/






















































































































































































































































































































Автор: Федосов Е.А. Васильев С.Н. Жерлов А.К. Федунов Б.Е.
Теги: математическая кибернетика кибернетика информатика
ISBN: 5-9221-0050-5
Год: 2000




Текст
ФСЛГРАЛЬНЛС ЦЕЛЕВАЯ ПРОГРАММА
ККА
МИГРАЦИИ ВЫСШЕГО О6РАЭ0ВА НИЯ
И ФУНДАМЕ ГГАЛЬНОЙ НАУКИ НА 1997-2000 ГОДЫ»
С.Н. ВАСИЛЬЕВ, А.К. ЖЕРЛОВ,
Е.А. ФЕДОСОВ, Б.Е. ФЕДУНОВ
ПНТЕЛЛЕКТНОЕ УПРАВЛЕНИЕ
ДИНАМИЧЕСКИМИ СИСТЕМАМИ
ФЕДЕРАЛЬНАЯ ЦЕЛЕВАЯ ПРОГРАММА
«ГОСУДАРСТВЕННАЯ ПОДДЕРЖКА ИНТЕГРАЦИИ ВЫСШЕГО ОБРАЗОВАНИЯ
И ФУНДАМЕНТАЛЬНОЙ НАУКИ НА 1997-2000 ГОДЫ»
С Н ВАСИЛЬЕВ, А К. ЖЕРЛОВ,
Е А ФЕДОСОВ, Б.Е. ФЕДУНОВ
ИНТЕЛЛЕКТНОЕ УПРАВЛЕНИЕ
ДИНАМИЧЕСКИМИ СИСТЕМАМИ
МОСКВА •ФИЗМАТЛИТ*2000
УДК 519.7
ББК 32.81
В 19
Издание осуществлено при финансовой поддержке Федеральной
целевой программы «Государственная поддержка интеграции
высшего образования и фундаментальной науки на 199^-2000 годы »
ВАСИЛЬЕВ С. Н„ ЖЕРЛОВ А. К., ФЕДОСОВ Е. А., ФЕДУНОВ Б. Е.
Интеллектное управление динамическими системами. — М.: Физико-
математическая литература, 2000. — 352 с. — ISBN 5-9221-0050-5.
Книга посвящена методам интеллектного управления и, отчасти, интеллектного ана-
лиза и проектирования динамических управляемых систем. Содержит оригинальные и
строго обоснованные методы вместе с их корректными приложениями, логический подход
к построению систем интеллектного управления.
Для специалистов в области управления, прикладной математики и информатики,
инженеров-исследователей, нацеленных на поиск новых структур алгоритмов в своих
предметных областях, а также аспирантов и студентов.
Научное издание
ВАСИЛЬЕВ СТАНИСЛАВ НИКОЛАЕВИЧ
ЖЕРЛОВ АЛЕКСАНДР КОНСТАНТИНОВИЧ
ФЕДОСОВ ЕВГЕНИЙ АЛЕКСАНДРОВИЧ
ФЕДУНОВ БОРИС ЕВГЕНЬЕВИЧ
ИНТЕЛЛЕКТНОЕ УПРАВЛЕНИЕ
ДИНАМИЧЕСКИМИ СИСТЕМАМИ
ЛР № 071930 от 06.07.99 Подписано в печать 01.02.2000.
Формат 60x90/16. Усл. печ. л. 22
Тираж 1000 экз. Заказ № 1847
Издательская фирма «Физико-математическая литература» (ФИЗМАТЛИТ)
МАИК «Наука/Интерпериодика»
117864 Москва, ул. Профсоюзная, 90
ISBN 5-9221-0050-5
91785922 1 00502
ISBN 5-9221-0050-5
© Центр «Интеграция», 2000
Отпечатано в полном соответствии с качеством предоставленных диапозитивов
в ППП «Типография «Наука» 121099, Москва, Шубинский пер., 6
ОГЛАВЛЕНИЕ
ПРЕДИСЛОВИЕ.......................................................... 7
ИЗ РЕЦЕНЗИИ НА КНИГУ «ИНТЕЛЛЕКТНОЕ УПРАВЛЕНИЕ ДИНА-
МИЧЕСКИМИ СИСТЕМАМИ»................................................ 13
ВВЕДЕНИЕ
ОТ КЛАССИЧЕСКИХ ЗАДАЧ РЕГУЛИРОВАНИЯ
К ИНТЕЛЛЕКТНОМУ УПРАВЛЕНИЮ
В.1. Эволюция задач и методов теории управления .................... 19
В.2. К истории искусственного интеллекта............................ 22
В.З. Интеллектное управление........................................ 31
Литература.......................................................... 37
ГЛАВА 1
СИСТЕМЫ, ОСНОВАННЫЕ НА ЗНАНИЯХ,
И ИХ ПРИМЕНЕНИЕ В УПРАВЛЕНИИ
1.1. Системы, основанные на правилах................................ 46
1.2. Системы, основанные на автоматическом доказательстве теорем ... 48
1.3. Системы, основанные на автоматическом гипотезировании.......... 50
1.4. Системы, основанные на рассуждениях по аналогии................ 52
1.5. Объектно-ориентированные интеллектные системы.................. 52
1.6. Интеллектное управление на основе нечетких и других правил ... 55
1.7. О методах логического вывода для управления динамическими систе-
мами ......................................................... 65
1.8. Некоторые проблемы и их решение в логико-управляемых системах . 70
1.9. Проблема повышения уровня интеллектуальности систем управле-
ния .......................................................... 76
Литература.......................................................... 84
ГЛАВА 2
ЛОГИЧЕСКИЙ ВЫВОД И ПОРОЖДЕНИЕ ГИПОТЕЗ
2.1. О классическом исчислении предикатов........................... 91
2.1.1. О значении исчисления предикатов.......................... 91
3
2.1.2. О формальных аксиоматических системах.................... 92
2.1.3. Язык исчисления предикатов .............................. 92
2.1.4. Аксиомы и правила вывода исчисления предикатов........... 95
2.1.5. О расширении языка исчисления предикатов................. 96
2.1.6. Об алгоритмически разрешимых и неразрешимых задачах ... 96
2.1.7. Семантика исчисления предикатов.......................... 97
2.2. Задача поиска вывода в исчислении предикатов................... 99
2.2.1. О поиске вывода в исчислениях гильбертовского типа...... 100
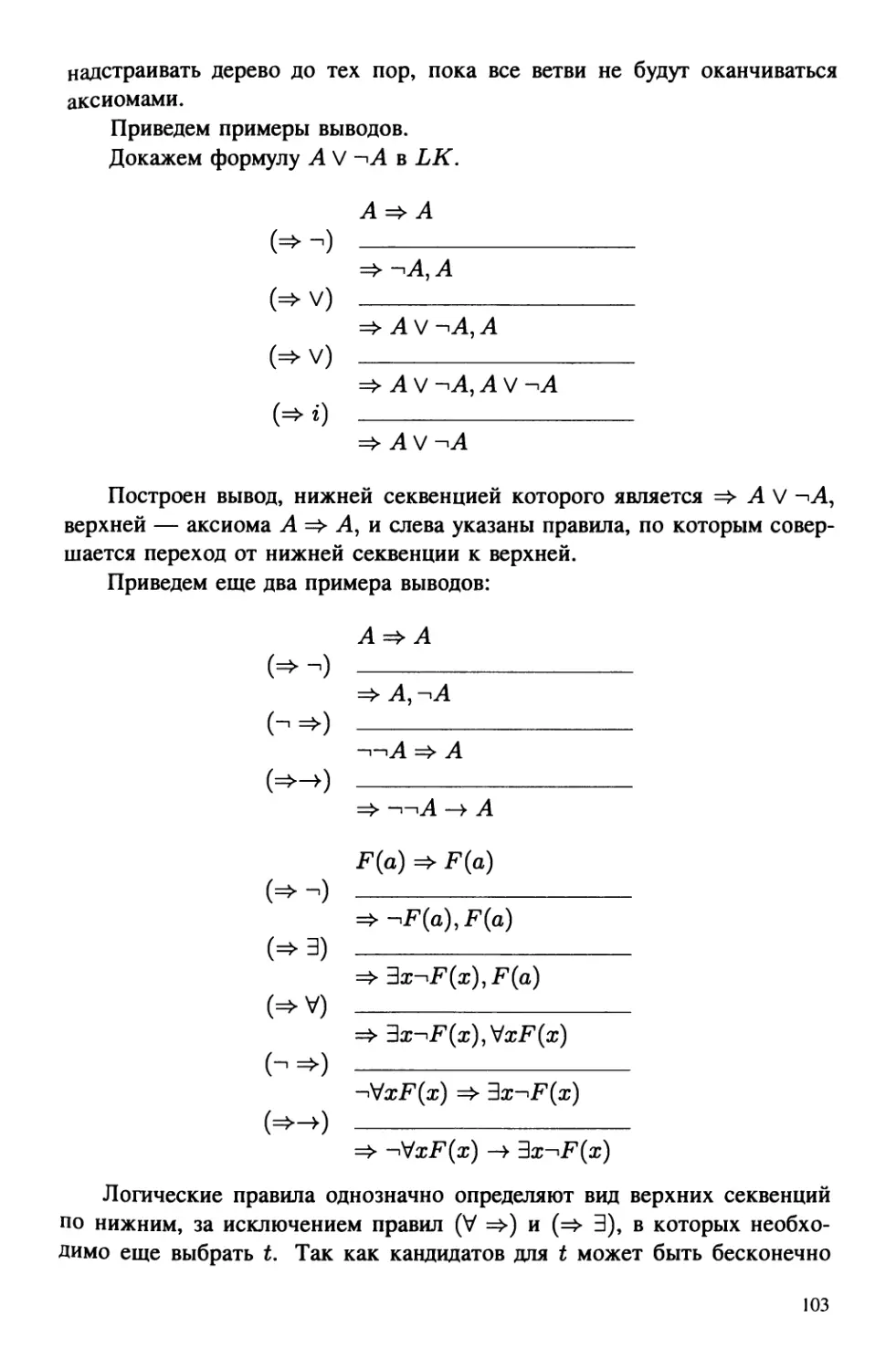
2.2.2. Секвенциальное исчисление Генцена....................... 101
2.2.3. Теорема Эрбрана......................................... 104
2.2.4. Метод резолюций......................................... 107
2.2.5. Об интуиционистском исчислении предикатов и конструктивных
задачах........................................................ 113
2.2.6. О сложности и перспективах логического подхода к решению
задач.......................................................... 116
2.3. Тйповые кванторы ............................................. 119
2.4. Язык L позитивно-образованных формул.......................... 122
2.5. Некоторые производные дедуктивные правила..................... 127
2.6. Исчисление J по-формул .................................... 129
2.7. О стратегиях поиска вывода в исчислении J..................... 141
2.8. Исчисления дескриптивных и конструктивных задач.............. 147
2.9. Логическое порождение гипотез................................. 154
Литература ........................................................ 161
ГЛАВА 3
ПРИМЕНЕНИЕ ЛОГИЧЕСКОГО ВЫВОДА
И ПОРОЖДЕНИЯ ГИПОТЕЗ В ЗАДАЧАХ УПРАВЛЕНИЯ
И ИССЛЕДОВАНИЯ СВОЙСТВ СИСТЕМ
3.1. Интеллектное управление группой лифтов........................ 165
3.1.1. Абстрактная модель...................................... 165
3.1.2. Логическая модель....................................... 168
3.1.3. Логический вывод управления............................. 172
3.2. Пример управления мобильным роботом........................... 174
3.3. Наведение телескопа на центр планеты в неполной фазе.......... 178
3.3.1. Исходная идея метода ................................... 179
3.3.2. Случай |тг—V>| < arccos(l/4). Пропозициональный стиль форма-
лизации ...................................................... 182
3.3.3. Представление задачи в предикатном варианте по-формул ... 185
3.3.4. Ослабление условия (3.16)............................... 188
3.4. Примеры применения логического порождения гипотез в анализе ди-
намических и управляемых систем ................................... 194
3.5. Порождение условий разрешимости задач распознавания типа лета-
тельного аппарата.................................................. 200
Литература......................................................... 202
4
ГЛАВА 4
СИСТЕМНЫЙ АНАЛИЗ И СЕМАНТИЧЕСКИЙ
ОБЛИК СЛОЖНЫХ АНТРОПОЦЕНТРИЧЕСКИХ СИСТЕМ
4.1. Введение................................................ 205
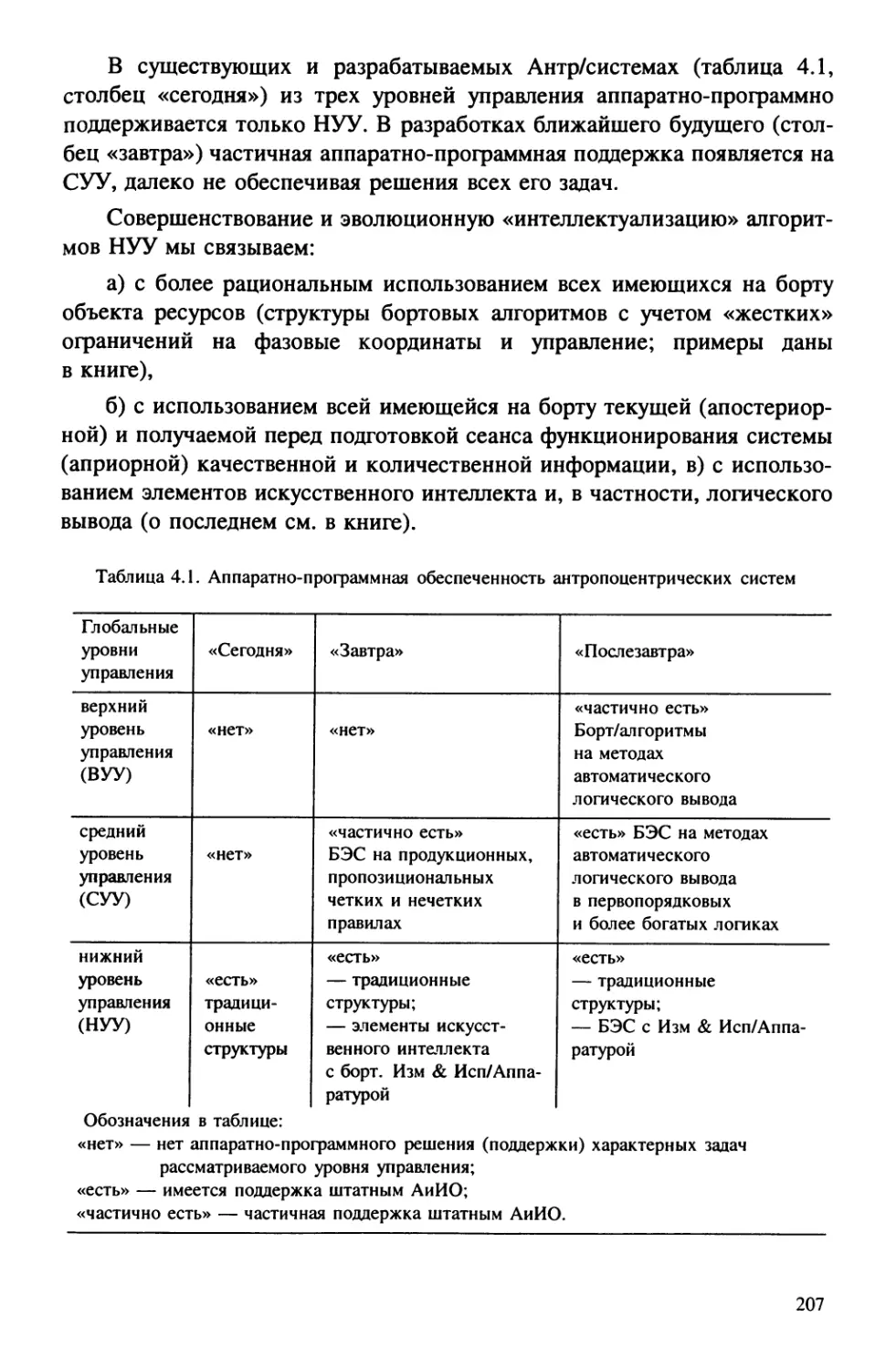
4.2. Системный анализ проблем разработки бортового интеллекта антропо-
центрических систем......................................... 206
4.3. Граф решений оператора и схема бортовых алгоритмов...... 210
4.3.1. Среда функционирования. Формализация описания......211
4.3.2. Формализованный сценарий работы системы «оператор - борто-
вая аппаратура».......................................... 213
4.3.3. Граф решений оператора............................ 214
4.3.4. Схема бортовых (компьютерных) алгоритмов.......... 215
4.4. Системный облик и структура бортового алгоритмического и индика-
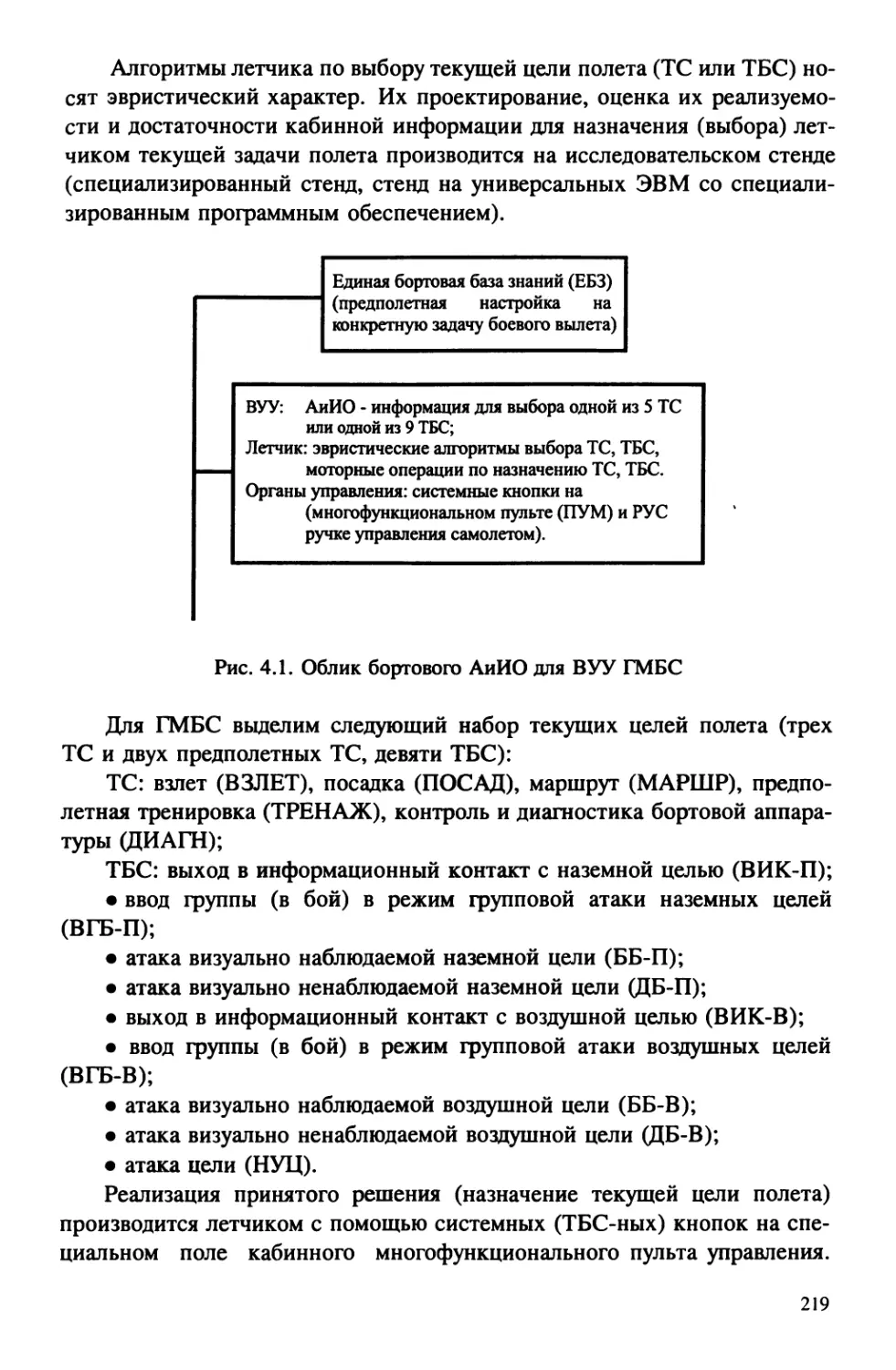
ционного обеспечения многофункционального самолета ......... 218
4.4.1. Верхний уровень управления........................ 218
4.4.2. Средний уровень................................... 220
4.4.3. Нижний уровень.................................... 221
Литература................................................... 227
ГЛАВА 5
ИНТЕЛЛЕКТУАЛИЗАЦИЯ РЕШЕНИЯ ЗАДАЧ
СРЕДНЕГО И НИЖНЕГО УРОВНЕЙ УПРАВЛЕНИЯ
5.1. Введение...................................................... 228
5.2. Проблемы разработки бортовых оперативно-советующих экспертных
систем (БОСЭС) для антропоцентрических систем ......................231
5.2.1. БОСЭС и их особенности.................................. 231
5.2.2. Концептуализация предметной области типовой ситуации.
Структура БОСЭС ......................................... 232
5.2.3. Аппаратно-программная реализация БОСЭС типовой ситуа-
ции ........................................................... 237
5.2.4. Технология совершенствования базы знаний БОСЭС...........240
5.2.5. О нормативно-технической документации для разработки
БОСЭС.................................................... 306
5.2.6. Некоторые исследовательские прототипы БОСЭС............. 248
5.3. БОСЭС «Дуэль» и ее исследовательский прототип................. 250
5.3.1. Назначение экспертной системы и краткая характеристика пред-
метной области................................................. 250
5.3.2. Структура экспертной системы............................ 252
5.3.3. Функционирование экспертной системы..................... 255
5.3.4. Логико-лингвистическая модель предметной области.........256
5.4. Некоторые задачи разработки бортовых алгоритмов среднего уровня
управления......................................................... 265
5.4.1. Минимаксная задача размещения и обхода точек в круге и по-
тенциальные возможности измерительных устройств................ 265
5
5.4.2. Задача выбора моментов применения бортовых исполнительных
устройств............................................ 284
5.5. Некоторые задачи разработки бортовых алгоритмов нижнего уровня
управления..................................................... 307
5.5.1. Задача рулевого тракта.............................. 308
5.5.2. Задача приводов бортовых измерительных систем....... 319
5.5.3. Экспертная система для синтеза систем управления ориентацией
космических аппаратов ..................................... 330
Литература..................................................... 346
СПИСОК ИСПОЛЬЗОВАННЫХ СОКРАЩЕНИЙ............................... 350
ПРЕДИСЛОВИЕ
Согласно определению, данному выдающимся ученым А.М. Летовым,
стоявшим у истоков современной теории управления и сделавшим многое
для ее развития [1], теория управления «есть совокупность методов, по-
зволяющих выработать и обосновать решение, которое принимается для
достижения заранее поставленной цели, в условиях как-либо определен-
ной ситуации» [2]. В частности, теория автоматического управления —
«наука о методах определения законов управления какими-либо объек-
тами, допускающих реализацию с помощью технических средств автома-
тики» [3].
Обычно различают объект управления (ОУ) и устройство управления
(УУ). В ОУ реализуется некоторый процесс, нуждающийся в организован-
ных воздействиях (решениях, управлениях) со стороны УУ для достиже-
ния цели (целей) управления. В теории автоматического управления ОУ
и УУ в совокупности именуются системой автоматического управления
(САУ), или управляемой системой. В случае дискретных систем (функци-
онирующих в дискретном времени и перерабатывающих дискретную ин-
формацию) часто используется также термин «управляющая система» [4].
Недавние достижения в кибернетике, информатике и, в частности,
так называемом искусственном интеллекте вызвали появление некоторых
новых средств моделирования, управления и оптимизации сложных нели-
нейных управляемых систем. На стыке современной теории управления
и искусственного интеллекта активно формируется и развивается область
исследований и разработок, именуемая интеллектным управлением.
Предлагаемая читателю книга посвящена методам интеллектного
управления и, отчасти, интеллектного анализа и проектирования динами-
ческих управляемых систем, хотя объектами приложений выступает более
конкретный класс систем — движущиеся объекты технической природы.
Во введении рассматривается эволюция задач управления и выделя-
ется одно из направлений прогресса в теории и практике управления,
основанное на применении средств искусственного интеллекта. Дается
краткий обзор средств искусственного интеллекта, применяющихся се-
годня и перспективных в задачах управления. Излагаются современные
представления о предмете, целях и методах интеллектного управления.
7
На сегодня более приспособленными для реализации высокоинтел-
лектуальных функций представляются так называемые системы, осно-
ванные на знаниях (СОЗ, Knowledge-Based Systems). В главе 1 дается
их классификация. Довольно сильно продвинутым в области интеллект-
ного управления является применение таких СОЗ, как продукционные
системы в форме нечетких и других правил. На примере систем, осно-
ванных на нечетких правилах, рассматриваются некоторые результаты их
применения в задачах интеллектного управления в технике. Обсуждаются
логический подход в теории управления и проблема повышения уровня
интеллекта в сложных системах управления. Делается вывод о необходи-
мости и возможности существенного повышения уровня интеллектуаль-
ности существующих систем интеллектного управления на основе разра-
ботки, развития и применения достаточно мощных средств логического
вывода и порождения гипотез. Таким средствам посвящена глава 2. В ней
дается представление о языке, дедуктивных и некоторых других свойствах
классического исчисления предикатов и на этой основе далее излагаются
оригинальные результаты авторов по автоматизации поиска логического
вывода. Развивается оригинальная теория автоматизации порождения ги-
потез, которая открывает новые возможности обеспечения функциониро-
вания систем в слабо структурированной среде.
С математической точки зрения, нами предлагается новое первопо-
рядковое логическое исчисление, ориентированное, в отличие от класси-
ческих исчислений, на автоматизацию поиска логических выводов (а точ-
нее — опровержений). Особенностью исчисления является, прежде всего,
его язык. Формулы этого языка состоят только из типовых кванторов
(в смысле Н. Бурбаки [5]), тйповые условия которых, в свою очередь,
являются либо элементарными (атомарными) формулами, либо их конъ-
юнкцией. Этот язык оказывается полным относительно выразительных
возможностей первопорядкового исчисления предикатов. Построенное в
этом языке логическое исчисление имеет единственное крупноблочное
правило вывода, по своей форме являющееся просто одноместной опера-
цией эквивалентного преобразования формул. Это исчисление обладает
необходимыми свойствами корректности и полноты. Полученная универ-
сальная (полная) логическая система для поиска выводов обладает рядом
преимуществ в сравнении с известными методами автоматического дока-
зательства теорем.
Известно, что универсальные методы обнаружения выводимости при
использовании в задачах с ограниченными ресурсами недостаточно эф-
фективны и нуждаются в тех или иных дополнительных средствах незави-
симо от разрешимости теории. Кроме того, даже при отсутствии ограни-
чений на ресурсы в неразрешимых теориях возникает проблема принятия
решения в случае, если доказываемая формула невыводима, а признаков
8
этого не обнаруживается ни сразу, ни в процессе доказательства. При
этом учет ресурсных ограничений оказывается полезным сам по себе для
построения решающих правил, в частности, прерывающих бесконечный
процесс поиска вывода.
Один из принципов, который может использоваться, таков [6]: «про-
буй доказать А, пока не исчерпаешь ресурсов, а потом, если доказать А не
удастся, заключи, что А ложно». Мы развиваем в книге другой подход, ко-
торый при возникновении трудностей с доказательством А преодолевает
их путем конструктивного формирования и принятия некоторых допол-
нительных предположений. Этот подход представляется характерным для
содержательных рассуждений и более продуктивным.
Теория логического вывода с порождением гипотез формализует про-
цедуры рассуждений с использованием всей доступной количественной и
качественной информации. Дополненная упреждающим логическим мо-
делированием процессов она позволяет создавать экономные процедуры
упорядочения альтернативных решений с целью выделения их наиболее
предпочтительного ядра.
Прикладная часть книги содержится в главах 3-5 и посвящена при-
менению процедур автоматизации вывода как альтернативе (или, может
быть, как органическому дополнению) освоенным в инженерной прак-
тике алгоритмическим процедурам. Без этих средств искусственного ин-
теллекта полноценное разрешение задач автоматического поиска способов
достижения цели и особенно задач целеполагания нам кажется проблема-
тичным. Применение логических (предикатных) языков для представления
знаний и интеллектного управления демонстрируется в главе 3 на примере
задач:
— наведения телескопа на центр планеты в неполной фазе;
— управления группой пассажирских лифтов;
— распознавания типа целей.
Приводятся примеры логического порождения гипотез в анализе свойств
динамических и управляемых систем.
Реальное приложение основывается на одном классе интеллектных
систем управления — на бортовых экспертных системах (БЭС), обеспе-
чивающих решение задач автоматического поиска способов достижения
Цели управления. Термином «БЭС» подчеркивается размещение экс-
пертной системы (ЭС) и оператора на борту, а также использование ЭС
в режиме реального времени.
В настоящее время БЭС проходят первый этап своего развития. Они
Достаточно широко представлены своими техническими проектами с фраг-
ментарным макетированием на лабораторной вычислительной технике
и теоретическими исследованиями проблем соответствующих предметных
областей. Сравнительно меньше серьезных прототипов, способных функ-
9
ционировать в реальной бортовой информационной среде приближенного
к реальным условиям сценария изменения внешней обстановки. Единич-
ные БЭС в виде прототипа доведены до натурных испытаний.
Разработка бортового алгоритмического и индикационного обеспе-
чения (АиИО) функционирования сложной человеко-машинной системы
управления предполагает, что для решения каждой задачи применяется
соответствующая структура бортовых алгоритмов. Отыскание адекватных
бортовых алгоритмов (их структур) как правило ведется через постановку
и исследование соответствующих оптимизационных задач.
Мы приводим формулировки, методы и результаты исследований ряда
оптимизационных задач, которые, по мнению авторов, в основном иллю-
стрируют подходы и проблемы оптимизации, возникающие при проекти-
ровании бортового АиИО.
Среди них отметим:
— задачу исследования «рулевого тракта» (управление при наличии
нескольких ограничений на фазовые координаты);
— задачу оптимального размещения и обхода п точек в круге (исполь-
зование принципа оптимальности Р. Веллмана для построения алгоритмов
обхода точек в заданной области);
— игровые задачи выбора оптимальных «ответов» при функциониро-
вании динамических систем в недружественных (особенно конфликтных)
средах с быстроменяющимися условиями.
Если по традиционным задачам читатель может найти обширную ли-
тературу, позволяющую нам только показывать, как применяются теоре-
тические результаты к нахождению структур алгоритмов АиИО, то для
практического применения в бортовых алгоритмах процедур автоматиза-
ции вывода читателю такую литературу найти труднее. Главы 2, 3 и 5
предоставляют читателю полезный для этого материал.
В главе 4 с системных позиций анализируется семантический облик
сложных динамических систем, яркими представителями которых явля-
ются антропоцентрические системы. Здесь рассматриваются различные
классификации бортовых алгоритмов (алгоритмов для бортовой вычисли-
тельной машины и алгоритмов деятельности экипажа) с позиций главной
цели функционирования антропоцентрической системы, с позиций по-
требных знаний о «мире функционирования», с позиций структур алго-
ритмов. Указываются причины, почему современная инженерная практика
в основном решает задачи нижнего уровня управления (НУУ), т.е. задачи
реализации найденных человеком способов достижения цели управления,
молчаливо оставляя оператору (экипажу) антропоцентрической системы
решение задач среднего уровня управления (СУУ), т.е. задач поиска этих
способов, и тем более задач целеполагания (задач верхнего уровня упра-
вления — ВУУ).
10
С точки зрения этой классификации, в главах 2, 3 дана теория и
ближайшая «завтрашняя» (если не сегодняшняя) практика решения задач
СУУ — того «интеллектуального» барьера, который должны «штурмо-
вать» инженеры-практики. Именно теория логического вывода и поро-
ждения гипотез явится тем фундаментом, на котором осваиваемые инже-
нерами-практиками БЭС ближайшего будущего будут «дорастать» до спо-
собности решать полный объем задач СУУ.
В главе 5 на частных примерах показываются направления интеллек-
туализации решения задач не только освоенного инженерами-практиками
НУУ, но и задач СУУ. В частности, здесь представлены современные
взгляды на теорию и практику бортовых оперативно-советующих экс-
пертных систем (БОСЭС) и отдельные типы тех оптимизационных задач,
которые приходится решать в процессе разработки их баз знаний.
Книга адресуется широкому кругу читателей: специалистам в области
управления, прикладной математики и информатики, инженерам-исследо-
вателям, нацеленным на поиск новых структур алгоритмов в своих пред-
метных областях, совпадающих или отличающихся от рассмотренных в
книге, а также аспирантам и студентам.
Книга по форме подачи материала написана доступным для этого чи-
тателя языком, с сохранением строгости изложения. Она отличается от
известных книг по искусственному интеллекту, обычно носящих харак-
тер лишь обзора и не включающих подробного и корректного описания
методов, тем, что содержит оригинальные и строго обоснованные методы
вместе с их корректными приложениями, а от большинства работ в пери-
одических изданиях и первых книг по интеллектному управлению — тем,
что посвящена логическому подходу к построению систем интеллектного
управления. Заметим, что сама демонстрация технических приложений
для систем автоматического доказательства теорем и автоматического ги-
потезирования является важным этапом развития прикладной логики, ис-
кусственного интеллекта и управления, что, мы надеемся, будет по досто-
инству оценено вдумчивым и заинтересованным читателем.
Авторы приносят глубокую благодарность профессору, д.ф.-м.н.
В.В. Беличенко, профессору, д.ф.-м.н. М.М. Хрусталеву за рецензирова-
ние книги и полезные замечания, учтенные нами в окончательной редак-
ции книги и способствовавшие ее улучшению, доценту, к.т.н. С.А.Дога-
новскому, к.т.н. Н.Н. Максимкину, А.Е. Хмельнову за полезные обсужде-
ния и замечания, а также Е.Ю. Батуриной, Г.Б. Кононенко, Н.П. Харта-
новой, Е.А. Черкашину — за огромный труд и помощь в оформлении
рукописи.
Данная монография написана и издана при поддержке Федеральной
Целевой программы «Интеграция».
и
ЛИТЕРАТУРА
1. Красовский Н.Н. Предисловие к книге: «А.М. Летов. Математическая теория процессов
управления». — М.: Наука, 1981. С. 3-4.
2 Летов А.М. Состояние и перспективы развития теории управления И Автоматика и те-
лемеханика, 1972. №9. С. 12-22.
3. Летов А.М. Автоматического управления теория // Математическая энциклопедия.
Т. 1. — М.: Сов. энциклопедия, 1977. С. 60-66
4. Яблонский С.В. Управляющая система // Математическая энциклопедия. Т. 5. — М.: Сов.
энциклопедия, 1985. С. 534-536.
5. Бурбаки Н. Теория множеств. — М.: Мир, 1965.
6. Алешина Н.А., Анисов А.М., Быстров П.И. и др. Логика и компьютер. Моделирование
рассуждений и проверка правильности программ. — М.: Наука, 1990.
ИЗ РЕЦЕНЗИИ НА КНИГУ
«ИНТЕЛЛЕКТНОЕ УПРАВЛЕНИЕ
ДИНАМИЧЕСКИМИ СИСТЕМАМИ»
Та часть рецензии, которая предназначена для авторов и издателей
книги, в основном, носит «технологический» характер, обсуждает узко-
профессиональные вопросы конкретных деталей содержания, и мало ин-
тересна читателям.
В части рецензии, которая обращена к читателю представляется более
важным дать другое — определить место, «фазовые координаты» новой
книги в динамическом многомерном «интеллектуальном пространстве»
научно-технических знаний.
В заканчивающемся XX веке «Ноте industrial» — «Человек инду-
стриальный» — почти полностью посвятил себя тому, чтобы вооружить
себя «сверхчеловеческими» физическими возможностями. Чтобы преодо-
леть естественные ограничения в мышечной силе, он построил подъем-
ные краны и домкраты, способные поднять непосильные ему грузы —
вплоть до городских многоэтажных зданий. Он создал экскаваторы, спо-
собные перемещать за один захват многие тонны грунта (рекорд здесь,
по-видимому, принадлежит россиянам, изготовившим такого монстра, как
шагающий экскаватор). Осознав свои ограничения в скорости передви-
жения, он в начале века уселся на автомобиль, потом на самолет, а за-
канчивает его «верхом» на ракете. Затем он занялся расширением своих
естественных органов слуха и зрения — оснастил себя радио и теле-
видением.
Конечно, такие успехи были подготовлены всей историей техниче-
ской цивилизации (рычаг, винт и увеличительные стекла были изобре-
тены еще в древности), но за последнее время прогресс в приобретении
этих «сверхчеловеческих» возможностей приобрел взрывной характер, и
за чрезвычайно короткий срок человек достиг здесь фантастических —
«планетарных» возможностей: вырвался за границы притяжения Земли,
наладил оперативную связь с другими планетами и заглянул вдаль за ты-
сячи световых лет.
Во второй половине XX века человек вспомнил (к сожалению, только
в ограниченной сфере своих научных занятий), что он к тому же —
13
«Homo sapiens», и занялся активным расширением своих ограниченных
естественных возможностей в собственно «человеческой» — интеллек-
туальной сфере. Здесь не будем формализовать обсуждаемые понятия —
этого с избытком в рецензируемой книге. Это та область, где требуется
«узнать», «понять», «запомнить», «оценить ситуацию», «найти решение»,
«проверить исполнение», и т.д. и т.п. И здесь имеются глубокие мно-
говековые корни и уже освоенные достижения, фантастичность которых
современное поколение не осознает просто потому, что, введенные в оби-
ход чуть раньше его рождения, психологически воспринимаются им как
«бывшие всегда». Примеры — от трамблера автомобиля, «знающего и
умеющего» послать точно в нужные доли секунды тысячи нужных импуль-
сов в цилиндры работающего двигателя, и до персонального компьютера,
которым может восхищаться профессиональный математик, прошедший
путь от логарифмической линейки и механического арифмометра, но ни-
как не юная секретарша современного офиса, в котором он «уже был» до
ее появления на этом месте. А между прочим, эта «пишущая машинка»
умеет подсказывать, учить, в том числе и как обращаться с самой со-
бой, может проверить правописание и отредактировать текст, перевести
его на многие языки и — практически мгновенно отыскать среди мил-
лионов адресов всего земного шара нужного корреспондента на другом
континенте.
Все сказанное — фон, та «система координат», в которой находится
эта книга. При всех удивительных достижениях, о которых мы упомя-
нули выше, это — только начало той огромной работы по расширению
интеллектуальных возможностей человека, которая приобретает взрывной
характер в наше время как раз в связи с возросшими возможностями и
доступностью как «традиционных» цифровых ЭВМ, так и техники нового
поколения — нейрокомпьютеров, и которая будет его главным занятием
в наступающем XXI веке.
Область, которой посвящена эта книга, в рассматриваемой «системе
координат научно-технической цивилизации» находится «правее и вы-
ше» приведенных выше примеров и рассматривает еще более сложные
вопросы. Если в упомянутых примерах рассматриваются действия и ра-
боты, которые человек «в принципе» мог бы выполнить и сам (если бы у
него было больше времени), то новая область объединяет методы решения
интеллектуальных задач, которые человек не в состоянии самостоятельно
решить даже и «в принципе». Это та область, которую рецензент имел
случай в свое время назвать «сверхинтеллектом».
Обсуждаемое «пространство цивилизации» многомерное, «область
сверхинтеллекта» формируется в нем как переплетение нескольких линий
развития, и определить ее сегодня можно только через описание ее разных
граней и направлений развития. Это свойство «многомерности» нашло
14
отражение также в построении и содержании этой книги, поэтому коротко
отметим эти основные свойства.
Прежде всего, «области сверхинтеллекта» принадлежит классичес-
кая математика, основные достижения которой как раз и состоят в уме-
нии выполнять «сверхчеловеческие» действия, например, такие, как вы-
числить квадратуру круга (с помощью трансцендентного числа тг), умение
вычислить сумму бесконечного числа членов (например, фундаменталь-
ное число е, или обычный интеграл). Если читатель скажет, что эти
способности «уже были» задействованы задолго до возникновения са-
мого термина «искусственный интеллект», и не согласится, что это —
проявление «сверхчеловеческих» возможностей, мы укажем другие при-
меры. Например, предоставляемые математикой «научные методы пред-
сказания будущего». Предсказывать будущее — это в области реальных
возможностей человека, или превосходит «человеческие» способности?
Но именно с этой задачей справляется математика, интегрируя систему
описывающих прогнозируемый процесс дифференциальных уравнений. И
предсказывает таким образом не только погоду на завтра, но и встречу
брошенного с Земли куска металла с далекой планетой — за месяцы до
этого события.
Теория управления (в расширительном смысле ее еще называют также
«кибернетикой») — основная дисциплина в «области сверхинтеллекта».
Ее главное занятие — это целенаправленное изменение технических, фи-
зических, химических, природных, социально-экономических — любых
процессов в желаемом направлении. Ее задачи «в бесконечное число раз»
сложнее тех «сверчеловеческих» задач, которые мы упомянули в связи
с «предсказанием будущего». Здесь приходится не просто прокладывать
в неизвестное будущее траекторию прогнозируемого процесса, а рассма-
тривать все неисчислимое «виртуальное» множество его всевозможных
траекторий, соответствующих всем альтернативам возможных управляю-
щих воздействий. Математики, встречаясь с ситуациями такого рода, не-
лицеприятно называют их даже «проклятием размерности». И все же
теория управления, используя специальные методы функционального ана-
лиза, успешно справляется с этими задачами, и при этом получает резуль-
таты, намного более сильные, чем приведенное «предсказание будущего».
Она позволяет указать, как воздействие, приложенное к системе «здесь и
сейчас» повлияет на состояние системы «там и потом», то есть, в точных
терминах, позволяет «управлять будущим из настоящего».
Кстати, затронув термин «социально-экономические процессы», от-
метим, что отсутствие самых элементарных представлений об управле-
нии процессами является причиной столь неутешительных результатов
«управления» отечественной экономикой: Правительство (в собиратель-
ном смысле) управляет по критериям ежедневных срочных надобностей,
15
исходя из «очевидных» представлений о первостепенной важности «биз-
неса», армии и иногда даже промышленности (в связи с забастовками
в «государственно важных» отраслях), и практически игнорирует «не
срочные» проблемы систем образования. Понятно, что тем самым оно
лишает страну и ближайших, и исторических перспектив.
Поскольку пришлось упомянуть слово «система», укажем, что в «обла-
сти сверхинтеллекта» находится также классическая механика, в которой
впервые было материализовано это привычное сегодня слово — «систе-
ма», и гамильтонов формализм которой (используемый и в настоящей
книге) стал основой теории управления.
Развитие механики привело к созданию недавно фантастического, а
сегодня такого привычного субъекта, как робот. Хорошо известно, что
робот сегодня наделяется «искусственным интеллектом» — рассматрива-
емым в рецензируемой книге. Но стоит заметить, что само конструирова-
ние робота невозможно без использования «сверхчеловеческих» возмож-
ностей «искусственного интеллекта» — человек попросту не в состоя-
нии даже выписать уравнения механики робота, и это делает компьютер,
который после его обучения «знает» законы механики лучше человека.
Примеры этого абзаца — тоже из «области сверхинтеллекта» нашего «ин-
теллектуального пространства».
Материал рецензируемой книги — «старший брат» указанных выше
направлений «сверхинтеллекта», и характерен тем, что придает больше
живых «человеческих» черт его формальным «механистическим» мето-
дам. Дело в том, что математические методы решения любых задач, в том
числе и задач искусственного интеллекта, требуют их полной и абсолют-
ной формализации, что создает огромный, часто непреодолимый барьер
(или, лучше сказать, — овраг) между этим инструментальным цехом, пол-
ным превосходных сверкающих математических инструментов, и реаль-
ной жизнью, по самой своей природе чуждой какой-либо формализации.
Она заполнена надеждами вместо самонадеянных планов, расплывчатыми
мнениями, приближенными оценками, опытом, который можно приобре-
сти в результате проб и ошибок, но который трудно объяснить, и даже
эмоциями, часто заставляющими принимать импульсивные «необдуман-
ные» решения.
Теория управления процессами реальной жизни — огромное пред-
приятие, которое еще предстоит построить, и настоящую книгу следует
отнести к одной из первых работ этого направления. Она находится как
раз на границе между строгими формальными математическими методами,
и областью новых запросов реальной жизни. Естественно, что авторы в ка-
честве объекта для развития новых методов избрали те области реальной
жизни, которые, в силу своей специфически высокой организованности,
наиболее подходят для использования строгих математических методов.
16
В качестве примеров в книге рассмотрены задачи управления боевыми
самолетами в условиях воздушного боя, роботами и — пример, наиболее
приближенный к «боевой обстановке» реальной жизни — лифтами много-
этажных зданий. Впрочем, главное в книге — ее «интеллектные» методы,
а приведенные примеры выполняют только свою роль экспериментального
материала. Поэтому читатель может перенести идеи, использованные для
решения рассматриваемых в книге задач типа «пуска ракет с самолета
в условиях помех истребителя противника» на задачи «запуска нового
оборудования на заводе в условиях рыночного противодействия конку-
рента», и на другие сложные задачи, которые могут встретиться в его
конкретной деятельности.
Подчеркнем, что новые методы, призванные ответить на поставлен-
ные запросы «неформальной» реальной жизни, остаются методами стро-
гой формализованной математики. Это, прежде всего, методы дискрет-
ной математики и математической логики, уже занявшие свое законное
место в «пространстве сверхинтеллекта» — и как естественная модель
мышления человека, и за заслуги в решении проблем автоматического
доказательства теорем. В книге они существенно развиваются для встре-
чи с новыми задачами «естественной» логики. Эти методы, разрабаты-
ваемые для решения сугубо прикладных задач, становятся новыми раз-
делами математики и пополняют ее фундаментальный фонд, затрагивая,
как в случае новых методов математической логики, сами основы мате-
матики.
В итоге можно сказать, что все методы «сверхинтеллекта» — мате-
матические, и, значит, «сверхинтеллект» — это и е^ть математика.
Мы подчеркиваем это для читателей — молодых инженеров и студен-
тов, которым придется заниматься конструкторской и исследовательской
работой в XXI веке. Пример этой книги, написанной математиками и ин-
женерами, показывает, что уже сегодня конкретные инженерные вопросы
требуют не только знания фундаментальной математики, но и разработки
ее новых методов. Математика в будущем столетии будет занимать все
большее место в инженерном образовании и инженерной деятельности.
Этот фундамент необходимо приобретать уже сегодня, и в этом окажет
существенную помощь предлагаемая вашему вниманию книга, которую
можно назвать книгой XXI века.
Мы хотели бы также обратить на это обстоятельство внимание руко-
водителей систем образования России, чтобы предостеречь от тенденций
Упрощенчества в образовании «в связи с реальными потребностями ры-
ночной экономики». Будущее России — только в новых промышленных
и теоретических технологиях, в самых основах которых лежит фундамен-
тальная математика, поэтому математический пласт образования является
тосударственным капиталом будущего.
17
Материал книги — не прост, ее математическое содержание выходит
за границы стандартного курса высшей математики ВУЗа. Вместе с тем
он вполне доступен инженеру с российской вузовской подготовкой, жела-
ющему пополнить свое общетеоретическое и профессиональное образо-
вание. Учебные пособия по теме книги на русском языке, рекомендуемые
авторами в качестве вспомогательного материала, вполне достаточны для
преодоления первых технических трудностей, за которыми читателя ожи-
дает встреча с новым интересным материалом.
Рецензент
профессор В.В. Величенко
ВВЕДЕНИЕ
ОТ КЛАССИЧЕСКИХ ЗАДАЧ РЕГУЛИРОВАНИЯ
К ИНТЕЛЛЕКТНОМУ УПРАВЛЕНИЮ
В.1. Эволюция задач и методов теории управления
Опираясь на принятую терминологию (см. предисловие к книге)
[1-4], перейдем к краткому рассмотрению эволюции задач и методов те-
ории управления. При этом мы не имеем возможности, к сожалению,
упомянуть с достаточной полнотой все важнейшие работы.
Здесь и далее будем рассматривать управление объектами, поведение
которых удается описать более или менее формально. Без формализма не
обойтись, особенно тогда, когда трудности решения задачи перекладыва-
ются на ЭВМ.
Принято различать системы программного управления (разомкнутые
системы) и системы управления по принципу обратной связи (замкнутые
системы). Для краткости, следуя [5], мы будем именовать системы второго
типа системами позиционного управления. Построение законов позици-
онного управления называют синтезом управляемой (регулируемой) си-
стемы. При программном управлении управляющие воздействия являются
функцией времени, а при позиционном — также функцией координаты,
или текущего состояния системы (отсюда и возникают термины «обратная
связь», «замкнутая система»).
Под регулированием в собственном смысле слова обычно понимается
поддержание постоянства, или стабилизация, управляемой величины при
заданном входном сигнале (или, как говорят, под задаваемую уставку).
Более широко задача о стабилизации понимается как задача о формиро-
вании регулирующего воздействия, которое на основе доступной инфор-
мации обеспечивает устойчивое осуществление заданного движения [6].
Термин же «управление» является более общим понятием, применяемым
и для других разнообразных задач управления, но часто под задачей упра-
вления понимают задачу отыскания сил, которые переводят ОУ из одного
заданного состояния в другое [6]. В известном смысле дуальной к ней
19
является задача наблюдения, т.е. задача определения текущих координат
объекта по доступным наблюдению величинам [7].
Знание одного лишь программного управления и даже его точная ре-
ализация обычно не обеспечивают достижения цели управления, так как
САУ с программным управлением, как разомкнутая система, не обеспе-
чивает компенсации действующих на объект возмущающих воздействий.
Поэтому более полное решение задачи управления связывается с приме-
нением позиционного управления или в комбинации с принципом регули-
рования по возмущению (J.V. Poncelet). На практике он был реализован с
применением теории статистического предсказания сигналов (N. Winer).
Теория инвариантности также явилась инструментом борьбы с возмуще-
ниями. При этом, например, на вход УУ подается информация как о те-
кущем состоянии системы, так и внешнем возмущении, воздействующем
на ОУ. Комбинированные принципы управления используются с 40-х го-
дов (В.С. Кулебакин, Б.Н. Петров, Г.М. Уланов, А.Г. Ивахненко и др.) [8].
Искусство позиционного управления является очень древним. Давний,
зарегистрированный письменно, признак активности человека в духе по-
зиционного управления зафиксирован около 2100 лет до н.э. [9] в Вави-
лонии. Один из законов Вавилонии с ее весьма совершенными на то время
ирригационными системами предусматривал наказание человека за непра-
вильные действия: «если кто-либо открывает свой канал для орошения
своего посева, но делает это небрежно, так что вода попадает на поле
его соседа, то он должен платить своему соседу зерном за причиненные
ему убытки». Первая паровая машина И.И. Ползунова (1765 г.) имела
поплавковый автоматический регулятор, поддерживающий уровень воды
в котле. Паровая машина Дж. Уатта (1784 г.) была снабжена центробеж-
ным регулятором скорости вращения вала. Считается, что в конце XVIII
и начале XIX столетий основная проблематика создания систем автома-
тического управления переместилась в математические науки, которые по
прошествии одного века оказали глубокое влияние на теорию и прак-
тику управления. Преобразования Фурье и Лапласа, а также появившаяся
примерно через одно поколение теория функций комплексного перемен-
ного Коши составили базу частотных методов теории автоматического
регулирования. Вместе с тем классические труды Э. Рауса, А.Стодола,
А. Гурвица, А. Пуанкаре, А.М. Ляпунова, Н.Е. Жуковского, Н.Г.Четаева и
др. составили иной базис теории управления, в котором преобладающей
является концепция дифференциальных уравнений.
Со второй половины XIX в. быстро развивается машиностроение.
Основоположник науки о регулировании, замечательный русский ученый
И.А. Вышнеградский в работе «Об общей теории регуляторов» [10] пред-
ложил методы расчета систем автоматического регулирования на основе
методологии линеаризации.
20
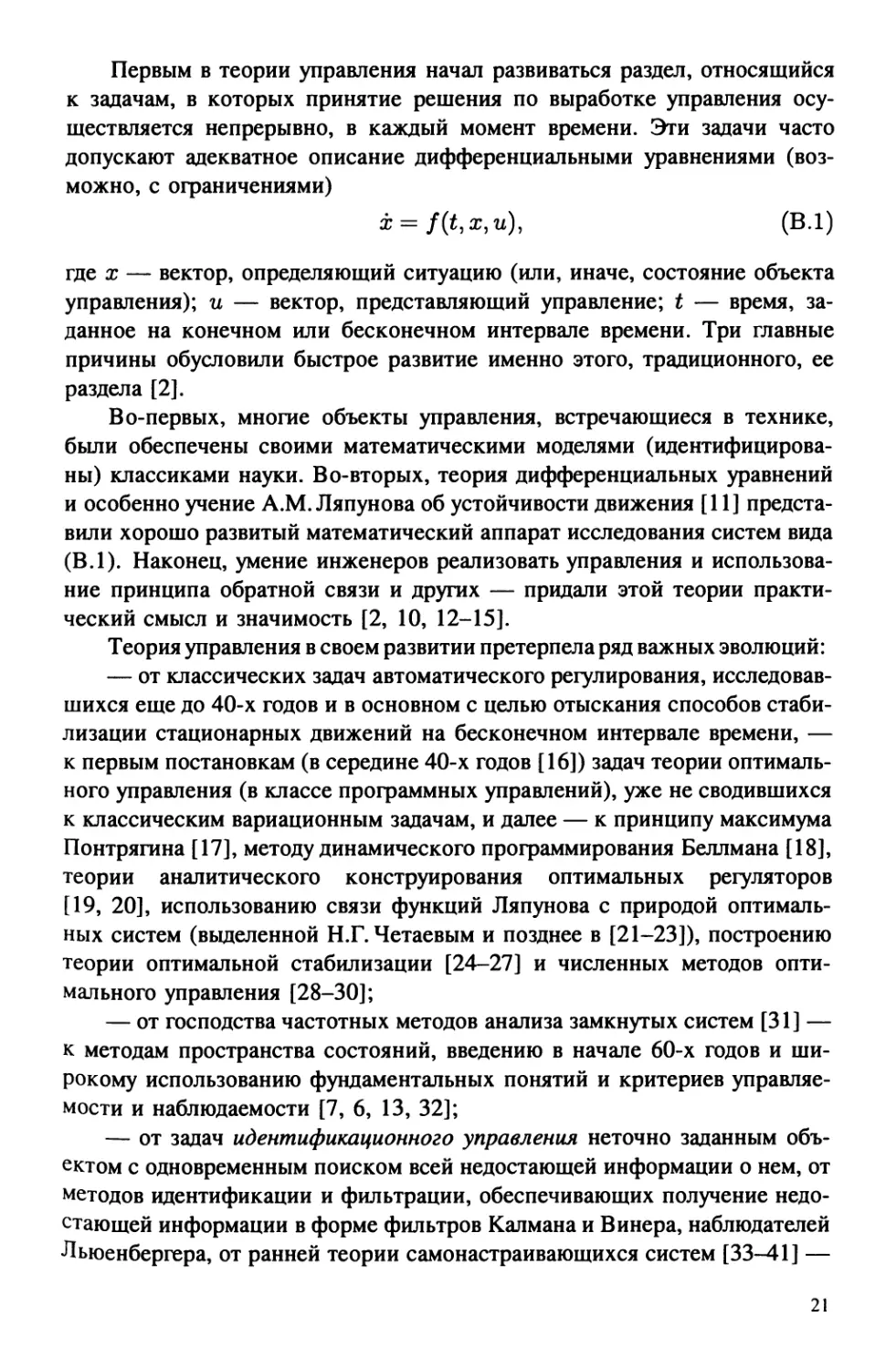
Первым в теории управления начал развиваться раздел, относящийся
к задачам, в которых принятие решения по выработке управления осу-
ществляется непрерывно, в каждый момент времени. Эти задачи часто
допускают адекватное описание дифференциальными уравнениями (воз-
можно, с ограничениями)
x = f(t,x, u), (В.1)
где х — вектор, определяющий ситуацию (или, иначе, состояние объекта
управления); и — вектор, представляющий управление; t — время, за-
данное на конечном или бесконечном интервале времени. Три главные
причины обусловили быстрое развитие именно этого, традиционного, ее
раздела [2].
Во-первых, многие объекты управления, встречающиеся в технике,
были обеспечены своими математическими моделями (идентифицирова-
ны) классиками науки. Во-вторых, теория дифференциальных уравнений
и особенно учение А.М. Ляпунова об устойчивости движения [11] предста-
вили хорошо развитый математический аппарат исследования систем вида
(В.1). Наконец, умение инженеров реализовать управления и использова-
ние принципа обратной связи и других — придали этой теории практи-
ческий смысл и значимость [2, 10, 12-15].
Теория управления в своем развитии претерпела ряд важных эволюций:
— от классических задач автоматического регулирования, исследовав-
шихся еще до 40-х годов и в основном с целью отыскания способов стаби-
лизации стационарных движений на бесконечном интервале времени, —
к первым постановкам (в середине 40-х годов [16]) задач теории оптималь-
ного управления (в классе программных управлений), уже не сводившихся
к классическим вариационным задачам, и далее — к принципу максимума
Понтрягина [17], методу динамического программирования Веллмана [18],
теории аналитического конструирования оптимальных регуляторов
[19, 20], использованию связи функций Ляпунова с природой оптималь-
ных систем (выделенной Н.Г. Четаевым и позднее в [21-23]), построению
теории оптимальной стабилизации [24-27] и численных методов опти-
мального управления [28-30];
— от господства частотных методов анализа замкнутых систем [31] —
к методам пространства состояний, введению в начале 60-х годов и ши-
рокому использованию фундаментальных понятий и критериев управляе-
мости и наблюдаемости [7, 6, 13, 32];
— от задач идентификационного управления неточно заданным объ-
ектом с одновременным поиском всей недостающей информации о нем, от
методов идентификации и фильтрации, обеспечивающих получение недо-
стающей информации в форме фильтров Калмана и Винера, наблюдателей
Льюенбергера, от ранней теории самонастраивающихся систем [33-41] —
21
к более современным постановкам задач адаптивного управления
[42-50], в том числе адаптивного управления «с элементами искусствен-
ного интеллекта» [45-50];
— от задач в форме обыкновенных дифференциальных уравнений
к задачам управления системами с запаздыванием [32, 51] и распределен-
ными системами [52-56], в том числе оптимального управления в форме
достаточных условий Кротова [57] и необходимых и достаточных условий
[58], а также вырожденных задач оптимального управления [59];
— от задач со скалярным критерием качества управления и систем
с фиксированной, одноконтурной схемой управления — к многокрите-
риальным задачам иерархического и децентрализованного управления
[60-65], системам координатно-параметрического и структурного упра-
вления (стабилизирующим [66,67], бинарным [68], адаптивным [69], не-
прерывно-дискретным и логико-динамическим [70-78], с реконфигура-
цией [79-83], переменной структуры [84]), к минимаксным и другим
дифференциальным, дифференциально-разностным, детерминированным
и стохастическим динамическим играм [85-94], задачам управления слож-
ными техническими и человеко-машинными системами в условиях не-
определенности, фазовых и смешанных ограничений, стохастичности, ко-
операции или противодействия подсистем [43, 45, 49, 65, 72, 74, 78,
95-112].
Развитие, помимо дискретного аналога теории непрерывных упра-
вляемых систем (теории дискретных управляемых процессов [113,114]),
самостоятельной теории дискретных устройств (конечных автоматов)
и теории логико-динамических систем, использование в устройствах ци-
фрового и логического (автоматного [115-118]) управления вычислитель-
ных машин [119, 120], применение методов искусственного интеллекта
(ИИ) стимулировали создание управляющих систем с более широкими
возможностями решения задач путем встраивания процедур распознава-
ния образов, планирования действий и других интеллектуальных функций
[33,43,48,50,65,79,81, 83,97,98,102,103,106-109,121-125].
В.2. К истории искусственного интеллекта
Область исследований, именуемая «искусственным интеллектом», воз-
никла и развивается параллельно с развитием теории автоматического
управления, начиная примерно с 50-х годов, с основными приложениями
вначале в вычислительной технике и информатике, а позднее и в авто-
матизации управления. Искусственный интеллект (от латинского intel-
lectus — познание, понимание, рассудок) — «раздел информатики, изу-
чающий методы, способы и приемы моделирования и воспроизведения
22
с помощью ЭВМ разумной деятельности человека, связанной с решением
задач» [126].
В отличие от философии и психологии, искусственный интеллект,
как область исследований и разработок, ориентирован не только на пони-
мание, но и на построение интеллектуальных (или интеллектных) систем.
ИИ формально, как область исследований, был назван в 1956 г., хотя
к этому году активные исследования с применением ЭВМ имели по мень-
шей мере 5-летний опыт, а работой, по всеобщему признанию, уже отно-
симой к ИИ, являлась еще публикация 1943 г. У.МакКаллока и У. Питса
об искусственных нейронных сетях. ИИ унаследовал и продолжает асси-
милировать многие идеи, взгляды и методы разных дисциплин (филосо-
фии, математики, психологии, лингвистики, информатики, теории упра-
вления).
В [127] дается следующий взгляд на историю ИИ. Период 1943-
1956 — период созревания ИИ, а 1952-1963 — годы раннего энтузиазма
и великих ожиданий. К периоду 1966-1974 относятся первые разочарова-
ния и главной причиной этому явился типичный «комбинаторный взрыв»
в задачах ИИ. Провал «кавалерийских атак» в форме программ типа
GPS (общий решатель задач — General Problem Solver) заставил иссле-
дователей строить системы более специализированные и основанные на
достаточном объеме экспертных знаний. Грубо говоря, для того, чтобы со-
здаваемая система ИИ смогла решать трудные проблемы, разработчик уже
примерно должен знать, на какой базе знаний это реализуемо. Несмотря
на меньшую амбициозность этого подхода, он привел к ряду значимых в
приложениях систем. Соответственно период 1969-1979 явился временем
нового энтузиазма, а именно периодом создания экспертных систем (ЭС).
ЭС явились первым коммерчески значимым продуктом в области искус-
ственного интеллекта. Ими обозначались СОЗ, аккумулировавшие опыт,
знания и умения глубоких профессионалов конкретного рода деятельности
для использования менее квалифицированными пользователями или теми
же профессионалами, но в более производительном режиме. В частности,
в такие системы по необходимости стали включать подсистемы объяс-
нения полученного решения. Однако постепенно содержание термина
«ЭС» стало размываться неоправданным включением в него программных
и других систем, отличных от СОЗ, но решающих задачи, традиционно
относившиеся до этого к более или менее творческим, благодаря эффек-
тивным специализированным алгоритмам. С целью отмежевания от таких
работ специалисты в области искусственного интеллекта стали исполь-
зовать для ЭС термин «СОЗ», хотя термин «СОЗ» значительно шире,
чем «ЭС».
В период 1980-1988 ИИ приходит в промышленность. Уже первая
коммерческая экспертная система компании Digital Equipment Corporation
23
экономила 40 млн. долл, в год [128]. С 1986 г. возобновился и сохраняется
интерес к нейронным сетям. В это время несколько исследовательских
групп переоткрыли алгоритм обучения сетей методом обратного распро-
странения ошибки [129], а в России был предложен более универсальный
алгоритм [130].
Последний период (с 1987 г.) характеризуется изменением содержа-
ния и методологии исследований в ИИ. За рубежом некоторые иссле-
дователи [127] характеризуют это изменение как победу «аккуратистов»
(Neats) — считающих, что ИИ должен обосновываться с математической
строгостью — над «неформалами» (Scruffies — дословно «неряхи») —
предпочитающих проверку разнообразного множества идей путем напи-
сания компьютерных программ (в России для обозначения второй группы
исследователей имеет хождение также шутливый термин «искусственные
интеллектуалы»). Оба подхода важны, а указанные изменения означают,
что ИИ достиг некоторого уровня стабильности и зрелости (будет ли эта
стабильность вскоре взорвана новой идеей — отдельный вопрос).
В период с 1987 г. в основном продолжали развиваться уже существу-
ющие теории вместо выдвижения новых, обосновывались новые утвер-
ждения скорее на базе строгих теорем и сложных экспериментов, пока-
зывалась адекватность результатов применениям в реальном мире. Это —
период «маленьких революций» в распознавании речи, системах плани-
рования и достоверного и вероятностного рассуждений, роботике, ком-
пьютерном зрении, машинном обучении и представлении знаний. Лучшее
понимание проблем и их сложностных свойств в комбинации с возра-
стающей математической поддержкой привели к осуществимым иссле-
довательским программам и довольно продуктивным методам, хотя про-
должают появляться дискуссионные публикации с новыми взглядами на
предмет и методы искусственного интеллекта, например, [131].
Начиная примерно с 80-х годов, идеи, относимые традиционно к обла-
сти искусственного интеллекта, начинают использоваться в теории и прак-
тике управления. Соответствующие разработки, включаемые в состав си-
стем управления, называются часто интеллектными компонентами си-
стем управления. Рассмотрим основные из них.
В качестве первого типа интеллектных компонент для систем упра-
вления выступают упоминавшиеся ранее искусственные нейронные сети
[132-134]. Они применимы для решения целого класса задач, где исполь-
зуются не уравнения динамики и даже не столько правила, как в традици-
онных экспертных системах, сколько опыт. Опытный врач поставит диа-
гноз, даже если симптоматика заболевания искажена и ему не доводилось
ранее ее наблюдать или абстрактно осмысливать. Механизм диагностики
при этом иногда напоминает скорее распознавание на подсознательном
уровне, чем цепочку рассуждений на логическом уровне. Искусственные
24
нейронные сети стали активно использоваться в теории и практике упра-
вления примерно с середины 80-х годов [127, 132, 133]. Имеется не-
сколько типов искусственных нейронных сетей, применимых в системах
управления: многослойный перцептрон, сеть Кохонена (как однослой-
ная самоорганизующаяся карта — Kohonen’s Self-Organizing Мар), сеть
Хопфилда, машина Больцмана и другие [132]. Они оказываются важным
инструментом автоматизации принятия решений, поскольку построение
алгоритмов или логических исчислений для решения указанного класса
задач упирается в сложность учета всех мыслимых сочетаний факторов
и формализации закономерностей, связывающих условия задачи с резуль-
татом. В сложных системах автоматического управления нейронные сети
хорошо поддерживают рефлекторный уровень управления. Более мощ-
ные интеллектные системы могут совмещать и нейронный, и логический
механизмы принятия решений [50, 133, 135, 136].
Сильный интерес к использованию нейронных сетей на стыке с зада-
чами управления имеется сегодня в разных областях: в роботике, управле-
нии технологическими процессами (особенно в химической промышлен-
ности), телекоммуникациях, системах искусственного зрения (обработки
изображений), аэрокосмосе. Например, в роботике причиной этого явля-
ется сложность традиционных моделей и неопределенность (неполнота
информации), присущая здесь постановкам математических задач упра-
вления; в технологических процессах — дороговизна адаптации традици-
онных моделей к условиям нового предприятия.
Одной из первых работ по использованию искусственных нейронных
сетей в задачах идентификации и управления нелинейными динамиче-
скими системами была [137].
В настоящее время область практических приложений нейронных се-
тей очень широка: от простых электромеханических систем до сложных
плохо описываемых процессов. Обзор этих приложений читатель может
найти в [138]. Например, в роботике нейронные сети используются
для управления манипуляторами, скоординированного управления груп-
пой роботов, в локомоционных задачах, в автоматическом планировании
действий и автономной навигации. Весьма перспективной областью при-
ложений является авиация и космос, где новые тактико-технические и
стоимостные требования заставляют использовать новые режимы, в ко-
торых требуются новые принципы управления и, в частности, технология
нейронных сетей. Эта технология начинает все шире применяться для диа-
гностики отказов и медленных деградаций, реконфигурации системы упра-
вления, идентификации нелинейной динамики и адаптивного управления.
Пример применения нейроидентификации и управления в больших слож-
ных орбитальных системах описан в [139]. Другой пример — проект
компании McDonnell Aircraft, в котором нейронные сети использованы
25
для идентификации в реальном времени параметров управления самоле-
том F-15. На имитационном стенде вводились различные повреждения
секций крыла и управляющих плоскостей. Нейронная сеть оказывалась
в состоянии для режима различных маневров быстро определять стаби-
лизирующие управления [140, 141]. Аналогично компьютерное моде-
лирование с шестью степенями свободы истребителя F/A-18 выполнено
в компании Lockheed [142] с эффективным использованием нейронных
сетей для обнаружения отказов в управляющих органах и адаптивного
управления самолетом. Применение нейронных сетей в управлении высо-
коскоростными судами изложено в [49]. Интересные приложения име-
ются в сталепрокатном производстве [143], где за счет нейроуправления
достигнута более высокая точность по сравнению с обычными ПИ- и ПИД-
регуляторами (т.е. пропорционально-интегральными и пропорционально-
интегрально-дифференциальными регуляторами), в дуговых печах [144],
где получено существенное улучшение функционирования печей, в техно-
логических процессах биоферментации [48] и т.д.
В качестве еще одного типа интеллектных компонент систем управле-
ния рассмотрим эволюционные (генетические) алгоритмы, которые тоже
являются инструментом поиска рациональных решений. Эволюционные
алгоритмы понимаются как генетические алгоритмы со специальными
структурами данных [145].
Эволюционный алгоритм — это алгоритм, оперирующий с популя-
цией индивидов, P(t) — {х\,... ,х„}, где t = 1,2,... — номер ите-
рации. Каждый индивид представляет некоторое возможное решение из
множества допустимых решений S. Каждое решение х* оценивается не-
которой мерой его «пригодности». На итерации t + 1 формируется но-
вая популяция путем отбора более пригодных индивидов (шаг селекции).
Некоторые члены этой новой популяции подвергаются преобразованиям
(шаг изменений) с помощью «генетических» операторов с целью образо-
вания новых решений. Имеются унарные (одноместные) преобразования
гпк'. S-+S (типа мутаций), которые приводят к появлению новых инди-
видов путем малых изменений одного индивида, а также преобразования
Cj: Sn —> S (перекрестного типа), которые порождают новые индивиды
путем комбинирования «составных частей» нескольких индивидов. После
некоторого числа поколений могут возникать решения, близкие к опти-
мальным.
Так называемый метод группового учета аргументов, активно пропа-
гандируемый еще более четверти века назад в нашей стране А.Г. Ивахнен-
ко [146], принадлежит рассматриваемому классу алгоритмов. Одно из пер-
вых применений генетических алгоритмов в компьютерах, по-видимому,
состоялось в работах [147, 148], в которых была предпринята попытка
организовать обучение с помощью мутации небольшой программы на
26
ФОРТРАНе. Так как большинство мутаций программы приводили к не-
исполняемому коду, то прогресс был небольшой.
Предположим [145], мы ищем граф, удовлетворяющий некоторым
требованиям (оптимальный путь робота, оптимальную топологию комму-
никационной сети и т.п.). Каждый индивид — это граф. Начальная
популяция графов Р(1) (порождаемая случайно или эвристически) есть
начальные данные эволюционной программы. Обычно также задается
оценочная функция, учитывающая требования задачи. Она выражает при-
годность каждого графа и формализует отношение предпочтения (хуже,
лучше) на множестве индивидов. Может быть несколько мутационных
операторов, преобразующих граф. Перекрестные операторы комбини-
руют структуры двух или более графов. Например, если искомый граф
должен быть связным и ацикличным (т.е. деревом), некоторый, зависящий
от специфики задачи, мутационный алгоритм может удалять какие-то ре-
бра и для связывания двух возникающих подграфов всякий раз добавлять
некоторое новое ребро. Мутации могут быть и более общими, т.е. нару-
шающими свойство графа «быть деревом», но тогда это свойство должно
учитываться оценочной функцией для отбрасывания на шаге селекции
графов-недеревьев.
Эволюционные алгоритмы довольно легко применимы в прототипиро-
вании для апробации в решении тех или иных задач. Однако результаты
могут быть очень хорошими в одних или плохими в других задачах. Эволю-
ционные алгоритмы могут комбинироваться с нейронными сетями [149].
Примером использования эволюционных алгоритмов в задачах упра-
вления является задача планирования маршрута для мобильного робота.
Целью любой навигационной схемы обычно является достижение ме-
ста назначения с рациональным расходованием ресурсов, без столкно-
вений с другими объектами и т.п. Зачастую путь робота планируется
заранее в режиме офлайн (Off-line). Офлайн-система характеризуется
тем, что необходимые сведения вводятся заранее, данные и знания не
меняются в сеансе решения задачи и время реакции, вообще говоря, —
большое, измеряется минутами или часами, в отличие от современных
систем управления в реальном времени с значительно меньшим време-
нем реакции, измеряемым в миллисекундах. В рассматриваемой задаче
навигации офлайн-планирование осуществляется в предположении, что
среда известна полностью, статична и робот может реализовать этот путь
в точности так, как он запланирован [145, 150-153]. Однако ограничения
офлайн-планирования (неполнота информации) подводят исследователей
к изучению возможностей планирования в реальном времени, т.е. в про-
цессе движения. Это осуществимо, если обеспечить приобретение знаний
о среде с помощью сенсорных датчиков [153] и использовать эти знания
Для преодоления препятствий в процессе перемещения в среде.
27
Эволюционные алгоритмы позволяют объединить офлайн-планирова-
ние и планирование в реальном времени (онлайн-планирование): офлайн-
планирование, основываясь на карте, ищет близкий к оптимальному
глобальный путь, а онлайн-планирование отвечает за учет возможных кол-
лизий (из-за обнаружения, например, первоначально неизвестных объек-
тов) путем замены части глобального плана другим оптимальным под-
маршрутом.
В [154] эволюционные алгоритмы применены к построению бескон-
фликтных маршрутов самолетов в известной новой концепции воздушного
движения «свободный полет» (Free-flight). В [155] эти алгоритмы исполь-
зованы для разрешения воздушных конфликтов.
Эволюционные алгоритмы и, в особенности, нейронные сети обла-
дают высокой распараллеливаемостью и, как следствие, повышенным бы-
стродействием, что важно в задачах управления в реальном времени, т.е.
когда идентификация или формирование закона управления осуществля-
ются в темпе протекания процесса. Вместе с тем искусственные нейрон-
ные сети сегодняшнего дня моделируют скорее, например, глаз, чем мозг.
Аналогично, генетические алгоритмы моделируют дарвиновского типа ор-
ганизацию природной стихии, а не творческий процесс. Сказанное ни-
как не умаляет значения нейроуправления и эволюционных алгоритмов
самоорганизации. В частности, в силу своей реактивности и способно-
сти к обучению они полезны уже в сегодняшнем их состоянии развития
при создании многоуровневых и многофункциональных систем управле-
ния с элементами ИИ.
На сегодня более адекватными компонентами систем управления для
реализации высокоинтеллектуальных функций представляются интеллект-
ныб компоненты третьего типа — системы, основанные на «знаниях»
(СОЗ, Knowledge-Based Systems). Например, знания могут быть предста-
влены в некотором логическом языке и их обработка с помощью логиче-
ских средств позволяет получать некоторые предпочтения на множестве
допустимых управлений с целью выбора одного из них.
В общем случае СОЗ оперируют с более широкой информацией —
логическими, объектно-ориентированными (см. ниже) и другими моде-
лями, основанными на знаниях экспертов. Вместе с тем СОЗ могут ис-
пользовать и традиционные алгоритмы, базирующиеся на уравнениях ди-
намики. Поэтому, как и в случае использования нейронных сетей и эволю-
ционных алгоритмов, класс решаемых задач принципиально расширяется,
по сравнению с традиционной проблематикой теории управления.
Базовая информация СОЗ обычно делится на данные (значения раз-
личных величин, элементарные факты и т.п.), знания и умения. В рамках
логического взгляда на информацию [156], различие данных и знаний мо-
жет усматриваться в уровне сложности их представления. Данные —
28
это константы аг и факты, т.е. элементарные формулы (атомы) вида
. .,а£п), где ai обозначают конкретные предметы (числа и т.д.),
Pj — предикатные символы, обозначающие различные отношения (на-
пример, бинарные отношения «равно», «больше», «чаще» и т.п.). Знания
— это формулы с кванторами, например, формула
которая может интерпретироваться как утверждение: для любого значения
переменной х такого, что имеет место свойство Р\(х), следует, что спра-
ведливо свойство Pz(x). Такого типа формулы образуют так называемые
предикатные языки. Они еще называются первопорядковыми языками и
отличаются от пропозициональных языков существенно большей выра-
зительной силой. В предикатных языках определяются первопорядковые
логические теории, например, исчисление предикатов, а в пропозицио-
нальных — исчисления высказываний.
В рамках лингвистического подхода к представлению знаний (исполь-
зуемого, например, в нечетких логиках) данные и знания тоже представля-
ются с помощью не только чисел, но и слов и предложений естественного
языка [157-159].
В английском языке слово «knowledge» означает не только «знание»,
но еще и «умение». В СОЗ умение представлено процедуральной инфор-
мацией, для которой характерно прежде всего исполнение, в то время как
данные хранятся и пересматриваются, а знания преобразовываются и
применяются [156]. При этом, в отличие от данных, знания могут иметь
не только информационную часть, но и описательную для эффективной
актуализации знания, и, кроме того, в качестве информационных еди-
ниц знания могут выступать встроенные процедуры, что придает знаниям
активность, их первичность по отношению к процедурам [160].
Термин «СОЗ» — неудачный, так как любые традиционные алго-
ритмы и структуры управления также аккумулируют знания человека. Од-
нако он в зарубежной литературе широко используется и нам остается
лишь доопределить наше понимание этого класса средств, уже сегодня
полезных и перспективных для интеллектуализации систем управления.
К системам, основанным на «знаниях» (СОЗ), мы в этой книге отно-
сим следующие:
1) системы, основанные на правилах (Rule-Based Reasoning),
2) системы, основанные на автоматическом доказательстве теорем
(Automatic Theorem-Proving Techniques),
3) системы, основанные на автоматическом гипотезировании (Auto-
matic Hypothesizing), т.е. на порождении гипотез,
4) системы, основанные на рассуждениях по аналогии (Analogical Rea-
soning),
5) объектно-ориентированные интеллектные системы (Object-Oriented
Intelligent Systems).
29
В СОЗ реализуется относительно высокоуровневый процесс умоза-
ключений, а современные искусственные нейронные сети и генетические
алгоритмы нами не включаются в понятие «СОЗ», хотя их роль сама
по себе и в составе комплексных многоуровневых систем управления явля-
ется весьма полезной. Например, сегодня искусственные нейронные сети
являются относительно низкоуровневыми средствами интеллектуализации,
но одновременно и более быстродействующими, реализуя рефлекторное
реагирование на входную информацию после подходящей настройки. Об-
рабатывая дополнительно результаты, полученные этими средствами, с по-
мощью логических средств обработки знаний, можно обеспечить более
высокоуровневую обработку информации. Характерный пример — авто-
матическое двухуровневое распознавание образов (например, автомашин
с борта летательного аппарата).
(4) (5)
Рис. В.1. Некоторые механизмы рассуждений, используемых в системах, основан-
ных на «знаниях»
С точки зрения нетривиальное™ автоматически продуцируемых и об-
рабатываемых знаний, системы класса 2, т.е. основанные на автомати-
ческом доказательстве теорем (АДТ), существенно превосходят другие
СОЗ. Правда, интеллектуальная сила систем АДТ демонстрируется чаще
в статических и достаточно хорошо формализуемых задачах из разных
разделов математики (прежде всего, дискретной математики, алгебры, ло-
гики). К оценке возможностей систем АДТ мы вернемся в п. 1.7.
30
Основным механизмом интеллектуализации в СОЗ является тот или
иной механизм рассуждений (рис.В.1). Возможны и другие, в том числе
комбинированные, механизмы рассуждений.
Подробнее СОЗ будут рассмотрены в гл. 1.
В.З. Интеллектное управление
До недавнего времени постановка и решение задач управления опира-
лись на более или менее традиционные математические модели в форме
тех или иных уравнений динамики управляемого процесса (дифференци-
альных, конечно-разностных и других).
Будучи всегда неточен, результат моделирования, как известно, мо-
жет содержать даже в явной форме «следы недомоделированной динами-
ки». Например, в правой части уравнений динамики могут оставаться
неизвестные члены, именуемые постоянно действующими возмущениями,
в отношении которых для исследования, например, устойчивости могут
делаться априорные предположения малости (в среднем, интегрально или
в каждый момент времени). Понятия адаптивности, робастности и другие
также были призваны учесть немоделируемую динамику путем получения
недостающей информации на этапе обучения или в режиме реального вре-
мени. Нейронные сети, методы автоматического гипотезирования и обу-
чения, а также другие средства ИИ позволяют более успешно справляться
с неполнотой информации.
В ряде задач управления зависимости настолько сложны, что не до-
пускают своего обычного аналитического представления. Сложность за-
дач управления, в которых существенная роль принадлежит экспертным
суждениям и знаниям человека, заставляет в дополнение к количествен-
ным методам или вместо них применять логический и лингвистический
подходы, в соответствии с которыми в качестве значений переменных до-
пускаются не только числа, но и слова или предложения искусственного
или естественного языка [157-159].
Логические исчисления не предписывают жесткой последовательно-
сти действий, а предполагают определенную свободу выбора в рамках
соответствующего «исчисления возможностей».
Переход к логическим исчислениям, как к новым, логическим, моде-
лям динамики и управления, стимулирует использование «аналитических
(символьных) вычислений, утверждавших свое право на существование
в условиях конкуренции с численными методами механики, физики, ма-
тематики» [161].
Использование интеллектных компонент, описанных в п.В.2, а также
других средств ИИ, приводит к новым технологиям, расширяющим по-
31
тенциал проектирования и управления динамическими системами путем
охвата задач с неизвестными или уже несправедливыми с некоторого мо-
мента эксплуатации уравнениями динамики (как в задачах выбора эф-
фективных каналов управления в объектах с реконфигурацией) либо за-
дач, в которых модели в форме уравнений динамики могут уступать по
эффективности использования моделям искусственного интеллекта (как
в задачах планирования действий в среде).
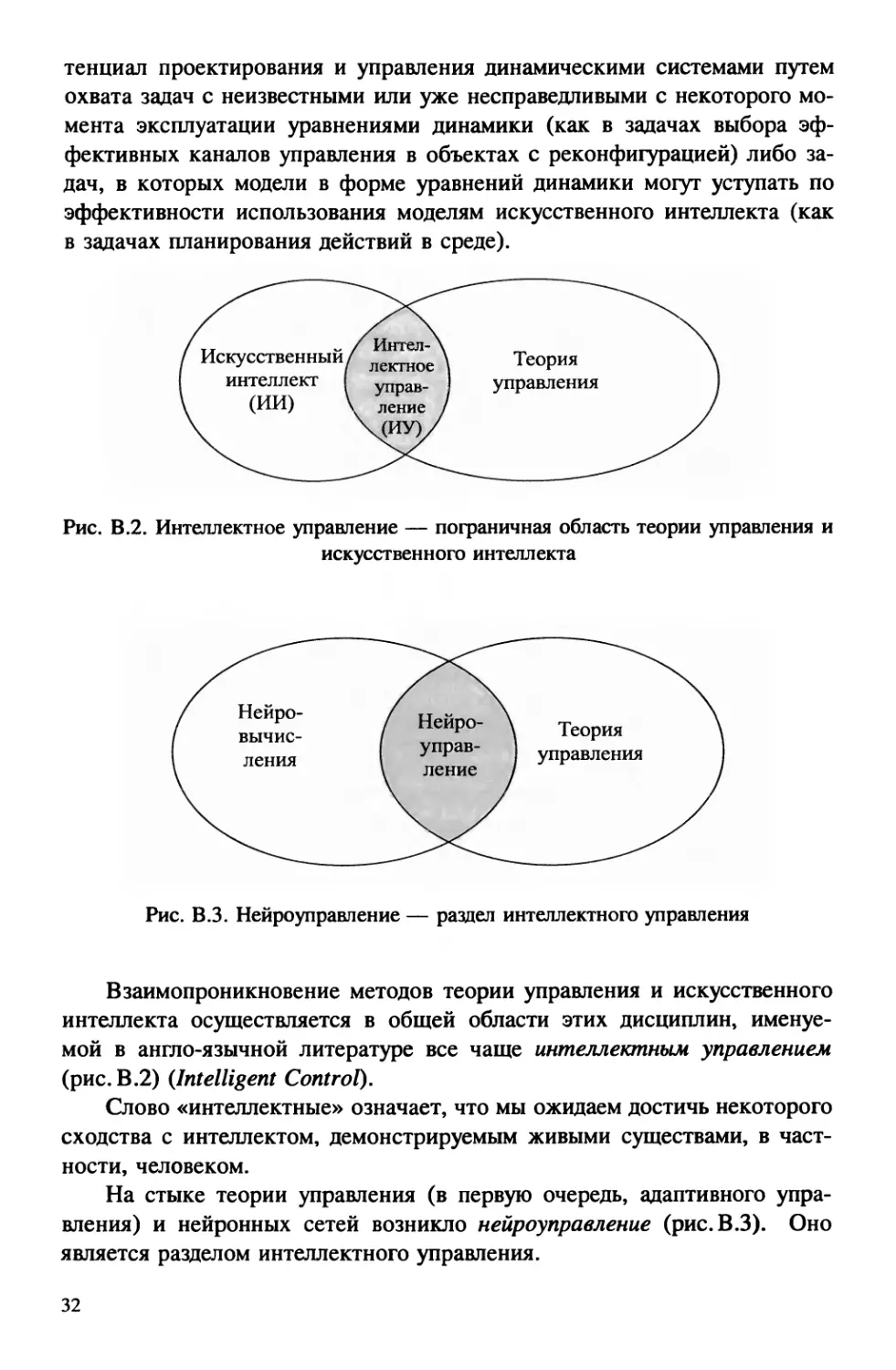
Рис. В.2. Интеллектное управление — пограничная область теории управления и
искусственного интеллекта
Рис. В.З. Нейроуправление — раздел интеллектного управления
Взаимопроникновение методов теории управления и искусственного
интеллекта осуществляется в общей области этих дисциплин, именуе-
мой в англо-язычной литературе все чаще интеллектным управлением
(рис.В.2) (Intelligent Control).
Слово «интеллектные» означает, что мы ожидаем достичь некоторого
сходства с интеллектом, демонстрируемым живыми существами, в част-
ности, человеком.
На стыке теории управления (в первую очередь, адаптивного упра-
вления) и нейронных сетей возникло нейроуправление (рис. В.З). Оно
является разделом интеллектного управления.
32
Управление на основе «знаний» образует другой раздел интеллектного
управления (рис. В.4) и включает, например, управление на основе пра-
вил (в частности, нечетких правил) и управление на основе логических
моделей (в частности, с применением автоматического доказательства те-
орем (АДТ)). Среди систем управления, основанных на применении АДТ,
находятся, к примеру, системы нечеткого вывода резолюционного типа.
Правда, из-за ряда нелогических элементов нечеткой «логики» возмож-
ности нечеткого варианта метода резолюций сравнительно ограничены
[162]. Более эффективен композиционный метод вывода [159], успешно
применяемый в многочисленных работах по нечеткому управлению.
Управление на
основе логиче-
ских моделей
Управление на
основе правил
Теория
управления
Системы, |
основанные на
\ «знаниях»
Нечеткое управление
(на основе нечетких
правил)
Управление
на основе
знаний
Управление с при-
менением автомати-
ческого доказатель-
ства теорем
Рис. В.4. Управление на основе «знаний» — раздел интеллектного управления
Общие цели интеллектного (интеллектуального) управления [163]:
— полнее использовать доступное знание об объекте и среде, чтобы
обеспечить надежное управление с предопределенным критерием (напри-
мер, зная желаемую траекторию, функционал качества управления, целе-
вое множество),
— управлять в творческой (интеллектуальной) манере (подобно чело-
веку), прогнозируя изменения в объекте и среде, сохраняя, например, пу-
тем реконфигурации работоспособность даже при больших изменениях,
2-1847
согласовывая и, может быть, пересматривая цели и критерии качества
управления,
— улучшать с течением времени способность управлять объектом
путем аккумулирования экспериментального знания, т.е. путем обучения
на опыте.
Термин «интеллектное управление» становится все более широко упо-
требляемым. Однако нет единодушия в вопросе определения этого поня-
тия, а также в выборе более или менее типовой структуры (архитектуры)
соответствующих — интеллектных — систем управления.
Довольно признаваемым является определение [164]: система ин-
теллектного управления должна иметь способность воспринимать (to
comprehend) информацию о процессах, возмущениях и условиях функцио-
нирования, выводить заключения (to reason) и обучаться.
В цитированном выше справочнике [132] по интеллектному управле-
нию и, в особенности, в недавней книге [133] содержится ряд интерес-
ных результатов, полученных в мире в рассматриваемой области с при-
ложениями в роботике, управлении полупроводниковым производством,
в космосе, авиации, химическом производстве и вообще промышленно-
сти. В частности, в [132] представлена информация о применении ин-
теллектных компонент для улучшения качества управления геометрией
и двигателями самолета при отказах и повреждениях.
Как отмечалось, предпринимаются многочисленные попытки ком-
бинирования интеллектных компонент разных классов. Так, интересное
применение нейронных сетей в сочетании с системами, основанными на
знаниях (экспертными системами) предложено в роботике [135]. Нейрон-
ная сеть функционирует параллельно с экспертной системой, которая по-
началу полностью задействована и ответственна за управление. С течением
времени, нейронная сеть обучается от экспертной системы и перехваты-
вает управление, обеспечивая более высокое качество. Эта гибридная си-
стема предназначена для использования в исследованиях других планет.
Экспертная система обеспечивает робастность функционирования, а ней-
ронная сеть — тонкую настройку на специфические условия планеты,
которые заранее с достаточной точностью неизвестны. Если произойдут
их резкие изменения, то система вновь передает управление экспертной
системе и процесс обучения начинается заново.
Схематично взаимовлияние теории управления и искусственного ин-
теллекта демонстрируется рис.В.5 (адаптировано из [165]). Два, пона-
чалу раздельных, источника интеллектного управления ныне сомкнулись
и образуют перспективное направление на их стыке (заметим, что другие
перспективные направления теории управления, в том числе отмеченные
в п. В.1, на рисунке никак не отражены).
34
Считается [165], что несмотря на уже имевшийся опыт цифрового и
логического (автоматного) управления, до 80-х годов было трудно объеди-
нить возможности методов теории автоматического управления и искус-
ственного интеллекта из-за несовместимости, с одной стороны, непрерыв-
ных моделей САУ (часто линейных и с неограниченными переменными)
Интеллектное управление
Искусственный интеллект Теория управления
Двоичные
переменные
(1/0)
Непрерывные
(ограниченные)
и двоичные
переменные
([0,1], [1/0])
Непрерывные
(неограниченные)
переменные
(-°°, +оо)
Рис. В.5. Два основных источника интеллектного управления
и> с другой стороны, даже тех дискретных методов искусственного интел-
лекта, которые базировались на двоичных (булевских) переменных, т.е. на
пропозициональных языках, близких к автоматным и достаточно тради-
ционных для восприятия специалистами-управленцами. Позднее, системы
Управления, основанные на нечетких логиках, и нейроуправление соста-
2*
35
вили проблематику нелинейных систем с непрерывными и ограниченными
интервалом [0,1] (или [-1,+1]) переменными. Это открыло новый этап, где
теория управления и искусственный интеллект становятся значительно бо-
лее совместимыми [132, 133, 166, 50].
Другой взгляд, не противоречащий изложенной точке зрения на опре-
деление интеллектного управления, дается на рис.В.6 [167, 168]. Здесь
интеллектное управление рассматривается как пограничная область не
только теории управления и искусственного интеллекта, но также и
исследования операций. Стрелками показано взаимное влияние этих трех
базовых областей исследований и разработок.
Рис. В.6. К определению интеллектного управления как области исследования
По оценке некоторых экспертов, приоритет по прикладному исполь-
зованию теории интеллектного управления, по крайней мере, СОЗ на
нечетких правилах [169, 170], принадлежит японским фирмам. Для под-
держки эффективного функционирования систем, основанных на интел-
лектных компонентах и, прежде всего, на нечетких правилах и нейронных
сетях, создана и развивается специальная вычислительная техника. Ко-
36
нечно, скептики туг же припомнят (и будут правы) чрезмерный ажиотаж,
вызванный в свое время другими специализированными ЭВМ, а именно
Лисп- и Пролог-машинами. Тем не менее, благодаря «нечетким» микро-
процессорам, нечеткое управление нашло простейшие, но многочислен-
ные приложения в быту, автомобилях, химическом производстве и т.д.
В настоящее время в мире насчитываются сотни практических разрабо-
ток таких систем интеллектного управления. Ожидается, что аппаратная
реализация и нейронных сетей на СБИС, пока еще распространенная
недостаточно широко, приведет к дальнейшему росту популярности ней-
роуправления, благодаря тому, что при этом раскроется значительно пол-
нее их потенциал массового параллелизма [138].
ЛИТЕРАТУРА
1. Красовский Н.Н. Предисловие к книге: «А.М. Летов. Математическая теория процессов
управления». —М.: Наука, 1981. С. 3-4.
2. Летов А.М. Состояние и перспективы развития теории управления // Автоматика и
телемеханика, 1972. № 9. С. 12-22.
3 Летов А.М. Автоматического управления теория И Математическая энциклопедия.
Т. 1. — М.: Сов. энциклопедия, 1977. С. 60-66.
4. Яблонский С.В. Управляющая система // Математическая энциклопедия. Т. 5. — М.:
Сов. энциклопедия, 1985. С. 534-536.
5. Красовский Н.Н., Субботин А.И. Позиционные дифференциальные игры. — М.: Наука,
1974.
6. Красовский Н.Н. Проблемы управляемости, наблюдаемости и стабилизируемое™ //
Труды 2-го Всесоюзного съезда по механике. — М.: Наука, 1964. С. 77-93.
7. Колман Р.Е. Об общей теории систем управления // Труды I Конгресса ИФАК. — М.:
Изд-во АН СССР. 1961. Т. 2. С. 521-548.
8 Кухтенко А.И. Кибернетика и фундаментальные науки. — Киев: Наукова думка, 1987.
9. Gadd C.J. Babylonian Law // Encyclopedia Britannica. 14th Ed. 1929. V. 2. P. 863.
10 Максвелл Д.К., Вышнеградский И.А., Стодола А. Теория автоматического регулирова-
ния (линеаризованные задачи). — М.: Изд-во АН СССР, 1949.
11. Ляпунов А.М. Общая задача об устойчивости движения. — М.-Л.: Гостехтеоретиздат,
1950.
12 Четаев Н.Г. Устойчивость движения. Работы по аналитической механике. — М.:
Изд-во АН СССР, 1962.
13 Красовский Н.Н. Теория управления движением. — М.: Наука, 1968.
14 Румянцев В.В. Устойчивость вращения твердого тела с эллипсоидальной полостью,
наполненной жидкостью // Прикл. мат. и мех. 1957. Т. 21, №6. С. 740-748.
15. Румянцев В.В., Озиранер А.С. Устойчивость и стабилизация движения по отношению
к части переменных. — М.: Наука, 1987.
*6 Охоцимский Д.Е. К теории движения ракет // Прикл. мат. и мех. 1946. Т. 10, № 2.
С. 251-272.
37
17. Понтрягин Л.С., Болтянский В. Г., Гамкрелидзе Р.В., Мищенко Е.Ф. Математическая
теория оптимальных процессов. —М.: Физматгиз, 1961.
18. Беллман Р. Динамическое программирование. — М.: ИЛ, 1960.
19. Летов А.М. Аналитическое конструирование регуляторов // Автоматика и телемеха-
ника, 1960. Т. 21, № 4. С. 436-441; 1960. Т. 21, № 5. С. 561-568; 1960. Т. 21, № 6.
С. 661-665; 1961. Т. 22, № 4. С. 425-435.
20. Красовский Н.Н., Летов А.М. К теории аналитического конструирования регуляторов И
Автоматика и телемеханика. 1962. Т. 23, № 6. С. 5-32.
21. Красовский Н.Н. Об одной задаче оптимального регулирования И Прикл. мат. и мех.
1959. Т. 23, № 2. С. 209-230.
22. Красовский Н.Н. О выборе параметров оптимальных устойчивых систем // Труды I Кон-
гресса ИФАК. — М.: Изд-во АН СССР, 1961. Т. 2. С. 482-491.
23. Kalman R.E., Bertram Т.Е. Control System Analysis and Design via the Second Method of
Lyapunov // J. Basic Eng. 1960. № 6. P. 96-112.
24. Красовский Н.Н. Проблемы стабилизации управляемых движений: Дополнение IV к
монографии Малкина И.Г. «Теория устойчивости движения». — М.: Наука, 1966.
25. Румянцев В.В. Об оптимальной стабилизации управляемых систем // Прикл. мат. и мех.
1970. Т. 34, № 3. С. 440-456.
26. Зубов В.И. Лекции по теории управления. — М.: Наука, 1975.
27. Кунцевич В.М.: Лычак М.М. Синтез систем автоматического управления с помощью
функций Ляпунова. — М.: Наука, 1977.
28. Черноусько Ф.Л.. Акуленко Л.Д., Соколов Б.Н. Управление колебаниями. — М.: Наука,
1980.
29. Черноусько ФЛ., Колмановский В.Б. Вычислительные и приближенные методы опти-
мального управления // Итоги науки и техники. Математический анализ. Т. 14. — М.:
ВИНИТИ, 1977.
