/











































































































































































































Автор: Цейтлин Я.М.
Теги: общественные науки приборостроение машиностроение единицы измерения издательство машиностроение
Год: 1981
Текст
Я. М. ЦЕЙТЛИН
НОРМАЛЬНЫЕ
УСЛОВИЯ
ИЗМЕРЕНИЙ
В МАШИНО-
СТРОЕНИИ
j _
, -> с.
ЛЕНИНГРАД «МАШИНОСТРОЕНИЕ»
ЛЕНИНГРАДСКОЕ ОТДЕЛЕНИЕ 1981
Б БК 34.9
Ц32
УДК 389 : (621 : 531.74)
Рецензенты: проф. И. С. Амосов и канд. техн, наук О. А. Иванов
Цейтлин Я. М.
Ц32 Нормальные условия измерений в машиностроении,—
Л.: Машиностроение. Ленингр. отд-ние, 1981. —224 с., ил.
70 к. ________________________
Л Я 105 9 "
- ‘о —-------' - - ' -
р..
' Л -5. i-J - ' <• ' ' ' -- f - - -4
б книге освещены-"Требования к- нормальным’ у&гееяям выполнения преци-
зионных линейных и угловых измерений и способы контроля величин, влияющих
на эти измерения. Приведены расчетные и экспериментальные данные по дей-
ствию температурных, вибрационных, электромагнитных и других факторов на
прецизионные средства линейных и угловых измерений. Даны рекомендации по
выбору и обеспечению нормальных условий измерений.
Книга предназначена для инженерно-технических работников машинострои-
тельных предприятий, занимающихся разработкой методов размерного контроля
и средств измерений, их поверкой и применением. Она также может быть
использована студентами вузов соответствующих специальностей.
ББК 34.9
6П5.8
ИБ № 2702
Яков Михайлович Цейтлин
НОРМАЛЬНЫЕ
УСЛОВИЯ
ИЗМЕРЕНИЙ
В МАШИНО-
СТРОЕНИИ
Редактор И. 3. Симоновский
Художественный редактор С. С. Венедиктов
Технический редактор Т. Н. Витошинская
Корректоры 3. С. Романова, Н. Б. Семенова
Обложка художника В. Н. Потекушина
Сдано в набор 16.10.80. Подписано в печать 12.06.81. М-28466. Формат 60X90/16. Бумага
типографская № 2. Гарнитура литературная. Печать высокая. Усл. печ. л. 14,0.
Уч.-изд. л. 14,35. Тираж 10 800 экз. Заказ 843. Цена 70 к.
Ленинградское отделение издательства «Машиностроение», 191065, Ленинград, Д-65,
ул. Дзержинского, 10.
Ленинградская типография № 2 головное предприятие ордена Трудового Красного Знамени
Ленинградского объединения «Техническая книга» им. Евгении Соколовой Союэполиграф-
прома при Государственном комитете СССР по делам издательств, полиграфии и книжной
торговли, 198052, г. Ленинград, Л-52, Измайловский проспект, 29.
© Издательство «Машиностроение»,, 1981 г.
ПРЕДИСЛОВИЕ
Условия выполнения измерений, харак-
теризуемые состоянием окружающей сре-
ды, в значительной степени определяют
точность, достоверность и сопоставимость
их результатов. От условий зависят требо-
вания к конструкции средств измерений,
производительность и трудоемкость изме-
рений, так как при «плохих» условиях тре-
буются повторные и даже многократные из-
мерения, а также введение поправок на
условия измерений. Точность и производи-
тельность измерений тесно связаны с каче-
ством продукции и эффективностью произ-
водства.
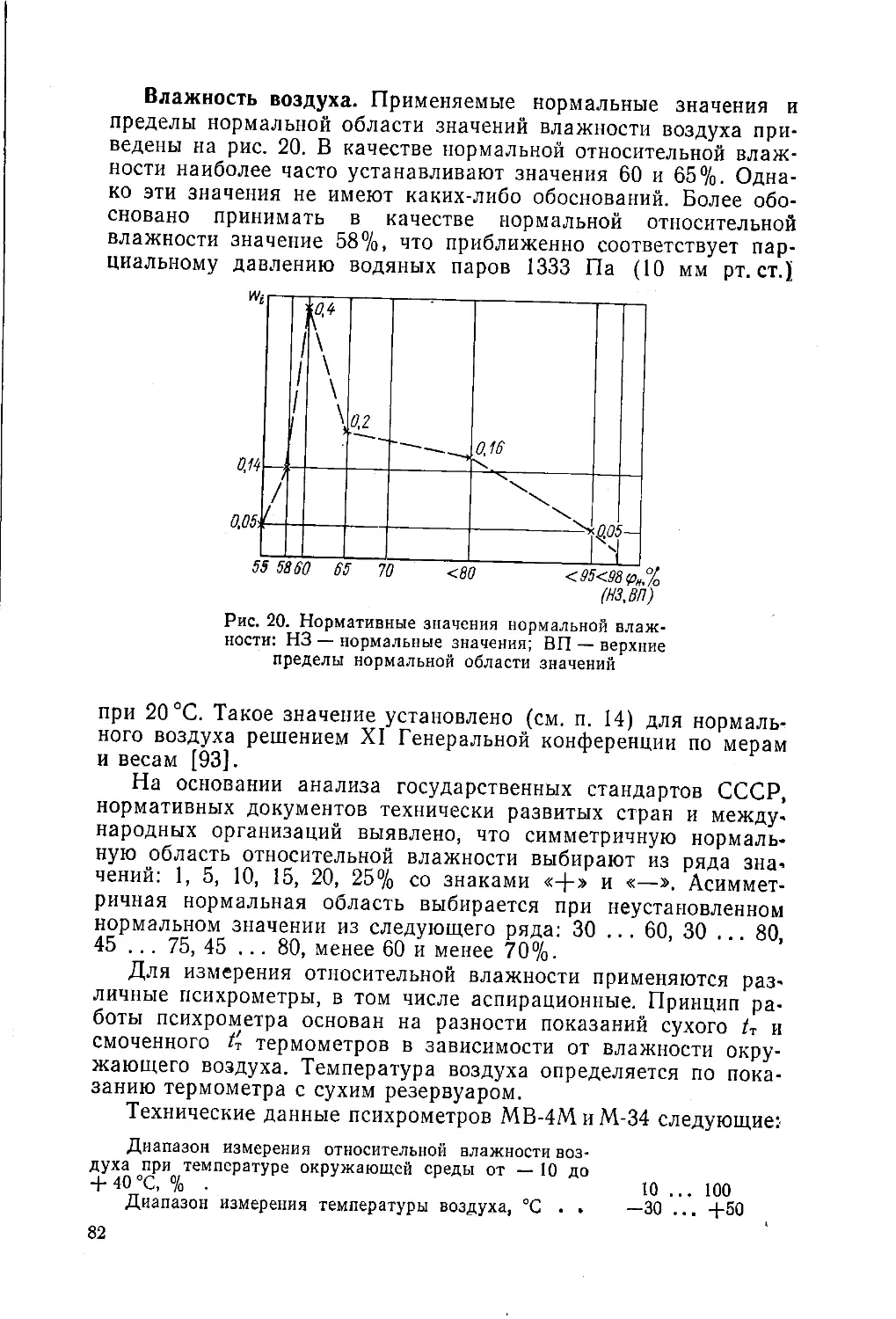
В машиностроении более 80% от общего
объема измерений приходится на измерения
длин и углов, являющихся наиболее специ-
фичными и ответственными в производст-
венных цехах, центральных измерительных
лабораториях, отделах технического конт-
роля. Условия этих измерений характеризу-
ются комплексом влияющих величин, часть
которых относится к сложным физиче-
ским полям, к числу существенных влияю-
щих величин при измерениях длины и угла
могут относиться температура, вибрации,
давление, влажность, состав окружающего
воздуха, ориентация в пространстве, элек-
трические и магнитные поля, т. е. весьма
широкий спектр физических факторов. По-
этому в прикладном плане названному виду
измерений и условиям его выполнения в на-
стоящей книге уделяется основное внима-
ние, хотя общие положения справедливы
практически для любых видов измерений,
Разрабатываемые здесь вопросы по иденти-
фикации нормальных условий измерений
составляют в комплексе новое направление,
которое можно назвать метрологической
экологией.
Если основной задачей метрологии яв-
ляется установление единиц физических
1
3
величин, воспроизведение их в точнейших эталонах и разработка
методики точных измерений, то экологические факторы — эле-
менты среды, оказывающие то или иное влияние на точность
измерений, воспроизведения и передачи единиц физических ве-
личин. Аналогии идут и дальше в части охраны среды, защиты
от индустриальных помех и т. п.
Следует отметить, что измерения могут выполняться и не
в нормальных условиях, но при этом необходимо введение по-
правок по так называемым функциям (коэффициентам) влия-
ния, что требует выполнения предварительных исследований и
сопутствующих расчетов. Даже при использовании адаптивных
измерительных систем с автоматическим введением поправки
далеко не всегда просто обеспечить необходимую быстроту и
адекватность их реакции на действие влияющих факторов. Та-
ким образом, обеспечение нормальных- условий измерений эф-
фективно во всех отношениях.
Настоящая работа является первой попыткой обобщить на-
копленный опыт по стандартизации, анализу и обеспечению
нормальных условий измерений, по теории и практике их иден-
тификации — распознавания и установления.
В 1978 г. утвержден стандарт СЭВ 1155—78 по нормальным
условиям для оценки основных норм взаимозаменяемости, кото-
рый в сочетании с методическим материалом СЭВ по выбору
нормальных условий линейных и угловых измерений соответ-
ствует действующему ГОСТ 8.050—73 и методике его примене-
ния МИ 88—76. В 1980 г. утвержден ГОСТ 8.395—80 на нормаль-
ные условия измерений при поверке (общие требования). С 1980 г.
введен отраслевой руководящий материал РМ 11 094.038—79.
Эти документы и другие аналогичные материалы основаны
на теоретических положениях, подробно освещаемых в гл. I.
Знание этих основ будет способствовать дальнейшему развитию
рассматриваемого направления, более правильному и эффектив-
ному обеспечению нормальных условий измерений, методам кон-
троля и практической реализации которых посвящены гл. II ...
... VII. В гл. VIII рассмотрены вопросы разработки средств из-
мерений с учетом нормальных условий их применения. Работа
основана на опыте автора в рассматриваемой области метроло-
гического обеспечения.
Все отзывы и пожелания по книге будут приняты с благо-
дарностью.
Принятые обозначения
/т — температура, °C;
Гт — температура, К;
Рат — атмосферное давление, Па;
<fH — относительная влажность воздуха, %;
vB — скорость движения воздуха, м/с;
va — амплитуда скорости вибраций, мм/с;
Sa — амплитуда виброперемещений, мкм, мм;
/ — частота колебаний, Гц;
а — круговая частота колебаний, рад/с;
Q3B — звуковое давление, дБ;
//маг ~ напряженность магнитного поля, А/м;
НЕ — напряженность электрической составляющей электро-
магнитного поля, В/м;
Вмаг — магнитная индукция, Тл;
— освещенность, лк;
пк — показатель преломления;
PY — плотность, г/мм3;
ат — температурный коэффициент линейного расшире-
ния, К-1;
Л — длина волны света, нм, мкм;
t, т — время;
g— ускорение свободного падения, м/с2;
о — среднее квадратическое отклонение;
Ду — составляющая погрешности измерений от действия
влияющих величин, мкм;
Ддоп — составляющая погрешности средства измерений от
выхода влияющих величин за нормальную область
их значений, мкм;
ДШ1 — инструментальная (аппаратурная) погрешность из-
мерений;
Доен — основная погрешность средства измерений;
бин — выход инструментальной (аппаратурной) погреш-
ности измерений за предел основной погрешности
средства измерений;
Н3 — энтропия;
Iq — количество информации;
t] — критерий малости погрешности измерений;
i]v — критерий малости составляющей погрешности изме-
рений
Г лава I
МЕТРОЛОГИЧЕСКИЕ ОСНОВЫ
НОРМИРОВАНИЯ ТРЕБОВАНИЙ
К НОРМАЛЬНЫМ УСЛОВИЯМ
ИЗМЕРЕНИЙ
1. УРОВЕНЬ ТОЧНОСТИ
СОВРЕМЕННОГО
ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА
Метрологический предел точности. Госу-
дарственный эталон единицы длины [8]^
состоит из газоразрядной лампы с крипто-
ном-86 — источником первичного эталонно-
го излучения, эталонного интерферометра,
эталонного спектроинтерферометра и пре-
цизионной аппаратуры для измерения тем-
пературы. Исследования показали, что
наиболее точную штриховую меру на эта-
лонной установке можно измерить с погреш-
ностью 0,02 ... 0,03 мкм. При этом необхо-
димо знать ее температуру с погрешностью
0,002 ... 0,003 °C и обеспечить постоянство
температуры в процессе измерения в пре-
делах сотых долей градуса.
Погрешность воспроизведения угла на
Государственном первичном эталоне оцени-
вается средним квадратическим отклоне-
нием (СК.О) в 0,01" при аттестации 24- и
36-гранных кварцевых призм и вариации
температуры ~ 0,03 °C в диапазоне 20 ±
±0,1 °C.
Передача единицы длины и угла от эта-
лона образцовым средствам выполняется
с 2 ... 3-кратной потерей точности на пере-
ходе между разрядами образцовых средств
и от образцовых к рабочим средствам из-
мерений. Для рабочих измерений важен
адекватный выбор метода измерений, поз-
воляющий уменьшить влияние технологиче-
ских погрешностей формы (ограничение се-
чений, секторов, зон измерения; контроль
огранки в призме, контроль некруглости
поверхностей большого диаметра в призме
переменного адаптирующегося угла). Не-
адекватность методов измерений связана
с погрешностями материализации точек ли-
нии измерения, концов диаметра и других
6
элементов геометрических фигур, что вызывается как техноло-
гическими факторами, так и особенностями формирования
входного сигнала чувствительными элементами (датчиками)
первичных измерительных преобразователей.
Технологический предел точности. Согласно А. П. Соколов-
скому [62] технологическая точность определяется соответ-
ствием реальной и заданной поверхностей деталей в четырех
аспектах: точностью формы, т. е. степенью соответствия отдель-
ных участков детали тем геометрическим образам, с которыми
они отождествляются, точностью размеров, точностью взаимно-
го расположения поверхностей, их шероховатостью. Следует от-
метить, что для функциональной взаимозаменяемости важно
в ряде случаев и соответствие комплекса физико-механических
свойств реальной и заданной поверхностей.
Реальные поверхности имеют макро- и микроотклонения
формы. Минимальная высота шероховатости поверхности, полу-
чаемая вибрационным шлифованием и ионным полированием
по оптической технологии, находится в пределах 1 ... 10 нм.
Минимум достигается на особо однородных материалах: пара-
фазном стекле, кварцевом стекле, монокристалле кремния и т.п.
Минимальные допускаемые отклонения от плоскопараллель-
ности на концевых мерах длины первого разряда 0,1 мкм, пло-
скостности контрольного бруска 0,06 мкм. Минимальные прак-
тически полученные отклонения от плоскостности на образцах
050 мм из плавленого кварца и монокристаллического кремния
при полировании—(0,01 ... 0,1) Х/2, где X = 0,6 мкм — длина
волны света.
Технологическое воспроизведение прямой как места пересе-
чения двух плоскостей, а тем более линий пересечения поверх-
ностей с пространственной кривизной дает отклонение более
0,2 мкм. Минимальные отклонения от круглости гладких калиб-
ров— пробок 0,0005 ... 0,00005 мм (ГОСТ 2015—69), допуски
некруглости для роликов по ГОСТ 6870—72 не менее 0,001 мм.
Минимальные допускаемые отклонения от круглости установоч-
ных и образцовых колец — 0,001, плунжерных пар — 0,0001, ша-
риков (ГОСТ 3722—60)— 0,0001 мм. Минимальные отклонения
эвольвенты профиля эвольвентных кулаков до 0,0005, а измери-
тельных колес — 0,001 мм. Наконец, минимальные допуски для
классов точнее первого квалитета по СТ СЭВ 144—75 составляют
десятые доли микрометра (0,2 мкм для диапазона 1 ... 3 мм
и класса 02).
Для машиностроения наиболее характерны линейные раз-
меры в диапазоне 1 . . . 500 мм. Малые пазмеоы менее 1 мм ти-
пичны для часовой, члектпопрс” ^^паслей
и радиопромышленности Большие размеры — свыше 500 мм—
применяются в энергетической и авиационной отрасли, в круп-
ном бумагоделательном оборудовании и станкостроении. Для
больших турбинных колес с диаметром 5 м допуск на смещение
7
зубчатого исходного контура ограничивается пределом менее
0,1 мм. Прямолинейность траектории на прецизионных направ-
ляющих движения станков обеспечивается в пределах 0,05 мкм
при перемещениях до 1 м. В относительном выражении по отно-
шению к измеряемому размеру и габаритам поверхности ука-
занные отклонения и допуски составляют 10-3 ... 5-Ю-8. Вме-
сте с тем адекватное нормирование, реализация и контроль ука-
занных величин возможны лишь при соблюдении определенных
референтных условий производства и измерений, характеризуе-
мых комплексом номинальных значений нормальных величин и
их нормальных областей. Так, изменение температуры только
на 1 °C вызовет изменение диаметра стального пятиметрового
колеса на 55 мкм, что превышает 50% указанного выше допу-
ска. При изготовлении и измерении малых точных изделий боль-
шие помехи возникают от пыли и вибраций.
Технологический предел точности повышается по мере раз-
вития технологии обработки, увеличения точности соответствую-
щего финишного оборудования, улучшения однородности и
стабильности физико-механических свойств конструкционных
материалов, стабилизации внешних влияющих факторов. Из-
вестно, что физический предел точности воспроизведения разме-
ров твердого тела превышает 1011 [8; 79], а гипотетическая
элементарная длина оценивается физиками менее 10~20 см. Эко-
номическая точность деталей, как правило, значительно ниже
достижимых пределов и соответствует квалитетам 1 и 2 в прези-
ционном машиностроении, 3 ... 8 — в производстве редукторов,
станков нормальной точности и т. п., 8 ... 12 — в горнодобываю-
щей и сельскохозяйственной технике.
Технологическое обрабатывающее оборудование является
источником тепловыделений, вибраций, магнитных и электриче-
ских полей и других факторов, снижающих как точность изго-
товления, особенно на финишных операциях, так и точность
измерений. Процессы обработки обычно сопровождаются изме-
нением состояния окружающей среды в рабочем пространстве
средств контроля, установленных на технологическом оборудо-
вании и в непосредственной близости от него. Так, при шлифо-
вании происходит нагрев обрабатываемой поверхности детали
До десятков и сотен градусов при разности температур внутри
нее до десятков градусов, нагрев узлов станка до 27 .. . 30 °C,
а жидкости в гидросистеме до 50 °C. При использовании магнит-
ных базирующих плит их температура повышается до 30 °C и
более [28]. В зоне обработки наблюдаются повышенное содер-
жание паров и брызг смазочно-охлаждающей жидкости (СОЖ),
углекислого газа, твердых частиц абразивной пыли, значитель-
ная скорость перемещения воздуха, а также действие высоко-
частотных вынуждающих вибраций.
Сопоставление приведенных данных со стандартными требо-
ваниями (ГОСТ 8.050—73) к нормальным условиям измерений,
8
казалось бы, выявляет полное несоответствие. Обеспечение до-
статочно узкой области значений температур вблизи 20 °C при
финишной обработке возможно в ряде случаев при использова-
нии заниженных режимов обработки, длительном выхаживании,
обильном охлаждении СОЖ и т. п. Однако эти меры могут ока-
заться экономически невыгодными, вследствие чего во многих
практических задачах измерений и контроля требуется совер-
шенно иной подход к оценке и обеспечению нормальных условий
измерений (см. п. 4). Способы компенсации влияний разнооб-
разны и рассмотрены в гл. II ... VIII.
Задача дифференциальной оценки функций влияния и учета
действия условий измерений на средства и объекты измерений
и их элементы удовлетворительного общего решения не имеет,
некорректна и плохо обусловлена. Даже если имеется возмож-
ность ввести поправки на систематические дополнительные по-
грешности, остаются неисключенные остатки систематических
погрешностей и случайные составляющие. В первом приближе-
нии предел неисключенных остатков систематической погрешно-
сти считают равным
где Д/П.с = %/= df (VJ/dVlK—коэффициенты влияния
/-Й влияющей величины; f(Vx)— функционал влияния условий
измерений на их результат; ДУ/К — погрешность определения
значений /-Й влияющей величины; zia — коэффициент распреде-
ления, зависящий от закона распределения неисключенных
остатков систематической погрешности и выбранной доверитель-
ной вероятности Sa.
Дифференциальная количественная оценка парциальной по-
грешности степени влияния весьма затруднительна по ряду
причин. Во-первых, большинство влияющих факторов являются
сложными неоднородными и нестационарными физическими по-
лями. Во-вторых, действие влияющих величин на средство изме-
рений выражается сложными тензорами влияния с неопределен-
ными коэффициентами и граничными условиями. В-третьих,
в реальных условиях на средство измерения воздействует неко-
торый комплекс частично взаимнокоррелированных влияющих
величин. В-четвертых, функции влияния могут быть многомер-
ными и неоднозначными.
2. ПОГРЕШНОСТИ И УСЛОВИЯ
ИЗМЕРЕНИЯ
Условия и погрешности результатов измерений взаимосвя-
заны как по систематическим, так и по случайным составляю-
щим, т. е. имеют место детерминированные и стохастические
связи. При этом нужно различать виды погрешностей, в кото-
9
рых действие условий должно учитываться, и знать способы их
эффективной оценки.
В теории измерительных устройств и метрологии погрешно-
сти разделяются по форме выражения на абсолютные, относи-
тельные, приведенные [11], по связи с измеряемой величиной
на аддитивные, мультипликативные, степенные, периодические
и т. п., по степени определенности на систематические и случай-
ные, по причинам появления на методические и инструменталь-
ные или аппаратурные (выделяют иногда также субъективные
или личные погрешности), по связи с временными факторами на
статические, динамические, смещения настройки (девиация).
Выделяются основные погрешности средств измерений, опреде-
ляемые в нормальных условиях, и дополнительные погрешности
от выхода влияющих величин за нормальную область
значений.
Несмотря на то, что эти понятия стандартизованы, по ряду
из них нет четких определений, обеспечивающих однозначное
понимание и нормирование. В первую очередь это относится
к термину «инструментальная (аппаратурная) погрешность».
Согласно ГОСТ 16263—70, инструментальная погрешность
является составляющей погрешности измерения, зависящей от
погрешностей применяемых средств измерений.
Однако здесь нет прямого указания относительно учета дей-
ствия условий измерений на средства их выполнения при оценке
инструментальной (аппаратурной) погрешности.
В других публикациях, как более ранних, так и последнего
периода находим развернутые, но неоднозначные трактовки ин-
струментальной погрешности.
Общепринято, что основная погрешность средств измерений
оценивается в нормальных условиях. Вместе с тем в работе [23]
по информационной теории измерении отчетливо указывается
на возможность неправильного использования понятий «нор-
мальные» и «рабочие» условия измерений. Несколько более
четкие определения, увязанные с метрологией, предложены в ра-
боте [57], где в качестве источников погрешности выделяются:
несовершенство теории (неполнота тезауруса или алгоритмиче-
ского языка); несоответствие (неэквивалентность) множества
эталонов множеству моделей; несовершенство системы образ-
цовых средств, неоптимальность решений (управлений), приме-
няемых на всех этапах создания и эксплуатации измерительной
системы, наличие множества возможных решений; регламента-
ции по ограниченности объема наблюдений х; воздействие на
измерительную систему внешних влияющих факторов z =
разброс относительно номинала и нестабильность во времени
параметров элементов С, из которых собирается измерительная
система; неадекватность критерия сравнения рси решаемой за-
даче. Причем критерий сравнения рСи обращается в нуль при
равенстве сопоставляемых величин,
10
Рис. 1. Виды условий изме-
рений по метрологическим
свойствам
Однако и в этой работе, использующей понятие «нормальные
условия измерений», не дается необходимых определений или
критериев их выбора. Таким образом, необходимо уточнить по-
нятия «инструментальная (аппаратурная), основная и дополни-
тельная погрешность», а также термин «нормальные условия из-
мерений».
Отсутствие общего определения для термина «нормальные
условия» не только выявляется при рассмотрении нормативной
документации (ГОСТ 16263—70), но имеются и работы по точ-
ности измерений, в которых авторы стараются доказать невоз-
можность или нецелесообразность установления единых норма-
тивов в данном аспекте.
Реальные условия измерений в фе-
номенологическом и нормативном ас-
пектах, по нашему мнению, следует
разделить на нормальные, при кото-
рых влияющие физические величины
равны нормальным по размеру или
находятся в пределах нормальной об-
ласти значений; рабочие 2 (рис. 1), в
пределах которых устанавливаются
метрологические характеристики для
средств измерений, в том числе функ-
ции влияния; предельные 3, границы
которых соответствуют пределам су-
ществования объектов измерения и их
необратимым изменениям (например,
температура плавления, предел пластичности для упругого тела,
пробой изоляции и т. п.). Отметим, что обратимые изменения
объекта измерения под действием влияющих факторов не яв-
ляются дополнительными погрешностями, а лишь вероятной
причиной таковых.
В общем случае нормальной областью влияющей величины
можно считать область значений, в пределах которой ее дейст-
вием Ду на результаты измерений в отношении их правильности,
воспроизводимости и единства по установленным нормам можно
пренебречь. Значение влияющей величины, к которому для обе-
спечения правильности и единства формально относят резуль-
таты измерений, называют нормальным по размеру. Следует
различать нормальную по размеру влияющую величину (нор-
мальную величину) как некое количественное содержание ‘и
номинальное значение нормальной величины, т. е. приписанное
этому содержанию значение в конкретных единицах физической
величины. Таким образом, нормальные условия .характеризуют-
ся нормальным значением (номинал) и нормальной областью
значений относительно номинала. Нормальные условия целесо-
образно подразделить на унифицированные 1, т. е. единые для
любых объектов, средств и методов измерений с заданной точ-
11
ностью, и расширенные 4 для конкретных сочетаний средств,
объектов и методов измерений. Встречаются предложения
делить условия измерений по месту их выполнения: цеховые 1
(рис. 2), лабораторные 2, на открытом воздухе 3 (вне помеще-
ния). Указанные границы носят ориентировочный характер. Та-
кое деление, по-видимому, целесообразно для учета или регули-
рования влияющих факторов. Так, пределы изменений условий
Рис. 2. Границы влияющих факторов по месту выполнения из-
мерений:
1 — в цеху; 2—в лаборатории; 3—на открытом пространстве; 4 и 5—в уни-
фицированных и расширенных нормальных условиях;
•^маг — напряженность магнитного поля; *Еф — освещенность;
<р^ — влажность воздуха; ав — скорость воздуха; оа — амплитуда
скорости вибрации; 6/т, Д/т. р — изменение и разность темпера-
тур; СО2 —• углекислый газ; Q3B — звуковое давление
на открытом воздухе соответствуют климатическим факторам
по ГОСТ 15150—69, многолетние данные по которым имеются
в отчетах Государственной метеорологической службы.
Однако в отношении точности и единства измерений подоб-
ная классификация условий измерений неэффективна. Точные
измерения в машиностроении на открытом воздухе выполняются
12
сравнительно редко, хотя для больших сооружений в период
монтажа подобные ситуации вполне возможны.
Под инструментальной (аппаратурной) погрешностью изме-
рений в настоящей работе понимается погрешность средств из-
мерений в условиях их применения, откуда следует
Лин —> Лсх ”Ь ЛТех 4” Лу, (О
где ЛСх — погрешность схемы прибора; Лтех— погрешность ее
реализации; Лу — погрешность от действия влияющих величин.
Инструментальную (аппаратурную) погрешность измерений
не следует смешивать с расчетной погрешностью схемы средства
измерений, в которой не учитывается действие условий измере-
ний. Инструментальная погрешность должна определяться не
с помощью образцовых мер и приборов, а по результатам изме-
рений и разбраковки реальных объектов в реальных условиях
при компенсации погрешностей метода и части субъективных
погрешностей оператора, не проявляющихся при оценке основ-
ной погрешности средства измерений.
Для определения аппаратурной погрешности ЛИн следует ре-
зультаты измерений размеров Ли объекта сопоставить с результа-
тами их аттестации jLaTT в нормальных условиях при совпадаю-
щих методах измерения и операторами равной квалификации:
Лин Латг-
Погрешность арбитражных измерений обычно допускается
не более 30% от предела допускаемой погрешности рабочих
измерений. В этом подходе мы несколько расходимся с встре-
чающимся определением инструментальной погрешности как
неизменной при измерениях на различных объектах. Вместе
с тем приведенное в [70] определение основной погрешности
как инструментальной, измеренной в нормальных условиях ра-
боты прибора, совпадает с принятым в настоящей работе.
В определении основной погрешности средства измерений, кро-
ме общепринятого требования нормальных условий, следует
указать способ оценки по образцовым мерам и приборам, что
соответствует метрологической практике и стандартным пове-
рочным схемам. В основную погрешность средства измерений
входят погрешности схемы ДСх, технологии ее выполнения Дтех,
действия влияющих величин бон в пределах нормальной области
их значений Л1/Ин и, конечно, погрешности метода аттестации
батт- Следовательно,
Доси —> ДсХ + Атех + бо. н + 6атт« (2)
Значения батт должны быть пренебрежимо малыми и в пределе
батт 0. Тогда
Доен —> (Лех “I- ЛТех) 4” ^о. н* (3)
где бо. н = Лу « 0. Составляющая погрешности средства изме-
рений, вызываемая отклонением одной или более влияющих
13
величин от нормальной по размеру или их выходом за пределы
нормальных областей, называется дополнительной погрешностью
Лдоп средства измерений. В нормальных условиях при определе-
нии основной погрешности по образцовым средствам ДДОп =
- 6о.н-*0.
Следует отметить, что при взаимодействии с прибором дру-
гих объектов, отличающихся в физико-механическом плане от
образцового средства, действие влияющих величин Ду, 6ИН, нахо-
дящихся в пределах нормальной области значений, будет
уже иным и не равным погрешности 6О.Н, проявляющейся при
оценке основной погрешности. Обеспечить Ду = бин = 0 в случае
средств измерений универсального назначения практически не-
возможно. Речь может идти лишь о некоторой минимизации Ду,
6ИН или их компенсации. Подробно это положение рассмотрено
в п. 3,
С понятием дополнительной погрешности связан термин
«функция (коэффициент) влияния» — метрологическая характе-
ристика средства измерений, отражающая зависимость погреш-
ности или другой метрологической характеристики средства из-
мерений от изменений влияющей величины.
3. ХАРАКТЕРИСТИКА
ВЛИЯЮЩИХ ВЕЛИЧИН
Источники влияющих величин делятся на естественные или
климатические и промышленные (производственные). К клима-
тическим факторам (по ГОСТ 15150—69) относятся внешняя
температура, атмосферное давление, влажность, скорость ветра,
соляной туман, солнечная радиация, содержание в воздухе кор-
розионных агентов. К естественным факторам следует отнести
ускорение свободного падения (силы тяжести), которое в пре-
делах Земли равно g = 9,8 м/с2, на Луне gn — 1,6 м/с2, в откры-
том Космосе й'к « 0.
Для открытой атмосферы характерно турбулентное движе-
ние воздуха. Согласно теории А. Н. Колмогорова и А. М. Обухо-
ва [32], диффузное выравнивание концентрации вихрей происхо-
дит лишь в самых мелкомасштабных неоднородностях, которые
из-за наличия вязкости выпадают из каскадного разрушения
вихрей.
Математическое описание статистических характеристик тем-
пературы и влажности приземного слоя воздуха выполняется
с помощью временных рядов. При этом составляется матрица
вида
0Ц012 . . • бц- ... 01Л
0,10/2 ... 0// ... 0/ft
0«1би2 • • • 6/21" • • •
14
Здесь индексы i = 1, 2, .... k — время, ч; j = 1, 2, ..., п — но-
мер реализации.
После получения выборочных оценок выполняется специаль-
ная проверка состоятельности статистик и однородности исход-
ного материала по выборочным автокорреляционным функциям,
критерию непараметрической гипотезы Н. В. Смирнова [61],
критерию Аббе систематических сдвигов в ряду наблюдений
и т. д.
Выявлено [23], что эмпирические плотности вероятности
распределения температуры приземного слоя удобно аппрокси-
мировать одномерным рядом Эджворта, обладающим тем до-
стоинством, что можно описать законы распределения в разных
временных сечениях единой формулой вида
где б,, o0i, Ф1(0() и фг(0;) —математическое ожидание, среднее
квадратическое отклонение процесса, коэффициент асимметрии
и эксцесса; Фз^Сг)— произведение n-го порядка от ин-
теграла вероятности (табулированы [10]), причем Ф3(з)
1
д/2л
Z
X ехр(—x2/2)dx. Первый член правой части уравне-
ния (4) дает нормальное распределение, второй член отражает
влияние асимметрии кривой, а третий — влияние ее крутизны.
Процесс изменения температуры статистически нестациона-
рен. Статистически стационарные функции иногда могут быть
получены при рассмотрении изменений температуры за сравни-
тельно короткие временные интервалы, для которых удобнее
пользоваться не корреляционными, а структурными функциями
вида Dv(r)= < [Vx(Z + т)—Ух(/)]2>, не требующими вычисле-
ния средних значений <V\(Z)> влияющего фактора. Структурные
функции Ду(т) являются средним квадратом приращения иссле-
дуемого фактора Ик(0 и для случайных функций со стацио-
нарными приращениями играют ту же роль, что и корреля-
ционные функции Вц(г) в теории стационарных случайных про-
цессов.
Относительная влажность в отличие от температуры или аб-
солютной влажности является существенно положительной ве-
личиной, физически ограниченной сверху и снизу, так как она
не может быть менее нуля или более 100%. В связи с этим за-
кон распределения для относительной влажности заведомо от-
личается от нормального закона и может быть аппроксимирован
15
Рис 3. Ход корреляционной функции: а — температуры в воздухе; б — на из-
рительной машине
16
17
с помощью ряда Лагерра:
00
W)= S bne~vva'L^(v) - [1/Г(аг+ 1)]^е'", (5)
м = 0
где (и) — обобщенный полином Лагерра; Г(аг+1)—гам-
ма-функция; аг = а^/(й2 — d2m^ — 1; ат — математическое ожи-
дание; а2 — второй начальный момент.
Анализ почасовых статистических характеристик показал
[23], что процесс изменения влажности не может быть признан
статистически стационарным. Наблюдается сильная изменчи-
вость закона распределения вероятностей относительной влаж-
ности как в течение суток, так и в течение года. Имеет место
и взаимная корреляция между температурой и влажностью воз-
духа. Знание подобных функций позволяет не только делать
некоторые выводы о внутренней структуре и взаимосвязанности
этих случайных процессов, но и анализировать совместное влия-
ние внешних факторов на аппаратуру.
Несмотря на то что в помещениях температурные и другие
характеристики состояния воздуха обычно изменяются в мень-
ших пределах, чем на открытом пространстве, в производствен-
ных цехах и даже лабораториях могут наблюдаться нестацио-
нарные изменения температуры и других влияющих величин.
На рис. 3 показан пример хода корреляционной функции Вц
температуры в лаборатории. Вид графика, имеющего незату-
хающие колебания, выявляет полигармонический характер рас-
сматриваемой функции. Даже в специально термостатирован-
ных помещениях наблюдаются колебания и изменения темпера-
туры, влажности, давления и других влияющих факторов в про-
странстве и времени. Отсюда в реальных условиях практически
невозможно обеспечить реализацию какого-либо одного посто-
янного значения влияющей величины.
Требования к нормальным условиям измерений, установлен-
ные в государственных стандартах и другой нормативной доку-
ментации, отличаются большой пестротой. Результаты анализа
стандартизованных нормальных значений и областей влияющих
величин по средствам и методам измерений пространства, вре-
мени, механических величин, температур и тепловых величин,
расходов, электрических и магнитных величин, физико-химиче-
ских, оптических, светотехнических, акустических параметров и
ионизирующих излучений показывают, что даже для темпера-
туры, влажности, давления в разных документах установлены
различные номиналы. В ряде стандартов нормальные области
значений влияющих величин дифференцированы по точности
средств и методов измерений. В этом отношении наиболее под-
робными и полными документами являются ГОСТ 8.050—73,
ГСИ «Нормальные условия линейных и угловых измерений»,
ГОСТ 12997—76, ГСП «Общие технические требования»,
ГОСТ 22261—76, «Средства измерений электрических величин».
18
4. ПРИНЦИП МЕТРОЛОГИЧЕСКОЙ
ИДЕНТИФИКАЦИИ
НОРМАЛЬНЫХ УСЛОВИЙ ИЗМЕРЕНИЙ
Для однозначного распознавания и установления нормаль-
ных условий измерений возможны два варианта.
Вариант А по приращению погрешности схемы. Если в ка-
честве исходной рассматривать погрешность Дсх схемы измери-
тельного средства, то в нормальных условиях должны выпол-
няться соотношения:
Асх Н- Ау Ад. осн>
Ау ^оАд. осн>
О2 + о д о2 ;
сх 1 А у д. осн’
<т. v А ,
Ду Ду2а о д. осн’
(6)
(7)
(8)
(9)
где Дсх и Стсх — погрешность и среднее квадратическое отклоне-
ние погрешности схемы; Дд. осн и <тд. ОСн — пределы допускаемой
основной погрешности и ее СКО для измерительного средства
определенного типа; Ду и Оду — погрешность и СКО погрешно-
сти влияния условий измерений; v0 — критерий малости состав-
ляющей основной погрешности; иДуха — процентная точка функ-
ции распределения погрешности влияния с доверительной ве-
роятностью 2а.
Так как погрешность схемы является расчетной величиной,
то для ее практического определения необходимо создать иде-
ализированные нормальные условия, в которых все существен-
ные влияющие величины имеют значения, равные нормальным
по размеру, т. е. номинальным нормальным значениям, а нор-
мальная область значения любой влияющей величины равна
нулю. Выполнение такого требования весьма затруднительно,
а в непосредственной близости от технологического оборудова-
ния и невозможно вследствие его собственных тепловыделений,
вибраций и т. п. источников влияющих величин.
Такой подход не охватывает всего комплекса задач, возни-
кающих из-за многообразия объектов измерения, и более харак-
терен для приборостроения при создании новых средств измере-
ний, чем для машиностроения и прикладной метрологии.
В отдельных случаях, особенно для расчетов по определению
требований к условиям поверки и аттестации конкретных образ-
цовых измерительных средств, этот критерий может быть доста-
точно эффективным и соответствует условию реализации макси-
мальной точности, обеспечиваемой измерительными средствами
данного типа, а также принятой процедуре введения поправок
по функциям влияния. Для статистического разделения система-
тической погрешности схемы прибора без действия влияющих
факторов и функции влияния в реальных условиях требуется
19
применение дисперсионного анализа [5; 23]. Обычно предпола-
гается:
+ mv (1) + П)1 fi M + ...
••• + [bk + (&) + Щ (£)] fk Ul) + Лау£- (10)
Математическое ожидание MO(r|aY£)=0. Весь анализ ве-
дется на основе исследования уравнения измерения (10) по экс-
периментально полученным реализациям погрешности yav^ при
соответствующем уровне значений внешних факторов у и £.
Для этого необходимо выполнять совместные измерения различ-
ных величин у, у и что требует применения достаточно слож-
ных, управляемых по специальной программе климатических
камер, в особенности при коррелированном воздействии ряда
влияющих факторов.
Чем больше область распределения факторов, тем больше
могут быть дисперсии оценок погрешности bv схемы и функций
влияния mv, зависящие от разброса наблюдений S$:
= £ (Ay? — A?) (иart ~ У fl) ’
где т — знак транспонирования, а черта означает осреднение по
множеству; fx= S («у? — 1)-
V?
В приведенной зависимости не учитывается динамика влияю-
щих факторов, действующих в реальных условиях.
Для оценки точности первичного параметрического измери-
тельного преобразователя (ИП) при воздействии на него изме-
няющихся во времени внешних Vv. влияющих величин [25]
рассматривают его модель в виде многополюсника с парамет-
рами Pi, Р$, ..., Рт, на входы которого поступают информа-
тивный х и неинформативные 7О=(7О1, ..., Юр) параметры
входного сигнала, папа метры источника питания Л=(/7[, ..., Пг)
и параметры А — (Vi.......К}, являющиеся характеристиками
условий окружающей среды, а с выхода многополюсника сни-
маются информативный у и неинформативные Я — {Я\, ..., Яд}
параметры.
Дисперсия случайной погрешности на выходе ИП тем мень-
ше, чем больше постоянная времени и уже полоса пропускания
соответствующей влияющей величины. Следует отметить, что
функции влияния могут зависеть от диапазона изменения влияю-
щих 1/и факторов, что затрудняет расчет соответствующих ком-
пенсационных поправок.
Для дисперсионного анализа часто используют ЭВМ. Одно-
и двухфакторный дисперсионный анализ экспериментальных
данных Xij, сгруппированных в таблицу из т строк и п столб-
цов, можно выполнить по стандартной программе на малогаба-
ритной машине «Электроника ТЗ-16». При однофакторном ана-
20
лизе общая дисперсия разбивается на внутригрупповую (столб-
цов таблицы) и дисперсию между группами. Затем вычисляется
отношение дисперсий
п
пт (т - 1) £ (X, - Х)2
Fa =-----:-----—---------' > (Н)
О m п _ ' '
(«-ЧЕ
i=i/=i
где х = (1/тп) £ £ %l7; Xt- = (!/«)£ %,7; (n - 1) = Ut = сте-
i=ij=i j=i
пень свободы числителя; n(m—l) = t)2 — степень свободы зна-
менателя.
После установки программы с клавишного пульта или маг-
нитной карты оператор вводит данные п столбцов в регистр У,
а т рядов в регистр X. После выполнения программы значения
Fa, »ь «2 появляются на индикаторе соответственно в регистрах
Z, У и X.
Программа двухфакторного дисперсионного анализа экспе-
риментальных данных, сгруппированных в таблицу т X 4 по
двум признакам, предназначена для оценки отношения диспер-
сии Fj стр между строками и дисперсии между столбцами Fa ст
к остаточной дисперсии. Для таблицы из четырех столбцов и т
строк вычисления реализуются по формулам:
4(m-l)-‘ £ (Xt-ХУ
Fa^ =--------------4 „Л1 _ _ _ . (12)
1 (m - I)"1 £ £ (Х,7 - X/ - Xt + XV
/=1i=i
где (m— 1)= ui — степень свободы числителя; 3(т—1) = t>2
степень свободы знаменателя;
4
lm£(X/-xv
Fa ст =------------, (13)
1 (,и - 1Г1 £ £ <х,7 _ Xj - Xi + xj2
/-1f-1
где 3 = 1)1 — степень свободы числителя; 3 (т — 1) = 1)2 — степень
свободы знаменателя.
После набора или ввода с магнитной карты программы в ма-
шину вводятся последовательно строка за строкой данные. По
окончании выполнения расчета на индикаторе высвечивается
Faст, uf, 1)2 и при повторном нажатии клавиши'«пуск» появляют-
ся значения Растр, i)i, Da соответственно в регистрах Z, У и X.
Имеется также стандартная программа для двухфакторного
21
дисперсионного анализа с повторениями наблюдений при раз-
бивке общей дисперсии на дисперсию между строками, диспер-
сию между столбцами и дисперсию взаимодействия.
Вариант Б по приращению основной погрешности. Среднее
квадратическое отклонение оДу и погрешность Ду влияния усло-
вий измерений можно рассматривать как характеристику соот-
ношения между инструментальной (аппаратурной) погреш-
ностью измерения в нормальных условиях и пределом допускае-
мой основной погрешности средств измерений. Это целесооб-
разно при рабочих измерениях, когда процедура введения
поправок малоэффективна, а часто и невыполнима вследствие
большого числа неизвестных параметров и недостаточной точ-
ности данных по граничным условиям.
При определении основной погрешности прибор взаимодей-
ствует с мерой, имеющей нормированные информативные (сре-
динная длина, плоскопараллельность концевых мер длины
и т. п.) и неинформативные (габаритные размеры, общая форма,
материал, электрическое сопротивление, теплоемкость и др.)
характеристики, а при рабочих измерениях параметры неинфор-
мативных свойств объектов распределяются в некотором доста-
точно широком диапазоне значений. При линейных измерениях
это связано с разнообразием формы, материала, взаимного рас-
положения объекта и элементов прибора.
Следовательно, при измерении система прибор — объект в
отношении действия условий измерений имеет случайный мате-
матический оператор. Эта ситуация подобна циркуляции влияю-
щего поля на многосвязных контурах. Как известно, связь
внешних действующих и внутренних индуцируемых полей выра-
жается формулой Остроградского
§V„vdF = $gradywdQ, (14)
(Л) (2)
где Киф — действующее на поверхность F поле, оказывающее
в объеме Q влияние с плотностью grad
Так как измерительная система, состоящая из средств и объ-
ектов измерений, аппроксимируется многосвязными областями,
как правило, переменной связности, то потенциал безвихревого
поля является многозначной функцией [46]. При этом на каж-
дом контуре возникает соответствующая циркуляция потоков
влияющей величины. Напомним, что циркуляцией называется
криволинейный интеграл по замкнутой линии (L) проекции век-
тора АфТ = (grad КИС(1)Т поля сил на касательную к линии (L),
проведенную в направлении ее обхода:
Ц = ф А<рх dL = grad У.ХФ • dr, (15)
(L) (L)
где г — радиус-вектор.
22
При поверке средств линейных измерений стандартными
концевыми мерами систему можно представить в виде двух-
связной области 1 (рис. 4), у которой в безвихревом поле имеет-
ся одна независимая циркуляция Ц. В то же время при изме-
рениях различных объектов 2 с отличающимися неинформа-
тивными параметрами тем же средством степень связности п
переменна. В результате для поверочных измерений формула
связи имеет вид
§ grad Vw dr = (16а)
а при рабочих измерениях
<§> grad dr =
= tfi + Z(2 + ... +цп, (166)
где Ц, Ц[, Цп — независи-
мые циркуляции по контурам L,
7-1, Т-2, - • • j
При непрерывно трансформи-
рующихся один в другой конту-
рах L, L\, ..., Ln имеем Ц =
= Ц1= ... = Цп, т. е.
ф grad Vw • dr = tOL. (17)
Следовательно, при поверке
$^Ц, (18)
а при измерениях
Ау^=«Д. (19)
Рис. 4. Степень связности системы
измерений и поверки
Отсюда при физически одних и тех же условиях разность зна-
чений погрешностей влияния в случае измерений и поверки
Ay —(п- 1).
(20)
В нормальных условиях Ау = йн—>0, а Ау должно быть пре-
небрежимо малым, т. е.
А“-Д^ = Д“-6н<6ин^Д(и-1), (21)
где бии ^Ад. изм; Ад. изм — предел допускаемой погрешности
измерений; v — критерий малости ее составляющей. Но
бцн == Дин Ад. ОСН Ау 6Н. (22)
Таким образом, показана возможная неоднозначность прояв-
ления безвихревого поля при поверке и измерениях одним и
тем же средством в практически не отличающихся внешних
23
условиях, фиксируемых по значениям обобщенных параметров
влияющих величин.
Таким образом, для практической проверки составляющей
бин функции влияния в инструментальной погрешности не тре-
буется ужесточения условий измерения по сравнению с уста-
новленными нормальными, что существенно упрощает проверку
п нормирование нормальных условий измерений. В качестве
исходного метрологического положения для линейных измере-
ний (по ГОСТ 8.050—73) принято, что нормальными условиями
измерения можно считать такие условия, при которых инстру-
ментальная составляющая погрешности измерения либо не пре-
вышает предела допускаемой основной погрешности Дд. осн сред-
ства измерения, либо незначительно по критерию малости со-
ставляющей погрешности измерения превышает этот предел,?, е.
I ^ин I I Дд. осн I бин ^Дд. нам- (23)
Измерительные средства в технологическом процессе исполь-
зуются для определения действительных значений размеров по-
верхностей, отклонений действительных размеров от заданных,
разбраковки и сортировки изделий при размерном контроле.
Для того чтобы при измерении определялся действительный
размер изделия, погрешности измерений должны быть малыми
по сравнению с допуском Диад. Тогда из выражения (23) имеем
б.,.. = | Дви. I — I Дд. осн I < ?цДИЗд = t|AM, (24)
где т] — критерий малости погрешности измерения относительно
соответствующего допуска; v = цн, т. е. равно значению крите-
рия 1] при нормальном законе распределения.
Применение этого закона определяется сочетанием большого
числа влияющих факторов (предельная теорема [61]). Возмож-
но, однако, приравнивание v к т] для другого характерного за-
кона, в частности закона равномерной плотности. Такое кон-
кретное условие идентификации (распознавания и установления)
нормальных условий может быть аналогично сформулировано
и для других видов измерений. Динамическое воздействие внеш-
них влияющих величин Vj(xt) и искажение выходного сигнала
y{t) функционально связаны через частотную характеристику
ф(цц) измерительной системы, включающей средства и объект
измерения. Если рассматриваемая система является линейной
стационарной, то по принципу суперпозиции
</(0 = 1>(До)^(х, 0- (25)
!
При изменении объекта измерения может измениться и ре-
акция измерительной системы на внешнее воздействие вследст-
вие вариации частотной характеристики. В результате
У (/) + б(/ (0 = Е 1Ф + Ьф W] Vi (*> о. (26)
i
24
Таким образом, погрешность Ау влияния условий измерения
имеет составляющие, выявляемые из выражения
Ду = (Ф + &Ф) (Vx + 61Q = фУ.„ + ьфу* + ФЬУ„ + бфбк„,
где У-л—влияющая величина; ф = %(Ук)—функция влияния.
Для номинальных (идеальных) нормальных условий фУк = О,
6ф == О, 67И=О, Ду = 0 и определяется ДСх. В нормальных
условиях поверки при 0, бф = О, Ду = фбУи определяется
основная погрешность Доен.
В унифицированных нормальных условиях
бф = бфь- 6УИ #= 0; Ду = фб1/и + бф1Уи=>|Ду| = |Дян|-
I Дд. ОСН I бин.
Наконец, в расширенных нормальных условиях
бф = бф2; 6УИ =/= 0; Ду = ф бУк + дф2Ук =>| Ду | =
' I Дин I I Дд. ОСН I бин.
Нетрудно показать, что значение бип в нормальных условиях
связано с допускаемой погрешностью схемы ДСх измерительного
прибора соотношением
би„ = Дсхт/(1 -V)2,
а допускаемая основная погрешность Дд. осн с расчетной погреш-
ностью схемы, включающей составляющие первого рода (остат-
ки систематических погрешностей) и второго рода (некомпен-
сируемые технологические погрешности), связана зависимостью
Ад. осн Дсх/1 —V.
Эти требования выводятся из соотношения
Дд. ОСН ~ Асх б0. Н>
где бо. н — составляющая основной погрешности от действия
влияющих факторов на измерительный прибор и образцовую
меру, причем в нормальных условиях б0.н vAa. оСН и при нор-
мальном законе распределения
Принятый здесь подход по методу наихудшего случая соответ-
ствует оценке оператора S расширения [57] при ограниченном
множестве и незаданной вероятностной мере, когда Н совпа-
дает с верхней гранью множества, т. е.
= sup р (со) = sup р [//„ (coj, ур (co)] A/?ffl,
где sup р (со) — супремум (наибольшее значение) соответствую-
щей погрешности
25
5. КРИТЕРИЙ МАЛОСТИ
СОСТАВЛЯЮЩЕЙ ПОГРЕШНОСТИ
При рассмотрении вариантов А и Б используется понятие
критерия малости составляющей погрешности. Это понятие не
новое, но не имевшее ранее достаточного обоснования. В метро-
логии известен критерий ничтожных погрешностей [41], а в тех-
нике прикладных линейных измерений — коэффициент точности
АМет измерений [42]. Следует отметить, что названные критерии,
хотя и удовлетворяющие численно практике измерений, установ-
лены из частных соображений.
Критерий точности измерений. Числовое значение критерия
ничтожных погрешностей устанавливалось исходя из предполо-
жения, что погрешности нормируются одной — двумя значащи-
ми цифрами, законы распределения их составляющих нормаль-
ны, а допускаемая пренебрежимо малая разность между прак-
тически равными суммарными погрешностями с учетом и без
учета отдельной составляющей ограничивалась 5 ... 10% от
полной суммарной погрешности. Числовые значения предела
коэффициента точности измерений Амет = аИзм/АизД (где <тизм —
среднее квартическое отклонение погрешности измерения;
Аизд — допуск размера изделия) выбраны из расчета, что про-
цент неправильно принятых в годные бракованных изделий дол-
жен быть достаточно мал (не более 5%), а процент ложного
брака, возникающего из-за погрешностей измерений, не более
8 . . . 10%. Ясно, что принятые критерии не являются достаточно
обоснованными. Установление обоснованных критериев является
сложной задачей, так как у разных авторов по этим вопросам
имеются различные рекомендации.
Для того чтобы при измерении определялся действительный
размер, случайные и неисключенные остатки систематических
погрешностей измерений должны быть достаточно малыми. По-
лученная в процессе измерений и контроля измерительная ин-
формация Д равна разности энтропии Нэ(х) измеряемой вели-
чины и условной энтропии распределения случайных погрешно-
стей ИЭ(А)
/, = Яэ(х)-Яэ(А).
При этом естественно требовать обеспечения положительной
информации Iq 0, т. е.
Яэ(х)>Яэ(А). (27)
Энтропия выражается через плотность <р(х) распределения
Случайных величин
+ 00
Н3 — — '. <р (х) In <р (х) dx.
26
Результат измерения с отрицательной информацией следует рас-
сматривать как дезинформацию. Поскольку энтропия есть мера
неопределенности, то в последнем случае после измерения и рас-
сортировки возникла бы большая неопределенность, чем до вы-
полнения этих операций, что нелогично. Ведь задачей измерений
и контроля является получение более точных и определенных
знаний объекта или партии объектов, подвергающихся оценке.
Напомним, что энтропия погрешности связана с энтропийным
значением Дэ погрешности экспоненциально [48]
Кэ<т, (28)
где Кэ — энтропийный коэффициент.
Из выражений (27) и (28) следует
Дэ(х)>1п2Дэ или Дэ<уеЯэ(л:).
Разделив обе части неравенства на доверительный интервал ци
поля рассеяния измеряемой величины при доверительной веро-
ятности 0,997, получим аналогичное условие для приведенной
относительной погрешности измерения
n =
Ии Ии
Используя выражение энтропии и доверительного интервала по-
ля рассеяния для соответствующих законов распределения кон-
тролируемой величины (нормального, равновероятного, суще-
ственно положительных величин), можно рассчитать верхние
пределы допускаемых значений параметров гр, v,, t]v (табл. 1).
При вычислении энтропии для закона Максвелла, например, со-
гласно теореме Шеннона [48], интегрирование выполняем в пре-
делах [0, оо]
w=- $ W) д/i е'*’/2%21п
о
(^)л/^е"х!/2а'
I /Н~ -0,923
= 1п -у2л<гсе ,
где <тс « 1,5ст.
Для такого закона при контроле формы Аэ = 1, у симметрич-
ных законов распределения Аэ == 0,5.
Так как значение критерия малости погрешности зависит от
формы закона распределения измеряемой величины, то график
(рис. 5) этого критерия для всего ансамбля законов распределе-
ния можно представить в виде поверхности
л(кэ, дАМгз = ек1)>
где фа — соответствующий эксцесс,
27
Таблица 1. Расчетные пределы критерия малости погрешности
Закон распределения *3 °и/а ”v Аз
Нормальный (Н) Равномерный (Р) Максвелла (М) Симпсона (С) 2,07 1,73 1,38 2,0 6,0 3,46 5,50 4,90 0,35 0,50 0,25 0,41 0,12 0,17 0,09 0,14 0,5 0,5 1,0 0,5
Примечание. В расчетах T]v принималось v=T]He0»35. Для гиперболического, или логарифмически равномерного закона распределе- ния Шеннона, характерного [48] в случае широкого диапазона значений измеря- емой величины (Х2—ЛГО, имеем л е э expfln (VxXlnX3/Xi)] 9 «И *2**1 где In In Лэ“|. Оценка значения Т|г для штангенциркуля с пределами измерения от Х1=0,25=5Дд_ изм до Х2=200 мм дает значение expin (л/200-0.25 1п 200/0,25) ”г_ ' 199,75"" U,J7'
Из рис. 5 следует, что наибольшее значение критерия р со*
ответствует закону равномерной плотности. Для плавных сим-
метричных законов распределения характерно убывание значе-
ний т] с увеличением эксцесса фг, особенно положительного. В то
Рис. 5. График критерия малости погрешности
же время для плавных законов с отрицательным эксцессом
в области ек = 0,58 ... 0,9 значение л почти не изменяется и
равно 0,35 0,33, Интересно также отметить, что для закона
28
распределения Коши, не имеющего среднего квадратического
отклонения, критерий ц получает конечное значение
Л10, 0| « 0,09 при »иа (а = 0,997).
Необходимость уменьшения приведенной относительной по-
грешности измерений для законов с большим эксцессом, по-ви-
димому, можно объяснить тем, что в этом случае большой про-
цент объектов измерения находится в меньшей по протяженно-
сти области размеров. Кроме того, для законов распределения
с положительным эксцессом очевидна целесообразность норми-
рования допусков равными доверительным интервалам с дове-
рительной вероятностью не более 0,95. При этом предел допу-
скаемой погрешности измерения увеличивается до 0,2 ... 0,25.
Таким образом, в подавляющем большинстве практических слу-
чаев значение критерия ц находится в диапазоне 0,2 ... 0,5.
Критерий малости ц погрешности для размерной сортировки.
Одной из распространенных задач контроля в производственных
приложениях является рассортировка объектов на годные по
размеру (Гк), находящиеся в допуске и бракованные (Бр). При
этом вследствие конечной погрешности измерения после рассор-
тировки в годных вероятно наличие некоторого процента ти
бракованных, а в браке — годных (см. ГОСТ 8.051—73 [42]).
В метрологии и математической статистике значения tn-л и пх
называют ошибками первого и второго рода [61]. Оценку коли-
чества получаемой при такой рассортировке измерительной ин-
формации Iqp можно получить по формуле сопоставления неоп-
ределенности двух систем: партии объектов до и после конт-
роля
1ЧР = Н3 (А) + Н3 (Бр) - [ГХН3 (ГХ1/ГК) + БрН3 (Бр./Бр) +
+ ГЛз МГИ) + БрН3 (т^Бр)]. (29)
Здесь Н3(ГХ) и Н3(Бр)— энтропия годных и брака соответствен-
но в партии изделий до рассортировки; Н3(Гх1/Гх); Н3(Брх/Бру,
Н3(пх/Гх) и Н3(тх/Бр) — условная энтропия годных Гх\ —
= Гх — пх, брака Бр\ = Бр — тх, ложно забракованных пх и
неправильно принятых в годные тх.
