна, и с — скорость
света в вакууме. На частотах за пределами 3 дБ частотная характеристи-
ка умножается на коэффициент (sincjr/cjr), где время распространения
т = nL/c. Из уравнения (12.12) понятно, что при постоянном N полоса
пропускания может быть расширена только уменьшением р, чему сопут-
ствует уменьшение эффективной постоянной Верде, обусловленное ли-
нейным двулучепреломлением, вызванным изгибом. Используя уравнения
(12.11) и (12.12), полезно вычислить произведение полосы пропускания на
чувствительность BRP = Af (в/г),
BRP = СУ Л [1 - (-) ] . (12.13)
тг2прд/2 [ 2#2£2 \р)
Для данного волокна (V, Л\, г и д) и для данного скручивания £ и ра-
диуса витков р произведение полосы пропускания на чувствительность
постоянно и не зависит от количества витков волокна N. Увеличение
чувствительности можно получить только за счет уменьшения полосы
пропускания.
12.2.2. Шум
В волоконных поляриметрах, применяемых в качестве датчиков, осно-
ванных на эффекте Фарадея, присутствуют три основных источника шу-
ма: тепловой шум (шум Джонсона) в нагрузочном резисторе приемника,
дробовый шум и низкочастотные механические и тепловые возмущения.
Фазовый шум, обусловленный лазерным источником, редко становится
проблемой для поляриметрических датчиков благодаря незначительной
разности хода между ортогонально поляризованными модами. Проблемы,
связанные с низкочастотным шумом, как правило, не являются акту-
альными — волоконно-оптические датчики Фарадея обычно работают
только на частотах от 50 до 60 Гц или выше.
12.2. Датчики на основе эффекта Фарадея
Если не рассматривать постоянную составляющую, ток Z, создавае-
мый приемником благодаря эффективному сигналу Фарадея PoNVi [урав-
нение (12.4)], равен
I = rjPvNVi, (12.14)
где tj — квантовая эффективность приемника. Дробовой шум добавит
к этому сигнальному току эффективный шумовой ток в пересчете на
единицу полосы пропускания
= (2ег)Р0^, (12.15)
\y/&V/sn
в то время как нагрузочный резистор приемника R добавит тепловой
шумовой ток на единицу полосы пропускания
(^=) =(4kBT/R^, (12.16)
\ V Az/ / Т
где е — заряд электрона и кв — постоянная Больцмана. Следовательно,
минимальный разрешаемый ток-сигнал на единицу полосы пропускания
определяется как
В предельном случае дробовой шум
tjPqVN
4квТ\*
R J
(12.17)
(12.18)
и в предельном случае тепловой шум
1
tjPqVN
(12.19)
Отметим, что tjPq/2 — это просто средний ток приемника и что V
при необходимости можно просто заменить на gV, чтобы учесть проявле-
ния линейного двулучепреломления, вызванные скручиванием и изгибом
волокна.
Пример 12.4. Предположим, что Pq = 100 мкВт, т] = 0,5 A/Вт и Т = 300 К,
и вычислим характеристики ограничений дробовым и тепловым шумами для
катушки из скрученного волокна из примера 12.3. Ограничение дробовым шумом
получается
\ min
-^=) = 0,12 mA/v/Гц
V Д^/ sn
и ограничение тепловым шумом
Глава 12. Волоконно-оптические датчики магнитного поля
5,6
vWi)
мА/\/Гц.
Порог чувствительности этого датчика будет ограничен тепловым шумом для
сопротивлений R 2,2 кОм. График зависимости эквивалентного тока шума
от R представлен на рис. 12.4.
Рис. 12.4. Эквивалентный ток шума как функция сопротивления нагрузки детек-
тора в волоконном поляриметре
12.2.3. Структуры датчиков
В этом разделе мы перечислим и кратко обсудим три характерных при-
мера волоконно-оптических датчиков, основанных на эффекте Фарадея.
I. Датчик: измерение тока в энергетических системах
Структура: многовитковая волоконная катушка на одинарной шине
В системе прямо и непосредственно используются принципы, обсужден-
ные ранее. Волоконный датчик особенно хорошо подходит для примене-
ния в этом приложении, поскольку в нем используется непроводящее под-
соединение к высоковольтной шине. Система, представленная на рис. 12.5,
аналогична той, которую протестировал Роджерс [15]. Излучение гелий-
неонового лазера поляризуется и вводится в одномодовое оптическое во-
локно посредством микрообъектива. Волокно скручено для создания по-
стоянного кругового лучепреломления аТ и N раз обернуто вокруг ши-
ны. Выходное излучение сводится в параллельный пучок и пропускается
через призму Волластона, чтобы разделить две ортогональные линейно
поляризованные моды. Разность выходов делится на сумму для придания
результату устойчивости и независимости от флуктуаций интенсивности.
12.2. Датчики на основе эффекта Фарадея 385
Рис. 12.5. Волоконно-оптическое устройство отображения тока, основанное на
эффекте Фарадея, в высоковольтной линии
II. Датчик: датчик тока с широкой полосой пропускания
и высоким разрешением
Структура: многовитковая волоконная катушка на одинарной
шине, обработанная отжигом
Если намотать голое волокно на керамический сердечник, затем выпол-
нить отжиг всей конструкции примерно при 800 °C, а после этого медлен-
но ее охладить, линейное двулучепреломление, вызванное изгибом, может
быть практически полностью устранено [16]. Этим способом были изгото-
влены катушки диаметром 7 мм, состоящие почти из 200 витков волокна.
Керамическое приспособление сохранялось после отжига в качестве за-
щитного контейнера для голого волокна, как показано на рис. 12.6.
Рис. 12.6. Зажимное приспособление из ке-
рамики используется для закрепления витков
голого волокна в процессе тепловой обра-
ботки для снятия напряжений. Устройство
остается после завершения отжига, чтобы
защитить волокно и позволить проводить из-
мерения тока г. [16]
13-3379
Глава 12. Волоконно-оптические датчики магнитного поля
III. Датчик: информационное кольцо
Структура: единственная волоконная петля с множеством
соленоидов
Рис. 12.7. Волоконный поляриметр, сконфигурированный как неинвазионное ин-
формационное кольцо. Сигнал с катушек передается в основной блок
обработки (усилитель с обратной связью) посредством угла поворота
плоскости поляризации при различающихся частотах [17]
Новый подход к применению эффекта Фарадея в волоконных системах —
схема с замкнутым контуром — представлен на рис. 12.7. Несколько мно-
говитковых проволочных соленоидов размещено на единственном воло-
конном «кольце». (В каждом соленоиде можно использовать также много-
витковые катушки, и в этом случае угол поворота плоскости поляризации
определяется как в — VNMi, где N — количество витков волокна и М —
количество витков проволоки с током г.) Один соленоид (F) использует-
ся в петле обратной связи, чтобы поддерживать значение полного угла
поворота плоскости поляризации меньше 90°, в то время как осталь-
ные соленоиды S(l), 5(2), ..., S(N) используются для передачи сигнала
в кольцо. Выход делится на два луча, каждый из которых анализируется
одним из двух поляризаторов, установленных под углами ±45° по отно-
шению к входному поляризатору. Таким образом, измеренные углы на
обоих выходах остаются в пределах 90°. Когда по одной из сигнальных
катушек пропускается ток, на катушку обратной связи приходит такой
сигнал с выхода дифференциального усилителя, чтобы углы оставались
в пределах 90°. Система мультиплексирована, поскольку на сигнальные
катушки подаются сигналы различающихся частот, и действует как ин-
12.3. Магнитострикционные датчики
формационное кольцо, в котором каждая сигнальная катушка работает
только на передачу [17]. В каждом канале может быть достигнуто разре-
шение лучше, чем 1 мА/^/Гц.
12.3. Магнитострикционные датчики
Рис. 12.8. Основные компоненты магнитострикционного волоконно-оптического
магнитометра на основе интерферометра Маха-Цендера
В магнитострикционных волоконно-оптических датчиках магнитного поля
для измерения зависящей от магнитного поля деформации в чувствитель-
ных элементах (магнитострикции) применяются волоконные интерферо-
метры. На рис. 12.8 представлена базовая схема интерферометра Маха-
Цендера, включающего в себя магнитострикционный элемент, подсоеди-
ненный к волокну длиной L в одном из плеч интерферометра [18]. (В гл. 10
дано подробное описание принципов работы волоконно-оптического ин-
терферометра Маха-Цендера.) Если деформация вещества е зависит от
общего приложенного внешнего магнитного поля Н, зависящий от поля
сдвиг фазы ф(Н\ возникающий в интерферометре, определяется как
</>(Я) = ^£т/е(Я), (12.20)
Л
где А — длина волны лазерного источника в свободном пространстве,
п — показатель преломления сердцевины волокна, L — длина волокна,
подвергающегося зависящей от поля деформации е(Я), г/ — эффектив-
ность передачи деформации (деформация в волокне)/(деформация в маг-
нитострикционном элементе) и £ — оптический коэффициент коррекции
деформации, который позволяет учесть изменение постоянной распро-
странения в сердцевине волокна при продольной деформации [19]
е=1-|п2[(1-м)Я12-/2Рц], (12.21)
где р, — коэффициент поперечной деформации Пуассона для материала
волокна и Pij — элементы тензора коэффициентов оптической чувстви-
тельности к деформациям. Для кварцевого волокна значение £ примерно
равно 0,78 и п = 1,46, в результате чего получается = 1,14. Не вся
деформация, сформировавшаяся в магнитострикционном элементе, пере-
дается в сердцевину оптического волокна, поскольку в области сопряже-
ния между волокном и материалом всегда присутствуют потери. Сколько
именно деформации передается, зависит от типа и толщины связываю-
щего вещества, используемого для соединения волокна с магнитострикци-
онным материалом, типа материала, покрывающего волокно, и частоты
возмущения. В общем случае эффективность передачи деформации рас-
считать точно достаточно сложно. В некоторых простых случаях она
измерена, однако типичные значения для одномодового волокна с покры-
тием и эпоксидным клеем лежат в диапазоне 0,3 т) 0,9.
12.3.1. Магнитострикция
Большинство ферромагнитных материалов обладает свойством магни-
тострикции, и для большинства материалов величину магнитострикции
можно вычислить по формуле
е = СН2. (12.22)
Это уравнение описывает так называемую «модель когерентного враще-
ния», которая применима только при выполнении набора условий, как
показано на рис. 12.9. В модели когерентного вращения предполагает-
ся, что вещество обладает одноосной магнитной анизотропией, и опре-
деляется ось легкого намагничивания, характеризующаяся полем анизо-
тропии Н\. То есть в отсутствие внешнего приложенного магнитного
поля магнитные моменты направлены в положительную или в отрицатель-
ную сторону вдоль поля анизотропии — «легкая ось». Эта анизотропия
обычно является результатом локальной атомной конфигурации вблизи
момента (анизотропия кристаллической структуры), но также зависит
от макроскопической формы образца (анизотропия формы). Сила поля
анизотропии определяет, насколько сильно «привязаны» моменты к напра-
влению легкой оси. Все моменты в образце не просто направлены в одном
и том же направлении вдоль легкой оси. Вместо этого магнитостати-
ческая энергия образца как целого минимизируется доменной структу-
рой (рис. 12.9), в которой легкая ось располагается в плоскости полос
и перпендикулярно направлению приложенного поля. Под воздействием
приложенного поля моменты поворачиваются когерентно в направлении
поля. При таких условиях намагниченность возрастает пропорционально
приложенному полю и возрастание намагниченности сопровождается из-
менением длины образца вдоль направления поля, причем длина зависит
от величины приложенного поля не линейно, а квадратично, как следует
из уравнения (12.22).
12.3. Магнитострикционные датчики 389
Рис. 12.9. Доменная структура поперечно отпущенного образца металлического
стекла. Реакция моментов на приложенное поле вытекает из модели
когерентного вращения
По мере возрастания величины приложенного поля и превышения им
значения На деформация асимптотически достигает насыщения магни-
тострикции Л5 (рис. 12.10). Значение С в уравнении (12.22) зависит от Л5
и На как С — ЗА5/27/^. Понятно, что материал, пригодный для использо-
вания в качестве магнитострикционного чувствительного элемента, дол-
жен иметь одновременно большое Л5 и маленькое На-
Рис. 12.10. Характеристика
магнитострикции металличе-
ского стекла демонстрирует
квадратичную зависимость
при слабых полях и насыще-
ние при сильных полях. Л5 —
насыщение магнитострикции
Особенно подходят для использования в волоконных датчиках такие
магнитострикционные материалы, как аморфные ферромагнитные спла-
вы (металлическое стекло). (Слово «стекло» в названии указывает на аморф-
ную природу сплава.) Оптимальное значение С достигается только после
того, как материал соответствующим образом подвергается термической
обработке в процессе, который называют отжигом поля. Хорошие резуль-
таты достигнуты для аморфного сплава Метгласе 2605 S2 (FeygBiaSig)
нагреванием материала или в вакууме, или под потоком обезвоженного
Глава 12. Волоконно-оптические датчики магнитного поля
аргона примерно до 400 °C в присутствии магнитного поля с индук-
цией от 0,01 до 0,1 Тл и последующим медленным охлаждением в при-
сутствии поля [21]. Сопоставление магнитострикции в слабых полях до
и после отжига полем приведено на рис. 12.11. Параметр С может быть
увеличен примерно в 10 раз, обычно с 10~7 Э"2 до 10~6 Э~2. Магни-
тострикция насыщения, которая не показана на рисунке, после отжига
полем существенно не изменяется. Некоторые параметры металлических
стекол, характеризующие их свойства и относящиеся к нашему изучению
волоконных датчиков, приведены в табл. 12.2.
Рис. 12.11. Сопоставление
магнитострикции в слабых
полях образца металлическо-
го стекла до и после отжига
поперечным полем
Таблица 12.2. Типичные значения механических, электрических и магнитных па-
раметров для металлических стекол на основе железо/бор
Параметр Обозначение Значение Ссылка
Механические/физические
Модуль Юнга Ет 1,7 х 1011 Нм-2 [22]
Коэффициент Пуассона Р 0,30 [23]
Плотность а 7,3 х 103 кг/м3 [23]
Электрические
Сопротивление Р 1,4 х 10 6 Ом • м [23]
Магнитные
Намагниченность насыщения Xs 27 х 10~6 [23]
Температура Кюри Те 410 °C [23]
Намагниченность насыщения 4ttBs 1,5 Т [23]
Поле анизотропии" На 1,0 Э [20]
Магнитная восприимчивость6 X 2 х 104 (ед. СИ) [24]
а Образец поперечно отожженный
^Образец поперечно отожженный, измерения при постоянном поле
12.3. Магнитострикционные датчики
При работе с датчиками наиболее важной особенностью уравнения
(12.22) является нелинейная зависимость магнитострикции от Л, свой-
ство чрезвычайно полезное при измерениях низкочастотных магнитных
полей. Рассмотрим магнитное поле, состоящее из постоянной составля-
ющей Но, медленно изменяющейся составляющей с частотой Q и быстро
изменяющейся составляющей с частотой си (си Q)
Н — Но + Н& cos Qf + h cos cot. (12.23)
Сдвиг фазы, возникающий в результате приложения этого поля к маг-
нитострикционному элементу, будет состоять из частот составляющих
постоянной, Q, 2Q, си, 2си, и ио ± Q. При условии, что мы управляем высо-
кочастотным полем и требуется измерить постоянное и низкочастотное
поля, достаточно измерить только компоненты сдвига фазы при со и cu±Q,
имеющие амплитуды
Ф(Н0) = (2^^CLh\HQ
\ А /
и
(^CLh\Hn.
(12.24)
(12.25)
При фиксированном значении h амплитуда составляющей со изменяет-
ся линейно при изменении в то время как амплитуда боковой полосы
при cu±Q изменяется линейно при изменении амплитуды низкочастотного
поля Т/q. Более того, знак этих сигналов зависит от направления Но и Н&.
Высокочастотное магнитное поле, приложенное к магнитострикционному
элементу, называют по-разному: возмущающее поле, модулирующее поле
или магнитная несущая. На рис. 12.12 показана переменная деформация,
получающаяся в результате приложения небольшого возмущающего по-
ля, центрированного относительно постоянного поля смещения Hq. При
Но = 0 переменный сдвиг фазы состоит только из компоненты 2си, и при
увеличении Но компонента 2си остается постоянной, тогда как величи-
на вклада компоненты со возрастает линейно при увеличении Hq. Врезка
на рис. 12.12 показывает частотный спектр характеристики. (Постоянная
составляющая не показана.) Понятно, что уравнение (12.24) симметрично
по отношению к постоянному и переменному полям. Следовательно, этот
преобразователь может также использоваться в качестве датчика пе-
ременного магнитного поля, если приложено фиксированное постоянное
поле подмагничивания. Тогда изменения выходного сигнала на частоте со
будут пропорциональны изменениям амплитуды переменного поля на час-
тоте СО.
На рис. 12.13 показан график зависимости от постоянного поля
Но, полученный в результате измерений при помощи волоконного маг-
Глава 12. Волоконно-оптические датчики магнитного поля
питометра, работающего на длине волны А = 0,83 мкм и включающего
в себя полосу металлического стекла, встроенную в покрытое защитной
оболочкой одномодовое оптическое волокно длиной L — 25 см. Для воз-
буждения использовалось магнитное поле, имеющее среднеквадратичную
напряженность 6,0 мЭ на частоте 1 кГц. Доля линейного выхода соответ-
ствует С = 1,0 х 10“6 Э~2.
Рис. 12.12. Смешивание воздей-
ствий постоянного и переменно-
го полей при нелинейной магнито-
стрикции. На врезке показан со-
ответствующий частотный спектр
(постоянная составляющая не по-
казана)
Рис. 12.13. Сдвиг фазы
на частоте возмущения как
функция постоянного поля,
демонстрирующий область
линейной зависимости при
слабых полях и насыщение
при значениях выше при-
мерно 1 Э
Из графика очевидно, что получилась кривая гистерезиса; такой эф-
фект проявляется почти во всех устройствах, в которых используются
12.3. Магнитострикционные датчики 393
магнитные материалы, его следует принимать во внимание также и при
разработке магнитострикционных волоконно-оптических датчиков. Ме-
тод преодоления эффектов гистерезиса будет рассмотрен далее.
При требуемом режиме работы волоконно-оптических датчиков воз-
можность регистрации сигналов на частоте си ограничена собственным
фазовым шумом интерферометра (см. гл. 10). Мощность фазового шу-
ма интерферометра обычно зависит от частоты как 1//, и при частотах
выше 1 кГц фазовый шум правильно сконструированного волоконного
интерферометра может быть легко сведен к диапазону 1-10 мкрад/^/Гц.
При особенно хорошем источнике и симметричном хорошо изолированном
интерферометре могут быть достигнуты значения меньше 1 мкрад/\/Гц
[25]. Однако при частотах порядка 1 Гц фазовый шум, достигающий зна-
чений 1-10 мрад/х/Гц, не является чем-то примечательным даже в интер-
ферометрах, сконструированных соответствующим образом. Он обусло-
влен медленными случайными изменениями температуры лазера, а также
разностью температур и механических напряжений волокон двух плеч
интерферометра. Необходимость использования возмущающего сигнала
вытекает непосредственно из этой проблемы низкочастотного фазового
шума. Смешивание возмущающего поля с измеряемым полем улучшает
отношение сигнал/шум не только за счет повышающего преобразования
сигнала до частот, при которых шум интерферометра ниже, но также за
счет повышения уровня сигнала в результате умножения низкочастотно-
го поля на амплитуду возбуждающего поля. При условии, что общая (по-
стоянная 4- переменная) напряженность поля мала настолько, что модель
когерентного вращения остается применимой, это означает, что увели-
чение амплитуды возмущения прямо увеличивает отношение сигнала на
частоте возмущения к шуму интерферометра.
12.3.2. Магнитострикционные преобразователи
Два основных типа магнитострикционных преобразователей представле-
ны на рис. 12.14. В первом типе устройства магнитострикционным ма-
териалом покрыто или голое волокно, или волокно, предварительно по-
крытое немагнитным полимером, придающим упругость и позволяющим
сохранять целостность чувствительному к магнитному полю волокну [26].
В преобразователях второго типа форма элемента из магнитострикцион-
ного материала фиксирована и волокно подсоединено к этому элементу.
Наиболее распространенные формы элементов — плоские прямоугольные
полосы и цилиндры. Чтобы соответствующим образом сравнить и оце-
нить преобразователи двух типов, необходимо изучить влияние трех эф-
фектов, которые не учитываются уравнением (12.22): размагничивание,
механические нагрузки и механический резонанс.
Рис. 12.14. Два типа магнитострик-
ционных преобразователей: а) магни-
тострикционная оболочка на волокне;
б) волокно, соединенное с магнито-
стрикционным элементом
12.3.2.1. Размагничивание
Магнитное поле в высоко восприимчивом к полю веществе никогда не рав-
но приложенному внешнему полю. Это «размагничивание» возникает из-за
того, что магнитные моменты в образце реагируют на приложенное по-
ле таким образом, что если вещество имеет положительную магнитную
восприимчивость, то магнитные моменты откликаются, частично ней-
трализуя приложенное внешнее поле. Если рассматривать только одно
направление, внешнее и внутреннее поля связаны как
(12.26)
где N — коэффициент размагничивания, который зависит только от фор-
мы элемента, и х — объемная магнитная восприимчивость, которая свя-
зывает намагниченность М с напряженностью внутреннего поля Hint как
М = xHint- В общем случае величина х зависит как от величины, так и от
частоты приложенного поля. Если для образца отношение площади пер-
пендикулярного полю сечения Ат к квадрату длины параллельной полю
грани Lm достаточно мало, то в грубом приближении при постоянных
полях и пренебрежении краевыми эффектами [27]
N « (12.27)
“т
На рис. 12.15 показано уменьшение внутреннего поля, обусловленное
размагничиванием, для полосы обработанного отжигом сплава Метгласе
2605 S2 в зависимости от коэффициента размагничивания 8Am/L^. Вос-
приимчивость к постоянному полю этого вещества составляет примерно
X = 2 х 104 (единицы СИ) [24]. Типичный размер полосы, используемой
в качестве чувствительного элемента, в магнитострикционном преобра-
12.3. Магнитострикционные датчики 395
зователе составляет 5 см в длину, 1,25 см в ширину и 25 мкм в толщину.
В этом случае для полей, приложенных параллельно длине элемента, N ~
« 1,0 х 10-3, (1 + 7VX) ~ 21, т. е. менее 5% приложенного внешнего поля
проникает внутрь элемента посередине. Около граней коэффициент раз-
магничивания больше, чем посередине, и внутрь элемента проникает еще
меньшая доля внешнего поля.
Рис. 12.15. Размагничива-
ние прямоугольного образ-
ца с у = 20000 (единицы
СИ)
12.3.2.2. Механические нагрузки
В уравнении (12.22) предполагается, что образец не связан, однако под-
соединение волокна к магнитострикционному элементу фиксирует мате-
риал до некоторой степени и, следовательно, вызывает некоторый уро-
вень нежелательной механической нагрузки. Величину нагрузки можно
оценить, рассматривая магнитострикцию через эквивалентную силу Fm,
действующую на элемент. То есть
е = СН2 = , (12.28)
АтЕт
где Ет — модуль Юнга элемента. Когда материал, не обладающий магни-
тострикционными свойствами, такой как волокно, подсоединяется к эле-
менту, сила, обусловленная магнитострикцией, остается той же самой,
однако площадь, на которую сила должна действовать, увеличивается на
величину, равную площади волокна Af, с учетом модуля продольной упру-
гости волокна Ef. Если предположить, что волокно связано с элементом
идеально (77 = 1), соотношение между деформацией в отсутствие нагруз-
Глава 12. Волоконно-оптические датчики магнитного поля
ки (свободной) и деформацией при нагрузке определяется как
____________________________ е free
eioaded ~ l + AfEf/AmEm
12.3.2.3. Механические резонансы
Чтобы интерпретировать частотную характеристику магнитострикци-
онного преобразователя, мы должны рассматривать его как составной
(вещество чувствительного элемента, волокно, склеивающее вещество) воз-
буждаемый нелинейный магнитомеханический резонатор. Во всех магни-
тострикционных преобразователях наблюдаются сильные механические
резонансы, частоты которых зависят от формы преобразователя, гра-
ничных условий и эффективного механического модуля упругости всего
преобразователя. На рис. 12.16 представлена частотная характеристика
цилиндрического преобразователя из металлического стекла как функ-
ция частоты возмущения при фиксированном постоянном поле смещения.
Не определяя вид точно, просто обозначим как R(u) — нормализованную
частотную характеристику преобразователя. Механические резонансы
можно использовать для восстановления значительной части характери-
стики, потерянной из-за размагничивания.
Рис. 12.16. Частотная характе-
ристика цилиндрического магни-
тострикционного преобразователя
Если теперь учесть размагничивание, механические нагрузки и меха-
нические резонансы, то уравнение (12.22) можно модифицировать следу-
ющим образом
----------2 Hext, (12.30)
причем выражение в квадратных скобках позволяет уточнить теорети-
чески оптимальную характеристику ЗА5/27/д, а частотная зависимость
восприимчивости х не учитывается. Удобно переписать уравнение (12.30)
12.3. Магнитострикционные датчики 397
в виде уравнения (12.22)
е — CeffHext, (12.31)
где «эффективный параметр С», обозначенный Ceff, включает в себя все
корректирующие факторы. Как правило, параметр Cejj измеряется экс-
периментально.
Используя значения из табл. 12.2, поучительно рассчитать Ceff для
двух случаев: (1) плоской полосы, подсоединенной к волокну, и (2) во-
локна с магнитострикционным покрытием. В этих вычислениях не будут
учтены как частотная зависимость восприимчивости, так и механические
резонансы.
Пример 12.5. Преобразователь состоит из полосы Метгласса 2605 S2 раз-
мером 5 см х 1,25 см х 25 мкм, полностью нагруженной оголенным кварцевым
волокном диаметром 80 мкм с Ef = 7,1 х 1О10 Дж/м3 (156 проходов, общая дли-
на волокна, подсоединенного к элементу из Метгласса L — 7,8 м, общий объем
элемента из Метгласса Vm = 1,56 х 10-8 м3). Тогда
= 40,5 х 10'6 Э-2, (1 + NX)'2 = 2,3 х 10'3, ( 1 + .Af^f ) = 0,99
2Я2 л' \ АтЕт/
и, наконец,
Ceff «4,6 х 10~8 Э-2.
В этом случае коэффициент размагничивания фиксирован и зависит только от
геометрии элемента и добавление или удаление волокна влияет только на про-
явление механических нагрузок.
Пример 12.6. Преобразователь состоит из 7,8 м оголенного кварцевого во-
локна диаметром 80 мкм, покрытого 25 мкм слоем Метгласса 2605 S2. (Общий
объем Метгласса Vm = 6,4 х 10-8 м3.) В этом случае оценим размагничивание,
предполагая, что кольцо магнитострикционного вещества эквивалентно плос-
кой прямоугольной полосе толщиной 25 мкм и шириной, равной средней длине
окружности покрытия из Метгласса 2л (52,5 мкм). Вычисляя, как и в первом
случае, получаем
= 40,5 X 10~6 Э~2, (1 + Nx)“2 = 1,о, + =0,80
2НД \ AmEm)
И
Ceff « 3,2 Х10~5Э~2.
Здесь механическая нагрузка является постоянной, изменение длины волокна
изменяет только коэффициент размагничивания.
Из сравнения двух примеров становится понятным, что выбор во-
локна с магнитострикционным покрытием предпочтительнее, поскольку
в этом случае эффектом размагничивания можно пренебречь. Хотя это
Глава 12. Волоконно-оптические датчики магнитного поля
преимущество очевидно, задача осаждения или напыления равномерного
покрытия из магнитострикционного вещества, имеющего хорошие ме-
ханические и магнитные свойства, на оптические волокна приемлемой
длины (> 10 см) оказалась сложной и добиться воспроизводимых резуль-
татов пока не удалось. Компоновка создает дополнительные проблемы
для этого типа преобразователей. Для уменьшения размеров такого чув-
ствительного элемента приходится складывать или скручивать волокно
так, чтобы оно уместилось в небольшом объеме. Из-за этого возникают
две проблемы. Во-первых, размещение смежных витков волокна в непо-
средственной близости увеличивает коэффициент размагничивания бла-
годаря увеличению площади магнитострикционного вещества в сечении,
перпендикулярном полю, и в тоже время уменьшению длины элемента
в направлении, параллельном полю (см. рис. 12.15). Во-вторых, та часть
волокна, что расположена в «области разворота», теперь уже не будет
ориентирована параллельно полю и, следовательно, не будет реагировать
на приложенное поле в соответствии с уравнением (12.22). Конечным
результатом является уменьшение эффективной длины чувствительного
волокна. Для сравнения, экспериментально измеренные значения Ceff для
полос металлического стекла и цилиндров в целом соответствуют значе-
нию, вычисленному выше в примере 12.5. Достаточно большие значения
Ceff, лежащие в диапазоне от 1 до 5 х 10-6 Э-2, могут быть получены
при введении возмущений с частотой в окрестности резонанса. К тому
же преобразователи, включающие в себя десятки метров волокна, могут
быть скомпонованы последовательно без дальнейшего ухудшения Ceff.
По этим причинам преобразователи, состоящие из волокна, свернутого
и подсоединенного к однослойным цилиндрам из металлического стекла,
до сих пор демонстрируют в целом лучшую эффективность. Однако при
коротких волокнах преобразователи на основе волокон с магнитострик-
ционным покрытием имеют безусловные преимущества.
Теперь кратко рассмотрим составляющие магнитострикционного во-
локонно-оптического магнитометра, в общем виде представленного на
рис. 12.17.
Преобразователь. Преобразователь является магнитострикционным эле-
ментов одного из типов, описанных ранее. Его размер и форма зависят
от конкретного приложения.
Волоконный интерферометр. На рис. 12.17 показан интерферометр Ма-
ха - Цендера, но также могут использоваться интерферометры Майкель-
сона, Фабри-Перо или поляриметрический. Интерферометр должен
иметь низкий пороговый сдвиг фазы на частотах, близких к частоте
возмущения, и достаточную оптическую выходную мощность, чтобы
преодолеть шум в блоке электронной обработки сигнала.
12.3. Магнитострикционные датчики 399
В Демодулированный в разомкнутом контуре
С Демодулированный в замкнутом контуре
Рис. 12.17. Схема волоконно-оптического низкочастотного магнетометра, в ко-
тором используется двойное детектирование: активное гомодинное
слежение за фазой для демодуляции выхода интерферометра и фазо-
чувствительное детектирование для демодуляции магнитного сигнала
Оптические источник и приемник. Источник состоит из одномодово-
го лазера, газового или твердотельного, какого-либо устройства для
эффективного ввода излучения в сердцевину волокна и оптической
развязки, достаточной, чтобы воспрепятствовать перескокам моды
в лазере из-за обратного отражения от микрообъективов, стыковых
соединений и концов волокна на выходе разветвителя. Приемник пред-
ставляет собой фотодетекторную схему с достаточным усилением и
полосой пропускания для точного воспроизведения сигнала на частоте
возмущения.
Демодуляция. Последовательно должна применяться схема для демодуля-
ции выхода интерферометра. В системе на рис. 12.17 демодуляция на
основе активного гомодинирования (слежение за фазой). Другие мето-
ды демодуляции — это фазомодулированная несущая и разветвитель
3x3 (см. гл. 10).
Магнитное возмущение и электронная обработка сигнала. Возмущаю-
щее магнитное поле обеспечивает осциллятор, подсоединенный к со-
леноиду, содержащему преобразователь, причем осциллятор должен
обладать хорошей амплитудной устойчивостью и иметь малый шум
в окрестности несущей и в окрестности постоянного поля. Геометри-
ческие и электрические параметры соленоида определяются размера-
ми преобразователя, требованиями компоновки, а также выходным
Глава 12. Волоконно-оптические датчики магнитного поля
импедансом осциллятора и его способностью возбуждаться. Фазочув-
ствительный детектор — наиболее эффективное средство для обра-
ботки демодулированного сигнала интерферометра на частоте возму-
щения си, позволяющее получить величину и направление статичного
и низкочастотного полей.
При работе выходной сигнал можно отслеживать в трех точках систе-
мы: (1) непосредственно на выходе интерферометра, где вид сигнала под-
ходит для отображения на осциллоскопе или спектроанализаторе в целях
настройки или калибровки; (2) на выходе фазочувствительного детектора
(разомкнутый контур), где напряжение прямо пропорционально измеря-
емому полю; и (3) на резисторе обратной связи (замкнутый контур), где
ток ошибки пропорционален измеряемому полю. Если использовать выход
фазочувствительного детектора для возбуждения обмотки, можно на-
строить замкнутый контур так, чтобы поддерживать в чувствительном
элементе фиксированный уровень постоянного поля, обычно Но = 0 [28].
При таком варианте схемы постоянное поле в чувствительном элементе
никогда не подвергается существенным изменениям и гистерезис прак-
тически исключается, по крайней мере, для частот в пределах значения
произведения коэффициента усиления на ширину полосы пропускания за-
мкнутого контура. Результат воздействия замкнутого контура показан
на рис. 12.18.
