/









Автор: Мищенко А.С. Фоменко А.Т.
Теги: математика геометрия топология дифференциальная геометрия
ISBN: 5-9221-0442-X
Год: 2004




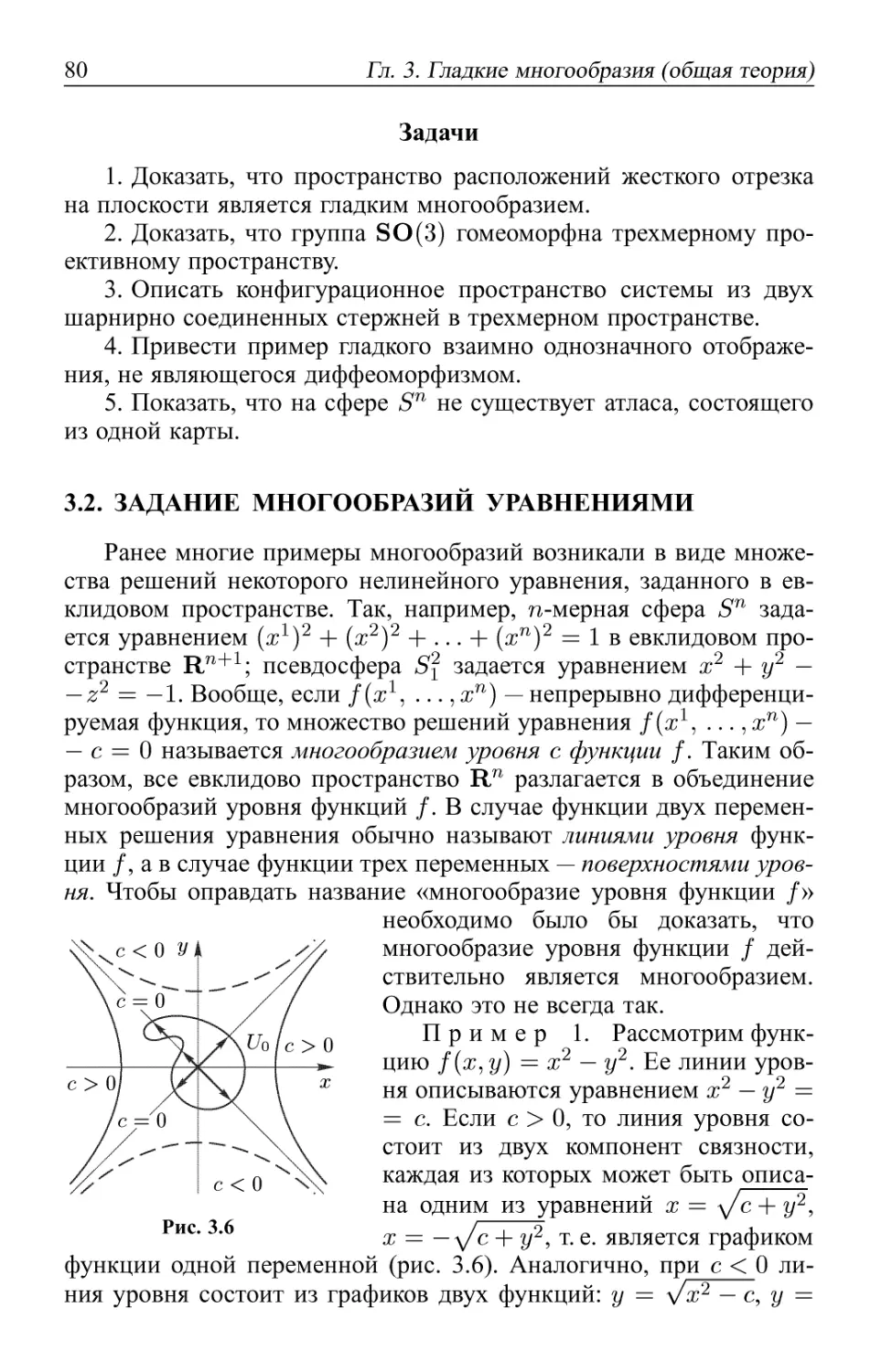
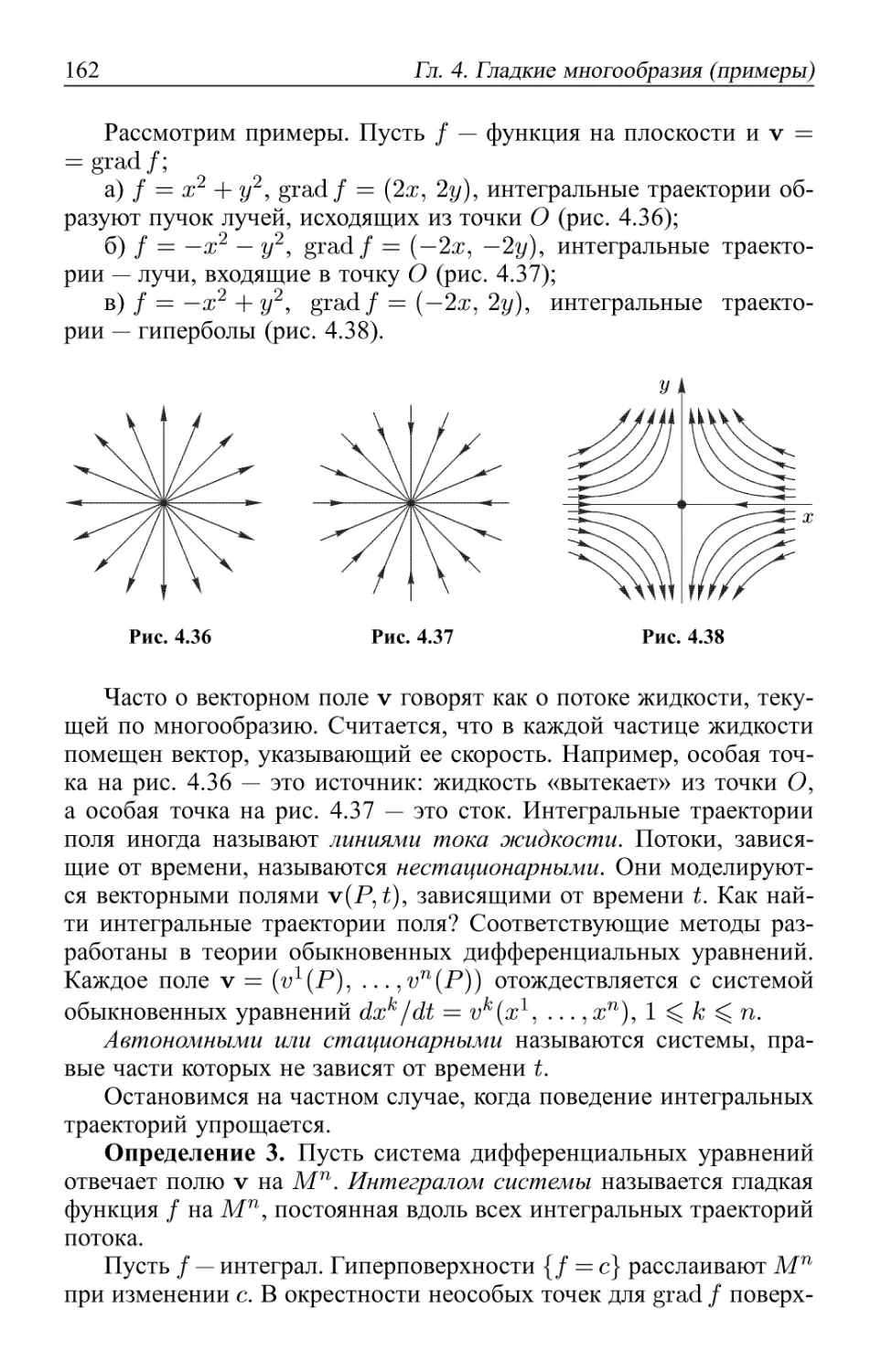
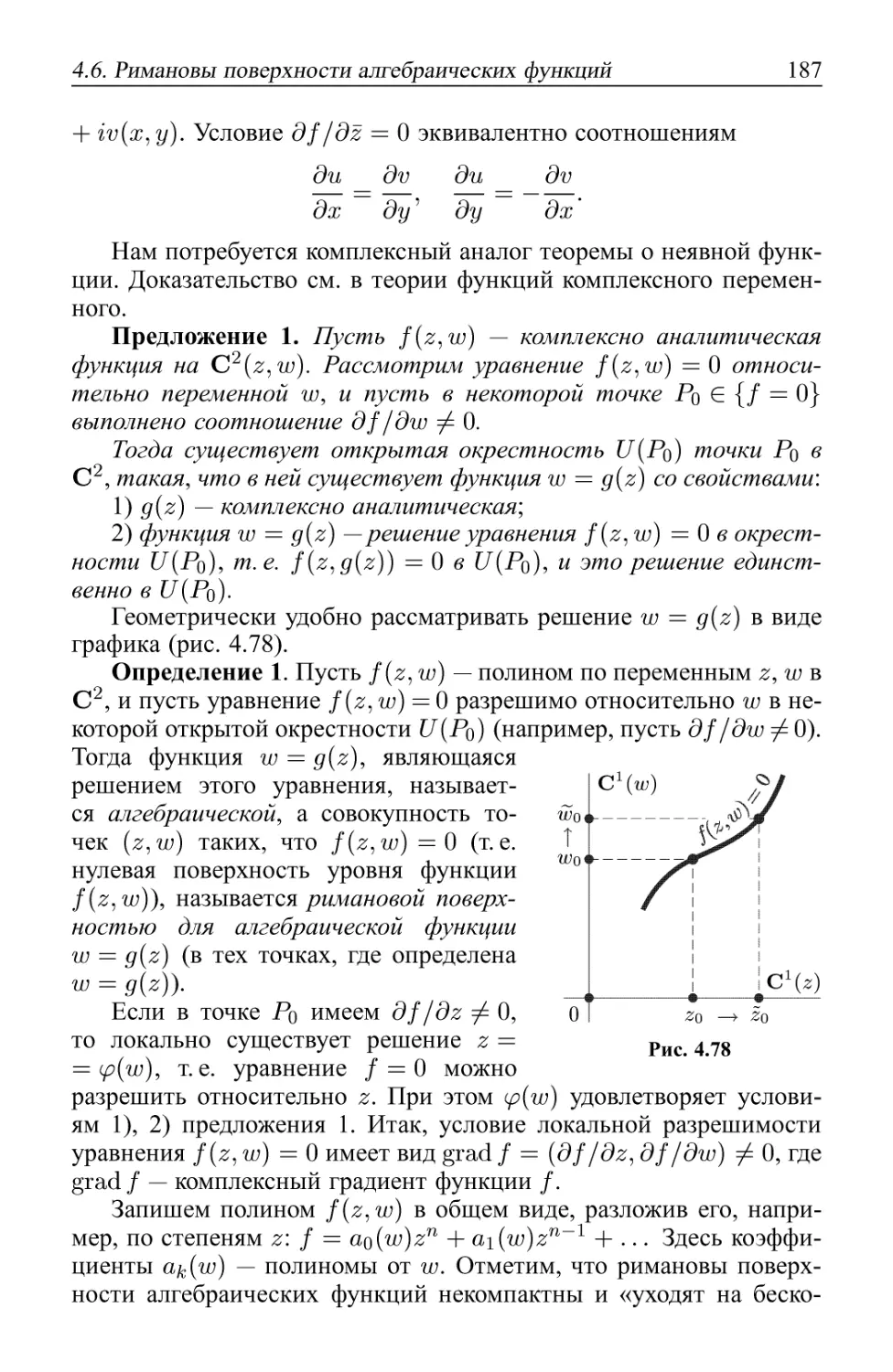
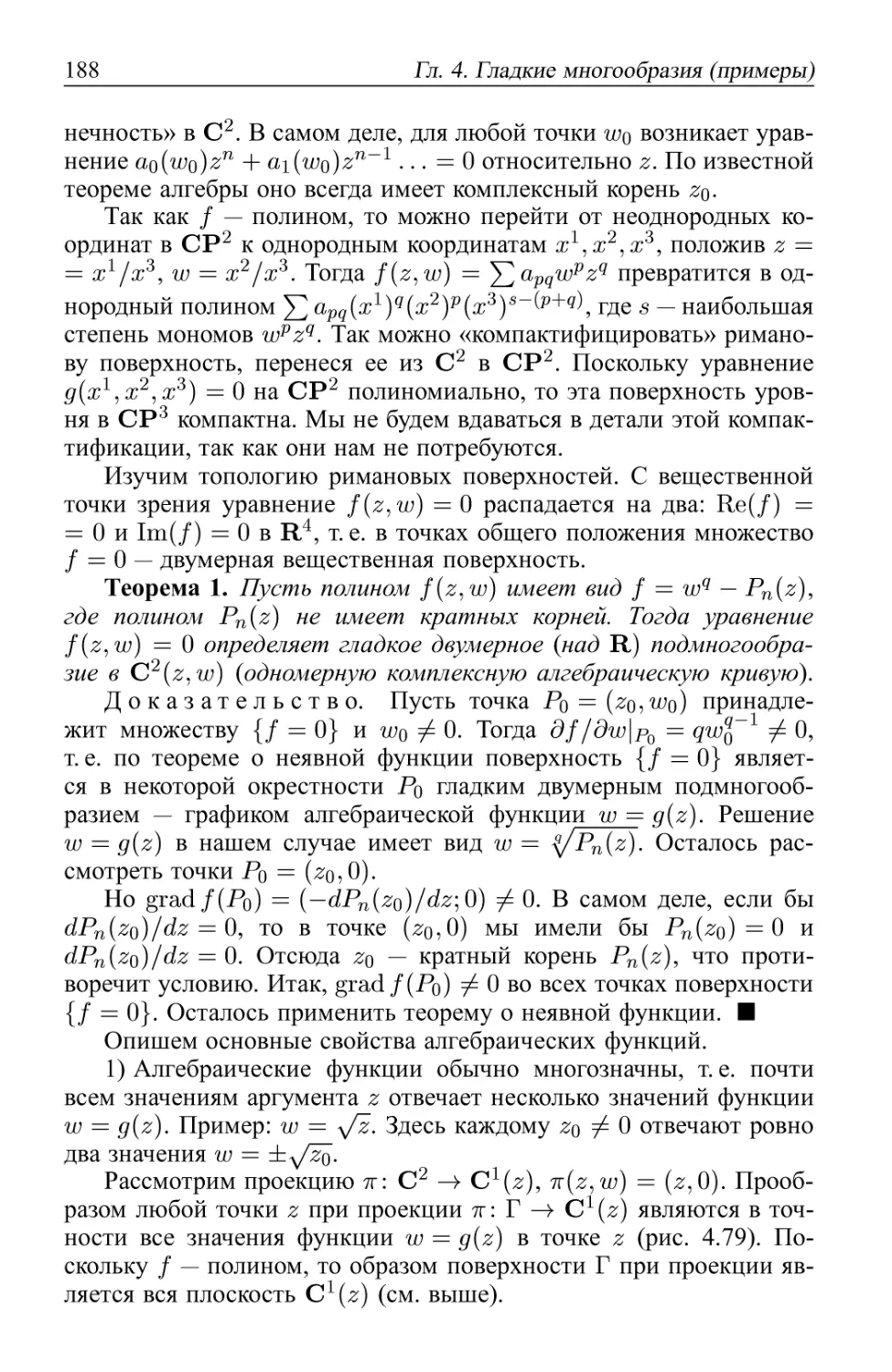
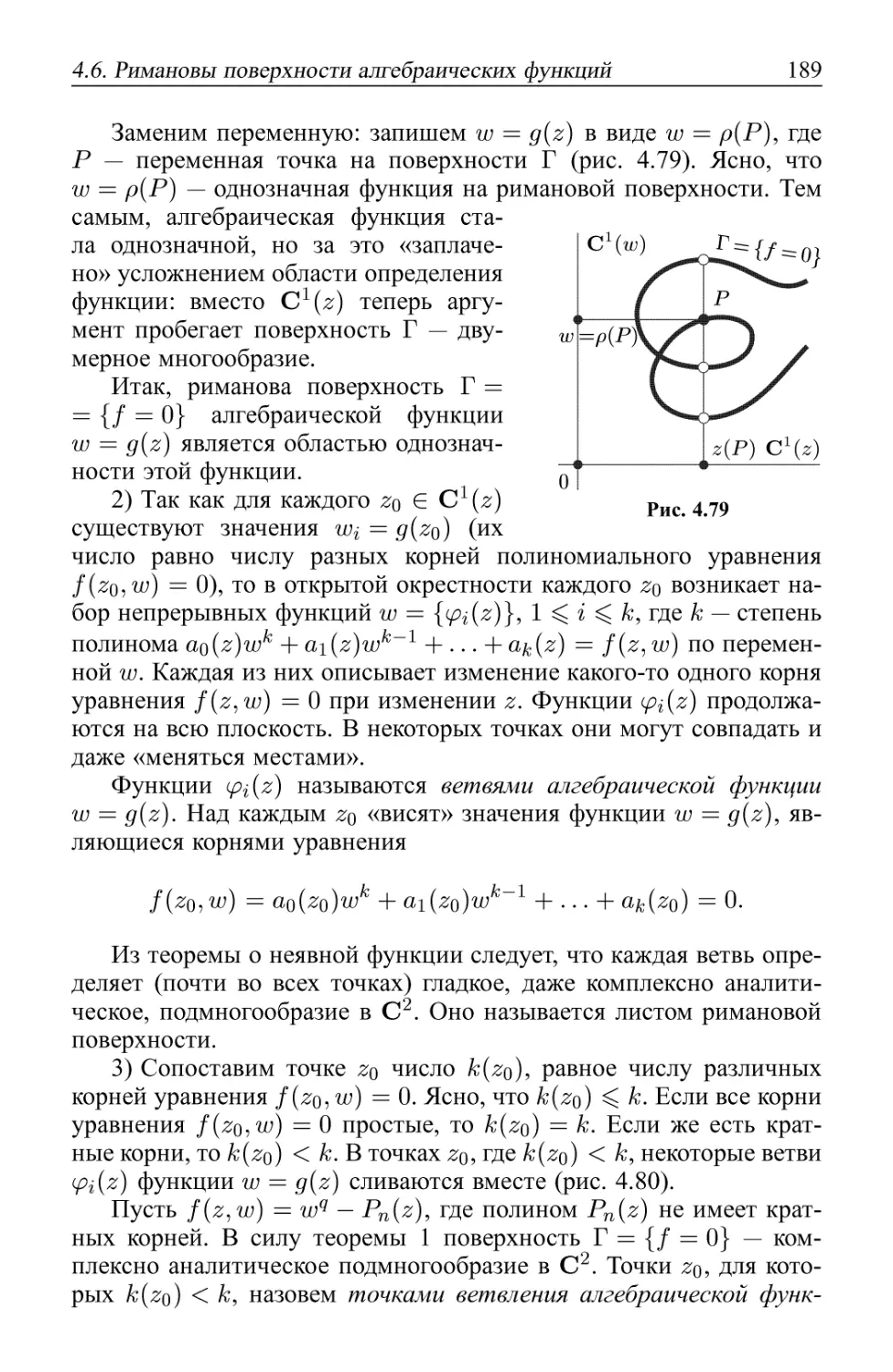
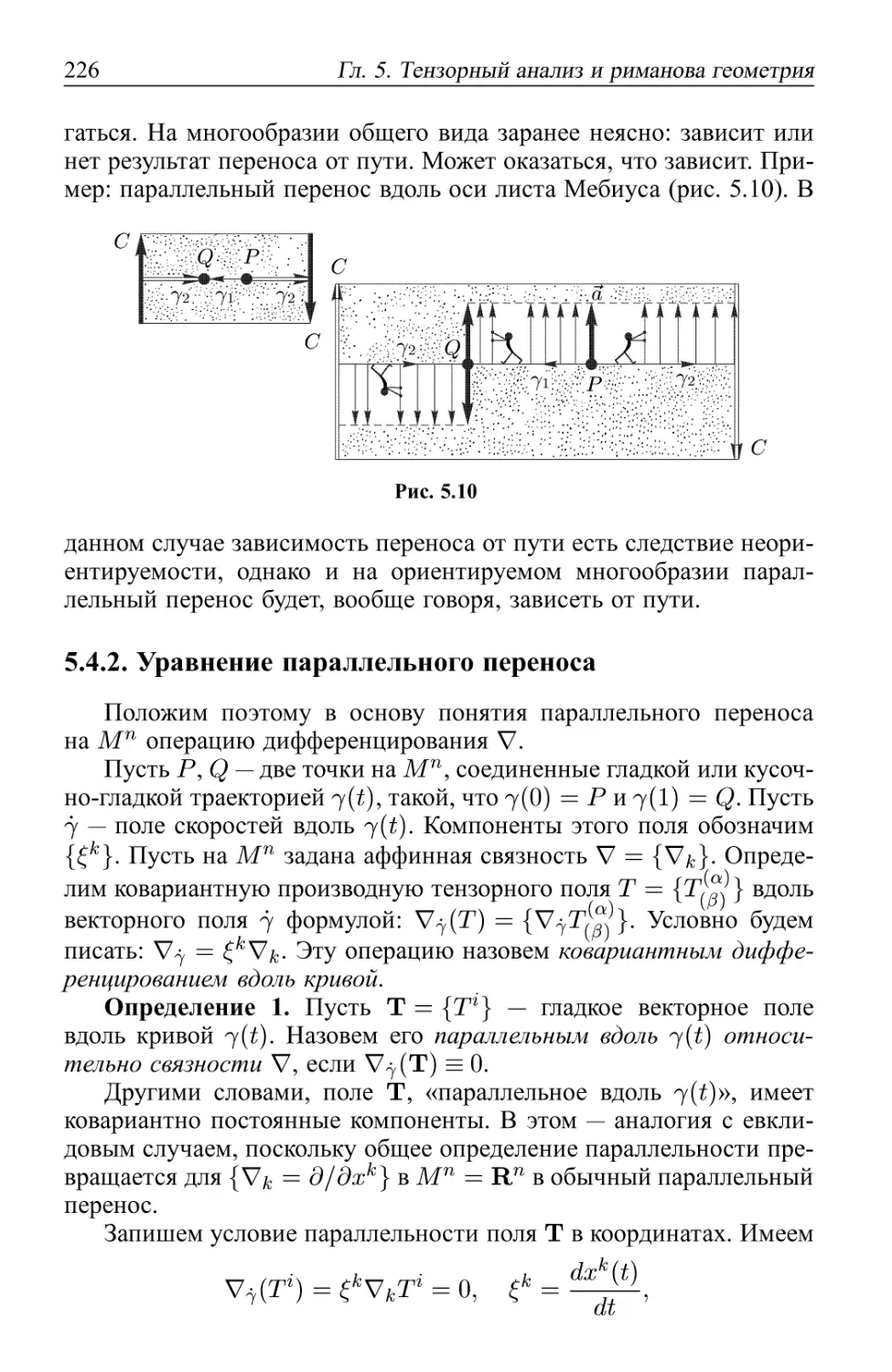
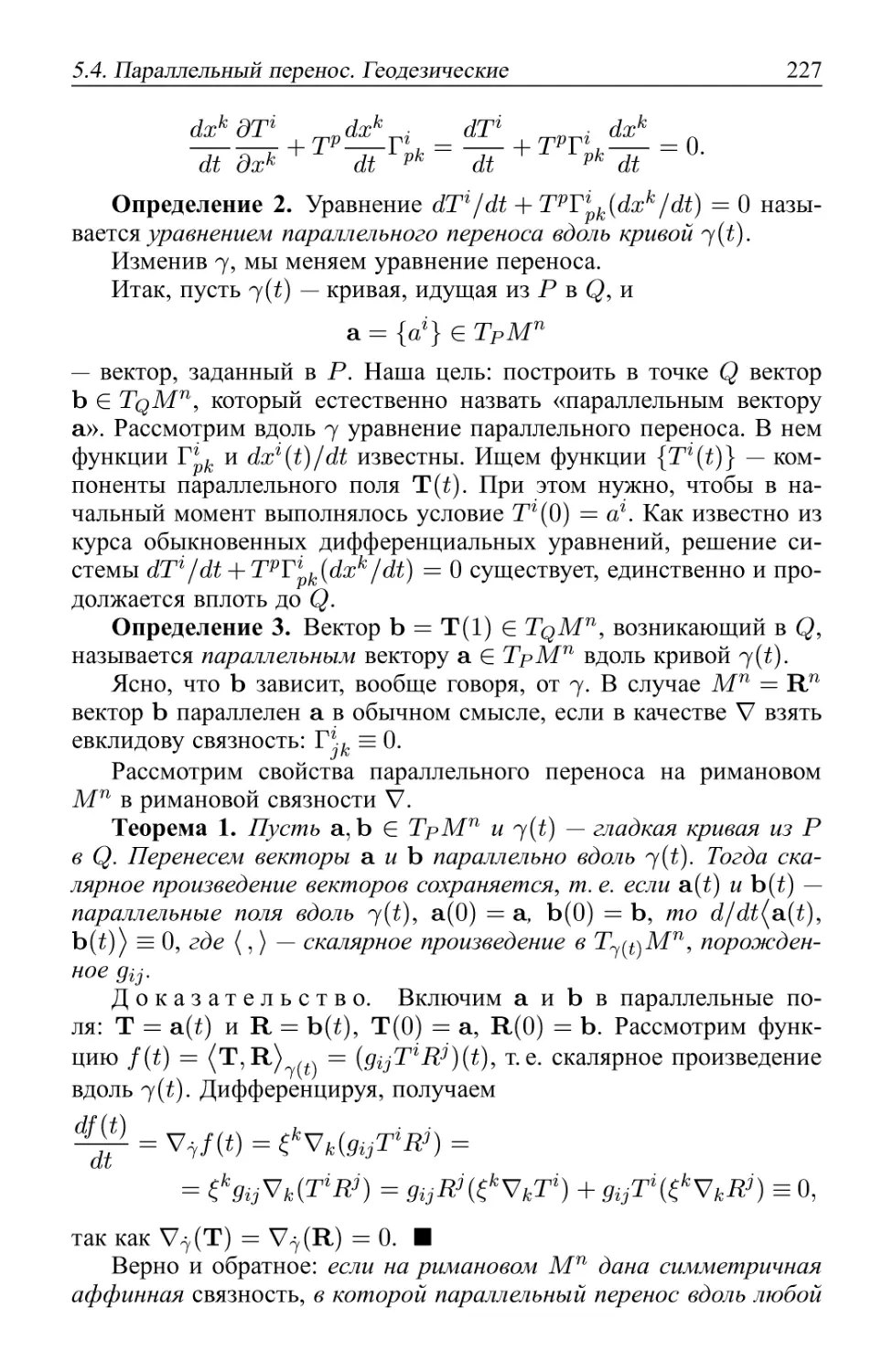
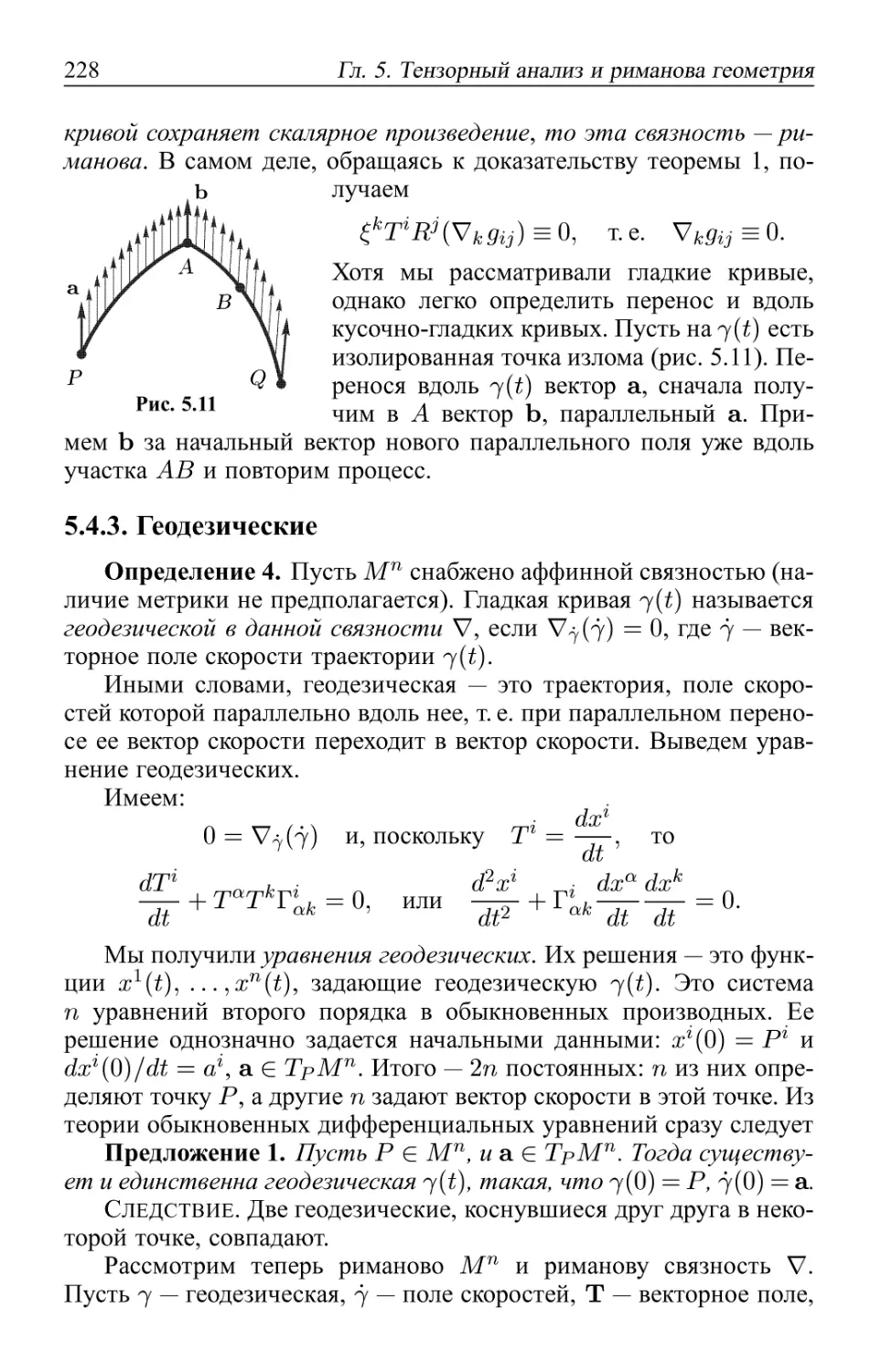
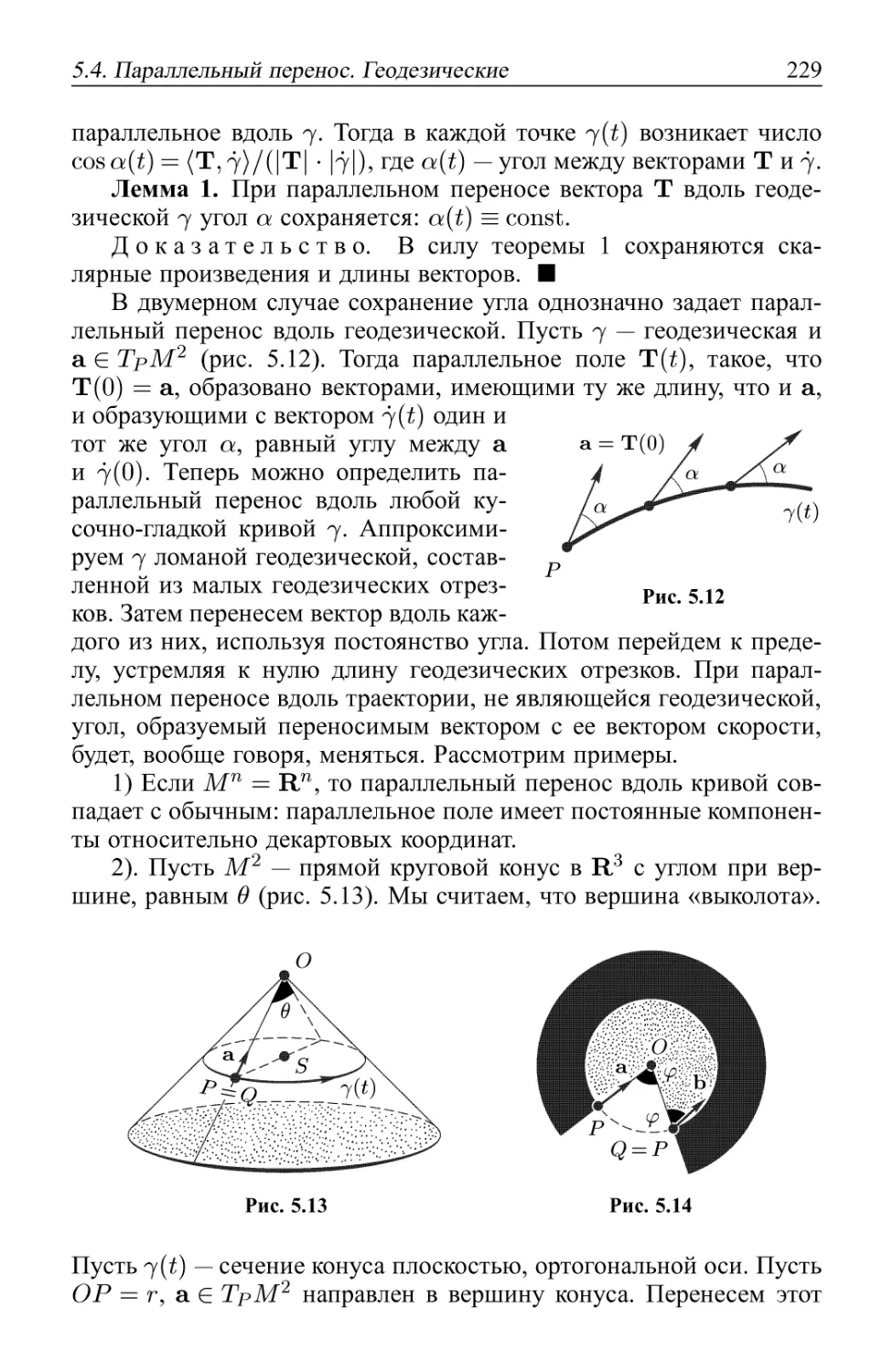
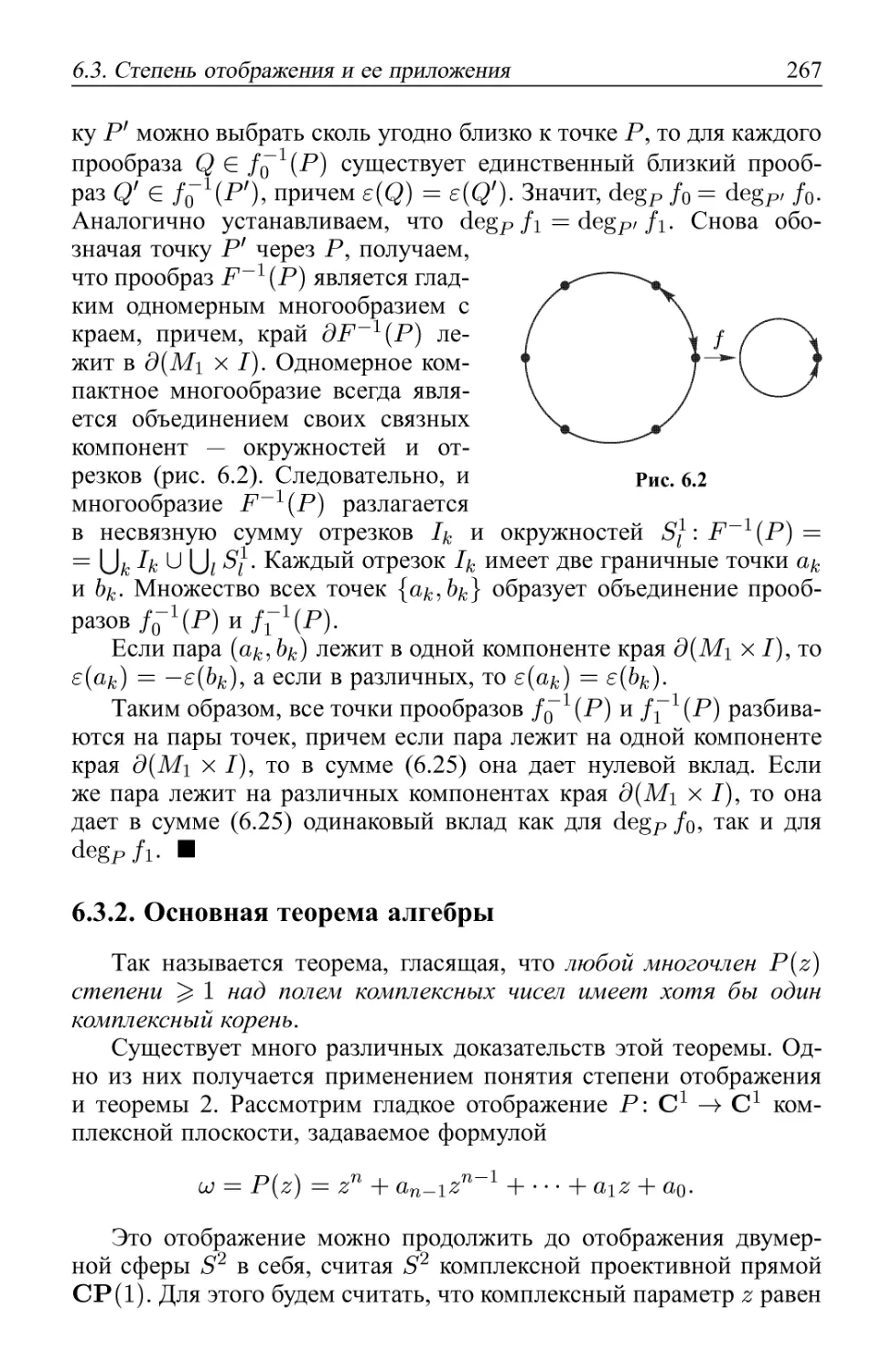
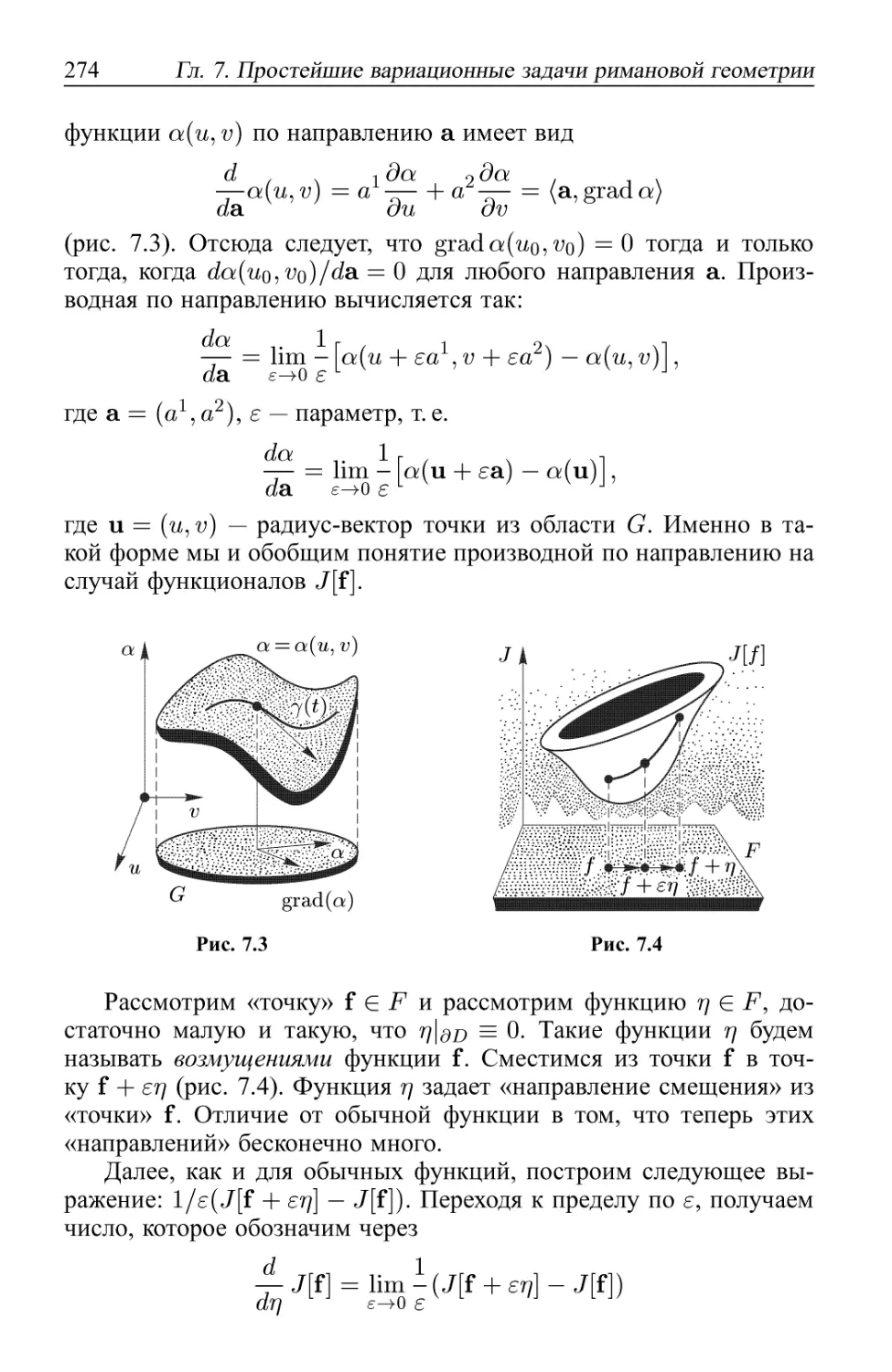
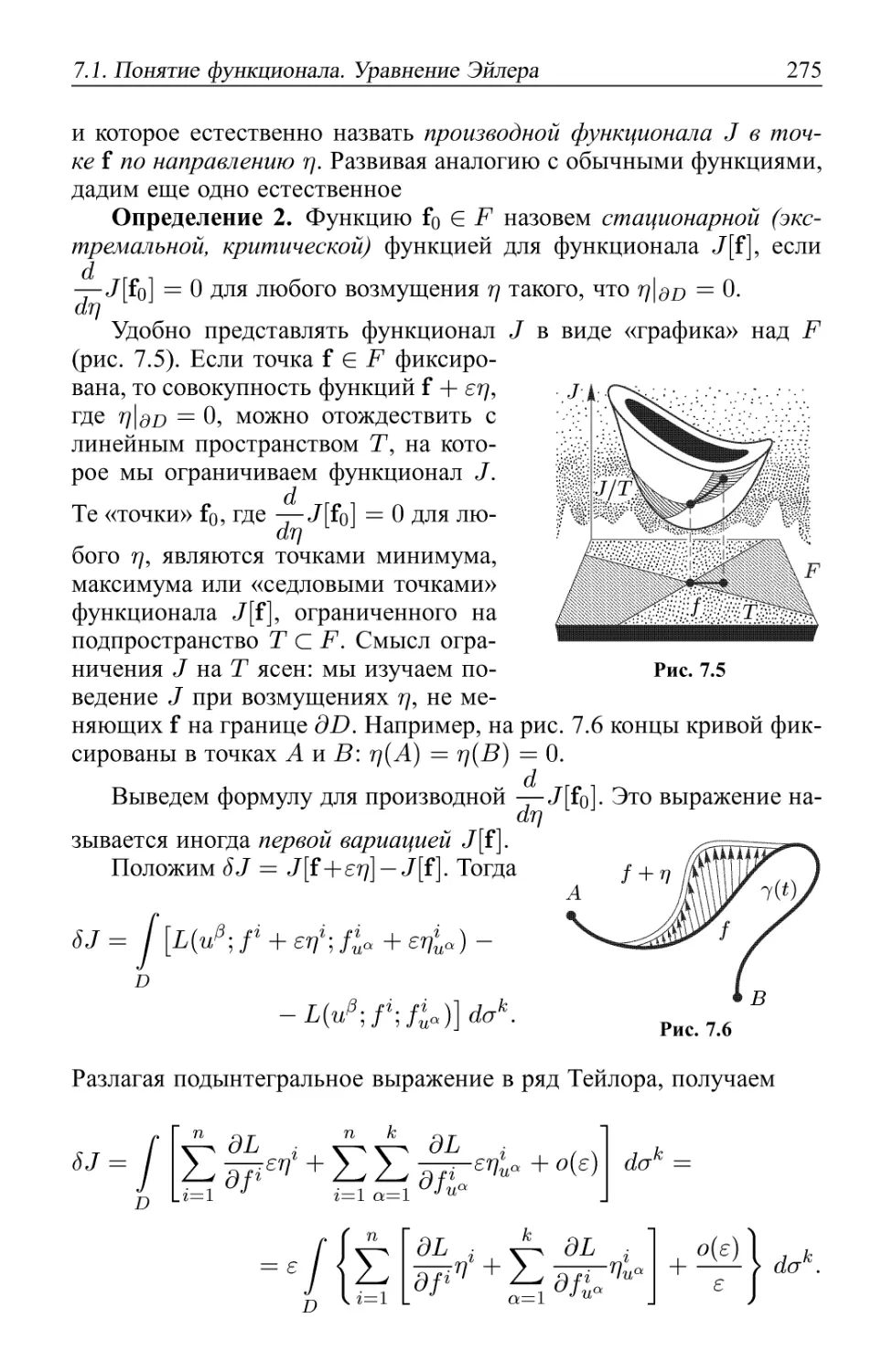
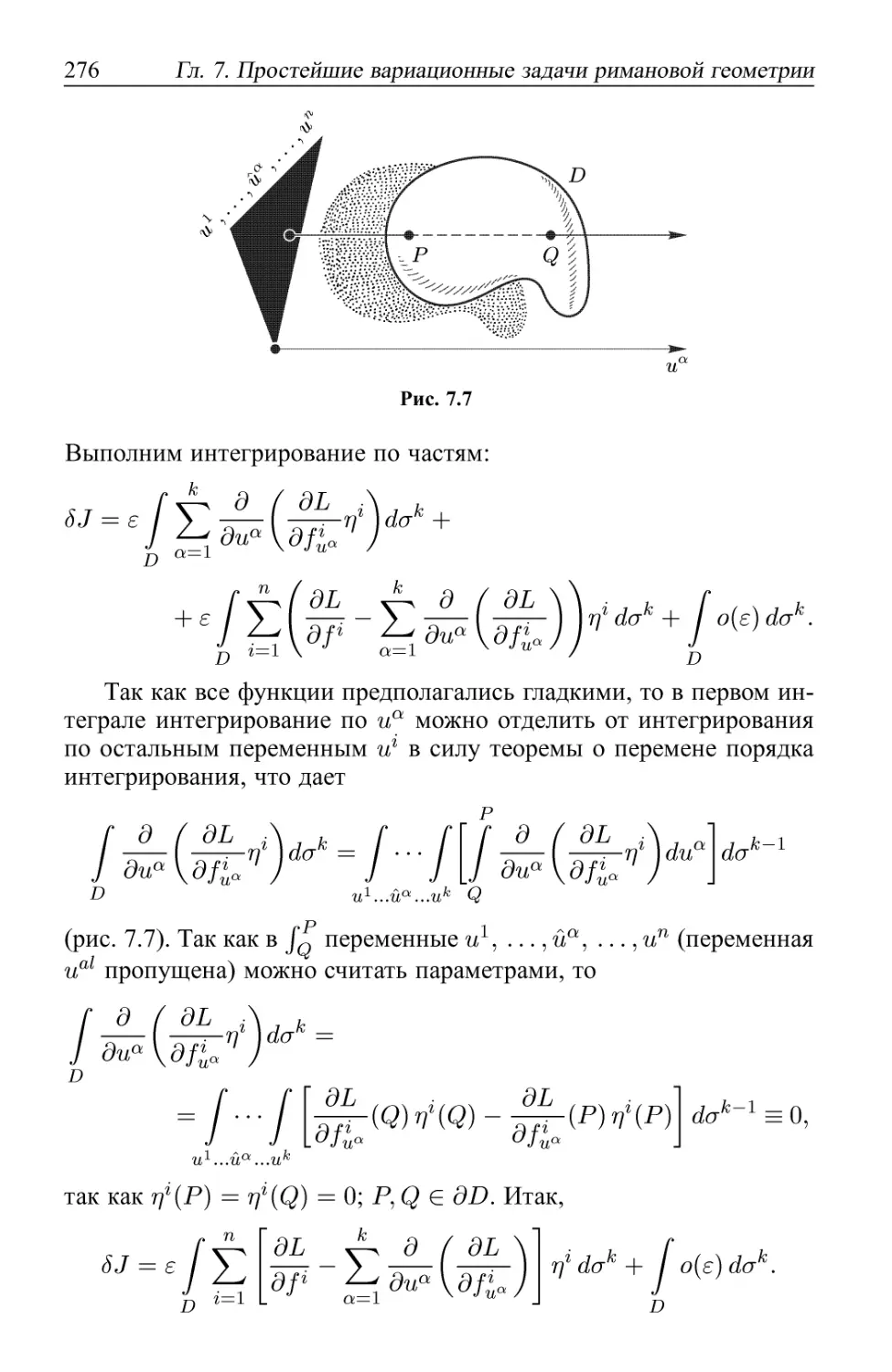
Текст
УДК 513.73
ББК 22.151
М71
Мищенко А. С, Фоменко А. Т. Краткий курс дифференци-
дифференциальной геометрии и топологии. — М.: ФИЗМАТЛИТ, 2004. — 304 с. —
ISBN 5-9221-0442-Х.
Книга представляет собой краткую версию курса дифференциальной
геометрии, читаемого в течение двух семестров на математических факуль-
факультетах университетов. Она содержит основной программный материал по
общей топологии, нелинейным системам координат, теории гладких многооб-
многообразий, теории кривых и поверхностей, группам преобразований, тензорному
анализу и римановой геометрии, теории интегрирования и гомологиям, фун-
фундаментальным группам поверхностей, вариационным принципам в римано-
римановой геометрии. Изложение иллюстрируется большим количеством примеров
и сопровождается задачами, часто содержащими дополнительный материал.
Для математиков и физиков, студентов, аспирантов, преподавателей
и научных работников.
© ФИЗМАТЛИТ, 2004
ISBN 5-9221-0442-Х © А. С. Мищенко, А. Т. Фоменко, 2004
ОГЛАВЛЕНИЕ
Глава 1. Введение в дифференциальную геометрию 7
1.1. Криволинейные системы координат. Простейшие приме-
примеры 7
1.1.1. Мотивировка 7
1.1.2. Декартовы и криволинейные координаты 9
1.1.3. Простейшие примеры криволинейных систем коорди-
координат 14
1.2. Длина кривой в криволинейных координатах 17
1.2.1. Длина кривой в евклидовых координатах 17
1.2.2. Длина кривой в криволинейных координатах 19
1.2.3. Понятие римановой метрики в области евклидова про-
пространства 23
1.2.4. Индефинитные метрики 25
1.3. Геометрия на сфере, плоскости 28
1.4. Псевдосфера и геометрия Лобачевского 34
Глава 2. Общая топология 48
2.1. Определения и простейшие свойства метрических и топо-
топологических пространств 48
2.1.1. Метрические пространства 48
2.1.2. Топологические пространства 50
2.1.3. Непрерывные отображения 52
2.1.4. Фактортопология 54
2.2. Связность. Аксиомы отделимости 56
2.2.1. Связность 56
2.2.2. Аксиомы отделимости 58
2.3. Компактные пространства 60
2.3.1. Компактные пространства 60
2.3.2. Свойства компактных пространств 61
2.3.3. Метрические компактные пространства 62
2.3.4. Операции над компактными пространствами 62
2.4. Функциональная отделимость. Разбиение единицы 63
2.4.1. Функциональная отделимость 64
2.4.2. Разбиение единицы 66
Оглавление
Глава 3. Гладкие многообразия (общая теория) 68
3.1. Понятие многообразия 70
3.1.1. Основные определения 70
3.1.2. Функции замены координат. Определение гладкого
многообразия 73
3.1.3. Гладкие отображения. Диффеоморфизм 77
3.2. Задание многообразий уравнениями 80
3.3. Касательные векторы. Касательное пространство 85
3.3.1. Простейшие примеры 85
3.3.2. Общее определение касательного вектора 88
3.3.3. Касательное пространство Тро(М) 89
3.3.4. Производная функции по направлению 90
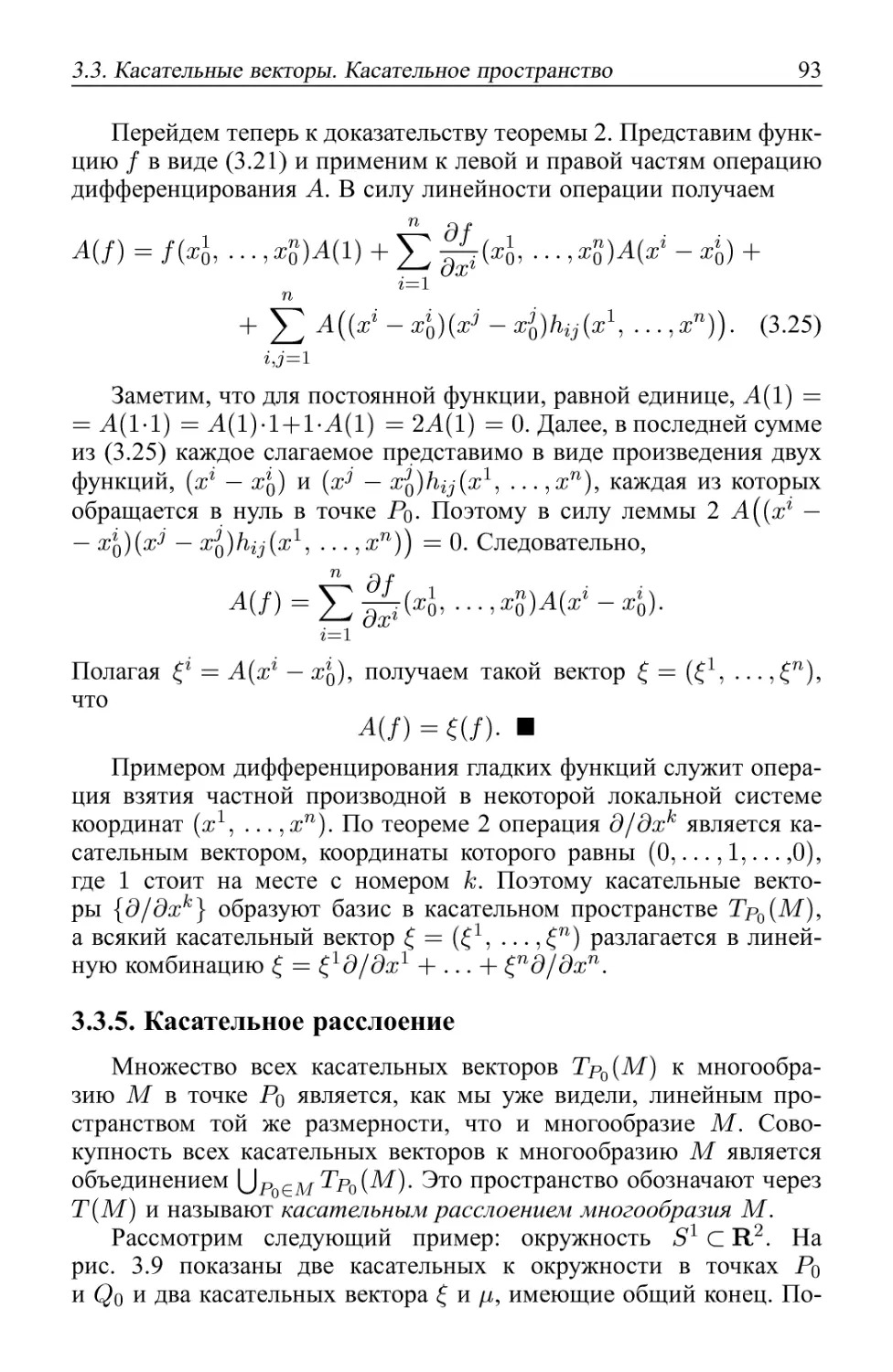
3.3.5. Касательное расслоение 93
3.4. Подмногообразия 95
3.4.1. Дифференциал гладкого отображения 95
3.4.2. Локальные свойства отображений и дифференциал ... 98
3.4.3. Вложение многообразий в евклидово пространство. . . 100
3.4.4. Риманова метрика на многообразии 102
3.4.5. Теорема Сарда 104
Глава 4. Гладкие многообразия (примеры) 109
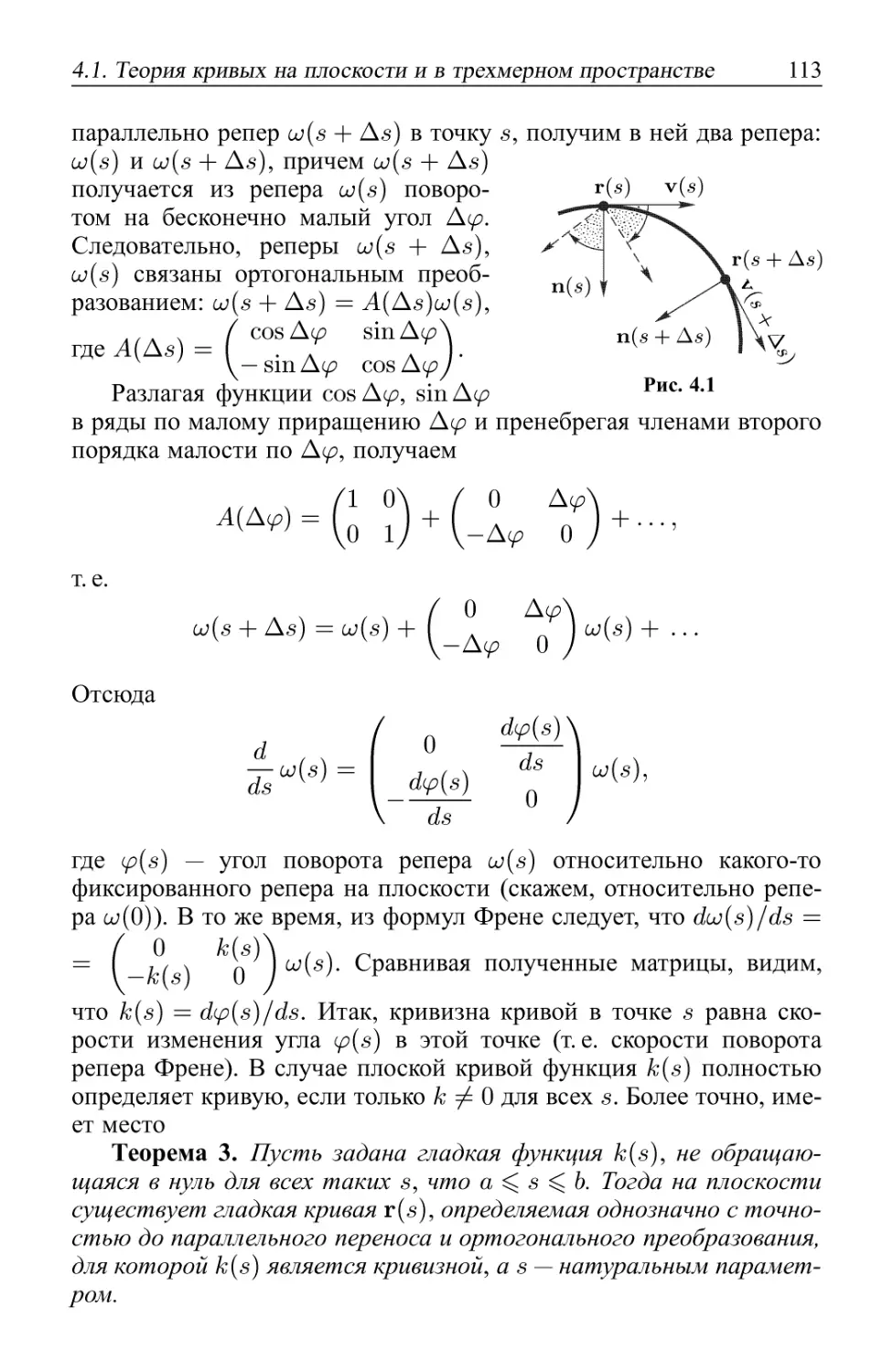
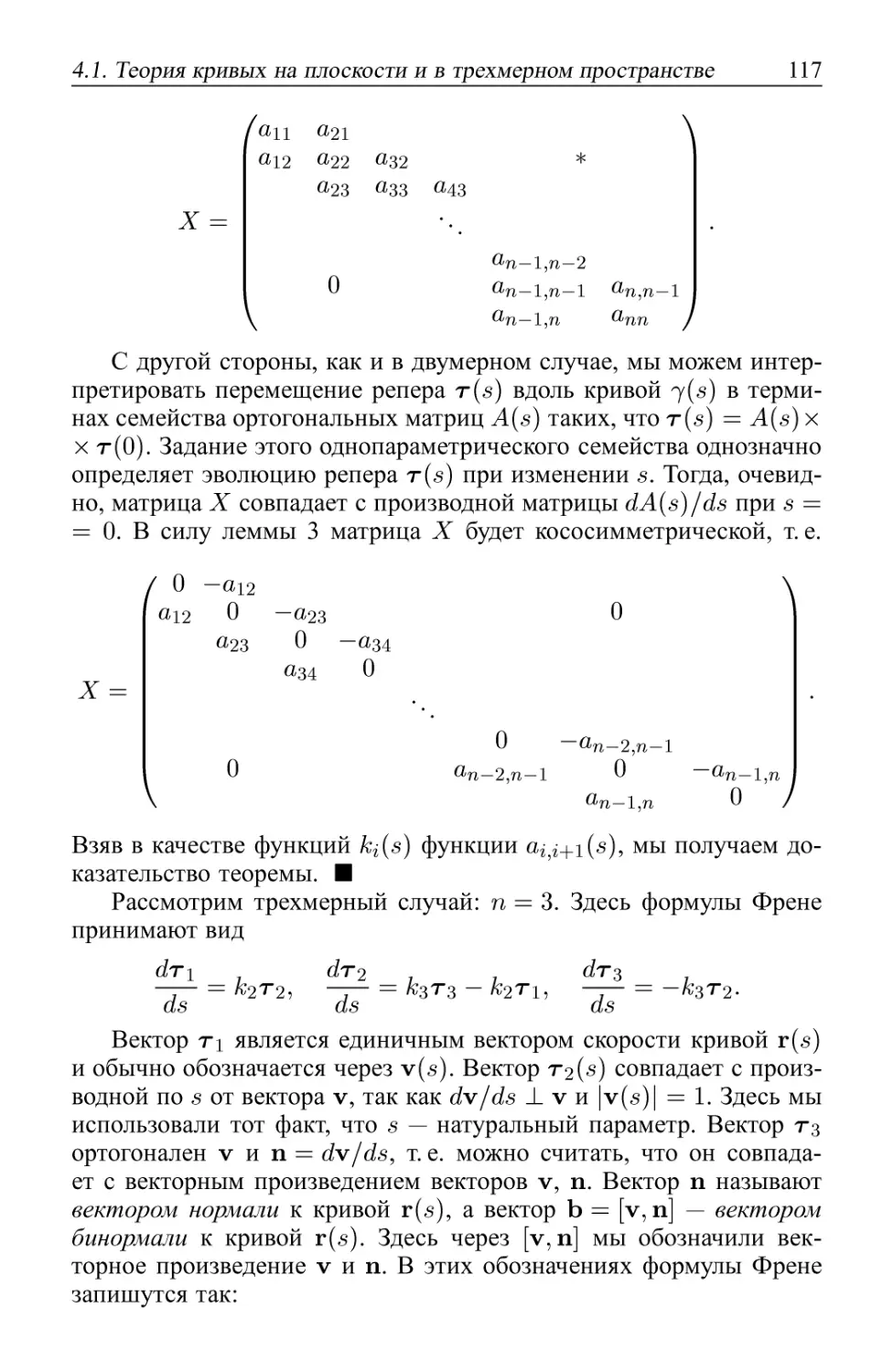
4.1. Теория кривых на плоскости и в трехмерном простран-
пространстве 109
4.1.1. Теория кривых на плоскости. Формулы Френе 109
4.1.2. Теория пространственных кривых. Формулы Френе . . 114
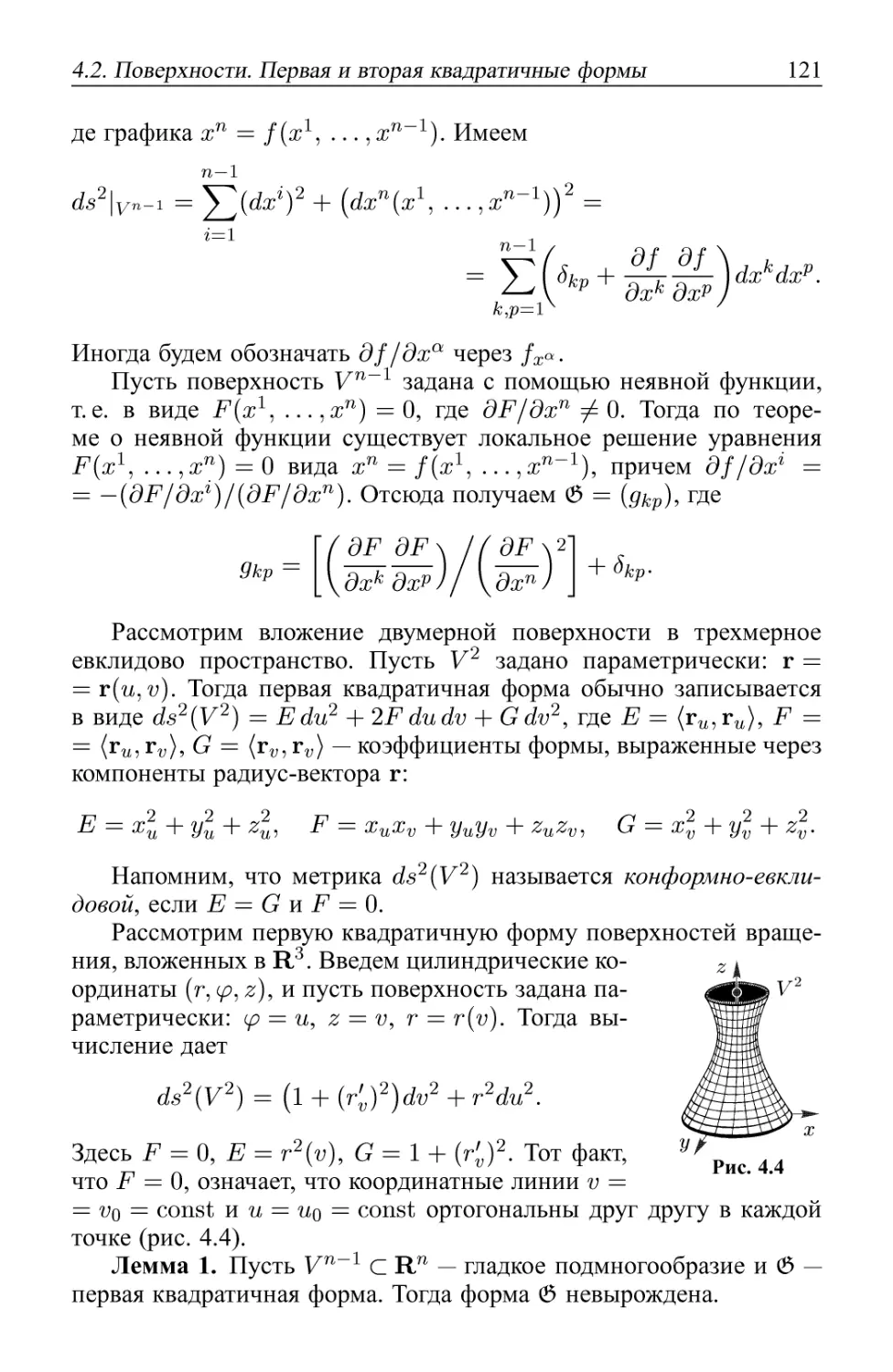
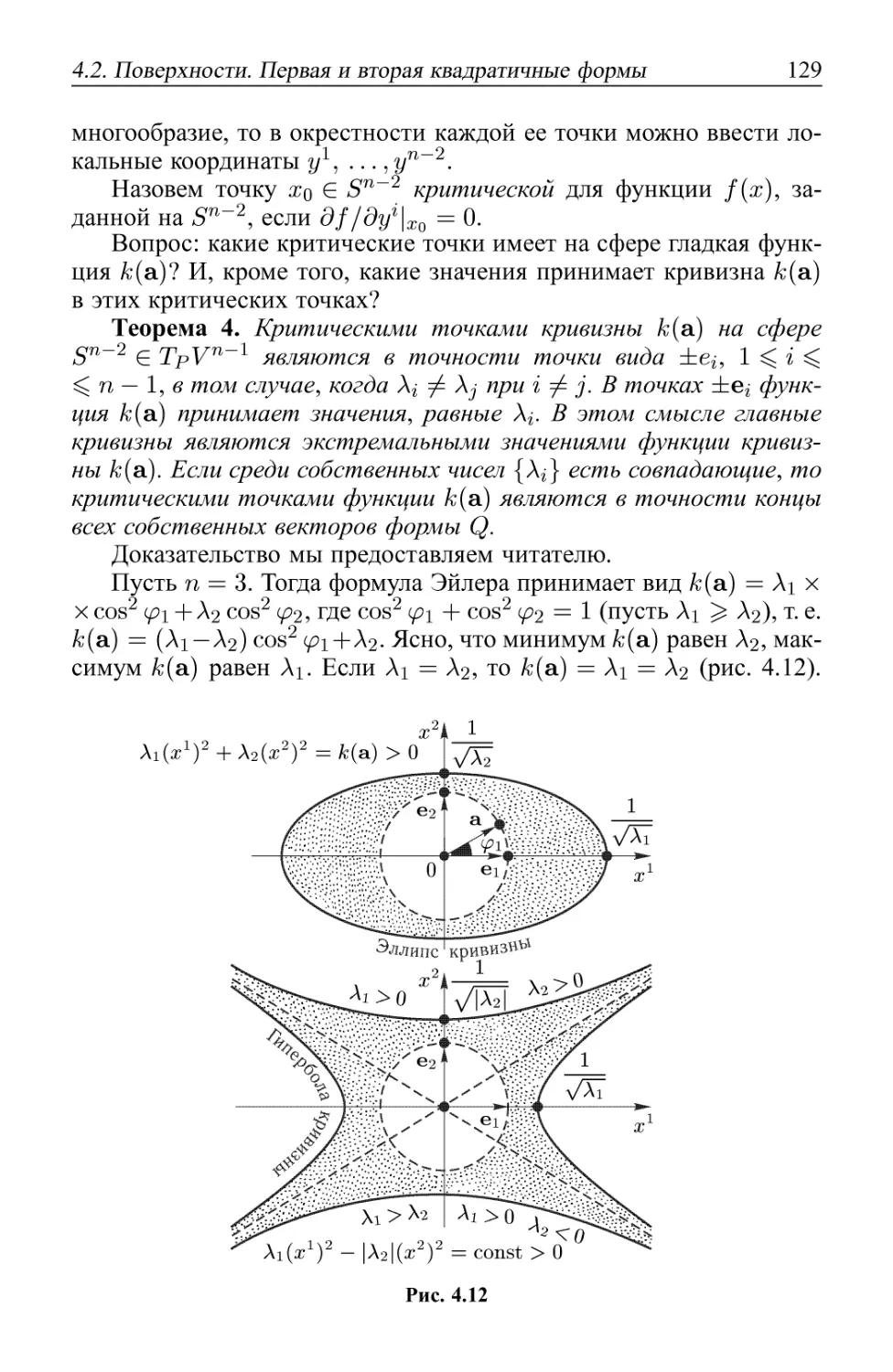
4.2. Поверхности. Первая и вторая квадратичные формы 119
4.2.1. Первая квадратичная форма 119
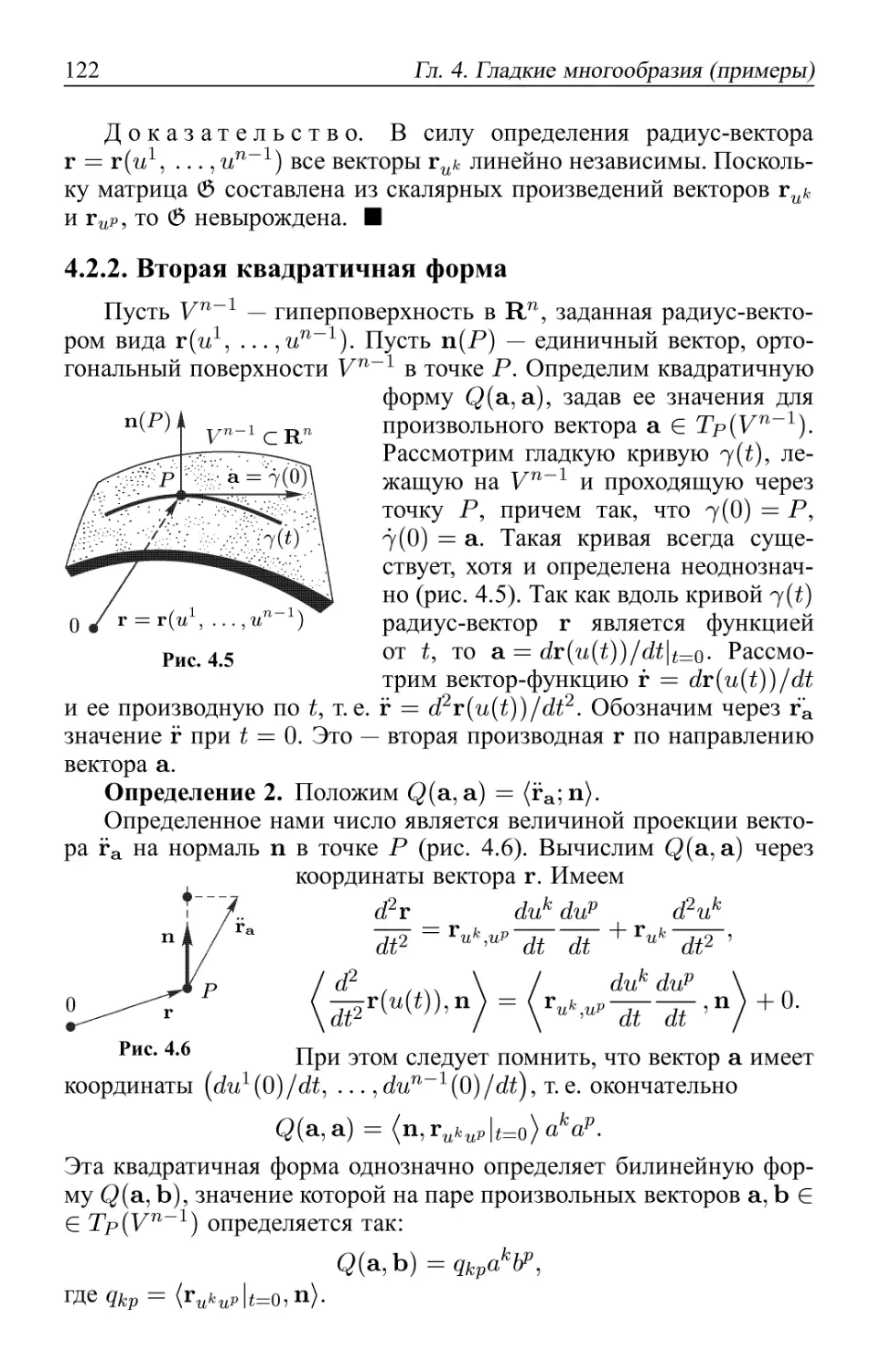
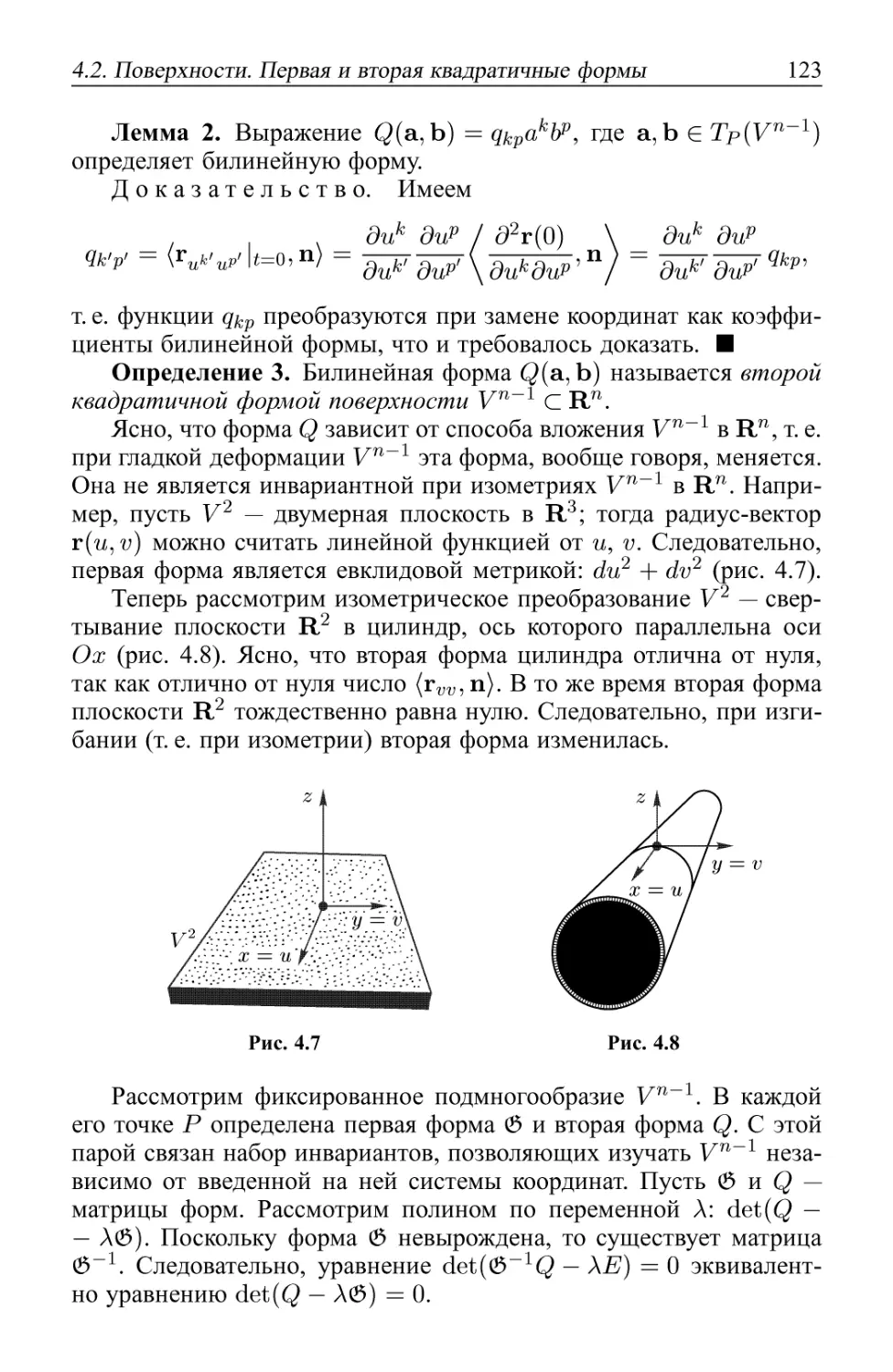
4.2.2. Вторая квадратичная форма 122
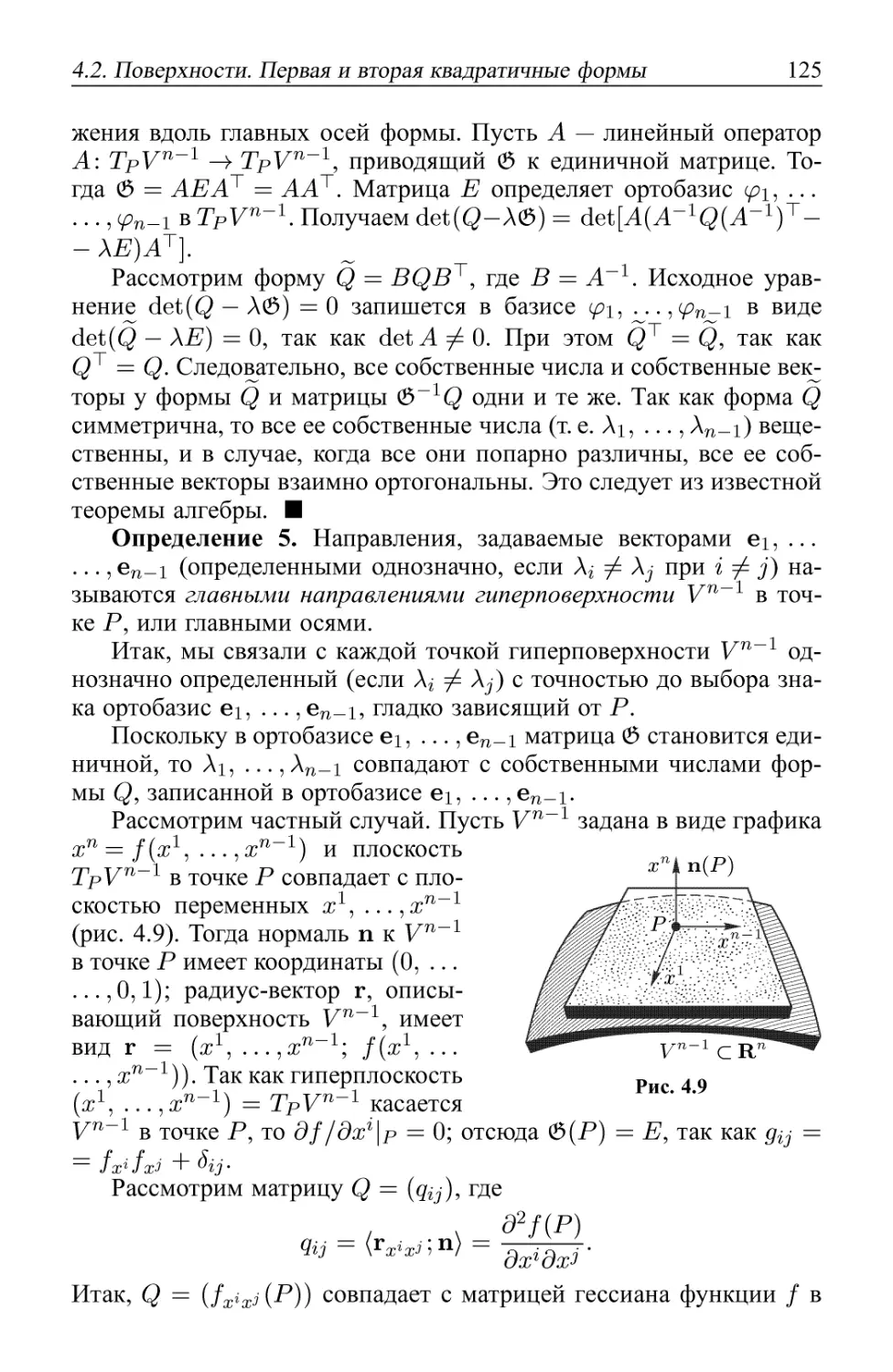
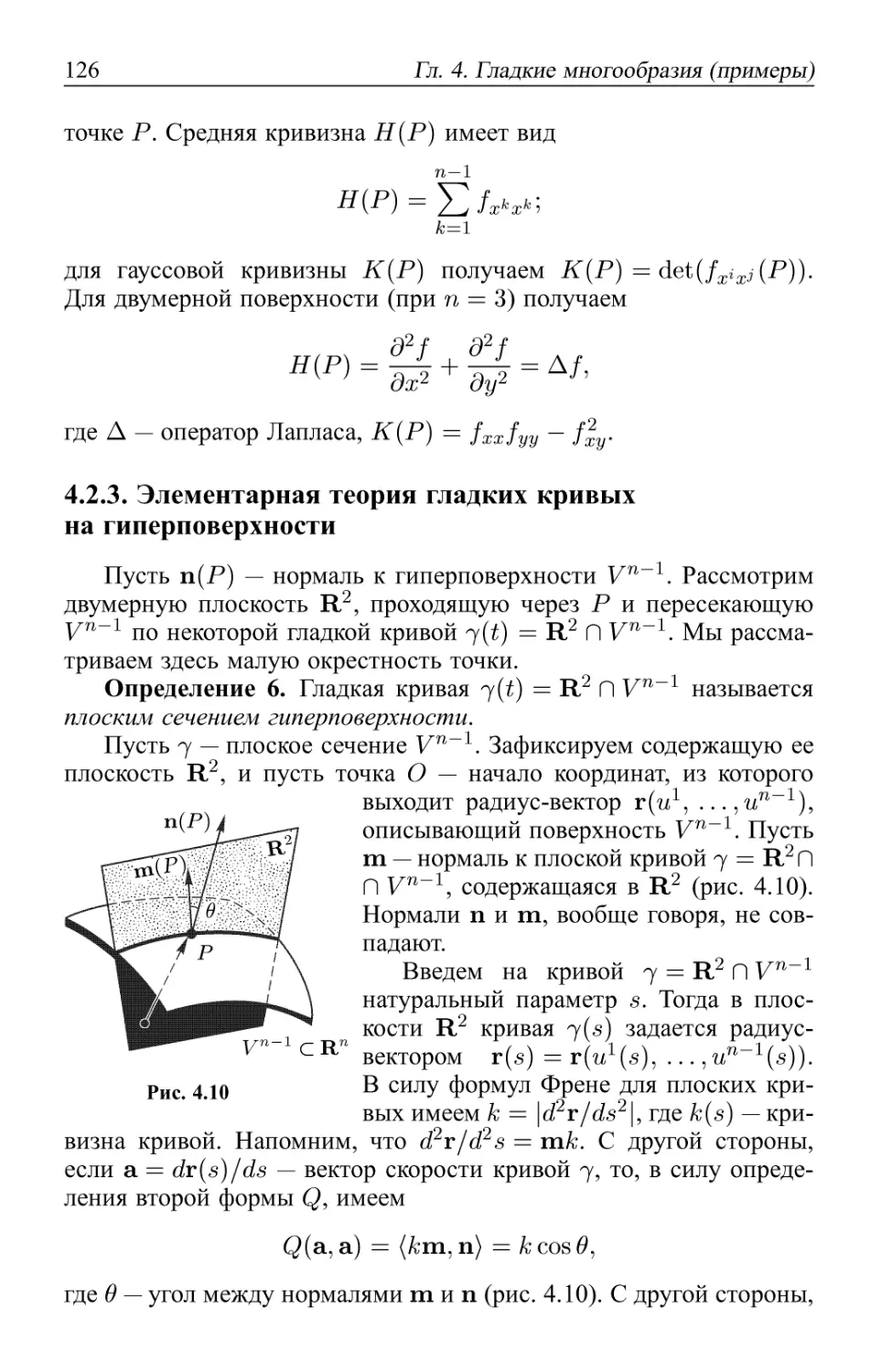
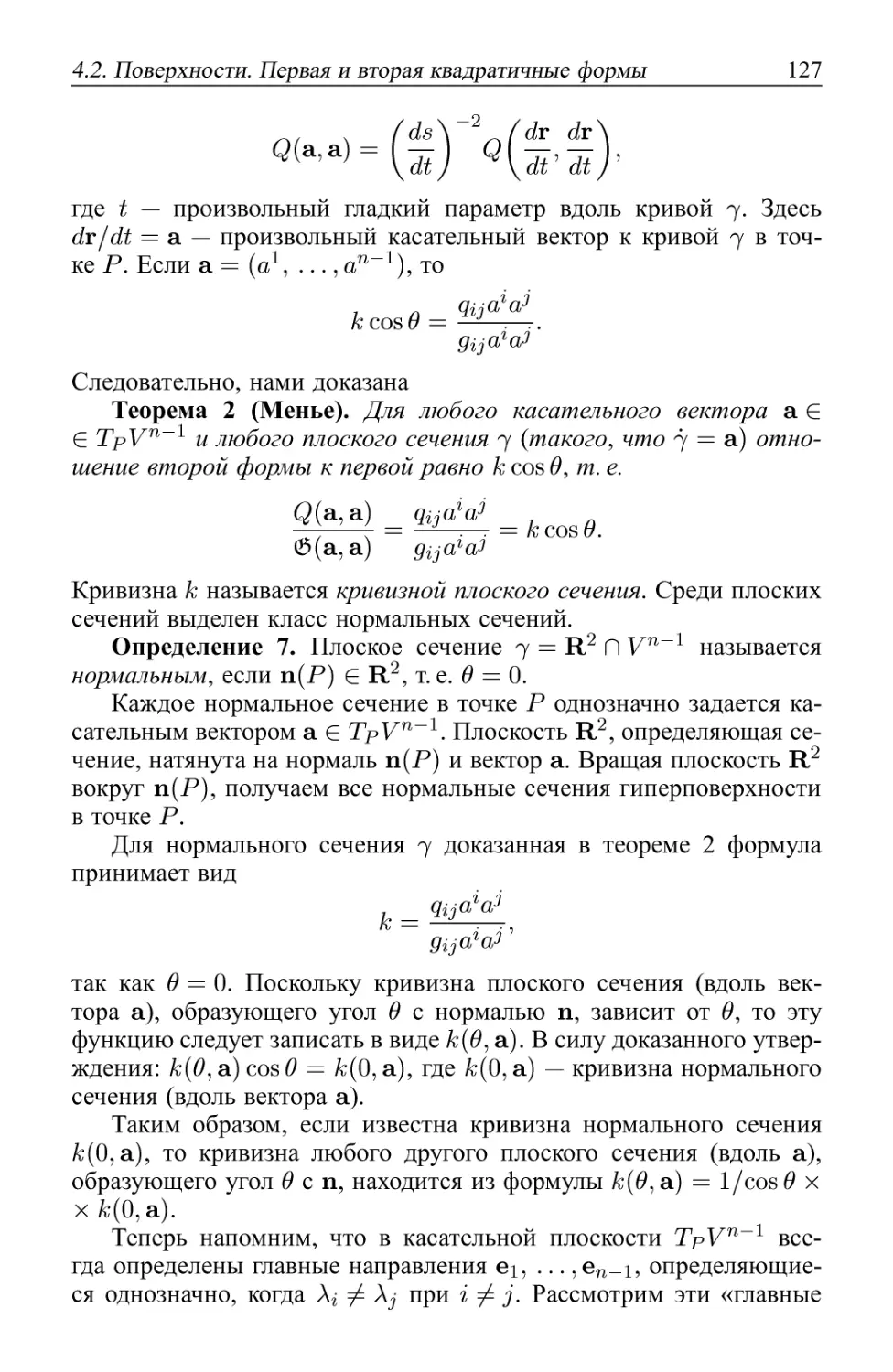
4.2.3. Элементарная теория гладких кривых на гиперповерх-
гиперповерхности 126
4.2.4. Гауссова и средняя кривизны двумерных поверхнос-
поверхностей 131
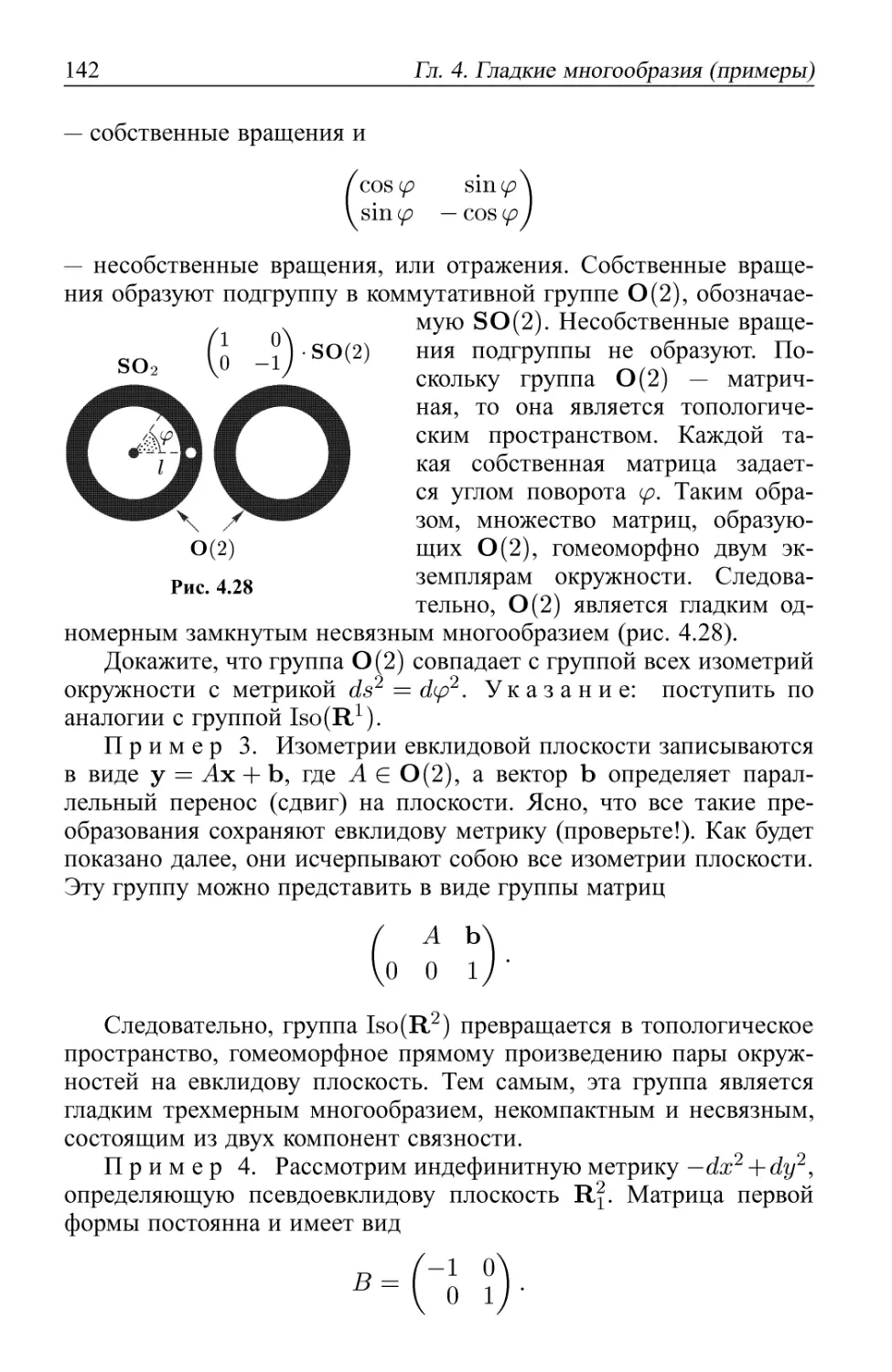
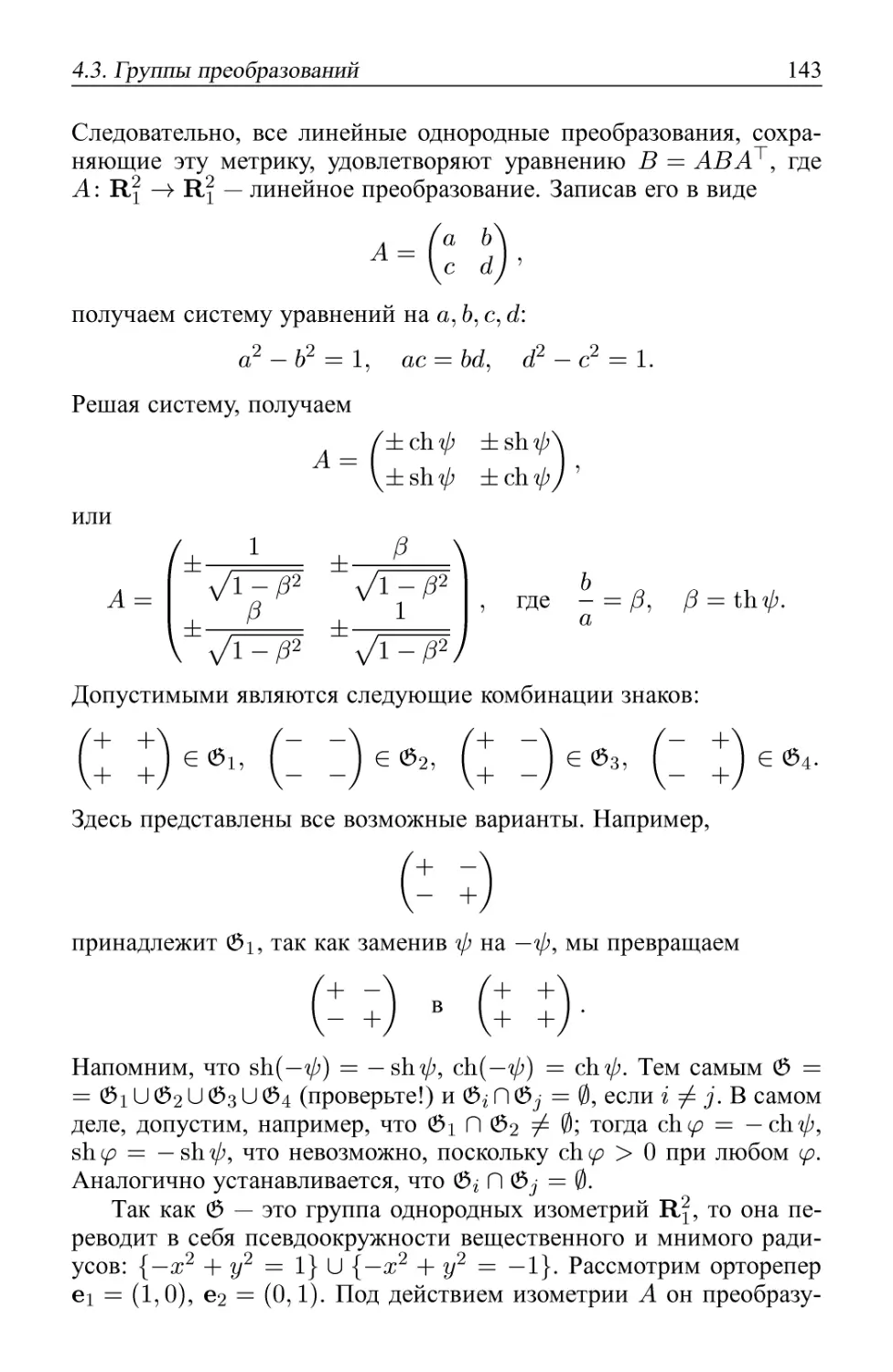
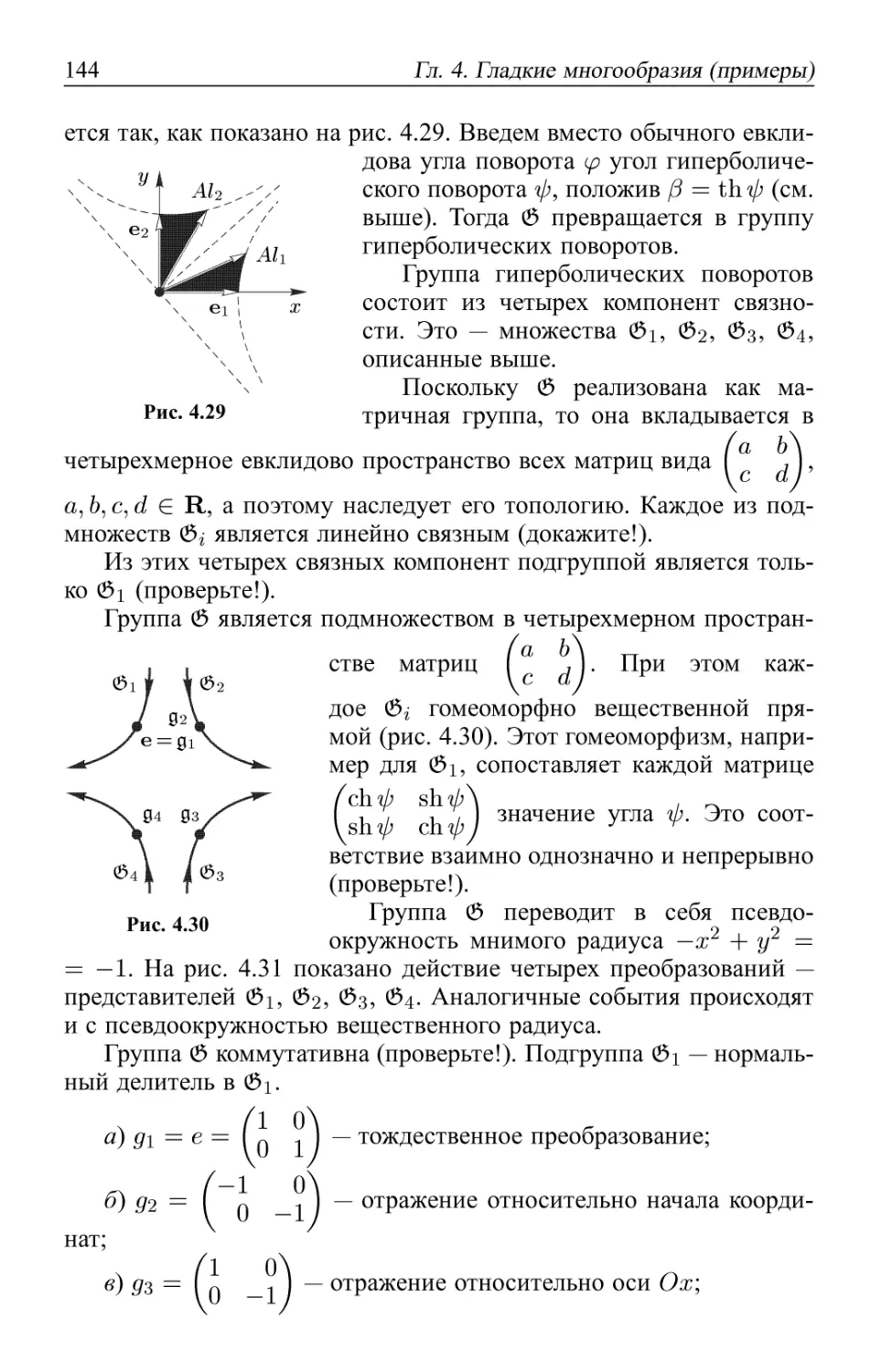
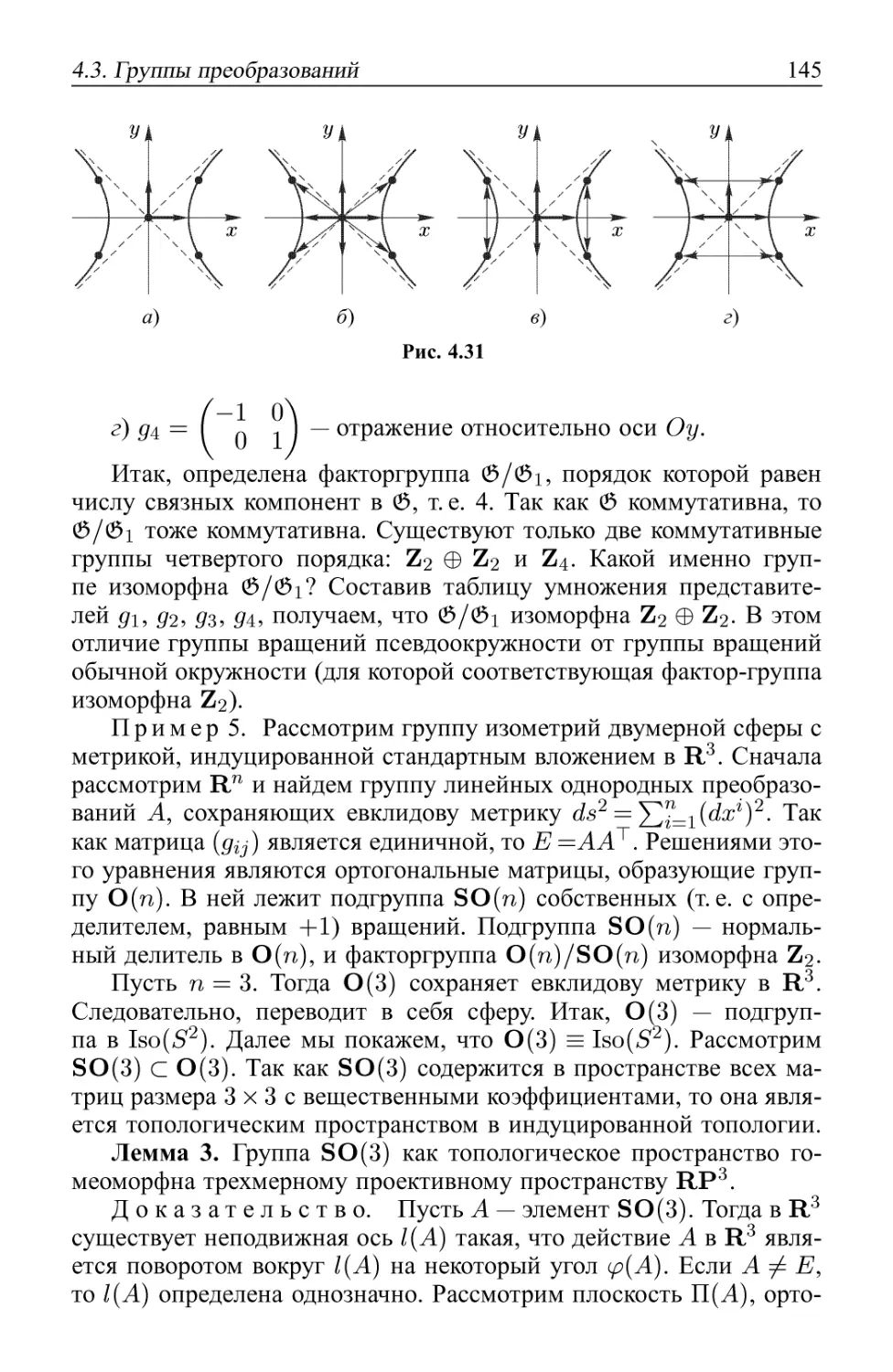
4.3. Группы преобразований 140
4.3.1. Простейшие примеры групп преобразований 140
4.3.2. Матричные группы преобразований 151
4.3.3. Полная линейная группа 152
4.3.4. Специальная линейная группа 152
Оглавление
4.3.5. Ортогональная группа 153
4.3.6. Унитарная группа и специальная унитарная группа. . . 154
4.3.7. Симплектическая некомпактная и симплектическая
компактная группы 157
4.4. Динамические системы 161
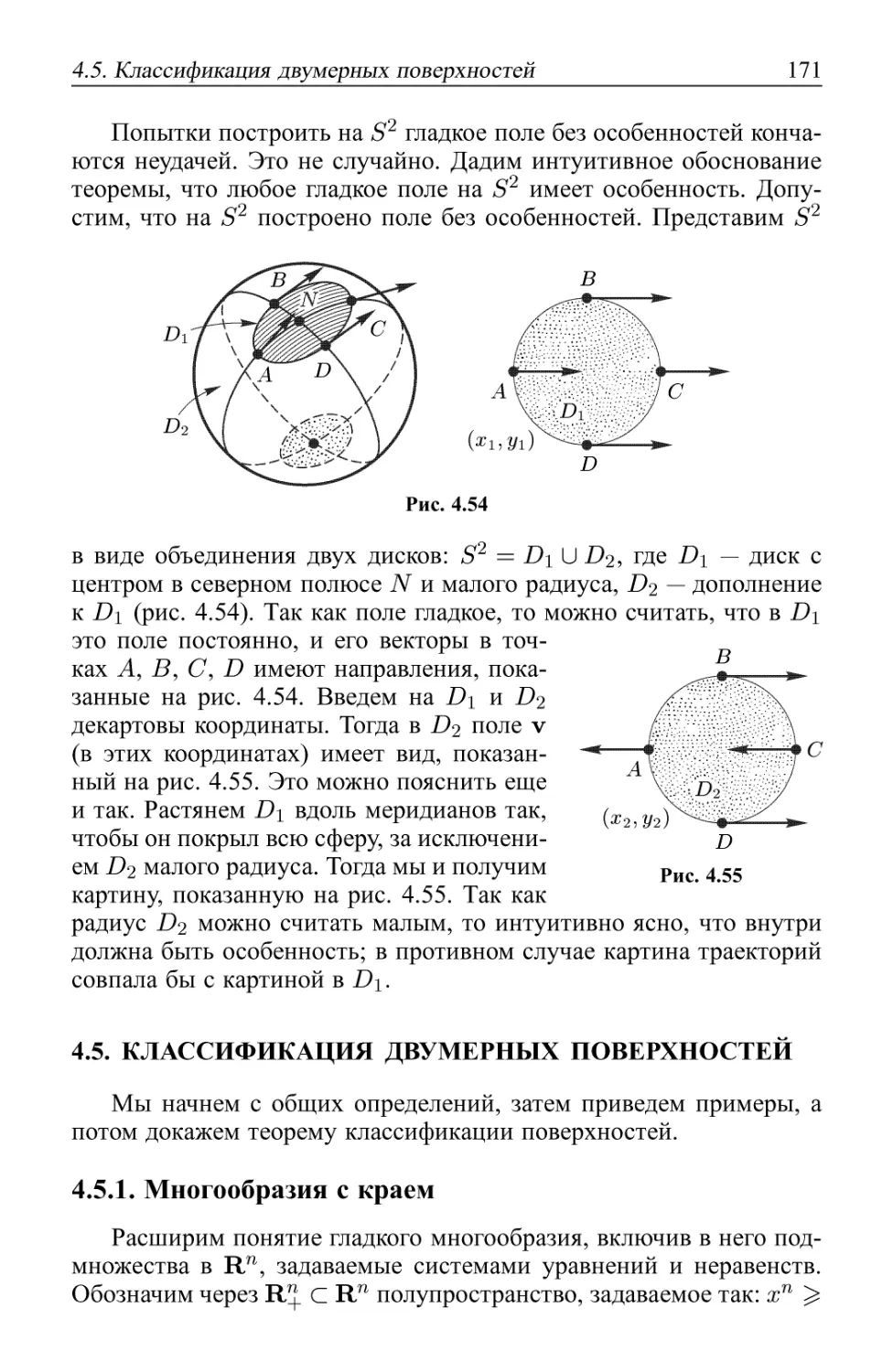
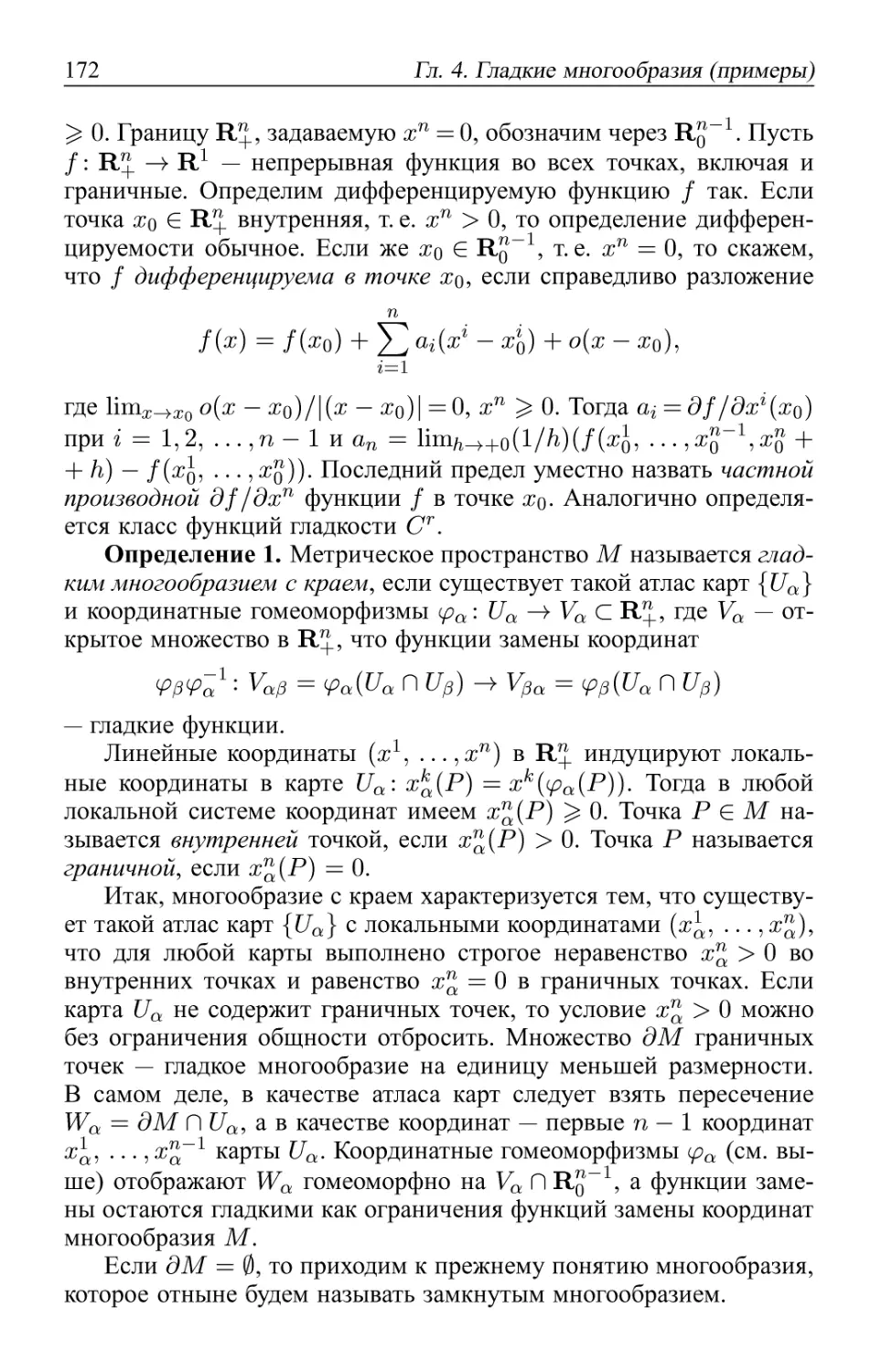
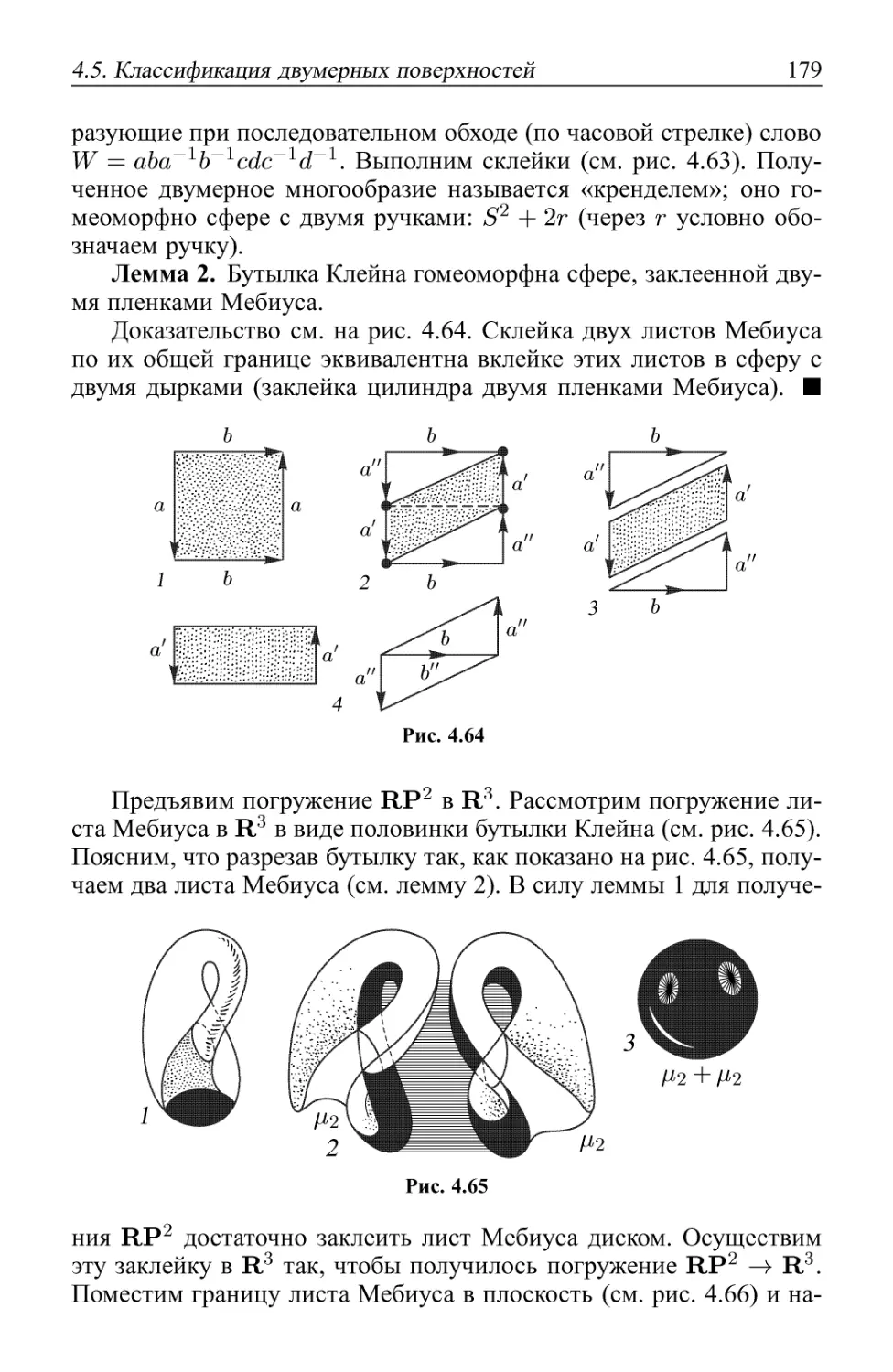
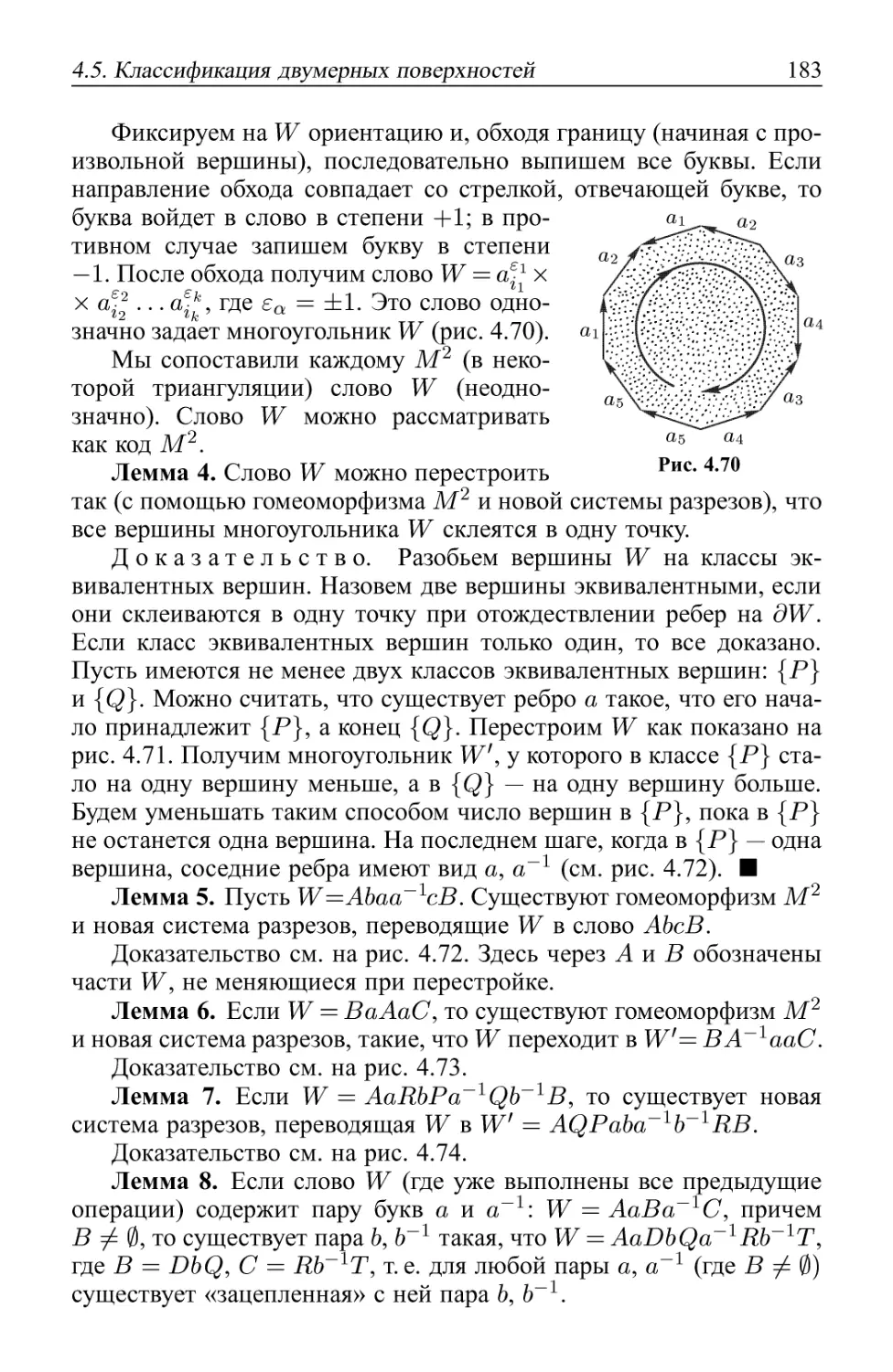
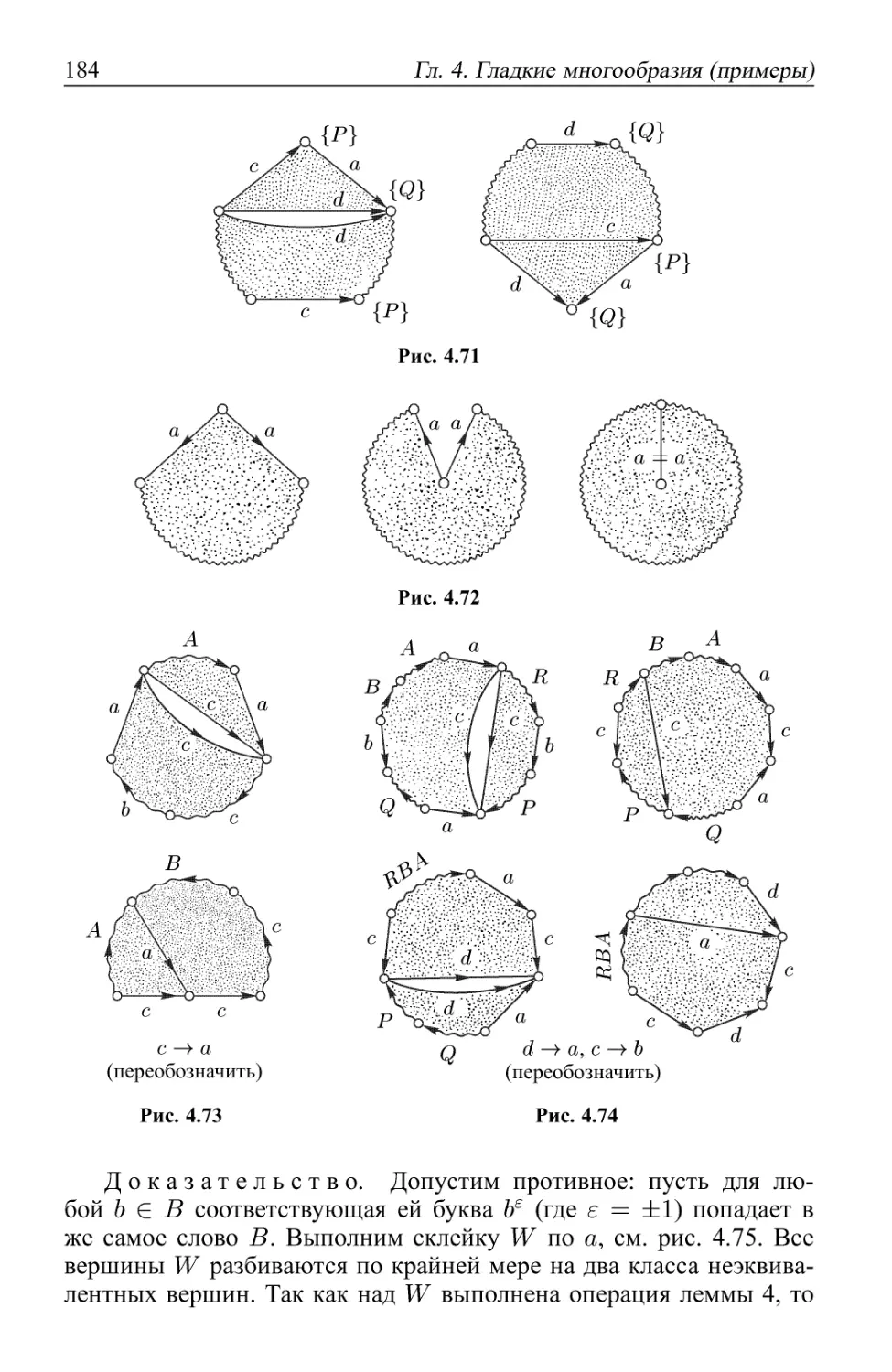
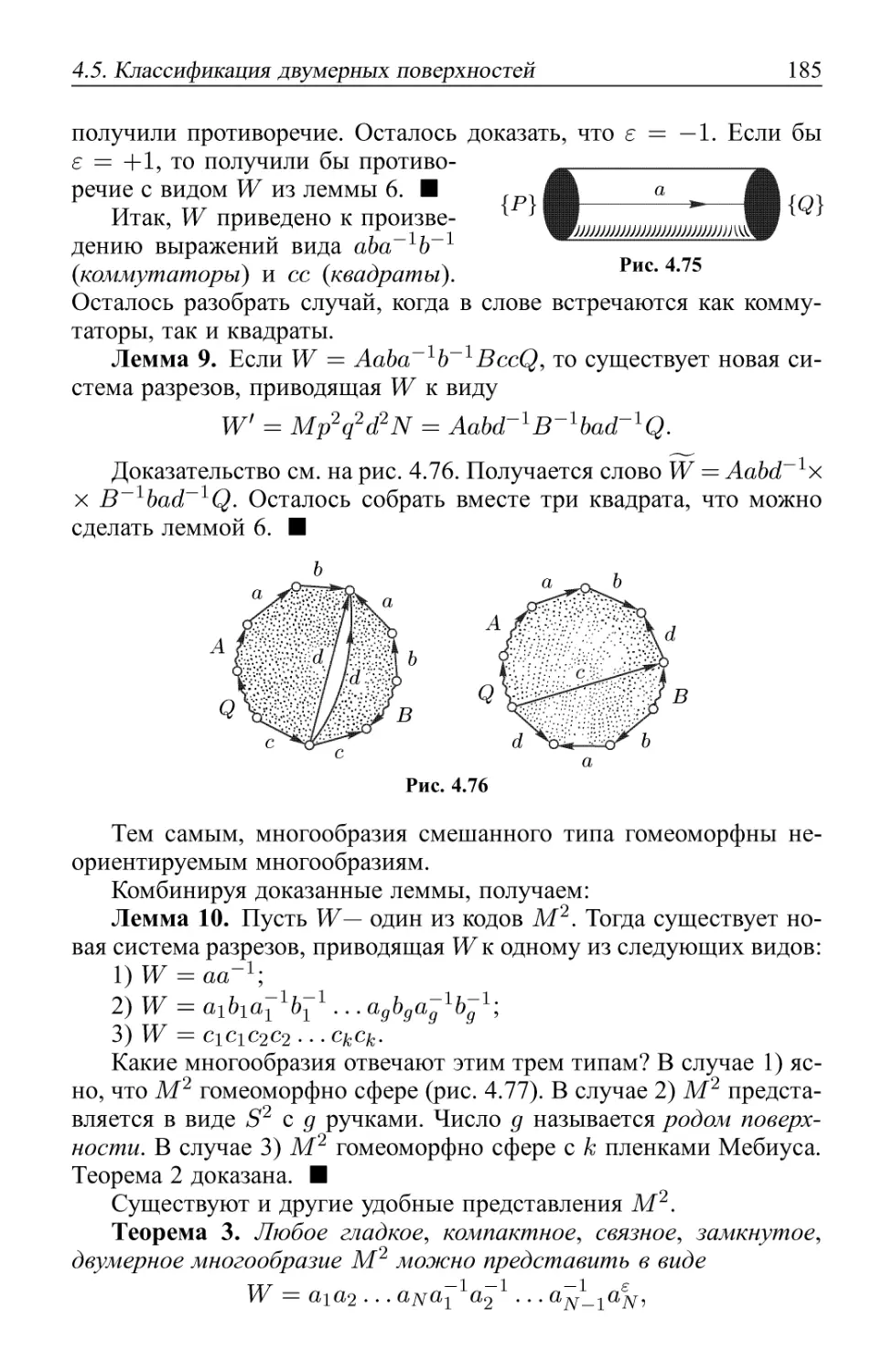
4.5. Классификация двумерных поверхностей 171
4.5.1. Многообразия с краем 171
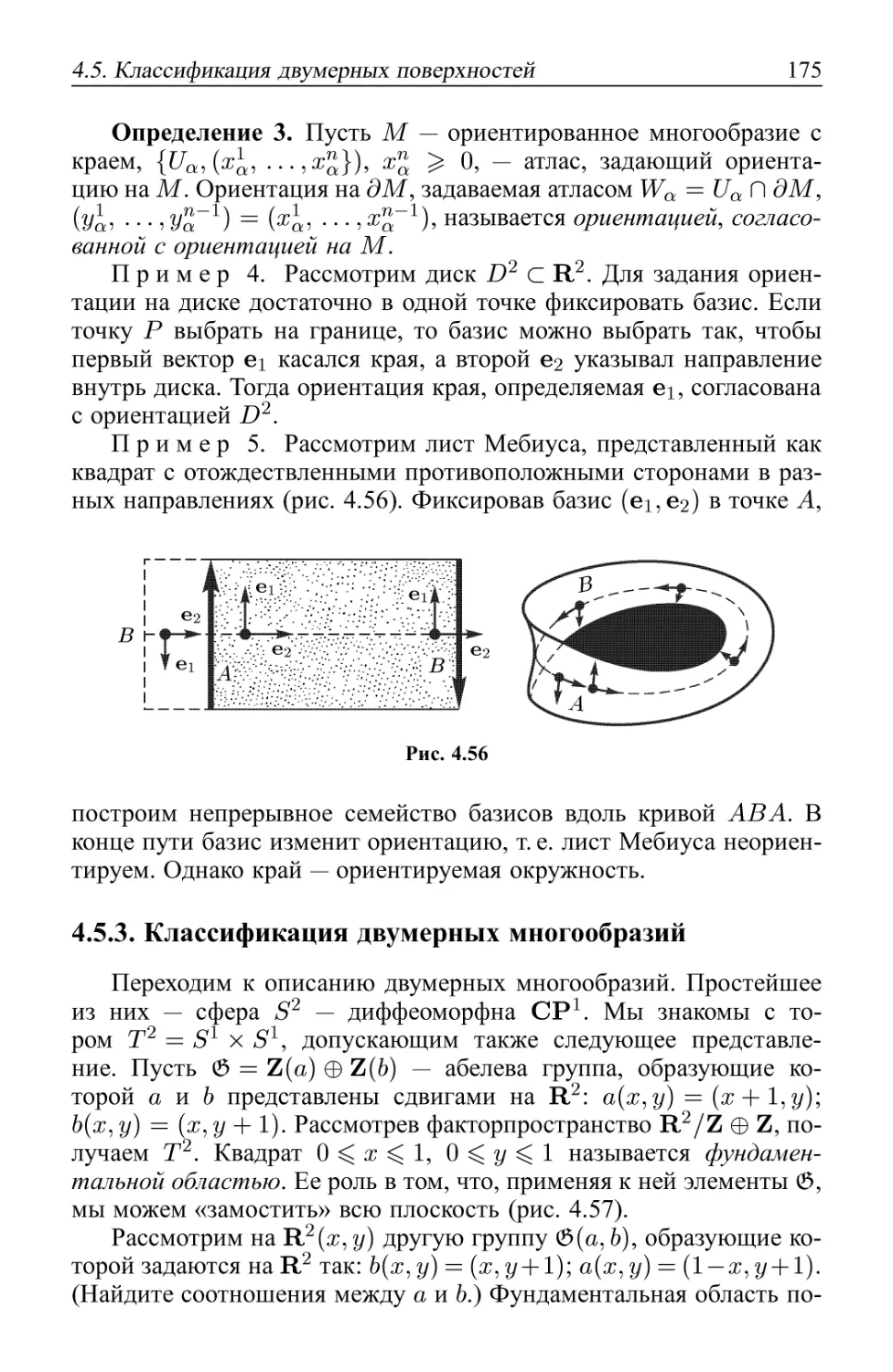
4.5.2. Ориентируемые многообразия 173
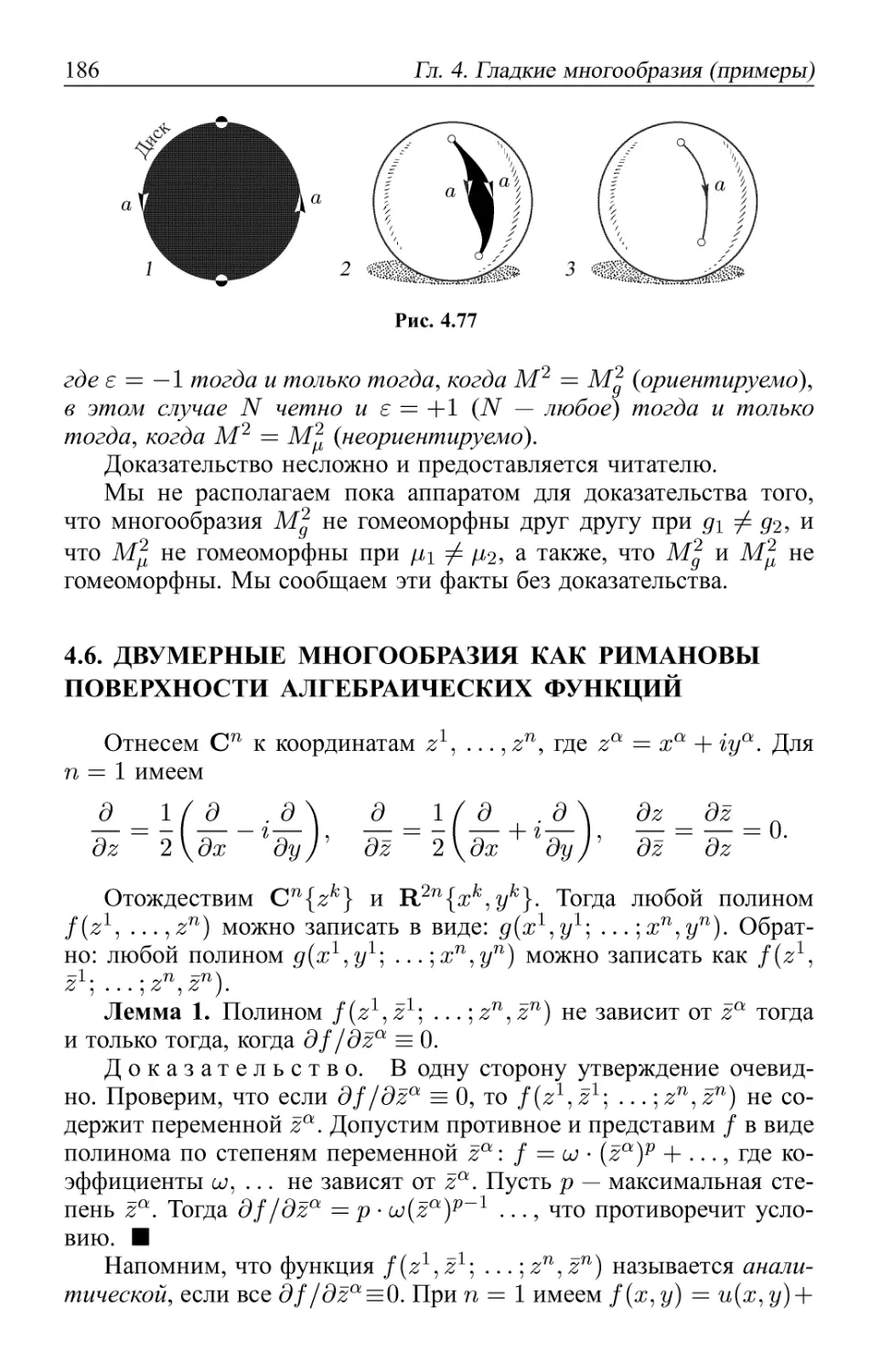
4.5.3. Классификация двумерных многообразий 175
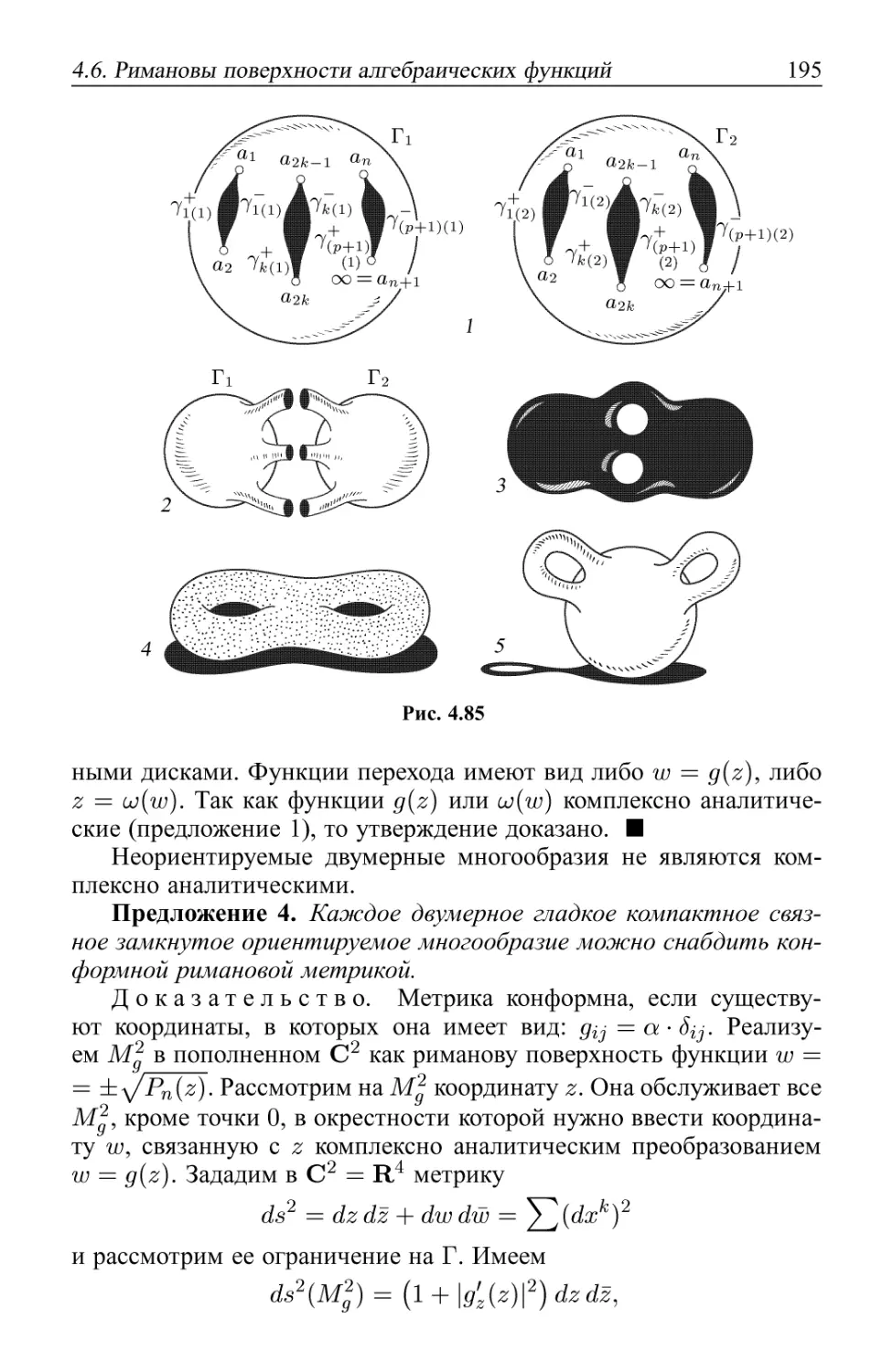
4.6. Двумерные многообразия как римановы поверхности ал-
алгебраических функций 186
Глава 5. Тензорный анализ и риманова геометрия 197
5.1. Общее понятие тензорного поля на многообразии 197
5.2. Простейшие примеры тензорных полей 202
5.2.1. Примеры 202
5.2.2. Алгебраические операции над тензорами 205
5.2.3. Кососимметричные тензоры 208
5.3. Связность и ковариантное дифференцирование 215
5.3.1. Определение и свойства аффинной связности 215
5.3.2. Римановы связности 222
5.4. Параллельный перенос. Геодезические 224
5.4.1. Предварительные замечания 224
5.4.2. Уравнение параллельного переноса 226
5.4.3. Геодезические 228
5.5. Тензор кривизны 237
5.5.1. Предварительные замечания 237
5.5.2. Координатное определение тензора кривизны 238
5.5.3. Инвариантное определение тензора кривизны 239
5.5.4. Алгебраические свойства тензора кривизны Римана . . 240
5.5.5. Некоторые приложения тензора кривизны Римана .... 243
Глава 6. Теория гомологии 246
6.1. Исчисление внешних дифференциальных форм. Когомо-
логии 247
6.1.1. Дифференцирование внешних дифференциальных
форм 247
Оглавление
6.1.2. Когомологии гладкого многообразия (когомологии де
Рама) 252
6.1.3. Гомотопические свойства групп когомологии 255
6.2. Интегрирование внешних форм 260
6.2.1. Интеграл дифференциальной формы по многообразию 260
6.2.2. Формула Стокса 261
6.3. Степень отображения и ее приложения 266
6.3.1. Степень отображения 266
6.3.2. Основная теорема алгебры 267
6.3.3. Интегрирование форм 268
6.3.4. Гауссово отображение гиперповерхности 269
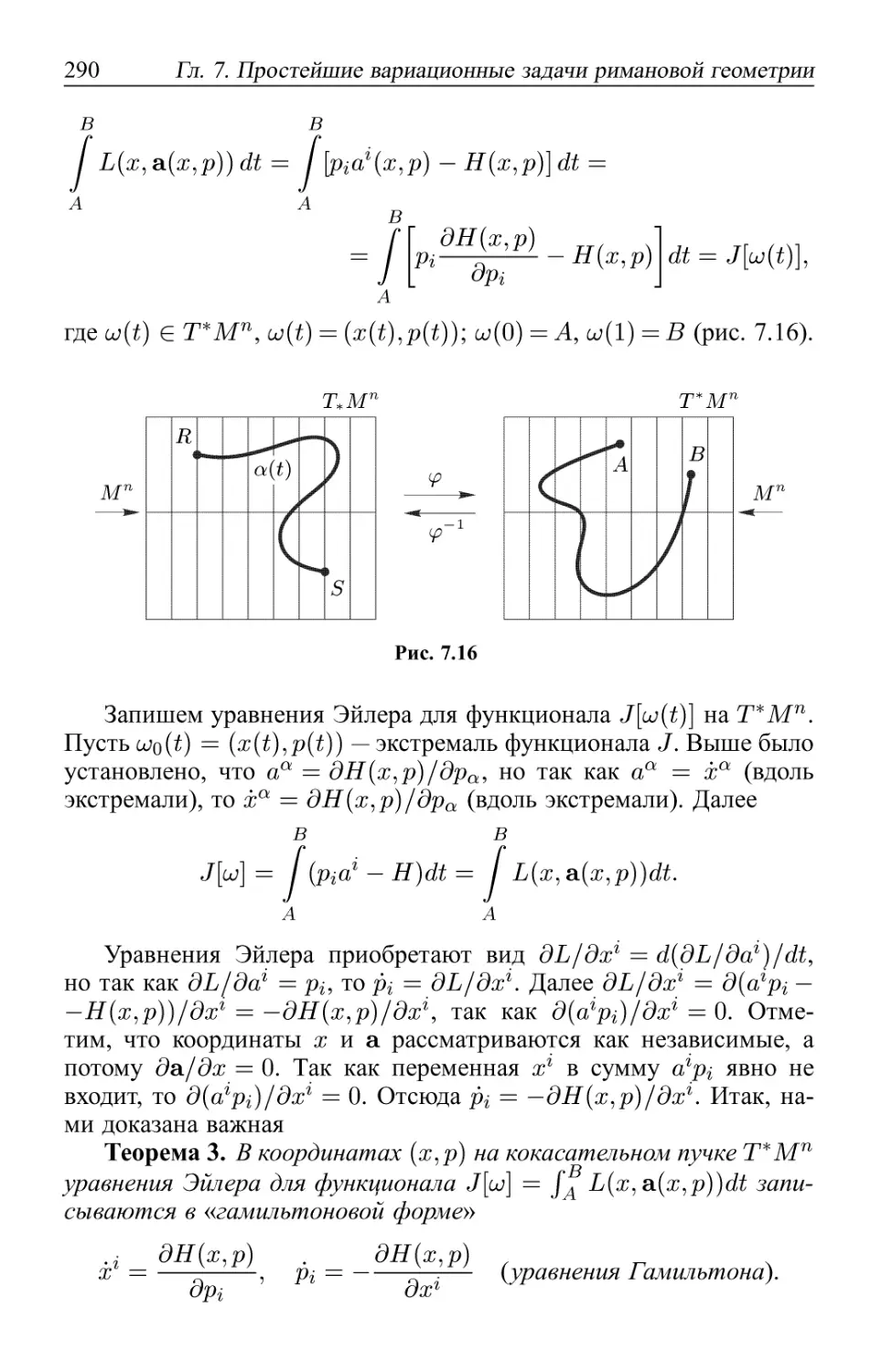
Глава 7. Простейшие вариационные задачи римановой
геометрии 271
7.1. Понятие функционала. Экстремальные функции. Уравне-
Уравнение Эйлера 271
7.2. Экстремальность геодезических 277
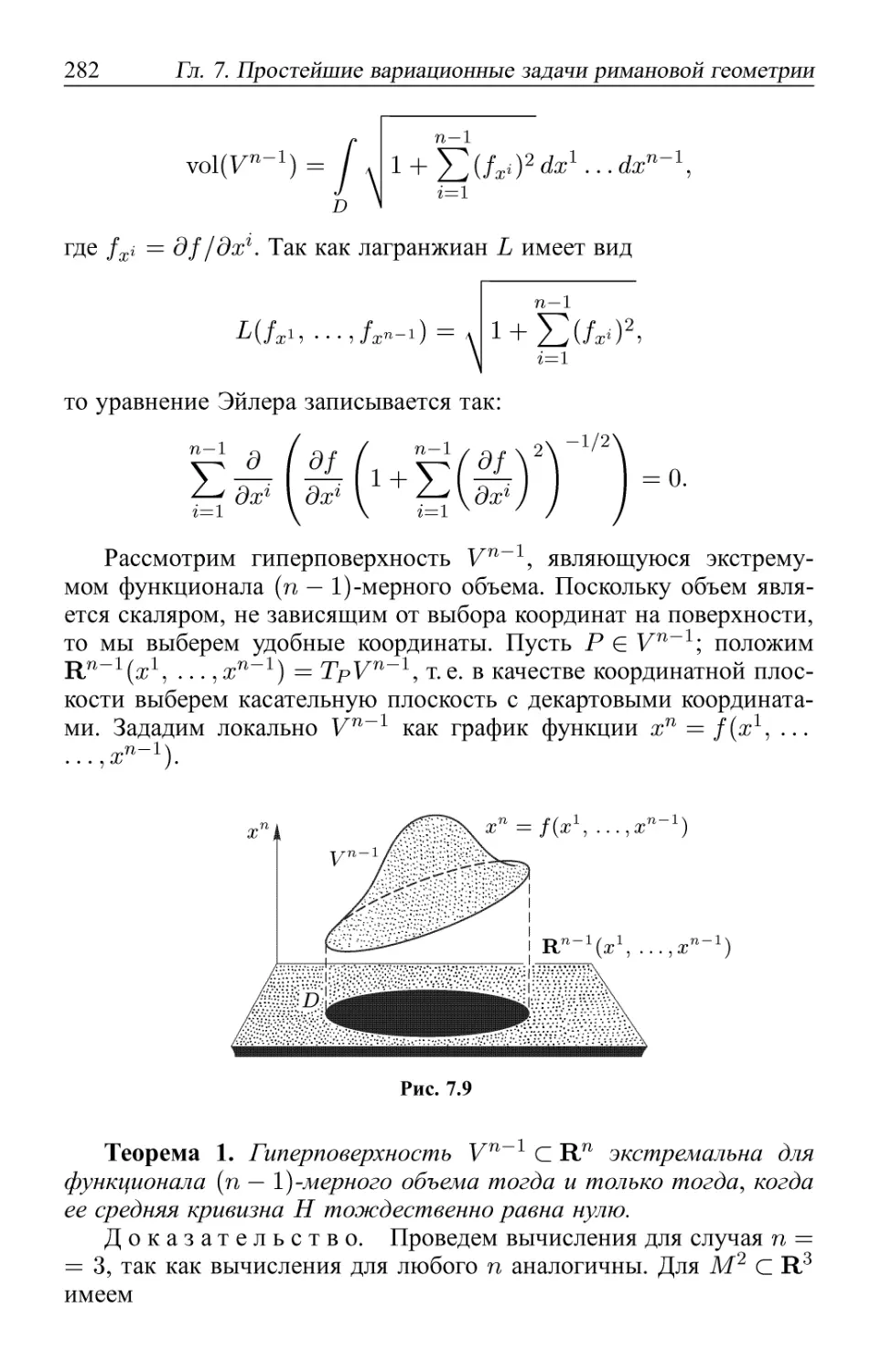
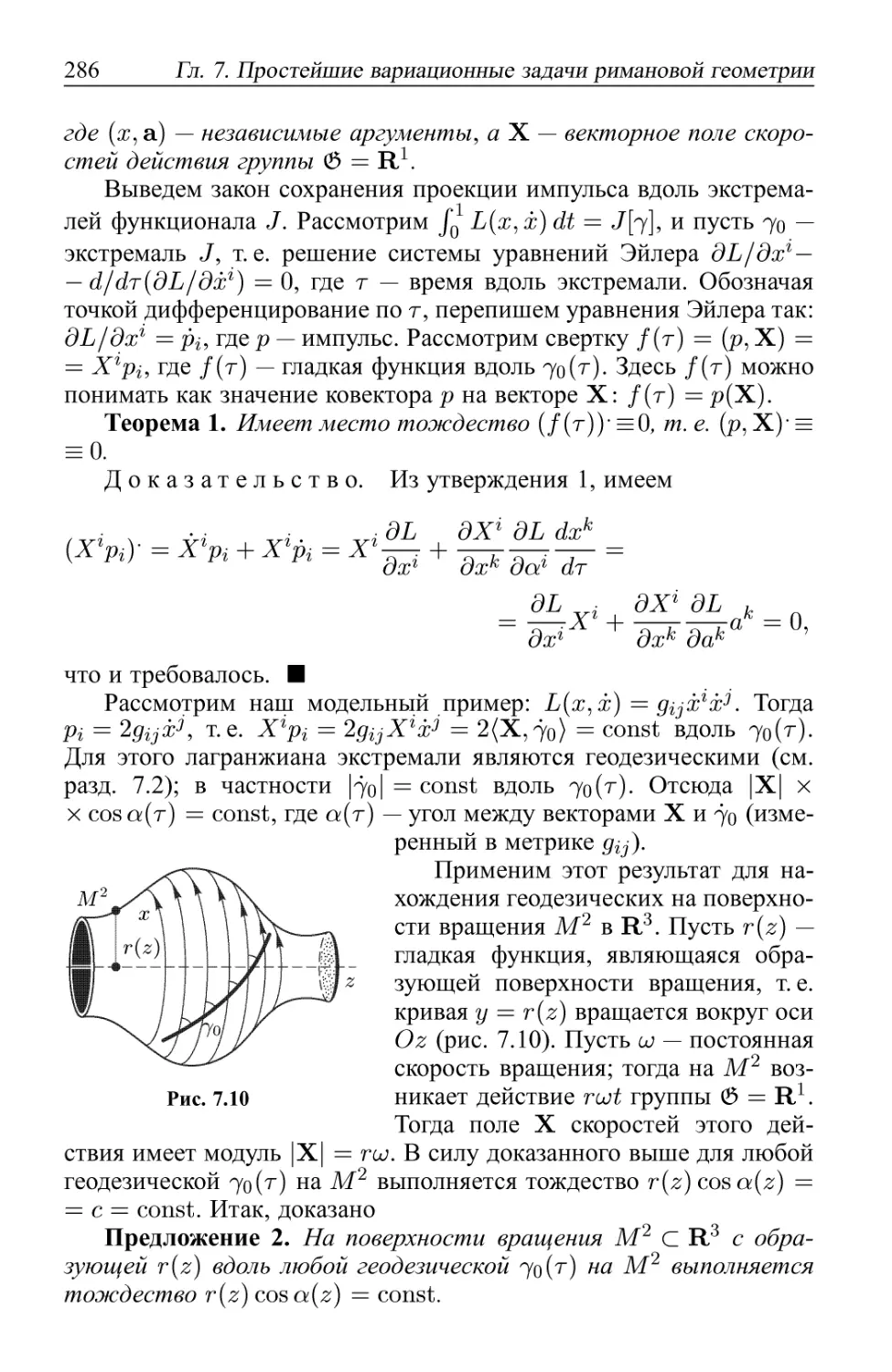
7.3. Минимальные поверхности 281
7.4. Вариационное исчисление и симплектическая геометрия . 284
Глава 1
Введение
в дифференциальную геометрию
1.1. КРИВОЛИНЕЙНЫЕ СИСТЕМЫ КООРДИНАТ.
ПРОСТЕЙШИЕ ПРИМЕРЫ
1.1.1. Мотивировка
Рассмотрим евклидово пространство размерности п, которое мы
в дальнейшем будем обозначать через Rn. Будем считать, что в нем
заданы декартовы координаты ж1, ..., хп относительно выбранного
и фиксированного ортонормированного базиса ei,e2, . ..,en. На-
Напомним, что с декартовыми координатами тесно связано понятие
евклидова скалярного произведения — билинейной формы, сопо-
сопоставляющей каждой паре векторов (,?|GRn вещественное чис-
число (?,г/), причем эта операция является симметричной, линейной
по каждому аргументу, а сама форма — положительно определен-
определенной. В декартовых координатах
Однако декартовых координат недостаточно для удобной ана-
аналитической записи многих конкретных задач. Конечно, когда мы
имеем дело с довольно простыми кривыми, например с окружно-
окружностью или эллипсом, то их аналитическое выражение в декартовых
координатах является весьма простым. Но весьма часто, напри-
например в физических задачах, встречаются, скажем, траектории дви-
движения материальных точек в поле каких-либо сил, явное выраже-
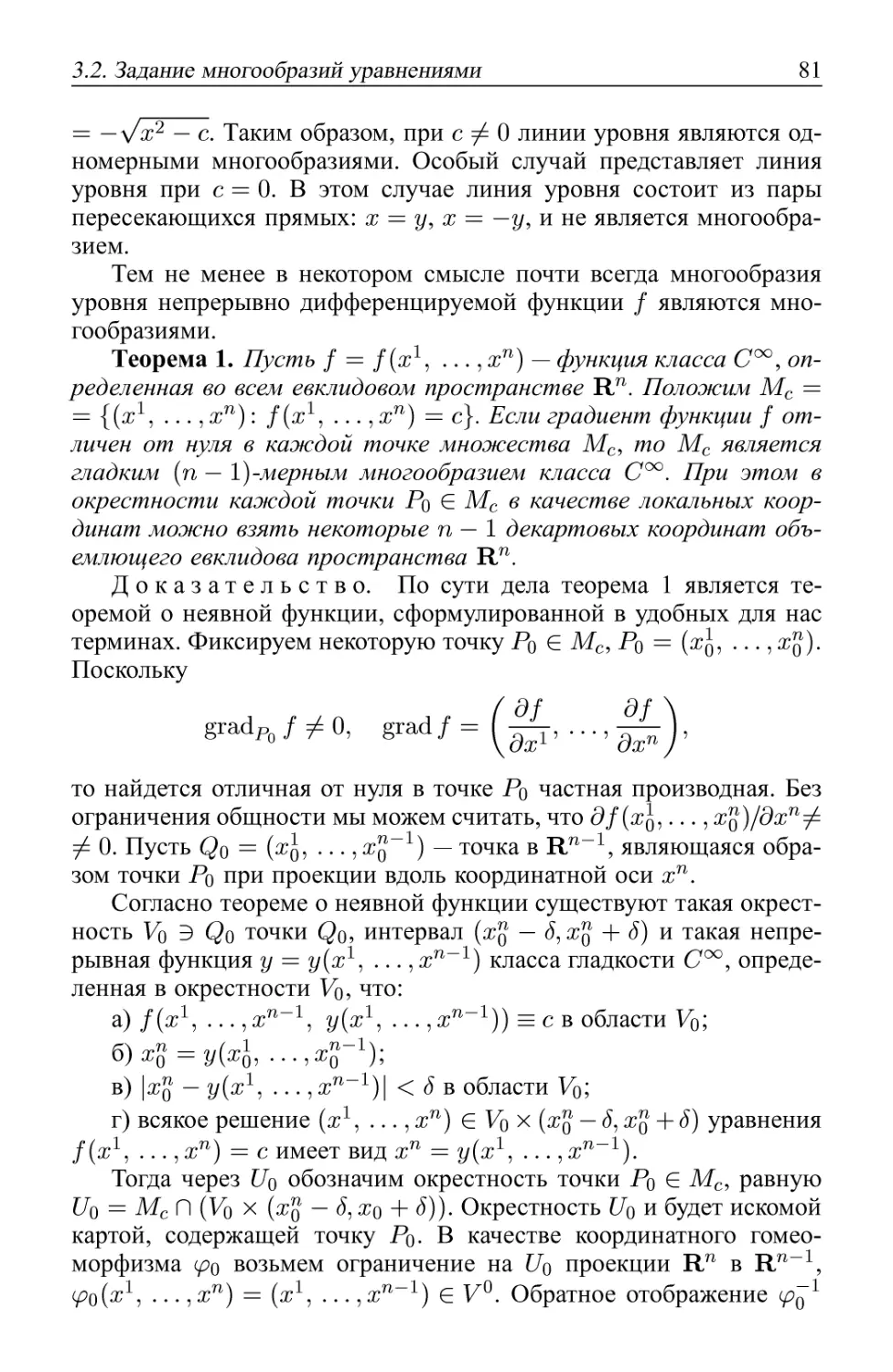
выражение которых в декартовых координатах затруднительно. Например,
следующее уравнение определяет в декартовых координатах спи-
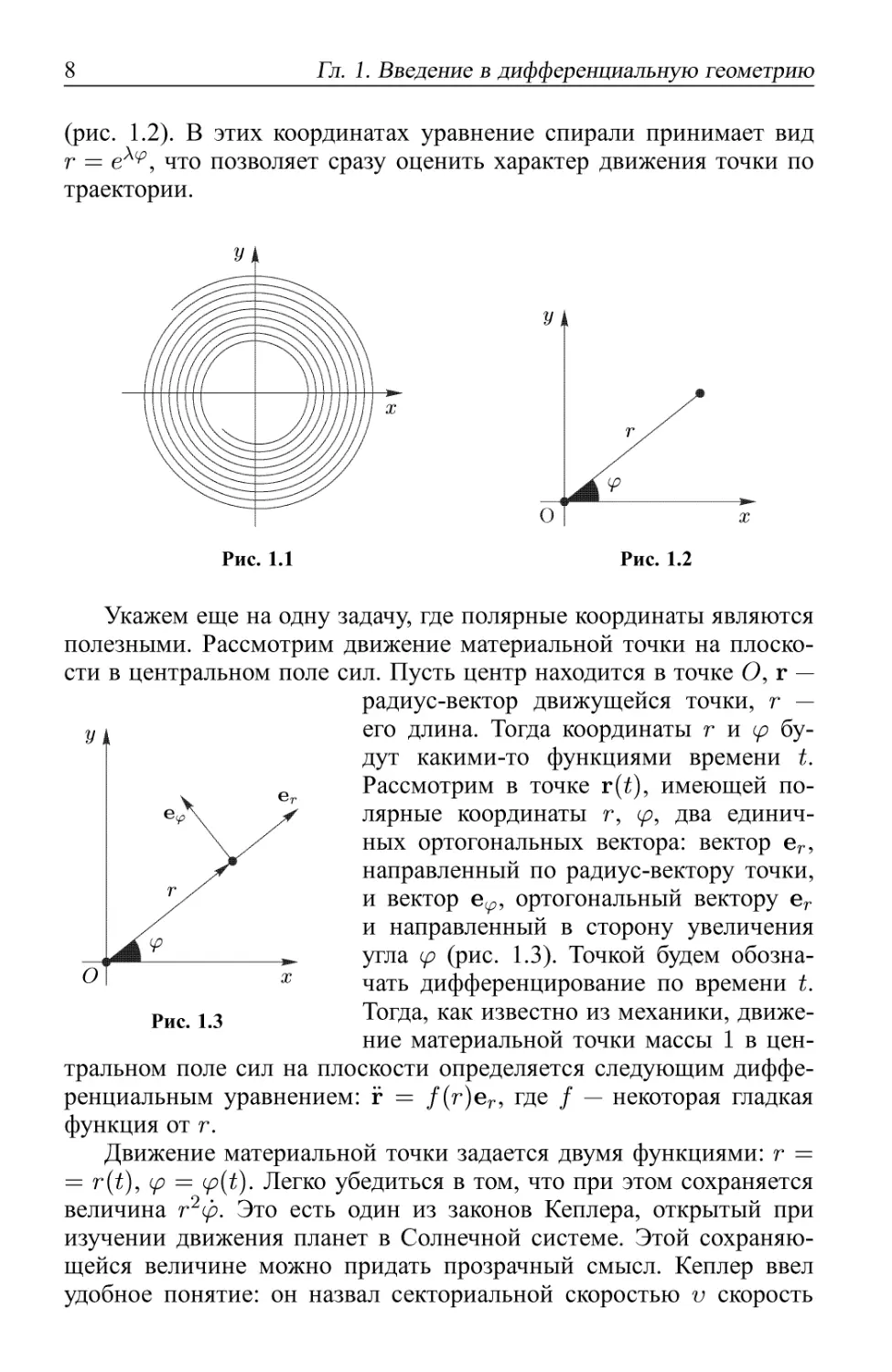
спираль: л/ж2 + у2 — eA(arctgB//a;)) =0 (рис. 1.1). Конечно, эта запись
не слишком сложна, но тем не менее эта кривая запишется значи-
значительно проще в другой, так называемой полярной системе коорди-
координат (г, ср), связанных с декартовыми
х = г cos <р, у = г sin if
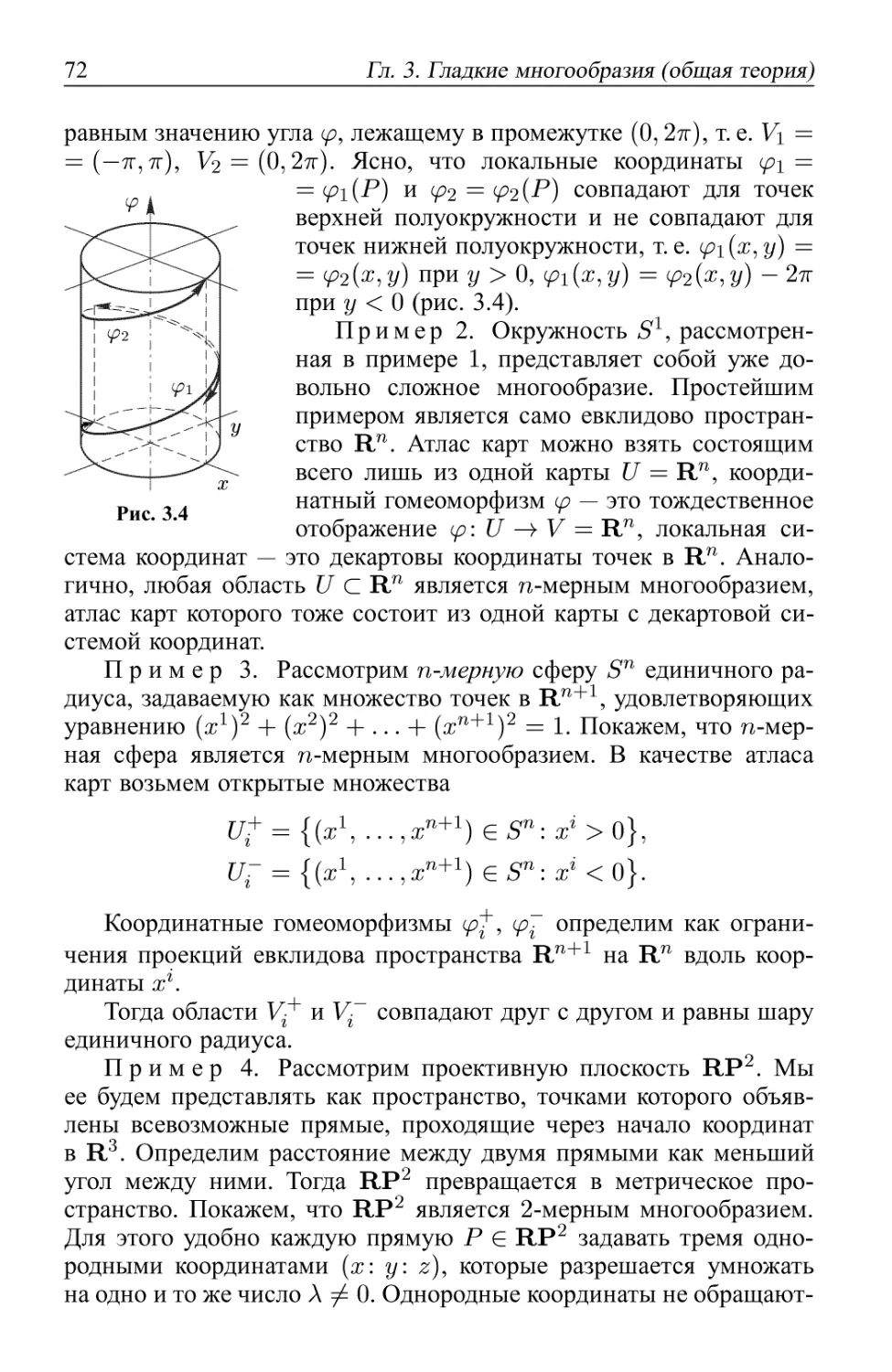
Гл. 1. Введение в дифференциальную геометрию
(рис. 1.2). В этих координатах уравнение спирали принимает вид
г = еХ(р, что позволяет сразу оценить характер движения точки по
траектории.
У I
Рис. 1.1
Рис. 1.2
У I
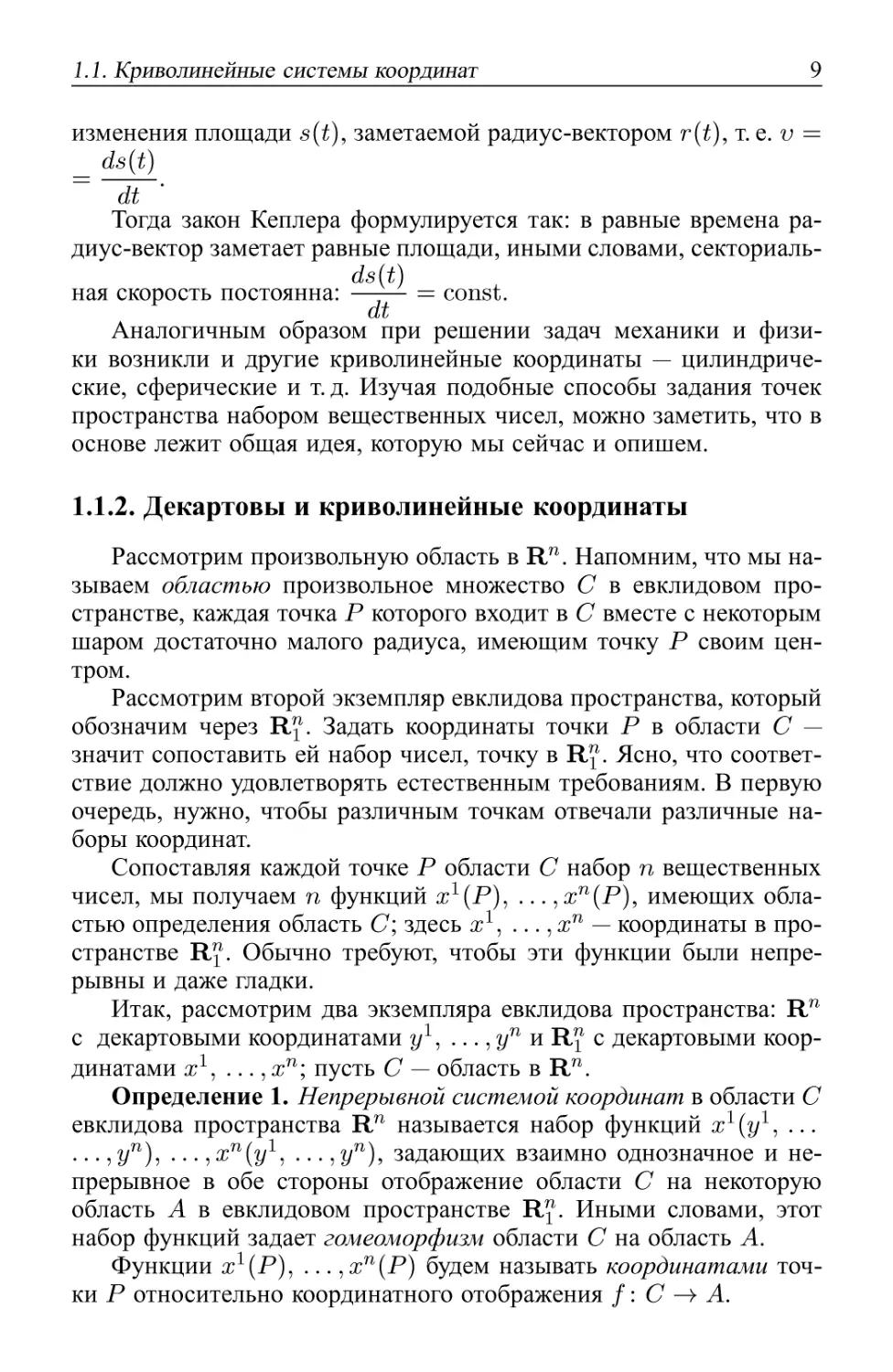
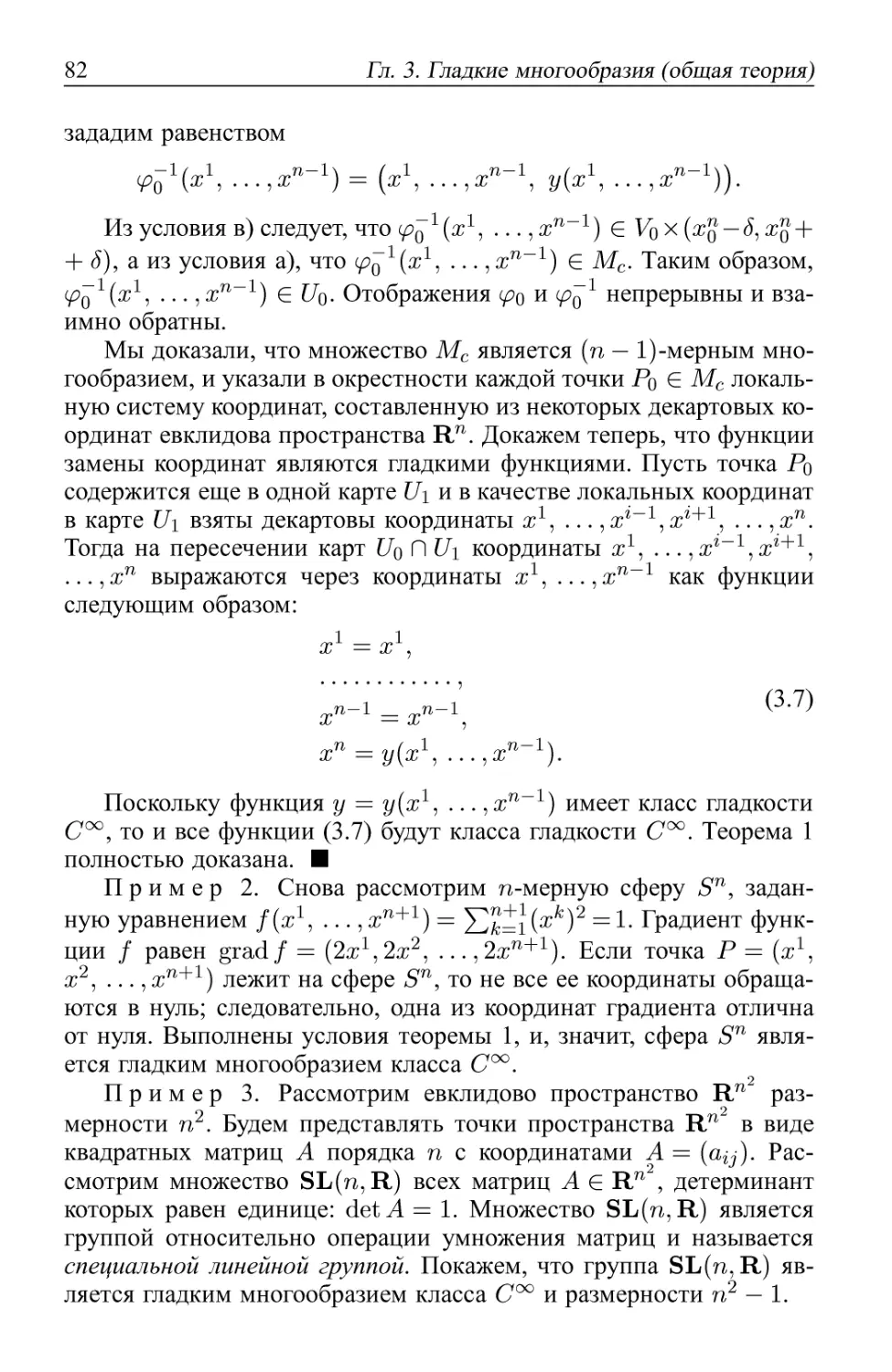
Укажем еще на одну задачу, где полярные координаты являются
полезными. Рассмотрим движение материальной точки на плоско-
плоскости в центральном поле сил. Пусть центр находится в точке О, г —
радиус-вектор движущейся точки, г —
его длина. Тогда координаты г и ср бу-
будут какими-то функциями времени t.
Рассмотрим в точке г(?), имеющей по-
полярные координаты г, ср, два единич-
единичных ортогональных вектора: вектор ег,
направленный по радиус-вектору точки,
и вектор е^, ортогональный вектору ег
и направленный в сторону увеличения
угла ср (рис. 1.3). Точкой будем обозна-
обозначать дифференцирование по времени t.
Тогда, как известно из механики, движе-
движение материальной точки массы 1 в цен-
центральном поле сил на плоскости определяется следующим диффе-
дифференциальным уравнением: ? = /(г)ег, где / — некоторая гладкая
функция от г.
Движение материальной точки задается двумя функциями: г =
= r(?), (p = (p(t). Легко убедиться в том, что при этом сохраняется
величина г2ф. Это есть один из законов Кеплера, открытый при
изучении движения планет в Солнечной системе. Этой сохраняю-
сохраняющейся величине можно придать прозрачный смысл. Кеплер ввел
удобное понятие: он назвал секториальной скоростью v скорость
Рис. 1.3
1.1. Криволинейные системы координат
изменения площади s(t), заметаемой радиус-вектором г(?), т. е. v =
_ ds(t)
~ dt
Тогда закон Кеплера формулируется так: в равные времена ра-
радиус-вектор заметает равные площади, иными словами, секториаль-
ds(t)
ная скорость постоянна: —— = const.
Аналогичным образом при решении задач механики и физи-
физики возникли и другие криволинейные координаты — цилиндриче-
цилиндрические, сферические и т. д. Изучая подобные способы задания точек
пространства набором вещественных чисел, можно заметить, что в
основе лежит общая идея, которую мы сейчас и опишем.
1.1.2. Декартовы и криволинейные координаты
Рассмотрим произвольную область в Rn. Напомним, что мы на-
называем областью произвольное множество С в евклидовом про-
пространстве, каждая точка Р которого входит в С вместе с некоторым
шаром достаточно малого радиуса, имеющим точку Р своим цен-
центром.
Рассмотрим второй экземпляр евклидова пространства, который
обозначим через R™. Задать координаты точки Р в области С —
значит сопоставить ей набор чисел, точку в R™. Ясно, что соответ-
соответствие должно удовлетворять естественным требованиям. В первую
очередь, нужно, чтобы различным точкам отвечали различные на-
наборы координат.
Сопоставляя каждой точке Р области С набор п вещественных
чисел, мы получаем п функций ж1(Р), ... , жп(Р), имеющих обла-
областью определения область С; здесь ж1, ..., хп — координаты в про-
пространстве R™. Обычно требуют, чтобы эти функции были непре-
непрерывны и даже гладки.
Итак, рассмотрим два экземпляра евклидова пространства: Rn
с декартовыми координатами у1, ..., уп и R™ с декартовыми коор-
координатами ж1, ..., хп; пусть С — область в Rn.
Определение 1. Непрерывной системой координат в области С
евклидова пространства Rn называется набор функций ж1 (у1, ...
..., уп), ..., хп(у1, ..., уп), задающих взаимно однозначное и не-
непрерывное в обе стороны отображение области С на некоторую
область А в евклидовом пространстве R^. Иными словами, этот
набор функций задает гомеоморфизм области С на область А.
Функции жх(Р), ... ,жп(Р) будем называть координатами точ-
точки Р относительно координатного отображения /: С —>> А.
10 Гл. 1. Введение в дифференциальную геометрию
Например, в качестве отображения /: С —>> А можно взять то-
тождественное отображение: х1 = у1, ..., хп = уп.
Иногда будем записывать точку Р с ее координатами ж1(Р), ...
..., хп(Р) в виде Р(х1, ..., хп), предполагая, что уже задано коор-
