/






































































































































































































Текст
1 В. Босс
Питтл
лыъцмп
•1
г
МАТЕМАТИКЕ
Пшпня алгебра
изложение
предмета
В. Босс
по
том
3
ЛЕКЦИИ
МАТЕМАТИКЕ
Линейная алгеОра
МОСКВА
Ш55
ББК 22.143 22.144 22.151.5
Босс В.
Лекции по математике: линейная алгебра. Т. 3. — М.: КомКнига, 2005.
224 с.
I5ВN 5-484-00046-7
Книга отличается краткостью и прозрачностью изложения. Объяснения да-
даются «человеческим языком» — лаконично и доходчиво. Значительное внимание
уделяется мотивации результатов и прикладным аспектам. Даже в устоявшихся
темах ощущается свежий взгляд, в связи с чем преподаватели найдут для себя
немало интересного. Книга легко читается.
Аналитическая геометрия рассматривается как вспомогательный предмет,
способствующий освоению понятий векторного пространства. Охват линейной
алгебры достаточно широкий, но изложение построено так, что можно ограни-
ограничиться любым желаемым срезом содержания.
Для студентов, преподавателей, инженеров и научных работников.
Издательство «КомКнига». 117312, г. Москва, пр-т 60-летия Октября, 9
Подписано к печати 24.02.2005 г. Формат 60x90/16. Печ. л. 14. Заказ № 1912
Отпечатано с готовых диапозитивов во ФГУП ИП К «Ульяновский Дом печати»
432980, г. Ульяновск, ул. Гончарова, 14
I5ВN 5-484-00046-7
© КомКнига, 2005
НАУЧНАЯ И УЧЕБНАЯ ЛИТЕРАТУРА
Е-таН
Каталог изданий в Интернете:
ННр://11КЗЗ.ш
Тел./факс: 7 @95) 135-42-16
УД55 Тел./факс: 7 @95) 135-42^6
3143 Ю 26865
785484
000463
Оглавление
Предисловие к «Лекциям» 7
Предисловие к тому 9
Глава 1. Аналитическая геометрия 10
1.1. Координаты и векторы 10
1.2. Описание геометрических объектов 15
1.3. Векторное произведение 19
1.4. Определители 22
1.5. Матрицы и преобразования 23
1.6. Прямые и плоскости 29
1.7. Геометрические задачи 32
1.8. Кривые и поверхности второго порядка 35
Глава 2. Векторы и матрицы 38
2.1. Примеры линейных задач 38
2.2. Векторы 39
2.3. Распознавание образов 43
2.4. Линейные отображения и матрицы .< 45
2.5. Прямоугольные и клеточные матрицы 49
2.6. Два примера 51
2.7. Элементарные преобразования 52
2.8. Теория определителей 57
2.9. Системы уравнений 62
2.10. Задачи и дополнения 65
Глава 3. Линейные преобразования 66
3.1. Замена координат 66
3.2. Собственные значения и комплексные
пространства 68
3.3. Собственные векторы 72
4 Оглавление
3.4. Эскиз спектральной теории 74
3.5. Линейные пространства 76
3.6. Манипуляции с подпространствами 78
3.7. Задачи и дополнения 80
Глава 4. Квадратичные формы 81
4.1. Квадратичные формы 81
4.2. Положительная определенность 86
4.3. Инерция и сигнатура 89
4.4. Условный экстремум 90
4.5. Сингулярные числа 91
4.6. Биортогональные базисы 92
4.7. Сопряженное пространство 94
4.8. Преобразования и тензоры 98
4.9. Задачи и дополнения 100
Глава 5. Канонические представления 103
5.1. Унитарные матрицы 103
5.2. Триангуляция Шура 105
5.3. Жордановы формы 108
5.4. Аннулирующий многочлен 112
5.5. Корневые подпространства ИЗ
5.6. Теорема Гамильтона—Кэли 117
5.7. А-матрицы 118
5.8. Задачи и дополнения 120
Глава 6. Функции от матриц 123
6.1. Матричные ряды 123
6.2. Нормы векторов и матриц 125
6.3. Спектральный радиус 130
6.4. Сходимость итераций 131
6.5. Функции как ряды 132
6.6. Матричная экспонента 133
6.7. Конечные алгоритмы 135
6.8. Задачи и дополнения 138
Оглавление 5
Глава 7. Матричные уравнения 140
7.1. Типичные задачи 140
7.2. Кронекерово произведение 141
7.3. Уравнения 143
Глава 8. Неравенства 147
8.1. Теоремы об альтернативах 147
8.2. Выпуклые множества и конусы 149
8.3. Теоремы о пересечениях 152
8.4. Р-матрицы 153
8.5. Линейное программирование 156
8.6. Задачи и дополнения 161
Гпава 9. Положительные матрицы 162
9.1. Полуупорядоченность и монотонность 162
9.2. Теорема Перрона 163
9.3. Неразложимость 168
9.4. Положительная обратимость 170
9.5. Оператор сдвига и устойчивость 172
9.6. Импримитивность 176
9.7. Стохастические матрицы 177
9.8. Конус положительно определенных матриц 179
9.9. Задачи и дополнения 180
Гпава 10. Численные методы 182
10.1. Предмет изучения 182
10.2. Ошибки счета и обусловленность 184
10.3. Оценки сверху и по вероятности 187
10.4. Возмущения спектра 188
10.5. Итерационные методы 191
10.6. Вычисление собственных значений 194
Глава 11. Сводка основных определений и результатов 196
11.1. Аналитическая геометрия 196
11.2. Векторы и матрицы 200
11.3. Линейные преобразования 205
6 Оглавление
11.4. Квадратичные формы 208
11.5. Канонические представления 210
11.6. Функции от матриц 211
11.7. Неравенства 213
11.8. Положительные матрицы 214
Обозначения 216
Литература 218
Предметный указатель 219
Предисловие к «Лекциям»
Самолеты позволяют летать, но доби-
добираться до аэропорта приходится самому.
Для нормального изучения любого математического предмета
необходимы по крайней мере четыре ингредиента:
1) живой учитель',
2) обыкновенный подробный учебник;
3) рядовой задачник;
4) учебник, освобожденный от рутины, но дающий общую картину, мотивы, связи,
«что зачем».
До четвертого пункта у системы образования руки не дохо-
доходили. Конечно, подобная задача иногда ставилась и решалась,
но в большинстве случаев — при параллельном исполнении функ-
функций обыкновенного учебника. Акценты из-за перефузки менялись,
и намерения со второй-третьей главы начинали дрейфовать, не до-
достигая результата. В виртуальном пространстве так бывает. Аналог
объединения гантели с теннисной ракеткой перестает решать обе
задачи, хотя это не сразу бросается в глаза.
«Лекции» ставят 4-й пункт своей главной целью. Сопутствую-
Сопутствующая идея — экономия слов и средств. Правда, на фоне деклараций
о краткости и ясности изложения предполагаемое издание около
20 томов может показаться тяжеловесным, но это связано с обшир-
обширностью математики, а не с перефузкой деталями.
Необходимо сказать, на кого рассчитано. Ответ «на всех» вы-
выглядит наивно, но он в какой-то мере отражает суть дела. Обозри-
Обозримый вид, обнаженные конструкции доказательств — такого сорта
8 Предисловие к «Лекциям»
книги удобно иметь под рукой. Не секрет, что специалисты са-
самой высокой категории тратят массу сил и времени на освоение
математических секторов, лежащих за рамками собственной спе-
специализации. Здесь же ко многим проблемам предлагается короткая
дорога, позволяющая быстро освоить новые области и освежить
старые. Для начинающих «короткие дороги» тем более полезны,
поскольку облегчают движение любыми другими путями.
В вопросе «на кого рассчитано» — есть и другой аспект. На силь-
сильных или слабых? На средний вуз или физтех? Опять-таки выходит
«на всех». Звучит странно, но речь не идет о регламентации круго-
кругозора. Простым языком, коротко и прозрачно описывается предмет.
Из этого каждый извлечет свое и двинется дальше.
Наконец, последнее. В условиях информационного наводнения
инструменты вчерашнего дня перестают работать. Не потому, что
изучаемые дисциплины чересчур разрослись, а потому, что новых
секторов жизни стало слишком много. И в этих условиях мало
кто готов уделять много времени чему-то одному. Поэтому учить
всему — надо как-то иначе. «Лекции» дают пример. Плохой ли,
хороший — покажет время. Но в любом случае, это продукт нового
поколения. Те же «колеса», тот же «руль», та же математическая
суть, — но по-другому.
Предисловие к тому
Дом строят месяц, сдают под ключ — год.
Если что и дает ясное представление о высшей математике, так
это линейная алгебра. Барьер повседневности здесь преодолевается
легко и просто. При этом оказывается, что удивительные вещи
находятся не в туманной дали, а совсем рядом.
Для освоения, разумеется, нужна еще определенная составляю-
составляющая у вектора жизненных интересов. Некоторая готовность к труд-
трудностям и, конечно, время. Вы представьте, что переехали жить
в другой город. День-другой побродили по главным улицам. Взгля-
Взглянули на панораму с какой-нибудь вышки. Разве этого достаточно —
для знакомства? Чтобы узнать город, надо исходить его пешком.
Много раз, вдоль и поперек, и в дождь, и в снег. И в хорошем,
и в плохом настроении. Сжиться с людьми, побегать по магази-
магазинам, поездить на трамвае — и по делу, и просто так. И тогда лишь,
в тысячный раз выходя из дома, вы увидите вдруг — знакомый город.
Глава 1
Аналитическая геометрия
Аналитическая геометрия представляет собой удобную ступеньку к пониманию
линейной алгебры. Рене Декарт создавал ее, правда, с другой целью — чтобы
геометрические задачи можно было решать алгебраически. Но результат часто
не совпадает с намерением. Декартовы координаты оказались полезнее в проти-
противоположной ситуации, когда числам приписывается роль координат выдуманного
пространства. При этом, конечно, получается виртуальная фикция, но она рабо-
работает. Будит воображение там, где изначально никакой геометрии нет.
Когда дело было сделано, об аналитической геометрии стали забывать,
начиная сразу с п измерений. У подсознания ушла почва из под ног, — ибо ему
нужна другая последовательность. Геометрия, потом алгебра. Наглядность, затем
абстракция.
1.1. Координаты и векторы
Координатами называют числа, определяющие положение точки
на плоскости В? или в пространстве В?. Обозначения К2, В? —
пока для удобства. Прямоугольные {де-
{декартовы [9]) координаты точки на плос-
плоскости — суть снабженные знаками плюс
или минус расстояния от точки х до двух
взаимно перпендикулярных прямых Ох\
и 0x2 — осей координат, — точка пере-
пересечения которых считается началом ко-
координат. На рис. 1.1 точка х = {х\,Х2}
описывается двумя координатами Х\ и Х2- Горизонтальная Х\ —
называется абсциссой, вертикальная Х2 ¦— ординатой.
Систему декартовых координат в пространстве задают три вза-
взаимно перпендикулярные плоскости, относительно которых поло-
положение точки определяется тремя числами аналогично предьщущему,
х = {жьж
1.1. Координаты и векторы
11
Точку х = {х\, Х2, а?з} называют также вектором либо радиусом-
вектором. Изначально, правда, вектор определяют как направлен-
направленный отрезок прямой, изображая его со стрелочкой на конце. Однако
все векторы, которые одинаково направлены и равны по длине, счи-
считаются равными1), — что, собственно, и позволяет ограничиться
рассмотрением векторов, исходящих из начала координат.
Сумма х = {х\, Х2, Жз} и у = {у\,у2, Уз} определяется как
Х2+У2,
что равносильно сложению векторов по правилу параллелофамма,
эквивалентом которого является правило треугольника. Преиму-
Преимущества последнего выявляются при сложении нескольких векто-
векторов (рис. 1.2): каждый следующий слагаемый вектор приставляется
началом к концу предыдущего — замыкающий вектор дает сумму.
Вычитание выводится из сложения: Ь — а определяется как вектор,
который в сумме с а дает Ь. Этому соответствует простой геомет-
геометрический трюк: начала а и Ь совмещаются, а концы соединяются
отрезком, направленным к &, что и дает разность Ь — а (рис. 1.2).
Ь-а
а + Ь
Рис. 1.2
Умножение на скаляр А,
Ах = {Хх\,Хх2,
растягивает (|А| > 1) или сжимает (|А| < 1) вектор ж, не меняя на-
направления при А > 0, и меняет его на противоположное при А < 0.
*' Это характерно для идеологии свободных векторов, которая удобна в геометрических
задачах.
12 Глава 1. Аналитическая геометрия
Вектор иногда определяют как направленный отрезок, но тогда в погранич-
пограничных ситуациях возникают проблемы. Скажем, вращение около некоторой оси
на угол <р — вектор или не вектор? С одной стороны, ему можно сопоставить
направленный по оси отрезок прямой длины у?, но это не решает проблему. Не-
Неприятность заключается в том, что вращения около разных осей не складываются
по правилу параллелограмма 2\ — и это приводит к отрицательному ответу на ис-
исходный вопрос. Поэтому в подобное определение вектора необходимо добавить
требование, чтобы векторы складывались по правилу параллелофамма.
В данном контексте речь идет о математических объектах вида х = {хх, х2, х{\,
которые складываются «как надо» по определению. Что касается правил сложе-
сложения сил, моментов, потоков и других физических величин, — это задача другой
епархии.
«Второе дно». Идея декартовых координат проста до гениальности,
но громоздка, — и поначалу возникает впечатление, что вектор-
векторные понятия нужны для краткости. Это лишь половина правды.
Геометрия имеет «некоординатный» характер, и ее координатное
описание часто уводит мысль в ложном направлении. Векторный
язык точнее отражает суть геометрических свойств, что обнаружи-
обнаруживается на каждом шагу.
Векторы, лежащие на одной прямой (одинаково или про-
противоположно направленные), называют коллинеарными; лежащие
в одной плоскости, — компланарными.
Говорят, что векторы3) {хь...,х*} линейно зависимы, если
существуют такие коэффициенты А],..., Ад, не все равные нулю, что
А1Х1 + ... + А*х* = 0.
В противном случае говорят о линейной независимости векто-
векторов {хь...,х*}.
Коллинеарные векторы всегда линейно зависимы. Компланарные — линейно
зависимы, если их больше двух. (?)
Линейно независимое множество {еье2,ез} в пространстве
считается базисом, если любой вектор х можно представить в виде
2' Складываются по правилу параллелофамма бесконечно малые вращения, что влечет
за собой векторную природу угловой скорости [3].
3' Как правило, векторы с индексом выделяются жирным шрифтом, чтобы отличить их
от координат.
1.1. Координаты и векторы
13
линейной комбинации
X =
Величины Х{ называют координатами точки х ^ В?.
Стандартный базис В? (единичные векторы, орты, {е],е2,ез}
направлены по осям декартовых координат):
A.1)
1
0
0
, е2 =
0
1
0
. е3 =
0
0
1
Подготавливая плацдарм для линейной алгебры, естественно нуме-
нумеровать оси координат и орты {в|,е2,ез}, что потом облегчает
следующий шаг — тройка увеличивается до п, и обобщение готово.
Но в обычном пространстве более удобны и привычны другие обозна-
обозначения: оси координат х, у, г; соответствующие орты \, }, к, — чему
далее отдается предпочтение.
Упражнения
1. Из векторов а, Ь, с можно сложить треугольник, если а + Ъ + с = 0.
2. Любые три вектора на плоскости либо четыре — в пространстве, — линейно
зависимы.
3. Любые два не коллинеарных вектора а, Ъ определяют плоскость4\ все точки
которой могут быть записаны в виде
г = Да
4. В случае А + // = 1 точка г = Да 4- цЪ лежит на прямой, проходящей
через концы векторов а и Ь. При дополнительном условии А, [X ^ 0 точка
г = Да + //6 лежит на отрезке, соединяющем а и Ъ.
5. Если а,Ь,с — радиус-векторы вершин треугольника АВС, то
является радиусом-вектором точки пересечения медиан.
Проекция аь вектора а на вектор (направление) Ь определяется
формулой
= а СО5 (р9
' Проходящую через три точки: нуль, а и Ь.
14
Глава 1. Аналитическая геометрия
«6
Рис. 1.3
Ь
где <р — угол между векторами а и & (рис. 1.3),
не важно по малой или большой дуге измерен-
измеренный — в силу соз ср = соз Bтг — (р).
Проекции ах, ау, а2 на декартовы оси х, у, г
представляют собой координаты вектора а.
а)
Рис.1.4
При дальнейшем развитии
теории важным оказывается деле-
деление систем координат на две ка-
категории. Прямоугольную систему
Охуг называют правой, если бу-
буравчик при вращении от х к у
движется вдоль г — рис. 1.4 я,
и левой, если ось г направлена
противоположно — рис. 1.4 б.
Косоугольные координаты. Иногда декартовой называют косоугольную систему
координат общего вида, в которой координаты определяются разложением век-
вектора5* — рис. 1.5 — по двум (на плоскости) или
по трем (в пространстве) направлениям, которые
не обязательно взаимно перпендикулярны.
Атрибутом «декартовости» при этом явля-
является наличие базиса. Примером не декартовых
координат могут служить (нелинейные) поляр-
: " ^ ные координаты (вектор характеризуется длиной
г и углом (р с выделенным направлением).
Рис.1.5
В общем случае не прямоугольных координат понятие ориентации опи-
опирается на следующее определение. Упорядоченная тройка некомпла-
некомпланарных векторов а,Ъ,с, исходящих из точки 0, называется правой,
если для наблюдателя, расположенного в нуле, обход концов а, 6, с
в указанном порядке происходит по часовой стрелке. В противном
случае тройка а,Ъ,с — левая. Соответственно классифицируются
базисы.
' Операция разложения вектора по заданным направлениям известна со школы (разло-
(разложение сил, скоростей на несколько составляющих — две на плоскости, три в пространстве),
и заключается в построении подходящего параллелограмма (либо параллелепипеда) с по-
последующим представлением диагонали в виде векторной суммы сторон.
1.2. Описание геометрических объектов
15
Если не оговорено прошивное, под декартовыми — подразумеваются далее
прямоугольные координаты.
1.2. Описание геометрических объектов
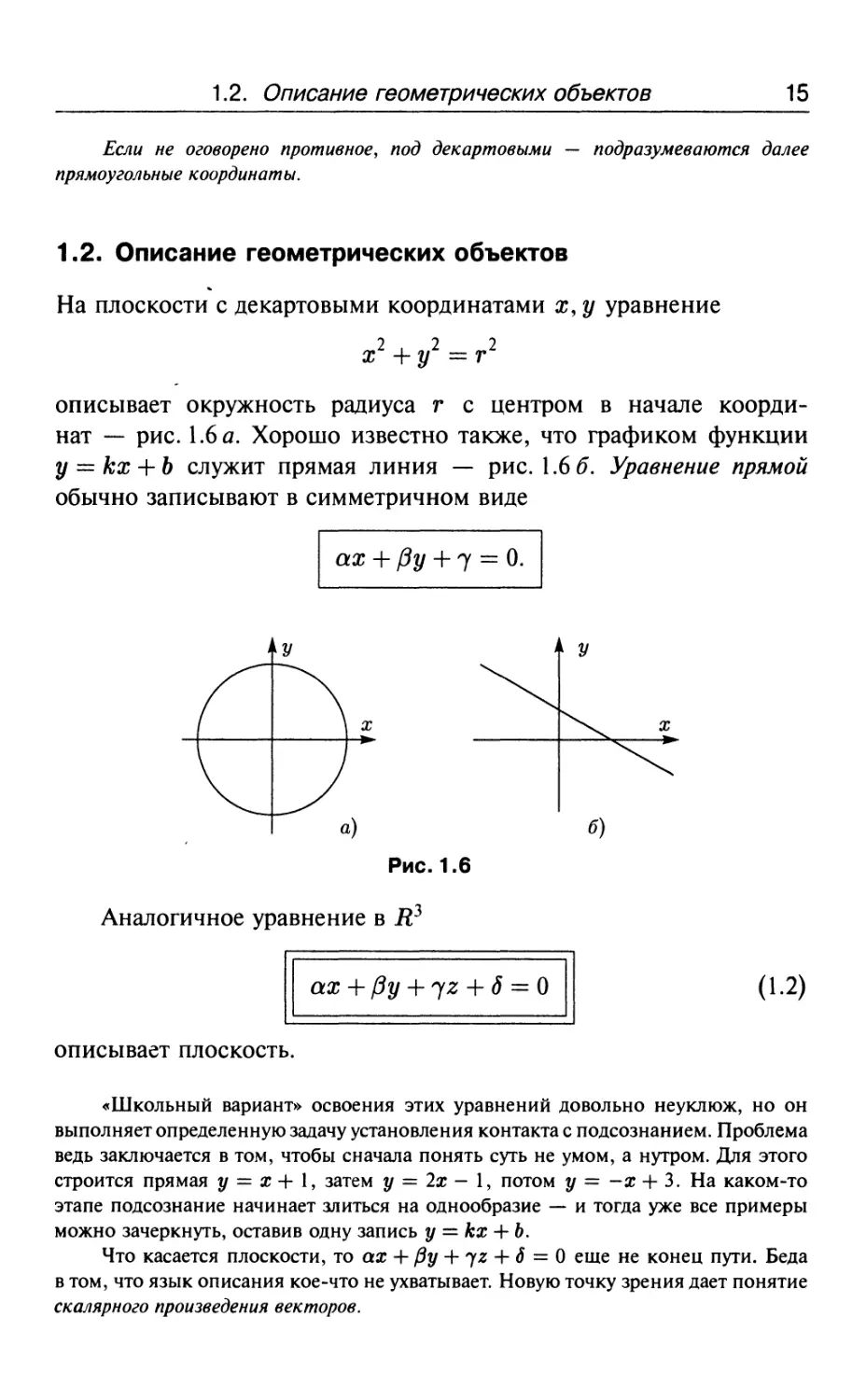
На плоскости с декартовыми координатами ж, у уравнение
описывает окружность радиуса г с центром в начале коорди-
координат — рис. 1.6 а. Хорошо известно также, что графиком функции
у = кх + Ъ служит прямая линия — рис. 1.66. Уравнение прямой
обычно записывают в симметричном виде
ах + (Зу + 7 = 0.
Рис. 1.6
Аналогичное уравнение в К3
ах + {Зу + 72 + 6 = 0
A.2)
описывает плоскость.
«Школьный вариант» освоения этих уравнений довольно неуклюж, но он
выполняет определенную задачу установления контакта с подсознанием. Проблема
ведь заключается в том, чтобы сначала понять суть не умом, а нутром. Для этого
строится прямая у = х -+- 1, затем у = 2х — 1, потом у = -х 4- 3. На каком-то
этапе подсознание начинает злиться на однообразие — и тогда уже все примеры
можно зачеркнуть, оставив одну запись у = кх + Ь.
Что касается плоскости, то ах + @у 4- у г + 6 = 0 еще не конец пути. Беда
в том, что язык описания кое-что не ухватывает. Новую точку зрения дает понятие
скалярного произведения векторов.
16
Глава 1. Аналитическая геометрия
Скалярное произведение определяется как произведение длин
векторов на косинус угла между ними6) (рис. 1.7),
х • у = \х\ • \у\
A.3)
Рис.1.7
Другими словами, ху (точка в
обозначении скалярного произведения
часто опускается) есть произведе-
произведение длины х на проекцию вектора у
на вектор ж, т.е.
ху = \х\ух.
Для обозначения скалярного произведения используется также более гро-
громоздкая, но иногда полезная запись (ж, у).
Скалярное произведение удовлетворяет обычным свойствам
умножения:
Ху = ух (коммутативность),
х(у + х) = Ху + XX (дистрибутивный закон).
Второе вытекает из равенства проек-
проекции суммы векторов — сумме проек-
проекций.
Отметим попутно, что длина \а\
(еще говорят — норма, и пишут ||а||)
вектора а = {ах, ау} по теореме Пи-
Пифагора равна (рис. 1.8)
Рис. 1.8 \\п\\ -
т. е. а2 = а- а =
В пространстве, соответственно,
\а\\2 = а2 =
6' Из-за четности и периодичности косинуса, созBтг - <р) — со$^>, — не важно, как
измеряется угол.
1.2. Описание геометрических объектов
17
откуда
что приводит к
(а ± бJ = (о, ± Ы2 + (в, ± Ь,J + (а, ± ЬгJ,
и (а + бJ - (а - бJ
а • о = = ахох + ау0у + агог.
Последнюю формулу
а-Ь = ахЪх
ауЬу
A.4)
иногда принимают за исходное определение скалярного произве-
произведения, выводя A.3) в качестве следствия.
Произведение а • Ъ = \а\ • |5| соз гр отражает широко распространенный в при-
природе способ взаимодействия векторов, характеризуемый умножением длины од-
одного вектора на проекцию другого: \а\Ьа. Например, работа силы Р на переме-
перемещении 5 равна
Р - 8 = \Р\ • \з\со5(р,
поскольку «работает» только составляющая Р, направленная вдоль 5.
Поток жидкости через площадку площади А5 равен скалярному произве-
произведению уАЗ, где V — скорость течения (в районе А5), а вектор А5 считается
направленным по нормали к площадке. Физически опять-таки понятная ситу-
ситуация: количество жидкости, протекающей через Д5, определяется нормальной
составляющей потока и не зависит от касательной составляющей.
Скалярное произведение — удобный инструмент при решении
многих задач. Пусть, скажем, исходная декартова система коор-
координат имеет орты \,},к, а новая (тоже декартова) — орты \',}[ к'.
Поскольку координаты вектора а = {ах,ау,аг} — есть проек-
проекции а на оси х,у,г, в новой системе
координаты а' = {ах,,а',,а'2,} — сно-
снова проекции, но уже на оси х',у',г'.
Поэтому, например,
где коэффициенты дают запись орта
1' = {гх,1у,г'г} в старой системе коор-
координат.
Рис. 1.9
18
Глава 1. Аналитическая геометрия
Произведение единичных векторов (рис. 1.9)
а = {соза, зша}, Ь = {соз/?, зш/?}
сразу дает формулу
соз (а - /3) = соз а соз /3 + зт а зт /3,
поскольку \а\ = |6| = 1.
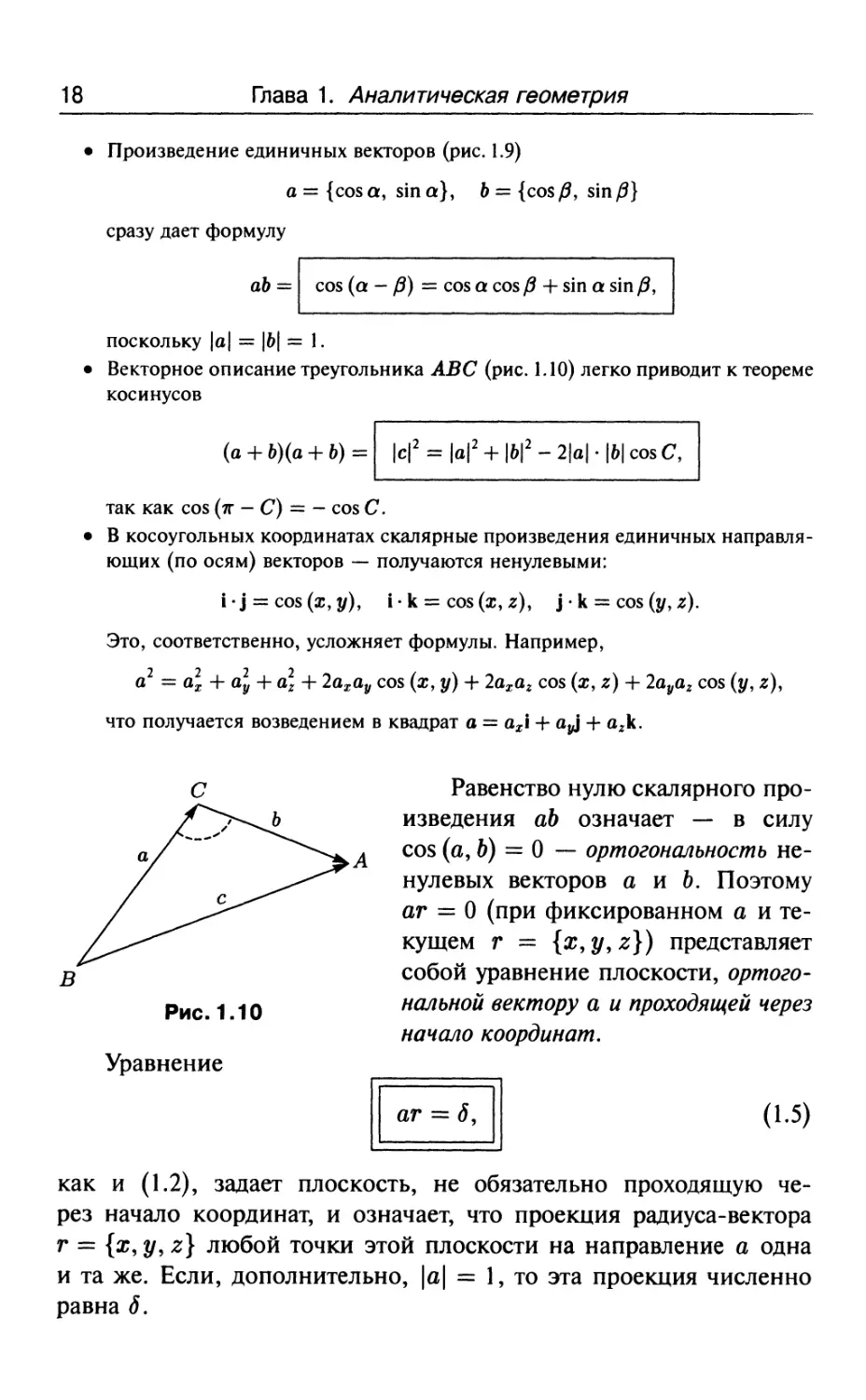
Векторное описание треугольника АВС (рис. 1.10) легко приводит к теореме
косинусов
(а + 6)(а + Ь) =
|6|2-2|а|-|6|созС,
так как соз (тг - С) = - соз С.
• В косоугольных координатах скалярные произведения единичных направля-
направляющих (по осям) векторов — получаются ненулевыми:
1-} = со$(х,у), I • к = соз (ж, г), \ • к = соз (у, г).
Это, соответственно, усложняет формулы. Например,
а2 = а2х + а2у + а\ + 2ахау соз (ж, у) + 2ахаг соз (ж, г) + 2а^аг соз ($/, г),
что получается возведением в квадрат а = ах1 + а>у\ + агк.
Равенство нулю скалярного про-
произведения аи означает — в силу
соз (а, Ь) = 0 — ортогональность не-
ненулевых векторов а и Ъ. Поэтому
аг = 0 (при фиксированном а и те-
текущем г = {ж, 2/, г}) представляет
собой уравнение плоскости, ортого-
ортогональной вектору а и проходящей через
начало координат.
Рис. 1.10
Уравнение
аг = 6,
A.5)
как и A.2), задает плоскость, не обязательно проходящую че-
через начало координат, и означает, что проекция радиуса-вектора
г = {х, у, г} любой точки этой плоскости на направление а одна
и та же. Если, дополнительно, \а\ = 1, то эта проекция численно
равна д.
1.3. Векторное произведение 19
Понятно, что A.5) лишь другая (векторная) форма записи
уравнения A.2), но она привносит дополнительную интерпретацию,
которая позволяет наглядно мыслить.
Прямые и плоскости в евклидовой геометрии — одни из основ-
основных объектов. Соответствующую роль в аналитической геометрии
играет уравнение A.5), манипуляции с которым помогают описать
многие задачи. Например, совокупности двух уравнений
аг — 5, Ьт — ^
удовлетворяет прямая в В? (пересечение плоскостей).
Понятия точки, прямой и плоскости в геометрии Евклида первичны и пото-
потому — неопределяемы. Аналитическая геометрия дает определение этих понятий7*,
но никакого чуда при этом не происходит — первичные понятия отодвигаются
в другую область.
1.3. Векторное произведение
Векторное произведение,
с = ах Ь,
определяется как вектор с, ортогональный векторам а и Ь, и состав-
составляющий тройку {а,Ъ,с}, совпадающую по ориентации с тройкой
базисных векторов, а длина с равна
площади параллелограмма, построен-
построенного на векторах а, Ь (рис. 1.11),
\с\ = \а\ • \Ь\ ы
Часто подразумевают, что система коор- Рис. 1.11
динат правая, — тогда проблему направления
с решает «правило буравчика», и странность определения с = а х Ь забывается.
«Странность» заключается в том, что векторное произведение ах Ь как бы ощу-
ощущает ориентацию пространства (меняет направление при замене левой системы
координат на правую). Такие векторы называют аксиальными, и даже — псев-
псевдовекторами. Обычные векторы (сила, скорость) — их называют полярными —
на замену системы координат не реагируют8).
7* Как множеств решений тех или иных уравнений.
'Реагирует их описание. При замене координат {х,у,г} на {—х, — у, — г\ описание
полярного вектора {ах, ау,аг} переходит в {-ах, -ау, —а2}. Запись аксиального — не ме-
меняется.
20
Глава 1. Аналитическая геометрия
Векторное произведение не ассоциативно,
(охб)хс^ох(Ьхс),
антикоммутативно,
х х у = -у х ж,
но справедлив дистрибутивный закон,
A.6)
проверка которого требует некоторых усилий.
^ Для обоснования A.6) представим вектор х в виде суммы х = х±
где составляющая х± перпендикулярна вектору и, а х\\ — параллельна. Очевидно,
ххи = х±хи, (х + у)± = х±+ у±.
Равенство A.6) теперь следует из почти очевидного
Линейная скорость V конца
радиуса-вектора г при вращении
вокруг оси, проходящей через на-
начало координат О, с угловой ско-
скоростью ш равна
V = Ш X Г,
A.7)
где (пока формально) вектор ш на-
направлен по оси вращения (в сто-
сторону, определяемую по «правилу
буравчика», рис. 1.12).
Если тело участвует в двух вращениях ш1 и ш2 (с пересекаю-
пересекающимися осями), то линейные скорости
V = Ш X Г И V = Ш X Г
складываются как векторы, и в силу A.6) —
V = ш1 х г + ш2 х г = (а;1 + а;2) х г.
Это означает, что результирующее движение происходит с угло-
угловой скоростью ш = ш1 -Ьо;2. Таким образом, угловые скорости
складываются по правилу параллелограмма, и поэтому являются
полноценными векторами9).
' Аксиальными.
(«
(а
(а
X
X
X
«А
а>гЪх
ахЬу
-агЬу,
- ахЬг,
- ауЬх.
1.3. Векторное произведение 21
В правой декартовой системе координат:
что совместно с дистрибутивным законом A.6) легко приводит10) к формулам,
определяющим координаты векторного произведения а х Ь:
A.8)
Векторное произведение оказывается удобным инструментом при описании
многих физических явлений.
Моментом силы Р относительно точки О называется вектор
М = гхР.
Аналогично определяется момент количества движения:
N = г х ту.
Дифференцируя 14, получаем
N = г х ту + г х ту = г х ту = г х Р = М,
поскольку ту = Р и г х ту = у х ту = 0.
Вот несколько примеров из геометрии.
• Раскрытие скобок в (а + Ь) х (а - Ъ) приводит к
(а + Ь) х (а - Ь) = -2а х &,
откуда следует, что площадь параллелограмма, построенного на диагоналях,
в два раза больше площади исходного параллелограмма.
• Перемножение векторов, изображенных на рис. 1.9, дает (в случае правой
ориентации {1,,|,к})
а х Ъ = - 8И1 (а - /3) к,
т. е. ненулевой является только координата
(а х Ь)г = ахЬу - ауЬх = со$ а зш р - &\п а со$ р.
Поэтому
81П(а -/3) = втасов/3 - со$а$тр.
• Уравнением прямой, параллельной вектору а и проходящей через точку Ь
(конец вектора &), служит
(г - Ь) х а = 0.
10)
В результате раскрытия скобок в (ах1 + ау\ + а2к) х (ЬХ1 + Ьу\ + Ь2к).
22
Глава 1. Аналитическая геометрия
1.4. Определители
Объем V параллелепипеда, построенного на векторах а, Ь, с (как
на ребрах), определяется смешанным произведением
а-(Ьхс) = ±У,
где Ь х с дает площадь параллелограмма, лежащего в основании,
а проекция аьхс — высота параллелепипеда. Что касается знака,
то плюс получается в ситуации, когда ориентация тройки {а, Ь, с}
такая же, как у базиса, минус — в противном случае (базис левый,
тройка {а, Ь, с} правая; либо наоборот).
В случае компланарных векторов а • (Ь х с) = 0, поскольку параллелепипед
сплющен, и его объем — нуль.
Рутинное перемножение векторов в координатной форме после исключения
нулевых членов приводит к
а(Ьх с) = ахЬус2 - ахЬ2Су + ауЬ2сх - ауЬхс2 + а2ЬхСу - агЬусх. A.9)
Тот же результат, что и A.9), дает раскрытие определителя, или
детерминанта
ах ау а2
Ьх Ьу Ьг
сх су сг
A.10)
общая теория которых будет изложена в следующей главе, но част-
частные случаи определителей 2-го и 3-го порядков — это те самые при-
примеры, которые более поучительны,
чем правила.
Детерминант второго порядка по оп-
определению равен
ах ау
= ахЬу - ауЬх.
A.11)
Если ось г перпендикулярна плоскости
векторов а, 6, то аг = Ьг = 0 и из фор-
формул A.8) для векторного произведения ста-
становится понятно, что детерминант A.11)
равен, по модулю, площади параллело-
параллелограмма, построенного на векторах а и 6.
1.5. Матрицы и преобразования
23
С учетом A.11) отсюда следует, что площадь параллелограмма О АС В (рис. 1.13)
равна разности площадей прямоугольников ООН К и ОЛЕР. Вне векторной
идеологии это не такая уж легкая геометрическая задача.
Сопоставление A.11) с A.9) приводит к равенству
ах ау а2
Ьх Ьу Ьг
Сх Су С2
= ах
Ьу Ь2
су с2
~пУ
ьх ь2
сх с2
ьх ьу
сх су
A.12)
которое сводит вычисление детерминанта 3-го порядка к вычислению детерми-
детерминантов 2-го порядка.
Из этой формулы следует, что векторное произведение а на & можно записать
в форме определителя
^ к
а х Ь =
ах ау а2
Ьх Ьу Ь2
где У, к — единичные орты.
1.5. Матрицы и преобразования
При манипулировании векторами часто встречается квадратная таблица чисел
вида
\ах ау аЛ
\ЬХ Ьу Ъх\,
которая фигурировала в записи определителя A.10). На такую таблицу можно
смотреть как на координатную запись друг под другом трех векторов (вектор-
строк) а, &, с; либо как на координатную запись в строчку трех вектор-столбцов
Более удобной оказывается запись таких таблиц (матриц) в виде
A.13)
А =
аи п\2 а\з
п2\ а22 0,23
«31 «32 «33
где первый индекс у элемента ац обозначает номер строки, вто-
второй — столбца. При этом через аг: будем обозначать г-ю строку А,
24
Глава 1. Аналитическая геометрия
через а^ — ^-и столбец, т.е.
Матрицы как операторы. Матрица A.13) чаще всего возникает как
таблица коэффициентов линейного преобразования
= а,
а22у
A.14)
переводящего вектор г = {ж, $/, г} в вектор й = {а, /?,7}.
Преобразование A.14) записывают в виде Ат = й, что опреде-
определяет по сути правило умножения матрицы на вектор и позволяет
смотреть на матрицу как на линейный оператор11), действующий
в пространстве трех переменных и преобразующий векторы по ука-
указанному правилу.
Если на произведение С = АВ матриц А = [ау] и В = [Ьу]
смотреть как на последовательное применение линейного операто-
оператора В, потом А, то правило умножения матриц
A.15)
получается обыкновенным приведением подобных в равенстве
Сх = АВж =
Из A.15) видно, что элемент сц матрицы С получается ска-
скалярным умножением вектор-строки аг: на вектор-столбец Ь у, т. е.
у = аг: • Ь :;- .
) Отображение, функцию.
1.5. Матрицы и преобразования
25
0
0
0
1
0
0'
0
1
Обратной к А называют матрицу А 1, такую что
где / — единичная матрица,
Т
определяющая тождественное преобразование 1х = х.
Наконец, матрица А* с элементами а*^ — а^ (строки становят-
становятся столбцами, столбцы — строками) называется транспонированной
к А. Вместо А* используются также равноценные обозначения АТ
либо А'.
Легко проверяется, что \А\ = \А*\.
Линейные уравнения. На A.14) можно смотреть также как на уравнение относи-
относительно г = {х, у, г] при заданном д, = {а, /3,7}.
Здесь полезно рассмотрение уравнения A.14) с разных точек зрения. С одной
стороны, A.14) есть
1~а1 1~°п1
т. е. решение {ж, у, г\ представляет собой координаты
вектора <к = \Р\
Ы
в базисе
При этом понятно, что вектор-столбцы могут составлять базис, если они неком-
некомпланарны (не лежат в одной плоскости). Для этого необходимо и достаточно,
чтобы определитель \А\ был не равен нулю.
С другой стороны, A.14) можно рассматривать как
A.16)
где
а = {аи, 012,
Ь = {а2\,а22,
с = {азиап, а33}.
26 Глава 1. Аналитическая геометрия
Каждое из трех уравнений A.16) описывает плоскость — см. A.5), — причем
векторы а, &, с перпендикулярны к этим плоскостям. Понятно, что плоскости
пересекаются в единственной точке, если нормали а, &, с некомпланарны, для
чего опять-таки необходимо и достаточно \А\ Ф 0. Остальные возможности
геометрически также очевидны |2).
Хотя решить линейную систему уравнений численно всегда легко после-
последовательным исключением переменных, интерес представляют единообразные
формулы и возможные интерпретации.
С целью получения общего решения A.16) рассмотрим сначала систему
A.17)
Поскольку в A.17) скалярное произведение г на & и на с равно нулю, то г
перпендикулярен Ь и с, т. е. параллелен &хс, а значит г = А(&хс) при некотором А,
которое определяется подстановкой г = А(& х с) в первое уравнение A.17), откуда
А[а-(Ьхс)] = 1 =^ А=— =^ г = —тг^-т-
а(Ьхс) а(Ьхс)
Обозначая полученное решение г через а° и два аналогичных через Ь° и с°,
в _ (Ьхс) _ (сха) о _ (ахЪ)
а(ЬхсУ а (Ьхс)' а (Ьхс)'
имеем
A.18)
Умножая теперь системы A.18), соответственно, на а,/?, 7 и складывая,
получаем
а • (аа° 4- ($Ь° 4- 7е) = <*>
Ь • (аа 4- /?&° 4- 7с°) = /?,
с • (аа° 4- РЬ° 4- 7С°) = 7'
откуда видно, что
г = аа + (ЗЬ° 4-7С° A.19)
является решением системы A.16).
'У плоскостей может не быть общей точки пересечения (решение системы A.16)
невозможно). Либо пересечением плоскостей является прямая — решений системы A.16)
бесконечно много.
1.5. Матрицы и преобразования
27
Таким образом, знание Векторов а°, &°, с позволяет практически мгновенно
|>ешать исходную систему уравнений A.16) при любой правой части.
Говорят, что векторы а°,Ъ°,с взаимны по отношению к а,Ъ,с. Из A.18)
видно, что точно так же а, 6, с взаимны по отношению к а° ,Ь°, с°. Очевидно,
ау
Ох К
О |О
пу Оу
аг К
Су
О
=
0
0
0
1
0
0"
0
1
т. е. матрица, составленная из вектор-столбцов а°, &°, с , является обратной по от-
отношению к исходной. Именно поэтому система A.16) сразу решается, как только
определены а°, Ь°, с . На матричном языке это выглядит тривиально. Уравнение
Ат = 6, после умножения слева на А~] переходит в г = А~хй, что сразу дает
решение, т. е. выражает г через д..
Правило Крамера. Многое из сказанного может показаться переливанием из пу-
пустого в порожнее, поскольку мы толчемся вокруг да около. Как решить систему —
ясно, а смена позиций меняет форму, но ничего не прибавляет по существу.
По крайней мере, так кажется. Тем не менее разные взгляды на один и тот же
факт позволяют математике расти и достигать новых областей, очень далеких
от первоначальных постановок задач. Разные взгляды — разные ассоциации,
связи, возможные обобщения.
Остановимся еще на одной интерпретации, для чего перенумеруем перемен-
переменные, считая г = {х\, х2, ж3}, и перепишем систему уравнений A.14) в виде
а,,ж, 4- а,2ж2
— а,
A.20)
т. е. по-прежнему Ат = Л.
Пусть Х> = \А\, а ^^ обозначает определитель матрицы, которая получается
из А заменой 1-го столбца на вектор-столбец Л. Тогда решение A.19) с учетом
формулы разложения определителя A.12) можно записать как
= {х1,х2,х3],
что называют правилом Крамера, которое точно так же формулируется в случае
двух переменных13*.
В качестве упражнения полезно вернуться к представлению решения как
координат вектора Л в базисе, составленном из вектор-столбцов матрицы А.
В двумерном случае
а,\Х\ +Ъхх2 = а,
а2Х\ 4- Ь2х2 = Р,
13)
Равно как и п переменных — см. следующую главу.
28 Глава 1. Аналитическая геометрия
результат получается совсем легко. Векторная запись системы уравнений имеет
вид ах\ 4- Ьх2 = йи после умножения (векторно) на Ь дает (а х Ь)х{ = (д, х Ь)
(поскольку Ь х Ь = 0), откуда х{ = (й х Ь)/(а х &), что есть Х\ =В\1В. Аналогично
получается х2 = #гД>- Деление в данном случае вектора на вектор возможно в
силу коллинеарности векторов.
Переход к другим координатам. Пусть имеется два базиса,
{еье2} и {е'ье^},
и
( [ +812*2,
A-21)
[ +822*2
определяет их взаимосвязь.
Допустим теперь, что ж, обозначают координаты вектора х
в базисе {е}, а х\: — в базисе {е'}. Подставляя е, из A.21) в
х = х\е\ + х2е2 = ж^в! + х*
и приравнивая коэффициенты при ег, — после раскрытия скобок
и приведения подобных, получим
т.е. х = 8*х' и, соответственно, х' — (8*) 1х. Другими словами,
если связь между базисами определяется матрицей 5 — в смыс-
смысле A.21), — то связь между координатами х' = Тх осуществляет
матрица Т = (8*)~{.
Неудобство, связанное с тем, что взаимоотношение базисов
и координат выражается разными матрицами, не играет роли,
поскольку рассматривать то и другое одновременно обычно не тре-
требуется. Пусть, говорят, новые координаты через старые (либо на-
наоборот) выражаются с помощью Т, — и о базисе не вспоминают.
