/








































































































































































Текст
БИБЛИОТЕКА ПО АВТОМАТИКЕ
ВЫПУСК 485
С. А. ДОГАНОВСКИИ
ПАРАМЕТРИЧЕСКИЕ
СИСТЕМЫ
АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ
«Э Н Е Р Г И Я»
МОСКВА 1973
6П2.12
Д 59
УДК 62-52
РЕДАКЦИОННАЯ КОЛЛЕГИЯ:
И. В. Антик, Г. Т. Артамонов, А. И. Бертинов, А. А. Воронов,
Л. М. Закс, В. С. Малое, В. Э. Низе, Д. А. Поспелов, О. В. Слежа-
новский, Б. С. Сотсков, Ф. Е. Темников, М. Г. Чиликин;
А. С. Шаталов
Догановский С. А.
Д 59 Параметрические системы автоматического регу-
лирования. М., «Энергия», 1973.
1G8 с. с ил. (Б-ка по автоматике. Вып.
В книге изложены основные понятия и особенности реализации
принципа обратной связи с помощью параметров системы, приводя-
щих к параметрическим обратным связям и к построению параметри-
ческих систем автоматического регулирования. Книга может быть
полезной широкому кругу читателей, так как в ней излагаются глав-
ным образом физические идеи, а не математический аппарат теории.
Приведены примеры из практики действующих и разработанных си-
стем и устройств автоматики.
Книга предназначена для работников научно-исследовательских и
проектных организаций, занимающихся разработкой и освоением со-
временных систем автоматического контроля и управления; может
быть также полезной аспирантам и студентам учебных институтов,
специализирующимся в области автоматизации производства.
д 3313-086 ? 6П212
051(01)-73
ДОГАНОВСКИЙ СТАНИСЛАВ АНАТОЛЬЕВИЧ
ПАРАМЕТРИЧЕСКИЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ
Редактор В. А. Соколова
Редактор издательства Е. Н. Сальников
Технический редактор Л. В. Иванова
Корректор И. А. Володяева
СданоТв набор 20/IX 1972 г. Подписано к печати 15/11 1973 г. T-03539
Формат 84ХЮ87за Бумага типографская №3
Усл. печ. л. 8,82 Уч.-изд. л. 10,91
Тираж* 10 ООО экз. Зак. 1374 Цена 55 коп.
Издательство «Энергия». Москва, М-114, Шлюзовая наб., 10.
Московская типография № 10 Союзполиграфпрома
при Государственном комитете Совета Министров СССР
по делам издательств, полиграфии и книжной торговли.
Москва, М-114, Шлюзовая наб., 10.
ПРЕДИСЛОВИЕ
В настоящее время все большее применение в технике находят
устройства и автоматические системы, использующие в основе по--
строения параметрические явления, связанные с изменением параме-
тров их элементов. Такие автоматические системы хорошо известны
в инженерной практике, начиная с параметрических усилителей,
устройств генерирования и детектирования колебаний в радиотех-
нике, систем АРУ, АРЧ, стабилизаторов напряжений и токов в элек-
тронных устройствах, мостовых схемах переменного тока с автома-
тическим уравновешиванием в измерительной технике и кончая со-
временными адаптивными системами автоматики, необходимость при-
менения которых возникает в случае изменяющихся условий работы
и при отсутствии точной информации о взаимосвязях в сложных со-
временных объектах. Однако только в последние годы в связи с раз-
витием идей адаптации стала особенно заметно выявляться роль па-
раметрических воздействий и в традиционных автоматических систе-
мах, что позволило более полно оценивать их свойства и создавать
перспективы для усовершенствования.
В предлагаемой, книге рассматриваются основные понятия о па-
раметрических воздействиях и особенности реализации принципа
обратной связи с помощью параметров системы, приводящих к па-
раметрическим обратным связям и построению параметрических си-
стем автоматического регулирования. В связи с производственно-тех-
нической направленностью изложения материала основное внимание
уделяется детализации идеи параметрического регулирования на
практических примерах действующих и разработанных систем и
устройств автоматики. Изложение материала в рамках объема книги
методически построено по принципу усложнения рассматриваемых
вопросов и группируется вокруг двух направлений применения пара-
метрического регулирования: стабилизации состояний (координат)
системы или ее динамических свойств (гл. 1) и адаптивного поведе-
ния системы для решения задач в изменяющихся условиях работы
объекта управления при наличии помех (гл. 2). Это дает возмож-
ность последовательно усложнять материал и математический аппа-
рат, который не выходит, однако, за пределы курса институтов по
теории автоматического регулирования. Выбор практических приме-
ров обусловлен, в известной мере, влиянием тематики исследований,
проведенных с участием автора.
Другие примеры и материалы исследований, иллюстрирующие
действующие устройства или системы параметрического регулирова-
ния (например, радиотехнические системы типа АРУ, инвариантные
САР с корректируемыми компенсаторами и пр.), не нашли своего
3
отражения в рамках настоящей книги и приведены в библиографий.
Книга предназначается для инженеров — специалистов по авто*
матическому управлению и может быть полезной работникам смеж-
ных областей знаний, аспирантам и студентам старших курсов, спе*
циализирующимся в области автоматизации производства и изме-
рительной техники.
Автор выражает искреннюю признательность и благодарность
канд. техн. наук, доценту Н. А. Озеряному за ряд ценных замечаний
при рецензировании рукописи, редактору В. А. Соколовой за боль-
шую работу по подготовке рукописи к изданию, всем товарищам й
сотрудникам, принявшим участие в разработках многих параметри-
ческих систем, приведенных в книге.
Автор
ВВЕДЕНИЕ
Влияние параметров на поведение динамической системы и ее
свойства давно известно в инженерной практике. Реальная физиче-
ская система имеет множество взаимосвязей (переменных), форми-
рующих в целом ее поведение и динамические свойства, но учет
всех взаимосвязей невозможен и нецелесообразен, поскольку основ-
ные черты поведения системы определяются сравнительно небольшим
числом связей, а остальные как второстепенные могут быть отброше-
ны при решении инженерных задач. Учитываемые взаимосвязи обра-
зуют систему переменных. Дальнейшее упрощение задачи вызывается
необходимостью получения приближенных решений, поскольку часто
затруднительно исследовать систему переменных, например, из-за
сложности математического аппарата. Переменные, не входящие
в систему, образуют множество параметров системы.
С этих позиций развитие теории автоматического управления от
первоначальной, находящейся в рамках математического аппарата
линейных дифференциальных уравнений с постоянными коэффициен-
тами (параметрами), до теории адаптивных систем управления озна-
чает стремление ослабить влияние второго этапа упрощения задачи
путем включения все большего числа параметров в категорию пере-
менных системы для более детального исследования свойств объек-
тов или улучшения .возможностей их управления [Л. il—4].
Следует различать по крайней мере следующие два вида вопро-
сов при оценках влияния параметров на динамические свойства си-
стемы: влияние постоянных (неизменяемых во времени) параметров
и влияние изменяемых (переменных во времени или управляемых)
параметров отдельных элементов системы.
Первая группа вопросов является традиционной для исследова-
ний в теории автоматического регулирования: выбор параметров
САР с целью достижения устойчивости или качества регулирования
с помощью 'методов £>-разбиения, частотных методов, методов фазо-
вой плоскости. Определенному множеству значений параметров и на-
чальных условий здесь ставится в соответствие фиксированная траек-
тория движения изображающей точки в фазовом пространстве, при-
чем выбор другого множества параметров означает движение по
иной траектории с другими состояниями равновесия или установив-
шегося движения (например, предельные циклы). Пример системы
второго порядка, отдельные «листы» фазовых плоскостей с траекто-
риями движения 'изображающей точки которой определяются выбо-
ром ряда значений одного из ее параметров, показан на рис. 1,а.
Здесь значению параметра Пг соответствует неустойчивая форма
5
Параметр
z
Рис. 1. Влияние параметров на
динамические свойства си-
стемы.
а — поведение системы, определяе-
мое тремя переменными, одна из
которых является параметром П;
б — структурная схема системы
с «силовой» отрицательной обрат-
ной связью: в — структурная схема
системы с параметрической обрат-
ной связью, замыкаемой через не-
линейный преобразователь с двумя
входами (НП-2); г — структурная
схема линеаризованной системы
с параметрической обратной
связью; д — характеристика НП-2,
при которой выполняются условия
эквивалентности структурных cxew
системы на рис. 1,6 и г.
траекторий движения с особой точкой типа «седло» (лист /), выбор
значения параметра #ц определяет траектории движения с устойчи-
вой особой точкой равновесия типа «узел» (лист //). При разработке
такой системы заранее производится выбор подходящего листа и,
следовательно, фиксация требуемого значения ее параметра Я. Если
же значения параметров изменяются во времени, например, непре-
рывным образом или дискретно (ступенчатое переключение), то по-
ведение системы вовсе не определяется простым переходом изобра-
жающей точки с одного листа траекторий на другие, что справедли-
во лишь для частного случая квазистационарности (малой скорости
изменения) соответствующих параметров (вертикальные стрелки
рис. 1,а, иллюстрирующие фазовые траектории движения при пере-
ключении параметра IJi на /7ц).
Вторая более сложная группа вопросов связана с исследования-
ми поведения динамических систем при изменяющихся параметрах,
что в существенной мере изменяет общую картину движений исход-
ной системы с постоянными параметрами.
Системы, в которых изменение значений множества ее параме-
тров во времени осуществляется по заранее известным или заданным
законам (детерминированного или случайного вида), являются си-
стемами с переменными параметрами, в которых возможны параме-
трические явления генерирования, детектирования и усиления коле-
баний, используемые в радиотехнических устройствах. Их рассмотре-
ние выходит за рамки настоящего изложения.
Здесь будут рассмотрены динамические системы, в которых влия-
ние изменяющихся параметров определяется не заранее'заданными
законами, а воздействием отдельных координат (переменных) систе-
мы на ее параметры — параметрических обратных связей, вводящих
дополнительные нелинейности в исходную систему. Они реализуются
с помощью управляющих устройств непрерывного или дискретного
(ступенчатое переключение) действия, изменяющих параметры исход-
ной динамической системы в соответствии с задаваемыми законами
(алгоритмами) параметрических обратных связей.
Формирование алгоритмов представляет самостоятельную зада-
чу, детализируемую далее при изложении конкретных примеров и!
систем с параметрическими обратными связями. Во всяком случае
мы можем сталкиваться здесь с обычными законами регулирования,
например, пропорционального, интегрального, пропорционально-инте-
грального (ПИ) и других видов, но применяемых с целью улучшения
работы для регулирования параметров, что вносит специфические
особенности в поведение динамической системы в целом.
Остановимся далее на некоторых определениях, необходимых
для понимания последующего изложения. Указанные выше системы,
реализуемые на основе использования цепей параметрических обрат-
ных связей, определяются как параметрические системы автоматиче-
ского регулирования, подчеркивающие различие между обычным
(«силовым», по переменной или координате) и параметрическим воз-
действиями в системе (Л. 2—4]. Устройством, предназначенным для
замыкания цепи параметрической обратной связи, является управ-
ляемый преобразователь с двумя входами, который с функциональ-
ной точки зрения определяется как нелинейный преобразователь
типа НП-2, выполняющий операцию вида z=f(x, у), где х и z —
входной и выходной сигналы; # —управляемый параметр. Опреде-
ления силовой и параметрической обратных связей рассмотрим на
примерах простейших систем первого порядка.
7
Пусть линейная динамическая система (например, /?С-цепочка)
описывается уравнением
dy
-Ж + У = *. О)
где х и у — входной и выходной сигналы.
Уравнение (1) может быть записано в ином виде
■ *L -
I-*-».- { dt~Z'' (2)
z= х — у,
где z — некоторый новый сигнал, вводимый в рассматриваемую си-
стему чисто формально. Тогда, осуществляя построение структурной
схемы такой системы (рис. 1,6), можно выявить наличие отрицатель-
ной обратной связи, замыкаемой с выхода системы через сигнал
(переменную) у на ее вход х. Имеющийся здесь блок рассогласова-
ния можно рассматривать как НП-2 простейшего вида, реализующий
операцию z=f(x, у) =х—у.
Пусть, далее, динамическая система описывается нелинейным
уравнением вида
dy
dy
~dF = f(x> У)> или
dt~Z; (3)
* = /(*. У)>
где z=f(x, у)—аналитическая нелинейная функция от двух пере-
менных. Структурная схема системы приведена на рис. 1,в. Здесь
в отличие от схемы на рис. 1,6 обратная связь с выхода системы по
координате у замыкается не через блок рассогласования, а через
нелинейный преобразователь НП-2, т. е. осуществляется параметри-
ческая обратная связь, поскольку для канала преобразования сигна-
ла х в z сигнал у выполняет роль параметра.
Динамические свойства системы на рис. 1,в намного разнообраз-
нее свойств системы на рис. 1,6 с отрицательной силовой обратной
связью.
В линейном приближении при определенном виде функции
f-(x, у) система на рис. 1,в может функционировать аналогично си-
стеме на рис. 1,6. Записывая уравнение (3) в виде
^j^ — kyby = kxbx, (4)
где kx = df/dx\ ky=df/dg и учитывая условия устойчивости его ре-
шений, найдем ky = dfldy<0, что определяет эквивалентную струк-
турную схему (рис. 1,г) линейного приближения, аналогичную схеме
на рис. 1,6. Следовательно, при определенном выборе вида функции
f(x, у) динамическое поведение системы с параметрической обратной
связью (рис. 1,в) аналогично обычной системе с силовой обратной
связью (рис. 1,6).
В качестве НП-2 может быть, например, использован блок^вы-
полняющий операцию вида z= (а+х)/(b + y), или блок с характери-
стиками (рис. 1,(9). Подобный подход может быть распространен на
8
более сложные системы, в том чисте и на системы с силовой и па-
раметрической обратными связями (рис. 2). На рис. 2,а- приведена
структурная схема системы, описываемой уравнениями вида
- мм - и ч
у = щр)г- z = f (*. у).
где черта над переменной обозначает ее изображение по Лапласу;
щр), n(p)—операторные полиномы т- и /t-го порядка т^п. На
рис. 2,6, приводится структурная схема системы /i-го порядка, имею-
щей уравнения
^ = zi* zt = u(y> *) (* = 1. 2...л),
где y={#i, у2 уп} — вектор; fi(y, х) — нелинейная функция мно-.
гих переменных, определяющая соответствующий нелинейный преоб-
разователь вида нп-(п + 1).
В качестве примера на рис. 2,в приведена комбинированная си-
стема с силовой и параметрической обратными связями, уравнения
которой записываются в виде
М(р) _
N(p)
z. Z = f(e, г), г = а(у), е = Х — у.
Здесь параметрическая система регулирования осуществляется
в цепи 1регулятора, действующего в контуре обычной САР с силовой
отрицательной обратной связью для улучшения работы системы
в целом.
нп-2
X
z
Мф)
у
N(P)
у
|
а)
-НхН*- р —п о
| регулятор объект ^
f,(-)
f
б)
у1
уг
Рис.
2. Структурные схемы систем с параметрической обратной
связью.
а — распространение идеи схемы на рис 1,8 на объект л-го порядка; б —на
объект, уравнения которого записываются в Форме Коши: в — комбинирован-
ная система с силовой и параметрической обратными связями; / — параметри-
ческая обратная связь; 2 —силовая отрицательная обратная связь в системе.
'Таким образом, в настоящей книге рассматриваются особенно-
сти поведения • и преимущества практических приложений одного
класса нелинейных автоматических систем, реализуемых с помощью
цепей параметрических обратных связей в параметрической системе
автоматического регулирования. Во всяком случае, хотя разница
между силовыми и параметрическими воздействиями не всегда четко
просматривается в нелинейных системах, в указанном классе систем
всегда можно выделить цепи параметрических обратных связей, за-
мыкаемые через нелинейные преобразователи.
В книге на конкретных примерах систем и устройств, состав-
ляющих содержание гл. 1 и 2 в порядке усложнения условий функ-
ционирования объектов (от детерминированных случаев к изменяю-
щимся условиям работы в присутствии помех), показываются пре-
имущества и практическая целесообразность рассмотрения систем
с позиций понятий параметрического регулирования и параметриче-
ских обратных связей. Такое понимание явлений необходимо при
исследованиях биологических систем, систем ядерной энергетики
('§ 3, 4), где, учитывая параметрические взаимосвязи, удается соста-
вить более точное суждение о характере протекания реальных про-
цессов. В других системах выявление цепей параметрического регу-
лирования позволяет более полно оценить условия их реального
функционирования, что создает перспективы для новых разработок
и модификаций (электронные стабилизаторы и регуляторы напряже-
ний, давления и расхода — § 1, 2, мосты переменного тока с автома-
тическим уравновешиванием — § 9). Наконец, несомненно наиболее
широкая область применения параметрических систем автоматиче-
ского регулирования связана с коррекцией динамических свойств
САР путем изменения их параметров (§ 5), параметрической иденти-
фикации и оптимального управления с прогнозирующими адаптив-
ными моделями (§ б—8). Автору, по-видимому, не удалось избежать
недостатков при изложении материала книги. Тем не менее она мо-
жет оказаться полезной инженерно-техническим работникам, аспи-
рантам и студентам старших курсов при исследованиях и разработ-
ках систем с параметрическими обратными связями.
Глава первая
ПАРАМЕТРИЧЕСКОЕ РЕГУЛИРОВАНИЕ
И СТАБИЛИЗАЦИИ
1. СТАБИЛИЗАЦИЯ НАПРЯЖЕНИИ
Задача стабилизации напряжений и токов традиционна для обес-
печения условий высококачественной работы электронной или полу-
проводниковой аппаратуры. Стабилизирующее устройство служит
для управления мощностью первичного источника питания, обеспечи-
вая требуемую стабильность напряжения или тока в нагрузке. Требо-
вания эти становятся все более жесткими по допустимым пределам
изменения питающих напряжений или токов (±0,001-~0,01%), а так-
же по нестабильности. Например, источники питания многокаскад-
ных или операционных усилителей постоянного тока АВМ должны
обеспечивать стабильность питающих напряжений в пределах
10
±0,0054-0,01%; источники питания схем электронных микроскопов
±0,0005-^0,01%, в то же время как обычные источники питания
радиоустройств имеют менее жесткие требования (радиовещательные
станции, например, всего 2—3%).
В большинстве стабилизирующих устройств высокого уровня
стабильности управление осуществляется изменением потребления
мощности в узле, передающем энергию от первичного источника
к нагрузке, с помощью обратной связи. Указанный узел может рас-
сматриваться как нелинейный преобразователь с двумя входами
(НП-2), реализующий операцию вида
</=/(*, г),
(5)
где х — входное напряжение (ток) первичного источника питания;
у— выходное напряжение (ток) стабилизирующего устройства; г —
управляемый параметр.
При 'замыкании цепи обратной связи через управляемый пара-
метр и регулирующее звено обеспечивается реализация схемы стаби-
лизирующего устройства (рис. 3,а), поддерживающего равенство на-
f(xs)
нп-2
у
Щ9
4
г ни-г
Регулятор
а)
Рис. 3. Стабилизатор напряже-
ния — система с параметриче-
ской обратной связью.
а — структурная схема; б — дели-
тель напряжения на сопротивлениях
и его эквивалентные схемы; / — па-
раметрическая обратная связь.
Г
0-
j нп-2
X тш^шшшашшшял ft
, 0 1
нп-2
6)
пряжения (тока) в нагрузке требуемому (эталонному у0) значению.
Схема стабилизирующего устройства представляет собой, таким
образом, наиболее простой вариант системы с параметрической
обратной связью. Возможные разновидности схем стабилизирующих
устройств определяются способами задания и реализации функции
}(х, г). Как известно [Л. 4], элементарными звеньями среди НП-2
являются делительное и множительное звенья, которые могут быть
выбраны для реализации функции $(х, г). Другие варианты связаны
с возможностью использования различных видов сигналов |(непре-
11
рывного, дискретного, непрерывно-дискретного). Следовательно, ста-
билизирующие устройства, где f(x, г) реализуется в схемах непре-
рывными сигналами, могут быть отнесены к стабилизаторам непре-
рывного действия. Если же f(x, г) реализуется в схемах с дискрет-
ными сигналами, то подобные устройства называют стабилизаторами
дискретного (например, импульсного) вида.
Воспользуемся схемой на рис. 3,а для построения стабилизирую-
щих устройств непрерывного действия. Делитель напряжения на со-
противлениях (рис. 3,6), вероятно, является простейшим преобразо-
вателем типа НП-2, поскольку его входное х и выходное у напря-
жения связаны следующей зависимостью:
f-Mx. г) = —V' (6)
где г — управляемое; R — неизменное сопротивления плеч делителя.
Остановимся вначале на оценке стабилизирующих свойств схе-
мы с делителем напряжения на сопротивлениях, когда возможна
линеаризация функции f(xy г) в «малом». Записывая полный диффе-
ренциал нелинейной функции f(x, г) в виде
df df
где соответствующие частные производные
ниями
щ 1 . *l
\х=х0
г=г0
1+Г
х=х0
г=г0
определяются выраже-
(8)
получаем следующие уравнения в приращениях:
1 Г , *0
Г" dx~~—7 7~\dr '
^xL r{x+-t)
=TT^(rfx-«T7.rfr)' (9)
где dx, dr, ^ — соответствующие вариации переменных. Решение за-
дачи стабилизации определяется выполнением условия dy-—Ю при
с1хФ0, т, е. выполнением условий инвариантности выходного сигнала
при колебаниях входного сигнала. Например, полагая в (9) dy=0,
найдем:
dr = {R+rt)^-, (10)
определяющий алгоритм управления параметром г НП-2 с помощью
регулирующего звена, реализующего решение задачи методом ком-
12
пенсации возмущений. Или, полагая, например, dr=kpdy, найдем:
R dx
dy =
R+r0 Rx0
l + (R + r9)* *»
(11)
где kv — коэффициент усиления регулирующего звена, что опреде-
ляет решение задачи методом регулирования с помощью отрицатель-
ной обратной связи (dy—Ю при kv—>-оо).
Возможно, наконец, решение задачи с помощью комбинирован-
ного алгоритма управления вида
dr = х^ dx + kvdy,
(12)
что в свою очередь улучшает работу стабилизатора.
С целью повышения динамических свойств стабилизирующих
устройств, определяемых уменьшением длительности переходных про-
цессов при кратковременных нестабильностях напряжений первичных
источников питания, используются управляемые сопротивления г бес-
контактного вида (электронные лампы или полупроводниковые эле-
менты). Подобные схемы известны как электронные стабилизирую-
щие устройства [Л. 4, 5].
Схема электронного стабилизатора напряжения, реализующего
алгоритм комбинированного управления вида (12), приведена на
рис. 4,а. Здесь в качестве управляемого сопротивления г использует-
ся электронная лампа Л\. С помощью усилителя на лампе Л2 обес-
печивается введение отрицательной обратной связи по току нагрузки,
а выбором положения движка потенциометра RK обеспечивается
компенсация изменений напряжения входного сигнала. В линейном
приближении работа электронного стабилизирующего устройства
эквивалентна работе схемы, содержащей делитель напряжения на
сопротивлениях.
Представим схему на рис. 4,а в виде структурной схемы
(рис. 4,6), где функции усилителя на Л2 при управлении по экран-
ной и управляющей сеткам разделены (коэффициенты усиления къ
и ky). Запишем систему уравнений схемы в виде
x=U0 + y,
iaR — У\
— U г = (Р* — х0) k9 + (ay — у о) k7,
где ia, Ua, Ut — анодный ток, анодное напряжение и напряжение на
сетке лампы Л4 соответственно; fi, а — коэффициенты; х0, Уо — на-
пряжения опорных источников питания.
Линеаризуя систему уравнений (13), найдем:
(13)
dia=*-j^-dUa + SdUr;
dx = dUa + dy\
diaR = dy;
— dUr = k$dx + kyady.
(14)
13
Рассмотрим действие и функции каждого из усилителей на
рис. 4,6, где знак 2 означает суммирование выходных сигналов уси-
лителей. Пусть вначале отключен усилитель с kY (например, а=0).
Тогда из уравнений (14) найдем:
dy + -щ) = dx^- Sk9^j R. (15)
Условие компенсации колебаний dx имеет вид:
fRtSk9 = 1, или р = , (16)
что обеспечивается выбором соответствующего положения движка
потенциометра.
Полагая далее р=0, найдем уравнение, определяющее действие
схемы с усилителем ky:
Рис. 4. Электронный стабилизатор напряжения.
а — функциональная схема: / — цепь параметрической обрат-
ной связи, 2 — цепь компенсационной связи; б — структурная
схема*
14
Выполнение условий стабилизации dy -* (^возможно, если SkY-*co,
что определяет требования к выбору типа лампы Л1 (с большим зна-
чением крутизны S) и большим значением коэффициента усиления
(ь ^Ra \
(усилителя на Л2 (с большим
'~ Ri+Ra j>
Остановимся далее на оценке стабилизирующих свойств приве-
денных схем, учитывая в целом вид функции г), т. е. в «боль-
шом». Для удобства дальнейшего изложения рассмотрим функции
вида
fix, r) = xf(x, г)
(19)
отличающиеся от прежних лишь масштабным коэффициентом
Тогда вместо (6) получим уравнение
R + r
(20)
На рис. 5,а приведено семейство кривых вида (20) при различ-
ных значениях входных сигналов х и г НП-2. Соответствующее
уравнение регулирующего звена в цепи обратной связи г——(/о—О^у
определяет графически прямую, имеющую наклон tgy=ky, а точки
пересечения определяют значения i и г для различных х. Из рисун-
Рис. 5. Характеристики регулирующего элемента стабили-
зирующих устройств.
а — для схемы с делителем напряжения на сопротивлениях на
рис. 3,6; б — для схемы с электронной стабилизацией на рис. 4,а;
Хз>Х2>Х\.
6пзс(триодное включение)
45 37,530 22,515 7.5 0 50 100 150 200 250 300 350 б
б)
15
ка следует, что при увеличении ky прямая поворачивается по часовой
стрелке и при ky—»-оо оказывается в горизонтальном положении, при
котором изменения х не изменяют значения i=i0. Здесь имеет место
режим стабилизации координаты i, или y=ir. Аналогичные резуль-
таты могут быть получены и для схемы электронной стабилизации
на рис. 4,а.
На рис. 5,6 показано графическое построение семейства харак-
теристик вида (20) для цепи с управляющей лампой jii и сопро-
нп-z
нп-2
регулятор
а)
Wp(p)
регулятор
^}—н~
нп-2
#0
>
регулятор
Рис. 6. Структурная схе-
ма стабилизирующих
устройств с учетом влия-
ния реактивных эле-
ментов.
а — схема с делителем на-
пряжения на сопротивле-
ниях; б — схема с электрон-
ной стабилизацией; в—экви-
валентная схема; / — цепь
параметрической обратной
связи.
тивлением нагрузки r (при отключенном усилителе ky и kd на
рис. 4,6). Полученные характеристики аналогичны функции вида (20),
а потому дальнейшие результаты графического решения уравнений
с учетом действия цепи параметрической обратной связи (усилитель
с коэффициентом усиления ky включен) повторяют изложенное вы-
ше. При k7—>-оо достигается эффект полной стабилизации тока ia
и, следовательно, выходного напряжения y=iar стабилизатора.
Рассмотрим далее влияние реактивных элементов, присутствую-
щих в схемах стабилизирующих устройств в качестве паразитных
(например, паразитные емкости электронных ламп) или намеренно
вводимых в схемы для фильтрации выходных напряжений. Остано-
вимся на схеме рис. 6,а, где параллельно сопротивлению r делителя
16
включена емкость С. В этом случае уравнение делителя будет опре-
деляться дифференциальным уравнением вида
rC% + y(l + i-)=X (21)
или
■§=f(*.r.y). (22)
где функция
f(x, г, i,) = ^p[*_j, (l+'-£-)]•
Если уравнения цепи параметрической обратной связи регули-
рующего звена имеют вид:
г==(Уо—vy)k7— пропорциональный закон (23)
или
dr
~~df = (Уо — аУ) &у — интегральный закон, (24)
то динамические свойства всего устройства стабилизации будут опре-
деляться системой нелинейных дифференциальных уравнений (22),
(23) или (22), (24).
При оценке динамических свойств системы в «малом» восполь-
зуемся линеаризацией функции f(x, г, у). Записывая уравнение (22)
в вариациях
df df , df
и линеаризуя уравнения (23), (24), найдем:
тН-г#-ЗЬ-&« (26)
d4y df dAy df df dAx
~W--dJ4r + ak*-dTAy=W-dT' (27)
где соответствующие коэффициенты определяются в виде
dx г,С 9 dy г0С \l + R )' дг~ rjf ' ( '
Исследование решений уравнений (26), (27) не представляется
затруднительным.
Перейдем к оценке динамических свойств системы в «большом».
Выделяя управляемый параметр г, перепишем уравнение (21) в виде
гШ У)=*-У> (29)
где
2—1374 17
найдем значение
dr_ (*-yMy.y)-(*-V)d*'(^ у)
~* if (у. у)У
(30)
Учитывая, далее, выбранные законы параметрического управле-
ния (23), (24), найдем соответствующие уравнения движения в виде
(х _ у) + (у, у)У (у0- ay) ky +
+ !(у. y)(y-i) = 0; (31)
к7(Уь — *У)<?(У. у) = х — у. (32)
Другой путь получения уравнений состоит в определении у из
(23), (24) и подстановке найденных .выражений в (21), что приведет
к уравнениям движения относительно управляемого параметра г. Со-
ответствующие уравнения движения запишутся следующим образом:
dr , г2 ( u0kv \
_ d2r , dr f г \ yQkv
где Cr —Т — „изменяемая" постоянная времени.
Другой вид уравнений (33), (34) может быть найден, если-во-
спользоваться соотношением
. 1 dz\ 1 d2z2 _ %
zz — 2 dt ' 2 dt2 z +zz:
CR dr2 ( y0ky \
~2 df + r* + rR i 1 - ^J = kjR (y0 - ax); (35)
, 1 № dr _ / dr\2
f ~2~ "5Г + R~df ~~RC \df ) ~~ ry°k* = kiR (У* - "*>•
C#_dV_2 , 1 dr2
2 dt2
(36)
Таким образом, оценка динамических свойств стабилизирующих
устройств в «большом», сводящаяся к исследованию решений нели-
нейных дифференциальных уравнений (33) — (36), вовсе не является
тривиальной задачей. Из самого вида полученных уравнений [урав-
нение (33) может быть еще отнесено к уравнению Абеля второго
рода] вытекает возможность возникновения довольно сложных по
своему характеру и отличных от линейного приближения движений.
Они могут быть более детально изучены с помощью методов фазовой
плоскости и построения фазовых траекторий движения исследуемых
нелинейных систем стабилизации.
18
Рассмотрим стабилизирующие устройства непрерывного дей-
ствия, в которых функция f(x, г) реализуется в виде другого эле-
ментарного звена НП-2 — множительного звена
y=f(x, r)=rx,
(37)
где г — управляемый параметр устройства.
Оценка стабилизирующих свойств схемы (рис. 7,а) в «малом»
определяется следующими уравнениями:
dy=rodx+Xodr\
dr=—kydy —'пропорциональный закон;
t
(38)
dr-.
J kYdy dt —
интегральный закон.
Следовательно, условия стабилизации dy=0 выполняются в слу-
чае алгоритма компенсации
<1г = -г.%. (39)
х0
или алгоритмов управления, определяемых соотношениями
r0dx
dy= i + *A
и
1
1 dby dbx
+ x^y = r0
dt &v
(40)
(41)
k dt
где Ly -» 0 при k7 -> oo.
Возможно решение задачи стабилизации с помощью комбиниро-
ванного алгоритма управления вида
t л
dx с
+ kndy+ vky2 dydt
^ о
нп-2
dr
(42)
wfp)
) *
г
wp(p)
г*
регулятор
а)
Рис. 7. Другой вариант стаби-
лизирующего устройства, отли-
чающийся видом функции
НП-2.
а —- структурная схема устройства;
/ — цепь параметрической обратной
связи; б — статические характери-
стики НП-2.
19
Графическое построение семейства характеристик f(x, г) и пря-
мой, определяющей действие цепи обратной связи при пропорцио-
нальном законе, приведено на рис. 7,6, иллюстрирующем аналогично
рис. 5 достижение эффекта стабилизации при kY—>-оо.
Реальные схемы регуляторов стабилизирующих устройств Wp(p)
содержат фильтры низкой частоты (инерционные звенья), предна-
значенные для окончательного «сглаживания» выходных напряже-
ний. На рис. 7,а в качестве указанного фильтра регулятора приме-
няют инерционное звено с коэффициентом усиления &ф и постоянной
времени Гф, описываемое линейным дифференциальным уравнением
Тф^Г + у = кфг, (43)
где z=f(x, r)=rx.
Тогда выбор пропорционального закона управления r=(y0—y)kY
определит следующее уравнение схемы:
i^%+y(l+k^) = y<>- (44)
где 7ф/&ф£ух — изменяемая постоянная времени.
При интегральном законе г = J* (у0 — у) kY dt, найдем:
о
d*y :dy f 1 _ Тфх \ ( % \
Дифференциальные уравнения (44), (45) нелинейны и могут
быть исследованы методами фазовой плоскости для весьма ограни-
ченного класса функций x(t). В данном случае более приемлемыми
для исследований оказываются дифференциальные уравнения систе-
мы, разрешенные относительно управляемого параметра г. Применяя
аналогичные (33), (34) подстановки, получим искомые уравнения
в виде
(46)
Гф 'dr /1 \
Гф d*r . 1 dr
"зг+ '*•*="*•• <47>
Поскольку kY, k$, Тф — константы, то уравнения (46), (47)
являются линейными дифференциальными уравнениями с перемен-
ным коэффициентом x(t). Их решение возможно аналитическими
методами для ряда функций x(t), в том числе типичных для задачи
стабилизации (х=х0+хт sin со00-
Другой вариант стабилизирующего устройства, в котором
используется НП-2 в виде множительного звена, приведен на схеме
рис. 8,а. Здесь множительное звено управляет величиной переменного
напряжения x(t) —хт sin (d0t на входе выпрямителя, что также изме-
няет выходное напряжение последнего. В схеме используется пропор-
циональный закон параметрического управления коэффициентом уси-
ления усилителя, выполняющего функции множительного звена. Рй-
20
сунок 8,6 иллюстрирует схему электронного стабилизатора напря-
жения, построенного по этому принципу [Л. 7]. Здесь на лампе Л\
собран /?С-генератор сигнала x(t), на пентоде Л2 с переменной кру-
тизной сеточной характеристики — усилитель с управляемым коэффи-
циентом усиления (аналог множительного звена), на лампах Лз —
Ль — фазоинвертор и усилитель мощности; на Л%, Лч — 'высоковольт-
ный выпрямитель напряжения. С помощью Л8 осуществляется ком-
пенсация дрейфа выходного напряжения Л2, Л3, вызываемого изме-
нениями тока накала, что обеспечивает более надежную работу
устройства при увеличении коэффициента усиления усилителя. Схе-
мы стабилизации напряжения, приведенные на рис 8,6, используются
обычно для питания цепей высокозольтной аппаратуры (вторичные
электронные умножители, ионизационные камеры, газоразрядные при-
боры и др.). Такие схемы экономичнее и допускают более широкие
пределы регулировки выходного стабилизируемого напряжения. На
схеме рис. 8,6 регулировка напряжения осуществляется движком
потенциометра /7 в пределах от 1,2 до 6,5 кв при токе нагрузки До
1,5 ма [Л. 7].
Рассмотрим уравнения стабилизирующего устройства на рис. 8,а,
выбирая, например, квадратичный закон детектирования Д. Уравне-
ния статики, учитывая y=(xr)2, r=(y0—ay)kyy запишутся в следую-
щем виде:
a*V2 +т; = у«> (48)
или относительно у
у(\+ хЧ2у 2у0а) = x*k2y (у20 + aV). (49)
Динамические уравнения могут быть получены, если учесть дей-
ствие низкочастотного фильтра выпрямителя, описываемого, напри-
мер, выражением
Т*^ + У = кь(хг)\ (50)
Определяя
dr dy \ ( г \
найдем:
^l+v+r2^Sa=i"- (51)
Таким образом, при квадратичном детекторе нелинейное диффе-
ренциальное уравнение (51) с переменным коэффициентом [х(0]2
описывает динамику системы с параметрической обратной связью.
Пусть, далее, используется двухполупериодная схема выпрямления.
В этом случае вместо выражения (50) получим:
ТФ% + У = кф\хг\, (52)
где г=|лт|—аналитическое выражение характеристики «линейного»
детектора выпрямителя Д, определяющее модуль (абсолютное зна-
22
чение) произведения хг. Поскольку модуль произведения равен про-
изведению модулей сомножителей, запишем (52) в виде
Т*^+у = кф\х\\г\. (53)
Учитывая определения dr/dt и у, найдем дифференциальное урав-
нение движения системы
I7"S" + r("^" + afe«'lxlsl£nr) = J'»' (54)
или
£-Й+1&Г + в**1*11г1=,«'- (55)
Например, для x=xmsincoo£, |х\ =xm |sin оо?|, где |sincoo^|
определяет аналитически кривую, получаемую в детекторе выпрями-
теля при двухполупериодном выпрямлении. Известное разложение
этой функции в ряд Фурье записывается в виде
2 / уг\ cos 2ka>0t \
|sinW|=_^_2g__^j (56)
и определяет переменный коэффициент нелинейного дифференциаль-
ного уравнения (55). Если постоянная времени Тф фильтра низкой
частоты велика, то можно пренебречь гармоническими слагаемыми
(56), что позволяет записать уравнение (55) для .квазистационарного
случая в следующем виде:
Тф dr г 2а&фхт
Заметим, что в практических приложениях управляющий пара-
метр г обычно является положительной величиной. Поэтому диффе-
ренциальное уравнение (57) при указанных ограничениях сводится
к линейному уравнению с постоянными коэффициентами, исследова-
ние которого не представляет затруднений.
Воспользуемся далее полученными результатами для построения
стабилизирующих устройств, в которых реализуется функция /(#, г)
и сигналы х и г могут быть представлены различными способами.
Схемы множительных звеньев могут быть реализованы, если со-
множители f(x, r)=xr входят в звено при различных видах сигналов.
Например, х — непрерывная величина, г — дискретная (импульсная).
Простейшим звеном НП-2 такого вида является нелинейный преоб-
разователь с двумя входами, иллюстрирующий принцип время-им-
пульсного преобразования входного напряжения х, варианты кото-
рого приведены на рис. 9. Показанный на схемах ключ К периодиче-
ски замыкается и размыкается, осуществляя коммутацию входного
сигнала л:. Обычно частота коммутации выбирается значительно боль-
шей по сравнению с частотой изменения (точнее, наивысшей частот-
ной слагающей спектра) входного сигнала х. Поэтому принцип дей-
ствия схем, изображенных на рис. 9, можно рассматривать, полагая,
что значения входного сигнала x(t) неизменны во времени (х=
= const) (Л. 4, 5]. Выходное напряжение схемы с ключом К затем
поступает на фильтр низкой частоты, выделяющий постоянную со-
ставляющую. Рассмотрим в качестве примера работу схемы НП-2
23
на рис. 9,а. Пусть ключ К замкнут на интервале времени 0</</и и
разомкнут на интервале tn<t<T в течение каждого периода Т ком-
мутации. При x=const получим график изменения напряжения ©виде
+ — д>
В!