координатное отображение /.
Среди всех непрерывных координатных отображений выделены
такие, которые задают гладкое отображение области С на область А,
т. е. все функции ж1 (у1, ..., уп), ..., хп(у1^ ..., уп) являются глад-
гладкими функциями. Мы сразу перейдем к определению координат, у
которых гладкими являются оба отображения: как /, так и f~l. На-
Напомним понятие матрицы Якоби гладкого отображения.
Пусть /: С —>> А — гладкое отображение, задаваемое функция-
Ш1х1{у\...,уп),...,хп{у\...,уп).
Определение 2. Матрицей Якоби отображения / называется
функциональная матрица
/дх1 дхг\
ду1 дуь
дхп дхг>
\ду1 "' дуг>
составленная из частных производных от координат. Ее определи-
определитель будем обозначать через J(f) и называть якобианом отображе-
отображения /.
Замечание. Обозначение df для матрицы Якоби не вызовет пу-
путаницы с дифференциалом функции /, поскольку дифференциал
гладкой функции соответствует матрице Якоби в этом частном слу-
случае. Матрица Якоби является переменной матрицей, т. е. зависит от
точки Р из области С.
Определение 3. Регулярной системой координат в области С
пространства Rn называется набор гладких функций х1(у1^ ...
..., уп), ..., хп(у1^ ..., уп), задающих взаимно однозначное ото-
отображение области С на некоторую область А в пространстве Щ\
причем якобиан отображения J(f) отличен от нуля во всех точках
области С.
Отличие от нуля якобиана отображения / во всех точках обла-
области С означает, что отображение /-1, обратное к /, является глад-
гладким. Это следует из теоремы о системе неявных функций. Итак,
регулярная система координат задается двумя гладкими, взаим-
взаимно обратными отображениями, устанавливающими гомеоморфизм
между областями С и А.
1.1. Криволинейные системы координат 11
Можно было бы считать, что с самого начала в области С про-
пространства Rn были введены декартовы координаты с помощью то-
тождественного отображения С на А при естественном отождествле-
отождествлении обоих пространств Rn и R™. Тогда введение в области С еще
одной системы координат, задаваемой регулярным отображением /,
можно рассматривать как замену координат: мы перешли от декар-
декартовых координат к новым координатам в той же области.
Определение 4. Регулярную систему координат общего вида в
области С будем называть также криволинейными координатами
в области С.
Рассмотрим теперь в области С две произвольные криволиней-
криволинейные системы координат: xl(P), ... ,хп(Р) и z1(P), ... ,zn(P). Это
означает, что заданы два регулярных отображения:
/: С ^ АсЩ(х\ ...,жп); д: С ^ В сЩ(г\ ...,zn),
т. е. отображения / и д устанавливают взаимно однозначные и глад-
гладкие в обе стороны соответствия между областями С, А и С, В
соответственно. Иными словами, каждой точке Р из области С
сопоставлены два набора ее криволинейных координат, {хг(Р)} и
{zl(P)}. Следовательно, можно сопоставить координатам {хг(Р)}
точки Р ее координаты {гг(Р)}> что определяет отображение
фх,г: А -> Б, т. е. фх^: {хг(Р)} -> {^(Р)}, 1 ^ i ^ п.
Отображение фх^ называется заменой координат в области С.
При этом точка Р получает вместо исходных координат {хг(Р)}
новые координаты {гг(Р)}.
Лемма 1. Отображение фх^ является взаимно однозначным,
гладким в обе стороны отображением области А на область В с
ненулевым якобианом.
Доказательство. Взаимная однозначность отображения
фх^ сразу следует из определения 3. Гладкость отображения фх^
следует из того, что композиция двух гладких отображений является
гладким отображением. Осталось проверить, что отображение фх^
имеет ненулевой (в каждой точке области А) якобиан.
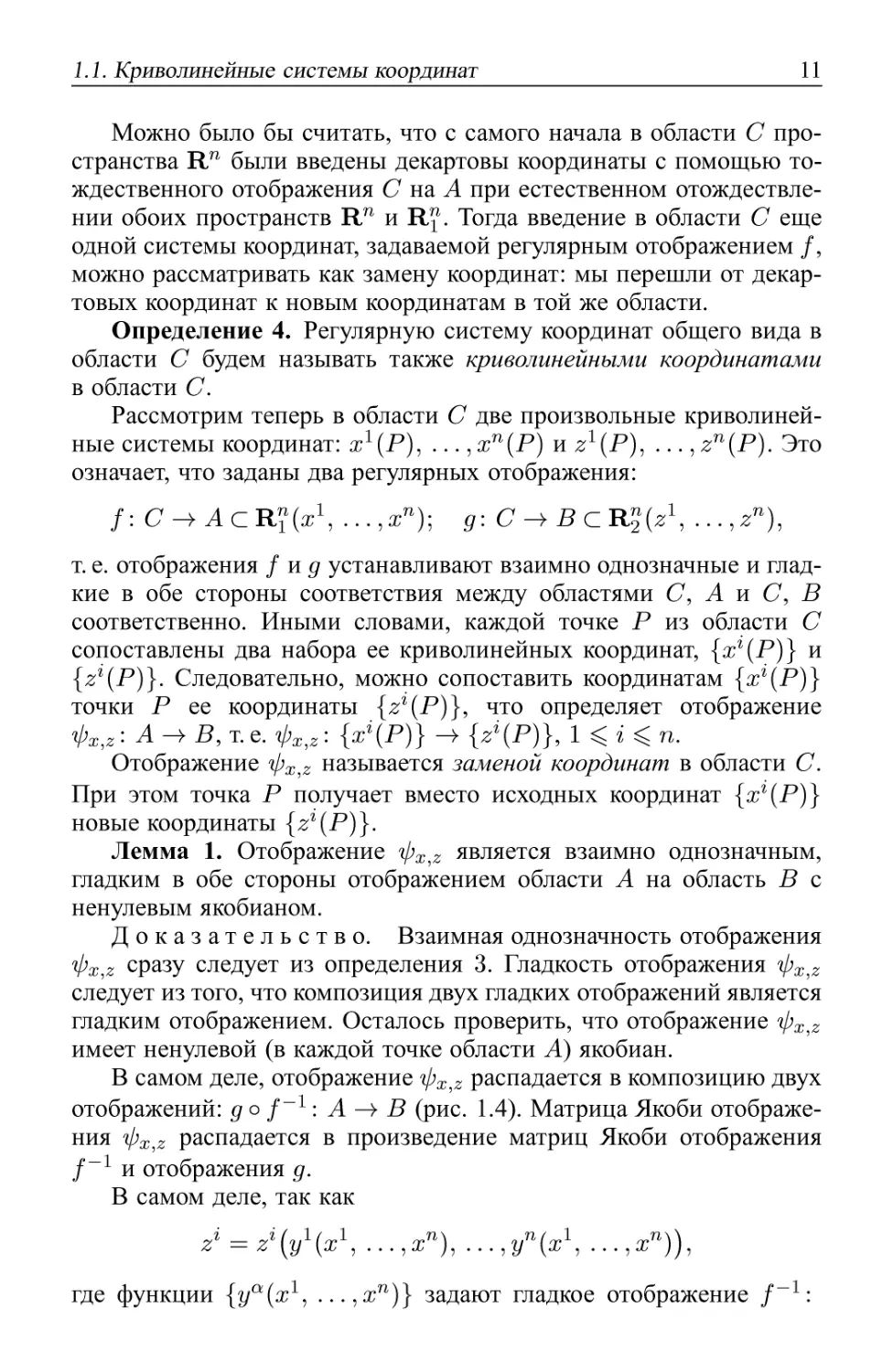
В самом деле, отображение фх^ распадается в композицию двух
отображений: g о f~l: А —>> В (рис. 1.4). Матрица Якоби отображе-
отображения фх^ распадается в произведение матриц Якоби отображения
f~l и отображения д.
В самом деле, так как
,уп(х\
где функции {уа(х1^ ...,жп)} задают гладкое отображение f
~l
12
Гл. 1. Введение в дифференциальную геометрию
А
Rn(*) \gof~1
в
Рис. 1.4
A —>> С, то по формуле дифференцирования сложной функции по-
dzl ^A dzl дук
лучаем ——г = > ——г ——г, что и означает, что матрица Якоби агрх z
oxJ *-^ дуК дхЭ '
распалась в произведение двух матриц, dg и df~l. Осталось выяс-
выяснить, как связаны матрицы Якоби df и d(f~l). Так как композиция
f~l о / является тождественным отображением области С на себя,
то получаем, что d(f~l о /) = df~l о df = Е, где Е — единичная
матрица, т.е. окончательно, d(f~l) = (df)~l. Тем самым, di\)x^z =
= (dg) • (df)~l, т. е. J(i/jx,z) = , . , и так как оба якобиана
«/(/) отличны от нуля, то и якобиан J(ipx,z) отличен от нуля. ¦
Пусть на области С задан набор гладких функций {жг(Р)}, 1 ^
^ г ^ п. Как узнать, задает ли он регулярную систему координат?
Лемма 2. Пусть гладкие функции {хЛ(Р)}, 1 ^ г ^ п, таковы,
что соответствующий якобиан J(/), /(-Р) = {жг(Р)}, отличен от
нуля в области С. Тогда для каждой точки Р из области С суще-
существует такая открытая окрестность, что в ней функции {хг(Р)} за-
задают регулярные координаты.
Такие функции можно назвать локальной системой координат.
Доказательство. В условии леммы не было предполо-
предположено, что функции {хг(Р)} определяют взаимно однозначное ото-
отображение области С на область А пространства R^. Однако по те-
теореме о неявных функциях из отличия от нуля якобиана вытекает
существование (по крайней мере локально) обратного гладкого ото-
отображения. Лемма доказана. ¦
Отметим, что функции, удовлетворяющие условию леммы 2,
не обязательно определяют регулярную систему координат сразу
во всей области С, т.е. гладкое отображение f~l области А на
1.1. Криволинейные системы координат
13
область С может и не существовать. Действительно, рассмотрим
простой пример. Возьмем в качестве области С двумерную плос-
плоскость, из которой «выколота» одна точка — начало координат О, и
рассмотрим гладкое отображение
f(y)=(x1(y),x2(y)),
\ х2(у)=2у1у2,
т. е. если положить z = у1 +iy2, w = x1 +ix2 (где г — мнимая едини-
единица), то w = z2. Это отображение переводит комплексное число z в
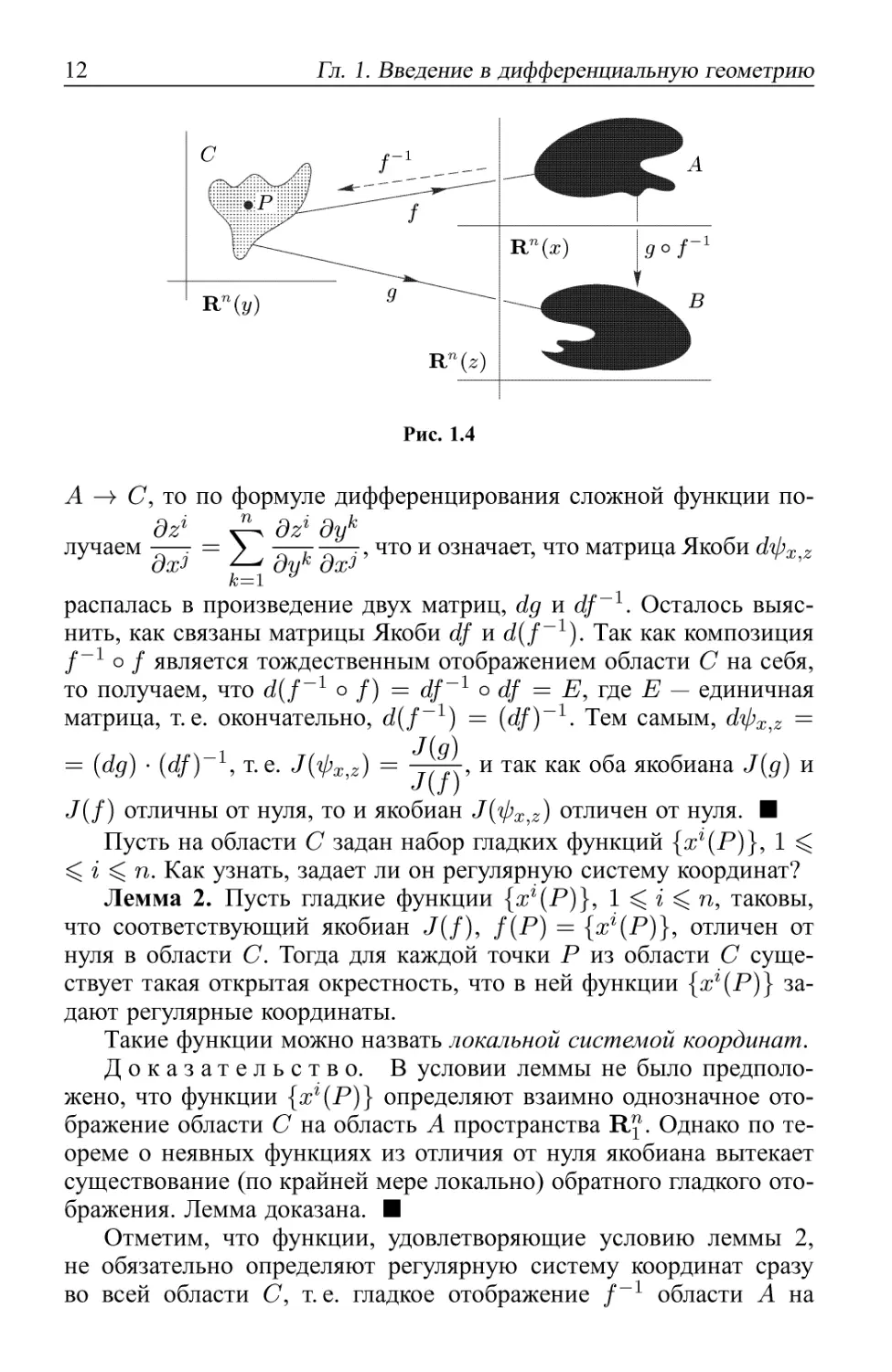
его квадрат. В полярных координатах (г, ф) отображение запишется
так: f(r,cp) = (г2,2ср) (рис. 1.5). Мат-
Матрица Якоби df имеет вид у |
df =
2у
Рис. 1.5
J(f) = 4((у1J + (у2J) > 0.
Мы видим, что якобиан положите-
положителен во всех точках области С (так как
начало координат «выколото»). Следо-
Следовательно, по лемме 2 отображение уста-
устанавливает локальные регулярные координаты в некоторой открытой
окрестности каждой точки из области С. В то же время отображе-
отображение / не имеет обратного отображения /-1, поскольку / не взаимно
однозначно.
Дело в том, что каждая точка w = х1 + гх2, не являющаяся на-
началом координат, всегда имеет ровно два прообраза при отображе-
отображении /, это — точки (г, if) и (г, ср + тг).
В приведенном примере якобиан системы функций стремится к
нулю, когда точка Р приближается к выколотой точке. В геометрии
давно обсуждается вопрос: будет ли взаимно однозначным такое
гладкое отображение / евклидова пространства на себя, при кото-
котором на якобиан наложено условие 0 < е ^ J(f) ^ N < оо? Здесь
е и N — постоянные. Мы не будем здесь заниматься этой пробле-
проблемой.
Каждая система криволинейных координат в области определя-
определяет так называемые координатные линии. А именно: г-я координат-
координатная линия задается уравнением
х\Р)=съ...,
X
X
где все
l(P)=Ci-i, :
хп(Р) = сп,
— постоянные, at — непрерывный параметр. С измене-
14
Гл. 1. Введение в дифференциальную геометрию
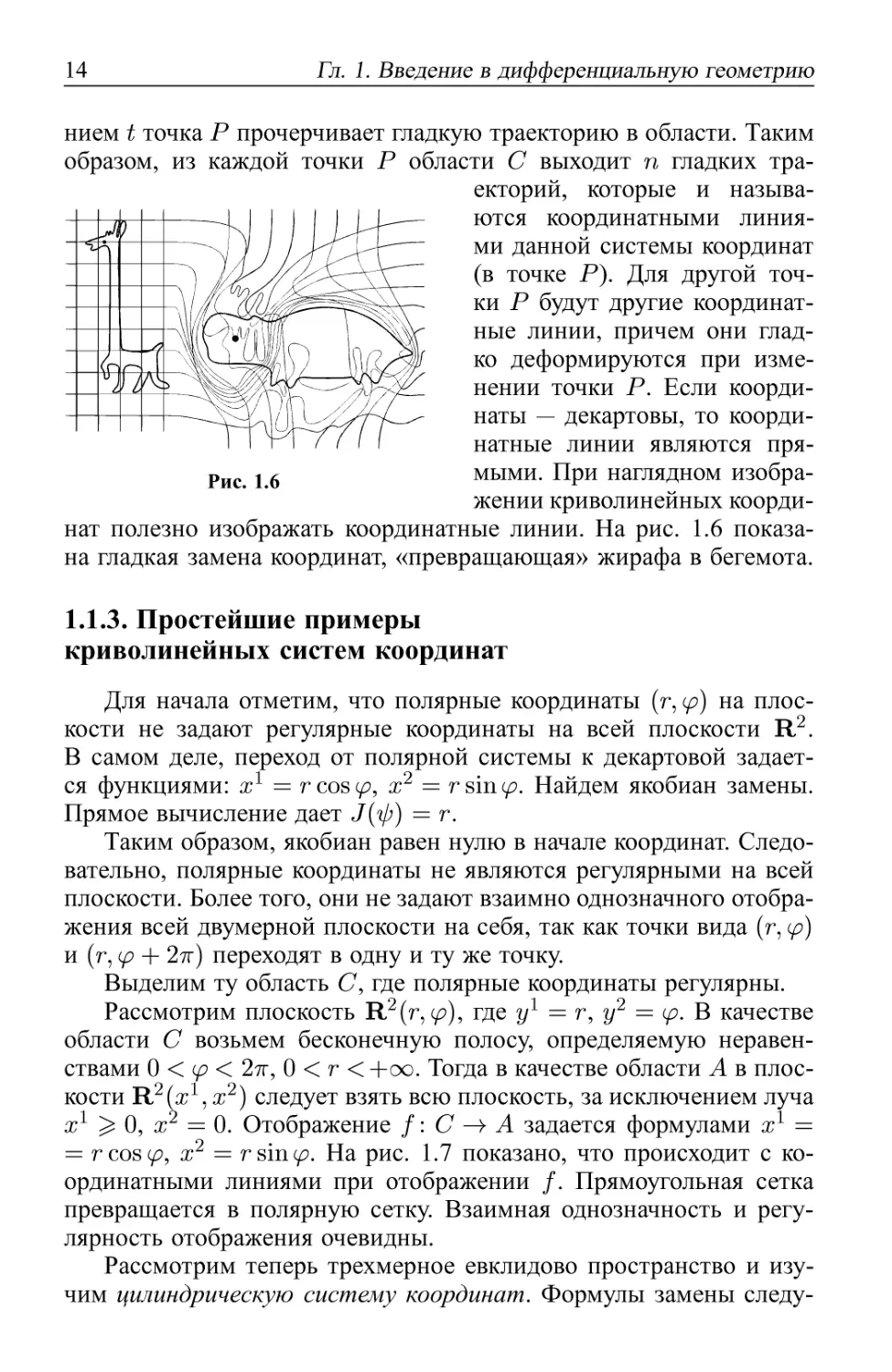
нием t точка Р прочерчивает гладкую траекторию в области. Таким
образом, из каждой точки Р области С выходит п гладких тра-
траекторий, которые и называ-
называются координатными линия-
линиями данной системы координат
(в точке Р). Для другой точ-
точки Р будут другие координат-
координатные линии, причем они глад-
гладко деформируются при изме-
изменении точки Р. Если коорди-
координаты — декартовы, то коорди-
координатные линии являются пря-
Рис 16 мыми. При наглядном изобра-
изображении криволинейных коорди-
координат полезно изображать координатные линии. На рис. 1.6 показа-
показана гладкая замена координат, «превращающая» жирафа в бегемота.
1.1.3. Простейшие примеры
криволинейных систем координат
Для начала отметим, что полярные координаты (г, ф) на плос-
плоскости не задают регулярные координаты на всей плоскости R2.
В самом деле, переход от полярной системы к декартовой задает-
задается функциями: х1 = rcosip, х2 = rsin^. Найдем якобиан замены.
Прямое вычисление дает J(^) = г.
Таким образом, якобиан равен нулю в начале координат. Следо-
Следовательно, полярные координаты не являются регулярными на всей
плоскости. Более того, они не задают взаимно однозначного отобра-
отображения всей двумерной плоскости на себя, так как точки вида (г, ф)
и (г, ср + 2тг) переходят в одну и ту же точку.
Выделим ту область С, где полярные координаты регулярны.
Рассмотрим плоскость R2(r, tp), где у1 = г, у2 = ср. В качестве
области С возьмем бесконечную полосу, определяемую неравен-
неравенствами 0 < ср < 2тг, 0 < г < +оо. Тогда в качестве области А в плос-
плоскости КЯГж1, х2) следует взять всю плоскость, за исключением луча
х1 > 0, х — 0. Отображение /: С —>> А задается формулами х1 =
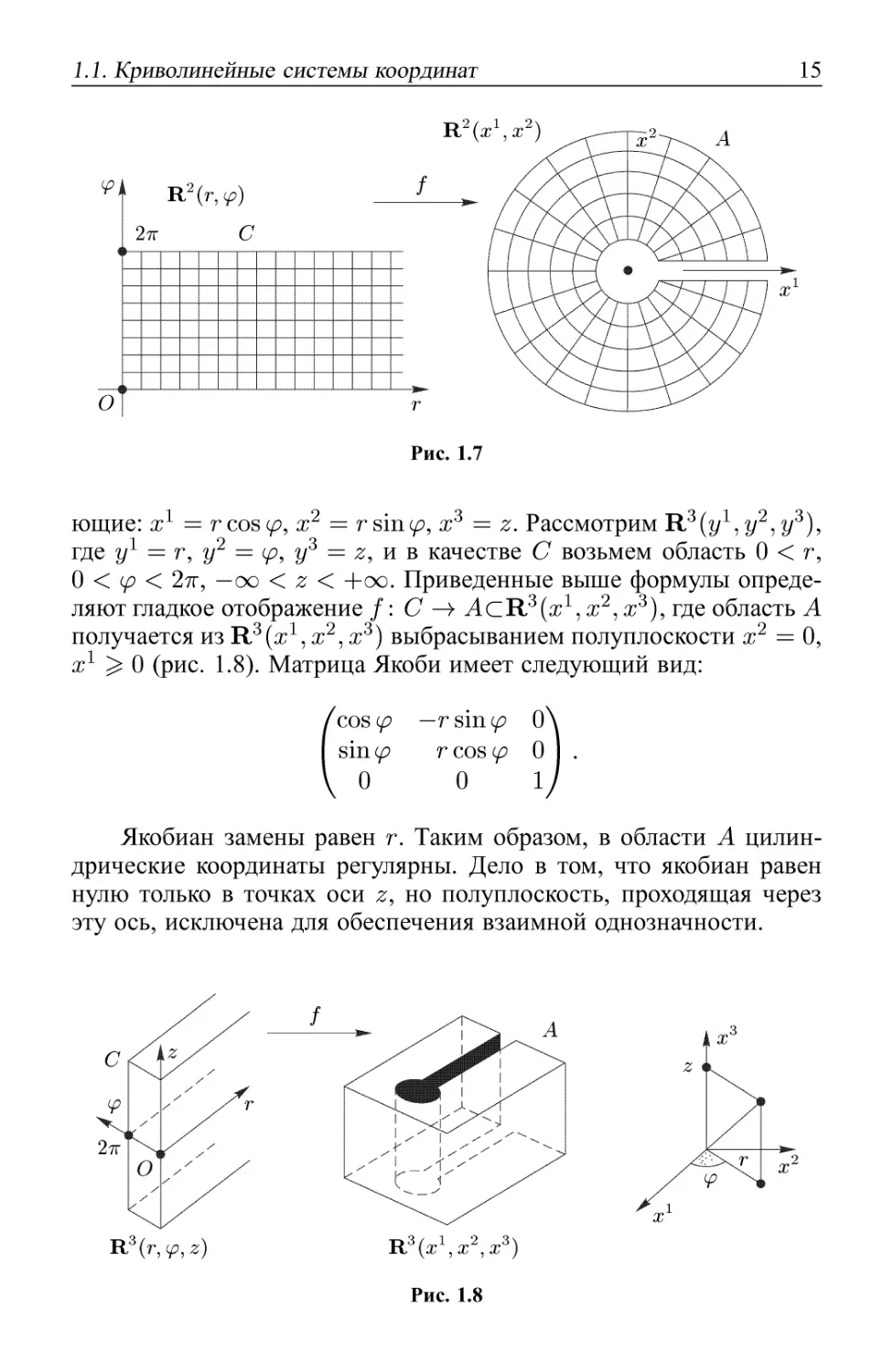
= rcosip, х2 = rsin^. На рис. 1.7 показано, что происходит с ко-
координатными линиями при отображении /. Прямоугольная сетка
превращается в полярную сетку. Взаимная однозначность и регу-
регулярность отображения очевидны.
Рассмотрим теперь трехмерное евклидово пространство и изу-
изучим цилиндрическую систему координат. Формулы замены следу-
1.1. Криволинейные системы координат
15
2тг
С
О
ющие: х1 = rcosip, ж2 =
1 2 3
где у1 = г, у2 =
3 =
Рис. 1.7
3 =
х3 = z. Рассмотрим
у3 = z, и в качестве С возьмем область 0 < г,
О < (р < 2тг, —оо < z < +оо. Приведенные выше формулы опреде-
определяют гладкое отображение f:C—> AcR3^1, ж2, ж3), где область А
получается из R3(x1, ж2, ж3) выбрасыванием полуплоскости х2 = О,
х1 ^ 0 (рис. 1.8). Матрица Якоби имеет следующий вид:
/ cos (p
V 0
—r simp
r cosy? 0
0 1,
Якобиан замены равен г. Таким образом, в области А цилин-
цилиндрические координаты регулярны. Дело в том, что якобиан равен
нулю только в точках оси z, но полуплоскость, проходящая через
эту ось, исключена для обеспечения взаимной однозначности.
Рис. 1.8
16
Гл. 1. Введение в дифференциальную геометрию
Теперь рассмотрим n-мерное евклидово пространство и введем
в нем сферическую систему координат. Формулы замены таковы:
' х1 = г cos#i,
х2 = г sin#i cos #2,
х3 = г sin #1 sin 02 cos 63,
xn = r sin#i sin #2 • • • sin#n_2 cos0n_i,
Замечание. Структура формул ясна: удобно считать, что все
строки имеют одно и то же происхождение, но только параметры 6^
начиная с номера % = п, равны нулю. Предоставляем читателю вы-
вычисление матрицы Якоби и якобиана.
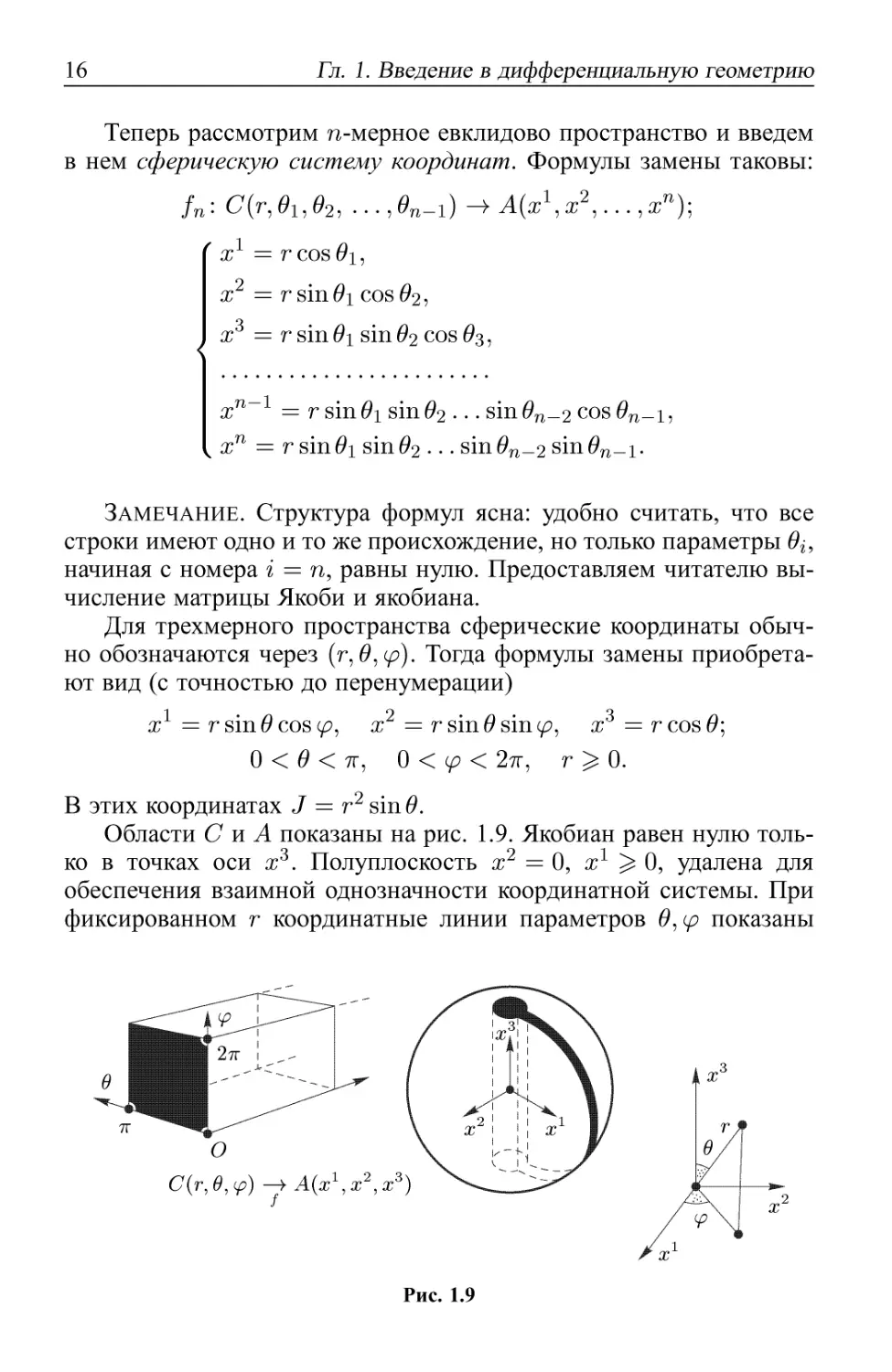
Для трехмерного пространства сферические координаты обыч-
обычно обозначаются через (г,6,ср). Тогда формулы замены приобрета-
приобретают вид (с точностью до перенумерации)
х1 = г sin в cos <р, х2 = г sin в sin <р, ж3 = г cos б;
О < в < тг, 0 < с^ < 2тг, г > 0.
В этих координатах J = г2 sin б.
Области С и А показаны на рис. 1.9. Якобиан равен нулю толь-
только в точках оси ж3. Полуплоскость х2 = 0, х1 ^ 0, удалена для
обеспечения взаимной однозначности координатной системы. При
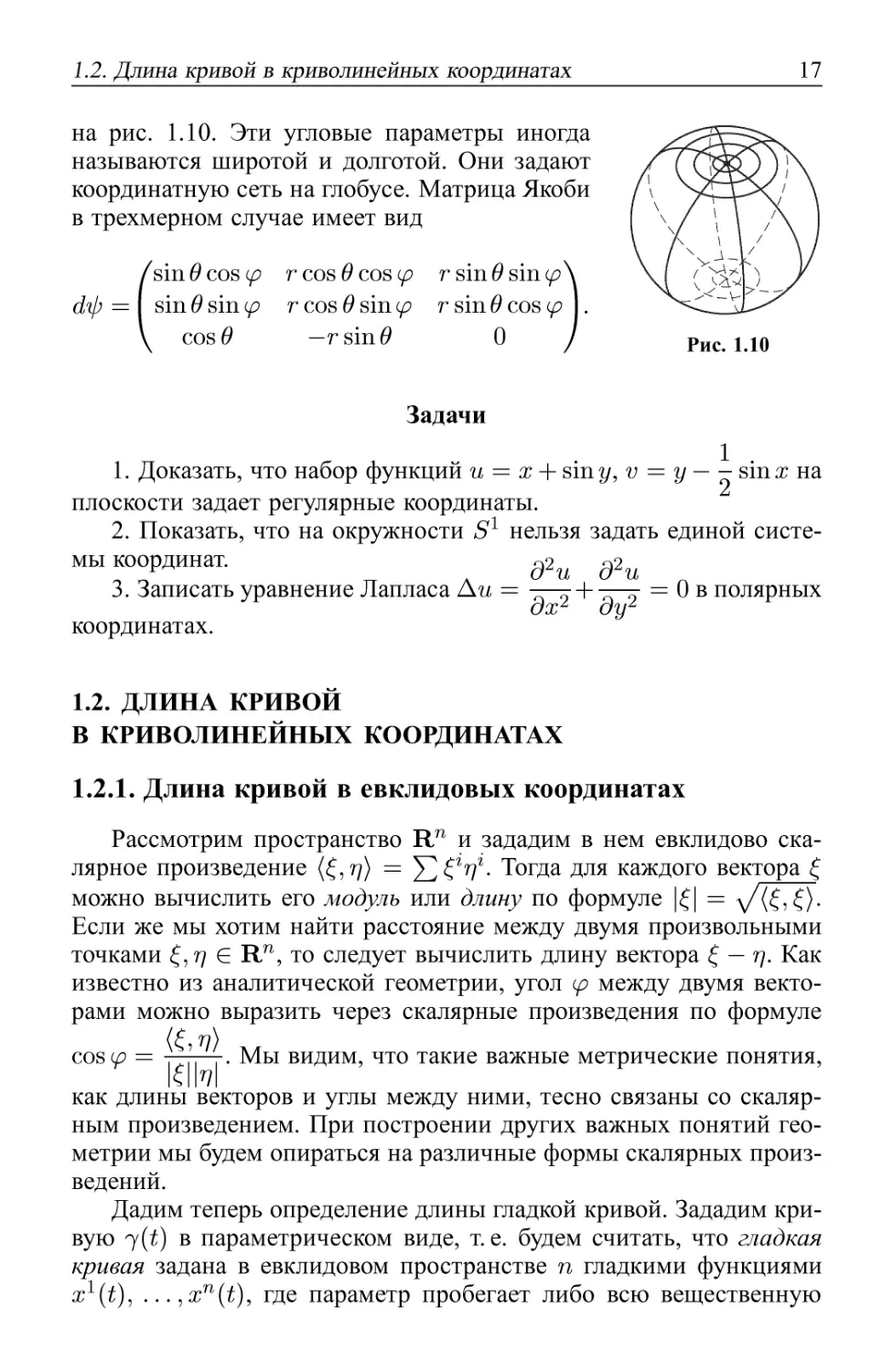
фиксированном г координатные линии параметров 6, ср показаны
Рис. 1.9
1.2. Длина кривой в криволинейных координатах
17
на рис. 1.10. Эти угловые параметры иногда
называются широтой и долготой. Они задают
координатную сеть на глобусе. Матрица Якоби
в трехмерном случае имеет вид
/sin в cos if
= sin в sin cp
\ cos в
Г COS в COS if
r cos в sin if
—rsinO
r sin в sin cp\
rsmOcoscp .
0 /
Рис. 1.10
Задачи
1. Доказать, что набор функций u = x + sin у, v = у sin ж на
плоскости задает регулярные координаты.
2. Показать, что на окружности S1 нельзя задать единой систе-
системы координат. д2и д2и
3. Записать уравнение Лапласа Аи = тг^т + тгт = 0 в полярных
дх2 ду2
координатах.
1.2. ДЛИНА КРИВОЙ
В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ
1.2.1. Длина кривой в евклидовых координатах
Рассмотрим пространство Rn и зададим в нем евклидово ска-
скалярное произведение (?,7/) = ^2Crf- Тогда для каждого вектора ?
можно вычислить его модуль или длину по формуле |?| = л/(?,?).
Если же мы хотим найти расстояние между двумя произвольными
точками ?, г/ Е Rn, то следует вычислить длину вектора ? — г/. Как
известно из аналитической геометрии, угол ср между двумя векто-
векторами можно выразить через скалярные произведения по формуле
cos (p = | Мы видим, что такие важные метрические понятия,
как длины векторов и углы между ними, тесно связаны со скаляр-
скалярным произведением. При построении других важных понятий гео-
геометрии мы будем опираться на различные формы скалярных произ-
произведений.
Дадим теперь определение длины гладкой кривой. Зададим кри-
кривую j(t) в параметрическом виде, т. е. будем считать, что гладкая
кривая задана в евклидовом пространстве п гладкими функциями
x1(t), ...,жп(?), где параметр пробегает либо всю вещественную
18 Гл. 1. Введение в дифференциальную геометрию
ось, либо конечный отрезок [а, Ь]. Здесь ж1, ..., хп — это декартовы
координаты в Rn.