Рис. 12.18. Сравнение эффектов гистерезиса при работе волоконного магнито-
метра с разомкнутым и замкнутым контурами [28]
Прежде чем завершить изучение магнитострикционных датчиков, сле-
дует проанализировать еще два дополнительных эффекта. Ранее было
показано, что достаточно измерить только компоненту фазового сдвига
при си, чтобы восстановить как величину, так и направление постоянного
поля, перпендикулярного собственной оси преобразователя, и что предпо-
чтительно использовать как можно большую амплитуду возмущающего
поля для максимизации отношения сигнал/шум. Однако большие ампли-
туды возмущающего поля могут вызвать большие сдвиги фаз при 2 си, что
12.3. Магнитострикционные датчики 401
создаст проблемы как для интерферометра, так и для синхронизирующе-
го усилителя.
Оптическая мощность Р на выходе интерферометра Маха-Цендера
как функция разности фаз ф определяется формулой
Р — (1 + $cos^>),
(12.32)
где Ро/2 — средняя оптическая мощность и д — контрастность полос
интерферометра. Если ф состоит из членов при ш и 2td, т. е. ф = фш +
выходная мощность также состоит из компонент при си и 2си. Когда сигнал
на выходе интерферометра удерживается в пределах 90°, амплитуда си
компоненты мощности Рш cos cot определяется формулой
PjJ — Po$Jo (02и) J1 (Феи) •>
(12.33)
где Jn(x) — функция Бесселя первого рода порядка п. Для малых сдвигов
фазы Ji(<^lu) ~ Фи/Ъ * Рц прямо пропорционально т.е.
Рш=
(12.34)
Поскольку коэффициент пропорциональности зависит от Jq для 2си
сдвига фазы, большой сдвиг фазы при 2си может сильно повлиять на вы-
ход интерферометра при си. Несложно сконструировать преобразователи,
для которых фъи » 1 рад даже при умеренных значениях амплитуды
возмущающего поля. Например, в системе из 10 м волокна, намотанно-
го на цилиндрический преобразователь с Ceff = 1,0 х 10-6 Э-2, при
А = 0,83 мкм достигается ф^, « 10 рад при максимуме возмущения
h = 0,5 Э. Поскольку 7о(Ю) ~ 0,25, отклик при ы уменьшится на 75%
из-за присутствия сдвига фазы 2си. Более того, если попытаться такой
же преобразователь использовать в таких же условиях для измерения
низкочастотных полей, к примеру в диапазоне пТ, то даже пренебре-
гая интерферометрическим эффектом, описанным выше, отношение 2си
сдвига фазы к ы сдвигу фазы для поля 1 — пТ превышает значение 105
(100 дБ по амплитуде). При этом потребуется синхронизирующий усили-
тель с динамическим резервом свыше 100 дБ [29].
Для решения «проблемы 2си» разработано множество методов. Самый
простой первый шаг заключается в электронной фильтрации выходно-
го сигнала интерферометра. Этот метод позволяет снизить требования
к динамическому резерву синхронизирующего усилителя, но не реша-
ет собственно проблему интерферометрии [уравнение (12.34)]. Наилуч-
ший метод, позволяющий преодолеть снижение выходного сигнала ин-
терферометра, обусловленное Jq(2cu), использует механические резонансы
преобразователя. На рис. 12.16 представлена частотная характеристи-
ка преобразователя цилиндрической формы из металлического стекла.
Глава 12. Волоконно-оптические датчики магнитного поля
На графике выделяются два резонансных максимума, за которыми сле-
дует быстрый спад характеристики в области высоких частот. Если час-
тоты действующего на цилиндр возмущающего поля таковы, что 2си на-
ходится далеко за пределами области резонанса, то сам преобразователь
действует как механический фильтр, устраняя сдвиг фазы 2cj из интер-
ферометра и, следовательно, обеспечивая я 1.
Наконец, на практике было установлено, что поведение магнитострик-
ционных преобразователей не подчиняется строго модели когерентного
вращения, описываемой уравнением (12.22). Оказалось, что появляется
дополнительная составляющая деформации при си, не являющаяся линей-
ной функцией постоянного поля и ненулевая даже при Но, стремящемся
к нулю. Эта дополнительная составляющая называется остаточным сиг-
налом. Сильный остаточный сигнал требует, чтобы синхронизирующий
усилитель имел достаточно большой динамический диапазон, часто за
счет разрешения. При этом повышающему преобразованию подвергают-
ся также и низкочастотный шум оптической мощности, и низкочастот-
ные немагнитные возмущения преобразователя, соответствующие боко-
вым полосам частоты возмущения. Остаточный сигнал можно подавить,
если тщательно подобрать частоту и амплитуду колебаний возмущающе-
го поля [30].
12.3.3. Шум в магнитострикционных датчиках
В магнитострикционных волоконных магнитометрах присутствует множес-
тво источников шума и действует множество его механизмов. На практике
при уровнях ниже примерно 1 пТ/уТц магнитный фон окружающей сре-
ды становится существенным, и для соответствующего определения соб-
ственного уровня шума датчика становятся необходимыми такие меры
предосторожности, как использование магнитного экранирования. При
условии, что внешний фон магнитных флуктуаций будет исключен, отно-
шение сигнал/шум в волоконном магнитометре обычно определяется или
фазовым шумом интерферометра на частоте вносимых возмущений, или
немагнитным низкочастотным шумом, подвергнувшимся повышающему
преобразованию. В конце концов, разрешение может быть ограничено те-
пловым шумом в самом магнитострикционном веществе.
Обозначим минимально различимый интерферометрический сдвиг фазы
на единицу полосы пропускания в частотном диапазоне ы — Q ы
cj + Q как фт1П/у/ Аи и предположим, что частота колебаний возмущаю-
щего поля магнитометра — си. Из уравнения (12.25) разрешимая величина
низкочастотного магнитного поля (Яо)шгп/л/Az/ определяется как
(^o)min _ Фт'т/\/Az/
у/дГ 2тт£С Lh/А’ ’ '
12.3. Магнитострикционные датчики
Кроме этого очевидного интерферометрического шума, возможны низко-
частотные флуктуации таких параметров, как температура, напряжение
и т. д., влияющих на выходной сигнал в окрестности частоты колебаний
возмущающего поля [31]. Вернемся к уравнению (12.24) и предположим,
что температура датчика изменяется с амплитудой Tq на частоте Q, т. е.
Т — Tqcoscj^. (Мы выполним вычисления, используя температуру как
флуктуирующий параметр, но полученный результат применим к любо-
му из параметров, таких как напряжение, ускорение, давление и т. д.)
Изменение в выходном сигнале интерферометра, составляющее 5ф^ coswt
при и) и обусловленное изменением температуры, пропорционально тем-
пературной зависимости всех коэффициентов в уравнении (12.24). Таким
образом:
6фш = 2KCLh
г / 1 дК 1 дС 1 dL 1 dh\ дНо
°\КдТ+СдТ + ЬдТ + Кдт)+ ~дТ
xTqcosQZ, (12.36)
где К = 2тгп£/А. Следовательно, изменение температуры приводит к по-
явлению сигнала в боковых по отношению к ш полосах, и этот сигнал
интерферирует с сигналом, создаваемым измеряемым низкочастотным
полем. Важно отметить, что воздействие температуры на параметры /С,
(7, L и h зависит линейно от Но- Если поддерживать на преобразовате-
ле Но = 0, то механизм повышающего преобразования будет исключен
в принципе. Это еще одно преимущество использования замкнутого кон-
тура при работе с датчиком магнитного поля.
Наконец, независимо от того, насколько хорошо работают интерфе-
рометр и преобразователь, флуктуации, присущие самой магнитострик-
ции, накладывают теоретически обоснованные ограничения на разреше-
ние датчика. Используя флуктуационно-диссипативную теорему, можно
показать, что для чувствительного элемента из металлического стекла
при температуре Т, имеющего объем V, модуль Юнга Ет^ магнито-
стрикционный параметр Ceff и возбуждаемого полем с амплитудой А,
минимально различимое поле на единицу полосы пропускания определя-
ется как [32]
2 / k„T \1'2
Ce/Ih \VEmwQj ’ 1 ' 1
где кв — постоянная Больцмана, и предполагается, что возмущение пре-
образователя осуществляется на частоте механического резонанса и пре-
образователь имеет добротность Q на частоте а?/2тг. Влияние вихревых
токов не учитывается. На рис. 12.19 представлен график функции рас-
считанного минимально различимого поля от частоты возмущения (ре-
Глава 12. Волоконно-оптические датчики магнитного поля
зонансной) для волоконного магнитометра, в котором используется пре-
образователь из металлического стекла, при температуре Т = 300 К. Для
частот возмущения выше 10 кГц теоретическое разрешение низкочастот-
ных полей лежит в диапазоне Ю/Т/^Тц при минимально разрешимых
сдвигах фазы ниже 0,1 мкрад/^Гц.
Рис. 12.19. Теоретически рас-
считанное минимально разли-
чимое поле (разрешение) как
функция частоты для преобра-
зователя цилиндрической фор-
мы из металлического стекла
с параметрами: длина волокна
L = 31 м, С = 4 х 10“6 Э“2,
Ет = 1,7 х 1011 Дж/м3, объ-
ем 1,810“7 м3, возбуждаемого
полем со среднеквадратичным
значением напряженности 1,0 Э
12.3.4. Структуры датчиков
В этом разделе мы рассмотрим различные виды волоконно-оптических
интерферометрических датчиков магнитного поля с высоким разреше-
нием. Под датчиками «с высоким разрешением» мы подразумеваем дат-
чики, обеспечивающие величину минимально различимого поля порядка
1 nT/уТц или ниже.
I. Датчик: низкочастотный одноосный
магнитометр Маха-Цендера
Структура: магнитострикционный цилиндр
(Металлическое стекло)
Большинство работ в области низкочастотных магнитострикционных дат-
чиков посвящено подсоединению оптических волокон большой длины к маг-
нитострикционным элементам из металлического стекла в конфигурации
интерферометра Маха - Цендера, как показано на рис. 12.20. Наилучшие
результаты были получены при использовании обработанного отжигом
в поле цилиндра из Метгласса 2605 S2 с толщиной стенок 25 мкм, дли-
ной 5 см и диаметром 4,45 см, обмотанного 31 м одномодового волок-
на в оболочке [30]. Это волокно подсоединено к цилиндру из Метгласса
склеивающим веществом с небольшим модулем упругости. Такой пре-
образователь продемонстрировал Ceff = 5x 10-6 Э-2 при механическом
резонансе на 26,5 кГц. На частоте Q/2tt = 1 Гц было достигнуто разре-
шение 20 рТ/уФц.
12.3. Магнитострикционные датчики 405
Рис. 12.20. Волоконно-оптический магнетометр с магнитострикционным пре-
образователем цилиндрической формы
II. Датчик: низкочастотный поляриметрический
одноосный магнитометр
Структура: магнитострикционный цилиндр
(Металлическое стекло)
Внешняя нагрузка приводит не только к изменению длины оптического
пути в волокне, но и является причиной изменения состояния поляри-
зации излучения в волокне. Тогда как сдвиг фазы, обусловленный из-
менением длины пути, измеряется при помощи интерферометра Маха-
Цендера, изменение состояния поляризации, вызванное магнитострикци-
онной деформацией, также может быть зарегистрировано при помощи
поляриметра, если взять за основу такую схему измерений [33], как пока-
занная на рис. 12.21. Здесь используется точно такой же метод поляриме-
трического измерения изменений поляризации, как тот, что обсуждался
ранее в применении к эффекту Фарадея (см. рис. 12.5). При использова-
нии обработанного отжигом в поле, покрытого Метглассом акрилового
сердечника с 20 м намотанного волокна с высоким двулучепреломлением
было достигнуто разрешение 2.6 nT/v^4 при 1 Гц [34].
Рис. 12.21. Цилиндрический магнитострикционный чувствительный элемент
в поляриметрическом магнитометре
М06 Глава 12. Волоконно-оптические датчики магнитного поля
III. Датчик: Низкочастотный одноосный градиентометр
Маха - Цендера
Рис. 12.22. Волоконно-оптический градиентометр для измерений 6Hx/6z, имею-
щий базис Zb
Структура: магнитострикционная полоса (металлическое стекло)
Двухлучевая структура интерферометра Маха - Цендера идеальна для ис-
пользования в магнитном градиентометре, как показано на рис. 12.22, где
магнитострикционные преобразователи, оба возмущаемые полем с часто-
той си, размещены в обоих плечах интерферометра. Тогда сдвиг фазы при
частоте си пропорционален [35]
фш = (C2L2h2H02 - ЫМ) , (12.38)
А
где нижние индексы соответствуют двум плечам интерферометра. Пусть
Но2 — Hoi + (SH/Sz)zb, где Zb — расстояние между двумя чувствитель-
ными элементами, и SH/dz — градиент поля. Если датчик симметричен,
так что CiLih-i — 02^^^ то
(12.39)
A dz
и выход интерферометра прямо пропорционален градиенту поля.
Градиентометр имеет существенное преимущество по сравнению с маг-
нитометром, поскольку отфильтровывает и постоянные поля, и измене-
ния полей с длиной волны намного больше базиса Zb- Благодаря этому
градиентометр может применяться для регистрации и измерений харак-
теристик локальных магнитных источников в присутствии магнитного
поля Земли и внешних магнитных шумов.
Сообщалось о получении разрешения меньше 1 пТ/^Тц при часто-
тах меньше 1 Гц [36] при использовании устройства с базисом 30,5 см,
включающего в себя два чувствительных элемента, состоящие из 17 м
волокна каждый, подключенного к обработанным отжигом полосам из
металлического стекла шириной 2,5 см, длиной 10 см и толщиной 25 мм,
расположенных в пятислойной структуре вокруг плексигласового сердеч-
ника.
12.4. Датчики на основе силы Лоренца
Магнитострикция не единственный механизм, благодаря которому маг-
нитное поле может изменять физическую длину оптического волокна [37, 38].
Если волокно покрыто проводящей оболочкой, по которой течет ток i
в присутствии магнитного поля В, то на волокно длиной L будет дей-
ствовать сила F, равная
F = iL х В. (12.40)
Рис. 12.23. Структура преобразователя для волоконно-оптического датчика на
основе силы Лоренца. По металлу, покрывающему волокно длиной L,
течет ток i перпендикулярно магнитному полю В. Смещение в точке
х является суммой двух составляющих постоянной (dyi) и зависящей
от времени (dyz)
Это хорошо известная сила Лоренца, действующая на движущиеся за-
ряды в магнитном поле. Рассмотрим схему преобразователя, представлен-
ную на рис. 12.23. По проводящей оболочке волокна, закрепленного через
промежутки длиной L, течет ток i в присутствии перпендикулярного маг-
нитного поля В. Результирующая сила Лоренца действует равномерно
по всей длине волокна и в любой точке перпендикулярна как току, так
и приложенному полю.
Рассмотрим точку х волокна, вертикально смещенную на y(x,t). При
условии, что смещение достаточно мало, так что можно пренебречь от-
клонениями силы Лоренца от вертикали, волокно ведет себя как луч «с за-
крепленными концами» [39]. Далее предположим, что волокно закреплено
на концах с такой силой натяжения, что возникает небольшой статиче-
408 Глава 12. Волоконно-оптические датчики магнитного поля
ский провес. Тогда уравнение движения для у определяется уравнением
Эйлера [40]
д4у д2у
Qx^ + Av dt2 ~ + f
(12.41)
Е, I, А и р — модуль Юнга волокна, проекция момента инерции, пло-
щадь поперечного сечения и плотность соответственно, /о — статическое
приложенное поле на единицу длины. Динамическая движущая сила на
единицу длины f sincuf возникает при переменном токе в присутствии по-
стоянного магнитного поля или при переменном поле, воздействующем на
проводник, по которому течет постоянный ток, как следует из уравнения
(12.40). Например, для тока zsincuf в присутствии постоянного магнит-
ного поля Bof sin wt — zBosincj/.
Если решение уравнения (12.41) можно записать в виде
y(x,t) = Уо(ж) 4-У1 (x,t),
(12.42)
из рис. 12.23 понятно, что зависящая от времени продольная деформация
волокна определяется как
-г/
о
2&уо дух /дух
дх дх \ дх
dx.
(12.43)
Мы просто приведем решение уравнения (12.41). Заинтересовавшиеся
читатели могут обратиться к работе [40] или к аналогичным работам
по вибрационной технике за более детальными объяснениями. Налагая
граничные условия у — 0 и fry/Sx — 0 при х — 0, мы получим
Уо(х) =
/о (L2x2 - 2Lx3 + х4)
2AEI
(12.44)
и при резонансе
yr (х, Г) — -—sin — sincut
L
(12.45)
Из первого члена под интегралом в уравнении (12.43) получается со-
ставляющая деформации, пропорциональная произведению /о/ на часто-
те си, а из второго члена получается составляющая, пропорциональная
/2 на частоте 2си. Следовательно, при фиксированной амплитуде пере-
менного тока постоянное поле может быть определено путем изме-
рения деформации на частоте си. Выполняя интегрирование и используя
результаты, полученные ранее, получим формулу для амплитуды дефор-
мации еш на частоте си
(12.46)
где численный коэффициент К, появляющийся в результате интегриро-
Литература 409
вания, равен примерно 0,307. Такой режим работы аналогичен поведению
магнитострикционного датчика, но существует важное отличие. Здесь
сигнал на частоте си, линейно пропорциональный произведению величины
постоянного поля и величины «возмущения» (в данном случае переменного
тока), возникает из-за присутствия небольшой статической силы, вызы-
вающей постоянный провес уо. В отсутствие статической силы /о при-
сутствует только составляющая на частоте 2си, пропорциональная (гВ)2.
Следовательно, ненулевой статический провес — необходимое условие
функционирования преобразователя в соответствии с уравнением (12.46).
Пример 12.7. Рассмотрим стандартное волокно диаметром 125 мкм, покры-
тое алюминиевой оболочкой толщиной 25 мкм, закрепленное с помощью поддер-
живающих устройств, расположенных на расстоянии 10 см [39]. Предположим,
что Е = 6,9 х 109 Н/м2,1 — 4,6 х 10~17 м4, А = 2,4 х 10~8 м2 и р = 2,4 х 103 кг/м3,
/о, сила на единицу длины, обусловленная силой тяжести, примерно равна 5,8 х
х10~4 Н/м. Если подставить эти значения в уравнение (12.49), получится
_ (4,7х 102)гВо
е“~ Т? ’
где fr — резонансная частота. Частоты мод самых низких порядков при L = 0,1 м
обычно находятся в окрестности 100 Гц. Следовательно, при эффективном токе
i = 0,1 А датчик на основе силы Лоренца создаст в волокне напряжение
Ыь0ге„<г = (4,7х10-3)Во(Т).
Сравним этот результат с магнитострикционным датчиком. При
— 2CeffhHo = 2CeffhoBo
и предполагая Ce/f = 1 х 10~6 Э~2 и среднеквадратичное h = 0,1 Э, получим
few] magnetostrictive — (2 X 10 ) Bq (Т) .
Датчик силы Лоренца намного предпочтительнее магнитострикцион-
ного датчика при малых длинах преобразователей.
Благодарность. Автор выражает признательность А. Дандриджу
(A. Dandridge), Д. М. Дагенаису (D.M. Dagenais), К.П. Коо (К.Р. Коо)
и С. С. Патрику (S. S. Patrick) за полезное обсуждение в процессе подго-
товки этой главы.
Литература
1. F. Primdahl, The Fluxgate Magnetometer, J. Phys. E 12, 241-252 (1979).
2. W. F. Stuart, Earth’s Field Magnetometry, Rep. Prog. Phys. 35, 803-881 (1972).
Глава 12. Волоконно-оптические датчики магнитного поля
3. Т. Van Duzer and С. W. Turner, Principles of Superconducting Devices and
Circuits, Elsevier, New York, 1981, p. 216-226.
4. F. Bucholtz, K.P. Koo, A.D. Kersey, and A. Dandridge, Fiber Optic Magnet-
ic Sensor Development, Proc. SPIE 718, Fiber Optic and Laser Sensors IV,
Cambridge, Mass., 1987, p. 56-65.
5. M. D. Mermelstein and A. Dandridge, Low-Frequency Magnetic Field Detection
with a Magnetostrictive Amorphous Metal Ribbon, Appl. Phys. Lett. 51, 545-
547 (1987).
6. G. L. Romani, S. J. Williamson, and L. Kaufman, Biomagnetic Instrumentation,
Rev. Sci. Instrum. 53, 1815-1845 (1982).
7. G. W. Day and A. H. Rose, Faraday Effect Sensors: The State of the Art, Proc.
SPIE 985, Fiber Optic and Laser Sensors VI, Boston, 1988, p. 138-150.
8. R. M. A. Azzam and N. M. Bashara, Ellipsometry and Polarized Light, North-
Holland, Amsterdam, 1977, p. 1-10.
9. S. Ezekiel and H.J. Arditty, Fiber-Optic Rotation Sensors: Tutorial Review,
in Fiber-Optic Rotation Sensors and Related Technologies, S. Ezekial and H.J.
Arditty, Eds., Springer-Verlag, Berlin, 1982, p. 2-26.
10. S. C. Rashleigh and R. Ulrich, Magneto-Optic Current Sensing with Birefringent
Fibers, Appl. Phys. Lett. 34, 768-770 (1979).
11. M.P. Varnham, R. D. Birch, and D.N. Payne, Helical-Core Circularly Bire-
frigent Fiber, IOOC-ECOC ’85 Technical Digest, 1985, p. 135-138.
12. D. N. Payne, A. J. Barlow, J. J. Ramskov-Hansen, M. R. Hadley, and R. J. Mans-
field, Fabrication of Low Birefrigence Spun Fibers, in Fiber Optic Rotation
Sensors, S. Ezekial and H. J. Arditty, Eds., Springer-Verlag, Berlin, 1982, p. 185-
195.
13. R.I. Laming, D.N. Payne, and L. Li, Current Monitor Using Elliptical Bire-
frigent Fibre and Active Temperature Compensation, Proc. SPIE 798, 283-287
(1987).
14. A. D. Kersey, F. Bucholtz, and A. Dandridge, Sensitivity-Bandwidth Limitations
in Optical-Fibre Faraday-Rotation Current Sensors, Int. J. Optoelectron. 3, 323-
332 (1988).
15. A. J. Rogers, Optical methods for the measurement of voltage and current on
power systems, Opt. Laser Technol. 9, 273-283 (1977).
16. G. W. Day, Compact Sensors for the Measurement of Low Level Electric Cur-
rents, Technical Digest of the Jth International Conference on Optical Fiber
Sensors, Tokyo, 1986, p. 81-84.
17. M. Berwick, J.D. C Jones, and D.A. Jackson, Alternating-Current Measure-
ment and Noninvasive Data Ring Utilizing the Faraday Effect in a Closed-Loop
Fiber Magnetometer, Opt. Lett. 12, 293-295 (1987).
18. K.P. Koo, A. Dandridge, A.B. Tveten, and G.H. Sigel, Jr., A Fiber-Optic DC
Magnetometer, IEEE J. Lightwave Technol. LT-1, 524-525 (1983).
19. C. D. Butter and G. E. Hocker, Fiber Optics Strain Gauge, Appl. Opt. 17, 2867-
2869 (1978).
20. J.D. Livingston, Magnetomechanical Properties of Amorphous Metals, Phys.
Status Solidi 70, 591-596 (1982).
21. F. Bucholtz, K.P. Koo, A. Dandridge, and G.H. Sigel, Jr., Easy Axis Distribu-
tion in Transversely Annealed Metglas 2605 S2, J. Magn. Magn. Mater. 54-57,
1607-1608 (1986).
Литература 4IJ^
22. L. A. Davis, Y. T. Yeow, and P. M. Anderson, Bulk Stiffness of Metallic Glasses,
J. Appl. Phys. 53, 4834-4837 (1982).
23. Applied Metglas Products Specification Sheet, Allied Signal Inc., Metglas, Par-
sippany, N. J., 1989.
24. H. T. Savage and M.L. Spano, Theory and Application of Highly Magnetostric-
tive Metglas 2605SC, J. Appl. Phys. 53, 8092-8097 (1982).
25. A. Dandridge, A.B. Tveten, R. O. Miles, D.A. Jackson, and T.G. Giallorenzi,
Single-Mode Diode Laser Phase Noise, Appl. Phys. Lett. 38, 77-78 (1981).
26. J.E. Lenz, C.D. Anderson, and L. K. Strandjord, Magnetic Materials Charac-
terization Using a Fiber Optic Magnetometer, J. Appl. Phys. 57, 3820-3822
(1984).
27. R. I. Joseph and E. Schlomann, Demagnetizing Field in Nonellipsoidal Bodies,
J. Appl. Phys. 36, 1579-1593 (1965).
28. A. D. Kersey, D. A. Jackson, and M. Corke, Single-Mode Fibre-Optic Magne-
tometer with DC Bias Field Stabilization, IEEE J. Lightwave Technol. LT-3,
836-840 (1985).
29. M. L. Meade, Lock-in Amplifiers: Principles and Applications, Peter Peregrinus,
London, 1983.
30. D. M. Dagenais, F. Bucholtz, and К. P. Koo, Elimination of Residual Signals
and Reduction of Noise in a Low-Frequency Magnetic Fiber Sensor, Appl. Phys.
Lett. 53, 1417-1476 (1988).
31. F. Bucholtz, K.P. Koo, and A. Dandridge, Effect of External Perturbations
on Fiber-Optic Magnetic Sensors, IEEE J. Lightwave Technol. LT-6, 507-512
(1988).
32. M. D. Mermelstein, Fundamental Limit to the Performance of Fibre-Optic Metal-
lic Glass DC Magnetometers, Electron. Lett. 21, 1178-1179 (1985).
33. S. C Rashleigh, Magnetic-Field Sensing with a Single-Mode Fiber, Opt. Lett. 6,
19-21 (1981).
34. M. D. Mermelstein, Fiber Optic Polarimetric DC Magnetometer Utilizing a Com-
posite Metallic Glass Resonator, IEEE J. Lightwave Technol. LT-4, 1376-1380
(1986).
35. K.P. Koo and G.H. Sigel, Jr., A Fiber-Optic Magnetic Gradiometer, IEEE J.
Lightwave Technol. LT-1, 509-513 (1983).
36. C.M. Dube, S. Thordarson, and K.H. Wanser, Closed-Loop Fiber-Optic Mag-
netometer/Gradiometer, Proc. SPIE 838, Fiber Optic and Laser Sensors V,
1987, p. 17-27.
37. K. A. Arunkumar, Ultrasensitive Fiber-Optic Magnetic Field Sensor, Digest of
the 1985 Annual Meeting of the Optical Society of America, 1985, p. 67-68.
38. H. Okamura, Fibre-Optic Magnetic Sensor Utilizing Metal-Coated Fibre, Elec-
tron. Lett. 23, 834-835 (1987).
39. H. Okamura, Optical Phase Retardation of Lorentzian Force-Type Fibre-Optic
Magnetic Sensor, Electron. Lett. 25, 622-623 (1989).
40. L. D. Jacobsen and R. S. Ayre, Engineering Vibrations with Applications to
Structure and Machinery, McGraw-Hill, New York, 1958, p. 482-488.
ГЛАВА 13
ИНДУСТРИАЛЬНЫЕ
ПРИЛОЖЕНИЯ
ОПТОВОЛОКОННЫХ
ДАТЧИКОВ
Дж. У. Бертхольд III
Компания «Бэбкок & Уилкокс» (Babcock & Wilcox)
1562 Улица Биэон (Beeson Street)
Аллайенс, Огайо (Alliance)
13.1. Введение
Использование оптических волокон для измерения физических и химиче-
ских параметров начали рассматривать с конца 1970-х годов. С тех пор
выполнено множество исследований и разработок, предназначенных для
применения как в аэрокосмической, так и в других отраслях промышлен-
ности. В Японии продемонстрировали, что управление производственным
процессом на предприятиях [1] может осуществляться с помощью оптиче-
ских устройств, а в США и Европе множеством производителей [2, 3] (это
1987-88 годы!) полным ходом предпринимаются попытки начать серий-
ный выпуск волоконно-оптических датчиков различных типов. Отлично
составленный подробный обзор промышленных приложений волоконно-
оптических датчиков можно найти в [4].
С точки зрения промышленного применения использование волоконно-
оптических датчиков привлекательно, поскольку они имеют превосход-
ную чувствительность и широкий динамический диапазон, компактны
и допускают плотную компоновку, а в перспективе имеют низкую се-
бестоимость и высокую надежность. Первоначально такие датчики ис-
пользовались в агрессивной внешней среде, где под воздействием высоких
температур, коррозийных веществ, высокого уровня электромагнитных
помех или при угрозе взрыва традиционные датчики и чувствительные
Волоконно-оптические датчики: Вводный курс для инженеров и научных работников,
под редакцией Эрика Удда. ©1991 John Wiley &; Sons, Inc.
13.1. Введение 4l3j)
элементы не могут работать соответствующим образом. Приложения для
высокотемпературных измерений — это хороший пример, когда датчики,
основанные на тугоплавком стеклянном волокне, имеют преимущества
по сравнению с электронными тензодатчиками или емкостными датчи-
ками, в которых проволочные соединения могут не выдержать высоких
температур. Второй пример — это возможность прокладывать длинные
кабели между датчиками и блоками электронной обработки. Волоконно-
оптические кабели стали сопоставимы по цене с коаксиальными и даже
с двужильными кабелями при прокладке линий длиной в многие тысячи
футов. Поскольку оптическое волокно является диэлектрической средой,
оно не излучает и не подвержено (по крайней мере, в первом прибли-
жении) воздействию электромагнитных помех (ЭМП). Чем острее стоит
проблема шума, тем привлекательнее становятся волокна. Волокна не тре-
буют ни экранирования, ни специального заземления и могут проходить
в непосредственной близости к высоковольтным линиям. Электронные
модули, необходимые для модуляции/демодуляции оптических сигналов,
не требуют специальных фильтров в среде с высоким уровнем электро-
магнитных помех.
В химической и пиротехнической промышленности, где существует
опасность взрыва, волокна в отличие от электрических кабелей можно
прокладывать везде и они не требуют защитных изоляционных трубок,
защитных устройств с замыканием на «землю» или взрывобезопасных
контейнеров. В такой взрывоопасной окружающей среде защитное за-
земление требуется для отдельных электрических передатчиков с вы-
ходом 4-20 мА, чтобы защитить возможные источники воспламенения
от искр. Но стоимость защитного заземления, наряду со сложностями,
возникающими при установке этих специальных защитных устройств,
накладывают ограничения на варианты конфигурации сетей электрон-
ных передатчиков. При установке волоконных сетей таких ограничений
не возникает, и, следовательно, волоконные датчики имеют несомненные
преимущества во взрывоопасных средах. На производстве в настоящее
время часто устанавливают волоконно-оптические сети для передачи дан-
ных, что позволяет использовать преимущества, предоставляемые воло-
конно-оптической технологией. Это обеспечивает возможность перехода
на следующую стадию технологии, логически вытекающую из предыду-
щей, — использование волоконно-оптических датчиков и чувствительных
элементов для мониторинга и управления процессом производства.
Были продемонстрированы волоконные датчики для измерения по су-
ществу всех основных параметров, необходимых для управления процес-
сом производства: температуры, давления, уровня жидкости, скорости
потока, положения, вибрации, pH, содержания растворенного кислорода,
414 Глава 13. Индустриальные приложения оптоволоконных датчиков
содержания углекислого газа, электрического напряжения и тока. Все эти
датчики различаются в соответствии с методами, посредством которых
оптическое излучение модулируется измеряемым параметром (это может
быть, например, модуляция интенсивности, фазы, поляризации или длины
волны.). Применение различных методов модуляции обсуждалось в пре-
дыдущих главах. С коммерческой точки зрения, волоконно-оптические
датчики, доступные на рынке в наши дни, отличаются простотой мето-
дов измерений, минимальной сложностью электроники и самыми низкими
затратами на производство. Поэтому в серийно выпускаемых датчиках,
предназначенных для измерения физических/механических параметров,
применяется почти исключительно модуляция интенсивности, а в датчи-
ках, предназначенных для измерения химических параметров, — модуля-
ция длины волны.
В течение нескольких последних лет происходило быстрое развитие
волоконно-оптических датчиков, и в настоящее время несколько компаний
предлагает серийно выпускаемые изделия для промышленного примене-
ния на основе волоконно-оптических датчиков. Применение волоконных
датчиков в аэрокосмической промышленности обеспечило первоначальный
импульс и последующую подпитку их развития, благодаря финансирова-
нию правительством США. Интенсивные усилия, прилагаемые в аэрокос-
мической промышленности, наряду с расширением применения волокон
в системе коммуникаций, позволили снизить стоимость волокон и элек-
трооптических компонент настолько, что волоконно-оптические датчики
в целом могут конкурировать с эквивалентными электрическими датчи-
ками, такими как тензодатчики.