б)
l
1 J
Рис. 9. Схема нелинейных преобразователей НП-2 непре-
рывно-дискретного вида,
а, б — с параллельным ключом; в, г — с последовательным ключом.
прямоугольных импульсов, представленных на рис. 9,а. Постоянная
слагающая последовательности прямоугольных импульсов опреде-
ляется выражением
т
1 cxdt_xtn
У — ~f~ \ ~~f f~ (5о)
о
и реализуется аппаратурно на выходе фильтра низкой частоты с эле-
ментами /?ф, R*, Сш.
Полагая, далее, что величина t^lT, называемая скважностью,
пропорциональна другому входному сигналу г, т. е.
Г = /72 ~Y~y (59)
найдем окончательное выражение
y=mxr, (60)
определяющее действие схемы (рис. 9,а) как НП-2 типа множитель-
ного звена.
Таким образом, в схеме (рис. 9,а) напряжение х задается в не-
прерывной форме представления сигналов, а напряжение г в соот-
ветствии с (59) должно быть преобразовано соответствующим устрой-
ством. Указанное устройство является широтно-импульсным модуля-
тором, преобразующим непрерывный сигнал r(t) в эквивалентную
24
его ординатам величину скважности tK/T прямоугольной последова-
тельности импульсов. Следовательно, структурная схема стабилизи-
рующего устройства (рис. 10), реализующая время-импульсный прин-
цип действия НП-2, содержит коммутирующее устройство и фильтр
низкой частоты в цепи прохождения непрерывного сигнала x(t),
а также широтно-импульсный преобразователь (модулятор) ШИМ,
реагирующий на управляющее напряжение r(t). При высокой часто-
те коммутации схема на рис. 10 эквивалентна по своим характери-
стикам схеме стабилизирующего устройства с множительным звеном
непрерывного действия (рис. 7,а), Поэтому динамические свойства
стабилизирующих устройств с НП-2 типа множительного звена мо-
гут, быть описаны полученными ранее уравнениями для схемы на
рис. 7,а. Детальные исследования должны проводиться методами
теории импульсных систем' автоматического регулирования [Л. 8, 9].
Известно, что подобные системы в ряде случаев имеют преиму-
щества по сравнению с непрерывными, связанными с простотой аппа-
ратуры, большей экономичностью и более приемлемыми процессами
в системе. С технической точки зрения в настоящее время разработ-
ка бесконтактных быстродействующих переключающих (коммутирую-
щих) элементов не представляет принципиальных затруднений. По-
этому схемы импульсных стабилизаторов напряжений находят все
большее применение.
В качестве коммутирующих устройств здесь используются полу-
проводниковые или электронные элементы. Поскольку в импульсных
НП-2, как видно из рис. 9,а, отсутствует управляемое сопротивление,
на котором в схемах непрерывной стабилизации (рис. 3,6) рассеи-
вается значительная мощность, то достигается большая экономич-
ность, в существенной мере повышается к. п. д. (90% вместо 50%
при непрерывной стабилизации), снижаются требования к тепловому
режиму устройств стабилизации. Все это приводит к уменьшению
размеров и веса стабилизи-
рующих устройств, что весь-
ма существенно (при их
использовании для пита-
ния схем полупроводнико-
вой радиоэлектронной аппа-
ратуры.
Рассмотрим схему им-
пульсного стабилизатора
напряжения, построенного
на основе изложенного прин-
ципа, где детализированы
отдельные элементы струк-
турной схемы, приведенной
на рис. 10.
На схеме, изображен-
ной на рис. 11, элемен-
ты Ru, Си представляют
собой нагрузку стабилизирующего устройства. Дроссель L и
Rn, Сн выполняют функции фильтра низкой частоты. В качестве
ключа коммутирующего устройства использован составной транзи-
стор на 7\, Г2. Указанные элементы вместе с диодом Д1 представ-
ляют собой силовую цепь стабилизирующего устройства с параллель-
ным ключом (рис. 9,6), которая относится к схеме выпрямителей
с нагрузкой импульсного характера [Л. 5, 8]. Здесь ключ К периоди-
Регулятор
Рис. 10. Структурная схема импульс-
ного стабилизатора напряжения как
системы с импульсной цепью пара-
метрической обратной связи.
ШИМ — широтно-импульсный модулятор;
/ — цепь параметрической обратной связи.
25
чески замыкается и размыкается, причем в интервалы его замыкания
ток в индуктивности L увеличивается, а напряжение на Rn поддер-
живается за счет разряда Сн, поскольку диод Д4 предотвращает
возможность разряда Сн через замкнутый ключ К. В интервалах,
когда ключ А разомкнут, энергия, запасенная в индуктивности Lt
передается в нагрузку. Управление скважностью tK/T коммутирующе-
го устройства (составного транзистора 7\, Т2) осуществляется через
промежуточный усилитель на транзисторе Г3 схемой широтно-им-
пульсного модулятора. В качестве последнего в схеме на рис. 11
применяется управляемый мультивибратор с емкостными коллектор-
но-базовыми связями, собранный на транзисторах 74, Г5, причем
транзисторы Г6, Г7 используются как регулируемые сопротивления
в. цепях разряда конденсатора Ci, С2 мультивибратора. Управление
Т6, Г7, а следовательно, скважностью последовательности прямо-
угольных импульсов, генерируемых мультивибратором, осуществляет-
ся напряжением рассогласования, задаваемым в цепь базы тран-
зистора Ti и получаемым на выходе схемы сравнения. Последняя
выполнена в виде делителя напряжения на сопротивлениях R, где
в качестве одного из плечей делителя включен опорный диод Д2,
напряжением стабилизации которого определяется задаваемая вели-
чина уставки {уо) схемы стабилизирующего^ устройства.
Рис. 11. Принципиальная схема импульсного транзисторно-
го стабилизатора напряжения с НП-2 по схеме рис. 9,6.
Для повышения надежности работы коммутирующего ключа на
Ти Т2 используется дополнительный источник напряжения £/см, обес-
печивающий положительное смещение на базах Ти Т2 при их запи-
рании, а также диод Д3, обеспечивающий прохождение запирающего
положительного потенциала на базы обоих транзисторов для преду-
преждения перегрузки по току транзистора Г2.
Динамические свойства импульсного стабилизирующего устрой-
ства могут быть подробно исследованы методами расчета импульс-
ных САР, причем широтно-импульсный модулятор вводит дополни-
тельную нелинейность в систему 1[Л. 9]. Не останавливаясь на ука-
занных свойствах, найдем лишь обоснование эффекту стабилизации
26
в «малом». Записывая уравнение (58), в вариациях, получим:
/ *и \ . , Ata
Ау = ^"у j Ax + x0-j-
(61)
Линеаризуя уравнение регулятора с пропорциональным законом
tulT=kY (у о—ay)
~y = — ak7Ay, (62)
найдем следующее выражение для изменения напряжения Ау:
СП
Ах
ау= ;,'\ ' (63)
Очевидно, что условия полной инвариантности выполняются
в случае k7—^оо, т. е. Ау—Ч), где k7 определяются свойства ши-
ротно-импульсного модулятора по изменению скважности последова-
тельности прямоугольных импульсов при изменении величины откло-
нения выходного напряжения импульсного стабилизатора от его уста-
новленного значения. Практически скважность может изменяться
лишь в ограниченных пределах и, следовательно, k7 — конечная ве-
личина, что и определяет ошибку в работе импульсного стабилизи-
рующего устройства.
Ограничения спектра частот входного напряжения, которое еще
может быть стабилизировано в импульсном стабилизирующем
устройстве, в основном определяются свойствами фильтра низкой
частоты. Сглаживая влияние импульсного характера стабилизации
на нагрузку, он в существенной мере замедляет действие цепи пара-
метрической обратной связи из-за инерционности и наличия постоян-
ной времени Тф. .Повышенные частоты коммутации ключей позво-
ляют уменьшить постоянную времени Тф и размеры сглаживающего
фильтра низкой частоты. Другая возможность построения импульсно-
го стабилизатора на основе метода время-импульсного преобразова-
ния входного напряжения х состоит в использовании блока НП-2,
реализующего операцию время-импульсного делителя напряжения.
Воспользуемся вновь выражением (58), записывая его в виде
y = f(x, u)=x Ц— = x/l- Ц—V (64)
Действительно, если входными сигналами, кроме х, являются
*и=&у(#о—ау), *в = const (65)
tn = k7(y0—ш/), /и=const, '(66)
или
то функция (64) определяет операцию время-импульсного делителя
напряжения х. Поскольку Г=1в + *и, выбор ?и или tB в качестве
управляемого параметра приводит к изменению частоты коммутации.
Преобразующие устройства, осуществляющие операции (65), (66),
27
Могут быть разработаны специально или могут использоваться нели-
нейные автоматические системы, в которых операция преобразования
осуществляется за счет режима автоколебаний.
Основные преимущества таких устройств стабилизации заклю-
чаются в их простоте. Они широко применяются, несмотря на боль-
шие ошибки стабилизации выходного напряжения, меньший диапа-
зон стабилизации по величине и частотному спектру входного сигна-
ла и нестабильности рабочего процесса при изменении нагрузки
в сравнении со схемами стабилизации с широтно-импульсным моду-
лятором.
Рис. 12. Принципиальная схема импульсного транзисторно-
го стабилизатора напряжения с НП-2 но схеме на рис. 9,г.
На рис. 12 приведена схема двухпозиционного импульсного ста-
билизатора напряжения, в котором автоколебательный режим осу-
ществляется за счет релейного элемента. Здесь элементы яя, Сн,
дроссель L, коммутирующее устройство, выполненное на составном
транзисторе ти т2, а также диод Д4 образуют силовую цепь
импульсного стабилизатора вида (рис. 9,г). Управление ключом
(7\, т2) осуществляется через транзистор т3 несимметричным триг-
гером, собранным на транзисторах Г4, т5 и представляющим собой
релейный элемент с гистерезисной характеристикой. Сравнение вы-
ходного напряжения стабилизатора с напряжением уставки, задавае-
мой опорным диодом Дг, осуществляется непрерывно, а величина
рассогласования усиливается в усилителе постоянного тока, собран-
ном на транзисторе Ге, поступая далее на вход несимметричного
триггера. Структурная cxeMia двухпозиционного импульсного стаби-
лизатора напряжения приведена на рис. 13,а.
Рассмотрим функции, выполняемые в схеме. Поскольку схема на
рис. 12 есть релаксационный генератор, ее выходное напряжение
имеет постоянную слагающую с наложенными на нее близкими по
форме к «пилообразным» (если RR, Сн достаточно малы, а (/вх ве-
лико) колебаниями. Колебания выходного напряжения стабилизатора
являются рабочим режимом схемы. Амплитуда' колебаний опреде-
ляется отношением ширины зоны гистерезиса релейного элемента AU
28
к коэффициенту усиления kY усилителя на 7V Она может быть сде-
лана достаточно малой и удовлетворяющей поставленным требова-
ниям стабильности за счет надлежащего выбора зоны AU несимме-
тричного триггера и увеличения коэффициента kY. Покажем далее,
что одновременно с генерацией импульсов в схеме на рис. 12 осу-
ществляются функции управления параметром tu (65) при измене-
ниях входного напряжения, а постоянная слагающая выходного на-
пряжения связана с входным напряжением зависимостью (64). На
рис. 13,6 представлены графики изменения выходного напряжения и
напряжения на входе фильтра низкой частоты после коммутирующе-
го ключа. Здесь величина интервала времени tB, когда ключ разо-
мкнут, не зависит от входного напряжения х, поскольку она опре-
X
г
нп-2
у
Релейный
элемент
Регулятор
а)
Рис. 13. Импульсный стабилизатор напряжения двухпозиционного
типа как вариант системы параметрического регулирования.
а — структурная схема: / — цепь параметрической обратной связи; б — диа-
грамма изменений напряжений стабилизирующего устройства.
деляется разрядом конденсатора фильтра Сн на сопротивление нагруз-
ки Rut постоянная времени которого Сн/?н = const, и поэтому tB =
= const. Наоборот, скорость заряда конденсатора Сн при замыкании
ключа, а следовательно, наклон прямой на участке прямого хода
«пилообразного» напряжения иЪых определяются величиной входно-
го напряжения. Например, при увеличении х наклон прямой возрас-
тает, что приводит ввиду постоянства ширины зоны AU/kY к умень-
шению интервала /и времени замыкания ключа. Таким образом,
в схеме на рис. 13,а интервал tB = const, а /и изменяется при измене-
нии х в обратном направлении, что соответственно меняет также
частоту коммутации. Однако, как следует из выражения (64), по-
стоянная слагающая выходного сигнала импульсного стабилизатора
определяется не частотой, а скважностью коммутируемых импуль-
сов. Следовательно, как видно из рис. 13,6, увеличение х приводит
к соответствующему уменьшению £и, сохраняя неизменной площадь
прямоугольного импульса xtn = const в каждом периоде Т последова-
тельности прямоугольных импульсов и, следовательно, стабильность
напряжения у. Более подробное исследование схемы на рис. 13,а вы-
ходит за рамки настоящего изложения. Естественным результатом
«возложения» на простую по аппаратурной реализации схему на
рис. 13,а разнородных функций параметрической системы (реализа-
ция требуемой функции НП-2, изменение вида представления управ-
ляющего параметра £и и стабилизация параметра tB) являются отме-
ченные выше недостатки в ее работе. Из рассмотрения рис. 13,6
29
следует, например, что непроизвольное или задаваемое заранее изме-
нение Rn — дестабилизирующий фактор. В этом случае изменяются
параметр tB функции (64) -и, следовательно, величина стабилизируе-
мого напряжения.
2. СТАБИЛИЗАЦИЯ ДАВЛЕНИЯ И РАСХОДА
Воспользуемся полученными ранее соотношениями для рассмо-
трения типовых систем стабилизации давления' газа в резервуаре.
Здесь объект регулирования — закрытый резервуар, в котором тре-
буется стабилизация давления газа, поступающего из сети высокого
давления через трубопровод. Обозначим через Qi — приток газа
в резервуар из сети высокого давления; Q2 — расход газа (нагруз-
ка), поступающего к потребителям. Стабилизация давления в резер-
вуаре необходима ввиду изменения расхода (нагрузки) Q2, темпера-
туры окружающей среды, колебаний давления в сети, являющихся
возмущающими воздействиями на объект. Давление в резервуаре
стабилизируется изменением величины открытия управляемого венти-
ля, устанавливаемого в трубопроводе и представляющего гидравли-
ческое сопротивление потоку газа из сети высокого давления. Обыч-
но управляемые вентили конструктивно выполняются таким образом,
чтобы обеспечивалась линейность соотношения между перемещением
вентиля (ход штока клапана) и изменением его гидравлической про-
водимости. При этом форма дросселирующего элемента вентиля
близка к коноидальной или логарифмической [Л. 10].
Простейшая схема стабилизации давления прямого действия
приведена t:i рис. 14,а. Здесь изменение давления в резервуаре р
воздействует на мембрану, являющуюся чувствительным элементом.
Мембрана имеет пружину, величина давления которой определяет
уставку стабилизируемого давления в резервуаре. Мембрана связана
со штоком управляемого вентиля, перемещение которого пропорцио-
нально рассогласованию давления от задаваемого уставкой. Измене-
ние штока вентиля меняет величину гидравлического сопротивления
трубопровода и подачу Qi газа из сети высокого давления до тех
пор, пока давление газа в резервуаре не будет стабилизировано.
Более высокая точность стабилизации достигается в схемах ре-
гулирования непрямого действия [Л. 11]. На рис. 14,6 приведена
подобная схема стабилизации давления. Она отличается от схемы
на рис. 14,а тем, что мембрана управляет штоком вентиля не непо-
средственно, а струйной трубкой усилительного звена, которая в свою
очередь воздействует на исполнительный поршневой серводвигатель,
изменяющий положение штока управляемого вентиля в нужном на-
правлении. Наконец, в электрическом варианте стабилизатора давле-
ния (рис. 14,<з) мембрана чувствительного элемента связана с пол;
зунком реостата электронного усилителя, воздействующего затем на
электрический двигатель, перемещающий шток вентиля в требуемом
по условиям стабилизации направлении.
Структурная схема системы стабилизации давления, соответст-
вующая случаю непрямого регулирования, показана на рис. 15. Здесь
изображена гидравлическая цепь, состоящая из источника потока х
(сети высокого давления), проводимости управляемого вентиля g
и его утечки gyT, гидравлической емкости объекта С .и проводимо
сти выхода G (нагрузки). Датчик давления (мембрана) и усилитель-
ный элемент служат безынерционными звеньями. Исполнительный
Серводвигатель, если пренебречь силами трения и массой его по-
30
4/
к'
) Иг
Объект
а)
Регулятор
б)
Рис. 14. Схемы стабилизации давления.
а — схема стабилизации давления прямого действия;
б, в — схемы стабилизации непрямого действия.
движных частей, является интегрирующим звеном.. Или, если учиты-
вать влияние указанных выше факторов, он может быть представлен
последовательным соединением интегрирующего и инерционного
звеньев. Гидравлическая цепь представляет собой, аналогично цепи
стабилизации напряжения на рис. 3,6, нелинейный преобразователь
НП-2, входными сигналами которого являются величина давления
Рис. 15. Структурная схема управления вентилем
в системе стабилизации давления с параметриче-
ской обратной связью.
/ — цепь параметрической обратной связи.
сети и проводимость управляемого вентиля. Выходной сигнал — дав-
ление в резервуаре, измеряемое датчиком давления. Для простоты
расчетов, пренебрегая проводимостью утечки вентиля, найдем вид
функции НП-2
y = f(*. g) = Y+-G*' (67)
Динамические свойства гидравлической цепи (рис. 15) опреде-
ляются дифференциальным уравнением
С 4f+(e+0)y = gx. (68)
Это уравнение представляло бы линейное дифференциальное
уравнение, если х было входным сигналом. Однако в схеме стабили-
зации давления управление осуществляется сигналом g и потому
уравнение (68) оказывается нелинейным ![Л. 12]. Найдем уравнение
стабилизирующего устройства давления в целом, учитывая действие
цепей параметрической обратной связи. Для схемы стабилизации
давления прямого действия имеем закон параметрического управле-
ния вида
g = ky{yQ—y). (69)
Для схемы на рис. 15 в случае, если исполнительный серводвига-
тель представляется интегрирующим звеном, найдем:
~§~ = ky (Уо — У) (70)
32
или в случае более полного описания свойств серводвигателя полу-
чим уравнение вида
d2g , dg
Гу + = М#о — </). (71)
где ту — постоянная времени серводвигателя.
Уравнениями (69) — (71) совместно с уравнением (68) гидрав-
лической цепи определяются динамические свойства стабилизирую-
щих устройств.
Для закона параметрического управления (69) найдем у=уо—
—g/£y*> у=—g/ky и, следовательно, имеем:
С dg г G \ ш g*
Ъ1?г + 8(*+Т7-У°) + 1Г=0У'- <72>
Для случая параметрического управления (70) соответственно
найдем у = у0 — g/k7, у — —g/ky и получим:
С d*g dg 1
lb -d^+dt t£ to + G) + g (* ~ y.) = Gy0. (73)
Наконец, для закона параметрического управления (71), определяя
' У*{t,g + g); y=—-j~-(t,'g"+'g),
найдем:
+W£t^ +2 = (74)
В уравнениях (72) —(74) x>0 и (x—#о)>0, однако это нелиней-
ные дифференциальные уравнения, решение которых в аналитической
форме затруднительно. Уравнения (72), (73) позволяют, аналогична
уравнениям (46), (47) стабилизатора напряжения, исследовать дина-
мические свойства методами фазовой плоскости. Исследование ди-
намических свойств стабилизатора давления, описываемых нелиней-
ным дифференциальным уравнением (74) третьего порядка, пред-
ставляет более сложную задачу.
Вначале рассмотрим частотные свойства системы на рис. 15 по
входу g, полагая x=*o = const, а у — выходной сигнал. Из уравнений
(67), (68) следует, что функция f(x, g) нелинейна относительно вхо-
да g и, следовательно, при синусоидальном входном сигнале g=
=go+gi cos со* выходной сигнал у будет несинусоидален. Разлагая
сигнал в ряд Фурье и ^записывая его в экспоненциальной форме, най-
дем:
п
И0 = *в+Е*ь Re (75)
/5=1
3—1374 33
Тогда уравнение (68) запишется в виде
/соС
У°+у>Ук Re
п
+ (£<> +£1 Re e*'°*.+ G)X
X (У° + 2 </ь Re ) - Хо^о + gl Re (76)
k=\
Ограничивая рассмотрение определением составляющей выходно-
го сигнала y(t) на частоте со, найдем:
(G + /соС) ух + (£,*/<> + ylgo) = ^х0. (77)
Следовательно, коэффициент усиления системы по составляющей
спектра на частоте о имеет вид:
«Г ^1 - ^о —^° _*Q —0° 1 ,7QN
Al~^i Л + G + ycoC. fir0 + Gi , . с ' (78)
Коэффициент усиления на нулевой частоте (оз = 0) определяет
статическую (регулировочную) характеристику стабилизатора. Из
(67) или (68).найдем:
В практических приложениях обычно достаточно найденных вы-
ражений для исследования свойств системы по каналу параметри-
ческого управления, поскольку в объекте и серводвигателе, являю-
щихся 'фильтрами низкой частоты, осуществляется фильтрация более
высоких гармонических составляющих выходного сигнала y(t). Одна-
ко при таком подходе не учитываются спектральные свойства сигна-
ла x(t), так как выражения (77), (79) получены при условии x(t) =
= x0=const. Известные результаты метода гармонической линеари-
зации (гармонического баланса), обычно применяемые для систем,
содержащих нелинейные звенья на один вход НП-1, здесь также не-
приемлемы. Необходимо иметь описывающие функции для нелиней-
ных звеньев типа НП-2. Некоторые результаты в этом направлении
будут рассмотрены далее (см. § 4).
Воспользуемся предыдущими результатами для рассмотрения
задачи стабилизации расхода жидкости. Перемещение жидкости
происходит под действием источников потока (насосы или компрес-
соры) по трубопроводам к технологическим аппаратам (объектам),
которые образуют гидравлическую цепь. Элементы цепи характери-
зуются гидравлическими сопротивлениями (например, трубопроводы
или вентили) и емкостями [Л. 11]. Рассмотрим здесь задачу стаби-
лизации потока (расхода) управляемым вентилем, установленным
з трубопроводе. Объектом управления является трубопровод, в кото-
ром необходимо стабилизировать поток Q, изменяющийся в силу
различных возмущений. Такими воздействиями являются колебания
перепада напора НА жидкости или давления Яд, которые имеют
место на участке трубопровода в его крайних сечениях, причем
//д = //,-//„; РА = Р1-Ри.
34
вентиль, установленный в трубопроводе, представляет собой пг-
дравлическое сопротивление. Для участка трубопровода с вентилем
справедливо соотношение, аналогичное закону Ома для электриче-
ской цепи,
PA = RQ,
где Рд — перепад давления; Q — расход (поток) жидкости; r— гидрав
лическое сопротивление потоку. Измеряя поток Q в трубопроводе,
являющемся выходным сигналом объекта, можно осуществить цепь
параметрической обратной связи через регулятор, серводвигатель ко-
торого будет изменять положение потока управляемого вентиля,
а следовательно, и величину гидравлического сопротивления цепи.
Изменение последнего приводит к изменению перепада давления на
вентиле и потока Q (рис. 16,а). Будем полагать далее, что вентиль
и трубопровод безынерционны. Тогда уравнение гидравлической цепи,
связывающее входные сигналы иа, ра с выходным Q, запишется
в следующем виде:
-/ (30)
где g — ускорение силы тяжести; р — плотность жидкости. Уравне-
ния, цепи параметрической обратной связи стабилизирующего устрой-
ства определяется выбранными законами вида (69), (71), где, одна-
ко, теперь управляемым параметром является не проводимость, а со-
противление вентиля. Поэтому получим:
R = k7 (Q0-Q);
dR
-df = k7 (Q0-Q);
(81)
Структурная схема стабилизирующего устройства приведена на
рис. 16,6. Она аналогична соответствующей схеме стабилизатора на-
пряжения. Структурная схема той же системы в «малом», получае-
мая после линеаризации нелинейной функции (80), т. е.
. df _ . df
приведена на рис. 16,0. Динамические свойства подобных схем могут
быть исследованы аналогично приведенным ранее (см. § 1). Пусть,
далее, к трубопроводу с управляемым вентилем (рис. 17,а) на его
входе подсоединен резервуар, в который поступает извне поток QBX,
являющийся входным сигналом, и необходима стабилизация пото-
ка Q в трубопроводе на линии отвода потока из резервуара. По-
скольку жидкость не меняет своего объема, запишем уравнение за-
кона сохранения материи (сплошности) за бесконечно малый про-
межуток времени dt и небалансе между входящим Qbx и исходя-
щим Q потоками жидкости
(Q**-Q)dt=--Sd7iA, (83)
3* 35
Регулятор
^изм
—\3*
Но
АР
а)
Объект
мг1-2
ДР
df
АН
df
дН
Регулятор
в)
Рис. 16. Схема стабилизации потока в трубопроводе как параметри-
ческая система регулирования.
а — функциональная схема; б — структурная схема стабилизации потока с па-
раметрической обратной связью (/); в — структурная схема линеаризованной
системы стабилизации потока в трубопроводе.
где S —площадь поперечного сечения резервуара; dHL —прираще-
ние напора, или
S-lf=Q„-Q.
(84)
Уравнение (84) вместе с (80) определяет теперь уравнения ги-
дравлической цепи [Л. 11].
Структурная схема подобной системы стабилизации расхода при-
ведена на рис. 17,6. Здесь гидравлическая цепь описывается нели-
36
4«л
- регулятор
кил*
is
0_
1
\ЛР
а)
>Н8Н2>
объект
нп-2
| на ftvz
7 Ч *„(р)
регулятор
б)
j
-®-—ф
ли
объект
лр
регулятор
ла0
в)
Рис. 17. Схема стабилизации потока на выходе резервуара как пара-
метрическая система регулирования.
а — функциональная схема; б — структурная схема системы стабилизации
с цепью параметрической обратной связи (/); в — структурная схема линеари-
зованной системы.
37
нейным дифференциальным уравнением вида
(85)
или
SR2 dQ2
2g dt
(86)
Динамические свойства системы стабилизации расхода в целом
определяются теперь уравнением (86) и одним из уравнений цепи
параметрической обратной связи (81), что вновь приводит к затруд-
нениям в исследовании получаемых решений. Аналогичные задачи,
обусловленные введением параметрической обратной связи с целью
создания эффекта стабилизации, были рассмотрены выше. Линеари-
зованная структурная схема системы стабилизации приведена на
рис. 17,в и может быть исследована детально существующими мето-
дами в «малом».
Импульсные стабилизаторы давления и расхода принципиально
могут быть построены методами, аналогичными импульсным стаби-
лизаторам напряжения. Однако практическая реализация управляе-
мых 'вентилей, работающих в режиме ключа (клапана), из-за значи-
тельной инерционности подобных устройств затруднительна.
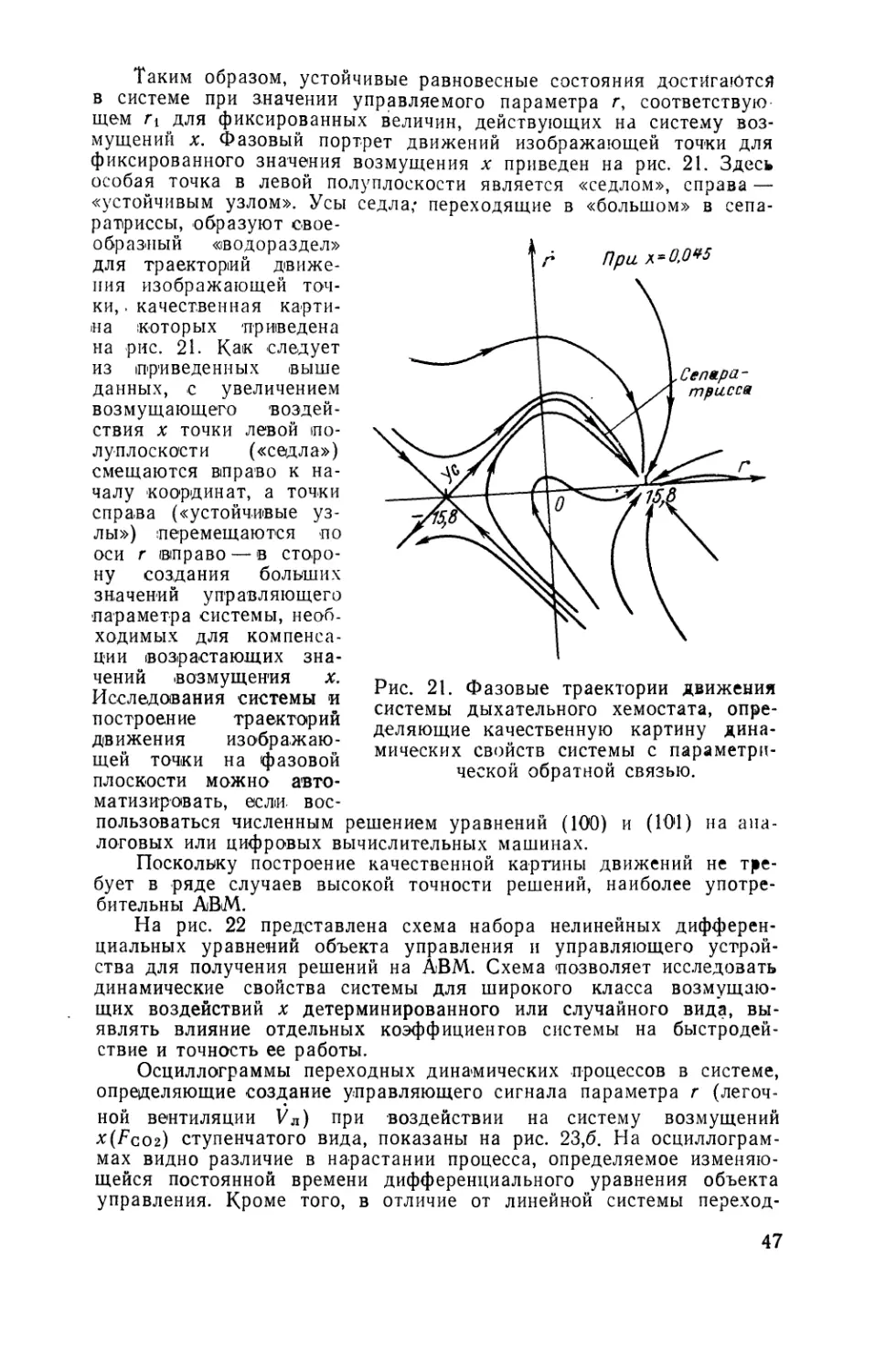
Воспользуемся полученными результатами для исследования
поведения биологической системы регуляции дыхания (дыхательного
хемостата) {Л. 13]. Более краткое название системы — дыхательный
хемостат — определяется словом «хемос», что означает химическое
равновесное состояние, а система есть стабилизатор химического
равновесного состояния состава артериальной крови. Не вдаваясь
в сущность физиологических процессов, происходящих в отдельных
элементах биологической системы, а фиксируя внимание на их функ-
циональных связях, покажем идентичность задачи, решаемой в био-
логической системе регуляции дыхания, задаче стабилизации. Про-
цессы установления или достижения химического равновесного со-
стояния в биологической системе эквивалентны при определенных
ограничениях процессам и динамическим свойствам рассмотренных
выше стабилизирующих устройств. Поэтому биологическая система
регуляции дыхания представляет собой вариант стабилизирующего
устройства, реализованный с помощью параметрической обратной
связи. Задачей биологической системы регуляции дыхания является
обеспечение требуемых условий жизнедеятельности организма, опре-
деляемых стабильностью химического состава артериальной крови
по концентрациям содержащегося кислорода, углекислого газа и
концентрации водородных ионов Н+.
Факторами, обусловливающими отклонение химического состава
указанных компонент от их требуемых значений, являются возму-
щающие воздействия на биологическую систему. Например, повыше-
ние концентрации углекислого газа С02 в крови может вызываться
увеличением С02 во вдыхаемом через легкие воздухом или переда-
чей С02 от тканей, или недостатком кислорода воздуха. Увеличение
кислотности крови повышает концентрацию водородных ионов. Нако-
нец, пониженное содержание кислорода воздуха уменьшает концен-
3. СТАБИЛИЗАЦИЯ ХИМИЧЕСКОГО СОСТАВА
38
трацию кислорода в крови. Все эти факторы являются возмущения-
ми, оказывающими дестабилизирующее влияние на систему.
Чувствительными элементами системы, определяющими показа-
тели химического состава артериальной крови, являются хеморецеп-
торы, имеющиеся в различных частях организма. Они передают сиг-
налы возбуждения по нервным путям в дыхательный центр, выпол-
ТЕ
возмущения
регуля-
тор
у»
объект
обратная связь
а)
"С0?
регуля-
тор
б)
объект
-С02
*[Н+]
со,
, у венозный поток
легочный f
резервуару
вл\х«л
1 >^=^ \ ет>кт
\ тканевый
i резервуар
артериаль-
ный поток
нп-z
fc0?
регуля-
тор
объект
1
в) г)
Рис. 18. Схема стабилизации химического состава с помощью цепей
параметрической обратной связи.
а — функциональная схема дыхательного хемостата; б — функциональная схе-
ма одноконтурной системы стабилизации дыхательного хемостата по СОг; в —
функциональная схема объекта управления биологической системы дыхатель-
ного хемостата; г — структурная схема биологической одноконтурной системы
стабилизации химического состава артериальной крови с цепью параметриче-
ской обратной связи (1).
няющий функции управляющего устройства системы. Последний вы-
рабатывает сигналы, воздействующие на исполнительное устройство
биологической системы: дыхательные мышцы легких, обеспечивающие
вентиляцию легких и альвеолярную вентиляцию, что приводит к ста-
билизации показателей химического состава крови.
Таким образом, мы имеем многомерную систему с отрицательной
обратной связью, в которой осуществляется стабилизация нескольких
показателей химического состава артериальной крови (рис. 18,а).
39
Для более детального выявления цепей параметрических обратных
связей при исследовании ограничим рассмотрение случаем стабилиза-
ции одного показателя химического состава — концентрации углекис-
лого газа С02 в артериальной крови при одном типе возмущения —
вдыхании через легкие воздуха с повышенным.содержанием углекис-
лого газа. Структурная схема одноконтурной цепи дыхательного хе-
мостата приведена на рис. 18,6. Выходным сигналом управляющего
устройства является величина альвеолярной вентиляции Ул, воздей-
ствующая на объект управления.
Рассмотрим объект управления, который с функциональной точ-
ки зрения может быть представлен в виде схемы (рис. 18,в), состоя-
щей из легочного и тканевого резервуаров, связанных через сосуды
циркулирующей кровью. Венозный поток, содержащий повышенную
концентрацию С02, «очищается» в легочном (или альвеолярном)
резервуре, где происходит газообмен с кровью за счет диффузии,
образуя артериальный поток. В тканевом резервуре, наоборот, проис-
ходит «загрязнение» артериального потока крови вследствие газооб-
мена с тканью, где образуется СОг в результате обмена веществ.
Кроме того, в легочный резервуар ноступает С02, находящийся во
вдыхаемом воздухе. Величина скорости поступления воздуха, содер-
жающего С02, определяется значением альвеолярной вентиляции W
Наконец, часть С02 выносится из легочного резервуара с выдыхае-
мым воздухом.
Соответствующие уравнения элементов схемы (рис. 18,в) запи-
сываются в следующем виде:
8л = (v^coa +я*~яг-^)> (87)
^=^Г^со,+ <?2-<7з); (88)
■?,=V«e,; (89)
?в = свт; q2 = at*+b, (90)
где &л, £т —величины объемов легочного и тканевого резервуаров;
л, 6, с —постоянные коэффициенты; fCOiy ФСОа — концентрации С02
во вдыхаемом воздухе и образуемая в организме в процессе обмена
веществ соответственно; 0Л, От — концентрации СОг в легочном и
тканевом резервуарах; vn — скорость поступления вдыхаемого в лег-
кое воздуха (легочная вентиляция).
Уравнения (87) и (88) — уравнения непрерывности для легочного
и тканевого резервуаров, определяющие скорости изменения концент-
рации С02 в резервуаре через скорости движения С02 в потоках вы-
дыхаемого воздуха qlt артериальном q2, венозном q3. Здесь Ул^со*—
скорость поступления С02 во вдыхаемом воздухе; Фсо> — скорость об-
разования С02 в процессе обмена.
Уравнения (89) и (90) — уравнения равновесия концентраций
С02 в потоках: уравнение (89) — для выдыхаемого потока и легоч-
ного резервуара; уравнение (90) — для тканей, венозного потока и
легочного резервуара.
40
Ограничимся далее исследованием влияния на систему (рис. 18,в)
возмущающего воздействия ^ccv полагая ФСОа == const. Разрешая
систему уравнений (87) — (90) относительно 0,., найдем:
где Т = kAkr\ А = ckA + akT; В = ФСОа + b — постоянные коэффи-
циенты.
Уравнением (91) описывается поведение объекта управления
(рис. 18,в), находящегося под воздействием возмущения Fco2.
Управляющее устройство Дыхательного хемостата (рис. 18,6), со-
стоящее из дыхательного центра, регулирующего деятельность ды-
хательных мышц, осуществляет управление величиной легочной вен-
тиляции Vn, входящей в уравнение (91) в виде коэффициента или
параметра. Поэтому оказывается, что в биологической системе
(рис. 18,г) цепь обратной связи, содержащая управляющее устрой-
ство, замыкается через параметр, вызывая нелинейный характер дви-
жений в системе. Будем полагать далее, что в управляющем устрой-
стве биологической системы реализуются пропорциональный или
интегральный законы управления
V« = *f (вмтв,); (92)
dVJdt = k7(bt0-bT), (93)
определяющие параметрическую обратную связь. Тогда динамические
свойства хемостата будут определяться совокупностью уравнений
(91), (92) или (91), (93), представляющей нелинейную систему диф-
ференциальных уравнений.
В биологических системах реализация многих нелинейных зави-
симостей осуществляется благодаря обратной связи через параметры
и является уже традиционной задачей, вызывающей затруднения при
исследованиях {Л. 13, 14]. Вначале воспользуемся полученными ранее
результатами для выяснения эффекта стабилизации в статике, запи-
сывая уравнение (91) в следующем виде:
с*т = f >V*) = a (^СОя + "^Гр-)+ В, (94)
где функция f(FCOtt Va) реализуется нелинейным преобразователем
на два входа НП-2.
Графическое изображение семейства кривых (94) для различных
значений Z^cQj, приведено на рис. 19. Здесь кривая 1 соответствует
виду функции (94) при отсутствии С02 в составе вдыхаемого возду-
ха, т. е. в случае, когда на систему возмущение не действует. Увели-
чение концентрации С02 в составе вдыхаемого воздуха графически
определяет смещение ординат кривой / вдоль оси 0Т на величину,
пропорциональную значению/гСОа (кривые 2, 3 на рис. 19). Характер
графиков семейства кривых во многом походит на характер кривых,
изображенных на рис. 5, относящихся к работе стабилизатора на-
пряжения. Дальнейшее графическое построение будет связано с изо-
бражением (на рис. 19), прямой, соответствующей уравнению пара-
41
метрической обратной связи вида (92). Она отсекает на осях коор-
динат отрезки 1/л = &у0то и 0т = Это, а точки пересечения ее с семей-
ством кривых определяют решение системы уравнений (94), (92) при
различных значениях возмущения ^ссу
Из рис. 19 следует, что 9Т == 0хО и не зависит от fco^ в случае,
если прямая будет занимать горизонтальное положение. Этот ре-
жим обеспечивает идеальную стабилизацию концентрации СОг
в легочном резервуаре, равную норме (9т = 0то) при колебаниях
концентрации СОг во вдыхаемом воздухе. Он достигается за счет
увеличения ky—^оо.