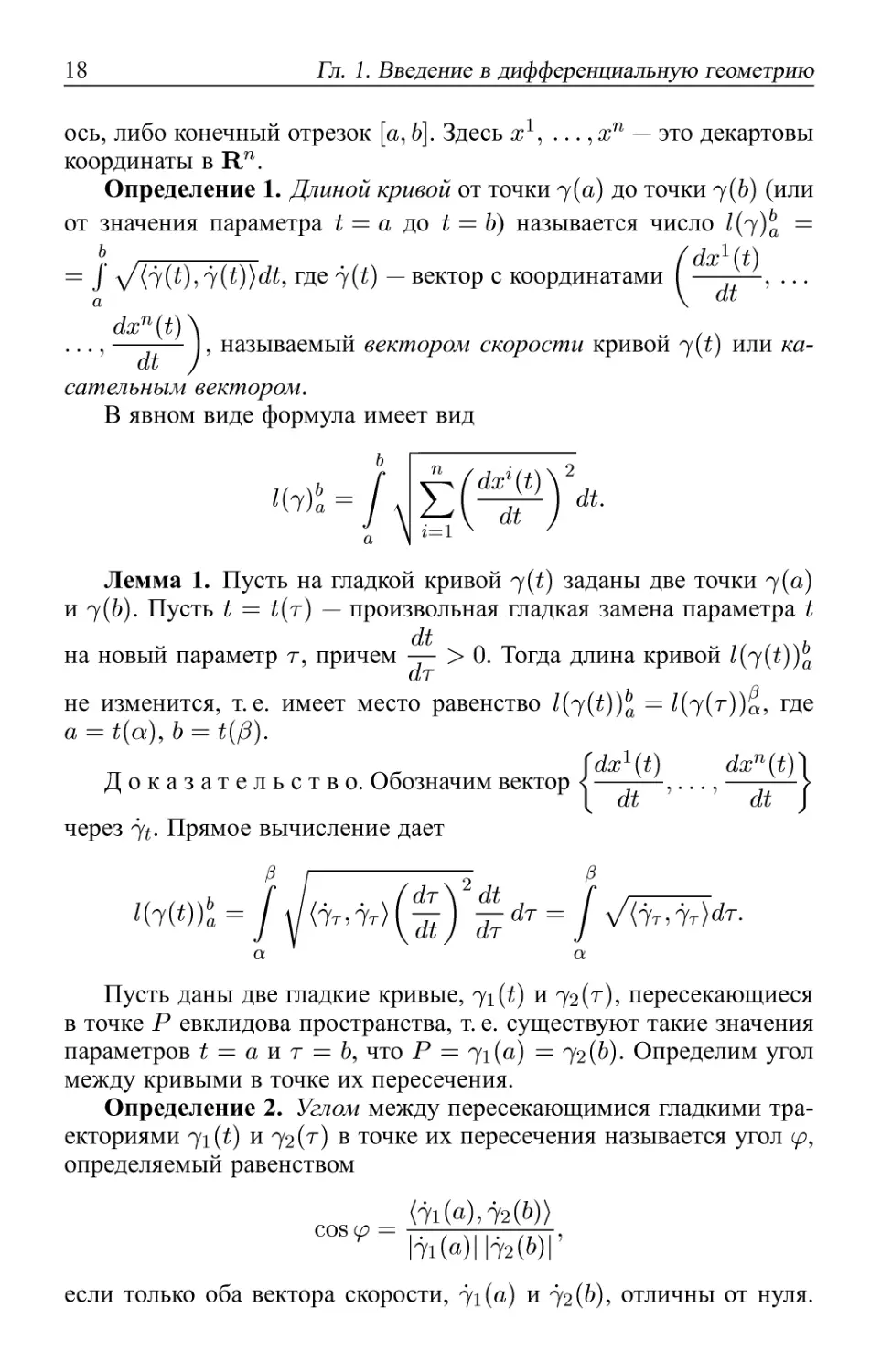
Определение 1. Длиной кривой от точки j(a) до точки j(b) (или
от значения параметра t = а до t = b) называется число /G) \ =
ь fdxl(t)
I VVW/VW)^5 гДе т№ ~~ вектор с координатами I
I , ...
a \ at
dxn(t)\
..., I, называемый вектором скорости кривой j(t) или ка-
аъ j
сателъным вектором.
В явном виде формула имеет вид
«GI =
а \
г=1
2
dt.
Лемма 1. Пусть на гладкой кривой j(t) заданы две точки j(a)
и 7(^)- Пусть t = t(r) — произвольная гладкая замена параметра t
dt
на новый параметр т, причем — > 0. Тогда длина кривой l{"i{t))a
dr
не изменится, т.е. имеет место равенство l{"i{t))ba = 1(^(т))а, где
dxl(t) dxn(t)
Доказательство. Обозначим вектор J
dt ' ' rft
через 7t- Прямое вычисление дает
Пусть даны две гладкие кривые, 71W и 72 (/г)? пересекающиеся
в точке Р евклидова пространства, т. е. существуют такие значения
параметров t = а и т = 6, что Р = 7i(a) = 72 (&)• Определим угол
между кривыми в точке их пересечения.
Определение 2. J/гло/м между пересекающимися гладкими тра-
траекториями 7i № и 72 (т) в точке их пересечения называется угол ср,
определяемый равенством
если только оба вектора скорости, 7i(a) и 72 (Ь), отличны от нуля.
1.2. Длина кривой в криволинейных координатах
19
72
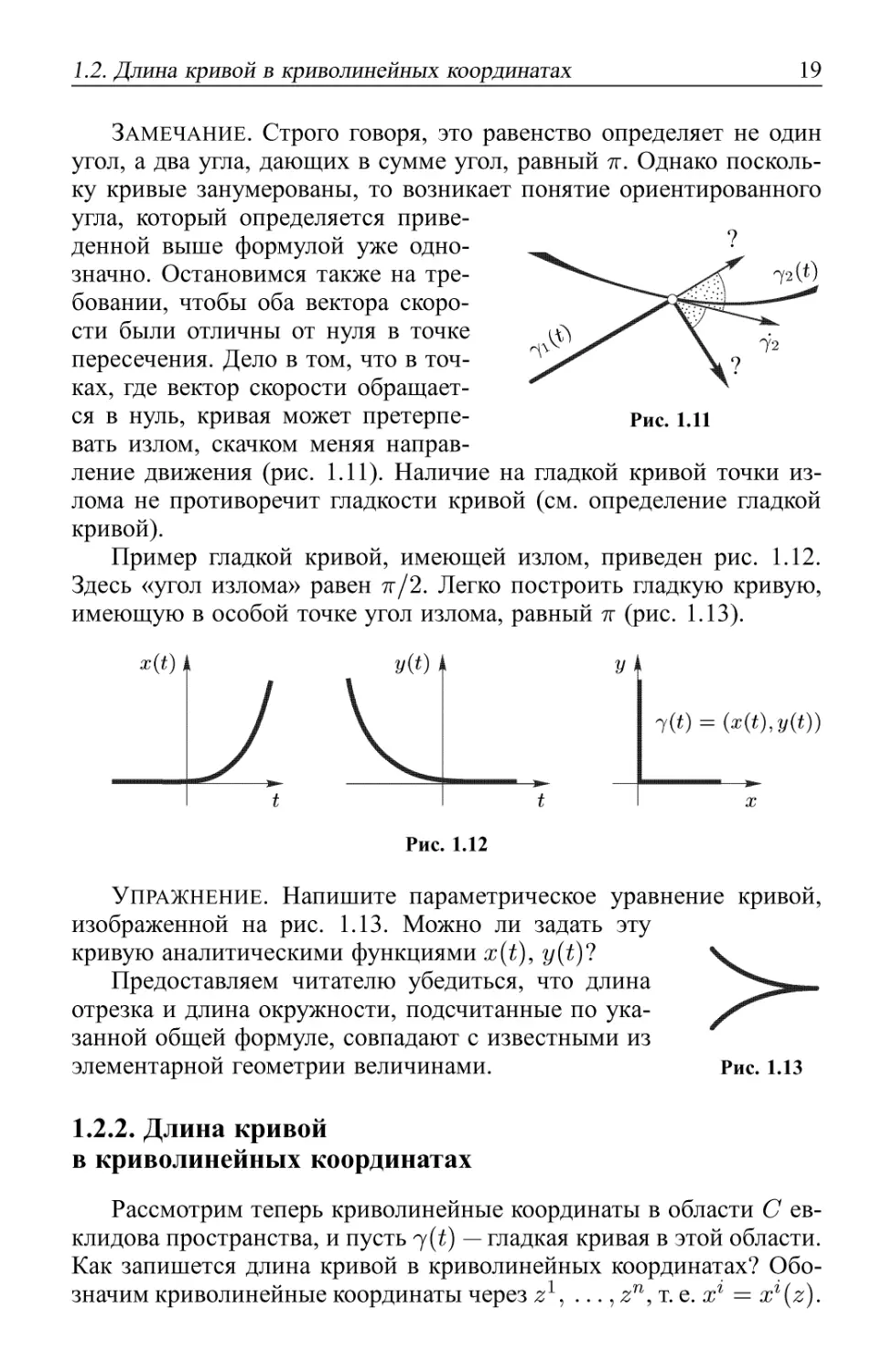
Замечание. Строго говоря, это равенство определяет не один
угол, а два угла, дающих в сумме угол, равный тг. Однако посколь-
поскольку кривые занумерованы, то возникает понятие ориентированного
угла, который определяется приве-
приведенной выше формулой уже одно-
однозначно. Остановимся также на тре-
требовании, чтобы оба вектора скоро-
скорости были отличны от нуля в точке
пересечения. Дело в том, что в точ-
точках, где вектор скорости обращает-
обращается в нуль, кривая может претерпе-
претерпевать излом, скачком меняя направ-
направление движения (рис. 1.11). Наличие на гладкой кривой точки из-
излома не противоречит гладкости кривой (см. определение гладкой
кривой).
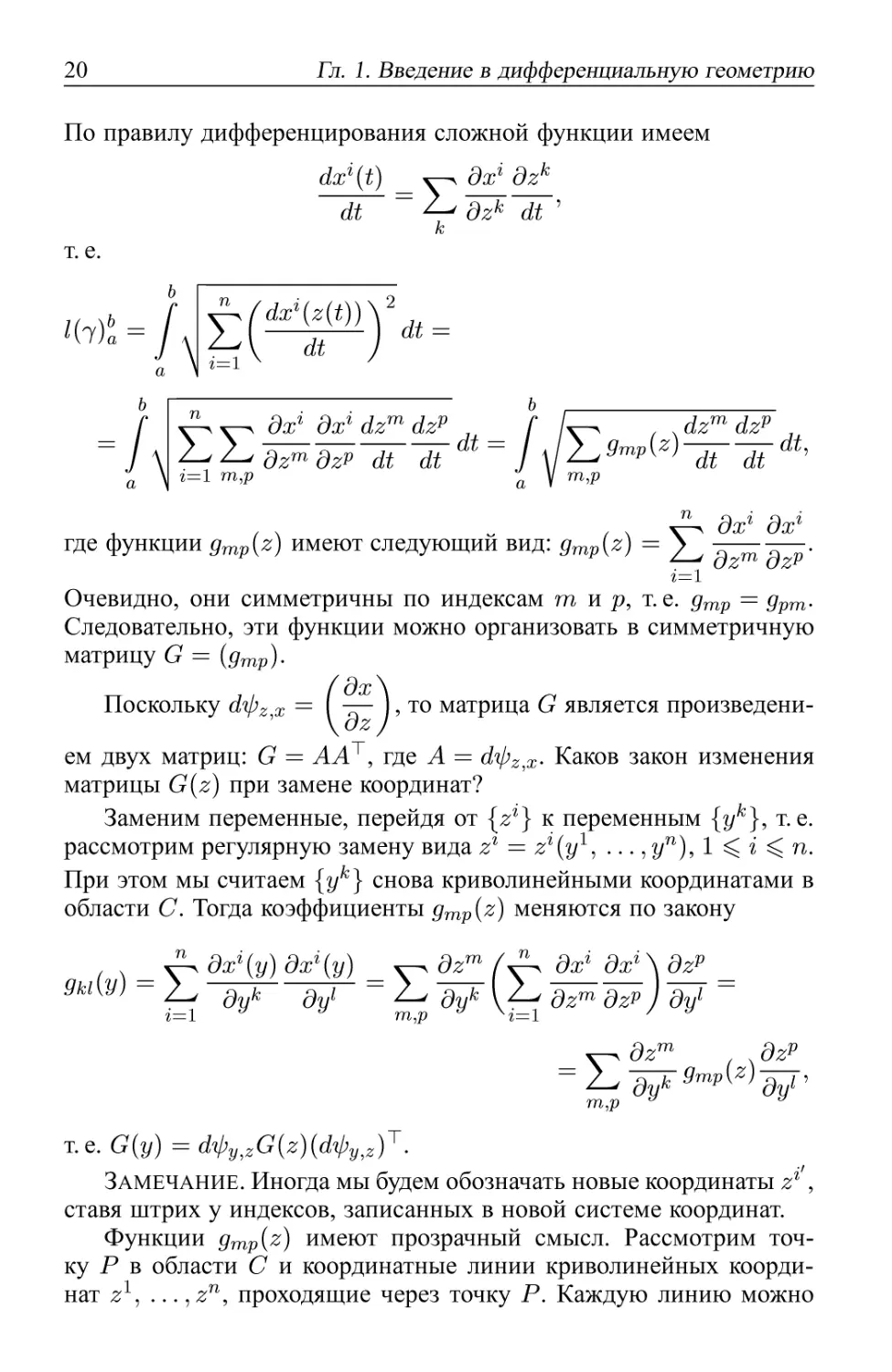
Пример гладкой кривой, имеющей излом, приведен рис. 1.12.
Здесь «угол излома» равен тг/2. Легко построить гладкую кривую,
имеющую в особой точке угол излома, равный тг (рис. 1.13).
Рис. 1.11
x(t)
У
= (x(t),y(t))
Рис. 1.12
Упражнение. Напишите параметрическое уравнение кривой,
изображенной на рис. 1.13. Можно ли задать эту
кривую аналитическими функциями x(t), y{t)l
Предоставляем читателю убедиться, что длина
отрезка и длина окружности, подсчитанные по ука-
указанной общей формуле, совпадают с известными из
элементарной геометрии величинами. Рис. 1.13
1.2.2. Длина кривой
в криволинейных координатах
Рассмотрим теперь криволинейные координаты в области С ев-
евклидова пространства, и пусть j(t) — гладкая кривая в этой области.
Как запишется длина кривой в криволинейных координатах? Обо-
Обозначим криволинейные координаты через z1, ..., zn, т. е. х1 = xl(z).
20 Гл. 1. Введение в дифференциальную геометрию
По правилу дифференцирования сложной функции имеем
dxl{t) ^—ч 9хг dzk
dt ^ dzk dt '
/с
т. е.
a
\
dxi dxi dzm
d
i=l m,p
где функции gmp(z) имеют следующий вид: gmp(z) =
г=1
Очевидно, они симметричны по индексам тир, т.е.
Следовательно, эти функции можно организовать в симметричную
матрицу G = (дтр).
Поскольку dij)z^x = I — I, то матрица G является произвелени-
\oz )
ем двух матриц: G = ААТ, где А = d^z^x. Каков закон изменения
матрицы G(z) при замене координат?
Заменим переменные, перейдя от {z1} к переменным {ук}, т.е.
рассмотрим регулярную замену вида zl = zl(yl, ..., уп), 1 ^ i ^ п.
При этом мы считаем {у^} снова криволинейными координатами в
области С. Тогда коэффициенты gmp(z) меняются по закону
дх*(у) дхг{у) _
* * m,p
дук ЭгпрН
m,p v v
Замечание. Иногда мы будем обозначать новые координаты zl,
ставя штрих у индексов, записанных в новой системе координат.
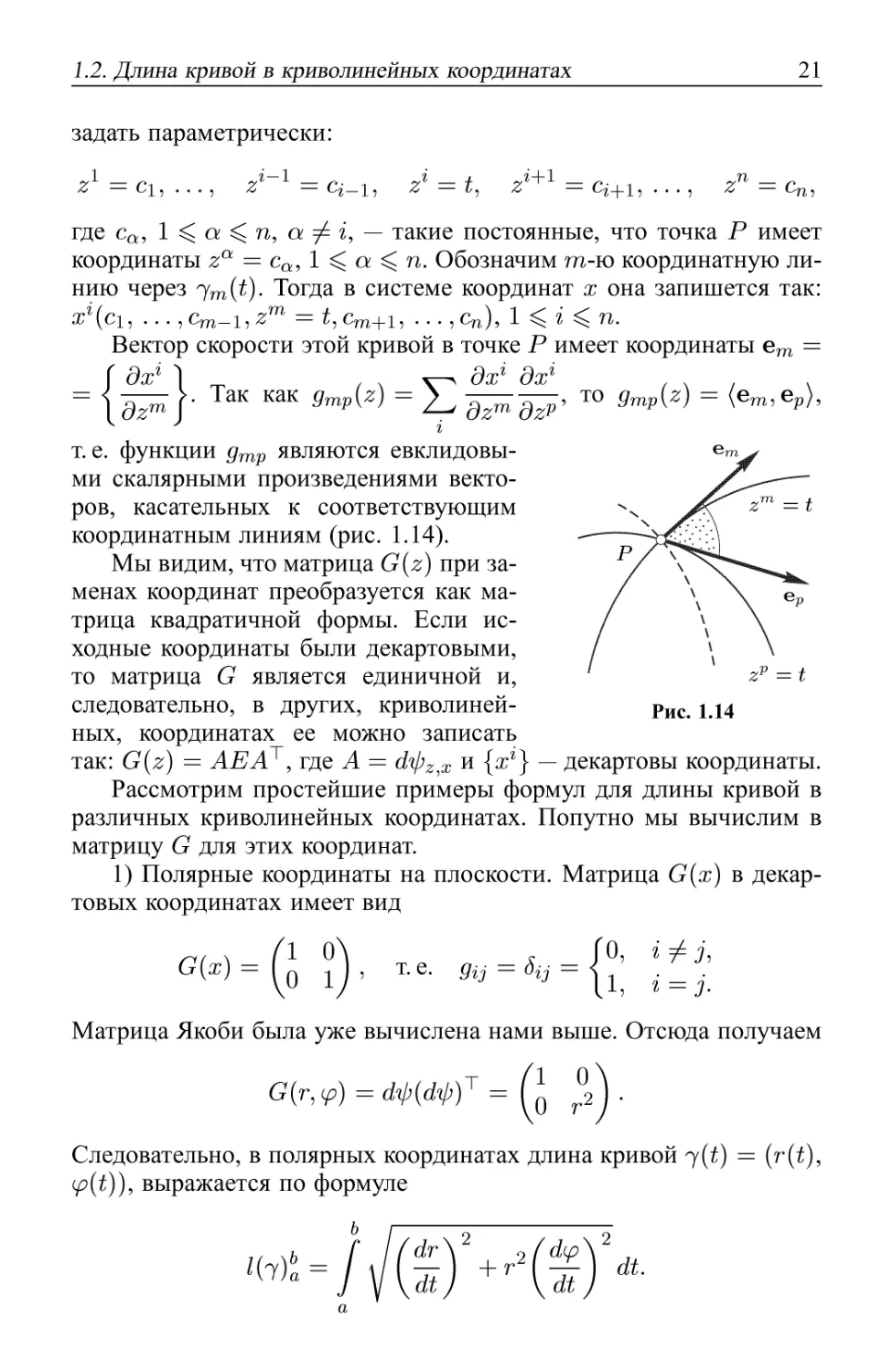
Функции gmp(z) имеют прозрачный смысл. Рассмотрим точ-
точку Р в области С и координатные линии криволинейных коорди-
координат z1, ..., zn, проходящие через точку Р. Каждую линию можно
1.2. Длина кривой в криволинейных координатах
21
задать параметрически:
=сь ...,
-1 = (Ч-Ъ zl = t,
где са, Ц a ^ n, o; / i, - такие постоянные, что точка Р имеет
координаты za = са, 1 ^ а ^ п. Обозначим m-ю координатную ли-
линию через jm(t). Тогда в системе координат х она запишется так:
Вектор скорости этой кривой в точке Р имеет координаты ет =
дхг 1 v^ <9жг 5жг
Так как gmp{z) =
Qzm Qzp •¦
то
= (еш,ер),
т. е. функции ^тр являются евклидовы-
евклидовыми скалярными произведениями векто-
векторов, касательных к соответствующим
координатным линиям (рис. 1.14).
Мы видим, что матрица G(z) при за-
заменах координат преобразуется как ма-
матрица квадратичной формы. Если ис-
исходные координаты были декартовыми,
то матрица G является единичной и,
следовательно, в других, криволиней-
криволинейных, координатах ее можно записать
так: G(z) = АЕАТ, где А = ЛДг,ж и {%г} — декартовы координаты.
Рассмотрим простейшие примеры формул для длины кривой в
различных криволинейных координатах. Попутно мы вычислим в
матрицу G для этих координат.
1) Полярные координаты на плоскости. Матрица G(x) в декар-
декартовых координатах имеет вид
Рис. 1.14
G(x)=
т.е.
Матрица Якоби была уже вычислена нами выше. Отсюда получаем
С(г,<р)=<1ф(<1ф)т=
Следовательно, в полярных координатах длина кривой j(t) = (r(t),
), выражается по формуле
^•ЧШ+*(?!*-
22 Гл. 1. Введение в дифференциальную геометрию
2) Цилиндрические координаты в трехмерном евклидовом про-
пространстве R3(r, <p, z). Матрица G(x) в декартовых координатах име-
имеет вид G(x) = Е. Матрица Якоби была уже вычислена нами выше.
Отсюда получаем
/1
= °
lo
0
г2
0
0
0
1
Следовательно, в цилиндрических координатах длина кривой j(t) =
= (r(t),(p(t),z(t)), выражается по формуле
Пример. Длина винтовой линии на прямом круговом цилин-
цилиндре, заданной параметрически уравнениями: r(t) = i?, (^(t) = out,
z = qt вычисляется так:
ь
l(n)ba = t VR2u2 + Q2dt = (i?V + q2)(b - a).
a
3) Сферические координаты в трехмерном евклидовом про-
пространстве R3(r, в,(р). Матрица G(x) в декартовых координатах
имеет вид G(x) = Е. Матрица Якоби была уже вычислена нами
выше. Отсюда получаем
/10 0
G(r,0,(p) = (Aф)(Aф)т = 0 г2 0
\0 0 г2 sin2 -
Следовательно, в сферических координатах длина кривой j(t) =
= (r(t),O(t),(p(t)), выражается формулой
Иногда удобно выписать явную формулу для дифференциала длины
дуги dl. В частности, в разобранных примерах эти дифференциалы
имеют вид: (dlJ = (drJ+r2(dcpJ в полярных координатах; (dlJ =
= (drJ + г2(dipJ + (dzJ в цилиндрических координатах; (dlJ =
= (rfrJ + r2(d6J + г2 sin2 б в сферических координатах.
1.2. Длина кривой в криволинейных координатах 23
1.2.3. Понятие римановой метрики
в области евклидова пространства
Мы сопоставили каждой криволинейной системе координат z в
области С гладкую матричную функцию G(z), преобразующуюся
при замене координат, как квадратичная форма.
Определение 3. Мы скажем, что задана риманова метрика
в области С евклидова пространства, если в каждой регулярной
системе координат z1, ...,zn определен набор гладких функций
gmp{zl, ...,zn) таких, что:
1) gmp{z) = gpm{z)> т. е. матрица G(z) симметрична;
2) матрица G(z) = (gmp) невырождена и положительно опреде-
определена;
3) при замене координат z —> у матрица G(z) преобразуется по
правилу G(y) = dipG(z)(dip)T. Здесь через dip обозначена матрица
Якоби замены координат d^y^z.
Замечание. Для упрощения обозначений в выражениях ти-
типа Yl,i aibl-> гДе суммирование ведется по повторяющимся индек-
индексам (один индекс — верхний, другой — нижний), мы иногда будем
опускать знак ^ и писать просто аф1, подразумевая суммирование
по г.
Определение 4. Если в области С задана риманова метрика
G(z) = (gij), и в системе координат (zl) задана гладкая кривая
j(t) = {zl(t)}, то ее длиной от точки j(a) до точки j(b) называется
число
ъ
dt dt dt-
Определение римановой метрики можно сформулировать в бо-
более инвариантных терминах. А именно, задание римановой метри-
метрики позволяет определить квадратичную форму (, )д, определенную
в каждой точке области на множестве всех векторов, касательных
к гладким траекториям, проходящим через эту точку. В самом де-
деле, если 7i @) = Р = 72@), то для векторов ? = 7i@) и г/ = 72@),
гДе С = (f1, • • • ??п)> V = fa1, • • • ,r)n), можно положить: (?,г))д =
j
j
Лемма 2. Отображение ?,г/ —>> {€,rj)g задает невырожденную,
положительно определенную квадратичную форму, гладко завися-
зависящую от точки.
Доказательство. Симметрия и билинейность построен-
построенного отображения следует из определения 3. Убедимся в том, что
24 Гл. 1. Введение в дифференциальную геометрию
это соответствие определяет билинейную форму. Сделаем регуляр-
регулярную замену координат zl —>> zl . Тогда
71 = {*}(*), -,*
г1 _ dz( _ dz1' { г1 _ dz1' i _ dzl
dt 5^г 5^г J dz1
Отсюда
т.е. (^f])g действительно является билинейной формой. При дока-
dzi dz1'
зательстве мы воспользовались тем, что -тг ^1 И
Итак, можно говорить, что в области С евклидова простран-
пространства задана риманова метрика, если в каждой точке области задана
билинейная форма (скалярное произведение), определенная на век-
векторах, касательных к гладким кривым, проходящим через эту точку,
причем форма невырожденная и положительно определенная.
Из леммы 1 вытекает эквивалентность этого определения и
определения 3. В частности, из леммы 1 вытекает независимость
длины гладкой кривой от выбора криволинейных координат.
Если в точке Р пересекаются две гладкие кривые 71 и 72 (такие,
что 7i@) = 72@) = P, 7i@) Ф 0,72@) ф 0), то углом между ними,
в данной римановой метрике, называется такое число <р, что
Gь72)
СО8(р= —.
ыы
Существуют ли римановы метрики? Да, и первый пример мы
уже привели. В самом деле, если в области С в декартовых коор-
координатах, ж1, ..., жп, задать матрицу G(x) = (Sij), то тогда в любых
криволинейных координатах z, получающихся из декартовых ре-
регулярной заменой, можно по определению положить G(z) = Aф х
xG{x){d^)T = (Л/>)(Л/>)Т, где <1ф — матрица Якоби данной заме-
замены. Тем самым мы определили риманову метрику, заданную в обла-
области евклидова пространства. Эта метрика является евклидовой, и
квадрат дифференциала дуги гладкой кривой в декартовых коор-
1.2. Длина кривой в криволинейных координатах 25
динатах записывается так: (dlJ = Ya=i(^x1J- Однако если задана
произвольная риманова метрика, то не следует думать, что путем
подходящей замены координат в области С эту метрику можно при-
привести к виду *YA=i{dx1J. В общем случае это неверно.
Определение 5. Риманова метрика G, заданная в области С,
называется евклидовой, если существуют координаты у (вообще го-
говоря, криволинейные), в которых матрица G(y) становится единич-
единичной.
Если задана евклидова метрика, то можно описать все системы
координат, в которых она также имеет евклидов вид, то есть зада-
задается единичной матрицей. Такое описание мы дадим позже. Здесь
отметим только, что все такие системы координат получаются из
одной путем вращений, сдвигов и отражений в евклидовом про-
пространстве.
Существование неевклидовых метрик, т. е. таких, которые не
могут быть приведены к виду Yl^ii^x1J никакой регулярной заме-
заменой координат, пока ниоткуда не следует. В данный момент мы не
можем пока предъявить такую метрику. Но вскоре мы это сделаем.
Евклидова метрика, записанная в криволинейных координа-
координатах z, теряет свой простой «евклидов» вид и задается матрицей
G(z), распознать в которой евклидову метрику иногда не просто.
Посмотрим, как записывается евклидова метрика в простейших
криволинейных координатах, указанных выше. Часто бывает удоб-
удобно записывать не матрицу G(z), а квадрат дифференциала длины
дуги гладкой кривой (dlJ = gij(z)dzldz^:
1) в полярных координатах на плоскости: dl2 = dr2 + r2d(p2;
2) в цилиндрических координатах в трехмерном пространстве:
dl2 = dr2 + r2d(p2 + dz2;
3) в сферических координатах в трехмерном пространстве: dl2 =
2 22 22
1.2.4. Индефинитные метрики
До сих пор мы имели дело только с положительно определенны-
определенными метриками, которые мы называли римановыми. Однако в при-
приложениях часто встречаются так называемые индефинитные мет-
метрики.
Определение 6. Мы скажем, что задана индефинитная метри-
метрика в области С евклидова пространства, если в каждой регулярной
системе координат z1, ...,zn определен набор гладких функций
{gmp(z1^ ...,zn)}, удовлетворяющих всем требованиям, наложен-
наложенным на риманову метрику (см. определение 3), кроме требования
26 Гл. 1. Введение в дифференциальную геометрию
положительной определенности, т. е. соответствующая квадратич-
квадратичная форма является индефинитной.
Простейший пример: псевдоевклидовы метрики индекса s в
псевдоевклидовых пространствах R™. Для построения этой метри-
метрики возьмем обычное евклидово пространство Rn с декартовыми
координатами ж1, ..., хп и зададим в каждой точке Р следующую
билинейную форму (с постоянными, т. е. не зависящими от точки
коэффициентами): (?, r/)s = - Yd=\ Cvl + YIj=s+i fV- ТогДа Для
гладкой кривой j(t) = {жг(?)} длина дуги выражается по формуле
\ Ь\л>
2
При п = 4 псевдоевклидово пространство индекса 1 называется
иногда пространством Минковского (в специальной теории относи-
относительности). Мы также будем рассматривать пространства Rf и R^.
Отметим, что псевдоевклидово пространство индекса 0 совпадает с
обычным евклидовым пространством.
Как и в обычном евклидовом пространстве, длина вектора ? в
пространстве R™ определяется по формуле |?|s = a/(?,?)s, одна-
однако в R™, в отличие от Rn, длины векторов могут быть нулевыми
и мнимыми. В самом деле, так как форма (, )s не является поло-
положительно определенной, то множество всех векторов разбивается
на следующие три непересекающихся класса: (?,?)s < 0 {времени-
подобные векторы), (?,?)s = 0 {световые или изотропные векто-
векторы), (?,?)s >0 {пространственно-подобные векторы). Таким об-
образом, имеются векторы нулевой, вещественной и чисто мнимой
длины. Времени-подобные векторы имеют чисто мнимую длину,
световые (изотропные) — нулевую, а пространственно-подобные —
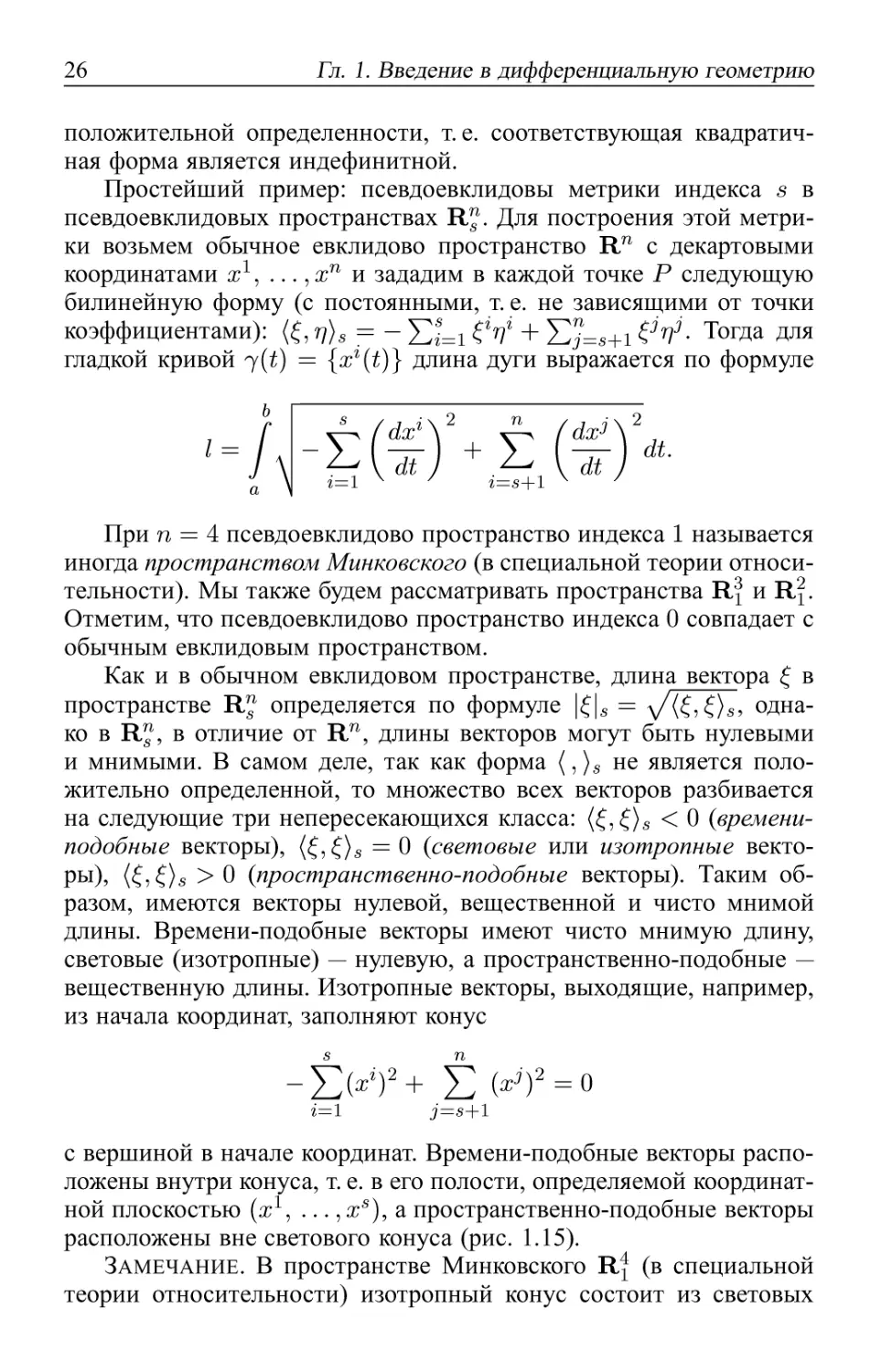
вещественную длины. Изотропные векторы, выходящие, например,
из начала координат, заполняют конус
-Е(*гJ + Е(^J = о
г=1 j=s-\-l
с вершиной в начале координат. Времени-подобные векторы распо-
расположены внутри конуса, т. е. в его полости, определяемой координат-
координатной плоскостью (ж1, ..., Xs), а пространственно-подобные векторы
расположены вне светового конуса (рис. 1.15).
Замечание. В пространстве Минковского И\ (в специальной
теории относительности) изотропный конус состоит из световых
1.2. Длина кривой в криволинейных координатах
27
<0
Рис. 1.15
векторов и называется световым конусом. Луч света, выпущенный
из начала координат, будет распространяться по одной из образую-
образующих этого конуса.
Мы определим длину гладкой кривой в псевдоевклидовом про-
пространстве R™ индекса s, положив ls = fa ^(j,j)sdt. В отличие от
евклидова случая, некоторые кривые могут иметь нулевую, чисто
мнимую или комплексную длину.
Пространство Минковского R| было введено для удобной за-
записи некоторых эффектов специальной теории относительности.
Отнесем пространство Rf к координатам х° 1 2
3 2 22 2 2 2
3 =
р
° = ct, х1 = ж, х2 =
рр f р у
= z, т. е. dl2 = —c2dt2 + dx2 + dy2 + dz2. Здесь t — время, с —
х
скорость света. Рассмотрим так называемую мировую линию какой-
нибудь материальной частицы 7(т)- Эта линия является гладкой
траекторией в R|. Если коорди-
координаты ж, у, z трактовать как про-
пространственные, то тогда движе-
движение частицы по траектории j(r)
можно интерпретировать как эво-
эволюцию во времени материальной
точки, перемещающейся в трех-
трехмерном евклидовом пространстве.
Пусть 7 — как и раньше, касатель-
касательный вектор к траектории j(r). В
специальной теории относительно-
относительности принимается постулат, что ни-
никакой сигнал не может распростра-
распространяться со скоростью, превышаю-
превышающей скорость света с. Следователь-
Следовательно, cdt > \Jdx2 + dy2 + dz2, где (ссЙ, cfe, dy, dz) — координаты бес-
бесконечно малого вектора смещения вдоль траектории j в направле-
направлении касательного вектора j.
Рис. 1.16
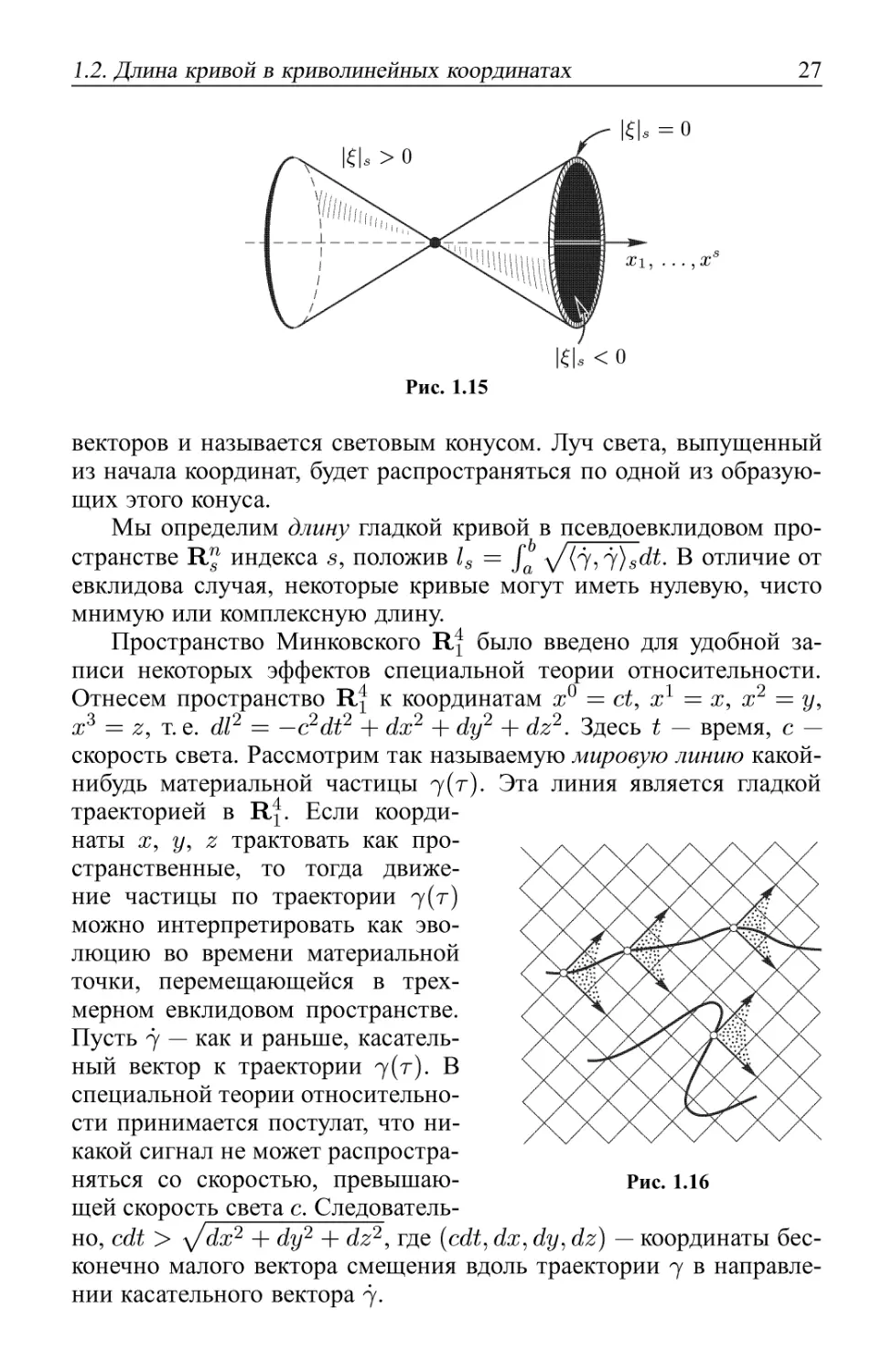
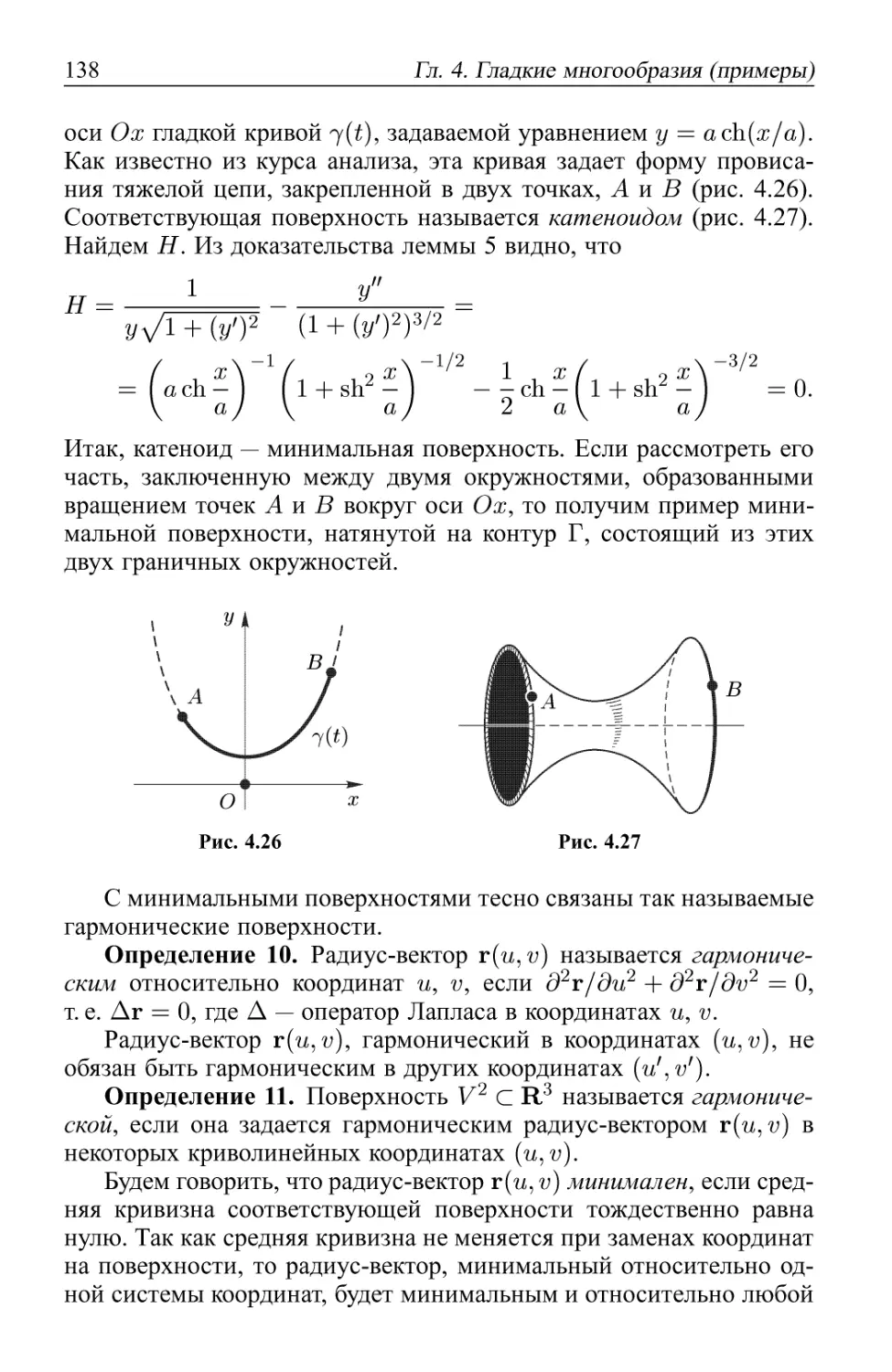
28 Гл. 1. Введение в дифференциальную геометрию
Отсюда мы получаем, что вдоль мировой линии материальной
частицы всегда выполнено соотношение —c2dt2 + dx2 + dy2 + dz2 <
< О, т.е. G(t),7(t))i < 0. Это означает, что каждый касательный
вектор к мировой линии является времени-подобным. Отсюда сле-
следует, что мировая линия всегда имеет чисто мнимую длину. В част-
частности, мировая линия целиком распространяется строго внутри све-
светового (изотропного) конуса, имеющего своей осью ось t. Это усло-
условие должно выполняться в каждой точке мировой линии (рис. 1.16).
Задачи
1. Проверить, что длину кривой можно вычислять как предел
длин ломаных, которые состоят из отрезков, соединяющих после-
последовательно конечное число точек на кривой, когда максимальная
длина отрезков стремится к нулю.
2. Доказать, что в евклидовом пространстве прямолинейный от-
отрезок имеет минимальную длину среди длин кривых, соединяющих
две точки.
1.3. ГЕОМЕТРИЯ НА СФЕРЕ, ПЛОСКОСТИ
Рассмотрим двумерную плоскость, отнесенную к декартовым
координатам ж, у и снабженную евклидовой метрикой dl2 = dx2 +
+ dy2. Иногда для обозначения бесконечно малого элемента длины
дуги кривой используют наряду с dl2 также символ ds2. Мы будем
пользоваться обоими этими обозначениями. Окружности с центром
в точке О окажутся в полярных координатах координатными линия-
линиями вида r(t) = const. Здесь бесконечно малый элемент дуги окруж-
окружности равен rdip.
Рассмотрим теперь стандартное вложение двумерной сферы
в трехмерное пространство, отнесенное к декартовым координа-
координатам x,y,z в виде множества точек, являющихся концами векторов
длины R, выходящих из точки О. Сделаем следующее общее за-
замечание. Пусть на сфере S2 задана гладкая кривая j(t), и нужно
найти ее длину. Для этого можно рассмотреть объемлющую трех-
трехмерную евклидову метрику ds2 = dx2 + dy2 + dz2, записать кривую
в параметрическом виде j(t) = (x(t),y(t),z(t)) и вычислить длину
по правилу, изложенному ранее. Точно так же можно поступить,
если нужно измерить угол между двумя лежащими на сфере и пе-
пересекающимися кривыми.
Введем в R3 сферические координаты г, #, ср. Тогда сфера ради-
радиуса R задается одним уравнением г = R.
1.3. Геометрия на сфере, плоскости 29
Вычислим скалярное произведение двух векторов, касательных
к кривым, целиком лежащим на сфере S2. Пусть ji(t) = (Д,0i(?),
72(<) = (Д,02(*),?>2(*))- ТогДа 7i(*) = (Mi^i), 72W =
2,^), т.е.
<7ъ 72> = R2 {0А + sin2
Формула записана в точке пересечения двух кривых.
Видно, что получившееся скалярное произведение совпадает со
скалярным произведением двух векторов, @i,</?i) и (#2,ty?2)> отно-
относительно новой билинейной формы i?2(#i#2 + sin2 в(t)фхфъ)- Она
определяет квадратичную форму R2(d02 + sin2 в dip2), получающу-
получающуюся из соответствующей квадратичной формы в евклидовом про-
пространстве dr2 + r2(d02 + sin2 в dip2) подстановкой в нее вместо пе-
переменных г, 6, (р новых функций от 6, (р вида г = R, в = в, (р = (р.
Будем говорить, что полученная в результате риманова метрика на
сфере S2
R2(d62 + sin2 2
является индуцированной объемлющей евклидовой метрикой трех-
трехмерного пространства.
Положение точки на сфере можно задавать двумя параметрами,
в и ср, (широта и долгота). Поэтому радиус-вектор точки на сфере
записывается так:
х = R cos в cos <р, у = R cos в sin <p, z = R sin (p.
Подставляя эти три функции от двух параметров в квадрат диф-
дифференциала длины дуги в трехмерном пространстве dx2 + dy2 + dz2,
мы получаем
R2(d02 +sin2 0d(p2).
Этот пример будет нами в дальнейшем сильно обобщен. Он ока-
окажется частным случаем индуцированных римановых метрик на по-
поверхностях в евклидовом пространстве.
На сфере S2 можно ввести и другие криволинейные коорди-
координаты, иногда используемые при вычислениях. Приведем основные
примеры.
Рассмотрим стереографическую проекцию сферы на плоскость.
Поместим центр сферы радиуса R в начало координат и рассмотрим
координатную плоскость R2(x,y), проходящую через точку О. От-
Отметим также на сфере северный полюс N и южный полюс S. Пусть
Р — точка сферы, отличная от N. Соединим ее с северным полюсом
30
Гл. 1. Введение в дифференциальную геометрию
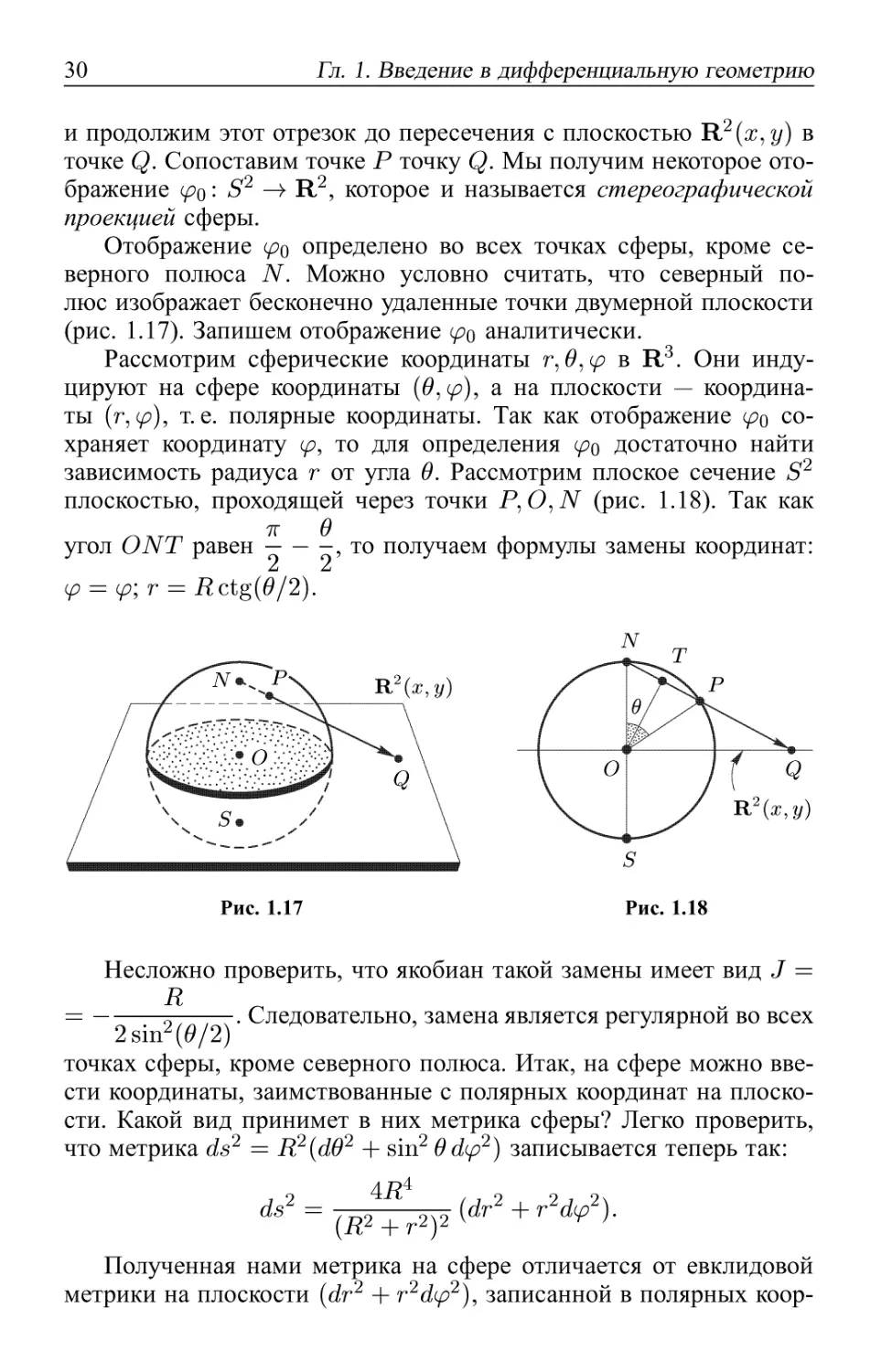
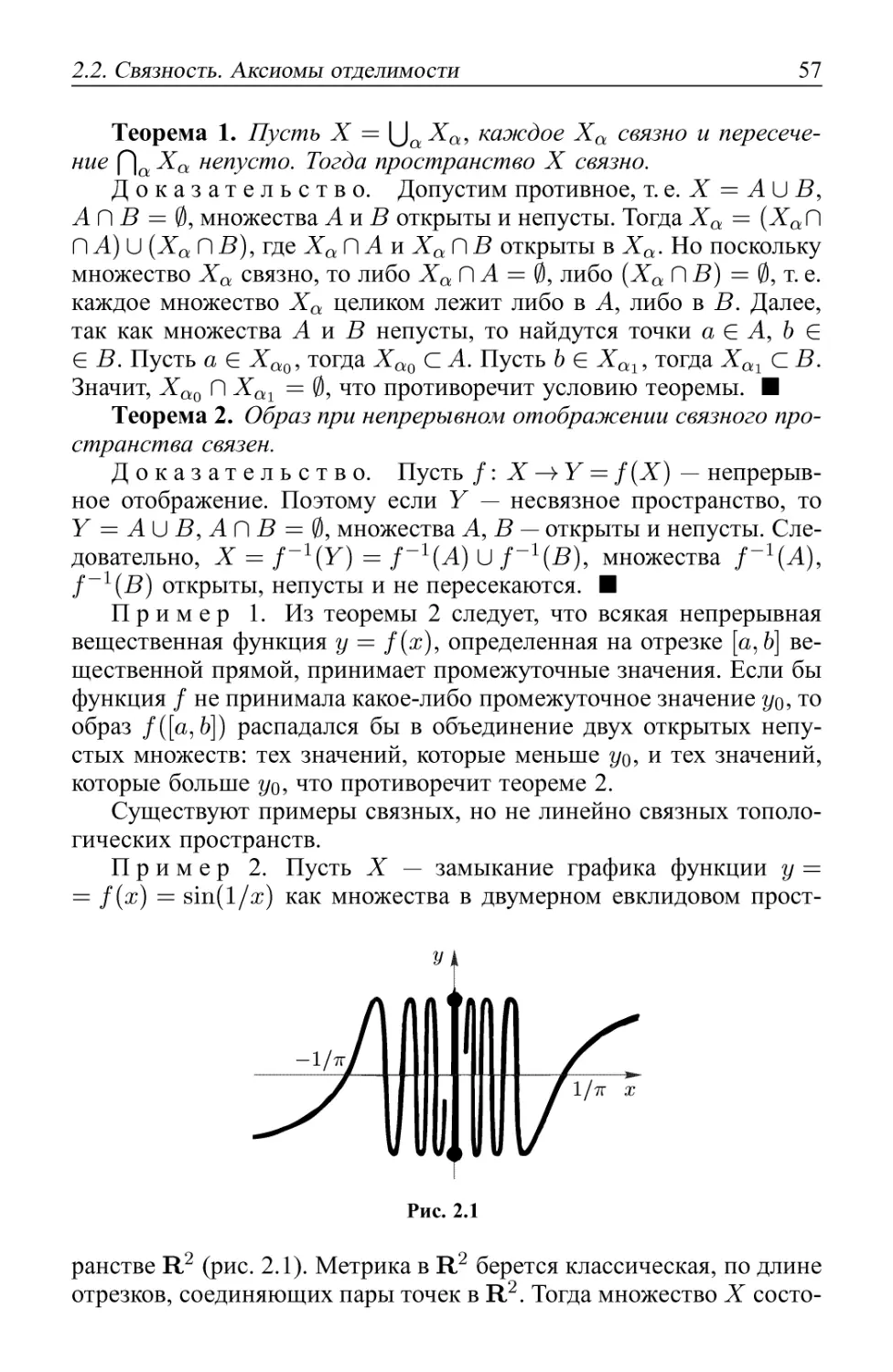
и продолжим этот отрезок до пересечения с плоскостью Л2(х,у) в
точке Q. Сопоставим точке Р точку Q. Мы получим некоторое ото-
отображение (fQi S2 —>> R2, которое и называется стереографической
проекцией сферы.
Отображение сро определено во всех точках сферы, кроме се-
северного полюса N. Можно условно считать, что северный по-
полюс изображает бесконечно удаленные точки двумерной плоскости
(рис. 1.17). Запишем отображение сро аналитически.
Рассмотрим сферические координаты г,6,ср в R3. Они инду-
индуцируют на сфере координаты @, <р), а на плоскости — координа-
координаты (г, ср), т.е. полярные координаты. Так как отображение сро со-
сохраняет координату ср, то для определения (ро достаточно найти
зависимость радиуса г от угла в. Рассмотрим плоское сечение S2
плоскостью, проходящей через точки Р, O,N (рис. 1.18). Так как
угол О NT равен , то получаем формулы замены координат:
Рис. 1.17
Несложно проверить, что якобиан такой замены имеет вид J =
= Ту . Следовательно, замена является регулярной во всех
2sirr(#/2)
точках сферы, кроме северного полюса. Итак, на сфере можно вве-
ввести координаты, заимствованные с полярных координат на плоско-
плоскости. Какой вид принимет в них метрика сферы? Легко проверить,
что метрика ds2 = R2(d62 + sin2 в dip2) записывается теперь так:
Полученная нами метрика на сфере отличается от евклидовой
метрики на плоскости (dr2 + r2dcp2), записанной в полярных коор-
1.3. Геометрия на сфере, плоскости 31
4^
динатах. Отличие — в множителе —-^ ^ттт. Такие метрики назы-
(R2 + г2J
ваются конформными.
Определение 1. Риманова метрика gij(z), заданная в области С
евклидова пространства в криволинейных координатах z1, ... , ?п,
называется конформной, если она имеет вид gij(z) = X(z)gfAz), где
X(z) — гладкая функция, a g\Az) — евклидова метрика, записанная в
координатах z1, ..., zn. Иными словами, метрика gij(z) называется
конформной, если существует такая система координат ж, в которой
(x) = \(x)Y:nk=1(dxkJ.
Таким образом, на евклидовой плоскости возникли две метрики:
dr2 + r2d(p2, т.е. евклидова, и —^ 2(dr2 + r2d(p2), т.е. метрика
сферы. Вернемся к вопросу об эквивалентности метрик. Существу-
Существует ли такая регулярная замена координат на плоскости, при которой
первая метрика перейдет во вторую?
Мы приведем наглядное обоснование того факта, что эти две
метрики неэквивалентны. Подсчитаем длину окружности х2 + у2 =
= а2 в евклидовой и в сферической метриках как функцию от ра-
радиуса окружности. Длина в евклидовой метрике нам известна: 1е =
= 2тга, где а — величина радиуса, подсчитанная в евклидовой мет-
метрике. Рассмотрим теперь сферическую метрику. В ней соотношение
между евклидовой величиной радиуса а и его величиной р в сфе-
сферической метрике, а также длина окружности имеют вид
/R2
-2—^dr = 2i?arctg (a/R),
I S2
P = ~
о
27Г
2
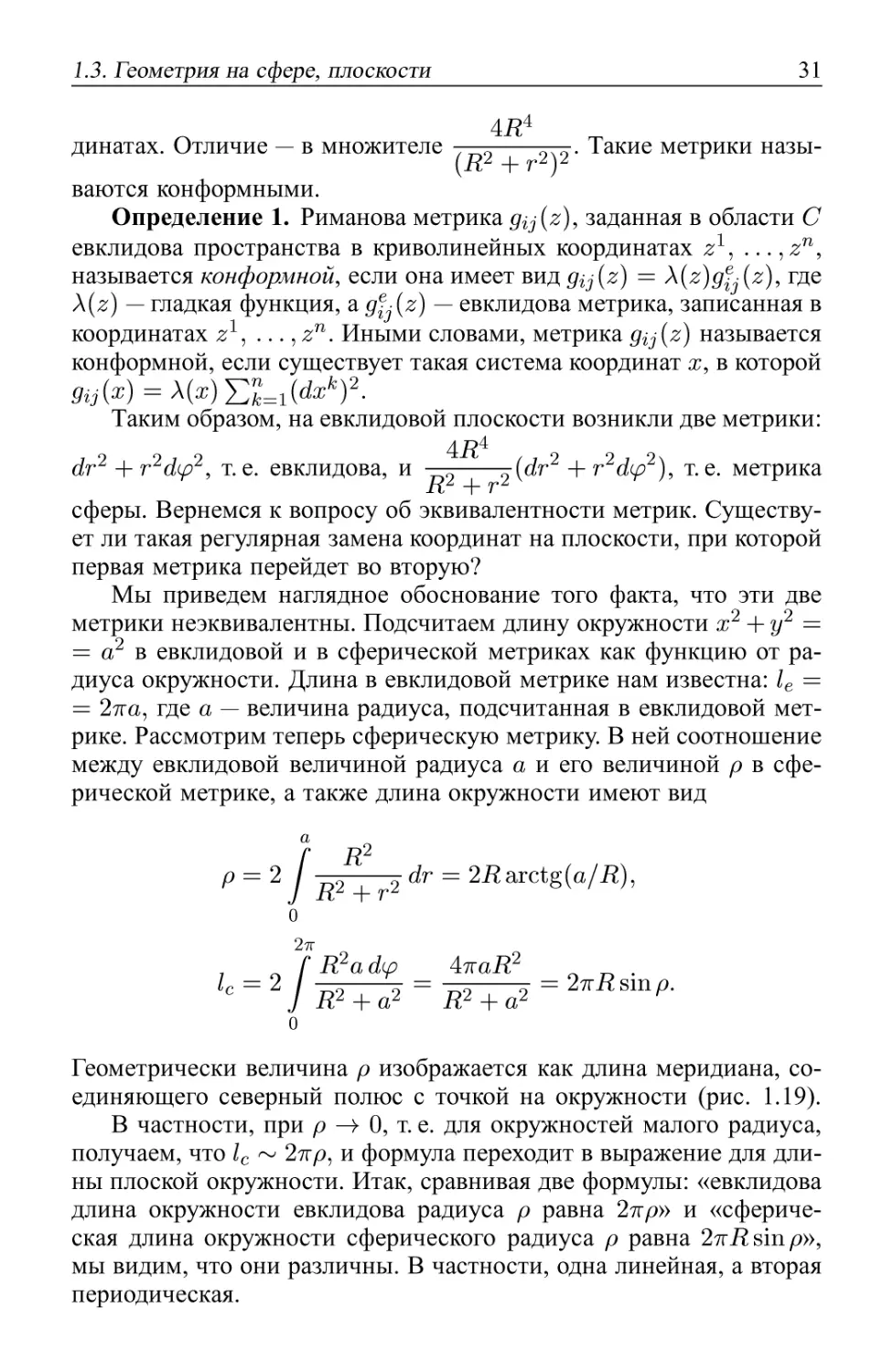
Геометрически величина р изображается как длина меридиана, со-
соединяющего северный полюс с точкой на окружности (рис. 1.19).
В частности, при р —>> 0, т. е. для окружностей малого радиуса,
получаем, что lc ~ 2тгр, и формула переходит в выражение для дли-
длины плоской окружности. Итак, сравнивая две формулы: «евклидова
длина окружности евклидова радиуса р равна 2тгр» и «сфериче-
«сферическая длина окружности сферического радиуса р равна 27ri?sinp»,
мы видим, что они различны. В частности, одна линейная, а вторая
периодическая.
32
Гл. 1. Введение в дифференциальную геометрию
Рис. 1.19
5
Мы видим, что формулы для длины окружности одного и того
же радиуса в евклидовой и сферической метрике — разные. Это ука-
указывает на то, что метрики не эквивалент-
эквивалентны, или, как часто говорят, не изометрич-
ны. Строгое доказательство их неизомет-
ричности мы получим позже.
Тот факт, что выпуклая поверхность
сферы не деформируется с сохранением
длин всех кривых на ней в область на
евклидовой плоскости, можно осознать,
представив себе, какое требуется усилие,
чтобы сплющить сферический сегмент на
плоскость, по сравнению с усилием, кото-
которое мы прикладываем при изгибании пря-
прямого кругового цилиндра, накладывая его на плоскость.
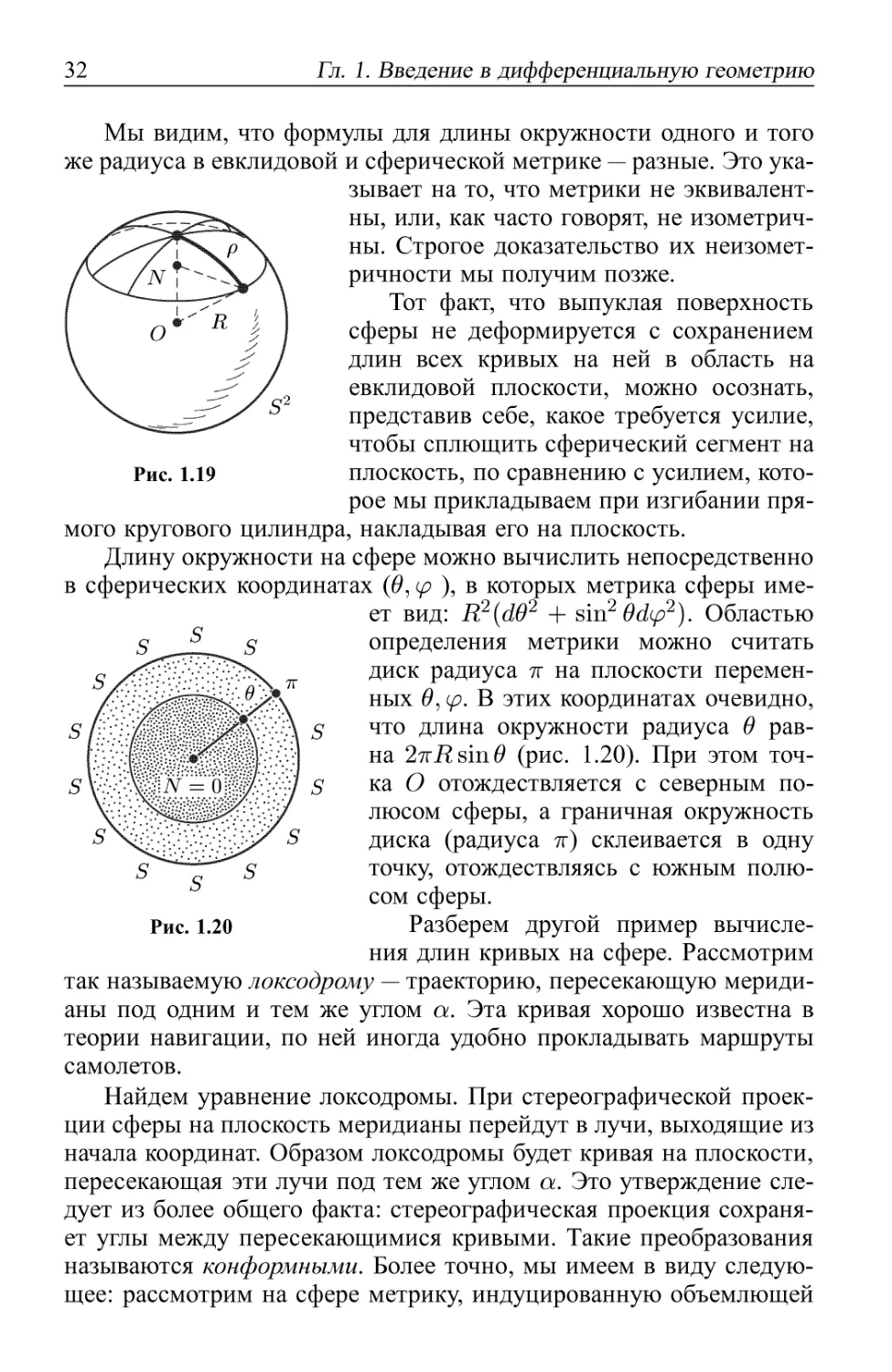
Длину окружности на сфере можно вычислить непосредственно
в сферических координатах @, <р ), в которых метрика сферы име-
имеет вид: R2(d62 + sin2 Odcp2). Областью
определения метрики можно считать
диск радиуса тг на плоскости перемен-
переменных #, ср. В этих координатах очевидно,
г что длина окружности радиуса в рав-
равна 27ri?sin# (рис. 1.20). При этом точ-
1 ка О отождествляется с северным по-
полюсом сферы, а граничная окружность
диска (радиуса тг) склеивается в одну
точку, отождествляясь с южным полю-
полюсом сферы.
Разберем другой пример вычисле-
вычисления длин кривых на сфере. Рассмотрим
так называемую локсодрому — траекторию, пересекающую мериди-
меридианы под одним и тем же углом а. Эта кривая хорошо известна в
теории навигации, по ней иногда удобно прокладывать маршруты
самолетов.
Найдем уравнение локсодромы. При стереографической проек-
проекции сферы на плоскость меридианы перейдут в лучи, выходящие из
начала координат. Образом локсодромы будет кривая на плоскости,
пересекающая эти лучи под тем же углом а. Это утверждение сле-
следует из более общего факта: стереографическая проекция сохраня-
сохраняет углы между пересекающимися кривыми. Такие преобразования
называются конформными. Более точно, мы имеем в виду следую-
следующее: рассмотрим на сфере метрику, индуцированную объемлющей
Рис. 1.20
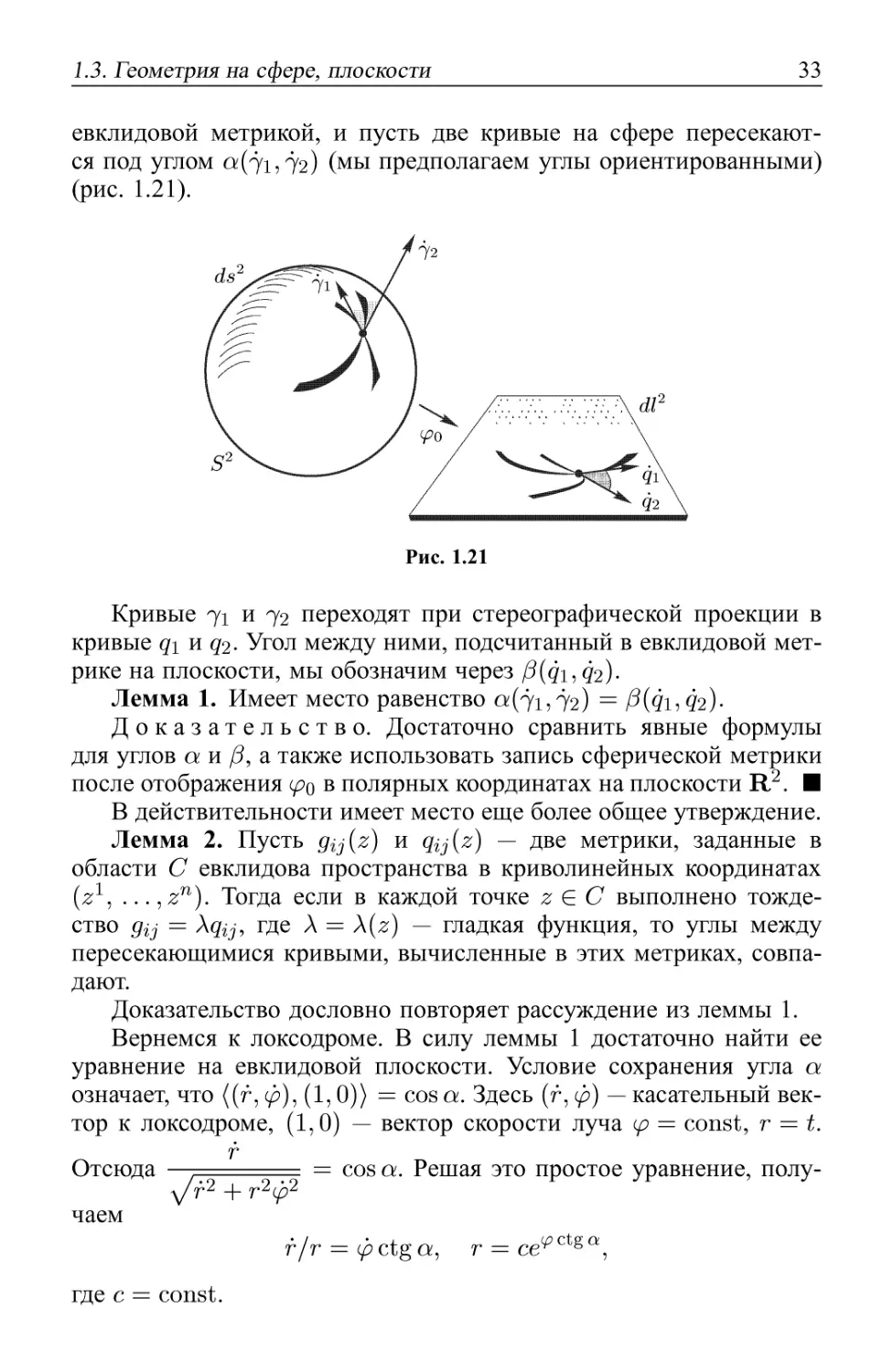
1.3. Геометрия на сфере, плоскости 33
евклидовой метрикой, и пусть две кривые на сфере пересекают-
пересекаются под углом а G1,72) (мы предполагаем углы ориентированными)
(рис. 1.21).
Рис. 1.21
Кривые 7i и 72 переходят при стереографической проекции в
кривые q\ и 6/2- Угол между ними, подсчитанный в евклидовой мет-
метрике на плоскости, мы обозначим через /3(#ь (Ы-
Лемма 1. Имеет место равенство аG1,72) = /^Йь^Ь)-
Доказательство. Достаточно сравнить явные формулы
для углов аи C, а также использовать запись сферической метрики
после отображения сро в полярных координатах на плоскости R2. ¦
В действительности имеет место еще более общее утверждение.
Лемма 2. Пусть gij(z) и qij(z) — две метрики, заданные в
области С евклидова пространства в криволинейных координатах
(z1, ... ,zn). Тогда если в каждой точке z Е С выполнено тожде-
тождество gij = Xqij, где А = X(z) — гладкая функция, то углы между
пересекающимися кривыми, вычисленные в этих метриках, совпа-
совпадают.
Доказательство дословно повторяет рассуждение из леммы 1.
Вернемся к локсодроме. В силу леммы 1 достаточно найти ее
уравнение на евклидовой плоскости. Условие сохранения угла a
означает, что ((г, ф), A,0)) = cos a. Здесь (г, ф) — касательный век-
вектор к локсодроме, A,0) — вектор скорости луча ср = const, r = t.
г
Отсюда = cos a. Решая это простое уравнение, полу-
/2 + 2ф2
чаем
г/г = <pctga, г =
где с = const.
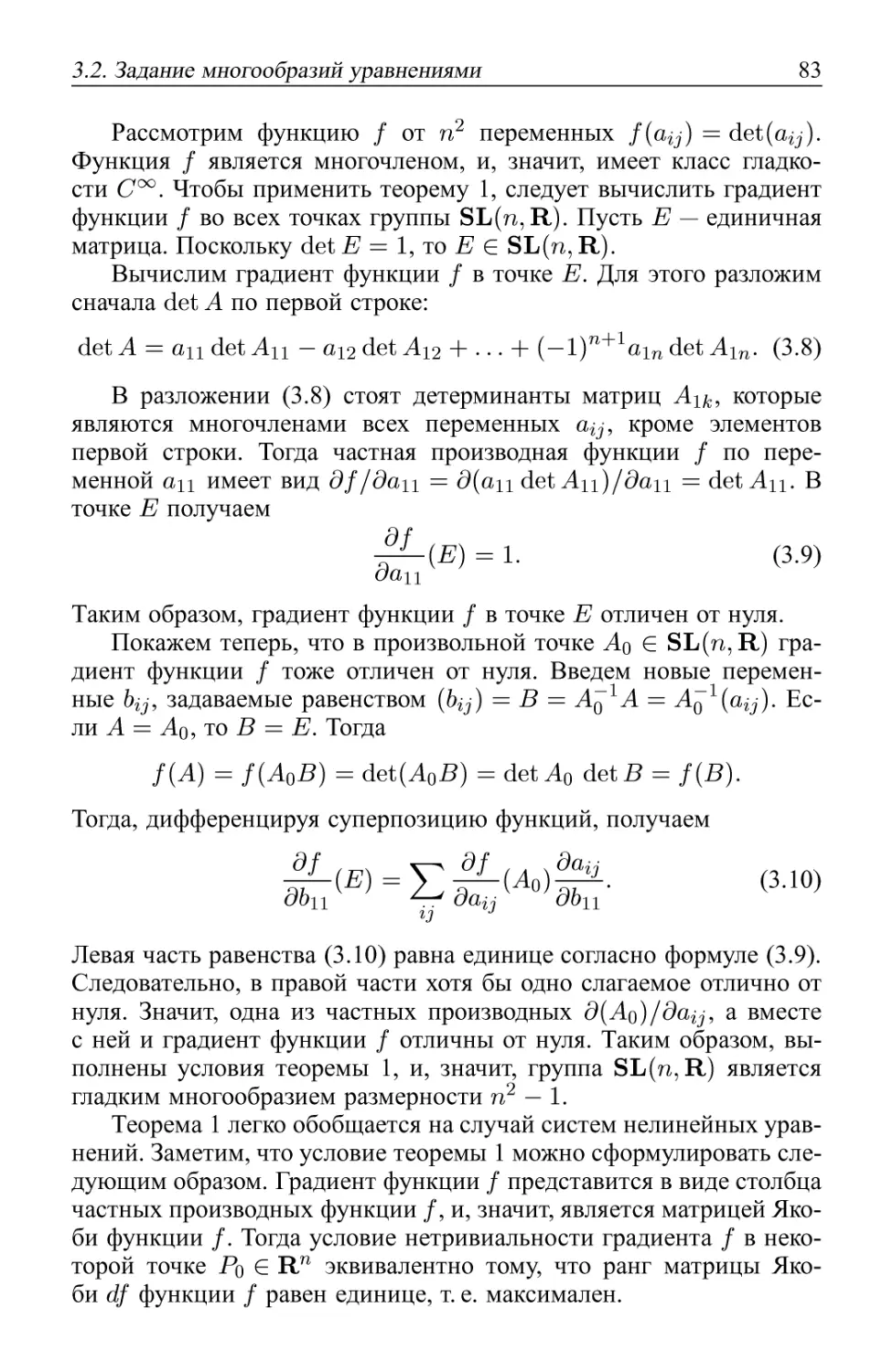
34 Гл. 1. Введение в дифференциальную геометрию
Вычисляя длину дуги, получаем
где с", с' = const. Задача: найдите значение постоянных с7, с".
Задачи
1. Показать, что у треугольника на сфере S2, составленного из
дуг больших окружностей, сумма углов больше 2тг.
2. Выразить сумму углов треугольника на сфере S2 через его
площадь (треугольник составлен из дуг больших окружностей).
3. Показать, что на сфере S2 преобразование подобия возможно
только с единичным коэффициентом.
4. Показать, что для любой римановой метрики найдется такая
система координат, в которой в данной точке матрица римановой
метрики единична.
1.4. ПСЕВДОСФЕРА И ГЕОМЕТРИЯ ЛОБАЧЕВСКОГО
В евклидовом пространстве Rn сфера Sn~l (гиперсфера) мо-
может быть определена как множество точек, удаленных от начала
координат на расстояние р. В псевдоевклидовом пространстве R™
индекса s также можно рассмотреть множество точек, удаленных
от некоторой точки на расстояние р. Но здесь число р может быть
не только вещественным, но также чисто мнимым или нулем. Это
множество мы назовем псевдосферой индекса s и обозначим че-
через S^. Будем различать псевдосферы вещественного, мнимого
и нулевого радиусов. Псевдосфера нулевого радиуса описывается
уравнением второго порядка — YH=\{xlJ + S?=s+i(x<7J = 0' где
ж1, ...,жп — декартовы координаты в Rn, на котором мы моде-
моделируем псевдоевклидово пространство. Очевидно, что псевдосфера
нулевого радиуса совпадает с изотропным конусом.
Рассмотрим примеры. Пусть п = 2, s = 1. Изотропный «конус»
на двумерной плоскости состоит из двух прямых: х1 = =Ьж2. Он
разбивает плоскости на две области: в одной из них (?, ?)i > 0, т. е.
х2\ > \xl\, а в другой (?,?)i < 0, т.е. здесь \х2\ < \хг\ (рис. 1.22).
Псевдоокружности вещественного радиуса — это гиперболы
— (ж1J + (х2J = а2, где а — вещественно. Псевдоокружности мни-
мнимого радиуса — это гиперболы —(ж1J + (ж2J = —а2 (рис. 1.23).
Пусть теперь п = 3, s = 1. Изотропный конус, т. е. псевдосфера
нулевого радиуса, — это обычный конус второго порядка, задавае-
задаваемый уравнением — (х1J + (х2J + (х3J = 0, с осью х1. Он разбивает
1.4. Псевдосфера и геометрия Лобачевского
35
р = — a
Рис. 1.22
Рис. 1.23
пространство на две области — внутреннюю и внешнюю (рис. 1.24).
Псевдосферы вещественного радиуса — это однополостные гипер-
гиперболоиды -(ж1J + (ж2J + (ж3J =
= +а2. Псевдосферы мнимого ра-
радиуса — это двухполостные гипер-
гиперболоиды -(х1J + (х2J + (ж3J =
= —а2, (рис. 1.25). Напомним, что
для удобства мы моделируем R3
на пространстве R3. Через ж, у, z
обозначаются декартовы коорди-
р
наты. Тогда (?,?)i = — x2-\-y2-\-z2.
Рис. 1.24
О
Рассмотрим псевдосферу мни-
мнимого радиуса — двухполостный ги-
гиперболоид —а2 = —х2 + у2 + z2.
Геометрия (метрика) пространства R3 индуцирует некоторую гео-
геометрию (метрику) на псевдосфере мнимого радиуса.
Рис. 1.25
Для простоты ограничимся изучением только одной ее полости,
например, определенной неравенством х > 0. «Точками» геомет-
36
Гл. 1. Введение в дифференциальную геометрию
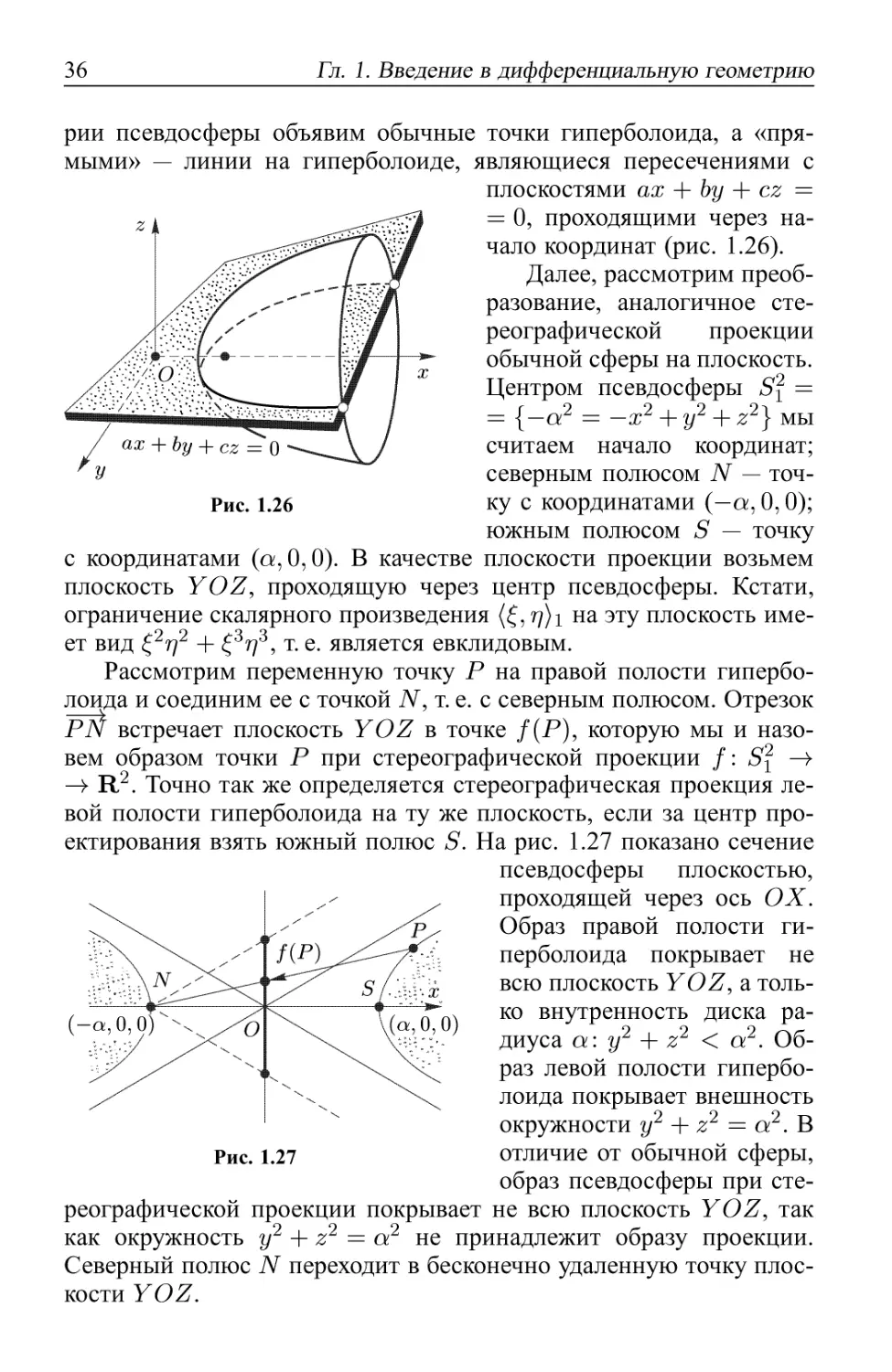
Рис. 1.26
рии псевдосферы объявим обычные точки гиперболоида, а «пря-
«прямыми» — линии на гиперболоиде, являющиеся пересечениями с
плоскостями ax + by + cz =
= 0, проходящими через на-
начало координат (рис. 1.26).
Далее, рассмотрим преоб-
преобразование, аналогичное сте-
стереографической проекции
обычной сферы на плоскость.
Центром псевдосферы S2 =
= {-а2 = -х2 + у2 + z2} мы
считаем начало координат;
северным полюсом N — точ-
точку с координатами (—а, 0,0);
южным полюсом S — точку
с координатами (а, 0,0). В качестве плоскости проекции возьмем
плоскость YOZ, проходящую через центр псевдосферы. Кстати,
ограничение скалярного произведения (?, rf)\ на эту плоскость име-
имеет вид ?27/2 + ?37/3, т. е. является евклидовым.
Рассмотрим переменную точку Р на правой полости гипербо-
гиперболоида и соединим ее с точкой N, т. е. с северным полюсом. Отрезок
PN встречает плоскость YOZ в точке f(P), которую мы и назо-
назовем образом точки Р при стереографической проекции /': Sf —>>
—>> R2. Точно так же определяется стереографическая проекция ле-
левой полости гиперболоида на ту же плоскость, если за центр про-
проектирования взять южный полюс S. На рис. 1.27 показано сечение
псевдосферы плоскостью,
проходящей через ось ОХ.
Образ правой полости ги-
гиперболоида покрывает не
всю плоскость YOZ, а толь-
только внутренность диска ра-
радиуса а: у2 + z2 < а2. Об-
Образ левой полости гипербо-
гиперболоида покрывает внешность
окружности у2 + z2 = а2. В
отличие от обычной сферы,
образ псевдосферы при сте-
стереографической проекции покрывает не всю плоскость YOZ, так
как окружность у2 + z2 = а2 не принадлежит образу проекции.
Северный полюс N переходит в бесконечно удаленную точку плос-
плоскости YOZ.
Рис. 1.27
1.4. Псевдосфера и геометрия Лобачевского
37
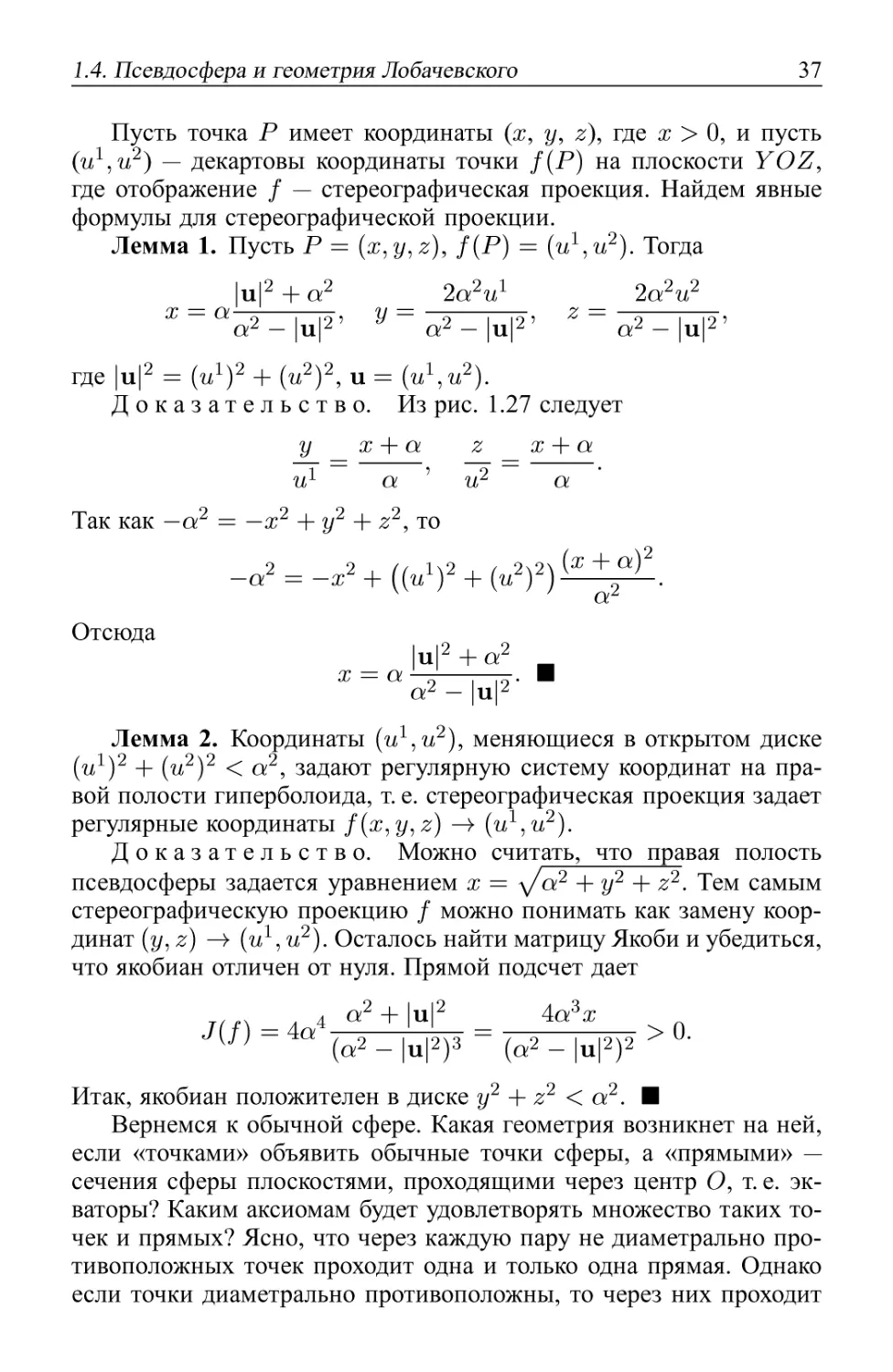
Пусть точка Р имеет координаты (ж, у, z), где х > О, и пусть
(и1, и2) — декартовы координаты точки f(P) на плоскости YOZ,
где отображение / — стереографическая проекция. Найдем явные
формулы для стереографической проекции.
Лемма 1. Пусть Р = (ж, у, 2), f(P) = {ul,u2). Тогда
х = a
u
У
2aV
V
2aV
V
где
u|2 = (и1J
2, u =
9 119
a2 — ur
,и2).
9 119-
r — ur
Доказательство. Из рис. 1.27 следует
у х + a z х + a
и1
a
и2
a
Так как —а2 = —х2 + у2 + z2,to
9 9 / / 1 \ 9 /9\9\
-а2 = -х2 + ((и1J + (и2J) ¦
а2
Отсюда
х = а
Лемма 2. Координаты
(и1J +
2J
меняющиеся в открытом диске
() (и2J < а2, задают регулярную систему координат на пра-
правой полости гиперболоида, т. е. стереографическая проекция задает
регулярные координаты f(x,y,z) —>> [и1,и2).
Доказательство. Можно считать, что правая полость
псевдосферы задается уравнением х = л/а2 + у2 + z2. Тем самым
стереографическую проекцию / можно понимать как замену коор-
координат (у, z) —)> (и1, и2). Осталось найти матрицу Якоби и убедиться,
что якобиан отличен от нуля. Прямой подсчет дает
а
(а2 -
и|
(а2 -
и\
Итак, якобиан положителен в диске у2 + z2 < а2. Ш
Вернемся к обычной сфере. Какая геометрия возникнет на ней,
если «точками» объявить обычные точки сферы, а «прямыми» —
сечения сферы плоскостями, проходящими через центр О, т. е. эк-
экваторы? Каким аксиомам будет удовлетворять множество таких то-
точек и прямых? Ясно, что через каждую пару не диаметрально про-
противоположных точек проходит одна и только одна прямая. Однако
если точки диаметрально противоположны, то через них проходит
38 Гл. 1. Введение в дифференциальную геометрию
бесконечное множество прямых. Кроме того, через точку, располо-
расположенную вне прямой, нельзя провести ни одной прямой, не пересе-
пересекающейся с исходной прямой. В получившейся геометрии на сфере
не существует параллельных, т. е. не пересекающихся, прямых.
Кое-какие улучшения сделать можно. Объявим «точками» новой
геометрии пары диаметрально противоположных точек, Р и — Р,
на сфере. Теперь через любую пару точек проходит одна и только
одна «прямая» (если точки не совпадают). Легко проверяется, что
в получившейся геометрии выполнены все классические аксиомы
Евклида, кроме так называемого пятого постулата. По-прежнему,
через точку, взятую вне прямой, нельзя провести ни одной прямой,
параллельной данной, т. е. любые две прямые либо пересекаются
в одной точке, либо совпадают. Эта геометрия называется иногда
эллиптической.
Описанное отождествление точек вида Р и —Р эквивалентно
факторизации сферы по действию симметрии отражения в точке О.
Так как каждая пара (Р, — Р) определяет ровно одну прямую в трех-
трехмерном пространстве (куда вложена сфера), то можно сопоставить
каждой «прямой» эллиптической геометрии, т. е. экватору, ортого-
ортогональную прямую, проходящую через О. Таким образом, эллиптиче-
эллиптическая геометрия моделируется на двумерном вещественном проек-
проективном пространстве.
Вернемся к псевдоевклидовой геометрии и к геометрии, инду-
индуцируемой на псевдосфере мнимого радиуса. Рассмотрим стереогра-
стереографическую проекцию /: +Sf —>> {у2 + z2 < a2} = D2. Через +Sf
обозначена правая полость гиперболоида. Ее точки переходят во
внутренние точки диска D2 радиуса а. В какие кривые на круге D2
перейдут «прямые» геометрии на гиперболоиде, т. е. линии пересе-
пересечения его с плоскостями, проходящими через центр псевдосферы —
точку О, т. е. аналоги экваторов на сфере?
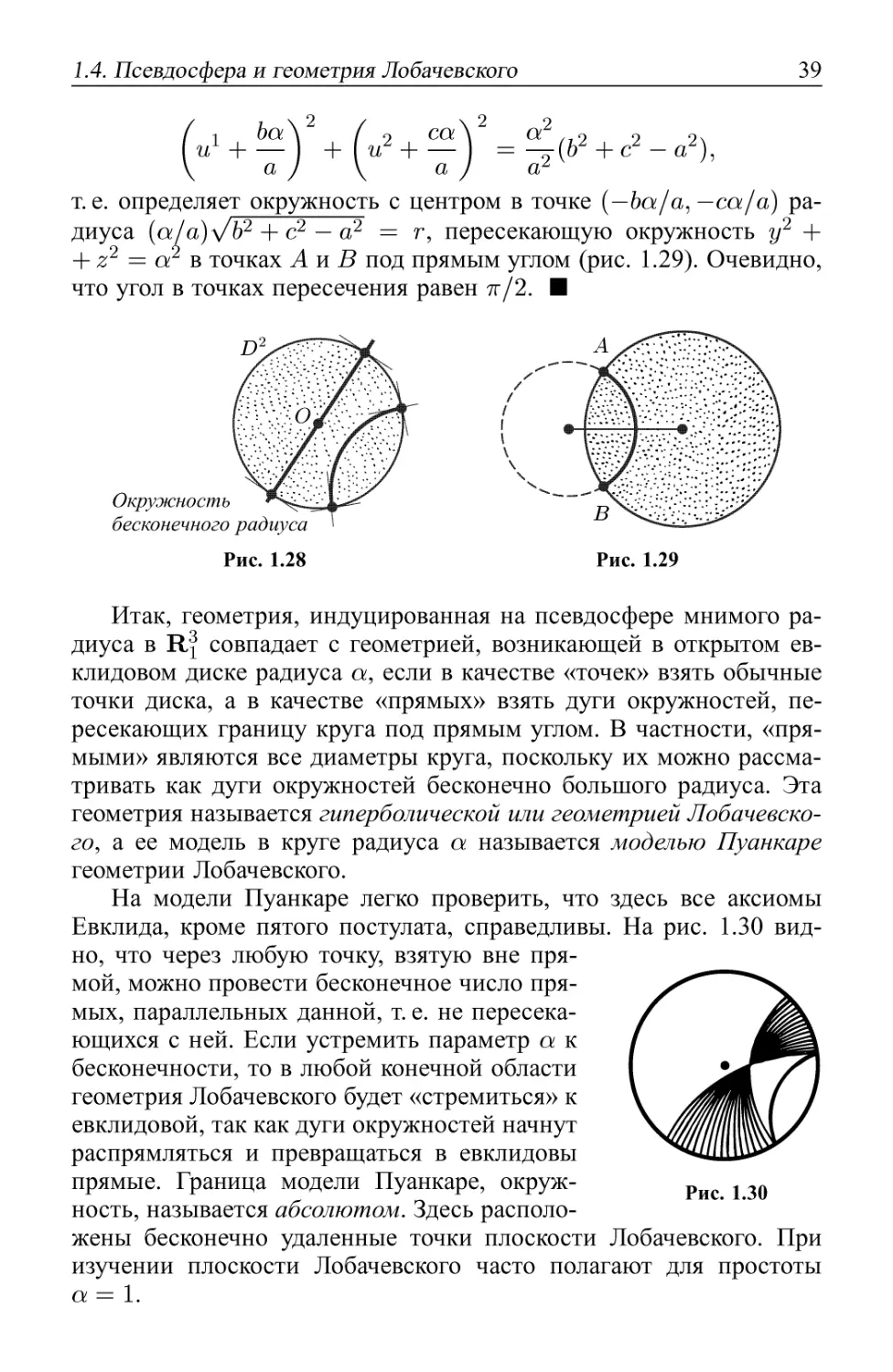
Лемма 3. Каждая линия пересечения +S2 с плоскостью вида
ах + by + cz = 0 переходит при отображении / в дугу окружно-
окружности, пересекающую окружность у2 + z2 = а2 под прямым углом
(рис. 1.28).
Доказательство. В силу леммы 1 достаточно подста-
подставить в уравнение плоскости ах + by + cz = 0 выражения перемен-
переменных ж, у, z как функций от переменных и1, и2. Пусть, например,
а ф 0. Тогда уравнение
|u
a2 2ba2ul 2са2и2
2 ' ^2 _ |„|2 ' ^2 _ „12
ur or - и
и
после элементарных преобразований приводится к виду
1.4. Псевдосфера и геометрия Лобачевского
39
ba у
a /
ca\
a2
a J a2
т.е. определяет окружность с центром в точке (—ba/a, —ca/a) ра-
радиуса (a/a)Vb2 -\- с2 — a2 = г, пересекающую окружность у2 +
+ ?2 = а в точках Аи В под прямым углом (рис. 1.29). Очевидно,
что угол в точках пересечения равен тг/2. ¦
D
Окружность
бесконечного радиуса
Рис. 1.28
Рис. 1.29
Итак, геометрия, индуцированная на псевдосфере мнимого ра-
радиуса в Rf совпадает с геометрией, возникающей в открытом ев-
евклидовом диске радиуса а, если в качестве «точек» взять обычные
точки диска, а в качестве «прямых» взять дуги окружностей, пе-
пересекающих границу круга под прямым углом. В частности, «пря-
«прямыми» являются все диаметры круга, поскольку их можно рассма-
рассматривать как дуги окружностей бесконечно большого радиуса. Эта
геометрия называется гиперболической или геометрией Лобачевско-
Лобачевского, а ее модель в круге радиуса а называется моделью Пуанкаре
геометрии Лобачевского.
На модели Пуанкаре легко проверить, что здесь все аксиомы
Евклида, кроме пятого постулата, справедливы. На рис. 1.30 вид-
видно, что через любую точку, взятую вне пря-
прямой, можно провести бесконечное число пря-
прямых, параллельных данной, т. е. не пересека-
пересекающихся с ней. Если устремить параметр а к
бесконечности, то в любой конечной области
геометрия Лобачевского будет «стремиться» к
евклидовой, так как дуги окружностей начнут
распрямляться и превращаться в евклидовы
прямые. Граница модели Пуанкаре, окруж-
окружность, называется абсолютом. Здесь располо-
расположены бесконечно удаленные точки плоскости Лобачевского. При
изучении плоскости Лобачевского часто полагают для простоты
а= 1.
Рис. 1.30
40 Гл. 1. Введение в дифференциальную геометрию
Замечание. Можно рассмотреть геометрию, возникающую на
псевдосферах вещественного радиуса, т. е. на однополостных ги-
гиперболоидах. Докажите, что она совпадает с геометрией Лобачев-
Лобачевского.
Вычислим риманову метрику, индуцированную на псевдосфе-
псевдосфере мнимого радиуса объемлющей индефинитной метрикой. Введем
в Rf аналог сферических координат. В плоскости YOZ зададим
полярные координаты (г, <р), где ср — угол с осью у. Введем еще
параметр в' и сделаем замену переменных
у = a sh в' cos <p, z = a sh в' sin <p, х = a ch в'.
В этой «псевдосферической» системе координат уравнение псевдо-
псевдосферы очевидно запишется в виде a = const.
Вычислим риманову метрику на псевдосфере в координатах и1,
и2 на модели Пуанкаре. Подставляя формулы для стереографиче-
стереографической проекции в квадрат дифференциала длины дуги в Rf, получа-
получаем (проверьте!)
(du
2J
(9 / 1\9 / 9 \ 9\ ^
or — (и1J — (и2J)
В полярных координатах (пусть а = 1) на модели Пуанкаре эта
же метрика запишется так:
. dr2 + r2dip2
ds2 = 4-
A-r2
Видно, что получившаяся метрика конформна, т. е. отличается от
евклидовой множителем А(г) = 4A — г2)~2. Перепишем метрику в
псевдосферических координатах. Заменим координаты (г, ф) на па-
параметры (%, ip) по формулам: г = cth(x/2), (p = (р. Непосредствен-
Непосредственное вычисление дает (проверьте!) ds2 = dx2 + sh2 х^ф2- Этот вид
метрики полностью аналогичен записи метрики сферы в координа-
координатах F,ср), но только обычные тригонометрические функции заме-
заменены здесь на гиперболические.
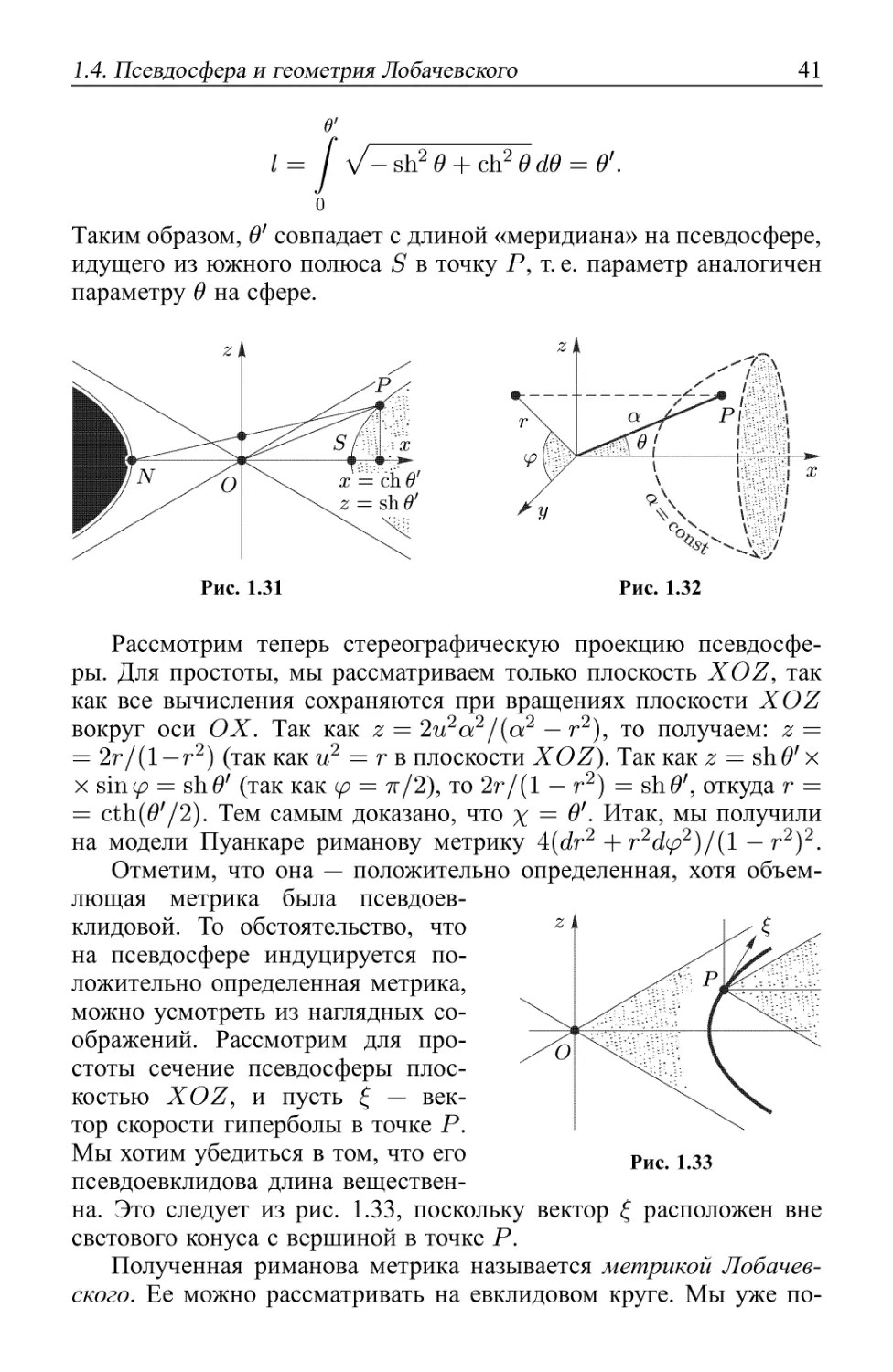
Найдем геометрический смысл параметра х- Рассмотрим плос-
плоскость XOZ с индуцированной на ней псевдоевклидовой метрикой
—dx2 + dz2. Псевдосфера пересекает эту плоскость по гиперболе,
которая в псевдосферических координатах имеет вид (мы считаем,
что a = 1) х = ch^7, z = sh^7 (рис. 1.31). В качестве параметра в
возьмем евклидово значение угла POS (рис. 1.32). Тогда, очевидно,
tg# = th^7. Найдем длину отрезка гиперболы в псевдоевклидовой
метрике от значения 0 до б7. Имеем
1.4. Псевдосфера и геометрия Лобачевского
41
Таким образом, в' совпадает с длиной «меридиана» на псевдосфере,
идущего из южного полюса S в точку Р, т. е. параметр аналогичен
параметру в на сфере.