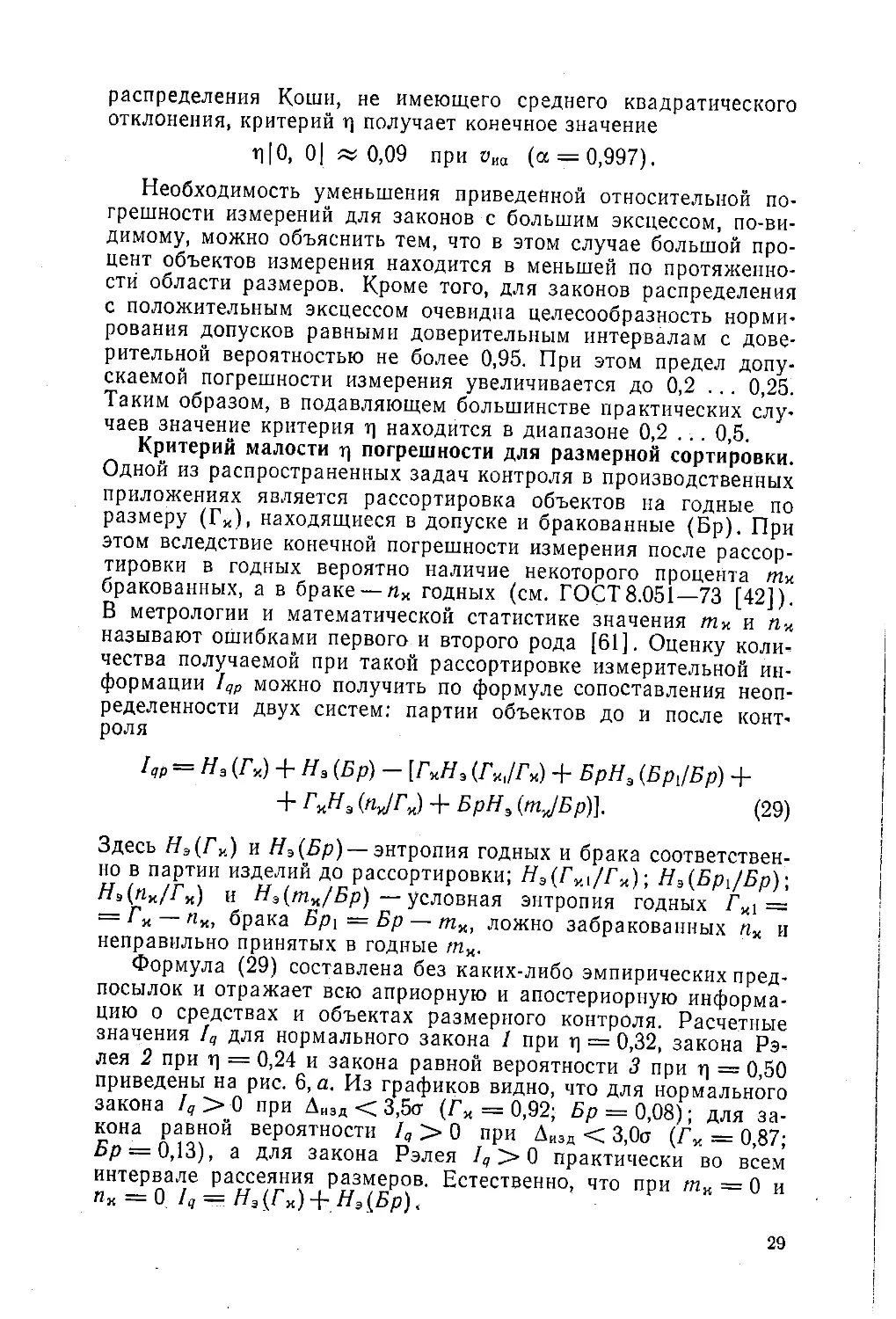
Формула (29) составлена без каких-либо эмпирических пред-
посылок и отражает всю априорную и апостериорную информа-
цию о средствах и объектах размерного контроля. Расчетные
значения Iq для нормального закона / при ц = 0,32, закона Рэ-
лея 2 при г] = 0,24 и закона равной вероятности 3 при г] = 0,50
приведены на рис. 6, а. Из графиков видно, что для нормального
закона Iq > 0 при ДИэд < 3,5ст (Гх = 0,92; Бр = 0,08); для за-
кона равной вероятности Iq > 0 при Дизд < 3,0о (Гх = 0,87;
Z>p = 0,13), а для закона Рэлея Iq > 0 практически во всем
интервале рассеяния размеров. Естественно, что при тх = 0 и
пх = 0 Iq = H3(rx)+ H3(Bp)f
29
На рис. 6,6 показана зависимость ц(/? = 0, х) для нормаль-
ного закона, а на рис. 6, в — для закона равной вероятности.
При этом в обоих случаях Бр « (т + п).
Рис. 6. Оценка предела допускаемой погрешности измерений при
размерной сортировке
Достоверность информационных оценок. Допустимость приме-
нения информационных оценок в измерительной технике оспари-
вается отдельными авторами. Однако их мотивировки не пред-
30
ставляются достаточными, что подтверждается приведенным
анализом задачи рассортировки и формулой правдоподобия.
В частности, по методу статистического правдоподобия должно
обеспечиваться [61] наибольшее значение функции правдопо-
добия
£6=<р7‘(е)Ф?(е) ...<р?(0)
г
при фиксированном числе испытаний п = X тг> что равносиль-
но требованию наибольшего значения функции
In Le = т\ In ф] (6) -f- In ф2 (0) + ... + mr In фг (0)
или после деления на число п испытаний [81]
-^1пЛе = ^1пФ1(0) + ^-1пф2(0)+ ...
Г
... +^1пфг(0) = 2^-1пфг(0). (30)
1
Так как в пределе тг/п = фг(0), то правая часть выражения
г
(30) соответствует энтропии ~ — £ фг (9) In фг (0) и условию
наибольшего значения функции
-^-1пА0= — #э. (31)
Известно, что второй закон термодинамики эквивалентен
утверждению о невозможности убывания энтропии в изолиро-
ванной физической системе. Хотя эта «физическая» энтропия
в изолированной системе согласно формуле Больцмана выра-
жается математически аналогично информационной энтропии
для системы с равновероятностными состояниями Нэ$ =
= k In + const (где k — постоянная Больцмана), смешивать
их не следует.
Для изолированной физической системы число микросостоя-
ний Рц определяется ее внутренней энергией и с течением вре-
мени растет из-за перехода энергии в теплоту. Информационная
энтропия обычно оценивается как в изолированных, так и в не-
изолированных системах с отсутствием внутренней энергии взаи-
модействия между ее элементами или без учета последней ввиду
малой значимости этого фактора. При этом уже нельзя априори
требовать самопроизвольного увеличения энтропии со временем.
Общие вопросы взаимосвязи термодинамической энтропии
и информации рассматривались Л. Бриллюеном. Он показал,
что получение информации само связано с затратами энергии и
изменением энтропии измерительной системы. Однако информа-
ция о состоянии контролируемой системы уменьшает энтропию
последней.
31
Нужно отметить, что условию (31) соответствует наибольшее
правдоподобие и наименьшая энтропия, т. е. наименьшая не-
определенность оценок. Отсюда следует, что вместо функции
правдоподобия можно в аналогичных задачах использовать
энтропию. Тогда согласно определению критерия отношения "Кн
правдоподобия [71] при больших выборках п->оо имеем
. _ Ле (х, 0о)
" l0 (%, е„)
но
In Lq (х, 0о) — In Le (х, 0„) = In кн
и
~1п£е(х, 0о)-±Те(х, 0„) = -//(х, 60) + Я(х, 0„) =
~ lim — 1пЛя = 0. (32)
П->оо П
Следовательно, выражение (32) является условием асимптоти-
ческой мощности критерия отношения правдоподобия. Это тре-
бование совпадает с требованием (27), использованным при
оценке критерия малости погрешности. Так как из выраже-
ния (31) Ln (0) = е~Нэ'г, то для закона равномерной плотности
распределения случайных величин
= = = (33)
Vin(6).
а отношение
Таким же образом на основании (32) и (33) определяются кри-
терии малости погрешности для других законов распределения.
Более подробно общие свойства и вопросы связи критерия отно-
шения правдоподобия, энтропии и количества информации осве-
щены в работе С. Уилкс [71]. Отметим только, что предельное
требование (32) равенства нулю разности энтропии Н(х, 0О) и
Н(х, 0„) следует и из информационного интеграла Калбэка
4-00
н (0О, 0О) —Я(0О, 01)= ву- dF (х, 0О), так как при
— оо
условии отсутствия искажающего действия измерительной ап-
паратуры dF(х, f)0)/dF(x, 0i) ~ 1 и логарифм этого отношения
равен нулю. А отсюда равен нулю и весь интеграл, характери-
зующий среднее количество информации для выявления разли-
чий распределений F(x, 0о) и F(x, OJ. Особенности и эффектив-
ность информационной теории измерений подробно освещены
в работах [23; 48; 49; 58; 81]. Основные понятия теории инфор-
мации изложены в работе Е. С. Вентцель [13].
32
б. НАТУРАЛЬНОЕ СОСТОЯНИЕ
УПРУГОЙ СРЕДЫ
И ТРЕБОВАНИЯ
Н НОРМАЛЬНЫМ УСЛОВИЯМ
ЕЕ НАЧАЛЬНОГО СОСТОЯНИЯ
Измерительные системы должны быть упругими по отноше-
нию к действию на них силовых влияющих факторов в нормаль-
ных условиях применения, поскольку эти влияния должны быть
обратимыми и достаточно малыми.
Для упругой системы характерна связь между силами и пе-
ремещениями или напряжениями Оц и деформациями ец через
потенциальную энергию П в виде стц = дП/дгц. Для линейной
упругой среды деформируемого твердого тела согласно закону
Гука [37] с помощью диагональных матриц можем записать
0 1-1 0 1-1
diag (ct£Z, сц, ст(у) = diag (£, Е, £)diag(e2, е(1-, е(-/) =
= diag (£) diag (е), (34)
о 1 -1
где + ст1() — составляющие нормальных напряжений; сщ —
S
касательные напряжения; £ — квазиобобщенные модули;
£ = цп£/[(1 + цп)(1 - 2цп)]; £ = £/(1+Ип); £= Од
£ — модуль нормальной упругости; — модуль сдвига; цп—
коэффициент Пуассона; е»— относительные удлинения; 8ц —
з
искажения или сдвиги углов от деформации; б2=£б.(; зна-
1 = 1
ком diag обозначены диагональные матрицы с нулевыми ком-
понентами, кроме расположенных на диагонали, i, j = 1, 2, 3 —
декартовы координаты.
Выражение (34) справедливо при исходном натуральном не-
напряженном начальном состоянии. В зависимости от выбран-
ного начального состояния, отличающегося от натурального не-
которым преобразованием подобия с масштабом Ка, обобщен-
ные модули упругости £, £, £
могут измениться и принять зна-
чения:
£* = Ша)£; £* = ЛШ£;
£* = ^(^)£.
(35)
Тогда в близком к натуральному начальном состоянии компо-
ненты напряжений а и деформаций б связываются выраже-
нием вида
diag (ст*) = diag (£*) diag (s*),
2 Зак. 843 33
а их обратная матрица равна
з з , з ,
diag (а*)- = diag (£*)" diag (е*Г . (36)
Перемножая левые и правые части (34) и (36), получим без-
размерную матрицу относительного изменения напряжений и
деформаций
diag (a) diag (о*) = diag (Ё) diag (£*) 1 diag (е) diag (е*) =
— diag (&Е) diag (e) diag (e*)-1. (37)
Если принять по аналогии с [37]
Ш.)=те: <38>
и 'обозначить приращения относительных деформаций и сдвигов
S S
Де/е, то окончательно имеем
3 3, S3
diag (a) diag (о*) = diag (K^, l/K2a, Ка) diag (1 — Де/е). (39)
На основании оценки первого числа Kyi обусловленности матри-
цы Тюринга среднее квадратическое значение (СКЗ) относи-
3 5
тельной погрешности Де/е определения компонент деформации
3 S
при отношении СКЗ погрешности Д6Е к СКЗ коэффициентов 6Е
СКЗ Д СЛ\3(1-6£) _
СКЗ6£ СКЗ6Е
равно _______ ___________
СКз(Ц^ = 2ДКа4- (4°)
\ е /
где ДКа = 1 —п = 3 — ранг матрицы; 6Е — члены обрат-
3
ной матрицы diag(6E)-1.
Среднее квадратическое значение (СКЗ) по способу оценки
соответствует второму начальному моменту а2 случайных вели-
чин, т. е. СК.З = -у/а2. Если в нормальных условиях предел от-
носительной погрешности Лв^б'у'аг упругой измерительной
системы от действия внешних факторов с учетом статистической
экстраполяции наибольшего отклонения не должен превышать
некоторого установленного (см. п. 5) значения ф t]v, то из
выражений (39) и (40) при Ка близком, но меньше 1, находим
r]v 12ДКЯ. Отсюда
AKa<T]v/12.
(41)
34
Подставляя в выражение (41) значение щ = 0,12 для нор-
мального закона распределения погрешности, получим искомую
численную оценку Ка допускаемого масштаба преобразования
подобия начального состояния упругой среды в нормальных
условиях
= 1 - ДДа « 0,99.
Откуда пределы допускаемых в нормальных условиях измене-
ний модулей упругости соответственно равны:
О 0 1 1-1-1
| \Е | < 0,03£; I ДЕ | < 0,02Е; | ДЕ | < 0,01Е.
При допускаемый масштаб преобразования Ка—> 1,
s 0 1-1
а ДЕ->0. Обобщенные модули упругости Е, Е, Е являются
функциями свойств материала среды, ее напряженно-деформи-
рованного состояния и зависят от действия влияющих факторов,
в том числе от температуры. В частности, для упругих систем
из конструкционных материалов эффективный модуль нормаль-
ной упругости Е и модуль сдвига G имеют температурное при-
ращение, описываемое полиномом третьей степени вида
а™ Д/?; и — 1, 2, 3,
Для ориентировочной оценки нормальных пределов отклоне-
ний температуры достаточно использовать первый член полино-
ма ацДЬ, что соответствует ограничению по модулю
Д/т. н < 100r|v/12aTi, (42)
а для нормального закона распределения
Д/Т.н < (0,12 • 100)/12ат1 = 1/ат],
где аТ1 — приращение модуля упругости в процентах на 1 °C.
При a-ri = 0,1, нормальном законе распределения измеряе-
мых величин и допускаемой погрешности Д^т. н < 10 °C; при
an = 0,2 соответственно ДЕ. н < 5 °C.
Обобщенные модули упругости могут изменяться и при изме-
нении ориентации фа упругой измерительной системы в поле тя-
жести, так как при этом изменяются действующие Q(- силы по
зависимости
AQ; = Qz(l — cos ф9).
Полученные обобщенные оценки подлежат уточнению для кон-
кретных реализаций упругой системы с наложением соответ-
ствующих граничных условий и при учете динамики процесса
деформации.
Кроме изотермических модулей упругости, проявляющихся
без изменения температуры упругой среды, в упругой измери-
тельной системе реализуются так называемые адиабатические
2* 35
модули упругости. Адиабатические модули отличаются от изо-
термических Е и р-п слагаемыми вида. [33]
А£ад = £2-^- и Дцп. ад = (1 + рп)£'1^1-
Адиабатические и изотермические модули сдвига совпадают.
При адиабатическом и изотермическом процессах деформа-
ции внутренняя 6£в = 8А'е + 6QT и свободная Ее энергии соот-
ветственно равны удельной потенциальной энергии 6'Ае дефор-
мации, так как изменение подведенного количества теплоты
6Qt = 0. Но в расчетные зависимости входят различные модули
упругости: в первом случае адиабатический, а во втором — изо-
термический.
При других процессах деформации рассматривается свобод-
ная энергия
6£с = 6£в - 0Т 6HS - Tst des< - £S60T,
где 0т = Тт — абсолютная температура тела; Hs — энтропия;
g и G — метрические тензоры начального и конечного состоя-
ний; d~st и е5/ — контравариантные и ковариантные компоненты
тензора напряжений и деформации. Следует учесть, что непо-
средственному измерению доступно только поле деформаций,
тогда как о напряжениях можно судить только по их интеграль-
ным эффектам [37]. Поэтому понятие «натуральное» состояние
является идеализирующей абстракцией. Любое реальное тело
в начальном состоянии имеет суперпозицию напряжений, вы-
званных действием силы тяжести, вынуждающих вибраций,
внешнего теплового и других полей, заделками, а также дейст-
вием внутренних остаточных напряжений технологического ха-
рактера. Обеспечить полное исключение действия внешней сре-
ды в реальных условиях практически невозможно.
7. МЕТОДИКА
СТАТИСТИЧЕСКОЙ ОЦЕНКИ
ПРЕДЕЛОВ Ду И бин
Методически выход бин инструментальной (аппаратурной)
погрешности за предел допускаемой основной погрешности опре-
деляется при помощи аттестации объектов измерения. Указан-
ную аттестацию (см. гл. VII, схема 2) можно выполнять сле-
дующими методами: 1) измерением тем же рабочим средством
в унифицированных нормальных условиях; 2) измерением арби-
тражным средством повышенной точности в унифицированных
либо в расширенных нормальных условиях; 3) измерением в ра-
бочих условиях средствами с аттестованными компенсаторами
выхода существенных влияющих величин за стандартную нор-
мальную область их значений,
36
Если систематическая составляющая погрешности влияния мала
и (или) исключается введением поправки, то
SUP|#1 (Ю) | ~ SUP I ^2 (10) | < 6нн-
Погрешность метода, естественно, не учитывается, так как
в обоих случаях метод измерения один и тот же.
При экспериментальном определении значений Ду, Днн, бин
необходимо в первую очередь исключить промахи. Так как по-
казания средств при измерениях и поверке обычно распреде-
ляются по нормальному закону, то и разности этих показаний
согласно свойству устойчивости в композиции распределяются
по нормальному закону. При этом среднее квадратическое от-
клонение и математическое ожидание генеральной совокупно-
сти неизвестны. Если наибольшая (наименьшая) разность Дун
вызывает сомнение, то для проверки ее аномальности исполь-
зуется равенство [77]
где
Рр < Ду. нб 1> Рр < 77' Ау ^у. НМ I"
Здесь индексами нб и нм отмечены большее и меньшее значе-
ния ряда данных.
Для п = 10, рР = 2,04 при РР = 0,10; рР = 2,18 при
Рр = 0,05; рР = 2,41 при Рр = 0,01. рР выбирается по табли-
це [95].
Простейшая оценка однородности двух групп наблюдений
выполняется [61] по критерию Фишера в предположении нор-
мальности законов распределения. Различие оценок дисперсий
считается допустимым, если выполняется условие
P{Fh<^<F0}=1-<7, (43)
где s] и s]- оценки большей и меньшей дисперсий; FB и Гн —
верхние и нижние предельные значения /'-распределения Фи-
шера при числе степеней свободы (п—1) и уровне значимости
q/2 = 0,05.
Если условия измерений идеально нормальные, т. е. все
влияющие величины имеют нормальное номинальное значение,
то sf/s| = 1 и статистическая подконтрольность обеспечивается
практически при любой выборке. При унифицированных или
расширенных нормальных условиях Дд. нзм = 0,35 ДИзД, а Ду =
= 0,12 Лизд. Отсюда s^/s^ (1,35/1,23)2= 1,24, что соответствует
выборке более 120 изделий (объектов). Если при том же значе-
нии Дд. „з„ допустить Ду = 0,25 Дизд или, что то же самое, Досн «
» 1 /ЗДд. „эм, — статистически подконтрольная выборка снижа-
ется до 60 объектов, так как s2/s| *** (1>35/1,1)2 & 1,44.
38
Приближенно при Ду « бин условие (43) можно представить
в виде
____Дд, изминай 4" 1
(Дд. изм ^у) Диад 4" 1
Таким образом, доказано, что соотношение составляющей от
действия условий измерения не может приниматься произвольно
даже при обеспечении стандартизованных допускаемых суммар-
ных погрешностей измерения, а должно четко и единообразно
нормироваться и в аспектах получения статистически однород-
ных результатов измерения. Без соблюдения подобного требова-
ния вполне возможно и экспериментально проверено получение
в одних и тех же условиях и на одних и тех же средствах изме-
рения различных дополнительных погрешностей при нерегуляр-
ном использовании установочных мер, особенно при интенсив-
ных изменениях влияющих величин во времени. Периодичность
контроля влияющих величин и значений бин может устанавли-
ваться в соответствии с теоремой В. А. Котельникова [78]:
\ так как влияющие факторы описываются непре-
рывными функциями, удовлетворяющими условиям Дирихле
с ограниченной верхней существенной частью. Причем fc —
= 2пф/тц где «ф — ранг функции; т/ — продолжительность конт-
роля. По теореме В. А. Котельникова каждый процесс x(t)
с ограниченным спектром частот ос < 2лД может быть пред-
ставлен в виде
xft’~ X^k' 2nfc(t-tk)
/С- — oo
(/ft= k/2fc, k = 0, ±1; ±2 ...),
t. e. процесс x(Z) для всех t однозначно определяется своими
выборочными значениями х(^) в точках Д, разделенных вре-
менными промежутками 0,5/с 1 = tk.
Пределы допускаемой погрешности измерения влияющих ве-
личин определяются по установленному выше критерию г] для
отклонений от нормального значения. Методы экстраполяции
данных по Ду во времени при непрерывном, стационарном, нор-
мальном и дифференцируемом процессе изменения погрешности
Ду подобны принятым для ускоренных испытаний. В частности,
эффективно применение теории выбросов случайных функций.
С этой целью для ускоренных оценок устанавливаются совме-
щенные границы 6ИН = 0, что соответствует возможности экстра-
поляции во времени на порядок по сравнению с продолжитель-
ностью проведения эксперимента. При недифференцируемом
случайном процессе возможно применение теории марковских
процессов, метода Монте — Карло и др.
Экспериментальная проверка изменчивости законов распре-
деления результатов измерений при значительной дополнитель-
39
Рассмотрим статистическую представительность наиболее
распространенного первого метода.
Результат уц однократного наблюдения в аттестуемых усло-
о
виях содержит систематическую Доен и Ду и случайную Д0Сн и
о
Ду составляющие основной и дополнительной погрешности:
о о
Уи Ул. н 4” Дрен 4” Ду 4” f I (Доен Ь Ду1)»
где ул. н — действительное значение контролируемого размера
в нормальных условиях. При десятикратных наблюдениях полу-
чаем ряд, в котором наибольший отсчет отклоняется от гене-
рального среднего совместного распределения погрешностей
о о
Доен и Ду на Psup р = DpG, где Dp = Upi для Pi=0,5(l + P1/n).
Здесь Upi — квантиль распределения погрешностей; Р — довери-
тельная вероятность появления наибольшего отклонения Riapp
[[77]. В случае Р = 0,95 Л = 0,5(1 + Р1'В * 10) = 0,99744 и
^0,95(10) = «0,99744 = 2,80.
Если в качестве исходного рассматривать не генеральное,
а выборочное среднее, то отклонение наибольшего наблюдения
от выборочного среднего равно [95] PBsupp = kpa, где
kp — uPl ^/(п — V)/n для Pi = 1 — (1 — Р)/п. При п = 10 и Р = 0,95
получаем Pi = 0,995, а йо.эз aoj = «ода д/9/10 = 2,576 • 0,95~2,44.
Следовательно,
о о
sup У1 (10) = Ул. н 4- Досн 4- Ду + Psup (досн р Ду1);
о о
Доев 4- Ду 4- Psup (Дрен 1> Ду1) == Slip Див (Р == 0,95),
т. е. наибольшее значение Дин с вероятностью Р — 0,95. При
десятикратных наблюдениях тем же прибором в нормальных
условиях
SUP Уц (10) “ Ул. н 4" Досн 4" Psup (ДОсн 1)>
но
о
Дрен 4- 2,8а (Досн 1) Дд. осн (Р = 0,95),
где Р — доверительная вероятность.
Отсюда
оо о
sup | У\ (10) | SUp [ У 2 (10) I = Ду 4“ PSup (Дрен 1’ Ду1) *sup (Дрен 1)1
В соответствии с принципом идентификации нормальных усло-
вий имеем
0 0 о
Ду ~* 0; Psup (Дрен 11 Ду1) - Psup (Досн 1) ^ИВ1
37
ной погрешности от действия температуры по сравнению С ос-
новной погрешностью средства измерений выполнялась при мно-
гократных измерениях п одной и той же концевой меры длиной
100 мм микрокатором 02ИГП (ГОСТ 6933—72) с ценой деления
0,2 мкм в стойке С1 по ГОСТ 10197—70 (рис. 7, а, б). Получа-
лись следующие характерные распределения Wi(n — 182):
1) при резком квазипериодическом изменении температуры
в пределах 18 ... 20 °C и однократной настройке по установоч-
ной мере показания прибора распределяются по антиподально-
му закону (рис. 7, а) при среднем квадратическом отклонении
Рис. 7. Трансформация законов распределения
результатов измерений
S2 ~ 0,63 мкм, в то время как при стабильной температуре эти
показания распределяются по закону, близкому к нормальному,
при среднем квадратическом отклонении st < 0,075 мкм. Следо-
вательно, s.ys\ ~70 не соответствует критерию Фишера для вы-
борки из 182 результатов наблюдений;
2) при резком разовом изменении температуры среды и одно-
кратной настройке средства измерений изменение показаний
распределяется по асимметричному закону;
3) при периодической корректировке настройки средства из-
мерений изменяется как значение дополнительной погрешности,
так и закон распределения погрешности измерения в зависимо-
сти от разности температурных коэффициентов линейного рас-
ширения (ТКЛР) установочной и измеряемой мер.
Жак видно из рис. 7, б, при равных ТКЛР и регулярных под-
надстройках прибора через 10 измерений распределение прибли-
жается к нормальному при среднем квадратическом отклонении
s2 ~ 0,05 мкм. В этом случае отношение дисперсий I.
Поскольку периодичность использования установочной меры
при неавтоматических относительных линейных измерениях
обычно не нормируется, то вполне возможно получение в одних
и тех же условиях и на одних и тех же средствах измерения раз-
личных дополнительных погрешностей результатов наблюдения
40
объекта, особенно при интенсивных изменениях влияющих вели-
чин во времени внутри установленных пределов их значений.
При автоматизированных измерениях возможна оптимизация
поднастройки на базе статистического предсказания случайных
последовательностей. Однако и в этом случае требуется обе-
спечение статистической однородности последовательных реали-
заций, т. е. выполнение измерений в нормальных условиях.
8. СУЩЕСТВЕННЫЕ
ВЛИЯЮЩИЕ ВЕЛИЧИНЫ
И НОРМАЛЬНЫЕ УСЛОВИЯ ПОВЕРКИ
СРЕДСТВ ИЗМЕРЕНИЙ
Способы выделения. К существенным влияющим величинам
относятся такие величины, изменения которых в диапазоне, со-
ответствующем климатическим или индустриальным источникам,
могут вызвать дополнительные погрешности, равные и более
Рис. 8, Распределение стандартизованных отно-
шении А доп/Ад. осн
бин —— 0,35 Анам ИЛИ 0,5 Доен, Так КаК Ад. нам бин ^5.Ад. осн И
бин 0,35/0,65 Ад. осн « 0,5 Ад. осн. Распределение стандартизо-
ванных отношений бИн/Аосн = Адоп/Аосн показано на рис. 8.
Существенные влияющие величины условно можно разде-
лить на интегральные, функционально зависящие от композии
других величин, и дифференциальные. Для выделения суще-
ственных влияющих величин используются дисперсионный ана-
лиз [61] и оптимальное планирование эксперимента [73]. Дей-
ствие отдельных влияющих величин на средства и объекты из-
мерений рассмотрено в гл. II ... VI и VIII.
В метрологии по поверочным схемам реализуется передача
размера единицы физической величины от эталонов образцовым
мерам и приборам и далее рабочим средствам измерений [8,41].
Однако в поверочных схемах не приводятся требования к усло-
виям передачи размера, что существенно для практического обе-
спечения единства измерений.
41
Единство требований. В метрологическом и технико-экономи-
ческом аспектах единые условия формально обеспечиваются вы-
бором единых номиналов нормальных значений влияющих фак-
торов. Требования к внешним условиям воспроизведения едини-
цы на эталоне установлены соответствующими спецификациями.
На эталоне длины предъявляются жесткие требования к откло-
нению температуры (менее 0,01 °C) и к уровню действующих
вибраций (при частоте 1 ... 10 Гц амплитуда менее 0,1 мкм).
При аттестации образцовых мер длины первого разряда на ин-
терферометре Кестерса в результат измерений вводятся поправ-
ки на температуру, влажность, давление. Нормальная область
в этом случае по температуре не превышает ±0,1 °C, по относи-
тельной влажности —1% и по атмосферному давлению —
±133 Па. Для концевых мер второго и третьего разрядов, по-
веряемых на контактных интерферометрах, оптиметрах, оптика-
торах сравнительным методом обычно вводится только тем-
пературная поправка. Необходимые поправки вводятся и при
поверке штриховых мер. При нормальных условиях соотношения
допускаемых пределов погрешностей от действия влияющих ве-
личин Ад. у должны соответствовать запасу точности 2 ... 5.
Отсюда выявляются требования к условиям реализации пове-
рочной схемы при бин = 1 для мер низшего разряда. Если при
поверке мер 5-го разряда обеспечивались условия, соответст-
вующие воспроизведению мер 4-го разряда, то бин проявится
при поверке мер установочных и рабочих средств измерений.
Нормальные условия применения и поверки рабочих средств
измерений должны совпадать. Поверка в идеализированных же-
стких условиях может оказаться малоэффективной, так как
данные по основной погрешности средства измерений окажутся
заниженными. Даже в отношении сопоставления технического
состояния средств измерений такая поверка недостаточна.
Учет веса влияющей величины. Если необходимо учесть вес
ау влияющей величины при оценке нормативных требований
к ней в нормальных условиях, можно воспользоваться зависи-
мостью, вытекающей из правила суммирования дисперсий о2
от N независимых влияющих величин, из которых одна имеет
дисперсию влияния (ауо)2. При этом
„ „ аГ’йЛд. изм
Ct у U <5^-. =“ ,
kSay(^~l) + alr
а для остальных величин
________*1Ад. изм__
"" fe2a - о + aV
где kza — коэффициент вероятности.
42
Число существенных влияющих величин для средств измере-
ний колеблется от 1 до 11 (смД'ОСТ 8.050—73, ГОСТ 22261—76,
ГОСТ 12997—76). Отсюда . .3. Тем самым определяет-
ся и требование к ограничению каждой некоррелированной
влияющей величины, причем в нормальных условиях действие
влияющих величин по уровню приближается к шуму. Шумы,
встречающиеся в физике и технике, можно описать при помощи
нормального распределения, что является следствием централь-
ной предельной теоремы теории вероятностей.
Для нормального закона распределения по отдельной влияю-
щей величине бИН1 10% предела допускаемой погрешности из-
мерений при действии 7 ... 11 влияющих величин; 6ИН i =57 15%
при действии 4 ... 6, бин ( 20% при действии 2 ... 3 влияющих
величин.
Наиболее распространенные существенные влияющие вели-
чины можно назвать основными влияющими величинами (ОВВ).
Интегральные ОВВ более специфичны. К ним относятся пока-
затель преломления (см. п. 14) при линейных измерениях, плот-
ность воздуха при измерениях массы (п. 39), уровень вибраций,
характеризуемый определенным комплексом параметров в за-
висимости от особенностей измерительной системы.
Матрицы упругих измерительных систем. Для линейных упру-
гих измерительных систем характерна матричная связь между
усилиями и перемещениями на входе (Qi, Si) и выходе (Q2, s2).
Если цепь составлена из нескольких упругих передаточных эле-
ментов, то результирующая матрица учитывающая обрат-
ную силовую связь от действия последующих элементов, опре-
деляется как произведение парциальных матриц а($. Причем
а?,’ па^ п
a(i)Y = 11 12
||u21 и22
%п>
51
5„
_i_ л ;/пр — жесткость ведомой системы,
1пр5« “Г хОлИ
где %е=
подключаемой к выходу. Отсюда передаточное отношение пря-
мой цепи преобразования in. с = [Яц ”] *, обратной — 10. с =
= af2-'I/np, а общее —«у к у =[а^п + ар2’п/Пр]_1. Эти соотноше-
ния позволяют использовать те же методы, что и при анализе
состояния упругой среды, для метрологически обусловленного
синтеза средств измерений.
Глава II
ТЕМПЕРАТУРНЫЕ
УСЛОВИЯ ИЗМЕРЕНИЙ
9. СПЕЦИФИКА
ТЕПЛОВОГО ВЛИЯЮЩЕГО ПОЛЯ
Деформация и другие обратимые изме-
нения свойств объектов измерения под дей-
ствием температуры не являются темпера-
турными погрешностями,а только причиной
таких погрешностей при неэффективных
средствах и методах измерений.
Случайная составляющая температурно-
го поля приближенно описывается много-
мерной функцией вида
0тк = ЛА1 sin (со/+ Уз) + ЛА2[1 — е *32)] +
+ Ak?ie {t — 4з) + ИА46 (/ — би). (44а)
где уз = (о/зь /зп — время задержки нагре-
ва; Akv — независимые случайные величи-
ны, характеризующие амплитуду случай-
ных реализаций изменения температуры от
различных источников: при u == 1 — кон-
вективное изменение температуры воздуха
вследствие нормальной работы кондицио-
нера [26]; и = 2 — тепловое радиационное
выделение те^а оператора с длиной волны
порядка 9 мкм или других местных инер-
ционных нагревателей; и = 3; 4 — включе-
ние малоинерционных нагревателей.
Величина в термостатированных по-
мещениях распределяется по нормальному
закону в пределах ±1 ... ±0,5°C. Конди-
ционеры в сочетании с высокоточными ре-
гуляторами температуры (ВРТ) обеспечи-
вают распределение значений Аы в преде-
лах ±0,05 °C. Индексом k отражается про-
странственная неоднородность влияющего
теплового поля. В термостатированном по-
мещении для k=\, 2, 3. Величина
AA2sC0,2 °C.
В нетермостатированном пространстве
значительно увеличиваются интервалы рас-
сеяния значений в особенности Аы
и Ла2, доходящие до десятка градусов. Кро-
44
ме того, меняется и вид многомерной аппроксимирующей
функции
бтк = Akv Е Sin (<ov/ 4- v3J + Ak („+1) [1 — e 11 M +
+ Ak (n+^e (J — 4з) + Ah (Я4-з)6 (t — t3i). (446)
В первом члене (446) отражается аппроксимация периодиче-
ских составляющих полигармонического изменения температу-
ры (см. рис. 3), и в том числе от суточного, сезонного, годичного
ее хода [23]. Отличаются также и законы распределения вели-
чин Akv, их дисперсии и оценки математических ожиданий.
Здесь и = 1, ..., (п + 3).
Известно [32], что в нестабилизированных условиях призем-
ной атмосферы ход температуры нестационарен, причем с уве-
личением продолжительности контроля и объема выборки выяв-
ляются новые, более длинные периоды прецессии. Вместе с тем
более вероятна стационарность приращений температуры за
определенные временные промежутки, характеризуемые так на-
зываемыми структурными функциями (см. гл. I). Следует отме-
тить, что и случайная температурная погрешность часто в боль-
шей степени зависит от приращений температуры во времени
б/т. и, чем от ее начального значения.
Систематическая составляющая может быть исключена вве-
дением соответствующей поправки. Однако известные методы
введения температурных поправок несовершенны и во многих
приложениях имеют погрешности более 35%. Для нормирова-
ния необходимо найти минимальное число наиболее простых
показателей теплового поля, что определяется из уравнения
теплопроводности Фурье
dVK/dt = a^VJdxl (45)
где Ят — коэффициент температуропроводности.
Из выражения (45) следует, что для температурного поля
= 0ТЙ должны быть заданы скорость изменения его во вре-
мени dV^/dt и функция пространственного распределения тем-
пературы d2VHi/dx2.. Полное описание этих параметров с уче-
том произвольной ориентации поля можно выполнить в тензор-
ной форме. Однако для нормирования во времени достаточно
задавать среднее Д/т значение отклонений и амплитуду измене-
ний б/т. и температуры, так как согласно теореме о среднем и
теореме оценки определенного интеграла влияния
f (т)/г (/ — т) dx sup f (t) /г (/и);
о
(и (и
? f(t)h (t — x)dx = f (/с) j h (t — т) dx-
oJ о
45
Отсюда для получения репрезентативных оценок достаточно за-
дать
sup /(/) = й/т. и + А/т; f(/c)==A/T.
В пространстве вместо распределения d2VKi/dx2t имеем раз-
ностное представление А/тр, так как
(х + se) - 2Ух + V^(X- яе)
<Эх2 s2
= [AVK (+ se) + AVK (- se)] 4 =
se se
где se — разностный шаг в пространстве.
Наличие вариации температурной погрешности 6АД0П при
измерении объектов одного и того же размера, но из различных
материалов и разной конфигурации, а также при разных спосо-
бах установки выявлялось многими исследователями, пытавши-
мися дать физическую интерпретацию этому явлению.
Г. Б. Кайнер установил [24] возникновение локальных скач-
ков температуры в зоне контакта при арретировании измери-
тельного наконечника контактного интерферометра, оптикатора
(ГОСТ 10593—74), микрокатора (ГОСТ 6933—72), механотро-
на. Показано, что эти скачки достигают 0,05 ... 0,15°C и вы-
званы разрывом теплопроводной цепи измерительной системы,
так как коэффициент kT. ПР теплопроводности тела измеритель-
ной системы в среднем равен feT. пР = 4400-10-6 Вт/(м-К), т. е.
близок к теплопроводности стали, а для воздуха kT. ПР =
= 24-10~6 Вт/(м-К). Для кварцевых мер kT. ПР =
= 80-10_6 Вт/(м-К), в результате чего эффект смещения пока-
заний и скачка температуры для таких мер меньше. Меньший
тепловой скачок и меньшее смещение показаний, по данным
того же автора, наблюдаются у приборов, не имеющих встроен-
ных источников теплоты. У оптикаторов и контактных интерфе-
рометров смещение последействия достигает 0,15 мкм, в то вре-
мя как для микрокаторов с ценой деления 0,1 мкм оно не более
0,05 мкм. Полученные данные соответствуют общим представле-
ниям о характере поведения системы при разрыве ее теплопро-
водящей цепи. Однако при анализе следует учитывать эффек-
тивную площадь контакта измерительного наконечника. Кроме
того, для твердых тел следует рассматривать не коэффи-
циент йт. пР теплопроводности, а коэффициент ат температуро-
ь
иР
проводности, причем ат = -г, где ст — удельная теплоем-
кость; pY — плотность материала. Влияние формы и расположе-
ния объектов измерения на температурную функцию рассмот-
рено в работе Р. Ноха и X. Хюна [43] (рис. 9) и в исследова-
ниях автора (рис. 10).
На рис. 9 представлены графики изменения показаний голо-
вок микрокатора с ценой деления 0,1 мкм при одинаковом скач-
46
ковом изменении температуры рабочего пространства: кривые
нетермокомпенсированной / и термокомпенсированных II и III
головок (рис. 9, а, б, в) для нижнего IV ... IX (рис. 9, г, б) и
для верхнего IV ... IX' крепления их базовой трубки соответ-
ственно в кронштейнах малой стойки (рис. 9, г) с диаметром ко-
ловки 49,5 мм и большой—(рис. 9,6) с диаметром колонки
Рис. 9. Графики изменения показаний от изменения температуры
у измерительных головок: а — с фиксированным измерительным
стержнем; б — с дополнительной втулкой на базовой трубке из ге-
тинакса; в — с дополнительной стальной втулкой; г — при установке
в малой стойке; д — при установке в большой стойке
88 мм при измерении концевой меры L = 20 мм. При этом в на-
чальный момент времени температура окружающего воздуха
изменяется скачком от 20 до 22 °C.
Различная реакция головок (кривые / ... III рис. 9,а) вы-
звана конструктивными особенностями, а изменение этой реак-
ции (рис. 9,б,в) связано с установкой на свободную часть ба-
зовой трубки специальных втулок толщиной 10 мм. Этим можно
показать действие вспомогательных элементов или полостей из-
меряемых объектов на температурную функцию влияния. Кри-
вые изменения показаний тех же измерительных головок, уста-
новленных в стойки, зависят от типа стойки и положения места
крепления. Нижнее положение головки без термокомпенса-
ции IV (рис. 9, г) оказывает компенсирующее действие, в то
время как для головки с термокомпенсацией II и III
(рис. 9, а... в) лучшие результаты достигаются при верхнем
47
Рис. 10. Графики изменения температуры и показаний головок
при измерении: а — ситалловой меры, б — стальной меры дли-
ной 50 мм
48
расположении в кронштейне стойки (кривые VI' ... IX',
рис. 9, г, д). Нижнее же положение этих головок в кронштейне
стойки оказывается декомпенсирующим (VI ... IX).
На графиках X (рис. 10, а) и XI (рис. 10,6) отражено изме-
нение показаний пружинных головок с ценой деления 0,05 мкм
при измерении ситалловой и стальной мер от изменения темпе-
ратуры у меры 0т1, у шкалы головки Отг, у трубки 0тз, на изме-
рительном столе стойки 0Т4. При измерении ситалловой меры
(график X) характер изменения показаний качественно подо-
бен графику / (см. рис. 9, а) для нетермокомпенсированной из-
мерительной головки при фиксации измерительного стержня
инварным стаканом. График XI (рис. 10, б) для стальной меры
имеет существенно отличающийся характер.
Для большинства практических случаев выбора нормальных
температурных условий устанавливается предпочтительное со-
отношение
&1т. н > р. Н > 61-rt НН»
где Д/т. н — предел допустимого отклонения от номинала;
Д/т. р. н — допускаемая разность; б/т< Ин — допускаемое изменение
температуры за время измерения /и.
Отсюда видно стремление уменьшить динамические состав-
ляющие температурной погрешности. Это достигается ограни-
чением скорости изменения температуры, причем обычно для
средств и объектов измерения массой более 1 кг не учитываются
отдельные изменения температуры с периодом менее 0,5 мин.
В унифицированных нормальных условиях допускаются только
плавные изменения температуры. Если расчетное время изме-
рения неизвестно априори, то оно устанавливается условно рав-
ным 1 ч.
10. МЕТОДЫ РАСЧЕТА
ТЕМПЕРАТУРНЫХ ДЕФОРМАЦИЙ
В тепловом влияющем поле теплопередачи осуществляются
теплопроводностью, конвекцией и радиацией. При этом разли-
чаются три рода граничных условий [38, 43]:
1) при задании распределения температуры на поверхности
тела, т. е. известна температура любой точки поверхности в лю-
бой момент времени;
2) при задании плотности теплового потока через поверх-
ность тела в любой момент времени, оно имеет место при ра-
диационном нагреве в высокотемпературных печах;
3) при задании температуры окружающей среды и закона
теплообмена между ней и поверхностью тела. Граничное усло-
вие третьего рода наблюдается при конвективном теплообмене
в процессе нагревания или охлаждения тел в воздушной среде.
Граничное условие первого рода является частным случаем
граничного условия третьего рода.
49
Аналитический расчет распределений температуры. Анали-
тическое решение термоупругих задач базируется на использо-
вании так называемых критериев подобия:
тепловой гомохронности 5~Q =-^f-; Био — Д = ^т-п = £т/?п;
^т. пр
L v
Нуссельта ; Прандтля Рг = —; Предводителева Pd =
ср т
и (k оз \
__ т—с т—п^, ррасгофа Qr — —— р^Д/ где —половина
толщины пластины, радиус шара или цилиндра; L — опреде-
ляющий размерный параметр; йт. ср— коэффициент теплопро-
водности среды; vK — коэффициент кинематической вязкости;
От — скорость изменения температуры среды; tTO — температура
среды в начальный момент т = 0; kc — темп охлаждения (на-
грева) среды; <0т — круговая частота колебаний температуры
среды; ₽т — коэффициент объемного расширения среды нагре-
ваемого объекта; Д/т.Р — температурный «напор»; £т — коэффи-
циент теплообмена.
Распределение температуры при наличии внутренних источ-
ников теплоты описывается уравнением Фурье
Э&Т о V
-3r = «.VH+
а термоупругий потенциал описывается уравнением Лапласа
V2i|)T = 4±^aTA©T.
где цп — коэффициент Пуассона; ат — температурный коэффи-
циент линейного расширения; WT. у — удельная мощность внут-
ренних источников теплоты.
Средняя температура тела рассчитывается по интегралу
внутри рассматриваемого объема тела.
Точные аналитические решения термоупругих задач полу-
чены только для полуограниченных тел так называемой класси-
ческой, или основной, формы: безграничной пластины, безгранич-
ного цилиндра и шара [38].
Полуограниченным называется тело, в котором теплообмен
происходит только через одну поверхность, отделяющую его от
среды. Для определения температуры в деталях сложной формы
разработаны приближенные аналитические методы: метод
А. И. Вейника, основанный на свойстве «стабильности тепло-
вого потока», и метод А. Г. Темкина.
Тела по методу А. И. Вейника условно разделены на три
группы. Тела, имеющие все три измерения (длину, ширину и
высоту) одного порядка, отнесены к первой группе. Основным
телом первой группы является шар. Тела, имеющие два конеч-
50
ных измерения одного порядка и третье измерение, большее, по
крайней мере, на порядок, отнесены ко второй группе. Основ-
ным телом этой группы является цилиндр. Наконец, тела, обла-
дающие одним измерением конечного размера и двумя беско-
нечно большими (пластины, стенки), отнесены к третьей группе.
Основным телом третьей группы является неограниченная пла-
стина. Задачу для исследуемого тела сложной формы заменяют
задачей эквивалентного ему основного тела. Условием эквива-
лентности является требование равенства теплового потока че-
рез поверхность исследуемого и основного тел и равенства их
объемов.
При равенстве поверхностных температур условие эквива-
лентности записывается следующим образом:
Сто = 'QtF/F0 = CtCjj или Zto = ItF/F0 = 1^f>
где Ст и 5то — коэффициенты теплообмена исследуемого и основ-
ного тела; gT и Сто— относительные коэффициенты теплообмена;
F и Fo — площади поверхности исследуемого и основного тел;
er = (p(F/F0)—безразмерный критерий приближенного подо-
бия, устанавливающий связь между геометрической формой
тела и его температурным полем.
Еще сложнее расчет теплового поля при резании металлов,
где тепловыделения реализуются вследствие деформации сни-
маемого слоя и трения на контактных поверхностях инструмен-
та, причем источник выделения тепла [56] быстро перемеща-
ется.
Значения критерия ее приближенного подобия практически
находятся в пределах от 1 до 2. Это ограничение вызвано тем,
что по мере усложнения формы изменяется коэффициент тепло-
обмена. Известно также, что формула эквивалентности ее для
тел второй группы приемлема только для цилиндрической фор-
мы. У винтов вместо отношений периметров поперечных сече-
ний рассматриваемого и эквивалентного основного тел для при-
ближенного подобия следует брать отношение площадей поверх-
ности на равных участках длины тел.
Метод Г. А. Темкина позволяет вычислить средние темпера-
туры тел сложной формы по средней температуре основных тел
для любого промежутка времени. Сущность метода состоит
в том, что изменение теплосодержания тела за период (0, т)
равно
т т
AQT ~ 5 S ^TPv dx = Ст (Е. п А. с) dF dt.
О (Й) OF
При неизменных термических коэффициентах kT. Пр, ст и по-
стоянной температуре А. с среды получается
AQt == £тРу^- I^to (^)l:= Ст^Е (/j, /т. с)»
51
где Zto — начальная средняя температура тела; tT. пт — усред-
ненная по площади и времени температура поверхности.
Обозначив
/т (т)ЛтО == ®т (^)> (^т. пт А. с)АтО == ®т. пт>
получим
±^-М1гТ'.
Т. П-С
£ X
где Л/, =---£=----критерий Михеева; Гк — критерий формы
PY У Q ст
тела [43].
При равенстве критериев Михеева и усредненных температур
поверхности
1-6T1
1 0тз V fca/
Если первое тело реальное, для которого известны значения ко-
эффициентов £т, &т. пр, Ст и ру, то в качестве второго можно вы-
брать основное тело, равное ему по объему или площади попе-
речного сечения, с теми же значениями температурных коэффи-
циентов. Тогда по значениям 0Т2 определяется среднее значение
температуры реального тела:
@Т1 = 1 — (1 —
Метод А. Г. Темкина позволяет определять только среднюю
температуру деталей сложной формы; он может быть использо-
ван как при постоянной температуре среды, так и при темпера-
туре tT. с среды, являющейся функцией времени. Однако слож-
ная форма тела в этом случае понятие достаточно условное (так
же, как и при методе А. И. Вейника), так как критерий формы
не должен быть более Г3 (2, 5 ... 3) и Л 5 ... 6. Темпера-
турные деформации таких тел аналитически могут определяться
только по их средней температуре, т. е. при симметричных тем-
пературных полях и равномерном распределении масс.
Таким образом, расчет температурных деформаций в реаль-
ных случаях затруднителен в связи с необходимостью получения
информации о действительных значениях температурных коэф-
фициентов влияния элементов средств и объектов измерения,
видах деформации, граничных условиях теплопередачи, действи-
тельных распределениях температуры во времени и простран-
стве и т. п.
Электрическое моделирование и метод конечных элементов.
Дифференциальные уравнения, соответствующие температур-
ным полям, в общем виде описывают также явления диффузии,
магнетизма, фильтрации жидкости, процессы электропроводно-
сти, напряженности мембран и др. Следовательно, любое из
этих явлений может быть математической моделью теплового
52
поля. Наибольшее распространение получили электрические
аналоги, основанные на электродинамической, электротепловой,
электроупругой аналогиях.
Теоретически интегрирующей электрической моделью неста-
ционарного теплового поля, описываемого уравнением Фурье
д2Тт । д2Тт __ 1 дТт
дх% ду* ат дх
является полупроводящий конденсаторный слой [67]
дги , д2и п ди
э 9 “Г -»2 ----»
ду* дх3
(46)
(47)
где Сэ — удельная электрическая емкость полупроводящего кон-
денсаторного слоя; Яэ — удельное электрическое сопротивление.
Коэффициент температуропроводности можно представить
в виде
а Cp/kx. пр Ст^?т>
где ст = Ср — удельная тепловая емкость единицы объема; Ят =
= \/kT. пр — удельное тепловое сопротивление при /=1 мм и
F — 1 мм2. Заменяя в уравнении модели соответствующие вели-
чины тепловыми с помощью констант подобия, получим усло-
вия тождественности уравнений (4'6) и (47), которые обеспечи-
ваются при следующей связи тепловых и электрических харак-
теристик:
С3 /?э х ____________
С-г Тэ
(48)
С помощью выражения (48) производят пересчет тепловых па-
раметров исследуемой системы в электрические параметры мо-
дели.
Модели из электролитов дают возможность создания точ-
ного соответствия между геометрией образца и модели, обеспе-
чивают легкость исследования пространственной трехмерной
модели и большую однородность моделирующей среды. Однако
такие модели, как и модели из электропроводной бумаги, не
позволяют учитывать неоднородность теплофизических свойств
материалов исследуемого объекта, требуют больших затрат по
созданию каждой новой модели.
Решение тепловых задач в средствах линейных измерений
при нестационарных и неоднородных граничных условиях с уче-
том реальных форм измерительных систем можно получить ме-
тодом электрического моделирования пространственных обла-
стей сетками электрических сопротивлений [6]. При этом
дифференциальные уравнения теплопроводности заменяются си-
стемой конечно-разностных уравнений.
53
В основе метода лежит разделение моделируемой области на
элементарные объемы, которые обладают некоторой теплопро-
водностью (рис. 11, а), характеризующейся соответствующими
сопротивлениями по трем осям координат и замещением этих
элементарных объемов эквивалентными электрическими схе-
мами (рис. 11,6). Эквивалентная электрическая схема замеще-
ния элементарного объема получается в результате соединения
геометрического центра О элемента с центрами граней сопро-
тивлениями Rx, Ry, Rz. Таким образом, масса элементарного
объема сведена в точку О, а объемные электропроводящие свой-
ства заменены сосредоточенными сопротивлениями. Элементар-
ный объем, имеющий некоторые значения емкости, также заме-
няется сосредоточенной емкостью, подключенной к центру О.
Значение емкости Сэ пропорционально удельной теплоемкости
вещества и элементарному объему. Соединением ряда эквива-
лентных электрических схем замещения получаем электриче-
скую сетку исследуемого объекта. В этой сетке аналогом тепло-
вого поля служит поле электрического тока в дискретной среде,
аналогом температур и тепловых потоков — напряжения U и
токи, которые измеряются в узловых точках сетки.
Такие модели универсальны, так как дают возможность мо-
делировать как стационарные, так и нестационарные поля при
сборке модели исследуемого объекта из элементов одной и той
же структуры с учетом изменения геометрических размеров эле-
ментарных объемов и неоднородности их теплофизических кон-
стант.
Применение электрических сеток для определения теплового
состояния измерительных систем для линейных измерений дик-
туется и тем, что погрешность решения тепловых задач на сеточ-
ных моделях обычно не превышает 3%.
На рис. 12 показана схема разбивки измерительной стойки
типа CI (ГОСТ 10197—70) на элементарные объемы с узловыми
точками 1 в центрах элементарных площадок.
54
В сочетании с методом электромоделирования для расчета
соответствующих напряжений и температурных деформаций
удобно применять метод конечных элементов [59], позволяю-
щий на основе матричных представлений учитывать произволь-
ную геометрию поперечного сечения, широкое разнообразие
условий нагружения и неоднородность термоупругих свойств
материалов.
При реализации метода конечных элементов реальная сплош-
ная среда рассматриваемого объекта представляется совокуп-
ностью отдельных элемен-
тов 2 конечных размеров
любой формы, связанных в
узловых точках конечным
числом узловых состояний.
Вычисление перемещений в
узлах сводится к решению
системы алгебраических
уравнений. Эта система
уравнений отвечает усло-
виям равновесия.
Уравнения равновесия
совокупности конечных эле-
ментов для рассматривае-
мой температурной задачи
имеют вид
где Q — вектор соответ-
ствующих узловых сил от
температурного воздейст-
вия; ||Kq||—матрица сило-
вых коэффициентов влия-
Рис. 12. Схема разбивки измеритель-
ной стойки
ния, устанавливающая соотношение между узловыми силами и
перемещениями;
и
v
Щ = {
(х, у) )
(х, у) J
Суммирование матриц для обобщенного вектора сил от тем-
пературного воздействия выполняется суммированием вычис-
ленных сил в каждом узле. Суммарная погрешность такой рас-
четной методики, как показали практические расчеты и экспе-
риментальная проверка, не превышает 35 . .. 40%.
Минимальное число участков разбиения подбирается из
условия малости относительной погрешности ед0 = Asl0/sl9 при-
ближенного расчета температурных перемещений sI0, причем
(вде) eLQ '
(49)
55
где rK — порядок убывания числа Nx(el0),
з
— =V _L = 1+1 + 1=L
г Zj rk 2 3 ' 3 6
х 4-1 й
При 6l9 = 0,05 число элементарных участков IV к = 0,05_7/6 «
« 33, при ez.0 = O,12 N* = 0,12-7/6 « 15. В случае егв = 35%
достаточное число участков NK « 3 ... 5. Оптимальное распре-
деление элементарных участков по поверхности исследуемой си-
стемы — равномерное.
Метод топограммы парциальных переходных функций. Ме-
тод [6] заключается в том, что реальная поверхность линейной
измерительной системы и объекта измерения представляется как
совокупность конечных элементов, на которых последовательно
экспериментально определяются парциальные переходные 0ei
температурные функции путем реализации местных Д/Тг поверх-
ностных скачков температуры и фиксации соответствующих
ДЛт, изменений показаний измерительного прибора во времени.
Явления на поверхности и внутри ограниченного его объема ма-
тематически взаимосвязаны через градиент или поток влияю-
щего физического фактора [46]. Если построить последователь-
ную топограмму парциальных переходных функций, то с ее по-
мощью температурная поправка оценивается расчетным путем
на базе преобразований свертки или интеграла Дюамеля:
п
длт = Z ДДт« (0>
i=i
где
t
i\LTi (/) = j Qel (t — т) Д/т; (т) dx.
о
Для реализации этого способа разработаны специальные
контактные и бесконтактные нагреватели. Первыми воспроизво-
дятся граничные условия 4-го рода — нагрев при соприкоснове-
нии двух тел, что имитирует в определенной мере и граничные
условия l-ro рода, вторыми — граничные условия 3-го рода при
нагревании участка поверхности через воздушный карман
(рис. 13, а). Температура воздуха в кармане 5 контролируется
встроенной термопарой 4, а питание сопротивления 3 устанав-
ливается так, чтобы обеспечить скачок изменения температуры
приповерхностного слоя воздуха примерно на 5 °C. Тем самым
устраняются влияния небольших флуктуаций температуры окру-
жающей среды, от которой корпус нагревателя 1 изолирован
поролоном 6 и теплоизоляционной металлизированной тканью 2.
Условия радиационного теплообмена можно создавать опти-
ческим нагревателем, состоящим из источника света 1 (рис. 13,6),
конденсора 2, диафрагмы 3, регулирующей размеры и форму
светового пятна, матового стекла 4 и объектива 5. Термометром
сопротивления 7 (7?т) является термопара, термистор и т. п,
5<?
Для исключения рассеяния теплоты в окружающее прост-
ранство оптический нагреватель заключен в теплозащитный
корпус. Нагреватель устанавливается на значительном расстоя-
нии от объекта. Бесконтактный нагреватель удобен и в случае
исследования упругих податливых элементов. Обеспечение необ-
ходимого температурного импульса производится настройкой
потенциометра, подключенного к диагонали моста. Поддержа-
ние заданного теплового режима обеспечивается термометром
RT, сигнал с которого подается на реле Р, управляющее рабо-
той источника света. Время установления теплового скачка ме-
нее 0,1 от постоянной времени исследуемого элемента. В каче-
стве источника света 1 удобно использовать галогенную лампу.
Рис. 13. Нагреватель: а — накладной; б —дистан-
ционный
Метод парциальных топограмм в принципе пригоден для
объектов любой сколь угодно сложной формы и не требует оце-
нок их соответствия телу основной формы, как это необходимо
в случае применения описанных выше приближенных расчет-
ных методов.
Экспериментальные данные целесообразно табулировать и
обрабатывать на ЭВМ по алгоритму свертки. Для специализи-
рованных средств измерений топограммы переходных функций
могут быть паспортизованы.
Достоинством метода парциальной топограммы является не-
посредственный учет действительных значений приведенных
температурных коэффициентов, реальных видов деформаций,
рода граничных условий и т. д. Приведенными будем называть
температурные коэффициенты, приведенные ко входу измери-
тельного преобразователя, в частности для линейных измере-
ний к линии измерения.
При получении парциальных переходных функций нагрев
одного l-го локального участка на Д/т/ сопровождается нагре-
вом других участков и даже прилежащих к ним слоев воздуха
Д/т/(0 .