Главное, что Т линейно.
В К3 ситуация аналогична. Выражение одних координат через
другие — это всегда определение проекций вектора
1.6. Прямые и плоскости 29
на новые направления, задаваемые векторами другого базиса. При
этом решает простое правило — проекция суммы векторов равна
сумме проекций:
ге = гх соз (еТж) + гу соз (еру) + тг соз (О)-
Если при переходе к новым координатам растяжения осей не происходит, —
остается только поворот, который описывается матрицей
5(<р)=\СО5<Р
ЧГ/ |51
Транспонированию 5 здесь соответствует замена <р на —<р (замена вращения
на угол (р противоположным вращением),
Упражнение
сов(а + /3) -5Ш (а + /?)] _ Гсоза -эта] Гсоб/З -бш/Л ,?
$т(а + /3) со$(а + /3)\ ~ [зта соз а] " [зтр соз/?] ' ^
1.6. Прямые и плоскости
Различные описания плоскости. Как уравнение
ах + /Зу + 7* + б = О,
т.е. а -г + # = 0, так и
г = Ха + //6 + с,
задают плоскость. Первое описание служит уравнением плоскости
с нормалью а — {а, /?, 7} и позволяет легко проверить, принад-
принадлежит ли предъявляемая точка г = {х, у, г} этой плоскости (про-
(проверкой равенства а - г + д = 0), второе — параметрически задает
плоскость, проходящую через точку с и ортогональную а х Ь, —
с его помощью удобно генерировать точки плоскости, выбирая
произвольно параметры А, /х.
Подобная двойственность характерна для математики вообще, и между та-
такими описаниями иногда лежит пропасть|4). В данном случае различие не так
велико. Из одного описания легко получить другое. (?)
^ См. например, в [3] главу о вычислимости и доказуемости.
30
Глава 1. Аналитическая геометрия
Приведенные варианты являются опорными, но не исчерпы-
исчерпывают возможностей. Необходимо, скажем, описать плоскость, про-
проходящую через три заданные точки
г1 =
г2 = {х2,у2,
г3 = {х3,уз,
Задача выглядит по-другому, но легко сводится к предыдущему.
Полагая, например,
и выбирая в качестве с любую из точек г1, г2, г3, получаем парамет-
параметрическую запись плоскости15) г = \а + цЪ + с. Описанием первого
типа будет
(а х 6) • г + д = 0,
где д определяется подстановкой вместо г любой из точек г1, г2, г3.
В иной форме это можно записать как равенство нулю определителя
Х-
~х\ Уз~У\
-о,
что означает линейную зависимость векторов
Г_Г1, гХ-Г\ Г1-Г\
Кстати, вместо уравнения ах + Ру + 72 + б — 0 часто целесо-
целесообразно использование его эквивалента
а(х -
~ Ч) = 0,
где вместо не всегда удобного параметра 6 фигурирует точка
!Ль 2о}> через которую проходит плоскость.
Прямая. Прямая на плоскости играет роль аналогичную той, кото-
которую играет плоскость в пространстве трех переменных. Поэтому
а(х-хо)+Р(у-уо) = О
' Почему в качестве с можно выбирать любую из точек г\г , г¦ ?
1.6. Прямые и плоскости
31
есть уравнение прямой, ортогональной вектору {а,/?} и проходя-
проходящей через точку {жо, Уо}- Но для описания прямой в пространстве
требуются уже два линейных уравнения
A.22)
Если г удовлетворяет обоим уравнениям, это означает, что г лежит
на пересечении плоскостей, т.е. на прямой.
Разумеется, можно ограничиться одним нелинейным уравне-
уравнением
но это не меняет сути. Суть в каком-то смысле меняет запись A.22)
в виде одного линейного уравнения
г х (а х Ь) = дЪ - (а,
A.23)
однако в координатной записи A.22) — это два уравнения, тогда
как A.23) приводит к трем уравнениям.
Поскольку о происхождении вектора (а х Ь) можно забыть,
каноническое уравнение прямой можно записать так
г х с =
Вектор с здесь направлен вдоль прямой, а д, = г° х с, где г° —
любая точка, через которую проходит прямая.
Другой вариант описания прямой, проходящей через точ-
точку г0, — параметрическое задание, г - г° = ат, т. е.
х - х° = ахт, у-у0 = аут, г - г° = а2т,
где вектор а задает направление прямой.
При необходимости описать прямую, проходящую через две
точки
г1 = {хиуигх}, г2 = {х2, уъ 2г),
32
Глава 1. Аналитическая геометрия
достаточно в качестве а взять вектор г1 - г2. После исключения
параметра г, получается уравнение прямой 16)
X
х2
-х0
-ж,
У
У2
-З/о
-2/1
г
-20
где точка г0 = {х$, уо, %о}-> понятно, не может быть произвольной.
Обычно полагают г° = г] либо г° — г2.
Касательная плоскость. Пусть речь идет о функции двух переменных г = /(ж, у).
Как известно, градиент
дх
д-1\
9 ду)
перпендикулярен к линии постоянного уровня /(ж, у) = сопз1 в любой точ-
точке {ж0, Уо}- Поэтому касательная плоскость — проходящая через точку {ж0, уо} —
к линии постоянного уровня функции
2, — /(ж, у) описывается уравнением
(на рис. 1.14 это пунктирная прямая)
'У
Если интерес представляет каса-
касательная плоскость к поверхности гра-
графика функции г = /(ж, у), то это
сводится к предыдущему случаю рас-
рассмотрением функции и = г - /(ж, у)
трех переменных. Ее градиент
Рис. 1.14 Г д/ 6
\ '~"дх'~~ду.
Поэтому касательная плоскость к поверхности г = /(ж, у) в точке {%о,Хо,уо}
определяется уравнением
1.7. Геометрические задачи
Расстояние до плоскости. Пусть плоскость задает уравнение га = 6.
Если г разложить по взаимно перпендикулярным направлениям
16)
На самом деле — два уравнения.
1.7. Геометрические задачи 33
г = га + г_|_а> становится ясно, что минимальная длина у г будет
в случае г±а = 0. Таким образом, расстояние от начала координат
до плоскости равно
Расстояние от произвольной точки Ь определяется так же — после
переноса в Ь начала координат, что достигается заменой г = г' + Ь,
и в итоге дает величину \6 - а • 6|/||а||.
Если требуется не само минимальное расстояние, а ближайшая к началу
координат точка (на плоскости), то для ее определения надо решить систему
из двух векторных уравнений: га = 6игха = 0, что равносильно г1о = 0.
При нежелании иметь дело с векторами — можно рассматривать координат-
координатную запись задачи:
х2 + у2 + г2 -> ппп, ах + /Зу + ^г = 6,
которая легко решается методом множителей Лагранжа (см. [4, т. 1]).
Расстояние до прямой. Разнообразие возможностей здесь опреде-
определяется вариантами задания прямой, которые легко сводятся друг
к другу. В варианте A.23), т.е. г х а = с, ближайшая к началу
координат точка на прямой определяется системой уравнений
г х а — с, г • а = 0.
Находя решение и вычисляя длину соответствующего вектора г,
получаем расстояние до прямой (от начала координат).
Если сама ближайшая точка не нужна, то расстояние определя-
определяется совсем просто. Раскладывая г по взаимно перпендикулярным
направлениям г — г\\а + г±а, в ближайшей к началу координат точке
имеем |гха| * 11а11 = НСН> откуда искомое расстояние:
1И1/И1
Скрещивающиеся прямые. Пусть имеются две прямые, описываемые уравнениями
г х а = А, з х Ь = В,
где векторы г и з лежат, соответственно, на первой и второй прямой.
Умножая первое уравнение скалярно на 6, второе — на а, имеем
(г х а) • Ъ = А • 6, (« х Ъ) • а = В • а,
34 Глава 1. Аналитическая геометрия
или равносильно 17)
г-(ахЬ) = А-Ь, з • (Ь х а) = В • а.
Последние два уравнения при сложении дают
(г - 5) • (а х Ъ) = А - Ъ + В • а.
Это означает, что проекция вектора г — 5 на направление (а х Ь) постоянна.
Поэтому длина (норма) г - в будет минимальна, когда (г — з) || (а х 6). В этом
случае \\г - з\\ • \\а х 6|| = ||А • Ъ + В • а\\, откуда (минимальное) расстояние между
прямыми равно
\\А-Ъ + В-а\\
\\а х *|| '
При А • Ь + В • а = 0 прямые пересекаются.
Чтобы найти сами точки г и 5, на которых достигается минимум расстояния,
надо решить систему трех векторных уравнений
(г - 5) х (а х Ъ) = 0, г ха = А, з хЪ = В.
Частные задачи.
• В ряде случаев полезна следующая формула для двойного век-
векторного произведения18)
а х (Ь х с) = Ь(а • с) - с(а • 6).
Вот одно из полезных следствий:
п х (Ь хп) = Ь- п(п • Ь), если п-п= 1,
что приводит к формуле
Ь = п(п -Ъ) + п х (Ъ хп), \\п\\ = 1,
которая дает разложение Ь на две составляющие — параллель-
параллельную и перпендикулярную единичному вектору п.
• Координатно-векторное мышление «переворачивает» и упро-
упрощает почти любую геометрическую задачу. Вот, например, как
выглядит векторное доказательство известного факта: если диа-
диагонали четырехугольника АВСБ делят друг друга пополам, то
АВСБ — параллелограмм.
Поскольку смешанное произведение а • (Ь х с) не меняется при циклической переста-
перестановке векторов (и меняет знак при — не циклической) — объем параллелепипеда тот же
самый, знак определяет ориентация.
18^ Мнемоническое правило: «абэцэ равно бац минус цаб».
1.8. Кривые и поверхности второго порядка 35
Пусть а,Ь,с,й — радиус-векторы, соответственно, вершин
А, В, С, И. По условию
(а + с)=(Ь + а),
откуда следует Ь - а = с - й, т. е. стороны АВ и СВ равны
и параллельны. >
Упражнения
• Пусть а,Ь,с — радиус-векторы вершин треугольника АВС. Тогда вектор
з = ахЬ + ах с + Ьхс
равен удвоенной площади ААВС и перпендикулярен плоскости, в которой
лежит треугольник.
• Уравнение
ХоХ + УоУ + 202 — К2
определяет плоскость, касающуюся сферы х2+у2+г1—К2 в точке {х0, у0, г0}.
• Пусть а,Ь,с — радиус-векторы вершин треугольника АВС. Тогда радиус-
вектор точки пересечения биссектрис равен
_ аВС + ЬАС + сАВ
Т~~ ВС + АС + АВ '
где ВС, АС, АВ — длины соответствующих сторон,
а + Ъ + с
г = — точка пересечения медиан,
г — — точка пересечения высот.
\%А + \%В + \%С
1.8. Кривые и поверхности второго порядка
Уравнение на плоскости
поворотом осей координат
_ Гсо8 V ~ 8*п чЛ Гж1
приводится к виду
А!х2 4- 2В'ху 4- С1 у1 = В.
36
Глава 1. Аналитическая геометрия
При этом выбором угла <р всегда можно обеспечить19) В' = 0. Вари-
Варианты в результате считаются на пальцах одной руки. Вырожденные
случаи, когда одна из констант Аг, С' обращается в нуль20), мало-
малоинтересны. В остающихся вариантах получаются эллипс и гипербола.
Эллипс. Каноническое уравнение эллипса:
а > Ь > 0.
На рис. 1.15 изображена со-
соответствующая геометрическая
фигура. Величины а и Ь равны
длинам большой и малой полу-
полуосей. В случае а = Ь получается
окружность.
-Ь
Рис.1-15. Эллипс
Эллипс обладает радом замеча-
замечательных свойств и может быть охарак-
охарактеризован как:
• Множество точек плоскости, для каждой из которых сумма расстояний
до фокусов Р\, Р2 постоянна и равна 2а. Расстояние между фокусами — 2с,
гдес2 = а2-Ь2.
• Кривая, получаемая в пересечении кругового конуса с плоскостью.
Оптическое свойство: световой луч, исходящий из одного фокуса, после
отражения от эллипса проходит через другой фокус.
Отношение е = с/а называют эксцентриситетом эллипса. В полярных
координатах р, <р эллипс описывается уравнением
1 + е сов (р'
где р — фокальный параметр, равный половине длины вертикальной хорды,
проходящей через фокус.
Принять на веру или проверить — каждый решает сам. Хорошо (плохо) и то, и другое.
Проверки изощряют навыки, но замедляют ход. Вера, как воздушный шар, быстро возносит
в облака, но отрывает от Земли.
20)
Это соответствует ситуации
1.8. Кривые и поверхности второго порядка
37
Пространственное обобщение — эллипсоид. Уравнение:
а2 + Ь2 + с2
Птербола. Гипербола — плоская кривая,
как и эллипс, представляет собой сечение конуса плоскостью.
На рис. 1.16 изображена соответствующая геометрическая фигу-
а
ра. Имеет две асимптоты у = ±—х. Расстояние между фокусами Р\,
о
Р2 — 2с, где с2 = а2 + Ь2.
Характеризуется как геометриче-
геометрическое множество точек плоскости, мо-
модуль разности расстояний которых до Р\
и 2*2 постоянен и равен 2а.
При а = Ь асимптоты взаимно
перпендикулярны. Если их принять за
координатные оси, — уравнение гипер-
гиперболы трансформируется в у = к/х.
)
а
/
Ь
ч
( *
Пространственное обобщение —
гиперболоид. Уравнение:
Рис. 1.16. Гипербола
Глава 2
Векторы и матрицы
2.1. Примеры линейных задач
Изучать абстрактную науку удобнее, имея в голове несколько содержательных
задач. Конечно, преодолевать отвращение к конкретике нелегко, но это потом
окупается.
Модель производства. Пусть ж; обозначает интенсивность ^'-го технологического
процесса, а|; — количество 1-го продукта, производимого (а|; > 0) или потреб-
потребляемого (а|; < 0) при единичной интенсивности ,;-го технологического процесса.
Суммарное производство (потребление) 1-го продукта определяется суммой
п
У,- = 53вуЖу, 1=1,..., т. B.1)
;='
На этом фоне могут решаться задачи оптимизации типа ^Г^ с^ -> шах.
1
Межотраслевой баланс. Имеется п отраслей, 1-я отрасль выпускает 1-й продукт
в количестве ж,. На выпуск единицы 1-го продукта в системе затрачивается а^ ^ 0
единиц ^-то продукта. Понятно, что при выпуске набора
х = {х19...,хп}
чистый выпуск 1-го продукта равен
Вопрос о продуктивности модели, таким образом, сводится к положительной
разрешимости системы уравнений ^
*' =
!' Толи при любом, то ли при некотором наборе у > 0. Как оказывается, существование
продуктивного плана х > 0 при некотором у > 0 достаточно для существования решения
х ^ 0 — при любом у^О.
2.2. Векторы 39
Транспортная задача. Допустим, имеется п пунктов, в которых производится
и потребляется некий вид продукта (хлеб, например). Из г-го пункта в ^'-й
продукт перевозится в количестве ж,;. Естественно, что из г-го пункта нельзя
вывезти больше продукта, чем там производится: \^ ж,; ^ Р,, а в ^'-й пункт надо
завозить не меньше, чем там потребляется \^ ж,; ^ С;.
I
Если цена перевозки единицы продукта из г-го пункта в ;-й — равна Л1;,
общая задача минимизации транспортных расходов выглядит так:
Пассажиропотоки. В городе имеется п районов, Р, — число жителей г-го района,
IV] — число работающих в ^'-м районе, наконец, ж,; — число живущих в г-м
районе и работающих в ^'-м. Очевидно,
К этим линейным взаимосвязям переменных могут добавляться другие фак-
факторы и соотношения.
2.2. Векторы
При изучении вектор-функций /(х\,..., хп) набор х = {х\ч...,хп}
называют вектором, мысленно откладывая значения х\,...,хп
по координатным осям «выдуманного» пространства.
Аналогия с обычным представлением о векторах становится
осмысленной при подходящем определении операций:
• умножение на скаляр А ,
Хх = {Ажь...,Ажп}, B.2)
• сложение,
х + у = {х\ + 2/1,..., хп + уп), B.3)
• скалярное произведение,
х-у = Хху1 + ... + хпуп, B.4)
для которого используются эквивалентные обозначения2) (х, у)
и ху.
^ Эквивалентные обозначения не менее ценная вещь, чем синонимы в обычном языке.
40
Глава 2. Векторы и матрицы
С помощью скалярного произведения вводится норма (длина
вектора),
11x11 = \/ж2 =
которую принято считать евклидовой.
Множество векторов, на которых введены перечисленные операции,
называют п-мерным евклидовым пространством и обозначают Кп.
Операции B.2)—B.4) представляют собой обобщения ана-
аналогичных понятий в Е3. Покоординатное сложение B.3) в К3
равносильно определению суммы векторов по правилу параллело-
параллелограмма. Скалярное произведение в К3 изначально иногда опре-
определяется как произведение длин векторов на косинус угла между
ними, но потом выясняется, что формула B.4) при п = 3 дает то же
самое. В общем случае такая интерпретация может быть сохранена
благодаря известному неравенству Коши—Буняковского3)
М1-Ы1,
B.5)
которое дает возможность ввести понятие косинуса угла между
векторами при любом п,
B.6)
-4 Неравенство B.5) доказывается совсем просто. Раскрывая скобки в оче-
очевидном неравенстве (х — ХуJ ^ 0, имеем
для любого Л, — что возможно лишь при неположительности дискриминанта
квадратного многочлена — а это и есть B.5). >
' Альтернативное название: неравенство Коши—Шварца.
2.2. Векторы
41
Линейная независимость и базис. Говорят, что множество векторов 4)
{хь ..., х#} линейно зависимо, если существуют такие коэффициен-
коэффициенты А1,..., А*, не все равные нулю, что
В противном случае говорят о линейной независимости элемен-
элементов5) {хь... , х*}. Коллинеарные векторы6), например, — линейно
зависимы.
Если и = Х\Х\ + ... + А*хл, то говорят, что вектор и — линейная комбинация
векторов {х!,..., хк}. Совокупность всевозможных
и = Х\Х\ + ... + Хкхк
считают линейной оболочкой множества {Х(,..., х*}. Линейная оболочка представ-
представляет собой линейное пространство Р, натянутое на {хь ..., х*}. Характеристиче-
Характеристическое свойство Р:
х.уеР =» ах + /Зу€Р.
Линейно независимое множество {еь ..., еп} называют бази-
базисом, если любой вектор х Е Кп можно представить в виде линейной
комбинации7)
х = х{е\ + ... + жпеп.
Величины Х\,..., хп именуются координатами точки х Е Яп.
Стандартный базис Кп:
B.7)
Число п векторов, составляющих базис (не зависящее от выбора
последнего), называют размерностью пространства.
Любые п линейно независимых векторов в Кп могут служить
базисом.
' Напомним, что векторы с индексом выделяются жирным шрифтом, чтобы отличить
их от координат.
' Элемент и точка — употребляются как синонимы вектора.
6^ Коллинеарными называют векторы, лежащие на одной прямой, т. е. векторы, которые
одинаково или противоположно направлены.
' То есть Яп натянуто на свой базис.
42
Глава 2. Векторы и матрицы
Упражнения
• Если множество векторов {Гь ..., Гш} составляет базис Кп, то га = п.
Множество
"Г
0
1
1
0
Г, =
является базисом в множестве векторов вида
Ортогональность. Векторы х, у определяют как ортогональные, если
их скалярное произведение равно нулю, х • у — 0.
Важная роль ортогональности заключена в том, что с ее помо-
помощью определяется понятие плоскости Ро, как множества элемен-
элементов х, ортогональных некоторому вектору а,
= 0, т.е. а\Х\
апхп = 0.
Понятно, что х,у б Ра влечет за собой ах + /Зу Е Ра-
Описанная стартовая позиция представляет собой упрощенный взгляд
на предмет — достаточный для понимания основных результатов
линейной алгебры при некотором поэтапном расширении угла зрения.
Важно лишь отдавать себе отчет в ограниченности избранного ра-
ракурса, чтобы для необходимых дополнений были открыты «форточки».
Вот некоторые бреши в изложении, которые будут заделаны позже. Нера-
Неравенство Коши—Буняковского гарантирует сов \р ^ 1, но этого мало для определе-
определения угла.
Правда, сама формула B.6) далее не требуется, но она полезна в идеологиче-
идеологическом отношении — ибо легализация п-мерного пространства в сфере подсознания
нуждается в том, чтобы Кп имело те же атрибуты, что и К3. Обоснование B.6)
тривиально. Два вектора ж, у определяют плоскость Р (проходящую через три
точки 0, ж, у), представляющую собой двумерное пространство К2, — а скалярное
произведение х • у в К2 как раз и дает косинус. Таким образом, при любой
размерности Кп угол остается явлением двумерным, что льет воду на мельницу
«легализации».
Однако легко сказка сказывается. На указанном пути возникает проблема
с толкованием х • у в плоскости Р. Беда в том, что в основе определения B.4)
2.3. Распознавание образов 43
лежит координатное представление8* векторов. При переходе к другой системе
координат скалярное произведение как-то меняется (по форме записи) — пока
не ясно как. В плоскости Р система координат вообще не задана. Как ее
задать, и нужно ли? Благодаря двумерности Р, можно просто ограничиться
произведением длин векторов на косинус угла между ними. Но совпадет ли это
с результатом перемножения по формуле B.4)?
Имеется также некоторое ощущение дискомфорта в связи с понятиями
ортогональности, базиса и размерности. Пока есть пробелы в определении угла,
ортогональность слегка расплывается. Как понимать х • у = 0? Лучше всего, как
сов (рху = 0, но это уже сказка про белого бычка.
На упомянутые вопросы легко ответить, особенно, если начинать с более
точных определений абстрактного характера (см. раздел 3.5). В данном случае
избран не самый экономный путь для того, чтобы лучше почувствовать мотиви-
мотивировку некоторых абстракций, освоение которых помогает геометрическому стилю
мышления. Линейную алгебру, строго говоря, можно изучать вообще без геомет-
геометрических представлений, как науку о прямоугольных таблицах чисел, с- но тогда
она больше походит на китайскую грамоту. Здесь предпочтение отдается ее трак-
трактовке как теории линейных операторов, действующих в евклидовом пространстве.
Это требует некоторых дополнительных усилий на освоение исходных понятий,
что окупается впоследствии наглядностью и другими удобствами.
2.3. Распознавание образов
Абстрактные высоты хороши при обеспеченных тылах. Поэтому время от вре-
времени имеет смысл возвращаться к практическим задачам, которые напоминают
о секторе прицела.
В одной из возможных постановок задачи распознавания образов объекты
характеризуются наборами параметров х = {х\,... ,хп} и группируются в классы
(образы), которым в Кп соответствуют некоторые множества точек.
Допустим, есть всего два класса объектов 9) и, соответственно, два множества
РЬР2 6 -й", которые для простоты будем считать конечными. Предположим, что
существует плоскость, разделяющая Рх и Р2. Это означает существование такого
вектора с, что сх > О, если х 6 Р\, и сх < О, если х 6 Рг-
В процессе обучения линейной распознающей машине предъявляется бес-
бесконечная обучающая последовательность
в которой любой объект из Р\ или Р2 встречается бесконечное число раз.
Машина в качестве с принимает сначала произвольный вектор с0, и потом меняет
8' Уступки в общности определений обычно выигрывают в наглядности, но проигрывают
в широте охвата.
9) Скажем, жук и бегемот, либо А и В, либо свой самолет и самолет противника.
= ск-хк
44 Глава 2. Векторы и матрицы
его следующим образом. Если с помощью с* точка хк распознается правильно, то
с*+1 =с*. Если же хк ЕР\у но с* ж* ^ 0, то с**1 = с* + хк .И
если хк € Рг, но с*ж* ^ 0. Вопрос заключается в том, научится ли машина
за конечное число шагов безошибочно распознавать образы.
Многословие описания здесь связано с содержательной интерпретацией.
Грамотный математический эквивалент выглядит проще. Существование разделя-
разделяющей плоскости равносильно наличию такого вектора с, что
сх > 0 для любого х е Р = Р\ р| (-Рг).
Процедура подстройки с*:
Г с*, если с*ж* > 0,
с Ч * * * * ВСе Х еР' A8)
с +х ,
если
^ Покажем сходимость B.8) за конечное число шагов. Пусть хк обозначает
сокращенную обучающую последовательность, из которой выброшены правильно
распознаваемые «показы». Тогда
сН1=1Ч... + 1*, B.9)
если для простоты положить с0 = 0. Умножая B.9) на с, получаем
ск+1 -с = х1 с + ... + хкс^к0,
где в > 0 — минимальное значение х • с при условии х Е Р.
Опираясь далее на неравенство Коши—Буняковского, приходим к оценке
Н^'И^р*. BЛ0)
С другой стороны, возводя с7 = с*; +1? в квадрат, имеем
что, в силу (? -х}^0, дает Н^"'!!2 - Цс^Ц2 ^ ||ж;||2. Суммируя эти неравенства по ],
приходим к
А:
^Ч2 *+|^ B.11)
где в — максимум Ця^'Н при условии х Е Р.
Сопоставление неравенств B.11) и B.10) показывает, что к не может расти
неограниченно. >
2.4. Линейные отображения и матрицы
45
2.4. Линейные отображения и матрицы
Линейная функция
у = пх =
апхп
принимает постоянные значения а • х — C на «плоскостях» парал-
параллельных плоскости а• х = 0. Действительно, из а • и = /?, а • г; = /?
следует а • (и - г;) = 0, т. е. вектор и - V параллелен (лежит в)
плоскости а • х = 0.
Множества ах — C называют гиперплоскостями1^, чтобы
подчеркнуть, что они не являются линейными пространствами,
которым положено вместе с векторами содержать их сумму. Другими
словами, гиперплоскость — это плоскость, не проходящая через
начало координат.
Важную роль в анализе играет понятие линейного оператора,
сопоставляющего вектору х = {х\,..., хп} вектор у = {у\,..., уп}
по правилу:
Ух =
Уг =
B.12)
Уп = Оп\Х\ + ап2х2 + ... + аппхп.
Таблицу коэффициентов А = [а^],
А =
ап а12 •-. ащ
а2\ а22 ... а2п
аП[ ап2 ... апп
называют матрицей, и коротко пишут у — Ах, определяя тем самым
умножение матрицы на вектор.
Из приведенной записи видно, что первый индекс у а,; обозначает номер
строки, второй — столбца. Совокупность элементов Оц,..., апп называют главной
диагональю матрицы.
10)
А иногда — и просто плоскостями, допуская вольность терминологии.
46
Глава 2. Векторы и матрицы
Через аг: обозначается г-я строка матрицы А, через а^ — ]-й
столбец, т. е.
Двоеточие как бы заменяет весь список индексов.
Матрица называется невырожденной, если ее вектор-строки
линейно независимы.
Забегая вперед, отметим, что из линейной независимости вектор-строк выте-
вытекает линейная независимость вектор-столбцов, которую с равным успехом можно
было бы взять за определение невырожденной матрицы.
Умножение матрицы на скаляр 7 и сложение матриц А — [ау]
иВ = [6у] определяются так:
7Л = [7ау], А + В = [ау + &,,].
При этом, очевидно,
А(\х + /гу) = ХАх + /хАу.
Умножение А на В дает матрицу С = АВ с элементами
B.13)
Иными словами, су оказывается равным скалярному произведению
1-й вектор-строки а|: на ]-й вектор-столбец Ь^, т.е.
Полезно также представление
B.14)
2.4. Линейные отображения и матрицы
47
которое подчеркивает, что ] -й столбец матрицы С = АВ получается
умножением ]-то столбца матрицы В на матрицу А, Соотношение
B.14) означает
ап
+
т. е. каждый столбец матрицы С представляет собой линейную
комбинацию столбцов А. Все это, конечно, тавтология, не при-
прибавляющая содержания. Но такая перезапись B.13) меняет форму
восприятия и помогает укрупненно мыслить.
Правило умножения матриц возникает автоматически, если
на матрицы смотреть как на линейные операторы. Вектор х под
действием оператора В переходит в г = Вх, а вектор г под дей-
действием оператора А переходит в у = Ах. Результирующее преоб-
преобразование х в у определяется матрицей С = АВ с элементами с^,
формула вычисления которых B.13) определяется обыкновенным
приведением подобных,
Уг =
Произведение матриц в общем случае не коммутативно
АВфВА
, но ассоциативно
А(ВС) = (АВ)С
и дистрибутивно
А(В + С) = АВ +
«/то лег/со проверяется.
В случае АВ = В А говорят, что матрицы А и В коммутируют.
Матрица А* с элементами а* = а^ называется транспониро-
транспонированной к А, и получается как бы пространственным поворотом А
вокруг главной диагонали на 180°, в результате чего столбцы и стро-
строки меняются местами. Матрицу называют симметричной (симмет-
(симметрической), если А = А*, и — кососимметричной, если А — — А*.
48
Глава 2. Векторы и матрицы
Для транспонированной матрицы широко распространены обозначения
А' либо АТ, тогда как через А* обозначают сопряженную мат-
матрицу, которая получается из А транспонированием с последующим
комплексным сопряжением всех элементов о,;. Например,
Г г 3 ГГ-г 2 + .1
[2-г 1 + г] ~ [ 3 1 - г] *
Таким образом, в случае матриц с вещественными элементами, како-
каковые пока имеются в виду, сопряженная матрица А* — есть транспо-
транспонированная. Поэтому использование обозначения А* экономит символы
«штрих» и «Т» для других целей.
При транспонировании произведения часто используется фор-
формула
(АВ)*=В*А*.
B.15)
Л Доказательство занимает одну строчку,
(АВУ =
Ъаи=В'А'. >
Обратной к А называют матрицу А ', такую что
где / — единичная матрица и\
1 0 ... О
О 1 ... О
О 0 ... 1
определяющая тождественное преобразование 1х = х. Очевидно,
1А = А1 = А
для любой матрицы А.
И)
Иногда используют обозначение / = (Пае {1,..., 1}.
2.5. Прямоугольные и клеточные матрицы
49
Вопрос существования обратной матрицы рассматривается да-
далее. Пока речь идет об определении, но уже из определения вытека-
вытекают некоторые следствия. В частности, формула, аналогичная B.15),
B.16)
при условии, что матрицы А и В обратимы.
А После умножения B.16) слева на В получается В(АВ) ' = А ', что
после умножения слева на А переходит в очевидное АВ(АВ)~Х = /. Разумеется,
эта цепочка обладает доказательностью в обратном направлении. Очевидное
АВ(АВ)~Х — I после умножения слева на Л, потом на В~х, — дает B.16J)
12)
Транспонируя А х А — 1, получаем А*(А ])* = I,
откуда
что означает перестановочность операций транспонирования и об-
обращения матрицы.
2.5. Прямоугольные и клеточные матрицы
Матрицу А, имеющую т строк и п столбцов, называют тхп мат-
матрицей. При переходе от квадратных матриц к прямоугольным кое-
что теряет смысл, но многое — сохраняется. С некоторыми уточ-
уточнениями, конечно. Например, произведение С = АВ вычисляется
по той же формуле B.13), но теперь при условии, что число столб-
столбцов А равно числу строк В. В противном случае АВ не имеет смысла.
Понятие прямоугольной матрицы позволяет считать векторы
тоже матрицами. При этом надо следить, какую «матрицу» представ-
представляет собой вектор — вектор-столбец или вектор-строку. Чтобы мат-
матрицу А умножать на х справа, надо, чтобы х был обязательно век-
вектор-столбцом. После транспонирования вектор-столбца возможно
х*А. Скалярное произведение (х, у) записывают тогда в виде х*у.
1 ' Обычно мы стараемся не засорять текст подобными уточнениями. Концентрация
на идейной стороне дела требует жертв.
50
Глава 2. Векторы и матрицы
Для наглядности:
Ух
х{уп
При этом важно не увлекаться общностью, чтобы не потерять
различие между векторами и матрицами, которое позволяет считать
векторы точками пространства, а матрицы — линейными опера-
операторами. Возможность подобной интерпретации составляет главную
силу линейной алгебры.
Заметим, наконец, что у — Ах в случае прямоугольной т х п
матрицы А можно интерпретировать как линейное преобразова-
преобразование ш-мерного вектора х в п-мерный вектор у. Понимать это
можно по-разному. Векторы х, у могут принадлежать совершенно
разным пространствам, не имеющим друг к другу никакого отно-
отношения, а могут — быть векторами одного и того же «объемлющего»
пространства. Но это связано не с природой задачи, а с волей,
как говорят, лица, принимающего решение13). Придание того или
иного смысла координатам
{«!,..., жте}, {уь...,уп}
будет порождать различные геометрические интерпретации, предо-
предоставляя или упраздняя те или иные возможности.
Ортогональна, например, система координат в записи вектора
х = {х\,..., хт} или нет? Годится любой ответ. На усмотрение «за-
«заказчика». До поры до времени можно обходиться даже без ответа.
Но если возникает, скажем, необходимость в скалярном произве-
произведении, то без декларации свойств системы координат уже не обой-
обойтись 14\ Ортогональная — тогда скалярное произведение определя-
определяется формулой B.4), нет — тогда нужна другая формула (см. далее).
Другое дело, что разумная воля опирается на понимание задачи и действует в интересах
эффективного решения.
' На практике часто обходятся без явных деклараций. Какая система координат имеется
в виду — вытекает из контекста.
2.6. Два примера
51
Блочное умножение. Матрицы могут состоять из прямоугольных
блоков,
А =
А\к
В\\
В2\
В\8
#41 #42 •••
где каждая из клеток А^, В^ представляет собой прямоугольную
матрицу. Если размеры клеток согласованы, а именно: А^ имеет
размер т, х п;, а В^ — щ х г;, то матрицы А и В можно умножать
прямо в блочном виде по «обычному» правилу
где блоки Си получаются размера га, хг/,и они образуют матрицу
Если А и В квадратные матрицы, то
С
,_\А В]
-[В -А\
АВ-ВА\
-АВ
2.6. Два примера
Матрицей перестановки называют матрицу, у которюй в каждом столбце и каждой
строке — ровно один элемент равен 1, остальные нули. Умножение на такую
Матрицу слева — переставляет строки, справа — столбцы. Например,
Матрицы перестановок, вообще говоря, не коммутируют, но их произведение
остается матрицей перестановки.
У треугольных матриц ненулевые элементы стоят исключительно выше
(ниже) главной диагонали:
*„ 1|2 ...
О 122 ...
О ... О
*21 «22
52 Глава 2. Векторы и матрицы
В первом случае матрицу называют верхней треугольной, во втором — нижней.
Произведение треугольных матриц одного типа — есть треугольная матрица того же
типа. Обратная к треугольной {если существует) — тоже треугольная матрица
(соответственно, верхняя или нижняя).
2.7. Элементарные преобразования
На B.12) можно смотреть как на систему линейных уравнений
относительно ж. Решение этой системы иногда воспринимают как
главную задачу линейной алгебры, но такая расстановка акцентов
ошибочна. Сама по себе задача решения системы
а,,ж,
п = у2, .
к ап1ж, + оп2х2 + ... + аппхп = уп
достаточно тривиальна, хотя без нюансов ни одно простое дело,
конечно, не обходится.
Один из возможных способов решения системы B.17) мог бы опираться
на последовательное применение всего двух операций:
• умножение любого выбранного уравнения на ненулевой скаляр;
• сложение двух уравнений.
Если при этом отвлечься от уравнений и следить за матрицей
то указанным операциям соответствуют два элементарных преобразования мат-
матрицы:
умножение строки матрицы на ненулевой скаляр; . .
прибавление одной строки к другой, — У • )
каждому из которых можно сопоставить умножение А слева на некоторую эле-
элементарную матрицу Л. В первом случае Л получается из единичной матрицы /
заменой г-й единицы на диагонали скаляром Л ф 0. Во втором случае Л получа-
получается из единичной матрицы / заменой нуля, стоящего на пересечении г-й строки
и 2 -го столбца, — единицей 15).
1 ' Если речь идет о прибавлении г-й строки к ^'-й.
2.7. Элементарные преобразования 53
Например,
П О П Г0П «12 <*1з] [ОП+ОЗ! «12 +«32 «13 + <*3з]
О 1 0 • 021 О22 °23 = «21 О22 «23
И) О 1 I |031 О32 «33 I I «31 «32 «33 I
К элементарным преобразованиям (матрицам) относят также преобразования,
получаемые последовательным применением операций B.18). Другими словами, если
все Л, описывают одну из двух операций B.18), то матрица
Л = Л, •••Л#
считается элементарной. К элементарным — относятся, например, любые переста-
перестановки строк, которые всегда могут быть получены в результате последовательного
применения перестановок двух строк (транспозиций). Транспозиции, в свою оче-
очередь, сводятся к последовательности операций вида B.18) по схеме:
Любое элементарное преобразование обратимо . Это важный, хотя и простой
факт. Действительно, если первое из преобразований B.18) умножает строку на Л,
То обратное — получается умножением строки на 1/Л. Обратным ко второму
из преобразований B.18) будет вычитание, т.е. прибавление строки после ее
предварительного умножения на -1.
Элементарные преобразования занимают в линейной алгебре
скромное место, но в самом начале пути позволяют легко установить
основополагающие факты.
Метод Гаусса. Принципиально следующее утверждение.
2.7.1. Любая невырожденная матрица элементарным преобразова-
преобразованием, т.е. последовательностью операций B.18), может быть пре-
преобразована в единичную.
<4 Из невырожденности матрицы А следует, что у нее в первой строке,
заведомо, есть ненулевой элемент]6) а];1. Разделим строку п\: на й|;,, после чего
умножим 01; на о^;, и вычтем из 1-й строки. Проделав такую операцию для всех
Иначе вектор-строки были бы линейно зависимы.
54 Глава 2. Векторы и матрицы
г = 2,..., п, получим в итоге матрицу Апею, у которой в $\ -м столбце стоят везде
нули, за исключением а^, = I.
Матрица А™" невырождена |7\ поэтому во второй строке у нее есть ненулевой
элемент а™* • Далее, по аналогии с предыдущим, делим строку а™ на а™*, затем
умножаем вновь полученную строку на а™* и вычитаем из 1-й строки. Проделав
это для всех г ф 2, получим в итоге матрицу, у которой в ]2 -м столбце стоят
везде нули, за исключением а2,2 = 1. Заметим, что в результате второго этапа
преобразования $\ -и столбец, остается прежним (везде нули, за исключением 1
на {1, ]\} -м месте).
Продолжая далее в том же духе, в конце концов получим матрицу, у которой
в каждой строке и в каждом столбце всего одна единица — остальные нули. Такая
матрица перестановкой строк легко преобразуется в единичную18). >
Только что описанный процесс называют методом Гаусса.
В применении к сопутствующей задаче решения системы урав-
уравнений Ах — Ь метод дает решение х' (Ах' = Ь), при условии,
что умножению и сложению строк А соответствует умножение
и сложение уравнений Ах = Ь. В итоге вектор Ь преобразуется в ж'.
Если матрица А вырождена, то для решения Ах = Ь можно
применять модифицированный метод Гаусса, в котором на каждом
шаге переход осуществляется не обязательно к следующей стро-
строке, а к первой ненулевой. В итоге часть строк А в результате
преобразований станут нулевыми. Если при этом соответствующие
координаты вектора Ь тоже преобразуются в нулевые, то система
Ах = Ь, очевидно, решается с запасом19). Если нет20) — система
Ах — Ъ не имеет решения.
Обратная матрица. Утверждение 2.7.1 означает наличие такой по-
последовательности элементарных матриц Л1,..., Л#, что
откуда следует существование у невырожденной матрицы А обрат-
обратной,
B.20)
|7' Поскольку элементарные операции переводят линейно независимые векторы в линей-
линейно независимые (проверьте).
1 ' Если в ]-м столбце а,^ = 1, то х'у-ю строку переставляем на ^-е место.
' Часть переменных можно задать произвольно.
м' Т. е.
среди соответствующих Ъ] есть ненулевые.
2.7. Элементарные преобразования 55
Точнее говоря, следует существование «левой обратной матрицы» Л (А А = /).
Но элементарная матрица Л = Л# • • • Л| обратима (см. выше). Поэтому, умножая
А А = I слева на Л, получаем А = Л~1, что после умножения справа на Л, дает
АА = /, гарантируя тем самым B.20). >
Таким образом,
АА = 1 =» А = АГ\
а поскольку Л элементарная матрица, то можно утверждать, что любая не-
невырожденная матрица А представима в виде произведения элементарных матриц
из категории B.18). Равно как и наоборот, если А представима в виде такого про-
произведения, то она невырождена, что ясно из представления А = Л/, поскольку
здесь невырожденная матрица / элементарным преобразованием переводится
в невырожденную.
Упражнения
• Элементарные преобразования переводят линейно зависимые строки в ли-
линейно зависимые.
• Вырожденная матрица не имеет обратной.
2.7.2. Лемма. При элементарных преобразованиях строк линейная
независимость {зависимость) столбцов сохраняется.
М Столбцами матрицы А А являются векторы Ла:;. В силу обратимости Л,
очевидно,
& ахАаЛ + ... + апАа:п =
Из леммы 2.7.2 сразу вытекает, что у вырожденной (невырожденной)
матрицы вектор-столбцы линейно зависимы (независимы). Другими
словами, А и транспонированная матрица А* вырождены или невы-
невырождены одновременно.
Отметим, наконец, что в определении элементарных преобразований строки
можно заменить столбцами, не меняя выводов по существу.
Ранг матрицы. Пусть теперь речь идет о прямоугольных матрицах
то х п (т строк, п столбцов).
2.7.3. Определение. Максимальное число линейно независимых век-
вектор-строк либо вектор-столбцов матрицы А называется ее рангом
и обозначается как гапк А.
56 Глава 2. Векторы и матрицы
В данном определении «заложена теорема», поскольку совпаде-
совпадение максимального числа линейно независимых строк и столбцов
сразу неочевидно, но это так.
<* Пусть г обозначает максимальное число линейно независимых строк
матрицы А, з — максимальное число линейно независимых столбцов. Допустим,
г > 5. Оставим эти строки, уберем остальные, и применим к оставшейся матрице
метод Гаусса. Выше он был описан для квадратной матрицы, но в «прямоуголь-
«прямоугольном» случае почти ничего не меняется. Точно так же в итоге элементарных
преобразований B.18) получатся г столбцов вида
у которых единицы стоят в разных строках21^.
Это и есть линейно независимые столбцы. Исходные линейно независимые
столбцы имеют те же номера по лемме 2.7.2, которая справедлива и в «прямо-
«прямоугольном» случае. >
Теперь понятно, что ранг матрицы можно было бы определить
еще одним эквивалентным способом. Ранг тп х п матрицы — это
максимальный размер ее квадратной невырожденной подматрицы22^'.
Фактическое определение ранга возможно модифицированным методом Гаус-
Гаусса. На каждом шаге переход осуществляется не обязательно к следующей строке,
а к первой ненулевой. По завершении процесса число ненулевых строк дает ранг.
Довольно часто требуется оценка ранга произведения АВ.
В большинстве случаев можно обойтись неравенством
гапк АВ ^ гшп{гапк А, гапк В}.
B.21)
<* Поскольку столбцы матрицы АВ являются линейными комбинациями
столбцов А, то ранг матрицы [АВ, А]23* не может быть больше ранга А. В свою
очередь, ранг АВ не больше ранга [АВ, А]. Поэтому
гапк АВ ^ гапк А.
Неравенство гапк АВ ^ гапк В устанавливается аналогично. >
21' В отличие от ситуации квадратной матрицы здесь будут «лишние» столбцы, но они
не мешают, так как для противоречия нам достаточно показать 5 ^ г.
Подматрицей матрицы А называют матрицу, элементы которой стоят на пересечении
выбранных строк и выбранных столбцов матрицы А. Если номера строк и столбцов
одинаковы — подматрицу называют главной.
2 ' Полученной приписыванием справа к АВ матрицы А.
2.8. Теория определителей 57
Если А и В квадратные матрицы, то из B.21) вытекает, что
произведение любой матрицы на вырожденную — дает вырожденную
матрицу.
Упражнение
Если Р невырожденная матрица, то
гапк Р<? = гапк <?, гапк 8Р = гапк 8.
2.8. Теория определителей
Определители, или детерминанты, иногда воспринимаются как «ложка дегтя»,
которая омрачает настроение при изучении линейной алгебры. С одной стороны,
все достаточно просто в любом варианте формального изложения теории. С дру-
другой — не все «почему» находят простые и ясные ответы, и это оставляет чувство
неудовлетворенности.
Вот один из формальных вариантов. Определителем (или детерминантом)
матрицы А называется величина
B.22)
где а обозначает перестановку (отображение) множества индексов
{1,...,п} в М1) ф)},
N@) — число транспозиций2^ в а, а суммирование в B.22) идет по всем
ио тожным перестановкам.
Иными словами, определитель представляет собой алгебраическую сумму
всевозможных произведений аа^)\ • • • <*,(„)„, знак которых определяется четностью
или нечетностью перестановки а (четностью или нечетностью числа транспозиций
щ а). Вычисление N@) представляется обременительным, но его можно заменить
рутинным определением числа беспорядков25^ в а.
Кстати, последовательность элементов аа(\)\,..., аа(п)п называют диагональю
матрицы А, соответствующей перестановке а. В случае тождественной переста-
перестановки а(]) — 2 диагональ ац5... ,апп называют главной. Если сказать иначе, то
24) Любая перестановка может быть представлена в виде последовательно выполненных
грииспозиций (перестановок двух элементов) — см. [11].
"* Число беспорядков в а — это сумма беспорядков для каждого числа <т(г), равных
количеству чисел меньших (т(г), но стоящих после (т(г).
58 Глава 2. Векторы и матрицы
диагональ матрицы, это совокупность п ее элементов, таких что никакие два
не стоят в одной строке или в одном столбце.
Из определения B.22) все свойства детерминантов достаточно легко выво-
выводятся (см., например, [11]), и при определенном устройстве мозгов проблема
оказывается исчерпанной. Но кому-то мешает ощущение фокуса, и тогда прихо-
приходится заходить с другой стороны.
В основу определения детерминанта может быть положено
понятие ориентированного объема (по аналогии с трехмерным ва-
вариантом). Геометрическая фантазия в этом направлении может быть
такой. Детерминант (определитель) \А\ — равносильное обозначе-
обозначение с1е1 А — это объем параллелепипеда, построенного на вектор-
строках матрицы А, — взятый со знаком плюс (минус), если набор
вектор строк
с базисом.
одинаково (противоположно) ориентирован
Пока такое определение несостоятельно, поскольку в наличии нет опреде-
определения объема параллелепипеда и ориентации упорядоченных наборов векторов
в Кп. В подобных ситуациях часто спасает принцип «мы не знаем, что это та-
такое, но „оно" должно обладать такими-то свойствами». Самое удивительное, что
обычно два-три очевидных свойства однозначно характеризуют объект.
2.8.1. Определение. Детерминантом квадратной матрицы А на-
назовем скалярную функцию дс1 А, обладающую тремя свойствами
(I) при умножении строки матрицы на скаляр А величина й&А
умножается на А;
(И) прибавление одной строки к другой не меняет детерминанта',
(Ш) детерминант единичной матрицы с1е1 / = 1.