Z \
Рис. 1.31
Рис. 1.32
Рассмотрим теперь стереографическую проекцию псевдосфе-
псевдосферы. Для простоты, мы рассматриваем только плоскость XOZ, так
как все вычисления сохраняются при вращениях плоскости XOZ
вокруг оси ОХ. Так как z = 2u2a2/(a2 — г2), то получаем: z =
= 2г/A —г2) (так как и2 = г в плоскости XOZ). Так как z = sh6f x
7 2 7
/( )
х simp = sh^7 (так как ср = тг/2), то 2г/A — г2) = sh^7, откуда г =
= cth(^//2). Тем самым доказано, что х — 6'. Итак, мы получили
на модели Пуанкаре риманову метрику 4(rfr2 + r2d(p2)/(l —r2J.
Отметим, что она — положительно определенная, хотя объем-
объемлющая метрика была псевдоев-
псевдоевклидовой. То обстоятельство, что
на псевдосфере индуцируется по-
положительно определенная метрика,
можно усмотреть из наглядных со-
соображений. Рассмотрим для про-
простоты сечение псевдосферы плос-
плоскостью XOZ, и пусть ? — век-
вектор скорости гиперболы в точке Р.
Мы хотим убедиться в том, что его
псевдоевклидова длина веществен-
вещественна. Это следует из рис. 1.33, поскольку вектор ? расположен вне
светового конуса с вершиной в точке Р.
Полученная риманова метрика называется метрикой Лобачев-
Лобачевского. Ее можно рассматривать на евклидовом круге. Мы уже по-
Рис. 1.33
42 Гл. 1. Введение в дифференциальную геометрию
знакомились с другими метриками на круге — евклидовой и сфери-
сферической. Было показано, что они метрики не эквивалентны.
Докажем, что метрика Лобачевского не эквивалентна ни од-
одной из двух предыдущих метрик. Применим уже использованный
прием: найдем длину окружности на плоскости Лобачевского как
функцию от радиуса (вычисленного в метрике Лобачевского). Пусть
окружность имеет центр в точке О и ее евклидов радиус равен а.
Найдем длину радиуса в метрике Лобачевского. По определению
длины кривой, получаем
l
2 = lni'
1 — г2 1 — a
о
т. е. a = th(x/2). Длина окружности:
2тг
= 2 т-^ = - г =
J 1 — a2 I — az
о
Если х мало, то приближенно можно считать, что / ~ 2тгх, т. е. по-
получаем формулу для длины окружности в евклидовой метрике.
Поскольку мы выразили длину окружности (в метрике Лоба-
Лобачевского) в инвариантных относительно замен координат терминах,
т. е. через величину радиуса, также подсчитанную в метрике Лоба-
Лобачевского, то полученная формула инвариантна относительно замен
координат. Следовательно, метрика Лобачевского не эквивалентна
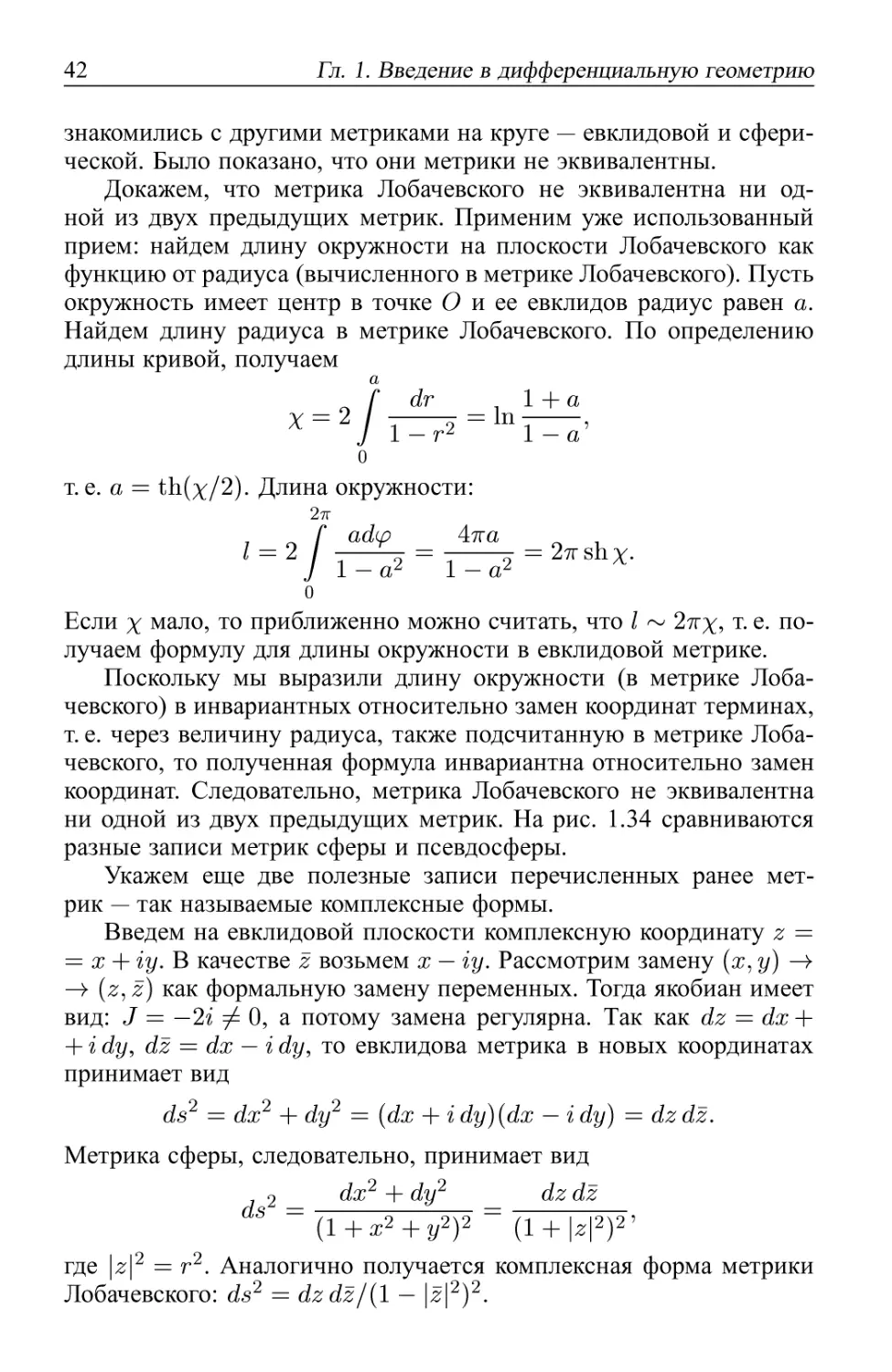
ни одной из двух предыдущих метрик. На рис. 1.34 сравниваются
разные записи метрик сферы и псевдосферы.
Укажем еще две полезные записи перечисленных ранее мет-
метрик — так называемые комплексные формы.
Введем на евклидовой плоскости комплексную координату z =
= х + iy. В качестве z возьмем х — iy. Рассмотрим замену (ж, у) —>>
—>> (z, z) как формальную замену переменных. Тогда якобиан имеет
вид: J = — 2г ф 0, а потому замена регулярна. Так как dz = dx +
+ i dy, dz = dx — i dy, то евклидова метрика в новых координатах
принимает вид
ds2 = dx2 + dy2 = (dx + i dy) (dx — i dy) = dz dz.
Метрика сферы, следовательно, принимает вид
dx2 + dy2 dz dz
dsz =
A+х2+у2J A + И2)
где \z = r . Аналогично получается комплексная форма метрики
Лобачевского: ds2 = dzdz/(l — \z\2J.
1.4. Псевдосфера и геометрия Лобачевского
43
Сфера
Псевдосфера
ds2 = dQ2 + sin2 в dip2
О < в <тг
О ^ (р < 2тг
Развертка
сферы S2\S
ds2 = dX2 + sh2
< 2тг
+
1 A+r2J
0 ^ r < oo
0 ^ y? < 2тг
ds2 =
/ 2 , 2
г + г
A-r2)
2J
< 1
? < 2тг
Рис. 1.34
Для метрики Лобачевского существует еще одна полезная фор-
форма записи на верхней полуплоскости. Рассмотрим еще один эк-
экземпляр плоскости с комплексной координатой w. Выделим верх-
верхнюю полуплоскость неравенством Im(w) > 0, где w = u + iv; v =
Рассмотрим отображение H2(w) —>> H2(z), задаваемое форму-
формулой z = (aw + b)/(cw + d), где a, b, с, d — комплексные числа такие,
что ad — be ф 0. Такие отображения называются невырожденными
дробно-линейными. Отметим, что если ad — be = 0, то отображение
переводит всю плоскость в одну точку (проверьте!).
Легко найти невырожденное отображение вида z = (aw + b)/(cx
х w + d), переводящее верхнюю полуплоскость на внутренность
единичного круга \z\ < 1 на плоскости z. При этом вещественная
прямая Im(w) = 0 перейдет в окружность \z\ = 1. Между прочим,
любое невырожденное дробно-линейное отображение однозначно
задается образом любых трех точек, не лежащих на одной пря-
прямой. Мы не будем здесь доказывать этот факт. Итак, найдем та-
такое отображение z = (aw + b)/(cw + d), чтобы 0 —>> 1, г —>> 0, 1 —м
44
Гл. 1. Введение в дифференциальную геометрию
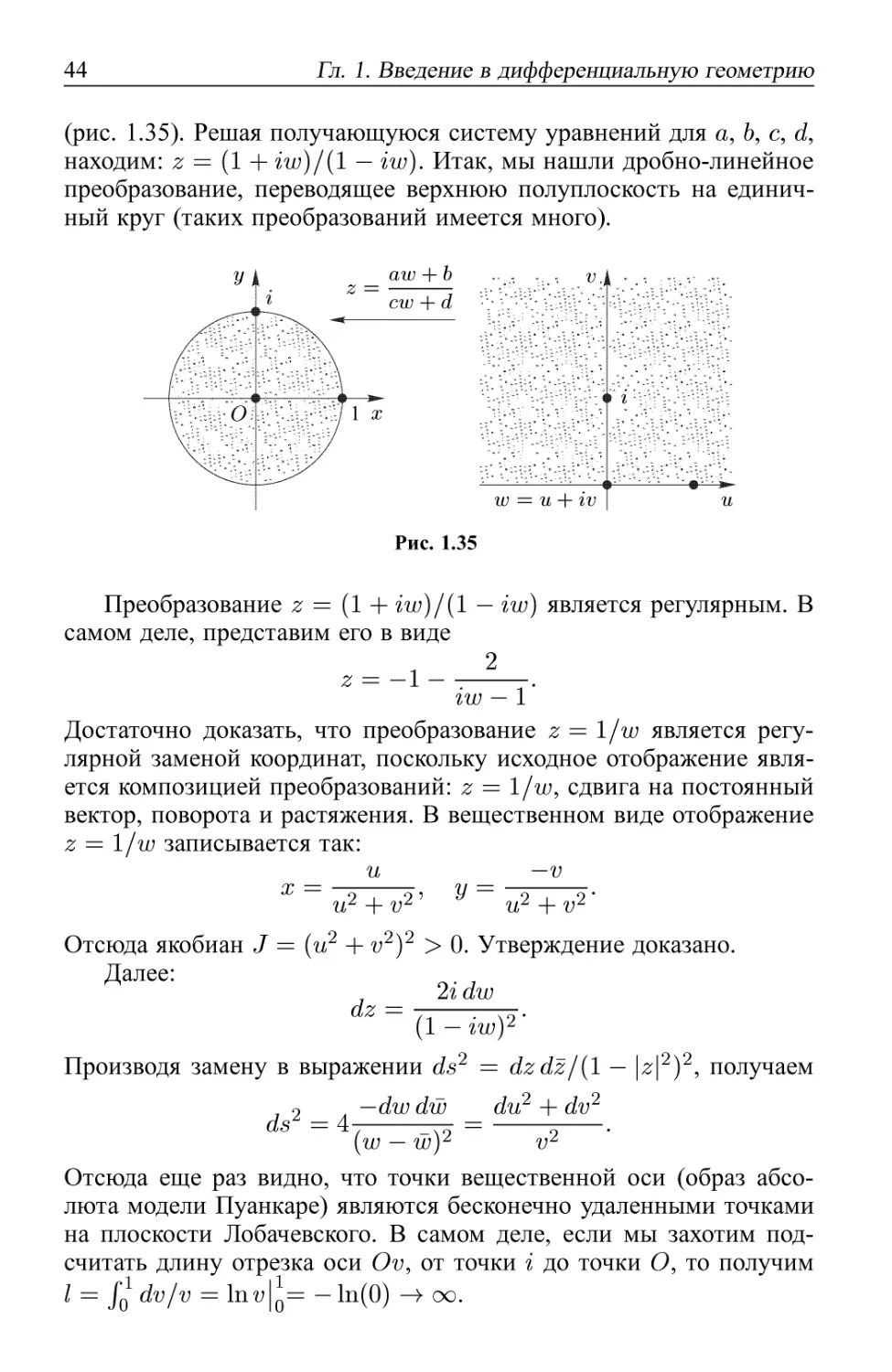
(рис. 1.35). Решая получающуюся систему уравнений для а, 6, с, d,
находим: z = A + iw)/(l — iw). Итак, мы нашли дробно-линейное
преобразование, переводящее верхнюю полуплоскость на единич-
единичный круг (таких преобразований имеется много).
aw + Ъ
w = и + iv
Рис. 1.35
Преобразование z = A + iw)/(l — iw) является регулярным. В
самом деле, представим его в виде
%w — 1
Достаточно доказать, что преобразование z = 1/w является регу-
регулярной заменой координат, поскольку исходное отображение явля-
является композицией преобразований: z = 1/w, сдвига на постоянный
вектор, поворота и растяжения. В вещественном виде отображение
z = 1/w записывается так:
и —V
X =
и2 + v2'
Отсюда якобиан J =
Далее:
uz + vz)
У= и2 + ^2 -
> 0. Утверждение доказано.
(l-m;J'
Производя замену в выражении ds2 = dzdz/(l —
—dw dw du2 + cfo2
получаем
ds2 = 4-
гш —
Отсюда еще раз видно, что точки вещественной оси (образ абсо-
абсолюта модели Пуанкаре) являются бесконечно удаленными точками
на плоскости Лобачевского. В самом деле, если мы захотим под-
подсчитать длину отрезка оси Ov, от точки % до точки О, то получим
/ = /0 dv/v = 1пг>|0= — 1п@) —>> оо.
1.4. Псевдосфера и геометрия Лобачевского
45
Выясним, в какие кривые перейдут при отображении на верх-
верхнюю полуплоскость прямые плоскости Лобачевского (в модели Пу-
Пуанкаре). Сначала решим аналогичный вопрос для эллиптической
геометрии. Напомним, что здесь «прямыми» являются экваторы на
сфере. Рассмотрим стереографическую проекцию сферы на плос-
плоскость и найдем образы экваторов.
Лемма 4. При стереографической проекции экваторы сферы пе-
переходят либо в окружности на плоскости, либо в прямые. При-
Причем, экватор отображается в
прямую тогда и только тогда, ко-
когда он проходит через северный
полюс сферы.
Доказательство. Запи-
Запишем стереографическую проек-
проекцию в декартовых координатах.
Пусть ж, у, z — координаты точ-
точки Р на сфере, а х', у' — коорди-
координаты ее образа на плоскости. Из
рис. 1.36 получаем: х' = х/A — рис j зб
- z),y' = y/(l -z).
Окружность на сфере радиуса 1 зададим двумя уравнениями:
ax + by + cz = d, x2 + у2 + z2 = 1. Прямое вычисление дает:
2а
{x'f + (y'f + ^X
с — d
26
с — d'
_2d_
с — d
Это уравнение второго порядка определяет на плоскости либо пря-
прямую, либо окружность.
Аналогичное утверждение имеется и для плоскости Лобачевско-
Лобачевского. ¦
Лемма 4. Невырожденное дробно-линейное преобразование
z = (aw + b)/(cw + d) плоскости в себя, отображает прямые и ок-
окружности снова в прямые и окружности, причем прямая может
перейти в окружность, и наоборот.
Доказательство. Если с = 0, то утверждение очевид-
очевидно, так как тогда преобразование представляет собой параллельный
сдвиг на вектор и умножение на комплексное число. Пусть с ^ 0.
Тогда
a (ad — be)
с c(cw + d)'
т. е. утверждение осталось доказать лишь для преобразования z =
= 1/w.
46
Гл. 1. Введение в дифференциальную геометрию
Запишем произвольную окружность на плоскости z в виде \z —
— zq\2 = б2, т. е. (z — zq)(z — го) = е2. Делая замену z = 1/w, полу-
получаем
Zz(e2 — ZqZq) + ZqZ + ZqZ — 1=0.
Ясно, что это уравнение, в зависимости от параметров s,zq, опре-
определяет либо окружность, либо прямую. ¦
Следствие 1. Рассмотрим отображение z = A + iw)/(l — iw),
переводящее верхнюю полуплоскость в единичный круг. Тогда
«прямые» модели Пуанкаре, т. е. дуги окружностей, ортогональ-
ортогональных абсолюту, переходят либо в прямые на плоскости w = u + iv,
ортогональные вещественной оси, либо в полуокружности, ортого-
ортогональные вещественной оси (рис. 1.37).
О
Рис. 1.37
Доказательство. Отображение z = A + iw)/(l — iw)
можно считать определенным всюду на плоскости w. В силу лем-
леммы 4 оно переводит прямые либо в прямые, либо в окружности.
Аналогично и окружности переходят либо в прямые, либо в окруж-
окружности. Преобразование имеет обратное: w = (z — l)/i(z + 1). Сле-
Следовательно, «прямые» модели Пуанкаре переходят либо в прямые,
либо в окружности на плоскости w. Осталось доказать, что они
должны быть ортогональны вещественной оси в точках пересече-
пересечения с ней. Это будет следовать из леммы 5.
Лемма 5. Любое невырожденное дробно-линейное преобразо-
преобразование z = (aw + b)/(cw + d), отображающее плоскость w на плос-
плоскость z, сохраняет углы между гладкими кривыми в точках их пе-
пересечения.
Доказательство. Достаточно вычислить евклидову мет-
метрику dzdz в новых координатах w = u + iv. Прямое вычисление
показывает, что
1.4. Псевдосфера и геометрия Лобачевского
47
dz =
ad — be
(cw + dJ'
т. е. dz dz =
\ad-bc\2
\cw
dwdw. Таким образом, отображение оказа-
лось конформным, т. е. умножает евклидову метрику на положи-
положительный множитель и, как было доказано ранее, сохраняет углы
между пересекающимися кривыми. ¦
Тем самым полностью доказано и следствие 1.
Отметим, что через любые две различные точки на плоскости
Лобачевского всегда проходит единственная прямая (в смысле Ло-
Лобачевского). Ее построение см. на рис. 1.38. В случае, когда обе
точки расположены на прямой, ортогональной вещественной оси,
прямая плоскости Лобачевского совпадает с этой прямой.
Рис. 1.38
Найдем формулу для длины отрезка прямой от точки Pi до
точки Р2 в метрике Лобачевского, реализованной, например, на
верхней полуплоскости. Применяя горизонтальный параллельный
перенос (он сохраняет метрику Лобачевского ds2 = (dx2 + dy2)/y2),
можно считать, что центр окружности, изображающей прямую,
проходящую через точки Р\ и Р2, находится в точке О. Уравне-
Уравнение прямой имеет вид г = го, где (г,ср) — полярные координаты.
Пусть точки Pi и Р2 задаются координатами (ro,<pi) и (го,^) со-
соответственно. Тогда длина дуги от Р\ до Р2 имеет вид (проверьте!)
г0
Глава 2
Общая топология
Топология — это раздел математики, который изучает свойства
геометрических объектов, не меняющиеся при «деформации» или
при преобразованиях, подобных деформациям.
Первоначально топологические задачи возникли в математиче-
математическом анализе, где встречается много понятий схожих по своим свой-
свойствам и методам исследования. Например, понятия сходимости и
предела встречаются в анализе в качестве: а) предела последова-
последовательности, б) различных типов пределов функций одной перемен-
переменной, в) пределов функций многих переменных, г) пределов вектор-
нозначных функций, д) сходимости интегральных сумм. Все эти
понятия сходимости и предела основаны на некоторых общих для
них приемах исследования, которые интуитивно мы понимаем как
близость точек некоторого множества.
Другим важным стимулом для развития топологии было изу-
изучение различных типов понятия непрерывности, к которым тесно
примыкает понятие сходимости.
Общая топология возникла в результате изучения наиболее об-
общих свойств геометрических пространств и их преобразований,
связанных со свойствами сходимости и непрерывности.
2.1. ОПРЕДЕЛЕНИЯ И ПРОСТЕЙШИЕ СВОЙСТВА
МЕТРИЧЕСКИХ И ТОПОЛОГИЧЕСКИХ ПРОСТРАНСТВ
2.1.1. Метрические пространства
Метрикой на произвольном абстрактном множестве X называ-
называется числовая неотрицательная функция р(ж, у), зависящая от пары
элементов х,у Е X, для которой выполнены следующие аксиомы:
а) р(х, у) = 0 тогда и только тогда, когда х = у (аксиома тожде-
тождества);
б) р(х,у) = р(у,х) (аксиома симметрии);
в) для любых трех элементов x,y,z E X имеет место неравен-
неравенство р(ж, у) ^ р(х, z) + p(z, у) (неравенство треугольника).
2.1. Определения и простейшие свойства пространств 49
Множество X, снабженное некоторой метрикой р, называется
метрическим пространством. Элементы множества X называются
его точками. Значение метрики р(х,у) называется расстоянием
между точками х и у.
Примером метрического пространства является множество ве-
вещественных чисел R1, метрика на котором задается равенством
р(х, у) = \х — у\. Аналогично, n-мерное векторное пространство Rn
с метрикой р(х, у) = у/{х — у, х — у), х, у Е Rn, тоже является при-
примером метрического пространства. Любое подмножество Y С X
метрического пространства X является метрическим простран-
пространством по отношению к ограничению метрики р на подмножество Y.
Подмножество Y при этом называется подпространством простран-
пространства X.
Шаровой окрестностью с центром х Е X радиуса е называется
множество О?(х) всех точек у Е X, для которых р(ж, у) < е.
Расстоянием p(Yi, Y2) между двумя множествами Yi, Y2 С X
называется нижняя грань множества чисел вида р(х,у), когда х
пробегает множество Y\, а у пробегает множество Y2. Если мно-
множества Y\ и Y2 имеют общую точку, то p(Yi, Y2) = 0.
Шаровой окрестностью подмножества Y С X радиуса е назы-
называется множество O?(Y) всех точек х Е X, для которых р(х, Y) < е.
Точкой прикосновения подмножества Y С X называется всякая
точка х Е X, для которой р(х, Y) = 0.
Замыканием множества Y называется множество всех его_точек
прикосновения. Замыкание множества Y обозначается через Y.
Подмножество Y метрического пространства называется замк-
замкнутым, если его замыкание Y совпадает с Y: Y = Y.
Подмножество Y С X называется открытым множеством, если
его дополнение X \ Y замкнуто.
Объединение любого семейства открытых множеств, а также
пересечение конечного числа открытых множеств являются откры-
открытыми множествами. Пересечение любого семейства и объединение
конечного числа замкнутых множеств являются замкнутыми мно-
множествами.
Во всех предыдущих утверждениях мы пока не пользовались
свойством в) метрики. Сформулируем несколько утверждений о
метрических пространствах, основанных на этом неравенстве.
а) шаровая окрестность О?(х) является открытым множеством;
б) внутренность Int Y произвольного множества Y является от-
открытым множеством;
в) замыкание Y произвольного множества Y является замкну-
замкнутым множеством.
50 Гл. 2. Общая топология
Во многих утверждениях о метрических пространствах исполь-
используются только свойства, сформулированные выше. Поэтому можно
расширить класс пространств, для которых имеет смысл говорить
об открытых, замкнутых множествах, внутренних точках и точках
прикосновения.
2.1.2. Топологические пространства
Скажем, что на множестве X задана топология, если задано не-
некоторое семейство подмножеств множества X, называемых откры-
открытыми множествами, для которого выполнены следующие условия:
а) все множество X, а также пустое множество являются откры-
открытыми множествами;
б) объединение любого семейства и пересечение конечного чис-
числа открытых множеств являются открытыми множествами.
Множество X с заданной на нем топологией называют топо-
топологическим пространством, элементы множества X называются
точками пространства X. Дополнения к открытым множествам на-
называются замкнутыми множествами. В топологическом простран-
пространстве X выполнены двойственные условия для замкнутых множеств:
а7) все множество X, а также пустое множество являются за-
замкнутыми множествами,
б7) пересечение любого семейства и объединение конечного чис-
числа замкнутых множеств являются замкнутыми множествами.
Семейство открытых множеств метрического пространства X
задает на X некоторую топологию, т. е. превращает X в топологи-
топологическое пространство.
В топологических пространствах воспроизводятся многие по-
понятия метрических пространств. Окрестностью точки х тополо-
топологического пространства X называется любое открытое множество,
содержащее точку х. Открытое множество, содержащее подмноже-
подмножество У, называется окрестностью множества Y. Точкой прикосно-
прикосновения множества Y С X называется такая точка ж, для которой каж-
каждая ее окрестность имеет непустое пересечение с множеством Y.
Множество всех точек прикосновения множества Y называется за-
замыканием множества Y и обозначается через Y. Внутренней точ-
точкой множества Y называется такая точка х Е Y, которая лежит в Y
вместе с некоторой своей окрестностью. Множество всех внутрен-
внутренних точек множества Y называется внутренностью и обозначается
через Int Y.
Множество Y С X замкнуто (т. е. является дополнением к от-
открытому множеству) тогда и только тогда, когда Y = Y.
2.1. Определения и простейшие свойства пространств 51
Замыкание Y произвольного множества Y топологического про-
пространства X является замкнутым множеством, т. е. Y = Y.
Пример 1. Рассмотрим множество X, состоящее из одного
элемента х. Тогда на X может быть введена единственная топо-
топология, открытыми множествами которой являются множество X и
пустое множество.
Пример 2. Рассмотрим множество X, состоящее из двух
элементов, х и у, х ф у. На этом множестве можно ввести уже
несколько различных топологий. Первая топология задается мно-
множеством всех подмножеств в качестве открытых множеств, т. е. {0,
{ж},{у},Х}. Вторая топология задается следующим семейством
открытых множеств: {0,Х}. Можно задать и третью топологию,
в качестве семейства открытых множеств которой следует взять
{0,{ж},Х}. Мы перечислили все различные топологии на одном
и том же множестве X, которые задают три различных топологиче-
топологических пространства.
Пример 3. Пусть X — произвольное множество. Введем
на X топологию, объявив любое его подмножество открытым. То-
Тогда любое одноточечное подмножество является открытым, а зна-
значит, и всякое подмножество как объединение своих точек тоже от-
открыто. Такая топология называется дискретной.
Пусть X — топологическое пространство, Y С X — его подмно-
подмножество. Тогда на Y также можно задать топологию, объявив откры-
открытым всякое множество вида Y П U, где U — открытое в X мно-
множество. Тогда топологическое пространство Y называется подпро-
подпространством топологического пространства X, а топология в У —
индуцированной топологией. Если X — метрическое пространство,
а У — его подпространство, то топология в Y задается независимо
от порядка операций: ограничения метрики и перехода к топологии
или перехода к топологии и индуцирования топологии.
Пусть Y С X — подмножество в топологическом простран-
пространстве X. Множество Y называется плотным (всюду плотным), если
Y = Х.
Теорема 1. Если Y\ и Y2 — два открытых плотных множе-
множества в пространстве X, то их пересечение Y = Y\ П У2 открыто
и плотно в X.
Доказательство. Пусть х Е X — произвольная точка,
U — ее окрестность. Поскольку множество Y\ плотно, то U П Y\ ф
Ф 0, т. е. найдется такая точка у, что у Е U П Y\. Так как U П Y\ —
открытое множество, a Y2 — плотное множество, то U П Y\ П Y2 Ф
Ф 0, т. е. U П Y ф 0, это и означает, что Y — плотное множество
вХ. ¦
52 Гл. 2. Общая топология
2.1.3. Непрерывные отображения
Понятие топологического пространства настолько удобно, что
определение непрерывности отображения дословно переносится из
математического анализа.
Определение 1 (по Коши). Отображение /: X —>> Y тополо-
топологических пространств называется непрерывным в точке xq G X,
если для любой окрестности V(f(xo)) точки /(жо) ? Y существует
такая окрестность U(xo) точки ж0 ? -X", что f(U(xo)) С У(/(жо)).
Отображение / называется непрерывным отображением, если оно
непрерывно в каждой точке пространства X.
Теорема 2. Отображение f: X —>> У непрерывно тогда и
только тогда, когда выполнено одно из следующих эквивалент-
эквивалентных условий:
а) прообраз любого открытого множества является откры-
открытым множеством;
б) прообраз любого замкнутого множества является замкну-
замкнутым множеством.
Доказательство. Поскольку для прообразов справедли-
справедливо соотношение f~l(Y \А) = X \ /~1(А), то условия а) и б) эк-
эквивалентны. Допустим, что / — непрерывное отображение, V С
С Y — открытое множество. Покажем, что его прообраз f~l{V)
открыт. Пусть х G /~1(F); тогда /(ж) E V, т. е. V является окрест-
окрестностью точки f(x). Тогда согласно определению непрерывности
отображения / найдется такая окрестность U точки ж, что f(U) С
С V, т.е. U С f~1(V); это означает, что множество f~l(V) отк-
открыто.
Обратно, пусть выполнено условие а). Если V Э /(#o) — окрест-
окрестность точки /(жо), то U = f~1(V) Э xq — окрестность точки (жо),
причем f(U) = f(f~1(V)) = V CV. Следовательно, / — непре-
непрерывное отображение. ¦
Условия а) и б) теоремы 2 удобны при проверке непрерывности
отображений топологических пространств. В частности, если ото-
отображения f: X ^ Y и g: Y —>> Z непрерывные отображения топо-
топологических пространств. Тогда композиция отображений, gf: X —>>
—>> Z, тоже непрерывна.
Пусть топологическое пространство X представлено в виде
объединения двух своих замкнутых подмножеств: X = F\ U F2,
и пусть /: X —)> Y — отображение пространства X в топологиче-
топологическое пространство Y. Отображение / непрерывно тогда и только
тогда, когда непрерывны ограничения /|^ и f\p2 отображения / на
подмножества F\ и i^.
2.1. Определения и простейшие свойства пространств 53
Рассмотрим непрерывное отображение /: X —>> Y топологиче-
топологического пространства X в топологическое пространство Y. Если ото-
отображение / взаимно однозначно, а обратное отображение f~l не-
непрерывно, то отображение / называется гомеоморфизмом. При этом
топологические пространства X и Y называются гомеоморфными
топологическими пространствами. При гомеоморфизме устанав-
устанавливается не только взаимно однозначное соответствие между точка-
точками топологических пространств X и Y, но и взаимно однозначное
соответствие между самими топологиями, т. е. между семействами
открытых множеств (семействами замкнутых множеств).
Пример 4. Важным частным случаем непрерывных отобра-
отображений являются непрерывные функции, т. е. непрерывные отобра-
отображения топологического пространства X в пространство R1 веще-
вещественных чисел. Условие непрерывности функции / можно сфор-
сформулировать следующим образом: для любой точки xq Е X и лю-
любого е > 0 найдется такая окрестность U точки xq, что при
у Е U выполнено неравенство |/(жо) ~~ /(уI < е- Для функций на
топологическом пространстве можно определить равномерный пре-
предел последовательности непрерывных функций. Функция f назы-
называется равномерным пределом последовательности непрерывных
функций Fn, если для любого е > 0 найдется натуральное чис-
число N, такое что для всех п > N и всех точек х Е X выполнено
неравенство \fn(x) — f(x)\ < e. Так же, как и в случае функций
одной вещественной переменной, справедливо утверждение: если
f = lirr^-^oo fn и последовательность {fn} непрерывных функций
на топологическом пространстве X сходится к f равномерно, то
функция f тоже непрерывна.
Пример 5. Пусть /: X —>> Y — непрерывное отображение
метрических пространств, р\ и р2 — метрики на пространствах X
и Y соответственно. Тогда условие непрерывности отображения /
можно сформулировать следующим образом: для любого xq E X и
е > 0 существует такое 8 > 0, что из неравенства pi(x,xo) < S
следует неравенство р2(/(#)? f(xo)) < e-
Скажем, что последовательность точек {хп} сходится к точ-
точке xq, Игп^-юо хп = xq, если lim^^oo p(xQ,xn) = 0. В терминах схо-
сходящихся последовательностей метрического пространства форму-
формулируются многие свойства пространств и отображений. Например,
множество Y С X является замкнутым, если для любой сходящейся
последовательности точек {хп} С Y предел xq = liniy^oo хп также
принадлежит множеству Y. Далее, условие непрерывности отобра-
отображения /: X —)> Y метрических пространств можно сформулировать
по Гейне.
54 Гл. 2. Общая топология
Определение 2 (по Гейне). Отображение / непрерывно в
точке жо, если из равенства XQ = \imn^ooxn следует равенство
Hindoo/(жп) = f(x0).
Пример 6. Рассмотрим два топологических пространства X
и У. Образуем новое топологическое пространство X х У. Множе-
Множество X х У есть множество всех пар вида (ж, у), х Е X, у Е У, и на-
называется декартовым произведением множеств X и У. Определим
теперь топологию в X х У. Множество [/сХхУ назовем откры-
открытым, если U представимо в виде объединения U = (Ja(^a x Wa),
где Va С X, Wa С У — открытые множества. Проверка свойств от-
открытых множеств тривиальна. Множество X х У с определенной
выше топологией называется декартовым произведением топологи-
топологических пространств X uY. При этом топологические пространства
X и У называются сомножителями декартова произведения X х У.
Пусть Z, Х\ и Х2 — топологические пространства. Для любых
двух отображений Д: Z —>> Хх и /2: Z —>> Х2 отображение F: Z ^
—)> Xi х Х2, i^(^) = (/i(^),/2(^))j непрерывно в том и только том
случае, если Д и Д непрерывны.
Пример 7. Пусть X и У — метрические пространства; тогда
декартово произведение X х У допускает метрику, согласованную
с топологией декартова произведения. Пусть ръ Р2 — метрики про-
пространств X и У соответственно. Определим метрику р в декартовом
произведении X х У по формуле
р((х1,у1),(х2,У2)) =тах{р1(хъх2),Р2(уъУ2)}- B.1)
Другой способ задавать метрику в декартовом произведении ис-
использует аналогию между между сомножителями X и У декартова
произведения с осями координат на плоскости. Метрика задается
по формуле
p'((xuyi),(x2,y2)) = \/pi(x1,x2J + p2(y1,y2J. B.2)
Топология, задаваемая метрикой B.2), совпадает с топологией,
задаваемой метрикой B.1), для чего достаточно найти две такие
константы С\ > 0 и С2 > 0, что
i),(Ж2, У2)) ^ P'((XU 2/l)> (Ж2, У2)) ^ С2р((хЪ ух), (ж
2.1.4. Фактортопология
Пусть X — топологическое пространство, У — некоторое мно-
множество и /: X —)> У — отображение пространства X на У. Фактор-
топология на множестве У, задаваемая отображением /, опреде-
2.1. Определения и простейшие свойства пространств 55
ляется следующим образом: множество UcY открыто тогда и толь-
только тогда, когда f~1(U) — открытое подмножество пространства X.
Пример 8. Пусть X — замкнутый интервал [0, 2тг], Y — еди-
единичная окружность х2 + у2 = 1. Определим отображение /: X —>>
—>> Y формулой /(?) = (cost,sint). Тогда топология окружности,
индуцированная из R2, совпадает с фактортопологией, задаваемой
отображением /.
Пример 9. Пусть R — отношение эквивалентности на топо-
топологическом пространстве X, X/R — множество всех классов экви-
эквивалентности и /: X —>> X/R — естественное отображение, ставящее
в соответствие каждой точке из X ее класс эквивалентности. То-
Тогда на X/R вводится фактортопология, задаваемая этим отображе-
отображением. Наделенное этой топологией пространство X/R называется
факторпространством пространства X по модулю R. Например,
пусть X = R1 — действительная прямая и R — отношение эквива-
эквивалентности «х = у mod R тогда и только тогда, когда число х — у
целое». Тогда факторпространство X/R гомеоморфно окружности.
Пример 10. Пусть X — квадрат ABCD на плоскости R2.
Тогда X является топологическим пространством с топологией, ин-
индуцированной из R2. Введем следующие отношения эквивалентно-
эквивалентности Rf.
— (Ri) отождествим точки отрезков АВ и DC, лежащие на од-
одной и той же прямой, параллельной AD;
— (Д2) отождествим точки отрезков АВ и CD, лежащие на од-
одной и той же прямой, проходящей через центр квадрата;
— (Дз) отождествим точки отрезков АВ и DC no (i?i) и точки
отрезков ВС и AD, лежащие на одной и той же прямой, параллель-
параллельной АВ;
— (R4) отождествим точки отрезков АВ и CD no (i?2) и точки
отрезков ВС и AD, лежащие на одной и той же прямой, параллель-
параллельной АВ;
— (Rs) отождествим точки отрезков АВ и CD no (R2) и точки
отрезков ВС и DA, лежащие на одной и той же прямой, проходя-
проходящей через центр квадрата.
Тогда XjR\ — кольцо, X/R2 — лист Мебиуса, X/R3 — двумер-
двумерный тор, X/R± — бутылка Клейна, X/R$ — проективная плоскость.
Задачи
1. Привести пример метрики на конечном множестве, которая
не индуцируется никаким его вложением в евклидово пространство.
2. Показать, что конечное множество на прямой является замк-
замкнутым.
56 Гл. 2. Общая топология
3. Показать, что р(ж, Y) = р(ж, У).
4. Доказать, что функция f(x) = р(ж, Y) непрерывна для любо-
любого подмножества Y.
5. Показать, что любая метрика на конечном множестве инду-
индуцирует на нем дискретную топологию.
6. Доказать, что интервал, полуинтервал и сегмент на вещест-
вещественной прямой попарно не гомеоморфны.
7. Доказать, что метрика р(х,у) является непрерывной функци-
функцией на декартовом квадрате X х X метрического пространства X.
8. Доказать, что множество X пред ставимо в виде разности двух
замкнутых множеств тогда и только тогда, когда (X \ X) является
замкнутым множеством.
9. Доказать, что образ плотного подмножества при непрерывном
отображении плотен в образе.
2.2. СВЯЗНОСТЬ. АКСИОМЫ ОТДЕЛИМОСТИ
2.2.1. Связность
Рассмотрим две точки х,у ? X в топологическом простран-
пространстве X и такое непрерывное отображение единичного отрезка
7: [0,1] —>> X, что 7@) = ж, 7A) = У- Скажем, что 7 есть кривая,
соединяющаяя точки х и у. Топологическое пространство X назы-
называется линейно связным, если любые его точки можно соединить
кривой. В этом случае пространство нельзя разбить на два непу-
непустых непересекающихся открыто замкнутых подмножества. Этот
факт вытекает из того, что единичный отрезок уже обладает этим
свойством. В самом деле, допустим, что отрезок [а, Ь] представлен в
виде объединения двух непустых открыто-замкнутых непересекаю-
непересекающихся множеств, [a, b] = A U В. Без ограничения общности будем
считать, что a Е А. Тогда в силу открытости А найдется такое е >
> 0, что полуинтервал [а, а + е) С А. Пусть e0 = sup{e}, когда е
пробегает такие числа, что [а, а + е) С А. Тогда для любого е < sq
имеем включение [a, a + е + (бо ~~ ?)/2) С А, т. е. а + е Е А для
любого е < sq. Следовательно, а + sq E А в силу замкнутости А.
Так как А одновременно открыто, то ?q входит в А вместе с некото-
некоторой окрестностью. Единственной возможностью для ?q может быть
только равенство а + ?q = 6, поскольку в противном случае ?q <
< supje}. Таким образом, А = [а, 6], т. е. В = 0, что противоречит
предположению.
Вообще, пространство X называется связным, если его нельзя
разбить на два непустых открыто замкнутых подмножества.
2.2. Связность. Аксиомы отделимости
57
Теорема 1. Пусть X = [JaXa, каждое Ха связно и пересече-
пересечение f]a Xa непусто. Тогда пространство X связно.
Доказательство. Допустим противное, т. е. X = A U В,
АП В = 0, множества Аи В открыты и непусты. Тогда Ха = (ХаП
П A) U (Ха ПВ), где Ха П А и Ха П Б открыты в Ха. Но поскольку
множество Ха связно, то либо Ха П А = 0, либо (Ха П Б) = 0, т. е.
каждое множество Ха целиком лежит либо в А, либо в В. Далее,
так как множества А и В непусты, то найдутся точки а Е A, b Е
Е Б. Пусть а Е Хао, тогда Хао С А. Пусть 6 Е Ха1, тогда Ха1 С В.
Значит, Хао П XQl = 0, что противоречит условию теоремы. ¦
Теорема 2. Образ при непрерывном отображении связного про-
пространства связен.
Доказательство. Пусть /: X ^Y = f(X) — непрерыв-
непрерывное отображение. Поэтому если Y — несвязное пространство, то
Y = Аи В, АП В = Ф, множества А, В — открыты и непусты. Сле-
Следовательно, X = f~l{Y) = f~l{A) U f~l{B), множества f~l(A),
f~1(B) открыты, непусты и не пересекаются. ¦
Пример 1. Из теоремы 2 следует, что всякая непрерывная
вещественная функция у = /(ж), определенная на отрезке [а, Ь] ве-
вещественной прямой, принимает промежуточные значения. Если бы
функция / не принимала какое-либо промежуточное значение у о, то
образ /([а, Ь]) распадался бы в объединение двух открытых непу-
непустых множеств: тех значений, которые меньше уо, и тех значений,
которые больше уо, что противоречит теореме 2.
Существуют примеры связных, но не линейно связных тополо-
топологических пространств.
Пример 2. Пусть X — замыкание графика функции у =
= f(x) = sin(l/x) как множества в двумерном евклидовом прост-
и
1/тг х
Рис. 2.1
ранстве R2 (рис. 2.1). Метрика в R2 берется классическая, по длине
отрезков, соединяющих пары точек в R2. Тогда множество X состо-
58 Гл. 2. Общая топология
ит из объединения графика функции у = sin(l/x) и вертикально-
вертикального отрезка Гз = {(х,у) | х = 0, — 1 ^ у ^ +1}- График функции /
распадается на два подмножества, каждое из которых гомеоморфно
интервалу:
Г1 = {(ж,у) | 0<х< оо, у = /(ж)},
Г2 = {(ж,у) | -оо <ж<0, у = /(ж)}.
Поэтому, если X = Аи В, An В = ®, А, В — открытые непу-
непустые множества, то каждое из подмножеств Гх, Г2, Г3 целиком ле-
лежит либо в А, либо В. Пусть Гз С В. Нетрудно проверить, что лю-
любая окрестность Гз пересекается как с Гх, так и с Г2, т. е. Гх С В,
Гз С В. Значит, А = 0, что противоречит предложению. Таким об-
образом, X — связное пространство.
Покажем теперь, что X не является линейно связным. Рассмо-
Рассмотрим две точки Р = (—1/тг, 0) и Q = A/тг, 0) в X. Предположим,
что существует непрерывное отображение /: [0,1] —>> X, /@) = Р,
/A) = Q. Отображение / задается двумя непрерывными числовы-
числовыми функциями: /(?) = (x(t),y(t)), y(t) = sin(l/x(t)) при x(t) Ф 0.
Поскольку х@) = — 1/тг, то точная нижняя грань to тех значений ?,
для которых x(t) = 0, строго больше нуля, to > 0.
Итак, на интервале [0, to] выполнены условия: x(t) < 0, y(t) =
= sin(l/x(t)). Поскольку x(t) — непрерывная функция, и существу-
существует последовательность t& > to, t& —)> to, где ж(^) = 0, то ж (to) =
= limt^to x(t) = 0. Но тогда функция sin(l/x(t)) не имеет предела
при t —^ to — 0; следовательно, функция y(t) не является непрерыв-
непрерывной. Таким образом, пространство X не является линейно связным
пространством.
2.2.2. Аксиомы отделимости
Топологическое пространство X называется хаусдорфовым про-
пространством, если для любых точек х,у Е Х,х ф у, найдутся такие
окрестности U(x) и U(y), что U(x) П U(y) = 0.
В хаусдорфовом пространстве каждая точка х Е X является
замкнутым множеством. В самом деле, если у ф х, то найдет-
найдется окрестность U(y) точки у, не содержащая х. Тогда множество
X \ {х} = [Jy^x U(у) является открытым, а его дополнение, состо-
состоящее из одной точки ж, замкнуто.
Дискретное топологическое пространство X является хаусдор-
хаусдорфовым пространством. В самом деле, каждая точка х Е X являет-
является открытым множеством, значит, если х ф у, то окрестности {х}
и {у} не пересекаются.
2.2. Связность. Аксиомы отделимости 59
Если X и Y — хаусдорфовы пространства, то их декартово про-
произведение, несвязная и связная суммы являются хаусдорфовыми то-
топологическими пространствами.
Всякое метрическое пространство хаусдорфово. Более того, ес-
если два замкнутых подмножества F\ и F2 метрического простран-
пространства не пересекаются, то существуют непересекающиеся их окрест-
окрестности U\ D F\ и U2 D F2.
Действительно, пусть X — метрическое пространство с мет-
метрикой р, F\ и F2 — два непересекающихся замкнутых множества.
Пусть х Е Fl9 е(х) = (l/3)p(x,F2). Положим Ux = [jxeFi Оф)(х).
Аналогично определим открытое множество U2 = Uwgf2 Oef(y)(y)>
где е'(у) = A/3)р(у, Fi). Мы получили окрестности множеств F\
и F2. Покажем, что множества U\ и U2 не пересекаются. Допустим
противное, т. е. что существует точка z E U\ П U2. Тогда для неко-
некоторых точек х Е F\ и у Е F2 имеем z E O?^(x), z E O?t^(y), т. е.
p{x,z) < (l/3)p(x,F2),p(y,z) < (l/3)/9(y,Fi). В частности,
p(x,z) < A/3)/о(ж,у), p(y,z)
Складывая эти два неравенства, получаем
p(x,z)+p(y,z)
что противоречит неравенству треугольника.
Система открытых множеств {Ua} топологического простран-
пространства X называется открытым покрытием, если X = [ja Ua. По-
Покрытия — удобное понятие при изучении топологических про-
пространств. Например, если в каждом множестве Ua задана непре-
непрерывная функция fa, а на каждом пересечении Ua П Up функции fa
и fp совпадают, то существует одна непрерывная функция / на про-
пространстве X, совпадающая с fa в каждом открытом множестве Ua.
Пусть задано два открытых покрытия {Ua} и {Vp} топологи-
топологического пространства X. Скажем, что покрытие {Vp} измельчает
покрытие {Ua} или является более мелким, чем покрытие {Ua},
если каждое множество Vp лежит в некотором множестве Ua, a =
= а(C).
Теорема 3. Пусть X —метрическое пространство, {Ua}^=1 —
конечное открытое покрытие. Тогда существует более мелкое по-
покрытие {Va}a=i-> причем Vа С Ua.
Доказательство. Заметим, что в теореме 3 утвержда-
утверждается существование не просто более мелкого покрытия, а такого,
у которого элементы нумерованы тем же индексом а и включе-
включение множеств происходит с одинаковым значением индекса а. Для
60 Гл. 2. Общая топология
доказательства теоремы рассмотрим замкнутые непересекающиеся
множества X \ \Ja=2 Ua и X \ U\. Тогда существуют окрестности,
разделяющие эти два множества. В качестве окрестности V\ нужно
взять ту из них, что содержит X \ U^=2 Ua- Тогда X \ \J^=2 UaC
cVi С V\ С Ui и система множеств {Vi, [/2, • • •, Un} покрывает
пространство X. Поэтому мы можем найти множество V2GV2, при-
причем система {Vi, V2, ^з? • • • •> Un} тоже покрывает^пространство X.
Заменяя последовательно множество Uk на V& С V^ С Uk, мы при-
придем к искомому покрытию {Vi, ..., Vn} за N шагов. ¦
Задачи
1. Доказать, что если из Rn, n ^ 2, выбросить конечное (или
счетное) число точек, то оставшееся пространство будет связным.
2. Доказать, что если из Rn выбросить конечное число подпро-
подпространств размерности меньше, чем п — 1, то оставшееся простран-
пространство будет связно.
3. Подсчитать, на какое наибольшее число компонент связности
разобьется R2 конечным числом прямых. Каково наименьшее число
компонент связности?
4. Пусть /: X —)> X — непрерывное отображение хаусдорфова
пространства. Доказать, что множество неподвижных точек (т. е. то-
точек ж, для которых f(x) = х) замкнуто.
5. Доказать, что пространство X хаусдорфово тогда и только то-
тогда, когда диагональ А = {(ж, у) \ х = у} С X х X замкнута в X х
х!
6. Доказать, что отображение /: X —>> Y в хаусдорфово про-
пространство Y непрерывно тогда и только тогда, когда график Tf =
= {(х, f(x)) \х е X} СХ xY замкнут в X х У.
2.3. КОМПАКТНЫЕ ПРОСТРАНСТВА
Свойство компактности, которое мы рассмотрим в настоящем
параграфе, является одним из важнейших свойств топологических
пространств. В частности, это свойство играет фундаментальную
роль при исследовании вещественных чисел и непрерывных функ-
функций.
2.3.1. Компактные пространства
Определение 1. Хаусдорфово топологическое пространство X
называется компактным, если из его всякого открытого покрытия
{Ua} можно выделить конечную часть {Uak}%=1, покрывающую X.
2.3. Компактные пространства 61
Можно требовать всего лишь, чтобы существовало конечное бо-
более мелкое покрытие.
Пример 1. Докажем, что любой конечный отрезок [а, Ь] ве-
вещественной оси R является компактным пространством. В самом
деле, если {Ua} — открытое покрытие отрезка [а, Ь], то без ограни-
ограничения общности можно считать, что каждый элемент покрытия Ua
является интервалом (ca,da) (за исключением двух полуинтерва-
полуинтервалов, [а, а') и (Ь7, Ь]). Рассмотрим множество Р всех таких чисел
х Е [а, 6], что отрезок [а, ж] покрывается конечным числом элемен-
элементов Ua. Тогда, если х Е Р, у < х, то у тоже принадлежит Р. По-
Поскольку точка а принадлежит элементу покрытия [а, а'), а' > а, то
множество Р состоит более чем из одной точки а.
Пусть xq — точная верхняя грань множества Р, xq > а. Если
xq < 6, то точка xq лежит в некотором интервале Uao = (cao,dao),
т. е. сао < xq < dao. Пусть y,z — такие числа, что сао < у < xq <
< z < dao. Тогда у Е Р и, значит, конечное число множеств Up по-
покрывает отрезок [а, у], поэтому отрезок [a,z] тоже покрывается ко-
конечным числом множеств Up. Следовательно, xq не является верх-
верхней гранью множества Р. Таким образом, xq = b. Тогда Ъ' < xq = b.
Если Ъ' < у < xq, то у Е Р, и отрезок [а, у] опять-таки покрывается
конечным числом множеств Up. Вместе с ним покрывается конеч-
конечным числом множеств Up и весь отрезок [а, Ь].
2.3.2. Свойства компактных пространств
Теорема 1. Пусть F С X — компактное подпространство в
хаусдорфовом топологическом пространстве X. Тогда F — замкну-
замкнутое множество в пространстве X.
Доказательство. Пусть х — произвольная точка про-
пространства X, не принадлежащая F. В силу хаусдорфовости про-
пространства X для точек у Е F найдутся непересекающиеся окрест-
окрестности Uу Э у и Vy Э х. Тогда семейство {Uy} покрывает множе-
множество F, а в силу его компактности найдется конечное семейство
{Uyk}%=1, покрывающее F. Тогда объединение U/c=i Uyk не пере-
пересекается с пересечением П/с=1^//е и содержит множество F. Следо-
Следовательно, точка х имеет окрестность, не пересекающуюся с множе-
множеством F, что и означает, что множество F замкнуто. ¦
Теорема 2. Пусть f: X —>• Y — непрерывное отображение
компактного пространства X в пространство Y. Тогда образ
f(X) является компактным пространством.
Доказательство. Пусть {Ua} — открытое покрытие
множества f(X). Тогда семейство {f~1(Ua)} является открытым
62 Гл. 2. Общая топология
покрытием компактного пространства X. Следовательно, некото-
некоторое конечное семейство {f~1(Uak)}^=1 покрывает пространство X.
Тогда семейство {Uak}^=1 покрывает образ f(X). Ш
Из теорем 1 и 2 вытекает следующее общее свойство непре-
непрерывных функций на компактных пространствах, известное из курса
математического анализа.
Теорема 3. Пусть f: X —>> R1 — непрерывная функция на ком-
компактном пространстве X. Тогда функция f ограничена и принима-
принимает максимальное и минимальное значения.
Доказательство. По теореме 2 образ f(X) является
компактным подпространством в R1, а по теореме 1 — замкнутым
множеством. Если бы образ f(X) не был ограниченным, то система
интервалов Un = (—п,п) покрывала бы f(X) и из нее нельзя было
бы выделить конечного подпокрытия. Положим А = supxeX{f(x)},
В = mfxex{f(x)}. Тогда А и В — точки прикосновения множест-
множества f(X). Так как множество f(X) замкнуто, то i,BG f(X). Ш
2.3.3. Метрические компактные пространства
Для метрических пространств свойство компактности можно
сформулировать в привычных для математического анализа терми-
терминах.
Теорема 4. Пусть X —метрическое пространство. Простран-
Пространство X является компактным тогда и только тогда, когда выпол-
выполнено одно из следующих эквивалентных свойств:
а) всякая последовательность {хп} имеет сходящуюся подпо-
подпоследовательность;
б) всякая последовательность вложенных непустых замкнутых
подмножеств {Fn}, Fn D Fn+i, имеет непустое пересечение.
В качестве следствия из теоремы 4 приведем следующее фун-
фундаментальное свойство вещественных чисел: последовательность
вложенных отрезков вещественной прямой имеет общую точку.
2.3.4. Операции над компактными пространствами
Если хаусдорфово пространство X является объединением ко-
конечного числа своих компактных подмножеств, то X является ком-
компактным пространством.
Теорема 5. Декартово произведение X х Y метрических ком-
компактных пространств X и Y является компактным простран-
пространством.
Замечание. В самом деле, согласно теореме 4 рассмотрим про-
произвольную последовательность {zn}, zn = (хп,уп). Поскольку X —
2.4. Функциональная отделимость. Разбиение единицы 63
компактное пространство, то существует сходящаяся подпоследова-
подпоследовательность {хПк}. Тогда в силу компактности пространства Y из по-
последовательности {упк} выделяется сходящаяся подпоследователь-
подпоследовательность {уПк }• Таким образом, подпоследовательность {гПк } также
сходится.
Задачи
1. Доказать, что объединение конечного числа компактных про-
пространств компактно.
2. Показать, что если X — некомпактное метрическое простран-
пространство, то существует непрерывная и не ограниченная на этом про-
пространстве функция.
3. Доказать, что метрическое компактное пространство имеет
счетное плотное подмножество.
4. Доказать, что если в компактном метрическом пространстве
два замкнутых множества А и В не пересекаются, то р(А, В) > 0.
2.4. ФУНКЦИОНАЛЬНАЯ ОТДЕЛИМОСТЬ.
РАЗБИЕНИЕ ЕДИНИЦЫ
В этом параграфе мы приведем теоремы, позволяющие при
довольно слабых предположениях проводить анализ непрерывных
функций так же, как и в случае функций одной вещественной пе-
переменной. Как уже отмечалось ранее, непрерывные функции на
топологических пространствах во многих отношениях ведут себя
так же, как и функции одной вещественной переменной. Сумма
f + g, произведение fg двух непрерывных функций, а также отно-
отношение f/g при д ф 0 являются непрерывными функциями. В классе
непрерывных функций на топологическом пространстве X можно
переходить к пределу. Последовательность функций fn равномерно
сходится к функции /, если для любого е > 0 существует такой
номер N, что при п > N выполнено неравенство \f(x) — fn(%)\ < ?
для любой точки х Е X.
Теорема 1. Равномерный предел последовательности непре-
непрерывных функций на топологическом пространстве X является
непрерывной функцией.
Доказательство. Пусть f(x) = limy^oo fn(x). Покажем,
что функция / непрерывна. Фиксируем число е > 0 и точку xq E X.
Тогда найдется такой номер п, что для любой точки х Е X выполне-
выполнено неравенство \f(x) — fn(x)\ < б/З. Поскольку функция fn непре-
непрерывна, то найдется такая окрестность О(хо), что при х Е O(xq) вы-
выполнено неравенство \fn(x) — fn(%o)\ < ^/3. Тогда при х Е O(xq)
64 Гл. 2. Общая топология
имеем
\f(x) - /Ы| < \f(x) - Ш\ + \fn(x) - fn(xQ)\ +
+ \fn(x0) - /Ы| < е/3 + е/3 + е/3 = е.
2.4.1. Функциональная отделимость
Если Fi, F2 — два непересекающихся замкнутых множества
в топологическом пространстве X, то для построения непересе-
непересекающихся окрестностей множеств F\ и F2 достаточно построить
такую непрерывную функцию / на пространстве X, для которой
f(x) ^ a при х Е Fi, f(x) ^ b при ж Е F2 и а > 6. Тогда в качестве
окрестностей множеств F\ и F2 можно взять прообразы интервалов
/-1(с, оо) и f~l{—00, с), где 6 < с < а. В некотором смысле спра-
справедливо и обратное утверждение.
Теорема 2 (лемма Урысона). Пусть X — нормальное топо-
топологическое пространство, Fq.Fi— два замкнутых непересекаю-
непересекающихся множества. Тогда существует такая непрерывная функция
f: Х^ [0,1], что.f\Fo= 0, f\Fl = l.
Доказательство. Построим такую систему открытых
множеств Гг, занумерованных всеми двоично-рациональными чис-
числами 0 ^ г ^ 1, что выполнены следующие условия: 1) Fq С Го;
2) Ti С X \ Fi; 3) Гг С Гг/ при г < г'.
Тогда систему открытых множеств {Гг} можно расширить, до-
добавив к ним множества I\ = |Jr<trr, где t — уже произвольное
вещественное число, 0 ^ t ^ 1. Система открытых множеств {1\}
удовлетворяет тем же условиям: 1\ С IV при t < t'. В самом деле,
взяв такие рациональные числа г^7, что t < г < г' < ?', получаем
Tt С Гг, Гг/ С IV, следовательно, 1\ С Гг С Гг/ С IV
Построим теперь непрерывную функцию f:X —>> [0,1], по-
полагая f(x) = 0 при х Е Го и f(x) = sup{? I x ? Tt} при ж ^ Го.
Покажем, что / — непрерывная функция. Фиксируем точку xq и
е > 0. Положим to = /(^о)- В силу определения функции / име-
имеем xq ? T(to_?/2), xq Е Г(?о+?/2)- Рассмотрим окрестность С/ точ-
точки жо_: f/ = r(to+e/2) \ r(to_e/2). Тогда если у Е [/, то у Е Г^0+е/2),
у ^ Г^о_?/2). По определению функции / выполнены неравенства
t0 - е/2 ^ f(y) ^ t0 + б/2, т. е. \f(x0) - f(y)\ ^ e. Таким образом,
функция / непрерывна. Кроме того, если х Е Fq, то /(ж) = 0, а
если х Е i7!, то f(x) = 1.
Чтобы завершить доказательство теоремы 2, нам осталось по-
построить систему открытых множеств Гг, удовлетворяющих услови-
2.4. Функциональная отделимость. Разбиение единицы 65
ям 1), 2) и 3). В силу нормальности пространства X для любого
замкнутого множества F и его окрестности U, F С U, найдется
другая окрестность V такая, что F С V С V С U. Для краткости бу-
будем писать V < U, если V С V С U. Итак, Fo = Fo С X \ Fr. По-
Поэтому Fq <С X \ F\. Следовательно, найдется открытое множество
Го такое, что Fo <С Го <С X \ F\. Аналогично, найдется такое от-
открытое множество Fi, что i*o <С Го <С Fi <С X \ i*\. Предположим,
что для всех двоично-рациональных чисел вида г = р/2п, 0 ^ р ^
^ 2П, уже построены открытые множества Гг, причем Г(р/2™) ^
< Г((р+1)/2«)- Определим тогда множество ^ЛBр+1)/2п+1 так? что
Гр/2™ ^ ГBр+1)/2^+1 < Г(р+1)/2п. По индукции все семейство мно-
множеств {Гг} построено. ¦
Из теоремы 2 следует теорема о продолжении непрерывных
функций.
Теорема 3. Пусть X — нормальное топологическое простран-
пространство, F С X — замкнутое множество, f: F —)> R1 — непрерыв-
непрерывная функция на множестве F. Тогда функция f продолжается до
непрерывной функции д: X —>> R1 на всем пространстве X. Если
функция f ограничена, \f(x)\ ^ А, то и функцию дможно выбрать
ограниченной той же константой, \д(х)\ ^ А.
Доказательство. Предположим сначала, что функция /
ограничена, |/(ж)| ^ А. Положим <ро(х) = f(x) и рассмотрим два
замкнутых подмножества: Aq = {х | <ро(х) ^ —А/3}, Bq = {х \
^о(^) ^ ^./3}. Поскольку множества Aq и Bq не пересекаются, то
согласно теореме 2 существует непрерывная функция /о: X —>>
—>> [—А/3, А/3], равная —А/3 на множестве Aq и А/3 на множе-
множестве Во. Другими словами, |/о(ж)| ^ А/3, х е X, \ipo(x) - fo(x)\ ^
^ 2А/3.
Положим (fi(x) = (fo(x) — fo(x). Тогда функция (р\ ограничена
на множестве F константой 2А/3. Поэтому, повторяя весь процесс,
можно построить два непересекающихся замкнутых множества:
Ai = {х | (pi(x) < -2А/9}, В\ = {х | (pi(x) > 2A/9}, и непрерыв-
непрерывную функцию /i: X —)> [—2А/9, 2А/9], равную —2А/9 на множе-
множестве Ai и 2А/9 на множестве В\. Другими словами, |/i(#)| ^
^ 2/3 • А/3, \ip\{x) — fi{x)\ ^ 4A/9. Повторяя указанный процесс
бесконечное число раз, мы построим две последовательности функ-
функций fn: X —)> R1, ipn\ F —)> R1, удовлетворяющих следующим ус-
условиям:
= (рп(х) - fn(x),
\fn(x)\ < (^)у. 1^пИ| < (IT A. B.3)
66 Гл. 2. Общая топология
Далее,
f(x) = (ро(х) = /о (ж) + ipi(x) = ...
••• = /о (ж) + Л (ж) + ... + /п(ж) + (fn+i(x) при ж Е F.
В силу неравенства B.3) ряд ^2^=q fk(x) сходится равномерно
на всем пространстве X. По теореме 1 функция д(х) = ^2^=ofk(x)
является непрерывной и по построению д(х) = f(x) при ж Е F. В
силу неравенства B.3) имеем
3 - = a.
к=0 /с=(Л '
Тем самым теорема доказана для случая ограниченной функ-
функции /.
В общем случае рассмотрим гомеоморфизм h: R1 —>> (—1,1).
Тогда композиция hf: F —>> (—1,1) является непрерывной ограни-
ограниченной функцией. Применяя теорему 3 для ограниченной функ-
функции hf, построим непрерывную функцию д: X —> [—1,1], про-
продолжающую функцию hf. Значения ±1 функция д принимает на
некотором замкнутом множестве F\, не пересекающемся со множе-
множеством F. По теореме 2 существует непрерывная функция ф: X —>>
—>> [0,1], равная 1 на множестве F и 0 на множестве Fi. Тогда функ-
функция д\(х) = ф(х)д(х), х <Е X, совпадает с функцией hf на множе-
множестве F и не принимает значений ±1. Таким образом, функция д\
отображает пространство X в интервал (—1,1). Наконец, положим
д(х) = h~lg\(x). Тогда д: X —>> R1 непрерывна и при х Е F вы-
выполнены равенства #(ж) = h~lg\(x) = h~lhf{x) = /(ж). Теорема
полностью доказана. ¦
2.4.2. Разбиение единицы
Носителем непрерывной функции / на топологическом про-
пространстве X называется замыкание множества тех точек х Е X, где
f(x) т^ 0. Носитель функции / обозначается через supp/. Таким
образом, вне носителя функция / тождественно равна нулю. Одним
из полезных приемов в топологии является разложение функций в
сумму так, чтобы каждое из слагаемых имело достаточно малый
носитель.
Теорема 4. Пусть X — метрическое пространство, {Ua} —
конечное открытое покрытие. Тогда существуют такие функции
(ра: X -> R1, 0 ^ <ра(х) ^ 1, что: a) supp (pa С Ua, б)
= 1.
2.4. Функциональная отделимость. Разбиение единицы 61
Система функций {(ра}-> указанных в теореме 4, называется раз-
разбиением единицы, подчиненным покрытию {Ua}.
Доказательство. Рассмотрим конечное покрытие {Ua}.
Согласно теореме^ из разд. 2.2 найдется более мелкое покры-
покрытие {Va}, причем Va С Ua. По теореме 2 существует непрерывная
функция фа на пространстве X, удовлетворяющая условиям
фа\уа = 1, фа\х\иа = °? 0^фа^1.
Это значит, что supp ^>а С Ua и фа(х) = 1 при х EVa.
Положим ф(х) = ^2афа(%)- Функция ф непрерывна. Покажем,
что ф(х) ^ 1 в каждой точке х Е X. В самом деле, поскольку систе-
система {Vq,} покрывает пространство X, то найдется такой номер «о,
что ж Е 140, т.е. фао(х) > 0. Тогда ф(х) = ^2афа(х)^фао(х) > 0.
Наконец, положим <ра(ж) = фа(х)/ф(х). Тогда
С Ua, 0 ^ (ра(ж) ^ 1,
Е
ф(х)
_ 1
Задачи
1. Доказать, что в теореме 2 можно требовать, чтобы функция /
была гладкой, если X — евклидово пространство Rn.
2. Доказать, что в теореме 4 при X = Rn можно требовать, что-
чтобы функции сра были гладкими.
3. Для окружности построить разбиение единицы системой
а) непрерывных, б) гладких функций.
4. Доказать, что для окружности не существует разбиения еди-
единицы системой аналитических функций.
5. Обобщить задачи 3, 4 на случай сферы Sn = {х\ + ...
4 1} в Rn+1.
Глава 3
Гладкие многообразия (общая теория)
В гл. 1 на различных примерах было показано, что основным
инструментом при изучении геометрических объектов является си-
система координат, характеризующая расположение точек в простран-
пространстве. С помощью системы координат мы можем использовать для
решения многих задач методы дифференциального и интегрально-
интегрального исчисления. Поэтому в геометрии выделяют в отдельный раздел
изучение таких пространств, которые допускают такие понятия, как
дифференцируемые или гладкие функции, операции дифференци-
дифференцирования и интегрирования.
Полезно рассмотреть несколько примеров таких пространств.
Пример 1. Рассмотрим на плоскости (т. е. в двумерном ев-
евклидовом пространстве R2) окружность S1 единичного радиуса.
Для того чтобы описать точки окружности с помощью системы ко-
координат, зададим ее как множество точек, удовлетворяющих урав-
уравнению
х2 + у2 = 1, C.1)
где (х,у) — декартовы координаты точки на плоскости. Таким об-
образом, каждая точка Р Е S1 однозначно задается парой чисел —
декартовыми координатами х и у. Однако для точек окружности
излишне задавать обе координаты х и у. Если нам известна коор-
координата х точки Р, то вторая координата у может быть получена
из уравнения C.1): у = ±д/1 — ж2, т.е. вторая координата у одно-
однозначно (с точностью до знака) определяется первой координатой х.
Более того, если точка Pq = (жо,уо) не находится на оси абсцисс,
т. е. уо т^ 0, то найдется такая достаточно малая окрестность U точ-
точки Pq, что для всех точек Р Е U выбор знака координаты у точ-
точки Р определяется однозначно знаком координаты у о точки Pq. В
некотором смысле мы можем сказать, что точки на окружности S1
описываются одним числовым параметром — ее первой декартовой
координатой х. Более точно, можно утверждать, что точки, лежа-
лежащие в верхней половине окружности, т. е. удовлетворяющие нера-
неравенству у > 0, однозначно задаются одним числовым параметром х.
Аналогично, точки, лежащие в нижней половине окружности, т. е.
Гл. 3. Гладкие многообразия (общая теория) 69
удовлетворяющие неравенству у < О, тоже однозначно задаются од-
одним числовым параметром х. Как для верхней половины окружно-
окружности, так и для ее нижней половины область изменения параметра х
одна и та же, а именно интервал вещественной оси (—1,1). Если бы
мы захотели подобным же образом параметрически описывать точ-
точки окружности, включая и оставшиеся «особые» точки Pq = A,0) и
Pi = (—1,0), то нам бы пришлось поменять местами координаты х
и у и выразить из уравнения C.1) координату х через координату у.
Возникает вопрос: нельзя ли так ввести параметризацию точек
на окружности Si, чтобы сразу все точки окружности однознач-
однозначно задавались некоторым значением числового параметра? Наилуч-
Наилучшим приближением к ответу на этот вопрос является угловой па-
параметр ср, равный углу между осью абсцисс и радиус-вектором с
концом в точке Р. Но угловой параметр определен неоднозначно.
Если же мы ограничимся значением угла (р в некотором интерва-
интервале, скажем, 0 < (р ^ 2тг, то функция, сопоставляющая точке Р Е Si
значение углового параметра ср, будет претерпевать разрыв в точке
Ро = A,0).
Таким образом, можно сформулировать следующее утвержде-
утверждение: на окружности S1 (как на топологическом пространстве) не
существует такой непрерывной функции, значения которой одно-
однозначно определяли бы точки окружности.
Пример 2. В качестве еще одного примера рассмотрим дву-
двумерную сферу S2 в трехмерном евклидовом пространстве, задавае-
задаваемую уравнением
х2 +у2 + z2 = 1.
Так же, как и в случае окружности, для точек сферы S2 из-
излишне задавать все три декартовы координаты (x,y,z), посколь-
поскольку, скажем, координату z можно выразить через первые две: z =
= =Ьл/1 — х2 — у2. Ясно, что на верхней (и, аналогично, на нижней)
полусфере, координата z точки Р однозначно восстанавливается по
ее первым двум координатам х и у.
Можно показать, что и в случае двумерной сферы невозможно
найти две непрерывные функции на сфере S2, по значениям кото-
которых точка Р на сфере восстанавливалась бы однозначно.
Рассмотренные примеры показывают, что мы имеем только один
выход — отказаться от попытки построения системы координат, еди-
единой для всех точек рассматриваемого пространства, и довольство-
довольствоваться для различных частей пространства своей системой коорди-
координат. Строгое описание этой конструкции привело к введению спе-
специального понятия в геометрии — многообразия.
70 Гл. 3. Гладкие многообразия (общая теория)
3.1. ПОНЯТИЕ МНОГООБРАЗИЯ
3.1.1. Основные определения
Метрическое пространство М называется п-мерным многообра-
многообразием (или просто многообразием), если каждая его точка Р содер-
содержится в окрестности U С М, гомеоморфной некоторой области V
евклидова пространства Rn. Это условие кратко формулируют сле-
следующим образом: n-мерное многообразие М локально гомеоморф-
но области в евклидовом пространстве Rn. При этом говорят, что
размерность многообразия М равна п и записывают dimM = п.
Таким образом, если М — n-мерное многообразие, то в простран-
пространстве М можно указать систему открытых множеств {Ua}, зану-
занумерованных некоторым (конечным или бесконечным) множеством
индексов г, и гомеоморфизмов сра: Ua —>> Va С Rn множеств Ua на
области Va. При этом система открытых множеств {Ua} должна
покрывать пространство М: М = UaUa. Области Va могут, вообще
говоря, пересекаться между собой. Множество Ua вместе с гомео-
гомеоморфизмом (ра называется картой.
Фиксируем в пространстве Rn некоторую декартову систему ко-
координат (ж1, ... ,жп), как систему линейных функций на Rn. То-
Тогда композиции хк = хк(Р) = хк((ра(Р)), Р ?Ua, задают систему
функций на открытом множестве Ua, которая назывется локальной
системой координат на карте Ua.
Совокупность карт {Ua}, покрывающая все многообразие М,
называется атласом карт.
Удобно локальные координаты точки РЕМ нумеровать допол-
дополнительным индексом, нумерующим саму карту Ua: x^= х^(Р). Пос-
Поскольку точка Р может принадлежать одновременно нескольким кар-
картам, то она приобретает несколько наборов локальных координат.
Рассмотрим простейшие примеры многообразий.
Пример 1. Во введении была рассмотрена окружность S1 С
С R2, заданная уравнением х2 + у2 = 1. Покроем S1 атласом, со-
состоящим из четырех карт (рис. 3.1)
иг = {(х,у) е S1: у > 0}, U2 = {(x,y) e S1: у < 0},
U3 = {(х,у) Е^:Ж>0}, Щ = {(х,у) е S1: х < 0}.
Соответствующие им области Vi, V2, V3, V4 на вещественной пря-
прямой R1 совпадают и равны открытому интервалу (—1,1). Гомео-
Гомеоморфизмы (pi и (f2 построим как проекции окружности на ось аб-
абсцисс: y>i(x, у) = ц>2(ж, у) = ж, а гомеоморфизмы (р%, ср^ — как про-
проекции на ось ординат: срз(х,у) = (р4,(х^у) = у. Чтобы доказать, что
3.1. Понятие многообразия
71
отображения ср^, к = 1, ... ,4, являются гомеоморфизмами, доста-
достаточно в явном виде записать формулы для обратных отображений:
<Рз\у) =
и убедиться, что обратные отображения непрерывны. Тогда на ок-
окружности получаются четыре локальных системы координат, каж-
каждая из которых состоит из одной координаты: х\ = <pi(x,y) = ж,
х2 = ч>2{х,у) = ж, х3 = (рз(х,у) = у, ж4 = щ{х,у) = у. Некоторые
точки снабжены сразу двумя локальными системами координат. Так,
например, для точек Р пересечения U\ П U% определены координаты
Ж1(Р)ид;з(Р)(рис. 3.2).
Рис. 3.1
Рис. 3.2
Существуют и другие способы введения атласа карт на окруж-
окружности. В гл. 1 были рассмотрены полярные координаты (г, ф) на
плоскости. Уравнение окружности в полярных координатах имеет
простой вид: г = 1. Строго говоря, полярные координаты на плоско-
плоскости не являются системой координат (см. гл. 1). Поэтому на окруж-
и2
Рис. 3.3
ности S1 введем карты U\ = {(х,у) Е S1: х ф —1}, U2 = {(х,у) Е
Е S1: х ф 1} (рис. 3.3). Положим y>i(P) = tpi(x,y) равным значе-
значению угла tp, лежащему в промежутке (—тг, тг), а (р2(Р) = ^2(ж, у) —
72
Гл. 3. Гладкие многообразия (общая теория)
равным значению угла ср, лежащему в промежутке @, 2тг), т. е. V\ =
= (—тг, тг), V2 = @,2тг). Ясно, что локальные координаты (р\ =
= tpi(P) и ср2 = tp2{P) совпадают для точек
верхней полуокружности и не совпадают для
точек нижней полуокружности, т. е. <pi(x, у) =
= (р2 (х, у) при у > 0, (рг (х, у) = (р2 (х, у) - 2тг
при у < 0 (рис. 3.4).
Пример 2. Окружность S1, рассмотрен-
рассмотренная в примере 1, представляет собой уже до-
довольно сложное многообразие. Простейшим
примером является само евклидово простран-
пространство Rn. Атлас карт можно взять состоящим
всего лишь из одной карты U = Rn, коорди-
координатный гомеоморфизм (р — это тождественное
отображение (р: U —>> V = Rn, локальная си-
система координат — это декартовы координаты точек в Rn. Анало-
Аналогично, любая область U С Rn является n-мерным многообразием,
атлас карт которого тоже состоит из одной карты с декартовой си-
системой координат.
Пример 3. Рассмотрим п-мерную сферу Sn единичного ра-
радиуса, задаваемую как множество точек в Rn+1, удовлетворяющих
уравнению (ж1J + (ж2J + ... + (жп+1J = 1. Покажем, что п-мер-
ная сфера является n-мерным многообразием. В качестве атласа
карт возьмем открытые множества
Рис. 3.4
Ur = {(x\ ...,
Координатные гомеоморфизмы ср^~, ср^ определим как ограни-
ограничения проекций евклидова пространства Rn+1 на Rn вдоль коор-
координаты х1.
Тогда области V^ и Vf~ совпадают друг с другом и равны шару
единичного радиуса.
Пример 4. Рассмотрим проективную плоскость RP2. Мы
ее будем представлять как пространство, точками которого объяв-
объявлены всевозможные прямые, проходящие через начало координат
в R3. Определим расстояние между двумя прямыми как меньший
угол между ними. Тогда RP2 превращается в метрическое про-
пространство. Покажем, что RP2 является 2-мерным многообразием.
Для этого удобно каждую прямую Р Е RP2 задавать тремя одно-
однородными координатами (х: у: z), которые разрешается умножать
на одно и то же число А ф 0. Однородные координаты не обращают-
3.1. Понятие многообразия 73
ся в нуль одновременно, т. е. х2 + у2 + z1 > 0. Покроем RP2 тремя
картами: U\ = {(х: у: z): х ф О}, U2 = {(х: у: z): у ф О}, [73 =
= {(ж: у: z): z Ф 0}. Пусть Vi = V^ = V3 = R2. В качестве коорди-
координатных гомеоморфизмов возьмем отображения ср^: Uk —^ 14 = R2:
<Р1(ж: у: 2;) = (y/x,z/x), <р2(х: у: z) = {xjy.zjy),
<рз(х: у: z) = (x/z,y/z).
Таким образом, мы построили три локальных системы координат:
х\ = у/х, х\ = 2;/ж; х\ = ж/у, ^2 = z/y;
х\ = ж/^, ж^ = y/z.
Рассмотренные примеры показывают, что в одном и том же мно-
многообразии М можно фиксировать различные атласы карт. Даже если
карты как открытые множества оставить неизменными, можно ме-
менять локальную систему координат в карте путем выбора другого
координатного гомеоморфизма. Если U' <ZU — открытое подмно-
подмножество в карте [/, то, ограничивая координатные функции на под-
подмножество U1\ получаем новую карту, более мелкую, чем карта U.
Пусть {Ua}9 {Up} — два атласа карт на многообразии М. Тогда
существует третий атлас карт, измельчающий как {Ua}, так и атлас
{Uo}. Этот новый атлас можно, например, составить из попарных
пересечений карт исходных двух атласов.
3.1.2. Функции замены координат.
Определение гладкого многообразия
Определение 1. Пусть М — n-мерное многообразие, {Ua} —
его атлас карт, (ра — координатные гомеоморфизмы, {х^} — набор
локальных систем координат. В каждом пересечении Uap = Ua П
f\Up двух карт определены две локальные системы координат, {х1^}
и {хкЛ, причем координатные функции х^(Р) одной карты функ-
функционально выражаются через координатные функции хкр(Р) друго-
другого атласа, xka(P) = xka(xlp(P), ...,^(P)),PG Uap. Функции xka =
= Жд(жк ...,й) называются функциями замены координат или
функциями перехода от координат {хка} к координатам {хк}.
Функции замены координат определены не во всей области Vp, a
в ее некоторой части Vpa = (рр(иар), там, где имеет смысл говорить
сразу о двух системах координат.
На рис. 3.5 для удобства области Va и Vp в евклидовом про-
пространстве показаны как непересекающиеся множества. Функции
74
Гл. 3. Гладкие многообразия (общая теория)
и,
Ui
м
_--—-
" ¦—¦—_
х
-—"л
R"
„^—^^
Xi =
^ Уг J
Рис. 3.5
замены координат хка = ж^(жк ... ,ж5) осуществляют совместное
отображение области Vpa в область Vap, лежащие в Rn:
Определение 2. Гладким п-мерным многообразием называет-
называется n-мерное многообразие М, на котором фиксирован атлас карт
{Uа} с локальными системами координат {ж^}, удовлетворяющими
к
{
к = ж
являют-
являютусловию: функции замены координат хка =
ся непрерывно дифференцируемыми функциями для любой пары
карт Ua hU{3 и во всей области их определения.
Определение 3. Функция /: М —>> R1, определенная на глад-
гладком многообразии Л/f, называется непрерывно дифференцируемой
функцией в точке Pq E М, если в любой локальной системе коор-
координат (ж^, ..., ж^) (карты С/а Э Ро из фиксированного атласа карт)
функция / представляется в виде непрерывно дифференцируемой
функции h(xla, ..., ж^) от п независимых переменных в окрестно-
окрестности точки (ж^(Р0), • •. ,ж2(Л))).
Пример 5. Рассмотрим следующий пример атласа карт на
многообразии М. Пусть М = R1 — вещественная прямая, атлас
карт состоит из двух одинаковых карт Ui = U2 = М = R1, но с
различными системами координат. На J7i зададим координату х\ =
= ж, ж Е R1, а на [/2 координату зададим формулой Ж2 = ж3. Тогда
функции замены координат имеют вид
3 C.2)
C.3)
Если функция замены координат C.2) является непрерывно
дифференцируемой функцией (многочлен!), то функция C.3) имеет
ж2 = х2{х{) = (Ж1K,
xi =x1(x2) =
3.1. Понятие многообразия 75
разрывную производную. Поэтому согласно определению 2 много-
многообразие М с атласом карт {?/]_, ?/2} не является гладким многооб-
многообразием.
Замечание. Если атлас карт на многообразии М состоит из
одной карты (т. е. М гомеоморфно области в евклидовом простран-
пространстве), то М является гладким многообразием.
Определение 4. Пусть на многообразии М заданы два атласа
карт, {Uо) и {U'Л, и по отношению к каждому из них М явля-
является гладким многообразием. Два атласа карт, {Ua} и {Щ}, на-
называются эквивалентными, если функции перехода от каждой ло-
локальной системы координат в атласе {Ua} в каждую локальную си-
систему координат в атласе {и'Л являются непрерывно дифференци-
дифференцируемыми.
Определение 4 оправдывается тем, что всякая функция f на
многообразии М является непрерывно дифференцируемой в атла-
атласе {Uа} тогда и только тогда, когда она непрерывно дифферен-
дифференцируема в атласе {и'Л. Таким образом, с точки зрения непрерыв-
непрерывно дифференцируемых функций на многообразии М эквивалент-
эквивалентные атласы карт равноправны, и для представления функций в ви-
виде непрерывно дифференцируемых вещественнозначных функций
от независимых переменных (координат точки) можно пользовать-
пользоваться любыми из эквивалентных атласов карт.
Напомним, что вещественнозначная функция h(xl,..., хп) име-
имеет класс гладкости Сг в окрестности (xj, • • •, х\]), если в окрестно-
окрестности этой точки существуют и непрерывны все частные производные
функции h до порядка г включительно. В случае г = оо это означа-
означает, что существуют и непрерывны частные производные функции h
всех порядков.
Определение 5. Многообразие М с фиксированным атласом
карт {Uа) называется гладким многообразием класса С7\ если все
функции замены координат являются функциями класса гладко-
гладкости Сг во всех точках области их определения.
В дальнейшем, если не оговорено противное, мы будем рассма-
рассматривать только многообразия класса С°°, а функции на многообра-
многообразии — класса гладкости С°°.
Пример 6. Модифицируем пример 5. Выберем координату
во второй карте U2 равной ж2 = х + х\х\. Тогда многообразие М
является гладким многообразием класса С1, но не является гладким
многообразием класса С2.
В примерах 1-4 рассмотрены многообразия с такими атласами
карт, что эти многообразия автоматически являются гладкими мно-
многообразиями класса С°°.
16 Гл. 3. Гладкие многообразия (общая теория)
В геометрии рассматриваются и другие, более сильные усло-
условия на атласы карт и их функции замены координат. Так, если все
функции замены координат являются вещественно аналитически-
аналитическими функциями, т. е. в окрестности каждой точки их определения
разлагаются в сходящиеся ряды Тейлора, то само многообразие на-
называется вещественно аналитическим многообразием. Веществен-
Вещественно аналитическое многообразие является гладким многообразием
класса С°°.
Более важный класс многообразий — комплексно аналитические
многообразия. Пусть М — 2п-мерное многообразие, {Up} — атлас
его карт, срр: Up —>> Vp С R2n — его координатные гомеоморфизмы.
Отождествим 2п-мерное евклидово пространство R2n с п-мерным
комплексным линейным пространством Сп, считая, что комплекс-
комплексные координаты точки (я1, ..., zn) дают 2п вещественных коорди-
координат (ж1, ..., жп, у1, ..., уп), zk = xk + iyk. Тогда 2п координатных
функций ж^(Р), ...,а$(Р), Ур(Р), ...,упр{Р) в карте Up превра-
превращаются в п комплекснозначных функций zko{P) = хкЛР) + iyko{P).
Функции Zq(P) мы назовем комплексными координатами точки в
карте Up. На пересечении двух карт Up П U1 мы имели функции
перехода из одной системы координат в другую в виде
„к _ „к ( I п 1 п\
^C — ^C \Л7' ' ' ' ' 7' ^7' ' ' ' ' ^7 ^'
У/3
которые можно представить как комплекснозначные функции от п
независимых комплексных переменных:
4 = 4^ ¦¦¦'4)- C-4)
Функции C.4) мы назовем функциями перехода или функциями
замены комплексных координат.
Многообразие М с фиксированным атласом карт {Up} и ло-
локальными системами комплексных координат (zL ... ,22) называ-
называется комплексно аналитическим многообразием, если все функции
замены комплексных координат C.4) являются комплексно анали-
аналитическими функциями, т. е. разлагаются в сходящиеся ряды Тейлора
комплексных переменных в окрестности каждой точки своей обла-
области определения.
В качестве примера многообразия, допускающего структуру
комплексно аналитического многообразия, рассмотрим двумерную
сферу S2 и специальным образом построим на ней атлас карт.
В гл. 1 была построена стереографическая проекция сферы S2 =
3.1. Понятие многообразия 77
= {х2 + у2 + z1 = 1} из северного полюса Pq = @,0,1) на коор-
координатную плоскость (ж, у). Обозначим это отображение через (р^.
Отображение сро отображает все точки сферы S2, за исключени-
исключением полюса Ро? т. е. открытое множество Щ = S2 \ Pq гомеоморфно
на всю плоскость Vq = R2. В декартовых координатах гомеомор-
гомеоморфизм сро имеет вид cpo(x,y,z) = (ж/A — z),y/(l — z)). Поэтому
введем в карте Uq одну комплексную координату wq = (х + гу)/A —
— z), выраженную через декартовы координаты точки на сфере.
Кроме этого, рассмотрим южный полюс Р\ = @,0,-1) и стерео-
стереографическую проекцию cpi из южного полюса на ту же коорди-
координатную плоскость (ж, у). Отображение cpi гомеоморфно отображает
множество Ui = S \ Р\ на всю плоскость V\ = R2. В декартовых
координатах гомеоморфизм (р\ имеет вид ipi(x,y,z) = (х/A + z),
у/A + z)). Введем в карте Ui комплексную координату w\ = (х —
— iy)/(l + z). Тогда на пересечении Uq П Ui получаем wqWi = (х2 +
+ у2)/A — z2) = 1. Следовательно,
г^о = wq(wi) = l/^i, wi = wi(wo) = 1/гУо. C.5)
Функции C.5) являются комплексно аналитическими функциями.
Значит, сфера S2 является комплексно аналитическим многообра-
многообразием.
3.1.3. Гладкие отображения. Диффеоморфизм
Пусть Mi и М2 — Два гладких многообразия, f: М\-* М2 —
непрерывное отображение.
Определение 6. Отображение /: М\ —>> М2 гладких многооб-
многообразий называется гладким отображением класса С7\ если для лю-
любых локальных систем координат (ж1, ..., хп) в окрестности любой
точки Pq e Mi и (у1,..., ут) в окрестности точки Qo = /(Лз) ? Л^2
представление функции / в виде вектор-функции у = (yk) = (hk(xl,
..., жп)) = /г(х) является вектор-функцией класса гладкости Сг.
Отметим, что определение гладкого отображения класса гладко-
гладкости СТ имеет смысл только в том случае, когда классы гладкости
многообразий М\ и М2 не меньше, чем г.
Пусть /: М\ —)> М2 — гомеоморфизм многообразий. Если / яв-
является гладким отображением класса С7\ то обратное отображение
f~l не обязано быть гладким отображением. В случае, когда обрат-
обратное отображение f~l: М2 —>> Mi тоже является гладким отображе-
отображением класса С7', гомеоморфизм / называют гладким гомеоморфиз-
гомеоморфизмом класса Сг или диффеоморфизмом класса С7'. Диффеоморфиз-
Диффеоморфизмы гладких многообразий Если /: Mi —>> М2 — диффеоморфизм, то
78 Гл. 3. Гладкие многообразия (общая теория)
многообразия М\ и М2 называются диффеоморфными многообра-
многообразиями.
Теорема 1. Пусть /: Mi —>> М2 — гладкий гомеоморфизм клас-
класса Сг (г ^ 1) гладких многообразий. Тогда dim Mi = dimM2.
Доказательство. Выберем локальные координаты (х1,
..., хп) на многообразии М\ и локальные координаты (у1, ..., ут)
на многообразии Мъ в окрестности Vq точки Qq. Пусть g = f~l —
обратное к / отображение. Тогда отображения fug представля-
представляются в виде двух вектор-функций, которые мы обозначим теми же
буквами, у = /(х) и х = д(у), причем д(/(х)) = х, f(g(y)) = у.
Другими словами, для функций / и д выполнены равенства
gf = Idx, fg = Idy,
где Idx, Idy — тождественные отображения векторных пространств.
Значит, и для матриц Якоби выполняются аналогичные равенства
(dg)(df)=Ex, (df)(dg) = Еу,
где Ех,Еу — единичные матрицы соответствующих размерностей.
Из линейной же алгебры известно, что ранг произведения двух
матриц не превосходит ранга каждого из сомножителей. Поскольку
rank dh ^ min(m, n), rank dh~l ^ min(m, n) (матрицы dh и dh~l —
прямоугольные!), то rankofeo ^ min(ra, n), rankrfei ^ min(m, n).
Следовательно, т^т.т(т,п), n^m.m(m,n), или max(m,n) ^
^ min(?77,, n), что и означает, что т = п. Теорема доказана. ¦
В заключение приведем два полезных утверждения об атласах
карт.
Лемма 1. В гладком многообразии М существует такой атлас
карт {Uа}, что каждая карта Ua диффеоморфна Rn.
Доказательство. Сначала покажем, что можно постро-
построить такой атлас карт, чтобы каждая карта была диффеоморфна от-
открытому шару некоторого радиуса е в Rn. Пусть Pq e M — про-
произвольная точка, Ua Э Pq, (ра'- Uа —)> Va С Rn — координатный го-
гомеоморфизм, Qq = сра(Ро). Поскольку Va — открытое множество
в Rn, то найдется такое число е, что открытый шар радиуса е с
центром в точке Qq лежит в Va. Обозначим этот шар через O?(Qq),
а его прообраз (p~1@?(Qo)) — через Wp. Семейство открытых мно-
множеств {Wp} является атласом карт на многообразии М, и каждая
карта Wp диффеомофна открытому шару в Rn. Чтобы завершить
доказательство леммы, покажем, что открытый шар радиуса е диф-
феоморфен Rn. Достаточно рассмотреть случай е = 1. Итак, пусть
(ж1, ... ,жп) — точка в шаре радиуса 1, (ж1J + ... + (хпJ < 1.
Положим
3.1. Понятие многообразия 79
VI "(я1J--..-
у/1 + (у1J + ... + (упJ
Функции C.6) являются гладкими и осуществляют взаимно об-
обратное отображения шара радиуса 1 и Rn. ¦
Лемма 2. Пусть М — гладкое компактное многообразие, {Ua} —
атлас карт на нем. Тогда существует гладкое разбиение единицы фа,
подчиненное покрытию {Ua}9 т. е.
Е
Фа = 1, SUpp V>a С
Доказательство. Достаточно считать на основании лем-
леммы 1, что все карты гомеоморфны шару радиуса 1. Пусть сра: Ua —>>
—>> D™ С Rn — координатные гомеоморфизмы. (Здесь D™ — откры-
открытый шар радиуса г с центром в начале координат.) Выберем такое
достаточно малое е > О, чтобы (p~1(D?1_^) покрывали многообра-
многообразие М. Допустим, что существует такая гладкая функция / клас-
класса С°° на шаре D™, что supp / = D?r_?y 0 ^ / ^ 1. Положим
фа(Р)=0, если P<?Ua,
f(<pa(P)), если PeUa.
Поскольку f((pa(P)) = 0 при Р ? ^(^(l-g))* то Функции фа
гладкие на многообразии М, причем supp^a С Ua, 0 ^ фа ^ 1.
Более того, supp^ D (p~1(D?1_?^). Следовательно, сумма функ-
функций фаф(Р) = ^2i фа(Р) строго больше нуля в каждой точке. Тогда
положим фа(Р) — Фа(Р)/Ф(Р)- Функции фа(Р) образуют гладкое
разбиение единицы, подчиненное покрытию {Ua}.
Таким образом, нам осталось построить такую функцию / клас-
класса С°° в Rn, чтобы ее носителем был шар D?1_?y Будем искать
функцию / в виде /(ж1,... ,хп) = h((x1J + ... + (хпJ). Следо-
Следовательно, достаточно построить гладкую функцию одной перемен-
переменной h(x), чтобы выполнялись условия: h(x) = 0 при х > A — еJ и
h(x) > 0 при х < A — еJ. В качестве h возьмем функцию
О, ж^A-бJ,
которая, как известно, является гладкой класса С°°. Ш
80
Гл. 3. Гладкие многообразия (общая теория)
Задачи
1. Доказать, что пространство расположений жесткого отрезка
на плоскости является гладким многообразием.
2. Доказать, что группа SOC) гомеоморфна трехмерному про-
проективному пространству
3. Описать конфигурационное пространство системы из двух
шарнирно соединенных стержней в трехмерном пространстве.
4. Привести пример гладкого взаимно однозначного отображе-
отображения, не являющегося диффеоморфизмом.
5. Показать, что на сфере Sn не существует атласа, состоящего
из одной карты.
3.2. ЗАДАНИЕ МНОГООБРАЗИЙ УРАВНЕНИЯМИ
Ранее многие примеры многообразий возникали в виде множе-
множества решений некоторого нелинейного уравнения, заданного в ев-
евклидовом пространстве. Так, например, n-мерная сфера Sn зада-
задается уравнением (ж1J + (ж2J + ... + (жпJ = 1 в евклидовом про-
пространстве Rn+1; псевдосфера S2 задается уравнением ж2 + у2 —
— z2 = —1. Вообще, если /(ж1, ..., хп) — непрерывно дифференци-
дифференцируемая функция, то множество решений уравнения /(ж1, ..., хп) —
— с = 0 называется многообразием уровня с функции /. Таким об-
образом, все евклидово пространство Rn разлагается в объединение
многообразий уровня функций /. В случае функции двух перемен-
переменных решения уравнения обычно называют линиями уровня функ-
функции /, а в случае функции трех переменных — поверхностями уров-
уровня. Чтобы оправдать название «многообразие уровня функции /»
необходимо было бы доказать, что
многообразие уровня функции / дей-
действительно является многообразием.
Однако это не всегда так.
Пример 1. Рассмотрим функ-
функцию /(ж, у) = х2 — у2. Ее линии уров-
уровня описываются уравнением х2 — у2 =
= с. Если с > 0, то линия уровня со-
состоит из двух компонент связности,
каждая из которых может быть описа-
на одним из уравнений ж = у/с + у2,
х = — у/с + у2, т. е. является графиком
функции одной переменной (рис. 3.6). Аналогично, при с < 0 ли-
линия уровня состоит из графиков двух функций: у =
3.2. Задание многообразий уравнениями 81
= —л/ж2 — с. Таким образом, при с ф 0 линии уровня являются од-
одномерными многообразиями. Особый случай представляет линия
уровня при с = 0. В этом случае линия уровня состоит из пары
пересекающихся прямых: ж = у, ж = —у, и не является многообра-
многообразием.
Тем не менее в некотором смысле почти всегда многообразия
уровня непрерывно дифференцируемой функции / являются мно-
многообразиями.
Теорема 1. Пусть f = /(ж1, ..., хп) — функция класса С°°, оп-
определенная во всем евклидовом пространстве Rn. Положим Мс =
= {(ж1, ..., хп): /(ж1, ..., хп) = с}. Если градиент функции f от-
отличен от нуля в каждой точке множества Мс, то Мс является
гладким (п — 1)-мерным многообразием класса С°°. При этом в
окрестности каждой точки Pq Е Мс в качестве локальных коор-
координат можно взять некоторые п — 1 декартовых координат объ-
объемлющего евклидова пространства Rn.
Доказательство. По сути дела теорема 1 является те-
теоремой о неявной функции, сформулированной в удобных для нас
терминах. Фиксируем некоторую точку Pq Е Мс, Pq = (xj, • • •, х$).
Поскольку
то найдется отличная от нуля в точке Pq частная производная. Без
ограничения общности мы можем считать, что df(x^ ..., х^)/дхпф
Ф 0. Пусть Qq = (zjjj, ..., x^~l) — точка в Rn-1, являющаяся обра-
образом точки Pq при проекции вдоль координатной оси хп.
Согласно теореме о неявной функции существуют такая окрест-
окрестность Vb Э Qo точки Qqj интервал (х^ — S,Xq + 5) и такая непре-
непрерывная функция у = у(х1, ..., хп~1) класса гладкости С°°, опреде-
определенная в окрестности Vb, что:
а) /(ж1, ... ,хп~1, у(х1, ... ,хп~1)) = с в области Vb;
5)x% = y(xl...,xn0-1);
в) |жд — у{х1-) • • • ,жп-1)| < 8 в области Vb;
г) всякое решение (ж1, ..., хп) EV^x (х$ — 5, х$ + S) уравнения
/(ж1, ... ,жп) = с имеет вид хп = ^(ж1, ... ,хп~1).
Тогда через Щ обозначим окрестность точки Pq E Мс, равную
Щ = Мс П (Vb х (xq — 5, жо + 5)). Окрестность Щ и будет искомой
картой, содержащей точку Pq. В качестве координатного гомео-
гомеоморфизма (fQ возьмем ограничение на Uq проекции Rn в Rn-1,
(foix1, ... ,жп) = (ж1, ... ,жп-1) Е V0. Обратное отображение ср^1
82 Гл. 3. Гладкие многообразия (общая теория)
зададим равенством
?>„ V, ...,ЖП) = {х\...,хп-\ у{х\...,хп-1)).
Из условия в) следует, что ^1(ж1, ..., хп~1) Е Vq х (жд — #, Жд +
+ E), а из условия а), что ^1(ж1, ..., хп~1) Е Мс. Таким образом,
ср^1(х1^ ..., жп-1) Е f/g. Отображения с^о и ^о непрерывны и вза-
взаимно обратны.
Мы доказали, что множество Мс является (п — 1)-мерным мно-
многообразием, и указали в окрестности каждой точки Pq E Мс локаль-
локальную систему координат, составленную из некоторых декартовых ко-
координат евклидова пространства Rn. Докажем теперь, что функции
замены координат являются гладкими функциями. Пусть точка Pq
содержится еще в одной карте Ui и в качестве локальных координат
в карте U\ взяты декартовы координаты ж1, ..., ж*, жг+1, ..., хп.
Тогда на пересечении карт Щ П Ui координаты ж1, ... ,жг-1,жг+1,
...,жп выражаются через координаты ж1, ...^ж™ как функции
следующим образом:
Поскольку функция у = у (ж1, ..., хп~1) имеет класс гладкости
С°°, то и все функции C.7) будут класса гладкости С°°. Теорема 1
полностью доказана. ¦
Пример 2. Снова рассмотрим n-мерную сферу Sn, задан-
заданную уравнением /(ж1, ..., жп+1) = Y^ktl(xkJ = 1. Градиент функ-
функции / равен grad/ = Bж1,2ж2, ... ,2жп+1). Если точка Р = (ж1,
ж2, ..., жп+1) лежит на сфере Sn, то не все ее координаты обраща-
обращаются в нуль; следовательно, одна из координат градиента отлична
от нуля. Выполнены условия теоремы 1, и, значит, сфера Sn явля-
является гладким многообразием класса С°°.
Пример 3. Рассмотрим евклидово пространство Rn раз-
размерности п2. Будем представлять точки пространства Rn в виде
квадратных матриц А порядка п с координатами А = (а^). Рас-
Рассмотрим множество SL(n, R) всех матриц А Е Rn , детерминант
которых равен единице: det A = 1. Множество SL(n, R) является
группой относительно операции умножения матриц и называется
специальной линейной группой. Покажем, что группа SL(n, R) яв-
является гладким многообразием класса С°° и размерности п2 — 1.
3.2. Задание многообразий уравнениями 83
Рассмотрим функцию / от п2 переменных /(а^)
Функция / является многочленом, и, значит, имеет класс гладко-
гладкости С°°. Чтобы применить теорему 1, следует вычислить градиент
функции / во всех точках группы SL(n, R). Пусть Е — единичная
матрица. Поскольку det Е = 1, то Е Е SL(n, R).
Вычислим градиент функции / в точке Е. Для этого разложим
сначала det А по первой строке:
det A = an det Ац - ai2 det Au + ... + (-l)n+1ain det A\n. C.8)
В разложении C.8) стоят детерминанты матриц А\^ которые
являются многочленами всех переменных ац, кроме элементов
первой строки. Тогда частная производная функции / по пере-
переменной ац имеет вид df/дац = д(ац det Ац)/дац = det Ац. В
точке Е получаем
? = 1. C.9)
Таким образом, градиент функции / в точке Е отличен от нуля.
Покажем теперь, что в произвольной точке Aq E SL(n, R) гра-
градиент функции / тоже отличен от нуля. Введем новые перемен-
переменные bij, задаваемые равенством (Ъц) = В = А^1А = А^1(а^). Ес-
Если А = Aq, то В = Е. Тогда
f(A) = f(A0B) = det(A0B) = det Ao det В = f(B).
Тогда, дифференцируя суперпозицию функций, получаем
IJ J
Левая часть равенства C.10) равна единице согласно формуле C.9).
Следовательно, в правой части хотя бы одно слагаемое отлично от
нуля. Значит, одна из частных производных д{Ао)/да^, а вместе
с ней и градиент функции / отличны от нуля. Таким образом, вы-
выполнены условия теоремы 1, и, значит, группа SL(n, R) является
гладким многообразием размерности п2 — 1.
Теорема 1 легко обобщается на случай систем нелинейных урав-
уравнений. Заметим, что условие теоремы 1 можно сформулировать сле-
следующим образом. Градиент функции / представится в виде столбца
частных производных функции /, и, значит, является матрицей Яко-
би функции /. Тогда условие нетривиальности градиента / в неко-
некоторой точке Pq E Rn эквивалентно тому, что ранг матрицы Яко-
би df функции / равен единице, т. е. максимален.
84 Гл. 3. Гладкие многообразия (общая теория)
Пусть задана система уравнений
f\x\...,xn)=c\
C.11)
fk/ I п\ _ к
которую кратко можно записать в виде /(х) = с, где х = (ж1, ...
..., хп) G Rn, с = (с1, ..., ск) G TLk, a / — отображение, опреде-
определяемое функциями (Z1, ...,//с). Множество Мс решений систе-
системы C.11) будем называть многообразием уровня системы функций
Теорема 2. Пусть f: Rn —>• R^ — отображение класса гладко-
гладкости С°°, Мс — множество решений системы уравнений /(х) = с.
Если ранг матрицы Якоби отображения f максимален в каждой
точке Pq G Мс (т. е. rankd/(Pq) = &)> то Мс является (п-к)-мер-
ным гладким многообразием класса С°°. При этом в окрестности
каждой точки Pq G Мс в качестве локальных координат можно
взять некоторые п — к декартовых координат объемлющего ев-
евклидова пространства Rn.
Доказательство дословно повторяет доказательство те-
теоремы 1 с той лишь разницей, что вместо одной переменной хп
выделяется к переменных хч, ..., х%к. Обозначив эту группу пере-
переменных одной буквой, скажем, у = (ж*1, ... ,жг/г), мы будем полу-
получать те же формулы, что и в доказательстве теоремы 1. ¦
Пример 4. Рассмотрим в евклидовом пространстве R4 с ко-
координатами ж1, ж2, ж3, ж4 систему двух уравнений
(Ж1J + (Ж2J = ^ (жЗJ + (ж4J = L (ЗЛ2)
Соответствующие им функции Д и /2 имеют вид
Чтобы применить теорему 2, вычислим матрицу Якоби отобра-
отображения / = (Z1,/2):
df\
2х1 2х2 О О
О 0 2ж3 2ж4
Ясно, что rank df ^ 1 только в том случае, когда одна из строк
матрицы Якоби равна нулю, что невозможно в точках решения
3.3. Касательные векторы. Касательное пространство 85
системы C.12). Таким образом, решения системы C.12) образу-
образуют гладкое двумерное многообразие класса С°°. Поскольку систе-
система C.12) распадается на два уравнения, каждое от своей группы
переменных, то и множество решений можно представить в виде
декартова произведения решений каждого уравнения в отдельно-
отдельности, т.е. решения системы C.11) представляются в виде произве-
произведения двух экземпляров окружности. Это многообразие называется
(двумерным) тором.
3.3. КАСАТЕЛЬНЫЕ ВЕКТОРЫ.
КАСАТЕЛЬНОЕ ПРОСТРАНСТВО
В гл. 1 мы видели, что для изучения метрических свойств кри-
кривых и поверхностей и вообще метрических свойств областей ев-
евклидовою пространства важную роль играют так называемые ин-
финитезимальные свойства пространств. Это такие свойства, кото-
которые определяются в очень малой окрестности фиксированной точ-
точки Р путем пренебрежения величинами большего порядка малости,
чем расстояние до точки Р. В математическом анализе существуют
аналогичные процедуры пренебрежения бесконечно малыми вели-
величинами при изучении поведения функции в окрестности некоторой
точки. При изучении гладких многообразий тоже возникает есте-
естественное желание осуществлять процедуру пренебрежения беско-
бесконечно малыми величинами. Один из таких способов заключается
во введении специальных понятий, аналогичных касательным век-
векторам к кривым и касательным плоскостям к поверхностям.
3.3.1. Простейшие примеры
Рассмотрим гладкую кривую в трехмерном пространстве R3,
параметризованную некоторым параметром t: х = x(t) = (x1(t),
х2(t), х3(t)). Фиксируем значение параметра to. Применим к век-
вектор-функции х = x(t) разложение по формуле Тейлора в окрестно-
окрестности точки to:
г/х
x(to + At) = x(to) + ^(*o)A< + O(At2). C.13)
Первые два слагаемых в правой части C.13) можно, с одной сто-
стороны, рассматривать как некоторую аппроксимацию вектор-функ-
вектор-функции x(t) в окрестности точки to с помощью линейной вектор-
функции. С другой стороны, эта линейная функция у (At) = x(to) +
+ dx./dt(to)At задает в R3 параметризованное представление пря-
86
Гл. 3. Гладкие многообразия (общая теория)
мой, проходящей через точку Pq = x(?o). Эта прямая называется
касательной прямой к кривой х(?) в точке Pq, а направляющий век-
вектор rfx/rft(to) называется касательным вектором к кривой х(?) в
точке Pq (рис. 3.7).
Рассмотрим теперь поверхность М в трехмерном простран-
пространстве R3, заданную в параметрическом виде как вектор-функция
х = х(гл, г;) от двух независимых параметров u, v. Поверхность
х(гл, г;) называется невырожденной, если в каждой точке частные
производные dx(u,v)/du и d(u,v)x(u,v)/dv линейно независимы
как векторы в R3.
