/








































































Текст
1024873325
X
Е
В. В. СторожЕВ, Н. А. Феоктистов
Системотехника
Моногрдфия
И МЕХАТрОНИКА
ТЕХНОЛОГИЧЕСКИХ
МАШИН
и оборудовдния
В. В. Сторожев, Н. А. Феоктистов
СИСТЕМОТЕХНИКА И МЕХАТРОНИКА
ТЕХНОЛОГИЧЕСКИХ МАШИН
И ОБОРУДОВАНИЯ
Монография
Москва
Издательско-торговая корпорация «Дашков и К°»
2015
УДК 681.527.7
ББК 621.865.8
С82
Авторы:
В. В. Сторожев — заслуженный деятель науки и техники РФ,
доктор технических наук, профессор.
Н.А. Феоктистов — заслуженный работник высшей школы РФ,
доктор технических наук, профессор.
Рецензенты:
Б. В. Тарасов — генеральный директор НПЦ «Модуль», доктор
технических наук, профессор;
Б. С. Сункуев — зав. кафедрой машин и аппаратов легкой промыш-
ленности, доктор технических наук, профессор Витебского государст-
венного технологического университета (республика Беларусь);
М. С. Ершов — зав. кафедрой теоретической электротехники и элект-
рификации нефтяной и газовой промышленности РГТУ нефти и газа
им. Губкина, доктор технических наук, профессор.
Сторожев В. В.
Системотехника и мехатроника технологических машин и обору-
дования: Монография / В. В. Сторожев, Н. А. Феоктистов; под ред. д.т.н.,