Сразу, естественно, возникают вопросы. Существует ли такая
функция? Если да, то единственна ли и как ее вычислять?
Все ответы благоприятные, но сначала удобнее из @-(ш) вы-
вывести некоторые следствия.
1. Если матрица А имеет нулевую строку, то с!е1 А = 0, что сразу вытекает из A).
2. Прибавление одной строки, умноженной на любой скаляр, к другой строке —
не меняет детерминанта. Это чуть более общее свойство, чем (и). Факт легко
2.8. Теория определителей 59
выводится. <* Если записать А — . , выделяя только строчки а и 6,
с которыми что-то происходит, то
3. Прибавление к строке линейной комбинации других — не меняет детерминанта.
^ Операция сводится к последовательности операций из предыдущего
пункта. >
4. Детерминант вырожденной матрицы равен нулю. -4 При линейной зависимо-
зависимости строк прибавление к одной из строк некоторой линейной комбинации
других — дает нулевую строку. >
5. При перестановке двух строк знак определителя меняется на противоположный.
4 Преобразования по схеме B.19) меняют значение детерминанта только
на шаге умножения строки на -1. >
Наконец, последнее и самое важное, ч Если А невырождена,
то применение к ней метода Гаусса превращает ее в единичную —
с детерминантом равным 1, в силу (ш). В процессе преобразований
с!е1 А меняется п раз. При делении первой строки на а^х, второй —
на пу™', и т.д. (см. раздел 2.7). Поэтому, в силу A),
с1е1 А = а^-, • с!ц^ • • •, B.23)
что не только устанавливает существование и единственность с1е1 А,
но и дает удобный алгоритм его вычисления. >
Итак, детерминант определен, причем однозначно. Ориентированный ли это
объем — теперь, вообще говоря, не играет роли. Более того, первоначальный
замысел определить де1 А как объем26* — можно вывернуть наизнанку, определив
объем как детерминант. Для этого надо лишь убедиться в естественности свойств
A)-(ш) для объема ориентированного параллелепипеда.
Свойство A11) есть равенство единице объема прямоугольного п-мерного
куба со стороной 1. При увеличении одной из сторон в А раз объем увеличивается
тоже в А раз — это (I). Обратим внимание, что при А < 0 знак объема меняется
на противоположный — и это как раз тот минимум требований к ориентации,
который можно высказать, не понимая, что она (ориентация) есть такое. Наконец,
A1) — следствие линейности объема по ребру: если ребро а равно сумме Ъ 4- с,
то объем равен сумме объемов двух параллелепипедов, один из которых вместо а
имеет ребро 6, другой — с. Если при этом с = а, а Ь другое ребро, то «другой»
26^ Понятно, замысел был чисто эмоционален, ибо не было ясно (и не ясно до сих пор),
что такое объем в Яп.
60 Глава 2. Векторы и матрицы
параллелепипед будет иметь нулевой объем, поскольку у него два одинаковых
(векторных) ребра. Это приводит к (и).
Разумеется, все свойства 0)-(ш) выполняются при п — 2, 3, где для площади
и объема есть другие идеологические платформы. Условие (и), например, для
площади параллелограмма ах Ь есть очевидное
Для ориентированного объема параллелепипеда
справедливость (н) вытекает из очевидных равенств типа
а • (Ь х с) = (а + Ь) • (Ъ х с), а • (Ъ х с) = а • [(Ь + а) х с].
В результате получено важное (за пределами линейной алгебры) опре-
определение ориентации п-мерного пространства. Базис из упорядоченного
набора векторов {а,...} ориентирован так же, как исходный, если
Aе1 . > 0, и — противоположно, если детерминант < 0.
На с1е1^4 полезно взглянуть еще как на функцию линейно-
линейного преобразования А. Единичный куб, построенный на векто-
векторах (ребрах) стандартного базиса B.7) под действием оператора
А — [а,ц] переходит в параллелепипед, построенный на вектор-
столбцах аЛ,... ,ап. Объем этого параллелепипеда, равный по мо-
модулю |с1е( А\, естественно считать коэффициентом искажения объема
линейного оператора А.
С тем же коэффициентом искажения объема оператор А пре-
преобразует любое тело V. Разбивая V на N мелких кубиков (со сто-
стороной е и объемом еп), объем V можно сколь угодно точно
приблизить величиной N • еп. Каждый кубик под действием А пе-
переходит в параллелепипед объема |с!е1 А\ -еп, что и дает необходимое
заключение.
Теперь вернемся к альтернативному определению детерминанта
B.22). Совпадает ли оно по сути с определением 2.8.1? Совпадает.
2.8. Теория определителей
61
Поскольку легко проверяется, что B.22) удовлетворяет свойствам
A)-(ш), а в этом случае детерминант однозначно вычисляется ме-
методом Гаусса — см. B.23).
Из B.22), в свою очередь, сразу вытекают некоторые свойства
детерминантов, которые проверять иначе несколько обременитель-
обременительно. Например,
А =
B.24)
т. е. транспонирование не меняет определителя матрицы.
Еще одно легко выводимое следствие — разложение определи-
определителя по элементам столбца (строки):
где М1; обозначает дополнительный минор27) элемента ац.
Такое разложение в большей степени является теоретическим инструментом.
В принципе оно сводит вычисление детерминанта п-го порядка к вычислению
детерминантов (п — 1)-го порядка, но при больших п вычислять лучше по более
простым схемам (методом Гаусса, например).
Еще одна часто используемая формула:
B.25)
определитель произведения матриц равен произведению определите-
определителей.
В частности,
откуда
с!е1 А = (да А)
-1
«* Формула B.25) легко устанавливается разными способами. В курсе [11]
это делается с помощью изящного фокуса28*.
27* Дополнительный минор М^ элемента о|; есть определитель подматрицы, которая
получается из А вычеркиванием 1-й строки и ./'-го столбца.
28* Фокусы плохи тем, что непонятны, но хороши тем, что инициируют поиск.
62
Глава 2. Векторы и матрицы
Для конструктивного понимания полезна опора на понятие коэффициента
искажения объема. Если А искажает объем в а раз, В — в /3 раз, то ясно, что
последовательное применение А и В в любом порядке меняет объем в а/3 раз —
и это справедливо с учетом изменения ориентации.
Простейший вариант доказательства основывается на представлении обеих
матриц А и В в виде произведения элементарных матриц, для которых равенство
<1е1 (Л, • • •
, • • •
очевидно. Если же одна из матриц А, В вырождена, то B.25) вытекает
из B.21). >
В заключение обратим внимание, что при определении детерминанта вместо
строк можно было бы взять столбцы, ничего не меняя по сути29*. В итоге полу-
получились бы те же самые результаты, с заменой в формулировках строк на столбцы.
2.9. Системы уравнений
Системы п X п. Система линейных уравнений Ах = Ь с квадрат-
квадратной невырожденной матрицей А всегда имеет единственное решение
х = А~1Ь.
Результат х = А~1Ь можно интерпретировать и записывать по-
разному. Перезапись Ах = Ь в виде
ап
0>п\
х{
лпп
х„ = Ь
B.26)
показывает, что решение х = {х\,... ,хп}* представляет собой
координаты вектора Ь в базисе {а\,..., ап} из вектор-столбцов
матрицы А.
Определение таких координат относительно просто. Пусть А^
обозначает матрицу, полученную из А заменой ^-го столбца векто-
вектором Ь. С учетом представления B.26) —
ж;-с!е14, B.27)
поскольку А^ь получается из А умножением ^-го столбца А
на X] — с последующим прибавлением линейной комбинации
* Что сразу следует из B.24).
2.9. Системы уравнений
63
других столбцов А, что уже не играет роли (не меняет детерминан-
детерминантаK0). Из B.27) вытекает правило Крамера:
3 = 1,...,п,
дающее в случае невырожденной матрицы А решение системы
Ах = Ь.
Еше одна идея решения Ах = Ь заключается в использовании принципа
суперпозиции. Если векторы
Ь:,,...,Ь:п B.28)
линейно независимы и Ах:$ = Ь:;, то разложение Ь = ^Г^ А;Ь:; вектора Ь по бази-
базису B.28) сразу дает решение х = ^ А;ж:; системы Ах = Ь. Иными словами, зна-
ние п решений ж:; позволяет «легко» выписывать решение Ах = Ь при любом Ь.
Конечно, легко сказка сказывается. Такой путь может оказаться длиннее,
поскольку Л; надо определять, решая систему ВХ = 6, где матрица В образована
столбцами B.28). Однако при выборе в качестве B.28) базиса
-г
0
.0.
•о-
1
.0.
, ..., еп —
•0"
0
.1.
матрица X = [хЛ,'..., хп] оказывается обратной к А, т. е. X = А х.
Вырожденный случай. Если п х п матрица А вырождена, то при-
применение к системе Ах = Ь модифицированного метода Гаусса
приводит ее к виду
1 пе«/
где I — единичная матрица размерности <п - 1, остальные бло-
блоки нулевые. При этом ясно, что система имеет решение, если
у преобразованного вектора Ьпет координаты напротив нулевых
строчек матрицы — нулевые. В противном случае исходная система
не имеет решения.
/
0
0
0
30) См. раздел 2.8.
64
Глава 2. Векторы и матрицы
Таким образом, как исследование, так и решение конкретной линейной
системы — не представляет принципиальных трудностей и сводится к рутинно-
рутинному сложению уравнений, умноженных на те или иные коэффициенты. Ничего
другого знать не нужно. Но проблема заключается в другом — в понимании
причин и механизмов, стоящих за кадром. Решения сами по себе, оказывается,
имеют почти нулевую ценность, — и это подтверждается всем дальнейшим из-
изложением. Достаточно под таким углом проанализировать спектральную теорию
(собственные значения, собственные векторы и т. п.).
Анализ вырожденных систем экономнее проводить сразу для
случая прямоугольных матриц.
Системы тп х п. Система уравнений Ах = Ь с прямоугольной
матрицей А,
п\\Х\ + а12Ж2 + • • • + 0>\пХп = Ь\9
B.29)
ат\Х\ + ат2х2 + ... + атпхп = Ьт
может быть записана в виде B.26) с учетом возможного (но не обя-
обязательного) тфп, т.е.
ап
Х\
<*>\п
Опять ясно, что решение B.29) {х\9... 9хп}* представляет
собой набор коэффициентов в разложении вектора Ь по векторам
{а:\,..., а:п}. Возможная разница с предыдущим заключается в том,
что прежде столбцы а:; были линейно независимы и ж; потому
были координатами31). Теперь ж; могут определяться неоднозначно
либо вообще не определяться.
Когда решение B.29) существует? Очевидно, когда вектор Ь есть
линейная комбинация векторов {а:\9..., а:п}, что возможно лишь
в случае, когда ранг А совпадает с рангом расширенной матрицы
[А, Ь], полученной приписыванием к А справа столбца Ь. Если же
Ь линейно не выражается через {а:\9..., а:п} (и потому ранг [А, Ь]
больше ранга А), решение B.29) невозможно. Объединение этих
двух предложений называют теоремой Кронекера—Капеллы.
31)
Однозначно определяемыми коэффициентами разложения.
2.10. Задачи и дополнения 65
Упражнение
Если ранг п х п матрицы А меньше п, то однородное уравнение Ах = 0
имеет ненулевое решение х.
2.10. Задачи и дополнения
• В тех случаях, когда коэффициенты матрицы АA) зависят от времени
(параметра), могут использоваться естественные операции поэлементного
дифференцирования и интегрирования,
= [/ МО *] •
При этом очевидны стандартные свойства:
Дифференцирование тождества АA)А ] = I приводит к
6А . 6А~1
что означает
Т~ А 6.1 •
• Обратная матрица А ' имеет элементами (-1)|+;М|;/с1е1 А, где М,; допол-
дополнительные, миноры элементов о|; матрицы А.
• <1е1Л = (-1)|+;о|;М|; + с1е1 Л|;, где матрица Л|; получается заменой в А
элемента о|; нулем.
• Матрица Вандермонда
л = к,] = [АГ'1
имеет определитель
• Если матрица Л содержит нулевую подматрицу ;?хд,
вырождена. (?)
• Если гапкЛ = 1, то найдутся такие векторы и и V, что Л =
• Матрица ранга к всегда есть сумма к матриц ранга 1.
Глава 3
Линейные преобразования
3.1. Замена координат
Изучение матриц в отрыве от геометрических представлений сильно меняет
краски, и взгляд на матрицу как на линейный оператор начинает казаться если
не откровением, то изобретательным ходом. На самом деле понятие линейного
оператора «первичнее». Естественное изучение функций нескольких переменных,
у = /(ж), в первую очередь обращает внимание на простейший тип линейных
преобразований — характеризуемых свойством /(аж + ру) = а/(ж) Н-/?/(у), —
каковыми и оказываются ^ /(ж) = Ах.
При изучении же функций эффективным инструментом служит переход
к другой (более выгодной) системе координат. Например, перенос начала коор-
координат преобразует у = ж2 -+- /?ж + 7 в и = V2, а вращение осей координат сильно
упрощает запись кривых второго порядка (глава 1). Аналогичные выгоды можно
извлечь и в п-мерном случае.
При переходе к другой (штрихованной) системе координат
с помощью невырожденной матрицы Т:
х = Тх,
соотношение и — Ау после подстановки и — Ти\ V — Ту' пре-
превращается в Ту! — АТу', что в результате умножения слева на Т~{
переходит в
и =Т~1АТу,
на основании чего можно утверждать, что в новой системе коорди-
координат линейному оператору А соответствует матрица
А! =Т~ХАТ.
C.1)
'' Без дополнительного требования непрерывности линейные функции могут быть раз-
разрывными — см., например, [3].
3.1. Замена координат 67
Если начинать не с замены координат, а с замены базисов — простота
несколько рассыпается. Но те, кто живет поиском трудностей2^ на пути усовер-
усовершенствования Галактики, могут здесь кое-что извлечь.
Пусть имеется два базиса,
и / через е выражается линейно:
\ ' "-•••••••••-•"•"• C.2)
В отличие от предыдущего каждое уравнение C.2) дает связь между
векторами. Поэтому запись / = 8е здесь не имеет смысла либо
требует уточнения.
Допустим теперь, что ж* обозначает координату точки х в базисе {е}, а х\\ —
в базисе {/}. Подставляя Г, из C.2) в
х = ж,е, +... + ж„е„ = ж',Г, +... + хп1п
и приравнивая коэффициенты при е,, — после раскрытия скобок и приведения
подобных, получим
Г Х\ =;
т. е. х = 8*х* и, соответственно, х' = (8*) 1х. Другими словами, если связь
между базисами определяется матрицей 5 — в смысле C.2), — то связь между
координатами х' = Тх осуществляет матрица Т = E*).
Замечание. Далее будут рассматриваться ортогональные матрицы, которые осу-
осуществляют поворот векторов, не меняя их длины. Для таких матриц # транспо-
транспонированная является обратной, 5* = 5*. В этом случае получается
Т = (8*У1 = (8'1У1 = 8.
Полиномы. Если А' = Т~1АТ, то В = А2 в новой системе коорди-
координат:
Вг = (А1J = Т~1АТ • Т~1АТ = Т~ХА2Т.
То же самое можно сказать по поводу любой другой степени Ак
(к = 2,3,...), а также по поводу любого матричного полинома
р(А) = Ак+ ъ-х^'1 +...
2)
Избегать трудностей — другая игра, которая лишь выглядит более разумной.
68
Глава 3. Линейные преобразования
т.е.
-1
Р(Т~1АТ)=Т-1р(А)Т.
Наконец, {Т-{АТ)~{ = Т~1А~1Т, т.е. (А')~1 = (А~1у.
3.2. Собственные значения и комплексные пространства
Обнадеживающе выглядит идея, исходя из C.1), преобразовать
матрицу так, чтобы она приобрела в новой системе координат
наиболее простой вид. Одна из ориентации при этом может быть
на матрицы диагонального вида:
А =
Л, О
О А„
C.3)
у которых ненулевые элементы могут стоять только на главной
диагонали.
Другими словами, соблазнительно задаться целью найти такое
преобразование Т, чтобы матрица А в новой системе координат
стала диагональной, т. е.
А' =
C.4)
Матрицы А' и А в соотношении А' — Т х АТ называют подобными.
Это различные матрицы, но они описывают один и тот же оператор
{в разных системах координат). Здесь начинает ощущаться разница
между матрицей и оператором.
Понятно, что в случае C.4) оператор А на векторы нового базиса
действует предельно просто:
АЦ = \Д .
Умножая C.5) слева на Т, справа на Т~\ получаем
ТА'Т~1 -ГГ-Т =А;ТГ}Т~\
т. е. А1; = А;Т,-, где Г; = ЩТ~Х.
C.5)
3.2. Собственные значения и комплексные пространства 69
Таким образом, для определения чисел А^ и векторов ^ надо
решить уравнение
Ах = Хх,
C.6)
которое в эквивалентной записи выглядит как (А-Х1)х = 0 и может
иметь ненулевое решение х лишь в том случае, если матрица А — XI
вырождена, т. е.
с!е1 (А - XI) = 0.
C.7)
Уравнение C.7) называют характеристическим уравнением матри-
матрицы А, его решения А; — собственными значениями, а соответству-
соответствующие ненулевые решения х = Г, уравнения C.6) — собственными
векторами3^ матрицы А.
3.2.1. Если матрица А имеет собственные значения А^, которым
отвечают собственные векторы ^, то матричный полином
имеет собственные значения р(Х^) и те же собственные векторы Г,.
< Применяя к А{; = Л;Т; оператор А, получаем
Л2Г; = А;ЛГ; = Л;2Г;.
Продолжая аналогично, имеем
АЧ; = А&, (аАр + РА*)% = (аА? + рЩ,
что в итоге дает р(А)^ = ^(А;)Г;. >
Если матрица А невырождена (все А^ Ф 0), то
откуда вытекает, что собственными значениями обратной матрицы
А~] являются А^1 и те же собственные векторы.
3* Собственные векторы определены с точностью до умножения на константу. Принято
считать, что все Г; нормированы: ||Г;-|| = 1.
70 Глава 3. Линейные преобразования
Из записи C.7) в форме
«м - А ... а|п
... '.. ... =0
«п! ••• «пп-А
видно, что рл (А) = с1е1 (А — XI) представляет собой многочлен п-й степени,
рА(Х) = Ап + 7.-1 А" + •.. + 71А + 7о,
который называют характеристическим.
Из
\Т~1АТ -Х1\ = \Т~\А -Х1)Т\ = |Т"'| • \А - А/| - \Т\ = \А-Х1\
вытекает, что полином рл(А) инвариантен при замене координат, и потому —
характеризует как матрицу, так и сам линейный оператор4* (независимо от базиса).
В фокус внимания часто попадают два коэффициента: 7п-1, равный, по тео-
теореме Виета, сумме корней Х\(А) + ... + Хп(А), и 7о> равный произведению
7„-, = А, (А) + ... + Хп(А) = Хт А,
где Хт А = аи + ... + апп называют следом матрицы (оператора).
В этом месте линейный анализ подходит к фундаментальному
поворотному моменту своего развития. Если уравнение
<1е* (А - XI) = 0
имеет п различных действительных корней А^, то все слишком
хорошо. Каждому А^ соответствует свой собственный вектор Г^.
Эти векторы составляют базис новой системы, в которой матри-
матрица Т~ХАТ принимает диагональный вид, а матрица перехода Г
образуется столбцами ^.
Действительно, для Т = [Г|,..., Гп] получается
Было бы опрометчиво сразу отказываться от всех этих благ
из-за того, что полином п-й степени редко имеет п действитель-
действительных корней. Обстоятельства подталкивают к выходу в комплексную
плоскость. Там характеристическое уравнение всегда (по основной
Естественно, что коэффициенты Ра(Х) не меняются при переходе к другому базису.
3.2. Собственные значения и комплексные пространства 71
теореме алгебры) имеет п корней. Но лиха беда начало. Одна уступ-
уступка влечет за собой необходимость другой. Если в C.6) параметр А
комплексный, то к рассмотрению надо допускать комплексные
векторы 5\ иначе нет смысла говорить о ненулевых решениях х
уравнения C.6).
Далее возникает необходимость в сдаче следующей позиции.
Столбцы Г^ (теперь комплексныеN) образуют в совокупности мат-
матрицу перехода Т, которая приводит А к диагональной форме
Т~]АТ, причем у Т~]АТ на диагонали могут стоять в том числе
комплексные Л;. Получается, что надо допускать к рассмотрению
комплексные матрицы. Поэтому проще всего — и целесообраз-
целесообразнее — с самого начала все считать комплексным 7К
Но тогда необходимо вернуться назад и пересмотреть уже сде-
сделанное. Оказывается, в ранее изложенном ничего не меняется,
исключая понятия скалярного произведения и транспонирования
матрицы. Последние приходится переопределить.
Под скалярным произведением в общем случае понимается
что при действительных координатах переходит в стандартное определение B.4).
Что касается «транспонирования» комплексной матрицы, то в билинейных
формах (Ух, у) действие матрицы У приходится перебрасывать с первого вектора
на нторой, не меняя значения функции, т. е.
C.8)
Для справедливости C.8) в случае действительной матрицы У надо, чтобы V*
была транспонированной матрицей V.
Действительно,
(Ух, у) =
= (*> У*у).
5) Имеющие комплексные координаты.
6^ Если, конечно, таковые существуют.
7) Логика комплексификации математического знания на других примерах прослежива-
прослеживается в [3].
72 Глава 3. Линейные преобразования
Аналогичная выкладка в случае комплексных векторов и матриц показывает,
что V* должна получаться из V транспонированием с последующей заменой всех эле-
элементов на комплексно сопряженные. Такая матрица V* называется сопряженной V.
Формулы (АВ)* = В*А* и (Л*) = (А~1)* сохраняются и при таком понимании
операции «звездочка».
3.3. Собственные векторы
Выход в комплексную плоскость обеспечивает существование п
собственных значений Ль ..., Ап, но не п собственных векторов.
«Потери» возникают при совпадении некоторых А; между собой,
но это не выглядит поначалу большой неприятностью. Так или
иначе, комплексный вариант теории начинает казаться не злонаме-
злонамеренной выдумкой, а удачной находкой, которая во многом спасает
теорию матриц от блуждания впотьмах.
3.3.1. Теорема.
ственные значения
ственный вектор Г;
симо.
Если
Л,,.
матрица А имеет
., Лп, то каждому
, множество которых {г\
попарно различные
Л; отвечает свой
соб-
соб-
..., Гп} линейно незави-
Л Существование Г; очевидно, поскольку уравнение (А — Л;/)ж = 0 заве-
заведомо имеет ненулевое решение в силу вырожденности матрицы А - Л;/.
Допустим, {ГЬ...,ГП} линейно зависимы. Выберем из {ГЬ...,ГП} мини-
минимальное число линейно зависимых векторов. Можно считать 8\ что это первые к
векторов, которые удовлетворяют соотношению
0, C.9)
где все 7> ненулевые, иначе к не было бы минимально. В силу ЛГ; = Л;Т;,
ЛG,Г, + ... + 7Л) = 71Л.Г, + ... + 7*Л*Г* = 0. C.10)
Умножая C.9) на Хк и вычитая из C.10), получаем
7.(Л, - ЛЛ)Г, + ... + 7*-1(Л*_, - ЛЛ)ГЛ_, = 0,
что противоречит минимальности к. >
При к < п попарно различных собственных значениях —
теорема 3.3.1 по сути остается в силе. Гарантируется существование
не менее к линейно независимых собственных векторов.
' По крайней мере, после перенумерации переменных.
3.3. Собственные векторы
73
3.3.2. Теорема. ПустьАх = \х,уА = цуи\фц.Тогда{х,у)=0.
Другими словами, левый и правый собственные векторы, отвечающие
разным собственным значениям, всегда ортогональны друг другу.
Собственный вектор-столбец х в Ах = Хх называют правым, вектор-строку
у в у А = \ьу — левым собственным вектором. Очевидно, А* у* = ру*.
А Вычисление у Ах двумя способами,
у(Ах) = (у,\х) = \(у,х), (уА)х = (цу,х) =ц(у,х),
приводит к (у, х) = 0 в силу А Ф \х. >
Ортогональность левых и правых собственных векторов в пред-
предположениях теоремы 3.3.2 служит обычно источником различного
рода двойственных результатов — см. главу 8.
Пример. Замена переменных х = Ту приводит задачу Кош и
х = Ах, х@) = х0
к виду
Если
у = Т'1АТу,
Т~]АТ =
О
Ап
то это «развязывает» исходную динамическую систему. В новых координатах
система у = Т АТу распадается на независимые друг от друга скалярные
уравнения ук = Хкук, интегрирование которых по отдельности дает
геА'< ... О
2/@).
О ... сЛ
Возврат в исходное пространство, у = Т~1х, приводит к решению
зА|' ... О
О ... еХп(
74 Глава 3. Линейные преобразования
3.4. Эскиз спектральной теории
Акцент ниже делается на фактах — обоснования рассматриваются в следующих
главах.
Множество (т(А) собственных значений А; матрицы А называ-
называют спектром, а максимальное значение модуля |А^| — спектральным
радиусом, и обозначают р(А).
Спектр в значительной мере характеризует свойства матрицы.
Например, из КеА; < 0 для всех ] — следует асимптотическая
устойчивость (см. [4, т. 2]). системы х = Ах + Ь. Из г(А) < 1 вы-
вытекает сходимость последовательных приближений хк+[ = Ахк + Ь
к решению системы уравнений х = Ах + Ь.
Спектр не меняется при переходе к другому базису, т. е. харак-
характеризует сам линейный оператор, а не его конкретную запись в той
или иной системе координат.
Если у п х п матриц А и В спектры состоят из п попарно раз-
различных точек и совпадают, то матрицы подобны — переходят одна
в другую при замене системы координат, В = Т~{АТ, — и пред-
представляют собой запись одного и того же оператора в различных
базисах.
В общем случае это не так. Погоду портит возможность равен-
равенства собственных значений. Кратность А как корня характеристи-
характеристического многочлена рл(Х) называется алгебраической кратностью
собственного значения А. Число линейно независимых решений
уравнения Ах = Хх называют геометрической кратностью соб-
собственного значения А.
Если бы геометрическая кратность всегда совпадала с алгебраической, —
у любой матрицы А было бы п линейно независимых собственных векторов
{Гь ..., (п} и преобразование Т = [Г,,..., Гп] приводило бы А к диагональному
виду.
Матрица, у которой геометрическая кратность какого-либо собственного
значения меньше алгебраической, называется дефектной. Таковой является, на-
например, п п . Собственное значение А = 0 здесь имеет кратность 2, но ему
соответствует лишь один собственный вектор Ы . Вот еще несколько примеров
3.4. Эскиз спектральной теории 75
дефектных матриц:
Идея предельного перехода. Тот факт, что наличие кратных соб-
собственных значений имеет принципиальное значение, может пока-
показаться странным, ибо совпадение корней многочлена, равно как
и вообще двух чисел, — вещь экзотическая. Более того, кратные А
всегда можно ликвидировать сколь угодно мало «пошевелив» мат-
матрицу. Или скажем иначе. Любую матрицу А можно представить как
предел
А = \\тА(е), C.11)
где матрица А(е) при любом е Ф О имеет «хороший» спектр —
попарно различные собственные значения и, соответственно, п ли-
линейно независимых собственных векторов Г/(б). При этом возника-
возникает впечатление, что предельная матрица должна наследовать свой-
свойства А(е). В интересующем нас случае этого как раз не происходит.
«Беда» заключается в том, что линейно независимые векторы
Г;(е) в пределе при е = О могут стать зависимыми — и тогда
предельный переход оказывается в некотором смысле холостым
выстрелом. Однако идея представления матриц в виде C.11) иногда
эффективно работает (даже в тех случаях, где речь идет о собствен-
собственных векторах, см. раздел 4.1).
Очевидно, А + е1 имеет собственные значения Ау(Л) + е. По-
Поэтому с помощью сколь угодно малой добавки е1 вырожденную
матрицу А можно превратить в невырожденную А(е) = А + е1,
сдвигая все точки спектра с(А) на е.
Выше, однако, речь шла о более сложной задаче — о возму-
возмущении матрицы, ликвидирующем кратные собственные значения.
Либерально настроенной части населения это кажется само собой
разумеющимся, ибо для «управления» п коэффициентами характе-
характеристического полинома \А — А/| = 0 имеется п2 степеней свободы
(п2 элементов матрицы А). Тем не менее строгое обоснование оче-
очевидных вещей иногда наталкивается на определенные трудности 9\
9' Формальное доказательство дано в главе 5.
76 Глава 3. Линейные преобразования
3.5. Линейные пространства
Ориентация на модель, в которой векторы изначально представ-
представляются в форме х = {жь ..., жп}, где Х{ вещественные или ком-
комплексные числа, — освобождает от массы скучных подробностей
и охватывает 99 % приложений. Но из-за недостачи одного процен-
процента — дело может стоять на месте.
Вот как выглядит более фундаментальный подход. Линейное
пространство X определяется как множество элементов, на кото-
котором заданы две операции: сумма х + у и произведение Хх (элемента
х 6 X на число А из некоторого поля10)), причем
х,уеХ => ах + (ЗуеХ,
а сами операции удовлетворяют следующим аксиомам:
• 1 • ж = ж, А(/*ж) = А^ж,
• (А + /*) = Аж + /*ж, \(х + у) = Аж + Ау,
а также:
1. ж + у — у + ж (коммутативность сложения),
2. (ж + у) + г = ж + (у + г) (ассоциативность сложения),
3. существует нулевой элемент 0 € X такой, что ж + 0 = ж,
4. существует обратный элемент -х такой, что ж + (-ж) = 0.
Ощущения среднестатистического студента здесь естественны. Понятие ли-
линейного пространства «наводит тень на плетень», чтобы обучающей стороне было
легче надувать щеки. И в этом есть свой резон, если после общих многозначи-
многозначительных разговоров курс целиком опирается на единственный частный случай.
А при широком охвате цель не достигается по другой причине. На первом
этапе знакомства с предметом, дай бог, уследить за одной линией изложения.
Дополнительная информация вредит, особенно, если не подчеркивается, что ее
можно игнорировать полностью или частично.
Поэтому данный раздел на первом витке изучения линейной алгебры можно
пропустить, но лучше — бегло просмотреть. Второе предпочтительнее, поскольку
традиционный стиль обучения, тяготеющий к черно-белым тонам, далеко не оп-
оптимален. Нет никаких оснований отказываться от обычного взгляда на мир, когда
что-то в фокусе внимания, а что-то — на периферии.
Примеры. Главный пример в данном контексте это, конечно, множество X из эле-
элементов
*={*,,...,*,}. C.12)
' Пространство называют комплексным, если А принадлежит комплексной плоскости.
3.5. Линейные пространства 77
Линейным пространством является множество матриц гахп, а также совокупность
многочленов
ркA) = ао + а|г + ... + а*_1**~|, к ^ п,
с обычными операциями сложения и умножения многочленов на число.
Координатами здесь можно считать коэффициенты х^ — а,_ь что соответ-
соответствует выбору в качестве базиса {в\ — 1, е^ = I, ..., еп = 1П~1}. Но можно
взять и другой базис. Например, {е, = (I - аI}, — и тогда координатами будут
коэффициенты в разложении Тэйлора:
РпA) = Рп(а) + Р'п(аI + • • • + (^Т7}ТР" "' <в)'
С точки зрения данного определения линейными пространствами оказыва-
оказываются множества бесконечных последовательностей
с естественными операциями сложения и умножения, а также различные функ-
функциональные пространства.
Последние примеры относятся к линейным пространствам бесконечной
ра змерности и рассматриваются в других математических дисциплинах. Линейная
цлгебра изучает пространства конечной размерности. Последняя определяется как
миксимальное число линейно независимых векторов в X (векторов в базисе),
и обозначается как д\тХ.
Разговоры о большой общности абстрактного подхода заканчиваются, правда,
простой теоремой об изоморфизме п-мерных пространств [2, 7], которая означает
следующее. Между линейными пространствами X и X' одинаковой размерности
всегда можно установить взаимно однозначное соответствие х «->• х\ при котором
х + у <-> х + у, \х<-> Хх'.
Поэтому в любом случае анализ сводится (выбором базиса, например) к изу-
изучению арифметического пространства с элементами C.12). Однако теорема об изо-
изоморфизме вовсе не перечеркивает целесообразность общего подхода. Здесь все,
как в жизни. Одни на мир смотрят просто, иные все усложняют, но те и другие
оказываются в проигрыше попеременно.
Евклидово пространство из линейного получается введением скалярного про-
и жедения. На докоординатном этапе форма х • у = хху\ 4-... 4- хпуп, разумеется,
дает осечку.
Формальное определение таково. Скалярное произведение — это так или иначе
определенная операция, которая паре, вообще говоря, комплексных векторов ж, у
ставит в соответствие комплексное число (ж, у), и удовлетворяет следующим
требованиям (аксиомам):
(*)° (ж, х) — обязательно вещественное число, строго большее нуля при ненулевом
х и равное нулю только при х = 0.
(ИH (ж, у) = (у, х)*, где звездочка обозначает комплексное сопряжение.
78
Глава 3. Линейные преобразования
(гггг)° (Хх,у) = Х(х,у).
Заметим, что
Х*(х,у)
, поскольку
(х, Ху) = (Ху, хУ = А* (у, х)* = Х*(х, у).
Даже на «координатном» этапе, как выясняется, перечисленным требованиям
удовлетворяет не только стандартное
но и (Уху у) с положительно определенной матрицей V (см. след. главу).
При изучении многочленов в качестве скалярного произведения может ис-
использоваться, например,
Отсюда, кстати, многое следует. Дело в том, что все предшествующие резуль-
результаты, опиравшиеся на скалярное произведение, были связаны не с конкретной
формой
3
а только с наличием свойств (*)°—(гигH. Ничто другое в доказательствах не ис-
использовалось и*. Поэтому в ситуации C.13) сразу можно утверждать справедли-
справедливость неравенства Кош и—Буняковского (интегральный аналог)
I
рA)дA) л
I
/
2@<й.
3.6. Манипуляции с подпространствами
Было бы ошибкой думать, что общее понятие линейного простран-
пространства нужно лишь для того, чтобы пустить пыль в глаза и охватить
полиномы.
При изучении обычной матрицы в обычной ситуации возникает
потребность говорить о множестве значений Ах (образе, обознача-
обозначаемом 1гп4) либо о множестве решений Ах = 0 (ядре кегЛ)), т.е.
о множестве векторов х, которые оператором отображаются в нуль.
11' Точнее говоря, все доказательства могли быть получены только лишь с использованием
свойств (г')°-(гггг'У.
3.6. Манипуляции с подпространствами 79
И то и другое является линейным пространством (подпростран-
(подпространством 12) Кп) в смысле предыдущего раздела, — и без соответству-
соответствующих определений кое-что на понятийном уровне ускользает 1Ъ\
Что такое, например, множество значений Ах в случае Я3? Это может
быть все пространство К3 (матрица А невырождена), плоскость (гапкЛ = 2),
прямая (гапкЛ = 1), точка (гапкЛ = 0). Но при исходной модели описания
ж = {Х|,..., хп] нет возможности говорить о таких объектах до тех пор, пока там
не введены координаты. В координатах же исходного пространства К3 это доста-
достаточно неудобно, чтобы воспрепятствовать даже самым простым рассуждениям.
Нередко возникает необходимость оперировать инвариантными подпростран-
подпространствами матрицы (оператора) А.
3.6.1. Определение. Подпространство X С Кп называется инвариантным от-
относительно А, если х € X => Ах € X, т.е. АХ С X.
Оператор А, рассматриваемый на инвариантном подпространстве X, т.е.
сужение А1Х оператора А на X, является, очевидно, линейным оператором.
При работе с подпространствами часто возникает необходимость рассмат-
рассматривать их комбинации. Суммой Х + У подпространств Х,У С Кп называется
множество линейных комбинаций ах ¦+¦ /Зу элементов х € X и у € У. Другими
словами, — линейная оболочка X и У. Пересечением подпространств называют
X р| У, где подразумевается обычное теоретико-множественное пересечение, т. е.
и 6 X р| У, когда и « 6 I, и « 6 У. Наконец, X1 определяют как ортогональное
дополнение, при условии что X 4- X1 = Кп и
х е х, уех1- => (ж, у) = о.
Если X плоскость, а У прямая, не лежащая в этой плоскости, Х + У даст
трехмерное пространство, а X (^\У — точку. Если же У С X (прямая лежит
в плоскости), то X + У = X, X р\У = У. В случае
6\т (X + У) = д\т X + сШп У
сумму X 4- У называют прямой.
Упражнения
• Если линейный оператор А действует в Кп, то
61т (\т А) 4- сИт (кег А) = п.
' Непустое подмножество X' линейного пространства X называется линейным подпро-
подпространством, если х, у € X1 => ах + /Зу (Е X'.
13* Как ускользает все, что не имеет имени.
80 Глава 3. Линейные преобразования
• сПт Aт А) = гапк А.
• д'хтХ1 = п-д\тХ.
• При замене координат меняется матрица, но не ее инвариантное подпро-
подпространство.
3.7. Задачи и дополнения
• Из
~
= В~\ВА)В
очевидно: если хотя бы одна из матриц А, В
невырождена, то АВ и В А подобны, и <т(АВ) = <т(ВА).
Совпадение спектров, а(АВ) = <т(ВА), имеет место и в общем случае, когда
обе матрицы вырождены.
^ Доказательство легко сводится к предыдущему. Для достаточно ма-
малых е Ф 0 матрица В(е) = В + е1 невырождена, поэтому спектры АВ(е)
и В(е)А совпадают. Необходимое заключение дает предельный переход|4)
при е -> 0. >
У любого линейного оператора А, действующего в Кп, всегда существуют п
инвариантных подпространств X,-, таких что размерность Х; равна ] и
X, СХ2С...СХП = КП.
^ Это весьма важный факт, который очень просто доказывается по индук-
индукции. Пусть К — некоторое одномерное инвариантное подпространство15^ А*,
т. е. А*х' — Хх'. Ортогональное дополнение К1 имеет размерность п-1 и ин-
инвариантно относительно А. Действительно, если у € К1, т. е. (а/, у) = 0, то|6*
Сужение А на Х„_, = К± имеет (по индуктивному предположению) це-
цепочку вложенных инвариантных подпространств. Остается присовокупить
ХП = К\ >
14* Предельный переход такого типа, как всегда, хорошо работает, когда поведение
собственных векторов не играет роли.
Существование которого следует из существования у А* хотя бы одного собственного
вектора.
16' См. «правило переброски» по предметному указателю.
Глава 4
Квадратичные формы
4.1. Квадратичные формы
Кинетическая и потенциальная энергия механической системы с п степенями
гноболм обычно выражаются через обобщенные координаты ^^ и обобщенные
гкорости д; следующим образом:
Т *^2 № и^2 DЛ)
Квадратичные формы D.1) проходят красной нитью через всю теорию малых
колебаний [5].
Это хороший содержательный пример, на котором видна принципиальная
роль квадратичных форм и их преобразований. Дело в том, что в задачах механики
при выборе обобщенных координат всегда имеется большая свобода, и попасть
и десятку экспромтом не так легко. Поэтому ц^ как-то задают, а потом уже
пытаются заменой координат привести Т и П к более простому виду. Отсюда,
кстати, возникает задача о приведении к диагональному виду двух форм одним
преобразованием — но об этом речь впереди.
Другой источник повышенного интереса к квадратичным формам — их
роль в изучении стационарных точек, характеризуемых условием \7у?(ж) = 0.
Потенциал <р(х) в окрестности таких точек представим в виде
ф) - ф + Ах) = ^ ~0х~дх~АХ{АХ) + °(* * '*•
Главный источник, конечно, сама линейная алгебра. Но на этом список
далеко не заканчивается.
Квадратичная форма ^
(УХ, Х) = ^Г У^ХгХ], D.2)
Пока имеются в виду действительные переменные.
82 Глава 4. Квадратичные формы
задается п х п матрицей У, которая обычно предполагается сим-
симметричной, Уц = у^, поскольку в (Ух,х) коэффициент при жгж;
равен Уц +У]г — и матрицу можно симметризовать, заменив у^ по-
полусуммой (уц+Ур)/2. Однако при рассмотрении билинейной формы
(Ух, у) симметризация не проходит.
Напомним правило переброски:
(Ух,у) = (х,У*у),
где V* — (в данном случае) транспонированная матрица У.
Необходимость использования формулы (Ух, у) — (х, У*у) возникает до-
довольно часто. Например, производная функции Ляпунова2) (Ух, х) вдоль траек-
траекторий линейной динамической системы х = Ах равна3*
(Ух, х) + (Ух, х) = (УАх, х) + (Ух, Ах) = ((УА + А*У)х, х).
Задача упрощения. При переходе к другой (штрихованной) системе
координат с помощью невырожденной матрицы 5:
х = 8х,
функция (Ух, х) после подстановки х = 5х' переходит в
(Ух, х) = (УЗх, 8х) = E*У5х, х) = (У'х', х),
откуда ясно, что матрица V, задающая квадратичную форму, при
линейной замене системы координат х = 8хг преобразуется по пра-
правилу
у1 = 8*уз,
D.3)
которое отличается от C.1L). Но для ортогональных преобразова-
преобразований формулы C.1) и D.3) совпадают.
Если взаимоотношения с линейной алгеброй складываются так, что
формулы типа D.3) приходится как-то специально запоминать, то
эти взаимоотношения нуждаются в небольшой коррекции. Проще пом-
помнить не формулы, а их выводы. Точнее даже, не выводы, а идеи, —
представляющие собой кнопки, нажатие которых разворачивает вы-
вывод сам собой, и формула всплывает как побочный эффект.
2) См. [4, т. 2].
' По правилу дифференцирования произведения.
4.1. Квадратичные формы 83
4.1.1. Определение. Преобразование 8 называют ортогональным,
если оно не меняет длину векторов,
(х, х) = (8х, 8х) = (х, 8*8х) = (8*8х, х),
откуда 8*8 = 8*8 = I, что означает
8* = 5Г1.
Иными словами, если матрица ортогональна, для получения
обратной — ее достаточно просто транспонировать.
4.1.2. Определение. Множество векторов {(,,...,(„} называется ортогональ-
ортогональным, если (Г*, Г;) = 0 при I ф ]. Если, дополнительно, все векторы нормированы,
(Г,, Г,) = I, то их множество называется ортонормированным.
Сопоставление определения 4.1.2 с правилами транспониро-
транспонирования и умножения матриц показывает, что столбцы {равно как
и строки) ортогональной матрицы являются ортонормированным
множеством. При этом очевидно, что множество всех ортогональ-
ортогональных матриц компактно.
Хотелось, бы обратить внимание на некоторую двойственность, присущую
линейной алгебре. Геометрический стиль мышления и алгебраический стиль дока-
доказательств. Геометрически ясно, например, что взаимно ортогональные векторы
линейно независимы, но почти любой учебник предпочитает алгебраический вывод.
И проблема не так проста, как может показаться при поверхностном взгляде.
Если п > 3, то о чем идет речь? В межотраслевом балансе, например, —
что там такое ортогональность?Поэтому результат проще получить, манипулируя
формулами. Геометрия, конечно, во главе угла, — но на заднем плане. Как ориентир,
прожектор, профессиональный секрет, — но не как абсолютно законный инстру-
инструмент. Беда здесь заключается в том, что ни у кого не доходили руки до того, чтобы
геометрический стиль в алгебре полностью узаконить и стандартизовать. И дело
даже не в том, что не нашлось нового Евклида. Просто путь наименьшего сопро-
сопротивления иной. Там, где возникает геометрическая ясность, дать алгебраический
эквивалент, как правило, не вызывает труда.
Упражнения
Произведение ортогональных матриц — ортогональная матрица.
Транспонирование ортогональной матрицы дает — ортогональную.
84 Глава 4. Квадратичные формы
• Решением системы уравнений Сх = Ь с ортогональной матрицей С является
ж = С*6.
• Определитель ортогональной матрицы по модулю равен единице.
• Матрицы
1 0
ортогональны.
Симметричные матрицы (аг;- = а;г) широко распространены
в физических приложениях. Таковы, в частности, формы D.1).
4.1.3. Все собственные значения вещественной симметричной мат-
матрицы вещественны, и им соответствуют вещественные собственные
векторы.
^ Из Ах = Хх следует Ах = Аж, где черта означает обычное комплексное
сопряжение без транспонирования. Умножая скалярно первое равенство на ж,
второе — на ж, получаем
(ж, Ах) = А(ж, ж), (ж, Ах) = А(ж, ж).
А поскольку левые части равенств здесь равны, то равны и правые. Поэтому
(А-А)(ж,ж) = 0 =» А = А.
Вещественная разрешимость Ах = Аж относительно ж при вещественном А
очевидна. >
4.1.4. Лемма. Собственные векторы вещественной симметричной
матрицы, соответствующие различным собственным значениям, —
ортогональны.
< Умножая скалярно Ах — Аж, Ау = /ху, соответственно, на у, ж, полу-
получаем (у, Ах) = А($/, ж), (ж, Ау) — /х(у, ж), откуда, в силу А ф /х,
(А-//)(ж,у) = 0 =» (ж,у) = 0. >
Таким образом, для вещественной симметричной матрицы А
с попарно различными собственными значениями всегда суще-
существует ортонормированный базис, в котором А принимает диа-
диагональный вид. Оказывается, что требование попарного различия
собственных значений необязательно, но это надо еще доказать.
4.1. Квадратичные формы 85
¦* Пусть произвольная симметричная матрица А является пределом вида
C.11), т.е. А(е) -» А при е -> 0, где А(е) при любом е Ф О симметрична
и все ее собственные значения попарно различны. Поэтому А(е Ф 0) могут быть
приведены ортогональным преобразованием Т(е) к диагональному виду.
А поскольку множество всех ортогональных матриц компактно, то Т(е) схо-
сходится к некоторой тоже ортогональной матрице Т. При этом ортонормированное
множество {1:\(е),... Л.п(е)} собственных векторов А(е) сходится к ортонорми-
рованному множеству {1Л,..., Ьп] собственных векторов матрицы Л. >
Успех доказательства определился тем, что столбцы Т(е), оставаясь в про-
процессе предельного перехода взаимно ортогональными, не могли стать линейно
зависимыми, как это могло бы случиться в общей ситуации.
Лемма 4.1.4, таким образом, приводит к общему результату.
4.1.5. Теорема. Вещественная симметричная пхп матрица А все-
всегда имеет п различных собственных векторов {Гь ..., Гп}, которые
образуют ортонормированное множество, а ортогональное преобра-
преобразование Т = [г\,..., гп] приводит А к диагональному виду:
Т~ХАТ = Т*АТ.
В терминах квадратичных форм D.2) это означает, что (ж, Ух)
исегда может быть приведена ортогональной заменой переменных
х — Ти к виду
(ж,Уж) = ]Г;А;^, D.4)
з
где А; — собственные значения V, если матрица V симметрична, —
либо собственные значения симметризованной матрицы (У+У*)/2.
Совокупность приведенных результатов создает впечатление, что с симмет-
симметричными матрицами «все ясно». Но такого рода ситуации бывают обманчивы,
и самые простые вопросы могут ставить в тупик.