13.2. Основы
Были продемонстрированы различные методы измерения волоконно-опти-
ческими датчиками таких параметров производственного процесса, как
температура, давление и скорость потока, но методы, используемые в су-
ществующих серийно выпускаемых датчиках можно отнести главным обра-
зом к двум категориям:
Пассивные волоконно-оптические датчики интенсивности. Эти устройс-
тва включают в себя зонды, такие как эндоскоп, или для дистанци-
онного наблюдения, или для доставки и сбора излучения из недоступ-
ной области с высокой температурой или радиацией, или от объемного
оптического датчика. С помощью таких зондов, например, может быть
выполнен удаленный спектральный анализ.
Волоконно-оптические датчики интенсивности с внешним чувствитель-
ным элементом или чистоволоконные. Такие измерительные системы
13.2. Основы 41^)
включают в себя отражательные датчики смещения (внешние), на вы-
ходе которых излучение снова вводится в оптические волокна; или
датчики микроизгибов (чистоволоконные), в которых излучение мо-
дулируется внутри самого оптического волокна. Для работы таких
датчиков необходимы специально для этого предназначенные источ-
ники излучения и приемники, подсоединенные к измерительному во-
локну.
Примеры серийно выпускаемых волоконно-оптических датчиков, осно-
ванных на фазовой модуляции, в настоящее время немногочисленны. Это
связано с тем, что таким датчикам требуется более сложная электронная
обработка по сравнению с датчиками интенсивности, стоимость лазеров
с когерентным излучением выше, чем стоимость светоизлучающих ди-
одов, к тому же таким датчикам необходима стабилизация для защиты
от долговременного дрейфа. Хотя для волоконно-оптических датчиков на
основе фазовой модуляции требуются динамические методы регистра-
ции, чтобы исключить дрейф, присущий этим методам, динамические
методы регистрации несовместимы с измерениями таких технологиче-
ских параметров, как давление, которые могут медленно изменяться во
времени. Поэтому в настоящее время необходимость статической ста-
билизации препятствует использованию волоконно-оптических датчиков,
основанных на фазочувствительных элементах. В будущем такие датчи-
ки смогут работать эффективно благодаря применению некоторых видов
электромеханических возмущений чувствительных элементов [5, 6], но
в настоящее время стабилизация датчиков интенсивности достигается
использованием опорного сигнала с разделением по времени или по дли-
не волны [7, 8]. При использовании таких методов может быть получен
хороший уровень стабильности волоконно-оптических датчиков на осно-
ве интенсивности [9], и эти датчики абсолютно не чувствительны к та-
ким воздействиям, как флуктуации параметров источника излучения или
флуктуации, не связанные с изменениями измеряемых параметров.
Чтобы обеспечить волокну при промышленном применении механиче-
скую гибкость и длительный срок эксплуатации при высоких температу-
рах, часто необходимо дополнительное специальное защитное покрытие.
Покрытое алюминием оптическое волокно, выпускаемое компанией «Хьюз
эркрафт» (Hughes Aircraft Company), поддерживает предел прочности на
разрыв до 425 °C [10]. Волокно с защитным покрытием из полиимида, вы-
пускаемое Polimicro Technologies или Spectran, обеспечивает приемлемую
прочность до 325 °C [11]. Другие специальные покрытия, такие как золото
или углерод, позволяют волокнам работать при температурах до 600 °C
в приложениях, в которых сниженная механическая прочность приемлема.
Таким образом, во многих приложениях, используемых в промышленно-
Л16 Глава 13. Индустриальные приложения оптоволоконных датчиков
сти, от волоконно-оптических датчиков, помимо всего прочего, требуется
хорошая стабилизация и возможность работать при высоких температурах.
Основные параметры, измеряемые и используемые для управления при
производстве электроэнергии, тяжелых металлов и в других технологи-
ческих процессах, — это температура, давление, уровень жидкости, ско-
рость потока, положение, вибрация, химический состав и электрические
ток - напряжение.
Волоконно-оптические датчики для измерения каждого из этих параме-
тров поочередно обсуждаются в следующих разделах. Чтобы понять, где
в стандартном производственном процессе могут проводиться измерения
с использованием волоконно-оптических датчиков, обратимся к рис. 13.1.
На рисунке показана часть работающего на угольной пыли котла, ис-
пользуемого при производстве электроэнергии, и показаны места рас-
положения датчиков. Измерение температуры пламени (А) может быть
использовано для управления соотношением горючее/воздух в горелке,
а достоверное измерение уровня жидкости (В) необходимо, чтобы предо-
хранить бойлер от работы всухую. Информация о скорости потока пара
и давлении в сети трубопровода (С) на выходе котла может использо-
ваться для управления с прогнозированием турбиной-электрогенерато-
ром, а мониторинг уровней вибрации больших вентиляторов (D) необхо-
дим для предупреждения о приближающемся разрушении от смятия, что
позволяет предотвратить серьезную аварию. Точная индикация по прин-
ципу открыт/закрыт о состоянии главного клапана питательной воды
(Е) необходима, наряду с мониторированием химического состава воды
в системе водоочистки (F), для обнаружения нарушений и оповещений
о появлении коррозийных составляющих. Чтобы убедиться, что выделе-
ние кислотного газа удовлетворяет требованиям Управления по охране
окружающей среды, необходимы датчики (G), измеряющие содержание
диоксида серы и окиси азота в выпускаемом из котла газе.
13.3. Измерение температуры
Для измерения температуры в промышленных условиях разработано мно-
жество методов на основе оптических волокон, и некоторые датчики вы-
пускаются серийно. Представители компании «Вестингауз» (Westinghouse)
продемонстрировали распределенные измерения температуры в ядерных
реакторах и измерили температуру выхлопного газа двигателя, анализи-
руя спектр лучеиспускания абсолютно черного тела, излучаемого оптиче-
ским волокном, расположенном в горячей точке. Зависимость спектраль-
ной излучательной способности абсолютно черного тела от температуры
показана на рис. 13.2. Отметим, что при возрастании температуры излу-
чение при данной длине волны также возрастает. Этот метод реализован
в компании Accufiber Inc. на основе работ Дилса (Dils) [14], и серийно
выпускаются датчики для измерения температуры выхлопного газа ре-
активных двигателей вплоть до 1900 °C. Высокоточные измерения темпе-
ратуры до 300 °C также могут быть выполнены в работающих ректорах.
Измельчитель
угля
Вентилятор
для создания
искусственной тяги
К газоочистителю
® Дополнительный
подогреватель
Печь
Форсунки
Паровой
барабан
Основной выход
пара к турбине
Поток
продуктов
горения
Диспетчер-
ская
©
Первичный вентилятор
Рис. 13.1. Типичный котел с нагревом угольной пылью
Вода, поступающая
на очистку
©
Система
очистки воды
Первичный
пароперегреватель
Нагреватель
воздуха
Источник
воды
(А) Измерение температуры пламени
(В) Уровень воды
(С) Скорость потока, давление
(D) Уровень вибрации
(Е) Положение клапана
(F) Химический состав воды
(G) Химический состав выпускаемого газа
13.3. Измерение температуры 41
Глава 13. Индустриальные приложения оптоволоконных датчиков
Рис. 13.2. Спектральная излу-
чательная способность абсолют-
но черного тела при различных
температурах [13]
Рис. 13.3. Схема датчика компании Accufiber на основе сапфирового черного тела
и оптический анализатор
Датчик компании Accufiber включает в себя тонкий сапфировый стер-
жень (см. рис. 13.3). Измерительный конец стержня покрыт тугоплавким
металлом. Другой конец стержня подсоединен к низкотемпературному
оптическому волокну за пределами высокотемпературной зоны измере-
ний. Лучистая энергия от раскаленного металлического покрытия про-
водится по сапфировому стержню и низкотемпературному оптическому
волокну к блоку анализа и отображения. Покрытый металлом кончик
волокна представляет собой черное тело, спектр излучения которого за-
висит от температуры в соответствии с законом излучения Планка. Ана-
лиз узкой полосы спектра излучения, выходящего из низкотемпературно-
го волокна, выполняется при помощи оптического интерференционного
фильтра и фотодетектора, преобразующего энергию излучения в элек-
трическую энергию.
Рис. 13.4. Схема кончика волокна с люминофорным покрытием, используемого
Luxtron в качестве волоконно-оптического датчика температуры
Дистанционные измерения температуры при температурах ниже 400 °C
могут быть выполнены при помощи спектрально-селективных методов,
используемых несколькими компаниями в серийно выпускаемых устрой-
ствах. Такие методы не чувствительны к изменениям излучения черного
тела, но скорее регистрируют на вызванные температурой изменения
флуоресценции или спектров поглощения определенных специальных ве-
ществ. В выпускаемой в настоящее время системе Luxtron светящийся
люминофор размещен на кончике оптического волокна в зоне измерения
(см. рис. 13.4). Импульсы оптического возбуждения вызывают свечение
люминофора (рис. 13.5), и время, за которое угасает свечение, зависит
от температуры. Измеряется время т, за которое люминесцентный сиг-
нал Si спадает в е раз по сравнению с его первоначальной величиной.
Температура получается из калибровочной кривой зависимости времени
угасания т от температуры (рис. 13.6). В другой системе измерения тем-
пературы компании MetriCor для двух длин волн отслеживается сдвиг
края полосы поглощения в полупроводниковом материале в зависимости
от температуры.
Глава 13. Индустриальные приложения оптоволоконных датчиков
т (мс) Интенсивность
Время
Рис. 13.5. График угасания интенсивности флуоресценции с течением времени
в люминофоре Luxtron после импульса оптического возбуждения. Тем-
пература люминофора неизвестна
Рис. 13.6. Температура в датчике Luxtron получается из калибровочной кривой,
определяющей зависимость времени угасания г от температуры
13.3. Измерение температуры
Поскольку все эти методы измерения температуры связывают изме-
нения температуры с изменениями интенсивности излучения более чем
на одной длине волны, появляется возможность скорректировать неже-
лательные изменения интенсивности, вызванные, например, изменениями
условий передачи излучения в волокне. Такая коррекция может осуще-
ствляться в электронном блоке при помощи логометрической обработки
сигнала. С другой стороны, для достижения точности и долговременной
стабильности оптические методы измерения температуры, основанные на
анализе излучения твердого тела, требуют, чтобы заранее была извест-
на излучательная способность объекта или зонда или существовал метод
коррекции колебаний излучательной способности.
Некоторые компании, производящие радиационные пирометры, на-
чали применять в этих приборах головку, формирующую изображение,
и волоконный жгут. Такое сочетание позволяет дистанционно выполнять
бесконтактные измерения температуры путем передачи по волокну излу-
чения из горячей зоны к пирометру. Дополнительной особенностью вы-
полнения дистанционных измерений температуры таким способом явля-
ется возможность пространственного разрешения. Отдельные волокна до-
ставляют излучение с различных участков плоскости изображения линзы,
которая создает изображение горячей зоны, воспринимаемое затем уда-
ленной фотодиодной матрицей фирмы Reticon. Таким способом может
быть, например, построена тепловая карта процесса горения. Для этого
используется показанная на рис. 13.7 система, называемая анализатором
качества горения, которая устанавливается в печи для варки стекла.
Анализатор качества горения — это электрооптическая система, раз-
работанная для оценки интенсивности пламени (см. рис. 13.1), а также
определения температуры пламени и профиля излучения при помощи двух-
цветной пирометрии [15]. Для работы оптический зонд устанавливается
в существующие отверстия в стенках печи. Оптический зонд со сторо-
ны печи состоит из широкоугольной линзы, формирующей изображение,
и двумерного массива оптических волокон, которые передают изобра-
жение пламени и, следовательно, профиль интенсивности в блок обра-
ботки: оптической, электронной и формирующей сигнал. С той стороны
оптического зонда, который ведет к блоку обработки, волокна переупо-
рядочиваются, образуя линейный массив, в соответствии с положением
в зоне горения, как показано на рис. 13.7. Для определения интенсив-
ности на двух различных длинах волн сигнал интенсивности горения
воспринимается двумя фотодиодными матрицами. Проведение анализа на
двух близлежащих длинах волн позволяет устранить возможные неясно-
сти, обусловленные колебаниями излучательной способности. Полученная
информация используется для вычисления температуры пламени в соот-
ветствии с законами Планка об излучении черного тела (см. рис. 13.2).
После экспериментального определения эмпирической корреляции темпе-
ратуры и формы пламени с темпом смешивания горючего и воздуха вы-
422 Глава 13. Индустриальные приложения оптоволоконных
Рис. 13.7. Схема анализатора качества горения, предназначенного для наблюдения за процессом горения в печи для ©
выработки листового стекла. На врезке показано, как положение в пламени связано с двумя матрицами фотодиодов, §
©
работающими на двух длинах волн §
<3>
13-4- Измерение давления 423
ходной сигнал анализатора качества горения может использоваться для
управления процессом горения.
13.4. Измерение давления
Разработано несколько волоконно-оптических датчиков на основе интен-
сивности, предназначенных для измерения давления в промышленных усло-
виях. Такие датчики могут применяться для наблюдения за давлением
в котлах (рис. 13.1), химических реакторах, двигателях и в теле челове-
ка. Компанией Heise выпускается высокоточный чувствительный элемент
для измерения давления, в котором мембрана подсоединена к пропускаю-
щей дифракционной решетке, расположенной между передающим и при-
нимающим волокнами. В преобразователях компаний Litton и Metricor
обеспечивается двуволновая и многоволновая коррекция потерь в соеди-
нителях волоконных световодов и самих волокнах.
Волоконно-оптические датчики для измерения давления интенсивно
совершенствуются. В особенности датчики, предназначенные для акусти-
ческих приложений, разрабатываются рамках программы Военно-мор-
ских сил США «Системы с использованием волоконно-оптических датчи-
ков» [16]. Для измерения переменных флуктуаций давления применяются
как датчики с внешним чувствительным элементом, так и «чистоволо-
конные» датчики, как датчики интенсивности, так и датчики интерферо-
метрического типа. Для измерения статического давления может быть изме-
рена величина интенсивности излучения, отражаемого от тонкой мембраны,
которая прогибается под воздействием прилагаемого давления. Калибро-
вочная кривая такого датчика давления приведена на рис. 13.8. Такой
датчик, разработанный ОРТЕСН, включает в себя волоконно-оптический
отражательный чувствительный элемент. Если раздвоенный жгут при-
меняется так, как показано на врезке на рис. 13.8, то половину волокон
можно использовать для передачи излучения к волокну, а вторую поло-
вину волокон использовать для передачи излучения к фотодетектору.
Свет выходящих из входных волокон образует массив пятен, диаметр
которых увеличивается при увеличении расстояния от конца жгута про-
порционально числовой апертуре волокна. Количество излучения, которое
попадает в выходные волокна после отражения от мембраны, зависит
от приложенного давления, поскольку в зависимости от давления изме-
няется расстояние от мембраны до конца жгута.
Разработаны волоконно-оптические датчики для измерения статиче-
ского давления при высоких температурах [17]. Они могут использоваться
для измерения давления в газовых трактах в авиационных двигателях
с высокими эксплуатационными характеристиками и для наблюдения за
давлением в технологическом процессе на предприятиях, осуществляю-
щих сжижение угля.
Приложенное давление (фунт на квадратный дюйм)
Рис. 13.8. Калибровочная кривая соотношения между измеренным и приложенным
давлением для датчика давления, показанного на врезке, включающего
в себя волоконно-оптический отражательный чувствительный элемент.
Калибровочные данные предоставлены компанией «Оптические техно-
логии» (Optical Technologies Inc.) (OPTECH)
Металлические мембраны, используемые в обычных датчиках давления,
при высоких температурах начинают деформироваться, и измерители
деформации или емкостные тензодатчики перестают функционировать.
Кроме того, гидросмесь, используемая при технологическом процессе сжи-
жения угля, обладает чрезвычайной едкостью. Чтобы избежать проблем,
связанных с деформацией и разъеданием, в качестве материала мембраны
используется высокопрочный сплав инконель; а для измерения прогиба
мембраны под воздействием приложенного давления используется воло-
конно-оптический датчик [18] на основе микроизгибов (см. рис. 13.9). Бы-
ло продемонстрировано, что этот датчик способен измерять давление при
температуре до 425 °C, при этом он показывает повторяемость, не пре-
вышающую 1% точности измерений [17]. Фотография датчика приведена
на рис. 13.10. Для достижения такого уровня точности и долговременной
повторяемости выходной сигнал датчика на основе микроизгибов должен
быть нормализован, что позволяет исключить влияние вибрации и тепло-
вого дрейфа.
13.4- Измерение давления 425
Выходной сигнал преобразователя (В)
Рис. 13.9. Выходной сигнал преобразователя в зависимости от приложенного да-
вления для датчика давления, включающего в себя чувствительный
элемент на основе микроизгибов, показанный на врезке
Рис. 13.10. Фотография лабораторного образца волоконно-оптического датчика
на основе микроизгибов, предназначенного для измерения давления
при высоких температурах
М26 Глава 13. Индустриальные приложения оптоволоконных датчиков
Благодаря применяемому методу коррекции статического сигнала дат-
чик на основе микроизгибов становится невосприимчивым к воздействи-
ям неблагоприятной внешней среды, но не к препятствиям на пути излу-
чения между чувствительным элементом и источником или приемником.
Упоминавшиеся ранее [7, 8] и описанные в гл. 11 методы использования
собственных опорных сигналов позволяют сделать датчик давления не-
восприимчивым также и к помехам в волоконном световоде.
Волоконно-оптический датчик на основе микроизгибов представляет
собой покрытое защитной металлической оболочкой многомодовое опти-
ческое волокно со ступенчато изменяющимся показателем преломления,
сдавливаемое двумя гофрированными поверхностями, как показано на
рис. 13.9. Гофрированная поверхность мембраны смещается под воздей-
ствием вызванного давлением прогиба мембраны. Прогиб служит при-
чиной изменения амплитуды периодических искривлений волокна меж-
ду складками поверхности. Оптическая мощность в сердцевине волок-
на затухает пропорционально амплитуде искривлений из-за превращения
распространяющихся мод в излучаемые. Обусловленные излучением мод
потери мощности в сердцевине волокна оптимальны, когда частота про-
странственных изгибов волокна равна разности между константами рас-
пространения (Д/3) распространяющихся и излучаемых мод:
где Л — промежутки между складками гофрированной поверхности [18].
13.5. Измерение уровня жидкости
Было продемонстрировано множество подходов к измерению уровня жид-
кости при помощи волоконно-оптических датчиков. При одном из подхо-
дов волокна используются для передачи света в призму. При соответству-
ющим образом подобранном угле призмы происходит полное внутреннее
отражение света, когда призма находится в воздухе. Если призма погру-
жается в жидкость, в жидкости происходит преломление света. Таким
образом, это устройство действует как выключатель света, зависящий
от уровня жидкости. Подобные датчики серийно выпускаются компа-
ниями ЕоТес и Tedeco. При специально разработанных призмах такой
подход обеспечивает высокий уровень отношения сигнал/шум при рабо-
те по принципу включено - выключено и нечувствительность к наросту
отложений на внешних сторонах призмы [19]. Уровень жидкости изме-
ряется также и непрерывными методами через измерения смещений или
перемещений. Датчики, непрерывно измеряющие уровень жидкости, при-
13.5. Измерение уровня жидкости
меняются в топливных баках и для обнаружения протечек в нефтехими-
ческих резервуарах-хранилищах. При этом используются подходы, при
которых кодовая маска между двумя фиксированными массивами воло-
кон смещается при изменении уровня или одно из волокон перемещается
при изменении уровня относительно другого или нескольких фиксирован-
ных волокон (см. раздел 13.7).
В компании Diamond Power Specialty разработано дистанционное во-
локонно-оптическое считывающее оборудование, специально предназна-
ченное для наблюдения за уровнем воды в корпусе котла [20]. Система
называется Fiber Viewer 7001. В считывающей части системы исполь-
зуются кабели с отдельными оптическими волокнами, по каждому из
которых передается красное или зеленое излучение от отдельных пор-
тов в датчике уровня в диспетчерскую электростанции, расположенную
более чем в 500 футах от корпуса котла (см. рис. 13.1). В диспетчер-
ской волокна подсоединены к устройству отображения в том же самом
вертикальном порядке, в каком расположены порты датчика. Локальное
устройство отображения предусмотрено и непосредственно около корпуса
котла.
Рис. 13.11. Принцип действия датчика уровня воды, разработанного компанией
Diamond Power Specialty: а) отклонение пучков света при прохо-
ждении через воду; б) отсутствие отклонения пучков света при
прохождении через пар
Треугольная призма, используемая в датчике уровня воды, устроена
так, что, когда она погружена в воду (показатель преломления 1,33), пуч-
ки красного и зеленого цвета, проходя через порты, отклоняются по от-
ношению к отверстиям в кодирующей пластине в соответствии с зако-
ном преломления Снеллиуса. Для формирования пучков света использу-
ются лампа, красный и зеленый цветовые фильтры и коллимирующие
линзы (рис. 13.11 и 13.12). При наличии воды зеленый свет проходит
через порт датчика и отверстие. При отсутствии воды лучи проходят
через воздух или пар (показатель преломления 1,00) и не отклоняют-
ся. В результате через отверстие проходит пучок красного света. Свет
от каждого из отверстий собирается и вводится в отдельные оптические
волокна, которые подсоединены к устройству отображения в диспетчер-
ской (см. рис. 13.12).
Основным преимуществом такого волоконно-оптического средства счи-
тывания уровня воды с датчика-водомера является его надежность, обес-
печенная пассивностью процесса измерения. Установлены сотни таких
датчиков, и многие из них работают больше 9 лет. Системе требует-
ся минимальное техническое обслуживание, и она может использоваться
как предохраняющее устройство, первоначально определяющее уровень
воды в корпусе энергетического котла, работающего при температуре
выше 700° по шкале Фаренгейта и давлении 3200 фунтов на квадратный
дюйм. С другой стороны, этот метод изменения уровня применим толь-
ко для прозрачных жидкостей, таких как вода, и наибольшая проблема,
возникающая при его использовании, — это возможность загрязнения по-
верхностей, проводящих свет, особенно в грязной воде.
Красный
Красный
Зеленый
Зеленый
Зеленый
Рис. 13.12. Вид сбоку волоконно-оптического считывающего устройства датчика
уровня воды, состоящего из пяти портов. Показана схема подсоеди-
нения кабелей к устройству отображения в диспетчерской
13.6. Измерение скорости потока
Дистанционные лазерные доплеровские измерители скорости с использо-
ванием оптических волокон реализованы и предлагаются на рынке ком-
13.6. Измерение скорости потока
панией TSI, Inc. Поскольку метод лазерного доплеровского измерения
скорости давно известен и хорошо обоснован, в настоящее время следу-
ет особенно обратить внимание на конструкцию удаленного оптического
зонда, предназначенного для введения в движущийся поток. Излучение
подводится к этому зонду по оптическим волокнам, и он фокусирует
два световых пучка внутри текущего вещества. Картина интерферен-
ционных полос в области перекрытия световых пучков определяет объем
выборки (рис. 13.13). Также по волокнам в электронный блок обработки
возвращается излучение, рассеянное частицами, которые проходят че-
рез картину интерференции, созданную формирующими объем измере-
ния пучками. Скорость частиц определяется на основании частотного
спектра модуляции по графику зависимости интенсивности излучения
от времени (рис. 13.13). Поскольку скорость потока связана с изменения-
ми интенсивности во времени, а не с количеством рассеянного излучения,
выходной сигнал такого датчика нечувствителен к загрязнению оптиче-
ской поверхности. В промышленных условиях были продемонстрированы
измерения скорости потоков вплоть до 100 м/с при точности 0,5% [21].
Этот метод применим для проведения измерений в жидкостях или газах,
таких как пар.
Рис. 13.13. Зонд лазерного доплеровского измерителя скорости, в котором опти-
ческие волокна используются для доставки и сбора излучения
Было продемонстрировано измерение скорости потока, основанное на
явлении периодического вихреобразования. При этом волокна были про-
ложены внутри труб [22]. Однако долгосрочная надежность методов, тре-
бующих прокладки оптических волокон в трубах с рабочими жидкостями,
до сих пор не продемонстрирована.
Глава 13. Индустриальные приложения оптоволоконных датчиков
Чтобы избежать возможных проблем с надежностью, производители
в большей степени разрабатывают измерители скорости потока, волокон-
но-оптический чувствительный элемент которых расположен за предела-
ми стенок функционирующего трубопровода [23]. Один из таких измери-
телей скорости производится и предлагается на рынке компанией Bailey
Controls. Измеритель скорости выполняет измерения объемной скорости
потока жидкости при температуре вещества вплоть до 325 °C. Соединен-
ный встык волоконно-оптический чувствительный элемент преобразует
периодические механические движения, вызванные вихреобразованием,
в модулированный световой сигнал, который в свою очередь регистри-
руется и преобразуется фотодиодами в модулированный электрический
сигнал.
Рис. 13.14. Схематическое представление расходомера на основе вихреобразова-
ния, выпускаемого компанией Bailey Controls. Волоконно-оптический
чувствительный элемент механически присоединен к вибрирующему
стержню
При разработке учтены механические свойства жидкости; в поток
помещено препятствие, позади которого возникает периодическая тур-
булентность (см. рис. 13.14). Частота возникновения обусловленных пре-
пятствием турбулентных вихрей пропорциональна скорости потока. При-
мером подобного явления может служить флаг, развевающийся на ветру;
количество волн на поверхности флага пропорционально скорости ветра.
В измерителе скорости потока Bailey используются тонкое металлическое
препятствие, проходящее по диаметру технологической трубы, и отдель-
ный металлический стержень позади препятствия, который смещается
с частотой образования вихрей. Смещения этого подвижного стержня пе-
редаются волоконно-оптическому чувствительному элементу, находяще-
муся за пределами трубы, через мембрану в стенке трубы (не показана).
Мембрана служит как перемычкой, так и точкой крепления для подвиж-
ного стержня. На рис. 13.14 показано, что входное оптическое волокно
механически присоединено к подвижному стержню. Второе, выходное
оптическое волокно неподвижно зафиксировано. Частота обусловленных
перемещениями колебаний входного волокна пропорционально скорости
13.7. Измерение положения 431
потока, и излучение, проходящее между двумя волокнами, в свою очередь
модулируется по интенсивности с частотой вихреобразования. На выходе
модулированный оптический сигнал при помощи фотодетектора преобра-
зуется в модулированный электрический сигнал.
13.7. Измерение положения
Для определения положения, а также измерения степени близости и сме-
щения используются различные волоконно-оптические методы измерения,
основанные на интенсивности. Среди них есть методы, в которых ис-
пользуются раздвоенные Y-образные зонды, так что свет излучается из
передающих волокон, падает на отражающую поверхность и после отра-
жения попадает в принимающие волокна (см. рис. 13.8). Интенсивность
излучения, попадающего в принимающие волокна, зависит от расстоя-
ния до отражающей поверхности. Такие Y-образные чувствительные эле-
менты имеют хорошие чувствительность и точность, но ограниченный
динамический диапазон. Датчики имеют переключатели, позволяющие
использовать их в сочетании с мембраной для измерения давления или
с биметаллической полоской для измерения температуры. Относительное
или абсолютное перемещение также может быть измерено путем реги-
страции интенсивности излучения, передаваемого между двумя концами
волокон, близко расположенными один к другому (волоконно-оптический
датчик интенсивности на основе соединения встык показан на рис. 13.14).
Линейные оптические преобразователи смещения были разработаны для
аэрокосмических приложений [24]. Эти устройства, как правило, включа-
ют в себя два неподвижно зафиксированных массива оптических волокон
(см. рис. 13.15). Один из массивов передает излучение во второй прини-
мающий массив. Шкала кода Грея или кодирующая пластинка нейтраль-
ной плотности, размещенная между массивами, позволяет уникальным
образом изменять картину передаваемого излучения при движении пла-
стинки. Таким образом, величину абсолютного перемещения или угла
поворота кодирующей пластинки можно определить, измеряя выходную
интенсивность излучения каждого из волокон принимающего массива. Та-
кой подход к измерениям может быть легко адаптирован и использован
для определения положения направляющих винтов, стержней клапанов
(см. рис. 13.1) и гидравлических поршней, которые используются в сило-
вых приводах технологических установок. При измерениях как линейных
перемещений, так и углов поворота может применяться мультиплексиро-
вание датчиков с разделением по времени или по длине волны.
Основная проблема при использовании таких датчиков в промышлен-
ных условиях возникает из-за того, что измерения выполняются бескон-
тактно (что является очевидным преимуществом). Поскольку для работы
этих датчиков необходимо, чтобы выходящее излучение вновь попадало
в волокна, поддержание чистоты поверхности волокон является непремен-
ным условием, позволяющим избежать ошибок при считывании и ухода
выходного сигнала. Успех различных приемов и методов очистки, пред-
назначенных для предотвращения загрязнения поверхности, существенно
зависит от загрязненности среды, в которой работает датчик.
Рис. 13.15. Схема датчика на основе циклического двоичного кода (кода Грея),
в котором массивы оптических волокон используются для передачи и
приема излучения
13.8. Измерение вибрации
Для наблюдения за сотрясениями, свободно закрепленными частями и
вибрацией вращающихся механизмов (см. рис. 13.1) используются аксе-
лерометры. Такое наблюдение часто необходимо для гарантии того, что
вращающиеся компоненты остаются в равновесии и что износ опоры не
вызывает чрезмерную вибрацию. На рис. 13.16 схематически предста-
влен волоконно-оптический акселерометр, в котором используется воло-
конно-оптический датчик интенсивности на основе микроизгибов [25].
Использующий механизм микроизгибов датчик перемещений измеряет
силу, необходимую для придания массе ускорения. Масса закреплена на
тонкой широкой балке и имеет рифленую нижнюю поверхность. На осно-
вании акселерометра расположена ответная рифленая поверхность и за-
креплены опоры концов балки. Волокно зажато между двумя рифлеными
13.8. Измерение вибрации
поверхностями. Ускорение основания становится причиной движения мас-
сы относительно основания и приводит к возникновению микроизгибов
и модуляции интенсивности излучения в оптическом волокне (см. также
раздел 13.4). Диапазон и чувствительность акселерометра определяются
жесткостью перекладины и величиной массы, закрепленной на перекла-
дине. Эти параметры можно отрегулировать так, чтобы приспособить
акселерометр к конкретным требуемым условиям измерений. Внутренний
объем под мембраной, в котором находятся рифленые поверхности, мож-
но заполнить жидкостью, как для амортизации чрезмерных сотрясений,
так и для того, чтобы погасить высокочастотные резонансные вибрации.
Рис. 13.16. Схема волоконно-оптического акселерометра, в котором используется
датчик интенсивности на основе микроизгибов
Рис. 13.17. Выходной сигнал акселерометра в зависимости от ускорения
Характеристика акселерометра линейна в достаточно широком диа-
пазоне ускорений, как следует из графика, приведенного на рис. 13.17.
Максимальные отклонения от идеальной прямой составляют 2,7%. Коэф-
15-3379
Глава 13. Индустриальные приложения оптоволоконных датчиков
фициент калибровки, найденный на основании экспериментальных дан-
ных методом наименьших квадратов, равен 10 мВ/g. Частотная харак-
теристика акселерометра также очень важна. Идеальный акселерометр
должен иметь одинаковый выход (мВ/g) на любой частоте во всем диа-
пазоне измерений. Частотная характеристика колебаний для волоконно-
оптического акселерометра в диапазоне от 0 до 1000 Гц показана на
рис. 13.18. Фотография лабораторного образца акселерометра показана
на рис. 13.19.
Рис. 13.18. Выходной сигнал акселерометра в зависимости от частоты
Рис. 13.19. Фотография лабораторного образца волоконно-оптического акселеро-
метра, предназначенного для наблюдения за вибрацией
13.9. Химический анализ 435
13.9. Химический анализ
Источник .
излучения*
к_____/
О О О О
ООО
Спектрометр,
спектрофотометр
Волокна
Автоматический сбор данных
и отображение спектра
Оптический
Область измерений
Рис. 13.20. Схема дистанционной спектроскопии при помощи оптических волокон
В настоящее время среди волоконно-оптических систем для химического
анализа, серийно выпускаемых Guided Wave и Oriel, есть и такие, в кото-
рых волокна используются для удаленных измерений свечения или погло-
щения образцов [26]. Разрабатываются и другие методы измерений, по-
зволяющие выполнять удаленную рамановскую спектроскопию [27]. В этих
системах волокна выступают просто в качестве линий передачи, связыва-
ющих выбранный удаленный образец со спектрометром (см. рис. 13.20).
Дополнительной особенностью таких систем является возможность муль-
типлексирования и обработки сигналов от множества удаленных образ-
цов одним спектрометром. По своим возможностям волоконно-оптические
системы для химического анализа сопоставимы с теми, в которых в насто-
ящее время используются газовые хроматографы. Эти системы могут ис-
пользоваться в пищевой промышленности, при производстве и обработке
фотоматериалов и в химической промышленности, для анализа опасных
отходов, для наблюдения за грунтовыми водами и для анализа дымового
газа. Применение многоволновых разностных или логометрических ме-
Глава 13. Индустриальные приложения оптоволоконных датчиков
тодов позволяет сделать дистанционные измерительные системы нечув-
ствительными к загрязнению поверхностей волокон. Во многих случаях
множество разнообразных химических веществ может быть идентифици-
ровано при концентрациях менее 1 промилле.