профессора Феоктистова Н. А. — М.: Издательско-торговая корпорация
«Дашков и К°», 2015. — 412 с.
ISBN 978-5-394-02468-9
В монографии рассмотрены основные элементы, узлы и устройства
для построения электронных, электромехатронных и мехатронных систем и
комплексов технологических машин и оборудования, принципы построения
электромехатронных и мехатронных модулей и систем, приведены
практические системы автоматизации технологических процессов и
производств на их основе.
Для инженерно-технических работников, связанных с разработкой и
внедрением электромехатронных, мехатронных и интеллектуальных систем
и комплексов, а также аспирантов и студентов технологических и маши-
ностроительных направлений подготовки.
© Сторожев В. В., Феоктистов Н. А., 2014
ОГЛАВЛЕНИЕ
Введение......................................................5
Глава 1. Элементы электронных схем............................9
1.1. Полупроводниковые приборы Принцип работы электронно-
дырочного перехода..........................................9
1.2. Биполярные транзисторы................................18
1.3. Полевые транзисторы...................................32
1.4, Операционные усилители................................41
1.5. Интегральные микросхемы...............................51
Глава 2. Логические функции и логические элементы............55
2.1. Основы алгебры логики. Логические функции и способы
их записи...................................................55
2.2. Минимизация логических функций.........................65
2.3. Базовые логические элементы. Схемотехника логических
элементов различных логик..................................73
2.4. Особенности выходных каскадов цифровых микросхем......88
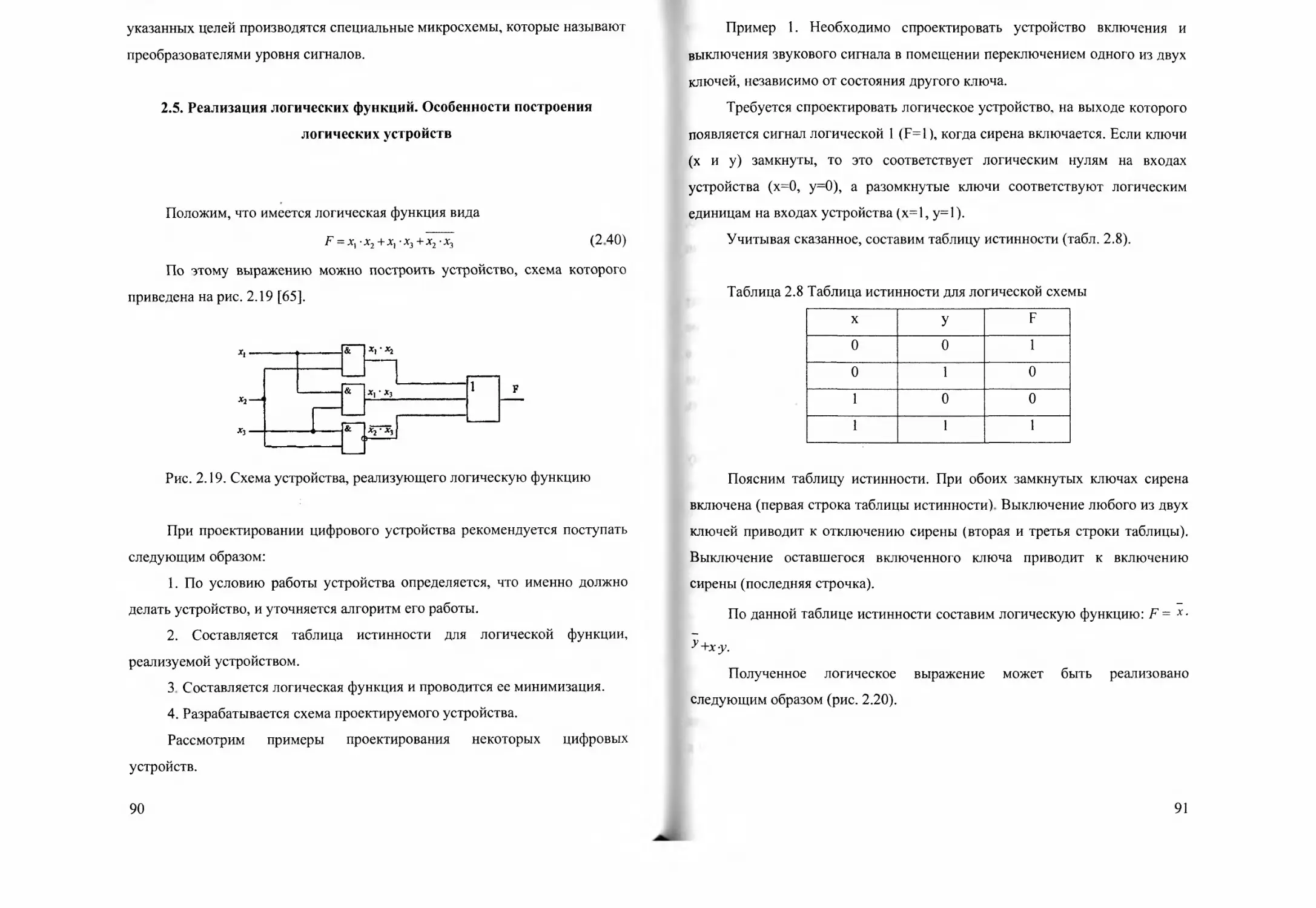
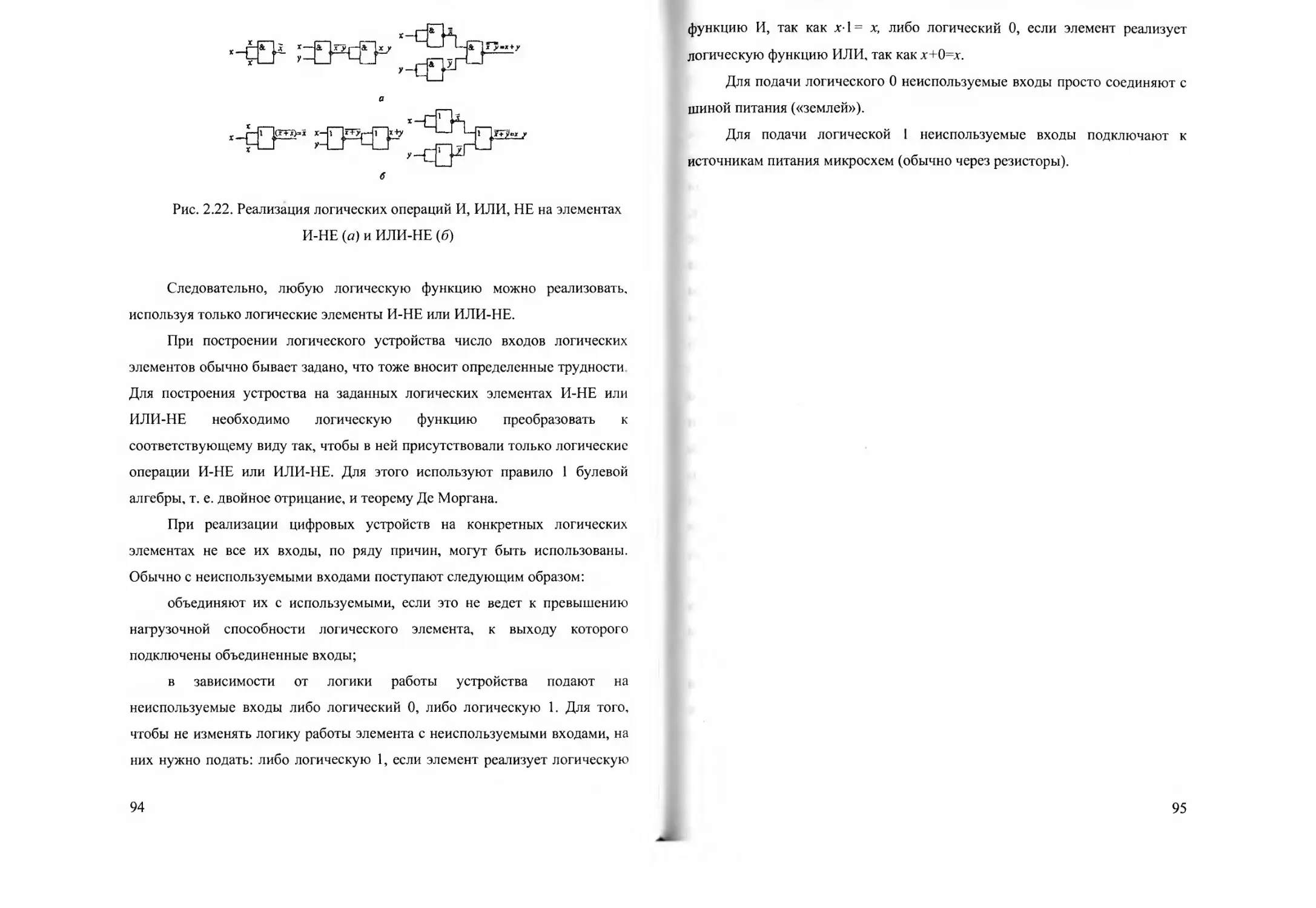
2.5. Реализация логических функций. Особенности построения