Симметрично ли произведение симметричных матриц? Интуитивно почему-
то кажется «да». Простая выкладка показывает, что «нет»,
(АВ)* = В* А* = В А.
Поэтому для (АВ)* = АВ надо, чтобы А и В коммутировали.
Тот же факт, что любая матрица А подобна некоторой симметричной 5,
А = Т~]8Т, и всегда может быть представлена в виде произведения двух сим-
симметричных5*, мягко говоря, вызывает удивление. Но по здравому размышлению
5)См. например, [18].
86 Глава 4. Квадратичные формы
становится ясно, конечно, что здесь речь не может идти о вещественных матрицах.
Однако странным кажется, что симметричные комплексные матрицы (в отли-
отличие от вещественных) никакими специфическими свойствами не обладают. Тем
не менее это так. А вот эрмитовы матрицы, или самосопряженные, определяемые
условием А — А*, где звездочка обозначает уже транспонирование плюс комплекс-
комплексное сопряжение всех элементов, служат естественным обобщением вещественных
симметричных матриц, обладая основными свойствами, присущими последним.
Эрмитовы матрицы. Если матрица А эрмитова, то:
• Все собственные значения А действительны.
• Квадратичная форма (ж, Ах) принимает действительные значения при любых
комплексных х.
• Матрица 8*А8 тоже эрмитова.
• Существует представление А = II*ЛС/, где Л — унитарная матрица, а Л —
вещественная диагональная. Обратное тоже верно. Кроме того, А = С*С.
где С = А1/2а
• Любая матрица В представима в виде В = 8 -+¦ гТ, где обе матрицы 8 и Т
эрмитовы. (?)
4.2. Положительная определенность
Следующим шагом преобразования D.4) может быть линейная
замена переменных г^ — \/РУ/1Ч/> после которой квадратичная
форма приобретает вид
^2г1 D.5)
В D.5) коэффициенты при г1- равны плюс или минус единице,
а некоторые могут быть равны нулю.
Результирующее преобразование переменных х в г имеет вид
х = Т8г, где Г ортогональная, а 5 диагональная матрица, у которой
на диагонали стоят 1/\/|А;-|, если А; / 0, и — нули в противном
случае. Матрица V трансформируется в
(Т8)*У(Т8) = 8*Т*УТ8.
Разумеется Т8 уже не обязана быть ортогональной, а потому (Т8)*У(Т8) —
не тот же самый линейный оператор V, как было бы в случае (Т8)~1 У(Т8). В этом,
собственно, и заключается некоторая путаница при изучении преобразований
квадратичных форм.
На определенной стадии возникает привычка к тому, что преобразование
матрицы меняет матрицу, а не оператор. Но это в случае Т~1АТ. Матрица же
4.2. Положительная определенность 87
квадратичной формы меняется совсем по другому правилу: Т*АТ. Опираясь на ре-
результаты предыдущего раздела, можно было бы ограничиться ортогональными
преобразованиями, для которых Т АТ = Т*АТ, — и вопрос приведения к диа-
диагональному виду решался бы не только положительно, но и однозначно. Конечно,
квадратичную форму к диагональному виду приводит «миллион» других преобра-
юваний, неортогональных. Казалось бы, их можно исключить из рассмотрения,
чтобы не усложнять. Велика ли выгода от замены коэффициентов Л; в D.4) на ±1?
Приведение двух форм. Выгода есть, и она выявляется в задаче
приведения к диагональному виду сразу двух квадратичных форм 6).
Оказывается, если одна из матриц А, В положительно определена,
то обе формы (х,Ах) и (х,Вх) приводятся к диагональной форме
одновременно (одним и тем же преобразованием).
4.2.1. Определение. Матрицу V, равно как и квадратичную форму
(х, Ух), называют положительно определенной, если
(ж, Ух) > О
при любом ненулевом х.
Совершенно ясно, что ортогональное преобразование приводит форму
(х, Ух) к виду D.4) со строго положительными Л; — в противном случае для
к л к их-то х было бы (ж, Ух) ^ 0. На следующем шаге:
(*,К*) = (*,*) = ^, D.6)
т. с. при переходе к переменным г матрица V преобразуется в единичную /,
котрую потом можно «крутить» любым ортогональным преобразованием Т,
и имею не меняя, ибо Т*1Т = I.
Теперь, если одна из матриц А, В положительно определена
(например, А), то (х,Ах) можно привести к сумме квадратов
типа D.6). При этом А к В перейдут, соответственно, в / = 8*АЗ
иВ' = 8*В8. После этого квадратичная форма
приводится к диагональной форме некоторым ортогональным пре-
преобразованием Т, которое на первую форму (г, 1г) уже не влияет7).
' Кинетической и потенциальной энергии, например.
7' Если же Л ф /, то Т*АТ не обязана быть диагональной. В этом, собственно,
и заключается роль предположения о положительной определенности одной из матриц,
которое позволяет обеспечить Л = /.
88 Глава 4. Квадратичные формы
Преобразование 8Т приводит обе формы (х, Ах) и (х,Вх) к диа-
диагональному виду — одновременно.
Пример. Пусть связанные линейные осцилляторы описываются системой диффе-
дифференциальных уравнений
Ъ\\Х\ +612*2+0113?! +а12Ж2 = О,
D-7>
Ь\2Х\ + &22*2 + ^12^1 + 022^2 = 0.
Это могут быть индуктивно связанные колебательные контуры, либо связанные
пружиной маятники.
Квадратичные формы
Г (ж, Ах) = аих2 + 2апх{х2 + а22Я2,
[ (х,Вх) = Ъпх] + 2ЪпХ\Х2 + Ъ22±\
представляют потенциальную и кинетическую энергию системы, и потому -
положительно определены.
Поиск решения D.7) в форме х — Ч соз (ш1 + а) приводит к системе
уравнений *¦ 2-"
Г (ам - Ьиш2)сх + (а12 - Ьпш2)с2 = О,
I (°12 ~~ ^12^ )С\ + (п22 — Ь22Ш )С2 = О,
совместной лишь в случае равенства нулю детерминанта,
2 2
Оц ~~ ЬцШ п\2 — Ъ\2ш
2 2 =0> D'8)
°12 ~~ Ь\2ш а22 — Ъ22ш
что называют секулярным, или вековым уравнением.
Корни D.8) дают две так называемые нормальные частоты8* ш} и ш2. В итоге
решение D.7) принимает вид
Интересно, что при этом в системе присутствуют две «виртуальные» гармони-
гармонические компоненты ^ и &, не взаимодействующие друг с другом. Переменные9)
= ^Ч линейно выражаются через х = ' ,
причем Т «развязывает» систему D.7), приводя ее к виду
(,+шНх =0,
^ Проверьте, что и>2, ш2 > 0.
' Их называют нормальными координатами.
4.3. Инерция и сигнатура 89
Преобразование Т — это то самое преобразование, которое приводит од-
одновременно квадратичные формы (ж, Ах) и (х, Вх) к диагональному виду. При
определенных навыках владения лагранжевым формализмом с этого можно бы-
было бы начинать.
Роль положительно определенных матриц, конечно, не сводится к участию
й управлении парами квадратичных форм. Есть другое важное направление,
связанное с изучением экстремальных точек. Если градиент Уу?(ж) обращается
н нуль в точке х*, то минимум (р характеризуется условием
А<р = ф) - ф") = (ьх, [^^-] А*) + о(Дж2) > О
при достаточно малых по норме Ах. Таким образом, вопрос сводится к положи-
юлыюй определенности гессиана
4.3. Инерция и сигнатура
Киадратичная форма D.5) после перенумерации переменных может
бы I ь приведена к виду
7=1 7=Р+1
Число д ^ п называют рангом квадратичной формы, р и # — р —
индексами инерции (положительным и отрицательным), а разность
индексов — сигнатурой.
За пределами положительной определенности квадратичные
формы не так интересны и популярны, но в отдельные моменты
понимание их устройства в общем случае — играет принципиаль-
принципиальную роль.
Естественные вопросы по отношению к D.9) заключаются
н правомочности данных выше определений. Не могут лир и д
поменяться, если от (х, Ух) к правой части D.9) идти другим путем?
Не могут. Это называют законом инерции. Разумеется, необхо-
необходимо обоснование.
М В предположении противного возможны два представления с различны-
различными {р,д} и {г,*}:
(х,
90
Глава 4. Квадратичные формы
Сразу заметим, что д = $ = гапк V, поскольку при невырожденном преобра-
преобразовании
что узаконивает понятие ранга квадратичной формы.
Допустим теперь, что р > г, и переменным г и ^ соответствуют базисы
{е],...,е„} и {Г|,... ,Г„}. Пусть X обозначает линейную оболочку векторов
{еь ...,ер}, а У — линейную оболочку {Гг+|, • • • >М-
В силу р > г размерность сИт X р| У ^ 1, и для ненулевых ж € X р) У,
очевидно, (ж, 7жO > 0, а (ж, 7ж)// ^ 0, что дает противоречие. >
4.4. Условный экстремум
Использование метода множителей Лагранжа для решения задачи
на условный экстремум10)
(х, Ух) -> тах, (ж, х) = 1
D.10)
приводит к необходимости решения параметрической системы
уравнений
Ух = Аж,
проистекающей из максимизации лагранжиана
ПО X.
Если упорядочить собственные значения матрицы V в порядке
убывания
А] ^ ... ^ Ап,
то
что сразу вытекает из представления D.4), поскольку в
Матрица V предполагается симметричной.
4.5. Сингулярные числа 91
имеет место
(х, х) = (и, и)
так как переход от х к и осуществ-
осуществляется ортогональным преобразованием, которое не меняет длину
векторов.
Промежуточные собственные значения могут быть охарактери-
охарактеризованы в терминах минимаксов [1,18], что называют вариационным
описанием собственных значений симметричных матриц.
4.5. Сингулярные числа
Далее речь идет о вещественной, вообще говоря несимметричной
матрице А. Другими словами, о матрице общего вида. Оказы-
Оказывается, что всегда существует ортонормированием система векто-
векторов !|) {?!,...,Гп}, переводимая матрицей А в ортогональную12^:
\А\\,..., А{п}. Длины и направления векторов I* под воздействи-
воздействием А меняются, но взаимное расположение (в смысле попарной
ортогональности) сохраняется.
Это полезный факт, который легко устанавливается, и заодно выводит на по-
понятие сингулярных чисел матрицы.
М У симметричного13* отображения А* А всегда существует ортонормиро-
кянный базис {Гь..., Гп} из его собственных векторов (теорема 4.1.5).
Преобразование А (не А* А !) ортогональные векторы этого базиса преобра-
преобразует в ортогональные, поскольку
= (А* А^ Г,) = А,(Г„ (•),
откуда ясно, что (АЬ, А(^) = 0, если г Ф ], и (А^J = А*, где А, — собственные
шачения оператора А*А. >
Величины а, = у/Х1 называют сингулярными числами матри-
матрицы А. Максимальное а, представляет собой евклидову норму А
(раздел 6.2).
4.5.1. Любая матрица А может быть разложена в произведение
А = Т8 ортогональной матрицы Т и симметричной неотрица-
неотрицательно определенной матрицы 8.
"' Единственная, если А невырождена.
'2* Точнее говоря, часть векторов А% могут быть нулевыми, если А вырождена.
13) Поскольку (А*А)* = А*А.
92 Глава 4. Квадратичные формы
М Множество ортонормированных векторов е, = ЛГ,/^^, А, ^ О, допол-
дополним (если А вырождена) произвольным образом до ортонормиро ванного базиса,
и пусть Т ортогональная матрица, переводящая {Г,} в {е,},
Преобразование 5 = Т~1А в ортонормированном базисе е имеет диаго-
диагональный вид Л = сНа§ {у/Х\,... , у/Х^ }. Поэтому в исходном, ортонормированном
базисе 8 = 17*А17 — симметрична. Остается заметить
Из приведенного рассуждения следует также возможность син-
сингулярного разложения любой матрицы А в виде произведения
а =
где II и ТУ — ортогональные матрицы, а Л — диагональная матрица
с сингулярными числами аг на диагонали14).
Разложения подобного рода возможны и для прямоугольных
матриц [18].
4.6. Биортогональные базисы
У матрицы А общего вида, имеющей попарно различные собственные
значения {Ль ..., Ап}, существует базис из собственных векторов
но он не обязан быть ортогональным, что с инструментальной точки
зрения — серьезная потеря. «Дух ортогональности», тем не менее,
сохраняется в общем случае, хотя и в замаскированном виде.
Транспонированная матрица А* имеет те же собственные зна-
значения, но другие собственные векторы
{г,,..., и,
отвечающие сопряженным собственным значениям А,-.
4.6.1. Теорема. Базисы {е,-} и {$} биортогональны:
(е,-,Г;-) = О при гф].
' Отсюда сразу следует |с!е1 А\ — о.\ • • • ап.
4.6. Биортогональные базисы
93
¦4 С одной стороны,
(Ле,)Г,) = (А,е,,Г>)=А((е„Г;).
С другой —
<Ле„ Г,-) = <е„ А*Ь) = <е„ АД,-) = А;<е„ Г,),
что при А, Ф А; возможно лишь в случае (е,, Г7) = 0. >
Базисы {е;} и {Г,} можно так нормировать, что
(е,,Г,) = 1, 1 = 1,...,п.
< Действительно, разложение е, по базису {Гь ..., гп}\
после умножения на е, дает
(е„е,)=^|(Г|>е() + ...+^(Г„)е,)=е(Гье,).
Р.сли базис {е,} ортонормирован, то векторы {Г,} достаточно заменить на
Результаты типа теоремы 4.6.1 выглядят несколько схоластично,
когда излагаются в отрыве от мотивировок. На вопрос «зачем это
нужно?» — здесь ответить легко, но приходится отвлекаться.
Вот одна из возможных сфер приложения.
В численных методах (глава 10) при изучении спектральных
свойств матриц требуется, например, переходить от оператора А
к его сужениям на собственные подпространства. Скажем, А име-
имеет базис из собственных векторов {еь... ,еп}. Возникает нужда
в конкретных рецептах. Как, скажем, записать матрицу, действую-
действующую в собственном подпространстве {в2,..., еп}?
Если Ле, = А,е,, Л* Г, = А,* Г, и
е, =
7,
./пг]
то матрица
| — /х /\|6|1| — А
[/и ¦¦¦ и]
94 Глава 4. Квадратичные формы
имеет те же собственные значения, что и Л, за исключением А,, которое заменя-
заменяется нулем:
Л,е, = Ае{ - А,(е^1*)е1 = А^е, - Л.еДГ.'е,) = О,
поскольку|5) Г,*е^ = 1.
Что касается остальных собственных значений и векторов, то при хф у.
Л,е; = Ле, - А1(е,Г|*)е; = Луе, - Л^еДГ.'е,) = Л,е,,
так как Г,*е, = О
Билинейное разложение. Приведенный факт представляет собой
частный случай более общего трюка.
4.6.2. Теорема. С помощью биортогональных базисов {е,} и
при условии нормировки (е,, Г^) = 6^ 16) — матрица А с попарно раз-
различными собственными значениями {Аь ..., Ап} может быть пред-
представлена как
А = \1е111* + ... + \пеп(п\ D.11)
М Матрица Нк — ек(к* имеет элементы Н^ = е{к/,к, а матрица ^^Щ —
элементы к
Поэтому ^2 Дь = /, т. е.
Умножая последнее матричное равенство слева на Л и пользуясь ассоциативно-
ассоциативностью матричного умножения, получаем D.11). >
4.7. Сопряженное пространство
Наличие в евклидовом пространстве Е = Яп скалярного произ-
произведения мешает оценить целесообразность понятия сопряженного
пространства Е*. Последнее естественно воспринимается там, где
без него не обойтись. В линейной же алгебре многозначитель-
многозначительные разговоры о Е* кончаются почти безрезультатно, порождая
разочарование.
Поэтому лучше заранее отказаться от особых ожиданий, вос-
воспринимая сопряженное пространство как инструмент, необходимый
|5' Изменение порядка сомножителей превращает матрицу е,Т;* в скаляр Г**е,.
16)^ г Г 1, если 1 = 7',
Где <У,, = | 0 если .^ - символ Кронекера.
4.7. Сопряженное пространство 95
в смежных областях (функциональный анализ, тензорное исчисле-
исчисление). Что касается матриц, то здесь его можно рассматривать
как дополнительный способ мышления, подготавливающий заодно
к изучению других территорий.
В то же время нельзя сказать, что в линейной алгебре Е* со-
совсем не имеет реальной почвы. Даже наоборот. Другое дело, что
в процессе исследования появляются возможности обойтись без Е*.
Но соответствующие «следы» остаются. В частности, матрицы, зада-
задающие линейное преобразование и квадратичную форму, при замене
координат преобразуются по разным законам. Это как раз из-за Е*.
Вообще использование в линейной алгебре разных пространств
изначально выглядит более разумно, чем «приведение к одному
знаменателю» Кп. Пусть у = Ах. Почему хну надо считать
векторами одного пространства? Обычно они даже измеряются
в разных единицах (ж, скажем, в трудоднях, а у в копейках),
и надо сильно постараться, чтобы сгладить это различие17). А уж
если речь идет о билинейной форме (Ах,у), то это функция двух
переменных, и от рассмотрения двух пространств, одного — для х,
другого — для у, уже не уклониться. На диагонали х = у, правда,
можно обойтись одним пространством, но происхождение (Ах, х)
от (Ах, у) дает о себе знать.
Короче говоря, сопряженное пространство Е* определяется как пространство
линейных функционалов ^ /(ж), заданных на Е (в частности, Е = Яп).
В базисе {еь ... ,еп}
где коэффициенты /; = /(е,).
Сумма функционалов и умножение на число определяются естественным
образом, откуда становится ясно, что Е* — линейное пространство, причем
п~мерное, если п-мерно Е, поскольку любой функционал / определяется п
числами (координатами) /, = /(е7).
Дальше иногда мешают двигаться возгласы. Дескать, /(ж) это
скалярное произведение, и огород можно больше не городить.
|7' Это делается фиксацией системы единиц, но тогда замена координат порождает новую
головную боль.
|8* Функционалом принято называть скалярную функцию. Под линейностью }(х) пони-
понимается обычное /(ая 4- Ру) = <*/(ж) 4- Р/(у)>
96 Глава 4. Квадратичные формы
В этом есть свой резон, но резон есть и в продолжении на-
начатого дела. Более того, намек насчет скалярного произведения
стоит учесть, вводя обозначение /(ж) = (/,ж), которое вызыва-
вызывает полезные ассоциации, подчеркивая некое равноправие х и /.
Число (/, ж), как функция двух переменных, линейно по каждому
аргументу в отдельности. Как ж, так и / — векторы, но природа
их различна. Векторы ж из Е называют контравариантными, /
из Е* — ковариантными. Различие, конечно, не только в названии.
Главное различие фундаментально и заключено в том, что х
и / подчиняются совсем разным законам преобразования коорди-
координат (см. далее). Векторы х — это аргументы, а наборы коорди-
координат / — это коэффициенты преобразований. Там и там, конечно,
числа. Но за числами, как известно, прячутся разные вещи. Мы уже
едва не попали впросак, согласившись, что линейное преобразова-
преобразование и квадратичную форму определяет матрица. В обоих случаях,
правда, суть дела заслоняют похожие таблицы чисел, — но разве
это основание игнорировать остальное? Шахматные фигуры тоже
можно характеризовать размером и весом, но мы их классифици-
классифицируем все же по роли в игре. Пространства Е и Е* нуждаются
в таком же разумном подходе. Попытка игнорировать их разли-
различие мешает правду с ложью и порождает «таинственные» явления.
Скорость — вектор, и угловая скорость — вектор. Почему же при
определенных обстоятельствах они ведут себя различно? Линейное
отображение — «матрица», и квадратичная форма — «матрица».
Почему опять возникают аномалии?Да потому, что все это тензоры
различной природы (см. следующий раздел), имеющие из-за стечения
обстоятельств одинаковый внешний вид.
Чтобы лучше почувствовать проблему, полезно рассмотреть нелинейное пре-
преобразование
у, = шах а#хк9 ), к = 1,..., п,
однозначно характеризуемое матрицей [а,*]. Пытаясь произвести линейную заме-
замену переменных, легко убедиться, что от матрицы здесь — одно название. Объект
совсем из другой оперы.
Вернемся, однако, к взаимосвязи Е <=>> Е*.
Векторы х и / считаются ортогональными, если (/, х) = 0.
Определение выглядит странно (ибо х и / находятся в разных
пространствах), но это лишь первое впечатление.
4.7. Сопряженное пространство
97
4.7.1. Базисы
{еь...,еп}СЯ, {Г',...,ГП}СЯ*
называются взаимными (биортогональными), если (Р, е*) = 5^.
_ _, с7 Г Ь если з = к,
Символ Кронекера ок — < п . , , здесь в отличие от обычного
I О) если ? -р- /с
варианта имеет один индекс верхний, другой — нижний. Манипулирование
индексами вообще характерно для тензорного исчисления.
При заданном базисе {в|,..., еп} С Е всегда существует взаимный ему базис
{Г1,..., Гп} С Е*, поскольку система уравнений (при каждом У)
{*\ек)=63к, к=\,...,п
однозначно определяет вектор (линейный функционал) Р.
4.7.2. Взаимные базисы характеризуются тем, что координаты лю-
любых векторов
х = ^в! + ... + ^пеп, / - 771Г1 + ...
удовлетворяют соотношениям
Очевидно,
Остальные соотношения устанавливаются аналогично. >
Сопряженный оператор. Если А — линейный оператор, действу-
действующий в Е, то /(Ах) = {/, Ах) — есть некоторый линейный
функционал р(ж) = (д,х). Сопряженный оператор А* определяет-
определяется условием д = Л*/, т. е.
Таким образом, если }{х) меняется в связи с воздействием на аргумент
линейного преобразования А, то А* позволяет достичь того же
результата (изменения), не трогая ж, а воздействуя на функционал,
98 Глава 4. Квадратичные формы
Сопряженный к сопряженному — снова исходный оператор, (А*)* = А. Так
же, как (Е*У = Е. (?)
Двойственность. Взаимоотношения между векторами и операто-
операторами сопряженных пространств лежат в основе различного рода
двойственных результатов. К этой категории, например, может
быть отнесено содержание раздела 4.6, где изучение «объекта» Ах
ведется по наблюдению его «реакций». Очень естественный прин-
принцип исследования, кстати. Заключения о свойствах Ах делаются
на основании того, как Ах ведет себя под воздействием линейных
функционалов (/, Ах). Успех дела в данном случае обеспечивается
«сопряженной равноправностью» х и /.
Так сложилось, что о двойственности часто говорят полувос-
полувосторженно-полузагадочно. Начинаешь искать, где бы почитать, —
негде. Встречаются одни частности. Но где общая теория?
Секрет в том, что никакой общей теории нет. Двойствен-
Двойственность — это идея, работающая в разных областях в разных формах.
Между различными объектами устанавливаются некие взаимоот-
взаимоотношения (сходства, противоположности, дополнительности), бла-
благодаря которым из свойств одних объектов делаются заключения
о поведении — других. В подобном ключе естественно интерпре-
интерпретируются многие результаты о линейных неравенствах. См. также
разделы 6.2 — о двойственной норме, и 8.5 — о двойственности
в линейном программировании 19\
4.8. Преобразования и тензоры
Пусть
задает переход от базиса
{еь...,еп} к {?!,..., еп},
а {Г1,..., Г*} и {г,...,Г1} — соответствующие биортогональные
базисы.
1 'Двойственность широко используется вообще: в оптимизации, геометрии, топологии,
теории аналитических функций и т. д.
4.8. Преобразования и тензоры
99
Взаимосвязь между последними определяется соотношениями:
D.12)
где, обратим внимание, суммирование идет по нижнему индексу Й,
что соответствует транспонированию №]. При необходимости вы-
выразить Г через Г матрицу [Й] * надо обратить,
гЧОДТг.
Если элементы матрицы {[Й] } обозначить через зкл, то
Для тензорного исчисления характерно жонглирование индексами. Базисы
Е помечаются нижними индексами, координаты — верхними. В Е* правило
обратное. Одна из причин — местоположение индекса показывает, о чем идет
речь. Другая причина имеет стенографическую природу. Если у сомножителей
один и тот же индекс стоит один раз внизу, другой вверху, то по этому индексу,
считается, идет суммирювание. Это позволяет опускать знак ^ ^, что при изобилии
сумм расчищает игровое поле.
Поскольку тензоры в данном контексте играют третьестепенную роль, выгоды
стенографии не используются (чтобы не привыкать).
< Проверим теперь D.12). С одной стороны, в силу взаимности базисов,
с другой, — если связь 1* = ^"^ Тр С считать пока неизвестной,
откуда т;- = I). >
Что касается формул преобразования соответствующих коор-
координат, то
100 Глава 4. Квадратичные формы
т.е.
где ^ — координаты ъ Е, а т) — ъ Е*.
Различие формул преобразования координат у контравариант-
ных и ковариантных векторов представляет собой крайне важное
обстоятельство, игнорирование которого ведет к принципиальным
ошибкам.
Если матрица [I*] ортогональна, то {[/*]*} = [I*], — и различие
исчезает. Но при этом нельзя забывать, что не исчезает явление как
таковое.
Для многоиндексных объектов, каковые называются тензора-
тензорами, такое различие играет аналогичную роль, о чем напоминает
рассмотрение квадратичных форм. Мы не останавливаемся по-
подробно на определении, да это и не может увеличить ясность 20\
Вектор — это тензор первого ранга, матрица — второго. В общем
случае тензора п-го ранга стандартной моделью служит полили-
полилинейная функция — линейная по каждому вектор-аргументу при
фиксации остальных.
Главной характеристикой тензора является количество верхних
и нижних индексов, что определяет правила его преобразования
при переходе к другому базису21), — см., например, [2].
4.9. Задачи и дополнения
• Если 2^ Ъг]ЯгУ] представляет собой запись билинейной формы (Ух, у) в базисе
{е,,...,еп},то (Уе>,е;)=у^.
20' Ясности способствуют примеры, но это задача другого курса.
'' При этом говорят, что тензор р раз контравариант
и д, соответственно, число верхних и нижних индексов.
'' При этом говорят, что тензор р раз контравариантный и д раз ковариантный, если р
4.9. Задачи и дополнения
101
• Пусть у симметричной матрицы V все главные миноры:
=!>,„
1>П
«21
1>п,
17,2
«22
1>п2
... !71п
... 1724
... 17ПП
VII «12
1 1722
не равны нулю. Тогда существует базис {Г|,..., Гп}, в котором
где для единообразия записи принято Бо = 1.
D.13)
«* Базис {Гь ..., Гп} через исходный {еь ..., еп} выражается следующим
«треугольным» образом:
Г,=е„
+ е2,
... + е„.
Коэффициенты а,; определяются из условий диагональной записи,
(У'Г,-, Г;) = 0 при г ^ 7, квадратичной формы в новом базисе. >
Из записи D.13) следует, что для положительной определенности квадра-
квадратичной формы достаточна положительность всех главных миноров Лк. Не-
Необходимость всех Бк > 0 доказывается совсем просто 22\ и в совокупности
с достаточностью называется критерием Сильвестра.
Скалярное произведение (ж, х) можно рассматривать как квадратичную фор-
форму (ж,/ж), которая при замене координат х = Ту переходит в (у,Т*Ту),
откуда следует положительная определенность матрицы Т*Т, если Т невы-
невырождена.
Из представления Т в виде объединения вектор-строк 2|: видно, что {г,;}-м
элементом матрицы Т*Т является скалярное произведение B,.,2;:). Главные
миноры этой матрицы называются определителями Грама, и они все стро-
строго положительны, когда векторы {1]:,... ,1п} линейно независимы23*, —
поскольку Т*Т положительно определена.
• Теорема Шура о произведении. Если А и В симметричные положительно опре-
определенные матрицы, то матрица2А'
с = КМ
тоже положительно определена.
22*Если #;=0, то существует такой ненулевой х = {х]у. ,.,ж;-,0,.. .,0}, что (Ух,х) = 0.
' Что равносильно невырожденности Т.
' «Наивное» произведение матриц, сводящееся к поэлементному умножению, Ло5 =
1;А;Ь называют произведением по Адамару.
102 Глава 4. Квадратичные формы
<4 Поскольку А приводится к диагональному виду Т*АТ = Л, то А = ТАТ*,
в силу чего элементы А можно представить в виде
Поэтому
Окончательный вывод следует из А* > 0, положительной определенности В
и невырожденности Т. >
• Возможность полярного разложения сохраняется в случае прямоугольной
матрицы. Любая га х п (га ^ п) матрица А представима в виде А = 5Т,
где # = (АА*)^2 неотрицательно определена, а Т имеет ортонормированные
строки (ТТ* = I).
• Пусть случайные величины ж, имеют математические ожидания га,. Ковари-
Ковариационная матрица К с элементами
Л,-;- = М{(ж, - га,)(ж; - га;)},
где М обозначает оператор математического ожидания, — неотрицательно
определена:
• Пусть га, из предыдущего пункта равны нулю. При необходимости прогно-
прогнозирования случайной величины у с помощью линейной комбинации ^^ с,ж,
часто ориентируются на минимизацию среднеквадратической ошибки
Производные по с; должны быть равны нулю,
^«{(»-Е«*)'}—{(»-Е«Ь}-»
Оптимальный вектор с, таким образом, определяется решением системы
Ее = Кхуу
где К — ковариационная матрица, а вектор ковариации Кху имеет коорди-
координаты М{хгу}.
Описанный рецепт называют методом наименьших квадратов.
Глава 5
Канонические представления
В первых двух разделах главы рассматриваются простые и важные результаты,
широко применяемые в различных ситуациях.
Затем излагаются факты, к элементарной линейной алгебре не относящиеся,
и им не имеет смысла уделять много внимания, если математика не планиру-
планируется в качестве специальности. Речь идет о жордановых формах, традиционно
изучаемых чаще, чем это целесообразно.
Сами по себе жордановы формы не так важны, как методы, с помощью
которых они изучаются. Поэтому аннулирующие многочлены, корневые под-
подпространства и прочие «фокусы» — это не столько инструменты, необходимые
для изучения жордановых форм, сколько эффективные категории мышления при
изучении более высоких этажей линейной алгебры.
5.1. Унитарные матрицы
Унитарные матрицы — это комплексный вариант ортогональных.
Матрица II унитарна, если
G**7 =
. Форма определения такая
же, но теперь II* — не просто транспонированная, а сопряженная *)
матрица II, т. е. и^ = Щ1.
Источник интереса к унитарным матрицам — тот же самый, что и к ор-
ортогональным. Те и другие возникают обычно как инструмент исследования.
Ортогональные матрицы, как матрицы преобразований, удобны благодаря орто-
ортогональности столбцов (строк). Оказалось, что их как раз «хватает» при изучении
симметричных матриц.
В общем случае ортогональных преобразований уже недостаточно, и унитар-
унитарные матрицы — следующий шаг. Выгоды, по сути, те же:
• (и:|-, и:;) = 0 при г ^.?, и г^, = 1 (аналогично для строк щ:);
) Эквивалентный термин: эрмитово сопряженная матрица.
104 Глава 5. Канонические представления
• евклидова длина преобразованного вектора х — Ну (у = ?7*ж) сохраняется 2\
(ж, ж) = (у,у);
• все собственные значения по модулю равны единице, А* = е1<Рк.
Ортогонализация 1]>ама—Шмидта. При манипуляциях с ортого-
ортогональными и унитарными матрицами полезной часто оказывает-
оказывается замена некоторого множества линейно независимых векторов
{еь ..., еп} ортонормированной системой {Гь ..., Гп}, которая по-
порождает то же самое пространство 3\ Это всегда возможно, при-
причем — разными способами. Удобный алгоритм дает стандартный
процесс ортонормирования Грома—Шмидта.
< На первом шаге полагается п, = в| и
г, =
На втором — строится вектор Ь2 = е2 - (е2,1*1 I, ортогональный Гь и опять
Ь2
происходит нормировка: Г2 =
гтт? •
(Н2, Ь2>|/2
На к-м шаге строится вектор
*_, -...- (еьГ,)Гь
ортогональный ко всем {Гь ..., Г*-|} (проверьте), после чего нормируется,
** = 1 ГСП - ^а п"м шаге процесс заканчивается. >
Обратим внимание, что в случае исходной системы векторов с дей-
действительными координатами процесс не выходит в комплексную плос-
плоскость, т. е. векторы {Г|, , Гп} получаются тоже действительными.
Заметим, что на к-и шаге процесса Грама—Шмидта векторы
{Гь ...,&} линейно выражаются через к первых векторов множе-
множества {еь ..., еп}. По-другому это может быть сформулировано так.
Если матрицы X и У составлены из вектор-столбцов {е} и {Г}, т.е.
2' Под скалярным произведением в комплексном пространстве понимается
' В том смысле, что линейные оболочки обеих систем, {е} и {Г}, совпадают.
5.2. Триангуляция Шура 105
то У = Хф, X = УД, где ф и # — верхние треугольные матрицы4).
Этот факт обычно выделяют в самостоятельное утверждение:
5.1.1. Теорема. Любая действительная невырожденная матрица А
может быть представлена в виде произведения А = ф/2 ортогональ-
ортогональной матрицы (% на верхнюю треугольную^ Я.
Упражнения
• Для унитарности V необходимо и достаточно, чтобы 11~] = II*. Отсюда
легко следует, что произведение унитарных матриц унитарно.
• Детерминант унитарной матрицы равен по модулю единице.
• Матрицы А и В называют унитарно эквивалентными, если А = 11*В11, где
II — унитарная матрица. Если А и В унитарно эквивалентны, то
5.2. Триангуляция Шура
5.2.1. Теорема об унитарной триангуляции. Любая матрица А
может быть приведена унитарным преобразованием к треугольному
виду.
Т, E.1)
где Т — верхняя треугольная матрица6^. Если матрица А и все
ее собственные значения вещественны, то V может быть выбрана
вещественной.
Таким образом, в комплексном пространстве всегда существует базис, в ко-
котором А имеет треугольный вид. На диагонали Г, понятно, стоят собственные
значения матрицы А. Доказательство совсем просто.
«* Матрица V строится поэтапно. Пусть \\ обозначает собственный век-
вектор А, отвечающий собственному значению7* Л|. Дополнив (неважно как) Г|
до базиса
{Г,,е2,...,еп}
4) <Э = Я ¦лгу-.гу =0при г>].
5' Либо наоборот, верхней треугольной на ортогональную. Либо, наконец, в том и другом
случае верхнюю треугольную матрицу можно заменить на — нижнюю.
6' С тем же успехом — нижняя треугольная матрица.
7* Любому собственному значению Л всегда отвечает хотя бы один собственный вектор.
106 Глава 5. Канонические представления
и применив к последнему процесс ортонормирования Грама—Шмидта, придем
к ортонормированному базису
№,82,..., 8»}.
в котором матрица А примет вид8)
™ = [о;,] -
где 0 обозначает нулевой столбец, а * — некую вектор-строку. Наконец, А\ —
это (га — 1) х (п - 1) матрица.
Далее аналогичная процедура применяется к матрице А\, в результате чего
находится такая
матрица 272, что 112*А{172' — \ ~ * . Тогда
где 272 = к гг' • В итоге 27 = 27| • • • 27П_| дает необходимое унитарное преобра-
преобразование.
Если матрица А и все ее собственные значения вещественны, то им отвечают
вещественные собственные векторы, и описанные шаги не выводят за пределы
вещественных чисел. >
В случае 1/*А1/ = В говорят об унитарной эквивалентности
матриц А и В. Понятно, что унитарная эквивалентность явля-
является частным случаем подобия. Может быть, например, так: А
приводится к диагональному виду, но с помощью унитарных пре-
преобразований — только к треугольному.
Зачем это нужно. Триангуляция Шура (теорема 5.2.1) обычно ис-
используется двояко: как теоретический инструмент и как алгоритм
решения практических задач.
• Вернемся, например, к задаче Коши (раздел 3.2)
х = Ах, х@) = х0.
Пусть замена переменных ж = 27у, с унитарной матрицей 27, приводит ее
к треугольному виду
У = И* А\]у, у@) = 27*ж0,
8' Потому что в этом базисе Г1 = {1, 0,..., 0}*.
5.2. Триангуляция Шура
107
где
А,
0 ... Лп
Хотя это и не «развязывает» полностью исходную систему (в отличие
от диагонализации), но сводит ее к легкому последовательному интегри-
интегрированию скалярных уравнений. Сначала интегрируется уп = \пуп, затем
уп_1 = Хп-1Уп-\ + О(п-1)пУп И Т.Д.
• Рассмотрим теперь задачу о малом возмущении матрицы А с кратными
собственными значениями, приводящем к матрице А(е) с попарно раз-
различными собственными значениями (см. раздел 3.4). Пусть V приводит А
к треугольному виду, Т = V* АН. Добавление к Т диагональной матрицы 9)
А(е) =
е1 ... О
О ... е"
дает матрицу Т + Л(г), имеющую при достаточно малых е ф 0 попар-
попарно различные собственные значения. Те же собственные значения имеет
А(е) = II (Т + А(е)р*, и А(е) -> А при е -> 0.
• Из треугольного представления матрицы сразу следует:
ае1 А = Л, (
1г А = А,(Л) + ... + Хп(А).
Рассмотренные примеры демонстрируют два вида преиму-
преимуществ, которые дает треугольное представление. На диагонали у Т
стоят собственные значения матрицы — и это позволяет работать
с Т, почти как с диагональной матрицей. В частности, во вто-
втором примере возмущение диагонали было в точности возмущением
спектра, а внедиагональные элементы никакой роли не играли.
В первом примере главное было в другом — в нулях под диагона-
диагональю, что позволило с комфортом интегрировать дифференциальные
уравнения одно за другим.
Другие варианты. При желании обойтись вещественными преобра-
преобразованиями можно ориентироваться на следующий результат.
5.2.2. В случае вещественной матрицы А всегда существует ве-
вещественная ортогональная матрица (}, преобразующая А к «почти
9* Здесь верхние
индексы являются показателями степени.
108
Глава 5. Канонические представления
треугольному» виду
0
где каждый диагональный блок А$ отвечает либо вещественному
собственному значению — и тогда это просто скаляр, либо — паре
комплексно сопряженных — и тогда А] = * -1 3
Результат поначалу воодушевляет, но наличие ненулевой «поддиагонали»
все же портит малину, обесценивая достигнутое упрощение.
Существенно более полезен другой вариант триангуляции,
но опять комплексный и, плюс к тому, уже не унитарный.
5.2.3. Пусть Х\,..., А& обозначают различные собственные значения
матрицы А кратности п^. Тогда А подобна10^ блочно-диагональной
матрице
" ^1 О
А2
0
где А2 — верхние треугольные матрицы размера п^ х п^ с диагональ-
диагональными элементами А^.
Результат будет, по существу, доказан в разделе 5.5. Техническое обоснование,
не выходящее за пределы элементарных категорий линейной алгебры, можно
найти в [18].
5.3. Жордановы формы
При переходе к треугольной форме матрицы возможен, образно
говоря, миллион вариантов. Слишком легкая задача. Ее можно
решать «и так и этак». Поэтому возникает желание распорядиться
свободой выбора с целью извлечения дополнительных выгод.
10)
Но не обязательно «унитарно подобна».
5.3. Жордановы формы
109
На этом пути оказывается, что любая матрица А заменой
базиса, А = 8~138, может быть приведена к жордановой форме:
3¦ =
"Л, (А.)
о
E.2)
где у жордановой матрицы 3 на диагонали стоят жордановы клетки
(А)
"А 1 0"
0
в которых на главной диагонали повторяется собственное значение
А, над главной диагональю — диагональ из единиц, все остальные
элементы — нули11).
В E.2) к\ + ... + кр = п и собственные значения А; в разных
клетках не обязательно различны. С точностью до перестановки
блоков «/*(•) — форма E.2) определяется однозначно. Конкретный
вид 3 для А связан со следующими факторами:
• Число жордановых клеток 3 равно максимальному числу линейно независимых
собственных векторовХГ) А.
• Сумма порядков жордановых клеток, отвечающих одному и тому же собствен-
собственному значению Л;, равна алгебраической кратности Л;, а число этих клеток
равно геометрической кратности Л;.
Перечисленных факторов, однако, не хватает для полной опреде-
определенности. Проблема будет «дожата» в следующих разделах.
Никаких особых выгод жорданова форма (по сравнению с треугольной)
не дает, а по «литрам испорченной крови» занимает лидирующее место. К тому
же, малейшее изменение матрицы способно изменить ее жорданову форму. В та-
таких случаях обычно говорят о структурной неустойчивости изучаемого объекта.
Ситуация, понятно, не из приятных. Сколь угодно малое изменение условий
задачи — кардинально меняет ответ. Какой смысл тогда решать, казалось бы.
Проблема, однако, не так проста. Вычисление жордановой формы для кон-
конкретной матрицы практического смысла, конечно, не имеет, если речь не идет
' У жордановой клетки размера 1 х 1 кроме А нигде, разумеется, ничего не стоит, потому
что негде.
' При р = п матрица 3 диагональна.
110 Глава 5. Канонические представления
об упражнениях учебного характера. Смысл имеет изучение самой задачи с целью
выявления природы аномальных явлений, когда до них доходит дело.
Подводная часть айсберга. Тот факт, что не всякая матрица приво-
приводится к диагональному виду, становится очевиден из самых простых
примеров. Матрица А = п , имеет два равных собственных зна-
значения А1 д = 1, но она не может быть подобна / = п . , иначе
приводило бы к противоречию {3\
Причина, как уже отмечалось (раздел 3.2), в пресловутой крат-
кратности собственных значений. Механизм возникновения «неприят-
ностей» наглядно демонстрирует модель перехода к А с помощью
А(е) -> А при е -> 0 , где у матриц А(е) все собственные значе-
значения различны (е Ф 0). По теореме 3.3.1 А(е) имеет п линейно
независимых собственных векторов
Г(е) = {Г,(е),...Л(с)>, E.3)
которые могут становиться линейно зависимыми — в случае появ-
появления в спектре а{А) (при е -» 0) кратных А.
Дело в том, что ранг матрицы А — XI никак не связан с крат-
кратностью А как корня характеристического уравнения \А — Х1\ = 0.
Единственное, что можно утверждать, если А собственное зна-
значение, что гапк(Л — XI) < п. Поэтому ненулевую разрешимость
(А — Х1)х = 0 (существование собственного вектора) можно гаран-
гарантировать, но о количестве линейно независимых решений — полином
\А - Х1\ = 0 информации не дает.
Разнообразие возможностей при Г(е) -* Г достаточно велико.
Векторы {^(е),..., Гп(^)} распадаются на подгруппы, соответству-
соответствующие подмножествам собственных значений, которые уравнива-
уравниваются при е -> 0. Внутри подгруппы — пусть для определенности
' Но А = \ _ . подобна / = I 0 . при сколь угодно малом е Ф 0 (теоре-
(теорема 3.3.1).
5.3. Жордановы формы 111
это будет {^(г),..., (к(с)} — собственные векторы в пределе могут
остаться линейно независимыми, а могут стать линейно зависимы-
зависимыми. При этом размерность линейной оболочки {(\,..., {*} может
уменьшиться вплоть до единицы ]4\ становясь в общем случае рав-
равной некоторому т в пределах от 1 до А;. Число15) к - т + 1
показывает, сколько линейно независимых собственных векторов
отвечает данному собственному значению, но этим разнообразие
не исчерпывается, поскольку вариантов «вырождения» — уклады-
укладывания к векторов в т-мерное подпространство — тоже может быть
несколько — векторы могут распадаться на подгруппы следующего
уровня, вырождаясь там на свой манер (становясь коллинеарными,
компланарными и т.п.).
Варианты друг от друга отличаются структурой линейной «зави-
«зависимости-независимости» собственных векторов. Матрицы А и В,
имеющие одинаковую структуру, переводятся друг в друга невы-
невырожденным преобразованием, А = Т~[ВТ.
Все это в какой-то мере проясняет существо возможных яв-
явлений, но от понимания сути до формального алгоритма имеется
некоторое расстояние. Проблема с более конструктивной точки
зрения рассматривается в следующих разделах.
О приложениях. Жордановы формы оказываются полезны16) каж-
каждый раз, когда задаются максималистские вопросы, требующие
предельно точных ответов.
В каком случае матрицы А и В подобны? — Если их спек-
спектры не содержат кратных значений и совпадают. — А если есть
кратные собственные значения? — Тогда возможен универсальный
ответ. Если совпадают жордановы формы А и В, — разумеется,
с точностью до порядка расположения жордановых клеток.
Триангуляция Шура здесь бы уже не помогла. Другое дело, что циник бы
сказал, что максималистские вопросы никого не интересуют, кроме диссертан-
диссертантов. Однако циники, заслуживая всяческого уважения, все же не исчерпывают
Вселенной.
|4^ То есть векторы {Г1 (б"),..., Мб")} могут стать в пределе коллинеарными. Либо компла-
компланарными — предельные {Г|,..., Г*} попадают в одну плоскость. Либо уложиться в пределе
в трехмерное пространство и т. д.
' Геометрическая кратность собственного значения.
16' Это компенсация высказанных выше скептических замечаний.
112
Глава 5. Канонические представления
Подобна ли матрица своей транспонированной? Наивный вро-
вроде бы вопрос. Но положительный ответ очевиден лишь в случае
«хорошего» спектра. А если в спектре кратные значения?
Выручают жордановы формы. Клетка транспонируется легко:
ГО И ГА 1 01 ГО П ГА 01
1
0] 1.0
1
о
1
Поэтому транспонируется и вся жорданова матрица, «7* = Р ]1Р, а значит,
и А = Т~] ЗТ, если речь идет о вещественной матрице17*.
5.4. Аннулирующий многочлен
В силу конечномерности Еп множество
Х9 АХ ^ . . . , А. Х9
при некотором минимальном к, становится линейно зависимым, что
означает существование таких констант у$, что 18)
Акх
{х + ... + и{х = 0.
Последнее равенство может быть записано в виде (р(А)х = 0, где
(р(\) обозначает многочлен
который называют аннулирующим многочленом19^ вектора х.
Аннулирующими в смысле гр(А)х = 0 могут быть и другие многочлены 'ф(Х),
но из построения ясно, что у>(А) имеет наименьшую степень, и потому — любой
аннулирующий многочлен 'ф(Х) делится на <р(\) без остатка.
Действительно, из ^(А) = С(^)^(^) + г(^) следует, в силу гр(А)х = 0,
гр(А)х = ((А)(р(А)х + г(А)х = г(А)х =» г(А)х = 0.
Пусть теперь <р;(А) обозначает минимальный аннулирующий
многочлен базисного вектора е;. Наименьшее общее кратное
' Комплексная матрица тоже подобна своей транспонированной (без сопряжения).
1 ' В частности, все V) могут быть равны нулю, если Акх = 0.
19' Для рассматриваемого оператора А.
5.5. Корневые подпространства 113
многочленов Ч>\{\),..., у>п(А) — называется минимальным многочле-
многочленом оператора1®* А (иногда говорят: минимальный аннулирующий).
Очевидно, (рд(А)х = 0 для любого вектора
х =
и потому <рл(А) представляет собой матрицу из одних нулей.