Разлагая функцию х(г/, г;) по формуле Тейлора в точке (щ, vo):
х(г*о + Аи, v
+
Av) = х(г*о, ^
+ -^-
ov
О(Аи2
C.14)
получаем, что линейная часть разложения C.14) определяет па-
параметрическое представление плоскости, которая называется каса-
касательной плоскостью П к поверхности М в точке Pq = х(г^о,^о)
(рис. 3.8).
Рис. 3.7
Рис. 3.8
Касательным вектором к поверхности М в точке Pq называется
всякий вектор с началом в точке Pq, лежащий в касательной плоско-
плоскости П. Касательный вектор ? разлагается в линейную комбинацию
векторов <9х(г?о, vo)/du и
<9х
<9х
—
для подходящего выбора параметров Аи и Аг;. Таким образом, век-
векторы дх(щ,Уо)/ди и дшх.(щ,Уо)/ду образуют базис в касательной
3.3. Касательные векторы. Касательное пространство 87
плоскости П, а величины Аи и Av служат линейными координата-
координатами касательного вектора ? в этом базисе.
Проведем теперь на поверхности М гладкую кривую х = х(?),
проходящую через точку Pq. Поскольку кривая х = х(?) лежит на
поверхности М, то ее параметрически можно представить в виде
композиции
x(t)=x(u(t),v(*)) C.15)
для некоторых функций u(t), v(t). Иначе это можно сказать сле-
следующим образом: функции u(t), v(t) являются параметрическим
заданием кривой в локальной системе координат (u,v) на поверх-
поверхности М. Тогда условие прохождения кривой через точку Pq пере-
перепишем в виде условия на координаты щ = u(to), vq = v(to). Вы-
Вычислим теперь касательный вектор к кривой (или, как его иначе
называют, вектор скорости кривой):
<9х , \\dv <9х du <9х dv
dv к ' dt du dt dv dt
Следовательно, касательный вектор к кривой, лежащей на поверх-
поверхности М, лежит в касательной плоскости.
Определение 1. Пусть ? = dx(uo,vo)/du • ^ + dx(uo,vo)/dv x
х ?2 — касательный вектор к поверхности М в точке Pq. Тогда числа
(?1,?2) назовем координатами касательного вектора ? к поверх-
поверхности М в точке Pq по отношению к локальной системе координат
(гл, г;) на поверхности М.
Если (uf,vf) — другая система координат, то координаты и и v
выражаются как гладкие функции от координат u',v'\ u = u(uf,
v'), v = v(u',vf), щ = u(uq,Vq), vq = v(uq,Vq). Тогда, рассматривая
композиции функций, мы получаем новое параметрическое задание
поверхности М\
х =
Поэтому кривая C.15) может быть записана с помощью некоторых
функций u'(t), v'(t) так, чтобы х = x(^(^/(t),'y/(t)),'y(^/(t),'y/(t)).
Тогда, согласно определению координат касательного вектора к
кривой по отношению к этой новой локальной системе коорди-
координат (u',v'), пара чисел [du'(to)/dt^dv/(to)/dt) является коорди-
координатами касательного вектора к кривой. Дифференцируя сложные
функции, получим зависимость между координатами касательного
Гл. 3. Гладкие многообразия (общая теория)
вектора к кривой в различных локальных системах координат:
du du f f du' du f , dv'
dt du1 dt dv1 dt ^ ^
dv, ч dv , , , ч du , ч dv , , ,,d\
3.3.2. Общее определение касательного вектора
Рассмотренные примеры позволяют дать следующее общее оп-
определение касательного вектора к многообразию.
Определение 2. Пусть М — гладкое n-мерное многообразие,
Р$ Е М — произвольная точка. Касательным вектором ? в точ-
точке Pq к многообразию М называется соответствие, которое каждой
локальной системе координат (ж^, ..., ж^) сопоставляет набор чи-
чисел (?^, ... ,?2)' удовлетворяющий следующему соотношению для
каждой пары локальных систем координат:
1=1
Числа (?^, • • • ? ?2) называются координатами касательного век-
вектора ? в локальной системе координат (ж^, . ..,ж^). Соотноше-
Соотношение C.17) называется тензорным законом преобразования коорди-
координат касательного вектора ? при заменах локальных координат.
Определение 2 обобщает понятие координат касательного век-
вектора к кривой на поверхности. Закон C.16) изменения этих коор-
координат является частным случаем тензорного закона C.17) преоб-
преобразования координат касательного вектора к многообразию. Более
того, всякая гладкая кривая на гладком многообразии снабжается в
каждой своей точке касательным вектором в смысле определения 2.
Это важное свойство мы сформулируем в виде предложения.
Предложение 1. Пусть М — гладкое многообразие, j: (—1,
1) —>• М — гладкое отображение интервала (—1,1) в многооб-
многообразие М. Тогда соответствие, которое каждой локальной систе-
системе координат (ж1, ... ,жп) в окрестности точки Pq = 7@) сопо-
сопоставляет набор чисел (dx1('j(t))/dt, ..., dxn(j(t))/dt)t_Q, являет-
является касательным вектором в смысле определения 2.
Для доказательства предложения 1 достаточно проверить тен-
тензорный закон преобразования координат C.17). Положим ?о =
= dxko{^{t))/'dt\t_Q, где (жо, ... ,й) — локальная система коорди-
координат на многообразии М в окрестности точки Pq. Тогда для двух
3.3. Касательные векторы. Касательное пространство 89
локальных систем координат получим:
^ d
1 = 1 OXP ai 1 = 1 OXP
Это и есть тензорный закон C.17). ¦
Таким образом, указанное в предложении 1 соответствие есте-
естественно называть касательным вектором к кривой 7 или вектором
скорости кривой 7. Касательный вектор к кривой будем обозначать
через dj(to)/dt или 7(^0)-
3.3.3. Касательное пространство TPq(M)
Множество всех касательных векторов в фиксированной точ-
точке Pq к многообразию М называется касательным пространством
к многообразию М в точке Pq. Это множество обозначается че-
через Тро(М). Каждый касательный вектор ? Е Тро(М) однозначно
определяется своими компонентами в одной фиксированной систе-
системе координат. Действительно, если задан набор чисел (/i1, ... ,/in)
и мы считаем этот набор компонент искомого касательного вектора
в фиксированной локальной системе координат (ж^0, ..., ж^0), т. е.
\ik = <^0, то для задания всего касательного вектора необходимо
определить его компоненты в каждой локальной системе координат
(Жд, . . . , Ж™). ПОЛОЖИМ ДЛЯ ЭТОГО
Полученные компоненты удовлетворять тензорному закону пре-
преобразования координат C.17):
1=1 <*о s=1 ~~р i=1
Поскольку дхка(Ро)/дх1ао = E:=i дхка(Р0)/дх*р ¦ dxsp(Po)/dxlao (за-
кон изменения матрицы Якоби тройной замены координат), то со-
соотношение C.17) выполняется тождественно.
90 Гл. 3. Гладкие многообразия (общая теория)
Мы установили, таким образом, что множество всех касатель-
касательных векторов к многообразию М в точке Pq однозначно описыва-
описывается своими компонентами в одной фиксированной локальной си-
системе координат. Следовательно, все касательное пространство Тр0
отождествляется с арифметическим векторным пространством Rn.
Это значит, что касательное пространство Тро(М) можно снаб-
снабдить структурой линейного пространства. Структура линейного
пространства в Тр0 не зависит от выбора локальной системы коор-
координат в окрестности точки Pq, т. е. справедливо следующее
Предложение 2. Операции сложения векторов и умножения
вектора на число в касательном пространстве Тро(М) не зави-
зависят от выбора локальной системы координат на многообразии М
в окрестности точки Pq.
Доказательство. Проверка справедливости предложе-
предложения основана на линейности тензорного закона C.17) преобразова-
преобразования координат касательных векторов. ¦
3.3.4. Производная функции по направлению
Существует способ представлять касательный вектор на много-
многообразии М в виде операции дифференцирования гладких функций.
Определение 3. Пусть Pq Е М, ? Е Тр0, j(t) — гладкая кривая,
проходящая через точку Pq, 7(^0) = Лз и ее касательный вектор в
точке Pq равен ?. Пусть / — гладкая функция на многообразии М.
Число
4/(т(*)) =Ш) C.18)
йг t=t0
называется производной функции f no направлению касательного
вектора ?. Операция взятия производной называется дифференци-
дифференцированием функции f no направлению вектора ?.
Теорема 1. Пусть (ж1, ...,жп) — локальная система коорди-
координат в окрестности точки Pq = (жд, ..., Жд) многообразия М, ? =
= (^, ..., ?п) — касательный вектор к многообразию М в точке
Ро? f = /(ж1, ..., хп) — гладкая функция в окрестности точки Pq,
представленная как функция от локальных координат (ж1, ..., хп).
Тогда
г=1
Следовательно, определение C.18) производной не зависит от
выбора кривой 7, а правая часть C.19) не зависит от выбора ло-
локальной системы координат.
3.3. Касательные векторы. Касательное пространство 91
Доказательство. Представим кривую j(t), проходящую
через точку Pq, в координатном виде: j(t) = (^1(t), ... , жп(?)). То-
Тогда по определению касательного вектора к кривой dxl(to)/dt = ?\
Следовательно,
=н) г=1
Операция дифференцирования гладкой функции / по направле-
направлению касательного вектора ? удовлетворяет следующим двум свой-
свойствам:
а) операция дифференцирования по направлению вектора ? ли-
линейна, т. е. если /ид — две гладких функции, a A, /i — два произ-
произвольных числа, то
б) операция дифференцирования по направлению вектора ? удо-
удовлетворяет формуле Ньютона-Лейбница: если /ид — две гладких
функции в окрестности точки Pq, то для произведения функций /
и д справедлива формула
• • • >*о)¦ C.20)
Дадим общее определение.
Определение 4. Операция А, сопоставляющая каждой гладкой
функции / класса С°° на гладком многообразии М число A(f),
удовлетворяющее свойствам а) и б), называется операцией диффе-
дифференцирования в точке Pq Е М.
Теорема 2. Пусть М — гладкое многообразие класса С°°, Pq E
Е М — произвольная точка, А — операция дифференцирования в
смысле определения 4. Тогда операция А совпадает с диффернци-
рованием вдоль некоторого {единственного) касательного векто-
вектора ? в точке Pq.
Доказательство. Касательный вектор будем искать в ви-
виде столбца его компонент в некоторой локальной системе координат
(ж1, ... ,хп) в окрестности точки Ро. Тогда всякую гладкую функ-
функцию будем представлять в виде функции от переменных (ж1, ...
..., хп). Докажем две вспомогательные леммы.
Лемма 1. Всякую гладкую функцию /(ж1, ... ,жп) класса С°°
можно представить в виде
92 Гл. 3. Гладкие многообразия (общая теория)
f(x\ ...,xn) = f(xl ...,х%) + ?^(хЪ, ...,х$)(х* -хЬ) +
г=1
где hij(x1^ ..., жп) — гладкие функции класса С°°.
Доказательство. Запишем тождество
1
jtf(xl + t(x1-x10), ...,xnQ+t{xn-xn,))dt
о
и произведем дифференцирование по t под знаком интеграла:
х^х1)Ы(х\...,хп), C.22)
г=1
где
1
1
= J ^{хЪ
C.23)
Применим теперь формулу C.22) к самим функциям hi(xl, ..., хп).
Получим
п
3=1 C.24)
Подставим C.24) в C.22) и учтем C.23):
Лгр -L Т* I ~F (Т* Т* I I > IT* Т" I IT" Т* I I
г=1
hj=l
Лемма 2. Пусть f,g — две такие гладкие функции на многооб-
многообразии М, что f(Po) = <7(Лз) — 0. Тогда для любого дифференциро-
дифференцирования А в точке Pq имеет место равенство A(fg) = 0.
Доказательство следует немедленно из формулы Нью-
Ньютона-Лейбница C.20). ¦
3.3. Касательные векторы. Касательное пространство 93
Перейдем теперь к доказательству теоремы 2. Представим функ-
функцию / в виде C.21) и применим к левой и правой частям операцию
дифференцирования А. В силу линейности операции получаем
A(f) = f(xl ...,xnQ)A{\) + J2 |?(
г=1
п
. C.25)
Заметим, что для постоянной функции, равной единице, АA) =
= АA-1) = ЛA)-1 + 1-ЛA) = 2ЛA) = 0. Далее, в последней сумме
из C.25) каждое слагаемое пред ставимо в виде произведения двух
функций, (хг — хг0) и (ж-7 — xJ())hij(x1, ... ,жп), каждая из которых
обращается в нуль в точке Pq. Поэтому в силу леммы 2 А((хг —
— хго)(х3 — xJ())hij(x1^ ..., хп)) = 0. Следовательно,
г=1
Полагая ?г = А(хг — хг0), получаем такой вектор ? = (?1, ... ,?п),
что
A(f) = Ш)- ¦
Примером дифференцирования гладких функций служит опера-
операция взятия частной производной в некоторой локальной системе
координат (ж1, ..., хп). По теореме 2 операция д/дхк является ка-
касательным вектором, координаты которого равны @,..., 1,... ,0),
где 1 стоит на месте с номером к. Поэтому касательные векто-
векторы {д/дхк} образуют базис в касательном пространстве Тро(М),
а всякий касательный вектор ? = (?1, ..., ?п) разлагается в линей-
линейную комбинацию ? = ?}д/дх1 + ... + ^пд/дхп.
3.3.5. Касательное расслоение
Множество всех касательных векторов Тро(М) к многообра-
многообразию М в точке Pq является, как мы уже видели, линейным про-
пространством той же размерности, что и многообразие М. Сово-
Совокупность всех касательных векторов к многообразию М является
объединением |Jp eMTp0(M). Это пространство обозначают через
Т(М) и называют касательным расслоением многообразия М.
Рассмотрим следующий пример: окружность S1 С R2. На
рис. 3.9 показаны две касательных к окружности в точках Pq
и Qq и два касательных вектора ? и /i, имеющие общий конец. По-
94
Гл. 3. Гладкие многообразия (общая теория)
этому, для того чтобы изобразить касательное расслоение T(S1) в
виде топологического пространства, расположенного в евклидовом
пространстве, необходимо перейти в трехмерное пространство R3
и «повернуть» касательные к окружности на некоторый угол по от-
отношению к плоскости (ж, у) так, чтобы они перестали пересекаться
(рис. ЗЛО). Тогда касательное расслоение ТE1) превратится в
однополостный гиперболоид (геометрический цилиндр). При этом
потеряется свойство «тесного примыкания» касательного простран-
пространства Tpo(S1) к окружности. Мы как бы «оторвали» касательную к
окружности и забыли о том, что слои должны касаться окружно-
окружности S1. Можно немного изменить способ вложения касательного
расслоения в R3 так, чтобы свойство касания Tpo(S1) к S1 исчезло
и различные слои не пересекались. Это можно сделать не на всей
окружности S1, а только на ее части — дуге. Вложим дугу в R3
в виде винтовой линии. Тогда касательные к винтовой линии не
пересекаются (рис. 3.11).
TqAS1)
Рис. 3.9
Рис. 3.10
Рассмотрим некоторые примеры из механики, показывающие,
что для описания механических систем удобно рассматривать не-
нетривиальные многообразия и касательные расслоения к ним.
Пример 1. Рассмотрим движение плоского маятника, т. е. твер-
твердого стержня, закрепленного шарниром в одной точке (рис. 3.12).
Тогда положение стержня определяется одним параметром — уг-
углом if между осью стержня и вертикалью. Поэтому множество всех
положений стержня представляет собой окружность S1. Множество
всех положений называют конфигурационным пространством.
Рассмотрим двухшарнирный маятник — два стержня, соединен-
соединенных шарниром (рис. 3.13). Положение маятника определяется двумя
углами, (pi и ср2, а множество всех положений представляет дву-
двумерный тор Т2 = S1 х S1. На рис. 3.14 изображена другая система,
у которой пространство конфигураций является тором, вложенным
bR3.
3.4. Подмногообразия
95
/MW//////
Рис. 3.14
Пример 2. В механике обычно описывают движение меха-
механической системы совокупностью параметров, описывающих поло-
положение системы и скоростей ее частей. Множество всех расположе-
расположений механической системы с учетом скоростей называют фазовым
пространством. Тогда фазовое пространство естественно отожде-
отождествить с касательным расслоением к конфигурационному простран-
пространству Так, например, если материальная точка движется по поверх-
поверхности двумерной сферы с постоянным модулем скорости, то фазо-
фазовым пространством в данном случае будет подмножество в каса-
касательном расслоении, состоящее из касательных векторов постоян-
постоянной длины.
Пример 3. Бывают и более сложные примеры конфигураци-
оных и фазовых пространств. Рассмотрим, например, твердое трех-
трехмерное тело с закрепленной точкой. Всевозможные его положения
в R3 можно описать следующим образом. Фиксируем в твердом те-
теле три ортонормированных вектора, еь &ъ ез с началом в закреп-
закрепленной точке. Тогда любое расположение твердого тела с закреп-
закрепленной точкой однозначно задается расположением этих векторов
еь в2, ез в R3. Таким образом, конфигурационное пространство
можно отождествить с компонентой связности множества всех ор-
ортонормированных базисов в R3.
3.4. ПОДМНОГООБРАЗИЯ
3.4.1. Дифференциал гладкого отображения
Определение 1. Пусть /: М\ —>> М2 гладкое отображение глад-
гладких многообразий. Дифференциалом dfp0 гладкого отображения f
в точке Pq Е М\ называется линейное отображение касательного
пространства Tpo(Mi) в касательное пространство Tgo(M2), Qo =
= f(Po), определяемое в локальных системах координат матрицей
Якоби отображения /.
96 Гл. 3. Гладкие многообразия (общая теория)
Определение 1 дифференциала dfp0, не зависит от выбора ло-
локальных систем координат в окрестностях точек Pq е Mi и Qq e М2.
Чтобы показать это, достаточно переформулировать определение 1
в терминах дифференцирований гладких функций, в которых вооб-
вообще не участвуют какие бы то ни было локальные координаты.
Лемма 1. Пусть f: М\-* М2 гладкое отображение, f(Po) =
— Qo> С = Tpo(Mi) — касательный вектор к многообразию Mi в
точке Pq, г] = dfpo(?) — касательный вектор к многообразию М2 в
точке Qo в смысле определения 1. Тогда для любой гладкой функ-
функции g на многообразии М2 выполнено соотношение
ri{g)=i{gof). C.26)
Проверку сотношения C.26) достаточно производить в произ-
произвольной системе координат. Правая часть C.26) не зависит от выбо-
выбора локальной системы координат. Значит от этого выбора не зависит
и правая часть.
Лемма 2. Если 7 = j(i) — кривая на многообразии Мь прохо-
проходящая через точку Pq, 7(^0) — Дь а С ~~ касательный вектор к кри-
кривой 7 в точке Pq, то образ вектора ?, г/ = d/po(?) при отображении
/: Mi —)> М2 является касательным вектором к образу кривой 7?
Доказательство непосредственно проверяется в некоторых ло-
локальных системах координат многообразий Mi и М2.
Пример 1. Рассмотрим гладкую функцию y = f(x) как глад-
гладкое отображение многообразий /: R1 —>> R1. Тогда согласно опре-
определению 1 дифференциал — это линейное отображение ТЦК,1) =
= R1 в Tf(x)(R}) = R1, задаваемое формулой г/ = f'(x)^. В ма-
математическом анализе под дифференциалом функции f(x) понима-
понимают линейную часть приращения функции / как функцию от двух
независимых аргументов (х и dx): dy = ff(x)dx. Так что, полагая
dx = ^, dy = г/, получаем совпадение понятий.
Пример 2. Рассмотрим гладкую функцию f от п независи-
независимых переменных у = /(ж1, ..., хп). Так же, как и в случае функции
одной переменной, представим ее как гладкое отображение много-
многообразий /: Rn —)> R1. Тогда дифференциал отображения / является
линейным отображением касательных пространств
dfPo: ТРо(Кп)=Кп -»• TQo(Rl) = R\
Дифференциал dfp0 в локальных координатах задается форму-
формулой т] = X)fe=i d(Po)/dxk ¦ ?k. С другой стороны, дифференциал
3.4. Подмногообразия 97
функции / есть линейная часть приращения функции (ж1, ... , жп)
как функция от д 1
и (с/ж1, ... ,dxn)\
, , )
как функция от двух групп независимых переменных, (ж1, ..., хп)
1
к=1
Полагая ?к = dxk, r/ = dy, получаем совпадение понятий диф-
дифференциала функции и дифференциала ее же как отображения мно-
многообразий. Более того, матрица дифференциала dfp0 есть матрица
Якоби отображения /, а с другой стороны — градиент grad/ функ-
функции /; таким образом, градиент / — это матрица дифференциа-
дифференциала dfp0 в фиксированной системе координат. Ясно, что при изме-
изменении системы координат будут меняться и компоненты градиента
функции /.
Пример 3. Рассмотрим гладкую функцию / = /(ж1, ..., хп).
Пусть Pq = (жд, ... ,Жд) — экстремальная точка функции /. Тогда
одна из теорем анализа гласит, что gradPo / = 0. В нашей терми-
терминологии это значит, что dfp0 = 0. Это утверждение обобщается на
случай произвольных многообразий: если в точке Pq Е М гладкая
функция f достигает локального максимума, то dfp0 = 0.
Это обстоятельство получает новое освещение в теории много-
многообразий. В случае областей в евклидовом пространстве всегда су-
существуют такие гладкие функции, для которых grad/^0 в каж-
каждой точке. Для гладкого многообразия это уже не так. Например,
на двумерной сфере S2 для всякой гладкой функции / ее диффе-
дифференциал df обращается в нуль по крайней мере в двух точках: в
точке максимума функции /ив точке ее минимума. Вообще, ес-
если М — компактное гладкое многообразие, то для всякой гладкой
функции f дифференциал df обращается в нуль не менее чем в двух
точках. На рис. 3.15 изображено поведение дифференциала функ-
функции «высоты» на двумерной сфере 52, а на рис. 3.16 — функция
высоты на торе Т2.
Пример 4. Пусть /: Rn —>> Rm — линейное отображение, ко-
которое в стандартных координатах записывается в матричном виде:
Y = АХ,
/an ... a\n\
Тогда, очевидно, матрица Якоби отображения / (а, значит, и диффе-
98
Гл. 3. Гладкие многообразия (общая теория)
Tpo(S2)
Рис. 3.15
Рис. 3.16
ренциал rf/p0) совпадает с матрицей А. Другими словами, d/po(?) =
= /(С)- Впрочем, это не удивительно. Если представить дифферен-
дифференциал dfp0, как и в случае функций многих переменных, в виде ли-
линейной части приращения отображения, то получим АУ = А(Х +
+ АХ) — АХ = А АХ. Следовательно, само приращение АУ то-
тождественно совпадает с его линейной частью. Таким образом, диф-
дифференциал линейного отображения не зависит от точки Pq Е Rn.
3.4.2. Локальные свойства отображений и дифференциал
Определение 2. Пусть f: М\-* М2 — гладкое отображение.
Точка Pq Е Mi называется регулярной точкой отображения /, ес-
если дифференциал отображения dfp0: Tpo(Mi) —>> Тдо(М2), Qq =
= f(Po), является эпиморфизмом, т. е. отображением на все прост-
пространство Tqo(M2). Точка Qo ? Л^2 называется регулярной точкой
отображения /, если всякая точка Pq из прообраза f~1(Qo) яв-
является регулярной точкой отображения /.
Следующая теорема является обобщением теоремы 2 из
разд. 3.2:
Теорема 1. Пусть f: Mi —>> М2 — гладкое отображение глад-
гладких многообразий, Qq E М2 — регулярная точка отображения /.
Тогда прообраз М% = f~1(Qo) является гладким многообразием,
сШпМз = dim Mi — dimM2. Более того, в качестве локальных ко-
координат в многообразии М% можно взять некоторые из локальных
координат многообразия Pq Е М%.
Доказательство. Для того чтобы доказать, что Ms явля-
является многообразием, достаточно в окрестности каждой точки Pq E
Е Ms применить теорему 2 из разд 3.2. Получаем, что каждая точка
Pq Е Ms допускает окрестность U Э Pq, гомеоморфную области в
3.4. Подмногообразия 99
евклидовом пространстве Rn~m, где п = dim Mi, m = dimM2. Бо-
Более того, в качестве локальных координат в окрестности U мож-
можно взять некоторые (п — га) локальных координат (ж1, ...,жп)
многообразия М\ в окрестности точки Pq. Если это координаты
(х11, ..., хЪп-ш), то остальные локальные координаты (ж-7) выража-
выражаются на Мз через (жп, ... ,х1п-ш) в виде гладких функций. Отсю-
Отсюда следует, что Мз — гладкое многообразие. В самом деле, пусть
(у1, ...,уп) — другая система координат на многообразии Mi, a
(уп, ... ,у1п-ш) — образуют локальную систему координат на Мз.
Тогда
yi»=yi>'(x\...,xn) =
= yik(x1(xi\ ...,xin~™)), ...,хп(х*\ ...,xin~™))
— гладкая функция. ¦
Определение 3. Пусть /: Mi —>> М2 гладкое отображение. Ото-
Отображение / называется погружением, если в каждой точке Р Е Mi
дифференциал dfp является мономорфизмом, т. е. взаимно одно-
однозначным отображением на свой образ.
Если, кроме того, отображение / взаимно однозначно отобра-
отображает многообразие Mi на свой образ /(Mi) и /(Mi) — замкнутое
множество, то отображение / называется вложением. Образ /(Mi)
(равно как и Mi) в этом случае называется подмногообразием мно-
многообразия М2.
Пример 5. Прообраз регулярной точки отображения f:M\ —>>
—>> М2 согласно теореме 1 является подмногообразием. В самом де-
деле, так как в качестве локальной системы координат в Мз можно
взять некоторые из локальных координат объемлющего многообра-
многообразия Mi, то в локальных координатах тождественное отображение
ip: M3 —> Mi имеет вид
xl=x\
/ 1 хп
Поэтому матрица Якоби dip содержит в себе единичную квадратную
матрицу. Следовательно, rank dip = п — т, т. е. dip является моно-
мономорфизмом.
100 Гл. 3. Гладкие многообразия (общая теория)
Пример 6. Рассмотрим отображение /: S1 —>> R2, заданное
формулами f((p) = {cos<p, sin2<p}. Вектор скорости равен df /dip =
= {—sin^, 2cos2(^} и ни в какой точке не
обращается в нуль, т. е. ранг матрицы Яко-
»» би равен единице. Поэтому / является погру-
x жением (рис. 3.17). Кривая, изображенная на
рис. 3.17, является одной из фигур Лиссажу,
ис* * и может быть получена на осциллографе при
синусоидальных сигналах на вертикальной и горизонтальной раз-
развертках.
3.4.3. Вложение многообразий в евклидово пространство
Мы завершим настоящий параграф теоремой Уитни, показыва-
показывающей, что всякое компактное многообразие можно считать подмно-
подмногообразием евклидова пространства достаточно большой размер-
размерности.
Теорема 2 (слабая теорема Уитни). Пусть М — гладкое ком-
компактное многообразие. Тогда существует вложение (р: М —>> RN
для подходящего выбора размерности N.
Доказательство. Пусть {Ua}^=1 — конечный атлас карт,
(ж^, ..., ж™) ~~ локальная система координат в карте Ua. Без огра-
ограничения общности можно считать, что карты Ua гомеоморфны
шару Dn сИп радиуса 1, причем координаты (ж^, . ..,ж^) осу-
осуществляют гомеоморфизм сра карты Ua на шар Dn. Далее, можно
считать, что шар Dn лежит в Rn и не содержит начала координат.
Этого можно достигнуть с помощью параллельного переноса в Rn.
Пусть, далее, Df С Dn — шар меньшего радиуса с тем же центром,
что и шар Dn, причем открытые множества U'a = (/9~1(Df) С Ua
покрывают многообразие М. Пусть / — гладкая функция в Rn, рав-
равная тождественно единице на Df, и supp/ С Dn. Положим тогда:
если P$Ua.
Ясно, что Уа(Р) = Ха(Р), если Р G U'a. Мы получили систему
гладких функций {уа(Р)} в количестве N = nM. Эта система
функций совместно осуществляет отображение g многообразия М
в евклидово пространство R^: g(P) = {Уа(Р)} Е R^.
Покажем, что ранг дифференциала отображения g в каждой точ-
точке равен п. Пусть Р Е М — произвольная точка, U'a Э Р, {х1а, ...
..., ж^) — локальная система координат. Матрица Якоби отображе-
3.4. Подмногообразия 101
ния g в точке Р в локальной системе координат (ж^, ..., ж™) состо-
состоит из частных производных {дуко{Р) / х3о]. В частности, если /3 = а,
то
g
т. е. матрица Якоби отображения g содержит единичную матрицу
порядка п. Следовательно, rank dg = п.
Таким образом, отображение g является погружением. Для того
чтобы отображение g было вложением, необходимо, чтобы различ-
различные точки Р и Q переходили в различные точки д(Р) и g(Q).
Построим новое отображение
д(Р) =
Оно по тем же причинам, что и д, является погружением. Пусть
теперь Р и Q, Р ф Q, — две точки на многообразии. Рассмотрим
такой номер а, что f(cpa(P)) = 1. Если f(ipa(Q)) < 1, то ~д{Р) Ф
фдШ еСЛИ f(<pa(Q)) = h ТО Уа(Р) = *а(Р), v'aiQ) = *№)>
и, значит, для некоторого номера к координат (ж^,...,ж^) име-
имеем: Ха(Р) ф Xa(Q)> т-е- ~9(Р) ?" ~q{Q)- Таким образом, отображение
~д\ М —)> R^+M является взаимно однозначным погружением, т.е.
вложением. ¦
Итак, всякое гладкое компактное многообразие М можно счи-
считать вложенным в виде подмногообразия в евклидово простран-
пространство R^ некоторой достаточно большой размерности N. На самом
деле размерность евклидова пространства R^ можно существенно
понизить. Так, например, сфера Sn вкладывается в Rn+1, а тор Тп
вкладывается в R2n. Проективная плоскость RP2 не вкладывает-
вкладывается в R3, однако может быть вложена в R5. В самом деле, пусть
{х\: Х2'. жз) — однородные координаты точки Р в RP2. Положим
2 2 2
1 Хл о Хп о Хо
у1 = ± yz = ± у6 — 2
JL-| ~г" Xсу ~\ Jbо Л ~> 'О "т" Хо Л ~> 'О "т" Хо
4 _ ХгХ2 5 _ Ж2^3 6 _
у о 9 2 ' & 2 2 2 ' & 2 2 2 *
io-| ~~г~ Жо "т" Хо Хл ~\ X ел ~\ Хо Хл ~т~ Жо ~|~ Хо
Получаем отображение
д: RP2 ^R6, д(Р) = д{хх: х2: х3) = (у1,у2,у3,у4,у5,у6).
На самом деле образ отображения д лежит в линейном подпро-
подпространстве R5 С R6, задаваемом уравнением у1 + у2 + у3 = 1.
102 Гл. 3. Гладкие многообразия (общая теория)
ЗАЛ. Риманова метрика на многообразии
Теперь мы можем дать общее понятие римановой метрики на
многообразии, частные случаи которого рассматривались выше.
Римановой метрикой на гладком многообразии М назовем се-
семейство положительно определенных скалярных произведений, за-
заданных в каждом касательном пространстве Тр(М). Если в окрест-
окрестности U точки Р фиксирована система координат (ж1, ..., жп), то и
в Тр(М) задается система координат (?х, ... , ?п). Скалярное про-
произведение в системе (?1, ..., ?п) определяется невырожденной сим-
симметрической матрицей G = (gij), зависящей от точки. При переходе
к новой системе координат (у1, ..., уп) матрица меняется по закону
= Е
аф=1
где G' = (д'ц(Р)) — матрица скалярного произведения в новой си-
системе координат (у1, ..., уп).
Определение 4. Римановой метрикой на гладком многообра-
многообразии М называется такое семейство невырожденных положительно
определенных скалярных произведений в каждом касательном про-
пространстве Тр(М), Р Е М, что в локальной системе координат ма-
матрица скалярного произведения является гладкой функцией от ло-
локальных координат.
Метрику можно задавать как соответствие, сопоставляющее
каждой системе координат (ж^, ..., ж^) в карте Ua матричнознач-
ную гладкую функцию в карте Ua: Ga(P) = (gfAP)), такую, что:
а) матрица Ga(P) симметрична и положительно определена;
б) коэффициенты gf?(P) преобразуются по закону
Ер С/Х р С/Х р
^p)aJ-{p)ji{p) C-27)
для точек Р е11аП Up. Если f = (^, ..., ??), V = (^, ..., rj%) -
два касательных вектора, то скалярное произведение ?, г/ записыва-
записывается так:
Ниже мы приведем более общую конструкцию римановой мет-
метрики на многообразии.
3.4. Подмногообразия 103
Пусть /: Mi —>> М2 — гладкое вложение многообразия М\ в
многообразие М2, dim Mi = m, dimM2 = п. На многообразии М2
определена риманова метрика, которая задана набором матрично-
значных функций {Ga(P) = (Gfj(P))} на атласе карт {Ua}.
Тогда вложение / задает на подмногообразии М\ риманову мет-
метрику, порожденную римановой метрикой в объемлющем многооб-
многообразии М2. В самом деле, без ограничения общности можно считать,
что атлас карт {Va} на подмногообразии Mi задается пересече-
пересечениями
Va = Мх П Ua
и некоторыми локальными координатами {yla}i^i^m B карте Va.
Вложение / в картах Va и Ua задается набором формул
Ti _ Ti (yl ym\
^а ^аУУач • • • i Уа /'
Матрица Якоби этого отображения имеет максимальный ранг:
rank -^ = m dim Mi.
\Уа/
Метрика на многообразии Mi задается формулами
\vLJ
где
C.28)
Предложение 1. Формулы C.28) задают риманову метрику на
многообразии М\.
Доказательство. Симметричность и положительная оп-
определенность матрицы На(Р) следует из алгебраических свойств
формул C.28). Осталось проверить только выполнение закона пре-
преобразования C.27). В силу формул C.28) имеем
Тем самым выполнен закон преобразования C.27). ¦
Следствие 1. На любом компактном многообразии существует
риманова метрика.
104 Гл. 3. Гладкие многообразия (общая теория)
Доказательство. Напомним, что в силу предложения 1
риманова метрика определена на подмногообразии М\ если она она
определена на объемлющем многообразии М2.
В силу теоремы Уитни, задача сводится к построению римано-
вой метрики на евклидовом пространстве R^. Так как многооб-
многообразие R^ покрывается одной картой, то необходимо предъявить
лишь одну функцию G(P), Р Е R^. В качестве этой функции
можно выбрать G(P) = Е, где Е — единичная матрица. Тем са-
самым, на R^ имеется хотя бы одна риманова метрика, а, значит,
на любом компактном многообразии также существует риманова
метрика. ¦
Задачи
1. Построить вложение тора Тп в Rn+1.
Указание. Представить тор Тп как гиперповерхность вра-
вращения Тп~1 вокруг оси.
2. Построить вложение S2 х Т2 в R5.
Указание. Найти в R5 открытую область, гомеоморфную
S2 х R3.
3.4.5. Теорема Сарда
В предыдущем пункте мы показали, как по свойствам диффе-
дифференциала восстанавливаются локальные свойства гладкого отобра-
отображения. В некоторых случаях можно, и обратно, восстановить свой-
свойства дифференциала по свойствам самого отображения. Например,
если /: М\ —>> М2 — гладкий гомеоморфизм, то, как было показано
в разд. 3.3 (лемма 2), дифференциал df: Тр(М\) —>> Тдр) (М2) явля-
является изоморфизмом. Рассмотрим теперь задачу, в некотором смысле
обратную к задаче, решенной в теореме 1. Пусть /: М\ —>> М2 —
гладкое отображение многообразия М\ на все многообразие М2,
т. е. /(Mi) = M2. Такие отображения можно рассматривать как ана-
аналоги эпиморфизмов для линейных отображений. Поставим вопрос:
будет ли дифференциал df: Тр(М\) —>> Tj(P)(M2) эпиморфизмом?
К сожалению, это не так. Рассмотрим следующий пример. Пусть
Mi = М2 = R1, /: R1 -^ R1, f(x) = ж3, х Е R1. Тогда / - глад-
гладкое отображение и /(R1) = R1. Однако в точке х = 0 дифференци-
дифференциал df равен нулю и, значит, не является эпиморфизмом. В других
же точках дифференциал df имеет значение Зж2 dx и является эпи-
эпиморфизмом. В рассмотренном примере можно предугадать общий
ответ на поставленный вопрос. Мы его сформулируем в виде сле-
следующего утверждения.
3.4. Подмногообразия 105
Теорема 3 (Сард). Пусть f: Mi —>> М2 — гладкое отображе-
отображение компактных многообразий. Тогда множество G регулярных то-
точек Q Е М^ отображения f является открытым всюду плотным
множеством.
Прежде чем доказывать теорему 3, рассмотрим несколько при-
примеров.
Пример 7. Пусть /: R1 —>> R1, f(x) = а, где а = const. В
этом случае дифференциал df ни в одной точке не является эпи-
эпиморфизмом. Однако образ /(R1) состоит из одной точки а, т.е.
согласно определению всякая точка у ^ а является регулярной (так
как f~l(y) 7^ 0)- Следовательно, множество регулярных точек яв-
является открытым всюду плотным множеством.
Пример 8. Пусть /: R1 —>> R1 — финитная гладкая функ-
функция. Пусть F = {х: f'(x) = 0}. Множество F является замкнутым
множеством. Образ f(F) является компактным множеством и со-
состоит из всех нерегулярных точек. Покажем, что f(F) нигде не
плотно. Если бы это было не так, то нашлась бы внутренняя точка
у Е f(F), т.е. точка у лежит в f(F) вместе с некоторой окрест-
окрестностью у Е U С f(F). Поскольку / — финитная функция, то образ
f{F) лежит в образе некоторого интервала /([а, Ь\). Другими сло-
словами, достаточно доказать, что образ f(Ff), F' = F П [а, 6], нигде
не плотен. Пусть V D F' — некоторая окрестность множества F1\
F' = V С (—2а, 2а). Тогда f(V) содержит окрестность U. Значит,
найдется такая точка х Е V, у которой производная f'(x) по мо-
модулю больше числа е = diam [7/4а. Уменьшая окрестность V, по-
получим последовательность точек хп -Л F'. Без ограничения общно-
общности можно считать, что хп —>> xq Е F'. Тогда f'{xn) —>> /7(жо), т.е.
|/7(жо)| ^ ?-> что противоречит условию /7(жо) = 0, xq E F' С F.
Теорему 3 удобнее формулировать более общим образом: если
F С М\ — компактное множество, состоящее из нерегулярных то-
точек, то множество f(F) нигде не плотно. Покажем, что теорему 2
достаточно доказать для случая, когда Mi является окрестностью
замкнутого диска в евклидовом пространстве. В самом_деле, покро-
покроем Mi конечным атласом карт Ua и выберем Va С Va С Ua так,
чтобы Va было гомеоморфно диску в евклидовом пространстве.
Пусть Ga С М2 — множество регулярных точек для отображения /,
ограниченного на Va. Тогда пересечение G = HGa состоит из ре-
регулярных точек всего отображения /. Если Ga — открытые всюду
плотные множества, то G тоже является открытым всюду плотным
множеством. Выберем достаточно мелкий атлас карт Ua так, что-
чтобы образ f(Ua) лежал в одной карте Wp многообразия М2. Тогда
теорему 1 достаточно доказать для регулярных точек отображения
106 Гл. 3. Гладкие многообразия (общая теория)
f\uaapa
В самом деле, если GcWp -^множество регулярных точек
отображения f\ua, то GU (М2 \ f(Va) является множеством регу-
регулярных точек отображения /: Ua —>> М2 на Va. Итак, пусть U —
окрестность диска Dn в ~Rn, f: U ^ Rm — гладкое отображение.
Покажем, что множество тех точек у Е Rm, для которых Dn П
П f~l(y) состоит из регулярных точек, является открытым всюду
плотным множеством.
Лемма 3. Теорема справедлива для m = 1.
Доказательство. Пусть F С Dn — множество нерегу-
нерегулярных точек функции /. Тогда f(F) компактно и содержит все
нерегулярные точки функции /. Покажем, что R1 \ f(F) всюду
плотно. Если это не так, то найдется интервал V С f(F). Фикси-
Фиксируем k > n и рассмотрим множество F^ таких точек, у которых все
частные производные функции / до порядка к включительно равны
нулю. Тогда, разлагая функцию / по формуле Тейлора в окрестно-
окрестности произвольной точки у Е i7^, получаем оценку \f(y) — f(x)\ <
< С\х — у\к, причем константа С не зависит от выбора у Е F^ и
х Е Dn. Это значит, что если покрыть множество F^ кубами со
стороной 1/N (число этих кубов не превосходит Nn), то образ
f(Fk) покроется интервалами, причем длина каждого интервала не
превосходит числа 2у/пС/Nk~n. Следовательно, сумма длин всех
интервалов не превосходит 2y/nC/Nk~n и стремится к нулю при
N —)> оо. Значит, множество f(F^) нигде не плотно.
Оставшуюся часть множества F, т.е. F \ F^, можно предста-
представить в виде объединения конечного семейства подмножеств, каж-
каждое из которых лежит на подмногообразии, задаваемом одним из
уравнений
dlf
— i _ = 0, /1 + ... + ln = / < к.
dxll ... дх1?
В самом деле, пусть Filmjn — множество тех точек из F, где
= 0, grad —: —г ф 0. C.29)
д1^ дк
dxi1 ...дхгпп ^ к
Ясно, что F \Fk = U/!+ +in <k Fh...in- С другой стороны, множе-
множество Filmmmin лежит на подмногообразии Milmmmin, состоящем из тех
точек, где выполнены условия C.29). Размерность подмногообра-
подмногообразия Milmmmin меньше п. Поэтому, применяя индукцию, можно счи-
считать, что лемма 2 выполнена для M^..jn.
Итак, множество f{F^) не покрывает интервал V. Значит най-
найдется такая окрестность U^ D F^, что /(?/&) не покрывает интер-
3.4. Подмногообразия 107
вал V. Пусть 1\ + ... + 1п = к — 1. Тогда Filmmmin \Uk — компактное
множество в многообразии Milmmjn и поэтому f(Filmmmin \ Uk) не по-
покрывает V \ f(Uk), т. е. f(Fk U ^1,...,гте) не покрывает ТЛ Следова-
Следовательно, имеется такая окрестность
(J
Fh..Jn
П/(**и U Fh..j}j
и
что f(Us) не покрывает интервал У. Поэтому множества Fi1%%%in \ Us
при 1\ + .. . + ln = s тоже не покрывают при отображении / остатка
Значит
не покрывает интервал У. За конечное число шагов получаем, что
f(F) не покрывает У. Лемма доказана. ¦
Применим лемму 2 к доказательству теоремы 3 для случая си-
системы функций /: U -> Rm, Dn С U, f(P) = (Z1^), • • -Jm(P))>
индукцией по числу га. Поскольку J1 — гладкая функция, то по
лемме 2 множество G\ регулярных значений функции f1 открыто
и всюду плотно в R1. Пусть у^ g Gi, N = (/1)~1(Уо)- По теоре-
теореме 1 множество 7V является гладким подмногообразием, которое
с помощью отображения / отображается в гиперплоскость Ит~1.
Тогда точка (уд? • • • ? УсГ) является регулярной для отображения /|дг
тогда и только тогда, когда точка (j/q, ..., у^1) является регулярной
для отображения /. По предположению индукции множество то-
точек (уд, ... тУ™), регулярных для отображения /|дг, всюду плотно
в Rm, всюду плотно в Rm-1, следовательно, и множество регуляр-
регулярных точек для отображения / всюду плотно в Rm. Для того что-
чтобы показать, что множество регулярных точек открыто, достаточ-
достаточно заметить, что прообраз регулярной точки Dn П /-1(уо, ..., Уо)
является компактом и в каждой его точке отличен от нуля неко-
некоторый минор матрицы дифференциала отображения /. Поэтому
для любой достаточно близкой точки (у{, ...,у™) прообраз D П
^ f~1(vh - - - 1У1) лежит в достаточно малой окрестности множе-
множества D П /-1(уо, ..., уд), т. е. те же миноры отличны от нуля. Это
и значит, что множество регулярных точек отображения / открыто.
Доказательство теоремы 3 завершено. ¦
108 Гл. 3. Гладкие многообразия (общая теория)
В качестве применения теоремы Сарда рассмотрим гладкое ото-
отображение /: Mi —>> М2 при dim Mi < dimM2. Тогда ни одна точка
Р Е М\ не может быть регулярной. Это значит, что образ /(Mi)
нигде не плотен в многообразии М2. В частности, образ отображе-
отображения / не покрывает многообразие М2.
Замечание. Теорема Сарда может быть обобщена на случай
некомпактных сепарабельных многообразий. Однако тогда множе-
множество регулярных точек не обязано быть открытым множеством, а
всего лишь пересечением счетного числа открытых всюду плотных
множеств. Такие множества называются G^-множествами. Из об-
общей топологии известно, что пересечение счетного числа открытых
всюду плотных множеств в Rn всегда не пусто и всюду плотно. Так
что множество регулярных точек для случая некомпактных много-
многообразий непусто и всюду плотно.
Глава 4
Гладкие многообразия (примеры)
4.1. ТЕОРИЯ КРИВЫХ НА ПЛОСКОСТИ
И В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
4.1.1. Теория кривых на плоскости. Формулы Френе
Рассмотрим на плоскости декартовы координаты (ж, у). Глад-
Гладкие плоские кривые j(t) будем задавать радиус-вектором r(t) =
= (x(t),y(t)), выходящим из начала координат. Напомним, что век-
вектором скорости v(t) кривой j(t) называется вектор с координата-
координатами (dx(t)/dt,dy(t)/dt). Определяемая им прямая касается кривой
в точке ^(t). Обычно будем предполагать, что v(t) ^ 0. Напомним,
что в точках, где вектор скорости обращается в нуль, гладкая кри-
кривая может претерпевать излом. Мы будем рассматривать регуляр-
регулярные кривые, то есть с ненулевым вектором скорости. Производную
будем иногда обозначать точкой или штрихом.
Через \dr(t)/dt\ = |v(t)| обозначим модуль вектора скорости в
евклидовой метрике. Пусть s — длина дуги кривой от некоторой
фиксированной точки до переменной точки на кривой. Поскольку
длина дуги монотонно растет при движении точки по кривой в од-
одном направлении, то длину дуги можно взять за параметр вдоль
кривой. Он называется натуральным параметром. Уравнение кри-
кривой r(s) = (x(s),y(s)), записанной относительно параметра s, на-
называется натуральной параметризацией кривой.
Лемма 1. Модуль вектора скорости кривой, записанной в нату-
натуральном параметре, постоянен и равен единице.
Доказательство. Утверждение следует из формулы для
дифференциала dl длины дуги /, т. е. dl = dt\dr(t)/dt\. Ш
Отметим, что в каждой точке регулярной гладкой кривой вектор
скорости v(s) отличен от нуля.
Далее, в каждой точке кривой можно задать еще один вектор,
а именно, ускорение кривой: r(s) = dv(s)/ds. Оказывается, ускоре-
ускорение (относительно натурального параметра) ортогонально скорости
кривой.
ПО Гл. 4. Гладкие многообразия (примеры)
Лемма 2. Пусть задана вектор-функция р(?) такая, что |р(?)| =
= 1. Тогда вектор dp(t)/dt ортогонален вектору р(?).
Доказательство. Дифференцируя тождество (р, р) = 1,
получаем:
Итак, в каждой точке гладкой кривой, отнесенной к натураль-
натуральному параметру, возникают два ортогональных друг другу вектора,
один — скорость, другой — ускорение. Вектор ускорения не обязан
быть единичным. Предположим, что ускорение отлично от нуля и
рассмотрим единичный вектор n(s) = (dv(s)/ds)/\dv(s)/ds\, т.е.
«нормированное ускорение». Тем самым мы получаем вдоль кри-
кривой гладкое семейство реперов вида: (v(s), n(s)). Они называются
реперами или базисами Френе. Вектор n(s) называется вектором
нормали к кривой в точке s. Каждый репер Френе, после его па-
параллельного переноса в начало координат, однозначно определяет
некоторое вращение плоскости вокруг точки О. Тем самым репер-
ное поле вдоль кривой задает гладкое отображение j(s) кривой в
группу ортогональных матриц, т. е. в группу вращений плоскости.
Ниже мы изучим свойства этого отображения сразу в многомерном
случае.
Определение 1. Пусть кривая отнесена к натуральному пара-
параметру. Кривизной кривой в точке s называется величина k(s) =
= \d2r(s)/ds2\, т.е. модуль ускорения.
Из определения сразу видим, что d2r(s)/ds2 = k(s)n(s), где
n(s) — вектор нормали к кривой.
Определение 2. Радиусом кривизны гладкой кривой в точке s
называется число R(s) = l/k(s).
Рассмотрим простые примеры. Прямая на плоскости задается
линейной вектор-функцией: x(s) = х@) + as; y(s) = у@) + /3s, где
s — натуральный параметр. Ясно, что должно выполняться равен-
равенство у а2 + /З2 = 1, так как v = (а, /3) и |v(s)| = 1. Тогда ускорение
dv{s)/ds равно нулю тождественно, а потому кривизна прямой ли-
линии равна нулю и радиус кривизны равен бесконечности.
Рассмотрим плоскую окружность радиуса R. Ее параметриче-
параметрическое уравнение таково:
x(s) = х@) +Rcos(s/R), y(s) = у@) +Rsin(s/R).
Прямой подсчет дает, что кривизна окружности постоянна и рав-
равна 1/R, то есть радиус кривизны равен 1/k = R.
4.1. Теория кривых на плоскости и в трехмерном пространстве
111
Однако во многих задачах уравнения кривой отнесены не к на-
натуральному параметру, а к какому-то произвольному параметру ?,
а потому полезно уметь вычислять кривизну кривой, отнесенной к
произвольному параметру
Теорема 1. Пусть гладкая кривая j(t) отнесена к некоторому
параметру ?, не обязательно натуральному Пусть в точке t век-
вектор скорости v(t) отличен от нуля. Тогда
k(s) =
х"у'-у"х'\
[Or'J + {У1J]
3/2'
где через х',х", ... обозначены производные по параметру t.
Доказательство. Пусть r(?) = (x(t),y(t)) — радиус-
вектор кривой и v(t) = (x'(t),y'(t)) — вектор скорости. Если s —
натуральный параметр, то для произвольной вектор-функции q(t)
имеем
d dq(t) dt
ds dt ds
Из определения кривизны получаем
k =
d
ds\\v(t)\
Далее:
d ( v(t) \ dt d f v(t)
dsdt\\v(t)\
Отсюда
1
dt
ds \dr(t)/dt\
k =
1 d ( v(t)
\v{t)\dt\\v{t)\
Так как
2|r'|2dt'
то
k =
г — г
г', г")
li./|2
112 Гл. 4. Гладкие многообразия (примеры)
Далее:
/*•', г")
|r'PV " |Г'|2
'x"(y'J-x'y>y"\ , 1 /y"(x'J-y'x'x"
Ir'l2
Оказывается, производные от векторов репера Френе удовлетво-
удовлетворяют простым соотношениям, называемым «формулами Френе».
Теорема 2 (Формулы Френе). Если кривая отнесена к нату-
натуральному параметру, то выполнены равенства
dv(s) dn(s)
— = k(s)n(s), -^- = -Hs)v(s).
Доказательство. Первая формула сразу следует из опре-
определения кривизны. Далее, в силу определения имеем (n(s), n(s)) =
= 1. Из леммы 2 получаем:
п, —п) =0,
ds
т. е.
dn(s)
ds
= X(s)v(s),
где X(s) — некоторая гладкая функция. Найдем ее. Дифференцируя
тождество (v, n) = 0, получаем
dn
откуда fc(n, n) + (v, Av) = 0, т. е. k = —A. ¦
Формулы Френе можно переписать в виде
\dn/ds) " \-к Oj \п)
Это соотношение имеет прозрачный геометрический смысл. Рас-
Рассмотрим в точке s репер oj(s) = (v(s),n(s)) и сместимся по кри-
кривой r(s) в бесконечно близкую точку s + As (рис. 4.1). Перенеся
4.1. Теория кривых на плоскости и в трехмерном пространстве 113
параллельно репер uj(s + As) в точку s, получим в ней два репера:
u)(s) и lj(s + As), причем uj(s + As)
получается из репера oj(s) поворо-
поворотом на бесконечно малый угол Аср.
Следовательно, реперы oj(s + As),
w(s) связаны ортогональным преоб-
преобразованием: uj(s + As) = A(As)w(s),
л/а ч ( cosAo9 sinAo9\
где A(As) = ' l
Разлагая функции cosAy?,
в ряды по малому приращению Аср и пренебрегая членами второго
порядка малости по Atp, получаем
т.е.
0
Отсюда
As) = w(s) + ( д
ds
где (^(s) — угол поворота репера uo(s) относительно какого-то
фиксированного репера на плоскости (скажем, относительно репе-
репера u)@)). В то же время, из формул Френе следует, что duo(s)/ds =
О k(s)
_, / ч р I u)(s). Сравнивая полученные матрицы, видим,
что k(s) = d(p(s)/ds. Итак, кривизна кривой в точке s равна ско-
скорости изменения угла cp(s) в этой точке (т. е. скорости поворота
репера Френе). В случае плоской кривой функция k(s) полностью
определяет кривую, если только k ^ 0 для всех s. Более точно, име-
имеет место
Теорема 3. Пусть задана гладкая функция k(s), не обращаю-
обращающаяся в нуль для всех таких s, что а ^ s ^ Ъ. Тогда на плоскости
существует гладкая кривая r(s), определяемая однозначно с точно-
точностью до параллельного переноса и ортогонального преобразования,
для которой k(s) является кривизной, as — натуральным парамет-
параметром.
114 Гл. 4. Гладкие многообразия (примеры)
Доказательство. Рассмотрим систему дифференциаль-
дифференциальных уравнений
(dv(s)/ds\ _ ( 0 k(s)\(v(s)
\dn(s)/dsj - \-k(s) 0 Дп(/)
где k(s) — заданная функция. Так как k(s) ф О, то по теореме суще-
существования и единственности из теории дифференциальных уравне-
уравнений эта система имеет единственное (при фиксированных началь-
начальных данных) решение, гладкое на всем интервале a < s < b. Следо-
Следовательно, можно рассмотреть уравнение dr(s)/ds = k(s)v(s).
По тем же причинам, это уравнение имеет решение, однознач-
однозначно определенное при задании начальных данных на всем интервале
a < s < b. (Проверьте, что решение г = r(s) является искомой кри-
кривой!) Здесь любые начальные данные на плоскости можно совме-
совместить параллельным переносом и поворотом. ¦
Какова роль условия k(s) Ф 0? Рассмотрим гладкую кривую,
кривизна которой в некоторой точке s = sq обращается в нуль вме-
вместе с производными всех порядков. Суще-
Существование таких кривых вытекает из теоре-
s0 ^уУ мы 3, примененной к гладкой функции к(s),
имеющей нуль бесконечного порядка в од-
одной из концевых точек, а или 6, где a ^
so s ^ 5(Л ^5^6. Сопрягая две такие кривые двумя
разными способами в их общей концевой
Рис 4 2
точке, где кривизна обращается в нуль вме-
вместе со всеми производными, мы и получаем две гладкие кривые,
имеющие совпадающие кривизны, но не конгруэнтные (рис. 4.2).
4.1.2. Теория пространственных кривых. Формулы Френе
Рассмотрим гладкую кривую r(t) в пространстве Rn, отнесен-
отнесенном к декартовым координатам ж1, ...,жп, т.е. r(i) = (rr1(t), ...
... ,xn(t)). Как и в плоском случае, с каждой точкой кривой r(s)
можно однозначно связать репер Френе, гладко меняющийся вдоль
кривой при изменении натурального параметра s. Докажем снача-
сначала вспомогательное утверждение о дифференцировании матричных
функций.
Рассмотрим гладкую кривую в линейном пространстве матриц,
т. е. однопараметрическое семейство A(t), где A(t) — (n x п)-матри-
п)-матрица, коэффициенты которой суть гладкие функции по ?, t E (—a, a).
Предположим, что все матрицы A(t) ортогональны с определите-
определителем +1, а также, что А@) = Е, где Е — единичная матрица.
4.1. Теория кривых на плоскости и в трехмерном пространстве 115
Лемма 3. Пусть X = A(t)\t=o — производная этого однопара-
метрического семейства ортогональных матриц A(t) при t = 0, т. е.
X — это матрица, составленная из функций вида daij(t)/dt\._Q, где
A(t) = (a,ij(t)). Тогда X — кососимметрическая матрица.
Доказательство. Ортогональная матрица A(t), действуя
как оператор, сохраняет евклидово скалярное произведение. Поэто-
Поэтому любых двух векторов х, у Е Rn имеет место тождество (Ах,
Ау) = (х, у). Слева стоит гладкая функция от t. Вычислим ее произ-
производную при t = 0. Получим (Ах, Ау) + (Ах, Ay) t=Q = 0, т. е. (Хх,
у) + (х, Ху) = 0, что и означает косую симметрию матрицы X. Ш
Матричнозначную функцию A(t) можно разложить в точке t =
= 0 по степеням бесконечно малого приращения At:
A(At) =E
dA(t)
dt
At
t=o
Тогда матрица X появляется как «коэффициент» при At.
Построим репер Френе. Пусть r(s) — вектор-функция, задаю-
задающая гладкую траекторию j(s) в евклидовом пространстве. Предпо-
Предположим, что все векторы вида dr/ds, d2r/ds2, ..., dnr/dsn линейно
независимы при каждом s. Тогда они образуют репер (не ортого-
ортогональный!), гладко меняющийся от точки к точке. В частности, все
dkr/dsk отличны от нуля, 1 ^ k ^ п.
Предложение 1. Пусть r(s) — гладкая вектор-функция в Rn,
и пусть k-я производная dkr/dsk оказалась линейно зависимой от
производных dr/ds,d2r/ds2, ... ,dk~1r/dsk~1 в каждой точке ин-
интервала а ^ s ^ 6, причем dkr/dsk ^ 0 при а ^ s ^ b и все про-
производные dr/ds, d2r/ds2, ..., dk~1r/dsk~1 линейно независимы при
а ^ s ^ Ъ. Тогда кривая y(s) целиком содержится в некоторой
(к — 1)-мерной плоскости, натянутой на векторы dr/ds,d2r/ds2,
... ,dk~1r/dsk~1. Эта плоскость не меняет своего положения в
пространстве при изменении s от а до Ъ.
Доказательство. В силу условия существуют гладкие
функции \i(s), 1 ^ г ^ к — 1, такие, что dkr/dks = Y^tZi \{s) x
х dlr/dls. В силу линейной независимости векторов dr/ds, d2r/ds2,
..., dk~1r/dsk~1 они определяют базис в плоскости R^, натя-
натянутой на эти векторы. Чтобы доказать, что кривая j(s) лежит в
fc-мерной плоскости, достаточно показать, что плоскость R/c~1(«s)
не меняет своего положения в пространстве Rn при изменении s.
Достаточно показать, что производная указанного базиса состоит
из векторов, разлагающихся по нему же. Но это очевидно в силу
условия. ¦
116 Гл. 4. Гладкие многообразия (примеры)
Итак, если векторы dr/ds,d2r/ds2, ... ,dnr/dsn линейно неза-
независимы, то кривая г(s) не содержится ни в какой фиксированной
(п — 1)-мерной плоскости. Построим в каждой точке s ортонор-
мированный базис тх, ..., тп. Положим (dr/ds)/\dr/ds\ = т\. За-
Затем рассмотрим двумерную плоскость, натянутую на векторы т\
и d2r/d2s, и выберем в ней вектор Т2, ортогональный т\. Так как
по предположению dr/ds и d2r/d2s линейно независимы, то Т2
имеет нулевую проекцию на d2r/d2s. Следующий вектор тз вы-
выберем в трехмерном пространстве, натянутом на d3r/d3«s,T2,Ti,
причем в качестве тз возьмем вектор, ортогональный плоскости
векторов Т2,Т]_. Продолжая процесс, мы и получаем искомый ор-
тонормированный репер тх, ..., тп. Ясно, что при изменении s ре-
репер t(s) меняется гладко. Рассмотрим производные от векторов ре-
репера r(s) = (rx(s), • • •, rn(s)). Оказывается, что они также удовле-
удовлетворяют формулам Френе.
Теорема 4. Пусть гладкая кривая r(s) в Rn отнесена к на-
натуральному параметру s, и пусть векторы dr/ds, d2r/ds2, ...
..., dnr/dsn линейно независимы в каждой точке а ^ s ^ Ъ. Тогда
существуют такие гладкие функции ^(s), • • • ^n(s), что выпол-
выполняются тождества {формулы Френе)
dTi/ds = &2T2,
dT2Jds = /C3T3
drn-i/ds = knrn - kn-
m. e. dTi/ds = А^+хтг+1 ~ ^iTi-\y где k\ = кп+\ = О.
Доказательство. Так как вектор т^ содержится в ли-
линейной оболочке векторов dr/ds, ... ,dlr/dsl, то его производная
содержится в линейной оболочке векторов dr/ds,...,dlr/dsl,
+1+1 т.е. существуют некоторые функции a^x(s), ...
такие, что
Если мы составим матрицу X размера п х п, выражающую на-
набор векторов dri/ds, ..., drn/ds через репер r(s) = (тх, ..., тп),
то она будет иметь следующий вид:
4.1. Теория кривых на плоскости и в трехмерном пространстве
117
X =
fan 0,21
\2 «22 «32
«23 «33 «43
\
«n-l,n-2
«n—l,n—1 «n,n—1
С другой стороны, как и в двумерном случае, мы можем интер-
интерпретировать перемещение репера r(s) вдоль кривой j(s) в терми-
терминах семейства ортогональных матриц A(s) таких, что t(s) = A(s) x
х т@). Задание этого однопараметрического семейства однозначно
определяет эволюцию репера t(s) при изменении s. Тогда, очевид-
очевидно, матрица X совпадает с производной матрицы dA(s)/ds при s =
= 0. В силу леммы 3 матрица X будет кососимметрической, т. е.
0 -
X =
\
0 —а2з
«23 0
«34
\
0
«п-2,п-1
0
Взяв в качестве функций fci(s) функции a^+i(s), мы получаем до-
доказательство теоремы. ¦
Рассмотрим трехмерный случай: п = 3. Здесь формулы Френе
принимают вид
dr\
as as as
Вектор т\ является единичным вектором скорости кривой r(s)
и обычно обозначается через v(s). Вектор T2(s) совпадает с произ-
производной по «s от вектора v, так как dw/ds _L v и |v(s)| = 1. Здесь мы
использовали тот факт, что s — натуральный параметр. Вектор тз
ортогонален v и n = dw /ds, т. е. можно считать, что он совпада-
совпадает с векторным произведением векторов v, n. Вектор п называют
вектором нормали к кривой r(s), а вектор b = [v, n] — вектором
бинормали к кривой r(s). Здесь через [v, п] мы обозначили век-
векторное произведение v и п. В этих обозначениях формулы Френе
запишутся так:
118 Гл. 4. Гладкие многообразия (примеры)
dw dm dh
— = fen, — = seh — fev, — = — sen.
ds ds ds
Здесь k(s) = k2{s) и называется кривизной кривой, a ae(s) = ks{s)
и называется кручением кривой. Иногда вектор n(s) называют не
просто нормалью, а главной нормалью к кривой r(s).
Для удобства работы с кривизной, будем всегда считать, что век-
вектор Т2 совпадает с (dv(s)/ds)/\dv(s)/ds\; тогда k(s) совпадает с
модулем вектора dv(s)/ds и, следовательно, является положитель-
положительным числом (мы считаем, что соответствующие производные ради-
радиус-вектора отличны от нуля). Если кривая плоская, то вектор бинор-
бинормали является постоянным вектором, не меняется при изменении
точки на кривой; в частности, кручение кривой равно нулю. Сле-
Следовательно, плоские кривые могут быть охарактеризованы (с точки
зрения R3) как кривые с нулевым кручением.
Изучим подробнее роль кручения пространственной кривой, ко-
когда оно отлично от нуля. Рассмотрим скольжение репера (v, n, b)
вдоль кривой и будем проектировать векторы v(s), n(s) и b(s) на
плоскость, натянутую на векторы b(so) и n(so)> где sq — некоторое
фиксированное значение параметра s, а значения s предполагаются
бесконечно близкими к sq. При этом вектор скорости спроектиру-
ется в вектор бесконечно малой длины, а потому можно считать (в
первом приближении), что этот вектор проектируется в нуль. Тогда
в плоскости b(so)j п(^о) возникает некоторое движение векторов
b(s), n(s), спроектированных на эту плоскость. Из формул Френе
следует, что это движение описывается формулами dn/ds = аэЬ,
dh/ds = — sen, т.е. движение определяется кососимметрической
- ( 0 ае\ -
матрицей п , что определяет бесконечно малый поворот
у-ае иу
репера Ь, п. Следовательно, векторы b, n вращаются относитель-
относительно вектора скорости кривой, при-
причем скорость вращения одно-
однозначно задается кручением кри-
кривой (отсюда, кстати, происходит
и сам термин «кручение»). При
этом кривая теряет свою плоскую
форму и становится «изогнутой в
пространстве», если она первона-
первоначально была плоской. Итак, мож-
Рис. 4.3 '
но считать, что пространственная
кривая (в малом) может быть получена из плоской кривой, если
двигаться по ней с равномерной скоростью, «подкручивая» в каж-
каждый момент времени эту кривую с помощью кручения ае (рис. 4.3).
4.2. Поверхности. Первая и вторая квадратичные формы 119
Предложение 2. Гладкая кривая с ненулевым вектором скоро-
скорости является гладким одномерным многообразием, гладко вложен-
вложенным в Rn.
Доказательство. То, что кривая является гладким мно-
многообразием, непосредственно следует из определения гладкого мно-
многообразия. Остается проверить, что она является гладким подмно-
подмногообразием в Rn, для чего нужно изучить дифференциал отображе-
отображения вложения г, т. е. линейное отображение di. Поскольку оно пол-
полностью определяется вектором скорости кривой, то матрица Якоби
имеет максимальный ранг в каждой точке кривой, а потому кривая
является подмногообразием. ¦
Ясно, что любое одномерное гладкое замкнутое (т. е. не имею-
имеющее края) многообразие диффеоморфно либо прямой (некомпакт-
(некомпактное многообразие), либо окружности (компактное многообразие).
Таким образом, все одномерные многообразия исчерпываются толь-
только двумя различными многообразиями. Они уже не диффеоморфны,
так как прямая некомпактна, а окружность компактна.
Задачи
1. Доказать, что если у плоской кривой кривизна тождественно
равна нулю, то это — прямая линия.
2. Доказать, что в трехмерном пространстве плоские кривые ха-
характеризуются условием ае = 0.
3. Доказать, что прямые в трехмерном пространстве характери-
характеризуются условиями к = 0, ае = 0.
4. Описать класс кривых, для которых к = const, ае = const.
5. Доказать, что траектории движения материальной точки в
центральном силовом поле являются плоскими кривыми.
4.2. ПОВЕРХНОСТИ.
ПЕРВАЯ И ВТОРАЯ КВАДРАТИЧНЫЕ ФОРМЫ
4.2.1. Первая квадратичная форма
Рассмотрим в пространстве Rn гладкое подмногообразие Vn~1
размерности п — 1 (или, как говорят, «коразмерности один»). Сей-
Сейчас мы будем интересоваться лишь локальными свойствами ги-
гиперповерхности. Поэтому можно считать, что задано гладкое вло-
вложение диска Dn~1 в Rn. Выше мы обсуждали различные спосо-
способы задания гиперповерхностей. Выберем параметрическое задание,
т.е. будем считать, что Vn~1 локально задается гладким радиус-
120 Гл. 4. Гладкие многообразия (примеры)
вектором г = г^1, ... ,un~l), где координаты и1, ... ^un~1 меня-
меняются в некотором диске в пространстве параметров Rn-1. Векто-
Векторы dr/du1, ... ,dr/dun~1 можно считать линейно независимыми
в каждой точке области определения. Они являются касательны-
касательными к соответствующим координатным линиям, проходящим через
выбранную точку на поверхности. Гладкое вложение Vn~1 в Rn
порождает на Vn~1 индуцированную риманову метрику. Напомним
эту конструкцию.
Пусть ж1, ..., хп — декартовы координаты в Rn; тогда радиус-
вектор г задается гладкими функциями хг(и1^ ...,un~1). Пусть
ds2 = YA=i(dx1J — евклидова метрика; тогда возникает следую-
следующая квадратичная форма:
n n~1 dxi dxi n~1
ds2\Vn-i = E E
i=l k,p=l k,p=l
dr_ dr \
здесь через (,) обозначено скалярное произведение в Rn.
Определение 1. Первой квадратичной формой гиперповерхно-
гиперповерхности Vn~l в Rn называется форма ds2\Vn-i = Y^hp9kpdukdup, где
функции gkp{ul, ..., ип~1) определены выше.
Первая квадратичная форма определена на векторах, касатель-
касательных к Vn~1. Более точно: если a,bE TpVn~1 — два касательных
вектора, то определено скалярное произведение (a, b)ds2^Vn-i^ =
k Y^Lk
Напомним, что для упрощения обозначений мы опускаем знак
суммирования, когда оно ведется по совпадающим верхним и ниж-
нижним индексам. Ясно, что скалярное произведение (a, b)ds2(Vn-i^
совпадает с евклидовым скалярным произведением векторов а
и Ь, рассматриваемых как векторы объемлющего пространства Rn.
Симметричная матрица метрического тензора б, составлена из
функций gkp.
Длина дуги j(t), расположенной в Vn~1, выражается по форму-
формула л/^' 7) dt> т- е-
b
\
п-1
?
к,р=1
Какой вид приобретает первая квадратичная форма для различ-
различных способов задания гиперповерхности? Пусть Vn~1 задана в ви-
4.2. Поверхности. Первая и вторая квадратичные формы
121
де графика хп = /(ж1, ..., хп г). Имеем
ds2\Vn-i = У^(с/жгJ + (dxn(xl, ... ,хп~л
-1
г=1
Иногда будем обозначать df /dxa через /жа.
Пусть поверхность Vn~1 задана с помощью неявной функции,
т.е. в виде F(xl, ... ,хп) = 0, где dF/dxn ^ 0. Тогда по теоре-
теореме о неявной функции существует локальное решение уравнения
F(xl, ... , жп) = 0 вида хп = /(ж1, ... ,жп-1), причем df /dxl =
= —(dF/dxl)/(dF/dxn). Отсюда получаем б = (gkp), где
Г/ OF dF\ If dF\*
p [\dxkdxPJ/ \dxnJ
Рассмотрим вложение двумерной поверхности в трехмерное
евклидово пространство. Пусть V2 задано параметрически: г =
= r(u,v). Тогда первая квадратичная форма обычно записывается
в виде ds2(V2) = Edu2 + 2Fdudv + Gdv2, где Е = (rw,rw), F =
= (rw, r-y), G = (yv,yv) — коэффициенты формы, выраженные через
компоненты радиус-вектора г:
F = xuxv
zuzv
G =
Напомним, что метрика ds2(V2) называется конформно-евкли-
конформно-евклидовой, если Е = G и F = 0.
Рассмотрим первую квадратичную форму поверхностей враще-
вращения, вложенных в R3. Введем цилиндрические ко-
координаты (г, (p,z), и пусть поверхность задана па-
параметрически: (р = и, z = v, r = r(v). Тогда вы-
вычисление дает
V2
Рис. 4.4
ds2(v2) = A + (г;J)^2 + г V.
Здесь F = О, Е = г2(^), G = 1 + {r'vJ. Тот факт, ^^
что F = 0, означает, что координатные линии г; =
= ^0 = const и и = щ = const ортогональны друг другу в каждой
точке (рис. 4.4).
Лемма 1. Пусть Vn~1 С Rn — гладкое подмногообразие и б —
первая квадратичная форма. Тогда форма б невырождена.
122
Гл. 4. Гладкие многообразия (примеры)
Доказательство. В силу определения радиус-вектора
г = г^1, ..., ип~1) все векторы ruk линейно независимы. Посколь-
Поскольку матрица б составлена из скалярных произведений векторов тик
и тиР, то б невырождена. ¦
4.2.2. Вторая квадратичная форма
Пусть Vn~1 — гиперповерхность в Rn, заданная радиус-векто-
радиус-вектором вида г^1, ... ,ип~1). Пусть п(Р) — единичный вектор, орто-
ортогональный поверхности Vn~1 в точке Р. Определим квадратичную
форму Q(a, а), задав ее значения для
п(^)| лтп-\ ^ъп произвольного вектора а Е Tp(Vn~1).
Рассмотрим гладкую кривую j(t), ле-
лежащую на Vn~1 и проходящую через
точку Р, причем так, что 7@) — Р>
7@) = а. Такая кривая всегда суще-
существует, хотя и определена неоднознач-
неоднозначно (рис. 4.5). Так как вдоль кривой j(t)
радиус-вектор г является функцией
от ?, то а = dr(u(t))/dt\t=o- Рассмо-
Рассмотрим вектор-функцию г = dr(u(t))/dt
и ее производную по ?, т. е. г = d2r(u(t))/dt2. Обозначим через га
значение г при t = 0. Это — вторая производная г по направлению
вектора а.
Определение 2. Положим Q(a,a) = (ra;n).
Определенное нами число является величиной проекции векто-
вектора га на нормаль п в точке Р (рис. 4.6). Вычислим Q(a, а) через
координаты вектора г. Имеем
J d2r _ duk dvP d2uk
dt2 u 'uP dt dt u dt2
d2 , , чч \ / dukdvP
0
Рис. 4.5
+ 0.
Рис# 4'6 При этом следует помнить, что вектор а имеет
координаты (dul(Q)/dt, ..., dun~l @)/dt), т. е. окончательно
Q(a, a) = (n, rukuP\t=o) а ар.
Эта квадратичная форма однозначно определяет билинейную фор-
форму Q(a, b), значение которой на паре произвольных векторов a, b E
Е Tp(Vn~1) определяется так:
Q(a,b) =qkpakbp,
где qkP = (rukuP\t=o,n).
4.2. Поверхности. Первая и вторая квадратичные формы
123
Лемма 2. Выражение Q(a,b) = q^vakW, где a,bE Tp(Vn
определяет билинейную форму.
Доказательство. Имеем
duk dvP I <92r@)
duk dvP
qk'P' ~
т. е. функции g^ преобразуются при замене координат как коэффи-
коэффициенты билинейной формы, что и требовалось доказать. ¦
Определение 3. Билинейная форма Q(a, b) называется второй
квадратичной формой поверхности Vn~1 С Rn.
Ясно, что форма Q зависит от способа вложения Vn~1 в Rn, т. е.
при гладкой деформации Vn~l эта форма, вообще говоря, меняется.
Она не является инвариантной при изометриях Vn~1 в Rn. Напри-
Например, пусть V2 — двумерная плоскость в R3; тогда радиус-вектор
r(u,v) можно считать линейной функцией от и, v. Следовательно,
первая форма является евклидовой метрикой: dv? + dv2 (рис. 4.7).
Теперь рассмотрим изометрическое преобразование V2 — свер-
свертывание плоскости R2 в цилиндр, ось которого параллельна оси
Ох (рис. 4.8). Ясно, что вторая форма цилиндра отлична от нуля,
так как отлично от нуля число (rvv, n). В то же время вторая форма
плоскости R2 тождественно равна нулю. Следовательно, при изги-
изгибании (т. е. при изометрии) вторая форма изменилась.
Рис. 4.7
Рис. 4.8
Рассмотрим фиксированное подмногообразие Vй г. В каждой
его точке Р определена первая форма б и вторая форма Q. С этой
парой связан набор инвариантов, позволяющих изучать Vn~1 неза-
независимо от введенной на ней системы координат. Пусть б и Q —
матрицы форм. Рассмотрим полином по переменной A: det(Q —
— Аб). Поскольку форма б невырождена, то существует матрица
б. Следовательно, уравнение detF~1Q — ХЕ) = 0 эквивалент-
эквивалентно уравнению det(Q — Аб) = 0.
124 Гл. 4. Гладкие многообразия (примеры)
Обозначим через Ai, ..., An_i собственные числа матрицы
&~1Q, т. е. корни уравнения det(Q — A(S) = 0. Вскоре мы докажем,
что все они вещественны. Запишем характеристический полином
F(X) в виде Х}а?=о ak^k> гДе ak — симметрические функции от
корней Ai, ..., An_i.
Лемма 3. Функции а^ являются инвариантами пары форм б
и Q, т. е. сохраняются при произвольной невырожденной замене
координат в окрестности точки Р Е Vn~1.
Доказательство. При регулярной замене координат х —>>
—>> х' в касательном пространстве TpVn~1 возникает индуцирован-
индуцированное линейное невырожденное преобразование с помощью матрицы
Якоби: J. При этом б ->> J<5JT = б'; Q -+ JQJT = Qf. Следова-
Следовательно,
det(F/)Q/ - ХЕ) = det[(JT)-1FQ - XE)JT] =
= det(©-1 Q-XE),
что и требовалось доказать. ¦
Нас будут особенно интересовать инварианты
Л = det@-1Q).
/с=1 /с=1
Определение 4. Функция Д*(Р) = cr\{P) = cri(Ai,..., An_i) на-
называется средней кривизной поверхности Vn~1. Функция К(Р) =
= an-i(P) = crn_i(Ai, ..., An_i) называется гауссовой кривизной
поверхности Vn~1.
Если п = 3, то Н(Р) = Ai + А2, К(Р) = Ai • А2.
Теорема 1. Все собственные числа Ai, ..., An_i пары форм б,
Q вещественны. В том случае, когда все эти числа попарно раз-
различны, собственные векторы ei, ..., en_i матрицы <S~lQ взаимно
ортогональны, как относительно объемлющей евклидовой метри-
метрики в Rn, так и относительно римановой метрики, индуцированной
naVn~l вложением Vn~l ->> Rn.
Доказательство. По известной теореме из алгебры соб-
собственные числа симметрической матрицы вещественны и все ее
собственные векторы взаимно ортогональны для различных соб-
собственных чисел. Пока что эта теорема неприменима, так как ма-
матрица <S~lQ, вообще говоря, не симметрична. Так как форма &(Р)
симметрична, то в некоторой окрестности точки Р существует ре-
регулярная замена координат такая, что в одной точке Р форма &(Р)
приводится к диагональному виду. Приведя б к диагональному ви-
виду, можно затем привести ее к единичной матрице, применяя растя-
4.2. Поверхности. Первая и вторая квадратичные формы 125
жения вдоль главных осей формы. Пусть А — линейный оператор
A: TpVn~1 —>> TpVn~1, приводящий б к единичной матрице. То-
Тогда б = АЕАТ = ААТ. Матрица Е определяет ортобазис <pi, ...
..., (fn-i в TpVn~l. Получаем det(Q-A6) = &et[A(A-lQ(A-l)T-
-ХЕ)АТ].
Рассмотрим форму Q = BQBT, где В = А~1. Исходное урав-
уравнение det(Q — Аб) = 0 запишется в базисе <pi, ..., (pn-i в виде
det(Q — ХЕ) = 0, так как det А ф 0. При этом QT = Q, так как
QT = Q. Следовательно, все собственные числа и собственные век^
торы у формы Q и матрицы &~1Q одни и те же. Так как форма Q
симметрична, то все ее собственные числа (т. е. Ai, ..., An_i) веще-
вещественны, и в случае, когда все они попарно различны, все ее соб-
собственные векторы взаимно ортогональны. Это следует из известной
теоремы алгебры. ¦
Определение 5. Направления, задаваемые векторами ei, ...
..., en_i (определенными однозначно, если А^ ф Xj при г Ф j) на-
называются главными направлениями гиперповерхности Vn~1 в точ-
точке Р, или главными осями.
Итак, мы связали с каждой точкой гиперповерхности Vn~1 од-
однозначно определенный (если А^ ф Xj) с точностью до выбора зна-
знака ортобазис ei, ..., en_i, гладко зависящий от Р.
Поскольку в ортобазисе ei, ..., en_i матрица б становится еди-
единичной, то Ai, ..., An_i совпадают с собственными числами фор-
формы Q, записанной в ортобазисе ei, ..., en_i.
Рассмотрим частный случай. Пусть Vn~1 задана в виде графика
xn = f(x1, ...,жп~1) и плоскость хпкп(Р)
TpVn~1 в точке Р совпадает с пло- д п^ '
скостью переменных ж1, ...,хп~1
(рис. 4.9). Тогда нормаль п к Vn~1
в точке Р имеет координаты @, ...
..., 0,1); радиус-вектор г, описы-
описывающий поверхность Vn~1, имеет
вид г = (ж1, ...,хп~1; /(ж1, ...
..., хп~1)). Так как гиперплоскость
(ж1, ... ,xn~l) = TPVn~l касается
уп-1 в точке р? то df /дхг\р = 0; отсюда б(Р) = Е, так как gij =
Рассмотрим матрицу Q = (<ftj)> гДе
Итак, Q = (fxixj(P)) совпадает с матрицей гессиана функции / в
126 Гл. 4. Гладкие многообразия (примеры)
точке Р. Средняя кривизна Н(Р) имеет вид
71-1
k=l
для гауссовой кривизны К(Р) получаем К(Р) = det(fxixj(P)).
Для двумерной поверхности (при п = 3) получаем
где А — оператор Лапласа, К(Р) = fxxfyy — fxy
4.2.3. Элементарная теория гладких кривых
на гиперповерхности
Пусть п(Р) — нормаль к гиперповерхности Vn~1. Рассмотрим
двумерную плоскость R2, проходящую через Р и пересекающую
Vn~1 по некоторой гладкой кривой j(t) = R2 П Vn~1. Мы рассма-
рассматриваем здесь малую окрестность точки.
Определение 6. Гладкая кривая j(t) = R2 П Vn~1 называется
плоским сечением гиперповерхности.
Пусть 7 — плоское сечение Vn~1. Зафиксируем содержащую ее
плоскость R2, и пусть точка О — начало координат, из которого
выходит радиус-вектор г^1, ...,г^п~1),
описывающий поверхность Vn~1. Пусть
m — нормаль к плоской кривой 7 = R2 П
П Vn~l, содержащаяся в R2 (рис. 4.10).
Нормали пит, вообще говоря, не сов-
совпадают.
Введем на кривой 7 = R-2 Л Vn~1
\ натуральный параметр s. Тогда в плос-
_ п кости R2 кривая j(s) задается радиус-
^Кп вектОрОМ rE) =r(i/1(s), ... ,un~1(s)).
Рис. 4.10 В силу формул Френе для плоских кри-
кривых имеем к = \d2r/ds2\, где k(s) — кри-
кривизна кривой. Напомним, что d2r/d2s = т.к. С другой стороны,
если а = dr(s)/ds — вектор скорости кривой j, то, в силу опреде-
определения второй формы Q, имеем
Q(a, a) = (fem, n) = к cos в,
где в — угол между нормалями тип (рис. 4.10). С другой стороны,
4.2. Поверхности. Первая и вторая квадратичные формы 127
ds\~2nfdr dv
где t — произвольный гладкий параметр вдоль кривой j. Здесь
dr/dt = а — произвольный касательный вектор к кривой j в точ-
точке Р. Если а = (а1, ..., an~l), то
k cos в =
Следовательно, нами доказана
Теорема 2 (Менье). Для любого касательного вектора а Е
Е TpVn~1 u любого плоского сечения 7 (такого, что 7 = а) отно-
отношение второй формы к первой равно k cos 0, т. е.
6 (а, а)
Кривизна к называется кривизной плоского сечения. Среди плоских
сечений выделен класс нормальных сечений.
Определение 7. Плоское сечение 7 — R-2 П Vn~1 называется
нормальным, если n(P) E R2, т. е. 0 = 0.
Каждое нормальное сечение в точке Р однозначно задается ка-
касательным вектором а Е TpVn~1. Плоскость R2, определяющая се-
сечение, натянута на нормаль п(Р) и вектор а. Вращая плоскость R2
вокруг п(Р), получаем все нормальные сечения гиперповерхности
в точке Р.
Для нормального сечения j доказанная в теореме 2 формула
принимает вид
к =
так как 0 = 0. Поскольку кривизна плоского сечения (вдоль век-
вектора а), образующего угол 0 с нормалью п, зависит от 0, то эту
функцию следует записать в виде к@, а). В силу доказанного утвер-
утверждения: k@, a) cos 0 = А;@, а), где fc@, a) — кривизна нормального
сечения (вдоль вектора а).
Таким образом, если известна кривизна нормального сечения
А;@, а), то кривизна любого другого плоского сечения (вдоль а),
образующего угол йсп, находится из формулы к@, а) = 1/cos 0 х
х А;@,а).
Теперь напомним, что в касательной плоскости TpVn~1 все-
всегда определены главные направления ei, ..., en_i, определяющие-
определяющиеся однозначно, когда А^ ф Xj при г ф j. Рассмотрим эти «главные
128
Гл. 4. Гладкие многообразия (примеры)
оси» ei, ..., en_i и построим по каждому из них нормальное плос-
плоское сечение 7г = R-f П Vn~1, где плоскость R2 натянута на п, е^.
Все главные направления е^ взаимно ортогональны в евклидовой
метрике на TpVn~l. Обозначим через ki кривизну нормального се-
сечения 7г (эти сечения иногда называются главными нормальными
сечениями).
Теорема 3. Собственные числа Ai, ..., An_i совпадают с кри-
кривизнами fci, ..., кп-\ главных нормальных сечений.
Доказательство. Из теоремы 2 имеем k cos в = q^a1 x
х aJ/дцаъа?\ так как в = 0 для нормального сечения, то к = д^аг х
х aJ/gijala3\ где a — определяющий вектор нормального сечения.
Фиксируем в TpVn~1 ортобазис ei, ..., en_i. Тогда gij = Sij, qij =
= ^jA^; следовательно,
i\2
)
k =
urr
гп—1
Если а Е TpVn x совпадает с одним
из е^, то ki = Xi, что и требовалось. ¦
Рассмотрим в TpVn~l произвольный
вектор а и рассмотрим нормальное сече-
сечение вдоль а. Обозначим через cpi углы, об-
образуемые а с главными направлениями ei, ...,en_i (рис. 4.11).
Предложение 1. Для нормального сечения вдоль произвольного
вектора а Е TpVn~1 выполнена формула Эйлера
Рис. 4.11
к(з) =
п-1
г=1
Доказательство.
*(а)=|>
В силу теоремы 3 имеем
ы2
г=1
п-1
= 2-j ^ COS2 <
г=1
где
= 0,11\Щ
Формула Эйлера позволяет установить «экстремальные свой-
свойства» главных кривизн Ai, ...,An_i. Рассмотрим кривизну нор-
нормального сечения fc(a) как функцию от а Е TpVn~1. Положив хг =
= cos ifi, можно считать, что k(a) = к(х1, ..., хп~1) = Y^iZi \{xlJ
является функцией на сфере Sn~2, заданной уравнением (ж1J +
+ ... + (хп-1J = 1 в TpVn~l. Так как сфера Sn~2 - гладкое
4.2. Поверхности. Первая и вторая квадратичные формы
129
многообразие, то в окрестности каждой ее точки можно ввести ло-
локальные координаты у1, ..., уп~2.
Назовем точку xq Е Sn~2 критической для функции /(ж), за-
заданной на Sn~2, если df /дуг\Хо = 0.
Вопрос: какие критические точки имеет на сфере гладкая функ-
функция А;(а)? И, кроме того, какие значения принимает кривизна А;(а)
в этих критических точках?
Теорема 4. Критическими точками кривизны А; (а) на сфере
gn-2 ? ^руп-\ являются в точности точки вида =Ье^, 1 ^ г ^
^ п — 1, в том случае, когда \ ^ Xj при г ^ j. В точках =Ье^ функ-
функция А;(а) принимает значения, равные \. В этом смысле главные
кривизны являются экстремальными значениями функции кривиз-
кривизны А;(а). Если среди собственных чисел {А^} есть совпадающие, то
критическими точками функции А; (а) являются в точности концы
всех собственных векторов формы Q.
Доказательство мы предоставляем читателю.
Пусть п = 3. Тогда формула Эйлера принимает вид А;(а) = Ai x
х cos2 (fi + А2 cos2 (f2, где cos2 (fi + cos2 (f2 = 1 (пусть Ai ^ A2), т. e.
k(a) = (A]_ —A2) cos2 (P1+A2. Ясно, что минимум k(a) равен А2, мак-
максимум k(a) равен Ai. Если Ai = А2, то k(a) = Ai = А2 (рис. 4.12).
Эллипс' кривнзвь1
2 1
X
Ai>0
Ai(x1J-|A2|(x2J = const > О
Рис. 4.12
130
Гл. 4. Гладкие многообразия (примеры)
Квадрикой нормальных кривизн называется следующая поверх-
поверхность: Ai cos2 (pi +... + An_i cos2 (fn-i = const. Направления, соот-
соответствующие экстремальным (критическим) значениям кривизны,
совпадают с главными осями квадрики. Если все главные кривизны
положительны, то квадрика является эллипсоидом.
Разберем случай двумерной поверхности V2 С R3. Ее гауссова
кривизна К(Р) описывает важные локальные свойства поверхно-
поверхности. Поскольку К(Р) = А1А2, то выделяются три случая: а) К > 0;
б) К < 0; в) К = 0.
Достаточно рассмотреть только случаи: a) Ai > 0, А2 > 0; б) Ai >
> 0, А2 < 0; в) Ai = 0, А2 7^ 0; Ai = A2 = 0. В случае а) поверхность
выпукла, т. е. локально расположена по одну сторону от касатель-
касательной плоскости в точке Р (рис. 4.13). В случае б) поверхность ло-
локально имеет вида седла (рис. 4.14). Такие точки называются сед-
ловыми или точками перевала. В случае в), при А2 ^ 0, Ai = 0, по-
поверхность V2 имеет (локально, в первом приближении) вид «цилин-
«цилиндра» (рис. 4.15). Если обе главные кривизны нулевые, такая точка
называется точкой уплощения поверхности.
тР(у2)
Рис. 4.13
Рис. 4.14
ТР\
Рис. 4.15
4.2. Поверхности. Первая и вторая квадратичные формы 131
4.2.4. Гауссова и средняя кривизны
двумерных поверхностей
Пусть поверхность V2 С R3 задана в виде графика z = f(x,y),
где (x,y,z) — декартовы координаты. Пусть /@,0) = 0; тогда ко-
координатная плоскость (ж, у) — касательная к V2 в точке @,0). Так
как
(\К\ тт» /О| I Jxx Jxy \
Ф 1@,0) = bi 4/1@,0) = f f I j
\Jxy JyyJ
то К = /^/^ - /^; H = fxx + fyy = Ai + A2. Теперь вычислим Я
и К в точках, отличных от @,0).
<* (Е F\ ^ (L м\ ^
Пусть & = [ j-, \ Q = \ . Тогда прямой подсчет да-
\rKjrt \1V1 iV I
ет:
Н= -(GL-2MF-
9
Здесь g = det 6.
Если 2; = /(ж, у), то ds2 = A + fl)dx2 + 2fxfy dx dy + A+
+fy)dy2. Так как радиус-вектор поверхности имеет вид г = (ж,у,
/(ж, у)), то
п =
f2
'2/
Отсюда
Я\ • о у / о ^^ о >ju о у о >juy ¦ \ ¦ о л, / о у у TS-
fyjfxx 2fxfyfxy + [1 + fxjfyy j. _ fxxfyy fxy
Гауссова и средняя кривизны не зависят от выбора локальных
координат на поверхности.
Легко подсчитать, что для сферы К = 1/i?2, H = 2/i?, в част-
частности, ее гауссова и средняя кривизны постоянны.
Гауссова и средняя кривизны двумерной плоскости равны нулю.
Определение 8. Двумерная поверхность V2 С R3 называется
поверхностью постоянной кривизны, если ее гауссова кривизна К
постоянна.
Определение 9. Двумерная поверхность V2 С R3 называется
поверхностью положительной, нулевой, отрицательной кривизны,
132
Гл. 4. Гладкие многообразия (примеры)
если соответственно гауссова кривизна поверхности во всех ее точ-
точках положительна, равна нулю, отрицательна.
Стандартная двумерная сфера является многообразием положи-
положительной (постоянной) кривизны.
Задача. Докажите, что эллипсоид х2/о? + у2/Ь2 + z2/с2 =
= 1 является поверхностью строго положительной кривизны, если
полуоси а, 6, с отличны от 0 и оо. Эллипсоид можно записать пара-
параметрически так:
х = a cos в cos <р, у = b cos в sin <p, 2 = sin в.
Евклидова плоскость является многообразием нулевой постоян-
постоянной кривизны. Пример многообразия отрицательной кривизны дает
график z = х2 — у2. Ясно, что
К =
-4
Здесь гауссова кривизна является переменной функцией. Легко
построить многообразие постоянной отрицательной кривизны V2 С
С R3. Сейчас мы укажем такую поверхность. Тем самым мы дока-
докажем утверждение: в трехмерном евклидовом пространстве суще-
существуют {локально) поверхности постоянной положительной, нуле-
нулевой и отрицательной кривизны.
Рассмотрим на плоскости кривую 7? расположенную в первом
квадранте, со следующим свойством: длина отрезка касательной от
точки касания с кривой до точки пересечения касательной с осью
Ох постоянна и равна а (рис. 4.16). При перемещении точки А
\AB\ — a — const
\AoBo\ =a
7
по кривой 7 точка В скользит по оси Ох, и отрезок АВ имеет
постоянную длину, равную а.
Найдем уравнение кривой j. Из треугольника АВх (рис. 4.16)
имеем tgcp = — у'х, где у = у(х) — график j; a simp = у. Отсюда
4.2. Поверхности. Первая и вторая квадратичные формы
133
где х = х(у) — график 7- Итак,
Рассмотрим поверхность вращения, получающуюся вращением
кривой 7 вокруг оси Ох (рис. 4.17). Она называется поверхностью
Бельтрамщ или псевдосферой. Найдем ее гауссову кривизну. Сде-
Сделаем это для поверхности вращения общего вида.
Рассмотрим в R3(x, у, z) поверхность V2, образованную враще-
вращением вокруг оси Ох кривой х = х(у) (т.е. образующей), располо-
расположенной в плоскости Оху. На V2 возникает ортогональная коорди-
координатная сеть: параллели и меридианы (рис. 4.18).
W
Рис. 4.17
Рис. 4.18
Лемма 4. В каждой точке поверхности вращения главные на-
направления, т. е. отвечающие главным кривизнам Ai, A2, всегда мож-
можно считать совпадающими с направлениями
меридиана и параллели, проходящих через
эту точку.
Замечание. Если Ai ^ A2, то главные
направления определены однозначно и сов-
совпадают с направлениями меридиана и па-
параллели. Если Ai = A2, то любое направле-
направление главное.
Доказательство. Главными на-
направлениями в TpV2 являются те ортоба-
зисы еь в2, в которых обе формы б и Q
диагональны. Ясно, что первая форма диа-
гональна в координатах (u,v) на поверхно-
поверхности, порожденных меридианами и параллелями. Докажем, что вто-
вторая форма также диагональна. Надо доказать, что М = {ruv, n) = О,
V
Рис. 4.19
134
Гл. 4. Гладкие многообразия (примеры)
где r(u,v) — радиус-вектор V2, п — нормаль к V2. Рассмотрим ци-
цилиндрические координаты (г, <р, х) в R3. Пусть V2 задается образу-
образующей г = г(х). Тогда радиус-вектор г(ж, ф) поверхности V2 имеет
вид г = (ж,г(ж) cos(p,r(x) simp) (рис. 4.19). Нормаль к V2 имеет
вид n = (г',-cos<p, — sirup)/у/1 + (г7J. Ясно, что (гЖ(^п) = О,
что и требовалось. ¦
Лемма 5. Модуль гауссовой кривизны К поверхности враще-
вращения имеет вид
11 ~ r(i + (г7JJ'
где г = г(х) — образующая поверхности вращения в цилиндриче-
цилиндрических координатах.
Доказательство. В силу леммы 4 главные направления
совпадают с направлениями меридиана и параллели в точке Р. По-
Поэтому К(Р) = А1А2, где А2 и Ai — кривизны плоских кривых — ме-
меридиана и нормального сечения вдоль направления параллели соот-
соответственно. Так как меридиан совпадает с образующей, то \2(х) =
= г"/{1 + (г7JK/2, что следует из формул Френе.
Найдем \\{х) для нормального сечения вдоль направления па-
параллели в точке Р = (ж,г(ж)). Кривизна fc@, а) самой паралелли-
окружности (вдоль касательного век-
' ¦ i n тора а к параллели) очевидно рав-
/ на 1/г(х). Здесь в — это угол между
нормалью к V2 и вектором т, рас-
расположенным в плоскости параллели
(рис. 4.20). Напомним, что
у cos^
Рис. 4.20 Здесь А;@, а) — интересующая нас кри-
кривизна Ai. Так как в плоскости хОг
вектор m имеет координаты @,1), а вектор п — координа-
координаты 1/л/1 + (г7J (—г7,1), то cos# = 1/л/1 + (г7J. Следовательно,
Xi(x) = l/{ry/l + (г7J), что и завершает доказательство.
Лемма 6. Поверхность Бельтрами является многообразием по-
постоянной отрицательной кривизны.
Доказательство. Поскольку поверхность Бельтрами яв-
является поверхностью вращения, то можно воспользоваться лем-
леммой 5. Функция у = у(х) является обратной функцией к функции
х = х(у), найденной нами ранее. Как было уже подсчитано, х' =
= (—у/а2 — у2)/у. Отсюда х" = а2/(г2у/а2 — у2). Прямое вычис-
4.2. Поверхности. Первая и вторая квадратичные формы
135
ление дает, что К = —I/a2. Знак минус возник потому, что кривая
у = у(х) выпукла вниз. ¦
Итак, мы указали в R3 поверхности постоянной положитель-
положительной, нулевой и отрицательной гауссовой кривизны. Сфера имеет по-
постоянную положительную кривизну, является компактным замкну-
замкнутым (без края) многообразием. Многообразиями нулевой гауссовой
кривизны являются плоскость или конус, образованный прямыми,
исходящими из одной точки (конечной или бесконечной) и скользя-
скользящими по произвольной гладкой кривой. Это — некомпактные (без
края) открытые многообразия. Предъявленное нами многообразие
отрицательной постоянной кривизны не является замкнутым мно-
многообразием, поскольку имеет край — окружность (рис. 4.17). Мож-
Можно показать (мы не будем этого делать), что поверхность Бельтра-
ми нельзя продолжить за эту окружность с сохранением условия
К(Р) = —I/a2 < 0. Обычно эту поверхность «достраивают», до-
добавляя поверхность, симметричную исходной относительно плос-
плоскости уOz (рис. 4.21). Но эта поверхность имеет «окружность из-
излома», состоящую из особых точек.
Рис. 4.21
Найдем индуцированную риманову метрику на «воронке» Бель-
трами. Введем в R3 цилиндрические координаты (ж,г, <р), где х =
= ж, у = rcosip, z = г simp (т.е. ось Ох — ось вращения). Тогда
индуцированная метрика на поверхности вращения с образующей,
задаваемой функцией х = х(г), имеет вид
В нашем примере х'г = (—>
2/2 22
р
/r2 +r2d(p2
г2)/г (см. выше), т.е. ds2 =
= dr2/
Предложение 2. Риманова метрика, индуцированная на по-
поверхности Белътрами объемлющей евклидовой метрикой, является
метрикой Лобачевского.
136
Гл. 4. Гладкие многообразия (примеры)
Доказательство. Рассмотрим замену и = ср, v = 1/г.
Тогда ds2 = (v2/г>4) dv2 + du2/v2 = (du2 + dv2)/v2, что, очевидно,
и доказывает утверждение. ¦
Итак, локально поверхность Бельтрами изометрична плоскости
Лобачевского, т. е. мы построили изометричное вложение некоторой
области плоскости Лобачевского в трехмерное евклидово простран-
пространство. Можно описать — какая именно часть плоскости Лобачевского
допускает изометричное вложение в R3 в виде поверхности Бель-
Бельтрами, разрезанной вдоль ее образующей (рис. 4.22). Соответству-
Рис. 4.22
ющая ей область на плоскости Лобачевского (в модели Пуанкаре)
показана на рис. 4.23. Она отмечена символами оо, Aq, Bq и заклю-
заключена между двумя параллельными прямыми геометрии Лобачевско-
Лобачевского, выходящими из одной точки оо на абсолюте, и дугой AqBq,
являющейся дугой длины 2тг (если a = 1), ча-
частью окружности (в евклидовом смысле), ка-
касающейся точки оо на абсолюте.
Таким образом, область (oo,Aq,Bq) явля-
является бесконечной полосой, заключенной меж-
между двумя параллельными прямыми и ограни-
ограниченной с одного конца дугой AqBq.
Вопрос: можно ли изометрично реали-
реализовать в R3, в виде двумерной поверхности
постоянной отрицательной кривизны не толь-
тольBq), но и всю плоскость Лобачевского? Ответ
отрицательный (мы не будем здесь этого доказывать).
Рассмотрим теперь среднюю кривизну поверхностей V2 С R3.
Как было отмечено, средняя кривизна зависит от способа вложе-
вложения V2 С R3, т. е. определяется как первой, так и второй формами.
Как устроены поверхности постоянной средней кривизны? Напри-
Например, поверхности нулевой средней кривизны — это так называе-
называемые минимальные поверхности. Они характеризуются тем, что их
площадь локально минимальна по сравнению с площадью других
Рис. 4.23
ко полосу (оо,
4.2. Поверхности. Первая и вторая квадратичные формы
137
поверхностей, отличающихся от исходной только внутри (любого)
шара достаточно малого радиуса (рис. 4.24). Физической моделью
минимальных поверхностей V2 С
являются «мыльные плен-
возникающие на замкну- /'
с R3
¦с IT
ки»,
тых проволочных контурах после
их извлечения из мыльной во-
воды. Уравнение Я = 0 называет-
называется уравнением минимальных по-
поверхностей. Найдем его явный
вид. Так как Я = (GL - 2MF +
+ EN)/(EG - F2), то уравнение
Я = 0 имеет вид GL - 2MF +
+ EN = 0. Если поверхность задана с помощью графика z =
= /(ж, у), то (см. выше) уравнение приобретает вид
ds2 = A + /2) dx2 + 2fxfy dx dy + (l + f2) dy2,
fx
Рис. 4.24
L= -
M =
Ixy
f2
>y
fF+f?
N =
Jyy
f2
J x
следовательно,
A + fy)fxx ~ Vxyfxfy + A + fx)fyy = 0.
Уравнение довольно сложное и описывать его решения непро-
непросто. Конечно, есть простые случаи. Например, евклидова плоскость
является минимальной поверхностью, так как Q = 0. Приведем бо-
более сложный пример некомпактной мини-
минимальной поверхности. Рассмотрим в R3 две
ортогональные, пересекающиеся в точке О
прямые 1\ и /2- Фиксируем прямую 1\ и бу-
будем перемещать вдоль нее с постоянной ско-
скоростью а прямую I2, одновременно вращая
/2 с постоянной угловой скоростью ио вокруг
оси 1\ (винтовое движение). Прямая /2 за-
заметает двумерное гладкое подмногообразие
V2 С R3, которое называется прямым гелико-
геликоидом (рис. 4.25). Докажите, что прямой гели-
геликоид — минимальная поверхность. Отметим,
кстати, что любая минимальная поверхность имеет неположитель-
неположительную гауссову кривизну, так как Ai + A2 = 0.
Приведем еще один пример минимальной поверхности. Рассмо-
Рассмотрим некомпактную поверхность, образованную вращением вокруг
Рис. 4.25
138
Гл. 4. Гладкие многообразия (примеры)
оси Ох гладкой кривой j(t), задаваемой уравнением у = ach(x/a).
Как известно из курса анализа, эта кривая задает форму провиса-
провисания тяжелой цепи, закрепленной в двух точках, А и В (рис. 4.26).
Соответствующая поверхность называется катеноидом (рис. 4.27).
Найдем Н. Из доказательства леммы 5 видно, что
-1/2
1
2
ch
X I
-
a \
(
1
+ sl
2 Ж
a
-3/2
= 0.
Итак, катеноид — минимальная поверхность. Если рассмотреть его
часть, заключенную между двумя окружностями, образованными
вращением точек А и В вокруг оси Ох, то получим пример мини-
минимальной поверхности, натянутой на контур Г, состоящий из этих
двух граничных окружностей.
В
Рис. 4.27
С минимальными поверхностями тесно связаны так называемые
гармонические поверхности.
Определение 10. Радиус-вектор r(u,v) называется гармониче-
гармоническим относительно координат и, v, если д2г/ди2 + d2r/dv2 = 0,
т. е. Аг = 0, где А — оператор Лапласа в координатах и, v.
Радиус-вектор r(u,v), гармонический в координатах (u,v), не
обязан быть гармоническим в других координатах (u',vf).
Определение 11. Поверхность V2 С R3 называется гармониче-
гармонической, если она задается гармоническим радиус-вектором r(u,v) в
некоторых криволинейных координатах (u,v).
Будем говорить, что радиус-вектор r(u,v) минимален, если сред-
средняя кривизна соответствующей поверхности тождественно равна
нулю. Так как средняя кривизна не меняется при заменах координат
на поверхности, то радиус-вектор, минимальный относительно од-
одной системы координат, будет минимальным и относительно любой
4.2. Поверхности. Первая и вторая квадратичные формы 139
другой регулярной системы координат. Для гармонических поверх-
поверхностей это уже не так. Поэтому говорят о гармонических отобра-
отображениях г: D(u,v) —>> H3(x,y,z), где D(u,v) — область на плоско-
плоскости (u,v),a,r(u,v) — отображение, задающее поверхность V2 С R3.
Отображение г, гармоническое в одних координатах, уже не будет,
вообще говоря, гармоническим в других координатах (приведите
пример!). Пример гармонической поверхности: г(х,у) = (х,у,х2 —
— у2), где х, у, z — декартовы координаты, т.е. поверхность V2
задается графиком z = х2 — у2. Ясно, что эта поверхность гармо-
гармоническая. В то же время она не минимальна: Н = 0 только в точ-
точке @,0), а в других точках Н ф 0.
Напомним, что криволинейные координаты (u,v) на поверхно-
поверхности называются конформными, если в них метрика Edu2-\-2Fdudv-\-
+ Gdv2 является конформно-евклидовой, т. е. Е = G, F = 0.
Замечание. Рассмотрим двумерное многообразие, на котором
задана риманова метрика ds2 с вещественно аналитическими коэф-
коэффициентами Е, F, G, рассматриваемыми как функции от локальных
криволинейных координат и, v. Тогда для любой точки Р существу-
существует такая окрестность U = U(P), что в ней можно ввести координа-
координаты р, q (являющиеся вещественно аналитическими функциями от
исходных координат и, v), в которых ds2 имеет вид \(p,q)(dp2 +
+ dq2), т.е. координаты р, q будут конформными. Доказательство
несложно, однако требует ссылки на теорему существования ре-
решения специального уравнения в частных производных (уравнения
Бельтрами-Лапласа), что выходит за рамки нашего курса.
Как связаны гармонические и минимальные векторы? Пример
гармонического, но не минимального вектора мы привели. Мини-
Минимальный вектор тоже не обязан быть гармоническим. Тем не менее
имеет место следующее
Предложение 3. Минимальный вектор, записанный в конформ-
конформных координатах, является гармоническим.
Доказательство. Пусть (гд, v) — конформные координа-
координаты, а г (и, v) — вектор, задающий минимальную поверхность.
Напомним, что Е = G = (rv, rv) = (rw, ru), F = (rw, rv). Требу-
Требуется доказать, что ruu + rvv = 0. Положим а = ruu + rvv. Так как
Я = 0, то GL - 2MF + EN = 0, т. е. L + N = 0. Отсюда (а, п) =
= (ruu, n) + (rvv, n) = L + N = 0, где п — нормаль к V2. Осталось
доказать, что (а, ти) = (а, rv) = 0, так как тогда а будет иметь ну-
нулевые скалярные произведения с ортогональными векторами rw, rv,
т. е. п должен быть нулевым вектором. Дифференцируя тождества
Е = G, F = 0, получаем (rww,rw) = (ruv,rv), (rwv,rw) = (г^,^),
140 Гл. 4. Гладкие многообразия (примеры)
Отсюда (a, rw) = (ruv, rv) - (rvu, rv) = 0. Аналогично, (a, rv) =
= 0, что и требовалось. ¦
Задачи
1. Доказать, что если гауссова и средняя кривизны тождествен-
тождественно равны нулю, то поверхность в R3 является плоскостью.