до Д/т/(0, причем —Следовательно, необхо-
димо одновременно с фиксацией парциальной переходной функ-
57
ции температурного перемещения фиксировать и тепловой
портрет измерительной системы, позволяющий построить мат-
рицу Haz/ll переходных функций индуцированного нагрева смеж-
ных участков поверхности. Тогда при расчете температурных
поправок в зависимость свертки (интеграла Дюамеля) вместо
действительных приращений Д/т»(0 температуры подставляются
расчетные приращения:
t
Д^т/р (0 = 5 II (! — т) IIII а,] (т) II dr.
о
При этом ац = 1, aij < 1 при i #= j, а для удаленных участков
atj « 0. Тепловой портрет удобно фиксировать с помощью теп-
ловизоров или термореак-
тивных красителей.
Известен способ полу-
чения общей температур-
ной переходной функции
измерительной системы
[43]. При этом способе
измерительный прибор 1
(рис. 14) помещают в спе-
циальный термостатиро-
ванный шкаф или под
колпак 2, в котором
устанавливается опреде-
ленная температура, пре-
Рис. 14. Изоляционный колпак: вышающая температуру
/—прибор; 2 — стекло колпака; 3 — нагреватель; ОКруЖЭЮЩеГО ПОМеЩе-
4-термометр; 5-каркас; 6-поролон; 7-фольга; ния Далее ПОСЛС НвОбхО-
S —металлизированная ткань „
димои выдержки стенки
шкафа или целиком колпак удаляют, чем создается общий ска-
чок температуры приповерхностного воздуха. Скачок несколько
искажается за счет конвекции нагретого у прибора и более хо-
лодного воздуха в помещении. После общего скачка темпера-
туры фиксируют изменения показаний измерительного прибора
до их стабилизации, в результате чего получают эксперимен-
тальную переходную функцию температурной деформации. Сле-
дует отметить, что описанный способ пригоден лишь в том слу-
чае, когда тепловое поле однородно либо когда измерительную
систему можно считать сконцентрированной в малую точку.
Причем никакая аппроксимация полученной переходной функ-
ции суммой экспонент или другими математическими функция-
ми не дает дополнительной информации, позволяющей учиты-
вать неоднородность температурного поля в пространстве. По-
этому предлагаемые так называемые «схемы замещения» [43]
с представлением измерительной системы в виде суммы услов-
ных стержней могут рассматриваться лишь в качестве алгориг-
58
Таблица 2. Виды парциальных переходных
температурных функций
Тип реакции Вид и математическое выражение парциальной переходной функции Признаки
Апериодиче- ская первого по- рядка с запаз- дыванием № T'lon Функция близка к экс- поненциаль- ной при 1 > т3ап« При t < тзап функция равна нулю
t 0ei. = MO = feTLl-e Т J = = kxf (t, Тзап» Т)
Апериодиче- ская второго по- рядка с запаз- дыванием hit] Mt) taan t = ktlf (^» T] aan^l) ~ (£, т2 зап, Г2) V-образная функция после t ~ Тзап* При <<тэап функция равна нулю
Апериодиче- ская монотонная второго порядка с запаздыванием h(t) S-образная функция
h (i) = kx 1 'з- F I kA 1 ’ ! I to « 1 “ a et> g 1 я - —J I " w* и Я +
“Г Г| - Тг ~ J
Нулевая — Отклонение равно нулю при любом t
Обозначения: Т—постоянная времени; kx—передаточный коэффициент; тзап—время запаздывания.
59
мических приемов. Пространственное размещение этих «заме-
щающих» стержней по полученной переходной функции нельзя
ни определить, ни учесть. Для стационарных средств измерений
с большими габаритными размерами реализация способа экспе-
риментального определения общей переходной функции весьма
затруднительна, а часто и невозможна. В то же время для экс-
периментального определения топограммы парциальных пере-
ходных функций накладными нагревателями нет никаких огра-
ничений в отношении габаритных размеров исследуемых объ-
ектов.
Результаты оценки парциальных переходных функций си-
стемы типа микрокатор в стойке С1 приведены в табл. 2.
11. ИЗМЕРЕНИЕ ТЕМПЕРАТУРЫ
Температура как физическая величина, характеризующая
внутреннюю энергию тел, не поддается непосредственному изме-
рению. Все используемые измерительные приборы преобразуют
температуру в какую-либо другую физическую величину, кото-
рая может быть измерена непосредственно. В большинстве слу-
чаев для измерительных приборов (кроме термоприемников),
включаемых в тракт системы измерения температуры, в каче-
стве нормальных условий принимается температура помещения
20 ±5 °C, атмосферное давление 101,3 ±4 кПа или (760 ±
±30) мм рт. ст., относительная влажность воздуха 40 ... 80%.
Методы измерения температуры можно разделить на контакт-
ные и бесконтактные.
Контактные методы измерения температуры безотносительно
к типу измерительного преобразователя (табл. 3) отличаются
вторжением в исследуемое пространство и возмущением там
дополнительных тепловых потоков. Наиболее точными и пер-
спективными в отношении автоматизации контроля температур-
ных условий являются термометры сопротивления, термисторы
и термопары.
Термометры сопротивления и термисторы. Работа термомет-
ров сопротивления основана на зависимости
Ят1 Т?т2= ®Д^т2 (^т2 ^т1)>
где и Rt2 — сопротивление материала при температурах М
и /та", «я — температурный коэффициент сопротивления (ТКС).
Для большинства чистых металлов [70] значение в ин-
тервале температур /т = 273 ... 373 К составляет 4-Ю-3 К-1,
для железа и никеля ~6,3-10-3 К-1. Полупроводниковые мате-
риалы обладают значительно большим ТКС, который в среднем
оценивается значением —40-10—3 К-1.
Наиболее распространенным материалом для изготовления
термометров является платина с температурным коэффициен-
том сопротивления а« = 4-10~3 К-1- Платиновые термометры
60
используют для воспроизведения международной практической
температурной шкалы в диапазоне от —200 до 630 °C и для из-
мерения температур до 1100 °C. Сопротивление R т. пл платино-
вого термометра зависит от температуры нелинейно. Для диа-
пазона 0 ... 630 °C
R1 пл = /?о (1 + Artt + Вт4).
Медные термометры сопротивления изготовляют из электро-
литически очищенной медной проволоки с aRM = 4,2’6 • Ю-3 К-1.
Сопротивление медного термометра практически линейно изме-
няется в зависимости от температуры и в диапазоне —50 ...
... +180 °C может быть определено по формуле
Rt. м =
При температурах более 180 °C происходит окисление прово-
локи, приводящее к изменению градуировочной характеристики.
Никелевые термометры сопротивления изготовляются из про-
волоки с аяник = (6,25 .. . 6,60) 10_3 К"1 и используются для из-
мерения температур —50 ... +180 °C. Сопротивление Вт. ник
термометров при любой температуре этого диапазона можно
определить по формуле (стандарт ГДР DIN 43760)
Rt ннк = Я0(1 + 0,С547/т + 0,639 • Ю’^ + 0,69- 10"8/?).
Нестабильность термометров сопротивления обычно менее
0,05 °C. Зависимость сопротивления Вт. тер полупроводникового
термометра сопротивления (термистора) нелинейна и выража-
ется формулой
Ат. тер Z1iepc ’
где Атер и Втер — постоянные; Тт — температура, К-
В паспорте на термистор обычно приводят сопротивление
при 20 °C, при любой другой температуре его рассчитывают по
формуле
n п Г"5тер(Г20—Гт)
Ат. тер — А20 exp I ™
н L * 207 т
где Rm — сопротивление термистора при 20 °C или 293,15 К.
Для определения постоянной Втер измеряют сопротивление
термистора при двух температурах: при Гт = 273 К и любой
другой температуре. Тогда
D ____ О ОАО 1g R173 Вт
25тер — Z.dlM 1/Г2п_ 1/?т •
Погрешность измерения сопротивления чувствительного эле-
мента термометров определяется схемой измерения и вторичным
измерительным прибором. Так, при компенсационных схемах
погрешность менее 0,02%, при использовании переносных мо-
стов — 0,05%. Для показывающих и самопишущих приборов
61
g Таблица 3. Контактные преобразователи температуры [70]
Преобразователь Элементарная схема Изменяю- щееся термометри- ческое свойство Выходная величина Пределы применения (инструментальная погрешность) Конструктивные элементы
серийных приборов эксперимен- тальных образцов
Жидкостно-стек- лянные термометры (ртутные и с орга- ническими жидко- стями): — погружаемые в среду — накладные Объемное тепловое расширение жидкости Перемеще- ние мениска в капил- ляре, м -70 ... +800 °C ± (0,01 ... 2) °C 1 — резервуар- теплоприемник с жидкостью1 2 — мениск; 3 — прозрачная труб- ка со шкалой
1 'i % tf \ \\ "* N> СЦ
Дилатометриче- ские термометры 47/ 7, Линейное тепловое расширение твердого тела Перемеще- ние конца стержня, м — —50 ... +300 °C (±5 °C) 1 — стержень; 2 — измеритель- ный преобразова- тель перемещения
1
Электрические — См. стр. 60—66
Манометрические термометры (жидко- стные, паровые, газовые) Давление, упругость паров
Термочувстви- тельные люмино- форы — Интенсив- ность све- чения при стабильном возбужде- нии
Температурные краски — Цвет
— — —
Давление, Па -20. ..+500°C ± (1 ... 4) °C — 1 — резервуар- теилоириемник с воздухом; 2 — упругая мемб- рана; 3 — измери- тельный преобра- зователь переме- щений
Яркость свечения — -100 ... +400 °C (1%) —
Смена цвета — — —
погрешность в зависимости от класса находится в пределах
0,2 ... 1%. Логометры выпускаются классов 0,5 ... 1,5
(ГОСТ 13384—75). Достоинством термисторов кроме большого
ТКС является также малое влияние подводящих проводов на
погрешность измерения их сопротивления, так как последнее
больше 1 кОм.
Термопары — термометры термоэлектрические. Диапазон тем-
ператур, который можно измерять термопарами, очень широк:
примерно от —270 до 3000 °C. До 400 ... 500 °C термопары по
точности уступают термометрам сопротивления, а при темпера-
турах выше 2500 °C — оптическим пирометрам.
При выборе материала термопары основными характеристи-
ками являются: термо-э. д. с., развиваемая термопарой; макси-
мальная температура применения; взаимодействие с окружаю-
щей средой. Термопары могут быть простыми и дифференци-
альными.
В области средних и низких температур применяют медь —
константановые термопары. В диапазоне 0 ... 100 °C термо-э. д. с.
изменяется практически по линейному закону. Термоэлектродви-
жущая сила хромель — копелевых термопар значительно выше
остальных (80 мкВ/K), что делает их наиболее приемлемыми
в диапазоне нормальной температуры, характерной для машино-
строения. При 600 °C и выше эти термопары быстро окисляются.
Хромель — алюмелевые термопары работают до 1100°C, для
предотвращения их окисления в окислительной среде в охран-
ный колпачок иногда кладут кусочек титана [70]. Погрешности
термопар складываются из следующих погрешностей: погрешно-
сти градуировки, неоднородности электродов от компенсацион-
ных проводов, погрешности, связанной с электропроводимостью
материала изоляции, смещения температуры холодного спая
(для стабилизации применяют сосуды Дюара) и погрешности
выходного сигнала термопары.
Считается, что глубина погружения термометра в среду
полная, если она равна или более 2(Мж (dx — диаметр жезла
термометра). В этом случае можно пренебречь теплоотводом по
жезлу. Метрология градуировки термометров изложена в мето-
дике МИ 108—76.
Погрешности контактных измерений температуры. Метроло-
гическое обеспечение термометров сопротивления и термопар
реализуется по поверочным схемам (ГОСТ 8.083—73). Погреш-
ности измерения температуры складываются из двух основных
видов: 1) преобразования температуры в непосредственно изме-
ряемую вторичную физическую величину [70]; 2) измерения
вторичной физической величины.
Погрешности первого вида у контактных термоприемников
имеют пять основных источников: 1) отличие теплофизических
характеристик контактного термоприемника и исследуемого
объекта; конечность размеров термоприемника; 2) наличие пе-
64
репада температуры между измеряемым объектом /т. п и окру-
жающими физическими телами, в том числе воздушной средой
/т. в; 3) принципиальная нестационарность тепловых процессов
н термическая инерционность термоприемников; 4) равновесная
температура газового потока при неподвижном термоприемнике
выше статической за счет преобразования кинетической энергии
в тепловую; 5) недостаточный контакт термоприемника с по-
верхностью вследствие шероховатости, непостоянства усилия
прижима и т. и.
При анализе систематических погрешностей наиболее харак-
терного для машиностроения измерения температуры поверхно-
стей твердых тел выделяются специфичные случаи взаимного
расположения исследуемой поверхности и термоприемника.
Для случая 1 при /т ц > в и т)л = (ф, измеренная темпе-
ратура равна действительной (Л7г = 0), для случая 2 при т]л >
> Ыл измеренная температура ниже действительной вследствие
действия теплоотвода </7т по термоприемнику; для случая 3 при
Цл < ©л термоприемник оказывает теплоизолирующее действие.
С учетом двухкоординатного распределения температур в про-
странстве контактного сопротивления и перепада температур
в спае термопары расчетные зависимости становятся более
сложными (см. [70], стр. 69). Для повышения точности измере-
ния температуры поверхности с помощью термопары рекомен-
дуется заглублять ее рабочий спай в материал на глубину 1 мм.
Для особо точных измерений температуры воздуха в диапазоне
19,5 ... 20,5 °C разработан набор термометров ТСУ (ВНИИМ.
им. Д. И. Менделеева) с погрешностью не более 0,001 °C.
При резании металлов применяют естественные термопары,
образованные режущим инструментом и обрабатываемым мате-
риалом, и искусственные закладные термопары, которые делят-
ся на прижимные, защемленные, перерезываемые и «бегущие»
[56]. Специфична в этом случае и передача измерительного
сигнала: непосредственным замыканием вращающихся элемен-
тов СПИД на ртуть через скользящий контакт или со связью
через гибкий трос.
Уменьшение геометрических размеров термоприемника и
улучшение контакта Ло его чувствительного элемента с поверх-
ностью исследуемого тела хотя и снижают погрешность измере-
ния, но не устраняет ее полностью. Влияние отвода теплоты
можно в значительной степени уменьшить, помещая вблизи чув-
ствительного элемента (спая термопары) электрический нагре-
ватель (рис. 15). В варианте I мощность нагревателя подбирают
по отсутствию изменений в показаниях при перемещении тер-
моспая вдоль поверхности; в вариантах II и III — по нулевому
сигналу от дифференциальной термопары (выводы 2 и 3 в
* т|л = Л г/Ло, Ол = Л„1Ла, где Ла— теплопроводность свободной поверх-
ности.
3 Зак. 843
65
варианте 11, выводы 1 и 4 при закороченных выводах 2 и 3 в ва-
рианте ///). Длина (1 ... 6)10~3 м; /1 « (0,2 ... 1)10—3 м,
диаметр термоэлектродов (0,1 .. . 0,4) 10—3 м.
В дифференциальных термопарах сплавной электрод следует
накладывать на контролируемую поверхность, а электроды из
чистого металла, менее чувствительные к градиенту темпера-
туры окружающей среды, используются в качестве подводящих
и располагаются в воздухе. Другим приемом снижения погреш-
ности является использование двух термоприемников с различ-
ными размерами и теплофизическими свойствами.
Пластинчатые (плоские) термоприемники выполняют обычно
в виде металлических и полупроводниковых термометров сопро-
тивления. Иногда такое конструктивное оформление придают
Рис. 15. Термопара с компенсатором теплоотвода:
/и 2 — термоэлектроды основной термопары; 3 н 4— электроды
вспомогательной термопары; 5 — контролируемая поверхность
термоэлектрическим термоприемникам, укладывая или осаждая
электроды термопары на соответствующую подложку. Источ-
ники погрешности связаны с нестационарным теплообменом
между внешней средой и термоприемником, а также и между
исследуемым телом и термоприемником. При измерении темпе-
ратуры тонких стенок распределение температур Zt(vp, т) по
толщине hT термоприемника считают прямолинейным
Ъ (vp, т) = (1 — vp) /т (0, т) + vp/T (1, т),
где vp = x/hT — относительная координата; МО, т) и /т (1, т)—
значения температур на поверхностях термоприемника при х —
= 0 п х = hT; х — время.
Пирометры. Пирометрическое бесконтактное измерение тем-
пературы по излучению поверхности тела выполняется с по-
мощью визуальных и фотоэлектрических пирометров [18]. Ви-
зуальные оптические пирометры предназначены для работы
в видимом спектре и используются для оценки яркостной тем-
пературы раскаленных тел. Для средних температур, близких
к 30 °C, применяются фотоэлектрические пирометры, работаю-
щие в инфракрасной области спектра.
66
Существуют различные определения понятий цветовой, ярко-
стной и радиационной температур. Определения основаны на
том, что по мере изменения температуры тела меняется рас-
пределение энергии в его спектре.
Цветовой называется такая температура абсолютно черного
тела, при которой в данной области спектра черное и нечерное
тела характеризуются одинаковым распределением энергии или
имеют одинаковый цвет.
Радиационной Тг. рад называют температуру абсолютно чер-
ного тела, при которой энергетические светимости черного и не-
черного тел, отнесенные ко всему диапазону длин волн спектра
теплового излучения, равны между собой. По закону Стефана —
Больцмана ___
Тг = Тт. рад Vl/eT)
где Тт — действительная температура нечерного тела; ет < 1 —
суммарный коэффициент черноты излучения.
Яркостной температурой тела в лучах с длиной волны X на-
зывается такая температура абсолютно черного тела Тя, при ко-
торой яркости обоих тел в свете одной и той же длины волны
равны между собой.
Абсолютно черным называется тело с коэффициентом погло-
щения лучей, равным единице. Для определения свойств излу-
чения абсолютно черного тела применяется формула Планка
4г=¥№(есЛ-1Г’м-
где Ci = 2лйс2 = (3,7413 ± 0,0002) 10-6 Вт-м2; с2 = Тгс/кб =
= (1,4380 ± 0,0001) 10-2 м-К; с — скорость света в вакууме;
Й— постоянная Планка; k б—постоянная Больцмана; — по-
казатель преломления среды (по отношению к вакууму), в ко-
торой распространяется излучение. В воздухе « 1.
Формула Планка определяет светимость абсолютно черного
тела, т. е. мощность энергии, излучаемой в полусферу единицей
поверхности с температурой Тт внутри спектрального интер-
вала ДХ, середина которого характеризуется длиной волны %.
Погрешность пирометрических измерений связана с неточ-
ностью определения коэффициентов черноты тела. Абсолютно
черное тело воспроизводится [18] с некоторой степенью при-
ближения с помощью изотермичной полости со скошенной зад-
ней стенкой, внутри которой поглощается вся энергия, излучае-
мая отдельными частями. Метод определения яркостных темпе-
ратур с выделением сравнительно нешироких рабочих
спектральных участков надежнее методов измерения темпера-
тур тел по их суммарному излучению. Однако измерение тем-
ператур тел по инфракрасному излучению характеризуется ря-
дом особенностей, которые необходимо учитывать. По мере
уменьшения температуры тел максимум кривых распределения
3* 67
энергии их излучения смещается все больше в длинноволновую
область спектра. Для большинства металлов коэффициент чер-
ноты излучения снижается по мере возрастания длины волны
и понижения температуры, что ведет к повышению погрешности
оценки действительной температуры по измеренной яркостной.
При дистанционном измерении излучения тел в инфракрасной
области спектра некоторые участки спектра претерпевают в воз-
духе поглощение из-за толщины воздушного слоя, находящегося
между излучателем и прибором, измеряющим яркость, а также
наличия в воздухе углекислого газа и водяных паров.
Наиболее надежные результаты получаются при измерении
температур тел с помощью инфракрасного излучения прибора-
ми, в которых чувствительный элемент (фотосопротивление или
болометр) работает в нулевом режиме, т. е. играет роль инди-
катора равенства и рассогласования лучистой энергии, получен-
ной элементом из визируемого тела и от источника сравнения.
Метрологическое обеспечение пирометрии реализуется в со-
ответствии с требованиями ГОСТ 8.130—74; ГОСТ 13881—68;
ГОСТ 8.293—78 и др.
Перспективно применение электронно-оптических преобразо-
вателей яркостной температуры с люминесцирующим экраном.
На этом принципе построены тепловизоры, фиксирующие теп-
ловой портрет исследуемой поверхности. Измерение температу-
ры внутри твердых тел применяется только для специальных
исследований [70].
Промышленные средства для контроля температуры *. Термо-
метры термоэлектрические, сопротивления и пирометрические
термометры разрабатываются Львовским научно-производствен-
ным объединением «Термоприбор» и выпускаются Луцким и
Каменец-Подольским приборостроительными заводами. Причем
первый специализируется на контактных**, а второй — на бес-
контактных фотодиодных преобразователях. Агрегатный комп-
лекс стационарных пирометрических преобразователей АПИРС
имеет пределы измерения от 30°C (преобразователь ПЧД). По-
грешность измерений АПИРС до 2%.
Для автоматизации контроля температуры можно использо-
вать термографы метеорологические с биметаллическим чувст-
вительным элементом по ГОСТ 6416—75 при погрешности за-
писи ±1 °C, что соответствует допускаемым пределам более
±3°С.
В Бюро Взаимозаменяемости Минстанкопрома (БВ) разра-
ботаны электротермометры для измерения поверхностной тем-
пературы и разности температур: БВ9017, БВ 9040. Термопре-
образователем контактного термометра БВ 9017 служит мало-
* См. следующие документы: ГОСТ 2045—71; ГОСТ 13646—68;
ГОСТ 10688—75; ГОСТ 5.1897—73.
** См. следующие документы; ТУ 25.02.703—73; ТУ 25.02.837—73;
ТУ 25.021.1821—75; ТУ 25.02.1833—75, ТУ 25.02.747—74.
68
габаритный терморезистор, заделанный вблизи торца серебря-
ного цилиндра. Пределы измерения 15 .. . 45 °C, цена деления
0,5 °C, погрешность не более 0,5 °C, время измерения 6 с.
Основой фрикционного термометра БВ 9040 служит бронзо-
вый термощуп, приводимый в контакт с обрабатываемой де-
талью. Нагревание термопреобразователя от трения о шлифо-
ванную поверхность вращающегося вала без полива ее охлаж-
дающей жидкостью достигает 4 °C при усилии прижима 0,15 И
и угловой скорости 35 м/мин [39]. При снижении усилия при-
жима до 0,025 Н нагревание преобразователя не превышает 1 °C.
При поливе вала охлаждающей жидкостью нагревание от тре-
ния отсутствует при усилиях до 0,1 Н.
12. ТЕРМОСТАТИРОВАНИЕ,
ТЕРМОКОМПЕНСАЦИЯ
И НОРМАЛЬНАЯ ТЕМПЕРАТУРА
Выдержка. Стабилизация температуры средств и объектов
измерений в термостатированном помещении осуществляется
выдержкой. Для определения времени выдержки можно исполь-
зовать формулы Берндта или Злодеева [43]. Эти формулы яв-
ляются весьма приближенными и пригодны лишь для ориенти-
ровочных оценок. Метод Злодеева, будучи расчетно-эксперимен-
тальным, требует предварительных экспериментальных данных
для каждого типа исследуемого объекта, что трудоемко, а в
ряде случаев и невыполнимо. Причем следует также обеспечи-
вать и реальные условия теплопередачи (стальная, деревянная
плита и т. д.). Стабилизация температуры воздуха в помещении
осуществляется при помощи кондиционеров (см. гл. III), регу-
лируемыми системами подогрева [19], естественным термоста-
тированием при соответствующей планировке внутренних поме-
щений (см. гл. VII). В системах активного контроля, где вы-
держка во времени не дает стабилизирующего эффекта вслед-
ствие непрерывного тепловыделения в процессе обработки,
применяются термокомпенсирующие системы и специальные
методы термокомпенсации.
Термокомпенсация в процессе обработки. Для круглого врез-
ного шлифования И. С. Амосовым и А. П. Архаровым [1];
предложена система автоматического регулирования, основан-
ная иа непрерывном измерении температурного удлинения обра-
батываемой детали (квазидилатометрический метод измерения
температуры). Система включает подвижный центр 3 (рис. 16),
пневматическое компенсационное сопло 9 в арретируемой рамке
кронштейна 10 (с сохранением исходной настройки начального
зазора истечения воздуха при разных длинах обрабатываемой
детали в пределах допуска) для контроля температурного удли-
нения детали вдоль оси, измерительные сопла 16 для контроля
диаметра обрабатываемой поверхности, вторичный пневмоизме-
69
рительный преобразователь 17 с отсчетным устройством мано-
метрического типа. Выходной контролирующий и управляющий
сигнал преобразователя 17 является функцией суммы изменений
Рис. 16. Система термокомпенсации при круглом шлифовании:
1— центр; 2—обрабатываемая деталь; 3— подвижный центр; 4— задняя
бабка; 5 — пружина; 6— шток; 7—тяга; 8—заслонка; 5— пневматическое
компенсационное сопло; 10 — кронштейн; 11, 13 и 18 — шланги; 12 и 15—уста-
новочные микровинты; 14 — скоба; 16 — измерительное сопло; 17 — отсчет-
ное устройство; 19 — переключатель рода работ; 20— блок стабилизатора
и фильтра; 21— сопло противодавления
6si зазоров в термокомпенсационной системе сопла 9 и измери-
тельной системе сопел 16 — (6ss).
При круглом врезном шлифовании с охлаждением вала
0 55 мм из стали 45, Я/?С50 .., 55 с припуском на обработку
70
0,33 мм при поперечной подаче 0,2 мм/мин, диаметре круга
Э9А25СМ2К7 387 мм, ширине шлифования 35 мм, скорости вра-
щения детали 120 об/мин среднее арифметическое темпера-
турных деформаций составляет 8,7 мкм [1]. В то же время
среднее арифметическое температурной компенсации равно
6,3 мкм. Следовательно, в этом случае погрешность приведения
по температуре равна 2,4 мкм. При АИзД = 30 мкм по 7-му ква-
литету СТ СЭВ 145—75 (второй класс точности системы ОСТ)
эта погрешность соответствует требованиям к нормальным усло-
виям измерений, так как 2,4/30 0,35• 0,35 = 0,12; для допуска
Рис. 17. Система автоматического регулирова-
ния для плоского шлифования
по 6-му квалитету СТ СЭВ 145—75 (первый класс точности си-
стемы ОСТ) требуется некоторое повышение точности термо-
компенсации, так как 2,4/19 > 0,12.
Для компенсации температурных погрешностей формы де-
тали при плоском шлифовании предложен [2] способ, основан-
ный на измерении температурной деформации формы при шли-
фовании. При этом по измерительному прибору фиксируется
суммарная температурная деформация формы за время снятия
припуска с детали. После охлаждения с применением СОЖ
устанавливается глубина резания, равная зафиксированной ра-
нее деформации, и осуществляется последний проход, в ходе
которого температурные деформации малы. Для автоматической
компенсации температурных погрешностей формы разработан
ряд систем автоматического регулирования (САР). На рис. 17
показана схема САР с образцом исходной плоскости 1, закреп-
ленным под шлифовальным столом 2. Положение плоскости 1
контролируется дифференциальным пневмоизмерительным уст-
ройством 4, второе сопло противодавления 5 которого контроли-
рует положение шлифовальной бабки 6, перемещаемой при
71
рассогласовании цепей (измерительной 3 и противодавления 5)
с помощью электропривода 7. Применение такой пневмоэлектри-
ческой САР уменьшило погрешность профиля от непрямолиней-
ности перемещения стола с 19 до 4 мкм на длине 500 мм.
В Бюро Взаимозаменяемости разработай пневматический
прибор БВ4041—К1 Для контроля изделий диаметром 150 ...
... 400 мм при шлифовании методом врезания с автоматическим
введением компенсационной поправки на тепловые деформации
детали и скобы. В этом приборе для термокомпенсации из-
меняется зазор под соплом противодавления на значение, со-
ответствующее тепловой деформации обрабатываемой детали и
скобы. В результате смещается его настройка на выдачу коман-
ды прекращения обработки. В приборе применены фрикцион-
ный термопреобразователь температуры детали и контактный
термопреобразователь температуры скобы. На скобе выделен
элемент, температура которого является наиболее представи-
тельной по связи с температурной погрешностью. Таким элемен-
том оказалась измерительная губка. Испытания в термокамере
прибора показали, что его статическая температурная погреш-
ность не превосходит 2 мкм, а динамическая — 3,5 ... 5 мкм.
Подробные исследования температурных деформаций накидных
скоб при активном контроле в процессе врезного шлифования
проводились А. В. Ляховским [39]. Им установлены следующие
упрощенные соотношения. Температурную погрешность скобы
можно приближенно определить по формуле
А/ = Е А/; = ХотЛ [0Т1 (0 — Тто],
i i
где li — длина основных элементов; ат, и 0Т?(/)—их темпера-
турный коэффициент линейного расширения (ТКЛР) и темпе-
ратура, Тто'—температура настройки.
Связь температуры среды Тс(/) и элементов скобы выра-
жается зависимостью типа
t
Тй (/) - 0Т (0 = [Тео - ет (4))] e“"l/ J е"!/( dt,
f,
где mt—постоянная тепловой инерции, обратная постоянной
времени переходного процесса температурной деформации.
Если температура среды изменяется по линейному закону и
в начальный момент Тс0 = 6т (Лэ), то
с \ / 1 \ /
После установления температуры Тт. уст среды изменение тем-
пературы скобы идет по экспоненциальному закону
0т (0 = Л. уст(1-е"тО-
72
Температурная погрешность скобы снижается при уменьше-
нии размеров с приближением ее ТКЛР ат « 14-10*6 К-1
к ТКЛР обрабатываемого объекта, при близких значениях теп-
ловой инерции пи губки, планки и стержня скобы.
При шлифовании детали цилиндрической формы (для связи
тепловой деформации с температурой поверхности) в формулу
равномерного теплового расширения атА/тД вводят поправоч-
ный коэффициент, учитывающий непостоянство температуры
поверхности детали по ее периметру.
Исследованиями И. С. Амосова, О. А. Иванова, Ю. А. Кутьи-
на (ЛПИ им. М. И. Калинина) установлено, что при круглом
наружном шлифовании с обильным охлаждением СОЖ наблю-
дается тепловое насыщение обрабатываемых деталей. Темпера-
турное поле Тт(г) становится практически стационарным и рав-
новесным с малым приращением температуры по радиусу г от
центра детали к шлифуемой поверхности. Для шлифования на
станках моделей ЗА151 и 3E153 поверхностей 0 40 мм кругами
марки 24А25НСМ1К6 при врезной подаче 0,2 и 0,4 мм/мин и
расходе СОЖ 10 ... 20 л/мин:
7’т(г) = Д/1. ц4-0,02г’^,
где АА. ц — отклонение температуры в центре детали от нор-
мальной.
Температурное приращение диаметра D = 2R шлифуемой
детали в режиме теплового насыщения равно
я
ADT = J гт (r) r dr = 2а7? А/ц -ф 0,0085/? » атП А/ц.
о
При компенсации температурной погрешности по этой зави-
симости CKO AD равно s == 0,68 мкм, а среднее значение неком-
пенсированной тепловой деформации — 0,16 мкм, что для нор-
мального закона распределения отклонений размеров может
соответствовать нормальным условиям измерений детали 6-го
квалитета с допуском 25 мкм для размеров в диапазоне 30 ...
... 50 мм, так как
3-0,68 + 0,16
25
= 0,088 as P/Vj, = 0,25 • 0,35.
Ускоренная стабилизация температуры обработанных дета*
лей осуществляется размещением их на стальной массивной
плите, в теплопроводящей жидкости (масло, вода), воздушным
обдувом.
Выбор нормальной температуры. При выборе нормальной
температуры учитываются технико-экономические возможности.
Именно из этих соображений нормальная температура вместо
ранее общепринятой 0°С [7] установлена /тн —20°С, хотя это
73
значение и не соответствует реперной точке температурной шка-
лы. Однако из статистической физики выявляется отрицатель-
ный метрологический эффект перехода на увеличенную нор-
мальную температуру /т. н + Д/т, так как вследствие термодина-
мических флуктуаций появляется погрешность с СКО
<Уу = д/Оха (К. и), (50)
где Oxa'ltr. и)—среднее квадратическое отклонение термодина-
мических флуктуаций при нормальной температуре /т.н. Анало-
гичные выводы получаются и из уравнения Найквиста для
э. д. с. [48].
Дальнейшее увеличение нормальной температуры (согласно
отдельным нормативным документам до 23 °C или даже до
Рис. 18. Нормативные значения нормальных пределов темпе-
ратуры
25 °C) вряд ли целесообразно. Следует отметить, что темпера-
тура 25 °C при длительной работе плохо переносится исполни-
телями (см. гл. VI), в то время как при 20°C индивидуальные
тепловые потребности компенсируются дополнительной одеж-
дой. Поэтому установление повышенной нормальной темпера-
туры требует определенных обоснований.
Установление единых нормальных пределов температуры для
всех видов измерений нецелесообразно и невозможно. Здесь
следует учитывать специфику действия температуры на сред-
ства и объекты измерений, требования к точности измерений и
контроля. Поэтому может быть установлен только предпочти-
тельный ряд значений таких пределов, отражающий практику
нормирования (рис. 18). На рис. 18 по оси ординат отложены
частости нормирования Wi определенного значения, указанного
на оси абсцисс. Нормальная область температуры может быть
симметричной и асимметричной.
В стандарте по выбору нормальных условий измерений при
поверке (ГОСТ 8.395—80) устанавливаются следующие ряды
значений нормальных пределов температуры:
74
а) отклонений от нормального значения: 0,01; 0,02; 0,05; 0,1;
0,2; 0,5; 1; 2; 5; 10; 15 °C со знаком плюс и минус;
б) изменения за время измерения и разности температур
в пространстве: 0,001; 0,002; 0,005; 0,01; 0,02; 0,05; 0,1; 0,2; 0,5;
1; 2; 5; 10°С.
Вместе с тем для конкретного вида измерений можно уста-
новить унифицированные нормальные пределы температуры
в зависимости от диапазона и точности измерений (см.
ГОСТ 8.050—73) исходя из общего требования к нормальным
условиям измерений Адоп бин (см. гл. I). Это требование ис-
пользуется п при установлении пределов расширенных нормаль-
ных условий (см. гл. VII).
Нормальная область значений температуры для направляю-
щих вращательного, поступательного движений, измерительных
механизмов. Унифицированную область отклонений температу-
ры для направляющих вращения можно оценить из следующих
соотношений. Если кинематическая систематическая погреш-
ность такой направляющей равна scx=(d/2)0rp (d— диаметр
окружности катания [79]; 0Ф— угол поворота направляемого
звена), то температурная погрешность соответствует
Sy (/т) = [Agpl (/т) + Ad/2 (/т)] 0Ф.
Здесь А|Р1(/т)—температурное смещение начального положе-
ния полюса первого порядка (мгновенного центра вращения);
&d/2 — температурное изменение радиуса окружности катания.
Очевидно, что
(М == А/т,
Дг//2 (/т) = aTd (d/2) &tT,
где aTj и ата — приведенные ТКЛР параметров gPi и d; А/т —
отклонение температуры от нормальной.
Отсюда составляем требование малости дополнительной по-
грешности по отношению к погрешности схемы при нормальном
законе распределения
Sy (ZT) [AEpi (G) + kd/1! (^т)1 6<p v
= (Ж < =ил
Получаем условие
f2ctT^ppd -]- А/т. н 0,5.
Для нормальной области отклонений обобщенной темпера-
туры с учетом передаточного отношения I измерительного меха-
низма
' + axd) Z *
75
Наибольшее отношение bi^-1 Для одноленточных упругих
направляющих [79] равно 5, ТКЛР аТ£ и ат^ для этих направ-
ляющих в статике равны ТКЛР материала лепт. В результате
для одноленточной направляющей со стальными лептами
aT? = aTd =11- КГ6 К-1
и
д. 0,5
т' 2-5,5.11 10-6/'
При i — 10 000
А/т.„<у^0,4°С.
При i= 1000
А/т. н < 4 °C.
Для перекрестных двухленточных направляющих вращения
отношение ^P\/d = 3. При <7—>-0 это отношение растет, но обе-
спечение d = 0 затруднительно по техническим причинам. Для
прямолинейных направляющих с пересекающимися линиями
действия погрешность схемы выражается зависимостью [79]
А-$СХ. П
где /и 4; АР/ = s2 + ВпО'ф — погрешность траектории точки
пересечения линий действия.
Отсюда изменение Ар/ при отклонениях Д/т температуры бу-
дет
(/т) = (а„2«2 + ат. оВптЭ'ф + ИтоВпО'ф) А/т,
где «тз2; ест. в; —соответствующие приведенные ТКЛР.
В статике ат^->-0. Если aTS 2 ~ ат. в « ат и ат<> = 0, то
Кт)/^pi ®т А/т. н 0,0.
Отсюда
А/т. нСО.баГ’г"1.
Для поступательных направляющих с параллельными линия-
ми действия погрешность схемы равна Ascx = Вп'&ф, а дополни-
тельная погрешность составит
б As (/т) = АВП (/т) Оф ДО'ф (/т) Вп = (ат. в + ат0) ВПОФ А/т.
Тогда
б As (/T)/Ascx (<xTi в 4~ сь-го) А/т. и < ОД
и нормальная область отклонений температуры
А/т. н < 0,5 (ат. п 4~ ^то) i *
76
где i— передаточное отношение в последующей цепи измери-
тельного механизма.
Для измерительного механизма нормальная температурная
область оценивается соотношением
Л . 0,5d In /0
'т- « d In ц ’
где io — статическая передаточная характеристика схемы; in—
то же при отклонении температуры от номинала нормального
значения на 1 °C; din io и d In iv — соответственно относительная
погрешность схемы и погрешность влияния, отнесенные к пере-
даточной характеристике i0.
Температурный режим работы подвижного соединения. Тем-
пературный режим в соединении определяется [89] из условия
равновесия теплообразования и теплоотдачи. При установив-
шемся режиме работы
Г0 = Ге! + We2,
где Wq = QT — количество теплоты, выделяемой от трения
(см. табл. 4); Fgi — количество теплоты, отводимой через кор-
пус и вал; — количество теплоты, отводимой через смазку.
Теплоотвод через корпус и вал определяется по формуле
1Е01 = йт • 20/пОп (/т. п — 20°),
где kT — коэффициент теплоотдачи; /т.п — температура подшип-
ника, 0 С. Применительно к нормальным корпусам подшипников
принимают йт min = 18,2 Вт/(м2-К).
Из условия равновесия теплообразования и теплоотдачи
можно определить отклонение температуры подшипника Д/т от
нормальной
AiT = 0,006-^-п
Ктфз
где и — угловая скорость вращения вала; £>п — диаметр под-
шипника; Цс — вязкость смазки; ф3 — относительный зазор.
Изменение зазора при отклонении А/т температуры от нор-
мальной при разных температурных коэффициентах ссц и ат2
корпуса и вала равно
А3 = £)п А/т (ctT| сьт2).
Если в качестве точностной характеристики подшипника исполь-
зуется эксцентриситет еп положения вала во втулке, то ограни-
чение нормальной области' температуры разогрева подшипника
можно найти из требования малого относительного изменения
эксцентриситета беп/еп ц.
77
Так как
__ ___Аэ/2__ _ (Дп/2) А/т {<*Т1 — Отз)
% “ DM2-4) ~ Dn(V-xJ
где Xft — hmin/Dn — относительный минимальный слой hmin
смазки.
Динамические температурные влияния на упругую балку-
подвеску. Переходную температурную функцию для балки с
плоскопараллельно перемещающимся 5 концом можно найти,
решая дифференциальное уравнение прогиба us
u'v = °-
Общее решение имеет вид
Х1 XI
Huus (х) = — ^ МТ2 (xi) dx\ dx2 -ф Ни (Со -ф Ctx) — Л10х2/2 — us0x3/6.
о о
Ни ±= Е1,
где / — осевой момент инерции сечения балки.
Если температурный момент Лф2 постоянен во всех сечениях
балки, т. е.
Мтг = Л4Т, Huus (х) = Мтх2/2 -ф Ни (Са -ф Cix) — М$х?12 — н3ох3/6.
Откуда при принятых граничных условиях:
Со== 0; С1 - 0; Л4о = 22ИТ — u^L(2\
= 12 (tfuS -ф Л4тС2/2) С'3.
Следовательно,
Mo = 2М т - 6 (HUS -ф Л4тС2/2) L ~2;
PQ = 12L-3 (HUS -ф Л1тЛ2/2).
При Л/т = 0
действующее усилие Pq = 12HUSL~3.
Способ упрощенной экстраполяции пределов нормальной
температурной области. При переходе к более грубым или более
точным квалитетам i (классам точности) с в заданном диа-
пазоне длин L значение нормального предела температуры
соответствующее квалитету / с бн„ в том же диапазоне L,
следует умножить на бинАин- При этом квалитет / с нормальной
областью — ближайший по номеру к квалитету I.
Если изменяется не только бин, но и диапазон длин L с
на Е(<), то
д/(« aja//)
78
Эти соотношения следуют из элементарных стационарных пред-
ставлений приращения температурной погрешности.
Упрощенную экстраполяцию норм времени т выдержки объ-
екта измерения при нормальной температуре можно осуществ-
лять согласно формуле Г. Берндта [7] по зависимости
(0- m +
Т ~Х +
где Л/т. об — допускаемое отклонение от нормальной темпера-
туры объекта, помещаемого в рабочее пространство.
При этом принимаем, что отношение массы к площади по-
верхности и условия передачи тепла не изменяются. Учитывая
ориентировочный характер таких оценок, их следует применять
при сравнительно небольших изменениях длин и норм точности.
Влияющие факторы могут оказывать кратковременное и
длительное действие. Поэтому условно их можно делить на фак-
торы с последействием и без него. Для первых характерна акку-
муляция в объектах воздействия с последующим проявлением
в погрешности результатов измерений в течение длительного
времени и после прекращения действия внешнего фактора. К та-
ким факторам и относится температура.
При наличии факторов с последействием важно периодиче-
ски проверять смещение настройки средств измерений и ход
систематических погрешностей. Методически это реализуется
периодической проверкой «нуля» шкалы и другими аналогичны-
ми приемами оценки ее реперных течек. Для факторов с боль-
шим последействием необходима постоянная стабилизация, в
частности круглосуточное термостатирование.
Следует заметить, что в рабочем пространстве со статисти-
чески нестабильными условиями цель анализа и аттестации в
основном состоит в экспериментальном определении (проверке)
норм для существенных влияющих величин, характеризующих
расширенные нормальные условия измерений. Соблюдение этих
норм необходимо контролировать в процессе выполнения изме-
рений.
Глава III
НОРМАЛЬНЫЙ ВОЗДУХ
13. ДАВЛЕНИЕ, ВЛАЖНОСТЬ,
ТЕПЛОСОДЕРЖАНИЕ
И ПЛОТНОСТЬ ВОЗДУХА
Давление воздуха. Давление окружаю-
щего средства и объекты измерения возду-
ха определяются его атмосферным давле-
нием и соотношениями поступающих и уда-
ляемых объемов в рабочем пространстве
(помещении). Во многих ГОСТах (рис. 19),
рекомендациях СЭВ, ИСО, МОЗМ. * нор-
мальное давление устанавливается равным
101 325 Па (760 мм рт. ст.). Значение
750 мм рт. ст., принятое в ГОСТ 12997—76
и ряде других стандартов, является резуль-
татом округления до 100 кПа, что допусти-
мо при малой чувствительности средств и
объектов измерений к изменению давления
окружающего воздуха, когда нормальная
область значений этого фактора шире диа-
пазона 86 ... 106 кПа. Норма 100 кПа
(1000 мбар) принята и в публикации
68 МЭК **. Из рис. 19 видно, что пределы
симметричной нормальной области СНО
выбираются из следующего ряда значений:
0,1; 0,4; 1,33; 3,0; 4,0 кПа или 1; 3; 10; 25;
30 мм рт. ст. Асимметричные нормальные
области АНО значений атмосферного дав-
ления обычно допускаются в тех случаях,
когда нормальное значение (Н. 3.) не уста-
новлено.
Для исключения подсоса пыли в рабо-
чее пространство извне нормируется допу-
скаемое превышение естественного атмо-
сферного давления на 3 ... 4 кПа. Для из-
мерения атмосферного давления применя-
ются барометры.
Барометр контрольный
МД-49-2 служит для измерения атмосфер-
* Международная организация законодательной метрологии.
** .Международная электротехническая комиссия.
80
него давления в наземных условиях. Действие прибора осно-
вано на свойстве анероидных коробок деформироваться с из-
менением атмосферного давления. Деформация коробок, соб-
ранных в блок, преобразуется передаточным механизмом в пе-
ремещение указывающей стрелки относительно шкалы,
отградуированной в миллиметрах ртутного столба. Прибор
0.53
wL=0,63
I 9-™
0,02
0,02
0,1
0,07
026
T 0.03
042
0,26
I I 1 U,UO
I T T kM I iT IT I________________________________________
100 101,3 102 110 I 84-105 96-103 98-104\Щ1*-0ЩЗЗ*-3 *4 par, кПа
(7501(7601(766) (8251 I I630-m-\l720-\l735-\^0.76) (Ч0)(к25) £30)(мртсГ)
ИЗ \Ш Ш0 \780]\7B5h (*3)
I №0 I CHO
/НО
Рис. 19. Нормативные значения нормального да-
вления
смонтирован на пружинах в деревянном футляре и имеет сле-
дующие технические данные:
Пределы измерения атмосферного давления, мм рт. ст.
» » » » , кПа . . .
Цена деления шкалы, мм рт. ст........................
Погрешность измерения, мм рт. ст.....................
610 ... 790
81 ... 105
1
±0,8
Барометр-анероид БАММ предназначен для измере-
ния атмосферного давления в наземных условиях. Принцип дей-
ствия прибора аналогичен принципу действия барометра
МД-49-2. Для учета температуры окружающей среды в цифер-
блат прибора вмонтирован дугообразный ртутный термометр,
по показанию которого вводятся температурные поправки. Тех-
нические данные прибора следующие:
Пределы измерения атмосферного давления, мм рт. ст. 600 ... 800
» » » » , кПа ... 80 ... 106,4
» » температуры, °C....................... —Ю ... +40
Цена наименьшего деления шкалы давления, мм рт. ст. 0,5
» » » » температуры, °C . . 1,0
Погрешность измерения атмосферного давления, мм рт. ст. ±1,5
» » температуры, °C......................... ±1,5
Применяется также инспекторский барометр с ценой деле-
ния 0,05 мм рт. ст. (~6,7 Па). Наименьшая практическая по-
грешность измерения давления 0,07 мм рт. ст. (~10 Па).
81
Влажность воздуха. Применяемые нормальные значения и
пределы нормальной области значений влажности воздуха при-
ведены на рис. 20. В качестве нормальной относительной влаж-
ности наиболее часто устанавливают значения 60 и 65%. Одна-
ко эти значения не имеют каких-либо обоснований. Более обо-
сновано принимать в качестве нормальной относительной
влажности значение 58%, что приближенно соответствует пар-
циальному давлению водяных паров 1333 Па (10 мм рт. ст.}
Рис. 20. Нормативные значения нормальной влаж-
ности: НЗ — нормальные значения; ВП — верхние
пределы нормальной области значений
при 20 °C. Такое значение установлено (см. п. 14) для нормаль-
ного воздуха решением XI Генеральной конференции по мерам
и весам [93].
На основании анализа государственных стандартов СССР,
нормативных документов технически развитых стран и между-
народных организаций выявлено, что симметричную нормаль-
ную область относительной влажности выбирают из ряда зна-
чений: 1, 5, 10, 15, 20, 25% со знаками «+» и «—». Асиммет-
ричная нормальная область выбирается при неустановленном
нормальном значении из следующего ряда: 30 ... 60, 30 ... 80,
45 ... 75, 45 ... 80, менее 60 и менее 70%.
Для измерения относительной влажности применяются раз-
личные психрометры, в том числе аспирационные. Принцип ра-
боты психрометра основан на разности показаний сухого /т и
смоченного # термометров в зависимости от влажности окру-
жающего воздуха. Температура воздуха определяется по пока-
занию термометра с сухим резервуаром.
Технические данные психрометров МВ-4МиМ-34 следующие:
Диапазон измерения относительной влажности воз-
духа при температуре окружающей среды от — 10 до
+ 40°C, % . 10 ... 100
Диапазон измерения температуры воздуха, °C . . —30 ... +50
82
Воздухообдувный механизм психрометра МВ-4М
с заводом на 8 мин ...............................
психрометра М-34..............................
Погрешность определения относительной влажно
сти, %............................................
Механический
Электрический
1,5 ... 11
Для психрометрического термометра (по ГОСТ 112—78Е)
скорость вентиляции должна быть 0,8 м/с; для аспирационного
психрометра — 2 м/с. Наименьшая практическая погрешность
измерения влажности имеет случайную составляющую ±0,5%
и систематическую составляющую в пределах ±0,3%.
Многоточечный влагомер относительной влажности воздуха
типа ВВ-4 предназначен для измерения в трех, шести или две-
надцати точках контролируемого объекта, регистрации и регу-
лирования.
Влагомеры состоят из первичных преобразователей влажно-
сти ДИВ4 или первичных преобразователей влажности и тем-
пературы ДИВТ2 и уравновешенного моста переменного тока
самопишущего прибора типа КСМ4. Выпускаются 24 модифи-
кации влагомера в зависимости от типа и градуировки первич-
ных преобразователей, количества точек измерения и наличия
регулирующего устройства в приборе.
Технические данные влагомера следующие:
Пределы измерения относительной влажности . . 20 ... 80
и 40 ... 90%
Абсолютная погрешность измерения, регистрации
и срабатывания регулирующего устройства По относи-
тельной влажности....................................... ±3,5%'
Постоянная времени измерения, мин............. 15
Максимальная скорость движения диаграммной
ленты............................................. 7200 мм/ч
Длина линии связи между первичными преобразо-
вателями и прибором.................................. Не более 700 м
Принцип действия аналогичного устройства для дистанцион-
ной регистрации относительной влажности воздуха модели
УДРОВ-01 основан на изменении электрического сопротивления
влагочувствительной пленки при изменении относительной
влажности окружающей среды. Датчик влажности включается
в измерительный электронный мост через согласующий входной
делитель напряжения.
Выпускаются также пьезосорбционные измерители относи-
тельной влажности в пределах 0 ... 100% с погрешностью
±(1,5 ... 2) %. Принцип действия основан на изменении резо-
нансной частоты колебаний пьезосорбционного чувствительного
элемента, который состоит из кварцевого резонатора с нанесен-
ной пленкой сорбента, избирательно поглощающего водяные
пары из анализируемого воздуха. В качестве сорбента исполь-
зуется полиамид. Основная частота колебаний чувствительного
элемента в сухом воздухе 5 МГц.
83
По ф/7, tr, рат или данным психрометрических измерений
/т, р„ можно определить упругость срна водяного пара в воз-
духе [54] (рис. 21, а):
Лф/м (Рат) ® 0,5 (рат — 100) 1 (Г2 ;
рат ё= [80,106], кПа; | /т - | at 5 °C.
Для оценок соответствия <ря, (рна, температуры влажного 11
и сухого tT термометров используются линии одинакового вида
(сплошные, штриховые, штрих-пунктирные).
Рис. 21. Диаграмма влажности воздуха при рат=100 кПа
Согласно рекомендации МЭК.68-1, для получения атмосферы
с различными значениями относительной влажности исполь-
зуются насыщенные растворы различных солей, помещенных в
закрытую камеру. Насыщенный раствор приготовляется кипяче-
нием водного раствора одной части хлористого натрия и 2,25 ча-
стей азотнокислого натрия. Затем раствор остужается и добав-
ляется некоторое количество твердой смеси, превышающее
количество смеси, которое может быть растворено в данном
количестве воды.
Для того чтобы раствор оставался насыщенным, он должен
содержать избыток соли в твердом виде, соль должна быть по-
крыта раствором и поверхность свободна от корки или пленки
жира, грязи и т. д. Чтобы обеспечить внутри камеры одинако-
вые условия, необходима циркуляция воздуха при помощи вен-
тилятора над поверхностью насыщенного раствора и вокруг
исследуемых объектов.
Диаграмма Iq — du состояния воздуха. Зависимость между
физическими параметрами воздуха (температурой /т, относи-
тельной влажностью (рн, энтальпией Iq, влагосодержанием du,
парциальным давлением tpe водяных паров, характеризующими
состояние влажного воздуха при постоянном давлении), графп-
84
чески выражают диаграммой Iq — du. Напомним, что энталь-
пией (теплосодержанием) называется функция состояния тер-
модинамической системы, равная сумме ее внутренней энергии
и произведения давления на объем. Энтальпия смеси идеальных
газов равна сумме энтальпий всех газов, входящих в ее состав.
Энтальпия влажного воздуха равна
4 + 4>
rpfiIc = cptT — энтальпия сухой части воздуха, кДж/кг; 1Г,=
= (2500 + 1,88/т. „)dH — энтальпия dH кг водяного пара в кДж/кг
сухого воздуха; 2500 кДж/кг — теплота испарения воды ири 0°С;
1,88 кДж/(кг-К)—теплоемкость водяных паров; tT. п — темпера-
тура водяного пара, °C.
Влажный воздух рассматривается как однородная смесь
с одинаковой температурой. Тогда в килоджоулях на килограмм
сухого воздуха
4 = сptT (2500 -|- 1,88/т) d[],
где ср = 1 — теплоемкость воздуха при постоянном давлении,
кДж/(кг-К).
Диаграммы Iq— dH строят для определенного барометриче-
ского давления в косоугольных координатах.
На полях диаграммы Iq — dn наносится угловой масштаб —
тепловлажностное отношение
где /qi, dm и /q2> dHz — энтальпия и влагосодержание воздуха
в начальном и конечном состояниях.
Пользуясь Iq — dn диаграммой, по любым двум параметрам
воздуха можно найти все другие его параметры. Температуру
точки росы ^т.рс находят в месте 2 пересечения кривой сри =
= 100% (рис. 21,6) с вертикалью, проведенной из точки, харак-
теризующей состояние воздуха. Температура по мокрому термо-
метру определяется точкой 3 пересечения кривой <рн — 100%
с прямой, параллельной линиям энтальпии, проведенной через
точку /, характеризующую параметры воздуха. Наименьшая
практическая погрешность измерения температуры окружаю-
щего воздуха имеет случайную составляющую в пределах
±0,05 К, т. е. 2-Ю-4 4, и систематическую составляющую в
пределах ±0,01 К, т. е. 3-10-5 Тт.
Плотность воздуха. Из уравнения состояния смеси реальных
газов выводится формула расчета плотности руа воздуха
PVB = /’aT.BMa^XIfer1[1 +(ев.в~ Офе/Рат. в]>
где Рат. в — суммарное давление воздуха; <ре = уна — парциаль-
ное давление водяных паров; Ма — молекулярная масса сухого
85
воздуха, равная
Ala = Alao,33 + [12,011 Vco2/V - 0,00033],
а при содержании СО2 0,033% А1ао,зз = 28,962; Rr.„ — 8,31441 ±
± 0,00026 Дж-моль-1 К-1—газовая постоянная; Тт — темпера-
тура (в К) воздуха и водяных паров; ев. в — отношение молеку-
лярных масс водяного пара и сухого воздуха, равное 0,62202
при содержании СО2 0,033%; kz — коэффициент сжатия, рав-
ный 0,99960 при Тт = 293,15 К; рат. в =И= 101 325 Па; <рн = 50%.
Следует отметить, что значение kz зависит от температуры,
давления и влажности, но при меньших температурах зависи-
мость от влажности меньше.
Для практических расчетов применяется выражение
%, -0,12027^, ДГДД! - 0,37798ф,/р„ в).
Отсюда плотность нормального* воздуха при Д = 293,15 К
Рат. в = 101 325 Па, <fn — 58% или <ре = 1333 Па и содержании
СО2 0,033% равна рув. н = 1,203 кг/м3.
Общая случайная составляющая относительной погрешности
расчетно-экспериментальной оценки плотности воздуха равна
±3-10_ 4, а систематическая составляющая — в пределах
±4-10_4. Содержание СО2 в лабораториях и цехах непостоянно,
а изменение содержания СО2 на 0,01 % вызывает относительное
изменение плотности воздуха на 4-10-5, что требует контроля
этой величины при высокоточных измерениях массы. Вместе
с тем считается, что сумма концентраций СО2 и кислорода до-
статочно постоянна и равна 0,20979. Для практических расчетов
при измерениях массы используется условная плотность воз-
духа pYB. у = 1,2 кг/м3.
14. ПОКАЗАТЕЛЬ ПРЕЛОМЛЕНИЯ
СТАНДАРТНОГО И НОРМАЛЬНОГО
ВОЗДУХА
Расчетные зависимости. Показатель преломления щ воздуха
является одним из важных параметров для оптических интер-
ференционных измерений, с помощью которого выполняется пе-
реход от длин волн в вакууме Хвак к их значениям в воздушной
среде X = %вак/ц?.. Так называемый стандартный воздух сухой
имеет температуру 15 °C при прочих параметрах, соответствую-
щих нормальному воздуху, но с Цн — 0. Для определения пока-
зателя преломления яс в стандартном воздухе без СО2 принята
дисперсионная формула Б. Эдлена [94], удовлетворяющая ме-
* Согласно решению XI Генеральной конференции по мерам и весам [93].
нормальный воздух соответствует tT = 20 °C, р= 101 324,72 Па, содержанию
СО3 0,033% и влажности с парциальным давлением водяных паров 1333,22 Па
или с округлением — относительной влажности ~ 58%.
86
трологическим требованиям во всей области оптического диа-
пазона:
(пхс — 1) 107 = 643,18 4- 294 933(146 —v2)-1 + 2553,6(41-v2)-1,
где v= 1/^вак — волновое число в вакууме.
С поправкой на СО2 показатель n^i преломления стандарт-
ного воздуха равен
(пХс1 - 1) 108=6432,8 + 2 949 810(146 - v2)-1+ 25 540 (41 - v2)"' «
«27 259,9+ 153,58v2+ l,318v4;
(«xd - 1) = (1 + 0,0003 (nXc - 1).
Погрешность приближенного выражения для (nxci — 1) не пре-
вышает 1-1(Н для длин волн более 500 нм. Редукционная фор-
мула для вычисления показателя преломления в нормаль-
ном воздухе [92] имеет вид
(гаи-1) = (^с-1)7?ге-10^-10-8,
где = iTSVl^o' = 0-982890947; Кп = 5,722 - 0,0457v2.
Для определения показателя «л, р, t, <р в воздухе при любых
условиях р, и срн измерений применяется формула [92]
(п. — П 0,00138823р „ а
(-». 1 4+ 0,00367177- - <Р„. (5.722 - 0,0457V2) 10
ИЛИ
(р__
(пхр. t. ф 1)= (галс 1) А. Г+’7[аГ
где ат = 0,003661;
l±loV- 5 = (1,049 — 0,0157/т) 10~s;
л 1 + 101,Зр15 1 + гтат101,3 гг '
р15 = 0,8135 • 10~6; Вк= 10-6(0,0624 - 0,000680^).
Здесь р в кПа.