5.4.1. Теорема. Если минимальный многочлен оператора А пред-
представим в виде произведения двух взаимно простых многочленов,
то Кп представимо в виде прямой суммы (расщепляется на сумму)
двух инвариантных21) для А подпространств Х\ и Х^.
<4 Легко видеть, что Х\ = кег^ДЛ), Х2 = кепр2(А). Действительно,
из ж € X] и перестановочности А с любым своим многочленом следует
т. е. АХ) С X^.
Остается показать, что Х\ ^\Х2 — 0. В противном случае существовал бы
ненулевой вектор х такой, что (р\(А)х = 0 и <р2(А)х = 0, но это противоречи-
противоречило бы взаимной простоте многочленов <р\(\) и ^2(А), ибо тогда (р\(Х) и ^г(А)
были бы представимы в виде ^-(А) = ^(А)^(А) с общим множителем, равным
минимальному аннулирующему многочлену (р(Х) вектора х. >
Разумеется, теорема 5.4.1 влечет за собой более общий факт: если минимальный
многочлен оператора (рл(Х) представим в виде произведения р взаимно простых
многочленов, то Кп расщепляется на сумму р инвариантных для А подпространств
Х\,..., Хр.
5.5. Корневые подпространства
Поскольку речь идет о комплексных А, то минимальный многочлен
)
разлагается в произведение22)
E.4)
20* Предполагается, что все рассматриваемые многочлены имеют старший коэффициент,
равный единице.
' Напомним, что подпространство X С Яп называется инвариантным для оператора Л,
если АХ С X.
' Все А^ попарно различны.
114 Глава 5. Канонические представления
и по теореме 5.4.1 множителям (А - Х^)8* отвечают инвариантные
подпространства X,-, называемые корневыми, на которые расщеп-
расщепляется Лп.
5.5.1. Корнями минимального многочлена E.4) служат собственные
значения матрицы А, и только они.
Ч Аннулирующим для собственного вектора Г; (Ж; = А;Т;) является мно-
многочлен А-А; =0. Поэтому все собственные значения А являются корнями ^л(А).
Теперь в обратную сторону. Пусть среди А; в E.4) есть корень, не являю-
являющийся собственным значением А. Тогда сужение А на соответствующее корневое
подпространство — было бы линейным оператором, не имеющим собственных
значений. >
Выбор в качестве базиса Яп объединения базисов корневых
подпространств Х; приводит к блочно-диагональной записи мат-
матрицы А
1 01
А2
где блоки А] имеют собственное значение А;, кратность которого
совпадает с размерностью Х$.
Далее каждым блоком А$ можно заниматься независимо от дру-
других блоков23^, меняя базис Х$ и не затрагивая базисы других под-
подпространств X*, к Ф ]. Поэтому, чтобы не загромождать изложение,
индекс ] далее опускается.
Итак, можно считать, что речь идет о матрице А с совпадаю-
совпадающими собственными значениями, равными Ао, где Ао обозначает
одно из А;, а {е, Г,..., Ь} — собственные векторы, число к которых
определяется условием
гапк (А - Ао/) = г - й,
если А имеет размер г х г.
Перейдем к построению базиса. В качестве в! возьмем соб-
собственный вектор е. Очевидно, (А - А0/)в1 = 0. Затем в качестве е2
23) Результирующее преобразование А определится матрицей Т = сЛав{Т\,...,Тр}, где
блоки Т] влияют только на Л^.
5.5. Корневые подпространства 115
возьмем решение уравнения (А — Ао/)в2 = е\. Далее продолжаем
в том же духе, пока решаются уравнения
(А-Ао/)е* = ^-ь E.5)
Почему и до каких пор решаются эти уравнения, и почему в ре-
результате получается базис, мы обсудим позже, а пока остановимся
на том, как будет выглядеть матрица в этом базисе. Запись E.5)
в виде
Аед = Аое^ + ед-\
сразу показывает, что в этом базисе А приобретает вид
Затем берется следующий собственный вектор Г, проводится
такая же манипуляция, и т. д. В итоге матрица (блок) А приобретает
жорданову форму. Процесс не может остановиться ^ситуации, когда
в правом нижнем углу стоит не жорданова клетка А\ а собственные
векторы уже кончились. Тогда бы матрица А1 не имела собственных
векторов, чего не бывает.
-4 Теперь подготовим почву для обоснования. Начнем с рассмотрения по-
последовательности подпространств К^ = кег (А - Ло/)9. Очевидно, К^ — есть так
называемое собственное подпространство, базис которого составляют собственные
векторы {е, Г,..., Ь} (и любой вектор которого тоже является собственным).
Если (А - \о1)х = О, то тем более (А - Хо1Jх = 0, поэтому К{^ С К^.
Действуя аналогично, получаем
E.6)
где включения строгие до некоторого р^ 1, начиная с которого включения
превращаются в равенства.
Содержательный вариант р > 1 имеет место в том случае, когда у ми-
минимального многочлена (Л - Ао)*° матрицы24) А показатель степени 50 > 1.
Причина заключается в том, что минимальный многочлен аннулирует матрицу,
т. с. (А - Ао/)*° = 0, — и поэтому К^ при р = 50 совпадает со всем про-
пространством, в котором действует А. Следовательно, цепочка E.6) должна быть
' То есть у соответствующего множителя (Л — А^)** в E.4).
116
Глава 5. Канонические представления
возрастающей (по размерности) от К^ до К^° . Причем затормозить в сере-
середине, К^~1^ — К^, она не может, поскольку в этом случае дальнейший рост
размерности остановился бы. (?)
Наконец, заметим, что подпространства К^ инвариантны относительно А,
что вытекает из очевидной импликации
(А - Х01)ях = 0 =* А(А - Х01)ях = (А- Х01)дАх = 0,
поскольку А коммутирует с (А - Х01)я. >
Перейдем к обоснованию описанного выше алгоритма приведения матрицы
к жордановой форме. Что касается уравнений E.5), то их разрешимость очевидна,
в силу
причем ясно, что ед 6 К^\К^~1\ — и потому векторы {е|,...,ер} линейно
независимы.
Как только К^ = К^~ , процесс останавливается. Линейная оболочка по-
построенного базиса представляет инвариантное подпространство относительно А.
Действительно, х = У~^ хчед влечет за собой
Ах =
хчАея =
где жр_|_1 = 0. Далее процесс продолжается указанным выше образом. Берется
следующий собственный вектор Г и т.д.
Нильпотентные матрицы. Матрица А называется нильпотентной,
если Ак — 0 при некотором25) к. Жорданова клетка может быть
записана в виде «/& = А/ + Щ, где ТУ* нильпотентна, 7У^ = 0,
ГА 1
1-0
01
1
А]
гЛ
01
Г0
Отсюда ясно, что жорданова матрица в общем случае пред-
ставима в виде суммы, 3 = Л + №, где Л диагональная матрица,
а N — нильпотентная, причем Л и N коммутируют26). В случае
произвольной матрицы,
А =
= Т~1АТ + >.
5' Показатель нильпотентности к не превышает порядка матрицы. (?)
' Поскольку 3 = XI + N, а единичная матрица / коммутирует с любой.
5.6. Теорема Гамильтона—Кэли 117
А\ диагонализируема, А^ нильпотентна, и они опять-таки комму-
коммутируют.
Из представления А = А& + А^ ясно, что для сходимости Ат
к нулевой матрице при т -» оо необходимо и достаточно условие
р(А) < 1, т.е.
тах |А;| < 1.
Упражнения
• Матрицу А называют простой, если геометрическая кратность любого ее
собственного значения равна единице, т.е. гапк(Л - А;) = п - 1. Число
жордановых клеток простой матрицы равно числу различных собственных
значений.
• Матрица А диагонализируема в том и только том случае, когда все корни
минимального многочлена имеют кратность 1, т. е.
где все А; попарно различны. Идемпотентная матрица, определяемая усло-
условием А2 = А, имеет минимальный многочлен А(А - 1), — поэтому диагона-
диагонализируема.
• Характеристический многочлен нильпотентной матрицы имеет вид
Рл(А) = А".
5.6. Теорема Гамильтона—Кэли
Излагаемые ниже результаты примыкают к рассматриваемой тема-
тематике, но имеют в большей степени эстетическое значение27).
У пространства п х п матриц — размерность п2, поэтому
множество
А А2 Ам
при N > п2 линейно зависимо, что гарантирует для А существова-
существование аннулирующего полинома степени N.
Теорема Гамильтона—Кэли дает намного более экономный ре-
результат.
^ Имеется в виду, что теорема Гамильтона—Кэли применяется довольно редко.
118 Глава 5. Канонические представления
5.6.1. Теорема. Любая матрица удовлетворяет своему характери-
характеристическому уравнению.
В учебниках популярны предостережения от ошибочных доказательств этого
результата28*, что нередко инициирует слишком подробные рассуждения. На са-
самом деле возможно совсем простое обоснование.
<4 Пусть
обозначает характеристический полином, все собственные значения Л; матрицы А
попарно различны и Т приводит А к диагональному виду. Тогда
рА(А) =рА{ТАГ1) = Трл(А)Т'1 = @],
ибо Ра(Л) — диагональная матрица с диагональными элементами рл(А>) = 0.
Прямолинейная попытка достичь общего результата за счет предельного
перехода, А(е) -> Ау не проходит 29\ но это надо делать просто чуть иначе,
избегая участия в рассуждениях матрицы перехода Те.
Попарно различные собственные значения при малых е Ф 0 гарантированно
имеет матрица А + еАА (см. раздел 5.2). Поэтому из доказанного выше следует
РА+е*л(А + еАА) = (А + еАА)п + ул^(е)(А + еАА)п~] + ... + Ъ(еI = [0].
Но, очевидно, рл+еДл(-4 4- еАА) = рл(А) + о(е), что оправдывает предельный
переход при е —> 0. >
Возможно и чисто алгебраическое доказательство без обращения к топо-
топологическим соображениям непрерывности. Подстановка А = 17*817, где 5 —
треугольная матрица, в рл(Х) = (А — А|) • • • (А — Ап) вместо Л — приводит к
У треугольной матрицы 5 - А,/ на диагонали ^-й элемент равен нулю (поскольку
8П — А>)« Произведение п таких матриц, (8 — Х\1)---(8 - ХП1)9 дает чисто
нулевую матрицу, но в этом надо убедиться, что можно использовать в качестве
упражнения.
5.7. Л-матрицы
Матрицу
Гаи(А) ... а1п(А)]
[вп1(А) ... впп(АI
28* От наивного «Подставим А в \А- Х1\ = 0 вместо А — получим \А - А\ = 0» —
до изощренных, но несостоятельных манипуляций.
^ При € -> 0 матрица Те в 7^27* вырождается, в результате чего некоторые элемен-
элементы Т^1 стремятся к бесконечности.
5.7. Х-матрицы 119
элементы которой являются многочленами от Л, называют Х-матрыцей. На А-
матрицы можно смотреть как на матричные многочлены,
А(Х) = В0Хк + Я, А* + • + Я*., А1 + Вк.
Основной источник интереса к данной области — матрица Л- XI. Естествен-
Естественное ожидание, что канонизация А - XI связана с канонизацией самой матрицы А,
оправдывается, и путь к жордановым формам оказывается даже короче и проще.
Но этот путь, алгебраический по природе, менее нагляден. Ясно и просто тео-
теория А-матриц изложена у Куроша [11]. Остановимся здесь лишь на стержневых
моментах.
Элементарным преобразованием А(Х) называется любая конечная последова-
последовательность четырех типов операций:
• умножение строки (столбца) матрицы на ненулевой скаляр;
• прибавление строки (столбца) к другой (другому).
По сравнению с элементарными преобразованиями обычных матриц — здесь
добавлена возможность «то же самое» делать со столбцами. Результаты получаются
аналогичные (см. раздел 2.7).
Центральный результат: любая Х-матрица элементарным преобразованием
приводится к каноническому виду
Ге,(А) О
е2(А)
О ея(А).
ёде у диагональной матрицы Е(Х) многочлен е,(А) (,; = 2,..., п) делится (без остат-
остатка) на е^-1 (Л), и старшие коэффициенты всех е^(А), в том числе в!(А), равны
единице, если многочлен не нулевой.
Две А-матрицы называют эквивалентными, если они приводятся к одному
и тому же каноническому виду. В итоге все А-матрицы распадаются на классы
эквивалентных между собой (это, разумеется, теорема). Классы эквивалентности
однозначно характеризуются последовательностью многочленов в)(А),..., еп(А),
называемых инвариантными множителями, которые, в свою очередь, определяются
как
где й;(А) — наибольший общий делитель всех миноров ./-го порядка30* матрицы
А(Х).
30' Понятно, что 4;-(А), таким образом, определяется однозначно и конструктивно матри-
матрицей А(\). Факт неизменности А](\) при элементарных преобразованиях А(Х) очевиден. (?)
120 Глава 5. Канонические представления
Теорию «заземляет» следующий принципиальный факт.
Числовые матрицы А и В подобны в том и только том случае, когда их
характеристические матрицы А — XI и В — XI эквивалентны, т. е. приводятся
к одному и тому же каноническому виду (имеют одни и те же инвариантные
множители).
5.8. Задачи и дополнения
• Если матрицы А и В коммутируют, т. е. АВ = В А, то существует унитарное
преобразование XI, одновременно приводящее А и В к треугольному виду. (?)
Подсказка. Поскольку у коммутирующих матриц всегда есть общий соб-
собственный вектор (?), то такой вектор можно использовать на каждом шаге
процедуры, описанной в доказательстве теоремы 5.2.1.
• Из предыдущего утверждения легко вытекает, что собственные значения сум-
суммы А+В коммутирующих матриц равны А;+^;, где Л;, //; — определенным
образом упорядоченные собственные значения матриц А и В.
• Треугольную форму матрицы всегда можно выбрать такой, что ее наддиаго-
нальные элементы будут сколь угодно малы.
-4 Действительно, у треугольной матрицы
Т = 8~ХА8
после дополнительного преобразования Л~!ТЛ, где
наддиагональные элементы уменьшаются в И*'1 раз, и выбором достаточно
большого N можно добиться желаемого результата. >
Надо лишь отдавать себе отчет, что успех этот — иллюзорный31*, хотя
и не всегда. Примерно такой же, как увеличение зарплаты за счет измерения
ее в копейках.
Как правило, указание базиса, в котором матрица имеет тот или иной
вид, несущественно. Важно лишь, что базис и матрица перехода к нему
существуют. С этой точки зрения эффективен следующий алгоритм. Ищутся
все собственные значения, после чего анализируются ранги
гапкD-А;/)*, к= 1,2,...,
что позволяет определить число и размеры жордановых клеток для каждого
собственного значения Л;. Для указания жордановой формы больше ничего
не нужно.
Невырожденные жордановы клетки у АВ и В А одинаковы. (?)
Подобные матрицы имеют один и тот же минимальный многочлен. Обратное
неверно. (?)
* Из-за того, что ||Л|| -> оо при е -» 0.
5.8. Задачи и дополнения
121
• Оператор дифференцирования В, действующий в пространстве многочленов
третьей степени в базисе {1,1,12,13} записывается как
0
0
0
1
0
0
0
0
2
0
0
0
0
3
0
Жорданова форма «7# и матрица перехода Т к соответствующему базису
здесь:
0
0
0
0
1
0
0
0
0
1
0
0
0"
0
1
0
Т —
, 1 =
0
0
0
0
6
0
0
0
0
3
0
0"
0
0
1
• При возведении в степень жорданова клетка эволюционирует следующим
образом
0
0
0
1
0
0
0
0
1
0
0
0"
0
1
0
2
0
0
0
0
0
0
0
1
0
0
0
0"
1
0
0
0
0
0
1
0
0
0
0
1
0
0
0"
0
1
0
3
0
0
0
0
0
0
0
0
0
0
0
г
0
0
0
четвертая степень оказывается уже чисто нулевой матрицей.
При замене единиц другими числами характер поведения степеней не меня-
меняется,
• Матрица
0 0 0 70
0 0 0 0
0 0 0 0
0 0 0 0
0
0
0
7
0
0
0
,0
5
0
0
0"
0
2
0
2
0
0
0
0
0
0
0
0
35
0
0
0
0"
10
0
0
0
0
0
7
0
0
0
0
5
0
0
0"
0
2
0
3
А =
г0
1
0
. 0 а0 "|
0
ЬО . . 0 1 ап_,]
называется сопровождающей матрицей многочлена
) = Хп-ап^Хп~1 -...-а,Л-а0,
который, со своей стороны, служит минимальным многочленом А.
Например, для
д(Х) = А3 - 5Л2 + 8Л - 4 = (Л - 2J(Л - 1)
122 Глава 5. Канонические представления
Го о 4*1
матрица А имеет вид 1 0 -8 . Жорданова форма А и матрица перехода Т
[О 1 5]
к соответствующему базису здесь:
Г 4
Т = -4 -3
I
Матрица подобна сопровождающей матрице своего характеристического
многочлена в том и только том случае, когда характеристический много-
многочлен является ее минимальным многочленом.
Матрицу А называют нормальной, если она коммутирует со своей сопряжен-
сопряженной, т. е. АА* = А*А. Интерес к нормальным матрицам объясняется тем, что
они, обладая уникальными свойствами, объединяют «под одной крышей»
унитарные матрицы,
Ц*Ц = 1 = ЦЦ\
эрмитовы (определяемые условием А = А*), косоэрмитовы (А — -А*) и не-
некоторые другие.
Нормальная матрица А унитарно диагонализируема, имеет ортонормирован-
ное множество собственных векторов,
Еы> = Е м*.
наконец, всегда существует ортогональная матрица С?, приводящая веще-
вещественную нормальную матрицу к блочно-диагональному виду
Если геометрическая кратность собственного значения А матрицы А порядка
п больше или равна А:, то А является собственным значением любой главной
подматрицы А порядка т> п-к. (?)
Глава 6
Функции от матриц
6.1. Матричные ряды
Полином от матрицы ^1 + ^\А + ... + ^\Ак дает простейший
пример матричной функции. Следующий шаг — ряд
00
\ А° = 1. F.1)
Рассмотрение бесконечных сумм F.1) не является метафизической выдум-
выдумкой. Ряды вида F.1) возникают в самых естественных ситуациях. Например,
по аналогии с A - ж) = \+х + х2 + ... хотелось бы иметь возможность так же
вычислять обратные матрицы,
но здесь, понятно, нужны условия, в которых это работает.
Другой источник — дифференциальное уравнение X = АХ. Естественный
поиск решения в виде
с неопределенными матричными коэффициентами Ск — после подстановки
в X = АХ дает
Приравнивая коэффициенты при равных степенях I, получаем кСк = АСъ-\, что
в итоге (при условии Х@) = I) приводит к ряду
который было бы естественно назвать матричной экспонентой, но пока не на что
опереться — в смысле идеологической базы.
124
Глава 6. Функции от матриц
Ситуация отнюдь не безнадежна, как может показаться, а при
отсутствии у А кратных собственных значений — даже тривиальна.
Если А = Г~1ЛТ, где матрица Л диагональна, то частичные суммы
к=0
диагонализируются тем же преобразованием *) Г,
Л(Г-1АГ)=ГЛ(А)Г.
Поэтому стоящие по краям Г и Г оказываются как бы
внешними наблюдателями того, что происходит на диагонали,
я
где элементами являются обычные суммы ]^7*^> переходящие
в обыкновенные числовые ряды к=о
7*А* при к -> оо.
F.2)
к=0
Для сходимости же F.2), как известно (см. ниже), достаточно,
чтобы модуль А; был строго меньше радиуса сходимости г, и необ-
необходимо |А; | ^г. Таким образом, если спектральный радиус р(А), т. е.
максимум |А;| по ], строго меньше г, то все числовые ряды F.2)
на диагонали сходятся.
В случае / + А 4- А2/2\ +..., например, диагональные элементы F.2) имеют
вид 1 + А,- + \2^2\ + ... = еА'. В результате
О ... Лп
е =Т
0
Однако идиллическая картина такого типа разрушается при столкновении с недиа-
гонализируемыми матрицами. Предельный переход здесь не работает. Приходится
либо залезать в дебри жордановых канонических форм, либо изобретать простые
обходные пути — см. раздел 6.5.
О сходимости числовых радов. Напомним некоторые определения и результаты
о числовых рядах (см. например [4, т. 1]).
0 В силу (Т~]АТ)Р = ГЛГГЛГ • • • Т~1АТ = Т~*АРТ.
6.2. Нормы векторов и матриц 125
Конечный или бесконечный предел а частичной суммы ап = а{ + ... + ап
00
определяют как сумму ряда ^ ак. Ряд, имеющий конечную (бесконечную) сумму,
к=\
называют сходящимся (расходящимся).
00
• Если ряд ^2 ак сходится, то ак -» 0. Обратное неверно.
• Ряд называют абсолютно сходящимся, если сходится ряд из абсолютных
величин, [а\\ 4- \а2\ 4- Любой абсолютно сходящийся ряд сходится.
00
• Если степенной ряд ]Г^7*#* сходится при каком-то ж, |ж| = г, то при
условии |ж| < г он сходится абсолютно. Отсюда ясно, что область схо-
сходимости степенного ряда — всегда круг некоторого радиуса г (возможно
бесконечного), который называют радиусом сходимости.
Ряды
З!^--^ ч Bп+1)'. "
сходятся при любом ж, — радиус сходимости бесконечен.
Ряд
сходится при |ж| < 1, г = 1.
6.2. Нормы векторов и матриц
Разговор о нормах здесь более подробен, чем того требует проблематика сходи-
сходимости матричных рядов. Но тема важна сама по себе. Нормы относятся к тем
инструментам, которые работают каждый день, а не к тем, которые «висят на сте-
стене», а все ждут «когда выстрелит».
До сих пор рассматривался вариант ||ж|| = л/(х, х), — но есть
и другие способы. Их контроль осуществляет следующее опреде-
определение.
Нормой вектора х Е Кп называют положительное число ||х||,
удовлетворяющее следующим требованиям:
(I) ||я||=0 & х = 0;
(II) ||ж + 2/|| ^ ||х|| + \\у\\ (неравенство треугольника);
(III) |М| = |а|-|М|.
126 Глава 6. Функции от матриц
Множество точек, удовлетворяющих условию ||х|| ^ г (||ж|| = г) называется
шаром (сферой) радиуса г. В силу A11) любой шар центрально симметричен.
Норма представляет собой обобщенное расстояние от точки х
до начала координат. Расстояние между точками определяется как
р(х9 у) = \\х - у\\. Функцию р(х, у) называют метрикой.
Помимо евклидовой \\х\\ = у/(х, х) иногда используется норма
\\х\\у =
где V — положительно определенная матрица.
Подставляя х — Ау в (ж, ж), получаем
(х,х) = (Ау,Ау) = (у,А'Ау),
откуда видно, что (у, Уу) с матрицей V = А*А — есть то же самое (ж, ж) в новых
координатах, переход к которым осуществляет матрица А.
Отсюда, кстати, вытекает, что А*А — всегда положительно определена,
разумеется для невырожденной матрицы А.
Широкое распространение имеют также
||х||т = тах |Ж|-| (кубическая норма)
и
п
||х||/ = ^^ \Хг\ (октаэдрическая норма).
1 = 1
В случае комплексного пространства под |ж,-| здесь понимается
модуль комплексного числа ж,-.
Норма однозначно определяется указанием единичного шара, в каче-
качестве которого может быть «назначено» любое выпуклое центрально-
симметричное тело.
Разнообразие норм объясняется двумя причинами. Любопыт-
Любопытством и свободой маневра, которую дает большой ассортимент
вариантов. Основу свободного манипулирования нормами обеспе-
обеспечивает следующее утверждение.
6.2. Нормы векторов и матриц 127
6.2.1. В Яп все нормы эквивалентны (с точки зрения сходимости),
т. е. для любых двух норм 11 • 111, | Н12 можно указать такие константы
а и /3, что
\\х\\\^а\\х\\2, \\х\\2 ^ Й\х\\{
при любом ж6йп.
<4 Функция (р(х) = ||х||| на множестве ||ж||2 = 1 достигает своего мини-
минимального G > 0) и максимального F > 0) значения. Поэтому
при любом жбДп, что завершает доказательство. >
Роль эквивалентности норм конечномерного пространства выявляется при
изучении вопросов сходимости. В Еп всегда справедлива импликация
||х*-х,||,->0 => ||х*-х,||2-»0.
Это позволяет рассматривать предельные переходы в той норме, которая в наи-
наибольшей степени подходит данной конкретной задаче2*.
Простейший вопрос. Означает ли сходимость по норме (||х* - х|| -* 0) поко-
покоординатную сходимость? — Означает, и судить об этом легче всего в кубической
норме, после чего общий положительный ответ вытекает из эквивалентности норм.
Нормой матрицы А называют положительное число \\А\\, удо-
удовлетворяющее тем же самым условиям A)-(ш), если в них векторы
заменить на матрицы.
Поскольку матрицы — это одновременно и линейные операто-
операторы в Яп, необходимо позаботиться об оценке образов Ах. Норма
матрицы ||Л|| называется согласованной с нормой вектора ||ж||, если
для любых А и х
Ш\<\\а\\-М\
и для любых А и В выполняется неравенство ||АВ|| ^ ||Л|| • ||2?||.
Чтобы неравенство \\Ах\\ ^ ||Л|| • ||ж|| давало хорошую оценку,
оно должно быть неулучшаемо. Это мотивирует выделение в само-
самостоятельное понятие подчиненной нормы матрицы:
= тах \\Ах\\.
11*11=1
2> В бесконечномерных пространствах нормы не эквивалентны, и там необходимы меры
предосторожности.
128 Глава 6. Функции от матриц
Матричные нормы играют важную роль как в самой линейной алгебре, так
и за ее пределами. Для нелинейного оператора /(ж), например,
\\у\\ Лт = ||/(* + ву)\\ ¦ \\у\\
о
при некотором в € @, 1).
Поэтому, если ||/'(г)|| < V < 1, то / сжимает в метрике р(х,у) = \\х - у\\
со всеми вытекающими последствиями [4].
В случае евклидовой нормы \\х\\Е = л/(х, х) норма матрицы равна макси-
максимуму
(Ах, Ах) = у/(ж, А*Ах)
на единичной сфере. Это приводит к результату3) \\А\\Е = ^/р(А*А).
Нормам || • ||то и || • ||/ подчинены, соответственно4),
\\А\\т = тах \~^ |а^| (строчная норма),
п
I = тах \^ \пц\ (столбцовая норма).
Если \\х\\ — некоторая норма, а М — невырожденная матрица, то ||ж||л/ =
ЦМ^!! — также норма. Норма матрицы, подчиненная норме ||ж||д/, определяется
как
\\А\\М = \\М~]АМ\\.
В случае М = сНа§ {//,,..., //„}, /х, > О,
1 1 п
Ытм = тах — |ж,|, \\А\\тМ = тах —
1 " №
1
77 ^ — I««>I-
1=1 & ^ |=, №\
3^ См. раздел 4.4.
4^ Модуль |а,;| обозначает модуль, вообще говоря, комплексного числа а^.
6.2. Нормы векторов и матриц
129
Двойственная норма. Если ||^4|| ^ А, — что можно сказать о норме
транспонированной (сопряженной) матрицы? Существует ли норма
|| • ||', в которой \\А*\\* $С А? Универсальный положительный ответ
дает понятие двойственной нормы, определяемой как
Импликация
\\А*\
Л вытекает из
= тах{А*х, у} = тах{ж, Ау] ^ тах{ж, г} = Х\\х
1Ы1=|
И1=А
Двойственная норма к двойственной — опять исходная, \\х\\4<1 = ||х||. (?)
Евклидова норма двойственна сама себе. Двойственная к октаэдрической норме —
кубическая, и наоборот. (?) Отметим также
|Ы|'=
тах{ж, у}
О комплексификации пространства. Одно из неудобств при изучении линейной
алгебры заключается в том, что объекты внимания все время «двоятся». С одной
стороны, как уже отмечалось, переменные проще всего считать комплексными.
С другой — хочется обойтись действительными. В частности, что надо иметь
в виду при определении норм? Максимум в
\\А\\ = тах
|И|=1
либо
!= тах {х,у}
Ы\=\
надо считать по комплексным переменным или действительным? Оказывается,
все равно. Для понимания этого обстоятельства полезна следующая точка зрения
на комплексные пространства.
Коплексификащей любого нормированного пространства Е считается ком-
комплексное пространство Е, элементами которого являются формальные пары
г — х н- г у (х,у € Е) с определением линейных операций на базе сложения
и умножения комплексных чисел,
(а + г/3)(х + гу) = (ах - /Зу) + г(/3х + ау),
и продолжением линейных операторов на Е по правилу А(х + гу) = Ах + гАу.
Норма в Е определяется формулой
||ж 4- гу\\ — тах ||х соз (р + у в'т (р\\,
откуда ясно, что в ||Л|| = тах ||Лж||, например, нет разницы, какие переменные
||х||=1
имеются в виду.
130 Глава 6. Функции от матриц
6.3. Спектральный радиус
Напомним, что спектральным радиусом р(А) называется максимальный модуль
собственного числа матрицы А. Иными словами, р(А) — это радиус минимального
круга, содержащего весь спектр <т(А).
Из \х = Ах следует
т. е. любая норма матрицы ^ любого собственного значения. Отсюда
р(А) < \\А\\.
В разделе 5.5 уже отмечалось, что для сходимости А™ к нулевой
матрице при га -» оо необходимо и достаточно, чтобы р(А) < 1.
Для диагонализируемой матрицы это очевидно. В общем случае результат
вытекает из всегда возможного представления А = Л л + -/Уд, где Лд — диагональ-
диагональная матрица, а «ЛГ^ — нильпотентная, причем Л^ и ^ коммутируют. Поскольку
Я* = 0, начиная с некоторого к = А;о, то поведение Аш при больших тп опреде-
определяется поведением Лд.
6.3-1 - Лемма. Если р(А) < I, то существует норма ||*||*, в которой
||4||.<1.
^ В качестве || • ||» можно взять
\\Акх\\
Ы1 = к™*.>Г~' F-3)
где р(А) < Л < 1, а || • || — произвольная норма.
Максимум существует, поскольку р(А/Х) < 1 => (А/Х)к -> 0 при к -> оо.
Аксиомы нормы для F.3) проверяются без труда. Окончательный вывод следует
из неравенства
Лемма 6.3.1 — важный и полезный результат, облегчающий
многие рассуждения. Разумеется, всегда существует норма || • ||*,
в которой при любом е > 0
\\А\и<р(А) + е,
F.4)
что сразу вытекает из леммы 6.3.1, поскольку оператор
(р(А) + еГ1А,
независимо от Л, имеет спектральный радиус строго меньший 1.
6.4. Сходимость итераций 131
6.3.2. Какова бы ни была норма,
=Ш \/\\А*\\-
*->оо у
С одной стороны, р(А)к = р(Ак) < \\Ак^ влечет за собой
С другой — спектральный радиус матрицы А = \р(А) + е\~хА при е > 0 строго
меньше 1. Поэтому ||Л*|| -> 0 при Д: -> оо, что означает
при достаточно больших А;. Таким образом, ^/||Л*|| - е < р(А) < ^
Наконец, р(А) = р(А*).
6.4. Сходимость итераций
Для вычислений часто используется итерационная процедура
Ь. F.5)
Процесс, очевидно, развертывается следующим образом,
Х1=4Хо+Ь,
х2 = А2хо + АЬ + 6,
При условии ||А|| < 1 слагаемое Акх^ стремится к нулю, поскольку
||Л*|| ^ ||Л||* -> 0 при к -> оо. Поэтому динамика процесса F.5) определяет-
00
ся сходимостью ряда ^^ Ак9 который сходится в силу
что влечет за собой сходимость х* к решению уравнения
х = Ах + Ь9 х = A-АIЬ9
соответственно, / + Л + Л2 + ... + Ак + ...->(/- А)~1.
132 Глава 6. Функции от матриц
6.5. Функции как ряды
Сходимость матричного ряда F.1) обычно определяют через сходи-
сходимость частичных сумм
я
F.6)
к /(А), что оформляется стандартным образом. Ряд F.1) сходится
к /(А), если по любому е > 0 можно указать такое N, что
||/(А) - /д(А)\\ < е как только д > N.
Чаще всего это «стреляет в молоко», поскольку /(А) обычно
определяется как сумма ряда, — и выходит, что сходимость выво-
выводится сама из себя. Разорвать порочный круг позволяет понятие
фундаментальной последовательности (последовательности Коши).
В данном случае эффективный аналог звучит так.
Матричная последовательность Д(Л) фундаментальна, если по любому е > О
можно указать такое N, что
как только р, д > N.
В конечномерном пространстве фундаментальные последова-
последовательности сходятся, а сходящиеся — фундаментальны (см. [4, т. 1]).
Что касается F.1), то здесь добавляется специфика степенного ряда.
00
М Пусть 5^7Й* сходится, что влечет за собой ^кХк ~* 0» а значит,
и ограниченность: |7*А*| < М. Пусть ||Л|| < |Л|. Тогда
оо оо ц^м к оо ||^|| к
к=0 к=0 к=0
Следовательно, сходится ряд ^^7*11^11*- Это означает, что частичные суммы
представляют собой фундаментальную последовательность, поскольку
00
В итоге гарантирована сходимость ряда У, 7кА - >
6.6. Матричная экспонента 133
Подключение к проведенному рассуждению леммы 6.3.1 вместе
с неравенством F.4) приводит к следующему результату.
6.5.1. Если спектральный радиус р(А) < г, где г радиус сходимости
00 00
ряда /]*Ук^ 9 я*0 матричный ряд /^%А сходится, определяя
к=0 к=0
некоторую функцию }{А).
Никаких дополнительных требований на матрицу А здесь
не накладывается.
6.6. Матричная экспонента
экспонента еА, которая теперь строго определена:
Главным мотивом изучения функций от матриц, конечно, является
грого опр
14+- <»>
но, как всегда, по достижении цели становится ясно, что хотелось-
то не совсем того, что получилось.
Формула F.7) позволяет просто и с большой точностью вычис-
вычислять ел. Но что можно сказать, например, о спектре еА? Конечно,
если матрица А диагонализируема, то (см. раздел 6.1)
ГеА' ... О"
: *.. : Т, F.8)
О ... ех\
где А; собственные значения А, а Т диагонализирующее преоб-
преобразование. Спектр еА, получается, состоит из точек еА', да еще
и собственные векторы — те же самые5).
А если — не диагонализируема? Готового ответа нет. Определе-
Определение F.7), правда, пока выручает. Можно использовать стандартную
идею предельного перехода А(е) -> А с диагонализируемыми при
е Ф О матрицами А(е). Коэффициенты характеристического по-
полинома непрерывно зависят от е, и в спектре оказываются те же
5) Вектор-столбцы матрицы Т являются собственными векторами как самой матрицы А,
так и экспоненты е .
134
Глава 6. Функции от матриц
точки6) еА>. Но конечной записи типа F.8) уже не получается,
и повисают вопросы, связанные с собственными векторами и ка-
каноническим представлением.
На базе определения функций с помощью матричных рядов, конечно, можно
продвинуться достаточно далеко. Например, если Т приводит А к блочно-
диагональному виду
т,
то, очевидно,
А,
0
0
0
Ак
)
п
где 1(А±) определяются рядом с теми же самыми коэффициентами, что и ^^ 7*^* •
Если Т приводит А к треугольному виду А = Т~15Т, то и /(А) = Т~1/(8)Т,
где /E) имеет тот же самый вид, что и 5. Это происходит потому, что полином
от треугольной матрицы — тоже треугольная матрица, и предельный переход
не в состоянии разрушить эту импликацию.
Получается как бы, что «хороший» базис для А хорош и для /(А), независимо
от /. То есть при подборе базиса можно ориентироваться не на функцию,
а на аргумент. Матрицы /(А) и А выглядят родственной парой. Они всегда
коммутируют, у них общие инвариантные подпространства, — и все это из-за
того, что /(А) является пределом полиномов от А.
Отметим популярную формулу
F.9)
которая в случае диагонализируемой матрицы А очевидна, поскольку при линей-
линейном преобразовании Т~1АТ ни детерминант, ни след не меняются7), а в диаго-
диагональном случае F.9) есть простое
еА1...еА"=еА1+-+А-.
Окончательный вывод о справедливости F.9), без предположений о свойствах А,
получается стандартным предельным переходом А(е) —> А.
6) И аналогичный вывод получается при рассмотрении других функций типа у/А или
1пу4.
7' Поскольку детерминант равен произведению, а след — сумме собственных значений
матрицы. Последние же инвариантны при переходе к другому базису.
6.7. Конечные алгоритмы
135
Обратим, наконец, внимание на импликацию
АВ^ВА =»
= еАев.
Но
А В
феАе
, если АВ Ф В А. Это становится очевидным
при перемножении рядов еА и ев.
Упражнения
• Если матрица А гурвицева (все Ке А; < 0), то спектральный радиус р(еА) < 1.
_ ~АA+») „А1ЛА$
• с — ее.
• Независимо от А экспонента всегда невырождена, с!е1 ел Ф 0.
6.7. Конечные алгоритмы
За ширмой бесконечных рядов прячутся все-таки какие-то другие механизмы
вычисления функций. Точные результаты типа
0 1
-1 0
е =
=»• ем =
СО5 I 51П
1
0
0
1
1
0
I2'
2
1
\
получаются, конечно, с помощью F.7), но возникает впечатление, что за кадром
остаются нераскрытые возможности.
Рассмотрим сначала диагонализируемую матрицу А. В этом
случае
ПА) = Г сИаЕ {/(А!),..., /(АП)}Г, F.10)
что уже позволяет обойтись без F.7). Но здесь интересно про-
продвинуться чуть дальше. Из F.10) видно, что /(А) определяется
значениями /(А) всего в п точках {Аь ..., Ап}. Это позволяет за-
заменить / любой другой функцией, которая в этих точках принимает
те же значения, — и результат не изменится (если, конечно, речь
идет о вычислении ^(А) для данной конкретной матрицы А).
136 Глава 6. Функции от матриц
В частности, /(А) можно положить равной интерполяционному
полиному Лагранжа8)
/(А) = Р(А) - ап_1А(п) + ... + а{\ + а0.
Тогда
п-1 п-1
11,.. .,А„}*Т=
п-1 п-1
Выходит, что }{А), какова бы ни была функция /, всегда
можно вычислить как полином (п - 1)-й степени от А. Отличие
от F.1) состоит в том, что коэффициенты этого полинома зависят
от Л. Но это никак не мешает, если речь идет об одной конкрет-
конкретной матрице А. Преимущество более громоздкого рецепта F.1)
заключается в универсальности — алгоритм вычисления одинаков
для любой матрицы. Тем не менее представление отдельно взятой
матрицы $(А) в виде конечного полинома от А нередко играет
принципиальную роль.
Например, в динамических задачах об управляемости возникают системы
уравнений типа /(А)Вх = Ь, для однозначной разрешимости которых требу-
требуется гапк /(А)В = п. При этом один лишь факт представимости /(А) в виде
Оо/ + ... + о>кАк позволяет заменить гапк /(А)В = п конечно проверяемым усло-
условием гапк V = п для матрицы
Все это справедливо и в общем (недиагонализируемом) случае, но для
обоснования приходится углубляться в дебри корневых подпространств.
Из жорданова представления А — 8
^ = <^тё{^к^(\^),...,^к(\р)},
Где коэффициенты а^ определяются после приведения подобных в
6.7. Конечные алгоритмы
137
следует
ДА) =
,(А,)),...,
откуда становится ясно, что ключом к /(А) является умение вы-
вычислять /(«7* (А)).
Поскольку Л(А) = XI + Б, где наддиагональная матрица В нильпотентна,
2?; = 0 при .; ^ &, — то в разложении9^
я
отличаются от нуля только члены, содержащие 2? в степени ] <к.
00
Приведение подобных в /(./*) = /^ Ъ^к показывает, что частичные суммы
этого ряда имеют вид <?=о
N к-\ N
д=0 ;=0 3=0
оо
С другой стороны, если А лежит в круге сходимости ряда /(А) = ^ ^ удХя', то
этот ряд можно почленно дифференцировать, не нарушая сходимости и получая
00 „]
Поэтому
при N -> оо.
В итоге (с учетом И = 1к — XI) получается
Например,
А 1 О О"
О А 1 О
О О А 1
О О О А
какова бы ни была функция /.
>=0
;!
/(А) /'(А) -/B)(А
О /(А) /'(А)
/(А)
О
/'(А)
/(А)
1 Здесь СЪ биномиальные коэффициенты.
138 Глава 6. Функции от матриц
Опять значение /(А) для данной конкретной матрицы А ока-
оказывается зависящим только от конечного числа значений функции /
и ее производных на точках спектра (т(А). Поэтому /(Л) можно
заменить полиномом Р(А). По сравнению с диагонализируемым
вариантом добавились значения производных, но убавилось чис-
число точек спектра. Легко сообразить (разобравшись предварительно
в корневых подпространствах), что степень Р(А) на единицу мень-
меньше степени минимального полинома Л.
6.8. Задачи и дополнения
• Скалярные тождества с участием одной переменной10) переходят — в матрич-
матричные,
8т2 (р + со82 <р = 1 => $т2 А + сов2 А = I.
• е*А = сов А + *$т А.
• Унитарная матрица V всегда имеет представление ?7 = е*я, где Я —
самосопряженная (эрмитова) матрица. Если 17 вещественна и ортогональна,
причем с!е117 = 1, то II = е5, где 8 — кососимметричная матрица.
• Преобразование Лапласа м) дифференциального уравнения х = Ах приво-
приводит к
рх(р)-х@) = Ах(р),
откуда х(р) = Aр - А)~1х@), т. е. хA) = Aр - А)~]х(О). Теперь сравнение
с известным фактом хA) = емх@) дает
еА' = Aр-А)-].
Используя формулу обращения
G+100
/(<)=— / е"/(Р)Ф,
(Г-100
это можно записать как
G+100
/ 1АГйр. F.11)
При двух переменных мешает некоммугативность матриц.
Преобразованием Лапласа называют интегральное преобразование
где р = а +-10/. Функцию {(г) при этом называют оригиналом, а /(р) — изображением, что
записывают обычно как /(г) = /(/?).
6.8. Задачи и дополнения 139
Если матрица А устойчива (гурвицева), то в F.11) можно положить а = О,
поскольку единственное назначение а в преобразовании Лапласа — это по-
подавление быстро растущих функций. Если матрица гурвицева, все ||х({)|| -> О,
подавлять нечего. Задача попадает в рамки преобразования Фурье.
• Матричную функцию Aр — А)~1 комплексной переменной р называют ре-
резольвентой. В предыдущем пункте резольвента сыграла принципиальную роль
в интегральном представлении экспоненты. Это обстоятельство не случайно.
Имеет место общая формула
ПА) = 2^ / /(Р>GР - АУ *Р> <612)
обобщающая обычную интегральную формулу Коши из ТФКП (см. [4, т. 1]).
Для справедливости F.12) предполагается, что замкнутый контур С содержит
внутри себя спектр А, а функция /(р) аналитична внутри С.
Различные способы описания матричных функций — это различные инстру-
инструменты, позволяющие решать разнородные задачи. Конечно, можно ограничиться
чем-то одним, но это ограничивает возможности. Так же как приготовление пищи
с помощью только сковороды.
Что касается представления F.12), то его более естественно изучать вместе
с аналитическими функциями, где базовая идеология способствует проникнове-
проникновению в суть дела.
Глава 7
Матричные уравнения
7.1. Типичные задачи
Матричные уравнения естественно возникают в задачах, которые
изначально выглядят, как «векторные».
Скажем, поиск собственных векторов х^ (Ах^ = А^х^) объеди-
объединяется одним уравнением
АХ = ХЛ,
G.1)
где Л = сНа§ {Аь ..., Ап}, а X — искомая матрица со столбцами х;-
в качестве собственных векторов.
Другой характерный пример — линейное дифференциальное
уравнение х — Ах. Как известно, общее решение имеет вид
х(г) = с{х{(г) + ... + спхп(г),
где линейно независимые решения х^A), как вектор-столбцы, со-
составляют матрицу фундаментальных решений
удовлетворяющую матричному дифференциальному уравнению
которое выгоднее рассматривать с самого начала вместо х = Ах.
Поиск преобразования X, обеспечивающего подобие матриц
Аи В, порождает уравнение Х~{АХ = В. После умножения слева
7.2. Кронекерово произведение 141
на X оно переходит в эквивалентное
~* G.2)
АХ = ХВ,
в предположении невырожденности X.
Очевидно, G.1) при заданной матрице Л представляет собой
частный случай G.2).
Наконец, поиск функции Ляпунова1) для линейной системы
х — Ах приводит к уравнению
А*У + УА = -1 G.3)
относительно матрицы V.
Обозначая неизвестную матрицу V через X и обобщая G.3),
приходим к уравнению
АХ + ХВ = С,
G.4)
которое охватывает в качестве частных случаев все рассмотренные
выше случаи, — разумеется, кроме дифференциального.
Уравнение G.3) возникает следующим образом. Ищется положительно опре-
определенная квадратичная форма (р(х) = (ж, Ух), убывающая на траекториях х — Ах.
Очевидно,
ф = (Ах, Ух) + (я, УАх) = (ж, [А*У + УА]х).
С точки зрения убывания (р(х) устроило бы любое решение А*У + У А — УУ
с отрицательно определенной матрицей IV. Оказывается, однако, что выбор IV
не играет роли (что само по себе представляет интересный факт), — и потому
берут максимально простое РГ = -/.
7.2. Кронекерово произведение
Уравнение G.4) линейно относительно элементов х^ неизвест-
неизвестной матрицы X, и этим замечанием, казалось бы, можно закон1
чить исследование, сославшись на предыдущее изучение линейных
уравнений. Но проблема заключается в том, что уравнение G.4),
как линейное, имеет нестандартную форму, опираясь на двухин-
дексное описание переменных. В принципе, нет никакой трудности
О
См. [4, т. 2].
142
Глава 7. Матричные уравнения
в том, чтобы перенумеровать переменные х^, вытянув их в строчку.
Но при бесхитростной перенумерации содержательная информация
о матрицах А, В, С может разрушиться, что будет означать отсут-
отсутствие смысловой связи между получаемыми линейными системами
вйв и исходными операторами А, В, С, действующими в Я".
Для решения таких задач имеется специальный инструмент —
кронекерово произведение2) матриц, А® В. Если А и В — прямо-
прямоугольные матрицы размера, соответственно, тдхпирхд,то
апВ аиВ ... а1пВ
а22В ... а2пВ
атХВ ат2В ...
Размер А® В, очевидно, тр х щ.
Свойства
(А® В)® С = А® (В ® С) = А® В® С
легко проверяются.
Важную роль играет формула
(А ® В)(С <8> #) = АС <8> ВЮ.
G.5)
Разумеется, все операции в G.5) предполагаются выполнимыми,
т. е. размерности матриц должны быть согласованы. Часто рас-
рассматриваются только квадратные матрицы одного размера, тогда
о проблеме согласованности можно не думать. В частности, для
множества квадратных матриц Ак, Вк справедливо
G.6)
что легко выводится из G.5) по индукции.
' Кронекерово произведение называют также прямым или тензорным произведением.