30. Энеев Т.М. О применении градиентного метода в задачах теории оптимального упра-
вления И Космические исследования. 1968. Т. 4, № 5.
31. Техническая кибернетика, теория автоматического регулирования / Под. ред. В.В.Со-
лодовникова. Кн. 1: Математическое описание, анализ устойчивости и качества систем
автоматического регулирования. — М.: Машиностроение, 1967.
32. Габасов Р., Кириллова Ф.М. Качественная теория оптимальных процессов. — М.:
Наука, 1971.
33. Фельдбаум А.А. Основы теории оптимальных автоматических систем. — М.: Наука,
1966.
34. Цыпкин Я.З. Адаптация и обучение в автоматических системах. — М.: Наука, 1968.
35. Якубович В.А. К теории адаптивных систем // Докл. АН СССР. 1968. Т. 182, № 3.
С. 518-521.
36. Цыпкин Я.З. Основы теории обучающихся систем. — Л.: Наука, 1970.
37. Петров Б.Н., Рутковский В.Ю., Крутова И.Н., Земляков С.Д. Принципы построения
и проектирования самонастраивающихся систем управления. — М.: Машиностроение,
1972.
38. Срагович В.Г. Теория адаптивных систем. — М.: Наука, 1976.
38
39. Красовский А.А., Буков В.Н., Шендрик В.С Универсальные алгоритмы оптимального
управления непрерывными процессами. — М.: Наука, 1977.
40. Петров Б.Н., Рутковский В.Ю., Крутова И.Н., Земляков С.Д., Ядыкин И.Б. Некоторые
вопросы теории беспоисковых самонастраивающихся систем. I, II // Изв. АН СССР.
Тех. кибернетика. 1976. № 2. С. 154-163; № 3. С. 142-151.
41. Саридис Дж. Самоорганизующиеся стохастические системы управления. — М.: Наука,
1980.
42. Справочник по теории автоматического управления / Под ред. А.А. Красовского. —
М.: Наука, 1997
43. Красовский А.А. Некоторые актуальные проблемы науки управления // Изв. РАН, Тео-
рия и системы управления. 1996. Т. 6. С. 8-16.
44. Фрадков А.Л. Адаптивное управление в сложных системах. — М.: Наука, 1990.
45. Tsypkin Ya. Z. Learning in Robust Control Systems // Intelligent Control Systems: Theory
and Applications I Eds. M.M.Gupta, N.K.Sinha. — New York: IEEE Press, 1996.
46. Тимофеев A.B. Адаптивное и интеллектуальное управление роботами // Изв. вузов,
Приборостроение. 1988. № 11. С. 23-28.
47. Тимофеев А.В., Юсупов Р.М. Интеллектуальные системы управления // Изв. РАН. Тех.
кибернетика. 1994. № 5. С. 209-224.
48. Boskovic J.D., Narendra K.S. Comparison of Linear, Nonlinear, and Neural Network Based
Adaptive Controllers for a Class of Fed-Batch Fermentation Processes // Automatica. 1995.
V. 31, № 6. P. 817-840.
49. Rauch H.E., Schmidt T, Natoni B. Adaptive Control of a High-Speed Schip // Proc. 9th
Yale Workshop on Adaptive and Learning Systems. 1996.
50. Васильев В.И., Рембольд У., Аполов С.Г., Кирин Д.В. Адаптивное нейро-фаззи упра-
вление многозвенным манипулятором И Интеллектуальные автономные системы. —
Уфа-Карлсруэ: УГАТУ, 1996. С. 23-27.
51. Колмановский В.Б., Носов В.Р. Устойчивость и периодические режимы регулируемых
систем с последействием. — М.: Наука, 1981.
52. Бутковский А.Г. Теория оптимального управления системами с распределенными па-
раметрами. — М.: Наука, 1965.
53. Сиразетдинов Т.К. Оптимизация систем с распределенными параметрами. — М.: Нау-
ка, 1977.
54. Дегтярев Г.Л., Сиразетдинов Т.К. Теоретические основы оптимального управления
упругими космическими аппаратами. — М.: Машиностроение, 1986.
55. Васильев О.В. Принцип максимума Л.С.Понтрягина в теории оптимальных систем с
распределенными параметрами. — Новосибирск. 1978. С. 109-138.
56. Москаленко А.И. Методы нелинейных отображений в оптимальном управлении. —
Новосибирск: Наука, 1983.
57. Кротов В.Ф. Решение вариационных задач на основе достижимых условий абсолют-
ного минимума, I—IV // Автоматика и телемеханика. 1962. Т. 23, № 12. С. 2021-2029;
1963. Т. 24, № 5. С. 506-513; 1963. Т. 24, № 7. С. 1051-1062; 1965. Т. 26, № 4.
С. 1785-1798.
58. Хрусталев М.М. Необходимые и достаточные условия для задачи оптимального упра-
вления И Докл. АН СССР. 1973. Т. 211, № 1. С. 59-72.
59. Гурман В.И. Вырожденные задачи оптимального управления. — М.: Наука, 1977.
39
60. Месарович М., МакоД., Такахара И. Теория иерархических многоуровневых систем. —
М.: Мир, 1973.
61. Моисеев Н.Н., Гермейер Ю.Б. О некоторых задачах теории иерархических систем
управления // Проблемы прикладной математики и механики. — М.: Наука, 1971.
62. Моисеев Н.Н. Элементы теории оптимальных систем. — М.: Наука, 1975.
63. Shiljak D.D., Vukcevic M.V. Decentrally Stabilizable Linear and Bilinear Large-Scale Sys-
tems // Int. J. of Control. 1977. V. 26, № 2. P. 289-305.
64. Балашевич H.B., Габасов P., Кириллова Ф.М Реализация позиционного решения ли-
нейной задачи оптимального иерархического управления // Изв. РАН, Теория и си-
стемы управления. 1977. № 1. С. 71-78.
65. Красовский А.А., Буков В.Н. Иерархическая оптимизация управления полетом: Воп-
росы кибернетики. Управляющие вычислительные системы движущихся объектов /
Под ред. И.С. Уколова. — М.: 1988. Вып. 139. С. 4-18.
66. Догановский С.А. Параметрические системы автоматического регулирования. — М.:
Энергия, 1973.
67. Озеряный Н.А. Системы с параметрической обратной связью. — М.: Энергия, 1974.
68. Емельянов С.В. Бинарные системы автоматического управления. — М.: Изд-во
МНИИПУ, 1984.
69. Рутковский В.Ю., Земляков С.Д. Адаптивное координатно-параметрическое управле-
ние: Вопросы кибернетики. Системы и методы управления движущимися объектами. —
М.: 1984. С. 16-41.
70. Кряжимский А.В., Осипов Ю.С. Дифференциально-разностная игра сближения с функ-
циональным целевым множеством // Прикл. мат. и мех. 1973. Т. 37, № 1. С. 3-13.
71. Федосов Е.А., Инсаров В.В., Селивохин О.С. Системы управления конечным положе-
нием в условиях противодействия среды. — М.: Наука, 1989.
72. Матросов В.М., Решетнев М.Ф., Раевский В.А., Сомов Е.И. Нелинейные методы дина-
мического синтеза отказоустойчивых систем управления космическими аппаратами И
Изв. РАН. Теория и системы управления. 1997. № 5. С. 120-130.
73. Lakshmikantham V., Sivasundaram S., Kaymakcalan. Dynamic Systems on Measure Chains.
Dortrest/Boston/London: Kluwer Academic Publisher, 1996.
74. Бурносов C.B., Козлов Р.И. Исследование динамики нелинейных систем с неопределен-
ностью и возмущениями на основе метода ВФЛ, II. // Известия РАН. Тех. кибернетика.
1994. №6. С. 117-125.
75. Исследование структур и моделирование логико-динамических систем. — Киев: Нау-
кова думка, 1975.
76. Семенов В.В., Журина Н.Э. Оптимальное управление летательными аппаратами в
классе логико-динамических систем // Тезисы докладов X Всесоюзного совещания
по проблемам управления. — М.: 1986. С. 250-251.
77. Бортаковский А.С. Достаточные условия оптимальности управления детерминирован-
ными логико-динамическими системами // Информатика, Автоматизация проектирова-
ния. Вып. 2-3. — М.: ВИМИ. 1992. С. 72-79.
78. Васильев С.Н., Кузнецов П.К., Лакеев А.В. К общей теории интегро-операторного
уравнения динамики переключательных схем // Доклады РАН. 1996. Т. 348, № 4.
С. 439-441.
40
79. Васильев В.А., Левкин М.И., Павленко А.И. Реконфигурация интегрированной системы
управления с помощью экспертной системы // Вопросы кибернетики. Управляющие
вычислительные системы движущихся объектов / Под ред. И.С. Уколова. Вып. 139. —
М.: 1988, С. 90-97.
80. Ашимов А.А., Соколова С.П. Введение в теорию систем автоматического управления с
изменяющейся конфигурацией. — Алматы: Галам, 1993.
81. Vassilyev S.N., Doganovski S.A., Maksimkin N.N., Kuznetsov A.I. Integrated Control Systems
with Reconfiguration of Active Plants. Design and Applications I I Proc. 2nd IFAC Workshop
on New Trends in Design of Control Systems. — Smolenice: 1997. P. 517-522.
82 Обухов B.E., Павлов В.В. Синтез избыточных дискретных устройств с реконфигурацией
структуры. — Киев: Наукова думка, 1979.
83. Догановский С.А., Озеряный Н.А. Системы автоматического управления с реконфигу-
рацией И Измерения, контроль, автоматизация. 1990. № 4. С. 62-80.
84. Емельянов С.В. Системы автоматического управления с переменной структурой. — М.:
Наука, 1967.
85. Айзекс Р. Дифференциальные игры. — М.: Мир, 1967.
86 Красовский Н.Н. Игровые задачи о встрече движений. — М.: Наука, 1970.
87 Roxin Е. Axiomatic Approach in Differential Games 11 J. Optimiz. Theory and Appl. 1969.
V. 3, № 3.
88. Roxin E., Tsokos C.P. On the Definition of a Stochastic Differential Game // Math. Syst.
Theor. 1970. V. 4, № 1.
89 Осипов Ю.С. К теории дифференциальных игр с неполной информацией // Докл. АН
СССР. 1974. Т. 215, № 4. С. 780-783.
90. Осипов Ю.С. Минимаксное поглощение в дифференциально-разностных играх И Докл.
АН СССР. 1972. Т. 203, № 1. С. 32-35.
91 Куржанский А.Б. Дифференциальные игры наблюдения // Докл. АН СССР. 1972. Т. 207,
№ 3. С. 527-530.
92. Кац И.Л., Куржанский А.Б. Минимаксная многошаговая фильтрация в статистически
неопределенных ситуациях // Автоматика и телемеханика. 1978. № И.С. 79-87.
93. Черноусько Ф.Л., Меликян А.А. Игровые задачи управления и поиска. — М.: Наука,
1978.
94 Жуковский В.И., Молоствов В.С. Многокритериальное принятие решений в условиях
неопределенности. — М.: Изд-во МНИИПУ, 1988.
95 Бусленко Н.П, Калашников В.В., Коваленко И.Н. Лекции по теории сложных си-
стем. — М.: Сов. радио, 1973.
96 Матросов В.М. Метод векторных функций Ляпунова в анализе сложных систем
с распределенными параметрами (обзор) // Автоматика и телемеханика. 1973. № 1.
С 5-22.
97 Охоцимский Д.Е., Платонов А.К. Алгоритмы управления шагающим аппаратом, спо-
собным преодолевать препятствия И Изв. АН СССР. Техническая кибернетика. 1973.
№ 5.
98 Охоцимский Д.Е., Платонов А.К. Перцептивный робот, перемещающийся в трехмерной
среде // Труды IV-й Международной объединенной конференции по искусственному
интеллекту. — М.: ВИНИТИ. 1975. Т. 9. С. 117-123.
41
99. Куржанский А.Б. Управление и наблюдение в условиях неопределенности. — М.: На-
ука, 1977.
100. Черноусько Ф.Л. Оптимальные гарантированные оценки неопределенностей с помощью
эллипсоидов, I—III // Изв. АН СССР. Техническая кибернетика. 1980. № 4. С. 3-11;
№ 5. С. 5-11.
101. Растригин Л.А. Современные принципы управления сложными объектами. — М.: Сов.
радио, 1980.
102. Поспелов Г.С. Системный анализ и искусственный интеллект И Сообщения по при-
кладной математике. — М.: ВЦ АН СССР, 1980.
103. Белоусов Ю.А., Федосов Е.А. Основные проблемы применения БЦВМ дня управле-
ния движущимися объектами И Вопросы кибернетики. Проблемы авиационной и кос-
мической кибернетики (Интегрированные системы активного управления) / Под ред.
И.С. Уколова. — М.: 1981. № 76. С. 5-24.
104. Абдуллин Р.З., Анапольский Л.Ю. и др. Метод векторных функций Ляпунова в теории
устойчивости / Под ред. А.А. Воронова, В.М. Матросова. — М.: Наука, 1987.
105. Васильев С.Н. Метод векторных функций Ляпунова в задачах быстродействия И Докл.
АН СССР. 1986. Т. 287, № 1. С. 29-32.
106. Васильев С.Н. К управляемости нелинейных систем при фазовых ограничениях и по-
стоянно действующих возмущениях И Известия АН СССР. Техническая кибернетика.
1993. № 1. С. 77-82.
107. Филимонов Н.Б. Системы многорежимного регулирования: концепция, принципы
построения, проблемы синтеза // Изв. ВУЗов. Приборостроение. 1988. Т. 31, № 2.
С. 18-33.
108. Sastry S., Meyer G., Tomlin C., Lygeros J., Godbole D., Pappas G. Hybrid System in Air
Traffic Control II IEEE Control and Decision Conference. 1995. P. 1478-1483.
109. Федосов Е.А. Критические технологии России И Труды Всероссийской конференции
Государственных научных центров РФ. — М.: 1995. С. 80-95.
ПО. Федунов Б.Е. Проблемы разработки бортовых оперативно-советующих систем дчя ан-
тропоцентрических объектов И Изв. РАН. Теория и системы управления. 1996. № 5.
С. 147-160.
111. Беличенко В.В. К проблеме управления катастрофами И ДАН. 1996. Т. 349, № 6.
С. 732-735.
112. Беличенко В.В. Управление дискретно-непрерывными моделями катастроф И ДАН.
1996. Т. 350, № 1. С. 9-11.
113. Фурасов В.Д. Устойчивость и стабилизация дискретных процессов. — М.: Наука, 1982.
114. Болтянский В.Г. Оптимальное управление дискретными системами. — М.: Наука,
1973.
115. Цетлин М.Л. Исследования по теории автоматов и моделированию биологических
систем. — М.: Наука, 1969.
116. Варшавский В.И. Коллективное поведение автоматов. — М.: Наука, 1973.
117. Бухараев Р.Г. Основы теории вероятностных автоматов. — М.: Наука, 1985.
118. Пулатов А.К. Автоматные модели и их использование в системах управления. — Таш-
кент: Изд-во «ФАН» Узбекской ССР, 1984.
119. Ауэрбах И. Революция в теории информации и ее воздействие на автоматическое упра-
вление И Труды II Международного конгресса ИФАК. — М.: Наука, 1965. С. 19-27.
42
120. Прангшивили И.В. Распределенные микропроцессорные системы обработки данных
и управления И Информатика, управление, вычислительная техника. Вып. 1. — М.:
Машиностроение, 1987. С. 44-58.
121. Фельдбаум А.А. Новые принципы автоматического управления // Изв. ВУЗов СССР.
Радиотехника. 1960. № 3. С. 299-308; № 4. С. 419^430.
122. Айзерман М.А., Браверман Э.М., Розоноэр Л.И. Метод потенциальных функций в тео-
рии обучения машин. — М.: Наука, 1970.
123. Saridis G.N., Hofstadter R.F. Pattern Recognition Approach to the Classification of Non-
linear Systems I I IEEE Transactions on Systems, Man, and Cybernetics. 1974. SMC-21.
№ 4. P. 362-371.
124. Журавлев Ю.И. Об алгебраическом подходе к решению задач распознавания или клас-
сификации // Проблемы кибернетики. 1978. Вып. 33. С. 5-68.
125. Кудрявцев В.Б., Алешин С.В. Комбинаторно-логический подход к распознаванию обра-
зов // Интеллектуальные системы. 1996. Т. 1, № 1-4. С. 31-40.
126. Математический энциклопедический словарь. — М.: Изд-во Сов. энциклопедия, 1988.
127. Russell S.J., Norvig Р. Artificial Intelligence: A Modem Approach, Prentice-Hall, Inc.,
1995.
128. McDermott J. Rl: A Rule-Based Configurer of Computer Systems // Artificial Intelligence.
1982. V. 19, № 1. P. 39-88.
129. Bryson A.E., Ho Y.-C. Applied Optimal Control. — New York: Blaisdell, 1969.
130. Охонин B.A. Адаптивные сети переработки информации. — Красноярск: Изд-во ИФ
СО АН СССР, 1986.
131. Беличенко В.В. Технический интеллект И Интеллектуальные системы. 1996/ Т. 1,
Вып. 1-4. С. 5-18.
132. Handboook of Intelligent Control I Eds. D.A. White, D.A. Sofge. — New York: Van
Nostrand Reinhold, 1992.
133. Intelligent Control Systems: Theory and Applications I Eds. M.M. Gupta, N.K. Sinha. —
New York: IEEE Press, 1996.
134. Горбань A.H., Россиев Д.А. Нейронные сети на персональном компьютере. — Новоси-
бирск: Наука, 1996.
135. Handelman D.A., Stengel R.F. An Architecture for Real-Time Rule-Based // Proc. American
Control Conference. 1987. P. 1636-1642.
136. Пупков К.А. О некоторых новых задачах теории и техники интеллектуальных си-
стем // Труды 3-го Международного симпозиума «Интеллектуальные системы» / Под
ред. К.А. Пулкова. — М.: ООО «ТВК». 1998. С. 19-23.
137. Narendra K.S., Parthasarathy К. Identification and Control of Dynamical Systems Using
Neural Networks I I IEEE Transactions on Neural Networks. 1990. № 1. P. 4-27.
138. Narendra K.S. Neural Networks for Control: Theory and Practice 11 Proc, of the IEEE.
1996. V. 84, № 10. P. 1385-1406.
139. Rauch H.E., Schaecter D.B. Neural Networks for Control, Identification, and Diagnosis //
Proc. World Space Congress. 1992. P. F4.4-M1.06.
140. Barto A.G., Bradtke S.J., Singh S.P. Real-Time Learning and Control Using Asynchronous
Dynamic Programming. Technical Report COINS 91-57, Univ, of Massachusetts, Amherst,
MA. 1992.
43
141. Barto A.G., Jordan MJ. Gradient Following without В ack-Propagation in Layered Net-
works 11 Proc. IEEE 1-st Annual Conference on Neural Networks. San Diego. 1987. P. II
629-11 636.
142. Rauch H.E. Intelligent Fault Diagnosis and Control Reconfiguration И IEEE Control Systems
Mag. 1994.
143. Sbarboro-Hofer D., Neumerkel D., Hunt KJ Neurocontrol of a Steel Rolling Mill 11 IEEE
Control Systems Mag. V. 13, № 3. C. 69-75.
144. Staib W.E., Staib R.B. The Intelligent Arc Furnace™ Controller: A Neural Network
Electrode Position Optimization System for the Electric Arc Furnace // Proc. Internal. Joint
Conference on Neural Networks. 1992. P. Ill l-III 9.
145. Michalewicz Z. Genetic Algorithms + Data Structures = Evolution Programs. — Berlin-
Heidelberg: Springer-Verlag. 1994.
146. Ивахненко AT. Техническая кибернетика. — Киев: Гос. изд-во техн. лит. УССР, 1962.
147. Friedberg R.M. A Learning Machine: Part I // IBM Journal. 1958. № 2. P. 2-13.
148. Friedberg R., Dunham B., North T. A Learning Machine: Part II 11 IBM Journal of Research
and Development. 1959. V. 3, № 3. P. 282-287.
149. Montana DJ., Davis L. Training Feedforward Neural Networks Using Genetic Algorithms //
Proc. Intern. Joint Conference on Artificial Intelligence. — Los Altos. CA. Morgan Kauf-
mann Publishers, 1989.
150. Lozano-Perer T., Wesley M.A. An Algorithm for Planning Collision Free Paths among
Polyhedral Obstacles I I Communications of the ACM. 1979. V. 22. P. 560-570.
151. Kambhampati S.K., Davis L.S. Multi-resolution Path Planning for Mobile Robots // IEEE
J. of Robotics and Automation. 1986. RA-2. P. 135-145.
152. Jarvis R.A., Byrne J.C. Robot Navigation: Touching, Seeing, and Knowing 11 Proc. 1st
Australian Conference on Artificial Intelligence. 1986.
153. Khatib O. Real-Time Obstacle Avoidance for Manipulators and Mobile Robots I I Intern. J.
of Robotics Research. 1986. № 5. P. 90-98.
154. Gerdes I. Construction of Conflict-Free Routes for Aircraft in Case of Free-Routing with
Genetic Algorithms // Proc. 1-st U.S.A./Europe Air Traffic Management R&D Seminar,
1997, 12 p.; http://atm-seminar-97.eurocontrol.fr/gerdes.htm.
155. Alliot J.M., Bose J.F., Durand N., Maugis L. An Experimental Study of ATM Capacity //
Proc. 1-st U.S.A./Europe Air Traffic Management R&D Seminar, 1997, 36 p.; http://atm-
seminar-97. eurocontrol.fr/bosc.htm.
156. Непейвода A.H., Кутергин B.A. Об уровнях знаний и умений в экспертных системах И
Экспертные системы: состояние и перспективы / Под ред. Д.А. Поспелова. — М.:
Наука, 1989. С. 30-37.
157. Bellman R.E., Zadeh L.A. Decision-Making in a Fuzzy Environment // Management Science.
1970. № 17. P. B-141-B-164.
158. Bellman R.E., Giertz M. On the Analytic Formalizm of the Theory of Fuzzy Sets // Inf.
Sci. 1973. № 5, P. 149-156.
159. Заде Л. Понятие лингвистической переменной и его применение к понятию при-
ближенных решений // В серии: Математика. Новое в зарубежной науке / Под ред.
А.Н. Колмогорова, С.П. Новикова. —М.: Мир, 1976.
160. Поспелов Д.А Предисловие к книге: Экспертные системы: состояние и перспекти-
вы. — М.: Наука, 1989. С. 3-8.
44
161. Климов Д.М., Леонов В.В., Руденко В.М. Методы аналитических вычислений на ЭВМ
в нелинейных задачах механики. — М.: Наука, 1989.
162. Мукаидоно М. Нечеткий вывод резолюционного типа И Нечеткие множества и теория
возможностей. Последние достижения / Под ред. Р. Ягера. — М.: Радио и связь, 1986.
163. White D.A., Sofge D.A. Editors’ Preface I I Handbook of Intelligent Control. Neural, Fuzzy,
and Adaptive Approaches I Eds. D.A. White, D.A. Sofge. — New York: Van Nostrand
Reinhold. 1992. P. xvii-xviii.
164. Astrom K.J., McAvoy T.J. Intelligent Control: An Overview and Evaluation // Handbook of
Intelligent Control. Neural, Fuzzy, and Adaptive Approaches / Eds. D.A. White, D.A. Sof-
ge. — New York: Van Nostrand Reinhold. 1992. P. 3-34.
165. Werbos P., Marsh E., Baheti K., Burka M., Moraff H. Foreword И Handbook of Intelligent
Control. Neural, Fuzzy, and Adaptive Approaches / Eds. D.A. White, D.A. Sofge. — New
York: Van Nostrand Reinhold. 1992. P. xi-xv.
166. White D., Bowers A., Iliff K., Noffz G., Gonda M.4 Menousek J. Flight, Propulsion and
Thermal Control of Advanced Aircraft and Hypersonic Vehicles // Handbook of Intelligent
Control. Neural, Fuzzy, and Adaptive Approaches I Eds. D.A. White, D.A. Sofge. — New
York: Van Nostrand Reinhold. 1992. P. 357-465.
167. Saridis G.N. Intelligent Robotic Control I I IEEE Transactions on Automatic Control. 1983.
V. AC-28, № 5. P. 547-557.
168. Saridis G.N. Architectures for Intelligent Control 11 Intelligent Control Systems: Theory
and Applications / Eds. M.M. Gupta, N.K. Sinha. — New York: The IEEE, Inc. 1996.
P. 127-148.
169. Прикладные нечеткие системы / Под ред. Т. Тэрано, К. Асаи, М. Сугено. — М.: Мир,
1993.
170. Driankov D., Hellendoom Н., Reif rank М. An Introduction to Fuzzy Control. — Berlin-
Heidelberg: Springer-Verlag. 1993.
ГЛАВА 1
СИСТЕМЫ, ОСНОВАННЫЕ НА «ЗНАНИЯХ»,
И ИХ ПРИМЕНЕНИЕ В УПРАВЛЕНИИ
В данной главе мы рассмотрим системы, основанные на «знаниях»
(СОЗ). Они охарактеризованы в п.В.2 как средства искусственного ин-
теллекта, перспективные для реализации верхних (высокоинтеллектуаль-
ных) уровней управления.
1.1. Системы, основанные на правилах
Здесь будут рассмотрены системы класса 1 — системы, основанные
на правилах. Примерами таких систем являются следующие весьма попу-
лярные в области искусственного интеллекта системы.
1.1. Нечетких правил (формулируемых в удобных для человека ка-
чественных терминах, а именно в терминах нечетких понятий: много,
мало, ...).
1.2. Продукционных правил (типа «если выполняются условия ..., то
делай ...»).
1.3. Логического программирования.
Нечеткие правила обычно имеют семантику «условие-действие» и по-
этому являются частным случаем продукционных правил (продукций), ко-
торые могут и не использовать нечетких понятий. На основе нечетких
правил могут делаться нечеткие логические заключения. Использование
нечеткой логики и нечетких понятий позволяет в ряде задач упростить
процесс представления знаний.
Системы, основанные на продукционных правилах, используются в ре-
жиме интерпретаторов: в соответствии с некоторой стратегией правила
просматриваются одно за другим и, если рассматриваемое на очередном
шаге правило применимо (т.е. его условия выполняются), то сразу испол-
няется и предписываемое этим правилом действие.
Системы 1.1, 1.2 хороши для моделирования действий квалифици-
рованного оператора, хорошо знакомого со всеми особенностями ОУ и
успешно справляющегося с управлением им «вручную».
46
Важным свойством, расширяющим возможности систем 1.1, 1.2, явля-
ется то, что действия могут включать вставки и удаления из базы знаний
новых и устаревших знаний (и данных) соответственно. Это позволяет
охватить ряд задач реального мира с изменяющимися закономерностями
(с динамической моделью). В некоторых системах имеется механизм вы-
бора действия, если могут быть применены несколько правил одновре-
менно. Он может основываться на априорном ранжировании правил по
приоритетам или основываться на следующих и других эвристиках: не
применять правило при тех же значениях аргументов повторно; предпочи-
тать правила, применимые к более свежим (позднее выведенным) фактам;
предпочитать более специфические правила, например, второе из двух
правил
«Если Млекопитающее (ж), то дорисуй Ноги (ж, 4)»,
«Если Млекопитающее (ж) и Человек (ж), то дорисуй Ноги (ж, 2)».
В системах логического программирования правила тоже имеют вид
импликаций, но более широко используется классический логический
формализм. Примером систем 1.3 является Пролог (Prolog) [1]. В си-
стемах 1.3 обычно не разрешается использовать отрицания, дизъюнкции
и/или равенства. Обычно правила имеют вид «конъюнкция атомов &А
влечет атом В», где атомы могут содержать не только константы, но
и переменные (по смыслу, связанные кванторами всеобщности). Соответ-
ствующий язык, включающий также и просто атомы (в частности, факты),
называется хорновским языком [2, 3].
Процедурная семантика («условие-действие») хорновских дизъюнктов
определена в [4]. В соответствии с ней импликация & Ai —> В понимается
г
как процедура, тело которой состоит из процедурных вызовов
i
Решая задачу В, мы можем свести ее к подзадачам А^ И наконец, проце-
дуры с пустым телом необходимы для окончательного прямого решения
задачи. Это соответствует тому, что в отличие от 1.1, 1.2 в системах 1.3
используется не прямой вывод, а обратный, а именно, базируясь на ато-
мах, входящих в запрос, отыскивается правило, условие которого (после
подходящих подстановок вместо переменных) следует из этого множества
атомов. По этому правилу выводится его заключительный атом, добавляе-
мый в использованное множество атомов, и т.д.
Тем самым создана возможность декларативного стиля программи-
рования, когда программисту достаточно в форме хорновских формул
описать предметную область и затем задать вопрос. Интерпретатор Про-
лога «в принципе» находит ответ на него.
На практике для повышения эффективности поиска выводов исполь-
зуются нелогические элементы. В системах логического программирова-
47
ния с ограничениями (ЛПО — Constraint Programming) [5-7] используется
дополнительный механизм удовлетворения ограничениям (в частности, ре-
шения логических уравнений). Это позволяет оперировать в декларатив-
ном стиле (описывая, что дано и что требуется, без указания алгоритма
решения) не только с задачами логического, но и численного характера,
что как расширяет область приложения логического программирования,
так и обеспечивает более совершенное управление логической програм-
мой. В работе [8] описан амбициозный проект использования ЛПО в каче-
стве основы управления в реальном времени с приложениями к созданию
полностью автоматических пилотов.
Довольно продвинутым с точки зрения эффективности распаралле-
ливания вывода в системах 1.3 является PIM (Parallel Inference Machine)
[9] — проект, являвшийся частью японского проекта компьютерных си-
стем 5-го поколения. PIM показал скорость 64 млн логических операций
в секунду (LIPS).
1.2. Системы, основанные на автоматическом
доказательстве теорем
Следует заметить, что, по крайней мере, в отечественной литературе
на возможность и перспективность использования автоматического дока-
зательства теорем в теории и практике управления указал еще в 1960 г.
А.А. Фельдбаум [10].
Среди систем класса 2, т.е. основанных на автоматическом доказа-
тельстве теорем (АДТ), наиболее популярными в области искусственного
интеллекта являются системы:
2.1) революционного типа, реализующие в разных модификациях ме-
тод резолюций, который является машинно-ориентированным и соста-
вляет также теоретическую базу языков логического программирования
типа Пролог,
2.2) генценовского типа либо в форме так называемого естествен-
ного (натурального) вывода, который в сравнении с резолюционным вы-
водом больше напоминает манеру рассуждений человека, либо в форме
секвенциального вывода, в котором секвенции играют роль задач и вы-
воды имеют вид некоторых конечных многошаговых процессов последо-
вательной декомпозиции задач на подзадачи до получения тривиальных
подзадач.
Метод резолюций и аналогичный ему так называемый обратный ме-
тод предложены в 1965 г. независимо Дж. Робинсоном и С.Ю. Масловым
[11-13]. Естественный вывод был одним из самых ранних исчислений
(после Г. Фреге) и введен в 1934 г. (Г. Генценом и С.Яськовским) [14,15].
48
Одной из первых и наиболее известных в нашей стране систем АДТ была
машинная реализация естественного вывода [16].
Следует подчеркнуть, что в отличие от систем логического програм-
мирования системы АДТ работают обычно в полной первопорядковой ло-
гике и существенно превосходят сегодня другие средства ИИ с точки зре-
ния сложности теорем, доказываемых ими. Решены некоторые открытые
задачи, поставленные известными математиками [17, 18], причем планка
сложности неуклонно повышается.
С другой стороны, эти достижения в области систем АДТ принад-
лежат сфере офлайн-задач, т.е. без характерных ресурсных ограничений:
это — сфера математических задач, программирования и вообще автома-
тизации строгих рассуждений, допускающих формализацию в некотором
логическом языке, когда нет особой критичности в вопросе о ресурсах,
отпущенных на проведение автоматических выкладок.
Последнее не означает, что методы АДТ принципиально не приме-
нимы к задачам реального времени. Например, так же, как и в логичес-
ком программировании [8], известны попытки применить АДТ в управ-
лении движущимися объектами для построения полностью автономных
систем.
Первым примером такого типа является система управления мобиль-
ным интегральным роботом STRIPS — самоходным аппаратом, соверша-
ющим передвижения в упрощенной среде по формируемым в УУ коман-
дам [19, 20]. Типичной задачей, решаемой STRIPS, является задача
«убрать деталь в контейнер», т.е. задача перемещения детали из неко-
торой точки рабочего пространства с помощью схвата робота в контей-
нер. STRIPS умеет перемещать схват из одного места в другое, схваты-
вать деталь (когда схват и деталь находятся в одном месте) и перено-
сить схваченную деталь. АДТ является интеллектным уровнем устройства
управления, обеспечивающим в режиме реального времени планирование
действий, т.е. формирование последовательности команд для достижения
поставленной цели. Этот интеллектный уровень более гибко поддержи-
вается моделями в форме логических исчислений, нежели жесткими ал-
горитмами. Однако уже в этом простом примере авторы для повыше-
ния эффективности применили нелогические элементы: вставки (удале-
ния) новых (соответственно устаревших) знаний. Введение исчисления
ситуаций (а по существу экстрапеременной времени в качестве допол-
нительного аргумента к тем предикатам, истинность которых меняется в
процессе функционирования робота) позволяет погрузить все описание в
полное исчисление предикатов, но при этом система АДТ должна быть
достаточно мощной. В работе [21] полное исчисление предикатов было
использовано для планирования с учетом новых для того времени продви-
жений в АДТ.
49
1.3. Системы, основанные на автоматическом
гипотезировании
Автоматизация гипотезирования (выдвижения гипотез) в системах ис-
кусственного интеллекта может достигаться по-разному. В частности,
автоматическое гипотезирование (АГ) используется в литературе в кон-
тексте реализации фундаментальной функции — обучения. Обучение
существенно для оперирования в полностью или частично неизвестной
среде, имеет много форм и в обобщенной постановке может быть сведено
к обучению достаточно точному представлению некоторой функции. При
этом обучение на основе некоторого множества предъявленных учителем
примеров, а именно пар (аргумент, значение), называется индуктивным
обучением, а ответное конкретное предположение о виде этой неизвест-
ной функции — гипотезой. Трудности обучения зависят от выбранного
представления: булевские функции, логические формулы, вероятностные
и нейронные сети, полиномы и др. Описание соответствующих методов
(обучающихся деревьев решений, адаптивных вероятностных сетей и др.)
можно найти в [22].
Другой тип задач обучения возникает, когда среда еще беднее, т.е. обу-
чаемый не получает примеров и, начиная действовать, может временами
в порядке обратной связи получать подкрепления (поощрения). Соответ-
ствующая проблематика давно занимала специалистов в области коллек-
тивного поведения автоматов [23,24] и адаптивного управления [25].
Наблюдения
(примеры)
Рис. 1.1. Процесс кумулятивного обучения использует и дополняет запас априор-
ных знаний
Исходя из того, что системы с элементами ИИ, как правило, обладают
априорными знаниями (сверх примеров и подкреплений), представляется
весьма важным кумулятивный (накопительный) вид обучения, когда на-
копление знаний, вообще говоря, улучшает способность к обучению —
с учителем или без учителя (рис. 1.1).
50
Примером кумулятивного обучения является обучение на основе обоб-
щающего анализа (или «объяснения примеров»). Это — метод извлечения
общих правил из индивидуальных наблюдений и некоторой общей теории
[26]. Взятие производной по х от х2 в логическом программировании
требует 136 шагов доказательства, в которых 99 являются тупиковыми
для доказательства [26]. Естественно, что интеллектная система, выпол-
нив однажды все эти шаги, должна была бы впредь сделать это быстрее,
причем не простым запоминанием в базе данных пары вход-выход вида
(ж2,2ж), иначе при вычислении производной по у от у2 пришлось бы
повторить 136 шагов заново. Система должна быть способна сформули-
ровать итоговое правило, общее для всех выражений и2 с неизвестными
арифметическими выражениями и (еще лучше — для ип). «Цивилизация
прогрессирует путем расширения числа важных операций, которые мы
можем выполнять, не задумываясь о них» [27].
Одной из новых областей в ИИ является индуктивное логическое про-
граммирование (ИЛП). Оно комбинирует индуктивные методы с мощно-
стью первопорядковых представлений, концентрируя их, в частности, на
представлении теорий как логических программ. С начала 90-х годов ИЛП
стало главной частью исследований в области машинного обучения, бла-
годаря строгости и предложенным полным (универсальным) алгоритмам
порождения первопорядковых теорий из примеров [28, 29]. Одним из
методов ИЛП является обратная резолюция, позволяющая, например, на-
ходить одну из двух посылок (дизъюнктов) по известной второй посылке и
их резольвенте (т.е. логическому следствию посылок по правилу резолю-
ции Дж. Робинсона [11]). При этом без потери полноты применяется ряд
ограничений для сокращения комбинаторики. Замечательной особенно-
стью систем обратной резолюции является то, что они порождают новые
предикаты. По мере того, как новый предикат входит в состав все новых
гипотез, он становится все более и более семантически осмысливаемым
и может получить от человека отождествление с некоторым из известных
понятий или новое наименование, если потребуется.
Остановимся вкратце на некоторых других методах АГ.
В работе [30] введены логические исчисления с обобщенными кван-
торами (в смысле А. Мостовского [31]). Эти исчисления применены
для формализации так называемых рациональных индуктивных выводов,
для построения основ вычислительной статистики и для разработки на
стыке математической логики и математической статистики соответст-
вующего метода автоматического образования гипотез — GUHA-мето-
да. Методы получения правдоподобных рассуждений в стиле Ф. Бэкона—
Д.С. Милля разработаны в [32].
В качестве одного из перспективных направлений обеспечения куму-
лятивного обучения и вообще АГ является и метод АГ на основе перво-
51
порядковых логических уравнений, предложенный в [33]. Он является
развитием работ по регулярному получению формулировок теорем типа
теорем сравнения в терминах векторных функций Ляпунова (В.М. Матро-
сов [34-36], см. также [37-39]) в математической теории систем и, прежде
всего, в динамике систем, а также работ о сохранении свойств алгебраи-
ческих систем при морфизмах (см., например, [2, 3, 39]).
Интересное сочетание методов решения логических уравнений и ав-
томатического доказательства теорем представляет метод последователь-
ного порождения гипотез (ПП-метод) [40]. На нем мы подробнее остано-
вимся в главе 2 (п. 2.9).
1.4. Системы, основанные на рассуждениях по аналогии
Вместо использования примеров для их обобщения (п. 1.3) с после-
дующим применением полученного гипотетического знания для решения
задачи, нередко можно использовать эти примеры более или менее напря-
мую, способом, именуемым рассуждением по аналогии.
Эта форма рассуждений варьируется в литературе от формы правдо-
подобных рассуждений, основанных на степенях правдоподобия или «по-
хожести» (Similarity) [41] до «ленивого» обучения путем объяснения при-
меров («Lazy» Explanation-Based Learning). Последняя форма рассужде-
ний по аналогии состоит как бы в приспособлении направления обобще-
ния старого примера под потребности новой задачи и наиболее выражена
в рассуждениях по прецеденту (Case-Based Reasoning) [42] (см. также
подход, основанный на производной аналогии [43]).
Механизм рассуждений в системах, основанных на прецедентах, ба-
зируется на коллекционировании и использовании решений старых задач
рассматриваемой предметной области для построения решений новых за-
дач [44], что позволяет порой избежать повторной трудоемкой обработки
информации. Адаптируемое к новой задаче старое решение выбирается
как решение такой ранее решенной задачи, которая в определенном смы-
сле достаточно близка к новой задаче. При этом понятие «близости»
к прецеденту может быть формализовано по разному. Часто принятие
решений по прецедентам комбинируется с другими механизмами, напри-
мер, с логическим программированием [45, 46].
1.5. Объектно-ориентированные интеллектные системы
Достоинством декларативного стиля представления знаний и програм-
мирования (см. п. 1.1) является, как отмечалось, то, что создателю системы
не надо заботиться о потоке управления в программе. По существу, опи-
52
сание задачи представляется слабо структурированной совокупностью от-
ношений. При большом количестве таких отношений понимание Пролог-
программы становится практически невозможным, а встраивание нелоги-
ческих элементов в стратегию вывода — неизбежным [47].
Вместе с тем тенденция все более широкого использования ЭВМ
в процессах управления приводит на практике к созданию весьма слож-
ных систем управления. С этой точки зрения объектно-ориентированный
подход к представлению и обработке знаний с его возможностями высоко-
эффективно поддержать отношения наследования, использовать значения
«по умолчанию» и т.д. является привлекательным [48] по крайней мере в
некотором симбиозе с логическим программированием.
Объектно-ориентированные интеллектные системы используют декла-
ративно-процедурные (описательно-алгоритмические, дескриптивно-кон-
структивные) формы представления знаний и быстрые, хотя и ограничен-
ные по возможностям вывода нового знания, алгоритмы вывода свойств
объектов на основе иерархических, сетевых, фреймовых и некоторых дру-
гих представлений отношений между объектами (описанными морфологи-
чески, функционально, атрибутивно и т.д.) [49, 50]. При этом чаще всего
используются объектно-ориентированные языки программирования, ха-
рактерные взаимопроникновением структур данных и процедур. Хорошо
известный из них — язык Smalltalk (Смолток). Среди языков представле-
ния знаний выделяются также языки KRL, KL-ONE и некоторые другие.
Для них характерно двухуровневое представление данных [50] (абстракт-
ная модель предметной области в виде иерархии множеств понятий и кон-
кретная модель ситуации как совокупность взаимосвязанных экземпляров
этих понятий), представление связей между понятиями и закономерно-
стей в виде присоединенных процедур, семантический подход к сравне-
нию образцов и поиску по образцу. Инструментом, предназначенным
специально для создания экспертных систем, явились языки представле-
ния знаний (и соответствующие программные среды) ART, 0PS5 [51-54].
Они используют продукции и фреймы.
Фрейм — это структура данных, предназначенная для представления
стереотипной ситуации. Он представляет собой совокупность вопросов,
которые можно задать о соответствующей воображаемой ситуации. Эта
совокупность вопросов должна быть минимальной с точки зрения еще
сохранения сущности описываемой ситуации. Другого типа фреймы (ро-
левые) описывают некоторые процессы, т.е. служат для представления
процедурного знания (умений). С ролевыми фреймами ассоциируется, на-
пример, информация о том, чего ожидать в следующий момент, что сде-
лать, если ожидания не подтвердятся и т.п.
Следует заметить, что рассмотренная классификация СОЗ 1-5 не явля-
ется разбиением', конкретные системы, основанные на «знаниях», могут
53
принадлежать одновременно нескольким классам. В частности, весьма
перспективные, с нашей точки зрения, средства ИИ имеются в пере-
сечении классов 1, 2, 5. Внутри него находятся СОЗ, использующие
объектно-логические языки, фреймовые логики (F-logics), логики тран-
закций (Transaction Logics) [55-57] и т.д. Последовательное сочетание
объектно-ориентированного подхода с логическим программированием
позволяет повысить эффективность последнего с сохранением свойств
универсальности (полноты) и корректности обработки знаний (см. об-
зор [58]).
Рис. 1.2. Пересечение классов СОЗ, использующих три указанных на рисунке ме-
ханизма рассуждения (классы СОЗ 4 и 5 на рисунке не представлены). Области А
принадлежат, например, системы логического программирования (Пролог и дру-
гие), области Б — GUHA-метод. области В — ПП-метод, области Г — некоторые
системы ЛПО
Рис. 1.2 иллюстрирует непустоту пересечений А-Г классов 1-3. На-
пример, области А принадлежат системы логического программирования.
В свою очередь, в их числе — системы типа Пролог, ^-программирования
[59, 60] и системы ЛПО (см. п. 1.1) [5-7].
Действительно, механизм рассуждений классического Пролога имеет
одновременно черты систем, основанных на правилах, и систем доказа-
тельства теорем (на множестве хорновских формул исчисления преди-
катов). Системы ЛПО являются их дальнейшим развитием, включая, на-
пример, механизм решения простейших логических уравнений. Так как
отыскание решений логических уравнений может иметь характер обзора
гипотез, то некоторые системы ЛПО по своим возможностям попадают
в наиболее общую область Г.
54
В следующем разделе, на примере некоторых систем, основанных
на правилах, рассматривается применение СОЗ в задачах управления.
1.6. Интеллектное управление на основе нечетких
и других правил
Разработка систем интеллектного управления (СИУ) класса 1, т.е.
основанных на правилах, предполагает выбор переменных состояния и
выхода, в терминах которых и формулируются правила. В самом простей-
шем случае — интеллектных аналогов широко распространенных в тео-
рии автоматического управления способов формирования управления —
этот выбор можно реализовать в соответствии с позиционным управле-
нием по положению и скорости ОУ, а именно в соответствии с прин-
ципами пропорционального (П) и пропорционально-дифференциального
(ПД) управления. Разумеется, могут использоваться аналоги и других ти-
повых способов формирования управления, например, пропорционально-
интегрального (ПИ) или пропорционально-интегрально-дифференциаль-
ного (ПИД) управления. Для нелинейных систем управления способы
формирования управления могут получаться и более сложными.
Рассмотрим структурную схему простейшей следящей системы
(рис. 1.3).
Рис. 1.3. Структурная схема простейшей следящей системы
Назначение регулятора — удерживать для любого момента времени
достаточно близким значение сигнала у (на выходе объекта управления)
к значению уставки, т.е. входного сигнала 2/вх. Иными словами, необхо-
димо в условиях действия возмущения f обеспечивать достаточную ма-
лость ошибки (рассогласования) е = уък — у. Показатели ошибки е, ис-
пользуемые в посылках правил, аналогичных ПИД-управлению, обычно
выбираются из числа следующих трех [61]:
— ошибка е,
— изменение-ошибки, обозначаемое Де или ё,
— сумма-ошибок бе.
55
Показатели управления и на выходе УУ, т.е. на входе в процесс,
используемые в заключениях правил, обычно выбираются из числа сле-
дующих:
— изменение-управления, обозначаемое Ди или й,
— управление и.
Кроме того, в случае дискретного времени к = 1,2,..., по аналогии
с обычным регулятором, мы имеем
е(к) = Увх~у(к),
Де(/с) = e(fc) — е(к — 1),
Ди(/с) = и(/с) — и(к — 1),
к-1
= $2е(г),
г=1
где 7/вх — желаемый выход процесса, у — текущий выход.
Уравнение обычного ПД-регулятора имеет вид
и = Кре + АГрё,
где Kp,Kd — коэффициенты усиления ПД-рехулятора (пропорциональ-
ной и дифференциальной составляющих в законе управления). Дискрет-
ному аналоху отвечают правила, имеющие форму [61]:
ЕСЛИ е(к) обладает свойством «имя свойства»
И ^е(к) обладает свойством «имя свойства»,
ТО и(к) обладает свойством «имя свойства»,
где <имя свойства> — предикатный символ, например, РАВНО-НУЛЮ,
ПОЛОЖИТЕЛЬНОЕ-МАЛОЕ, ПОЛОЖИТЕЛЬНОЕ-СРЕДНЕЕ, ПОЛО-
ЖИТЕЛЬНОЕ-БОЛЬШОЕ, ОТРИЦАТЕЛЬНОЕ-МАЛОЕ, ... Смысл этих
правил очевиден.
Если уравнение обычного ПИ-регулятора
и = Кре + Kj J edt,
где Kf — коэффициент усиления интегрального члена в законе управле-
ния, преобразовать в эквивалентную форму
й = Крё 4- Kje,
то предыдущая форма правил (дискретного аналога) сохраняется. В этом
случае для получения значения управления и(к) изменение-управления
Ди(А?) суммируется с и(к — 1).
56
Форма представления правил дискретного П-регулятора имеет вид:
ЕСЛИ е(к) обладает свойством «имя свойства»,
ТО и(к) обладает свойством «имя свойства».
Уравнению обычного ПИД-регулятора
и = Кре + К&ё + Ki J edt
отвечают правила следующей формы:
ЕСЛИ е обладает свойством «имя свойства»
И Де обладает свойством «имя свойства»
И бе обладает свойством «имя свойства»,
ТО и обладает свойством «имя свойства».
В некоторых случаях, когда доступны знания не только в форме по-
казателей ошибки е (е,Де,5е), но и, например, показатели выхода у
процесса, то в посылки правил могут включаться свойства переменной у
и других показателей выхода.
Примером такого правила является выражение:
ЕСЛИ давление обладает свойством <Б0ЛЫ1ЮЕ>
И изменение-давления обладает свойством <ПОЛОЖИТЕЛЬНОЕ-
МАЛОЕ>,
ТО подвод-отвод-энергии обладает свойством <ОТРИЦАТЕЛЬНОЕ-
СРЕДНЕЕ>,
где давление — выход у процесса, а подвод-отвод-энергии — управление.
Если в правилах имена свойств рассматривать как предикатные сим-
волы, то возможна формализация этих правил в предикатной форме
(а именно в стиле хорновских формул, образующих подмножество фор-
мул первопорядкового исчисления предикатов, см. п. 1.1) с выходом на
методы обработки знаний в духе автоматического доказательства теорем
или логического программирования. Такое чисто символьное представле-
ние правил достаточно и для некоторого качественного анализа вопро-
сов устойчивости системы управления. Разумеется, в составе УУ должны
быть представлены преобразователй входов УУ (аналоговых или цифро-
вых) в двоичные, т.е. истинностные значения предикатов (истина — ложь),
и обратно — двоичных выходов в обычные, приемлемые для ОУ величины
(сигналы).
Если же эти имена свойств рассматривать как нечеткие значения лин-
гвистических переменных в смысле [62], то соответствующие правила
являются нечеткими, а в составе УУ предусматриваются фазификатор,
преобразующий обычные (четкие, аналоговые или цифровые) значения
входов УУ в нечеткие (лингвистические) значения, и дефазификатор для
обратного преобразования нечетких значений выходных переменных УУ
57
в приемлемые для ОУ величины. Помимо того же качественного ана-
лиза, что и выше, путем количественной интерпретации содержательного
смысла нечетких значений лингвистических переменных в терминах не-
четких множеств или функций принадлежности [62] можно обеспечить
и количественное описание поведения системы управления [61].
Основными задачами, решаемыми при создании СИУ с нечеткой логи-
кой, являются сопоставление описаний состояний ОУ с условиями истин-
ности продукционных правил, а также определение стратегии (порядка)
использования правил.
В зависимости от того, как решается вторая задача, предлагается
[63] различать два типа формирования управления: «ситуация-действие»
(С-Д) и «ситуация-стратегия управления-действие» (С-СУ-Д). В случае
С-Д правила задаются в явной форме, т.е. как выше, образуя базу знаний.
На очередном шаге используется правило, условия истинности которого
наиболее соответствуют в смысле некоторой меры близости состоянию
ОУ. Стратегия просмотра, как правило, неизменна.
В случае С-СУ-Д явно заданных правил нет. Они выводятся, базиру-
ясь на некоторой нечеткой ситуационной сети, как нечетком взвешенном
графе переходов внутри множества эталонных описаний состояний ОУ
[63]. Набор правил, необходимых для вывода управляющего действия,
а также порядок их применения определяются стратегией управления —
нечетким маршрутом в сети от исходной к целевой ситуации. Формиро-
вание управления в случае С-СУ-Д обладает большей гибкостью и устой-
чивостью к нештатным условиям управления.
Заметим, что значения переменных, которые входят в правила, име-
ющие формы, представленные выше в качестве интеллектных аналогов
классических регуляторов, динамически меняются. Например, значение
бе зависит от всей предыстории. Сами же правила в нормальном режиме
эксплуатации СИУ не предполагается менять. В этом смысле можно счи-
тать СИУ, основанную на правилах указанных форм, статической.
Исторически нечеткое управление использовалось вначале в контек-
сте именно статических правил. Позднее были созданы адаптивные не-
четкие регуляторы либо в неявной форме [64], в которых использова-
лась промежуточная модель процесса для «перепроектирования» (син-
теза) регулятора в реальном времени (рис. 1.4), либо в более привычной
форме прямой адаптации, когда по результатам наблюдения функциониро-
вания контура управления модифицируется прямо база правил (рис. 1.5).
В общем случае, последние регуляторы именуются самоорганизующимися,
основанными на нечеткой логике [65].
Пример СИУ для проводки грузового судна между островами без
вмешательства человека описан в [66]. Входами в процесс (ОУ) явля-
ются и (скорость) и 5 (угол поворота руля), выходами — курс судна
58
ф (относительно осей фиксированной системы координат) и положение
в плоскости (я, у). Структура системы управления является двухуровне-
вой и представлена на рис. 1.6.
Рис. 1.4. Нечеткой регулятор с неявной адаптацией
Рис. 1.5. Типовой самоорганизующийся нечеткий регулятор
Рис. 1.6. Экспертно-нечеткий регулятор для проводки грузового судна
Нечеткий регулятор нижнего уровня должен обеспечивать для любого
момента времени достаточную близость курса Ф к значению уставки Фг,
вырабатываемой регулятором верхнего уровня. Этот регулятор именуется
59
экспертным, т.е. является экспертной системой, формирующей в реаль-
ном времени на основе некоторой совокупности экспертных правил как
уставку Фг, так и значение управления скоростью и, подаваемого
прямо на ОУ.
Нечеткий регулятор является ПД-регулятором и использует ошибку
6 = Ф — Фг и ее производную для выбора значения управления 6 углом
поворота рулей. Экспертный регулятор использует курс Ф, текущую по-
зицию (х,у) и знание пункта назначения (В) для определения, с какой
скоростью двигаться и какой курс Фг задать нечеткому регулятору.
Экспертный регулятор разработан в духе работы [67]. Он использует
некоторую систему приоритетов для правил, управляющую процессом вы-
вода. Регулятор отыскивает курс и скорость, основываясь на положении
островов, обеспечивая подходящее маневрирование между ними в стиле
опытного капитана. Например, для задачи перевода судна из точки А
в точку В, представленной на рис. 1.7, оказывается достаточным всего
лишь 10 правил для представления опыта капитана. В общем случае эти
правила характеризуют желание замедлить судно на поворотах, ускорить
на прямых участках и порождают управления, обеспечивающие судну от-
слеживание траектории, изображенной на рис. 1.7 пунктиром.
Рис. 1.7. Карта островов для проводки грузового судна
Степень интеллектуальности СИУ (рис. 1.6) характеризуется качест-
вом функционирования и степенью автономности от вмешательств че-
60
ловека. При этом верхний (экспертный) регулятор имеет дело с более
медленными аспектами движениями: так он подправляет скорость значи-
тельно реже, чем нижний (нечеткий) регулятор обновляет угол поворо-
та руля.
В [66] отмечается, что возможно добавление еще одного — третьего
(более высокого) — уровня для встраивания других функций, таких, как:
— дружественный пользовательский интерфейс для капитана и судо-
вой команды,
— интерфейс с метеоинформацией, используемой для изменения про-
водки судна, основываясь на условиях моря,
— высокоуровневое планирование маршрута доставки грузов,
— способность к обучению, позволяющая улучшать качество функ-
ционирования с течением времени, используя оценки функционирования
на предыдущих рейсах,
— управление или координация другими, более сложными подсисте-
мами, такими как обнаружение и идентификация отказов, минимизация
затрат топлива и времени.
В конце п.В.З мы упомянули о многочисленных коммерческих при-
ложениях нечеткого управления в быту и промышленности.
Вместе с тем имеются две крайние позиции в оценке полезности
нечеткого управления [61]. С одной стороны, многие сторонники этой
технологии провозглашают, что нечеткое управление будет революциони-
зировать технику управления, обещает прорывы и будет способно решить
сложные технические проблемы с помощью малых затрат. С другой сто-
роны, многие представители управленцев все еще являются активными
сторонниками того взгляда, что «все, что может быть сделано в нечетком
управлении, может быть сделано также и традиционными средствами те-
ории управления», и прогнозируют в ближайшем будущем спад нечеткого
управления как направления теории и приложений.
Понимание того, что обе эти позиции не учитывают реального потен-
циала нечеткого управления, постепенно возрастает. Использование экс-
пертных знаний позволяет повысить степень автоматизации управления,
например, во многих производственных процессах химической промыш-
ленности. Здесь традиционно реализуется некоторое множество базовых
контуров управления, но на фазах запуска и отключения оператору при-
ходится устанавливать параметры регуляторов или переключать разные
блоки управления. Соответствующие знания описываются не в терминах
дифференциальных уравнений, а часто скорее в форме «если ситуация
такая-то и такая-то, то следует сделать следующее». В этом случае не-
четкое управление предлагает метод представления и использования экс-
пертных знаний оператора, технолога или инженера-разработчика.
61
Например, одна португальская компания в целлюлозно-бумажной про-
мышленности [61] реализовала нечеткое управление автоклавами на верх-
нем уровне управления этим технологическим процессом с 25 нечеткими
правилами для записи стратегии управления, осуществляемой обычно опе-
ратором. Основным достижением от повышения степени автоматизиро-
ванное™ и круглосуточной поддержки рациональной стратегии управле-
ния является существенное уменьшение (до 60%) вариации качества про-
дукции. Кроме того, последовавшая за этим оптимизация программного
обеспечения системы управления привела к значительному уменьшению
затрат энергии и потребления сырья. В общем, возврат инвестиций в раз-
работку пакета программ по нечеткому управлению и базы знаний реаль-
ной системы управления был достигнут через несколько месяцев.
Рассмотрим другую задачу: многозвенный манипулятор робота должен
перемещать объекты разной массы вдоль заданной траектории. Так как
имеются хорошие и точные модели, то не составляет большого труда ре-
ализовать ПИД-регулятор, работающий с известными массами внутри уз-
кого их диапазона изменения. Однако в случае существенных параметри-
ческих изменений или больших внешних возмущений наблюдается рез-
кое ухудшение качества функционирования. При этом ПИД-управление
обычно наталкивается на дилемму: быстрая реакция со значительным
промахом или точная, но медленная реакция, или даже возникает про-
блема стабилизации в целом. В этом случае нечеткое управление позво-
ляет реализовать простые, но робастные решения, покрывающие широкий
диапазон возможного изменения и справляющиеся с большими возмуще-
ниями. В этом частном случае была реализована СИУ с так называемым
нечетким скользящим режимом [61], который демонстрирует аналогич-
ные характеристики для заданной массы с небольшими варициями, но
перекрывает по качеству ПИД-решение как только вводятся большие из-
менения массы.
Такого типа решение использовано в СИУ длинным многозвенным
манипулятором (около 10 м), установленным на космической станции
[68], когда требуется устранить негативное влияние люфта в соединениях
звеньев на конечную ошибку позиционирования и обеспечить требуемую
точность при широком диапазоне нагрузок.
В работе [63] описываются примеры нечеткого управления запуском-
выпуском изделий на технологической операции «металлизация» произ-
водства прецизионных резисторов и модели управления роботом-манипу-
лятором в системе «глаз-рука». Подробно описываются используемые
нечеткие модели С-СУ-Д и С-Д соответственно.
Нечеткое управление успешно использовано в проекте самолета с вы-
сокотехнологичными крыльями (Rockwell’s experimental adanced technol-
ogy wing) [69] улучшенной аэродинамики.
62
Имеются и другие немаловажные обстоятельства при переходе к ин-
теллектному управлению.
В случае интеллектного подхода к управлению во многом может ни-
велироваться отрицательный эффект наличия известного коммуникацион-
ного барьера между конструкторами и программистами изделия и размы-
тости сфер ответственности за окончательный результат. Этот эффект
проявляется в деловых конфликтах, задержках и плановом растягивании
срока разработки системы управления. Интеллектное управление предла-
гает языки, понятные соответствующим коллективам разработчиков, а на-
личие простых и корректных трансляторов из языка нечетких правил в
язык элементарных объектов и алгоритмов (табличные функции, интер-
поляции, компараторы и т.д.) упрощает проблемы коммуникации и разде-
ления сфер ответственности. Например, в сфере автомобильной электро-
ники решалась задача управления холостым режимом на базе 8-разрядных
микропроцессоров [61]. На фоне возможных больших параметрических
изменений в системе (включая разные дорожные условия и дополнитель-
ное энергопотребление рулевым механизмом, кондиционером и т.д.) под-
держание постоянной скорости холостого режима двигателя может быть
обеспечено нечетким управлением. Время разработки составило примерно
6 человеко-месяцев в отличие от 2 человеко-лет в рамках традиционного
подхода.
В Японии слово «нечеткий» стало одним из самых популярных. В бы-
ту оно ассоциируется с терминами «современный», «высококачествен-
ный», «дружественный». «Кнопка одного касания» в новой стиральной
машине заменяет большие управляющие панели старых машин. В 1990 г.
японскими производителями продано бытовой нечетко управляемой тех-
ники на сумму в несколько миллиардов американских долларов. Термин
«нечеткий» приобрел в Японии самостоятельное маркетинговое значение.
Большинство вновь вводимых бытовых приборов маркируются «нечет-
кий» или «нейро-нечеткий».
Что касается промышленных применений, этот маркетинговый эф-
фект вряд ли состоится, хотя ожидается, что в некоторых случаях нечет-
кое управление будет использоваться в промышленности и без необхо-
димости, просто для демонстрации приобщенности компаний к техноло-
гической конкуренции в сфере интеллектного управления. Кроме того,
ожидается также использование нечеткого управления без улучшения ха-
рактеристик системы управления и уменьшения стоимости разработки
в сфере патентной конкуренции: использование нечеткого управления
в качественно эквивалентных решениях помогает обходу существующих
патентов.
Ясно, что в большинстве случаев гибридные — интеллектные + тра-
диционные — технологии улучшат существующие системы управления.
63
Но зададимся вопросом: какие имеются пределы у интеллектного упра-
вления, хотя бы на примере нечеткого управления? Дадим некоторые
комментарии к декларациям, публикуемым в рекламных и научных целях.
Нечеткие регуляторы — более робастны, чем обычные. Имеются мно-
гие приложения, где использование нечеткого управления — в чистом
виде или в комбинации, например, с ПИД-управлением — обеспечило
высокую робастность систем управления. Имеются и другие случаи. Из-
вестны [61] две попытки управления системами воздушного кондициони-
рования на основе нечетких логик и лишь с двумя небольшими отличиями
в структуре и базе знаний: одна попытка оказалась успешной, обеспечив
высокую робастность даже при больших возмущениях, другая привела к
неустойчивости. По-видимому, еще не до конца методологически ясно,
для какого типа технических задач управления нечеткое управление ве-
дет к улучшению робастности и устойчивости и как проектные решения
влияют на эти свойства. Вместе с тем, для нечетких систем управления
есть первые приемлемые критерии устойчивости. Такие критерии обсу-
ждаются в [70, 71] и можно утверждать, что нечеткое управление и в этом
смысле начинает конкурировать с обычным нелинейным управлением.
Нечеткое управление сокращает время разработки. Пример из ав-
томобильной электроники, упомянутый ранее, как и ряд других, подтвер-
ждает это, хотя на начальных этапах освоения технологии нечеткого упра-
вления возможен, разумеется, и обратный эффект.
Продукция, использующая нечеткое управление, легче продается. Это
характерно для бытовой техники в Японии. Вместе с тем, надежный
маркетинг должен фокусироваться не на модной этикетке «нечеткий»,
а на потребительских свойствах: повышение уровня интеллектуально-
сти и дружественности интерфейса, дополнительные функции и ресурс-
ные аспекты, такие, как экономия энергии, уменьшение расхода свежей
воды (в стиральных машинах) и т.д. Ввиду наличия параллельных средств
искусственного интеллекта и меньшей зависимости этой области инте-
грально от конъюнктуры рынка, в бытовых электронных приборах и ви-
деооборудовании использование нечеткого управления не упоминается (по
понятным причинам, термин «нечеткая автофокусирующая система» вряд
ли является маркой качества и большинство поставщиков таких това-
ров использует термин «цифровая или интеллектная (автофокусировка)»,
даже если в приборе используется нечеткая логика).
По оценке настоящего и будущего рынка приборов нечеткого упра-
вления, данной в [61], примерно 10-15% всей электрической и электрон-
ной техники выиграет от использования нечеткого управления в форме
«усиливающей» или «безальтернативной» технологии.
С другой стороны, в областях с чисто информационными технологи-
ями управления (базы данных, экспертные системы в финансовом секторе
64
и т.д.) имеется все еще малое, хотя и возрастающее число приложений
нечеткой логики.
Нечеткое управление ведет к более высокой степени автоматизации
для сложных, плохо структурированных процессов.
Это справедливо, но только если имеется подходящее знание о про-
цессе, которое может быть хорошо представлено в терминах нечетких
правил. Существуют различные процессы, для которых такого знания нет
вовсе или его нет в необходимой степени. Например, если в системе
управления возможны ситуации таких отказов элементов (подсистем), ко-
торые заранее не предусмотрены и не обеспечены средствами их обна-
ружения и локализации, равно как и автоматическим выходом в соот-
ветствующие априорно предусмотренные аварийные режимы, то система
управления должна над имеющейся базой знаний принять наиболее ра-
циональное решение (осуществить реконфигурацию) с предопределенной
заранее целью (сохранение работоспособности и т.п.) или, еще лучше,
с возможным пересмотром цели и критериев качества управления. При
этом может понадобиться заранее не предусмотренным (совокупностью
экспертных правил «если..., то...») способом спланировать целую после-
довательность действий по выводу системы в работоспособное состояние.
Для этого нужны другие методы интеллектуализации, с другими фор-
мами представления и обработки знаний, вообще говоря, обеспечивающие
более высокий уровень интеллекта. В частности, могут понадобиться бо-
лее мощные методы «обдумывания» ситуации, обрабатывающие знания
более общего вида, нежели просто использующие правила, априорно
заготовленные или несколько модифицируемые в процессе функцониро-
вания. К таким методам относятся, например, упомянутые в п. 1.2 методы
АДТ и вообще методы логического вывода. Рассмотрим их несколько по-
дробнее.
1.7. О методах логического вывода
для управления динамическими системами
Методы логического вывода служат для автоматизации доказательства
теорем, построения следствий (развертывания теорий), порождения гипо-
тез и т.д. В п. 1.2 мы подчеркивали, что системы АДТ работают обычно
в полной первопорядковой логике и существенно превосходят сегодня дру-
гие средства ИИ с точки зрения глубины логических выводов и сложности
доказываемых ими утверждений (математических теорем).
Для анализа возможностей сближения систем логического вывода
(в том числе АДТ) и уже существующих систем интеллектного управле-
ния (в реальном мире), основанных на правилах, целесообразно восполь-
зоваться чисто логическим взглядом на них. С точки зрения этого взгляда
з - 1847
65
на правила «интеллектного» варианта ПИД-регулятора, описанные в п. 1.6,
эти правила имеют форму
Vxi...Vxn (P^Cri) &•. .& Pin(xn) Q(u)), (1.1)
где o?i,..., xn, и — переменные, ,..., Pin, Q — предикатные символы.
При этом логические формулы указанного вида имеют конструктивную се-
мантику: по заданным значениям переменных a?i,..., хп, таким, что спра-
ведливо Pi1 (xi),..., Pin (хп), устройство управления формирует («умеет
конструктивно найти») такое значение переменной и, что имеет место
Q(u). О бедности знаний, допускающих формализацию в форме ука-
занных правил, свидетельствует тот факт, что семантика формул (1.1)
формализуема также в пропозициональном (булевском, непредикатном)
виде
Pl & ...&рп -> Q, (1.2)
где pi &... & pn,q — пропозициональные переменные фрагмента кон-
структивного (интуиционистского) исчисления высказываний, причем pj
(соответственно q) конструктивно истинно тогда и только тогда, когда
задано значение переменной Xi (соответственно получено и), такое, что
имеет место Pi^Xi) (соответственно Q(u)). Так, даже чуть более общие,
чем (1.1), формулы
Vxi.-.Vxn (Р^ (xi )&...&Pin(xn) -> Q(xi,...,Xn,u)) (1.3)
уже не представимы в пропозициональной форме. Формулы (1.3), как
и (1.1), (1.2), могут выражать конструктивную реализуемость некоторого
умения получать и по задаваемым xi,..., хп , но — в отличие от (1.1) и
(1.2) — не только само значение и, но и выражение свойства, предста-
вленного с помощью символа Q, теперь существенно зависит от значений
xi,...9xn. Например, в классе формул (1.3) можно записать утвержде-
ние о том, что «для заданных положительных, целых, четных х устройство
конструктивно вычисляет и = —0,5ж», а в классе (1.1) или (1.2) выразима
лишь более бедная информация; в частности, в том же примере мы смогли
бы представить знание о том, что «для заданных положительных, целых,
четных х устройство конструктивно вычисляет отрицательное, целое и»,
т.е. выразить точно связь значений переменных и и х в классе формул
(1.1), (1.2) не удается (табличное представление для аппроксимации этой
зависимости принципиально не меняет этого вывода).
Отсюда видна ограниченность знаний, с которыми работает СИУ,
основанная на нечетких правилах логической формы (1.1), а следова-
тельно, и ограниченность класса решаемых задач управления. В то же
время, традиционная система АДТ работает не только с формулами вида
(1.3), но обычно и со всем запасом формул предикатных исчислений.
66
На наш взгляд, проникновение полных первопорядковых логик и ме-
тодов автоматизации логического вывода (в частности, в форме АДТ)
в сферу интересов и компетентности специалистов по теории управле-
ния является весьма существенным, позволяя развить теорию управления
в направлении расширения потенциала решения сложных задач управле-
ния, увеличения степени автоматизации, создания СИУ, в большей сте-
пени оправдывающих свое название, благодаря повышению уровня их
интеллектуальности. При этом теория управления и искусственный ин-
теллект становятся значительно более совместимыми, поскольку преди-
катные языки (1-го и более высоких порядков) существенно более выра-
зительны и охватывают вещественные и другие переменные. Грубо говоря,
выразительная сила предикатных языков так соотносится с выразительной
силой булевских (пропозициональных) языков, как выразительная сила
языка математической теории управления соотносится с выразительной
силой языка двоичной арифметики. Предикатные языки позволяют фор-
мализовать более широкие знания для последующей обработки машинно-
ориентированными правилами. Каждое правило формализует не столько
специальный (локальный) переход от условий к действию, выражающий
более или менее очевидным образом отдельный шаг приближения к цели
управления, сколько интуитивное представление человека о правильности
(логичности) умозаключений, т.е. имеет более универсальный характер.
Применимость логического вывода в контуре управления, помимо
прочего, базируется на том, что цель управления и возможности доступ-
ных при этом средств достижения цели могут быть описаны в логическом
языке. Тогда свойство разрешимости задачи управления эквивалентно кон-
структивной логической выводимости формулы А, записывающей цель
управления, из формул Вг, i = 1,п, представляющих возможности средств
достижения цели.
Пусть А выводимо из Bi,... ,Вп. Если найденный (обычно много-
шаговый!) вывод конструктивен, то из него алгоритмически может быть
извлечено искомое управление как целенаправленная последовательность
действий.
Таким образом, система АДТ как интеллектная компонента СИУ
реализует автоматическое доказательство теорем, в том числе вида
—> А, и формирует соответствующее управление, обеспечивающее
достижение цели управления, может быть, в многошаговом процессе, ко-
гда вывод и отработка полученного управления многократно чередуются,
а каждый вывод значения управления в свою очередь является обычно
многошаговым.
Иначе говоря, система АДТ, обрабатывая разные (!) знания и на-
ходя в общем случае целую последовательность (!) действий, способна
вырабатывать план достижения цели управления.
з*
67
Сложность, которая здесь возникает, это необходимость учета измен-
чивости мира. СИУ должна иметь способность к рассуждениям о пове-
дении данных и знаний с течением времени, о связи прошлых, настоя-
щих и будущих событий. Динамичность мира вызывается уже действи-
ями самой СИУ. Очевидное решение, доступное в классе предикатных
языков, — это расширение списка аргументов каждого «динамического»
предиката (т.е. истинность которого при тех же значениях старых аргу-
ментов может меняться с течением времени) дополнительным аргумен-
том, обозначающим момент времени рассмотрения истинности/ложности
этого предиката. К сожалению, этот подход предъявляет высокие требо-
вания к эффективности системы логического вывода в силу повышенной
громоздкости представления знаний и, вследствие этого, сложности обра-
ботки полученных логических формул. Так, прямое использование метода
резолюций [11] может не обеспечить требуемой эффективности.
Один из основных недостатков метода резолюций состоит в том, что
он нуждается в предварительном преобразовании знаний в «россыпь мел-
ких утверждений», а именно в множество дизъюнктов, т.е. в множество
дизъюнкций, образованных из элементарных формул или их отрицаний.
При этом знание теряет не только наглядность для человека (что есте-
ственно и является продолжением достоинства метода резолюций, состо-
ящего в однородности материала, обрабатываемого механически), но и те
структурные (синтаксические и семантические) свойства, которые могут
быть полезными для организации той или иной стратегии вывода, учи-
тывающей специфику предметной области, например, динамичность мира
и связанную с этим желательность введения понятия «время». Утрата
структурных свойств естественных форм представления знания означает
расфокусировку внимания и ухудшение совместимости логического вы-
вода с возможными эвристиками, в том числе отражающими специфику
применения знаний о функционировании СИУ, знаний для оценки каче-
ства процессов при разных управлениях, для оценки истечения времени
принятия решений и т.п. Недостатки метода резолюций еще более ощу-
тимы в задачах управления в реальном времени.
Важно отметить, что сложная структурированность знания (слож-
ность изначальной формульной структуры в сравнении с машинизиро-
ванной структурой дизъюнктов) Дж. Робинсоном, автором метода резо-
люций [11], квалифицировалась как негативное свойство с точки зре-
ния эффективности АДТ. Однако это не так. В [33, 37, 72-75] предло-
жены новые типово-кванторные языки позитивно-образованных формул,
а также логические исчисления и механизмы поиска выводов, которые
тоже являются машинно-ориентированными, но способны работать с бо-
лее сложными формами представления знаний. При этом сложность фор-
мул оборачивается полезным богатством структуры, хорошей совмести-
68
мостью с эвристиками, укрупненностью понятийного базиса и обрабаты-
ваемых деталей и, как следствие, сокращением комбинаторики.
Имеются убедительные свидетельства компактности и выразительно-
сти этих типово-кванторных языков и примеры легко доказываемых тео-
рем, на которых споткнулся метод резолюций (пример с «паровым кат-
ком» Л. Шуберта [76]). Перевод формулы исчисления предикатов в язык
позитивно-образованных формул не разрушает эвристическую структуру
исходной формулы и практически не увеличивает длину получаемого вы-
ражения, тогда как перевод даже бескванторной формулы
(Р/ &... & Рп!) V ... V (РГ & ... & Fnm)
на язык метода резолюций — язык дизъюнктов, приводит к множеству
из nm дизъюнктов. Некоторые приложения типово-кванторных языков и
средств АДТ в задачах управления описаны в [33, 37, 72, 73, 77-79].
Другой подход к повышению эффективности логического подхода
к построению СИУ намного ранее предложен разработчиками системы
STRIPS [19, 20]. Типичная, решаемая ею задача «убрать деталь в кон-
тейнер» предполагает планирование действий (как верхний, абстрактный,
уровень программирования траекторий) в изменяемом мире. Это — задача
более интеллектуального уровня, чем только стабилизация программных
движений, осуществимая, в частности, как мы видели, в форме интеллект-
ного аналога ПИД-управления в классе формул (1.1). При достаточно об-
щем описании знаний соответствующая задача нуждается в существенно
более общих языковых средствах, чем (1.1).
Разработчики системы STRIPS использовали метод резолюций [11]
как метод АДТ для автоматизации планирования действий. Однако из-за
динамичности знаний (факты могут устаревать) для повышения эффектив-
ности их обработки потребовалось использовать достаточно естественное
решение, основанное на комбинации универсальной логики и априорных,
предусмотренных человеком, алгоритмов обновления знаний. При этом
всегда существует только обновленный, но статический мир (вся преды-
стория забывается для облегчения задачи обработки информации). Созда-
тели STRIPS’а были вынуждены прибегнуть к этому компромиссу «ло-
гика + алгоритмы» по причине указанного и других недостатков метода
резолюций (несмотря на его революционность на этапе своего появления).
Третий подход состоит в использовании неклассических логик. Их
применение в принципе может обеспечивать наиболее естественное пред-
ставление знаний и совместимость с эвристиками для эффективного вы-
вода управлений. Основной недостаток состоит в необходимости специ-
ализации под предметную область, т.е. заново подбирать или изобретать
под новый класс задач наиболее подходящее логическое исчисление. При
69
этом с учетом меньшей разработанности средств АДТ для неклассических
логик может понадобиться изобретать «с нуля» эффективную и соответ-
ствующую целям решения этого класса задач стратегию поиска вывода.
В целом, СИУ, основанная на логическом представлении и обработке
знаний, как впрочем и все современные компьютеризированные САУ, под-
падают под класс так называемых гибридных систем [80]. «Гибридным
управлением» называют управление непрерывными ОУ с помощью авто-
матов (в частности, ЭВМ). Другие термины — системы с цифровым упра-
влением, логико-динамические системы (ЛДС). Следует, правда, заметить,
что последний термин (ЛДС) в отечественной литературе используется
уже давно. Он часто используется, например, для систем описываемых
дифференциальными (или разностными) уравнениями с правыми частями,
переключаемыми по логическим условиям [81, 82]. Например, это мо-
гут быть системы указанных уравнений, рассматриваемые в совокупности
с уравнениями некоторого автомата, и при этом правые части всех урав-
нений могут зависеть от полного вектора переменных всей совокупности
уравнений [82]. Более сложные ЛДС рассмотрены, например, в [83].
Из сказанного вытекает, чтот термин «СИУ» обозначает подкласс
ЛДС (или гибридных систем). Для выделения тех СИУ, в которых фор-
мирование управления осуществляется на основе логического вывода, мы
используем термин логико-управляемые системы (ЛУС), так как термин
«системы логического управления» также занят (в последнем случае —
это управление на основе логических и других автоматов [23, 24, 84],
сетей Петри, графов операций [85, 86] и т.п.).
Помимо проблемы представления динамичности знаний, в ЛУС, как
и вобще в СИУ, необходимы методы учета ограниченности ресурсов (вре-
мени, памяти, информации), в том числе в аспектах неполноты и ир-
релевантности знаний. В ЛУС может возникать также так называемая
проблема неразрешимости. Эти вопросы рассматриваются в следующем
пункте.
1.8. Некоторые проблемы и их решение
в логико-управляемых системах
СИУ в режиме реального времени (РВ) решают жесткие и мягкие
задачи [87]. В жесткой задаче РВ корректное действие или решение за-
висит не только от результатов формирования управления, но и времени,
в течение которого эти результаты получены, причем выход за временные
ограничения означает полную бесполезность управления. Пример — нави-
гационная система на борту ракеты. В мягкой задаче РВ также имеются
временные ограничения, но выход за временные ограничения приводит
70
к постепенной (обычно монотонной по времени) потере ценности управ-
ления.
Согласование требования работы СИУ в режиме РВ с возможным эф-
фектом медлительности логического вывода состоит в такой организации
формирования управления, при которой первое приближение управления
выводится быстро, но, может быть, с низким качеством и, если еще оста-
ется ресурс времени на его улучшение, то это управление итеративно
улучшается вплоть до момента передачи его на исполнение. Такие алго-
ритмы ИИ за рубежом именуются «Anytime Algorithms» — алгоритмы,
«всегда готовые» выдать грубое (низкокачественное) или более совершен-
ное управление [88, 89].
При этом можно использовать систему логического вывода так, что
формирование управления будет обеспечиваться в стиле комбинирован-
ного управления (п.В.1): управление по принципу обратной связи в ком-
бинации с упреждающим логическим моделированием управляемого про-
цесса при альтернативных управлениях. Глубина просмотра будущего
может зависеть от жесткости режима РВ. С логической же точки зре-
ния, здесь вместо априори заданной теоремы выводятся лишь следствия
текущего состояния при альтернативных управлениях. Эти следствия мо-
гут выражать свойства соответствующих траекторий, важные для оценки
качества управлений. Реализуемость этого подхода к построению СИУ
показана в [73]. Ниже мы будем именовать его автоматическим выводом
следствий (АВС).
СИУ не могут работать эффективно со слишком бедной информа-
цией. Но и слишком много знаний также вызывают в существующих ав-
томатических СИУ тенденцию к деградации. Поэтому важное значение
имеет также решение проблемы иррелевантности знаний, т.е. смешения
полезных знаний с бесполезными, которые лишь усложняют обработку
знаний. Известно [90], что около 90% нейронных окончаний в нашем
мозге являются запрещающими и служат для игнорирования и подавления
сигналов от органов чувств. Более того, в ходе обдумывания проблемы мы
в явной форме рассуждаем о релевантности отдельных сущностей в нашей
концептуализации рассматриваемой проблемы. Тем самым мы стремимся
упростить формулировку проблемы и исключить расточительные действия
при ее решении.
В работе [91] дан логический подход к учету иррелевантности в кон-
тексте обеспечения эффективных дедуктивных построений над большими
базами знаний (хорновского типа). При этом достигнуто весьма суще-
ственное ускорение обработки запросов на основе автоматического вы-
вода утверждений об иррелевантности определенного типа [91]. Подроб-
ному рассмотрению этой проблемы посвящен отдельный номер журнала
«Artificial Intelligence» (1997, №97), как в контексте логических выво-
71
дов, так и обработки изображений (например, в задаче автоматического
управления автомобилем на автотрассах — с целью выделения разгра-
ничительных линий дорожного полотна, загромождаемых изображениями
других автомобилей).
В богатых логических теориях одновременно с увеличением вырази-
тельной и дедуктивной силы возникает и заслуживает внимания нераз-
решимость проблемы выводимости. Уже классическое исчисление преди-
катов является неразрешимым, как это независимо показали еще в ЗО-е
годы А. Черч [92] и А. Тьюринг [93]. Точнее, оно является только полураз-
решимым, т.е. существует процедура, распознающая любую теорему как
доказуемую, однако не существует процедуры, классифицирующей про-
извольную формулу, является ли она теоремой или не является таковой.
Это фундаментальное негативное свойство достаточно богатых логиче-
ских систем является прямым продолжением их достоинства — высокой
выразительной силы, позволяющей охватить в своей формализации су-
щественно более широкий пласт знаний, а, следовательно, и поддержать
более широкий класс задач управления, включая более сложные, к кото-
рым просто неприменимы более бедные, хотя и разрешимые, логические
теории.
Таким образом, достаточно богатые логические системы распознают
все принципиально доказуемые в них теоремы, но в случае доказатель-
ства некоторых недоказуемых утверждений могут работать неограниченно
долго, не проявляя видимых признаков того, что доказываемое утвержде-
ние принципиально недоказуемо. Негативный эффект этого усиливается
на практике ограниченностью ресурсов.
Разумеется, сама по себе ограниченность ресурсов является отрица-
тельным фактором и в разрешимых (более бедных) дедуктивных системах,
например, в пропозициональных исчислениях. Вместе с тем, неразреши-
мость (полуразрешимость) выступает принципиальным недостатком бога-
тых систем АДТ, тормозящим их широкое применение в теории и прак-
тике интеллектного управления и является платой за расширение класса
решаемых задач.
Казалось бы, это ставит предел применению не только логик, но и
вообще ЭВМ. Но, как отмечал еще В.М. Глушков [94], «проблемы тео-
ретической и практической разрешимости задачи лежат в совершенно
разных областях». Необходимо найти не универсальный алгоритм, ко-
торый решал бы все проблемы пусть даже конкретной данной области,
а «практически функционирующие алгоритмы, которые работали бы так
же или лучше, чем специалист этой области».
Сказанное касается и задач с неполной информацией, когда недока-
зуемую теорему F\ = —> А) (о достижимости цели управления
А над имеющимися средствами Bi) можно пытаться преобразовать, на-
72
пример, в доказуемую теорему F<2 = Н —> Fb где Н — дополнительные
гипотезы, при которых F\ становится доказуемой. При этом Н может
быть либо 1) спецификацией недостающих конструктивных средств, либо
2) некоторым дескриптивным знанием, выражающим условие, при истин-
ности которого цель управления достижима, либо 3) формулой смешанной
семантики, выражающей одновременно и первое, и второе.
Методы пополнения информации путем гипотезирования были ука-
заны в п. 1.3. В частности, метод последовательного порождения гипотез
[40] может преобразовать принципиально недоказуемое в рассматрива-
емом исчислении утверждение в теорему, т.е. преобразовать неразреши-
мую задачу в разрешимую, если синтезированные дополнительно гипотезы
являются истинными (в нужном на практике смысле — дескриптивном,
конструктивном или смешанном). Метод полезен и в случае ограниченно-
сти ресурсов времени и памяти, так как в случае нехватки этих ресурсов
метод ускоряет вывод теорем ценой введения дополнительных избыточ-
ных условий. Основная идея этого метода гипотезирования состоит в сле-
дующем:
— в чередовании дедукции и синтеза новых условий доказуемости,
управляемом логически с учетом некоторых признаков недоказуемости
или исчерпания ресурсов;
— в разработке и использовании человеко-ориентированных правил
упрощения порожденных гипотез (правил типа декомпозиции, обобщения,
конкретизации и т.п.);
— в специальном механизме ограничения или расширения языка,
в котором порождается гипотеза.
Таким образом, метод последовательного порождения гипотез пыта-
ется доказать исходное утверждение, а при появлении трудностей с его до-
казательством синтезирует фрагмент будущей гипотезы, немедленно при-
менимый для использования в незавершенном доказательстве. Если про-
долженное доказательство снова сталкивается с трудностями, то синтези-
руется следующий фрагмент гипотезы и т.д. Под трудностями доказатель-
ства понимается, например, исчерпание допустимого времени непрерыв-
ного доказательства; если же будет исчерпан полный временной ресурс
доказательства (т.е. с промежуточным синтезом фрагментов гипотезы), то
синтезируется условие, априори достаточное для доказуемости получен-
ной до этого формулы, может быть довольно грубое, но не требующее
доказательства своей достаточности.
Органическое сочетание АДТ с порождением гипотез приближается
в большей мере к стилю умозаключений человека, нежели каждая из
этих интеллектуальных функций в отдельности. Вместе с тем современное
состояние этого направления исследований по созданию СИУ, сочетаю-
щих АДТ и автоматическое гипотезирование, обеспечивает пока большую
73
приложимость результатов именно в человеко-машинных системах, по-
скольку автоматическое гипотезирование может приводить к целому спек-
тру возможных гипотез, окончательная оценка и принятие которых, во-
обще говоря, требует мотиваций и умения пересматривать цели.
Резюмируя, заметим, что слабая на сегодня приспособленность боль-
шинства систем АДТ к задачам РВ не является абсолютно непреодолимым
барьером и фатальным следствием названного ранее преимущества перед
другими видами интеллектных компонент для СИУ. Такое заключение
можно сделать на базе как рассмотренного в п.п. 1.7, 1.8, так и других, не
упомянутых здесь работ. Оно не является следствием того, что вот-вот по-
дойдут новые суперпроизводительные модели ЭВМ, способные в большей
степени поддержать сложные выводы в режиме РВ (хотя и это не бес-
смысленно, так как последовательное поднятие планки сложности задач
не может не улучшать постепенно применимости средств АДТ в задачах
РВ). Указанный недостаток является постепенно устранимым, более того,
он уже сегодня заметно нивелируется при должном учете специфики ин-
теллектуальных подзадач задачи управления и выбора такой архитектуры
СИУ, в которую бы были встроены разные виды принятия решений —
от «обдумывания» на основе знаний (путем АДТ, АВС и другими мето-
дами) до рефлекторных реакций (искусственные нейронные сети).
При этом важно иметь возможность автоматического преобразова-
ния декларативного знания в процедурное, т.е. от уровня обдумывания
(на основе АДТ и других методов) к продукционному уровню («если ...,
то ...») и ниже — к рефлекторному уровню. Такая архитектура обсужда-
ется в [95, 96, 22] (рис. 1.8). Обучение на основе обобщающего анализа
(п. 1.3) — один из методов такого преобразования.
Остается фактом необходимость разработки методов априорной оцен-
ки нелинейных эффектов в системах интеллектного управления. Разу-
меется, в стиле приближения к идеологии ИИ эта проблема в извест-
ном смысле может перекладываться на этап эксплуатации, а именно на
саму систему. Однако методы самодиагностирования, самонастройки и
самореконфигурации еще далеки от такой постановки самоанализа и са-
моорганизации. Поэтому необходимо развитие теории нелинейного ана-
лиза динамических и структурных свойств СИУ. Положительные преце-
денты имеются. Например, в работах [61, 70, 71] дается математическое
описание логико-динамических процессов в системах нечеткого управле-
ния и методы анализа устойчивости, инвариантности и других свойств.
В [83] вопросы управляемости изучаются применительно к логическим
схемам (цифровым, переключательным) с непрерывным внутренним со-
стоянием элементов и дискретным выходом с учетом инерционности эле-
ментов. При этом ЛДС описывается системой интегро-операторных (или
дифференциально-операторных) и логических уравнений, где интеграль-
74
ная часть описывает динамику изменения внутренних состояний элемен-
тов (накопление заряда — разряд), операторное — динамику выходов
(О или 1), а логическая часть — логику функционирования схемы.
Рис. 1.8. Повышение эффективности систем реального времени путем преобразо-
вания декларативного знания в процедурное
Что касается предпочтения между разными логическими средствами
верхнего уровня принятия решений в СИУ, то, как это отчасти отмеча-
лось в п. 1.7, абсолютных приоритетов здесь нет. Так, среди неклассиче-
ских логик, используемых в принятии решений, существуют две группы:
конкурирующих с классическими логиками и являющихся их расшире-
ниями. К первой группе, помимо рассмотренных ранее нечетких логик,
относятся, например, многозначные и конструктивные логики. Ко второй
группе относятся модальные логики (временная, динамическая и др.) и
многосортные логики.
Классическая логика хороша уже тем, что может использоваться как
универсальная система, по крайней мере, с точки зрения использования
созданных ранее мощных систем АДТ и того, что существует алгоритми-
ческая процедура, которая переводит (в содержательном смысле) почти
любую неклассическую логику в классическую [97]. Однако, как отме-
чается в [97], проблема естественности представления и совместимости
с рассуждениями в предметных областях стимулирует подчас использова-
ние неклассических логик, тем более что для некоторых неклассических
логик тоже разработаны и продолжают развиваться методы АДТ (см., на-
пример, методы резолюционного типа для нечетких логик — [98], для
модальных логик — [99, 100], для многосортных логик — [76, 101]).
75
Внутри логического подхода к автоматизации рассуждений, помимо
отмеченных выше логик, интересным и перспективным направлением
является обработка знаний в условиях неопределенности и, в частности,
разработка выразительных языков первопорядковых вероятностных ло-
гик. ИИ по существу только приступает к серьезному интегрированию
логического и вероятностного подходов, хотя продукционные системы
с оценками правдоподобия (вероятности истинности) правил использу-
ются давно. В задачах со сложными предметными областями, помимо
использования первопорядковых модальных и многосортных логик, воз-
растает интерес к комбинированию логик [102-104]. Это отражает ту же
тенденцию, что и для систем, основанных на правилах (пример совмеще-
ния в одной СИУ одновременно двух машин вывода на основе продукци-
онных (четких) и нечетких правил изложен в работе [105] применительно
к задаче управления группой лифтов в высотных зданиях).
Вместе с тем, резюмируя все ранее изложенное, следует заметить, что
несмотря на определенные успехи интеллектного управления, как обла-
сти исследований (и логического подхода в ней, в частности), даже если
указанные в определении систем интеллектного управления (п.В.З, [106])
интеллектуальные функции понимать очень ограничительно, оказывается,
что существующие СИУ должны пройти достаточно длинный путь, чтобы
оправдать свое название.
1.9. Проблема повышения уровня интеллектуальности
систем управления
Современная жизнь характеризуется резким возрастанием сложности
систем, создаваемых человеком. К сожалению, сложность автоматизиро-
ванных систем, измеряемая объемом информации, которую они произво-
дят, часто уже превосходит возможности людей по анализу этой информа-
ции. Известные аварии и катастрофы на транспорте, в промышленности,
энергетике и др. (Тримайлайлэнд, Бхопал, Чернобыль) связываются с
перегрузкой операторов и/или с недостаточным качеством проектирова-
ния управляемых систем, возникновением нештатных ситуаций неупра-
вляемости. Традиционные методы управления не обеспечивают требуемой
эффективности формирования управлений в условиях:
— недостаточности априорной информации о внешней среде функ-
ционирования;
— большого количества трудно учитываемых факторов нестационар-
ности и субъективного их характера;
— изменяемости целей и критериев качества управления вследствие
деградации (отказов, аварий) или целенаправленной реконфигурации
(восстанавливающего или развивающего управления).
76
Для таких задач было бы естественно попытаться использовать, со-
здать и развить наиболее интеллектуальные системы и компоненты упра-
вления.
Полезно упомянуть здесь вкратце и прокомментировать пять принци-
пов организации СИУ, предложенные в [107] (с некоторыми изменениями
в формулировках).
Первый принцип (принцип информационного обмена). Наличие тес-
ного информационного взаимодействия СИУ с реальным внешним миром
с использованием специально организованных информационных каналов.
Комментарий: если в традиционных системах автоматического упра-
вления внешние, априори не запланированные, неизвестные, воздействия
являются скорее негативным фактором, именуемым по этой причине «воз-
мущением», то в СИУ внешние воздействия могут иметь также характер
информационной «подпитки», позволяющей организовать антиэнтропий-
ный процесс самоорганизации. Находясь в тесном взаимодействии с из-
меняющимся внешним миром, система получает информацию для попол-
нения знаний и принятия решений.
Сформулированный выше принцип предполагает наличие в СИУ мо-
дели мира. Следующий принцип предусматривает ее пересмотр и подстра-
иваемость к изменяющимся условиям мира.
Второй принцип (принцип открытости, или развиваемости). Откры-
тость СИУ для самообучения и самоорганизации.
Комментарий: для реализации принципа необходима способность си-
стемы преобразовывать сигнальную информацию в данные и, что су-
щественно труднее, в знания. Очень трудной задачей в проблеме при-
обретения знаний является формирование достаточно адекватной модели
мира — на основе такой фундаментальной интеллектуальной функции,
как формирование новых понятий и отношений с целесообразным экспе-
риментированием во внешнем мире.
Третий принцип (принцип прогнозирования). Предсказание измене-
ний в мире (среде и системе) при разных предположениях.
Комментарий: в качестве указанных предположений могут выступать
альтернативные управления, для каждого из которых система осуществля-
ет прогноз динамики на определенный отрезок времени вперед с целью
оценки и отбора наиболее предпочтительных управлений и соответству-
ющей коррекции текущего, реализуемого, управления.
Четвертый принцип (принцип возрастания точности с уменьшением
интеллектуальности — increasing precision with decreasing intelligence
[108]). Наличие у СИУ многоуровневой структуры, построенной в со-
ответствии с правилом: повышение интеллектуальности и снижение тре-
бований к точности по мере повышения уровня управления в системе
(и наоборот).
77
Комментарий: более верхний (более высокого ранга) уровень решает
исходную или более близкую к исходной, более сложную, более твор-
ческую задачу, которая зачастую и не может быть решена точно, чисто
алгоритмически, в силу отсутствия точной постановки или подходящей
теории (алгоритма), а решением является взаимосвязанная совокупность
более простых подзадач, решение которых в совокупности обеспечивает
решение рассматриваемой задачи более высокого уровня. Неточность или
неполнота знания о модели ОУ, самой СИУ и среде компенсируется вве-
дением дополнительных более высоких уровней интеллектуальности.
Пятый принцип (принцип частичности деградации).
Комментарий: допускается разве лишь частичная утрата работоспо-
собности при нарушениях в работе высших уровней управления, лишь
частичная деградация, лишь некоторое ухудшение качества функциониро-
вания при отказах и сбоях подсистем высших рангов, благодаря децентра-
лизации управления, частичному дублированию функций, перекрестным
связям.
Для оценки эффективности СИУ важное значение имело бы умение
измерять уровень интеллектуальности (интеллектуальную силу) автома-
тических и человеко-машинных систем. С нашей точки зрения, уровень
интеллектуальности (уровень интеллекта) некоторого агента определя-
ется, прежде всего,
(А) способностью агента использовать старые знания в новых, мо-
жет быть, заранее неизвестных проблемных ситуациях и
(Б) широтой проблемных областей, где оцениваемый агент приемлем
как активный решатель задач.
Свойства А и Б очень интегральные и, например, могут включать спо-
собность планировать действия и самообучаться. Важность требования
автономности функционирования агента или — в известной мере, проти-
воположного свойства — умения взаимодействовать с другими агентами
для совместного решения проблемы управления, равно как и требова-
ния нормального функционирования в условиях противодействия других
агентов, зависит от проблемной области.
Можно различать два главных класса СИУ: 1) класс, в котором СИУ
прямо (без участия человека) осуществляет функционирование, т.е. пол-
ностью замещает традиционные алгоритмы управления (или использует
их в сочетании с интеллектными компонентами управления); 2) класс,
в котором в СИУ реализуется человеко-машинное управление, т.е. с уча-
стием человека. СИУ этих двух классов могут именоваться как автомати-
ческие и человеко-машинные системы интеллектного управления (АСИУ
и ЧМСИУ).
Если человеко-машинное управление понимается в этом широком
смысле (как управление с тем или иным участием человека), а человека
78
рассматривать как второе «устройство интеллектного управления», то мо-
гут существовать разные схемы взаимодействия этих двух устройств с об-
щим для них объектом управления. Дальнейшее обобщение может свя-
зываться с рассмотрением двух или более СИУ (АСИУ и/или ЧМСИУ),
когда каждая СИУ имеет свой объект управления, но взаимодействует с
другой (другими) СИУ прямо или через общую среду (общие расходуемые
ресурсы). Такие постановки принадлежат пограничной области нарожда-
ющейся в искусственном интеллекте теории многоагентных систем [109]
(Multiagent Systems) и теории игр.
Поскольку свойства А и Б трудно оценить количественно, целесо-
образно в контексте традиционных и перспективных задач управления
дать качественную шкалу возрастания потенциала решения задач в си-
стемах автоматического (и автоматизированного) управления. В нижесле-
дующей шкале каждый класс систем включает все предыдущие с точки
зрения охвата их возможностей управления.