2. Пусть поверхность S образована касательными прямыми к
кривой. Выразить гауссову и среднюю кривизны поверхности S че-
через кривизну и кручение кривой.
3. В предыдущей задаче показать, что метрика на поверхности
зависит только от кривизны кривой.
4.3. ГРУППЫ ПРЕОБРАЗОВАНИЙ
4.3.1. Простейшие примеры групп преобразований
Здесь мы будем изучать основные примеры групп преобразова-
преобразований метрик, т. е. отображений многообразий, сохраняющих метри-
метрику. Рассмотрим риманово многообразие Мп с метрикой дц.
Определение 1. Диффеоморфизм / многообразия Мп на себя
называется движением римановой метрики дц или изометрией, ес-
если риманова метрика при этом отображении переходит в себя, т. е.
выполнено тождество
где у1, ... ,уп — локальные координаты в некоторой окрестности
точки у Е Мп\ х1, ... ,хп — локальные координаты в некоторой
окрестности точки х Е Мп; х1 = хг(у1^ ... ,уп) — функции, зада-
задающие (локально) отображение /, причем х = f{y).
Мы дали «координатное» определение изометрии. Иногда удоб-
удобно пользоваться инвариантным определением, не использующим
локальные координаты. При диффеоморфизме / дифференциал df
изоморфно отображает ТуМп на ТХМП. В каждом из касатель-
касательных пространств ТуМп и ТХМП определено скалярное произведе-
произведение (, )у и (, )х соответственно, построенное по римановой метри-
метрике. Например, (а,Ь)^ = д^(у)аъЬ^9 где а, b E ТуМп.
Определение 2. Диффеоморфизм / многообразия Мп на себя
называется изометрией, если (а, b)^ = (df(a) , df(h))x для любых
а,Ь еТуМп, х = f(y).
Лемма 1. Координатное и инвариантное определение изомет-
рий эквивалентны.
4.3. Группы преобразований 141
Доказательство. Пусть а Е TyMn, a = (а1, ... ,ап) в
локальных координатах у1, ...,уп; отсюда d/(a) ?TxMn имеет
вид
так как d/: ТуМп —>> ТХМП задается матрицей Якоби. Отсюда
(a), df{h))x = дг
что и доказывает лемму. ¦
Лемма 2. Множество всех изометрий риманова многообра-
многообразия Мп образует группу (в алгебраическом смысле).
Доказательство. То, что композиция изометрий сно-
снова изометрия, вытекает из правила дифференцирования сложной
функции и закона изменения коэффициентов д^ при замене ко-
координат. То, что f~l является изометрией, вытекает из того, что
матрица Якоби отображения f~l обратна к матрице Якоби J(f). В
качестве единичного элемента группы следует взять тождественное
преобразование. ¦
Группа изометрий риманова многообразия Мп обычно снабжа-
снабжается топологией из пространства отображений и обозначается через
Iso(Mn). Рассмотрим простейшие примеры.
Пример 1. Снабдим вещественную прямую евклидовой мет-
метрикой ds2 = dx2, где х — координата на прямой. Пусть / — диф-
диффеоморфизм R1 на себя, задаваемый, следовательно, строго возра-
возрастающей (или убывающей) функцией х = f(y). Поскольку метрика
сохраняется, то ds2 = (f'yJdy2 = dy2, т.е. (fyJ = 1. Таким обра-
образом, либо f(y) = у + а, либо f(y) = — у + 6, где а и b — постоянные.
Итак, группа изометрий вещественной прямой гомеоморфна паре
вещественных прямых. Собственные изометрий сохраняют ориен-
ориентацию прямой, а несобственные — меняют.
Пример 2. Найдем группу изометрий евклидовой плоско-
плоскости, сохраняющих начало координат. Сначала будем искать изомет-
изометрий среди линейных преобразований (можно показать, что любая
изометрия плоскости линейна; но мы не будем здесь на этом оста-
останавливаться). Условие инвариантности метрики dx2 + dy2, записы-
записывается в виде матричного уравнения Е = ААТ, где A: R2 —>> R2 —
линейное преобразование. Это — определение ортогональной груп-
группы, т. е. группы О B), состоящей из матриц
/ cos (p simp\
у—simp cos (pj
142 Гл. 4. Гладкие многообразия (примеры)
— собственные вращения и
fcoscp sin^A
Ii —cos (p)
— несобственные вращения, или отражения. Собственные враще-
вращения образуют подгруппу в коммутативной группе О B), обозначае-
обозначаемую SOB). Несобственные враще-
• SOB) ния подгруппы не образуют. По-
Поскольку группа О B) — матрич-
матричная, то она является топологиче-
топологическим пространством. Каждой та-
такая собственная матрица задает-
задается углом поворота ср. Таким обра-
образом, множество матриц, образую-
образующих О B), гомеоморфно двум эк-
Рис 428 земплярам окружности. Следова-
Следовательно, О B) является гладким од-
одномерным замкнутым несвязным многообразием (рис. 4.28).
Докажите, что группа О B) совпадает с группой всех изометрий
окружности с метрикой ds2 = d(p2. Указание: поступить по
аналогии с группой Iso(R1).
Пример 3. Изометрий евклидовой плоскости записываются
в виде у = Ах + Ь, где А е О B), а вектор b определяет парал-
параллельный перенос (сдвиг) на плоскости. Ясно, что все такие пре-
преобразования сохраняют евклидову метрику (проверьте!). Как будет
показано далее, они исчерпывают собою все изометрий плоскости.
Эту группу можно представить в виде группы матриц
А Ъ
О 0 1
Следовательно, группа Iso(R2) превращается в топологическое
пространство, гомеоморфное прямому произведению пары окруж-
окружностей на евклидову плоскость. Тем самым, эта группа является
гладким трехмерным многообразием, некомпактным и несвязным,
состоящим из двух компонент связности.
Пример 4. Рассмотрим индефинитную метрику —dx2 + dy2,
определяющую псевдоевклидову плоскость Л2. Матрица первой
формы постоянна и имеет вид
В= 1 0 1
4.3. Группы преобразований
143
Следовательно, все линейные однородные преобразования, сохра-
сохраняющие эту метрику, удовлетворяют уравнению В = АВАТ, где
А: R2 —>> R2 — линейное преобразование. Записав его в виде
a b
А =
получаем систему уравнений на а, 6, с, d:
Решая систему, получаем
А =
или
A =
, где - = /3, C = Ипф.
а
Допустимыми являются следующие комбинации знаков:
Здесь представлены все возможные варианты. Например,
принадлежит ©i, так как заменив ф на —*ф, мы превращаем
Напомним, что sh(—ф) = — sh^, ch(—ф) = сЪ.ф. Тем самым б =
= ©1U б2 U ©з U ©4 (проверьте!) и ©^ П ©j = 0, если г ф j. В самом
деле, допустим, например, что ©i П ©2 т^ 0; тогда chip = — ch?/?,
shcp = — sh^, что невозможно, поскольку chcp > 0 при любом <р.
Аналогично устанавливается, что ©^ П ©j = 0.
Так как © — это группа однородных изометрий R2, то она пе-
переводит в себя псевдоокружности вещественного и мнимого ради-
радиусов: {—х2 + у2 = 1} U {—ж2 + у2 = —1}. Рассмотрим орторепер
ei = A,0), в2 = @,1). Под действием изометрий А он преобразу-
144 Гл. 4. Гладкие многообразия (примеры)
ется так, как показано на рис. 4.29. Введем вместо обычного евкли-
евклидова угла поворота (р угол гиперболиче-
Al2 ^y'f ского поворота ф, положив C = ЬЪ.ф (см.
выше). Тогда © превращается в группу
гиперболических поворотов.
Группа гиперболических поворотов
состоит из четырех компонент связно-
\ \ сти. Это — множества ©ь ©2, ©з, ©4,
\ \ описанные выше.
Поскольку © реализована как ма-
Рис. 4.29 тричная группа, то она вкладывается в
fa
четырехмерное евклидово пространство всех матриц вида ,
\ Су (Л
а, 6, с, d E R, a поэтому наследует его топологию. Каждое из под-
подмножеств &i является линейно связным (докажите!).
Из этих четырех связных компонент подгруппой является толь-
только ©1 (проверьте!).
Группа © является подмножеством в четырехмерном простран-
пространна Ъ\ ^
стве матриц , . При этом каж-
дое &i гомеоморфно вещественной пря-
прямой (рис. 4.30). Этот гомеоморфизм, напри-
например для ©1, сопоставляет каждой матрице
1 I ) значение угла ф. Это соот-
соответствие взаимно однозначно и непрерывно
(проверьте!).
Группа © переводит в себя псевдо-
псевдоокружность мнимого радиуса —х2 + у2 =
= — 1. На рис. 4.31 показано действие четырех преобразований —
представителей ©i, ©2, ©3, ©4- Аналогичные события происходят
и с псевдоокружностью вещественного радиуса.
Группа © коммутативна (проверьте!). Подгруппа ©i — нормаль-
нормальный делитель в ©i.
,,„=.= (J J)_ тождественное преобразование;
б) 92 — ( п _1 ) — отражение относительно начала коорди-
координат;
(\ о\
в) 9з = I п _¦] ) ~~ отражение относительно оси Ох;
4.3. Группы преобразований
145
\
а)
б) в)
Рис. 4.31
-1 О
О 1
— отражение относительно оси Оу.
Итак, определена факторгруппа 0/0 ь порядок которой равен
числу связных компонент в 0, т. е. 4. Так как 0 коммутативна, то
0/01 тоже коммутативна. Существуют только две коммутативные
группы четвертого порядка: Z2 0 Z2 и Z4. Какой именно груп-
группе изоморфна 0/0i? Составив таблицу умножения представите-
представителей gi, 32, зз> 34> получаем, что 0/01 изоморфна Z2 0 Z2. В этом
отличие группы вращений псевдоокружности от группы вращений
обычной окружности (для которой соответствующая фактор-группа
изоморфна Z2).
Пример 5. Рассмотрим группу изометрий двумерной сферы с
метрикой, индуцированной стандартным вложением в R3. Сначала
рассмотрим Rn и найдем группу линейных однородных преобразо-
преобразований А, сохраняющих евклидову метрику ds2 = ^2™=1(с1хгJ. Так
как матрица (gij) является единичной, то Е =ААТ. Решениями это-
этого уравнения являются ортогональные матрицы, образующие груп-
группу О(п). В ней лежит подгруппа SO(n) собственных (т.е. с опре-
определителем, равным +1) вращений. Подгруппа SO(n) — нормаль-
нормальный делитель в О(п), и факторгруппа O(n)/SO(n) изоморфна Z2.
Пусть п = 3. Тогда ОC) сохраняет евклидову метрику в R3.
Следовательно, переводит в себя сферу. Итак, ОC) — подгруп-
подгруппа в Iso^2). Далее мы покажем, что ОC) = Iso^2). Рассмотрим
SOC) С ОC). Так как SOC) содержится в пространстве всех ма-
матриц размера 3 х 3 с вещественными коэффициентами, то она явля-
является топологическим пространством в индуцированной топологии.
Лемма 3. Группа SOC) как топологическое пространство го-
меоморфна трехмерному проективному пространству RP3.
Доказательство. Пусть А — элемент SOC). Тогда в R3
существует неподвижная ось 1{А) такая, что действие А в R3 явля-
является поворотом вокруг 1{А) на некоторый угол ц>(А). Если А ф Е,
то 1{А) определена однозначно. Рассмотрим плоскость П(А), орто-
146
Гл. 4. Гладкие многообразия (примеры)
ЩА)
Рис. 4.32
тональную оси 1{А) и проходящую через О. В И(А) выберем про-
произвольный вектор еь и пусть в2 — вектор, получающийся из ei при
повороте на угол ц>(А) (рис. 4.32).
Дополним еь &2 третьим векто-
вектором ез до репера (ei, в2, ез) так, чтобы
ориентация репера (ех,е2,ез) совпала
с ориентацией фиксированного зара-
заранее репера (а!,а2,аз) в R3. Ось 1{А)
превращается в вещественную пря-
прямую, поскольку на ней можно задать
направление с помощью ез и отложить
значение (р(А). Мы однозначно сопо-
сопоставили каждому элементу А Е SOC)
точку в R3. Обозначим ее РA,ф). Ясно, что Р(/,тг) = Р(/, — тг),
так как повороты вокруг 1{А) на тг и на —тг совпадают. Если же
|(^(А)| < тг, то РA,ф) соответствует одному и только одному вра-
вращению А. Непрерывно меняя А, мы непрерывно меняем РA,ф)\
верно и обратное.
Итак, мы взаимно однозначно и непрерывно в обе стороны ото-
отождествили ортогональные преобразования А с точками трехмерно-
трехмерного шара радиуса тг, на границе которого (т. е. на сфере радиуса тг)
склеены диаметрально противоположные точки Р(/,тг) и Р(/, — тг).
Осталось доказать, что этот шар со склейками на границе гомео-
морфен RP3. Одно из определений RP3 — это пучок прямых в R4,
проходящих через О. Эта модель эквивалентна следующей: нужно
отождествить диаметрально противоположные точки на сфере S3.
Достаточно отождествить диаметрально противоположные точки на
границе полусферы S+, т.е. на экваторе S2 (рис. 4.33). Полусфера
диффеоморфна трехмерному диску: диффеоморфизм задается орто-
ортогональным проектированием S+ на D3 (рис. 4.33). Итак, RP3 го-
меоморфно D3 с отождествленными диаметрально противополож-
противоположными граничными точками. ¦
D6
Рис. 4.33
4.3. Группы преобразований
147
Так как RP3 — линейно связно, то ОC) состоит из двух компо-
компонент линейной связности.
Пример 6. Изучим группу изометрий плоскости Лобачев-
Лобачевского. Рассмотрим реализацию плоскости Лобачевского на верх-
верхней полуплоскости с метрикой w = —dzdz/(z — zJ. Будем искать
ее группу изометрий среди дробно-линейных преобразований ком-
комплексной плоскости (az + b)/(cz + d), a, b,c,d Е С. Так как dw =
= (ad — bc)/(cz + dJ dz (проверьте!), то
dw dw =
\ad-bc\2
dz dz.
Кстати, отсюда видно, что евклидова метрика домножается на ска-
скалярный переменный множитель, т. е. дробно-линейные преобразо-
преобразования конформны. Они сохраняют косинусы углов между пересека-
пересекающимися кривыми. Проверим, что сохраняются ориентированные
углы.
Докажем, что якобиан J положителен. В самом деле, dw =
= X(z) dz, X(z) = (ad - bc)/(cz + dJ, TZ(K2) = R2, TW(K2) = R2
(рис. 4.34). Следовательно, действие дифференциала df отображе-
отображения /: z —>> w записывается так: df(z) = А • z, где А Е С. Пусть А =
= u + iv, u, v E R. Тогда матрица Якоби в вещественной записи
f U v\ r 2,2
имеет вид , т. е. якобиан равен u + v и положителен.
y—v uj9 F
Итак, углы сохраняются.
С1
Рис. 4.34
Отберем теперь из всех дробно-линейных преобразований те,
которые переводят в себя верхнюю полуплоскость.
Лемма 4. Преобразование w = (az-\-b)/(cz-\-d) переводит в себя
верхнюю полуплоскость тогда и только тогда, когда (а, 6, с, d) =
= р(а7, б7, с7, d'), где а7, б7, с7, d' E R, р Е С, р ^ 0 (иными словами,
коэффициенты a,b,c,d пропорциональны четверке вещественных
чисел а7, б7, с7, d') и, кроме того, ad — be > 0.
148 Гл. 4. Гладкие многообразия (примеры)
Доказательство несложно и мы предоставляем его читателю
(либо см. курс комплексного анализа).
Лемма 5. Любое преобразование w = (az + b)/(cz + d) такое,
что а, 6, с, d E R, ad — be > 0, является изометрией плоскости Ло-
Лобачевского.
Доказательство. Имеем
. ad — be dw dw dz z
(cz + dy (w — w)z [z — z)z
что и требовалось доказать.
Так как ad — be > 0, то можно считать, что ad — be = 1. ¦
Предложение 1. Группа изометрий плоскости Лобачевского
Iso(L/2) содержит подгруппу, изоморфную группе SLB;R)/Z2,
т.е. факторгруппе SLB,R) матриц размера 2x2 с веществен-
вещественными коэффициентами и определителем +1 по подгруппе Z2, со-
состоящей из преобразований Е и —Е.
Доказательство. Изометрий, описанные в лемме 5, об-
образуют группу. В самом деле, композиция дробно-линейных преоб-
преобразований с вещественными коэффициентами и единичным опре-
определителем, является преобразованием того же типа. Так как ad —
— be 7^ 0, то существует обратное преобразование того же типа.
Рассмотрим матричную группу SLB, R) — группу ( ,), где
Vе а)
а, 6, с, d E R и ad — be = 1. Построим отображение (р: SLB, R) —>>
—> ©1, где ©1 — группа преобразований w = (az + b)/(cz + d), a, 6,
с, d E R, ad — be = 1. Положим
a 6\ _ a? + b
Ясно, что (р — гомоморфизм (проверьте!). Эпиморфность (р оче-
очевидна. Найдем Кекр. Ясно, что (р(д) = (р(—д), а потому KenpD
D Z2 = (Е, —Е). Докажем, что Ker (p = Z2. Пусть <p(gr) = (p(gf), т. е.
az + 6 a7? + б7
cz -\- d с' z + rf7'
Отсюда
b d а с а + b a' + b'
— ~~ — ~~ ^ — ~~ — ~~ \^"> ~~ 1
Отсюда следует, что /i = А и (/ = Ag, поэтому А = =Ы, что и требо-
требовалось доказать. ¦
4.3. Группы преобразований 149
Задача. Докажите, что SLB, R)/Z2 — связное топологиче-
топологическое пространство.
Группа SLB,R)/Z2 не исчерпывает группу Iso(L2). В самом
деле, рассмотрим отображение до: z —>> —z. Оно переводит верх-
верхнюю полуплоскость в себя и сохраняет метрику Лобачевского (от-
(отражение относительно оси Оу). В то же
время до не имеет вида (az+b)/(cz+d). В
самом деле, преобразования (az+b)/(cz+
+ d) конформны (см. выше), сохраняют
ориентированные углы. Отображение до Jf
таковым не является (рис. 4.35).
Итак, нужно еще рассмотреть преоб- —
разования w = g(z) = — (az + b)/(cz+ d),
где а, 6, с, d E R, ad — be = 1, или, что то Рис 4.35
же самое, w = (az + b)/(cz + d), где a, 6,
с, d E R, ad — be = — 1. Обозначим множество таких преобразова-
преобразований через ©2. Множества ©i и ©2 гомеоморфны, так как любое
д Е ©2 имеет вид д = gof, где / Е ©ь и так как до и f — изо-
метрии, то и ^о/ - изометрия. Гомеоморфизм задается умножени-
умножением множества ©i на до Е ©2- Далее, ©i П ©2 = 0. В самом деле,
преобразования первого типа сохраняют ориентированные углы, а
второго типа — нет.
Лемма 6. Множество © = ©i U ©2 является группой, причем
©1 — подгруппа.
Доказательство. Рассмотрим группу LB,R) вещест-
вещественных матриц размера 2 х 2 с определителем ±1. Группа состоит
из двух компонент связности LB, R) = Li UL2, а именно: матрицы
с определителем +1 и определителем — 1.
Подгруппа Li обозначается SLB,R). Построим отображение
ср: L —)> ©. Если
то
^) = /€«5ь f(z) = ^^- ad-bc=l;
CZ ~т~ CL
если
то
/е®2, 9(*) = Щ^, ad-bc=-l.
150 Гл. 4. Гладкие многообразия (примеры)
Ясно, что (р — гомоморфизм (проверьте!). Далее, (р — эпимор-
эпиморфизм, но не взаимно однозначный и имеет ядро. Для нахожде-
нахождения ядра нужно найти прообраз единичного элемента группы б.
Как и в предложении 1, доказывается, что Кет((р) = Z2, где Z2 =
= (+Е, -Е). ¦
Фактически доказана следующая лемма.
Лемма 7. Группа б = ©i U 62 изоморфна LB, R)/Z2, где
Итак, в группе всех изометрий плоскости Лобачевского мы
предъявили подгруппу, состоящую из двух компонент линейной
связности, а именно б = LB, R)/Z2. Сколькими параметрами опи-
описываются элементы этой группы? Очевидно, что элемент ^Еб
задается тремя независимыми параметрами.
Лемма 8. Группа SLB, R) как топологическое пространство го-
меоморфна прямому произведению окружности на евклидову плос-
плоскость, а поэтому является гладким трехмерным некомпактным мно-
многообразием. Группа LB,R) гомеоморфна прямому произведению
двух экземпляров окружности на евклидову плоскость.
Доказательство. Из курса алгебры известно, что лю-
любое линейное однородное преобразование плоскости с определите-
определителем +1 однозначно пред ставимо как композиция собственного вра-
вращения и треугольного преобразования (теорема об ортогонализации
базиса). Итак, любая матрица g Е SLB, R) допускает (однозначно)
представление в виде произведения матриц
coscp sin<p\/a /3
— s'mcp coscp
p p
у s'mcp coscpj\0
Так как совокупность вращений образует окружность, а тре-
треугольные унимодулярные матрицы — евклидову плоскость, то лем-
лемма доказана. ¦
Как мы покажем ниже, группа LB, R)/Z2 полностью исчерпы-
исчерпывает собою всю группу Iso(L2).
Пример 7. Вернемся к группе движений евклидовой плос-
плоскости. Найденные нами преобразования у = Ах + Ь, где А Е О B),
b E R2, можно записать в комплексной форме w = az + 6, где
Ъ Е С, а Е С, \а\ = 1, т. е. w = ещ • z + b. Эта группа изоморфна
fa b\ j,n
группе матриц вида I ^ , I, где а = е*.
4.3. Группы преобразований 151
Легко проверяется, что группа линейных изометрий Iso(Rn) ев-
евклидова пространства Rn изоморфна группе преобразований у =
= Ах + Ь, где матрица А — ортогональна, а вектор b задает сдвиг.
Группа Iso(Rn) изоморфна группе матриц
A b
О ... О 1
т. е. как топологическое пространство она гомеоморфна прямому
произведению O(n) x Rn.
4.3.2. Матричные группы преобразований
Все разобранные примеры групп оказывались не только топо-
топологическими пространствами, но и гладкими многообразиями. То-
Топология на группе преобразований индуцировалась ее вложением в
группу матриц, в которой топология определяется обычным обра-
образом: матрицы близки, если они близки поэлементно. Итак, возник
класс гладких многообразий, точки на которых можно умножать,
причем умножение удовлетворяет всем аксиомам группы.
Определение 3. Гладкое многообразие Мп называется группой
Ли, если на нем заданы два гладких отображения, /: Мп х Мп -л
—>> Мп (умножение) и v: Мп —>> Мп (взятие обратного элемента),
обозначаемые обычно так: f(x,y) = х • у, и(х) = х~х\ кроме того
существует отмеченная точка е Е Мп (единица), удовлетворяющая
вместе с отображениями /, v соотношениям:
1) х - (у • z) = (х • у) • z;
2)е-х = х-е = х,х- х~1 = х~1 • х = е.
Иногда требуют лишь непрерывность операций / и v, однако в
примерах, с которыми мы будем иметь дело, групповые операции
будут гладкими, а потому мы и ввели в определение группы Ли
именно гладкие отображения / и v.
Определение 4. Множество элементов д группы Ли б, кото-
которые можно соединить непрерывным путем с единицей группы б,
называется связной компонентой единицы группы б и обозначается
через бо-
Предложение 2. Множество бо является подгруппой в б. Бо-
Более того, бо — нормальный делитель в б, а потому определена
факторгруппа б/бо-
Доказательство. Пусть <7ь #2 ? ©о- Докажем, что g\ x
х 92 ? ©о- В силу определения бо существуют непрерывные пути
7i(*) и 72 (*), такие, что
7i@)=e, 7iA)=3i; 72@) =е, 72A)= 32-
152 Гл. 4. Гладкие многообразия (примеры)
Рассмотрим путь j(t) = 71 № ' 72 (t). В силу непрерывности ум-
умножения в б путь непрерывен и, очевидно, соединяет единицу с
элементом д\ • дэ.
Докажем, что для любого до Е ©о и любого g Е б элемент ggo x
х д принадлежит ©о- Так как д$ Е ©о? то существует непре-
непрерывный путь j(t) такой, что 7@) = е, 7A) = 9о- Рассмотрим путь
?>(*) = #7(%~1-ОннепРеРывени^@) = е; (рA) = ддод'1, т.е. #х
х зо^ G ©о- ¦
Рассмотрим основные примеры матричных групп. Все они яв-
являются группами Ли, однако мы докажем это лишь в некоторых
частных случаях.
4.3.3. Полная линейная группа
Рассмотрим пространство Rn и множество GL(n, R) всех не-
невырожденных линейных однородных преобразований Rn в себя,
т. е. множество всех невырожденных матриц n x n с вещественными
коэффициентами. Аналогично определяется и GL(n, С).
Лемма 9. Множества GL(n, R) и GL(n, С) являются группами
Ли.
Доказательство. Рассмотрим для определенности GL(n,
R). Тот факт, что это — группа (в алгебраическом смысле), оче-
очевиден. Снабдим GL(n, R) структурой гладкого многообразия так,
что все групповые операции будут гладкими. Ясно, что GL(n, R) =
= Rn \ {det(g) = 0}, где пространство Rn отождествлено с про-
пространством всех матриц порядка п над полем R. Так как уравне-
уравнение det(g) = 0 полиномиально, то множество Rn \ {det(g) = 0}
открыто, т. е. является областью, а потому гладким многообразием
размерности п2. Умножение матриц — гладкая операция, поскольку
каждый элемент матрицы АВ является полиномом второго поряд-
порядка от элементов матриц А и В. Каждый элемент обратной матри-
матрицы А~1 является рациональной функцией от элементов матрицы А
(со знаменателем, отличным от нуля в силу невырожденности А).
Аналогичным путем доказывается, что GL(n, С) — группа Ли. ¦
4.3.4. Специальная линейная группа
Группа SL(n, R) определяется как подмножество в GL(n, R),
задаваемое уравнением det(g) = 1. Ясно, что это множество яв-
является группой и топологическим пространством. В действитель-
действительности SL(n, R) является гладким многообразием, но мы не будем
здесь это доказывать. Группа SL(n, С) определяется как подгруп-
4.3. Группы преобразований 153
па в GL(n, С), удовлетворяющая соотношению det(g) = 1. Размер-
Размерность SL(n, R) равна п2 — 1, а размерность SL(n, С) равна 2п2 — 2.
4.3.5. Ортогональная группа
Рассмотрим Rn с билинейной евклидовой формой (а, Ь) =
= Y^i=ialb1' Группа O(n, R) определяется как группа веществен-
вещественных матриц А порядка п, сохраняющих это скалярное произведе-
произведение, т.е. (Ла,ЛЬ) = (а,Ь) для любых a, b E Rn. Обычно группа
O(n, R) обозначается О(п). Группа О(п, С) определяется анало-
аналогично. Группа О(п) содержит подгруппу, обозначаемую SO(n) и
называемую специальной ортогональной группой: д Е SO(n), если
det(ff) = 1.
Лемма 10. Группа SO(n) линейно связна и совпадает со связ-
связной компонентой единицы в группе О(п).
Факторгруппа O(n)/SO(n) изоморфна Z2, т. е. О(п) состоит из
двух связных компонент.
Доказательство. Из курса алгебры известно, что для
любого элемента до Е SO(n) существует такое ортогональное пре-
преобразование д Е О(п), что а = дд$д~1, если п = 2к четно, есть ма-
матрица вида
0
0 cos ifk sin ifk
\ -sin<pfc cos
и, если n = 2A; + 1 нечетно, то к указанной выше матрице добавля-
добавляет еще один диагональный блок (размера 1 на 1), в котором стоит
единица.
Непрерывный путь j(t), соединяющий до с единицей, получа-
получается умножением на параметр t всех углов-аргументов в блочно-
диагональной матрице. Итак, SO(n) = O(n)o- Так как множество
ортогональных матриц с определителем —1 гомеоморфно SO(n),
то лемма доказана. ¦
Удобно представлять О(п) как подмножество в Rn , определя-
определяемое системой уравнений ААТ = Е. Здесь Rn — линейное про-
пространство матриц А порядка п.
Рассмотрим в нем форму (А, В) = tr ABT. Получается евкли-
евклидово скалярное произведение в базисе, состоящем из следующих
векторов: е^ (все элементы такой матрицы равны нулю, кроме од-
154 Гл. 4. Гладкие многообразия (примеры)
ного, равного единице и расположенного в i-й строке и j-м столб-
столбце). Если
А = Yli aieiji B =
TO
(A, B> =
что, очевидно, совпадает со скалярным евклидовым произведением.
Отождествляя каждую матрицу А Е Rn с вектором А = ^- а]е^,
можно вычислить его длину, причем ||А||2 = tr AAT. Следователь-
Следовательно, для А Е О(п) имеем: \\A\\ = ^/п, т. е. О(п) лежит в стандартной
сфере Sn -1 С Rn радиуса
4.3.6. Унитарная группа и специальная унитарная группа
Рассмотрим комплексное пространство Спс координатами z1,
..., zn и эрмитовым скалярным произведением (a,b)= (^^=1
х 6г), ассоциированным с билинейной комплекснозначной формой
Ya=i a%b%' Через U(n) обозначим группу всех линейных операто-
операторов в Сп, сохраняющих начало координат и это скалярное произ-
произведение, т. е. группу всех комплекснозначных матриц А порядка п,
таких, что (а, Ь) = (Аа, АЪ) для любых a, b E Сп. Это условие эк-
эквивалентно матричному уравнению ААТ=Е, где черта обозначает
комплексное сопряжение. Если g E U(n), то det(g) = ег(р. Опреде-
Определим SU(n) как подгруппу в U(n), такую, что det(^) = 1.
Лемма 11. Группы U(n) и SU(n) линейно связны.
Доказательство. Рассмотрим SU(n). Из курса алгебры
известно, что для любого go E SU(n) существует унитарное преоб-
преобразование д Е U(n) такое, что a = ддод~г — диагональная матри-
матрица с собственными числами ег(рк, 1 ^ к ^ п, совпадающими с соб-
собственными числами оператора до, причем tpi + .. . + (fn = 2/тг, / Е Z.
Непрерывный путь j(t), соединяющий до ? Е задается семейством
матриц 7(*) = 9~1^(t)g, где
\
a(t) =
Ясно, что 7@) = ?7, а 7A) = до- Связность U(n) доказывается
аналогично.
4.3. Группы преобразований 155
Удобно представлять U(n) как подмножество в R2n , определя-
определяемое системой уравнений ААТ=Е, где R2n = Сп отождествле-
отождествлено с линейным пространством всех комплекснозначных матриц А
порядка п. Рассмотрим в Сп базис, состоящий из матриц Ещ
и Ifrj, все элементы которых равны нулю, кроме одного, располо-
женного в А;-м столбце и j-й строке. Если А, В Е Сп , то (А, В) =
= Retr АВТ = Yaj=i аЩ-> что совпадает с эрмитовым скалярным
2
произведением в Сп . Отождествляя матрицу А с вектором, можно
найти его длину: ||А||2 = RetrААТ. Следовательно, U(n) распо-
расположена в сфере S2n ~l радиуса д/п.
Лемма 12. Группа GL(n, R) состоит из двух компонент линей-
линейной связности. Группа GL(n, С) линейно связна.
Доказательство. Группа GL(n,R) распадается в объе-
объединение двух подмножеств, ©о = {д I det д > 0} и ©i = {д \ det g <
< 0}. Они не пересекаются, так как определитель матрицы — глад-
гладкая функция от ее коэффициентов, т. е. координат в Rn . Далее, ©i
очевидно гомеоморфно ©о-
Докажем связность ©q. Так как каждый элемент д Е ©о ин-
интерпретируется как некоторый базис в Rn, то, применяя извест-
известный процесс его ортогонализации, получаем, что д = а • <р, где а Е
Е SO(n), a if — верхнетреугольная матрица с положительными соб-
собственными числами <pi, ... ,срп на главной диагонали. Матрица д
непрерывно деформируется в матрицу а вдоль пути j(t) = а • (p(t),
где
(
0 ipnt+(l-t),
Осталось воспользоваться связностью SO(n). Лемма доказана
для GL(n,R). Доказательство связности GL(n, С) мы предоста-
предоставим читателю. ¦
Замечание. Связность GL(n, С) и несвязность GL(n, R) мож-
можно пояснить (нестрого) еще так. Группа GL(n,R) получается из Rn
выбрасыванием гиперповерхности det(g) = 0, разделяющей Rn
на две области. В комплексном случае GL(n, С) получается из
С™2 = R2n2 выбрасыванием подмножества det(g) = 0, веществен-
вещественная коразмерность которого равна 2, так как комплексное уравнение
эквивалентно двум вещественным: Re(det(g)) = 0, Im(det(g)) = 0.
Интуитивно ясно, что поверхность коразмерности два не разби-
156 Гл. 4. Гладкие многообразия (примеры)
о 2
вает R n на два куска. Любая пара неособых точек может быть
соединена путем, «обходящим» особое множество.
Мы определили U(n) как группу матриц, сохраняющих веще-
ственнозначное произведение (а,Ь) = ReX)fc=i akbk. Однако в Сп
имеется ассоциированная билинейная комплекснозначная форма
(a, b) = Y^k=i akbk, а потому естественно возникает группа матриц
U(n)r9 сохраняющих эту форму, т. е. (Ба, ВЪ) = (а, Ь) для любых
a, b Е Сп.
Лемма 13. Группа U(n) и группа U(nO совпадают.
Доказательство несложно и предоставляется читателю.
Определим операцию овеществления, отождествляющую Сп
с R2n. Выберем в Сп эрмитов базис ei, ..., еп. Рассмотрим орто-
ортогональные (относительно (•,•)) векторы ei, ..., еп; гех, ..., ien.
Тогда для любого z Е Сп возникает разложение z = Y^!k=i %кек +
+ ^Ук-i ук(геь), где zk = хк + гук, т. е. Сп отождествляется с R2n.
Отображение ср: Сп —>> R2n, задаваемое формулой cp(z) = (ж1,
..., жп; у1, ..., уп), называется овеществлением Сп. Легко прове-
проверить, что скалярное эрмитово произведение в Сп переходит после
овеществления в евклидово скалярное произведение R2n.
Что означает «задать в R2n комплексную структуру»? Рассмо-
Рассмотрим овеществление (р: Сп -> R2n; тогда R2n = Rn 0 iKn = Сп.
Итак, в R2n возникает линейный оператор А(х) = гх. Ясно, что
А2 = -Е и А(гек) = -еь т. е. в ортобазисе (еь ..., ек; геи ..., ге^)
матрица А имеет вид
А~ \Е О
причем А Е SOBn).
Определение 5. Будем говорить, что ортогональный оператор
А Е SOBn) такой, что А2 = —Е, определяет комплексную струк-
структуру на R2n.
Легко проверить, что такой оператор ортогональным поворотом
базиса приводится к виду
'о -I
,Е °,
Итак, возник ортобазис ei, ..., еп; ti, ..., tn такой, что А(ек) =
= tkl A(tk) = — efc. Натягивая на ei, ..., еп пространство Rn{e/C},
получаем разложение R2n = Rn{e/c}0Rn{t/c}. Следовательно, лю-
любой а Е R2n допускает единственную запись вида а = х + гу, где
х, у Е Rn{ek}. Так как А2 = —Е, то мы получаем Сп, рассмотрев
все комплексные линейные комбинации векторов
4.3. Группы преобразований 157
Что происходят с унитарной группой при овеществлении (р?
Поскольку оператор А Е U(n) сохраняет эрмитову форму, то по-
после овеществления он превратится в оператор срА, действующий
в R2n и сохраняющий евклидову форму, т. е. станет элементом груп-
группы ОBп).
Предложение 3. Мономорфизм ср: U(n) —>> SOBn), возникаю-
возникающий при овеществлении ср: Сп —>> R2n, записывается так:
Е SOBn),
где С и В вещественны. Кроме того,
(p(U(n)) = SOBn) П ip(GL(n; С)).
Доказательство. Пусть ei, в2, ..., еп — базис в Сп. То-
Тогда (С + iB)ek = Cek + B(iek), (С + iB)(iek) = -Bek + C(iek),
т.е.
Прямое вычисление показывает, что det(cp(A)) = | det A\2, т.е.
det(ip(A)) > 0.
Далее, пусть <р(А) Е (p(U(n)). Тогда, с одной стороны, (р(А) Е
Е SOBn), а с другой стороны, <р(А) получен овеществлением ком-
комплексного невырожденного оператора; отсюда: cp(\J(n)) cSOBn)D
()
Обратно, пусть g E SOBn) и ^ Е <p(GL(n, С)). Это значит,
что ^ имеет вид: ( „ „ \, т. е. g E (p(U(n)). ¦
4.3.7. Симплектическая некомпактная
и симплектическая компактная группы
Говорят, что в линейном пространстве L2n задана линейная сим-
симплектическая структура, если задано билинейное кососимметри-
ческое невырожденное скалярное произведение (,), т.е. (а,Ь) =
= — (Ь,а) для любой пары векторов, и (а,Ь) = 0 для любого а в
том и только в том случае, когда b = 0. Пространство L2n с та-
такой структурой называется симплектическим. Удобно моделировать
симплектическое пространство на евклидовом R2n. Линейное пре-
преобразование симплектического пространства в себя называется сим-
симплектическим, если оно сохраняет симплектическую структуру. Со-
Совокупность всех симплектических преобразований, оставляющих
158
Гл. 4. Гладкие многообразия (примеры)
на месте начало координат, называется вещественной симплекти-
ческой (некомпактной) группой и обозначается Sp(n, R). Докажите,
что определитель линейного симплектического преобразования ра-
равен единице.
Компактная группа Sp(n) определяется с помощью алгебры
кватернионов Q. Рассмотрим R4 с ортобазисом, обозначенным 1, г,
j, к. Любой вектор q Е R4 записывается в виде q = а0 • 1 + а2 • г +
+ а2 • j + а3 • к, где а0, а1, а2, а3 Е R. Определим умножение в R4,
задав его на базисе 1, г, j, к, а затем продолжив на все векторы по
линейности. Таблица имеет вид
1
г
j
к
1
1
г
j
к
г
г
-1
-к
3
j
3
к
-1
—i
к
к
-j
i
-1
Возникает четырехмерная алгебра над R, ассоциативная, но не
коммутативная. Она называется алгеброй кватернионов Q. В Q
имеется сопряжение
q ^ q = а0 • 1 — а1 • i — а2 • j — а3 • к
и взятие обратного элемента q~1=q/\q\2, где \q\2=qq = Y^=o(atJ•
В Q имеется скалярное вещественнозначное произведение (gi, #2) —
= Re((/i • (/2)- Здесь через q\ • 6/2 обозначено произведение в Q. Эле-
Элементы q называются кватернионами. Кватернионы, у которых а0 =
= 0, называются мнимыми; координата а0 (см. выше) обозначается
через Re(q). Итак q = Re(q) + lm(q).
Рассмотрим n-мерное кватернионное пространство Qn с бази-
базисом ei, ..., еп, т. е. любой вектор а Е Qn записывается в виде а =
= ELi^ebrAegfeGQ.
Определение 6. Компактной симплектической группой Sp(n)
называется совокупность всех линейных кватернионных преобра-
преобразований Qn, сохраняющих точку 0, оставляющих инвариантным
следующее скалярное произведение в Qn:
k=i
Пространство Qn канонически отождествляется с С2п. Поло-
Положим п = 1; тогда Q1 = Q. Пусть q = а0 • 1 + а1 • г + а2 • j + а3 х
х к. Тогда, очевидно, q = (а0 + а1 • г) + j(a2 — а3г) = z1 + jz2, где
1 0 1 z2 = а2 + а3г — комплексные числа. Выполняя эту
,
z1 = а0 + га1
4.3. Группы преобразований 159
операцию для каждой кватернионной координаты в Qn, получаем
отождествление Qn = С2п. Как и в комплексном случае, наряду
с Sp(n) определена группа инвариантности кватернионнозначной
формы
п
(a, b) = X)a*ft*; a\bk eQ.
к=1
Оказывается, группа инвариантности (а, Ь) совпадает с груп-
группой Sp(n). Доказательство предоставляем читателю.
Что происходит с кватернионнозначной формой (а, Ь) при ото-
отождествлении Qn с С2п? Положим п = 1, тогда
а • Ъ -> (р + jq)(с + jd) = (рс + qd) + (-pd + qc)j.
Мы воспользовались соотношениями jq = qj, j2 = — 1, a • b =
= b • а (проверьте!).
При произвольном п форма (a, b) переходит в форму
J2(pkck + qkdk) + J2(qkck -pkdk) ¦ j,
k=l k=l
где
a=(a1, ...,an)-^(p1+jg1;...;pn+jgfl),
Ясно, что форма (а,Ь)эрм = Y^k=i(Pk^k + ^/c^/c) совпадает с эр-
эрмитовой формой в С2п, а форма (а, b)KCM = ^^=i(^c/c — Pkdk) яв-
является кососимметрической, т. е. (а, Ь)ксм = — (Ь, а)ксм. Если опера-
оператор A: Qn —)> Qn сохраняет (а,Ь)квт, то после отождествления Qn
с С2п он сохраняет уже две формы: (а, Ь)эрм и (а, Ь)ксм. То, что
оператор сохраняет (а, Ь)эрм> означает, что он становится унитар-
унитарным оператором.
Мы доказали, что Sp(n) вкладывается в UBn) как подгруп-
подгруппа, сохраняющая в С2п кососимметрическую форму (а, Ь)ксм =
Предложение 4. Группы GL(n, R), GL(n, С), SL(n, С), SL(n,
R), Sp(n, Д) некомпактны; группы U(n), SU(n), O(n), SO(n),
Sp(n) компактны.
Доказательство проводится по схеме, показанной нами выше.
Отметим, что мы отнюдь не исчерпали список всех групп Ли.
Рассмотрим некоторые группы Ли малых размерностей. Мы ви-
видели, что группа SOB) гомеоморфна окружности; SOC) гомео-
морфна RP3. Ясно, что U(l) = S1. Изучим группы Sp(l) и SUB).
160 Гл. 4. Гладкие многообразия (примеры)
Предложение 5. Группы SUB) u Sp(l) изоморфны (в алгебра-
алгебраическом смысле) и обе гомеоморфны сфере S3. Группа SOC) яв-
является факторгруппой SUB) no подгруппе Ъ^ состоящей из эле-
элементов Е, —Е.
Доказательство. Группа Sp(l) действует в Q1 = Q как
умножение на кватернион, т. е. каждый А Е Sp(l) имеет вид: Aq =
= q • а, где а — фиксированный кватернион. Так как (дь^квт =
= Qi'Q2 сохраняется при действии A,Toqiq2 = q\aaq2 = \a\2q\ • q2-
Отсюда \а\ = 1. Так как \а\ • \Ь\ = \а-Ъ\ (проверьте!), то Sp(l) изо-
изоморфна группе кватернионов а таких, что \а\ = 1. Такие кватерни-
кватернионы очевидно образуют сферу S3.
Докажем, что Sp(l) изоморфна SUB). Рассмотрим вложение
Sp(l) —>> UB) (см. выше). Так как п = 1, то вложение имеет вид
Р
-q
причем рр + qq = 1. Это проверяется прямым вычислением.
Итак, Sp(l) изоморфна унимодулярной подгруппе в UB), при-
причем размерность ее равна 3. Так как SUB) также трехмерна, то
Sp(l) и SUB) изоморфны.
Докажем, что существует эпиморфизм /: SUB) —)> SOC) с яд-
ядром, изоморфным Z2. Реализуем SUB) как группу единичных ква-
кватернионов. Положим /(а) = aqa, где \а\ = 1, и Ke(q) = 0, т. е. q —
мнимые кватернионы, образующие подпространство R3, ортого-
ортогональное к 1 Е Q. Тогда / — гомоморфизм, так как f(a\ • аг) = а\п2 х
х qa2ai =/(ai) -/(аг). Преобразование /(а) переводит в себя R3
(мнимые кватернионы) и является изометрией, так как Ke(aqiaa x
х q2a) = Ke(aqiq2a) = Re(gi(/2). Итак, /(a) E SOC) (в силу связ-
связности S3 образ f(S3) лежит в SOC)).
Найдем ядро /. Если aqa = q для всех мнимых q, то aq = qa,
a| = l, т. е. а = =Ы, так как коммутирование а со всеми мнимыми
кватернионами означает, что мнимая часть а равна нулю. Так как
Ker(/) = Z2 = (?;,-?;), то dim(S'3/Z2) = 3, и так как dim SOC) =
= 3, то / — эпиморфизм.
Тот факт, что SOC) = *S3/Z2 соответствует представлению RP3
в виде фактора: *S3/Z2, где Z2 действует на S3 как умножение век-
векторов на —1. ¦
Задачи
1. Доказать, что группа О B) совпадает с группой всех изомет-
рий окружности (с метрикой ds2 = dip2).
2. Доказать, что группа SLB, R)/Z2 является линейно связной.
4.4. Динамические системы 161
3. Доказать, что группа U(n) (как топологическое пространство)
гомеоморфна прямому произведению SU(n) на окружность S1.
4. Пусть б — связная группа Ли и Н — ее дискретная нормаль-
нормальная подгруппа. (Подгруппа Н называется дискретной, если единица
группы б обладает такой открытой окрестностью U, что в ней со-
содержится только один элемент Н — единица.) Доказать, что любая
дискретная нормальная подгруппа Н лежит в центре б, т. е. комму-
коммутирует со всей группой б.
4.4. ДИНАМИЧЕСКИЕ СИСТЕМЫ
Мы уже знакомы с векторным полем лг(х) = grad/(ж), где / —
гладкая функция на Rn. В действительности в криволинейных ко-
координатах grad не является векторным полем, так как у него иной
закон преобразования, и трактовать grad как векторное поле можно
только при наличии римановой метрики.
Напомним, что в евклидовом пространстве выполнено равенст-
равенство: df/da. = (a,grad/), где df/da. — производная по направлению,
(,) — евклидово произведение.
Размерность гиперповерхности уровня функции {/ = с} равна
п — 1, если {/ = с} — гладкое многообразие.
Определение 1. Точка xq Е {/ = с} называется критической
точкой функции /, если grad/(^o) = 0; в противном случае хо на-
называется неособой {некритической или регулярной) точкой.
Лемма 1. Пусть f(x) — гладкая функция на Rn и xq E {/ =
= с} — неособая точка. Тогда вектор grad/(^o) ортогонален гипер-
гиперповерхности {/ = с} в точке жо, т- е. grad/(xo) ортогонален любо-
любому вектору а, касательному к {/ = с} в точке xq.
Доказательство вытекает из соотношения (a,grad/) = df/da..
Говорят, что на гладком многообразии Мп задано гладкое век-
векторное поле v, если в каждой точке Р задан вектор v(P) E ТрМп,
гладко зависящий от точки.
Определение 2. Точка Ро Е Мп называется особой для вектор-
векторного поля v, если v(Pq) = 0. Особая точка Pq поля v называется
изолированной, если у нее существует открытая окрестность U, в
которой поле v не имеет других особенностей, кроме точки Pq.
В физике большую роль играют разрывные поля, являющиеся
гладкими всюду, кроме некоторого числа изолированных точек раз-
разрыва. См. примеры ниже.
Пусть v — гладкое поле на Мп. Траектория j(t) называется ин-
интегральной кривой поля v, если j(t) = \-(j(t)), т.е. если касатель-
касательные векторы скорости к j(t) совпадают с векторами поля v.
162
Гл. 4. Гладкие многообразия (примеры)
Рассмотрим примеры. Пусть / — функция на плоскости и v =
= grad/;
а) / = х2 + у2, grad/ = Bж, 2у), интегральные траектории об-
образуют пучок лучей, исходящих из точки О (рис. 4.36);
б) / = —х2 — у2, grad/ = (—2ж, — 2у), интегральные траекто-
траектории — лучи, входящие в точку О (рис. 4.37);
в) / = —ж2 + у2, grad/ = (—2ж, 2у), интегральные траекто-
траектории — гиперболы (рис. 4.38).
Рис. 4.36
Рис. 4.37
Рис. 4.38
Часто о векторном поле v говорят как о потоке жидкости, теку-
текущей по многообразию. Считается, что в каждой частице жидкости
помещен вектор, указывающий ее скорость. Например, особая точ-
точка на рис. 4.36 — это источник: жидкость «вытекает» из точки О,
а особая точка на рис. 4.37 — это сток. Интегральные траектории
поля иногда называют линиями тока жидкости. Потоки, завися-
зависящие от времени, называются нестационарными. Они моделируют-
моделируются векторными полями v(P, ?), зависящими от времени t. Как най-
найти интегральные траектории поля? Соответствующие методы раз-
разработаны в теории обыкновенных дифференциальных уравнений.
Каждое поле v = (/у1(Р), ... ,vn(P)) отождествляется с системой
обыкновенных уравнений dxk/dt = vk(xl, ..., xn), 1 ^ k ^ n.
Автономными или стационарными называются системы, пра-
правые части которых не зависят от времени t.
Остановимся на частном случае, когда поведение интегральных
траекторий упрощается.
Определение 3. Пусть система дифференциальных уравнений
отвечает полю v на Мп. Интегралом системы называется гладкая
функция / на Мп, постоянная вдоль всех интегральных траекторий
потока.
Пусть / — интеграл. Гиперповерхности {/ = с} расслаивают Мп
при изменении с. В окрестности неособых точек для grad / поверх-
4.4. Динамические системы
163
траектории быть
может
Рис. 4.39
ности {/ = с} являются гладкими подмногообразиями размерности
п - 1. Из определения интеграла еле- Такой ИНТегРальной
дует, что если интегральная траекто-
траектория имеет общую точку с {/ = со},
то она целиком лежит в {/ = со}. От-
Отсюда следует, что поле v(P) каса-
касается в каждой точке Р поверхности
{/ = /(Р)} (рис. 4.39). Каждая по-
поверхность {/ = с} расслоена на ин-
интегральные траектории потока v. Это
позволяет понизить порядок исход-
исходной системы уравнений на единицу, ограничив поле v на поверх-
поверхность {/ = с}.
Если известны два функционально независимых интеграла /
и д (т. е. почти во всех точках Мп поля grad / и grad g линей-
линейно независимы), то порядок системы понижается на две единицы
(рис. 4.40) и т. д. Если найдены п — 1
независимых интегралов, то все ин-
интегральные траектории описываются
так: 7(?) = {/i = ci} n ... П {/n-i =
= cn_i}, где 7@) = Р, fk(P) = ck.
Если интегралов п, то последний ин-
интеграл задает скорость движения точ-
точки по интегральной траектории, т. е.
поток интегрируется полностью.
Определение 4. Пусть на Мп за-
заданы поля vi, ..., Vfc. Они называют-
называются линейно независимыми, если векторы vi(P), ..., v/c(P) линейно
независимы в каждой точке Р.
Предложение 1. Пусть Мп = б — группа Ли. Тогда на & все-
всегда существуют п линейно независимых гладких векторных полей
Vi, ...,Vn.
Доказательство. Рассмотрим на б операцию левого
сдвига La: g —>> ад. Ясно, что La является диффеоморфизмом.
Рассмотрим единицу е и зададим в Теб п независимых векторов
ei, ..., еп. Рассмотрим дифференциал dLa: Теб —>> Та&. Положим
Vfc(a) = dLa(ek). Так как La — диффеоморфизм, то dLa невыро-
невырожден, т. е. все векторы v/c(a) линейно независимы. ¦
Интересный пример трех независимых полей можно построить
на сфере *S3, гомеоморфной SUB). Пусть S3 = {q ? Q;\q\ = 1}.
Положим vi(q) = iq, ^(q) = jq, ^s(q) = kq. Легко видеть, что эти
поля касаются сферы и всюду независимы.
Рис. 4.40
164
Гл. 4. Гладкие многообразия (примеры)
Задача. Найти в явном виде интегральные траектории ука-
указанных полей на сфере S3.
Среди полей на Мп выделен класс так называемых градиентных
или потенциальных полей. Пусть Мп снабжено римановой метри-
метрикой и / — гладкая функция на Мп. Тогда grad / = {df /dx1} — эле-
элемент пространства, дуального к ТрМп. Для того чтобы получить
вектор, рассмотрим поле с компонентами vk = gkp • df /dxp. Ясно,
что функции v1, ...,vn преобразуются по закону преобразования
координат вектора; его мы и обозначим через grad/.
Определение 5. Потенциальным или градиентным полем v
на Мп называется поле вида v = grad/, где / — гладкая функция
наМп.
Лемма 2. Потенциальное поле не имеет замкнутых интеграль-
интегральных траекторий без особых точек.
Доказательство. Пусть такая траектория есть. Она на-
называется периодическим решением системы. Тогда x(t) = лг(х), где
x(t) — решение. Если / — потенциал, то
—
= gijxivj = gijvivj = | grad/|2 > 0.
Поэтому / строго монотонно растет с ростом t. Но так как тра-
траектория 7 замкнута, то через некоторое время точка j(t) вернется в
прежнее положение, что противоречит однозначности функции. ¦
Например, поле, изображенное на рис. 4.41, не потенциально
(вращение жидкости вокруг начала координат).
Рассмотрим поля на двумерных многообразиях. Ограничимся
их локальным изучением. Тогда можно считать, что поток задан
на евклидовой плоскости. Будем трактовать поле как поток жидко-
жидкости постоянной плотности, равной 1. Как из-
известно из курса обыкновенных дифференци-
дифференциальных уравнений, с каждым потоком свя-
связана однопараметрическая группа диффео-
диффеоморфизмов, т. е. сдвигов вдоль интеграль-
интегральных траекторий поля. Пусть поле v имеет
координаты (Р(ж,у), Q(x,y)). Рассмотрим
изменение массы в бесконечно малом пря-
прямоугольнике со сторонами dx, dy (рис. 4.42).
Если dm — масса жидкости в прямоуголь-
прямоугольнике, то dm = dxdy. Если j(t) — решение,
то t определено с точностью до сдвига. Положим fto(P) = т(^о)>
где 7@) — Р- Отображение ft0 — диффеоморфизм. Рассмотрим
Р = (х,у) и прямоугольник (cfe, dy). Его образом при /д^ будет
Рис. 4.41
4.4. Динамические системы
165
бесконечно малый параллелограмм Г (рис. 4.43). С изменением t
масса dm(t) = dx(t) dy(t) также меняется.
У к
v(x,y)
Лемма 3. Изменение массы в бесконечно малом прямоугольни-
прямоугольнике (cfe, dy) имеет вид
вводит в {dx, dy)
х ду
Доказательство. Будем считать, что
новые координаты. Имеем
dx(t + At)dy(t + At) = d(x(t) + Atx't)d(y(t) + Aty[) =
(i *+f *
Так как в первом сомножителе приращению берется только
вдоль оси Ох, то здесь Ау равно нулю. Во втором сомножителе
равно нулю приращение вдоль Оу, т. е. Ах исчезает. Поэтому
dy(t) + At^-dy) =
dx(t) + At^
= dx(t) dy(t) + Atdx(t) dy(t) (^ + Щ
Мы пренебрегаем малыми высшего порядка. Отсюда
Admit) = At(^- + ?Q
\дх ду
Определение 6. Функция div(v) = дР(х,у)/дх + dQ(x,y)/dy
называется дивергенцией потока v (в декартовых координатах). По-
Поток называется несжимаемым, если div(v) = 0.
166
Гл. 4. Гладкие многообразия (примеры)
Из леммы 3 следует, что изменение массы равно нулю тогда
и только тогда, когда поток несжимаем. Пусть D — ограниченная
область с кусочно гладкой границей, D(t) — область, полученная
из D ее сдвигом вдоль интегральных траекторий v за время t. Пусть
площадь D(t) равна V(t). Если плотность жидкости равна 1, то
V(i) — масса, заключенная в D(t).
Предложение 2. Для любой ограниченной области D(t) имеем
dV(t)
dt
iv(v) dxdy.
D(t)
Для доказательства достаточно разбить D(t) на бесконечно ма-
малые прямоугольники и применить лемму 3.
Определение 7. Поток v = (P, Q) называется безвихревым, ес-
если Ру = Qx.
Это условие можно видоизменить. Рассмотрим на плоскости
гладкий контур С = j(t). Вихрем потока
v вдоль С называется число /c*(vG(^)),
j(t))dt (рис. 4.44). Оно также называется
циркуляцией потока вдоль контура.
Лемма 4. Поток v безвихревой то-
тогда и только тогда, когда его циркуляция
вдоль любого гладкого контура равна ну-
нулю.
Доказательство. Пусть D — об-
Рис. 4.44 ласть, ограниченная С. Имеем
2тг
I (v, y)dt = J (р^ + Q^j dt = JJ(Py - Qx) dx dy;
7(t) 0 D
7(О)=7Bтг).
Здесь применена формула Стокса (см. гл. 6). ¦
Предложение 3. Пусть v — безвихревый поток на плоскости.
Тогда v потенциален, т. е. существует гладкая функция а(х,у) та-
такая, что v = grad а(х,у). Форма Р dx + Q dy — полный дифферен-
дифференциал функции а(х,у), определенной однозначно с точностью до ад-
аддитивной постоянной.
Доказательство. Проинтегрируем уравнения Р = да/дх,
Q = да/ду при условии, что дР/ду = dQ/dx. Интегрируя по х
первое уравнение, получаем а(х,у) = /ож P(x,y)dx + g(y). Диффе-
4.4. Динамические системы \61
ренцируя по у, получаем
Q(X,y)=Id-^dx + d-^l,
J ду dy
о
или g'(y) = Q@, у), т. e. g(y) = Jjf Q@, y) dx + С, где С = const.
Итак,
x у
a(x, y)= P(x, y)dx + / Q@, y)rfy + C.
о о
Начиная с уравнения Q = da/ду, мы получим а(ж, у) = /0^ Q(x, у) х
х Л/ + /ожР(ж,О)^ + С.
Функция а(х,у) — потенциал потока. Опишем его геометриче-
геометрически. Рассмотрим два кусочно гладких пути: j = 71U72 и 77 = 7i U72
(рис. 4.45). Ясно, что
Г Г
а(х,у) = (Pdx + Qdy) = / (Pdx + Qdy),
j j
7 77
т. е. а (ж, у) получается интегрированием дифференциальной формы
со = Pdx + Qdy вдоль пути 7 или 77- ¦
Предложение 4. Пусть поток v безвихревый. Тогда он потен-
потенциален, и потенциал имеет вид
а(ж, у) = Р dx -\- Q dy = / а;,
7
У,
1
71
@,0)
72 (я
7i
,2/)
72
X
7 ~~ любой кусочно-гладкий путь, ве-
ведущий из точки @, 0) в точку (х,у). Ин-
Интеграл J со не зависит от выбора пути.
Доказательство. Тот факт, что Рис# 4.45
J (P dx + Q dy) не зависит от пути (ес-
(если начало и конец фиксированы), вытекает из формулы Стокса
(см. гл. 6). Так что можно взять один из путей, показанных на
рис. 4.45. ¦
Пусть поток v — безвихревый и несжимаемый. Тогда
&P__dQ &P_dQ р_^ Q- —
дх ду ду дх' дх' ду'
откуда д2а/дх2 + д2а/ду2 = 0.
168 Гл. 4. Гладкие многообразия (примеры)
Линейный дифференциальный оператор второго порядка А =
= д2 /дх2 + д2 /ду2 (записанный в декартовых координатах) назы-
называется оператором Лапласа. Функция /(ж, у) такая, что А/ = О,
называется гармонической.
Мы доказали, что потенциал безвихревого и несжимаемого по-
потока — гармоническая функция. Иногда а (ж, у) рассматривают в па-
паре с другим потенциалом Ь(ж, у), называемым сопряженным потен-
потенциалом или потенциалом сопряженного потока. Он является реше-
решением системы db/дх = —Q, db/ду = Р.
Функция Ь(ж, у) является потенциалом потока v = (—Q, Р). По-
Поток v называется сопряженным к потоку v = (Р, Q).
Потоки v и v очевидно взаимно ортогональны.
Рассмотрим плоскость комплексной переменной z = х + гу и
комплекснозначную функцию: /(ж,у) = а(ж,у) +гЬ(ж,у), где а и
b — соответственно потенциал и сопряженный потенциал несжима-
несжимаемого потока v = (Р, Q). Вместо дд/ду, dg/дх будем писать про-
просто ду, дх. Так как ах = Р, ау = Q, bx = —Q, Ьу = Р, то ах = Ц,
а^ = —Ьх. Такие функции / = a + ib называются комплексно анали-
аналитическими, а уравнения на а и b — уравнениями (условиями) Коьии-
Римана. Функции а и Ъ называются соответственно вещественной
и мнимой частями функции /: а = Re(/), b = Im(/). Напомним не-
некоторые свойства комплексно аналитических функций.
Пусть z = x + iy, z = х — гу. Любая функция д(х, у) = и(х, у) +
+ iv(x, у), разлагающаяся в сходящийся ряд по ж, у, может быть за-
записана так: #(ж, у) = GB, ^). По правилу дифференцирования слож-
сложной функции имеем
д__ д^д_ ду_д__ \(д__.д_
dz dz дх dz ду 2 \ дх ду
Аналогично d/dz = 1/2(<9/<9ж + г(д/ду)). Выделим функции
g(z,z), зависящие только от z. Аналитически это можно записать
так: (d/dz)g(z,z) = 0. Они называются комплексно аналитически-
аналитическими и разлагаются в сходящийся ряд только по степеням перемен-
переменной z. Так как dg/dz = 0, то gx+igy = 0, т. е. ux+ivx+i(uy+ivy) =
= 0, и условие dg/dz = 0 эквивалентно уравнениям Коши-Римана
^х — Vy , Uy — rVx.
Тем самым, нами доказана
Теорема 1. Любой безвихревый и несжимаемый поток v на
плоскости представим в виде v = grada^,y), а сопряженный по-
поток v — в виде v = grad6^,y), где функция /(ж, у) = а(ж,у) +
+ г6(ж,у) комплексно аналитическая и определена однозначно с
точностью до аддитивной постоянной.
4.4. Динамические системы 169
Верно и обратное: если f(z) — комплексно аналитическая функ-
функция, то потоки v = gradRe(f(z)) и v = gradIm(/(^)) безвихревые
и несжимаемые; кроме того они сопряжены друг другу.
Интегральные траектории v и v ортогональны. Функция / =
= а + ib называется комплексным потенциалом потока. Рассмо-
Рассмотрим примеры особых точек векторных полей.
Пусть v — безвихревый и несжимаемый поток. Как найти ну-
нули v и v? Из уравнений Коши-Римана имеем
fz = 2^fx ~ ify) = ax- iay = by + ibx.
Лемма 5. Точки, в которых f'z{z) обращается в нуль, совпадают
с нулями потока v (эти же точки — нули потока v).
Доказательство сразу следует из равенства f'z(z) = ах — гау =
= by + ibx.
До сих пор мы рассматривали гладкие поля. Однако рассужде-
рассуждения можно повторить и для потоков, имеющих изолированные точ-
точки разрыва (они не являются решениями уравнения f'{z) = 0).
Пусть v — несжимаемый, безвихревый поток; т. е. поток вида
grad Re(/(;?)). Как найти интегральные его траектории? Оказыва-
Оказывается, нет необходимости решать соответствующую систему диффе-
дифференциальных уравнений.
Предложение 5. Пусть f = а + ib — комплексно аналитическая
функция, v = grad(a), v = grad(fr). Тогда b — интеграл для поля v,
а — интеграл для v, т. е. интегральные траектории v суть ли-
линии уровня функции 6, интегральные траектории v — линии уровня
функции а.
Доказательство. Ясно, что dbjdw = (v, grad b) = axbx+
+ ctyby = 0 и da/dv = 0. ¦
Рассмотрим примеры.
1) Пусть f(z) = zk,k ^ 2. Ясно, что а = rk cos kip; b = rk smkip.
На рис. 4.46 изображены интегральные траектории grad а при к =
= 4.
2) Пусть f(z)=z~k, к ^ 1, / = r~k(coskip — ismkip). На
рис. 4.47 изображены интегральные траектории grad а при к = 4.
3) Пусть f(z) = \nz. На рис. 4.48 изображены интегральные
траектории v и v. Это — логарифмическая особенность.
4) Рассмотрим функцию Жуковского: f(z) = z+1/z. Интеграль-
Интегральные траектории (для одного потока) см. на рис. 4.49.
Задача. Постройте траектории сопряженного потока.
5) Пусть f(z) = l/a(ln(z + a) — ln(z — а)), а вещественное.
Картина одного потока показана на рис. 4.50.
170
Гл. 4. Гладкие многообразия (примеры)
Задача. Постройте картину сопряженного потока.
Здесь можно проиллюстрировать слияние особенностей. При
а/0 картина потока (рис. 4.50) совпадает с диполем (два заряда,
помещенные в особых точках). При a —>> 0 поле диполя превраща-
превращается в поток полюса первого порядка (рис. 4.51).
6) Рассмотрим полином Pk(z) = Пг=1(^ ~~ ai) c простыми ве-
вещественными корнями. Качественная картина поток показана на
рис. 4.52. Пусть все корни щ стремятся к нулю и полином пре-
превращается в zk. Деформацию потока см. на рис. 4.53.
7) 3 а д а ч а. Используя стереографическую проекцию, пере-
перенести описанные выше потоки на двумерную сферу.
Рис. 4.46
Рис. 4.47
Рис. 4.48
Рис. 4.49
Рис. 4.50
Рис. 4.51
Рис. 4.52
Рис. 4.53
4.5. Классификация двумерных поверхностей
171
Попытки построить на S2 гладкое поле без особенностей конча-
кончаются неудачей. Это не случайно. Дадим интуитивное обоснование
теоремы, что любое гладкое поле на S2 имеет особенность. Допу-
Допустим, что на S2 построено поле без особенностей. Представим S2
D
Рис. 4.54
в виде объединения двух дисков: S2 = D\ U D2, где D\ — диск с
центром в северном полюсе N и малого радиуса, D2 — дополнение
к D\ (рис. 4.54). Так как поле гладкое, то можно считать, что в D\
это поле постоянно, и его векторы в точ-
точках А, В, С, D имеют направления, пока-
показанные на рис. 4.54. Введем на D\ и D2
декартовы координаты. Тогда в D2 поле v
(в этих координатах) имеет вид, показан-
показанный на рис. 4.55. Это можно пояснить еще
и так. Растянем D\ вдоль меридианов так,
чтобы он покрыл всю сферу, за исключени-
исключением 1>2 малого радиуса. Тогда мы и получим
картину, показанную на рис. 4.55. Так как
радиус 1>2 можно считать малым, то интуитивно ясно, что внутри
должна быть особенность; в противном случае картина траекторий
совпала бы с картиной в D\.
4.5. КЛАССИФИКАЦИЯ ДВУМЕРНЫХ ПОВЕРХНОСТЕЙ
Мы начнем с общих определений, затем приведем примеры, а
потом докажем теорему классификации поверхностей.
4.5.1. Многообразия с краем
Расширим понятие гладкого многообразия, включив в него под-
подмножества в Rn, задаваемые системами уравнений и неравенств.
Обозначим через R/f С Rn полупространство, задаваемое так: xn ^
172 Гл. 4. Гладкие многообразия (примеры)
^ 0. Границу R™, задаваемую хп = 0, обозначим через Rq. Пусть
/: R™ —>> R1 — непрерывная функция во всех точках, включая и
граничные. Определим дифференцируемую функцию / так. Если
точка хо Е R+ внутренняя, т. е. хп > 0, то определение дифферен-
цируемости обычное. Если же xq Е Rq, т-е- хП — 0? то скажем,
что / дифференцируема в точке xq, если справедливо разложение
п
f(x) = f(x0) + J2 ai(xl - хг0) + o(x - ж0),
г=1
где Цтж^1о о(ж — хо)/\(х - хо)\ =0, жп > 0. Тогда щ = д//дхг(х0)
при г = 1,2, ...,п - 1 и an = lim/l_)>+o(l//i)(/(a;J, ... ,Жо~\ж(? +
+ /г) — /(жд, ..., Жд)). Последний предел уместно назвать частной
производной df /дхп функции / в точке жо. Аналогично определя-
определяется класс функций гладкости Сг.
Определение 1. Метрическое пространство М называется глад-
гладким многообразием с краем, если существует такой атлас карт {Ua}
и координатные гомеоморфизмы сра: Ua —>> Va С R^, где Va — от-
открытое множество в R™, что функции замены координат
Р/ЗРа1 : УаР = Ч>а(Ца П fZ/з) ^ 1^а = ^/з(^« П Up)
— гладкие функции.
Линейные координаты (ж1, ... ,жп) в R^ индуцируют локаль-
локальные координаты в карте Ua: xka(P) = xk(<pa(P)). Тогда в любой
локальной системе координат имеем х%(Р) ^ 0. Точка Р Е М на-
называется внутренней точкой, если х%(Р) > 0. Точка Р называется
граничной, если х^(Р) = 0.
Итак, многообразие с краем характеризуется тем, что существу-
существует такой атлас карт {Ua} с локальными координатами (ж^, ..., ж^),
что для любой карты выполнено строгое неравенство ж™ > 0 во
внутренних точках и равенство ж™ = 0 в граничных точках. Если
карта С/а не содержит граничных точек, то условие ж™ > 0 можно
без ограничения общности отбросить. Множество дМ граничных
точек — гладкое многообразие на единицу меньшей размерности.
В самом деле, в качестве атласа карт следует взять пересечение
Wa = дМ nUa, а в качестве координат — первые п — 1 координат
ж^, ..., х^~1 карты Ua. Координатные гомеоморфизмы сра (см. вы-
выше) отображают Wa гомеоморфно на Va П Rq~\ а функции заме-
замены остаются гладкими как ограничения функций замены координат
многообразия М.
Если дМ = 0, то приходим к прежнему понятию многообразия,
которое отныне будем называть замкнутым многообразием.
4.5. Классификация двумерных поверхностей 173
Пример 1. Рассмотрим шар Dn, задаваемый неравенством
^^=1(жгJ ^ 1 в Rn. Это — многообразие с краем Sn~1.
Пример 2. Пусть /: Rn —>> R^ — вектор-функция, удовлет-
удовлетворяющая условиям теоремы о неявных функциях, т. е. во всех
точках Р Е М = {f(P) = 0} дифференциал df имеет максимально
возможный ранг. Рассмотрим систему
f1(x\...,xn) = 0,
fk-1(x1,...,xn)=0,
Jk(x\...,xn)>0,
и пусть М' — множество решений этой системы.
Если в каждой точке Р Е М' ранг \\dfl/dxs\\, 1 ^ г ^ k — 1; 1 ^
^ s ^ п, равен к — 1, то М' — многообразие с краем дМ' = М. В
самом деле, в точках Р Е М' \ М существует атлас карт по тео-
теореме о неявной функции для системы f1 = 0, ..., fk~l = 0. Рас-
Рассмотрим Р Е М. Пусть Nf — множество решений системы f1 =
= 0, ..., fk~l = 0 в некоторой окрестности точки Р. Тогда fk мож-
можно рассматривать как функцию на N'. Ясно, что дифференциал fk
на N' отличен от нуля. Следовательно, по теореме из гл. 3 разд. 5 N'
диффеоморфно прямому произведению интервала (—?,?) на мно-
многообразие N, являющееся пересечением М с окрестностью точки
Р: Nf = N х (—?,?). Поэтому неравенство /n ^ 0 выделяет карту
вида N х [0, б), в которой в качестве координат можно взять набор
(ж1, ..., хп~к) на многообразии N и функцию fk > 0.
Пример 3. В предыдущем примере видно, что декартово
произведение многообразия М с краем дМ на замкнутое много-
многообразие N является многообразием М х N с краем дМ х N.
4.5.2. Ориентируемые многообразия
Определение 2. Многообразие (с краем) М называется ориен-
ориентируемым, если существует такой атлас карт {Ua}, что якобиан
функций перехода от одной локальной системы координат к дру-
другой положителен. Будем говорить также, что атлас карт {Ua}, у
которого все якобианы функций перехода положительны, задает на
многообразии М ориентацию, а сам атлас карт назовем ориенти-
ориентированным атласом карт. Два атласа карт {Ua} и {и'Л задают оди-
одинаковую ориентацию, если объединение атласов {Ua} U {и'Л снова
является ориентированным атласом карт.
174 Гл. 4. Гладкие многообразия (примеры)
Всякий атлас карт на ориентируемом многообразии можно пре-
превратить в ориентированный атлас карт путем изменения локальных
координат в каждой карте (докажите!).
Предложение 1. На связном ориентированном многообразии
существуют ровно две различные ориентации, причем любая карта
задает локальную ориентацию, совпадающую с одной из ориента-
ориентации М.
Доказательство предоставляется читателю.
Существует другое представление об ориентации М. Скажем,
что базис (ei, ... ,en) Е Rn задает ориентацию евклидова прост-
пространства. Два базиса считаются одинаково ориентированными, если
детерминант матрицы перехода положителен. Тогда Rn приобре-
приобретает ровно две различных ориентации. Задать ориентацию М —
значит задать ориентацию касательного пространства ТрМ в каж-
каждой точке Р Е М. Пусть (р: [0,1] —>> М — непрерывный путь. Для
любого базиса в начальной точке (ei, ..., en) E Т^^М построим
непрерывное семейство базисов (ei(t), ... ,en(t)) E Т^^М, начи-
начинающееся с базиса (ei, ..., еп). Любые два таких семейства задают
в ТуЫлМ одинаковую ориентацию. Если М ориентируемо, то ори-
ориентация в конечной точке (рA) пути (р не зависит от выбора пути.
Таким образом, задать ориентацию на М — значит задать ориента-
ориентацию касательных пространств ТрМ так, чтобы они были согласо-
согласованы по любому непрерывному пути, соединяющему пары точек.
(Докажите эквивалентность двух определений ориентируемости.)
Теорема 1. Если многообразие с краем М ориентируемо, то
край дМ тоже является ориентируемым многообразием.
Доказательство. Пусть {Ua, (xla, ... ,х\\)} — атлас на М.
Последняя координата х\\ в любой карте является неотрицательной
функцией. Поскольку М ориентируемо, то, меняя в каждой кар-
карте Uа координату х1а на —х1а, если это необходимо, можно считать,
что якобиан замены переменных положителен в каждом пересе-
пересечении карт Uap = Ua П Up. В качестве карт на дМ, как и раньше,
возьмем пересечения Wa = UaH дМ, а в качестве локальных коор-
координат — первые п—1 координат, т. е. (у*,..., у^~1) = {х1а,..., х^~1).
Покажем, что det 11 дуга/ду111 > 0 в произвольной точке Р Е Wa П Wp.
Рассмотрим в объемлющем многообразии М матрицу Якоби
д(ха)/д(хр) замены координат в точке Р.
Поскольку на пересечении Wa П Wp имеем: ж™ = хпо = О,
то дх^/дхгп =0, l^i^n — 1. Поэтому det(d(xa)/d(xp)) =
= det(d(ya)/d(yp)) х дх^/дх7^ > 0. Следовательно, дх^/дх7^ ф 0.
Так как х\\ > 0 в пересечении Ua П Up, то dx\\jдхпЛР) > 0. Итак,
det(dya/dyp(P))>0. Ж
4.5. Классификация двумерных поверхностей
175
Определение 3. Пусть М — ориентированное многообразие с
краем, {[/q, (ж^, . ..,ж™}), ж™ ^ 0, — атлас, задающий ориента-
ориентацию на М. Ориентация на дМ, задаваемая атласом Wa = UaP\ дМ,
(у\, ..., Уа~г) = (^, ..., ж^), называется ориентацией, согласо-
согласованной с ориентацией на М.
Пример 4. Рассмотрим диск D2 С R2. Для задания ориен-
ориентации на диске достаточно в одной точке фиксировать базис. Если
точку Р выбрать на границе, то базис можно выбрать так, чтобы
первый вектор ei касался края, а второй в2 указывал направление
внутрь диска. Тогда ориентация края, определяемая ei, согласована
с ориентацией D2.
Пример 5. Рассмотрим лист Мебиуса, представленный как
квадрат с отождествленными противоположными сторонами в раз-
разных направлениях (рис. 4.56). Фиксировав базис (ei, в2) в точке А,
Рис. 4.56
построим непрерывное семейство базисов вдоль кривой ABA. В
конце пути базис изменит ориентацию, т. е. лист Мебиуса неориен-
неориентируем. Однако край — ориентируемая окружность.
4.5.3. Классификация двумерных многообразий
Переходим к описанию двумерных многообразий. Простейшее
из них — сфера S2 — диффеоморфна СР1. Мы знакомы с то-
тором Т2 = S1 х S1, допускающим также следующее представле-
представление. Пусть б = Z(a) 0 Z(b) — абелева группа, образующие ко-
которой а и b представлены сдвигами на R2: а(х,у) = (ж + 1,у);
Ь(ж, у) = (ж, у + 1). Рассмотрев факторпространство R2/Z 0 Z, по-
получаем Т2. Квадрат 0^ж^1, O^y^l называется фундамен-
фундаментальной областью. Ее роль в том, что, применяя к ней элементы б,
мы можем «замостить» всю плоскость (рис. 4.57).
Рассмотрим на R2(x, у) другую группу б (а, 6), образующие ко-
которой задаются на R2 так: Ь(х,у) = (ж,у + 1); а(х,у) = A — ж,у + 1).
(Найдите соотношения между а и Ь.) Фундаментальная область по-
176
Гл. 4. Гладкие многообразия (примеры)
казана на рис. 4.58. Стрелками показаны отождествления сторон в
соответствии с действием группы. Поверхность, возникающая по-
после факторизации, показана на рис. 4.58 и называется бутылкой
Клейна. Тор и бутылка Клейна — гладкие многообразия; тор — ори-
ориентируемое, а бутылка Клейна — неориентируемое. (Проверьте!)
УI
@,1)
A,0)
ъ = ъ
Рис. 4.57
Рис. 4.58
Рассмотрим склейку на границе квадрата, показанную на рис.
4.59. Так как квадрат гомеоморфен диску, то мы получили проек-
проективную плоскость. Попробуем изобразить ее в R3, выполнив тре-
требуемые склейки. На рис. 4.60 показана склейка, приводящая к мо-
модели RP2 в R3. Она не является погруженным подмногообразием,
поскольку есть две особые точки А и В. Тем не менее погруже-
погружение RP2 в R3 все же существует. Об этом ниже.
Лемма 1. RP2 гомеоморфно склейке по общей границе диска
и листа Мебиуса.
Доказательство на рис. 4.61.
4.5. Классификация двумерных поверхностей
:$ЩУ:
а а
b
II?
Ъ 1
Рис. 4.59
1
j
a
b
• •* *.*•*! •
Рис. 4.61
Эквивалентная формулировка: если из RP2 удалить диск, то
останется лист Мебиуса.
Рассмотрим Т2 и RP2 с иной точки зрения. Применим к ним го-
гомеоморфизм, показанный на рис. 4.62. Тор получается из S2 выбра-
выбрасыванием двух дисков и приклейкой вместо них ручки (рис. 4.62),
гомеоморфной S1 x D1. Для получения RP2 следует выбросить
из S2 один диск и приклеить вместо него лист Мебиуса (рис. 4.62).
Эту операцию называют приклейкой пленки Мебиуса.
Рассмотрим сферу с двумя ручками и сферу с двумя пленками
Мебиуса. Какие получим поверхности? Рассмотрим восьмиуголь-
восьмиугольник (рис. 4.63), на границе которого расставлены буквы а, 6, с, d, об-
178
Гл. 4. Гладкие многообразия (примеры)
Ручка
Цилиндр 51 х D2
(D1 — отрезок)
Рис. 4.62
:;Фундаменталь- л,_
тный многоуголь-
Рис. 4.63
4.5. Классификация двумерных поверхностей
179
разующие при последовательном обходе (по часовой стрелке) слово
W = aba~1b~1cdc~1d~1. Выполним склейки (см. рис. 4.63). Полу-
Полученное двумерное многообразие называется «кренделем»; оно го-
меоморфно сфере с двумя ручками: S2 + 2 г (через г условно обо-
обозначаем ручку).
Лемма 2. Бутылка Клейна гомеоморфна сфере, заклеенной дву-
двумя пленками Мебиуса.
Доказательство см. на рис. 4.64. Склейка двух листов Мебиуса
по их общей границе эквивалентна вклейке этих листов в сферу с
двумя дырками (заклейка цилиндра двумя пленками Мебиуса). ¦
ii-'U i
3 b
Рис. 4.64
Предъявим погружение RP2 в R3. Рассмотрим погружение ли-
листа Мебиуса в R3 в виде половинки бутылки Клейна (см. рис. 4.65).
Поясним, что разрезав бутылку так, как показано на рис. 4.65, полу-
получаем два листа Мебиуса (см. лемму 2). В силу леммы 1 для получе-
Рис. 4.65
ния RP2 достаточно заклеить лист Мебиуса диском. Осуществим
эту заклейку в R3 так, чтобы получилось погружение RP2 —>> R3.
Поместим границу листа Мебиуса в плоскость (см. рис. 4.66) и на-
180
Гл. 4. Гладкие многообразия (примеры)
чнем перемещать эту плоскость параллельно самой себе по направ-
направлению к зрителю. При этом будем в ней гладко деформировать гра-
граничную кривую листа Мебиуса (рис. 4.66). Автоматически достра-
Рис. 4.66
иваем исходное погружение листа Мебиуса поверхностью, замета-
заметаемой деформирующейся окружностью. В последний момент време-
времени окружность становится несамопересекающейся, и мы заклеива-
заклеиваем ее диском, что дает искомое погружение RP2 в R3. Мы полу-
получили два способа построения двумерных многообразий (рис. 4.67):
1) к S2 нужно приклеить к ручек;
2) к S2 нужно приклеить s пленок Мебиуса.
Рис. 4.67
Получаем две серии многообразий: М2к = S2 + кг (ориенти-
(ориентируемые), M2=s = S2 + s/i (неориентируемые). Можно приклеивать
к S2 одновременно как ручки, так и пленки Мебиуса. Однако но-
новых многообразий не получается. Оказывается, ручка в присут-
присутствии пленки Мебиуса превращается в две пленки Мебиуса (мы
докажем это позже). Следовательно, S2+ кг + sfi = S2+ Bk + s)/i,
т. е. многообразия смешанного типа гомеоморфны неориентируе-
мым многообразиям.
4.5. Классификация двумерных поверхностей 181
Как было показано, все М2 гладко вкладываются в R3. Дока-
Докажем, что неориентируемые многообразия гладко погружаются в R3.
Мы показали это для RP2 = S2 + /i. Из рис. 4.68 следует, что М2
есть склейка (так называемая связная сумма) нескольких экземпля-
экземпляров RP2. Погружая каждый из них в R3, получаем погружение М2
bR3.
Рис. 4.68
Теорема 2 (теорема классификации). Любое гладкое, компакт-
компактное, связное, замкнутое двумерное многообразие гомеоморфно либо
сфере S2 с к ручками, либо сфере S2 с s пленками Мебиуса.
Доказательство. Разобьем его на несколько этапов. Бу-
Будем говорить, что М2 триангулировано, если на нем отмечено ко-
конечное число точек Pi, ...,P/v, соединенных конечным числом
гладких дуг ja так, что:
1) каждая дуга 7г начинается в некоторой вершине Ра и закан-
заканчивается в некоторой вершине Рр, Рр ^ Ра; причем на ней нет дру-
других Р7, кроме Ра и Рр;
2) совокупность этих дуг разбивает М2 на конечное число за-
замкнутых треугольников с вершинами в точках из множества {Ра}'->
3) любые два таких треугольника Ai и А2 либо не пересекают-
пересекаются, либо пересекаются по одной общей вершине, либо пересекаются
по одной общей стороне (т. е. по какому-то из отрезков 7г)-
Задача. Постройте триангуляции тора, проективной плос-
плоскости и бутылки Клейна.
Одно и то же многообразие допускает бесконечно много триан-
триангуляции.
Лемма 3. Любое двумерное, гладкое, компактное, связное, за-
замкнутое М2 допускает конечную триангуляцию.
Доказательство будет дано в гл. 5.
Рассмотрим триангуляцию М2. Каждое ребро каждого тре-
треугольника отметим какой-либо буквой. Будем считать, что разные
отрезки занумерованы разными буквами. На каждой стороне про-
182
Гл. 4. Гладкие многообразия (примеры)
извольным образом поставим стрелку (ориентацию). Разрежем М2
вдоль всех отрезков. Тогда М2 рассыпается на конечное множество
треугольников, у которых на каждой стороне стоит буква и стрелка.
Разрезая М2 вдоль какого-то отрезка, мы ставим на обоих берегах
разреза ту букву и ту стрелку, которые на нем были (рис. 4.69).
Рис. 4.69
Наша цель — склеить обратно все треугольники, но так, чтобы
получился плоский многоугольник. Возьмем какой-то треугольник
и обозначим его Ai. Берем любую его сторону с буквой и ориен-
ориентацией. Так как каждая буква входит в общий набор сторон тре-
треугольников в точности два раза (напомним, что М2 замкнуто, т. е.
не имеет края), то найдется сторона с той же буквой на другом тре-
треугольнике (обозначим его А2). Эта буква найдется на треугольнике,
отличном от Ai, так как в противном случае исходное разбиение не
было бы триангуляцией. Склеим Ai и А2 по этой общей стороне,
совмещая стрелки. Получается плоская фигура, на границе кото-
которой расставлены буквы со стрелками. Снова берем какую-то букву;
снова найдется Аз, на одной из сторон которого стоит та же буква.
Приклеиваем Аз и т. д. Процесс закончится, когда все треугольники
исчерпаются.
Мы подклеим к плоской фигуре все треугольники, так как если
бы в какой-то момент оказалось, что никакая граничная буква по-
получающейся области не появляется среди букв, оставшихся на еще
неприсоединенных треугольниках, то, склеив все буквы-дубликаты,
вернемся к исходному М2 (склейка ликвидирует разрезы). Но то-
тогда М2 оказалось бы несвязным, что противоречит условию. Итак,
получился плоский многоугольник W.
1) Плоский многоугольник W определен неоднозначно, даже
при фиксированной триангуляции. 2) Его граница 8W состоит из
четного числа ребер. 3) На каждом из них стоит буква и стрелка;
каждая буква встречается ровно два раза.
4.5. Классификация двумерных поверхностей 183
Фиксируем на W ориентацию и, обходя границу (начиная с про-
произвольной вершины), последовательно выпишем все буквы. Если
направление обхода совпадает со стрелкой, отвечающей букве, то
буква войдет в слово в степени +1; в про-
противном случае запишем букву в степени
— 1. После обхода получим слово W = а^1 х
х а^22 ... ae{k, где еа = =Ы. Это слово одно-
однозначно задает многоугольник W (рис. 4.70).
Мы сопоставили каждому М2 (в неко-
некоторой триангуляции) СЛОВО W (неОДНО- а v;::...;•;• ттг..;.¦••/а3
значно). Слово W можно рассматривать "' 'Z ' ""
как код М2.
Лемма 4. Слово W можно перестроить
так (с помощью гомеоморфизма М2 и новой системы разрезов), что
все вершины многоугольника W склеятся в одну точку.
Доказательство. Разобьем вершины W на классы эк-
эквивалентных вершин. Назовем две вершины эквивалентными, если
они склеиваются в одну точку при отождествлении ребер на dW.
Если класс эквивалентных вершин только один, то все доказано.
Пусть имеются не менее двух классов эквивалентных вершин: {Р}
и {Q}. Можно считать, что существует ребро а такое, что его нача-
начало принадлежит {Р}, а конец {Q}. Перестроим W как показано на
рис. 4.71. Получим многоугольник W1\ у которого в классе {Р} ста-
стало на одну вершину меньше, а в {Q} — на одну вершину больше.
Будем уменьшать таким способом число вершин в {Р}, пока в {Р}
не останется одна вершина. На последнем шаге, когда в {Р} — одна
вершина, соседние ребра имеют вид а, а~1 (см. рис. 4.72). ¦
Лемма 5. Пусть W=Abaa~1cB. Существуют гомеоморфизм М2
и новая система разрезов, переводящие W в слово АЪсВ.
Доказательство см. на рис. 4.72. Здесь через А и В обозначены
части W, не меняющиеся при перестройке.
Лемма 6. Если W = ВаАаС, то существуют гомеоморфизм М2
и новая система разрезов, такие, что W переходит в W'= BA~laaC.
Доказательство см. на рис. 4.73.
Лемма 7. Если W = AaRbPa~1Qb~1B, то существует новая
система разрезов, переводящая W в W' = AQPaba~1b~1RB.
Доказательство см. на рис. 4.74.
Лемма 8. Если слово W (где уже выполнены все предыдущие
операции) содержит пару букв а и a~l: W = АаВа~1С, причем
В т^ 0, то существует пара 6, b~l такая, что W = AaDbQa~1Rb~1T,
где В = DbQ, С = Rb~lT, т. е. для любой пары а, а~1 (где В ^ 0)
существует «зацепленная» с ней пара 6, b~l.
184
Гл. 4. Гладкие многообразия (примеры)
с —>- a
(переобозначить)
Рис. 4.73
Рис. 4.72
q d —>- а, с —>- 6
(переобозначить)
Рис. 4.74
Доказательство. Допустим противное: пусть для лю-
любой Ъ Е В соответствующая ей буква Ье (где е = =Ы) попадает в
же самое слово В. Выполним склейку W по а, см. рис. 4.75. Все
вершины W разбиваются по крайней мере на два класса неэквива-
неэквивалентных вершин. Так как над W выполнена операция леммы 4, то
4.5. Классификация двумерных поверхностей
185
Рис. 4.75
получили противоречие. Осталось доказать, что е = — 1. Если бы
е = +1, то получили бы противо-
противоречие с видом W из леммы 6. ¦ ._. ^Л a
Итак, W приведено к произве-
произведению выражений вида aba~1b~1
(коммутаторы) и ее (квадраты).
Осталось разобрать случай, когда в слове встречаются как комму-
коммутаторы, так и квадраты.
Лемма 9. Если W = Aaba~1b~1BccQ, то существует новая си-
система разрезов, приводящая W к виду
W1 = Mp2q2d2N = Aabd-lB-lbad~lQ.
Доказательство см. на рис. 4.76. Получается слово W = Aabd~1x
х B~1bad~1Q. Осталось собрать вместе три квадрата, что можно
сделать леммой 6. ¦
В
Рис. 4.76
Тем самым, многообразия смешанного типа гомеоморфны не-
ориентируемым многообразиям.
Комбинируя доказанные леммы, получаем:
Лемма 10. Пусть W— один из кодов М2. Тогда существует но-
новая система разрезов, приводящая VKk одному из следующих видов:
\)W = aa~1;
2)W = aibia^b^1... agbga~lb~l\
3) W = cicic2c2...ckck.
Какие многообразия отвечают этим трем типам? В случае 1) яс-
ясно, что М2 гомеоморфно сфере (рис. 4.77). В случае 2) М2 предста-
представляется в виде S2 с g ручками. Число g называется родом поверх-
поверхности. В случае 3) М2 гомеоморфно сфере с к пленками Мебиуса.
Теорема 2 доказана. ¦
Существуют и другие удобные представления М2.
Теорема 3. Любое гладкое, компактное, связное, замкнутое,
двумерное многообразие М2 молено представить в виде
W =
• • •aN_1a]y
186 Гл. 4. Гладкие многообразия (примеры)
а\
Рис. 4.77
где е = — 1 тогда и только тогда, когда М2 = М2 (ориентируемо),
в этом случае N четно и е = +1 (N — любое) тогда и только
тогда, когда М2 = М2 (неориентируемо).
Доказательство несложно и предоставляется читателю.
Мы не располагаем пока аппаратом для доказательства того,
что многообразия М2 не гомеоморфны друг другу при д\ ф д2, и
что М2 не гомеоморфны при /ii ф {12, а также, что М2 и М2 не
гомеоморфны. Мы сообщаем эти факты без доказательства.
4.6. ДВУМЕРНЫЕ МНОГООБРАЗИЯ КАК РИМАНОВЫ
ПОВЕРХНОСТИ АЛГЕБРАИЧЕСКИХ ФУНКЦИЙ
Отнесем Сп к координатам z1, ..., zn, где za = xa + iya. Для
п = 1 имеем
дх ду J' 5^ 2 5 9
Отождествим С™!^} и R271!^^,?/^}. Тогда любой полином
f(zl, ... ,zn) можно записать в виде: д(х1^у1; ... ;хп,уп). Обрат-
Обратно: любой полином д(х1^у1; ... ;хп,уп) можно записать как f(zl,
z1;...;zn,zn).
Лемма 1. Полином f(zl,zl\ .. .;zn,zn) не зависит от za тогда
и только тогда, когда df /dza = 0.
Доказательство. В одну сторону утверждение очевид-
очевидно. Проверим, что если df/dza = 0, то f(zl, z1; ...; zn, zn) не со-
содержит переменной za. Допустим противное и представим / в виде
полинома по степеням переменной za: f = uo • (za)p + ..., где ко-
коэффициенты о;, ... не зависят от za. Пусть р — максимальная сте-
степень za. Тогда df /dza = р • ou(za)p~1 ..., что противоречит усло-
условию. ¦
Напомним, что функция f(zl,zl; ...; zn^ zn) называется анали-
аналитической, если все df /dza=0. При п = 1 имеем /(ж, у) = и(х, у) +
4.6. Римановы поверхности алгебраических функций 187
+ iv(x,y). Условие df/dz = 0 эквивалентно соотношениям
du dv ди dv
дх ду' ду дх
Нам потребуется комплексный аналог теоремы о неявной функ-
функции. Доказательство см. в теории функций комплексного перемен-
переменного.
Предложение 1. Пусть f(z,w) — комплексно аналитическая
функция на C2(z,w). Рассмотрим уравнение f(z,w) = 0 относи-
относительно переменной w, и пусть в некоторой точке Pq Е {/ = 0}
выполнено соотношение df/dw ^ 0.
Тогда существует открытая окрестность U(Pq) точки Pq в
С2, такая, что в ней существует функция w = g(z) со свойствами:
1) 9{z) ~ комплексно аналитическая;
2) функция w = g(z) — решение уравнения f(z,w) = 0 в окрест-
окрестности U(Po), т.е. f(z,g(z)) = 0 в U(Po), и это решение единст-
единственно в U(Po).
Геометрически удобно рассматривать решение w = g(z) в виде
графика (рис. 4.78).
Определение 1. Пусть f(z, w) — полином по переменным z,wb
С2, и пусть уравнение f(z, w) = 0 разрешимо относительно w в не-
некоторой открытой окрестности U(Pq) (например, пусть df/dw ^ 0).
Тогда функция w = g(z), являющаяся
решением этого уравнения, называет-
называется алгебраической, а совокупность то-
точек (z,w) таких, что f(z,w) =0 (т.е.
нулевая поверхность уровня функции
f(z,w)), называется римановой поверх-
поверхностью для алгебраической функции
w = g(z) (в тех точках, где определена
w = g(z)).
Если в точке Pq имеем df/dz ф 0,
то локально существует решение z =
= <p(w), т.е. уравнение / = 0 можно
разрешить относительно z. При этом <p(w) удовлетворяет услови-
условиям 1), 2) предложения 1. Итак, условие локальной разрешимости
уравнения f(z, w) = 0 имеет вид grad / = (df/dz, df/dw) ^ 0, где
grad/ — комплексный градиент функции /.
Запишем полином f(z,w) в общем виде, разложив его, напри-
например, по степеням z: f = ao(w)zn + a\(w)zn~l + ... Здесь коэффи-
коэффициенты dk(w) — полиномы от w. Отметим, что римановы поверх-
поверхности алгебраических функций некомпактны и «уходят на беско-
188 Гл. 4. Гладкие многообразия (примеры)
нечность» в С2. В самом деле, для любой точки wq возникает урав-
уравнение ao(wo)zn + ai(wo)zn~1... = 0 относительно z. По известной
теореме алгебры оно всегда имеет комплексный корень zq.
Так как / — полином, то можно перейти от неоднородных ко-
координат в СР2 к однородным координатам ж1, ж2, ж3, положив z =
= хг/х3, w = х2/х3. Тогда f(z,w) = ^2apqwpzq превратится в од-
однородный полином ^2 Q'Pq(x1)q(x2)p(x3)s~^q\ где s — наибольшая
степень мономов wpzq. Так можно «компактифицировать» римано-
ву поверхность, перенеся ее из С2 в СР2. Поскольку уравнение
д(х1^х2^х3) = 0 на СР2 полиномиально, то эта поверхность уров-
уровня в СР3 компактна. Мы не будем вдаваться в детали этой компак-
тификации, так как они нам не потребуются.
Изучим топологию римановых поверхностей. С вещественной
точки зрения уравнение f(z,w) = 0 распадается на два: Re(/) =
= 0 и Im(/) = 0 в R4, т. е. в точках общего положения множество
/ = 0 — двумерная вещественная поверхность.
Теорема 1. Пусть полином f(z,w) имеет вид f = wq — Pn(z),
где полином Pn(z) не имеет кратных корней. Тогда уравнение
f(z,w) = 0 определяет гладкое двумерное (над R) подмногообра-
подмногообразие в C2(z,w) (одномерную комплексную алгебраическую кривую).
Доказательство. Пусть точка Pq = (zq^wq) принадле-
принадлежит множеству {/ = 0} и wq ф 0. Тогда df/dw\p0 = qw^1 ф 0,
т. е. по теореме о неявной функции поверхность {/ = 0} являет-
является в некоторой окрестности Pq гладким двумерным подмногооб-
подмногообразием — графиком алгебраической функции w = g(z). Решение
w = g(z) в нашем случае имеет вид w = $/Pn(z). Осталось рас-
рассмотреть точки Pq = (^о, 0).
Но grad/(Po) = (—dPn(zo)/dz;O) Ф 0. В самом деле, если бы
dPn(zo)/dz = 0, то в точке (^о^О) мы имели бы Pn(zo) = 0 и
dPn(zo)Idz = 0. Отсюда zq — кратный корень Pn(z), что проти-
противоречит условию. Итак, grad/(Po) Ф 0 во всех точках поверхности
{/ = 0}. Осталось применить теорему о неявной функции. ¦
Опишем основные свойства алгебраических функций.
1) Алгебраические функции обычно многозначны, т. е. почти
всем значениям аргумента z отвечает несколько значений функции
w = g(z). Пример: w = л/z. Здесь каждому zq ф 0 отвечают ровно
два значения w = ±y^o.
Рассмотрим проекцию тг: С2 —>> С1(^), it(z,w) = B,0). Прооб-
Прообразом любой точки z при проекции тг: Г —>> Cl{z) являются в точ-
точности все значения функции w = g(z) в точке z (рис. 4.79). По-
Поскольку / — полином, то образом поверхности Г при проекции яв-
является вся плоскость С1 (z) (см. выше).
4.6. Римановы поверхности алгебраических функций
189
Рис. 4.79
Заменим переменную: запишем w = g(z) в виде w = р(Р), где
Р — переменная точка на поверхности Г (рис. 4.79). Ясно, что
w = р(Р) — однозначная функция на римановой поверхности. Тем
самым, алгебраическая функция ста-
стала однозначной, но за это «заплаче-
«заплачено» усложнением области определения
функции: вместо С1 (z) теперь аргу-
аргумент пробегает поверхность Г — дву-
двумерное многообразие.
Итак, риманова поверхность Г =
= {/ = 0} алгебраической функции
w = g(z) является областью однознач-
однозначности этой функции.
2) Так как для каждого zq E С1 (z)
существуют значения w\ = g(zo) (их
число равно числу разных корней полиномиального уравнения
f(zo,w) = 0), то в открытой окрестности каждого zq возникает на-
набор непрерывных функций w = {(fi(z)}, 1 ^ г ^ к, где к — степень
полинома ao(z)wk + a\(z)wk~l + ... -\- ak(z) = f(z,w) no перемен-
переменной w. Каждая из них описывает изменение какого-то одного корня
уравнения f(z,w) = 0 при изменении z. Функции <fi(z) продолжа-
продолжаются на всю плоскость. В некоторых точках они могут совпадать и
даже «меняться местами».
Функции (fi(z) называются ветвями алгебраической функции
w = g(z). Над каждым zq «висят» значения функции w = g(z), яв-
являющиеся корнями уравнения
/(го, w) = ao(zo)wk + a1(z0)wk~1 + ... + ak(z0) = 0.
Из теоремы о неявной функции следует, что каждая ветвь опре-
определяет (почти во всех точках) гладкое, даже комплексно аналити-
аналитическое, подмногообразие в С2. Оно называется листом римановой
поверхности.
3) Сопоставим точке zq число k(zo), равное числу различных
корней уравнения f(zo,w) = 0. Ясно, что k(zo) ^ к. Если все корни
уравнения f(zo,w) = 0 простые, то k(zo) = к. Если же есть крат-
кратные корни, то k(zo) < к. В точках zq, где k(zo) < к, некоторые ветви
<Pi(z) функции w = g(z) сливаются вместе (рис. 4.80).
Пусть f(z,w) = wq — Pn(z), где полином Pn(z) не имеет крат-
кратных корней. В силу теоремы 1 поверхность Г = {/ = 0} — ком-
комплексно аналитическое подмногообразие в С2. Точки zo, для кото-
которых k(zo) < к, назовем точками ветвления алгебраической функ-
190
Гл. 4. Гладкие многообразия (примеры)
щи w = g(z).B случае w = ^/Pn(z) точками ветвления в конечной
части плоскости С1 (z) являются корни полинома Pn(z).
4) В точках ветвления сливаются несколько ветвей функции w =
= g(z). Так как точка ветвления изолирована, то ее можно считать
центром малого диска D2, где нет других точек ветвления. Рассмо-
Рассмотрим окружность с центром в zq, расположенную в D2 и обойдем
ее. Тогда ветви функции g(z), вообще говоря, меняются местами.
Разберем пример. Пусть / = w2 — z. Тогда w = g(z) = л/z. Яс-
Ясно, что (fi(z) = +л/г, (f2{z) — — \fz- Пусть z = гещ'. Точка 0 Е
Е С1 (z) — единственная точка ветвления в конечной части плос-
плоскости. При обходе вокруг 0 ветви (pi(z) и (f2(z) меняются местами:
/1 ) /1
Условную схему см. на рис. 4.81. На самой римановой поверх-
поверхности особых точек нет, так как Г — гладкое подмногообразие в С2.
k(zo) = k
Точка v J
ветвления k(z'o) <k
Рис. 4.80
Рис. 4.81
Изучим топологические свойства римановых поверхностей. Ог-
Ограничимся случаем f(z,w) = w2 — Pn(z), где Pn(z) не имеет крат-
кратных корней. Поверхность Г задается в С2 как график w = g(z) =
= y/Pn(z). Изучим поведение Г «на бесконечности». Имеются раз-
разные способы придать этому понятию содержательный смысл. Опи-
Опишем так называемую компактификацию, позволяющую превращать
некомпактные открытые многообразия в компактные многообразия,
«присоединяя край». Известно несколько способов компактифика-
ции.
Сначала пополним комплексную прямую С1 (z) бесконечно уда-
удаленной точкой. В результате получим СР1. В самом деле, доста-
достаточно рассмотреть СР1 как множество точек (Xz1, \z2), где А ф 0
и взять отображение
4.6. Римановы поверхности алгебраических функций 191
h: (\z\\z2) ^ — = — eS2 = C\z)Uoo.
Xzz zz
Напомним, что пополненная плоскость отождествляется со сфе-
сферой при помощи стереографической проекции.
Теперь компактифицируем С2. Рассмотрим СР2 с однородны-
однородными координатами (ж1, ж2, ж3). Тогда СР2 покрывается тремя кар-
картами, гомеоморфными С2. Возьмем одну из них, например, As =
= {\(хг, х2, х3), х3 ф 0}. Положим
a: As -> C2(z,w), где z=—,ги = -т.
х6 х6
Тогда а — гомеоморфизм между картой Аз и С2. Положим СР1 =
= S2 = {А(ж\ж2,0)}. Тогда СР2 = AUS2. Итак, С2 компакти-
компактифицируется, превращается в СР2, путем присоединения сферы S2.
Что происходит с римановой поверхностью Г, вложенной в С2?
Она также превращается в компактное пространство Г. Докажите,
что в случае простых корней Г — гладкое многообразие.
Вообще, пусть g(z,w) — многочлен степени п по совокупно-
совокупности переменных. При подстановке z = х1 /х3, w = х2/х3 получаем
g(z,w) = Qn(x1^x2^x3)/(x3)n, где Qn — однородный многочлен.
На проективную плоскость СР2 уравнение g(z,w) = 0 продолжа-
продолжается в виде Qn(x1^x2^x3) = 0. Точки, где х3 = 0 называются «бес-
«бесконечно удаленными» точками римановой поверхности. В неосо-
неособом случае однородное уравнение задает двумерное компактное
подмногообразие.
Например, в нашем случае, при п = 1 имеем
2
w —
/„2\z T1
[_) __-о (х2J-х1х3-
\Х6) X6
Пересечение Г с бесконечно удаленной сферой S2 — одна точ-
точка, имеющая в карте А\ = {А(ж1,ж2,ж3),ж1 ф 0} координаты а =
= х2/х1 = 0, /3 = х3/х1 = 0. В окрестности этой точки сделаем за-
замену а = х2 /х1, C = х3 /х1, что дает
Ясно, что это уравнение определяет гладкое подмногообразие в
окрестности точки а = /3 = 0, что и доказывает гладкость поверх-
поверхности Г в бесконечно удаленной точке.
Изучим точки ветвления функции w = y/Pn(z), определенной
уже на всей сфере S2 = СР1.
192
Гл. 4. Гладкие многообразия (примеры)
Предложение 2. Пусть w2 — Pn(z) = 0, где Pn(z) имеет толь-
только простые корни ах, ..., ап. Тогда все эти точки — точки ветвле-
ветвления w = y/Pn(z), расположенные в конечной части плоскости. На
сфере S2 к ним добавляется еще одна точка ветвления — беско-
бесконечность, в том случае, когда степень Рп нечетна. Для Рп четной
степени точка оо не есть точка ветвления. Других точек ветвле-
ветвления функция w = y/Pn(z) не имеет.
Доказательство. Пусть а& — произвольный корень Рп (z).
Рассмотрим малую окружность S1 с центром в а&, внутри которой
нет других корней полинома, и запишем точку z ? S1 в виде z =
= dk + гег(р, где г — радиус окруж-
окружности. Имеем
w(z) =
О
Рис. 4.82
(рис. 4.82). Так как при обходе во-
КРУГ ак аргумент (z — a&) меняет-
меняется на 2тг, то y/z — dk меняет знак.
В то же время при обходе вокруг а& аргументы чисел z — ар, р Ф
Ф к, не получают приращения на 2тг, т. е. все радикалы y/z — ар
возвращаются к прежнему значению.
Итак, {ак} — точки ветвления. Рассмотрим оо и сделаем заме-
замену и = 1/z. Тогда w = g(z) примет вид 1 / [y/vP П^=1 лЛ ~ )
Е 0
/ )
Если п четно, то очевидно, что 0 не есть точка ветвления. Если
п = 2р + 1 нечетно, имеется ветвление. ¦
Как мы знаем, поверхность Г — область однозначности алгебра-
алгебраической функции. Представим Г как склейку нескольких листов,
каждый из которых будет графиком однозначной функции. Начнем
с примера.
Рассмотрим функцию w = ±y/z, имеющую на сфере две точки
ветвления: 0 и оо. Соединим их гладкой дугой j и сделаем вдоль j
разрез от 0 до оо. Тогда Г получается объединением двух подмно-
подмножеств: Fi — график ветви epi = y/z, определенной на S2 \ 7, а Г2 —
график ветви ср2 = — y/z, определенной на S2\j. Ясно, что на *S2\7
нельзя перейти с ветви cpi на ветвь ср2, т. е. каждый из листов Гх
и Г2 гомеоморфен S2 \ 7 (рис. 4.83). При проекции тг: С2 —)> С1 (z)
каждый из листов Гх и Г2 гомеоморфно проектируется на S2 \ j.