логических устройств.......................................90
Глава 3. Сигналы импульсных и цифровых устройств.............96
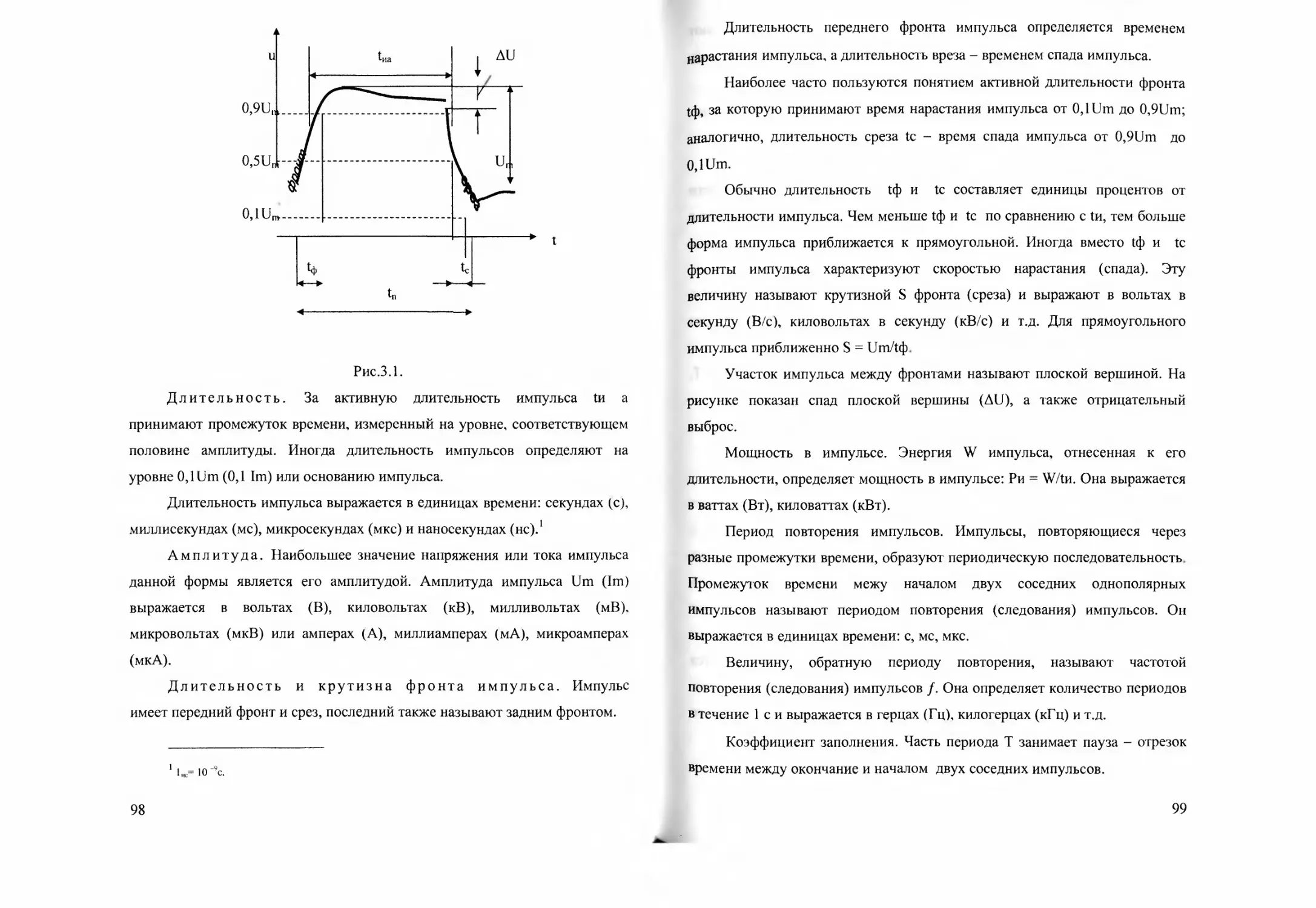
3.1. Общие сведения........................................96
3.2. Сигналы импульсных устройств..........................97
3.3. Сигналы цифровых устройств...........................103
Глава 4. Последовательностные цифровые устройства...........106
4.1. Триггеры.............................................107
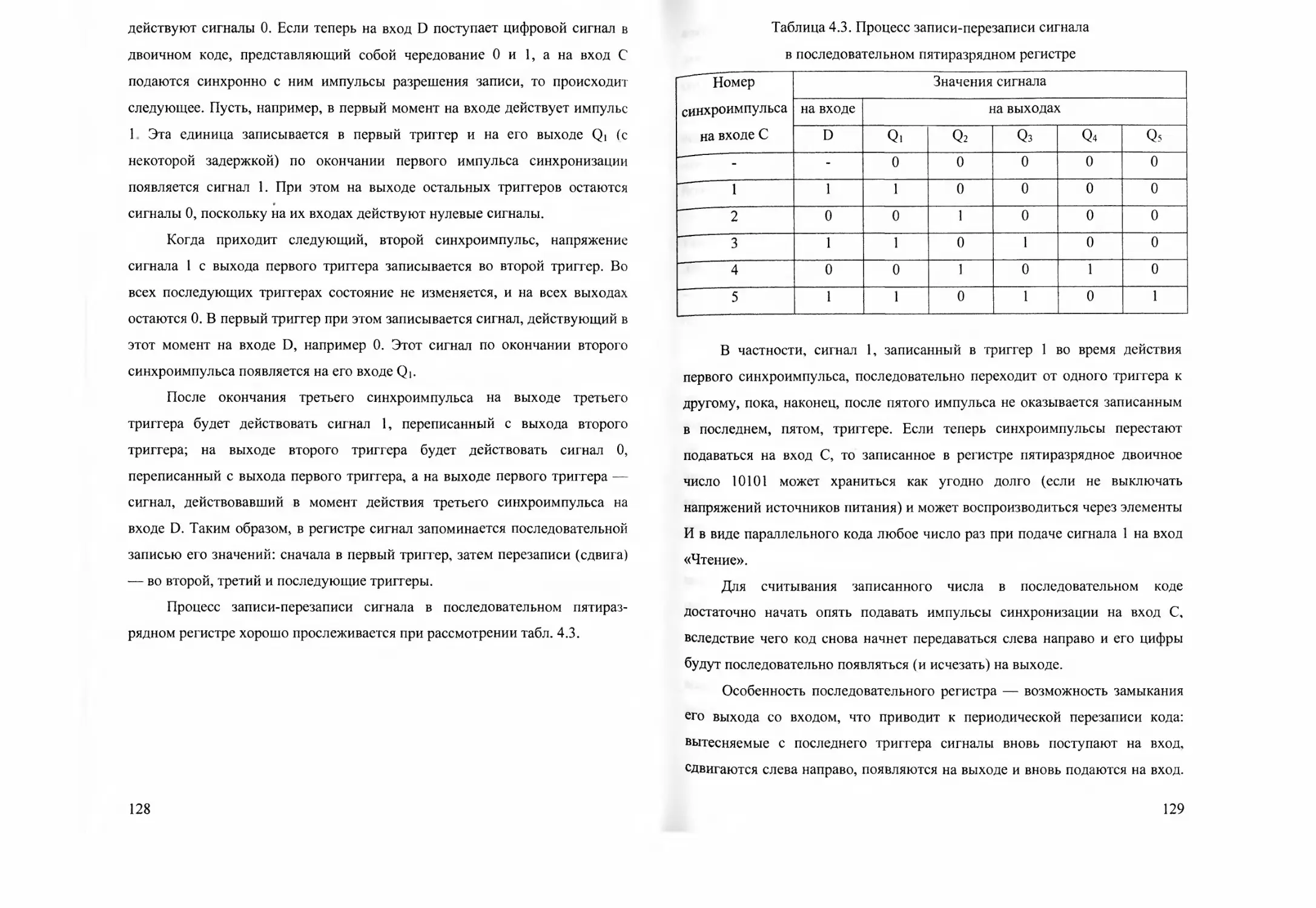
4.2. Регистры.............................................126