1. Системы программного управления (разомкнутые системы).
2. Системы с обратной связью (замкнутые системы).
3. Системы идентификационного управления.
4. Системы адаптивного управления (системы с самонастройкой).
5. Системы интеллектного управления (СИУ без целеполагания).
6. Интеллектуальные системы управления (СИУ с целеполаганием,
формированием новых понятий и отношений в развиваемой модели мира).
Появление уровней интеллектного управления 5 и 6 (без целеполага-
ния и с целеполаганием), вообще говоря, переводит наши рассмотрения
в сферу кибернетики, определяемой в [ПО] как «наука об управлении,
связи и переработке информации» (буквально «искусство управления ру-
лем»). «Автоматизация дедуктивных построений и распознавание обра-
зов — важные составные части раздела кибернетики, получившего назва-
ние «искусственный интеллект», где особая группа задач возникает при
изучении целенаправленного поведения, методов выбора целей и подцелей
и планов их достижения» [110].
«Под интеллектуальной системой понимается объединенная инфор-
мационным процессом совокупность технических средств и программного
обеспечения, работающая во взаимодействии с человеком (коллективом
людей) или автономно, способная на основании сведений об окружающей
среде и собственном состоянии при наличии знаний и мотивации синте-
зировать цель, принимать решение о действии и находить рациональные
способы достижения цели» [111].
Появление функции целеполагания, а вместе с ней и развиваемой
модели мира, существенно отличает интеллектуальные системы управле-
ния от СИУ без целеполагания, однако создание автоматических си-
стем с целеполаганием остается весьма сложной проблемой. Вместе с тем,
79
в настоящее время в классе интеллектуальных систем управления содер-
жатся те СИУ, в которых имеются определенные средства воздействия со
стороны оператора для того, чтобы по его желанию и с учетом обстановки
изменять цели и критерии качества функционирования СИУ, а также мо-
дель мира. Воздействия оператора на процесс управления могут быть и
шире, но принципиально новым качеством, не достигнутым в современ-
ных автоматических СИУ, является мотивированный интеллектуальный
выбор цели, не сводящийся к выбору одной из нескольких, априори преду-
смотренных и хорошо формализованных целей.
Теперь мы можем сказать, что именно для СИУ с целеполаганием мы
и зарезервировали антропоморфный, эмоциональный и претенциозный,
но в таком случае, по-видимому, оправданный термин «интеллектуальная
система управления». Такое использование термина согласуется также
с англоязычной терминологией соответствующей области: именно тер-
мином «intelligent», а не «intellectual», сегодня предпочитают именовать
системы управления и их компоненты.
Соответственно приведенной ранее качественной шкале возрастания
потенциала решения задач управления, многоуровневая организация слож-
ных систем управления иллюстрируется на рис. 1.9.
Представленная структура соответствует концепции иерархического
управления, которая существует и широко используется в роботике [112].
Иерархии управлений, пришедшие еще из работ 60-х гг. по самоор-
ганизующимся системам, базировались на многоуровневом членении си-
стем [113]. В соответствии с упомянутым выше четвертым принципом
организации СИУ, рассматриваются три уровня управления [114]. Верх-
ний уровень — организация, средний уровень — координация и ниж-
ний — исполнение. Управляющая подсистема на верхнем уровне упра-
вляет процессом как обобщенным целым, а компоненты системы упра-
вления на нижнем уровне «фокусируются с большим разрешением» на
подпроцессах (подлежащих координации). С другой стороны, управляю-
щая подсистема верхнего уровня является неточной, так как имеет дело
с процессом на уровне лингвистического описания; управляющая подси-
стема нижележащего уровня — более точна и т.д.
Такая структура иерархической системы управления, по-видимому,
аналогична структуре функционирования мозга и является результатом
декомпозиции задач с постепенным фокусированием внимания на более
мелких деталях.
Заметим, что в литературе известна другая классификация систем
управления [115] — по объему необходимой информации о внешнем
мире. В соответствии с ней различаются:
— простые системы управления (F-системы), в которых при любой
наблюдаемой ситуации заранее определено, как будет вырабатываться
80
решение. Иначе говоря, при этом в системе управления есть априорно
заложенная функциональная связь', ситуация — алгоритм выработки ре-
шения. В структуре системы используются только априорные знания об
объекте управления и среде его функционирования;
Рис. 1.9. Многоуровневая организация сложных систем управления
— системы с адаптацией (F-A-системы), в которых предусмотрен
механизм подстройки алгоритма выработки решений под изменяющиеся
условия работы объекта управления. В структуре таких алгоритмов, кроме
априорных, используются апостериорные знания об объекте управления и
среде его функционирования;
— модельные системы управления (F-M-системы) содержат блок
«знаниевая модель мира», являющийся совокупностью необходимых для
управления знаний об объекте управления и о среде его функциони-
рования;
— семиотические системы (S-системы) содержат блок «интерпрета-
тор», который из наблюдаемых (в процессе функционирования объекта
управления) фактов выделяет «причинно-следственные цепочки» и об-
наруживает закономерности. Центральная проблема здесь — построение
«модели мира», «интерпретатора» и процедур их взаимодействия.
81
Нетрудно видеть, что F- и F-A-системы соответствуют на рис. 1.9 си-
стемам с уровнями управления 1, 2 и 3, 4 соответственно.
Если считать, что СИУ без целеполагания, хотя и используют разви-
тую «знаниевую» модель мира, но эта модель в основном задана проекти-
ровщиком или допускает изменения, но лишь в части, предусмотренной
им заранее, то F-M-системы соответствуют СИУ 5-го уровня. Если, к тому
же, считать, что семиотические системы, активно строя и перестраивая
модель мира, способны к функции целеполагания, то S-системы соот-
ветствуют СИУ 6-го уровня, т.е. интеллектуальным системам управления.
В целом же, взаимное соответствие систем в рассмотренных классифика-
циях представлено на рис. 1.10.
Семиотические системы
(S-системы)
6. Интеллектуальные системы
управления
Модельные системы
управления
(F-M-системы)
5. Системы интеллектного
управления
Системы с адаптацией
(F-A-системы)
4. Системы адаптивного
управления
3. Системы идентификационного
управления
2. Системы с обратной связью
Простые системы
управления (F-системы)
1. Системы программного
управления
Рис. 1.10. Соответствие классов систем управления в двух классификациях
Известна также классификация уровней и соответствующих алгорит-
мов управления в следующем глобальном аспекте. Различаются три (всегда
объективно существующие) уровня управления [116]:
— верхний уровень управления (ВУУ): целеполагание,
— средний уровень управления (СУУ): поиск способа достижения
поставленной на верхнем уровне цели,
— нижний уровень управления (НУУ): реализация выбранного на
среднем уровне способа достижения поставленной цели.
82
В настоящее время, как было отмечено выше, СИУ с нетривиаль-
ным верхним уровнем управления существуют только в форме человеко-
машинных систем.
Рис. 1.11. Многоуровневая организация управления в человеко-машинной системе
Рассмотрим алгоритмическую (аппаратную) обеспеченность уровней
ВУУ-СУУ-НУУ [117-120]. В современных человеко-машинных (суперви-
зорных, антропоцентрических) системах управления аппаратно-алгорит-
мически поддерживается главным образом нижний уровень; проблемы
этого уровня хорошо разрешаются с помощью алгоритмов традицион-
ной структуры, хотя, как мы видели в п. 1.6, применение интеллектных
компонент управления возможно и целесообразно даже на НУУ. Про-
блемы среднего и особенно верхнего уровней уже выходят за пределы
возможностей алгоритмов традиционных структур; по своей природе они
ближе к тем интеллектуальным задачам, которые для своего решения
с необходимостью требуют привлечения методов искусственного интел-
лекта. Рис. 1.11 демонстрирует многоуровневую организацию управления
в человеко-машинной системе и основное соответствие трех упомянутых
выше глобальных уровней управления (ВУУ, СУУ, НУУ) шести уровням
организации управления, представленным ранее на рис. 1.9.
Ограниченность структуры традиционного бортового алгоритмичес-
кого и индикационного обеспечения, поддерживаемого бортовыми вы-
числительными машинами, на фоне разнообразия структуры алгоритмов
деятельности членов экипажа осознается уже не только теоретиками, но и
инженерами-исследователями, непосредственно проектирующими техни-
ческие объекты. Таким образом, проблема аппаратно-алгоритмического
обеспечения уровней СУУ и, в особенности, ВУУ является вызовом для
специалистов в области интеллектного управления.
83
В заключение этой главы заметим, что ареал применения средств ис-
кусственного интеллекта к задачам всех уровней управления постоянно
расширяется. Относительные неудачи кавалерийских атак на глобальные
проблемы типа Универсального Решателя Задач (General Problem Solver
[121]) предсказаны классическими отрицательными результатами [92, 93]
и объясняются в теории сложности алгоритмов. Эти неудачи побудили
к более тонким и глубоким исследованиям и специализации логического
и других подходов к тем или иным классам задач.
На повестке дня создание полностью автоматических систем интел-
лектного управления. Достижения в области автоматизации логического
вывода, индуктивного логического программирования, порождения гипо-
тез, распознавания образов и др. уже вызвали в жизнь ряд амбициозных
проектов, в том числе, например, проект создания полностью автома-
тических пилотов [8]. В следующей главе мы рассмотрим некоторые
из упомянутых в гл. 1 логических методов более подробно.
Вместе с тем, не должно быть неоправданного обобщения в оценке
будущих перспектив использования интеллектного управления, как это
уже было в прошлом в искусственном интеллекте (см. п.В.2). Требу-
ются новые идеи и решения, в том числе развивающие и интегрирую-
щие перспективные и уже сегодня полезные методы, упомянутые в этом
обзоре. Приложения и экспериментальные исследования должны помочь
сакцентировать и/или скорректировать направления прогресса в области
интеллектного управления.
ЛИТЕРАТУРА
1. Calmerauer A., Kanoui Н., Pasero R., Roussel Р. Un Systeme de Communication Homme-
Machine en Francais. Rapport, Groupe d’Intelligence Artificielle, Universite d’Aix-Marseille
11, 1973.
2. Horn A. On Sentences which Are True on Direct Unions of Algebras // J. on Symbolic
Logic. 1951. V. 16. P. 14-21.
3. Мальцев А.И. Апгебраические системы. — M.: Наука, 1970.
4. Kowalski R. Predicate Logic as a Programming Language 11 Proc. IFIP-74 Congress. 1974.
P. 569-574.
5. Roach J.W., Sundararajan R., Watson L.T. Replacing Unification by Constraint Satisfaction
to Improve Logic Program Expressiveness 11 J. Automated Reasoning. 1990. V. 6, № 1.
P. 51-75.
6. Colmerauer A. Opening the Prolog III Universe // Byte. 1987. August. P. 177-182.
7. Jaffar J., Lassez J.-L. Constraint Logic Programming // Proc. Conference on Principles of
Programming Languages. 1987.
8. Kohn W. Declarative Control Architecture // Communications of the ACM. 1991. V. 34,
№ 8. P. 65-79.
84
9. Taki К. Parallel Inference Machine PIM 11 Fifth Generation Computer Systems. 1992. № 1.
P. 50-72.
10. Фельдбаум А.А. Новые принципы автоматического управления 11 Изв. ВУЗов СССР.
Радиотехника. 1960. № 3. С. 299-308; № 4. С. 419^430.
11. Robinson J.A. A Machine-Oriented Logic Based on the Resolution Principle //J.ACM. 1965.
№ 12. [P у с пер.: Робинсон Д. Машинно-ориентированная логика, основанная на
методе резолюции И Киберн. сб. Нов. сер. Вып.7, — М.: Мир, 1970. С. 180-218.]
12. Маслов С.Ю Обратный метод установления выводимости непренексных формул исчи-
сления предикатов //Докл. АН СССР. 1967. Т. 172, № 1. С. 22-25.
13. Маслов С.Ю. Обратный метод установления выводимости в классическом исчислении
предикатов //Докл. АН СССР. 1964. Т. 159, № 1. С. 17-20.
14. Gentzen G. Untersuchungen uber das Logische Schliessen // Mathematische Zeitschrift,
№39. P. 176-210, 405-431.
15. Jdskowski S. On the Rules of Suppositions in Formal Logic 11 Studia Logica. 1934. № 1.
16. Шанин H.A., Давыдов Г.В. и др. Алгоритм машинного поиска естественного логиче-
ского вывода в исчислении высказываний. — М.-Л.: Наука, 1965.
17. Wos L. Solving Open Questions with an Automated Theorem Proving Program // Lecture
Notes in Computer Science. 1982. V. 138. P. 1-31. [P у с. п e p.: Л. Воз. Решение неко-
торых открытых проблем с помощью программы для автоматического доказательства
теорем // Киберн. сб. Нов.сер. Вып.21. — М.: Мир, 1984. С. 235-263.]
18. Was L., Veroff R. Logical Basis for the Automation of Reasoning: Case Studies II Handbook
of Logic in Artificial Intelligence and Logic Programming I Eds. D.M. Gabbay, C.J. Hogger,
J.A. Robinson. — Oxford: Clarendon Press. 1994. V. 2. P. 1^40.
19. Fikes R., Nilsson N. STRIPS: A New Approach to the Application of Theorem Proving in
Problem Solving // Artificial Intelligence. 1971. № 2. P. 189-208; в сб. «Интегральные
роботы», Вып.1. — М.: Мир, 1973.
20. Fikes R.E., Nilsson N.J. STRIPS, a Retrospective. // Artificial Intelligence. 1993. V. 59,
№ 1-2. P. 227-232.
21. Bibel W. A Deductive Solution for Plan Generation // New Generation Computing. 1986.
V. 4, № 2. P. 115-132.
22. Russell S.J., Norvig P. Artificial Intelligence: A Modem Approach, Prentice-Hall, Inc.,
1995.
23. Цетлин МЛ. Исследования по теории автоматов и моделированию биологических
систем. — М.: Наука, 1969.
24. Варшавский В.И. Коллективное поведение автоматов. — М.: Наука, 1973.
25. Widrow В., Hoff М.Е. Adaptive Switching Circuits // 1960 IRE WESCON Convention
Record — New York, 1960. P. 96-104.
26. Samuelsson C., Rayner M. Quantitative Evaluation of Explanation-Based Learning as an
Optimization Tool for a Large-Scale Natural Language System 11 Proc. 12th International
Joint Conference on Artificial Intelligence. 1991. P. 609-615.
27. Whitehead A N An Introduction to Mathematics. — London: Williams and Northgate,
1911.
28. Muggleton S. Inductive Logic Programming. — New York: Academic Press, 1992.
29. Flach P.A Towards a Theory of Inductive Logic Programming // Proc. BENELEARN-
91. — Depart, of Social Science Informatics, Univ, of Amsterdam. 1991. P. 88-96.
85
30. Гаек П., Гавранек Т. Автоматическое образование гипотез: математические основы
общей теории. — М.: Наука, 1984.
31. Mostovski A. On a Generalization of Quantifiers // Fundamenta Mathematice. 1957. № 44.
P. 12-36.
32. Финн В.К. О машинно-ориентированной формализации правдоподобных рассуждений
в стиле Ф. Бэкона-Д.С. Милля // Семиотика и информатика. 1983. Вып. 20. С. 23-31.
33. Vassilyev S.N. Machine Synthesis of Mathematical Theorems // J. of Logic Programming.
1990. V. 9, № 2, 3. P. 235-266.
34. Матросов B.M. Принцип сравнения с вектор-функцией Ляпунова, I-IV // Дифферен-
циальные уравнения. 1968. Т. 4, № 8. С. 1374-1386; 1968. Т. 4, № 10. С. 1739-1752;
1969. Т. 5, № 7. С. 1171-1185; 1969. Т. 5, № 12. С. 2129-2143.
35. Матросов В.М. Метод сравнения в динамике систем, I, II // Дифференциальные урав-
нения. 1974. Т. 10, № 9. С. 1547-1559; 1975. Т. 11, № 3. С. 403-417.
36. Матросов В.М., Васильев С.Н., Анапольский Л.Ю. Метод сравнения в математической
теории систем. — Новосибирск: Наука, 1981.
37. Васильев С.Н. Метод сравнения в анализе систем. I-IV И Дифференциальные уравне-
ния. 1981. Т. 17, № 9. С. 1562-1573; 1981. Т. 17, № 11. С. 1945-1954; 1982. Т. 18,
№ 2. С. 197-205; 1982. Т. 18, № 6, С. 938-947.
38. Матросов В.М., Васильев С.Н., Каратуев В.Г., Козлов Р.И., Суменков Е.А., Яды-
кин С.А. Алгоритмы вывода теорем метода векторных функций Ляпунова. — Новоси-
бирск: Наука, 1981.
39. Vassilyev S.N., Sivasundaram S. Homomorphism of Automata Networks // Proc. 2nd
IMACS Intern. Multiconference «Computational Engineering in Systems Applications»
(CESA’98). 1998. V. 2. P. 151-156.
40. Васильев С.Н. Метод синтеза условий выводимости хорновских и некоторых других
формул //Сибирский математический журнал. 1997. Т. 38, № 5. С. 1034-1046.
41. Gentner D. Structure Mapping: A Theoretical Framework for Analogy // Cognitive Science.
1983. V. 7. P. 155-170.
42. Kolodner J. Case-Based Reasoning. — San Mateo: California, Morgan Kaufmann, 1993.
43. Veloso M., Carbonell J. Derivational Analogy in PRODIGY: Automating Case Acquisition,
Storage, and Utilization П Machine Learning. 1993. № 10. P. 249-278.
44. Riesbeck C.K., Schank R.C. Inside Case-Based Reasoning. — Northvale, Erlbaum, 1989.
45. Huang K, Miles R. Combining Case Based and Constraint Based Techniques in Travel
Reservation Systems 11 Proc. 11th Conference on Artificial Intelligence for Applications.
1995. P. 46-54.
46. Towhidnejad M., Garland D. Traffic Flow Manager Associate 11 Proc. 1СТАГ96, Workshop
on Artificial Intelligence in Aeronautics and Space. 1996. P. 57-64.
47. Kowalski R. Algorithm = Logic + Control // Communications of the Association for Com-
puting Machinery. 1979. № 22. P. 424-436.
48. Белякова И.П. Объектно-ориентированный подход к построению распределенных си-
стем управления. — Препринт / Изд-во ЛИИ АН СССР. — Л., 1989. — № 85.
49. Непейвода Н.Н. Логический подход как альтернатива системному в математическом
описании систем И Экспертные системы: состояние и перспективы. — М.: Наука,
1989. С. 20-30.
86
50. Хорошевский В.Ф., Шерстнев В.Ю. Программный инструментарий представления зна-
ний в экспертных системах // Экспертные системы: состояние и перспективы. — М.:
Наука, 1989. С. 38-46.
51. Clayton B.D. ART Programming Primer. — Los Angeles, Inference Corp., 1984.
52. Brownston L. et al. Programming Expert System in 0PS5: An Introduction to Rule-Based
Programming. — New York: Addison-Wesley, 1985.
53. Lenat D. EUR1SKO: A Program, that Learns New Heuristics and Domain Concepts: The
Nature of Heuristics. Ill: Program Design and Results // Artificial Intelligence, 1983. V. 21,
№ 1-2. P. 61-98.
54. Lenat D.B., Brown J.S. Why AM and EUR1SKO Appear to Work 11 Artificial Intelligence.
V. 23, № 3. P. 269-294.
55. Kifer M., Wu J. A Logic for Object-Oriented Logic Programming // Proc. 8th ACM
SIGACT-SIGMOD-S1GART Symposium on Principles of Database Systems. 1989. P. 379-
393.
56. Kifer M., Lausen G. A Higher Order Language for Reasoning about Objects, Inheritance
and Scheme 11 Proc, of 1989 ACM SIGMOD Intern. Conference on Management of Data.
1990. V. 18, № 2. P. 134-146.
57. Kifer M., Lausen G., Wu J. Logical Foundations of Object-Oriented and Frame-Based
Languages. — Tech. Report 90/14, SUNY at Stony Brook, 1990.
58. Davison A. A Survey of Logic Programming-Based Object Oriented Languages. — Tech.
Report 92/3, Univ, of Melbourne Parkville, 1992.
59. Ершов Ю.Л. E-определим ость на допустимых множествах // Докл. АН СССР. 1985.
Т. 285, № 1. С. 792-794.
60. Гончаров С.С., Свириденко Д.И. S-программирование // Вычислительные системы.
1985. № 107. С. 24-51.
61. Driankov D., Hellendoorn Н., Reif rank М. An Introduction to Fuzzy Control. — Springer-
Verlag, Berlin-Heidelberg, 1993.
62. Заде Л. Понятие лингвистической переменной и его применение к понятию
приближенных решений // Математика. Новое в зарубежной науке / Под ред.
А.Н. Колмогорова, С.П. Новикова. — М.: Мир, 1976.
63. Мелихов А.Н., Бернштейн Л.С., Коровин С.Я. Ситуационные советующие системы с
нечеткой логикой. — М.: Наука, 1990.
64. Moore C.G., Harris C.J. Indirect Adaptive Fuzzy Control // Intern. J. of Control. 1992.
V. 56, № 2. P. 441^468.
65. Procyk T.J., Mamdani E.H. A Linguistic Self-Organising Process Controller // Automatica.
1979. V. 15. P. 15-30.
66. Passino K.M. Toward Bridging the Perceived Gap between Conventional and Intelligent
Control I Eds. M.M. Gupta, N.K. Sinha. — New York: IEEE Press. 1996. P. 3-27.
67. Passino K.M., Lunardhi A.D. Stability Analysis of Expert Control Systems // Proc. IEEE
Conference on Decision and Control. 1993. P. 765-770.
68. Imasaki N., Nishida S. Positioning Control for a Space Manipulator System Using Fuzzy
Control Method // Toshiba’s Selected Papers on Science & Technology. 1992. V. 4, № 1.
P. 13-16.
69. White D., Bowers A., Iliff K, Noffz G., Gonda M., Menousek J. Flight, Propulsion and
Thermal Control of Advanced Aircraft and Hypersonic Vehicles // Handbook of Intelligent
Control. Neural, Fuzzy, and Adaptive Approaches / Eds. D.A. White, D.A. Sofge. — New
York: Van Nostrand Reinhold. 1992. P. 357-465.
87
70. Kiszka J.В., Gupta M.M., Nikiforuk M.N. Energetistic Stability of Fuzzy Dynamic Systems //
IEEE Trans, on Systems, Man, and Cybernetics. 1985. № 15. P. 783-792.
71. Gias M. de. Invariance and Stability of Fuzzy System // J. Math. Analysis Appl. 1984.
№ 199. P. 299-319.
72. Васильев C.H., Гулямов Ш.Б, Жерлов А.К., Литвинов Ю.Ф. О логических средствах
системы планирования вычислений «ПАСАД» И Алгоритмы. ИК АН УзССР. Ташкент,
1986. Вып. 66. С. 97-112.
73. Васильев С.Н., Жерлов А.К. Логическое моделирование и управление в реальном вре-
мени И Материалы Всесоюзной научно-технической конференции «Интеллектуальные
системы в машиностроении» / Под ред. В.А. Виттиха. — Самара. 1991. Ч. 2. С. 33-38.
74. Васильев С.Н., Жерлов А.К. Об исчислениях типово-кванторных формул И Доклады
РАН. 1995. Т. 343, № 5. С. 583-585.
75. Vassilyev S.N. Modelling Logical Derivation and Hypothesis Generation // Proc. IEEE
Symposium on Modelling, Analysis and Simulation, CESA’96 IMACS Multiconference.
1996. V. 1. P. 148-153.
76. Walther C. A Mechanical Solution of Schubert’s Steamroller by Many-Sorted Resolution //
Proc. 4th National Conference on Artificial Intelligence. 1984. P. 330-334.
77. Vassilyev S.N. Logical Approach to Control and Applications // J. Nonlinear Analysis.
Theory. Methods and Applications. 1997. V. 30, № 4. P. 1927-1937.
78. Butyrin S.A., Makarov V.P., Mukumov R.R., Somov Ye.I., Vassilyev S.N. An Expert System
for Design of Spacecraft Attitude Control Systems //J. Artificial Intelligence in Engineering.
1997. № 11. P. 49-59.
79. Васильев C.H., Черкашин E.A. Интеллектное управление телескопом // Сибирский жур-
нал индустриальной математики. 1998. Т. 1, № 2. С. 81-98.
80. Nerode A., Kohn W. Models for Hybrid Systems: Automata, Topologies, Controlla-
bility, Observability. // Hybrid Systems I Eds: R.L. Grossman, A. Nerode, A.P. Ravn,
H.Rischel. — Berlin Heidelberg. Springer Verlag. 1993. P. 317-356.
81. Жук К.Д., Тимченко A.A., Даленко Т.И. Исследование структур и моделирование
логико-динамических систем. — Киев: Наукова думка, 1975.
82. Бортаковский А.С. Достаточные условия оптимальности управления детерминирован-
ными логико-динамическими системами И Информатика. Автоматизация проектирова-
ния. — М.: ВИМИ, 1992. Вып. 2-3. С. 72-79.
83. Васильев С.Н., Кузнецов П.К., Лакеев А.В. К общей теории интегро-операторного
уравнения динамики переключательных схем // Доклады РАН. 1996. Т. 348, № 4.
С. 439-441.
84. Закревский А.Д. О корректности параллельных алгоритмов логического управления И
Изв. АН СССР. Техническая кибернетика. 1987. № 4. С. 106-112.
85. Юдицкий С.А., Покалев С.С. Логическое управление гибким интегрированным произ-
водством — Препринт / ИПУ. — М., 1989.
86. Авакян В.В., Юдицкий С.А. Описание и анализ параллельных алгоритмов логического
управления с применением графов операций И Автоматика и телемеханика. 1990. № 1.
С. 100-108.
87. Stankovic J.A., Ramamritham A. Hard Real-Time Systems: A Tutorial. Washington, D.C.:
Computer Society Press (IEEE). 1988.
88. Dean T., Boddy M. An Analysis of Time-Dependent Planning // Proc. 7th National Confer-
ence on Artificial Intelligence. 1988. P. 49-54.
88
89. Zilberstein S. Operational Rationality through Compilation of Anytime Algorithms. PhD
Thesis, Univ, of California, Berkeley. 1993.
90. Subramanian D., Greiner R., Pearl J. The Relevance of Relevance // Artificial Intelligence.
1997. № 97. P. 1-5.
91. Levy A.Y., Fikes R.E, Sagiv Y. Speeding up Inferences Using Relevance Reasoning: A
Formalism and Algorithms // Artificial Intelligence. 1997. № 97. P. 83-136.
92. Church A. A Note on the Entscheidungsproblem //J.Symbolic Logic. 1936. № 1. P. 40-41;
исправления там же, P. 101-102.
93. Turing А.М. On Computable Numbers, with an Application to the Entscheidungsproblem //
Proc. bond. Math. Soc., Ser. 2, 1936. № 42, P. 230-265; 1936. № 43. P. 544-546.
94. Глушков B.M. Электронные машины и автоматизация умственного труда И Кибернети-
ка — неограниченные возможности и возможные ограничения. Итоги развития. — М.:
Наука, 1979. С. 122-138.
95. Laird J.E., Newell A. Rosenbloom P.S. SOAR: An Architecture for General Intelligence 11
Artificial Intelligence. 1987. V. 33, № 1. P. 1-64.
96. Mitchell T.M. Becoming Increasingly Reactive (Mobile Robots) // Proc. 8th National Con-
ference on Artificial Intelligence. 1990. V. 2. P. 1051-1058.
97. Gabbay D.M. Classical vs Non-classical Logics (The Universality of Classical Logic) //
Handbook of Logic in Artificial Intelligence and Logic Programming I Eds. D.M. Gabbay,
C.J.Hogger, J.A. Robinson. — Oxford: Clarendon Press. 1994. P. 359-500.
98. Мукаидоно M. Нечеткий вывод резолюционного типа И Нечеткие множества и теория
возможностей. Последние достижения / Под ред. Р. Ягера. — М.: Радио и связь, 1986.
99. Farinas del Cerro L. Resolution Modal Logic 11 Logique et Analyse. 1985. V. 28, № 110-
111. P. 153-172.
100. Mints G. Gentzen-type Systems and Resolution Rules: Part I. Propositional Logic //
COLOG-88, Lecture Notes in Computer Science. 1990. V.417. P. 198-231; Part II. Predi-
cate Logic // Lecture Notes in Mathematical Logic, V. 2.
101. Walther C. A Many-Sorted Calculus Based on Resolution and Paramodulation // Proc. 8th
International Joint Conference on Artificial Intelligence. 1983. P. 882-891.
102. Blackburn P. de Rijke M. Why Combine Logics? // Studia Logica. 1997. № 59. P. 5-27.
103. Finger M., Gabbay D.M. Combining Temporal Logic Systems // Notre Dame Journal of
Formal Logic. 1996. № 37. P. 204-232.
104. Eiben G., Kurucz A., Janossy A. Combining Logics via Combining Algebraic Theories I I
Notre Dame Journal of Formal Logic. 1996. № 37. P. 366-380.
105. Tsuji S., Amano M., Hikita S. Application of the Expert System to Elevator Group-
Supervisory Control // Proc. 5th Conference on Artificial Intelligence for Applications.
1989. P. 288-294.
106. Astrom K.J., McAvoy T.J. Intelligent Control: An Overview and Evaluation // Handbook of
Intelligent Control. Neural, Fuzzy, and Adaptive Approaches I Eds. D.A. White, D.A. Sof-
ge. — New York: Van Nostrand Reinhold. 1992. P. 3-34.
107. Захаров B.H. Интеллектуальные системы управления: основные понятия и определе-
ния И Известия РАН. Теория и системы управления. 1997. № 3. С. 138-145.
108. Saridis G.N. Analytical Formulation of the Principle of Increasing Precision with Decreasing
Intelligence for Intelligent Machines // Automatica. 1989. № 3, P. 25.
89
109. Городецкий В.И. Многоагентные системы: основные свойства и модели координации
поведения // Информационные технологии и вычислительные системы. 1998. № 1.
С. 22-34.
110. Глушков В.М. Кибернетика // Математическая энциклопедия. — М.: Изд-во «Сов.
энциклопедия». 1979. Т. 2. С. 850-855.
111. Пупков К.А. Некоторые результаты разработки научно-технической программы «Ин-
теллектуальные системы» Федеральной комплексной программы «Университеты Рос-
сии» // Труды 2 Международного симпозиума «ИНТЕЛС’96», «Интеллектуальные си-
стемы» / Под ред. К.А. Пупкова. 1996. Т. 1. С. 5-9.
112. Охоцимский Д.Е.. Платонов А.К. Алгоритмы управления шагающим аппаратом, спо-
собным преодолевать препятствия И Изв. АН СССР. Техническая кибернетика. 1973.
№ 5.
113. Месарович М., МакоД., Такахара И. Теория иерархических многоуровневых систем. —
М.: Мир, 1973.
114. Саридис Дж. Самоорганизующиеся стохастические системы управления. —М.: Наука,
1980.
115. Поспелов Д.А. Логико-лингвистические модели в системах управления. — М.: Энер-
гоиздат, 1981.
116. Моисеев Н.Н. Теория управления и проблема «человек — окружающая среда» И
Вестник АН СССР. 1980. № 1. С. 62-73.
117. Федосов Е.А. Критические технологии России И Труды Всероссийской конференции
Государственных научных центров РФ. — М.: 1995. С. 80-95.
118. Федунов Б.Е. Проблемы разработки бортовых оперативно-советующих систем для ан-
тропоцентрических объектов // Изв. РАН. Теория и системы управления. 1996. № 5.
С. 147-160.
119. Позняков П.В., Федунов Б,Е. Основы информационной интеграции бортовой аппара-
туры. — М.: МАИ, 1993.
120. Федунов Б.Е., Романова В.Д., Юневич Н.Д. Бортовые оперативно-советующие эксперт-
ные системы на борту антропоцентрических человеко-машинных объектов И Интел-
лектуальные системы. 1996. Т. 1, № 1-4. С. 145-157.
121. Newell A., Simon Н.А. GPS, a Program that Simulates Human Thought // Lemende Auto-
maton / Ed. H.Billing. — R. Oldenbourg. Munich. 1961. P. 109-124.
ГЛАВА 2
ЛОГИЧЕСКИЙ ВЫВОД И ПОРОЖДЕНИЕ ГИПОТЕЗ
В данной главе мы сначала знакомим читателя с некоторым мини-
мальным объемом сведений из области математической логики в форме,
доступной инженерам-прикладникам. Далее излагаются оригинальные ре-
зультаты авторов в области автоматического доказательства теорем и по-
рождения гипотез. Оценка эффективности этих результатов с точки зре-
ния приложений базируется на ранее выполненных сопоставительных экс-
периментах с применением, например, такого хорошо известного метода
автоматического доказательства теорем как метод резолюций.
Авторы стремились минимизировать объем формального изложения,
заменяя его всюду, где это не вредит строгости, легче воспринимаемыми
содержательными рассуждениями, однако доказательства всех необходи-
мых оригинальных результатов приводятся.
2.1. О классическом исчислении предикатов
2.1.1. О значении исчисления предикатов
По общепринятому определению, логика есть наука о методах рассу-
ждений, и ее история насчитывает более двух тысяч лет (начиная с IV в.
до н.э.), однако можно считать, что современное оформление она полу-
чила к концу XIX в., когда после работ Дж. Буля, де Моргана, Ч. Пирса,
Пеано и, наконец, Г. Фреге было окончательно сформулировано понятие
исчисления предикатов. Далее развитие логики стимулировалось в основ-
ном программой Гильберта [1] обоснования непротиворечивости мате-
матики (первая половина уходящего века). При этом проблемам поиска
формальных выводов отводилась второстепенная роль, поскольку спра-
ведливо считалось, что ту или иную теорему человек докажет быстрее,
пользуясь обычными рассуждениями, чем используя какие-либо формаль-
ные аксиомы и правила вывода. Появление компьютеров изменило ситу-
ацию и заставило вспомнить мечты Р.Луллия и Г. Лейбница о создании
«универсального языка» и механизации умозаключений. Хотя исследова-
ния по теории алгоритмов и, особенно, теории сложности вычислений
91
показали принципиальные и практические ограничения для таких гло-
бальных проектов, как, например, GPS (Универсальный Решатель Задач)
[2], значение логики, как средства представления знаний и решения задач
многими исследователями было понято сразу. Сейчас это значение только
возрастает с развитием компьютерных технологий, программирования и
внедрения компьютеров во все новые области деятельности человека. Вме-
сте с тем появилась потребность в новых логических подходах, развитии
неклассической логики, построении новых языков и исчислений, облада-
ющих определенными свойствами и позволяющими решать те или иные
задачи. А поскольку построение новых подходов и исчислений происхо-
дит, как правило, отправляясь от классического образца, т.е. исчисления
предикатов, роль его остается центральной. Поэтому в п. 2.1 мы дадим
представление об одном из вариантов классического исчисления предика-
тов в минимально необходимом нам в этой книге объеме.
2.1.2. О формальных аксиоматических системах
Исчисление предикатов является примером таких систем. Для опре-
деления формальной аксиоматической системы необходимо задать:
1) Язык системы. Для этого определяется алфавит языка, т.е. не-
которое множество символов, и правила построения из символов это-
го алфавита элементов языка, называемых формулами определяемого
языка;
2) Аксиомы системы. Некоторые из формул языка формальной си-
стемы выделяются, как ее аксиомы.
3) Правила вывода системы. Определяется некоторое конечное мно-
жество правил {Щ} — отношений между формулами, причем, если для
формул Fl,..., Fm, Fm+i выполнено отношение Ri(Fi,..., Fm, Fm+i),
то формула Fm+i называется непосредственным следствием из Fi,...,
Fm по правилу Rz.
Как правило, определение формальных систем должно также удо-
влетворять требованию, чтобы существовал метод, с помощью которого
мы могли бы определить, является ли любая данная последовательность
символов формулой языка системы, любая данная формула — аксиомой
системы и находятся ли формулы Fi,..., Fm, Fm+i в отношении Ri.
2.1.3. Язык исчисления предикатов
Теперь перейдем к определению языка Lq исчисления предикатов
(ИП).
Символами алфавита языка исчисления предикатов являются:
1) логические связки —> («влечет»), -• («не») и вспомогательные сим-
волы (скобки, запятые);
92
2) счетное множество предметных переменных Ж1,Ж2,... для обо-
значения произвольных объектов некоторого мира или, как говорят,
универсума;
3) множество (возможно, пустое) предметных констант ai для обо-
значения фиксированных объектов;
4) счетное множество функциональных букв f™ (n,j > 1) для поро-
ждения на базе первичных объектов ti,..., tn типа xi, ai некоторых про-
изводных объектов , tn), а также производных объектов на базе
первичных и ранее порожденных производных объектов; все первичные
и производные объекты именуется далее термами;
5) непустое множество предикатных букв (n,j > 1) для обо-
значения отношений между п термами как элементарных утверждений
о свойствах объектов универсума;
6) символ V («для любого», для построения утверждений вида «для лю-
бого х имеет место свойство В(ж), где F(x) — некоторое более простое
утверждение), с помощью которого образуются выражения Уж, называе-
мые кванторами.
Итак, функциональные буквы, примененные к переменным и кон-
стантам, порождают термы. Более точно:
1) всякая предметная переменная или предметная константа есть терм;
2) если — функциональная буква и — термы, то
. ,tn) есть терм;
3) других термов нет.
Формулы исчисления предикатов определяются следующим образом:
1) всякая элементарная формула Р"(*ь.. •, tn), где Р™ — предикат-
ная буква, ti — термы, есть формула;
2) если А, В — формулы, х — предметная переменная, то выражения
А —> В, -«Л, Уж А есть формулы;
3) других формул нет.
Множество формул, определенное выше, назовем языком Lq исчи-
сления предикатов первого порядка (или первой ступени). Вообще, суще-
ствуют исчисления высших порядков, допускающие, например, формулы
с кванторами по переменным предикатным символам, но мы везде да-
лее под исчислением предикатов будем подразумевать именно исчисление
предикатов первого порядка.
Если формула В использовалась при построении А, то назовем В
собственной подформулой формулы А и будем писать В С А. В есть
подформула формулы А (В С А), если она либо совпадает с А, либо
является ее собственной подформулой. Скобки применяются для указания
способа, которым построена формула. Например, скобки позволяют от-
личить формулу А —> (В —> С), построенную из подформул А и В —> (7,
от формулы (А —> В) —> С, построенной из А -> В и С.
93
В формуле \/хА подформула А называется областью действия кван-
тора \/х\ говорят также, что квантор Уж управляет формулой А или ее
подформулами. Когда это нам важно, для указания факта, что А не со-
держит вхождений переменной х, пишем Л]ж[ («Л не содержит х»). В
общем случае, через А]М[, где М — множество переменных, обознача-
ется отсутствие в А вхождений всех переменных из М.
Вхождение переменной х в данную формулу называется связанным,
если оно является частью входящего в эту формулу квантора Уж или на-
ходится в области действия входящего в эту формулу квантора Уж (упра-
вляется этим квантором); в противном случае вхождение переменной ж
в данную формулу называется свободным. Например, в формуле
Р^х1,х2) (2.1)
первое вхождение переменной Ж1 является свободным, а второе и тре-
тье — связанными.
Переменная называется свободной (связанной) переменной в данной
формуле, если существуют свободные (соответственно, связанные) ее вхо-
ждения в эту формулу (таким образом, переменная может быть одновре-
менно свободной и связанной в одной и той же формуле, как, например,
переменная Ж1 в (2.1)).
Формула называется замкнутой, если в ней нет свободных пере-
менных.
Пусть ж$х,..., Xik — переменные, A G Lq. Не обращая внимания на
то, являются ли эти переменные свободными в Л и существуют ли в Л
другие свободные переменные, запись Л(ж^,...,Xik) будет иногда упо-
требляться для обозначения формулы Л с тем, чтобы через A(ti,...
обозначить последующий результат подстановки термов ti,..., соответ-
ственно вместо всех свободных вхождений в Л (если таковые имеются)
переменных жи,..., Xik. Иногда используется более подробная запись
результата подстановки: Л^/ж^,... ,tk/xik).
Терм t называется свободным для переменной х в формуле Л, если
никакое свободное вхождение ж в Л не лежит в области действия никакого
квантора У?/, где у входит в t.
Примеры. 1) Терм Xj свободен для ж* в Pi(xi) (нет вообще кванторов
в данной формуле), но не свободен для жг В 'ixjPi(xi').
2) Терм /1 (ж1,жз) свободен для Ж1 в Ужг Р1(ж1,жг) -> Pi(«i) (нет
кванторов с Ж1 и жз, управляющих вхождениями переменной жх), но не
свободен для Ж1 в Ужз Ужг P\(xi, Ж2) -4- P^(xi) (квантор с жз управляет
первым свободным вхождением Ж1).
Последнее определение нужно для исключения коллизии переменных
при подстановке термов вместо свободных вхождений переменных. Вне
94
языка Lq такие коллизии также возможны. Например, рассмотрим тожде-
2
ство J у— = у In 2, в котором у — свободная, х — связанная перемен-
1 х
ные. Переменная х не свободна для у в этом выражении. Недопустимая
2
подстановка х вместо у приводит к равенству J dx = х In 2, верному
1
лишь при х = 1/1п2.
2.1.4. Аксиомы и правила вывода исчисления предикатов
Аксиомы исчисления предикатов, выделяются из языка Lq следующим
списком:
(А.1) А-> (В-> А)
(А.2) (А -> (В -> С)) -> ((А -> В) -> (А -> С));
(А.З) (-В -> -А) -> ((-В -> А) -> В);
(А.4) УжА(ж) A(t), где t — произвольный терм, свободный для х в А;
(А.5) Ух (А]ж[—> В) —> (А —> УхВ) (здесь А не содержит х).
Эти аксиомы еще называются логическими, чтобы отличать их от дру-
гих так называемых собственных аксиом, возникающих при построении
на базе исчисления предикатов конкретных теорий. Здесь А, В, С — про-
извольные формулы. Например, частным случаем аксиомы (А.4) является
Уж Уг/А —> Уг/А.
Правилами вывода исчисления предикатов являются:
1) правило МР («модус поненс»): из А и А -> В непосредственно
следует В;
2) правило обобщения: Gen («generalization»): из А непосредственно
следует \/хА.
Выводом в исчислении предикатов из множества гипотез Г назы-
вается последовательность Ai,...,An формул, такая, что для любого i
формула Аг есть либо частный случай какой-либо аксиомы, либо эле-
мент множества формул Г, либо непосредственное следствие каких-либо
предыдущих формул по одному из правил вывода. Вывод с пустым мно-
жеством гипотез Г называется просто выводом.
Формула А называется теоремой, если существует вывод, в котором
последней формулой является А; формула А при этом называется выво-
димой, и этот факт обозначается через Н А. Аналогично выводимость А
из множества гипотез Г обозначается через Г Н А.
Пример. Формула F = \fy Ух А выводима из гипотезы Уж Уг/ А,
поскольку можно указать следующий вывод F из этой гипотезы:
1) Уж Уг/ А (гипотеза),
2) Уж Уг/ А —> Уг/ А (частный случай аксиомы (А.4)),
3) Уг/ А (из первых двух формул по правилу МР),
95
4) Vy A —> А (частный случай аксиомы (A.4)),
5) А (из третьей и четвертой формул по правилу МР),
6) Чх А (из предыдущей формулы по правилу Gen),
7) Чу Чх А (из предыдущей формулы по правилу Gen).
2.1.5. О расширении языка исчисления предикатов
С точки зрения удобства пользования тем или иным языком есте-
ственно допускать в нем избыточность выразительных средств. Обычно,
в отличие от п. 2.1.3, в язык исчисления предикатов включают дополни-
тельные связки V, &, о и символ 3. При этом учитывается, что А V В
есть сокращение для ~^А —> В, А к В — для ->(А —> ->В), А <-> В —
для (А —> В) & (В —> А) и ЗхА для -Ч/х^А. Также нами будут употре-
бляться пропозициональные константы Л («ложь» или «противоречие»)
и И («истина»), где Л есть сокращение для формулы G & -G, G —
некоторая замкнутая формула, и И есть сокращение для -» Л.
Формула F в расширенном языке исчисления предикатов есть, по
определению, теорема исчисления предикатов тогда и только тогда, когда
теоремой является формула, полученная из F замещением определяемых
связок V,&, <->, кванторных символов 3 и пропозициональных констант
И, Л на их формульные определения.
Например, формула А —> (BvA) есть теорема исчисления предикатов
в расширенном языке, поскольку формула А —> (-В -+ А) есть частный
случай аксиомы А1.
Легко видеть, что такое расширение множества теорем исчисления
предикатов является консервативным, т.е. оставляет неизменным множе-
ство всех теорем, сформулированных в исходном языке с помощью связок
—> и символа V.
2.1.6. Об алгоритмически разрешимых и неразрешимых задачах
До сих пор нами определялись синтаксические понятия, т.е. понятия,
связанные со строением выражений (термов, формул) как таковым. Легко
проверить, что в соответствии с требованием к формальным системам,
определения терма, формулы, аксиомы, вывода в исчислении предикатов
даны таким образом, что для любой последовательности символов мы
всегда можем дать ответ, является ли она термом, формулой или выводом,
а для любой формулы — является ли она аксиомой.
Вообще, задача называется разрешимой, если существует некая фор-
мальная механическая процедура, решающая эту задачу пусть даже в прин-
ципе, т.е. отвлекаясь от реальных возможностей, связанных с ограничени-
ями времени и пространства. Это понятие особенно важно для так назы-
ваемых массовых проблем. Каждая массовая проблема есть бесконечный
96
класс однотипных задач, и она разрешима, если существует единая про-
цедура, решающая каждую задачу этой массовой проблемы. Примеры
массовых проблем: «решить квадратное уравнение», «найти разложение
натурального числа на простые множители» и т.п. В соответствии с этим
мы можем сказать, что массовые проблемы определения свойств после-
довательностей символов быть термом, формулой, аксиомой или выво-
дом являются разрешимыми, или, проще, что соответствующие свойства
являются разрешимыми. Однако Черч [3] и Тьюринг [4] независимо до-
казали, что свойство формул ИП быть теоремой является неразрешимым,
т.е. невозможно изобрести процедуру, которая определяла бы за сколь
угодно большое (разумеется конечное) число шагов, является ли фор-
мула теоремой. Это свойство называется неразрешимостью ИП. С другой
стороны можно придумать процедуру (называемую «алгоритмом Британ-
ского музея»), которая порождала бы по очереди все выводы, начиная
с простейших и перечисляла бы таким образом все теоремы. Поэтому
говорят, что множество всех теорем ИП перечислимо. Можно доказать,
что множество формул ИП, не являющихся теоремами, неперечислимо,
т.е. не существует процедуры, которая порождала бы все формулы ИП,
не являющиеся теоремами. Действительно, иначе мы бы имели две про-
цедуры, перечисляющие теоремы и не теоремы соответственно. Чтобы
определить, является ли некоторая формула теоремой, достаточно было
бы «включить» обе процедуры и ждать, пока эта формула не будет поро-
ждена одной из них. Но это противоречит результату Черча-Тьюринга,
т.е. за конечное число шагов мы могли бы решить для каждой формулы,
является ли она теоремой.
Свойство перечислимости всех теорем ИП называют иначе его полу-
разрешимостью.
Затронутые здесь вопросы, лежащие на стыке математической логики
и теории алгоритмов, более строго и подробно освещаются в любом до-
статочно полном учебнике математической логики, например в [5-7].
2.1.7. Семантика исчисления предикатов
Теперь от синтаксических рассмотрений мы переходим к семантике
исчисления предикатов, т.е. к понятиям, так или иначе связанным с со-
держательным смыслом. Вообще существуют различные семантические
подходы (например, конструктивные, в рамках которых основ-
ным понятием является реализуемость в том или ином смысле
[8,9]). Нас же здесь пока будет интересовать классический или теоретико-
множественный подход, для которого основным понятием является истин-
ность (или ложность) формул в некоторой теоретико-множественной
интерпретации (модели).
4 - 1847
97
Аксиомы и правила вывода исчисления предикатов выбраны так,
чтобы множество всех теорем совпадало с множеством всех истинных
(в смысле, определенном ниже) формул исчисления. Истинность какой-
либо формулы определяется с помощью интерпретации входящих в эту
формулу символов.
Под интерпретацией I понимается совокупность непустого множе-
ства £>, называемого областью интерпретации (универсумом), и соответ-
ствия, относящего каждой предикатной букве PJ1 некоторое п-местное
отношение в D (подмножество из £>п), каждой функциональной букве
/J1 — некоторую n-местную операцию в D (отображение Dn —> £>) и
каждой предметной константе аг — некоторый элемент из D. При за-
данной интерпретации предметные переменные мыслятся пробегающими
область 7), а логическим связкам и кванторам придается их обычный
смысл, а именно:
1) элементарная формула Pj'iti, •.. ,tn) истинна в I при
Zi = di,..., tn = dn, di G D, если п-ка (di,..., dn) удовлетворяет
отношению, соответствующему предикатной букве PJ*, и ложна в I в
противном случае;
2) формула -«F истинна в 7, если F ложна в 7, и ложна в 7, если
F истинна в 7;
3) формула F —> G ложна в 7, если F истинна в 7 и G ложна в 7, и
F G истинна в 7 в остальных случаях;
4) формула VxF(x) истинна в 7, если для любого d G D F(d) истинна
в 7, в противном случае Ух F(x) ложна в 7.
Для данной интерпретации 7 всякая замкнутая формула представляет
собой утверждение, которое либо истинно, либо ложно. Формула же со
свободными переменными выражает некоторое отношение на области ин-
терпретации D. Это отношение может быть выполнено (истинно) для
одних значений переменных из D и не выполнено (ложно) для других.
Факт истинности в интерпретации 7 формулы F (возможно незамкнутой,
но тогда при любых значениях свободных переменных) обозначается так:
7 |= F. При этом интерпретация 7 называется моделью для F.
Пример. Рассмотрим формулы
1)
2) ЧуР?(х,у);
3) By ^xPl(x,y).
Если D — множество целых положительных чисел 1,2,...,
Р2(х,у) — отношение х < у, то первая формула, как двуместное отно-
шение, выполнена для всех упорядоченных пар (a, b) G D2 таких, что
а < Ь; вторая представляет отношение (с одним аргументом х) «для ка-
ждого у е D имеет место х < у», которое выполнено только при х = 1;
98
наконец, третья формула — замкнутая и оказывается истинным утвержде-
нием «существует наименьшее число из D». Если бы мы взяли в качестве
D множество всех целых чисел, то третья формула была бы, очевидно,
ложной.
Формула F, истинная в любой интерпретации, называется общезна-
чимой (в исчислении предикатов). Этот факт обозначается через F.
Формула F называется выполнимой, если существует такая интерпретация
I, что I F. Легко убедиться, что определенные нами выше аксиомы
являются общезначимыми формулами и непосредственными следствиями
общезначимых формул по правилам МР и Gen являются общезначимые
формулы.
Пример. Формула 3 у \/хР^(г/, ж) —> Уж 3 уР%(у, х) общезначима,
а формула УжЗг/Р^г/, ж) —> Зг/УжР^г/, ж) выполнима, но не общезна-
чима. Например, в интерпретации с областью D, состоящей из всех целых
чисел, и отношением у < ж для Р% посылка последней формулы истинна,
а заключение ложно.
Очевидно, что формула А общезначима тогда и только тогда, когда
формула -А не является выполнимой. Формула А называется противо-
речивой (противоречием), если формула -А общезначима или, что то же
самое, формула А ложна во всех интерпретациях. Формула F есть ло-
гическое следствие формул Ai,...,An тогда и только тогда, когда для
каждой интерпретации I из того, что I |= Ai для каждого i — 1,..., п,
следует, что I |= F. Простое, но полезное свойство, связывающее введен-
ные понятия, предоставляется доказать читателю.
Предложение 2.1. Формула F является логическим следствием фор-
мул Ai,..., Ап тогда и только тогда, когда формула Ai &... & Ап —> F
общезначима.
Основной теоремой, связывающей синтаксис и семантику исчисления
предикатов, является теорема Геделя о полноте исчисления предикатов.
Теорема 2.1 [10]. В исчислении предикатов теоремами являются те и
только те формулы, которые общезначимы.
Доказательство можно найти, например, в книге [5] (с. 71-78).
Таким образом, в исчислении предикатов выводимость равносильна
общезначимости.
2.2. Задача поиска вывода в исчислении предикатов
Многие задачи можно решать следующим образом: если мы хотим
доказать, что свойство, заданное формулой F исчисления предикатов, ис-
тинно для некоторой предметной области, то сначала мы выписываем
все существенные свойства этой области Ai,...,An, формализованные
4*
99
в том же языке, и в истинности которых мы не сомневаемся. Далее
доказываем, что F есть логическое следствие Ai,...,An, т.е. F всегда
истинно, как только истинны Ai,..., Ап. Однако непосредственная про-
верка с использованием определения логического следствия в общем слу-
чае невозможна хотя бы потому, что интерпретаций бесконечно много,
а областями интерпретации могут быть как угодно сложные бесконечные
множества. Но, учитывая предложение 2.1 и теорему о полноте, для уста-
новления логического следствия нам достаточно доказать, что формула
Ai &... & Ап —> F является теоремой. Поэтому важно иметь процедуры
доказательства, которые бы механически использовали правила вывода.
2.2.1. О поиске вывода в исчислениях гильбертовского типа
Однако для автоматического доказательства теорем сформулирован-
ное выше исчисление плохо пригодно, как и все исчисления подобного
типа (так называемые исчисления гильбертовского типа). Строение та-
ких исчислений, предполагающее наличие схем аксиом и пра-
вила МР (или некоторого его аналога), ставит задачу поиска вывода
перед дилеммой: либо искать вывод, пользуясь некоторым вариантом ал-
горитма Британского музея, что практически неприемлемо, либо идти в
обратном направлении, т.е. от доказываемой формулы. Трудности по-
следней альтернативы проиллюстрируем на выводе простейшей по стро-
ению истинной формулы А —> А:
(1) (А ((А -> А) -> А)) -+ ((А —> (А —> А)) (А А)), (А.2)
(2) А((АА)-> А), (А.1)
(3) (А (А А)) -> (А -> А), (MP, (1), (2))
(4) А-> (А-> А), (А.1)
(5) А -> А. (МР, (3), (4))
Для того, чтобы найти такой вывод, необходимо было догадаться,
что надо взять частный случай аксиомы (А.2), в котором С есть А, и
подобрать такое В, чтобы А—>ВиА—>(В—>С) тоже стали частными
случаями каких-то аксиом. В общем случае, чтобы пользоваться правилом
МР для вывода некоторой формулы F, мы должны «изобретать» формулу
G такую, что G и G —> F были бы выводимы. Но мы даже не знаем,
какой вид должна иметь формула G.
Для нашего примера вывод находился бы несравнимо проще, если до-
бавить дополнительное правило вывода, следующее из теоремы дедукции
[5] (все формулы предполагаются замкнутыми):
Г,А h В => Г НА->В,
т.е. если В выводима из гипотез Г U {А} (Г — некоторое конечное
100
множество формул), то А —> В выводима из Г. Тогда следующая после-
довательность формул является выводом А А
(1) А (гипотеза),
(2) А А (правило дедукции).
Однако добавление нескольких производных правил, упрощающих
вывод многих теорем, не меняет кардинально проблем поиска вывода в
исчислениях гильбертовского типа. Поэтому с самого начала работы по
созданию систем АДТ базировались на одном из двух результатов, полу-
ченных в ЗО-е годы: либо на секвенциальных исчислениях, определенных
Г. Генценом [11] и доказанной им теореме об устранении сечения, либо
на теореме Эрбрана [12].
2.2.2. Секвенциальное исчисление Генцена
Дадим сначала краткое описание первого подхода. Несколько упро-
щая формализм Генцена, назовем секвенцией выражение вида Г => Д,
где Г и Д — множества (возможно пустые) экземпляров формул исчи-
сления предикатов. Содержательно, под секвенцией понимается формула
& Fi —> V G? (причем, если Г пусто, то & Fi есть И и, если Д
ггег GjEA 7 Fitr
пусто, то ^Gj есть Л). Сформулируем исчисление LK. Аксиомой
является любая секвенция Г => Д, в которой Г и Д имеют хотя бы одну
общую формулу, т.е. непустое пересечение.
Правила вывода исчисления LK разделяются на структурные и логи-
ческие.
Структурными правилами, при наших упрощениях, являются правила
сокращения
х I\F,F^A , ,х V^^F.F
r,F=>A ’
и сечения
, х Г=> д,г г,п=>л
<cut> Г.п^д.л—
Здесь запятая используется вместо знака теоретико-множественного
объединения. Правило сечения, например, можно прочитать так: «Для
того, чтобы доказать секвенцию Г, П => Д, Л, достаточно для некоторой
формулы F доказать секвенции Г => Д, F и F, П => Л».
Правила сокращения необходимы, чтобы создать достаточный запас
экземпляров некоторой формулы, а правило сечения использовалось Ген-
ценом для доказательства эквивалентности секвенциального исчисления
гильбертовскому.
101
Логические правила построены так, что каждое правило удаляет опре-
деленную связку или квантор в левой или правой части секвенции, по-
этому они разбиваются на пары для каждой связки или квантора. Приве-
дем их:
: Г,Г1&Г2=^ Д’
Г => Д, Fi Г => Д, 1*2
Г => Д,1*\&;1*2
Г, Fi => Д Г, 1*2 => Д
Г, I**! V 1*2 => Д 1
(=► V)
Г=»Д,^
Г => Д, Fi V 1*2 ’
Ь =>)
r=i> A,F
Г,-iF=> Д’
(=> -)
Г, F=> Д
Г => Д,-lF’
Г,Я^>Д Г=^Д,Г
Г, F->H=>A
Г,Р=>Л,Н
Г=>Д, F-> Н’
. r,F(t)^H . . Г=>Н, F(g) .
1 7 ’ Г, VxF(x) =► Н’ 1 ’ Г => H,VxF(x) ’
. r,F(a)^H . . Г => H,F(t)
k ’ Г, 3xF(x) => H 1 ' Г => H, 3xF(x)
Здесь i G {1,2}, в (V =>) и (=> 3) t есть произвольный терм, а в
(=> V) и (3 =>) а не входит в нижнюю секвенцию.
Секвенциальное дерево есть дерево вывода секвенции Г => Д, если
корень этого дерева есть Г => Д, листьями дерева являются аксиомы, и
переход от каждой секвенции дерева к непосредственно верхним совер-
шается согласно одному из структурных или логических правил.
Г. Генцен [И] доказал теорему об устранении сечения: если суще-
ствует дерево вывода (т.е. вывод) некоторой секвенции, то существует
вывод этой же секвенции, не использующий правила сечения.
Можно заметить, что во всех правилах, кроме правила сечения, фор-
мулы верхних секвенций являются подформулами формул нижней секвен-
ции, поэтому вывод в секвенциальном исчислении без сечения обладает
свойством подформульности, т.е., например, если мы доказываем секвен-
цию => F (формулу F), то ограничиваемся рассмотрением только под-
формул формулы F.
Общий способ построения вывода некоторой формулы F (т.е. се-
квенции => F), если он вообще существует, состоит в следующем. Не-
обходимо, отправляясь от секвенции F и используя правила вывода,
102
надстраивать дерево до тех пор, пока все ветви не будут оканчиваться
аксиомами.
Приведем примеры выводов.
Докажем формулу А V -А в LK.
А=> А
(=>-) -----------------------
=> -'Л, А
(=>v) -----------------------
=> А V -’А, А
(=>V) -----------------------
=> А V -Л, Л V -Л.
(=> г) ----------------------
=> А V-Л
Построен вывод, нижней секвенцией которого является => А V -Л,
верхней — аксиома А => Л, и слева указаны правила, по которым совер-
шается переход от нижней секвенции к верхней.
Приведем еще два примера выводов:
Л => Л
=> А, -Л
т-Л => А
=> тЛ -4- А
F(a) => F(a)
=> ->F(a),F(a)
3x-F(x),F(a)
=$> 3x~F(x)yxF(x)
-tfxF(x) => Bx-F(x)
=> -MxF(x) —> 3x->F(x)
Логические правила однозначно определяют вид верхних секвенций
по нижним, за исключением правил (V =>) и (=> Э), в которых необхо-
димо еще выбрать t. Так как кандидатов для t может быть бесконечно
103
много, эти правила сродни правилам МР, сечения и «ответственны» за не-
разрешимость исчисления предикатов в его секвенциальном виде. Однако
на каждом конкретном шаге поиска вывода выбор t можно ограничить по
крайней мере двумя способами:
— использованием метапеременных (С.Кангер [13]). В этом случае
выбор кандидата на t откладывается до тех пор, пока не накапливается
достаточно информации, позволяющей делать этот выбор более осмы-
сленным, например, для превращения в аксиомы максимального числа
секвенций — листьев дерева поиска вывода. Следует подчеркнуть, что
при этом необходим глобальный анализ дерева поиска вывода;
— подстановкой только тех термов, которые уже задействованы в вы-
воде, т.е. выбором из уже конечного множества термов. В этом случае
может оказаться, что необходимые термы еще не порождены, и прежде-
временным применением этих правил мы лишь «захламляем» простран-
ство поиска.
Так или иначе, проблема выбора t для правил (V =>) и => 3) отражает
сложность соответствующей теоремы, вывод которой ищется, и этот поиск
или выбор вряд ли может быть полностью и эффективно устранен. •
Основной недостаток систем автоматического вывода, использующих
секвенциальные исчисления, состоит в том, что определенные правилами
шаги вывода «микроскопичны» и трактуются не как содержательные рас-
суждения, а в терминах чисто логической техники удаления связок и кван-
торов. Этот недостаток, к сожалению, присущ и другому популярному
методу АДТ, излагаемому в следующих двух пунктах.
2.2.3. Теорема Эрбрана
С самого начала с секвенциальными подходами соперничали методы
автоматического доказательства теорем, основанные на теореме Эрбрана.
Для ее использования отрицание доказываемой формулы F приводилось
к некоторому виду и доказывалась невыполнимость -«F, что, как легко
видеть, влечет истинность F. Мы рассмотрим приведение формул к ску-
лемовской стандартной форме (процедура Дэвиса-Патнэма [14, 15]) и
сформулируем теорему Эрбрана применительно к этой форме.
Процедура Дэвиса-Патнэма состоит из следующих шести шагов:
1. Переименование переменных', если одна и та же переменная встре-
чается в двух различных кванторах, то используем новую переменную для
одного из этих кванторов.
2. Исключение —> и о: используем эквивалентности А о В о (А —>
£)&(£-> А),
3. Продвижение символа -« внутрь: используем эквивалентности
—\/хА о Зх—iA; —ЗхА <=> Vx—«А; ~|(А & В) <=> -iA V -ijB; -i(A V B) <=>
104
-,Л & -»В; -i-iA <=> А. В конце исполнения шага 3 мы придем к фор-
муле, в которой отрицание может встречаться лишь перед элементарной
подформулой.
4. Исключение квантора существования', вычеркиваем поочередно
каждый квантор существования Эу, заменяя его переменную у на
g(xi, •.., Хт), где д — новый функциональный символ, zi,...,— все
переменные кванторов всеобщности, управляющих квантором 3?/. При
т = 0 у заменяется на некоторый новый символ константы.
Это преобразование, называемое скулемизацией, уже не является экви-
валентным, однако можно доказать, что, если некоторая формула F вы-
полнима, то ее скулемизация также выполнима, и наоборот.
Покажем это на простом примере. Однако легко догадаться, что такое
доказательство пройдет и в общем случае.
Пусть формула Уж 3?/ F(x,y) выполнима. Тогда она истинна в не-
которой интерпретации I с областью интерпретации D. Это означает,
что для любого т G D существует некоторый элемент т' е D, такой,
что формула F(rn, т') истинна в I. Положим т! = д(т). Мы опре-
делили на D функцию д такую, что I |= Va:F(a;,^(a:)). Обратно, если
I |= \/xF(x,g(x)), то, очевидно, I |= Vx3yF(x,y).
5. Приведение к предваренному виду. Полученная после шага 4 фор-
мула может быть приведена к предваренному виду V^i... \/xmF\ где F' —
бескванторная формула, преобразованиями, определенными следующими
эквивалентностями:
А &; \/хВ(х) <=> Чх(А & А]х[ V ЧхВ(х) <=> Уя(А V В(а?))
(последняя эквивалентность истинна лишь потому, что мы знаем, что по-
сле шага 1 в А не встречается х).
6. Подъем & в F': используем до тех пор, пока возможно, эквива-
лентность (А & В) V С о (Av С) & (В V С).
После исполнения всех шагов получается формула вида
Vxi... Vxn(Z>i & ... & Dk),
где каждое Di является дизъюнктом, т.е. представимо в виде Di = Ьц V
• • • V Liri, и Lij есть литера, т.е. либо элементарная формула, либо ее
отрицание.
Она называется скулемовской стандартной формой формулы F и
выполнима тогда и только тогда, когда выполнима формула F, поскольку
все шаги преобразования, кроме 4, приводят к эквивалентным формулам.
По сути дела, можно считать, что скулемовская стандартная форма есть
некоторое конечное множество (конъюнкция) дизъюнктов, так как пре-
фикс ... Ужп определяется множеством переменных, встречающихся
в Di,..., Dk, а порядок кванторов несущественен.
105
С каждой скулемовской стандартной формой формулы F связыва-
ется функциональный словарь для F, состоящий из всех функциональных
и константных символов, встречающихся в этой форме. Причем, если
множество константных символов пусто, то в функциональный словарь
добавляют некоторую константу а.
Эрбранов универсум H(F) для F есть множество всех термов, по-
строенных из символов функционального словаря для F.
Например, если F(x,y, z) — бескванторная формула, не содержащая
функциональных и константных символов, то эрбранов универсум
для \/x\/yizF(x, у, z) совпадает с {а},
для 3xBy3zF(x, y,z) — с {ci, с2, с3},
для VxV?/3zF(tf, ?/, z) — с а),^(^(а,а),а),^(а,^(а,а)),
5(5(0,а),5(0,а)),...},
для 3x\/yBzF(x,y,z) — с {с,51(c),51 (51(c)),51 (51(51(01))),...},
где ci,C2,c,^,^i — скулемовские символы, получаемые при удалении со-
ответствующих 3-кванторов.
Легко видеть, что эрбранов универсум для некоторой формулы есть
бесконечное множество тогда и только тогда, когда функциональный сло-
варь для этой формулы содержит хотя бы один функциональный символ.
Пусть D(xi,..., хп) есть дизъюнкт, принадлежащий скулемовской
стандартной форме формулы F. Тогда для любых ti,... ,tn G H(F),
Dfa,.. .,tn) называется примером дизъюнкта D.
Теперь мы можем сформулировать один из вариантов теоремы Эр-
брана.
Теорема 2.2 (теорема Эрбрана [12, 16]). Формула F невыполнима
тогда и только тогда, когда существует конечное невыполнимое множество
примеров дизъюнктов, принадлежащих скулемовской стандартной форме
формулы F.
Таким образом, чтобы доказать формулу F, нужно привести ->F к
скулемовской стандартной форме, образовать некоторое «достаточное»
множество примеров {Z^,..., D's} дизъюнктов этой формы и доказать
невыполнимость формулы & ... & D's. Причем для этого доказатель-
ства уже достаточно средств исчисления высказываний, так как последняя
формула не содержит переменных. Единственным «но» является то, что
непонятно, как определить «достаточное множество примеров». В форму-
лировке теоремы ничего не сказано ни о сложности термов, замещающих
переменные в примерах, ни о количестве примеров каждого дизъюнкта
формы.
Поэтому в первой попытке (П. Гилмор [17]) непосредственного ис-
пользования теоремы Эрбрана для доказательства теорем на ЭВМ при-
менялись так называемые процедуры насыщения и мультипликативный
106
алгоритм проверки на выполнимость. По некоторому правилу (конкрети-
зирующему принцип «от простых к более сложным») порождалось мно-
жество {2/1),..., D^} примеров дизъюнктов скулемовской стандартной
формы и проверялась невыполнимость формулы В
случае неудачи, множество {/У1) &...& D^} дополнялось следующей
порцией примеров, и проверка повторялась для расширенного множе-
ства. Мультипликативный алгоритм для проверки невыполнимости
множества примеров состоял в следующем: от множества приме-
ров, как конъюнкции дизъюнктов &f=1(Lii V ... V переходили к
дизъюнкции V(bin Ь8Гв\ где Liri есть некоторая литера дизъ-
юнкта D^\ пользуясь преобразованием, определенным эквивалентностью
(AvB) & С о (Л & С) V (В & С). Полученная дизъюнкция невыпол-
нима тогда и только тогда, когда в каждом ее члене Liri Lsrs
содержится некоторая пара {L, ~^L} противоположных литер.
Попытки использования программы Гилмора для доказательства срав-
нительно простых формул исчисления предикатов встретились с комби-
наторными трудностями: легко проверить, что, если в , D^}
каждый дизъюнкт состоит из тп литер, то мультипликативный алгоритм
порождает ms членов дизъюнкции, т.е. при увеличении количества при-
меров s сложность проверки на выполнимость росла экспоненциально.
Хотя позднее были предложены существенные усовершенствования
[14,18,19] рассматриваемых процедур, все же самым значительным и рас-
пространенным подходом, основанным на теореме Эрбрана, является ме-
тод резолюций, к описанию которого мы переходим в следующем пункте.
2.2.4. Метод резолюций
Метод был предложен в 1965 г. в работе Дж.А. Робинсона [20]. В са-
мом названии статьи и во введении подчеркивалась «машинная ориента-
ция» предлагаемого метода. Под этим, очевидно, подразумевались как спо-
соб представления опровергаемой формулы в виде множества однородных
объектов-дизъюнктов, так и само исчисление, состоящее из единственного
правила вывода. Роль машины состояла в быстром порождении из исход-
ного множества дизъюнктов их следствий, пользуясь правилом резолюции,
до тех пор, пока не будет порожден пустой дизъюнкт (т.е. дизъюнкт, не со-
держащий литер), обозначаемый через □ и эквивалентный Л. Хотя в той
же работе (как и в последующих [21, 22]) признавалась необходимость
использования тактик поиска опровержения, ограничивающих порожде-
ние следствий, т.е. в какой-то мере интеллектуализации соответствующих
процедур, преимущества механистического подхода не ставились под со-
мнение. В качестве иллюстрации приводился пример, решаемый методом
резолюции за один шаг, а при стандартном эрбрановском подходе с про-
107
цедурой насыщения требующий рассмотрения 10256 примеров исходных
дизъюнктов.
Метод резолюций основан на теореме Эрбрана и использует два сле-
дующих результата:
— логическим следствием двух дизъюнктов Di V L и Z>2 V (с па-
рой противоположных литер (£,-«£)) является дизъюнкт Di V D2, и
соответствующее правило
Z>1 V L Д2 V-.Z
£»i V D2 ( >
полно в исчислении высказываний. Это значит, что если множество Т>
дизъюнктов, не содержащих переменные, невыполнимо, то всегда можно
получить пустой дизъюнкт, пользуясь этим правилом, т.е. построить де-
рево, листьями которого являлись бы дизъюнкты из Р, корнем — □, а
переходы от пары верхних соседних дизъюнктов к непосредственно ниж-
нему совершались бы согласно правилу (2.2);
— чтобы воспользоваться правилом (2.2) в общем случае, для пары
дизъюнктов Di V P(?i) и D2 V -<Р(?2) не обязательно искать общий при-
мер для P(ti) и Р(?2), т.е. такую подстановку вместо переменных из
?1,?2 термов без переменных, которая приводит к совпадению результа-
тов подстановки. Достаточно найти самое общее (может быть, содержа-
щее переменные) решение системы уравнений = £2 и подставить в
дизъюнкты. Рассмотрим в качестве примера уже упоминавшийся пример
Робинсона [20]:
{Q(x, 9(Х)>У> ?/), z, к(х, у, z)), ^Q(u, v, e(v), w, f(v, w), x')}. (2.3)
Имеем систему уравнений
x = и, h(x, у) = w,
д(х) = v, z = f(u, w),
у = e(v), k(x, y,z) = x1.
Его наиболее общим решением является
и = х, w = Л(ж, е(^(ж))),
V = д(х), z = h(x, е(д(х))),
У = е(д(х)), х' = к(х, е(д(х)), f(g(x), h(x, е(д(х)))У).
Представив это решение в (2.3), мы получим пару противоположных
дизъюнктов-литер, и, воспользовавшись правилом (2.2), получим □. Если
же искать «вслепую» взаимно-противоположные примеры этих дизъюнк-
тов, используя процедуру насыщения (т.е. от простых примеров к более
108
сложным), то сложность такого поиска можно охарактеризовать тем,
что эрбранов универсум для данного примера содержит порядка 1064
термов с не большей, чем шесть, глубиной вложения функциональных
символов.
Основой для построения процедур автоматического поиска таких наи-
более общих решений, уравнивающих (унифицирующих) множества ато-
мов, являются алгоритмы унификации. Мы опишем здесь один из таких
алгоритмов. Дадим сначала точное определение наиболее общего решения
или НОУ.
Наиболее общий унификатор (НОУ) множества атомов
• • • jPftm) есть подстановка а = {xi иг} такая, что Р(1^а) =
... = Pftma) и, для любой подстановки г, если P(tir) = ... = Р(1тт),
то существует подстановка р такая, что ар = т.
Алгоритм унификации [23]. Для того, чтобы вычислить НОУ мно-
жества атомов {P(t{,..., t„),..., P(t™,..., t™)} , составляется система
уравнений S = {tk = tk},k е l,n, i,j E l,m, i j, в которой для
любой пары t = t' порядок (t = tf или t' = t) считается несущественным.
Полагаем а := е (пустая подстановка). Далее применяем правила:
1. {t = t}eS=>S-.= S\{t = t};
2. {х = t} Е S => если х не встречается в то S' := (5\{ж = t}) [t/x] ,
где (S\{a: = t}) \t/x] есть результат замены всех вхождений х на t в
S после того, как из нее удалена {х = t}. Полагаем
а := a[t/x\ U {х —> t}.
Если х встречается в t, то неудача;
3. {/(fl,..., tn) = /(si, • • •, Sn)} € s =>
S := (SU {fi = si} U ... U {tn - «„}) \{/(ti,.. • ,fn) = /(si, - •• ,Sn)};
4. {f(t) = g(s)} € S, fug — различные (может быть, константные)
символы, то неудача.
Применяя эти правила, алгоритм работает до тех пор, пока не прихо-
дит к неудаче и тогда соответствующие множества атомов неунифициру-
емы или пока S не превратится в пустую систему и итоговая подстановка
а есть искомый НОУ заданного множества атомов.
Легко видеть, что предложенный алгоритм всегда завершает ра-
боту за конечное число шагов, и, при отсутствии неудачи, получаемая
подстановка а есть НОУ, т.е. наиболее общее решение системы уравне-
ний, так как мы использовали только те равенства, которые заведомо
должны выполняться.
Однако непосредственная реализация описанного алгоритма (так же,
как и алгоритма, предложенного Дж.А. Робинсоном [20]) приводит
к процедурам экспоненциальной сложности. Характер этих сложностей
виден на следующем примере.
109
Пример. Необходимо унифицировать два атома
•^(^1? f (^3, • • • , *^3)5 Жз, . . . , f (Х2п— 1 j • • • ? *^2п— 1)? *^2п—1)
И P(f&2,..., х2), х2, f(x4,..., Ж4),..., Х2п_2, f(x2n,..., х2п)),
где Р — (2п— 1)-местный предикатный, a f — m-местный функциональ-
ный символы.
Составляется система уравнений
*^1 /(*^2? • • • ? *^2), Х2 = /(ж3, . . . , Ж3), . . . , Х2п— 1 = /(ж2п, • • • , Х2п).
Первое равенство по правилу 2 приводит к подстановке х± —>
—> f(x2, • • •, х2). На втором шаге, второе равенство добавляет компоненту
подстановки х2 —> /(ж3,... ,х3). Кроме этого, в первой компоненте мы
должны заменить все вхождения х2 на /(я3,..., ж3). Аналогично, на к-м
шаге мы добавляем к-ю компоненту хь —> . ,^+1) и заменяем
в остальных компонентах хь на , ж^+1). Нетрудно видеть, что
количество необходимых замен возрастает на каждом шаге более, чем
в т раз, а терм t компоненты х^ —> t получаемого НОУ содержит m2n-1
вхождений переменной х2п.
Экспоненциальное™ можно избежать, используя специальные спо-
собы представления термов. Это сделано в [24], где предложен алгоритм,
унифицирующий атомы в количество элементарных шагов, линейное от
исходной длины их записи.
Теперь мы можем сформулировать само правило резолюции.
Правило резолюции. Из двух дизъюнктов
= D\ V P(tx) У ...У P(tn) hD2 = D'2V -PfFj V ... V -P(Fm),
при условии унифицируемости множества атомов {P(ti),..., P(tn),
P(t'i),..., P(t'm)} можно получить дизъюнкт D = D2cr, где а есть
НОУ множества {Pi(?i),..., P(tn), P(tfi), ..., P(t'm)}- При этом D есть
логическое следствие дизъюнктов Di и D2.
Теорема 23 (о полноте резолюции [20]). Формула F невыполнима
тогда и только тогда, когда существует вывод пустого дизъюнкта □ по пра-
вилу резолюции из множества дизъюнктов, определенного скулемовской
стандартной формой формулы F.
Универсальной процедурой поиска минимального по высоте дерева
резолюционного вывода является процедура насыщения уровней. Она по
исходному множеству V дизъюнктов строит последовательность множеств
22° = 2) С 2Э1 с 2Э2 С ... С С Т>к такую, что множество Т>к содер-
жит 2?fc-1 и все дизъюнкты, которые можно получить по правилу резолю-
ции из пар дизъюнктов, принадлежащих 2?fc-1. Построение заканчивается
ио
на шаге п, если □ € Т>п или 2?п-1 = 2?п. Тогда в первом случае дока-
зана невыполнимость В, во втором — выполнимость Т>. Так всегда бу-
дет происходить, если доказывается невыполнимость формул исчисления
высказываний, так как при резолюционном выводе новых пропозицио-
нальных переменных не появляется, а количество различных дизъюнктов
от т пропозициональных переменных, за исключением тавтологий (т.е.
дизъюнктов, содержащих некоторую литеру и ее отрицание), равно Зт.
В общем случае, для формул исчисления предикатов, число п может
быть сколь угодно большим, а для выполнимых формул процедура может
работать бесконечно долго.
Недостатком такой процедуры является быстрый рост Vk при возра-
стании к. Рассмотрим простой пример.
Пример. Доказать общезначимость формулы
(Л -> В) & (В -> С) & (С -> Z>) & (Z) -> Л) &
&(AVBVCVD)4A&B&C&D.
Используя процедуру Дэвиса-Патнема, преобразуем отрицание этой фор-
мулы в множество D, состоящее из шести дизъюнктов:
1. пЛ7В; 2. nBVC; 3. 4. V Л;
5. ilVBVCVD; 6. ^VnBV^CVnD.
Можно проверить, что □ появляется, начиная с В4, и мощность IP11 мно-
жества В1 равна 18, |Р2| = 34; |Р3| = 66. Учитываются лишь нетавто-
логичные дизъюнкты, т.е. дизъюнкты, не содержащие некоторую литеру
и ее отрицание. И это при том, что количество всех нетавтологичных
дизъюнктов от 4 переменных равно всего 81! Между тем, для вывода □
достаточно породить только 6 дизъюнктов, например:
7. -Л V V получается из 3 и 6;
8. V -В — из 2 и 7;
9. -Л — из 1 и 8;
10. A VCVD — из 2 и 5;
11.AVD — из 3 и 10;
12. А — из 4 и 11;
13. □ — из 9 и 12.
Если обобщить этот пример, т.е. рассмотреть резолюционный вывод
формулы
(Л1 —> А2) & (А2 —> -A3) &... & (л4п_ 1 —> Ап) & (Ап —> Л1) &
& (Л1 V ... V Ап) -> А! &... & Ап,
in
то можно доказать, что □ 2?п-1 и □ € Pn, |©п~1| = Зп — 2n + 1, а для
вывода □ достаточно породить всего 2(n — 1) дизъюнктов. Например, для
п = 10, а это сравнительно несложный случай, процедура насы-
щения уровней порождает 58014 различных дизъюнктов перед тем, как
породить □.
Хотя при поиске вывода трудно избежать порождения избыточных,
не нужных для построения вывода, дизъюнктов, следует признать, что
процедура насыщения уровней производит их слишком много. Необхо-
димы процедуры, которые вели бы более целенаправленный поиск. Для
этого изучались различные модификации (называемые стратегиями) ме-
тода резолюций, получаемые наложением на вывод ограничений разного
рода, позволяющим сузить пространство поиска вывода.
Примером такой стратегии является линейная резолюция [25, 26].
Правило линейной резолюции допускает порождение нового дизъюнкта
только тогда, когда один из пары порождающих дизъюнктов сам порож-
ден на предыдущем шаге. Такое ограничение существенно сужает выбор
на каждом шаге поиска вывода, однако обладает и недостатками. Во-
первых, оно может существенно увеличить длину вывода, а во-вторых,
что более важно, при его реализации необходимо создать также и не-
который механизм возврата или бэктрекинга (backtracking). Дело в том,
что, хотя линейная резолюция обладает свойством полноты, т.е. суще-
ствует линейный вывод □ из любого невыполнимого множества дизъюнк-
тов, конкретный его поиск может привести в ситуацию, из которой вывод
уже невозможно получить. Поэтому необходимо распознать такую ситуа-
цию и вернуться назад, в ту точку, из которой, предположительно, был
сделан неверный выбор.
Линейную резолюцию можно ограничивать и далее. Самым извест-
ным примером является SLD-резолюция, где выбор (Selecting) литер осу-
ществляется посредством линейной (Linear) стратегии и просмотра на-
бора возможных дедукций в глубину (Depth-first). После опубликования в
1974 г. Р. Ковальским статьи [27] SLD-резолюция была положена в основу
языка логического программирования — Пролога.
О методе резолюций и его стратегиях можно прочитать в [16, 23].
Хотя метод резолюций является, пожалуй, одним из самых разра-
ботанных подходов к автоматическому доказательству теорем, нельзя не
отметить его ахиллесову пяту: представление логической информации
в форме множества дизъюнктов приводит к ее дроблению и уничтоже-
нию изначальной структуры формул, затрудняя поиск резольвирую-
щихся пар дизъюнктов. Не случайно Р. Ковальский [28] выдвинул
идею использовать в процедурах поиска вывода не множества, а графы
дизъюнктов.
112
2.2.5. Об интуиционистском исчислении предикатов
и конструктивных задачах
Следует отметить, что во многих случаях классический вывод не го-
дится для решения прикладных задач, называемых конструктивными. Их
особенность заключается в том, что по выводу требуется произвести неко-
торое построение, заданное целью задачи. Так, если цель есть дизъюнция
А(х) V В(х), то вывод должен давать способ определения по параме-
трам X) входящим в А и В, какой из случаев имеет место для каждого
конкретного набора параметров, и, если цель есть BxF(x), то из вывода
должен извлекаться способ построения такого х. Классический вывод не
удовлетворяет этим условиям. Это связано с тем, что в классической ло-
гике истинен закон исключенного третьего «tertium non datur» А V -А.
Действительно, А V -А есть сокращение формулы -уА —> ->Л, выводимой
в исчислении предикатов, как частный случай формулы А А, выведен-
ной нами в п. 2.2.1. Поэтому классический вывод задачи с целью А V -А,
где А есть, например, утверждение «Великая теорема Ферма верна» бу-
дет тривиальным и нисколько не способствующим решению проблемы
Ферма.
Другой пример [29, 9]. Рассмотрим доказательство теоремы:
«Существуют два иррациональных числа а и b таких, что аь рацио-
нально».
Мы можем доказать, что д/2 — иррациональное число. Возьмем число
/-у/2
v2 , относительно которого мы не знаем, рационально оно или ирра-
ционально. По закону исключенного третьего, возможны два варианта,
каждый из которых мы рассмотрим ниже:
г-л/2 г- /—
1) v2 — рациональное число. Тогда полагаем а = у2, b = у2.
2) — иррациональное число. Тогда (л/2^)^ = 2, и а —
b = у/2.
Из этого классического доказательства теоремы существования не-
ясно, какая из пар удовлетворяет условиям теоремы, т.е. доказательство
теоремы неэффективно. Поэтому для решения конструктивных задач ис-
пользуется конструктивная или интуиционистская логика, в которой дизъ-
юнкция и квантор существования понимаются именно так, как говори-
лось выше.
Интуиционистская логика была аксиоматизирована (представлена в
виде исчисления) А. Рейтингом [30] в 1930 г., и уже в 1932 г., т.е. еще до
известных работ Г. Генцена, А.Н. Колмогоров [31] предложил интерпре-
тацию интуиционистских исчислений, как исчислений задач. Интуицио-
нистская логика имеет ряд особенностей, отличающих ее от классической.
Некоторые из них мы отметим ниже.
из
Мы не будем приводить какое-либо интуиционистское исчисление
гильбертовского типа, которые имеют, как правило, большее количество
аксиом и правил вывода, так как систему связок {&, V, -»} нельзя све-
сти к паре связок и пару кванторов Vz, Эх к одному, как в классическом
случае, потому, что эквивалентности Л V В <=> ->А V В, А & В о -i(A —>
-iB), ЗхЛ(х) <=> -Мх->А(х) интуиционистски уже не верны. Исключе-
ние составляет интуиционистски верная эквивалентность ~^А о А —> Л,
позволяющая сводить отрицание к импликации и противоречию.
Нам проще определить секвенциальное интуиционистское исчисле-
ние (LJ) [32, 11, 9] на основе уже определенного классического LK.
Оно отличается от LK тем, что допускаются только секвенции, правая
часть которых состоит максимум из одной формулы. Правила вывода
исчисления L J совпадают с соответствующими правилами LK с учетом
требования для интуиционистских секвенций. Так, в LJ нет правила, со-
ответствующего классическому правилу (=> г) сокращения справа, а пра-
вилам (-1 =>), (=> ->) и (—>=>) исчисления LK соответствуют правила
исчисления LJ:
F,T=> T,G=>H Г => F
r=>-.F’ r,F^G=>H ’
Легко убедиться теперь, что примеры секвенциальных выводов, пред-
ставленные в п. 2.2.2, являются существенно классическими и не мо-
гут быть переделаны в интуиционистские, а, следовательно, соответству-
ющие формулы интуиционистски недоказуемы. Например, для секвен-
ции => А V -А мы уже не можем воспользоваться правилом сокращения
справа. Единственная возможность — это удаление дизъюнкции справа,
т.е. переход к => А или => ~^А, что, кстати соответствует вышесказанным
интуиционистским требованиям к дизъюнкции. Легко видеть, что в общем
случае ни секвенция => А, ни => -iA недоказуемы.
Может создаться впечатление, что, поскольку интуиционистские тео-
ремы есть подмножество классических теорем, то интуиционистская ло-
гика в некотором смысле проще классической. Это не так.
Во-первых, любую классическую теорему можно перевести в интуи-
ционистскую, применяя следующие правила:
1) Атом А переводится в А* = —»AL;
Тогда, если формулы F и G переведены в F* и G* соответственно, то
2) F & G переводится в F* & G*;
3) F -> G переводится в F* —> G*;
4) F V G переводится в -i(-iF* & ->G*);
5) ->F переводится в -F*;
6) VxF(x) переводится в VxF*(x) и
7) 3xF(x) переводится в ->Va?-F*(z).
114
При некотором усилии можно доказать индукцией по числу связок в
формуле F следующее утверждение [32]:
Теорема 2.4. Секвенция => F доказуема в LK тогда и только тогда,
когда секвенция => F* доказуема в LJ.
Это можно понять так, что все теоремы классической логики истинны
в указанном переводе для интуиционистской, но тогда, кроме этого, су-
ществуют и чисто интуиционистские теоремы.
Во-вторых, классическая логика имеет довольно простую семантику,
по крайней мере, в концептуальном смысле. В ее основе лежит двузначная
логика и теория множеств.
Классическая двузначная логика таблична, т.е. по истинностным зна-
чениям (И или Л) составляющих пропозициональной формулы мы всегда
можем вычислить истинностное значение самой формулы.
Определение классической истинности формулы на модели просто и
естественно и удовлетворяет свойству полноты, по которому множество
всех истинных формул совпадает с множеством теорем. Хотя возражение
интуиционистов вызывает, например, привлечение таких понятий, как
«истинность на бесконечных моделях».
С другой стороны, пропозициональная интуиционистская логика не
является табличной, т.е. не существует какой-либо конечной системы ис-
тинностных значений и таблицы, позволяющей вычислять значение фор-
мулы по значениям ее составляющих.
Существует определение истинности интуиционистских формул,
основанное, например, на теореме полноты для семантик Крипке [33], по
которой множество формул, истинных во всех структурах Крипке, сов-
падает с множеством интуиционистских теорем. Но такая семантика (так
называемая семантика возможных миров) является усложнением класси-
ческой и неприемлемой для интуиционистов. Поэтому, начиная с работ
Клини [34], появились семантики реализуемости, в основе которых лежит
формализация интуитивного понимания интуиционистской формулы, как
«неполного сообщения о некотором выполненном построении» [9]. Но
формализовать «интуитивное понимание» можно, как правило, многими
способами, обращая внимание на те или иные нюансы. Так получилось и с
реализуемостью: было предложено много ее вариантов, из которых самая
известная — это реализуемость по Геделю [35]. Однако относительно всех
реализуемостей интуиционистская логика обладает свойством неполноты:
множество интуиционистски доказуемых формул является собственным
подмножеством реализуемых. Это говорит в пользу того, что интуитивное
понятие конструктивности неформализуемо и существенно шире интуи-
ционистской доказуемости.
Рассматриваемые нами ниже конструктивные по-формулы обладают
довольно простыми свойствами по сравнению с классом всех интуицио-
115
нистских формул. Дело в том, что в отличие от классического случая, ко-
гда любая формула исчисления предикатов может быть с некоторыми ого-
ворками представлена по-формулой, существенная часть интуиционист-
ских формул не имеет адекватного перевода в по-языке.
2.2.6. О сложности и перспективах логического подхода
к решению задач
Исследование различных стратегий показало, что сужение простран-
ства поиска вывода влечет, в общем случае, увеличение длины кратчай-
шего вывода. Это верно как для метода резолюций, так и для всех осталь-
ных методов. Например, показано [36-38], что избавление от правила
сечения для различных вариантов исчисления предикатов дает такое уве-
личение длины вывода, которое нельзя оценить сверху никакой элемен-
тарной по Кальмару функцией, т.е., например, одной из функций вида
— r»9ca:
2 , 2 , 2 ,..., где х — длина вывода с правилом сечения, с — не-
которая постоянная. Вместе с тем еще ранее в [39] была доказана воз-
можность экспоненциального сокращения выводов в исчислении выска-
зываний, если к правилу резолюции добавить некоторый аналог правила
сечения.
Таким образом, работы в области АДТ сразу столкнулись со следу-
ющим обстоятельством. Предположим, что вывод не найден в течение
некоторого, быть может, достаточно продолжительного времени. Необхо-
димо установить причины этой неудачи.
Во-первых, причина может заключаться в том, что для исследуемой
формулы вывода не существует, но мы этого не знаем.
Во-вторых, может оказаться, что сложность поиска вывода (количе-
ство шагов вывода, объем пространства поиска) таковы, что системе АДТ
не хватает или даже заведомо не хватит ресурсов.
В-третьих, неудача может произойти из-за несовершенства самой си-
стемы поиска доказательства или способа представления задачи.
В большом числе случаев, при неудаче, невозможно установить, ко-
торая из причин имеет место, поскольку не существует универсальных
методов установления невыводимости, а способы представления знаний
(т.е. используемый язык и стиль формализации) и методы поиска вывода,
эффективные для задач одного класса, могут быть непригодными для дру-
гого класса.
Казалось бы, что выявленные трудности в АДТ свидетельствуют о
невозможности широкого применения логики в задачах, требующих по-
лучения нового знания посредством той или иной формы логического
вывода. Однако эти трудности лишь подстегнули большинство исследо-
вателей на более глубокую и интенсивную работу по их «обходу» или
116
преодолению. Глобальные отрицательные результаты не отменяют необ-
ходимости исследования роли логики в интеллектуальной деятельности
человека и, через это, в построении систем и решении различных задач
ИИ. Так, признавая частично критику в адрес существующих логических
систем и языков, Д.М. Габбай выражает надежду [40], что опыт приме-
нения логики к задачам ИИ позволит им развиваться, эволюционируя и
взаимно обогащаясь, и утверждает, что в конце концов «логика станет для
ИИ тем же, чем является математика для науки».
Работы по совершенствованию методов и систем АДТ продолжа-
ются, причем планка сложности теорем, доказанных этими системами,
неуклонно повышается. Решены некоторые открытые задачи, поставлен-
ные известными математиками [41, 42]. Кроме того, никто не может пору-
читься, что здесь сделано все или почти все. Например, можно выделять
классы формул, либо классы задач, сложность поиска вывода которых
ограничена каким-либо способом, например, полиномиальной или даже
линейной зависимостью от сложности самой формулировки. И, наконец,
несмотря на вот уже 40 лет декларируемую важность эвристик для поиска
вывода, на необходимость использования опыта, в том числе опыта, став-
шего алгоритмическим знанием (если считать, например, формулы корней
квадратного уравнения опытом решения этих уравнений), нет понимания
механизмов их усвоения и использования. Очевидно, что система, кото-
рая могла бы эффективно использовать эвристику и опыт, не может быть
одноуровневой: необходим, как минимум, метауровень, управляющий про-
цессом поиска вывода на основе анализа его хода и результатов.
Язык представления знаний должен быть приспособлен для усвоения
как эвристик, так и опыта в различных его проявлениях. Для этого, по на-
шему мнению, он должен быть достаточно однороден и в то же время хо-
рошо структурирован. Предлагаемый авторами язык по-формул [43] рас-
сматривается нами как кандидат на эту роль, имеющий хорошие шансы.
Начиная с 70-х годов, после создания интерпретатора Пролога [44]
и работ Р. Ковальского [27] интенсивное развитие получило логическое
программирование. Большой рекламой для логического программирова-
ния явилось то, что оно было выбрано в качестве основной методологии
разработки программных средств для японского проекта ЭВМ пятого по-
коления.
Как отмечалось в п. 1.1, отличительной особенностью логического
программирования является то, что вместо обычной программы, пред-
писывающей жесткую последовательность действий, программисту доста-
точно описать предметную область, т.е. написать некоторое число утвер-
ждений об интересующем его предмете на языке исчисления предикатов
(для Пролога — на языке хорновских дизъюнктов) и задать полученной
программе вопрос. Если программа содержит достаточно сведений, то
117
интерпретатор Пролога «в принципе» найдет ответ на этот вопрос. В
этом заключается дескриптивный стиль программирования (в отличие от
процедурного стиля).
Классическим языком логического программирования является язык
хорновских дизъюнктов. Напомним, что дизъюнкт называется хорновским,
если он содержит максимум одну положительную литеру. Тогда проце-
дурная интерпретация хорновской программы состоит в том, что целе-
вое предложение (вопрос к программе) задается отрицательным дизъюнк-
том. Всякий дизъюнкт с одной положительной литерой ] Ai, V... V"| V
В, т > 0 (записываемый как В Ai,... , Am), понимается как про-
цедура (см. п. 1.1), тело которой {А1,...,Ат} состоит из процедурных
вызовов. Решая задачу В, мы можем свести ее к подзадачам Ai,..., Ат.
И, наконец, процедуры с пустым телом (или просто, факты) необходимы
для окончательного прямого решения задачи.
С помощью хорновских программ можно задать вычисление любой
рекурсивной функции, что говорит о сложности и неразрешимости языка
(в общем случае нет метода определить, остановится ли программа). Тем
не менее, многие исследователи считают, что хорновский язык имеет бо-
лее слабую выразительность по сравнению с языком исчисления преди-
катов, приводящую к тому, что многие задачи, например, те, что тре-
буют рассмотрения вариантов или доказательства вспомогательных лемм,
мохут быть формализованы лишь в неестественном виде, усложняющем
или искажающем существо задачи. Кроме того, существуют стили про-
граммирования, например, функциональное и объектно-ориентированное
(см. п. 1.5), которые имеют ряд полезных свойств, не присущих чистому
Пролоху. Поэтому появилась обширная область исследований, связанная
с созданием языков, усиливающих выразительные и исполнительные спо-
собности Пролога. И хотя полное исчисление предикатов первого порядка
не имеет простой процедурной семантики, уже предлагаются подходы с
«почти» процедурной семантикой [45] — так называемое дизъюнктивное
логическое программирование.
Ведутся также интенсивные исследования, связанные с неклассиче-
скими логиками. Эта область настолько обширна и разнообразна, что мы
воздерживаемся от какой-либо, пусть даже краткой, ее характеристики
и отсылаем к обзорам и монографиям, например, в области модальных
логик к [46-48].
Следует выделить еще один момент, раскрывающий потенциал рас-
ширения систем АДТ, несмотря на отмеченные ранее трудности. Многие
исследования, в том числе и наши [49], показали, что имеются важные
прикладные задачи, например, диагностики и управления движущимися
объектами, которые уже по самим своим постановкам отличаются от «ка-
нонических» задач АДТ тем, что в них априори не задана теорема, доказа-
118
тельство которой составляет суть задачи. Так, задача диагностики предста-
влена Рейтером [50] как задача поиска минимального непротиворечивого
множества формул.
С другой стороны, для движущихся объектов требуется синтезиро-
вать некоторые следствия, вытекающие из имеющейся базы данных и
описывающие, например, свойства объекта рассмотрения в ближайшем
будущем при альтернативных выборах параметров, управлений и т.п. В
зависимости от этих прогнозируемых свойств логически (а может быть, и
другими средствами) оценивается предпочтительность (полезность и т.п.)
соответствующих выборов для корректировки параметров, управлений и
т.д. Иной способ практического использования систем логического вывода
в постановке, отличной от стандартных задач АДТ, состоит в корректи-
ровке текста априори предъявленной теоремы с целью преобразования ее
в доказуемую (если она принципиально недоказуема) или с целью ускоре-
ния доказательства (с учетом ограниченности ресурсов).