Таким образом, исследования показывают принципиальную
возможность стабилизации показателя 6Т в дыхательном хемо-
стате за счет параметрической
цепи обратной связи. В реаль-
ной системе величина ky огра-
ничена, что определяет допу-
стимую по физиологическим
нормам жизнедеятельности ор-
ганизма в целом точность под-
держания концентрации СОг.
Результаты и выводы о работе
дыхательного хемостата в ста-
тике не отличаются от изло-
женного в § 1 материала по
эл ектрон н ы м стабилиз а тор а м
напряжения. Обе системы
с функциональной точки зре-
ния эквивалентны и различа-
ются лишь физической приро-
дой сигналов и реализацией
элементов. Можно оказать, что
это — родственные системы,
или с исте м ы - «р од ств е н н ик и »,
обладающие идентичным функ-
циональным строением, осно-
ванным на /принципе использо-
вания параметрической обрат-
ной связи и поэтому являющи-
мися нелинейными.
Созданная действием об-
ратной связи через параметр
нелинейность характеристик
в таких системах определяет
возможности работы в режи-
ме стабилизации. Поскольку
в данном случае мы не
разрабатываем, а лишь исследуем функционирование биологической
системы в рамках инженерной теории управления, в отличие от
стабилизаторов напряжения необходимо учитывать физиологиче-
ские ограничения, присущие действиям управляющего устройства.
Структурная схема управляющего устройства, реализующая тот
или иной законы параметрического управления (92), (93), появи-
лась здесь в результате абстрактных понятий теории управления,
а не физиологии. Поэтому при исследованиях функционирования
Рис. 19. Статические характери-
стики НП-2 дыхательного хемо-
стата и эффект стабилизации по-
казателя 6Т с помощью цепи пара-
метрической обратной связи.
42
системы нет 'необходимости в детализации действий реальных био-
логических элементов, выполняющих операции по формированию
указанных законов управления. Эти операции должны где-то вы-
полняться, чтобы функционировала система в целом, причем такие
понятия, как элемент сравнения, усилитель рассогласования, нельзя
переносить на биологические системы. В подобных системах такие
самостоятельные узлы могут отсутствовать, но их функции в целом
будут выполняться. Например, нелинейный преобразователь с дву-
мя входами НП-2 в линейном приближении может рассматриваться
как блок, осуществляющий обе указанные операции.
.Пусть в НП-2 реализуется зависимость вида
?. = /(В*.6т)= Д°9т +В. (95)
Тогда уравнение в приращениях записывается
А^=^А8Т0--^А9Т, (96)
где df/dBT9 = 1/(А + 6?), df/dBT = 0тО/(Л + 0Т)2 — постоянные коэффи-
циенты.
Величиной ky= 1/(А + ©J) определяется общий коэффициент уси-
ления, а уравнением (96) — операция, реализуемая элементом срав-
нения.
Следовательно, схема НП-2, реализующая функцию вида (95),
подходит с функциональной точки зрения в качестве управляющего
устройства биологического хемостата. Однако здесь операции по
формированию закона управления вида (96) выполняются над при-
ращениями переменных. Поэтому рабочую точку, в окрестности
которой осуществляется линеаризация, необходимо выбрать таким
образом, чтобы совпадали численные значения коэффициентов
в уравнениях (92) и (96). Другой путь состоит в добавлении к сиг-
налу АУл постоянного значения Ул<ь обеспечивающего номиналь-
ное (соответствующего норме 6то) значение стабилизируемой ве-
личины 9т при отсутствии возмущения ^С02 — О-
Тогда работа нп-2 будет происходить в режиме приращений
сигнала А0Т, вызываемых изменениями AFq0 при отклонениях концент-
рации СОг во вдыхаемом воздухе. Это улучшает условия работы
управляющего устройства, поскольку статическая ошибка системы,
определяющая точность стабилизации при нормальных условиях
(^со2=0), будет равна нулю и не зависит от коэффициента усиле-
ния k7 управляющего устройства. Учитывая изложенное, перепишем
закон управления биологической системы (92) в следующей форме:
v« = Meie-eT) (97)
^ Теперь уравнениями (91) и (97) определяются динамические
свойства замкнутой системы стабилизации химического состава СОг.
Структурная схема замкнутой системы, построенная по уравнениям
(91) и (97), приведена на рис. 20. Она лишь незначительно отли-
чается от рассмотренных ранее схем стабилизации. Входным,воз-
действием здесь является Fqq » выходным сигналом — концентра-
ция С02 в тканевом резервуаре 0Т, причем управляющий сигнал Ул
43
воздействует на объект только через его параметры, обусловливая
введение параметрической обратной связи.
Параметрическое воздействие изменяет статические и динами^
ческие свойства, поскольку в уравнении (91) появляются изменяе-
мые постоянные времени при производных d2QT/dt2 и dQT/dt, а ве-
личина возмущения, определяемая выражением в скобках в правой
' ^ Объект
Параметрическая обратная
связь
Регулятор
Рис. 20. Структурная схема замкнутой с помощью пара-
метрической связи системы дыхательного хемостата.
части уравнения (91), также подвержена изменениям. По существу
параметрическое воздействие сводится в системе к стабилизации ве-
личины выражения, стоящего в скобках правой части уравнения
(91). Действительно,, обозначая
2 = ^соа + ФсоА
и записывая уравнение в приращениях
Фсо
Az = AFCOa--^AV- (98)
найдем йг = 0 при условии
фсо,
4fco,=-(^r^- (99)
определяющем условие компенсации изменения Fco в замкнутой си-
стеме за счет параметрического воздействия АУП.
Перейдем далее к исследованию динамических свойств системы,
изображенной на рис. 20. Для сравнения получаемых здесь урав-
нений с уравнениями, выведенными ранее в § 1, 2, введем следую-
щие обозначения переменных: .
^со, = *> = г- ^ло = 'о, 9т = у, 0to = г/0.
Тогда, умножая левую и правую части уравнения (91) на Ул и
учитывая вводимые обозначения, найдем:
Ту+ y(A + V) + Уг = а (хг+ ФСОа) + Brt (100)
г = -Ыу.-у) + г.. (101)
44
Ранее было показано, что уравнения стабилизирующих уст-
ройств, разрешаемые относительно переменного параметра г, ока-
зываются проще и, следовательно, их использование при аналити-
ческих методах исследования более предпочтительно. Поэтому
запишем общее уравнение динамики, разрешая систему (100), (101)
относительно координат у и г. Тогда получим следующие нелиней-
ные дифференциальные уравнения, описывающие движение выби-
раемых переменных системы:
Ту + у[А + Vo + My (У — Уо)] +
+ У[г0 — by (Уо+ ах + В)] + kYy2 = аФСОл + (r0 — k7y0) {ах + В);
(102)
(103)
Умножая далее левую и правую части уравнения (ЮЗ) на k7 м
учитывая, что при х = 0, у= у0, г = у' = у = 0 в уравнении (100)
и, следовательно, у0 — В = яФС0 /г0, запишем уравнение (ЮЗ) в сле-
дующем виде:
7> +r{A + V) + г - (ах + ] к, + г» = ^УФС0,-
(104)
Полученное уравнение действительно более приемлемо для
исследований в данном случае, поскольку проще уравнения (102).
Уравнение (104) является нелинейным дифференциальным урав-
нением второго порядка, и потому его решения, определяющие
динамические свойства системы, могут быть найдены и исследованы
методом построения траекторий движения изображающей точки на
фазовой плоскости. Положим далее, что возмущающее воздействие
FCOa в системе и, следовательно, переменная х в уравнении (104)
представляются в виде ступенчатой функции времени. В этом слу-
чае фазовый портрет исследуемой системы представляет собой се-
мейство траекторий движения, каждая траектория которого соот-
ветствует фиксированному значению ординаты ступенчатой функции
возмущающего воздействия. Если теперь подставить в уравнение
(104) числовые значения входящих в него коэффициентов (напри-
мер, рассчитанные по данным типовой системы [Л. 13]), получим:
20/ + г (132,2 + 6,7г) + г (45 — \0*х))+ г* = 250. (105)
Представляя уравнение (105) в виде системы
dr 250 — (132,2 + 6,7г) г — г (45 — 10»*) — г2
dt в 20
dr
(106)
45
находим уравнение искомых траекторий движения на фазовой пло-
скости в следующей форме:
df _ 250 — г (132,2 + 6,7г) — г (45 — ЮЪс) — г2 ^
~dF ~ 90г ' ( )
Особые точки, определяющие химическое равновесное состоя-
ние исследуемой системы, удовлетворяют значениям корней алге-
браического уравнения
г2 + г,(45-ч103х)—250=0. (108)
Корни уравнения (108) зависят от величины приложенного
к системе ступенчатого возмущения х, т. е. равновесные состояния
системы требуют от управляющего устройства выработки различ-
ных по величине сигналов г в зависимости от величины действую-
щего возмущения х. Значения особых точек системы по управляе-
мому параметру г для типовых значений диапазона изменений воз-
мущения х приведены ниже:
X. . . 0 0,02 0,05 0,06 0,07 0,08 0,1 0,2
г, . . . 5 7,7 18,5 25 32,7 41,2 59,5 156
г8 . . . —50 —32,7 —13,5 —10 —7,7 —6,2 —4,5 —1,5
Дальнейшее исследование состоит в рассмотрении движений
изображающей точки в «малом» вокруг найденных выше значений
особых точек системы. Записывая систему (106) в вариациях пе-
ременных
dbr 2гбУ + дг (45 — 103х-) + (132,2 + 6,7r) Sr + 6,7r6Y
dt ~~~ 20
dt
(109)
и подставляя соответствующие значения х, г± или г2, приведенные
выше, находим характеристическое уравнение, корни которого)
определяют тип движения вблизи особой точки в «малом». Можно
показать, что особые точки г4 в данном случае представляют точки
типа «устойчивый узел», в то время как особые точки г2 — точки
типа «седло». Например, полагая х=0, /4 = 5, 6г=0, запишем харак-
теристическое уравнение системы (109) в виде
, 1 1 = Х2 + 165,7Х + 55 = 0. (110)
| _ (Ю + 45) — (X +165,7) ^ ^ v '
Корни уравнения (ПО) Xi =—0,3; А*=—165,7 — действительны
и отрицательны по знаку, что характерно для особой точки типа
«устойчивый узел». Характеристическое уравнение для особой точ-
ки г2 = —50 при Jt=0, 6г=0 запишется
~ЛГ ! , ,in =?i2— 143^ — 55 = 0.
+ 55 — X + 143
Соответствующие корни Xi = — 0,4; Х2=144,4— действительны,
но различны по знаку, что характеризует особую точку типа «сед-
ло», равновесное состояние системы в которой неустойчиво.
46
Таким образом, устойчивые равновесные состояния достигаются
в системе при значении управляемого параметра г, соответствую
тем т 1 для фиксированных величин, действующих на систе*му воз-
мущений х. Фазовый портрет движений изображающей точки для
фиксированного значения возмущения х приведен на рис. 21. Здесь
особая точка в левой полуплоскости является «седлом», справа —
«устойчивым узлом». Усы седла; переходящие в «большом» в сепа-
ратриссы, образуют свое-
образный «водораздел»
для траекторий движе-
ния изображающей точ-
ки, . качественная ка-рти-
iha которых -приведена
на рис. 21. Как следует
из приведенных выше
данных, с увеличением
возмущающего 'воздей-
ствия х точки левой по-
луплоскости («седла»)
смещаются вправо к на-
чалу координат, а точки
справа («устойчивые уз-
лы») перемещаются по
оси г ©право — в сторо-
ну создания больших
значений управляющего
параметра системы, необ-
ходимых для компенса-
ции возрастающих зна-
чений .возмущения х.
Исследования системы и
построение траекторий
движения изображаю-
щей точки на фазовой
плоскости можно авто-
матизировать, если вос-
пользоваться численным решением уравнений (100) и (101) на ана-
логовых или цифровых вычислительных машинах.
Поскольку построение качественной картины движений не тре-
бует в ряде случаев высокой точности решений, наиболее употре-
бительны АВМ.
На рис. 22 представлена схема набора нелинейных дифферен-
циальных уравнений объекта управления и управляющего устрой-
ства для получения решений на АВМ. Схема позволяет исследовать
динамические свойства системы для широкого класса возмущаю-
щих воздействий х детерминированного или случайного вида, вы-
являть влияние отдельных коэффициентов системы на быстродей-
ствие и точность ее работы.
Осциллограммы переходных динамических процессов в системе,
определяющие создание управляющего сигнала параметра г (легоч-
ной вентиляции Ул) при воздействии на систему возмущений
x(Fcoz) ступенчатого вида, показаны на рис. 23,6. На осциллограм-
мах видно различие в нарастании процесса, определяемое изменяю-
щейся постоянной времени дифференциального уравнения объекта
управления. Кроме того, в отличие от линейной системы переход-
\г При** 0,0*5
Рис. 21. Фазовые траектории движения
системы дыхательного хемостата, опре-
деляющие качественную картину дина-
мических свойств системы с параметри-
ческой обратной связью.
47
ные процессы при ступенчатом «сбросе» возмущения Fco2 происхо-
дят значительно быстрее, чем при его возрастании. Рисунок 23,6
иллюстрирует влияние коэффициента усиления управляющего уст-
ройства k7 на характер протекания переходного процесса установ-
ления управляемого параметра. Увеличение коэффициента усиле-
ния ky в определенных пределах повышает быстродействие в выра-
Рис. 22. Структурная схема математической модели дыхатель-
ного хемостата для решения уравнений на аналоговой вычис-
лительной машине (АВМ).
ботке и установлении требуемого значения управляемого параметра
Ул, улучшает точность работы системы в целом. Реальные пере-
ходные процессы при вдыхании углекислого газа оказались близ-
кими кривым на рис. 23 [Л. 13, 14].
Таким образом, возвращаясь к постановке задачи стабилизации
химического равновесного состояния биологической системы, отме-
тим, что одноконтурная цепь дыхательного хемостата не отличается
®т рассмотренных ранее стабилизирующих устройств, имеющих
цепь параметрической обратной связи. Описание многокомпонент-
ной системы стабилизации показателей химического состава, осно-
ванной на использовании более сложных схем с параметрическим
управлением, выходит за рамки настоящего изложения. Несмотря
на актуальность поставленных. в этой области задач по обеспече-
нию жизнедеятельности организма человека на больших высотах,
при кислородной недостаточности и других возмущениях, трудности,
с которыми встретились исследователи подобных систем, весьма
типичны для многих биологических систем, где, учитывая парамет-
рические взаимосвязи при регулировании, удается более точно со-
ставить суждение о характере реальных процессов.
48
%
1,0
0,8
0,6
w
0,2
О
г
кура
icmei
Г " ' 1
77
/г
ку
У/
к
а)
10 20
30 О
%
1,0
0^
0,6
0,«
0,2
О
Г |
/7/7-74
<
—U,L
(0,04
що?
h
11
1,01
pat
'теп
0,07
б)
70
20
30
5 мин
Рис. 23. Переходные процессы в динамической системе дыхательно-
го хемостата, обусловленные влиянием параметрической обратной
связи.
а —кривые изменения легочной вентиляции при неизменной величине ^CCV
соответствующей 5%-ному содержанию со2 в смеси, для различных значений
коэффициента усиления регулятора ky\
б — кривые изменения легочной вентиляции при различных значениях fqot'
4. СТАБИЛИЗАЦИЯ МОЩНОСТИ ЯДЕРНОГО РЕАКТОРА
Рассмотрим задачу стабилизации мощности ядерного реактора.
Ядерный реактор представляет собой устройство для производства
промышленной электроэнергии на основе использования энергии
управляемой цепной реакции деления ядер. Энергетические установ-
ки, использующие ядерный реактор, получили название атомных
(точнее, «ядерных») электростанций. Первой такой энергетической
установкой (работает с 1954 г.) является атомная электростанция
АН СССР мощностью 5 000 кет [Л. 15]. Ее структурная схема при-
ведена на рис. 24. Основной элемент установки — ядерный реактор
на медленных нейтронах (тепловой реактор), заключенный в сталь-
ной цилиндрический корпус высотой 2 и диаметром 1,5 м. Он уста-
новлен на бетонном основании. Для отбора тепла, выделяющегося
4—1374
49
в активной зоне реактора, используется система охлаждения. Она
состоит из трубопроводов, по которым с помощью насосов прока-
чивается вода, охлаждающая реактор, а отводимый нагретый в зоне
реактора поток воды поступает далее в теплообменное устройство
(теплообменник-парогенератор), производящее нагретый пар. По-
следний воздействует на турбину, вырабатывающую электроэнер-
гию. Отработанный пар поступает затем в конденсатор. Циркуляция
пара осуществляется с помощью насоса цепи парогенератора.
15
Рис. 24. Функциональная схема системы стабилизации мощности
ядерной энергетической установки.
/ — урановые стержни; 2 — графитовая кладка реактора (замедлитель нейтро-
нов); 3 — аварийные стоп-стержни; 4 — управляющие стержни реактора, поло-
жение которых регулируется с помощью исполнительных двигателей Д систе-
мы регулирования мощности; 5 — датчики для измерения плотности нейтрон-
ного потока (мощности ядерного реактора); 6 — насос; 7 — трубопроводы си
стемы охлаждения; 8 — теплообменник-парогенератор; 9 — насос цепи пароге-
нератора; W — конденсатор; U — турбогенератор; /2 —защитный слой бетона:
/3 — защитный слой воды; 14— защитный металлический корпус реактора;
15 — защитные плиты.
Защита обслуживающего персонала станции от радиоактивного
облучения обеспечивается чугунной плитой, закрывающей реактор
сверху, и защитными слоями воды и бетона толщиной 1 и 3 м со-
ответственно.
Кроме того, обычно применяется передача тепла, выделяюще-
гося в активной зоне ядерного реактора, через два теплообменника:
первый замкнутый контур движения охлаждающей воды через
реактор и второй замкнутый контур циркулирующей воды, нагре-
ваемой стенками трубопровода первого таким образом, что здесь
циркулирует теплоноситель, не проходящий через реактор и потому
нерадиоактивный.
5Q
Ядерный реактор в качестве основного узла имеет так назы-
ваемую активную зону, где происходит управляемая цепная реак-
ция деления ядер загружаемого ядерного горючего. Основное тре-
бование к последнему — способность поддерживать цепную реакцию
деления. В приведенной схеме (рис. 24) общая загрузка реактора
составляет 550 кг, ядерного горючего — урана, обогащенного изо-
топами U235. Для управления цепной реакцией деления ядер
в ядерном горючем используются замедлители нейтронов — графит.
Обычно активная зона — это графитовый цилиндр, в котором свер-
ху вниз проходят рабочие каналы реактора. В каналы помещаются
тонкостенные стальные трубки, внутри которых находится ядерное
горючее. Другие каналы содержат компенсирующие стержни из
материала, поглощающего нейтроны. Эти стержни по мере выгора-
ния ядерного горючего постепенно и периодически поднимаются из
рабочей зоны. Для управления мощностью реактора имеются ка-
налы, содержащие стержни типа компенсирующих, но непрерывно
управляемые по положению в канале с помощью исполнительных
двигателей управляющей системы. Все каналы ядерного реактора
омываются охлаждаемой водой системы теплопередачи.
В ядерном горючем осуществляется цепная реакция деления
ядер урана под действием нейтронов, за счет которой выделяется
огромная тепловая энергия. Осуществление саморазвивающейся
цепной реакции деления возможно было бы в том случае, когда
каждое разделившееся ядро атома создавало бы один вторичный
нейтрон, вызывающий затем деление нового ядра. В этом случае
коэффициент размножения k—A, вообще же цепная реакция воз-
можна при k^\[. Однако необходимо учитывать, что часть нейтро-
нов может вылететь из активной зоны и не будет участвовать
в поддержании реакции. Вводится показатель кЭфф=у&, где вели-
чина у — коэффициент, определяющий потерю части нейтронов.
Условие цепной реакции деления записывается так:
Ьэфф=ук^ 1.
Обычно k определяется типом реактора, а изменение &эфф осу-
ществляется изменением у с помощью компенсирующих и регули-
рующих стержней реактора. При пуске реактора регулирующие
стержни выведены и &Эфф>1, в рабочем режиме реактора необхо-
димо иметь и поддерживать Лэфф = 1, для этого существует система
управления регулирующими стержнями. Мощность ядерного реак-
тора пропорциональна числу делящихся в единицу времени ядер
или числу нейтронов в реакторе, или плотности нейтронного по-
тока. Поэтому мощность ядерного реактора определяется плот-
ностью нейтронного потока. Для измерения плотности нейтронного
потока в реакторе устанавливаются датчики. Основным показателем
относительной скорости изменения мощности является реактив-
ность р, равная (&Эфф—1)/&эфф. Реактивность реактора определяет
меру отклонения от рабочего режима, при котором ^Эфф = 1 i(p=0).
Управление мощностью ядерного реактора, таким образом, озна-
чает стабилизацию его реактивности при значении р=0 за счет
соответствующего перемещения регулирующих стержней. Следова-
тельно, стабилизирующее устройство должно представлять собой
замкнутую систему автоматического управления положением регу-
лирующих стержней, входным сигналом которой является уставка
реактивности ро=0, а регулируемой переменной — истинное значе-
4* 51
ние реактивности ядерного реактора р. Управляющее устройство
включает узел получения рассогласования значений реактивности
ро—р и узел, реализующий выбранный закон управления, а также
исполнительные двигатели, воздействующие на перемещение регу-
лирующих стержней ядерного реактора. Необходимы также датчики
для измерения величины реактивности, мощности ядерного реак-
тора и плотности (концентрации) нейтронов в потоках различных
групп излучателей (рабочих стержней реактора). Обычно для изме-
рения плотности нейтронов используются быстродействующие иони-
зационные датчики.
Рис. 25. Схема типового датчика для измерения плотности нейтрон-
ного потока и реактивности ядерного реактора.
/ — ионизационная камера; напряжение ^ВЫХп пропорционально плотности
нейтронного потока (мощности реактора); напряжение ^вых р пропорцио-
нально относительной скорости изменения мощности реактора (реактивности
ядерного реактора).
На рис. 25 приведена схема одного из типовых датчиков такого
вида, представляющего ионизационную камеру, заполненную газо-
образным соединением бора BFa — трехфтористым бором. При
ионизации молекул BF3 потоком нейтронов в цепи коллектора этого
ионного устройства, работающего в области несамостоятельного
разряда, возникает ионизационный ток, величина которого и, сле-
довательно, величина напряжения на нагрузочном сопротивлении /?н
пропорциональны концентрации нейтронов в зоне размещения дат-
чика. Время срабатывания устройства составляет около 0,001 сек,
что удовлетворяет требованиям быстродействия при управлении
мощностью ядерного реактора на медленных нейтронах. Датчики
величины реактивности ядерного реактора имеют ряд модификаций.
В качестве примера на рисунке представлена одна из применяемых
схем, являющаяся последовательным соединением ионизационной
камеры с логарифмирующей и дифференцирующей цепочками. Это
обеспечивает получение на выходе напряжения, пропорционального
реактивности как относительной величины изменения скорости изме-
нения мощности. Более подробное рассмотрение указанных схем
выходит за рамки настоящего изложения.
Остановимся далее на уравнениях динамики ядерного реактора
как объекта управления. Такие уравнения известны из технологии
ядерных реакторов [Л. 16, 17] и представляют собой систему не-
линейных дифференциальных уравнений с нелинейностями типа
«произведение», обусловленными с функциональной точки зрения
наличием в объекте управления параметрических цепей обратной
52
связи. Уравнения ядерного реактора могут быть записаны в раз-
личной форме. Например, в виде следующей системы дифферен-
циальных уравнений:
dn p-lft
—;—n + VktCt + s\
dt
dCt
dt e
dT,
•\tCt
dt
bj/г— CjTjt
(111)
где a$, bj, Cj—постоянные коэффициенты; p — реактивность ядер--
ного реактора; п — плотность нейтронов; С*—концентрация 1-й
группы; Xi — постоянная распада t-й группы излучателей замедлен-
ных нейтронов; е — время генерации нейтронов; s — запас нейтро-
нов; Tj — температура /-го района реактора. Для случая ядерного
реактора малой мощности кинетические уравнения могут быть за-
писаны в следующем виде:
т \
Т ~5Г = *(t) + *{t) у (t)~~ у {t) + S atCi (t);
(112)
dCt (t)
-dt
К ly{t) — Ct{t)] при £ = 1. .
. m,
где p, a\, %i — постоянные коэффициенты; x(t)—входной сигнал
(реактивность ядерного реактора); y(t) — выходной сигнал (отно-
сительное отклонение мощности от установившегося значения);
Ci(t)—относительное изменение концентрации i'-й группы замед-
ленных нейтронов.
Наконец, входной x(t) и выходной y(t) сигналы ядерных реак-
торов могут быть связаны нелинейным дифференциальным уравне-
нием вида
k
Sd$x
/=1
dO)x
dt*
(113)
где а и b — постоянные коэффициенты.
Соответствующее нелинейное статическое уравнение, опреде-
ляющее равновесное состояние системы (113), где производные
равны нулю, имеет следующий вид:
Уо-
(ао+а0оХо) y0=b + b0x0t
b + b0x0 . . В
#0j+ #00*0
-А +
#0 ~Т~ #00*0
(114)
53
где Л = 6о/яоо; B=b—а0А — постоянные коэффициенты. При 1=2,
j=\t й = 60 = о; = а;0=ао=0 уравнение (113) записывается'
I / \ dy ( dx\ л
где x(t)—реактивность ядерного реактора; y(t)—относительное
отклонение мощности.
Рассмотрим далее частные случаи уравнения (113). Пусть си-
стема стабилизации реактивности ядерного реактора описывается
уравнениями вида
dy Л
-зг + (а.+ аюг)у=Ь,г; I
r = (yi — y)- j
Тогда результирующее дифференциальное уравнение запишется
dy
—ft- + У («о + ьо + а00у0) — а00у* =rb0y0. (116)
Структурная схема системы (115) представлена на рис. 26,а,
где
, __&£_. Доо . . J „т
Тогда с учетом приведенных обозначений уравнение (116) по-
лучает следующий вид:
Т-^г+У^+Ь-^Уо) + My* = ky0. (117)
Уравнение (117)—нелинейное дифференциальное уравнение
первого порядка (сравните с уравнениями системы стабилизации
напряжения), которое может быть решено аналитически. Например,
полагая r/0 = const и используя метод разделения переменных,
найдем:
f (B + D)e-Ct \
yV)-y.\l- (А^с< )- (118)
где
i4=l+ft(l+Xj,,)(l+Xj,»); B=(l—^-)[l+ft(l+Xi,.)]; Z>=
= XA<*.-*•)<!+**.): C=l+T\\l^f ,
а величина z/° определяется соответствующим уравнением статики
0° (1 + 6—Xky0) +Xk(y°)2=kyQ. (И 9)
Рассмотрим далее систему, описываемую уравнениями второго
порядка (113) вида
d2y dy
аг яг ^ (120)
г = (Уо — У)-
54
Регулятор
НП-2
Объект
а;
0
Рис. 26. Структурная схема стабилизации мощности (реактивности)
ядерного реактора.
а — схема для объекта первого порядка; б — схема для случая математическо-
го описания объекта дифференциальным уравнением второго порядка; / — па-
раметрическая обратная связь в обьекте управления; 2 — основная отрицатель-
ная обратная связь, реализуемая для стабилизации мощности ядерного
реактора.
Представляя структурную схему системы в виде рис. 26,6 и
учитывая приведенные обозначения, находим:
-Ц- + 2£со0 + а$(1 - Ikr) у = ufyr.
Учитывая, далее, уравнение статики системы
*М1+Х0*)=0в[1+*(1 + А0*)]
(121)
(122)
и вводя обозначения Y=Xy, Y0=Xy0l получим следующее нелиней-
ное дифференциальное уравнение системы:
+ 2£со0 ^ + со* (1 + k - kY,) Y + egfey = «g*y.. (123)
Поскольку уравнение (123) — дифференциальное уравнение
второго порядка, его решения могут быть представлены траекто-
55
риями движения изображающей точки на фазовой плоскости. На-
пример, полагая У0 = const, запишем уравнение (123) в виде
d* . = (о^У0 сфу2 - со*У (1 + k - kY0) - 2faj =
У =
У =
dt
dY
= Q(y, У);
= Р(У, У).
(124)
Уравнение траекторий движения изображающей точки на фа-
зовой плоскости запишется
dY
dY
<*20kY0 -"2&».У - со* (1 + k - kY0)Y - «g*y«
(125)
Особые точки, определяющие положения равновесия, находятся
в виде корней следующего алгебраического уравнения:
У2 + ("Ч^-7о)У-Уо = 0'
откуда получаем:
_ JL fl+jl
Ylt2-— 2 [ k
(126)
Исследуем виды движения системы вблизи особых точек, запи-
сывая уравнения (124) в вариациях
dbY, = 2?со0дУ + ©2 [ 1 + k — 6У0 + 2£У] 5У;
dt
dbY
dt
= 8y.
(127)
Выражение в квадратных скобках, стоящее в правой части
первого из уравнений (127), с учетом значений особых точек У1,2,
определяемых уравнением (426), запишется в виде
[•] = ±2й1/(т-уо),^' + Уо'
Характеристические уравнения системы (127) для У4 и Уг
запишутся в виде
+ 2^ + 20)2^/ ^-Ш--у2у4" + Уо = 0;
^2 + 2£°>(
откуда
^•1,2 :
=-5co0±co0^/^T2^j/ (Ш-_у2у^ + У0
56
Воспользуемся найденными выражениями для построения ка-
чественной картины фазовых траекторий движения изображающей
точки, задавая следующие численные значения параметрам систе-
мы: &=il, 5=0,707, coo=il для различных уровней ступенчатого сиг-
нала У0. Пусть вначале Уо=2.
Тогда особые точки определяются Уь2 = + vе! , [причем точка
У, = v2 — устойчивый фокус, а точка У2 = — v2 — седло. Далее
для значений У0=22/з находим особые точки Vi =il,98, Уг——1,32,
причем вновь Yi— устойчивый фокус, У 2— седло. Фазовые портре-
ты качественных картин движения изображающей точки приведены
на рис. 27,а, б, где Ус седла определяет сепаратриссу движения
к устойчивому фокусу.
Рис. 27. Фазовые портреты качественной картины траекторий движе-
ний изображающей точки регулируемой системы с внутренней пара-
метрической обратной связью* объекта при различных уровнях сту-
пенчатого входного сигнала Y0.
Изменим знаки Уо, задавая У0=—1 и Уо=—2. В этом случае
качественная картина движений изображающей точки на фазовой
плоскости сохраняется, однако положение особой точки типа устой-
чивого фокуса смещается в область отрицательных значений
(рис. 27,0, г).
57
На рис. 28 приведен фазовый портрет траекторий движения
изображающей точки для случая, когда &=1, £=0,707, <Оо = 1,То = 2,
который точнее рассчитан в «большом» методом изоклин. Здесь
показаны черточками наклоны участков траекторий движения,
образующие «поле направлений» фазового портрета в каждой из
множества точек фазовой плоскости (у, у). Соответствующее урав-
нение изоклин записывается в виде
у tg ос = со^о — 2fa0y — со0 (1 + k — ky0) у — co^f/2,
где а — угол наклона участков траекторий движения.
Задавая значения у, у в каждой из точек фазовой плоскости,
находят соответствующие значения tg а, удовлетворяющие этому
уравнению. На рис. 28 определены
сепаратриссы фазового портрета,
являющиеся ib «большом» продол-
жением усов седла особой точки,
находящейся в левой полуплоско-
сти, и представляющие континиум
особых точек, выделяющих обла-
сти движений, при которых обе-
спечивается сходимость процесса
■к устойчивому положению равно-
весия. Область начальных значе-
ний системы стабилизации (на
рисунке заштрихована) является
«запрещенной», ибо приводит к
движениям по фазовым траекто-
риям, не достигающим особой точ-
ки типа устойчивого фокуса ©пра-
вой полуплоскости. Найденные
области устойчивых и неустойчи-
вых начальных значений положе-
ния системы зависят также от ве-
личины коэффициента X.
Исследование решений урав-
нений вида (113), порядок которых
выше второго, не может (быть про-
ведено методом фазовой плоско-
сти. Остановимся поэтому на ре-
шении таких задач методом гармо-
нической линеаризации, разрабо-
танном для систем, дифференциаль-
ные уравнения которых имеют нелинейные члены вида произведений
или степеней переменных [Л. 18, 19].
Рассмотрим вначале простой пример дифференциального урав-
нения первого порядка
-%- = x'(t) + x(t)y(t), (128)
служащий для иллюстрации метода, а затем, перейдем к исследова-
ниям системы вида (113). Пусть функция x(t) имеет вид:
х (t) = x0 + xl cos Ы = Re (х0 + xtei(ot). (129)
Рис. 23. Фазовый портрет
траекторий движения регули-
руемой системы, более точно
определяющий «запрещенную»
область начального множества
значений координат системы
стабилизации.
58
Выходной сигнал системы, являющийся искомым решением tie-
линейного дифференциального уравнения (128), записываем в виде
суммы гармонических составляющих различных частот
= Re 2
v=0
(130)
Учитывая далее, что для произведения действительных частей
комплексных чисел Z\ и г2 справедливо выражение
Re гх Re z2 = -у-Re (z,02 + ^2*2),
где звездочкой обозначено сопряженное комплексное число, напри-
мер z2 = a+jb, z*2=a—jb, и подставляя выражения сигналов (129),
(130) в исходное дифференциальное уравнение (128), найдем:
Re S jwy,clwt = Re (х. + я,**"') +
+ 4-Re
it
v=0
vv=0 v—0
Переписывая уравнение (131) в виде
т.
5]
)
(131)
Re J }шу^ — — x.e'-' - x. J] <//v<°' -
4=0 v=0
- 4-*. I}} ^e(v+,)'+1] <*-'>')}=о
v=0
(132)
и составляя уравнения «баланса» коэффициентов при членах с оди-
наковыми частотами, получим систему уравнений
1
*о + *оУо + -у Re хлух = 0;
(133)
Ух (/со— х0) — хх ^1 + у0 + 4гу2 j = 0;
f/2 (;2со — х0) — -у (01 — у г) = 0;
0П (//г© — х-о) — -у"(0»-! — = °-
Найдем далее из системы алгебраических уравнений (133) гар-
монический комплексный коэффициент усиления, определяющий
59
реакцию системы на гармонический входной сигнал!
_ 1+0.
~ . 1 2 1
усо-х0- — хх- — j
у2со — х0- -j-X! j j
/Зсо-х0-гх^-...
(134)
Выражение (134) представляет собой цепную дробь с ограни-
ченным числом членов т, а если т—^оо, то бесконечную цепную
дробь. В практических приложениях обычно учитывается постоян-
ная составляющая и первая гармоника, а с помощью уравнения
(134) могут быть оценены погрешности расчета, вызываемые пре-
небрежением высших гармонических составляющих.
Рассмотрим систему уравнений ядерного реактора (112), пола-
гая, например, i=6, чем определяется соответствующий порядок
системы. Естественно, исследование такой системы не может быть
проведено методом фазовой плоскости.
Полагая далее, что реактивность ядерного реактора x(t) явля-
ется периодическим входным сигналом вида
х (0 = Re (х,+ , (135)
ищем искомые решения системы (112) в виде суммы бесконечного
ряда гармонических составляющих вида
Loo
0(O = ReE </У •> О36)
v=0
00
Ct(0 = ReS (137)
v=0
Подставляя выражения (135)—(137) в исходную систему диф-
ференциальных уравнений (112) и приравнивая коэффициенты при
членах с одинаковыми частотными составляющими, приходим к сле-
дующей системе уравнений:
*оО +0o) + 4-Re*iyi=;O; )
#v [С? (/vto) — Xol— (#v_i +У, + \) =° ПРИ v=- l,2...oo,j
60
где введено обозначение
о(/«)-/»(т + |]15Тхг)-
(138)
После исключения переменных xv из системы (138) найдем гар-
монический комплексный коэффициент усиления в виде
У\ 1 + У о
К (/со):
G (/со) — х0 — -j- х\ X
х-
(139)
G(/2co)-Xo- — А
представляющий аналогично (134) бесконечную цепную дробь, в ко-
торой /vco заменяется функцией 6 (/vco) более общего вида.
Комплексный коэффи-
циент усиления К (/со) мо- \\к(/а>)\
жет быть записан через его '
модуль и фазу
/С(/со) = |/С(/со)и^ш),
где вид |/С(/со)| и ф(со)
определяется из выражения
(139). Соответствующие
графики функций \К(]'<о)\ и
ф(со) комплексного коэффи-
циента усиления приведены
на рис. 29, где для упроще-
ния расчетов *о=0. Здесь
кривые семейства, соответ-
ствующие значениям *i = 0,
определяют линейную ис-
ходную систему (112), в ко-
торой отсутствуют нелиней-
ности типа произведения, а
|/С(/<о)| и 1ф((0) в этом
случае есть амплитудно- и
фазо-частотные характери-
стики линеаризованной си-
стемы уравнений ядерного
реактора. Как следует из
рисунка, в нелинейной си-
стеме с параметрическими
связями в отличие от ли-
неаризованной системы с ростом амплитуды Xi гармонической со-
ставляющей реактивности |/С(/со)| и xp(co) уменьшаются по вели-
чине, что приводит к эффекту увеличения запаса устойчивости по
модулю и фазе.
5. СТАБИЛИЗАЦИЯ ДИНАМИЧЕСКИХ СВОЙСТВ СИСТЕМ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Рассмотрим применение параметрических o6r^tjnjx_cbh3eu в ка-
честве це7те1Г корТУещ
стем, т. еУ прт^ Jme-
лШТьГм "или эталонным}. ~~
Рис. 29. Амплитудно-частотная и
фазо-частотная характеристики гар-
монического комплексного коэффи-
циента усиления регулируемой систе-
мы с внутренней параметрической
цепью обратной связи ядерного реак-
тора при различных значениях ампли-
туды входного сигнала.
61
Эталонное поведение системы может быть задано в различной
форме и определяется .предъявляемыми к системе требованиями. На-
пример, в форме кривой переходного процесса при определенном
виде детерминированного входного сигнала; показателей качества пе
реходного процесса, таких, как время установления, величина пере-
регулирования или колебательности; кривой переходного процесса
вида экстремальной функции. Другая возможность заключается в за-
дании структуры и параметров эталонного устройства (эталонной
модели), определяющей динамические свойства разрабатываемой си-
стемы как образцовой меры. В этом случае аппаратура эталонной
модели обычно включается в схему реальной автоматической системы
с целью сравнения и последующей^«стабилизации» ее динамических
свойств по эталону (системы с моделью). Дальнейшая детализация
приводит к задачам оптимального управления в смысле выбранных
критериев поведения динамической системы (например, минимум
среднеквадратичной ошибки или времени установления, максималь-
ный к. п. д. или максимальная мощность в нагрузке и т. д.), кото-
рые здесь не рассматриваются.
Возможности изменения динамических свойств замкнутых систем
автоматического регулирования за счет изменения параметров
с целью обеспечения устойчивости и повышения качества хорошо
известны. Эти задачи решаются, например, в линейных САР с по-
мощью критериев устойчивости, при оценке качества по частотным,
интегральным методам и методам расположения корней, а также по
кривым /)-разбиения.