Итак, Г склеена из двух листов Гх и Г2. Каким образом? Зададим
на S2 ориентацию и отметим один берег разреза знаком «—», а
другой — знаком «+». Эти метки возникают на берегах разрезов
каждого листа: Гх и Г2. При склейке двух экземпляров S2 \ 7, нуж-
4.6. Римановы поверхности алгебраических функций
193
но согласовать знаки «+» и «—». Так как при обходе вокруг точек
ветвления ветви меняются местами, то берег 7^ листа Гх должен
склеиться с берегом ^ листа Г2. Соответственно склеиваются и
берега 7f и ^ на листах Гх и Г2 (рис. 4.84). Ясно, что эта склейка
дает сферу. Итак, нами доказана
Рис. 4.84
194 Гл. 4. Гладкие многообразия (примеры)
Лемма 2. Компактифицированная риманова поверхность Г ал-
алгебраической функции w = ±л/г гомеоморфна сфере S\
Рассмотрим риманову поверхность функции w = \/(z — a)(z — 6),
где а т^ b. В силу предложения 2 эта функция имеет ровно две точки
ветвления: z = а и z = Ь. _
Лемма 3. Компактифицированная риманова поверхность Г ал-
алгебраической функции w = ±\/(z — a)(z — b) гомеоморфна дву-
двумерной сфере.
Доказательство. Достаточно сделать разрез 7 от а до b
и повторить рассуждения леммы 2. ¦
Теорема 2. Пусть f(z,w) = w2 — Pn{z), где полином Рп не
имеет кратных корней. Тогда компактифицированная риманова
поверхность Г алгебраической функции w = ±^Pn(z) гомеоморф-
гомеоморфна сфере с [(п — 1)/2] ручками (через [,] обозначена целая часть).
Доказательство. Пусть п = 2р + 1. Тогда в силу пред-
предложения 2 точками ветвления являются все корни ai, ..., ап и точ-
точка оо. Это множество можно разбить на пары, например, (ai, 02),...
..., (an, an+i), где an+i = 00. Соединяя точки a2/c_i и a,2k гладким
отрезком 7/с?1^^^Р+19 получаем сферу S2 с р + 1 разрезами.
Тогда на 52 \ Gi U ... U 7p+i) °бе ветви, (рх и (р2, являются одно-
однозначными функциями. В самом деле, мы запретили обходы вокруг
нечетного числа точек ветвления — при нашей системе разрезов мы
можем обойти только вокруг четного числа точек ветвления. Сле-
Следовательно, при любом обходе получается четное число изменений
знака перед радикалами.
Отметим берега каждого разреза знаками «+» и «—». Тогда каж-
каждый лист Гх и Г2 гомеоморфен S2 \ G1 U ... U 7p+i)-
Следовательно, для восстановления Г следует склеить два ли-
листа, отождествив берега разрезов с учетом их знаков (рис. 4.85).
Получаем сферу S2 с р = [(п — 1)/2] ручками.
Пусть п = 2р. В силу предложения 2 точками ветвления явля-
являются все корни ах, ..., а2р и только они. Затем дословно повторяем
предыдущие рассуждения. ¦
Предложение 3. Каждое двумерное гладкое компактное связ-
связное замкнутое ориентируемое многообразие рода g (т. е. сфера с
ручками) является комплексно аналитическим многообразием.
Д о к а з а тельство. Рассмотрим Г для функции w =
= ±y/Pn(z), где Рп — имеет простые корни. Так как Г С С2, где
задается графиком w = g(z) или графиком z = w(w), то имеем две
ортогональные проекции (z,w) —>> С1 (z) и (z,w) —)> C1(w). В каж-
каждой точке Г определена по крайней мере одна из проекций, так как
2 — Pn(z)) 7^ 0 (теорема 1). Получаем покрытие Г локаль-
4.6. Римановы поверхности алгебраических функций
195
Рис. 4.85
ными дисками. Функции перехода имеют вид либо w = g{z), либо
z = w(w). Так как функции g(z) или w(w) комплексно аналитиче-
аналитические (предложение 1), то утверждение доказано. ¦
Неориентируемые двумерные многообразия не являются ком-
комплексно аналитическими.
Предложение 4. Каждое двумерное гладкое компактное связ-
связное замкнутое ориентируемое многообразие можно снабдить кон-
конформной римановой метрикой.
Доказательство. Метрика конформна, если существу-
существуют координаты, в которых она имеет вид: дц = a-5ij. Реализу-
Реализуем М2 в пополненном С2 как риманову поверхность функции w =
= ±y/Pn(z). Рассмотрим на Мд координату z. Она обслуживает все
Мд, кроме точки 0, в окрестности которой нужно ввести координа-
координату w, связанную с z комплексно аналитическим преобразованием
w = g(z). Зададим в С2 = R4 метрику
ds2 = dzdz + dw dw =
и рассмотрим ее ограничение на Г. Имеем
196 Гл. 4. Гладкие многообразия (примеры)
или
ds2(M2g) = A + u\ + vl)(dx2 + dy2),
где z = x + iy, g = u + iv. ¦
При комплексно аналитических заменах z = 7/(?) полученная
выше конформная метрика останется конформной (проверьте!).
Глава 5
Тензорный анализ и риманова
геометрия
5.1. ОБЩЕЕ ПОНЯТИЕ ТЕНЗОРНОГО ПОЛЯ
НА МНОГООБРАЗИИ
Рассмотрим гладкое многообразие Мп\ пусть Р Е Мп и ж1, ...
..., хп — регулярные координаты в окрестности Р. Мы изучим объ-
объекты, инвариантные относительно замен координат. Обозначим но-
новые координаты знаком «штрих» — х1 , ..., хп .
1) Пусть а Е Тр(Мп) — касательный вектор к Мп. Найдем связь
между компонентами вектора, вычисленными в разных координа-
координатах. Так как а = а1 {д/дх1) = а1' (д/дх1') и так как {д/дх1'} обра-
образуют базис в Тр(Мп), то а1 = (дхг /дхг)аг. Мы видим, что компо-
компоненты вектора а1, ..., ап преобразуются с помощью матрицы Яко-
би (дхг /дхг) = J. Это условие мы получили из инвариантности
вектора как геометрического объекта при замене координат.
Теперь можно определить вектор как объект, задаваемый в каж-
каждой системе координат ж1, ..., хп числами а1,..., ап, преобразую-
преобразующимися при переходе от координат х1,..., хп к координатам х1 ,...
..., хп по правилу а1 = (дхг /дхг)аг. Ясно, что определенный та-
таким образом объект будет инвариантным.
2) Пусть f(x) — гладкая функция на Мп. Рассмотрим grad/ =
= {df /дх1}. Найдем закон преобразования этого набора функций.
Имеем
dxl
где
f _ df_ (dx{
dxl' \ <9жг
т.е. набор (?i, ...,?n) преобразуется по другому закону, чем ком-
компоненты вектора, а именно с помощью матрицы (J-1)T. Тот же за-
закон получится из инвариантности (относительно замен координат)
производной функции / по направлению вектора а. В самом деле:
198 Гл. 5. Тензорный анализ и риманова геометрия
J?_ _ ,. /G00)-/G@))
da. e^o e
где
Мп, 7(О)= Р, 7@)=a
отсюда
j/ i дх1
что и требовалось. ¦
3) Рассмотрим Тр(Мп) и сопряженное к нему пространство
Т*(Мп) вещественных линейных функционалов /(а), где аЕ
Е Тр(Мп). Как меняются компоненты функционала I при замене
координат? Введем в Тр(Мп) базис е1, ...,еп из функционалов:
efe(ea) = J^, где ei, ..., еп — базис в Тр(Мп). Так как скаляр /(а)
не зависит от выбора координат, то /(а) = /'(а7); отсюда
а = аге^; /(а) = //^ = //^ =
Отсюда в силу произвольности а имеем 1# = {дхк/дхк'I^. По-
Поэтому координаты функционала / преобразуются как координаты
grad/. Элементы Тр(Мп) называются ковекторами. Итак, grad/ —
ковектор.
Вводя в Т* сопряженный базис из ковекторов е1, ... ,еп, ото-
отождествим Т с Т*, положив (р: Т ^ Т*, <р(а) = /, где а = аке^,
I = X^^=i °>кек-> т- е- считая, что / имеет относительно е1, ..., еп те
же координаты, что и а относительно ei, ..., еп. Этот изоморфизм
не инвариантен при замене координат (х) —>> (ж7), так как компо-
компоненты вектора преобразуются матрицей J, а ковекторы — матри-
матрицей (J~1)T. Имеются, впрочем, замены, при которых соответствие
ср: Т —)> Т* сохраняется. Это замены, где J = (J-1)T, т.е. задаю-
задающиеся в точке Р ортогональной матрицей Якоби.
4) Пусть С — линейный однородный оператор, преобразующий
в себя Тр(Мп); пусть С — матрица оператора, записанная в базисе
ei, ..., еп. При замене (х) —>> (х') имеем С = JCJ~l, т. е. с1'-, =
= (дхг /дхг)(дх3/дх^ )й. Закон преобразования матрицы операто-
оператора получается из соотношения b = С(а), инвариантного относи-
относительно замен координат.
5) Рассмотрим билинейную симметричную форму В на Тр(Мп):
5(а, b) = bijdlW. Из алгебры известно, что при замене коорди-
5.1. Общее понятие тензорного поля на многообразии 199
нат матрица В формы преобразуется так: В' = JBJT, т.е. Ъуу =
= {дх1 /дх1 )(дх3/дх3 )bij. Как и выше, закон преобразования В
получается из требования сохранения скаляра 5(а, Ь) при заменах
координат. В самом деле,
дх1 дх3
Б(а,Ь) =
т.е.
Мы привели простейшие примеры законов преобразования. Раз-
Различия между ними мы указывали разным положением индексов у
компонент объектов: а\ lj, сг, Ъц. Верхние индексы называются
контравариантными, нижние — ковариантными. Удобно задавать
тип подобных объектов парой (p,q), где q — число ковариантных,
р — число контравариантных индексов. Набор координат вектора
имеет тип A,0), ковектора — @,1), оператора — A,1), билинейной
формы на векторах — @,2). Наряду с такой формой существует
и форма ВA,т) на ковекторах /,га. Вычисление (по аналогии с
Б(а,Ь)) дает, что В1 = {J~l)TB{J~l).
Итак, если в каждой системе координат задан набор чисел (фун-
(функций), преобразующихся по указанным правилам, то они определя-
определяют инвариантный объект, который мы изучаем с помощью коорди-
координатной записи в различных системах координат. Это обстоятельство
кладется в основу общего определения тензорного поля на многооб-
многообразии, т. е. инвариантного геометрического объекта, не зависящего
от выбора координат. От координатной системы зависит лишь кон-
конкретная запись его компонент.
Определение 1. Гладким тензорным полем типа (р, q) ранга
р + q называется объект, задаваемый в каждой системе координат
(х) = (ж1, ... ,жп) набором гладких функций Тгь"*р(ж), преобра-
преобразующихся при замене координат (х) —> (V) по закону
^ ^^ дхМ_ ilm..ip
jlj'
Мы ввели объект, инвариантный относительно замен координат.
В самом деле, как известно из курса алгебры, тензор (тензорное
поле) можно определить как полилинейное отображение
Т: ТР х ... хТрхТр х ...Тр ->> R,
задаваемое формулой
200 Гл. 5. Тензорный анализ и риманова геометрия
Т(ал Я • J1 1Р\ — грП—lp jx jqjl jp
± \<х\ 5 . . . 5 <Xq, t 5 . . . 51 у — _!. • • сь-^ . . . Сбд 6^ ... 6^ 5
Функции Тгь"*р являются коэффициентами отображения Т. Ес-
Если фиксированы базисы ei, ..., еп и е1, ..., еп, то для Т^1'"^ воз-
возникает полезная формула
В самом деле,
= Т«\:ра/(епГ
Все объекты в формуле Т: (Tp)q® (Тр)р —>> R, а также свойство
полилинейности, инвариантны. От выбора координат зависит лишь
конкретная запись коэффициентов Тгь"*р.
Мы будем часто работать с координатной записью, так как она
полезна при конкретных вычислениях. Для удобства введем так на-
называемые мультииндексы (г) = (i\... ip), заменяя целую строку од-
одним индексом. Например, тензорный закон запишется так:
(г') Эх^ дх^ (г) дх^ дх^ дх1Р
-L • ^ -L ¦ где ^
Изучим простейшие свойства тензорных полей.
Лемма 1. Пусть (х) —>> (V) — регулярная замена. Тогда тензор-
тензорный закон Т/.,ч = (дх^1')/дх(г)) {дх^/дх^'}}Т(Ъ1 обратим, т. е.
U) дхA'} дх^) W)
Доказательство следует из тождества (дх1 /дхк') х
х (дху/дхэ) = (дх1/дхэ) = 8).
Лемма 2. Пусть тензорное поле записано в системе (х) и сде-
сделаны замены координат (х) —>> (z) —)> (у) и (ж) —)> (г;) —)> (у). Тогда
запись поля Т в системе (у) не зависит от способа перехода от (х)
к (У)-
Доказательство следует из формулы дифференцирова-
дифференцирования сложных функций:
5.1. Общее понятие тензорного поля на многообразии 201
ду1 ду1 dzq dyl dva
dzq дхк dva
Напомним свойства тензоров, известные из курса алгебры.
а) Тензоры ранга р + q типа (р, q) (тензоры рассматриваются в
точке) образуют линейное пространство Н, причем dimH = npJrq.
Доказательство следует из представления тензора как полилиней-
полилинейного отображения: линейная комбинация таких отображений снова
полилинейна.
б) В пространстве Н всех тензоров ранга р + q типа (р, q) име-
имеется аддитивный базис из следующих полилинейных отображений:
е^ 0 ... 0 ei
р 0 еп 0 ... ?
Число их равно np+q. Каждое отображение
еч0...0е2
задается формулами
eia(l) =lia,
"р
где / G Тр
где а G ТР.
(Мп
Мп;
Если Т: (TpMn)q x (TpMn)p —)> R — произвольное полилиней-
полилинейное отображение ранга (р, д), то
я-/1 jp\ —
.. .a
9
т.е.
Т = ^^(е^ (8)... 0 eip 0 ejl 0 ... 0 ejq).
С помощью мультииндексов это разложение произвольного тен-
тензора Т по базисным тензорам записывается так: Т = ТA1е(^ 0 е^\
Напомним закон преобразования базисных тензоров е^ 0 ... 0
0 eip 0 eJ1 0 ... 0 eiq при замене координат:
Все эти свойства и определения переносятся с тензоров в точ-
точке на случай гладких тензорных полей на многообразии. Нужно
рассматривать линейные комбинации базисных полей типа (р, q) с
переменными коэффициентами, что превращает пространство тен-
тензорных полей в бесконечномерное пространство.
202 Гл. 5. Тензорный анализ и риманова геометрия
5.2. ПРОСТЕЙШИЕ ПРИМЕРЫ ТЕНЗОРНЫХ ПОЛЕЙ
5.2.1. Примеры
1) Гладкое векторное поле Т(х) на многообразии является тен-
тензорным полем типа A,0). Пространство всех гладких векторных
полей бесконечномерно.
2) Гладкое ковекторное поле задается в каждой точке х Е Мп
линейным функционалом 1{х) E Т*Мп, гладко зависящим от точ-
точки. В этом бесконечномерном пространстве тензорных полей ти-
типа @,1) лежит бесконечномерное подпространство потенциальных
полей grad/(x).
3) Пусть на Мп задана риманова метрика gij(x). Так как g^j/ =
= {дх1 /дх1 )(dxi/dxi )gij, то возникает тензорное поле типа @, 2).
Этот тензор называется метрическим тензором.
4) На комплексно аналитическом многообразии в каждом ТхМ2п
определен оператор / — «умножение на мнимую единицу», I2 =
= —Е. Этот оператор гладко зависит от точки, и мы получаем тен-
тензорное поле типа A,1).
5) Тензор моментов инерции. Рассмотрим в R3 твердое тело с
закрепленной точкой 0, вращающееся вокруг нее. Пусть тело состо-
состоит из конечного числа N материальных точек, жестко скрепленных
между собою. Пусть массы точек — mi, Ш2, • • •,гп^, а их коорди-
координаты — Жцч, ..., x\N\, i = 1, 2, 3. Построим матрицу
N N
aij = _^ maxia)xJ{a) + Sij Y^ ma|x(a)|2.
Этот симметричный тензор ранга 2 типа @, 2) называется тензором
моментов инерции твердого тела.
Поясним его роль. Пусть через 0 проведена прямая с единичным
направляющим вектором 1 = (Z1, /2, /3). Найдем сумму ^-• al4lV =
= Н(\). Вычисления дают
#(l) = f>Q(|x(Q)|2-«x(Q),l»2).
a=l
Величина |x(a)|2 — (x(a),lJ — это квадрат расстояния точки с
массой та до оси 1. Мы получили известное выражение для мо-
момента инерции тела относительно оси. Собственные векторы ма-
матрицы aZJ задают главные оси инерции твердого тела.
6) Тензор деформаций. Рассмотрим сплошную среду, заполняю-
заполняющую некоторый объем в пространстве Rn, отнесенном к декарто-
5.2. Простейшие примеры тензорных полей
203
вым координатам ж1, ... ,жп. Рассмотрим малую деформацию сре-
среды под действием каких-то сил. Смещения точек среды задаются
гладкими функциями иъ(х1,^.. ,жп), зависящими от точки. Коор-
Координаты смещенной точки Р
выражаются через координа-
координаты исходной точки так: х1 =
= х1 + иг(хг, ... ,хп). Пусть
смещения малы, т. е. малы
функции иг(х).
Как меняются длины глад-
гладких кривых при деформации
среды? Рассмотрим две близ-
близкие точки: Р(х1,... ,жп) и Р'(х1 ,... ,жп ). Пусть (А/J= Ym=i{x% ~
—х1J = ^2i=i(Ax1J — квадрат длины евклидова отрезка, соединя-
соединяющего Р и Р'. Найдем квадрат длины (А/7J отрезка, соединяюще-
соединяющего образы точек Р и Р' после их смещения в новые точки Р и Р'
(рис. 5.1). Имеем
Рис 5.i
(А/7J =
г=1
f) -хг-и\х)J =
= (А/J + 2
г=1
г=1
Так как Аиг = (диг/дхк)Ахк, то
г, /с
duk\ А ,• А u v^ dul dul
)АА +^
i,k,p
Итак,
диг дик
дхк дхр
Если деформации иг(х) малы, то можно считать, что
' диг дик'
- {diy ^
г,к
dxi
dxl dxk.
Положим r]ik(x) = ди1/дхк + дик/дх1\ тогда (rf/7J
= rjikdxidxk. Набор функций гц^ образует тензор второго ранга
типа @, 2), называемый тензором малых деформаций.
204 Гл. 5. Тензорный анализ и риманова геометрия
7) Тензор напряжений. Рассмотрим деформацию упругого тела.
В нем появляются «напряжения». Пусть da — плоская малая ори-
ориентированная площадка в теле, проходящая через точку Р. Пусть
п(Р) — нормаль к da в точ-
точке Р (рис. 5.2). Вблизи пло-
площадки упругое тело разбито ею
на две части: одна расположе-
расположена с положительной стороны
площадки, другая — с отрица-
отрицательной. Считается, что первая
РИС# 5.2 из этих частей упругого тела
действует на вторую через пло-
площадку da с силой F, приложенной в Р и пропорциональной пло-
площади площадки. Площадь тоже обозначим da. Итак, каждой норма-
нормали п(Р) в точке Р отвечает вектор F(n); т. е. F = F(n). Характер
зависимости устанавливается в теории упругости на основе экс-
экспериментов. Оказывается, часто можно считать зависимость F(n)
линейной, т. е. F(n) = Qp(n)da, где Fl = Ql-n^da\ {nJ} — коорди-
координаты п(Р). Возникает тензорное поле Qp типа A,1). Оно и опре-
определяет тензор напряжений.
Из механических соображений следует, что тензор напряжений
Qp симметричен. Его можно определить не только в деформиро-
деформированном упругом теле. Он имеется и в идеальной жидкости. Счи-
Считается, что здесь силы внутреннего трения отсутствуют, а потому
сила напряжения F(n), действующая на da, направлена по норма-
нормали к da. Отсюда следует, что оператор Qp — диагоналей, т. е.
где скалярная функция q(P) называется давлением. Оно не зави-
зависит от направления п и определяется только самой точкой Р. Если
среда такова, что Qp = q(P) • Е, то говорят, что выполнен закон
Паскаля. Он выполняется не всегда. Например, в вязкой жидкости
тензор напряжений может иметь более сложный вид.
Между тензорами деформации и напряжения имеется зависи-
зависимость. В первом приближении считается, что при малых дефор-
деформациях тензор напряжений линейно зависит от тензора дефор-
деформаций, т.е. Q1- = аъ^1Щ1, где функции а1^1 образуют тензор 4-го
ранга типа C,1). В R3 тензор а1^1 имеет 81 компоненту. Ука-
Указанное линейное соотношение называется законом Гука. Предпо-
Предположим, что среда однородна и изотропна, т. е. вид зависимости
Q = Q(rj), не меняется при ортогональных преобразованиях, т.е.
5.2. Простейшие примеры тензорных полей 205
тензор а1^1 инвариантен относительно SOC). Можно показать,
что в этом случае Ql- = Qij = цщ + A spur (г/) • Sij, где числа /i
и А называются коэффициентами Ламе. Функция ]Р щ = spur(r/)
имеет простой смысл (мы не различаем верхних и нижних индек-
индексов, так как события происходят в R3). Рассмотрим перемещение
частиц среды под действием малых деформаций. Тогда функции
и1 — это компоненты векторного поля деформации. Обозначим его
через v(P). Тогда spur(r/) = ^2(диг/дхг + ди1 /дхг) = 2^щ =
= spur(r/) ^2^диг/дхг) = 2 div(v), т. е. spur(r/) — дивергенция поля
перемещений. Коэффициент \i для жидкости называется коэффици-
коэффициентом вязкости.
5.2.2. Алгебраические операции над тензорами
1) Сложив два тензорных поля одинакового типа и ранга т^"Лр
и Р^"Лр получаем новое тензорное поле (проверьте!): С1^'Лр =
~ jl-jq "•" jl-jq'
2) Если Тп"л-р — тензорное поле, a f(x) — гладкая функция на
Мп, то f{x)T7-1i'"lp также тензорное поле. Доказательство очевидно.
3) Перестановка индексов одного типа. Рассмотрим, напри-
например, тензорное поле Т^_^ и построим новое поле по формуле:
Pi1...is...ia...iq = Tilmmmiammmis_iq; т.е. перенумеруем компоненты тензо-
тензора. Эта операция — тензорная (проверьте!). Здесь мы поменяли
местами два индекса: is ига. Ясно, что можно было сделать любую
перестановку.
Замечание. Перестановка ковариантного и контравариантного
индексов не является, вообще говоря, тензорной операцией, так как
верхние индексы преобразуются с помощью матрицы J, а нижние —
с помощью (J-1)T. Рассмотрим, например, поле типа A,1), т. е. по-
поле операторов С. Пусть в координатах (х) оператор симметричен,
т.е. С1а = С\. Другими словами, С = СТ. Допустим, что и в лю-
любых других координатах С = (С')т. Если А — матрица Якоби, то
С1 = АСА'1, АСА'1 = {АСА~1)Т, т. е. ВС = СВ, где В = АТА.
Ясно, что матрицы В и С не всегда коммутируют. Если матрица
Якоби ортогональна, то перестановка индексов г и j является тен-
тензорной операцией.
4) Операция свертки. Пусть Т^"Лр — тензорное поле. Выделим
два индекса разного типа — ковариантный js и контравариантный
га. Построим функции: ^^:? = Zi^I&it^¦
206 Гл. 5. Тензорный анализ и риманова геометрия
Эта операция — тензорная (проверьте!). Она переводит тензор типа
(р, q) в тензор типа (р—l^q—l). Если р = q, то для исходного поля
Тгь"*р можно определить полную свертку, свернув все верхние ин-
индексы со всеми нижними. Получится скалярная функция spur(T),
являющаяся инвариантом поля Т, т. е. не меняющаяся при заменах
координат.
5) Тензорное произведение. Из двух тензорных полей Т^]]Л? и
pai...as nfin™VPTV/r ttorop ттпттр ^•••bai---as _ rpH—ip роц...а3 стРНП
^Pi...pt °°РазУем новое поле S'i-j^i-Д ~ 1ji-jq,3i...Pt • жшо'
что это — тензорное поле типа (р + s,q + t). Оно обозначается так:
С = Т®Р. Тензорное умножение, вообще говоря, некоммутативно.
6) Поднятие и опускание индексов. Рассмотрим, например, не-
невырожденное тензорное поле ац типа @, 2), т. е. матрица А = (а^)
невырождена. Коэффициенты обратной матрицы А~1 обозначим
агК Отсюда агка^1 = 81-. Для произвольного тензорного поля Т^'"^р
построим поле вида Р ¦" р- = aaix Т• '•" р ¦ . Аналогично строится
полеС^1">=о^1^-|р.
J2---Jq Jl---Jq
Первая операция называется опусканием индекса, вторая — под-
поднятием индекса. Операции тензорные, так как являются композици-
композицией тензорных операций: умножения и свертки тензоров. Операции
поднятия и опускания индексов взаимно обратны в силу невыро-
невырожденности поля агК В самом деле: о^аС^1''-'^ = ajiaaasTls1-'2"lp- =
= 5s- Т1)"Лр- = Т\х'-Лр ¦ . Обычно в качестве ац берется метрический
Л Sj2---Jq JlJ2---Jq bJ Г Г
тензор gij. Если Мп = Rn и дц = Sij, то в декартовых координа-
координатах нет разницы между верхними и нижними индексами. Напри-
Например, можно считать все их нижними. Поднятие и опускание индек-
индексов в общем случае позволяет канонически отождествить ТрМп
и ТрМп. В самом деле, элементами ТрМп являются векторы, а
элементами ТрМп — ковекторы. Построим линейные отображения:
А:Т^Т\ A(a)=f, где & = д{ааа;
Ясно, что
ВоА:Т^Т, ВоА =
Т*
(тождественное отображение). Аналогично: АоВ:Т*ч
о В = 1Г. Это означает, что А и В — изоморфизмы. Такое отож-
отождествление Т и Т* инвариантно относительно замен координат, по-
поскольку использованные операции — тензорные.
5.2. Простейшие примеры тензорных полей 207
7) Симметрирование. Рассмотрим все индексы одного типа у
тензорного поля Т (например, нижние). Определим операцию так:
Ph...jq =T(n...Jq) = 1/Q]'E(a)Ta(j1...Jq)^ где суммирование ведется
по всем перестановкам индексов. Операция симметрирования —
тензорная (проверьте!).
Определение 1. Поле Тг-^'р называется симметричным, если
оно не меняется при перестановке любых двух индексов одного
типа.
Симметрирование симметричного поля очевидно его не меняет.
8) Альтернирование. Рассмотрим все индексы одного типа у
тензорного поля Т (например, нижние). Определим альтернирова-
альтернирование так:
q'
Здесь (р(ст) — четность перестановки о (иногда пишут (—1)°"). Опе-
Операция альтернирования — тензорная (проверьте!).
Определение 2. Тензорное поле тгь'^ называется кососим-
метричным, если его компоненты меняют знак при транспони-
транспонировании (перестановке) любых двух соседних индексов одного
типа.
Лемма 1. Альтернирование не меняет кососимметричный тен-
тензор и обращает симметричный тензор в нуль.
Доказательство очевидно следует из определений.
Понятие симметрии и косой симметрии операторов приобре-
приобретают инвариантный смысл лишь при наличии римановой метрики
(более общо: при наличии невырожденного тензорного поля типа
@, 2) или B,0)). Риманова метрика дц порождает в каждом ТрМп
скалярное произведение (а, Ъ)р = д^(Р)агЫ.
Определение 3. Оператор Т или операторное поле типа A,1)
называется симметричным (соответственно, кососимметричным),
если (Та, Ь) = (а,ТЪ) для любых a, b e TpMn; соответственно:
(Та, Ь) = — (а, ТЬ) для кососимметричного случая.
Например, для симметричного оператора имеем: (а, ТЬ) = [дц х
х Т3к)а1Ьк = Т1ка1Ьк, где Tik = д^т{. Аналогично: (Та, Ь) = Тыа1Ьк,
где Tki = gikT3{. Так как Tika{hk = Tkialbk, то Tik = Tki. Итак, по-
после опускания индексов у тензора Т типа A,1) условие симметрии
приобретает привычный вид, т. е. Т{к не меняются при перестанов-
перестановке индексов. Аналогично рассматривается и кососимметрический
случай.
208 Гл. 5. Тензорный анализ и риманова геометрия
5.2.3. Кососимметричные тензоры
Рассмотрим ковариантные кососимметричные тензоры Т^...^.
Лемма 2. Кососимметричный тензор Т^...^ максимального ран-
ранга п на Мпполностью определяется только одной своей компонен-
компонентой Т\2...п (существенной компонентой); остальные отличаются от
нее только множителем (—IH", причем
Доказательство. В исходных координатах х1, ..., жп
имеем: Т^...^ = (—l)crTi2...n (см. определение косой симметрии).
Сделаем замену: (х) —> (V). Тогда:
дх* ?(^{ дх ?дхА
= (detJ)-Ti2...n.
Лемма доказана. ¦
Для кососимметричных тензоров определена важная операция:
внешнее умножение. По двум кососимметричным тензорам Tilmmmik
и Pj1...jq определим новый кососимметричный тензор RAP, где
73 гтл 73 ^W / 1 \ СГ /Т~т 73
Это умножение билинейно. Ранги тензоров суммируются. Рас-
Рассмотрим интерпретацию на языке внешних дифференциальных
форм. Сначала рассмотрим кососимметричные тензоры Tilmmmik в
одной точке Мп. Рассмотрим координаты ж1, ...,жп как гладкие
функции в окрестности точки Р. Тогда определены их дифферен-
дифференциалы dx1, ... ^dxn. Для любой гладкой функции f(x) ее диффе-
дифференциал df есть элемент пространства, сопряженного к Т*, т.е.
линейный функционал на Т*. В самом деле, если а Е Т*, то
df
k)ak
где 7@) = P, 7@) = а, т. e. rf//rfa = (df/dxk)ak. Если / = ж\ то
dfx1/da. = аг и с/ж^ = afedt.
Итак, с/ж^ являются функционалами на Т*, т. е. — элементами Т*.
Здесь ей можно рассматривать как коэффициент пропорционально-
пропорциональности и опускать его. Если ei, ..., еп Е Т* — базис в Т*, то в каче-
качестве базиса в Т* возьмем dx1, ... ,dxn, считая, что dxk(ea) = 6%,
5.2. Простейшие примеры тензорных полей 209
т.е. dxk(a) = ак. Определим внешнюю алгебру A(dx1^ ... ,dxn) с
образующими dx1, ..., dxn и с соотношениями: dxl Л dxi + dxi Л
/\dxl = 0, г т^ J- Умножение Л билинейно, алгебра Л аддитивно по-
порождена мономами: dx1, ..., dxn; dxl Л cfeJ, г < j; ...; cfen Л ...
..., /\dxlk, i\ < ... < ik\ dx1 Л ... Л cfen. Как известно из курса ал-
алгебры, между этими мономами нет линейных соотношений с по-
постоянными коэффициентами. Мультипликативными образующими
являются dx1, ..., dxk. Алгебра Л разлагается в прямую сумму под-
подпространств Л^; Л = 0^=о Л^, где Л^ порождено мономами dx4 Л
Л ... Л dxlk. При этом, Л° = R и порождено единицей 1. Размер-
Размерность алгебры Л равна 2П.
Рассмотрим новую алгебру Л(МП), элементами которой явля-
являются линейные комбинации ujW = Tilmm.ikdx4 Л ... Л dxlk и всевоз-
всевозможные линейные комбинации Х}а?=о °° -> гДе ^u..ifc (%) — кососим-
метричное тензорное поле ранга к и индексы i\... г^ упорядочены
в порядке возрастания. Умножение в Л(МП) определим ниже.
Что происходит с ио^ при замене (х) —>> (х'I
Лемма 3. Элементы о/*) = Т^...^(ж) с/жп Л ... Л dx4 определе-
определены инвариантно, в том смысле, что при замене (х) —>> (V) имеем
Тг\..Л^Х^ Л ... Л ^ = Т{1..ЛкAхк Л ... Л
Доказательство. Достаточно воспользоваться законами
преобразования Т^^Лк(х) и dx1. ¦
Элементы a/fc) алгебры Л(МП) называются внешними диффе-
дифференциальными формами.
Размерность Л(МП) бесконечна. Каждая внешняя форма ujW
определяет компоненты Т^...^ (х) кососимметричного тензора. Вер-
Верно и обратное: любое кососимметрическое тензорное поле одно-
однозначно определяет внешнюю форму.
Замечание. При определении внешних форм можно рассма-
рассматривать линейные комбинации вида Ailmmmikdx%1 Л ... Л dxlk, где
Ailmmmik — произвольное тензорное поле (не обязательно кососим-
метричное), и суммирование ведется по всем неупорядоченным
наборам i\.. Ль. Но в силу косой симметрии внешнего умножения
имеем
Ailmm,ikdx11 Л ... Л dx4 = A[h^Ak]dx4 Л ... Л dx4, i\ < ... <гк,
т. е. любая комбинация А^^Лк dx4 Л.. ./\dxlk порождает некоторую
внешнюю дифференциальную форму.
Зададим умножение в Л(МП). Если ио^ =Tilmmmikdx4 Л... Л
Л dx%k и оо^ = Pjlmmmjsdx^ Л ... Л dx^s — две внешние формы, то их
210 Гл. 5. Тензорный анализ и риманова геометрия
произведение a;(/c+s) = uj^ Л ио^ определим как форму вида
ш{к+з) = ^п1шшЛкйх11 Л ... Л dxik) Л (Ph^sdxh Л ... Л dxjs) =
= Th ikPh js dxh Л ... Л dxik Л dxjl Л ... Л dxjs =
Ясно, что умножение форм совпадает с внешним умножением
соответствующих им тензорных полей. Итак, Л(МП) является ал-
алгеброй с единицей. Умножение ассоциативно, но не коммутатив-
коммутативно. Алгебра Л(МП) распадается в прямую сумму подпространств
Ак(Мп) = {Tilmmmikdx4 Л ... Л dx^k}. Число к называется степенью
формы uj(k\ Элементы ш^ называются однородными элемента-
элементами алгебры Л(МП). Дифференциальные формы ио^ удобно трак-
трактовать как полилинейные кососимметрические отображения. Если
ai, ..., а^ Е Т*Мп, то, считая, что dxt(a.) = a\ получаем
Рассмотрим декартовы координаты xl,...,xn в Rn. Пусть
u;(n) = dx1 Л ... A dxn — внешняя форма максимального ранга;
ах, ...,ап — векторы в Rn. Обозначим через volll(ax, ...,ап)
n-мерный объем параллелепипеда П(ах, ... ,ап), натянутого на
ах, ..., ап. Из курса алгебры известна следующая лемма.
Лемма 4. Пусть
А =
пп
— матрица, построенная из координат ах, ... ,ап. Тогда det(A) =
= voin(ax, ...,an).
Вернемся к внешним формам.
Лемма 5. Пусть ио^ = dx1 А ... Л dxn — форма максимально-
максимального ранга в декартовых координатах в Rn. Тогда а/п)(ах, ..., ап) =
= voin(ax, ...,an).
Доказательство. Так как dx1 (a) = а\ то
=detA
5.2. Простейшие примеры тензорных полей 211
Итак, объем параллелепипеда (как значение внешней формы) —
не скаляр. Он меняет знак при нечетной перестановке векторов.
Это «ориентированный объем». Такая точка зрения на объем плодо-
плодотворна. Аналогичная интерпретация
возможна и для форм меньшей сте-
степени. Пусть в Rn задана форма
cjW = dx4 Л ... Л dx%k. Найдем зна-
значение (dx4 Л ... Adxlk)(a.i, ... ,а&),
где ai, ...,а& — векторы в Rn. /^S^^^^I^^r^bK^
Докажите, что аЛ ;(ai, . ..,а&) = Ш^^^ШЩф^-^Щ^^\
= voin(bi, ..., bk) — объем fc-мер- mIIIIIII i i i ¦¦ i i i i i i i i i i i ¦ ¦ t
ного параллелепипеда в плоскости Рис. 5.3
R/c(e^1, ..., Gik), натянутого на век-
векторы bi, ..., Ьь являющиеся ортогональными проекциями векто-
векторов ai, ..., а& на плоскость R/c(e^1, ..., е^) (рис. 5.3).
Если форма ujW есть комбинация вида uj^^^^dx11 Л ... Л dx%k,
то ее значение на ai, ..., а^ будет линейной комбинацией объемов
voin(bi, ..., bfc) с «весами» u)^...^.
Опишем связь внешних форм с объемом области на римано-
вом многообразии. Мы считаем, что читатель знаком с понятием
многомерного (кратного) интеграла Римана. Пусть Мп — римано-
во многообразие и D — открытая область в Мп, диффеоморфная
области U в Rn, отнесенном к декартовым координатам ж1, ..., хп.
Пусть д(х) — определитель матрицы [дц{х)).
Определение 4. Объемом области D С Мп называется число
V(D) = vol(D) =/•••/ у/д(х) dx1 Л ... Л dxn',
Щх)
где ж1, ..., хп — декартовы координаты в области U(x) С Rn.
Если область на многообразии «большая», т. е. не покрывает-
покрывается одной картой, то ее объем определяется при помощи разбиения
единицы, ассоциированного с данным гладким атласом.
Определение обосновывается тем, что в простейших случаях
оно приводит к тем же значениям объема, какие получаются из дру-
других соображений.
1) Пусть Mn = Rn, U = D С Rn — ограниченная область в Rn,
9ij = Sij9 т. е. д(х) = 1, а потому
vol(Z>) = f - fdx1...dxn,
Щх)
212
Гл. 5. Тензорный анализ и риманова геометрия
что совпадает с обычным, «евклидовым», определением объема об-
области в Rn. Если считать dx1, ..., dxn бесконечно малыми величи-
величинами, то da = dxl • ... • dxn — это объем бесконечно малого парал-
параллелепипеда со сторонами dx1, ..., dxn. Итак, объем области UcHn
представляется как «сумма» объемов бесконечно малых параллеле-
параллелепипедов.
2) Пусть Мп — подмногообразие в R^ и gij{x) — индуциро-
индуцированная риманова метрика на Мп. Пусть ж1, ..., хп — криволиней-
криволинейные координаты в окрестности точки Р на Мп. Пусть область D
«мала», т. е. содержится в этой окрестности. Тогда можно считать,
что объем области D есть «сумма» объемов бесконечно малых па-
параллелепипедов (но уже не прямоугольных) {П&}, получающихся
разбиением области D криволинейными «координатными плоско-
плоскостями» х1 = const (с «бесконечно малым шагом») (рис. 5.4). Так
Рис. 5.4
как Мп — гладкое подмногообразие, то П& хорошо аппроксимиру-
аппроксимируется «линейным параллелепипедом» П&, содержащимся в ТрМп,
где Р — вершина П& (рис. 5.5). Стороны П& направлены вдоль ко-
координатных линий {хг}, проходящих через Р. Пусть ai, ..., ап —
векторы скоростей этих линий.
Так как дц индуцирована ев-
евклидовой метрикой, то уо1(П&) =
= Yo\(tlk) совпадает с евклидовым
объемом П/^в Rn. Итак, vol(D) =
Пусть около точ-
точРис. 5.5
ки Р наряду с криволинейны-
ми координатами х
дены координаты у1,
..., х'° вве-
,п
.^"орто-
.^"ортогональные в Р, т.е. являющиеся декартовыми в ТрМп. Пусть
ei, ..., еп — единичные векторы скоростей этих новых координат-
координатных линий в точке Р. Тогда gij(y) = 8ij в точке Р. Пусть J —
5.2. Простейшие примеры тензорных полей
213
Рис. 5.6
an). Утверждение
матрица Якоби замены в точке Р. Тогда J переводит
ai,..., ап. Докажем, что уо1(Щ) =\/д(х) х
х dan', где dan = dx1, ..., dxn — евклидов
объем прямоугольного параллелепипеда со
сторонами dx1, ..., dxn. Рассмотрим па-
параллелепипед П^, натянутый на ai, ..., ап.
Тогда voinj^ai, ..., ап) = у/д(х). В самом
деле, так как gij(y) = SiJ9 то (дц(х)) =
= J(gij(y))JT = JJT, т- е. det J = л/#(ж)-
В силу леммы 4: \/д(х) = det J = vol Пд.(ах,
доказано. _
Так как П& натянут на (dx1)^, ..., (dxn)sLn (рис. 5.6), то
voin^ = \/д(х) dx1 • ... • dxn.
Так как из объемов П& (при их суммировании) и набирается
объем области D, то vol(D) = J ••• /^/ж\ л/д(х) dx1 • ... • cfen, что
и требовалось.
3) Пусть М2 С R3 — подмногообразие, задаваемое радиус-век-
радиус-вектором r(u,v). Тогда для площади области D на М2, имеем
vol(D)= If\/EG-F2dudv = Г Г \[ru,rv]\dudv,
U {у)
где через [ , ] обозначено векторное произведение, а через | [ , ] | —
его модуль.
4) Пусть подмногообразие Мп~1 С Rn задано как график глад-
гладкой функции хп = /(ж1,..., хп~г). Най-
Найдем объем ограниченной области D С
С Мп~х. Можно считать, что vol(?>) =
= S(dcr), где da — объем бесконечно ма-
малого параллелепипеда. Проектируя его на
гиперплоскость Кп~1(х1, ... ,хп~1), по-
получаем бесконечно малый объем duo =
= dx1 • ... • dxn~1¦, связанный с cfcr так:
da = rfo;/ cos а (рис. 5.7). Здесь а — угол
между нормалью m к Мп~1 и вектором
еп. Ясно, что cos a = (en,m), где еп =
= @, ... ,0,1); m = (gradF)/| gradF|, где
Рис. 5.7
214
Гл. 5. Тензорный анализ и риманова геометрия
т. е.
da =
\
га-1
dx1
г=1
Итак,
vol(D)=
J.-.j .
1 гП-1\ У
п-1
г=1
Эта формула совпадает с общим определением объема (см. выше).
В самом деле, как мы знаем, индуцированная метрики на Мп~1
имеет вид
s2
ds2 = A + (/ж02)(^J + 2fxifxidxidx>,
откуда д(х) = 1 + Y^iZi f2i (проверьте!). Например, если п = 3, то:
g{x) = l + px+fl
Упражнение. Найдите площадь круга радиуса г на плоскости
Лобачевского и на двумерной сфере.
Итак, мы предъявили несколько обоснований общей формулы
для объема области на римановом многообразии
l... dxn.
U(x)
В частности, мы доказали, что для vol(D) существует представле-
представление
vol(Z>) = Г ••• f
с) • (dx1 А ...
U{x)
где ai, ..., an — касательные векторы скоростей координатных ли-
линий {х1} в точке Р, a dt1, ..., dtn — величины бесконечно малых
смещений из Р вдоль этих линий. Эти смещения образуют беско-
бесконечно малый параллелепипед Ilj^aidi1, ... ,a.ndtn). Поэтому фор-
формула для объема и представляется в виде, который мы только что
указали. Обычно ее пишут в сокращенном виде: J • • • fjj(x\ у/д(х) х
xdx1 Л.. .Adxn, подразумевая развернутое выражение, приведенное
выше.
Ясно, что этот интеграл не зависит от выбора локальной систе-
системы координат. В самом деле, если дана замена: (х) —>> (у), то
5.3. Связность и ковариантное дифференцирование 215
,).(!).(?).*• л... л*" =
U(y(x))
— I' Vq(x) dx1 Л ... Л dxn.
U(x)
5.3. СВЯЗНОСТЬ
И КОВАРИАНТНОЕ ДИФФЕРЕНЦИРОВАНИЕ
5.3.1. Определение и свойства аффинной связности
Необходимость дифференцировать тензорные поля возникает в
прикладных задачах. При этом нужно, чтобы дифференцирование
было тензорной операцией, т. е. чтобы оно превращало тензор в тен-
тензор. Первым кандидатом на эту операцию является обычное диффе-
дифференцирование компонент тензоров в криволинейных координатах.
Возьмем, для простоты, ковариантное поле T^b..^fc и рассмотрим
функции Pa;ii,...,ik — dTii,...,ik/dxa, т.е. вычислим обычные част-
частные производные. В другой системе координат мы должны взять
производные Pat.i' 5...^ = д/дха Т^ ^/ . Вопрос: образуют ли эти
наборы тензорное поле Р? Другими словами, будут ли они пре-
преобразовываться друг в друга при замене координат по тензорному
закону? Проверим это. При переходе от (х) к (V) имеем
Итак,
дха дхч дх1к
— р . . ~^ ^ ic , , (т г г'\
— гои\..Лк о п/ о ,•/ гл о' * °Oi'i\ ...г. К-1 i^i^ )•>
где
*а'*1Ъ- tl
216 Гл. 5. Тензорный анализ и риманова геометрия
При замене общего вида (х) —>> (V) выражение S^v ^/, во-
вообще говоря, отлично от нуля, т.е. Рап..лк преобразуются не по
тензорному закону. Итак, обычное дифференцирование д/дх1 — не
тензорная операция. Оно будет тензорным лишь в частных случа-
случаях, например, при линейных заменах координат, поскольку здесь
S^l.j' At =0.
Наша цель: научиться инвариантно дифференцировать тензор-
тензорные поля на многообразиях в произвольных системах координат.
Сначала ограничимся евклидовым пространством, где наряду с де-
декартовыми рассматриваются всевозможные криволинейные коорди-
координаты. Обозначим разыскиваемую нами операцию через V («набла»)
и потребуем от нее следующего.
1) В декартовых координатах в Rn операция V должна совпа-
совпадать с обычным дифференцированием {д/дх1}.
2) Операция V должна быть тензорной, т. е. если Т — тензорное
поле, то и VT должно быть тензорным полем.
Начнем с примеров. Рассмотрим в Rn векторное поле Т\ Пусть
(х) — декартовы координаты, (V) — криволинейные. Запишем усло-
условия A) и B), наложенные на V. В системе (х) имеем: (VT)*- =
= дТ1 /дхК При переходе к (V) должно быть: (VTV-, = {дх1 /дхг) х
х (дх3/дх3 )(VT)Z. Найдем явный вид V в криволинейных коор-
координатах. Имеем
V _ дх^ дх^_д_(дх^ к,\ дх1' дх^ дх{ дТк' дха'
^ )з' " dxi дхз' дхз \дхк' )
dxi дхз' дхз \дхк' ) " dxi дхз' дхк'
Вт1' (9т-7 ,/ В ( Вт1 \ •/ i ВТк' иВт1' В2т1
UX UX kr U I UX \ _ I r U± kr UX UX
дхг дхэ' Bxj V дхк') к' Jf дх*' дх
дх1
к,
Итак, появились функции Гг//с,, измеряющие отклонение V от
операции обычного дифференцирования.
Рассмотрим теперь в Rn ковекторное поле Т{. Чтобы найти
явный вид V на Т^, нужно решить систему уравнений: (VT)^ =
= dTi/dxj; (VT)iiji = (дх1 /дх1 )(дх3/дх3 )(VT)^-. Аналогично
предыдущему случаю получаем (проверьте!):
где Гк'-, = (д2хк>/дх3дхг)(дхг/дх1'){дх^/дх^'). Итак, возникли
функции Г^, ,, измеряющие отклонение V от обычного дифферен-
дифференцирования на ковекторных полях.
5.3. Связность и ковариантное дифференцирование 217
Лемма 1. Имеет место равенство Гк-, = — Г^, •,.
Доказательство. Дифференцируя очевидное тождество
(dxi'/dxi")(dxi"/dxk') = 5%, по хр', получаем Г*,к, + f*,k, = 0.
Лемма доказана. ¦
Итак, действие V на векторные и ковекторные поля (в криволи-
криволинейных координатах в Rn) имеет вид
Теперь рассмотрим действие V на операторных полях, т. е. на
полях типа A,1). Имеем
, дх" дх* дхк д ( дх* дх?' Л
[ )j'k' Ox* OxJ' дхк' дхк \дх"' dxJ pf )
(
Ox* OxJ' дхк' дхк \дх"'
дх1' дхэ дхк dx
^~~\ о ^~\ I' ^~\ I/4' ^~\ f\r ^~~\ I ^~\ /~i' ^~\ I/4
s~~\ /у» v s~4 rf I jr~\rfi\j irwrf*^j /и ^У* I /ш/УъЧ s~y/у* ri>
,r dxl dxi Qxk q^xi
р'
+ р' dxi dxi' дхк' дхч'дха' дхк
/ дх1' дхэ дхк дх1 д2хР' d(Ti\
р' дх^ д^' дхк' дх*' dxkdxJ дхк'[ *''+ ^ р'к'
Итак, мы нашли действие V на Т-.
Теорема 1. Пусть Мп = Rn, (x) — декартовы координаты,
(х') — криволинейные координаты. Тогда в Ип существует тен-
тензорная операция V, задаваемая на произвольном тензорном поле
т]1'.'.'Тр Ф°рмулоп
^i^^^i
__(j V ^p
~ дха' \ J'i-J'p> 4< ii-Jp q'a' 4< JiJsQfP
S — 1 S — 1
где функции Y1-, , преобразуются при замене (xf) —)> (xff) так:
J Ч
гп дхг" dxi Qx
з"к" = ~д^Ъ^Ъх^ J'k'
* dxJ"dxk"'
а поле т?1'"^
ливается дословным повторением проделанных выше вычислений
Доказательство. Явный вид V на поле т?1'"^ устанав-
устанавй
218 Гл. 5. Тензорный анализ и риманова геометрия
для случая векторных, ковекторных, и операторных полей, повто-
повторенных столько раз, каков ранг поля Т^"л-к. Выписывание формул
оставляем читателю как обязательное упражнение. Изучим закон
преобразования Гг//с,. Имеем
VkllT =
дхк д (дх
дхк" дхк' \ дх1'
1 I 41 •/ 1 I
L/Jb L/Ju L/-L •/ L/Ju
t, дх д^ ,дх г„
' дхк" дхк'дх* дхр' р"к"'
дхк" dxv дхк' дхк"
дхк' дх>" , дх*дх*'(дТ*
Сравнивая, получаем
/ дх^дх^ г, i дхк' д2х1" idx? гп
дхк" dx* р'к' дхк"дхк'дхр' дхр' р"к"'
дхк" dx* р'к' дхк"дхк'дхр'
Так как это тождество должно иметь место для любого поля Тг,
то
л/1 л/ дхр' дхк' дх1" дхр' дхк' д2х1"
&^д^ дхР" дхк" Охк'дхР''
В силу леммы 1
д2х1" дхР' дхк' д2х1' дх1"
дхк' дхР' дхР" дхк" дхР" дхк" дх1'
Теорема доказана. ¦
Мы доказали существование «тензорного дифференцирования»
пока только для случая Мп = Rn, т.е. «в присутствии» декарто-
декартовых координат. Это позволило нам в явном виде вычислить функ-
функции Г^//с,.
Рассмотрим теперь произвольные гладкие многообразия. Новую
операцию V зададим аксиоматически, положив в основу определе-
определения тензорные свойства V на Rn.
Определение 1. Будем говорить, что на гладком многообра-
многообразии Мп задано ковариантное дифференцирование V, если для каж-
каждого гладкого атласа в каждой карте заданы гладкие функции Гг-к
(называемые символами Кристоффеля), преобразующиеся при за-
замене координат по закону
5.3. Связность и ковариантное дифференцирование 219
,/ _ дх1' Эх? дхк г дх1' д2х1
З'к' = ~d^lh?lhF +
Тогда V задается формулой
ft p
jjxa I- p ^__^ I- p ^__^
Существование многообразий, где можно ввести V, доказано
нами выше: можно взять Мп = Rn. Тогда Тг-к задаются получен-
полученными выше формулами. Важно, что набор Тг-к не образует тензора!
Символы Кристоффеля преобразуются как тензор лишь в частных
случаях, например, при линейных заменах координат. Иногда гово-
говорят, что символы Кристоффеля (или V) задают на Мп аффинную
связность. Если координаты фиксированы, то V представляется как
совокупность операций V& — ковариантных дифференцирований по
отдельным координатам.
Определение 2. Тензором кручения аффинной связности Yl-k
называется тензор, задаваемый в каждой системе координат равен-
равенством: Щк = Yl-k - Ylkj.
Лемма 2. Набор функций Щк действительно образует тензор.
Доказательство. Используя закон преобразования сим-
символов Кристоффеля и альтернируя Yl-,k, по нижним индексам, полу-
получаем, в силу симметрии «нетензорного добавка» по f и к' формулу
Ог' _ дх 8x3 8хк г
э'к> ~ д* dJ' дхк' ^
Определение 3. Связность (или ковариантное дифференциро-
дифференцирование) V называется симметричной, если тензор кручения равен
нулю.
Связность, введенная нами в Rn, была симметричной (проверь-
(проверьте!). Кстати, на произвольном Мп символы Кристоффеля уже не
обязаны иметь вид вторых частных производных от координат, как
это было в Rn.
Предложение 1. Ковариантное дифференцирование {связ-
{связность) V удовлетворяет соотношениям'.
1) операция V = {V&} — линейна;
2) для произвольного тензорного поля ТУ.1 набор функций
VfcT/.j = (VT)k\., образует тензорное поле;
3) если тензорное поле — скалярное (т. е. гладкая функция f на
Мп\ то
220 Гл. 5. Тензорный анализ и риманова геометрия
4) операция V на векторных полях Т1 имеет вид
+ТТ
операция V на ковекторных полях Т{ имеет вид
5) операция V удовлетворяет формуле Лейбница:
где Т/.ч w Р}?^ — произвольные тензорные поля.
Доказательство. Свойства 1)-4) сразу следуют из опре-
определения V. Осталось доказать 5). Рассмотрим простейший случай:
одно из полей T^l, р№ — скалярное. Тогда 5) вытекает из формулы
Лейбница для скалярных функций. Пусть теперь поля Т и Р —
векторные поля Т\ РК Имеем
\7к(Т1 • pi) = — (Г • pi) + TaPJTlak + TPaTJak =
Доказательство для произвольных полей Р и Т аналогично пре-
предыдущему после замены индексов i,j на мультииндексы (г), (j). ¦
Теорема 2. Пусть на Мп задана операция V = {V&}, удовле-
удовлетворяющая 1)-5) (см. Предложение 1). Тогда для произвольного
(i)
тензорного поля ТУ1 имеет место тождество
и (rjiiiia\
ji—jp rk jijsjp j
q=l s=l
m. e. V — ковариантное дифференцирование в смысле нашего опре-
определения (см. выше). Свойства 1)-5) однозначно задают опера-
операцию V, т. е. ее можно вводить аксиоматически с помощью этих
свойств.
5.3. Связность и ковариантное дифференцирование 221
Доказательство. Действие V на скалярных функциях
и на тензорах ранга 1 задано согласно 1)-4). Осталось найти V&
на тензорах произвольного типа. Докажем лемму: любое тензорное
поле разлагается в линейную комбинацию (с гладкими коэффици-
коэффициентами) произведений полей первого ранга. В самом деле, любое
тензорное поле есть полилинейное отображение,
т = 4i;'.'.j*e*i ® • • • ® eik ®ejl ® - - - ®ejq>
где e^,eZa — поля 1-го ранга и а1^^ — гладкие функции. Пусть
{Т?*} — компоненты тензора е^ , a Tls — компоненты eJs. Тогда
rpOLl...OLk
1
rpjq
i nT (—-i- -РГЧ- ——(Т- ) -Гр Т -Vq Т
\dxk q ik)~dxk^ j) ikPJ Jk i
Вернемся к доказательству теоремы. Для простоты рассмотрим
случай 2-го ранга (для произвольного поля выкладки аналогичны).
В силу линейности V формулу E) достаточно проверить на мо-
мономах Tij = a(x)TiPj, где а(х) — гладкая функция. По формуле
Лейбница E) имеем
V^) = Vk(a(x)TtPj) =
\dxk
что и требовалось. ¦
Определение 4. Пусть V — аффинная связность на Мп. Локаль-
Локальные координаты ж1, ..., хп называются евклидовыми для V, если в
них Т]к(х) = 0.
Такие координаты могут и не существовать, например, если V
не симметрична. В этом случае Щк отличен от нуля. Если бы су-
существовали координаты, в которых Т1-к = 0, то обратился бы в нуль
и Огд,, а тогда он был бы тождественным нулем в любых координа-
координатах в силу тензорности.
Общее ковариантное дифференцирование никак не связано с ри-
мановой метрикой. Риманова метрика и аффинная связность — это
различные структуры на Мп. В частности, евклидовы координаты
для аффинной связности и евклидовы координаты для метрики д^
(т. е. такие, в которых д^ = 5ц) — это разные понятия.
222
Гл. 5. Тензорный анализ и риманова геометрия
Пусть теперь на Мп задана метрика д^. Тогда среди всех аф-
аффинных симметричных связностей выделяется одна (и только од-
одна!) связность, согласованная с этой метрикой и полностью опреде-
определяемая ею. Такие связности называются римановыми.
5.3.2. Римановы связности
Определение 5. Аффинная симметричная связность V = {Г^}
на римановом многообразии называется согласованной с метрикой
gij (или называется римановой связностью), если V(^j) = 0.
В силу тензорности V тождество {V/C(^j) = 0} имеет место
в любых координатах. Относительно римановой связности тензор
gij — «постоянен» в том смысле, что его ковариантная производная
равна нулю. В частности, для любого тензорного поля T^V имеем
(р)
(я)
= gijVk(T^pJ), см. формулу Лейбница.
Теорема 3. Пусть дц —риманова метрика на Мп. Тогда суще-
существует и единственна симметричная аффинная связность, согла-
согласованная с дц, причем
гг = 1 m (д9ка dgja _ dgjk \
jk 2g \ dxi дхк дха)'
Доказательство. Предположим, что существование до-
доказано. Покажем единственность связности. Согласно определе-
определению: Vk(gij) = 0. Достаточно доказать, что отсюда однозначно
находятся Тг-к как функции д^. Имеем: Vkgij = 0, dgij/dxk =
= gajTfk + gai^%- Циклически переставляя индексы, получаем
дхк
дды
dxi
+ Гг:7
= Tk;ji +
(ijk)
(kij)
tiki),
^ dxi
где F^.^j = giaTa-. Складывая первые два тождества и вычитая тре-
третье, получаем
dgij дды_ _ dgjk_ = 2Г =2 . га
охК охЭ ox1 J
(напомним: Yl-k = Г^..). Далее,
va — /
\dxk
dxa
5.3. Связность и ковариантное дифференцирование 223
Мы решали здесь систему вида: дарТа = Q/з- Так как дар — невы-
невырожденный тензор, то существует обратный тензор да@, а потому
Итак, если решение исходной системы существует, то оно един-
единственно. Для доказательства существования определим Гг-к с по-
помощью полученных выше формул. Повторяя выкладки в обратном
порядке, получаем Vk{g%j) = 0. Теорема доказана. ¦
Замечание. Пусть на Мп существуют координаты, в которых
9ij = $ij- Существование такой системы эквивалентно существо-
существованию координат, в которых (дц) становится постоянной матри-
матрицей (не зависящей от точки). Тогда линейной заменой эта матри-
матрица приводится (одновременно во всех точках окрестности) к ви-
виду Sij. Поэтому координаты можно называть евклидовыми, если в
них метрический тензор постоянен. Вернемся к римановой связ-
связности.
Предложение 2. Система координат евклидова с точки зрения
римановой связности, согласованной с gij, тогда и только тогда,
когда эти координаты евклидовы с точки зрения дц {т. е. дц ло-
локально постоянен).
Доказательство. В самом деле, если дц локально по-
постоянен, то, в силу теоремы 3: Тг-к = 0. Обратно: если Тг-к = 0, то в
силу теоремы 3: дд^/дхк = gaj^Jk + ЗшГ^. = 0, т. е. д^ постоянен
в этих координатах, что и требовалось. ¦
Рассмотрим гладкую гиперповерхность Vn~1 С Rn, заданную
графиком: хп = /(ж1, ... ^хп~1). Пусть Pq e Vn~1 — точка, в ко-
которой Tpo(Vn~1) параллельна плоскости Rn~1(x1, ...,xn~l), т.е.
df(Po)/dxl = 0. Мы вычисляли дц относительно таких координат.
Имеем: дц = 5^ + fxifxj. Отсюда: Тг-к(Ро) = 0 для связности, со-
согласованной с gij. В окрестности Pq функции Гг-к могут быть нену-
ненулевыми.
Риманова связность позволяет корректно определить диверген-
дивергенцию потока. Отметим, что понятие дивергенции (изменения беско-
бесконечно малого объема) предполагает наличие метрики.
Итак, пусть Т — векторное поле на Мп с римановой связно-
связностью. Положим: div(T) = V{Tl. Ясно, что div(T) — скалярная
функция.
Предложение 3. Имеет место формула
где g — определитель матрицы
224 Гл. 5. Тензорный анализ и риманова геометрия
Доказательство. В силу теоремы 3 имеем
rlrT1^ 1 / г)п г)п • f)n • \
u I ma iv I иУро1 . иУрг иУаг \
= —:—г J- ~д I —:—г — 11
Далее
(УХ Zi (УХ
так как
Ар uQpa ip U9ai n
g — — g = U.
dxl dxp
Мы утверждаем далее, что
ipdgip о d
д тг~^ = ^т;—v^\/9)-
оха оха
Напомним, что дгр = Aip/g, где Aip — минор, дополнительный к gip
в матрице (gij). Отсюда следует, что достаточно проверить соотно-
соотношение
dgip dg
дха дха
(ьр)
Определитель g есть сумма однородных мономов степени п. Собе-
Соберем все члены в сумме д, содержащие gip. Тогда: д = ... + gip x
х Rip + ..., где Rip — полином степени п — 1, уже не содержащий
gip. При этом, Rip = Aip. Вычисляя dg/dxa видим, что dgip/dxa
войдет с множителем А^. В другие слагаемые, т.е. в (Aip), где
(Aip) = g—gipAip, функция gip не входит. Следовательно, дд/дха =
= 1>2(i,P)(dgip/dxa)Aip, что и требовалось. ¦
5.4. ПАРАЛЛЕЛЬНЫЙ ПЕРЕНОС. ГЕОДЕЗИЧЕСКИЕ
5.4.1. Предварительные замечания
Рассмотрим гладкое многообразие (не обязательно риманово).
Во многих задачах требуется сравнить касательные векторы, прило-
приложенные в различных точках. Для произвольного Мп задача сложна
по той причине, что ТХМП и ТуМп различны. В случае Mn = Rn
имеется операция параллельного переноса, позволяющая сравни-
сравнивать векторы в разных точках. Формально ее можно определить так.
Рассмотрим пару точек Р и Q и пусть а — вектор в точке Р. Рассмо-
5.4. Параллельный перенос. Геодезические
225
трим гладкую кривую j(t), такую, что 7@) = Р и 7A) = Q- Парал-
Параллельно перенесем а вдоль j(t) так, чтобы начало вектора скользило
по j(t). В результате получаем вдоль j векторное поле a(t), имею-
имеющее постоянные компоненты, равные компонентам а в начальный
момент. Производные по t от компонент поля а(?) равны нулю. Век-
Вектор аA), возникший в точке Q, не зависит от выбора кривой 7- В
этом смысле параллельный перенос в Rn не зависит от пути.
При переходе к произвольному Мп эта простая схема разру-
разрушается, поскольку в общем случае М нельзя покрыть одной кар-
картой, т. е. ввести единую систему координат. Предположим сначала,
что М2 гладко вложено в R3 и пусть Р, Q — близкие точки на М2.
Пусть а Е ТрМ2 и 7 — кривая на поверхности из Р в Q. Можно
предложить такой «параллельный «перенос» на М2. Рассмотрим а
как вектор из R3 и перенесем его параллельно вдоль 7 с точки
зрения R3. Получится некоторый вектор b в точке Q. Но b уже
не обязан лежать в TqM2. Поэтому мы спроектируем Ъ на TqM2
и назовем его проекцию тгЬ результатом параллельного переноса
из Р в Q (рис. 5.8). Эта операция не зависит от пути. Однако она
корректно определена лишь в малой окрестности точки Р. Если
мы захотим перенести а «далеко», то может оказаться, что вектор
тгЬ окажется нулевым. Например, так произойдет на S2 (рис. 5.9),
Рис. 5.8
Рис. 5.9
если мы пройдем половину меридиана. «Параллельный перенос»,
дающий в результате нулевой вектор, следует отвергнуть. Впрочем,
можно поступить более аккуратно. Будем двигаться по 7 бесконеч-
бесконечно малыми шагами и каждый раз ортогонально проектировать полу-
получающийся вектор на Т^и\М2. Оказывается, возникает корректный
«параллельный перенос» на М2 С R3. Мы не будем здесь изучать
эту операцию детальнее.
Обратим внимание, что при определении параллельного перено-
переноса мы вынуждены фиксировать кривую, вдоль которой нужно дви-
226
Гл. 5. Тензорный анализ и риманова геометрия
гаться. На многообразии общего вида заранее неясно: зависит или
нет результат переноса от пути. Может оказаться, что зависит. При-
Пример: параллельный перенос вдоль оси листа Мебиуса (рис. 5.10). В
С
с
с
ШШШШ
'¦'{:':':¦'¦'.
М
п
i
i
TF
с
Рис. 5.10
данном случае зависимость переноса от пути есть следствие неори-
неориентируемости, однако и на ориентируемом многообразии парал-
параллельный перенос будет, вообще говоря, зависеть от пути.
5.4.2. Уравнение параллельного переноса
Положим поэтому в основу понятия параллельного переноса
на Мп операцию дифференцирования V.
Пусть P,Q — две точки на Мп, соединенные гладкой или кусоч-
кусочно-гладкой траекторией j(t), такой, что 7@) = Р и 7A) = Q- Пусть
7 — поле скоростей вдоль j(t). Компоненты этого поля обозначим
{?*}. Пусть на Мп задана аффинная связность V = {V&}. Опреде-
Определим ковариантную производную тензорного поля Т = {т№ } вдоль
векторного поля j формулой: V^(T) = {V^T^}. Условно будем
писать: V^ = <^^/с- Эту операцию назовем ковариантным диффе-
дифференцированием вдоль кривой.
Определение 1. Пусть Т = {Тг} — гладкое векторное поле
вдоль кривой j(t). Назовем его параллельным вдоль j(t) относи-
относительно связности V, если V^(T) = 0.
Другими словами, поле Т, «параллельное вдоль 7(^)>>> имеет
ковариантно постоянные компоненты. В этом — аналогия с евкли-
евклидовым случаем, поскольку общее определение параллельности пре-
превращается для {V& = д/дхк} в Мп = Rn в обычный параллельный
перенос.
Запишем условие параллельности поля Т в координатах. Имеем
dt '
5.4. Параллельный перенос. Геодезические 227
dx^dT_ dx^ г _dT_ dx^_
dt 8xk^ dt pk dt + pk dt
Определение 2. Уравнение dTl/'dt + TpTlpk(dxk/'dt) = 0 назы-
называется уравнением параллельного переноса вдоль кривой
Изменив 7, мы меняем уравнение переноса.
Итак, пусть j(t) — кривая, идущая из Р в Q, и
— вектор, заданный в Р. Наша цель: построить в точке Q вектор
b Е TqMu', который естественно назвать «параллельным вектору
а». Рассмотрим вдоль 7 уравнение параллельного переноса. В нем
функции Тък и dxl{t)jdt известны. Ищем функции {Tl(t)} — ком-
компоненты параллельного поля Т(?). При этом нужно, чтобы в на-
начальный момент выполнялось условие Тг@) = а1. Как известно из
курса обыкновенных дифференциальных уравнений, решение си-
системы dTlIdt + TpTlpk(dxkIdt) = 0 существует, единственно и про-
продолжается вплоть до Q.
Определение 3. Вектор b = T(l) E TqMu, возникающий в Q,
называется параллельным вектору а Е ТрМп вдоль кривой j(t).
Ясно, что b зависит, вообще говоря, от j. В случае Мп = Rn
вектор b параллелен а в обычном смысле, если в качестве V взять
евклидову связность: Гг-к = 0.
Рассмотрим свойства параллельного переноса на римановом
Мп в римановой связности V.
Теорема 1. Пусть a, b Е ТрМп и j(t) — гладкая кривая из Р
в Q. Перенесем векторы в. и Ъ параллельно вдоль j(t). Тогда ска-
скалярное произведение векторов сохраняется, т. е. если а(?) и h(t) —
параллельные поля вдоль j(t), a@) = a, b@) = b, то rf/rft(a(t),
b(t)) = 0, где (,) — скалярное произведение в Т^^Мп, порожден-
порожденное gij.
Доказательство. Включим а и b в параллельные по-
поля: Т = а(?) и R = b(?), T@) = a, R@) = b. Рассмотрим функ-
функцию /(?) = (T,R) , , = (gijTlR?)(t), т.е. скалярное произведение
вдоль j(t). Дифференцируя, получаем
3 ц = 0,
так как V^(T) = V^(R) = 0. ¦
Верно и обратное: если на римановом Мп дана симметричная
аффинная связность, в которой параллельный перенос вдоль любой
228 Гл. 5. Тензорный анализ и риманова геометрия
кривой сохраняет скалярное произведение, то эта связность —ри-
—риманова. В самом деле, обращаясь к доказательству теоремы 1, по-
получаем
Ъ, т.е. Vkgij=0.
Хотя мы рассматривали гладкие кривые,
однако легко определить перенос и вдоль
кусочно-гладких кривых. Пусть uaj(t) есть
изолированная точка излома (рис. 5.11). Пе-
Перенося вдоль j(t) вектор а, сначала полу-
ис* чим в А вектор Ь, параллельный а. При-
Примем b за начальный вектор нового параллельного поля уже вдоль
участка АВ и повторим процесс.
5.4.3. Геодезические
Определение 4. Пусть Мп снабжено аффинной связностью (на-
(наличие метрики не предполагается). Гладкая кривая j(t) называется
геодезической в данной связности V, если V^G) = 0, где j — век-
векторное поле скорости траектории ^(t).
Иными словами, геодезическая — это траектория, поле скоро-
скоростей которой параллельно вдоль нее, т. е. при параллельном перено-
переносе ее вектор скорости переходит в вектор скорости. Выведем урав-
уравнение геодезических.
Имеем:
dxl
О = V^G) и, поскольку Т1 = ——, то
<П* k _ rfV dx°dxk
— +TTTak-0, или — + Tak — —
Мы получили уравнения геодезических. Их решения — это функ-
функции x1(t), ...,жп(?), задающие геодезическую ^(t). Это система
п уравнений второго порядка в обыкновенных производных. Ее
решение однозначно задается начальными данными: хг@) = Р1 и
dxl(Q)/dt = а\ а Е ТрМп. Итого — 2п постоянных: п из них опре-
определяют точку Р, а другие п задают вектор скорости в этой точке. Из
теории обыкновенных дифференциальных уравнений сразу следует
Предложение 1. Пусть Р Е Мп, и а Е ТрМп. Тогда существу-
существует и единственна геодезическая ^(t), такая, что 7@) = Р, 7@) = а.
Следствие. Две геодезические, коснувшиеся друг друга в неко-
некоторой точке, совпадают.
Рассмотрим теперь риманово Мп и риманову связность V.
Пусть 7 — геодезическая, j — поле скоростей, Т — векторное поле,
5.4. Параллельный перенос. Геодезические
229
а = Т@)
параллельное вдоль 7- Тогда в каждой точке j(t) возникает число
cosa(t) = (Т,7)/(|Т| • |7|), где a(t) —угол между векторами Т и j.
Лемма 1. При параллельном переносе вектора Т вдоль геоде-
геодезической 7 угол а сохраняется: a(t) = const.
Доказательство. В силу теоремы 1 сохраняются ска-
скалярные произведения и длины векторов. ¦
В двумерном случае сохранение угла однозначно задает парал-
параллельный перенос вдоль геодезической. Пусть 7 — геодезическая и
SL^TpM2 (рис. 5.12). Тогда параллельное поле Т(?), такое, что
Т@) = а, образовано векторами, имеющими ту же длину, что и а,
и образующими с вектором ^(t) один и
тот же угол а, равный углу между а
и 7@). Теперь можно определить па-
параллельный перенос вдоль любой ку-
кусочно-гладкой кривой 7- Аппроксими-
Аппроксимируем 7 ломаной геодезической, состав-
составленной из малых геодезических отрез-
отрезков. Затем перенесем вектор вдоль каж-
каждого из них, используя постоянство угла. Потом перейдем к преде-
пределу, устремляя к нулю длину геодезических отрезков. При парал-
параллельном переносе вдоль траектории, не являющейся геодезической,
угол, образуемый переносимым вектором с ее вектором скорости,
будет, вообще говоря, меняться. Рассмотрим примеры.
1) Если Мп = Rn, то параллельный перенос вдоль кривой сов-
совпадает с обычным: параллельное поле имеет постоянные компонен-
компоненты относительно декартовых координат.
2). Пусть М2 — прямой круговой конус в R3 с углом при вер-
вершине, равным в (рис. 5.13). Мы считаем, что вершина «выколота».
Рис. 5.12
Рис. 5.13
Пусть j(t) — сечение конуса плоскостью, ортогональной оси. Пусть
ОР = г, а Е ТрМ2 направлен в вершину конуса. Перенесем этот
230 Гл. 5. Тензорный анализ и риманова геометрия
вектор параллельно вдоль j{t) и вернемся в точку Р. На какой угол
повернется вектор? Используем связность, согласованную с инду-
индуцированной метрикой на конусе. Так как она евклидова, то конус
можно развернуть на плоскость, разрезав его вдоль образующей.
Достаточно найти поворот а при его параллельном переносе на R2
вдоль дуги окружности (рис. 5.14). Легко подсчитать, что угол по-
поворота (р равен 2тгA — sin@/2)).
Укажем геометрический смысл символов (коэффициентов) Кри-
стоффеля с точки зрения параллельного переноса. Найдем Vda{dp),
где да и др — координатные векторные поля координат ж1, ..., хп
на Мп. Тензор Voa {др) снова — векторное поле.
Лемма 2. Имеет место тождество Vsa{dp) = Ykoadk-
Доказательство. Имеем
где
ij f sjQ fiQ \. Я /Т1^
{ Т + r^r^J = %%!%, = 1%,;
Т* + r^r^J = %%!%, = 1%
Лемма доказана. ¦
Это утверждение можно понимать так. Сделаем бесконечно ма-
малый перенос др вектора в направлении да. При этом др как-то «по-
«повернется», и коэффициенты его разложения по д\, ..., дп как раз и
равны Ткра.
3) Пусть Мп = Rn отнесено к декартовым координатам ж1, ...
..., хп. Тогда Гг-к = 0. Уравнения геодезических имеют вид
at1
т.е.
Итак, геодезические — прямые линии и только они.
4) Пусть М2 = S2 со стандартной метрикой ds2 = d62 + sin2 6 х
х dip2 в сферических координатах. Найдем геодезические. Прямой
подсчет дает (проверьте!): Т\2 = —1/2sin20; Г22 = ctgO; Гг-к = 0
для всех остальных наборов индексов {i,j,k). Здесь ж1 = в, х2 =
= <р; дп = 19 gf12 = д2\ = 0, ^22 = sin2 в. Отсюда уравнения геоде-
геодезических имеют вид: d26/dt2 — 1 /2 sin 26{dip/dtJ = 0, d2ip/dt2 +
+ ctg в{dip I dt){d61 dt) = 0. Одно из решений имеет вид: ср = const,
5.4. Параллельный перенос. Геодезические 231
в = t. Это — меридиан, выходящий из северного полюса, отнесен-
отнесенный к параметру в = t — длине дуги.
Предложение 2. Пусть S2 снабжена стандартной метри-
метрикой. Тогда геодезическими римановой связности являются все цен-
центральные плоские сечения сферы {экваторы) и только они.
Доказательство. Сначала докажем, что любое централь-
центральное плоское сечение S2 — геодезическая (относительно натурально-
натурального параметра). Для одного меридиана 7о это уже доказано. Рассмо-
Рассмотрим произвольный «экватор» 7- Очевидно существует вращение,
переводящее 7 B То-
Лемма 3. Пусть /: Мп —>> Мп — изометрия риманова многооб-
многообразия Мп и 7 — геодезическая римановой связности. Тогда образ 7
при изометрии / — также является геодезической.
Изометрия сохраняет риманову связность, а потому сохраняет и
уравнения геодезических, т. е. / переводит
решение системы снова в решение системы,
что и требовалось. ¦
Возвращаясь к доказательству предло-
предложения 2, получаем, что 7 — геодезическая.
Обратно: пусть 7 — геодезическая на S2.
Рассмотрим в произвольной точке 7 ее век-
вектор скорости 7 и проведем через эту точку
в направлении вектора экватор (через лю- Рис 5 15
бую точку S2 в любом направлении прохо-
проходит один и только один экватор) (рис. 5.15). Так как 7 и экватор —
решения одной и той же системы, то, касаясь, они совпадают. ¦
5) Пусть М2 = L/2 — плоскость Лобачевского со стандартной
метрикой ds2 = dx2 + sh2 х dtp2 - Напомним, что в модели Пуанкаре
метрика имеет вид A — r2)~2(dr2 + r2 dip2). Найдем геодезические.
Предложение 3. Геодезическими плоскости Лобачевского в мо-
модели Пуанкаре являются все дуги окружностей, выходящих на аб-
абсолют под прямым углом {в частности, все диаметры), и только
они.
Так как метрика 1*2 получается из метрики S2 заменой тригоно-
тригонометрических функций на гиперболические, то: Т\2 = — V^sM^x);
Г22 = cthx; Г*-д. = 0 для всех остальных индексов (i,j,k); здесь
х1 =х, х2 = (р. Отсюда d2x/dt2-l/2shBx)(d(p/dtJ = 0, d2(p/dt2 +
-\-cth x(d(p/dt)(dx/dt) = 0. Одно из решений имеет вид: (р = const,
X = t — прямая, проходящая через точку 0 на плоскости. Так как
(%, (р) «обслуживают» в то же время правую полость гиперболо-
гиперболоида — псевдосферы мнимого радиуса, то при стереографической
проекции «прямая» с уравнением ср = (р$, х = t перейдет в диа-
232
Гл. 5. Тензорный анализ и риманова геометрия
метр единичного круга. Мы доказали, что один из диаметров 70 на
модели Пуанкаре — геодезическая.
Докажем, что любая дуга окружности, ортогональная абсолю-
абсолюту, — геодезическая. Используем лемму 3. Надо доказать, что любая
такая окружность переводится изометрией в 70 • Перейдем к модели
на верхней полуплоскости с метрикой (dx2 + dy2)/y2. Напомним,
что существует изометрия (дробно-линейное преобразование), пе-
переводящая единичный круг в полуплоскость. При этом граница кру-
круга переходит в вещественную ось, а диаметр 7о — в прямую, орто-
ортогональную вещественной оси (рис. 5.16). Можно считать, что ось
f(D) f(C)
Рис. 5.16
OY на полуплоскости является геодезической, поскольку она — об-
образ диаметра 7о ПРИ изометрии. Тогда любая прямая, ортогональ-
ортогональная вещественной оси, — геодезическая, так как сдвиг z —> z + a,
a E R, — изометрия. Отсюда следует, что любая дуга окружно-
окружности, выходящая под прямым углом на ось ОХ, — геодезическая, так
как переводится в ось OY дробно-линейным преобразованием: сна-
сначала сдвиг z —>> z + a, a E R, затем
z —>> —z/(z — а), а Е R. Доказано, что
все прямые, ортогональные веществен-
вещественной оси, и все дуги окружностей,
встречающих ось ОХ под прямым уг-
углом, — геодезические. Пусть теперь
7 — произвольная геодезическая. Дока-
Докажем, что она совпадает с уже описан-
описанными геодезическими. Возьмем на 7
точку Р и рассмотрим вектор 7- Прове-
Проведем через Р дугу окружности, встречающую абсолют под прямым
углом и имеющую тот же вектор скорости (рис. 5.17). Как мы уже
знаем, 7 совпадает с этой дугой. Доказательство завершено.
У i
o\
p
7/
X
Рис. 5.17
5.4. Параллельный перенос. Геодезические
233
Покажем, как параллельно переносится вектор на плоскости Ло-
Лобачевского вдоль прямой, параллельной оси ОХ. Это — не геодези-
геодезическая. Аппроксимируем j ломаной геодезической (рис. 5.18). Ка-
Качественная картина параллельного переноса а показана на рис. 5.19.
Переносимый вектор вращается вокруг своего начала.
У i
J
a
у г
/
/ /
/ /
/ /
/ 1
1 I (
О
w
11/
p» iiim,^
/ 1
' /
/
/
/
/
%
<
i
Т1Г7
W/,
x /
у
/ \
/ \
\
\
1
\ /
Y
/ \
/ \
/ \
1 \
1 1
l"*4«<m
\
\
\
\
\
\
1
Q
\
\
\
\
\
1
X
Рис. 5.18
a
Р
О
Рис. 5.19
Q
Замечание. Геодезические на плоскости Лобачевского можно
найти, проинтегрировав уравнения геодезических. Это удобно вы-
выполнить на верхней полуплоскости. Символы Кристоффеля име-
имеют вид (проверьте!): Г{2 = 1/у; Г^ = —1/у; V\2 = 1/у; остальные
равны нулю. Уравнения геодезических х = 2ху/у, у = (у2 — х2)/у.
Отсюда
dx2
yy" + yn
= -1;
У
{yy'I
= -1;
х2
D
{х - СJ + у2 = C2
D.
Если х = 0, то получаем прямые, ортогональные вещественной
оси. Если х Ф 0, то получаем окружности, ортогональные абсолюту.
234
Гл. 5. Тензорный анализ и риманова геометрия
Замечание. Перенести параллельно вектор а вдоль плоского
(не центрального) сечения S2 (рис. 5.20).
6) Пусть М2 = Т2 — двумерный тор с локально евклидовой мет-
метрикой. Рассмотрим на окружностях Sl(np) и Б1{ф) углы (риф. Они
будут координатами на торе, в которых метри-
метрика примет вид: dip2 + Aф2. Ее можно предста-
представить как индуцированную евклидовой метри-
метрикой из R4 при вложении Т2 в R4 = С2 по фор-
формуле: /_((р,ф) -> (е^, е^). Так как ds2(R4) =
= dz dz + dw dw, то ds2(T2) = dip2 + dip2.
Поскольку в евклидовой метрике Yl-k = 0,
то геодезические на торе — это образы пря-
прямых плоскости И2((р,ф) при ее факториза-
факториза(р,ф) Т2((р,ф), Ц(р,ф) = ((р,ф) mod27r, т.е. Т2 =
= R2/Z 0 Z (рис. 5.21). Других геодезических на торе нет. Геоде-
Геодезические разбиваются на два класса: замкнутые и незамкнутые. Их
Рис. 5.20
ции h: И2((р,ф)
2
ф
2тг
2тг
?
Рис. 5.21
удобно изображать прямыми на Л2((р,ф) с отмеченной решеткой
Z 0 Z = Bтгга, 2тгп); га, n E Z. Рассмотрим прямые, выходящие из
точки 0. Ясно, что соответствующая геодезическая на торе замкнута
тогда и только тогда, когда прямая
встречает какую-либо «целую» точ-
точку Bтгга, 2тгп). Напротив, геодезиче-
геодезическая на Т2 незамкнута (гомеоморф-
на прямой) тогда и только тогда, ко-
когда соответствующая прямая не со-
содержит «целых» точек, кроме точки
0. Выразим это в терминах тангенса
угла наклона прямой к оси ОХ. Гео-
Рис. 5.22 дезическая замкнута тогда и только
тогда, когда tga (рис. 5.22) — ра-
рационален. Геодезическая незамкнута, если tga иррационален. На
рис. 5.22 показана прямая, проходящая через точку Bтг -3, 2тг • 2).
ф1
0
щ
a
у
C,2)
5.4. Параллельный перенос. Геодезические
235
После факторизации мы получим на квадрате 0
^ 2тг образ этой прямой (рис. 5.23).
5 = 1
2тг; 0
Рис. 5.23
На рис. 5.23 показана также соответствующая геодезическая на
торе (окружность). Если тангенс иррационален, то геодезическая
порождает «иррациональную обмотку» тора, т. е. ее замыканием яв-
является весь тор.
Опишем некоторые применения геодезических.
Теорема 2. Пусть М2 — одно из следующих многообразий:
плоскость R2, сфера S2, плоскость Лобачевского L/2, со стан-
стандартными метриками. Пусть б = Iso(M2) — группа всех изомет-
рий М2. Тогда каждое преобразование g Е б задается тремя не-
непрерывными параметрами, т. е. dim 6 = 3.
Здесь б — полная группа изометрий, т. е. группа диффеоморфиз-
диффеоморфизмов, сохраняющих метрику. Группа б = Iso(Mn) определяется для
любого гладкого риманова многообразия. Она является топологиче-
топологическим пространством: два преобразования gi,g2 считаются близки-
близкими, если они близки как диффеоморфизмы Мп, т. е. для всех точек
х Е Мп близки точки g\{x\g2{x).
Теорема 2 вытекает из общего утверждения, которое мы дока-
докажем в частном случае.
Пусть Мп — компактное гладкое риманово связное замкнутое
многообразие и б = Iso(Mn). Тогда dim© ^ п(п + 1)/2, т. е. каж-
каждое преобразование g E б задается не более чем п(п + 1)/2 непре-
непрерывными параметрами.
Мы докажем эту теорему только для указанных трех многооб-
многообразий, хотя большая часть рассуждений верна для многообразий
общего вида.
Доказательство. Пусть xq Е Мп и H(xq) С б — мно-
множество изометрий, оставляющих xq на месте. Ясно, что H(xq) —
подгруппа. Она называется стационарной подгруппой точки xq.
Пусть h Е Н(х0). Так как h(x0) = х0, то dh(x0): ТХоМп -> ТХоМп.
236 Гл. 5. Тензорный анализ и риманова геометрия
Построим отображение A: H(xq) —>> GL(n; R), положив X(h) =
= dh(xo). Ясно, что dh E GL(n; R), так как h — диффеоморфизм.
Далее, А отображает H(xq) в подгруппу О(п) С GL(n, R). В самом
деле, можно считать, что в окрестности xq выбраны координаты,
такие, что gij(xo) = 5ц\ тогда gij(xo) определяет в ТХоМп евкли-
евклидову метрику. Так как h — изометрия, то dh(xo) сохраняет евкли-
евклидово скалярное произведение в ТХоМп. Далее: А — гомоморфизм
H(xq) в О(п). В самом деле: X(h\ 0/12) = d{h\ о/12X^0) = dhi(xo) о
odh2(xo). Более того, А — мономор-
мономорфизм. В самом деле, допустим, что
dh = Е, т. е. тождественно. Надо дока-
доказать, что h(x) = х для любого х Е Мп.
Воспользуемся тем, что Мп — одно из
многообразий: S2, R2, 1*2. На каждом
из них любая пара точек соединяется
р 5 24 геодезической. На плоскости и сфере
утверждение очевидно. Если М2 = 1*2,
то рассмотрим верхнюю полуплоскость. Построение искомой гео-
геодезической см. на рис. 5.24.
Итак, пусть dh(xo) = Е. Соединим геодезической j(t) произ-
произвольную точку х Е Мп с xq. Пусть 7@) — ее вектор скорости в
точке xq. Так как h — изометрия, то образ 7 ПРИ действии h —
геодезическая. Поскольку dh(xo) = Е, то геодезическая 71 = Мт)
имеет в xq тот же вектор скорости, что и 7- Две касающиеся гео-
геодезические совпадают. Так как 7 можно отнести к натуральному
параметру, то h не меняет его вдоль 7, а потому х остается на 7
на прежнем расстоянии от жо, т.е. h(x) = ж, что и требовалось.
Итак, H(xq) — замкнутая подгруппа в О(п). Замкнутость H(xq)
вытекает из того, что изометрия, являющаяся пределом изометрий,
сохраняющих хо, сама сохраняет xq. Итак, для М2 = S2, R2, L/2
имеем: dim#(xo) ^ dim0B) = 1. Для общего Мп можно пока-
показать, что dimif(^o) ^ dimO(n), т.е. dimH(xo) ^ п(п — 1)/2. Рас-
Рассмотрим теперь группу 6.
Предложение 4. Любая изометрия д Е б определяется обра-
образом д(хо) точки xq, и дифференциалом dg(xo): ТХоМп —>> Tg(XQ^Mn.
В самом деле, рассмотрим соответствие: g —>> (g(a;o);rfg(a;o)) и
пусть (gi(x0); dgi(x0)) = E2(^0); dg2{x^)). Отсюдаgi(z0) =52(^0),
dgi(xo) = dg2(xo); тогда рассмотрим g = (^fx) о g2- Очевидно, что
^ E H(xq). Далее: dg(xo) = ((rf^i) о (dg2))(^o) = ^- Отсюда g =
ЕЙна Mn, т.e. gi(x) = g2(x). Так как д(жо) определяется п пара-
параметрами, a dg(xo) задается не более чем п(п — 1)/2 параметрами,
то ^ может быть задано не более, чем п(п + 1)/2 параметрами. Для
5.5. Тензор кривизны 237
М2 = S2, R2, L2 имеем: dim© ^ 3. С другой стороны, как было
показано в гл. 4, каждая из групп Iso(R2), Iso(*S2), Iso(L2) содер-
содержит трехмерную подгруппу Так как эти подгруппы открыты и зам-
замкнуты, то для М2 = S2, R2, L2 имеем: dimIso(M2) = 3. Теорема
доказана. ¦
Следствие. Пусть Iso(MnH — связная компонента единицы
в Iso(Mn); тогда Iso(M2H для М2 = S2, R2, L2 совпадает с теми
трехмерными группами, которые построены в гл. 4; т. е. Iso(*S2)o =
= SOC); Iso(L2)o = SLB;R)/Z2; Iso(R2)o совпадает с группой
всех линейных изометрий плоскости, сохраняющих ориентацию.
Следующую теорему мы сообщим без доказательства.
Лемма 4. Для каждой точки Pq на римановом Мп существу-
существует окрестность U и число е > 0, такие, что: (а) каждые две точки
из U соединяет одна и только одна геодезическая длины меньше е\
(б) эта геодезическая гладко зависит от своих концов и целиком
лежит в этой окрестности.
Отсюда несложно вывести следующий факт.
Теорема 3. Любое двумерное гладкое, компактное, связное, за-
замкнутое многообразие триангулируемо.
Доказательство. Снабдим М2 римановой метрикой (на-
(например, вложим М2 в евклидово пространство). Так как М2 — ком-
компактно и замкнуто, то его можно покрыть конечным числом малых
дисков. В силу леммы 4 можно считать, что в каждом из них любая
пара точек соединяется единственной геодезической длины, не пре-
превосходящей е. Покрыв М2 достаточно плотной сетью точек {Pi},
соединим геодезическими точки, попавшие внутрь какого-либо дис-
диска покрытия, и в результате разобьем диски на треугольники, удо-
удовлетворяющие требованиям триангуляции. ¦
5.5. ТЕНЗОР КРИВИЗНЫ
5.5.1. Предварительные замечания
Рассмотрим Мп (не обязательно риманово) с симметричной аф-
аффинной связностью V. Как мы видели, связность определяет парал-
параллельный перенос. Как измерить отклонение связности от евклидо-
евклидовой? Как узнать — существуют ли локальные евклидовы координа-
координаты? Иными словами, как оценить «искривленность» многообразия?
Если связность допускает евклидовы координаты, то в них тензо-
тензоры дифференцируются обычным образом, поскольку ковариантное
дифференцирование совпадает с обычным частным дифференци-
дифференцированием. Из анализа мы знаем важное свойство частных произ-
238 Гл. 5. Тензорный анализ и риманова геометрия
водных — они коммутируют. Поэтому в евклидовых координатах
V&V/ — V/V& = 0. Если же Мп — произвольно, то этот дифферен-
дифференциальный оператор, вообще говоря, отличен от нуля. Оказывается,
он хорошо измеряет «искривленность» многообразия.
5.5.2. Координатное определение тензора кривизны
Рассмотрим на Мп локальные координаты ж1, ... ,жп и опера-
оператор V&V/ — V^V/c. Применим его к полю Т = {Тг}. Связность V
симметрична, поэтому:
дТ1
V*V'(T>» -
TpT\-
дх1 рЬ
д2Т1 дТр ¦ д ¦ дТр
+ г + тр(г%) +
ВТ1
г
pP \ u± , TV \ГР Г* Гр Г* Г* Гр -к Г^ Гр 1
kl - l Ik) ~Q^ + 1 I1 qll pk -lqklpl~l qpl kl + l qpl kl\
Так как Y)k = rkj9 то (V^V; - VtVk)T* = T^w где
Лемма 1. Функции Д* д,г образуют тензор 4-го ранга.
Доказательство.' Оно очевидно, так как V = {V&} —
тензорная операция. ¦
Определение 1. Тензор R1 ы называется тензором кривизны
Римана данной связности V.
Если Мп = Rn, то этот тензор очевидно равен нулю. Напом-
Напомним, что координаты — евклидовы для данной связности, если в
них Yl-k = 0. Отсюда следует:
Лемма 2. Пусть Мп снабжено симметричной аффинной связно-
связностью. Если ее тензор кривизны Римана отличен от нуля (в какой-то
системе координат), то на Мп нельзя ввести локально евклидовы
координаты.
Если бы такие координаты нашлись, то в них аннулировались
бы Гг-к, а потому тензор кривизны также обратился бы в нуль.
5.5. Тензор кривизны 239
5.5.3. Инвариантное определение тензора кривизны
Пусть X, Y, Z — произвольные гладкие векторные поля на Мп
с симметричной аффинной связностью. Построим «оператор кри-
кривизны» R, сопоставляющий тройке X, Y, Z новое векторное поле.
Удобно трактовать поля как линейные дифференциальные операто-
операторы. Это обстоятельство будем указывать так: вместо X напишем
просто X.
Определение 2. Положим: R(X,Y)(Z) = VxVy(Z) -VyX
х VX(Z) - V[x,y](Z)- Тогда R переводит Tx x Tx x Tx в Тх.
Теорема 1. Отображение R трилинейно и потому задает тен-
тензор четвертого ранга.
Доказательство. Если рассмотреть линейные комбина-
комбинации полей с постоянными коэффициентами, то трилинейность оче-
очевидна. Осталось доказать, что за знак операции R можно выно-
выносить гладкую функцию f{x). Начнем со случая: R(XY)(fZ) = / х
xR(X,Y)Z. Имеем
- VYVx(fZ) - V[x,Y](fZ) = Vx((VYf)Z) +
- Vy(/VjZ) - (V[x,Y]f)Z -
(VYf)VxZ + (V
= {(X(Yf) - Y(Xf) - (XY - YX)f}Z +
= 0 + / • R(X, Y)Z,
так как Vj/ = X(/). Теперь проверим, что: R(fX,Y)Z = / х
х R(X,Y)Z. Имеем
R(fX, Y)Z = VfxVYZ - VyVfxZ - V[fXtY]Z.
Ясно, что Vfx = /Vx- Далее
[fX, Y]=f(XY)-Y(fX)=f[X, Y]-(Yf)X.
Отсюда
R(fX, Y)Z =
Z = f-R(X,Y)Z,
что и требовалось. Соотношение R(X,fY)Z = / • R(X, Y)Z про-
проверяется аналогично. ¦
240 Гл. 5. Тензорный анализ и риманова геометрия
Свяжем инвариантное и координатное определения тензора кри-
кривизны. Введем базисные поля д{ (как дифференциальные операто-
операторы). Тогда X = Х{д{\ У = YWj; Z = Zkdk. Получаем: R(X, Y)Z =
= XlYiZk - {R(dh dj)dk}. Далее
R(di,dj)Z = VdiVdjZ- VdjVdiZ - V[diidj]Z.
Ясно, что Vdi = Vi, т. e. R{du d3)Z = (VZVJ - VJVt)Z - V[diidj]Z.
Так как [dh dj] = 0, то R{dh dj)Z = (V^Vj - VjVfiZ, что и требо-
требовалось.
5.5.4. Алгебраические свойства тензора кривизны Римана
Теорема 2. Для любых трех гладких полей X, У, Z на Мп вы-
выполняются тождества:
1) R(X, Y)Z + R(Y, X)Z = 0; R)^kl + R^lk = 0; т. е. косая сим-
симметрия no аргументам X, Y;
2) R(X, Y)Z + R(Z, X)Y + Д(У, Z)X = 0, /и. е. тождество
Якоби; в координатах: Rl- kl + R\ -k + Rlkl • = 0.
3) ?а/ш связность риманова, mo {R(X, Y)Z, W) + (R(X, Y)W,
Z) = 0 Элл любых полей X, У, Z, VK; здесь (,) — скалярное произве-
произведение, порожденное метрикой д^\ в координатах: Rij^i + Rji,kl —
= 0, где ^^г = ЯгаЩи-
4) ?с/ш связность риманова, то (R(X, Y)Z, W) = (i?(Z, W)X,
У), т.е. ^^г = Дад.
Доказательство.
1) Первый пункт очевиден.
2) Сначала докажем, что для симметричной связности: VxY —
— VyX = [X, У]. В самом деле:
д
так как У^Х^Т^ = УРХТ^; Ykpi = Гкр. Если X и Y коммутируют,
то VXY = VyX.
В силу теоремы 1 достаточно проверить тождество Якоби толь-
только на коммутирующих полях. Имеем:
VyVZX - VzVyX - V[Y,z]X = 0.
3) Достаточно проверить, что (R(X,Y)Z,Z) = 0. Снова счита-
считаем, что [X,Y] = 0. Тогда (R(X,Y)Z,Z) = ((VxVy- VyVx)^, Z).
5.5. Тензор кривизны 241
Рассмотрим функцию (Z, Z) = / и вычислим Х(/) = V'x(Z, Z) =
= 2(Vx^,^>. Далее
YX(f) = 2Vy (Vx^, Z) = 2(Vy VjZ, Z) + 2(Vx^, VyZ).
Аналогично: ХУ(/) = 2(VxVyZ, Z) + 2(VyZ, VjZ). Ясно,
что (VyVjZ, Z) = (VjVyZ, Z), что и требовалось.
4) Рассмотрим октаэдр, показанный на рис. 5.25. Четыре его
грани заштрихованы, и в каждой вершине поставлено скалярное
произведение. Используя доказанные соотношения, легко показать,
(R(X,Y)Z;W)
ь (R(y,W)Z;X) Ш1 шш^ (Я(У'^Х; W^
^W)Y;Z)^^^^R^X^
Рис. 5.25
что сумма произведений, расположенных в вершинах каждой за-
заштрихованной грани, равна нулю. Записывая теперь тождество
(а + а + с) + (а + b + d) = 0 = (а + Ъ + /3) + (с + d + /3), получа-
получаем: 2а = 2)9, т. е. (R(X, Y)Z; W) = (R(Z, W)X; У), что и требова-
требовалось. ¦
Определение 3. Тензором Риччи римановой связности называ-
называется тензор Rji = R1jh> т.е. тензор, полученный сверткой (по паре
индексов) тензора Римана. Тензор Риччи симметричен (проверьте!).
Определение 4. Скалярной кривизной R риманова многообра-
многообразия называется функция R(x) = gklRku T- e. полная свертка тензора
Риччи с тензором, обратным к метрическому.
Ясно, что Rhi — тензор 2-го ранга, a R(x) — скалярная функ-
функция. Для многих задач полезно знать выражение тензора Римана
через gij.
Теорема 3. На римановом многообразии имеет место тожде-
тождество
d2gqk d2gik d2gql (гт
dx*dxl dx^dx1 дх*дхк) 9трК qk
242 Гл. 5. Тензорный анализ и риманова геометрия
Доказательство. Из координатной записи тензора Ри-
мана имеем
Ы _ Ф_ Ф_ , гр Г* Гр Г* — I ^- +ГР Г*
^ " ~dxF~~dxr ql pk~ qk pl ~ \Jfab ql pk
где знаком [fc, /] обозначена альтернация по индексам к и / без де-
деления на 2. Далее
где знаком * обозначена пара индексов (ql). Выражение в круглых
скобках можно формально понимать как результат ковариантного
дифференцирования V& набора Г*, где на знак * пока не обращаем
внимания. Набор Г^ не образует тензора, однако в каждой данной
системе координат можно рассмотреть и тензор с такими компонен-
компонентами: Г^ (в других системах этот тензор будет иметь уже какие-то
другие компоненты, отличные от Г^, но для дифференцирования
в данной системе это обстоятельство несущественно). Так как gsi
опускает индекс у «тензора» Г*, то это можно выполнить и под
знаком ковариантного дифференцирования, так как тензор д^ кова-
риантно постоянен. Отсюда
в = 98г^к (П) [Л, I] = V, (9siTl) [к, 1} = V, (Гв>#) [Л, /],
где
-L s,* = -L s,ql =
= 1 ia (^ЯоХ_ dgaq _ дддЛ = 1. (dg^ dg^ _ dgql\
29si9 \dxv dxl dx*) 2\dx(i dxl dxs)'
Подставляя это выражение в исходную формулу для Rsq,kh получа-
получаем
Rsq,ki = vfc(re*)[fc,i] = (^ - Tat.r%s) [к,l] =
_(dvs,qi Г гд V, п _ 1 / d2gsi d2gsq d2gqt
(
\dxk
Г« Г*- /1 = I ( d9sl 4- ^^ - d9sk - d9gl \ 4-
' ы ' J 2\дхкдхч dxldxs dxldX4 dxkdxs)
5.5. Тензор кривизны 243
Следствие 1. Если на римановом многообразии тензор кривиз-
кривизны Римана отличен от нуля в какой-то системе координат, то на Мп
нельзя ввести локальные евклидовы координаты, т. е. такие, в кото-
которых gij — постоянная матрица (или, что то же: Гг-к = 0).
Доказательство следует из леммы 2. ¦
5.5.5. Некоторые приложения тензора кривизны Римана
Теорема 4. На двумерном гладком римановом многообразии
имеет место тождество: R = 2К, где R — скалярная кривизна,
К — гауссова кривизна.
Следствие 2. Так как R полностью определяется заданием д^,
то К также определяется только д^, в частности, не меняется при
изометриях М2 в R3 (при изгибаниях поверхности).
Нетривиальность следствия видна из того, что в определении
гауссовой кривизны К участвовала вторая квадратичная форма, не
сохраняющаяся, вообще говоря, при изометриях.
Доказательство теоремы. Зададим поверхность М2
в окрестности точки Р в виде графика z = /(ж, у), где (х,у) — де-
декартовы координаты в ТрМ2. Так как ТрМ2 = И2(х, у) — касатель-
касательная плоскость, то grad/(P) = 0, т.е. д^(Р) = (^ + fxifxj){P) =
= Sij. Отсюда: Г^(Р) = 0, так как (dgij/dxk)\p = 0 (проверьте!).
В силу алгебраических симметрии Riq^i У него в данном случае
имеется только одна существенная компонента: i?i2,i2- Остальные
либо равны нулю, либо отличаются от i?i2,i2 только знаком, или
совпадают с Ru,i2- Запишем тензор Римана в координатах (х,у).
Из теоремы 3 имеем
о 1(ndgn d2g22 д2дп
#12,12 = о 2
2 \ дхду дх2 ду2
_ 1
" 2
xy I — К
(ь
= {jxxjy + Jxjxyjy — {jyjxy)x — {jxjxyjy = Ciet I p
Отсюда: #12,12 — К. Вычислим R.
R = gklRkl = 9к1Щ>а1 = gklga(>Rqk,al = Д12Д2(? ± gkl ¦ <T),
где
v^> | /ct G.Q 22 11 21 21 I 11 22 12 12
= 2(g22gn-(g12J)=2det(gtj)-1 = 2/g, где д =
244 Гл. 5. Тензорный анализ и риманова геометрия
Итак: R = B/g)Ri2,i2- Отсюда: R = 2К, так как gij(P) = Sij.
Но так как R и К — скаляры, то их значения не зависят от выбора
координат и потому в любой системе получаем: R = 2К. ¦
Примеры
1) Для евклидовой метрики dx2 + dy2 имеем: R = 2К = 0, т. е.
кривизна равна нулю.
2) Для сферической метрики dr2 + (sin2(r/Vo)) dip2 имеем: R =
= 2К = 2/Vq, т. е. кривизна постоянна и положительна.
3) Для метрики плоскости Лобачевского dr2 + (sh2(r/ro)) dip2
имеем: R = 2К = — 2/Vq, т. е. кривизна постоянна и отрицательна.
4) Для конформно-евклидовой метрики \(x,y)(dx2 + dy2), где
А(ж, у) — положительная функция, имеем: R = 2К = — (I/A) A In A,
где А — оператор Лапласа. Доказывается прямым вычислением.
В трехмерном случае тензор Римана более сложен. Больше
число существенных компонент (их шесть): i?i2,i35 ^21,23; ^31,32;
R\2,\2\ ^13,13\ ^23,23\ остальные Rij^ki либо равны нулю, либо сов-
совпадают с указанными, либо отличаются знаком.
Можно подсчитать, что для Мп число существенных компонент
у тензора Римана таково: N = п2(п2 — 1)/12. Когда п —>> оо, то от-
отношение N к общему числу компонент (т. е. к п4) стремится к 1/12.
В геометрии большое значение имеет «кривизна по двумерному
направлению». Рассмотрим риманово Мп, и пусть X, Y G ТрМп.
Пусть площадь параллелограмма П(Х, Y), натянутого на них, рав-
равна 1 в метрике дц. Тогда кривизной Мп в двумерном направле-
направлении а, определяемом векторами X, Y, называется число R(cr) =
= (R(X,Y)X;Y), где X, Y — любые векторные поля в окрестно-
окрестности Р, такие, что Х(Р) = X, Y(P) = Y, т. е. совпадающие в Р с
выбранными векторами X, Y.
Лемма 3. Имеет место формула R(cr) = R^j^iX^XkYlY^, где
Ха и Y13 — координаты векторов X и Y. В частности, R{p) не
зависит от способа включения X, Y в X, Y.
Доказательство. Имеем
Определение 5. Риманово многообразие Мп называется мно-
многообразием положительной {отрицательной, нулевой, постоянной
и т.д.) кривизны, если его кривизны по всем двумерным направ-
направлениям положительны (отрицательны, нулевые, постоянны и т. д.).
Лемма 4. Рассмотрим риманово М2, и пусть К(Р) — гауссова
кривизна, R{cr) — кривизна по двумерному направлению, (X, Y) =
= а в точке Р е М2. Тогда R(a) = К(Р) = A/2)Д(Р).
5.5. Тензор кривизны 245
Доказательство. Рассмотрим координаты (ж,у), коор-
координатные линии которых ортогональны в точке Р. Скалярное про-
произведение, порождаемое метрикой в ТрМ2, можно считать евкли-
евклидовым. Тогда
R(a) = R^
= Ri2,i2{X2X2YlYl-X2XlY2Yl+XlXlY2Y2-XlX2YlY2) =
= R\2,12\P^ Y —Y X ) = i?i2,12 • 1 — R\2,l2->
так как X2Yl — Y2Xl = [площадь параллелограмма П(Х, Y)]. По-
Поскольку i?i2,i2 = K{P)> то Щя) = К{Р)> что и требовалось. ¦
Глава 6
Теория гомологии
До сих пор мы в основном изучали локальные свойства гладких
многообразий, т. е. такие свойства, которые можно было определять
и вычислять в окрестности каждой точки Р многообразия М неза-
независимо друг от друга и которые не зависели от того, каким обра-
образом М представлено в виде объединения карт. Однако
Во многих же задачах бывает недостаточным знать только ло-
локальные свойства многообразия М.