Таким образом, ареал применения логики к различным областям зна-
ния и деятельности будет постоянно расширяться. Классические отрица-
тельные результаты [3, 4] и стремление найти практически разрешающие
алгоритмы (в смысле В.М. Глушкова, см. п. 1.8) побудили к более тон-
ким и глубоким исследованиям и специализации логики применительно к
тем или иным задачам и областям. Требуется создание новых подходов,
языков, исчислений, чему, в частности, и посвящена эта работа.
2.3. Типовые кванторы
Основателями математической логики введены в обиход кванторы
всеобщности и существования как элементы формул языка Lq исчисления
предикатов. При этом, как отмечалось, в рассматриваемой интерпретации
переменные всех кванторов пробегают одну и ту же, полную область ин-
терпретации D (весь универсум), что было естественным для математиче-
ских теорий, имеющих дело с простыми по характеру своего определения
объектами.
Например, язык теории частично упорядоченных структур имеет одну
предикатную букву Pf и не содержит функциональных букв и предмет-
ных констант; Pf интерпретируется как отношение строгого частичного
порядка и аксиоматизируется собственными аксиомами:
\/х^(х < х) (иррефлексивность), (2.4)
4x\/y^z(x <y&y<z—>x<z) (транзитивность). (2.5)
Всякая интерпретация I, в которой истинны эти две собственные ак-
сиомы, называется частично упорядоченной структурой. В аксиомах (2.4),
119
(2.5) области изменения кванторных переменных х, у, z не различаются и
совпадают с областью интерпретации D, т.е. с множеством, на котором
задается рассматриваемое отношение порядка.
В естественных языках (например, русском) и языках теорий с более
сложно определяемыми объектами заметно, что в качестве структурных
элементов языка выступают не просто кванторы Уж, 3®, а конструкции
типа Vx(A —> LI) («для любого х, обладающего свойством А, имеет место
...») и Зх(А & LI) («существует х, обладающее свойством А и такое, что
имеет место ...»).
Характерно, что математиками-нелогиками Н. Бурбаки (менее кон-
сервативными в отношении сохранения традиций математической логики)
такие конструкции, названные типовыми кванторами, были введены в яв-
ной форме в язык формализации математики [51]. Но типовые кванторы
являются довольно устойчивыми конструкциями в языках и других пред-
метных областей.
Для краткости введем следующие обозначения:
: Za = Vza(Za -> U),
wQ = Bza : Za = 3za(Za&U).
Тогда выражения waF и waF понимаются соответственно как Vza(Za —>
F) и 3za(Za & F) и могут читаться как: «все Za есть F», «некоторые Za
есть F». Например, если формула Za(za) означает, что «za — молодой
человек», а формула F(za) — «za — студент», то waF означает, что «все
молодые люди — студенты», a waF — что «некоторые молодые люди —
студенты».
Все типовые кванторы всеобщности называются одноименными (друг
другу). Аналогично все типовые кванторы существования одноименны
друг другу.
Формула Za называется типовым условием соответствующего кван-
тора wQ, а переменная za — кванторной переменной. Очевидно:
waF BzaF, ^zaF —> waF
Типовые кванторы называют также ограниченными, хотя при этом
часто предполагается, что условия А — не произвольные и означают при-
надлежность переменных некоторым наперед заданным фиксированным
и непустым множествам. При этом переменные, принимающие значения
из одного и того же множества, называются односортными. Сам язык
называется языком ограниченных кванторов или многосортным языком.
(Используются также термины: язык многоосновных моделей, язык спе-
циализированных кванторов [52]).
120
Попытка ввести в язык Lq новые конструкции (Qza е M)F(zQ), где
Q совпадает с V или 3, М интерпретируется как фиксированное непустое
множество (например, всех молодых людей), G — как новый символ языка
(принадлежность), (Vza G М), (3zQ G М) — как новые структурные
элементы языка, не отвечающие ранее определенному синтаксису языка
исчисления предикатов, нарушает критерий «не умножайте сущностей без
необходимости» (а кроме того, неудачна с точки зрения охвата ситуаций,
когда Za, помимо зависимости от za, зависит и от других предметных
переменных).
Но если ZQ начинается с кванторной переменной, а затем следует
предикатный символ инфиксного типа, то в целях сокращения записи
можно использовать запись вида (QZa)F. В частности, используются
конструкции (Qz& G M)F, (Qza е М : Z'a)F (скобки могут опускаться).
Так, определение непрерывности числовой функции f в языке с ти-
повыми кванторами
Vx(x G R1 -> Ve(e > 0 -> 35(5 > 0 &
^iy(y е R1 -> (|х - у| < 5 -> |/(х) - /(у)| < е))))), (2.6)
(символы G, > рассматриваются как предикатные буквы, /, | |, «-» —
как функциональные буквы, R1, 0 как предметные константы) короче и
естественнее записать в форме
Vx G R1 Ve > 0 35 > 0 Vy G R1 (|х - у\ < 8 |/(rc) - f(y)\ < е) (2.7)
ИЛИ
Vrr G Я1 V£ > 0 35 > 0 Vy G Я1 : - у\ < 5 lf(x) - f(y)\ < е. (2.8)
Представления (2.7), (2.8) и даже (2.6) гораздо компактнее, удобнее и
строже, чем следующий естественный текст определения непрерывности
функций f : R1 —> R1: «функция f непрерывна на R1, если для любого х
из R1 и каждого, сколь угодно малого положительного е найдется такое
достаточно малое положительное 6, зависящее от х и е, что для всех у
из R1, отличающихся от х меньше, чем на 6, f(y) отличается от f(x)
меньше, чем на е».
Представления (2.7) и (2.8) нами рассматриваются лишь как сокра-
щения для формул (2.6). Вспомогательные скобки и логические связки
—& кванторов wa, wa восстанавливаются однозначно или с точностью
до эквивалентности: запись (2.7) переходит в (2.6), а выражение (2.8)
В формулу eRi Ve(£ > 0 > 0 &
& Vy(y G R1 к |х - 2/1 < 5 |/(гг) - /(у)| < £)))) (2.9)
(хотя (2.9) и (2.6) эквивалентны).
121
Заметим также, что в представлениях (2.6)-(2.9) порядок первых двух
типовых кванторов \/х е R1, Ve > О логически несущественен по двум
причинам:
1) они одноименны;
2) они независимы, т.е. типовое условие первого из этих кванторов не
содержит вхождений переменной второго квантора.
В некоторых примерах указание конкретного порядка одноименных
независимых кванторов привносит эффект некоторого неравноправия пе-
ременных. Например, рассмотрим утверждение [53]: «Некоторые парни
и девушки дружат друг с другом». Из следующих эквивалентных форм
представления этого утверждения
Згг(П(а;) & Зу(Д(у) & Др(гг,?/) & Др(у,гг))), (2-Ю)
ЗггЗу(П(а;) & Д(у) & Др(а;, у) & Др(у, а;)), (2-11)
второе, пожалуй, несколько выразительнее и яснее подчеркивает равно-
правие парней и девушек в этом утверждении [53].
Однако представление (2.11) в сравнении (2.10) как будто бы при-
обретает недостаток, состоящий в том, что типизации переменных П(х),
Д(1/) могут «раствориться» среди других фрагментов формулы, становясь
равноправными, например, с Др(я,у), Цр(у,х). Этот эффект нивелиру-
ется при использовании «блочных» типовых кванторов и отделяющих их
структурных скобок
Зж у(П(ар & Д(у) & (Др(гг,у) & Др(у, гс))),
где подчеркнут фрагмент, являющийся блочным квантором (блочным ти-
повым квантором существования). Здесь два одноименных типовых кван-
тора соединены в один типово-кванторный блок
Зге у(П(гг) & Д(у) &1_|).
2.4. Язык L позитивно-образованных формул
Дадим определение языка Lx, который по форме представления зна-
ний является промежуточным между представлением в языке Lq исчи-
сления предикатов (с типовыми кванторами как сокращениями) и основ-
ным языком L, который будет введен чуть позже и для которого в даль-
нейшем будут построены исчисление и механизм поиска вывода. Язык
Li является промежуточным и потому, что в процессе формализации
знаний формулы, записываемые поначалу чаще всего в виде формул
122
языка Lo, затем переводятся в форму, где явно выделяются типовые кван-
торы wQ (wQ е {wa,wa}), затем в формулу языка Li и, наконец, в
формулу из L.
Забегая вперед, заметим, что формулы из L будут состоять только из
типовых кванторов (простых или блочных). Поэтому, помимо типовых
кванторов wQ, введенных ранее, будем рассматривать также фиктивные
типовые кванторы va G
va = —> LI), va = 3(ZQ & LJ),
отличающиеся от wa отсутствием кванторных переменных при символах
V, 3. Далее будем считать кванторы va частным случаем кванторов wa.
Определение языка типово-кванторных формул (тк-формул)\
1) wa — тк-формула (элементарного типа);
2) если F — тк-формула, то waF — тоже тк-формула;
3) если Fi,..., Fn, п > 2, — тк-формулы, то wft(Fi, ..., Fn) —
тк-формула;
4) других тк-формул нет.
Будем считать, что в тк-формуле не встречаются два разных квантора
с одной и той же переменной и нет переменных, одновременно связанных
и свободных.
Семантику формул F языка Li определим через семантику отвечаю-
щих им формул (F)™ языка исчисления предикатов L&
1) (wQ)Hn = BzaZa\ (w)Hn = VzQ(ZQ —> Л), т.е. (wQ)Mn эквива-
лентна VzQ-iZQ;
если wa — фиктивный квантор, то
(wQ)Hn = ZQ, (w™) = ZaЛ;
2) если A G Li, то (й>аА)ип = 3zQ(ZQ & (А)ип), (шаЛ)ип =
VzQ(Za -+ (А)ип);
если wa — фиктивный квантор, то
(»а)ип = Za & (Л)ип, (йа)ип = Za —>(А)ИП;
3) если Fi,..., Fn е Li, то
(Ш ..., Fn))™ = 3za(Za к (&"=1(^)ИП)),
(wQ(F1,...,Fn))Hn = v2Q (za^ (\/(^)ип));
\ \г=1 / /
если wQ — фиктивный квантор, то аналогично предыдущему в формулах
(wq(Fi, ..., Fn))Mn будут отсутствовать кванторы Qzq.
123
Семантика логических операций над тк-формулами (в метаязыке) по-
нимается как семантика соответствующих операций над образами этих
формул в исчислении предикатов. Например, эквивалентность тк-формул
означает эквивалентность их образов в исчислении предикатов. В даль-
нейшем для краткости операция перехода к образу может явно не ука-
зываться, но подразумеваться. Например, если известно, что F и Ff —
по-формулы, то запись F —> F' означает (мы не разли-
чаем выражения и (F)Mn).
Очевидно, чтобы от тк-формулы F перейти к ее отрицанию, доста-
точно одновременно поменять wQ на wQ и w@ на w@.
Представимость любой формулы F е Lq в языке Li гарантируется
введением фиктивных кванторов.
Пример. Рассмотрим формулу F Е Lq
F = ByPi(x,y) —> BzPi(u, z)).
Очевидно,
F <=> Vu(Vz ByFf (х, у) & Vz(Pl(u,z) -> Л)) о
\fu : И 3 : И(Уя : И By : Р?(х,у), Vz : P?(u,z) 3 : Л).
Каждая пара отвечающих друг другу скобок в тк-формуле задает ветвление
в ее структуре. Пример:
Wi W2 Ws (w4 W5 Wq, W? Ws Wg Wio)-
На каждом линейном участке этой структуры можно интересоваться мак-
симальными цепочками соседних одноименных типовых кванторов и за-
менять их на максимальные блочные кванторы
(Vziz2 : Zi & Z2)w3((Vz4z5 : Z4 & Z5)wG,
W7(3z8ZgZio : Zg & Z9 & Z10)). (2-12)
Если какие-то из кванторов Wi, w2, w4, w$, ws,wg, wiq являются фиктив-
ными, то в блочных кванторах соответствующие переменные будут отсут-
ствовать. Так, если фиктивными являются кванторы wi, w4, w$, йо, то
формула (2.12) примет вид
(Vz2 : Zi & Z2)w3((V : Z4 & Z^Wq, wy^BzgZg : Zg & Z9 & Z10)).
В дальнейшем блочные кванторы
QZir . . . zin . Z(z^ , . . . , zin , Ui, . . . , Um) j
124
где z^, ... ,zin — множество всех кванторных переменных блока,
— множество всех свободных переменных блока, будем для
краткости записывать Qz : Z(z,u).
Очевидно, что после перехода к максимальным блочным кванторам
на линейных участках структуры тк-формулы будет наблюдаться чередо-
вание смысла кванторов («всеобщность» чередуется с «существованием»).
Такая регулярность структуры в дальнейшем будет способствовать умень-
шению разнообразия правил вывода (заметим, что, если бы образование
блочных кванторов осуществлялось не только по их одноименности, но и
с требованием независимости, то такой регулярности в общем случае мы
бы не имели).
Если дополнительно потребовать, чтобы внутри структурных скобок
ветвления Fi,..., Fn начинались все с кванторов, противоположных по
смыслу квантору, непосредственно предшествующему этим скобкам, то
будем иметь регулярное чередование смысла кванторов не только на ли-
нейных участках, но и вдоль полных ветвей структуры. Формула (2.12)
удовлетворяет этому требованию, так как смысл квантора ш3 противопо-
ложен смыслу кванторов (VZ4Z5 : Z4 & Z5) и w?.
Требованию регулярности можно удовлетворить всегда введением в
структуру тк-формулы, если надо, дополнительных фиктивных кванторов
И = У(И —> U), Й = 3(И&1_1), очевидно, не меняющих истинностного
значения тк-формулы.
Пример.
(Wi(w2, w3))Hn (wi(Hw2,Ш3))ИП-
Позитивно-образованные формулы (по-формулы), образующие язык
L, определяются следующим образом.
Рассматриваются тк-формулы языка Li, но с требованием регуляр-
ности. Такие формулы называются позитивно-образованными (по-фор-
мулами), если типовые условия кванторов являются конъюнктами, т.е.
конъюнкциями элементарных формул (атомов) языка Lq. При этом авто-
матически будут использоваться упрощающие преобразования конъюнк-
тов: А/{А & И), Л/(А & Л), так как формулы А & И о А, 4 & Л о Л
истинны.
Для краткости кванторные переменные при символах V, 3 можно не
писать {сокращенные по-формулы). Это корректно, если формула — за-
мкнутая, так как при этом местом связывания переменной считается место
ее первого вхождения. Если формула — не замкнутая и ,..., Xin —
полный перечень ее свободных переменных, то эти переменные рассма-
триваются как параметры, и явное указание этих параметров также позво-
ляет не писать переменных при символах V, 3. В этом случае мы говорим
о сокращенной по-формуле F{xix,..., Xin} как о параметризованной
125
по-формуле (т.е. формуле с параметрами хг{,..., Xin). По-формулы и
параметризованные по-формулы будем называть общими по-формулами,
когда важно подчеркнуть, что по-формула может иметь параметры, но
является сокращенной.
Если переменные при символах V, В не писать, то для представимо-
сти даже замкнутых формул из Lo в L кванторы Qx без типовых условий,
вообще говоря, требуется дополнять типовыми условиями U(х) («х при-
надлежит универсуму»). Рассмотрим снова формулу
F = ~^Эи(ух ByPi(x,y) —> BzP%(u, z)).
F О Vu(Vz By : ?/) & Vz : (Pj^u, z) 3 : Л) О
О Vu : U(u)B : H(Vz : U(x) By : Р?(х,у\ Vz : (P?(u,z) 3 : Л) О
oVL/(u) ЗИ (yU(x) ВР?(х,у\ VP?(u,z) ЗЛ).
Блочные (в общем случае) кванторы в структуре по-формул будем
обозначать часто символами a, b, с, d, е, возможно, с нижними индексами.
Причем буквы а и е будут использоваться для обозначения блочных кван-
торов всеобщности и существования соответственно.
Семантика общих по-формул очевидна и определяется аналогично
семантике тк-формул. В частности, эквивалентность (логическое следо-
вание) общих по-формул понимается как эквивалентность (логическое
следование) их образов в исчислении предикатов. Аналогично для осталь-
ных связок.
Пусть F — общая по-формула, F' — ее подформула. Далее выраже-
нием F' □ F обозначается отношение подформульности в соответствии с
определением по-формул. Подформула в старом (обычном) смысле может
не быть подформулой в смысле определения по-формул. Пусть Wf',f —
формула вида VA, где А = &^=1Д, a Ai,...,An — типовые условия
всех кванторов из F, управляющих F'. Тогда Wf',f — тоже общая
по-формула, т.е. она в общем случае может нуждаться в явном указании
своих параметров.
Далее, индексы при W будем указывать лишь в том случае, если из
контекста не ясно, что W построена на базе формул F и F', где F' □ F,
т.е. W = Wf',f- Будем использовать также запись Wf', если известно, о
какой формуле F идет речь.
Заметим, что если F — без параметров, то и W — тоже без параме-
тров. Формула W будет использоваться всегда как префикс при некоторых
параметризованных по-формулах, у которых множество параметров в точ-
ности совпадает с множеством всех кванторных переменных из W, т.е.
в составе по-формул вида WA. Запись вида WB, когда В е. Lo, будет
126
пониматься как результат подстановки в 1УИП вместо Л формулы В, т.е.
WB = Wm (В/Л).
2.5. Некоторые производные дедуктивные правила
Для закрепления общих навыков обоснования истинности или выво-
димости логических формул и вместе с тем для расширения дедуктивной
базы исследования свойств вводимого в п. 2.6 исчисления по-формул по-
лезно рассмотреть правило подстановочности импликации, его модифика-
ции и следствия. Оно для произвольных формул исчисления предикатов
несправедливо.
Лемма 2.1 (о подстановочности импликации). Пусть А — по-формула,
В С A, WB = Wb,a- Тогда
н Wb^ —> В) -> (А(ВХ/В) -+ А), (2.13)
где Bi — некоторая общая по-формула, a А(ВХ/В) — результат замены
подформулы В на Bi.
Доказательство проведем по индукции. Если В = А (база индукции),
то Wb — пустое утверждение и (2.13) принимает вид |= (Вх —> В) ->
(Bi —> В), что справедливо.
Пусть справедливо индуктивное предположение: для некоторого С
такого, что С □ А, доказано, что для любой общей по-формулы С\
f= Wc(C\ -> С) -> (А(СХ/С) -+ А), (2.14)
где Wc = Wc,a- Пусть В С С, причем С минимально сложнее, чем
В, т.е. можно указать квантор w € А такой, что 1) wB = С или 2)
w(B, Z>i,..., Bn) = С (индуктивный шаг).
Для доказательства (2.13) достаточно доказать, что
|= Wb^ В) -> (А(ВХ/В) -> А), где WB = Wcw.
Если С имеет первый вид, то достаточно доказать, что
н Wcw(Bi —> В) —> (A(wBi/wB) А).
Так как A(wBx/wB) = A(wBx/C), то приняв в (2.14) Ci = wBi, доста-
точно доказать, что
н Wcw^Br —> В) —> TVc(wBi wB). (2.15)
Пусть в некоторой интерпретации I справедливо
Fi = Wcw{B1 В).
127
Пусть также кванторные переменные из Wc приняли произвольные зна-
чения из области интерпретации D, причем в I удовлетворились типовые
условия из Wc и справедливо wBi (очевидно, что если такого набора зна-
чений переменных нет, то I f= Wc(wBi —> wB) и значит утверждение
(2.15) справедливо).
Пусть w = w. Выберем произвольно в D значения для кванторных
переменных из w, но так, чтобы в I были истинны типовые условия
из w (невозможность такого выбора означает, что в I истинно wB, а
следовательно, истинна формула (2.15)). При этом из истинности wBi
в I следует истинность В г в I. Но тогда в силу того, что I |= Fi, при
выбранных значениях переменных справедливы В, wB и формула (2.15).
Если же w = w, то выберем значения кванторных переменных из w
такими, чтобы удовлетворились типовые условия из w и было истинно
Bi (невозможность такого выбора означает, что формула (2.15) истинна).
При этом в силу того, что I |= Fi, при выбранных значениях переменных
будут справедливы В, wB, а следовательно и формула (2.15).
Во втором случае достаточно доказать, что
и Wcw{Br В)(A(w(Bi,Di,...,Dn)/w(B,Di,...,Dn))А).
Так как, при С\ = w(Bi, Di,... ,Dn),
A(w(Bi,Di,..., Dn)/w(B, Di,..., Dn)) = A(Cx/C),
то с учетом (2.14) достаточно доказать, что в любой интерпретации I
I h Wcw(Bi -> В) -> TVc(w(Bi, Dr,. w(B, Di,..., Dn)).
(2-16)
Пусть I |= Fi. Выберем значения кванторных переменных из Wc
произвольно, но в соответствии с типовыми условиями и так, чтобы при
этом было истинным в I утверждение w(Bi, Di,..., Dn). Снова неосу-
ществимость такого выбора означала бы, что в I истинна импликация
Wc(w(Bi,Di,... ,Z>n) —> w(B,Di,... ,Z>n)), а значит и (2.16).
Если w = w, выбираем в D значения кванторных переменных из w
произвольно в соответствии с типовыми условиями из w (невозможность
такого выбора означает истинность формулы w(B, Di,..., Dn), а следо-
вательно и (2.16)). Тогда в I будет справедливо Bi V Di V ... V Dn.
В силу того, что I |= Fi, при выбранных значениях переменных будет
справедливо В VBi V ... V Dn.
Поэтому I (= ..., Dn), а, следовательно, справедливо (2.16).
Если w = w, то при некоторых значениях кванторных переменных,
ограниченных типовыми условиями из w, в I будет справедлива конъюнк-
ция Bi & Di & ... & Dn (иначе формула w(B, ..., Dn) ложна, a
(2.16) истинна). Но тогда в силу Fi : I |= В & Di & ... & Dn.
128
Отсюда следует истинность в I формулы w(B, Z>i,..., Z>n), а значит,
справедливо (2.16).
Таким образом, по индукции справедливо (2.13). Лемма доказана.
Правило подстановочности импликации (ПИ) легко распространимо
на случай тк-формул.
Часто встречающимся случаем применения правила ПИ является сле-
дующий частный случай. Если zi,..., zn — перечень всех свободных пе-
ременных из (Bi —>В), то с учетом импликации |= Vzi... Vzn(Bi —> В) —>
—> Wb(Bi —> В) легко заметить, что справедливо следствие леммы 2.1:
(= Vzi... Vzn(Bi -> В) -> (Л(Вг/В) -> А). (2.13а)
Нетрудно видеть, что доказательство леммы 2.1 проходит и для сле-
дующей модификации правила ПИ:
(= WB(B -> -> (А -> А(ВХ/В)). (2.136)
Отсюда с учетом (2.13) справедливо и правило подстановочности эквива-
лентности (правило ПЭ, ср. [5] ):
(= Wb(B В1) ч (Л н Л(В1/В)). (2.13а)
Легко видеть следствия утверждений (2.136) и (2.13а), аналогичные
следствию (2.13а) леммы 2.1.
2.6. Исчисление J по-формул
Аксиомами исчисления J объявляются по-формулы вида
VH (ВЛФ1,..., ЗЛФП). Если формула F имеет такой вид, то записываем
F е Ах. В исчислении предикатов
(г=1 \
И У (Л & (Фг)ИП) I О (И —> Л) ФФ Л.
п /
Смысл выбора в качестве аксиом для J тождественно ложных по-
формул состоит в том, что вместо доказательства общезначимости некото-
рой формулы ищется опровержение ее отрицания, т.е. с помощью, может
быть, многократного применения некоторого, определяемого ниже для ис-
числения J правила вывода си из отрицания заданной формулы выводится
противоречие. Таким образом, выводом в J естественно назвать цепочку
по-формул F, cuF, cu2F, ..., wkF, где F — заданная формула (отрицание
Доказываемой теоремы), сиг — г-кратное применение правила си, г = 1, Л,
5 - 1847
129
a wkF e Ax. При этом по аналогии с исчислением предикатов пишем:
h (символом h — обозначается выводимость в J).
При этом будем считать, что F имеет канонический вид аФ (т.е.
Ф = ёФ или Ф = (ё1Ф1,..., ёпФп), п > 2 , а если F начиналась с ё, то
будем приписывать впереди VH.
Пусть в по-формуле F некоторый квантор di непосредственно пред-
шествует квантору d2, при этом di может входить в F в двух вариантах:
di d2 Fi □ F, di(d2Fi , F2) £ F- Во втором из возможных случаев d±
— точка ветвления структуры F. Через К (di) и V(di) обозначим со-
ответственно конъюнкт и множество кванторных переменных квантора
di. Заметим, что множество переменных, входящих в К (di) может быть
шире, чем V(di). Через lC(di) (соотв. V(di)) обозначается конъюнкция
типовых условий (соотв. объединение множеств кванторных переменных)
всех кванторов, управляющих квантором d2. Очевидно, V(d2)AV(di) = 0.
Пример. В формуле
did2d3d4 = \/P(x)BQ(x,y)VP(y) & R(y,z)BS(z,t,x,y)
K(dr) = P(x), K(d2) = Q(x,y), V(dr) = {z}, V(d2) = {y}, V(d4) = {0,
JC(d3)i= P(x) & Q(x,y) &P(y)&R(y,z)y(dz) = {x,y,z} и т.д.
Для кванторов всеобщности вводится понятие подстановки. Если d2 —
d2, то подстановкой для d2 называется отображение в : V(d2) —> V(di).
Подстановка называется ответной, если K(d2) в С )C(di). Квантор d2
называется тривиальным вопросом, если K(d2) С 7C(di) (при этом d2
оказывается фиктивным квантором).
Привлечение здесь терминов, производных от слов «вопрос», «ответ»,
связано с тем, что процесс поиска вывода (опровержения) можно истол-
ковать как некоторую процедуру «ответов на вопросы».
Правило вывода w в исчислении L введем в два приема. Сначала опре-
делим правило дублирования с уточнением lui, а затем правило удаления
тривиального вопроса ш2. Основное правило си является композицией
этих правил: lu = а>х о cj2, т.е. luF = lu2(luiF).
Введем правило cui.
Пусть Fg — подформула по-формулы F (начинающаяся с ё), Fg □ F,
Рё = ё(аФ,Ф); а — выделенный квантор всеобщности, в : V(a) —> V(e)
— некоторая подстановка для а. Правило lui параметризуется по а и в,
поэтому пишем cui(a,0), если хотим указать к какому квантору формулы
F и с какой подстановкой оно применяется.
Определение cui : cui(a,0)F = F, если в = 0. Иначе:
LUi(d,0)F = Р(ё(аФ,авФв,Ф)/Рё), где ав = У (К (а) О —> U). Далее через
wiFg обозначаем выражение ё(аФ,а0Ф0, Ф).
130
Замечание. Надо делать разыменование кванторных переменных в
кванторах из Ф и Ф0, чтобы не было коллизии переменных в дальнейшем.
Тогда wF — тоже по-формула.
Лемма 2.2 (о логической корректности правила cui).
|= F ++ ujiF.
Доказательство. Эквивалентность по-формул понимается как эквива-
лентность их образов в исчислении предикатов. Пусть zi,..., Zk — пере-
чень всех кванторных переменных из У(ё), за исключением переменных
квантора ё. Очевидно, cuiF = F(wiF&/Ft) и в силу подстановочности
эквивалентности достаточно доказать, что
н W^Fe М (2.17)
где W = Wf^f.
Докажем (2.17). Имеем
(Fe)Hn = 3z(A(z) & Vy(B(y) -> Фип(§)) & Фип),
(слГё)ип= Зж(А(ж) & Уу(В(у) ->Фип(г/)) & (В(г/0) ->ФИП(£0) & Фип),
где А = К(ё), В = К(а), В(у0) = ВО, Фип(?/0) = Фип0 — результат
замены в В (у) и Ф(т/) переменных уг е (у) = V(a) на переменные 0(yi) е
У(ё). Здесь (у) рассматривается как множество переменных вектора у;
В может содержать переменные из (ж), а также, как и А, — другие
переменные формулы F, свободные в F^.
Эти формулы отличаются лишь наличием в ((JiFg)Hn дополнитель-
ного конъюнктивного члена (ВО —> Фип0) в утвердительной части кван-
тора
ё = Зж(А(ж) &U).
Поэтому для любой интерпретации I и при любых значениях свободных
переменных zi,..., zn истинность импликации cuiFg —> F& очевидна.
Поэтому
HVzx...Vzn (^Fe->Fe). (2.18)
Покажем теперь, что |= Vzi... Vzn(Fe —> cuiFs). Докажем вначале,
что e(F& -> FaO), т.е. Чх(А -> (Уу(В -> Фип) -> (ВО -> Фип0))),
и даже более общее утверждение: ЧуС(у) —> СО, где 0 : {yi,..., ут} —>
{^i,..., zn, (ж)}, где Fa = аФ, F&0 = аО^О, dom# — множество всех ком-
понент вектора у, range 0 — множество свободных переменных формулы
С и, может быть, некоторых других переменных, не входящих
В нее. Действительно, так как СО можно рассматривать как результат по-
следовательных подстановок (... (C0i)02 • • -)^m, где 0i : {yi} —> range О,
5*
131
а каждое 6($i) принадлежит множеству {zi,... ,zn} и является термом,
свободным для yi в (... (C0i).. то по аксиоме (А.4) исчисления
предикатов имеем Ут/Д... (Св\).. .)0;-i (С 61)... Oi-i)0i.
Поэтому факт У у С (у) —> СО доказывается индукцией по г = 1, ттг
независимо от свободных значений этой формулы. Отсюда заключаем,
в частности, что \fxNy(B —> Фип) —> (В0 —> Фип0)), а отсюда полу-
чаем e(Fa —> FaO). На основании правила ПИ и Gen получаем, что
|= Vzi.. .\/zk(Fe -> c^iFe). Объединяя это с (2.18), получим усиление
утверждения (2.17), что и требовалось. Лемма доказана.
Определим правило
Пусть Fc — подформула по-формулы F,
Fd = с(Ф, а(Ф, &(схФ1,..., спФп))),
причем Ь — тривиальный вопрос, т.е. К(Ъ) С /С(а).
Определение (*>2:
(J2F = FfazFc/Fc),
где
^г = с(Ф,а1(Ф,Ф1),...,ап(Ф,Фп)), К(щ) = К(а) Ь К(а), i = T^L
Из определения 012 следует, что каждый квантор di является блочным
и образуется из а и Ci .
Лемма 2.3 (о логической корректности правила 1^2)»
|= F ++ W2F.
Доказательство. Нам понадобится доказать две вспомогательные
леммы.
Лемма 2.4 (о перестановке в паре ab). Пусть F е Li, F' С F, F" =
= abF1 □ F, 1) b — фиктивный квантор и его типовое условие Z(b) (не
обязательно конъюнкт!) не содержит вхождений кванторных переменных
из а. Пусть также справедливо 2) |= Wb, где W составлено из кванто-
ров, управляющих в F формулой F" и выписанных в естественном по-
рядке с инверсией кванторов существования (по аналогии с по-формулами
W = WF„,F).
Тогда
н F о F(baF'/F"). (2.19)
Доказательство. Тривиальной частью этого утверждения является пря-
мая импликация, справедливая без требований 1), 2). Поэтому приведем
лишь доказательство утверждения
н F(bdF'/F") F.
132
По правилу ПИ и в силу полноты исчисления предикатов достаточно
доказать то, что для произвольной интерпретации I имеет место
I (= W(baF' -4- abF'). (2.20)
Покажем это. Выберем значения кванторных переменных из W про-
.ПОЛП1.иШ4П ил Х7ГТПП ТТ^-ТИППСТтТТТЫЖЖТЛ TUnHDLTM TTODTJCT14 m ТЛ/ (пап Л Э1<Л
1AV J /4 \J A W A W ЖЧ/ Л Л Л I ЛШМММИИ J UlkJlkfk HU ft А Л. W W ^AVAWZAV
ность такого выбора означает справедливость (2.20)). Пусть при выбран-
ных значениях этих переменных истинно Ь a F' (ложность означает спра-
ведливость (2.20)при этих значениях переменных). По условию 2) леммы
в интерпретации I истинно Wb, т.е. при выбранных значениях квантор-
ных переменных из W истинно Ь. Отсюда и из истинности формулы baF1
заключаем I |= baF1. Так как по условию 1) (daF')Hn имеет структуру
Z(&)&(aF')Hn, то I [= aFf и тем более по правилу ПИ I |= abF', что и
требовалось для доказательства (2.20). Лемма 2.4 доказана.
Замечание. Из доказательства леммы 2.4 видно, что вместо условия
фиктивности b достаточно требовать лишь отсутствие вхождений кван-
торных переменных из Ъ в F' (оно автоматически выполняется, если Ъ —
фиктивный квантор).
Пусть F' □ F, F" = abF' С F и Z(b) не содержит вхождений кван-
торных переменных из а. В случаях ab е {ab, ab} справедливы следующие
эквивалентности
н F ++ F(baF'/F"\ (= F о F(baF'/F"). (2.21)
Справедливость этих утверждений очевидна, поэтому их доказатель-
ство мы опускаем.
Лемма 2.5. Если А, В — конъюнкты атомов, то для любой формулы
F справедливо:
h А к (В F) о А к (В \ А -> F), (2.22)
h А -> (В -> F) о А -> (В \ А F), (2.23)
где В \ Л-конъюнкт, полученный из В исключением атомов, общих с А.
Доказательство тривиально.
Продолжим доказательство леммы 2.3. В исчислении предикатов фор-
мулам Fc и отвечают образы:
(Гг)ип = Vx(A(x) (Фип V Эу(В(х,у) & Фип & (С(х, у) О)))),
(и>2^£)ип = Vx(A(x)
(/ п \ \
Фип V V By3zi(B(x,y) к Di(x,y,Zi) к Фип & Фгип)) I ,
\г=1 / /
133
где
А = К(с), В = К(а), С = K(b), Di = K(ct), С С ОД,
D = \] 3zi(Di(x,y,Zi) к Ф“п).
г=1
Если С(х,у) содержит вхождения переменных из у, то тогда С допус-
кает эквивалентное представление в виде конъюнкции двух конъюнктов
С"(х,у) и С[(х), состоящих из атомов, содержащих и не содержащих
такие вхождения. Иначе С(х,у) = С^х). Так как по условию приме-
нимости правила о>2 Ь — тривиальный вопрос, т.е. K(b) С /С(а), то
все атомы из С"(х,у) обязаны повториться в В(х,у). Отсюда на основе
(2.22) и правила ПЭ заключаем, что h- (Fc)Hn о Gi, где
G1 = Уж(Л(ж) -> (Фип V Эу(В(х,у) & Фип & (Cj(z) ->
V 3zi(Di(x, у, Zi) & Ф”п))))). (2.24)
г=1
Легко убедиться в том, что h где Fi = WaC^x) и W = Wf-j?.
Действительно, пусть I — произвольная интерпретация. Выберем для
кванторных переменных из Wa произвольные значения так, чтобы удо-
влетворились их типовые условия (невозможность такого выбора означает
истинность в I формулы Fi). При выбранных значениях переменных
справедливо I |= С{(ж), так как каждый атом из С[(х) уже встречался
в типовых условиях из Wa и по предположению должен быть истинен.
Поэтому |= Fi.
На основании леммы 2.4 (полагая Z(a) = В(х, у) & Фип) получаем
h= Gi о G2,
где G2 = Уж(Л(ж) (Фип V (G'(z) F))),
Е=Зх(В(х,у}кФиЧП).
В силу того, что для любых формул R, S, Т справедливо |= R V (S -»
ч Т) н S -> (Л V Т), а также на основании (2.23) и правила ПЭ имеем
|= G2 G3,
где G3 = Уж(Л(ж) —> (G2 —> Фип V F)), где G2 — результат удаления
из С[(х) всех атомов, содержащих вхождения переменных из х (т.е. в
точности тех атомов из CJ(x), которые входят и в А(х)).
134
На основании (2.21) (перестановочности одноименных кванторов все-
общности) получим, что
[= G3 ++ G4,
где G4 = С2 -> Я, Н = Vz(A(z) -> Фип V Е).
Докажем, что |= Н о (о,2-^с)ип-
Дня этого достаточно доказать, что
h Е о \/ ЗуЗ^(В(5, у) к Di{x, у, zt) & Фип & ф“п), (2.25)
г=1
где Е = 3у (в(х,у) & Фип & ( V 3^(А(х,у,*) & Ф”п))) .
Так как для любых формул (из Lq) Q, i = 1,п, справедливо
\=Q& Ri),
M=1 / г=1
TO
h E о 3y ( \/(B(i, j/) & Фип & ЗгДА(г,у,^) & Ф”п)) ) .
\г=1 /
Кроме того, для любых формул S и Т таких, что S не содержит перемен-
ных из z, справедливо
f= 5 & ЭгТ о 3z(S & Т),
а для любых формул Ti справедливо
(п \ п
утЛ о У(ЗуТ-),
г=1 / г=1
поэтому
|= Е о \/(3y3zi(B(x,y) & Фип & Di(x,y,Zi) к Ф*™)),
г=1
ЧТО равносильно (2.25).
Таким образом, с учетом (2.25) и предыдущих эквивалентностей
имеем
н (*г)ип о (С2 (О^НИ). (2.26)
Если Fc = F (т.е. W пусто), то в силу тривиальности 6 С2 — пустой
конъюнкт, т.е. Fc w2Fc, и лемма 2.3 справедлива.
135
Если же Fc 7^ F, то можно указать квантор di такой, что
а) б£1(Ф, Fe) □ F или б) diFc £ F.
В случае а) формула (^1(Ф, Fc))Mn = Зй(М(й)) & ФИП & (Fc)Mn)
на основании (2.26) и правила ПЭ эквивалентна формуле Hi = Зй(М (й)
& ФИП & (<?2 -> (^2^г)ип))- В случае б) все рассмотрения аналогичны.
Если вновь в С2 оставить только те атомы, которые не встречаются
в М(й), получим конъюнкт С2, не содержащий кванторных переменных
из di, и формулу Н2 = эквивалентную Hi.
В силу тривиальности b: |= (W \ di)C2. На основании леммы 2.4
~ ИП
(считая типовым условием квантора а формулу М (й) & Ф ) справедливо
И Н2 о Н3, где Яз = (С'2 -4 (б/1(Ф,^2Г£))ип)._
Если F^ = F, то, в силу тривиальности Ь конъюнкт С2 пустой и
получаем
Hdi^F^odi^^Fc),
т.е. справедливость доказываемой леммы.
Если Fj 7^ F, можно указать квантор ёх такой, что ei(^,Fji) С F
(или eiFji С F). Доказательство ее эквивалентности формуле G3 —>
-> (ё1(Ф,б/1(Ф,а;2^с)))ип, где Сз — результат удаления из С2 всех ато-
мов, встречающихся в K(ei), аналогично доказательству эквивалентности
G3 и G4, после чего рассматривается следующий квантор существова-
ния (/2, такой, что б/2(Ф, F^i) С F (или d2F^ £ F). Из G3 удаляются
атомы, входящие в K^dz}', полученный конъюнкт как фиктивный квантор
всеобщности переставляется с (/2 с обоснованием эквивалентности этого
преобразования аналогично доказательству эквивалентности Hi, Н2и Н$
и т.д. Поскольку вопрос Ь тривиален, то после некоторого числа таких
перестановок конъюнкт С, GJ, С2,... с необходимостью станет пустым
и мы получим, что \- F F(w2Fc/Fc), т.е. F н w2F. Лемма 2.3
доказана.
Леммы 2.2 и 2.3 гарантируют логическую корректность правила ш и,
следовательно, исчисления J.
Теорема 2.5. По-формула F противоречива, если она выводима в J.
Доказательство. Пусть FF. Тогда существует вывод в J: F, o>F,
oj2F, ..., uikF. Так как wkF е Ах, то wkF противоречива (h wkF о Л,
т.е. u>kF тождественно ложна, или невыполнима ни в одной интерпрета-
ции). В силу того, что каждое применение правила ш в выводе означает
применение логически корректных правил (Ji и затем си2 , получаем, что
h- uikF ++ ivk~1F,..., h o>F o F и, следовательно, h F н Л, что и
требовалось доказать.
Теорема 2.5 означает, что, если для отрицания формулы А исчи-
сления предикатов, проверяемого на выводимость после представления в
136
языке L, найден вывод в J, то формула А является теоремой исчисления
предикатов.
Вместе с тем остается вопрос: если А — произвольная общезначи-
мая формула исчисления предикатов, то всегда ли существует вывод ее
отрицания в J (после представления в языке £)?
На этот вопрос положительно отвечает следующая теорема.
Теорема 2.6 (о полноте исчисления J по-формул).
Если по-формула F противоречива, то она выводима в J.
Доказательство. Утверждение теоремы эквивалентно тому, что если
F невыводима в J, то F выполнима, т.е. существует интерпретация, в ко-
торой (Р)ип истинна.
Мы будем рассматривать интерпретации Is, которые задаются конъ-
юнктами S. Здесь под конъюнктами будем понимать множества атомов,
конечные или бесконечные. Областью таких интерпретаций является мно-
жество термов, построенных из символов переменных и функциональных
и константных символов, встречающихся в формуле. Тогда, по определе-
нию, для любого атома Р(й,... ,tn),
Is (= P(*i, • • • • • • .tn) e S.
Для доказательства покажем, что, в предположении невыводимости
F, можно построить такой конъюнкт S, что Is (= (F)Mn.
Рассмотрим формулу
F = F° = VH{3Xi : Ai Фь..., 3Xn : Ап Фп},
где для i е 1,п множество Ф* имеет вид Ф* = {\/У^ • Bij^ij}. j е 0, k(i),
а множества Ф^ имеют вид : Ciji Щр}, I € 0, M(z,j)). Любой
конъюнкт Ai формулы F называется базовым конъюнктом, а квантор
3Xi : Ai — базой формулы F.
Множества Ф; могут быть пустыми. Если в подформуле \/YZJ : Вгз^гз
из Ф^ Фч — пусто, то заменяем ее на эквивалентную подформулу
^Yij : Bij 3 : Л. Считаем, что для каждого i € l,n, Аг Л, иначе
ветвь ЭХг : Ai$i просто удалили бы, воспользовавшись эквивалентными
упрощениями, упоминаемыми в определении
Доопределим для F порядок применения си; тем самым определим
процесс порождения базовых конъюнктов в виде так называемого конъ-
юнктного дерева.
Для F0 конъюнктное дерево G0 имеет по определению вид
А
G0 :
Ап
137
Для каждой базы ЗХг : Ai определим ответную очередь как упоря-
доченную последовательность всех пар (Ву,0£) таких, что
1) формула W'ij ' содержится в Ф» и
2) Bij6\j С Ai, т.е. : Yij —> Term Ai — ответная подстановка для
вопроса Bij.
Если у какой-нибудь базы нет ответов ни на один ее вопрос и ее
ответная очередь пустая, то определяемый процесс построения конъюнкт-
ного дерева прекращается. Конъюнкт такой базы мы называем модельным
конъюнктом.
Если модельных конъюнктов в F0 нет, то строим F1 как резуль-
тат применения ш к каждой базе первого ответа из соответствующей
очереди. Если — первая компонента в очереди для г-й базы
и I G l,M(i,j), то общий вид F±:
F1 = VH | ЗХ U Zijt : Ai U {Ф; U Е^} .
Для простоты будем ветвь BXi U : А{ U {Ф, U Е^в^}
записывать как
3-Xiq • АгдФгц.
Заметим, что Ai С А^, Фi С Ф^.
Если Aig = Л, т.е. Ciji = Л для некоторых j и Z, то ветвь ВХгд :
Aiq$iq удаляется из F1. Поскольку J-вывода F не существует, мы можем
утверждать, что при этом останется по крайней мере одна ветвь. Нарастим
соответственно конъюнктное дерево. Получим G1 :
/ Лп
А. ....
G1 : •
'Ч* Ani
Ап ....
\ ^nNn
Для каждого базового конъюнкта Aiq определим очередь путем уда-
ления из очереди для Ai использованной пары и добавления
в конец очереди всех новых ответов, полученных за счет расширения Ai
и Ф^ Заметим, что все старые, еще не использованные пары (BiS,0?)
сохраняют свойства 0? быть ответом в базе с конъюнктом Aiq к вопросу
VYi5 • Bis ИЗ Ф^.
138
Если в слое вершин Aiq модельных конъюнктов нет, т.е. все соответ-
ствующие очереди не пусты, то используем первые ответы очередей для
получения формулы F2 и конъюнктного дерева G2 :
Ли
Ли
Ai
\ /
А1ДГ1
/ \
G2:
\ /
Ani
/ \
Ап
\ /
AnJvn
\
ЛПДГПМП
Снова слой Aigm непуст, иначе было бы FF. Очевидно, Aiq С А}дт,
$iq Q $iqm, где $iqm — область действия типового квантора, отвечаю-
щего базе с содержимым Aiqm.
Для каждой базы с содержимым Aiqm определяем очередь способом,
аналогичным ее определению для базы с конъюнктом Aiq, и т.д. Если на
некотором шаге получим модельный конъюнкт (т.е. базу с пустой очере-
дью), то построение конъюнктного дерева завершается.
Если ни на одном шаге модельный конъюнкт не получен, то про-
цесс построения конъюнктного дерева будет продолжаться неограниченно
долго. В пределе, дерево имеет бесконечное множество вершин, причем
каждая из вершин ветвится конечным образом. Поэтому, по известной
лемме Кенига, существует бесконечная ветвь конъюнктного дерева:
Ai2i2 С ... С Ai1i2^^ik С ... (2.27)
Итак, при невыводимое™ F, возможны два варианта:
1) процесс заканчивается на конечном шаге и некоторое .^к есть
модельный конъюнкт;
2) процесс неограничен и существует бесконечная ветвь (2.27).
Тогда назовем модельным конъюнктом S формулы F базу
оо
в первом случае, и объединение U Л^...^ — во втором.
139
Очевидно, что для завершения доказательства теоремы достаточно
убедиться в справедливости следующего утверждения.
Лемма 2.6. Is И (F)Hn.
Доказательство. Доказательства в обоих случаях, конечном и беско-
нечном, существенно не отличаются, поэтому будем доказывать их вместе.
Так как
(F)Hn = (3Xi: А? & (Фх)ип) V ... V (3Xn : & (Фп)ип),
то достаточно доказать, что
/з(=ЗХъ(А£ &(Фь)ип),
где отвечает начальной вершине выбранной ветви конъюнктного де-
рева (2.27).
Тогда, так как С S, достаточно доказать
Распишем (Ф^)™1 подробнее:
(Фй)ип = VTill(Bill -> (Ф^1)ИП) & ••• & VYiia(BiiQ -> (Фл«)ип).
Нам достаточно доказать для каждого (3 е 1, а, что
/S (Ф^Г)-
Для этого убедимся, что для любой подстановки
в : Y^p —> Term F,
Is h -) (Фг1/З0)ип, (2.28)
где
(Ф;1/?0)ИП = (3Zilj91 к (^1/?10)ИП) V ... V
Возможны два случая:
1) В^рв g S. Тогда В&рО ложна в Is, и поэтому утверждение (2.28)
справедливо;
2) В^рв С S. Тогда в обоих случаях, конечном и бесконечном, су-
ществует наименьшее I такое, что В^рв С Это означает, что на
Z-м шаге процесса построения конъюнктного дерева вопрос VY^p : В^р
140
приобретает ответ 0, который по правилу построения очередей попадает
в очередь на некоторое г-е место. __________
Тогда А^..Л1..Л1+Г U Cii0y, где 7 € По-
этому, для доказательства (2.28) достаточно доказать
is |= Bzil0^0y ь (г<1/?70)ип).
и, так как С S, то достаточно доказать
Is и (^.д^)ип,
если не пусто, иначе доказательство завершено. Далее доказатель-
ство проводится для каждого конъюнктивного члена так же, как для
(2.27). В силу конечности F рано или поздно мы придем к висячей вер-
шине формулы F вида ЭХ : С, где С — некоторый конъюнкт. Поэтому
доказательство леммы завершится успешно в любом случае. Теорема 2.6
доказана.
2.7. О стратегиях поиска вывода в исчислении J
Для построения какого-либо алгоритма поиска вывода в исчислении J
полезно иметь в виду следующие соображения. Процедура поиска вывода
может быть представлена, как некоторая вопросно-ответная процедура'.
подформула вида
ЭХ : B{VYi : (7i{Ф1},..., VYn : <7П{ФП},
где В — база, представляющая собой «дано», т.е. множество известных
фактов, а {(71,(72,..., Сп} есть множество вопросов к «дано». С помо-
щью операции ш мы «отвечаем» на некоторые вопросы и расширяем мно-
жество известных фактов. Повторные одинаковые ответы на один и тот
же вопрос лишены смысла и должны быть запрещены. Если мы отвечаем
на целевой вопрос, т.е. вопрос подформулы вида VY: (7 3: Л, то прихо-
дим к успешному завершению поиска опровержения для соответствующей
базы. Если мы отвечаем на вопрос подформулы с дизъюнктивным ветвле-
нием, т.е. подформулы вида
VY : (7 {Эг1:Е1 {Фх},..., 3Zm : Еш {Фт}},
где т > 2, то база расщепляется на т баз {В, Е^О},..., {В, Ет0}, где
О — соответствующая ответная подстановка. Это, в общем, усложняет
задачу поиска вывода. Поэтому такие формулы следует применять либо
когда применение формул без ветвлений (т = 1) не дает результата, либо
141
когда видно, что большинство из новых баз, полученных в результате
расщепления, могут быть опровергнуты.
Пример полного алгоритма поиска вывода в исчислении J извлекается
из доказательства теоремы 2.6 о полноте.
Организация вопросно-ответной процедуры зависит от класса реша-
емых задач. Например, можно упорядочить вопросы и использовать не
более одного ответа на каждый вопрос. Если вывод не получен, то от-
вечать на вопросы в той же последовательности, используя следующие
ответы и т.д. Пример применения этой простейшей стратегии приведен
ниже. Однако, можно сразу использовать все ответы на первый вопрос,
далее, так же, на второй и т.д. Заметим, что существуют формулы, на-
пример, вида Vrr : Р(х) By : Р(у), А(х, у), которые могут «зациклить»
вопросно-ответную процедуру при ее неправильной организации. Поэтому
в задачах можно распорядиться дополнительно этой свободой выбора кон-
кретной стратегии. Как правило, при выделении и формализации некото-
рого класса задач приходится «заново изобретать» наиболее адекватную,
т.е. эффективную и соответствующую целям решения этого класса задач,
стратегию.
На наш взгляд, не следует преувеличивать значение полноты алго-
ритма поиска вывода. Это — предельное свойство и схоже со свойством
сходимости числовой последовательности: как бы «дурно» ни вела себя
последовательность на начальном отрезке, имеет значение лишь ее по-
ведение в окрестности бесконечности. Если учесть ресурсные ограниче-
ния и то, что полнота алгоритма поиска вывода не гарантирует успеха
за минимальное количество шагов, то предпочтение следует дать более
«сообразительным», хотя возможно неполным алгоритмам.
Наш оптимизм вызван тем, что, при формулировке той или иной
стратегии мы теперь можем оперировать такими содержательными по-
нятиями, как «вопрос», «ответ», вместо технических терминов «связка»,
«терм», «литера», употребляющихся при формулировании стратегий се-
квенциальных и резолюционных методов.
Это, в частности, значит, что мы можем более свободно пользоваться
эвристиками, и расширяет возможности различных содержательных ин-
терпретаций вывода. Например, можно связать факт ответа на выделенный
вопрос с некоторым событием и т.п. Примеры стратегий, увязывающих
вывод с временем, даны в следующей главе.
Дадим в виде правил примеры эвристик, не связанных со спецификой
какой-либо предметной области и способствующих во многих случаях
обузданию комбинаторного взрыва.
Правило к-опровержения. Если в по-формуле
3d : А(^х : B(3£i : С1Ф1,Зт/2 • СзФг),^)
142
имеется ответ 6 : х —> а на вопрос В, то этот ответ используется лишь
в том случае, когда одна из баз {A,CiO},i = 1,2, имеет опровержение
длиной не более к.
Естественно сначала применять правило 1-опровержения, затем 2-
опровержения и т.д.
Правило отсроченного присваивания. Если некоторый вопрос до-
пускает несколько ответов Oi, различающихся лишь в одной компоненте
х —> ti, то используется любой из них с подстановкой вместо переменной
х неопределенного значения а, и его конкретизация откладывается до тех
пор, пока в ходе вывода не станет ясно, как распорядиться значением а
в соответствующей базовой формуле для получения в базе противоречия.
Это правило особенно хорошо сочетается с правилом /с-опровер-
жения.
Заметим наконец, что перевод формулы исчисления предикатов в
по-формулу не разрушает структуру исходной формулы и практически
не увеличивает длину получаемого выражения, тогда как перевод даже
бескванторной формулы
на язык метода резолюций — язык дизъюнктов, приводит к множеству из
дизъюнктов.
Рассмотрим пример доказательства с помощью исчисления J следую-
щего утверждения [16]: «Некоторые пациенты любят всех докторов. Ни
один из пациентов не любит знахарей. Поэтому, ни один из докторов не
является знахарем».
Формализация этого текста:
Ai & А2 -> В, где Ai = Эх(Р(х) &; Уу(В(у) -> Ь(х,у)У), А2 =
=Уя(Р(х)—> yy(Q(y) -> -iL(x,2/))), В = Уж(В(я) -> ->Q(x)).
Рассмотрим задачу АДТ: доказать теорему А = (Ai & А2 В)
первопорадкового языка исчисления предикатов, с помощью исчисления
J. Отрицание формулы А имеет вид Ai & А2 к ^В, a Ai, А2, ^В можно
представить как по-формулы Ai = УИЗя : Р(ж) Уу : D(y) BL(x,y),
А2 = УИ ЗИ Уху : P(x),Q(2/),L(ir,2/) ЗЛ, -В = УИ Эх : Z>(z), Q(z).
Тогда для
F = -А = УИ Эи : И
УИ Зж : Р(ж) Уу : D(y) ЭЦх,у),
УХ1У1 : Р(ж1), Q(?/i), Z<(rri, 1/1) ЗИ,
УВЗж2 : D(x2),Q(x2)
(так как А2 входит теперь в F на правах подформулы, то нет нужды иметь
ее корнем типовой квантор УИ и поэтому пара УИ ЗИ при окончательной
формализации полной формулы -1А для краткости по алгоритму перевода
143
будет вычеркнута) получаем пример вывода F в J (с вышеупомянутой
простейшей стратегией):
F-
wF = VH Эих : Р(х) <
Vy : D(y) 3L(x,y),
Vxiyr : P(xi),Q(yi),L(a;i,yi) ЗИ,
VH 3x2 : -0(^2), 0(2:2);
w2F — VH 3uxx2 :
P(X),D(X2), Q(x2) ( уУ : D(yL3L^’ x r , x
( Vaiij/i : P(a:1),Q(2/1),L(xi,y1) ЗИ:
w3F = VH Зихх2У :
P(x),D(x2),Q(x2),L(x,y2) { ^.iyi
a>4F = VH ЗЛ.
В качестве другого, существенно более сложного примера, рассмо-
трим известную задачу Л. Шуберта [54] о «паровом катке» (Schubert’s
steamroller), получившую столь грозное название по причине, понятной
из последующего. Ниже приводится ее словесная формулировка.
Волки, лисицы, птицы, гусеницы и улитки являются животными и
существует хотя бы один экземпляр каждого из них. Также существует
злак, и злаки являются растениями. Каждое животное любит есть либо
все растения, либо всех травоядных животных, которые намного меньше
его. Гусеницы и улитки намного меньше птиц, которые намного меньше
лисиц, которые, в свою очередь, намного меньше волков. Волки не лю-
бят есть лисиц или злаки, а птицы любят есть гусениц, но не любят
улиток. Гусеницы и улитки любят есть некоторые растения. Доказать,
что существует животное, которое любит есть животных, поедаю-
щих злаки.
Непосредственная формализация данной задачи в языке дизъюнктов
состоит из 27 дизъюнктов. В такой постановке она не могла быть решена
(80-е годы) ни одним из известных автоматических решателей, включая
Markgraf Karl Refutation Procedure (MKRP), несмотря на то, что в эту
процедуру внесли несколько усовершенствований специально для реше-
ния этой задачи. Как на причины, указывается на то, что даже из исход-
ного множества дизъюнктов на первом шаге может быть порождено 102
различных дизъюнкта, а минимальная длина вывода равняется 20, поэтому
комбинаторный коллапс неизбежен. В конце концов, задача была решена,
но уже с помощью введенной К. Уолтером [54] многосортной резолюции.
Мы формализуем эту задачу в исчислении J, не прибегая к много-
сортному языку, и укажем на более глубинные причины неудач, а также
на способ их преодоления.
144
Представим в языке L нашу задачу. Пусть
А(х) — «х есть животное»; Ж(ж) — «х есть волк»;
F(x) — «х есть лисица»; В(х) — «х есть птица»;
С(х) — «х есть гусеница»; S(x) — «х есть улитка»;
G(x) — «х есть зерно»; Р(х) — «х есть растение»;
М(х,у) — «х намного меньше г/»; Е(х,у) — «х любит есть у».
Тогда задача представляется по-формулой
Bwfbcsg: W(w),F(f),B(b),C(c),S(s),G(g) {(1), (2),..., (7)},
где группы формул (1)-(7) будут определены ниже.
Это, во-первых, шесть формул группы (1):
Ух:\У(х) 3:А(ж),
Ух : F(x) 3:А(ж),
Ух : В(х) 3 : А(х),
Ух: С(х) 3:А(ж),
Vrr:S(rr) 3:А(я),
Ух : G(x) 3:Р(я).
Четыре формулы группы (2):
Уху : С(х),В(у) Э:М(х,у),
Уху : S(x),B(y) 3 : М(ж, у),
Уху : В(х), F(y) 3 : М(х, у),
Уху : F(x),W(y) 3:М(ж,г/).
Три формулы группы (3):
Уху : W(x),F(y), Е(х,у) ЗЛ, (2.29)
Уху : W(x),G(y),E(x,y) ЗЛ, (2.30)
Уху : B(x),S(y),E(x,y) ЗЛ. (2.31)
Формула группы (4):
Уху : в(х), С(у) 3 : Е(х, у).
Две формулы группы (5):
Чх:С(х) By : Р(у),Е(х,у),
VxtS(x) By : Р(у),Е(х,у).
Формула группы (6):
ЧХ!У1Х2У2
А(Х1),Р(У1),А(Х2),Р(У2),М(Х2,Х1),Е(Х2,У2) || ’ (2-32)
И, наконец, формула группы (7), являющаяся отрицанием целевого
утверждения:
3t/:G(2/) У : Е(Х1, х2^ Е(х2, у) 3 : Л. (2.33)
145
Оценим комбинаторную сложность задачи. Во-первых, заметим, что
ни одна из формул «не порождает» животных (соответствующими кванто-
рами существования). Поэтому количество разных, фигурирующих в вы-
водах, термов, обозначающих животных, ограничено и равно 5. Растений
гораздо больше: существование злака постулировано; у гусениц и улиток
есть растения, которыми они любят питаться. Кроме того, формула (2.33)
постулирует существование злака gaia3 Для каждой пары животных аг и
aj. Итого, растений может быть максимум 28 видов. Поэтому возмож-
ная эрбранова база этой задачи ограничена, а причина неудач решений —
в возможном частом расщеплении баз (говоря в терминах нашего исчи-
сления J).
К примеру, рассмотрим первые возможности расщепления, порождае-
мые формулой (2.32). По составу базы животным Х2 из вопроса формулы
(2.32) может быть только улитка и Xi — птица. Гусеница не может быть в
качестве z2, так как в этом случае во второй ветви расщепляющейся фор-
мулы ничего не добавляется. Значение у 2 также определяется однозначно.
Но значение для у± мы можем выбрать 28-ю различными способами. Хотя
28 различных ответов не приводят автоматически к появлению 228 ветвей
формулы, тем не менее понятно, что именно здесь кроется причина труд-
ностей.
Исключительно для компактности изложения будем считать, что ре-
шатель обращается к формуле (2.32) лишь после того, как все формулы
остальных групп «выработали свой ресурс», т.е. установлено, что явля-
ется животным и что является растением, установлены факты М(с, 6),
M(s,b), М(Ь,/), M(/,w), Е{Ь,с\ Р(рх), £?(ci,pi), Р(р2\ E{s.p2) и
G(</aia2), ^P(^Gia2) Для каждой пары животных ai и а2, а также доба-
влены 25 формул вида
V: E(alla2\E(a2,gaia2) ЗЛ,
получающихся из (2.33) при ответе х± Х2 —> а>2, (ai,a2 €
е {w, /, 6, с, $}).
Как было сказано, формула (2.32) имеет 28 ответов:
Х1 Ь, г/1 -> # V pi V Р2 V gww V ... V gcsV gss, х2 з, у2 -> р2-
Мы полагаем г/i —> а, где а — пока неопределенная константа. Тогда
мы получаем расщепление базы
( 3:Е(Ь,а),
( 3 :£(&,$).
146
Во второй базе можно ответить на вопрос формулы (2.31) {B(b), S(s),
E(b,s)} и прийти за один шаг к ее опровержению.
В первой базе мы за счет добавления Е(Ь, а) можем ответить хi f,
ух —> ai, Х2 —> Ь, у2 —> сс, где ai также может принимать 28 возможных
значений. Получается расщепление
Г 3:Е(/,^1),
1 3:£(М).
Одна из 25 добавленных формул совпадает с
V:E(/,b)AE(b,^d) ЗЛ.
Мы ее применим, чтобы в один шаг опровергнуть нижнюю базу. При этом
мы доопределяем а, полагая, что а = gjb-
Используем E(f, c*i) верхней базы, чтобы получить новые ответы
ГГ1 -> w, т/i -> а2, -> /, У2 -> <*1
на вопрос формулы (2.32). Получаем
( 3:E(w, а2),
1 3:E(w,/).
Обе полученные базы опровергаются за один шаг, верхняя — форму-
лой (2.30), причем определяем, что а2 = д, а нижняя — формулой (2.29).
Опровержение получено.
Итак, мы нашли 1-опровержение формулы, воспользовавшись сочета-
нием правил /^-опровержения и отсроченного присваивания. При этом мы
3 раза отвечали на вопрос нехорновской формулы (2.32) и 3 раза откла-
дывали присвоение значения переменным аг, таким, что Р(аг). Дважды
при этом мы устанавливали точное значение ai : а = д/ь и а2 = д. Для
ai подошло любое у, такое, что Р(у).
Вывод в данной задаче был получен с помощью программной си-
стемы «ATPPCF» Е.А. Черкашина, в которой реализована стратегия к-
опровержения. Причем в выводе оказалось достаточным 1-опровержение.
Вывод был найден за 114 шагов поиска, в ходе которого было отвергнуто
324 попытки ветвления.
2.8. Исчисления дескриптивных и конструктивных задач
Применение логического исчисления J (с дескриптивной семантикой)
или его некоторых модификаций в задачах с конструктивной семанти-
кой (планирование действий, синтез программ для ЭВМ, автоматическое
147
управление и т.п.) нуждается в дополнительном исследовании. При этом
оказывается полезным предварительное преобразование исчисления J в
так называемое исчисление задач.
Определим сначала исчисление J1 дескриптивных задач. J'-задачей
является выражение F => ЗЛ (доказать невыполнимость по-формулы F).
При этом ввиду модификации правила вывода (см. ниже правило RJ')
нам будет удобнее считать, что в канонической форме по-формулы начи-
наются с квантора существования. Тогда J1 -исчисление есть исчисление
с одной схемой аксиом
AxJ' : ЗЛ{Ф} => ЗЛ
и единственным правилом вывода
. п задач ЭХ U Ui : A U А&{Ф U Ф^г} => ЗЛ, г = 1, п
задача ЭХ : А{Ф} => ЗЛ
для некоторого ответа 0 : Y —> X, ВО С А, где VK : B{3Zi : А1{Ф1},
..., 3Zn : АП{ФП}} € Ф и для любого i е l,n Oi = О U {u\/z[,...,
uki/zki}, {zi> • • •, zki) = — новые переменные, Ui = {u\,... ,игк.}.
Решение задачи, представленной в нижней части фигуры RJ', сводится
(редуцируется) к п задачам из верхней части RJ'.
Для «/'-исчисления задач теорему 2.6 можно переформулировать в
более общем варианте, для чего введем некоторые понятия.
По-стратегией, т.е. стратегией вывода в исчислении задач J', исполь-
зующем язык по-формул, будем называть правило у, определяющее для ка-
ждой J'-задачи, не являющейся примером AxJ', множество у-допустимых
ответов. Будем считать, что по-стратегия исключает повторное исполь-
зование ответов.
Если у — по-стратегия, то исчисление (J', у} определяется тем, что
правило RJ' дополняется условием, что ответ ВО С А 1/-допустим.
Точной no-стратегией у называется по-стратегия, определяющая для
каждой J'-задачи одноэлементное множество ^-допустимых ответов. Точ-
ная по-стратегия у однозначно определяет для каждой J'-задачи ЭХ:
А {Ф} => ЗЛ дерево поиска ТР(ЗХ: А {Ф} => ЗЛ), являющееся беско-
нечным для некоторых задач. Неиспользованный ответ BQ С А задачи
ЭХ: А {Ф} => ЗЛ пренебрегается точной стратегией у, если в дереве
ТР(ЗХ: А {Ф} => ЗЛ) существует бесконечная ветвь, в которой этот
вопрос не используется. Точная стратегия у — непренебрегающая, если
для любой J'-задачи ЭХ: А {Ф} => ЗЛ в дереве ТДЗХ: А {Ф} => ЗЛ)
не существует задачи и ответа для этой задачи, который пренебрегается
стратегией у.
148
Теорема 2.7. Если и — точная непренебрегающая стратегия, то исчи-
сление (J9\v) — полное, т.е. для любых по-формул F\ и F2 справедливо
F1\=f2^ ь зи{Г1,А}=»зл.
Доказательство этой теоремы отличается незначительно от доказа-
тельства теоремы полноты 2.6 для исходного исчисления J: вместо жест-
кой конструкции формирования очереди здесь — некоторая непренебре-
гающая стратегия. Это значит, что для любого неиспользованного ответа
существует натуральное число Iq, определяемое стратегией, такое, что на
10-м шаге ответ будет использован.
Точная непренебрегающая стратегия есть некоторый правильно орга-
низованный поиск вывода (т.е. последовательность ответов на вопросы),
который гарантирует в принципе построение вывода задачи ЗИ{/*1, F2} =>
ЗЯ в случае Fi |= F2. Выделение такого понятия позволяет говорить о
пренебрегающих стратегиях. Оказывается, что некоторые пренебрегаю-
щие стратегии позволяют реализовать поиск других (например, интуици-
онистских) выводов в рамках исчисления J' и даже J (см. ниже теорему
2.10 и следствие 2.1, а также п. 3.2).
Чтобы приспособить исчисление J' задач с дескриптивной семанти-
кой для решения конструктивных задач, необходима некоторая модифи-
кация J'. При этом необходимо учесть следующее:
1) простое сведение задачи F => G к задаче 3H{F, G} => ЗЛ, допу-
стимое в классическом случае, интуиционистски недопустимо;
2) при переводе формул исчисления предикатов в по-формулы без-
возвратно теряются некоторые интуиционистские нюансы. Так, две неэк-
вивалентные интуиционистски пропозициональные формулы (Л —> В) —>
С и (Л & ->В) V С представляются по-формулами одинаково, как
VH{3C, ЗА ЗЛ}. Поэтому язык по-формул интуиционистски беднее.
Итак, по определению задачами исчисления Jc (конструктивного ана-
лога исчисления J') являются выражения F => G, где F и G — по-
формулы, причем без ограничения общности можно считать, что F есть
3-формула. Содержательно, эти конструктивные задачи можно понимать
так: F есть совокупность дескриптивных знаний и спецификаций кон-
структивных средств (например, программ для ЭВМ и т.п.), G — специ-
фикация цели (например, соответственно, вычислительной задачи и т.п.).
Исчисление Jc формулируется как исчисление с одной аксиомой
и тремя правилами вывода:
АхС : ЗЛ{Ф} => F;
п задач ЭХ UUi : Ли Д^{Ф U ФД} => F, i — 1,п
1 задача ЭХ : Л{Ф} => F
149
для некоторого ответа в : Y^X, ВОС. А, где \/Y: B{BZi: А1{Ф1},... ,
BZn : АП{ФП}} е Ф и для любого i G l,n Oi = в U {ui/zj,... ,uki/zk.},
{zj,..., zk.} = Zt, uzj — новые переменные, Ui = {и^ ..., ик.};
п задач ЭХ U Ui : A U АгОг{Ф} => \/И{Ф^г}, i = 1,п
2 : задача ЭХ : А{Ф} => ЗУ : B^Z, : А^Фх},..., VZn : АП{ФП}} ’
для некоторого ответа 6 : У -> X, ВО С А, где для любого i 6 1,п
Oi = 0U{u\/z\,.. .,игк.^.}, {zj,... ,z£.} = Zi, Uj — новые переменные,
Ui = {uj, •••,<};
ЭХ : Л{Ф} => Fj
3 “ 3X:4{$}=>VH{Fi,...,Fn}’
где i € 1, n.
Необходимо заметить, что для i = 0 правило R2Q превращается в
ЗЛ{Ф} =» ЭЛ
Й2Со ’ ЭХ : А{Ф} => ЗУ : В
при ВО С А, так как ЗУ : В о ЗУ : В VJI, т.е. верхняя задача в К2С0
будет частным случаем АхС.
Теорема 2.8. Задача F => G имеет решение в Jc тогда и только тогда,
когда FMn—>GHn доказуема интуиционистски.
Приведем лишь схему доказательства.
В качестве стандартного интуиционистского исчисления выберем уже
рассмотренное нами в 2.2.5 секвенциальное исчисление LJ.
Тогда проверка того, что 7с-вывод задачи Fi => F2 может быть пе-
ределан в LJ-вывод секвенции (Fi)Mn—>(F2)Mn, не более, чем рутинна.
Обратно, если существует LJ-вывод секвенции (Fi)Mn—>(^)ип, где Fi,
F2 — по-формулы, то пользуясь некоторой перестановочностью правил в
LJ и свойствами структуры по-формул, можно доказать, что существует
вывод в некотором исчислении с итерированными относительно &, V, 3
и V правилами, например,
$,F=>Gj $,FX=>G ... ^,Fn=>G
Ф^=> Gi V... VGn’ Ф,^ V... VFn =>G ’
где Ф — последовательность формул, внешняя связка в Gi, Fif i е l,n,
отлична от V. Аналогичные правила — для &, 3, V.
Далее доказывается, что любой вывод, содержащий подвыводы вида
(Г) (А)
Ф => G Ф,Н => F
Ф, G^H F ’
150
где в соответствии со структурой по-формулы G является конъюнкцией
атомов, можно перестроить так, чтобы при любом применении правила
(—>,=>) Ф => G было тривиальной секвенцией, т.е. чтобы Ф совпадало
с {Ф',С}. Превратить вывод в 7с-вывод задачи Fi => F} не представля-
ет труда.
Теорема 2.9. Если задача F => G имеет решение, то каждым 3-
переменной и V-ветвлению формулы G можно сопоставить процедуры,
представимые как термы из процедур, сопоставленных 3-переменным и
V-ветвлениям формулы F.
Доказательство сводится к индуктивному построению терма в соот-
ветствии со структурой вывода и участвующих в них формул.
Теорема 2.10. Исчисление Jc можно представить как сочетание исчи-
сления J' с некоторой определенной стратегией у, ограничивающей при-
менение cj, т.е. любому выводу F => G в Jc соответствует вывод F => G
в у) и наоборот.
Доказательство. Сформулируем стратегию у. Рассматриваются J'
задачи следующего вида
ЗА: А{Ф,Ф,П}=>ЗЛ,
где
а) на использование вопросов У-формул множества Ф нет ограни-
чений,
б) можно использовать только один ответ на один из вопросов
формул из Ф,
в) вопросы формул из Q игнорируются.
Правила выделения Ф, Ф, Q определяются ниже. При этом заметим,
что при практической реализации у формулы из Q проще удалить. Это
не делается здесь лишь в интересах демонстрации разницы между класси-
ческим (когда Ф, Ф, Q равноправны) и интуиционистскими выводами для
по-формул.
Исходной 7с-задаче
ЭХ0: Ао {Фо} => УВДо, • •, Fn0} (2.34)
сопоставим J'-задачу вида
ЗХ0: {Фо, Фо, ^о} => ЗЛ, (2.35)
где Фо = {Ао, • • •, Kio} и Qo = 0- В частности, когда п = 1, 7с-задача
(2.34) имеет вид
ЗХ0: Ао {Фо} => ЗА': А'о {Ф'о}
и тогда в (2.35) Фо совпадет с {УА£: А'о {Фо}}.
151
Пусть текущей (промежуточной) задаче ЭХ: А {Ф} {Fi,..., F^}
Jc-вывода для исходной задачи (2.34) сопоставлена задача ЭХ:
А {Ф,Ф,П} => ЗЛ соответствующего (J', z/)-вывода для задачи (2.35), где
Тогда
а) если применяется R^C для ответа BQ С А, где
VY: В {3Zi: А, {Фт},..., 3Zn: Ап {Фп}} е Ф,
и 7с-задача расщепляется на тп задач
ЭХ U иг: Агег {Ф U Фгег} => VH {F15..., FJ,
то в соответствующей J'-задаче используется тот же ответ на тот же
вопрос и она расщепляется на тп задач
ЭХ U Ui: А{&г {Ф U Фй Ф, Q} => ЗЛ;
б) если Jc-задача имеет вид
ЭХ: А {Ф} => ЗУ: A' {VZ,: А, {Фг},..., VZm: Am {Фт}}
(т.е. I — 1), и применяется R^C для ответа Л'©' С А, то она расщепляется
на тп задач
ЭХ U Ui: AiQ'i {Ф} => VH {Ф*©'}.
Тогда в соответствующей с J'-задаче ЭХ: А {Ф,Ф,П} => ЗЛ множество
Ф имеет вид
Ф = {VY: А' {37ц А, {Фх},..., 3Zn: Ап {Ф„}}}
и, используя ответ A'Q' 6 А приходим к тп задачам
ЭХ UUi:AU Лг©' {Ф, Фй Q} => ЗЛ;
в) если применяется КзС, т.е. осуществляется переход от
ЭХ: А {Ф} => VH {F15...,FJ
к УХ: А {Ф} => Fi, i е 1,4 то в соответствующей J'-задаче происходит
перегруппировка во множествах Ф и Q (выбор F^) и от ЭХ: Л {Ф, Ф, Q} =>
=> ЗЛ переходим к
ЭХ: А {Ф, {FJ, Q U (Ф \ {FJ)} => ЗЛ.
152
Этими правилами каждому 7с-выводу задачи (2.34) сопоставляется
(J', 1/)-вывод задачи (2.35). Очевидно, что эти правила обратимы и опи-
санная процедура устанавливает взаимооднозначное соответствие между
Jc- и (J', г/)-выводами задач (2.34) и (2.35).
Доказательство теоремы 2.10 завершено.
Замечание 2.1. Из вышесказанного следует, что в исчислении J'
для класса формул вида ЗИ УХ : A {ЗУ1 : Bi, ..., ЗУП : Вп} и для
по-формул F е L1 любого вида из существования классического вывода
F => ЗИ УХ: А {ЗУр В17 ..., ЗУП: Вп} следует существование конструк-
тивного. Действительно, легко проверить, что при (J', г/)-выводе этой за-
дачи множество Q будет всегда пустым, т.е. ни одна из возможностей
классического вывода не пренебрегается.
Замечание 2.2. Из сказанного вытекает корректность использования
исходного исчисления J (без перехода к исчислениям J'-задач), если цель
G описывается по-формулой класса
( ЗУ1 : Bi
ЗИ УХ : А < • • • (2.36)
( ЗУП : Вп,
a F — произвольная по-формула, необязательно хорновская, не имеющая
ветвлений в вершинах с кванторами всеобщности. При этом сведение
задачи F G в Jc к задаче ЗИ{Р, G} => ЗЯ в J' означает, в свою очередь,
возможность замены рассматриваемой задачи на задачу поиска вывода
формулы \/И ЗИ{Р, G} в J (опровержение формулы (F)Mn & (<?)ип), т.е.
справедливо следующее утверждение.
Следствие 2.1. Произвольная задача F G в Jc, где G — класса
(2.36), может быть заменена задачей вывода по-формулы УИ ЗИ {F, G} в
исчислении J.
Замечание 2.3. Расширение класса (2.36) в классе по-формул про-
блематично, что видно из следующего, простейшего в некотором смысле,
примера. Рассмотрим задачу
УИ ЗХ1Х2Х3 : Р(х1,Х2,хз) УР(х2,хз,Xi) ЗЯ =>
=>УИ ЗУ1У2УЗ : -Р(У1,У2,Уз) У-Р(Уз,У1,У2)ЗЛ
(или
3х13х23хз (P(xi, Х2, Хз) & -|Р(Х2, Хз, Х1)) —>
-> Зу1Эу2Эу3 (Р(У1,У2,Уз) & -’-Р(уз,У1,У2))
в переводе на обычный язык). Эта задача имеет решение в J' и J, но не
имеет в Jc.
153
Интересно отметить, что в переводе на язык дизъюнктов, мы имеем
из посылки и отрицания цели задачи три хорновских дизъюнкта
{P(ai, а2, а3), -'Р(а2, а3, aj, у2, Уз) V Р(у3, уг, у2)}.
То же множество дизъюнктов получается из задачи
VyiVy2Vy3(P(yi,T/2,y3) -> ^(уз,У1,У2)) =►
=>Чх1Чх2Чхз(Р(х1,х2,хз) Р(х2,х3)а;1)).
Однако последняя задача решаема и интуиционистски.
2.9. Логическое порождение гипотез
В п. 1.8 уже отмечалось, что универсальные (полные) методы обнару-
жения выводимости (например, метод резолюций [20]) при использовании
в задачах с ограниченными ресурсами (когда абстракция потенциальной
бесконечности не справедлива) недостаточно эффективны и нуждаются
в тех или иных дополнительных средствах независимо от разрешимо-
сти теории. Кроме того, даже при отсутствии ограничений на ресурсы в
неразрешимых (полуразрешимых) теориях возникает проблема принятия
решения в случае, если доказываемая формула невыводима, а признаков
этого не обнаруживается ни сразу, ни в процессе доказательства. При
этом учет ресурсных ограничений оказывается полезным сам по себе для
построения решающих правил, в частности, прерывающих бесконечный
процесс поиска вывода.
В предисловии к книге мы отмечали, что один из принципов, ко-
торый может здесь использоваться, таков: «Пробуй доказать А, пока не
исчерпаешь ресурсов, а потом, если доказать А не удастся, заключи, что
А ложно». Мы рассмотрим другой подход, который при возникновении
трудностей с доказательством А преодолевает их путем конструктивного
формирования и принятия некоторых дополнительных предположений X.
Этот подход представляется характерным для содержательных рассужде-
ний и более продуктивным.
Под трудностями доказательства понимается не только собственно
исчерпание ресурсов, но и, например, появление тех или иных призна-
ков бесперспективности или невозможности дальнейшего доказательства
(зацикливание, неприменимость правил вывода и т.п.). Поясним это на
простейшем примере.
Пусть требуется доказать, что справедлива импликация
А = р & (р q) & (s —> t) & (t u) —> и.
154
Доказывая А, заключаем, что из посылок этой импликации следует р & q
и, во-вторых, что из тех же посылок следует, что и вытекает из s V t.
После этого процесс доказательства останавливается без успеха из-за
принципиальной недоказуемости А. Его можно «протолкнуть» и в данном
случае сразу успешно завершить, вводя гипотезу
X = р & q —> s\/ tV и
и рассматривая выводимость А из гипотезы X. Нетрудно видеть, что
X — необходимое и достаточное условие для А. В общем случае, при
появлении трудностей доказательства, переход от Л к формуле X —> А
либо обеспечивает принципиальную выводимость новой формулы (если
А было невыводимо) и выводимость при ресурсных ограничениях, либо
ускоряет эту выводимость (если А было выводимо).
По своей постановке задача разработки алгоритмического метода син-
теза нетривиальных гипотез X для выводимости формул X А напоми-
нает работы по автоматическому синтезу теорем [55-59], решению перво-
порядковых логических уравнений [60-62], обобщению формул исчисле-
ния предикатов [63, 64], индуктивному логическому программированию
[65, 66], автоматическому построению теорий [67]. Однако предлагаемый
нами метод решения по своему содержанию и сфере возможных прило-
жений достаточно сильно отличается от указанных работ.
Здесь мы предлагаем метод для случая, когда формула А представима
как отрицание хорновской или как конъюнкция таких отрицаний.
Гипотезы X синтезируются в сигнатуре А (или в ее подмножестве) по
мере появления в процессе доказательства трудностей с его продолжением
(завершением).
Выделен случай, когда синтезируемое условие X является не только
достаточным, но и необходимым. Это повышает нетривиальность X, так
как оно становится логически неулучшаемым (т.е. его логическое осла-
бление невозможно). Однако естественно, что свойство нетривиальности
не является до конца формализуемым и, помимо желательности ослабле-
ния X, предполагает, например, обеспечение как можно более простой
проверяемости X на выполнимость по сравнению с А на моделях рассма-
триваемой теории. Хотя учет критерия проверяемости здесь не рассма-
тривается (по этому поводу см., например, [59, 60, 68], получение X в
форме необходимых и достаточных условий позволяет дополнительными
преобразованиями из [59, 60, 68] получать, вообще говоря, более слабые
окончательные условия.
Для невыполнимых (противоречивых) формул А естественно полу-
чаются также невыполнимые условия X. При этом интересна и другая
постановка задачи обеспечения выводимости [69], когда допускается не-
155
которая «минимальная» корректировка самой формулы А. Эта поста-
новка предложена в [69] только для исчисления высказываний и нам не
известно какое-либо ее развитие.
Назовем по-формулу хорновской, если каждая V-вершина не имеет
ветвлений, т.е. соответствующий квантор всеобщности непосредственно
управляет только одной подформулой.
Введем класс так называемых квазихорновских уравнений как непол-
ностью заданных по-формул
G = V:H {ЗХ:Л Ф,и{Ш=т^, (2.37)
где k > 1, Фг — известные (может быть, пустые) хорновские по-формулы,
а Ц — новые, попарно различные пропозициональные переменные, обо-
значающие некоторые неизвестные подформулы, г = 1,/с. Под отысканием
решения этого логического уравнения (первого порядка) (ЛУ) понимается
построение нескольких полностью известных по-формул Wi,..., Wk, та-
ких, что результат их подстановки в (2.37), т.е. G(Wi/Vi,... ,Wk/Vk),
будет по-формулой, выводимой в J.
Добавлением пропозициональных переменных (как неизвестных), лю-
бая подлежащая выводу по-формула F может быть преобразована в ЛУ.
Решение ЛУ, т.е. синтез дополнительной информации Wi,... ,Wk,
может облегчить вывод, так как вместо формулы F рассматривается новая
формула G, которая является логически более сильной.
Применение правила ш к G понимается как его применение к вопросу,
имеющему ответ (т.е. как и раньше, хотя теперь G — частично известная
формула).
Пусть множества Ф^ имеют структуры: Фг = {УУ^-гД?
mi > 0,г = 1,к. Правило синтеза а определяется как подстановка Vi/V,
где V = У: Ai {ЗУг7 -В^ Vij}j=j^, и Vj — новые, попарно различные
неизвестные (пропозициональные переменные) (если mi = 0, тогда V
получается как по-формула V : А» 3 : Л, так как V{a : а € 0} о Л).
Мы будем предполагать, что после каждого применения а к возникшему
вопросу V : Ai сразу же применяется правило Эта композиция ша
не выводит формулу из класса квази-хорновских ЛУ или превращает G в
аксиому У:И 3:Л. Последующие применения cj (если еще не получена
аксиома) обладают тем же свойством.
Произвольная последовательность применений ш и ш к G генерирует
последовательность квазихорновских ЛУ Gi = G, G2, G3,..., которая мо-
жет быть конечна или бесконечна. Назовем этот процесс Последователь-
ного Порождения все более и более длинного решения Ц заменой Vij
новой, неполностью известной по-формулой и т.д. ПП-процессом (а весь
метод вывода с синтезом — ПП-методом). Очевидно, что ПП-процесс —
156
конечен тогда и только тогда, когда последнее выражение становится ак-
сиомой.
Если ПП-процесс конечен, в синтезированных решениях К остальные
неизвестные могут быть выбраны произвольно, и, в частности, логически
минимальными, т.е. как пустые выражения. После этого получаем желае-
мые по-формулы Wi,... Wk-
Принимая во внимание, что Wz будет иметь вид V : Ai W- и
(2.37), мы можем заключить, что формула W = & iWi, где Wi =
= (yXi U X- : Ai Ж/)ип, а Х{ — множество всех свободных перемен-
ных Ж/, не входящих в Xi, является достаточным условием для вывода
I—'(G)Hn. Формулы Wi,..., Wk (а также W) будут называться решением
ЛУ (2.37).
Если ПП-процесс бесконечен, тогда для его прерывания после шага,
когда было получено Л У V : И {3Z2 : Аг Фг U {применима
I раз композиция cj/3, где /3 — правило прерывания, понимаемое как
подстановка Уг/Уг, где Уг — V : Аг 3 : Л. Для доопределения остав-
шихся неизвестных в Уг делается то же, что и выше (в случае конечного
ПП-процесса). Поскольку в обоих случаях процесс останавливается с по-
лучением аксиомы, мы можем заключить, что Wi,..., Wk — желаемое
решение ЛУ G.
В действительности, принимая во внимание ресурсные ограничения,
правило (3 может использоваться также в конечном ПП-процессе для
ускорения вывода. Правило а также может управляться этими ограни-
чениями, причем как в случаях неопровержимости, так и опровержи-
мости Gs, хотя более раннее применение этих правил делает условия
Wi,..., Wk более грубыми. В частности, преждевременное использова-
ние а, а именно до исчерпания возможностей использования ш, если такое
исчерпание осуществимо, дает в общем случае только достаточное, но не
необходимое, условие. Это тем более справедливо в случае бесконечной
применимости cj.
Пусть А — первопорядковая формула, F — некоторое представление
ее отрицания -»А в классе хорновских по-формул. Если ПП-процесс для
F останавливается без какого-либо применения а полностью, ничто не
синтезируется, в противном случае перед первым применением а мы по-
лучим некоторую по-формулу wnF. Поскольку wnF сохраняет свойство
быть хорновской по-формулой, она имеет структуру У:И ЭХ : Ф (ква-
зихорновская). После перехода в ЛУ V : И ЭХ : Л Ф U {У1}(к = 1,
так как имеется только одна база) мы получим в конечном ПП-
процессе или в процессе с прерываниями только одну формулу W\,
которая очевидно является достаточным условием выводимости А в
исчислении предикатов. Если -А представимо в классе по-формул, име-
ющих квазихорновскую структуру F = V:T{3Xj: Аг Фг}г=гТ’ Где к > 1,
157
Фг — хорновские по-формулы, тогда в ПП-процессе или в процес-
се с прерыванием мы получим, очевидно, также достаточные условия
Если ПП-процесс для F использует правило а, только когда правило
lu неприменимо, то такой процесс назовем ограниченным.
Теорема 2.11. Если ограниченный ПП-процесс для F конечен, тогда
он порождает необходимое и достаточное условие W: h W о А.
Доказательство. Достаточность (Н W А) установлена выше. Необ-
ходимость доказывается индукцией по частичному порядку относительно
свойства подформульности в W [61].
Последняя теорема показывает, что ПП-процесс является довольно
совершенным, поскольку в случае его собственной остановки (без вме-
шательства оракула) результат W является логически неулучшаемым. Для
нетривиальности решений ЛУ надо иметь возможность их проверки на
некоторых моделях изучаемой теории. Она (проверка) должна быть более
простой, чем прямая проверка А = ->(F)Hn.
Радикальным средством улучшения W относительно критерия прове-
ряемости является указание человеком некоторого языкового ограничения
на W по сравнению со всем языком ЛУ. Например, могут быть исключены
трудно проверяемые предикаты, а также функции или переменные, свой-
ства которых неполностью известны.
Для описания нижеследующих правил преобразований, нацеленных
на улучшение проверяемости формулы W, будем использовать теперь
образы по-формул в языке исчисления предикатов. При этом каждый ти-
повый квантор с векторной переменной х±... хт будем заменять эквива-
лентным образом на блок типовых кванторов с одноэлементными конъ-
юнктами и скалярными или фиктивными кванторными переменными. На-
пример, типовый квантор Эж13ж2(Р(ж1) & Р(ж1,Ж2) & Р(я4) & LJ) мо-
жет быть заменен на 3a?i(P(a:i) & Зж2(Р(ж1,xz) & Э(Р(ж4) & □))). Эта
замена может осуществляться достаточно произвольно, в том числе с при-
менением конъюнкта И.
R1. Выделение экзистенциального квантора:
И W1...& w'l ...-> W1W2 ... шп-1гопФ, где Wi =
= \fxi(Ai LJ), Wi = ЭжДАг & U) (типовые кванторы), Ai — атом, Ф —
произвольная формула, Vz = l,n — 1, если Wi = Wi, то w' = w" = Wi,
в противном случае: е {wi,Wi} и = Wi тогда и только тогда,
когда w-' = Wi.
R2. Сокращение: Пусть атом Аг в G F содержит нежелательный
элемент. Если Wi = V(Ai —> U) — типовый квантор с фиктивной пе-
ременной, то он может быть вычеркнут из F, в противном случае (если
переменная — не фиктивная) его атом может быть заменен на И. Резуль-
тат логически сильнее, чем F, в обоих случаях.
158
R3. Удаление У-веток: Если F' — подформула F и F' = Fi V Р2,
то благодаря позитивности F и, как следствие, монотонности F относи-
тельно подформул получаем Н F(F'/Fi) -> F
R4. Удаление несущественных кванторов'. Типовый квантор Wi в F
называется несущественным тогда и только тогда, когда его кванторная
переменная не встречается в области действия Wi в F. Результат удаления
из F всех несущественных кванторов Wi влечет F.
R5. Удаление повторов: Пусть wz,w3 е F, Wj встречается в области
действия Wi в F Aj = Ai, Wj — фиктивный квантор. Тогда резуль-
тат удаления из F квантора Wj будет эквивалентен F. Если Wj = Wj,
Wj — лист и существуют Wk или Fi такие, что WkWj или соответственно
F\twj, I Е {&, V} — подформулы F, то для корректности R5 мы должны
заменить Wj на 3(И).
R6. Специализация кванторов существования: Допустим, что
Wj Е F, Wj встречается в области действия Wi в F и переменные хг,х3
(кванторные переменные из wz,w3 соответственно) являются однотип-
ными, т.е. в простейшем случае существует предикатный символ Р1 такой,
что P1(xi) = Ai,P1(xj) = Aj. Если обозначить область действия w3 че-
рез Ф, а результат подстановки $(xj/xi) через Фь то h F(wj$/$i) -> F.
Легко понять возможность обобщения этого правила для случая предиката
произвольной арности. В наиболее общем случае мы можем использовать
некоторую специальную теорию типов.
Очевидно, что правила R1-R6 могут также применяться подходящим
образом непосредственно к по-формулам или ЛУ.
Пример. Рассмотрим отрицание формулы
А = Vx(P(a:) -> Q(x)) -> Зт/(Р(?/) & Q(y)).
Оно имеет по-представление F = V: И Зг : И{Ф1,Фг}, где Ф1 = Vrr :
Р(х) 3: Q(s), Ф2 = ^y-P{y),Q(y) 3:Л.
F не может быть выведена в J потому, что VA (действительно, мы не
можем применить правило логического вывода ш к F).
После применения ПП-процесса к формуле F, рассматриваемой как
ЛУ (2.37), мы получим следующую последовательность
aF = У:И Зг:И{Ф1? Ф2,У:И{Зж' :P(x')Vu Зу' : Р(у'), <Ж)У2}},
uaF = V:H{3zx' :Р(ж'){Ф1, Ф2, М 3zyf:P(y'), Q(y'){$i, $2, V2}},
w2oP = tf:H 3zx’ :Р(х,){Ф1,Ф2,У1},У2 = 0,
cu'W = V:H Bzx1 :Р(х,)^(х,){Ф1,Ф2,У1},
w4aF = V:H 3:Л,У! = 0.
159
После применения R3 мы получим достаточное (и необходимое) усло-
вие W = Зж'Р(ж') доказуемости формулы А.
Определим также правило синтеза а!, которое отличается от а только
тем, что множество :Вг] Vij} в Ц формируется из более ограничен-
ного набора конъюнктов Bij, а именно только из таких конъюнктов Bij,
для которых правило еще не применялось.
Рис. 2.1. Алгоритм вывода по-формулы F с порождением гипотез
Следствие 2.2. ПП-процесс с w и а' (вместо а) не выводит из класса
ЛУ (2.37) и конечен (вообще говоря, не обеспечивая необходимости W
даже для ограниченного ПП-процесса).
Применение некоторой последовательности правил R1-R6 к реше-
нию W ЛУ (2.37) или к промежуточному ЛУ ПП-процесса (с а или а!)
сохраняет свойство результата быть решением.
160
В частности, применимо правило синтеза а*, которое отличается от
а' только тем, что для кванторов существования : Bij используется
правило R6.
Пусть Тнепр — максимально допустимое время непрерывного, т.е. без
использования правила синтеза, вывода предъявленной по-формулы F;
Тполн — максимально допустимое время ее доказательства с порождением
гипотез. По смыслу ТНепр < Тполн.
На рис. 2.1 представлен алгоритм вывода F на основе исчисления J
и порождения гипотез. Алгоритм допускает случаи:
(а) неприменимости правила вывода,
(б) исчерпания времени непрерывного вывода (без порождения гипо-
тез),
(в) исчерпания времени полного вывода (с порождением гипотез).
На рис. 2.1 параметр t обозначает время, затраченное на обработку
по-формулы F к моменту проверки условий t < ТПОлн или t < Тнепр.
Этот алгоритм позволяет решать задачи с неполной информацией,
поскольку он синтезирует некоторую дополнительную информацию и при
истинности знаний, содержащихся в ней, неразрешимая поначалу задача
может стать практически разрешимой.
ЛИТЕРАТУРА
1. Гильберт Д., Бернайс П. Основания математики: логические исчисления и формапиза-
ция арифметики. — М.: Наука, 1983.
2. Newell A., Shaw J.C., Simon Н. A Variety of Intelligent Learning in a General Problem
Solver // Self-Organizing Systems / Eds. M.S. Yovits, S. Cameron. — New York: Pergamon
Press. 1960. P. 153-189. [Рус. пер.: «Самоорганизующиеся системы». — M.: Мир,
1964.]
3. Church A. A Note on the Entscheidungsproblem // J.Symbolic Logic. 1936. № 1. P. 40-41.
[исправления там же. P. 101-102.]
4. Turing А.М. On Computable Numbers, with an Application to the Entscheidungsproblem //
Proc. Lond. Math. Soc. Ser. 2. 1936. № 42. P. 230-265; 1936. № 43. P. 544-546.
5. Мендельсон Э. Введение в математическую логику. — М.: Наука, 1971.
6. Шенфилд Дж. Математическая логика. — М.: Наука, 1975.
7. Ершов ЮЛ., Палютин Е.А. Математическая логика. — М.: Наука, 1979.
8. Клини С., Весли Р. Основания интуиционистской математики. М.: Наука, 1978.
9. Драгалин А.Г. Математический интуиционизм. Введение в теорию доказательств. — М.:
Наука, 1979.
Ю. Godel К. Die Vollstandigkeit der Axiome des Logischen Funktionenkalkiils П Monatsh.
Math. Phys. 1930. № 37. P. 349-360.
6 - 1847
161
11. Genzen G. Untersuchungen fiber das Logische Schliessen II Math. Zeitschr. 1934. № 39.
P. 176-210, 405-431. [Рус. пер.: «Математическая теория логического вывода». —
М.: Наука, 1967. С. 9-76.
12. Herbrand J. Recherches sur la theorie de la demonstration. Travaux de la Soc. des Sci. et
des Lettres de Varsovie. III. 1930. № 33. P. 33-160.
13. Kanger S. A Simplified Proof Method for Elementary Logic // Computer Programming and
Formal Systems I Eds. P. Braffort, D. Hirschberd. — Amsterdam: North-Holland Publishing
Co. 1967. P. 87-94. [Рус. пер.: «Математическая теория логического вывода». — М.:
Наука, 1967. С. 200-207.]
14. Davis М., Putnam Н. A Computing Procedure for Quantification Theory // J. ACM. 1960.
№ 7. P. 201-215.
15. Davis M. Eliminating the Irrelevant from Mechanical Proofs 11 Proc. 15th Symposium in
Applied Mathematics of the AMS. 1963. № 15. P. 15-30; [Рус. пер.: Девис M. «Устра-
нение лишнего из механических доказательств» И Киберн. сб. Нов. сер. Вып. 7. — М.:
Мир, 1970. С. 160-179.
16. Чень Ч., Ли Р. Математическая логика и автоматическое доказательство теорем. — М.:
Наука, 1983.
17. Gilmore P.S. A Proof Method for Quantification Theory 11 IBM J. Res. Develop. 1960. № 4.
P. 28-35.
18. Prawitz D. An Improved Proof Procedure // Theoria. 1960. № 26. P. 102-139.
19. Prawitz D. A Proof Procedure with Matrix Reduction И Proc. Symposium on Automatic
Demonstration / Eds. M.Laudet et al. Springer Lecture Notes in Math. 1970. № 125. P. 207-
214.
20. Robinson J.A. A Machine-Oriented Logic Based on the Resolution Principle // J.ACM.
1965. № 12. P. 23-41. [Рус. пер.: Робинсон Д. Машинно-ориентированная логика,
основанная на методе резолюции И Киберн. сб. Нов. сер. Вып. 7. — М.: Мир, 1970.
С. 180-218.]
21. Robinson J.A. Automated Deduction with Hyper-Resolution // Intern. J. of Comp. Math.
1965. № 1. P. 227-234.
22. Robinson J.A. The Generalised Resolution Principle // Machine Intelligence I Ed. D. Michie.
1968. № 3. New York: American Elsevier. P. 77-94.