В нелинейных САР определенному множеству значений параме-
тров и начальных условий ставится в соответствие фиксированная
траектория движения изображающей точки в фазовом пространстве,
а изменение параметров ведет к изменению картины фазовых траек-
торий, влияя также на положение состояний ее устойчивого равно-
весия. Изменение картины фазовых траекторий не всегда и не в лю-
бых точках пространства является непрерывной (аналитической)
функцией множества значений параметров системы. Если значения
параметров меняются непрерывно или дискретно (ступенчатое пере-
ключение), то малое их изменение означает не просто переход с одной
фазовой траектории движения на другую в «малом», а иногда при-
водит к совершенно измененной картине движения изображающей
точки. Очевидно также, что скорость изменения параметров в свою
очередь влияет на поведение динамической системы, т. е. на картину
движения изображающей точки в фазовом пространстве.
Системы, в которых изменение множества значений ее параме-
тров осуществляется по заранее заданным законам в функции вре-
мени, являются системами с переменными параметрами. Их рассмо-
трение выходит за рамки настоящего изложения [Л. 9]. Здесь будут
рассмотрены системы, в которых изменение значений параметров осу-
ществляется в функции отдельных координат системы (например,
выходного и входного сигналов или значения рассогласования и их
производных по времени). Такие системы, более сложные для изуче-
ния происходящих в них процессов, позволяют осуществлять и более
сложные функциональные операции по коррекции их динамических
свойств с помощью параметрических обратных связей, вводящих до-
полнительные нелинейные зависимости. Они могут быть реализованы
с помощью непрерывных или дискретных устройств, изменяющих па-
раметры регулятора в замкнутых линейных или нелинейных САР
в соответствии с алгоритмами цепей параметрических обратных свя-
62
зей. Алгоритмы определяются в виде законов функционирования или
программ переключения значений параметров, обеспечивающих ста-
билизацию динамических свойств системы по заранее заданному эта-
лону.
В линейных САР изменяемые параметры регулятора определяют-
ся в виде изменяемых коэффициентов усиления, постоянных времени
и времени транспортного (чистого) запаздывания отдельных элемен-
тов, которые могут находиться в прямой цепи, цепи основной или
дополнительных (местных) обратных связей САР. В нелинейных
САР, кроме того, возможно управление соответствующими нелиней-
ными преобразователями НП за счет изменения структуры и харак-
тера _ функциональных зависимостей между переменными. Например,
в Я/7-7 типа зоны нечувствительности и ограничения могут изменять-
ся величина зоны нечувствительности и уровень сигнала ограничения,
в другом случае—ширина петли гистерезиса и т. д. Подобные устрой-
ства, через которые проходят сигналы и параметры которых изме-
няются во времени по заданным алгоритмам, выполняют функции
модуляции сигналов, изменяя их частотный спектр, что в свою оче-
редь оказывает влияние на устойчивость процессов замкнутой САР
в целом.
Рассмотрим примеры стабилизации динамических свойств САР
с помощью введения цепей параметрического регулирования. В исход-
ную линейную систему (рис. 30,а) введем параметрическую обрат-
ную связь непрерывного вида, изменяющую коэффициент демпфиро-
вания таким образом, чтобы улучшить динамические свойства исход-
ной САР. Уравнения исходной САР имеют вид:
(ek0 - TlPx) k = p(\+PT) *, f <14U>
где Xo, x — входной и выходной сигналы; k0 — коэффициент усиления
регулятора; Ti — постоянная времени гибкой обратной связи системы.
Уравнение исходной САР запишется в виде линейного дифферен-
циального уравнения второго порядка
Т d2x , rdx
Kk dt2
~*~ dt [ k0k + k0 J + x'
■xot (141)
где 0 = H—— коэффициент, пропорциональный величине
демпфирования, который в линейной САР обычно выбирается исходя
из компромиссных требований: его уменьшение повышает быстродей-
ствие системы в начальном участке переходной характеристики, вы-
зывая, однако, колебательные процессы при приближении к устано-
вившемуся значению (х=х0=const), и, наоборот, большая его вели-
чина замедляет движение системы в начальном участке, обеспечивая
апериодические процессы на участке установления. Для удовлетво-
рения быстродействия в начальном участке и отсутствия колебаний
при приближении к установившемуся значению (эталон стабилизации
динамических свойств системы) необходимы дополнительные сред-
ства коррекции, связанные, как правило, с введением воздействий по
производным от рассогласования е, что вызывает значительные за-
труднения. Введя цепь параметрической обратной связи внутрь глав-
ного контура исходной САР так, чтобы величина 9 в начальном уча-
стке процесса была мала, а увеличивалась бы на участке установле-
63
ния значения х, можно решить задачу стабилизации динамических
свойств системы более простыми средствами. Осуществим замыкание
цепи параметрической обратной связи на коэффициент усиления ре-
I 1 —
Регулятор
Объект
б)
НЛ-2
Ър
Регулятор | 1
Объект
т2'р
Рис. 30. Стабилизация динамических свойств исходной САР
а — структурная схема исходной линейной САР; б — структурная
коэффициента усиления регулятора; / — цепь параметрической
в — окончательный вид структурной схемы САР с изменяемой
зи, 2—цепь основной обратной связи; г. а — переходная харакге
ной САР (1) (рис. 30,а) и нелинейной системе
64
гулятора через множительное звено и дополнительное звено гибкой
обратной связи Т2р (рис. 30,6).
Уравнения системы имеют следующий вид:
6 ■ Xq х,
z = kQmexT2',
(z — Tlpx)k = p(\ + pT)x,
(142)
где m — масштабный коэффициент множительного звена; Г2 — по-
стоянная времени звена гибкой обратной связи. Результирующее
дифференциальное уравнение оказывается нелинейным
Т сРх
Кк dt2
+
dx
dt
Г Т1
—г- + -т— — тТ2(х0 — х)
]...
(143)
Здесь величина 9 определяется выражением в квадратных скоб-
ках, удовлетворяя поставленным требованиям. Однако это уравнение
претерпело изменения, которые устранятся, если положить в (142)
z = mk0T2ex + е = (mk0T2X + 1) е,
(144)
что определяет окончательную структурную схему системы в виде,
представленном на рис. 30,в. Нелинейное дифференциальное уравне-
ние такой системы имеет вид:
Т
_l_ I _!_ 1_ ^ '/' i ^ \ I -4-
d2x , dx
T 1 х
+ -г2- — mT2(x0 — х) + — =
к0
d2x
dt2
, dx Г I 1
(145)
Пусть далее, Ti = mk0t2, тогда величина 9 определится выраже-
-—+Т1[\-(х0-х)].
t=0
введением корректирующей цепи параметрической обратной связи,
схема САР с цепью параметрической обратной связи, изменяющей величину
обратной связи, 2 — цепь отрицательной «силовой» обратной связи исходной САР;
величиной коэффициента демпфирования: / — цепь параметрической обратной свя-
ристика и фазовый портрет траекторий движения изображающей точки в исход-
с параметрической, обратной связью (2) (рис. ЗО.в).
5—1374 65
Если входной сигнал представляет собой ступенчатую функцию
хо=<1(0> то ПРИ :*=0, х=0 величина 0=il/£, а затем возрастает до
значения 0—*\Jk + Ti по мере приближения к установившемуся
значению х0=х, удовлетворяя поставленным требованиям коррекции.
На рис. 30,г, д иллюстрируются процессы в исходной (/) и стабили-
зированной (2) по динамическим свойствам системах при введении
параметрической обратной связи, фазовые траектории движения изо-
бражающей точки в случае (2) непрерывно «сшиваются» из беско-
нечно малых кусков фазовых траекторий исходной системы, обеспе*
чивая движение по выбранному эталону.
R L
Рис. 31. Функциональная схема САР по положению задаю-
щей оси, реализуемая введением корректирующей цепи па-
раметрической обратной связи.
На рис. 31 приведена САР по положению, реализующая струк-
турную схему на рис. 30,6. Здесь потенциометры Яь #2 обеспечи-
вают задание уставки и получение выходного сигнала (отработка
положения оси двигателя постоянного тока Д). Через тахогенератор
ГА вводится гибкая обратная связь с постоянной времени Г4. Тахо-
генератор 7Т2 обеспечивает введение гибкой обратной связи с по-
стоянной времени Г2 и выполняет функции множительного звена за
счет управления по обмотке возбуждения ОВ сигналом рассогласо-
вания. Выходные цепи тахогенераторов имеют встречное включение
с целью получения требуемой разности их напряжений для замыка-
ния цепи параметрической обратной связи 1[Л. 20, 21].
Другой вариант схемы может быть получен следующим образом
(рис. 32,а). В уравнении (140) исходной САР сделаем изменяемой
постоянную времени Тг с помощью введения множительного звена
в цепь гибкой обратной связи. Тогда сигнал на выходе этой цепи
будет определяться выражением туТ\.х, где m — масштабный коэф-
фициент, а у — управляющий сигнал множительного звена. Для вве-
дения цепи параметрической обратной связи выберем простейший
пропорциональный закон управления параметром у в виде
66
y = k0(x0—X) =k0E.
(146)
Тогда, очевидно, схема на рис. 32,а перейдет в схему на рис. 32,б\
незначительно отличающуюся от рассмотренной ранее. Уравнения та-
кой системы с параметрической обратной связью имеют вид:
е = х0 — х\ z = (mk0Txx -f- 1) е; z>k=p(\-\-рТ)х.
'Поэтому дифференциальное нелинейное уравнение для регулируе-
мой координаты х запишется
Т d2x
к dt2
+
dx Г 1 1
~аТ[Т'-~т^Т^Хо~^ J +* = *о. (147)
Здесь величина 0= l/k—mkoTi(x0—х) и, следовательно, при ма-
лых значениях t и ступенчатом сигнале х0 9 мало, при t—>оо вели-
Регулятор
У
Т?р
НП-2 '1
Регулятор
РП+РЩ
Объект
2
б)
Рис. 32. Другой вариант коррекции динамических свойств исходной
САР с помощью цепи параметрической обратной связи.
а —исходная САР; б — окончательный вид структурной схемы САР с цепью
параметрической обратной связи: / — цепь параметрической обратной связи,
2 — цепь основной обратной связи исходной САР.
чина 9—увеличивая демпфирующие свойства системы. Другие
варианты системы могут быть получены, например, если воспользо-
ваться параметрическими связями не непрерывного, а дискретного
(ступенчатого) вида |[Л. 22, 23]. Так, если закон управления выбрать
вместо (146) в следующем нелинейном виде
5*
y=ko(x0, х) (хо—х) =&o(ie)e,
(148)
67
где коэффициент kG теперь представляет нелинейную функцию рас-
согласования 8, то появляются новые возможности для изменения
характеристик системы. Пусть, например, &о(е) реализуется в релей-
ном усилителе с характеристикой рис. 33,а, где
k01 при | s |< е0;
k02 при |е|>е0.
Тогда система определяется совокупностью этих уравнений и
уравнением (147).
Фазовый портрет траекторий движения системы, определяемый
этими уравнениями, очевидно, будет состоять из трех участков, со-
ответствующих зонам характеристики на рис. 33,а, на стыке, которых
ка/е) \УЮ
У02
У01
Уог
О
а)
О
б)
Рис. 33. Варианты характеристик НП-2, используемых
при реализации дискретных (ступенчатое переключение)
корректирующих цепей параметрических обратных свя-
зей (для схем на рис. 30,в или 32,6).
осуществляется «сшивание» кусков фазовых траекторий движения
изображающей точки. Для более детального исследования системы
целесообразно переписать уравнение (147), разрешая его относитель-
но рассогласования е, чтобы воспользоваться затем характеристикой
&о(е). Полагая далее, что x0(t) есть ступенчатая функция, получим
следующие уравнения;
1
Ме)==/*01при|е|<
(149)
1 "F" I w I ^ ~0> I
\kQ2 при |е|>еа. j
Уравнения движения изображающей точки "на фазовой плоскости
(е, е) определяются в виде
е* ["-L_^oiriej + e k ]
; Т
de
при
\<Ч'>
de
de
I (150)
-у при | в | > е0
68
Особая точка системы, определяющая ее состояние равновесия,
есть (е, е) =0. Линии, по которым «сшиваются» куски траекторий
движения изображающей точки (линии переключения релейного уси-
лителя системы), есть прямые, задаваемые уравнением (148).
Наконец, если закон управления выбирается в виде (рис. 33,6)
^ /^ПРи|е|<е0;
[у02 при |е|>е0,
дифференциальное нелинейное уравнение системы записывается
Т d2x
к dt
Т dU
к dt2
. dxJT 1 1
+ 1Г I т~ + ту° (е) I + * = *<>
. de Г \ 1
d2x0 dx0
к dt2
dt
Г 1 1
~Y + my0(e) •
Полагая далее х0 (t) = а + Ы, найдем:
Т d2e
к dt2
de Г 1 1 [1 1
+ "Ж Т + (е) + 9=Ь ~Т + (е) '
(152)
Уравнениями (151), (152) описываются динамические свойства
исследуемой системы с параметрической обратной связью, причем
здесь в отличие от ранее рассматриваемых схем значение постоянной
времени цепи гибкой обратной связи Т± может принимать лишь
два фиксированных значения Т10=туо1 и Т2о = ту02. Значение Т2о
необходимо выбрать значительно меньше Гю, чтобы в начальной ста-
дии переходного процесса, когда рассогласование велико (|е|>е0),
осуществить быстрое нарастание сигнала x(t), а затем, когда |е|<ео
и система подходит к установившемуся значению x(t)=btf предот-
вратить колебательный режим в системе. Уравнение траекторий дви-
жения изображающей точки на фазовой плоскости (е, е) имеет вид:
1 1
~Y + ту о (е) (Ь — е) — £
_ к
где у о (г) определяется уравнением закона управления (151).
Особая точка, определяющая состояние равновесия системы есть
[е=0, 8= (llk + myoi)b]. Она переходит в начало координат, если
действует сигнал xo(t) вида ступенчатой функции и Ь = 0. При воз-
действии x0(t) =a + bt положение особой точки на горизонтальной оси
фазовой плоскости определяет «скоростную» ошибку системы.
Структура фазового портрета траекторий движения -в силу вы-
бранного закона управления (151) должна определяться наличием
69
трех зон траекторий, отделяемых друг от друга вертикальными пря-
мыми, проходящими через точки 8=0, е=±8о. Фазовые траектории
движений «сшиваются» по кускам на этих прямых.
' На рис. 34 приводится фазовый портрет системы с объектом
управления, имеющим передаточную функцию вида 1/р2, для сле-
дующих численных значений коэффициентов уравнений: #oi=l; #02 =
=0; i80=il; b=2. Фазовый (портрет
имеет три зоны, отмеченные выше,
в каждой из которых имеется свой
тип движения: в зонах / и ///
куски фазовых траекторий есть
дуги окружностей с центром вна-
чале координат, в зоне II— уча-
стки логарифмических спиралей,
которые «закручиваются» к фоку-
су, расположенному на горизон-
тальной оси е=х/о1 6=2.
Б системе за счет действия це-
пи (параметрической обратной свя-
зи положение равновесия опреде-
ляется в точке e=8o'=!l и не за-
висит от величины уровня ступен-
чатой функции сигнала x0:(t). При
других численных значениях ко-
эффициентов, например при умень-
шении значений z/0i или Ь, особая
точка типа фокус может находить-
ся внутри зоны //, если выполня-
ется условие #od&<8o. В этом слу-
чае положение устойчивого равно-
весия системы есть фокус, опреде-
ляющий установившуюся ошибку
при отработке воздействия х=а+
+ bt, меньшую 80-
Рассмотрим другой возможный
вариант осуществления дискрет-
ной параметрической обратной
связи в системе управления поло-
жением [Л. 24]. Пусть объект уп-
равления исходной САР, охвачен-
ный гибкой обратной связью с по-
стоянной времени Ti, имеет переда-
точную функцию третьего порядка (рис. 35). Введем вторую гибкую
обратную связь, постоянная времени которой Т2 будет изменяться
с помощью множительного звена управляющим сигналом у. В отли-
чие от схемы на рис. 30,в выберем дискретный (ступенчатый) закон
управления цепью параметрической обратной связи. Пусть, напри-
мер, скачкообразное (дискретное) изменение величины демпфирова-
ния задается в момент времени ^о, определяющий значение xt0 =x(io).
Тогда алгоритм управления цепи параметрической обратной связи
имеет вид:
Рис. 34. Фазовый портрет
траекторий движения изобра-
жающей точки САР второго
порядка с дискретным вариан-
том реализации корректирую-
щей цепи параметрической
обратной связи при входном
сигнале вида суммы ступенча-
того и линейно изменяющегося
воздействия.
У[* (0]
== ( Уо1
\ У02
при | х (0 |< xt0\
при | х (t) | > xt0.
(154)
70
Уравнения системы, содержащей цепь параметрической обратной
связи, записываются следующим образом (при &о=1):
г=х0—х\ z=e+Tix—тТгхуог при 1=1, 2;
zk=p(T0p2 + Tp+\)x.
Нелинейное дифференциальное уравнение, определяющее дина-
мические свойства системы, имеет вид:
Т0 d*x
k dt* ' k dt
d2x dx
dt
Y - J-+m T2y0i — T i = x0
(155)
где yoi (t=l, 2) определяется уравнениями (154). Реализация алго-
ритма управления (154) наиболее просто может быть осуществлена
с помощью^ релейного устройства типа зоны нечувствительности, если
Рис. 35. Структурная схема исходной САР, динами-
ческие свойства которой должны (быть стабилизи-
рованы.
положить #01 = 0 (рис. 33,6). Тогда на начальном участке переходно-
го процесса, когда x(t)<xt0 и */<h=#oi=0, величина демпфирующего
члена 0='1/&—7\ мала, что обеспечивает быстрое нарастание сигнала
x(t). На втором участке x(t)>xto переходного процесса с целью
предупреждения колебательности с помощью цепи параметрической
обратной связи осуществляется автоматическое увеличение 0 = 1//г +
-НтГгг/ог—Ti. Аналитическое исследование решений уравнения (155)
затруднительно, поскольку, например, метод фазовой плоскости здесь
не применим. Для различных видов x0(t) можно воспользоваться ме-
тодом гармонического баланса частотных составляющих спектра и
соответствующими описывающими функциями аналогично приведен-
ным ранее (см. § 4).
Конкретная схема системы на рис. 35 приведена на рис. 36
[Л. 24]. Она содержит измерительные устройства положений задаю-
щей и отрабатывающей осей, выполненные с помощью сельсинной
пары (сельсина-датчика СД и приемника СП), фазочувствительный
усилитель переменного тока и усилитель постоянного тока регулято-
ра, воздействующий на электромашинный усилитель ЭМУ. Последний
служит для управления исполнительным устройством САР — двига-
71
телем Д постоянного тока с независимым возбуждением. Вал двига-
теля через редуктор связан с приемной осью сельсина-приемника и
с осями тахогенераторов 7Ti и 7Т2, осуществляющих введение гиб-
ких обратных связей в системе. Тахогенератор ТГ2 выполняет также
функции множительного звена цепи параметрической обратной связи,
поскольку его выходное напряжение пропорционально произведению
Рис. 36. Функциональная схема САР по положению задающей оси,
реализуемая введением дискретной корректирующей цепи параметри-
ческой обратной связи.
напряжения в обмотке возбуждения ОБ и скорости вращения вала.
Напряжение, величина которого пропорциональна значению У02 за-
кона параметрического управления (154), задается в обмотку ОБ
возбуждения 7Т2 от источника напряжения Uo. В цепи обмотки воз-
буждения ОБ имеется контакт электромагнитного реле Р, отключе-
ние которого эквивалентно заданию значения уо\ = 0. Напряжение на
обмотке реле задается от потенциометра П, установленного на при-
емной оси. Величина хм, при которой происходит срабатывание реле,
задается с помощью движка потенциометра R, включенного последо-
вательно с потенциометром П. Движок потенциометра R соединен
72
с задающей осью, положение которой определяется уровнем входного
сигнала [Л. 24, 70].
На рис. 37 приведены осциллограммы переходных процессов
в исходной САР положения и САР, в которой осуществлена стабили-
зация динамических свойств но заданному эталону [апериодический
характер движения, требуемые -показатели качества /о, xto при задан-
ном уровне x0(t)] с помощью релейной цепи параметрической обрат-
ной связи. Рисунок иллюстрирует эффект улучшения динамических
свойств САР с помощью цепей параметрической обратной связи.
Другой вариант осуществления дискретной параметрической
обратной связи приводится на рис. 38. Эта система предназначалась
для управления скоростью в плоскости тангажа самолета типа «Лок-
хид» 'F-94C США фирмы «Минниаполис — Ханиуэлл» на задаваемых
эталоном летных траекториях. На входе системы включается эталон-
ная модель, а .выходной сигнал системы должен следовать за сигна-
лом с модели, определяющим динамический-эталон поведения систе-
мы. Объект управления описывается линейным дифференциальным
уравнением второго порядка. Алгоритм управления здесь также реа-
лизуется с помощью релейного устройства типа зоны нечувствитель-
ности и ограничения. Однако величина зоны нечувствительности не-
изменна, а уровень ограничения изменяется в зависимости от сигнала
ошибки по следующему закону Л (е):
j Уо1 при | е|>е0;
У={ _±
[ (У qi — У02) б Т +У01 при | е |<е0,
где yoi, г/02—- уровни ограничениям Т — постоянная времени; 80 — за-
даваемый опорный уровень рассогласования.
Основная цепь отрицательной обратной связи системы обеспечи-
вается гироскопом, замеряющим скорость полета самолета в верти-
кальной плоскости 0, и устройства сравнения 0 с эталонной скоро-
стью 0о, задаваемой выходным сигналом модели на основе реальных
характеристик, заложенных заранее в ее структуре [Л. 23].
Естественным обобщением изложенных вариантов реализации
дискретного (ступенчатого) алгоритма управления цепями параме-
трической обратной связи для стабилизации динамических свойств
системы является переход к управлению параметрами с помощью
дискретных (логических) схем типа дискретных автоматов. Основная
идея подобного подхода состоит в ступенчатом переключении значе-
Рис. 37. Переходные ха-
рактеристики системы
автоматического регули-
рования по положению.
/ — _ переходная характери-
стика исходной САР; 2 —пе-
реходная характеристика
САР с дискретной корректи-
рующей цепью параметриче-
ской обратной связи
(рис. 36); 3 — переходная ха-
рактеристика САР с коррек-
тирующими линейными це-
пями.
73
ний параметров системы, например коэффициентов усиления или по-
стоянных времени цепей гибких обратных связей, задаваемых в виде
набора (ряда) их уровней (квантованных по уровню). Такое пере-
ключение вызывает изменение динамических свойств системы и, сле-
довательно, возможна их стабилизация в желаемом направлении,
если правильно выбраны и реализованы соответствующие алгоритмы
(законы) управления цепями параметрических обратных связей. Здесь
реализация указанных законов возлагается на схемы с дискретным
видом представления сигналов. Элементарными блоками подобных
схем, как известно, являются блоки, выполняющие элементарные ло-
гические операции: блок И, производящий операцию логического
умножения, (блок ИЛИ, осуществляющий операцию логического
сложения, блок НЕ, выполняющий операцию логического отрицания,
во
Модель
-эталон
А(е)
НП-1
Wo
«у
НП-2
7%(Р)
Объект
(самолет)
Гироскоп
Рис. 38. Другой вариант реализации дискретной корректирующей
цепи параметрической обратной связи.
блок «памяти», выполняющий операцию запоминания сигналов ди-
скретного вида (0 или 1). Соединение элементарных логических
блоков позволяет формировать сложные нелинейные логические
функции («высказывания») над двоичными сигналами, представ-
ляя в целом схемы логических дискретных автоматов. Логические
функции задаются обычно в виде таблицы функций или алге-
браических выражений, составляемых по правилам алгебры логики
с использованием «минимальных полиномов», что в существенной
мере упрощает построение структурной схемы дискретного автомата
из элементарных логических блоков.
Обратимся к примеру системы (рис. 39), где объект управления
представляется звеном, описываемым дифференциальным уравнением
второго порядка. Охватывая объект жесткой и гибкой отрицатель-
ными обратными связями, запишем следующие уравнения системы:
е = Хо — Х\ Z = е&р — /о.с &о.оХ* ' ^2 i 2q ^ "ТГX — KqZ,
где fa, kv> k0.c — коэффициенты усиления объекта, регулятора и цепи
жесткой обратной связи; Т0.с — постоянная времени гибкой обратной
связи; хо, х — входной и выходной сигналы динамической системы
соответственно.
74
Дифференциальное уравнение системы запишется
d2x dx
T1F + (2t + k0T0.Q) -Sf+ [1 + k0 (k0.c + kv)] x = kvkQx0. (156)
Осуществим далее квантование по уровню значения параметров
системы в допустимых пределах их изменений. Пусть имеем следую-
щие дискретные значения параметров:
ko.c = {^o.ci, &о.с2, 1&о.сз, ko.ci}', ^о.с.мин^^о.с ==^&о.смаке!
То.с = {То.с1у То.с2, То.сз, ^о.с4}; То.с.мън^То.с ^7*0.смаке! ('1'57)
&Р = {|&р1, &Р2, &рЗ, ^р4}; &р.мин ^l&p^'&p.макс
Параметр &o='const недоступен для изменения, так как относится
к объекту управления. Осуществляя комбинирование квантованных
уровней параметров, получим множество уравнений' (156), опреде-
ляемых как линейные дифференциальные уравнения движения с по-
стоянными коэффициентами из их дискретного множества (157).
Н-Ф
л0.0
Tpz+2£pt1\
Объект
ТасР
хп х х е
Коррект^ируемь/е
параметры
Рис. 39. Структурная схема стабилизации динамических свойств
исходной САР введением дискретных корректирующих цепей пара-
метрических обратных связей с помощью дискретного автомата.
/ — параметрическая обратная связь; 2 — основная отрицательная обратная
связь исходной САР.
Автоматизация процесса переключения параметров осуществляет-
ся б зависимости от значений 'выходного х и входного х0 сигналов
системы, их производных или значений ошибки е с помощью ди-
скретного логического автомата на основе алгоритма управления
цепи параметрической обратной связи" (рис. 39). На рис. 40,а более
детально показаны цепи параметрической обратной связи схемы на
75
рис. 39, коммутируемые дискретным автоматом, состоящим из соеди-
нения элементарных логических блоков.
Дискретные автоматы оперируют не с непрерывными, а с ди-
скретными сигналами, представленными в двоичной форме. Поэтому
в схеме на рис. 40,а непрерывные сигналы х, х0, е, е, х непосредст-
венно не могут быть введены в это устройство. Один путь состоит
в применении достаточно сложной аппаратуры аналого-цифровых
преобразователей для решения задачи. Однако в ряде случаев воз-
можен более простой подход, связанный с использованием информа-
ции о знаках (sign) указанных сигналов, которая представляется
в двоичной форме, если, например, положить
: ( 1 при х>0;
signx= < (158)
* I 0 (или— 1) х<0. v '
Тогда могут быть использованы релейные элементы, на входы
которых поступают непрерывные значения сигналов системы, а их
выходные сигналы в соответствии с (158) представляют двоичные
переменные, вводимые далее в аппаратуру дискретного автомата.
Например в схеме на рис. 40,а дискретный автомат есть устрой-
ство с четырьмя входами и 12 выходами, причем мгновенным зна-
чениям нулей и единиц на его входах соответствуют определенные
значения нулей и единиц на его выходах. Выходные (исполнитель-
ные) релейные элементы дискретного автомата осуществляют замы-
кание (1) или размыкание (0) соответствующих контактов системы
с фиксированными значениями уровней ее параметров. В интервалы
времени между коммутацией цепей в системе на рис. 40,а осуществ-
ляется движение, определяемое решением дифференциального линей-
ного уравнения (156) при постоянных значениях его параметров.
Логическая функция дискретного автомата, определяющая алго-
ритм управления, обычно устанавливается на основании предвари-
тельного изучения фазовых траекторий движения изображающей точ-
ки для каждой из комбинаций значений переключаемых параметров
и их последующего «сшивания» ((см. также рис. 1,а). «Листы» фазо-
вых портретов траекторий движения для параметров (157) наклады-
вают друг на друга и удаляют области траекторий, не удовлетворяю-
щие эталонным траекториям движения, формируя многолистную фа-
зовую плоскость, удовлетворяющую решению задачи стабилизации
динамических свойств системы. Закон переключения движения
с одного листа на другой, выявляемый при таком подходе, является
искомой логической функцией, которая реализуется в дискретном
автомате. Запишем уравнение (156) в виде (159), полагая x0=eonst:
T4F+ Ж (25 + *°Г°с) + <! + + Мр) • = 0 + Мо.с) *с
(159)
Рис. 40. Структурная схема коррекции динамических свойств исход-
ной САР' с помощью дискретного автомата.
а — принципиальная схема, в которой осуществляется ступенчатое переключе-
ние квантованных уровней значений коэффициентов усиления регулятора fcpi,
цепи жесткой обратной связи kQ j и значений постоянных времени TQ ci
цепи гибкой обратной связи: / — цепи параметрического регулирования, 2 —
основная цепь отрицательной обратной связи исходной САР; б — структурная
схема, детализирующая рис. 40,а для объекта второго порядка: / — цепи пара*
метрического регулирования, 2 — основная обратная связь.
77
Уравнение траектории движения изображающей точки 'на фазо-
вой плоскости е, е записывается в следующем виде:
de 1 (1 + Мо.е) — (2g + k0To.c) в — (1 + k0kQ.c + fe0fep) s
_____ , в (1б0)
Особая точка системы, определяющая состояние равновесия, есть
е = (J, е = г т -
1 ~Т" ^о^о.с
Движение системы в окрестности особой точки, как известно,
определяется для линейной системы видом корней ее характеристи-
ческого уравнения и зависит как от величины фиксированных уровней
ее параметров (157), так и уровня сигнала х0. Особые точки могут
быть типа центра, седла, устойчивого или неустойчивого узла или фо-
куса. Подставляя в правую часть уравнения (160) численные значе-
ния возможных комбинаций квантованных уровней параметров (157),
найдем соответствующие листы фазо-вых портретов траекторий дви-
жения системы. Для простоты изложения будем полагать далее, что
&р, k0.c неизменны, а Г0.с= {^о.сь То.съ}, т. е. осуществляется пере-
ключение двух квантованных уровней постоянной времени Г0.с цепи
гибкой обратной связи в системе .(рис. 40,6). В зависимости от кон-
кретных численных значений T0.ci, TV с 2 и остальных неизменяемых
параметров системы возможны различные фазовые портреты траек-
торий движения.
Пусть, например, имеют место листы I и II фазовых портретов
траекторий движения при фиксированных значениях T0.ci и Г0.С2
(рис. 41,а), которые принадлежат линейным системам с особой точ-
кой типа центр. Накладывая листы друг на друга и выбирая за ли-
нии переключения координатные оси, где «сшиваются» траектории,
получим результирующую траекторию движения, удовлетворяющую
устойчивой системе.
В другом случае (рис. 41,6) листы фазовых портретов «сшивают-
ся» по линии переключения, совпадающей с усом седла, по которому
осуществляется движение к устойчивому положению равновесия, или
по линии переключения (рис. 41,б), в которой фазовые траектории
направлены навстречу друг другу и возникает вырожденное движе-
ние к положению равновесия вдоль линии переключения («скользя-
щий режим»), причем изображающая точка колеблется в своем дви-
жении.
Другие варианты возникают при коммутации с помощью пара-
метрической обратной связи нескольких параметров системы или ком-
бинирования гиперплоскостей скольжения (Л. 25, 26].
Законы переключения движения с одного листа на другой могут
быть представлены в форме логических функций, определяющих
алгоритмы цепей параметрических обратных связей. Например, для
случая, приведенного на рис. 41,а, искомая функция может опреде-
ляться в виде нелинейного преобразования над двумя переменными 8
и е, являющимися координатами фазовой плоскости:
78
T0,0 = 4?{i9 в).
(161)
Пусть, например, в качестве НП-2, аналогично рис. 35, выби-
рается преобразователь типа множительного звена. Тогда, учитывая,
что на рис. 41,а в первом и третьем квадрантах фазовой плоскости
значения координаты е и ее производной е одинакового знака, а во
втором и четвертом — различного, найдем логическую функцию ди-
скретного автомата в виде
при ее>0;
\ т0.е
(162)
при ее < 0.
Аналогичным образом для случая на рис. 4.1, в, учитывая уравне-
ние линии переключения 5=6 +Ye, получим:
при (e + Ye)s>0;
при (е* + уе) е < 0.
(163)
Jlucml
Лист I
.Лист Л
в)
Лист П
Рис. 41. Возможные варианты синте-
за алгоритмов дискретного автомата
методом «сшивания» траекторий дви-
жения фазовых портретов на линиях
переключения.
а — ступенчатое переключение параметров
по линии координатных осей исходных
САР: б — ступенчатое переключение пара-
метров по линии, совпадающей с усом сед-
ла одной из исходных САР; в —. ступенча-
тое переключение параметров по линии, на
которой фазовые траектории исходных
САР встречны.
79
Используя информацию лишь о знаках соответствующих сигна-
лов, что допустимо для функционирования дискретного автомата,
запишем (162), (163) в следующем виде;
7\>. с —
Т0.С1 при a sign е sign е > 0;
Т0 с2 при a sign ё sign е < 0;
' о.с — ч
\ Том при Ь sign (е
в + Ye) sign s > 0;
gn (e + Y£)signs<0,
(164)
(165)
где а и Ь — коэффициенты. Возможно также осуществление «гибрид-
ных» законов управления, если используется информация о знаке
одного из сигналов, например:
, TQ Р1 при esipjne>>0;
7VO ='{ . О66)
7VC2 при esign е<0;
Го.с = |
Т0.с1 при esign(e + Ye)>0;
Т0.е2 при е sign (г + Ye) < 0.
(167)
Устройства, реализующие атшаратурно алгоритмы дискретных
автоматов (162) — (167), достаточно просты по своему выполнению
(логические переключающие устройства типа «ключ» {Л. 25]).
Другой пример реализации подобной системы для уравнений
(156), (159) в случае параметрического управления коэффициентами
гибкой и жесткой обратных связей объекта управления второго по-
рядка приведен на рис. 40,6 [Л. 23]. Здесь законы параметрического
управления найдены в виде
TVc = (Д_ sign е + а2 sign е) sign х\
Kq.q = (bt sign е + b2 sign e) sign x.
(168)
Уравнение, определяющее величину г, с учетом (168) записы-
вается следующим образом:
z (t) = kve (0 + sign *{Ь1\х\ + а1\х\} + sign е {b2\*x | + а2 \ х \}.
Более детальное рассмотрение вопросов, связанных с особенно-
стями и рядом преимуществ систем дискретных параметрических свя-
зей, выходит за рамки настоящего изложения |[Л. 25, 70].
Глава вторая
ПАРАМЕТРИЧЕСКОЕ РЕГУЛИРОВАНИЕ
И АДАПТАЦИЯ
6. СТАБИЛИЗАЦИЯ ДИНАМИЧЕСКИХ СВОЙСТВ СИСТЕМ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ В ИЗМЕНЯЮЩИХСЯ
Более сложные задачи возникают при управлении объектами,
параметры которых подвержены непредвиденным изменениям или
не могут быть по ряду причин известны с достаточной точностью.
Такая начальная неопределенность (неполная априорная информация
об объекте) и изменяющиеся в широком диапазоне параметры, на-
рушающие заданное эталоном протекание процесса в системе, обыч-
но обусловлены влиянием неконтролируемых параметрических возму-
щающих воздействий.
Системы автоматического регулирования, построенные на прин-
ципе отрицательной обратной связи, способны компенсировать влия-
ние указанных воздействий лишь в известных «локальных» пределах
и оказываются неработоспособными в более сложных и разнообраз-
ных условиях поведения объекта.
Возможности совершенствования обычных САР в указанном на-
правлении обусловливаются в отказе от разработки традиционных
управляющих устройств с фиксированными параметрами и создании
устройств, характеристики которых способны меняться, подстраи-
ваясь к изменяющимся условиям работы объекта. Такие системы,
обладающие свойствами приспособления, или адаптации, способны
более эффективно компенсировать параметрические возмущающие
воздействия в более широких диапазонах и поэтому надежнее и
эффективнее в изменяющихся режимах работы.
Будем полагать, что основной контур САР с введенными в него
цепями коррекции (в том числе и рассмотренными выше цепями па-
раметрической рбратной связи, применяемыми для этих целей) не
обеспечивает выполнения более широких и жестких требований, за-
даваемых эталоном, и необходима дальнейшая стабилизация динами-
ческих свойств САР с помощью новых цепей адаптирующих параме-
трических обратных связей, вводимых в систему.
Рассмотрим задачу стабилизации динамических свойств системы
автоматического регулирования в изменяющихся условиях работы на
типовых примерах систем, реализуемых с помощью введения адап-
тирующих цепей параметрических обратных связей ![Л. 1, 27]. На
рис. 42,а приведена одноконтурная линейная система автоматического
регулирования, состоящая из объекта с передаточной функцией
k0M(p)IN (р) и регулятора с пропорциональным законом регулирова-
ния, представляющего усилитель с коэффициентом усиления kv. Урав-
нения исходной САР имеют вид:
УСЛОВИЯХ РАБОТЫ
(169)
где
Ы(р)=Ьпрп + Ьп-1рп-{+ ... +&1/?+1;
M(p)=ampm + am-iPm-i+ ... +aip+U
6—1374
81
ko—'статический коэффициент усиления объекта, подверженный не-
предвиденным изменениям в широком диапазоне &омин^&о^&омакс,
о величине которого отсутствует точная априорная информация, что
вносит начальную неопределенность в условия проектирования рабо-
тоспособной САР.
Действительно, если k0 = const, величина kv регулятора, опреде-
ляемая условиями устойчивости замкнутой САР, не может быть вы-
брана выше предельного коэффициента усиления kv.nv. При неизвест-
ном заранее значении коэффициента усиления объекта k0 настройка
Регулятор
7n а,
Z
X
Г*-
кр
V
Объект
а)
Модель
Регулятор
НП-2
М(р)
Nfp)
У
\ \ Объект
\/о.
ко
О комин М(кд) к0маке
б)
с
2
в)
г)
Рис. 42. Пример стабилизации динамических свойств САР в изме-
няющихся условиях работы объекта.
а — структурная схема исходной САР с изменяющимся в процессе работы
коэффициентом усиления объекта &0=var; б — характеристика плотности ве-
роятностного распределения значений коэффициента усиления объекта h в из-
меняющихся условиях его работы; в — структурная схема адаптивной систе-
мы, стабилизирующей динамические свойства исходной (рис. 42,а) САР
с помощью цепи параметрической обратной связи 2 — цепь отрицательной
обратной связи исходной САР; г — структурная схема линейной САР, эквива-
лентная по динамическим свойствам адаптивной системе на рис. 4>2,в.
величины коэффициента усиления регулятора &р по'величине &омин
невозможна из-за потери системой устойчивости при возрастании
&о>&омин- Настройка величины kv по величине бомакс означает заве-
домое ухудшение работоспособности системы в целом, поскольку
в режимах, когда &о<&омакс, остаются недоиспользованными" воз-
можности увеличения kv с целью уменьшения ошибки в работе си-
стемы.
Если, например (рис. 42,6), кривая плотности вероятностного
распределения p(k0) есть нормальное распределение с математиче-
ским ожиданием (Ломаке—&омин)/2, то вероятность достижения вели-
чины &омакс мала и, следовательно система работает с существенным
понижением точности в отработке входного сигнала Хо. Средством
улучшения режима работы системы являлась бы стабилизация обще-
го коэффициента усиления контура системы на рис. 42,а на уровне
82
допустимого предельного значения &Пр=А:о&р, определяемого из усло-
вий устойчивости для известных по условиям постановки задачи ди-
намических параметров а%, by{i=\, Q, ..., т\ /=Я, 2, ..., п) объекта,
входящих в его передаточную функцию M(p)[N(p). Другими слова-
ми, параметр &р, определяющий в схеме на рис. 42,а характеристику
регулятора, должен изменяться, подстраиваясь (адаптируясь) к пара-
метру k0 объекта управления в обратной пропорциональности, так
как &р = &Пр/&о. В этом случае справедливо выражение
е
z = ~й~^пр = f (е, k0),
«о
где &Пр есть постоянная для системы на рис. 42,а величина.