Согласно опытным данным, величины («я., р, t, ф—1) ведут
себя так же, как и плотности воздуха, т. е. следуют законам
Бойля — Мариотта и Гей-Люссака, а показатель преломления
воздуха, уменьшенный на 1, получается сложением величин
(«х—1) для отдельных компонентов. Согласно DIN 5450—68,
при нормальных атмосферных условиях воздух имеет следую-
щий состав (%): кислорода — 20,9476, азота — 78,087; аргона —
0,934 и углекислого газа — 0,0314. Данных по влажности в этом
стандарте не приводится. Влияние содержания СО2 на показа-
тель преломления определяется по зависимости
ДпСо2 = (0,0145 + 0,00011 v2) (/гСо2 - 3) 106,
где -v=lA; Zsco210~4 — содержание СО2 в воздухе.
87
Степень влияния неточности измерения давления Др, темпе-
ратуры Д/т и влажности Дср/у на оценки показателя преломления
«г воздуха определяется соотношением [12]
Л ______ 0,358 Др । п п 1-3 л у i 0,056 .
Д/гл10 — 133 322 + 0,9 13 Д^т + 133 322 Афна-
Если принять, что давление измеряется инспекторским баромет-
ром с погрешностью Др = 13,3 Па, температура — платиновым
термометром и термопарами с погрешностью Д/т=0,01 °C, влаж-
ность— с погрешностью A(pWa — 13,3 Па, то Дпл = 5-10-8. Увели-
чение содержания в воздухе углекислого газа со стандартного
Рис. 22. Схема рефрактометра
0,03 до 0,06% приводит к изменению показателя преломления
на 4,4 -10-8.
Непостоянство состава воздуха приводит к еще большей не-
точности оценок Д«л, достигающей при расчетном методе (1 ...
... 2)10_7. Состав воздуха в ограниченном рабочем простран-
стве изменяется даже вследствие наличия примесей от смазки и
краски.
Рефрактометр. Наиболее точные значения показателя пре-
ломления воздуха дает метод непосредственного измерения ре-
фрактометром, основанный на сравнении оптических разностей
хода интерферирующих пучков света при прохождении их в воз-
духе и в вакууме. Если один из пучков проходит путь в вакууме,
а другой — путь такой же длины в воздухе, то порядок интер-
ференции, соответствующий длине пути лучей (длине вакуум-
ной камеры /вак), изменяется ОТ 2/вакДа ДО 2/Вак/ХВак и разность
порядков интерферирующих пучков будет = 2lsa,K/\a —
— 2/вак/Хвак, Откуда
A/W вак
2/вак
Оптическая схема рефрактометра, встроенного в эталонный
интерференционный компаратор, показана па рис. 22. Пучок
света от монохроматического источника 1, отразившись от зер-
кал 8 и 3, падает на разделительный блок 4. Разделенные пучки
88
(«Л — 1)
света идут параллельно друг другу. Один пучок проходит через
вакуумную камеру 5, а другие пучки проходят в воздухе путь,
ограниченный теми же плоскопараллельными прозрачными пла-
стинками, что и вакуумная камера. За камерой установлены
два зеркала 6 в регулируемых оправах, что дает возможность
регулировать ширину и наклон полос равной толщины 7, на-
блюдаемых по визирной системе 2.
При откачке воздуха из камеры 5 полосы одной из интерфе-
ренционных картин перемещаются; по достижении степени раз-
ряжения 0,4 Па движение полос прекращается и интерферен-
ционная картина стабилизируется. Относительное смещение по-
лос интерференции в вакуумной камере до и после откачки
дает значение А/Сщ. Длина /вак вакуумной камеры может быть
100, 200, 500 или 1000 мм. Дисперсия значений ш, полученных
на описанном рефрактометре, равна
/ дп. \2 / дп. \2 / дп. \2
£,(^) = Ьг) jD^ + (aTA-) №ак) + (-агЧ D(lB3K) =
\аеК/ \олвак/ V 01 вак/
= 449 • 10-8
где соответствующие погрешности D0,5eK = 0,05 д/ 2 — оценки
дробной части полосы; £>°'5Хвак = ± 1 -10 8 — длины волны оран-
жевой линии криптона 86; £)°>5/азк = ±0,1 мкм — длины камеры
интерференционным методом.
Погрешность Л/ц. оценки показателя преломления на рефрак-
тометре АшЛ = 2-10± Разность между расчетными и измерен-
ными значениями показателя преломления на длине метр дает
погрешность интерференционного метода измерения длины до
0,4 мкм. Допускаемые погрешности оценки показателя прелом-
ления воздуха для прецизионных измерений длины приведены
в ГОСТ 8.050—73.
Газоанализаторы. Для непрерывного измерения содержания
окиси углерода, двуокиси углерода или метана в газовых сме-
сях, включающих также азот, кислород, водород и инертные
газы, применяется стационарный автоматический оптико-акусти-
ческий газоанализатор типа 0А5501. При определении двуокиси
углерода суммарное содержание окиси углерода и метана в га-
зовой смеси не должно превышать 10% по объему, а содержа-
ние водорода не должно отличаться более чем на ±10% по
объему от среднего значения.
Газоанализатор типа 0А5501 рассчитан для анализа газовых
смесей, имеющих следующие параметры на входе в прибор:
Влагосодержание, г/м3................................ Не более 1,0
Содержание пыли и других механических приме-
сей, г/м3............................................... Не более 0,001
Температура, °C................................. 10 ... 35
Давление избыточное, мм вод. ст........................ 30±10
» » , кПа...................... 0,3±0,1
89
В анализируемых газовых смесях не допускается содержа-
ние агрессивных примесей. Газоанализатор предназначен для
установки во взрывобезопасных помещениях с температурой
окружающего воздуха 10 ... 35 °C и относительной влажностью
30 . . . 90%. Газоанализатор должен быть защищен от воздей-
потоков холодного воздуха, электро-
магнитных полей и механических
ствия местных перегревов,
Рис. 23. Схема оптико-акусти-
ческого газоанализатора
вибраций.
Пределы измерения двуокиси
углерода (% от объема): 0—0,01;
0—0,02; 0—0,05; 0—0,1; 0—0,2 и
0—0,5. Основная приведенная по-
грешность (% от верхнего предела
измерения)—±10. Запаздывание
показаний от момента изменения
концентрации определяемого компо-
нента при расходе анализируемой
газовой смеси 0,3 ... 0,5 л/мин не
превышает 1 мин. Время запуска
(прогрева) 3 ч.
Действие оптико-акустических
газоанализаторов основано на из-
мерении поглощения анализируе-
мым газом инфракрасной радиации.
Степень поглощения радиации за-
висит от концентрации измеряемого
компонента в анализируемой газо-
вой смеси. В газоанализаторе ис-
пользована дифференциальная схе-
ма с непосредственным отсчетом.
Источниками радиации являются
два нихромовых излучателя 1 (рис.
23), питаемых от блоков 13, 14. По-
токи инфракрасной радиации, отра-
жаясь от металлических параболи-
ческих зеркал 2, поступают в два оптических канала. Оба пото-
ка поочередно прерываются обтюратором 3 с частотой 5 Гц.
В правом канале поток прерывистой радиации проходит через
рабочую 4 и фильтровую 5 камеры и поступает в правый луче-
приемник мерной камеры 6. В левом канале поток прерывистой
радиации проходит сравнительную 12 и фильтровую 11 камеры
и поступает в левый лучеприемник мерной камеры. Через рабо-
чую камеру непрерывно проходит анализируемая газовая смесь.
Сравнительная камера заполнена азотом. Фильтровые камеры
служат для уменьшения влияния на показания газоанализатора
неизмеряемых компонентов, присутствующих в анализируемой
газовой смеси, и заполняются газовыми смесями, содержащими
только неизмеряемые компоненты. Мерная камера заполнена
смесью определяемого компонента с аргоном. Последнее обес-
печивает избирательность анализа, так как в объеме мерной ка-
меры колебания температуры и давления газа будут возникать
только за счет поглощения инфракрасной радиации, соответ-
ствующей спектру поглощения определяемого компонента.
При поступлении прерывистой радиации в правый и левый
лучеприемники мерной камеры в них возникают колебания тем-
пературы и давления, которые воспринимаются конденсаторным
микрофоном 9, находящимся в мерной камере. Колебания мем-
браны 10 преобразуются микрофоном в переменное напряжение,
которое усиливается электронным усилителем 8, выпрямляется
синхронным детектором и подается на показывающий прибор 7.
Нормальные условия интерференционных измерений длин.
Интерференционные измерения длины являются наиболее точ-
ными, но весьма чувствительны к условиям выполнения при
разности хода интерферирующих лучей более 1 мм. При непо-
средственных измерениях таким методом вводят поправки на
каждый 1 мм рт. ст. (~0,13 кПа) отклонения давления, на про-
цент относительной влажности и доли градуса Цельсия. При
измерениях эталонных и образцовых мер длины используются
абсолютные и относительные интерференционные методы.
При известных ТКЛР в результаты измерений вводят по-
правку на удлинение меры по формуле
diag (Двак^н ) =
= diag (1 + атА/т), (1 +Fr)] diag(X, L~\ L~1\
где Fr — безразмерная геометрическая характеристика меры
при равномерном сжатии.
При номинальных нормальных значениях параметров воз-
духа:
Ар = Д<рЯа = О; А/т = 0; AZ; = LHaT А/т = 0; Ыр = LaFT = 0.
В этом случае матрицы связи имеют вид:
diag(AaaK> , LH ) = diag 1, l)diag(A.H, La , Lu ) =
i i
= diag (nx„) diag (A,H);
diag(lBaK, Ah', ZJ1) ' = diag(«XH) ’diag^)-1.
Перемножая левые и правые части выражений связи, полу-
чаем матрицы относительных параметров третьего ранга z = 3
diag(l, 1, l) = diag[(l + \пМ, (1+атД/т), (1 + -^- Fr] X
X diag [(1 + ДХДН), (1 - А/Дн), (1 - Д/р/Ли)].
91
Отсюда, используя первое число обусловленности Тюринга
1 ‘ -1 ‘
(см. п. 32) и обозначая (Д/гЛ)(пХн) — Ъпк, получаем
СКЗ (АЛДИ)
ГД i 11/2ГЛ <• Т'-
= [£(М2] LS^1)2] = [(ЪА.,)2 +
+ (агД/т)2 + (Ар/£Д)2],/2г-1/2.
Принимая далее по [12]
(Апх)210’2 = (-g Ар + 0,913 А/т + ЛФна)2.
а также Ар = 345,8 А/т — по уравнению состояния идеального
газа в замкнутом рабочем пространстве, находим
при L < 1 м; Fr= 1/3
ат = 11,5 • 10-6 К-1; 5 = 2-10“ Па; СКЗ (АЛ/Л„) = 1,5 • 10-6;
| А/т. н К 0,05 К; | Арн | < 35 Па; | Аф/М | < 133 Па.
Длина волны первичного эталонного излучения криптона 86
в нормальном воздухе М = 605,61574 нм; длина волны вторич-
ного эталонного излучения Х2 = 546,07819 нм; пц1н — 1,00027159,
п&2н = 1,00027259.
При компарировании длина измеряемой меры, отнесенная
к средней температуре /т. ср измерения, вычисляется по одной
из формул:
5т. ср 50 “Н 5 (ато Д- Р?/т. ср) 5. ср Н~ А/Ср,
5Т. ср = 52о + 5 [ат2о + ₽т (/т. ср ~ 20°)] (/т. ср — 20°) + А/ср,
где Z-o, 52о — длина образцовой меры при 0° и 20 °C; ат0; ат2о;
Рт — температурные коэффициенты удлинения образцовой меры;
А/ср — среднее значение измеряемой разности мер, приведенное
к средней температуре.
ТКЛР образцовой меры зависит от температуры
ат = «о + 2Рт/г или ат = а2о + 2рт (/т — 20°).
Затем длина поверяемой меры приводится к 20 °C
ср - L [«i + ц; (/, ср - 20")] (!,. ср - 20").
Для любой температуры /т уравнение меры имеет вид
LT = + L [< + p; (/T - 20°)] (/T - 20°),
где <4 и |3(- ТКЛР поверяемой меры.
Для расчетно-экспериментальной оценки функции и коэффи-
циентов влияния при измерении мер интерференционным мето-
дом удобно использовать алгоритм, построенный по методу наи-
92
меньших квадратов. Для оценки коэффициентов влияния при
измерениях концевых мер на интерферометре Кестерса во
ВНИИМ им. Менделеева была составлена программа решения
системы нормальных уравнений с четырьмя неизвестными:
[аа] х + [ab] у + [ас] 2 + [ad] и = [al];
[ab] х + [66] у + [6с] z + [bd] и — [6/];
[ас] х + [6с] у + [сс] z + [cd] и = [с/];
[ad] х + [bd] у ф- [cd] 2 + [dd] и = [dl],
где в квадратных скобках заключены суммы произведений (обо-
значение Гаусса) соответствующих экспериментальных значе-
ний влияющих величин а, 6, с, d и результаты измерений /.
Отсюда
IM До Дг| Д„
= -L^-L; 2 = - и =
|Д| v |Д| 1A 1 |Д|
[a/] [ab] [ас] [ad]
[Ы] [66] [6с] [bd]
[с/] [6с] [сс] led]
[dl] [6с/] [cd] [dd]
Определители |Л|, |Ду|, |Л2|, |Д«| выражаются аналогич-
ным образом.
Для интерферометра Кестерса при измерении стальной меры
коэффициенты влияния по температуре 10,57-10~6 К-1, по давле-
нию 0,27-10-8 Па-1, по влажности 0,375-10-9 Па-1.
Для интерференционных измерений большое значение имеет
также ограничение скорости движения воздуха, запыленности,
уровня вибраций (см. гл. IV), электромагнитных полей, ориен-
тации объекта измерения в пространстве (см. гл. V).
Лазерный луч в турбулентной атмосфере. При прохождении
лазерного луча в турбулентной атмосфере наблюдаются [32]
флуктуации фазы в световом пучке, нарушение когерентности,
изменение средней интенсивности излучения на неоднородной
трассе, случайные смещения центра тяжести светового пучка,
сопровождаемые дрожанием лазерных пучков. Все эти эффекты
существенны только при большом ходе х лазерного луча. Кроме
того, в интерферометрии наиболее важна разность параметров
двух интерферирующих лучей. Отсюда целесообразно обеспе-
чить прохождение этих лучей по возможно более близким на-
правлениям, чтобы не нарушать их когерентность.
Радиус рл когерентности плоской волны при очень силь-
ных флуктуациях в атмосфере равен р^ = 0,41 (СеКх/о-1^) в
случае влияния внутреннего масштаба турбулентности /0;
93
рх= (0,365СеДхх) в случае независимости от масштаба турбу-
лентности, что более характерно для реальной атмосферы.
Среднее квадратическое отклонение смещений центра ла-
зерного пучка выражается зависимостью
арХ = З'1 • 2~5/Чл2Г (1/6) СЛ;/3,
где Ло = 0,033; Г(1/6)—гамма-функция; а-,.— размер пучка.
Дисперсия углового смещения центра пучка = стрх/х2>
К}, = соо/с — отношение круговой частоты световых колебаний
к фазовой скорости света c = co/«x; СЕ — структурная характе-
ристика состояния атмосферы; х — координата вдоль хода луча.
Для сферической волны выражения радиуса когерентности
отличаются от приведенных численным коэффициентом.
Таким образом, применение лазерного интерферометра вы-
сокой точности требует стабилизации скорости движения воз-
духа (см. п. 17).
15. ЗАПЫЛЕННОСТЬ ВОЗДУХА
И ОСЕДАНИЕ ВИТАЮЩЕЙ ПЫЛИ
Источники и концентрация пыли. Источниками пыли в воз-
духе являются эрозия почвы, износ асфальтовых покрытий, аэро-
планктон, т. е. различные микроорганизмы, а также все техно-
логические процессы. В воздухе содержатся пары различных
минеральных масел и других органических жидкостей, которые
также можно отнести к аэрозолям. Частицы пыли имеют самые
произвольные формы и различный химический состав. В воз-
духе производственных помещений содержится множество раз-
личных тонких волокон, в том числе и металлических. Пыль
современных промышленных городов состоит из минеральных
(70%) и органических (30%) веществ.
Фракционный состав пыли показан на рис. 24, а. Крутой
спад кривой при возрастании размера ач частиц обусловлен бы-
стрым их оседанием. Расчетные данные по скорости иач оседа-
ния частиц пыли шарообразной формы приведены в [85]. Рас-
четы выполнялись по формуле Стокса для свободного падения
тел в совершенно спокойном воздухе (ач 1 мкм; иач
^3,5-10~3 см/с). Пылинки диаметром более 10 мкм оседают
достаточно быстро, оач > 0,3 см/с. При уменьшении размеров
пылевых частиц их концентрация в воздухе увеличивается
(рис. 24,6). Однако с увеличением концентрации Мач пылевых
частиц возрастает вероятность их взаимных столкновений и коа-
гуляции — слипания под действием сил притяжения (сил Ван-
дер-Ваальса и электрических). Силы зависят от размера частиц.
Энергия связи двух шарообразных частиц с радиусом 1 мкм
оценивается 10~17 Дж. Такая энергия связи намного превосхо-
дит энергию связи атомов в химических соединениях. Следова-
94
тельно, после соприкосновения частицы прочно прилипают одна
к другой.
Согласно механике аэрозолей, скорость коагуляции пылевых
частиц пропорциональна их концентрации. Поэтому, как бы не
была велика начальная концентрация пыли в момент ее образо-
вания, уже через короткое время она не может превышать
106 частиц в 1 л воздуха. Коагуляция пылевых частиц уско-
ряется во влажном воздухе, так как адсорбционная пленка влаги
увеличивает силы сцепления между частицами при столкнове-
ниях. Разноименные заряды на частицах также способствуют
Рис. 24. Характеристики пыли:
/ — в сухом воздухе; 2 —при дожде
коагуляции. Пределы дробления частиц пыли — вплоть до раз-
меров молекул. С помощью электронного микроскопа обнару-
жены частицы размером 0,5 ... 1,0 нм.
Физический механизм перемещения маленькой пылевой ча-
стицы обусловлен хаотичным движением молекул воздуха. Если
имеется градиент температуры, молекулы воздуха ударяют ча-
стицу более сильно в направлении к холодному предмету. При
этом на хаотическое броуновское движение пылевой частицы
накладывается направленное движение термофореза. Загрязне-
ние деталей по этой причине может наблюдаться, в частности,
при интенсивном освещении деталей на рабочих местах мощны-
ми лампами накаливания. Скорость перемещения частиц при
термофорезе возрастает с увеличением градиента температуры
и уменьшением размера частиц. Именно мелкая пыль наиболее
быстро осаждается при термофорезе. Второй механизм осажде-
ния витающей пыли объясняется инерционностью пылевых ча-
стиц (циклонный эффект) при вихревых потоках воздуха вблизи
деталей. При этом частицы пыли отбрасываются на детали и
прилипают к ним. При большой влажности силы связи частиц
с поверхностью резко возрастают. Пылинки диаметром 1 . ..
. . . 2 мкм, осевшие на детали, имеют настолько прочную адгезию
с поверхностью, что их невозможно сдуть струей сжатого воз-
духа со скоростью 200 м/с.
Электризация частиц обусловлена различными причинами:
сорбцией ионов из воздуха, трением частиц о предметы, фото-
эффектом, термоэлектронной эмиссией и др. Заряд зависит от
скорости потока воздуха (рис. 24,в) и от состава газа. Как
видно из рис. 24, в, даже при сравнительно небольших скоростях
воздуха — до 0,5 м/с заряд пылевых частиц может достигать
нескольких сотен вольт. Полярность пылевых частиц может
быть как положительной, так и отрицательной. Притяжение за-
ряженных частиц к предметам обусловлено либо индуцирован-
ными силами «зеркального отображения», либо зарядами, уже
существующими на поверхностях предметов. Термин «пылеот-
талкивающие материалы», в качестве которых применяются
пленки, краски, покрытия, означает лишь минимальные пыле-
удерживающие свойства, т. е. материалы, плохо сорбирующие
пары воды и разряжающие пылевые частицы при столкновении.
Контроль запыленности. В СССР и других странах для оцен-
ки запыленности применяются фотоэлектрические счетчики пы-
ли: типа АЗ-5 (СССР); Датасааб (финско-датское производство)
и т. п. Эти приборы фиксируют частицы размером от 0,5 мкм, их
работа основана на фотоэлектрической идентификации и счете
частиц пыли. Для сбора проб запыленности применяются разно-
образные счетчики пыли, состоящие из заборной мерной камеры
и фильтрующего элемента, на котором осаждаются частицы
пыли. При отсутствии специализированных средств измерений
используется полированная стеклянная пластина, которая уста-
навливается горизонтально на высоте 1 м от пола на t — 1 ч.
Затем с помощью микроскопа с увеличением 60 . . . 90х под-
считывается число Nan осевших частиц нормируемых размеров.
В США методы измерения размеров и счета частиц пыли
для чистых комнат и других контролируемых по пыли помеще-
ний устанавливаются стандартами ASTMF 25—68; F-50—69
(США) «Частицы, загрязняющие атмосферу на пылеконтроли-
руемых участках. Помещения чистые и пылеконтролируемые
площади для размещения электронной аппаратуры». Установка
для автоматического определения размера и подсчета частиц —
по стандарту Р 32—72. На пылемеры существует также стан-
дарт BS 1747—72 (Англия).
Нормы пыли. Содержание пыли в объеме Nan и количество
пыли Naa, осевшей на поверхность Р„л пластины, связаны фор-
мулой
А/ ^tVa4Fдч
W ап '*•' з
где Yp4~ 1 г/см3
96
При прямом освещении в микроскопе видны пылинки разме-
ром 0,4 мкм и более, а при косом освещении — 0,2 мкм. Предел
видимости в темном поле — до 0,06 мкм [60]. Подсчет пылинок
методом фазового контраста в счетчиках Оуэнса позволяет фик-
сировать частицы размером до 0,02 мкм. Особо высоким раз-
решением обладают электронные микроскопы. Поскольку ли-
нейные измерения связаны с идентификацией положения и
расстояния точек поверхностей, то допускаемую объемную за-
грязненность воздуха твердыми частицами можно, в частности,
определять через нормы запыленности измеряемой поверхности.
При контактных измерениях поло-
жение точек измерения оценивает-
ся с разрешением порядка 1 ... 2 мм
(кроме специальных задач), откуда
допускаемое число частиц пыли
Nan нормируемых размеров а
бин на площади F (см2) поверх-
ности за время измерения /Изм при
равномерном распределении не
должно превышать 40F. При обоб-
Рис. 25. Требования к обеспы-
щенном нормировании принимается ливанию
/изм = 1 ч = 3600 с.
При скорости оседания Van это соответствует объемной кон-
центрации твердых частиц в 1 м3, равной
„ 10Wan 40-10°
ач ^измаач
^измаачГ
Скорость оседания пыли зависит от состояния окружающего
воздуха. При ламинарном движении воздуха нормально к изме-
ряемой поверхности или вдоль линии визирования с нормальной
скоростью ив. н МОЖНО принять Van = VB. н-
При движении воздушного потока под углом к измеряемой
поверхности возможно сдувание пылинок. В этом случае можно
пользоваться предложенной нами в МИ 88—76 формулой вида
Na4 = 1,4 • 103 (1 — Ра) v-1 соз-'ф,
где Ра — доверительная вероятность оседания частиц пыли;
ф 89° — угол между направлением движения воздуха и ли-
нией измерений (нормально к поверхности).
Вследствие явлений коагуляции, сорбции, электризации, тер-
мофореза, турбулентности воздуха и т. п. пыль скапливается на
одних участках поверхности и отсутствует на других. Поэтому
в конкретных случаях целесообразно оценивать действительное
распределение пыли на контролируемых поверхностях.
По данным [91] требования к обеспыливанию определяются
видом прецизионных производств (рис. 25). В США нормы до-
пускаемой пыли в чистых комнатах установлены федеральным
4 Зак. 843 97
стандартом 209а. Повышенные требования к обеспыливанию
предъявляются в производстве пленок 1, электрических контак-
тов 2, оптики 3 и подшипников 4.
16. КОНДИЦИОНИРОВАНИЕ
Виды кондиционеров. Системы кондиционирования воздуха
(СКВ) для обеспечения нормальных условий измерений отно-
сятся к технологическим и технологически-комфортным. СКВ
включает следующие составные части: установку кондициони-
рования (УКВ), средства автоматического регулирования и
контроля нужных кондиций в УКВ, а также поддержания по-
стоянства заданных параметров воздуха в помещении; устрой-
ства для подачи и распределения воздуха; устройства глушения
шума агрегатов СКВ. Примерная классификация применяемых
СКВ показана на схеме 1.
Создание единого оборудования для систем вентиляции и
кондиционирования воздуха осуществляет ВНИИ «Кондвент-
мащ».
Домодедовский машиностроительный завод «Кондиционер»
выпускает общепромышленные автономные кондиционеры с под-
держанием температуры в помещениях в пределах 20 ± 2 °C.
Выделяются два основных типа автономных кондиционеров об-
щего назначения: КТА-1 с водяным охлаждением конденсатора
(производительность по воздуху 1,6 ... 80 тыс. м3/ч, по холоду
24 ... 1200 тыс. кДж/ч и по теплоте 40 ... 2000 тыс. кДж/ч);
КТА-2 с воздушным охлаждением конденсатора (производитель-
ность по воздуху 1,6 ... 25 тыс. м3/ч, по холоду 26,3 ...
. . . 400 тыс. кДж/ч и по теплоте 40 . . . 640 тыс. кДж/ч).
На рис. 26 представлена принципиальная схема автономного
кондиционера КВ 1-17 с водяным охлаждением конденсатора.
При работе вентилятора 1 в кондиционер поступает смесь на-
ружного и рециркуляционного воздуха, которая очищается в
фильтре 2 и поступает на охлаждение в испаритель 3 холодиль-
ной машины.
Автономные кондиционеры малой производительности с воз-
душным охлаждением конденсатора выполняются в форме го-
ризонтальных агрегатов и в рабочем положении устанавливают-
ся в оконном проеме. На рис. 27 представлена конструктивная
схема оконного кондиционера БК 1500, выпускаемого Бакин-
ским заводом бытовых кондиционеров [26]. Внутренняя пере-
городка 3 делит кондиционер на два отсека. В наружном отсеке 1
размещается герметичный компрессор 2.
Кроме устройств описанного конструктивного типа выпуска-
ются агрегатно-раздельные автономные кондиционеры с воз-
душным охлаждением, состоящие из наружного агрегата, вклю-
чающего герметичный компрессор 4 (рис. 28), осевой вентиля-
тор 2 с электродвигателем 3 и воздушный конендсатор 1, и
98
Схема 1. Классификация систем кондиционирования
внутреннего агрегата, включающего воздушный фильтр 8, испа-
ритель 7, центробежный вентилятор с электродвигателем 6 и
декоративную решетку с поворотными жалюзи для направления
t f I I
Рис. 27. Схема оконного кондиционера
воздуха. Все конструктивные элементы размещены под кожу-
хами 5. При агрегатно-раздельной конструкции понижается
шумность кондиционера, так как компрессор и электровентиля-
торная группа конденсатора удалены от обслуживаемого поме-
щения.
100
Методы стабилизации температуры воздушных сред термо-
константных помещений. Для повышения точности стабилиза-
ции температуры в помещении разработаны [19] высокоточные
регуляторы (ВРТ) температуры. Система автоматического ре-
гулирования показана на рис. 29.
Погрешность Дет стабилизации температуры равна
Авт = Д/т.Возм{1 + [Д(/5) wK(p) wa(p) Кпе~х^][Тпр + I]”1}
где Wk(p), Wn(p), F(p)—передаточные функции р соответст-
венно электрокалорифера /, первичного 3 и вторичного 4 пре-
образователей; Д/т. возм — суммарное возмущение температуры
в зоне первичного преобра-
зователя; Лп, тп, Та — пара-
метры передаточной функ-
ции помещения 2, завися-
щие от кратности обмена
воздуха в помещении, ско-
рости воздушного потока в
зоне первичного преобразо-
вателя, расстояния между
калорифером и воздухорас-
пределительными щелями.
Передаточная функция име-
ет вид
(Р)
/Спе V
тар +1 •
В помещении с объемом
до 200 м3 для кратности об-
мена воздуха 5 ... 12 об/ч
параметры передаточной
Рис. 28. Схема агрегатно-раздельного
кондиционера
функции находятся в преде-
лах 0,1 < Кп < 0,4; 5 < тп < 120 с; 15 < Тп < 20 мин. Для
осуществления необходимой передаточной функции F (р) при-
менен релейный элемент 5, охваченный инерционной обрат-
ной связью 8, и выполнено параллельное соединение интегрирую-
щего и пропорционального звеньев. При этом необходимо, чтобы
частота периодических температурных колебаний воздуха на
входе в электрокалорифер не превышала частоты захвата си-
стемы при заданной амплитуде колебаний. В рассмотренной
системе первичный преобразователь температуры имеет термо-
сопротивление в виде химически чистой никелевой проволоки
диаметром 0,1 мм, намотанной на изоляционный крестовидный
каркас. Допустимое значение тока 7Т. с в проволоке определяет-
ся из выражения
ks^np 8it. в
Т' ”Р “ 0,86V’np - Л2. ЛпратД
101
где ДА. пр — изменение температуры проволоки от тока, проте-
кающего через нее; ks — коэффициент теплоотдачи; Fnp — пло-
щадь наружной поверхности проволоки; ДА. в— изменение тем-
пературы воздуха; 7?Опр— начальное сопротивление проволоки;
атд — температурный коэффициент сопротивления; /т. с — ток,
протекающий по термосопротивлению. Переключением секций
можно установить мощность нагрева в пределах 1 ... 4,5 кВт.
Скорость движения воздуха через электрокалорифер равна
2,8 м/с. Время отработки режима у калорифера не превы-
шает 1 с.
Интегратором служит двигатель 6, управляющий напряже-
нием, снимаемым с потенциометра 7. Сложение сигналов цепи
Рис. 29. Схема точного регулирования температуры
интегратора и пропорциональной цепи происходит в схеме уп-
равления тиристорного усилителя мощности 9. Для уменьшения
скорости изменения температуры на входе в электрокалорифер
необходимо иметь астатическую систему непрерывного или ре-
лейного регулирования.
При испытании системы ВРТ в термоконстантных помеще-
ниях объема до 160 м3 в течение многосуточной работы неста-
бильность температуры в зоне первичного преобразователя на-
ходилась в пределах ±0,05 °C.
Система ВРТ-2 предназначена для прецизионного регулиро-
вания температуры. Эта система состоит из двух приборов: из-
мерительного блока типа И102 и регулирующего устройства
типа Р-111. В измерительном блоке сигнал термопары компен-
сируется сигналом от встроенного задатчика и разница этих
сигналов усиливается предварительным усилителем. Усиленный
сигнал разбаланса поступает на вход регулирующего устрой-
ства. Последнее преобразует входной сигнал в унифицирован-
ный сигнал постоянного тока 0 ... 5 мА, который может быть
использован в блоках питания тиристорных, магнитных или дру-
гих устройств управления нагревом. Блок Р-111 имеет индика-
торы, по которым можно контролировать разбаланс и выходной
ток, органы динамической настройки, а также переключатель
управления,
102
Технические данные системы ВРТ-2 следующие:
Диапазон регулирования температур, °C........... О ... 1600
Погрешность регулирования в пределах, °C . . . ±0,5
Тип измерительного преобразователя ............. Термопара
Сопротивление нагрузки, кОм..................... 0 ... 3
Установка задания:
дискретная, мВ................................. 0 ... 20
плавная, мВ................................... 0 ... 0,1
Минимальная цена деления задатчика, мкВ ... 1
Законы регулирования:
пропорциональный ....................................... П
пропорционально-интегральный . . ............... ПИ
пропорционально-интегрально-дифференциальный ПИД
Коэффициент пропорциональности................. 0,25 .. 50
Время /и интегрирования при законах регулирова-
ния ПИ и ПИД, с.................................... 2 ... 475
Отношение времени дифференцирования tg ко вре-
мени /и при законе ргулирования ПИД, с............. 0 ... 0,4
Габаритные размеры каждого блока, мм:
ширина................................................ 160
высота................................................. 80
глубина................................................ 535
Система ВРТ-2 в комплекте с тиристорным усилителем типа
У-252 образует систему ВРТ-3. Система обеспечивает помехоза-
щищенность от продольной помехи с параметрами до 220 В,
50 Гц и поперечной помехи до 1 мВ, 50 Гц. Напряженность
внешнего магнитного поля в месте установки приборов ВРТ-2
не должна превышать для блока И102 — 40 А/м; для блока
Pill —400 А/м.
Принцип работы измерительного блока следующий. Входное
напряжение ивх э. д.с. термопары сравнивается с напряжением
задатчика (рис. 30) и поступает на модулятор М, управляемый
генератором опорного напряжения. Задатчик питается от ста-
билизатора напряжения СИ, помещенного в термостат, где
температура стабилизирована с помощью стабилизатора СТ. По-
ступившее на модулятор напряжение Xi преобразуется в пере-
менный сигнал Х2, после чего подается на вход автогенератор-
ного усилителя, содержащего параметрическое устройство ПУ,
коэффициент передачи которого зависит от входного сигнала,
колебательный контур КК и нелинейный усилитель У перемен-
ного напряжения и~, охваченный положительной обратной свя-
зью ПОС. Выходное высокочастотное напряжение детекти-
руется амплитудным детектором Д, а сигнал огибающей выпрям-
ляется демодулятором ДМ. Сигналом исм автогенераторный
усилитель выводится на уровень генерации, определяющийся
значением и и степенью инерционной обратной связи. При от-
сутствии сигнала на входе модулятора М на выходе усилителя У
устанавливается высокочастотное напряжение х$, частота кото-
рого определяется параметрами колебательного контура ЯК.
103
После детектирования и высокочастотного сглаживания в точке
х7 образуется постоянный сигнал, который подается в цепь инер-
ционной обратной связи ИОС. Сигнал и0. с, полученный на вы-
ходе инерционной обратной связи, в противофазе к и~ подается
на вход параметрического устройства ПУ, стабилизируя уровень
генерации. При поступлении сигнала на модулятор М в точке
Рис. 30. Измерительный блок терморегулятора типа ВРТ-2:
М — модулятор; 3 — задатчик; ГОН — генератор опорного напряжения;
СИ — стабилизатор напряжения; ПУ. КК, У — параметрическое устройство,
колебательный контур и нелинейный усилитель с положительной обратной
связью ПОС автогенераторного усилителя; ИОС — инерционная обратная
связь; Д — амплитудный детектор; ДМ — демодулятор; ООС — отрицатель-
ная обратная связь; СТ — стабилизатор; В — выпрямитель
Х2 образуется переменное прямоугольное напряжение. Если его
подать на параметрическое устройство, постоянная времени ко-
торого значительно меньше полупериода опорного напряжения,
то амплитуда генерации в один полупериод увеличится, а в дру-
гой — уменьшится, и на выходе появится высокочастотный сиг-
нал %5, модулированный частотой опорного напряжения. На
входе инерционной обратной связи ИОС постоянная составляю-
щая практически не изменится, а сигнал огибающей на выходе
детектора Д после демодуляции преобразуется в постоянное вы-
ходное напряжение нвых, знак которого зависит от фазы сигнала
%2, а следовательно, и от знака Хь При работе с тиристорным
усилителем минимальная мощность управляемой нагрузки
0,3 кВт, а максимальная — 22 кВт,
104
Таблица 4. Расчетные зависимости тепловыделения QT в помещении
Источник тепловыделения Расчетная зависимость для QT, кВт Значения параметров
Оборудование с элек- тродвигателем QT = B7y Ц|Ц2ц3ц4 Hl =0,7 ... 0,9; Ha = 0,4 ... 0,9; Цз=0,4 ... 1;ц,4 = 0,1 — для станков; ц4 = 0,1 — для вентиляторов и насосов; у.|Ц2ц3|л4 as «0,015 — для физиче- ских лабораторий
Металлорежущие станки без охлаждения инструмента при посто- янной загрузке QT = 0,25 ITy —
Металлорежущие станки с СОЖ при по- стоянной' Нагрузке - QT = 0,15 Гу —
Металлорежущие станки в инструмен- тальных, ремонтных и сборочных цехах QT = 0,21 lFy —
Оборудование прес- совых цехов QT=(0,2 ... 0,13) UZy р2 ~ 0,4 ... 0,6
Оборудование лабо- раторий QT = 0,015 lTy Н1Н2В3Ц4 ~ 0,015
Вращение вала в подшипнике скольже- ния Qt = = 0,28*10“3 QpgTp(or —
Нагретые поверхно- сти Qr = (/r, n tTt B) При коэффициенте излучения сп = = 4 ... 4,5 Вт/м2 К: для цилиндрической поверхности цт = = 8,1 +0,045 (/т.п- ^т. в)- для плоской цт — = 8,4 + 0,06 (/т,п- + в)
Обозначения: №у—установочная мощность электродвигателя, кВт;
Hi* U2» Ц-э» ц-4—коэффициенты использования, загрузки, одновременности работы,
перехода теплоты в помещение; Qp—радиальная нагрузка; цтр —коэффициент
трения; ©—угловая скорость вращения; г —радиус вала и втулки; цт—коэффициент
теплоотдачи от поверхности к воздуху: Ft / -д — площадь и температура поверх-
ности.
105
17. ВОЗДУХООБМЕН
И СКОРОСТЬ ДВИЖЕНИЯ ВОЗДУХА
Требуемый воздухообмен .9 определяется зависимостями:
по теплоте
ух-^т. пГ1;
по влаге
^вл = (ф/7 ух — Фяп) ‘>
по газам
*^Г £рв (*г. ух ^г. п) •
где QT, tfHw и Срв — соответственно количество теплоты (табл. 4),
влаги и газов, выделяющихся в помещении; ст. в — массовая теп-
лоемкость воздуха; tT. ух, Ф7/ ух и +. ух— температура, влажность
и концентрация в уходящем воздухе; tT. п, при п и kr. п — то же
в поступающем воздухе.
Теплоту от люминесцентных светильников рекомендуется
удалять с помощью местных отсосов [44] из расчета 70 м3/ч на
1 кВт установочной мощности.
В ряде производств происходит интенсивное испарение вла-
ги. Влага выделяется с открытой поверхности емкостей, со смо-
ченных поверхностей полов и стен, от обрабатываемых материа-
лов, через неплотности оборудования, коммуникаций, от людей.
Количество влаги, испаряющейся с открытой водной поверх-
ности, определяется по формуле [44]
Фнш = (+ + 0,0174ав) (Рв. п. н - Рв. п) F (133)'
где ад — фактор гравитационной подвижности окружающей
среды, зависящий от температуры /т воды, ае « 0,022 +
+ 0,000628 (К — 30) при температуре воды 30 ... 10 °C; ов —
скорость воздуха над зеркалом испарения, м/с; Рв. п. н — давле-
ние водяных паров, насыщающих воздух помещения при данной
температуре поверхности воды, Па; Рв. п — давление водяных
паров, содержащихся в воздухе помещения, Па.
Количество воды (кг/ч), испаряющейся со смоченной по-
верхности пола, определяется по формуле
ФщГ *^вл (4. п + ух)/585,
где ^вл — количество вытекающей на пол F горячей воды, кг/ч;
+ п и /т. Ух — температура поступающей и стекающей в канали-
зацию воды.
Измерение малых скоростей воздушных потоков. Для изме-
рения скоростей воздушных потоков менее 1 м/с применяются
термоанемометры. Анемометры АВТ-1 и АВТ-IM успешно про-
шли государственные испытания и поверяются на специализи-
рованной образцовой установке, воспроизводящей диапазон ско-
ростей 0,026 ... 4,65 м/с. Время стабилизации скорости воздуш-
106
ного потока не более 10 с. Погрешность воспроизведения едини-
цы скорости воздушного потока не более ±2,5% при времени
поддержания заданного значения скорости не менее 45 с. Пло-
щадь входного отверстия насадки воздухопровода 13,24 мм2.
Отличительной особенностью приборов АВТ-1 и АВТ-IM являет-
ся наличие гибкого стержня между измерительной головкой и
рукояткой. Стержень представляет собой двойную спиральную
намотку упругой проволоки. Такая конструкция позволяет вво-
дить измерительную головку в труднодоступные места техноло-
гического оборудования и измерительного прибора. Первичным
измерительным преобразователем в этих приборах является
терморезистор СТЗ-25 с постоянной времени 0,1 с.
Рис. 31. Термоанемометр ТАП-71: а — схема; б — кон-
структивное исполнение
Полупроводниковые термоанемометры ТАП-71, ТАП-73 с
температурной компенсацией чувствительности предназначены
для измерения скоростей потоков воздуха в пределах 5 см/с ...
... 10 м/с.
Работа термоанемометра основана на зависимости теплоот-
дачи нагретого тела — резисторов Rl, R2 (рис. 31) от скорости
обдува. Регистрируя температуру нагретого тела электросамо-
писцем, по изменению его электрического сопротивления опреде-
ляют эквивалентную скорость потока воздуха. R3, R4, R5 —
балансные сопротивления моста.
В многоточечном термоанемометре ТАП-73 поочередно фик-
сируется сигнал каждого из пяти преобразователей, включаемых
в индивидуально подобранный мост.
Для измерения малых скоростей движения воздуха применя-
ется шаровой кататермометр. Скорость движения воздуха
находят по градуировочной таблице, предварительно опреде-
лив отношение Яф/0т, где Яф = </>K(A. Ki— Я. кг)/т — величина
охлаждения; фк— константа кататермометра; tT. ki — темпера-
тура кататермометра в начале опыта; /т. к2 — температура ката-
термометра в конце опыта; т — время, за которое кататер-
мометр охладится от температуры Я.к1 до Д. К2, 6т — 36,5 —
— 0,5(0т1 — 0тз)—разность между средней температурой при-
бора во время опыта (36,5 °C) и средней температурой воздуха;
107
6ri—температура воздуха в начале опыта; 0т2—температура
воздуха в конце опыта. Кататермометр позволяет определять
скорость движения воздуха в диапазоне 0,05 ... 2 м/с.
Нормальная скорость движения воздуха. В качестве номина-
ла нормальной скорости движения воздуха принимается ов=0.
Нормальная область скорости vB обычно не превышает 0 ...
... 0,5 м/с, а для прецизионных линейных и угловых измерений
с целью исключения рефракции, неравномерной деформации,
переноса пыли предел скорости уменьшается до пв 0,1 м/с.
Для уменьшения местных турбулентных завихрений тепло-
защитные щиты обтягивают мягкой демпфирующей тканью.
Иногда в термостатированных помещениях, чтобы исключить
движение воздуха, временно отключают кондиционер. Однако
воздухообмен необходим, и поэтому скорость vB не может по-
стоянно равняться нулю.
Нетрудно показать, что в локально однородном поле турбу-
лентной атмосферы, для которого структурная функция про-
странственной флуктуации диэлектрической проницаемости под-
чиняется «закону двух третей» Колмогорова — Обухова [32],
радиус корреляции показателя преломления щ равен Рх(пд,) =
= 0,35 То, где Lq — внешний масштаб турбулентности. Следова-
тельно, в пределах La значения п\ целесообразно контролиро-
вать не менее чем в трех точках или на отрезках, равных 0,35 Lo.
Такое значение рДпх) получается при использовании известной
связи между диэлектрической проницаемостью воздуха и его
показателем преломления (см. п. 27). Практика оценки показа-
теля преломления при интерференционных измерениях длин со-
ответствует данному соотношению.
Глава IV
ВИБРАЦИИ,
ВИ Б РОУСТОЙ Ч И ВОСТЬ,
ВИБРОИЗОЛЯЦИЯ
18. ИСТОЧНИКИ
И ПАРАМЕТРЫ ВИБРАЦИЙ,
ДЕЙСТВУЮЩИХ
НА СРЕДСТВА ИЗМЕРЕНИЙ
Характер промышленных вибраций. Ис-
точники вибраций весьма разнообразны.
Действие ветра, колебания грунта от про-
ходящего транспорта, работа различного
технологического оборудования (прессов,
молотов, компрессоров, генераторов, венти-
ляторов, воздуходувок, металлорежущих
станков) вызывают колебания сооружений,
зданий и их частей. Частота вибраций, вы- ,
зываемых проезжающим транспортом,
обычно не превышает 30 ... 35 Гц. Вибра-
ции вентиляторов, воздуходувок имеют ос-
новную частоту в диапазоне 10 ... 30 Гц.
Самую значительную группу источников ви-
браций в машиностроении составляют ме-
таллорежущие станки [45]. В процессе ра-
боты в них возникают динамические силы,
которые вызывают колебания станка и пе-
редаются его основанию. В токарных, свер-
лильных станках — это, главным образом,
центробежные силы, возникающие в ре-
зультате эксцентричности вращающихся де-
талей станка, обрабатываемых изделий и
приспособлений. Частота таких колебаний
не превышает 50 Гц. В строгальных, зубо-
долбежных, шлифовальных станках инер-
ционные силы возникают от возвратно-по-
ступательных движений суппортов. Число
двойных ходов суппортов в таких станках
не превышает 200 в минуту. Неуравнове-
шенность роторов двигателей, удары в зуб-
чатых передачах, автоколебания от трения
в направляющих, процесса резания мате-
риала и другие причины вызывают значи-
тельно менее интенсивные вибрации, но
зато с более высокими частотами и более
сложного характера. Частота вибраций,
109
вызываемых станками, находится в широких пределах 0,2 ...
... 1500 Гц.
Автоколебания в отличие от колебаний вследствие биений
и эксцентриситетов могут носить негармонический характер.
Причиной автоколебаний является нелинейный характер зави-
симости силы резания от скорости и наличие трения в системе
станок — инструмент — приспособление — деталь (СПИД). Диф-
ференциальное уравнение колебаний системы СПИД с одной
степенью свободы при точении (рис. 32) имеет вид [45]
A4mZ + CAZ + /c.nZ = Qz(Z), (51)
где Мт — приведенная масса СПИД; Сн — коэффициент сопро-
тивления движению (трение); /с.п — жесткость СПИД; Qz(Z)—
нелинейная характеристика си-
лы резания в направлении Z.
Характеристика силы реза-
ния в зависимости от обраба-
тываемого материала имеет
Рис. 33. Характеристики силы
резания
два вида: 1) монотонно убывающая с падающим характером
зависимости от скорости резания (рис. 33, а); 2) с двумя падаю-
щими участками зависимости от скорости резания (рис. 33,6).
Аппроксимацию такой силы выполняют полиномом третьей сте-
пени. В результате дифференциальное уравнение (51) пред-
ставляется в нелинейной форме
Z - C0Z + pZ3 + co2Z = 0, (52)
где С0 = Яр2Яи; Р = Яр2/ЗМтц2р; и2 = /с п/Л1т; Ярг
=(Q - - Z Wap]; Q = Qz (Z) + Ch (Z) - обобщенная сила
резания и сопротивления; Qo = Qz(0) + С/ДО)—обобщенная
сила резания и сопротивления при отсутствии вибраций; оар —
половина протяженности нелинейного участка зависимости силы
от скорости резания.
Уравнения, аналогичные (52), получаются и для систем с
крутильными и изгибными колебаниями.
110
Решение дифференциального уравнения (52) при малом па-
раметре epz = HP,,a/ic. п < 1 представляется в форме [45]
Z (/) = (2пар/<в) [cos vj — j (sin vat — у sin eP2 4-
+ i (cos + 4cos 3v“z _ iVcos 5 v) ep J <53)
где частота колебаний v„ = cofl —) в отличие от соб-
\ ЮР*/
ственной частоты со колебаний системы СПИД.
Форма колебаний может быть близкой к синусоидальной 1
(гармонические колебания при ер21) и пилообразной 2
(рис. 34), т. е. носить релаксационный характер при epz > 1.
Путь распространения вибраций от источника до измери-
тельного прибора достаточно велик, за исключением случаев
непосредственного размещения изме-
рительных приборов на технологиче- _ /х
ском оборудовании. Элементы систе- f /\j
мы, передающей вибрации, имеют У \J /Ул
сравнительно низкие собственные ча- /\/\/ '
стоты. Так, частота собственных коле-
баний элементов железобетонных ме-
ждуэтажных перекрытий лежит в дна- Рис. 34. Формы^ автоколеба-
пазоне 10 ... 30 Гц. Частота собствен- ний
ных колебаний амортизаторов, приме-
няемых для металлорежущих станков в качестве активной ви-
брозащиты, находится в пределах 10 ... 35 Гц. Частота собствен-
ных колебаний деревянных столов с установленными на них при-
борами находится в диапазоне 6 ... 20 Гц. Несколько в ином по-
ложении средства измерений, установленные непосредственно на
суппорте или станине станка и воспринимающие более интен-
сивные и с большими частотами вибрационные помехи. Однако
и здесь часто имеются виброизолирующие прокладки, амортиза-
торы и тому подобные виброгасящие устройства. Вследствие
влияния указанных систем «связи» вибрации, вызываемые их
источниками, и вибрации, действующие на измерительные при-
боры, не идентичны. Для получения более полной информации
о вибрационном воздействии на приборы в процессе измерения
были проведены специальные исследования: С. Б. Тарасовым
на предприятиях машиностроения, Г. Б. Гречухиной, Н. Г. Гор-
буновым и автором на предприятиях машиностроения и элек-
тронной промышленности, В. А. Шеметилло на предприятиях
топливной аппаратуры.
Параметры вибраций измерялись на корпусе, основании при-
бора, на поверхности его установки, на полу помещений, в це-
хах, расположенных на земле и на этажах каркасных зданий.
Фиксация вибраций проводилась одновременно по трем осям
координат. При исследованиях применялся комплект приборов
111
К-001 с вибропреобразователями индукционного типа (см.п. 19).
Указанная аппаратура позволяет измерять вибрации с частотой
2 ... 200 Гц при амплитуде от 0,5 мкм и дает сигнал, пропор-
циональный виброперемещению. Использовался также магнито-
электрический сейсмоприемник типа С-205 с усилителем по-
стоянного тока и шлейфным осциллографом Н-700. Частота соб-
ственных колебаний ~10 Гц. Обработка виброграмм показала,
что действующие на приборы вибрации имеют различный харак-
тер и могут быть моногармоническими, полигармоническими и
почти периодическими. Вибрационный процесс часто содержит
не более двух-трех существенных гармоник. Спектр вибраций
в единицах спектральной плотности для стационарного эргоди-
ческого процесса определяют по формуле [29]
+°° +*п
Sxx(f) = Bxx(x)e~ia>x dx — litn-^j— x (/) x (/ — x) ez“x dx, (54)
-°o —tn
где <o = 2nf = 2лЦп — круговая частота; ВХх(т) — корреляцион-
ная функция стационарного случайного процесса; [—tn, -{-tn} —
временной интервал фиксации вибрационного процесса.
Анализ параметров колебаний. Для выделения гармоник с
существенными амплитудами используют равенство Парсева-
ля — Ляпунова:
Л / V* тккт
Sen «А/ 2и~’ (55>
Яв1
где sc. п — СКО кривой реализации процесса колебаний от сред-
Р л2
\ **п
ней линии; / д —-полусумма квадратов существенных ампли-
п— 1
туд р гармоник. Как видно из выражения (53), для автоколе-
баний системы с относительно большой жесткостью этот процесс
имеет первую, третью и пятую гармоники с амплитудами соот-
ветственно:
А,=V(1 + it ’’J’ + хг ;
A>“: i
Так как для общего периодического процесса со случайной фа-
зой ковариационная функция равна
оо
W = С0 + Т Е (an + C0S kVX’
112
а дисперсия
00 oo
<.=в.,,=R„ (0) - q -1X + 6=) = 4 £
n=l n—1
то условие Парсеваля — Ляпунова для решения (53) выполня-
ется при ер2 1 и без учета пятой гармоники. Пятая гармоника
становится существенной при ер2 > 5.
С. Б. Тарасовым и В. А. Шеметилло были построены диаг-
раммы рассеяния параметров вибраций, действующих на при-
боры в вертикальном направлении и в
горизонтальной плоскости, в координа-
тах частоты и амплитуды перемещения.
Сопоставление этих диаграмм вибраци-
онных помех показало, что вибрацион-
ное воздействие на приборы в вертикаль-
ном и горизонтальном направлениях
практически одинаково. Амплитуды дей-
ствующих вне станков вибраций не пре-
вышают 30 мкм при их уменьшении с
увеличением частоты. При этом сущест-
венные амплитуды = А вибропереме-
щения (0,5 мкм и более) наблюдаются
при частотах до 60 Гц. Наибольшая ам-
плитуда действующего виброускорения
составляла 0,4 м/с2. Довольно узкий
27,5-
25
22,5-
20
17,5
15
12,5
10
2
7,5\-
30-
2,5\
п\_____।_____। ;—।______l_----1 1 г-—।------1------*----1-----1-----1—
5 10 15 20 25 30 35 40 45 50 55 BOfJu,
Рис. 35. Распределение уровня вибраций в производствах разного
характера, действующие:
; —на приборы 2—передаваемые полом (rQfl=0,5); 3.. .5 —пределы нор-
мальной области по ГОСТ 8.050-73 для рядов XI. X, I при кОд=0,315; 0,189; 0,063 мм/с
спектр частот, действующих на приборы в производственных
зданиях, объясняется фильтрующими свойствами системы пере-
дачи вибраций, особенно столов и подставок, вследствие чего
ослабляются высокие и устанавливаются низкие частоты. Спе-
циальные виброзащитные столы снижают уровни вибраций,
ИЗ
а обычные столы и подставки часто усиливают вибрации более
чем в три раза, особенно в диапазоне 3 ... 30 Гц. Были отме-
чены случаи, когда столы усиливали амплитуды вибрации пола
в 8 ... 11 раз [66]. Это объясняется резонансными колебаниями
столов, имеющих собственную частоту 6 ... 20 Гц. На основании
диаграммы вибрационных помех, с достаточной достоверностью
установлена граница уровня действующих на приборы вибра-
ций. Анализ показал, что рассматриваемая граница соответ-
ствует примерно постоянной амплитуде виброскорости vQa, так
как кривые на рис. 35 близки к гиперболам *. Такой способ
нормирования, предложенный автором, оказался весьма эффек-
тивным; он использован в ГОСТ 8.050—73 и принят в класси-
фикациях по виброчувствительности машин и приборов Цент-
ральным научно-исследовательским институтом строительных
конструкций им. Кучеренко. Однако, учитывая низкочастотный
характер действующих вибраций, измерение и воспроизведение
заданного уровня вибраций удобней выполнять при контроле
частоты и амплитуды виброперемещений. При размещении из-
мерительных средств непосредственно на станках в случае
активного контроля на них могут действовать не только гармо-
нические, но и релаксационные колебания от процесса резания
и трения в элементах СПИД, в том числе между измеритель-
ными наконечниками и движущейся контролируемой поверх-
ностью, в поворотных опорах и т.п.
19. ИССЛЕДОВАНИЕ ДЕЙСТВИЯ
И ИЗМЕРЕНИЕ ПАРАМЕТРОВ
ВЫНУЖДАЮЩИХ ВИБРАЦИЙ
Пределы нормальной области вынуждающих вибраций. В ка-
честве номинала нормального значения уровня действующих
вибраций принимается нулевое.
Можно показать, что постоянство скорости вынуждающих
виброперемещений в определенной мере закономерно. Рассмот-
рим элементарную динамическую одномассовую систему с со-
средоточенной массой т и вязким демпфером (рис. 36). Диффе-
ренциальное уравнение движения такой массы под действием
вынуждающих колебаний опоры
5г+2”А + <4$2 = 2^ + ^
имеет решение с амплитудой
* См. примечание к табл. 1,
114
где ей = 2щ/соо; щ = Сл/2/и— коэффициент затухания; Си—
коэффициент сопротивления; ©0=V///n — круговая частота
собственных колебании системы при отсутствии сопротивления;
/— жесткость упругого звена.
При балансировке технологического оборудования обычно
добиваются ограничения вибраций на заданном уровне по
амплитуде виброускорения, являющегося аналогом силового
воздействия оборудования на систему его закрепления и уста-
новки, т. е. обеспечивают ус-
ловие S^aco2 и в преде-
ле Sgn(D2 = Аа = const. Так
как масса т системы закреп-
ления и передачи вибраций на
здание, сооружения и далее
на расположенные в них при-
боры весьма велика, то через
такую систему передаются
только резонансные частоты.
Следовательно, при ы = соо и
< 1 имеем
со
Sza = 2^- •
Произведение амплитуды Рис. 36. Динамическая система с вяз-
Sza на частоту ®0, равное ам- ким ДемпФеР°м
плитуде виброскорости выну-
ждающих колебаний, действующих на средства измерения, бу-
дет при щ ~ const:
5га<о0 = ==2^-=v0a = const.
Постоянство коэффициента затухания щ обеспечивается
вследствие использования практически одних и тех же материа-
лов и типовых конструкций в перекрытиях и других элементах
промышленных зданий и сооружений. Таким образом, постоян-
ство амплитуды виброскорости вынуждающих вибраций не яв-
ляется случайным эмпирическим казусом. Из рассмотренной
модели выявляются и границы асимметричной унифицирован-
ной нормальной области вынуждающих вибраций. В относитель-
ных координатах перемещение подвижной массы будет
//от., = У a C0S ~ бе) - Sa C0S
Причем сдвиг фаз
е £3
где :ш = «е/со0.
115
При е« ->0 бе->0 и амплитуда относительного перемещения
отсчетного указателя равна
Уатн. а = ' _-.% •
Если длина деления шкалы прибора равна аш, передаточное
отношение in и амплитудно-частотная характеристика- ведомой
цепи измерительного механизма Лач. х, то
г/оТн.а<т-Й—- (56)
где %а — доля деления шкалы, соответствующая допускаемой
амплитуде колебаний отсчетного индекса.
Согласно ГОСТ 8.050—73, принято Ха= 10, т. е. допускаемый
размах колебаний отсчетного указателя на шкале не более
0,2 длины аш деления шкалы. Эффективность такой нормы под-
тверждается в экспериментах, выполненных С. Б. Тарасовым на
Ленинградском инструментальном заводе на базе многофактор-
ного анализа по схеме 3X9X3 и 3X5X4: три фактора опе-
ратора, девять и пять в симметричном варианте уровней фак-
тора положения и соответственно три и четыре уровня фактора
состояния указателя как неподвижного, так и при моно- и поли-
гармонических колебаниях. Превышение установленного пре-
дела размаха колебаний отсчетного указателя ведет к суще-
ственному увеличению погрешности отсчета и снижению его
производительности (см. гл. VI).
При ха = Ю имеем
Ю'п^вч.
Если Лвч. х « I, ТО
о
а ю/Д
Для прецизионных измерительных приборов характерны сле-
дующие диапазоны значений передаточного отношения in —
= 100 ... 10 000; собственных частот / = 10 ... 50 Гц; длин де-
ления шкалы аш = 0,5 ... 1 мм. Отсюда для частоты вынуж-
дающих вибраций 1 Гц:
£а = 1/10 ... 1/50 и соответственно при
Л Q
Сй=1/ю, in= 1000=>Sa< 16.-1боб717100-^°’01 мм:
при = 1/30, in = 10 000 =>Sa < loooo • 1/1000 == 0,01 мм,
при = 1/50, 1„ — 10 000 =>Sa < 0,025 мм «0,03 мм;
для £ш=1/50, in = 5000 => Sa < 0,05 мм.
116
Для большинства средств измерений значения Sa при 1 Гц
могут быть увеличены, так как имеется демпфирование, т. е.