23. Eisinger N., Ohlbach H.J. Deduction Systems Based on Resolution // Handbook of Logic
in Artificial Intelligence and Logic Programming / Eds. D.M.Gabbay et al. — Oxford:
Clarendon Press. 1993. V. 1. P. 183-271.
24. Paterson M.S, Wegman M.N. Linear Unification // J. of Comp, and System Sci. 1978. V. 16,
№ 2. P. 158-167.
25. Loveland D.W. A Linear Format for Resolution 11 Proc. IRIA Symposium on Automatic
Demonstration. 1970. P. 147-162.
26. Luckham D. The Resolution Principle in Theorem Proving // Machine Intelligence I Eds.
N.L. Collins, D. Michie. New York: American Elsevier. 1967. № 4. P. 47-61.
27. Kowalski R. Predicate Logic as a Programming Language // Proc. IFIP-74. North Holland.
1974. P. 569-574.
28. Kowalski R. A Proof Procedure Using Connection Graphs I I J. ACM. 1975. V. 22, № 4.
P. 572-595.
29. Dalen D. van. Lectures on Intuitionism П Leet. Notes Math. 1973. № 337. P. 1-94.
162
30. Hey ting A. Die Formalen Regeln der Intuitionistischen Logik П Sitzungsber. preuss. Akad.
Wiss — Berlin, 1930. P. 42-56.
31 Kolmogoroff A.N. Zur Deutung der Intuitionistischen Logik // Math. Z. 1932. № 35. P. 58-65.
32. Такеути Г. Теория доказательств. — M.: Мир, 1978.
33 Kripke S. A Completeness Theorem in Modal Logic // J. Symbolic Logic. 1959. № 24.
P. 1-15.
34. Kleene S.C. On the Interpretation of Intuitionistic Number Theory 11 J. of Symbolic Logic.
1945. № 10. P. 109-124.
35. Gode IK. Uber eine bisher noch nicht beniitzte Erweiterung des finiten Standpunctes // Dialec-
tica. 1958. № 12. P. 280-287. [Рус. пер.: Гедель К. Об одном еще не использованном
расширении финитной точки зрения И Математическая теория логического вывода. —
М.: Наука, 1967. С. 499-510.]
36. Statman R. The Predicate Calculus is Not a Kalmar Elementary Speed-up of the Equation
Calculus. — Preprint I Cambridge. 1975.
37. Оревков В.П. Нижние оценки увеличения сложности выводов после устранения сече-
ний И Зап. научн. семинаров ЛОМИ АН СССР. 1979. № 88. С. 137-162.
38. Оревков В.П. Алгоритм Британского музея может быть эффективнее метода резолю-
ций И Чень Ч., Ли Р. Математическая логика и автоматическое доказательство тео-
рем. — М.: Наука, 1983. С. 314-326.
39. Цейтин Г.С. О сложности вывода в исчислении высказываний И Зап. научн. семинаров
ЛОМИ АН СССР. 1968. № 8. С. 234-259.
40. Gabbay D.M. Preface to Handbook of Logic in Artificial Intelligence and Logic Programm-
ing I Eds. Gabbay D.M., Hogger C.J., Robinson J.A. — Oxford: Clarendon Press. 1993.
V. 1. P. v-viii.
41. Wos L. Solving Open Questions with an Automated Theorem Proving Program II Lecture
Notes in Computer Science. 1982. V. 138. P. 1-31. [Рус. пер.: Л.Воз. Решение неко-
торых открытых проблем с помощью программы для автоматического доказательства
теорем И Киберн. сб. Нов. сер. Вып. 21. — М.: Мир, 1984. С. 235-263.]
42. Wos L., VeroffR. Logical Basis for the Automation of Reasoning: Case Studies // Handbook
of Logic in Artificial Intelligence and Logic Programming I Eds. D.M. Gabbay, C.J. Hogger,
J.A. Robinson. — Oxford: Clarendon Press. 1994. V. 2. P. 1-40.
43. Васильев С.Н.У Жерлов A.K. Об исчислении типово-кванторных формул И Докл. РАН.
1995. Т. 343, № 5. С. 583-585.
44. Colmerauer A. Les Systemes-Q ou un Formalisme Pour Analiser et Synthetiser des Phrases
sur Ordinateur П Publication Interne. 1973. № 43. Dept. d’Informatique. Un.de Montreale.
45. Loveland D. Near-Horn Prolog // Proc. 4th Intern. Conference on Logic Programming I Ed.
J.-L.Lassez. The MIT Press. 1987. P. 456-469.
46. Fitting M. First Order Logic and Automated Theorem Proving. — Berlin: Springer. 1990.
47. Fitting M. Basic Modal Logic // Handbook of Logic in Artificial Intelligence and Logic
Programming / Eds. D.M. Gabbay et al. — Oxford: Clarendon Press. 1993. V. 1. P. 365-
448.
48. Фейс P. Модальная логика. — M.: Наука, 1974.
49. Васильев С.Н., Жерлов А.К. Логическое моделирование и управление в реальном вре-
мени И Труды Всесоюзной конференции «Интеллектуальные системы в машинострое-
нии» / Под ред. В.А. Виттиха. — Самара: 1991. Т. 2. С. 33-38.
6*
163
50. Reiter R. A Theory of Diagnosis from First Principles II Artificial Intelligence. 1987. V. 32,
№ l.P. 57-95.
51. Бурбаки H. Теория множеств. — M.: Мир, 1965.
52. Мальцев А.И. Модельные соответствия И Изв. АН СССР. Математика. 1959. № 23.
С. 313-336.
53. Непейвода Н.Н. Язык математики. Методы перевода. — Препринт / УГУ. — Ижевск.
1990.
54. Walther С. A Mechanical Solution of Schubert’s Steamroller by Many-Sorted Resolution //
Proc. 4th National Conference on Artificial Intelligence. 1984. P. 330-334.
55. Wang H. Towards Mechanical Mathematics // IBM J. Res. Develop. 1960. V. 4, № 1.
P. 2-22.
56. Lee R. A Completeness Theorem and a Computer Program for Finding Theorems Derivable
from Given Axioms: Doctoral Diss. Dept, of Electrical Engineering and Computer Science.
Univ, of California. Berkeley. 1967.
57. Глушков B.M. Машина доказывает — M.: Знание, 1981.
58. Матросов В.М., Васильев С.Н., Анапольский Л.Ю. Метод сравнения в математической
теории систем. — Новосибирск: Наука, 1981.
59. Матросов В.М.Ч Васильев С.Н., Каратуев В.Г., Козлов Р.И., Суменков Е.А., Ядыкин С.А.
Алгоритмы вывода теорем метода векторных функций Ляпунова. — Новосибирск: На-
ука, 1981.
60. Vassilyev S.N. Machine Synthesis of Mathematical Theorems // J. of Logic Programming.
1990. V. 9, № 2,3. P. 235-266.
61. Васильев С.Н. Метод синтеза условий выводимости хорновских и некоторых других
формул // Сибирский математический журнал. 1997. Т. 38, № 5. С. 1034-1046.
62. Таутс А.И. Решение логических уравнений итерационным методом в исчислении преди-
катов И Известия Института физической астрономии Академии наук ЭССР. 1964. Т. 24.
С. 17-24.
63. Muggleton S. Inductive Acquisition of Expert Knowledge. — Wokingham: Turing Institute
Press. Addison-Wesley Publ. Company. 1990.
64. Moore J.S., Boyer R.S. A Computational Logic Handbook. I I Perspectives in Computing.
Academic Press. 1988. V.23.
65. Muggleton S., Buntine W. Machine Invention of First-Order Predicates by Inverting Resolu-
tion // Proc. 5 Internal. Conference on Machine Learning I Ed. J. Laird. 1988. P. 339-352.
66. Flach P.A. Towards the Inductive Logic Programming // Proc. BENELEARN-91. Depart, of
Social Science Informatics. Univ, of Amsterdam. 1991. P. 88-96.
67. Lenat D.B. On Automated Scientific Theory Formation: A case Study Using the AM Pro-
gram I I Machine Intelligence. 1981. № 9. P. 251-283.
68. Vassilyev S.N. Modelling Logical Derivation and Hypothesis Generation // Proc. IEEE Sym-
posium on Modelling. Analysis and Simulation. 1996. V. l.P. 148-153.
69. Давыдов Г.В. О корректировании недоказуемых формул И Зап. Научн. Сем. ЛОМИ АН
СССР. 1967. Т. 4. С. 18-29.
ГЛАВА 3
ПРИМЕНЕНИЕ ЛОГИЧЕСКОГО ВЫВОДА
И ПОРОЖДЕНИЯ ГИПОТЕЗ
В ЗАДАЧАХ УПРАВЛЕНИЯ
И ИССЛЕДОВАНИЯ СВОЙСТВ СИСТЕМ
3.1. Интеллектное управление группой лифтов
3.1.1. Абстрактная модель
Опишем сначала абстрактную модель группы лифтов, в которой вы-
деляются основные понятия и связи между ними, отражающие интере-
сующие нас стороны функционирования реальных лифтов. Такая модель
может служить основой для построения имитационной и логической мо-
делей группы лифтов. При построении моделей неизбежны упрощения,
чтобы с одной стороны они были достаточно просты для анализа, а с дру-
гой достаточно близки к реальному объекту для достоверности результатов
этого анализа и возможности применения их на практике. Нашей целью
является выявление принципиальной возможности и целесообразности по-
строения и использования систем логического вывода в рассматриваемой
задаче. Поэтому все упрощения вполне оправданы и могут быть устранены
при переходе к реальному приложению.
Группа лифтов есть система из к кабин, способных перемещаться по
п > 2 этажам, имеющая некоторую управляющую подсистему (процессор),
которая принимает решения на основе информации о вызовах, положении
и маршрутах кабин. Далее, для определенности, везде считаем, что к = 4
и п = 12.
Первое основное упрощение заключается в том, что под временной
осью мы понимаем дискретное множество последовательных моментов
времени с заданной величиной интервала между соседними моментами
(тактами), содержащее начальный (первый) момент времени и бесконечно
продолжимое вправо. Скорость движущихся кабин принимается посто-
янной и равной высоте этажа, деленной на длительность такта (высота
этажей тоже считается одинаковой). Длительность остановки кабин для
165
входа-выхода пассажиров полагаем равной длительности одного такта. Ем-
кость кабин и пассажиропоток таковы, что нет необходимости рассматри-
вать случаи переполнения кабин.
Считается, что любой пассажир соблюдает следующие правила:
1) для вызова лифта он нажимает на этаже кнопку вызова соответству-
ющего направления и ждет кабину, которую процессор лифта адресовал
на этот вызов (отсутствие ложных и ошибочных вызовов);
2) войдя в кабину, пассажир задает ей команду, для чего он нажи-
мает кнопку нужного этажа, который вносится в маршрут этой кабины —
перечень этажей, на которых кабине предстоит сделать остановку. При
остановке на указанном этаже пассажир выходит (отсутствие ложных и
ошибочных команд).
Упрощая, исключаем случаи нескольких, входящих на одном этаже,
пассажиров. Или, что более точно, после входа пассажиров маршрут ка-
бины может пополняться максимум еще одной остановкой.
Не обязательна какая-либо статистическая информация о пассажиро-
потоке. Однако интересно проверить возможность использования и такой
информации в рамках логического подхода. При этом мы можем исполь-
зовать: 1) частоту вызовов с каждого этажа в определенном направлении,
2) а при посадке на l-м этаже: вероятность адресации на т-й этаж, I / т.
Эти допущения о времени, работе лифтов, поведении пассажиров, ин-
формация о потоке пассажиров и некоторый алгоритм управления, связы-
вающий поступивший вызов с одной из кабин (т.е. включающий в маршрут
этой кабины остановку на этаже вызова при движении в соответствующем
направлении) определяют функционирование некоторого гипотетического
лифта, т.е. служат основой для построения имитационной модели лифта.
Функционирование гипотетического лифта (или имитационной модели)
при отсутствии вызовов однозначно предопределено командами для ка-
ждой кабины, поэтому нет необходимости в работе процессора. Принятие
решения необходимо в те моменты, когда поступает вызов, и процессор
либо связывает этот вызов с одной из кабин, включая в ее маршрут этот
вызов, либо откладывает это связывание, например, на один такт «до про-
яснения ситуации».
Простейший алгоритм принятия решения — связывание поступив-
шего вызова с ближайшей в некотором смысле кабиной. Однако, опре-
деление «ближайшей» кабины требует уточнения. Например, для двух
кабин, первая из которых свободна и находится на 1-м этаже, вторая —
на 2-м, но ей предстоят остановки на 3-м и 4-м этажах, ближе к 5-му
этажу первая кабина, так как ей необходимо 4 такта, чтобы прибыть на
5-й этаж, тогда как второй — минимум 5 тактов. Назовем дистанцией от
кабины до этажа количество тактов, за которое кабина может его достичь,
исполняя уже сформированный ей маршрут (команды и вызовы). Но ал-
166
горитм наименьшей дистанции не учитывает обстановку, которая может
сложиться в следующие такты. Рассмотрим пример (рис. 3.1). Пусть ка-
бины находятся на 1-м, 4-м, 9-м и 11-м этажах, и все, кроме первой,
движутся вверх по маршрутам, обозначенным точками. Кроме того, че-
твертая кабина связана с вызовом (5 — количество тактов ожидания).
Поступил вызов с 3-го этажа для движения вверх. Так как все кабины,
кроме первой, имеют слишком большую дистанцию от этого вызова, то ва-
рианты связи с ними отвергаются и тогда возможна связь только с первой.
в покое движутся по
маршрутам,
обозначенным
точками
Рис. 3.1. К интеллектному управлению группой лифтов
Но усложним задачу: предположим, что частота вызова с 1-го этажа
достаточно высока (например, в среднем 0,9 вызовов за 2 такта), хотя
в текущий такт вызова не поступило. Если мы свяжем первую кабину
с вызовом с 3-го этажа, то дистанция от весьма вероятного вызова с 1-го
этажа до всех кабин будет слишком велика (например 8). Поэтому будет
разумнее ждать вызова с первого этажа, и после этого связать 1-ю кабину
с вызовом с 3-го этажа.
167
Как видно, чтобы принять такое решение, необходимо рассмотреть
предполагаемое развитие событий в каждом из вариантов и оценить их.
При этом длительность процедуры принятия решения естественно огра-
ничить одним тактом.
Об оценивании вариантов. Можно было бы говорить об оптимальных
в некотором вероятностном смысле решениях, но вероятностные характе-
ристики пассажиропотока чаще всего неизвестны. Что касается критериев
оптимальности, требующих одновременной оптимизации, то их несколько
(средняя длительность ожиданий, возможность долгих ожиданий и т.д.).
Список этих критериев изменчив и, в частности, зависит от условий
функционирования (типа здания — административное, производственное,
жилое здание, режима его использования, в свою очередь, зависящего от
сезона, дня недели, часа суток и т.д.). Выявление степени предпочтитель-
ности на шкалах значений отдельных критериев, ранжирование критериев
между собой по важности резко усложняются динамичностью ситуации и
неопределенностью пассажиропотока.
Другой подход состоит в исключении заведомо худших альтернатив
на основе логического вывода. Поскольку после такого логического со-
кращения числа допустимых альтернатив их может оставаться больше
одной, но оставшиеся альтернативы все являются достаточно разумными,
то окончательный выбор между ними может быть либо случайным, либо
основываться на методах многокритериальной оптимизации. Условия эф-
фективной применимости тех или иных процедур окончательного выбора
естественно формализовать логически и встраивать в общую стратегию
логического вывода.
3.1.2. Логическая модель
Логическая модель группы лифтов есть тройка (F, S, V), где
F — по-формула, описывающая состояние лифта и правила, которым
должна подчиняться работа лифта, S — порядок использования ответов
на вопросы при логическом выводе (по-стратегия), V — внешние допол-
нительные процедуры, полезные для имитации работы лифта (например,
имитация пассажиропотока в соответствии со статистикой).
Перечислим основные понятия и связанные с ними предикаты.
T(t) — «t есть момент времени».
— «tf — момент времени, непосредственно следующий за t».
Cab(i, е, S, t) — «кабина i находится в момент времени t на этаже е
и ей предстоит последовательно посетить этажи из списка S (маршрута)».
Если кабина i остановлена, то либо S = nil (пустой список), либо S =
= (е, S"). Если кабина i движется, то S = (е', S") для некоторых е' / е и
S', и знак разности е — е' определяет направление движения.
168
Call(e, d, т, t) — «вызов в момент времени t с этажа е в направлении
d 6 {вверх, вниз}, имеющий длительность ожидания исполнения т».
Сопп(г,е, d) — «кабина i связывается с вызовом (е, d)». В этом
случае в маршрут кабины i вставляется остановка на этаже е и, при ими-
тации, остановка на этаже <//*(е), где ipd(e) — целое число, наиболее
близкое к математическому ожиданию адресации с этажа е в направлении
d в соответствии с известной нам статистикой.
Dist(e,d, i,t, а) — «дистанция между кабиной i в момент времени t
и вызовом (е, d) равна а». Как отмечалось, дистанция может определяться
и вычисляться более сложно, чем просто подсчетом разности этажей и ко-
личества остановок, если учитывать вероятностный характер адресации,
длительности остановок и того, что на промежуточных остановках пасса-
жиры могут выходить и тем самым вносить изменения в маршрут. Мы не
будем углубляться в эти специальные вопросы.
Z(k, 61,62) — «из зоны, включающей все этажи е, ei < е < 62, за
любые к последовательных тактов поступает по крайней мере один вызов
со статистической вероятностью, превышающей порог». Таким порогом,
например, может быть число 0,9.
Кроме перечисленных предикатов, в F присутствуют проверяемые
предикаты, например, ei < 62, ei = 62, истинностное значение которых
вычислимо при подстановке констант на все аргументные места.
Если атом — проверяемый предикат — принимает в формуле зна-
чение И, то он может быть удален из формулы (за счет А Л И = А).
Если он принимает значение JI и входит в 3-конъюнкт, то соответствую-
щая ветвь опровергается, а если в V-конъюнкт, то соответствующая ветвь
«запирается», т.е. вопрос не имеет ответа.
Примеры. Здесь и далее в этом параграфе для экономии места будем
использовать сокращенные по-формулы, например, упрощать запись фор-
мулы Ух : А(х) Эу : В(х,у) до УА(х)ЭВ(х, у), понимая под этим, что
любая переменная связана квантором V, если она встречается в Л (ж), и
связана квантором 3, если она встречается в В(х,у\ но не встречается в
Л (ж). Предполагается, что мы можем отличить переменную от константы.
1) Пусть имеется формула 3 Л1,Р(1,2){Ф} и
V P(ei,e2) {3 е2 < ei,Bi(ei,e2), 3S2(ei,e2)} е Ф.
Тогда, отвечая ei —> 1,62 —> 2 на вопрос УР(61,62), получаем по первой
ветви 2 < 1 О Л и приходим к формуле
ЗЛ1,Р(1,2),В2(1,2){Ф}.
169
2) В формуле
ЗЛ(с1,е2) <
Vej < е2{Ф1},
Vei = е2{Ф2},
Vej > е2{Фз},
когда константы ei и б2 вычислены, существует ответ на один и только
один вопрос.
В каждый момент to принятия решения формула F имеет вид
3A(t0) <
Ф,
Ф.
(3.1)
Здесь A(to) — конъюнкт, описывающий состояние в момент времени
to. Если в момент времени не поступило вызовов, то задачи принятия
решения не существует: кабины движутся в соответствии с их маршру-
тами, либо, в случае.пустого маршрута, остановлены. Если A(to) содержит
Call-атомы, то соответствующие вызовы необходимо связать с определен-
ной кабиной. Тогда группа формул Ф порождает все варианты связи и,
совместно с формулой времени имитирует движе-
ние кабин в каждом из вариантов для некоторого числа тактов. При этом,
начиная с первого шага имитации, происходит отбрасывание некоторых
вариантов с помощью формул группы Ф.
Оставшиеся варианты оцениваются некоторой процедурой, выбираю-
щей наилучший вариант. В модельном примере, рассматриваемом нами,
исключаются все варианты, кроме одного.
Формулы группы Ф:
VCall(e, d, т, t), N(t, t') 3Dist(l, e, d, t, aj,...,
3Conn(l,e,d),
Dist(4, e, d, щ) <
3Conn(4, e,d),
3Call(e,d,r+l,f).
(3-2)
Здесь использован еще один прием сокращения записи, состоящий
в том, что запись формулы
VA
' ^ВЪВ,
k звп,в.
170
при громоздком В заменяется на тк-формулу
ЧА ЭВ {
I ЗВП.
Такой прием применяется и далее (формулы 3.4, 3.5).
Смысл формулы: если имеется несвязанный вызов, то вычисляются
дистанции ai от этого вызова до каждой из кабин. Далее вводятся вари-
анты связи каждой из кабин с этим вызовом, а также вариант, когда связь
вызова откладывается.
< ->Са11(1,«вверх», 0, £') > VZ(2,1,
3Call(l, «вверх», 0, t") (3.3)
— конкретный вид упрощенной формулы для Z(2,1,1), необходимый
для нашего примера. Здесь О есть условие срабатывания формулы (3.3):
ответ на вопрос этой формулы используется (т.е. в момент t" поступает
вызов) только при условии, если в момент tf такого вызова не поступило.
Формулы
VCab(i,«, S, <), Conn(i, < d), i') { g.
(3-4)
{Ve = е' 3Cab(i,e,Si,i'),
Ve' < е 3Cab(i,e —
\/e < e' 3Cab(i,e+l,S,i'),
(3.5)
VCab(i,e,nil, t') 3Cab(i, e, nil, t') (3-6)
— формулы движения, в которых пересчитываются положение и маршрут
кабины в следующий такт. S/e есть операция вставки этажей е и </(е)
в маршрут S.
Формулы группы Ф:
VDist(z, е, d, t, а^, Dist(J, е, d, t, aj), аг > aj + 6, Conn(z, e, d) ЗЛ (3.7)
— формула, исключающая вариант связи г-й кабины с вызовом поскольку
он заведомо хуже (нами выбрано: на 6 тактов хуже) варианта связи с J-й
кабиной.
VCall(e, d, 0, t), Dist(1, е, d, t, ai),..., Dist(4, e, d, t, ад),
Qi > 8, ...,ад > 8 ЗЛ (3-8)
171
— формула, исключающая вариант, при котором дистанции от каждой
кабины до только что поступившего вызова больше 8.
VCall(e,d,4,t) ЗЛ (3.9)
— формула, запрещающая варианты, при которых вызов не связывается
в течение 4-х тактов.
Итак, мы определили F, необходимую нам для иллюстративного при-
мера вывода решения.
Рассмотрим пример логического принятия решения для состояния,
изображенного на рис. 3.1.
Дня этого состояния А совпадает с
T(t0), Cab(l, 1, nil, t0), Cab(2,4, (9,12), t0), Cab(3,9, (11), t0),
Cab(4,11, (12), t0), Z(2,1,1), Call(3, «вверх», 0, t0)
и формулы группы Ф и Ф нами ранее определены.
3.13. Логический вывод управления
Стратегия, которой мы будем пользоваться для логического вывода ре-
шения, называемая нами стратегией моделируемого времени, будет опре-
делена при самом выводе.
На первом шаге мы отвечаем на первый вопрос VT(t) формулы (3.1)
подстановкой t —> to, в результате чего в А добавляется коньюнкт {T(ti),
AT(to,ti)} и атом JV(to,ti) объявляется актуальным, т.е. мы моделируем
переход в момент времени ti.
Далее, по порядку, формула (3.2) вычисляет для вызова (при от-
вете е —> 3, d —> «вверх», т —> 0, t —> to, t' —> ti на вопрос
VCall(e, (/, г, t), JV(t, t')) дистанции до кабин (положим = 2, с*2 = 19,
аз = 13, ад = 11) и вводит в рассмотрение 5 вариантов реакции на вызов,
после чего получается формула следующего вида
ЗЛ,T(ti),7V(to,ti),B,Conn(l,3,«вверх») {Q},
< EL4, T(ti), АГ (to, 11), В, Сопп(4,3, «вверх») {Q},
ЗЛ, T(ti)^(to,ti),B, Са11(3, «вверх», l,ti) {Q},
где
В = Dist(1,3, «вверх», to, 2), Dist(2,3, «вверх», to, 19),
Dist(3,3, «вверх», to, 13), Dist(4,3, «вверх», to, 11)
и Q — объединение формул времени, Ф и Ф. Вопрос формулы (3.3)
не имеет ответа ни в одном из пяти вариантов. Формулами (3.4)-(3.6)
172
пересчитываются положение кабин и маршруты для каждого варианта в
момент ti.
Далее, формулой (3.7) бракуются все варианты связи вызова, кроме
связи с первой кабиной. Например, для второго варианта на вопрос фор-
мулы (3.7) существует ответ г —> 3, е -> 3, d -> «вверх», t —> to, «г —> 19,
j? 1, ctj -> 2 и проверяемый атом > aj + 6 истинен, поэтому во
второй вариант добавляется противоречие Л, т.е. он исключается. Анало-
гично для третьего и четвертого варианта.
На вопросы формул (3.8)-(3.9) ответов нет.
Таким образом, мы прошли полный цикл и получили формулу вида
( 34,T(ii)^(Z0, ti),B,C'n,Conn(l,3, «вверх») {(!}, /о1ПА
[ ЗЛ,T(ti)^(t0,ii),B,Ci5,Call(3, «вверх», l,ii) {П}, 10 '
где Ch — компонент, определяющий положение и маршруты всех кабин
в момент ti для г-го варианта.
Осталось два варианта, и надо сделать попытку исключить один из
них. Повторяем цикл, отвечая t —> ti, на вопрос формулы времени, и в ка-
ждом из вариантов добавляется r(t2), 7V(ti, t2). Формула 7V(ti, t2) объ-
является актуальным атомом, т.е. мы перешли в момент времени t2. Основ-
ное свойство нашей стратегии моделируемого времени состоит в том, что
рассматриваются только те ответы, в которых задействован актуальный
атом.
Поскольку вызовов в момент ti не поступило, вопрос формулы (3.2)
не имеет ответа.
Формула (3.3) теперь имеет ответ t -> to, t' —> ti, t" -> t2, и в каж-
дый из двух вариантов добавляется весьма вероятный вызов
Са11(1, «вверх», 0, t2).
Формулами группы Ф пересчитываются положения кабин для момента
времени t2, и формулы группы ф не имеют ответа.
Итак, при окончании второго цикла, мы получаем формулу, отлича-
ющуюся от (3.10) тем, что в г-й 3-узел добавлено множество атомов
{T(t2),7V(t 1, t2),Са11(1,«вверх»,0,t2), C2i},
где С2г — конъюнкт, описывающий положение кабин в момент t2.
Третий цикл. После порождения нового момента формулой времени,
срабатывает формула (3.2) и вычисляются дистанции
Dist (г, 1, «вверх», t2, с^)
для каждого из двух вариантов и каждый из этих вариантов расщепляется
на 5 новых вариантов. Дистанции от предполагаемого вызова до кабин
173
для вариантов первой ветви будут более 8: первая кабина откликнулась
на вызов (3, «вверх») и пойдет на 8-й этаж, поэтому ai > 17. Аналогично,
«2 = 19, аз = 13 и ад — 11. Поэтому независимо от других срабатываний,
для всех вариантов первой ветви существует ответ на вопрос формулы
(3.8), опровергающий эти варианты, а следовательно, и первоначальный
первый вариант.
Итак, из всех вариантов реагирования на вызов в момент to остался
один, что и является целью нашего вывода.
При невозможности исключения всех, кроме одного, вариантов, мож-
но анализировать оставшиеся варианты сценариев, развернутые логиче-
ским выводом, используя иные средства, например, некоторый вариант
многокритериальной оптимизации [1].
Разумеется, вывод, как и вся процедура принятия решений, должны
быть ограничены по длительности тем реальным промежутком времени,
который соответствует такту.
3.2. Пример управления мобильным роботом
Рассмотрим известную простую задачу планирования действий [2] и,
заодно, обсудим применение тех или иных формализмов и стратегий. Име-
ется робот-манипулятор, способный двигаться. Необходимо спланировать
его действия, чтобы взять некоторый предмет, находящийся в определен-
ном месте, и положить его в контейнер. Попробуем сначала сформулиро-
вать задачу обычным способом, используя по-формулы (т.е., по сути дела,
в рамках исчисления предикатов), и обсудим возникающие при этом слож-
ности. Далее предлагается некоторая стратегия вывода, с учетом которой
исходную формализацию задачи можно существенно упростить.
Рассматривается замкнутый мир, состояния которого можно охарак-
теризовать положениями контейнера, предмета и схвата робота, а также
состоянием, в котором находится схват (либо в открытом нерабочем со-
стоянии, либо в замкнутом рабочем). Решение задачи предполагает по-
следовательность совершения действий, влекущих изменение состояния
мира.
Однако у классической логики есть фундаментальное свойство — мо-
нотонность — согласно которому, если из каких-то истинных посылок
установлен некоторый факт, то в его справедливости мы не можем со-
мневаться, какие бы дальнейшие следствия ни были порождены. Если
же мы через P(obj,a) запишем, что предмет находится в месте а, и да-
лее выведем, т.е. спланируем некоторое действие, влекущее P(obj,6), то
наличие двух положений одного и того же предмета говорит о том, что
наша формализация некорректна.
174
Естественный выход, если оставаться в рамках классической логи-
ки, — явное введение времени или последовательности действий в язык.
Самый прямолинейный способ — использование моментов времени или
тактов t0, й, ^2, • • • для отслеживания последовательности действий и фор-
мулы, «порождающей время»:
Vt: T(t) Bt' : T(t'), AT(t, t') (3.11)
т.е. «если t есть момент времени, то существует непосредственно следую-
щий за ним момент времени t'».
Так как наш замкнутый мир состоит только из того, что нас интере-
сует, то его начальное состояние полностью описывается формулой
3 : P(obj, a, to), P(cont, b, to), P(arm, c, to), А~ (to), T(to)
т.е., предмет в начальный момент to находится в а, контейнер в Ъ, схват
в с, и схват — в нерабочем состоянии (Л“(£о)).
Тогда цель планирования задается формулой
Btx : P(obj, х, t), P(cont, x, t)),
а действия описываются формулами:
«схватить»
Vxytt' : Р(агш, x,t),P(obj,x,t),P(cont,y,t),A~(t),N(t,t') (3.12)
3 : P(arm, х, t'), P(obj, j;, Zz), P(cont, ?/, ^)М+(^),
т.е., если схват и предмет находятся в одном положении, то предмет может
быть схвачен (Л+(£')); «двигаться к предмету»
Vxyztt' : P(arm,x,t),P(obj,7/,t),P(cont, z,t), A~(t),N(t,tf) (3.13)
3 : P(arm, у, t'), P(obj, y, t'), P(cont, z, tf), A~ (tz);
«подойти и положить в контейнер»
X/xytt' : P(arm, х, t), P(obj, x,t), P(cont, у, t), А+ (t), N(t,tf) (3.14)
3 : P(arm, y, t'), P(obj, y, t'), P(cont, y, t'), A~ (tf).
Теперь можно собрать по-формулу планирования:
3 : P(obj, a, to), P(cont, b, t0), P(arm, c, to), A (t0), T(to)
{(3.11), (3.12), (3.13), (3.14), Vtx : P(obj, x, t), P(cont, y, t)}.
175
По-вывод можно описать следующей таблицей, в каждой строке кото-
рой в первой колонке — номер вопроса, ответ на который используется,
во второй — соответствующая ответная подстановка и в третьей — выве-
денные и добавленные в базовый конъюнкт знания.
3.11 t to
3.13 X, у, z, t, t' —> с, a, 6, to, t\ F(arm, a, ti), F(obj, a, ti), F(cont, b, ti), A~(ti)
3.11 t —> ti T^N^tz)
3.12 х, У, t, t' —> a, b, 11, t2 F(arm, a, t2), F(obj, a, t2), F(cont, b, t2), A+(t2)
3.11 t t2 T(t3),W2,*3)
3.14 х, у, t, tf —>• a, 6, t2, t3 F(arm, b, i3), F(obj, 6, ts), F(cont, b, i3), A~(ts)
t, X -> tz, b A
Можно проверить, что это — корректный (т.е. все подстановки из
второго столбца действительно являются ответными) и минимальный вы-
вод, в результате которого планируется последовательность действий
(3.13), (3.12), (3.14).
Отметим особенности такого стиля формализации. Каждое действие
описывается формулой вида
\fxtt' : Л(ж,В : Л'(ж,t'),
где Л(ж, t) и A'(x,tf) — полные описания соответственно исходного
(предусловие) и конечного состояния мира. Вывод «порождает» проме-
жуток времени ti+i и планирует на этот промежуток одно из действий.
Если некоторое предусловие является общим для нескольких разных дей-
ствий, чего нет в нашем примере, то могут быть спланированы несколько
одновременных действий. Если они несовместимы, то вывод необходимо
дополнить стратегией, запрещающей вывод двух действий в один про-
межуток времени, т.е. чтобы в каждый нечетный шаг срабатывала фор-
мула (3.11).
Однако основной недостаток такого способа формализации — гро-
моздкость, даже для нашего простого примера. Если мы, например, опус-
каем в описании А! положение некоторого предмета, то оно «забывается»,
т.е. предмет исключается из нашего замкнутого мира.
Можно воспользоваться способом, впервые примененном к этому же
примеру в системе STRIPS [2]. Этой задаче посвящена обширная лите-
ратура. Например, в [3] дается оценка сложности планирования в духе
STRIPS, а в [4] — ретроспективный взгляд на проект STRIPS и связь с
более современными результатами.
В [5-8] описываются другие планировщики. [9] представляет хорошее
введение в проблематику планирования действий и содержит конкретную
попытку интеграции средств искусственного интеллекта с классической и
современной теорией управления. [10] — превосходный обзор современ-
ных алгоритмов интеллектного планирования. Применения в реальных
176
задачах описаны, например, в [11-15]: в планировании последовательно-
сти действий на борту спутника UOSAT-II [11]; в планировании косми-
ческих наблюдений в NASA [12] и Европейском космическом агенстве
(ЕКА) [13]; в автоматизации изготовления космических аппаратов в ЕКА
[14]; в планировании действий с вероятностными исходами [15].
Управление в стиле STRIPS не требует в рамках по-формул какого-
то нового формализма. Достаточно лишь добавить некоторую стратегию
вывода.
Мы будем представлять формулы действий без временных перемен-
ных в следующем виде:
Ух : А1(ж),А^ж) 3 : А'(ж),
где А£ (ж) — конъюнкт, состоящий из помеченных * атомов. Помеченные
атомы ничем не отличаются от обычных, кроме того, что при приме-
нении этой формулы с некоторой ответной подстановкой 7, атомы из
подмножества ^2(27) базового конъюнкта «забываются», «устаревают»,
и их запрещается использовать для ответов на следующие вопросы, т.е.,
по сути дела, мы их удаляем из базового конъюнкта. Такие действия при-
водят к неполноте вывода, так как эта стратегия — пренебрегающая, но,
очевидно, вывод остается корректным. Запишем в этом стиле наш пример.
Начальное состояние мира и цель остаются такими же, только без
временных переменных:
3 : P(obj, a), P(cont, 6), Р(агш, с), А
Зж : P(obj, ж), P(cont, х),
а формулы действия запишутся следующим образом
Ух : Р(агш, ж), P(obj, х\А * 3 : А+
Уху : Р(агш,ж)*, P(obj,?/), А 3 : Р(агш,у)
Уху : Р(агш, ж)*, P(obj, ж)*, P(cont, у) Л А+*
3 : P(arm,?/),P(obj,2/), А~
(3.12*)
(3.13*)
(3.14*)
Тогда вывод плана с той же последовательностью действий 3.13* —
3.12* — 3.14* будет происходить следующим образом: после ответа на
вопрос формулы 3.13* с подстановкой х,у —> с, а, «забудется» Р(агш, с),
и в базовый конъюнкт добавится Р(агш, а). На втором шаге удаляется
А~ и добавляется А+, на третьем — удаляются Р(агш, a), P(obj, а), А+
и добавляется Р(агш, с), Р(агш, с), А~.
177
Таким образом, из разных постановок задач управления, нуждаю-
щихся во временных рассуждениях, рассмотренная задача является про-
стейшей в том смысле, что мир — абсолютно предсказуем. Последнее
является следствием того, что его изменчивость полностью определяется
только действиями робота. Из двух описанных способов представления
знаний первый является более универсальным и его громоздкость явля-
ется платой за эту универсальность.
3.3. Наведение телескопа на центр планеты
в неполной фазе
Рассмотрим задачу наведения оси визирования телескопа (оптиче-
ского прибора) в геометрический центр Земли, Луны или другого не-
бесного тела (называемого для краткости планетой), находящегося в не-
полной фазе с видимым угловым размером от десятых долей градуса до
20 градусов. Обычно это осуществляется рядом последовательных измере-
ний, необходимых для установки круговой световой диафрагмы прибора
концентрично яркому лимбу планеты [16,17].
Рис. 3.2. Изображение планеты в фокальной плоскости телескопа
В литературе известны способы [16,17], основанные на использова-
нии информации о расстояниях О Hi (рис. 3.2) от центра телескопа О до
яркого лимба планеты (лимб представляется дугой АНВ', ось симметрии
изображения СН перпендикулярна диаметру АВ). В [17] путем реше-
ния двух алгебраических уравнений с двумя неизвестными определялись
составляющие абсолютной угловой ошибки визирования по каналам ази-
мута и высоты. В [16] вместо ЭВМ использовалось простое логическое
178
устройство (автомат), в котором в отличие от [17] использовался скользя-
щий режим наведения с шаговыми двигателями (с фиксированным шагом
отработки ошибки визирования); при этом в качестве значений управле-
ния использовались сигналы —1, 0, 1, кодирующие лишь направления
отработки ошибки наведения по каждому из каналов.
В [17] рассматривалась задача автоматического слежения с Земли
за Луной. При этом направления OHi съема информации (так называ-
емые направления сканирования) выставлялись вручную при начальной
настройке прибора, а проводимое в ночное время слежение за центром
диска Луны было кратковременным. Космическая практика выдвигает не-
обходимость решения задачи автоматического наведения на центр диска
планеты и длительного слежения за ним в условиях, когда изменение фазы
и положения оси симметрии изображения планеты в фокальной плоско-
сти прибора является существенным. Метод из [16] решал эту задачу, при
некоторых ограничениях (в форме неравенств) на текущее значение фазы
планеты. Здесь мы развиваем идеи [16] в направлении ослабления этого
ограничения. Вместе с тем, основное значение данного раздела состоит не
столько в этом, сколько в демонстрации применения автоматического до-
казательства теорем в контуре управления (в режиме реального времени)1.
3.3.1. Исходная идея метода
Пусть система координат xOz расположена в фокальной плоскости
прибора и связана с ним; приборный центр О расположен на оптической
оси Оу. Цель наведения состоит в совмещении его с центром С изо-
бражения планеты, находящейся в неполной фазе (рис. 3.2). Исходной
служит информация о расстояниях pi = OHi от приборного центра О
до яркого лимба планеты, измеряемых по фиксированным в системе xOz
п направлениям сканирования аг, г е 0,n— 1, образующим одинаковые
углы Д = 2тг/п между соседними направлениями. На рис. 3.2 и далее для
определенности п = 8.
Выбирается информативный пучок из 3 соседних направлений ска-
нирования, т.е. такой, у которого все лучи а71, aj2, aj3, ji = j2 © 1,
7з = 72 © 1, пересекают яркий лимб планеты. Здесь и далее операциями
©, G обозначаются сложение и вычитание по модулю 8. Достаточным
условием существования такого пучка является неравенство [16]
arctg q > Зтг/8, q = R/ max \]xq + Zq, q > 1, (3.15)
где max у/х% + Zq — максимальная конечная ошибка этапа грубого наве-
1 Работа выполнена совместно с Е.А.Черкашиным
179
дения, после которого включается система точного наведения, основанная
на описываемом методе наведения. Будем считать, что ошибка грубого на-
ведения не более Л/4 (при этом условие (3.15) выполняется), а также, что
пучки (тройки соседних направлений сканирования) зануме-
рованы, причем номер i пучка совпадает с номером среднего направления.
Образуем величины n = sgn (pWQi - Pn), r2 = sgn (pNei - pN),
{1, если x > 0,
0, если x = 0,
— 1, если х < 0.
Двумя диаметрами Z>iZ>3, D2D^ (рис. 3.3), параллельными биссек-
трисам bi, Ь2 углов а^Оа±, а±Оа2, образованных тройкой выбранных
направлений 1, диск планеты делится на четыре сектора S'+1+1, S'+1,“1,
S'-1-1, S'”1’4-1, в каждом из которых постоянны величины г±, г2, прини-
мающие соответственно значения (+1,4-1), (+1,-1), (-1,-1), (-1,4-1).
{С} = S°’°; CDi \ {С} = S0’1;
CD2 \ {С} = S1’0;
CD3\{C} = S0’"1;
Рис. 3.3. Разбиение диска планеты
Пара (г1,г2) на границах секторов принимает другие значения. На-
пример, на множестве точек CD± \ {С}, (ri,r2) = (0,4-1), а в точке
С (п,г2) = (0,0). Обозначим S°’+1 = CDX \ {С}, S'0,0 = {С}. Обо-
значая аналогично через 5Г1,Г2 остальные множества точек С Di \ {С}9
I = 2,3,4, получим всего девять областей знакопостоянства пары (ri,r2):
S+1,+1, S+1’-1, ..., S'0’-1, S°’°. Периодическое определение области
180
Sri’r2, в которой находится приборный центр О, позволяет организовать
многошаговый процесс отработки начальной ошибки визирования ОС.
Сигналы управления шаговыми двигателями по критерию монотонного
уменьшения ошибки мотуг быть сформированы в направлении смещения
точки О относительно точки С, параллельном биссектрисе выделенного
сектора и в сторону уменьшения ошибки ОС (это направление далее име-
нуется направлением, предписываемым выделенным сектором). Эта идея
была предложена одним из авторов этой книги в работе [16].
В случае принадлежности точки О границе секторов направление сме-
щения может выбираться тремя способами, два из которых соответствуют
отнесению точки О к тому или другому из соседних секторов, а тре-
тье совпадает с биссектрисой угла, образуемого направлениями смещения,
предписываемыми этими секторами. С точки зрения скорости уменьше-
ния ошибки и уменьшения количества включений исполнительного органа
существуют разные возможности выбора между указанными тремя напра-
влениями смещения. Например, на рис. 3.4 для информативного пучка О
и положения приборного центра в точке Oi существуют следующие три
допустимые направления уменьшения ошибки: вдоль а4, аб, а5. Среди
них а$ обеспечивает максимальную скорость уменьшения ошибки.
Рис. 3.4. Возможные варианты управления на границах секторов (для удобства
иллюстрации мы пренебрегаем ограничением ОгС < R/4 на этом рисунке)
Будем использовать среднее направление среди допустимых трех на-
правлений смещения (направление а$ для О± и информативного пучка О,
ав для О2 и информативного пучка 1).
Таким образом, управляющие сигналы полностью определяются выде-
ленной областью и номером информативной тройки, для которой область
5Г1’Г2 была определена. Нормальное функционирование описанной си-
стемы автоматического наведения предполагает исключение возможности
ошибочной работы по терминатору, когда приборный центр лежит на
181
изображении планеты, но хотя бы одно направление сканирования пере-
секается только с терминатором. Для этого, в общем случае, необходимо
различать (распознавать) направления, пересекающие лимб, и направле-
ния, пересекающие только терминатор. В частности, если по некоторому
направлению а» величины меньше, чем то ясно, что не пересе-
кает лимб и пересекается только с терминатором. Тогда информативный
пучок может быть выбран как некоторый «центральный» пучок направле-
ний среди всех тех направлений аг сканирования, по которым pi >
Этот пучок идентифицируется игнорированием информации по «боко-
вым» направлениям.
Заметим, что в процессе наведения переход некоторого пучка на-
правлений из состояния информативного в состояние неинформативного
пучка эквивалентно отказу соответствующего из восьми датчиков, а логи-
ческий поиск нового информативного пучка - автоматическую реконфи-
гурацию системы управления в подсистеме измерительной аппаратуры.
В случае |тг — -0| < arccos(l/g), где гр — фаза планеты, отмеченной
проблемы распознавания не возникает, т.е. если центр О не лежит на
ярком изображении, то любое направление, пересекающееся с изображе-
нием планеты, пересекается с лимбом. Рассмотрим сначала этот случай.
3.3.2. Случай |тг — гр\ < arccos (1/4).
Пропозициональный стиль формализации
Действительно, предположим, что соблюдается условие
А < |тг — гр\ < arccos(l/4), (3.16)
где А = const назначается с учетом светотехнических характеристик при-
бора и свойств планеты как излучающего тела. Применим логическое
управление процессом наведения, соответствующее автоматному описа-
нию из [16]. Оно представимо 65 правилами типа «если ..., то ...»,
перечисленными ниже. При этом предполагается, что приборные оси Ох
и Oz совпадают соответственно с направлениями ао, а2.
1) г = 0 & (п,г2) = (+1,+1) -> (их,иг) = (-1,0),
2) г = 0& (п,г2) = (+1,0) -» (иж,иг) = (-1,-1),
3) г = 0& (п,г2) = (+1,-1) -> (ux,u2) = (0,-1),
64) г = 7 & (п,г2) = (0,+1) -> (ux,Uz) = (—1, +1),
65) (п,г2) = (0,0) -» (иж,иг) = (0,0).
Так как здесь условия применимости всех правил попарно не пе-
ресекаются, то получим полностью детерминированный алгоритм упра-
вления, реализуемый обычной (неинтеллектной) программой, которая по
182
заданным значениям i и (ri,r2) находит значение (ux,uz). Для ослабле-
ния требований к условиям нормального функционирования будем теперь
предполагать, что в распоряжении системы управления имеется система
логического вывода (ЛВ), которая в силу известной универсальности ло-
гических методов может использоваться для решения и некоторых дру-
гих задач (например, технической диагностики рассматриваемой системы
управления). Будем считать, что система ЛВ реализована на базе исчисле-
ния по-формул. Поскольку язык L по-формул в качестве своего частного
случая содержит пропозициональный язык, то начнем с пропозициональ-
ного стиля формализации задачи.
Нетрудно видеть, что выписанные правила представимы в пропозици-
ональном языке с использованием следующих пропозициональных пере-
менных га, Г(з^/з2, где a G 0,7, fa; е Е = {—1,0,+1}, j = 1,2,
интерпретируемых следующим образом:
ia истинно тогда и только тогда, когда пучок а информативен,
истинно тогда и только тогда, когда п = /31 & Г2 = /З2, т.е.
приборный центр принадлежит области S^1^2,
ири$2 истинно тогда и только тогда, когда их = /31 & иу = fa, т.е.
ошибка наведения уменьшается с помощью управлений fa, /З2 по
осям Ox, Oz соответственно; при этом мы пренебрегаем тем, что
в зоне нечувствительности указанные управления могут увеличивать
ошибку, т.е. считается, что в силу малости зоны нечувствительности
дальнейшее уменьшение уже не требуется, и, более того, фактиче-
ски, ошибка может незначительно увеличиться, когда длина отрезка
ОС соизмерима с размером области нечувствительности, но это уве-
личение может привести лишь к временной немонотонности пере-
ходного процесса.
Правила (3.17) перепишем в виде формул исчисления высказываний
1) 1о & г+1,+1 —>
2) г0 &r+i,o ->u_i-i,
65) го,о —> ио,о-
Добавим к этим формулам две элементарные формулы ia и г/зг^2 с
конкретными значениями a, fa, /З2- Они соответствуют текущему состо-
янию объекта управления, т.е. задают информативный пучок с номером
а и область нахождения приборного центра. На базе этих знаний,
для синтеза управления системе ЛВ нужно вывести конструктивно дизъ-
юнкцию \/ U/31,р2, т.е. в результате вывода мы должны получить
/31 GE,@2GE
3.18)
183
информацию о том, какой конкретно член этой дизъюнкции истинен. Та-
ким образом, надо решить задачу
& ifX f*/3i,/32
/31 ЕЕ,/32^Е
(3.19)
Поскольку логическое исчисление, которое мы будем использовать в
дальнейшем, является исчислением J по-формул и будет ориентировано
на получение опровержений, рассмотрим отрицание (3.19)
i(X &L Г/?! ,02
PiE.E'^G.E
(3.20)
Правомерность перехода от (3.19) к (3.20) определяется теоремой 2.6
и замечаниями 2.1, 2.2, так как цель V u(3i,(32 представима по-
/3iEE,/32^E
формулой G класса, выделенного в замечаниях 2.1 и 2.2.
Приближаясь к языку L по-формул и учитывая отсутствие в нем знака
каждую формулу ~и^р2 заменим на импликацию ир1ур2 -> Ans^,^.
Использование этой импликации вместо просто импликации и$ир2
False, нацелено на сохранение в базе параметров 02, при которых
достигается требуемое опровержение. Появление пропозициональной пе-
ременной Ans/31?02 в базе знаний после некоторого процесса вывода озна-
чает окончание соответствующего процесса синтеза управления (их = 019
uz = Л)- Теперь формула (3.20) может быть представлена в виде по-
формулы
Vi0,r+ii+1 Vio,r+i,o Vio, г+1,-1
F = УИЭга,г/з1г/з2 < Vro,o Vu-i,o Vu_i,_i Vuo ,-i
Vuo,o
3u_i,o,
3uo-1,
’ ’ * ?
3uo,o,
3Ans_i,o,
3Ans_i?_i,
3Anso,-i,
3Anso,o.
(3-21)
Очевидно, все выводы формулы F будут иметь длину 2. Например,
если а = 0, /?1 = /?2 = +1, после одного применения правила вывода и
184
исчисления J получим формулу
Vio,r+i?+1
3u_i,o,
VH3zo,r+i?+i,u_i,o <
Vro,o
Vu_i,o
3uo,o,
3Ans_i,o,
а еще через один шаг вывода — аксиому VH3Ans_i?o- Иначе говоря, при
рассматриваемых исходных данных га, управляющими сигналами
будут их = -1, uz = 0.
333. Представление задачи в предикатном варианте по-формул
Информационная сложность задачи, если под ней понимать размер
формулы (3.21), может быть уменьшена путем приближения к более «че-
ловеческой» форме представления знаний о задаче (это иллюстрирует еще
раз целесообразность замены термина «логическое управление» термином
«интеллектное управление», см. конец п. 1.7, а также п.п. В.З, 1.9). Для
этого надо использовать полнее выразительную силу языка по-формул, в
частности, ввести предикаты и индивидные переменные (для обозначе-
ния объектов, а не суждений, как в случае пропозициональных перемен-
ных):
Inf(i), который истинен тогда и только тогда, когда тройка i (направлений
сканирования aiei, аь a*ei) информативна.
S(ri,r2) истинно тогда и только тогда, когда приборный центр О при-
надлежит области 5Г1,Г2.
U(izi,U2) истинно тогда и только тогда, когда ошибка наведения умень-
шается при подаче на шаговые двигатели по оси азимута Ох и вы-
соты Oz управлений и\ и U2 соответственно (с точностью до области
нечувствительности).
Для дополнительного укрупнения понятийного базиса и сокращения
количества формул типа (3.18) переопределим переменные п, г 2 и, кроме
того, введем новые предикаты и переопределим некоторые старые:
1- (п,г2) = (4-1,4-1), если Api = pnqi~Pn > 0, Др2 = Pn®i~Pn >
0 и хотя бы одно из этих неравенств строгое;
2. (Г1,Г2) = (-1,-1), если Api < 0, Др2 < 0 и хотя бы одно из
неравенств строгое;
3. (п,г2) = (-1,4-1), если Др1 < 0 и Др2 > 0;
4. (п,г2) = (+1,-1), если Др1 > 0 и Др2 < 0;
5. (г1,г2) = (0,0), если Др1 = Др2 = 0;
185
6. Along (А;) истинно тогда и только тогда, когда ошибка наведения
уменьшается при смещении центра О вдоль направления
7. S(+l, +1) истинно тогда и только тогда, когда приборный центр О
принадлежит области S+1,+1 U S+1,0 U S'0,4-1;
8. S(—1, —1) истинно тогда и только тогда, когда О е S'-1,-1US-1,0U
S0’-1;
9. S(—1,+1) истинно тогда и только тогда, когда О е S-1,4-1;
10. S(+l, —1) истинно тогда и только тогда, когда О е S+1’-1;
Теперь мы в состоянии заменить 65 формул (3.18) на более компакт-
ный перечень формул первопорядкового языка:
1. Правило выбора направления смещения а^, такого, что Along(fc)
истинно:
Vi (i е 6/7 & Inf (г) ->
-> ((S(+l,+1)-» Along(i ф 4)) & (S(+l, —1)-» Along(i ф 2)) &
& (S(—1,—l)->Along(i)) & (S(-l,+l)-»Along(i®2)))j,
(3.22)
где термы i ф j, i ф j заменяются их значениями, когда становятся
известны г и j. Это осуществляется встроенными (нелогическими)
процедурами так же, как проверка предиката «i G 0,7» при каждом
значении г.
2. Правило покоя:
S(0,0) ->U(0,0), (3.23)
т.е. управляющие сигналы равны 0, когда п = гг = 0 (ошибка
наведения равна 0).
3. Правила синтеза управлений при известном направлении к смеще-
ния (к е 6/7):
(Along(O) -> U(+l,0)) & (Along(l) -> U(+l,+l)) &
(Along(2) U(0, +1)) & (Along(3) U(—1, +1)) & ( .
(Along(4) -> U(-l, 0)) & (Along(5) -> U(-l, -1)) & { }
(Along(6) -> U(0, -1)) & (Along(7) -> U(+l, -1)).
Теперь наша задача логического вывода управляющих сигналов для
конкретных допустимых значений исходных данных i*, г*, г? в предикат-
ном языке представима задачей
(3.22) & (3.23) & (3.24) & А => BuxBuyU(ux,uy), (3.25)
186
где А = {Inf(i*), S(r*,7*2)}’ а кванторы существования понимаются в кон-
структивном смысле: эта формула должна быть не просто доказана (ло-
гически выведена), но и доказана конструктивно, т.е. с указанием кон-
кретных значений их и uz, при которых верно U(izx,iz2). Заметим, что
представление задачи знаниями (3.22)-(3.25) является не только более
компактным, чем (3.18), но и более естественным.
Снова, на базе теоремы 2.6 и замечаний 2.1, 2.2, отрицание консе-
квента формулы (3.25) можно представить в виде
\/ux\/uz(y(ux,Uz) -> Ans(izx,iz2)),
что в языке по-формул приводит к формуле
Ai = Уиж, uz. и(их,uz) BAns(wr, uz).
Преобразуем теперь и формулы (3.22)-(3.24) в соответствующие по-фор-
мулы
Л2 = Уг: г е 0,7, Inf(i) ЗИ<
VS(+1,+1)
VS(+1, -1)
VS(-1, -1)
VS(-1,+1)
3Along(i ф 4),
3Along(i © 2),
3Along(i),
3Along(i © 2),
A3 = VS(0,0) 3U(0,0),
VAlong(O)
VAlong(l)
k VAlong(7)
3U(+l,0),
3U(+1,+1),
3U(+1,-1).
Обозначим через Ф множество {Л1,Л2,Лз} U Л4, тогда отрицание фор-
мулы (3.25) может быть представлено в языке по-формул
F = УИЗД Ф = УИЗД
Л1,
Аг,
Лз,
(3.26)
{Л4.
В случае (г*, г$) = (0,0) за 2 шага получается формула УИЗАпз(0,0),
т.е. независимо от информативной тройки г* управляющие сигналы ока-
зываются равными 0, что и должно быть.
В случае (г*,^) (0,0) выводы имеют длину 4. Например, пусть
А = {Inf(O), S(+l,+1)}. Путем ответа на первый сверху вопрос из Л2 с
подстановкой 0 вместо г получим формулу
( VS(+1,+1) 3 Along (4),
VS(+1,-1) 3 Along (6),
= VS(—1,—1) 3Along(0), (3.27)
VS(-1,+1) 3Along(2),
Ф.
187
После следующего применения ш, т.е. после ответа на вопрос VS’(+1, +1)
в (3.27) с тривиальной (пустой) подстановкой получим по-формулу
w2F = VH3A, Along(4) <
VS(+1,-1) 3Along(6),
VS(-1,-1) 3Along(0),
VS(-1,+1) 3Along(2),
Ф.
(3.28)
После очередного применения правила вывода ш, т.е. ответа на тривиаль-
ный вопрос VAlong(4) из Л4 с Ф, получим по-формулу
w3F = VH ЗД Along(4),U(-l,0) <! **
где Ф1 содержит три верхние ветви формулы (3.28), а Ф2 получается из Ф
удалением ветви VAlong(4) 3U(—1,0) .
После четвертого применения правила ш к вопросу \/их, uz: U(izx, uz)
из Ai е Ф2 (с подстановкой —1 вместо их, 0 вместо uz) получим аксиому
w4F = VH3Ans(-l,0),
т.е. тот же набор управляющих сигналов их = — 1, uz = 0 по осям ази-
мута Ох и угла высоты Oz9 что и в пропозициональном варианте фор-
мализации. Теперь номер информативной тройки выводится логически
(не считается заданным) и для этого понадобился более выразительный
первопорядковый язык.
Замечание 3.1. Заметим, что в каждом цикле измерений р^ непо-
средственно перед запуском логического вывода формула (3.26) требует
обновления только в части А.
3.3.4. Ослабление условия (3.16)
Рассмотрим некоторое усложнение предыдущей задачи. Предположим
нарушение условия (3.16) нормального функционирования. Пусть си-
стема грубого наведения исправна и по-прежнему обеспечивает конечную
ошибку наведения не больше 7?/4, но с некоторого момента из-за измене-
ния фазы планеты неравенство (3.16) перестает выполняться. Пусть тем
не менее выполняется следующее ослабленное условие
А < |тг — -01 <
(3.29)
Заметим, что в этом случае направления сканирования мотуг пересе-
кать изображение дважды. Поэтому мы предполагаем, что pi обозначает
расстояние от центра О до самой дальней точки изображения планеты
188
вдоль этого направления. Так как точка О может лежать на изображении
планеты (когда все направления ai пересекают изображение планеты),
тогда некоторые измеренные значения pi хотя и будут определены, но
будут неинформативными, поскольку будут соответствовать расстояниям
от точки О до терминатора планеты. Надо, чтобы система Л В учитывала
этот факт при логическом выводе номера информативной тройки.
Рис. 3.5. Оптический центр телескопа О расположен на изображении планеты
Пусть атом Р(г) обозначает, что для направления pi определено
и pi > %R/£. Будем говорить, что тройки ink противоположны, если
г = А;ф4. Для любого момента времени, пока выполняется (3.29) (рис. 3.5)
существуют противоположные пучки i and к такие, что условия
6{iel,i,i®l}->P(j)), Vj(jG{fcel,fc,fc®l}->-P0)) (3.30)
выполняются одновременно. Информативная тройка может выбираться по
следующему правилу.
Правило выбора информативного пучка:
Если при условии (3.29) для некоторого пучка i выполняется условие
(3.30), то пучок i = к ф 4 — информативный, т.е. Vj G {г © 1, г, г ф
1} = {к ф 3, к ф 4, к ф 5} направление aj пересекает лимб.
В формализованном виде последнее правило можно записать следую-
щим образом:
Уг(геО^&Р(г®1)&Р(г)&Р(г®1)& , .
& ->Р(г ® 3) & -.Р(г ® 4) & -.Р(г ® 5) -> Inf (г)), '
189
а в языке по-формул
s = Vj: jeo,7, P(jei),P(j),P(j®i){
3P(j©3),
3P(je4),
3P(je5),
3Inf(j).
Итак, справедливо следующее утверждение.
Предложение 3.1. При условии (3.29) правило (3.31) применимо
всегда и корректно.
Доказательство. Нам надо убедиться, во-первых, в том, что для лю-
бого момента времени Зг е 0,7 такое, что выполняются посылки имплика-
ции (3.31), т.е. условия применимости правила (3.31) всегда выполняются.
Иначе говоря, нам надо убедиться, во-первых, что всегда для некоторого,
изменяющегося со временем, пучка к его направления aj либо вовсе не
пересекают изображение, либо pj < 3R/4, а у направлений aj противо-
положного пучка i pj > 3R/4 (условие применимости всегда правила ин-
формативности пучка). Во-вторых, что, если для некоторого пучка i е 0,7
выполняются все посылки правила (3.31), то все направления пучка i пе-
ресекают лимб (корректность правила (3.31)).
Рис. 3.6. К обоснованию предложения 3.1
Рассмотрим рис. 3.6а. Прежде всего заметим, что, по крайней мере, 3
пары из 4-х пар противоположных пучков г, к обладают тем свойством,
что е {г©1,г,гф1} прямая, образованная противоположно направлен-
ными лучами aj, а7$4, обязательно пересечет диаметр NS (назовем его
условно свойством NS).
Действительно, при максимальном отклонении прямой NSi (каса-
тельной в точке О) от NS (рис. 3.6а) прямая PQ направлением OQ про-
должает пересекать диаметр (меридиан) NS, так как R/4 < R ctg^1.
Если бы ошибка этапа грубого наведения была не меньше, чем R ctg^1 =
190
R\/3 — 2\/2 = (с избытком) 0.41422Я, то только 2 пары из 4-х указан-
ных обладали бы этим свойством NS. Эта величина ошибки определяется
из условия максимума высоты СО в треугольнике NOS с фиксированным
углом NOS = Зтг/4 (рис. 3.66).
Таким образом, далее считается, что на рис. 3.6а NO пересекает лимб.
Имеем, что на рис. 3.6а весь пучок OQi (т.е. направления OQ2, OQi, OQ)
пересекает диаметр NS (не пересекает лимб), а все направления проти-
воположного пучка пересекают лимб. При этом в зависимости от фазы
планеты (внутреннего или внешнего расположения точки О относительно
изображения планеты) величины pj по направлениям пучка OQ\ могут
быть определены (точка О лежит на изображении), но будут неинформа-
тивны, либо будут неопределимы (точка О не лежит на изображении). В
последнем случае (внешнего расположения точки О) по всем направле-
ниям aj пучка OQi выполняется формула -P(j) (изображение не пересе-
кается) и с учетом предыдущего (противоположно направленные лучи пе-
ресекают лимб) заключаем, что все условия применимости правила (3.31)
информативности пучка все время будут применимы к пучку ОР± (проти-
воположному пучку OQi), по крайней мере, пока точка О находится вне
изображения, причем пучок ОР± будет информативен, т.е. применение
правила (3.31) корректно.
В случае внутреннего расположения точки О относительно изобра-
жения выделение, среди направлений, пересекающих диаметр NS, пучка
OQi направлений aj по условию ->P(J) является более сложным, так как
при этом для пучка, пересекающего диаметр NS, все величины pj опреде-
лены, но все они являются неинформативными, поскольку характеризуют
расстояния по направлениям пучка от точки О не до лимба, а до тер-
минатора. При этом достаточно рассмотрения неинформативности pj по
критерию pj < 3R/4. Так как с учетом ранее рассмотренного проти-
воположные направления пересекаются с лимбом, т.е. информативны, то
для завершения доказательства нам остается убедиться в том, что среди
направлений, пересекающих диаметр NS, всегда найдется пучок напра-
влений, по каждому из которых pj < ЗЯ/4. Нетрудно видеть, что с точки
зрения поставленного вопроса наихудший случай расположения точки О
и направлений сканирования относительно изображения и одновременно
наихудшее значение фазы планеты представлена на рис.З.бв, где фаза
V’, которая по условию удовлетворяет неравенству, |тг — -01 < тг/2, пред-
полагается равной тг/2, точка О лежит на оси симметрии изображения
(СН), СО = 7?/4, треугольник АОВ — равнобедренный, АО = ОВ,
Z.AOB = Зтг/4. Так как
СО 3
АО = ВО =------= 0.653Д < -R,
COS §ТГ 4
о
191
то искомый пучок найдется, а противоположный к нему пучок и бу-
дет применимым в качестве информативного. Это завершает обоснование
Предложения 3.1.
Рассмотрим теперь полную логическую спецификацию нашей задачи.
Замечание 3.2. Вначале заметим, что в новом представлении знаний о
задаче использованы и атомы (факты), и их отрицания. Так как язык по-
формул не содержит знака отрицания все негативные факты _,Р(^) надо
заменить на эквивалентные формулы Р(^) —> Л, или, в языке по-формул,
на VP(^) ЗЛ. Множество всех таких формул образует Ф. В отличие
от этого, конъюнкт А содержит сначала все положительные факты Р(^),
и только после обработки знаний будет расширен добавлением атомов
inf(i*), s(rj,r;).
Следует также заметить, что выражения А и Ф формируются про-
цедурно как текущая информация для системы ЛВ. Атом с
конкретными значениями г*, г*, также добавляется процедурно (см. за-
мечание 3.1), но только после логического вывода атома Inf(i*), поскольку
разбиение диска планеты на области зависит от номера i (информативного
пучка).
Подформула Ф (конъюнктивное ветвление) из (3.26) в формальном
представлении знаний об усложненной задаче тоже несколько усложня-
ется и будет иметь вид:
Ф = {Ai, Л2, Лз, 52} U Л4 U Ф.
Заметим, что хотя теперь из-за вида 52 (ветвление после типового
квантора всеобщности) формула F (3.26) не является хорновской, в силу
замечаний 2.1, 2.2 исходное исчисление J по-прежнему применимо. Рас-
смотрим теперь пример вывода управляющих сигналов в конкретной си-
туации, но при условии (3.29). Пусть ситуация в процессе наведения
выглядит как на рис. 3.5, т.е. четыре направления аз, 04, а$, ав пере-
секаются терминатором планеты и только с ним, расстояния pj <
VJ € {3,4,5,6}, а остальные пересекаются с лимбом и только с ним. То-
гда имеет место -iP(3), —<Р(4), -Р(5), -Р(6), а для остальных направлений
истинны атомы Р(^), V£ е {7,0,1,2}. Это значит, что
{VP(3) зл,
VP(5) 3Jb
VP(6) зл.
Подформулы 52 и Ф ответственны за вывод номера информативного пучка.
192
Применяя правило вывода ш к вопросу V?: j € 0,7, P(j © 1),Р(у),
P(j ® 1) c подстановкой 0 вместо j, получим
u>F = VH<
ЗДР(З) |Ф,Е,Ф,
ЗЛ,Р(4) |Ф,Е,Ф,
ЗЛ,Р(5) (ф,Е,Ф,
ЗЛ, Inf(O), S(+l, +1) (ф, S, Ф.
Применяя правило ш для ответа на тривиальные вопросы VP(3), VP(4) и
VP(5) (из Ф) к верхним трем базам соответственно, получим в этих базах
противоречие, и тогда формула примет вид
u4F = Уи{ ЗЛ,Inf(O), S(+l, +1) {ф, S, Ф.
Оставшаяся часть вывода по аналогии с п. 3.3.3 приводит к выбору упра-
вляющих сигналов их = 0, uz = 4-1.
Рис. 3.7. Пример наведения: начальная позиция центра телескопа О на рис. 3.7а
соответствует точке 1 на рис. 3.76
Наведение телескопа, как многошаговый процесс измерений, вычи-
слений и логического вывода на знаниях, проиллюстрирован на рис. 3.7.
Здесь мы предполагаем, что в каждом цикле наведения, если существует
больше одного информативного пучка, система управления выбирает пу-
чок с наименьшим номером. Поэтому, в позициях 1, 2, 3, 4 точки О
используется информативный пучок 2, а после этого в позиции 5 напра-
вление сканирования ао начинает пересекать лимб, и поэтому использу-
ется пучок 1. Начиная с точки 6 в области S-1,4-1 центр О за 1 шаг
управления попадает сразу в противоположную область 54-1’-1 (точка 7).
Это свидетельствует о попадании в зону нечувствительности. Если и далее
пренебречь динамикой планеты относительно платформы телескопа, то
дальнейшими положениями точки О будут 8 (область S'-1,4-1), 9 (область
S'4-1’""1), 10 (область S'-1,4-1) и т.д.
7 - 1847
193
Ясно, что динамические свойства описанной системы интеллектного
управления должны быть согласованы с реально имеющей место динами-
кой относительного движения планеты и платформы телескопа (например,
так как в [16]).
Итак, рассмотрена задача интеллектного наведения телескопа на центр
планеты в неполной фазе. Описаны и использованы язык и соответствую-
щее логическое исчисление позитивно-образованных формул (по-формул).
По сравнению с [16], разработанный метод управления функционирует
нормально в более широкой области допустимых значений фазы планеты.
Комбинация системы ЛВ и вспомогательных, встроенных, нелогиче-
ских процедур является типичным для таких приложений. В нашем случае
алгоритм синтеза управления следующий:
1. Измерить pj, сгенерировать А и Ф (с помощью вычисления истин-
ностных значений соответствующих атомов P(J)).
2. Вывести номер информативного пучка г*.
3. Вычислить код (rj,^).
4. Вывести управляющие сигналы.
Предлагаемая система интеллектного управления (система ЛВ) с точки
зрения динамичности знания принадлежит к классу систем, управляемых
временем (time-driven reasoning), так как все знания периодически и пол-
ностью обновляются. Конкретные значения полученных в результате из-
мерений и вычислений данных не изменяют стратегии логического вывода.
Поэтому нет необходимости в использовании каких-либо специальных
временных связок или дополнительной переменной для времени (такие
подходы развиваются в так называемых временных (темпоральных) логи-
ках [19,20]).
В более сложных случаях требуется обогащение предложенного логи-
ческого инструмента. Например, если поставить цель — минимизировать
потребление энергии, что может осуществляться отключением шаговых
двигателей на некоторое время после того, как точка О попадает в область
нечувствительности, или при необходимости сделать какие-то другие усо-
вершенствования качества управления, целесообразно использовать вре-
менной вывод (temporal reasoning), основанный на специальном кольцевом
буфере для запоминания последней предыстории, или упомянутые выше
методы [19,20]. Эти усовершенствования рассмотрены в [21,22].
3.4. Примеры применения
логического порождения гипотез
в анализе динамических и управляемых систем
Рассмотрим синтез теоремы о свойстве достижимости процессов аб-
страктной динамической системы F: Т х X —> X относительно множеств
194
X° Q X, X* С X, где Т означает множество моментов времени t, X
означает пространство состояний систем F, Х° имеет смысл множества
начальных состояний, X* — целевое множество.
Определим достижимость как динамическое свойство попадания в
X*:
Р = Va?o(^o £ Х°—>3t(t еТ & Вх(х = F(t,xo) & х € X*))).
В соответствии с основной идеей метода сравнения [23], пусть дана си-
стема сравнения G : Т х Y -» У, У0 С У, У* С Y и вспомогательная
функция v : X —> У, где У частично упорядочено отношением <. Есте-
ственно задаться вопросом: при каком условии W из двух следующих
фактов
1) G имеет свойство R = Ууо(уо е У0 -> 3ti(ti 6 Т & Зу(у =
2) выполняется условие мажорирования
м = V4(4 е Х° -> Vy^y'o е Y0 & v(x'o) <у'о^
&Т^ Чх'(х' = F(t', 4) Vy’(y' = G(t', у'о) -> v(x’) < з/'))))),
следует, что исходная система F будет иметь свойство Р?
Применим ПП-процесс (п. 2.9) для порождения искомого условия W.
Нетрудно проверить что ПП-процесс для по-формул
R, V:H 3z0:z0GX0
Viz: t e T,x = F(t,x0), x e X* 3 : JI}
бесконечен (формулы M, R понимаются как V-формулы). После третьего
применения а с промежуточными применениями w и на основании /3,
R3, R6, RI, R4, R2 получим формулы, в совокупности эквивалентные
следующему набору трех условий:
Vx0(x0 G Х° -> Зуо(Уо € Г° & v(z0) < Уо)), (3.32)
Vzo(zo G Х° Vi (t е Т -> Эх(х = F(t, х0)))), (3.33)
Vt(t е Т -> Vz(z £ X* -> Vy(y е Y* -> v(x) у))). (3.34)
Последнее условие означает некоторую оценку v относительно мно-
жеств Х*,У*. Смысл (3.32), (3.33): (3.32) означает оценку v относи-
тельно Х°,У°, а (3.33) — продолжимость траекторий F(t,xo).
Таким образом, условие W = (3.32) & (3.33) & (3.34) — требуе-
мое решение. В динамике систем оно означает новую теорему сравнения:
W (М к R Р).
7*
195
Рассмотрим теперь другую математическую модель в форме разност-
ного уравнения
x(t + 1) = F(z(t),u(t),p(t)), (3.35)
где t е N = {1,2,...}, х = x(t) е X, u = u(t) G U, р = p(t) € Р, X, U,
Р — абстрактные множества, F : X xU х Р —> X.
Через U, Р обозначим некоторые классы допустимых управлений и :
N -» U и возмущений р : N -» Р.
Для каждого xq € X, и е W, р € Р функция переходов F системы
определяет соответствующий процесс x(-,xq,u,p) : N —> X такой, что
х(1, жо,гх,р) = 2?о-
Рассмотрим следующее динамическое свойство системы (3.35):
S = Vzo £ Х° Эи е U \/р е Р 3x(-,zo,ix,p)
Зй е N (yt е N.-1 > й x(t) е x*&vt2 е N: t2 < ti &x(t2) е х1),
отражающее, что для любого начального состояния xq € Х° найдется
допустимое управление и, которое при любом допустимом возмущении
р обеспечивает достижимость целевого множества X*, причем после не-
которого из моментов попадания в X* процессы остаются в нем неогра-
ниченно долго, а до этого момента выполняются фазовые ограничения
z(t2) е х1.
Введем в рассмотрение вспомогательный автомат
2/(t + l) = F'(2/W,^(t),p'(t)), (3.36)
t е TV, у = y(t) € У, u' = u'(t) е и\ р' = p'(t) € Р', F' : Y х и' х
Р' —> У, uf е pf е Р', 2/(1,2/о,^,5Р/) = Ро- В отличие от обычного
метода сравнения [23] и в духе работ по использованию гомоморфизмов
в динамике систем [24, 25], мы применим отображение V =
v : X —> У, s -.11 —> U1, г : Р —> Р', которое является гомоморфизмом F
в F', т.е. для всех t е N, х е X, р еР
v(F(x, = F'(y(x), (3.37)
В модели (3.36) будем рассматривать свойство S", аналогичное S. Через А
обозначается дополнение множества А до всего пространства. Рассматри-
вая ЛУ W & (3.37) & Sf —> S и применяя язык L и ПП-процесс получим
решение W, допускающее интерпретацию в виде следующей теоремы.
Теорема 3.1. Система (3.35) обладает свойством 5, если существуют
система (3.36) со свойством S' и гомоморфизм V из (F в F'), такой, что
v(X°) С У0, s(M) = г(Р) С р', ^(Х1) С У1, v(X*) С У*.
Аналогично можно рассмотреть вместо (3.35) модель управляемой си-
стемы с непрерывным временем. Получающийся при этом подход опять
является качественным.
196
Рассмотрим применение последней теоремы. Для этого введем неко-
торые понятия и обозначения. Разбиение множества X на классы экви-
валентности называется подстановочным разбиением, если каждая пара
эквивалентных состояний xi и Х2, переходит в эквивалентные состоя-
ния при любом входе (и,р) (два тривиальных подстановочных разбиения
имеются всегда [26]).
Назовем множество А С X представимым с помощью нетривиаль-
ного разбиения тг, если А может быть представлено как объединение
некоторых классов эквивалентности разбиения тг.
Пусть А С X, тг — подстановочное разбиение X. Обозначим тг(А) =
{у : Вх е А у = [ж]^}, где [ж]^ — класс эквивалентности, содержащий х.
Определим v : X —> У, Y = 7г(Х),и(я) = [z]w, а также систему (3.36) с
пространством состояний У, U' = U, Р' = Р, и функцией F' = ?r(F) вида
F'(v(z),u, р) = v(F(z,u, р)). Нетрудно видеть, что v — гомоморфизм
F в F' и справедливо следующее утверждение.
Следствие 3.1. Пусть для (3.35) существует нетривиальное подстано-
вочное разбиение тг такое, что множества X*, X1 представимы с помощью
тг. Тогда (3.35) обладает свойством S тогда и только тогда, когда (3.36) с
правой частью F' = ?r(F) обладает свойством Sf относительно множеств
У0 = 7г(Х°), У* = 7г(Х*), У1 = тгрС1), U = U\ Р1 = Р.
Рис. 3.8. Сеть (3.38) с 5 пороговыми элементами
Применим последнее утверждение в рассмотрении следующего иллю-
стративного примера сети с пороговыми элементами (рис. 3.8)
x(t + 1) = П(Лх(<) - Ь), x(i) е Е5, Е = {0,1}, (3.38)
где П(х) = 1, если х > 0, П(х) = 0, если х < О,
А =
О
1
-1
-1
-1
-1
О
О
-1
о
1 о о \
-10 0
ООО
ООО
-10 0/
6 = (o,o,u(f),o,o),u(t)eK
(3.39)
197
X* — целевое множество, X1 — фазовые ограничения.
Рис. 3.9. Диаграмма переходов сети (3.38)
Сеть состоит из 5 элементов х\,..., х$, причем
( 1, если элемент г возбужден,
[ 0, если элемент г заторможен.
aij — взаимодействие между элементами г, J, bi — порог срабатывания
г-го элемента, агд > 0 означает возбуждающую связь, aZJ < 0 означает тор-
мозящую связь. Элемент г будет находиться в возбужденном состоянии
тогда и только тогда, когда aij больше, чем его порог срабатыва-
ния bi.
На рис. 3.9 показана диаграмма переходов в этой сети.
198
Пусть необходимо найти управление u(f) — порог срабатывания тре-
тьего элемента, удовлетворяющего свойству S при Х° = {0,2,15}, X* =
{8 — 11}, X1 = {0 — 27} (для краткости используется кодировка двоичных
чисел 00000, 00001, ..., 11111 соответствующими десятичными числами
0, 1, ..31).
Внимательный анализ переходов при разных значениях u(f) е Е при-
водит к выводу, что при u(t) = 1 все траектории с начальными состояни-
ями из Х° удовлетворяет свойству S. Эта задача синтеза управления u(t)
соответственно упрощается не только в этом примере, но вообще говоря,
и в общем случае (что важно для случая высокой размерности модели),
если перейти к гомоморфной сети.
v : X —> У, v(F(a;, u)) = F'(v(a;), и);
и:({0-3}) = {0},
v : ({4 - 7} U {12 - 15}) = {1},
v : ({8 - 11}) = {2}, У0 = v(XQ) = {0,1},
v : ({16 - 23}) = {3}, У* = v(X*) = {2},
v : ({24 - 27}) = {4}, У1 = ^(Х1) = {0 - 4},
v : ({28 — 31}) = {5}, и = u(t) = 1 — результат.
Рис. 3.10. Диаграмма переходов гомоморфной системы
Рассмотрим разбиение тг со свойством подстановочности: {{0 — 3},
{4 - 7,2 - 15}, {8 - 11}, {16 - 23}, {24 - 27}, {28 - 31}}. Ему соответ-
ствует гомоморфная сеть F' = v(F) с 6 состояниями. Диаграмма пере-
ходов этой сети изображена на рис. 3.10. Легко убедиться в том, что эта
сеть обладает свойством S' относительно множеств У0 = v(X°) = {0,1},
У* = v(X*) = {2}, У1 = ^(Х1) = {0 — 4}: достижимости У* при фазо-
вых ограничениях У1 и положительной инвариантностью множества У*.
199
Требуемым управлением является u(t) = 1. Поэтому по следствию 3.1 ис-
ходная сеть при этом управлении гарантированно обладает аналогичным
свойством S.
3.5. Порождение условий разрешимости
логического распознавания
летательного аппарата
Рассмотрим задачу определения типа летательного аппарата по дан-
ным, доступным для ее решения. Нас интересует принципиальная воз-
можность использования логического подхода и, конкретно, метода поро-
ждения гипотез, описанного в гл. 2 (ПП-метода), в этой задаче. Поэтому
она рассматривается в сильно идеализированной постановке.
Мы вводим предикаты:
ЛА(я)
НАБЛЮДАТЕЛЬ^)
НИЖ(ж,7/)
ВПЕРЕДИ (ж, у)
ПРИБЛИЖАЕТСЯ (ж, у)
ВИДНО-ВПЕРЕДИ (ж)
ВИДНО-СВЕРХУ (ж)
ФЮЗЕЛЯЖ^,)
КРЫЛОВ,)
СТАБИЛИЗАТОР^,)
ОПЕРЕНИЕ (z, ж)
ДВИГАТЕЛЬ^, х)
ВИДНО(г,)
ФОРМА-ПРОДОЛЬНАЯ (u, z)
УДЛИНЕНИЕ^, z)
ТИП_ ДВИГАТЕЛЯ (u, z)
СПОСОБ. РАСПО-
о «х — летательный аппарат» (опо-
знаваемый),
о «у — наблюдатель» (наш борт),
о «х находится под у или в нижних
полусферах обзора»
о «х находится впереди у»,
о «х приближается к у»,
о «х наблюдается в переднем секторе
обзора»,
о «ракурс наблюдения аппарата х
сверху»,
о «z — фюзеляж аппарата»,
О «Z — крыло X»,
о «z — стабилизатор ж»,
о «z — оперение х»,
о «z — двигатель х»,
«z — виден» (z — элемент летатель-
ного аппарата),
о «и — продольная форма z»,
о «и — удлинение z»,
о «и — тип двигателя z»,
о «V — способ расположения элемен-
ЛОЖЕНИЯ(1;, z2, z3) тов z2, z3 относительно друг друга».
Одной из аксиом, устанавливающих определенные отношения между
понятиями пространственного положения летательного аппарата (ЛА) и
200
ракурса, под которым он наблюдается, является:
Л1 = Уа:(ЛА(ж) -> ^/(НАБЛЮДАТЕЛЬ^) ->
-+ (НИЖ(®, у) 8с ВПЕРЕДИ^,?/) & ПРИБЛИЖАЕТСЯ^, у) ->
-> ВИДНО-СПЕРЕДИ(х) & ВИДНО-СВЕРХУ(а:)))).
Среди аксиом, устанавливающих некоторые отношения между ракур-
сом наблюдения и свойствами наблюдаемости конструктивных частей ЛА,
выделим следующие две:
Л2 = Чх(ЛА(х) 8с ВИДНО-ВПЕРЕДИ(х) -> 3zx(ФЮЗЕЛЯЖ^,) &
& ВИДНОЕ) & Эг2(КРЫЛО(г2, ж) & (ВИДНО(г2) &
& Зг3(СТАБИЛИЗАТОР(г3, а:) & ВИДНО(г3))))),
Дз = V(JIA(x) & ВИДНО-СВЕРХУ(®) -> Szi (ФЮЗЕЛЯЖ^, х) &
& ВИДНО(гх) & 3z2 (ОПЕРЕНИЕ (z2, х) 8с ВИДНО(г2) &
& Зг3(ДВИГАТЕЛЬ(г3, ж) & ВИДНО(г3))))).
Спецификация бортовых средств, которые при видимости ЛА сверху
определяют продольную форму фюзеляжа (острый нос, округлая корма,
...) и его удлинение (большое, среднее, ...):
Л4 = У(ЛА(®) & ВИДНО-СВЕРХУ (ж) -> \/z (ФЮЗЕЛЯЖ (z, х) 8с
8с ВИДНО(х) -> Зи1(ФОРМА_ПРОДОЛЬНАЯ(и1, z) 8с
8с Зи2 (УДЛИНЕНИЕ^, z))))).
Спецификация бортовых средств определения типа двигателя и спо-
соба его расположения относительно фюзеляжа и крыла (внутри фюзе-
ляжа, на крыльях, ...):
Д5 = Уж(ЛА(ж) 8с ВИДНО-СВЕРХУ (ж) -+ Vzx (ДВИГАТЕЛЬ^,) 8с
8с BHflHO(zi) -> Уг2(ФЮЗЕЛЯЖ(г2, х) 8с ВИДНО(г2) ->
Зи(ТИП ЛВИГАТЕЛЯ(гМ1)&Уг3(КРЫЛО(г3,2:)&ВИДНО(гз)
Эи(СПОСОБ_РАСПОЛОЖЕНИЯ^, zi, z2, г3)))))))-
Будем считать, что применение аксиом Л4, Д5 сопровождается кон-
структивным отысканием признаков ui, u2, и, v, существование которых
декларируется. Это означает, что в базу по-формулы — спецификации
знаний и задачи — вводятся значения этих признаков.
201
Аксиомы для установления типов летательных аппаратов:
Лб = Уж(ЛА(ж) -+ Vzi(ДВИГАТЕЛЬ^, ж)
-> Vz2(ФЮЗЕЛЯЖ(z2, х) -> Vui (ТИП_ ДВИГАТЕЛЯ (ui, zj &
& ui = (реактивный) —> Vz3(KPbLJIO(z3, х) —>
—> Vu2 (УДЛИНЕНИЕ (u2,z2) & u2 = (малое) —>
-> Vv(СПОСОБ.РАСПОЛОЖЕНИЯ(v, zuz2, z3)&
& v = (внутри фюзеляжа) -> Зиз(ТИП_ЛА(из, х) &
& из = (истребитель))))))))),
Рассмотрим в качестве исходной для принятия решений ситуацию,
когда неопознанный ЛА находится впереди «Нас» (нашего борта) и при-
ближается к «Нам». Тогда спецификация задачи определения типа лета-
тельного аппарата запишется
А7 = У(ЛА(ж) & ВПЕРЕДИ(ж, (Мы )) &
& ПРИБЛИЖАЕТСЯ (ж, ( Мы )) ЗиТИП_ЛА(и,).
Формула А = &^=1Лг & НАБЛЮДАТЕЛЬ^ Мы )) —> Д7 в случае
своей доказуемости означала бы разрешимость задачи определения типа
ЛА. Поскольку в действительности А недоказуема, то в процессе по-
иска вывода будет синтезировано условие, достаточное для разрешимости
задачи:
У(ЛА(ж) & ВПЕРЕДИ (z, ( Мы )) & ПРИБЛИЖАЕТСЯ (ж, ( Мы ))
—> НИЖ(я, ( Мы ))).
Для удовлетворения этому условию (ЛА должен находиться под «на-
ми» или в нижних полусферах обзора) пилот может осуществлять под-
ходящий маневр. После этого формула А будет выводима. В процессе
вывода будут найдены признаки продольной формы и удлинения фюзе-
ляжа, тип двигателя, способ расположения конструктивных частей ЛА и,
как следствие, тип ЛА.
Так, если фюзеляж имеет малое удлинение, двигатель — реактивный
и расположен внутри фюзеляжа, то с помощью А будет установлено, что
ЛА — истребитель.
ЛИТЕРАТУРА
1. Васильев С.Н., Вороненко С.В., Шуров Ю.В. К интеллектуальному групповому упра-
влению в транспортной системе И Труды Всесоюзной конференции «Интеллектуальные
системы в машиностроении» / Под ред. В.А. Виттиха. — Самара, 1991. Вып. 2. С. 9-12.
202
2. Fikes R., Nilsson N. STRIPS: A New Approach to the Application of Theorem Proving in
Problem Solving // Artificial Intelligence. 1971. № 2. P. 189-208. [Рус. пер.: «Интеграль-
ные роботы». Вып. 1. — M.: Мир, 1973.]
3. By lander Т. Complexity Results for Serial Decomposability // Proc. 10th National Conference
on Artificial Intelligence (AAAI-92). 1992. P. 729-734.
4. Fikes R.E., Nilsson N.J. STRIPS, a Retrospective // Artificial Intelligence. 1993. V. 59,
№ 1-2. P. 227-232.
5. Soderland S, Weld D. Evaluating Nonlinear Planning // Tech. Report TR-91-02-03. Univ, of
Washington, Depart, of Computer Science and Engineering. Seattle. Washington. 1991.
6. Me Allester D., Rosenblitt D. Systematic Nonlinear Planning // Proc. 9th National Conference
on Artificial Intelligence (AAAI-91). 1991. № 2. P. 634-639.
7. Russell S.J., Norvig P. Artificial Intelligence: A Modem Approach. Prentice-Hall. 1995.
8. Erol K., Hendler J., Nau D.S. HTN Planning: Complexity and Expressivity // Proc. 12th
National Conference on Artificial Intelligence (AAAI-94). Seattle. Washington. 1994.
9. Dean T.L., Wellman M.P. Planning and Control. — San Mateo. California: Morgan Kaufman.
1991.
10. Weld D.S. An Introduction to Least Commitment Planning 11 AI Magazine. 1994.
11. Drabble B. Mission Scheduling for Spacecraft: Diaries of T-SCHED И Expert Planning
Systems. Institute of Electrical Engineers. 1990. P. 76-81.
12. Johnston M.D., Adorf H.-M. Scheduling with Neural Networks: The Case of the Habble
Space Telescope 11 Computers and Operations Research. 1992. V. 19, № 3-4. P. 209-240.
13. Fuchs J.J., Gasquet Д., Olalainty B., Curvie K.W. Planers-1: An Expert Planning System
for Generating Spacecraft Mission Plans // Proc. 1st Intern. Conference on Expert Planning
Systems. Brighton, Institute of Electrical Engineers. 1990. P. 70-75.
14. Arup M., Arentoft M.M., Parrod K, StaderJ., Stokes I. OPT1MUM-A1V: A Knowledge-Based
Planning and Scheduling System for Spacecraft AIV И Knowledge Based Scheduling I Eds.
M.Fox, M.Zweben. — San Mateo. California: Morgan Kaufmam. 1994.
15. Draper D., Hanks S., Weld D. Probabilistic Planning with Information Gathering and Con-
tingent Execution // Proc. 2nd AIPS. — San Mateo. California: Morgan Kaufmarn. 1994.
16. Бильченко Г.Г., Васильев C.H., Матросов B.M. Система наведения телескопа на центр
планеты в неполной фазе И Труды V Международного симпозиума ИФАК по автомати-
ческому управлению в пространстве. — М.: Наука. Т. 1. С. 45-57.
17. Эстей Р.С. Прибор для слежения за Землей или Луной, находящейся в неполной фазе //
Автоматическое управление космическими летательными аппарами. — М.: Наука, 1968.
18. Intelligent Control Systems. Theory and Applications I Eds. M. Gupta, N. Sinha. — New
York: IEEE Press. 1996. P. 804-807.
19. Васильев C.H., Жерлов А.К. Логическое моделирование и управление в реальном вре-
мени И Труды Всесоюзной конференции «Интеллектуальные системы в машинострое-
нии» / Под ред. В.А. Виттиха. — Самара: 1991. Вып. 2. С. 33-38.
20. Gabbay D.M., Reynolds М. Towards a Computational Treatment of Time I I Handbook
of Logic in Artificial Intelligence and Logic Programming. — Epistemic and Temporal
Reasoning. Oxford: Clarendon Press. 1995. 4. P. 351-437.
21. Васильев C.H., Черкашин Е.А. Временной вывод в интеллектом управлении телеско-
пом И Труды III Междунар. симпозиума «Интеллектуальные системы» (INTELS’98) /
Под ред. К.А. Пулкова. — Псков. 1998. С. 70-75.
203
22. Cherkashin E.A., Vassilyev S.N. Telescope Guidance via Automatic Theorem proving //
Proc, of Intern. Conference on Systems. Man and Cybernetics (SMC’98). San-Diego. 1998.
>P. 1439-1444.
23. Матросов B.M., Анапольский Л.Ю., Васильев C.H. Метод сравнения в математической
теории систем. —Новосибирск: Наука, 1981
24. Васильев С.Н. Управление динамикой поведения автоматных сетей с минимальным
временным достижением целевых состояний И Труды 11 Байкальской международной
школы-семинара «Методы оптимизации и их приложения». Т. «Пленарные доклады». —
Иркутск: 1998. С. 36-47.
25. Vassilyev S.N., Sivasundaram S. Homomorphism of Automata Networks // Proc. 2nd IMASS
Intern. Multiconference «Computational Engineering in Systems Applications» (CESA’98).
1998. V. 2. P. 151-156.
26. Lee S.C. Modem Switching Theory and Digital Design. Prentice-Hall. 1978.
ГЛАВА 4
СИСТЕМНЫЙ АНАЛИЗ
И СЕМАНТИЧЕСКИЙ ОБЛИК
СЛОЖНЫХ АНТРОПОЦЕНТРИЧЕСКИХ СИСТЕМ
4.1. Введение
Общественная потребность в совершенствовании технических объек-
тов и возрастающие технологические возможности общества по их про-
ектированию и производству приводят к созданию все более интеллекту-
ально сложных технических объектов. Сегодня наиболее представитель-
ным классом таких объектов является класс человеко-машинных систем
интеллектного управления (ЧМСИУ, см. п. 1.9) и, в частности, класс ан-
тропоцентрических систем.
Под антропоцентрической системой (Антр/система) мы будем здесь
понимать материально объединенную аппаратно-функциональную целост-
ность (борт системы), состоящую из:
а) бортовой измерительной и исполнительной аппаратуры (Изм &
Исп/Аппаратуры), обеспечивающей взаимодействие Антр/системы с внеш-
ней средой;
б) сети бортовых цифровых вычислительных машин (БЦВМ);
в) бортовых алгоритмов, реализованных на сети БЦВМ, т.е. бортового
алгоритмического и индикационного обеспечения (АиИО);
г) информационно-управляющего поля (ИУП) кабины (рабочих мест)
экипажа;
д) алгоритмов деятельности экипажа (АДЭ), материализованных в ин-
струкциях для него по применению системы, в семантических элементах
ИУП, в навыках и концептуальных моделях деятельности членов экипажа
(полученных ими в процессе целевого обучения);
с главенствующей ролью экипажа в ней и функционально организованую
в три объективно существующих глобальных уровня управления (верхний,
средний и нижний уровни управления): ВУУ, СУУ, НУУ (см. п. 1.9).
Характерными представителями Антр/систем являются транспорт-
ные и другие достаточно сложные технические средства, управляемые
205
человеком-оператором в реальном времени и включающие критические
технологии [1].
Под семантическим обликом сложной Антр/системы будем понимать
упорядоченную (по отношению: к главной цели функционирования си-
стемы, к объему оперативно необходимых знаний о «мире функцио-
нирования») совокупность бортовых алгоритмов для БЦВМ и алгорит-
мов деятельности экипажа, называемую часто «Бортовым интеллектом»
(БИ). Это позволит нам увидеть весь объем задач, который должна
решать система и ту долю этого объема, решение которой инженеры-
проектировщики обеспечили программно-аппаратными средствами борта.
В качестве главной интерпретации антропоцентрических систем бу-
дем рассматривать самолеты. Мы увидим целый пласт бортовых задач,
к решению которых уже могут приступить конструкторы бортового ин-
теллекта и которые в настоящее время молчаливо «сбрасываются» ими
только на экипаж не всегда с благоприятными (для него и для системы)
последствиями. Этот пласт задач может решаться на основе алгоритмов,
которые более интеллектуальны, чем алгоритмы, освоенные сегодняшней
инженерной практикой.
4.2. Системный анализ проблем разработки
бортового интеллекта антропоцентрических систем
Основой функциональной целостности Антр/системы является доста-
точно полная и непротиворечивая совокупность алгоритмов деятельности
ее операторов и алгоритмов ее АиИО. В силу сложности создаваемых
Антр/систем целесообразен системный анализ существующего БИ и про-
блем его совершенствования [2].
Будем говорить о наличии бортовой программно-аппаратной поддерж-
ки соответствующего уровня управления (НУУ, СУУ, ВУУ), если хотя бы
некоторая, но существенная часть характерных только для этого уровня
задач решается этими бортовыми средствами.
Отметим, что практика проектирования и применения сложных
Антр/систем подтвердила сделанный инженерно-психологической наукой
вывод: по мере совершенствования аппаратной части Антр/системы роль
человека-оператора, его ответственность за эффективность и безопас-
ность работы Антр/системы может возрастать с ее усложнением, осо-
бенно если это усложнение не сопровождается должным повышением
уровня интеллектуальности аппаратной (аппаратно-программной) части
Антр/системы.
206
В существующих и разрабатываемых Антр/системах (таблица 4.1,
столбец «сегодня») из трех уровней управления аппаратно-программно
поддерживается только НУУ. В разработках ближайшего будущего (стол-
бец «завтра») частичная аппаратно-программная поддержка появляется на
СУУ, далеко не обеспечивая решения всех его задач.
Совершенствование и эволюционную «интеллектуализацию» алгорит-
мов НУУ мы связываем:
а) с более рациональным использованием всех имеющихся на борту
объекта ресурсов (структуры бортовых алгоритмов с учетом «жестких»
ограничений на фазовые координаты и управление; примеры даны
в книге),
б) с использованием всей имеющейся на борту текущей (апостериор-
ной) и получаемой перед подготовкой сеанса функционирования системы
(априорной) качественной и количественной информации, в) с использо-
ванием элементов искусственного интеллекта и, в частности, логического
вывода (о последнем см. в книге).
Таблица 4.1. Аппаратно-программная обеспеченность антропоцентрических систем
Глобальные уровни управления «Сегодня» «Завтра» «Послезавтра»
верхний уровень управления (ВУУ) «нет» «нет» «частично есть» Борт/алгоритмы на методах автоматического логического вывода
средний уровень управления (СУУ) «нет» «частично есть» БЭС на продукционных, пропозициональных четких и нечетких правилах «есть» БЭС на методах автоматического логического вывода в первопорядковых и более богатых логиках
нижний уровень управления (НУУ) «есть» традици- онные структуры «есть» — традиционные структуры; — элементы искусст- венного интеллекта с борт. Изм & Исп/Аппа- ратурой «есть» — традиционные структуры; — БЭС с Изм & Исп/Аппа- ратурой
Обозначения в таблице:
«нет» — нет аппаратно-программного решения (поддержки) характерных задач
рассматриваемого уровня управления;
«есть» — имеется поддержка штатным АиИО;
«частично есть» — частичная поддержка штатным АиИО.
207
Почему же ни «сегодня», ни «завтра» не решаются вопросы аппа-
ратно-программной поддержки задач ВУУ и части задач СУУ? Ответ на
наш взгляд состоит в следующем.