Управляющее устройство, реализующее зависимость f(s, ko),
является нелинейным преобразователем с двумя входами НП-2 типа
делительного звена. Однако необходимо устройство для измерения
статического коэффициента усиления ko объекта управления в режи-
ме его работы. Такое измерительное устройство может, например,
быть реализовано с помощью динамической модели, неизменяемой и
иьзестной заранее передаточной функции объекта M(p)/N(p), вклю-
чаемой параллельно объекту (рис. 42,в). Выходной сигнал у дина-
мической модели определяется выражением
_ М(р) _
и, следовательно, отношение
У
реализуемое аппаратурно в нелинейном преобразователе НП-2 типа
делительного звена, определяет искомый сигнал измеренного таким
образом статического коэффициента усиления ko объекта управления.
Далее с помощью цепи адаптирующей параметрической обратной
связи осуществляется изменение коэффициента усиления регулятора
(&р), стабилизирующее динамические свойства исходной САР.
Уравнения системы на рис. 42,в в целом с учетом цепей адапти-
рующей параметрической обратной связи имеют вид:
„ * . М(р) ,
е _ х„— х; z - ^ fcnP; у = N ( j z,
_ М(р) ■ х
(170)
Несмотря на то, что для реализации адаптирующей параметри-
ческой обратной связи в схеме на рис. 42,в потребовалось 'выполне-
ние нелинейных операций, дифференциальное уравнение, описываю-
щее работу системы в целом, получаемое после исключения перемен-
ных из (170), кроме Хо и х, является линейным с постоянными коэф-
6* 83
фициентами. Соответствующая передаточная функция такой замкну-
той системы записывается в следующем виде:
К, (Р) :
М(р)
N(p)
#0
1 ^М{р)ъ
1 +■ ttj-ztK
_ К(р)
(171)
где К (р) =
М(р)
N(p)
лентной линейной САР (рис. 42, г).
Модель
Регулятор
передаточная функция разомкнутой эквива-
а
Модель
Регулятор
Hfh-2
Рис. 43. Другие варианты структурных схем адаптивной системы для
стабилизации динамических свойств исходной САР (рис. 42,а) с по-
мощью цепей параметрических обратных связей.
/ — цепь адаптирующей параметрической обратной связи; р —• цепь основной-
«силовой» обратной связи исходной САР.
Другой вариант, схемы (рис. 43,а) может быть получен, если
в регуляторе для реализации НП-2 вида /(е, k0) используется мно-
жительное звено, а в НП-2 измерительного устройства реализуется
операция деления вида
__=_!_
X k, '
84
Наконец, возможно создание дополнительного контура параме-
трического регулирования kVj полагая &Пр за уставку или заданное
значение (рис. 43,6). Уравнение сигнала ошибки стабилизируемых
коэффициентов усиления основного контура САР может быть запи-
сано следующим образом:
&пр—kvko = 6k,
где 66 — ошибка (рассогласование) по стабилизируемому показате-
лю САР. Пусть в регуляторе основного контура используется НП-2
вида .множительного звена M3i. В измерительном устройстве форми-
руем сигнал 6k с помощью множительного звена М32 и устройства
сравнения. Далее введем цепь параметрической обратной связи с за-
данным законом регулирования 'вида
R(p)
q(p)
где R(p), Q(p)—'Полиномы, определяемые выбираемым законом па-
раметрического регулирования (например, если R(p)/Q(p)=y— про-
порциональный закон, если R(p)/Q(p) = уи/р — интегральный,
R(p)IQ(p)=y+yJp — ПИ закон и т. д.).
Уравнения системы на рис. 43,6 с контуром основной САР и до-
полнительным контуром адаптирующей цепи параметрического регу-
лирования записываются:
- - М{р) _ и М(р)
k0 = —у &пр — k0k$ = dk, кр = q
(172)
Осуществляя аналогичные (171) преобразования для пропорцио-
нального закона параметрического регулирования kv=y6k, найдем
выражение передаточной функции системы
^пр М(р)
Ж 1 + IMo N(p) к**
К> W= *Г~ N(P) k^= М(р) 1 * <173>
М(р) М + 1Д6о 1 + N(p) +Y*o
При у—уравнение (173) эквивалентно (171), что определяет
стабилизирующее действие системы на рис. 43,6 за счет действия до-
полнительного адаптирующего контура цепи параметрического регу-
лирования.
Найдем далее дифференциальное уравнение, описывающее дина-
мические свойства системы на рис. 43,6 при выборе интегрального
dkv
закона параметрического регулирования —JJ =yn6k. Произведя по-
следовательное двукратное дифференцирование уравнения для 6k,
получим:
— 6* k = k0 kjt + kokj); — bk = &o^p "t~ ^p&o ~b 260 kp
или
"— & &e kpk9 + 2 k9kp — k% '—^—•
85
Подставляя в это уравнение выражение закона регулирования,
получаем дифференциальное уравнение, описывающее динамические
свойства адаптирующей цепи параметрического регулирования:
1 d4k , dbkl "k0 \ / . "k0\
v^+^-^t) + 8\2fe--^t)=0- (174)
Поскольку Yh — постоянный коэффициент, уравнение (174)
является линейным дифференциальным уравнением второго порядка
с переменными коэффициентами:
A (t) =ko - - \~ и В (t)=2k0 -ko^r-
Исследование решения уравнения (474) аналитическими метода-
ми, аналогичное, например, полученным ранее уравнениям стабилизи-
рующих устройств (см. § 1), представляет известные затруднения.
Так, если изменения k0(t) носят случайный характер, необходимо
использование методов сходимости решений в стохастическом смысле.
В более простом случае, если изменения k0(t) носят детерминирован-
ный характер гармонических колебаний \k0(t) =k0+ki sin соо^, най-
дем значения коэффициентов в следующем виде:
а уравнение !(Т74) может 'быть отнесено к уравнению Хилла. Это,
как известно, предопределяет возможность получения решений, в до-
статочной мере сложных и отличных по своему характеру от реше-
ний уравнения в линейном приближении. Однако если обеспечивается
сходимость решений уравнения 1(174), то 6k—>0 и выполняются
искомые условия (171) стабилизации динамических свойств системы
на рис. 43,6.
Рассмотренные простейшие примеры (рис. 42,в, 43) стабилизации
динамических свойств исходной САР, находящейся в режиме изме-
няющихся условий работы объекта, иллюстрируют возможности па-
раметрического регулирования как средства реализации приспосаб-
ливания САР к изменяющимся условиям работы. Полученные урав-
нения и схемы адаптивных систем, содержащие звенья типа НП-2,
лишь незначительно отличаются от уравнений и структурных схем
приведенных ранее стабилизирующих устройств.
Остановимся далее на оценке функционирования адаптивных си-
стем (рис. 42,б, 43) в «малом»,'осуществляя линеаризацию уравне-
ний, описывающих поведение ее отдельных элементов. Подобное
исследование схем стабилизирующих устройств (см. § 1, 2) позволи-
ло выявить эффект стабилизации, обеспечиваемый введением цепей
параметрической обратной связи. Исследование поведения систем
с адаптирующими параметрическими цепями -обратных связей в «ма-
лом» позволит выявить эффект адаптации.
86
Для схемы на рис. 42,в, линеаризуя уравнения (170), найдем:
dek°Q — e0dk0 М(р)
de=-~ dx0 — dx; dz = knV —к- ; dy = N( . dz;
M(p) dxk°0 — x°dk0 rfxyo _ dyx°
N(P) dZ== (*°)« ; dko= (У0)2 '
где de, dx0, dx, dz, dy, dk0 — вариации переменных; ie0=A:0o—x°,
а .индекс «О» вверху над переменной означает рабочий исходный ре-
жим системы, вблизи'которого осуществляется линеаризация ее урав-
нений. Перепишем систему уравнений в следующем виде:
М(р)
de = dx0 — dx; dz = &nP (a de — $dk0); df — ~Njp) dz>
dy = adx—bdk0; dko = cdx—ddy,
где a, p, a, b, c, d — постоянные коэффициенты, и разрешим систему
относительно вариаций входного dx0 и выходного dx сигналов. В ре-
зультате получим:
[a-be , М(р) (• J c^-ad_\l М (р)
[t=bd+ ak** ЛГ^Д1 + Т" t=bd )\ dx = ак°* щр)~ dx°-
Передаточная функция Кз(р) замкнутой системы записывается
в следующем виде:
М(р)
1 + N(p) ftnP°
где постоянные коэффициенты"/! и В определяются выражениями
aj«(\-bd) .
а— be 9
В =
a(l — bd) + $(c— ad) с —ad
be
a + *t=be-
Если положить 8о = 0, то и $ = 0, тогда выражение Кз(р) запи-
шется в следующей форме:
N(p) _ к{р)
+ N (р) *прл
где К(р)—1 передаточная функция разомкнутой эквивалентной ли-
неаризованной САР, зависящая в отличие от системы на рис. 42,г
от коэффициента А и, следовательно, фиксированного исходного зна-
чения k°0 статического коэффициента усиления объекта управления.
87
Для получения структурной схемы системы записываем уравне-
ния в виде
М (р)
de = dx0 — dx; dz = £nP (ads — §dk0)\ drj = M („4 dz;
N(p)
n M (p) M (/>)__
dx ~ 0 n (p) dz + z" N (p) dli<>'' dk° = cdx ~ dd'h
(175)
где a, p, c, d, &q, z° — коэффициенты.
Структурная схема эквивалентной линеаризованной системы
с адаптирующими параметрическими цепями обратной связи, соответ-
ствующая уравнениям (175), приведена на рис. 44 (ср. с рис. 42,г).
Здесь аналогично схеме стабилизирующего устройства (см. § 1 и
рис. 1,б,в) нелинейные преобразователи НП-2 типа блоков деления
схемы на рис. 42,в заменены устройствами вычитания; объект управ-
модель
Рис. 44. Структурная схема системы, эквивалентная линеаризованной
системе адаптации с параметрическими цепями обратных связей.
/, // — обозначения каналов- распространения сигнала dk0 в схеме.
ления имеет стационарный статический коэффициент усиления 6°0:
влияние вариаций dk0 статического коэффициента усиления объекта
на координату dx системы проявляется через дополнительное звено
с передаточной функцией z°M(p)/N (р).ф
Структурная схема (рис. 44) —многоконтурная, и здесь принци-
пиально возможно выполнение условий двухканальности акад.
В. С. Кулебакина и Б. Н. Петрова |[Л. 28—30], приводящих к инва-
риантности (независимости) выходной координаты dx от влияния
вариаций dk0.
На рис. 44 два канала между точками приложения возмущаю-
щего воздействия dk0 и выходной координатой dx системы проявля-
ются в весьма наглядной форме: это канал I распространения сиг-
нала dk0 через звено с передаточной функцией z°M(p)/N(p) и ка-
нал // — через звенья с коэффициентами р и &пр и объект с переда-
точной функцией k°0M(р)/N (р). Уравнение, опоелоляющее выполне-
88
ние условий инвариантности в системе (рис. 44), запишется в сле-
дующем виде:
AU Г О мм ,0М (р) 1 А
dk |* -щр)- f*np*o тгщ J =°
ИЛИ
*„р*8. (176)
, Следовательно, в «малом» поведение системы с адаптирующими
цепями параметрических обратных связей эквивалентно поведению
инвариантной линейной многоконтурной системы автоматического ре-
гулирования с переменными коэффициентами.
Выполнение условий инвариантности в системе (рис. 44) опреде-
ляет принадлежность этой схемы к классу систем с условной обрат-
ной связью или нулевой чувствительностью к изменяющемуся стати-
ческому коэффициенту усиления объекта управления |[Л. 30—33].
Для схемы на рис. 43,а записываем уравнения системы с адап-
тирующей параметрической обратной связью в виде
s = Х0 — Х\ z = knPf(e, k0); i• =
М (р)
М(р)
N(p)
z;
Осуществляя линеаризацию для эквивалентной системы в «ма-
лом», найдем:
de = dx0 — dx; dz = k
np
dy-
de
df
8=eo de + -jy-
•=*«o dk0
M(p)
: N(p)
dz;
dx --
JW,, ,,fim(p) -w- ,,s d?
Полагая здесь
у=1у°
х- x%
dy.
df_
de
' dx
df
x=x°
У=У°
dk0
= dy
e=s0 .
x=x°
У=У°
приходим к структурной схеме системы, аналогичной схеме на
рис. 44.
Для схемы на рис. 43,6 линеаризованные уравнения запишутся
в следующем виде:
о М (Р)
de == dx0 — dx; dz = eQdkv -|- kp de; dy = ^ ^ dz;
89
М (р) _ о М {р)
dx = z° N (р) dk° + 7Цр)~ d*'> dk» = cdx ~~ dd^;
— dbk = k°0 dkv + k°p dk0', dkp =
Для 'пропорционального закона параметрического управления
dkv=yd6k справедливо выражение
dz=k°Jde- {^\оу dk0
Поэтому структурная схема системы аналогична схеме на рис. 44;
где a = 1- р = ,2°Iov ; ^пр = й° .
В общем случае уравнение для dz записывается в форме
J s° Q (/>)
Поэтому значения соответствующих коэффициентов структурной
схемы (рис. 44) имеют вид а=1, 6пР = kp , а передаточная функ-
ция звена
Up) = —Т7[Щ~ф- = Ъ (p)f
Таким образом, в «малом» поведение рассмотренных схем САР
(рис. 42,в; 43) с адаптирующей цепью параметрической обратной
связи эквивалентно инвариантной САР с жесткой структурной схе-
мой (рис. 44) {Л. 33].
Могут применяться другие методы построения схемы измеритель-
ного устройства для определения значения статического коэффициен-
та усиления k0 объекта управления.
Запишем исходное уравнение объекта упразления (рис. 42,а);
в виде
, dn% dn~1x . , dx ,
90
_ , / dmz dm~1z . dz_
— k0 iam dtm -tam-x tfm-i "г • • • + 0i dt +z
Осуществляя л-кратное интегрирование по времени выражений
его левой и правой частей и разрешая относительно искомого значе-
ния k0, получим:
t
Ьп* (0 + *n-i dt+...+
t t it
am \ ...^(0(dOn"w+flm-iJ... j*(*)W+l-w +
0 0
я+1— m
о 0
где
t t
i=l 1=1
(177)
dV
— соответствующие значения переменных, определяемые начальными
условиями.
Аппаратурная реализация схемы измерительного устройства по
алгоритму (177) требует применения нелинейных элементов типа
НП-2 (для осуществления операции деления), а также интегрирую-
щих и суммирующих (вычитающих) элементов [Л. 34].
Структурная схема адаптивной системы с применением такого
измерительного устройства представлена на рис. 46.
Воспользуемся полученными результатами для рассмотрения за-
дачи стабилизации мощности ядерного реактора в изменяющихся
условиях работы. Обычный подход к такой задаче был изложен
в § 4. Дополнение обычных систем стабилизации адаптирующими
цепями с параметрическими обратными связями является в настоя-
щее время эффективным средством управления ядерным реактором
в широком диапазоне изменения его мощности. На рис. 46,а приведе-
на система стабилизации мощности ядерного реактора, действующая
на основе информации о величине ошибки в потоке нейтронов. Здесь
По — уставка; п — регулируемый поток нейтронов; х — положение ре-
гулирующих стержней. Передаточная функция разомкнутой САР ста-
билизации мощности ядерного реактора имеет вид:
где kn/p—передаточная функция исполнительного устройства,
т р + 'а
WQ (р) = k0 ~~ , , — передаточная функция активной зоны ядерного
91
реактора; а и Ь — постоянные коэффициенты, определяемые кон-
струкцией реактора; k0 — подверженный изменениям статический ко-
эффициент усиления объекта.
Рис. 45. Структурная схема адаптивной системы, отличающаяся изме-
рительным устройством в цепи параметрической обратной связи.
/ — цепь параметрической обратной связи; 2 — цепь обратной связи исходной
САР. '
Система стабилизации способа компенсировать влияние измене-
ния ko лишь в ограниченных «локальных» диапазонах. Действитель-
но, определяя передаточную функцию замкнутой системы (рис. 46,а)
в виде
3 {Р) ~ Р2 + Р(Ь + к0кя) + ak0ku>
найдем дифференциальное уравнение системы:
d2n dn
dn f dn0 \
~df (b + kokn) + ak0knn = k0ku ( + an0 и
где коэффициент демпфирования Q = b + kokvl зависит от k0. Это
определяет апериодический характер процессов при больших ko и
колебательный при малых значениях изменяющегося коэффициента
усиления kQ. Нормальный режим работы ядерного реактора опреде-
ляется эталонным значением 9Э или стабилизацией величины
koku = k3.
Потребуем, далее, выполнения условия стабилизации kokn = k*
с помощью адаптирующей цепи параметрической обратной связи
в системе (рис. 46,а). Используя измерительное устройство (рис. 43,6),
приходим к структурной схеме адаптивной системы управления мощ-
ностью ядерного реактора (рис. 46,6). Здесь передаточные функции
неизменяемой части объекта управления и соответствующей динами-
92
т p-f-a
Регулятор Объект
Модель
Регулятор
НП-2
Kopfpt6)\
/7 I МЗЛки Ооъект
а)
Рис 46. Стабилизация мощности ядерного реактора в изменяющихся
условиях работы объекта.
а _ структурная схема исходной САР мощности ядерного реактора; б - струк-
?у1шаяРУсхема адаптивной системы; в - структурная схема другого варианта
Адаптивной Системы; г - структурная схема линеаризованной системы адап-
%W™Z™p™£™a* к параметрическим возмущениям / цепь параметриче-
ской обратной связи; 2 - цепь обратной связи исходной CAF.
93
ческой модели, включаемой параллельно объекту, определяются вы-
ражением
М(Р) ^ Р + а
N{p) p(p+b)>
а система уравнений имеет следующий вид:
_ — ъ - Р+Ь ~ — ь р + а -
е — П0 — П, Z— еЛи, гсм — р ^ _j_ ^ * , п — Я0 ^ ^ _j_ ^ Z,
/г /? (р) _.
k0 = ; k9 — kQka = £и —Q"(/0~
Полагая пропорциональный закон параметрического регулиро-
вания kn = ydk, найдем передаточную функцию системы в виде
Р + а ,
Р(Р+ Ь)
1, 1 I Р+а и
+ Y*o ^Р(Р+Ь)
При y—>-оо обеспечивается стабилизация динамических свойств
системы на рис. 46,6 в широком диапазоне изменения статического
коэффициента усиления k0 ядерного реактора.
При другом варианте выполнения схемы измерительного устрой-
ства (рис. 45), записывая уравнение объекта управления в виде
d2n t dn [dz \
-ж+ b4t = k>\4t+azy
находим следующий алгоритм:
t
n(t) + b ^n(t)dt — N (0)
ъ - о
«0 ; -7—, ,
J z(t)dt+a^z(t) (dt)*-Z(0)
0 0 0
где N{0) и Z(0) —значения переменных, определяемых начальными
условиями.
Аппаратурная реализация варианта системы адаптации по этому
алгоритму представлена на рис. 46,в.
Воспользуемся полученными ранее соотношениями для исследо-
вания систем стабилизации динамических свойств ядерного реактора
с адаптирующими параметрическими обратными связями в «малом».
Для системы на рис. 46,6~ с учетом пропорционального закона пара-
метрического регулирования, получим следующие уравнения в ва-
риациях:
о _ Р +а
de = dn0 — dn; dz = e0dku + ka de; dnm = р(р_^щ dz;
dn = z° p (p+'b) d** + ko p(p+b) dI; dk° = cdn " ddn™
94
dz
— dbk =k°0dkB + kldk0; dkn=4dSk;
+ *oY
Структурная схема эквивалентной линеаризованной системы
управления мощностью ядерного реактора приведена на рис. 46,г,
а уравнение, определяющее выполнение условий инвариантности
в линеаризованной системе с жесткой структурой, записывается в сле-
дующем виде:
Схема измерительного устройства для определения значения ста-
тического коэффициента усиления k0 объекта управления может быть
построена без дополнительной динамической модели неизменяемой
части объекта управления M\(p)jN{j)) (рис. 42, 43) |[Л. 35—38].
Структурная схема подобного варианта системы приведена на
рис. 47,а. Здесь аналогично ранее приведенным схемам имеются
основной контур исходной САР и контур цепи адаптирующей пара-
метрической обратной связи. В цепи основного контура исходной
САР вводится дополнительная обратная связь, охватывающая объект
управления и формирующая измерительный контур |для определения
значений изменяющегося статического коэффициента усиления объек-
та k0. Измерительный контур системы (рис. 47,а) представляет собой
динамическую систему с положительной обратной связью, находя-
щуюся в режиме установившихся автоколебаний. При изменениях
статического коэффициента усиления k0 объекта соответственно изме-
няются показатели, характеризующие режим автоколебаний (напри-
мер, амплитуда или частота автоколебаний). Измерительная схема
осуществляет определение указанных показателей, соответствующих
значению статического коэффициента усиления k0 объекта управле-
ния. В этой схеме k0 измеряется в режиме автоколебаний, который
является полезным рабочим режимом измерительного устройства и
бесполезным для основного контура исходной САР, так как в по-
следнем случае он вносит дополнительные погрешности (см. § 1).
При построении схем, подобных изображенным на рис. 47,а, учиты-
ваются компромиссные требования работы измерительного и основно-
го контуров системы автоматической стабилизации динамических
свойств. В связи с тем, что на выходе системы всегда будут колеба-
ния, вызываемые автоколебательными процессами в измерительном
контуре, амплитуда колебаний должна быть достаточно малой и в то
же время удовлетворять задаваемым требованиям точности работы
измерительного контура системы.
Упростить схему ;(рис. 47,а) можно, отказавшись, скажем, от
создания самостоятельного измерительного контура, функции которо-
го «перекладываются» на основной контур исходной САР. С помо-
щью регулятора, например релейного вида, исходная САР вводится
в режим установившихся автоколебаний, соответствующие показатели
которого определяют величину искомого статического коэффициента
усиления объекта управления. Контур параметрической адаптирую-
щей цепи обратной СВЯЗИ /in служит для стабилизации общего коэф-
фициента усиления системы и, следовательно, ее динамических
свойств в целом (рис. 47,6).
95
Другой вариант упрощения схемы на рис. 47,а может заключать-
ся в отказе от самостоятельной цепи измерительного контура, функ-
ции которого реализуются действием контура цепи адаптирующей
параметрической обратной связи системы (рис. 47,в). При работе си-
стемы (рис. 47,0) цепь параметрической обратной связи (выполняет
двойную функцию: осуществляет возбуждение автоколебаний в основ-
ном контуре исходной САР и адаптирует воздействие на параметры
регулятора основного контура.
Эта схема может быть представлена в виде схемы на рис. 47,г,
где z=/(e, kp), которая в свою очередь может быть сведена к экви-
валентной ей структурной схеме на рис. 47,д. В ее контуре объеди-
няются функции измерительного (имеет место режим автоколебаний)
основного и адаптирующего контуров схемы на рис. 47,в. Поэтому
схема на рис. 47Д представляющая собой нелинейную одноконтур-
ную автоколебательную систему с жесткой структурой, не столь про-
ста, как кажется на первый взгляд, и обладает, по образному выра-
жению проф. М. В. Меерова, «чем-то большим по сравнению с обыч-
7
Регулятор
М(р)
'Объект
Ч
а)
Рис. 47. Варианты структурных схем адаптивных систем с автоколеба
регули
а — структурная схема трехконтурной адаптивной системы, стабилизирующей
тельного измерительного контура (3) и цепи параметрической обратной связи (/);
ные схемы двухконтурных систем адаптации, отличающиеся от схемы на рис. 47,а
ной связи и измерительного контура; г ■— структурная схема одноконтурной систе
с жесткой структурой (д); / — цепь параметрической обратной связи; 2 — цепь
тельного
96
ной системой с обратной связью [Л. 33]. Это «большее» выявляется
в реализации условий дуальности управления при решении задачи
адаптации динамических свойств исходной САР.
Основным преимуществом вариантов схем адаптации, представ-
ленных на рис. 47, является простота их аппаратурной реализации.
Недостатками схем являются: зависимость показателей режима уста-
новившихся^ автоколебаний (например, амплитуды или частоты) от
уровня входного сигнала, пределы изменения коэффициента усиления
с
k0=var
регулятор объект
.7^
-1,3
НП-2
Регулятор
объект
■{■
НП-2
е
-k0=va,r
Mfp)
(регулятор объект"^
iz,3
тельным .измерительным устройством - и цепями параметрического
рования.
динамические свойства исходной САР (рис. 42,а) за счет действия автоколеба-
2 — цепь основной отрицательной обратной св^зи исходной САР; б, в — структур-
совмещением функций основной обратной связи или цепи параметрической обрат-
им адаптации, эквивалентная нелинейной одноконтурной автоматической системе
отрицательной обратной связи; 3 — цепь измерительного устройства автоколеоа-
вида.
7—1374
97
объекта обусловлены возможными нарушениями режима установив-
шихся автоколебаний измерительной цепи, возможность возникнове-
ния параметрических явлений возбуждения и захвата частоты .авто-
колебаний из-за наличия контура адаптирующей параметрической
обратной связи в системе и др.
Рассмотрим примеры реализации систем адаптации, приведенных
на рис. 47 [Л. 38—40].
Для управления скоростью самолета в вертикальной плоскости
(плоскости тангажа) применяют цепи коррекции его динамических
Рис. 48. Кривая типовой реализации
случайного процесса, характеризующего
изменение скорости воздушных потоков
вдоль горизонтальной оси движения.
свойств в соответствии с задаваемым эталоном (эталонная модель)
(рис. 38). Однако при полете современных летательных аппаратов из-за
высоких скоростей и больших диапазонов перекрываемых расстояний и
высот такие САР не в состоянии обеспечить требуемые характеристи-
ки полета. Основные виды возмущающих воздействий в данном слу-
чае связаны, например с неравномерностью характера сгорания топ-
лива внутри двигателя, что проявляется в непредвиденных измене-
ниях тяги двигателя, вызывающих вибрацию летательного аппарата
и отклонение его от задаваемой эталоном траектории движения.
Другой вид возмущений обусловлен взаимодействием самолета
с аэродинамической средой, состав и свойства которой подвержены
случайным изменениям. В результате изменений перепадов давлений
и температур в зоне траектории полета происходит изменение усло-
вий обтекания несущих плоскостей и фюзеляжа самолета аэродина-
мическим потоком, вызывающим отклонения его угловых движений
и движений центра массы от заданных. Указанные свойства аэроди-
намической среды определяются турбулентностью атмосферы. Ош
порождаются процессами движения и вихреобразования частиц воз-
духа и перемещением воздушных потоков в слоях и зонах атмосфе-
ры. При большой интенсивности турбулентных порывов скорость вос-
ходящих и нисходящих воздушных потоков составляет около 20—
30 м/сек, что приводит к вибрации '(«болтанке») летательного аппа-
рата и к погрешностям в работе измерительных приборов самолета
(ошибка в показаниях высотомеров может достигать примерно 300—
98
500 м). Все это усложняет процессы пилотирования самолета в изме-
няющихся условиях полета.
Рисунок 48 иллюстрирует типовую кривую случайного процесса
подобного вида, которая показывает изменение скоростей воздуш-
ных потоков, происходящих в плоскости тангажа вдоль горизонталь-
ного направления движения самолета (ось /). Другие виды возму-
щающих воздействий могут искусственно создаваться, например, при
использовании летательных аппаратов в боевых условиях с целью
искажения летной траектории.
Модель-
этяалон
I k0=var
i,
z
K0 wo(P)
Регулятор 05ъект
У
/77
A
p
Рис. 49. Структурная схема адаптивной системы управления ско-
ростью самолета в плоскости тангажа с автоколебательным измери-
тельным и параметрическим контурами обратной связи.
/ —- цепь параметрической обратной связи; 2 — цепь отрицательной обратной
связи исходной САР.
На рис. 49 приведена схема управления скоростью самолета
в плоскости тангажа, компенсирующая действие возмущающих воз-
действий за счет применения системы стабилизации динамических
свойств САР с -адаптирующей цепью параметрической обратной свя-
зи (рис. 47,6). Здесь объектом управления является самолет, движу-
щийся в плоскости тангажа. Управление скоростью самолета осу-
ществляется с помощью исполнительного устройства (сервопривода).
В линейном приближении движение объекта описывается дифферен-
циальным уравнением второго порядка. Статический коэффициент
усиления i&o подвержен непредвиденным изменениям в диапазоне от
1 до 100, вызываемым действием указанных выше возмущений. За-
дача стабилизации общего коэффициента усиления системы, приво-
дящая к стабилизации динамических свойств, решается с помощью
автоколебательной системы с релейным регулятором, уровень зоны
ограничения которого регулируется автоматически с помощью адап-
тирующей цепи параметрической обратной связи. Уравнения цепи
основного контура системы автоматического регулирования скорости
самолета в плоскости тангажа записываются в виде
9э=ИМ/>)90; e=9e-6;,z.= f(., *р); q=koWQ{p)Z, (178)
где W3 (р)—задаваемая перэдаточная функция эталонной модели;
W0 (р) = р ijp>р _|_ \ ){Т%р + 1) — неизменяемая часть передаточной
функции объекта управления и исполнительного устройства; f (е, kv) =
7* 99
= (&р + &р) sign е — нелинейная функция релейного вида с управляе-
мым уровнем ограничения.
Полагая, что в цепи параметрической обратной связи исполь-
зуется -интегральный закон управления, запишем уравнение адапти-
рующего контура в виде
^f=Y(^-«|8|), (179)
где у» т— постоянные коэффициенты; — задаваемое исходное зна-
чение параметра, определяющее уровень ограничения релейного эле-
мента регулятора основного контура САР; |0|—значение выходно-
го сигнала линейного детектора системы.
Уравнениями (178), (179) описывается поведение системы на
рис. 49 в целом. Рассмотрим вначале поведение основного контура
САР, в котором реализуется автоколебательный режим, и определим
его основные показатели: амплитуду и частоту автоколебаний. За-
пишем уравнение основного контура САР в виде
dtz + (Ti + т*) dt2 1 dt №°
Тг Тг ^Г+(ТХ + Т%) ^+^Г = К (*g + kv) sign (9. - 9). (180)
Уравнение" (180)—нелинейное дифференциальное уравнение
третьего порядка, исследование решений которого методом фазовой
плоскости невозможно. Поэтому воспользуемся методом гармониче-
ской линеаризации, полагая 0Э=0 и определяя гармонический комп-
лексный коэффициент усиления релейного элемента регулятора
в виде
где Л — амплитуда основной гармонической составляющей релейного
элемента.
Подставляя в правую часть уравнения (180) выражение (181)
и осуществляя его гармоническую линеаризацию, получим уравнение
ri72(/(o)3"+ (Tl + T2(i(d)2 + 0'(o)4Wp(/(o) =0. (182)
'Приравнивая нулю вещественную и мнимую части выражения
(182), найдем:
-(Tl + Tt)ufi + k.{%+kv)£=b ^ (183)
(TtT2tf— 1) со = 0.
Разрешая уравнения (183) относительно А и со, определим иско-
мые показатели режима автоколебаний: амплитуду А и частоту соо
автоколебаний:
А = ('84)
где параметры Т19 Т2, k®, &р неизменны.
Таким образом, в исходной САР, находящейся в режиме авто-
колебаний, амплитуда А пропорциональна статическому коэффици-
енту усиления объекта k0 и, следовательно, возможно измерение зна-
100
чений ко путем измерения амплитуды автоколебаний в системе. Дей-
ствие адаптирующей цепи параметрической обратной связи при из-
менениях статического коэффициента усиления k0 объекта управле-
ния должно приводить к стабилизации значения амплитуды Л, по-
этому в соответствии с (184) k0 (kp + kv) = const.
Учтем действие контура адаптирующей параметрической обрат-
ной связи, записывая уравнение (179) в следующем виде:
-^p = Y (k°p -тА\ sinI), (185)
где значения А и coo определяются выражениями (184).
Следовательно, дифференциальное уравнение движения регули-
руемого параметра записывается так:
dk ТХТ2 4&0 п
~dT + ^m 7\+ Т2 ~lsin(°o*l ^=Т^р» (186)
о 4уяг ТХТ2
где #=«р+&р, a B(t) = — jr-^^Y~ ko\sm(dot\ является пере-
менным коэффициентом. Для скачкообразного изменения статическо-
го коэффициента усиления k0 объекта, определяя по (56) постоян-
ную составляющую в разложении функции |sina)o/|, с учетом филь-
трующих свойств цепи параметрической обратной связи найдем:
Решение линейного дифференциального уравнения (187) пред-
ставляет собой экспоненциальную функцию, сходящуюся к требуе-
мой уставке &°р при /—>-оо, что определяет стабилизацию амплиту-
ды автоколебаний и общего коэффициента усиления основного кон-
тура САР. Оценка влияния уровня входного сигнала Оо САР и его
изменений на процессы адаптации здесь не рассматривается (см.
[Л. 38—40]).
Рассмотрим другой пример реализации схем на рис. 47 с авто-
колебательным режимом,процессов в основном контуре САР.
Усилители постоянного тока находят в настоящее время широ-
кое применение в различных областях техники автоматического кон-
троля и управления и являются основными элементами АВМ. Основ-
ные возмущающие воздействия в подобных устройствах приводят
к дрейфу 'выходного сигнала, а это затрудняет их практическое ис-
пользование.
Известные инженерные решения, направленные Ш компенсацию
возмущающих воздействий, связаны с применением компенсирующих
входных каскадов, со стабилизацией напряжений источников питания
и температурного режима преобразования непрерывного входного
сигнала с помощью схем модуляции — демодуляции. Рассмотрим
применение схем с адаптирующими цепями параметрической обрат-
ной связи для стабилизации характеристик усилителей постоянного
тока [Л. 41].
На рис. 50 приведена схема усилителя постоянного тока, ис-
пользующего указанный метод построения и детализирующая от-
дельные элементы структурной схемы на рис. 47,в. Здесь автоколе-
101
бания создаются в колебательном контуре, образуемом емкостями
нелинейных управляемых конденсаторов (варикапов) си С2 и индук-
тивностью дросселя l, с помощью цепи положительной обратной
связи, вводимой в схеме на рис. 50 с выхода двухкаскадного усили-
теля переменного напряжения, выполненного на транзисторах 7\ и
Г2. Выходное напряжение автогенератора поступает далее на детек-
тирующее устройство (транзистор т3) и в нагрузку 7?н, где осу-
ществляется фильтрация высокочастотных составляющих яапряже-
4Ь
ж
Рис. 50. Схема усилите-
ля постоянного тока с
автоколебательной изме-
рительной и параметри-
ческой цепями обратных
связей.
ния. Амплитуда автоколебаний и, следовательно, выходное напря-
жение на нагрузке ra, в схеме на рис. 50 определяются напряже-
нием входного сигнала, воздействующим на параметры колебатель-
ного контура (управляемые емкости Сь с2).
Варикапы представляют собой специальный вид полупроводни-
кового диода, емкость которого обусловлена емкостью р-я-перехода
и зависит от величины приложенного к диоду напряжения обратной
полярности (Л. 42]. Управление величиной емкости варикапа с по-
мощью изменения управляющего напряжения на диоде позволяет
осуществлять бесконтактные конденсаторы переменной емкости. Ти-
повая зависимость величины емкости варикапа с от приложенного
к нему напряжения uo приведена на рис. 51,а. Эта зависимость не-
линейна и для ряда варикапов '(«например, сплавных или кремние-
вых) аппроксимируется выражением вида
л
c==ybtit:
где А и Б постоянные; uo— величина напряжения, приложенного
к варикапу.
Нелинейная зависимость на рис. 51,а нежелательна в ряде слу-
чаев, поэтому на практике применяется встречно-последовательное
включение двух однотипных варикапов, линеаризующее характери-
стику (c = muo). Схема подобного включения варикапов, используе-
мых в качестве элементов настройки колебательного контура, приве-
дена на рис. 51,6. Здесь uo— управляющее напряжение; с — эле-
102
менты колебательного контура; Сь Сч — варикапы. Свойства конден-
сатора для варикапов сохраняются, если амплитуда переменного
напряжения Um в колебательном контуре не превышает Uq/2, т. е.
через варикап не проходит ток в прямом направлении. С другой
стороны, как и при использовании обычных диодов, общая величина
приложенного к варикапу напряжения не должна превышать допу-
стимой величины, что обусловлено выходом его из строя в результа-
те пробоя р-я-перехода.
30
20
W
О
с\
Д9
01Е
"о
ю го зо w в
а)
Рис. 51. Типовая характеристика варикапа.
а — кривая, определяющая зависимость емкости варикапа от величины прило-
женного к нему напряжения; б — схема встречно-последовательного включения
двух однотипных варикапов, линеаризующая характеристику, представленную
на рис^ 51, а.
Обратимся к рис. 50. Здесь в качестве управляющего напряже-
ния, изменяющего емкости варикапов, используется входное напря-
жение усилителя постоянного тока VBXj осуществляющее параметри-
ческое воздействие. В этой схеме аналогично рис. 51,6 используется
встречно-последовательное включение двух однотипных варикапов,
которые вместе с плечами регулируемого сопротивления R образуют
электрический мост. В одну из диагоналей моста от цепи положи-
тельной обратной связи автогенератора поступает напряжение с вы-
хода двухкаскадного усилителя на транзисторах Гь Т2. Другая диа-
гональ моста используется для задания управляющего напряжения
UBX. Емкости Сь С2 варикапов и индуктивность L являются эле-
ментами цепи колебательного контура. Передаточная функция схемы
имеет вид: _
^■"-fe" w+ ?/>.+ ! ' (188)
где Го — постоянная времени варикапного моста; k — статический
коэффициент усиления схемы.
Усилительные элементы на 1\, Т2 полагаем безынерционными
звеньями с нелинейной характеристикой типа ограничения, коэффи-
циент усиления линейной части которой подвержен непредвиденным
изменениям. Структурная схема рассматриваемой системы представ-
лена на рис. 62,а. З'десь контур, состоящий из элемента W(p) и не-
линейного звена, находится в режиме автоколебаний, управляемых
иъх\ выходной сигнал постоянного тока образуется после детектора
Д и фильтра низкой частоты Фн.ч-
Воспользуемся схемой на рис. 52,а для определения амплитуды
и частоты автоколебаний в контуре системы, полагая UBX = const.
Учитывая, что двухкаскадный усилитель на Тх, Tz осуществляет
103
сдвиг фазы гармонического сигнала на 360°, запишем условие воз-
буждения автоколебаний в контуре системы на рис. 52,а в виде
■| IF (/©)|*'&<<°>+27с]/Сл (/со) = 1,
где |Щ/со)|, ф(со)—амплитудно-и фазо-частотная характеристики
линейного элемента системы; К а (/со) — комплексный гармонический
и
Wfp)
а)
д
*н.ч
\
I
Рис. 52. Структурная схема усилителя постоянного тока с автоколе-
бательной измерительной и параметрической цепями обратных связей.
а — структурная схема: / — цепь параметрической обратной связи, 2 — цепь
«силовой» обратной связи; б — графический метод определения амплитуды
автоколебаний системы в зависимости от уровня входного сигнала усилителя
постоянного тока.
коэффициент усиления нелинейного элемента с ограничением, опре-
деляемый известным выражением
при А < Ь\
2 / Ъ Ь */
^ = — ^^^^-.+^-1/1-^ при А>Ь.