ег =# 0. Кроме того, обычно неуравновешенная масса значитель-
но меньше общей массы механизма [68]. Сопоставление уровня
вибраций, действующих на приборы в машиностроении, с виб-
рациями, действующими на приборы других типов (авиацион-
ные, судовые, а также электроизмерительные щитовые в энерге-
тических установках), показывает, что на приборы в цехах пре-
цизионного производства и особенно в лабораториях действуют
менее интенсивные вибрации и в более узком частотном диапа-
зоне. Однако влияние вибраций на высокоточные приборы для
линейных измерений в условиях машиностроения весьма значи-
тельно [66].
Сравнивая уровни вибраций, действующих на приборы (см.
рис. 35), и передаваемые полом с допускаемыми уровнями вибра-
ций, видим, что область действующих рабочих вибраций в не-
виброизолированных помещениях значительно шире области
унифицированных нормальных значений параметров вибраций.
Данные анализа для различных помещений на соответствие рас-
ширенным нормальным условиям в подавляющем большинстве
случаев положительны, что обеспечивается наличием демпфиро-
вания е1; > V2 в механизмах средств измерений, при котором
резонансные пики размыты и прибор работает в зарезонансном
режиме, использованием амортизирующих опор, оснований
и т. п.
Смещение ус« центра колебаний отсчетного указателя и изме-
нение погрешности измерительной цепи зависят от нелинейности
механизма, непостоянства передаточных отношений между ско-
ростями центров масс звеньев и точки приведения, характера
трения в кинематических парах. Для подобной оценки необхо-
димо знать массы звеньев и соответствующие производные
di 2y/dx2, dy/dx, d2y/dQ(f, dy/dB<f (у — траектория движения точ-
ки приведения; х — перемещение центров масс звеньев; 0ф —
угол поворота звеньев). При этом нормальная область ампли-
туды Sa. н вынуждающих вибраций оценивается по преобразо-
ванным зависимостям [68].
Для вращательных звеньев
i ф фО I ф фО
Здесь А4В — А0фД/е; Д0фд — допускаемая погрешность угла по-
ворота от действия вибраций, которая связана со статической
погрешностью А0фсх угла поворота направляемого звена усло-
вием малости погрешности А0<рД < О,75А0фСх; / — момент инер-
ции механизма; tnq = р/g— масса звена.
117
Перемещение центра тяжести подвижного звена описывается
выражением
y = (d/2) e(P + (d/2) о2,
где d — диаметр окружности катания.
Отсюда
= d/2; d\ld^ = d.
"°<Р 1(^=0
Подставляя соответствующие значения в выражение (а) и по-
лагая е 1-^-0 для механизмов с малым трением, получим
„2 2 A6wg2/e72 (1 - g2) 3 Л0ф с/ (1 - g2)
а' нш2/р^ (<7/2) d nt^c?
Таким способом можно оценить порядок нормальной области
уровня вибраций для направляющих вращения.
Для направляющих поступательного движения [68] имеем
2 2Qa^[(1_^ + e2J
(d2y/dxP)'] ^[PvQ(dy/dx}] ’
V V °
где QB = ASy/; ASy — погрешность от действия вибраций, при-
чем ASy 0,75As cxj М = pq/s;
„2 l,5AScx(l-g2)
а- н (d2y)dx2) (dy/dx) ’
ASCX Вп тах^ф
где В„. щах — расстояние между параллельными линиями дей-
ствия, аш — цена деления, i — передаточное отношение.
При пересекающихся линиях действия погрешность прямоли-
нейных направляющих равна ASCX С /и тахАр/, где коэффициент
/х max < 4; Ар/ — погрешность положения точки пересечения ли-
ний действия.
Виброустойчивость и демпфирующие свойства подвижного
соединения. Вследствие большой вязкости смазки (гидродина-
мической, гидростатической, аэростатической) колебания, выз-
ванные различного рода возмущениями, затухают достаточно
быстро. Масляный слой демпфирует значительные удары, цик-
лические и колебательные нагрузки.
Для оценки виброустойчивости подшипника используются
различные критерии: многофакторный [89]; Орбека по угловой
скорости со и относительно му эксцентриситету %е = 2en/s; Фо-
гельполя по и относительной длине подшипника = ln/D„;
Типпея в координатах и 1/ХПш и т. п. Область неустойчивости
для радиальных подшипников по Типпею располагается в зоне
между 1/Х пш = 0,06 .,. 0,4.
118
Требования к системе закрепления прибора. Для обеспече-
ния виброустойчивой работы измерительного прибора важны
как его собственные параметры, так и данные системы закреп-
ления. Универсальные измерительные головки средств линей-
ных измерений (микрокаторы по ГОСТ 6933—72, оптикаторы
по ГОСТ 10593—74 и др.) и измерительные преобразователи
(фотоэлектрические по ГОСТ 15900—70, индуктивные и др.)
обычно крепятся в приспособлениях типа стойка (стойки изме-
рительные по ГОСТ 10197—70 и др.). Допускаемую минималь-
ную жесткость /к закрепления можно оценить по формуле, пред-
ложенной С. Б. Тарасовым [66],
( Фач. х мах^ЕО
/к==1 [Д^
1) та?,
где т — приведенная масса головки (преобразователя); А^о—•
амплитуда перемещения основания стойки; Фач. х мах — макси-
мальное значение амплитудно-частотной характеристики изме-
рительных механизмов на частотах рабочего диапазона; [ДР] —
допускаемый размах колебания указателя (уровня сигнала),
принимаемый по ГОСТ 8.050—73 равным 0,2 длины деления
шкалы (0,2 допускаемой основной погрешности прибора).
Расчетные требования к жесткости стоек распространенных
измерительных головок и преобразователей средств линейных
измерений приведены в [66]. Для оценки виброустойчивости из-
мерительных механизмов необходимо знать жесткость их упру-
гих элементов. В табл. 5 приведены расчетные зависимости для
некоторых распространенных упругих элементов.
Нормативные ограничения нормальной области вибраций. Со-
гласно ГОСТ 8.050—73, при выполнении линейных измерений
в пределах 1 ... 500 мм амплитуда скорости гармонических ко-
лебаний, действующих на средства и объект измерения, для
диапазона частот 1 ... 30 Гц в зависимости от допусков и диа-
пазона линейных размеров не должна превышать: 0,063 мм/с —
для I ... III рядов (квалитеты 01,0); 0,19 мм/с — для IV ... X
рядов (квалитеты 1 ... 7) и 0,315 мм/с для XI ... XV рядов
(квалитеты 8 ... 10 по СТ СЭВ 144—75). При измерениях
углов с длиной меньшей стороны до 500 мм амплитуда скорости
гармонических колебаний, действующих на средства и объект
измерения, для диапазона частот 1 ... 30 Гц, в зависимости от
допусков и диапазона длин меньшей стороны угла, не должна
превышать 0,063 мм/с для 1-й и 2-й степеней точности и
0,19 мм/с — для 3 ... 5-й степеней точности.
По решению ЦНИИСК им. В. А. Кучеренко [40] в руковод-
ствах по расчету строительных конструкций на динамические
нагрузки с 1976 г. принято нормирование классов машин, обо-
рудования и приборов по чувствительности к гармоническим
колебаниям основания с помощью амплитуды скорости коле-
баний в диапазоне частот 1 ... 100 Гц. При этом к классу I
119
Таблица 5. Характеристики упругих элементов
Вид упругого элемента измерительного прибора Расчетная схема Расчетные зависимости
Ленточный шарнир / / - 1 &. 'e L ’ ‘у 0,0833 L3 ’ . bh3 J~ 12
Цилиндриче- ский выборочный шарнир %. TamujjHaiv к '0 a ~ D<p Eh (\b)2 4(1 + Vl + 0,215J?/A& ) при p,„ = 1/3
Двуленточный перекрестный шарнир • _ M a иф 24 cos у 12//KL cos у + L3Q sin a.Q ' HH = EJ
Пружинный параллелограмм Q . 24 Г EJ _ 1 „ , "I ' = —h?-4- 20
<1
Скрученная микролента (мультипликатор пружинных изме- рительных голо- вок)—сдвоенный тонкий упругий геликоид 1" Q GFX. / /e-е =69-6 // 1 + <p 4 h = > = 5/28- v,. =0,32 ... 0,35; /ф / bW \ /«=Gro(i+>4-): EFb2^ !xk 4 ’ ikk = EF-,
1 M
12Q
с допускаемой амплитудой скорости колебаний г?а=0,0315 мм/с
отнесены сверхвысоковольтные электронные микроскопы с уско-
ряющие напряжением 500 кВ и выше, электронные микроскопы
с разрешением 0,3 нм и менее, эталонные интерферометры и
интерференционные установки для абсолютных измерений дли-
ны в длинах волн, интерференционные компараторы, интерфе-
рометры с автоматическим счетом интерференционных полос,
лазерные интерферометры, интерферометрические столы длиной
более 2 м для проведения голографических и интерференцион-
ных исследований, оптические и контактные профилографы и
профилометры, оптические скамьи длиной более 5 м, делитель-
ные машины для изготовления дифракционных решеток.
К классу II с допускаемой амплитудой скорости колебаний
Ра = 0,1 мм/с. отнесены электронные микроскопы с разреше-
нием 0,4 нм и более, растровые электронные микроскопы, фото-
электрические интерферометры для поеерки штриховых мер,
стационарные специализированные приборы на основе гологра-
фии, компараторы, измерительные машины длины более 1 м,
установки для поверки долемикрометровых головок, приборы
для контроля линейных размеров с электронным индикатором
контакта и ценой деления менее 0,1 мкм, оптические скамьи
длиной до 5 м, эталонные установки для измерения плоского
угла, автоколлиматоры с ценой деления 0,5" и менее, гониомет-
ры с погрешностью измерения 1" и менее, экзаменаторы с ценой
деления 0,1", кругломеры, сферометры, весы лабораторные об-
разцовые 1а 1-го и 2-го разрядов, лабораторные рычажные 1-го
и 2-го классов точности, торсионные весы, особо точные про-
дольные и круговые делительные машины, ультрамикротомы,
металлорежущие станки особо высокой точности шлифовальной
группы с направляющими качения, тяжелые высокоточные зу-
бофрезерные станки, мастер-станки и т. п., плавильные печи для
выращивания кристаллов, поливные машины для нанесения
эмульсионных слоев.
К классу III с допускаемой амплитудой виброскорости ца=
==0,315 мм/с отнесены оптикаторы, оптические длиномеры,
ультраоптимеры, измерительные машины длиной до 1 м, кате-
тометры, контактные интерферометры, приборы для контроля
линейных размеров с электронным индикатором контакта и це-
ной деления 0,1 ... 0,5 мкм, растровые измерительные микро-
скопы, микроинтерферометры, приборы светового сечения, при-
боры для контроля цилиндрических и конических зубчатых колес,
спектрографы, спектрометры, спектрофотометры, масс-спектро-
метры, микрофотометры, фотоэлектрические усилители, преци-
зионные металлорежущие станки средних размеров (внутришли-
фовальные, круглошлифовальные с направляющими скольже-
ния, плоскошлифовальные, координатно-расточные и т. п.).
К классу IV с допускаемой виброскоростью щ = 1,0 мм/с от-
несены инструментальные и универсальные измерительные ми-
121
кроскопы, оптиметры, приборы для контроля линейных размеров
с электронным индикатором контакта с ценой деления более
0,5 мкм, пневматические длиномеры высокого давления (рота-
метры), измерительные пружинные головки (микрокаторы), из-
мерительные рычажно-пружинные головки бокового действия
(миникаторы), балансировочные станки, прецизионные метал-
лорежущие станки средних размеров (отделочные токарные,
алмазнорасточные, координатно-расточные станки небольших
размеров и т. д.).
К классу V с На = 3,15 мм/с относятся токарные, фрезерные,
сверлильные и другие металлорежущие станки нормальной точ-
ности. К классу VI с На — 10 мм/с относятся турбоагрегаты,
электрические машины, центрифуги, центробежные насосы, ком-
прессоры, ленточные, пластинчатые и скребковые конвейеры, пу-
скатели механизмов и аналогичная им аппаратура электроавто-
матики.
К классу VII с На > 10 мм/с относятся вентиляторные уста-
новки, дымонасосы, дробильное оборудование, виброплощадки
и т. п. Принятый способ нормирования (ГОСТ 8.050—73) более
эффективен, чем применявшиеся ранее способы нормирования
по амплитуде виброперемещений и виброускорений.
Испытание виброустойчивости. Международное сотрудниче-
ство в области стандартизации испытаний на воздействие вибра-
ций и ударов осуществляется в рамках технического комитета
№ 50 Международной электротехнической комиссии (МЭК).
Этой комиссией разработаны и изданы такие документы по виб-
рационным и ударным испытаниям приборов:
1) основные методы механических испытаний (публикация
'68-2-6, 1970, ч. 2 Fc. D). Предпочтительные режимы испытаний
для приборов (публикация 68-2-6С);
2) основные методы механических испытаний электронных
конструктивных элементов и электронных приборов (публика-
ция 68-2-29, 1968 г).
В публикации МЭК 68-2-6 описаны методы испытания воз-
действием синусоидальной вибрации [35]. Предусматривается
испытание вибрацией с рядом фиксированных частот; при пред-
варительно определенных резонансных частотах; с плавно изме-
няющейся частотой. Для воздействия синусоидальной вибрацией
с плавно изменяющейся частотой рекомендуется принимать оп-
ределенную зависимость амплитуды ускорения S3a от частоты
(рис. 37). При частотах ниже fK = 60 Гц постоянной должна
быть амплитуда виброперемещения, а при частотах выше этого
значения постоянной принимается амплитуда виброускорения.
В стандарте ГДР TGL 200-0057 предусмотрены испытания
работоспособности приборов при действии вынуждающих вибра-
ций. При этом результаты испытания считают успешными, если
Испытуемый объект во время воздействий на него сохраняет ра-
бочие характеристики в установленных допусках. В этом стан-
122
дарте при испытаниях работоспособности приборов рекоменду-
ется плавно изменять частоту синусоидальных вибраций в пре-
делах 10 . . . 500 Гц с обеспечением постоянных амплитуд виб-
роускорений: 5 м/с2 — для группы I; 9,8 — для группы II; 19,6 —
для группы III. Группа I соответствует работе при небольших
вибрациях и ударах в месте установки; группа II — при вибра-
циях и ударах среднего уровня; группа III — при сильных виб-
рациях и ударах в месте установки. Сильные вибрации и удары
в месте установки вызывают-
ся действием молотов, прес-
сов, компрессоров, воздуходу-
вок и т. п.
Влияние вибраций на точ-
ность и работоспособность
средств измерений может но-
сить скрытый и явный харак-
тер. Под действием вибраций
изменяется внешнее трение в
кинематических парах измери-
тельных механизмов, внутрен-
нее трение — в упругих элемен-
тах, деформируются звенья
приборов и преобразователей,
что может привести к измене-
нию юстировки, погрешности
преобразования измерительной
информации. Примером тако-
го влияния служит эффект
Максвелла [68] смещения цен-
тров движения масс (см. с. 117),
а также изменение частоты и
Рис. 37. Рекомендуемая амплитуда
ускорения, при механических испы-
таниях
длины волны у приемника света и звука в интерференцион-
ных приборах вследствие эффекта Допплера. Смещения со
скоростью и вдоль линии, соединяющей источник и приемник
света (продольный эффект), приводят к относительному изме-
нению частоты бсо, воспринимаемой приемником бы = —v/c, где
с — скорость света. Относительное изменение частоты в системе
приемника при взаимных поперечных смещениях (поперечный
эффект) равно б<п =—1/2(о/с)2.
Выявление скрытого влияния требует применения средств и
методов поверки с использованием образцовых средств либо не
чувствительных к вибрациям, либо соответственно от них изо-
лированных. Для линейных измерений малочувствительными
к вибрациям в обычном для машиностроения диапазоне частот
являются концевые меры длины (ГОСТ 9038—73) до I гС
160 мм. Меры большей длины уже могут иметь резонанс,
так как при установке на две разнесенные опоры (см. рис. 47)
с рекомендуемым по Эри расстоянием 0,58/ между ними частота
123
собственных колебаний находится в диапазоне действующих
вынуждающих вибраций (см. и. 21).
Характер проявления вибраций важен для выбора средств и
методов оценки их действия. Им в значительной мере опреде-
ляется вид вызываемой погрешности, наличие систематических
и случайных составляющих.
В первом случае скрытого характера для выявления вибра-
ционных погрешностей требуется применение специальной мето-
дики; во втором — влияние вибраций проявляется в колебаниях
отсчетного указателя прибора, которым может быть стрелка,
световой индекс, интерференционная картина, или в нестабиль-
ности показаний цифрового отсчетного устройства. Этот случай
более характерен для высокоточных средств измерений, не
имеющих кинематических пар с внешним трением, неупругим
гистерезисом и т. п.
Таким образом, под виброустойчивостью прибора понимает-
ся способность выполнять функции и обеспечивать установлен-
ные метрологические характеристики при действии вибраций
определенной интенсивности в заданном диапазоне частот. При
исследовании влияния вибраций на средства измерений иногда
применяютшонятие виброчувствительность, обратное виброустой-
чивости, отражающее реакцию прибора на действие вибраций и
характеризуемое размахом колебаний указателя. Под чувстви-
тельностью измерительного прибора (ГОСТ 16263—70) пони-
мается отношение изменения сигнала на выходе измерительного
прибора к вызывающему его изменению измеряемой величины.
Вынуждающие вибрации при измерениях являются влияющими
(функция влияния) и поэтому понятие виброчувствительности
здесь уже непригодно.
Оценку виброустойчивости приборов проводят аналитически
и экспериментально. Аналитический метод используется при
проектировании (см. гл. VIII) конструкций, а также в случае
невозможности или нецелесообразности применения эксперимен-
тальных средств. Связь между случайным входным х воздейст-
вием вынуждающих вибраций и реакцией у средства измерений
на выходе в линейных системах оценивается при помощи соот-
ношений Винера — Ли [29], представленных через корреляци-
онные Кхх, взаимно-корреляционные Кху, импульсивные переход-
ные /г(т) функции или через спектральные плотности Sxx, Sxy,
Syy и частотную характеристику Ф(г, со) системы. В частности,
имеем
ОО оо
Kxy(i)= \ h(r — y)Kxx(y)dy; Kyy(r)= h(T — n)KyX(ii)dii;
— ОО -ОО
Sxy (со) = Ф (гео) Sxx (со); Syy (со) = | Ф (гео) | Sxx (со),
где прямыми скобками отмечен модуль частотной характеристи-
ки исследуемой системы.
124
Частотная характеристика здесь играет роль функции влия-
ния, что характерно для анализа действия вынуждающих виб-
раций, являющихся динамическим процессом (см. и. 21). Экспе-
риментальный метод реализуется с помощью вибрационных
Рис. 38. Схемы вибрационных установок: а — механической; 6 — элек-
трической; в — гидравлической;
/, 2—с эксцентриковым и дебалансным вибровозбудителями
Рис. 39. Схемы накладных вибраторов:
а — эксцентрикового типа; б — экс-
центриково-маятникового; в — элек-
тродинамического; г — пьезоэлектри-
ческого
установок (рис. 38) и накладных вибраторов (рис. 39). Испы-
тательные вибрационные установки делятся по принципу работы
на механические, электродинамические и гидравлические [35].
Отечественная промышлен-
ность выпускает различные
вибрационные установки [22;
66] для испытания на вибро-
устойчивость и виброчувстви-
тельность средств измерений.
Электродинамические уста-
новки имеют достаточную гру-
зоподъемность и широкий диа-
пазон частот. Они подвергают-
ся аттестации на соответствие
параметров вибраций поГОСТ
19118—73, что делает их при-
менение предпочтительным.
Методика исследования ви-
броустойчивости и высокая
чувствительность к вибрациям
точных средств линейных и
угловых измерений предъявляют определенные требования к
применяемым вибраторам — воспроизведение колебаний гармо-
нического типа с очень малыми амплитудами (порядка долей
микрометра) и трехкомпонентных пространственных колебаний.
Электродинамические вибрационные стенды не имеют микро-
скопов для измерения перемещений, а контроль работы уста-
новки осуществляют с помощью акселерометра, т. е. средства
измерения ускорений. При этом следует помнить, что для виб-
раторов, у которых коэффициент гармоник
, ___ VSal + Sa2 + Sa3 + • •
11 AS — c2
dal
100%,
125
где Sai, Sa2, Sa3 — амплитуды первой, второй и последующих
гармоник, превышает 3%, пересчет параметров вибраций по ли-
нейным правилам = шо0а = <o2Sa внесет значительную по-
грешность, так как эти соотношения справедливы только для
гармонических колебаний с одной гармоникой. Кроме того, наи-
меньшее устойчивое значение амплитуды ускорения электроди-
намических вибраторов значительно превышает необходимый
нижний предел испытаний. Так, для вибрационных установок
типа ВЭДС эта величина составляет 0,1g, в то время как наи-
большая амплитуда ускорения, допустимая для работы прибо-
ров линейных измерений, составляет 0,04g.
Для применения виброустановок в качестве испытательных
их целесообразно обеспечить измерительным блоком с выходом
по амплитуде перемещения или виброскорости. Точность воспро-
изведения параметров вибраций вибрационной установкой зави-
сит от коэффициента гармоник, относительного уровня попереч-
ных составляющих, относительной неоднородности поля
перемещений (ускорений) на столе установки. Действительные
значения характеристик вибраторов в значительной степени за-
висят от параметров и расположения испытуемого объекта. При
исследованиях практически невозможно установить объект на
столе вибратора, чтобы центр массы последнего находился на
линии действия толкающей силы. В результате возникает инер-
ционный момент вращения, который вызывает качание подвиж-
ной системы вибратора, неравномерность распределения ам-
плитуды колебания в точках крепления объекта, а соответствен-
но и поперечные составляющие вибраций. Следовательно, при
каждом исследовании или типовом испытании необходимо про-
изводить отдельно контроль метрологических характеристик ви-
братора. В принципе, плавно смещая центр массы исследуемого
прибора относительно стола вибратора, можно добиться совпа-
дения оси колебаний с центром. У электродинамических вибра-
торов для создания колебаний горизонтального направления
можно повернуть весь вибратор на 90°.
В этом случае при закреплении испытуемого прибора на
платформе резко ухудшаются метрологические характеристики
вибратора из-за появления статического момента, действующего
на подвижную часть вибратора. Поэтому следует произвести
дополнительное исследование вибратора для условий его экс-
плуатации в повернутом состоянии. Для обеспечения необходи-
мых характеристик при вибрациях в горизонтальном направле-
нии приходится использовать вибраторы со значительным
(более трехкратного) запасом грузоподъемности и точности. За-
дача упрощается, если прибор применяется в различных рабо-
чих положениях или имеет такую конструкцию, что его харак-
теристики виброустойчивости не зависят от ориентации
в пространстве. В этом случае при постоянном вертикальном
расположении оси вибратора исследуемые средства измерений
126
закрепляют на платформе вибратора в различных положениях.
Для получения стабильных вибраций в области низких частот
(от 2 Гц) может использоваться виброплатформа с гидравли-
ческим приводом [87]. Вибрации, создаваемые эксцентриковым
механизмом 6 (рис. 40, а), связанным с электродвигателем 7,
через поршень 5 передаются подвижному основанию 1 от четы-
рех сильфонов 2 и 2', заполненных с помощью устройства 4
Рис. 40. Схемы вибростендов
смесью веретенного масла с керосином и закрепленных на кор-
пусе 3 платформы. Такая виброплатформа обеспечивает гармо-
нические колебания в диапазоне 2 ... 15 Гц. При больших ча-
стотах сказывается неидентичность характеристик сильфонов.
Для частот выше 15 Гц может использоваться механический
стенд модели ST-300 [22] с эксцентриковым приводом 6
(рис. 40,6), реактивной массой 3, основными 4, вспомогатель-
ными уравновешивающим 2 и подвесными 5 упругими элемен-
тами. Амплитуда вибраций регулируется свободной длиной
основных пружин. Исследуемый прибор устанавливается на под-
вижное основание 1. Применяются и центробежные вибростенды
(рис. 40,в).
Средства измерения вибраций. Теоретические вопросы изме-
рения параметров вибраций подробно рассмотрены в работе
Ю. И. Иориша [22]. Измерение параметров вибраций в маши-
ностроении выполняется с помощью специализированной аппа-
ратуры (ИВА; ВИП-2; К001).
Для исследования, измерения и осциллографирования низко-
частотных вибраций гидро- и турбоагрегатов, синхронных ком-
пенсаторов, двигателей, трансформаторов и других машин,
127
а также зданий и различных сооружений применяется комплект
приборов типа К001. В комплект входят: вертикальный датчик
И001, два горизонтальных датчика И001, два соединительных
шнура, регулятор увеличения Р003, шесть гальванометров ин-
тегрирующих М002. Этот комплект рассчитан на работу со све-
толучевыми осциллографами Н700, Н004. Комплект позволяет
измерять параметры вибраций: а) по частоте в пределах 2 ...
.. . 200 Гц; б) по амплитуде до 1 мм при максимально допусти-
мом ускорении измеряемой вибрации 7g. Допустимые измеряе-
Рис. 41. Пределы измеряе-
мых комплектом К001 ам-
плитуд вибраций
мые амплитуды в зависимости от ча-
стоты вибрации определяются по
рис. 41.
Вибрации осциллографируются с
четырьмя различными коэффициента-
ми увеличения порядка 500; 200; 80 и
30. Комплект приборов К001 предна-
значен для работы при температуре
окружающего воздуха 10 ... 35 °C и
относительной влажности воздуха до
80% при 30°C. Наводки от внешнего
магнитного поля с частотой 50 Гц
любого направления и напряжен-
ностью до 1000 А/м практически не
влияют на работу датчиков. Чувстви-
тельность гальванометров к постоян-
ному току не менее 8-Ю3 мм/мА при
индукции 0,4 Тл в зазоре магнитного блока светолучевого
осциллографа. Для преобразования механических колебаний
в электрические применены индукционные датчики (преобра-
зователи) сейсмического типа. Для крепления преобразователя
в основании имеются четыре стальные втулки с внутренней
резьбой Мб. К боковым стойкам основания с помощью пло-
ских пружин подвешен балансир. На свободном конце ба-
лансира укреплены две цилиндрические катушки. Каждая из
них находится в своей магнитной системе, состоящей из магни-
топровода и постоянного магнита с полюсным наконечником.
Магнитные системы установлены в специальном цилиндре
основания. Между магнитами для их центровки и лучшего за-
крепления помещена распорка. Для удержания балансира в по-
ложении равновесия служит цилиндрическая пружина. Одним
концом она крепится к регулировочному устройству, связанно-
му с основанием преобразователя, а другим концом — к пласти-
не, установленной на балансире. В горизонтальных преобразова-
телях пластина изготовляется из латуни, а в вертикальных — из
биметалла. Биметаллическая пластина выполняет роль темпера-
турного компенсатора, т. е. дополнительно натягивает или ослаб-
ляет цилиндрическую пружину при изменении температуры
окружающего воздуха, благодаря чему балансир не выходит из
128
положения равновесия. Температурная компенсация регулиру-
ется следующим образом. Преобразователь с балансиром в рав-
новесном положении устанавливают и выдерживают не менее
1 ч при постоянной температуре. Затем температуру повышают,
но не более 60 °C, и вновь выдерживают 1 ч. Если балансир
выходит из положения равновесия более чем на ±0,7 мм, его
установку изменяют. Комплект К001 должен периодически по-
веряться на образцовых вибростендах.
Для измерений малых амплитуд виброперемещений исполь-
зуются магнетронные преобразователи, состоящие из электрон-
ной лампы в магнитном поле, чем обеспечивается преобразова-
ние мехнических колебаний в электрический сигнал при моду-
ляции потока электронов внешним магнитным полем [36]. В ка-
честве лампы магнетрона используется стержневой пентод типа
1Ж29Б, а в качестве источников магнитного поля—малогаба-
ритные ферритовые магниты, закрепляемые на вибрирующую
поверхность. Сигнал с выхода магнетронной системы поступает
на вход усилителя лампового микровольтметра В2-11, а затем
на вход электронного самопишущего потенциометра ЭПП-09М.
Для получения максимальной чувствительности и уменьшения
смещений настройки нуля магнетронов используется мостовая
схема включения.
Для специальных исследований и аттестации вибростендов и
виброизмерительной аппаратуры можно использовать бескон-
тактные интерференционные методы, основанные на счете ин-
терференционных полос, эффекте исчезновения интерференцион-
ных полос при амплитуде, пропорциональной корням функции
Бесселя нулевого порядка первого рода, с двухчастотным опти-
ческим квантовым генератором, с фотоэлектрическим отсчетом
(интерферометры ФОУ-1; БаЗООО и др.). Кроме того, разраба-
тываются методы, основанные на принципах голографии, эф-
фекте Допплера смещения частоты излучения движущегося ис-
точника, эффекте Мессбауэра резонансного поглощения гамма-
квантов. Схемы, функциональные особенности и метрологиче-
ские характеристики соответствующих установок подробно
рассмотрены в [52].
20. УМЕНЬШЕНИЕ ВИБРАЦИЙ
И ВИБРОИЗОЛЯЦИЯ
Борьба с вибрационными помехами осуществляется сниже-
нием интенсивности источников вибраций за счет уменьшения
инерционных сил, дисбалансов подвижных звеньев технологиче-
ского оборудования, работы в противофазе, применением актив-
ной виброзащиты, методами отстройки. Для виброизоляции
средств измерений наиболее универсальным можно считать при-
менение общих виброизолирующих фундаментов как под от-
дельные помещения лаборатории, так и под целые здания. На
5 Зак. 8-13
129
рис. 42 показаны виды монолитных и сборных виброизолирую-
щих фундаментов. Кроме накладных, используются подвесные
фундаменты.
Рис. 42. Виды виброизолирующих фундаментов: а —с пружин-
ным амортизатором; б — с круглыми стойками; в — с дополни-
тельной плитой и прокладкой; г—с резипопружинными аморти-
заторами; д — с массивным блоком в песке; е — с бетонными
стойками; ж — с вентиляционными каналами для подогрева; з — ко-
робчатый с железобетонными стойками:
1— металлический шпунт; 2— навесной пол; 3 — бетонный блок; 4 — бетонная
плита; 5 —металлическая или деревянная стойка; 6 — демпфирующая про-
кладка; 7 —чугунная плита; 8— пружинные амортизаторы; 9 —резиновые
амортизаторы; 10— измерительная установка; 11 — монолитный бетонный
блок; 12 — песчаное основание
Рекомендации по выбору фундаментов для виброизоляции
помещений и крупных агрегатов приводятся в [72].
Местная виброизоляция заключается в применении вибро-
изолированных столов и опор, на которых размещаются высоко-
точные приборы, и виброизо-
Рис. 43. Виброизолирующие устрой-
ства пневматического типа: а — на
на группе
ляции отдельных приборов.
Столы и подставки для прибо-
ров рекомендуется размещать
на железобетонных тумбах,
развязанных с полом. Такой
стол может иметь стальную или
гранитную плиту. Виброизо-
ляция столов осуществляет-
ся с помощью пневматических
одном амортизаторе; б —
амортизаторов
Собственные частоты
пределах 1 ... 3 Гц,
амортизаторов,
автомобильной
системы камер
в частности,
камеры или
(рис. 43,а,б).
виброизолированных столов находятся в
что обеспечивает изоляцию от вибраций
с частотами соответственно от 1,5 (4,5) Гц и выше. Примером
такого стола является виброизолирующее устройство, разрабо-
танное автором совместно с С. Б. Тарасовым п специалистами
130
Ленинградского филиала НИИфундаментпроект, под прибором
для поверки микрокаторов с ценой деления 0,05 и 0,02 мкм.
Собственная частота системы не превышает 2,8 Гц при массе
500 кг. Упругим элементом служит автомобильная камера. Из-
вестны другие конструкции виброизолированных столов [66];
виброизоляция может выполняться и с помощью набора тенис-
ных шаров.
Средства активной виброизоляции можно подразделить на
две группы: внутренние амортизирующие включения, обеспечи-
вающие подавление вредных вибраций, ударов и шумов непо-
средственно в их источнике, а также амортизирующие устрой-
ства, обеспечивающие виброизоляцию установки в целом.
Для снижения виброактивности подшипников применяются
упругие виброизолирующие вкладыши. Установка подшипников
качения в такие вкладыши приводит к снижению уровня вибра-
ций в области средних и высоких частот до 12 ... 15дБ. Для
частот до 200 Гц эффективным является конструирование меха-
низмов с промежуточными упругими элементами в районе опор-
ных поверхностей.
К материалам со значительными демпфирующими свойст-
вами относятся пластмассы, металлорезины, различные сплавы
из марганца, меди, никеля, титана. Так, замена чугунного кор-
пуса насоса корпусом из сплава марганца и меди [69] позво-
ляет снизить вибрации в области средних и высоких частот до
10 ... 15 дБ.
В последнее время проводятся исследования слоистых кон-
струкций. Толщина слоя вязкоупругого материала не влияет су-
щественно на качество демпфирования, однако с увеличением
слоя расширяется частотный диапазон такой вибродемпфирую-
щей конструкции.
Конструкционное демпфирование реализуется за счет трения
на поверхности контакта элементов, в том числе и при нали-
чии смазки.
Используются также различные вибропоглощающие покры-
тия, в частности напыление вязкоупругого материала на поверх-
ность детали, совершающей изгибные колебания. Наиболее эф-
фективными материалами для этих целей являются мастиковые
глушители. Они изготовляются из высокополимерных материа-
лов, обладающих свойствами виброподавления. Хорошими виб-
ропоглощающими качествами обладает [69] мастика «Антиви-
брит-3» с большой вибропрочностью, химической стойкостью ко
многим рабочим средам и работоспособностью в диапазоне тем-
ператур 20 ... 100 °C. Для материала с модулем упругости Е\
демпфирующие свойства т]дф детали связаны со свойствами при-
меняемой мастики следующими соотношениями [69]:
/ Чдфг^а Л ( ^2 \2
5*
131
где т]дф = 2Сл; т]дф2 — коэффициент потерь демпфирующего ма-
териала (1]дгЬ2~0,44 для мастики «Антивибрит-3»); Ё2 — модуль
упругости демпфирующего материала; hi — толщина демпфи-
руемой части конструкции; h2 — толщина слоя мастики.
Наиболее существенными недостатками резиновых прокла-
док являются чувствительность к низким температурам и поте-
ря амортизационных качеств под влиянием атмосферных усло-
вий.
Ориентировочный расчет пневматического амортизатора мож-
но выполнить исходя из общего уравнения состояния газа
PqQ = RrTT, принимая Й = Fh и RrTT = const (psi — давление в
камере; h — высота камеры; F — площадь нормального к оси
сечения; Rr — газовая постоянная; Тт— температура, К). Тогда
дра const pqQ paF
~dh~= Ip—= = h~'
Так как жесткость такой опоры
• дРа г, PaFi
——•
то собственная частота колебаний массы тпл, установленной на
пневматической камере, равна
/соб 2л у ктпл
Если используется п параллельно действующих пневматических
амортизаторов, то значение fco6 нужно умножить на .
Отношение Sa/Ь для колебаний корпуса и выхода Sa
измерительного прибора называется функцией влияния А0ч. х
вибрации, а при вынужденных механических колебаниях любого
элемента машин и промежуточных звеньев измерительной систе-
мы это отношение называется коэффициентом динамичности.
При подаче виброперемещений на вход средства линейных из-
мерений поведение выходного сигнала (указателя, отсчетного
индекса) характеризуется амплитудно-фазочастотной характе-
ристикой.
Для обеспечения виброизоляции система, согласно ампли-
тудно-частотной характеристике Фач. х = Sa/Ь, должна иметь
низкую собственную частоту, так как уменьшение амплитуды
вибраций реализуется только в зарезонансной области при
(о/соо > 1,44.
Получение низкой собственной частоты при сравнительно не-
больших массах ведет к снижению жесткости виброизолирую-
щего устройства, что затрудняет его нормальную эксплуатацию
ввиду повышенной возбудимости. Поэтому масса виброизоли-
рующих устройств должна согласовываться с массой средств
измерений и необходимой жесткостью установочных баз для
приборов.
-132
Виброизоляция отдельных радиоэлектронных приборов осу-
ществляется с помощью амортизаторов с различными грузо-
подъемностями и частотами собственных колебаний. Амортиза-
торы модели АП и АЧ прошли типовые испытания и соответст-
вуют ГОСТ 11679.1—76. Станочные амортизаторы рассчитаны
на большие нагрузки. Однако их приме-
нение к приборам требует определенной
осторожности, так как их собственные
частоты 10 ... 35 Гц находятся в пре-
делах рабочих частот оборудования.
Учитывая, что на стационарные средства
измерений чаще всего действуют про-
мышленные колебания с частотами
5 ... 30 Гц, необходимо, чтобы аморти- Рис. 44. Механическое
заторы имели собственную частоту не виброизолирующее уст-
более 3 Гц и достаточно низкий коэф- ройство
фициент динамичности. Эффективна раз-
работка специализированных виброизолирующих устройств, по-
строенных с учетом данных по виброустойчивости типовых
средств измерений и уровня действующих вибраций. Примером
специального виброизолирующего устройства [87] является виб-
Рис. 45. Схема активной виброизо-
лирующей системы:
1 — измерительное; 2 — корректирующее;
3 — исполнительное устройство; 4 — основа-
низ; 5 —объект управления; Л —параметры
вибрации; В— воздействия на основание;
С — кинематические воздействия; Q — сило-
вые воздействия
розащитная платформа, со-
стоящая из плиты / (рис. 44)
массой 25 кг и равномерно
расположенных по периметру
резиновых амортизаторов 2 мо-
дели АП-2-1,35 (ГОСТ 11679.1 —
76) мембранного типа. Плита
с закрепленными на ней амор-
тизаторами опирается на ос-
нование 3. Амортизаторы рас-
положены под углом 45° к
рабочей поверхности плиты,
на которой устанавливаются
измерительные приборы, что
вызвано необходимостью иск-
лючения раскачивания послед-
них от действия оператора в
момент установки и съема
объектов измерения.
Для автоматического управления виброзащптиыми устрой-
ствами применяются активные системы [27]. Такне системы
могут быть линейными и нелинейными. Принципиальная схема
многомерной активной виброизолирующей системы показана на
рис. 45. Штриховыми линиями показаны возможные дополни-
тельные связи.
Задачи виброизоляции и повышения виброустойчивости весь-
ма сложны и требуют проведения специальных расчетов с
133
последующей экспериментальной проверкой и корректировкой.
Особые сложности возникают в случае низкочастотных и нели-
нейных колебаний, при неопределенных и непостоянных пара-
метрах сред передачи вибраций, действии интенсивных возму-
щений полигармонического и случайного характера.
21. РАСЧЕТ СОБСТВЕННЫХ ЧАСТОТ
КОЛЕБАНИЙ МЕХАНИЧЕСКИХ СИСТЕМ
И ВИБРОГАСИТЕЛЕЙ
Свойства механических колебательных систем. Механические
колебательные системы делятся на линейные и нелинейные, без
демпфирования и с демпфированием. При этом оцениваются их
резонансные частоты.
Линейные колебания механической системы описывают си-
стемой дифференциальных уравнений вида
ВД + C;xz 4- jxi = Qo sin <ог/. (57)
Для нелинейной механической системы уравнения имеют вид
tntXi + CiXi + it (хг) Xi = Qi (/) sin a>i (I), (58)
где ji(xt) —жесткость, зависимая от перемещений.
Частоты и амплитуды свободных колебаний при отсутствии
демпфирования оцениваются из частотного уравнения [53]
Щ1<02 — Ри
— Р21
— Рп1
Р12
/7?2<О2 Р22
Рп2
— Pin
— Р2п
ЩгеК* Рпп
где Qik — единичная реакция системы на вынуждающее пере-
мещение импульсного характера.
У линейной системы существуют однозначные устойчивые
состояния. Нелинейные системы могут иметь неустойчивые со-
стояния, зависящие от направления изменения частоты вынуж-
дающих колебаний.
Нелинейными моделями, ввиду сложности анализа нелиней-
ных систем, пользуются только в тех случаях, когда систему
даже приближенно нельзя рассматривать как линейную. В боль-
шинстве приложений допущение о линейности системы право-
мерно, в особенности при малых возмущениях.
Динамические свойства произвольной линейной системы пол-
ностью описываются одной из следующих характеристик:
1) динамической передаточной функцией (отношение изобра-
жения по Лапласу выходной величины к изображению входной
величины) Ц7(р);
2) амплитудно-фазовой частотной характеристикой W(ia) =
— А (со) = Н (/со), называемой частотной передаточной
функцией;
134
3) амплитудно-частотной и фазочастотной характеристиками
А (а>); <р (со); А (со) = Фач. х = Лвч. х;
4) вещественной частотной характеристикой /?(©)=
= Re U7(tco);
5) мнимой частотной характеристикой /(со) = Im IV'(ico);
6) импульсной характеристикой (реакция на единичный
импульс)
7) переходной характеристикой (реакция системы на еди-
ничный скачок) h(t).
Между всеми этими характеристиками существуют соотно-
шения, позволяющие выразить их друг через друга. Приведем
Некоторые из этих соотношений:
оо со
Л (/)== — ( -- sin at da — R (0) + — - cos at da;
' Я J ffl ' ' 1 Л J
о 0
йи(/) = ^Р = й(/);
Л(со)= V^2(«) + /2(co); <p(co) = arctg—
Для линейной системы закон изменения выходного сигнала
при произвольном входном сигнале можно определить расчет-
ным путем по известной переходной функции из следующих об-
щих зависимостей:
1) в операционной форме по связи изображений
^ВЫХ (р) Р^ (Р) ^ВХ (р)>
где Ивых (р); «вх(р) и /г (р) — выходная, входная и переходная
функции системы, преобразованные по Лапласу;
2) в обычной форме — путем решения интеграла Дюамеля
t
^вых W 5 ^вх dxt
о
Следует отметить, что в общем случае амплитудно-частотная
А (со) или фазочастотная <р (со) функции, взятые по отдельности,
не позволяют рассчитать динамическую реакцию системы. Су-
ществуют, однако, так называемые минимально-фазовые систе-
мы, для которых Л (со) и ср (со) представляют полные динамиче-
ские характеристики. Для этого случая имеем следующие соот-
ношения:
i \ 1 f In А (и) , , ,
<Р(Ф) = -- \ (а)
— оо
оо
1пА(со) = -± J ^du. (б)
135
Для соотношений (а) и (б) достаточно, чтобы динамическая
передаточная функция системы не имела нулей и полюсов в
правой полуплоскости ее графика.
Механической системе с одной степенью свободы и вязким
демпфированием соответствует простейший колебательный кон-
тур, СОСТОЯЩИЙ ИЗ КаТуШКИ ИНДУКТИВНОСТИ £Инд, реЗИСТОра /?реэ
и конденсатора Cj (рис. 46), в котором протекает ток 7. Если за
переменную принять за-
ряд gj на конденсаторе и
gj = /, то дифференци-
альное уравнение свобод-
ных колебаний в контуре
будет иметь вид
Длндй/Ч'-^рез^/ Н Si Q-
Рис. 46. Колебательный контур
Это уравнение является аналогом уравнения колебаний механи-
ческой системы. Электрическим аналогом механической системы
с двумя степенями свободы является система, состоящая из двух
ВЗаИМОСВЯЗаННЫХ контуров /?1рез, С1Л L 1ИНД и /?2рез, Cjy, 7-2инд.
Многие измерительные устройства состоят из систем стерж-
ней или им подобных конструкций. При анализе свободных ко-
лебаний стержней с перемен-
ной жесткостью и массой при-
меняют приближенные спосо-
бы: способ замены распреде-
ленных параметров сосредо-
точенными, формулы Рэлея,
Граммеля, Гогензер — Праге-
Рис. 47. Установка концевой меры
ра, Донкерли, способ последо-
вательных приближений, методы Ритца и Галеркина, оценки
С. А. Бернштейна [53].
Применение формулы Донкерли рассмотрим на примере
оценки частоты собственных колебаний меры (рис. 47), распо-
ложенной горизонтально на двух опорах в точках Эри (см.
и. 26).
Стержень меры состоит из участков I . . . Ill, на которых
функции влияния при малых деформациях можно представить
в следующем виде:
, (а' + Ь') Ь'2 a^i}i
б1 (х, х) = ; 6П (х, х) = 3£/ + 6) ;
б.п(х, х) = -^±И^
где У = (0,2.17. — х); a' — 0,F>8L; а = (х — 0,217.); а'^0; Ь'^0;
6^0; b"^0; 6 = 0,797, —х; b" = х - 0,797..
136
L
Интеграл rn (x) 5 (x, x)dx разбиваем соответственно на три
о
интеграла
L 0,21 L
m (x) & (x, x) dx — m (x) 61 (x, x) dx +
о о
0.79Z. L
+ tn (x) 611 (x, x) dx + \ m fiin (*, x) dx.
0.21Z. 0,79b
При m (x) =Fyu/g после подстановки выражений для а, b,
а', Ь', Ь" и решения соответствующих интегралов приближенно
получаем:
при установке меры на узкое ребро шириной hM
f ~, 3bw I Eg _
'° ~ 4л/.2 Д/ 3Vm 1
при установке меры на широкую сторону сечения
г _____________________, 3/tM / Eg
10 ~ 4nL* У Зум ’
где ум — плотность материала меры; Ьм — ширина сечения.
В общем случае действия возмущающих сил и сложных гранич-
ных условий применяется видоизмененный метод Бубнова —
Галеркина — Ритца, основанный на смешанном вариационном
принципе Рейсснера [37]. Уравнения равновесия и соотношения
упругости при статическом нагружении и гармонических коле-
баниях трехмерного тела, оболочки и стержня могут быть за-
писаны в виде вариационного (вариационно-разностного) функ-
ционала.
Согласно Инструкции ЦНИИСК им. В. А. Кучеренко по рас-
чету несущих конструкций промышленных зданий и сооружений
па спокойные периодические нагрузки определяется следующее
число «ч частот и форм собственных вертикальных колебаний
несущих конструкций:
Для однопролетных балок................ 2
» » плит................ 4
Неразрезных балок с числом пролетов
А'п................................... 2Л7П
Ферм................................... 5
Если Лч-я частота больше частоты вынуждающих колебаний,
то последующие частоты и формы не определяются.
Для импульсивных и ударных нагрузок имеется Инструкция
по расчету перекрытий на импульсивные нагрузки.
137
Методы проектирования средств виброизоляции. После того
как определен характер динамических воздействий на оборудо-
вание и выполнен частотный анализ вибраций, переходят к вы-
бору средств виброизоляции. Необходимую жесткость / системы
виброизоляции расчитывают по формуле
j ~ 0,04т/2,
где т — масса изолируемой установки; f0— резонансная ча-
стота изолируемого объекта.
При проектировании систем виброизоляции возможны про-
тиворечивые требования. Так, при обработке металла резанием
необходимо приложить к заготовке некоторое усилие, и поэтому
узел крепления резца должен быть достаточно жестким. С дру-
гой стороны, необходимо изолировать резец от внешних воздей-
ствий, которые ведут к потере точности обработки, но для этого
узел крепления резца должен быть по возможности мягким.
Аналогичные задачи возникают при виброизоляции промышлен-
ных контрольно-измерительных комплексов.
В данном случае параметры системы виброизоляции опреде-
ляются по динамической оптимизации. Виброизолирующие свой-
ства системы удобно характеризовать дисперсией виброускоре-
ния при определенном спектре вынуждающих вибраций Sy
ОО л
Du = Ву (0) = ~ \sy(a)da = ±\\H (/со) |2SX (со) с/со.
— со 0
Качество передачи рабочего усилия (движения) определяют
функционалом вида
со
Is = [х (!) — и (/)]2 dt, (59)
е
где x(f)—действительное перемещение; u(t)—заданное дви-
жение.
Таким образом, задача проектирования оптимальной систе-
мы виброизоляции формулируется [69] как воспроизведение по-
лезного сигнала и в присутствии вибрационных помех. При этом
необходимо так подобрать передаточную функцию Н (/со) дина-
мической системы, образованной агрегатом и амортизацией,
чтобы при заданной дисперсии виброускорения прибора
со
го = Н (/со) Н (—/со) S (со) da
— со
эта передаточная функция минимизировала интегральную оцен-
ку (59).
13§
Динамический виброгаситель. В двухмассовой системе при
определенных соотношениях масс mi, т2 (рис. 48) и жестко-
стей /1 и /2 пружин можно обеспечить так называемый антире-
зонанс [53], при котором точка приложения периодической силы
остается неподвижной. Уравнения движения масс mi и т2 мож-
но записать в виде:
— liUi + /2 (й — г/i) + Qo sin о/ = т^уу, (59а)
— /2 (i/2 — Уд = т2у2,
(596)
где у\ = уч = у2(1)—перемещение обеих масс во вре-
мени.
Система уравнений (59) удовле-
творяется решением
у{ = a, sin at; уч = а2 sin at, (60)
означающим, что колебания проис- Рис. 48. Схема динамического
ходят с частотой <в возмущающей виброгасителя
силы. Это частное решение описы-
вает стационарную часть процесса. При подстановке (60) в
(59, а, б) получается два уравнения с двумя неизвестными ам-
плитудами:
Отсюда
— л/що? + /Щ1 — /2 («2 — «1) = Qo!
— а2т2а2 + /2 (а2 — щ) = 0.
__________Qo (/2 — m2<aa)__________.
(Л + i2 - mi«2) (/2 - /и2а2) - /2 ’
________________Qq/2_______________
(/'i 4- /2 - mi®2) (/2 - «С®2) ~ ft '
(61)
Резонанс такой системы наступает при обращении в нуль
знаменателей в уравнениях (61) и соответствующем стремлении
амплитуд di и а2 к бесконечности. При этом резонансные часто-
ты равны собственным частотам рассматриваемой системы, а их
число всегда равно числу ее степеней свободы. При антирезо-
нансе в нуль обращается числитель первой формулы (61). Для
этого необходимо, чтобы вынуждающая частота а составляла
со = дЛгМг- При таком значении частоты ио формулам (61)
<21 = 0, й2 = —Qo/12-
Следовательно, первая масса остается неподвижной, хотя
к ней приложена возмущающая сила Q=Qo sin at. Возможность
антирезонанса практически используется при устройстве дина-
мического гасителя колебаний. При этом в систему вводится
дополнительная масса на упругой связи. Надлежащая настрой-
ка виброгасителя обеспечивает прекращение колебаний основ-
ной конструкции, в то время как дополнительная масса т2 ви-
брирует достаточно интенсивно. Динамический виброгаситель
139
способен, однако, гасить колебания лишь строго фиксированной
частоты. Всякое отклонение вынуждающей частоты от расчет-
ной вызовет отход от антирезонанса. Введением в систему гаси-
теля вязкого сопротивления можно несколько расширить диапа-
зон частот, внутри которого происходит интенсивное гашение
вибраций. В настоящее время существуют регулируемые вибро -
гасители со схемами автоматического регулирования собствен-
ных частот. Следует отметить, что в сравнительно легких Мт
конструкциях даже установка виброметра может исказить те-
чение фиксируемого процесса колебаний вследствие эффекта
виброгашения. Считается [69], что при вязком демпфировании
соотношение между резонансными частотами виброгасителя fa
и изолируемой fa систем должно быть f Jf® ~ л/М пКт + Л1 „) .
При малом значении т/Мт разница между fa и f0 незначитель-
на. С увеличением отношения масс динамического виброгаси-
теля резонансное усиление уменьшается.
Уменьшение амплитуды виброперемещений в грунтах оцени-
вают ориентировочно по формуле
S'ir/Sa. ф "V
где S2r — амплитуда колебаний на расстоянии г от фундамента
источника вибраций; Гф= — условный радиус фундамента
с площадью F; Sa. ф— амплитуда виброперемещений фундамен-
та источника вибраций; kn — переходный коэффициент.
Кроме виброизолирующпх фундаментов, устанавливаемых
на пружинные, рессорные, пружинно-резиновые, пружинно-гид-
равлические, пневматические амортизаторы, применяются под-
весные виброизолирующие фундаменты.
Наименьшие собственные частоты колебаний бетонных фун-
даментов на пружинно-резиновых амортизаторах (имеются со-
ответствующие каталоги) порядка 3 . . . 10 Гц, наименьшие ча-
стоты, обеспечиваемые пневматическими амортизаторами, по-
рядка 0,5 ... 1,2 Гц. При этом пневматические амортизаторы
удобны и эффективны в эксплуатации.
Г лава V
МАГНИТНЫЕ,
ЭЛЕКТРИЧЕСКИЕ
И ГРАВИТАЦИОННЫЕ ПОЛЯ
22. ЭЛЕКТРОСТАТИЧЕСКОЕ
ВЛИЯЮЩЕЕ ПОЛЕ
Действие электростатического ноля
трансформируется в силовое воздействие на
электрические заряды, накапливающиеся
на диэлектрических элементах измеритель-
ных механизмов. Силовое воздействие элек-
трического ноля напряженностью в 1 В/м
на заряд в 1 Кл равно 1 Н. Действие элек-
тростатического ноля на размеры L объек-
та измерения существенно при пьезоэлек-
трических характеристиках его материала
А’э. п <5П[[/О,О5Д а при Кэ. п < 6„H/0,05L
оно не существенно. Причем Кэ. п оценива-
ется в мкм/В.
Напряженность электростатического по-
ля Земли 130 В/м. Это значение для боль-
шинства средств и объектов измерений на-
ходится внутри области нормальных усло-
вий. Жесткие требования к напряженности
электростатического поля возникают лишь
в отдельных случаях, например ири исполь-
зовании неэкранированных кристаллов в
электрооптических устройствах, при изме-
рении или применении тонких волокон, лент
и т. п. Для большинства средств измерений
нормальный предел напряженности элек-
тростатического поля может быть расши-
рен до 0,5 ... 1 кВ/м.
Средства измерения электростатических
полей в воздухе весьма разнообразны [21].
Методы измерения напряженности элек-
тростатических полей делятся на прямые и
косвенные. Косвенные измерения выполня-
ются с помощью разнообразных коллекто-
ров, увеличивающих проводимость среды
(радиоактивные, пламенные, с коронным
разрядом, электронные) и не меняющих ее
проводимости.
Основными источниками погрешностей
при измерениях с применением коллекторов
141
Являются инерционность (постоянная времени т = 2 ... 100 с
в зависимости от вида коллектора), несовершенство изоляции.
Для радиоактивных коллекторов сопротивление изоляции долж-
но быть порядка 1013 Ом. При менее совершенной изоляции вво-
дят поправку на сопротивление изоляции и кажущуюся проводи-
мость коллектора. Существенным источником ошибки может
явиться неодинаковость характеристик коллекторов, применяе-
мых при измерениях разности потенциалов, а также турбулент-
ность атмосферы вокруг коллектора. При сильной турбулентно-
сти погрешность измерения возрастает в несколько раз,
Рис. 49. Прибор для изме-
рения напряженности элек-
тростатического поля
Рис. 50. Схема однонит-
ного электрометра
Непосредственное прямое измерение электростатического по-
ля в воздухе основано на поляризации проводящего тела и из-
мерении тем или иным способом плотности поверхностного за-
ряда на теле, внесенном в электрическое поле. Плотность заряда
в точке тела q$ будет равна q3 = Ед/4п, причем Ед — напряжен-
ность поля, нормального к поверхности тела в этой точке. Меж-
ду Ед и напряженностью поля Не, которая существовала до
внесения тела в электрическое поле, существует прямо пропор-
циональная зависимость Eq = kqHc, где kq — коэффициент на-
рушения, определяемый конфигурацией тела и конфигурацией
поля.
Различают статический и динамический принципы непосред-
ственного измерения. Наиболее простой прибор, основанный на
статическом методе, с компенсационным устройством состоит
из круглой пластины 1 (рис. 49), являющейся частью металли-
ческого кожуха 2, однонитного электрометра 3 чувствитель-
ностью 20 ... 50 делений на 1В и электродов компенсатора 4.
Электрометр и один из электродов компенсатора соединены с
пластиной 1. На второй электрод компенсатора 4 подается на-
пряжение от батареи 5.
Электрометр имеет тонкую диаметром 1 ... 3 мкм платино-
вую нить 3 (рис. 50), укрепленную сверху на жестком стержне,
142
вделанном в янтарный изолятор 2, а снизу — на упругой квар-
цевой дужке 5. Клемма 1 служит для подачи измеряемого на-
пряжения или заряда. Нить 3 находится во вспомогательном
электрическом поле, создаваемом изолированными плоскими
пластинами 4, на которые подаются вспомогательные напряже-
ния и\ и 11% через клеммы 7. Для ограничения тока замыкания
в цепи пластин установлены сопротивления 6. Перемещение
нити под действием электростатических сил наблюдают в микро-
скоп с отсчетной шкалой. Существуют однонитные электро-
метры и других конструктивных типов: с поворотной стрелкой 1
(рис. 51, а), с кварцевыми нитью ] и коромыслом 2 (рис. 51,6).
Вариант крутильного электрометра с коромыслом СГ-1М
Рис. 51. Разновидности электрометров
освоен промышленностью. К его достоинствам относится устой-
чивая работа в любом пространственном положении, в то время
как электрометры со стрелкой (рис. 51, а) чувствительны к из-
менению ориентации в пространстве.
Компенсатор представляет собой цилиндрический воздуш-
ный конденсатор, одна из обкладок которого может переме-
щаться относительно другой. Привод соединен с диском, на
котором нанесены деления, позволяющие отсчитывать положе-
ние компенсатора. Изменяя положение подвижного электрода
компенсатора, можно менять индуцируемый компенсатором за-
ряд, а следовательно, и потенциал, измеряемый электрометром.
Меняя полярность батареи, изменяют знак индуцированного за-
ряда.
Измерения электростатического поля описанным прибором
осуществляются следующим образом. После того как измеряе-
мое поле (см. рис. 49) вызовет появление индуцированного за-
ряда и отклонение нити электрометра, перемещением компенса-
тора добиваются возвращения нити в нулевое положение. По-
ложение компенсатора является мерой индуцированного количе-
ства электричества и, следовательно, эквивалентно определяет
напряженность поля. При этом потенциал пластины / все время
поддерживается равным потенциалу Земли. Измерения можно
143
Рис. 52. Схема флюксметра
также проводить, заземляя сначала измерительную пластину,
открытую действию поля, а затем прерывая заземление и экра-
нируя пластину 1 от поля крышкой. Компенсационный прибор
обладает двумя преимуществами: меньше сказываются дефекты
изоляции и непостоянство чувствительности электрометра.
Прибором Вильсона [21] можно проводить измерения и без
компенсации. В этом случае отклонение нити электрометра про-
порционально измеряемой напряженности поля. Однако прибо-
ры с непосредственным отсчетом менее точны.
Динамический метод измерения напряженности электриче-
ского поля основан на применении электростатических генера-
торов. Действие электростатического генератора основывается
на том, что при внесении в
переменное электрическое
поле проводящего тела в
последнем возникает движе-
ние индуцированных заря-
дов. Ток, создаваемый пере-
мещающимися зарядами,
пропорционален вызываю-
щему его изменению поля.
Для реализации этого мето-
да в простейшем варианте
измерительная металличе-
ская пластина площадью Fso
и емкостью CF соединена
с землей через сопротивление R. Измерительная пластина пе-
риодически экспонируется в поле Не и закрывается от него с по-
мощью вращающегося заземленного экрана 2 (рис. 51, в, г).