7.3. Уравнения 143
Равенство G.5) вытекает из
поскольку ^Г^ ансСк] есть (г,;)-й элемент матрицы АС. >
Легко проверяется
(А®В)* =А*®В*.
Менее очевидно, что в случае невырожденности квадратных матриц
А и В произведение А®В тоже невырожденно, и3)
Рассмотрим две квадратные матрицы Аи В размера пхп, каждая из которых
имеет п попарно различных собственных значений, которые обозначим через А;,
/1;-, и пусть е^, Г,- — соответствующие собственные векторы. В силу G.5),
(А <8> В)(е, ® Г,-) = Ае, <8> В^ = А.е, ® /1,Г, = А.-^-е,- ® Г,.
Это влечет за собой справедливость следующего факта.
7.2.1. Спектр матрицы А® В, имеющей размер п2 х п2, состоит
из п2 попарных произведений Аг/г^, которым отвечают собственные
векторы е, ® Г^.
Если теперь допустить кратные собственные значения у А и В,
то идея предельного перехода А(е) -> А, В(е) ~> В (см. раздел 3.4)
здесь работает без проблем. Собственные векторы в пределе могут
становиться линейно зависимыми, но это в данном случае ничему
не мешает. Поэтому утверждение 7.2.1 справедливо без каких бы то
ни было предположений о матрицах А и В.
Сразу становится ясной отмечавшаяся выше невырожденность
А®В в случае невырожденности А и В.
7.3. Уравнения
Обычное соотношение АХ = С может быть записано в виде
(/ ® А)х = с,
3) Из G.5) следует (Л 0ЯХ/Г1 ® В) = АА~] ®ВВ~\
144 Глава 7. Матричные уравнения
где вектор х это вытянутая в столбик матрица X,
вектор с из С получен аналогично.
Соотношение ХБ = С записывается иначе,
(В* ® 1)х = с.
Поэтому уравнение G.4), т.е.
с помощью кронекерова произведения можно переписать так
{1®А + В*®1)х = с. G.7)
В этой перезаписи уравнения не было бы большого смысла,
если бы она не позволяла делать выводы в терминах исходных
матриц А и В. Но специфика кронекерова произведения как раз
такова, что она дает возможность судить о спектральных свойствах
«^-матриц» во многих практических ситуациях. Причиной является
следующий факт.
7.3.1. Лемма. Если
А! = Т~ХАТ, В' = 8
то
А! ® В1 = (Т ® 8)~1(А ® В)(Т
-4 Результат сразу вытекает из G.6),
Лемма 7.3.1 означает, что матрицы А и В в А 0 В могут быть приведены
к желаемому виду (диагональному, треугольному, жордановому) независимо друг
от друга. Пусть, например,
где За,Зв — соответствующие жордановы формы. Тогда ясно, что спектры А (&В
и Зд% Зв совпадают4*, что еще раз доказывает утверждение 7.2.1.
Матрица За ® Зв верхняя треугольная с собственными значениями на диагонали.
7.3. Уравнения
145
Точно так же А и В могут быть приведены к своим жордановым
формам5) в
1®А + В*®1, G.8)
после чего становится очевидным, что матрица G.8) имеет соб-
при всевозможных комбинациях г
ственные значения
Аг
и ,;. Под Аь /х; подразумеваются собственные значения А и В.
Отсюда ясно, что для невырожденности G.8) необходимо и до-
достаточно, чтобы не нашлось противоположных собственных значе-
значений, Аг + /х;- Ф 0. Это и является условием однозначной разреши-
разрешимости уравнения G.7), т.е. G.4).
Как теоретический инструмент иногда полезна формула
X
00
-/
емСетЛ,
G.9)
дающая решение уравнения АХ + ХВ = С в случае, когда мат-
матрицы А и В гурвицевы, т.е. действительные части их собственных
значений строго отрицательны. Устанавливается это совсем легко.
Решением задачи Коши
У = АУ + УВ, У@) = С, G.10)
является У (г) = еАгСет, что проверяется подстановкой. Из гурви-
цевости Аи В следует6) экспоненциально быстрое убывание до ну-
нуля ем и ет при I -> оо. Это позволяет проинтегрировать G.10)
от 0 до оо, что сразу дает G.9).
В частности, решение уравнения А*У + VА = — I в случае
гурвицевой матрицы А приводит к положительно определенной
функции Ляпунова
00 00
(ж, Ух) = (х, [ еА'11ем Л1 х) = I (еА'1х, еА'1х)(И > 0.
о
о
5* Достаточно говорить о диагонализании. но тогда надо иметь в виду предельный переход
А(е) -> А (см. выше).
6) См. [4, т. 2].
146 Глава 7. Матричные уравнения
Стоит обратить внимание на то обстоятельство, что кронекерово произве-
произведение выручает в вопросах разрешимости матричных уравнений, но пасует при
изучении свойств самого решения. Что будет, если «длинный» вектор х сло-
сложить в матрицу X? Будет ли матрица X вырождена, положительно определена,
диагонализируема? Здесь уже лучше анализировать само исходное уравнение.
Скажем, из проведенного выше анализа ясно, что однородное уравнение
АХ - ХВ = 0 имеет ненулевое решение, если найдутся А, + Ц; ф О, дающие
в сумме нуль. Но каковы условия невырожденности X? Это уже довольно тонкий
и громоздкий вопрос. Ответ положителен, когда жордановы формы А и В
одинаковы.
Упражнения
• Уравнение АХ В = С эквивалентно
(В* ® А)х = с,
где х и с — вытянутые в столбик матрицы X и С.
• Для однозначной разрешимости АХВ - X = С необходимо и достаточно
отсутствие у А и В таких собственных значений, что А,-/1;- = 1.
Если матрицы А и В обе унитарны, симметричны и положительно опреде-
определены, нормальны, — то матрица А® В такая же.
Глава 8
Неравенства
8.1. Теоремы об альтернативах
Матрицы в этой главе не обязательно квадратные, что естественно
при рассмотрении систем линейных неравенств
Ах =
пц а12
«21 «22
ж>0,
••- «то».
где «>» означает совокупность покоординатных неравенств,
{еи...9сЛ}>0 => все Сг>0.
Аналогично определяется «^» между векторами.
Разрешимость неравенства Ах > 0 означает существование такого вектора ж,
скалярное произведение которого на любую вектор-строку о, положительно,
Геометрически ясно, что подходящий элемент х существует, если все векторы а|:
расположены строго по одну сторону некоторой (п — 1)-мерной плоскости.
Для этого, в свою очередь, требуется, чтобы множество К (А) векторов
при всевозможных наборах положительных коэффициентов
было заостренным конусом, не содержащим противоположно направленных век-
векторов. Если же
и и = -V, то и + » =
= 0.
148
Глава 8. Неравенства
Проведенное рассуждение указывает на справедливость следу-
следующего результата.
8.1.1. Теорема. Либо неравенство Ах > О разрешимо, либо у А — О
имеет ненулевое положительное решение.
Если требуется строго положительное решение х > О неравен-
неравенства Ах > О, то это сводится к предыдущей задаче о разрешимости
В г > 0 с матрицей В =
Задача о разрешимости неравенства Ах > Ь тоже сводится
к предыдущей — с матрицей
аи
а2\
а>2п
-6,
1тп
О
х > 0.
М Если последнее неравенство имеет решение {х\,..., жп+|}, то решением
является и
8.1.2. Теорема. Либо неравенство Ах ^ 0 разрешимо (х Ф 0),
2/Л = 0 имеет строго положительное решение у > 0.
«* Для доказательства достаточно заметить, что Ах ^ 0 разрешимо, если
ИГ(Л) помещается в некотором полупространстве. В противном случае К(А)
совпадает со всем пространством Кпщ и тогда для любого и = ^^ у;а; , где все
У] > 0, существует противоположный вектор V = ^^Л;:, причем у + г > 0,
( )
По существу теоремы 8.1.1, 8.1.2 в совокупности со стандартны-
стандартными приемами перехода к новым матрицам (неравенствам) охваты-
охватывают многие результаты в области линейных неравенств (альтерна-
(альтернативного характера «либо — либо»). Разнообразие вариантов в этой
области, тем не менее, достаточно велико и формулировки резуль-
результатов выглядят весьма непохожими друг на друга (см. раздел 8.6).
8.2. Выпуклые множества и конусы 149
8.2. Выпуклые множества и конусы
Предыдущий раздел отражает упрощенческую позицию, каковая
хороша в определенных обстоятельствах. Если смотреть глубже, то
теория линейных неравенств довольно обширна, содержит тонкие
результаты и уходит корнями в различные смежные дисциплины.
Наиболее естественно и продуктивно линейные неравенства
трактуются в рамках выпуклого анализа [16]. Подробное обсуждение
здесь неуместно. В то же время основные категории мышления
выпуклого анализа становятся постепенно всеобщим достоянием,
и их трудно обойти стороной.
Аффинные множества. Множество А С Кп называется аффинным, если вместе
С любыми двумя различными точками оно содержит проходящую через них пря-
прямую. В случае О С Л. множество Л является линейным пространством. Всякое
аффинное множество — есть пересечение гиперплоскостей, описываемых урав-
уравнениями вида ах = C. Совокупность решений Ах = Ь, таким образом, это
•ффинное множество.
Отображение 5 из Кт в Кп, удовлетворяющее условию
8(ах + /Зу) = а8х + /ЗЗу,
называется аффинным. Аффинное отображение — это всегда преобразование вида
8(х) = Ах + Ь, где А — линейное отображение.
Выпуклость. Множество X С Кп называется выпуклым, если вместе с любыми
двумя точками х, у € X оно содержит отрезок, их соединяющий,
Аж + A-Л)у€Х, Л €[0,1],
а скалярная функция <р векторного аргумента считается выпуклой, если
<р[\х + A - Х)у] ^ \<р(х) + A - \)<р(у), А € [0,1].
Линейную комбинацию 52 А;Т; точек {Гь... ,Г#}, при условии А; ^ 0,
л >-¦
У ^ А; = 1, называют выпуклой.
Объединение всех выпуклых комбинаций конечных наборов точек из X С Яп
определяется как выпуклая оболочка множества X.
Теорема Каратеодори: выпуклая оболочка всегда совпадает с объединением
всевозможных выпуклых комбинаций конечных подмножеств X С Кп, содержа-
содержащих не более п + 1 точек.
Отделимость. Выпуклые множества Х,У С Кп называются отделимыми (строго
отделимыми), если существует разделяющая гиперплоскость Н С Яп (ах = р),
относительно которой множества располагаются в разных замкнутых (открытых)
полупространствах Н+, Н~:
150
Глава 8. Неравенства
Теорема об отделимости. Непересекающиеся выпуклые множества X, У все-
всегда отделимы, и — сирого отделимы, если хотя бы одно их этих множеств
ограничено.
Опорной гиперплоскостью к X называют гиперплоскость Я, которая имеет
хотя бы одну общую точку с X и либо X С Н~*~, либо X С Н~.
Конусы. Выпуклое множество К С Д", со-
содержащее вместе с любой точкой х € К луч
Ах, проходящий через эту точку, называется
конусом. Конус, не содержащий противопо-
противоположных точек,
х € К9 х ф 0 => -х $ К,
называют острым, или заостренным.
Множество К*, состоящее из точек у,
для которых скалярное произведение ух ^ О
при любом х € К, называется двойствен-
двойственным конусом по отношению к К. На рис. 8.1
изображен пример на плоскости.
При изучении линейных неравенств важную роль играют следующие легко
проверяемые свойства1*:
• (К*)*=К.
• К + К*=Кп.
• К\ С Кг =>¦ К\ Э К^.
К
Рис. 8.1. Двойственный конус
Мвогогранннкн. Выпуклую оболочку конечного множества точек называют мно-
многогранником1*.
Пересечение Р многогранника Р с любой своей опорной гиперплоскостью
называют гранью многогранника,, к-гранью, если сНт2? = к; Ограни — вершины,
1-грани —ребра.
Каждая грань многогранника, в свою очередь, является многогранником.
Всякий многогранник совпадает с выпуклой оболочкой своих вершин.
Пересечение конечного числа замкнутых полупространств называют полиэд-
полиэдром. Ограниченный полиэдр — многогранник.
Конусная техника. Докажем, для иллюстрации, следующее утвер-
утверждение. Либо существует ненулевой вектор х ^ 0 — такой, что
Ах ^ 0, либо уА > 0 при некотором у^О.
-4 Множество решений системы Ах ^ 0 — есть конус К = {х : Ах ^ 0},
двойственный к которому
Под суммой X + У подразумевается множество точек г =
, гдехЕХ, у €У.
Или выпуклым многогранником, если рассматриваются еще и невыпуклые.
8.2. Выпуклые множества и конусы 151
Совокупность положительных решений Ах ^ 0 является пересечением К с не-
неотрицательным ортантом К+. Если ненулевых положительных решений нет, то
К П Я+ = 0, что влечет за собой (К П К+)* — Кп. Остается заметить,
где, очевидно, Я*+ представляет собой отрицательный ортант К-. Если теперь
|зятъ и < О (и € Л-), то условие К*+ К- = Кп влечет за собой (в силу 0 € Кп)
у А - -и > 0, у > 0. >
Инструментарий, таким образом, несколько иной. Он доста-
достаточно хорошо формализован и удобен, что становится ясно, правда,
по приобретению необходимых навыков. Преимущества, однако,
заключаются не только в технике, но и в результатах. Концентрация
внимания на линейных неравенствах часто маскирует более фунда-
фундаментальные причины. Во многих ситуациях линейность на самом
деле ни при чем. Либо она ответственна лишь за второстепенную
аранжировку результатов. Вот, например, один из общих нелиней-
нелинейных результатов [16], из которого легко выводится серия теорем
о линейных альтернативах.
8.2.1. Пусть (р\,..., (рт — выпуклые функции на выпуклом множе-
множестве С. Возможна лишь одна из двух альтернатив:
• существует такой вектор ж 6 С, что
(р\(х)<0, ..., <рт{х)<0;
• существует ненулевой вектор у = {у\,..., ут} ^ 0 такой, что
У\<р1(х) + --- + Ут<Рт(х)>0 при любом х 6 С.
Линейные следствия можно получать, выбирая щ(х) = ^^ а,*2* + &> и раз-
к
личные выпуклые множества в качестве С. Например, в случае С = К+ можно
утверждать: либо Ах < 0 положительно разрешимо, либо у Ах ^ 0 при некото-
некотором ненулевом у^О и любом х ^ 0. Последнее означает существование такого
Иснулевого у ^ 0, что у А ^ 0.
На этом пути в качестве С могут фигурировать различные конусы,
К -{х.Вх^О} либо К = {х:х = ВууИу ^ 0},
или — многогранники, М = {х : Вх ^ 6}, — что дает обозримо трактуемые
результаты в отдельных случаях.
152 Глава 8. Неравенства
8.3. Теоремы о пересечениях
Один из естественных подходов к разрешимости неравенств
дают теоремы о непустоте пересечения3).
8.3.1. Лемма4). Пусть X — произвольное множество в Кп9 А(х) —
точечно-множественное отображение (из X в Еп) с компактными
образами. Пусть для всякого конечного подмножества {х[,.. .,х^}СХ
выпуклая оболочка точек {х1,...,х^} содержится в объединении
к
{_} л4(х,-). Тогда
«=1 р| А(х) ф 0.
хех
< В силу компактности образов достаточно показать, что не пусто пе-
пересечение любого конечного множества образов. Предположим противное, т. е.
к к
П А(х,) = 0 для некоторого множества точек {Х|,..., \к}. Тогда ^| Ух, = Кп, где
1=1 1 = 1
У, обозначает дополнение к Л(х,).
Пусть теперь р,-(ж), как говорят, разбиение единицы в Кп. согласованное
с покрытием {У;}, т.е. такой набор функций, что5)
к
^2р((х)= 1, зиррр, су;.
1=1
А
Отображение (р(х) = ^^р,(ж)х,-, очевидно, преобразует в себя выпуклую
1=1
оболочку со{Х|,..., х*} и, по теореме Брауэра, имеет неподвижную точку х°. При
этом р,(х°) > 0 для г из некоторого подмножества индексов М С {!,...,&},
и р,-(х°) = 0 для г (. М. Но тогда
х° = 2_2 л(х°)х1 ^ со{х, : г € М] С I) А(хг).
%ем (ем
Следовательно, х° € А(хг) для некоторого г е М, т. е. х° ^ У(, а значит, р,(х°) = О,
что приводит к противоречию. >
' Если $1 обозначает множество точек х, для которых /{(х) > 0, то разрешимость
/(х) > 0 равносильна условию р| 8г Ф 0.
' Результат известен как лемма Кнастера—Куратовского—Мазуркевича (см., например,
Ниренберг Л. Лекции по нелинейному функциональному анализу. М.: Мир, 1977).
5' 51фр р обозначает носитель функции р(х), т. е. множество тех х, для которых р(х) > 0.
8.4. Р-матрицы 153
Другой тип утверждений о пересечениях дает классическая
теорема Хелли.
8.3.2. Пусть 8 — семейство из не менее чем п + 1 выпуклых
множеств в Еп, причем либо 8 конечно, либо каждое множество из 8
компактно. Тогда, если каждые п+1 множеств из 8 имеют непустое
пересечение, то пересечение всех множеств из 8 не пустой. >
Проиллюстрируем возможности теоремы 8.3.2 на примере линейной модели
Производства (раздел 2.1), описываемой в целом системой уравнений
у = Ах
(у* = ]С а<л
С матрицей размера т х п, т ^ п.
Здесь естественно возникает вопрос о продуктивности модели. Можно ли
так подобрать интенсивности ж* технологических процессов, чтобы результиру-
юшее производство всех видов продуктов было строго положительным? Другими
Словами, существует ли положительное решение неравенства Ах > О?
Теорема Хелли позволяет дать следующий ответ. Если можно обеспечить стро-
90 положительное производство любых п видов продуктов, то можно обеспечить
строго положительное производство всех видов продуктов. А Для доказатель-
доказательства достаточно рассмотреть на (п - 1)-мерном симплексе {х : ||ж|| = 1, х ^ 0}
семейство множеств
#,; = < х ::^2 ачхз > ° г' « = 1, • • •, т.
7 = 1
Упражнение
Пусть семейство # состоит из тысячи 100-мерных параллелепипедов с реб-
ребрами, параллельными осям координат. Все множества из 5 имеют общую точку,
вели общую точку имеют любые два из них.
8.4. Р-матрицы
Квадратная п х п матрица А называется Р-матрицей, если для
Любого ненулевого вектора х можно указать такой индекс ]% что
ж;- • у2 > 0, где у — Ах.
Другими словами, Р-матрица не обращает знак ни одного
ненулевого вектора.
6* Многочисленные доказательства и приложения имеются в [8].
154 Глава 8. Неравенства
8.4.1. Если А является Р-матрицей, то неравенство Ах > О всегда
имеет строго положительное решение ж > О.
Линейность здесь, вообще говоря, излишня. Результат сохра-
сохраняет силу при естественном нелинейном обобщении. Оператор
назовем Р-отображением, если для любого ненулевого вектора
можно указать такой индекс ]9 что ж,- • /;(ж) > 0.
8.4.2. Теорема7). Если / — непрерывное Р-отображение, то нера-
неравенство /(ж) > 0 положительно разрешимо.
-4 Применим лемму 8.3.1, которая, заметим, остается справедливой при
замене предположения о компактности образов А(х) требованием их открытости
и ограниченности. В качестве X возьмем п вершин симплекса Д = {х : ||х|| = 1,
0 0}
х, = {0,...,0, 1,0 0}
и положим
А(ъ) = {х : /,(х) > 0, х € А}.
Из определения Р-отображения следует, что выпуклая оболочка любого
подмножества вершин симплекса Д покрывается соответствующим объединением
), что позволяет (лемма 8.3.1) гарантировать непустоту пересечения всех
Упражнения
• Одновременная и одинаковая перестановка строк и столбцов преобразует
Р-матрицу в Р-матрицу.
• Если А — Р-матрица, Г = сПа§ {71,..., 7п} и все 7; Ф О» то Г АГ — тоже
Р -матрица.
Остановимся на возможной содержательной интерпретации. Назовем пере-
переменные ж, действиями, у, — результатами^. Одинаковые номера за действиями
как бы закрепляют «свои» результаты.
Понятно, что при наличии перекрестных взаимосвязей (побочных влияний)
совместные стереотипные действия могут приводить к отрицательным послед-
последствиям.
7' См. КагатагсНап 5. Ех151епсе оГ 5о1шюп5 оГ сейаш зуз^етз оГ поп-Нпеаг теяиаИИез //
Мтег. Ма*Ь. 1968. 12. № 4. Р. 327-334.
8* Например, я, — количество г-го лекарства, у, — мера 1-го симптома (температура,
например).
8.4. Р-матрицы 155
Если связи у,- = /|(х) определяются Р -отображением, то это означает,
Что любая совокупность положительных действий не может дать отрицательные
результаты по всем номерам, для которых ж, > 0. Хотя бы один результат будет
Ожидаемым. В этом случае теорема 8.4.2 гарантирует возможность так подобрать
действия Х\ > 0, что все результаты будут положительными.
Рассмотрение только положительных переменных в данном контексте со-
щоем необязательно. Непрерывный оператор /(ж) = {/|(ж),...,/„(ж)} назовем
универсальным Р отображением, если для любого х Ф 0 можно указать такой
Индекс ,/", что ж, ~/,(ж) > 0.
Если / — универсальное Р-отображение и К+- — произвольный ортант, то
Существует х € -Й+- такой, что }(х) € Л+- (т. е. все результаты являются
ожидаемыми, все действия — стереотипными).
8,4.3. Матрица является Р*-матрицей в том и только том случае,
когда все ее главные миноры строго положительны.
<4 Необходимость. У Р-матрицы А любая главная подматрица А — тоже
Р-матрица, что легко следует из определения. А если де1 А ^ 0, то матрица А
Обязана9) иметь собственное значение Л < 0, но тогда она будет обращать знак
Соответствующего собственного вектора. Противоречие.
Достаточность. Действуем по индукции. Для п = 1 утверждение очевидно.
Предположим его справедливость в случае п-1 и перейдем к п.
Допустим: Ах < 0 при ненулевом х ^ 0. При этом можно считать|0)
в,,ж, + в,2ж2 + ... + а1пхп = 0,
... + а2пхп < 0,
+ О^Жз + ... + ОппХп < 0.
Умножая последовательно первое равенство на ау1/аи и вычитая его из /-го
Неравенства (у = 2,..., п), приходим к системе
| + «12*2 + -.. + аХпхп = 0,
+ ... + вппжп < 0,
у матрицы которой — все главные миноры, куда входит первая строка, строго
Юложительны м). Но тогда, в силу аи > 0, строго положительны все главные
9) Поскольку йе! А равен произведению собственных значений.
' В противном случае, в силу ац > 0, любую координату х^ можно увеличивать до тех
ПОр, пока одно из неравенств не превратится в равенство. Перенумерацией его можно
сивяать первым.
и' См. свойства определителей в разделе 2.8.
156 Глава 8. Неравенства
миноры матрицы
"а22@ ...
ап2A) ... аппA)\
Далее срабатывает индуктивное предположение. >
Утверждение 8.4.3 позволяет переопределить Р-матрицы, по-
положив в основу положительность главных миноров. Именно так
Р-матрицы были определены изначально п\
8.5. Линейное программирование
Добавление к изучению неравенств оптимизационного аспекта проливает допол-
дополнительный свет, но уводит в другую область. Поэтому здесь рассматривается лишь
эскиз одного ракурса.
Задача линейного программирования
(с, х) — тах, Ах ^ 6, х ^ О,
характеризуется линейностью целевой функции (с, х) и ограничений
чх] ^ **{• Матрица А имеет размер га х п (га ограничений,
п переменных).
Стандартная модификация
(с, и) = тах, Ви = Ь, и^О (8.2)
получается из (8.1) добавлением фиктивных параметров 2, ^ 0 таких, что
У^ а|;ж; +2, = &,-. В переменных и = исходная задача (8.1) принимает
1 I2]
вид (8.2).
Использование фиктивных переменных позволяет менять форму задачи
до неузнаваемости. Например, вместо (с, х) максимизировать единственный ска-
скалярный параметр жп+1 = тах, добавляя к ограничениям условие
(с, х) - жп+, = 0.
1 ' Са!е Д, МкаШо Н. ТЬе ^соЫап та1пх апс! §1оЬа1 ишуа1епсе оГ таррт§$ // Ма1Ь. Апп.
1965. 159. №2.
8.5. Линейное программирование 157
Заметим, наконец, что варианты с минимизацией (с, х) ничего нового в
постановку не привносят, ибо сводятся к максимизации после замены (с, х)
на (-с, ж).
Линейная модель производства. Остановимся более подробно на модели произ-
производства B.1). Ситуацию можно представлять себе так. На вход модели подается
набор ресурсов х — {Ж|,... ,хп}, на выходе образуется набор различных видов
производимой продукции у — {у,,..., ут}. Внутреннее состояние производства
характеризуется вектором г = {2|,...,2*}, компоненты которого принято на-
называть интенсивностями технологических процессов, но терминология условна.
В частности, 2, может обозначать количество рабочих, занятых в том или ином тех-
технологическом процессе; время работы некоторого агрегата; количество основного
вида изготавливаемой продукции и т. д.
Как правило, имеются нормативы, определяющие взаимосвязи х = Аг,
у = Вг, а также ограничения по ресурсам х < Ь и ассортименту продукции
у ^ 6,. Возможные программы работы предприятия в свою очередь подвержены
ограничениям. Агрегаты не могут работать больше чем 24 часа в сутки, рабочих
нельзя задействовать в большем количестве, чем есть в наличии и т. п. Все
это записывается в виде некоторой совокупности неравенств С г ^ е. Сведение
ограничений воедино дает Ог^Н, г^О.
Если цель производства заключается в максимизации объема реализации,
(с,у) = тах, где с, — цена г-го вида продукции, то после подстановки
(с, у) = (с, Вг) = (В*с, г) = (д, г) = тах
Возникает задача линейного программирования, приведенная к внутренним пере-
переменным г. При этом д — В*с также интерпретируется как вектор «внутренних»
цен (р, показывает, сколько в ценовом измерении продукции дает 1-й технологи-
технологический процесс, работающий с единичной интенсивностью).
Задача о диете. Имеется п продуктов О\,..., Сп, каждый из которых содержит т
питательных веществ (белки, витамины и прочее). Пусть ж, обозначает количество
<-го продукта, с, — цену С{, а|; — количество г-го питательного вещества
В пищевом рационе. Задача минимизации стоимости пищевого рациона при
ограничениях на содержание питательных веществ выглядит следующим образом
(с, х) = тах, Ах ^ 6, х ^ О,
где нормативы Ь определяются диетологами 13).
Геометрическая интерпретация. Каждое из неравенств
'Либо традициями, либо (что чаще всего) «берутся с потолка».
158
Глава 8. Неравенства
определяет в Нп сдвинутое полупространство. Пересечение таких
полупространств дает выпуклый многогранник и\ ограниченный
или неограниченный (возможно, пустой). Линейная целевая функ-
функция (с, х) растет при движении точки х вдоль с. Поверхностями
постоянного уровня, на которых функция (с,х) принимает од-
одно и то же значение, являются гипер-
гиперповерхности (с, х) — 7» ортогональные
вектору с (рис. 8.2).
Легко понять, что решение задачи
линейного программирования, если су-
существует, обязательно лежит в некоторой
вершине допустимого многогранника
15)
Рис. 8.2
Решения может не быть, когда допусти-
допустимый многогранник либо пуст, либо не-
неограничен в направлении с.
Обратим внимание на определенную нечувствительность ре-
решения к данным задачи. Достаточно очевидно, что при малых
изменениях вектора с оптимальное решение будет достигаться
в той же самой вершине. Пределы нечувствительности решения
к изменению критерия могут быть достаточно велики. Например,
в ситуации, изображенной на рис. 8.2, решение одно и то же при
любом положительном векторе с.
Двойственность. Вернемся к исходной задаче
(с, х) — тах, Ах ^ 6, х ^ 0.
Двойственной к ней называется задача
(Ь, у) = ппп, А* у ^ с, у ^ 0.
Легко проверить, что двойственная к двойственной — снова
исходная задача. Двойственные задачи тесно связаны между собой,
и эта связь имеет принципиальное значение.
И' Который называют допустимым многогранником, или многогранником допустимых ре-
решений.
15' Решение не обязательно единственно. Когда одна из «дальних» граней допустимого
многогранника ортогональна вектору с, — все точки этой грани (в том числе вершины)
будут решениями.
8.5. Линейное программирование 159
$.5.1. Пусть х — допустимый вектор задачи (8.1), а у — допусти-
допустимый вектор двойственной задачи. Тогда
(с, х) < (Ь,
А Таким образом, максимизируемая целевая функция в прямой (исходной)
задаче всегда не больше, чем минимизируемая целевая функция двойственной
задачи, если только эти функции вычисляются в точках, удовлетворяющих огра-
ограничениям соответствующих задач. Обоснование совсем просто. Умножая Ах ^ Ь
Скалярно на у, а неравенство А* у ^ с —- скалярно на х> получаем
Откуда, в силу (Ах, у) = (А*у, х),
(с, х) ^ (Ах, у) < F, у). >
Из утверждения 8.5.1 легко выводится следующий критерий
оптимальности.
8.5.2. Пусть х° и у0 — допустимые векторы прямой и двойствен-
ной задач, причем (с, #°) = (Ь, у0) Тогда векторы х°, у0 являются
решениями соответствующих задач.
Утверждение 8.5.1 дает также ключ к пониманию основной
теоремы двойственности.
8.5.3. Теорема. Если прямая и двойственная задача имеют допу-
допустимые векторы, то обе они имеют решения.
•* При наличии допустимых векторов задача (8.1) неразрешима, если на до-
допустимом многограннике функцию (с, х) выбором х можно сделать сколь угодно
вольшой. Но по условию функция на допустимом многограннике ограничена:
Такие же рассуждения — с учетом того, что ищется минимум, а не макси-
максимум, — годятся для двойственной задачи. >
Активные и пассивные ограничения. Вернемся к рассмотрению пары
двойственных задач:
(с, х) = тах, Ах ^ 6, х ^ О,
(Ь, у) = тю, А*у ^ с, у ^ 0.
160 Глава 8. Неравенства
Пусть ж°, у° — их оптимальные решения. Через с(Ь) обозначим максимально
возможное значение (с, ж). В силу утверждения 8.5.2,
Приращение Ас(Ь) — с(Ь 4- Д6) - с(Ь) при малом изменении вектора Ь,
очевидно, равно
Дф) = (Ь + Д6, г/° 4- Аг/) - F, г/°) = (А6, у) 4- F, Аг/) 4- (А6, Дг/),
где г/° 4- Аг/ обозначает решение двойственной задачи с новой целевой функцией
(Ь 4- А6, г/) при старых ограничениях А*у ^ с.
Как уже отмечалось, при малых изменениях Ь решение двойственной задачи
не меняется, т.е. А г/ = 0, что влечет за собой АсF) = (Д6, г/°). В частном случае
ДЬ = {0,..., А6,, 0,... , 0} имеем Дф) = г/'Дб,, т. е.
(8.3)
Таким образом, г-я компонента решения двойственной задачи показывает,
во сколько раз приращение целевой функции больше, чем приращение А6/.
Другим словами, у] это цена г-го ограничения.
При этом ясно, что если ограничение ^^ а^х) ^ 6, не активно, т. е.
;
^^ а^х] < 6,-, то малые изменения величины Ь^ никакого влияния на реше-
;
ние х° не оказывают. Поэтому соответствующее Ас(Ь) = 0, а значит, и г/,° = 0,
в силу (8.3). На этом пути в итоге получается следующий результат.
8.5.4. Теорема. Для того чтобы допустимые векторы прямой и
двойственной задан были решениями этих задан, необходимо и доста-
достаточно выполнение следующих условий:
Уг
х-
-0,
-0,
если
если
3
г
Понятно, что в решении исходной задачи часть неравенств обращается в ра-
равенства — эти ограничения называют насыщающими или активными, в противопо-
противоположность ненасыщающим, или пассивным. Решение задачи (8.1) было бы предельно
простым, если бы было известно, какие ограничения активные. В этом случае
было бы достаточно неравенства, соответствующие активным ограничениям, за-
заменить на равенства — и решить получившуюся систему линейных уравнений.
Но решение двойственной задачи как раз однозначно указывает, какие ограниче-
ограничения активные. Поэтому, если известно двойственное решение, исходную задачу
можно считать «почти решенной».
8.6. Задачи и дополнения 161
8.6. Задачи и дополнения
• Система линейных уравнений и неравенств,
Ах = О, ж ^ О, у А ^ О,
всегда имеет такое решение {ж, г/}, что г/Л + х > 0.
• Либо Ах = Ъ имеет решение х ^ 0, либо г/Л ^ 0 влечет за собой г/& ^ 0 (лемма
Минковского—Фаркаша) хь\
• Либо Лж = & имеет решение х ^ 0, либо разрешима система неравенств
гуЛ 2> 0, г/6 < 0 (переформулировка предыдущего утверждения).
• Либо Лж ^ & имеет решение ж ^ 0, либо система неравенств у А ^ 0, уЪ < 0
имеет решение г/ ^ 0.
• Либо Лж ^ & разрешимо, либо система г/Л = 0, уЬ = 1 имеет решение г/ ^ 0.
• Система неравенств
Лж ^ 0, ж ^ 0, г/Л ^ 0, г/ ^ 0
всегда имеет такое решение, что
ж + у А > 0, г/ - Лж > 0.
• Если в прямоугольной области X матрица Якоби д/г/дх^ всюду является
Р-матрицей, то отображение /(ж) взаимно однозначно в X [14].
• Если в прямоугольной области X матрица Якоби д/г/дх^ всюду является
Р-матрицей, то отображение /(ж) в области X является универсальным
Р-отображением.
• Введем обозначения |7)
Л(Л, В) = {С : С = 1А + A - 1)В, I € [0, 1]},
г(А, В) = {С:С = ТА + A- Т)В, Т = сПаё {*ь ...,<„}<>€ [0, 1]},
г(Л, Б) = {С = [сц] : с1; = Ь^ац + A - *,,)&,,, ^ 6 [0, 1]}.
1. Все матрицы из Л(Л, Б) невырождены в том и только том случае, когда
В А'1 не имеет отрицательных собственных значений.
2. Если все матрицы из г(Л, Б) невырождены, то АВ~Х и БЛ являются
Р-матрицами.
3. Любая матрица из г(А,В) невырождена в том и только том случае,
когда ВА~] — Р-матрица.
' Дополнительную информацию о линейных неравенствах можно найти в сборнике [12].
^ По поводу результатов данного пункта см. Зокпвоп СИ., Тшвотегоз М. Сопуех зе*5 оГ
Р-та1псе5 // Упеаг апд МиШНпеаг А1§еЬга. 1995. 38. Р. 233-239.
Глава 9
Положительные матрицы
Уникальные свойства положительных матриц выглядят тем удивительнее, чем
дальше объяснение от истинных причин. Основные результаты в рассматриваемой
области базируются на явлениях полуупорядоченности и монотонности. С этого
ракурса предмет выглядит не так удивительно, зато более понятно.
9.1. Полуупорядоченность и монотонность
Заостренный конус К С Лп позволяет ввести в Еп полуупорядо-
если х - у € К. Если х - у лежит внутри К
ценность:
1й конус
х^у |,
х >у
(для чего требуется телесность конуса), пишут
Основная линия изложения опирается далее на ситуацию
К = К+, где Д+ обозначает неотрицательный ортант 1\ В этом слу-
случае х > у означает покоординатные неравенства ж, > у^ для всех ].
Монотонность отображения2) /(х) означает:
Оператор /(х) называют положительным, если
т. е. х > 0 влечет за собой /(ж) ^ 0.
В случае
х > 0 =*
> 0
говорят, что оператор сильно положителен.
'' Множество векторов х с неотрицательными координатами.
2' Имеется в виду отображение Кп в Яп.
9.2. Теорема Перрона 163
Итерационный процесс
с монотонным оператором / обладает следующим характерным
свойством. Если точка хо под действием оператора / идет впе-
вперед (назад), т.е. /(хо) > хо (<хо), то вся последовательность х*
монотонно возрастает (убывает),
Хо < • • • < X* < • • • (Хо > • • • > Хк >•)•
^ Это сразу вытекает из применения к неравенству х* ^ х*_, оператора /,
что дает х*+1 ^ х* и т. д. >
Если теперь есть две точки Уо ^ щ, «меньшая» из которых идет
вперед, а «большая» — назад, то для
У*+1 = /(V*),
имеем
Обе последовательности у^, ^ оказываются ограниченными
и в случае непрерывного / сходятся к неподвижным точкам
V* = /(у*), \9* = /(иг*). А если / имеет лишь одну неподвижную
точку х*, то любая последовательность х* процесса х*+1 =
при условии уо < хо < ^о оказывается зажата в тиски,
и потому тоже сходится, х* -> х*.
Заметим, что множество точек х, удовлетворяющих неравенствам
V ^ х ^ ю,
называется конусным отрезком и обозначается {о, ю).
9.2. Теорема Перрона
Матрицу А с неотрицательными элементами, а,7 ^ 0, назовем поло-
положительной, с положительными, а,7 > 0, — строго положительной.
164 Глава 9. Положительные матрицы
Под \А\ подразумевается матрица с элементами |ау|, где, во-
вообще говоря, имеется в виду модуль комплексного числа3). Анало-
Аналогично,
\х\ =
9.2.1. Лемма. Пусть А ^ 0, хо > 0 и
ахо^о^/Зхо (<).
Тогда а^р(А)^р (<L>.
^ Из Лхо ^,/Зхо следует, что оператор В = — А отображает в себя конусный
Р
отрезок (—Хо, Хо). Отсюда вытекает отраниченность всех итераций Вк, что влечет
за собой ||G#)*|| -* 0 при к -* оо и любом 7 € @, 1). Следовательно (см. 6.3.2),
Далее,
ахо^Лхо => а||хо|| ^ ||Л|
т.е. а ^ ||Л||, какова бы ни была норма. Но для любой матрицы всегда суще-
существует норма, сколь угодно близкая к спектральному радиусу (см. лемму 6.3.1).
Поэтому а ^ р(А). При замене неравенств на строгие — рассуждения обрастают
незначительными оговорками. >
Замечание. При рассмотрении векторных неравенств часто возникают
неудобные ситуации. В том смысле, что вопрос, как говорится, не стоит
выеденного яйца, но плодит многословие.
Рассмотрим в качестве примера лемму 9.2.1. Пусть А > 0 и существует
х > 0, при котором Ах ^ х, но Ах Ф х. Лемма утверждает р(А) ^ 1.
На самом деле р(А) < 1. Обоснование просто, но несколько громоздко.
^ Без ограничения общности можно считать, что в Ах ^ х первые несколь-
несколько неравенств строгие, остальные — равенства. В блочном виде это записывается
так,
Г Аихх +Апх2 <х,,
1 Л21Х1 + А22*2 = Х2.
' |Л| обозначает также детерминант матрицы, но в данной главе используется только
в смысле |Л| = [|о|;|].
4^ Знак (<) говорит о том, что утверждение сохраняет силу при замене нестрогих
неравенств на строгие в указанных местах.
9.2. Теорема Перрона 165
Поскольку Л21Х1 > 0, то Л22Х2 < Х2. Прибавляя тогда ^22^X2 < ех2 (с > 0)
к равенству в (9.1) и увеличивая в неравенстве (9.1) х2 на ех2, приходим к
( Аихх + А12(\ + е)х2 <хь
\ А2Ххх + А22(\ + е)х2 < A+ е)х2,
если только е достаточно мало5^. Таким образом, небольшое «шевеление» вектора
х = {хьх2}, связанное с переходом к вектору {х,, A + е)х2}, позволяет заменить
нестрогое неравенство Ах ^ х строгим Ах' < х'. >
Подобного рода «шевеление» неравенств, векторов и матриц дает эффект
во многих ситуациях. Форма, правда, бывает разная, хотя идея одна и та же. Так
или иначе, но ссылка на «метод шевеления» (оговариваемая или подразумеваемая)
иногда спасает от тяжеловесных пояснений.
(!) В общем случае произвольной матрицы, неравенство Ах ^ х не обязано
шевелением икса приводиться к строгому.
9.2.2. Пусть А^О и
-А^В^А (<).
Тогда р(В) < р(А) (<).
<4 Очевидно, |Б| ^ А. Далее
Теперь остается сослаться на формулу р(А) = Нт {/11-^*11» Я^я которой годится
к->оо
любая норма (см. 6.3.2). > Опробование метода шевеления предоставляется
в качестве упражнения.
9.2.3. Если В главная подматрица6) матрицы А ^ 0, то
Если А > 0, то р(В) < р(А).
<4 Пусть матрица С получается из А обнулением всех элементов, не вхо-
входящих в В. Тогда р(В) = р(С), после чего решает ссылка на предыдущее
утверждение. >
5* Чтобы не нарушить первого неравенства в (9.1).
6) Подматрица называется главной, если ее элементы стоят на пересечении строк и столб-
столбцов исходной матрицы — с номерами из одного и того же подмножества индексов {1,..., п].
166 Глава 9. Положительные матрицы
Дальнейшее рассмотрение предполагает строгую положитель-
положительность матрицы А.
1°. Понятно, что оператор
т~ |Ц*|1Г
где ||ж||| = У^ \х{\, отображает в себя симплекс
,-| = 1, все ж,^0,
I
и по теореме Брауэра7) имеет неподвижную точку, = х .
Н^х II
Н II/
Иными словами, у А существует положительное собственное зна-
значение и положительный собственный вектор^,
Ах° = Ах°, А - \\Ах%.
2°. Вектор х°, ясно, строго положителен, поэтому9)
где подразумевается М = <Ищ {х®,..., ж®}. Теперь, с одной сто-
стороны (раздел 6.3), ||^||тл^ ^ р{А)> с Другой — А ^ р(А). Поэтому
найденное позитивное собственное значение равно спектральному
радиусу,
= р(А).
(9.3)
Собственное значение (9.3) называют ведущим и обозначают как ХЛ.
Очевидно, ХА = Хл*.
3°. Допустим, что у А в Я+ собственному значению р(А) отвечают два разных
собственных вектора XI и х2, которые, силу А > 0, строго положительны. Пусть
7' Теорема Брауэра (см. [4, т. 1]) гарантирует существование неподвижной точки у любого
непрерывного оператора, отображающего в себя выпуклое, замкнутое и ограниченное
множество.
8' То же самое можно сказать о любом нелинейном строго положительном операторе.
9) См. раздел 6.2.
9.2. Теорема Перрона 167
а > 0 обозначает число, максимальное в неравенстве хг — вХ| ^ 0. Поскольку
х2 -<*Х\ ^ 0 и А > 0, то Л(х2 -аХ|) > 0, а значит 4(х2 -ах|)^0Х\ при некотором
Х2 — ЛХ| ^ , ^ Х|,
что противоречит максимальности а и исключает возможность существования
у А линейно независимых собственных векторов|0) хь х2 > 0.
Возможность х2 ^ 0 также исключена, поскольку тогда при достаточно
малых г > 0 у Л все равно будет другой положительный собственный вектор
+тх2.
4°. Возможно ли существование у А > 0 других собственных
значений А, равных по модулю р(А)*> Нет.
Если Ах = \х, то либо х = \х\е*9, и тогда А\х\ = А|ж|,
что влечет за собой А > 0, либо комплексные координаты х
неодинаково направлены, и тогда
что приводит к противоречию р(А) > р(А) (лемма 9.2.1).
5°. Выше уже было показано, что геометрическая кратность
собственного значения ХА = р(А) равна единице. То же самое
имеет место и для алгебраической кратности.
4 Пусть Ак обозначает подматрицу, получаемую из А вычеркиванием Л-й
строки и Л-го столбца. Производная
в точке А = Ха не равна нулю, поскольку п) \л > Хлк> — * результате чего все
слагаемые \Ак - ХЛк1\ имеют один знак. >
По совокупности сказанного можно сделать следующие вы-
выводы.
|0) Возможность существования хг > 0, отвечающего другому положительному Л ф р(А),
исключена рассуждениями предыдущего пункта, где установлена импликация
Ах = А*, х > 0, А > 0 =» А = р(А).
10 См. п. 9.2.3.
168 Глава 9. Положительные матрицы
9.2.4. Теорема Перрона. Пусть А > 0. Тогда:
• Спектральный радиус р(А) > 0 является собственным значением
матрицы А алгебраической кратности единица, и ему отвечает
строго положительный собственный вектор.
• Других положительных собственных значений и векторов матри-
матрица А не имеет.
• Если Ах = Хх, А Ф р(А), х Ф 0, то |А| < р(А).
Обратим внимание, что р(А) = 0 для А ^ 0 возможно лишь
в том случае, когда Ар = 0 при некотором р.
9.3. Неразложимость
Теорема Перрона опирается на предположение А > 0. В случае
А ^ 0 картина усложняется: /)(Л) остается собственным значением,
которому отвечает собственный вектор х ^ 0 (уже не обязательно
ж > 0). Остальная часть выводов рушится.
Все восстанавливается, если Ак > 0 при некотором к, — по-
поскольку \(Ак) = А*(Л). Но это слишком просто. Поиск трудностей
разворачивается в других направлениях.
Матрица А называется разложимой12) (неразложимой), если
одинаковой перестановкой строк и столбцов она приводится (не мо-
может быть приведена) к виду
Аи Ап
0 А22
где Ап и А22 — квадратные матрицы.
Иными словами, А неразложима, если не существует такого
подмножества индексов 3", что а{к = 0 для всех г Е 3', к$ 3'.
Система уравнений Ах = Ь с разложимой матрицей, по сути, имеет вид
л; а И -М-
т.е.
= Ь2.
' Разложимую матрицу называют также приводимой.
9.3. Неразложимость 169
Наличие автономной подсистемы Л2гХ2 = Ь2, которую можно решать неза-
независимо, — характеристическое свойство разложимой матрицы.
Понятие неразложимости иногда используется при изучении
матриц общего вида, но в основном все же — это атрибут теории
положительных матриц, что далее подразумевается. Расположение
ненулевых элементов в А ^ 0 однозначно определяет расположение
ненулевых элементов в степенях Ак.
Неразложимость матрицы А = [а^] равносильна существова-
существованию дорожки невырожденности, каковой называют последователь-
последовательность ненулевых элементов
где среди индексов г1, г2,..., гЛ имеются все числа 1, 2,..., п.
Вот еще два эквивалента. Неразложимость А ^ О равносильна либо неравен-
неравенству G 4- А)п~х > 0, либо существованию для любой пары индексов г,] такого к,
что а^ > О, где а^ обозначает (г^)-й элемент матрицы Ак. Заметим, что отсюда
не вытекает существование к, при котором Ак > 0.
Неразложимая матрица положительно невырождена: Ах Ф 0 при любом
ненулевом х ^ 0.
Если главная диагональ неразложимой матрицы А строго положительна, то
Ап~1 > 0.
9.3.1. Если матрица А ^ 0 неразложима, то р(А) > 0 является
ведущим собственным значением А алгебраической кратности 1, ко-
которому отвечает строго положительный собственный вектор. Других
положительных собственных значений и векторов у А нет.