(189)
Поскольку Ка является вещественным и частотно-независимым
коэффициентом, уравнение запишется еледующим образом:
ep(co)±2jt = 0; \
104
\W(ia>)\KA = l J
(190)
Определяя далее фазо-частотную характеристику ф(со) для вы-
ражения (188), получаем -в соответствии с первой строкой (190)
уравнение
arct-2 1~™*Т°Т +2п = 0. (191)
Частота автоколебаний определится в виде
1
(192)
Уравнение второй строки с учетом (192) записывается
£/Са = 1. (193)
Пусть, далее, воздействие UBx осуществляется через коэффици-
ент усиления к основного контура, т. е. k=y(JBx- Тогда уравнение
(193) записывается в виде
4-(arcsin4-+4-/i-J)t/"=i-
(194)
Аналитическое решение уравнения (194) практически затруд-
нительно [Л. 43J.
На рис. 52,б приведены графики функций Кд —J [^~~b~J вида
(189) и КА = — , позволяющие определять для задаваемых значе-
ний Un соответствующее значение амплитуды автоколебаний А гра-
фическим методом.
7. СТАБИЛИЗАЦИЯ ДИНАМИЧЕСКИХ СВОЙСТВ САР
В ИЗМЕНЯЮЩИХСЯ УСЛОВИЯХ РАБОТЫ
ПО ЭТАЛОННОЙ МОДЕЛИ
Рассмотрим применение адаптирующих цепей параметрических
обратных связей для стабилизации динамических свойств САР в из-
меняющихся условиях работы объекта, задавая эталонное поведе-
ние системы в форме эталонной динамической модели [Л. 44—47].
Такая форма задания приводит к особенностям решения задачи
стабилизации, которые будут детализированы на конкретных при-
мерах.
Эталонная модель является устройством, динамические харак-
теристики которого служат в качестве образцовой меры поведения
САР. Решение задачи стабилизации означает устранение рассогла-
сования между выходными сигналами эталонной модели и исходной
САР при задании одинакового сигнала на их входы, осуществляе-
мое с помощью автоматического регулирования параметров управ-
ляющего устройства исходной САР при изменяющихся условиях
работы ее объекта.
В отличие от рассмотренных ранее систем здесь не требуется
измерение изменяющихся в процессе работы параметров объекта,
поскольку по смыслу постановки задачи осуществляется приближе-
ние значения выходного сигнала САР к выходному сигналу эталон-
105
ной модели. Рассмотрим схему на рис. 53, где осуществляется па-
раллельное включение эталонной модели и САР, в которой изменяет-
ся коэффициент усиления k0. Тогда для решения задачи
стабилизации динамических свойств САР при изменениях kQ с по-
мощью эталонной модели той же структуры необходима стабилиза-
Модель -эталон
У
М(р)
*N(p)
Регулятор \kff=var
If
2
\М(Р)
Кр
Объект
Ш
Щр)
Параметрическая обратная связь
Рис. 53. Структурная схема адаптивной системы с эталонной мо-
делью и цепью параметрической обратной связи.
ция ее общего коэффициента усиления kvk0 = kyi, где kM — задавае-
мый эталонной моделью требуемый коэффициент усиления системы.
Уравнения системы с эталонной моделью записываются так:
М(р) М(р)
z = k^x0, х =- k0 N ^ z, Г/ = kM ~дГ/—j" х0. (195)
Соответствующее уравнение рассогласования выходных сигналов
эталонной модели и исходной системы г=у—х определяется выра-
жением
N (/>)7= (*м - kvk0) М (р) *0. (196)
Для формирования алгоритма цепи адаптирующей параметриче-
ской обратной связи аналогично (177) можно разрешить уравнение
(196) относительно рассогласования bk=ku—kvk0 значений коэффи-
циентов усиления эталонной модели и исходной системы, осуществив
предварительно многократное интегрирование по времени соответ-
ствующих выражений его левой и правой частей. Тогда аналогично
(177) имеем:
t t t
bne (t) + bn.x j e (0 dt + ... + j\ . . j s (0 (dt)n - E (0)
'— t t
106
t t
am j . . . j *o (0 (dt)-~ m + Лж_1 j- • • J x0 (t) (dt)»+*-™+
0 0
о 0
t t
+ *"+Г'.$*° (t)(dt)n-X0 (0)
о 0
(197)
где
т
/=1 /=1
— выражения, определяемые начальными условиями.
Осуществляя далее введение цепи параметрической обратной
связи с заданным законом регулирования вида
JE
v~Q(p) '
где R(p) и Q(p)—полиномы, определяющие закон регулирования,
приходим к структурной схеме системы стабилизации, приведенной
на рис. 53.
Приведенный подход к решению задачи оказывается весьма
не совершенным в смысле большого объема применяемой аппарату-
ры, поскольку при формировании алгоритма (197) мы воспользова-
лись цепью с эталонной моделью для реализации измерительного
контура изменяющегося коэффициента усиления ko объекта управ-
ления. Для практических приложений было бы целесообразно фор-
мирование алгоритмов работы адаптирующих цепей параметрических
обратных связей, реализуемых более простыми средствами. Возмож-
ный вариант подобного подхода к решению задачи может состоять
в следующем. Запишем уравнение (196) в виде
Г=д*Т^ (198)
М(р)
где х1 = дГ^у^о — промежуточный сигнал эталонной модели, снима-
емый на выходе блока с передаточной функцией M(p)jN(p). Умно-
жая левую и правую части уравнения (198) на Xi, получим сле-
дующее выражение:
*xx = *kx\ (199)
и, следовательно,
sign (exi) = sign 6k, (200)
поскольку всегда
(*?)>о.
Разрешая уравнение (199) относительно 6k, получим:
dk^zxi/ixt)2. (201)
Уравнения (200), (201) определяют алгоритмы цепей параметри-
ческого регулирования релейного или -пропорционального вида, реа-
лизуемые весьма простыми средствами. На рис. 54,а приведена
структурная схема системы, в которой реализуется алгоритм (201).
Для его формирования использованы нелинейные преобразователи
НП-2 типа множительных и делительного звеньев. Схема на
рис. 54,6 — блок для формирования алгоритма (200), представляю-
щий множительное звено и релейный элемент. Возможна также
107
г)
Рис. 54. Варианты структурных схем адаптивной системы с эталон-
ной моделью для различных алгоритмов цепей параметрической
обратной связи.
а — структурная схема адаптивной системы с эталонной моделью и алгорит-
мом пропорционального вида; б — структурная схема элемента цепи парамет-
рической обратной связи для формирования релейного алгоритма; в — струк-
турная схема элемента цепи параметрической обратной связи для формирова-
ния релейно-пропорционального алгоритма; г — структурная схема дискретного
автомата для формирования алгоритма цепи параметрической обратной связи
системы.
108
реализация комбинированного релейно-пропорционального алгорит-
ма, если, например, записать уравнение (201) в виде
sign (ex,)
k== (*))»' (202)
обусловливающем структурную схему блока, приведенную на
рис. 54,в.
Рассмотренный подход к формированию алгоритмов цепей па-
раметрического регулирования допускает весьма простое физическое
истолкование. Действительно, если &о&р<&м — сигнал на выходе
эталонной модели у>х, следовательно, знак е совпадает со знаком
у й хх\ наоборот, если kokp>kM — сигнал х>у, знак е противополо-
жен знакам у и Х\. Поэтому алгоритм функционирования цепи пара-
метрической обратной связи может быть задан в виде следующих
«логических» высказываний:
Если знаки сигналов s и хх совпадают, то необходимо увели-
чивать коэффициент усиления &р.
Если знаки сигналов е и xt не совпадают, то необходимо умень-
шать значение коэффициента усиления kv.
т-т ,.r-r, [ 1 при z > 0,
Полагая аналогично (158) sign z = <
V ' т \0 при z<0.
и определяя результирующие логические высказывания «увеличить»
kp—*-(1), «уменьшить» kp—^(0), составим соответствующую табли-
цу логической функции в виде
е ... 0 1 0 1
х,... 0 0 1 1
kv ... 1 0 0 1
Алгебраическое выражение этой функции записывается так:
/fep=e/x/i + ejci> (203)
где штрих обозначает операцию отрицания (НЕ), произведение —
операцию (И), сумма — операцию (ИЛИ), осуществляемые над
двоичными переменными (0 или 1) соответствующих сигналов
(sign е и signal). Здесь kv есть также двоичная переменная, при-
чем уравнением (203) описывается работа дискретного автомата,
структурная схема которого, составленная из элементарных логиче-
ских звеньев, приведена на рис. 54,г. Схема на рис. 54,г определяет
другой вариант реализации алгоритма цепи параметрической обрат-
ной связи с дискретным законом адаптации. При интегральном за-
коне регулирования параметра &р уравнение цепи параметрической
обратной связи для схемы на рис. 54,г записывается в *виде
~4f = Y [sign t sign x, + (sign t)' (sign x,)'], (204)
образуя совместно с уравнениями исходной схемы с эталонной мо-
делью
*i= д/^ч Ж0. У = кмх1 (205)
полную систему уравнений, описывающую динамические свойства
системы в целом.
е = у — х; z = &рх0; х = k0 м /гЛ z,
109
Усложним поставленную выше задачу, • полагая, что изменяю-
щиеся условия работы объекта управления обусловлены изменения-
ми не только его статического коэффициента усиления &о, но и из-
менениями других параметров—коэффициентов а\, bj полиномов
М(р, t)., N(p, t). Тогда уравнения исходной системы с эталонной
моделью записываются в следующем виде:
е = х—у; z=kpX0, x = Wq(p, t)z,
y = k*lWn(p)xoi (206)
где W0(p, t)=k0(t)Mo(p, t)/No(p, t)—параметрическая передаточ-
ная функция объекта управления; Wu(p) =М(р)/N(р)—передаточ-
ная функция эталонной модели, причем
N0(p, 0=Pn + M0Pn_1 + M0Pn-2+
...+&no(0; Мо(^ ^)=Pm + aio(t)pm-i +
+ a20(0Pm"2+ ... +flmo(0-
Полиномы M(p) и N(p) модели имеют ту же структуру и по-
стоянные значения соответствующих коэффициентов. Задача стаби-
лизации динамических свойств системы сводится, таким образом,
к стабилизации ее статического коэффициента усиления k0kv — ku и
соответствующих коэффициентов aj0 = ajM, fr;0 = 6iM уравнений.
Рис. 55. Структурная схема адаптивной системы с эталонной
моделью и цепями параметрической обратной связи для стаби-
лизации динамических свойств исходной САР.
Изменение этих коэффициентов возможно осуществлять, ме-
няя значения параметров корректирующих цепей, включаемых
в цепи дополнительной обратной связи W0.c(p) и последовательно
Wn(p) с объектом. Эти цепи наряду с усилителем kp относятся
к схеме регулятора САР и показаны на рис. 55. Пусть, например,
110
рассматривается система, когда з уравнениях (206) М0(р, t) =
= М(р) = \. В этом случае передаточные функции корректирующих
цепей определяются в виде W0.c (р) pipn_1+iP2/?n_2 + ••• + Рп,
^п(р)=1. Тогда уравнение исходной системы записывается так:
\pn+{bi0+'k$i)pn-*+ (&2о+'£о<р2)рп-2 +
. • . + (bnO + k0$n)]x^kQkvXO,
(207)
где коэффициенты kv и р* могут регулироваться затем с помощью
цепей параметрических обратных связей, a k0 и bi0 принадлежат
объекту, неконтролируемы и подвержены изменениям. Уравнение
эталонной модели имеет вид:
(рп + biMpn-1 + &2мРп-2+ ... +&пм)у = *м*о.
(208)
Уравнение, записанное относительно рассогласования выходных
сигналов эталонной модели и исходной системы 8, определяется
следующим образом:
п
(Рп}+ W1"1 + + ... + Ьпм) 7= ДЬ)о - S bbn-tp»-*S ,
£=1
(209)
где Д£ = &м—&oV, Abn-i = biM— (bi0 + k0^i) — рассогласования пара-
метров системы, которые должны быть сведены к нулю за счет дей-
ствия цепей параметрических обратных связей, поскольку в этом
случае величина е—Ю, что решает поставленную задачу. Для фор-
мирования алгоритмов цепей параметрических обратных связей
в системе умножим левую и правую части уравнения (209) на соот-
ветствующие сигналы х0, Бп-*х и получим следующую систему
уравнений:
zh= (WM(D)e)x0 + [Abn.iDn-ix^j х0= Ak (х0)2;
■-{Nu{D)*)D»-*x+ 2 bbn-tDn-ix X
\i=\ ]1фП—\
X Dn-1x~— Akx0Dn~1x = — Abx (Dn-1x)2;
**= (А^м (D) .) x + S AftnilD»-«x x -
V=i /Mi
— AkxQx = —Abn(x)2.
Следовательно, справедливы выражения
(210)
(*о)2
A6j — ■
(Dn_1x)2
гп-1 . A и zn
(211)
111
или
sign Ak = sign zk\ signA6i =
—sign zu
..., sign Abn = — sign zn, (212)
определяющие величину и знаки рассогласований коэффициентов
эталонной модели и исходной системы.
Уравнения цепей параметрических обратных связей с заданны-
ми законами регулирования имеют вид:
*>=07ЙМ; ^=4(7)д6'ЩАр) д&п' (213)
Таким образом, уравнениями (211) — (213) определяются алго-
ритмы работы цепей параметрического регулирования.
Структурная схема системы стабилизации динамических свойств
при изменяющихся условиях работы объекта (207) по эталонной
модели (208), реализующая алгоритмы (211) цепей параметриче-
ского регулирования, приведена на рис. 56. В отличие от схемы на
рис. 54 здесь осуществляется взаимосвязанное многомерное пара-
метрическое регулирование ряда коэффициентов kv и (3* регулятора
исходной системы. Аналитическое исследование динамического по-
ведения схемы (рис. 56) по ее уравнениям представляется сложной
задачей.
Другой метод формирования алгоритмов цепей адаптирующих
параметрических обратных связей возможен, если использовать усло-
вия устойчивости нелинейных САР. Наиболее общим методом тео-
рии устойчивости нелинейных САР является, как известно, прямой
метод Ляпунова, который применяется для решения задачи
[Л. 19, 45, 46].
Производная по времени от функции Ляпунова должна быть
отрицательно определенной, чтобы гарантировать достаточные усло-
вия асимптотической устойчивости системы в целом. Поэтому при
синтезе системы предварительно задается положительно определен-
ная функция (функция Ляпунова) от рассогласования е выходов
объекта и эталонной модели и ее производных по времени, а также
рассогласований соответствующих параметров эталонной модели и
исходной системы. Рассматривается система двух дифференциаль-
ных уравнений: для производной по времени ох функции Ляпунова
и сигнала рассогласования е приближаемых выходов эталонной мо-
дели и объекта, что позволяет найти выражения (алгоритмы цепей
параметрического регулирования), при которых производная по вре-
мени от функции Ляпунова отрицательна и удовлетворяются усло-
вия устойчивости - системы в целом.
Для иллюстрации указанного подхода воспользуемся схемой
на рис. 53, где необходима стабилизация коэффициента усиления
kpko = ku, полагая неизменяемую передаточную функцию объекта и
эталонной модели в виде М(р)in(р) = 1/(7>+1). Уравнение для сиг-
нала рассогласования е запишется следующим образом:
Т -^Г + е=АкХо, (214)
где Ak = ku—kvkQ.
112
Задавая положительно определенную функцию Ляпунова в виде
V=e2 + y(Ak)\ (215)
получим следующее выражение для ее производной по времени:
dV_
dt
f de .m dAk\
■ = \^4t+^k4t)' (216)
Рассмотрим далее систему дифференциальных уравнений (214),
(216). Разрешая уравнение (214) относительно величины d&/dt и
подставляя это выражение в правую часть уравнения (216), при-
ходим к следующему уравнению:
2 dt
f dAk , ex0\
Условия асимптотической устойчивости e-*0, t-*oo выполняются,
dAk ex0
если dV/dt<C.O. Это определяет соотношение y ~jjr + -у- = 0 или
dAk/dt = -^ex0/yT, (218)
т. е. алгоритм цепи параметрической обратной связи в системе ста-
билизации на рис. 53. Выражение (218) записывается в окончатель-
ной форме следующим образом:
dkv ех0
-jt+f№=vb> (219)
где f (t) = -7г~ — переменный коэффициент.
В случае k0 = const значение f (t) = 0. Поэтому получаем алго-
ритм
dt 4Tk0 ^Хо>>
отличающийся от полученного ранее (см. стр. 107) лишь масштаб-
ным коэффициентом.
Общее дифференциальное уравнение движения системы адап-
тации имеет вид:
Поскольку в этой системе dV/dt<0, решение нелинейного диф-
ференциального уравнения (220) устойчиво и, следовательно, при
t—^оо, Ak—Ю (kokj>—>kw).
Здесь сложность нелинейных дифференциальных уравнений
движения системы адаптации несущественна, ибо заранее гаранти-
руется сходимость их решений. В этом состоят основные преиму-
щества применения изложенного подхода к формированию алгорит-
мов адаптирующих цепей параметрических обратных связей си-
стемы.
114
Рассмотрим стабилизацию динамических свойств системы управ-
ления скоростью тангажа "самолета по эталонной модели. На рис. 57
представлена схема подобной системы. Здесь имеется эталонная мо-
дель с заданной передаточной функцией
WM(p)=-
р2 + 2fa0Mp + со;
'Ом
определяющей требуемые летные характеристики движения само-
лета в вертикальной плоскости. Объект управления вместе с регу-
лятором &р и исполнительным устройством представляет исходную
САР,. динамические свойства которой изменяются в результате из-
менения коэффициента усиления k0 объекта. Необходима стабилиза-
Модель -эталон
wM(P)
Регулятор
US
kQ-var
хор(р+гш\
Объект
f
Параметри-
ческая обрат-
ная связь
Рис. 57. Структурная схема стабилизации динамических
свойств системы управления скоростью тангажа самолета по
эталонной модели с помощью параметрической обратной связи.
ция САР, осуществляемая соответствующей цепью параметрическо-
го регулирования коэффициента усиления kv регулятора для при-
ближения значений регулируемой величины 0 (скорости тангажа)
к ее эталонному значению Эм. Записывая соответствующие уравне-
ния эталонной модели и исходной САР в виде
(D2 + 2^cooD + co2)0M=:co^o;
(D2 + 2£co0D + to^ofcp) 8 = cD^0fcp90,
найдем уравнение рассогласования €=9М—Э:
ф2 + 2fa0D + 0)2) е = (0О - 9) Ak, (221)
где Ak = 1 —k0kv.
Зададим положительно определенную функцию Ляпунова в сле-
дующей форме:
V = 2£co0 (о>2<+ e'2H-Y (А*)2,
получим уравнение для ее производной в виде
4~ ^Jf = 2|<00f(co^ee + ее) + ^AkAk.
8*
(222)
(223)
115
Перепишем уравнение (221) в виде
ё + cojje = o)q (90 — 9) Ak — 2|со0е (224)
и, подставляя (224) в (223), найдем выражение
4" = - 452too (s> + А* [ТАЛ + 26«gt (90 - 9)], (225)
где dV/dt < 0, если выполняется соотношение
dAk_ 2^о
Л Y
в(90 - 9), (226)
определяющее алгоритм цепи параметрической обратной связи в си-
стеме стабилизации скорости тангажа
Структурная схема системы с цепью параметрической обратной
связи для случая &0 = const приведена на рис. 57.
В более сложных случаях, когда объект описывается дифферен-
циальным уравнением высокого порядка и изменяются многие ко-
эффициенты его уравнения, для квадратичных форм функций Ля-
пунова и их производных, а также уравнений системы целесооб-
разно использование матричных форм записи. Это в существенной
мере упрощает расчеты по определению алгоритмов цепей парамет-
рических обратных связей в системе (Л. 47]. Рассмотрим, например,
схему на рис. 55, решая задачу синтеза алгоритмов цепей парамет-
рического регулирования методом Ляпунова. Вводя следующие обо-
значения, заменим уравнение (209) эквивалентной ему системой
ei = е; е2 = De; en == Dn~le\ е1 = е2\ е2 = е3...;
(228)
еп= — &1меп ~ &m«n-i — ... — 6Лме1 +
п
Функция Ляпунова запишется в виде
п
V = e*tf е + Yft (Ak)* + Y< 2 (A6t)2, (229)
i=l
где 8T=(8i, 62,..., en), e—я-мерный вектор состояния; H — эрмито-
ва матрица характеристического (при правой части, равной нулю)
уравнения (209); ун, у» — постоянные коэффициенты квадратичной
формы. Выражение для производной по времени от функции Ляпу-
нова имеет вид:
\ = - 4 + *п (^х0 - Jj А6П.tDn-<х j +
116
+ 4hAkAk+4t JJaM^i. (230)
где
г„ = (6, «D« -1 + &зм£»п " * + b6MD« -•+...)••
Величина dV/dt<Q, если выполняются следующие соотношения:
dAk _ 1_ ^i=_L dAb2=s
dt \h z«x«: dt Ti 2"5^' "ЗГ
1 d«-H dAbn 1
°ir2" rf^-2 •••~=^rz*x- (23,)
определяющие алгоритмы адаптации.
Рассмотримформирование алгоритмов цепей параметрических
обратных связей градиентным методом с использованием функций
чувствительности, применяемым обычно для решения задач опти-
мизации. Смысл указанного подхода аналогично рассмотренному
выше состоит в предварительном задании некоторой выпуклой
функции Q от рассогласования е.приближаемых выходов эталонной
модели и объекта. Такая функция определяет критерий оптималь-
ного поведения системы, и должен достигаться ее экстремум при
эталонном поведении исходной системы. Она обычно выбирается
в виде гладкой или аналитической функции координат, что гаранти-
рует существование частных производных по каждой из координат
и, следовательно, градиента функции в каждой точке пространства.
Например,
Q=(a0e + ai*e + ...+ane(n))2,
или
Q = ae.t + a, (;)■> ... + an (e(»))*, (232)
где e=y—x — рассогласование приближаемых выходов эталонной
модели и объекта; а, — постоянные коэффициенты. Для решения за-
дачи возможно применение известных вариационных методов орга-
низации движения (метода градиента, наискорейшего спуска, Гаус-
са— Зайделя, слепого поиска) к точке экстремума, где значения
частных производных по каждой из координат равны нулю. Для
метода градиента справедливы соотношения
Лв-*5л' (233)
где pi(t=l,..., п) — адаптируемые параметры системы; dQ/dpi —
частные производные.
Обратимся далее к схеме на рис. 55 и решим задачу синтеза
алгоритмов цепей параметрических обратных связей градиентным
методом, задавая выпуклую функцию Q=«e2. Тогда значения dQfdpi
могут быть определены в виде
(234)
117
где de(t)/dpi есть коэффициент влияния параметра pi системы на
сигнал рассогласования е или функция (мера) чувствительности сиг-
нала e(t) к изменениям параметра pi [Л. 48].
Поскольку эталонная модель системы имеет фиксированные
параметры и, следовательно, сигнал у не зависит от адаптируемых
параметров регулятора исходной системы, уравнение (234) запишет-
ся в следующем виде:
dQ дх
— 2as —- . (235)
dpi apt у >
Выражения (233), определяющие алгоритмы цепей параметри-
ческих обратных связей, имеют вид:
f^t? (2^>
где dxjdpi — функция чувствительности выходного сигнала исходной
САР к адаптируемым параметрам pi ее регулятора.
Поэтому теперь для реализации алгоритмов (236) необходимо
измерение значений dx/dpi в исходной системе. Пусть дифферен-
циальное уравнение исходной системы, включающей объект управ-
ления и цепи регулятора, записывается следующим образом:
;=о
где ait bj — коэффициенты.
Дифференцируя левую и правую части уравнения (237) по па-
раметру pk, найдем:
п п т
i—0 i=0 /=0
Если значения ph квазистационарны (изменяются достаточно
медленно, так что dphfdt—*0), то уравнение (238) может быть за-
писано в виде
п т п
Sdi_ ( дх \ дЬ, dhc^^yn dai__ dhc
"'dt* [dph J 2jdP* dV 2jdPh dt** (^У)
i-0 /=0 /=0
решение которого u(t) =dx(t)jdpk является искомой функцией чув-
ствительности.
В уравнении (237) регулируемыми параметрами исходной САР
являются коэффициенты ai, bj. Поэтому из уравнения (239) опре-
делятся функции чувствительности вида dx/dat и dx/dbj. Соответ-
ствующие уравнения функций чувствительности при условии неза-
118
вйсимостй начальных условий от параметров aif bj записываются
следующим образом:
п п
SAi (дх \ 1П _Ц (dx \
а* dt* \да0)--х> 2j "1 \даг)
i=0 i=0
п
dt, •••»2ja* dt* \дап)
dnx .
(дх \ Y1
a* у = *°; Jj^W* \dbx
i=0 i=0
n
dty * ' dt* \dbm
i=0
(240)
В операторной форме уравнения (240) имеют вид:
%т, дх дх
дах
■■ — рх\
дх
(/О а£ = -(/»"*;
дх
дх
дх
(241)
где /V (р) = 2 atPi есть характеристический оператор исходной
i=o
М(р)
САР. Поскольку х= уравнения (241) записываются следу-
ющим образом:
дх
М(/?) _ AW
N(p)
дх _ Af (/г) die . дя
M(p)
N(p)
M (p) dx
dx
~N (p) dbQ' da, N (p) dbt9 " ' (tam
Af (/?) d#
~~ N(p) dbj
119
дх
дах
m + i
М (р) дх
дх
9 дап
М (р) дх
• к-^рп-т
N(p)
дЬп
где М (р) = 2 bjpK Следовательно, функции чувствительности, за-
/-0
писанные в операторной форме, являются взаимосвязанными через
передаточные функции М(р) и N(p) исходной САР.
Однако реализация устройств по уравнению (241) для получения
функций чувствительности (моделей чувствительности) невозможна,
поскольку коэффициенты ai, bj операторов N(p) и М(р), принад-
лежащие исходной САР, неизвестны из-за влияния изменяющихся
параметров объекта. Следовательно, необходима аппроксимация
функций чувствительности исходной САР функциями чувствитель-
ности эталонной модели.
Записывая уравнение чувствительности для уравнения рассогла-
сования 8 приближаемых сигналов эталонной модели и исходной
САР, получим:
{D* + aluD*-* + ...+ а„) |^ =
=-^{№Dm'1 + ДМ)"1"2 + ... + A6m)x0}-
д
■ {(AaxDn -1 + Aa2Dn -2 + ... + Аап)]х},
где Abj = bjM—bj\ Aai = uiM—я*.
Следовательно, уравнение функции чувствительности имеет вид
т
^е__Г1^ dn-iXp y\dAat dn~*x
(242)
i=l i=l
n
где NM (D) = Dn + ^ а1урп-* есть характеристический полином эта-
лонной модели, а не исходной САР, и потому обладающий извест-
ными характеристиками. Соответствующие уравнения искомых функ-
ций чувствительности записываются в операторной форме следую-
щим образом:
120
(р) = - ^"м (р) ■
де
= — рх\ Nu (р)
дАап
де
дАал
дАЬп
- {р)п~1х\
д7
дАЬп
= рх0) Nm(p)
дАЬх
(243)
Аппаратурная реализация функций чувствительности дг/dAbj
возможна непосредственно в эталонной модели путем формирования
соответствующих «точек чувствительности» внутри ее структуры
(рис. 58,а). Для формирования функций чувствительности дг/дАа{
необходимо применение дополнительного блока с передаточной
функцией \/Nm(p) и устройств дифференцирования выходного сиг-
нала* х исходной САР.
Модель -
NMfP)
эталон
—©к
у
—©~
л„—-
М(Р)
Nfp)
de de de
дЛдт dAbmJ," dAb,
Объект
NM(P)
Модель
de de de
дйап dAa^Y^7 дЛа1
Модель
Nm(P)
-эталон
M(p)
N(P)
Объект
Рис. 58. Структурные схемы реализаций функций чувствительности
в системе с эталонной моделью.
а — использование элементов эталонной модели в качестве элементов модели
чувствительности; б — вариант упрощения модели чувствительности.
Упрощение схемы реализации функций чувствительности
(рис. 58,а) возможно, если включить эталонный блок модели с пе-
редаточной функцией llNM(p) на входе системы, полагая за новый
входной сигнал Xo/NM(p)=Xi (рис. 58,6). Однако при этом изменя-
ются условия функционирования канала исходной САР.
121
Из рассмотрения- рис. 58 следует, что упрощение схемы реа-
лизации функций чувствительности при сохранении условий работы
канала'исходной САР возможно лишь для случая, когда NM(p) = \.
В других случаях схема на рис. 58,6 может быть приемлема для
варианта последовательно-параллельного включения элементов эта-
лонной модели с передаточными функциями \/NM(p) и Мм(р) при
стабилизации динамических свойств исходной САР.
Модель -эталон
Объект
М(р)
Nfp)
Модель
чивстба
тельноста\
с/
Параметры, честя
обратная сбязь
де_
dbj
Рис. 59. Вариант реализации адаптивной системы с эталонной мо-
делью и цепями параметрической обратной связи с применением
модели чувствительности.
Общая структурная схема стабилизации динамических свойств
исходной САР в изменяющихся условиях работы по эталонной мо-
дели, осуществляемая градиентным методом с применением функций
чувствительности, приведена на рис. 59. Здесь модель чувствитель-
ности определяется выражениями (243), а алгоритмы цепей адапти-
рующих параметрических обратных связей записываются в следую-
щем виде:
dAan де # dAan_, де
: Тап<5 дАап' Ш = V.
dt
dAbn
dt
де
; Ybw<s дАЬт
dt
dAax
~~dt
dAbn
de
а» dAax 9
dt
де
дАЬп
dt = £ dAbx '
(244)
122
Они реализуются в схеме на рис. 59 с помощью множительных
звеньев и интегрирующих./ (исполнительных) устройств цепей пара-
метрических обратных связей системы.
Нелинейные дифференциальные уравнения движения системы
имеют вид:
N"(D) (тЙ") = ~(/))п"^(0' ^м(/)) ("^)==(D)m"iXeW-
(245)
п
где AfM (D) = Dn + 2 amDn-i; х0 (t), х (t) — входной и выходной
t=l
сигналы исходной системы; у'—постоянные коэффициенты.
Сходимость решений (245) не гарантируется заранее, поскольку
в модели чувствительности истинные составляющие градиента реа-
лизуются приближенно. Поэтому возникает необходимость более
детального исследования и анализа решений (245) на сходимость,
например прямым методом Ляпунова, что представляет дополнитель-
ные затруднения при расчетах системы. Другой недостаток схемы
на рис. 59 состоит в необходимости построения модели чувствитель-
ности, что усложняет аппаратуру адаптивной системы 1[Л. 49, 50].
8. ПАРАМЕТРИЧЕСКОЕ РЕГУЛИРОВАНИЕ И СТАБИЛИЗАЦИЯ
САР В ПРИСУТСТВИИ ПОМЕХ. ИДЕНТИФИЦИРУЕМЫЕ
МОДЕЛИ И АДАПТИВНОЕ УПРАВЛЕНИЕ
Предыдущее изложение, иллюстрирующее разнообразные при-
менения цепей параметрических обратных связей для решения все
более сложных задач современной автоматики, оставалось непол-
ным, поскольку не рассматривались вопросы влияния неучтенных
или возможных дополнительных помех на поведение системы. В ря-
де случаев в этом не было необходимости ввиду самого характера
процессов системы, где учитывались лишь основные виды возму-
щений, обусловливающие необходимость введения цепей параметри-
ческих обратных связей.
Свойства систем" с цепями параметрических обратных связей
могут быть оценены более полно, если по тем или иным причинам
приходится учитывать действие все большего числа помех, мешаю-
щих требуемому протеканию процессов в системе [Л. 49, 50]. В этом
случае возникают дополнительные задачи, связанные с помехоза-
щищенностью цепей параметрического регулирования, что всегда
означает компромисс между оценками точности и быстродействием
системы.
Возвратимся к рассмотренной ранее (рис. 42,в) задаче стаби-
лизации динамических свойств исходной САР в изменяющихся усло-
виях работы, учитывая также воздействие аддитивной помехи F
в объекте управления (рис. 60). В этом случае возникают затруд-
нения в измерении статического коэффициента усиления объекта,
изменяющегося по условиям задачи. Действительно, отношение вы-
ходных сигналов САР и динамической модели теперь не определяет
ko, а именно: x/y=k0 + F/y.
Поэтому возмущение F будет оказывать нежелательное воздей-
ствие через адаптирующую цепь параметрической обратной связи
123
на систему, уравнения которой записываются в следующем виде:
в . М(р)
е = х0 — х; z =
ko + F/У пр'
N(p)
М (Р)
о N(p)
х = хх + F, — =k0+ F/y,
(246)
где Xi — выходной сигнал объекта при отсутствии возмущающего
воздействия аддитивной помехи F. Таким образом, адаптирующая
цепь параметрической обратной связи не способна устранить влия-
ние аддитивной помехи F.
Модель
Регулятор
^ф1
НП-2
и
Z
Х/тр
*° N(P)
M(P)
NIP)
I k0=var
Объект
Рис. 60. Стабилизация динамических свойств САР, находящейся
в изменяющихся условиях работы объекта в присутствии аддитивной
помехи.
/ — цепь параметрической обратной связи; 2 — цепь основной обратной связи
исходной САР.
В других системах, например при стабилизации САР по эта-
лонной модели, наличие аддитивной помехи F в объекте эквивалент-
но введению дестабилизирующего воздействия на цепи параметри-
ческого регулирования. Следовательно, наличие помехи F вызывает
ложные движения в цепях параметрических обратных связей, что
понижает точность и обусловливает возможность возникновения
неустойчивых движений в системе.
Поэтому в присутствии аддитивных помех задача измерения
изменяющихся динамических характеристик, объекта представляется
весьма важной. В рамках задания структуры объекта, находящегося
в режиме нормальной работы под воздействием аддитивных помех,
она известна как задача оценки параметров объекта в присутствии
помех, или задача параметрической идентификации объекта. Общие
методы решения задач идентификации представляют в настоящее
время самостоятельный раздел теории управления и выходят за
рамки настоящего изложения [Л. 50].
Рассмотрим применение цепей параметрических обратных свя-
зей для решения задачи параметрической идентификации объектов
управления, находящихся в режимах нормального функционирова-
ния, с учетом влияния помех.
124
Обратимся к системе, приведенной на рис. 61, где включено из-
мерительное устройство в виде динамической модели той же струк-
туры, что и объект управления, параллельно объекту. Задача пара-
метрической идентификации считалась бы здесь решенной в случае
совпадения (идентичности) параметров модели (k, ai, bj) и объекта
(kQ, йг, bj), т. е. минимизации рассогласования ем их выходных
сигналов в присутствии аддитивной помехи F в объекте. Следова-
тельно, в этом случае динамическая модель позволила бы осуще-
ствить контроль за параметрами объекта (в режимах заданной струк-
туры) и за промежуточными координатами (состояниями) объек-
Лараметричес-
вектор ^гОгТ4 обратная-
параметров к а^ bj связь
Выходы
модели.
УВыходы
системы
Объект
Рис. 61. Структурная схема адаптивной системы с идентифицируемой
моделью и цепями параметрических обратных связей для идентифи-
кации параметров исходной САР в присутствии помех.
та, недоступными для непосредственного замера. Указанный резуль-
тат очень важен для практики, поскольку в реальных физических
объектах информация о внутренних состояниях объекта часто не
может быть получена из-за технологических или конструктивных
ограничений (например, высокой температуры или давления). Кро-
ме того, за счет использования получаемой информации об объек-
тах можно улучшить работу системы управления.
Автоматизация процесса идентификации параметров динами-
ческой модели может осуществляться адаптирующими цепями пара-
метрических обратных связей, получающих, таким образом, свое
новое назначение в качестве параметрических регуляторов системы
автоматической идентификации.
Структурная схема, иллюстрирующая применение идентифици-
руемой модели (рис. 61), во многом повторяет схему стабилизации
динамических свойств САР по эталонной модели (рис. 55). Однако
идентифицируемая модель на схеме рис. 61 корректируется цепями
параметрических обратных связей под объект управления в отличие
125
Of схемы на рис. 55, где параметры САР корректируются под
эталонную модель. Алгоритмы действия адаптирующих цепей пара-
метрических обратных связей схемы на рис. 61 помехозащищены
в отношении аддитивных неконтролируемых помех объекта. Други-
ми словами, при идентификации параметров модели не решается,
как в схеме на рис. 55, задача приближения выходных сигналов
объекта х и модели у. Более того, при решении задачи идентифи-
кации сигнал рассогласования выходов объекта и модели em = F.
xnxz е
А
$ Mfbjp)\
Инденти оэицару-
емая модель
Рис. 62. Общая структурная схема стабилизации динамических
свойств исходной САР с помощью идентифицирующей и адаптирую-
щей цепей параметрической обратной связи.
/ — идентифицирующая параметрическая цепь обратной связи; 2 — адаптирую-
щая параметрическая цепь обратной связи; 3 —- цепь обратной связи исход-
ной САР.
При оценке действия системы (рис. 61), работающей в условиях
случайных помех, необходимо использовать в качестве меры рассог-
ласования модели и объекта значения дисперсии—Л4 (е^), или сред-
неквадратичное отклонение |/^М(ем)> получающие минимальны
значения при решении задачи параметрической идентификации.
Структурная схема системы стабилизации динамических свойств
исходной САР в изменяющихся условиях работы, измерительный
контур которой реализуется с помощью идентифицируемой модели,
приведена на рис. 62. Здесь исходный контур САР и цепь основной
адаптирующей параметрической обратной связи, осуществляющей
изменение параметров регулятора для стабилизации динамических
свойств САР, аналогичны схеме на рис. 55. Измерительное устрой-
ство содержит идентифицируемую модель, параметры которой регули-
руются цепями идентифицирующей параметрической обратной связи.
126
Рассмотрим далее линейную САР, структурная схема которой
•приведена на рис. 63. Здесь через Л0(со), Ap(cv)i ^Mi(cM) 'обозна-
чены линейные операторы, объекта, регулятора и 'идентифицируемой
модели [Л. 51].
z
I Модель I
Регулятор
Объект
Рис. 63. Структурная схема исходной САР, динамические свой-
ства которой должны быть стабилизированы с помощью пара-
метрического регулирования.
Напомним, что для систем, описываемых линейными дифферен-
циальными уравнениями, выражение оператора совпадает с фор-
мой записи решения в виде уравнения свертки
00
у (t) = А {х (t)} = £ w (z) х (t — z) dz,
0
где до(т) —импульсная переходная характеристика.
Структура операторов полагается заданной, а их выходные
сигналы определяются соответствующими входными сигналами и
внутренними параметрами (с). \
На работу исходной САР оказывают влияние возмущающие
воздействия Ф, искажающие сигнал уставки Хо, а также возмущения,
действующие на объект: аддитивная помеха F и подверженные изме-
нениями параметры со.
Задача состоит в построении системы регулирования парамет-
ров ср оператора регулятора Av(cp) с помощью идентифицируемой
модели Лм(См) таким образом, чтобы компенсировать действие
указанных возмущающих воздействий, обеспечивая минимизацию
задаваемой выпуклой аналитической функции Q вида
Q = Q(e, с), (247)
где е — сигнал ошибки; с={ср, см}—вектор адаптируемых пара-
метров исходной САР. Для решения задачи воспользуемся градиент-
ным методом. Алгоритмы действия цепей параметрических обратных
связей аналогично (233) записываются следующим образом:
dc
-^=TcgradQ, (248)
dc
где с = — векторная функция скоростей изменения вектора с
адаптируемых параметров.