Рис. 13.21. Принципиальная схема системы для измерения содержания SO2 в газе,
выпускаемом печью
Один из методов был продемонстрирован на примере дистанционных
измерений содержания сернистого ангидрида (SO2) в газе, выпускаемом
печью энергетической установки (см. рис. 13.1). На рис. 13.21 приведена
схема системы для измерений «на месте» концентрации SO2 [28]. Чув-
ствительный элемент встраивается в стальную трубку диаметром 2 см
и длиной 2 м, что обеспечивает продувку датчика и возможность от-
бора образца. Трубка поперечно устанавливается в канале, по которому
проходит выпускаемый газ. Для доставки ультрафиолетового излучения
к отобранному образцу и от него используется жгут оптических волокон,
включающий в себя одно передающее волокно, расположенное в кольце
из шести принимающих волокон. На конце, противоположном от датчи-
ка, жгут разветвляется. Единственное передающее волокно соединяется
13.10. Измерение тока и напряжения 437
с лампой, в то время как шесть принимающих волокон подключены к ана-
лизатору. Излучение ртутной дуговой лампы мощностью 200 Вт вводится
в передающее волокно после прохода через узкополосный фильтр. Макси-
мум передачи фильтра приходится на длину волны 298 нм, что позволяет
частично перекрыть спектр поглощения SO2.
Анализатор построен на принципе недисперсионной спектроскопии.
Для обеспечения коррекции при колебаниях интенсивности излучения, из-
менениях коэффициента прохождения в волокнах, поглощения частицами
и рассеяния используются сигнальный и опорный фотодетекторы, меж-
ду которыми делится пучок излучения. Перед одним из фотодетекторов
расположен опорный элемент, содержащий SO2, и пучок излучения прохо-
дит через него. Ультрафиолетовое излучение тех длин волн, на которых
оно сильно поглощается SO2, устраняется из этого пучка, и таким обра-
зом снижается чувствительность опорного детектора к присутствию SO2
в удаленном образце.
Компанией Cardiovascular devices выпускаются оптоволоконные систе-
мы для анализа крови — определяются концентрации водородных ионов,
СО2 и 02- Изменения флуоресцентного свечения специального покры-
тия кончиков оптических волокон могут отслеживаться в организме [29].
Спектр свечения изменяется в зависимости от концентрации водородных
ионов, СО2 и О2. Анализ газов крови особенно важен при проведении
операций на открытом сердце.
13.10. Измерение тока и напряжения
Волоконно-оптические датчики для измерения высоких напряжений и то-
ков выпускаются компанией «Вестингауз электрик». В этих и аналогич-
ных датчиках используется методы, основанные на эффекте Фарадея, —
вращении плоскости поляризации излучения в оптически активной среде,
такой как магнитооптические кристаллы, или непосредственно в стеклян-
ном волокне (датчик тока) [30] или изменении состояния поляризации
излучения в двулучепреломляющей среде, такой как электрооптические
кристаллы, под воздействием высокого напряжения (линейный электро-
оптический эффект Поккельса) [31]. Изменение поляризации преобразу-
ется в изменение интенсивности излучения при помощи соответствующе-
го анализатора поляризации, как показано на рис. 13.22. Такие датчики
используются для мониторирования эффективности работы трансформа-
торов в силовых электроэнергетических сетях.
В случае измерения тока с использованием магнитооптических кри-
сталлов излучение проходит через кристалл, расположенный в магнитном
16-3379
поле, как показано на рис. 13.22, и плоскость поляризации излучения по-
ворачивается (эффект Фарадея) на угол 0, который можно вычислить
по формуле
О = VHL.
Здесь V — магнитооптическая постоянная Верде и L — длина оптическо-
го пути в кристалле. Магнитное поле Н создается измеряемым электриче-
ским током г, протекающим по проводнику, расположенному в непосред-
ственной близости к кристаллу. Модуляция поляризации, обусловленная
эффектом Фарадея, преобразуется в модуляцию интенсивности с помо-
щью анализатора поляризации. При соответствующем подборе сдвига
между углами поляризатора и анализатора изменения интенсивности из-
лучения регистрируемого выходного сигнала могут быть почти линейны-
ми относительно изменений магнитного поля Н.
•’К —
Источник
излучения
Волокно
_0_
Поляризатор
Электрический проводник
Оптически
активный материал
Волокно
о
Анализатор
-О
Приемник
Рис. 13.22. Схема волоконно-оптического поляриметрического датчика
Методы измерения напряжения, основанные на эффекте Поккельса,
аналогичны. Вместо магнитооптического используется сегнетоэлектри-
ческий кристалл. Под воздействием напряжения электрического поля в кри-
сталле возникает двулучепреломление, что становится причиной изме-
нения состояния поляризации излучения, проходящего через кристалл.
Изменение поляризации преобразуется в изменение интенсивности, как
описано выше, при помощи анализатора поляризации. Основное различие
между этими двумя методами измерения заключается в том, что эффект
Поккельса является обратимым, а эффект Фарадея — нет. Это означает,
что, если излучение, прошедшее через сегнетоэлектрический кристалл,
отражается обратно, изменение плоскости поляризации, вызванное двулу-
чепреломлением, нейтрализуется и излучение выходит из кристалла в том
же состоянии поляризации, которое было при входе. Если же магнитооп-
тический кристалл подвергается воздействию магнитного поля (как и при
других видах оптической активности), такого эффекта не наблюдается.
Изменения поляризации накапливаются и не являются обратимыми при
прохождении света в обратном направлении.
13.11. Важные замечания для индустриальных приложений
13.11. Важные замечания
для индустриальных приложений
Во многих случаях при промышленном применении внешние условия не-
благоприятны для чувствительных элементов датчиков и всего комплекса
измерительной аппаратуры. Это относится, прежде всего, к производству
тяжелых металлов, химическим предприятиям и производству электро-
энергии. Текущая эксплуатация оборудования в таких условиях выпол-
няется людьми, привыкшими к грязи и копоти, экономически заинтере-
сованными поддерживать уровень производства любой ценой. Все, что
препятствует процессу производства, решительно устраняется, особенно
если возникает опасность остановки процесса. Поэтому надежность явля-
ется важнейшим требованием, предъявляемым к исполнительным меха-
низмам, датчикам и другой аппаратуре, участвующей в технологическом
процессе. Если на показания каких-либо компонент или систем нельзя по-
лагаться, они не будут приниматься во внимание, будут отключены при
первой же возможности и демонтированы.
Результатом подобного подхода к производственным условиям ста-
новится недоверие к новым разработкам, существенно отличающимся от
испытанных и проверенных методов. Следовательно, процесс внедрения
в технологические процессы новых датчиков, преобразователей и испол-
нительных механизмов протекает медленно до тех пор, пока эффектив-
ность и надежность таких компонент окончательно не утвердится.
Надежность волоконно-оптических датчиков и преобразователей все
еще нуждается в точной количественной оценке. К настоящему моменту
еще не произведено достаточное количество устройств и они не служат
достаточно долго, чтобы статистически достоверно можно было выпол-
нить анализ отказов или повреждений. Хотя надежность отдельных дат-
чиков можно оценить количественно, вопросам надежности систем в це-
лом до сих пор не уделялось достаточно внимания. С другой стороны, при
рассмотрении мультиплексированных массивов датчиков возникают до-
полнительные вопросы, связанные с надежностью компонент, аппаратно
обеспечивающих мультиплексирование.
Наряду с надежностью, проблемными являются вопросы техническо-
го обслуживания и установки. Потенциальные потребители волоконно-
оптических технологий в промышленности, как правило, мало с ними
знакомы, но положение дел улучшается. Распространенное в прошлом
мнение о хрупкости стеклянных волокон и о постоянной необходимости
их соединений постепенно высказывается все реже. Прокладка волокон-
ных кабелей обычно выполняется быстро и легко. Проблем с техническим
обслуживанием становится меньше по мере возрастания осведомленности
440 Глава 13. Индустриальные приложения оптоволоконных датчиков
о соответствующих технологиях. Установка на промышленных предпри-
ятиях волоконных сетей с ограниченной областью применения в значи-
тельной степени способствует ознакомлению потребителей с волоконны-
ми технологиями.
С волоконными датчиками конкурируют так называемые «интеллек-
туальные» электронные датчики с калибровкой на месте и функциями са-
мопроверки, выпускаемые в настоящее время для промышленного приме-
нения. Такие датчики температуры, давления, скорости потока и других
параметров процесса относительно дешевы. Их преимуществом является
цифровая обработка на микропроцессорах. При высоком уровне электро-
магнитных помех предпочтительна возможность удаленной обработки
сигнала на стороне приема; но в большинстве приложений приемлема
возможность обработки сигнала и калибровки на месте, что и предла-
гают «интеллектуальные» датчики. Один из прекрасных примеров — это
современный промышленный разностный датчик давления, двухпорто-
вое устройство на основе корректирующего чувствительного элемента
для выполнения измерений перепадов давления напротив отверстий в ба-
ках и т.п. В дополнение к датчику силы такие удаленные встроенные
датчики включают в себя микропроцессор, электроника которого позво-
ляет такие операции, как автоматическая калибровка, контроль нулевого
положения и изменения диапазона, выполнять под управлением команд,
посылаемых удаленным переносным программирующим устройством. Та-
кой класс электронных приборов затрудняет распространение волокон-
ных датчиков, поскольку эквивалентных оптических интегрированных
схем для удаленной обработки сигнала пока не существует.
Однако волокна позволяют доставлять, не искажая, необработанную
информацию через неблагоприятную промышленную среду с высоким
уровнем электромагнитных помех. Следовательно, интеллектуальная об-
работка сигнала может быть сосредоточена со стороны приемника, где
электрической мощности достаточно и внешняя среда благоприятна. До
появления волоконных датчиков не было возможности доставить к «интел-
лектуальному» приемнику необработанные данные измерений, не масшта-
бированные, не линеаризованные или нескорректированные. Благодаря
оптическим волокнам теперь возможно передавать такие необработанные
данные и выполнять все эти функции, связанные с обработкой сигна-
ла, в тысячах футах от точки измерения, обеспечивая соответствующим
образом масштабированный выходной сигнал, понятный пользователю.
Продолжают появляться новые виды серийно выпускаемых волокон-
но-оптических датчиков интенсивности, предназначенных для измерения
физических параметров. Производителям датчиков интенсивности еще
предстоит решить следующие задачи: (1) эффективная компенсация по-
терь в кабелях и соединениях в квазистатических измерительных систе-
мах; (2) реализация методов мультиплексирования датчиков интенсив-
ности в волоконно-оптических сетях передачи данных; (3) модификация
новых и существующих датчиков для военного и промышленного при-
менения (приспособление для использования в. экстремальных условиях
и компоновка в жестких корпусах) и (4) определение на практике преде-
лов точности и повторяемости.
13.12. Резюме
Волоконно-оптические датчики постепенно вторгаются в специализирован-
ные области применения, традиционно занимаемые электронными пре-
образователями. Большая часть оборудования, основанного на волоконной
оптике, продается для использования в целях тестирования и оценки.
Ожидается, что эти первые установки позволят продемонстрировать основные
технические характеристики и эффективность систем, а также оценить
сложность установки, надежность и уровень требуемого технического
обслуживания. Будущее волоконной оптики в обрабатывающих отрас-
лях промышленности выглядит обнадеживающим, и вторжение уже на-
чалось, благодаря использованию волоконно-оптических каналов переда-
чи данных. Начало ограниченному использованию волоконно-оптических
датчиков также положено. Присущие волоконно-оптическим компонентам
характеристики делают их более надежными, чем применяемые в настоя-
щее время компоненты, и позволяют использовать приложения при таких
внешних условиях, где с существующими компонентами это прежде было
невозможно. Разработаны специальные волоконно-оптические датчики,
стойкие по отношению к коррозии и воздействию высоких температур.
Размеры, вес и стоимость волоконно-оптических компонент продолжа-
ют снижаться. Очень важно, что волоконно-оптические датчики могут
быть интегрированы в традиционную аппаратуру, с которой потребите-
ли знакомы. Все эти факторы способствуют расширению промышленных
применений волоконно-оптических систем. В наши дни волоконные дат-
чики и каналы передачи данных уже используются во многих областях
производства.
Литература
1. К. Sakurai, Opt. News, 11, 6 (1985).
2. J. W. Berthold, Overview of Fiber Optic Intensity Sensors for Industry, Proc.
SPIE O-E/Fibers ’87-’88, San Diego, Calif., 1987.
442 Глава 13. Индустриальные приложения оптоволоконных датчиков
3. A. L. Harmer, Status of Fiber Optic Sensors in Europe, Proc. SPIE O-E/Fibers
’88, 985, Boston, 1988.
4. B. Culshaw and J. Dakin, Eds., Optical Fiber Sensors: Systems and Applica-
tions, vol. 2, Artech House, Norwood, Mass., 1989.
5. A. D. Kersey et al., Interferometric Sensors for de Measurands: A New Class of
Fiber Sensors, Proc. SPIE 718, O-E/Fibers ’86, Cambridge, Mass., 1986.
6. C. A. Wade and A. Dandridge, An Optical Fiber Flowmeter Based on the Cori-
olis Effect, Proc. SPIE 985, O-E/Fibers ’88, Boston, 1988.
7. W. B. Spillman, Jr. and J. R. Lord, Self-Referencing Multiplexing Technique for
Intensity Modulating Fiber Optic Sensors, Proc. SPIE 718, O-E/Fibers ’86,
Cambridge, Mass., 1986.
8. S. F. Watanabe and A. A. Joseph, Overview of Multiplexing Techniques for All
Fiber Interferometer Sensor Arrays, Proc. SPIE 718, O-E/Fibers ’86, Cam-
bridge, Mass., 1986.
9. T. A. Lindsay et al., Standard Fiber Optic Sensor Interface for Aerospace Ap-
plications: Time Domain Intensity Normalization, Proc. SPIE 989, O-E/Fibers
’88, Boston, 1988.
10. J. A. Wysocki et al., Long-Term Strength of Metal-Coated Fibers in Harsh Envi-
ronments, Physics of Fiber Optics, vol. 2, American Ceramic Society, Columbus,
Ohio, 1981, p. 134.
11. D.R. Miers et al., Life Tests of Optical Fibers in a Microbend Configuration,
American Ceramic Society 88th Annual Meeting, Glass Division, Chicago, 1986.
12. M. Gottlieb and G.B. Brandt, Appl. Opt. 20, 3408 (1981).
13. R. D. Hudson, Infrared System Engineering, Wiley, New York, 1969.
14. R.R. Dils, J. Appl. Phys. 84, 1198 (1983).
15. H. R. Carter and R. T. Bailey, Flame Quality Analyzer for Temperature Mea-
surement and Combustion Control, Sensors 5(1) (1988).
16. T. G. Giallorenzi et al., IEEE J. Quantum Electron. QE-18, 626 (1982).
17. J. W. Berthold et al., IEEE J. Lightwave Technol. LT-5, 870 (1987).
18. N. Lagakos et al., Appl. Opt. 20, 167 (1981).
19. G.D. Pitt, Electron. Commun. 57, 102 (1982).
20. L. A. Jeffers et al., EPRI Workshop in Incipient Failure Detection for Fossil
Power Plant Components, Hartford, Conn, 1982.
21. K. Kyuma et al., Appl. Opt. 20, 2424 (1981).
22. J.H. Lyle and C W. Pitt, Electron. Lett. 17, 244 (1981).
23. D. J. Wroblewski and E. Skuratovsky, Proc. ISA 653, 31st International Instru-
mentation Symposium, San Diego, Calif., 1985.
24. S. W. Flynn and B. J. Smoot, Final Report USAAVRADCOM-TR-83-D3, July
1983.
25. D. R. Miers et al., Design and Characterization of Fiber Optic Accelerometers,
Proc. SPIE 838, E-E/Fibers ’87, San Diego, Calif, 1987.
26. W. A. Chudyk et al., Anal. Chem. 57, 1237 (1985).
27. T. L. Ferrell et al., Fiber-Optic Surface-Enhanced Raman System for Field
Screening of Hazardous Compounds, Proc. First International EPA Symposium
on Field Screening Methods for Hazardous Waste Site Investigations, Las Vegas,
Nev., 1988.
28. L. A. Jeffers, Fiber Optic SO2 Analyzer, Proc. SPIE 566, Fiber Optics Tech-
nology, San Diego, Calif., 1985.
Литература
29. W. R. Seitz, Sensors 2, 6 (1985).
30. G. W. Day, Compact Sensors for the Measurement of Low Level Electric Cur-
rents, Proc. 4th International Conference on Optical Fiber Sensors, Tokyo, 1986.
31. K. Kyuma et al., Opt. Lasers Eng. 3, 155 (1982).
ГЛАВА 14
ВОЛОКОННО-ОПТИЧЕСКИЕ
ИНТЕЛЛЕКТУАЛЬНЫЕ
СТРУКТУРЫ
Эрик Удд
Компания «Макдоннел-Ду глас Электроник Системе»
Санта-Ана, Калифорния
14.1. Введение
В передовой авиационной и космической технике технологии измерений
необходимы как для наблюдения за внешней средой, окружающей лета-
тельные аппараты, так и для оценки конструктивной целостности самих
аппаратов. Размер, вес, невосприимчивость к электромагнитным поме-
хам, повышенная прочность и защищенность от воздействий внешней
среды являются основными факторами, влияющими на выбор технологий.
Следующее поколение мостов, атомных электростанций, небоскребов и
других сооружений, подвергающихся критическим нагрузкам, будет су-
щественно лучше благодаря встроенным системам наблюдения за прочно-
стью конструкций. Во всех этих случаях требуются недорогие пассивные
системы с высокой надежностью. Волоконная технология для этих прило-
жений имеет ряд преимуществ по сравнению с электронной технологией
[1-5], в том числе небольшой вес и удобная компоновка, полностью пассив-
ная схема, использование малой мощности, невосприимчивость к электро-
магнитным помехам, высокая чувствительность и широкая полоса про-
пускания, совместимость с оптической передачей и обработкой данных,
длительный срок эксплуатации и низкая стоимость. Волоконно-оптиче-
ские измерительные системы могут быть легкими и удобно компоновать-
ся благодаря присущим им небольшим размерам. В частности, в случае
использования волоконных датчиков, область измерения которых огра-
ничена самим волокном, это волокно можно внедрить в материал какого-
либо фрагмента или прикрепить к материалу и при этом общие размеры
Волоконно-оптические датчики: Вводный курс для инженеров и научных работников,
под редакцией Эрика Удда. ©1991 John Wiley & Sons, Inc.
самого фрагмента изменятся весьма незначительно. То, что схемы элек-
трически пассивны, важно для тех приложений, в которых приходится
избегать токопроводящих трактов. Такие ситуации возникают в тех слу-
чаях, когда появление проводящей дорожки может привести к катастро-
фическим последствиям, таким как искрообразование. Использование ма-
лой мощности существенно для систем, в которых возможно большое
количество датчиков. Невосприимчивость к электромагнитным помехам
важна также и с точки зрения веса и размеров. Во многих электри-
ческих системах экранирование слабых электрических сигналов, идущих
от датчиков, является трудноразрешимой проблемой. Для ее разреше-
ния часто приходится прокладывать объемные и тяжелые кабели. Для
волоконной оптики этой проблемы не существует. Это последнее пре-
имущество становится еще весомее, когда большое количество датчиков
объединяется в массив. Если эти датчики имеют высокую чувствитель-
ность и большой динамический диапазон, требуемая полоса пропускания
массива окажется достаточно широкой. Поскольку возможно мультиплек-
сирование этих датчиков с использованием широкополосного оптического
волокна, потенциально способного поддерживать передачу сигналов ты-
сячами датчиков, проблем не возникает. Для обеспечения эквивалентной
полосы пропускания электрический кабель должен иметь толщину не-
сколько сантиметров. Наконец, благодаря значительным капиталовложе-
ниям в индустрию телекоммуникаций волоконно-оптические компоненты
имеют низкую стоимость при высокой надежности. Эти преимущества
особенно важны для волоконно-оптических интеллектуальных структур,
используемых в аэрокосмических аппаратах, где требуется широкий диа-
пазон измерительных возможностей и устойчивость к экстремальным
внешним условиям при минимальных размерах и весе.
Волоконно-оптические датчики в интеллектуальных структурах обес-
печивают четыре ключевые функции. Первая функция — это наблюдение
за процессом производства и измерение таких параметров, как деформа-
ция, температура и давление. Вторая функция позволяет выполнять про-
верку каждой отдельной структуры на каждой стадии процесса изгото-
вления и сборки, используя неразрушающие методы оценки, дополнитель-
но расширяемые благодаря встроенным датчикам. Третья функция — это
функционирование в составе волоконно-оптических сетей, состоящих из
мультиплексированных волоконно-оптических датчиков и каналов пере-
дачи данных и обеспечивающих наблюдение за техническим состоянием
системы. В четвертой функции сочетаются контроль за эффективностью
работы системы и управление системой, как, например, управление поле-
том самолета или космического корабля.
Важный класс материалов, в перспективе прекрасно сочетающихся
с волоконно-оптическими интеллектуальными структурами, — это компо-
зитные материалы, обеспечивающие ряд преимуществ при использовании
их в будущих структурных приложениях, где необходим небольшой вес
и высокая эффективность при работе в неблагоприятной внешней среде.
Чтобы реализовать эти преимущества, необходимы датчики для наблю-
дения за процессом производства, что позволит увеличить выход продук-
ции и снизить стоимость производства. Если встраивать такие датчики
непосредственно в композитные материалы, то дополнительную выгоду
можно извлечь, используя такие датчики для дополнительной неразру-
шающей оценки. Размеры и вес этих датчиков должны быть такими,
чтобы их наличие не сказывалось на прочности материала, и датчики
могли выполнять свои функции даже в критических внешних условиях,
возникающих в процессе производства. Волоконно-оптические датчики,
встраиваемые или прикрепляемые к материалам, способны удовлетворить
этим требованиям. Эти датчики позволяют производить измерения пара-
метров в процессе производства и осуществлять неразрушающую оценку
отдельных фрагментов после завершения производства, а затем следить
за эффективностью работы и техническим состоянием системы, посколь-
ку в процессе производства датчики уже встроены в определенные фраг-
менты транспортного средства, летательного аппарата или структуры.
14.2. Системы оптоволоконных датчиков
Структура типичной волоконно-оптической интеллектуальной структу-
ры показана в виде блок-схемы на рис. 14.1. Композитная панель, в кото-
рую встроены волоконно-оптические датчики, может подвергаться раз-
личным воздействиям внешней среды, таким как деформирующая нагруз-
ка, температура или давление, и их параметры могут быть измерены.
Датчики оптически мультиплексированы, так что встраиваются в па-
нель или прикрепляются к ней только стеклянные волокна, и полученные
сигналы направляются непосредственно в блок обработки сигналов. Блок
обработки сигналов может включать в себя оптические или электрон-
ные элементы, выполняющие предварительную обработку данных, по-
сле чего они будут переданы в систему управления, выполняющую такие
функции, как управление полетом, регулировка характеристик двигате-
ля, оценка технического состояния или угрозы повреждения. Для упра-
вления исполнительными механизмами могут использоваться волоконно-
оптические каналы связи. В системах с электроприводом управление вы-
полняется просто через интерфейс канала передачи данных; а в волокон-
ных системах кроме передачи информации осуществляется еще и энер-
госнабжение [6], причем питание также подается по оптическим каналам
связи.
Ц.2. Системы оптоволоконных датчиков 447
Система управления
Изменяющиеся
параметры
Композитная
панель
Рис. 14.1. Структурная схема волоконно-оптической интеллектуальной структуры
Архитектура
системы
Обработка
сигнала
Мультиплекси-
рование
Волоконно-
оптические
датчики
Материалы
волокон
• Наблюдение
за техническим
состоянием
• Наблюдение
за производительностью
• Оценка угрозы
повреждения
* Управление полетом
* Авиационное
оборудование
• Электрическая
• Оптическая
* Многоканальная
* Со многими
датчиками
* Временное
мультиплексирование
* Мультиплексирование
с разделением
по длине волны
• Частотная
модуляция
• Когерентность
• Поляризация
• Разветвители
• Звездообразные
соединения
* Механическое
напряжение
• Температура
* Вибрация
• Акустика
• Электрическое
и магнитное поля
• Угол поворота
• Ускорение
• Целостность
структуры
• Совместимость
* Покрытие волокон
* Соединитель
• Ориентация
* Старение материала
• Графит
• Эпоксидные смолы
* Полиимид
• Титан
• Алюминий
* Керамика
• Углерод-углеродные
материалы
Рис. 14.2. Технологии, связанные с волоконно-оптическими интеллектуальными
структурами
Технологии, связанные с волоконно-оптическими интеллектуальными
структурами и оболочками, перечислены на схеме, приведенной на рис. 14.2.
Первая проблема заключается в успешном встраивании волокон в компо-
зитные материалы [7-10]. Ее решение включает в себя выбор покрытия,
совместимого с используемым композитным материалом, определение по-
ложения волокна в материале и его совместимость с внешними условия-
ми в процессе производства. Набор используемых материалов включа-
ет в себя как сравнительно низкотемпературные графитовые эпоксид-
ные и термопластические материалы, так и металлы, керамику и даже
углерод-углеродные материалы, температуры которых могут достигать
тысяч градусов Цельсия. На рис. 14.3 показан испытательный образец из
эпоксикарбопласта со встроенными волоконно-оптическими датчиками,
используемыми для измерения механического напряжения и температуры.
На рис. 14.4 приведена фотография алюминиевого испытательного образ-
ца, на поверхность которого эпоксидным клеем прикреплены волокон-
Глава Ц. Волоконно-оптические интеллектуальные структуры
но-оптические датчики для измерения полей деформации. Ограничением
в этом случае является температура плавления стеклянных оптических
волокон, составляющая 1400 °C. При температурах намного превышаю-
щих 1000 °C диффузия легирующих присадок, применяемых для создания
разности показателей преломления в волноводах, начинает в значитель-
ной степени ухудшать передаточные характеристики волокна. Поэтому
для создания датчиков, способных работать с жаропрочными материала-
ми, проводятся исследования с более жаропрочными волноводами, изго-
тавливаемыми из таких материалов, как сапфир, которые потенциально
могут функционировать при температурах вплоть до 2000 °C [И]. Ес-
ли этот потенциал будет реализован, датчики можно будет использовать
при температурах обработки жаропрочных материалов. Благодаря своей
низкой стоимости кварцевые волокна могут широко использоваться в тех
приложениях, где применяются средние и низкие температуры обработки.
Рис. 14.3. Испытательный
образец из эпоксикарбопла-
ста с закрепленными на по-
верхности электрическими
тензодатчиками и встро-
енными волоконно-оптиче-
скими датчиками, исполь-
зуемыми для измерения ме-
ханического напряжения
Насколько успешно волокно будет встроено в материал, зависит от ис-
пользуемого покрытия волокна. При встраивании волокон в органиче-
ские материалы, такие как эпоксикарбопласт или термопласт, результат
может быть получен при покрытии волокна смолами, аналогичными со-
ответствующим органическим композитным материалам. В этом случае
совместимость химического состава покрытия с материалом имеет пер-
востепенное значение. При встраивании волокон в металлы наиболее важ-
ным фактором, влияющим на полученный результат, являются «металли-
ческие» свойства покрытия по отношению к окружающему материалу и на
границе соединения металл-стекло. Положение волокон в материале так-
же имеет значение. Самое лучшее соединение может быть получено при
Ц.2. Системы оптоволоконных
размещении волокон параллельно силовым линиям композитного матери-
ала. Поперечное размещение волокон может привести к возникновению
пустот, нарушающих структурную целостность фрагмента. На рис. 14.5
представлено поперечное сечение композитного образца из термопласта,
в который поперек силовых линий встроено волокно с покрытием из по-
лиимида. Поскольку покрытие совместимо с полимерным композитным
материалом, связь с волокном оказывается хорошей. Насыщенная поли-
мером область типична для волокон, расположенных перпендикулярно
силовым линиям. Когда волокна расположены параллельно силовым ли-
ниям, вокруг них образуется уплотнение силовых линий.
Рис. 14.4. Алюминиевый ис-
пытательный образец, на по-
верхность которого эпоксид-
ным клеем прикреплены во-
локонно-оптические датчики
для измерения полей дефор-
мации
Рис. 14.5. Поперечное сече-
ние композитного образца из
термопласта, в который по-
перек силовых линий встрое-
но оптическое волокно с по-
крытием из полиимида
450 Глава Ц. Волоконно-оптические интеллектуальные структуры
После того как выбраны волокна, покрытие и определен технологиче-
ский процесс встраивания оптических волокон в исследуемый материал,
следует обсудить способы получения доступа к концам волокон, чтобы
подсоединить их к другим фрагментам конструкции или к волоконно-
оптическим каналам связи [12]. Эту проблему можно решать разными
способами, в том числе, размещая волокна непосредственно во фрагмен-
те в процессе производства и принимая меры по снижению натяжения
выходящих из фрагмента концов волокон путем встраивания разъемов
во фрагменты и формирования фрагментов таким способом, чтобы сни-
зить нагрузку на разъемы; или прикрепляя волокна прямо к поверхности
фрагментов. С точки зрения ремонтопригодности и технического обслу-
живания прикрепление волокон к поверхности фрагментов существенно
привлекательнее. В этом случае к волокнам есть непосредственный до-
ступ и их намного проще заменить по сравнению со встроенными волок-
нами. Бывают, однако, ситуации, когда необходимую информацию можно
получить только при использовании встроенных волокон. Для соедине-
ния соседних фрагментов могут применяться или волоконные соедини-
тели, или методы сращивания. Сваривание волокон вместе дуговым раз-
рядом — простой экономичный способ, позволяющий сращивать волокна
с очень небольшими потерями, но его опасно использовать в присутствии
летучих газов, что является серьезным недостатком. По этой причине
применяется сращивание с помощью эпоксидных смол, хотя и предпола-
гающее большие потери, но не требующее использования электрической
дуги. Во многих случаях необходимо использовать соединители. При этом
основная проблема заключается в том, чтобы встроенные соединители
не повлияли существенно на конечную стоимость самих фрагментов.
После того как выбраны методы присоединения волокон к отдель-
ным фрагментам структуры и их соединения между собой, перед раз-
работчиком открываются возможности выбора из широкого диапазона
волоконно-оптических датчиков, предназначенных для измерения прак-
тически любых параметров и результатов воздействия внешней среды,
в том числе таких, как механическое напряжение, температура, вибра-
ция, акустические параметры, параметры электрического и магнитного
полей, ускорение и угол поворота. На рис. 14.6 приведены схемы трех
интерферометрических датчиков [13, 14], которые могут использоваться
в волоконно-оптических интеллектуальных структурах и оболочках (см.
гл. 9 и 10). Интерферометры имеют следующие преимущества: (1) они
могут использоваться для измерений, вызванных внешними воздействия-
ми изменений оптической длины пути излучения, распространяющегося
по волокну, с большой чувствительностью и высокой точностью; (2) из-
мерение осуществляется непосредственно в самом волокне и (3) интер-
Ц.2. Системы оптоволоконных
ферометры хорошо совместимы с методами мультиплексирования (см.
гл. 11). В некоторых приложениях перечисленные преимущества могут
скомпенсировать большую сложность и стоимость, характерную для этих
методов. В интерферометре Маха - Цендера, схема которого приведена на
рис. 14.6, пучок света, испускаемый источником высококогерентного из-
лучения, расщепляется на два пучка при помощи светоделителя. Один из
пучков проходит по оптическому волокну, обеспечивающему максималь-
ную чувствительность к измеряемому внешнему воздействию; в то время
как второй пучок света проходит по оптическому волокну, изолированно-
му от внешних воздействий. Разность между длинами оптических путей
двух пучков определяется демодулятором, выходное напряжение которо-
го пропорционально разности длин путей.
Измерительный
волоконный
Подключенный Волоконный чувствительный
выводами светоделитель элемент
к волокну
одномодовый
лазерный диод
вызванному сигналом
Интерферометр Маха-Цендера
Опорное волокно
Выходное напряжение,
Пассивная
гомодинная
демодуляция
Волоконный
пропорциональное сдвигу фазы,
Интерферометр Майкельсона
Интерферометр Саньяка
Рис. 14.6. Схемы интерферометрических датчиков, используемых в волоконно-
оптических интеллектуальных структурах
кж
Интерферометр Майкельсона функционирует аналогично интерферо-
метру Маха-Цендера, «сложенному» вдвое при помощи отражающих зер-
кал. Преимуществом такого подхода по сравнению с вариантом Маха-
Цендера является уменьшение количества входных и выходных волокон
и расширение возможностей для мультиплексирования. Существует так-
же несколько недостатков, в том числе ухудшение отношения сигнал/шум,
обусловленное ответной реакцией источника излучения.
Третий интерферометр, схема которого приведена на рис. 14.6, —
это интерферометр Саньяка, который может быть сконфигурирован для
работы с несколькими различными модами, что позволяет не только изме-
Глава Ц. Волоконно-оптические интеллектуальные структуры
рять амплитуду внешнего воздействия, но и определять его локализацию.