Рассмотрим в качестве примера следующую задачу Пусть М =
= S1 — окружность, в качестве локальной координаты на которой
взят угловой параметр ср. Рассмотрим задачу об отыскании такой
гладкой функции / на S1, чтобы выполнялось тождество
^Г = </(?>), F-1)
аср
где д — некоторая гладкая функция на S1. Если решать эту задачу
в малой окрестности точки Р Е S1 с координатой сро, то решением
будет служить любая первообразная функции д: f(cp) = / д(ф) dip.
В целом же на S1 решение существует не всегда. В самом деле,
любую гладкую функцию на S1 можно отождествить с периоди-
периодической функцией одной вещественной переменной с периодом 2тг.
Тогда функция / является решением нашей задачи, если f((p) =
= f g((p)d(p и функция / является периодической функцией. Вся-
Всякая первообразная функции д выражается через определенный ин-
интеграл: f((p) = /^ д((р) dip + С. Поэтому условие периодичности
функции / записывается в виде: J^° ng((p) dip = 0, или
2тг
J g((p)d(p = 0. F.2)
о
Например, если д((р) = 1, то /0 ъ д((р) dip = 2тг ^ 0. Поэтому в слу-
случае д((р) = 1 задача F.1) не имеет решения на S1. Условие F.2)
является необходимым и достаточным условием для существования
решения задачи F.1). В рассмотренной задаче видно, что существо-
6.1. Исчисление внешних дифференциальных форм. Когомологии 247
вание решения существенно зависит от структуры многообразия в
целом. В настоящем параграфе будут изучены именно такие свой-
свойства многообразий, от которых зависит поведение тех или иных
функций и отображений в целом на многообразии.
6.1. ИСЧИСЛЕНИЕ ВНЕШНИХ ДИФФЕРЕНЦИАЛЬНЫХ
ФОРМ. КОГОМОЛОГИИ
6.1.1. Дифференцирование
внешних дифференциальных форм
Для внешних дифференциальных форм дифференциальное ис-
исчисление несколько упрощается по сравнению с дифференциаль-
дифференциальным исчислением произвольных тензорных полей. Если на много-
многообразии фиксирована некоторая связность, то ковариантный гради-
градиент кососимметрического тензорного поля не является, вообще го-
говоря, кососимметрическим тензорным полем. Поэтому естественно
определить градиент внешней дифференциальной формы как ком-
композицию ковариантного градиента и альтернирования по всем ин-
индексам тензорного поля. При этом, если связность симметрична,
то в формуле для градиента внешней дифференциальной формы
вообще не участвуют символы Кристоффеля, т. е. определение гра-
градиента внешней дифференциальной формы не зависит от выбора
симметрической связности на многообразии М.
Определение 1. Градиентом внешней дифференциальной фор-
формы ио называется внешняя дифференциальная форма duo, компонен-
компоненты которой в локальной системе координат (ж1, ..., хп) имеют вид
fc + l Q
1)S+1 F3)
Теорема 1. Градиент внешних дифференциальных форм удовле-
удовлетворяет следующим условиям'.
а) d(ui А ио2) = duoi А ио2 + (-l)deguJlooi A duo2\
б) d(doo) = 0.
Доказательство. Пусть (х1, ..., хп) — локальная систе-
система координат, ио\, U02 — две внешних дифференциальных формы
степеней р и q, соответственно. Компоненты произвольной диффе-
дифференциальной формы ио отличны от нуля только для таких наборов
индексов (ii, ...,ip), (ji, ...,jq), у которых индексы принимают
попарно различные значения. Значит для определения компонент
фомы ио достаточно рассматривать только такие наборы индексов,
248 Гл. 6. Теория гомологии
значения которых попарно различны и упорядочены по возраста-
возрастанию. Такие наборы индексов соответствуют подможествам /С [I, n]
в отрезке всех целых чисел от 1 до п. Соотвествующую компоненту
формы ио будем обозначать через uoj. При таких обозначениях фо-
мулы умножения и дифференцирования дифференциальных форм
примут более простой вид:
(ал Л ио2)к = Е (-1I^(^I uo^uo^j, F.4)
IUJ = K
{i}UJ = K UX
где суммирование производится по всем подходящим разбиениям
множества К на два подмножества I U J = К, состоящим соответ-
соответственно из р и q элементов, a a(I, J) — такая перестановка, ко-
которая переставляет индексы из множества / на первые р мест с
сохранением порядка. Во второй формуле смысл всех обозначений
аналогичен с тем изменением, что множество / состоит из одного
индекса г.
Применим формулу F.5) к F.4), получим
{)K Е ЛК Л
K = {i}UJUl ОХ
В последней сумме суммирование производится по всевозможным
разбиениям множества К на три непересекающихся подмноже-
подмножества {г}, /, J, а ст(г,/, J) — перестановка, которая переставляет
индекс г на первое место, а далее идут множества I и J с сохране-
сохранением порядка внутри множеств I и J.
Таким образом,
K = {i}UlUJ
K = {i}UlUJ UX
= (dun А ио2)к + (-l)de6"i (ал Л duo2)K.
Свойство б) достаточно доказать для базисных форм, по кото-
которым разлагается любая форма. Без ограничения общности, мож-
можно считать, что в локальной системе координат (ж1, ... ,хп) фор-
форма ио имеет вид: ио = /(ж1, ..., xn)dxl Л ... Л dxk. Заметим, что ес-
если свойство (б) выполнено для форм ио\ и ио2, то оно справедливо и
6.1. Исчисление внешних дифференциальных форм. Когомологии 249
для их внешнего произведения цЛ^. В самом деле,
dd(ui А ио2) = d(dui А ио2 + (-l)degcJlo;i Л duo2) =
Л ио2 + (-l)deg(^l}rfa;i Л do;2 +
o;i Л duo2 + (-lJdegWlo;i Л
Первое и последнее слагаемые равны нулю по предположению,
а два средних одинаковы с противоположными знаками. Таким об-
образом, свойство б) достаточно доказать для произвольной функ-
функции / и для формы dxk. В последнем случае dd(dxk) = 0, посколь-
поскольку хк — тоже некоторая функция на многообразии. Итак, покажем,
что d(df) = 0. Имеем (df)i = тг^> далее
ох1
Отметим, что условие б) теоремы 1 основывалось на замеча-
замечательном свойстве функций многих переменных — независимости
смешанных частных производных от порядка дифференцирования.
Свойство б) в некотором смысле является максимальным обобще-
обобщением этого свойства на случай систем функций, образующих ком-
компоненты кососимметрического тензора.
Пример 1. В локальной системе координат всякая внешняя
дифференциальная форма согласно определению имеет вид суммы
ш = Szi< <г ш11,...,1рйхЪ1 Л ... Л dxtp. Поэтому по теореме 1 гра-
градиент формы ио вычисляется по формуле
duo = Y2 = ^(^н,...,^) Л dx11 Л ... Л dxlp.
Далее, градиент гладкой функции df в локальной системе коор-
координат имеет компоненты {д//дхг}. Следовательно, df=^2df/dxt x
xdx\ Поэтому do; = Z)ii<...<ip Y^Ti=i(douiu...,ip/dxl) dx1 A dx4 A ...
... Л dxlp. Последняя формула, очевидно, эквивалентна форму-
формуле F.3). Рассмотрим задачу отыскания такой дифференциальной
формы ио, чтобы выполнялось тождество:
duo = О, F.6)
где О — фиксированная дифференциальная форма. В каждой ло-
локальной системе координат уравнение F.6) превращается в систему
дифференциальных уравнений в частных производных:
250 Гл. 6. Теория гомологии
k + l о
Л \s-\-l O^h, •••,га-1,га+1, i
По условию б) теоремы 1 решения уравнения F.6) существуют
только тогда, когда dft = 0. В самом деле, применив к левой и пра-
правой части F.6) операцию d, получаем: dft = d(duo) = 0. В частном
случае, когда degO = 1, задача сводится к отысканию такой глад-
гладкой функции / на многообразии М, градиент которой равен задан-
заданной форме О. В локальной системе координат (ж1,..., хп) форма О
имеет вид О = X^ILi ^idx1, уравнение F.6) эквивалентно системе
|4 = Ог, г = 1, ...,п. F.7)
дх1
Если решение системы F.7) существует, то, продифференциро-
продифференцировав F.7) по переменным ж-7, получаем: _ . _—г = т^1- Поскольку
дх1дх3 дхз
смешанные частные производные гладкой функции / не зависят от
порядка дифференцирования, то
d = idi Khj^ri. F.8)
дх1
Условия F.8) в бескоординатной записи эквивалентны условию
dVt = 0. Покажем, что условия F.8) достаточны для того, чтобы
система F.7) имела решение в достаточно малой окрестности лю-
любой точки Р многообразия М. Для этого решим сначала одно из
уравнений системы F.7), скажем df /дх1 = Oi. Имеем
х1
f(x\ ...,xn)= f
), F.9)
где if2(ж2, ..., хп) — произвольная гладкая функция от переменных
(ж2, ...,жп). Подставим правую часть F.9) во второе уравнение
системы F.7):
х1
= П2(х\...,хп).
6.1. Исчисление внешних дифференциальных форм. Когомологии 251
Учитывая условие F.8), получаем
т.е.
^(х2,...,хп) = п2(хЪ,х2,...,хп). F.10)
Общее решение уравнения F.10) имеет вид
<р2(х2, ...,хп)= / п^х^х2, ..., хп) dx2 + <р3(х3, ...,хп).
х2° F.11)
Подставляя F.9) и F.11) в третье уравнение системы F.7), по-
получаем
х1
п3(х\ ...,хп) = j^(x\ ...,xn)dxl +
Снова учитывая F.8), получаем уравнение на функцию
х0
х2
\ ..., хп) - пз(хЪ,х2, ..., хп) + пз(хЪ,х2, ..., хп)
дх*у '
_ Q / 1 2 3
252 Гл. 6. Теория гомологии
Продолжим этот процесс; получим последовательность функ-
функций (fk(xk, ..., хп), определяемых рекуррентно формулами
хк
(pk{% , ..., ж ) — / ibk[XQ,..., Xq ,x ,..., х ) ах -\-
хо
+ (рк+1(хк+1, ...,хп), (pn+i = const,
к
п х
f(x\ ...^xn)=^2 Пк(х1 ...,хк~\хк ...,xn)dxk
k=1
k=1 к
хо
Последняя формула дает нам произвольное решение системы F.7),
зависящее от одного числового параметра <pn+i = const. Впрочем,
неединственность решения системы F.7) следует из общих алгебра-
алгебраических свойств внешних дифференциальных форм. В самом деле,
если /i и /2 — два решения системы F.7), то df\ = О, dfz = О, т. е.
d(fi — /2) = & — & = 0. Функция h = /1 — /2 обладает тем свой-
свойством, что ее градиент тождественно равен нулю на многообра-
многообразии М. Следовательно, h — локально постоянная функция. Если
М — связное многообразие, то тогда h — постоянная функция.
Таким образом, любые два решения системы F.7) отличаются
на константу, а множество всех решений системы F.7) или пу-
пусто, или является одномерным многообразием в пространстве всех
гладких функций на многообразии М.
Переходя к общему случаю решений системы F.6), мы можем
сделать следующие заключения:
а) необходимым условием существования решения системы F.6)
является условие dtl = 0;
б) если со —решение системы F.6), то всякая форма вида ио +
+ duo' тоже является решением системы F.6).
6.1.2. Когомологии гладкого многообразия
(когомологии де Рама)
Свойства решений системы F.6) удобно формулируются в тер-
терминах так называемой теории когомологии де Рама.
Определение 2. Внешняя дифференциальная форма ио на глад-
гладком многообразии М называется замкнутой, если duo = 0. Фор-
Форма ио называется точной, если ее можно представить в виде ио =
= duo'. Факторпространство пространства замкнутых форм степе-
степени к по подпространству точных форм называется группой кого-
6.1. Исчисление внешних дифференциальных форм. Когомологии 253
мологип (де Рама) размерности к многообразия М и обозначается
через Нк(М).
Всякая точная форма ио является замкнутой, поскольку duo =
= d(duo') = dd{uo) = 0. Поэтому пространство всех точных форм яв-
является подпространством в пространстве замкнутых форм. Группа
когомологии Нк(М) является векторным пространством (вообще
говоря бесконечной размерности). В терминах групп когомологии
задача о решении уравнения F.6) формулируется следующим обра-
образом. Пусть ио — замкнутая внешняя дифференциальная форма сте-
степени к. Обозначим через [ио] элемент группы когомологии Нк(М),
равный классу смежности формы ио по подпространству точных
форм. Тогда имеет место
Теорема 2. Рассмотрим уравнение
duo = tt, degO = A; + l. F.12)
а) Решение уравнения F.12) существует тогда и только то-
тогда, когда форма О замкнута, а класс когомологии [О] Е Нк+1(М)
равен нулю.
б) Всякие два решения со и со' уравнения F.12) отличаются на
замкнутую форму, т. е. d{uo — ио') = 0. Множество всех решений
уравнения является классом смежности формы ио по подпростран-
подпространству всех замкнутых форм степени к.
в) Пространство всех замкнутых форм степени к изоморфно
прямой сумме пространства точных форм степени к и группы ко-
гомологий Нк(М).
Доказательство. Если со — решение уравнения F.12),
то О — точная форма, значит, согласно определению, [О] = 0.
Обратно, если [О] = 0, то О — точная форма, т. е. О = duo для
некоторой формы ио, которая и является решением уравнения F.12).
Пусть иотлио' — два решения уравнения F.12), т. е. duo = О, duo' = О.
Тогда d{uo — ио') = duo — duo' = О — О = 0, т. е. ио — ио' — замкнутая
форма. Следовательно, всякое решение ио' уравнения F.12) можно
получить путем прибавления к форме ио некоторой замкнутой фор-
формы. Обозначим через О&(М) линейное пространство всех внешних
дифференциальных форм степени к на многообразии М. Тогда гра-
градиент d является линейным отображением
d: Пк(М) ^ Пк+1(М) F.13)
из пространства форм степени к в пространство форм степени к+1.
Пространство замкнутых форм степени к совпадает с ядром Ker d С
С flk(M) отображения F.13). Аналогично, градиент d отображает
пространство O/c_i(M) в О
254 Гл. 6. Теория гомологии
d:Uk_1(M)^nk(M). F.14)
Тогда пространство точных форм степени к совпадает с об-
образом отображения F.14): Imd = d(ftk_i(M)) С Kerd С О/ДМ).
Следовательно, группа fc-мерных когомологий Нк(М) совпадает с
факторпространством Кетd/Imd. В обозначении последнего про-
пространства мы одной и той же буквой d обозначили два различных
отображения F.13) и F.14). Однако это не приведет к путанице,
поскольку мы рассматриваем подпространства в одном простран-
пространстве 0&(М) форм степени к. В линейном пространстве Kerd рас-
рассмотрим алгебраическое дополнение Н' к подпространству Im d С
С Ker d. Тогда пространство Ker d разлагается в прямую сумму сво-
своих подпространств Ker d = Im d 0 H'.
Покажем, что пространство Н' изоморфно группе когомологий
Нк(М). В самом деле, пусть (р: Нг -> Нк(М) — отображение, со-
сопоставляющее замкнутой форме ио Е Н' ее класс смежности [ио] Е
Е Нк(М). Если (р(ио) = 0, то [со] = 0, т. е. ио — точная форма. Это
значит, что ио Е Im d. Поскольку подпространства Im d и Н' пере-
пересекаются только по нулевому элементу, то ио = 0. Таким образом,
отображение (р является мономорфизмом. Пусть х Е Нк(М) — про-
произвольный элемент. Тогда х является классом смежности некоторой
формы ио Е Ker d по подпространству Imd, x = [со]. Поскольку про-
пространство Ker d разложено в прямую сумму своих подпространств
Im d и Н', то и форма ио разлагается в сумму ио = dVt+uo1\ dVt E Im d,
ио' Е Н'. Тогда х = [со] = [со'] = (р(оо'). Следовательно, (р является
эпиморфизмом. Мы доказали, что (р является изоморфизмом. ¦
Пример 2. Рассмотрим в качестве многообразия открытый
интервал вещественных чисел М = (а, 6). Вычислим его группы
когомологий. Поскольку многообразие М одномерно, то отличны
от нуля только пространства форм степени 0 и 1. Сначала рассмо-
рассмотрим пространство Oq(M) форм степени 0. Всякая форма степени
0 — это гладкая функция на интервале (а, Ь). Ее градиент df имеет
вид: df = (df /dx)(x) dx, где х — декартова координата на интервале
(а, Ь). Поэтому пространство замкнутых форм степени 0, т. е. Ker d,
состоит из всех таких функций, для которых (df/dx)(x) = 0, т.е.
Ker d состоит из постоянных функций. Следовательно, простран-
пространство Ker d изоморфно одномерному пространству R1. Точных форм
в пространстве Oq(M) нет. Поэтому Н°(М) = Ker d = R1. Рас-
Рассмотрим теперь пространство Oi(M) форм степени 1. Поскольку
всякая форма степени 2 на одномерном пространстве равна нулю,
то Ker d совпадает с пространством Oi(M). Вычислим теперь Imd.
Пусть ио Е Oi(M) — произвольная дифференциальная форма степе-
6.1. Исчисление внешних дифференциальных форм. Когомологии 255
ни 1. В локальной системе координат она имеет вид: со = g(x)dx.
Поэтому если df = ш, то (df/dx)(x) = g(x)dx, т. е. df/dx = g. Сле-
Следовательно, функцию / можно определить равенством
х
f{x) = / g(x) dx, x e (a, 6), a <c< b.
F.15)
Таким образом, всякая форма ио Е fti(M) представима в ви-
виде со = df для подходящей функции /. Это значит, что Im d =
= fti(M) = Kerd. Тогда группа одномерных когомологии Н1{М),
определяемая как факторпространство Kerrf/Imrf, равна нулю:
Н1(М) = 0. Для всех других размерностей k ^ 2 группы кого-
когомологии Нк(М) равны нулю, поскольку уже пространство форм
степени к при к ^ 2 равны нулю на одномерном многообразии М.
Ответ: Н°(М) = R1,Hk(M) = 0 при к > 1.
Пример 3. Пусть М = S1 — одномерная окружность. Так
же как и в примере 1 вычисляется группа нульмерных когомологии
i/°(*S1) = R1, и группы Hk(S1) = 0 при к ^ 2. Остается вычислить
одномерную группу когомологии i71(S'1). В силу одномерности S4
ядро Kerd совпадает с Oi(S'1). Пусть ср — локальный угловой па-
параметр окружности S1. Решим уравнение df = uo для некоторой
формы uo = g{ip)dif. Функция f((p) должна быть периодической по
параметру ip с периодом 2тг. Используя формулу F.15), получа-
получаем, что f((p) = Jq g((p)d(p и /027Г g((p)d(p = 0. Таким образом, не
всякая форма ш Е 01E1) попадает в образ градиента Imd, а толь-
только такая форма, для которой выполнено условие: /Q27r g(y>) dip = 0.
Покажем, что пространство форм 01E1) разлагается в прямую
сумму своих подпространств 01E1) = ImrfSR1, причем второе
слагаемое состоит из форм с постоянным коэффициентом д(ф) =
= const. В самом деле, пусть со = g((p)d(p — произвольная форма,
с = A/2тг) /0 ж д((р) dip. Тогда форма со' = g'((p)d(p = (д(ф) — с)dip
уже лежит в Imrf, поскольку f^77д'(ф) dip = 0. С другой стороны,
любая форма uo = g(ip)dip с постоянным коэффициентом g(ip) =
= с = const при с^О не лежит в Imrf, ибо /0 ^ сс/ур = 2тгс т^ 0.
Тогда факторгруппа Я1^1) = Kerrf/Imrf = fii^J/Imd = R1.
Ответ: H^S1) =Я1E1) = K\Hk(S1) = 0 при А; > 2.
6.1.3. Гомотопические свойства групп когомологии
Каждое гладкое отображение многообразий индуцирует отобра-
отображение внешних дифференциальных форм, направленное в обрат-
обратную сторону: /: Mi —>> М2, /*: О/ДЛ^) —>>
256 Гл. 6. Теория гомологии
Определение 3. Пусть /: М\ —>> М2 — гладкое отображение
многообразий, uj Е 0&(М2) — внешняя дифференциальная форма
степени к на многообразии М2. Обратным образом f*(w) фор-
формы ио называется внешняя дифференциальная форма на много-
многообразии Mi, задаваемая следующей формулой: /*(^)(?ь • • • , ?&) —
= uo(df(ii),...,<//(&))> где ?ь... ,& Е Tp(Mi) -касательные век-
векторы в точке Р многообразия Mi, a d/(?i),..., d/(?fc)
их образы при дифференциале отображения /.
Так определенное отображение /*: О/ДМ2) —>> fifc(Mi) прост-
пространств дифференциальных форм является, очевидно, линейным
отображением линейных пространств.
Лемма 1. Если в локальных координатах отображение / запи-
записывается системой функций у1 = fl(xl, ..., хп), а форма ш записы-
записывается в виде uj = Х^ь-^аДу1' • • • ^ym)dy4 Л ... Л Л/г/% то
11,..Л(/1,...,ГМГ Л...ЛГ. F.16)
Соотношение F.16) является обобщением так называемого свой-
свойства инвариантности дифференциала функции, гласящего, что вид
дифференциала функции у = f(x) не зависит от того, является пе-
переменная х независимой или, в свою очередь, функцией от другой
переменной: dy = (df /dx)(x) dx. Доказательство леммы основано
на непосредственной проверке определений.
Теорема 3. Обратный образ дифференциальных форм удовлет-
удовлетворяет следующим соотношениям:
а) если /: Mi —)> М2 и g: М2 —>> М3, то
ШУ = /V;
б) отображение /* коммутирует с оператором d, т. е.
f*d = df*;
в) отображение /* ядро Kerrf отображает в ядро Kerd, a
классы когомологий в классы когомологий: /: Нк(М2) —> Нк(М\).
Доказательство теоремы основано на проверке соотно-
соотношений в произвольной локальной системе координат и оставляется
читателю в качестве упражнения.
Теорема 3 полезна во многих отношениях. Так, например, если
два многообразия Mi и М2 диффеоморфны, то их группы когомоло-
когомологий изоморфны. В самом деле, если /: Mi —>> М2 — тождественный
диффеоморфизм, то гомоморфизм /*: ^(М2) —>> Нк(М\) тоже
является тождественным изоморфизмом. Поэтому если ср: Mi —>>
6.1. Исчисление внешних дифференциальных форм. Когомологии 257
—>> М2 — произвольный диффеоморфизм, то, взяв обратный диф-
диффеоморфизм ф: М2 —> Mi, получаем две возможные композиции
фср: Mi —>> Mi, срф: М2 —>> М2, причем обе являются тождествен-
тождественными диффеоморфизмами: фср = 1^, ^ = 1м2- Тогда, применяя
теорему 3, получаем (р*ф* = l#^(Mi)> V>V* = 1#^(м2)> т-е- гомо-
гомоморфизмы ^* и ?/>* взаимно обратны. Следовательно, ср* (а также
и ?/>*) является изоморфизмом групп когомологии.
В действительности, гомоморфизмы когомологии /*: Нк(М2) —>>
—>> Нк{М\), индуцированные гладкими отображениями /: Mi —>> М2
многообразий, обладают более сильными свойствами.
Определение 4. Пусть X, Y — произвольные топологические
пространства, / — единичный отрезок вещественных чисел. Непре-
Непрерывное отображение /: X х / —>> Y называется гомотопией между
отображениями /о = /|хх{о} и Л = /1хх{1}- Если X, Y — гладкие
многообразия, а / — гладкое отображение, то / называется гладкой
гомотопией. При этом отображения /о и Д называются гомотоп-
гомотопными отображениями.
Теорема 4. Гомотопные гладкие отображения /о, /i: Mi —>•
—>• М2 индуцируют одинаковый гомоморфизм групп когомологии
kk
Доказательство. Построим такое линейное отображе-
отображение пространств внешних дифференциальных форм D: 0&(М2) —>>
—)> O/c_i(Mi), чтобы выполнялось тождество
(fS-fi)(u) = (dD±Dd)(u) F.17)
для любой формы ио Е О/С(М2). В самом деле, если ио — замкнутая
форма, представляющая класс когомологии [ио] Е Нк{М2), то фор-
формы /q (cj) и f*(u)) тоже замкнуты и представляют классы когомоло-
когомологии /о (М) и Д*(М). В силу же F.17) разность форм /ц(ш) — f*(w)
равна (dD ± Dd)uo = d(Doo) ± D(doo) = d(Doo), поскольку rfo; = 0.
Поэтому формы /о (cj) и fi(co) лежат в одном классе смежности по
подпространству точных форм, т. е. они представляют один класс
когомологии [/о (о;)] = [/*(cj)]. Таким образом, /о (М) = /Г(М),
что и требуется доказать.
Итак, осталось построить отображение D, удовлетворяющее то-
тождеству F.17). Поскольку отображения /о и Д гомотопны, то суще-
существует такое гладкое отображение F: М\ х/ч М2, что F(P, 0) =
)()
Скажем, что форма О степени А; на многообразии Mi x I не
зависит от dt, если форма равна нулю на любой системе векторов
вида (?ь ...,&_
258 Гл. 6. Теория гомологии
Лемма 2. Всякая внешняя дифференциальная форма О степе-
степени к на многообразии Mi x / однозначно представляется в виде
О = О\ + О2 Л dt, F.18)
причем формы О\, О2 не зависят от dt.
Доказательство леммы 2 достаточно провести в каж-
каждой карте Uа многообразия Mi. Тогда через О\ обозначим сумму
всех слагаемых вида /(ж1, ..., хп', t)dx11 А.. .Adxlk, а через O2Adt
сумму всех слагаемых вида /(ж1, ..., xn,t)dx11 A ... Л dx4-1 A dt.
Нетрудно проверить, что указанное разложение на два слагаемых
не зависит от выбора локальной системы координат.
Положим далее
1
D(u>) =
о
где О = F*(oj), О = Oi -\- O2 A dt — разложение по формуле F.18).
Если форма О на Mi x /не зависит от dt, то ее градиент dO тоже
разлагается по формуле F.18) в сумму dO = dx0Mx +dOM1/dtAdt.
Здесь dx обозначает градиент формы Омг на многообразии Mi, До-
Докажем теперь формулу F.17). Левая часть F.17) может быть полу-
получена следующим образом. Сначала вычисляется форма О = F*(u),
а потом берется ее ограничение на подмногообразия Mi x {0} и
Mi х {1}, при вложении сро: Mi —>> Mi x / и cpi: Mi —>> Mi x /.
Для этого в форме О нужно подставить t = 0 или 1 и dt = 0.
Это в точности означает, что
f*(rj\ — Q-, Л/Г (Г)\ f*(uj) = Ол Л/г A) F 19^
Для вычисления правой части F.17), вычислим последователь-
последовательно Dd(uo) и Dduo. Имеем
F*(dui) = dF*(ui) = d(fti + О2 A dt) =
= dxui,Ml (t) + ^т fii,Mi (*) Л dt + da;O2,Mi Л dt.
Поэтому
1
(^1Ml(t) + dxu2,Ml(t)J d< =
= fii)Ml A) - fii)Ml @) + dx /^2^! (t) dt. F.20)
6.1. Исчисление внешних дифференциальных форм. Когомологии 259
С другой стороны, i
dD(uo) = dx fi2,Mi(*) dt. F.21)
о
Сравнивая F.19) и F.20), F.21), получаем Д*(о;) - f$(u) = (Dd -
— dD)(w), что и требовалось доказать. ¦
Следствие. Если М = Rn — n-мерное евклидово простран-
пространство, то Н°(М) = R1, Hk(Rn) = 0, А; > 1.
Доказательство. Если п = 0, т. е. М состоит из одной
точки, то утверждение следствия очевидно, поскольку одноточеч-
одноточечное многообразие не имеет нетривиальных форм степени больше
нуля. Формы же степени 0 — это функции на М, т. е. попросту веще-
вещественные числа. Поэтому Oq(M) = R1, ядро градиента совпадает
с Oq(M), а образ градиента равен нулю. Следовательно, Hq(M) =
= Keid/lmd = O0(M)/0 = О0(М) = R1. Пусть теперь п > 0,
Mq = R° — одноточечное многообразие. Рассмотрим два отображе-
отображения^: МочМи <р(М0) =0еМ,^:Мч Мо, ф(М) = 0 = М0.
Таким образом, отображение ср отправляет единственную точку
многообразия Mq в нулевой вектор, а отображение ф отобража-
отображает все евклидово пространство М = Rn в единственную точку Mq.
Рассмотрим две возможные композиции фср: Mq —>> Mq, срф: М —)>
—)> М. Композиция ^у? является, очевидно, тождественным отобра-
отображением одноточечного многообразия Mq. Композиция срф отобра-
отображает все евклидово пространство М в нулевой вектор. Покажем,
что отображение (рф гомотопно тождественному отображению ев-
евклидовою пространства. Для этого построим гомотопию в явном
виде: F: Mxl, F(x,t) = tx, х е М = Rn, t G [0; 1] = /. При t = 1
мы получаем тождественное отображение /i(x) = х = F(x, 1). При
? = 0 мы получаем композицию ^(х) = 0 = F(x, 0). Согласно те-
теореме 4 отображение срф и тождественное отображение индуциру-
индуцируют один и тот же гомоморфизм групп когомологии. Таким обра-
образом, гомоморфизмы (ф(р)*: Нк(М0) -+ Нк(М0), ((рф)*: Нк(М) -+
—)> Нк(М), являются тождественными изоморфизмами групп. По-
Поскольку ((рф)*=ф*(р*, (ф(р)*= (р*ф*, то гомоморфизмы (р* и ф* вза-
взаимно обратные изоморфизмы групп. Следовательно, у евклидового
пространства группы когомологии Нк(Ип) такие же, как и у одно-
одноточечного пространства, т. е. H°(Rn) =R}, Hk(Rn) = 0, к ^ 1. Ш
Приведенное выше следствие имеет следующую формулировку,
известную под названием леммы Пуанкаре:
Теорема 5. (Лемма Пуанкаре.) Любая замкнутая форма О на
многообразии М в достаточно малой окрестности каждой точки
Р G М является точной, т.е. О = duo.
260 Гл. 6. Теория гомологии
6.2. ИНТЕГРИРОВАНИЕ ВНЕШНИХ ФОРМ
6.2.1. Интеграл дифференциальной формы
по многообразию
Рассмотрим произвольное подмножество X в гладком многооб-
многообразии М. Скажем, что множество X С М имеет меру нуль, ц(Х) =
= 0, если для любой карты Ua и координатного гомеоморфизма
ip: Ua —>> Va С R+n множество <р(Х П Ua) С R+n имеет меру нуль
в евклидовом пространстве Rn.
Определение множества меры нуль корректно и не зависит от
выбора атласа карт.
Для этого достаточно показать, что если /: V\ —>> V2 гладкий го-
гомеоморфизм области V\ cRn на область V2 cRn, то образ f(X) лю-
любого множества X С V\ меры нуль является множеством меры нуль.
Множества меры нуль на многообразии удовлетворяют стан-
стандартным свойствам, справедливым для множеств евклидового про-
пространства:
б) образ /(У) гладкого (п — 1)-мерного многообразия Y при
гладком отображении /: Y —>> М имеет меру нуль.
Определим теперь интеграл от внешней дифференциальной
формы ио степени п на n-мерном ориентированном многообра-
многообразии М в случае, когда форма ио имеет компактный носитель. Пусть
носитель формы ио целиком лежит в одной карте Ua с коорди-
координатами (ж^, ...,ж™). Тогда форма со в карте Ua имеет вид со =
= fa(%lti • • • -> x^)dx^ A ... Л dx7^. Положим
Joo = J...J fa(xl ...,xl)dxla...dxl. F.22)
м иа
Правая часть формулы F.22) существует и не зависит от выбора
локальной системы координат (ж^, ...,ж™) с сохранением ориен-
ориентации. Для этого следует применить формулу замены переменных
в кратном интеграле и учесть положительность якобиана замены
переменных.
В общем случае произвольного компактного носителя формы ио
интеграл от формы дается следующим образом:
Определение 1. Пусть М — n-мерное гладкое ориентирован-
ориентированное многообразие с краем, со — внешняя дифференциальная форма
степени п с компактным носителем, {(ра} — разбиение единицы,
подчиненное атласу карт {Ua}. Тогда полагаем
6.2. Интегрирование внешних форм 261
= Е-/^.
м иа
Определение 1 корректно, т. е. не зависит от выбора разбиения
единицы. Оставляем доказательство корректности читателю в каче-
качестве упражнения.
Предложение 1.
\ г (л ,л \ лГ \ \ Г л л ^ тэ 1
а) J ъ/г\Л\ЬО\ -\- A2CJ2J — Л\ J *j U0\ -\- Л2 J уг U02-) Л\^ Л2 t -tt, .
б) Если М1 — противоположная к М ориентация, то fM, со =
Доказательство. Свойство а) очевидно. Для доказатель-
доказательства свойства б) заметим, противоположную ориентацию на много-
многообразии М можно задать, не меняя атласа карт, а изменив только
знак у первой координаты в каждом атласе Ua. Тогда нетрудно убе-
убедиться, что в определении интеграла от формы тоже поменяется
знак в каждом слагаемом. ¦
6.2.2. Формула Стокса
Следующая теорема представляет формулу, которая обобщает
многочисленные формулы интегрирования из математического ана-
анализа.
Теорема 1. Пусть М — п-мерное ориентированное многообра-
многообразие с краем дМ, со — внешняя дифференциальная форма степени
(п — 1) с компактным носителем. Тогда
(-l)n f dco= fco. F.23)
М дМ
Формула F.23) носит название общей формулы Стокса. Прежде
чем доказывать теорему 1, рассмотрим некоторые частные случаи
этой формулы.
Пример 1. Рассмотрим в плоскости R2 гладкую замкнутую
кривую Г без самопересечений, ограничи-
ограничивающую открытую область V в R2. Бу-
Будем считать, что на кривой Г введен па-
параметр ?, задающий направление обхода и,
следовательно, ориентацию Г как одномер-
одномерного многообразия. Тогда замыкание V яв-
является ориентированным двумерным много-
многообразием^ краем 8V = Г. Если ориентация
области V задается линейной системой ко- ис*
ординат (ж1, ж2), то ориентация на границе Г окажется согласован-
262 Гл. 6. Теория гомологии
ной с ориентацией в области V, если при обходе кривой Г при уве-
увеличении параметра t область V остается слева (рис. 6.1). Пусть со —
произвольная форма степени 1 на плоскости R2. Форма ио в коор-
координатах (ж1, ж2) имеет вид ио = P(x1,x2)dx1 + Q(x1,x2)dx2. Тогда
интеграл от формы ио по кривой Г совпадает с интегралом второго
рода:
f ш= Г Pdx1 + Qdx2 =
to
По формуле F.23) имеем
I u= I du>= f(dP Л dx1 +dQA dx2) =
v v
Таким образом, мы получили известную формулу Грина на плоско-
плоскости:
V
Пример 2. Аналогично, пусть Г — гладкая замкнутая кри-
кривая без самопересечений в трехмерном пространстве R3, ограни-
ограничивающая некоторую двумерную поверхность V. Тогда по форму-
формуле F.23) получаем классическую формулу Стокса. Для этого рас-
рассмотрим форму uj степени 1 в трехмерном пространстве R3:
и; = Р(ж\ х2, x3)dxr + Q(x1, x2, x3)dx2 + Д(ж\ х2, x3)dx3.
Тогда интеграл второго рода по кривой Г интерпретируется как ин-
интеграл от формы ио\
+ R(x\x,x)^
dt
На основании формулы F.23) имеем
6.2. Интегрирование внешних форм 263
Г V
/ O/^i О Т~) \
ёш = dP Л dx1 + dQ Л efe2 + cLR Л cb3 = ( --^ - т—7 ) dxl Л cb2 +
V^a;1 дх2)
Adx +W-^)dx AdxK
Таким образом, интеграл по кривой Г выражается через интеграл
второго рода по поверхности V:
JiPdx1 + Qdx2 + Rdx3) =
v
Пример 3. Последняя формула, формула Гаусса-Остро-
градского, тоже является частным случаем формулы F.23). Пусть
Г — замкнутая поверхность в R3, ограничивающая область V.
Пусть ио — внешняя дифференциальная форма степени 2. Форма ио
в координатах (ж1, ж2, ж3) имеет вид
и = Pdx1 Л dx2 + Qdx2 Л dx3 + Rdx3 Л dx1.
Тогда интеграл второго рода по поверхности Г интерпретируется
как интеграл формы ио. Применяя формулу F.23), получаем
г v
,Д л ^//v.2 | АГЛ л ^//v.2 л ЛпгЗ i A ~D л ЛпгЗ
duj = dP Л dx1 Л dx2 + dQ Л cb2 Л dx3 + dR Л dx3 Л
dP dQ dR
I^ J
Следовательно,
(Pdx1dx2 + Qdx2dx3 -
дР dQ
264 Гл. 6. Теория гомологии
Мы пришли к формуле Гаусса-Остроградского с обратным зна-
знаком. Знак минус связан с тем, что в классической формуле Гаусса-
Остроградского ориентация поверхности Г, задаваемая парой век-
векторов (ei,e2) в касательном пространстве к поверхности Г, выби-
выбирается так, чтобы третий вектор ез указывал направление вне обла-
области V.
Пример 4. Наконец, частным случаем формулы F.23) мож-
можно считать и формулу Ньютона-Лейбница: fa (df/dx) (x) dx = f (b) —
— /(а). Левую часть формулы Ньютона-Лейбница интерпретируем
как интеграл формы df = (df /dx)dx по отрезку [а, Ь] вещественных
чисел, который является одномерным ориентированным многооб-
многообразием с краем. Краем отрезка [а, Ь] является совокупность двух
точек {а, 6}, которые мы будем считать нульмерным многообрази-
многообразием. Однако для нульмерных многообразий мы не определяли поня-
понятие ориентации, поскольку у них отсутствуют касательные векто-
векторы. Поэтому можно поступить следующим образом. Будем считать,
что точка края одномерного многообразия М имеет положительную
ориентацию, если вектор, указывающий направление внутрь М, да-
дает исходную ориентацию многообразия М, и, наоборот, имеет от-
отрицательную, если вектор, указывающий направление внутрь М,
дает противоположную ориентацию многообразия М. Нульмерная
форма на многообразии является просто функцией. Поэтому инте-
интеграл функции по нульмерному многообразию будем считать сум-
суммой значений функции в точках, взятых со знаком, равным ориен-
ориентации точек на многообразии. В нашем случае правая часть форму-
формулы Ньютона-Лейбница будет истолкована как интеграл функции /
по краю, состоящему из двух точек {а, Ь}. При этом точка а имеет
положительную ориентацию, а точка b — отрицательную. Поэто-
МУ Id[a,b] f = f(a) ~ f(b)- Формула же F.23) имеет вид: /[а^ df =
= i-1O1 fd[a,b\ f'
Доказательство теоремы 1. Левая и правая часть
формулы F.23) линейна относительно формы со. Поэтому, разлагая
форму ио в сумму ио = ио\ + ... + ujn, достаточно доказывать фор-
формулу F.23) для случая, когда носитель формы ио компактен и лежит
в одной карте. Более того, достаточно доказать формулу F.23) для
случая формы ио вида
ио = f(x\ ..., xn)dxl A ... Л dxk~l Л dxk+1 Л ... Л dxn,
где / — функция с компактным носителем, определенная в R+n. То-
Тогда duo = (—l)k~1(df/dxk)dx1 Л ... Л dxn. Рассмотрим два случая.
Пусть к < п. Тогда ограничение формы ио на край Rq С R^ рав-
6.2. Интегрирование внешних форм 265
но нулю, поскольку dxn = 0. Поэтому /Rn-i ио = 0. С другой сто-
стороны, /R duo = / ••• /R n(—l)k~1(df/dxk)dx1... dxn. Переходя к
повторному интегралу, сначала по переменной хк, а потом по всем
остальным переменным получаем
оо
Г duo = I... fdx1...dxk-1dxk+1...dxn f
— оо
Внутренний интеграл равен нулю в силу следующих очевидных
соотношений: J_oo(df /дх )dx = f(x , ... ,жп) fc~_ . Поэтому
JR n duo = 0. Пусть теперь к = п. Тогда о; = /(ж1,..., xn)dxl Л ...
...\dxn~\
At.) — ( 1 \n—L il Г^г" тп}г1т Л Л г1тп~ Л г/тп
Имеем
[ оо= [ .. f f(x\ ...,xn~\0)dx1
Rn
o
R+"
= /¦¦¦ /'dx1 ...dxn-1((-l)n-1f(x1, ...,жп)|^-+°°) =
Ro
= (-l)n f ••• f fix1, ...,xn-\0)dx1...dxn-\
Ro
Следовательно, /Rn-i = (—l)n /R n do;. Таким образом, для завер-
завершения доказательства, достаточно разложить форму ио в сумму ио =
= ио\ + ... + uon так, чтобы носитель каждого слагаемого лежал в
одной карте многообразия М. Рассмотрим атлас карт {Ua} и раз-
разбиение единицы {(ра}-> подчиненное атласу {Ua}. Тогда 1 = ^(/}а,
^ = Z) ^^, supp ^а; С г7а. ¦
266 Гл. 6. Теория гомологии
6.3. СТЕПЕНЬ ОТОБРАЖЕНИЯ И ЕЕ ПРИЛОЖЕНИЯ
В этом параграфе мы опишем один важный геометрический ин-
инвариант отображений — степень отображения.
6.3.1. Степень отображения
Определение 1. Пусть /: М\ —>> М.2 гладкое отображение ком-
компактных, связных, ориентированных замкнутых многообразий,
dim Mi = dimM2, Р G M2 — регулярная точка. Для Q G f~l{P)
положим e{Q) = +1, если детерминант матрицы Якоби отобра-
отображения / в точке Q положителен, и e(Q) = — 1, если этот же де-
детерминант отрицателен. Степенью отображения f (относительно
регулярной точки Р) называется число
E F-25)
Определение 1 предполагает по крайней мере существование
хотя бы одной регулярной точки. Для этого применим одну теорему
из анализа, известную под именем теоремы Сарда.
Теорема 1. Пусть /: Mi —>> М2 — гладкое отображение ком-
компактных многообразий. Тогда множество G регулярных точек Q G
G Мъ отображения f является открытым всюду плотным мно-
множеством.
Для того чтобы установить корректность определения 1, сфор-
сформулируем следующее утверждение.
Теорема 2. Формула F.25) не зависит:
а) от выбора регулярной точки Р G М2;
б) от выбора отображения f в классе гладко гомотопных ото-
отображений.
Доказательство. Пункт а) сводится к пункту б). В са-
самом деле, если Р, Р' — две регулярные точки, то существует такое
непрерывное семейство диффеоморфизмов cpt: М2 —>> М2, что сро —
тождественное отображение, а (р\(Р') = Р. Тогда отображения / и
(pi о / гомотопны и у обоих точка Р регулярна. С другой сторо-
стороны, degP(cpi о /) = degp/ /. Итак, пусть F: М\ х/ч М2 гладкое
отображение, точка Р G М2 регулярна для /о = ^|(М1х{о}) и Для
/i = ^1(Mix{i})- Тогда для отображения F точка Р является регу-
регулярной во всех точках края д(М\ х I) = (М\ х {0}) U (М\ х {1}).
Снова применяем теорему Сарда, но уже для отображения F.
Тогда найдется регулярная точка Р7, сколь угодно близкая к точке Р.
Тогда точка Р' регулярна и для отображений /о и Д. Поскольку точ-
6.3. Степень отображения и ее приложения 267
ку Р' можно выбрать сколь угодно близко к точке Р, то для каждого
прообраза Q Е /0~1(Р) существует единственный близкий прооб-
прообраз Q' E ful{P')> причем e(Q) = e(Qr). Значит, degP /0 = degP, /0.
Аналогично устанавливаем, что degP f\ = degP/ /i. Снова обо-
обозначая точку Р' через Р, получаем,
что прообраз F~l(P) является глад-
гладким одномерным многообразием с
краем, причем, край dF~l(P) ле- / \ /
жит в д(М\ х /). Одномерное ком-
компактное многообразие всегда явля-
является объединением своих связных
компонент — окружностей и от-
отрезков (рис. 6.2). Следовательно, и Рис. 6.2
многообразие F~l(P) разлагается
в несвязную сумму отрезков /& и окружностей Sf: F~l(P) =
= IJ^, Ik U U/ ^/- Каждый отрезок /& имеет две граничные точки а&
и &&. Множество всех точек {а^,^} образует объединение прооб-
разов fuHP) и /f1 (P).
Если пара (а&, 6&) лежит в одной компоненте края д(М\ х /), то
z(ak) — ~?(fr/c)> a если в различных, то ^(а^) = бF/с).
Таким образом, все точки прообразов /0~1(Р) и /1~1(Р) разбива-
разбиваются на пары точек, причем если пара лежит на одной компоненте
края д(М\ х /), то в сумме F.25) она дает нулевой вклад. Если
же пара лежит на различных компонентах края д(М\ х /), то она
дает в сумме F.25) одинаковый вклад как для degP/o, так и для
degP/i. ¦
6.3.2. Основная теорема алгебры
Так называется теорема, гласящая, что любой многочлен P(z)
степени ^ 1 над полем комплексных чисел имеет хотя бы один
комплексный корень.
Существует много различных доказательств этой теоремы. Од-
Одно из них получается применением понятия степени отображения
и теоремы 2. Рассмотрим гладкое отображение Р: С1 —>> С1 ком-
комплексной плоскости, задаваемое формулой
и = P[z) = zn + an-izn~l Н h a\z + a0.
Это отображение можно продолжить до отображения двумер-
двумерной сферы S2 в себя, считая S2 комплексной проективной прямой
СРA). Для этого будем считать, что комплексный параметр z равен
268 Гл. 6. Теория гомологии
отношению однородных координат на СРA): z = zi/zq при zq ^ 0.
Аналогично w = wi/wq при wq ^ 0. Поэтому отображение
u)i=z^ + an-iz^zo + ... + cliZiZq-1 + аО2о , ^о = ^о F-26)
корректно определяет отображение СРA) в себя. Отображение
F.26), очевидно, является гладким отображением.
Вычислим его степень. Согласно теореме 2, вместо отображе-
отображения / можно взять гомотопное ему отображение. Рассмотрим гомо-
топию по параметру t, 0 ^ t ^ 1, задаваемую формулой F.27)
uoi = ^Г + t(an-izn-1 z0 + ... + аО2о )> w0 = ^. F.27)
При t = 0 получается простое отображение
«»! = *?, «;0 = г?. F.28)
В локальных координатах w = wi/wq, z = ^i/^o оно имеет вид:
w = zn, и, например, точка w = 1 является регулярной. Для это-
этого следует вычислить якобиан отображения F.28), который равен
n2\zn-i\2 > о при ^ т^О.
Поскольку уравнение zn = 1 имеет ровно п решений, то степень
отображения F.28), а вместе с ним и F.26), равна п: deg / = п. Ес-
Если бы многочлен Р не имел корней, то это значило бы, что точка
w = 0 не принадлежит образу отображения /. Следовательно, ото-
отображение /: СРA) —)> СРA) имело бы регулярную точку (w = 0)
с пустым прообразом, т. е. степень отображения / равнялась бы ну-
нулю. Противоречие доказывает теорему.
6.3.3. Интегрирование форм
Теорема 3. Пусть f: Mi —>> М2 — гладкое отображение ориен-
ориентированных компактных связных многообразий, ио — внешняя диф-
дифференциальная форма, deg о; = dim Mi = dimM2. Тогда
J f*(u>)= deg f Ju>. F.29)
Mi M2
Доказательство. Поскольку левая и правая часть фор-
формулы F.29) линейны относительно ио, то ее достаточно доказать
для формы ио, носитель которой лежит в малой окрестности U точ-
точки Q E M2. Рассмотрим частный случай, когда вся окрестность U
состоит из регулярных точек. Прообраз f~1(U) состоит из объеди-
объединения конечного числа открытых множеств f~1(U) = IJz=i ^' на
6.3. Степень отображения и ее приложения 269
каждом из которых отображение / является диффеоморфизмом. То-
Тогда, поскольку supp/*(o;) С f~1(U), то
N Р N
г=1 J г=1
Mi f-4Uo) Vi U
/c = deg//
ш.
В общем случае, если окрестность U содержит и нерегулярные
точки, подберем другую окрестность по теореме Сарда — Щ, ко-
которая уже состоит только из регулярных точек. Без ограничения
общности можно считать, что обе окрестности, как U так и Щ
диффеоморфны открытому диску. Тогда существует непрерывное
семейство диффеоморфизмов cpt многообразия М2, которое непре-
непрерывно переводит окрестность U в окрестность Uq, т. е.
<po(U) = U, про) = U.
Это значит, что формы ио = (ро(оо) и ио\ = (pi(ui) гомотопны, т.е.
дают одинаковое значение интеграла по формуле Стокса.
6.3.4. Гауссово отображение гиперповерхности
Рассмотрим гиперповерхность М в евклидовом пространстве
Rn, dimM = n — 1, задаваемое уравнением F(x) = 0, gradF 7^ 0.
Тогда на многообразии М определены: риманова метрика {gij}',
форма объема \f\g\dy1 Л ... Л dyn~1, где \д\ = det(^j); гауссова
кривизна К = К (у1, ... ,уп). Определим новую форму К da =
= К (у1, ..., уп) \f\g~\dy1 Л ... Л dyn~1, называемую формой кри-
кривизны гиперповерхности М. Кроме того, для гиперповерхности М
определено гладкое отображение /: М —»> S71'1 С Rn, которое каж-
каждой точке Р сопоставляет его нормаль. Это отображение называ-
называется сферическим отображением. Пусть О — форма объема на
сфере Sn~\
Теорема 4. Для сферического отображения /': М —)> Sn~l ги-
гиперповерхности М прообраз формы объема О на сфере Sn~l равен
форме кривизны на гиперповерхности М: /*О = К da.
Доказательство. Без ограничения общности можно счи-
считать, что в окрестности точки Pq е М многообразие М является
графиком функции хп = /(ж1, ..., хп~1), а в точке Pq = @, ..., 0)
нормаль к многообразию М параллельна оси Охп. Тогда в точке Pq
270 Гл. 6. Теория гомологии
риманова метрика имеет вид единичной матрицы: дц = Sij. Тогда
гауссова кривизна в точке Pq имеет вид: К = det[d2f/(dxldx^)).
На сфере Sn~1 С Rn в окрестности точки f(Po) = @, ..., 0,1) в
качестве координат выберем координаты (ж1, ..., хп~1). Тогда мет-
метрика на сфере Sn~l в точке f(Po) тоже имеет диагональный вид:
9ij = ^. Тогда форма О на сфере S71'1 в точке f(Po) равна: О =
= dx1 Л ... Л dxn~1. Вычислим теперь сферическое отображение.
Касательное пространство к многообразию М порождается каса-
касательными векторами
г* = A 0 ••• 0 fxi).
Тогда нормальный вектор п имеет координаты
n=(/*i /х» ••• /х-1 "I)
Прообраз формы О при сферическом отображении вычисляется пу-
путем подстановки вместо dx1 дифференциала координаты нормаль-
нормального вектора п:
Производя вычисления и учитывая, что в точке в точке Pq первые
частные производные функции / равны нулю, fxi(Po) = 0, полу-
получаем
/* (О) = det ( „ d.{ \ dx1 Л ... Л dx11-1 = К da.
\дх1дхэ )
В качестве следствия получается известная теорема Гаусса-Бонне:
Теорема 5. Пусть М — замкнутая компактная поверхность
в R3. Тогда fM К da — 4тгЛ, где Л — некоторое целое число.
Доказательство. Применим теоремы 3 и 4:
f Kda = Jr(u) = (deg/) IП = 47rdeg/.
MM S2
Глава 7
Простейшие вариационные задачи
римановой геометрии
7.1. ПОНЯТИЕ ФУНКЦИОНАЛА.
ЭКСТРЕМАЛЬНЫЕ ФУНКЦИИ. УРАВНЕНИЕ ЭЙЛЕРА
Начнем с общего понятия функционала и его вариации. Напри-
Например, мы уже знакомы с «функционалом»: каждому отрезку глад-
гладкой кривой j(t) сопоставляется его длина /^G) — fa |т| db. Это со-
соответствие: j(t) —>> la(l(t)) уже не является «обычной функцией»,
так как «аргументом» здесь является произвольная гладкая кри-
кривая. Соответствие 7 ~^(т) является важным примером нелиней-
нелинейного функционала, определенного на пространстве гладких кривых
j(t). Обобщим этот пример.
Рассмотрим в R^ ограниченную область D с гладкой грани-
границей 8D; пусть и1, ...,ик — декартовы координаты. Рассмотрим
на D гладкие вектор-функции f (гл1, ..., ик) = f (иа) = (fl(ua), ...
..., fn(ua)). Область D называют областью изменения параметров
и1, ... ,гА Для любых функций {/г(иа)} и {дг(иа)}, 1 ^ г ^ п, и
любых чисел а и b определена вектор-функция af+bg = {afl(ua) +
+ Ьдг(иа)}. Все гладкие вектор-функции на D образуют бесконеч-
бесконечномерное линейное пространство F. На нем мы и будем рассма-
рассматривать различные функционалы. Вектор-функции будут «аргумен-
«аргументами» функционалов J[f], f E F.
Определение 1. Функционалом J на пространстве F (или на
его подмножестве), называется непрерывное отображение J: F —>>
—>> R1. Если J[af + 6g] = aJ[f] + bJ[g], то функционал J называет-
называется линейным.
Замечание. Пусть D — отрезок на прямой: и1 = t, f (t) = (f1 (t),
/2(t),/3(t)) — вектор-функция. Тогда f(t) = 7(t) определяет кри-
кривую в R3. Здесь F — пространство всех таких кривых. Рассмотрим
интеграл J[f] = /J |7(t)| dt = /^ |f(t)| dt, т.е. длину кривой f(t),
0 ^ t ^ 1. Этот функционал нелинеен.
Пусть Ь(и^;рг;дга) — гладкая функция от трех групп перемен-
переменных: и@, 1 ^ /3 ^ к; рг, 1 ^ г ^ п; qla, 1 ^ а ^ /с, 1 ^ г ^ п. Назо-
272 Гл. 7. Простейшие вариационные задачи римановой геометрии
вем эту функцию лагранжианом. Пусть f = {/г(и@)} — гладкая
вектор-функция, определенная на D С RA Построим функционал
D
где кратный интеграл / • • • f D берется по fc-мерной области; dak =
dfHuP)
= du1 Л.. .Aduk — fc-мерный элемент объема, Риа (и^) = —
частные производные. Сокращенно запишем: J[f] = fD Ь(и@, /г,
f^a) dak. Класс таких функционалов включает практически все со-
содержательные примеры функционалов в механике и физике. Рас-
Рассмотрим функционал длины дуги
1 1
J[{} = J\i(t)\dt =
о о
т.е. f(t) = 7(t) = (x1(t), ... ,xn(t)) — гладкая кривая в n-мерном
многообразии с метрикой дц. Лагранжиан имеет вид
dt dt
Для плоской кривой j(t), заданной уравнением у = f(u), имеем:
Функционал длины определен на кривых в гладком многообра-
многообразии Мк. Обычно мы будем рассматривать малую окрестность кри-
кривой. Тем самым события переносятся в область fc-мерного евклидо-
евклидова пространства с некоторой римановой (вообще говоря, неевклидо-
неевклидовой) метрикой. Сложение вектор-функций, задающих кривые, про-
производится локально, лишь в окрестности фиксированной кривой.
Другой пример: функционал площади J[f] = ff D \/EG — F2 x
x dudv. Здесь f = (x (u,v);x2(u,v);x3(u,v)) — двумерная поверх-
поверхность в R3 с индуцированной метрикой ds2 = E du2 + 2F du dv +
+ Gdv2:
ад, f.) = Veg - f2 = ^/(iu,iu)(iv,iv)-(iu,ivJ.
Можно рассмотреть функционал площади в ином виде: J[f] =
= IId \ll + fx + fy dudV> гДе D - область в R2(x,y); f(x,y) =
= (ж, у, z(x, у)), т. е. вектор-функция f задана графиком z = /(ж, у).
Здесь L(zx,zy) = Jl + z2 + z2.
7.1. Понятие функционала. Уравнение Эйлера
273
max
В первую очередь нас интересуют «критические точки» функци-
функционалов J[f]. Обратимся к аналогии с обычными функциями. Возь-
Возьмем функцию одного или двух переменных: a(t) или a(u,v). В
большой степени ее поведение оп-
определяется количеством и распо- a | max
ложением тех точек to (соответ-
(соответственно (щ, vq)), в которых a'(to) =
= 0 (соответственно аи(щ,Уо) =
= av(uo,vo) = 0), т.е. grad(a) =
= 0. Такие точки называются кри-
критическими или стационарными
точками функции а. Иногда гово-
говорят: экстремальные точки. Напри-
Например, для функции а = a(t) такими Рис. 7.1
точками являются точки максиму-
максимума, минимума и точки перегиба (рис. 7.1). Если а = а(и, v), то сре-
среди точек, где grad(a) = 0, содержатся, например, точки максимума,
минимума и седловые точки (седла) (рис. 7.2).
Рис. 7.2
Например, в физике и механике те точки, где потенциальная
функция имеет экстремум, отвечают положениям равновесия си-
системы (устойчивым или неустойчивым).
Аналогично, при изучении функционалов большое внимание
уделяется поиску тех стационарных вектор-функций fo, в которых
функционал J достигает минимума, максимума или имеет «седло».
Чтобы уточнить задачу, нужно понять — что такое «производная по
направлению» от функционала J в некоторой точке f E F. Как было
отмечено, для функций a(u,v) все интересующие нас критические
точки являются решениями уравнения grad(a) = 0. Если в точ-
точке (u,v) задано направление (вектор) а = (а1, а2), то производная
274
Гл. 7. Простейшие вариационные задачи римановой геометрии
функции a(u,v) по направлению а имеет вид
—a(u, v) = a — + a — = (a, grad a)
da. ou ov
(рис. 7.3). Отсюда следует, что grada(?io,^o) = 0 тогда и только
тогда, когда da(uo,vo)/da. = 0 для любого направления а. Произ-
Производная по направлению вычисляется так:
da 1 г 1 2 -I
—— = lim - alu + ea , v + ?a ) — a(гл, г;) ,
aa ?^o e
где a = (a1, a2), ? — параметр, т. е.
da 1 г i
—— = lira - \a(u + ев.) — a(u) ,
где u = (u, v) — радиус-вектор точки из области G. Именно в та-
такой форме мы и обобщим понятие производной по направлению на
случай функционалов J[f].
a = a(u, v)
G grad(a)
Рис. 7.3
'"'' ¦ " Г" _' [ "¦"::"
Рис. 7.4
Рассмотрим «точку» f ? F и рассмотрим функцию т\ ? F, до-
достаточно малую и такую, что 7/I&D = 0. Такие функции г/ будем
называть возмущениями функции f. Сместимся из точки f в точ-
точку f + ?Г) (рис. 7.4). Функция г/ задает «направление смещения» из
«точки» f. Отличие от обычной функции в том, что теперь этих
«направлений» бесконечно много.
Далее, как и для обычных функций, построим следующее вы-
выражение: 1/б( J[f + erj\ — J[f]). Переходя к пределу по ?, получаем
число, которое обозначим через
7.1. Понятие функционала. Уравнение Эйлера
275
и которое естественно назвать производной функционала J в точ-
точке f no направлению г/. Развивая аналогию с обычными функциями,
дадим еще одно естественное
Определение 2. Функцию fо Е F назовем стационарной (экс-
(экстремальной, критической) функцией для функционала J[f], если
—- J[fo] = 0 для любого возмущения г/ такого, что t]\od = 0.
dr\
Удобно представлять функционал J в виде «графика» над F
(рис. 7.5). Если точка f E F фиксиро-
фиксирована, ТО СОВОКУПНОСТЬ фуНКЦИЙ f + ?7/,
где r]\dD = 0, можно отождествить с
линейным пространством Т, на кото-
которое мы ограничиваем функционал J.
Те «точки» fo, где —JTfol = 0 для лю-
dr]
бого г/, являются точками минимума,
максимума или «седловыми точками»
функционала J[f], ограниченного на
подпространство Т С F. Смысл огра-
ограничения J на Т ясен: мы изучаем по- Рис. 7.5
ведение J при возмущениях г/, не ме-
меняющих f на границе 3D. Например, на рис. 7.6 концы кривой фик-
фиксированы в точках А и В: г](А) = г](В) = 0.
Выведем формулу для производной —J[fo]. Это выражение на-
(Л I]
зывается иногда первой вариацией J[f].
Положим 8J = J[f+erj\-J[f]. Тогда f + r,
A lh\\\W 7@>
SJ =
D
Рис. 7.6
Разлагая подынтегральное выражение в ряд Тейлора, получаем
п к
8J
-I
D
дь
EUJ-J „ V "V V "V
дь
i=l а=1
dak =
= е
(=1
8L
+
a=l
dak.
276
Гл. 7. Простейшие вариационные задачи римановой геометрии
Рис. 7.7
Выполним интегрирование по частям:
к
6J = е
dL
D
, k f
. , k
Так как все функции предполагались гладкими, то в первом ин-
интеграле интегрирование по ua можно отделить от интегрирования
по остальным переменным и1 в силу теоремы о перемене порядка
интегрирования, что дает
D и1 ...йа ...ик Q
(рис. 7.7). Так как в Jg переменные и1, ..., йа, ..., ип (переменная
иа1 пропущена) можно считать параметрами, то
=/¦¦¦/[#¦
и1 ...йа ...ик
^-^о,
так как
8J =
= 0;P,Qe 3D. Итак,
Л 3 1
1.2. Экстремальность геодезических
277
Отсюда
7 Г П
д
dfta
так как lime_>.o JD o(e) dak = 0. Пусть fo — стационарная функция
для J. Тогда для любой функции г\ (где t\\qd = 0) выполняется ра-
равенство
I
D
3L
д ( 8L
dak = 0.
Как известно из курса анализа, это означает, что
к
= 0, г = 1, ..., п.
8L
~др
a=l
Qua
Эта система дифференциальных уравнений называется уравнения-
уравнениями Эйлера для функционала J[f]. Тем самым доказана важная
Теорема 1. Функция fо Е F является экстремальной {стацио-
{стационарной, критической) для функционала J[f] тогда и только тогда,
когда она удовлетворяет уравнениям Эйлера.
7.2. ЭКСТРЕМАЛЬНОСТЬ ГЕОДЕЗИЧЕСКИХ
Мы определили геодезические как траектории, вдоль которых
параллельный перенос сохраняет поле скоростей траектории. Ока-
Оказывается, в римановом случае имеется еще одно важное свойство,
которое можно взять за определение геодезической. Оказывается,
геодезические — это экстремальные траектории для так называемо-
называемого функционала действия, «похожего» на функционал длины.
Пусть Мп — риманово многообразие с метрикой дц, и ж1, ...
...,жп — локальные координаты. Траектории j(t) задаются так:
^(t) = (x1(t), ...,жп(?)). В качестве области D возьмем отрезок
/= [0,1]. Рассмотрим траектории с фиксированными началом и
концом: 7@) = P, j(l) = Q.
Определение 1. Функционал
v ~j\x)x XJ at
о о
называется функционалом длины траектории. Функционал
278 Гл. 7. Простейшие вариационные задачи римановой геометрии
1
= J\j\2dt =
о о
называется функционалом действия траектории ^
Лемма 1. Имеет место неравенство 1? ^ Е.
Доказательство. Применяя известное неравенство Швар-
Шварца
к функциям f(i) = lng(i) = \j(i)\9 получаем (L(^)J ^ E(j), при-
причем равенство достигается только при постоянной функции g(t),
т. е. тогда и только тогда, когда параметр t пропорционален длине
дуги. ¦
Рассмотрим экстремали функционалов Е и L.
Теорема 1. Экстремалями функционала действия E(j) явля-
являются геодезические траектории j(t), параметризованные пара-
параметром ?, пропорциональным длине дуги s. Если наложить началь-
начальное условие |7@)| = 1 в точке Р, то параметр t определяется од-
однозначно и является натуральным, т. е. совпадает с длиной дуги.
Доказательство. Мы рассматриваем здесь параметри-
параметризованные траектории, т. е. две совпадающие, но параметризованные
по-разному кривые считаются различными траекториями. В силу
теоремы 1 разд. 7.1 экстремали функционала E(j) удовлетворяют
уравнениям Эйлера, которые в данном случае имеют вид
dL d
Лагранжиан выглядит так: L(V,iJ) = д^{х)хгхК Вычисление дает
dL = %j ^j 9L_ = 2 ^
dxk dxk ' dxk J
(
dxk
т. e. xa + Tf-x1^ = 0. Итак, уравнения Эйлера совпали с уравне-
f-
1.2. Экстремальность геодезических 279
ниями геодезических в римановой связности. Теорема доказана. ¦
Экстремаль функционала E(j) определяется из уравнений Эй-
Эйлера как траектория с параметром. Если на геодезической заменить
параметр, то эта траектория перестанет, вообще говоря, быть гео-
геодезической.
Теорема 2. Экстремалями функционала длины L{^) являются
гладкие траектории j(t), получающиеся из геодезических произ-
произвольными гладкими заменами параметра на них. Любая экстремаль
функционала Е{^) {т. е. параметризованная геодезическая) являет-
является экстремалью L^), но не наоборот.
Доказательство. Рассмотрим уравнения Эйлера для
L(j). Лагранжиан имеет вид: L(x,x) = ^ д^хгхК Получаем
= 0.
Пусть j(t) — решение системы. Так как j(t) — гладкая кривая,
то на ней можно ввести натуральный параметр t = s. Тогда \j(s)\ =
= 1; следовательно, уравнения Эйлера превращаются в
Эти уравнения совпадают в силу теоремы 1 с уравнениями гео-
геодезических. Итак, вводя на произвольной экстремали L(j) нату-
натуральный параметр, получаем геодезическую. Обратно, пусть j(s) —
произвольная геодезическая на Мп. В силу предыдущего она — экс-
экстремаль L(j). Пусть s = s(t) — гладкая замена параметра на j(s).
Тогда L(j(s)) = L(/y(s(t))), поскольку длина дуги не меняется при
заменах параметра. Итак, j(s(t)) — снова экстремаль L. Теорема
доказана. ¦
Локально геодезические являются минимумами обоих функци-
функционалов L и Е. Иными словами, если рассмотреть малое возмуще-
возмущение г/ геодезической 7> где носитель г/ также мал, то новая траек-
траектория 7 + V будет иметь длину, не меньшую, чем j. Сформулиру-
Сформулируем точнее. Рассмотрим компактное риманово многообразие Мп. В
силу результатов, описанных в гл. 5, существует такое е > 0, что
любая пара точек Р, Q в шаре D™ радиуса е, соединяется един-
единственной геодезической, целиком лежащей в этом шаре.
Теорема 3. Пусть D™ —указанный выше шар, и пусть 7- [0,
1] —)> Мп — геодезическая длины меньше ?, соединяющая две точки
шара; пусть ио: [0,1] —)> Мп — любой другой гладкий (или кусочно-
гладкий) путь, соединяющий эти лее точки.
280
Гл. 7. Простейшие вариационные задачи римановой геометрии
Тогда L(uS) ^ L(pf), причем равенство достигается лишь при
совпадении точечных множеств 7[0,1] и о;[0,1] (т. е. когда два пу-
пути совпадают как гладкие кривые в Мп). В этом смысле геодези-
геодезическая 7 — кратчайший путь, соединяющий точки Р и Q.
Доказательство мы опускаем.
Следствие 1. Пусть ио: [0, б] —>> Мп — гладкая траектория, па-
параметризованная натуральным параметром, и пусть ее длина от
Pq = со@) до точки ио(е) не превосходит длины любого другого пу-
пути, идущего из Pq в w(e). Тогда ио — геодезическая.
Утверждение сразу следует из теоремы 3.
Определение 2. Геодезическая j: [a,b] —>> Мп называется ми-
минимальной, если она не длиннее никакого гладкого пути, соединяю-
соединяющего ее концы j(a) и j(b).
Согласно теореме 3, любой достаточно малый отрезок геодези-
геодезической минимален. В то же время длинная геодезическая может не
быть минимальной. Напри-
Например, мы доказали, что любой
экватор на сфере S2 — гео-
геодезическая. Рассмотрим дугу
SNP на рис. 7.8. Ясно, что
геодезическая SNP не мини-
минимальна, поскольку дуга PaS
короче, чем SNP.
Минимальная геодезиче-
геодезическая, соединяющая две «да-
«далекие» точки Р и Q, может
быть неединственна. Например, северный и южный полюсы на
сфере соединяются бесконечным числом минимальных геодезиче-
геодезических — меридианов.
В качестве следствия из теоремы 3 покажем, как найти все гео-
геодезические на сфере Sn (n произвольно), не вычисляя символов
Кристоффеля.
Следствие 2. Геодезическими на сфере Sn, снабженной стан-
стандартной метрикой, являются всевозможные экваторы (т. е. плоские
сечения Sn двумерными плоскостями через ее центр) и только они.
Доказательство. Пусть двумерная плоскость R2 пере-
пересекает Sn по экватору 7- Пусть g — отражение в Rn, оставляю-
оставляющее R2 на месте. Тогда возникает изометрия g: Sn —>> Sn, множе-
множество неподвижных точек которой в точности совпадает с эквато-
экватором 7- Пусть Р и Q — две достаточно близкие точки на 7? со-
соединяющиеся единственной минимальной геодезической (см. тео-
теорему 3) ио. Так как д — изометрия, то кривая g(w), проходящая через
Рис. 7.8
7.3. Минимальные поверхности 281
те же точки Р и Q, также геодезическая, соединяющая Р и Q. Сле-
Следовательно uj = g(u)), т. е. о; = 7 — геодезическая. То, что никаких
других геодезических нет, доказывается так же, как и в двумерном
случае: через любую точку сферы в любом направлении проходит
экватор. ¦
Аналогично доказывается, что на поверхности вращения любой
меридиан является геодезической (но здесь есть и другие геодези-
геодезические).
Рассмотрим теперь риманово компактное многообразие, и
пусть Р и Q — две произвольные точки. Обозначим через О(Р, Q)
пространство всех гладких кривых 7, соединяющих Р и Q. На нем
определены функционалы Е и L (см. выше). Определим расстоя-
расстояние р(Р, Q) между точками Р и Q как нижнюю грань длин гладких
кривых, соединяющих эти точки.
Предложение 1. Пусть Р u Q — две достаточно близкие точ-
точки многообразия, находящиеся на расстоянии d друг от друга. То-
Тогда функционал действия Е: Q(P,Q) —>> R достигает абсолютно-
абсолютного минимума d2 в точности на минимальной геодезической, соеди-
соединяющей точки Р и Q.
Доказательство. Пусть 7 — минимальная геодезиче-
геодезическая, 7@) = Р, 7A) = Q. В силу леммы 1 имеем: E(j) = L2(j) ^
^ L2(uo) ^ E(u))9 где и) — гладкая кривая из Р в Q. Равенство
L2(uo) = L2{^) имеет место в том и только том случае, когда ио —
также минимальная геодезическая (возможно, иначе параметризо-
параметризованная, с точностью до масштабного преобразования). В то же
время, равенство L2(lj) = E(uS) достигается, только если параметр
пропорционален длине дуги. Отсюда E(j) < E(uo) во всех тех слу-
случаях, когда ио не является минимальной геодезической. Предложе-
Предложение доказано. ¦
7.3. МИНИМАЛЬНЫЕ ПОВЕРХНОСТИ
В гл. 4 мы познакомились с минимальными двумерными по-
поверхностями, т. е. у которых средняя кривизна Н равна нулю. Ока-
Оказывается, они являются экстремумами функционала площади.
Рассмотрим функционал (п — 1)-мерного объема на компакт-
компактных гиперповерхностях, являющихся графиками гладких функций
хп = /(ж1, ...,хп~1) с областью определения D в Rn~1(x1, ...
...,xn~l). Пусть D имеет гладкую границу 8D и ограничена
(рис. 7.9). Из гл. 5 мы знаем, что (п — 1)-мерный объем записы-
записывается так:
282
Гл. 7. Простейшие вариационные задачи римановой геометрии
volfV") =
D
\
п-1
?
г=1
где fxi = df /dxl. Так как лагранжиан L имеет вид
\
п-1
?
г=1
то уравнение Эйлера записывается так:
п-1
-1/2N
= 0.
г=1
Рассмотрим гиперповерхность Vn 1, являющуюся экстрему-
экстремумом функционала (п — 1)-мерного объема. Поскольку объем явля-
является скаляром, не зависящим от выбора координат на поверхности,
то мы выберем удобные координаты. Пусть Р Е Vn~1; положим
Кп~1(х1, ..., xn~l) = TpVn~l, т. е. в качестве координатной плос-
плоскости выберем касательную плоскость с декартовыми координата-
координатами. Зададим локально Vn~1 как график функции хп = /(ж1, ...
тп-1\
Рис. 7.9
Теорема 1. Гиперповерхность Vn~1 С Rn экстремальна для
функционала (п — 1)-мерного объема тогда и только тогда, когда
ее средняя кривизна Н тождественно равна нулю.
Доказательство. Проведем вычисления для случая п =
= 3, так как вычисления для любого п аналогичны. Для М2 С R3
имеем
7.3. Минимальные поверхности 283
Q
Дифференцируя, получаем:
/ххA + fy) - Vxfyfxy + fyy(l + /|) = 0.
В силу гл. 4, это уравнение совпадает с уравнением Н = 0.
Рассмотрим поверхности М2 в R3, заданные в виде r(u,v) =
= (x(u,v);y(u,v)]z(u,v)). Тогда функционал площади запишется
так (см. гл. 5): S[r] = fDruv\ y/EG — F2 dudv. Пусть (u,v) — кон-
конформные параметры, т. е. в' них метрика на М2 имеет вид
Е — П — (г г \ — (г г \ F — Г)
Тогда
S[r] = / ((rw,rw) (rv,rv)I/2 dudv.
D
Прямое вычисление показывает, что уравнения Эйлера здесь та-
( д2 д2\
ковы: —^7 + тг^7 r(^5^) = 0- Итак, г — гармоническая вектор-
\dul dvz)
функция относительно координат (гл, г;). Поясним, что при варьиро-
варьировании лагранжиана все частные производные рассматриваются как
независимые. ¦
Рассмотрим бесконечномерное пространство F гладких отобра-
отображений диска D2(u, v) в R3. На F определен нелинейный функцио-
функционал площади S[r]. Его экстремальные «точки» (т. е. радиус-векторы
г(щу)) описывает
Теорема 2. Экстремальными векторами r(u,v) для S[r] явля-
являются те и только те, для которых средняя кривизна заметаемой
ими поверхности равна нулю.
Это вытекает из теоремы 1. Теперь рассмотрим наряду с S[r]
еще один функционал (Дирихле): D[r] = 1/2 fD,s(E + G) dudv.
Сравним экстремальные «точки» функционалов D и S.
Теорема 3. Экстремальными векторами r(u,v) для функцио-
функционала Дирихле являются те и только те, которые гармонические
( д2 д2 \
относительно (u.v), т. е. тг^т + тг^т )r(u,v) = 0.
\ди2 ov2)
Доказательство. Уравнения Эйлера имеют вид
д_(дЬ\ ±(^Л_
ди \ дги ) dv\ drv )
284 Гл. 7. Простейшие вариационные задачи римановой геометрии
+ yl + y% + zl +z%, т.е. А(г) = О,
л d2 d2
где А = -7—г + т—г. Теорема доказана. ¦
du2 dv2
Координаты (u,v) могут быть гармоническими для некоторо-
некоторого радиус-вектора, но не быть конформными для индуцированной
метрики на поверхности, заметаемой этим вектором. Рассмотрим
теперь специальные гармонические поверхности, на которых гар-
гармонические координаты являются в то же время и конформными,
т. е. Е = G, F = 0. Тогда эти поверхности минимальны.
Сформулируем без доказательства следующую теорему.
Теорема 4. Пусть М2 С R3 — минимальная поверхность, то
есть имеет нулевую среднюю кривизну Тогда любое гладкое, до-
достаточно малое ее возмущение с достаточно малым носителем
не уменьшает площади поверхности.
7.4. ВАРИАЦИОННОЕ ИСЧИСЛЕНИЕ
И СИМПЛЕКТИЧЕСКАЯ ГЕОМЕТРИЯ
Пусть Т*Мп — касательный пучок многообразия Мп, т.е. 2п-
мерное гладкое многообразие, точками которого являются пары
(х, а), где х е Мп, а е ТхМп. Пусть P,Q е Мп и ft(P, Q) - про-
пространство всех гладких кривых, соединяющих Р и Q. Введем
локальные координаты ж1, ...,жп и запишем траектории в виде
1
y) ((), ... ,жп(?)), ж@) = Р, хA) = Q. Рассмотрим функци-
функционал /[7] = /о L(x,x) dt, где L — гладкая функция от двух групп
переменных, т. е. L(x, а) — функция на Т*Мп.
Определение 1. Импульсом р = (^), 1 ^ г ^ п, называется ко-
вектор с компонентами: щ = dL/дх1. Энергией Е называется функ-
функция Е(х, х) = xlpi — L(x, x).
Энергию можно рассматривать как функцию на Т*Мп, т.е.
Е(х, а) = alpi — L(x, а). Важный пример: L(x, ж) = д^хгх^; отсюда
Pi = dLjdx1 = 2gij?i, т. е. р — ковектор, двойственный относитель-
относительно метрики gfjj вектору скорости а = х. Энергия Е имеет вид
т. е. является «кинетической энергией».
Пусть б — группа Ли, гладко действующая на Мп
дый ее элемент д представлен диффеоморфизмом Мп. Рассмо-
Рассмотрим следующий пример: б = R1 — вещественная прямая (груп-
(группа по сложению). Это действие порождает на Мп векторное поле:
7.4. Вариационное исчисление и симплектическая геометрия 285
Х(х0) = dgt(xo)/dt\t=Q9 где орбита <&(х0) = gt(xo)i 9оЫ) = %о-
Действие б на Мп порождает действие б на Т*МП по формуле
д*: (ж, а) ->> (д(ж), с^ж(а)).
Определение 2. Говорят, что лагранжиан L(x,a) сохраняется
при действии & (инвариантен относительно б), если при дей-
действии б на Т*Мп функция L(x, а) переходит в себя, т. е.
L(g(x);dgx(a)) =L(x,a).
Условие сохранения L имеет вид: dL/dt = 0. Дифференцируя,
получаем
dL dL dxl dL da1 dxl i
~dt=~dxI~df + ~da^~df' ~dt = ^
(см. выше). Найдем da1 /dt. Рассмотрим а и касательную траекто-
траекторию (p(r) = (хг(т)) такую, что а1 = dxl/dr\T=Q. При малом смеще-
смещении на At вдоль gt(x) функции х1 переходят в функции х1 + XlAt
(мы пренебрегаем малыми порядка выше первого). Отсюда
dxi dxi дХ1 Л dxk , , дХ1 k c
Далее
т.е. —- = —-г ал.
dt oxk
где J = (J?) — матрица Якоби. Отсюда
Итак,
а3 -> JJkak = aJ + —^ akAt.
dL dL ¦ dL dXi k Л
t г д1 к
Мы доказали
Предложение 1. Аналитическое условие сохранения лагранжи-
лагранжиана L(x, а) группой б = R1 имеет вид
dL ¦ dL dXi
Х +
286
Гл. 7. Простейшие вариационные задачи римановой геометрии
где (ж, а) — независимые аргументы, а X — векторное поле скоро-
скоростей действия группы б = R1.
Выведем закон сохранения проекции импульса вдоль экстрема-
экстремалей функционала J. Рассмотрим Jo L(x,x) dt = J[y], и пусть 70 —
экстремаль J, т.е. решение системы уравнений Эйлера дЬ/дх1 —
— d/dr{dL/dxl) = 0, где г — время вдоль экстремали. Обозначая
точкой дифференцирование по т, перепишем уравнения Эйлера так:
dL/дх1 = р^ где р — импульс. Рассмотрим свертку /(т) = (р, X) =
= Xlpi, где /(т) — гладкая функция вдоль 7о(т)- Здесь /(т) можно
понимать как значение ковектора р на векторе X: /(т) = р(Х).
Теорема 1. Имеет место тождество (/(т))* =0, т. е. (р, X)- =
= 0.
Доказательство. Из утверждения 1, имеем
y = хгРг + хгРг = хг—-
дхг
дхк дак
M
что и требовалось. ¦
Рассмотрим наш модельный пример: L(x,x) = g^xlxK Тогда
Pi = 2gijij, т.е. Хг_р^ = 2д^Хъх^ = 2(Х,7о) = const вдоль 7оМ-
Для этого лагранжиана экстремали являются геодезическими (см.
разд. 7.2); в частности I70I = const вдоль 7о(/т~)- Отсюда |Х| х
х cos a(r) = const, где а(т) — угол между векторами X и 70 (изме-
(измеренный в метрике gij).
Применим этот результат для на-
нахождения геодезических на поверхно-
поверхности вращения М2 в R3. Пусть r(z) —
гладкая функция, являющаяся обра-
образующей поверхности вращения, т. е.
кривая у = r(z) вращается вокруг оси
Oz (рис. 7.10). Пусть ио — постоянная
скорость вращения; тогда на М2 воз-
возникает действие root группы б = R1.
Тогда поле X скоростей этого дей-
действия имеет модуль |Х| = гио. В силу доказанного выше для любой
геодезической 7о(т) на М2 выполняется тождество r(z) cos a(z) =
= с = const. Итак, доказано
Предложение 2. На поверхности вращения М2 С R3 с обра-
образующей r(z) вдоль любой геодезической Jo (г) на М2 выполняется
тождество r(z) cos a(z) = const.
Рис. 7.10
7.4. Вариационное исчисление и симплектическая геометрия
287
Рассмотрим примеры. Пусть r(z) = const. Тогда поверхность
вращения является цилиндром и гео-
геодезические являются образами прямых
после сворачивания евклидовой плос-
плоскости в цилиндр (рис. 7.11).
Пусть r(z) определяет S2 (рис. 7.12).
Геодезические — экваторы.
Условие r(z) cos a(z) = const — необходимое условие геодезич-
ности траектории, но не достаточное. В самом деле, если ^(т) — ор-
орбита действия группы б, то a(r) = 0, т. е. (р, X) = |Х| \р\ = const
(на поверхности вращения), однако далеко не всегда является гео-
геодезической. Рассмотрим, например, прямой круговой конус и его
Рис. 7.11
Не геодезические Геодезические
Лпрямые)
Рис. 7.12
Развертка конуса
Рис. 7.13
вращения вокруг оси (рис. 7.13). Как мы уже знаем, все геодезиче-
геодезические на конусе являются образами прямых при сворачивании куска
евклидовой плоскости в конус. Окружности, очевидно, не геодези-
геодезические на конусе.
Поскольку dL/dt = 0 вдоль орбит действия б = R1 (для инва-
инвариантного лагранжиана), то локально можно направить вдоль орбит
<8(х) координату хп. Тогда (р, X) = 0, что эквивалентно: рп = 0, где
рп — проекция импульса по координате хп. Иными словами, можно
считать, что импульс р не зависит от координаты хп. Функция L
тоже не зависит от нее.
Докажем закон сохранения энергии вдоль экстремалей. Пусть
L(x,sl) — лагранжиан, уже не обязательно инвариантный относи-
относительно действия какой-либо группы, и пусть 7о(т) — экстремаль
функционала J[/y] = f L(x,x) dr. Рассмотрим энергию Е = xlpi —
— L; pi = dL/дх1, пусть L = gijXlxi — U(x), где функция U(x)
называется потенциалом.
Теорема 2. Вдоль экстремалей jo(r) функционала J[j] выпол-
выполняется тождество: dE/dr = 0.
288 Гл. 7. Простейшие вариационные задачи римановой геометрии
Доказательство. Имеем
— = (pid1 -L)'= pia1 +pial - —-X1 - —-a1 =
dr dxl da1
dxl da1 dxl da1
так как щ = dL/dxl в силу уравнений Эйлера, щ = dL/dal по
определению. Теорема доказана. ¦
Введем простейшие понятия гамильтоновой механики на мно-
многообразиях.
Пусть Т*Мп — касательный пучок многообразия, снабженный
координатами (ж, а) и L — лагранжиан на Т*Мп.
Определение 3. Лагранжиан L(x,a) называется невырожден-
невырожденным, если уравнение
г- Pi =
имеет для любого х Е Мп единственное решение а = а(ж,р).
Рассмотрим наряду с Т*Мп также кокасательный пучок Т*Мп,
т. е. 2п-мерное гладкое многообразие, точками которого являются
пары (ж,р), где р Е Т*Мп, т. е. р — ковектор. Рассмотрим энергию
, а) = ргаг - Цх, а) = ^^аг - L.
Здесь р = _р(ж,а). Выразим а = а(ж,р) и подставим в ?7. Полу-
Получим Е —)> ??(ж,а(ж,р)). Мы получили некоторую функцию ?7(ж,
а(ж,р)) = Н(х,р), называемую гамильтонианом. Она имеет вид
Д" = pial(x,p) — L(x, а(ж,_р)), т. е. L(x, а(ж,р)) = pidl(x,p) — Н(х,
р). Пусть 7(^) С Мп — гладкая траектория; тогда (ж, ж) Е Т*Мп,
где ж = i(t), ж = ж(^), т.е. j(t) порождает траекторию на Т*Мп:
(ж(?),ж(?)) = F(t). Рассмотрим лагранжиан Ь(ж,а) на траекториях
в Т*МП.
Отметим, что Т*Мп и Т*Мп диффеоморфны. В самом деле,
зададим на Мп метрику дц. Тогда возникает каноническое ото-
отождествление if: Т*Мп^Т*Мп; ^({ж*}, {аа}) = ({х% {драаа}) G
Е Т*Мп. Наряду с этим отождествлением имеется и другое отожде-
отождествление, возникающее при задании невырожденного лагранжиана
Ь(ж, а). В самом деле, уравнениер = dL(x, a)/9a имеет единствен-
единственное решение (при фиксированном ж) а = а(ж,р). Поэтому можно
сопоставить паре (ж, а) пару (ж,р), где р = <9Ь(ж,а)/<9а. Рассмо-
Рассмотрим именно этот диффеоморфизм Т*Мп и Т*Мп. В частном слу-
7.4. Вариационное исчисление и симплектическая геометрия
289
чае, когда L(x, а) = д^а1а^, имеем щ = 2д^ак, т. е. отождествление
с помощью такого лагранжиана совпадает с «римановым отожде-
отождествлением», описанным выше (рис. 7.14).
Р)
о;
Рассмотрим вариационную задачу поиска экстремалей функци-
функционала I[a] = fR L(x(t),a.(t))dt, где L(x, а) рассматривается на всех
гладких траекториях а(?) в Т*МП,
а точки R и S — две фиксирован-
фиксированные точки на Т*МП, т. е. Д(жо, ао) и
5(уо,Ьо) (рис. 7.15).
Рассмотрим уравнения Эйлера
для этого функционала. Возьмем ва-
вариации, не смещающие точек R и S.
Уравнения Эйлера на Т*МП имеют
dL d (dL\ n
вид т—- = — -г-т . Запишем их в
ажг dt \оаг J
терминах Т*МП, т. е. сделаем замену
(х,р) —)> (ж, а) с помощью описанного диффеоморфизма, построен-
построенного по лагранжиану L. Имеем
L( ()) l() Н() L( ())
Рис. 7.15
Отметим, что dL(x,a.(x,p))/dpi = 0, так как импульс р явно
не входит в Ь(ж,а), а при работе с уравнениями Эйлера вариации
берутся только по явно входящим в лагранжиан функциям. Итак,
О = —L(x,sl(x,p)) = аг(х,р) - —Н(х,р),
т.е. аг(х,р) = dH(x,p)/dpi. Отсюда
290
Гл. 7. Простейшие вариационные задачи римановой геометрии
в
в
/ L(x, а(ж,р)) dt = [pial(x,p) - Н(х,р)] dt =
А А
А
где w(t) e T*Mn, w(t) = (x(t),p(t)); ш@) = А, шA) = В (рис. 7.16).
т*мп
мп
Рис. 7.16
Запишем уравнения Эйлера для функционала J[o;(t)] на Т*Мп.
Пусть uio(t) = (x(t),p(t)) —экстремаль функционала J. Выше было
установлено, что aa = dH(x,p)/dpa, но так как aa = xa (вдоль
экстремали), то xa = dH(x,p)/dpa (вдоль экстремали). Далее
в
в
= / {рга1 - H)dt = / L(x,Si(x,p))dt.
А А
Уравнения Эйлера приобретают вид dL/дх1 = d{dL/dal)/dt,
но так как dL/да1 = р^ то щ = dL/дх1. Далее dL/дх1 = d(alpi —
—Н(х,р))/дх1 = —дН(х,р)/дх\ так как d(alpi)/dxl = 0. Отме-
Отметим, что координаты ж и а рассматриваются как независимые, а
потому дз./дх = 0. Так как переменная х1 в сумму alpi явно не
входит, то d(alpi)/dxl = 0. Отсюда щ = —дН(х,р)/дх\ Итак, на-
нами доказана важная
Теорема 3. В координатах (х,р) на кокасательном пучке Т*Мп
уравнения Эйлера для функционала J[uo\ = fA L(x,a.(x,p))dt запи-
записываются в «гамильтоновой форме»
., дН(х,р) . дН(х,р) ,
х = , pi = ^—.— (уравнения Гамильтона).
dpi ох1
7.4. Вариационное исчисление и симплектическая геометрия 291
Изучим уравнения Гамильтона на Т*МП. Они определя-
определяют на Т*МП гладкое векторное поле х1 = dH(x,p)/dpi, щ =
= —дН(х,р)/дх1. Это поле тесно связано с полем gradi/, ко-
которое является ковекторным полем на Мп. В самом деле, рас-
рассмотрим на Т*МП внешнюю дифференциальную форму сте-
степени два ljC2) = dpi Л dxl. Она определяет кососимметрическое,
невырожденное скалярное произведение в Т^Х^(Т*МП) и в
Т? JT*Mn). Оно задает отождествление касательного и ко-
кас'ательного пространств T(x^(T*Mn), TT АТ*МП). Рассмо-
Рассмотрим поток grad H(x,p). Тогда поток, двойственный к нему
относительно указанного скалярного произведения, имеет вид
(dH(x,p)/dpi; —дН(х,р)/дхг), т. е. совпадает с гамильтоновым по-
потоком, описанным в теореме 3. Итак, гамильтоново поле можно
определить как поток к градиенту гамильтониана Н(х,р), двой-
двойственный относительно внешней 2-формы, заданной на Т*МП.
Рассмотрим четномерное многообразие М2п, например мно-
многообразие Т*МП = Т*МП. Пусть ио^ = uoij dx{ A dxj — невыро-
невырожденная внешняя 2-форма на М2п, задающая кососимметриче-
кососимметрическое скалярное произведение. Тогда для любой гладкой функции
f(x) на М2п возникает понятие «кососимметрического градиента»
Определение 4. Кососимметрическим градиентом sgrad/
гладкой функции / (относительно скалярного произведения ио) на-
называется векторное поле, однозначно определяемое соотношени-
соотношением cj(Y,sgrad/) = Y(/), где Y пробегает множество всех гладких
векторных полей на M2n, a Y(/) — значение оператора Y на функ-
функции /.
Однозначность определения sgrad / следует из невырожденно-
невырожденности ио.
Определение 5. Гладкое многообразие М2п называется сим-
плектическим, если на нем задана внешняя дифференциальная
2-форма со, такая, что:
X) ио невырождена;
2) duo = 0, т. е. форма ио замкнута.
Оказывается, что на симплектических многообразиях существу-
существует атлас специального вида, в котором форма ио (называемая «сим-
плектической структурой») принимает канонический вид, а именно:
для любой точки Р Е М2п существуют окрестность U(P) и коор-
координаты {р1, ... ,pn; G1, ..., qn} в ней, в которых со имеет вид со =
= Ya=i ^Р1 Л dql. Эти координаты называются симплектическими.
Их существование утверждает известная теорема Дарбу, которую
мы не будем доказывать.
292 Гл. 7. Простейшие вариационные задачи римановой геометрии
Важный пример симплектического многообразия: М2п = R2n,
где р1, ... ,_pn, G1,..., qn — декартовы координаты и ио = J^ILi ФгЛ
Эта форма имеет постоянные коэффициенты ио\ • , поэтому
=0, т. е. форма замкнута. Невырожденность ее очевидна. Дру-
Другим важным примером симплектических многообразий являются
гладкие двумерные ориентируемые многообразия. На них можно
задать симплектическую структуру, взяв в качестве 2-формы внеш-
внешнюю форму площади относительно римановой метрики, т. е. форму,
задаваемую в локальных координатах (ж, у) так: ио = yfg dxAdy, где
g = det(gij). Невырожденность со следует из того, что yfg ^ 0, а за-
замкнутость со очевидна.
Определение 6. Гладкое векторное поле X на симплектическом
многообразии М2п с формой ио называется гамилътоновым, если
оно имеет вид X = sgrad Н, где Н — некоторая гладкая функция
на М2п. Функция Н называется гамильтонианом потока.
Найдем явную формулу для sgrad/. Имеем o;(sgrad/, Y) =
= ^-(sgrad/)* Y'' = Yk(df/dxk), откуда (sgrad /)* = ш^(д//дх^)9
т. е. вектор sgrad / сопряжен (относительно скалярного произведе-
произведения ш) ковектору grad /.
Пусть Н — гладкая функция на М2п, отнесенном к симп-
лектическим координатам (pl,ql), т.е. со = ^2™=1 dp1 A dql. Тогда
sgrad Я = {dH/dq1; -дН/др1).
Гамильтоновы поля допускают важное описание на языке од-
нопараметрической группы диффеоморфизмов, порожденной этим
полем. Пусть X = sgrad H — гамильтоново поле и &t — соответ-
соответствующая группа сдвигов вдоль его интегральных траекторий.
Группа действует на форму со, переводя ее в форму (&t)*oj. Если
при этом точка у переходит в точку xt(y) = &t(y), то
(&гУоо = uoi3(xt{y))dx\(y) A dxJt(y) = ookp(t,y)dyk A dyp,
где wkp(t,y) =u)ij(xt(y))(dx\(y)/dyk)(dx{(y)/dyp).
Векторное поле Х на симплектическом многообразии может не
допускать глобального представления в виде X = sgrad H, одна-
однако оно может обладать следующим важным свойством: для любой
точки Р Е М2п существует такая окрестность U(P) и такая функ-
функция Нц, определенная в ней, что Х(г>) = sgrad Hu(v), где v E U.
Такие поля назовем локально-гамильтоновыми. Локальные гамиль-
гамильтонианы Нц, вообще говоря, не «сшиваются» в единый гамиль-
гамильтониан на всем многообразии. В силу теоремы Дарбу изучение
локально-гамильтоновых полей сводится к изучению гамильтоно-
вых полей в R2n со структурой Ym=i dp1 Л dql.
7.4. Вариационное исчисление и симплектическая геометрия 293
Теорема 4. Векторное поле X на симплектическом многообра-
многообразии М является локалъно-гамилътоновым в том и только том
случае, когда однопараметрическая группа &t сохраняет симплек-
тическую структуру ио.
Доказательство. В силу теоремы Дарбу достаточно до-
доказать теорему только для случая, когда М2п есть R2n со структу-
структурой а/2) =??=1ф* Adq\
Докажем, что если ио сохраняется при действии Et, то поле X
локально-гамильтоново. То, что со переходит в себя при действии
©ь означает, что производная формы вдоль поля X равна нулю,
т. е. О = doj(j(t))/dt, где j(t) — интегральная траектория X. Имеем
J2d*(t) Adq*(t) =
П
= Y^ [d(Xl(t)) A dq\t) + dp1 {t) A dYl(t)],
г=1
где X = (X\ Yl), l^i^n. Далее
oqk
dxi dyk dXk
дрк dqi ' dqi dqk ' дрк др^
Это означает, что 1-форма а = Ya=i^X%<^P1 ~ Xldql) является замк-
замкнутой. В самом деле
х ^.'dY* dYk\ 1 k ¦
da= > | [ -тгт тг^- dpK A dv +
рк ор1 )
(dx эх\, k , Л
A p + (w" wr A dq\=
+wr A p + (w
в силу полученных выше соотношений. Из замкнутости 1-формы а
на R2n следует, что существует гладкая функция Н, градиент ко-
которой равен этой форме, т. е. а = dH. В самом деле, Н можно в
294 Гл. 7. Простейшие вариационные задачи римановой геометрии
явном виде восстановить по формуле
Н(Х)= Ja = ±±
7 7W i=1 0 i=1
где j(t) — произвольная гладкая траектория, идущая из фиксирован-
фиксированной точки в переменную точку с координатами (рг, ql). Число Н(х)
не зависит от выбора такого пути. Для п = 2 мы доказали это в
гл. 4. Для п > 2 это следует из формулы Стокса. В самом деле, рас-
рассмотрим пути: 7i(*), 72(*)> гДе 7i@) = 72@); 71A) = 72A)- Тогда
a — a = / a = a = da = О,
71 72 7iU(-72) dD2 D2
где D2 — произвольный диск, ограниченный этими траекториями
(самопересечения допускаются). Построение Н закончено. Оста-
Осталось доказать обратное: если X — гамильтоново поле в R2n, то
группа &t сохраняет со, т.е. Х(о;) =0. Достаточно повторить в
обратном порядке все предыдущие выкладки. Теорема доказана. ¦
Теперь легко предъявить примеры гамильтоновых потоков.
Например, рассмотрим сферу с g ручками, снабженную какой-
либо римановой метрикой и симплектической структурой ио =
= y/det(gij) dx A dy (см. выше). Как описать все гамильтоновы по-
потоки на этом симплектическом многообразии? Напомним, что по-
поле X на Мд имеет нулевую дивергенцию, если площадь произ-
произвольной области А не меняется при сдвигах вдоль интегральных
траекторий поля.
Следствие 1. Гамильтоновы потоки на М2 — это несжимаемые
потоки и только они, т. е. потоки, для которых div X = 0.
Доказательство. В силу теоремы 4 мы должны описать
все потоки, сохраняющие форму ио. Поскольку в качестве такой
формы мы выбрали форму площади: ио = ^/det{gij)dx A dy, то га-
мильтонов поток — это поле, сохраняющее форму площади. Как мы
знаем из гл. 4, это потоки с нулевой дивергенцией и только они.
Следствие доказано. ¦
Приведем важный пример гамильтонова потока — динамиче-
динамическую систему, описывающую движение трехмерного твердого тела
с одной неподвижной точкой. Для этого следует рассмотреть R3,
отождествленное с линейным пространством всех вещественных
кососимметрических матриц 3-го порядка; пусть X Е R3 — та-
такая матрица. Зададим в R3 самосопряженный линейный оператор:
ср: R3 —)> R3, действующий по формуле срХ = XI + IX, где / —
7.4. Вариационное исчисление и симплектическая геометрия
295
матрица вида
Ai О О \
О А2 О ], А^ — вещественные числа. Ясно,
V О О Аз/
что матрица срХ кососимметрическая. Рассмотрим систему диф-
дифференциальных уравнений (записанную в матричном виде) срХ =
= [Х,срХ]. Из механики известно, что этими уравнениями описы-
описывается движение трехмерного твердого тела с закрепленной точкой.
Запишем уравнения в координатной форме. При этом удобно в дей-
действительности рассматривать сразу n-мерное твердое тело, враща-
вращающееся в Rn вокруг закрепленной точки, и систему вида (рХ =
= [Х,срХ], где (р: so(n) —> so(n); so(n) = (X: Хт = —X) имеет
/Ai 0\
вид (рХ = XI + IX, 7=1 •.. . Считая, что X = (ж^),
\ 0 \п)
Xij = —Xji, получаем
j - (<pX)ikxkj) =
J г
При n = 3 имеем
A2 —
т
Л2
A3 — A2
^23 =
A3 —
A3
A3 + A2
Положив Ж12 = ж, жхз = у, ^23 = ^, получаем систему
Ai — А2 . A3 — Ai . A2 — A3
xyz ух^ z
Этот поток допускает два интеграла: Р = х2 + у2 + z2; Q = x2(Ai +
+ А2)+у2(А1 + Аз) + ?2(А2 + А3). В самом деле, эти функции посто-
постоянны вдоль интегральных траекторий потока. Найдем производные
Х(Р) иХ(<3).Имеем
Х(р\ — о
— А2 A3 —
Ai + А2 A3 +
A2 — A3
A2 + A3
(A3 -
1 + A2j(A2 +
A2)(A2 + A3)
(A2 - A3)(Ai + A2)(A3
= О,
296
Гл. 7. Простейшие вариационные задачи римановой геометрии
Q = const
X(Q) = 2xyz(X1 - А2 + А3 - Ai + А2 - А3) = О,
что и требовалось.
Если Ai, А2, A3 > 0 и А^ попарно различны, то эти два интегра-
интеграла функционально независимы в точках общего положения (про-
(проверьте!). Следовательно, интегральные траектории являются лини-
линиями пересечения двух семейств поверхностей — сфер Р = const и
эллипсоидов Q = const. Поле X удобно изобразить на поверхно-
поверхности уровня Q = const (рис. 7.17). Теперь зафиксируем какую-либо
сферу Р = const и ограничим на нее
поток X. Мы утверждаем, что этот по-
поток гамильтонов. В самом деле, доста-
достаточно доказать, что X сохраняет фор-
форму площади, т. е. бездивергентен. До-
Достаточно проверить, что поток сохра-
сохраняет форму объема в объемлющем ев-
евклидовом пространстве. Но это очевид-
дх ду dz
но, так как выражение -—\- -—h —
ox oy oz
тождественно равно нулю (см. явный
вид ж, у, i). Как видно на данном при-
примере, большое значение для описания геометрического поведения
потока имеют его интегралы; в случае трехмерного твердого тела
уравнения движения оказались вполне интегрируемы, т. е. мы ука-
указали два интеграла движения.
Рассмотрим вопрос об интегралах гамильтоновых потоков. По-
Полезно ввести новую операцию на пространстве гладких функций на
симплектическом многообразии.
Определение 7. Скобкой Пуассона двух гладких функций /, g
на симплектическом многообразии М2п называется функция {/, д},
определяемая формулой
{/,#} = a;(sgrad/,sgrad#) =
Явная формула для операции /, д
Рис. 7.17
{/, д} такова:
дд
так как (sgrad/)z =
д?_
дха'
Предложение 3. Скобка Пуассона
следующим соотношениям:
1) операция {f,g} билинейна;
{/, д} удовлетворяет
7.4. Вариационное исчисление и симплектическая геометрия 297
2) операция {/, #} кососимметрична, m. e. {/, #} = — {fls/};
3) имеет место тождество Якоби
{К {/, <?}} + {</, {h, /}} + {/, {</, Л}} = 0.
Доказательство. Докажем теорему для частного случая
М2п = R2n с канонической симплектической структурой. Свой-
Свойства A) и B) сразу следуют из определений. Докажем C). Через
Lf обозначим дифференцирование вдоль поля sgrad/, т. е. Lf(h) =
= (sgrad f)h. Мы утверждаем, что выражение, стоящее в левой ча-
части C), есть сумма мономов, в каждый из которых входит вторая
частная производная какой-либо из трех функций: /, g, h. В самом
деле рассмотрим {/, д}. Из определения sgrad получаем
{/,#} = о; (sgrad/, sgrad g) = - (sgrad g)f =
= -L,(/) =-(sgrad #Г|^.
Ho (sgrad gI = - —-, (sgrad g)j = —-. Следовательно, {f,g} яв-
является линейной комбинацией мономов, состоящих из произведе-
произведений частных производных первого порядка. Отсюда
{h,{f,9}} = -{{ШМ = -L{f,g}(h) = -(sgrad{/,5})*0,
т. е. выражение {/г, {/, д}} есть сумма мономов, каждый из которых
содержит вторые частные производные либо от функции /, либо от
функции д. Итак, левая часть тождества C) есть сумма мономов, в
каждый из которых множителем входит вторая частная производ-
производная. Фиксируем теперь, например, h. Соберем вместе все члены в
левой части C), содержащие вторые производные функции h. Эти
члены имеют вид
{/, {д, h}} - {g, {/, h}} = L}Lgh - LgLfh = [Lf,Lg]h.
С другой стороны, коммутатор двух операторов первого поряд-
порядка Lf и Lg является оператором первого порядка (а не второго), т. е.
выражение [Lf,Lg]h содержит только производные первых поряд-
порядков от h. Итак, левая часть C) вообще не содержит вторых про-
производных от h. По тем же причинам левая часть C) не содержит
и вторых производных от / и д, т. е. левая часть C) равна нулю.
Предложение доказано. ¦
Линейное пространство с билинейной операцией, удовлетворя-
удовлетворяющее свойствам A)-C), называется алгеброй Ли.
298 Гл. 7. Простейшие вариационные задачи римановой геометрии
Следствие 2. Линейное пространство F(M2n) всех гладких
функций на симплектическом многообразии (М2п,о;) является ал-
алгеброй Ли по отношению к скобке Пуассона {/, д}.
Это следует из доказанного выше. Алгебра Ли F(M) бесконеч-
бесконечномерна. Рассмотрим отображение а алгебры Ли F(M) в алгебру
Ли V(M) всех гладких векторных полей на М, определенное фор-
формулой a(f) = sgrad/.
Следствие 3. Отображение a: / —>> sgrad/ является гомомор-
гомоморфизмом алгебр Ли, т. е. а{/, д} = [а/, ад].
Доказательство. Следует доказать, что sgrad{/,g} =
= [sgrad/, sgradg]. Из тождества Якоби имеем:
(sgrad{/,#})/i = a;(sgrad{/,#}, sgrad/i) = ~{h,{
= -{ff, {/, h}} + {/, {g, h}} = -LgLfh + LfLgh = [Lf, Lg]h,
sgrad{/, g} = [sgrad /, sgrad g],
что и требовалось. ¦
Так как а — гомоморфизм алгебр Ли, то образом алгебры Ли
F(M) в алгебре Ли V(M) всех гладких полей на М является неко-
некоторая подалгебра, которую мы обозначим через Н(М). Из опреде-
определения а следует, что это — алгебра Ли всех гамильтоновых полей на
М. Тем самым a: F(M) —>> Н(М) — эпиморфизм. Однако а не мо-
мономорфизм, так как имеет нетривиальное ядро: ядром а являются
локально постоянные функции, а если предположить, что М связ-
связно, то ядро а одномерно и состоит из постоянных функций на М.
Следовательно, Н(М) ^ F(M)/Rl. Подалгебра H(M)cV(M),
Н(М) = HUJ{M) зависит, конечно, от симплектической структуры.
Скобка Пуассона играет роль в изучении интегралов гамильто-
гамильтоновых потоков.
Предложение 4. Пусть v = sgrad H — гамшътонов поток на
M2n, u пусть f(x) — гладкая функция, коммутирующая с гамиль-
гамильтонианом Н, т. е. {/, Н} = 0. Тогда / является интегралом пото-
потока v, т. е. функция / постоянна вдоль интегральных траекторий
поля v. Обратно: любой интеграл g поля sgrad H коммутирует с
Н: sgrad{#,#} = 0.
Доказательство. Достаточно найти производную /
вдоль поля v, т.е. (sgradH)f. В силу определения sgradH, име-
имеем: (sgrad H)f = {H, /} = 0, что и требовалось. ¦
Учебное издание
МИЩЕНКО Александр Сергеевич
ФОМЕНКО Анатолий Тимофеевич
КРАТКИЙ КУРС ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ
И ТОПОЛОГИИ
Редактор Р.А. Бунатян
Оригинал-макет: А.А. Пярнпуу
ЛР №071930 от 06.07.99. Подписано в печать 02.02.04.
Формат 60x90/16. Бумага офсетная. Печать офсетная.
Усл. печ. л. 19. Уч.-изд. л. 18,875. Заказ №
Издательская фирма «Физико-математическая литература»
МАИК «Наука/Интерпериодика»
117997, Москва, ул. Профсоюзная, 90
E-mail: fizmat@maik.ru, http://www.fml.ru
Отпечатано с готовых диапозитивов в ПФ «Полиграфист»
160001, г. Вологда, ул. Челюскинцев, 3
Тел.: (8172) 72-55-31, 72-61-75, факс: (8172) 72-60-72
E-mail: form.pfp@votel.ru http://www.vologda/~pfpv
ISBN 5-9221-0442-Х
985922 104425