При этом по сопротивлению R идет переменный ток Ц = dQ3/dt,
где Q3 — заряд пластины. Потенциал измерительной пластины
в момент времени t складывается из потенциала приобретае-
мого при экспонировании в электростатическом поле с напря-
женностью Не (причем Uj = HeFso/АлСе), и из потенциала «2,
создаваемого зарядом Q3. Этот потенциал равен и2 = —Q3/CF.
Отсюда Mi — м2 = HR.
Для измерения напряженности электростатического поля
применяются также приборы без перемещающихся механиче-
ских частей — флюксметры.
Прибор имеет металлическую измерительную пластину /
(рис. 52), покрытую пластиной 2 из сегнетоэлектрика, например
из титаната бария. Напряженность Eqii электростатического по-
ля, действующего на измерительную пластину, равна EqK =
= Не/^е, где ег — проницаемость диэлектрика, а Не — напря-
женность измеряемого поля. Емкость и диэлектрическая прони-
цаемость диэлектрика изменяются с помощью генератора пе-
ременного напряжения 6, подключенного к двум электродам 3,
наложенным на сегнетоэлектрик.
144
Тогда
Е =-----------------
и >
С де-
\ 'Л du
J ди
о
где kc — коэффициент пропорциональности, зависящий от фор-
мы сегнетоэлектрика, расположения и формы электродов 3.
Напряжение Ет, возникающее на пластине 1, усиливается
с помощью усилителя 4 и измеряется прибором 5. Для измере-
ния напряженности электростатических полей кроме механи-
ческих однонитных электрометров применяются механические
двухнитные, ламповые и полупроводниковые электрометры.
Контроль напряженности малых электростатических полей вы-
полняется электрометрами с чувствительностью от 0,1 В/м при
модуляторе на транзисторах и до 1 В/м при вращающемся сек-
торном электроде. Вопросы метрологического обеспечения из-
мерений параметров электростатического поля более подробно
освещены в работе ]88].
23. МАГНИТНОЕ ВЛИЯЮЩЕЕ ПОЛЕ
Источники и средства измерения. Источниками магнитного
поля являются замкнутые электрические токи и намагниченные
тела. Последние по своему действию эквивалентны совокупности
элементарных магнитов или элементарных контуров тока, назы-
ваемых диполями.
Напряженность Н маг мягнитного поля зямкнутого линейного
контура зависит от силы протекающего тока /, формы и длины
проводника
,, / ff dr /-> Л
//маг = — ~ V J J — COS (п, Г),
F
д2 д2 д2
где с—скорость света; V = + ~^г ~ оператор Ла-
->
пласа; dF— элемент поверхности контура; г — расстояние; п —
направление нормали к поверхности F.
Выражение под интегралом — элемент телесного угла dQa,
под которым виден элемент dF из текущей точки наблюдения.
Напряженность магнитного поля внутри намагниченного шара
определяется зависимостью Нмаг ,• = 4л/маг/3, где /маг =
— (Вмаг — //маг) /4Л = ИМаг//ма1 — НамаГНИЧвННОСТЬ; Хмаг — МЭГ-
нитная восприимчивость среды.
В зависимости от местоположения горизонтальная и верти-
кальная составляющие напряженности магнитного поля Земли
изменяются от 0 до 32 и от 0 до 48 А/м соответственно, кроме
мест локальных магнитных аномалий. В районе Курской маг-
нитной аномалии вертикальная составляющая магнитного поля
145
порядка 120 А/м, т. е. в три раза больше нормального геомаг-
нитного поля Земли для соответствующего географического ме-
ста. С удалением от аномалий на 300 . . . 500 м напряженность
магнитного поля быстро падает. Механическое (пондоромотор-
ное) воздействие магнитного поля QMar — сила притяжения —
определяется по магнитной Вмаг индукции QMar = 4,06В2а/маг
или магнитному потоку ф&- в зазоре QMar = 4,06ф2/Вмаг, где
Вмаг— площадь, через которую проходит магнитный по-
ток фй.
Наиболее характерными источниками значительных магнит-
ных полей в машиностроении являются магнитные плиты [28]
и другие магнитные захватные приспособления: кубики, призмы,
основания штативов (ГОСТ 10197—70) для крепления измери-
тельных головок, планшай-
Рис. 53. Магнитная индукция в стали
бы, патроны, тиски, прихва-
ты, кондукторы и пр. Маг-
нитная плита является и
источником тепловыделений
QT = 0,24 /2/?/.
Установившаяся темпе-
ратура плиты равна тт. у =
= Np/^qF^, где Ар —мощ-
ность, потребляемая пли-
той; Fo — площадь поверх-
ности плиты; ~ 0,3 —
обобщенный коэффициент
теплоотдачи, Вт/(дм2-°С). Действующие магнитные потоки на-
магничивают детали из ферромагнитных сплавов. Зависимость
магнитной индукции Вмаг некоторых марок стали при размеще-
нии в магнитном поле напряженностью //маг показана на рис. 53.
Магнитные потоки на полюсах круглых электромагнитных плит
достигают (0,38 . . . 1,65) 10-2 Вб при магнитной индукции 1,1 ...
... 1,65 Тл. Магнитные потоки в адаптерных плитах достигают
(1500 ... 200 000) 10® Вб; эти потоки соответствуют напряженно-
сти магнитного поля до 100 000 А/м.
Магнитное поле относится нами к существенно влияющим на
измеряемый объект величинам при магнитострикционной харак-
теристике Кмаг бин/0,08 L, а при /Gar меньше этого значения
(в мкм/А) действием магнитного поля на объект измерения мож-
но пренебречь. Магнитострикционные и пьезоэлектрические эф-
фекты невелики п становятся ощутимыми лишь при сильных
магнитных и электрических полях. С целью исключения дейст-
вия внешнего магнитного поля на измерительные механизмы их
элементы выполняют из немагнитных материалов. На неэкрани-
рованные электромеханические преобразователи, вибраторы,
пластины Холла искажающее действие магнитного поля суще-
ственно.
146
Для измерения напряженности магнитных полей используют-
ся магнитометры (тесламетры) на эффекте Холла, индукцион-
ные и феррозондовые с порогом реагирования 10-11 .... 10-12 Тл,
квантовые с порогом реагирования 10-12 ... 10-13 Тл, сверхпро-
водниковые с порогом реагирования 10-13 . . . ICC14 Тл. Магни-
тометр Г-74 — феррозондовый переносной измеритель напря-
женности постоянного магнитного поля, предназначенный для
измерения одной и трех (поочередно) ортогональных составляю-
щих вектора напряженности постоянного магнитного поля от
±1 мЭ до ±10 Э в малых объемах пространства (±0,08 ...
. .. ±800 А/м). В месте нахождения пульта магнитометра на-
пряженность постоянного и переменного (с частотой 50 Гц)
Рис. 54. Функциональная схема магнитометра
магнитных полей не должна превышать 400 А/м. В зоне распо-
ложения датчика напряженность переменных магнитных полей
не должна превышать 2,4 А/м, а магнитного поля Земли —
48 А/м. Время установления показаний прибора не более 5 с.
Выходной сигнал с пульта 20 мВ ± 1 % постоянного тока, а под-
ключаемый отсчетный прибор должен иметь сопротивление не
менее 50 кОм.
Грубая компенсация по каждому феррозонду от —48 до
+ 48 А/м и точная ±80 мА/м с погрешностью менее ±8 мА/м.
Мощность питания 35 В-А. Минимальная вероятность безотказ-
ной работы за 500 ч не менее 0,7. Среднее время безотказной
работы 1250 ч.
Габаритные размеры феррозонда: длина 10 мм, диаметр
4 мм; перемещение 200 мм в вертикальном направлении;
100 мм — в горизонтальной плоскости вдоль продольной оси (по-
грешность подвода 0,5 мм).
Магнитометр феррозондовый типа второй гармоники с ши-
ротно-импульсной модуляцией построен по функциональной схе-
ме на рис. 54. На рисунке показано: 1 — датчик (ФЭ); 2 — пе-
реключатель компонент; 3 — полосовой фильтр; 4 — усилитель;
5 — усилитель-ограничитель,6—формирователь импульсов; 7 —
147
фазочувствптельный детектор; 8 — фильтр ппжних частот; 9 —
переключатель пределов измерения; 10 — измерительный при-
бор; 11 — блок компенсации МПЗ; 12 — генератор возбуждения;
13— блок стабилизаторов.
Коммутируемый переключателем датчик ФЭ перемагничи-
вается до насыщения переменным магнитным полем, создавае-
мым синусоидальным током высокой частоты(50 кГц), проте-
кающим по обмотке возбуждения и поступающим от генератора
возбуждения 12. Полосовым фильтром 3 из выходного напря-
жения ФЭ их выделяется напряжение второй гармоники u2t,
пропорциональное измеряемому магнитному полю. После уси-
ления усилителем 4 напряжение и2; суммируется с опорным на-
пряжением первой гармоники щ, поступающим от генератора
возбуждения 12. Из суммарного напряжения щ + и21 с помощью
симметричного усилителя-ограничителя 5 формируются напря-
жения прямоугольной формы ип, разность длительности полу-
волн которых t'— t" пропорциональна измеряемому магнитному
полю. Формирователем импульсов 6 осуществляется преобразо-
вание напряжения прямоугольной формы ип в импульсы напря-
жения «н.п, разность длительности полупериодов которых А/=
= 1' — t" пропорциональна измеряемому магнитному полю.
Импульсы ип. п детектируются ключевым фазочувствительным
детектором 7, на который от генератора возбуждения 12 посту-
пает прямоугольное опорное напряжение и'п. 0. При изменении
направления измеряемого магнитного поля на противополож-
ное меняется полярность выпрямленного напряжения «фД на
выходе детектора 7. Для сглаживания пульсаций /0 использует-
ся фильтр нижних частот 8. Пропорциональный измеряемому
магнитному полю постоянный ток /пр поступает на переключа-
тель пределов измерения 9 и измерительный прибор 10, шкала
которого отградуирована в единицах напряженности магнитного
поля. Током /о. с осуществляется глубокая отрицательная обрат-
ная связь, позволяющая значительно снизить действующее на
ФЭ измеряемое магнитное поле. Значение постоянного тока /к
(компенсационного) регулируется устройствами блока компен-
сации МПЗ 11. Питание прибора осуществляется от блока ста-
билизаторов 13, преобразующих ток сети в постоянное напря-
жение и = 20 В + 10%.
В магнитометре используется дифференциальный феррозонд
с разомкнутыми сердечниками и продольным возбуждением. Он
содержит два параллельных друг другу одинаковых прямоуголь-
ного сечения сердечника 1 (рис. 55) толщиной 0,02, шириной
1,5 и длиной 7 мм, изготовленных из отожженного пермаллоя.
Сердечники наложены на основания (подложки) толщиной 0,55,
шириной 1,9 и длиной 10 мм. Поверх них намотаны в один слой
обмотки возбуждения 2, включенные последовательно и обра-
зующие цепь возбуждения сердечников. Эту цепь питают пере-
менным синусоидальным током If. Обмотки 2 соединены таким
148
Рис. 55. Феррозонд магнито-
метра
образом, что протекающий в них ток I; создает в объеме сердеч-
ников поля, равные по напряженности, но противоположные по
направлению. При наличии измеряемого магнитного поля Ямаг
в выходном напряжении обмотки 3, намотанной поверх обмо-
ток 2, содержится напряжение второй гармоники u2f, пропорцио-
нальное Ямаг- Протекающий по обмотке <3 постоянный ток об-
ратной связи /о. с создает постоянное магнитное поле Ям. а. к
автоматической компенсации измеряемого поля Ямаг в объеме
феррозонда. Ток /к, протекая по обмотке 4, намотанной поверх
обмотки 3, создает постоянное магнит-
ное поле Ям. к, компенсирующее в объ-
еме феррозонда магнитное поле Зем-
ли. Для переменного магнитного поля
разработан прибор типа Г-79.
Магнитные экраны. Магнитные эк-
раны применяются для защиты изме-
рительных механизмов электрических
приборов от воздействия внешних
магнитных полей и для защиты внеш-
него пространства от магнитных полей
рассеяния электромагнитной аппара-
туры. Экранирование прежде всего не-
обходимо для измерительных механиз-
мов со слабым собственным полем:
электромагнитные, электродинамиче-
ские и магнитоэлектрические с по-
движным магнитом. Экранирование с
целью защиты внешнего пространства от полей рассеяния также
необходимо для устройств с сильным собственным полем (маг-
нитоэлектрические и ферродинамические) и различных электро-
магнитов и реле, монтируемых вблизи от измерительных прибо-
ров [55].
В условиях эксплуатации электроизмерительных приборов
напряженность внешнего магнитного поля может достигать
400 А/м, что принято за испытательную (ГОСТ 22261—76). По-
ля с такой напряженностью встречаются лишь вблизи силовых
установок, постоянных магнитов, электромагнитов и проводов
сильного тока. Нижний предел напряженности постоянных маг-
нитных полей в машиностроительных'производственных поме-
щениях равен среднему значению поля Земли (около 40 А/м),
а для переменных магнитных полей он обычно не ниже 4 А/м.
Если защищаемое устройство находится на расстоянии I'
от источника поля, то поле в
можно считать равномерным.
Расчеты показывают, что
магнитного экрана для защиты
является многослойная сфера,
немагнитных прослоек, толщина которых по мере удаления от
149
1 м
зоне расположения устройства
наиболее совершенной формой
от постоянного магнитного поля
состоящая из концентрических
центра возрастает в геометрической прогрессии. Форма экрана
мало влияет на степень экранирования. Наличие в экране от-
верстий мало сказывается на степени экранирования. Стыки
между частями экрана следует располагать параллельно на-
правлению помехонесущего поля. При пропорциональном изме-
нении всех размеров экрана степень экранирования не изме-
няется. Уменьшение размеров экрана при сохранении его тол-
щины увеличивает степень экранирования, но одновременно
увеличивается рассеяние магнитного поля защищаемого устрой-
ства. Материал экрана должен обладать малой коэрцетивной
силой во избежание появления постоянных полюсов у самого
экрана и связанных с этим дополнительных погрешностей у при-
боров постояннного тока. Наиболее часто применяют одно- и
двуслойные цилиндрические экраны с отношением наружного
радиуса /?н к внутреннему RB RB/RB = 1,01 ... 1,25 и высоты
к наружному диаметру 0,8 ... 0,9. Многослойные экраны, при-
меняемые в особо ответственных случаях, имеют форму цилинд-
ров, намотанных из пермаллоевой ленты с немагнитной прослой-
кой, обычно из латуни. Степень экранирования оценивается
Коэффициентом &эк //маг. н/Нмаг. в, ГДе //маг. н — НЭПряЖеННОСТЬ
наружного поля; Нмаг. в — напряженность того же поля внутри
экрана. При расчете цилиндрического и прямоугольного экра-
нов можно пользоваться формулами сферического экрана, если
принять за радиус сферы среднее арифметическое из размеров
данного экрана по трем его главным осям. Коэффициент экрани-
рования k3K для сферического однослойного экрана рассчиты-
вается по формуле
k3K. о
(^маг
^Цмаг
1
«I
Для двуслойного сферического экрана расчетная формула имеет
вид
с _____ 1 | (Цмаг 1 )2 Г, । (Нмаг 4~ U2 1
"-эк. д 1 "Г д . М ймаг 1вмаг 2 ~Г л,, ^маг Шмаг 2Щлаг 121 >
чНмаг L аЦчаг J
где Цмаг — относительная магнитная проницаемость материала;
Ц.маг 1 1 /»маг 1> Ц.маг 1 (/?в//?1) , Ф.таг 12 1 ’ ^маг 12»
ймаг 12 = (/?1//?г)2, фдаг 2 = 1 ймаг 2» ЙСаг2 ~ (R'i/Rh)2’i
/?1 и R2— внутренний и наружный радиусы немагнитной про-
слойки, а (Цмаг— 1)2/4|.1маг « Цмаг/4, ТЭК КЭК Цмаг >1.
Относительная проницаемость материала лент цчаг толщиной
0,02 ... 2,5 мм из железо-никелевых сплавов (80НХМС, 79НМ
и др.) находится в пределах 10000 ... 35000. Практически пол-
ное магнитное насыщение наступает у этих сплавов при напря-
женности поля 600 . .. 800 А/м.
Ферромагнитные экраны используются только для защиты
от низкочастотных помехонесущих полей, так как при высокой
150
частоте из-за поверхностного эффекта действующее сечение сте-
нок ферромагнитного экрана становится ничтожным. Для за-
щиты от высокочастотных помехонесущих полей с частотой бо-
лее 1 кГц применяют проводниковые экраны из меди, алюминия
и других немагнитных материалов. Их экранирующее действие
возникает за счет реакции магнитных полей вихревых токов, на-
водимых в металле экрана помехонесущим полем. Неудачное
расположение отверстий в проводниковых экранах может зна-
чительно ослабить степень их экранирования. Если экранируе-
мое устройство имеет переменное магнитное поле низкой часто-
ты, то внутренний экран во избежание появления вихревых то-
ков следует делать наборным из колец листового материала,
а наружный экран — сплошным для лучшей защиты от внеш-
них переменных полей.
Режим работы проводникового экрана зависит от соотноше-
ния между толщиной его стенки di и эквивалентной глубиной
проникновения 6<j поля. Если di < 6d, то коэффициент затуха-
ния проводникового экрана прямоугольной, цилиндрической и
сферической форм равен
^э. 3
У-
при
d,
di > з —-
mvfid2 V2
D
где Di — расстояние между стенками экрана по линии дейст-
вия помехонесушего поля или диаметра цилиндра (сферы);
тц — коэффициент проницаемости формы экрана.
У прямоугольного экрана, размеры пластин которого больше
расстояния Di между пластинами, тц=1. У экрана в форме
длинного цилиндра = 2, а у сферического экрана — 3.
Сверхпроводящие экраны основаны на эффекте Мейснера.
24. РАДИОПОМЕХИ И ИХ ИСТОЧНИКИ
Источниками радиопомех, т. е. высокочастотного электромаг-
нитного излучения в диапазоне 0,15 ... 1000 МГц, являются:
электроустройства, эксплуатируемые в жилых домах или под-
ключаемые к их электросетям; электротранспорт (наземный
городской и железнодорожный); устройства, содержащие двига-
тели внутреннего сгорания; устройства, содержащие источники
кратковременных помех; промышленные, научные, медицинские
и бытовые высокочастотные установки; линии электропередачи
(ЛЭП) и электрические подстанции; светильники с люминес-
центными, ртутными, натриевыми и т. п. лампами; электроуст-
ройства, эксплуатируемые вне жилых домов и не связанные сих
электрическими сетями, предприятия и другие объекты на
151
Рис. 56. Схема оценки радиопомех
выделенных территориях или в отдельных зданиях; устройства
проводной связи; телевизионные и радиовещательные приемники.
Напряженность поля радиопомех (квазиииковое значение),
создаваемых ЛЭП и их электрическими подстанциями, освети-
телями микроинтерферометров и т. п., не должна превышать
5дБ при f = 0,15 МГц. С увеличением частоты допускаемая
напряженность поля радиопомех снижается до 12 дБ при f ==
= 30 МГц, а в диапазоне частот 30 .. . 1000 МГц допускается
уровень поля в 30 дБ. Для устройств с двигателями внутреннего
сгорания допускаемая напряженность поля радиопомех находит-
ся в пределах 34 ... 43 дБ при f = 75 ... 300 МГц. Напряжен-
ности поля радиопомех 0 дБ соответствует напряженность элек-
тромагнитного поля 1 мкВ/м. При оценке напряженности поля
радиопомех в полосе частот 0,15 ... 30 МГц измеряют магнит-
ную или электрическую составляющие напряженности поля
радиопомех с помощью вер-
тикально расположенных
антенн измерительного уст-
ройства (ГОСТ 11001—69).
В полосе частот 30 ...
... 1000 МГц измеряют толь-
ко электрическую состав-
ляющую напряженности по-
ля при горизонтальном и вертикальном расположении антенн.
Уровень радиопомех определяют на заданных частотах 0,15; 0,25;
0,5; 1,0; 1,5; 3,0; 6,0; 10; 15; 30; 45; 65; 90; 150; 180; 220; 300 МГц
и т. д.
Измерительное и испытательные устройства включают в себя
генератор стандартных сигналов 1 (рис. 56), передающую
антенну 2, приемную антенну 3, измерительный приемник 5,
коаксиальный кабель 4. Измерения должны производиться с че-
тырех сторон испытуемого устройства. Измерительная антенна
должна располагаться на расстоянии 10 + 0,5 м до ближайшей
металлической части испытуемого устройства с центром на вы-
соте 3 + 0,15 м над землей. Антенну ориентируют перпендику-
лярно прямой, соединяющей центр испытуемого объекта с цент-
ром антенны.
Если при эксплуатации изделие находится в руках, то изме-
рение радиопомех должно производиться с применением экви-
валента руки, представляющего собой последовательно соеди-
ненные конденсатор емкостью 200 пФ+ 10% и резистор сопро-
тивлением 510 Ом ±10%. Этот эквивалент включают между
землей и корпусом заземляемого источника радиопомех или
между землей и листом фольги размером 0,1 X 0,1 м, укреплен-
ным на корпусе незаземленного источника радиопомех в месте
возможного прикосновения руки в процессе эксплуатации. Для
измерения мощности индустриальных радиопомех от несущих
проводов служат «поглощающие клещи» — устройство, состоя-
152
щее из трансформатора тока и поглощающего магиитопровода.
Погрешности измерения синусоидальных напряжений измерите-
лями радиопомех рассчитывают по ГОСТ 11001—69 в децибелах
по формуле
*^и.р 20 lgXoH. p/-KiH, р,
где Хи,, р — напряжение, подаваемое на вход измерителя радио-
помех от генератора стандартных сигналов; х2и. р—показания
измерителя радиопомех.
Напряженность Ерп поля, создаваемого штыревыми излуча-
телями (ГОСТ 14660—69, ГОСТ 8.363—79), применяемыми для
испытания измерителей радиопомех, рассчитывается по формуле
F = / R
где Ерп, В/м; Вра = 15 ... 90 — для частот 1 ... 0,15 МГц, Врп=
= 98 для частоты 1 МГц и Врп — 40 для частоты 30 МГц; Л —
сила тока.
При частотах 0,01 ... 0,15 МГц напряженность электромаг-
нитного поля от штыревого излучателя определяют по формуле
Ерп = 0,96-10-3 и, где и— напряжение на зажимах штыревого
излучателя.
Помехозащищенность радиоприемного устройства от инду-
стриальных радиопомех состоит в том, что при помощи экранов
и фильтров исключают или уменьшают проникновение индуст-
риальных радиопомех в тракт приемника через цепи питания,
низкочастотные цепи, корпус, а также через антеннофидерный
тракт. Сетевой коэффициент kc. п помехозащищенности — коэф-
фициент, характеризующий степень защиты радиоприемного
устройства от индустриальных радиопомех, проникающих через
сеть питания, он равен отношению синусоидального напряжения
«2с, подаваемого от генератора па сетевые зажимы питания при-
емника, к напряжению uic, подаваемому на его вход через экви-
валент антенны при одинаковом в обоих случаях напряжении
на выходе приемника. Для получения результата в децибелах
ИСПОЛЬЗУЮТ ЗаВИСИМОСТЬ kc. п = 20 lg(«2c/«lc).
25. ДЕЙСТВИЕ
ПРОНИКАЮЩЕЙ РАДИАЦИИ
НА ПРОВОДНИКИ
И ИОНИЗАЦИЯ АТМОСФЕРЫ
Радиоактивное облучение оказывает влияние на электриче-
ское сопротивление металлов, используемых в различных изме-
рительных преобразователях, в зависимости от строения их кри-
сталлической решетки и энергии Эа межатомных связей. Харак-
тер этой зависимости для объемноцентрированной кубической
(тип I) п гранецентрированной (тип II) решеток показан на
рис. 57, где А7?э — относительное увеличение электрического
153
сопротивления. Химический состав медных, платИнородиеВых й
вольфрамовых электродов неустойчив при облучении. Медь пре-
вращается в никель и цинк; родий — в паладий; вольфрам — в
осьмий. В результате облучения могут измениться настройка,
градуировка и другие метрологические характеристики [70] при
уровне 1 -1017 ... 1-Ю19 нейтр./(см2-с).
Основной причиной создания ионов в атмосфере считают ра-
диоактивные и космические излучения. Земля, атмосфера, вода,
осадки содержат радиоактивные вещества, которые своим рас-
Рис. 57. Действие радиации на электро-
сопротивление металлов с энергией Эа:
1 — За = ЗО5(медь, тип II); 2 —Эа = 350(железо, тип I);
3 — Эа = 380 (никель); 4 — Эа = 535 (платина, тип II);
5 — Эа = 5-15 (молибден, тип I); 6 —Эа = 880 (воль-
фрам, тип I)
падом обусловливают ио-
низацию воздуха. Иони-
зация также вызывается
действием разнообраз-
ных электродинамических
и радиоактивных источ-
ников технологического
характера. Действие ио-
низатора на атмосферу
характеризуется интен-
сивностью ионизации —
числом /п пар ионов, со-
здаваемых в 1 см3/с. Из-
лучение почвы в зависи-
мости от ее состава может
давать интенсивность ио-
низации до 20 /п. Излуче-
ние атмосферы приводит
к интенсивности ионизации, меняющейся в пределах 0 ... 0,2 /п.
Верхняя проникающая радиация вызывает (1 . .. 80) /п.
Существенно осложняет измерения ионизация, создаваемая
измеряющим прибором, интенсивность которой может доходить
до 50 /п- Для измерения интегрального ионизационного эффекта
используются ионизационные камеры, представляющие собой
воздушный конденсатор с характерной вольт-амиерной харак-
теристикой. При исследованиях a-излучений источник а-частиц
либо размещается внутри камеры, либо в стенке камеры пред-
усматривается закрытое очень тонкой пленкой окно, через ко-
торое пропускается снаружи a-излучение. Ток насыщения при
измерениях а-частиц достигается только при больших полях.
При измерениях 0-излучений источник также размещается
внутри камеры пли перед окном с пленкой. Создаваемый в ка-
мере ток зависит от энергетического распределения 0-частиц и
их траектории, что весьма затрудняет абсолютные измерения.
Для последних лучше применять счетчики Гейгера — Мюллера.
Ионизация, наблюдаемая в камере ири измерениях у-излучений
И космической радиации, создается Вторичными электронами,
возникающими в наполняющем камеру газе, в стенках камеры
и в окружающем камеру веществе.
154
Применяемые средства измерений радиоизотопного принципа
действия (бетатолщиномеры, уровнемеры и др.) имеют хоро-
шую экранировку и вводятся в эксплуатацию по разрешению
главного санитарного врача, чем гарантируется полная безопас-
ность работы с такими приборами. Работа с электронными мик-
роскопами, радиоизотопными толщиномерами, уровнемерами,
лазерными интерферометрами и т. п. относится к вопросам мет-
рологической экологии, связанным с вероятным загрязнением
окружающей среды.
26. ДЕЙСТВИЕ ПОЛЯ ТЯЖЕСТИ ЗЕМЛИ
Основные закономерности этого потенциального поля отра-
жаются известными уравнениями Эйнштейна [33], а для макро-
тел и макропроцессов — законом Ньютона
Г) — ь т'т2
Ц-тяж j.2 >
где т.\ и mi — взаимодействующие массы; г — расстояние меж-
ду ними.
Сила фтяж тяжести в поле тяготения Земли для обычных
объектов с массой т равна = gm и направлена к центру
Земли. Поле тяготения Земли действует на все расположенные
в нем системы. Для механических объектов его действие свя-
зано с общими и контактными деформациями, причем в первом
случае деформации вызываются распределенной нагрузкой, а во
втором — концентрированной реакцией опор. Действие силы тя-
жести на средства и объект измерения существенным образом
зависит от их ориентации в пространстве и конструктивных осо-
бенностей. Для малой общей деформации S6 эта зависимость
имеет вид [37]
= и (Л) = J J $ G (Л, О) pYK/ (D) dQ + J J G (Л, D) Кц (D) dF, (62)
<-1 F
где О(Л, D)—тензор влияния; pY — плотность материала;
К1(£>) и Ки(£>)—массовые и поверхностные силы; Q и F—
объем и площадь тела; D и Л — точки истока и наблюдения
деформации.
Однако степень трудности эффективного построения тензора
влияния такая же, как и решения краевых задач. Вместе с тем
для многих практических случаев имеются достаточно точные
расчетные зависимости.
Изгиб мер длины. Характерным примером нормирования
установки и ориентации средств измерений являются способы
базирования мер длины более 100 мм и лекальных линеек в го-
ризонтальной плоскости. Для концевых мер длины, у которых
необходимо обеспечивать параллельность торцевых сечений
155
установочные базы (рис. 58) должны располагаться на расстоя-
нии /э = 0,2113 L от концов в точках Эри. Это следует из урав-
нения изгиба у балки с распределенной нагрузкой на двух опо-
рах. Для участка х С [0,1Х]
/ х х \ т.,
3-4 — + -= Н-------^-ИЛ-2/Д3-6/2 (Л-2/¥1 (х-1).
У 24 £7 \ lx 24£7LV х) *k х}
Для участка х С [Л, (Л — 1Х) ]
_туД-2/Д4Гх-/х
— 2477 L L
7‘
+
/И,,/?
+ Ч£Г к* - У2-Ь(х-/Д].
При этом угол наклона торцевых сечений, определяемый по
формуле
_ , = «у(£-/Д3 б^Д-2/J
Ух-о 2477 "t~ 247/ 24£7
при /хэ = 0,2113 L равен нулю:
. (Уз~- О г
2 д<3
У штриховых эталонов и мер
как можно меньшее изменение
длины необходимо обеспечить
расстояния между крайними
Рис. 58. Схема базирования концевой и штриховой мер
штрихами меры. Из уравнения прогиба в этом случае [7] еле-
2
дует требование 1Х = 0,22031 -g L, что соответствует точкам
£5!?2 -в
Бесселя, причем AL = 0,65310 , где 3 — равномерно рас-
пределенная масса меры.
Для наименьшего искажения прямолинейности лекальной ли-
нейки из уравнения изгиба следует условие наименьшего проги-
ба концов при 1Х = 0,2232 L, а для наименьшего прогиба в сере-
дине меры 1Х = 0,2386 L « 6/25 L. При вертикальном располо-
жении меры длиной L она растянется (укоротится) на величину
J_ _Ру£
L<3 2 £' ’
где pY— плотность материала.
156
Для стальной метровой меры
7,8 - ЮО2 - 10 „ „
=—2Лоэ— =0,2 мкм.
Для более тяжелой платино-иридиевой меры 6Ag.~ 0,4 мкм.
При интерференционных измерениях концевых мер харак-
терна притирка к мере плоскопараллельной стеклянной пла-
стины. При этом форма изгиба меры и оптимальное оазмеще-
-V/
ние ее опор несколько изменяется. Дифференциальное уравне-
ние изгиба меры 1 с притертой пластиной 2 (рис. 59, а) имеет
вид:
для участка I
д2у, г 1 1
tix 1 L 1
для участка II
/И Ту — — — <?£ (Хц + Al (хп —т1<Л~Р/Л)’
ClX j J
для участка III
d2«/n. 1
= — ~ ~2 — +
157
После соответствующего интегрирования при отсутствии раз-
ворота концов меры определяются оптимальные значения коэф-
фициентов fiz. и yr:
x
2
V2/Q - N't
x(2- ~Nl)< A’l=12VL, + 6; ^=12&Х- 3.
Рис. 60. Расчетная схема дви-
жения измерительного стержня
с упругим приводом
Расчетные значения уц и Pl для стандартной меры с притер-
той пластиной размером 40X40X 11,5 мм показаны на
рис. 59, б *.
Деформации иод действием сил тяжести тонкостенных колец
и скоб. К типовым легко деформируемым средствам и объектам
линейных измерений относятся кольца и скобы. В табл. 6 при-
ведены расчетные зависимости де-
формации этих объектов иод дей-
ствием сил тяжести S’ и усилия ре-
акции опор Qp ири произвольной
ориентации ф их оси в поле тяже-
сти Земли. Изменения диаметров
колец толщины h обозначены и
8у в соответствии с направлением
осей х и у. Знак минус соответ-
ствует уменьшению диаметра.
Трение в направляющих. Изменение ориентации средств и
объектов измерений в иоле тяжести может привести и к изме-
нению AQTp сил трения в направляющих вследствие изменения
нормального усилия Qu реакции опор:
AQtp == Ртр ^Qk == РтрФ/гО (1 cos ф),
где ф — угловое отклонение ориентации от нормальной; цтр —
коэффициент трения.
При любом изменении сил трения изменяется добротность
измерительной системы. Увеличение трения ухудшает условия
иолучения малых плавных перемещений на направляющих
скольжения с сухим и полусухим трением. Скачкообразное дви-
жение измерительного механизма легко наблюдать при опреде-
лении измерительного усилия на весах. Уравнение движения та-
кой системы, расчетная схема которой приведена на рис. 60,
можно приближенно записать в виде
— jg 1 + (vl — х)] + (QTP — PTpX) = 0, (63)
где тв — подвижная масса; х— скорость движения стержня;
х — ускорение движения стержня; i — время; QTP — (ЗтРх сила
кинетического трения при наличии постоянной составляющей
* По данным В. П. Голубковой и Я. Яеножевского.
168
Таблица 6. Деформации колец и скоб
Схема
Расчетные зависимости
<?р#3 Г я
6Х = --yr- — (1 - 4 sin а + sin2 а) +
тс с, j ।
+ 2 (а sin а + cosa)j;
Qp^3 Г л
д =--------— — 2,4674 + -х- (sin a cos а +
У ItcJ L 2
+ а — 2 sin а) + 2 (a sin а + cos a)j;
’S cos тр
Ур-------2ТГ-
SV2 1 - v (Л<
Л/= I2£V 6
® i, 2, з — массы элементов
ф < 90°
„ „ } sin ib b,
+ (^ + ^)/2 + ^ (Z_G)2|__L
Qt₽ и падающей характеристики скорости с коэффициентом про-
порциональности |3Тр; v — скорость перемещения привода 1 (счи-
таем ее постоянной); js — условная жесткость весов (величина,
обратная чувствительности и отнесенная к ходу чашек весов);
/м — приведенная жесткость механизма прибора.
Скачкообразное (прерывистое) скольжение характеризуется
линейным скачком 55Ск, а также его продолжительностью и про-
должительностью /ост остановки. Скачки ведомого звена при
дискретном перемещении привода в такой системе определяют
из решения дифференциального уравнения (63) и могут дости-
гать значения
SQrn
Д<? — 9 - . - Г__
СК /g С + ’
где 6Qrp — разность сил статического и кинетического трения.
159
Величина <5QTP зависит в некоторой степени от продолжи-
тельности остановки и возрастает с увеличением /ОСт. При ука-
занном направлении движения значение /ост, а следовательно,
и SQTp увеличивается с уменьшением жесткости привода /й (ве-
сов). Для ориентировочных расчетов 6QTP заменяют разностью
сил 6Qtp«> статического и кинетического трения ири бесконечно
большой продолжительности контакта.
Средства контроля угловой ориентации. Для оценки угло-
вой ориентации линий и поверхностей в машиностроении исполь-
зуются уровни, квадранты оптические и механические, теодоли-
ты, нивелиры, автоколлиматоры, в том числе и в сочетании
с теодолитом [8]. Эти приборы позволяют определить отклоне-
ние поверхностей от горизонтального или вертикального поло-
жения по отношению к направлению силы тяжести, а также вза-
имное положение элементов машин и приборов. Навигационные
средства ориентации в машиностроении не применяются.
27. НОРМАЛЬНЫЙ УРОВЕНЬ
ЭЛЕКТРОМАГНИТНОГО
И ГРАВИТАЦИОННОГО ПОЛЕЙ
Индукция, проницаемость и преломление. Для таких влияю-
щих факторов, как электростатическое, магнитное и гравита-
ционное поля, естественно устанавливать нормальное значение,
соответствующее напряженности этих полей Земли. Напряжен-
ность магнитного ноля Земли 40 ... 50 А/м, кроме районов маг-
нитных аномалий, а напряженность электростатического поля
Земли 130 В/м. Для точных электромагнитных измерений
иногда требуется нормальное значение 0,1 ... 1 нТл с экраниро-
ванием от поля Земли. В ряде нормативных документов маг-
нитное поле выражается в миллитеслах или в гауссах, что соот-
ветствует нормированию магнитной индукции Вмаг, которая свя-
зана с напряженностью Я маг через магнитную Цмаг проницае-
мость В маг — ЦмагЯмаг. Пределы нормальной области напряжен-
ности магнитного ноля обычно не превышают 400 А/м, а для
линейных измерений унифицированная нормальная область —
до 80 А/м. Для отдельных приборов и установок эта область еще
меньше. Так, в случае газоанализатора 0А5501 (см. п. 14) пре-
дел допускаемой напряженности магнитного поля 40 А/м.
Нормальные пределы магнитной индукции постоянного маг-
нитного поля 0,2-10-4 ... 1-Ю'4 Тл и даже до 5-Ю-4 Тл, что
соответствует нормальным пределам напряженности внешнего
магнитного поля в воздухе 20 .. . 80 А/м и 400 А/м. Нормаль-
ные пределы амплитуды магнитной индукции переменного маг-
нитного поля промышленной до 400 Гц и звуковой до 20 000 Гц
частоты—1-10“7; 1-Ю-6; 1- 10"5; 1 • 10-4 Тл, что соответствует
нормальным пределам амплитуды напряженности переменного
магнитного поля в воздухе 0,08; 0,8; 8,0 и 80 А/м.
160
С диэлектрической ?,е й магнитной цмаг проницаемостью воз-
духа связан и его показатель преломления пк = д/в£Цмаг> кото-
рый, согласно формуле Лорентц — Лоренца, зависит от заряда
и массы электронов, концентрации и резонансной частоты этих
частиц, частоты и длины волны X излучения: п\—1=ах +
+ \ (Х2 — Хо)-1. Дисперсионные постоянные воздуха при /т =
= О °C, р = 10 1325 Па ак = 5,7642; Ьк = 327,7 • 10“14 см2; =
= 0,005685 • 10-8 см2. Интегральным показателем состояния воз-
духа является также его проводимость, зависящая от уровня
ионизации, влажности и других параметров.
Отсутствие радиопомех. Нулевому уровню радиопомех в де-
цибелах соответствует напряженность электромагнитного поля
в 1 мкВ/м. Металлические площадки, предназначенные для
проверки действия радиопомех в полосе частот ниже 30 МГц,
должны находиться на таком расстоянии, чтобы расстояние от
источника радиопомех и измерительной антенны до ближайших
отражающих предметов было меньше, чем между ними. Метал-
лические площадки, предназначенные для измерения радиопо-
мех в полосе частот 30 ... 1000 МГц, считаются свободными от
посторонних отражений, если разность между эксперименталь-
ным коэффициентом Mi и расчетным его значением М2 (по
ГОСТ 16842—76) не превосходит 4 дБ.
Ориентация в поле тяжести. Гравитационное поле Земли
характеризуется ускорением свободного падения* g ж 9,81 м/с2.
Отклонение Ag на 1% (в третьем знаке) для большинства ви-
дов измерений несущественно. Поэтому в качестве нормального
для измерений в машиностроении принимается значение g —
= 9,8 м/с2. Однако для точных технологических операций по
выращиванию кристаллов полупроводников и приготовлению оп-
тического стекла желательно исключение действия гравитаци-
онного поля (космос). Действительное значение g определяется
гравиметром.
Нормальная ориентация в поле тяжести Земли выбирается
обычно совпадающей с вертикалью (0° по отношению к направ-
лению силы тяжести) либо с горизонталью (90° к направлению
силы тяжести). В метрологическом плане целесообразно, чтобы
нормальная ориентация линий и плоскостей рабочих измерений
совпадала с соответствующей ориентацией эталонов и образцо-
вых средств, чем уменьшаются погрешности передачи значения
единицы физической величины.
В технологии известен принцип Тейлора, согласно которому
Измерение размеров деталей выполняется в их рабочем положе-
нии. Однако в современном машиностроении этот принцип имеет
лишь частное значение, так как для нестационарных объектов
понятие рабочее положение неэффективно, а для объектов уни-
* Зависит от широты и высоты над уровнем моря.
6 Зак. 843 1 61
версального назначения—неоднозначно. Нормальная область
положения линий Дфе и плоскостей измерений, ориентации базо-
вых поверхностей средств и объектов измерений обычно ограни-
чивается пределами ± (2 ... 5)°: < 'y/'Zhglg- Следует отме-
тить, что рабочее измерение, кроме случаев арбитражной про-
верки результатов измерений и контроля, можно выполнять при
любой ориентации, предусмотренной конструкцией средств и
объектов измерения. Но для соответствия расширенным нор-
мальным условиям следует оценивать возникающую дополни-
тельную погрешность, которая не должна быть более 6m (см.
гл. 1).
Вихревое электромагнитное поле. Напряженность электриче-
ского поля Hf, магнитная составляющая Нмаг, магнитная индук-
ция Вмаг, электрическое смещение D3, плотность тока р, плот-
ность электрических зарядов ор/ связаны уравнениями Макс-
велла:
rot Нмаг = /7 + dD3/d/; rot Н£ = — дВмагМ div Вмаг = 0;
div D3 = ap/.
Это поле вихревое.
Э. д. с., наводимая в контуре проводника индукционного пре-
образователя, равна
( xri 3V дх,- )
еч = _ W | Y к/ (01 Л Ь Вмаг >
где вектор Y представляется матрицей diag(Y) =
i i i
= F diag (F°) diag (|i^ar); w — число витков; diag (ц*аг)—мат-
рица тензора относительной магнитной проницаемости сердеч-
i
ника; diag(F°) — матрица проекций нормали контура в коор-
динатах i = 1,2,3; Xi = BMarF°, х2 = F — площадь контура:
х3 = Цмаг, х4 = Ммаг — коэффициент размагничивания. Первый
член соответствует работе пассивных преобразователей, вто-
рой— отражает принцип действия активных преобразователей
с вращающейся катушкой (переменный угол BMarF0), с вибро-
зондом (переменная площадь F), с феррозондом (переменная
р’маг). Различают нечетногармонические и более эффективные
четногармонические индукционные преобразователи. Приведен-
ное выражение матрицы вектора Y можно использовать для
оценки нормальных условий измерений по методике (см. гл. I).
Г лава VI
ЭРГОНОМИЧЕСКИЕ
ОСНОВЫ ВЫБОРА
НОРМАЛЬНЫХ УСЛОВИЙ
ИЗМЕРЕНИЙ
28. ГИГИЕНИЧЕСКИЕ ПРИНЦИПЫ
КОНДИЦИОНИРОВАНИЯ ВОЗДУХА
Жизнедеятельность человека связана с
отводом с поверхности кожи и через дыха-
тельные пути углекислоты, теплоты и вла-
ги. В зависимости от состояния организма
(отдых, умственная работа, мускульная ра-
бота различной интенсивности) и парамет-
ров окружающей среды каждый человек в
течение 1 ч выделяет 120 ... 1100 кДж теп-
лоты, 40 ... 415 г влаги и 18 ... 36 л угле-
кислоты. Кроме того, в результате физиоло-
гических процессов, протекающих в челове-
ческом организме, выделяются вредные
органические вещества, жирные летучие
кислоты, аммиак, аммонийные соединения
и др. Все эти вещества необходимо удалять
из помещения вместе с загрязненным возду-
хом. Вредные выделения человека пропор-
циональны количеству выделяемой им угле-
кислоты. В связи с этим гигиенический воз-
духообмен в помещениях рассчитывается
на обеспечение содержания углекислоты в
воздухе в пределах 0,1 ... 0,2 % по объему,
или от 1 до 2 л/м3. Учитывая, что содержа-
ние углекислоты в чистом наружном воз-
духе составляет 0,3 л/м3, а человек выде-
ляет углекислоты в среднем 23 л/ч, необхо-
димое количество свежего воздуха для од-
ного человека при допустимой концентра-
ции углекислоты в воздухе помещения
1 л/м3 составит 23/(1—0,3) а: 33 м3/ч. Зо-
на дыхания — 50 см.
Теплота, выделяемая человеком, пере-
дается в окружающую среду в виде явной
теплоты через кожный покров за счет ра-
диации ( — 46%) и конвекции (~32%)?
а также в виде скрытой теплоты
за счет испарения выделяемой влаги
(-22%).
Тепловые ощущения человека зависят
от температуры, относительной влажности,
163
6*
скорости движения воздуха (подвижности), а также от темпера-
туры ограждающих поверхностей помещения. Чем выше темпе-
ратура и подвижность воздуха, тем больше испаряется влаги
с поверхности кожи человека, а следовательно, увеличиваются
затраты теплоты организмом на ее испарение. При этом тепло-
потери организма за счет конвекции и радиации уменьшаются.
Теплоотдача испарением увеличивается с уменьшением значе-
ния относительной влажности воздуха.
Значительное влияние на организм человека оказывает ион-
ный состав воздуха: положительное при легких ионах, отрица-
тельное при тяжелых ионах. Присутствие людей в помещении
увеличивает концентрацию тяжелых ионов.
Восприятие человеком тепловых ощущений ограничивается
[41] пределами 10 ... 47 °C. При более низких и более высоких
температурах эти ощущения приобретают болезненный харак-
тер. Наименьшая разница температуры, которую можно опреде-
лить по ощущению, около 0,4 °C. Однако субъективные суждения
о температуре довольно неопределенны. Хорошо проводящая
поверхность внешнего тела кажется теплее или холоднее, чем по-
верхность плохого проводника, имеющая ту же самую темпера-
туру. В силу этой неустойчивости тепловых ощущений субъек-
тивная оценка температуры в практике измерений применения
не находит.
29. НОРМАЛЬНОЕ ОСВЕЩЕНИЕ
Освещенность и яркость. Основными факторами, определяю-
щими работоспособность зрения, являются: угловой размер
объекта наблюдения, определяемый его линейными разме-
рами и расстоянием до глаз наблюдателя; яркость фона, на
котором рассматривается объект; контраст объекта с фоном,
определяемый различием в уровнях яркости; время наблюдения.
Увеличение каждого из этих параметров до определенных пре-
делов повышает работоспособность и снижает утомляемость
зрения [41]. В нормах искусственного освещения более пра-
вильно регламентировать не освещенность, а яркость [17].
Однако трудность расчета и контроля яркости рабочих поверх-
ностей вынуждает нормировать освещенность. Освещенность
(в лк) является поверхностной плотностью светового потока и
равна
где Фе — световой поток, падающий на поверхность, лм; Fe—
Площадь освещаемой поверхности, м.
Для диффузных поверхностей яркость Яе определяется по
формуле
ЯЕ = Л-’ДфРоЕ,
где Де —яркость, кд/м2; це — коэффициент отражения поверх-
ностей.
164
Устанавливаемые общие нормы освещенности дифференци-
руются по точности работ. Принятые нормы освещенности для
точных работ, требующих большого напряжения зрения (рис. 61),
зависят от линейных размеров /об объекта наблюдения в пред-
положении расстояния до глаз наблюдателя 0,3 ... 0,5 м.
Верхний предел нормируемой освещенности по строительным
нормам и правилам СНИП II-A.9—71 4000 лк при лампах нака-
ливания и 5000 лк— при газоразрядных лампах.
Рис. 61. Нормы освещенности на работы, дифференцирован-
ные по точности:
/—при работе на станках по проекту международного кода [17]; 2 — наи-
большие принятые нормативные значения при работе на станках;
3—для сборки
Качество освещения и ограничение ослепленности. Известно,
что наличие источников высокой яркости в поле зрения снижает
видимость (работоспособность зрения) и вызывает неприятное
ощущение. Поэтому в нормативных документах предусматрива-
ется ограничение слепящего действия осветительных установок.
Согласно DIN № 5035, наивысшее значение яркости для исклю-
чения ослепления 0,2 сб * при угле распределения 75 ... 180°;
0,3 сб при угле 30 ... 90° и 2 сб при угле 60 ... 90°. Согласно
DIN 5034, коэффициент дневного света, равный отношению
освещенности на рабочем месте в помещении к горизонтальной
освещенности от внешнего света снаружи, не должен быть ме-
нее 10%.
Распределение яркости в поле зрения. Неравномерное рас-
пределение яркости в поле зрения также отрицательно влияет
на его работоспособность и регламентируется в нормах ГДР,
ПНР, Великобритании, США [17] и СФРЮ.
В нормах СССР количественные требования к равномерно-
сти распределения яркости в поле зрения устанавливаются толь-
ко для оптикомеханических приборов экранного типа. При пе-
реходе от одной яркости к другой глазу требуется время для
* 1 сб = 104 кд/м2.
165
приспособления к новым условиям видения. Приспособление
глаза к изменяющимся условиям называется адаптацией. Суже-
ние зрачка происходит значительно быстрее, чем его расшире-
ние. По данным (41], в первом случае требуется несколько се-
кунд, а во втором — около 2 мин.
Таким образом, переадаптация вследствие неравномерной
освещенности в рабочем пространстве приводит к потерям рабо-
чего времени и к повышенной утомляемости глаз.
Наибольшая переносимая без вреда яркость является верх-
ним порогом чувствительности. Этот порог зависит от степени
адаптации глаза, т. е. от отношения хад слепящей яркости к
яркости адаптирующего поля (рис. 62). Верхний порог, соответ-
ствующий Ig хад = 0, зависит от индивидуальных особенностей
глаз. Восприятие яркости чело-
веком в значительной мере
субъективно и зависит от кон-
траста. Наиболее надежна
оценка равенства яркостей
двух качественно однородных
по цвету светящихся поверхно-
стей, соприкасающихся друг с
другом, с исключением эффек-
та асимметрии свойств сетчат-
ки глаза. Вопросы смешения
цветов и их объективной коли-
чественной оценки составляют
предмет колориметрии. На
глазомерную оценку цветов оказывает влияние цветовой кон-
траст.
Ясное видение. Устойчивость ясного видения определяется по
оценке отношения доли времени ясного видения мелкой детали
ко времени ее расплывчатого неясного восприятия при непре-
рывном наблюдении. Увеличение освещенности ведет к значи-
тельному улучшению ясного видения. Хорошее видение особен-
но необходимо при измерениях, связанных с отсчетом по шкалам
с нониусом, биссектором, спиралью, при оценке параметров ин-
терференционной картины.
Следует отметить, что наибольшая скорость перемещения
объекта наблюдения, при которой возникает впечатление сплош-
ной полосы вместо движения, колеблется в пределах 8,4 ... 21'
в миллисекунду на расстоянии нормального зрения 250... 300 мм
и зависит от условий освещения.
Порог восприятия сдвига прямой линии, что характерно при
совмещении шкал нониуса, для черных линий на белом фоне
в среднем составляет 10 ... 12" (12 ... 14 мкм). Если прямая
представляет собой границу между темным и светлым полем,
то порог составляет в среднем 7" (8,5 мкм), снижаясь в отдель-
ных случаях до 2,5" (3 мкм)
166
Пороги восприятия излома прямой линии 5 ... 8" (6 ...
...10 мкм), смещения точки от прямой — 60" (0,073 мм). Порог
восприятия смещения точки от середины промежутка зависит от
расстояния между крайними точками и повышается в 1,6 (от 23
до 38") раз при увеличении расстояния между крайними точ-
ками с 10' (0,73 мкм) до 46' (3,35 мкм). Если это увеличение
расстояния между крайними точками возникло вследствие виб-
раций шкалы или отсчетного указателя, то погрешность оценки
положения центра изображения штриха или указателя при их
трехкратном «размытии» (с 10 до 30') увеличивается примерно
на 35% (с 23 до 31"). Тем самым выявляется и необходимость
ограничения размаха колебаний отсчетного указателя прибора
двух-трехкратным «размытием». Для измерительных головок
средств линейных измерений характерная ширина отсчетного
указателя равна 0,25 длины деления. Отсюда в нормальных ус-
ловиях следует ограничиться допускаемым размахом его коле-
баний 0,2 деления, что соответствует ГОСТ 8.050—73 и под-
тверждается экспериментом (см. п. 19).
При сравнении длины прямых линий, находящихся в одина-
ковых условиях восприятия, если они параллельны и располо-
жены рядом, наименьшая относительная разность, которая мо-
жет быть замечена глазом, приблизительно постоянна и равна
в среднем 1%. Для вертикальных линий она несколько больше,
чем для горизонтальных. Кроме того, сравнение вертикальных
линий с одинаковыми по длине горизонтальными всегда сопро-
вождается кажущимся увеличением вертикальных линий.
Ограничение отраженной блескости. Отраженная блескость
отрицательно воздействует на работоспособность зрения и ха-
рактеризуется чремерно высокой яркостью рабочей поверхности,
а при работах с поверхностями, обладающими направленно рас-
сеяным отражением — также вуалирующим действием, снижаю-
щим контраст между объектом различения и фоном.
В целях ограничения вуалирующего действия отраженной
блескости в нормах СССР приведены конкретные указания к
приемам освещения различных поверхностей для обеспечения
высокого уровня видимости, регламентируются максимально до-
пустимые значения яркости рабочей поверхности с учетом ее
размеров.
Ограничение пульсации освещенности. В связи с малой све-
товой инерцией газоразрядных источников света при питании их
током промышленной частоты 50 Гц могут возникнуть колеба-
ния светового потока установки во времени, приводящие к пуль-
сации освещенности на рабочих поверхностях. Эта пульсация
с частотой 100 Гц неощутима визуально, но вызывает прежде-
временное утомление зрения. В нормах СССР регламентируются
максимально допустимые значения коэффициента пульсации
освещенности. В нормах Великобритании и Японии, кроме этих
показателей, предусмотрены вопросы адаптации. В целях сниже-
167
ния ощущения недостаточности освещения в зданий при входе в
него в дневное ввремя суток в нормах Японии рекомендуется
на стенах помещений, прилегающих к входу в здание, обеспе-
чить освещенность 1000 лк. Аналогичное требование есть и в
нормах Великобритании для зданий с естественным освещением.
Для освещения светильниками с люминесцентными лампами
необходимо учитывать, что такой светильник является источни-
ком радиопомех, создающих на расстоянии 2 м от светильника
уровень поля помех, равный примерно 100 мкВ в диапазоне
частот 0,15 ... 0,5 МГц, 20 мкВ в диапазоне частот 2,5 ...
... 20 мГц и 50 мкВ в диапазоне частот 0,5 ... 2 мГц и 20 ...
. . . 200 мГц. Для работающих в помещениях без естественного
света, а также с резко недостаточным естественным освещением
предусмотрено обязательное ультрафиолетовое профилактиче-
ское облучение (см. СН 245—71).
Средства контроля освещенности. Для контроля освещен-
ности применяются люксметры Ю16, Ю116, Ю117. Люксметр
Ю16 — фотоэлектрический переносной прибор с отдельным фо-
тоэлементом предназначен для измерения освещенностей, созда-
ваемых лампами накаливания и естественным светом в произ-
водственных, бытовых помещениях и других местах. Люксметр
состоит из селенового фотоэлемента с поглотителем и измери-
теля. Технические данные люксметра следующие:
Диапаарн измере-
ния, лк 5 .., 25; 20 ... 100; 100 ... 500;
500 ... 2500; 200 ... 10 000; 10 000 ... 50 000
§ремя успокоения
подвижной отсчетной
части, с . . . . г . . Не более 4
До 500 лк люксметр работает без поглотителя, свыше
500 лк-—с поглотителем, имеющим коэффициент ослабления
100 ±5% от измеряемой величины. Новые модели снабжаются
специальными исправляющими насадками для исключения
влияния отклонений угла падения- светового пучка.
30. ДЕЙСТВИЕ ВИБРАЦИИ
И ШУМА НА ЧЕЛОВЕКА
Вибрация. ГОСТ 17307-71 распространяется на вибрации в
диапазоне частот 1 . .. 300 Гц с амплитудой, допустимой по са-
нитарным нормам.
Динамические характеристики: модули передаточной функ-
ции по скорости и ускорению; модуль передаточного механиче-
ского импеданса — отношения силы, действующей на систему
в некоторой точке, к скорости реакции другой точки системы;
модуль входного механического импеданса — отношения силы
и скорости в одной и той же точке, выраженное как комплекс-
ная функция частоты.
1ед
Динамические характеристики определяются при одной из
следующих форм вибраций: гармонические; квазигармонические
с непрерывным монотонным изменением частоты; широкополос-
ные случайные; узкополосные случайные.
Вибростенды для испытаний человека в положении сидя
должны обеспечивать возбуждение синусоидальных колебаний
в диапазоне частот 0,3 ... 350 Гц. Действующее значение вибро-
скорости при испытаниях до 0,1 м/с, динамическая толкающая
сила до 1000 Н при массе объекта до 150 кг.
Методы расчета виброизоляции рабочего места операторов
самоходных машин изложены в ГОСТ 12.4.025—76.
Шум. Нормальное ухо воспринимает звуковые колебания,
частота которых лежит в пределах 16 ... 20000 Гц. Чувстви-
Рис. 63. Порог слышимости
силе звука характеризуется
порогом слышимости 1 (рис. 63, а), разностным порогом и по-
рогом осязания 2. При достижении силы звука Q3B порога ося-
зания в ухе возникает неприятное ощущение щекотания, перехо-
дящее в чувство боли. Кривые 1 и 2 ограничивают все восприни-
маемые ухом звуки различной высоты и силы. Эта область по
высоте занимает около 10 октав *, а по силе звука включает зна-
чения, лежащие от Q3B = 10~’2 до Q-jq = 10-102 Вт/м2 при ча-
стоте около 1000 Гц или от 0 до 140 дБ.
Посторонние шумы заметно понижают чувствительность слу-
ха. На рис. 63, б показано, во сколько раз увеличивается порог
слышимости при действии различных шумов. Кривая 1 характе-
ризует действие шума пишущей машинки, кривая 2 — уличного
шума и кривая 3 — высокого свистка. Подобное же действие
оказывает адаптация слуха к громкому звуку, после продолжи-
тельного действия которого на ухо порог слышимости значитель-
но повышается, особенно в области частот, близких к частоте
адаптирующего тона.
На уровень громкости восприятия звука заметное влияние
оказывает адаптация. На рис. 64, а показано падение уровня
* Октавой называется интервал частот с отношением 2:1.
169
громкости Qr. зв для тона 800 Гц по мере адаптации к трем раз-
личным уровням ощущения 80,94 и 108 дБ, а на рис. 64,6 — на-
растание уровня громкости по мере адаптации к тишине после
прекращения действия тона 800 Гц силой 94 дБ, длительностью
t = 2 мин. Эти кривые типичны [41] для частот в пределах
300 ... 2000 Гц. Действие адаптации особенно сильно сказы-
вается при внезапном изменении силы звука.
Связь между действительным Q3B (рис. 64, s) уровнем гром-
кости и ощущением Q3B. о громкости нелинейна. Ослаблению за-
водского шума со 100 до 90 дБ, т. е. на 10% по шкале уровней
Рис. 64. Зависимость ощущения громкости от адаптации
громкости, соответствует его ослабление по силе ощущения
вдвое.
При внимательном слушании слабых шумов ухо быстро утом-
ляется, что вызывает перерыв слуховых ощущений. Утомление
вызывается и сильными шумами, понижающими остроту слуха;
они вызывают оглушение уха. Кроме мешающего действия, шум
оказывает вредное действие на нервную систему и понижает ра-
ботоспособность. Поэтому борьба с шумами в рабочих помеще-
ниях и особенно в метрологических лабораториях имеет большое
значение.