Эти функции были продемонстрированы при использовании его в соче-
тании с интерферометром Маха-Цендера [15].
Источник
излучения
Линзы с плавным
изменением показателя _
г™™.™....,. Приемник
преломления \ к
--------------
Поляризатор <
Измерительная Анализатор
петля
Многомодовое
волокно
Приемник,
чувствительный
к длине волны
Датчик на основе поляризации
Датчик, основанный на излучении
абсолютно черного тела
Сердцевины волокон,
расположенные
Датчик, основанный на затухающем взаимодействии
Рис. 14.7. Волоконно-оптические датчики, которые могут использоваться в во-
локонно-оптических интеллектуальных структурах, основанные на поля-
ризации, излучении абсолютно черного тела и затухающем взаимодей-
ствии
Кроме интерферометрических датчиков многие другие волоконно-опти-
ческие датчики подходят для использования в интеллектуальных структурах
и оболочках. На рис. 14.7 и 14.8 приведены схемы нескольких различ-
ных типов датчиков, которые могут получить широкое распростране-
ние в разных областях применения. Общей чертой всех этих подходов
является то, что конструкцией датчиков предусматривается проведение
измерений в волокне, пригодном для встраивания во фрагменты струк-
туры. То есть область измерений мала и имеет полный размер поряд-
ка диаметра самого волокна, а защитная оболочка волокна сопоставима
или больше силовых линий композитного материала, в который встра-
ивается волокно. Для использования, таким образом, подходит датчик
поляризации (см. гл. 8), показанный на рис. 14.7 [16]. Для поляризации
излучения, исходящего из источника, в нем может применяться поляри-
затор, представляющий собой отрезок сохраняющего поляризацию волок-
на. Поляризованное излучение вводится под углом 45° к выделенной оси
в двулучепреломляющее сохраняющее поляризацию волокно. Состояние
поляризации излучения, выходящего из волокна, анализируется поляриза-
торами. Поскольку состояние поляризации выходного излучения является
функцией оптических путей внутри двулучепреломляющего волокна, ко-
торые в свою очередь зависят от внешних воздействий, этого достаточно
для построения датчика.
Ц.2. Системы оптоволоконных датчиков
Другой тип волоконно-оптических датчиков — это датчик, основан-
ный на излучении абсолютно черного тела, чрезвычайно простой, пригод-
ный для использования в промышленности и имеющий ключевое значение
для многих приложений, в которых измеряются высокие температуры.
Этот датчик представлен на рис. 14.7. По мере того как волокно на-
гревается, оно испускает инфракрасное излучение (излучение абсолют-
но черного тела). Измеряя спектрально интенсивность результирующего
излучения, можно определить самую высокую температуру в волокне.
Важнейшей особенностью данного датчика является возможность изме-
рять только температуру, поскольку он практически независим от других
внешних воздействий. Если установить этот датчик вместе с датчиками,
чувствительными к нескольким внешним воздействиям, например, ме-
ханическому напряжению и температуре, тогда датчик, основанный на
излучении абсолютно черного тела, может эффективно использоваться
для измерений и одновременно выступать в качестве средства для кор-
рекции показаний дополнительных датчиков.
Ультрафиолетовый
источник излучения Образец
Спектрометр
Оптрод
Источник
излучения
Пространственный
Импульсный
источник
излучения
Высокоскоростное
принимающее устройство
Завершающее
окончание
--------------1
Область
механического
напряжения
фильтр приемник
Образец
моды
Оптический рефлектометр временной области
Двойная мода
Рис. 14.8. Волоконно-оптические датчики, основанные на вызванной флуорес-
ценции, внутренних эталонах, оптической временной рефлектометрии
и распространении двойной моды
Некоторые датчики, (например те, в которых используются затухаю-
щие поля), основанные на вызванной внешней средой перекрестной связи
между волокнами, сплавленными вместе, могут быть установлены таким
образом, что будут нечувствительны к механическим напряжениям и при
этом измерять температуру, или наоборот. Другие характерные типы
волоконно-оптических датчиков представлены на рис. 14.8. Принцип ра-
боты оптрода [19] основан на флуоресценции, вызываемой источником
коротковолнового излучения для измерения параметров внутри вещества.
Этот вариант может использоваться для таких композитных материалов,
как эпоксикарбопласт или термопласт, в смолах которых можно вызвать
флуоресценцию и с ее помощью оценить степень отверждения и содер-
жание влаги [20]. Волоконно-оптические датчики, основанные на исполь-
зовании эталонов [21, 22], могут быть сформированы непосредственно
в волокнах, путем встраивания в них зеркал. Для измерения расстояния
между зеркалами, в случае встроенных волоконно-оптических датчиков
зависящего от воздействий внешней среды, могут использоваться опти-
ческие методы. В случае метода двойной моды [23-25], схема которого
приведена на рис. 14.8, излучение вводится в волокно таким образом, что
возможны два или более оптических пути, и после выхода мод из волокна
то, как они смешаны, зависит от воздействий внешней среды. В оптиче-
ском рефлектометре временной области [26, 27], показанном на рис. 14.8,
используются короткие импульсы излучения, которые распространяются
по встроенному волокну, и величина обратного рассеяния зависит от ло-
кальных, вызванных внешними воздействиями потерь.
Все эти датчики, кратко описанные выше, так же как многие другие
типы датчиков, подробно описанные в этой книге, могут использоваться
в волоконно-оптических интеллектуальных структурах. В табл. 14.1 пе-
речислены датчики, описанные в этом разделе, и приведены их рабочие
характеристики для случаев применения их в приложениях, измеряющих
механическое напряжение и температуру. При выборе подходящих для
встраивания в интеллектуальные структуры датчиков перед разработчи-
ками открывается множество возможностей. Следует стремиться к до-
стижению наилучшего соотношения по критериям производительности,
стоимости и риска.
Таблица 14.1 представляет общий обзор возможных компромиссных
решений, но, кроме того, возникает множество взаимодействий между
датчиками и целыми структурами на различных уровнях системы в це-
лом. Это выводит разработчика на следующую ступень принятия реше-
ния — необходимость выбора методов мультиплексирования [28, 29], со-
ответствующих требованиям приложения. В качестве примера в табл. 14.2
перечислены характеристики, которые могут быть получены при мульти-
плексировании интерферометрических датчиков [29] с разделением по длине
волны, временном мультиплексировании, мультиплексировании с разделе-
нием по когерентности, поляризации и частоте. Для полноты изложения
приведем краткий обзор этих методов; намного более подробно они опи-
саны в гл. 11.
Таблица 14.1. Волоконно-оптические датчики напряжения и температуры
Характеристики | Риск т—1 1—1 Низкий Низкий Низкий Умерен- ный
Возможность встраивания о 1—1 Высокая Высокая Высокая Умерен- ная
Возможность мультиплексирования о Высокая Очень высокая Низкая Низкая
Динамический диапазон 00 > 10® > 106 кремний: 50°-1200 °C; сапфир: 2400 °C 'о т—1 г
Механическая и температурная чувствительность ь- Продемон- стрировано < 0,5 мкм; возможно < 10 А < 0,1 А Продемон- стрировано - 3 °C; возможно < 1 °C Продемон- стрирована длина преобразо- вателя 4 х 10-4
Длина преобразо- вателя со От > 10 м до < 1 см От > 10 м до < 1 см От > 10 м до ~ 1 см ~ 5 см до < 1 см
Темпера- турный диапазон ю Высокий > 1000 °C Высокий > 1000 °C Очень высокий > 2000 °C Высокий > 1000 °C
Типы датчиков Механическое напряжение, температура Механическое напряжение, температура Температура Механическое напряжение, температура
Возможности многомерности со Высокие Умерен- ные Низкие Высокие
Линейность масштабирования еч Высокая Умерен- ная От низкой ДО уме- ренной Низкая
Оптоволоконный датчик 1—1 Интерфе- рометр Саньяка Интерфе- рометр Маха- Цендера Датчик черного тела Датчик на затухаю- щих полях
Таблица 14.1 (продолжение)
1 2 3 4 5 6 7 8 9 10 11
Датчик поляризации Низкая Высокие Механическое напряжение, температура Средний > 700 °C От > 10 м до < 1 см < 5 мкм ~ 106 Низкая Высокая Умерен- ный
Оптрод Низкая Умерен- ные Контроль растворимых в воде веществ, механическое напряжение, температура От низкого до среднего < 1 мм < 1 °C ю4 Низкая Умерен- ная От уме- ренного до высо- кого
Интерферометр Майкельсона Умерен- ная Умерен- ные Механическое напряжение, температура Высокий > 1000 °C От > 10 м; возможно < 1 см < 10 А > 10® Высокая Высокая От низкого до уме- ренного
Датчик, основанный на распростране- нии двойной моды Низкая Умерен- ные Механическое напряжение, температура Высокий > 1000 °C От> 10 м до < 1 см < 5 мкм 103 Низкая Высокая Умерен- ный
Датчик, основанный на оптической временной рефлектоме трии Низкая Умерен- ные Механическое напряжение, температура Высокий > 1000 °C От > 10 м до < 1 см < 10 мкм 103-104 Умерен- ная Умерен- ная Умерен- ный
Эталон Низкая Умерен- ные Механическое напряжение, температура Высокий > 1000 °C < 1 см < 10 мкм ~ ю4 От уме- ренной до высокой Умерен- ная Умерен- ный
456 Глава Ц. Волоконно-оптические интеллектуальные структуры
Ц-2- Системы оптоволоконных
Таблица 14.2. Сводная таблица по методам мультиплексирования интерфероме-
трических датчиков
Простота извлечения ин- формации из уплотнен- ного сигнала Сложность компонент Фазовый шум Уменьшение количества подводящих каналов Выход по мощности Разделение канал/канал
Мультиплек- сирование по длине волны Отлично Плохо Отлично Плохо Отлично Между удовлетво- рительно и хорошо
Временное мультиплек- сирование Удовлетво- рительно Хорошо Удовле- твори- тельно Отлично Между удовле- твори- тельно и хорошо Хорошо
Когерент- ность Хорошо Хорошо Плохо Хорошо Плохо Между хорошо и отлично
Поляризация Отлично Плохо Отлично Очень плохо Хорошо Между плохо и удовле- твори- тельно
Частота Хорошо Хорошо Хорошо Хорошо Удовле- твори- тельно Хорошо
На рис. 14.9 приведен пример структуры, основанной на мультиплек-
сировании с разделением по длине волны. Излучение широкополосного
источника вводится в разветвитель тина «звезда». Одно из волоконно-
оптических плеч используется в качестве опорного; его зеркальное окон-
чание отражает излучение в широком диапазоне длин волн. Различные
ветви, на которых расположены датчики, также оканчиваются зерка-
лами, отражающими излучение в относительно узких диапазонах длин
волн. Хотя все отраженное излучение заново воссоединяется при помощи
разветвителя, отдельные цвета в выходном излучении могут быть выде-
лены дисперсионным элементом, что позволяет непрерывно отслеживать
результаты отдельных датчиков. Преимуществами мультиплексирования
с разделением по длине волны являются чрезвычайная чистота разделения
17-3379
Глава Ц. Волоконно-оптические интеллектуальные структуры
сигналов и относительная простота реализации. Современные реализации
этого метода ограничены небольшим количеством каналов.
Широкополосный
Приемники
Рис. 14.9. Примерная схема мультиплексирования с разделением по длине волны
Интенсивность
обратно рассеянного
излучения
стыков труб
Время/Расстояние
Рис. 14.10. Схема применения мультиплексирования с временным разделением
На рис. 14.10 представлена реализация мультиплексирования с вре-
менным разделением. В этом случае используются короткие импульсы,
которые вводятся в волокно. При увеличении нагрузок, которым подвер-
Ц.2. Системы оптоволоконных датчиков
гается волокно, потери, обусловленные механизмом микроизгибов, также
значительно возрастают. Для локализации областей, в которых сосре-
доточены нагрузки, используется результирующее обратное рассеяние.
Мультиплексирование по когерентности основано на использовании меха-
низма длины когерентности, проиллюстрированного схемой на рис. 14.11.
Если пучок света от источника разделить на два пучка, которые идут
по двум оптическим путям с длинами L\ и Z/2, а затем снова соеди-
нить пучки, они будут интерферировать между собой в том случае, если
абсолютное значение разности длин двух путей меньше длины когерент-
ности излучения, испускаемого источником. Когда это расстояние на-
чинает превышать длину когерентности, степень взаимовлияния пучков,
проявляющаяся как интерференция, спадает по экспоненте. Это явление
может использоваться для мультиплексирования интерферометров.
Рис. 14.11. Схема, иллюстрирующая
принцип использования длины коге-
рентности. Сигнал спадает до нуля
по экспоненте при |Li — Z>21 > Lc
Рис. 14.12. Пример схемы, иллю-
стрирующей применение метода
мультиплексирования с разделе-
нием по когерентности
В схеме, представленной на рис. 14.12, два интерферометра Маха-
Цендера настроены так, что длина одного из их плеч L\ и Ь<2 отличается
от длины другого плеча L на величину, намного превышающую длину ко-
герентности излучения, испускаемого источником. Следовательно, когда
пучки света проходят через такие датчики, которые могут быть встро-
енными, они подвергаются в каждом из датчиков воздействию внешних
условий, но когда пучки света снова смешиваются, интерференции не воз-
никает. После этого пучки света возвращаются в выходной блок, состо-
ящий из компенсирующих интерферометров, которые уравновешивают
выходные сигналы так, что пучки света, которые прошли через первый
датчик с ветвью длиной Zq, заново уравновешиваются и разность путей
оказывается меньше длины когерентности. В результате на выходном
приемнике 1 пучки света создают картину интерференции. На компенси-
рующем интерферометре и приемнике, связанных со вторым датчиком,
происходит аналогичный процесс. Мультиплексирование с разделением
по поляризации основано на формировании различных и разделяемых
состояний поляризации внутри оптического волокна. Затем эти состоя-
ния используются, чтобы избирательно мультиплексировать волоконные
датчики, информация от каждого из которых передается только одним
состоянием поляризации. В конце состояния поляризации разделяются
приемной системой обнаружения. Реализация этого метода представлена
на рис. 14.13. Излучение вводится в сохраняющее поляризацию волокно
и распространяется в виде двух ортогонально поляризованных излуче-
ний. Чтобы получить избирательный доступ к излучению с определенным
состоянием поляризации применяются волоконно-оптические ответвите-
ли, сохраняющие поляризацию. В данном случае в качестве ответвителей
используются датчики, основанные на затухающих полях, которые в за-
висимости от настройки могут быть чувствительными к механическому
напряжению или к температуре. В результате излучение в каждом из
состояний поляризации модулируется и формирует выходной сигнал.
Источник
излучения
Состояния
поляризации
на затухающих полях
Приемник 1
Приемник 2
Рис. 14.13. Пример схемы
мультиплексирования с раз-
делением по поляризации
Пример схемы мультиплексирования с разделением по частоте пред-
ставлен на рис. 14.14. Здесь выходная частота лазерного диода, исполь-
зуемого в качестве источника излучения, меняется в диапазоне частот
в результате пилообразной модуляции возбуждающего тока. Такой про-
цесс называется линейной частотной модуляцией. Чтобы получить кача-
ние частоты, можно также использовать внешние модуляторы источника
излучения. При использовании для компенсации каждого из интерфероме-
тров Маха - Цендера, который должен быть мультиплексирован, различ-
ной оптической длины пути Zq, £2, • • •, Zqv, сигнал от каждого датчика
Ц-З. Приложения волоконно-оптических интеллектуальных структур
будет иметь различную частоту несущей Fi, F2, ..., Fyy. Это обусловле-
но разностью между временами прихода смешанного пучка на каждый
интерферометр, в результате чего различные частоты выступают в ка-
честве частоты несущей.
Источник излучения сигнала
Рис. 14.14. Пример схемы мультиплексирования с разделением по частоте
После того как волоконно-оптические датчики встроены, подсоедине-
ны и мультиплексированы, их сигналы должны быть оптическим и/или
электронным способом предварительно обработаны и представлены в ви-
де, совместимом с архитектурой системы, в которой они используются.
Это могут быть системы наблюдения за техническим состоянием и про-
изводительностью, предупреждения аварий и управления полетом. Из ар-
хитектуры систем вытекают требования к количеству, типу и располо-
жению датчиков.
14.3. Приложения волоконно-оптических
интеллектуальных структур и оболочек
Приложения волоконно-оптических интеллектуальных структур и оболочек
представлены на рис. 14.15. Волоконно-оптические структуры предоста-
вляют возможность создавать для космических платформ волоконно-опти-
ческую «нервную систему», действующую через структуру и позволяю-
Глава Ц• Волоконно-оптические интеллектуальные структуры
щую отслеживать такие параметры, как история нагрузки и вибрации,
которым подвергается структура, а также оценивать состояние отдель-
ных стоек. Все это можно осуществить, используя мультиплексирование
датчиков механического напряжения и температуры. Для быстрого об-
наружения утечки атмосферы мог бы использоваться массив волоконно-
оптических акустических датчиков, расположенных в стратегически важ-
ных местах, и после обработки полученная от них информация могла бы
использоваться для локализации места утечки и определения вероятной
степени опасности. Массивы волоконно-оптических датчиков механиче-
ского напряжения могли бы использоваться в сочетании с акустическими
датчиками или независимо от них для построения полей деформаций
и последующей оценки опасности, обусловленной такими эффектами, как
столкновения с микрометеоритами. Волоконно-оптические шины данных
могли бы не только связывать массивы волоконно-оптических датчиков,
но и применяться для передачи других данных.
«Нервная система» волоконно-оптических датчиков
для наблюдения за техническим состоянием
Высокоскоростные приемники —
регулирование формы/
Пассивное угловое
сопровождение
Контроль
вибрации/дрожания
Приложения для станций
космического базирования
Контроль утечек
и угрозы аварий
Мониторы
давления
Герметизация
—и отделение
Наблюдение за целостностью структуры/
управление
Современный самолет
Рис. 14.15. Приложения волоконно-оптических интеллектуальных структур
и оболочек
и температуры
Мониторы
высокой
Встроенное
адаптивное
управление
напряжением
температуры
Средство выведения
Высокая пропускная способность волокон предоставляет возможность
поддерживать очень большие массивы датчиков, а также обеспечивает
широкополосную передачу данных. В современных самолетах волоконно-
оптические датчики могут использоваться для оценки структурной це-
Ц-3. Приложения волоконно-оптических интеллектуальных структур 463
лостности перед взлетом и в промежутках между полетами. Волоконно-
оптическая система мониторирования структуры может также использо-
ваться в процессе технического обслуживания и ремонтных работ. Вто-
рая функция комплекса волоконно-оптических датчиков в современных
самолетах — это измерение внешних параметров, таких как температу-
ра, давление и положение удара, что позволяет самолетам летать близко
к предполагаемому конструкцией диапазону режимов безопасной эксплу-
атации, не выходя за его пределы. Сочетание выполняющих обе эти функ-
ции датчиков образует систему, которая автоматически корректирует
возможности пилота выполнять маневры, основываясь на осуществля-
емую в реальном времени оценку структурной целостности и параме-
тров полета. Третья функция, возлагаемая на волоконную оптику, связана
с приемом и передачей. Волоконно-оптические датчики могут использо-
ваться для измерения электрических или магнитных полей и, следова-
тельно, действовать как антенны и применяться в качестве приемников.
Что касается передачи, волоконная оптика наиболее подходит в каче-
стве источника пучков света, излучаемых с поверхности летательного
аппарата для связи. Матрицы волоконно-оптических «световодов» могут
также использоваться для приема приходящих световых пучков. В сред-
ствах выведения на волоконно-оптические интеллектуальные структуры
и оболочки возлагаются функции наблюдения за герметичностью и меха-
низмами разделения, совокупной нагрузкой, утечкой в топливном баке
и эффективностью функционирования ракетного сопла. В общем слу-
чае, эти и другие датчики могут быть объединены в систему подготовки
к старту и систему наблюдения за эффективностью функционирования
после взлета и использоваться в сочетании с адаптивной системой упра-
вления полетом.
На рис. 14.16-14.18 представлены три конкретных примера волоконно-
оптических интеллектуальных структур и оболочек. На обитаемой косми-
ческой станции, представленной на рис. 14.16, массивы волоконно-опти-
ческих датчиков могут быть установлены так, чтобы была возможность
локализовать положение ударов и степень угрозы от них по распреде-
лению механических напряжений, акустически и/или через повреждение
волокон [30, 31]. Другие датчики могут использоваться в составе герме-
тизирующего материала для оценки возможных утечек; чувствительные
к радиации волокна могут применяться для наблюдения за уровнем облу-
чения.
Кроме наблюдения за величиной деформации, волоконно-оптические
датчики в структуре, показанной на рис. 14.17, вместе с исполнительны-
ми элементами, встроенными в стойки, могут использоваться для форми-
рования структур, активно гасящих колебания [32, 33]. Это может быть
Глава 1J. Волоконно-оптические интеллектуальные структуры
необходимо для того, чтобы оградить часть структуры от вибраций, вы-
званных маневрами при стыковке.
Утечка/герметичность
оценка опасности
датчиков для обнаружения столкновений
с микрометеоритами и определения их локализации
• Радиация
• Электрические и магнитные поля
* Механические напряжения
• Температура
* Низкая наблюдаемость
• Сокращение сигнатуры
Рис. 14.16. Применение технологии волоконно-оптических интеллектуальных
структур в обитаемой космической станции
Рис. 14.17. Встроенная волоконно-оптическая интеллектуальная структура, спро-
ектированная для гашения колебаний и наблюдения за техническим
состоянием
В качестве последнего примера на рис. 14.18 представлена распре-
деленная система волоконно-оптических датчиков (см. гл. 11) на основе
волокна, которое может быть намотано внутри резервуаров при форми-
ровании композитных материалов. Датчики могут использоваться для на-
1J.J. Пример использования волоконно-оптического
блюдения за остаточной деформацией и другими ключевыми параметра-
ми в процессе затвердевания реактора. В сочетании с внешними акусти-
ческими источниками они могут применяться для неразрушающей оценки
бака, после того как он уже изготовлен, но еще до его установки; наконец,
использоваться для обнаружения утечек и локальных включений, после
того как бак установлен в передвижном средстве аппарата и подключен
к его системе контроля технического состояния.
Композитная
нить покрытия
Подведение
оптического
Наблюдение
за затвердеванием
Влагосодержание
— Остаточная деформация
— Температура
волокна
Резервуар из намоточного
композитного материала
Статический
контроль
р——1 Точечные датчики
* 1 в критических точках
Наблюдение за техническим
состоянием
Деформация
Температура
Давление
Рис. 14.18. Волоконно-оптическая интеллектуальная структура для увеличения
эффективности сборки резервуаров под давлением
14.4. Пример использования волоконно-оптического
датчика в интеллектуальных структурах
Функционирование волоконно-оптических датчиков микроизгибов осно-
вано на определении потерь, вызываемых изгибами в оптических волок-
нах. Как правило, в этих устройствах присутствуют механические ком-
поненты или специальные покрытия, вызывающие потери [34, 35]. Это
приводит к увеличению стоимости и в некоторых случаях ограничивает
применимость устройств, использующих механизм микроизгибов. В иде-
але, волокна, используемые в датчиках микроизгибов, должны иметь по
крайней мере настолько же низкую стоимость, как и волокна, применя-
емые системе телекоммуникаций, быть совместимыми с недорогими на-
Глава 1^- Волоконно-оптические интеллектуальные структуры
дежными источниками излучения и приемниками и быть простыми в при-
менении. Один из подходов, позволяющих этого достичь [36], заключает-
ся в использовании светоизлучающего диода в сочетании с обычными
PIN-диодами в качестве приемников для наблюдения потерь при микро-
изгибах в обычном телекоммуникационном волокне, встроенном в деталь
или присоединенном к ней. В табл. 14.3 приведены свойства шести видов
волокон компании Corning, которые были протестированы на чувстви-
тельность к микроизгибам. Три вида волокон — одномодовые, и три —
многомодовые. Пять видов волокон — это стандартные недорогие теле-
коммуникационные градиентные волокна. Волокна были протестированы
с помощью тестовых устройств, показанных на рис. 14.19. В качестве
источника излучения применялся светоизлучающий диод Oki, на длине
волны 1,3 мкм с выходной мощностью 50 мкВт, оптический выход которо-
го был подсоединен к 1,3 мкм одномодовому оптическому волокну. Чтобы
избежать возможных колебаний сигнала, обусловленных зависимостью
от поляризации, выходной сигнал светоизлучающего диода был скрембли-
рован при помощи волоконного деполяризатора «Лио». Этот выход в свою
очередь был подключен к дереву из трех одномодовых волоконно-оптиче-
ских разветвителей 2x2, являющихся источниками для четырех датчиков.
Приемное устройство было сконструировано с использованием многомо-
довых волокон, чтобы эффективно поддерживать как одномодовые, так
и многомодовые волокна, чувствительные к микроизгибам.
Таблица 14.3. Примеры волокон компании Corning
Номер волокна Номер продукта Идентификаци- онный номер волокна Тип сердечника Диаметр оболочки Диаметр дБ/км при 1300 нм Покрытие
1 1517 302096982303 ММ 50 125 0,60 СРСЗ
2 1519 181460940305 ММ 85 125 0,60 СРСЗ
3 1521 263169362313 ОМ 10 125 0,40 СРСЗ
4 1528 531059553320 ОМ 9,5 125 0,36 СРСЗ
5 1524 241236322303 ОМ - - 0,25(1550) СРСЗ
6 - 961121 ММ 10 125 2,79(850) СРСЗ
Каждый из видов оптических волокон был протестирован путем за-
крепления его в опытном образце из эпоксикарбопласта. Не предприни-
малось никаких специальных мер для оптимизации покрытия в процес-
се тестов, и использовалась стандартная эпоксиакрилатовая оболочка.
Соединительные концы волокон были затем подсоединены к тестовым
1J.J- Пример использования волоконно-оптического датчика
устройствам, и образцы из эпоксикарбопласта отверждены в условиях
повышенной температуры и под давлением.
Светоизлучающий
диод
Блок источника_____________________________________
Блок приемника Амплитуда 1 Приемник 1
Рис. 14.19. Оптическая система, применявшаяся для тестирования волоконно-
оптической интеллектуальной структуры, основанной на чувстви-
тельных к микроизгибам волокнах
Рис. 14.20. Характеристики оптических волокон из табл. 14.3, проявивших низ-
кую чувствительность к микроизгибам, вызванным давлением при
изготовлении опытного образца
Глава Ц. Волоконно-оптические интеллектуальные структуры
Выходные сигналы датчиков в процессе отверждения показаны на
рис. 14.20 и 14.21. Наилучшую чувствительность продемонстрировало ши-
роко используемое в индустрии телекоммуникаций одномодовое оптиче-
ское волокно Corning 1521.
Давление (фунт на квадратный дюйм)
Рис. 14.21. Характеристики оптических волокон из табл. 14.3, проявивших более
высокую чувствительность к микроизгибам, вызванным давлением
при изготовлении опытного образца
Тесты показали, что датчики могут использоваться в качестве недоро-
гого средства наблюдения при производстве деталей из эпоксикарбопла-
ста. Эти датчики могут также использоваться для поддержки системы
оценки повреждений, основанной на мониторировании ударных воздей-
ствий и акустического шума [37].
При испытаниях использовались два устройства для тестирования,
каждое из которых способно поддерживать четыре датчика на основе
микроизгибов. В тестовый образец, применяемый для тестирования, бы-
ла встроена матрица 4x4 чувствительных к микроизгибам оптических
волокон, как показано на фотографии, выполненной в рентгеновских лу-
чах, представленной на рис. 14.22. Тестовые удары наносились с энергией
в диапазоне от 1 до 20 при помощи установки для тестирования, пока-
занной на рис. 14.23. Стальная дробь с регулируемой высоты падает на
опытный образец. На рис. 14.24 показан акустический отклик одного из
датчиков на тестовый удар силой 1 фут-фунт. Очевидно, что картина
биений коррелирует со свободной колебательной модой испытательной
панели. На рис. 14.25 показан результат удара силой 20 фут-фунт. Здесь
картина биений, очевидная при меньшей силе удара, расстроена. Можно
предположить, что это обусловлено внутренними структурными повре-
ждениями панели. На рис. 14.26 и 14.27 представлены результаты скани-
Ц-4- Пример использования волоконно-оптического датчика
рования опытных образцов, подвергшихся ударам силой 20 фут-фунт, со
встроенными волокнами и без них. Повреждения в обоих случаях оказа-
лись практически идентичными. Можно сделать вывод, что размещение
волокон не вредит структурной целостности образца.
Рис. 14.22. Улучшенное рентгеновское изображение опытного образца из эпок-
сикарбопласта с матрицей четыре на четыре чувствительных к ми-
кроизгибам оптических волокон (благодарим за фотографию доктора
Хербу (Herb) Смиту, компания «Макдоннел Дуглас»)
Рис. 14.23. Башня для испы-
таний на удар для тестирова-
ния разрушений при ударе
Другим приложением датчиков на основе микроизгибов может быть
исследование возможности применения датчиков в системах наблюдения
за техническим состоянием. Датчик использовался для мониторирования
Глава Ц. Волоконно-оптические интеллектуальные структуры
адгезионного соединения двух поверхностей. Экспериментальная уста-
новка показана на рис. 14.28. Чувствительное к микроизгибам волокно
расположено непосредственно в адгезионном слое, соединяющем и удер-
живающем поверхности вместе. Одна из поверхностей зафиксирована,
в то время как к другой приложена растягивающая нагрузка. Исполь-
зуемое волокно имеет стандартное эпоксиакрилатовое покрытие, и его
стоимость при небольших объемах продаж составляет 12 центов за метр.
Было выполнено несколько циклов испытаний с нагрузками в диапазоне
от 0 до 1200 фунтов.
Рис. 14.24. Отклик одного из встроенных волоконных датчиков микроизгибов,
показанных на рис. 14.22, на удар силой 1 фут-фунт демонстрирует
отчетливый «звон» (затухающие колебания при ударном возбуждении)
Рис. 14.25. Удар силой 20 фут-фунт по опытному образцу, показанному на
рис. 14.22, порождает больший по энергии отклик встроенного во-
локонного датчика микроизгибов
Ц-4- Пример использования волоконно-оптического датчика
Результаты типичного испытания представлены на рис. 14.29. При
снижении нагрузок отклик системы не возвращается к нулю, что может
быть обусловлено изменениями в структуре соединения и/или в структу-
ре оболочки волокна в связи с динамическими процессами. Соединение
было подвергнуто нагрузкам, приводящим к катастрофическому разру-
шению, и результат представлен на рис. 14.30. Датчик отреагировал на
точку разрушения при нагрузке, примерно равной 35 000 фунтам. Отме-
тим, что стремительное падение выходного сигнала датчика началось за
несколько тысяч фунтов до момента разрушения.
Рис. 14.26. С-скан опытного образца со встроенными оптическими волокнами
после ударов силой 20 фут-фунт
Рис. 14.27. С-скан опытного образца, аналогичного показанному на рис. 14.26,
без встроенных оптических волокон после ударов силой 20 фут-фунт
Приведенные выше примеры специально подобраны, чтобы показать,
как недорогие и очень простые волоконные датчики могут применяться
в самых разнообразных волоконно-оптических интеллектуальных струк-
турах. Аналогичная или даже лучшая эффективность может быть получе-
на при использовании множества других волоконно-оптических датчиков.
Рис. 14.28. Тестовая уста-
новка для определения от-
клика чувствительных к ми-
кроизгибам оптических во-
локон, встроенных в адгези-
онное крепление
Оптическая мощность (нормализованная) Оптическая мощность (нормализованная)
Рис. 14.29. Отклик чув-
ствительного к микроиз-
гибам волокна, встроенно-
го в адгезионное крепле-
ние, на натяжение в диапа-
зоне 0-1200 фунтов
Рис. 14.30. Отклик чув-
ствительного к микроиз-
гибам волокна, встроен-
ного в адгезионное креп-
ление, на натяжения, до-
стигающие 35 000 фунтов
и приводящие к катастро-
фическому разрушению
14.5. Заключение
Волоконно-оптические интеллектуальные структуры и оболочки способны
радикально изменить будущее материалов и структур, предлагая следую-
щие возможности: (1) наблюдение за внутренними параметрами внешних
условий в процессе производства структур; (2) совершенствование мето-
дов неразрушающих оценок, после того как деталь изготовлена; (3) ак-
тивное управление структурами и формирование архитектуры системы
элементов управления; (4) обеспечение оценки повреждений и наблюде-
ние за техническим состоянием летательных аппаратов. Преимущества
волоконно-оптических датчиков в том, что касается прочности, размера,
веса, устойчивости к электромагнитным помехам и высокой пропуск-
ной способности, достаточно убедительны, так что волоконно-оптические
интеллектуальные структуры и оболочки станут в будущем одной из важ-
нейших областей приложения волоконно-оптических технологий.