127
Уравнения линейной САР, приведенной на рис. 63, запишем
в виде*
e(t) = [*o(t) + <t>(t)]-[x(t) + F(t)]; *(0 = Лр(сР)«; ) т9)
х (t)=A, (с0) г; y(t)=A*(cK) г; ем= у (t) - [х (t) + F (t)]. J
Воспользуемся вначале выражением (248) для определения ал-
горитмов регулирования параметров ср оператора ЛР(сР). Тогда
имеем:
cp = Ycp grad Q. (250)
Соответствующие составляющие градиента выпуклой функции
Q по параметрам cPi (/ = 1, 2,..., п) определяются в виде
dQ _ dQ (е, с) де
dcVi ~~ де dcVi
(251)
Осуществляя далее дифференцирование выражения для е(/)
в уравнениях (249) по параметру сРь найдем:
+ —(252)
dcPi {dcVi dcVi J \dcPi dcViJ dcVi' v '
где dxoldcVi = d<PIdcPi=dF\(t)ldcT>i=0, так как сигналы x0(t), Ф(/),
F(t) являются независимыми от параметров сРг регулятора САР.
Дифференцируя другие уравнения (249) по параметру сРг и учи-
тывая выражение (252), получим искомое значение функции чув-
ствительности de/dcpi в следующем виде:
де
-— = — CPi (с0, ср) е, (253)
dcVi
СРг(с0, ср) оператор функции чувствительности, определяемый
выражением
дА9 (ср)
л° \с<>> dcpt
Ск(с«- с") = 1+Л(с0)Лр(с0) • <254>
Структура модели чувствительности, входным сигналом которой
служит величина ошибки е, а выходным — значение де/дс^, опре-
деляется оператором СРг(с0, ср). Однако параметры Со оператора
объекта Л0(с0), входящие в (254), требуют еще определения.
Поэтому необходимым условием практической реализации мо-
дели чувствительности является идентификация параметров объек-
та с0.
Воспользуемся градиентным подходом для построения иденти-
фицируемых цепей параметрических обратных связей в модели,
структура которой аналогична'структуре объекта управления. Кри-
терий QH приближения параметров объекта с0 и модели см зададим
в виде
<Эи = М?и(ем), (255)
где Q(eM)—выпуклая функция; ем = */—{x+F)\ L — оператор пре-
образования.
128
Алгоритм действия цепей параметрических обратных связей
в системе идентификации аналогично (248) получает следующий
вид:
%- = YMgradQH. (256)
Соответствующие составляющие градиента выпуклой аналити-
ческой функции QH по параметрам Cmj(/ = 1, 2,..., т) имеют вид:
(257)
Поскольку сигналы F(t) и x(t) не зависят от параметров смз-
модели
де ^ ду = дАт (см)
и, следовательно, в рамках одинаковой структуры объекта и модели
[Лм( •) =л0( •)], имеем:
Структурная схема системы идентификации параметров модели
с помощью найденного алгоритма (256) и системы адаптивного
управления параметрами регулятора исходной САР (250), удовлетво-
ряющего критерию качества (247), приведена на рис. 64. Она содер-
жит контур исходной САР (3), контур цепи изменения параметров
объекта в присутствии помех F(t) (контур параметрической иденти-
фикации) (1) и контур цепей адаптивного параметрического регули-
рования параметров ср регулятора исходной САР (2). В этой схеме
параметры cv регулятора изменяются таким образом, что с помощью
цепей параметрических обратных связей компенсируют возмущающие
воздействия аддитивных (Ф, F) и мультипликативных с0 помех
в системе. Условия инвариантности выполняются здесь за счет по-
строения многоканальной системы параметрического регулирования,
являющейся взаимосвязанной и нелинейной в целом. Анализ такой
системы представляется затруднительным [Л. 51].
Другой подход к решению задач адаптации и оптимизации
в присутствии помех случайного вида имеется в работах Я- 3. Цып-
кина (Л. 52]. Смысл его заключается в рассмотрении процессов
адаптации и оптимизации с позиций теории вероятностных итера-
тивных решений и метода стохастической аппроксимации.
Пусть рассматриваемая система работает в нормальном режи-
ме, а действующие сигналы есть стационарные случайные процессы.
Сформируем критерий оптимальности вида
/(c)=M{Q(e, с)}, (259)
где М — знак математического ожидания; Q — выпуклая функция;
б — сигнал ошибки системы; с — вектор параметров. Пусть /(с)
неизвестно, а известны реализации Q(e, с), представляющие стацио-
нарный случайный процесс, определяемый действием случайных воз-
действий 8 и с.
9—1374
129
Задача состоит в определении вектора лараметров0 с°, минимизи-
рующего функционал, т.е. значений с0 =^(Ср cij, с„), для кото-
рых градиент функционала обращается в нуль
/д/(с) dJ (с) <?/(с)
grad/(c)= ^-д^-
0.
ьдс2 '
С учетом выражения (259) условие (260) записывается в виде
grad / (с) = M,{gradc Q (е, с)} = 0.
(260)
Идентисрициру-
емЬя модель
Ар (op)
Z
cg=var
1J
А даптируемый
регулятор
Объект
Рис. 64. Вариант реализации структурной схемы системы стабилиза-
ции динамических свойств исходной САР, детализирующей элементы
схемы на рис. 62.
1 — цепь идентифицирующей параметрической обратной связи; 2 — цепь адап-
тирующей параметрической обратной связи; 3 —• цепь обратной связи исходной
САР.
Здесь известны реализации градиента выпуклой аналитической
функции Q(e, с), т. е.
g,.d.Q(.,c) = (g-.g,...,g|), (261)
а составляющие градиента функционала (260) неизвестны. Для их
получения необходимо еще выполнить усреднение реализаций (на-
130
пример по времени на бесконечном интервале). Это приводит к по-
лучению весьма «медленных» алгоритмов адаптации вида dc[dt=
= -JYcgrad/(c).
Уменьшение времени адаптации возможно, если воспользоваться
алгоритмами
dc
-F = -Y(0sradQ(e,c). (262)
Здесь у(0—надлежащим образом выбираемый переменный ко-
эффициент, удовлетворяющий условиям
00 со
]Ч(0<И = оо; ^[4(t)]2dt<oo, (263)
о о
которые обеспечивают сходимость решений (262) в вероятностном
смысле.
Уравнения (262) представляют собой стохастические дифферен-
циальные уравнения, сходимость решений которых составляет пред-
мет исследований специального раздела математики [Л. 53, 54].
Смысл использования алгоритмов вида (262) состоит в умень-
шении времени адаптации за счет осуществления усреднения реали-
заций в процессе движения- к оптимальному режиму и все более
точного приближения к истинному значению grad/(c).
Аппаратурная реализация алгоритмов (262) осуществляется с по-
мощью элементов АВМ вида 'блока переменного коэффициента для
формирования y(t) (например, вида «у(^) = 1/(1+^)), блока произве-
дения и интегратора, а также моделей чувствительности, необходи-
мых для получения реализаций функций чувствительности dQ/dCi.
Значение указанного подхода для решения задач адаптации,
идентификации и оптимизации весьма важно, поскольку здесь, ана-
логично, например, использованию прямого метода Ляпунова для
синтеза адаптивных систем, заранее гарантируются сходимость и
устойчивость .решений в вероятностном (стохастическом) смысле.
Решение задачи параметрической идентификации этим методом
приведено на рис. 65,а. Запишем операторные уравнения объекта и
идентифицируемой модели в виде
00
У(*)=А0 (х, с0) = j* w0 (0 х (t — х) fa;
6
y{t)=AM (х, см) = с'кА (х),
где x(t)y y(t)y y(t) —стационарные случайные процессы; Ло(х, со) —
оператор объекта; Лм(х, см)—оператор идентифицируемой модели,
который может быть представлен структурно в виде множества
(вектора) операторов wUi с идентифицируемыми коэффициентами
с'мг. Сформируем критерий оптимальности в виде
/(c)=M{Q(e, со, см)},
где e(t)=y*(t)—y(t); Q — выпуклая (например, квадратичная)
функция. Решение задачи идентификации параметров сводится
к минимизации /(см) за счет выбора соответствующих значений
вектора см.
9* 131
Рис. 65. Вариант реали-
зации структурной схемы
адаптивной системы с
идентифицирующей па-
раметрической обратной
связью, детализирующий
элементы схемы на
рис. 61.
у ft)
Объект
Параметра чес -
кая обратная
связь
^2Я
* 0
L_ I
Условие минимума функционала /(см) записывается следующим
образом:
grad /(см) =M{gradCM Q(e, с0, см)}=0.
Тогда искомые алгоритмы действия цепей параметрических об-
ратных связей, осуществляющих решение задачи идентификации,
запишутся в виде
%- = -Y(OgradCMQ(e,c0,cM). (264)
Если оператор А'(х) идентифицируемой линейной модели пред-
ставить в векторной форме уравнений типа свертки, то
оо
У(П = с'шА (х) = с'м j wM (z) x(t-z) dz,
6
где wM(t) = {шМ1(т), Шмг(т),..., wMn{r)}—векторная импульсная
переходная характеристика неизменяемой части модели. Тогда урав-
нение (264) записывается в следующей форме:
со
=_ т (t) Q'(e,c0,CM) J WM (z) X (t - z) dz, (265)
0
где через Q' обозначена производная оператора по соответствующе-
му параметру см модели.
На структурной схеме системы идентификации цепи адаптирую-
щих параметрических обратных связей алгоритма (265) взаимно
связаны и образуют многомерную систему параметрической иденти-
фикации. Если динамические свойства объекта описываются, напри-
мер, нелинейным оператором, линейная идентифицируемая модель
осуществляет параметрическую идентификацию коэффициентов ста-
тистической (гармонической) линеаризованной нелинейной системы,
являющуюся определенным приближением (аппроксимацией) к ис-
комому решению в рамках задаваемой структуры модели и объекта
[Л. 52, 59].
Основные факторы, ограничивающие применение этого метода,
относятся скорее к недостаткам градиентного метода как метода по-
иска оптимального решения в локальной области экстремума функ-
ционала (259), где выполнение (260) — лишь необходимое условие
оптимальности. Другие затруднения связаны с аппаратурной реа-
лизацией моделей чувствительности для получения требуемых со-
ставляющих реализаций градиента функционала. Поэтому задача
упрощения функций чувствительности или осуществление негради-
ентного метода поиска оптимального решения, исключающее при-
менение функций чувствительности, актуальна для практических
приложений [Л. 55, 56]. Возможный вариант подобного подхода
к решению задачи изложен в (Л. 56], где используется априорная
информация о структуре объекта для формирования алгоритмов
беспоисковой неградиентной системы идентификации, реализуемой
параметрическими цепями регулирования.
138
Алгоритмы и уравнения беспоисковой неградиентной системы
идентификации
Рассмотрим предлагаемый подход на примере объекта, описы-
ваемого уравнением вида
dny dn~ly dn~2y
~di^ + ai <#n-i +U2 dtn~2 + + апУ = b(x + F), (266)
где ai} b — неизвестные коэффициенты (параметры); x(t)„ y(t) —
входной и выходной сигналы объекта; F(t)—неконтролируемое
аддитивное возмущающее воздействие, приведенное ко входу объ-*
екта.
Будем полагать, что aif b — постоянные или изменяющиеся
медленно по сравнению с сигналами в объекте, так что система
(266) может считаться квазистационарной; x(t) и F(t)—стационар-
ные случайные воздействия с известными характеристиками.
Уравнение адаптивной модели записывается в виде
а^у ~ dn~ly ~ dn~2y ^
IF + а* dtn~l + а* dtn~2 + ••• + апУп = Ьх, (267)
где #t, Ь — перестраиваемые параметры модели, скорость изменения
которых мала; у (t) — выходной сигнал модели.
Уравнение для сигнала ошибки е = у — у запишется следующим
образом:
e(n)+aie(n-М -|- а2е(п~ 2) + ... + Яяе = АЬх — Аа^у(п~1) —
— Аа^у(п -2) — ... — Аа^у — bF, (268)
где
АЬ = Т>— 6, Aat = #t— at при I = 1, 2 , п.
Предлагаемые алгоритмы идентификации основываются на при-
менении стохастических оценок вида скалярных произведений и ме-
тоде асимптотического усреднения движений в системе {Л. 56, 57,58].
Для формирования алгоритмов беспоисковой неградиентной
идентификации осуществим* преобразование, умножив левую и пра-
вую части уравнения (268) на некоторый оператор от сигнала
ошибки L(e).
а. Пусть L(e) = e, тогда получим:
ее(п) + агЫп'1) + а2Ып~2) + ... + апе2 =
== АЫх — Аа^уГ-*) — ... — Аапъу — beF. (269)
Далее в соответствии с [Л. 56] сформируем выражение
М {ее(") + ахЫп-1) + а2ее(п~2) + ... + апг2 + beF} =
= AbM {ex} — АахМ {eyi"-1)} — Аа2М {^у(п~2)} — ... — АапМ {е#},
(270) ^
где М — знак математического ожидания, определяющий оператор
усреднения по явно содержащемуся аргументу L
134
Запишем уравнения (268), (267) в виде
7= А6* — Aflj/^-1!/ — Аа2рп-*у — ... — Аа^у — ЬР .
Pn + aiPn-1 + a2Pn-2 + ...+an
ZZ Ьх
У = " —> (272)
Рп + alP*-* + а2р»-2 + ... + ап
где черта над переменной обозначает ее Лапласово изображение.
Введем следующие обозначения:
V />п- + «iPn"1 + 2 + .•. + «» У
Х ^ + л,^-1 + л./^-я+... + л» ; (273)
KF {Р) = p« + al/?n-l + ^n-2+ ...+Лп >' (274)
тогда
"i = /re(p)*-/CF(p)F. (275)
Рассмотрим выражение для спектральной плотности S(/co) соот-
ветствующей левой части уравнения (270)
5 (/«) = 5ее (со) [(/©)» + а, (/©)»-* + д2 (/»)«-«+ ... + ап] +658/?(<о),
(276)
где с учетом обозначении (273), (274)
See (со) = | Кх (/со) !■ Sxx со+ | KF (/со) |« 5W (со) -
- Кх (- /со) ^ (/со) SxF (со) - KF (- /со) Л'* (/со) 5^ (со); (277)
SeF И К* (- /со) 5^ (со) - ^ (- /со) SFF (со). (278)
Тогда выражение левой части уравнения (270) можно записать
в виде
М {ее(Л) + fllee(» - >) + я2ее(*- «)+...+ дпе2 + fref} =
оо
= i j {[(/«)"(/«)"-'+л. (М"-г + ... +а„]Х
X И Кх (/to) р Sxx (со) + | К, (/со) |а Sw (со) -
- KF (/со) Кж (/со) S^co)-^ (- /со) К. (/to) вЛ (со)] +
+ ЬКХ (- /со) SxF (со) - (- /со) 5FF(со)} rfco. (279)
Полагая, что сигналы x(t) и F(t) статистически независимы
(5xF(q)) =Sf*((o) =0), получим следующее выражение:
оо
./И
XII*. (/со) I2 S** (со) + | Af (/со) |» SFF (со)] - MCF (- /со) 5Ffco} rfco.
(280)
135
или
В уравнении (280) величина ЬКр(—/со) с учетом (274) опреде-
ляется выражением
ЬКР (- /со) = | KF (/со) |2 [(/со)" + аг (/со)«-1 + а2 (/со)*-2 + ... + ап].
(281)
Следовательно, уравнение (280) записывается следующим обра-
зом:
оо
М {> = i \ KW + ai (/ю)""1 +я2 (/<о)"-2 + ... +aJ|X
X I К. (/«)|*
—-00
v (/<o)n + ai(/<o)n-' + fl«(/<o)n-2 + .- + an v
Л I (/«)" +а, (/«о)"-> + о1(/»)»-*+...+в>|» Л
Х|Л'М (/а))р5жх((о)йсо.
кмы = дь — S" + +
Обозначая
.. (/(о)" + а, (ft>)n -' + «1 (/")" -2 + • ■ - + Д„
Л» - | (/со)" + а, (/«)»-' + а, (/»)»-2 + ... + ап |»«
запишем выражение (270) в окончательном виде
где
^ j Д'о (/«) I Км (/со |2 5ЖЖ (со) rfco =
—ОО
=-. ДШ {ex} — AatAf ,{е#(п- (282)
Формула (282) определяет несмещенную оценку близости век-
торов идентифицируемых, параметров модели и объекта, поскольку
в нее не входят моменты возмущения F и она обращается в нуль
при идентичности указанных векторов. Наряду с (282) рассмотрим
выражение
1 dQ
~2~ -rff~ — kbhb + LaxAax + Дя2Да2 + ... + ДдяДап, (283)
где tM=yt — аргумент медленного времени; Q — выпуклая функция
вида
п
<Э = (АЬ)2 + £(Д^)2. (284)
136
Сопоставляя (282) и (283), можно заключить, что, если выбрать
db
dt
db_
dt ~~
dat ^
чЛ4{ех}; = чМ {гу(п-*)} при i = l, 2,
j Re /C„ (/») 17CM (/со) I2 (») Л> > 0
—00
da* ^
= 4M{ex}\ -jf = — 4M{ey(n-i'} ПрИ i=\> 2,
00
j Re Ко (/со) I /См (/со) |2 5^ (со) rfco<0,
(285)
(286)
то —jj- <0 и обеспечивается сходимость, процессов идентификации.
Здесь уравнениями двух верхних строк определяются законы регу-
лирования параметров (алгоритмы идентификации), неравенства
нижних строк определяют частотные критерии устойчивости в стоха-
стическом смысле [Л. 53, 70]. Полученные результаты могут быть
•распространены на (более сложные системы. Пусть объект описыва-
ется уравнением вида
(Z)(n)+a1D(^-1) + a2Z)(n-2)+ ... +an)#=
= {DW+biD(™-i) + b2Di™-2)+ ... +bm) (x+F).
Тогда уравнение адаптивной модели
(D(n) +1lxIX"-" + a2D(*-*) + ... + ап) £ =
= (ЕКт) + %D(™~J) + $2D(™~2) + ... + bm) x,
где 2iytj(i=\y 2,..., л; / = 1, 2, ... , т) —перестраиваемые па-
раметры модели.
Уравнение для сигнала ошибки е = у — у имеет вид:
(D(n) + a,D(n - ъ + a2DC" ~2) + ... + ап) е =
= (AfcjZX™-1) + Ab2D(™~2) + ... + Abm) х —
— (A^ZX* -») + Aa2D(n -»)+... + Aan) # —
- - (D(™) + bxD(™ - *) + 62D(™ -2) + ... + bm) F
s = Kx (p)*-KF(/?)F,
10—1374
137
где
К.(Р) =
(Дб.р"*-1 + АЬ2р™-*+...+ ДЬт)-
X
(рт + Ь1рт-1 + ЬгР™-г + ...+ Ьт)Х
Ад1р"-' + Да!!р"-2+... +Ддп 1 ^
Р" + «I Рп ~1 + «гР" " 2 + • • • + «п
л /,» + ai/>»->+a2p»-3 + ... + a„»
р» + а1р»-, + а!р»-г + ... +л„
Kf (/>)
Осуществляя преобразования, аналогичные приведенным выше,
найдем следующие выражения, определяющие искомые алгоритмы
идентификации и условия стохастической сходимости процессов:
при i=l, 2.../2; /=1, 2.../и;
00
j Re Д'в (/со) | Км (/со) |» 5^ (со) </со > 0.
(287)
б. Пусть оператор L (е) имеет вид:
L(e) = e(«) + a1e(rt-1) + a2e(n-2)+ ... +<хяе, (288)
а уравнения объекта и модели записываются в виде (266), (267).
Тогда получим следующее выражение:
М {(е(п) + а, е(п~1) + ... + ane) (е(Л> + а^Р' ') +
+ а2е(п-2) + ... +Ляв) + (£(«) + а1в(п-1, + ... + аяе) bF} =
= АШ {(e(n; + al£^- *) + ... + апе) х} —
п
— Ц Аа{М {(е(п) + а1е(п-*)+ ... + а^)у&-(289)
1=1
Найдем выражение для спектральной плотности левой части
уравнения (289). Обозначим S(/co) =Si(/co) +5ц(/со), где Si(/co) —
спектральная плотность для первого, а £ц(/Чо)—для второго сла-
гаемого левой части уравнения (289).
Величина Si (/со) есть взаимнослектральная плотность между
сигналами гиг, получаемыми в результате преобразований ошибки
соответствующими операторами
z = (p*+alp»-\+[aip*-*+..:+an) e"=/Ca(p)7; (290)
Я'= (Рп + «iPn '1 + НРп ~2 + • • • + а«)7 = *а (Р)7- (291)
138
Следовательно, выражение Si (/со) записывается в следующем
виде:
5, (/со) = S^ (/со) = Ка (- /со) *„ (/со) See (со). (292)
г г
Аналогично выражение Sh>(/cd) определяет взаимноспектральную
плотность между сигналами г и F, поэтому справедливо выражение
S„ О'®) = 5~ У») = ^а (- /®) 5sF И (293)
Уравнения (292), (293) с учетом (277), (278) и условий стати-
стической независимости сигналов {SxF=SFx(&) =0) записываются
в окончательном виде следующим образом:
Sx (/со) = Ка (- /со) К0 (/со) [ | Кх (/со) р Sxx (со) + | К, (/со) |* SfF (со)];
(294)
S, ,(/«)=- К„ (- /со) KF (- /со) (со). (295)
Выражение для спектральной плотности S (/со) имеет вид:
S (/со) = Кл (- /со) (/со) | Кх (/со) |» (со) +
+ [К. (/со) | KF (/со) р - bKF (-/со)] S„ (со)}. (296)
Учитывая уравнение (274), которое в данных обозначениях имеет
Ъ
вид KF (р) = ^ ^ , и подставляя его в (296) при определении ве-
личины ЬКр (— /со), найдем:
5 (/со) = Ка (- /со) Ка (/со) | /С, (/со) |» S,, (со). (297)
Таким образом, уравнение (289) записывается в виде
00
i J *а (- /со) К„ (/со) | Кх (/со) |2 (со) da =
—00
/г
= АЬМ $х} — £j AaiM (*У(П~ *>}. (298)
где z определяется уравнением (291).
Если
п
0 = (Д&)2 + Ц(Дяг)2,
1=1
то сходимость процессов идентификации обеспечивается в случае
выполнения следующих соотношений:
db ^ dat —
-jf = — tM{zx}, -^=4M{zy(n-i)} при i=l, 2, ... , п\
00
_1_
2ГС
—00
10* 139
оо
J Яа (- /СО) Ка (/СО) | Кх (/СО) |I. Sra (СО) rfCO > 0.
(299)
Сравнение (299) с (285) позволяет сделать выводы о несомнен-
ной целесообразности введения производных от сигнала ошибки для
обеспечения условий сходимости процессов идентификации. Действи-
тельно, если ка (—/со)=/Са(—/со), последнее условие (289) всегда
выполняется, поскольку справедливо выражение
00
—00
Однако обеспечить выполнение равенства ка (— /со) = /Са (— /со)
невозможно, так как параметры а* оператора ка(р) требуют опре-
деления.
в. Если L(dif г) оператор зависит от сигнала ошибки и настраи-
ваемых параметров адаптивной модели, то имеем:
L (аи е)=е(п) + а1е(п-Ч + а2е(п~2)+ ...+ апе. (300)
Тогда выражение для ка (р) записывается следующим образом:
где
АКа (р) = AalP(n-*) + Аа2р("-*) + ... + Аап.
Следовательно, условие (299) принимает вид:
J { I ка (/со) | у + ака (- /со) ка (/©} | кп (/со) |2 (со) </<0 > О'
J_
(301)
Дополнительное ограничение, обеспечивающее выполнение нера-
венства (301), сводится к выполнению соотношения
\ka(j(0) |2>Л/Са(-/С0)Яа(/С0). (302)
Оно заведомо выполняется при локальных отклонениях Да,.
Сравнение с градиентной системой с использованием функций
чувствительности
Выберем в качестве критерия оптимальности выпуклую функ-
цию вида Q=M{e2}, обычно используемую при градиентном подхо-
де. Уравнения объекта и модели имеют вид (266) и (267). Состав-
ляющие градиента выпуклой функции Q по настраиваемым парамет-
рам адаптивной модели имеют вид:
% J [ db J
w =чЦг = ЪМ{*^) = ЪМ{*^)\ (303)
dtM
= Y —^" = 2уЛ1 < в — J> = 2уЛ/Г <|е-^-}- (304)
140
Соответствующие функции чувствительности записываются в виде
ft _
ду
x
рп + alP(n-1) + 22р(п -2) + ... + аЛ
— Рп~1У
да, рп + 2,рп-* + 22р"~*+ ... +2п
ду
■у
дап
р» + а1р*-* + -а1р"'* + ...+ап.
(305)
Соответствующие спектральные плотности выражений состав-
ляющих градиента выпуклой функции Q имеют вид:
V ч Кх (— /со) Q , ч
. (со) = 5^(0))
(/©)* +дх (/со)»-1 +
+ л, (/©)»-«+ ... + яп
(-/СО) (/СО) (п-1)У
в *L [(/co)n + flt (/co)(n-J) +
й' + 22(/со)»-2+... + 2п]2
-К, (-/со) У
5 ^ н=
. ду_ [(/©)* +я, (/со)"-1 +
5ЖЖ (со)
да
(306)
Полагая V = (Д6)2 + $j (Да*)2 и подставляя в правую часть
выражения (303), (304), (306), получаем:
2тс J L (/со)" 4-^ (/со)»-1
-2+. .. + Дап
+ ... + *»
X-
(—/со) (со) da
(/(0)» + ^ (/ю)п-1+ ... +дя
Учитывая (273), запишем (307) в окончательном виде
X
(307)
dV
dt
-^■оГ- I К х (/со) |2 5^ (со) — ^со.
м ^ J (/соГ + ^1(/со)"-1+...+ап
(308)
141
Следовательно, сходимость процесса идентификаций обеспечи-
вается в случае выполнения неравенства
00
i J* I Кх (/со) |2 Sxx (со) do > 0, (309)
—оо а*
где
Kg (Р)_ рп + агРп-1+а2рп-2 + ... + Дп
^(/?) />п + Яг"1 + 2+• • •
Действительно, если /Са (/?)=/С^(/?), условие (309) заведомо
а
выполняется. В противном случае выполнение условия (309) возможно
лишь при дополнительных ограничениях на отклонения параметров.
Ка (/СО)
Рассмотрим выражение ^ . Умножая его числитель и знаме-
а
натель на К^(—/со) и учитывая выражения Aai = ai— ait найдем:
а
*а (/<■>) _ |Уа(/С0)Р + АЛ'а(-/Ц)Ка(/ь>)
I ял/®) I2
a a
Неравенство (309) получает следующий вид [ср, с (301)]:
00
i J{ I *о (/CO) |2 + ДК0 (- /СО) Ka (/C0)}X
°°, lA'^/co)!2^^) ■ ^n „m
x—гот^т—dto>0- (311)
a
Дополнительное ограничение вида
\Ka(jO>) \2>AKa(-j<»)Ka(№) (312)
заведомо выполняется при локальных вариациях Да,-. Это совпадает
с результатами исследования условий сходимости неградиентной
системы идентификации без применения функций чувствительности
(302).
Структурные схемы аппаратурной .реализации неградиентной
системы идентификации отличаются значительной простотой, что
весьма важно при решении задач идентификации для объектов вы-
сокого порядка.
Эквивалентная1 схема такой системы приведена на рис. 65, б,
где Л — управляющее устройство, О — объект управления, опреде-
-> ->
ляемый уравнением Лге = <| ^ > +FQ; е0, е, F0 — скалярные вели-
~* ~*
чины, Р-— векторы. Уравнение, объекта управления эквивалентной
схемы на рис. 65, б соответствует уравнению для сигнала ошибки
исходной системы, например (268), где введены следующие обозначе-
ния: N = рп + игр71-1 -\-а2рп-2+ ... + ап; F0 = bF\ £ = {А6, Аах,...
->
...,A#n}; p. ={x, f/C1"-1),..., i/}; <•> — знак скалярного произведения
векторов.
142
В замкнутой системе на рис. 65,6 управляющее устройство и
объект многомерны по управляющему воздействию |, а вектор р, —
контролируем, поскольку его составляющие доступны для измерений
в отдельных точках адаптивной модели системы идентификации.
Подход к" решению задачи идентификации по эквивалентной
схеме на рис. 65,6 позволяет использовать известные методы устой-
чивости нелинейных САР для анализа и синтеза алгоритмов управ-
ляющего устройства Л.
Например, возможно представить управляющее устройство А
в виде последовательного соединения динамического и статического
звеньев, выбирая характеристики последнего с учетом контролируе-
мости вектора \i объекта так, чтобы результирующая статическая
характеристика системы была заключена в пределах гурвицева угла.
В этом случае обеспечивается устойчивость замкнутой САР на
рис. 65,6 и, следовательно, сходимость процесса параметрического
регулирования исходной системы идентификации. Этого можно до-
стичь с помощью блоков произведения, входящих в состав стати-
ческого звена управляющего устройства А и осуществляющих умно-
жение сигналов на составляющие вектора \i или некоторые функции
Другой путь может определяться использованием, например,
частотных критериев абсолютной устойчивости для синтеза алгорит-
мов управляющего устройства А схемы на рис. 65,6, что выходит за
рамки настоящего изложения и здесь не рассматривается 1[Л. 56, 59].
9. НЕКОТОРЫЕ ПРИМЕНЕНИЯ ПАРАМЕТРИЧЕСКОГО
УПРАВЛЕНИЯ В ПРОМЫШЛЕННЫХ
АВТОМАТИЧЕСКИХ СИСТЕМАХ
Автоматическая оптимизация некоторых процессов
цветной металлургии с применением идентифицируемых моделей
Автоматическое управление технологическими процессами с ис-
пользованием вычислительных устройств — эффективное средство
оптимизации технологических режимов в настоящее время [Л. 60].
Большинство технологических объектов характеризуется рядом спе-
цифических свойств, затрудняющих применение типовых систем авто-
матического управления: наличием неконтролируемых возмущающих
воздействий случайного вида, значительных транспортных и вре-
менных запаздываний процессов; инерционными свойствами, измене-
ниями параметров и режимов работы и др. Задача автоматического
определения значений коэффициентов моделей в рамках заданных
структур с учетом действия помех составляет содержание первого
из этапов теории оптимизации — идентификации математических
моделей объектов управления в нормальном режиме работы
[Л. 61]. Решение задачи идентификации позволяет осуществить авто-
матическое оптимальное управление объектом по схеме на рис. 66,а,
где О — объект управления; АМ— адаптивная (идентифицируемая)
математическая модель объекта; АУ—адаптивное управляющее
устройство оптимизации, использующее информацию о контролируе-
этого вектора (например, 1 /jx или -тт-р.
ИЗ
мых сигналах объекта и информацию об оценках параметров и сиг-
налах неконтролируемых переменных объекта, определяемых, с по-
мощью AM. Система идентификации с AM выполняет функции авто-
матического контроля за параметрами объекта и главное при авто-
матизации сложных технологических процессов позволяет автомати-
чески измерять ряд внутренних координат, которые недоступны для
измерения в самом объекте. При автоматическом управлении слож-
ными объектами, обладающими, как правило, транспортными и вре-
менными запаздываниями происходящих в них процессов, обуслов-
ленными конечными значениями скоростей передачи вещества и
Рис. 66. Структурная схема оптимального управления объектом, на-
ходящимся в режиме нормального функционирования, с использова-
нием информации от идентифицируемой адаптивной модели.
AM — адаптивная идентифицируемая модель объекта О; АУ — адаптивное
управляющее устройство оптимизации; ВУ — вычислительное устройство для
формирования алгоритмов цепей параметрического регулирования.
энергии, измерение промежуточных, внутренних координат объекта
позволяет в существенной мере улучшить условия работы управ-
ляющего устройства благодаря прогнозирующему характеру инфор-
мации.
Получаемая с помощью AM информация о параметрах и коор-
динатах объекта поступает затем в виде сигналов на устройство
оптимального управления АУ, которое формирует оптимальные
управляющие воздействия й на объект. Наличие большой информа-
ции об объекте, получаемое с AM, позволяет наиболее простыми
средствами решать задачу построения оптимального устройства при
достаточно полной информации об объекте.
Построение математических моделей металлургических процес-
сов связано с описанием протекающих химических реакций, особен-
ностей гидродинамики и условий переноса веществ и энергии.
Сложность этих явлений в присутствии помех в условиях рабо-
ты любого металлургического агрегата и недостаточная изученность
(начальная неопределенность) некоторых элементарных процессов
создают трудности при построении общей модели процесса.
Поэтому построение математических моделей проводится в два
этапа. На первом этапе определяется структура математической
модели объекта, а на втором, используя специальные алгоритмы
идентификации, должны находиться оценки параметров математиче-
ских моделей.
144
Выбор того и л pi иного метода оценок'близости математической
модели к объекту и алгоритма идентификации параметров Моделей
зависит от структуры уравнений математической модели объекта,
характера поведения объекта в условиях нормальной эксплуатации
и возможностей постановки экспериментов на объекте.
Приведем несколько примеров постановок задач в рамках сфор-
мулированного подхода. В рассматриваемом примере задача опти-
мизации требует идентифицируемой модели для объектов, описывае-
мых звеном первого порядка с запаздыванием.
Принцип построения систем автоматического управления с при-
менением динамических прогнозирующих моделей основывается на
том, что в некоторых технологических процессах критерий оптималь-
ного управления формулируется относительно динамических харак-
теристик процесса.
Оптимизация процесса обжига колчедана в кипящем слое
Экономическую выгоду, получаемую при производстве серной
кислоты, можно для установившихся режимов записать следующим
образом:
= %as04 ~~ ZS ~ Z* ~ гпер» С313)
где Fn — экономическая выгода, руб/ч; 2HaSo4 — стоимость серной
кислоты и пара от утилизации тепла, руб/ч\ zs — стоимость серы,
поступающей в печь в составе колчедана, руб/ч\ zu — затраты на
эксплуатацию печи и теплоутилизирующих устройств, руб/ч; znep —
затраты на переработку S02, руб/ч.
Слагаемые, входящие в выражение (313), зависят от ряда фак-
торов и, в частности, от расходов колчедана и воздуха, подаваемых
в печь. Обычно оказывается наиболее целесообразно стабилизировать
расход воздуха, выбирая его в зависимости ох необходимой произ-
водительности, печи, гранулометрического состава колчедана и дру-
гих факторов. Поэтому важно определить величину загрузки
колчедана, которая при заданном стабилизированном расходе дутья
обеспечит максимум экономической выгоды, т. е. максимум выраже-
ния (313).
Для решения этой задачи необходимо записать выражение
для зависимости (313) в (более детальном виде.
Обозначим: Ф^оА — расход серной кислоты, моль/ч; Ф50а —рас-
ход S02 без учета потерь; Ф50а — расход S02 на выходе печи,
моль/ч; zs — стоимость 1 г-атпом серы в колчедане, руб/г-атом)\
^пер—стоимость переработки 1 моль, руб/(моль); %2$о4—стоимость
1 моль серной кислоты и пара от утилизации, руб/(моль) \ ai — доля
потерь S02 при обжиге; а2 — доля потерь S02 при переработке.
Количество молей H2SO4 равно количеству молей переработан-
ного S02. Расход колчедана Ф$ определится из следующей схемы:
Ф\ -» обжиг Ф50а = (1 - Д1) Ф50апереработка =
= (l-fli)(l-flt) ^soa,
145
й выражение (313) можно переписать так.
/7n = (%2so4--nep)(l-^)(l-^)^sO2-^S0S -211. (3l4)
Затраты на эксплуатацию печи при заданном расходе воздуха не
зависят от величины расхода колчедана, т. е. от величины Ф$ . Поэ-
тому максимум выражения (314) определится из условия
dF ^so
F = (?H2S04 - *пер) О - *i) (1 — Л|) -тгзг - *s = 0
или
П _д \ 5°L= 5^?=с § = В, (315)
(I dOks dO% (%2S04-^neP)(l-^)
которое получает вид:
(1 -а1)-ц- = В, (316)
где б — расход SO2, образующегося при обжиге (в долях от тео-
ретического расчета S02).
Как показали результаты исследования, зависимость б (Р) име-
ет всегда монотонно убывающий наклон, т. е. монотонно убываю-
щую производную db/d$.
В силу этого в режимах с заниженной подачей колчедана
k>B. (317)
и в случае слишком большой подачи
k<B, (318)
где k — статический коэффициент усиления канала «относительный
расход серы р — концентрация S02 в обжиговых газах»,
чЧ '
Таким образом, определяя непрерывно статический коэффициент
усиления k и сравнивая его значение с зеличиной В, характеризую-
щей данное производство, можно осуществить поиск наиболее вы-
годного в экономическом отношении режима.
Как показывают соответствующие расчеты, максимум выраже-
ния (316) находится в области режимов с малыми избытками воз-
духа (Р^0,9-f-1,0). При этом чем меньше величина В, т. е. чем
меньше потери производства, тем меньший избыток воздуха оказы-
вается оптимальным. Так, для печи кипящего слоя Воскресенского
146
химического комбината (КС-ВКХ-2), с учетом приведенных выше
соображений, оптимальному режиму соответствуют величины
«0,95; Cs02 =14,5%, что подчеркивает целесообразность исследова-
ния режима обжига при высокой концентрации SO2.
Таким образом, задача оптимизации процесса обжига колчедана
в кипящем слое на основании технико-экономического критерия (317)
и (318) сводится:
1) к непрерывному определению или оценке в режиме нормаль-
ной эксплуатации объекта величины его статического коэффициента
усиления к;
2) к построению системы автоматическою управления парамет-
ром k в соответствии с алгоритмом (317), (318), что обеспечивает
оптимальное управление процессом.
Структурная схема системы автоматической оптимизации, ре-
шающая указанные задачи, приведена на рис. 66,6, где О — объект;
AM — адаптивная динамическая модель объекта; F — неконтроли-
руемые возмущения в объекте; РК — регулятор статического коэф-
фициента усиления, осуществляющий оптимальное управление про-
цессом; ВУ— вычислительное устройство, осуществляющее
самонастройку (адаптацию) параметров адаптивной модели в соот-
ветствии с параметрами объекта (идентификацию параметров). При
работе системы на рис. 66,6 с помощью AM и ВУ осуществляется
непрерывное определение параметров объекта (в том числе и его
статического коэффициента усиления k), а контур, включающий О,
AM, ВУ, представляет самостоятельную систему .автоматической
идентификации [Л. 62].
Технологические исследования динамики процесса обжига серно-
го колчедана в печи кипящего слоя показали, что в линейном при-
ближении для канала «относительный расход серы 0 — концентрация
S02 в обжиговых газах» как объекта справедливо следующее вы-
ражение:
T-a^ + y = kx(t-z) + F (t), (319)
где x(t), y(t)—входной и выходной сигналы; F(t)—помеха, пред-
ставляющие собой стационарные случайные процессы с известными
характеристиками.
Для случая двумерной идентификации полагаем (Т, k) за ис-
комый квазистационарный вектор параметров объекта, определяю-
щий изображающую точку на фазовой плоскости идентифицируемых
параметров модели (Г, k).