При традиционном подходе к задачам этих уровней, конструкторы
АиИО сталкиваются с непреодолимыми при таком подходе препятстви-
ями. Им мешает:
— слабая структурированность задач этих уровней,
— разнородная по качеству, полноте и аппаратной доступности ин-
формация, представляемая в Антр/системе для решения этих задач,
— необходимость привлечения большого, а на ВУУ — огромного
объема сведений об условиях, способах и закономерностях функциониро-
вания Антр/системы, т.е. некоторых общих знаний о «мире», в котором
действует Антр/система.
Вместе с тем, с помощью имеющихся сегодня научно-практических
знаний может решаться ряд задач ВУУ.
Напомним, что классификация задач по глобальным уровням упра-
вления строится по шкале «отношение к главной цели (задачи)» текущего
сеанса функционирования Антр/системы.
Если рассмотреть процесс проектирования Антр/системы и последу-
ющий процесс ее использования, то ВУУ обеспечивается проектировщи-
ком и оператором. Формирование целей управления Антр/системы про-
изводится частично проектировщиком, который создает систему с зара-
нее ограниченной областью назначения, тогда как оператор оперативно
назначает текущую цель ее функционирования (уровень целеполагания)
из множества целей, определенных проектировщиком.
Решение задач уровня целеполагания существенно опирается на «ин-
формационную модель» внешней и внутрибортовой обстановки, которую
проектировщик создает на ИУП кабины. Сами же задачи решаются опе-
ратором, с которым проводится предварительная проработка задания для
каждого предстоящего случая использования Антр/системы (на сеанс ее
функционирования). Так создается «модель внешней обстановки» (мо-
дель «мира»), которая используется человеком-оператором в процессе
конкретного сеанса функционирования Антр/системы.
Анализ возможных/необходимых целей текущего функционирования
Антр/системы и оперативный выбор из них одной для непосредствен-
ной реализации составляют содержание ВУУ. Постановка в Антр/системе
определенной цели функционирования конкретизируется выбором одной
из заранее определенного множества конкретных типовых ситуаций (ТС),
определение которых будет дано ниже.
Анализ возможных путей достижения Антр/системы оперативно по-
ставленной цели и выбор из них наиболее предпочтительного пути соста-
вляют содержание СУУ.
208
После достижения цели (завершения ТС) в Антр/системе формируется
новая цель функционирования (новая ТС), замыкая таким образом самую
внешнюю «петлю» обратной связи — «петлю» уровня целеполагания.
Для уровня целеполагания проектирование Антр/системы сегодня ве-
дется в направлении создания «удобной» для оператора информационной
модели внешней обстановки и «информационной внутрибортовой» об-
становки модели состояния элементов Антр/системы проработки графа
решения.
Итак, в настоящее время решение задач уровня целеполагания це-
ликом возлагаются на оператора. Инженерами-проектировщиками борто-
вого АиИО создается оператору только информативная модель внешней
обстановки (кстати, не всегда полная для эффективного решения задач
ВУУ) и (в редких случаях) размещение на управляющем поле кабины спе-
циальных органов («системные» тумблеры) ввода сигналов, однозначно
воспринимаемых БЦВМ как конкретная текущая цель функционирова-
ния Антр/системы. При этом весь процесс функционирования во внеш-
ней среде, как правило, организуется более высоким (реализованным вне
Антр/системы) уровнем управления. Эта организация должна быть такой,
чтобы работа оператора в Антр/системе на уровне целеполагания обеспе-
чивала ему достаточный резерв времени для сбора, осмысливания и ана-
лиза необходимой информации и принятия решения по оперативной цели
функционирования. Возможность бортового программно-аппаратного ре-
шения задач СУУ на временном рубеже «завтра» (см. табл. 4.1), на наш
взгляд, маловероятна.
Для решения задач СУУ к настоящему времени уже созрели научно-
практические предпосылки [1]. Мы подробно остановимся на теории
и практике разработки бортовых оперативно-советующих систем
(БОСЭС) — одного из наиболее простых способов реализации систем
интеллектного управления для задач этого СУУ. Здесь же мы обсудим
ограниченность этого способа и укажем направление ее преодоления на
базе развиваемой в книге теории логического вывода.
При проектировании управления бортового интеллекта на ВУУ и СУУ
строятся «графы решений» оператора и схемы «бортовых алгоритмов».
О них ниже.
Третий НУУ реализуется на F- и F-A-системах управления и опера-
тор здесь «используется» для «диспетчеризации» принятого решения и
включения его в бортовые следящие системы в качестве «звена». Нижний
уровень управления формируется при разработке графов решений опера-
тора и схем бортовых алгоритмов ВУУ и СУУ.
БИ Антр/системы состоит из согласованной совокупности бортовых
алгоритмов, реализуемых в БЦВМ, и алгоритмов деятельности экипажа.
Каждый из элементов этой совокупности (каждый бортовой алгоритм)
209
характеризуется определенной функциональной ролью (задачей, которую
он решает), входными и выходными информационными сигналами. Важно
с самого начала проектирования Антр/системы определить (предметно
опекать) каждый элемент этой совокупности, классифицировать его по
отношению к главной цели функционирования (по уровням управления),
по отношению к потребным знаниям о «мире» и типам механизмов вывода
(см. п. 1.9).
Ниже мы остановимся на описании самого способа конструирования
совокупности бортовых алгоритмов.
Описание множества бортовых алгоритмов будем осуществлять че-
рез две графовые структуры, описывающие состав его элементов и их
причинно-следственное упорядочение. Этими графовыми структурами
являются:
— схема бортовых алгоритмов (СБА) для алгоритмов БЦВМ;
— граф решений оператора (ГРО) для алгоритмов деятельности чле-
нов экипажа.
Начнем с СУУ.
4.3. Граф решений оператора и схема
бортовых алгоритмов
Для проектирования алгоритмов СУУ необходимо изначально иметь:
а) системное описание объекта управления и его Изм & Исп/Аппара-
туры;
б) описание среды функционирования Антр/системы с указанием «ро-
ли» каждого элемента Изм & Исп/Аппаратуры;
в) знание ограничений, накладываемых заказчиком и конструктором
Антр/системы на уровне ее целеполагания.
При проектировании ВУУ, как правило, удается выделить конечное
число ТС и достаточно четко сформулировать их содержание.
Формализация процесса принятия решения в сложной, слабо орга-
низованной внешней обстановке (а это как раз условия ВУУ и СУУ для
части ТС) при современном состоянии системного анализа, теории упра-
вления и теории принятия решений проведена быть не может. Создать
здесь полный ГРО не представляется возможным. Поэтому формируются
максимально полные фрагменты ГРО и выявляется в остальных местах
необходимый состав информации на индикаторах, позволяющий опера-
тору иметь полную информационную модель внешней обстановки. Состав
информации, определяемый эвристически и по фрагментам ГРО, должен
обеспечиваться соответствующими алгоритмами (программами) в БЦВМ.
210
Рассмотрим СУУ (уровень ТС). Для так называемых типовых быстрых
(боевых) ситуаций (ТБС) здесь удается получить полный ГРО. При про-
ектировании СБА и ГРО для этого уровня управления также необходима
перечисленная выше в пп. а, б, в информация с уточнением ее на усло-
виях рассматриваемой ТБС и ТС. Основная группа механизмов решения
задач в ТБС в настоящее время проектируется по структуре F-систем. В
классе F-A-систем строятся так называемые «тактически гибкие» алго-
ритмы. Адаптирующим «блоком» в таких алгоритмах является сам опе-
ратор. В ближайшем будущем («завтра» в таблице 4.1) на этом уровне
появятся БЭС (БОСЭС, как представитель класса F-M-систем).
Остановимся несколько подробнее на способе формализации описан-
ной среды функционирования Антр/системы (внешней обстановки) и раз-
работке СБА и ГРО. Отметим, что при выполнении этой работы коллек-
тивы проектировщиков обычно используют специальные компьютерные
среды проектирования [3].
4.3.1. Среда функционирования. Формализация описания
Поставив перед собой задачу создания функционально замкнутого,
согласованного с требованиями заказчика множества АиИО и алгоритмов
деятельности оператора (экипажа), мы рассчитываем на наличие не только
четкого, но и по возможности формального описания среды функциони-
рования Антр/системы, ее задач и критерия качества их выполнения.
В настоящее время это делается в форме технического задания (ТЗ)
на разработку конкретной Антр/системы. Это частично структурирован-
ный естественно-языковый текст объемом несколько сотен машинопис-
ных страниц.
Заметим, что любому проектировщику для каждого сообщаемого ему
факта нужны метафакты и информация о том, каким образом и в ка-
ких условиях сообщаемый факт можно использовать. Это предполагает
простирающуюся бесконечно вверх по естественной иерархии процедуру
анализа условий работы Антр/системы. Проектировщик и заказчик си-
стемы должны перед началом проектирования «разорвать» эту иерархию,
очертить условия функционирования Антр/системы, способы действия ее
и элементов. В очерченной таким образом среде проектировщик прежде
всего должен будет обеспечить системе возможность сохранить свою це-
лостность и стабильность (гомеостазис системы) и с должной эффектив-
ностью выполнить возложенные на нее задачи. Такой «разрыв» иерархии
и делается в ТЗ на разработку.
Непосредственно для проектирования АиИО текст ТЗ не использу-
ется. Для этой цели нужно больше информации и в более упорядоченной
форме. Наиболее рационально это сделать в форме сценария.
211
Сценарий — это упорядоченная по причинно-следственным связям
последовательность действий Антр/системы, включающая (в пределах до-
пустимых условий гомеостазиса) принятые для проектирования виды на-
рушений этой последовательности:
1) прерывание последовательности действий сценария другим сце-
нарием;
2) прерывание последовательности действий сценария наступлением
условий, когда кто-то или что-то мешает следующему по сценарию
действию;
3) ошибки — действия, завершающиеся не так, как требуется. Для
каждого конкретного (расчетного) нарушения в сценарии предусматри-
ваются новые последовательности действий, устраняющие ошибки или
препятствия.
Назначение сценариев: очертить и ограничить область исследования
при проектировании и анализе системы. Сценарий может разделяться на
множество возможных путей.
В каждом сценарии есть действующие элементы (Антр/система, опе-
ратор, элементы измерительно-исполнительной аппаратуры Антр/систе-
мы, противодействующие системы). Каждому из них назначается в сцена-
рии определенная роль. Набор необходимых для системного проектиро-
вания сведений по конкретному элементу (назначение, функциональные
возможности, влияние на другие действующие элементы) составляет его
системное описание.
Удобно, рассмотрев все множество сценариев, существующих в опи-
сательной форме, выделить в них ТС функционирования Антр/системы.
Под этим понятием мы объединяем множество таких реальных ситуаций,
которые имеют одинаковые цели, близкий состав и близкие роли действу-
ющих элементов, и побуждают Антр/систему к однотипным активным
действиям для достижения цели.
Среди ТС будем выделять множество ТБС, в которых Антр/система
должна работать в жестком лимите времени.
В каждом сценарии можно выделить ту часть информации, которая
описывает внешнюю обстановку, используя ТБС и ТС как элементы опи-
сания, и ту часть, которая касается каждой конкретной ТБС и ТС. Это
несколько упорядочивает имеющуюся в сценариях информацию.
Дальнейшее упорядочение информации идет через формирование си-
стемы вопросов, ответы на которые хочет получить проектировщик уров-
ня управления. Тестируя сценарии по этим вопросам, проектировщик
вместе с заказчиком формирует полное множество ТС, выделяет для ка-
ждой ТС полное множество ее проблемных субситуаций (Пр с/с), ко-
торые Антр/система должна разрешать своими активными действиями.
Для этого, наряду с анализом конкретной Пр с/с, должна быть осознана
212
включающая ее ТС, а та, в свою очередь, осознана, как элемент всей
совокупности ТС.
Все ТС упорядочиваются причинно-следственным отношением, соста-
вляя семантическую сеть ТС. Каждая ТС представляется семантической
сетью Пр с/с.
На практике это сценарное представление необходимой для проек-
тирования АиИО информации оформляется в виде текстового документа
«Логика работы системы «оператор — бортовая аппаратура»».
Для каждой ТС (ТБС) составляется свой документ. На базе этих до-
кументов инженеры-проектировщики создают так называемый формали-
зованный сценарий работы системы «оператор — бортовая аппаратура».
4.3.2. Формализованный сценарий работы системы
«оператор — бортовая аппаратура»
Формализованный сценарий (ФС) это бинарный граф, состоящий из
решений, которые упорядочены по причинно-следственным связям (дуги
графа). Он составляется для ВУУ и СУУ. Исходной информацией для
составления ФС являются тексты «Логики работы системы «оператор —
бортовая аппаратура»» и системного описания элементов бортовой Изм
& Исп/Аппаратуры.
Разработку ФС удобно начинать с анализа выбора конкретной ТС
и анализа одной из Пр с/с, входящих в эту ТС. Каждой Пр с/с ста-
вится в соответствие множество возможных (допустимых) способов ее
разрешения. Формирование таких множеств производится экспертом на
основании анализа возможностей Изм & Исп/Аппаратуры, входящей в
Антр/систему, и характера рассматриваемой Пр с/с. Назовем элементы
этого множества решениями, а само множество — множеством решений.
Следующим шагом разработки ФС является выделение из возможных
решений предпочтительного или оптимального решения. Часто такое
выделение можно провести только после предварительного изучения Пр
с/с на соответствующей ей математической модели. Типы таких моделей
рассмотрены в [4]. В ряде случаев для этого может понадобиться специ-
альный математический или натурный эксперимент.
Выбор предпочтительного решения при составлении ФС предусматри-
вает предварительное решение проблемы распределения функций между
оператором (учет его ограничений) и Изм & Исп/Аппаратурой (допусти-
мые типы бортовых алгоритмов). Подробнее об этом в [5].
Отсюда видно, что каждая Пр с/с может и должна быть автономно иссле-
дована с целью определения предпочтительного способа ее разрешения.
ФС является основой для разработки взаимно-увязанных ГРО и СБА.
Минимальный самоконтроль при составлении ФС осуществляется через:
213
а) оценку непрерывности причинно-следственной связи на сетях ТС
и Пр с/с,
б) проверки возможности организации входа и выхода Антр/системы
в каждую ТС и в каждую Пр с/с.
Фактически в ФС проектировщик впервые сопоставляет множество
задач, стоящих перед Антр/системой, с множеством освоенных им струк-
тур бортовых алгоритмов. Более детально он это делает в ГРО и в СБА.
4.3.3. Граф решений оператора
ГРО — бинарный граф, состоящий из решений оператора (узлы
графа), которые упорядочены по причинно-следственным связям (дуги
графа). Он разрабатывается с использованием математической модели
оператора [6] для каждой ТБС (ТС) и охватывает все задачи СУУ. Ис-
ходной информацией для его разработки является формализованный сце-
нарий.
При разработке ГРО, следуя причинно-следственной последователь-
ности Пр с/с в ТС, последовательно выявляются необходимые решения
оператора. Уточняется и формализуется цель разрешения Пр с/с. Слож-
ные Пр с/с изучаются путем исследования соответствующих им математи-
ческих моделей или в натурном эксперименте.
В ГРО выделяются необходимые эвристические решения. Такие ре-
шения изучаются экспериментальным путем с использованием компью-
терных инструментальных сред быстрого прототипирования.
ГРО для ТБС строится только на перцептивно-опознавательных и
речемыслительных решениях.
По каждой Пр с/с выявляется оптимальное или предпочтительное ре-
шение оператора и устанавливается его тип. Проработка Пр с/с в каждой
ГРО идет до глубины, позволяющей устанавливать необходимую для при-
нятия этих решений информацию и процедуры ее использования — по
перцептивно-опознавательным решениям:
• сигнал-стимул (звуковой, зрительный), по которому принимается ре-
шение. Для зрительного сигнала устанавливается вид его предста-
вления на информационном поле ИУП, для звукового — текст на
выбранном алфавите/языке;
• описание самого решения с характеристикой способа его реализа-
ции;
• описание условий принятия сигнала-стимула оператором (неожидан-
ный сигнал; сигнал, полученный оператором в процессе организо-
ванного им информационного поиска);
— по речемыслительным решениям:
214
• семантика на информационном поле ИУП в предлагаемой симво-
лике;
• оперативные единицы восприятия (ОЕВ) этой информации опера-
тором и их количество;
• общее количество однотипных ОЕВ, среди которых выбираются
ОЕВ, необходимые для рассматриваемого решения;
• состояние рабочей среды оператора, в которой он принимает рас-
сматриваемые решения (номинальная; экстремальная: по информа-
ционной перегрузке, по гомеостазису Антр/системы).
Каждому решению ставится в соответствие описание моторных/рас-
порядительных действий оператора, необходимых для реализации реше-
ния (работа оператора с управляющим полем кабины).
При наличии в сценарии ТБС (ТС) ограничений на время принятия
и реализацию решения (время работы оператора) необходимо добиваться,
чтобы в проектируемой АиИО временные затраты оператора по наиболее
«загруженной ветке» ГРО не превосходили бы допустимого времени.
В ГРО предусматривается выдерживание внешнего (по условиям внеш-
ней обстановки) и внутреннего (по информационной и моторной загрузке
оператора) гомеостазисов.
Определяемый состав информации на информационном поле ИУП,
на основании которой оператор будет принимать решения, должен обеспе-
чиваться информационными сигналами с выходов соответствующих ком-
пьютерных алгоритмов из СБА или выходов бортовой измерительной ап-
паратуры.
Увязка ГРО с одновременно разрабатываемой СБА и критерии завер-
шенности составления ГРО обсуждаются в [5].
ГРО используется при системном проектировании АиИО и алгорит-
мов деятельности оператора для обеспечения
— функциональной целостности Антр/системы,
— получения информации,позволяющей оценивать временную и ин-
формационную загрузку оператора,
— получения исходных данных для этапа проектирования ИУП
Антр/системы и составления инструкции по алгоритмам деятельности ее
операторам.
43.4. Схема бортовых (компьютерных) алгоритмов
При разработке СБА ориентировка идет на освоенные типы алго-
ритмов, реализованные в действующих Антр/системах, на вновь разра-
батываемые типы алгоритмов, прошедшие различную стадию отработки
в лабораторных условиях.
215
СБА целесообразно разрабатывать для каждой Пр с/с, ТС, а затем со-
здать СБ А, их объединяющую (ВУУ). Полученная иерархия СБА должна
охватывать все сопрягаемые режимы объединяемых системным проекти-
рованием элементов Изм & Исп/Аппаратуры проектируемой Антр/систе-
мы. СБА разрабатывается одновременно с ГРО. Она выявляет все необ-
ходимые признаки, которые определяют включение в работу каждого
отдельного алгоритма, подтверждает возможность их выработки алгорит-
мически (алгоритм в СБА) или вручную («смысловой» орган на ИУП)
и обеспечивает выработку всей информации на ИУП, которая выявлена
в ГРО.
СБА, представляемая в форме бинарного графа-дерева с нагружен-
ными ветками, содержит:
— состав основных алгоритмов, подлежащих реализации на БЦВМ;
— состав управляющих признаков;
— последовательность алгоритмов, отражающую причинно-следствен-
ную связь преобразования информации в БЦВМ;
— состав входных и выходных сигналов каждого алгоритма.
Исходной информацией для разработки СБА являются формализо-
ванные сценарии и системное описание сопрягаемых элементов Изм &
Исп/Аппаратуры Антр/Системы. При отсутствии на начало проектиро-
вания отдельных элементов к работе привлекаются эксперты из числа
инженеров-разработчиков этих элементов. Системное описание элемен-
тов содержит: перечень входных и выходных информационных сигналов
с указанием их точности; режимы работы элемента; органы управления
элементом, их назначение, возможная их взаимосвязь.
Процесс разработки СБА удобно начинать для определенной Пр с/с
выделенной ТС с составлением списков алгоритмов и таблиц входных-
выходных сигналов для каждого из них. При этом ориентируются на
уже созданные или создаваемые алгоритмы или на выданные технические
задания на разработку новых бортовых алгоритмов.
По ФС вдоль каждой из его веток составляется последовательность ал-
горитмов. Правильность ее составления контролируется таблицами вход-
ных-выходных сигналов каждого из алгоритмов и использованием сигна-
лов из ИУП, определенных в одновременно создаваемом ГРО. Отслежи-
вается естественная последовательность преобразования сигнала на пути
от источника его возникновения до потребителя (ИУП, элементы Изм &
Исп/Аппаратуры, другая БЦВМ).
При составлении СБА устанавливаются основные потоки информа-
ции между элементами Изм & Исп/Аппаратуры, выбираются структуры
алгоритмов, последовательность их включения, проверяется достаточность
информации для включения каждого из них. Экспертно назначается не-
обходимая частота счета каждого алгоритма.
216
Разработка ГРО и СБА идет одновременно. Следует добиваться их
полной непротиворечивости в части сигналов от управляющего поля ИУП
и информационных потоков «алгоритм-символ на информационном по-
ле ИУП».
Критерии завершенности разработки СБА и состав информации
в СБА, необходимой для оценки возможности реализации определивше-
гося состава алгоритмов на выбранном типе БЦВМ, обсуждаются в [5].
СБА на следующем (за системным проектированием) этапе разра-
ботки АиИО дальнейшим углублением превращается в иерархию функци-
ональных диспетчеров программного обеспечения БЦВМ.
Технические задания на создание новых алгоритмов, получаемых
в процессе разработки СБА, включают в себя все данные об инфор-
мационной среде функционирования будущего алгоритма (входные сиг-
налы, ожидаемая частота их поступления, точность), о роли этого алго-
ритма в системе АиИО (выходные сигналы, требуемая частота их выра-
ботки, требуемая точность), формализованном критерии качества работы
алгоритма.
Итак:
1. Представленная система понятий и форм описания семантически
антропоцентрических систем (Антр/систем) предусматривает:
— формализацию внешнего мира, в котором действует (будет дей-
ствовать) антропоцентрическая система (формализованный сценарий);
— системное описание измерительной и исполнительной аппаратуры,
входящей в Антр/систему;
— выделение используемых в Антр/системе типов систем управления
(от F- до S-систем) и мест востребуемости новых типов алгоритмов;
— выявление состава, содержания и взаимосвязи компьютерных ал-
горитмов Антр/системы и алгоритмов деятельности ее операторов для ка-
ждого из трех глобальных уровней управления в такой системе.
2. «Конструкторской документацией» начального этапа проектирова-
ния Антр/системы при таком подходе являются: СБА и ГРО.
СБА и ГРО являются взаимноувязанными и взаимнодополняющими
документами. Каждый из них функционально замкнут и является основой
и объектом дальнейшего уточнения:
— при разработке алгоритмов и программ БЦВМ (СБА, ГРО);
— при разработке алгоритмов индикации и речевой информации дня
операторов (ГРО);
— при разработке инструкций оператору (ГРО).
Обеспечивается общая информационно-семантическая увязка в еди-
ное функциональное целое компьютерных алгоритмов, алгоритмов дея-
тельности операторов, состава информации на ИУП и состава органов
управления на ИУП.
217
Появляется возможность при конструировании АиИО сложных
Антр/систем использовать компьютерные инструментальные среды проек-
тирования [3,7].
4.4. Системный облик и структура бортового
алгоритмического и индикационного обеспечения
многофункционального самолета
Проиллюстрируем обсужденную выше семантическую структуру (об-
лик) антропоцентрической системы на примере многоцелевого самолета.
С целью конкретизации изложения ниже все основные положения будут
излагаться примерами из АиИО некоторого гипотетического многофунк-
ционального боевого самолета (ГМБС).
4.4.1. Верхний уровень управления
На ВУУ (уровень целеполагания) основную работу по оценке текущей
внешней обстановки и назначение текущей задачи полета производит лет-
чик, используя информацию:
а ) визуальную из закабинного пространства;
б ) текущую директивную, полученную по радио и телекодовым ли-
ниям связи «борт-борт», «земля-борт»;
в ) на кабинных индикаторах.
Состав АиИО этого уровня для ГМБС:
1. Алгоритмы распаковки информации, пришедшей по каналам, ука-
занным в б).
2. Алгоритмы, предъявляющие на кабинных индикаторах взаимное
расположение:
• самолетов своей группы,
• самолетов (наземных целей) противника,
• назначенной (искомой) воздушной или наземной цели,
• непосредственно угрожающей воздушной или наземной цели (НУЦ).
3. Алгоритмы оповещения летчика о техническом состоянии борто-
вых измерительных и исполнительных устройств и выработки рекоменда-
ций по устранению (локализация, реконфигурация) неисправностей.
4. Алгоритмы выработки рекомендаций по предпочтению выпол-
нения:
• текущей задачи вылета,
• атаки НУЦ,
• возврата на основной, запасной аэродром,
• аварийного покидания самолета.
218
Алгоритмы летчика по выбору текущей цели полета (ТС или ТБС) но-
сят эвристический характер. Их проектирование, оценка их реализуемо-
сти и достаточности кабинной информации для назначения (выбора) лет-
чиком текущей задачи полета производится на исследовательском стенде
(специализированный стенд, стенд на универсальных ЭВМ со специали-
зированным программным обеспечением).
Рис. 4.1. Облик бортового АиИО для ВУУ ГМБС
Для ГМБС выделим следующий набор текущих целей полета (трех
ТС и двух предполетных ТС, девяти ТБС):
ТС: взлет (ВЗЛЕТ), посадка (ПОСАД), маршрут (МАРШР), предпо-
летная тренировка (ТРЕНАЖ), контроль и диагностика бортовой аппара-
туры (ДИАГН);
ТБС: выход в информационный контакт с наземной целью (ВИК-П);
• ввод группы (в бой) в режим групповой атаки наземных целей
(ВГБ-П);
• атака визуально наблюдаемой наземной цели (ББ-П);
• атака визуально ненаблюдаемой наземной цели (ДБ-П);
• выход в информационный контакт с воздушной целью (ВИК-В);
• ввод группы (в бой) в режим групповой атаки воздушных целей
(ВГБ-В);
• атака визуально наблюдаемой воздушной цели (ББ-В);
• атака визуально ненаблюдаемой воздушной цели (ДБ-В);
• атака цели (НУЦ).
Реализация принятого решения (назначение текущей цели полета)
производится летчиком с помощью системных (ТБС-ных) кнопок на спе-
циальном поле кабинного многофункционального пульта управления.
219
Итоговый семантический облик бортового АиИО и номинальных алгорит-
мов деятельности летчика дня ВУУ представлен на рис. 4.1.
4.4.2. Средний уровень
На СУУ (уровень выбора способа достижения поставленной текущей
цели полета: решение основной задачи выбранной ТБС или ТС) основ-
ную работу по оценке текущей внешней обстановки и выбору предпо-
чтительного способа действия в ТБС, осуществляет бортовая оперативно-
советующая экспертная система соответствующей ТБС (БОСЭС ТБС).
Выработанные ею рекомендации предъявляются летчику на кабинных ин-
дикаторах, частично дублируются речевыми сообщениями и сопровожда-
ются краткой информацией о мотивах такого выбора. Состав БОСЭС
многофункционального самолета-штурмовика представлен на рис. 4.2.
БОСЭС ВИК
вик-в вик-п
БОСЭС ВГБ
ВГБ-В ВГБ-П
БОСЭС ДБВ
ДБ-В ДБ-П
БОСЭС ББ
ББ-В ББ-П
Рис. 4.2. Состав БОСЭС для ГМБС
Несколько особняком стоит экспертная система для выделения не-
посредственно угрожающей цели (ЭС НУЦ), на основании всей имею-
щейся текущей и предполетной информации постоянно анализирующая
внешнюю обстановку с задачей выделить воздушную или наземную цель,
которая представляет непосредственную угрозу самолету и в случае пре-
небрежения ею сорвет выполнение текущей задачи полета (выполнение
ТБС или ТС) и возможно уничтожит самолет.
Все БОСЭС и ЭС НУЦ используют единую бортовую базу знаний
(ЕБЗ), содержащую самые общие знания о районе боевых действий, задаче
конкретного боевого вылета, тактике своих действий и действий против-
ника, технических характеристиках своих и чужих самолетов, наземных
целей и их бортовых измерительных и исполнительных устройств.
Структура БОСЭС для ТБС рассматривается в гл. 5.
Экспертная система предполетной тренировки летчика (ЭС «Тре-
наж»), использующая единую базу знаний самолета, обеспечивает в усло-
виях дефицита времени качественную подготовку летчика к конкретному
вылету. Информация о задаче вылета, условиях его протекания предвари-
тельно вводится в единую базу знаний самолета. Предполетный тренаж по-
могает летчику «освежить» необходимые в предстоящем полете алгоритмы
своей деятельности, а технический персонал получает дополнительную
информацию о работоспособности бортовой аппаратуры и возможности
220
ее согласованной работы в условиях предстоящего вылета. Возможность
реализации ЭС «Тренаж» в приведенной в гл. 5 структуре БОСЭС требует
уточнения на этапе создания ее исследовательского образца.
Экспертная система контроля и диагностики бортовой аппаратуры
(ЭС «Диагностика») дает возможность техническому составу средней ква-
лификации качественно подготовить самолет к вылету, провести диагно-
стику неисправностей бортовой аппаратуры и получить квалифицирован-
ную рекомендацию по устранению любой обнаруженной неисправности.
ЭС «Диагностика» позволяет в процессе полета фиксировать функцио-
нальные отказы бортовой аппаратуры, определять пути их локализации
и компенсации, сообщая эту информацию в БОСЭС ТБС (работа с уре-
занным составом бортовой аппаратуры) и в регистратор отказов (для по-
слеполетного устранения). Возможность реализации ЭС «Диагностика»
в приведенной выше структуре БОСЭС требует уточнения на этапе со-
здания ее исследовательского образца. Итоговый семантический облик
бортового АиИО и номинальных алгоритмов деятельности летчика для
СУУ представлен на рис. 4.3.
4.43. Нижний уровень
На НУУ (уровень реализации выбранного способа достижения по-
ставленной цели выбранной ТБС или ТС) всю необходимую работу вы-
полняют:
а) летчик (алгоритмы деятельности: диспетчеризация принятого ре-
шения — включение тумблеров, кнопок в определенной последователь-
ности; работа в качестве звена следящей системы — в режимах прицели-
вания, директорного управления самолетом, работа с кнюппелем);
б) АиИО, выполненное в традиционных структурах (алгоритмы обес-
печения движения самолета по заданной траектории, алгоритмы подго-
товки к применению выбранного оружия, алгоритмы прицеливания и т.п.);
в) экспертные системы бортовых измерительных и исполнительных
устройств (БЭС Изм & Исп/Аппаратуры). Они работают в тесном взаи-
модействии с БОСЭС и обеспечивают максимально полное представление
непротиворечивой информации и максимально точное исполнение приня-
тых решений имеющейся на данный момент работоспособной бортовой
аппаратурой.
БЭС Изм & Исп/Аппаратуры имеют разнообразное назначение и раз-
личные структуры. Выделим среди них разрабатываемые в настоящее
время:
1) бортовую ЭС обнаружения, опознавания и определения государ-
ственной принадлежности воздушных объектов (БЭС ООО В/В) и
2) ЭС определения типа обнаруженного объекта (типа цели).
221
Охарактеризуем (для примера) первую из названных ЭС — бортовую
экспертную систему обнаружения, опознавания и определения государ-
ственной принадлежности воздушных объектов.
Рис. 4.3. Облик бортового АиИО для СУУ на ГМБС
Опыт разработки самолетных бортовых систем, имеющих в своем
распоряжении измерители (бортовые информационные устройства) ра-
222
дислокационного и оптического диапазонов (соответственно РЛ и ОПТ
диапазоны) показал, что создаваемые в настоящее время бортовые алго-
ритмы совместной обработки сигналов РЛ и ОПТ диапазонов не выдер-
живают практической проверки. Причиной тому, на наш взгляд, является
ориентировка на традиционные структуры алгоритмов, которые не могут
обеспечить эффективное решение этой задачи.
Продвижение в сторону практических успехов следует искать в ис-
пользовании таких структур, которые могли бы работать со всей относя-
щейся к этой проблеме доступной информацией:
• текущей количественной и качественной информацией (К-инфор-
мация) от бортовых измерителей РЛ и ОПТ диапазонов;
• текущей К-информацией от внебортовых источников, в том числе
и от летчика;
• априорной К-информацией, имеющейся у экспертов (разработчи-
ков, экспериментаторов, летчиков);
• априорной К-информацией, имеющейся на аэродроме перед вы-
летом.
Адекватной этим требованиям является образ (структура) гибридной
БЭС ООО В/В, представленной на рис. 4.41. БЭС ООО В/В работает в
ситуации «Вход в информационный контакт с целью» (ВИК-В), где у лет-
чика имеется небольшой резерв времени для ограниченного с ней диалога.
Это позволяет требовать от БЭС развитой системы объяснений и ориен-
тировку ее на заметный объем дополнительной текущей информации от
летчика.
Для начала содержательной постановки задачи на определение струк-
туры БЭС ООО В/В необходимо иметь:
— облик образцов, «гипотезных по типам целей» сигналов в РЛ и
ОПТ диапазонах на срезе «приемник-АЦП» (АЦП — алфавитно-цифро-
вой преобразователь);
— облик образцов фоновых сигналов в РЛ и ОПТ диапазонах;
— конкретный перечень информативных признаков в отличиях реаль-
ного сигнала РЛ и ОПТ диапазонов и образцов, «гипотезных» по типам
целей и фоновых сигналов;
— группы правил вывода содержательных заключений.
Итоговый семантический облик бортового АиИО и номинальных ал-
горитмов деятельности летчика для НУУ ГМБС представлен на рис. 4.5.
Сделаем два замечания. Первое. Описанная структура бортового
АиИО в зависимости от принятой организационной структуры проведения
1 Структура разработана Е.Т. Егоровой.
223
разработки может реализовываться в виде различной совокупности ин-
формационно взаимодействующих аппаратных и программных (виртуаль-
ных) комплексов. Например, она хорошо «ложится» на аппаратную струк-
туру, описанную в [6]. Второе. Такое семантически и организационно-
технически сложное АиИО и его программная реализация не могут быть
разработаны вне рамок технологии системного проектирования АиИО и
использования в ней компьютерных систем поддержки процесса проекти-
рования [3, 7].
Рис. 4.4. Структура гибридной бортовой экспертной системы обнаружения, опо-
знавания и определения государственной принадлежности воздушных объектов
(ООО В/В)
Итак, подводя итог, можно сказать:
1. Бортовое АиИО функционирования гипотетического многофун-
кционального самолета ближайшего будущего («завтра») будет поддержи-
вать нижний и средний уровни управления в системе «экипаж (летчик) —
бортовая аппаратура — самолет».
224
2. На верхнем уровне управления (уровень целеполагания) экипаж по
информации о внешней и внутренней обстановке, получаемой в бортовых
Единая бортовая база знаний (FR3) (предполетная
настройка на конкретную задачу боевого вылета)
ВУУ: АиИО и эвристические алгоритмы деятельности
летчика
СУУ: АиИО - информация для выбора способа достижения
основной задачи ТС и контроля за работой БОСЭС в ТБС.
Летчик: эвристические решения в ТС, речемыслительные и
симультанные решения в ТБС.
Органы управления: кнопки на многофункциональном пульте (ПУМ),
тактильные экраны для ввода нечеткой информации
БОСЭС ВИК
ВИК-В ВИК-П
БОСЭС ВТБ
ВГБ-В ВГБ-П
БОСЭС ББ
ББ-В ББ-П
т
БОСЭС ДБВ
ДБ-В ДБ-П
1
Экспертные системы: «Выделение НУЦ» (ЭС НУЦ);
Предполетной тренировки летчика (ЭС «Тренаж»);
Контроля и диагностики бортовой аппаратуры (ЭС «Диагностика»)
НУУ: реализация выбранного способа достижения цели
Традиционные бортовые алгоритмы управления полетом по заданной
траектории, алгоритмы стабилизации самолета,
алгоритмы обеспечения применения выбранного оружия.
БЭС Изм & Исп/Аппаратуры
Экспертная система бортовых измерительных устройств
радиолокационного диапазона оптического диапазона
Экспертная система бортовых исполнительных устройств
Рис. 4.5. Облик бортового АиИО с нижним уровнем управления на ГМБС
алгоритмах главным образом традиционной структуры может назначать
следующие текущие цели функционирования системы «экипаж
8 - 1847
225
(летчик) — бортовая аппаратура — самолет». Для гипотетического много-
функционального боевого самолета такие цели перечислены в п. 4.4.1.
Основная интеллектуальная работа на этом уровне «сегодня», «завтра» и
«послезавтра» выполняется и будет выполняться экипажем.
3. На СУУ (уровень выбора способа достижения поставленной те-
кущей цели полета: решение основной задачи выбранной ТБС или ТС)
основную работу по оценке текущей внешней обстановки и выбору пред-
почтительного способа действия в ТБС «завтра», будут осуществлять борт-
овые оперативно-советующие экспертные системы соответствующих ТБС
(БОСЭС ТБС).
Для ГМБС несколько особняком стоит ЭС НУЦ.
Все БОСЭС и ЭС НУЦ используют ЕБЗ, содержащую самые общие
знания о районе боевых действий, задаче конкретного боевого вылета,
тактике своих действий и действий противника, технических характери-
стиках своих и чужих самолетов и наземных целей и их бортовых изме-
рительных и исполнительных устройств.
На самолете предусматривается поддержка предполетной тренировки
летчика (ЭС «Тренаж») и поддержка технического персонала на этапе
подготовки самолета к вылету (экспертная система контроля и диагно-
стики бортовой аппаратуры (ЭС «Диагностика»).
4. На НУУ (уровень реализации выбранного способа достижения по-
ставленной цели выбранной ТБС или ТС) «сегодня» всю необходимую
работу выполняют: а) летчик, б) АиИО, выполненное в традиционных
структурах, а «завтра» к ним присоединятся экспертные системы борто-
вых измерительных и исполнительных устройств (БЭС Изм & Исп/Апп.).
Они должны работать в тесном взаимодействии с БОСЭС ТБС и обес-
печивать максимально полное представление непротиворечивой информа-
ции и максимально точное исполнение принятых решений имеющейся на
данный момент работоспособной бортовой аппаратурой.
5. Разработка такого сложного АиИО должна вестись по технологии
системного проектирования с использованием компьютерных систем его
поддержки.
Таким образом, мы установили, что на борту сложных антропоцен-
трических систем существует пласт нерешаемых сегодня задач, конструк-
тивное инженерное решение которых на основе методов искусственного
интеллекта может быть получено уже в ближайшем будущем. Это зада-
чи СУУ.
Мы указали на место этих задач на борту антропоцентрической си-
стемы. В следующей главе книги мы укажем примеры решения некоторых
из них, а также отдельных задач НУУ.
226
ЛИТЕРАТУРА
1. Федосов Е.А. Критические технологии России И Труды Всероссийской конференции
Государственных научных центров РФ. — М.: 1995. С. 80-95.
2. Fedunov В.Е., Kondrikova Т.А. On-board Algorithms and Displayed Information for
Antropocentral System: Problems and Methods of Systematic Design // Proc. IEEE Con-
ference on Systems. Man and Cybernetics. 1993. V. 2. P. 568-571.
3. Кондрикова T.A., Федунов Б.Е., Черняев В.В. «Борт» — программная среда поддержки
процесса системного проектирования бортового алгоритмического и индикационного
обеспечения //Труды ГосНИИАС. Вопросы авионики. 1995. Вып. 1. С. 106-118.
4. Fedunov В.Е. The Optimization Models for Making the Decisions in the Algorithmic Indica-
tional Support System Designing // Proc. SAMS’95. 1995. V. 18-19. P. 455-458.
5. Позняков П.В., Федунов Б.Е. Основы информационной интеграции бортовой аппарату-
ры. — М.: МАИ, 1993.
6. Кондрикова Т.А., Савельева С.М., Федунов Б.Е. Математическая модель человека-
оператора для системного проектирования бортового алгоритмического и индикацион-
ного обеспечения функционирования антропоцентрического объекта И Изв. РАН. Теория
и системы управления. 1998. № 3. С. 164-176.
7. Невзорова О.А., Федунов Б.Е. Компьютерная система «ЛоТА» для анализа ЕЯ техни-
ческих текстов при системном проектировании «бортового интеллекта» антропоцентри-
ческого объекта И Труды VI Международной конференции «Знания-диалог-решения».
1997. Т. 2. С. 531-539.
8*
ГЛАВА 5
ИНТЕЛЛЕКТУАЛИЗАЦИЯ РЕШЕНИЯ ЗАДАЧ
СРЕДНЕГО И НИЖНЕГО УРОВНЕЙ УПРАВЛЕНИЯ
5.1. Введение
Рассмотренный в гл. 4 класс антропоцентрических систем предметно
показал необходимость использования на их борту для автоматизации ре-
шения задач верхнего и среднего уровня управления (ВУУ и СУУ) алго-
ритмов интеллектного управления, в частности, систем, основанных на
знаниях (СОЗ, см. п.В.2 и гл. 1) [1-3].
Знания о «мире», в котором будет функционировать объект, зна-
ния о способах разрешения конкретных конфликтных ситуаций, кото-
рые возникают перед объектом в текущий момент сеанса его функцио-
нирования «закладываются» конструкторами в аппаратную часть объекта
и в его бортовое алгоритмическое и индикационное обеспечение (про-
граммы БЦВМ).
В объектах с экипажем большая часть знаний, необходимых для
функционирования, «вложены» в алгоритмы деятельности экипажа (АДЭ).
Функциональная целостность алгоритмов БЦВМ и АДЭ образует «борто-
вой интеллект».
Каждый уровень управления использует один из четырех типов систем
управления: F, F-A, F-M, S (см. п. 1.9). Эти типы систем, перечисленные
в порядке возрастания их сложности, подробно описаны в [4]. Отметим,
что каждый из типов систем управления потенциально может реализо-
ваться с разной долей участия аппаратно-программно и экипажем.
Профессиональный уровень инженерно-технических кадров промыш-
ленности, состояние технологии и достижения теории управления по-
зволяют в настоящее время говорить о возможности полной аппаратно-
программной реализации на борту F- и F-A-систем. Поэтому выполне-
ние задач объектом управления в сложной и мало априорно изученной
обстановке (где эффективно могут работать только F-М- и S-системы)
возможно только при использовании экипажа.
Если рассматривать процесс проектирования системы и последующий
процесс его использования как единый процесс, то ВУУ — целеполага-
228
ние — обеспечивается в системе проектировщиком и экипажем. Форми-
рование целей управления на этом уровне производится частично (система
с экипажем) проектировщиком, который проектирует систему с заранее
ограниченной областью назначения. При узкой специализации системы
функция целеполагания выхолащивается и как бы может решаться пол-
ностью аппаратно-программно. Для широкоспециализированных объектов
требуется участие в процессе целеполагания человека (экипажа).
Уровень целеполагания строится на сложных объектах как семио-
тическая система. Сегодня он реализуется через экипаж. Проектировщик
обеспечивает экипажу лишь информационную модель внешней и внутрен-
ней обстановки. Обученный экипаж, прошедший перед каждым сеансом
функционирования системы проработку задания, является блоком «модель
мира» и блоком «интерпретатор» для S-системы.
Постановка экипажем в процессе функционирования текущей кон-
кретной цели функционирования объекта «запускает» СУУ, который кон-
кретизируется через типовую ситуацию (ТС) и типовую быструю ситуа-
цию (ТБС). После достижения поставленной цели управления (заверше-
ние ТБС и ТС) экипаж формирует новую цель управления (новая ТБС и
ТС), замыкая таким образом самую внешнюю петлю обратной связи на
объекте — петлю уровня целеполагания — в сложной иерархической си-
стеме управления объектом. Таким образом, на этом уровне управления
на борту системы экипажем реализуется S-система управления (в более
простых случаях F-M-система управления).
При этом весь процесс функционирования системы во внешней среде
должен быть организован более высоким (реализованным вне системы)
уровнем управления так, чтобы работа экипажа на уровне целеполагания
(работа в F-М и S-системах) обеспечивалась ему достаточным резервом
времени для осмысливания, анализа информации и принятия решения.
Средний уровень управления — выбор способа достижения поста-
вленной цели — это потенциальный и главный потребитель представлен-
ной в этой книге теории логического вывода. Именно здесь ее исполь-
зование даст инженерам-проектировщикам возможность осуществить ка-
чественный прорыв в программно-аппаратном обеспечении борта. Это,
конечно, не исключает возможности (и целесоообразности) использова-
ния этой теории и для разрешения задач НУУ.
Заметим, что все проблемы, которые инженеры-разработчики не су-
мели решить с помощью созданных ими бортовых алгоритмов, предъявля-
ются экипажу. Члены экипажа, которые работают в режиме «оператор»,
обязаны их оперативно решать.
В современной мировой практике создания сложных технических
объектов бортовые алгоритмы с принципами управления 1-4 (см. рис. 1.9)
освоены инженерами-проектировщиками, которые с их помощью успешно
229
решают все задачи НУУ. Мы надеемся, что предлагаемая читателю книга
позволит сделать «прорыв» к реализации бортовых алгоритмов на основе
автоматического доказательства теорем (АДТ) и автоматического гипоте-
зирования (АГ). Это позволит ожидать освоения инженерами всего СУУ.
В данной главе описываются примеры интеллектуализации решения
задач СУУ и НУУ.
Практическая реализация решений задач СУУ инженерами-констру-
кторами «бортового интеллекта» только начинается. Уже осознана невоз-
можность их эффективного решения в освоенных инженерной практикой
алгоритмических структурах. Понято, что основная трудность заключа-
ется в необходимости оперативного привлечения для решения этих задач
гораздо большего объема знаний о «мире», чем это делалось в «при-
вычных» для конструкторов задачах. Инженеры уже начинают говорить
о базах знаний и о механизмах вывода, т.е. появились признаки, что на
борт «рвутся» интеллектные системы.
Наиболее подготовленным к реализации на борту антропоцентриче-
ской системы классом интеллектных систем являются бортовые опера-
тивно-советующие системы (БОСЭС). В этом разделе мы остановимся на
описании БОСЭС, включая системные вопросы их разработки (п.5.2),
и демонстрационные примеры математических оптимизационных задач,
которые возникают при разработке их баз знаний (п.5.4, 5.5), а также
пример задачи логического моделирования динамики и управления воз-
душным боем (п.5.4.2.2). В п.5.3 дано описание конкретной БОСЭС
«Дуэль», иллюстрирующее основные положения этой главы.
Для конкретности изложения далее все общие рассуждения мы будем
иллюстрировать на примере самолета, имея в виду, что самолет (особенно
боевой) является наиболее представительным примером антропоцентри-
ческих систем.
Хотя описанная структура БОСЭС, несомненно, является новой для
решения задач СУУ, однако уже сегодня видятся ее ограничения — прак-
тическая невозможность конструктивно описать с помощью заранее реа-
лизованных правил-продукций достаточно сложную предметную область.
Первый шаг на пути преодоления этого ограничения нам видится в реали-
зации на борту оперативного генерирования необходимого правила с по-
мощью логических средств (см. гл. 2,3).
Создание интеллектуальных систем со структурой БОСЭС «Дуэль»
возможно только для сравнительно простых предметных областей (ПО).
Одно из просматриваемых препятствий к использованию такой струк-
туры в более сложной ПО — чрезмерное расширение числа правил-
продукций, являющихся одним из ее элементов. Наступает своеобразная
ситуация необозримости для множества правил их семантической целост-
ности и непротиворечивости. Однако при структурировании ПО через
230
ТС и проблемную субситуацию (Пр с/с) и при изучении последних через
«оптимизационные задачи» можно увидеть, что механизмы (процедуры)
содержательного конструирования правил-продукций для фиксированной
ПО, как правило, не так уж разнообразны (см. далее соответствующие
разделы книги). Осознав и формализовав эти механизмы, можно приме-
нить изложенную в книге теорию логического вывода для оперативного,
автоматического генерирования в БОСЭС необходимых для текущего мо-
мента множества правил-продукций. Конечно, при практическом констру-
ировании БОСЭС с такой структурой встают проблемы семантической
сертификации этого нового блока БОСЭС — блока «Автоматическое ге-
нерирование правил-продукций для ПО». Мы эти вопросы вынесем за
пределы книги.
5.2. Проблемы разработки бортовых
оперативно-советующих экспертных систем
для антропоцентрических систем
5.2.1. БОСЭС и их особенности
БОСЭС обсуждаемой структуры предназначены для совместной ра-
боты с бортовым оператором (экипажем) на среднем уровне управления
«Выбор способа достижения цели». При системном проектировании [5-7]
алгоритмического и индикационного обеспечения (АиИО) это «Разреше-
ние проблемных субситуаций в выбранной типовой ситуации (типовой
быстрой ситуации)».
От практически значимой БОСЭС требуется:
— быть всегда согласованной с активизированной в текущий момент
концептуальной моделью поведения оператора [7],
— иметь незаметное (в масштабе реальных изменений во внешней об-
становке и в темпе деятельности оператора) для оператора время реакции.
Если второе требование разработчиком БОСЭС воспринимается как
конструктивно-конкретное, то на первом необходимо остановиться по-
дробнее. Деятельность оператора включает в себя оперативное и пра-
вильное обнаружение и осознание возникшей проблемы, выявление воз-
можных способов ее разрешения, выбор среди них наиболее рациональ-
ного (оптимального) способа разрешения этой проблемы, реализацию вы-
бранного способа, контроль результатов этой деятельности. При этом ни
отсутствие необходимой для этого информации, ни недостаток времени
для ее анализа не освобождает оператора от необходимости к определен-
ному моменту времени (определяемому сложившейся обстановкой) при-
нять определенное (лучше оптимальное) решение. Именно в такой об-
становке БОСЭС призвана давать рекомендации оператору на решение
231
возникающих перед ним проблем. При этом следует помнить о крайне
ограниченных на борту технических возможностях прямого общения опе-
ратора с БОСЭС и о большом объеме имеющейся у оператора (и отно-
сящейся к делу) априорной и текущей количественной и качественной
информации. Имея это в виду, уточним для конструктора БОСЭС первое
из названных выше требований.
Для удовлетворения ему при разработке БОСЭС конструктору следует
учитывать, что:
— главенствующая роль на борту принадлежит оператору, и он не
обязан сообщать БОСЭС о своих текущих намерениях и о необходимо-
сти дать ему в настоящий момент рекомендации-советы. Другими сло-
вами, база знаний (БЗ) БОСЭС и заложенные в БОСЭС механизмы вы-
вода должны выявлять и предъявлять оператору значимые (в его, опера-
тора, действующей концептуальной модели поведения и в сложившейся
внешней и внутрибортовой обстановке) события, правильно их интерпре-
тировать, давать глубокие по анализу возникшей проблемы рекомендации
по ее разрешению;
— в любой практически значимой для оператора ситуации, которая
может возникнуть в рамках активизированной оператором концептуаль-
ной модели его поведения, давать убедительные и конструктивные реко-
мендации. Другими словами, предметная область (ПО) БОСЭС должна
быть функционально замкнута и для оператора;
— БОСЭС должна семантически и информационно встраиваться в ре-
альное (проектируемое) информационно-управляющее поле кабины. Дру-
гими словами, рекомендации и комментарии к ним должны предъявляться
в форме и на месте, естественном для конкретного рабочего места опе-
ратора и встраиваться в естественный пространственно-временной мир
кабины;
— прямой режим общения оператора с БОСЭС крайне ограничен
по аппаратным возможностям современных кабин и по обычно жестким
временным лимитам разрешения возникшей ситуации;
— с каждым конкретным экземпляром БОСЭС будет последовательно
работать не один, а несколько операторов, отличающихся уровнем своей
профессиональной подготовки, психофизиологическим складом, составом
и уровнем мотиваций.
5.2.2. Концептуализация предметной области типовой ситуации.
Структура БОСЭС
Под концептуализацией ПО для разработки БОСЭС будем понимать
процесс и результат создания такой формальной модели этой ПО, кото-
рая бы
232
— правильно отражала для нее состав объектов-деятелей (агентов) и
отношения между ними, мотивацию, способ и результат их действий;
— позволяла программисту-системщику без искажения своей семан-
тической сути разрабатывать на ее основе машинно реализуемый ее
вариант.
Приступая к концептуализации ПО, необходимо в начале процесса
конструктивно:
— выделить в среде «оператор — система» функционально замкнутую
для бортового оператора область функционирования будущей БОСЭС;
— разработать для нее формализованный сценарий (см. гл. 4);
— очертить возможный (доступный) аппаратный уровень общения
оператора с БОСЭС: а) перед применением системы (например: перед
вылетом самолета); б) в процессе применения системы ( в процессе полета
самолета);
— очертить возможный (аппаратно и организационно допустимый)
механизм совершенствования БЗ БОСЭС в процессе ее эксплуатации.
Приступая к процессу концептуализации авиационной ПО, отметим,
что профессионалы-летчики всегда:
— тщательно готовят вылет, уясняя при этом задачу вылета, ожида-
емые условия его выполнения (как положительные: внешняя информа-
ционная поддержка, помощь другого летательного аппарата (ЛА), так и
отрицательные: противодействующие объекты, неблагоприятные внешние
условия);
— представляют вылет как цепочку ТС, упорядоченных причинно-
следственным отношением.
Необходимо отметить, что сама процедура подготовки, регламентиро-
ванная и поддержанная соответствующими организационно-техническими
документами (например: боевой устав, наставления по применению), хо-
рошо структурирует задачу и условия вылета. Эта структуризация и пред-
полетная информационно-тактическая подготовка экипажа должны отра-
жаться в БЗ БОСЭС.
Для наших целей важно понятие «типовая ситуация» (гл. 4). Напо-
мним, что под ним понимается функционально замкнутая с четко обозна-
ченной целью (задачей) часть работы, выполняемая системой «летчик -
бортовая аппаратура - самолет», которая как единое целое встречается
в различных возможных (реальных) вылетах самолета, конкретизируясь
в них по условиям протекания и по доступным способам разрешения
возникающих в ТС Пр с/с. Множество ТС для каждого вида самоле-
тов состоит из минимально необходимого числа элементов, достаточного
для представления через него любой задачи вылета из тех задач, которые
определяются соответствующими регламентирующими документами.
233
При полной интеллектуализации борта системы на нем для каждой
ТС, по-видимому, будет существовать своя БОСЭС (БОСЭС ТС).
Формальное описание ТС, даваемое на естественном профессиональ-
ном языке (ЕПрЯ), протоязыке (типа Прото-2 [8] или БРЯН [9]) и на сети
фреймов, содержит следующие позиции:
1. Условия возникновения ТС.
2. Основная задача (цель) ТС.
3. Критерий качества и допустимые (возможные) способы достиже-
ния цели ТС.
4. Представление ТС через упорядоченное в причинно-следственном
отношении множество проблемных субситуаций (Пр с/с), прохождение
через которые позволяет достичь цели ТС.
5. Агенты ТС, информация о них на борту системы-носителя БОСЭС
(на этапе подготовки системы к применению и в процессе ее применения).
Намерения агентов в этой ТС и способы реализации ими этих намерений.
6. Объекты-напарники, объекты-противники, внешняя информаци-
онная поддержка системы-носителя БОСЭС. Общая характеристика их
с точки зрения достижения цели системой-носителем.
Как отмечалось, представление ТС через упорядоченное множество
Пр с/с уже намечает стратегию достижения цели ТС.
Формальное описание Пр с/с составляется как детализация (в соот-
ветствующей части) формального описания ТС.
Формальные описания ТС (Пр с/с) сопровождаются составлением сло-
варя понятий и отношений между понятиями, необходимых для последу-
ющей разработки логико-лингвистических моделей [4] каждой Пр с/с и
ТС в целом.
Состав БОСЭС для самолета-истребителя представлен на рис. 5.1 (из
всех необходимых БОСЭС типовых ситуаций на рисунке показаны только
те, названия которых будут упомянуты ниже).
При внедрении в бортовое АиИО элементов ИИ мы прежде всего
ставим перед собой задачу внедрить БОСЭС на уровни «Выбор способа
достижения поставленной цели (уровень ТС)» и экспертных систем на
уровень «Реализация способа разрешения текущей Пр с/с». К настоя-
щему времени наиболее осмысленными и подготовленными для разра-
ботки БОСЭС (чем и определился их выбор для представления на рис. 5.1)
являются следующие ТС (ТБС):
— «Ввод группы в бой» (ВГБ): для боя с воздушными целями
(ВГБ-В), для боя с наземными целями (ВГБ-П),
— «Дальний ракетный бой» (ДБ),
— «Дальний ракетный бой с воздушной целью» (ДБ-В),
— «Дальний ракетный с наземной целью» (ДБ-П).
234
В антропоцентрической системе каждую ТС будет «обслуживать»
своя БОСЭС и взаимодействующие с ней бортовые экспертные системы
измерительной и исполнительной аппаратуры (БЭС Изм & Исп/Апп.).
Рис. 5.1. Бортовые оперативно-советующие экспертные системы одноместного са-
молета
Обратимся к методике разработки БЗ БОСЭС для некоторой ТС. Для
каждой Пр с/с этой ТС из ее формального описания составим список
объектов-деятелей (агентов) и значимых событий. Представим каждую Пр
с/с этой ТС совокупностью математических моделей, которая описывает
пространственное расположение участников Пр с/с, прогнозирует его из-
менение во времени и определяет моменты возможного наступления зна-
235
чимых (для рассматриваемой Пр с/с) событий. Назовем эту совокупность
сценарием (СЦ), соответствующим этой Пр с/с.
Довольно часто Пр с/с требует предварительного своего исследова-
ния на ряде математических моделей, которые, как правило, формули-
руются в виде математических задач оптимального управления, теории
игр, различных задач принятия решений [10]. Ряд таких моделей опи-
сан в п. 5.4, 5.5 этой главы. Полученное в результате таких исследова-
ний или подобранное при имитационном математическом моделировании
«рациональное» разрешение Пр с/с закладывается в математическую мо-
дель (ММ).
Объединение ММ, дополненное рациональным по критерию эффек-
тивности СЦ поведением системы-носителя БОСЭС и объектов-против-
ников, формирует пространственно-временной «каркас» СЦ. СЦ Пр с/с в
БОСЭС связаны между собой таким причинно-следственным отношением,
которое позволяет при изменении внешней обстановки (определяемому в
результате анализа информации от бортовых измерительных устройств)
полностью описывать протекание ТС с помощью перехода из одного СЦ
в другой по пути к достижению цели ТС.
Анализ внешней и бортовой обстановки и выработку соответствую-
щих рекомендаций оператору проведем с помощью правил-продукций.
Множество таких правил БОСЭС разнесено по ее СЦ. В отдельный блок
выделены правила активизации сценария (БАС).
Подытожим сказанное.
• БОСЭС необходимо строить под функционально замкнутый объем
работы системы «оператор-бортовая аппаратура». Процесс формализа-
ции этой предметной области, определенной формальной моделью, явно
разбивается на два этапа. На первом этапе строится семантическая сеть
фреймов и совокупность ММ ПО, представляющих ее пространственно-
временной мир. Этапы такого построения:
— описание ПО на ЕПрЯ с последующим (по мере подготовки спе-
циалистов) переходом на протоязыки типа Прото-2, БРЯН;
— составление обобщенного графа работы системы «оператор — бор-
товая аппаратура»;
— составление семантической сети фреймов и определение необходи-
мого состава ММ, материализующих в БОСЭС необходимый пространст-
венно-временной мир.
На втором этапе строится логико-лингвистическая модель ПО и раз-
рабатываются иерархически упорядоченные множества «правил вывода»
и ММ.
Для практических целей проектирования БОСЭС такие описания
должны регламентироваться и контролироваться на полноту и непротиво-
речивость.
236
• При подготовке к применению антропоцентрического объекта к
вылету экипаж осмысливает поставленную перед ним задачу как последо-
вательность ТС, связанных друг с другом причинно-следственным отно-
шением.
Через множество таких ТС представляется любая задача (применения)
вылета. ТС нам представляется как та часть функционально замкнутой
работы системы «оператор — бортовая аппаратура», под которую нужно
разрабатывать полноценную БОСЭС. На борту должна быть сеть БОСЭС.
Конкретную БОСЭС в процессе применения активизирует экипаж (опе-
ратор) или специальная БОСЭС уровня целеполагания.
• Процесс достижения цели в выбранной ТС естественно предста-
вить в виде цепочки Пр с/с (естественный «путь» достижения поставлен-
ной в ТС цели) — сценариев БОСЭС. ММ и системы правил-продукций
группируются в БОСЭС по сценариям. Правила активизации конкретного
сценария оформляются в отдельный блок активизации.
5.2.3. Аппаратно-программная реализации БОСЭС
типовой ситуации
Как исследовательский прототип БОСЭС ТС, так и ее бортовой вари-
ант проектируются для работы в реальном времени с учетом требований
работать на борту с другими БОСЭС ТС.
Прототип БОСЭС реализуется, как правило, на ПЭВМ. Приведем
описание «оболочки БОСЭС ТС»1.
Критическими пунктами для реализации прототипа являются:
— требование реального времени,
— переносимость блоков прототипа на БЦВМ,
— объемы памяти, необходимые для хранения информации о пред-
метной области,
— обеспечение взаимодействия БОСЭС между собой, с ИУП кабины,
с бортовым оборудованием системы-носителя БОСЭС.
Обмен информацией между БОСЭС ТС осуществляется посредством
«доски объявлений» — общей рабочей памяти.
База правил БОСЭС представлена правилами-продукциями. В ней
поддерживается иерархическая структура.
Механизм логического вывода может дополняться работой с неопре-
деленностями и использовать математический аппарат теории вероятности
(априорные и апостериорные вероятности событий, степени достоверно-
сти событий).
1 Используются материалы А.Б. Сухомлинова.
237
База данных ориентирована на получение в интерактивном режиме
информации от бортовых источников, штатных бортовых алгоритмов,
ИУП кабины.
Обмен данными может осуществляться по сети, через файл, с кла-
виатуры.
Программное обеспечение работает в операционной среде MS DOS и
состоит из предметно-независимых «ядра» и «окружения».
«Ядро» содержит: загрузчик базы знаний в оперативное запоминаю-
щее устройство (ОЗУ), причинно-следственный анализатор, механизм по-
иска решений, модуль поддержки ММ, модуль ввода-вывода, резидентный
загрузчик.
«Окружение» содержит: специализированный редактор базы знаний;
средства просмотра и редактирования, находящейся в ОЗУ базы знаний;
оконный интерфейс; систему ниспадающих меню, позволяющих пользова-
телю осуществлять ручной ввод данных для конкретизации объектов базы
данных в рабочей памяти, производить настройку переменных окружения,
управлять работой БОСЭС; отладчик, обеспечивающий работу в пошаго-
вом режиме и запуск отдельных блоков БОСЭС изолированно; разные
утилиты.
Интеграция базы правил и «традиционных» ММ происходит путем
включения в базу данных БОСЭС элементов, соответствующих ММ, и ис-
пользования их в левых частях правил-продукций. При этом означенные
элементы рабочей памяти будут соответствовать фактическим значениям
выходных сигналов из ММ. Механизм логического вывода БОСЭС, обра-
батывая правила, будет запускать на выполнение модули ММ и затем с уже
обновленной рабочей памятью продолжать поиск решения по правилам.
Переключение с логического вывода на ММ может быть многократным.
Оболочка для реализации БОСЭС ТС требует следующих объемов
ОЗУ (в килобайтах: Кб):
— объем ОЗУ исполняемого резидентного модуля — 60 Кб,
— объем ОЗУ для «ядра» оболочки — 100 Кб,
— объем ОЗУ для базы знаний БОСЭС:
* база данных из F фактов — F х 0,25 Кб,
* база правил из R правил — R х 0,50 Кб,
* база ММ из N моделей — N х 50 Кб,
— объем ОЗУ для промежуточных величин - 60 Кб.
Итого (в килобайтах): 220 + 0,25 х F 4- 0,50 х R + 50 х N.
Оценка потребных вычислительных средств для реализации исследо-
вательского прототипа БОСЭС ТС выполнена на основе опыта реализации
на простейшей ПЭВМ (с процессором INTEL 386 с тактовой частотой
20 МГц) в среде MS DOS бортовой оперативно-советующей экспертной
системы «Дуэль» [11], подробнее изложенной в п. 5.3.
238
БОСЭС «Дуэль» содержит 5 сценариев, 15 ММ (ММ 1-ММ 15). Для
ее реализации потребовались следующие вычислительные ресурсы:
— 167 Кб для 5 сценариев (112 фактов в БД + 162 производных
факта + 234 исходных правил);
— размер исполняемого модуля одной ММ: от 31 Кб (для ММ5) до
50,7 Кб (для ММ4);
— объем свободной памяти ОЗУ, необходимой для нормальной ра-
боты БОСЭС: 60 Кб;
— максимальное время одного полного цикла работы механизма ло-
гического вывода для одного сценарного варианта:
— на логический вывод — 0,33 с,
— на работу ММ, запускаемых как внешняя программа — 0,44 с.
Имитационные модели внешней информационной обстановки имеют
следующие характеристики ресурсов:
Самолет:
— размер исполняемого модуля - 223 Кб;
— объем ОЗУ для модуля — 314 Кб;
— время одного полного цикла работы — 0,22 с.
Кабинная индикация:
— размер исполняемого модуля — 62 Кб;
— объем ОЗУ для модуля — 77 Кб;
— время отображения на дисплее ПЭВМ - 0,39 с.
(в режиме имитации индикаторов на лобовом стекле (ИЛС)).
На одной ПЭВМ PC-АТ 386/20 Мгц можно моделировать:
«СЦ 1+2+5» + самолет + индикация + «штатные бортовые алгорит-
мы»; или
«СЦ 3» + самолет + индикация + «штатные бортовые алгоритмы»;
или
«СЦ 4» + самолет + индикация + «штатные бортовые алгоритмы».
Время полного цикла работы «исследовательского прототипа БОСЭС
«Дуэль»» + самолет + индикация + «штатные бортовые алгоритмы» со-
ставляет 1,15 с.
Ориентируясь на приведенные данные, потребные вычислительные
ресурсы только БОСЭС будут составлять при F = 284, R — 300, N = 15:
— объем ОЗУ — 1 Мбайт,
— продолжительность цикла работы БОСЭС — 0,54 с.
В связи с этими оценками потребных для реализации БОСЭС ТС
вычислительных ресурсов заметим, что в России разработан модуль про-
граммируемого логического контроллера PLC 386ЕХ на базе микропро-
цессора 386ЕХ фирмы INTEL, выполненный в соответствии с требовани-
239
ями спецификации шины VME1. Модуль предназначен для использования
в составе автоматизированных управляющих систем реального времени
в качестве локального программируемого контроллера, непосредственно
связанного с объектами контроля и управления.
Микросхемы, установленные на плате модуля, рассчитаны на коммер-
ческий и индустриальный диапазоны температур.
5.2.4. Технология совершенствования базы знаний БОСЭС
Совершенствование разработанной на этапе концептуализации базы
знаний БОСЭС происходит как в процессе разработки БОСЭС, так и в
процессе ее эксплуатации.
5 .2.4.1. Совершенствование базы знаний БОСЭС в процессе разра-
ботки. Проверку на полноту и непротиворечивость БЗ БОСЭС антропо-
центрических систем проводят либо в системах имитационного модели-
рования (СИМ) либо на борту системы в реальных условиях применения.
Создание БОСЭС проходит традиционные фазы разработки эксперт-
ных систем:
— концептуализация предметной области и определение эквивалент-
ной ей структуры БД и БЗ экспертной системы;
— разработка на универсальных ЭВМ исследовательского прототипа
БОСЭС (ИЭС) и системы имитационного моделирования (СИМ-ЦВМ)
как инструмента для совершенствования (отладки) БЗ и БД создаваемой
экспертной системы и как тренажера для подготовки операторов, которые
будут эксплуатировать БОСЭС;
— отработка на универсальных комплексах полунатурного моделиро-
вания (СИМ-КПМ) исследовательского прототипа БОСЭС;
— реализация спроектированной экспертной системы на бортовых
вычислителях и отработка ее на реальных бортовых информационных
сигналах в реальном времени;
— передача БОСЭС в эксплуатацию.
Таким образом, СИМ является как инструментом разработки, так и
инструментом совершенствования БЗ БОСЭС. Именно поэтому, несмотря
на большую трудоемкость разработки, создание СИМ является не только
необходимым, но и возможным. При этом СИМ-ЦВМ фактически со-
здается вместе с БОСЭС и поддерживает все стадии ее проектирования,
а универсальный комплекс полунатурного моделирования превращается в
СИМ-КПМ путем внедрения в его цифровую систему программного блока
БОСЭС с выдерживанием информационных связей БОСЭС по штатно-
1 Используются материалы С.Г. Бобкова.
240
му (к этому времени разработанному) информационному протоколу со-
пряжения.
Проведенный этап концептуализации предметной области требует
дальнейшей проверки полноты ее представления в БЗ БОСЭС и достаточ-
ности глубины анализа возникающих перед оператором проблем. Наибо-
лее результативно и убедительно для заказчика это можно сделать также
на СИМ.
СИМ должна воспроизводить полную для исследуемой предметной об-
ласти (ТС или одна из ее Пр с/с) совокупность возникающих перед борто-
вым оператором проблем и представлять их ему через привычный для него
(проектируемый, штатный — далее везде «штатный») пространственно-
временной «мир кабины». В СИМ встраивается БОСЭС. Она использует
информационные сигналы от «штатных» бортовых источников инфор-
мации и предъявляет оператору рекомендации и комментарии к ним на
«штатном» информационном поле кабины. Оператор взаимодействует с
бортом объекта через «штатные» органы управления управляющего поля
кабины.
Для конкретности изложения приведем описание некоторых
СИМ-КПМ.
В рамках программы исследования сверхманевренных самолетов в
научно-исследовательском центре Лэнгли (США) разработана система ис-
следования бортовых систем управления в атаке тактических самолетов
TGRES (Tactical Guidance Research and Evaluation System) [12]. Система
состоит из трех основных элементов: TDG, TMS и DMS. TDG — это
основанная на базе знаний управляющая система (язык программирова-
ния Лисп). В нее вмонтируется БОСЭС, она содержит логику принятия
решений и оценивает тактические преимущества и негативные стороны
выбранного летчиком или системой того или иного решения. TDG ис-
пользует математическую модель самолета различной степени подробно-
сти. Есть вариант модели, когда самолет представляется достаточно точно
на режимах обычного маневрирования, и вариант, когда тяга, подъемная
сила, лобовое сопротивление, угловая скорость разворота представляются
своими максимальными постоянными значениями.
Два элемента системы TGRES-TMS и DMS — составляют программ-
ную и аппаратную среду моделирования [13], в которой применяется TDG.
Программы среды написаны на машинном языке.
Пользовательский интерфейс включает цветной графический модуль,
воспроизводящий воздушный бой и графический модуль с манипулятором
«мышь» для представления самолета и его систем для управления ими в
процессе моделирования на TMS. На имеющемся в системе индикаторе
воспроизведения воздушного боя предъявляются противоборствующие са-
молеты в трехмерном пространстве. На индикаторе выделены специаль-
241
ные окна для представления переменных параметров самолета, включая
тягу, скорость, относительное пространственное расположение самоле-
тов. Позиция для наблюдения воздушного боя может быть выбрана по
осям X и Z.
Интерактивный индикатор в TMS включает графический модуль с
манипулятором «мышь» для представления систем самолета (двигатель,
ударная, оборонительная системы) и информации о состоянии систем.
В процессе моделирования летчик/оператор может включать и выключать
системы самолета с помощью «мыши».
DMS — тренажер — состоит из двух сферических экранов диаметром
12 м с информационно-управляющими полями кабин самолетов. TDG ис-
пользуется в управлении одним из самолетов; при этом на другом само-
лете находится «реальный», непредсказуемый, адаптирующийся против-
ник. В качестве противника выступают инженеры-летчики-испытатели,
«полеты» выполняются в реальном времени. Каждый летчик проходит
стандартную последовательность начальных условий, включая положения,
в которых он имеет преимущество, находится в менее выгодных, чем про-
тивник условиях и нейтральные положения.
Универсальный комплекс полунатурного моделирования КПМ-2300
(Россия, ГосНИИАС, материалы К.М.Лучанского и В.В.Федорова) раз-
работан для имитации маломасштабных воздушных боев в реальном
масштабе времени с участием летчиков. Комплекс позволяет проводить
исследования эффективности структур бортового АиИО, включая
БОСЭС, разрабатывать и оценивать тактические приемы использова-
ния ЛА. В этом последнем режиме работы он и представляется как
СИМ-КПМ.
Технические средства комплекса состоят из двух основных частей:
вычислительной системы и рабочих мест операторов.
Вычислительная система имеет в своем составе два центральных вы-
числителя и четыре периферийных. Все вычислительные машины связаны
между собой и составляют локальную вычислительную сеть. Централь-
ные вычислители через преобразующие устройства связаны с имитаторами
бортовых приборов и органами управления на рабочих местах летчиков-
операторов.
Программное обеспечение на центральных вычислителях подразделя-
ется на базовое, управляющее и сервисное. К базовым средствам отно-
сятся программные блоки моделей самолетов, оружия, бортового обору-
дования, блоков бортовых алгоритмов, вычислительные блоки и блоки
выработки управляющих сигналов. К управляющим средствам относятся
программы, обеспечивающие работу комплекса КПМ-2300, программы
управления моделирования боя. К сервисным относятся программы обра-
ботки и выдачи информации. Все программные средства реализованы на
242
языке F-77. Операционная система центральных вычислителей UMSV.4.5.
Сетевая операционная система ОС-ДЕС.
Программные средства на периферийных вычислителях не имеют под-
разделения и представляют собой пакеты программ.
Сервисные программы комплекса обеспечивают выдачу результатов
моделирования в табличном и графическом виде; статистическую обра-
ботку данных; расчеты показателей эффективности; процедуры фиктив-
ных применений оружия; программы построения картин боя после моде-
лирования.
Управляющие программные средства включают: совокупность про-
грамм моделирования на КПМ одиночного воздушного боя, пакет про-
грамм парного воздушного боя.
На одних периферийных вычислителях программные средства реали-
зованы на языке АССЕМБЛЕР. Здесь содержатся программы формиро-
вания индикации прицельных режимов на ИЛС рабочих мест летчиков-
операторов.
На других периферийных вычислителях, обслуживающих рабочие ме-
ста операторов управления, программные средства реализованы на языке
Турбо-Паскаль V 5.0. Здесь содержатся программы: формирования кар-
тин воздушного боя в ходе и после моделирования; синтезирования
визуально-видимой обстановки (с борта носителя) в ходе моделирования;
подсчета показателей эффективности применения оружия.
Комплекс имеет 4 рабочих места летчиков-операторов и 2 рабо-
чих места операторов внешнего управления. Рабочие места летчиков-
операторов представляют собой макеты кабин самолетов с органами упра-
вления полетом, органами управления бортовым оборудованием, имита-
торами приборной информации, имитаторами ИЛС и кабинных инди-
каторов (индикатор тактической обстановки и индикатор вертикальной
обстановки). На комплексе имитируется визуально-видимая обстановка,
ограничено имитируются акселерационные, шумовые и тактильные воз-
действия на летчика. Комплекс оборудован устройствами переговорной
связи.
Рабочие места операторов управления оснащены персональными ком-
пьютерами и устройствами переговорной связи с летчиками-операторами.
Управляющие сигналы от летчиков передаются на центральные ЭВМ
комплекса. От этих ЭВМ возвращаются к летчикам отклики на их упра-
вляющие воздействия. Запаздывание отклика на управляющее воздействие
менее 0,1 с. Наблюдая картину боя на дисплее персонального компью-
тера, операторы управления корректируют бой по линиям переговорной
и сигнальной связи с операторами-летчиками.
Результаты моделирования боя фиксируются, обрабатываются, доку-
ментируются и представляются в удобном для пользователя виде.
243
5.2А.2. Совершенствование базы знаний БОСЭС в процессе эксплу-
атации. При реальной работе БОСЭС на борту самолета каждый случай
выработки в БОСЭС рекомендации, неадекватной внешней обстановке,
или выявления ситуации, в которой БОСЭС не выработала рекомендацию
(выработала несодержательную рекомендацию), передается по команде в
промышленно-исследовательский центр разработки БОСЭС (рис. 5.2).
Рис. 5.2. Совершенствование базы знаний БОСЭС в процессе эксплуатации
Документами, содержащими эту информацию, могли бы быть «Листок
совершенствования БЗ БОСЭС» и магнитный носитель системы объектив-
ного контроля (СОК) со штатной записью режима, с которым не справи-
лась БОСЭС.
«Листок совершенствования БЗ БОСЭС» содержит слоты-позиции:
ТС, описание проблемной субситуации (пространственно-временное, сиг-
нальное, критериально-целевое, возможности по средствам разрешения).
244
Сбор листков и их доставка в промышленно-исследовательский центр
обеспечивают эксплуатационные службы заказчика. В центре материал
обобщается, составляются корректировки БД, БЗ БОСЭС и вносятся в ис-
следователький вариант БОСЭС. После всесторонней проверки скоррек-
тированной БОСЭС на СИМе (непротиворечивость, глубина, конструк-
тивность рекомендаций) центр выдает сертификат возможности внесения
корректировок в штатные образцы БОСЭС. Решение о порядке и месте
внедрения корректировок в эксплуатируемые БОСЭС принимает за-
казчик. Итак:
* Система имитационного моделирования (СИМ) является необхо-
димым средством разработки пользовательски значимой БОСЭС. Только
она позволяет проверить целостность и глубину базы знаний в процессе
разработки и совершенствования БОСЭС.
* В отличие от систем отработки программ БЦВМ (например: ком-
плексов отработки программ — КОП) СИМ должна имитировать все
сколько-нибудь значащие для оператора проблемные субситуации той ТС,
для которой разрабатывается БОСЭС. Именно на СИМ должна быть отра-
ботана непротиворечивость БОСЭС и действующей концептуальной мо-
дели поведения оператора.
* Совершенствование БЗ БОСЭС (которая не имеет встроенных ме-
ханизмов самообучения) в процессе эксплуатации должно происходить
через:
— накапливание в эксплуатирующих подразделениях заказчика ин-
формации о несовершенстве рекомендаций БОСЭС в конкретной Пр с/с,
устанавливаемом по информации штатной СОК с помощью разработан-
ных в промышленно-исследовательских центрах методик (составление
«листков изменений БЗ»);
— анализ «листков изменений БЗ» в эксплуатационных службах за-
казчика и в промышленно-исследовательском центре и выработку на осно-
ве этого решений по направлениям и методам корректировки БЗ эксплу-
атируемой серии БОСЭС;
— проведение в промышленно-исследовательском центре корректи-
ровки БЗ БОСЭС с полной проверкой ее функциональной и семантиче-
ской целостности;
— передачу заказчику БОСЭС скорректированой БЗ.
5.2.5. О нормативно-технической документации
для разработки БОСЭС
Практически полезная БОСЭС должна иметь базу знаний, семантиче-
ски согласованную как с бортовым АиИО в выбранной оператором ТС,
так и с активизированной у оператора концептуальной моделью его по-
ведения.
245
Если БОСЭС создается в технологии системного проектирования
АиИО и одновременно с ним, то выдерживание этих требований к БОСЭС
является для конструктора почти естественным. Тем не менее в этом и
особенно в других случаях их выполнение следует контролировать через
определенную нормативно-техническую документацию.
Научно-техническая документация для разработки БОСЭС [14] долж-
на учитывать, определять и регламентировать следующее.
А. Формальное описание знаний для БОСЭС. Фиксируется ТС, для
которой предназначена БОСЭС. ТС представляется сетью, в узлах ко-
торой находятся Пр с/с, а ее направленные дуги определяют причинно-
следственное отношение, которое естественно упорядочивает эти Пр с/с.
При разработке БОСЭС множество рассматриваемых Пр с/с будет, как
правило, шире, чем множество, вводимое при системном проектировании
традиционного АиИО. Это определяется тем, что в последнем случае кон-
структор рассматривает только те Пр с/с, которые он по согласованию с
заказчиком намерен поддерживать аппаратно-алгоритмически. В первом
же случае множество Пр с/с должно быть полно с точки зрения борто-
вого оператора и должно совпадать с таковым в концептуальной модели
деятельности оператора для этой ТС. БОСЭС, не поддерживающая всех
Пр с/с, будет отвергнута операторами в процессе ее реальной эксплу-
атации. Поэтому в нормативно-техническую документацию необходимо
заложить механизм контроля функциональной полноты проектируемой
БОСЭС и согласованности ее БЗ с концептуальной моделью деятельно-
сти оператора в рассматриваемой предметной области.
Б. Качество вырабатываемых БОСЭС советов-рекомендаций. При
реальном проектировании БОСЭС это качество обеспечивается представ-
лением каждой Пр с/с своей математической моделью, которая описывает
пространственное расположение участников Пр с/с, прогнозирует его из-
менение во времени и определяет моменты наступления значимых, для вы-
бранной ситуации, событий. При наличии в Пр с/с целенаправленно про-
тиводействующих участков осуществляется предварительное математиче-
ское исследование Пр с/с. Полученное на базе математической теории
оптимального управления, теории игр или найденное при имитационном
математическом моделировании «рациональное решение Пр с/с» заклады-
вается в ее математическую модель, которая включает также рациональное
по критерию эффективности этой Пр с/с поведение всех ее участников.
Нормативно-техническая документация должна требовать наличие такого
представления Пр с/с и проведения необходимого исследования.
В. Структура БОСЭС. По-видимому, необходимо рекомендовать
определенную структуру БОСЭС, отступление от которой должно сопро-
вождаться в проекте БОСЭС убедительными объяснениями.
246
Г. Регламентация диалога «оператор-БОСЭС». Здесь необходимо
требовать информационно-временной оценки тех алгоритмов деятельно-
сти оператора, в которые включаются процедуры его общения с БОСЭС.
Необходимо помнить, что большой объем качественной информации, ко-
торая в текущий момент может появиться у оператора, при современных
способах общения оператора с ИУП, останется недоступной БОСЭС и
желание конструктора все же «втолкнуть» ее туда должно быть надежно
обеспечено, а сама возможность такого «вталкивания» подтверждаться не-
обходимыми экспериментальными расчетами.
Д. Тестирование БОСЭС и ее совершенствование в процессе экс-
плуатации. Жизненно важно одновременно с разработкой БОСЭС вести
разработку СИМ, которая позволяла бы в динамике, в среде, близкой
к ожидаемой в эксплуатации, с реальным пользователем БОСЭС вести
семантическую проверку вырабатываемых ею рекомендаций, проверять
их полноту и значимость. Крайне важно добиться, чтобы проектируемая
БОСЭС «не оскорбляла знаниями» квалифицированного пользователя.
Нормативно-техническая документация должна устанавливать опре-
деленный сертификат успешной завершенности такого моделирования.
Е. Разрабатываемые в России и за рубежом БОСЭС почти не имеют
встроенных механизмов самообучения. По-видимому, это вызвано не
только техническими трудностями реализации такого механизма на со-
временных БЦВМ, но и спецификой использования БОСЭС на борту.
В нормативной документации нужно предусмотреть регламентацию меха-
низма накопления в процессе эксплуатации БОСЭС необходимых изме-
нений в БЗ и БД БОСЭС, порядок их учета, рассмотрения и внесения
в новые редакциях БЗ и БД эксплуатируемой БОСЭС.
Этот механизм должен быть согласован с общей стратегией эксплуа-
тации системы-носителя БОСЭС.
Ж. Работа БОСЭС в условиях отказов бортовой аппаратуры. Прак-
тически значимая БОСЭС должна настраиваться на особенности работы
и реагировать на отказы бортовой аппаратуры конкретной технологиче-
ской серии систем. Предпосылки для этого возникают при переходе на
концепцию эксплуатации систем по техническому состоянию.
Напомним, что основное назначение эксплуатации по техническому
состоянию (ЭТС) является эксплуатация изделия до тех пор, пока визуаль-
но или средствами контроля не будут обнаружены признаки каких-либо
неполадок в его работе. Реализация ЭТС позволяет сократить парк изде-
лий, одновременно находящихся в эксплуатации, так как рассчитана на:
— снижение числа заводских переборок изделия,
— увеличение суммарной наработки изделия в эксплуатации за счет
регулярного текущего обслуживания,
— сокращение вторичных последствий серьезных отказов.
247
Эксплуатация изделия по техническому состоянию, а не по фиксиро-
ванному ресурсу, возможна только при такой технологии проектирования
и изготовления, когда
— при проектировании закладывается требуемая глубина контроля изде-
лия и необходимый для этого состав контрольно-проверочной аппаратуры
(в том числе и встроенной), модульность конструкции и расположение
модулей из номенклатуры заменяемых не далее, чем на одну глубину по-
иска,
— при изготовлении устойчивость технологического процесса позволяет
выполнять все требования проектировщиков и реализовать производство
изделий с высоким уровнем надежности, эксплуатационной технологич-
ности и контролепригодности.
Однако есть и сдерживающие факторы внедрения ЭТС.
Как видим, тенденция проектирования бортовой аппаратуры с уче-
том ее последующей эксплуатации такова, что при разработке БОСЭС
ее разработчики уже вправе рассчитывать на наличие на борту самолета
нужных информационных сигналов оценки и прогноза состояния борто-
вой аппаратуры.
Нормативно-техническая документация должна регламентировать уро-
вень учета в БОСЭС отказов бортовой аппаратуры конкретного носителя
БОСЭС.
3. Сертификация БОСЭС. Сертификация продукции представляет
собой действие, проводимое по установленным правилам с целью подтвер-
ждения посредством документа (сертификата), что продукция или услуга
соответствуют определенным стандартам и техническим условиям. В на-
стоящее время она является сугубо рыночным регулятором качества про-
дукции, эффективно действующим в условиях конкуренции товаропро-
изводителей. Нормативно-техническая документация должна определять
порядок, форму и место сертификации БОСЭС.
5.2.6. Некоторые исследовательские прототипы БОСЭС
Анализ российских и зарубежных источников показал, что ни в од-
ной стране мира еще не появились исследовательские прототипы БОСЭС
уровня целеполагания. Нащупываются только подходы к механизмам кон-
цептуализации предметной области для них [1,15].
Для СУУ есть несколько серьезных исследовательских прототипов
БОСЭС типовых ситуаций. Среди них [12] на авиационную тему БОСЭС
дальнего воздушного боя, БОСЭСы ближнего маневренного боя для раз-
рабатываемых в США сверхманевренных истребителей, БОСЭС взлета-
посадки для борьбы со сдвигом ветра (США).
248
Остановимся на БОСЭС дальнего боя. Этими БОСЭС с глубокой про-
работкой предметной области занимаются в нескольких научно-исследо-
вательских центрах. Наиболее значимыми по глубине проработки пред-
метной области, по имеющейся у нас информации, являются следующие.
* Pilot Advisory System. Предприятие, страна: Technion-Israel Institute
of Technology, Израиль. Область функционирования: вариант дальнего
воздушного боя; 1x1 — беспомеховая дуэльная ситуация дальнего боя
без сохранения обзора воздушного пространства.
Известный этап разработки: концептуализация предметной области
(выделены и решены оптимизационные задачи, проведена аппроксимация
полученных оптимальных решений; фрагментарное макетирование иссле-
довательского прототипа БОСЭС на универсальной ЭВМ: для боя на
одной высоте с пуском не более одной ракеты с каждого борта).
Проработки реализации БОСЭС на борту самолета нет.
* Mission Management Aid. Предприятие, страна: группа английских
фирм, в частности GEC Avionics Ltd., Rochester, Kent.
Область функционирования: вариант дальнего воздушного боя; 1x1—
перехват воздушной цели, оказывающей только маневренное противодей-
ствие. Обзор воздушного пространства не сохраняется.
Известный этап разработки: концептуализация предметной области
(выделены и решены оптимизационные задачи, проведена апроксимация
полученных оптимальных решений; фрагментарное макетирование иссле-
довательского прототипа БОСЭС на универсальной ЭВМ: смакетирован
процесс построения оптимальной траектории в координатах «пространст-
во-время»).
Проработки возможности реализации БОСЭС на борту самолета нет.
* БОСЭС «Дуэль». Предприятие, страна: ГосНИИАС, Россия.
Область функционирования: вариант дальнего воздушного боя; 1x1 —
дуэльная ситуация. Обзор воздушного пространства не сохраняется.
Выполненный этап разработки (на момент 1992 г.): концептуализация
предметной области (выделены и решены оптимизационные задачи, про-
ведена аппроксимация полученных оптимальных решений; фрагментарное
макетирование исследовательского прототипа БОСЭС на универсальной
ЭВМ: смакетирован процесс ведения дуэльной ситуации при безотказной
работе бортовой аппаратуры и вооружения.
Проработка возможности реализации на борту: информационная увяз-
ка с реальным бортом, БОСЭС вписана в информационно-управляющее
поле кабины реального самолета. Проведена предварительная оценка по-
требных ресурсов БЦВМ.
Во всех трех разработках не рассматривались вопросы работы БОСЭС
в условиях отказов бортовой аппаратуры, оружия и нечеткой информации
о выбранном к применению оружии противника.
249
5.3. БОСЭС «Дуэль» и ее исследовательский прототип
Бортовая оперативно-советующая экспертная система «Дуэль» [И]
предназначена для интеллектуальной поддержки летчика в одном из самых
сложных и напряженных режимов его работы в ТБС ДБ1.
Процесс принятия решений требует быстрого качественно-количест-
венного анализа большого объема имеющейся информации, часто в усло-
виях неполной и/или неточной информации. Проведение такого анализа
на достаточно глубоком уровне летчиком самостоятельно, без аппаратной
поддержки, весьма проблематично в условиях работы, связанных с де-
фицитом времени и сверхэкстремальной психологической напряженно-
стью. Это обстоятельство привело к необходимости разработки ЭС «Ду-
эль» класса БОСЭС. Конечная цель работы по созданию ЭС «Дуэль» —
реализация БЭС на борту самолета. Для достижения этой цели необхо-
дим этап создания на ПЭВМ прототипа БЭС — исследовательской ЭС
(ИЭС). ИЭС может использоваться в двух направлениях: как инструмент
для совершенствования (отладки) базы данных (БД) и базы знаний (БЗ)
ЭС и как наземный тренажер для летчиков. Для того, чтобы ИЭС могла
решать эти задачи, на ПЭВМ разработана система имитационного моде-
лирования (СИМ), которая включает в себя ЭС, имитатор внешней среды
и бортовой информационной среды для ЭС. В СИМ входят модели объ-
ектов (агентов), участвующих в рассматриваемом режиме, модели взаимо-
действия этих объектов, модели характерных для этого режима ситуации
и развития этих ситуаций во времени.
В данном пункте обсуждается проект реализации на ПЭВМ ИЭС,
включающий в себя структуру БЭС, способ формализации ПО, логико-
лингвистическую модель ПО.
ИЭС может работать в трех режимах: штатный (бортовой) режим
работы ЭС с выдачей рекомендаций и подсказок на экраны индикаторов
в СИМ; режим пошагового просмотра работы ЭС, содержимого файлов
БД и БЗ, объяснений, инструкций и т.п.; режим редактирования БД и БЗ.
В рассматриваемом прототипе ЭС БД и БЗ носят детерминированный
характер. При дальнейшем развитии ЭС предполагается использование
также аппарата вероятностных оценок и нечетких знаний.
53.1. Назначение экспертной системы
и краткая характеристика предметной области
ЭС «Дуэль» предназначена для помощи летчику в принятии им реше-
ний на протяжении всего режима работы системы «летчик — бортовая
1Данный раздел написан совместно с В.Д. Романовой и Н.Д. Юневич.
250
аппаратура» (Л-БА), в котором функционирует ЭС. В штатном режиме
своей работы ЭС анализирует информацию о внешней обстановке и со-
стоянии собственных систем самолета, выбирает наиболее рациональные
способы разрешения возникающих проблем и предъявляет летчику ре-
комендации и подсказки через систему отображения информации (СОИ)
самолета.
ЭС «Дуэль» принадлежит к классу оперативно-советующих систем,
работающих в реальном масштабе времени (время реакции системы на
изменение внешней среды должно быть заметно меньше 1 с). Взаимодей-
ствие ЭС с летчиком строится по принципу пассивных (оповещательно-
советующих) систем. Рекомендации только предъявляются ему на инди-
каторе, прямого замыкания на их исполнение нет. Этим обеспечивается
приоритет летчика в принятии решения. Летчик вправе принимать само-
стоятельные решения без помощи ЭС либо действовать в соответствии с
ее рекомендациями. Кроме рекомендации, при необходимости ЭС предъ-
являет летчику на одном из индикаторов (ТП — табло подсказок) краткое
пояснение (подсказку) к текущей рекомендации и временную перспективу
(прогноз) последующих рекомендаций, которые могут быть выработаны
ЭС при штатном развитии сложившейся на данный момент ситуации.
Основные характеристики предметной области ЭС «Дуэль» следую-
щие: острый дефицит времени, которым располагает летчик для принятия
решений; наличие множества объектов, взаимодействующих с самолетом-
носителем ЭС; необходимость быстрого изменения выбранного сначала
плана действий, так как действия некоторых взаимодействующих объек-
тов могут быть многообразными и непредсказуемыми; работа в условиях
сверхэкстремальной психологической напряженности, связанной с угро-
зой для жизни; большие объемы информации, которую должен проанали-
зировать летчик для принятия решения.
Изучение ПО ЭС «Дуэль» показало, что по условиям протекания и
решаемым летчиком задачам ПО можно разбить на несколько самостоя-
тельных фрагментов или этапов, которые мы опишем сценариями (СЦ).
Каждый из СЦ содержит ограниченное множество связанных причинно-
следственным отношением Пр с/с, которые должна разрешать система
Л-БА для достижения цели СЦ. Каждая Пр с/с представляется своей ММ,
которая описывает пространственное расположение объектов-участников
ПО (агентов), прогнозирует его изменение во времени и определяет мо-
менты возможного наступления значимых (для выбранного режима) собы-
тий. Предварительно осуществляется математическое исследование Пр с/с
(см. следующие пункты главы). Полученное на базе математической тео-
рии оптимального управления, теории игр или подобранное при имитаци-
онном математическом моделировании «рациональное решение Пр с/с»
закладывается в ее ММ. Объединение ММ всех Пр с/с СЦ, дополнен-
251
ное рациональным по критерию эффективности СЦ поведением системы-
носителя ЭС, в дальнейшем именуемого самолетом, и объекта-противника,
в дальнейшем именуемого целью, формирует пространственно-временной
каркас СЦ [16]. СЦ в свою очередь связаны между собой таким причинно-
следственным отношением, которое позволяет при изменении внешней
обстановки полностью описать ПО с помощью перехода из одного СЦ
в другой и в результате достичь конечной цели выбранного режима путем
достижения цели каждого из СЦ.
В описываемом прототипе ЭС «Дуэль» предметная область несколько
сужена. Из нее для простоты изложения исключены все проблемы, свя-
занные с отказами бортовой аппаратуры и оружия; сделано предположе-
ние, что полностью известна выбранная для применения (атаки) ракета
противника и с борта каждого из противоборствующих истребителей воз-
можно применение не более двух ракет. Для описания этой предметной
области использовано пять СЦ: «обеспечение информацией», «обеспече-
ние преимущества» (занятие тактически выгодного положения — ТВП),
«активный» (нападение), «пассивный» (защита), «смешанный» (нападение
с защитой).
Сценарий «обеспечение информацией» выделяется при отсутствии на
борту самолета достоверной оценки дальности до цели. Она появляется
в процессе реализации сценария. Сценарий «обеспечение преимущества»
(будем в дальнейшем называть его ТВП) назначается на начальном этапе
дуэли при наличии информации о дальности до цели и на больших дально-
стях до нее. В этом СЦ самолет занимает положение в пространстве (так-
тически выгодное), обеспечивающее упреждающее попадание его ракеты
в цель по отношению к ракете цели, пущенной по самолету. Сценарий
«активный» реализуется в том случае, когда пуска ракеты противника не
было, а самолет пустил или может пустить свою ракету. Сценарий «пас-
сивный» выбирается в том случае, если был пуск ракеты противником, а
самолет не пускал свою ракету и не может реализовать ответный пуск,
поэтому осуществляет защиту. Сценарий «смешанный» выделяется в том
случае, когда был пуск со стороны цели и самолет либо уже пустил свою
ракету, либо может организовать ответный пуск, т.е. осуществляет защиту
с нападением.
Множество рассматриваемых взаимодействующих друг с другом объ-
ектов содержит шесть объектов: СИ (самолет), Ц (цель), РС1 (первая ра-
кета самолета), РС2 (вторая ракета самолета), РЦ1 (первая ракета цели),
РЦ2 (вторая ракета цели).
5.3.2. Структура экспертной системы
На рис. 5.3 приведена структурная схема реализации ЭС «Дуэль» на
ПЭВМ. Тонкими линиями со стрелками обозначен процесс обмена
252
информацией между блоками ЭС, жирными — процесс активизации од-
них блоков другими.
Рис. 5.3. Структура ЭС
ЭС общается с внешним миром посредством двух блоков: «внешняя
среда» (ВС) и «входная информация пользователя» (ВИП). Блок ВС пред-
ставляет собой файл, который передает информацию из штатной бортовой
информационной среды носителя ЭС в базу данных (БД) и обратно. Этот
файл содержит информацию от бортовых датчиков, штатных бортовых
алгоритмов, органов управления кабины (т.е. летчика), которая поступает
в БД. БД передает в файл ВС результаты работы ЭС, рекомендации лет-
чику, подсказки на ТП, параметры для регистрации в бортовую систему
253
объективного контроля (СОК) и объяснения для предъявления летчику
в нештатном режиме работы ЭС. Блок ВИП служит для оперативной
настройки ЭС в конкретных условиях работы и позволяет менять харак-
теристики взаимодействующих объектов и их подсистем.
Собственно ЭС включает в себя три функциональных блока: базу
данных с системой управления базой данных (СУБД), базу ММ и оболочку
ЭС. БД и СУБД содержит множество файлов, которые можно объединить
в четыре группы по их функциональному назначению:
1) файлы исходных данных;
2) файлы внутренних переменных;
3) файлы результатов работы ЭС;
4) файлы функциональных (работающих) блоков ЭС.
К первой группе файлов относятся файлы, содержащие информацию
об объектах, которая поступает из ВС и ВИП. Вся поступающая извне
информация систематизируется и распределяется по этим файлам. При-
чем информация об одном объекте может храниться в нескольких файлах
(в том случае, если объект характеризуется очень большим объемом ин-
формации), и в то же время один файл может содержать информацию
о нескольких однородных объектах. Эта группа содержит 10 файлов.