Литература
1. Е. Udd, Overview of Fiber Optic Applications to Smart Structures, Review of
Progress in Quantitative Nondestructive Evaluation, Plenum Press, New York,
1988, p. 541.
2. E. Udd, R. J. Michal, S.E. Higley, J. P. Theriault, P. LeCong, and D. A. John,
Fiber-Optic Sensor Systems for Aerospace Applications, Proc. SPIE 838, 162
(1987).
3. E. Udd, Embedded Sensors Make Structures «Smart», Laser Focus, p. 135 (May
1988).
R. M. Measures, Smart Structures with Nerves of Glass, Prog. Aerosp. Sci. 26,
289 (1989).
4. C. J. Mazur, G. P. Sendeckyj, and D. M. Stevens, Air Force Smart Structures/Skins
Program Overview, Proc. SPIE 986, 19 (1988).
5. A. J. Mendez, T. R. Yao, H.K. Anderson, E. Garmire, and B. Sherman, Opti-
mization of a Power by Light System, Proc. SPIE 986, 62 (1988).
6. E. H. Urruti, P. E. Blaszyk, and R. M. Hawk, Optical Fibers for Structural Sens-
ing Applications, Proc. SPIE 986, 158 (1988).
7. M. A. Druy and W. A. Stevenson, In Situ Composite Cure Monitoring Using
IR-Transmitting Optical Fibers, Proc. SPIE 986, 130 (1988).
8. M. A. Afromowitz, Fiber Optic Cure Sensor for Thermoset Composites, Proc.
SPIE 986, 135 (1988).
9. R. L. Wood, A. K. Tay, and D. A. Wilson, Design and Fabrication Considera-
tions for Composite Structures with Embedded Fiber Optic Sensors, Proc. SPIE
1170, 160 (1989).
10. A. R. Raheem-Kizchery, S. B. Desu, and R. O. Claus, High-Temperature Refrac-
tory Coating Materials for Sapphire Waveguides, Proc. SPIE 1170, 513 (1989).
474 Глава Ц- Волоконно-оптические интеллектуальные структуры
11. W. В. Spillman, Jr., Fiber Optic Sensors for Composite Monitoring, Proc. SPIE
986, 6 (1988).
12. A. Dandridge and A. D. Kersey, Overview of Mach-Zehnder Sensor Technology
and Applications, Proc. SPIE 985, 34 (1988).
13. E. Udd, Applications of the Sagnac Interferometer, Proc. SPIE 985, 198 (1988).
14. J. P. Dakin, D. A. J. Pearce, A. P. Strong, and C. A. Wade, A Novel Distributed
Optical Sensing System Enabling Location of Disturbances in a Sagnac Loop
Interferometer, Proc. SPIE 838, 325 (1987).
15. B. W. Brennan, Prototype Polarimetric Based Fiber Optic Strain Gauge, Re-
view of Progress in Quantitative Nondestructive Evaluation, Plenum Press, New
York, 1988, p. 547.
16. T. E. Clark and M. W. Hall, Single Mode Coupler Sensors, Paper ThCC16, Proc.
5th International Conference on Optical Fiber Sensors, New Orleans, La., Jan.
1988.
17. T.E. Clark, Thermally Switched Couplers, Proc. SPIE 986, 164 (1988).
18. H. H. Miller and T. B. Hirschfeld, Fiber Optic Chemical Sensors for Industrial
and Process Control, Proc. SPIE 718, 39 (1986).
19. S. D. Schwab and R. L. Levy, In-Service Characteristics of Composite Matrices
with an Embedded Fluorescence Optrode Sensor, Proc. SPIE 1170, 230 (1989).
20. B.D. Zimmerman, K. A. Murphy, and R. O. Claus, Local Strain Measurements
Using Optical Fiber Splices, Review of Progress in Quantitative Nondestructive
Evaluation, Plenum Press, New York, 1988, p. 547.
21. C.E. Lee, R. A. Atkins, and H. F. Taylor, Performance of a Fiber Optic Tem-
perature Sensor from —200 to 1050 °C, Opt. Lett. 13, 1038 (1988).
22. J. N. Blake, S. Y. Huang, and B.Y. Km, Elliptical Core Two-Mode Fiber Optic
Strain Gauge, Proc. SPIE 838, 332 (1987).
23. N. K. Shankaranarayanan, K.T. Srinivas, and R. O. Claus, Mode-Mode Inter-
ference Effects in Axially Strained Few Mode Optical Fibers, Proc. SPIE 838,
385 (1988).
24. K.A. Murphy, M.S. Miller, A.M. Vengsarker, R. O. Claus, and N. E. Lewis,
Embedding Modal Domain Sensors Using Elliptical Core Optical Fibers, Proc.
SPIE 1170, 566 (1989).
25. R. W. Griffith and R. C. Lamson, Adaption of an Electro-Optic Monitoring Sys-
tem to Aerospace Structures, Proc. SPIE 838, 173 (1987).
26. B.D. Zimmerman, R. O. Claus, D. Kapp, and K.A. Murphy, Optical Time
Domain Reflectometry for Local Strain Measurements, Proc. SPIE 1170, 534
(1989).
27. A. D. Kersey, A. Daindridge, and A. B. Tveten, Overview of Multiplexing Tech-
niques for Interferometric Fiber Sensors, Proc. SPIE 838, 184 (1987).
28. R. E. Wagoner and T. E. Clark, Overview of Multiplexing Techniques for All-
Fiber Interferometer Sensor Arrays, Proc. SPIE 718, 80 (1986).
29. R. M. Measures, N. D. W. Glossip, J. Lymer, and R. C. Tennyson, Structurally
Integrated Fiber Optic Damage Assessment System for Composite Materials,
Proc. SPIE 986, 120 (1988).
30. R. M. Measures, Fiber Optic Smart Structures at UTIAS, Proc. SPIE 1170, 92
(1989).
31. R. Rogowski, M. Holben, Jr., and J. Heyman, A Method for Monitoring Strain in
Large Structures: Optical and Radio Frequency Devices, Review of Progress in
Quantitative Nondestructive Evaluation, Plenum Press, New York, 1988, p. 559.
32. J. S. Schoenwald and P. M. Beckman, Distributed Fiber Optic Sensor for Passive
and Active Stabilization of Large Structures, Review of Progress in Quantitative
Nondestructive Evaluation, Plenum Press, New York, 1988, p. 565.
33. D. W. Jensen and R. W. Griffiths, Optical Fiber Sensing Considerations for
Smart Aerospace Structure, Proc. SPIE 986, 70 (1988).
34. J. S. Schoenwald, R. H. Rattner, and P. M. Beckman, Evaluation of an OTDR
Microbend Distributed Sensor, Proc. SPIE 986, 150 (1988).
35. E. Udd, J.P. Theriault, A. Markus, and Y. Bar-Cohen, Microbending Fiber
Optic Sensors for Smart Structures, Proc. SPIE 1170, 478 (1989).
36. H.G. Smith, Jr., A. Garrett, and C.R. Saff, Smart Structures Concept Study,
Proc. SPIE 1170, 224 (1989).
Дополнение А
Волоконно-оптический датчик вращения
(инженерное руководство)
В. Н. Листвин, В. Н. Логозинский
Создано по материалам исследований и разработок волоконно-опти-
ческих гироскопов. Излагаются физические модели датчика и его
компонентов. Рассмотрены оптические механизмы начального сдвига.
Предисловие
Волоконно-оптические гироскопы (ВОГ) широко используются в систе-
мах автоматического контроля, управления и диагностики. Важнейший
метрологический параметр ВОГ — начальный сдвиг нуля (показание дат-
чика в отсутствие вращения). При создании ВОГ используются боль-
шое разнообразие конструкторских и технологических решений. Одной
из технологий ВОГ, обеспечивающей практически приемлемый уровень
сдвига, является т. н. «цельноволоконная» технология изготовления интер-
ферометра с использованием аналогового детектирования сигнала вра-
щения (open loop). В этой технологии оптические компоненты датчика
(контур, модулятор, ответвители, поляризатор) изготавливаются из од-
ного отрезка специального анизотропного волокна без сварных соедине-
ний [1]. Специфика функционирования «цельноволоконного» ВОГ и его
основных компонентов изложена в настоящем пособии.
ГЛАВА А. I
СДВИГ
НУЛЯ
Введение
Измерение угловой скорости с помощью ВОГ основано на «невзаимном»
эффекте Саньяка. В кольцевом интерферометре возникает разность фаз
(<^с) встречных волн пропорциональная скорости вращения. В оптической
среде (волноводе) существуют другие невзаимные эффекты (Фарадея,
Керра, термооптический и т. д.), которые приводят к сдвигу нуля и его
дрейфу.
А. I. I. Поляризационный сдвиг нуля
А. 1.1.1. Поляризационная фильтрация излучения
Поляризационный сдвиг возникает, когда трансформирующиеся на нере-
гулярностях (дефектах) волокна поляризации встречных волн не одина-
ковы на каких-то участках и волны приобретают разные фазовые набеги.
Поляризационный сдвиг устраняется, если датчик работает только в од-
ной линейной поляризации и одной пространственной моде (рис. А. 1.1).
Для этого в ВОГ «минималь-
ной конфигурации» [2] встречные /X
II ответвитель I ответвитель Л \
волны проходят последовательно УЧ \
все элементы контура (один раз) и
два раза через поляризатор и про-
странственный фильтр (волокно
* —-------0
Поляризатор
Рис. А.1.1.
между поляризатором и ответви- Миним£и1ьная конфигурация ВОГ
телем I), как видно в развернутой
схеме (рис. А. 1.2).
Последовательность элементов контура можно считать одним одно-
модовым элементом. Для обоснования «взаимности» схемы «минимальной
конфигурации» используют лемму Лоренца [3] — в отсутствии магнитно-
го поля и нелинейности среды статический коэффициент передачи одно-
модового оптического элемента не зависит от направления распростра-
нения света.
Глава АЛ. Сдвиг нуля
Рис. А. 1.2. Развернутая оптическая схема кольцевого интерферометра в мини-
мальной конфигурации ВОГ
А. 1.1.2. Модель с одним центром рассеяния
(дефектом)
Даже один дефект может привести к сдвигу нуля, если поляризатор не-
много (е 1) пропускает «запрещенную» поляризацию (Пз). Пусть де-
фект расположен недалеко (Lq < Ьд) от середины (рис. А.1.3), а «разре-
шенная» поляризация (Пр) и ось двулучепреломления волокна развернуты
на тг/4. Если бы дефект отсутствовал, то волны проходили бы в быстрой
и медленной модах волокна без изменения. Будем называть такие волны
основными.
Быстрая ось
Первый ответвитель
Середина контура
’ Медленная ось
Поляризатор
Поляризатор
Рис. А. 1.3. Схема рассеяния встречных волн на одном центре
Волна (cw) попадает в контур и выходит из него с поляризацией Пр.
Она распространяется в быстрой поляризационной моде волокна и ее
часть на дефекте q попадает (рассеивается) в медленную моду, созда-
вая в ней вторичную волну. Встречная волна (ccw) попадает в контур с
поляризацией Пз и выходит в поляризации Пр. Встречные волны выходят
в одной и той же поляризации и могут интерферировать. Они проходят
разный оптический путь, что приводит к сдвигу нуля в первом поряд-
ке по с. Сдвиг также пропорционален степени поляризации волны (р) на
входе в поляризатор, что связано с усреднением сдвига по разным со-
стояниям поляризации (для деполяризованных волн в общем случае сдвиг
нуля отсутствует).
А. 1.1.3. Оценка поляризационного сдвига нуля
Обычно внутренние дефекты (центры) распределены равномерно вдоль
A.1.1. Поляризационный сдвиг нуля 479
волокна (дополнительно могут образовываться при изготовлении ВОГ),
поэтому есть пары центров (®, gj), для которых \Li — Lj\ < (равно-
удаленность от середины) (рис. А. 1.4).
1 -ый ответвитель
--------ЦентР°в —ж-"Д
On-
Рис. А. 1.5. Схема разбиения не-
регулярного волокна в контуре на
пары центров
Рис. А. 1.4. Схема рассеяния встречных волн на двух центрах
Пропускание интерферометра для N дефектов имеет вид (в первом
порядке по е): рз ос (1 + cos <рс) +ре ^2 QiQN-i cos(ipc ~ суммирование
по парам. Первое слагаемое показывает интерференцию основных волн,
второе — вторичных волн (i,j), возникших на дефектах, = 2тг(Д —
Lj)/Lb — разность их фазовых набегов. Близкорасположенные дефекты
можно рассматривать как один дефект (рис. А. 1.5). Число дискретных
центров N = L/L& ~ 1000, р ~ 0,2 — степень поляризации излучения
слд.
Если пропускание представить в виде
Рз ~ 1 + cos(<pc + <Рп), то сдвиг
~ Р£ ^2 WN~i sin
Его среднее значение равно нулю, а средне-
квадратичное значение
<^п)1/2 =
Дисперсия (q2) связана с долей мощности,
рассеиваемой на одном дефекте в ортогональную моду. Интегральный па-
раметр сохранения состояния поляризации Н = (q2)N и <рп = peH/y/N =
= 2 мкрад [4].
А. 1.1.4. Зависимость поляризационного сдвига нуля
от температуры
Зависимость поляризационного сдвига нуля от температуры квазипери-
одическая. Ее амплитуда определяется параметром Н (рис. А. 1.6), а пе-
риод — скоростью изменения разности фаз -0г,j — ЩНц ~ &/3Lj.
При низкой температуре Н параметр растет из-за увеличения жестко-
сти оболочки, при высокой — из-за расширения бобины (алюминиевой).
Изменение определяется расширением катушки (рис. А.1.7). Если во-
локно прогревается однородно и не удлиняется, то двулучепреломление
Глава АЛ. Сдвиг нуля
волокна изменяется только под действием температуры и одинаково по
длине волокна (для кварцевой бобины). Приращение разности фаз
= д(^Ц - Д/Uj) W(bz - LjY
причем \Li — Lj\ ~ Гд. Период изменения оценим из условия SA/ЗЬд = 2тг.
Двулучепреломление определяется температурой: Д/3 ос (То — Т). Тогда
-d^/dT = Д/3/(Т-Т0) - 27г/Тб/(Т-Т0) и 6Т = (Т0-Т)(£Б/£д) - 20 °C.
Рис. А. 1.6. Типичные зависимости параметра Н при
намотке волокна в один слой а) — на алюминиевую и
б) — на кварцевую катушку
Рис. А. 1.7. Зависимость
оптического сдвига нуля
от температуры при на-
мотке волокна на кварце-
вую катушку
А. 1.2. Амплитудный сдвиг нуля
А. 1.2.1. Модуляция двулучепреломления волокна
Растяжение участка волокна на фазовом модуляторе (ПЗТ) приводит
к модуляции двулучепреломления [5]. Так как волокно расположено между
поляризаторами, модуляция двулучепреломления приводит к модуляции
пропускания. Амплитуда этой модуляции не зависит от вращения. Для
модуляции разности фаз поляризационных мод:
SA<pm = 5(Д/3£М) = 5Д/3£М 4- Д/3££м,
где первое слагаемое определяется изменением двулучепреломления во-
локна, второе — изменением его длины. Двулучепреломление напрягаю-
щей оболочки пропорционально поперечному растяжению волокна (для
определенности в направлении у): ос еу. Величина растяжения про-
порциональна разности КТР легированного и чистого кварцевого стекла:
€у = Да (То — Т), где То — температура размягчения легированного
стекла. Продольное растяжение волокна влечет за собой его поперечное
сжатие: 5еу = AvSLM/LM (Av — разность коэффициентов Пуассона леги-
рованного и чистого кварца). Так как 5Д/3/Д/3 = 5еу/еу^ то
W/A/3 = [Ар/Да(Т0 - Т)](<5£м/£м).
A. 1.2. Амплитудный сдвиг нуля
Для Al/ 0,04, Да(Т0 - Г)) = 4 • 10"4 получим 5A/3LM/(A/WLM) 102.
Видно, что модуляция двулучепреломления является доминирующей. Для
5А</?т = (5АД1/М = 102Д/35£м (ЛБм = 1 мкм) оценка дает £А</?т = 0,2 рад.
А. 1.2.2. Амплитудный сдвиг нуля
В отличие от поляризационного сдвига амплитудная модуляция возни-
кает только если дефекты находятся ближе ПЗТ к середине волокна.
Сигнал модуляции (квадратурный) сдвинут по фазе относительно сигна-
ла вращения на тг/2 и пропорционален 5A</?m cos(cumr/2)/f^1/2. Так как
синхронный детектор не точно согласован по фазе, сигнал амплитудной
модуляции частично 1/30) детектируется и приводит к сдвигу ну-
ля (<£а)- Собственная частота контура (/к — = 1 МГц) много больше
частоты ПЗТ (80 кГц), поэтому cos(curnr/2) = 1 и ~ 2^ рад. Отношение
поляризационного и амплитудного сдвигов — (p^)/(x^A^m) ~ 1
не зависит от параметра Н.
А.1.2.3. Зависимость амплитудного сдвига нуля
от температуры
Амплитудный сдвиг тоже квазипериодическая функция температуры.
Он пропорционален Н, а период -10-20 °C (рис. А. 1.8).
Температура
▲ намотки волокна
-30 +20 +70
Температура, ’С
Рис. А. 1.8. Зависимость ампли-
тудного сдвига нуля от температу-
ры при простой намотке волокна на
алюминиевую катушку
Температура
Рис. А. 1.9. Зависимость амплитуд-
ного сдвига нуля от температуры
при квадрупольной намотке волокна
на алюминиевую катушку
Оценим масштаб температурных вариаций амплитудного сдвига нуля
при растяжении первого намотанного слоя волокна. Длина волокна в од-
ном слое равна Ls = L/s. Относительное изменение длины слоя — «ал^Т.
Разность фаз <J(A/3LS) меняется из-за изменения двулучепреломления как
1021/зД/3«ал<5Т. Период изменения сдвига дТ — 27г/(102£5Д/Заал) — 0,1 °C.
При квадрупольной намотке на алюминиевую бобину зависимость как
у кварцевой бобины (рис. А.1.9), т. к. слои чередуются так, что волокно
растягивается симметрично. Первой растягивается пара слоев в середи-
не контура и оптическая разность хода изменяется для вторичных волн,
рассеянных на дефектах в этих двух слоях. Так как слои расположены
симметрично относительно середины, изменение разности хода при их
одновременном растяжении компенсируется.
А. 1.3. Магнитооптический сдвиг нуля
А.1.3.1. Фарадеевская фазовая невзаимность
Волокно обладает наведенным линейным двулучепреломлением, а также
небольшим круговым из-за продольной скрутки. В нем распространяются
эллиптически поляризованные моды [6]
71,2 = /3 ± (w2 4- tf2)1/2,
где /3 ± w — постоянные распространения без скрутки, w/k nt/к — ли-
нейное и круговое двулучепреломление, t = dO/dz — скорость скрутки.
Постоянные распространения не зависят от направления распростране-
ния. В магнитном поле возникает дополнительное круговое двулучепре-
ломление [7], зависящее от направления
7±1,2 = £ ± (w2 + (t ± УЯ/2)2)1/2.
Фазовая невзаимность Ф = (}^2-— ±(t/w)VHL(t/b 1), в разных
поляризационных модах она имеет противоположные знаки. Если t/w =
= 2 • 10~2 и Я = 1 Э. то Ф ~ 4'10-4 — оценка сверху (поле не направлено
вдоль волокна на всей его длине, а скрутка не постоянна). Проекция поля
на ось знакопеременна (рис. А. 1.10).
Сдвиг в определяется наличием в скрутке компоненты tr sin(z/r 4- #),
синхронной с проекцией магнитного поля.
oif c(z) ос cfsin(x/r+£)
H(z) = Hosin(z/r+n)
б)
Рис. А.1.10. а) — Ось ка-
тушки перпендикулярна векто-
ру магнитного поля; б) — Рас-
пределение вдоль волокна про-
екции магнитного поля H(z) и
кругового двулучепреломления
t(z)/k
А.1.3.2. Уменьшение фарадеевской невзаимности
Пропускание цельноволоконного ВОГ р(ос?ор) = (1/16){1 4-cos(2oc) х
х cos2(2ctp)} при ар = 45° равно 1/16 (вдвое меньше максимального) и не
зависит от «с- Кроме этого при этом уменьшается отклик на магнитное
поле в соответствии с </?"(ор,ас) — <Рм -cos2(oc) • cos(2ap)/p(oc? <^р), где
A. 1.4. Термо оптический сдвиг нуля
учтено что, из-за низкой когерентности, поляризационные моды образу-
ют независимые контура (рис. А. 1.11).
А. 1.3.3. Магнитоиндуцированная нефарадеевская
невзаимность
В датчиках наблюдается воспроизводимый отклик на магнитное поле ор-
тогональное плоскости контура. Установлено, что этот отклик почти не
зависит от ар и определяется количеством витков ~ 10-9 рад/виток-Э.
«Нефарадеевский» сдвиг связан с расщеплением траекторий встречных
волн Sx ~ 10-9 р/Э в поперечном магнитном поле [8]. Расщепление воз-
никает у волн поляризованных в плоскости контура из-за взаимодействия
компоненты электрического поля (Е2) с магнитным полем. Оно приводит
к тому, что встречные волны распространяются по контурам разного
диаметра (&г), а на одном витке разность фазовых набегов равна уА /N =
= 12HVA/n ~ 2 • 10-9 рад/виток-Э. Из-за случайной скрутки каждая из
поляризационных мод поляризована в плоскости контура примерно на по-
ловине длины, что усредняет сдвиг в два раза и делает его независимым
от ар.
Рис. А.1.11. Места в оптической схеме, где разворот осей двулучепреломдения
волокон влияет на чувствительность к магнитному полю
А. 1.4. Термооптический сдвиг нуля
Термооптический сдвиг возникает из-за неоднородного изменения опти-
ческой длины [9], когда участок с изменяемой длиной расположен в кон-
туре несимметрично. При изменении температуры участка длиной (с/г),
находящегося на расстоянии z от ответвителя встречные волны приобре-
тают разность фазовых набегов dp — dd^/dtr, где т = (2г — L)n/c —
Глава А.1. Сдвиг нуля
запаздывание встречных волн в точке z (рис. А. 1.12).
дд'ф/дТ = [кдп/дТ + knct^z, t)]dz,
Рис. А. 1.12. Схема распростра-
нения волн в кольцевом интерфе-
рометре
где «(г, t) — температурный коэффициент
удлинения волокна. Намотка (квадруполь-
ная) начинается с середины, слои уклады-
ваются парами симметрично относительно
середины (рис. А. 1.13).
При намотке в 6 слоев первым начи-
нает растягиваться слой I, расположенный
вблизи середины контура. Запаздывание
встречных волн в этом слоя мала и мала
разность фазовых набегов при его растя-
жении. Поэтому при квадрупольной намот-
ке термооптический сдвиг нуля получается заметно меньше, чем при
простой намотке, где первым начинает растягиваться слой, расположен-
ный в близи ответвителя. Следующим начинает растягиваться слой II,
также расположенный вблизи середины контура, но с другой стороны.
Возникающий при его растяжении термооптический сдвиг имеет про-
тивоположный знак и компенсирует сдвиг, возникший при растяжении
слоя I. При растяжении следующей пары слоев картина повторяется. В ре-
зультате вместо большой петли в температурной зависимости сдвига для
простой намотки, получается несколько маленьких петель (рис. А. 1.14).
Рис. А. 1.13. Схема распределения витков волокна
при квадрупольной намотке в 6 слоев
Температура намоткм
волокна
-30 +20 +70
Температура, град С
Рис. А.1.14. Зависимость
сдвига нуля от температу-
ры при квадрупольной на-
мотке волокна на алюми-
ниевую катушку
Сдвиг при квадрупольной намотке меньше чем при намотке в два слоя
в квадрат числа слоев М [9]
^ал,кв(М)/Лал(2) = 2/[М(М - 1)].
A. 1.5. Нелинейный сдвиг нуля
А. 1.5. Нелинейный сдвиг нуля
Фазовый модулятор, модулирующий разность фаз встречных волн на
рабочей (резонансной) частоте может создать и дополнительную моду-
ляцию на второй гармонике [10]. Например, из-за нелинейности пьезо-
электрического преобразователя (ПЗТ), присутствия второй гармоники
в питании ПЗТ или из-за изгибных колебаний участков волокна в контуре
или на поверхности ПЗТ. Нелинейные искажения при изгибных колеба-
ниях волокна иллюстрируются рис. А.1.15.
Рис. А.1.15. Изгибные колеба-
ния свободного участка волокна
на ПЗТ
В фазовом модуляторе участок волокна, намотанный на ПЗТ, совер-
шает продольные колебания. При этом он удлиняется один раз за период,
что вызывает модуляцию разности фаз встречных волн на частоте ко-
лебаний ПЗТ. В тоже время свободные участки совершают поперечные
колебания, при которых волокно удлиняется дважды за период, что при-
водит к модуляции на удвоенной частоте и к сдвигу <р из-за нелинейности
преобразования
= (s/2)[l - J3(m)/Ji(m)] sin(.
Нелинейную компоненту можно идентифицировать по характерным вспле-
скам в температурных зависимостях сдвига нуля и квадратурного сиг-
нала (рис. А.1.16).
Температура
Резонансная частота
Рис. А. 1.16. Особенности в температурной зависимости сдвига нуля и квадра-
турного сигнала при проявлении второй гармоники
При изменении температуры меняется резонансная частота ПЗТ и ча-
стота изгибных колебаний волокна. При совпадении частот вынужденные
колебания волокна сдвинуты на тг/2 относительно колебаний ПЗТ.
ГЛАВА А.2
ОПТИЧЕСКИЕ
ЭЛЕМЕНТЫ
А.2.1. Биконический переход
А.2.1.1. Адиабатический биконический переход
В адиабатическом переходе (рис. А.2.1) распространяется только основ-
ная мода. В волокне и в начале конического перехода она ведется жилой.
В перетяжке — уже не сердцевиной волокна, а кварцевым стержнем (диа-
метром 5-10 мкм), являющейся многомодовым волноводом. Если высшие
моды не возникают переход называется адиабатическим [11].
Механизм возбуждения высших мод при большом (> 1°) угле конуса
поясняется на рис. А.2.2. Луч 1 соответствует основной моде. Угол на-
клона луча в определяется из /3 = кп± cos 0. Так мода ведется жилой, то
0 < вс = arccos (п2/п1) — угла полного внутреннего отражения. Луч 2
соответствует второй моде. В одномодовом волокне вторая мода не на-
правляется жилой (луч 2 не испытывает полного внутреннего отражения
и для него в > 0С).
Рис. А.2.1. Адиабатическое изменение поля волны в биконическом переходе
В коническом переходе угол падения на границу между жилой и обо-
лочкой при каждом отражении увеличивается на величину угла конуса
dr/dz. Если угол большой, то при первом отражении угол падения луча
на границу (О + dr/dz) может превысить 0С. В этом случае возбуждаются
высшие моды. Так моды распространяются с разными скоростями, на вы-
ходе из перехода они не будут проектироваться в фазе в основную моду,
что приведет к потерям света.
A.2.1. Биконический переход 487
Рис. А.2.2. Лучевая картина мод: а) — в волокне; 6) — в коническом переходе;
в) — в перетяжке
А.2.1.2. Форма биконического перехода
Форма перехода определяется распределением вязкости кварцевого сте-
кла в зоне прогрева. При однородном прогреве переход приобретает при
вытяжке экспоненциальную форму (рис. А.2.3) [И]. Если распределение
температуры не однородно, профиль — примерно параболический.
Форма перехода находится из условия, что объем кварцевого сте-
кла постоянен [11]. При удлинении участка волокна на 2dz его радиус
уменьшается на dr. Условие постоянства объема записывается в виде:
тгк2Ь = тг(г — dr)2(b 4- 2с/г), откуда dr/г = dz/b и г(г) = А ехр(|г|/Ь). Кон-
станту А находим из условия: г((Ь 4- а)/2) = R. При Ь/2 < |г| < (а 4- Ь)/2
решение — г(г) — рехр(|г|/Ь), где р = Rexp(—a/2b).
R - радиус волокна, b — ширина зоны прогрева, а — длина
вытяжки, г = R ехр(-а/2Ь) — радиус перетяжки, г = R ехр(-
а/2Ь) — радиус конического перехода
Расстояние вдоль перехода, мм
б)
а)
Рис. А.2.3. Форма биконического перехода: а) — при однородной зоне перехода;
б) — полученная в дуге электрического разряда при R = 20 мкм и
а = 8 мм. Для продольной координаты масштаб в 100 раз меньше
А.2.1.3. Потери в адиабатическом переходе
В адиабатическом переходе основной причиной потерь является наличие
скачка показателя преломления между напрягающей и кварцевой оболоч-
кой [12]. В этом случае в кварцевой оболочке может распространяться
кольцевая оболочечная мода с фазовой скоростью близкой к фазовой ско-
Глава А.2. Оптические элементы
рости основной моды. В волокне поле основной моды сосредоточено в
жиле и слабо связано с этой оболочечной модой. В коническом переходе
поле основной моды проникает в кварцевую оболочку и возникает связь
с кольцевой оболочечной модой, приводящая к потерям (рис. А.2.4).
Рис. А.2.4. Распределение поля основной моды и профиль преломления дву-
лучепреломляющего волокна при нулевой длине вытяжки (а = 0)
и при длине вытяжки а = 12 мм. Диаметр кварцевой оболочки
2R = 125 мкм, ширина горячей зоны b ~ 10 мм. Burns W.K. J.L.T.
1986
При нагревании показатель преломления легированной напрягающей
оболочки изменяется сильнее, чем у нелегированной кварцевой оболочки.
Это приводит к скачку показателя преломления и в переходе возникают
потери. При охлаждении волокна эти потери исчезают (рис. А.2.5).
Рис. А.2.5. Изменение пропускания при вы-
тяжке волокна
А.2.1.4. Скрутка биконического перехода
Двулучепреломление в переходе меняется от максимального значения
(Ап = 3 • 10~4, при 1/6 = 3 мм) в начале до минимального значения в пе-
ретяжке. Происходит это потому, что по мере уменьшения диаметра все
большая часть поля волны выходит из жилы и распространяется в оболоч-
ке. Тонкая перетяжка диаметром 5-10 мкм представляет собой однород-
ный стержень из кварцевого стекла, двулучепреломление в котором мало
(длина биений больше длины перетяжки) [13]. Если скрутить бикониче-
ский переход так, чтобы поляризационные моды обменялись мощностью,
то получается — модовый конвертор. С его помощью можно, например,
компенсировать модуляцию двулучепреломления возникающую при ра-
стяжении участка волокна намотанного на ПЗТ.
A.2,2, Ответвитель 489
A.2.2. Ответвитель
A.2.2.1. Слабо сплавленный ответвитель
Ответвитель 2x2 представляет собой два биконических перехода со спла-
вленными перетяжками (рис. А.2.6).
Рис. А.2.6. Схема обозначений портов и волокон в ответвителе. Т = Pt/Pi —
коэффициент пропускания; R = Pc/Pi — коэффициент ответвления;
SR = Pc/(Pt+Pc) — коэффициент деления; С, = -10 log[(Pi+Fc)/Pf] —
избыточные потери; р = \Pt,x — Pt,y\/\Pt,x + Pt,y\ — поляризующая
способность; s2 = 10 \og(Pt,x/Pt,y) — коэффициент экстинкции
При вытяжке ответвителей поддерживается постоянная скорость вы-
тяжки. При большом натяжении (~ 1 г) получаются слабо сплавленные
ответвители, при малом (~ 50 мг) — сильно сплавленные (рис. А.2.7).
Рис. А.2.7. Модель сплав-
ной зоны: а) — сильно спла-
вленный; б) — слабо спла-
вленный ответвитель
"з
2р
а?
Слабо сплавленный ответвитель можно рассматривать как два связан-
ных волновода. В симметричном ответвителе (одинаковые волокна) для
связанных мод выполняются условия фазового синхронизма и обеспечи-
вается полный обмен мощностью между волокнами (рис. А.2.8). Коэффи-
циенты пропускания
Тх = cos2 </?х/2Ту = cos2 /2,
(/?х и <у9у — интегральные коэффициенты связи ортогонально поляризо-
ванных мод. Для слабо сплавленных волокон [14]:
92 сх 6Л5/2/[(п2 — п2)3/4//2], Д92/92 ~ 0,1
92 = (<£х + — (<£х — ^)/2. Деполяризованное излучение можно
рассматривать, как сумму двух ортогональных некогерентных компо-
нент, одна из которых поляризована в плоскости ответвителя, а другая в
18-3379
490 Глава А.2. Оптические элементы
ортогональной ей плоскости. Коэффициенты пропускания для этих ком-
понент (Тх и Ту), изменяются с длиной вытяжки с разной скоростью
9?х / <Ру Поэтому пропускание ответвителя для деполяризованного из-
лучения (Г = (Тх + Ту)/2) можно представить как произведение быстро
и медленно меняющихся компонент функций (cos 92 и cos Д<р):
Т = 1/2(1 + cos Дсрсозср].