По характеру спектра шумы делятся (см. ГОСТ 12.1.003—76)
на широкополосные, с непрерывным спектром шириной более
одной октавы и тональные, в спектре которых имеются слыши-
мые дискретные тона с превышением над соседними третьок-
тавными полосами на 10 дБ.
По временным характеристикам шумы делятся на постоян-
ные, уровень звука которых за восьмичасовой рабочий день из-
меняется во времени не более чем на 5 дБ, и непостоянные, уро-
вень звука которых за восьмичасовой рабочий день изменяется
во времени не менее чем на 5 дБ. Последние делятся на колеб-
лющиеся во времени, прерывистые с длительностью интервалов
170
постоянного уровня 1 с и более, импульсные, состоящие из зву-
ковых сигналов длительностью менее 1 с. Уровни звукового дав-
ления (в дБ)
Q3a==201g-Jb- ,
Чп; зв
где Qck. зв — среднее квадратическое значение звукового давле-
ния, Па; Qn. зв = 2-10-5 — пороговое значение среднего квад-
ратического звукового давления, Па.
Допустимые уровни звукового давления в октавных числах
частот f 63; 125; 250; 500; 1000; 2000; 4000; 8000 Гц и эквива-
лентные уровни звука (характеристика А) на рабочих местах
для широкополосного шума принимаются 40 ... 100 дБ [50 . ..
... 85 дБ (характеристика А)], тонального и импульсного шума
на 5 дБ меньше.
Средства уменьшения шума. Средства снижения шума по
принципу действия делятся на следующие:
а) уменьшение шума машин в источнике, применение техно-
логических процессов с уменьшенным шумом;
б) строительно-акустические мероприятия;
в) дистанционное управление шумными машинами;
г) индивидуальная защита (по ГОСТ 12.4.051—78) на уров-
нях шума более 85 дБ.
Запрещается даже кратковременное пребывание в зонах с
октавными уровнями звукового давления свыше 135 дБ в любой
октавной полосе. Использование различного рода средств ослаб-
ления промышленных вибраций приводит одновременно и к сни-
жению уровня шума. Следует учитывать, однако, что амплитуда
перемещений при вибрации не дает объективной характеристи-
ки интенсивности шума. При вибрациях больших поверхностей
возникающее в окружающей среде звуковое давление Q3B про-
порционально скорости вибрации
® Qsb/^Q’
где zq — удельное акустическое сопротивление. Уровень интен-
сивности шума рш и скорость колебаний связаны между собой
соотношением рш — 20 lg(Q3B/Qn. зв) = 20 lg(o/fo), где v — эф-
фективное значение скорости колебаний; Qn. зв — звуковое дав-
ление на пороге слышимости; ц0—скорость колебаний на по-
роге слышимости, для воздуха v0 — 50 мкм/с.
С увеличением площади излучающей поверхности уровень
шума от вибрации повышается.
При вибрациях пластин, стержней и других деталей наибо-
лее интенсивно колеблются незакрепленные края. Иногда ока-
зывается достаточным установить небольшие резиновые зажимы
на пучности и по краям детали, чтобы резко уменьшить ее зву-
чание и вибрации. Шум при работе шестерен можно ослабить,
прижав к боковой поверхности шестерни резиновые или войлоч-
171
ные прокладки. Значительного снижения шума добиваются за-
меной металлических деталей на шестерни, изготовленные из
пластмассы. Длительно звучащие при ударах детали (металли-
ческие стержни, пластины) желательно выполнять резъемными,
устанавливая в плоскости разъема демпфирующие прокладки.
Того же эффекта можно достичь, изготовляя детали с воздуш-
ными полостями при последующем заполнении их резиной или
пластиками.
При движении воды или воздуха в трубопроводах также воз-
никают шумы вследствие гидравлических ударов, завихрений,
вибраций насосов и агрегатов, соединенных с трубопроводами.
Снижение таких шумов достигается путем исключения резких
изгибов труб и резких изменений их сечения. Изоляция от «кор-
пусных» шумов производится с помощью разрывов в отдельных
участках сети и установки в места разрывов резиновых муфт и
шлангов.
Индивидуальная защита от шума. Для индивидуальной за-
щиты от шума применяются заглушки, наушники, экраны. Ко-
нусная заглушка из ультратонкой стекловаты диаметром 15 и
7 мм, длиной 30 мм обеспечивает ослабление шума в 1,5 раза
при f = 250 Гц и до 8 раз при f = 10 000 Гц. Ослабление цу. у
шума ультразвуковых установок обеспечивается экраном:
Чу. > = f - 0 +
-нДд/1 +(т?)"_ ’)]'
где Хзв — длина звуковой волны; г — расстояние от источника
шума до экрана; /эк— расстояние от экрана до работающего;
Аэк — размер стороны экрана.
Измерение и анализ шума. Измерение шума на ра-
бочих местах проводят в производственных помещениях по
ГОСТ 20445—75 и методике измерения шумовых характеристик
машин по ГОСТ 8.055—73.
Для оценки шумовых характеристик машин установлены
три метода:
1) свободного звукового поля, позволяющий определять все
шумовые характеристики машины и применяемый в заглушен-
ных камерах, в помещениях с большим звукопоглощением или
на открытом пространстве;
2) отраженного звукового поля, применяемый в ревербера-
ционных камерах или в гулких помещениях, позволяющий опре-
делять все шумовые характеристики, кроме направленности;
3) образцового источника шума с измерением на расстоянии
1 м от контура машины.
Метрологическое обеспечение акустических имерений осуще-
ствляется в соответствии с ГОСТ 21483—76, ГОСТ 17169—71
и др.
172
Аппаратура для измерения шума состоит из шумомеров,
имеющих на входе микрофоны, и октавных фильтров.
Шумомеры общего назначения выпускаются по
ГОСТ 17187—71, в котором установлены два класса точности.
Частотный диапазон шумомера первого класса должен быть
20 ... 12 500 Гц, частотный диапазон шумомера второго клас-
са —31,5 ... 8000 Гц.
Шумомер первого класса должен иметь частотные характе-
ристики А, В, Си Лин. Допускается дополнительное применение
частотной характеристики D. Эти характеристики определяют
зависимость показаний шумомера от частоты, измеренной на
чистых тонах и приведенной к нулевому уровню на частоте
1000 Гц. Характеристика направленности шумомера должна
быть круговой с допустимыми отклонениями от главной оси
±90° в диапазоне частот 500 ... 12500 Гц и ±30° в диапазоне
частот 2000 ... 8000 Гц. Характеристика направленности шумо-
мера— зависимость показаний шумомера от угла ориентации
микрофона относительно направления прихода звуковой волны.
Главная ось микрофона (шумомера) совпадает с его осью сим-
метрии или с направлением максимальной чувствительности.
Нижний предел динамического диапазона шумомера не более
30 дБ (А), с учетом коррекции по характеристике А. Уровень
собственных шумов должен быть не менее чем на 5 дБ ниже
нижнего предела динамического диапазона. Нормируется также
эквивалентный уровень звука в дБ (А), (В), (С), (Д) при воз-
действии на шумомер определенной вибрации, переменного маг-
нитного поля или ветра, если при этом акустическими помехами,
действующими на микрофон, можно пренебречь.
Шумомеры состоят из измерительного микрофона
(ГОСТ 13761—73), усилителя и показывающего прибора. Метро-
логическое обеспечение шумомеров выполняется по
ГОСТ 17188—71. Для измерения шума трансформаторов и дру-
гих объектов электромагнитного излучения рекомендуется при-
менять конденсаторные микрофоны, менее чувствительные к
электромагнитным полям. Для контроля шума широко приме-
няется шумомер Ш-71, ИШВ-1, ШМ-1, PSI-202 RFT (ГДР),
фирмы «Брюль и Къер» (Дания).
Шумомер Ш-71 — прибор 2-го класса точности общего при-
менения— предназначен для измерения эффективных значений
уровней акустических шумов (звуков). Принцип его работы
основан на преобразовании воздействия звуковой волны на
мембрану микрофона [76] в переменное напряжение на выходе
микрофона, пропорциональное звуковому давлению.
Технические данные шумомера Ш-71 следующие:
Пределы измеряемых уровней шума, дБ ...30 ... 130
Шаг изменения пределов измерения,дБ ...10
Цена деления стрелочного указателя,
ДБ................................. 1
Основная погрешность прибора, дБ . ±2,0
173
Электродинамический микрофон шумомера не должен рас-
полагаться ближе 2 м от источника магнитных полей (генера-
торы, индукционные печи и др.), а конденсаторный — на том же
расстоянии от источника электростатических полей. Микрофон
шумомера должен быть направлен в сторону источника шума
и удален от человека на 0,5 м. При гы > 1 м/с измерение шума
производят с противоветровым приспособлением. Уровень шума
определяется в трех точках помещения на уровне уха работаю-
щего. Уровни шума для каждого источника
- Sp - 20 Igr. - т] дгг 1СТ3 - 8 + ПН;
для нескольких источников
^3= 101g £ 10ОДЧ
где Sa и St — октавный уровень звукового давления; SP —
октавный уровень звуковой мощности источника; г, — кратчай-
шее расстояние до центра источника шума, м; ПН — показатель
направленности излучения; т)д — затухание звука в атмосфере;
Лд = 0 при f = 63 Гц, т)д = 48 дБ/км
при f = 8000 Гц.
Для производственных помещений
с большим количеством шумного обо-
рудования
S3-Sp +10 lg (1 +-1у),
где «пр ==0,12 (для цехов с малым
коэффициентом поглощения) —при-
веденный коэффициент звукопоглоще-
ния; F—минимальная технологически
необходимая площадь.
ализа шума применяется сцептрон или
волоконный анализатор. Он представляет собой набор воло-
конных световодов — стерженьков 2 (рис. 65) диаметром 0,1 мм
и меньше, каждый из которых настроен изменением длины вы-
лета из корпуса на определенную резонансную частоту. Корпус
присоединяется к электромеханическому преобразователю 5, в
качестве которого используется биморфная пьезоэлектрическая
пластинка, а также якорь, приводимый в движение подвижной
катушкой электродинамической системы возбуждения. Таким
образом, сигнал, полученный со звукоприемника (микрофон) и
усиленный усилителем 6, поступает на электромеханический пре-
образователь 5 и колеблет основание корпуса, где крепятся во-
локна. С другой стороны, источник света 1 посылает параллель-
ный пучок на входные концы световодов. На выходе световодов
в плоскости изображения возникает матрица из светящихся
Рис. 65. Схема сцептрона
Для спектрального
174
точек. Для удобства все световоды заслоняются точечной
маской (заслонкой) 3, чтобы в неподвижном положении свет
не проходил. Маску получают так: при пропускании света
через световоды поле сцептрона фотографируется и темные
пятна негатива располагаются против светлых точек свето-
водов. Следовательно, после установки заслонки поле сцеп-
трона остается темным, пока волокна не пришли в движе-
ние. Как только какое-нибудь волокно благодаря поданному
сигналу заколебалось, луч света минует заслонку и светящаяся
точка становится видимой для фотоприемника 4. При значи-
тельных амплитудах светлый блик вытягивается в линию. Кро-
ме спептронов на пропускание света, возможны конструкции на
отражение света от концов металлических стерженьков с накле-
енными стеклянными кружками.
Нормальный уровень шума. Нормальный уровень шума
должен быть по возможности низким, в принципе ниже порога
слышимости. Однако обеспечение такого уровня практически не-
возможно, если учесть весьма высокую чувствительность уха к
шуму и очень большое число его источников. Даже в специаль-
ных комнатах «тишины», имеющих особо эффективную звуко-
изоляцию, стены которых покрыты щитами и торцевыми сегмен-
тами из стекловаты, уровень шума за счет колебаний почвы и
здания достигает 18 ... 22 дБ. Однако постоянно работать в та-
ких комнатах трудно, да в этом и нет особой необходимости. Эф-
фективные шумоглушители обеспечивают демпфирование шума
в 30 раз, но постоянная работа с применением шумоглушителей
ведет к повышенной утомляемости. В то же время для обычных
монотонных работ в течение 8 ч достаточно, чтобы уровень шума
не превышал 80 ... 90 дБ (А). Этот уровень в качестве нор-
мального установлен в ГОСТ 8.050—73 для работ средней точно-
сти, а в стандарте США для монотонных непрерывных работ.
Такой уровень легко осуществим в любых лабораториях и даже
в тех производственных помещениях, где нет сильно шумящего
оборудования. Если при особо точных измерениях требуется по-
вышенное внимание исполнителя, нормальный уровень шума сле-
дует снизить до 45 ... 55 дБ. Такой уровень по ГОСТ 8.050—73
установлен для линейных измерений изделий квалитетов 2 ... 4
и менее, а также для угловых измерений при степени точности 2
и выше.
31. ГИГИЕНИЧЕСКАЯ ОЦЕНКА
МАГНИТНЫХ
И ЭЛЕКТРИЧЕСКИХ ПОЛЕЙ
Постоянному действию магнитных полей в машиностроении
подвергаются контролеры производства постоянных магнитов,
контролеры на магнитной дефектоскопии, шлифовщики, терми-
сты. У шлифовщиков на уровне головы, груди и живота напря-
женность магнитного поля 40 .., 120 А/м, на уровне рук — до
175
40 000 А/м [16]. Напряженность магнитного поля в производ-
стве магнитов достигает 72 000 А/м. У работников водородных
станций напряженность на уровне головы, груди и живота
480 . .. 800 А/м. Наиболее значительная напряженность магнит-
ных полей имеет место в специальных лабораториях для изуче-
ния ядерно-магнитного и электронно-парамагнитного резонанса,
где по данным [16] у кисти рук операторов она достигает
80 000 ... 20 000 А/м, а на уровне головы, груди и живота —
4000 ... 20 000 А/м. Данные медицинских обследований пока-
зывают, что постоянное действие магнитных полей с уровнем
более 24 000 А/м приводит к некоторым профессиональным за-
болеваниям сосудистого характера, изменению РОЭ крови. Дей-
ствие повышенных магнитных полей отражается на быстроте
реакции человека на внешние раздражители. Вместе с тем, орга-
низм больше реагирует на изменение напряженности магнитного
поля, чем на ее повышенное значение, поскольку он обладает
большой способностью к адаптации.
Пределы допустимых электромагнитных полей ВЧ. Предель-
но допустимые значения напряженности и плотности потока энер-
гии электромагнитных полей радиочастот (ГОСТ 12.1.006—76):
по электрической составляющей (В/м) не более 50 — для ча-
стот 60 кГц ... 3 МГц; не более 20 — для частот 3 ... 30 МГц;
не более 10 — для частот 30 ... 50 МГц; не более 5 — для ча-
стот 50 ... 300 МГц;
по магнитной составляющей не более 5 — для частот
60 кГц ... 1,5 МГц; не более 0,3 — для частот 30 ... 50 МГц.
Предельно допустимая плотность потока энергии в диапазоне
частот 300 МГц ... 300 ГГц с пребыванием в течение рабочего
дня не более 0,1 Вт/м2.
Для защиты персонала рекомендуется использовать следую-
щие способы и средства: уменьшение напряженности и плотно-
сти потока энергии посредством использования согласованных
нагрузок и поглотителей мощности; экранирование рабочего ме-
ста; удаление рабочего пространства от источника излучения и
рациональное размещение оборудования.
Нейтрализаторы статического электричества. В ряде отрас-
лей промышленности процессы переработки различных мате-
риалов сопровождаются электризацией — возникновением на их
поверхностях значительных зарядов статического электричества
вследствие трения материала о детали оборудования. Наиболее
эффективным средством борьбы с зарядами статического элек-
тричества являются радиоизотопные нейтрализаторы. Действие
нейтрализатора основано на способности а-частиц, испускаемых
радиоактивным изотопом, ионизировать, т. е. делать токопрово-
дящим воздух, через который они проходят. В зависимости от
знака зарядов на поверхности материала электрическое поле
этих зарядов будет перемещать ионы противоположного знака
к поверхности и нейтрализовать ее заряды. Одноименные ионы
176
будут перемещаться в противоположном направлении к зазем-
ленным частям нейтрализатора. Мощность экспозиционной дозы
тормозного и у-излучения не превышает на поверхности
2,58-10~6 Кл/(кг-ч), а на расстоянии 1 м — 0,78-10'7 Кл/(кг-ч).
Нормальная работоспособность приборов обеспечивается при
температуре окружающей среды —30 ... +60°C и относитель-
ной влажности до 98% при 30 °C. Постоянные рабочие места
должны быть удалены от нейтрализаторов на расстояние не ме-
нее 1 м или так, чтобы суммарная мощность дозы не превыша-
ла нбрм, указанных в Санитарных правилах № 879—71.
Допускаемая доза облучения человека в год 0,05 Дж/кг. До-
пускаемая экспозиционная доза рентгеновского излучения
2,06-1(Н° А/кг. Для контроля интенсивности излучений вы-
пускаются различные дозиметры: клинические, защитные
и т. п.
Для контроля содержания паров ртути в воздухе разработан
прибор модели «Меркурий-03».
Номенклатура нормируемых гигиенических, антропометриче-
ских, физиологических, психофизиологических и психологиче-
ских показателей установлена ГОСТ 16456—70 «Качество про-
дукции. Эргономические показатели».
Гигиенические показатели качества средств измерений ха-
рактеризуют нагрев при эксплуатации, шум, выделение токсич-
ных веществ, радиации, а также влияние их непосредственно
при контакте или опосредованно через изменение характеристик
среды на организм человека и его работоспособность. К числу
таких показателей относятся также вентилируемость в замкну-
том объеме, гравитационные перегрузки и ускорения.
Антропометрические показатели характеризуют приборы,
станки, другие устройства в отношении удобства рабочей позы,
оптимального захвата руками рукояток управления, соответ-
ствия размеров, формы, распределения массы возможностям
человека.
Физиологические и психофизиологические показатели влияют
на объем и скорость рабочих движений человека, на объем зри-
тельной информации с учетом размеров, формы, яркости, цвета
и пространственного положения объекта наблюдения при изме-
рениях, на объем слуховой и другой информации. Таким обра-
зом, физиологические и психофизиологические показатели ха-
рактеризуют средства отображения информации и органы уп-
равления на соответствие силовым, скоростным, энергетическим,
зрительным и другим возможностям человека.
Психологические показатели характеризуют средства изме-
рений в части использования закрепленных и вновь формируе-
мых навыков.
177
Глава VII
РАБОЧЕЕ ПРОСТРАНСТВО
И ПОМЕЩЕНИЕ
32. РАБОЧЕЕ ПРОСТРАНСТВО
И МЕТОДЫ КОНТРОЛЯ ЕГО СОСТОЯНИЯ
Размеры рабочего пространства опреде-
ляются при разработке средств и методов
измерений. Рабочее пространство у высо-
коточных приборов выделяется теплоизоля-
ционными накладками, щитами, фильтра-
ми, светозащитными кожухами, виброизо-
лирующими опорами и другими ограничи-
тельными устройствами. Если рабочее
пространство специально не выделено, то
нормальные условия обеспечиваются во
всем помещении за исключением зон, при-
легающих к стенам, окнам, полу и потолку.
При большой мощности, рассеиваемой аппа-
ратурой и ее элементами со значительным
повышением температуры воздуха вблизи
них, за температуру окружающей среды,
согласно п. 3 Публикации МЭК 68-1, при-
нимается средняя температура среды, из-
меряемая на расстоянии, равном половине
расстояния от аппаратуры или ее элемен-
тов до стенки камеры или помещения, или
на расстоянии 1 м в зависимости от того,
какое расстояние меньше.
Минимальные размеры рабочего прост-
ранства при известной топограмме парци-
альных переходных функций пар-
циальных функций влияния %i(£v), полу-
ченных методом локального воздействия
влияющего фактора (см. гл. II) на участки
поверхности средства и объекта измерения,
можно определить по выражениям:
Z ^max // (?г)
Ла/= £^maxi0(^)
i
Z Zi/ (5r) J
,|<'= Z i.(M >y'
173
Возможно и применение вероятностных способов суммирования,
причем в суммы по i входят только те участки, для которых
Атах ij 1
Лло =-----г----гДе sup «тах и — наибольшее значение
sup «max il d
максимума парциальной переходной функции 4-го участка по-
верхности j. За hio^v) или Xio(lv) принимается соответствую-
щая парциальная функция от воздействия на участки измеряе-
мой поверхности или ближайшей поверхности средства измере-
ния, параллельной линии (плоскости) измерения и входящей
в расчетную размерную цепь измерительной системы. Поверх-
ности и участки, для которых ЦЛ/, меньше 1/3, могут
находиться вне рабочего пространства. Необходимость конст-
руктивного выделения рассчитанного рабочего пространства оце-
нивается в зависимости от значений параметров существенно
влияющих факторов в помещении. Дополнительное изолирую-
щее ограждение для поверхностей средства и объекта измере-
ния, находящихся вне рабочего пространства, требуется, если
отклонение влияющего фактора на этих поверхностях А У ,- зна-
чительно больше соответствующего нормального предела АУН
в рабочем пространстве, т. е. АУу/АУн > 3.
Контроль случайного влияющего поля в рабочем простран-
стве. Основным вопросом контроля реального нестационарного,
неоднородного влияющего поля со случайной составляющей яв-
ляется выбор необходимого числа и правильное размещение из-
мерительных преобразователей соответствующей влияющей ве-
личины для получения достаточно полной информации.
Если случайное влияющее поле можно аппроксимировать
некоторым полиномом
п
V (х, 0 = £ Кх (т) фа (х),
а
то результат его действия ss на измерительную систему по
принципу суперпозиции в отображении Лапласа можно предста-
вить в виде
S’ss = ss = р Z (х, f>) SS £ Уа (т) фа (х),
i а
где р— аргумент отображения; х—координаты пространства;
т — время; hi(x)-hi(p) = hi(x, р)—отображение парциальной
переходной функции; фа(х)—базисные детерминированные
функции; Уа(т) —случайные функции времени.
В работе [9] сформулированы следующие принципы разме-
щения датчиков (измерительных преобразователей влияющих
величин).
1. Минимальное количество датчиков равно числу членов
ряда, необходимых для аппроксимации исследуемого поля.
В одномерной системе длиной I с ортогональными на отрезке
179
(0,1) базисными функциями фа(х) количество датчиков опреде-
ляется из неравенства
/2 > (64)
где %хп — масштаб неоднородности контролируемого поля, опре-
деляемый по базе тп автокорреляционной функции, сзп > 1 —
коэффициент запаса.
Требование (64) относится к случаю, когда поле стохастиче-
ски неоднородно. Если же поле V(x,t)—однородное и эргоди-
ческое по координате, то достаточно разместить датчики на
отрезке, равном нескольким масштабам корреляции. Число п
членов ряда влияющего поля определяется из условия аппрокси-
мации поля на данном отрезке.
2. Определители уравнения
t ala{Va(t)> = (V(xhi)}, /=1,2,..., га, (65а)
а-1
и уравнения вида
п п п
Г Z X • • biki...a(Jv... <ка(/) 1/рИа") ...)=
= (V(xh t)V(xk, t')V(xh t")...) (65)
для моментных функций любого порядка должны быть отличны
от нуля. Здесь ala = tya(Xi) образуют квадратную матрицу А
размерностью n X п. Коэффициенты bjki ...apY = фа(х/) X
X Фи (Xfe)tpY(%z) после надлежащего упорядочения образуют мат-
рицу ВЛ размерностью nN X nN, откуда Bv = A[,V|
Так как определитель N-й кронекеровской степени матри-
цы А размерностью га определяется через определитель этой
матрицы зависимостью detAlJV]= (det A)rajV, то достаточно тре-
бование
det А Ф 0. (66)
Требование (66) исключает грубые ошибки при планирова-
нии эксперимента. Примером такой ошибки является размеще-
ние всех датчиков на нулевой линии, соответствующей одной из
базисных функций.
3. Матрицы уравнений (65а) и (65) должны быть достаточно
хорошо обусловлены. Тогда малые погрешности при измерении
статистических характеристик поля в отдельных точках не бу-
дут приводить к большим ошибкам при реконструкции поля
в целом. Примерами хорошо обусловленных матриц служат
ортогональные и, в частности, диагональные матрицы вида
А = diag(ап, а22, .... а„п).
Требование, чтобы определитель матрицы А был достаточно
далек от нуля, приводит к критерию для расстановки датчиков
| det А | = шах.
180
Однако этот критерий, строго говоря, не имеет смысла. Путем
почленного умножения уравнений на числа, большие единицы,
определитель системы линейных алгебраических уравнений мож-
но сделать сколь угодно большим. Обусловленность системы при
этом не изменится. В теории матриц вводятся числа обусловлен-
ности, инвариантные относительно подобных преобразований.
К таким числам относятся числа Тюринга и Тодда.
Первое число 7<yi (А) обусловленности Тюринга определяется
выражением
Ayi (A) = -^-[A]1[A’1]i,
/ п п \1/2
где [Ajj —( Z Е аИ .
\ц.= 1 v=l /
Второе число обусловленности Тюринга имеет вид
Ау2 (А) =-^-[А]2[А~’]2,
где [А]2 = п max (ngv).
Ц, V
Использование любого из чисел обусловленности приводит
к близким результатам; чем лучше обусловлена матрица А, тем
числа Ау(А) ближе к единице. При помощи этих чисел и фор-
мируются критерии размещения датчиков АУ(А) = min.
4. Первое число обусловленности Тюринга для матрицы В
имеет вид Ау1 (Bw) = (А), т. е. равно А-й степени числа об-
условленности матрицы А. Аналогично для второго числа Тю-
ринга Ау2 (В„) = Ку2 (А). Следовательно, наилучшая обуслов-
ленность матрицы А влечет за собой наилучшую обусловлен-
ность матрицы Bv при всех N = 2, 3 . ..
Верхний предел первого числа обусловленности Тюринга.
Для чисел обусловленности Тюринга и Тодда установлено огра-
ничение только снизу Ay 1. Вместе с тем в приближенных
оценках целесообразно иметь и верхний предел. Для первого
числа обусловленности, выражающегося зависимостью [81],
_ CAO^gfHOlX^CO)^^)^^^) _ А*1*
у1 скз (t2a [S (01 Д® ‘
Разность между двумя оценками погрешности должна быть
малой
Д(') —Д(2)<пА(2),
у у I у ’
откуда 1 Ayi 1 + г]. Однако в нормальных условиях тре-
буется лишь Ау0 — Л® 2т)Дд изм. Следовательно, 1 Ayi 3.
181
Ориентировочная оценка второго числа обусловленности Тю-
ринга. Для ориентировочной оценки обусловленности располо-
жения измерительных преобразователей и компенсаторов мож-
но использовать второе число обусловленности Тюринга
Ку2(Ф) = пМ (ффи(ф;‘),
где М (Ф¥) = sup at/ — наибольший член прямой матрицы ФУ;
М(Ф7*) = 1/infа.ц—приближенная оценка наибольшего члена
обратной матрицы.
В результате принцип ориентировочной оценки обусловлен-
ности расположения преобразователей и компенсаторов в слу-
чайном влияющем поле формулируется как требование мини-
мизации произведения числа этих элементов п на частное от
деления наибольшего члена фиксируемой матрицы параметров
влияющего поля, определенной по множеству реализаций, на
минимальный диагональный член той же матрицы.
Вероятностно-статистическое содержание чисел обусловлен-
ности матриц. Кроме рассмотренных чисел Kyi и Куа Тюринга,
для оценки обусловленности матриц Д. К. Фаддеевым предло-
жено число Ну, равное Ну = д/xi V%n> где %.—наибольшее
собственное значение матрицы АТА; — наименьшее собствен-
ное значение этой матрицы. Здесь индексом т отмечено транспо-
нирование матрицы А. Вероятное содержание числа Ну при
нормальном законе распределения погрешностей коэффициентов
матрицы А соответствует отношению большой и малой осей
эллипсоида рассеивания результатов решения уравнения
b = А • х. (67)
Можно доказать, что для диагональных матриц //х = Ку2/«.
Так как первое число обусловленности Тюринга КУ1 характери-
зует соотношение между СКЗ погрешности решения Ах и СКЗ
погрешности АА коэффициентов матрицы А в уравнении (67),то
СКЗ Ах _ „ СКЗ АА
СКЗ х СКЗ А '
Среднее квадратическое значение по способу оценки соответ-
ствует второму начальному моменту а2, т. е. СКЗ='\/а2. Как
известно [77], второй начальный момент, а следовательно, и
СКЗ выражаются через оценку CKO — s и первый начальный
момент ai
а2= ai + s2-
Если для квадратной матрицы обозначить dXk/дац = —akiXj, то
dxk = — ^UkiXj dals
и математическое ожидание
МО dxk = — Sa^x/ЛЮ (rfai;).
При МО (datj) — О, МО dxk = «1=0.
182
Для статистической экстраполяции расчетных данных на не-
которую генеральную совокупность необходимо найти довери-
тельные границы соответствующей дисперсии о2 или СКО =
— о по оценке СКЗ = s, вычисленной из выборки п членов мат-
рицы А. Доверительные границы а2 определяются [77] по при-
нятой доверительной вероятности Р из уравнения
Р Is2 Л- < °2 < S2 -Й-1 = Р2 - Pl,
I Xft Хр, )
где = п — число степеней свободы; Р\ и Р2— доверительные
вероятности; Хр/ — табличные значения критерия х2 при
соответствующих значениях Р и
Если принять Р1 = 2,5%, Р2 = 97,5% и fH = 3 для диаго-
нальной матрицы третьего ранга, то из [95] находим
Х22,5(зЛ-1 = 0,0720; 4,5 (з)^'= 3,1160,
откуда получаем
Р {0,32s2 < а2 < 13,9s2}- = 95 %.
Это означает, что с доверительной вероятностью 95% значение
СКО = а находится в интервале 0,57s ОС 3,74 s. Столь ши-
рокий интервал прежде всего указывает на недостаточную пред-
ставительность полученной оценки СКЗ. В случае же закона
Гука с квазидиагональной матрицей = 9 и х2,5 (э4= 0,3000;
Х9750/Й* = 2’1137- Соответственно пределы СКО = а равны
0,69 s о sC 1,82 s. Таким образом, использование квазидиаго-
нальной матрицы в статистическом отношении дает более на-
дежный результат. Практический интерес представляют оценки
наибольшего отклонения Дхтах от среднего значения. При нор-
мальном законе распределения с доверительной вероятностью
0,997 Дхтах = За, а при подстановке верхнего предела а = 1,82 s
ОКОНЧатеЛЬНО ПОЛуЧИМ ДХтах = 3-1,82 s ~ 6 s.
33. ВОЗДУХ РАБОЧЕЙ ЗОНЫ
И ОБОРУДОВАНИЕ ПОМЕЩЕНИЯ
Помещения общего типа. Оптимальные нормы температуры
Д. оп, относительной влажности <ряоп и скорости vB. оп движения
воздуха в рабочей зоне производственных помещений указаны
в ГОСТ 12.1.005—76. Для легких работ /т.оп(1)=20 ... 25 °C,
для средних — /т. оп(Па) =18 ... 23 °C, К. оп (Пб) = 17 ... 22 °C,
Фяоп = 40 ... 60%; vB. оп 0,2 ... 0,4 м/с. К легким работам I
относятся работы, выполняемые с энергозатратами до 150ккал/ч
(172 Дж/с), к средним работам Па относятся работы с энерго-
затратами от 150 до 200 ккал/ч (172 ... 232 Дж/с), выполняе-
мые стоя или сидя без переноса тяжести. К работам Пб отно-
сятся работы, связанные с ходьбой и переносом небольших (до
10 кг) тяжестей.
183
Содержание вредных веществ в воздухе рабочей зоны не
должно превышать установленных ГОСТ 12.1.005—76 предельно
допустимых концентраций (ПДК). При одновременном содер-
жании в воздухе рабочей зоны нескольких вредных веществ
однонаправленного действия сумма отношений фактических кон-
центраций каждого из них (С] .. . Сп) в воздухе помещений
к их ПДК не должна превышать единицы:
С./ПДКх + С^ПДКг + ... + СП!ПДКП < 1.
В строительных нормах и правилах (см. СНиПП-ЗЗ—75 и
СН-НИИ—68) регламентируются общие нормы проектирования
отопления, вентиляции и кондиционирования воздуха в помеще-
ниях различных назначений *.
В приложениях к СНиПП-ЗЗ—75 приведены рекомендации
по определению потерь теплоты зданиями, сооружениями и по-
мещениями; по определению количества воздуха, подаваемого
в помещения для обеспечения требуемых условий; по определе-
нию количества теплоты, поступающей в помещения за счет
солнечной радиации. Фундаменты под оборудование, насосы и
компрессоры размещаются в подвале, причем фундаменты
должны быть отделены осадочными швами от несущих конст-
рукций здания. Примыкающие к машинам трубопроводы сле-
дует крепить к конструкциям здания «гибкими» вставками.
Заземление. Для целей измерений в отдельных помещениях
должно быть заземление с сопротивлением растеканию 2 . ..
... 3 Ом. Такое сопротивление обеспечивает проведение особо
точных измерений. Для других аппаратов допускается увеличи-
вать сопротивление растеканию заземления до 10 Ом. Очаг
технологического заземления должен быть удален от защитного
заземления на расстояние не менее 15 ... 20 м. Экранирование
помещений от внешних наводок высокочастотных полей для ра-
боты с точными приборами рекомендуется выполнять листовой
сталью толщиной 1,5 ... 2 мм, которая дает эффективность
82 ... 95 дБ в диапазоне мешающих частот 0,15 ... 15 МГц,
или при пониженных требованиях к экранизации стальной сет-
кой с диаметром прутка 1 мм и шагом 2 мм (эффективность 74 ...
...87 дБ). Экранировка помещений может выполняться также
путем металлизации поверхностей расплавленным металлом
(алЪминий, цинк, медь) с помощью распылительных электроду-
говых или газопламенных аппаратов. При толщине покрытия
0,2 ... 0,3 мм достигается эффективность 90 ... 120 дБ на СВЧ.
В экранированных помещениях в целях уменьшения количе-
ства цепей в фильтрах рекомендуется осветительные приборы
и силовые токоприемники питать от одного ввода. Для заземле-
ния экрана используется сеть защитного заземления корпуса.
* Эти нормы не распространяются на проектирование уникальных и спе-
циальных сооружений, к которым могут относиться помещения для эталон-
ных средств измерения.
184
Непременным условием выполнения экрана должно быть на-
личие непрерывного электрического контакта по периметру
экранируемого помещения путем соединения листов экрана
внахлестку с приваркой непрерывным швом. При экранирова-
нии луженой сеткой соединение полотен делается также вна-
хлестку 30 ... 50 мм с пропайкой мест соединений. Все трубо-
проводы и металлические короба приточных и вытяжных систем
должны привариваться по периметру в местах их примыкания
к экрану.
Неметаллические трубопроводы должны заключаться в ме-
таллические гильзы (длиной 6 ... 8 внутренних диаметров) с
приваркой последних по периметру к экрану. Крюки для наве-
ски радиаторов также должны привариваться по периметру
к экрану.
Электронные микроскопы с высокой разрешающей способ-
ностью должны размещаться в помещениях площадью 25 ...
... 30 м2 в цокольных и первых этажах, на специальных фунда-
ментах. При этом окна должны зашториваться, но применение
люминесцентных ламп для искусственного освещения недопу-
стимо. Рентгеноструктурные лаборатории размещаются не ниже
второго этажа в одной части корпуса в индивидуальных каби-
нах, площадью не менее 10 м2. Весовые микроаналитические
лаборатории и лаборатории точных линейных и угловых изме-
рений рекомендуется располагать не выше первого этажа с
окнами на север, северо-восток, северо-запад. На окнах должны
быть жалюзи. При этом следует избегать соседства возможных
источников вибрации. Микроаналитические весы рекомендуется
располагать на специальных виброизолирующих столах, под-
ставках, ящиках с песком. Вход в помещение через тамбур
с откатной внутренней дверью.
Теплозвукоизоляция. В качестве теплозвукоизоляционных ис-
пользуются [64] неорганические материалы: вата минеральная,
вата стеклянная из непрерывного волокна, плиты из минераль-
ной ваты, изделия из стеклянного штапельного волокна, пено-
пласты; блоки пеностекла. Для защиты от солнечных лучей на
окнах применяют щиты, жалюзи, занавеси из металлизирован-
ной ткани, алюминиевую фольгу.
В качестве тепло- и звукоизоляции используются плиты и
маты из минеральной ваты на синтетическом связующем, плиты
древесные и из пенопласта полистирольного, маты из штапель-
ного волокна, рулоны стекловолокна. Звукопоглощающие во-
локнистые и ячеистые материалы должны иметь коэффициент
звукопоглощения не менее 0,2 при частотах 125 ... 500 Гц, не
менее 0,4 в диапазоне 500 ... 2000 Гц.
Коэффициент Язв звукового поглощения испытательного по-
мещения на шум оборудования вычисляют по формуле (см.
ГОСТ 12.2.024—7'6)
Яза e Ctc. n^tii
185
где Fv — площадь поглощающей поверхности испытательного
помещения; ас. п — средний коэффициент поглощения звука,
otc. п = 0,05 — в почти пустом помещении с гладкими стенами из
бетона, кирпича со штукатуркой или покрытыми кафелем; ас. п =
= 0,10 — для частично пустого помещения с гладкими стенами;
etc.п = 0,15 — в прямоугольном помещении для машинного обо-
рудования и в прямоугольном промышленном помещении;
ас. п = 0,20 — в помещениях непрямоугольной формы; ас. п =
= 0,25 — в помещениях для машинного оборудования с незна-
чительным количеством звукопоглощающего материала на по-
толке и стенах.
Испытательное помещение (по ГОСТ 12.2.024—76) считается
пригодным для проведения шумовых испытаний трансформато-
ров, если Лзв/Г 1, что соответствует максимально допусти-
мому значению поправочного коэффициента для акустической
среды помещения — 7 дБ. Рабочее пространство для оценки
шума в этом случае выбирается с границами на расстоянии
0,3 м от источника.
34. ЧИСТЫЕ КОМНАТЫ
И УЧАСТКИ ПРЕЦИЗИОННЫХ РАБОТ
Чистые комнаты и кабины. По своему назначению, пара-
метрам, конструкции помещения и рабочие места с контроли-
руемой средой делятся (PC СЭВ 4494—74) на чистые комнаты,
пылезащитные кабины, пылезащитные камеры, скафандры с за-
щитной газовой средой.
В зависимости от класса чистоты * комнаты подразделяются
на четыре типа: 102; 103; 104; 105. Класс чистоты характеризует-
ся числом частиц с размерами 0,5 мкм в объеме 0,03 м3. По дан-
ным [91], в США имеются чистые комнаты класса 10. При про-
ектировании чистых комнат нужно обращать внимание на то,
чтобы не возникали мертвые зоны циркуляции воздуха. Для
получения определенного уровня пыли в чистой комнате перед
ее фильтрационными стенами размещаются предфильтры, про-
изводительность осаждения которых зависит от степени запы-
ленности атмосферного воздуха.
На рис. 66 показан комплекс чистой комнаты, где черно-се-
рое помещение для переодевания уличной одежды в производ-
ственную, а серо-белое — для переодевания производственной
одежды в уличную.
Согласно PC СЭВ 4066—73, оборудование для климатизации
и микроклиматизации должно предусматривать автоматическое
регулирование температуры и влажности и обеспечивать цирку-
ляцию воздуха со скоростью 0,1 ... 0,8 м/с при ламинарных и
* Наиболее высокие требования к чистоте комнаты предъявляются при
производстве и измерении тонких пленок (см. рис. 25).
186
неламинарных потоках. Требования к рабочим местам и конт-
ролю окружающей среды приводятся в стандарте США Fed.
Std 209b—73. По терминологии в области контроля загрязнения
воздуха имеется французский стандарт NFX 43-001—72.
Ленинградским институтом охраны труда разработаны без-
вихревые воздухораспределители, обеспечивающие реализацию
класса чистоты 102 (класс I по ОСТ 11050.001—73 электронной
Рис. 66. Комплекс чистой комнаты
промышленности) с числом частиц пыли в 1 л воздуха не более
4 в зоне площадью 1 X 2 м при высоте их расположения над
Полом 2,4 м. В этих распределителях используются фильтры
с тканью ФПП.
ЦИЛ и поверочные лаборатории. Согласно стандарту ГДР
TGL 31535/01, поверочное помещение, в котором проводятся,
подготавливаются и оцениваются испытания заводских средств
измерений, должно включать измерительное, предварительное
отделения и отделения для обработки результатов измерений.
По соседству с поверочным помещением не должны находиться
какие-либо источники загрязнения, шума или тепла. Минималь-
ное значение демпфирования теплоты для потолка, стен, пола
187
должно быть не менее 15. Для окон пропускаемость теплоты
через щели должна быть менее 2. Если разность температур
в соседних помещениях больше 8 °C, рекомендуется устанавли-
вать двойные двери, минимальное расстояние между которыми
равно 600 мм.
Через измерительное помещение не должны проходить теп-
ло- и водопроводы. Потолок и стены должны иметь светлое,
прочное покрытие. Рекомендуется устанавливать зону измерений
на высоте 0,5 ... 1,5 м от пола при высоте зала 5 м. Важное зна-
чение имеет планировка размещения оборудования. Так, элек-
тронные блоки и осветители
являются источниками тепло-
ты и должны располагаться вне
рабочего пространства высоко-
точных средств измерений. По
возможности их следует раз-
мещать вне измерительных по-
мещений. Электрические и маг-
нитные приборы чувствитель-
ны к ферромагнитным массам
и к соседнему расположению
идентичного прибора.
Участки делительных работ.
Прецизионные делительные ма-
шины устанавливаются в спе-
циальных камерах, в которых
поддерживается температура
20 ±0,01 °C. Для обеспечения
столь жестких требований
разработана специальная си-
двухступенчатой камерой. Для
стема кондиционирования [72] с
поддержания постоянной температуры в окружающем помеще-
нии искусственно изменяют с помощью специальных термоста-
тов температуру так, чтобы тепловая волна, пройдя через стен-
ку, затухла за счет рассеяния теплоты в материале стенки. Прин-
ципиальная схема системы показана на рис. 67.
Температура в диапазоне 20 ±0,01 °C поддерживается в ка-
мере 5. Она ограждена от вспомогательного помещения 6 изоля-
ционной стенкой 2, при прохождении через которую часть теп-
лоты рассеивается. В помещении 6 устанавливаются измери-
тельный преобразователь 8, терморегулятор 9 и электрические
нагреватели 7. По сигналу от преобразователя, настроенного на
температуру 20 °C, включается магнитный пускатель 12, управ-
ляющий работой электрических калориферов (нагревателей).
Путем периодического подключения нагревателей в помеще-
нии 6 поддерживается температура воздуха 20 ±0,1 °C. Поме-
щение 6 от основного участка отделено стенкой 1. Во внешнем
188
помещении 4 точной системой кондиционирования воздуха под-
держивается температура 20 ±0,25 °C. Воздух во внешнее по-
мещение поступает через приточный воздуховод 3, а избыточный
воздух выбрасывается наружу через вытяжной воздуховод 10.
Стенки 1, отделяющие наружное помещение от помещения 6,
рассчитываются на теплопередачу при стационарном режиме.
Частота включения нагревателей и продолжительность их ра-
боты зависят от мощности нагревателей, дифференциала термо-
регулятора и теплопотерь через стенку 1. В схему введен авто-
матический корректор циклов И, позволяющий регулировать
время работы нагревателей. Продолжительность периода 20 ...
... 40 мин. Эта система может работать при отсутствии в поме-
щении источников с изменяющейся температурой.
Термобарокамера. Для выполнения прецизионных измере-
ний на уровне эталонных в ряде случаев целесообразно поддер-
живать в заданных пределах основной интегральный показатель
условий работы. К таким характеристикам относятся показатель
преломления нормального воздуха (см. п. 14) при интерферен-
ционных линейных измерениях, плотность нормального воздуха
при измерениях массы и т. п. Отклонения показателя преломле-
ния и плотности воздуха от нормального значения можно ком-
пенсировать регулированием температуры, давления, влажности
как раздельно, так и комбинационно. Вместе с тем такой метод
следует использовать достаточно корректно, так как каждая из
составляющих по-разному влияет на отдельные компоненты из-
мерительной системы (см. гл. III и VIII).
35. МЕТОДИКА АНАЛИЗА
НОРМАЛЬНЫХ УСЛОВИЙ ИЗМЕРЕНИЙ
Продолжительность контроля влияющих величин дифферен-
цируется при анализе и эксплуатации помещений в зависимости
от степени стабильности в них условий. При стабилизированных
и статистически стабильных условиях анализ проводится в мень-
шие сроки при большей периодичности, чем в статистически не-
стабильных условиях. Это и понятно, так как для обеспечения
стабилизированных условий применяют специальное регулирую-
щее или изолирующее оборудование (кондиционеры и пр.). Ста-
тистически стабильные условия характерны для подвальных или
внутренних помещений лабораторий, а также могут быть созда-
ны в рабочем пространстве с помощью защитных кожухов, экра-
нов, щитов. Статистически нестабильные условия характерны
для некондиционированных помещений лабораторий и цехов.
С учетом ужесточенных требований к допускаемым границам
изменений контролируемых величин по методу ускоренных ис-
пытаний (см. стр. 39) возможна десятикратная экстраполяция
данных анализа, что для стабилизированных условий соответ-
ствует 1 X Ю — Ю неделям (сезон) и позволяет многие влияю-
189
шие факторы проверять с посезонной периодичностью, учитывая
одновременно и систематические расхождения климатических
факторов по сезонам.
При эксплуатации постоянно рекомендуется контролировать
только отклонения и разности температуры в рабочем прост-
ранстве, а также отклонение относительной влажности. Повтор-
но освещенность, шум, напряженность магнитного и электриче-
ского полей проверяются только при появлении дополнительных
источников этих факторов.
Временные интервалы контроля выбирают в соответствии с
теоремой В. А. Котельникова для стационарных процессов (см.
стр. 39): минимальные интервалы контроля температуры при
анализе 2—30 мин, отклонений атмосферного давления и влаж-
ности — 2 ч, скорости движения воздуха — один раз в течение
рабочего дня в стабилизированных, три раза в статистически
стабильных и пять раз в нестабильных условиях.
Анализ на соответствие условий измерений унифицирован-
ным или расширенным нормальным по ГОСТ 8.050—73 и
МИ 88—76 выполняется по схеме 2, где предусмотрены различ-
ные исходные данные, характерные для измерений и поверки.
При рабочих измерениях могут задаваться: 1).номинал из-
меряемого размера L и допуск АОб (класс, квалитет); 2) номи-
нал L и предел допускаемой погрешности измерения Ад. ИзИ;
3) номинал L и предел допускаемой основной погрешности
Ад. осн средства измерений. В первом случае номер ряда или
квалитета, которому должны соответствовать нормальные усло-
вия измерений, находится непосредственно по таблицам
ГОСТ 8.050—73. Во втором и третьем случаях необходимо пред-
варительно найти эквивалентный допуск Аоб э=Дд А'б э=
=АД> дси/Пор где т|( И т)о/ приведены в МИ 88—76. При оцен-
ке А'б э в случае необходимости учитывают и основную погреш-
ность установочных мер.
При поверочных работах могут задаваться: 1) диапазон из-
мерения L и предел допускаемой основной погрешности Ад. Осн
или 2) только Ад, осн. В последнем случае размер образцовых мер
рекомендуется выбирать в диапазоне измерения поверяемого
прибора, чтобы ему соответствовало большее значение бин по
стандарту.
Для анализа на соответствие расширенным нормальным
условиям следует аттестовать размеры LaTT объектов измерения
с тем, чтобы определить действительное значение инструмен-
тальной (аппаратурной) погрешности их измерения или выхода
этой погрешности за предел допускаемой основной погрешности
средства измерения.
Для аттестации рекомендуется выбирать объекты ОИ и сред-
ства СИ измерения, соответствующие наименьшему значению
бин и имеющие наибольшее отклонение ТКЛР от приведенного
190
Схема 2. Анализ условий линейных измерений
Обозначения: СИ —средства измерений; ОИ— измеряемый объект; ОВВ—ос*
новные влияющие величины; СКОВВ—средства контроля основных влияющих величин;
РНУИ — расширенные нормальные условия измерений; УНУИ—унифицированные нормаль*
ные условия измерений; РУИ —рабочие условия измерений; T)^—v4 ; Ап-поправка.
191
ТКЛР средства измерений, а также наиболее неблагоприятную
конструкцию с точки зрения виброустойчивости и теплопере-
дачи. Аттестацию обычно выполняют арбитражными средства-
ми измерений либо рабочими средствами измерений в унифи-
цированных нормальных условиях.
Ориентировочную оценку допускаемых пределов расширен-
ной нормальной области значений существенных влияющих ве-
личии можно выполнить расчетными методами ио известным
функциям влияния (соответствующим расчетным зависимостям)
с последующей практической проверкой по пределам значе-
нии бин-
При основной погрешности средства измерений, приравни-
ваемой к пределу допускаемой погрешности бИЗм по
ГОСТ 8.051—73 за вычетом из него соответствующего значения
бин по ГОСТ 8.054)—73 (| Аосн | = |бизм| —бИн; |бИзм| = |Аосн| -|-
+ бин), допускается экспериментально оценивать расширенные
нормальные условия ио результатам арбитражной перепровер-
ки измеряемых в нормальных условиях объектов на соответст-
вие т, п, С.л расчетным стандартизованным параметрам лож-
ного брака т, неправильной приемки п в годные и выхода Си
размера принятых в годные за границу поля допуска.
По результатам проведения анализа на соответствие усло-
вий измерений нормальным в случае положительных результа-
тов целесообразно оформить свидетельство аналогично тому,
как это делается при поверке средств измерений.
36. ВЫБОР НОРМАЛЬНЫХ УСЛОВИЙ
И ОСНОВЫ ОЦЕНКИ ЭФФЕКТИВНОСТИ
ИХ ОБЕСПЕЧЕНИЯ
Рассмотрим примеры нормирования.
Пример 1. Измеряют внутренний размер в диапазоне 80 ...
... 120 мм на горизонтальном длиномере. Предел основной по-
грешности горизонтального длиномера
120
Ад. оек = 2 + -ПУ = 2,86 ~ 2,9 мкм,
отсюда эквивалентный допуск
2 9
Аоб. э = 7гяг= 11,5 мкм ~ 12 мкм.
Этому допуску соответствует бин = 1,1 мкм.
Пример 2. Измеряют диаметр стального вала 0120 А с
ТКЛР ат ~ 10*10-6 К-1 в статических условиях, при которых
для расчета температурной погрешности можно использовать
зависимость Ау = ТАатА/т. В расширенных нормальных усло-
виях А/т.н <. (бин* 10~3)/LAaT. Разность ТКЛР средства и объек-
192
та измерений известна и равна Аат — 4• 10-G К~’. При допу-
ске Лоо = 22 мкм и бин = 2,2 мкм находим
2,2-10
120-4- 10“6
Отметим, что атД/тА = 10-10-6 -4-0,12 < 0,25 ДОб = 0,25-22 X
X Ю-6. Последнее неравенство существенно при термостатиро-
ванной шкале прибора, так как при этом не требуется введения
поправок.
Пример 3. Применяют оптикатор 05П в стойке С1. По разно-
сти показаний оптикатора в вертикальном и горизонтальном
Рис. 68. Граница виброустойчивости Рис. 69. Полигоны погрешности из-
оптикатора мерений
положениях определяют дебаланс его измерительного механиз-
ма, он соответствует перемещению отсчетного индекса на 0,5 де-
ления шкалы. Расчетная граница виброустойчивости такого
оптикатора при размахе колебаний отсчетного индекса 0,2 деле-
ния шкалы показана на рис. 68. Амплитуда скорости вынуждаю-
щих гармонических колебаний, мм/с,
оа = 2л.4;/ИГ'3.
При f X 60 Гц из графика находим Af=6o=lO мкм и иа <
< 2л-10-60-10“3 = 3,75 мм/с, что соответствует приведенной
скорости На. пр = 0а/2л « 0,6 Мм/С.
Примером экспериментальной сравнительной оценки погреш-
ности измерений в различных условиях их выполнения являются
полигоны распределения результатов измерения жестких нутро-
меров длиной 1000 мм, построенные А. Д. Рубиновым. Наибо-
лее близкие к нормальным условия в ЦИЛ (рис. 69, а) и КПП
(рис. 69, б) обеспечили и лучшую стабильность результатов из-
мерений, в то время как в худших условиях цеха (рис. 69, в, а)
диапазон рассеяния результатов и соответственно СКО в пять
7 Зак. 843 193
раз больше. По этим же данным двухсменное включение термо-
регулятора снижает СКО в 1,7 раза, а круглосуточное термоста-
тирование — в 3,7 раза по сравнению с односменным термоста-
тированием.
Оценка эффективности. Хотя практическое обеспечение нор-
мальных условий измерений в ряде случаев требует проведения
определенных организационных (для расширенных нормальных
условий) и даже материально-технических (для унифицирован-
ных нормальных условий) мероприятий, эти усилия полностью
окупаются повышением точности измерений и снижением по-
терь от брака; исключением необоснованных требований к соз-
данию термоконстантных и виброизолированных помещений;
повышением производительности измерений, снижением требо-
ваний к квалификации исполнителей; повышением эффективно-
сти поверочных работ.
Выполнение измерений при нормальных условиях (см. гл. I)
обеспечивает получение статистически стабильных результатов
измерений и поверки.
Ориентировочный расчет сокращения потерь от брака вслед-
ствие повышения точности линейных измерений при обеспечении
нормальных условий можно выполнить по формуле
Эф 0,01Ст [И12 (^2 мет) ^1 (А] мет)] "Ь 0,01Сп [п% (А% Мет) tl[ (Л] Мет)1>
где
мет
Ад. оен ^ин J g2.
2 А об
^2 мет
Ад. осн ~4~ ^доп 1 А2.
2А0б
т и «— вероятный процент брака в годных и годных в браке
соответственно (см. ГОСТ 8.051—73, СТ СЭВ 303—76); Ст —
расходы по доработке и использованию скрытого брака; Сп —
стоимость годного изделия.
Анализ нормальных условий линейных и угловых измерений
в различных организациях и предприятиях станкостроения,энер-
гетического машиностроения, топливной аппаратуры, приборо-
строения, электроники выявил, что для линейных измерений
размеров до 100 мм, соответствующих квалитету 2 и более гру-
бым квалитетам, не требуется специального термостатирования.
При этом допускается разность температур в рабочем простран-
стве до 2°C, отклонение температуры в пределах ±3 ... ±5°C,
влажность в диапазоне 38 ... 78%. В то же время для преци-
зионных измерений размеров '6 . . . 500 мм квалитетов 01 ... 1 и
Точнее практически обеспечиваются унифицированные нормаль-
ные условия с применением соответствующей регулирующей и
измерительной аппаратуры.
194
Г лава
VIII
7*
ОПТИМИЗАЦИЯ
КОНСТРУКТИВНОГО
ОФОРМЛЕНИЯ
СРЕДСТВ ИЗМЕРЕНИЙ
37. ВЫБОР МАТЕРИАЛА
И КОНСТРУКТИВНЫХ ЭЛЕМЕНТОВ
СРЕДСТВ РАЗМЕРНОГО КОНТРОЛЯ
Снижение температурной погрешности
средств линейных измерений осуществляет-
ся следующими, иногда и компромиссными,
методами:
1) компенсационным подбором материа-
ла измерительного устройства с обеспече-
нием минимальной разности ТКЛР сред-
ства и объекта измерения (применение
стальных концевых мер, измерительных
скоб, штангенинструмента, рулеток для из-
мерений стальных изделий; магниевых и
силуминовых скоб и мер—для объектов с
большим ТКЛР);
2) выбором материалов с малым ТКЛР
(применение мер из плавленого кварца с
ТКЛР 0,4-10~6 К-1, деревянных скоб с
ТКЛР 6-10—6 для контроля диаметров и
длины больших размеров);
3) выбором низкотеплопроводных мате-
риалов (базальтовые поверочные и устано-
вочные плиты);
4) применением теплоизоляционных ко-
жухов, накладок, термоизоляцией шкал с
помощью вакуумных оболочек;
5) выделением и отдельным размеще-
нием источников теплоты, в том числе
электронных блоков, двигателей, трансфор-
маторов, стабилизаторов, осветителей и т. п.;
б) эффективным конструктивным оформ-
лением (согласование толщин стенок стоек,
измерительных скоб и др.) и рациональной
схемой измерения (замена прямых измере-
ний диаметров косвенными с использова-
нием приборов — «наездников», установкой
средства активного контроля на шлифоваль-
ной бабке станка и т. д.);
7) обеспечением ускоренного равномер-
ного прогрева всех элементов специальным
195
режимом прогрева, выдержкой при нормальных условиях изме-
рений на массивной металлической плите (см. ГОСТ 8.128—74),
в жидкой ванне с нормальной температурой, равномерным об-
дувом воздухом нормальной температуры.
При выборе материалов для измерительных скоб, стоек, мер
следует учитывать особенности их поведения при переменных
температурных условиях.
Применения деревянных измерительных скоб взамен метал-
лических подтвердили их эффективность при измерениях боль-
ших длин и диаметров вследствие меньшей массы, меньшего
в два-три раза ТКЛР вдоль волокон, меньшего в 100 ... 350 раз
коэффициента теплопроводности поперек волокон. Применяются
хвойные породы, дерева (пихта, ель, сосна), имеющие объемную
массу, в 18 раз меньшую, чем у стали, при равном отношении
допускаемых напряжений растяжения и сжатия к единице мас-
сы. Основной недостаток деревянных измерительных скоб —
влияние влажности воздуха, что устраняется покрытием дере-
вянных инструментов несколькими слоями перхлорвиниловой
эмали.
Стеклянные меры хрупки и имеют повышенный тепловой ги-
стерезис, что требует осторожности при их использовании. По-
сле нагревания на AZT и последующего охлаждения стеклянный
брусок не возвращается к своей первоначальной длине, а прини-
мает длину [7]
L' = L(\ + а,тА/ +Ь, ЛЛ = Л/1 +// Д/
у 1 ГТ т 1 /т Т/ \ 1 Т 1/
Стеклянные линейки нельзя надолго оставлять на двух опо-
рах во избежание устойчивого остаточного изгиба. ТКЛР стекол
разных марок реализуется в диапазоне (4 . .. 11,5) 10_6 К-1.
Отожженное кварцевое стекло отличается отсутствием теп-
лового гистерезиса Ят ~ 0,0. Специфичными свойствами обла-
дают ситаллы. Кристаллический кварц отличается большой ани-
зотропией ТКЛР по разным направлениям от ат = 14,2-10~6 К-1
вдоль оси кристалла до ат = 7,8-10-6 К-1 поперек оси. Под
углом 40°30' к оси ТКЛР кварца соответствует данным стальных
концевых мер с ат = (11,5 ± 1) 10-6 К-1. Следует иметь в виду,
что вследствие анизотропии ТКЛР кварцевые меры и направ-
ляющие при колебаниях температуры скручиваются и изгиба-
ются. Из металлов малым ТКЛР обладает инвар.
Сочетание средств и объектов с различными ТКЛР, а также
применение приборов с термостатированной шкалой требуют
определенной методики, так как хорошая воспроизводимость
установочных размеров прибором не сопровождается компенса-
цией температурного расширения объектов измерения. Следова-
тельно, необходимы введение расчетных поправок или регламен-
тация частоты и порядка использования установочных мер с со-
ответствующим ТКЛР. Для ориентировочного определения
приведенного к линии измерения ТКЛР прибора используются
196
меры с известным ТКЛР при задаваемых стационарных темпе-
ратурных режимах в климатических камерах или термостатиро-
ванных помещениях с регулируемой настройкой уровня темпера-
туры. Простейшей системой такого типа являются ртутные кон-
трольные термометры, подключаемые к блоку реле включения
напряжения питания на масляные нагревательные батареи,
расставленные по помещению. Для лучшего перемешивания
воздуха на батареях закрепляются воздушные вентиляторы.