Ко второй группе относятся файлы, в которых хранится информа-
ция, сформированная или сгруппированная в ЭС. Эта группа содержит
5 файлов.
К третьей группе относятся файлы, в которые поступают результаты
работы ЭС для передачи их в блок ВС, откуда информация передается на
индикаторы и в СОК. Эта группа содержит 4 файла.
К четвертой группе относятся файлы, в которых хранятся тексты
функциональных («рабочих») блоков ЭС, т.е. фрагменты базы знаний.
Эти блоки представляют собой упорядоченные наборы правил, и они мо-
гут работать внутри СУБД, без оболочки ЭС (инструментарий СУБД по-
зволяет это сделать). Это следующие блоки:
а) активизации СЦ (БАС),
б) отбора данных для ММ текущего СЦ (БОД ММ СЦ) и
в) отбора данных для базы правил текущего СЦ (БОД БП СЦ).
Разрабатываемая ЭС имеет БЗ интегрированного типа, т.е. знания
представлены двумя различными способами: продукционным (блок «обо-
лочка ЭС») и традиционными алгоритмами или ММ (блок «база ММ»).
База ММ содержит 15 алгоритмов, написанных на Фортране и сгруп-
пированных по сценариям. Для каждого СЦ выделена система алгорит-
мов, функционирующих только в нем (ММсцг, г = 1,5). Эти алгоритмы
называются нештатными (внутренними для ЭС) в отличие от штатных
бортовых алгоритмов, функционирующих на борту самолета без учета
потребностей ЭС. Бортовая аппаратура и штатные бортовые алгоритмы
254
поставляют в ЭС большое количество информации о состоянии внешнего
мира и собственных систем через блок ВС, однако она оказывается не-
достаточной для решения возникающих проблем и вывода рекомендаций
летчику на их разрешение. Но этот объем информации позволяет полу-
чить недостающие знания с помощью нештатных алгоритмов внутри ЭС. В
основном это процедуры, имитирующие некоторые фрагменты внешнего
мира путем решения дифференциальных уравнений (мы назвали такие
алгоритмы ММ). ММ осуществляют прогноз текущей Пр с/с, возник-
шей в СЦ, до ее завершения и рассчитывают оценки моментов времени
наступления прогнозируемых событий. Целесообразно также чисто логи-
ческое моделирование и прогнозирование событий с целью расширения
возможностей ЭС и класса разрешимых ситуаций (см. п. 5.4.3.2).
Блок «оболочка ЭС» помимо инструментария обработки БЗ содер-
жит набор правил-продукций для формирования рекомендаций и подска-
зок летчику и объяснения к этим правилам. Правила сгруппированы по
сценариям (СЦбпг) так же, как и ММ. Один СЦ содержит от 20 до 200
правил. Набор правил для каждого СЦ является неупорядоченным и тре-
бует специального инструментария оболочки ЭС для обработки правил и
вывода рекомендаций и подсказок.
5.3.3. Функционирование экспертной системы
В разрабатываемом прототипе ЭС реализована самая простая схема
функционирования: циклическое (поочередное) подключение (активиза-
ция) функциональных блоков ЭС. На рис. 5.3 этот процесс отображен
жирными линиями со стрелками, в левой части каждого функциональ-
ного блока стоит цифра (от 1 до 5), показывающая порядковый номер
этого блока в одном цикле работы ЭС. Предварительно, перед каждым
циклом, в БД и СУБД происходит считывание информации из файлов
ВС, ВИП и распределение ее между всеми файлами исходных данных
(считывание информации из файла ВИП осуществляется один раз перед
началом работы ЭС).
Собственно работа ЭС начинается с БАС, в котором анализируется
информация о сложившейся внешней обстановке и адекватно ее теку-
щему состоянию выбирается (активизируется) один из реализованных в
ЭС сценариев. БАС помещается в БД и СУБД. Информация для проверки
правил активизации СЦ поступает в БАС из файла группы 1), в котором
локализована только необходимая для БАС часть информации из блока
ВС. После того, как какой-либо из СЦ активизирован, начинает работать
второй блок — БОД ММ СЦ. Этот блок отбирает ту информацию из
файлов группы 1), которая необходима для работы блока ММ активи-
зированного СЦ (ММсцг), и отправляет ее в один из файлов группы 2)
255
(файлы внутренних переменных). Блок БОД ММ СЦ помещается в БД
и СУБД. После этого отобранная в БОД ММ СЦ информация из файла
данных для ММсцг передается в БЗ, в блок «база ММ», где используется
в активизируемом блоке ММ текущего СЦ. После завершения работы
третьего блока — блока «база ММ» — сформированная в нем инфор-
мация возвращается в БД и СУБД и распределяется там между файлами
группы 2). После этого подключается к работе четвертый блок — БОД
БП СЦ. Этот блок аналогично второму помещается в БД и СУБД и от-
бирает информацию из файлов групп 1) и 2), которая необходима для
работы правил вывода рекомендаций и подсказок текущего СЦ (БПсцг).
Отобранная информация помещается в один из файлов группы 2). После
этого отобранная в БОД БП СЦ информация из файла данных для БПсцг
передается в БЗ, в пятый и последний блок цикла — оболочка ЭС, где
начинает работать блок правил активизированного СЦ (БПсцг), выраба-
тывающий рекомендации и подсказки. После завершения его работы вся
сформированная в нем информация поступает в группу 3) файлов БД и
СУБД; файл рекомендаций, файл подсказок, файл объяснений и файл
СОК. Одновременно с этим файл СОК пополняется информацией из
файлов группы 2) (результаты работы ММ), которая необходима для по-
следующего (внеэксплуатационного) анализа процессов в ЭС. После этого
информация из файлов группы 3) передается в блок ВС. На этом цикл
работы ЭС заканчивается и начинается следующий цикл (с блока БАС)
с обновленной информацией в‘файлах исходных данных.
5.3.4. Логико-лингвистическая модель предметной области
Конструирование правил-продукций в БАС и в блоке оболочка ЭС
происходит на базе логико-лингвистической модели ПО [4]. Необходи-
мость разработки такой модели для исследовательского прототипа ЭС
вызвана в основном двумя факторами: удобством редактирования и рас-
ширения БЗ ИЭС на всех этапах ее жизненного цикла; расширением
класса пользователей ЭС экспертами, не знакомыми с узкой профессио-
нальной терминологией и символикой ПО, которой пользуются эксперты-
разработчики ИЭС.
Структура логико-лингвистической модели ПО представлена на
рис. 5.4,5.5. Эта модель оперирует тремя типами лингвистических симво-
лов: понятие, переменная, отношение. В логико-лингвистической модели
создается словарь ПО (понятий, отношений, переменных и их значений)
и декларируется конструкция правильно построенных фраз и правил.
На рис. 5.4 представлен верхний иерархический уровень модели. Цен-
тральное, ключевое понятие «система» (здесь имеется в виду ЭС) свя-
зано отношением «имеет» с понятиями «Объект СИ», ..., «Объект РЦ2»
256
и с лингвистической переменной «Сценарий», принимающей одно из пяти
возможных значений, например, сценарий — «смешанный». Кроме того,
понятие «система» связано отношением «имеет» с лингвистическими пе-
ременными «Рекомендация» и «Подсказка», значениями которых явля-
ются результаты работы ЭС. В качестве значений переменной «Подсказ-
ка» выступает текст подсказки, предъявляемый летчику на ТП. В качестве
Рис. 5.4. Верхний уровень логико-лингвистической модели
значений переменной «Рекомендация» выступают понятия «применение
средства воздействия ...». Это сложные понятия, которые требуют упо-
рядочения и классификации, так как средства воздействия на внешнюю
среду могут быть трех видов (на рис. 5.4 «Вид ПХ», где ПХ — помеха;
«Вид ПК», где ПК — пуск; «Вид МН», где МН — маневр); каждый
вид имеет свои подвиды и некоторые подвиды имеют разновидности. На-
пример, вид ПК имеет подвиды ПК1 (пуск 1-й ракеты), ПК2 (пуск 2-й
9 - 1847
257
ракеты). Таким образом, понятие «применение средства воздействия ...»
раскрывается через отношение «часть — целое».
Готовит/
Рис. 5.5. Нижний уровень логико-лингвистической модели
Итак, понятие «система» имеет самый верхний иерархический уро-
вень. На следующем иерархическом уровне находятся понятия «объект...»
(«объект СИ», ... , «объект РЦ2») и переменные «сценарий», «рекоменда-
ция», «подсказка». Понятия «объект ...» описывают участников (агентов)
ПО и интересны тем, что они связаны множеством отношений с другими
понятиями и переменными. Объект СИ (рис. 5.5) имеет самую сложную
структуру отношений, и на его примере мы покажем, с какими понятиями
и переменными связаны объекты, какими отношениями и как в разра-
ботанной логико-лингвистической модели строятся фразы, описывающие
объект.
В левой части схемы отображено отношение «имеет» с перемен-
ными, имеющими значения. Например, имеет смысл фраза: «объект СИ
имеет наиболее эффективный ответ — применение средства воздействия
258
подвида АПХ из вида ПХ» (АПХ — активная помеха, ППХ — пассивная
помеха с разновидностями: ДО — дипольные отражатели, ЛЦ - ложные
тепловые цели). Понятие «применение средства воздействия ...» может
входить как в название переменной, так и в ее значение.
В правой части схемы отображены отношения, которыми объект СИ
может быть связан с понятием «применение средства воздействия ...»
(осуществил/не осуществил, готовит/не готовит). Например: «объект СИ
осуществил применение средства воздействия подвида ТО из вида МН»
(МН — маневр с подвидами: ТО — тактический отворот, ГО — гаранти-
рованный отворот, TH — тактический набор высоты, ТС — тактический
спуск).
Центральной линией на рис. 5.5 показано отношение «имеет/не име-
ет» с множеством понятий. Некоторые из этих понятий являются про-
стыми («преимущество», «эффективный ответ» и т.п.). Целый ряд по-
нятий включает в себя одно из основных понятий ПО — «применение
средства воздействия ...». Эти понятия являются различными характери-
стиками применения средства воздействия, например: возможность, не-
обходимость, эффективность и т.д. Полная формулировка этого класса
понятий звучит так: «ограничение применения средства воздействия вида
ПК» и т.п.
При построении фразы, имеющей смысл в созданной логико-лингви-
стической модели, необходимо учитывать следующие положения: в пер-
вой позиции фразы могут стоять только понятия двух верхних иерархи-
ческих уровней: «система», «объект...»; конструкция фразы может быть
двух типов: 1) понятие-отношение-понятие, например: объект СИ имеет
преимущество; 2) понятие-отношение-переменная-значение переменной,
например: система имеет сценарий — пассивный.
И наконец, правила в этой модели имеют конструкцию, показанную
на рис. 5.6.
Количество «правильно построенных фраз лингвистической модели»
в левой и правой частях правила-продукции может быть любым (на схеме
обозначено пунктирной линией). При этом «фразы» в левой части правила
могут соединяться союзами «и», «или», в правой части — только союзом
«и». Например:
ЕСЛИ
объект СИ не осуществил применение средства воздействия вида ПК
(ПУСК = 0)
И
объект СИ не имеет ограничения применения средства воздействия
вида ПК (Nyp = 2)
И
9*
259
объект СИ имеет разрешение применения средства воздействия вида
ПК (ПР = 1),
ТО
система рекомендует применение средства воздействия вида ПК
(РБК = 1).
ЕСЛИ
Правильно построенная фраза
1 лингвистической модели
И/ИЛИ
Правильно построенная фраза
лингвистической модели
ТО
Правильно построенная фраза
лингвистической модели
И
Правильно построенная фраза
лингвистической модели
Рис. 5.6. Структура правил логико-лингвистической модели
Необходимо учитывать, что БОСЭС встраивается в бортовую инфор-
мационную среду, которая имеет дело с цифровой информацией. Поэтому
в том случае, если факт (фраза) формируется по поступающей из внешней
среды информации, то при документировании в тексте правил в скобках
указывается закон формирования этого факта. Так, в приведенном выше
примере цифровой информацией являются:
ПУСК = 0 — отсутствие пуска ракеты самолетом (переменная ПУСК
принимает значение, равное нулю),
Nyp = 2 — количество ракет на борту равно двум,
ПР = 1 — пуск разрешен.
То же самое можно сказать и о выходной информации БОСЭС, посту-
пающей в бортовую информационную среду (рекомендациях, подсказках
и т.п.). В приведенном выше примере
РБК =1 — рекомендация на пуск (на нажатие боевой кнопки для
пуска ракеты).
260
Для «внутренних» фактов (новых фактов предметной области, сфор-
мированных внутри базы знаний, а не в результате непосредственного ана-
лиза базы данных) такого дублирования в цифровом виде не требуется.
Приведем еще один пример используемых в БОСЭС правил, ММ, вы-
работанной рекомендации и пояснения к ней в сценарии ТВП. Услови-
ями выбора сценария ТВП являются: отсутствие пуска ракеты самолетом
и целью, наличие ракет на борту самолета, наличие информации о даль-
ности до цели, нахождение самолета и цели вне зоны возможных пусков
(ЗВП) своего противника. На ММ сценария ТВП по текущей информации
о скорости (14) и высоте полета (Нс) самолета и цели (соответственно
К, Нц), а также типах готовящихся к применению ракет самолета и цели
устанавливаются:
1) граница зоны преимущества ракеты самолета над ракетой цели
(зоны ТВП) в координатах Н, V в виде прямой линии, описываемой урав-
нением Н = Нг(у) = А + В(у 4-/С) с коэффициентами Л, В, рассчиты-
ваемыми по аналитическим зависимостям с использованием типов ракет
и величин Нц, 14, Нс, Vc и заданной постоянной К\
2) факт нахождения самолета в зоне ТВП или вне ее, устанавливаемый
по расположению точки 7/с, 14 относительно прямой Hr(V);
3) «оптимальная» траектория движения самолета, обеспечивающая
минимальное время его выхода на прямую Hr(V) в плоскости Я, V и
координаты конечной точки Рк,Вк выхода «оптимальной» траектории
на прямую Hr(V). Они получаются на ММ, прогнозирующей движе-
ние самолета и цели путем интегрирования модельных уравнений движе-
ния с использованием модельных характеристик самолета и оптимального
управления;1
4) прогнозируемое время до входа самолета в ЗВП цели, которое
рассчитывается на ММ, состоящей из системы дифференциальных урав-
нений, описывающих движение самолета, цели и ракеты цели.
В блоке правил анализируется текущее положение самолета относи-
тельно зоны ТВП, устанавливается возможность достижения им границы
этой зоны раньше его входа в ЗВП цели и способ достижения границы
(вид маневра). Ниже приведены правила (фрагмент блока правил сценария
ТВП), участвующие в выводе рекомендаций летчику и подсказок в ситуа-
ции, когда самолет находится вне зоны ТВП и имеет возможность выхода
в эту зону с помощью тактического набора (TH).
ЕСЛИ
объект СИ не имеет преимущества (Пав =1)
Результаты работ Н.М. Гревцова, О.Е. Ефимова, И.О. Мельца
261
и
объект СИ не имеет ограничений на занятие ТВП (Птвп =1),
ТО
объект СИ имеет возможность занятия ТВП.
ЕСЛИ
объект СИ имеет возможность занятия ТВП
И
объект СИ имеет необходимость применения средства воздействия
подвида TH из вида МН (Птн =1),
ТО
система рекомендует применение средства воздействия подвида TH из
вида МН (РТН = 1).
ЕСЛИ
объект СИ имеет возможность занятия ТВП,
ТО
система подсказывает «выход в зону ТВП» (Втвп =1).
Коцца РТН = 1, летчику на индикаторе выводится рекомендация
на выполнение TH (в символьном виде), координаты заданной конечной
точки (Рк,Як). На табло подсказок выводится поясняющий рекоменда-
цию текст: «выход в зону ТВП».
Приведем правила выбора (активизации) сценария, реализованные в
БАС, и дадим комментарии по использованным в них сведениям, полу-
ченным при предварительном математическом исследовании соответству-
ющих Пр с/с.
Правило 1.
ЕСЛИ
объект Ц осуществил применение средств воздействия вида ПК (пуск
ракеты целью ПУСК Ц — 1)
И
объект СИ не осуществил применение средств воздействия вида ПК
(ПУСК = 0)
И
объект СИ не имеет разрешение применения средства воздействия
вида ПК (ПР = 0)
И
объект СИ имеет достоверную оценку дальности до Ц (полное при-
борное обеспечение ППО =1),
ТО
система имеет сценарий — «пассивный».
Комментарий к правилу 1. Исследование оптимизационной задачи
по определению оптимального противоракетного маневра с сохранением
262
информационного контакта с целью (см. далее данную главу) и оптималь-
ного противоракетного маневра без сохранения контакта с целью позво-
лило найти два класса эффективных ответов СИ на пуск ракеты целью.
Система правил сценария «пассивный» позволяет выбрать эффективный
маневр из соответствующего класса.
Правило 2.
ЕСЛИ
объект Ц осуществил применение средств воздействия вида ПК (ПУСК
Ц=1)
И
объект СИ имеет достоверную оценку дальности до Ц (ППО =1)
И
объект СИ имеет разрешение применения средств воздействия вида
ПК (ПР = 1),
ТО
система имеет сценарий — «смешанный».
Комментарий к правилу 2. Исследование оптимизационной задачи по
определению оптимального выбора момента пуска ракеты (ПУСК), при-
менения ПХ и противоракетного маневра (см. далее) позволило построить
систему правил сценария «смешанный», определяющих для сложивших-
ся на борту СИ текущих условий (упреждающих пуск противника) опти-
мальный порядок следования ПУСК 4- ПХ 4- маневр и моменты их реа-
лизации.
Правило 3.
ЕСЛИ
объект Ц не осуществил применение средств воздействия вида ПК
(ПУСК Ц = 0)
И
объект СИ имеет достоверную оценку дальности до Ц (ППО =1)
И
объект СИ имеет разрешение средств воздействия вида ПК (ПР =1),
ТО
система имеет сценарий — «активный».
Комментарий к правилу 3. Исследования, упомянутые в комментарии
к правилу 2, позволяют в этом сценарии обеспечить оптимальный выбор
момента пуска ракеты с учетом наиболее вероятных (эффективных для
него) ответов самолета противника (Ц).
Правило 4.
ЕСЛИ
объект СИ не осуществил применение средств воздействия вида ПК
(ПУСК = 0)
И
263
объект Ц не осуществил применение средств воздействия вида ПК
(ПУСК Ц = 0)
И
объект СИ находится вне ЗВП ракеты объекта Ц
И
объект Ц находится вне ЗВП ракеты объекта СИ
И
объект СИ имеет достоверную оценку дальности до Ц (ППО =1),
ТО
система имеет сценарий — «обеспечение преимущества».
Комментарий к правилу 4. Исследования по дальностям пуска ракет
при различных сочетаниях НС,14,НЦ,14 показали, что даже при оди-
наковых противостоящих ракетах в этом четырехмерном пространстве
Нс,..., Ц, существуют области превышения максимальной дальности пуска
одной ракеты над другой. Вкратце об этом мы говорили выше.
Правило 5.
ЕСЛИ
объект СИ не имеет достоверной оценки дальности до Ц (ППО = 0),
ТО
система имеет сценарий — «обеспечение информацией».
Комментарий к правилу 5. Исследования по восстановлению даль-
ности до Ц только по угловой информации о ней позволили разработать
различные типы маневров СИ и соответствующие бортовые алгоритмы,
восстанавливающие достоверную оценку дальности до Ц.
В целом, исследовательский прототип бортовой оперативно-советую-
щей системы «Дуэль» вырабатывает:
30 рекомендаций летчику по выбору способа воздействия на внешнюю
среду;
около 50 подсказок (краткое пояснение к текущей рекомендации),
выводимых на табло подсказок.
Предметная область ИЭС описывается:
пятью сценариями;
500 правилами (каждый из сценариев содержит от 20 до 200 правил);
15 моделями (ММ);
15 файлами данных, в которых хранится около 300 параметров (из них
около 200 поступает из внешней среды и около 100 — из ММ);
логико-лингвистической моделью, содержащей
а) словарь на ограниченном естественном языке (русском), включаю-
щий около 150 понятий и около 30 лингвистических переменных, каждая
из которых может принимать от 2 до 10 значений;
264
б) пять отношений между понятиями и переменными (иерархия,
часть — целое, имеет/не имеет, осуществил/не осуществил, готовит/не
готовит).
Описанная ЭС является существенно гибридной, т.к. механизм испол-
нения логико-лингвистических правил, обрабатывая правила, запускает
на выполнение модули ММ, которые имитируют некоторые фрагменты
внешнего мира в основном путем решения дифференциальных уравнений
управляемой динамики, обеспечивая прогноз текущей Пр с/с, возникшей
в рассматриваемом сценарии, до ее завершения, в частности, оценивая
моменты наступления прогнозируемых событий.
Расширение возможностей математического моделирования осуще-
ствимо применением дополнительного класса моделей — логических.
Возможности логического моделирования и управления динамикой упра-
вляемых систем были показаны в пп. 3.1-3.3, 3.5, а применительно к воз-
душному бою, как задаче среднего уровня управления, будут описаны
в п. 5.4.2.2.
5.4. Некоторые задачи разработки бортовых алгоритмов
среднего уровня управления
В разработках интеллектуальных систем среднего уровня управления
возникают задачи выбора предпочтительного решения из предварительно
определенного (иногда уже заданного) множества допустимых (разрешен-
ных) решений. Ниже мы приведем формализацию и решение двух типов
таких задач, возникших в процессе разработки базы знания БОСЭС «Ду-
эль» (пп. 5.4.1, 5.4.2). Кроме того, в п. 5.4.2.2 описывается применение
логического вывода для целей прогнозирования динамики и управления
воздушным боем.
5.4.1. Минимаксная задача размещения и обхода точек в круге
и потенциальные возможности измерительных устройств
При разработке измерительных устройств, имеющих сканирующую
антенную систему с механическим приводом, и бортовых алгоритмов вто-
ричной обработки информации, получаемой от такого измерительного
устройства, возникает задача определения максимального числа объектов,
которое может сопровождать такое измерительное устройство1.
Наблюдение за произвольно расположенными в пространстве движу-
щимися объектами производится разнообразными бортовыми и назем-
1 Излагаемые ниже результаты получены совместно с Е.Т. Егоровой.
265
ными измерительными устройствами (ИЗУ) активного (радиолокацион-
ные станции, оптические локационные станции с лазерным лучом) и пас-
сивного (оптико- и радиообзорно-следящие пассивные пеленгаторы) ти-
пов, которые снабжены сканирующей антенной системой [17], формиру-
ющей в физическом пространстве (зоне наблюдения) узконаправленный
луч (угловая ширина луча угл. град.). Перемещение такого луча в
пространстве осуществляется электронным или механическим способом.
Дальнейшее рассмотрение делается в интересах механического способа.
Рассматривается случай наблюдения одновременно за несколькими
ранее обнаруженными и взятыми на сопровождение траекторно проти-
водействующими объектами, причем анализируется режим, когда поиск
и обнаружение в заданной зоне пространства новых объектов не произ-
водится. В этом режиме разрешается перемещать луч ИЗУ от объекта
к объекту по кратчайшему пути с максимально возможной для механиче-
ской антенны скоростью Vbo, замедляя его движение вблизи возможного
расположения сопровождаемого объекта до скорости, необходимой для
накопления информации (проведения изменений) об объекте Vo. При пе-
реходе луча от одного сопровождаемого объекта к другому информацион-
ный контакт луча с первым объектом прекращается и будет возобновлен
только в момент, когда луч снова выйдет в район расположения первого
объекта. Положение каждого сопровождаемого объекта прогнозируется
(экстраполируется) бортовыми алгоритмами вторичной обработки инфор-
мации, которые рассчитывают возможное положение объекта на основе
данных, полученных при предыдущих информационных контактах луча
с этим объектом.
При разработке БОСЭС и ИЗУ, следящих за несколькими объектами,
возникает необходимость оценить возможность устойчивого сопровожде-
ния этих объектов и его качество (точность сопровождения, выполнение
критерия «один реальный объект в зоне наблюдения — одна «трасса»
на экране индикатора»), которые зависят от многих факторов: точности
первичных замеров координат объектов, типа и интенсивности их ма-
невра, алгоритмов вторичной обработки, расстояния между объектами и
т.д. и в очень большой степени — от взаимного расположения объек-
тов в пространстве и последовательности обращения к ним луча ИЗУ.
Поставим задачу оценки максимально возможного числа сопровождаемых
объектов в режиме работы ИЗУ, когда обнаружение новых объектов не
производится.
5.4.1.1. Физическая постановка задачи. Пусть ИЗУ сопровождает
п объектов (целей), перемещая свой луч от объекта к объекту. Воз-
можность сопровождения и его качество определяются точностью экс-
траполяции координат объектов, которая зависит как от характеристик
ИЗУ, так и от числа и вида траекторного движения (противодействия)
266
сопровождаемых объектов. Предполагается, что объекты оказывают тра-
екторное противодействие, направленное на срыв сопровождения путем
уменьшения точности прогноза (алгоритмами вторичной обработки) ме-
стоположения наблюдаемого объекта. Такое траекторное противодействие
объектов по способу его влияния на процесс сопровождения можно раз-
бить на приводящее:
а) к увеличению крутизны зависимости ошибки экстраполяции от
времени между двумя контактами с целью (от времени экстраполяции);
б) к увеличению этого времени.
Первый вид противодействия может быть реализован объектами пу-
тем осуществления непредвиденного (ненаблюдаемого) маневра каждого
объекта, характеризующегося появлением составляющей вектора скорости
перпендикулярной линии визирования объекта. Указанный маневр за
время отсутствия информационного контакта ИЗУ с объектом приводит к
угловым перемещениям объекта, зависящим от дальности до объекта, типа
и интенсивности маневра, которые плохо учитываютя алгоритмами про-
гноза и которые определяют размер зоны неопределенности положения
объекта. Второй вид противодействия может быть реализован путем за-
нятия объектами такого пространственного взаимного расположения, при
котором полное время их однократного обхода (время экстраполяции)
будет максимально при заданных размере и конфигурации зоны располо-
жения объектов и оптимальном способе их обхода.
Найдем такое расположение в заданном пространстве п сопровожда-
емых объектов, которое при наилучшем способе их однократного обхода,
дает максимальный путь обхода. Под наилучшим способом обхода бу-
дем понимать такой способ однократного обхода, который при заданном
расположении объектов обеспечивает минимальный путь этого обхода. В
качестве зоны наблюдения объектов при решении поставленной задачи
рассмотрим круг радиуса R. Обход зоны будем производить с постоянной
скоростью движения луча Voo = Vo-
5.4.1.2. Математическая постановка и исследование задачи. В круге
радиуса R (включая и его границу) размещается п точек. Размещает точки
в круге «размещатель», а обходит «обходчик». «Размещатель» выбирает
из множества {/?} возможных размещений точек в круге наихудшее для
«обходчика». «Обходчик» наблюдает это размещение и, выбрав одну из
этих точек, как исходную, организует однократный обход точек с воз-
вратом в исходную точку. При этом он из всего множества возможных
стратегий обхода {7} выбирает такую, при которой длина пути однократ-
ного обхода всех п наблюдаемых точек будет наименьшей
minmaxZ(7,/3,n, R) = Z*(n,R). (5.1)
{7} {/?}
267
Задачу (5.1) будем решать, используя метод динамического програм-
мирования Р. Веллмана [18]. Рассмотрим претендующие на неблагоприят-
ность для «обходчика» стратегии размещения точек в круге:
а) все точки размещаются в вершинах правильного вписанного в
круг радиуса R n-угольника. Обозначим эту стратегию размещения
п+0; минимальная длина обхода этих точек равна периметру п-угольника:
perim(n, R) = 2Rnsin
б) одна точка размещается в центре круга, а (n — 1) точек — в верши-
нах правильного вписанного (п — 1)-угольника; обозначим эту стратегию
размещения (п — 1) 4-1; минимальная длина обхода этих точек равна пе-
риметру (п— 1)-угольника без длины одной стороны, сложенному с двумя
радиусами круга: ?/(n, R) = perim((n — 1), R) — 2Rsin (тг/(п — 1)) 4- 2R;
в) одна точка размещается в центре круга, часть точек — на окруж-
ности, остальные точки — внутри круга.
Очевидно, что для малых п оптимальную стратегию следует искать
среди стратегий а), б). Для установления предпочтений в паре этих стра-
тегий введем функцию
Zi(n,/?) = max{perim(n, R);y(n,R)}. (5.2)
Значение этой функции при R = 1 и предпочтительная стратегия
размещения приведены в табл. 5.1. Как видно при п > 5, «размещателю»
целесообразно выбирать стратегию б) (стратегия (n — 1) 4-1). При «боль-
ших» п «размещатель» откажется от стратегии б) и перейдет к стратегии
в). Часть точек т он оставит на окружности R = 1, а оставшиеся п — т
точки он разметит внутри этого круга. Пусть эти точки размещены в круге,
минимальный радиус которого равен £R, где параметр £ (0 < £ < 1) опре-
делим ниже. Центр вновь построенного круга поместим в центр исходного
круга.
Таблица 5.1
п 2 3 4 5 6 7 8 9 10
Zi(n, 1) 4 5.20 5.66 6.24 6.70 7.00 7.21 7.36 7.47
Стратегия размещения 2+0 3+0 4+0 4+1 5+1 6+1 7+1 8+1 9+1
При любом фиксированном т задача оптимального размещения п—т
точек в круге радиуса £Л при малом п — т решается путем построения
ранее введенной функции Z\(n — m,£R). (Стратегии оптимального раз-
мещения: (п — т) 4- 0 — для (п — т) < 4 и (п — т — 1) 4- 1 — для
п — т > 5.) При этом остаются нерешенными две задачи:
оптимальный (для «размещателя») разворот внутреннего многоуголь-
ника по отношению к внешнему;
268
оптимальное (для «размещателя») распределение точек между внеш-
ним многоугольником и внутренним кругом. Приступим к их разрешению
для случая, когда п — т мало.
Остановимся на стратегии «обходчика». Будем считать, что точки
в круге радиуса R размещены так, что «обходчику» выгодно обходить
их следующим образом: сначала обходятся точки, лежащие на внешней
окружности, затем осуществляется оптимальный «сход» на внутренний
круг, оптимальный обход точек во внутреннем круге; переход в централь-
ную точку круга и, наконец, возврат в исходную точку.
Исх.
Рис. 5.7. К оптимальной стратегии «обходчика»
Пример такой стратегии для п = 10 приведен на рис. 5.7. Здесь
А и В — вершины вписанных многоугольников, расположенных на ми-
нимальном расстоянии друг от друга, иначе — «вершины перехода» с
внешнего круга на внутренний, а — угловое расстояние между верши-
нами перехода, «Исх.» — точка, с которой начинается обход точек на
внешней окружности (ближайшая к вершине перехода А). В соответ-
ствии с указанной выше структурой обхода найдем длину пути обхода
и составим выражение (5.3), которое позволяет определить оптимальное
распределение точек между внешней окружностью и внутренним кругом
Z2(n, R) = max {perim(m, R) — 2J?sin(7r/m)+
тп,,а,£,(п—т)>5
+а(т, (ti — т — 1), q, R, £R) + Zi((n — m),£R) — £R + R}, (5.3)
где под процедурой «шах по а» понимается поиск оптимального разворота
внешнего многоугольника по отношению к внутреннему многоугольнику;
269
Zi((n—m),£R) —длина пути при оптимальном обходе точек внутреннего
круга, полученная из (5.2); а( ) — длина отрезка АВ перехода с внешней
окружности на внутреннюю, а = а( ) = R\/l 4- £2 — 2f cosq.
В (5.3) максимум достигается на значениях а*,£*, зависящих только
от числа вершин внутреннего и внешнего многоугольников, и при страте-
гии обхода точек «внешняя окружность - внутреняя окружность — цен-
тральная точка — возврат в исходную точку на внешней окружности».
Перейдем к анализу общего случая (случай, когда п — т велико).
Обобщим полученные выше результаты по оптимальному размещению и
обходу п точек в круге радиуса R. Пусть имеются к концентрических
окружностей, на которых и в их общем центре размещены п точек. Точки
на окружности образуют правильный вписанный в эту окружность много-
угольник, являясь его вершинами. Обозначим структуру такого размеще-
ния точек через STR^. Охарактеризуем STRk следующими параметрами:
R — радиус внешней окружности; £ — отношение длины радиуса ближай-
шей к внешней окружности кВ; а — разворот всех внутренних много-
угольников (как единого целого) относительно внешнего многоугольника,
«Исх.» — маркировка одной из вершин на внешнем многоугольнике, с ко-
торой начинается оптимальный обход точек в STRk.
Для STRi и STRz были определены оптимальные значения параме-
тров £ R, «Исх.» и число точек, размещаемых на внешней окружности.
Определим функцию Zfc(s, R, п) как длину пути обхода п точек, раз-
мещенных в структуре STRk при их оптимальном обходе (по критерию
«обходчика»), и с началом обхода в вершине с номером s внешнего мно-
гоугольника.
Теорема 5.1. Оптимальное (по критерию «размещателя») расположе-
ние точек в круге радиуса R и оптимальный (по критерию «обходчика»)
обход этих точек определяются следующими соотношениями (уравнение
Веллмана):
Zk(R) n) = max{minZfc(s,-R, n); Zfc-i(-R, п)}, (5.4)
S
где
Zi(R,n) = Zi(/?,m);
Zk(s. R, n) = max {perimfm, R) — 2/?sin(7r/m)+
a;3<m<n-3;0<e<l
+ min[a(m,m*,s, $*, a,R^R)] 4- £[Zfc_i(s*,R,n — m) — R]} + R.
S.
Для всякого фиксированного n равенство Zk(R,n) = Zk-i(R,n) c
наименьшим индексом к определяет оптимальное решение задачи и тогда
для данного п Z*(n,1) = Zfc_i(l,n).
Доказательство теоремы 5.1 приведено в приложении (п. 5.4.1.4).
270
В таблице 5.2 представлены результаты расчетов по соотношению
(5.4) для п < 22 (здесь обозначено £Опт = С*)- Структуру алгоритма опти-
мального обхода точек (в этом диапазоне п) иллюстрирует рис. 5.7.
Таблица 5.2
п 7 8 9 10 11 12 13 14
Z*(n, 1) Стратегия 7.000 7.207 7.870 8.336 8.666 9.002 9.313 9.581
размещения 6+11 7+1 5+3+12 6+3+1 7+3+1 7+4+1 7+5+1 8+5+1
£опт — — 0.32 0.35 0.40 0.45 0.47 0.47
п 15 16 17 18 19 20 21 22
Z*(n, 1) Стратегия 9.828 10.054 10.273 10.462 10.636 10.808 10.935 11.083
размещения 8+6+1 8+7+1 9+7+1 9+8+1 10+8+1 10+9+1 11+9+1 12+9+1
Сопт 0.49 0.52 0.54 0.56 0.57 0.59 0.60 0.62
тОдин вписанный шестиугольник и центральная точка.
2Два вписанных многоугольника: пятиугольник «внешний», треугольник «внутренний»
и центральная точка и т.п.
5.4.1.3. Оценка максимально возможного числа сопровождаемых це-
лей. Рассмотрим две задачи, часто возникающие перед проектировщика
ми ИЗУ.
Задача 1. Определить максимальное число наблюдаемых объектов
в зависимости от дальности D до них, сохраняя принятые выше предпо-
ложения о структуре ИЗУ и непрогнозируемом маневре объектов.
Для описания процесса наблюдения за п объектами введем следую-
щие обозначения: R — радиус круга зоны наблюдения ИЗУ (круг R), в
угловых градусах; Ri < R — радиус круга обеспечения невыхода объ-
ектов из круга R за время отсутствия информационного контакта луча
с объектом, в угловых градусах; 8 — ширина сканирующего луча ИЗУ,
угловые градусы; 57.3 = Vm/D — максимально возможная угловая ско-
рость движения объекта перпендикулярно линии визирования его ИЗУ
на интервале времени ненаблюдения объекта, угловые градусы/с; объект
находится на дальности D, км от ИЗУ и имеет составляющую скоро-
сти движения Vm, км/с, перпендикулярную линии визирования; Vb —
максимально допустимая угловая скорость движения луча ИЗУ, при ко-
торой возможно проведение измерений по наблюдаемому объекту; tq —
время обновления информации по сопровождаемым объектам (интервал
времени, в течение которого однократно обходятся лучом все наблюда-
емые объекты); г — V^tq — радиус зоны неопределенности положения
объекта на момент прихода к нему луча ИЗУ.
Далее считаем, что Vbo — Vq. В установившемся режиме сопрово-
ждения то и время поиска лучом объекта в зоне неопределенности (при
271
фиксированном алгоритме поиска) являются постоянными величинами.
Примем, что при подходе луча к зоне неопределенности положения цели
организуется спиральный обход зоны неопределенности. Аппроксимируем
длину траектории такого обхода суммой длин вложенных друг в друга
концентрических колец: ширина каждого кольца д, число колец $* — г/д
(целую часть не выделяем). Тогда оценка величины длины обхода Z* одной
зоны неопределенности определяется равенством
S=S„
I* = 2?г£$,
s=0
а время, затрачиваемое ИЗУ на осмотр всей зоны неопределенности, г* =
= l./Vo
т* = 2tt5s2J2Vq = TrV?T2/(yQS).
Ясно, что из условия невыхода наблюдаемых объектов из зоны наблюдения
(круг радиуса R) объекты должны располагаться в круге радиуса Ri =
= R-V1r0.
Обратимся к величине длины пути обхода лучем ИЗУ наблюдаемых
объектов, находящихся в круге Ri, т.е. Z*(n, l?i). В диапазоне ожидаемых
решений аппроксимируем ее линейной зависимостью:
<Z*(n, l?i) — /?i(Zq 4- liTi).
Составим зависимость, связывающую время обновления информации
по наблюдаемым объектам то с длиной пути Z*(n, l?i) их обхода (при наи-
худшем их расположении в зоне наблюдения) и временем осмотра зоны
неопределенности положения цели т* : то = пт* 4- Z*(n,R — ViTq)/Vq.
Подставляя сюда найденные выше т* и Z*, получим:
то = тгУ^/Уо^ + Go + hn)(R - V1TO)/VO. (5.5)
Для сохранения возможности раздельного наблюдения объектов при
организации их обхода лучом потребуем, чтобы соседние зоны неопреде-
ленности не пересекались. Запишем это требование в виде:
(R - 4- /щ) > 2V1ron. (5.6)
Вернемся к задаче определения максимального числа объектов, кото-
рое может сопровождать ИЗУ на заданной дальности: п = n(D). Имея
в виду построение на плоскости nD границ допустимого числа объектов
на фиксированной дальности, примем в (5.6) равенство. Подставив (5.6)
в (5.5) и выполнив очевидные преобразования, получим:
1 = 1гУ?пт0/У06 + 2Vin/V0, (7? - Цт0)//0 = [2Vxt0 - h(R - ViT0)]n.
272
Разделим второе уравнение на первое, выполним преобразования, за-
тем, использовав обозначения г** = 7гУ1То/Ии$; Vi = 2Vi/Vo; R =
= tvR/2Sz получим:
T,2,+[(24-Z1)/Zo+Vi(l--R)]T„-[V1+Z1//o]Vifi = O) т„ = 1/n-V). (5.7)
Возведем второе равенство из (5.7) в квадрат, вычтем его из первого
и заменим в полученном равенстве т* на второе равенство, a Vi — на
2Vi/Vo и, произведя замену Vi = 57.3Vm/D^ получим
R = (2 J/тг) (1 + 2/Z0)/[(l/n + IJl^VoD/U^nVm - 1)]. (5.8)
Проведем расчеты по (5.8) для: 5 = 2°, Vb = 40%, Z*(l,n) =
4.95 + 0.29п (аппроксимация табл. 5.2 для 5 < п < 20); Vm = 0.3 км/с.
Рис. 5.8. К вопросу о максимальном числе сопровождаемых объектов на заданной
дальности
50 100 £>, км
Рис. 5.9. Области гарантированного сопровождения объектов при их наихудшем
расположении
На рис.5.8 представлена зависимость R = R(n,D), на рис.5.9 на плос-
кости п, D дана область (справа от кривой), в которой при наихудшем
273
расположении сопровождаемых объектов в круге радиуса R = 20 и 10
(соответственно зона 1256 и 314 квадратных градусов) обеспечивается их
сопровождение.
Задача 2. Пусть ИЗУ устанавливается на борт самолета, осуществля-
ющего прямолинейный полет со скоростью Vu. Навстречу ему со скоро-
стью Vu движется группа объектов (целей), которая вооружена ракетами
класса «воздух-воздух» с дальностью пуска 1?ртах. При сближении с ИЗУ
цели маневрируют в некоторой области воздушного пространства, стре-
мясь сорвать сопровождение, и сохраняют при этом некоторое общее
Рис. 5.10. К определению контролируемого пространства для обеспечения наблю-
даемой цели
генеральное направление движения. С любой D < 1?ртах цель может
осуществлять пуск ракеты, выйдя предварительно (мгновенно) на траек-
торию параллельного сближения с самолетом-носителем ИЗУ. Определим
область воздушного пространства, которую нужно контролировать ИЗУ,
чтобы цель, намеревающаяся осуществить ракетный удар без смены по-
лусферы сближения с ИЗУ, наблюдалась ИЗУ. Используя обозначения
рис. 5.10 и очевидные из изложения зависимости, получим
К sin a =VU sin(?r/2 - а); р = Dp max sin а = Dp maxу/1 + (И/К)2.
Отсюда необходимый радиус зоны наблюдения: R° = 57.3 p/D. На-
несем эту зависимость на рис. 5.9 (обозначение зависимости R = var, она
получена для Dpm3LX = 50К/К = 1.2) как границу максимально возмож-
ного числа сопровождаемых целей при указанных выше условиях.
Таким образом, проведенное исследование дает проектировщикам и
заказчикам измерительных устройств инструмент оценки влияния на чи-
сло сопровождаемых объектов:
а) конструктивных параметров ИЗУ (ширины луча, динамических ха-
рактеристик «антенна + механический привод», скорости «измерения»
274
mi(k — 1) л
----------- 2тг/тп\ (5-9)
Vb, структуры алгоритмов вторичной обработки, величина зоны обзора/со-
провождения);
б) плотности потока наблюдаемых объектов и их маневренных воз-
можностей;
в) дальности D до наблюдаемых объектов.
5.4.1.4. Приложение.
Лемма 5.1. Пусть на внешней окружности радиуса R = 1 раз-
мещаемые точки образуют правильный вписанный mi-угольник (внеш-
ний многоугольник), а на внутренней окружности радиуса £R — пра-
вильный т2-угольник (внутренний многоугольник). Пусть каждая из вер-
шин mi-угольника соединена отрезком а с ближайшей к ней вершиной
т2-угольника. Поворот на угол а* т2-угольника относительно тр
угольника, обеспечивающий при любом 0 < £ < 1 максимальную ве-
личину минимального расстояния между парой ближайших вершин а*,
среди всех пар ближайших вершин равен
а* = min(27r/mi — а/с)/2,
к
где
Qfc = 2тг(А; - 1)/т2 -
для всех 1 < к < т2, где [-]ц.ч — целая часть числа.
Доказательство. Совместим на одном радиусе какие-либо вершины
внутреннего и внешнего многоугольников (рис. 5.11 вершины В и А).
Перенумеруем все вершины внутреннего многоугольника (для определен-
ности против часовой стрелки), присвоив номер к = 1 вершине В(1 <
к < т2). Развернем внутренний многоугольник относительно внешнего
на угол а против часовой стрелки. Очевидно, что вершины А п В будут
ближайшими, пока
—2тг/тП1 < а < 2тг/тП1, если mi > m2,
—2тг/т2 < а < 2тг/т2, если т2 > mi.
Для интересующих нас случаев 2тг/т1 < тг/2 (г = 1,2) функция
а = R\/l 4- £2 — 2^ cos а монотонно возрастает по а при изменении а
от 0 до тг/2. Будем искать такой поворот внутреннего многоугольника
относительно внешнего, который обеспечит: реализацию минимального
расстояния между ближайшими вершинами на паре вершин В и А (угол
а между этими вершинами будет наименьший среди таковых углов на
множестве пар ближайших вершин); это минимальное расстояние будет
наибольшим, т.е. равным а* (угол а будет максимально возможным в
оговоренных выше условиях). Для этого поместим сначала вершины А
275
и В вдоль радиуса (рис. 5.11). Угловое расположение произвольной А:-й
вершины внутреннего многоугольника относительно этого радиуса соста-
вляет 2тг(&—1)/т2. Ближайшие к ней вершины внешнего многоугольника
Рис. 5.11. К доказательству леммы 5.1
отстоят от нее на углы од (ближайшая правая вершина) и /3k (ближайшая
левая вершина), определяемые выражениями
oik = — 1)/тп2 — [(2тг(А; — l)/m2)/(27r/mi)]u.427r/mi,
/3fc = 2тг/ш1 - ак-
Искомый поворот внутреннего многоугольника относительно внеш-
него многоугольника найдем, если:
а) среди всех пар «вершина внутреннего многоугольника — ближай-
шая к ней левая вершина внешнего многоугольника» найдем пару, для
которой реализуется = /3min;
к
б) развернем внутренний многоугольник относительно внешнего про-
тив часовой стрелки на угол /3min/2.
В результате такого поворота между вершинами А и В будет реали-
зован минимальный среди всех пар ближайших вершин угол а* = ХЗпцп/2
и этот угол будет максимальным среди всех пар ближайших вершин при
любом повороте внутреннего многоугольника относительно внешнего.
Приведенные доводы не зависели от £. Поэтому найденная процедура
определения а* оптимальна для любого 0 < £ < 1. Лемма доказана.
Лемма 5.2. Оптимальная величина £ = £* для стратегии размещения
m+(n — т—1)4-1 (размещение точек на двух концентрических окруж-
ностях к = 2) существует и зависит только от числа вершин внешнего и
276
внутреннего многоугольника. (Здесь п — общее число точек в размеще-
нии, т — число точек на внешней окружности, (п — т — 1) — число
точек на внутренней окружности.)
Доказательство. Пусть радиус внешней окружности R = 1, а радиус
внутренней — (0 < £ < 1). Внутренний многоугольник развернут по
отношению к внешнему на угол а* (лемма 5.1).
Исследуем две альтернативные стратегии «обходчика»:
(*) — обход точек на внешней окружности + сход на внутреннюю
окружность по минимальному пути а* + обход точек на внутренней окруж-
ности + переход в центральную точку + возврат из центральной точки
в исходную точку на внешней окружности (см. рис. 5.7);
(** ) — «одновременный» обход точек, лежащих на внешней и внутре-
ней окружностях + переход в центральную точку + возврат из централь-
ной точки в исходную точку внешней/внутренней окружности (рис. 5.12).
Обозначим длину пути обхода точек по стратегии (*) через Z*(n,£,m), а
по стратегии (**) — через Z**(n,f,m).
Рис. 5.12. К доказательству леммы 5.2
Определим длину пути Z**(n, т). Угловое расположение /с-й вер-
шины внутреннего многоугольника (1 < к < (п — т— 1)) по отношению
к ближайшим правой и левой вершинам внешнего многоугольника опре-
деляется формулами (5.9) с очевидной заменой т\ = т; т? = п - т — 1
и прибавлением к а* угла. Расстояния от А:-й вершины внутреннего
многоугольника до правой и левой ближайших к ней вершин внешнего
277
многоугольника определяются при R = 1 (см. рис. 5.11) соответственно
ак = \/1 4-£2 - 2£cosa/c; Ьк = \/1 4- £2 - cos/3fc.
Рассмотрим различные возможные случаи размещения точек на внеш-
ней и внутренней окружностях.
Рис. 5.13. К определению длины пути обхода рот двух стратегиях. Общее число
точек п = 12. Число точек на внешней окружности: — т = 3;---т = 4;
•. • т = 8
Случай Г. т > п — т — 1. Наилучший способ обхода точек в этом
случае для стратегии (**) может быть проиллюстрирован с помощью
рис. 5.13 для т = 6 и (п — т — 1) = 4. Здесь пронумерованы точки на
внутренней окружности, начиная с той, которая отстоит от ближайшей
точки внешней окружности на расстояние а* (лемма 5.1). Как видно из
рисунка, и это справедливо для любого размещения, удовлетворяющего
условию т> (п — т — 1), при таком обходе нет движения по сторонам
внутреннего многоугольника и по части сторон внешнего многоугольника.
Количество сторон внешнего многоугольника, которые будут проходиться
«обходчиком», составит т— (п — т— 1) — 1 = 2т — п. Длина траектории
обхода точек по стратегии (**) в этом случае
Z**(n, £, т) = 2 4- (ак 4- Ьк) 4- (2m — n)2 sin(7r/m).
1<к<(п—т— 1)
Случай 2: т = п — т — 1. Здесь, начиная с вершины на внешнем
многоугольнике, идет последовательный обход точек на внешнем и вну-
278
треннем многоугольнике с остановкой этого обхода на вершине внутрен-
него многоугольника. Из этой вершины путь лежит в центральную точку
(длина £), а оттуда — в исходную точку (путь R = 1). Полная длина пути
обхода
^**(n? т) = 1 + С + ап-т-1 + (fl/c + Ь/с).
l<fc<((n—m—1)—1)
Отметим, что в этом случае не обходятся ни одна из сторон внеш-
него и внутреннего многоугольника и последняя по индексу к вершина
внутреннего многоугольника соединяется только с одной из ближайших
вершин внешнего многоугольника.
Случай 3: т < (п — т—1). Пронумеруем точки на внешней окружно-
сти в направлении против часовой стрелки и начнем обход по стратегии
(**). Исходная (первая) точка на внешней окружности («Исх.») выбира-
ется так, чтобы ближайшая вершина внутреннего многоугольника была от
нее на расстоянии а* (лемма 5.1). При таком обходе нет движения по
сторонам внешнего многоугольника и по части сторон внутреннего много-
угольника. Количество сторон внутреннего многоугольника, которые бу-
дут проходиться «обходчиком», составит (п — т— 1) — т — п — 2т — 1.
Угловое расположение вершин внешнего многоугольника по отноше-
нию к ближайшим вершинам внутреннего многоугольника и соответству-
ющие расстояния между ними определяются по формулам /31 = а* для
2 < к < т
2тГ/, Г(2тг/т(А: — 1) — а*)1 Л ,,
ak—— (Л-1)- 0 ц---------гг- 2тг/(п — m — 1) — а»,
т [ 27г/(п - т - 1) JU 4
0k = 2тг/(п - т - 1) - ак,
ак = т/1 + С2 - 2£cosafc;
для 1 < к < т
ьк = x/i+e2-2ecos/?fc.
Длина траектории обхода точек по стратегии (**) для этого случая
Z**(n,f,m) = l+bi+f+(n-2т—l)2fsin7r/(n-т-1)+ (afc+M-
2<к<т
Длина траектории обхода точек по стратегии (*) Z*(n, £,т) опреде-
лена в (5.3).
Рассмотрим характерные свойства зависимостей от £ длин обхода по
стратегиям (*) и (**). В качестве иллюстрации на рис. 5.13 представлены
279
полученные расчетом указанные зависимости, обозначенные на рисунке,
как Z* и Z** для общего числа точек п = 12 и трех значений числа точек,
размещенных на внешней окружности т = 3,4 и 8. Введем функцию
Z(n, f,m) = min{Z*(n,£,m); Z**(n,f,m)}. Расчеты показали:
1) для каждого фиксированного п и т на отрезке 0 < £ < 1 суще-
ствует такая точка £ (точка пересечения зависимостей Z* и Z**), что
Z(n, £,m) = т) при 0 < £ < £,
Z(n^^m) = Z^(n,^m) при £<£<1;
при фиксированном п положение этой точки на отрезке [0,1] зависит от
т, т.е. £(т);
2) для фиксированного п
max Z(n,£,m) = Z(n, £*,m*) = Z(n,£(m*),m*);
т.е. вблизи точки максимума взаимное расположение зависимостей
Z*(n, £,m), Z**(n, £, т) и характер их изменения по £ при фиксиро-
ванном т качественно иллюстрирует рис. 5.13. Поэтому оптимальное £*
можно искать на множестве £(n, т), которое определяется из условия
Z*(n, £,m) = Z**(n, £,т) при произвольных пит. Кроме того, при
оптимальном размещении точек «размещателем» (£ = £*) стратегия об-
хода (*) будет оптимальной для «обходчика». Лемма 5.2. доказана.
Лемма 5.3. При размещении внутри круга £R точек на нескольких
концентрических окружностях к > 2 существует оптимальное £ = £* (по
критерию «размещателя»), и для этого £* введенная в лемме 5.2 стратегия
(*) «обходчика» является оптимальной.
Для подтверждения правильности леммы 5.3 приведем следующие до-
воды. На стратегиях размещения т + (п — т) + 1 для определения
оптимального £* проводилось сравнение (рис. 5.13) полных длин обхода
Z*(n,£,m) и Z**(n,£,m), соответствующих введенным в лемме 5.2 стра-
тегиям обхода (*) и (**). При этом использовалась информация о коли-
честве вершин правильных многоугольников, вписанных во внешнюю т
и внутреннюю п — т окружности, и о траекториях выхода в центральную
точку и возврата из нее в исходную точку обхода. Покажем, что для под-
тверждения существования оптимального £* и оптимальности стратегии
(*) достаточно провести сравнение только длин обхода точек внешней
и внутренней окружностей, обход которых делается по стратегии обхода
(*) с длиной пути обхода ^Z*(-), и стратегии обхода (**) с длиной пути
обхода <jZ**( ). Некоторые результаты расчета этих длин для к = 2 пред-
ставлены на рис. 5.14 (обозначения пи т, как и на рис. 5.13).
280
Сравнение результатов расчетов для к = 2 показывают, что неучет
траекторий схода в центральные точки (на точки, лежащие внутри двух
внешних окружностей) и выхода из них в исходную точку обхода не
изменяет качественного сходства и взаимного расположения зависимостей
Рис. 5.14. Общее число точек п = 18. Число точек на внешней окружности:
т = 10
Отсюда существование оптимального £* и установление факта опти-
мальности стратегии (*) можно получить, анализируя зависимости р£*(-)
и pZ**( ) для каждого фиксированного п. Заметим, что количественный
вклад (в длину пути обхода всех точек) длины пути схода с внешнего или
ближайшего к нему внутреннего многоугольников на вершину следующего
за ними многоугольника с ростом числа вложенных многоугольников (уве-
личение к) монотонно уменьшается. Это позволяет распространить при-
веденные выше рассуждения с частного случая размещения т+(п—т) + 1
на общий случай.
Доказательство теоремы 5.1. Покажем, что структура STRk является
оптимальной для любого п. Пусть для некоторого диапазона п структура
STRk-i оптимальна. Возьмем п несколько больше рассмотренных. Раз-
местим т точек из заданных п на внешней окружности радиуса R в
вершины правильного вписанного m-угольника. Оставшиеся п — т точек
поместим в круг радиусом £R. При любом (в том числе и оптималь-
ном) т и £ точки п — т должны размещаться в круге £R оптимально,
иначе только за счет их более удачного размещения «размещатель» до-
стигнет более благоприятных результатов, что будет противоречить пред-
полагаемой оптимальности испытуемого решения (принцип оптимально-
сти Р. Веллмана). Так как мы предполагали рассматривать такие п, что
281
п — т всегда принадлежит диапазону, где структура STRk-i оптимальна,
то в круге будет реализовываться оптимальное размещение в струк-
туре STRk-ъ Естественно т точек расположить в вершинах вписанного
в круг радиуса R m-угольника, а радиус £R выбрать таким, чтобы все
п—т точек помещались в нем. Таким образом, получена структура STRk.
Для оптимального размещения точек на ней необходимо: выбрать опти-
мальное распределение точек между внешней окружностью и структурой
STRk-i.') оптимальный разворот структуры STRk-i относительно внеш-
него многоугольника; оптимальный радиус £R круга, на котором будет
размещаться структура STRk-ъ
Рассмотрим проблему разворота. Наиболее благоприятным для «об-
ходчика» будет размещение «Исх.» точки структуры STRk-i на одном
радиусе с какой-либо вершиной внешнего многоугольника. В этом слу-
чае длина пути схода а(-) с вершины внешнего многоугольника на бли-
жайшую вершину внутреннего многоугольника будет наименьшей: а( ) =
= R — £R. Возьмем такой радиус за начало отсчета угла разворота струк-
туры STRk-i относительно внешнего многоугольника. Эта длина будет
зависеть от радиусов J?, (JR, числа вершин т внешнего многоуголь-
ника, числа вершин т* ближайшего к нему внутреннего многоугольника,
угла разворота а и выбранной точки схода s на внешнем многоуголь-
нике и связанной с ней точкой з* выхода «обходчика» на (ближайший
к внешнему) внутренний многоугольник: а(т^ т*, s, s*, a, R,£R). Есте-
ственно, что «размещатель» будет выбирать а так, чтобы при любом вы-
боре «обходчиком» точек схода з и выхода з* длина пути а(-) + (длина
обхода точек в STRk-i при начале обхода в точке з*) была возможно
больше.
Рассмотрим проблемы «обходчика». Пусть для fc—1 определена функ-
ция Zfc_i(s,7?,n). Как следует из предыдущего, оптимальное (по кри-
терию «размещателя») размещение точек не зависит от значения ради-
уса окружности R, а длина обхода пропорциональна: Zfc_i(s,J?,n) =
RZk-i(s, 1,п). Построим функцию Zfc(s,J?,n). Разместим т > 3 точек
на внешней окружности^ а расположенные внутри круга радиуса R точки
в количестве п — т заключим в круг радиуса £R. Для этого вновь вве-
денного круга функция Zk-i(s*,R,n — тп) даст оптимальную (по кри-
терию «обходчика») длину траектории обхода оптимально (по критерию
«размещателя») размещенных п — т точек с началом обхода в вершине
с номером з* внешнего (для этого круга) многоугольника и с выходом
из центральной точки в эту исходную точку. При этом, на окружности
£R будет размещено т* точек, перенумироваиных индексом з*; точки
на внешней окружности разместятся в вершинах правильного вписанного
m-угольника; разворот а всей совокупности точек, размещенных в круге
(R относительно внешнего множества определится леммой 5.1. Обход
282
точек на внешней окружности и переход на точки в круге радиуса £R мо-
жет быть осуществлен двумя стратегиями обхода (*) и (**), описанными
в лемме 5.2.
Рассмотрим случаи тп > т*, тп = m*, тп < тп* и проведем рассу-
ждения леммы 5.2 со следующими очевидными изменениями.
1. Выход по стратегии (**) с вершины внешнего многоугольника
или вершины ближайшего к нему внутреннего многоугольника осуще-
ствляется на вершины следующего за ними внутреннего многоугольника
(СВМ). Обозначим длину этого выхода через Cj или С2 соответственно.
Так как взаимное угловое расположение всех трех названных многоуголь-
ников известно, то при фиксированном £ и известном радиусе описанной
окружности для многоугольника СВМ величины Ci, i = 1,2, определя-
ется однозначно.
2. Для выбора между стратегиями (*) и (**) «обходчик» сравнит
длины двух следующих путей: <5Z*(£,m,m*) — путь обхода по стра-
тегии (*), равный «пути обхода по сторонам внешнего многоугольника
(исходная точка выбрана оптимально) + сход на ближайший (число сто-
рон его т*) внутренний многоугольник — путь обхода по сторонам
внутреннего многоугольника (число сторон его т*) + сход на СВМ»;
<SZ**(£, тп, тп*) — путь «одновременного» обхода (по стратегии (**)), как
описано в лемме 5.2, вершин внешнего многоугольника и вершин бли-
жайшего к нему внутреннего многоугольника с добавленным к нему от-
резком траектории С\ (или С2). Анализируя для фиксированных тп и
т* изменения 6Z*(£,m, тп*) и <SZ**(£, тп,тп*) по £, находим оптималь-
ное £ = £*.
Процедура определения оптимального £* (см. лемму 5.3) для произ-
вольного числа вложенных в круг многоугольников остается неизменной и
определяется только числом вершин внешнего многоугольника и ближай-
шего к нему внутреннего многоугольника. Для каждого фиксированного
числа точек 3 < тп < п — Зна внешней окружности и произвольно
выбранной на внешнем многоугольнике вершине схода (пусть ее номер
s, 1 < s < ттг)) осуществляется:
1) начиная с соседней (к вершине схода) в направлении против ча-
совой стрелки вершины внешнего многоугольника (исходная вершина),
последовательный обход всех вершин внешнего многоугольника до дости-
жения вершины схода. Длина этого пути Z(l,m) — 1(1, тп);
2) сход с вершины схода на ближайшую к ней вершину si ближай-
шего внутреннего многоугольника. Длина этого пути определяется зави-
симостью a(s, a, R,£, тп, тп*);
3) обход по оптимальной траектории точек на круге радиуса £R с
заменой заложенного в ней пути возврата (из центральной точки в точку
283
начала обхода, введенную в 1) на новый путь возврата с длиной
R : £[Zk-i(si,R,n — т) — R] + R.
Находя максимум этой длины по т, £, а для каждой исходной точки,
получаем при оптимальном подборе «обходчиком» точки выхода
Zk(s,R,ri)= max {Z(R,m) — l(R,m)+
a
3 < m < (n — 3)
0<£<l
+ min{a(m, R,£R) + £[Zk-i(s*, R, n — m) — R] + /?}}.
Оптимальная (по критерию «обходчика») исходная точка обхода и
(получающаяся при этом) оптимальная длина пути обхода Zk(R,n), при
оптимальном (по критерию «размещателя») размещении п точек на к
концентрических окружностях определяется из условия
minZfc(s, R,n) = Zk(R,Tt).
s
Пусть построено оптимальное размещение (как указано выше) п точек
на к — 1 и на к концентрических окружностях с радиусом внешней окруж-
ности R. Пусть для этих размещений найдены указанные выше, оптималь-
ные пути обхода этих п точек. Длина этих путей Zk-i(R,ri) и Zk(R,n).
Тогда, если Zk(R,п) > Zk-i(R,n), то процедуру поиска оптимального к
следует продолжить. Если Zk(R,n) < Zk-i(R,n), то процедура поиска
оптимального к прекращается и полагается Z*(J?,n) = Zk-i(R,n).
Учитывая линейность Zk(R,ri) по 7?, получаем утверждение теоремы.
Теорема доказана.
5.4.2. Задача выбора моментов применения
бортовых исполнительных устройств
В рассмотренной выше (в гл. 4 и п.5.2) типовой быстрой ситуа-
ции (ТБС) ДБ возникает задача оптимального выбора на борту самолета-
истребителя моментов пуска управляемых ракет и моментов применения
помех (включение станции активных помех (САП)) головкам самонаведе-
ния (ГСН) атакующих ракет противника и его системе управления воору-
жением.
5.4.2.1. Исследование задачи. Работа всего бортового комплекса ис-
требителя происходит при следующих ограничениях:
1. Нельзя одновременно использовать САП против режима сопро-
вождения (помехи системе управления вооружением) противника и (или)
ГСН атакующей ракеты противника и наводить собственную ракету.
284
2. Цикл помех имеет заданную эффективность (вероятность срыва ре-
жима работы радиотехнического устройства, которому ставится помеха),
когда он целиком укладывается во временной интервал наведения ракеты
противником.
Для выбора моментов включения САП и числа циклов в каждом
включении сформируем следующую игровую задачу. Исход дуэльной си-
туации будет характеризоваться вероятностями Pj (j = 1,2) поражения:
нашего истребителя — Рь
истребителя противника — В}.
Стратегиями каждого из истребителей-игроков будут:
— залповый пуск к ракет, где к = 1,2,...;
— применение г циклов помех, где г = 1,2,...;
— применение г циклов помех с последующим осуществлением залпа
из к ракет, где г = 1,2,..., к = 1,2,..., при произвольном сочетании их
конкретных значений;
— залповый пуск к ракет с последующим применением г циклов
помех, где к = 1,2,..., г = 1,2,..., при произвольном сочетании их
конкретных значений.
Набор возможных стратегий для каждого истребителя (j = 1,2) обо-
значим через {И?}, j = 1,2, и назовем их управлениями радиоэлектрон-
ным противодействием (РЭП). Критерий оптимальности выбора управле-
ния РЭП выберем в виде разности вероятности поражения истребителя
противника и вероятности поражения нашего истребителя.
Оптимальным управлением РЭП на нашем истребителе, назовем упра-
вление {Их}, обеспечивающее
max min(P2 — Pi)-
{Их}{И2}
Сформулированная задача относится к классу игровых задач с бесконеч-
ной матрицей стратегий.
Проведем анализ сформулированного выше множества управлений.
Для каждого истребителя будем различать:
1) пуск с упреждающим поражением противника, понимая под этим
пуск ракеты в момент времени, обеспечивающий поражение истребителя
противника и срывающий дальнейшее самонаведение находящейся в воз-
духе ее ракеты (пролет ракеты, оставшейся без связи с носителем, будет
больше допустимого, например, из-за прекращения подсвета);
2) одновременный с противником пуск, когда ракеты подошли к це-
лям в моменты времени, разделенные на величину не более твз.Пор с, при
которой пущенная ракета успешно заканчивает самонаведение без кон-
такта с носителем;
285
3) запаздывающей пуск — пуски, при которых ракеты подойдут к
целям в моменты времени, разнесенные на величину не более, чем твз.пор с,
причем ракета противника подойдет к своей цели раньше.
Пуск ракет будем рассматривать внутри зоны возможных пусков
£>pmin < D < -Ортах? рассчитанной под предполагаемый противоракет-
ный маневр противника. Обозначим вероятности поражения цели ракетой
(эффективность ракеты), пущенной внутри зоны пуска (при условии дви-
жения цели после пуска ракеты, соответствующего принятой при пуске
гипотезе движения цели) через: Ppi — эффективность нашей ракеты,
РР2 — эффективность ракеты противника. Эффективность САП будем
характеризовать вероятностью срыва успешного наведения ракеты:
Рсап1 — вероятность срыва наведения ракеты противника, при при-
менении в процессе ее наведения одного полного цикла помех САП с
борта нашего истребителя;
Рсап2 — вероятность срыва наведения нашей ракеты при применении
в процессе ее наведения одного цикла помех с борта самолета противника.
Будем рассматривать случай Рр1 = Рр2 = Рр и РСап1 = Рсап2 =
Рсап- Введем несколько понятий.
Упреждающий пуск — пуск ракеты, упреждающий по времени пуска
(но не всегда по времени попадания!) ответный пуск противника. Запаз-
дывающий пуск (ЗП) — пуск ракеты после пуска противника. Одновре-
менный пуск — пуск с борта истребителя, разнесенный по времени пуска
с ответным пуском противника не более, чем на тодн с.
Упреждающий пуск дает психологическое преимущество (усложнение
противнику анализа внешней обстановки, организацию защиты от пущен-
ной ракеты). Отсюда, в частности, следует необходимость организации
режима имитации пуска.
Расположение на временной оси моментов пуска ракет с борта нашего
истребителя и с борта истребителя противника не всегда совпадает по
очередности с моментами попадания ракет в цель. Это очевидно для
ракет разного типа, но проявляется и для однотипных ракет при различии
в скоростях и высотах истребителей в момент пуска ракет.
Рассмотрим структуру бортового алгоритма оценки времен попадания.
С каждым моментом пуска свяжем момент попадания. Рассмотрим
дуэльную ситуацию с некоторым количеством пусков с борта каждого из
противоборствующих истребителей. На временной оси рис. 5.15 с нача-
лом, совпадающим с началом дуэли, отмечены моменты пуска с нашего
истребителя Щ (на оси Ш —> 2) и с истребителя противника Щ (на оси
П2 —> 1). Моменты попадания каждой ракеты отмечены индексами S.
Отметим первый от начала дуэльной ситуации момент попадания и
заметим с какого истребителя был произведен пуск, соответствующий
этому моменту. Отложим от отмеченного момента попадания вправо и
286
влево временной интервал твз.Пор (интервал взаимного поражения). Вы-
делим все пуски с моментами попадания, лежащими внутри выделен-
ного интервала, и назовем их пусками с одновременными попаданием
П2 —> 1
12
12
б
П1 —> 2
Рис. 5.15. Взаимное расположение моментов пуска и моментов попадания ракет
(пуск с ОП). Если здесь есть пуски с разных истребителей, то все их
назовем пусками с ОП. На рис. 5.15а первый истребитель произвел один
пуск с ОП Пр а второй -s- два: П2, П^. Здесь все пуски с одного истре-
бителя являются пусками с упреждающими попаданиями (пуск с УП). На
рис. 5.156 — пуск с УП со стороны первого истребителя.
287
В дальнейшем исследовании ограничимся аналогичными случаями.
Исследование более сложных случаев (типа случая, указанного на
рис.5.15^) оставим на этап разработки конкретных бортовых алгоритмов
с учетом реальных ограничений на применение боекомплекта.
Сделаем следующие предположения, ограничивающие применение
САП при противодействии процессу наведения ракеты противника:
— при пуске с ОП применение циклов помех с бортов истребителей
противников не производится;
— при пуске с ЗП с борта истребителя, осуществившего этот пуск,
возможна предварительная постановка нескольких циклов помех.
Проведем количественное исследование взаимных пусков ракет, с бор-
тов противодействующих истребителей (рис. 5.15а,б).
Оценим вероятность события «уцелеть истребителю». Обозначим
событие для первого истребителя и для второго истребителя.
Индексами внизу далее будет даваться дополнительная характеристика со-
бытию. Вероятность появления события обозначим через j =
1,2. При пусках с ОП (пуск ракет со стороны первого истребителя и fc2
ракет со стороны второго) вероятность уцелеть первому истребителю —
Р(<}) = (1 ~ Рр)к2, второму истребителю P(N$) = (1 — Pp)fcl.
Отсюда, вероятности поражения первого истребителя:
P1 = 1 — P(N^),
второго истребителя (противника):
Р2 = 1 - P(N$>).
Значение критерия оптимальности:
Гоп(Р1,Р2) = Р2 - Pi = P(N$>) - P(N^),
Роп(Р1,Р2) = (1 - Pp)fc2 - (1 - Pp)fcl.
При &2 = 1 и = 2 зона преимущества нашего истребителя
Роп(1 - Рр) - (1 - Рр)2 = (1 - Рр)Рр > о
при всех Рр.
Экстремальное значение при
= 1 - 2Рр = 0, Рр = 0,5.
При пусках с УП со стороны первого истребителя (залповый пуск fci ра-
кет со стороны первого истребителя, применение г2 циклов помех и зал-
повый пуск ракет со стороны второго истребителя) событие уцелеть
288
первому истребителю состоит из двух несовместимых событий: «уце-
леть первому истребителю при условии, что второй был сбит и наведение
его ракеты сорвано при попадании в него ракеты первого истребителя»
(^УП1/^УП1)’ «уцелеть первому истребителю при условии непоражения
противника при попадании в него ракеты первого истребителя и после-
дующем нанесении вторым истребителем ответного удара» (^Vyni/^yni)-
Вероятность уцелеть первому истребителю в обычных обозначениях тео-
рии вероятности равна
P(N™) = P^/N^P^) + P(N^/N^P(N^.
Очевидно, что P(W^V^yni) == 1» а вероятность «уцелеть второму
истребителю» P(7Vy^ ) при пуске с УП fci ракет с борта первого истре-
бителя и применении с борта второго истребителя Г2 циклов помех
P(<n)l) = [l-^p(l-^CAn)r2)]fcl.
Тогда
Р(№) = (1 - [1 - Рр(1 - PCAn)r2]fcl) +
+ (1 - Pp)fc2[l - Рр(1 - РСАПГТ1.
Критерий оптимальности:
РУП1(Р1,Р2) = -Р(^1) + Р(^1) =
= (-l)[l-Pp(l-PCAn)r2]fcl+
+ (l-[l-Pp(l-PCAn)r2]fcl) +
+ (1 - Рр)*2[1 - Рр(1 - РСАПГТ1-
Руп1(Р1,Р2) = [1 - Р₽(1 - РсапГ2]*1 ((1 - PP)fc2 - 2) + 1.
При пуске ракет с УП со стороны второго истребителя (применение со
стороны первого истребителя ri циклов помех и залповом пуске ki ракет;
применение залпового пуска А?2 ракет со стороны второго истребителя)
событие «уцелеть первому истребителю» Nyn2 имеет вероятность
Р(^п2) = [1 - -Рр(1 - PcAn)rl]fe2. (5.10)
В рассматриваемом случае вероятность события «уцелеть второму истре-
бителю» Му$2 в соответствии с вышеизложенным:
Р<№) = (1 - [1 - Рр(1 - PCAn)rl]fc2) + (1 - PP)kl [1 - РР(1 ~ ^САпГТ-
(5.U)
10 - 1847
289
Критерий оптимальности с учетом (5.10) и (5.11):
Fyn2(Pi, Р2) = ~Р(А) + Р(Л#>2) =
= -(1 - [1 - Рр(1 - РСАП)Г1Н - (1 - Рр)И[1 - Рр(1 - PCAn)rl]fc2) +
+ [1 - Рр(1 - РсапГЧ*2-
Руп22(Р1,Р2) = [1 - Рр(1 - PCAn)rl]fe2[2 - (1 - РрН - 1. (5.12)
Исследуем оптимальность применения РЭП информационным
каналам.
Исследуем случай пуска с УП со стороны противника (второй истре-
битель). Рассмотрение проведем для практически интересного случая:
= 1,2 — количество ракет в залпе со стороны нашего истребителя
(первый истребитель);
Г1 = 1,2 — количество циклов помех, которое можно поставить со
стороны нашего истребителя;
А?2 = 1 — количество ракет в залпе противника с УП.
В ответ на пуск с УП противника, который не ставит помехи, приме-
нение с борта нашего истребителя:
— только Г1 циклов помех дает (5.12)
F(Pi,P2) =-Рр(1-РСАп)Г1;
— только залпа с ЗП из ki ракет в нем дает (5.12)
F(P1,P2) = (1 - Рр){2 - (1 - Рр)*1} - 1.
Зависимость критерия P(Pi,P2) от эффективности применяемых ра-
кет (Рр), эффективности помех (Рсдп) и количества ракет в ответном
залпе (A?i) представлена на рис. 5.16, 5.17.
Ответное применение только помех (рис. 5.16) не дает для практиче-
ски реальных значений РсдпСРсдп < 1) приемлемого значения критерия
Р(Р1,Р2) = 0. Ответное применение только ракет (рис. 5.17) позволяет
ценой увеличения количества ракет (&i) в ответном залпе поднять значе-
ние критерия P(Pi,P2) до минимально приемлемого значения только в
ограниченном интервале значений эффективности ракеты 0 < Рр < 0,5.
Причем, потребное ki существенно зависит от Рр.
Интересно для этого случая поставить вопрос о минимально необ-
ходимом числе ракет (&i) в запаздывающем пуске нашего истребителя в
ответ на залповый (А^) пуск с УП противника.
Область, где (см. (5.12))
F(Pl,P2) = [1 - Рр]/С2{2 - (1 - Pp)fe1} - 1 > 0,
290
на плоскости ki,k2 (рис. 5.18) лежит правее и ниже границ, отмеченных
принятым в расчете значением эффективности применяемых ракет (Рр).
Отсюда следует, что с увеличением Рр применение только залпового
ответного пуска требует при Рр < 0,5 повышенного расхода ракет с борта
нашего истребителя, а при (Рр) > 0,5 такой ответ вообще неприемлем.
F(P1}P2)A Г1 = 1
1.0
Рис. 5.16. Эффективность применения п циклов помех в ответ на пуск с УП
ракеты противника
Более благоприятный ответ на пуск с УП противника — применение
нескольких циклов помех с последующим залповым пуском ki ракет.
Пусть опять А?2 = 1. Приемлемый для нашего истребителя исход обмена
ударами (5.12)
Отсюда следует, что с увеличением Рр применение только залпово-
го ответного пуска требует при Рр < 0,5 повышенного расхода ракет
с борта нашего истребителя, а при (Рр) >0,5 такой ответ вообще не-
приемлем.
Рис. 5.17. Эффективность применения залпа из ki ракет в ответ на пуск с УП
ракеты противника
Рис. 5.18. Минимально необходимое число ki ракет в ответ на пуск с УП к2 ракет
противника
Более благоприятный ответ на пуск с УП противника — применение
нескольких циклов помех с последующим залповым пуском ki ракет.
Пусть опять А?2 = 1. Приемлемый для нашего истребителя исход обмена
ударами (5.12)
F(P1,P2) = [1 - Рр(1 - Рсап)Г1]{2 - (1 - Рр)*1} -1 > 0, (5.13)
причем, минимально допустимое значение P(Pi,P2) = 0.
292
Ответ из двух циклов помех (п = 2) и fci = 1,2 ракет в залпе со сто-
роны нашего истребителя будет приемлемый (обеспечит это неравенство),
если
при fci = 1 Рсап >1------77==,
при к± — 2 РсАП _ 1 Р2—2Рр—1’
как это следует из (5.13). На рис. 5.19 в области, лежащей выше кри-
вых = l,A?i = 2, обеспечивается P(Pi,P2) > 0 для рассматриваемого
Рис. 5.19. Область эффективного ответа (fci,ri = 2) на пуск с УП одной ракеты
противника
случая (пуск противником одной ракеты с УП). Ответ из одного цикла
помех (п = 1) и fci = 1,2 ракет в залпе со стороны нашего истребителя
будет приемлемым, если
при = 1 Рсап >
ПрИ ki = 2 Р2АП > 1 р2_2рр — 1 ?
как это следует из (5.13). На рис. 5.20 в области, лежащей выше кривых
A?i = 1,А?2 = 2, обеспечивается P(Pi,P2) > 0, для рассматриваемого
случая.
Таким образом, применение в ответ на пуск с УП противника только
помех, или только ответного залпа не может обеспечить устойчивого пре-
имущества (P(Pi,P2) > 0) нашему истребителю. Только совместное
применение помех и ракет позволяет это обеспечить.
Проведем ранжировку по эффективности приемлемых ответов со сто-
роны нашего истребителя при пуске противником одной ракеты с УП. Из
293
анализа зависимости (5.12) (рис. 5.21) непосредственно следует, что при-
менение со стороны нашего истребителя большего числа ракет в залпе
и большего числа циклов помех приводит к увеличению эффективности
ответа. Этот вывод является основой для разработки конструктивного ал-
горитма выбора ответа на пуск с УП противника.
Рис. 5.20. Область эффективного ответа (fci,n = 1) на пуск с УП одной ракеты
противника
В процессе сближения с противником при пуске с УП одной ракеты
с его стороны в зависимости от дальности пуска возможным ответом на-
шего истребителя (с учетом ранжировки) будет ri циклов помех + пуск ki
ракет. Число возможных циклов п определяется дальностью пуска про-
тивника. Наиболее реальное максимальное количество циклов п = 2 — 3
(оценку количества циклов см. ниже).
Из числа выбранных выше для исследования ответов конкурирующим
ответом нашего истребителя по сравнению с рассмотренными будет зал-
повый пуск ракет с ОП. Выбирая наиболее реальное к± = 1,2, получим
в плоскости Рсап? Р границы предпочтительности:
— ответа «два цикла помех с последующим залповым пуском ракет
(A?i = 1;2)» перед ответом «пуск с ОП к\ ракет» (рис. 5.22а с границами
на залповый пуск одной ракеты к\ = 1 и двух ракет /с 2 = 2);
— ответа «один цикл помех с последующим залповым пуском к\
ракет» перед ответом «залповый пуск к\ ракет с ОП» (для* кг = 1, fci = 2
на рис. 5.226 показана область предпочтительности названных ответов).
Пуск ракет с ОП целесообразен, если он вообще возможен. Нужен
соответствующий бортовой алгоритм при низких эффективностях САП.
При эффективности САП выше Рсап > 0,3 для любых ракет предпо-
чтительным является ответ: «два цикла помех с последующим залповым
294
пуском ракет». При эффективности САП выше Рсап > 0,5 таким являет
ся ответ: «Один цикл САП с последующим залповым пуском ракет».
Рис. 5.21. Эффективность Р(Р1,Р2) ответов (fci,n) на пуск с УП одной ракеты
противника
Для каждого конкретного значения Рр,Рсап и возможного в сло-
жившихся условиях числа ri циклов помех оптимальным ответом
(Р(Р1, Р2) > 0) на пуск противника будет:
— при малых эффективностях Рсап одновременный пуск ki = 1 или
А?2 = 2 (что больше) ракет с ОП;
— при достаточно больших Рсап (при n = 1 Рсап > 0,5, при
г2 = 2 для Рсап > 0,3) максимальное число циклов помех с последующим
пуском ракет.
Последняя рекомендация должна быть принята с оговоркой: затяну-
тый ответный пуск может быть встречен противником циклом помех, по-
ставленных им после окончания наведения собственной ракеты. В этом
случае эффективность пущенных с обеих сторон ракет снижается, и на-
ступает при определенных Рсап, Рр(1 — Рсап) состояние, когда пред-
295
почтительным оказывается одновременный пуск. Качественно это можно
проследить по рис. 5.226.
Рис. 5.22. Области предпочтительности ответов «г циклов помех + залп с ЗП из
ki ракет», «пуск с ОП ki ракет» на пуск одной ракеты противника: а) г = 2,
б) г = 1
Таким образом, для выработки конкретного решения в момент фик-
сации пуска ракеты противником необходимо:
— оценить возможное число циклов помех при обеспечении от-
ветного пуска с минимально допустимой дальности (пуск на дальности,
обеспечивающей попадание ракеты в цель до достижения истребителем
дальности до цели, равной дальности отворота, осуществляемого в конце
атаки);
296
— оценить целесообразность затягивания пуска до дальностей, при
пуске с которых противник после окончания своего наведения может
ставить помехи.
Решение первого вопроса представлено на рис. 5.23 (в нижеприведен-
ных иллюстративных оценках использованы числовые параметры гипо-
тетической ракеты класса «воздух-воздух»). По оси абсцисс отложена
дальность пуска ракет средней дальности в диапазоне максимально воз-
можной дальности пуска (попадание ракеты в цель в момент совпадения
скорости истребителя Vu со скоростью цели К) и минимально допусти-
мой дальности, равной дальности отворота Z>0TB в конце атаки (опреде-
ляемой по формуле £>Отв = 0,9-1- 6(К + в километрах). На рисунке
эти дальности отмечены заштрихованными вертикальными прямыми. По
оси ординат откладываются дальность между истребителем и целью £>иц
в момент пуска (прямая, походящая через начало координат) и дальность
между истребителем и целью в момент попадания ракеты в цель (кривая
в нижней части рисунка).
Пунктирными линиями нанесены линии, соответствующие дальностям
между истребителем и целью через 10 с, 20 с и т.д. после пуска ракеты.
Расчеты выполнялись по зависимости
£>p(t) = 200 + V" t Гоэ • 15 + К • t + — [1 - е-аэ<‘-15)],
2 аэ
где V03 — скорость ракеты в конце активного участка ее полета, аэ —
коэффициент, учитывающий торможение ракеты на пассивном участке
ее полета; £тах = 15 + In для 15 < t < tmax, где размерность t —
в секундах, Dp — в метрах для следующих расчетных условий применения
(РУП) (табл. 5.3).
Таблица 5.3
РУП Ни = Ни, км Vh = Vu, м/с Уоэ, м/с ot3
РУП1 0 300 1040 0,056
РУП2 5 500 1228 0,040
РУПЗ 10 700 1367 0,022
В атаке на встречных курсах для обеспечения безопасности в конце
атаки истребитель осуществляет отворот.
Для рассматриваемых РУП имеем следующие допустимые минималь-
ные дальности пуска £>min при сближении на встречных курсах:
РУП1 Ь = —600 м/с; D0TB = 4,34 км; ^min = 14 км;
РУП2 ь = —1000 м/с; ^отв = 6,60 км; -^min = 25 км;
РУПЗ ь = -1400 м/с; ^отв = 8,90 км; ^min = 35 км.
297
Из анализа рис. 5.23 следует, что между пуском ракеты с £>ртах, ко-
торый мог бы осуществить противник, и ответным пуском ракеты с £>min
нашего истребителя с борта последнего может быть поставлено до двух
циклов помех.
Рис. 5.23. Оценка допустимого числа циклов помех
Приведенные рассуждения касались оптимального ответа на упрежда-
ющий пуск противником одной ракеты. При упреждающем залповом
пуске противника (/с2 = 2 или 4) приемлемый ответ для различных зна-
чений Рр и Рсап должен обеспечивать Р3ал(А?Р2) > 0, где зависимость
берется из (5.23):
, > In [2 - 1/[1 - Рр(1 - РсапГ1]*2]
298
На рис. 5.24, 5.25 при залповом пуске противника &2 = 7 ответ нашего
истребителя «залп из ki ракет + п циклов помех» будет приемлемым при
П = 1, начиная с Рсап > 0,7 и для ri = 2, начиная с Рсап >0,5 при
Рис. 5.24. Минимально необходимое число ki ракет в залпе с предварительным
применением одного цикла помех в ответ на залповый пуск с УП двух (/с 2 = 2)
ракет противника
Рис. 5.25. Минимально необходимое число ki ракет в залпе с предварительным
применением двух циклов помех в ответ на залповый пуск с УП двух (fe = 2)
ракет противника
различных эффективностях ракет Рр. Отметим, что для меньших Рсап
существуют такие Рр, что приемлемого ответа в рассматриваемом классе
ответов не существует.
299
На рис. 5.26, 5.27 представлена аналогичная картина для залпового
пуска противника при к = 4 с упреждающим попаданием. В этом случае
Рис. 5.26. Минимально необходимое число ракет в залпе с предварительным
применением одного цикла помех в ответ на залповый пуск с УП четырех (/с2 = 4)
ракет противника
Рис. 5.27. Минимально необходимое число ki ракет в залпе с предварительным
применением двух циклов помех в ответ на залповый пуск с УП четырех (fc2 = 4)
ракет противника
300
решение всегда существует для r± = 1 при Рсап > 0,9, для п = 2 при
Рсап > 0,7. На рис. 5.24-5.27 штриховкой показаны асимптотические
границы существования приемлемых решений.
5.4.2.2. Логическое моделирование динамики и формирование упра-
вления воздушным боем. К настоящему времени исследованы многие
аспекты динамики воздушного боя двух истребителей, вооруженных ра-
кетами. В частности, это привело к выделению в пространстве боя зон —
областей, определяемых теми или иными качественными характеристика-
ми. Их форма и величина зависят как от соотношения параметров полета
обоих самолетов, так и от их технических характеристик и характери-
стик их ракет. (Здесь будет предполагаться, что, как полет обоих само-
летов, так и их возможные маневры, происходят в некоторой плоскости).
Соответственно, реализованы штатные алгоритмы, определяющие с доста-
точной степенью вероятности нахождение самолетов в той или иной зоне.
Определим некоторые из зон, которые нам понадобятся в дальнейшем.
Пусть на рис. 5.28а А есть наш истребитель, и В есть либо истребитель
противника, либо пущенная им ракета. Начнем с зон, характеризующих
оборонительные возможности А. Пара (Л, В) (вместе с их динамиче-
скими характеристиками) определяет разбиение пространства вокруг А
на три вложенные друг в друга зоны: Zro С Zto С Zpto, где индексы
являются следующими аббревиатурами: ГО — гарантированный отворот,
ТО — тактический отворот, РТО — разрешение на тактический отворот.
Рис. 5.28. Зоны, характеризующие оборонительные а и поражающие б способнос-
ти истребителя А {В — самолет его противника). Обозначения раскрыты в тексте
Если объект В находится вне Zpto, то основной маневр боя — так-
тический отворот, лишен смысла. Если В находится в зоне Zpto\^to, то
эффективен тактический отворот, при котором срывается наведение ра-
кеты противника на А, и при этом информационный контакт с ракетой,
возможно пущенной с истребителя А, не теряется. Если В находится
в зоне Zro\^ro? тактический отворот уже невозможен, но возможен т.н.
гарантированный отворот, при котором теряется информационный кон-
такт с ракетой, пущенной истребителем А. И, наконец, если В находится
в зоне Zro, то эффективной может быть только лишь постановка помех.
Двойственными группе зон, характеризующих оборонительные воз-
можности А, являются зоны, характеризующие поражающие способности
301
А (в этом случае, истребителя или пущенной им ракеты) по отношению
к В (цели — самолету противника). Они концентрически располагаются
вокруг В : Zm С Иэп С Zpn, где индексами служат аббревиатуры: ГП —
гарантированное поражение, ЭП — эффективное поражение, РП — раз-
решение на пуск.
Если А расположен вне ZPn, пуск ракеты с целью поражения В не-
эффективен. Если A Е Zpn\Z^n, то пуск разрешен, но противник может
сорвать его тактическим отворотом. Если A е Z3n\^rn, то для защиты
В тактического отворота недостаточно, необходим гарантированный от-
ворот, при котором срывается наведение ракеты противника на наш ис-
требитель. И, наконец, если А находится в зоне Zm, то для В поражения
можно избежать только лишь постановкой помех.
В начальной стадии боя, когда противники идут на сближение, можно
говорить о прямолинейном бое (расположение самолетов, ракет и векто-
ров их скоростей приблизительно на одной прямой). Тогда вместо зон
можно говорить о предельных константах — расстояниях £>рто, ^то,
Dro и £>рп, Дэп, Ать Причем из предыдущего ясно, что £>то и Dpo
нашего истребителя являются £>эп и для истребителя противника и,
наоборот, £>эп и нашего истребителя являются константами £>То и
Dro Для истребителя противника. Поэтому, характер дуэли во многом за-
висит от соотношения пар констант £>рто и Ачъ-Ото и £>эп, Ао и Z>m,
особенно — второй пары.
Далее, с формальной точки зрения, бой есть игра, в которой против-
ники делают ходы, т.е. предпринимают маневры, действия, и, при про-
чих равных условиях, преимущество имеет тот игрок, который может
проанализировать течение «партии» качественнее, и, может быть, на ход
дальше противника. Чтобы это сделать, целесообразно обогатить средства
математического моделированию! логическим представлением возможных
вариантов развития событий, причем во времени. Но, поскольку нам не
известен удобный способ логического представления событий, развиваю-
щихся в непрерывном времени, необходимо договориться о его дискрети-
зации (в духе главы 3), т.е. по существу ввести некоторые контрольные
(характерные) моменты времени. Что считать первым моментом времени
to, не вызывает сомнения — это «настоящий момент времени». Момент
времени t± — «следующий момент времени» — определяется констан-
той ti — to, различной для разных фаз боя. Она соизмерима с временем
нахождения в соответствующей зоне. «Последующий момент времени»
определяется разностью t2 — зависящей от зоны, в которой ожидается
нахождение самолета в момент ti. Поскольку развитие событий много-
вариантно и нахождение в той или иной зоне через промежутки времени
можно планировать лишь с убывающей вероятностью, то рассмотрение
дальнейших моментов времени лишено смысла.
302
Предполагается, что движение каждого из самолетов в любой момент
есть один из маневров: движение по «кривой атаки», тактический отво-
рот (вправо или влево), гарантированный отворот, причем при отсутствии
управления, реализующего отвороты, на борту всегда реализуется «кри-
вая атаки», представленная бортовым алгоритмом. Тактический отворот
характеризуется углом <рто, выбираемым так, чтобы можно было продол-
жать наведение ракеты, срывая наведение ракеты противником. Поэтому
результаты маневра истребителя и соответствующего маневра цели и их
взаимное расположение в момент времени ti можно предсказать с опреде-
ленной степенью вероятности, имитируя их с опережением. Аналогично,
с момента ti возможен следующий (предполагаемый) маневр (который мо-
жет быть и продолжением предыдущего) до момента ^2, с последующим
определением взаимного расположения.
Основным предикатом, необходимым для планирования, является вы-
числяемый предикат %(£, М\ М*, Si, S2), который означает, что при вы-
полнении маневра Мг истребителем и маневра М* истребителем против-
ника от момента, предшествующего моменту t, до момента t истребитель
посетит последовательно зоны {zi, Z2,..., zni}, составляющие список Si,
и истребитель противника посетит последовательно зоны {z*,..., z*2}
списка S2. Причем, для упрощения моделирования, зоны оборонитель-
ных возможностей вычисляются относительно ближайшей опасности —
наведенной ракеты и, только если нет таковой, относительно истребителя
противника.
При выполнении тактического отворота с определенного времени, ко-
гда срывается наведение ракеты, зоны оборонительных возможностей пе-
ресчитываются по отношению к самому самолету.
При выполнении предполагаемого маневра возможна расчетная ситу-
ация поражения объекта (истребителя или цели) ракетой. Будем записы-
вать это как X(t*) G Si или Х(/*) е S2, причем в данном случае t* есть
точное расчетное время поражения.
Рассмотрим общий вид замкнутой формулы упреждающего планиро-
вания дальнего боя, не определяя весь алфавит используемого языка:
F = 3A(t0){Fi,F2,^},
где Fi = VT(t) 3T(t'), N(t, t'Y
а Ф — множество формул.
зоз
Конъюнкт A(to) есть вся существенная информация, известная в «на-
стоящий» момент, т.е. нахождение в тех или иных зонах, наличие тех
или иных ресурсов и т.п. Формулы Fi и F2 аналогичны соответствующим
в формуле планирования для лифта (3.1) и (3.2). Fi есть формула вре-
мени и приведена здесь для логической замкнутости изложения. Формула
Г2 моделирует построение альтернативных вариантов развития событий
для их последующей оценки. Здесь М1, Л/2,Л/3,Л/4 — соответственно
«кривая атаки», тактический отворот вправо и влево и гарантированный
отворот — есть маневры истребителя. М* — соответствующие маневры
противника. есть «рекомендация маневра Мг в момент времени
t»9 где t может либо принимать одно из двух значений: to — настоящий
момент, ti — «следующий момент», либо быть точным расчетным време-
нем. Заметим, что о соглашении, что понимать под «следующим моментом
времени» говорилось раньше. Учитывая вероятностный характер планиро-
вания, это — размытая переменная, и Р(ЛР,£1) означает рекомендацию
маневра Мг после реализации маневра, предпринимаемого в настоящий
момент. Предикаты ,t) необходимы для построения и оценки
всех вариантов реакции противника.
Основное знание заключено в группе формул Ф, включающей в себя
оценочное и эвристическое знание. Приведем лишь несколько формул,
раскрывающих некоторые принципиальные моменты при оценке
ситуаций.
Во-первых, большую подгруппу из Ф составляют запрещающие фор-
мулы, которые бракуют варианты нежелательных рекомендаций. Пример
запрещающей формулы
G = VA(t) <£ZTo,P(M4,t) ЗЛ,
т.е. если истребитель в момент t не находится в зоне Zto (это означа-
ет, например при прямолинейном бое, что расстояние от истребителя до
поражающего объекта больше 1?то), то рекомендация гарантированного
отворота бракуется. Также запрещающие формулы можно сразу «при-
креплять» к соответствующей ветви в Р2, чтобы избежать построения ва-
риантов, которые все равно будут забракованы. В случае формулы G это
будет означать ветвь VA(£)^Zto ЗЛ, присоединенную к узлу 3P(M4,t).
Аналогично, как пример, можно указать следующую запрещающую
формулу:
ад^Ж,*) зл,
т.е. бракуется вариант, рекомендующий маневр Мг, при котором суще-
ствует маневр противника М*, такой что истребитель поражается в неко-
торое расчетное время t\, тогда как цель остается непораженной. Данную
304
формулу уже нельзя «закрепить» за каким-либо узлом в 7*2, так как в ней
говорится о произвольном маневре.
С другой стороны, в Ф входит следующая формула:
^ + Д <tJ,P(M\f), ЭРПом(**),Эфф(М\^,а).
Это значит, что если как истребитель, так и цель поражаются в (расчет-
ные) моменты времени t*f причем истребитель поражается позже по край-
ней мере на промежуток времени — константу Д, необходимую для поста-
новки помех, то в этом случае дается рекомендация РПом^) к организа-
ции помех в момент и вычисляется некоторое значение а, — 1 < а < 1,
необходимое в дальнейшем при оценке варианта рекомендации маневра
Мг. Это выражает атом Эфф(Мг, а), означающий, что вычисляется
а = /(Мг^2,р), где р — все прочие параметры, необходимые для вы-
числения а. Конкретный алгоритм f вычисления а мы не даем, так как
он зависит от возможности и эффективности постановки помех того или
иного класса.
Далее, можно указать на формулы, «отслеживающие» момент эффек-
тивного пуска ракеты, дающие рекомендации такого пуска с вычислением
соответствующей меры эффективности а. Предполагается также, что про-
тивник всегда пускает ракету в благоприятный для него момент, если он
уже не пустил ракету и не наводит ее.
Ясно, что эти соображения, также как и остальные, можно перевести
в формулы.
В итоге получается некоторое поддерево дерева, порождаемого фор-
мулой 7*2 (совместно с 7*1 в 2 такта), которое имело бы 256 листьев, если
бы не сработала ни одна запрещающая формула:
ЭЛ(«о),Во< ЗРЛГ(*о)>-8* | ,to),Bik,
< ВЗ(М\М^1),В^,
где G 1,4, которая представляет все незабракованные варианты
развития событий вместе с некоторой информацией (В с индексами), по-
лученной в ходе вывода. Помимо рекомендаций тех или иных действий
(отличных от маневров: пуск ракеты, постановка помех, ...), в В содер-
жится также выведенная оценочная информация.
305
Если из ВЛ(^о), Bq исходит лишь одна ветвь, то имеется один вариант
предлагаемого маневра (вместе с рекомендуемыми действиями). Иначе, по
оценочной информации нам необходимо вычислить глобальную оценку
каждого из вариантов. Оценка а принимает значения от —1 до 1 в со-
ответствии со шкалой, в которой а = — 1 есть «очень плохо», а = 0 —
«непонятно», а = 1 — «очень хорошо».
В каждом узле может быть разнородная оценочная информация. По
ней формируется некоторая взвешенная оценка а соответствующего узла.
Далее, по наихудшей для нас (и наилучшей для противника) оценке манев-
ров М* в момент ti и оценке маневра вычисляется взвешенная
оценка маневров AP(ti). По наилучшей взвешенной оценке маневров
MJ и оценке , to)7Biki вычисляется взвешенная оценка ма-
невра противника М£. в момент Iq. И, наконец, по полученным оцен-
кам вычисляется взвешенная глобальная оценка каждого из допустимых
маневров Мг(£о)«
Если получается не менее двух вариантов действий с положитель-
ной оценкой, то предлагаются два наилучших, которые рекомендуются на
выбор с явным указанием предпочтения.