Коэффициент пропускания Т получается равным 1/2 при ср = =
= тг/2 и при Д(/? = = тг/2 (точки А и В). В ВОГ ответвители делят
мощность пополам. При их изготовлении останавливаются в точке А, где
длина меньше чем в В, и поляризующая способность ответвителя меньше.
Поляризующая способность ответвителя
р = \Ту — ТХ\/\ТХ + Ту| = sin Д 99 sin 99/(1 + cos Acpcos (р).
В точке А при ср = тг/2 получаем: р = sinA^ = Д92. Для слабо спла-
вленного ответвителя Д<р/(р 0,1 и р = 0,16, что сравнимо со степенью
поляризации СЛД (~ 0,2). В точке В Д92 = тг/2 и р = sincp, /те. поляризу-
ющая способность может изменяться от 0 до 1. Непосредственно в точке
В поляризующая способность максимальна (р — 1), так как в этой точке
<р = Зтг/2 + 2ттг, а Д92 = тг/2. Ответвитель с такой поляризующей спо-
собностью мог бы применяться как поляризатор. Однако, они обладают
малым коэффициентом экстинкции е2 = 101og(Ty/Tx) ~ 20 дБ [18].
03450 I б 9
Длина вытяжки а, мм
Рис. А.2.8. Зависимость
коэффициентов пропуска-
ния слабо сплавленного
ответвителя от длины вы-
тяжки для деполяризован-
ного излучения
А.2.2.2. Сильно сплавленный ответвитель
В сильно сплавленном ответвителе собственные моды волокон сильно воз-
мущены и для расчета используется метод нормальных мод [14]. Пола-
гается, что в ответвителе распространяются две моды: симметричная и
антисимметричная, а эволюция мощности в Т и R волокне представляет
собой результат их суперпозиции (рис. А.2.9).
Для сильно сплавленного ответвителя аргументы <рх и <ру означают
разность фазовых набегов симметричной и антисимметричной моды (смот-
A.2.2. Ответвитель
ри рис. А.2.10). Они даются выражениями [12, 13]:
<х (А6/р2)[1/(1 + 1/V)]2, Др/р ~ 0,03.
Рис. А.2.9. Схема биений нормальных мод и эволюция мощности в Т и R волокне
при изменении разности фазовых набегов мод ip от 0 до 2тг
Длина вытяжки в точке А меньше, чем для слабо сплавленного отве-
твителя. Существенно, что и отношение Д<р/<р меньше, поэтому поляризу-
ющая способность у сильно сплавленного ответвителя: р = ^^^/2 = 0,05.
В датчиках вращения необходимы 3 дБ ответвители обладающие малой
поляризующей способностью, так как поляризационный сдвиг нуля про-
порционален степени поляризации излучения.
Рис. А.2.10. Зависимость коэффи-
циента пропускания сильно спла-
вленного ответвителя от длины вы-
тяжки для деполяризованного излу-
чения
А.2.2.3. Спектральные характеристики ответвителей
Разность фазовых набегов симметричной и антисимметричной моды
зависит от длины волны излучения (рис. А.2.11). В сильно сплавленном
ответвителе ср ос А, в слабо сплавленном — <р ос А5/2.
Для датчика важно произведение TR = Т(1 — Т) — эффективность от-
ветвителя, т. к. излучение проходит через каждый ответвитель дважды:
один раз через Т — волокно, а другой раз через R — волокно. Произве-
дение TR достигает своего максимального значения (0,25) при Т = 0,5
и зависит от длины волны заметно слабее коэффициента пропускания Т
Длина волны СЛД изменяется в пределах 0,78-0,86 мкм, а при изме-
нении температуры на 100 °C — на величину порядка ширины линии
излучения 0,015 мкм).
0,7 0,75 0,8 0,85 0,9 0,7 0,75 0,8 0,85 0,9
Длина волны, мкм
Длина волны, мкм
Рис. А.2.11. Зависимость коэф-
фициента пропускания от длины
волны: а) — в сильно сплавленном
ответвителе; б) — в слабо спла-
вленном ответвителе
Рис. А.2.12. Зависимость произ-
ведения TR (эффективности) от
длины волны: а) — в сильно спла-
вленном ответвителе; б) — в слабо
сплавленном ответвителе
А.2.2.4. Изгиб ответвителя
Деформации ответвителя (изгиб и скрутка) возникающие в процессе его
изготовления и эксплуатации могут изменить коэффициент деления. На-
пример [15], при изгибе ответвителя в плоскости волокон на 4° коэффи-
циент деления меняется в 2 раза. При температурных испытаниях ответ-
вителя изгиб волокон в ответвителе приводит к сильному гистерезису
20%) коэффициента деления. Устранить этот гистерезис можно при
заливке компаундом. Изгиб ответвителя в перпендикулярной плоскости
не влияет на коэффициент деления. При изгибе в плоскости волокон из-
меняется постоянная распространения основной моды. Радиус изгиба во-
локон получается разным и для волокна с меньшим радиусом, постоянная
распространения изменяется сильнее. В результате ответвитель стано-
вится асимметричным с неполным обменом мощности между волокна-
ми (рис. А.2.13). Коэффициент пропускания асимметричного ответвите-
ля [16]
Т = 1 — F2 sin2(</?/F),
где F2 = [1 + (Д/ЗЬ/</э)2]-1 — параметр симметрии.
Влияние асимметрии ответвителя на коэффициент пропускания за-
метно, когда длина биений Lg сравнима с длиной перетяжки. А так как по-
стоянная распространения основной моды велика, то для асимметрии до-
статочно небольшого изгиба ответвителя. Асимметрия ответвителя может
быть из-за разных диаметров свариваемых волокон.
Допустимую величину разности диаметров волокон можно оценить
следующим образом. Постоянные распространения основной моды (3 =
A. 2.2. Ответвитель
= [к2 — (тгп/2р)2]^ р — радиус перетяжки. Учитывая, что 2р Х/п2 и
полагая ЛрЪ ~ 1, находим: Др/р = 2р2/(тгАп2Ь) = 1% при р = 5 мкм.
Рис. А.2.13. Зависимость коэффициен-
та пропускания асимметричного ответ-
вителя от длины вытяжки при: а) —
ДЖ = 0; б) - - Д/36 = тг/4; в) — А/ЗЪ = 2,5
А.2.2.5. Скрутка ответвителя
Изменение коэффициента деления при скрутке ответвителя обусловле-
но изменением коэффициента связи между волокнами. Объясняется это
тем, что скрутка неизбежно приводит к изгибу волокон. При изгибе эф-
фективный показатель преломления волокон изменяется так, что моды
смещаются к периферии перетяжки и коэффициент связи между ними
уменьшается. Степень же асимметрии ответвителя при его скрутке нс ме-
няется.
А.2.2.6. Заливка ответвителя
Заливка ответвителя (обычно силиконом п,з ~ 1,4) производится для его
защиты от внешней среды. Так как показатель преломления силикона
зависит от температуры (~ 10~4 °C-1), то коэффициент деления отве-
твителя также завесит от температуры поскольку распространяющиеся
в компаунде доли симметричной и асимметричной моды перетяжки не
равны друг другу (рис. А.2.14).
У сильно сплавленного ответви-
теля в компаунде распространяется
большая часть асимметричной моды,
так как она ближе к отсечке и про-
никает дальше в окружающую сре-
ду. У слабо сплавленного ответви-
теля в компаунде распространяется
большая часть симметричной моды,
так как компаунд проникает в се-
редину перетяжки (рис. А.2.15). Та-
ким образом, существует оптималь-
Рис. А.2.14. Распределение электриче-
ского поля и асимметричной моды в за-
литой компаундом перетяжке ответви-
теля
нал степень сплавления ответвителя, при которой заливка не влияет на
коэффициент деления [17].
Степень сплавления t, мкм
Рис. А.2.15. Зависимость раз-
ности фазовых набегов симмет-
ричной и асимметричной моды
от степени сплавления волокон
(р = 5 мкм). При заливке отве-
твителя коэффициент связи в
сильно сплавленном ответвителе
уменьшается, а в слабо сплавлен-
ном увеличивается. Payne F. Р.
Ellectr. Lett. 1986
А.2.3. Поляризатор
А.2.3.1. Технология изготовления поляризатора
В компании Физоптика разработан новый тип волоконно-оптического
поляризатора в виде биконического перехода (рис. А.2.16), заращенного
двулучепреломляющим монокристаллом (NaNOa), для главных показате-
лей преломления которого выполняется условие
(по = 1,57) > nSiO2 > (пе = 1,33).
Кварцевая подложка Слюда
Рис. А.2.16. Поляризатор в виде би-
конического перехода с перетяжкой,
заращенной монокристаллом натрие-
вой селитры
Такой поляризатор высвечивает линейно поляризованную моду, для
которой показатель преломления больше nsiO2 и пропускает ортогональ-
ную моду, для которой показатель преломления меньше п§Ю2- Разрешен-
ное направление поляризатора (направление электрического вектора) ори-
ентировано перпендикулярно плоскости подложки.
А.2.3.2. Оценка величины коэффициента экстинкции
Длина перетяжки и ее диаметр подбираются для получения максималь-
ной экстинкции и небольших потерь. При увеличении длины перетяжки
и уменьшении ее диаметра увеличивается число отражений от границы
раздела перетяжки и оболочки. Излучение, поляризованное вдоль разре-
шенного направления поляризатора (ТМ волна), на границе этого раздела
A.2.3. Поляризатор 495
испытывает полное внутреннее отражение (для него выполняется усло-
вие nsiO2 > Часть этого излучения рассеивается на неровностях
границы (рис. А.2.17, а). Излучение, поляризованное вдоль запрещенного
направления поляризатора, претерпевает на границе раздела френелев-
ское отражение (для него п0 > nsiO2)- Часть этого излучения теряется,
преломляясь в оболочку, а часть отражается обратно (рис. А.2.17, б).
Рис. А.2.17. Схема распространения волны в перетяжке: а) — поляризованной
в разрешенном направлении (ТМ-волна); б) — в запрещенном на-
правлении (ТЕ-волна)
Коэффициент экстинкции поляризатора определяется выражением
s2 (дБ) = —10 log Т = —10m log 7?,
где Т = Rm — коэффициент пропускания (по мощности), R — коэффици-
ент френелевского отражения (ТЕ), тп — число отражений. Экстинкция
больше, когда меньше коэффициента отражения R и больше число от-
ражений тп. Число отражений от границ m = 5/(dtg0). Угол падения 0
определяется отношением поперечной и продольной составляющих посто-
янной распространения: tg# = (3//3±. Для основной моды перетяжки: к2 =
— (З2 4- /З2 и d • /3± = тг (J3 = к /3_l), откуда tg# = 2dnK/A. По-
этому число отражений обратно пропорционально квадрату диаметра
перетяжки: m = Ab/(2nKd2) = 22 для d = 5 мкм. Френелевский коэффи-
циент отражения для ТЕ волны R = [(nsiO2 cos в — п0 cos '0)/[(77'SiO2 cos 0 +
+n0cos-0)]2. Косинус угла падения получим из cos0 = ctg# = A/(2dnK) =
= 0,057. Для синуса угла преломления ip: по sin = ^SiO2sin0 и cos *ф =
= [1 — (no/nsiO2)2]1/Z2 — 0,38. Френелевское отражение R = 0,57. Боль-
шое значение R вытекает из большой разности по и nsiO2- Для тп = 22 и
R = 0,57 е2 55 дБ.
А.2.3.3. Измерение экстинкции
Проблема измерения большой экстинкции состоит в том, часть мощности
излучения проходит не через запрещенное, а через разрешенное направле-
ние поляризатора. Обусловлено это неточностью юстировки поляризатора
Глава А.2. Оптические элементы
на минимум пропускания и конечной величиной экстинкции входного по-
ляризатора (рис. А.2.18). Если экстинкция входного поляризатора 82 и
его разрешенное направление ориентировано вдоль запрещенного напра-
вления исследуемого поляризатора с экстинкцией с2, то доля мощности
прошедшая на фотоприемник с2 + е2, и ошибка при 8^ ~ 82 составляет
100%. Точность ограничивается экстинкцией входного поляризатора.
слд S0O =
Поляризатор
Волоконно-оптический
поляризатор
О
=J0 Ффд
Анализатор
Рис. А.2.18. Схема экспериментальной установки для измерения коэффициен-
та экстинции волоконно-оптического поляризатора. Изогнутыми
стрелками показаны места, где производится юстировка
Если же на выходе исследуемого поляризатора установлен поляриза-
тор (анализатор) с экстинкцией 8^ разрешенное направление которого
параллельно запрещенному направлению исследуемого поляризатора то
доля мощности прошедшая на фотоприемник будет 82 82 + £2 и можно об-
2 2 2
мерить поляризатор с 8 ~
А.2.4. Преобразователь вращения
А.2.4.1. Кольцевой интерферометр Саньяка
Рис. А.2.19. Оптическая схема датчика при ар = 45° и ас = 90°
Коэффициент передачи кольцевого интерферометра рассчитывается с по-
мощью матриц Джонса (рис. А.2.19). Поляризатор считается линейным,
для анизотропного волокна используется модель линейной фазовой пла-
стинки. Параметр Н и экстинкция 8 учитываются только при оценке
поляризационного сдвига. Перетяжки ответвителя (рис. А.2.20) можно
считать изотропными, т. к. в них двулучепреломление мало (длина бие-
ний больше длины перетяжки) и коэффициенты передачи ответвителя не
зависят в первом порядке от состояния поляризации излучения. В этом
A.2.4- Преобразователь вращения
приближении матрицы (Т) для портов 1-2 и 3 4 и матрицы (2?) для пор-
тов 1-3 и 4- 2 записываются в виде:
Т = VTE, D = iVRE,
г2 = —1, Е — единичная матрица, Т и R — коэффициенты пропускания
и ответвления по мощности. В отсутствие потерь коэффициенты Т и R
связаны между собой соотношением Т + R = 1 (сохранение энергии).
Рис. А.2.20. Модель отве-
твителя из анизотропных
волокон
Ориентация осей двулучепреломления волокон в каждом из бикони-
ческих переходов примерно постоянна, поэтому ответвитель сохраняет
поляризациию излучения в одном и том же биконическом переходе. Од-
нако, при ответвлении в другое волокно поляризация не сохраняется, т. к.
в разных волокнах оси двулучепреломления развернуты (угол ас). Для
определения коэффициентов передачи 1-3 и 2-4 матрица D умножается
на матрицу поворота Я(ас).
Теперь можно получить коэффициенты пропускания и отражения опти-
ческого контура с одним ответвителем (рис. А.2.21).
Ti = Т2 + R2 — 2TR cos2 ас cos <рс, Pi = 2Т7?(1 + cos2 ас cos <рс)
Коэффициенты т\ и р\ не зависят от состояния поляризации излучения
и также соотношением и + = 1. Коэффициент пропускания достигает
своего минимального значения равного (1 — cos2 <ас)/2 при Т = R = 0,5 и
<рс = 0. Для отраженной мощности видность интерференционной картины
V = (^макс - тмин)/(тмакс + тмин) не зависит от величины коэффициента
пропускания ответвителя: V = cos2 ас.
Рис. А.2.21. Схема изготовления первого ответвителя
При оптимальной длине вытяжки Т = R = 0,5 и выражения для коэф-
фициентов передачи контура приобретают более симметричную форму
Глава А.2. Оптические элементы
Л = (1/2)(1 — cos2 ас cos <^с), pi = (1/2)(1 + cos2 ас cos <рс).
В отсутствие вращения (</?с = 0) и ас = 0 вся мощность отражается от
контура (pi = 1). При ас — тг/2 интерферометр теряет чувствительность
к вращению. Второй ответвитель предназначен для передачи на фотопри-
емник излучения отраженного от контура (рис. А.2.22). Разворот осей
двулучепреломления во втором ответвителе не влияет на величину мощ-
ности, передаваемую на фотоприемник.
Рис. А.2.22. Баланс мощности при изготовлении 2-го ответвителя
Максимальное значение произведения TR — 0,25, поэтому после изго-
товления второго ответвителя коэффициент передачи оптической схемы
(без поляризатора)
р2 = (1/8)(1 + cos2 ас cos <£»с).
Полагая <рс — 0 и ас — 0 находим: р^ — 1/4, т.е. максимальная величи-
на мощности приходящей на фотоприемник не превышает 1/4 мощности
СЛД введенной в волокно.
Рис. А.2.23. Зависимость ко-
эффициента передачи оптиче-
ской системы от угла поворота
поляризатора ар и угла разво-
рота осей двулучепреломления
волокон в первом ответвителе
ас
Изготовление интерферометра завершается изготовлением, после чего
коэффициент передачи равен
рз = (1/32)(1 + cos2 2apcos2ac)(l + cos<pc).
Учтено, что через поляризатор проходит половина мощности излучения.
Схема с поляризатором обладает двумя важными свойствами (рис. А.2.23):
1. Видность интерференционной картины не зависит от а и равна
единице. Этот факт можно использовать для контроля целостности
волокна.
2. При р = 45° коэффициент передачи не зависит от а:
Рз = (1/32)(1 + cos<pc).
Приложение
Таблица П1. Сдвиг нуля
Параметр Формулы Оценки для ВГ910 (L “ 100 m, D S! 0,07 m)
Сдвиг фаз из-за эффекта Саньяка рс = (bnLD/Xc) х Q = = ОМ К х Q pc = 1,3 • 10-5 рад при Q = 15 град/час
Оптический масштабный коэффициент ОМ К = 2-nLD/Xc 2 “ 0,025LL> OMK “ 0.18 сек
Поляризационный сдвиг нуля <р„ “ peH/Nx/i рп 210"ь, Qn = рп/ОМК 10-5 рад/с = 2 град/час р = 0,2, е = ЗЮ-2, Н = 1%, N = Ь/Ьл = 1000, Ьд = 0,1 м
Температурный масштаб поляриза- ционного сдвига нуля 8Т = (То - T)(Lb/La) 6Т “ 20 °C, То = 800 °C, Т = 20 °C, £в = 3 мм, 7>д = 0,12 м
Амплитуда модуля- ции разности фаз поляризационных мод “ 6 • 102<5LM/LB 6Арт — 0,2 рад, 6LM = 1 мкм, Lb = 3 мм
Амплитудный (квадратурный) сдвиг нуля ¥>а * X^VmH/N1'2 4>л “ 2 • 10-в, Яа = ‘-рь/ОМК = 10-5 рад/с =* 2 град/час, х = 0,03, 6£х<рт = 0,2, Н = 1%, W = L/La = 1000
Температурный масштаб амплитудного сдвига нуля ST = 0,06£в/(Ьаал) 6Т = 0,1 °C. Простая намотка в 6 слоев Lb = 3 мм, аал = 210"5 К"1
Максимальный фарадеевский сдвиг нуля 0,3VHLLBt 4 • IO"0, Я" = Ч&/ОМК “ 4 10-5 рад/с~ 8 град/час, VH = 2 • 10 4 м 1 (Н = 1 Э), t = 0.2 м-1, Lb = 3 мм
Таблица П1 (окончание)
Фарадеевский сдвиг нуля при ар 45° . = 2у>" х х cos2(o!c) • (2<ар — тг/2) 99" “ 4 • 10“6, П" = 4 • 10~5 рад/с= = 0,8 град/час 72" = 4 • 10“6, ас = 45°, 2аР - тг/2 2 0,1
Магнито- индуцированный (нефарадеевский) сдвиг нуля = GVHX/nN 10~9НЯ = 10“6 (Я = 1 Э, N = 1000), П^ = ^/ОМК = 1 о/ч, N — число витков, VH = 2 • 10-4 м-1 (Я = 1 Э)
Термооптический сдвиг нуля при намотке в 2 слоя 7-^(2) — =* (кп2/^a^dT/dtL2/4 ¥>ал(2)^3-10-4 рад, (dT/dt =* 0,1° С/сек “ 360° С/ч), П„ = K(2)dT/dt, Яал(2) ~ 1 (о/ч)/(°С/ч), аал “ 2- 10-5/°С
Термооптический сдвиг нуля, простая намотка, М слоев Пал пр(А/)/Пал (2) = = (2/3)(М + 1)/М Пал пр(М)/Пал(2) 0,78 (М = 6)
Термооптический сдвиг нуля, квадрупольная намотка, М сл. Пая пр(М)/Пал(2) = = 2/[М(М - 1)] Пал пр(М)/Пал(2) 0,15 (М = 6)
Нелинейный сдвиг нуля ^нл = s/4 у9„л 2 2,5- 10-°, Пнп = 2,5 град/час, s = 10-4 — индекс модуляции на 2-ой гармонике
Таблица П2. Параметры элементов
Длина волны (в максимуме) Хт 0,83 мкм
Зависимость Хт от температуры (дХт/дТ),, (дХт/дТ)р 0,25 нм/°С, 0,16 нм/°С
Зависимость Лт от тока (дХт/д1)т 0,1 нм/мА
Ширина полосы ДА 14 нм
Длина деполяризации £д S* 0,51/в (А/ДА) 10 -20 мм
Мощность в волокне Рв Рв = 30 мкВт
Эффективность ввода л 3%
Зависимость мощности от тока АР/Р = 2 Д7 ~ 20 ма
Таблица ПЗ. Оптическое волокно
Длина волокна, число витков L, NK = L/ttD 100 m, 455 для ВГ910
Длина волокна на ПЗТ LM 1 M
Длина волны отсечки Лот 0,74 0,76 мкм
Числовая апертура NA = (n2 - Поб)1/2 0,18
Диаметр кварцевой оболочки б?к 38-45 мкм
Диаметр покрытия б?П 120 мкм
Длина биений поляризационных мод Lb = 2 мм
Параметр сохранения поляризации h < 0,0005 1/m
Компенсация напрягаю- щей оболочки < 0.1%
Скрутка волокна ~ 3 оборота/м
Разность постоянных распространения поляризационных мод = 2л/Lb ~ 2 мм-1
Относительное удлинение напрягающей оболочки Na(T - To) 4-10”4
Температура размягчения н. оболочки To 800 °C
Модуль Юнга кварца EK 70 ГПа = 7 • IO10 н/м2
КТР кварца 3 • 10'7 1/K
Показатель преломления кварца HSiO2 1,456
Таблица П4. Поляризатор
Длина кристалла 2,7 мм
Длина перетяжки b 3,5 5 мм
Длина вытяжки а 8-10 мм
Диаметр перетяжки (поляризатор) 2р = dK ехр(—а/2Ь) 5 мкм
Коэффициент экстинкции е2 = 4А2Ь/[(2р)3Пк(По - п|]1/2 > 25 дБ
Показатели преломления NaNO3 По, Пе по — 1,57, пе = 1,33 (Л = 0,83 мкм)
Таблица П5. Ответвитель
Длина перетяжки b b = 3,5 5 мм
Поляризующая способность Р 0,1-0,05
Литература
1. Листвин В.Н., Логозинский В.Н. // «Миниатюрные волоконно-оптические
гироскопы», Радиотехника и Электроника, т. 50, 1-9, 2005.
2. Ulrich R., «Fiber-optic rotation sensing with low drift», Opt. Lett., V. 5, p.
173-175, 1980
3. Каценеленбаум Б.З., «Высокочастотная электродинамика», «Наука», М.,
с. 237, 1966
4. Листвин В.Н., Логозинский В.Н., «Сдвиг нуля в волоконном кольцевом
интерферометре с широкополосным источником излучения», Изв. Вузов
Радиофизика, т. 34, № 9, с. 1001-1009, 1991.
5. Szafraniec В., Blake J., «Polarization modulation errors in all-fiber depolarized
gyroscopes», v. 12, № 9, p. 1679-1684, 1994.
6. Ulrich R., Simon A. // «Polarization optics of twisted single-mode fibers», Appl.
Opt. v. 18, 2241-2251, 1979.
7. Saida T., Rotate K. «General formula describing drift of interferometer fiber-
optic gyro due to Faraday effect: reduction of the drift in Twin-Depo-I-FOG», //
J. Lightwave Tech. V. 17, № 2, p. 222-228, 1999.
8. Логозинский В.Н. «Магнито-индуцированнаянефарадеевская невзаимность
в волоконно-оптическом гироскопе», Радиотехника и Электроника, т. 51,
№ 7, с. 890-894, 2005.
9. Mohr F., «Thermally induced bias drift in fiber optic Sagnac interferometers»,
J. Lightwave Techn., vol. 14, № 1, p. 27-41, 1996.
10. Carrara S. L. A., «Drift caused by phase modulator non-linearities in fiber gy-
roscopes», Proc. SPIE, vol. 1267, Fiber Optic Sensors IV, p. 187-191, 1990.
11. Birks T. A., Li Y. W., «The shape of fiber tapers», J. Lightwave Technol., V. 10,
№ 4, p. 432-438, 1992.
12. Burns W. E., et al, «Loss mechanisms in single-mode fiber tapers», J. Lightwave
Technol., V. 4, № 6, p. 608-613, 1986.
13. Villarruel C.A., et al, «Birefringence in etched and tapered polarization-pre-
serving fibers», Conf. Opt. Fiber Comm., OFC/IOCC, V. 3, p. 189, 1987.
14. Payne F. P., Hussey C. D., Yataky M. S., «Polarization analysis of strongly fused
and weakly fused couplers», Electron. Lett., V. 21, № 13, p. 561-563, 1985.
15. Birks T. A., «Twist-induced tuning in tapered fiber couplers», Appl. Opt., V. 20,
№ 19, p. 4226-4233, 1989.
16. Снайдер А., Лав Дж., «Теория оптических волноводов», М., «Радио и Связь»,
С. 655, 1987.
17. Payne F.Р., Finegan Т., Yataki M.S., Mears R. J., Hussey C.D., «Dependence
of fused taper couplers on external refractive index», Electron. Lett., V. 22,
№ 22, p. 1207-1209, 1986.
Дополнение Б
Волоконно-оптические гироскопы
с замкнутым контуром обратной связи
Ю. Н. Коркишко, В. А. Федоров, В. Е. Прилуцкий, В. Г. Пономарев,
И. В. Морев, С. М. Кострицкий, Е. М. Падерин, А. И. Зуев,
В. К. Варнаков
Научно-производственная компания «Оптолинк»
ООО НПК «ОПТОЛИНК»,
124498, Москва, Зеленоград,
проезд 4806, дом. 5
Тел. (495) 651-0960,
Факс (495) 651-0961,
E-mail: opto@optolink.ru,
www.optolink.ru
Введение
Волоконно-оптические гироскопы (ВОГ) используются для измерения угло-
вой скорости вращения и угла поворота и имеют широкую область прак-
тического применения для целей ориентации и навигации различных по-
движных объектов. ВОГи используются в навигационных системах для
авиации, судоходства, ракет и космических аппаратов, а также для на-
земных средств передвижения, к которым относятся автомобили, роботы,
сельскохозяйственные машины, железнодорожный транспорт и др. Кро-
ме того, ВОГи используются при бурении скважин, прокладке и контроле
автомобильных и железных дорог, газа и нефтепроводов, и т. п.
В настоящее время наиболее актуальными направлениями развития
волоконно-оптических гироскопов являются:
а) повышение стабильности ВОГов за счет повышения качества эле-
ментов (модуляторов, светоделителей, поляризаторов и волоконного
контура), их температурной стабильности и нечувствительности к
механическим и акустическим вибрациям, а также к температур-
ным градиентам;
б) повышение предельной чувствительности за счет повышения интен-
сивности и ширины полосы источников излучения;
в) удешевление и миниатюризация ВОГов за счет серийного производ-
ства интегрально- оптических и электронных модулей.
ВОГ является логическим продолжением кольцевого лазерного гиро-
скопа (КЛГ), выпускаемого в настоящее время в том числе и в России.
В КЛГ чувствительным контуром является кольцевой самовозбуждаю-
щийся резонатор с активной газовой средой и отражающими зеркалами,
в то время как в ВОГ пассивный многовитковый диэлектрический све-
товодный контур возбуждается внешним источником света. Среди пре-
имуществ ВОГ над КЛГ следует отметить отсутствие необходимости
высоковольтного питания и принятия мер по устранению так называемо-
го захвата лучей, возможность более легкого достижения малых уровней
квантования по углу и др.
Согласно прогнозам зарубежных экспертов, в ближайшее время имен-
но волоконно-оптические измерители угловой скорости с замкнутым кон-
туром обратной связи займут практически весь рынок высокоточных
гироскопов. Возможность промышленного выпуска прецизионных ВОГов
в значительной степени определяется уровнем технологической базы про-
изводства его основных компонентов и в первую очередь специальных
волоконных световодов и элементов интегральной оптики.
В ВОГ с замкнутым контуром обратной связи компенсация фазово-
го сдвига Саньяка и динамическое смещение разности фаз встречных
световых волн на тг/2 радиан осуществляется с помощью интегрально-
оптических фазовых модуляторов (ФМ), установленных на концах воло-
конного контура (ВК). В этом случае мерой угловой скорости является
один из параметров сигнала управления ФМ. Известно, что при таком
подходе выходная характеристика ВОГ линеаризуется, а масштабный ко-
эффициент (МК) становится независимым от параметров большинства
структурных составляющих прибора [1].
Остаточные погрешности измерения угловой скорости могут быть
уменьшены с помощью алгоритмической компенсации уходов нулевого
сигнала или изменений МК (это возможно даже для ВОГ прямого изме-
рения («открытого типа») [2]). Однако ясно, что в этом случае следует
говорить о компенсации только таких составляющих погрешности, для
которых известна их зависимость от заданных параметров (температу-
ры, времени и т.п.), т.е. детерминированных.
В данной работе представлены результаты разработок НПК «Опто-
линк» одноосных и трехосных волоконно-оптических гироскопов с за-
мкнутым контуром обратной связи.
Б.1. Конфигурация 505
Б. I. Конфигурация
Структурные схемы одноосных и трехосных ВОГов представлены на рис. Б.1
и Б.2 соответственно. Реализована так называемая минимальная конфи-
гурации с одинаковыми оптическими путями для двух лучей, распростра-
няющихся в волоконном контуре в противоположных направлениях.
Рис. Б.1. Структурная схема одноосных ВОГ. СЛД — суперлюминесцентный
диод, БУИ — блок управления излучателем, ВР — волоконный развет-
витель, ВК — волоконный контур, МИОЭ — многофункциональный
интегральный оптический элемент, УФП — устройство фотоприемное,
ДП — деполяризатор, RS-485 — последовательный интерфейс
Рис. Б.2. Структурная схема трехосных ВОГ
Приборы состоят из одного (как для одноосных, так и для трехосных
ВОГов) источника света — суперлюминесцентного диода с центральной
506 Дополнение Б
длиной волны 1550 нм, одного (для одноосных ВОГов) или нескольких
(для трехосных ВОГов) волоконных разветвителей, одного или трех коль-
цевых интерферометров Саньяка для измерения угловой скорости и элек-
тронных схем обработки сигналов [3-5]. Кольцевой интерферометр состо-
ит из многофункционального интегрально-оптического элемента (МИОЭ)
и из сохраняющего состояние поляризации света волоконного контура (ВК).
МИОЭ представляет собой интегрально-оптическую схему на кристалле
ниобата лития, изготовленную с помощью технологии высокотемператур-
ного протонного обмена [6-9] и выполняющую три функции: 1) поляри-
зации проходящего света с целью уменьшения нестабильности смещения
нуля вследствие поляризационной невзаимности; 2) расщепление свето-
вых волн на распространяющиеся по и против часовой стрелки в ВК
с равными мощностями с последующей рекомбинацией на Y-разветвите-
ле; 3) внесение фазового сдвига между встречными волнами с помощью
электрооптического фазового модулятора. Применение волокна, сохраня-
ющего состояние поляризации, обусловлено необходимостью уменьшения
как дрейфа, вызываемого перекрестной поляризационной связью, так и
дрейфа, вызываемого внешними магнитными полями вследствие эффекта
Фарадея.
Точность ВОГ сильно зависит от параметров оптического блока. Шум
прибора тем меньше, чем больше выходная мощность СЛД и чем мень-
ше потери оптических элементов, включая волокно, сохраняющее состоя-
ние поляризации, типа PANDA. Минимальная измеряемая скорость вра-
щения зависит от коэффициента перекрестной поляризационной связи
(А-параметра) и длины поляризационных биений Lp волокна следующим
образом [10]:
\/ hLv
^min ~ п т • (Б.1)
U Ju
Поэтому при разработке ВОГ основные усилия были направлены на умень-
шение оптических потерь в каждом из элементов и на уменьшение вели-
чин h и Lp в волокне типа PANDA. В НПК «Оптолинк» была разработа-
на технология и налажено серийное производство оптического волокна,
поддерживающего состояние поляризации излучения (РМ волокно) [11].
В табл. Б.1 представлены параметры таких волоконных световодов.
Наряду с «коммерческим» оптоволокном, световодная жила которого
содержит оксид германия, разработана технология изготовления ради-
ационно-стойкого (до доз облучения 1 Мрад) оптоволокна SiO2/SiO2-F
с тонкой отражающей оболочкой.
В научно-производственной компании «Оптолинк» разработаны три
базовые модели одноосных ВОГ, имеющие ВК с длинами 500 м (ОИУС-501),
1000 м (ОИУС-1000), 2000 м (ОИУС-2000) и две модели трехосных ВОГ
Б.1. Конфигурация 507
с длинами волоконного контура 200 м (ТИУС-200) и 500 м (ТИУС-500)
[12-16]. В трехосных ВОГ используется один излучатель на три канала.