При линейных измерениях наибольшие погрешности вызы-
ваются динамическими изменениями температуры во времени,
что ведет к изгибу и кручению элементов прибора. Угловое рас-
положение поверхности при изотропных материалах не зависит
от перехода в новое однородное температурное состояние, но
при изменениях температуры происходят искажения углов вслед-
ствие тепловой инерции деформируемых тел. Тепловое расши-
рение аг жидкостей примерно в 15 раз больше, чем у стали.
Высокостабильные базальтовые плиты вследствие низкого
коэффициента теплопроводности чувствительны к действию да-
же таких источников теплоты как люминесцентные. Тем более,
что эти плиты темного цвета.
Влияние температурных деформаций корпуса автоколли-
матора на точность его работы возникает вследствие смеще-
ния Xt коллимационной сетки из фокальной плоскости объек-
тива, что обусловливает непараллельность хода лучей, выхо-
дящих из объектива автоколлиматора (температурный парал-
лакс). Систематическая погрешность определяется по формуле
Дер, = 2x^//'6, где ф — измеряемый угол, при обычном объективе
xt = 2/'бат А/т; /'. — фокусное расстояние объектива; ат— ТКЛР
корпуса автоколлиматора.
Предел случайной составляющей погрешности:
%rxxt
Дф2 = /,/ \2 (^вых. зр 1) При Пвых, Зр -D3p. гл1
\'об)
при Двых. зр < Пэр. гл, где Озр. гл — диаметр зрачка глаза;
Овых. зр — диаметр выходного зрачка автоколлиматора.
Следует иметь в виду, что при рабочих измерениях ТКЛР,
как правило, известны весьма приближенно, даже у разных
сталей значение ТКЛР может находиться в пределах (8 ...
... 16)10~6 К-1, а у сложных измерительных систем приведен-
ные температурные коэффициенты могут быть как положитель-
ными, так и отрицательными. При динамическом воздействии
температуры наблюдаются температурные погрешности пере-
менного значения и знака.
197
Температурные деформации деталей при обработке с приме-
нением средств активного контроля удобно определять по изме-
нению показаний отсчетного устройства после прекращения об-
работки. Рассеяние температурных деформаций деталей при
шлифовании зависит от стабильности условий и режимов шли-
фования, главным образом от постоянства режущей способно-
сти шлифовального круга. Степень влияния температурных и
силовых деформаций узлов станка на точность обработки при
нуль-детекторной и однодетекторной схеме измерения зависит
от характера измерительной размерной цепи [1]. При двухдетек-
торной схеме измерения полностью исключается влияние на
размеры деталей размерного износа режущего инструмента,
температурных и силовых деформаций узлов станка.
Предельная погрешность измерения температурных дефор-
маций методом обкатывания зависит только от дискретности от-
счета и нагрева измерительного диска за время измерения, так
как все остальные погрешности являются систематическими и
взаимно исключаются при двукратных измерениях. Существенно
снижают температурную погрешность от нагревания обкатного
диска выполнением его из инвара. Суперинвар марки 32НКД
имеет ТКЛР, равный (0,2 .. . 0,5) 10“б К-1.
Прецизионные измерительные механизмы обычно выполня-
ются в виде упругих кинематических устройств [79]. Кинема-
тика прецизионного упругого устройства может быть представ-
лена структурной формулой
F (S) о FK (S) + К/ (Q) + 6F, (Q) + 6FK. у,
где F(S) — закон перемещения на выходе упругого механизма;
FK(S) — кинематический закон перемещения в прямой цепи пре-
образования; Fj(Q) н 6F/(Q)—линейная и нелинейная состав-
ляющие внутренней обратной связи по податливости упругой
кинематической цепи; 8FK. у—составляющая закона перемеще-
ния, отражающая зависимость кинематики от условий нагру-
жения механизма.
В нормальных условиях 6FK. V/F(S) i]v. При синтезе схем
измерения пространственных величин и при расчетах их раз-
мерных цепей, согласно ГОСТ 16320—70, для нормальных усло-
вий применения следует ограничивать действие влияющих ве-
личин на замыкающее звено значениями t]v и т].
38. ОЦЕНКА
НОРМАЛЬНОЙ ТЕМПЕРАТУРЫ
ПРИ ИЗМЕРЕНИЯХ ПРИБОРАМИ
С ЭЛЕКТРИЧЕСКИМИ
И ОПТИЧЕСКИМИ ПРЕОБРАЗОВАТЕЛЯМИ
Схемы с электрическими элементами. Средства измерений в
машиностроении кроме механических узлов часто содержат
электрические элементы. В этом случае нормальные пределы
193
±А/Т. н температуры можно ориентировочно оценивать по фор-
муле
О ,
I А<т. Н К бин [М (ат2) 4- б (ат2)] , (68)
где бИн = 1/ЗДИэм — допускаемое в нормальных условиях значе-
ние дополнительной погрешности измерения; Af(aTs) —матема-
тическое ожидание приведенного к линии измерения темпера-
о
турного коэффициента (ПТК); 6(aTs)— предел случайной со-
ставляющей ПТК-
В первом приближении для системы последовательного пре-
образования [74]
ЛШг)= Z АЖМ <69)
О ГпО 0 0 11/2
6(aTS) = ^[E/?S2(<V) + 2 г;/ЛД.б(%г)б(%/)] , (69а)
где At = (dfv/dqi) (qi/jv)—коэффициент преобразования от t-ro
элемента до входа измерительного устройства (линии измерения
в случае линейных измерений); /V—функционал преобразова-
ния; ag<; aqi — температурные коэффициенты элементов i и /;
Гц — коэффициент корреляции параметров qt и q; элементов i
и /; ky — доверительный квантиль закона распределения.
При независимых законах распределения параметров qt и
q, коэффициент корреляции Гц = 0.
Для системы параллельно-последовательного соединения п
элементов при т узлах ведется двойное суммирование по т и п:
т. п
М (alS) = £ £ Л/;Л1 (a9i/);
/ = 1 1 = 1
о ГД Д ° Л 0 ° 11/2
s(«lEWv[S + 2 2 ьЛЛ/(««,)»(%,„)] •
При независимых qt и qt коэффициент корреляции гху = 0.
По известным значениям М (aTs) и 6(aTv) из выражения
(68) при постоянном (и переменном в случае «точечного» прак-
тически безынерционного элемента) тепловом поле определяет-
ся нормальный предел допускаемого отклонения температуры
среды, средства и объекта измерений от /т.я. В стационарных
тепловых полях расчетное значение температуры А/т. н соответ-
ствует нормальному пределу среднеобъемной температуры. При
неоднородном и нестационарном тепловом поле в пространст-
венно распределенной системе расчетное значение А/т. и харак-
теризуется параметрами эквивалентного стационарного темпера-
турного режима.
199
В табл. 7 приведены ориентировочные значения температур-
ных коэффициентов некоторых электрических элементов.
Таблица 7. Ориентировочные значения температурных
коэффициентов
Элемент М(ат). %/°C 0 6 (ат). %/°С
Непроволочные рези- сторы МЛТ Конденсаторы БГМ Конденсаторы КМ-5 Транзисторы герма- ниевые Транзистор П16А (ток, усиление, вход- ное сопротивление) Транзисторы П414, П415 •щ • ю-2 (60 ... 140) ю~2 80 10-2 50- 10~2 (7 ... 12) 10-2 12,5 • 10-2 50 10~2 (25 ... 40) 10~2 40 - 10~2
Для элементарной электрической схемы с одним элементом
без термокомпенсации и при коэффициентах преобразования,
близких к единице, нормальный предел температуры соответ-
ствует
| Д/т. „ | < 2"'Дд.осн [М Ы + 6° (ат)Г ‘,
Так как в нормальных условиях (см. гл. I) Дд.ОСн ~ 2/ЗДд. изм.
Для приборов потенциометрического принципа действия
Класса 1 с непроволочным резистором марки МЛТ
| Д/т. н « 1/(2 • 12 • 1(Г2) « 4 °C,
для аналогичных приборов класса 0,2
Д/т.„ < 0,8 °C.
Для приборов класса 1 с конденсатором КМ-5
I ^т. н
1
2-50-10~2
« 1°С.
При усилителе низкой частоты (рис. 70) с одним транзисто-
ром П16А, пятью резисторами МЛТ и одним конденсатором
КМ-5 составляющие приведенного температурного коэффициен-
та усиления [74] в диапазоне 20 ... 60°C равны М(аТ£) = 0,42,1
о
6(aTs) = ± 0,62% на 1 °C. Отсюда для усилителя класса 1
1 н । < ~2 (0,42 4- 0,62) ~ с*
200
Таким образом, на конкретных элементарных примерах по-
казана возможность учета приведенного температурного коэф-
фициента электрической схемы измерительного преобразователя
при оценке нормальных пределов температуры для прецизион-
ных средств измерений по упрощенной методике. Следует обра-
тить внимание на то, что для многих электрических элементов
температурные коэффициенты имеют различное значение в об-
ласти температур более /т.н и менее /т.н, что соответствует асим-
метричному расположению
нормальной области значе-
ний температуры относи-
тельно /т.н и в определенной
мере усложняет решение за-
дачи термокомпенсации.
Естественно, что при ча-
стичной взаимнойтермоком-
-юв
пенсации механических и
электрических узлов сред- Рис- 70- Усилитель низкой частоты
ства и объекта измерений
нормальные пределы температуры могут быть расширены. На
электронные лампы влияние внешней температуры и влаги
практически мало.
Температурные погрешности фотоэлектрических сортирово-
чных преобразователей. В серийно выпускаемых фотоэлектриче-
ских сортировочных преобразователях типа ДФМ-ПФС
(ГОСТ 15900—70Е) с интервалом £ сортировки, равным 0,5; 1; 2
и 5 мкм, а также в недавно освоенных фотоэлектрических преоб-
разователях моделей 76101—76401 смещение настройки после
включения лампы осветителя достигает (2 ... 4) § за 8 ч ра-
боты или (6 ... 20) Аосн. Причем при постоянно включенной
лампе осветителя смещение в преобразователях серии 76 боль-
ше, чем в преобразователях серии ПФС, что, по-видимому, свя-
зано с большей мощностью лампы и конструктивным оформле-
нием новых преобразователей. Уменьшения температурной
погрешности можно добиться предварительным прогревом осве-
тителя в течение 1 ч или импульсной подачей напряжения на
осветитель с периодичностью 5 . . . 10 мин. Недостаточная эф-
фективность этих решений очевидна. Во-первых, время прогре-
ва выпадает из рабочего времени преобразователя, а во-вторых,
напрасно расходуется ресурс осветительной лампы. При
импульсном питании осветителя более вероятны отказ системы
включения, возникновение переходных процессов и соответст-
вующее снижение надежности, точности и долговечности систе-
мы. Вместе с тем наиболее правильным решением для фотоэлек-
трических сортировочных преобразователей является использо-
вание осветителей с волоконными световодами [75, 79], чем
обеспечивается возможность дистанционного расположения ис-
точника света и минимизация его теплового влияния на рабочее
204
пространство. Современные волоконные световоды имеют коэф-
фициент пропускания света до 0,8 ... 0,9 на 1 м длины, что впол-
не обеспечивает получение простой и эффективной конструкции.
Нормальная температура для гальваномагнитных преобра-
зователей Холла. Нормальные пределы температуры для пре-
образователей Холла зависят от температурных коэффици-
ентов э. д. с. Холла г]их « —0,015% на 1 °C и от температурных
коэффициентов сопротивления t]r^ л 0,08%. Эксперименталь-
ные данные [30] подтвердили возможность получения антимо-
нида индия (InSb), у которого температурный коэффициент со-
Рис. 71. Склейка цилиндрических
пластин
противления находится в диа-
пазоне 0,01 ... 0,05% на 1 °C.
Для преобразователей клас-
сов 0,1 в этом случае нормаль-
ный предел температуры со-
ставит 2 °C.
Действие температуры на
детали оптических приборов и
оптические системы. В оптико-
механических приборах ши-
роко применяются склеенные
объективы, окуляры, зеркала
и другие элементы с сочлене-
нием по криволинейным по-
верхностям. При изменении
внешних условий такие детали деформируются из-за возникаю-
щих в них напряжений. Эти деформации приводят к искажению
оптических изображений.
Для склейки п цилиндрических пластин (рис. 71), согласно
[50], имеем
Е (z) dF
F
rQ==~T^i---------------
\ г lE (z) dF
F
причем для двух пластинок
___________+ E2F2_______________
0 ь (£1 In га/г, + Е2 In Г3Л2) ’
где b — ширина пластинок; и, г2, гз— радиусы цилиндрических
поверхностей; Е — модули упругости.
При изменении температуры до +, указанные радиусы гра-
ничных цилиндрических поверхностей определяются из зависи-
мости
l + e
+ Д0
20?
Здесь
^фи —‘Т Р
\ Е (z) dF
F
dtfi
ных усилий; - м
еФ е<Р° + doj ra + 2 '
Е (z) ат (г) dF
-------------относительная деформация от нормаль-
Z
- — то же от изгибающих моментов;
\ Е (z) ат (z) z dF
dSe<p м Е
м — Д^т-------р------------относительное приращение угла
ф \E(z)zdF
р
между двумя смежными сечениями.
При двух соединенных пластинках:
_______________________д f 1 4~ Его^гР2 _
е<р0 —EiFf + E^i
_ Л/ £\ат1$]1 + ^2ат2^/2
ElSjl + E2S.2 ’
где ать аТ2 — температурные коэффициенты линейного расшире-
ния пластинок; Зд; 3/2— статические моменты площадей сече-
ний для каждой из пластинок относительно оси у.
Для линзы влияние изменения Д/т = 1 °C температуры оце-
нивается по изменению радиуса А/? кривизны и высоты ДЛ, при-
чем &R = <ХтД; АД = ат/1.
Для линзы в оправе:
Rt —' АчrRj — AtrE 1
ЛтЛ — 1 + аТ2 Д^т +
Д/г (ctri + йтз) (1 — Нпг) Ei
Ei (1 — Цпз) + Е2 (I — цп1)
где Ei, Цпь aTi — модуль упругости, коэффициент Пуассона,
ТКЛР материала оправы; Е->, Цпг, ссТ2— то же линзы.
При проектировании оптической системы измерительного
прибора большой точности важно знать изменение толщины
воздушного промежутка или толщины линзы в любом сечении,
параллельном оси симметрии. Экспериментально такие откло-
нения можно определить с помощью пробного стекла по числу
интерференционных колец, соответствующему воздушному про-
межутку If между контролируемой и «пробной» поверхностью.
Согласно рис. 72, смещение центра кривизны а, равно:
аг = Г[-{- If — г2;
_ ri + (П + If)2 - 2г 1 (Г! + If) cos (аф/2)
Г2 2[(r1 + Zf)-r1CoS(a((/2)]
203
Для устранения эффекта температурного смещения плоско-
сти изображения 5 (рис. 73) относительно плоскости приемника
Зф. п необходимо обеспечить
АВи.ф = Д5'к-Да = 0.
Здесь Зф. п — положение фиксирующей плоскости приемника при
нормальной температуре 20 °C, расположенной на расстоянии
S20 от последней поверхности оптической системы; 3( — по-
ложение плоскости изображения при температуре прибора /т;
Д£„. ф = Д5' — Да — температурное смещение плоскости изобра-
жения относительно фиксирующей плоскости приемника, выз-
ванное термооптической аберрацией ДЗ' = ЛЗ' —3'0 положения
изображения оптической системы и термическим изменением
Рис. 72. Смещение центра кри-
визны
Рис. 73. Смещение плоскости изобра-
жения
Да размеров механического устройства, связывающего оптиче-
скую систему с фиксирующей плоскостью приемника.
Если температурное изменение линейных размеров механи-
ческого устройства, связывающего оптическую систему с прием-
ником, компенсирует изменение расстояния от последней пре-
ломляющей поверхности оптической системы до плоскости при-
емника, то, очевидно, Да = 0 П ДЗ' = 0 или Д£и ф = 0. Это и
есть условие нерасстраиваемости оптического прибора по тем-
пературной дефокусировке изображения относительно плоскости
приемника. Для нерасстраиваемости оптического прибора в от-
ношении температурного изменения размеров изображения на
фиксирующей поверхности приемника необходимо Ц — Лго = О.
При Д£н. ф = 0
(Lt — L20) L20 = -----=-------7 — /--------/п == 0,
Рл. у хк 'л. г
где рл. у — линейное увеличение системы; Тц — коэффициент
термооптической аберрации увеличения; /л. г — инвариант, уста-
навливаемый по формуле Лагранжа — Гельмгольца,
j »iMi(*i -SQ _ (xi~si) __ n'ihtyj (x't ~ Sp
Л Г ^1х1 $ixi ^'ix'i
204
Здесь П; — показатель преломления t-ro элемента; п[ — то же
наклонных лучей; ht — ордината точки преломления паракси-
ального луча па z-й поверхности; Тц = — /л. г да/(хк — Sk).
При Да = 0 Гц = 0.
Приведенные формулы термооптических аберраций наряду
с обычными формулами монохроматических и хроматических
аберраций положены в основу проектирования и расчета опти-
ческих систем, не расстраивающихся при изменении темпера-
туры [15].
39. КОМПЛЕКСНОЕ ДЕЙСТВИЕ
ВЛИЯЮЩИХ ФАКТОРОВ
Нормальные условия для трансформаторных преобразовате-
лей. При колебаниях температуры происходит изменение как
электрических, так и магнитных параметров трансформаторных
функциональных преобразователей: активного сопротивления
Рис. 74. Схема индуктивного функционального пре-
образователя
обмотки 1 возбуждения RB (рис. 74), магнитного сопротивления
2 магнитопровода zM, магнитной проводимости воздушного за-
зора 5д6. Изменение sa& происходит за счет изменения геометри-
ческих размеров магнитопровода при колебаниях температуры
окружающей среды. В общем виде зависимости RB, гц, зд« от
изменений Д9Т температуры представляются [31] линейными
функциями:
RB = Rs» (1 + ат« Д0т);
(1 4" CtTy_ Д0Т),
5дб = 5д«о(1 +атаД0т),
где £во, 2цо, 5дво — значения, соответствующие нормальной тем-
пературе; ат«, атц, «те — соответствующие температурные коэф-
фициенты.
Относительная погрешность изменения сопротивления обмот-
ки возбуждения связана с изменением температуры
~ К + “ЖГ''
205
где « — частота питания; wB— число витков обмотки возбуж-
дения.
Изменение фазы тока возбуждения вызывает изменение фазы
Дф выходной э. д. с.
Аф = А0т
и
Птв = [2~' (/?в + — 1/$дв] 5двоата Абт-
Фазовая погрешность от изменения магнитной проводимости
А(РМ = “ WVe А0т (“ЭДв + ^в)"1’
где а6 — температурный коэффициент магнитной проводимости
зазора.
В результате суммарная относительная температурная по-
грешность
[здй 11 _ л а Д0т
2 (7?в + (0 J ^В + “ Ч8дв
Отсюда можно определить и нормальные пределы, температуры
для рассматриваемых преобразователей
где лд. осн — предел основной погрешности, соответствующий
классу преобразователя.
Погрешность от изменения внешних магнитных полей зави-
сит от вида воспроизводимой преобразователем функции. Для
симметричной измерительной обмотки 3 (рис. 74) влияние внеш-
них равномерных полей практически исключается за счет встреч-
ного направления возникающих э. д. с. Наиболее неблагоприят-
ным является несимметричное расположение контура
измерительной обмотки и направление магнитного поля перпен-
дикулярно к плоскости размещения витков. В случае магнитных
полей с напряженностью менее 400 А/м влияние их на индукцию
В& в зазоре пренебрежимо мало. Тогда часть контура измери-
тельной обмотки, находящаяся в зазоре магнитопровода, не
подвержена влиянию внешнего магнитного поля Ввн и в ней не
наводится э. д. с. Внешнее магнитное поле наводит э. д. с. в той
части контура измерительной обмотки, которая находится вне
рабочего зазора [31],
^-вн ““ j®BaliF~ ,
£/тах
где Fx — рабочая площадь контура обмотки, находящейся в за-
зоре магнитопровода; FMar—полная площадь магнитопровода.
Относительная погрешность т)т. в = Ввн/В6, т. е. чем выше
индукция в зазоре, тем меньше г]т. в. Наиболее сильное влияние
206
близкого размещения ферромагнитной массы имеет место в
функциональных преобразователях перемещении с плоскими об-
мотками, когда наружные поверхности их магнитолровода охва-
чены снаружи длинным 0-образным ферромагнитным кольцом
малой ширины. Для уменьшения этой дополнительной погреш-
ности необходимо увеличить расстояние между магнитопрово-
дом и внешней ферромагнитной массой, высоту магнитопрово-
да, ширину внешней массы и уменьшить рабочий зазор между
якорем и статором.
а)
Рис. 75. Пневматическое сопло
Влияние давления окружающего воздуха на пневмоизмери-
тельную систему. Пневматические средства контроля размеров
действуют по принципу истечения воздуха в атмосферу через
контролируемое отверстие или через щель между торцом изме-
рительного цилиндрического сопла / (рис. 75, а) и подвижной
заслонкой 2, в качестве которой при бесконтактных измерениях
используется контролируемая поверхность измеряемого объекта.
Отсчетные устройства при этом фиксируют скорость истечения
в приборах типа ротаметр или изменения давления на входе
в измерительное сопло в приборах манометрического типа.
В одном и том же сопле при одинаковом состоянии спокой-
ного воздуха с давлением рп (рис. 75, б) перед ним ход измене-
ния давления может протекать четырьмя различными способами
в соответствии со значениями противодавления рВн окружаю-
щего воздуха. Причем 0 < pi < р2 < Рз < Рп- Отношение ко-
нечных значений pt к первоначальному р„ [14] зависит от от-
ношения площади наиболее узкого сечения Fy к площади конеч-
ного сечения FBH. При каждом значении противодавления рВ11,
207
лежащем ниже уровня рг, процесс изменения давления проте-
кает по плавной кривой 1. В самом узком сечении сопла Ру дав-
ление падает до рл = 0,53 рп, а в выходном сечении FBH— до
Р\ < рл- Если противодавление ран < pi, то происходит внезап-
ное расширение воздуха на выходе сопла. Если рвн > pi, то
происходит внезапное уплотнение воздуха — прямой скачок
уплотнения. В этом случае звуковая скорость на выходе узкого
сечения сопла переходит в сверхзвуковую. Если противодавле-
ние лежит между предельными значениями P2 и рз, то внутри
Рис. 76. Сравнительные характеристики виброустойчивости из-
мерительных головок:
1 . . . 6 — границы £а виброустойчивости головок минйкатора, мпкатора,
рычажно-зубчатых измерительных головок типа ИГ, индикаторов типа МИГ,
микрокатора» оптикатора соответственно; ЧОд— уровень действующих ви-
браций
сопла между самым узким сечением Fy и выходным F&» обра-
зуется прямой скачок уплотнения в сечении Fa, положение ко-
торого зависит от внешнего давления рВн. В этом месте происхо-
дит скачок от сверхзвуковой к дозвуковой скорости на кривой 2.
При рвн = р2 скачок от pi к P2 происходит в выходном сечении
При рвн = Рз скачок происходит в самом узком сечении сопла
(кривая 2'). Наконец, когда противодавление рвн>Рз, давление
в самом узком сечении падает до ру, зависящего от значения
противодавления рвн. Звуковая скорость в этом случае (кри-
вая 3) не возникает.
Так как между торцом измерительного сопла и заслонкой
может возникнуть зона разряжения, в которую засасывается
атмосферный воздух,- то важна и степень его очистки от пыли.
При загрязненном окружающем воздухе пыль скапливается в
измерительном зазоре, уменьшает проходное сечение и способ-
ствует смещению настройки системы, а следовательно, вызы-
вает повышение погрешности измерения.
208
Повышение виброустойчивости пружинных измерительных
механизмов. Действие вынуждающих вибраций на средства ли-
нейных измерений рассмотрено в работе [66]. Сравнительные
характеристики виброустойчивости стандартных измерительных
головок для линейных измерений приведены на рис. 76, откуда
видно, что относительно низкой виброустойчивостью обладают
пружинные измерительные головки [79] — микрокаторы, опти-
каторы, миннкаторы, отличающиеся повышенной чувствитель-
ностью и точностью.
Рис. 77. Расчетные схемы оптикатора: а — механизма;
б — поперечных; в — крутильных колебаний:
/ — измерительный стержень; 2 — упругий механизм; З—зеркало;
4~ скрученная лента (упругий геликоид)
В измерительном механизме оптикатора (рис. 77) можно
выделить две колебательные системы. Зеркало 3 на скрученной
ленте 4 как масса на натянутой струне образует один колеба-
тельный контур. Но поперечная жесткость ленты настолько ве-
лика, что вибрации, действующие на приборы, обычно не вызы-
вают ощутимых колебаний зеркала. Другую колебательную
систему образует зеркало, совершая крутильные колебания отно-
сительно оси ленты. Такие колебания описываются уравнением
/йёф + % 0ф = - mglgl, (70)
где Jg — момент инерции поворотного зеркала; Св?— коэффи-
циент демпфирования; /тт — крутильная жесткость ленты при
кручении (см. табл. 5); ms, /g— приведенные масса и плечо дис-
баланса зеркала.
Решение выражения (70) дает связь амплитуды колебаний
корпуса оптикатора и амплитуды. з'о колебания его отсчетного
год
указателя на шкале
^gV((flo-(fl2)2+ 4е^ ' п
2mg/g7?w2 ’
где <о0 — частота собственных колебаний механизма; со — ча-
стота вынуждающих колебаний; еи = Cf^/QJg.
Заменив в (71) величину So на [Ар] = 0,1 а, т. е. на половину
предела допускаемого размаха, равного по ГОСТ 8.050—73 двум
десятым длины а деления шкалы, находим характеристики са
/— уровень действующих вибраций; 2 — расчетный уровень виброустойчивости
при дисбалансе зеркала, соответствующем смещению показаний на 0,5 де-
ления шкалы; <3 —то же с дисбалансом на четыре деления; 4 и 5—экспе-
риментальные уровни с дисбалансом на 0,5 и четыре деления соответственно
(рис. 78) виброустойчивости оптикатора в зависимости от дис-
баланса. Очевидно, что снижение дисбаланса повышает вибро-
устойчивость измерительного механизма.
Для миникаторов (рис. 79) характерна низкая жесткость
элементов крепления на стандартной державке. В результате
этого под действием вибраций корпус головки колеблется отно-
сительно базовой измерительной поверхности. Эти колебания
трансформируются в перемещения измерительного механизма
головки и соответственно передаются измерительному механиз-
му. Колебания стрелки на скрученной ленте в этом случае мож-
но выразить уравнением
40<р + Се<р0<р + -%6ф = -7Х/Р-м2(/), (72)
где jk-v — крутильная жесткость ленты при растяжении (см.
табл. 5); z (/) = ——т L cos (со/ + <р2) — виброперемещение го-
<в01 - со
ловки относительно основания; coOi — круговая частота собствен-
ных колебаний корпуса головки относительно основания; —
210
момент инерции стрелки; L — длина скрученного участка ленты;
ip. м — передаточное отношение рычажного механизма.
Из уравнения (72) определяется граница виброустойчиво-
сти миникаторов
[Ар] Ug (<Oqi - to2) д/(^02 ~ a2)2 -f- 4<ое2
ёа 2Wp. nAtp“2
где £Оо2 — круговая частота собственных крутильных колебаний
стрелки головки на скрученной ленте механизма; /?Стр — длина
стрелки.
Из графиков (рис. 80) характеристик виброустойчивости ра-
счетной 1 и экспериментальной 2 видно, что впброустойчивость
Рис. 79. Схемы маникатора: а—закрепления; б—ки-
нематической цепи
головки нарушается при резонансе на частоте крутильных коле-
баний стрелки на ленте йог- Головки выпускаются без жидкост-
ного демпфера, так как для квазистатических измерений вполне
достаточно воздушного успокоения отсчетного указателя, соот-
ветствующего коэффициенту затухания еи = О,2йо2- Применение
жидкостного демпфера в пружинном механизме головки позво-
ляет обеспечить е« ~ «02, что делает прибор виброустойчивым
(кривая 3 — расчетная; 4 — экспериментальная). Увеличение
частоты ®о1, соответствующее повышению жесткости системы
закрепления головки, эффективно повышает виброустойчивость
приборов, но применение жидкостного демпфера все равно не-
обходимо. Это иллюстрирует график 5 характеристики вибро-
устойчивости прибора с жесткостью системы закрепления в
1,5 раза выше применяемой. Качество демпфирования зависит
и от положения демпфера на скрученной ленте.
Исследования микрокаторов с различными ценами деления
шкалы в диапазоне 0,02 ... 10 мкм показали, что эксперимен-
тальные характеристики виброустойчивости имеют ярко выра-
женный резонансный характер вследствие поперечных колеба-
211
ний стрелки как уравновешенного упругого стержня с одной
опорой (рис. 81). Для получения зависимости частоты собствен-
ных колебаний стержня от его параметров составляется система
Рис. 80. Уровень действующих вибраций и характеристики вибро-
устойчивости миникатора
уравнений у\(х), t/2(x) собственной формы колебаний [53] для
левой и правой частей стержня:
Ух (х) = CjS (ах) + С2Т (ах) + C3U (ах) + C4V (ах);
г/2 (х) = C5S (ах) + С6Т (ах) + C7U (ах) + CaV (ах),
где С,, С2, С8— постоянные; S(ax)t U(ax), Т(ах), И (ах) —
функции Крылова.
Решение этих уравнений позволило установить зависимости
собственных частот поперечных колебаний стрелки от ее пара-
метров: массы т.\ указателя стрелки, массы т2 балансировочной
"У
Рис. 81. Расчетная схема стрелки-указателя
микрокатора
части стрелки, длины балансировочной части 12, диаметра стерж-
ня с1стр стрелки. Особый интерес для ремонтников и эксплуата-
ционников представляет зависимость виброустойчивости от по-
ложения балансировочной массы на стрелке, что легко регули-
руется при ремонте микрокатора [66].
На рис. 82 показаны экспериментальные 1 и 3 и расчетные 2
и 4 зависимости частоты собственных поперечных колебаний
212
Стрелки от длины балансировочной части. Из рисунка видно,
что с уменьшением длины балансировочной части увеличиваются
частоты собственных поперечных колебаний стрелки. В диапа-
зоне частот 4 ... 250 Гц выявлены вторая (/ и 2) и третья (3
и 4) частоты собственных поперечных колебаний. Для обеспече-
ния необходимой виброустойчпвости достаточно, чтобы частота
собственных поперечных колебаний стрелки была не менее
65 Гц.
Снижения дополнительных погрешностей от вынуждающих
вибраций добиваются как повышением виброустойчивости изме-
рительных элементов, так и установкой двигателей, сервоппиво-
Рис. 82. Зависимость частоты колебаний стрелки от
длины балансировочной части
дов и других источников на отдельные фундаменты, виброизо-
лирующие опоры и т. п. (см. гл. IV).
На работу струнного преобразователя, кроме температуры,
оказывают влияние влажность и давление воздуха через изме-
нение его плотности, а следовательно, и присоединенной мас-
сы, колеблющейся со струной. Для круглой струны &f/f =
= —0,5р?Ср/Рустр, для ленточной струны \f/f = —2р?Ср/р¥стр, где
Руср — плотность воздуха; рустр— плотность струны.
Реальный барометрический коэффициент прямых бронзовых
струн 4,95-10~6 i/кПа. Для естественно скрученных струн в ге-
ликоидных мультивибраторах (а. с. 706677) Af/f «
Действие электростатического поля на прецизионный упругий
механизм. Напряженность Не электростатического поля влияет
на точность пружинных измерительных головок, оказывая сило-
вое воздействие на стеклянную отсчетную стрелку, на которой
213
могут появляться заряды gQ3 трибоэлектричества или иной при-
роды, в результате чего на конце стрелки действует сила Q3,
равная Q3 = Не£Оз. Такая сила вызывает смещение конца стрел-
ки пропорционально податливости кручения скрученной ленты
<3э = - sin 8Ф = Q0 sin 0Ф,
где АЭфэ — угловое смещение стрелки под действием электроста-
тического поля; /стр — длина стрелки; 0<р — угол между направ-
лениями силовых линий поля и стрелки.
Максимальный заряд на стрелке можно оценить из предель-
ной поверхностной плотности заряда в воздухе 5-Ю-9 Кл/см2.
Отсюда £оэ — F<£>-10-9 Кл, где Рф— площадь флажка стрелки.
Погрешности от действия электростатического поля определяем
по формуле
АО <- 2/ZEg09ZCTP
2/xxsin0(p •
Для расчета предела напряженности электростатического
поля в нормальных условиях при Дд9фЭ = Д0Ф (Дд.осн/3) полу-
чаем
НЕ = 11О1оГф‘/c’pL-1 Ддефэ/„ sin 0Ф.
Плотность зарядов на стекловолокне ~1,0-10_|1 Кл/см2.
Микрофонный эффект. Шум и громкий звук действуют не
только на человека, но могут вызвать и дополнительные погреш-
ности в упругих ленточных системах с электромеханическими
преобразователями. Это действие аналогично принципу работы
ленточного микрофона, чувствительность которого к звуковому
давлению (в мВ/бар) равна
10-5 <лВ Fhd, ---------
Ъ-гНг cos
где Fb — Ы — площадь поверхности ленты; Вмаг — магнитная
индукция в зазоре между лентой и магнитом; I — длина; b —
ширина ленты; Fs = bh — площадь поперечного сечения; сзв—
скорость звука; /?н — нагрузочное сопротивление; di — кратчай-
шее расстояние по воздуху от одной стороны ленты до другой
при огибании полюсного наконечника магнита; р6 — удельное
сопротивление ленты; ZK — (10~9Вмаг/Л,)/2ра; Z=iaMm (1—со02/<о2);
&o = (Mm/Cj) —собственная основная частота попе-
речных колебаний ленты; С/ — гибкость ленты; ® — частота дей-
ствующей звуковой волны.
Зная входящие величины и допускаемую в нормальных усло-
виях погрешность Ду = 6ИН, можно найти предел нормальной
области допустимого уровня шума Q3B. н бин/^е. При этом
214
бин следует выражать в эквивалентном изменении электрического
сигнала на выходе электромеханического преобразователя.
Звуковая волна может вызвать и резонансные колебания
упругих лент, мембран, пластин, оболочек. При этом не требует-
ся даже большой звуковой мощности. Например, динамик мощ-
ностью 1 Вт, подключенный к звуковому генератору, вызывал
резонансные колебания бронзовых перфорированных пластин
0 30 мм при толщине 0,3 мм.
Нормальные условия измерения массы. Дополнительная по-
грешность сравнения двух масс с объемом и V2r на весах
связана с флуктуациями плотности воздуха ДруВ, отклонениями
ДА температуры, вызывающими объемное расширение тел и
неравноплечность весов.
Матрицы связи имеют вид
ч).
(1 - (Г, Д, - 1ТДг) К' 4'А...)] diag (1 + AS7S,,
1W, 1WJ,
где 9a — действительная масса тел при номинальных нормаль-
ных условиях; Pti, рт2 — объемные температурные коэффициен-
ты расширения тел; р7В— плотность воздуха; ат. в — темпера-
турный коэффициент неравноплечности весов; ДА— отклонение
температуры от нормальной; ^дУ1г = р1г, =р2г—плотно-
сти взвешиваемых тел.
Используя методику построения сопряженных и обратных
матриц для идеальных нормальных условий (см. гл. I и III),
можно найти и требования к нормальной области значений па-
раметров воздуха ири точных взвешиваниях, так как
скз (С)=тг _ )2 •+“* 4,;+
-НргЛ, - J‘s (А).
Здесь Xyi(A) — первое число обусловленности Тюринга (см,
п. 32).
40. АДАПТИВНЫЕ СРЕДСТВА
ИЗМЕРЕНИЙ
Автоматическая коррекция погрешности измерительных уст-
ройств вырабатывается ири использовании одной из следующих
трех процедур: 1) измерения влияющих факторов и расчета
поправки по известной для данного измерительного устройства
функции влияния Д = ф(^ги); 2) измерения погрешности измери-
тельного устройства, приведенной к его выходу; 3) измерения
погрешности измерительного устройства, приведенной ко входу.
215
ляться как самонастройкой
Рис. 83. Система коррекции:
а — самонастройки; б — введе-
ния поправок:
ИУ — измерительное устрой-
ство; ' ЗУ — запоминающее
устройство; ВУ — вычислитель-
ное устройство; KJ1 — коррек-
тор поднастройки
Первая процедура осуществляется способом совместных из-
мерений (принцип автоматического регулирования по возмуще-
нию или принцип Попселе), вторая — методом «образцового
сигнала»; третья—методом обратного преобразования, причем
второй и третий случаи соответствуют принципу автоматическо-
го регулирования по отклонению (принцип Ползунова —
Уатта). Собственно коррекция погрешности может осуществ-
(рпс. 83,а), так и введением попра-
вок (рис. 83,6). Основное достоин-
ство самонастройки заключается в
том, что корректируются в целом
параметры функции преобразова-
ния, причем поднастройки выпол-
няются через конечные промежутки
времени по мере смещения настрой-
ки системы. Этот метод наиболее
часто используется при линейной
функции преобразования, когда на-
стройка реализуется параллельным
смещением и поворотом статиче-
ской характеристики. Самонастрой-
ку целесообразно применять лишь
при пренебрежимо малой нелиней-
ности статической реальной функ-
ции преобразования.
Основным недостатком метода
поправок является то, что поправ-
ка вводится к определенному зна-
чению выходного сигнала. Это по-
вышает объем обрабатываемой си-
стемой дополнительной информа-
ции. Введение поправок применимо при любом характере функ-
ции преобразования, что является основным достоинством тако-
го метода коррекции. Системы введения поправок функциональ-
но сложнее систем самонастройки вследствие наличия в них
вычислительных устройств.
Расширение нормальной области влияющих факторов адап-
тивных устройств связано с уменьшением дополнительных по-
грешностей при автоматической самонастройке и введении по-
правок, так как
Адоп. к _ f (ai< ^t) Х < |
Адоп. НК (11С х
где Ддоп. к — дополнительная погрешность при наличии системы
автоматической коррекции; Адоп. нк— то же без коррекции. Если
согласно [20] наибольшая погрешность коррекции медленно
изменяющихся факторов
а погрешность без коррекции
Д _ f-'(y)-x = AL 4-.
НК -- 'И . W I' '
°'=i 'н
то при
6е^Ж-<1. 6аг ~ 0; -^- = 0
dfH
и в идеализированной коррекционной системе
Ак/^нК 1 >
а при выполнении подстановок и сокращений
АГ- 6е.<А£. .
®>Н I 31Н
Откуда приближенно
ДГгн = А&гн/6ег.
Здесь f~\ х) ~~ погрешность измерительного устрой-
ства, приведенная к его выходу; z, = £, -ф е, —значения влияю-
щих факторов h с учетом погрешности в, их измерения при от-
носительной погрешности 6ег-= A£iH = £г- — |н— отклоне-
ние влияющих величин от номиналов нормальных значений; А£*н
и AgiH — пределы нормальной области значений влияющих фак-
торов соответственно для системы с коррекцией и без коррек-
ции.
Так как 6ег < 1, то A^H/AgiH > .
Аналогично могут быть учтены особенности поведения адап-
тивной системы при нестационарных динамических изменениях
влияющих факторов. Динамическая погрешность коррекции со-
гласно [20] для инерционного звена
X
А ___ i
[/ t —- т
Т'выч + in f 1 — exp-JJ ’’ r‘ постоянная
времени звена; о, — скорость изменения влияющего фактора;
Гвыч - - продолжительность вычисления поправки.
217
При колебательном звене в критическом режиме
А^,д max ^Т’выч ”1“ I max 1>
где е,дтах = —2ц,/<во,—при собственной частоте колебаний зве-
на С1)0Ь
При £,(/) случайной функции времени оцениваются матема-
тическое ожидание погрешности коррекции ЛЮЛК. д и ее дис-
персия £)(АК. д):
£ (дф/д^.) МО Д^. (/)
D (Лк-д) ~ [/' WWC1]2 :
D (А|£) = F (со), wt (ja), 7^],
где — спектральная плотность влияющего процесса;
щ,(/са) —передаточная функция измерительного устройства.
Суммируя динамическую погрешность коррекции с ее стати-
ческим значением, можно найти уточненную нормальную об-
ласть влияющих факторов с учетом динамики влияния, которая,
естественно, становится уже, чем при учете только статической
составляющей от медленно изменяющихся влияющих факторов,
так как ориентировочно
Ак/Анк<Дн-1[(Ак)2 + (Ак.д)2].
Затронутые здесь вопросы нормальных условий адаптивных
систем, имеющие важное значение для измерительной техники
с коррекционными устройствами, могут быть развиты более под-
робно. Однако вследствие ограниченного объема эти аспекты
не излагаются в настоящей монографии.
Важным методом снижения погрешностей влияния и расши-
рения нормальной области влияющих величин является умень-
шение времени процесса измерения на основе автоматизации.
В заключение отметим, что изложенные в гл. I, III, VIII ме-
тоды идентификации нормальных условий измерений можно
использовать для синтеза любых измерительных механизмов и
систем при известных функциях преобразования в матрицах пх
связей.
СПИСОК ЛИТЕРАТУРЫ
1. Амосов И. С., Архаров А. П. Компенсация
температурных деформаций обрабатываемых дета-
лей при шлифовании. — В кн.: Исследование и оп-
тимизация процессов механической обработки при
автоматизации технологического проектирования.
Владивосток: ДВПИ, 1975, вып. с 54—61.
2. Амосов И. С., Семенов А. Н. Повышение точ-
ности формы деталей при плоском шлифовании. —
В кн.: Современные достижения в области чистовых
методов обработки деталей машин. Л.: ЛДНТП,
1976, с. 50—53.
3. Афанасьев Ю. В., Студенцов Н. В., Щел-
кни А. П. Магнитоэлектрические преобразователи,
приборы, установки. Л.: Энергия, 1972. 271 с.
4. Батарчукова Н. Р., Ирикова Л. А. Длины
волн монохроматических источников света и пока-
затели преломления в стандартном и нормальном
воздухе. М.: Издательство стандартов, 1968. 19 с.
5. Беляевский А. И. Оценка влияния внешних
факторов на погрешность измерительного прибора
с учетом коррелированности наблюдений. —
Тр. ВНИИЭП, 1972, № 13, с. 75—83.
6. Бердзенишвили Г. Г., Богуславский М. Г.,
Цейтлин Я. М. Расчетно-экспериментальный метод
определения температурных погрешностей при ли-
нейных измерениях. — Измерительная техника, 1974,
№ 8, с. 20—21.
7. Берндт Г. Основы и приборы технических ли-
нейных измерений. Л. — М.: ОНТИ, 1935. 496 с.
8. Богуславский М. Г., Цейтлин Я- М. Приборы
и методы точных измерений длины и углов. М.: Из-
дательство стандартов, 1976. 248 с.
9. Болотин В. В. Оптимальное размещение дат-
чиков для измерения случайных полей. — В кн.; Ме-
ханика деформируемых тел и конструкций. М.: Ма-
шиностроение, 1975, с. 77—83.
10. Большее Л. Н., Смирнов Н. В. Таблицы ма-
тематической статистики. М.: ВЦ АН СССР, 1968.
474 с.
И. Браславский Д. А., Петров В. В. Точность
измерительных устройств. М.: Машиностроение, 1976
311 с.
12. Бржезинский М. Л., Марголина Г. М. Изме-
рение показателя преломления воздуха при воспро-
изведении единицы длины на эталонном интерферен-
ционном компараторе.—Метрология, 1972, № И,
с. 70—74.
13. Вентцель Е. С. Теория вероятностей. М.:
Наука, 1969. 576 с.
14. Вимер А. Пневматические измерения разме-
ров. М.: Машгиз, 1962. 132 с.
21Q
15. Волосов Д. С. Основы теории термооптическпх аберраций.—Оптика
и спектроскопия, 1958, т. 4, вып. 5, 6, с. 663—669, с. 772—778.
16. Гигиеническая оценка магнитных полей. Материалы симпозиума 22—
23 мая 1972 г. АН СССР. Санэпидстанция г. Москвы. 168 с.
17. Глаголева Т. А., Рябец В. А. Нормирование искусственного освеще-
ния производственных помещений в СССР и за рубежом. М.: ВЦНИЙОТ
ВЦСПС. 1975. 66 с.
18. Гордое А. Н. Основы пирометрии. М.: Металлургия, 1971. 447 с.
19. Дюжин А. Г., Казанская Т. Л. Выбор оптимальной структуры кон-
тура управления для термостатирования воздушных сред больших объемов.—
Измерительная техника, 1970, № 6, с. 41—42.
20. Земельман М. А. Автоматическая коррекция погрешностей измери-
тельных устройств. М.: Издательство стандартов, 1972. 199 с.
21. Имянитов И. М. Приборы и методы для изучения электричества ат-
мосферы. М.: Гостехтеоретиздат, 1957. 483 с.
22. Иориш Ю. И. Виброметрия. М.: Наука, 1963. 931 с.
23. Кавалеров Г. И., Мандельштам С. М. Введение в информационную
теорию измерений. М.: Энергия, 1974. 375 с.
24. Кайнер Г, Б. Измерение линейных размеров высокоточных деталей.
М.: Машиностроение, 1975. 168 с.
25. Карташова А. Н., Крюченков В. В. Статистический анализ погрешно-
сти первичных измерительных преобразователей в динамических условиях.—
Метрология, 1975, № 7, с. 3—II.
26. Кокорин О. Я. Установки кондиционирования воздуха . ММашино-
строение, 1978. 264 с.
27. Коловский М. 3. Автоматическое управление виброзащитнымп систе-
мами. М.: Наука, 1976. 319 с.
28. Константинов О. Я. Магнитная технологическая оснастка. Л.\ Маши-
ностроение, 1974. 383 с.
29. Корн Г., Корн Т. Справочник по математике для научных работни-
ков и инженеров. 4-е изд. М.: Наука, 1977. 831 с.
30. Котенко Г. И. Магниторезисторы. Л.: Энергия, 1972. 81 с.
31. Куликовский Л. Ф., Конюхов Н. Е., Медников Ф. М Трансформатор
иые функциональные преобразователи с профилированными вторичными кон-
турами. М.: Энергия, 1971. 103 с.
32. Лазерное излучение в турбулентной атмосфере/А. С. Г у рвич,
А. И. Кон, В. Л. Миронов н др. М.: Наука, 1976. 277 с.
33. Ландау Л. Д., Лившиц Е. М. Теоретическая физика в 9 томах; Т. VII.
Теория упругости. М.: Наука, 1965. 203 с.; Т. V. Статистическая физика. М.-.
Наука, 1964. 567 с.; Т. II. Теория поля. М.: Наука, 1962. 422 с.
34. Лейнвебер П., Берндт Г., Киниле О. Справочник по технике линей-
ных измерений. М.: Машиностроение, 1959. 927 с.
35. Ленк А., Ренитц Ю. Механические испытания приборов и аппаратов.
М.: Мир, 1976. 270 с.
36. Линьков Е. М. Магнетронные системы преобразования сейсмических
колебаний в электрические. — Изв. АН СССР. Серия геофизическая, 1961,
№ 9, с. 1373—1376.
37. Лурье А. И. Теория упругости. М.: Наука, 1970. 939 с.
38. Лыков А. В. Теория теплопроводности. М.: Высшая школа, 1967.
599 с.
39. Ляховский А. В. Собственные температурные погрешности измери-
тельных скоб приборов активного контроля.—Измерительная техника, 1968,
№ 5, с. 34—36.
40. Максимов Л. С. Об изменении деления машин, оборудования и
приборов на классы по чувствительности к колебаниям основания.—В кн..'
Теоретические и экспериментальные исследования в области динамики
сооружений.— Тр. ЦНИИСК./Под ред. А. И. Цейтлина. М., 1977, с. 175—
180.
41. Маликов М. Ф. Основы метрологии. М.: Коммерприбор, 1949.
476 с.
220
42. Марков Н. Н., Кайнер Г. Б., Сацердотов П. А. Погрешности н выбор
средств при линейных измерениях. М.: Машиностроение, 1961. 390 с.
43. Марков Н. Н., Сацердотов П. А. Погрешности от температурных
деформаций при линейных измерениях. М.: Машиностроение, 1976.
231 с.
44. Меклер В. Я., Овчинников П. А. Промышленная вентиляция и конди-
ционирование воздуха. М.: Стройиздат, 1978. 311 с.
45. Мурашкин Л. С., Мурашкин С. Л. Прикладная нелинейная механика
станков. Л.: Машиностроение, 1977. 192 с.
46. Мышкис А. Д. Математика. Специальные курсы. М.: Наука, 1971.
632 с.
47. Мясников Л. Л., Мясникова Е. Н. Автоматическое распознавание зву-
ковых образов.. Л.: Энергия, 1970. 183 с.
48. Новицкий П. В. Основы информационной теории измерительных уст-
ройств. Л.: Энергия, 1968. 248 с.
49. Новицкий П. В. Действительные и мнимые проблемы развития ин-
формационной Теории средств измерений. — Измерительная техника, 1978,
№ 8, с. 37—40.
50. Пищик Г. Ф. Напряжения и деформации в деталях оптических при-
боров. Л.: Машиностроение, 1968. 247 с.
51. Полоник П. А. Борьба со статическим электричеством в текстильной
и легкой промышленности. М.: Легкая индустрия, 1966. 166 с.
52. Приборы и системы для измерения вибрации, шума и удара.
Справочник. Кн. 2/Под ред. В. В. Клюева. М.: Машиностроение, 1968, т. 1.
440 с.
53. Прочность. Устойчивость. Колебания. Справочник в трех томах. Под
общ. ред. И. А. Биргера и Я. Г. Пановко. М.: Машиностроение, 1968, т. 1.
831 с.; т. 3. 567 с.
54. Психрометрические таблицы/Д. П. Беспалов, В. Н. К о з л о в,
Л. Т. Матвеев. Л.: Гидрометеоиздат, 1972. 235 с.
55. Пятин Ю. М. Расчет электрических элементов измерительных прибо-
ров. Справочное пособие. М.: Машиностроение, 1965. 199 с.
56. Резников А. Н. Теплофизика резания. М.: Машиностроение, 1969.
288 с.
57. Розенберг В. Я. Основы теории измерительных систем. М.: Советское
радио, 1975. 304 с.
58. Розенберг В. Я. О детерминистском подходе к определению количе-
ства измерительной информации. — Измерительная техника, 1978, № 10,
с. 11-14.
59. Розин Л. А. Метод конечных элементов в применении к упругим си-
стемам. М.: Стройиздат, 1977. 129 с.
60. Сипягин В. А., Сачков А. Ф. Обеспыливание атмосферы. Практиче-
ское руководство. М.: Металлургиздат, 1958. 400 с.
61. Смирнов Н. В., Дунин-Барковский И. В. Курс теории вероятностей и
математической статистики. М.: Наука, 1965. 511 с.
62. Соколовский А. П. Научные основы технологии машиностроения. Л.:
Машгиз, 1955. 515 с.
63. Справочник по производственному контролю./Под ред. А. К. Кутая.
Л.: Машиностроение, 1974. 975 с.
64. Справочник по производству теплозвукоизоляционных материалов./
Л. М. Бутт, В. Вашляускас, Ю. Вайткус и др. М.: Стройиздат, 1975.
432 с.
65. Справочник по технике безопасности, противопожарной технике и
производственной санитарии. В четырех томах/К. А. Духанин, Я. М. Ос-
ми н к и н, С. С. Сидорачкин и др. Под общ. ред. А. И. Игнатка.—
4-е изд., перераб. Л.: Судостроение, 1970; т. 1. 551 с.
66. Тарасов С. Б., Цейтлин Я. М. Повышение впброустойчивости прибо-
ров для линейных измерений. Л.: ЛДНТП, 1976. 31 с.
67. Тетельбаум И. М. Электрическое моделирование. М.: Физматгиз, 1959.
319 с.
221
68. Тихменев С. С. Элементы точных приборов. М.: Оборонгиз, 1956.
360 с.
69. Тихомиров Ю. Ф. Промышленные вибрации и борьба с ними. Киев:
Техника, 1975. 184 с.
70. Точность контактных методов измерения температуры/А. Н. Гор-
дое, Я. В. Малков, Н. Н. Эргардт и др. М.: Издательство стандар-
тов, 1976. 232 с.
71. Уилкс С. Математическая статистика. М.: Наука, 1967. 632 с.
72. Федотов А. И. Технология автоматизированного нанесения штрихов
и знаков. Л.: Машиностроение, 1977. 302 с.
73. Федоров В. В. Теория оптимального эксперимента. М.: Наука, 1971.
312 с.
74. Фомин А. В., Борисов В. Ф., Чермошенский В. В. Допуски в радио-
электронной аппаратуре. М.: Советское радио, 1973. 128 с.
75. Фотоэлектрические автоматы для контроля размеров/Я. М. Цейт-
лин, Б. М. С о р о ч к и н, Б. Г. Ларионов, И. М. Баркан. Л.: Машино-
строение, 1968. 202 с.
76. Фурдуев В. В. Акустические основы вещания. М.: Связьиздат, 1960.
320 с.
77. Хальд А. Математическая статистика с техническими приложениями.
М.: Изд-во иностр, лит., 1956. 664 с.
78. Цапенко М. П. Измерительные информационные системы. Принципы
построения. М.: Энергия, 1974. 319 с.
79. Цейтлин Я. М. Упругие кинематические устройства. Л.: Машинострое-
ние, 1972. 295 с.
80. Цейтлин Я. М. Нормальные условия выполнения линейных и угловых
измерений. — Измерительная техника. 1974, № 3, с. 18—20.
81. Цейтлин Я. М. Идентификация нормальных условий линейных и уг-
ловых измерений. — В кн.: Теоретические вопросы метрологии. Л., 1979,
вып. 237 (297), с. 86—95 (Тр. метрологических институтов СССР).
82. Цейтлин Я. М. Условия получения статистически однородных резуль-
татов наблюдений при линейных измерениях.— Измерительная техника, 1978,
№ 9, с. 34—35.
83. Цейтлин Я. М. О нормальных условиях линейных и угловых изме-
рений при активном контроле.— Измерительная техника, 1978, № 5,
с. 16—17.
84. Центральная измерительная лаборатория станкостроительного завода.
М.: НИИИМаш, 1970. 140 с.
85. Черепнин Н. В. Основы очистки, обезгаживания и откачки в вакуум-
ной технике. М.: Советское радио, 1967. 408 с.
86. Шварц Я. М. Методы и аппаратура для измерения элементов атмо-
сферного электричества. — В кн.: Атмосферное электричество. Л.: Гидроме-
теоиздат, 1976, с. 59—70.
87. Шеметилло В. А. Исследование влияния температуры и вибраций на
погрешность комплекса унифицированных средств для измерения прецизион-
ных деталей. — В кн.: Опыт внедрения прогрессивных методов и средств тех-
нического контроля качества. Л.: ЛДНТП, 1975, с. 90—94.
88. Щигловский К. В., Аксельрод В. С. Приборы для измерения парамет-
ров электростатического поля и их калибровка. — Измерительная техника,
1978, № 2, с. 63—65.
89. Якушев А. И., Бежелукова Е. Ф., Плуталов В. Н. Допуски и посадки
ЕСДП СЭВ. М.: Издательство стандартов, 1978. 255 с.
90. Яновский Б. М. Земной магнетизм. Л.: ЛГУ, 1978. 591 с.
91. Austin Philip R. Design and operation of clean rooms. B. N., 1970,
452 p.
92. Barrel H. — JOSA, 1951, v. 41, N 5, p. 295—302.
93. Com. Rend. XI Conf. Gen. d. Pds et MS. 1961. 144 p.
94. Edlen B. — JOSA, 1953, v. 43, N 5, p. 339—344.
95. tJald A. Statistical tables and formulas. London. 1952. 97 p.
222
ОГЛАВЛЕНИЕ
Предисловие ................................. 3
Принятые обозначения......................... 5
Г лава I. Метрологические основы нормирования
требований к нормальным условиям имерений 6
1. Уровень точности современного техно-
логического процесса....................—
2. Погрешности и условия измерения 9
3. Характеристика влияющих величин . . 14
4. Принцип метрологической идентифика-
ции нормальных условий измерений . 19
5. Критерий малости составляющей по-
грешности .............................26
6. Натуральное состояние упругой среды
и требования к нормальным условиям
ее начального состояния .............. 33
7. Методика статистической оценки преде-
лов Ду И бив...........................36
8. Существенные влияющие величины и
нормальные условия поверки средств
измерений............................ 41
Глава II. Температурные условия измерений . 44
9. Специфика теплового влияющего поля —
10. Методы расчета температурных де-
формаций ...............................49
11. Измерение температуры...............60
12. Термостатирование, термокомпенса-
ция и нормальная температура ... 69
Глава 111. Нормальный воздух..................80
13. Давление, влажность, теплосодержа-
ние и плотность воздуха..................—
14. Показатель преломления стандартного
и нормального воздуха...................86
15. Запыленность воздуха и оседание ви-
тающей пыли.............................94
16. Кондиционирование ..................98
17. Воздухообмен и скорость движения
воздуха ...............................106
Глава IV. Вибрации, виброустойчивость, вибро-
изоляция.....................................109
18. Источники и параметры вибраций, дей-
ствующих на средства измерений . . —
19. Исследование действия и измерение па-
раметров вынуждающих вибраций . .114
20. Уменьшение вибраций и внброизоля-
ция ....................................129
21. Расчет собственных частот колебаний
механических систем и виброгасителей 134
223
Глава V. Магнитные, электрические и гравитационные поля............141
22 Электростатическое влияющее поле.........................—
23. Магнитное влияющее поле..................................145
24. Радиопомехи и их источники...............................151
25. Действие проникающей радиации на проводники и ионизация
атмосферы ................................................. 153
26. Действие поля тяжести Земли..............................155
27. Нормальный уровень электромагнитного и гравитационного по-
лей ........................................................ 160
Глава VI. Эргономические основы выбора нормальных условий измерений 163
28. Гигиенические принципы кондиционирования воздуха . . . . —
,29. Нормальное освещение.....................................164
30. Действие вибрации и шума на человека . . . ..............168
31. Гигиеническая оценка магнитных и электрических полей . . . 175
Глава VII. Рабочее пространство и помещение........................178
32. Рабочее пространство и методы контроля его состояния . . . —
33. Воздух рабочей зоны и оборудование помещения.............183
34. Чистые комнаты и участки прецизионных работ..............186
35. Методика анализа нормальных условий измерений............189
36. Выбор нормальных условий и основы оценки эффективности их
обеспечения..................................................192
Г лава VIII. Оптимизация конструктивного оформления средств измерения 195
37. Выбор материала и конструктивных элементов средств размер-
ного контроля ............................................... —
38. Оценка нормальной температуры при измерениях приборами с
электрическими и оптическими преобразователями...............198
39. Комплексное действие влияющих факторов.................205
40. Адаптивные средства измерений..........................215
Список литературы..................................................219