Из сравнения со сказанным в начале раздела видно, что нераз-
неразложимость добавляет к предположению А ^ 0 не так много п\ Пре-
Превосходство ХА над остальными собственными значениями (по мо-
модулю) не достигается.
Впрочем, как смотреть.
170 Глава 9. Положительные матрицы
9.4. Положительная обратимость
Если В = / - А, Л > 0 и р(А) < 1, то матрица В положительно
обратима, что сразу следует из сходимости ряда 14>
Условие р(А) < 1 в данном случае можно заменить эквивалентным: суще-
существуют такие положительные константы /1,,..., /1п > 0, что (см. разделы 6.2» 9.2)
либо
I п
либо
\\А\\Ш = тах/1, ]Г Ч«1>1 < 1.
4 Первое неравенство означает Ар < ^, где ц = {/1Ь..., ЦПУ> второе —
Л*/1 < /I. Далее решает ссылка на лемму 9.2.1 >
Если А = р(Л), то A - А) = 1 + А + А2 + ••• — ведущее собственное
значение матрицы Б, а A - А) — наименьшее по модулю собственное значение
матрицы В.
Положительная обратимость / - А иногда проявляется в завуа-
завуалированной форме, порождая эффект неожиданности. Следующий
факт, например, нередко дает ощущение глубины.
Если система х - Ах = у имеет решение х > 0 хотя бы при
одном у > 0, то она имеет положительное решение х^ 0 при любом15)
Вся хитрость здесь заключается в том, что из существования х > 0, при
котором х - Ах = у > 0, следует (лемма 9.2.1)
Ах<х => р(А)<\.
Поэтому х = (/ - А)~1у ^ 0 при любом у ^ 0.
|4* Из-за очевидной положительности всех степеней Лк ^ 0.
13* В применении к линейной модели межотраслевого баланса х - Ах = у это звучит
интригующе. Если возможен хотя бы один набор чистых выпусков у > 0 (хотя бы один
продуктивный план), то возможен и любой другой.
9.4. Положительная обратимость 171
Очевидным образом разрешается вопрос о положительной об-
обратимости внедиагонально отрицательной матрицы В — \Ь± ] с по-
положительной диагональю, характеризуемой неравенствами
все Ь„ > О, Ьо ^0 при %ф].
Понятно, что после деления каждой строки Ь{: на Ь„ задача сво-
сводится к предыдущей. При этом вопрос о справедливости В~1 ^ 0
заменяется эквивалентным вопросом о положительной обратимо-
обратимости матрицы В1 — I - А, А^О,
Форма утвердительного ответа может быть, например, такой.
9.4.1. Внедиагонально отрицательная матрица В с положительной
диагональю положительно обратима, если16)
при некотором наборе констант 71 >..., 7П > 0.
Условие (9.5) в общем случае 17) характеризует матрицы, имею-
имеющие доминирующую диагональ. Если «все &,-,'> О (Ь#<0)»* — говорят
о положительной (отрицательной) доминирующей диагонали. Если
в (9.5) все 7] = I, матрицу В называют матрицей Адамара. Инте-
Интерес к таким матрицам объясняется тем, что они невырождены и,
в случае отрицательной доминирующей диагонали, — устойчивы
(см. след. раздел).
К -матрицы. Матрицу А назовем К-матрицей, если отображение А не переводит
граничные точки неотрицательного ортанта К+ внутрь К+.
Очевидно, образ неотрицательного ортанта АК+ представляет собой неко-
некоторый конус в Кп. Если граничные точки К+ не переходят внутрь К+, имеются
две возможности: или пересечение К+ р| АК+ не содержит внутренних точек К+,
или конус АК+ охватывает К+, т. е.
К+ С АК+. (9.6)
16' Результат естественным образом перекликается с (9.4).
17* Без предположений о внед и атональной отрицательности или положительности В.
172 Глава 9. Положительные матрицы
Легко видеть, что в случае (9.6) матрица А невырождена и положительно
обратима, поскольку уравнение Ах = у при любом положительном у имеет
положительное решение. Ясно, что альтернатива (9.6) реализуется лишь в том
случае, когда уравнение Ах = у имеет положительное решение хотя бы при
одном у > 0.
9.4.2. Для положительной обратимости матрицы А необходимо и достаточно
выполнение двух условий: А является К-матрицей, уравнение Ах = у имеет
положительное решение хотя бы при одном у > 0.
Элементарные следствия:
• Пусть С—В^О, матрица С положительна обратима и Ви > 0 для некоторого
и^О. Тогда В~1 ^ 0.
• Пусть С ^ В ^ X), причем матрицы С и Б положительно обратимы. Тогда
9.5. Оператор сдвига и устойчивость
Рассмотрим задачу Коши
х = АA)х, х@) = х0,
решением которой является хA) = ХA)х@), где ХA) — так назы-
называемый матрицант (см. [4, т. 2]), представляющий собой решение
задачи
X = АA)Х, Х@) = /.
Другими словами, матрица ХA) — это оператор сдвига 11т
по траекториям х = АA)х.
9.5.1. Линейная система х = Ах асимптотически устойчива1^,
если (и только если) действительные части всех собственных значений
матрицы А строго отрицательны.
Ч Сходимость всех решений хA) -> 0 при I -> оо очевидна из представ-
представления хA) = ])Г]с*еА*'. Если все А* различны, то ск константы. При равных А*
коэффициенты ск могут полиномиально расти, но это не может перевесить
экспоненциальное убывание множителей еА*'. >
Матрица А, у которой все собственные значения А^ находятся
строго в левой полуплоскости, Ке Хк < 0, — называется устойчивой,
или гурвицевой.
18)
См. [4, т. 2].
9.5. Оператор сдвига и устойчивость 173
Утверждение 9.5.1 гарантирует асимптотическую устойчивость
нулевого равновесия линейной системы х = Ах с устойчивой
матрицей.
Полиномы Р(А), все корни Ад. которых удовлетворяют условию
Ке \к < О, также называют устойчивыми, либо гурвицевыми, а задачу
об устойчивости Р(Х) — проблемой Рауса—Гурвица (см. [4,15]).
При подстановке А = ш в
Р(Л) = Лп + а.Л71 +... + ап_,Л + ап
многочлен Р записывается в форме \Р(ш)\е%ах%р^%ш\ либо
Р(ш)=д(ш) + гП(ш), (9.7)
где р и Л — многочлены от ш. Например, в случае Р(Л) = А2 + О|А + а2,
р(а;) = -ш2 + а2, Л(а;) = а\Ш.
Кривая (9.7) в комплексной плоскости, задаваемая параметром о;, называется
амплитудно-фазовой характеристикой полинома, либо годографом Михайлова.
9.5.2. Если аргумент Р(ш) при изменении ш от 0 до +оо меняется
на величину
7Г
п—
, то многочлен Р(Х) устойчив.
Это так называемый критерий Михайлова [4,15] — один из про-
простых и эффективных методов проверки устойчивости полинома.
Теория устойчивых многочленов достаточно популярна, ибо в ми-
миниатюре востребована практикой, а в общем виде служит удобным
источником задач. В силу общих причин, однако, — см. главу 10 —
об устойчивости надежнее судить непосредственно по матрице А,
минуя запись характеристического полинома (конечно, если это
возможно).
9.5.3. Лемма. Если матрица АA) внедиагонально положительна
при любом г, то Х(г) ^ 0.
^ Траектории вспомогательной системы
х = АA)х + е (9.8)
со строго положительным вектором е > 0 — не могут выйти из неотрицательного
ортанта, так как в граничных точках направлены строго внутрь К+. Поэтому
174 Глава 9. Положительные матрицы
решение х{г) остается в Я+ при условии, что х@) 6 #+, т.е. ХеA)х@) > 0, если
ас(О) ^ 0. При е -* 0 траектории (9.8) переходят в траектории х = АA)х. >
Офаничимся далее рассмотрением автономного случая. Реше-
Решением х = Ах служит хA) = еА1х@). Положительность экспонен-
экспоненты еЛ1, при условии А > О, очевидна из обыкновенного разложения
в ряд F.7). Лемма 9.5.3 показывает, что для ем > 0 достаточно
внедиагональной положительности матрицы А.
9.5.4. Лемма. Если траектория линейной системы х = Ах с вне-
внедиагонально положительной матрицей А начинает двигаться вперед
{назад), то она все время будет двигаться вперед {назад).
Л Умножая неравенство х@) = Ах@) ^ 0 слева на положительную матри-
матрицу ем, получаем емАх{0) ^ 0, и далее, поскольку А и ем коммутируют,
Аемх{0) <; 0 => х{1) = Ах{1) ^ 0,
т.е. из ж@) ^ 0 следует х{1) ^ 0 при любом 1^0. Аналогично,
ж@)^0 => х{1)^0 {1^0). >
9.5.5. Лемма. Траектории и{1), г;(<) системы х = Ах с внедиаго-
внедиагонально положительной матрицей А, находящиеся в начальный момент
в положении и{0) ^ г;@), остаются в том же отношении и{1) ^ у{1)
при любом I ^ 0.
< В силу положительности (а значит — монотонности) ем,
и@) ^г;@) => еЛ1и{0)^еЛ'ь{0). >
Следующие шаги. Если А внедиагонально положительна, причем
А = В — I, В^0 и р{В) < 1, то матрица А гурвицева, поскольку ее
собственные значения \^{А) = \]{В)-1. Поэтому все Ке Х^{А) < 0.
В более общем случае внедиагонально положительной матри-
матрицы А с отрицательной доминирующей диагональю вывод о гурви-
цевости А сделать уже не так легко. Запишем А в виде А = В - Г,
где В > 0 — внедиагональная часть А (на диагонали у В стоят
нули), а
Г = (На8{7,„...,7ппЬ все 7« > 0. (9.9)
Умножение А слева на Г вроде бы сводит задачу к преды-
предыдущей, поскольку в Г~{А = Г~1В — / исходное предположение
9.5. Оператор сдвига и устойчивость 175
о доминирующей диагонали дает р(Г~1В) < 1, что обеспечивает
устойчивость А! = Г" А. Но из устойчивости А\ вообще говоря,
не следует устойчивость А = ТА\ ибо о спектре произведения не-
коммутирующих матриц трудно судить в общем случае. Тем не менее
в данной ситуации матрица А = ТА' гурвицева.
4 В силу р(Т~]В) < 1 матрица Г В имеет собственный вектор Хо ^ О,
«Метод шевеления» позволяет утверждать существование такого Хо > 0 (для про-
простоты обозначение оставляем тем же), что Гн.Вхо < Хо, т.е.
Вхо < Гхо =* Лхо < 0.
Таким образом, траектория х{1) уравнения х = Ах, начинающаяся в точке Хо, все
время убывает (лемма 9.5.4) при сохранении неравенства хA) ^ 0 (лемма 9.5.3)»
что влечет за собой хA) -> 0 (I -* оо). Наконец, лемма 9.5.5 гарантирует,
что любая траектория иA), удовлетворяющая в начальный момент неравенству
-ж@)^и@)^ж@), остается при любом 2^0 в пределах -ж($)^и($)^ж($), и потому
иA) ~> 0. А поскольку система линейна, то сходимость всех траекторий к нулю
влечет за собой асимптотическую устойчивость, что и означает гурвицевость
матрицы А. >
Устойчивость при доминировании. Рассмотрим две матрицы с оди-
одинаковой отрицательной диагональю,
где В и Я имеют нулевые диагонали, Г определяется как (9.9).
При этом В ^ 0, а знаковая структура Н произвольна.
9.5.6. Лемма. Пусть \Н\ ^ Б, и = Аи, V = Су. Тогда
и@) ^ у@) => иA) > у{1)
при любом 1^0.
Это весьма примечательный и полезный результат из разряда дифференци-
дифференциальных неравенств.
< Векторное неравенство иA) ^ ьA) не может нарушиться. Как только
= У;A0), так производная и;(<0) - ^;(<0) ^ 0, в силу В^\Н\. >
Лемма 9.5.6 легко позволяет сделать вывод об устойчивости
матрицы С — Н - Г с отрицательной доминирующей диагональю.
Достаточно взять В = \Н\ и применить лемму 9.5.6 в совокупности
с установленной выше гурвицевостью В - Г.
176 Глава 9. Положительные матрицы
9.6. Импримитивность
0
1
1
0
0
0"
1
0
Неразложимая матрица А^О может иметь несколько периферических
собственных значений {А1?..., А^}, равных по модулю р(А). Такие
матрицы называют импримитивными 19\
Здесь возникает в некотором роде неожиданность. Оказывается,
что все периферические А; обязаны иметь вид ш^р{А), где ш^ —
комплексные корни к-й степени из 1. Вопрос подробно излагается
в [14,18].
Примеры. У матрицы циклической перестановки 0 0 1 все три собственных
1 0 0
значения равны корням кубическим из единицы. Ничего по существу не меня-
[ а 0"|
ется в ситуации 0 0 6с произвольными а, 6, с > 020). Замена любого нуля
[с 0 О]
единицей превращает матрицу в примитивную.
Рассмотрим аналогичный вопрос для других п. Виденью результатов здесь
помогает следующая модель. Напомним предварительно, что если у А^О и В^О
ненулевые элементы стоят на одинаковых местах, то
А > 0 Ф» В > 0, равно как и А^О <=> В ^ 0.
Поэтому, изучая вопрос о строгой положительности Ак (положительной матрицы),
можно всегда рассматривать матрицу из нулей и единиц как бы определяющей
тип изучаемой матрицы.
Представим далее модель, в которой имеется п ячеек, расположенных по кру-
кругу, и заполненных, скажем, шариками в соответствии с расположением единиц
в векторе {1, 0, 0, 1,..., 0}. Действие матрицы «0-1» (из нулей и единиц) на «0-1»-
векторы можно ассоциировать с движением шариков, включая их размножение.
Например, циклическая матрица один шарик будет просто гонять по кругу.
]
Но если у циклической перестановки, скажем 0 0 1 , какой-либо нуль
0 1 П
заменить на 1, например
0 0 1 , то количество шариков со временем будет
0 0]
возрастать. Если в какой-то момент х3 = 1, то в следующий момент окажутся
заполнены 2-я и 3-я ячейки. В итоге заполнятся все ячейки, что будет означать
' В отличие от — примитивных, имеющих только одно собственное значение с |А| = р(А).
Необходимое и достаточное условие примитивности — строгая положительность некоторой
степени Ак.
' Собственные значения здесь равны трем корням у/аЬс.
9.7. Стохастические матрицы
177
0
0
0
1
1
0
0
0
0
1
0
0
Г
0
1
0
В четырехмерном пространстве ситуация меняется. Матрица
имеет собственные значения
А,,2 = ±1,272, Л3,4 = ±0,786».
Направления двух периферических А^ определяются корнями \/Т, а А3,4 —
корнями >/—Т. Процесс увеличения числа строго положительных координат у по-
положительного вектора при воздействии матрицы А здесь зацикливается. Но в слу-
случае, когда к той же циклической перестановке одна единица добавляется иначе,
Оп = 1, — снова Ак > 0 при некотором к.
Для п = 5 ситуация вновь упрощается. Достаточным оказывается добавление
единицы вместо любого нуля. Например,
0 10 0 1
0 0 10 0
0 0 0 10
0 0 0 0 1
1 0 0 0 0]
Аю еще имеет один нулевой элемент.
4 2 3 1 41
2 1111
12 113
3 12 12
2 3 1 2 4^
В другом варианте первая строго положительная степень только 17,
0 1 1 0 01
0 0 10 0
0 0 0 10
0 0 0 0 1
10 0 0 0]
1246
3 1113
3 3 4 11
13 6 4 1
.1 14 6 4
Естественная гипотеза: если п простое, то для Ак > 0 при некотором к
достаточно (в указанном выше смысле) у циклической матрицы перестановки
заменить один нуль (любой) на единицу. (?)
9.7. Стохастические матрицы
Положительная матрица А ^ 0, у которой все столбцовые суммы
\^ а%з ~ 1 •> называется стохастической.
Термин побуждает думать, что речь идет о случайных матрицах, но все де-
терминированно. Просто источником интереса к таким матрицам первоначально
была вероятностная задача. Имеется п состояний, и «нечто» находится в А;-и
момент времени в ^'-м состоянии с вероятностью р*. Вероятность попадания
178 Глава 9. Положительные матрицы
этого «нечто» в (к + 1)-й момент в *-е состояние определяется суммой2|)
з
т.е. р*+| = Лрк. Чтобы сумма вероятностей ^Р**1 была равна единице, необ-
необходимо как раз ^Г^ п\] = I. *
Естественный вопрос, конечно, предельное поведение итера-
итераций р*. Относительно прост случай примитивной матрицы А, в ко-
котором следующее по модулю собственное значение строго меньше
ХА, т.е. |А2| < ХА = 1. Тогда итерации р* сходятся к собственному
вектору р матрицы А, причем
а итерации Ак -> А^, где у 4^ все столбцы одинаковы и равны р.
Если матрица не стохастическая, форма аналогичного результата обрастает
деталями, но суть та же.
9.7.1. Пусть А>0 и
Ах = р{А)х, А*у = р(А)у, х > 0, у > 0, х*у - 1.
ш Л —> оо
В случае импримитивной неотрицательной матрицы предел у
может не существовать. Но предел имеют средневзвешенные суммы
Если обе матрицы, А и транспонированная А*, стохастиче-
стохастические, то матрицу А называют двоякостохастической. Классическая
теорема Биркгофа утверждает, что любая двоякостохастическая мат-
матрица есть выпуклая комбинация конечного числа матриц переста-
перестановок.
21' Величина а,-; интерпретируется как вероятность попадания из ,;-го состояния в 1-е.
9.8. Конус положительно определенных матриц 179
0.8. Конус положительно определенных матриц
Легко проверить, что множество К неотрицательно определенных
матриц — конус. Полуупорядочим с помощью К пространство Е
симметричных матриц. Неравенства А ^ 0, А )р В, таким образом,
означают, что матрицы Л, А - В неотрицательно определены.
Рассмотрим оператор
Н(х) = хх*,
действующий из Дп в Е. Его производная вдоль траекторий ли-
линейной системы дифференциальных уравнений х — Ах равна
—(хх*) = хх* А* + Ахх*',
а1
т.е.
Н = НА* + АН. (9.10)
Уравнение (9.10) — частный случай G.10). Его решением слу-
служит
НA) = емН@)еЛ*1.
Из Я,@) ^ #2@) следует
Я,(<) - Н2A) = ем[Н{@) - Н2ЩеАЧ ^ 0,
что означает монотонность оператора сдвига по траекториям
матричного дифференциального уравнения (9.10). Неравенство
еЛ1ВеАг > 0 для любой неотрицательно определенной матрицы
В вытекает из
(емВел\х) = (Велих9 еА*1х)>0
при любом х.
Для асимптотической устойчивости нулевого равновесия систе-
системы с монотонным оператором сдвига достаточно, чтобы нашлась
точка X б гШК, идущая под действием оператора сдвига назад,
и точка V Е —гШК, идущая вперед 22\ Наличие таких точек в дан-
данном случае гарантирует разрешимость^ в \Ш К уравнения
Н0А* + АН0 = -С0 (9.11)
при с0 е'\шк.
22' Обоснование этого факта почти не отличается от схемы рассуждений в ситуации
180 Глава 9. Положительные матрицы
В случае гурвицевой матрицы А интеграл
и.-/
е (тое
сходится и является решением (9.11).
В результате оказалось, что самый общий случай устойчивости
линейной системы укладывается в рамки идеологии полуупорядо-
полуупорядоченности. Это в какой-то степени свидетельствует, что последняя
не так узка, как иногда кажется.
Упражнения (см. [18])
Матрицы Л, В считаются симметричными (эрмитовыми).
• Если А У 0, то
А^В^О & р(ВА~1)^\.
• Для любой матрицы Т, в том числе прямоугольной,
А ^ В =» ТАТ ^ Т*ВТ.
• Если А )р В >- 0 и собственные значения А и В упорядочены по возраста-
возрастанию, то А;(Л) ^ АДВ).
9.9. Задачи и дополнения
• Функционал
Г Р 1
р(х, у) = 1п Ш1П < — : ах ^ у ^ @х >
представляет собой метрику на множестве лучей, лежащих во внутренности
неотрицательного ортанта. (?) Легко проверяется, что
р(ху у) — 1п гшп ——.
I* *У
Линейный оператор, описываемый строго положительной матрицей Л, сжи-
сжимает по этой метрике (?)
у), В<\.
См. о фокусирующих операторах в [10].
9.9. Задачи и дополнения 181
• Матрицу А называют вполне неразложимой, если не существует таких матриц
перестановок Р п ($, что
= \Аи А12]
[ О А22\ '
где Л,, и А22 квадратные матрицы23).
Матрица А вполне неразложима тогда и только тогда, когда существует такая
матрица перестановки Р, что главная диагональ РА строго положительна
и РА неразложима.
Если А вполне неразложима, то существует к, при котором Ак > 0.
• Неразложимая матрица А ^ 0 примитивна, если хотя бы один диагональный
элемент о„ > 0.
• Любая симметричная матрица с положительной доминирующей диагональю
положительно определена. Все главные миноры любой внедиагонально отри-
отрицательной матрицы с положительной доминирующей диагональю — строго
положительны (результат известен как условие Хокинса—Саймона [14]).
• Положительно обратимая внедиагонально отрицательная матрица является
Р-матрицей.
• В случае гурвицевой матрицы А спектральный радиус р(еА) < 1. Это озна-
означает, что оператор сдвига ем (I = 1) по траекториям х = Ах сжимающий
(в некоторой норме).
• Спектральный радиус р(А) < 1 в том и только том случае, когда существует
положительно определенная матрица V такая, что А*УА — V отрицательно
определена.
• Если положительная матрица [о,-;-] неразложима, то система уравнений
],к= 1,..., п,
имеет единственное положительное решение (х ^ 0, А > 0J4\
23' В отличие от обыкновенной неразложимости перестановки строк и столбцов не обя-
обязаны быть одинаковыми, т.е. () может быть не равно Р*.
24' См. ВараГ Я. В. А тах уегеюп оНЬе Реггоп— РгоЪепшз (Ьеогет // Ьлпеаг А1ееЬга апс1 Из
АррНсаНопз. 1998. 275-276. Р. 3-18.
Глава 10
Численные методы
Облик «вычислительной математики» в значительной мере определяется при-
причинами, которые давно перестали действовать. Сведение к минимуму объема
арифметических операций, требуемой памяти, времени счета — все эти факторы
совсем недавно были определяющими. А уж если говорить о временах ручного
счета, откуда численные методы берут начало, то многие загадочные ныне акценты
становятся понятны.
Сегодня системы уравнений «тысяча-на-тысячу» легко решает обыкновенный
ноутбук, а удобный интерфейс превращает вычисления в задачу, не требующую
понимания внутренних механизмов. И тогда возникает естественный вопрос:
«а кому эта внутренняя кухня нужна?»
Разумеется, — тем, кто будет заниматься «этим» профессионально. И тем,
как ни странно, кто заниматься «этим» профессионально не будет. Неосведом-
Неосведомленность о подводных течениях рано или поздно дает о себе знать. Поэтому
необходимость понимания, что там за кадром, всегда «висит на стене» — как
ружье Станиславского — и время от времени стреляет.
10.1. Предмет изучения
Интуитивные ожидания и мнения опираются, как правило, на примитивные при-
примеры — вплоть до уравнений, которые приходилось решать в седьмом классе.
От этой коллекции уже не избавиться, но к ней неплохо добавить что-нибудь
еще. Например, при решении уравнений в частных производных пространство
переменных разбивается на клетки (кубики), в узлах (вершинах кубиков) записы-
записываются приближенные связи переменных — получаются тысячи и даже миллионы
линейных уравнений. Для решения таких систем, оказывается, нужна совсем
другая философия.
Издалека иногда кажется, что практические задачи линейной
алгебры сводятся к решению систем уравнений. А спектры, базисы
и другие премудрости в большей степени проистекают из любопыт-
любопытства1).
''Здесь полезно вспомнить хA) = С1вА|' ¦+¦ ... ¦+¦ Спв*"', дающее решение линейной
системы х = Ах, где А;- — собственные значения, а с; — собственные векторы матрицы А.
10.1. Предмет изучения 183
Доля правды здесь есть, но в этом нет ничего предосудитель-
предосудительного. Математика, как и все остальное, развивается на основе
определенной игры. Одни придумывают задачи, другие — решают,
третьи — учат, четвертые — втирают очки и греют руки у того же
огня. Самое удивительное, что процесс не замыкается внутри себя,
питает другие игры (вплоть до космических перелетов), — и потому
оказывается фундаментально связан с жизнью всей цивилизации,
как бы высокопарно это ни звучало.
Численные методы в линейной алгебре несут на себе отпе-
отпечаток общей ситуации. В сектор прицела попадает многое, что
С вычислениями связано лишь опосредованно. В первую очередь,
это изучение линейной алгебры под другим углом зрения — кон-
конструктивным. То есть изучение всего, что потенциально может
пригодиться. КПД здесь очень низок, зато широта охвата решает
проблему занятости2), совершенствует понимание предмета и раз-
развивает чутье. Вторая мишень утилитарная — решение практических
Задач. При этом важно понимать, что собой представляют реальные
задачи, откуда они берутся и в каком виде являются.
Возьмем простой пример. Модель межотраслевого баланса3*:
х - Ах = у.
На выпуск единицы 1-го продукта, выпускаемого г-й отраслью в количестве ж,,
I системе затрачивается ау ^ 0 единиц ^'-го продукта.
При изучении жизни только по книгам фантазия в постановке задачи не про-
простирается дальше решения системы уравнений х - Ах = у относительно х. Ре-
Реальность шире. С матрицей затрат Л, описывающей модель, приходится иметь
дело из года в год, — что означает необходимость многоразового решения задачи.
Сегодня надо обеспечить один набор чистых выпусков у, «завтра* — другой.
Какие-то коэффициенты а,; известны приближенно. Это порождает свой круг
Проблем. От оценок точности решения до попыток организации децентрализо-
шанного решения задачи на базе итерационного обмена данными,
исходя из предположения, что «на местах* информация точнее. «Вниз* спускается
шариант плана х*, там прикидывают необходимые затраты, отсылают «наверх*,
далее вычисляется новый вариант хк+\ — и так несколько раз. Сходится ли
Процедура? Как быстро?
^ Как бы издевательски это ни звучало, поддерживать творческий процесс без топлива
невозможно.
3)См. раздел 2.1.
184 Глава 10. Численные методы
Так или иначе, становится ясно, что для овладения ситуацией в целом не
обходимо близкое знакомство с матрицей А. Проникновение в ее внутреннее
устройство, понимание, как различные коэффициенты влияют на интегральные
свойства системы. Матрица затрат задается ведь не на небесах, а зависит от ис-
используемых технологических процессов, потерь от неорганизованности и т. п
Поэтому в окрестности решаемых задач всегда маячат проблемы другого уровня
Как перестроить систему? На чем сосредоточить внимание, ресурсы?
Так что вычислительная практика — это совсем другая епархия. Теорети-
Теоретические акценты очень сильно меняются. Простейшая задача решения системы
Ах = Ь, например, сама по себе обычно не интересует, хотя иногда так кажет-
кажется. Причина довольно проста. Когда порядок системы, скажем, всего 10 х 10,
но от записи матрицы уже рябит в глазах, голому решению едва ли кто обрадуется,
поскольку голое решение — кот в мешке 4\ Хотя бы потому, что матрица может
быть близка к вырожденной. Тогда ошибка больше самого решения — и проще
было не решать, взяв что-нибудь от фонаря, получилось бы не хуже.
Из всего сказанного нетрудно сделать вывод, что всякое решение
практической задачи должно проходить под творческим надзором
куратора, мыслящего шире, чем это оговорено в алгоритме. Кура-
Куратора, способного «в случае чего» переосмыслить постановку задачи
и направить усилия, может быть, совсем в другое русло.
Если говорить открытым текстом, то успех дела в первую очередь опреде-
определяется «до-» и «надматематическим» этапом. В каждом проекте нужен человек,
который вникает, разбирается, переосмысливает — и ставит задачу 5\ Потом без
математики не обойдешься, но важно, чтобы решались задачи «те, что нужно»,
а не взятые с потолка 6). На практике в 99 % случаев решается «лишь бы что».
Но это нормально. Так устроена природа. Из миллионов сперматозоидов, двига-
двигающихся «лишь бы куда», один попадает в цель — и для поддержания интереса
к численным методам этого оказывается достаточно.
10.2. Ошибки счета и обусловленность
В принципе ясно, что практическое решение систем уравнений
Ах = Ъ сталкивается с трудностями, если матрица А близка к вы-
4' Особенно, если размер матрицы 104 х 104 ив глазах не рябит, потому что никому
в голову не придет выводить такую матрицу на бумагу из памяти.
5'Люди, которые могут разобраться и поставить задачу — товар штучный, большая
редкость.
' Разумеется, только в сказке ситуация аккуратно делится на два этапа: постановка, по-
потом решение. Реально все переплетено и перепутано. Поэтому нужна здравая направляющая
рука.
10.2. Ошибки счета и обусловленность
185
рожденной. Но что значит «близка»? До сих пор фигурировали
черно-белые тона «вырождена — не вырождена». Каким парамет-
параметром можно характеризовать нейтральную полосу?
Матрица
«плоха», потому что изменение ее элементов на 1
может увести решение Ах = Ь в бесконечность. Ее детерминант близок к нулю,
А = 10~4, — но служит ли это индикатором? Не служит. Потому что у мат-
[0,99 1 1
[ 1 1,01]
решение Ах
— но служит
[0,01 0 1 „
рицы ^ ООП детеРминант такои же» но это «хорошая» матрица, потому что
изменение ее элементов на I % дает в решении относительную ошибку того же
порядка.
Скрытый механизм определяется числом обусловленности.
Априорная оценка. Пусть
Ах = Ь
А(х + Ах) = Ь + ДЬ,
где Ах — смещение решения Ах = Ь при возмущении правой части
на АЬ. Под возмущением исходных данных может подразумевать-
подразумеваться что угодно; Ошибки при физическом измерении параметров,
неточный прогноз, ошибки счета и округления.
-4 Очевидно,
откуда
Пусть теперь
Ах = Ь и (А + АА)(х + Ах) = Ь,
где Ах по-прежнему смещение решения Ах — Ь, но уже при
возмущении матрицы на АА.
<4 Аналогично предыдущему
\\А-1\\ ¦ \\АА\\ ¦ \\х + Ах\\,
откуда
186
Глава 10. Численные методы
В том и другом случае определяющую роль играет величина
= ||4|-№~1||.
называемая числом обусловленности7). В случае вырожденной мат-
матрицы полагают а(А) = оо.
Для невырожденной матрицы и евклидовой нормы,
<т(А) =
где а^А) — максимальное сингулярное число, ап(А) — мини-
минимальное. Для симметричной матрицы
где собственные значения Хи ..., Ап расположены в порядке убы-
убывания модулей.
Число обусловленности всегда >1, поскольку
1 =» 1 =
Чем а(А) больше, тем хуже оценки. В этом случае говорят о плохой
обусловленности матрицы.
Роль понятия обусловленности матрицы рассмотренными за-
задачами не исчерпывается.
Апостериорная оценка. Приведенные выше оценки решения опи-
опирались только на информацию о возмущениях АА, ДЬ. Подход
может быть иной. Уравнение Ах = Ь так или иначе приближенно
решается, что дает Ах' « Ь. Далее вывод о близости х1 к настоящему
решению х делается на основе вектора невязки
В силу ||Ь|| = \\Ах\\ < ||Л|| • ||*|| и
^х- х\ имеем
II*-
' Термин введен Тьюрингом.
10.3. Оценки сверху и по вероятности
187
Деление второго неравенства на первое приводит к
10.3. Оценки сверху и по вероятности
Оценки предыдущего раздела — это оценки сверху, дающие макси-
максимально пессимистический прогноз. Реальные ошибки могут быть
меньше. Не в нашей Вселенной, правда. У нас бутерброд пада-
падает маслом вниз, и вообще, всякая потенциальная неприятность
случается. Подтверждением тому в данном контексте служит ряд
работ, где устанавливается, что вероятные ошибки в естественных
предположениях близки к наихудшим8). Воронка неприятностей,
получается, затягивает.
< Вот простые наводящие соображения из [18]. Если матрица А с нормой
порядка единицы плохо обусловлена, то в 4 = \а'^\ обязательно найдутся
большие элементы9*. Дифференцируя х = А~1Ь = [а!^]Ь по Ь^, получаем
откуда ясен источник происхождения больших ошибок,
Что касается возмущений самой матрицы А, то здесь «возни» чуть больше.
Дифференцирование тождеств
/•, <*•*<**< = *й
Приводит к соотношениям
' См. например, Красносельский М.А.У Крейн С. Г. Замечание о распределении ошибок
при решении системы линейных уравнений при помощи итерационного процесса // УМН.
1952. 7, вып. 4.
9) Чтобы норма ЦА!! была большая. Иначе а (А) будет мало.
188 Глава 10. Численные методы
учет которых при дифференцировании х = А~1Ъ = [а(-;-]Ь дает
Окончательно,
Прогнозы опять неутешительные. >
10.4. Возмущения спектра
Принципиальную роль в вопросах численного анализа играет вли-
влияние возмущений матрицы на ее спектр. Здесь возможны удиви-
удивительные явления, способные пустить насмарку многие численные
расчеты.
Остановимся пока на вспомогательном результате.
10.4.1. Лемма. Все собственные значения матрицы А лежат в объ-
объединении кругов Гершгорина
где
]С,1, либо
< Если А* — собственное значение А, то с!е*(Л - А*/) = 0, что влечет
за собой |А* -ац\ ^ Д, хотя бы для одного г. В противном случае (все |А* -а,-,-| > Л,-)
матрица А - А*/ имеет доминирующую диагональ |0\ и потому — невырождена,
что исключает возможность с!е1 (А - А*/) = 0. >
10.4.2. Теорема. Если матрица А диагонализируема,
1 А = ё1а8{А1,...,Ап},
|0' См. утверждение 9.4.1 с последующим замечанием.
10.4. Возмущения спектра 189
и А' — собственное значение возмущенной матрицы А + АА, то
найдется такое А^, что
|А' - А,К ЦГ|| • ЦТ II • \\АА\\ = <г(А)\\АА\\,
еде || • || обозначает одну из двух норм — строчную или столбцовую.
< Поскольку матрицы
А + АА и 1 '
имеют одинаковые собственные значения, то проблема сводится к возмущению
диагональной матрицы Л. Пусть с,-;- обозначают элементы матрицы ТААТ'1.
Лемма 10.4.1 гарантирует, что все собственные значения Л 4- ТААТ~] лежат
и кругах
которые, в свою очередь, содержатся в кругах
з
что влечет за собой оценку
|А' - А,| ^ ||ТДЛТ-'||т < ||Г||Щ • ЦТ-'Щ • ||ДЛ||т.
Аналогично получается неравенство для нормы || • ||/. >
Таким образом, при возмущении АА возмущением спектра А
замаскировано управляет матрица Т, приводящая А к диагональ-
диагональному виду. Задним числом это становится понятно. Но с самого
начала догадаться не так легко, о чем свидетельствует история
развития численных методов в докомпьютерную эпоху.
Многие разработанные тогда методы красиво выглядели на бумаге м\ но при
столкновении с вычислительной практикой на ЭВМ, сопровождаемой неизбеж-
неизбежными ошибками округления, — были полностью вытеснены из алгоритмического
арсенала. В первую очередь это коснулось методов определения спектра матрицы,
опиравшихся на вычисление характеристического полинома /?л(Л) с последую-
последующим определением его корней. Обе задачи, вычисления коэффициентов и корней
Рд(Л), таят в себе много ловушек и характеризуются очень сильной зависимостью
результатов счета от исходных данных и точности манипуляций.
В [19] приводится такой пример. Если у полинома
") И почти не проверялись фактически, поскольку решать вручную задачи хотя бы «10
на 10» никому не приходило в голову.
190 Глава 10. Численные методы
имеющего корни {1,2,... ,20}, изменить коэффициент при ж19 с —210 всего
лишь на —210 + 2~23, то у возмущенного полинома появляется, в частности, пара
комплексно сопряженных корней с мнимыми частями ~ ±3*.
Теперь достаточно выписать сопровождающую матрицу многочлена р(Х), —
как получится пример матрицы 20 х 20, у которой изменение одного элемента
на величину 23 (приблизительно на 2~24%) меняет спектр «революционным»
образом.
Замечание. Формулировка теоремы 10.4.2 опирается на ограниченный
список норм (строчную и столбцовую). Из эквивалентности всех норм
в Кп можно сделать вывод, что с той или иной долей натяжки (с добав-
добавлением некоторого множителя) норму в неравенстве
можно считать любой. Соответствующий множитель будет не очень боль-
большим, если норма не очень вычурна, без больших перекосов пК В есте-
естественных предположениях такой множитель вообще не требуется (равен
единице).
Наличие скрытого механизма, управляющего спектром матри-
матрицы при ее возмущении, показывает, что первоочередной интерес
может представлять вовсе не фасад задачи. Возмущение спектра со-
совсем редко фигурирует в прикладных постановках, но почти всегда
присутствует в подводной части айсберга. Спектральные свойства
очень сильно влияют на решение задач, где речь идет вроде бы
совсем о других вещах. Диагонализирующее преобразование Т, как
«внутренний орган» А, напрямую редко запрашивается, но имен-
именно Г, как показывает теорема 10.4.2, отделяет норму от аномалии.
Если возмущение в 2~24 % «ломает спектр» (см. выше), то это
катастрофическим образом сказывается на решении массы сопут-
сопутствующих задач. Скучную, но комфортную ситуацию определяет
равенство
В идеальном варианте ортогональной (унитарной) матрицы Т все
ее собственные значения равны по модулю 1, что в евклидовой
норме дает а(А) = \\Т\\ • ||Г~1|| = 1. Это одна из главных причин,
по которой приятнее всего иметь дело с симметричными матрица-
12) «Перекосы» возникаю!; например, в случае ||х|| = G1 х? +... + 7**«)!'2 при большом
разбросе значений 7/ -
10.5. Итерационные методы 191
ми. Возмущение симметричной матрицы приводит к возмущению
ее спектра того же порядка.
Упражнения
• Если круги Гершгорина на комплексной плоскости не пересекаются, то все
собственные значения матрицы — действительны. (?)
• Попытка улучшить обусловленность матрицы А в задаче Ах = Ь с помощью
умножения Ах = Ъ на А* не проходит. Обусловленность А* А в естественных
предположениях оказывается не лучше, чем у матрицы А.
10.5. Итерационные методы
К численным методам можно отнести все, что можно использовать
для счета. Значительной популярностью пользуются различного
рода итерационные процедуры типа
хш=Ахк+Ъ. A0.1)
Процесс (ЮЛ) при условии ||А|| < 1, а значит13) и р(А) < 1, схо-
сходится к решению уравнения х = Ах + Ь (раздел 6.4), но симпатии
вычислительной математики к таким процедурам выглядят по мень-
меньшей мере странно. Странно — при наличии простых и надежных
методов исключения переменных, например.
Простой и убедительный ответ здесь дать трудно. Кто-то будет
настаивать, что иначе тем для диссертаций не хватит, — и будет,
по-своему, прав, потому что жизнь устроена многопланово. Но су-
существуют также другие причины, менее дискуссионные, роль кото-
которых выявляется постепенно в процессе вычислительной практики.
Один из главных аргументов, конечно, специфика алгоритмизации,
требующая однотипности действий.
Вот пример из другой оперы, где вопрос обострен до крайности. Вычислять
значение полинома
оказывается, выгоднее на основе представления
Р(О = (• • • М
13) Поскольку р(А) < 1 влечет за собой существование нормы, в которой \\Л\\ < 1 (лемма
6.3.1).
192 Глава 10. Численные методы
которое приводит к возможности последовательного выполнения однотипных
действий: 60 = а0, и далее Ьк+] = ак+\ + Ьк% вплоть до
Это так называемая схема Горнера. Любой здравомыслящий человек поначалу
скажет: «Что в лоб, что по лбу». Второй вариант выглядит даже хуже — из-за
противоестественности. Потом лишь выясняется, что в этом есть определенный
смысл. Не потому, что схема Горнера приносит дополнительные дивиденды |4\
а потому, что итерационный характер действий оказывается краеугольным камнем
компьютерных алгоритмов.
Это, конечно, половина правды. При малых размерностях дей-
действительно «что в лоб, что по лбу», и всякая попытка агитации толь-
только усугубляет непонимание. Роль итерационных методов выявля-
выявляется сама собой при столкновении с матрицами больших размеров.
Там прямые, по идее точные, методы из-за ошибок округления ока-
оказываются хуже итерационных даже по точности. Не говоря о том,
что всякое преобразование большой матрицы обычно разрушает
структуру, порождая хаос. Достаточно представить себе матрицу А
«тысяча на тысячу» с элементами
которую не надо хранить в памяти — ее можно вычислять по мере
надобности. Перед тем как преобразовывать такую изюминку —
тысячу раз подумаешь 15).
Метод простой итерации. Пусть х обозначает решение системы
5 = Ах + Ь. A0.2)
Вычитая A0.2) из A0.1), получаем процесс
A0.3)
описывающий эволюцию ошибки Ахк = хк — х.
14' Коэффициенты Ьо,Ь\,...,Ьп-\ определяют полином
в тождестве Р(х) = (}(х)(х - {) + Ьп.
15' Покажите, что р(А) < 1.
10.5. Итерационные методы 193
Динамика вектора невязки
очевидно, подчиняется тому же закону A0.3),
= Адк-
Процессы A0.1), A0.3) сходятся при условии р(А) < 1. Если
критерием остановки счета служит неравенство \\бк\\ ^.е, то ошибка
ДхЛ, в силу Ахк = (/- А)~1дк, может быть значительно боль-
больше е по норме |6'. Формулируется это обычно так. Шару ||<у| ^ е
ошибок по невязке отвечает эллипсоид ошибок ДхЛ с полуосями,
равными е/(\ — а^), где ак — характеристические числа матрицы А
(раздел 4.6).
Приведение к удобному виду. Уравнение Ах = Ь при условии невы-
невырожденности А всегда может быть приведено к виду, пригодному
для итерационного счета. После умножения Ах — Ь на (А~] - е!)
получается эквивалентное уравнение
х = еАх + с, с = (А~х - е1)Ь.
При этом р(еА) < 1, если модуль е достаточно мал.
Разумеется, действовать именно так необязательно. Свободой
выбора имеет смысл распоряжаться более рационально, преследуя
те или иные конкретные цели.
Довольно часто предпочтение отдается процессам с самосопря-
самосопряженными матрицами. Умножая Ах — Ь на А*, приходим к уравне-
уравнению А*Ах — А*Ь с симметричной матрицей.
Процедура Зейделя. Итерация A0.1) реализуется в компьютере по-
последовательно. Сначала вычисляется первая координата хл+1, за-
затем — вторая и т.д. Естественно приходит мысль при вычислении
второй координаты использовать вычисленное перед этим новое
значение — первой. Затем при вычислении третьей — использо-
использовать уже вычисленные значения первой и второй. И так далее. Это
и есть метод Зейделя.
' В том случае, когда у матрицы есть собственные значения, близкие по модулю
к единице.
194
Глава 10. Численные методы
В более обозримой форме он записывается так. Матрица А = [о,-;-] представ-
представляется в виде суммы А = В + С двух матриц
о о
021 О
0>п\
и С =
0ц 012 •••
О а22 ...
О О
что позволяет процесс Зейделя записать в форме
х*+, =Вхк+\ +Схк + 6,
которая равносильна обычному итерационному процессу
Вопрос о сходимости, таким образом, сводится к выяснению вопроса:
Условия сходимости процессов Зейделя и обычной итерации A0.1) пересека-
пересекаются, но не совпадают. Любой из них может расходиться, когда другой сходится.
Подробности можно найти в любом учебнике по вычислительной математике
(см. [17]).
10.6. Вычисление собственных значений
Сначала о том, как действовать нецелесообразно.
Прямые методы определения спектра матрицы опираются на предварительное
развертывание определителя
с!е1 (А - XI) = Ап
р„ = р(А)
с последующим решением характеристического уравнения р(Х) = 0.
Коэффициенты р(Х) определяются, конечно, не в лоб, а с помощью тех или
иных уловок. Например, умножение тождества Гамильтона—Кэли
на некоторый вектор Хо дает систему линейных уравнений|7)
, +...+р„Хо = 0
относительно коэффициентов р(Х). Так р\,..., рп определяются в методе Крылова.
При небольших размерностях, о которых только и могла идти речь в старое
время, это хорошо работает (иногда). Но в случае «приличных» размерностей это
перестает работать совсем, поскольку матрица из вектор-столбцов хк получается
плохо обусловленной, мягко говоря.
Причина заключается в следующем. Пусть, для простоты, А имеет собствен-
собственное значение А( = 1, а остальной спектр лежит в круге |А| ^ А2 < 1. Тогда ясно,
17Ч = .
10.6. Вычисление собственных значений 195
чго итерации АкХо при к -> оо сходятся по направлению к собственному вектору
х - Ах . В результате столбцы х* при больших к оказываются почти параллельны.
Хуже того, если минимальный многочлен А имеет степень < п, то векторы
Хо,...,Х„
пообще обязаны быть линейно зависимыми.
Поэтому коэффициенты р(Х) определяются неточно, если вообще опре-
лелнются. А присовокупив сюда соображения раздела 10.4 о патологической
вычислительной неустойчивости корней многочленов, легко сделать вывод о не-
необходимости искать другие инструменты.
С точки зрения изучения предмета описанная история может показаться
холостым выстрелом. Но ошибки и неудачи обладают важным потенциалом,
ршнорачивающим идущего в правильном направлении.
Используемые ныне методы вычисления собственных значений
имеют итерационный характер. Наиболее популярен ($К-алгоритм,
опирающийся на возможность представления любой невырожден-
невырожденной матрицы А в виде произведения А = фй ортогональной
матрицы ф на верхнюю треугольную К (теорема 5.1.1).
Схема итераций фК-алгоритма такова.
Определяется фК-разложение матрицы Ак = ЯкЛк, после чего
(}к и Як перемножаются в обратном порядке, давая Ак+1 = ЩЯь-
Далее снова определяется ортогонально-треугольное разложение
Ак+} — Ф*-н1^*+1 и т. д. Процедура начинается с исходной матрицы
А0 = А.
Если обозначить
то (}кКк = А* и
Алгоритм, таким образом, порождает последовательность матриц Ак+Х, ор-
ортогонально подобных исходной А, сходящуюся, при определенных условиях,
к верхней треугольной матрице (с собственными значениями А на диагонали).
Глава 11
Сводка основных определений и результатов
11.1. Аналитическая геометрия
/ Прямоугольные {декартовы) координаты точки на плоскости — суть
снабженные знаками плюс или минус расстояния от точки х до двух взаимно
перпендикулярных прямых Ох\ и Ох2 — осей координат. Декартовы координаты
в пространстве задают три взаимно перпендикулярные плоскости, относительно
которых положение точки определяется тремя числами, х = {х\, х2, х{\.
/ Точку х = {х\, х2, #з} называют вектором либо радиусом-вектором.