Соответствующее дифференциальное уравнение адаптивной мо-
дели той же структуры запишем в следующем виде:
т af+y = kx(t-*), (320)
где т=т — постоянная; (Г, k) — вектор идентифицируемых парамет-
^ dy ^ ^ ^
ров адаптивной модели, причем значения у, x(t—х),т, Т, & явля-
ются контролируемыми и доступны для измерений. Полагая далее
147
статистическую независимость сигналов F (t) и % (t) и обозначая
— У — У> найдем выражения статистических оценок
qi = *Ъ W = W- b) то + &Т2- kTT) т2];
Q2 = R^ (^) =Ъ (Т—Т) тп2\
qs = Rx* e)=(k-k)m0+(kT*-kf*)m2>
(321)
где моменты нулевого т0 и второго т2 порядков определяются вы-
ражениями
SXx (со) d(o
о
00
(1 +Г2С02) (1 +^2)
со2^^ (со) dco
(l+Pco2) (1+Г2со2)
(322)
(323)
а (со) — автоспектральная плотность входного сигнала х (t) с из-
вестной характеристикой. Рассматриваем значения RX9(t),R^e (х),
# . (х) в качестве отклонений от составляющих вектора идентифици-
1/*
руемых параметров (Г, &). Тогда уравнения движения на фазовой
плоскости идентифицируемых параметров адаптивной модели (Г", k)
записываются в следующем виде:
dT k (т0 + т2Т2) — k (m0-\-m2T2)
dk k{(k—k) m0+(kT2—kTT)m2}
(324)
dT
km2 (T — T)
dk (k — k) m0+ (kT2— kTT)m2
(325)
Наконец, сокращение времени процесса идентификации дости-
гается применением тех же алгоритмов, но по отношению не к ма-
тематическим ожиданиям соответствующих оценок, а к их реализа-
циям. В этом случае уравнения записываются следующим образом:
dk
ЧГ^ч{1){у (у—у)};
dT
dt :
= Y(0 {X(t -z)(y-y)},
(326)
148
или
■§= y(0 Ыу-у)У,
d T
yW {y(y-y)h
(327)
Обоснование целесообразного выбора необходимой информации из
получаемого вектора (Г, k,.y,y) определяется далее формируемым
на основе технико-экономических показателей критерием оптималь-
ного управления. Например, в задаче оптимизации процесса обжига
колчедана в кипящем слое (рис. 66,6) оказывается целесообразным
использование лишь сигнала k=k, определяющего параметр В для
решения задачи оптимального управления. Изложенный подход
к оптимизации технологических процессов с применением идентифи-
цируемых динамических прогнозирующих моделей может быть рас-
пространен на другие объекты.
Оптимизация процесса электротермии цинка
В настоящее время электротермический способ получения цинка
является одним из наиболее прогрессивных. Сущность его состоит
в восстановительной плавке цинкового агломерата с возгонкой и по-
следующей конденсацией паров цинка в жидкий металл. Этим ус-
ловиям, например, соответствует печь Беловского цинкового завода,
где используется изотермический режим работы печи с периодиче-
ской загрузкой шихты. Для математического описания в данном
объекте выделяются зоны: зона Восстановления, шлаковая ванна
и конденсатор. Технико-экономические показатели процесса суще-
ственно зависят от эффективности конденсации цинковых паров
в жидкий металл. Процесс конденсации в свою очередь во многом
определяется качеством парогазовой фазы, образующейся, главным
образом, в зоне восстановления.
Динамические свойства печи как объекта управления опреде-
ляются, в основном, кинетикой восстановления цинка из твердой
фазы и поэтому существенно зависят от режима зоны восстановле-
ния, которая включает слой твердой шихты на поверхности расплава
и область контакта шлак — кокс. Контролируемыми параметрами,
характеризующими режим зоны восстановления, являются темпера-
тура свода печи и масса углерода в нечи. В то же время состояние
зоны восстановления определяется большим числом других факторов,
не поддающихся точному количественному учету, в силу чего дина-
мические свойства объекта подвержены.в сильной степени случай-
ным изменениям. К таким факторам относится изменение грануло-
метрического фракционного состава шихты, которое, как показали
исследования, является основным возмущающим воздействием на
процесс по отношению к процессу восстановления цинка из твердой
фазы, а также колебания напряжения и изменение формы концов
электродов в энергосистеме.
Задача оптимизации процесса электротермии цинка формули-
руется следующим образом: технико-экономическим критерием опти-
149
мальности процесса плавки и конденсации является себестоимость
тонны металлического цинка. Себестоимость тонны цинка является
функцией коэффициента извлечения цинка, степени конденсации цин-
ковых паров в металле, производительности печи по возогнанному
цинку, удельного расхода электроэнергии на тонну возогнанного цин-
ка. Исследованиями установлено, что величина степени конденсации
представляет собой экстремальную функцию контролируемых пара-
метров зоны восстановления — температуры свода печи и массы
углерода в печи и является тем технологическим критерием, по ко-
торому можно оптимизировать процесс. Цель оптимального управле-
ния состоит в достижении минимального значения себестоимости
тонны металлического цинка при ограничениях на коэффициент из-
влечения цинка из шлака и производительность печи по возогнанно-
му цинку.
Однако в производственных условиях определение значения
степени конденсации весьма затруднительно. Поэтому исследовалась
возможность сформулировать критерий оптимального управления
относительно динамических характеристик процесса, связанных со
степенью конденсации [Л. 63]. С этой целью рассматривалась дина-
мическая характеристика объекта по каналу «периодическая за-
грузка шихты — расход газов на выходе из конденсатора». В ли-
нейном приближении она может быть аппроксимирована уравнением
где х, у— входной и выходной сигналы; F(t)—помеха; k — коэф-
фициент усиления; Т — постоянная времени. Значения k и Т изменя-
ются в зависимости от технологического режима, причем величина
постоянной времени Т является интегральной оценкой режима вос-
становления и связана с экстремальным значением степени кон-
денсации.
Следовательно, решение задачи оптимизации исследуемого про-
цесса сводится к непрерывному определению постоянной времени Т
и поддержанию этой величины на допустимом уровне. По значению
величины Г устройство управления формирует задания на локальные
управляющие системы автоматического регулирования загрузки ших-
ты, массы углерода в печи, мощности.
Структурная схема системы, позволяющая решить задачу авто-
матической оптимизации, когда критерий оптимального управления
сформулирован относительно параметров динамической характери-
стики объекта, аналогична приведенной на рис. 66,6. Для автомати-
ческого контроля за параметрами объекта могут быть использованы
алгоритмы, реализуемые параметрическими системами регулирования
и предусматривающие формирование помехозащищенных статистиче-
ских оценок идентификации |71. 56], в виде функционалов, определяе-
мых скалярными произведениями контролируемых сигналов и рас-
согласованием выходных сигналов модели и объекта:
Для режима периодической загрузки шихты входной сигнал можно
представить в виде прямоугольного импульса длительности т; и ампли-
+ y = kx (t) + F(t),
(328)
= #х* (°) ={k — k) m0 +r(kT* — kT*) m2;
Q2 = r . (Q) = kkm{T—T).
(329)
150
sin** сох/2
туДы qy причем Sxx (со) = q2 ^2/4—< Тогда уравнения (329) запи-
сываются в виде
п __ k — k kTe —kTe
z —5
^ ^ т т
kk Те — Те
42 5
T + T
При интегральном законе параметрических цепей идентификации
уравнение траекторий движения на фазовой плоскости (7\ k) записы-
^ ^ ~ —ifr -т/Г
dT = kk (Те - Те ) (330)
dk (Т+ Т) [ (k—k)% +Vfe~Х/Т— kTe~~*IT]
Фазовый портрет движения системы для численных значений
соответствующих параметров печи Беловского цинкового завода
показывает, что процесс идентификации является сходящимся |[Л. 63].
Рассмотрим далее вопросы аппаратурной реализации системы авто-
матической идентификации, удовлетворяющей найденным выше алго-
ритмам, детализирующим структурную схему на рис. 66. Реализация
беспоисковых алгоритмов идентификации связана с построением ди-
скретных (импульсных) или непрерывных систем параметрического
регулирования с адаптивной моделью заданной структуры.
Структурная схема адаптивной прогнозирующей модели AM (рис. 67)
соответствует набору на АВМ уравнения (320), параметры Т, т"
которой пропорциональны управляющим напряжениям (У^, сУ^, (Ур, с
помощью соответствующей аппаратуры (блоков произведения для
£*, Т и блока регулируемого запаздывания БРЗ для т). Начальные
условия идентифицируемых параметров адаптивной модели k (0), т(0
Т(0) задаются напряжениями (7^(0), сУ~(0), (0) с выходов интег-
k t т
раторов, которые выполняют функции регуляторов Я^, Р^, Р пара-
k -с т
метрических обратных связей с интегральным законом регулирования.
Выходной сигнал адаптивной модели у сравнивается с выход-
ным сигналом объекта у, образуя сигнал е=у—у, поступающий да-
лее на ряд блоков произведения. На выходах последних формиру-
ются сигналы, пропорциональные реализациям соответствующих ста-
тистических оценок.
151
Дальнейшее усреднение полученных сигналов и выработка управ-
ляющих напряжений, поступающих на входы регуляторов Я^,
Р , осуществляются блоком формирования и алгоритма БФ,А, схема
т
которого определяется выбранным вариантом алгоритма иденти-
фикации. Например, выбор алгоритмов вида (324), (325), (330)
предопределяет усреднение сигналов на конечном интервале времени
Т, выполняемом интеграторами с фиксацией их выходного сигнала
на интервале Т + At и последующим сбросом. Система идентификации
представляется поэтому в виде импульсной системы регулирования
с параметрическими импульсными обратными связями.
Коэффициент у[п] реализуется с помощью блока переменного
коэффициента ВПК и изменяет свою величину после каждого ин-
тервала Т в соответствии с заданным законом. Коммутация кон-
тактов осуществляется тактовым устройством (не показанным на
Рис. 67. Вариант реа-
лизации структурной
схемы на рис. 66 для
типового случая ме-
таллургического
объекта.
1,2 — векторы оценок со-
стояний и параметров
объекта, составляющие
информацию АМ%
152
рис. 67) в соответствии с выбранным алгоритмом. Например, дли
алгоритма (325) на вход а поступает сигнал хе, на вход б — уг, при-
чем обеспечивается следующая последовательность тактов:
1-й такт. Контакты Ки Кг, замкнуты Кз—Къ разомкнуты, что
соответствует формированию оценок Qb Q2 на интервале времени Т\
2-й такт. /Контакты Ки Лг, Къ разомкнуты, Кз, Кь замкнуты,
что определяет режим управления параметрами адаптивной модели
в течение интервала времени Д/<СГ;
3-й такт. Контакты Ki—Кь разомкнуты, Къ— замкнут, что опре-
деляет сброс напряжений на выходах интеграторов. При выборе
непрерывных алгоритмов стохастических аппроксимаций (326), (327)
аппаратура упрощается путем исключения усредняющих устройств
и контактных групп, а ВПК перестраиваются на закон изменения
коэффициента в реальном масштабе времени. Система идентифика-
ции представляет непрерывную систему регулирования идентифи-
цируемых параметров k, Т адаптивной модели.
При исследованиях динамических двумерных систем управле-
ния наиболее целесообразным является применение метода фазовой
плоскости. Поэтому результаты исследований двумерной системы
идентификации на рис. 67 представляются в виде качественной кар-
тины движений изображающей точки на фазовой плоскости пара-
метров адаптивной модели. Фазовая параметрическая плоскость,
таким образом, определяет «мишень» для движений изображающей
точки из различных начальных положений.
Некоторые применения идентифицируемых моделей и параметриче-
ского регулирования в системах автоматического контроля
Воспользуемся далее полученными результатами для рассмот-
рения задачи- параметрического регулирования, являющейся тради-
ционной в измерительной технике — задачи измерения параметров
комплексных схем сопротивлений, различных схем замещения, запа-
здывания в промышленных объектах при наличии помех |[Л. 64—66].
Подобная задача типична для методов производственного конт-
роля неэлектрических величин, диэлектрических измерений для фи-
зико-химических и аналитических целей, исследований схем заме-
щения сложных электрохимических систем и современных полупро-
водниковых материалов и устройств. Комплексное сопротивление или
некоторую схему с измеряемым сопротивлением или электрическую
схему замещения можно рассматривать в виде динамического объ-
екта известной структуры, осуществляющего преобразование входно-
го сигнала х в выходной у при наличии возмущений (помех) F, дей-
ствующих на объект измерения (рис. 68,а). Структура объекта, как
правило, в задачах измерительной техники заранее известна, и не-
обходимо определить оценки его параметров. На рис. 68,6 приведена
структурная схема, соответствующая алгоритмам уравновешивания
(287), где звено на операционном усилителе У1 представляет объект
с двумерным измеряемым параметром (Сх, Rx) комплексного сопро-
тивления. Объект и адаптивная модель составляют активный мост,
питаемый напряжением x(t) детерминированного или случайного
вида. Кружками с точкой внутри отмечены блоки произведения, не-
обходимые при формировании соответствующих оценок и управле-
нии параметрами адаптивной модели |[Л. 67, 68].
11—1374
153
Начальные условия параметрам адаптивной модели задаются, на-
пряжениями С(0), R(0), вводимыми в исполнительные (интегрирую-
щие) устройства Р^Р^у выполняющими функции регуляторов пара-
С R
метрических обратных связей (Ри Pj на рис. 68, а).
\Г *У У
Рис. 68. Структурные схемы устройств многомерного параметриче-
ского регулирования в системе автоматического контроля.
а — обобщенная схема многомерного уравновешивания в условиях помех;
б — структурная схема двумерногб измерительного устройства для контроля
параметров комплексного сопротивления.
Поясним предлагаемый способ уравновешивания на примере
измерительной схемы четырвхплечевого моста (рис. 69,а). (Ветвь acb
содержит объект измерения — неизвестное комплексное сопротивле-
ние Zi, которое можно представить параллельной схемой замещения
с параметрами Ri и Ci. Ветвь adb той же структуры содержит об-
154
разцовые меры rl и С4. Соответственно двум неизвестным парамет-
рам сформируем критерии уравновешивания, например, вида
Qi=<>>; Q, =
где е — сигнал разбаланса моста, у — значение напряжения на плече
моста, содержащем образцовые меры #4 и С4; г/*—значение производ-
ной от у,
С
Рис. 69. Пояснение принципа уравновешивания с помощью парамет-
рической цепи отрицательной обратной связи.
а — измерительная схема четырехплечего моста; б — топографическая диа-
грамма, иллюстрирующая процесс уравновешивания моста.
Для напряжения питания моста x(t) =хт sin (dot эти критерии
запишутся через параметры измерительной схемы следующим обра-
зом:
2 C,/?ji?2/?4 I ^
w
(331)
155
C1R1R2 C4/?3/?4
(332)
где
Г r 2 г)2 п2
2 ^^1^2
e1+C°0 (/?! + Я2)2
г2г>йр2
с4к4к3
1 + С°0 (Я3+Я4)2
Рассмотрим алгоритм поочередного уравновешивания двумя ре-
гулирующими органами. Будем полагать, например, что система
уравновешивается сведением к нулю критерия Qi путем изменения
/?4, если выполнено условие предварительного обращения в нуль Q2
изменением С4:
Ai= {Qi/tf4—4)/Q2/C4—И)}. (333)
Тогда из условия равенства нулю критерия Q2 (т. е. Q2/C4—Ю)
получим следующее выражение:
с*-с* /?,/г4(/?! + /?•)' ( '
Соответствующее значение критерия Qi записывается в этом
случае в виде
+ #2)2 ^0 + 1
(335)
Уравнение (335) дает возможность сведения Qi к нулю измене-
нием сопротивления #4. Действительно, при значении #4, обращаю-
R3
щем разность (RzRi—R1R3) в нуль, т. е. при /?4=/?i -5—критерий
Qi обращается в нуль (Qi//?4—>-0). Следовательно, реализация алго-
ритма (333) приводит к выполнению условий равновесия моста
R2 R3
Ri = R*-^'> С^С^-д-.
В случае измерения емкости и tg б будем полагать, что система
уравновешивается изменением параметров Rs и #4. Используя те
же критерии (331) и (332), запишем алгоритм уравновешивания
в следующем виде:
Л2= {Qi/Rs—>0/Q2/#4—И)}.
(336)
>-0) полу-
(337)
Тогда при равенстве нулю критерия Q2 (т. е. Q2AR4-
чим выражение
D CxRxR2Rb
^-C4/M#i + ^2)-CV?i#2 '
В этом случае значение критерия Q1 будет:
О — (Г В Г f?\ CiR\R*m« Г С1 #1 Rt ,2
(^-(СЛ-СА) №+Ля)1(СЛ)в [(^да^о
Уравнение (338) позволяет свести значение Q, к нулю изменением
сопротивления R3. Критерий Qt обращается в нуль (т. е. QJ/R3 -> 0)
156
+ 1
(338)
при R3 = R2 ^r-* Следовательно, реализация алгоритма (336) приво-
дит к выполнению условий раздельного отсчета емкости и tg 6\ т. е
Cl = C4~|r; tgd= co0C4tf4 *
Исследование процесса поочередного уравновешивания моста
иллюстрируется на топографической диаграмме (рис. 69,6). Диа-
грамма построена для обобщенных параметров Р и у (для рассмат-
риваемой измерительной схемы ip—1Д#4; у=^оС^ «=1//?з) [Л. 69].
Предположим, что точка С на диаграмме имеет положение С0 (оно
постоянно, так как регулируемые параметры расположены только
в нижней ветви моста) и исходное положение второго конца век-
тора CD есть D0. Начнем уравновешивание с изменения у. Извест-
но, что при этом точка D перемещается по окружности Mi. Изменяя
Y в соответствии с выбранным алгоритмом (333) до тех пор, пока
не сведем к нулю скалярное произведение <уг> (вектор 8 норма-
лен вектору у, т. е. C0Di параллельно aD0)y придем в точку Di.
Далее будем изменять р. При этом точка D начнет перемещаться
по дуге окружности Nu которая пересекается с окружностью Mi
в точке Di. Меняя Р пока не получим равенства нулю скалярного
произведения <уг> (вектор е нормален вектору у), придем в точ-
ку D2. Если затем снова изменять у, то точка D на топографической
диаграмме будет перемещаться по окружности М2. Продолжая по-
переменное изменение у и р и добиваясь каждый раз равенства
нулю соответствующего скалярного произведения, получим совпаде-
ние точек D и Со.
Точно так же, путем многократных попеременных итераций осу-
ществляется процесс уравновешивания другими параметрами, напри-
мер р и а.
Для алгоритма одновременного автоматического уравновешива-
ния двумя регулирующими органами найдем:
Q, = m0k[k(\ +'со* Т2) — & (1 +«2 ТТ)\\
Q2 = m0<*lkk(T— Т),
(339)
где
R1 + R2 ' ~ R1+R2 Lu k= #з + я* ' т== R* + R* 4*
(340)
Применив метод фазовой плоскости, получим следующее урав-
нение фазовых траекторий:
4= Ч<?-П (341)
dk ц\+<4т*)-Ц\+а20ТТ)
Фазовый портрет системы, построенный по этому уравнению,
показывает, что процесс уравновешивания является сходящимся
[Л. 69].
157
Наконец, рис. 70 иллюстрирует структурные схемы приборов,
соответствующих алгоритмам, предназначенным для измерений за-
паздываний в промышленных объектах [Л. 68].
x(t)
БФА
bfo)
? ?(0)
Рис. 70. Структурная
схема устройства с
параметрической об-
ратной связью для
измерения запаздыва-
ния в промышленных
объектах в присут-
ствии помехи.
Рассмотрим далее пример измерения комплексного сопротивле-
ния (объекта), описываемого уравнением
y(t)=bx(t-x)+F(t),
с помощью адаптивной модели
y(t) = bx (t—^),
где (х, b), (х*, b)—двумерные векторы параметров объекта и мо-
дели.
Соответствующие статистические оценки записываются в виде
Qi = Rx* <°> = м i (£- у) *> W - «~ W
Q2 = % (°) = м{(у-у)уУ =* №?«.(0)-W«-в-х)]»
Q3
R ^ (0)
X (t- Т)8
-M{(y-y)x(t-*)}9
где RXx(t) —автокорреляционная функция сигнала x(t) с известной
характеристикой.
Рассмотрим, например, алгоритм уравновешивания вида (341) для
случайного и синусоидального детерминированного сигнала х (t), полагая
Rxx (х) = —е~~~^* и Rxx (х) =^=-cos со0х. Тогда, выбирая в качестве кри-
териев оценки Q2=Q^> Qi = получим соответствующие уравнения
движения изображающей точки в плоскости измеряемых- параметров
(х\ S) в виде
й(х С be
■ be-***
db
(342)
158
dz 1 ^ b cos со о х — 6 cos со0х
db цГ-—fccos со0 (х— х)]
(343)
при учете ограничений (6>0, &>0, х>0, t>0). Полагая далее
*Y I ^==-1 I* signY^=l, signY^=—1, найдем уравнение первого
X Ь t
приближения в окрестностях особых точек, определяемых решением
уравнений Q2=0, Qi=0.
Уравнение (342) в области задаваемых ограничений имеет един-
ственное решение b = b, т—т, в то время как для уравнения (343)
имеется континуум особых точек. Следовательно, уравнение пер-
вого приближения (342) в окрестности особой точки b = b, т=т за-
пишется:
dbz db dz
dtb
db dC
(344)
где
db ' dz
dQ2 , dQ2
~ =—o, —— = u.
db dz
Корни характеристического уравнения \l = — 2b^2ze~^y X2= —b
определяют особою точку равновесия типа устойчивого узла.
Аналогичные результаты имеют место и для уравнения первого
приближения (343) в окрестности той же особой точки (6, х), где
dQJdb = cos со0х; dQJdz = —6со0 sin <o0z; dQ2/db= — b; dQ2/dz = 0; и
Xt = — Ьщ sin co0x; X2 = — b. Однако другие ближайшие особые точ-
ки— есть седла, что определяет чередование полос устойчивости на
фазовом портрете (х, Ь) с границами каждой зоны вокруг особой
точки ±я/со0. Следовательно, сходимость процесса уравновешивания
в этом случае возможна лишь в ограниченной зоне плоскости (т, Ь),
определяемой выбором значений начальных условий параметров
т(0) адаптивной модели
Экспериментальные исследования приборов уравновешивания
подтвердили сходимость процессов и несмещенность получаемых
159
160
оценок параметров адаптивной модели. Рисунок 71,а иллюстрирует
фазовые траектории движения изображающей точки для дискрет-
ной системы уравновешивания (рис. 07), развертка процессов во вре-
мени для одной из траектории представлена на осциллограмме
рис. 71,6.
Таким образом, подход к задаче уравновешивания с позиций
теории параметрического регулирования позволяет выявить различ-
ные способы формирования сигналов управления, исключающие не-
обходимость применения моделей чувствительности, что приводит
к достаточно простым для аппаратурной реализации алгоритмам при
разработке измерительных приборов следящего уравновешивания.
Структурная схема измерительного прибора на рис. 68,а решает за-
дачу автоматического контроля параметров комплексного сопротив-
ления для случая многомерного уравновешивания в условиях помех
[Л. 56, 68].
СПИСОК ЛИТЕРАТУРЫ
1. Фельдбаум А. А. Новые принципы автоматического управле-
ния. — «Изв. вузов. Радиотехника», 1960, № 3, 4.
2. Беллман Р. Процессы регулирования с адаптацией. Пер.
с англ., под ред. А. М. Летова. М., «Наука», 1964.
3. Эшби Р. Происхождение адаптивного поведения. Конструкция
мозга. Пер. с англ., под ред. Анохина П. К. М., Изд-во иностр. лит.,
1962.
4. Фельдбаум А. А. Введение в теорию нелинейных цепей. Гос-
энергоиздат. М., 1948.
5. Рогинский В. Ю. Электропитание радиоустройств. Изд. 2-е.
Л., «Энергия», 1970.
6. Мазель К. Б. Выпрямители и стабилизаторы напряжения.
М.— Л., Госэнергоиздат, 1951.
7. Декабрун Л. Л. К-стабилизаторы напряжения лабораторных
выпрямителей.— «Радиотехника», 1955, т. 10, № 10.
8. Виленкин А. Г. Импульсные транзисторные стабилизаторы на-
пряжения. М., «Энергия», 1970.
9. Харкевич А. А. Нелинейные и параметрические явления в ра-
диотехнике. М., ГИТТЛ, 1956.
10. Корнилов Ю. Г. Теоретические основы автоматического ре-
гулирования. «Технжа», Киев, 1965.
11. Кэмпбелл Д. П. Динамика процессов химической технологии.
Пер. с англ., под ред. Кафарова В. В. и Феста Н. Я. М., Госхим-
издат, 1962.
12. О. Дж. М. Смит. Автоматическое (регулирование. Пер. с англ.,
под ред. Е. П. Попова. Физматгиз. М., 1962.
'13. Гродинз Ф. Теория регулирования и биологические системы.
Пер. с англ. М., «Мир», 1966.
14. Милсум Дж. Анализ биологических систем управления. Пер.
с англ. М., «Мир», 1968.
15. Воскобойник Д. И. Ядерная энергетика. М., ГИТТЛ, 1956.
16. Егоров К. В., Рихтер Р. Сравнительный анализ некоторых
структур САР мощности ядерного реактора. Труды МЭИ.— «Техни-
ческая кибернетика», № 95, 1971.
17. Керр К. Н., Мак Леллан Г. Д. С. Регулирование процессов,
зависящих от выходов. Труды II Международного конгресса ИФА1С
М., «Наука», 1965.
18. Лаубер Р. Новый метод определения описывающей функции
некоторых нелинейных систем. Труды II Международного конгресса
ИФАК. М., «Наука», 1965.
19. Л а Сааль Ж., Лефшец С. Исследование устойчивости пря-
мым методом Ляпунова. М., «Мир», 1964.
20. Хлыпало Е. И. Нелинейные системы автоматического регули-
рования. Л., «Энергия», 1967,
т
21. Таран В. А. Применение нелинейной коррекций и переменной
структуры для улучшения динамических свойств систем автоматиче-
ского регулирования. Обзор.— «Автоматика и телемеханика», 196.4,
т. 25, № 1.
22. Каплан К. Проектирование систем с преднамеренно введен-
ными нелинейными элементами.— В кн.: Приспосабливающиеся ав-
томатические системы. М., Изд-во иностр. лит., 1963.
23. Хэддед Р. А. Некоторые необычные, но не приспосаблива-
ющиеся системы.— В кн.: Приспосабливающиеся автоматические си-
стемы. М., Изд-во иностр. лит., 1963.
24. Наумов Б. Н. Выбор характеристики нелинейной скоростной
обратной связи позиционных следящих систем.— «Автоматика и теле-
механика» 1959, 20, № 3.
25. Емельянов С. В. Системы автоматического управления с пе-
ременной структурой. М., «Наука», 1967.
26. Макаров И. М., Рахманкулов В. 3. Об улучшении быстро-
действия систем с переменной структурой путем комбинирования
гиперплоскости скольжения.— «Автоматика и телемеханика», 1969;
№ 6.
27. Траксел Дж. Г. Принцип управления с приспосабливанием.—
В кн.: Приспосабливающиеся автоматические системы. М, Изд-во
иностр. лит., 1963.
Ж Кулебакин В. С. Теория инвариантности автоматически регу-
лируемых и управляемых систем. Труды I Международного конгрес-
са ИФАК. М., Изд. АН СССР, 1961.
29. Петров Б. Н. О применении условий инва.риантности. Труды
II Всес. совещ. по теории автоматического регулирования. Т. 2, М.,
Изд-во АН СССР, 1955.
30. Уланов Г. М. Статистические и информационные вопросы
управления по возмущению. М., «Энергия», 1970.
31. Догановский С. А. Вычислительные устройства в автоматиче-
ских системах управления по возмущению. М., «Энергия», 1964.
32. Мееров М. В. Методы синтеза структур, эквивалентных са-
монастраивающимся системам, для объектов с переменными пара-
метрами. Труды II Международного симпозиума ИФАК. М., «Нау-
ка», 1969.
33. Мееров М. В. Синтез систем с жесткой структурой, эквива-
лентных самонастраивающимся системам. Труды II Международно-
го конгресса ИФАК. М., «Наука», 1965.
34. Браун Л. Приспосабливающиеся системы автоматического уп;
равления с вычислительными устройствами (метод Корбина).— В
кн.: Приспосабливающиеся автоматические системы. М., Изд-во
иностр. лит., 1963.
35. Применение самонастраивающихся систем автоматического
управления. Труды I Международного конгресса ИФАК. М., Изд-во
АН СССР, 1961.
36. Кохенбургер Р. Д. Метод самонастройки систем управления
при больших изменениях коэффициента усиления объекта. Труды
II Международного конгресса ИФАК. М., «Наука», 1965.
37. Шак О. X. Самоприспосабливающиеся автопилоты. Труды
I Международного конгресса ИФАК. М., Изд-во АН СССР, 1961.
38. Чинаев П. И. Самонастраивающиеся системы. М., Машгиз,
1963.
39. Козлов Ю. М., Юсупов Р. М. Беспоисковые самонастраива-
ющиеся системы. М., «Наука», 1969.
163
40. Озеряный Н. А. Самонастраивающиеся системы с параметри-
ческими связями.— В кн.: Самонастраивающиеся системы. Под ред.
Чинаева П. И. Киев, Изд-во «Наукова думка», 1969.
41. Певзнер В. В. Об одном способе построения усилителей посто-
янного тока.— «Автоматика и телемеханика», 1967, № 3.
42. Лабутин В. К. Применение варикапов в радиоприемных уст-
ройствах.— В кн.: Радиоприемные устройства на полупроводниковых
приборах. М., «Советское радио», 1968.
43. Певзнер В. В., Полонников Д. Е. Усилители постоянного то-
ка с управляемыми генераторами. М., «Энергия», 1970.
44. Петров Б. Н., Рутковский В. Ю., Крутова И. Н. Основные
свойства и некоторые вопросы динамики самонастраивающейся си-
стемы с моделью. Труды II Международного симпозиума ИФАК.
М., «Наука», 1969.
45. Земляков С. Д. Некоторые вопросы анализа и синтеза само-
настраивающихся систем управления с эталонной моделью прямым
методом Ляпунова. Труды II Международного симпозиума ИФАК.
М., «Наука», 1969.
46. Костюк В. И. Беспоисковые градиентные самонастраивающие-
ся системы. Киев, «Технжа», 1969.
47. Шеклос Б., Батчарт Р. Синтез самонастраивающихся си-
стем управления с эталонной моделью вторым методом Ляпунова.
Труды II Международного симпозиума ИФАК. М., «Наука», 1909.
48. Розенвассер Е. Н., Юсупов Р. М. Чувствительность систем
автоматического управления. Л., «Энергия», 1969.
49. Осовский Л. М. Самонастраивающиеся модели. (Обзор).—
«Изв. АН СССР. Техническая кибернетика», 1963, № 1.
50. Райбман Н. С, Чадеев В. М. Адаптивные модели в системах
управления. М., «Советское радио», 1966.
51. Казаков И. Е., Евланов Л. Г. К теории самонастраивающих-
ся систем с поиском градиента методом вспомогательного оператора.
Труды II Международного конгресса ИФАК, М., «Наука», 1965.
52. Цыпкин Я. 3. Адаптация и обучение в автоматических си-
стемах. М., «Наука», 1968. Основы теории обучающихся систем. М.,
«Наука», 1970.
53. Кушнер Г. Дж. Стохастическая устойчивость и управление.
М., «Мир», 1969.
54. Хасьминский Р. 3. Устойчивость систем дифференциальных
уравнений при случайных возмущениях их параметров. М., «Наука»,
1969.
55. Сахаров М. П. Упрощение моделей чувствительности при по-
строении самонастраивающихся и адаптивных систем.— «Автоматика
и телемеханика», 1968, № 5.
56. Догановский С. А. Об алгоритмах идентификации, реализуе-
мых параметрическими системами регулирования.— «Автоматика и
телемеханика», 1968, № 4, 1970, № 11.
57. Моисеев Н. Н. Асимптотические методы нелинейной механи-
ки. М., «Наука», 1969.
58. Меерков С. М. Асимптотические методы исследования ква-
зистационарных режимов в непрерывных системах автоматической
оптимизации.— «Автоматика и телемеханика», 1967, № 11.
59. Попков Ю. С. Статистические модели нелинейных систем.—
«Автоматика и телемеханика», 1967, № 10.
60. Челюсткин А. Б. Применение вычислительной техники для
управления металлургическими агрегатами. М., Металлургиздат, 1960.
164
61. Догановский С. А., Абросимов Н. А. Автоматическая иден-
тификация математических моделей процессов цветной металлургии.—
В кн.: Автоматизация технологических процессов цветной металлур-
гии. М., «Металлургия», 1969.
62. Догановский С. А., Буровой И. А. Автоматическая оптими-
зация одного класса систем по статистическим критериям с помощью
параметрической обратной связи.— В кн.: Автоматизация техноло-
гических процессов цветной металлургии. М., «Металлургия», 1969.
63. Гавриленко А. Ф., Догановский С. А., Лисовский Д. И.,
Островская И. Л. Применение алгоритмов идентификации для опти-
мизации процесса электротермии цинка.— «Цветная металлургия»,
№ 24, 1970.
64. Кнеллер В. Ю. Автоматическое измерение составляющих ком-
плексного сопротивления. М., «Энергия», 1967.
65. Живоглядов В. 'П., Каипов В. X. Автоматическое измерение
запаздывания в распределенных объектах при наличии помех —
«Автометрия», № 5, 1966.
66. Догановский С. А., Иванов В. А. Устройства запаздывания
и их применение в автоматических системах. М., Машиностроение,
1966.
67. Николаев Д. И. Об одном методе построения схем для из-
мерения параметров комплексных сопротивлений. Труды Московского
ин-та радиотехники, электроники и автоматики, вып. 39, М., «Элек-
тротехника», 1969.
68. Догановский С. А. Об алгоритмах уравновешивания схем для
измерения комплексных сопротивлений. «Автоматика и телемехани-
ка», 1969, № 6.
69. Догановский С. А., Островская И. Л., Лисовский Д. И.
О способе автоматического уравновешивания мостов переменного
тока.— «Автоматика», 1971, № 1.
70. Наумов Б. Н. Теория нелинейных автоматических систем.
Частотные методы. М., «Наука», 1972.
ОГЛАВЛЕНИЕ
Предисловие 3
Введение 5
Глава первая. Параметрическое регулирование и стаби-
лизация 10
1. Стабилизация напряжений 10
2. Стабилизация давления и расхода 30
3. Стабилизация химического состава 38
4. Стабилизация мощности ядерного реактора ... 49
5. Стабилизация динамических свойств систем автома-
тического регулирования 61
Глава вторая. Параметрическое регулирование и адапта-
ция 81
6. Стабилизация динамических свойств систем автома-
тического регулирования в изменяющихся условиях
работы 81
7. Стабилизация динамических свойств САР в изме-
няющихся условиях работы по эталонной модели . 105
8. Параметрическое регулирование и стабилизация САР
в присутствии помех. Идентифицируемые модели и
адаптивное управление 123
9. Некоторые применения параметрического управления
в промышленных автоматических системах . . . 143
Список литературы 162
НОВЫЕ КНИГИ СЕРИИ
«БИБЛИОТЕКА ПО АВТОМАТИКЕ»
1. Алекса ко в Г. Н. Практика проектирования нелиней-
ных систем управления. М., 8 л. 10 000 экз. 40 к. (II кв.).
План 1972 г. № 269
2. Беличенко В. И., Михайлов В. В. и Ольсевич Л.Е.
Двухбазовые диоды в автоматике. М., 6 л. 15 000 экз. 30 к. (III кв.).
План 1972 г. № 270
3. Бенин В. Л. и К и з и л о в В. У. Статические измеритель-
ные преобразователи электрической мощности. М., 6 л. 10 000 экз.
30 к. (IV кв.).
План 19-72 г. № 271
4. Богданов Д. И. Феррорезонансные стабилизаторы напря-
жения. М., 9 л. 15 000 экз. 45 к. (IV кв.).
План 1972 г. № 272
5. Василенко В. А. и Романов А. Н. Обучение автоматов
распознаванию изображений. М., 6 л. 15 000 экз. 30 к. (I кв.).
План 1972 г. № 273
6. Гинзбург С. А. и Любарский Ю. Я. Функциональные
преобразователи с аналого-цифровым представлением информации.
М., 8 л. 10 000 экз. 40 к. (I кв.).
План 1972 г. № 274
7. Глаговский Б. А. и Пивен И. Д. Электротензометры
сопротивления. Изд. 2-е. Л., 7 л. 10 000 экз. 35 к. (II кв.).
План 1972 г. № 275
8. Глебов Б. А. Блокинг-генераторы на транзисторах. М., 7 л.
15 000 экз. Э5 к. (I кв.).
План 1972 г. № 276
9. Дмитренко Л. П. Тиратронные релейные устройства. М.,
6 л. 10 000 экз. 30 к. (I кв.).
План 1972 г. № Й77
10. Келлер Ф. Э. Графы кодов, кодирующие и декодирующие
устройства. Л., в л. 12 000 экз. 40 к. (IV кв.).
План 1972 г. № 278
11. Кон Е. Л., Тимошинов П. М. и Шеховцов О. И
Диагностика многотактных телемеханических систем. Л., 9 л.
8000 экз. .45 к. (II кв.).
План 1972 г. № 279
12. Константинов В. Г. Многофазные преобразователи на
транзисторах. М., 7 л. 12 000 экз. 35 к. (III кв.).
План 197? г. No ?80
167
13. Котенко Г. И. Магниторезисторы. Л., 6 л. 15 000 экз. 30 к.
(I кв.).
План 1972 г. № 281
14. Левин В. М. Расходомеры малых расходов для схем про-
мышленной автоматики. М., 6 л. 12 000 экз. 30 к. (III кв.).
План 1972 г. № 282
15. Орлов-Шулькин В. В. Согласование датчиков с маши-
нами централизованного контроля. М., 7 л. 12 000 экз. 35 к. (IV кв.).
План 1972 г. № 283
16. Павлов В. В. и Никитин А. В. Логические блоки для
управления исполнительными механизмами. М., 6 л. 15 000 экз. 30 к.
(IV кв.).
План 1972 г. № 284
17. Памфилов Р. К. Принципы выбора сельсинов и анализ
погрешностей сельсинных трансформаторных схем. М., 8,5 л.
8 000 экз. 43 к. (III кв.).
План 1972 г. № 285
18. Петренко А. И. и Ф е с е ч к о В. А. Методы и устройства
распознавания цвета объектов. М., 7 л. 8 000 экз. 35 к. (III кв.).
План 1972 г. № 286
19.- Пивоваров Л. В. Индукционные измерители линейной
скорости и длины. М., 7 л. 10 000 экз. 35 к. (I кв.).
План 1972 г. № 287
20. Рудаков В. В. и Мартикайнен Р. П. Синтез элек-
троприводов с последовательной коррекцией. Л., 9 л. 8 000 экз. 45 к.
(III кв.).
План 1972 г. № 288
21. Рыбников С. И. Автоматическое управление намоткой
эластичных материалов. М., 7л. 12 000 экз. 35 к. (III кв.).
План 1972 г. № 289
22. С н а й д е р Д. Методы состояний для непрерывной оценки
в применении к теории связи. Пер. с англ. М., 6 л. 8 000 экз. 43 к.
(IV кв.).
План 1972 г. № 290
23. С о б о л е в О. С. Однотипные связанные системы регули-
рования. М., 8 л. 12 000 экз. 40 к. (IV кв.).
План 1972 г. № 291
24. С т р о к о в В. А. Преобразование и передача информации
в многоканальных системах. (Развертывающее резонансное преоб-
разование). М., 6 л. 8 000 экз. 30 к. (I кв.).
План 1972 г. № 292
25. Схемы автоматики с фоточувствительными и излучающими
полупроводниковыми приборами. М., 5 л. 15 000 экз. 25 к. (IV кв.).
Авт.: Воронин В. Г., Гребнев А. К., Кривоносов А. И., Русла-
нов В. И.
План 1972 г. № 293
26. У с т и н с к и й А. П. Дифференциальные электромагнитные
муфты и коробки передач. М., 6 л., 10 000 экз. 30 к. (IV кв.).
План 1972 г. № 294
27. Шарин Ю. С, -Л и б ер м а н Я. Л. и Апахов В. Я.
Комбинаторные шкалы в системах автоматики. М., 7 л. 8 000 экз.
35 к. (I кв.).
План 1972 г. № 295
28. Элементы и устройства струйной техники. М., 8 л. 10 000 экз.
40 к. (I кв.).
План 1972 г. № 296
168