Если два наилучших варианта имеют все же отрицательные оценки, но
их разница несущественна, предлагаются оба варианта на выбор. В иных
случаях предлагается наилучший вариант.
Естественно, бортовая реализация логического вывода во многих
аспектах должна отличаться от его описания здесь. Например, формулы
времени и планирования боя, присутствующие в описании, на борту заме-
няют (максимум) три последовательно порождаемых «слоя» логических
данных: первый слой — логические данные, описывающие настоящий
момент, второй слой — логические данные, описывающие следующий
момент при условии выполнения соответствующей пары маневров обо-
ими участниками боя. Поэтому второй слой состоит максимум из 16
сегментов. Порождение 3-го слоя происходит в каждом из неотвергну-
тых сегментов 2-го слоя с описанием предположительного состояния в
последующий момент времени дня каждого из 16 сочетаний маневров.
Таким образом, формулы времени и планирования боя должны быть реа-
лизованы аппаратно и нужны лишь для описания логического прототипа
системы и, в частности, для логической замкнутости изложения. Анало-
гично, язык бортового представления логических данных во многом не
совпадает с описываемым здесь языком логического прототипа.
Предполагается, что система работает в непрерывном цикле, т.е. вы-
работанные за некоторое (меньше ti — to) время рекомендации отобра-
жаются на экране, в то время, как формируется A(t'o), т.е. новый первый
слой, и происходит следующий цикл порождения рекомендаций.
306
Таким образом, в заключение п. 5.4 отметим следующее.
1. Задачи СУУ не решаются в традиционных структурах и требуют
разработки нового типа бортовых алгоритмов — интеллектных систем,
использующих сочетание логических моделей и традиционных моделей
в форме уравнений динамики. В инженерную практику интеллектные си-
стемы внедряются, например, в форме БОСЭС — простейшего класса
интеллектных систем для решения задач СУУ.
2. Недостатком существующих БОСЭС является большое число ло-
гических и продукционных правил. Однако инженеры хорошо формали-
зуют предметную область (синтез управления в каждой «ячейке» предмет-
ной области по известным правилам-процедурам). Хотя «ячеек» много,
но в каждой из них — одна и та же процедура составления правил
для выработки управления. Представляется, что это составляет перспек-
тивное направление использования теории логического вывода (автома-
тического доказательства теорем): автоматизированное порождение базы
знаний. Здесь — «прорыв» теории на внедрение. Пока же реализация
интеллектного управления в сложных задачах СУУ требует всякий раз
достаточно больших усилий.
5.5. Некоторые задачи разработки бортовых алгоритмов
нижнего уровня управления
Алгоритмы решения задач НУУ не требуют непосредственного со-
гласования с активизированной концептуальной моделью поведения эки-
пажа. Они используют, по сравнению с алгоритмами СУУ, сравнительно
меньшие объемы знаний об окружающем «мире» и, чаще всего, могут
быть разработаны в традиционных структурах. Одно из направлений эво-
люционного развития этих структур — учет жестких (ограничения типа
неравенства) фазовых ограничений — мы демонстрируем на примерах за-
дачи «рулевого тракта» и задачи «приводов бортовых измерительных си-
стем». Это направление «интеллектуализации» алгоритмов решения задач
НУУ обеспечивает максимальное использование как имеющихся ресурсов
управления («жесткие» ограничения на управление), так и возможностей
самого объекта управления («жесткие» ограничения на фазовые коорди-
наты). Другим, более радикальным, направлением «интеллектуализации»
алгоритмов решения задач НУУ является использование в них процедур
логического вывода, позволяющих существенно упрощать механизмы по-
иска оптимального решения из класса допустимых или находить логико-
эвристически рациональные алгоритмы управления на основе подходящей
базы знаний.
307
Таким образом, интеллектуализация алгоритмов решения задач НУУ
включает в себя:
— учет «жестких» ограничений (ограничения типа неравенство) на
управление и на фазовые координаты,
— применение логического вывода,
— использование всей априорной информации об объекте управления
и среде его функционирования (в книге не рассматривается).
В этом случае практически полезные результаты удается получать на
пути постановки и решения задач оптимального управления с ограничени-
ями типа неравенства на управление и на фазовые координаты. Две такие
задачи на синтез оптимального по быстродействию управления объектом,
который описывается системой обыкновенных дифференциальных урав-
нений, рассмотрены ниже. Подробное изложение методики и результатов
исследования этих задач помогут нашим читателям решать свои конкрет-
ные технические проблемы, математическая формализация которых будет
близка к этим постановкам.
Логико-эвристическая интеллектуализация поиска рациональных ал-
горитмов управления рассматривается на примере задачи синтеза непре-
рывно-дискретной системы стабилизации углового движения космичес-
кого аппарата (КА). Описывается гибридная экспертная система гироста-
билизации КА.
5.5.1. Задача рулевого тракта
Для проектирования рулевых трактов систем управления летательных
аппаратов характерны задачи оптимального по быстродействию управле-
ния объектом, который описывается системой линейных дифференциаль-
ных уравнений четвертого порядка с постоянными коэффициентами. На
фазовые координаты объекта и управление наложены ограничения типа
неравенства.
5.5.1.1. Постановка задачи.1 Объект описывается обыкновенными
дифференциальными уравнениями с постоянными коэффициентами
d8/dt = и, dF/dt = a2F + аи 4- .ч
dti/dt = tfi, dtir/dt = Mi + b2F.
и ограничениями (на управление и на фазовые координаты):
U2 < и20, 62 < 5%, F2 < F2. (5.15)
1 Постановка задачи принадлежит Н.П. Дергунову.
308
Коэффициенты системы (5.14) связаны соотношениями
_ k/I\ _ kf _ 1
а~ Т2,а1~Т2,а2~ Т2 2~Т2’ 4~ Тг'
Величины uq, 50, Fo постоянны и положительны. Предполагается,
что а2 < О, Ь4 < 0, Ti > Т2 > 0, к0 > 0, kf > 0.
Нужно найти измеримую функцию u°(t) (оптимальное управление),
переводящую объект с максимальным быстродействием из начального со-
стояния 3 = F = '& = '&i=0b конечное состояние 6 = F = = 0, $ =
и обеспечивающую выполнение ограничений (5.15).
5.5.1.2. Условия оптимальности. Исследуем эту задачу, используя
результаты работы [19]. Пусть 6°(t\ F°(t), tf°(t), $°(£), u°(t) — опти-
мальное решение. Запишем принцип максимума
u°(t) = uosign (^i + а^2),
#1 d/ii йф2 i t k i 0770^2
— —7— = 01^2 - 25 ——, — —7— = а2гр2 4- Ь2гр4 — 2F
at at Cut Cut
= -^ = v>3 + Ь4^4, (5.16)
at at
~v.s°my-si]=o, ^>0,
СиЪ CLU
^[(F°(t))2-F2] = 0, ^>0.
СиЪ Qu
Выражение для функции V’i + а^2 получим из решения дифференци-
альных уравнений (5.16)
V>1(<) + atp2(t) = (V>1 + а^2)м + <?(*),
(V>i + afp2)ii = Are bit + A2e a2t + A3t + A4,
Q(t) = /[2<5°(t)^ + 2aF°(t)^]dt-
0
-(ai - aa2)fe-<^ j 2Р°(т)^еа^ drj,
0 0
(5-17)
_ (qi + afe4)b2
a2 — b4
a2 =
«2
Л, = -^С„
a4 = c4,
где Ci, C2, C3, C4 — произвольные постоянные.
309
Используя соотношения для коэффициентов системы дифференци-
альных уравнений (5.14), получим Ai = 0.
5.5.1,3. Структура оптимальных решений.
1°. Если оптимальное решение таково, что меры dpi/dt = 0 (г =
= 1,2), то оно будет совпадать с оптимальным по быстродействию ре-
шением соответствующей задачи без фазовых ограничений. Из (5.17) сле-
дует, что в этом случае оптимальное управление имеет два переключения
и представляет собой кусочно-постоянную функцию времени.
Фазовые траектории системы при и = ±uq на плоскости У1У2, где
<12 — ^1 .
У1 =-------6, y2 = F+—6
^2 а2
определяются выражением
aa2 + ar Г а% 1
У2±-----й—и0 = Сехр — ----------г—г/i . (5.18)
&2 [±(а2 ~ а 1)^0
Здесь С — произвольная постоянная. На рис. 5.29 пунктирные кри-
вые дают представление об обоих типах фазовых траекторий. Предель-
ные прямые П1 и П2 (рис. 5.29) определяются зависимостями (5.18) при
т/i —> ±оо для и = ±ио соответственно. Замкнутая кривая соответствует
типичной оптимальной траектории.
Рис. 5.29. Фазовые траектории и ограничения
2°. Пусть оптимальное решение таково, что хотя бы одна из мер
dpx/dt, dpz/dt не равна тождественно нулю. Изучим функцию (5.17).
По лемме из [20] функция (t/?i 4- имеет не более двух нулей, а ее
производная — не более одного нуля. На рис. 5.30 показан вид этой функ-
ции, функции Q(t) и ^(t) + Заметим, что на рис. 5.30 указан и
310
разбирается случай, когда при t = 0 функция ^i(t)+a^2(£) положительна.
Для другого случая рассуждения аналогичны.
Вернемся к рис.5.29. В координатах yi,y2 фазовые ограничения
F = ±F0 преобразуются в прямые ±F0, определяемые выражением
2/1 = (2/2 + Fq)-----
ai
а фазовые ограничения 6 = ±i0 — в соответствующие прямые ±6о-
Рис. 5.30. К характеристике элементов сопряженной задачи
На фазовые ограничения+7*о, -+<5о> (—Fo, —£0) (см. рис. 5.29, где фа-
зовые ограничения заштрихованы) система может выходить только с по-
ложительным (отрицательным) управлением. Так как а > 0 и ai+aa2 < 0,
то из выражения (5.17) видно, что в момент выхода на фазовое ограниче-
ние ни мера dpi/dt, ни мера dp^/dt скачков иметь не могут, т.е. в момент
выхода 2^1 W + = 0- Отметим также, что при нахождении на фазо-
вой границе = 0, а в момент схода с фазового ограничения
мера не может иметь скачков. Из всего этого следует (для одного случая
это показано на рис. 5.30), что сход с ограничений +7*о или +<5о может
быть осуществлен только в моменты, когда d(^i + a^^/dt < 0, ибо в
311
противном случае фазовое ограничение будет нарушено (сход с — Fo, —60,
когда d(^! + a^^/dt > 0).
Таким образом, в случае, когда в начальный момент t = 0 имеет место
> 0, оптимальная траектория может только один
раз выходить на фазовые ограничения +F0, +#о и только один раз — на
ограничения — Fo, — 6q.
Замечание 1. Каждое решение дифференциальных уравнений из
(5.14) удовлетворяет соотношению
+ tfi - kokfS) + (T21?1 +1?1 - kokf6) = 0.
Отсюда, учитывая, что в конечной точке 191 = F = 6 = 0, получим
(Т2 - = T2k0F - T^kfS. (5.19)
Замечание 2. Рассмотрим участки оптимальной траектории, лежащие
на фазовых ограничениях. При |F°(t)| = Fo, например при F°(t) = Fo
из (5.14) находим, что u°(t) — непрерывно дифференцируемая функция
u°(t) = +a2Foe_ai((_tl)a-^
а
где ti — момент выхода на фазовые ограничение. При этом координата
6°(t) равна
S°(t) = 6(M + -F0 е
L ai J
ai
(5.21)
и, монотонно возрастая, стремится к £(оо) = —a2F0/ai. Это следует из
щ/а > 0, (5.18) и ar6 + a2F = kf(T2 - T^T^l - e~s/T^] < 0. При
|i°(i)| = 60, например, 6° = -htfo, u°(t) = 0. Координата F°(t), мо-
нотонно убывая, стремится к F(oo) = —ai$oa2 1 > 0- Таким образом,
оптимальная траектория выходит на фазовые ограничения только в следу-
ющем порядке: +Fo, +<5о — Fo, — хотя при этом может и не выходить
на некоторые из них.
5.5.1.4. Синтез оптимального управления. При построении синтеза
управления ограничимся наиболее часто встречающимся на практике слу-
чаем, когда фазовая траектория с и = ±uq, проходящая через начало
координат, вначале выходит на фазовое ограничение F = ±F0. Другой
возможный случай, когда вначале осуществляется выход на ограничение
6 = рассматривается аналогично.
Исследуем оптимальное решение с управлением на начальном участке
u°(t) = ±izo- Из следующего далее приложения заключаем, что если на-
чальный участок оптимальной траектории заканчивается внутри фазовых
312
ограничений, то вся траектория лежит внутри фазовых ограничений. За-
дачей синтеза в этом случае является определение при помощи текущих
фазовых координат объекта двух моментов переключения. Рассмотрим
случай, когда начальный участок траектории заканчивается на фазовом
ограничении F = ±F0. Здесь задача синтеза состоит в определении мо-
мента времени t% схода с фазового ограничения (ограничения F = ±F0
или следующего за ним 6 = =Ыо) и различения после этого двух возмож-
ных концевых участков оптимальной траектории:
Рис. 5.31. К синтезу оптимального управления
1) концевой участок целиком находится внутри фазовых ограничений
(рис. 5.31, траектория, проходящая через точки 2, 1, 0) — тип 1);
2) концевой участок выходит на фазовое ограничение F°(t) = =р^о
(рис.5.31, траектория, проходящая через точки 3, 0) -0- тип 2).
В случае 1) синтез управления будет осуществлен, если момент t%
и момент -0- момент перехода на участок траектории с и = ±ио,
проходящей через начало координат (рис. 5.31) -0- будут выражены через
фазовые координаты системы. Изменение фазового состояния объекта на
концевом участке описывается при учете (5.19) следующими уравнениями:
$=«,
— =
dt 1,1
_ аг!?! + азб,
kok f
аз — Т2 '
(5.22)
Фазовые траектории этой системы при и = ио в координатах 6*, tfj,
где
-^5,
«2
о* =
а2
(5.23)
313
описываются уравнением
а3 „ —^6*
v-i-~uq = Се азио ,
о 9
(5-24)
где С — 0 параметр.
Выразим фазовые координаты системы в момент t5 (присвоим им ин-
декс (5)) через координаты в момент t3 (индекс (3)) перехода на концевой
участок оптимальной траектории. Используя уравнение (5.24), получим
2
^(5) = Т[Т^«о(<3) ± Ци0) exp(zF^M*(3>) + (^о)2]1/2, (5.25)
cl<2 a3ixo a2
2
J*(5) = in T_^2_^(5) + j
^2 a3^0
(5.26)
Здесь и ниже верхние знаки соответствуют траектории, начинаю-
щейся с и = 4-1X0, а нижние -0- траектории, начинающейся с и = — uq.
Проинтегрировав уравнения (5.22) от концевой точки 5 = F = ??1 = 0,
'О = &k в обратном порядке соответственно до точки t$ с и = ±оо, а от
точки t$ до t3 с и = 4=1х0, получим
,p-J
О>2 L a2 а2
[е-азт(3) _ 1] +
4^<з>ТВД10((^£_гк')1 +й(5>, (5.27)
02 \ 202 02 /
±1Хо ’ ’
q(5) ,«3^0 -а2т(5) , Гт(5) 1
i?i = ±—n-е а2Т ± a3iz0-----о ,
02 02 02 _
^(5) = [е_в2Т(»> _ ± a3UQ Гт<2. _ J_j т(5) +
02 [2а2 02
Подставляя (5.25), (5.26) и (5.23) в (5.27), получим
??3 = ^)(J(3)4(13)4fe).
Отсюда следует, что момент t3 определяется из условия равенства
нулю функции
Л(<541,<Мк) =0(t)-i43WMiW,M (5.28)
314
В случае 2), кроме моментов £з,£5, через текущие фазовые коор-
динаты нужно выразить еще один характерный момент времени -0-
момент выхода на фазовое ограничение F = =pFo- При движении по
этому ограничению семейство фазовых траекторий системы описывается
зависимостями:
в плоскости
$ = Ап
04
01 Т ^0
04
+ Т — + С,
\ О4 / 02
(5.29)
В ПЛОСКОСТИ 6$1 р
6 ± -Fo = —-.. . (5.30)
ai (62/64)^0
Двигаясь из конечной точки в точку t5, получим зависимости
$(5)(£(5))? т/5)(5(5)). Используя первую из них, при помощи (5.19) при
F — =pF0 определим 6^
^T2k0F - Ttkokfi^ - (Т2 - = 0.
Из (5.29), (5.30) находим,что в точке t4
1?(4) = In flW qz hF()
64 b4
+ (^Tb^Fo)L + c^,
04 02
(5.31)
± — Fo = + ^Fo), (5.32)
(21 1 и 4
где постоянные находятся из условия прохождения этих
фазовых траекторий через точку =pFo.
При движении в открытой области, когда и = const = =pizo, из си-
стемы (5.14) можно получить
d , q , q Ь2 - b2 . aib2
— (vi - 64V------F + a—о) =------0,
do a2 a2 a2UQ
что соответствует
С»> - s~. (5.33)
(21&2 а1 а1 2
Из условия прохождения фазовой траектории (5.33) через точку
$<4), $(4), находим
с(4) = .рОгио ^(4) _ М(4)) т uoFo т <^д(4) + №2? (5 34)
(2102 а1 (21 2
315
При помощи зависимости (5.18) получим уравнение, определяющее
8^ :
ТГО + т = С™ ехр(т^5<4)), (5.35)
02 ^2 ^0
С<3> = |г(3) + ^8™ т ехр(±—6™),
а2 ^2 J ио
T2koF^ - TrkokfS^ - (Т2 - Ti)^ = 0.
Таким образом, получаем из (5.35), (5.31), (5.32) и (5.34) соответ-
ственно
£(4) = j(4)(5<3) ^(4) =
i9<4) = С(4} = С(4}(6(3\^\дк).
Переход оптимальной фазовой траектории на концевой участок, т.е.
определение момента времени при синтезе оптимального управления,
происходит тогда, когда текущие фазовые координаты системы
удовлетворяют уравнению
/2(Mi,<W = - М)±
aiO2
± =F — 8 - + С = °> (5.36)
Q1 0>1 2
где С^4\...) определяется из (5.35), F — через 6 из (5.19).
Синтез управления строится следующим образом. В процессе движе-
ния объекта вычисляются определенные выше (см. (5.28), (5.36)) функции
текущих фазовых координат и требуемого конечного $k • /1(- • ЬЛС • •)
и проверяются условия F(f) = +F0(—Fo) и 6(t) = 4-i0(—<So)- Вна-
чале движение объекта происходит по начальной траектории (рис. 5.31)
с u°(t) = ±u0. Выбор того или другого начала определяется прави-
лом uQ(t) • dk > 0, которое обосновывается в приложении. В момент
F(t) = +Fo(—Fo) траектория выходит на фазовое ограничение по F и
движение продолжается с u°(t), определяемым в соответствии с форму-
лой (5.20). При этом координата |£(£)| монотонно возрастает. В момент
d(t) = +<5о(—<So) траектория выходит на фазовое ограничение по 6 и дви-
жение продолжается с и° (i) = 0. Траектория сразу же сходит с фазового
ограничения по F, так как координата |F| монотонно убывает.
Описанное движение осуществляется объектом полностью либо ча-
стично в зависимости от того, когда наступит момент t% схода с фазовых
316
ограничений. Этот момент совпадает с моментом выполнения одного из
равенств
MAU) = 0, = о.
В случае выполнения первого равенства оптимальная траектория име-
ет концевой участок типа 1). Движение объекта с момента происходит
с u°(t) = =pizo ДО момента и при этом = 0- Мо-
мент ts определяется как первый после момент, когда функция /1(. •.)
снова становится отличной от нуля. Начиная с t5, u°(t) = ±и0 и сохра-
няется таковым до конца процесса, определяемого равенством $(t) =
В случае выполнения второго равенства оптимальная траектория име-
ет концевой участок типа 2). Движение объекта с момента продолжа-
ется с u°(t) = =р^о ДО момента t4 и при этом А = 0.
Момент t4 определяется из условия F(t) = —F0(4-F0). Начиная с мо-
мента t4 и до момента t5, движение происходит с u°(t), определяемым
в соответствии с формулой (5.20). Момент t$ определяется условием
= 0. Затем, что до этого момента времени, начи-
ная с начала движения, эта функция знака не меняла. С момента t$ и до
конца процесса движение происходит с u°(t) = ±и0.
5.5.1.5. Приложение. Рассмотрим дифференциальное уравнение
^(01 - М) = b2F,
at
получаемое из (5.14). Функция
t
J(i) = i?1(t)-M(«) = j b2F(t)dt
О
имеет J(0) = 0, J(tk) = $k = ^k/Tr.
Определим знак этого функционала (t = tk) на оптимальных траек-
ториях, целиком лежащих внутри фазовых ограничений (рис. 5.31, траек-
тория 0,£+,£“,0). Пусть движение начинается с и = -Mio. Траектория,
проходящая через начало координат З/i = 2/2 = 0 (F = 0, 6 = 0),
в соответствии с (5.18) имеет вид
ai aa2+ai ааг + ах ,а2 ч х
F -I--S -I---5---и0 =--------и0 ехр(—£), (5.37)
а2 ^2 а2 ио
а через точку F = 0, 6 = 6* — вид
ai aa2+ai Га1с* aaz + ai 1 Г а2
F-----о-------~---Uq = —о-----------5-uQ exp-------(d — о ) .
а2 ^2 ^2 ^2
(5.38)
317
Подсчитаем J = + J(£+,£ ) + J(6 ,0), заменяя F(t) через
F(6) при помощи (5.37), (5.38)
А-.3 = -Ц-^[(*+)2-(<П2]}.
uq ( a2 )
Для оценки знака этой величины вычтем (5.38) из (5.37), чтобы полу-
чить <5+, 6~ — точки пересечения этих траекторий. После преобразования
получим
exp — 6± = 1 у/1 + 8(6*),
Uq
(5.39)
S(S-) =
_ j] ехр(^й-).
0,0,2 + Oj Uq J Ug
Отметим, что при 5* < 0 кривые не пересекаются и что <5+ > 0 и
6~ <0.
Для существования корней необходимо, чтобы 1 4- S(i*) < 1, —1 <
< S(£*) < 0. Изучим функцию £(£*). Производная dS/d6* этой функции
сохраняет знак на интервале 0 < £* < (аа2 + fli)^o(^i^2)-1 — cl2Uq Из
рис. 5.31 следует, что максимальное значение 6^ = (аа2 + а^ив^ая)"1 •
Отсюда, так как на 0 < <5* < 6^ функция 5(<5*) изменяется монотонно от
5(0) = —1 до 5(<5^) = (5.39) имеет действительные корни и
ё+ - |«Г| = 6+ - 6~ = — In [-S(<5*)] > 0.
й2
Таким образом, при u°(0) = +uq получаем, что объект с найденным выше
оптимальным управлением достигает конечной точки <&к > 0. Отсюда
в силу симметрии получим u°(0)$fc > 0.
Замечание 3. В рассматриваемом случае получаем |F(£+)| — |F(£“)| >
> 0. Это соответствует тому факту, что если первое переключение (£+)
было внутри фазовых ограничений, то внутри будет и второе переключе-
ние (£“).
Для доказательства указанного выше правила выбора начального упра-
вления в случае, когда оптимальная траектория выходит на фазовые огра-
ничения, можно провести аналогичные оценки интеграла либо удовлетво-
риться следующими рассуждениями.
Пусть движение начинается с u°(0) = +uq. При достижении фазового
ограничения F = 4-Fq система движется по этому ограничению с моно-
тонным вырастанием координаты 6(t) до <5(оо) = — a^Faa^1 (см. (5.21)).
Если —а^оа^1 < 6о, то траектория может находиться на фазовом огра-
ничении F = +Fq как угодно долго, увеличивая при этом значение
t
J b2F(t)dt.
о
318
%
—ГО
ai
После схода с этого ограничения и при движении на концевом участке
даже в случае выхода на фазовое ограничение F = — Fq в силу условий
l*rl<ltfl> 1<52+-^1>1<5Г-<52-|, ю<
находим, что с F(t) < 0 система находится ограниченное время.
Если же —а2^о^Г1 > <5о, то на фазовом ограничении F = +Fq си-
стема находится ограниченное время и затем переходит на ограничение
5(t) = io- При движении по нему координата F(t) монотонно убывает,
стремясь к значению F(oo) = —1 > 0- Таким образом, и в этом
случае система как угодно может выдерживать условие F(t) > 0.
Итак, среди фазовых траекторий, которые имеют установленную выше
структуру оптимальных траекторий, только траектории с |t=o> О
обеспечивают любое значение
tk
b2F(t)dt
о
требуемого знака.
Замечание 4. В предлагаемой работе не выписывается явная зави-
симость оптимального управления iz°(...) от текущих фазовых коорди-
нат объекта. Получение этой зависимости ввиду ее громоздкости вряд
ли целесообразно. Приведенные выражения для определения характер-
ных моментов времени (£3,^5 и т.д. ) через текущие фазовые координаты
и выражения для определения оптимального управления в промежуточные
моменты времени дают полную информацию для практической реализа-
ции искомого синтеза.
5.5.2. Задача приводов бортовых измерительных систем
5.5.2.1. Постановка задачи1. При конструировании приводов изме-
рительных систем возникает следующая задача. Измерительной системе,
предназначенной для слежения за внешним объектом, первоначально да-
ется угловое положение объекта. По полученному сигналу привод системы
разворачивает ее визирный луч по заданному направлению. Необходимо
обеспечить максимально быстрый разворот визирного луча с учетом огра-
ничения по скорости его движения и максимально допустимой потребля-
емой мощности.
1 Постановка задачи принадлежит В.Г. Разумову и В.В.Слатину.
319
Из этой постановки выделим задачу синтеза оптимального по быстро-
действию управления й°, переводящего систему
dy/dt = —(2£/Т)у - <р/Т2 4- й/Т\ d<p/dt = у.
Т > 0, 0 < £ < 1 (5,4°)
из произвольных допустимых точек ip, у в начало координат, при огра-
ничениях на управление й, на фазовые координаты
|й| < й0, \у\ < 2у0, \ydy/dt\ < 4Р0 (5.41)
(второе условие соответствует ограничению по скорости, третье — огра-
ничению по мощности).
Далее рассмотрим случай £ (0,519 4- л/2/2) (см. п. 5.5.2.5).
Известно [20], что вид искомых оптимальных траекторий при фазо-
вых ограничениях из (5.41) существенно зависит от вида корней характе-
ристического уравнения (5.40)
А1,2 = к ± fli, к = -£/Т < 0, д = (1 - е2)1/2/Т.
Преобразованием переменных
z
6
1/2 0
1/2кр~1 —А
У
\ 2д /
приведем систему уравнений (5.40) и ограничений (5.41) к виду, удобному
для исследования
dz/dt = kz + рб + рщ d8/dt = —/zz 4- kS 4- кщ (5.42)
|u| < u0, Uo = Лио, (5.43)
И < Уо, Уо = yo/2, (5.44)
z(kz + цб + ди) < Po, (5.45)
—Po < z(kz + д<5 + ди), Po = Po/l- (5.46)
Главным отличием сформулированной задачи (5.42)-(5.46) от задачи,
рассмотренной в [21], является наличие смешанных фазовых ограничений
(5.45), (5.46) и описание системы (5.41) колебательным звеном.
5.5.2.2. Условия оптимальности управления. Рассмотрим условия
оптимальности и° [19,20,22]. Существуют: постоянная aj > 0, функции
V’i > ^2, rft, dp± jdt, dp± Idt, удовлетворяющие условиям
^(±z-yo) = 0, <>0,
^-[±z(kz + (J.6 + ди) - Po] = 0, > 0
320
I (индекс плюс (минус) соответствует случаю z = уо (z = — уо) и равенству
(5.45), (5.46) и сопряженной системе дифференциальных уравнений (ti —
момент окончания управления)
=™=1*Ф1- Wfe - (±1)^ - + цб + ци) ± Kz],
= ДА + К^2 -
^г(*1) = -<*J,
Н = -01 + pS + ри) -F -02(—4- к<5 4- ки) 4-
- Уо) ~ ^-[±z(kz + fiS + ци) - Ро].
(5-47)
На оптимальной фазовой траектории z°(t),<5°(t) оптимальное упра-
вление и° (t) обеспечивает в каждый момент t
max [-01 (kz 4- /z<5 4- рй) 4- -02 (—4- к<5 4- ки)],
uev^,t (5.48)
= {u : + Mw)l - -Po < 0, |u| < u0}.
5.5.2.3. Управление системой внутри фазовых ограничений. Рассмот-
рим движение системы (5.42) на интервалах времени, где система не вы-
ходит на ограничения (5.44), (5.45). Тогда из п. 5.5.2.2 следует, что
dp±/dt = 0, dp±/dt = 0,
и приходим к задаче, рассмотренной в [20].
Из решения (5.47) имеем
-01 (t) = Ce~Kt sin (pt 4- a), i/>2(t) = Ce~Kt cos (pt 4- a)
(C, a — произвольные постоянные интегрирования).
Оптимальное управление
U° = Uq Sign (рфх 4- К-02)
сохраняет знак на максимальном временном интервале At = ir/p.
Отметим, что внутри фазовых ограничений имеем
d(pt[)i 4- к^г)/dt = -2к(рф1 4- к^г) + (м2 + ^2)^2-
Обозначим через е± = точки покоя системы (5.42) при
и = ±uq. Имеем
4- ра±^ 4- p(±uq) = 0, — ра±> 4- ка±) 4- k(±uq) = 0,
= 0, а±^ = -(±и0)
и относительно этих точек
dz/dt = &z-\- fi(S — а±^),
d(J — a±^)/dt = —fiz + к(6 —
или z = CeKt sin (fit-}- /3), 6 — = CeKt cos (fit -I- (3)
(C, /3 — произвольные постоянные интегрирования).
Участки фазовых траекторий системы (5.42) с ±uq, проходящие через
начало координат, составляют те концевые участки оптимальных фазовых
траекторий системы, по которым она непосредственно входит в начало ко-
ординат. На этих же участках происходит изменение знака оптимального
управления. Назовем их первыми участками линии переключения (ЛП).
Начало и конец первых участков ЛП находится на прямой z = 0.
Рис. 5.32. Управление системой внутри фазовый ограничений
Построение непосредственно примыкающих вторых и т.д. участков
ЛП производится по правилам из [20]. ЛП с первыми (1) и вторыми
(2) участками показана на рис. 5.32. В кружках на фигуре отмечены
значения оптимального управления в соответствующей области фазового
пространства (<5,z) — синтез оптимального управления внутри фазовых
ограничений.
Отметим, что экстремальные значения координаты z на ветвях опти-
мальных траекторий с и° = ±uq находятся на прямых
z = fi(6 — а±))/к (5.49)
(прямые на рис.5.32-5.37).
322
5.5,2.4. Управление системой на границе фазового ограничения по
скорости. При движении системы по границе ограничения (5.44) выход
на ограничения (5.45), (5.46) невозможен (так как dz/dt = 0). Тогда
dp±/dt = 0 и из (5.42)
и° = (к(±?/о) + м, <5)/м (5.50)
что влечет за собой выполнение в этих условиях (см. (5.48), (5.47)) следу-
ющих соотношений:
= 0, dfa/dt = 0,
dipi/dt е 0 = (к2 4- /х2)^2/д + (±l)rf/zf /dt.
Так как dp±/dt > 0, то при выходе на z = уо необходимо ^2 < 0, а
при выходе на z = — у о необходимо -02 > 0.
Рассмотрим выход на z = уо (z = — уо). Из (5.42) и (5.50) имеем
dS/dt = -(±?/о)(м2 + я2)/#-
При движении по границе координата <5 монотонно убывает (возра-
стает). Причем диапазон ее изменения определяется ограничениями на
управление
-и0 < [я(±г/о) + м<5]/м < ^о-
На рис. 5.33, 5.34 граничные точки допустимого диапазона движения
системы по фазовому ограничению z = ±?/о обозначены А^, В^. Эти
точки пересечения прямых (5.49) с прямыми z = ±?/о-
Рассмотрим выход на границу из области точек J, z, лежащих внутри
фазовых ограничений задачи (5.42)-(5.46).
Выход возможен на участках В+, В^ и В-, В^ для случая, когда
первый участок ЛП пересекает фазовое ограничение (рис. 5.33), и в точ-
ках В+, В“, когда не пересекает (рис. 5.34). Сход с фазового ограни-
чения в область точек <5, z, лежащих внутри фазовых ограничений задачи
(5.42)-(5.46), происходит из точки границы Af, Bf и В^, А^ для слу-
чая рис.5.33 и из точек границы А*", В+, А^, В” для случая рис. 5.34.
Область допустимых начальных условий системы, из которой ее без
нарушения условия (5.44) можно перевести в начало координат без учета
ограничений (5.45), (5.46), на рис. 5.33, 5.34 не заштрихована (остальные
обозначения, как на рис. 5.32). В общем случае на рис. 5.34 внутри этих
границ может быть еще несколько участков ЛП.
5.5.2.5. Управление системой на границе фазового ограничения по
мощности. Непосредственно видно, что одновременного движения по гра-
ницам (5.45), (5.46) и (5.44) быть не может, т.е. dp±/dt = 0.
ii*
323
Рис. 5.33. К управлению на границе фазового ограничения по скорости, когда
первый участок линии переключения пересекает фазовое ограничение
Рис. 5.34. К управлению на границе фазового ограничения по скорости, когда
первый участок линии переключения не пересекает фазовое ограничение
Для движения по границе (5.45), (5.46) необходимо
и° = ±Р$/pz — kz/р — 6 (5.51)
(знак плюс (минус) относится к движению по границе (5.45), (5.46)). При
этом фазовая траектория системы удовлетворяет уравнениям
dz/dt = ±Pq/z, d6/dt = ±kPq/pz — z(№ + p2)/p. (5.52)
324
Из (5.52) непосредственно получим (Сз — постоянная интегриро-
вания)
6(z) = K.z/p - (=Ll)z3(/z2 + K2)/(3/zPo) + Сз- (5.53)
При движении по (5.45) (см. (5.52)) в верхней (нижней) полуплоско-
сти z > 0 (z < 0) координата z (см. рис. 5.35) монотонно возрастает
(убывает), а координата <5 -0- монотонно убывает (возрастает). Из (5.51)
и (5.53) находим, что в верхней (нижней) полуплоскости
d?u°/dz2 > 0 (d2u°/dz2 < 0)
и в единственной точке стационарности (du°/dz = 0) функции u°(z)
ztin = ±[Ро(к 4- (2к2 + д2)1/2)/(д2 + к2)]1/2
max
(перед скобками «плюс» относится к верхней, а «минус» к нижней по-
луплоскости) управление достигает минимума (максимума). Это экстре-
мальное значение должно принадлежать [—uq, +uo], поэтому прямую z =
= zmin (z = zmax) фазовые траектории системы могут пересекать только
на отрезке
---Т------Zmin - Uo < о < -UQ + -----Т------•
MZmin М max P>Z min M max
Такие предельные траектории системы (5.52) нанесены на рис. 5.35.
Штрихами отмечена траектория (5.53), проходящая целиком, кроме одной
своей точки, внутри (5.45). Множество точек, удовлетворяющих условию
z(kz 4- р8 Ч- ри) = Ро, Ы <
(области А2,Вз на рис.5.35) является областью, где с помощью упра-
вления система может двигаться по границе (5.45). В области
(рис. 5.35) движение с выполнением условия (5.45) невозможно. Здесь
фазовое ограничение (5.45) будет нарушено. Причем область А^ опреде-
ляется ограничением на управление снизу, а область В 2 -0- сверху.
При движении (см. (5.52)) по (5.46) в верхней (нижней) полуплоско-
сти z > 0 (z < 0) координата z убывает (возрастает), а координата <5 на
прямых
Z3 = ±[-кР0/(д2 + Л2)]1/2
меняет знак скорости своего изменения (рис. 5.36).
В верхней (нижней) полуплоскости
d2u°/dz2 < 0 (d2u°/dz2 > 0)
325
z
Рис. 5.35. К управлению на границе фазового ограничения по мощности сверху
и в единственной точке стационарности (du°/dz = 0)
zmin = ±[-Ро(« - (2«2 + д2)1/2)/(д2 + «2)]1/2
max
(где перед скобками «плюс» относится к верхней, а «минус» к нижней
полуплоскости) управление и° достигает максимума (минимума). Полу-
чаем, что прямую z = z“ax (z = z”in) фазовые траектории системы могут
пересекать только на отрезке
Ро
M^min
К / г / Р0
-----Z .„in ~ Uq < d < Uq-----------—
Д max min
К
Z min •
f-L max
max
По аналогии с предыдущим на рис. 5.36 нанесены А2,В2 — области,
где с помощью управления (5.51) система может двигаться по границе
фазового ограничения (5.46). , Вз — области, где ограничение нару-
шается, причем Аз определяется ограничениями на управление сверху, а
Вз — снизу.
326
z
Рис. 5.36. К управлению на границе фазового ограничения по мощности снизу
В подобласти областей Аг и Вг (рис. 5.35, 5.36), покрытой косой
штриховкой, система после выхода на границу (5.46) при управлении
(5.51) движется по границе без ее нарушения и через некоторое время
покидает ограничение. При сделанных ограничениях на £ система не вы-
ходит за границы заштрихованной области.
Непосредственным сравнением d8/dz на траекториях, проходящих по
границам фазовых ограничений (5.45), (5.46), и на траекториях, выходя-
щих на границы из области внутри фазовых ограничений, показывается,
что в момент выхода и входа траектории касаются друг друга. При пере-
ходе траекторий из (5.45) на (5.46) наблюдается излом.
Отметим, что точки с d8/dz = 0 на оптимальных траекториях внутри
фазовых ограничений находятся на прямых
—iiz + к(<5 — uq) = 0, z > 0,
—[iz + + Uq) = 0, z < 0,
которые пересекают границу (5.46) в точках с координатой
zs = ±[-кР0/(«2 + М2)]1/2-
327
5.5.2.6. Синтез оптимального управления. Результаты изучения
свойств оптимального управления, полученные в пп. 5.5.2.3-5.5.2.5, по-
зволяют построить синтез оптимального управления — зависимости вели-
чины и° от текущих значений фазовых координат z, 6 системы. В самом
деле. Если в произвольный момент t фазовая точка находится внутри фа-
зового ограничения \z\ < уо и V*6t = {|u| < ио}, то величина и° = ±uq
и оптимальное движение для таких t подчиняется законам, установлен-
ным в п. 5.5.2.3. При выходе в некоторый момент времени t фазовой
точки на ограничение (5.44) или (5.45), (5.46) оптимальное движение си-
стемы должно подчиняться законам, установленным в п. 5.5.2.4 или 5.5.2.5
соответственно. Оптимальный момент схода фазовой точки с этих огра-
ничений (а одновременно на ограничениях (5.44) и (5.45), (5.46) фазовая
точка находиться не может) однозначно определяется тем фактом, что
после выхода системы из ограничений (5.44) и (5.45), (5.46) оптимальное
управление принимает только предельные значения ±ио и до достижения
начала координат знака не меняет.
Отметим, что существуют два качественно различных вида систем:
ЛП пересекает границу (5.46) (см. рис. 5.37), ЛП не пересекает границу
(5.46).
Произведем синтез управления для систем первого вида как наибо-
лее сложных, и пусть взаимное расположение ограничений таково, что
возможен выход на ограничение (5.44) и на ограничение (5.45), (5.46)
(см. рис. 5.37).
Пусть начальное положение фазовой точки находится строго внутри
ограничений, т.е. |z| < уо, V*6t = {|u| < ио} (из определенности на
оси 6 и внутри первого участка ЛП). Так как картина фазовой плоско-
сти и точки 1± — 4± симметричны относительно нуля, то на рис. 5.37
изображены траектории движения системы только для точек 1+ — 4+.
При движении системы из начальных точек типа 1± система не выхо-
дит на ограничения (5.44)-(5.46) (случай изучен в п. 3). Двигаясь с упра-
влением ±ио (принцип выбора знака ясен из рис. 5.37), она достигает ЛП,
по которой и приходит в начало координат.
При движении системы из точек типа 2± (случай изучен в пп.5.5.2.3,
5.5.2.5) система с управлением ±uq движется до границы (5.45). По ней
происходит движение системы с управлением (5.51) и Ро = ±Р0 до вы-
хода на ограничение (5.46). Выход происходит на линии Н±,Нз (огра-
ничения по скорости не достигаются), причем Н± — точка пересечения
границы (5.46) с конечным участком ЛП, а Н3 — точка пересечения гра-
ницы (5.44) с траекторией движения системы по границе (5.46), проходя-
щей через точку Н±. Двигаясь по Н± до точки Н± с управлением
(5.51) при Ро — -ft (управление достигает значения ±uq в точке Н±),
328
система в точке Н± выходит на концевой участок ЛП и далее по нему
попадает в начало координат.
Рис. 5.37. К синтезу оптимального управления
Оптимальное движение из начальных точек типа 3± отличается от
оптимального движения из точек типа 2± тем, что после выхода системы
на ограничение (5.45) и движения по нему в течение некоторого времени
(здесь синтез управления по правилу п. 5.5.2.5) система выходит на фазо-
вое ограничение (5.44) (синтез оптимального управления на нем произво-
дится по правилам п. 5.5.2.4). Причем выход на это ограничение не может
происходить вне отрезка А+В+(А”В“). Система движется по фазовому
ограничению к точке Н3. В момент достижения точки Н3 происхо-
дит переключение на управление, обеспечивающее движение системы по
траектории Н3 Н± (синтез оптимального управления осуществляется по
правилам п. 5.5.2.5). Дальнейшее движение системы совпадает с рассмо-
тренным выше.
Точка 4± является предельной точкой для множества точек типа 3±.
Движение из всех точек правее ее, для 6 > 0, и левее ее, для 6 < 0, при-
водит к нарушению ограничения по мощности (5.45). Движение из этой
точки осуществляется по законам, описанным для оптимальных движений
из начальных точек типа 3±.
329
5.53. Экспертная система для синтеза систем управления
ориентацией космических аппаратов
В ИДСТУ СО РАН разработана интеллектуализированная система
программного обеспечения (ИСПО) «DIALOG»1. Она является развитием
работ в области приложений методов логического вывода [23-29] к авто-
матизации решения задач моделирования, анализа и синтеза систем упра-
вления ориентацией (СУО) космических аппаратов (КА) [30-36]. ИСПО
предназначена для широкого круга конечных пользователей в областях,
требующих совмещения интеллектных (логических) и алгоритмических
подходов при поиске решения задач. В настоящее время создана пер-
вая версия ИСПО, которая включает оболочку, систему моделирования
и демонстрационную ЭС для проектирования цифровых систем силовой
гиростабилизации КА.
Оболочка ИСПО служит для создания гибридных ЭС. Ее основой
является блок логического вывода (БЛВ) системы «ЭВРОЛОГ» [23, 24,
26], а также реализованный в виде системы иерархических меню интер-
фейс с экспертом. Этот интерфейс позволяет создавать новые и моди-
фицировать имеющиеся БЗ, выполнять их отладку и тестирование. Работа
БЛВ «ЭВРОЛОГ» основана на исчислении предикатов, а именно на ис-
числении позитивно-образованных формул (по-формул).
Система моделирования предназначена для создания и модификации
моделей и расчетных процедур, используемых ЭС в процессе логического
вывода, и представляет собой соответствующую подсистему разработан-
ного в ИДСТУ СО РАН автоматизированного рабочего места (АРМ) «ДИ-
НАМИКА» [32-35]. Кроме функциональных средств (библиотеки рас-
четных процедур), она содержит также и инструментальные программные
средства (транслятор с проблемного языка MATFOR, базы данных и диа-
логовую оболочку).
ЭС включает: интерфейс с пользователем, БЛВ, подсистему объясне-
ний, а также подсистему модификации и отладки БЗ для эксперта.
Описание этого раздела следует работе [37].
5.53.1. Постановка задачи синтеза. Рассматривается задача проекти-
рования — обеспечения требуемых динамических свойств — замкнутой
одноканальной нелинейной непрерывно-дискретной системы стабилиза-
ции углового движения КА в орбитальной системе координат. Задача
состоит в параметрическом синтезе дискретного алгоритма управления
(ДАУ) и выборе параметров гироскопического исполнительного органа —
гиродина (ГД), исходя из требуемого качества и имеющихся ограниче-
1Под руководством Е.И. Сомова.
330
ний. Функциональная схема системы представлена на рис. 5.38, где Д —
датчик, АОИ — алгоритм обработки измерений; 0(f) — угол поворота
корпуса КА по каналу тангажа, ©р — его программное (командное) зна-
чение, = Qp — Q(t) — рассогласование ориентации по углу тангажа,
Ти, Tq — периоды дискретности управления и измерения, Mg(t) и Mz
= const — моменты управления и постоянного возмущения относительно
оси прецессии ГД и оси тангажа КА соответственно.
Рис. 5.38. Структура системы управления
Математическая модель непрерывного объекта управления (ОУ) в
виде твердого тела с установленными на нем ГД и упругими солнечными
батареями (СБ) представляется в виде векторно-матричного уравнения,
неразрешенного относительно старших производных
LJ
ё
Q
I 0 d
О J О
d 0 а
Mz + H$
Мд - Ъдр - Ни
—а((6/тг)Г1д -I- Q2g)
(5.54)
и скалярного кинематического уравнения
0 = U —
(5.55)
где Z, J — моменты инерции корпуса КА относительно оси тангажа и
ГД относительно оси его прецессии соответственно; a, d, <5, Q — параме-
тры упругой конструкции КА, а именно: приведенная масса, коэффици-
ент инерционного влияния, логарифмический декремент и парциальная
частота упругих колебаний панелей СБ; cu(t), cuq — абсолютная угловая
скорость корпуса КА относительно оси тангажа и орбитальная угловая
скорость движения его центра масс; Н — кинетический момент ротора
ГД; — угол прецессии ГД; q(f) — координата упругих колебаний
панелей СБ.
Далее используются обозначения
Xk = Xs = x(ts)] tk = кТи\ ts = sTq, к, s e N = {0,1,2,..}.
331
Блок-схема датчика рассогласования е по углу тангажа представлена
на рис. 5.39, а его математическая модель дается соотношениями
е = 0 - ©р; eds = SAT[QNTR(es, h£),e*], (5.56)
где
QNTR(:r, а) = а • Е[ж + 0.5а • sign(rc)];
SAT(i,a) = { Х .
v [ а • sign(rr)
|ж| < а
|ж| > а ’
Е[ • ] — символ целой части; — известные константы, являющиеся
параметрами дискретизации по уровню и ограничения выходного сигнала
датчика.
QNTR
SAT
Рис. 5.39. Блок-схема датчика ошибки
АОИ описывает процесс простого осреднения измерений с периодом
Tq на периоде управления Ти:
пи
I — Пи(к ~ 1); &к = £/+гj = Tu/Tq\ к > 1, (5.57)
Пи г=1
причем относительно периодов дискретности Ти и Tq должно быть вы-
полнено условие кратности: целое число пи > 1.
QNTR SAT ZH
Мсд
Рис. 5.40. Формирование управляющего момента
Блок-схема формирования кусочно-постоянного управляющего мо-
мента Mg(f) по дискретному входному сигналу ДАУ ek представлена на
рис. 5.40, где дополнительно обозначено: Ф — фиксатор (экстраполятор
нулевого порядка) на периоде управления Ти; Мд = — постоянный
332
момент компенсации; величины hu и М* аналогичны h£ ие*. Математи-
ческая модель ДАУ и формирования управляющего момента Mg(t) имеет
вид
Ufc = Uk— 1 Ч" кд(ёк 4“ 0>д£к— 1)?
Mg(f) = ZH[SAT(QNTR(ufc + Mcg,hu\M^,Tu], (5.58)
где модель фиксатора с периодом Ти такова:
2/W = ZH(xk,Tu) =Xk Vi € [tk,tk+1).
Параметрами, выбираемыми в процессе проектирования системы гироста-
билизации являются:
' Ти — период дискретности управления;
< кд, ад —коэффициенты ДАУ; (5.59)
Ьд — коэффициент демпфера ГД.
Требования к качеству управления и ограничения:
1°) Система (5.54)-(5.58) должна быть диссипативна относительно
требуемого состояния 0 = 0; tv = cuq; Q = 0; q = 0 по всем координатам,
кроме критической — угла прецессии ГД /3.
2°) Для угла тангажа ©(£) должны быть выполнены следующие тре-
бования:
— время переходного процесса Тг по углу ©(£) в заданную трубку
точности h& не больше заданного: Tr < Т*;
— перерегулирование Рг не больше заданного: Pr < Р*, где Рг —
= |min{©(t), t е [0, Тф] }|/0(О);
— модуль установившейся ошибки ег не больше заданного: £г < £*,
где ег = шах{|б(£)|,£ е [ЗД,4Д]};
— модуль максимальной скорости рассогласования в установившемся
режиме не больше заданного: Vr < К, где Vr = шах{|б(£)|,£ е [ЗД, 4Т*]}.
3°) При условиях /3(0) = /3(0) = 0 должны выполняться ограничения:
|/3(Z)|</3*; |/3(t)| </3*, Ме[0,4Д],
где /3* и /3* — заданные константы.
Характеристики качества 2° должны быть выполнены для заданных
начального значения по углу тангажа 0(0) > 0 и постоянного возмущаю-
щего момента Mz > 0.
Задача проектирования состоит в выборе параметров (5.59), при ко-
торых переходные процессы в системе (5.54)-(5.58) удовлетворяют харак-
теристикам качества и ограничениям 1°-3°.
333
5.5.3.2. Синтез алгоритма управления. Традиционная методика син-
теза систем управления непрерывно-дискретной системы включает: лине-
аризацию и упрощение исходных нелинейных дифференциальных урав-
нений движения ОУ; дискретизацию упрощенной линейной модели ОУ
с приведением к наибольшему периоду квантования, анализ ее динамиче-
ских свойств и синтез структуры ДАУ методами линейной теории дискрет-
ных систем; анализ динамических свойств полной нелинейной модели за-
мкнутой непрерывно-дискретной системы и параметрический синтез ДАУ
с использованием различных аналитических и численных методов.
На этапе синтеза структуры алгоритма управления ГД будем считать,
что ограничения на управляющий момент Мд, угол (3 и скорость прецес-
сии 3 ГД отсутствуют, измерение рассогласования е является идеальным
и не требует использования АОИ.
Рассмотрим сначала непрерывный ПИ закон управления
t t
Mg(t) = Мсд + fcie(t) + fc2 Уe(t)dt = Mcg + + Уe(t)dt), (5.60)
О о
где коэффициент усиления kj и постоянная времени изодрома Т[ опре-
деляются соотношениями kj = Т/ = fci/fo- Для исключения инте-
грала в законе управления (5.60) пространство состояний системы (5.54)-
(5.55) расширяется введением дополнительно координаты г(£), удовле-
творяющей дифференциальному уравнению г = е с начальным условием
г(0) = 0. С учетом того, что 0Р = 0, и следовательно, s(Z) = — 0(t),
закон управления (5.60) принимает вид Мд = Мд — k]Q — к2г; г = 0.
Нетрудно убедиться, что при Mz = 0 и ПИ-регуляторе (5.60) модель
непрерывной замкнутой системы для ОУ (5.54)-(5.55) для вектора со-
стояния z = со1{0,0, /3, (3, q,q, г} описывается векторным соотношением
z = Az, если же дополнительно считать ОУ абсолютно твердым телом, то
вместо (5.54) получим модель
I 0 1 [ © 1 = Г +
0 J Г L £ J I мд-ьдр-н(ё + и0)
(5.61)
и при Mz = 0 соответствующая замкнутая система будет иметь вид
zi = A-lZi, с вектором состояния zi = col{0,0, /3, (3, г} , где постоян-
ные матрицы А и Ai формируются с использованием параметров ОУ и
ПИ-регулятора.
Выбором коэффициента демпфера гиродина Ьд можно обеспечить
[31] эффективное гашение упругих колебаний панелей СБ, даже при от-
сутствии конструкционного демпфирования, т. е. при <5 = 0. Предпо-
лагая такое обеспечение демпфирования упругих колебаний конструкции
334
КА, для синтеза параметров ДАУ используем модель (5.61) и получим
передаточную функцию (ПФ) ОУ по углу О относительно управляющего
момента Мд ГД :
1 Q2 1 Q2
= ' s(s + bg/J) + П2 = Hs ’ s2 + 2£ffn9s + Q2’ (5’62^
где flg = Н/\/1 • J — собственная частота нутации, £д = Ьд у/l/ J/ (27/)
— нормированный коэффициент демпфирования нутационных колебаний.
Для закона управления (5.60) при условии > 1 в (5.62) ПФ ра-
зомкнутой непрерывной системы представляется в стандартном нормиро-
ванном виде простейшей системы с астатизмом второго порядка. Зада-
ваясь требуемым показателем колебательности т и нормированной ча-
стотой Qq = 3/Т*, определяющей длительность переходного процесса
Г*, находим аналитические выражения для расчета коэффициентов ki,
къ в непрерывном законе управления (5.60) и значение коэффициента
демпфирования ГД Ьд
к2 = к; = кг = к2Т; = Ьд = (5.63)
Mo 1 / J
Проводя дискретизацию непрерывной модели ОУ (5.61) с периодом
Ти, приходим к скалярной дискретной ПФ W(z), z = exp(sTiz), из кото-
рой с помощью подстановки z = (1 + j'ATu/2)/((l — jXTu/2} получается
дискретная частотная характеристика (ДЧХ) W(JX) в функции абсолют-
ной псевдочастоты А = 2tg(cuT’u/2)/Tu (а; — круговая частота)
iWo-n - 1 + 2<эТэСМ) + 1 , _ , . , }
H(jX) ’ T32(JA)2 + 2£X(jA) + 1 ‘(1 (jA)Tu/
где
—,2__ 1 + <72 + 2dnc
3 1 + (P — 2dK,c
(Tu/2)2;
r2 = T2
'э Э
£gTgTU(l — <Z2 -|- 2&d/ts)
1 + d2 - 2d«c ’
«c = cos (p), ks = sin (p),
1- = 1 - d2
2^1-£2’ Э л/(1 + ^2)2 + 4^2’
d — exp( ^gTu/Tg)\ Сэ-(6^э £дТд)/т3.
335
Так как тэ < Т3 при любом 0 < £э < 1, то в низкочастотной обла-
сти изменения абсолютной псевдочастоты (Л < 2/Ти) имеем зависимость
W(jX) = (Я(17Л)-[^э20^)2 + 2^эТ’э(7А) + 1])“1, совпадающую по структуре
с частотной характеристикой которая получается из ПФ (5.62).
Для достижения второго порядка астатизма в замкнутой одноканаль-
ной непрерывно-дискретной системе гиростабилизации КА по каналу тан-
гажа используем ДАУ в виде дискретного аналога изодромного звена.
С этой целью найдем дискретную ПФ, соответствующую такому звену —
закону управления (5.60), представив ее в виде W/(z) = kg(l-bagz~1)/(l —
z-1), с коэффициентами усиления ад = (Tu/Tj) — 1, кд = к/Т/ и по-
стоянной времени изодрома Tj, Этой дискретной ПФ соответствует ДЧХ
W}(jA) = kj • (т^С/А) +1]/(JA), где тд = Tj — Tuj2. Следовательно, в низ-
кочастотной области изменения абсолютной псевдочастоты (А < 2/Ти)
ДЧХ разомкнутой одноканальной системы представляется в виде
Wp(jA) = W^X) W(jA) = (JA)2 . + 1] ’
где коэффициент усиления разомкнутой дискретной системы кр — kj/H
представляет ее добротность по ускорению и определяет точность си-
ловой гиростабилизации КА в установившемся режиме. Коэффициент
кр и постоянная времени тд должны выбираться из условий устойчиво-
сти и требуемого качества переходных процессов в замкнутой однока-
нальной дискретной системе. В частотной области эти требования со-
ответствуют условию обеспечения достаточного запаса устойчивости по
фазе на псевдочастоте среза Хд логарифмической амплитудной характе-
ристики (JIAX). Положение и форма низкочастотной части этой Л АХ
полностью определяется заданием всего двух параметров — псевдоча-
стоты среза Хд и постоянной времени изодрома Tj. Увеличение псевдоча-
стоты среза приводит к более быстрому протеканию переходных процес-
сов в замкнутой дискретной системе, изменение же Tj влияет на колеба-
тельность этих процессов. Коэффициент усиления разомкнутой системы
кр = kj/H определяется по выбранной псевдочастоте среза Хд по фор-
муле кр = Хд/тд = Xg/(Ti — Ти/2\ что дает возможность определить
коэффициенты ДАУ (5.58) по явным соотношениям
кд — kjTj — — у /2 ’ — Г/ 1 (5.64)
Параметры Хд и Tj выражаются через значения показателя колебательно-
сти переходного процесса тп и нормированной абсолютной псевдочастоты
Ао следующим образом:
Хд = Аог/т/(т-1); Т, = (5,65)
336
Учитывая, что нормированный коэффициент демпфирования нутацион-
ных колебаний полностью определяет коэффициент демпфирования
ГД Ьд согласно (5.63), удобно использовать его наряду с нормированными
параметрами Ао и т, в качестве «внутренних» переменных в процессе
параметрического синтеза нелинейной непрерывно дискретной системы.
Рекомендуемые начальные (стартовые) значения нормированных па-
раметров Ао, т и £д равны
Ао = 3/Т*; т=1.2; ^ = 1.4,
где Г* — заданное время переходного процесса.
5.5.3.3. Знания о проектируемой системе. Проведенный синтез струк-
туры ДАУ и качественный анализ влияния параметров, представленный
выше только для линейной модели системы с одним периодом дискрети-
зации, позволил сформулировать основные знания о свойствах проекти-
руемой системы силовой гиростабилизации КА, которые можно разбить
на 3 группы: знания об исходных данных; основные знания, требуемые
для получения проектного решения; знания об используемых расчетных
процедурах.
Первая группа знаний из 19 правил используется для проверки кор-
ректности исходных данных, например соблюдения очевидных условий
I > О, J > 0, Ти > 0, la — d2 > 0,... и здесь не приводится.
Знания об используемых расчетных процедурах включают сведения о
назначении процедуры, ее входных и выходных параметрах. Описываемая
гибридная ЭС в процессе логического вывода использует три исполняемых
программных модуля:
SPEC — модуль вычисления спектра и запасов устойчивости линей-
ных непрерывных полной и упрощенной моделей замкнутой системы при
значениях коэффициентов ki,k2,bg, рассчитываемых по нормированным
параметрам т, Ао,^ по формулам (5.63) при По = Ао;
SINT — модуль вычисления параметров кд,ад и bg по m, А0,£р на
основе формул (5.64), (5.65) и (5.63);
MKTD — модуль численного интегрирования нелинейной непрерыв-
но-дискретной системы (5.54)-(5.58).
Для создания перечисленных модулей использована подсистема моде-
лирования ИСПО в виде АРМ «ДИНАМИКА» [32-35], реализованного
на ПЭВМ.
Вербальное описание основной группы знаний, сформулированных
в виде набора правил, представлено в п. 5.5.3.5.
Общее число правил в ЭС, сформированной с помощью оболочки
ИСПО, равно 53. Не приведенные в п. 5.5.3.5 правила касаются условий
применения расчетных процедур, обеспечивают логические связки между
337
правилами через промежуточные предикаты и определяют условия выхода
из ЭС при констатации ситуации о невозможности получения решения.
Формализация знаний заключается в определении списка предикатов,
термов и записи правил в виде по-формул. Приведем пример записи для
завершающего правила (см. п. 5.5.3.5):
[За : Трр(а) & Eps(a) & Espeed(a) & Epreg(a)]
[3Z0, ks, m, b : Act(a, ZO, ks, m, 6)]
[ЗД£е£г, eps, mgz^ vbm, bm, tu : Cact(b, hteti, eps, mgz, vbm, bm, tu)]
[Write ’’Проектирование завершено на шаге : ”, а,
” Коэффициенты:
” \nZ0 = ”, Z0, ” \nksig = ”,ks,” \nm = ”, m, ” \nhteti = ”, hteti,
” \neps = ”, eps, ” \nmgz = ”, mgz, ” \nvbm = ”, vbm,
” \nbm = ”, bm, ” \ntu = ”, tu)].
Смысл данного правила состоит в следующем: если существует та-
кая итерация а, для которой установлена истинность предикатов Трр(а),
Ергер(а), Eps(a), Espeed(a) и существуют 2 набора параметров, для
которых истинны предикаты Act(a,...) и Cact(a,...) соответственно, то
выполнить печать значений параметров, полученных в результате проекти-
рования. Истинность предикатов Грр(а), Epreg(a), Eps^a), Espeed(a)
соответствует, в порядке перечисления, выполнению требований Тг <
T*,Pr < P*,er < e*,Vr < К. После выполнения завершающей формулы
логический вывод и работа ЭС заканчивается.
5.5.3.4. Пример решения задачи синтеза. Пример приводится в виде
протокола диалога «Пользователь-ЭС» с пояснениями действий ЭС.
В процессе такого диалога при каждом изменении проектных параме-
тров на экран дисплея выводятся графики переходных процессов ©(£),
w(t), /?(t), Mg(t) для t G [0,4т*] в замкнутой нелинейной непрерывно-
дискретной системе (5.54)-(5.58), а на диск пользователя — таблица зна-
чений показателей качества 2°), значение проектных параметров (5.59)
и суммы отрезков времени Tb,rv и тт, соответственно для (3{t)^(t) и
Mg(t), в течение которых эти переменные находятся на ограничении.
Протокол содержит: номер итерации; пояснения; результат, содержа-
щий текущие значения показателей качества; запрос ЭС и ответ пользо-
вателя.
Каждое применение любого из правил (1-12) Приложения приво-
дит к появлению текста в специальном окне на экране дисплея. Текст
содержит объяснение текущей ситуации и рекомендацию пользователю
по изменению одного из нормированных проектных параметров Л, т,
в определенную сторону (уменьшения или увеличения, с указанием границ
изменения). Одновременно появляется поле для ввода параметра. Поль-
зователь вправе воспользоваться рекомендацией или отказаться от нее.
338
Если пользователь выполнил ввод, т. е. внес изменение по любому норми-
рованному проектному параметру, то счетчик итераций увеличивается на
единицу и автоматически выполняется запуск описанных выше численных
процедур SPEC, SINT, MKTD с новым набором проектных параметров.
При этом происходит вычисление степеней устойчивости полной и упро-
щенной линейных непрерывных систем, рассчитываются коэффициенты
а9’ Ъд и выполняется моделирование переходных процессов в полной
нелинейной непрерывно-дискретной системе (5.54)-(5.58), по которым
вычисляются характеристики качества. На экран дисплея выводятся гра-
фики переходных процессов, после чего открывается окно с результатами
автоматически проведенного анализа переходных процессов, на основе
которых пользователем принимается решение об очередном изменении
нормированных параметров Ло, £д, тп либо завершении проектирования
(логического вывода). В случае отказа пользователя от ввода используется
правило, имеющее такую же посылку, как и правило, для которого имел
место отказ. Если таких правил несколько, то используется ближайшее в
порядке их следования в базе знаний.
В представленном в п. 5.5.3.5 протоколе диалога текст <3апрос: «...»>
следует понимать как рекомендацию, выдаваемую ЭС пользователю по
изменению соответствующего параметра; текст <Ответ: «...»> — как
содержание ответа пользователя, а текст <Результат: > — некоторые
результаты анализа переходных процессов в системе (5.54)-(5.58) и объ-
яснение ситуации экспертной системой. Тексты <выполнено> или <не
выполнено означают выполнение или невыполнение соответствующего
требования.
Параметры модели и требуемые характеристики качества для рас-
сматриваемой демонстрационной задачи проектирования приведены
в Табл. 5.4 и Табл. 5.5. Начальные условия по углу и угловой скорости
КА составляют
0(0) = 1° = 1,74533-10-2 рад; w(0)= 9,97•10-4 с-1,
все остальные координаты системы в начальный момент времени равны
нулю.
В результате работы ЭС с указанными исходными данными на диск
пользователя записываются выбранные в процессе проектирования пара-
метры гиросиловой СУО: Ти = 1 — период управления ; Ьд = 1.635 —
коэффициент демпфера гиродина; кд = 35.17, ад = —0.9921 — коэффи-
циенты ДАУ, а также достигнутые характеристики качества.
Переходные процессы по углу тангажа ©(£), скорости прецессии /3(t)
и управляющему моменту Mg(t) ГД для t G [0,200]с приведены для на-
чальной и конечной итераций на рис. 5.41а и рис. 5.416 соответственно.
339
Таблица 5.4. Параметры
Параметры, размерность Обозна- чение Значение
1 Период измерения, с rq 0.25
2 Период управления, с Ти 4
3 Кинетический момент ГД, Н-м-с н 250
4 Коэффициент влияния d 151.3
5 Приведенная масса а 1
6 Логарифмический декремент упругих колебаний пане- лей СБ б 0.03
7 Парциальная частота упругих колебаний панелей СБ, с-1 Q 0.314
8 Орбитапьная угловая скорость, с-1 9.97 • 10-4
9 Момент инерции КА, кг-м2 I 44.5-103
10 Момент инерции ГД, кг-м2 J 0.36
11 Квант по уровню в управлении, Н-м hu 8-10~4
12 Возмущающий момент, Н-м Mz 0.1
13 Ограничение управляющего момента ГД, Н-м м-д 0.65
14 Ограничение скорости прецессии ГД, с"1 0* 0.5
15 Ограничение угла прецессии ГД, рад 0* 1
16 Квант по уровню при измерении б, рад he 10“4
17 Ограничение при измерении рассогласования б, рад е* 0.034
18 Полуширина трубки, определяюще время переходного процесса, рад 0.0006
Таблица 5.5. Требуемые характеристики качества
Параметры, размерность Обозна- чение Значение
1 Время переходного процесса, с Т* 125
2 Установившаяся точность, угл. мин. б* 0.5
3 Максимальная скорость в установившемся режиме, угл.мин/с V* 0.05
4 Перерегулирование, % Р* 10
Таким образом, первая версия ИСПО и демонстрационная ЭС по-
казали свою работоспособность при решении конкретной практически
важной задачи проектирования гиросиловой СУО КА. Дальнейшее раз-
витие ИСПО «DIALOG» связано с применением логических исчислений
в смешанной (дескриптивно-конструктивной) семантике [25, 26], логиче-
ских синтезаторов условий разрешимости задач [38-41], расширением за-
дач проектирования СУО при пространственных угловых движениях КА
для различных структур гиросиловых исполнительных органов и струк-
тур ДАУ, а также гиросиловых с расширением возможностей алгоритмов
управления за счет включения в их состав интеллектных компонент, ра-
ботающих в реальном времени [42—46]. Применение таких компонент
340
наиболее актуально при оценке непосредственно на борту реализуемости
планируемого пространственного поворотного маневра КА, управляемого
избыточной системой безупорных гиродинов, в которой возможны син-
гулярные (особые) состояния [47-49] при формировании управляющего
момента.
Рис. 5.41. Вид переходного процесса
5.5.3.5. Приложение. Основная группа знаний.
Правило 1: если соотношения
Ло < 2/• Ти)] Ti > кт - Ти,
(5.66)
где кх = 60; кт = 12.5, выполнены, то факт Lit имеется, иначе имеет
место факт Lif.
Объяснение: правило 1 определяет степень влияния дискретности
в системе и означает, что при нарушении неравенств (5.66) существенно
сказывается дискретность управления и знания, полученные на основе ана-
лиза непрерывного аналога рассматриваемой замкнутой системы гироста-
билизации, могут быть не справедливы. Коэффициенты кх, кт подобраны
экспериментально.
341
Правило 2: если имеется факт Lif, то рекомендуется уменьшить
период дискретности управления Ти. Объяснение: см. правило 1.
Правило 3: если Тг > Г*, то рекомендуется увеличить нормиро-
ванную частоту Aq.
Объяснение: правило 3 непосредственно вытекает из известного тео-
ретического результата — увеличение псевдочастоты Хд среза ЛАХ разо-
мкнутой линейной дискретной системы приводит к более быстрому про-
теканию переходных процессов в замкнутой системе.
Правило За: если имеется факт Lyr и Тг > Г*, то рекомендуется
уменьшить показатель колебательности тп.
Объяснение: правило За отражает тот факт, что уменьшение тп приво-
дит к увеличению протяженности среднечастотного участка ЛАХ и запаса
устойчивости по фазе и, следовательно, к менее колебательному протека-
нию переходного процесса в замкнутой системе.
Правило ЗЬ: если имеется факт L\f и Тг > Г*, то рекомендуется
увеличить тп.
Объяснение: правило ЗЬ носит эвристический характер: в области
существенного влияния дискретности управления увеличение тп приводит
к уменьшению протяженности среднечастотного участка ЛАХ , что осла-
бляет негативное влияние дискретности и, следовательно, увеличение тп
может дать положительный эффект, хотя это не гарантируется.
Правило Зс: если имеется факт Lit пТг> Г*, то рекомендуется
увеличить £д.
Объяснение: в правиле Зс учитывается, что увеличение нормирован-
ного коэффициента демпфирования £д уменьшает время переходного про-
цесса, так как возрастает демпфирование нутационных колебаний гиро-
системы.
Правило 4: если имеется факт Lyr и ег > е», то рекомендуется
увеличить Aq.
Объяснение: правило 4 обосновывается тем, что увеличение нормиро-
ванной частоты Ао дает уменьшение ошибки в установившемся режиме,
так как при этом повышается общий коэффициент усиления разомкнутой
системы.
Правило 4а: если ег > е*, то рекомендуется увеличить £д.
Объяснение: увеличение нормированного коэффициента демпфиро-
вания приводит к уменьшению ошибки в установившемся режиме, т.к.
возрастает демпфирование нутационных колебаний гиросистемы.
Правило 5: если Vr > V*, то рекомендуется уменьшить Aq.
Объяснение: уменьшение нормированной частоты Ао приводит
к уменьшению максимальной скорости в установившемся режиме, так
как уменьшается коэффициент усиления разомкнутой системы.
342
Правило 5а: если Vr > К, то рекомендуется увеличить £д.
Объяснение: увеличение демпфирования приводит к уменьшению мак-
симальной скорости в установившемся режиме, что обусловлено возраста-
нием демпфирования нутационных колебаний гиросистемы.
Правило 6: если имеется факт Lit и Рг > Р*, то рекомендуется
уменьшить т.
Объяснение: правило 6 отражает известный факт — в линейной за-
мкнутой системе при уменьшении показателя колебательности т (но
т > 1) уменьшается перерегулирование.
Правило 6а: если имеется факт L\f и Рг > Р*, то рекомендуется
увеличить т.
Объяснение: правило 6а носит эвристический характер — в условиях
существенного влияния дискретности управления увеличение т приводит
к уменьшению среднечастотного участка ЛАХ, что ослабляет негативное
влияние дискретности и, следовательно, увеличение т может дать поло-
жительный эффект, который не гарантируется.
Правило 6Ь: если имеется факт Lit и Рг > Р*, то рекомендуется
уменьшить £д.
Объяснение: уменьшение £д (но £д > 1 ) уменьшает и перерегули-
рование, т. к. при этом увеличивается протяженность низкочастотной ча-
сти ЛАХ правее частоты среза Хд, и, следовательно, увеличивается запас
устойчивости по фазе.
Правило 6с: если имеется факт Lyr и Рг > Р*, то рекомендуется
уменьшить Aq.
Объяснение: уменьшение нормированной частоты Ао приводит
к уменьшению перерегулирования, так как при этом уменьшается общий
коэффициент усиления разомкнутой системы и возрастает запас устойчи-
вости по фазе.
Правило 7: если упрощенная линейная замкнутая непрерывная
система с ОУ (5.61) неустойчива, то необходимо уменьшить Aq.
Объяснение: уменьшение нормированной частоты Qo ~ Ао снижает
общий коэффициент усиления разомкнутой системы и повышает степень
устойчивости замкнутой непрерывной системы.
Правило 8: если упрощенная линейная замкнутая непрерывная
система с ОУ (5.61) неустойчива, то нужно уменьшить т.
Объяснение: уменьшение т приводит к увеличению протяженности
среднечастотного участка ЛАХ и, следовательно, к увеличению запаса
устойчивости по фазе.
Правило 9: если степени устойчивости а и ао соответственно
полной и упрощенной линейных моделей замкнутой системы, опреде-
ляемые по спектрам матриц А и Ai, таковы, что а > 0, ао > 0 и
343
max (a, ao)/niin (a, ао) > 1-3, то возможно на время переходного про-
цесса Тг существенное влияние оказывают упругие колебания панелей
СБ; рекомендуется уменьшить нормированную частоту Ло и/или увели-
чить нормированный коэффициент демпфирования £д.
Объяснение: правило носит эвристический характер — если степени
устойчивости а и а0 существенно различаются, то влияние слабодепфиро-
ванных упругих колебаний конструкции КА на переходные процессы в за-
мкнутой непрерывной системе значительно. Надо попытаться увеличить
степень устойчивости, т. е. поступить так же, как в правиле 7 (пороговый
коэффициет 1.3 подобран экспериментально).
Правило 10: если h£ > 0, заданы е* < h£ и Tj < 1.5TU, то
могут возникнуть автоколебания и тогда нельзя будет достичь установив-
шейся ошибки гг < h£; рекомендуется уменьшить h£ и/или увеличить е*,
корректируя исходные данные.
Правило 11: если Mz > 0, 6* < h£/2 и Tj < 1.5TU, то
в установившемся режиме для h£ > 0 имеют место непериодические ко-
лебания (квазиколебания) с «амплитудой» несколько большей или равной
Де/2; достичь установившейся ошибки меньшей чем «амплитуда» этих
квазиколебаний невозможно; следует взять е* > 2.3 • h£.
Объяснение правил 10 и 11: правила связаны с известными услови-
ями возникновения в системе автоколебаний или квазиколебаний, обусло-
вленных квантованием по уровню в датчике рассогласования и приводе
ГД. Квазиколебания возникают при Mz 0. Очевидно, что при наличии
таких колебаний нельзя добиться установившейся ошибки меньшей, чем
амплитуда этих колебаний (коэффициент 2.3 выбран экспериментально).
Правило 12: если для решения {Tr, Pr, Vr,er}, полученного
при стартовых параметрах Ао,т,^, имеет место хотя бы один из фактов
тъ > Т*/3; tv > Т*/3; тт > Т*/3, то задача не может быть решена
при имеющихся ограничениях по углу прецессии, скорости прецессии и
управляющему моменту ГД соответственно. Пред лагается скорректировать
задаваемые ограничения в сторону увеличения. Величина Т*/3 подобрана
экпериментально.
Завершающее правило: если выполнены условия
Тг < Т*; Pr < Р*; ег < s*; Vr < К, то следует выполнить печать
результатов и завершить процесс проектирования.
Протокол диалога
Итерация 0: запуск процедур со стартовыми значениями
Ти = 4; Тд = 0.25; Ао = 0.024; = 1.4; тп = 1.2. (5.67)
344
— не выполнено
— выполнено
— выполнено
— не выполнено
(> 125 с),
(< 0.5 угл.мин),
(< 0.05 угл.мин./с),
(> 10 %).
Результат:
Тг = 177.6 с
ег = 0.2155 угл.мин
Vr = 0.01522 угл.мин/с
Рг = 13.14 %
На этой итерации не выполнено условие (5.66), т. е. влияние дискрет-
ности существенно. Запрос: «Введите значение кратности Ти к Tq : 1 <
кг > 16». Ответ: «кг = 4».
Итерация 1: вычисление нового значения периода дискретности упра-
вления Ти = krTq = 1; запуск численных процедур с параметрами (5.67)
и новым значением Ти. Результат:
Тг = 182.5 с — не выполнено
ег = 0.193 угл.мин — выполнено
Vr = 0.01800 угл.мин/с — выполнено
Рг = 11.18 % — не выполнено
(> 125 с),
(< 0.5 угл.мин),
(< 0.05 угл.мин./с),
(> 10 %).
Условие (5.66) на этой и последующих итерациях выполнено. За-
прос: «Рекомендуется увеличить нормированную частоту». Введите «Ао >
0.024». Ответ: «Ао = 0.027»
Итерация 2: запуск программы с Ао = 0.027. Результат:
Тг = 164 с — не выполнено
ег = 0.181 угл.мин — выполнено
Vr = 0.01700 угл.мин/с — выполнено
Рг = 11.06 % — не выполнено
Запрос: «Рекомендуется увеличить нормированную частоту». Введите
«Ао > 0.027». Ответ: «Ао = 0.033»
(> 125 с);
(< 0.5 угл.мин);
(< 0.05 угл.мин/с);
(> 10 %).
Итерация 3: запуск программы с Ао = 0.033.
Результат:
Тг = 133 с — не выполнено (> 125 с);
£г = 0.184 угл.мин — выполнено (< 0.5 угл.мин);
Vr = 0.02500 угл.мин/с — выполнено (< 0.05 угл.мин/с);
Рг = 12.43 % — не выполнено (> 10 %).
Запрос: «Рекомендуется увеличить нормированную частоту». Вве-
дите «Ао > 0.033». Отказ от ввода. Запрос: «Рекомендуется уменьшить
показатель колебательности». Введите «тп < 1.2». Ответ: «тп = 1.06»
Итерация 4: запуск программы с тп = 1.06
Результат:
Тг = 86.5 с — выполнено (< 125 с),
ег = 0.195 угл.мин — выполнено (< 0.5 угл.мин),
Vr = 0.03800 угл.мин/с — выполнено (< 0.05 угл.мин/с),
Рг = 11.42 % — не выполнено (> 10 %).
345
Запрос: «Рекомендуется уменьшить показатель колебательности».
Введите «тп < 1.06». Отказ от ввода. Запрос: «Рекомендуется умень-
шить демпфирование». Введите «£р < 1.4». Ответ: «£д = 1.15».
Итерация 5: запуск программы с £д = 1.15
Результат:
Тг = 87.0 с — выполнено
ег = 0.195 угл.мин — выполнено
Vr = 0.03800 угл.мин/с — выполнено
Рг = 9.77 % — выполнено
« 125 с);
(< 0.5 угл.мин);
(< 0.05 угл.мин/с);
« 10 %).
Сообщение ЭС «Проектирование завершено на шаге 5».
Значения параметров: Ти = 1; Ао = 0.033; тп = 1.06; £д = 1.15. Выход
из ЭС.
ЛИТЕРАТУРА
1. Федосов Е.А. Критические технологии России И Труды Всероссийской конференции
Государственных научных центров РФ. — М.: 1995. С. 80-95.
2. Белоусов Ю.А., Федосов Е.А. Основные проблемы применения БЦВМ для управле-
ния движущимися объектами И Вопросы кибернетики. Проблемы авиационной и кос-
мической кибернетики (Интегрированные системы активного управления) / Под ред.
И.С. Уколова. — М.: 1981. С. 5-24.
3. Федосов Е.А., Башков А.М., Братухин А.Г., Орлов В.В. и др. Авиастроение России. —
М.: Машиностроение, 1995.
4. Поспелов Д.А. Логико-лингвистические модели в системах управления. — М.: Наука.
Энергоиздат, 1981.
5. Федунов Б.Е., Кондрикова Т.А., Куликовская Е.С. Методика системного проектирова-
ния АиИО одноместного аппарата И Труды 2 Всесоюзного совещания «Комплекси-
рование систем управления движением». — Тбилиси. Научно-информационный центр
ГосНИИАС. 1988. С. 2-8.
6. Fedunov В.Е., Kondrikova Т.А. On-board Algorithms and Displayed Information for
Antropocentral System: Problems and Methods of Systematic Design I I Proc. IEEE Confer-
ence on Systems. Man and Cybernetics. 1993. V. 2. P. 568-571.
7. Позняков П.В., Федунов Б.Е. Основы информационной интеграции бортовой аппара-
туры. — М.: МАИ. 1993.
8. Дзержинский Ф.Я. Разработка программной документации: понятия и принципы нефор-
мального программирования. — М.: ЦНИИатоминформ, 1980.
9. Тайц О.Г. Базисный рафинированный язык науки (БРЯН) И Информационные процессы
и системы. — ВИНИТИ. 1994. сер. 2. № 7. С. 13-18.
10. Fedunov В.Е. The Optimization Models for Making the Decisions in the Algorithmic Indi-
cational Support System Designing // Proc. SAMS’95. 1995. V. 18-19. P. 455-458.
И. Романова В.Д., Федунов Б.Е., Юневич Н.Д. Реализация на ПЭВМ исследовательского
прототипа БОСЭС «Дуэль» И Изв. РАН. Теория и системы управления. 1995. № 5.
С. 229-237.
346
12. Научно-техническая информация. Авиационные системы. Подборка материалов «Бор-
товые оперативно-советующие экспертные системы самолетов-истребителей и систем-
ные исследования их предметных областей». — М.: Научно-информационный центр
ГосНИИАС. 1994. № 4-9.
13. Goodrich D., Kenneth Н., Me Manus J.W Development of a Tactical Guidance Research and
Evaluation System (TGRES) П Proc. AIAA Guidance, Navigation and Control Conference.
1989. P. 40-47.
14. Козловских Б.Д., Федунов Б.Е. Нормативно-техническая документация при разработке
БОСЭС И Вопросы авиационной науки и техники. Стандартизация и унификация АТ.
1994. Вып. № 2-3-4. С. 9-12.
15. Федунов Б.Е. Проблемы разработки бортовых оперативно-советующих экспертных си-
стем для антропоцентрических объектов И Изв. РАН. Теория и системы управления.
1996. № 5. С. 147-159.
16. Кондрашина Е.В., Литвинцева Л.В., Поспелов Д.А. Представление знаний о простран-
стве и времени в системах искусственного интеллекта. — М.: Наука, 1989.
17. Радиолокационные устройства / Под ред. В.В. Григорина-Рябова. — М.: Сов. радио,
1970.
18. Беллман Р., Гликсберг И., Гросс О. Некоторые вопросы математической теории про-
цессов управления. — М.: Изд-во иностр, лит., 1962.
19. Дубовицкий А.Я., Милютин А.А. Задачи на экстремум при наличии ограничений И Ж.
вычисл. матем. и матем.физ. 1965. Т. 5, № 3. С. 395-453.
20. Понтрягин Л.С., Болтянский В.Г., Гамкрелидзе Р.В., Мищенко Е.Ф. Математическая
теория оптимального управления. — М.: Физматгиз, 1961.
21. Федунов Б.Е. Синтез управления в задаче с фазовыми ограничениями И Прикл. мат. и
мех. 1973. Т. 37, № 1. С. 23-31.
22. Дубовицкий А.Я., Милютин А.А. Необходимые условия слабого экстремума в задачах
оптимального управления со смешанными ограничениями типа неравенства И Ж. вы-
числ. матем. и матем. физ. 1968. Т. 8, № 4. С. 725-779.
23. Матросов В.М., Васильев С.Н. ЭВРОЛОГ, или о творческих возможностях одной
системы с профессиональным искусственным интеллектом // Будущее науки. 1986.
Вып. 19. С. 10-23.
24. Vassilyev S.N., Matrosov V.M., Sumenkov Е.А. The System EVROLOG: Application of
Logical Synthesis of Programs in Some Problems of Computer-Aided Modelling and In-
vestigation of Interconnected Dynamical Systems // Mathematical Modelling and Applied
Mathematics. — Amsterdam: North Holland. Elsevier. 1992. P. 447-456.
25. Васильев C.H., Гулямов Ш.Б., Жерлов А.К., Литвинов Ю.Ф. О логических средствах
системы планирования вычислений «ПАСАД» И Алгоритмы. — Ташкент: 1986. № 66.
С. 97-112.
26. Мукумов Р.Р. Система логического вывода в исчислениях с типовыми кванторами сме-
шанной семантики И Труды 8 Сибирской школы по пакетам прикладных программ. —
Иркутск: 1989. С. 137.
27. Васильев С.Н. Системные свойства и их упорядочение И Труды КАИ. — Казань: 1975.
№ 184. С. 3-9.
28. Васильев С.Н., Жерлов А.К. Об исчислениях формул с типовыми кванторами И Докл.
РАН. 1995. Т. 343, № 5. С. 583-585.
347
29. Жерлов А.К. Пропозициональные позитивно образованные стандартизованные формулы
и реализация булевских функций // Труды Конференции по компьютерной логике, ал-
гебре и интеллектному управлению. — Иркутск: 1994. Т. 2. С. 221-227.
30. Макаров В.П., Платонов С.Н. Элементы искусственного интеллекта в проблемах обес-
печения живучести систем управления ориентацией космического корабля И Динамика
и управление космическими аппаратами / Под ред. В.М. Матросова, М.Ф. Решетнева. —
Новосибирск: Наука, 1992. С. 193-202.
31. Сомов Е.И. Динамика цифровой системы для пространственной гиростабилизации гиб-
кого космического аппрата // Динамика и управление космическими аппаратами / Под
ред. В.М. Матросова, М.Ф. Решетнева. — Новосибирск: Наука, 1992. С. 46-76.
32. Матросов В.М., Козлов Р.И., Сомов Е.И., Бутырин С.А. и др. Математические методы
и программное обеспечение для автоматизированного проектирования систем управле-
ния ориентацией космического аппарата И Динамика и управление космическими ап-
паратами / Под ред. В.М. Матросова, М.Ф. Решетнева. — Новосибирск: Наука, 1992.
С. 163-179.
33. Матросов В.М., Козлов Р.И., Сомов Е.И., Бутырин С.А. и др. Математические ме-
тоды и программное обеспечение для динамического исследования систем управления
ориентацией космических аппаратов И Труды 3 Российско-Китайского Симпозиума по
аэрокосмической технике. — Красноярск: 1994. С. 71-72.
34. Матросов В.М.Ч Раевский В.А., Козлов Р.И., Сомов Е.И., Бутырин С.А.У Симонов С.А.
Система прикладного программного обеспечения «ДИНАМИКА» для автоматизирован-
ного проектирования систем управления и проблемы ее интеллектуализации. И Труды
Всесоюзной конференции «Интеллектуальные системы в машиностроении» / Под ред.
В.А. Виттиха. — Самара: 1991. Вып. 2. С. 25-28.
35. Матросов В.М., Раевский В.А., Титов Г.П., Козлов Р.И.Ч Сомов Е.И., Бутырин С.А.,
Симонов С.А. Система прикладного программного обеспечения «ДИНАМИКА» для ав-
томатизированного проектирования систем управления И Труды Международного семи-
нара «Методы и программное обеспечение для систем автоматического управления». —
Иркутск: 1991. С. 63-64.
36. Vassilyev S.N., Somov E.I., Butyrin S.A., Mukumov R.R., Gerasin I.A. Expert Systems De-
sign for Control of Moving Objects. II Abstr. Intern. Conference AMCA’95: Advanced
Mathematics. — Novosibirsk: Computations and Applications. 1995. P. 341.
37. Butyrin S.A., Makarov V.P., Mukumov R.R., Somov E.I., Vassilyev S.N. An Expert System
for Design of Spacecraft Attitude Control Systems // Artificial Intelligence in Engineering.
1997. № 11. P. 49-59.
38. Vassilyev S.N. Machine Synthesis of Mathematical Theorems. // Logic Programming. 1990.
V. 9, № 2&3. P. 235-266.
39. Vassilyev S.N. Modelling Logical Derivation and Hypothesis Generation // Proc. IEEE Sym-
posium on Modelling. — Analysis and Simulation. 1996. V. l.P. 148-153.
40. Васильев С.Н. Метод синтеза условий выводимости хорновских и некоторых других
формул И Сибирский математический журнал. 1997. Т. 38, № 5. С. 1034-1046.
41. Гулямов Ш.Б. Метод решения логических уравнений в дескриптивно-конструктивной
семантике И Изв. РАН. Теория и системы управления. 1995. № 5. С. 24-37.
42. Intelligent Control Systems: Theory and Applications / Eds. M.M. Gupta, N.K. Sinha. —
New York: IEEE Press. 1996.
43 Васильев C.H., Жерлов А.К. Логическое моделирование и управление в реальном вре-
мени И Труды Всесоюзной конференции «Интеллектуальные системы в машинострое-
нии» / Под ред. В.А. Виттиха. — Самара: 1991. Вып. 2. С. 33-38.
348
44. Захаров В.Н., Ульянов С.В. Нечеткие модели для интеллектуальных промышленных
регуляторов и систем управления, III. Методология проектированиия И Изв. РАН. Тех-
ническая кибернетика. 1993. № 3. С. 197-220.
45. White D., Bowers A., Iliff К., Noffz G., Gonda M., Menousek J. Flight, Propulsion and
Thermal Control of Advanced Aircraft and Hypersonic Vehicles // Handbook of Intelligent
Control. Neural, Fuzzy, and Adaptive Approaches / Eds. D.A. White, D.A. Sofge. — New
York: Van Nostrand Reinhold. 1992. P. 357-465.
46. Васильев C.H., Рембольд У, Аполов О.Г., Кирин Д.В. Адаптивное нейро-фаззи управле-
ние многозвенным манипулятором И Интеллектуальные автономные системы. — Уфа-
Карлсруэ. УГАТУ. 1996. С. 23-27.
47. Токарь Е.Н. Проблемы управления гиромоментом И Космические исследования. 1978.
Т. 16, № 2. С. 179-187.
48. Margulies G., Aubrun J.N. Geometric Theory of Single Gimbal Control Moment Gyro
Systems //J. Astronomical Science. 1978. V. 26, № 2. P. 159-191.
49. Haelscher B. R., Vadali S. R. Optimal Open-Loop and Feedback Control Using Single Gimbal
Control Moment Gyroscopes // J. Astronomical Science. 1994. V. 42, № 2. P. 189-206.
СПИСОК ИСПОЛЬЗОВАННЫХ СОКРАЩЕНИИ
АВС — автоматический вывод следствий
АГ — автоматическое гипотезирование
АДТ — автоматическое доказательство тео-
рем
АДЭ — алгоритмы деятельности экипажа
АиИО — бортовое алгоритмическое и инди-
кационное обеспечение
Антр/система — антропоцентрическая си-
стема
АНУЦ — код для обозначения ТБС «атака
непосредственно угрожающей цели»
АОИ — алгоритм обработки измерений
АПХ — активная помеха
АРМ — автоматизированное рабочее место
АСИУ — автоматические системы интел-
лектного управления
АЦП — алфавитно-цифровой преобразова-
тель
БАС — блок выделения правила активиза-
ции сценария
ББ-В — код для обозначения ТБС «атака
визуально наблюдаемой воздушной цели»
БД — база данных
БЗ — база знаний
БИ — бортовой интеллект
БЛВ — блок логического вывода
БОД БП СЦ — блок отбора данных для базы
правил текущего сценария
БОД ММ СЦ — блок отбора данных для ма-
тематической модели текущего сценария
БОСЭС — бортовая оперативно-советующая
экспертная система
БП-П — код для обозначения ТБС «атака
визуально наблюдаемой наземной цели»
БПсцг — правила вывода рекомендаций и
подсказок по г-му сценарию
БЦВМ — бортовая цифровая вычислитель-
ная машина
БЭС ООО В/В — БЭС обнаружения, опо-
знавания и определения государственной
принадлежности воздушных объектов
БЭС — бортовая экспертная система
ВГБ-В — код для обозначения ТБС «ввод
группы в (бой) в режим групповой атаки
воздушных целей»
ВГБ-П — код для обозначения ТБС «ввод
группы (в бой) в режим групповой атаки
наземных целей»
ВГБ — ввод группы в бой
ВЗЛЕТ — код для обозначения ТС «взлет»
ВИК-П — код для обозначения ТБС «выход
в информационный контакт с наземной
целью»
ВИК-В — код для обозначения ТБС «выход
в информационный контакт с воздушной
целью»
ВИП — входная информация пользователя
ВС — внешняя среда
ВУУ — верхний уровень управления
ГД — гиродин
ГМБС — гипотетический многофункцио-
нальный боевой самолет
ГО — гарантированный отворот
ГП — гарантированное поражение
ГРО — граф решений оператора
ГСН — головка самонаведения
ДАУ — дискретный алгоритм управления
ДБ-В — код для обозначения ТБС «атака ви-
зуально ненаблюдаемой воздушной цели»
ДБ-П — код для обозначения ТБС «атака ви-
зуально ненаблюдаемой наземной цели»
ДБ — дальний ракетный бой
ДИАГН — код для обозначения ТС «конт-
роль и диагностика бортовой аппарату-
ры»
ДО — дипольные отражатели
ДЧХ — дискретная частотная характери-
стика
ЕБЗ — единая бортовая база знаний
ЕКА — Европейское космическое агентство
ЕПрЯ — естественный профессиональный
язык
ЗВП — зона возможных пусков
ЗП — запаздывающий пуск
350
Изм & Исп/Аппаратура — бортовая измери-
тельная и исполнительная аппаратура
ИЗУ — измерительное устройство
ИИ — искусственный интеллект
ИЛС — индикатор на лобовом стекле
ИЛП — индуктивное логическое программи-
рование (Inductive Logic Programming)
ИП — исчисление предикатов
ИСПО — интеллектуализированная система
программного обеспечения
ИУ — интеллектное управление
ИУП — информационно-управляющее поле
кабины экипажа
ИЭС — исследовательская экспертная си-
стема
К-информация — количественная и каче-
ственная информация
КА — космический аппарат
Кб — килобайт
КОП — комплекс отработки программ
КПМ — комплекс полунатурного моделиро-
вания
ЛА — летательный аппарат
Л-БА — система «летчик - бортовая аппа-
ратура»
ЛАХ — логарифмическая амплитудная ха-
рактеристика
ЛВ — логический вывод
ЛДС — логико-динамические системы
ЛП — линия переключения
ЛПО — логическое программирование с
ограничениями (Constraint Programming)
ЛУ — логическое уравнение
ЛУС — логико-управляемые системы
ЛЦ — ложные тепловые цели
МАРШ — код для обозначения ТС «марш-
рут»
Мбайт — мегабайт
Мгц — мегагерц
ММ — математическая модель
МН — маневр
ММсцг — система алгоритмов, функциони-
рующих только в г-м сценарии
НОУ — наибольший общий унификатор
НУУ — нижний уровень управления
НУЦ — непосредственно угрожающая цель
ОЕВ — оперативные единицы восприятия
информации
ОЗУ — оперативное запоминающее устрой-
ство
ОП — одновременное попадание
ОПТ-диапазон — оптический диапазон
ОУ — объект управления
П-регулятор — пропорциональный регуля-
тор
П-управление — пропорциональное управле-
ние
ПД-регулятор — пропорционально-диффе-
ренциальный регулятор
ПД-управление — пропорционально-диффе-
ренциальное управление
ПИ-регулятор — пропорционально-инте-
гральный регулятор
ПИ-управление — пропорционально-инте-
гральное управление
ПИД-регулятор — пропорционально-инте-
грально-дифференциальный регулятор
ПИД-управление — пропорционально-инте-
грально-дифференциальное управление
ПК — пуск ракеты
ПК1 — пуск 1-ой ракеты
ПК2 — пуск 2-ой ракеты
по-стратегия — стратегия вывода в исчисле-
нии J', использующем язык по-формул
по-формула — позитивно-образованная фор-
мула
ПО — предметная область
ПОСАД — код для обозначения ТС «посад-
ка»
ПП-метод — метод логического вывода с
синтезом гипотез (метод последователь-
ного порождения гипотез как решений
логического уравнения)
ППО — полное приборное обеспечение
ПП-процесс — процесс последовательного
порождения решений логического урав-
нения ПП-методом
ППХ — пассивная помеха
Пр с/с — проблемная субситуация
Правило ПИ — правило подстановочности
импликации
Правило ПЭ — правило подстановочности
эквивалентности
ПСВ — применение средства воздействия
ПУМ — многофункциональный пульт
ПФ — передаточная функция
ПХ — помеха
ПЭВМ — персональная ЭВМ
РВ — реальное время
РЛ-диапазон — радиолокационный диапазон
РП — разрешение на пуск
РС1 — первая ракета самолета
РС2 — вторая ракета самолета
РТО — разрешение на тактический отворот
351
РУП — расчетные условия применения
РУС — ручка управления самолетом
РЦ1 — первая ракета цели
РЦ2 — вторая ракета цели
РЭП — радиоэлектронное противодействие
САП — станция активных помех
САУ — система автоматического управления
СБ — солнечные батареи
СБА — схема бортовых алгоритмов
СВМ — следующий внутренний многоуголь-
ник
С-Д — формирование управления по типу
«ситуация-действие»
с — секунда
СИ — самолет
СИМ — система имитационного моделиро-
вания
СИМ-КПМ — универсальный комплекс по-
лунатурного моделирования
СИМ-ЦВМ — СИМ на универсальной ЭВМ
СИУ — системы интеллектного управления
(Systems for Intelligent Control)
СОЗ — системы, основанные на «знаниях»
(Knowledge-Based Systems)
СОИ — система отображения информации
СОК — система объективного контроля
С-СУ-Д — формирование управления по
типу «ситуация-стратегия управления-
действие»
СУБД — система управления базой данных
СУО — система управления ориентацией
СУУ — средний уровень управления
СЦ — сценарий
СЦбпг — группа правил г-го сценария
ТБС — типовая быстрая (боевая) ситуация
ТВП — тактически выгодное положение
ТЗ — техническое задание
тк-формула — тйпово-кванторная формула
TH — тактический набор высоты
ТО — тактический отворот
ТОЛ — тактический отворот влево
ТОП — тактический отворот вправо
ТП — табло подсказок
ТРЕНАЖ — код для обозначения ТС «пред-
полетная тренировка»
ТС — типовая ситуация
ТСп — тактический спуск
УП — упреждающее попадание
УУ — устройство управления
ФС — формализованный сценарий
Ц — цель
ЧМСИУ — человеко-машинные системы ин-
теллектного управления
ЭП — эффективное поражение
ЭС НУЦ — экспертная система для выделе-
ния непосредственно угрожающей цели
ЭС — экспертная система
ЭТС — эксплуатация по техническому со-
стоянию
F-A-системы — системы с адаптацией
F-M-системы — модельные системы
F-системы — простые системы управления
Gen — правило обобщения (Generalization)
GPS — Универсальный Решатель Задач
(General Problem Solver)
МР — правило вывода «модус поненс» (Mo-
dus Ponens)
S-системы — семиотические системы