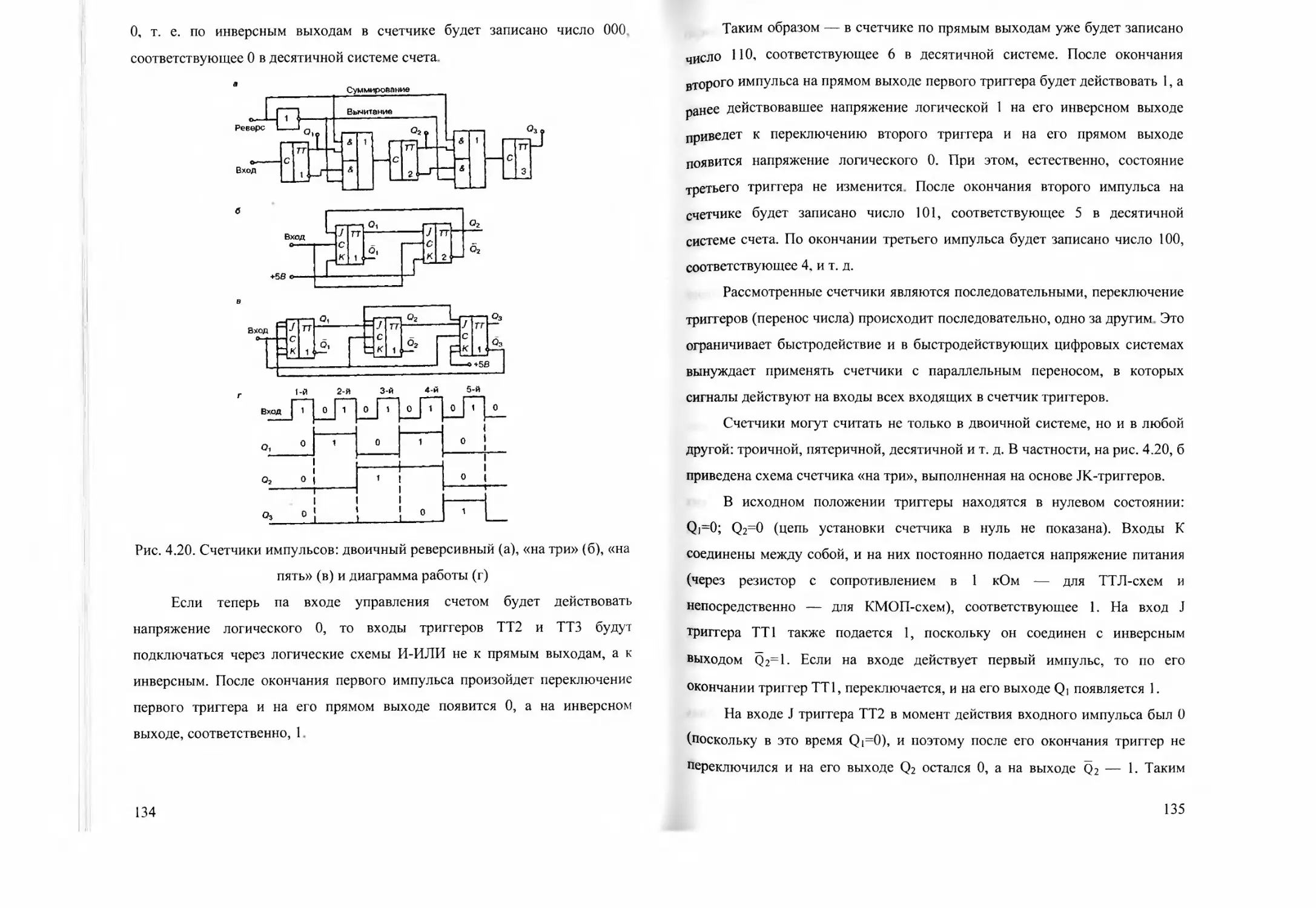
4.3. Счетчики.............................................131
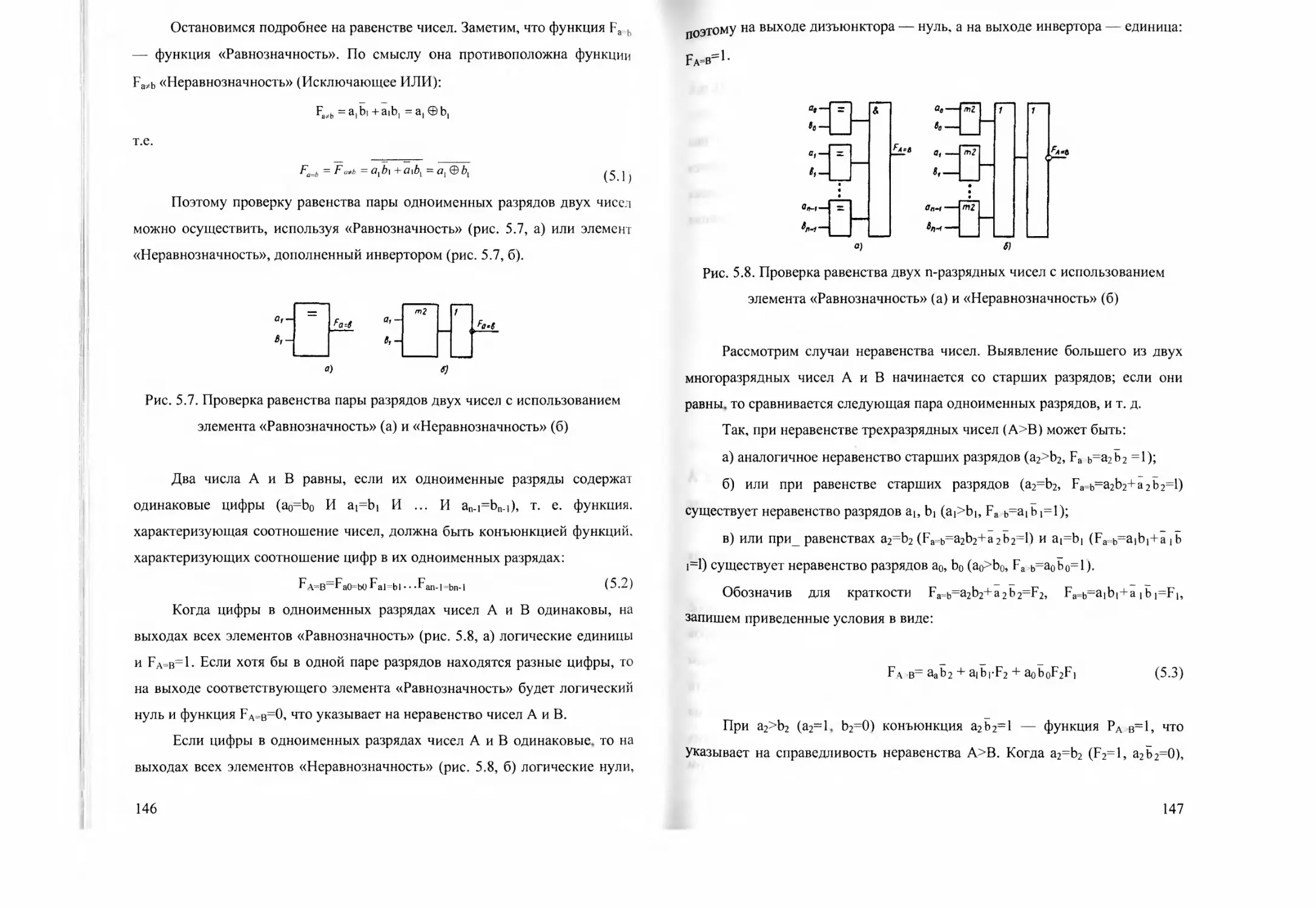
Глава 5. Комбинационные цифровые устройства.................139
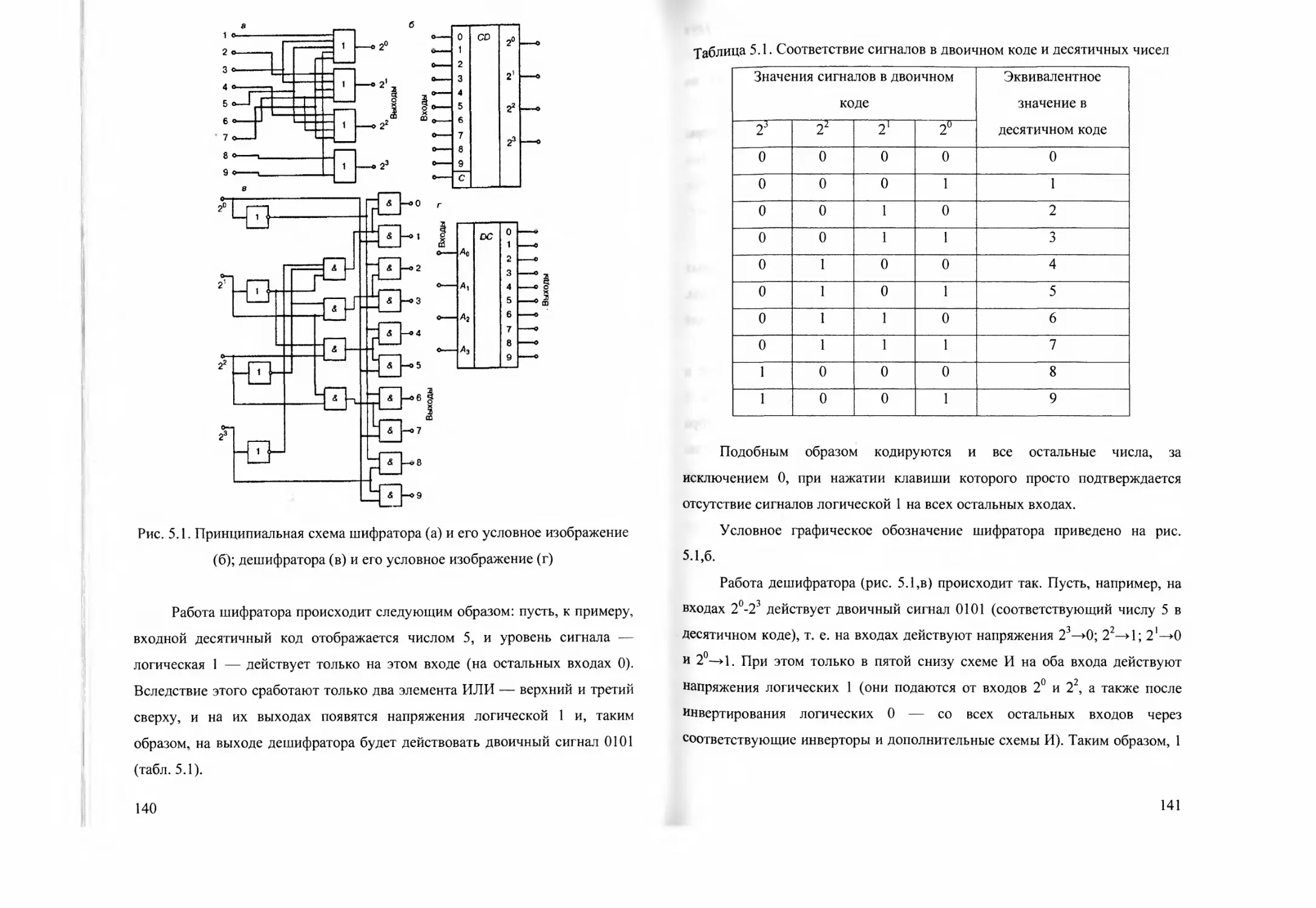
5.1. Дешифраторы и шифраторы..............................139
5.2. Мультиплексоры и демультиплексоры....................142
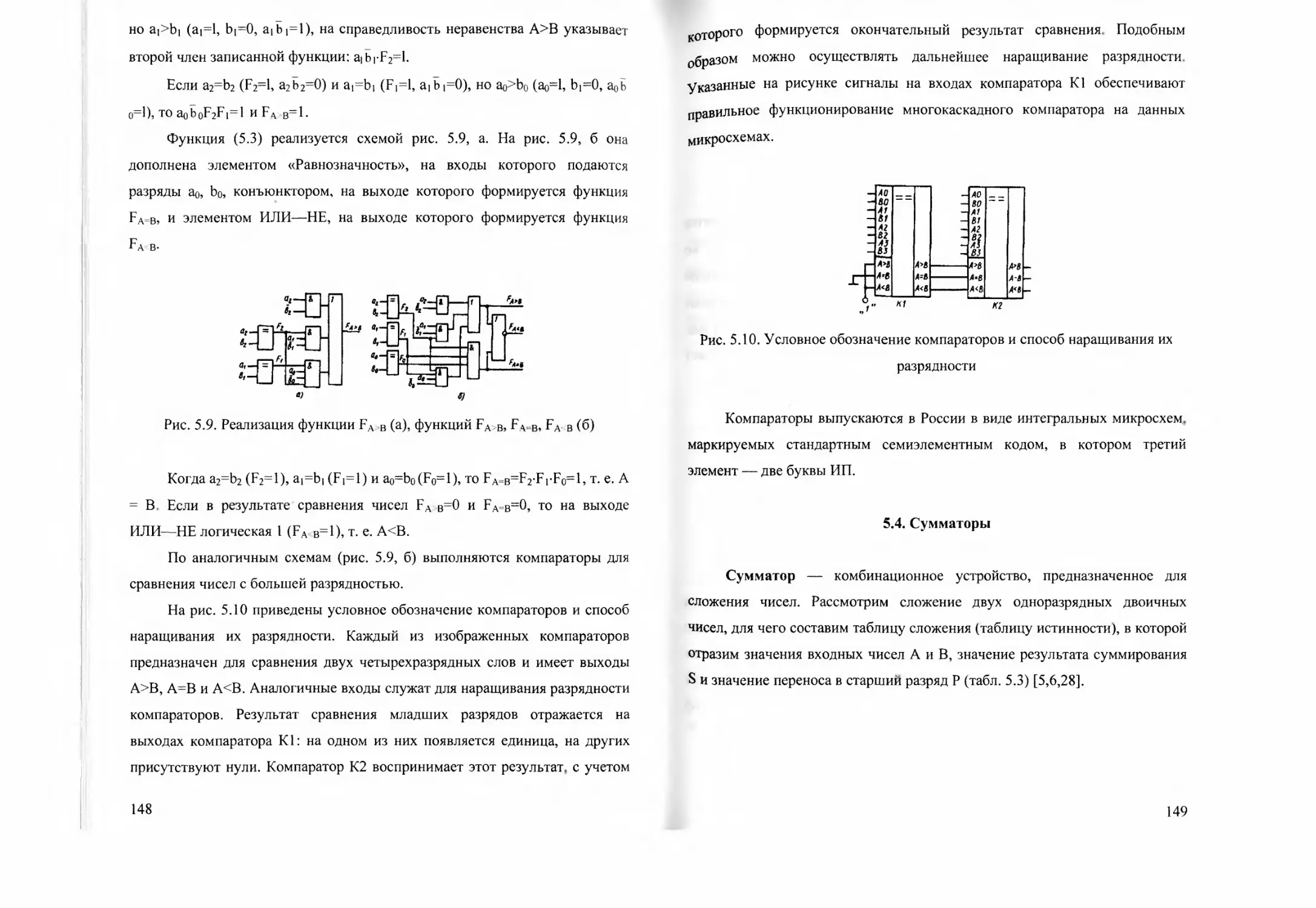
5.3. Компораторы..........................................144
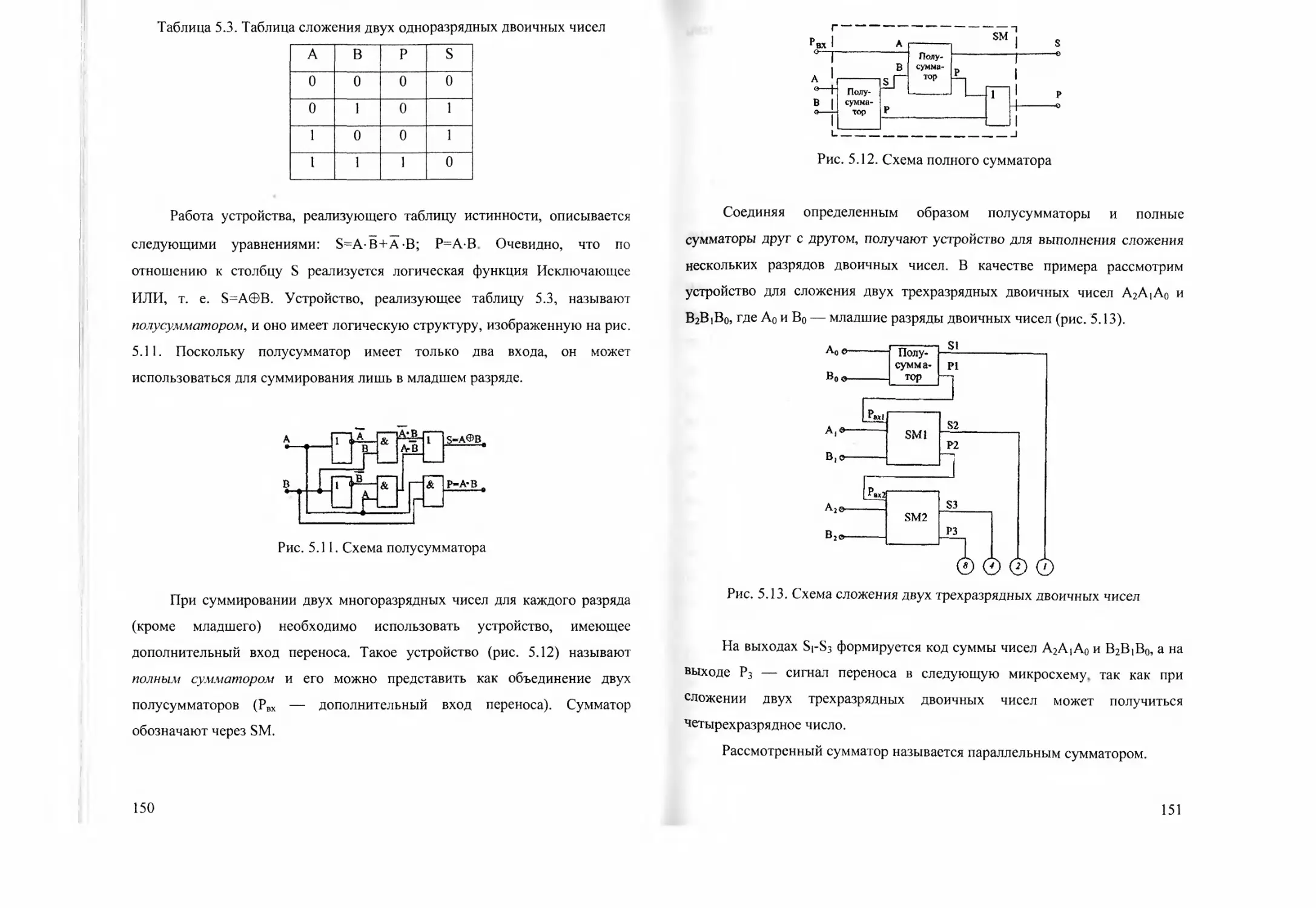
5.4. Сумматоры............................................149