/ Сумма х = {х\,х2,х2} иу = {у\,У2,Уз} определяется по правилу па-
параллелограмма:
+ У =
/ Векторы, лежащие на одной прямой (одинаково или противоположно
направленные), коллинеарны; в одной плоскости — компланарны.
/ Векторы {х|,...,х*} линейно зависимы (независимы), если существуют
(не существуют) такие Л|,..., А*, не все равные нулю, что
Л1Х1 -I-... -I- Хкхк = 0.
/ Стандартный базис К3 составляют орты {е|,е2,е3} направленные по
осям декартовых координат,
е3 =
Проекция аь вектора о на & определяется формулой
аь = а сов <р
, где
— угол между векторами а и Ь. Проекции ах,ау,аг на декартовы оси х,у,г
представляют собой координаты вектора о.
/ Скалярное произведение равно произведению длин векторов на косинус
угла между ними,
а • Ь = \а\ • \Ь\ сов (р = ахЬх + ауЬу + агЬг.
11.1. Аналитическая геометрия
197
Векторное произведение с = а х Ь определяется как вектор с, ортого-
нальный векторам о и & и составляющий тройку {о, Ь, с], совпадающую по ори-
ориентации с тройкой базисных векторов, а длина с равна площади параллелограмма,
построенного на векторах о, Ь,
\с\ = \а\-\Ь\&т(р.
/ Векторное произведение не ассоциативно, (о х Ъ) х с Ф а х (Ь х с),
антикоммутативно, х х у = —у х х, но справедлив дистрибутивный закон,
/ Определители. Объем V параллелепипеда, построенного на векторах
о, Ь, с (как на ребрах), определяется смешанным произведением
п'(Ъхс) = ±7,
где & х с дает площадь параллелограмма, лежащего в основании, а проекция аЬхс —
высота параллелепипеда. Что касается знака, то плюс получается в ситуации, когда
ориентация тройки {о, Ь, с} такая же как у базиса, минус — в противном случае
(базис левый, тройка {о, Ь, с} правая; либо наоборот).
/ Детерминант второго порядка по определению равен
Ьх Ьу
= ахЬу - ауЬх.
/ Вычисление детерминанта 3-го порядка сводится к вычислению детер-
детерминантов 2-го порядка:
ах ау аг
ьх ьу ьг
сх Су сг
= ах
ьу ьг
Су Сг
-пу
ьх ьг
Сх Сг
ьх ьу
Сх Су
/ Прямые и плоскости. Уравнение прямой в плоскости:
ах + /Зу + 6 = О,
плоскости в пространстве:
ах + /Зу + 7*
/ Оба уравнения в векторном виде записываются как аг + б = 0, что
интерпретируется как фиксация проекции текущего вектора г = {ж, у} либо
г = {ж, у, г) на вектор (направление) о.
/ Совокупности двух уравнений в пространстве
аг = 6, Ьг — С,
удовлетворяет прямая (пересечение плоскостей).
198 Глава 11. Сводка основных определений и результатов
•/ Оба описания,
ах + ру + у г + 6 = 0 и г = Аа + рЪ + с,
задают плоскость. Первое описание служит уравнением плоскости с нормалью
а = {а, /?, 7} и позволяет легко проверить, принадлежит ли г = {ж, у, г) этой
плоскости (проверкой равенства а • г + Л = 0), второе — параметрически задает
плоскость, проходящую через точку с и ортогональную а х Ь. С его помощью
удобно генерировать точки плоскости, выбирая произвольно параметры Л, ц.
</ Через три заданные точки г1, г2 г3 проходит плоскость
(а х Ь) • г + Я = 0,
где а = г1 — г2, Ь = г1 — г3, величина б определяется подстановкой вместо г
любой из точек г1, г2, г3. В иной форме это можно записать как равенство нулю
определителя
х-хх у-у\ г-
- ж, у2 - ух
-хх уз ~ У\
- гх
= 0.
Вместо ах + ру + у г 4- Я = 0 целесообразно использование эквивалента:
а(ж - ж0)
- *>) = 0,
где вместо не всегда удобного параметра б фигурирует точка {ж0, Уо, *о}, через
которую проходит плоскость.
/ Аналогично,
есть уравнение прямой в плоскости, ортогональной вектору {а, р} и проходящей
через точку {ж0, у0}.
/ Каноническим уравнением прямой удобно считать
Вектор с здесь направлен вдоль прямой, а Л = г0 х с, где г0 — любая точка, через
которую проходит прямая.
/ Другой вариант описания прямой, проходящей через точку г0, — пара-
параметрическое задание, г — г0 = ат, где вектор а задает направление прямой.
При необходимости описать прямую, проходящую через две точки, достаточ-
достаточно в качестве а взять вектор г1 — г2. После исключения параметра г получается
11.1. Аналитическая геометрия
199
уравнение
х -
х2 -
Хо
ж,
У
У2
~Уо
где точку г0 полагают обычно равной либо г1, либо г2.
/ Касательная плоскость, проходящая через точку {Ж{ьУоЬ к линии по-
постоянного уровня функции г = /(аз, у) описывается уравнением
/ Касательная плоскость к поверхности графика функции г = /(ж, у)
и точке {2о,Жо,уо} определяется уравнением
/ Расстояние от начала координат до плоскости га = 6 равно
/ Расстояние до прямой г х а = с. Раскладываем г по взаимно перпенди-
перпендикулярным направлениям г = гц0 4- г1а. В ближайшей к началу координат точке
имеем |г1о| • ||а|| = ||с||, откуда искомое расстояние:
1И1
иг
/ Минимальное расстояние между скрещивающимися прямыми,
гxо = ^4, г хЪ = В,
равно
\\А-Ь + В-а\\
/ Эллипс. Каноническое уравнение эллипса:
а > Ь > 0.
Эллипс получается в пересечении кругового конуса с плоскостью и может
быть охарактеризован как множество точек плоскости, для каждой из которых
200 Глава 11. Сводка основных определений и результатов
сумма расстояний до фокусов Р\, Р2 постоянна и равна 2а. Расстояние между
фокусами — 2с, где с2 = а2 — Ь2.
Оптическое свойство: световой луч, исходящий из одного фокуса, после
отражения от эллипса проходит через другой фокус.
/ Уравнение эллипсоида:
/ Гипербола. Гипербола — плоская кривая,
а2 Ь2 "" '
как и эллипс, представляет собой сечение конуса плоскостью.
Характеризуется как геометрическое множество точек плоскости, модуль
разности расстояний которых до Рх и Р2 постоянен и равен 2а.
При а = Ь асимптоты взаимно перпендикулярны. Если их принять за коор-
координатные оси, — уравнение гиперболы трансформируется в у = к/х.
/ Пространственное обобщение — гиперболоид. Уравнение:
а2 Ь2 с2
11.2. Векторы и матрицы
/ Операции над векторами х = {ж|,..., хп}:
• умножение на скаляр: Хх = {Лж|,..., Лж„},
• сложение: х + у = {х\ + у{,..., хп + уп},
• скалярное произведение: х-у = Х\у\ +... + хпуп. Эквивалентные обозначения
(ж, у), ху.
Евклидова норма:
/ Множество векторов, на котором введены перечисленные операции,
называют п-мерным евклидовым пространством и обозначают Кп.
/ Неравенство Коши—Буняковского (Коши—Шварца)
11.2. Векторы и матрицы 201
/ Векторы {Х|,...,х&} линейно зависимы (независимы), если существуют
(не существуют) такие Л|,..., Л*, не все равные нулю, что
=0.
/ Вектор и = А|Х| + ... + Ад-х* называют линейной комбинацией векторов
{х|,...,х*}, а совокупность всевозможных и — линейной оболочкой множества
/ Базисом называют линейно независимое множество {е|,...,еп} при
условии, что любой вектор х € Кп представим в виде линейной комбинации
х — Х|в| + ... + хпеп. Величины Ж|, хп — координаты точки х € Яп. Число п
векторов, составляющих базис, — размерность пространства.
/ Ортогональность. Векторы ж, у ортогональны, если х-у = 0. Плоскость
(линейное подпространство) определяется как множество элементов х, ортого-
ортогональных некоторому вектору о, т. е. а • х = 0.
/ Линейная функция у = а • х = а\Х\ + ... + апхп принимает постоянные
значения а-х = Р на «плоскостях», параллельных плоскости а-х — 0. Множества
а-х — Р называют гиперплоскостями.
/ Таблицу коэффициентов А = [о1;],
называют матрицей, которая определяет линейный оператор у = Ах, сопоставля-
сопоставляющий вектору х вектор у по правилу
У, = ]Г^а|;ж;, г = 1,...,п,
7
что задает тем самым умножение матрицы на вектор.
/ Совокупность элементов Оц,..., апп называют главной диагональю мат-
матрицы.
/ Через а,-: обозначается г-я строка матрицы А, через о:; — У~й столбец,
т.е.
"о,/
/ Матрица называется невырожденной, если ее вектор-строки линейно
независимы.
202 Глава 11. Сводка основных определений и результатов
/ По определению: ^А = [цац], А + В = [а^ + 6у]. Умножение Л и В
дает матрицу С = АВ с элементами с,7 = ]^ в»*Ь*/. Иными словами, с,7
равно скалярному произведению 1-й вектор-строки на ^-й вектор-столбец, т.е.
/ Произведение матриц в общем случае не коммутативно АВ ф В А,
но ассоциативно, А(ВС) = (АВ)С, и дистрибутивно, А(В + С) = АВ + АС.
В случае Л В = Б Л говорят, что матрицы А и В коммутируют.
/ Матрица А* с элементами ау = а7-,- называется транспонированной.
Симметричная матрица характеризуется равенством А = Л*.
/ Обратной к Л называют матрицу Л ' такую, что
где единичная матрица I определяет тождественный оператор 1х = х.
/ Если матрица А невырожденна, то:
1. гапкА = п.
2. Существует А~1.
3. дегАфО.
4. Система уравнений Ах = Ь имеет единственное решение при любом Ь.
/ Прямоугольные и клеточные матрицы. Матрицу А, имеющую т строк
и п столбцов, называют т х п матрицей. Произведение С = АВ вычисляется
по обычной формуле, но при условии, что число столбцов А равно числу строк В.
/ Понятие прямоугольной матрицы позволяет считать векторы тоже мат-
матрицами. Чтобы матрицу А умножать на х справа, надо, чтобы элемент х был
обязательно вектор-столбцом. После транспонирования вектор-столбца возможно
х*А. Скалярное произведение (ж, у) записывают тогда в виде х*у.
Пример:
№..... Хп\'
У\
1УпЛ
• Уп] =
Хпуп
11.2. Векторы и матрицы 203
</ Элементарные преобразования матрицы представляют собой последова-
последовательность операций двух типов:
умножение строки матрицы на ненулевой скаляр,
прибавление одной строки к другой.
</ Любая невырожденная матрица элементарным преобразованием может
быть преобразована в единичную. Соответствующий процесс называют методом
Гаусса.
/ При элементарных преобразованиях линейно зависимые (независимые)
строки и столбцы переходят в линейно зависимые (независимые).
/ У вырожденной (невырожденной) матрицы вектор-столбцы линейно
зависимы (независимы),т.е. А и А* вырождены или невырождены одновременно.
/ Максимальное число линейно независимых вектор-строк либо вектор-
столбцов (то и другое совпадает) прямоугольной матрицы А называется ее рангом
и обозначается как гапк А. Эквивалент: ранг тхп матрицы — это максимальный
размер ее квадратной невырожденной подматрицы.
гапк АВ ^ пип {гапк А, гапк В}.
/ Если Р невырожденная матрица, то
гапк Р<? = гапк <?, гапк 8Р = гапк 5.
/ Определители. Детерминантом, или определителем, квадратной матри-
матрицы А называется скалярная функция Л(А), обладающая тремя свойствами:
(|) при умножении строки матрицы на скаляр А величина Л{А) умножается на А;
(У) прибавление одной строки к другой не меняет детерминанта',
(ш) детерминант единичной матрицы AA) = 1.
/ Альтернативное определение:
а(А) = де1 А = \А\ = ^(-0^^1I • *' <Ч»)»>
где а обозначает перестановку индексов {1, п} в {<тA),. -., 0"(п)}, а ЛГ((г) —
число транспозиций (перестановок двух элементов) в а. Суммирование идет
по всем возможным перестановкам.
/ Детерминант представляет собой алгебраическую сумму всевозможных
произведений а^,), • • • а^ф, знак которых определяется четностью или нечетно-
нечетностью перестановки а (четностью или нечетностью числа транспозиций в а).
204 Глава 11. Сводка основных определений и результатов
</ Свойства определителей:
1. Если матрица А имеет нулевую строку, то йеХ (А) = 0.
2. Прибавление одной строки, умноженной на любой скаляр, к другой строке —
не меняет детерминанта.
3. Прибавление /с строке линейной комбинации других строк — не меняет детер-
детерминанта.
4. Детерминант вырожденной матрицы равен нулю.
5. При перестановке двух строк знак определителя меняется на противополож-
противоположный.
6.
7.
8. йегА'1 =(йегА)~1.
</ Базис из упорядоченного набора векторов {а,...} ориентирован так же,
Н М
как исходный, если с!е( . > 0, и — противоположно, если <1е1 I • I < 0.
/ Единичный куб, построенный на векторах (ребрах) стандартного базиса,
под действием оператора А = [а|;] переходит в параллелепипед, построенный
на вектор-столбцах а:\,..., ап. Объем этого параллелепипеда, равный по модулю
|<1е1 А\, называют коэффициентом искажения объема линейного оператора А.
/ Система линейных уравнений Ах = Ь с квадратной невырожденной мат-
матрицей А всегда имеет единственное решение х = А~ХЬ, вычисляемое по правилу
Крамера:
2 = 1,...,п,
где А^ обозначает матрицу, полученную из А заменой у-го столбца вектором Ь.
/ У системы уравнений Ах = Ь с прямоугольной матрицей А
аих{ + апх2 + ... + ашхп = 6,,
атХх{ + ат2х2 + ... + атпхп = Ьт
величины Ху могут определяться неоднозначно либо вообще не определяться.
Решение существует, когда ранг А совпадает с рангом расширенной матрицы
[А, Ь], полученной приписыванием к А справа столбца Ь. Если же ранг [А, Ь] больше
ранга А, решение невозможно (теорема Кроне кера—Капелл и).
11.3. Линейные преобразования
205
11.3. Линейные преобразования
/ При переходе к новой системе координат с помощью невырожденной
матрицы, х = Тх\ матрица А преобразуется по правилу:
А' = Т~1АТ.
/ Аналогично преобразуется любой полином от матрицы
р(Т~1АТ)=Т~1р(А)Т.
/ Операции взятия обратной матрицы и перехода к новой системе коор-
координат — перестановочны: (А')~1 = (А~1)'.
/ У диагональной матрицы
"Л, О
О Лп
ненулевые элементы могут стоять только на главной диагонали.
/ Матрица А диагонализируема, если существует такая невырожденная
матрица Т, что Т']АТ = Л.
/ Матрицы А' и А в соотношении А' = Т АТ называют подобными.
Это различные матрицы, но они описывают один и тот же оператор (в разных
системах координат).
/ Уравнение Ах = Хх может иметь ненулевое решение х лишь в случае,
когда матрица А - XI вырождена, т. е.
с!е1 (А - XI) = 0,
что называют характеристическим уравнением матрицы А, его решения X, — соб-
собственными значениями, а соответствующие ненулевые решения х = Г, уравнения
(А — Х1)х = 0 — собственными векторами матрицы А.
/ Полином
рА(Х) = да (А - XI) = Хп+ 7„-, А* + ... + 7,Л + 7о
называют характеристическим.
206 Глава 11. Сводка основных определений и результатов
</ Если матрица А имеет собственные значения Л;, которым отвечают
собственные векторы Г,, то матричный полином
р(А) = А°+ 7»-. Л11 +... + 7о/
имеет собственные значения р(Х^) и те же собственные векторы Г;.
/ Собственными значениями обратной матрицы А~1 являются Л^1 и те же
собственные векторы.
/ В фокус внимания часто попадают два коэффициента: 7п-|, равный сум-
сумме корней (собственных значений) А,(А)+.. .+Ап(л4), и 7о, равный произведению
А, (А) • • • А„(А). По теореме Виета
ап_, = А,(А) +... + ХП(А) = 1г Ау
где 1г А = ам + ... + а,,,, — след матрицы (оператора)
</ Под скалярным произведением в случае комплексных векторов понима-
понимается
что при действительных координатах переходит в стандартное определение.
</ Аналогом «транспонирования» в комплексном случае служит операция
сопряжения матрицы: V* получается из V транспонированием с последующей
заменой всех элементов на комплексно сопряженные — и называется сопряженной V.
</ В билинейных формах (Ух, у) переброска матрицы на другой сомножитель
происходит по правилу:
/ Формулы (АВ)* = В*А* и (А*) ' = (А ')* сохраняются в комплексном
случае.
Если матрица А имеет попарно различные собственные значения
Л|,...,ЛП, то каждому А^ отвечает свой собственный вектор Г;,
и множество собственных векторов {(\,..., Гп} линейно независимо.
Пусть Ах = Хх, у А = ру и А Ф ц. Тогда (ж, у) = 0. Другими
словами, левый и правый собственные векторы, отвечающие разным
собственным значениям, всегда ортогональны друг другу.
11.3. Линейные преобразования 207
/ Множество (г(А) собственных значений Л; матрицы А называют спек-
тром% а максимальное значение модуля |Л;| — спектральным радиусом, и обозна-
обозначают р(А).
/ Спектр в значительной мере характеризует свойства матрицы. Напри-
Например, из Ке А; < 0 для всех ] — следует асимптотическая устойчивость равновесия
системы ж = Ах + Ъ. Из г(А) < 1 вытекает сходимость последовательных при-
приближений ж*+| = Ахк + Ь к решению х = Ах + Ь.
/ Спектр не меняется при переходе к другому базису, т. е. характеризует
сам линейный оператор, а не его конкретную запись в той или иной системе
координат.
/ Если у п х п матриц А и В спектры состоят из п попарно различных
точек и совпадают, то матрицы подобны — переходят одна в другую при замене
системы координат, В = Т~]АТ, — и представляют собой запись одного и того же
оператора в различных базисах.
/ В общем случае это не так. Мешают кратные собственные значения.
Кратность Л как корня характеристического многочлена рл(Л) называется ал-
алгебраической кратностью собственного значения Л. Число линейно независимых
решений х уравнения Ах = Аж называют геометрической кратностью собствен-
собственного значения Л.
/ Если бы геометрическая кратность всегда совпадала с алгебраической, —
у любой матрицы А было бы п линейно независимых собственных векторов
{Г|,...,Г„} и преобразование Т — [Г,,...,ГП] приводило бы А к диагонально-
диагональному виду.
/ Матрица, у которой геометрическая кратность какого-либо собственно-
собственного значения меньше алгебраической, называется дефектной. Таковой является,
например, Л Л . Собственное значение Л = 0 здесь имеет кратность 2, но ему
соответствует лишь один собственный вектор Ы .
/ Множество значений Ах называют образом и обозначают как [тА,
а множество решений Ах = 0 называют ядром и пишут кегЛ, имея в виду
множество векторов ж, которые оператором отображаются в нуль. И то и другое
является линейным пространством.
/ Подпространство X С Кп называется инвариантным относительно А,
если ж еХ =* Ах е X, т.е. АХ С X.
/ Оператор А, рассматриваемый на инвариантном подпространстве X,
т. е. сужение А1Х оператора А на X, является, очевидно, линейным оператором.
208 Глава 11. Сводка основных определений и результатов
/ При работе с подпространствами возникает необходимость рассматри-
рассматривать их комбинации. Суммой Х + У подпространств Х,У С Кп называется
множество линейных комбинаций ах + (Зу элементов х в X и у в У. Пересече-
Пересечением подпространств называют X р| У, где подразумевается обычное теоретико-
множественное пересечение, т.е. и в Хр|У, когда и « 6 X, и « 6 У. Наконец,
Xх определяют как ортогональное дополнение, при условии что X + X1 *= Кп и
х е X, ж1 € Xх => (ж, ж1) = 0.
</ Если X плоскость, а У прямая, не лежащая в этой плоскости, X 4- У
даст трехмерное пространство, а X р) У — точку. Если же У С X (прямая лежит
в плоскости), тоХ + У = Х,ХП^ = ^-В случае
сПт (X 4- У) = сПт X 4- сНт У
сумму Х + У называют прямой.
11.4. Квадратичные формы
/ Квадратичная форма
задается пхп матрицей V. которая обычно предполагается симметричной.
/ При переходе к другой (штрихованной) системе координат с помощью
невырожденной матрицы, х = 8х\ матрица V преобразуется по правилу
V' = 8*У8.
/ Преобразование 5 называют ортогональным, если оно не меняет длину
векторов, что влечет за собой
5* = 5"'.
/ Множество векторов {Г,,..., Гп} ортогонально, если (Г,, Г7-) = 0 при гф ].
Если, дополнительно, все векторы нормированы, (Г,-,Г,-) = I, то их множество
считается ортонормированным.
/ Все собственные значения вещественной симметричной матрицы веще-
вещественны, и им соответствуют вещественные собственные векторы.
Теорема. Вещественная симметричная пхп матрица А всегда имеет
п различных собственных векторов {Г|,...,ГП}, которые образуют
ортонормированное множество, а ортогональное преобразование Т =
[Гь ..., Гп] приводит А к диагональному виду Т*АТ.
11.4. Квадратичные формы 209
/ (х, Ух) всегда может быть приведена ортогональной заменой переменных
х = Ти к виду
где А; — собственные значения У (при условии У = V*), и — к виду
если требование ортогональности на Т не накладывается.
/ Число д ^ п называют рангом квадратичной формы, р и д-р — индексами
инерции (положительным и отрицательным), а разность индексов — сигнатурой,
которая не зависит от способа преобразований, ведущего к указанной форме
(закон инерции).
/ Матрицу V, равно как и квадратичную форму (х, Ух), называют поло-
положительно определенной, если (х, Ух) > 0 при любом ненулевом х.
/ Если одна из матриц А, В положительно определена, то обе формы
(х, Ах) и (х, Вх) приводятся к диагональной форме одновременно (одним и тем же
преобразованием).
/ Если упорядочить собственные значения матрицы У в порядке убывания
Л, ^...^Лп, то
(х, Ух) . (х,Ух)
Л| = тах — —, А„ = тт —.
г (х,х) т (х,х)
/ Эрмитова матрица, или самосопряженная (комплексный вариант сим-
симметричной), определяется условием А = А*, где звездочка обозначает уже транс-
транспонирование плюс комплексное сопряжение всех элементов.
/ Если матрица А эрмитова, то:
• Все собственные значения А действительны.
• Квадратичная форма (х, Ах) принимает действительные значения при любых
комплексных х.
• Матрица 8* А8 тоже эрмитова.
• Существует представление А = Х1*М1, где II — унитарная матрица, а Л —
вещественная диагональная. Обратное тоже верно.
/ Сингулярные числа. Ортонормированная система собственных векторов
{Гь... ,Г„} преобразования А*А переводится матрицей А в ортогональную:
210 Глава 11. Сводка основных определений и результатов
Величины а, = \/А^, где А, — собственные значения А* А, называют сингулярными
числами матрицы А. Максимальное а, представляет собой евклидову норму А.
/ Любая матрица А может быть разложена в произведение
ортогональной матрицы Т и симметричной неотрицательно определенной мат-
матрицы 5.
/ Биортогональные базисы. У матрицы А общего вида, имеющей попарно
различные собственные значения {Аь ..., Ап}, существует базис из собственных
векторов {в|,..., еп}, не обязательно ортогональный.
Транспонированная матрица А* имеет те же собственные значения, но другие
собственные векторы {Г|,..., Г„}.
Базисы {е,} и {Г,} биортогоналъны:
(е<,Г,)= 0 при %ф$.
/ С помощью биортогональных базисов {е,-} и {Г,} — при условии норми-
нормировки (е*, Г;) = I — матрица А с попарно различными собственными значениями
{А1,..., Хп} может быть представлена как
11.5. Канонические представления
/ Унитарные матрицы — это комплексный вариант ортогональных. Мат-
Матрица V унитарна, если
. Форма определения такая же, но теперь
II* — не просто транспонированная, а сопряженная.
/ Источник интереса к унитарным матрицам — тот же самый, что и к ор-
ортогональным. Те и другие возникают обычно как инструмент исследования.
Ортогональные матрицы, как матрицы преобразований, удобны благодаря ор-
ортогональности столбцов. В общем случае ортогональных преобразований уже
недостаточно, и унитарные матрицы — следующий шаг. Выгоды, по сути, те же:
• (и,, и:;) = 0 при г Ф 2, и и2л = 1 (аналогично для строк и|:);
• евклидова длина преобразованного вектора х = 1/у (у = 1/*х) сохраняется,
(я, а) = (у,у);
• все собственные значения по модулю равны единице, А* = е%{рк.
11.6. Функции от матриц
211
Теорема об унитарной триангуляции. Любая матрица А может быть
приведена унитарным преобразованием к треугольному виду:
И* АИ = Г,
где Т — верхняя треугольная матрица. Если матрица А и все ее
собственные значения вещественны, то V может быть выбрана
вещественной.
/ Любая действительная невырожденная матрица А может быть пред-
представлена в виде произведения А = (}К ортогональной матрицы (} на верхнюю
треугольную Я.
/ Жордановы формы. Матрица А заменой базиса, А = 8^8. может быть
всегда приведена к жордановой форме:
'*,(А.) О
О \
где на диагонали стоят жордановы клетки Л (А),
Г А 1 01
1
А]
/ Конкретный вид ^ для А связан со следующими факторами:
• Число жордановых клеток 3 равно максимальному числу линейно независимых
собственных векторов А.
• Сумма порядков жордановых клеток, отвечающих одному и тому же собствен-
собственному значению А;, равна алгебраической кратности А;, а число этих клеток
равно геометрической кратности А;.
11.6. Функции от матриц
/ Матричный ряд
*=0
сходится, если р(А) < г, где г — радиус сходимости ряда
212 Глава 11. Сводка основных определений и результатов
..., р(А)<\.
А1 Аъ
А А
</ еА — I -\- А-\- — + — + ... (матричная экспонента).
2! 3!
, но
, если АВ ф В А.
А = е1гА е'А =
= е1гА, е'А = соз А +«31П Л.
Если матрица Л диагонализируема преобразованием Т, то
еА1 ... О
О ... ел
Г.
/7о любому е > 0 можно указать норму || • ||,, в которой
/ Какова бы ни была норма, р(Л) = \\т л/\\Ак\\.
к-*оо
/ Нормы. Помимо евклидовой \\х\\ = у/(ху х) широкое распространение
имеют также
||х||т = тах |ж,| (кубическая норма)
1М|| = /. \х*\ (октаэдрическая норма).
1=1
^ Двойственная норма: \\х\\* — тах{ж, у}.
11*11=1
/ В Кп все нормы эквивалентны, т. е. для любых двух норм || • ||ь || • ||2
можно указать такие константы аи^, что
I. (х€Лп).
Норма матрицы определяется как
= та=х |
11.7. Неравенства 213
/ Нормам || • ||т и || • ||/ соответствуют:
11Л11 т = тах 22 I ач I (строчная норма),
з=\
тах 2__^ \агз\ (столбцовая норма).
11.7. Неравенства
/ Теоремы об альтернативах.
• Либо неравенство Ах > О разрешимо, либо у А = О имеет ненулевое поло-
положительное решение.
• Либо неравенство Ах ^ 0 разрешимо (х ф 0), либо у А = 0 имеет строго
положительное решение у > 0.
• Система линейных уравнений и неравенств,
Ах = 0, ж ^ 0, уА ^ 0,
всегда имеет такое решение {ж, у}, что уЛ + х > 0.
• Либо Ах = Ь имеет решение ж ^0, либо уА^О влечет за собой уЬ^0 (лемма
Минковского—Фаркаша).
• Либо Лж = Ь имеет решение ж ^ 0, либо разрешима система неравенств
у А ^ 0, уЬ <0 (переформулировка предыдущего утверждения).
• Либо Лж ^ 6 имеет решение ж ^ 0, либо система неравенств у А ^ 0, уб < 0
имеет решение у ^ 0.
• Либо Ах ^ 6 разрешимо, либо система уЛ = 0, уб = 1 имеет решение у ^ 0.
• Система неравенств
Лж^О, ж^0, уЛ^О, у^0
всегда имеет такое решение, что
ж + у А > 0, у - Лж > 0.
/ Р-матрицы. Квадратная матрица Л называется Р-матрицей, если она
не обращает знак ни одного ненулевого вектора, т. е. для любого ж ф 0 можно
указать такой индекс $, что ж; • у; > 0, где у = Лж.
/ Если А является Р-матрицей, то неравенство Лж > 0 всегда имеет
строго положительное решение ж > 0.
/ Матрица является Р-матрицей в том и только том случае, когда все ее
главные миноры строго положительны.
214 Глава 11. Сводка основных определений и результатов
11.8. Положительные матрицы
/ Матрица А с неотрицательными элементами, а,; ^ 0, называется поло-
положительной, с положительными, а/; > 0, — строго положительной.
/ Пусть А ^ 0, Хо > 0 и
Тогда а ^ р(А) :
/ Пусть А^О и -А^В ^А. Тогда р{В) ^ р(А).
/ Если В главная подматрица матрицы А ^ 0, то
Если А > О, то р(В) < р(А).
/ Теорема Перрона. Пусть А > 0. 7огдд:
• Спектральный радиус р(А) > 0 является собственным значением матрицы А
алгебраической кратности единица, и ему отвечает строго положительный
собственный вектор.
• Других положительных собственных значений и векторов матрица А не имеет.
• Если Ах = Аж, Л ф р(А), х Ф 0, то |Л| < р(А).
</ Матрица А называется разложимой (неразложимой), если одинаковой
перестановкой строк и столбцов она приводится (не может быть приведена)
к виду
\Ли
[о
где Аи и А22 — квадратные матрицы.
</ Если матрица А ^ 0 неразложима, то р(А) > 0 является ведущим соб-
собственным значением А алгебраической кратности 1, которому отвечает строго
положительный собственный вектор. Других положительных собственных значе-
значений и векторов у А нет.
/ Внедиагонально отрицательная матрица В с положительной диагональю
положительно обратима, если
шах — ^2 №у17| < №«1
при некотором наборе констант 71 , 7п > 0.
/ Пусть С - В ^ 0, матрица С положительна обратима и Ви > 0 для
некоторого и^О. Тогда В~1 ^0.
11.8. Положительные матрицы 215
/ Пусть С ^ В ^ 2?, причем матрицы С и Б положительно обратимы.
Тогда В ^0.
/ Неразложимая матрица А ^ 0 может иметь несколько периферических
собственных значений {А|,...,А*}, равных по модулю р(А). Такие матрицы
называют импримитивными. Оказывается, что все периферические А^ обязаны
иметь вид Ш]р(А), где а/; — комплексные корни к-й степени из 1.
/ Положительная матрица А ^ 0, у которой все столбцовые суммы
называется стохастической.
/ Пусть А > 0 и
Ах =
ж > 0, у > 0, ж*у = 1.
Тогда при к -> с»
Обозначения
А и > — начало и конец рассуждения, темы, доказательства
(?) — предлагает проверить или доказать утверждение в качестве упражнения,
либо довести рассуждение до «логической точки»
А => В — из А следует В
х € X — х принадлежит X
X 13 У, X р| У, Х\У — объединение, пересечение и разность множеств X и У
X С У — X подмножество У, в том числе имеется в виду возможность X С У,
т. е. между X С У и X С У различия не делается
0 — пустое множество
1П1Г2 — внутренность Г2
К2 — плоскость, В? — трехмерное, Кп — п-мерное пространство
д\тХ — размерность линейного пространства X
Г 1, если г = у,
6ц — 6\ = < — символ Кронекера
(^ 0, если гф з,
г — мнимая единица, г2 = -1
г — х + гу — комплексное число, г — г(соз <р + г зт у?) — его тригонометрическая
запись, х = Ке г — действительная часть, у = 1т г — мнимая; ~г — г* = х — гу —
комплексно сопряженное число.
х =
ж,
— вектор, Х( — его координаты
Обозначения 217
Ж,
ж* = [ж,,...,ж„]
Л* — обозначает транспонированную (сопряженную) матрицу, если А имеет
действительные (комплексные) элементы
кегЛ — ядро линейного оператора А
(ж, у) либо (ж, у) — скалярное произведение векторов ж и у; в общем случае
комплексных векторов
(ж,у)=ж,у* + ... + жпу*.
Для скалярного произведения используются также эквивалентные обозначения
х • у и жу
|Л| = с!е1 А — определитель (детерминант), в главе 9 \А\ обозначает матрицу
с элементами |а,;|
(г А — след матрицы Л (сумма диагональных элементов)
р(А) — спектральный радиус матрицы А
41
— /'(I) — производная /(I)
ди
частная производная функции и по переменной ж. Эквивалентное обозна-
ох
чение и'х
— фадиент функции /(ж)
Литература
1. Беккенбах Э.9 Беллман Р. Неравенства. М., 2004.
2. Беклемишев Д. В. Курс аналитической геометрии и линейной алгебры.
М., 2004.
3. Босс В. Интуиция и математика. М., 2003.
4. Босс В. Лекции по математике. М.: УРСС, 2004.
5. Гантмахер Ф. Р. Лекции по аналитической механике. М., 1966.
6. Гантмахер Ф. Р. Теория матриц. М., 1988.
7. Гельфанд И. М. Лекции по линейной алгебре. М., 1998.
8. Данцер Л., Грюнбаум Б., Кли В. Теорема Хелли и ее применения. М.:
Мир, 1968.
9. Декарт Р. Геометрия. М., 1938.
10. Красносельский М.А., Лифшиц Е.А., Соболев А. В. Позитивные линей-
линейные системы. Метод положительных операторов. М., 1985.
11. Курош А. Г. Курс высшей алгебры. М., 2004.
12. Линейные неравенства и смежные вопросы: Сб. статей // Под ред.
Г. У. Куна и А. У. Таккера. М., 1959.
13. Маркус Л/., МинкХ. Обзор по теории матриц и матричных неравенств.
М.: УРСС, 2004.
14. Никайдо X. Выпуклые структуры и математическая экономика. М.:
Мир, 1972.
15. Постников М.М. Устойчивые многочлены. М.: УРСС, 2004.
16. Рокафеллар Р. Выпуклый анализ. М.: Мир, 1973.
17. Фаддеев Д. К., Фаддеева И. И. Вычислительные методы линейной
алгебры. М.: Физматгиз, 1963.
18. Хорн Р., Джонсон Ч. Матричный анализ. М.: Мир, 1989.
19. ЦЛШпзоп /. Я. ЯоигкИп& еггогв т а1§еЪгаю ргосеззез. Еп§1е\уоос1 СМз,
N.1., 1963.
Предметный указатель
Абсцисса 10
алгебраическая кратность 74, 109,
211
амплитудно-фазовая
характеристика 173
Базис 12, 41
беспорядок 57
билинейная форма 71, 100
билинейное разложение 94
биортогональность 92, 210
Ведущее собственное значение
166
вековое уравнение 88
вектор 11,39, 196
— аксиальный 19
— ковариантный 96
— контравариантный 96
— полярный 19
векторное произведение 19
векторы коллинеарные 12, 196
— компланарные 12, 196
— ортогональные 96
выпуклая комбинация 149
— оболочка 149
1аусса метод 54
геометрическая кратность 74, 111
гессиан 89
гиперплоскость 45, 149
главная диагональ 45, 201
— подматрица 56
главный минор 101
годограф Михайлова 173
грань многогранника 150
Декартовы координаты 10,
196
детерминант 22, 57, 58
диагональ главная 57
— матрицы 57
доминирующая диагональ 171
допустимый многогранник 158
дорожка невырожденности 169
Евклидово пространство 40
Жорданова клетка 109, 211
— форма 109, 211
Задача двойственная 158
закон инерции 89
Индексы инерции 89
Касательная плоскость 32
квадратичная форма 81
коллинеарные векторы 41
конус 150
— двойственный 150
— заостренный 150
— острый 150
конусный отрезок 163
координаты 10, 13, 41
корневое подпространство 114
критерий Михайлова 173
— Сильвестра 101
220
Предметный указатель
кронекерово произведение 142
круги Гершгорина 188
Лемма Кнастера—
Куратовского—Мазуркевича
152
— Минковского—Фаркаша 161,
213
линейная комбинация 41, 201
— независимость 12, 41
— оболочка 41, 201
линейно зависимые векторы 12,
41
линейное пространство 76
линейный оператор 45
Матрица 23, 45
— Адамара 171
— Вандермонда 65
— внедиагонально отрицательная
171
— вполне неразложимая 181
— гурвицева 145, 172
— двоякостохастическая 178
— дефектная 74
— диагональная 68
— единичная 25, 48
— жорданова 109
— идемпотентная 117
— импримитивная 176, 215
— ковариации 102
— кососимметричная 47
— невырожденная 46, 201
— неразложимая 168, 214
— нильпотентная 116
— нормальная 122
— обратная 25, 48, 202
— ортогональная 67
— перестановки 51
— подобная 74
— положительная 163, 214
— простая 117
— прямоугольная 49
— разложимая 168, 214
— самосопряженная 86
— симметричная 47
— сопровождающая 121
— сопряженная 48, 72
— стохастическая 177, 215
— строго положительная 163, 214
— транспонированная 25, 47
— треугольная 51
— унитарная 103, 210
— устойчивая 172
— элементарная 52
— эрмитова 86, 122
сопряженная 103
матрицы элементарные
преобразования 52
метод Гаусса модифицированный
54,56
— Зейделя 193
— наименьших квадратов 102
— шевеления 165
метрика 126
минор дополнительный 61
многогранник 150
многочлен аннулирующий 112
— минимальный 113
множество аффинное 149
— выпуклое 149
монотонность 162
Невязка 186, 193
неравенство
Коши—Буняковского 40, 78
— Коши—Шварца 40
норма вектора 16, 40, 125
— двойственная 129
— евклидова 40, 126, 212
Предметный указатель
221
— кубическая 126, 212
матрицы 127
октаэдрическая 126, 212
подчиненная 127
нормальные координаты 88
Образ линейного оператора 78
оператор положительный 162
— сильно положительный 162
опорная гиперплоскость 150
определитель 22, 57
— Грама 101
ордината 10
ортогонализация Грама—Шмидта
104
орюгональное дополнение 79
множество 83
ор то нормированное множество
83
отделимость 149
отображение аффинное 149
Перестановка 57
плоскость 42
подобные матрицы 68
полином гурвицев 173
— устойчивый 173
полиэдр 150
полуупорядоченность 162
правило Крамера 27, 63
— переброски 71
преобразование ортогональное 83
приведение двух форм 87
проекция на направление 13
произведение по Адамару 101
пространство инвариантное 79
— натянутое 41
прямая сумма 79
прямое произведение 142
псевдовектор 19
Радиус-вектор 11, 196
разделяющая гиперплоскость
149
разложение определителя 61
размерность 41, 77
ранг квадратичной формы 89
— матрицы 55, 203
резольвента 139
Секулярное уравнение 88
сигнатура 89
сингулярное разложение 92
сингулярные числа 91, 210
система координат правая, левая
14
скалярное произведение 16, 39,
200
след матрицы 70
собственное значение 69
— подпространство 115
собственный вектор 69
левый 73
правый 73
сопряженное пространство 95
спектр матрицы 74
спектральный радиус 74
столбцовая норма 128, 213
строчная норма 128, 213
сужение А на X 79
сумма подпространств 79
Тензор 100
тензорное произведение 142
теорема Биркгофа 178
— Гамильтона—Кэл и 117
— Каратеодори 149
— Кронекера—Капелл и 64
— об изоморфизме 77
— об отделимости 150
— Перрона 168, 214
222
Предметный указатель
- Хелли 153
транспозиция 53, 57
Унитарная эквивалентность 105,
106
Функционал 95
функция выпуклая 149
Характеристический полином 70
характеристическое уравнение 69
Число обусловленности 186
Эквивалентность норм 127, 212
Ядро линейного оператора 78
А-матрица 119
К -матрица 171
Р-матриш 153, 213
Р-отображение 154
фЯ-алгоритм 195
Уважаемые читатели! Уважаемые авторы!
Мйше ишательство специализируется на выпуске научной и учебной
чмгсрятуры, в том числе монографий, журналов, трудов ученых Россий-
Российской академии наук, научно-исследовательских институтов и учебных
миедсний. Мы предлагаем авторам свои услуги на выгодных экономи-
экономических условиях. При этом мы берем на себя всю работу по подготовке
ишннии — от набора, редактирования и верстки до тиражирования
и распространения.
ргли нышедших и готовящихся к изданию книг мы предлагаем Вам следующие:
В. Босс
Лекции по математике: анализ
Книга отличается краткостью и прозрачностью изложения,
вплоть до объяснений «на пальцах». Значительное внимание
уделяется мотивации результатов и укрупненному видению.
В первой части дается обширный материал стандартных
курсов математического анализа. Во второй, «необязатель-
«необязательной», части излагаются — в стиле обзоров и очерков —
примыкающие к анализу предметы: аналитические функ-
функции, топология и неподвижные точки, векторный анализ.
«Высокие материи» рассматриваются на доступном уровне.
Книга легко читается.
Дли студентов, преподавателей, инженеров и научных работников.
В. Босс. Лекции по математике
Планируются к изданию следующие тома:
Анализ (вышел)
Дифференциальные уравнения (вышел)
Линейная алгебра (вышел)
Вероятность, информация, статистика
Геометрические методы нелинейного анализа
Дискретные задачи
ГФКП
Вычислимость и доказуемость
Оптимизация
Уравнения математической физики
Функциональный анализ
Алгебраические методы
Случайные процессы
Топология
Численные методы
11о яссм вопросам Вы можете обратиться к нам:
тел./факс @95) 135-42-16, 135-42-46
или электронной почтой 11К88ОТК88.П1
Полный каталог изданий представлен
и Интернет-магазине: Ы(р://11К88.ги
Научная и учебная
литература
Представляем Вам наши лучшие книги:
Бэр Р. Линейная алгебра и проективная геометрия.
Золотаревская Д. И. Сборник задач по линейной алгебре.
Чеботарев И. Г. Основы теории Галуа. В 2 кн. ЫВВ! %
Чеботарев Н. Г. Введение в теорию алгебр.
Чеботарев И. Г. Теория алгебраических функций.
Чеботарев И. Г. Теория групп Ли.
Супруненко Д. А. Группы подстановок.
Супруненко Д.А., Тышкевич Р. И. Перестановочные матрицы.
Маркус А/., Минк X. Обзор по теории матриц и матричных неравенств.
Шевалле К. Введение в теорию алгебраических функций.
Яглом И. М. Необыкновенная алгебра.
Фейнман Р., Лейтон Р., Сэндс М. Фейнмановские лекции по физике.
Вайнберг С. Мечты об окончательной теории.
Грин Б. Элегантная Вселенная. Суперструны и поиски окончательной теории.
Пенроуз Р. НОВЫЙ УМ КОРОЛЯ. О компьютерах, мышлении и законах физики.
В. Босс. Наваждение
Смирное Ю. М. Курс аналитической геометрии.
Жуков А. В. Вездесущее число «пи».
Вейль А. Основы теории чисел.
Вейль Г. Алгебраическая теория чисел.
Хинчин А. Я. Три жемчужины теории чисел.
Гнеденко Б. В. Курс теории вероятностей.
Боровков А. А. Теория вероятностей.
Гильберт Д., Кон-Фоссен С. Наглядная геометрия.
Клейн Ф. Неевклидова геометрия.
Клейн Ф. Высшая геометрия.
Рашевский П. К. Курс дифференциальной геометрии.
Дубровин Б. А., Новиков С. Я., Фоменко А. Т. Современная геометрия. Т. 1—3.
БоярчукА. К. и др. Справочное пособие по высшей математике (Антидемидович). Т. 1-5.
Краснов М.Л. и др. Вся высшая математика. Т. 1—6.
Краснов М. Л. и др. Сборники задач с подробными решениями.
Тел./факс:
@95) 135-42-46,
@95) 135-42-16,
Е-таН:
нКр://1Ж$$.ги
Наши книги можно приобрести в магазинах:
«Библио-Глобус» (И.Лубянка, ул.Мясницкая, 6. Тел. @95) 925-2457)
«Московский дои книги» (и.Арбатская, ул. Новый Арбат, 8. Тел. @95) 203-8242)
«Москва» (и. Охотный ряд, ул. Тверская, 8. Тел. @95) 229-7355)
«Молодая гвардия» (и. Полянка, ул. Б. Полянка, 28. Тел. @95) 238-5083, 238-1144)
«Дои деловой книги» (и. Пролетарская, ул. Марксистская, 9. Тел. @95) 270-5421)
«Гнозис» (и. Университет, 1 гум. корпус МГУ, комн. 141. Тел. @95) 939-4713)
«У Кентавра» (РГГУ) (и.Новослободская, ул.Чаянова, 15. Тел. @95) 973-4301)
«СПб. дои книги» (Невский пр., 28. Тел. (812) 311-3954)
Проект издания 20 томов
«Лекций по математике» В. Босса
обретает краски.
Автор наращивает обороты
и поднимает планку все выше.
Читательская аудитория ширится.
В условиях
информационного
наводнения
инструменты
вчерашнего дня
перестают
работать.
поэтому учить
надо как-то иначе.
«Лекции» дают
пример.
^1лохой ли, хороший —
покажет время.
0(о в любом случае,
это продукт нового
поколения.
<]Ее же «колеса»,
тот же «руль», та же
математическая
суть, — но по-другому.
Я. Ъосс
НАУЧНАЯ И УЧЕБНАЯ ЛИТЕРАТУРА
Е-таН:
Каталог изданий в Интернете:
Мф://11К55.ги
Тел./факс: 7 @95) 135^2-16
| 11Н53 Тел./факс: 7 @95) 135-42^6
3143 Ю 26865
785484 000463
есеесе
Из отзывов читателей:
Чтобы усвоить предмет, надо освободить его от
деталей, обнажить центральные конструкции, по-
понять, как до теорем можно было додуматься. Это
тяжелая работа, на которую не всегда хватает сил и
времени. В «Лекциях» такая работа проделывается
автором.
Популярность книг В. Босса среди преподавате-
преподавателей легко объяснима. Дается то, чего недостает.
Общая картина, мотивация, взаимосвязи. И самое
главное — легкость вхождения в любую тему.
Содержание продумано и хорошо увязано. Гро-
Громоздкие доказательства ужаты до нескольких стро-
строчек. Виртуозное владение языком. Что касается за-
замысла изложить всю математику в 20 томах, с тру-
трудом верится, что это по силам одному человеку.
Лекции В. Босса — замечательные математиче-
математические книги. Как учебные пособия, они не всегда
отвечают канонам преподавания, но студентам это
почему-то нравится.
Отзывы о настоящем издании,
а также обнаруженные опечатки присылайте
по адресу 1Ж55@1Ж55.ги.
Ваши замечания и предложения будут учтены
и отражены на \л/еЬ-странице этой книги
в нашем интернет-магазине п«р://1Ж55.ги
11Ш1