Использование трех фотоприемников позволяет вести обработку сигналов
одновременно с трех каналов независимыми блоками цифровой обработки.
Таблица Б.1. Параметры РМ волокна, изготавливаемого на предприятии НПК
«Оптолинк»
Рабочая длина волны 1,55 мкм
Диаметр поля моды 6,5 мкм
Диаметр волокна 80 мкм
Диаметр покрытия 1204-160 мкм
Числовая апертура 0,13
/i-параметр < 10-5 м
Потери < 1,5 дБ/км
Длина волны отсечки 12504-1450 нм
Длина биений < 3 мм
Тип PANDA
Намотка катушек ведется по квадрупольной технологии, начиная от
середины длины отрезка волокна в направлении наружу к его концам
путем поочередного сматывания с двух вспомогательных шпулек и фор-
мированием геометрически симметричной структуры. Натяжение волок-
на поддерживается постоянным в течение всего процесса намотки. При
этом контролируется не только натяжение волокна, но и его изгибы или
искривления, а также поверхностные контакты. Катушка с волокном рас-
полагается на теплоизолированной плате с диаметром от 80 до 230 мм в
зависимости от типа ВОГ. Станки для намотки волоконных контуров
были специально разработаны на базе стандартных проволочных намо-
точных станков.
Изотропные волоконные разветвители изготавливаются методом спла-
вления - вытяжки и имеют следующие типовые значения параметров:
- коэффициент деления, % 50 ± 1,
- избыточные потери, дБ 0,1.
За основу конструкторского решения при разработке деполяризато-
ра взята конструкция, известная как волоконный деполяризатор Лайота.
Технология изготовления этого элемента обеспечивает достижение следу-
ющих параметров:
- потери оптической мощности, дБ: < 0,5;
- степень остаточной поляризации излучения при ширине спектраль-
ной линии 40 нм, %: < 0,05.
МИОЭ изготавливаются на кристаллах LiNbOa методом высокотем-
пературного протонного обмена [3]. Этот метод дает возможность до-
стижения следующих значений основных параметров МИОЭ:
- вносимые избыточные потери: < 4 дБ;
- коэффициент поляризационной экстинкции < — 30 дБ;
полуволновое напряжение: < 3 В ;
- амплитудная модуляция: < 0,1%.
Интегрирование МИОЭ в оптический блок (ОБ) производится путем
непосредственных стыковок его волноводов с концами ВК и с одним из
концов входного изотропного разветвителя, имеющего длину, достаточ-
ную для пространственной фильтрации излучения.
Отметим, что в НПК «Оптолинк» налажено собственное производство
всех как интегрально-оптических, так и волоконно-оптических компонент
ВОГ, что делает компанию независимой от поставщиков таких компо-
нент.
ВОГ выше описанной конфигурации обладают известной геометриче-
ской гибкостью: изменением только лишь параметров волоконного конту-
ра можно получать приборы различного класса точности и габаритных
размеров. Например, если в распоряжении имеется маломощный СЛД или
МИОЭ с большими потерями, или и то и другое вместе, то для компен-
сации недостатка мощности света на выходе оптического блока можно
использовать катушку меньшей длины, уменьшая тем самым и габариты
и чувствительность ВОГ — получаем малогабаритный грубый прибор
с широким динамическим диапазоном и т. п. При наличии достаточно
большой мощности света, доходящего до фотоприемника (СЛД большой
мощности, низкие потери излучения в МИОЭ и волоконном контуре) воз-
можна реализация прецизионных приборов. Важно, что при таких ма-
нипуляциях состав и параметры остальных оптических и электронных
компонентов существенно не затрагиваются.
Базовая структура на рис. Б.1 и Б.2 еще не определяет алгоритм рабо-
ты ВОГ, но предопределяет широкие возможности для его выбора ввиду
практически безинерционной работы фазового модулятора (ФМ) в МИОЭ.
В принципе могут быть реализованы следующие типы схем обработки
информации:
1. Схема с незамкнутым контуром обратной связи и синусоидальной
(или импульсной) модуляцией; выход — аналоговый, нелинейный.
2. Схема с замкнутым контуром обратной связи и синусоидальными
вспомогательной и компенсирующей модуляциями; выход - анало-
говый, линейный.
Б.1. Конфигурация 509
3. Схема с замкнутым контуром обратной связи и синусоидальной (или
импульсной) вспомогательной и пилообразной аналоговой со ста-
бильной фазовой амплитудой компенсирующей модуляциями; вы-
ход — дискретный, линейный.
4. Схема с замкнутым контуром обратной связи и синусоидальной (или
импульсной) вспомогательной и пилообразной аналоговой со ста-
бильной частотой компенсирующей модуляциями; выход анало-
говый, линейный.
5. Схема с замкнутым контуром обратной связи с импульсной вспомо-
гательной и импульсной пилообразной со стабильной фазовой ам-
плитудой компенсирующей модуляциями; выход — дискретный, ли-
нейный.
Варианты 3 и 4 представляются как наиболее отвечающие нынешнему
уровню технологии оптических и электронных компонентов в России и
наиболее пригодны к практической реализации: с их помощью реализуе-
мы все классы ВОГ. Поскольку оба варианта удовлетворяют основному
критерию, следует более детально рассмотреть, в чем состоит их отличие
и выявить возможные преимущества друг перед другом.
В так называемых серродинных схемах компенсация разности фаз
Саньяка — ~\(L^ осуществляется фазовым сдвигом, вносимым пи-
лообразной (на линейном участке) фазовой модуляцией световой волны
A</?m = <рДт9 = (₽ис- Б-3)-
Следящая система обеспечивает равенство этих величин с противопо-
ложными знаками. Т.о., с точностью до знака,
Q“3At = 47гЯЬ(1-Д</) ^rs Х Л ’ (Б’2)
здесь А — длина волны света; с — скорость света в вакууме; —
разность времен групповой задержки световых волн; R — радиус ВК;
L — длина ВК; <prs — размах фазовой «пилы»; f — частота «пилы»; Д£
время спада «пилы»; QU3JVt — измеренная угловая скорость.
Если считать, что Д£ — 0 (идеальная пила) и Дт^ = то (Б.1)
записывается в виде
Атт»
^изм — 77 (фгз * f)i (Б*3)
ztvJJ
где D — диаметр ВК; п — показатель преломления сердцевины волокна.
Можно сказать, что при заданных А, п и D произведение <prs х f явля-
ется мерой угловой скорости. Задача состоит в измерении этой величины.
Вариант 3 предполагает наличие стабильного значения фазовой ам-
плитуды. Это можно осуществить с помощью дополнительной следящей
системы в схеме обработки, причем из соображений исключения воз-
действия спада «пилы» на стабильность работы прибора целесообразно
выбирать ее равной 2тг рад. Таким образом, полагая cprs = 2тг, из (Б.2)
получаем
/ = (В.4)
где Q — входная угловая скорость.
Рис. Б.З. Серродинная схема компенсации разности фаз Саньяка. </>i, </>2 — пило-
образные изменения фаз первого и второго лучей
Частоту f легко измерить, поэтому она может служить очень удобной
мерой угловой скорости. Более того, легко заметить, что каждый сброс
«пилы» происходит после разворота прибора на угол Xn/D, что позво-
ляет простым подсчетом импульсов, соответствующих сбросам «пилы»,
измерять угол разворота с дискретностью Xn/D.
Вариант 4, наоборот, предполагает наличие стабильного значения час-
тоты /. Это очень легко осуществить с помощью кварцевой стабилизации.
Пусть f = const, в этом случае согласно (Б.2) можно записать:
_27rDo
An/Q’
но измерить <prs непосредственно невозможно. Если в качестве меры угло-
вой скорости выбрать напряжение J7, из которого формируется амплиту-
да фазовой пилы, то iprs = K$MKynU, при этом Кфм = тг/14 — эффек-
(Б.5)
Б.1.
тивность ФМ, 14 — полуволновое напряжение, а Куп — коэффициент
усилителя-преобразователя, формирующего пилообразное напряжение,
прикладываемое к ФМ. Таким образом:
U =
W.D
Куп
(Б.6)
Напряжение также легко измерять и преобразовывать в другие фор-
мы. Оно само может служить мерой угловой скорости и подаваться на
выход ВОГ. Но возможно также в составе прибора с помощью точного
интегрирующего АЦП превратить его в последовательность импульсов в
виде унитарного кода и получить полную аналогию варианта 3 без суще-
ственного ухудшения.
Самым главным отличием вариантов 3 и 4, таким образом, является
различие выражений для МК:
мк3 = (Б.7)
МК, = А^ТГ' (Б8)
Any 1^уп
Погрешность МК в первом случае определяется, главным образом, ста-
бильностью длины волны излучения Л, а во втором, в силу того, что
Уд- ~ Л, — стабильностью параметров МИОЭ и стабильностью переда-
точной характеристики усилителя-преобразователя Куп.
В серийно выпускаемых волоконно-оптических гироскопах компании
«Оптолинк» реализован вариант 3. В ВОГ применена схема с замкну-
тым контуром обратной связи с импульсной вспомогательной и ступенча-
то-пилообразной компенсирующей фазовыми модуляциями света. Схема
предполагает наличие стабильного значения фазовой амплитуды компен-
сирующей модуляции. Это достигается с помощью дополнительной сле-
дящей системы в схеме обработки.
Блок цифровой обработки (БЦО) формирует напряжения, поступаю-
щие на МИОЭ для формирования постоянного фазового сдвига между
встречными световыми волнами, равного л/2 рад, и компенсации разно-
сти фаз Саньяка. Тем самым обеспечивается работа прибора в режиме
непрерывно замкнутого контура.
Структурная схема БЦО представлена на рис. Б.4.
Аналоговый сигнал о наличии угловой скорости (сигнал рассогласо-
вания) поступает на АЦП с УФП, где предварительно усиливается. Вы-
сокоскоростной АЦП под управлением цифрового автомата, реализован-
ного на ПЛИС, преобразует аналоговый сигнал в цифровой и передает в
ПЛИС. В ПЛИС цифровой сигнал с АЦП демодулируется и полученный
цифровой код со знаком, соответствующим знаку сигнала рассогласова-
ния, поступает на цифровой интегратор. Код с интегратора использует-
ся для получения наклона фазовой «пилы», соответствующего скорости
вращения. Преобразованный в ЦАП сигнал поступает на МИОЭ. При ам-
плитуде сброса фазовой «пилы», равной 2тг рад, как известно, разность
фаз Саньяка компенсируется сигналом с частотой /, определяемой соот-
ношением (Б.4).
Рис. Б.4. Структурная схема БЦО: АЦП — аналогово-цифровой преобразова-
тель, ЦАП — цифро-аналоговый преобразователь, ПЛИС — програм-
мируемая логическая интегральная схема
В приборе используются два способа определения скорости вращения.
В первом способе происходит непосредственное измерение частоты следо-
вания спадов «пилы». При этом появление каждого спада соответствует
приращению угла поворота канала ВОГ вокруг оси, перпендикулярной
ВК, на Xn/D рад.
Для увеличения разрешающей способности прибора применяется спо-
соб измерения скорости вращения по наклону фазовой «пилы».
БЦО представляет собой схему, построенную на ПЛИС фирмы ALTERA,
к которой подключен высокоскоростной АЦП и два быстрых ЦАП фирмы
Analog Devices. Тактовые синхроимпульсы для ЦАП и АЦП вырабатыва-
ются ПЛИС. Работа ПЛИС тактируется высокостабильным генератором.
Микроконтроллер фирмы Atmel является загрузчиком для ПЛИС, а
также обеспечивает обмен по интерфейсу RS-485 с внешними устройства-
ми. На нем реализован монитор для настройки прибора. Кроме загрузки
ПЛИС, контроллер по последовательному каналу считывает с ПЛИС дан-
ные измерений.
Функциональная схема цифрового автомата, реализованного на ПЛИС,
представлена на рис. Б.5.
Б. 1. Конфигурация
Рис. Б.5. Функциональная схема цифрового автомата, реализованного на ПЛИС
Формирователь синхроимпульсов преобразует тактовую частоту в
набор импульсов для синхронного управления работой всех устройств и
узлов. Тактовая частота fmaKm выбирается кратной частоте вспомога-
тельной модуляции (ВМ) feM. Тактовые импульсы для ЦАП формируются
по фронтам ВМ. Тактовые импульсы для АЦП формируются так, чтобы
исключить измерения на фронтах сигнала с УФП.
Схема обработки сигнала с УФП состоит из сумматора, буфера для
хранения измеренного значения, схемы вычитания. На сумматоре накап-
ливается сумма значений сигнала рассогласования, измеренных на те-
кущей фазе ВМ. На буфере хранится сумма значений, измеренных на
предыдущей фазе ВМ. По окончании измерения числа с сумматора и с
буфера поступают на схему вычитания. В зависимости от текущей фазы
ВМ, одно число подается как вычитаемое, другое — как вычитатель. Та-
ким образом выделяется амплитуда переменного сигнала с учетом знака.
Код со знаком, соответствующий знаку сигналу рассогласования, по-
ступает на цифровой интегратор, который состоит из умножителя и сум-
матора со схемой ограничения. С помощью умножителя задается постоян-
ная времени цифрового интегратора. Сумматор используется в качестве
интегратора. Код с интегратора поступает на формирователь кода для
компенсирующей модуляции и через цифровой фильтр на последователь-
ный интерфейс связи с контроллером.
4 Дополнение Б
Формирователь кода для компенсирующей модуляции состоит из сум-
матора, с помощью которого формируется код «пилы» и второго сумма-
тора, который используется в контуре цифрового регулятора амплитуды
компенсирующей модуляции. Сигналом рассогласования для цифрового
регулятора амплитуды компенсирующей модуляции служит сигнал со схе-
мы обработки сигнала с УФП, снятый в моменты спадов «пилы». Этот
же сигнал используется и для подстройки амплитуды вспомогательной
модуляции.
Для достижения максимальной чувствительности необходимо устра-
нить все источники невзаимности, кроме тех, которые возникают в ре-
зультате эффекта Саньяка при распространении волн по часовой стрелке
и против часовой стрелки. Возникновение дополнительных фазовых сдви-
гов из-за недостаточного качества оптических компонентов или внешних
возмущений на фоне фазового сдвига Саньяка приводит к дополнитель-
ному дрейфу нулевого сигнала [1].
Рассмотрим основные факторы, ограничивающие точность ВОГ и влия-
ние которых удалось ослабить при разработке ВОГ с замкнутым конту-
ром обратной связи.
Оптические потери
Чувствительность ВОГ ограничена дробовым шумом, который вычисля-
ется как величина, обратная квадратному корню из мощности, которая
уменьшается с увеличением длины волокна, в то время как эффект Са-
ньяка увеличивается. Эти два конкурирующих эффекта определяют опти-
мальную длину волокна для данной чувствительности.
Тепловые помехи
Зависящий от времени температурный градиент вдоль длины волокна
может привести к ложным фазовым сдвигам вследствие температурной
зависимости показателя преломления волокна. Для минимизации этого
эффекта необходимо использовать волокна с меньшим значением dn/dT.
Квадрупольная намотка, в которой равноотстоящие от центра точки во-
локна расположены в физически равных условиях, также значительно
уменьшает этот эффект.
Обратное рассеяние света
Обратное рассеяние на входных-выходных соединителях и других неод-
нородностях ВОГ может являться причиной возникновения паразитных
интерференций. Иммерсионные элементы для уменьшения разностей по-
казателей преломления, а также использование наклонных поверхностей
в МИОЭ снижают обратное рассеяние.
Б.1. Конфигурация
Электрооптический эффект Керра
Электрические поля распространяющихся в противоположных направле-
ниях лучей могут привести к таким изменениям показателя преломления,
которые будут невзаимными, если свет расщепляется на неравные части.
Невзаимность, вызванная нелинейным эффектом Керра, может быть су-
щественно снижена путем использования низкокогерентного источника
излучения.
Магнитооптический эффект
Магнитооптический эффект Фарадея приводит к паразитному дрейфу
гироскопа. Значительное уменьшение его влияния достигается путем ис-
пользования волокна, сохраняющих поляризацию излучения, а также за
счет использования защитных оболочек из пермаллоя. Реализованные тех-
нические решения позволили снизить чувствительность ВОГ к магнитно-
му полю до уровня 0,05 град/ч/Эрстед.
Для ВОГ с идеальными компонентами (идеальным разветвителем, без
обратного рассеяния и т. д.) предел измерений зависит от дробового шума
в пучке света при измерении фотодетектором [17]. Недостоверность
создаваемая колебанием в пучке света, которое вызвано дробовым шумом,
можно выразить как [18].
= /в, Л/2 <Б9>
L ’ и (npnDr)2
где пр — количество фотонов/сек, попадающих на фотодетектор, пр —
квантовая эффективность детектора, ат — среднее время.
Параметры серийно выпускаемых в НПК «Оптолинк» волоконно-опти-
ческих гироскопов представлены в табл. Б.2.
В настоящее время волоконно-оптические гироскопы, выпускаемые
НПК «Оптолинк», используются в системах управления космическими ап-
паратами. Это, прежде всего, в системе управления спуском космических
кораблей «Союз» и системе управления телескопом египетского спутника
Egyptsat-1. В ближайшее время планируется использование ВОГ в ря-
де других космических аппаратов. Среди других применений ВОГ НПК
«Оптолинк» следует отметить авиацию, внутритрубную диагностику тру-
бопроводов, железнодорожный транспорт, космическую связь, военную
технику.
Осуществляется экспорт волоконно-оптических гироскопов в Велико-
британию, Германию, Италию, США, Канаду, Австрию, Китай, Индию,
Малайзию, Украину, Бразилию, Аргентину, Тайвань, Израиль, Корею.
Таблица Б.2. Параметры волоконно-оптических гироскопов производства НПК
«Оптолинк»
Параметр ОИУС2000 ОИУС1000 ОИУС501 ТИУС700 (преци- зионный вариант ТИУС500) ТИУС500 ТИУС200
Диапазон изме- ряемой угловой скорости, °/сек ±40 ±90 ±250 ±100 ±300 ±1000
Случайная сос- тавляющая дрей- фа нулевого сиг- нала при фик- сированной тем- пературе, °/час < 0,002 < 0,01 < 0,1 < 0,1 < 0,5 < 10
Случайная сос- тавляющая дрей- фа нулевого сиг- нала при изме- нении темпера- туры от минус 40 °C до 50 °C, °/час < 0,02 < 0,1 < 0,5 < 0,5 < 1,5 < 30
Погрешность масштабного коэффициента, % < 0,005 < 0,01 < 0,08 < 0,08 < 0,1 < 0,51
Полоса про- пускания, Гц > 50 > 100 > 100 > 100 > 100 > 300
Спектральная плотность мощности шума, °/х/час < 0,0002 < 0,001 < 0,005 < 0,007 < 0,01 < 0,05
Напряжение питания 5У±0,25* 5У±0,25* 5У±0,25* 5V ± 0,25* 5V ± 0,25* 5Г±0,25*
Мощность, потребляемая прибором, Вт: < 7 < 7 < 7 < 7 < 7 < 7
Масса (net), кг 1,7 0,9 0,35 1,2 1,2 0,3
Габаритные размеры, мм 0250 x 45 0150x38 0100x30 110x110x90 110x110x90 062 x 91
Выходной сигнал RS485** RS485** RS485** RS485** RS485** RS485**
* По требованию заказчика возможно от 18 до 36 В
** По требованию заказчика возможно RS232/RS422, унитарный код
Литература 5 17
Литература
1. Lefevre Н., «The Fiber-Optic Gyroscope», Artech House, 1993
2. Smith R. B., ed., «Selected Papers on Fiber-Optic Gyroscopes», SPIE Milestone
Series, Vol. MS8, 1989.
3. Коркишко Ю.Н., Федоров В. А., Прилуцкий B.E., Пономарев В. Г., Фе-
нюк М. А., Марчук В. Г., Кострицкий С.М., Падерин Е. М. Высокоточный
волоконно-оптический гироскоп с линейным цифровым. // Гироскопия и
навигация. 2004. NIC. 69-82.
4. Прилуцкий В.Е., Пономарев В. Г., Марчук В. Г., Фенюк М.А., Коркишко
Ю.Н., Федоров В. А., Кострицкий С.М., Падерин Е.М., Зуев А. И. Интер-
ферометрические волоконно-оптические гироскопы с линейным выходом //
Гироскопия и навигация. 2004. N 3. С. 62-72.
5. Ю. Н. Коркишко, В. А. Федоров, В. Е. Прилуцкий, В. Г. Пономарев, В. Г. Мар-
чук, И. В. Морев, С. М. Кострицкий, Е. М. Падерин, Л. П. Несенюк, А. С. Бу-
равлев, Л. Г. Лисин Волоконно-оптический гироскоп навигационного клас-
са точности // Гироскопия и навигация, 2008, N 1, С. 71 81.
6. Korkishko Yu. N., Fedorov V. A., Feoktistova O. Y. LiNbCb Optical Waveguide
Fabrication by High-Temperature Proton Exchange // J. Lightwave Technology.
2000. Vol. 18. P. 562-568.
7. Korkishko Yu. N., Fedorov V. A., Kostritskii S. M., Alkaev A. N., Paderin E. M.,
Maslennikov E.I., Apraksin D.V. Multifunctional integrated optical chip for
fiber optical gyroscope fabricated by high temperature proton exchange // in
Integrated Optical Devices: Fabrication and Testing, G. C. Righini, Editor. Proc.
SPIE. 2003. V. 4944. P. 262-267.
8. Патент РФ на изобретение № 2248020. Заявка № 2003128668/28 (030720)/
Способ изготовления многофункционального интегрально-оптического эле-
мента на кристалле ниобата лития. Приоритет 25.09.2003. / Патентообла-
датель: ООО «НПК Оптолинк» / Авторы Ю.Н. Коркишко, В. А. Федоров,
С.М. Кострицкий, А.Н. Алкаев.
9. Патент РФ на изобретение К5 22988190. Заявка № 2005114116. Интеграль-
но-оптический модуль для волоконно-оптического гироскопа Приоритет:
11.05.2005 / Патентообладатель: ООО «НПК Оптолинк»/ Авторы: Понома-
рев В. Г., Прилуцкий В. Е., Коркишко Ю. Н., Федоров В. А., Падерин Е. М.
10. Burns W.K. Phase Error Bounds of Fiber Gyro with Polarisation-Holding
Fiber // J. Lightwave Tech. 1986. V. 4. P. 21-30.
11. Патент РФ на изобретение К5 2252197. Заявка К5 2003134317. Способ из-
готовления одномодового волоконного световода, сохраняющего поляриза-
цию излучения. Приоритет 27.11.2003 / Патентообладатель: ООО «НПК
Оптолинк»/ Авторы: А. И. Зуев, А. В. Белащенко, В. К. Варнаков, А. Н. Си-
лин, А. Л. Махалин.
12. Патент РФ на изобретение К5 2283475. Заявка № 2005114117. Волоконно-
оптический гироскоп. Приоритет 11.05.2005 / Патентообладатель: ООО
о Дополнение Б
«НПК Оптолинк»/ Авторы: Пономарев В. Г., Прилуцкий В.Е., Коркишко
Ю. Н., Федоров В. А., Рамзаев А. П.
13. Патент РФ на промышленный образец № 57894. Заявка № 2003500928. Из-
меритель угловой скорости волоконно-оптический. Приоритет 24.04.2003 /
Патентообладатель: ООО «НПК Оптолинк» / Авторы: Ю.Н. Коркишко,
В. А. Федоров, В.Е. Прилуцкий, В. Г. Пономарев, Ю.К. Пылаев.
14. Патент РФ на промышленный образец № 58500. Заявка № 2004500548. Трех-
осный волоконно-оптический измеритель угловых скоростей. Приоритет
03.03.2004 / Патентообладатель: ООО «НПК Оптолинк»/ Авторы Ю. Н. Кор-
кишко, В. А. Федоров, В.Е. Прилуцкий, В.Г. Пономарев.
15. Патент РФ на изобретение № 2283475. Заявка № 2005114117. Волокон-
но-оптический гироскоп. Приоритет 11.05.2005. Патентообладатель: ООО
«НПК Оптолинк»/ Авторы: Пономарев В. Г., Прилуцкий В.Е., Коркишко
Ю. Н., Федоров В. А., Рамзаев А. П.
16. Решение о выдаче патента РФ на промышленный образец. Заявка № 2006503810.
Малогабаритный трехосный волоконно-оптический измеритель угловых ско-
ростей. Приоритет 23.11.2006 / Патентообладатель: ООО «НПК Оптолинк»/
Авторы: Ю.Н. Коркишко, В. А. Федоров, В.Е. Прилуцкий, В.Г. Понома-
рев.
17. Lin S., Giallorenzi Т. G. Sensitivity analysis of the Sagnac-effect optical-fiber
ring interferometer // Appl. Optics. 1979. V. 18. N 6. P. 915-931.
18. Davis J.L., Ezekiel S. Techniques for shot-noise-limited inertial rotation mea-
surement using a multiturn fiber sagnac interferometer // Proc. SPIE, 1978.
V. 157. P. 131-143.
ИЗДАТЕЛЬСТВО “ТЕХНОСФЕРА
ПРЕДСТАВЛЯЕТ КНИГИ:
В серии «Мир электроники»
Фрайдеи Дж.
Современные датчики. Справочник
Москва
Техносфера, 2006 — 592 с. ISBN 5-94836-050-4 цена 370 руб.
Справочник по современным датчикам можно назвать настольной книгой исследовате-
ля в любой области естествознания, поскольку в нем изложены физические принципы,
методы разработки и варианты практического использования широкого спектра дат-
чиков в самых разнообразных областях применений. Книга издана на английском языке
уже третий раз, и это не случайно, поскольку любая современная система измерений
не обходится без применения датчиков, которые являются «переводчиками» окружаю-
щей аналоговой природы на язык цифровой техники, т. е. можно сказать, что датчики
являются «глазами, ушами и носами» кремниевых кристаллов. Последнее издание допол-
нено описанием электромеханических микродатчиков (MEMS) и электрооптомеханиче-
ских микросистем (MEOMS), без которых был бы невозможен такой резкий прогресс
в областях беспроводных систем телекоммуникации и отдельных областях медицины
и техники, наблюдаемый в последние годы. Книга является превосходным справочным
пособием для студентов, исследователей, проектировщиков датчиков и специалистов,
разрабатывающих измерительные системы.
Джексон Р.Г.
Новейшие датчики
Москва:
Техносфера, 2007. — 384 с. ISBN 978-5-94836-111-6 цена 275 руб.
Стремительный рост числа разработок и применений датчиков на основе ранее не ис-
пользовавшихся физических принципов и внедрения новых технологий для реализации
известных эффектов стимулирует появление современных руководств. В учебнике-мо-
нографии изложены многие недавно сформировавшиеся или обновившиеся направления
сенсорики, включая измерительную микромеханику, датчики на ПАВах, оптические,
ионизационные и магнитные, химические микросенсоры, оптико-волоконные и интел-
лектуальные измерительные системы, расходометрию для нестационарных потоков и
ряд других.
Как заказать наши книги?
почте: 125319 Москва, а/я 91
По факсу: (495) 9563346
E-mail: knigi@technosphera.ru
sales@technosphera.ru
Заявки на книги присылайте по адресу:
125319 Москва, а/я 91
Издательство «Техносфера»
e-mail: knigi@technosphera.ru
sales@technosphera.ru
факс: (495) 956 33 46
В заявке обязательно указывайте
свой почтовый адрес!
Подробная информация о книгах на сайте
http: //www.technosphera.ru
Волоконно-оптические датчики.
Вводный курс для инженеров и научных работников
Под ред. Э. Удда
Редактор — Е.Л. Свинцов
Компьютерная верстка — С.А. Кулешов
Корректор — О.Н. Заикина
Дизайн книжных серий — С.Ю. Биричев
Дизайн — И.А. Куколева
Выпускающий редактор — О.Н. Кулешова
Ответственный за выпуск — С.В. Зинюк
Формат 70x100/16. Печать офсетная.
Гарнитура Computer modern
Печ. л. 32,5. Тираж 3000 экз. (1-й завод 1500 экз.) Зак №3379
Бумага офсет № 1, плотность 65 г/м2.
Издательство «Техносфера»
Москва, ул. Краснопресненская, д. 16, стр 2
Отпечатано с готовых диапозитивов
в ООО ПФ «Полиграф-Книга»
160001, г. Вологда, ул Челюскинцев, дом 3.
Тел.: (8172) 72-55-316 72-61-75
optolex
Оптоволоконные датчики
и многоканальные системы измерения
• температуры;
• деформации;
• давления с температурной компенсацией.
Распределенные системы
измерения температуры и виброконтроля
Разрешающая
способность 0,001%
Диапазон измеряемых
относительных деформаций
-до 1 %
Область применения
• Нефтегазовая отрасль.
Контроль трубопроводов.
• Контроль сложных
инженерных сооружений.
• Атомная энергетика.
Контроль объектов АЭС.
• Контроль мостов и
зданий большой этажности.
• Авиация.
Космические технологии.
119992, Москва,
Научный парк МГУ, офис 521;
тел./факс: 930-80-53; www.optolex.ru
ООО ИП «НЦВО - Фотоника»
предлагает приборы собственной разработки:
- Волоконно - оптический зондовый высокоточный измеритель температуры.
- Волоконно - оптические телеметрические системы для измерения
• давления;
• температуры;
• механических деформаций;
• перемещения;
• ускорения и вибрации;
• сейсмических воздействий.
- Волоконно - оптические датчики различного назначения на основе
брэгговских решеток для применения в таких областях как:
• энергетика, в том числе - атомная и термоядерная;
• авиация и космонавтика;
• наземный, водный и подводный транспорт
• металлургия и химическая промышленность;
• нефтедобыча и газодобыча;
• трубопроводный транспорт;
• строительство;
• медицина;
• системы безопасности;
• научные исследования.
ООО ИП «НЦВО - Фотоника»
1 19333, Россия, г.Москва, ул.Вавилова,д.38, корп. «Фианит»,
тел.: +7 (499) 1 35-29-23, факс: +7 (499) 135-81-39,
e-mail: info@forc-photonics.ru, www.forc-photonics.ru
ВРАЩЕНИЯ ОПТИЧЕСКИЕ
ИЗМЕРИТЕЛЬНЫЕ
СЕРИИ ВГ ТЕХНОЛОГИИ
серия ВТ
экономичные
точные
надежные
прочные
аналоговые
цифровые
VG series
low power
accurate
reliable
robust
analog
digital
3o[eue
isnqoj
o|qe![9J
ajejriDDB
jdMod mo|
dJniBiuiiu
sauas 9Д
Э1чаос1срип
oinaoJOiTEHB
ONHhOdu
□1чнжэ1Ген
OIHHhOl
Э1ЧНЬИИОНОМ€
ONHdoIlBHHHW
jg виёээ
модельный ряд серия ВГ
точные
надежные
прочные
аналоговые
цифровые
миниатюрные
экономичные
Датчик вращения прямого преобразования серии ВГ преобразует
скорость вращения в выходной сигнал. Он содержит волоконно
оптический чувствительный элемент и электронный блок
обработки.
ВГ- это надежный и прочный прибор, не требующий
обслуживания в течение всего срока эксплуатации и хранения. Он
обладает всеми достоинствами оптических измерений -
точностью, устойчивостью к электромагнитным, механическим и
температурным возмущениям.
ВГ производится по передовой патентованной технологии, когда
все компоненты изготавливаются из цельного отрезка волокна.
При этом избыточные потери устраняются и шумы прибора
минимальны. Изпользование волокна с сохранением поляризации
подавляет дрейфы нуля.
Физоптика:
- 20 лет разработок и производства
- более 50 тыс приборов поставлено
- покупатели в 20 странах мира
- быстрая адаптация приборов
www.fizoptika.ru
мир
электроники
Волоконно-
оптические датчики
Вводный курс для инженеров
и научных работников
ПОД. РЕД. Э. УДДА
ЭРИК УДД - ПРЕЗИДЕНТ COLUMBIA
GORGE RESEARCH.
РАНЕЕ ЗАНИМАЛ РУКОВОДЯЩУЮ
ДОЛЖНОСТЬ В McDonnel DOUGLAS
ELECTRONIC SYSTEMS (1977 - 1993 ГОДЫ),
ЯВЛЯЕТСЯ ОДНИМ ИЗ ОСНОВАТЕЛЕЙ
КОМПАНИИ BLUE ROAD RESEARCH
И РАБОТАЛ В НЕЙ С 1993 ПО 2005 ГОДЫ
НАПИСАННАЯ ВЕДУЩИМИ
ПРОФЕССИОНАЛАМИ,
КНИГА МОЖЕТ СЛУЖИТЬ
УНИВЕРСАЛЬНЫМ ИСТОЧНИКОМ
ЗНАНИЙ ПО КЛЮЧЕВЫМ
ОБЛАСТЯМ ОПТИКИ
И ТЕЛЕКОММУНИКАЦИЙ
ТЕХНОСФЕРА