Глава 6. Мехатронные системы в управлении механическим
движением и функциями технологических машин.................153
6.1. Основы мехатроники и принципы построения мехатронных
модулей в системах машин. Мехатроника, основные определения.153
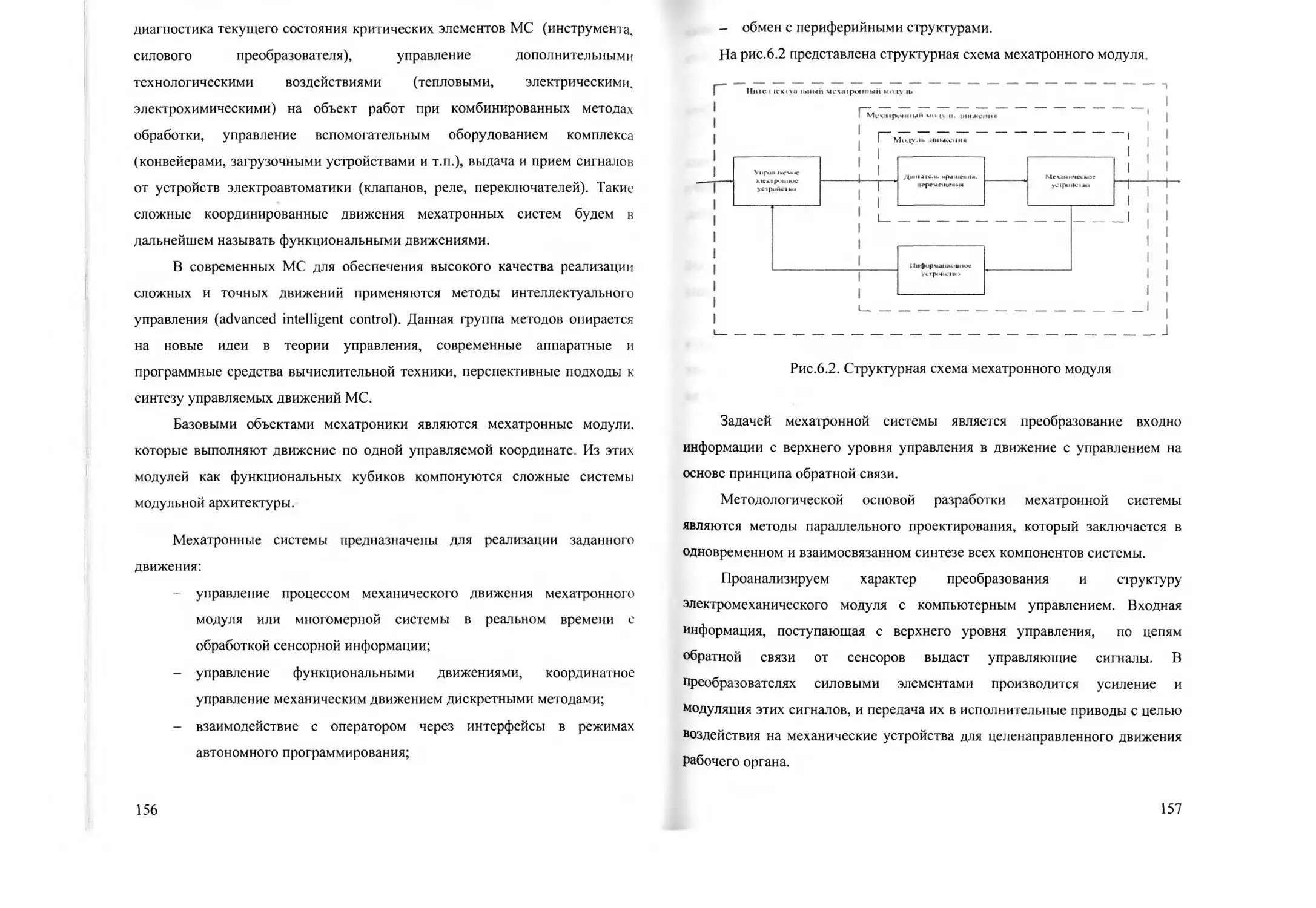
6.2. Структурные особенности различных процессов производства
и принципы построения модуля движения элементов машин.....161
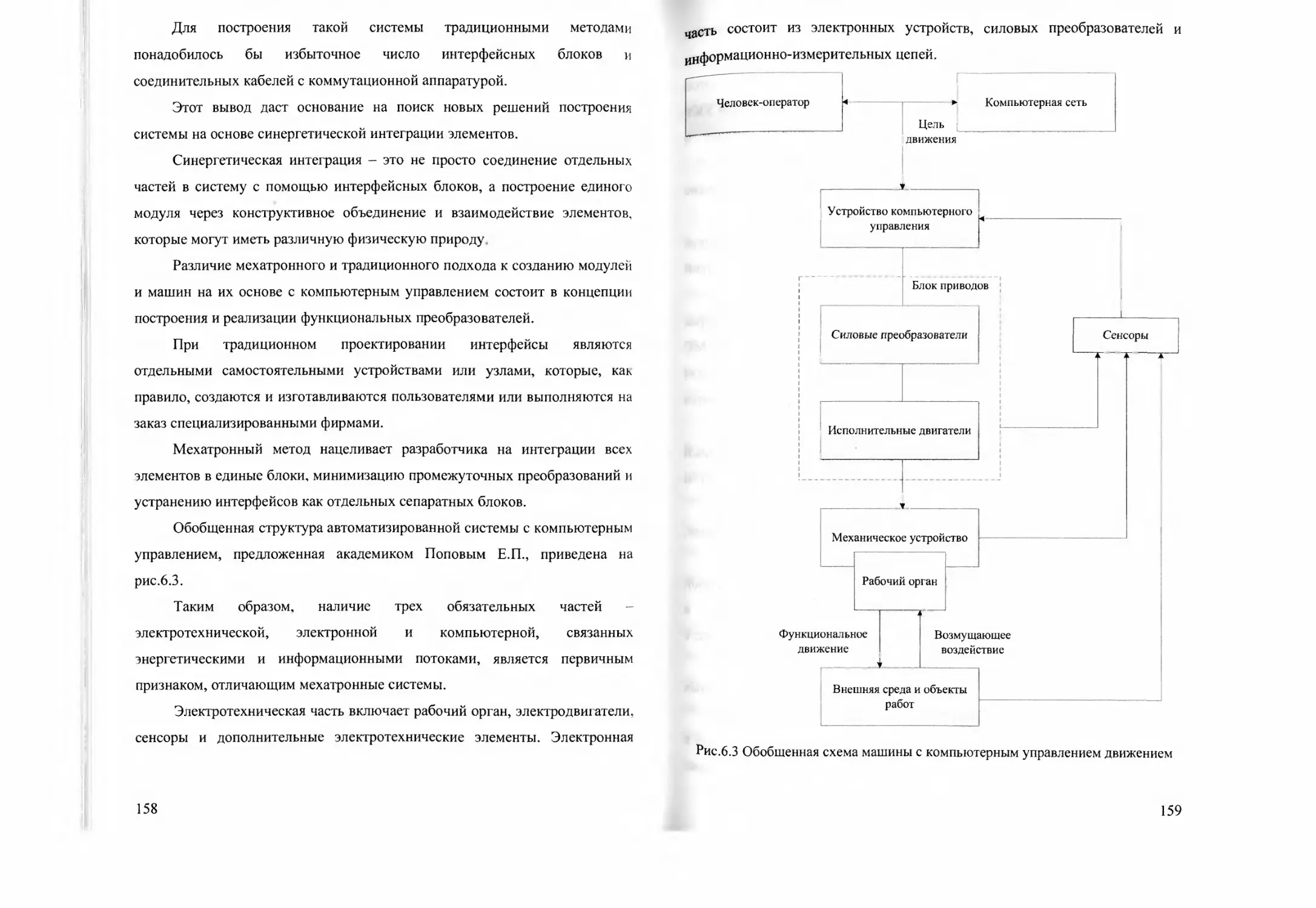
6.3. Промышленное оборудование для раскроя материалов.....163
6.4. Общая структура и особенности функционирования машин
швейного и обувного производства............................182
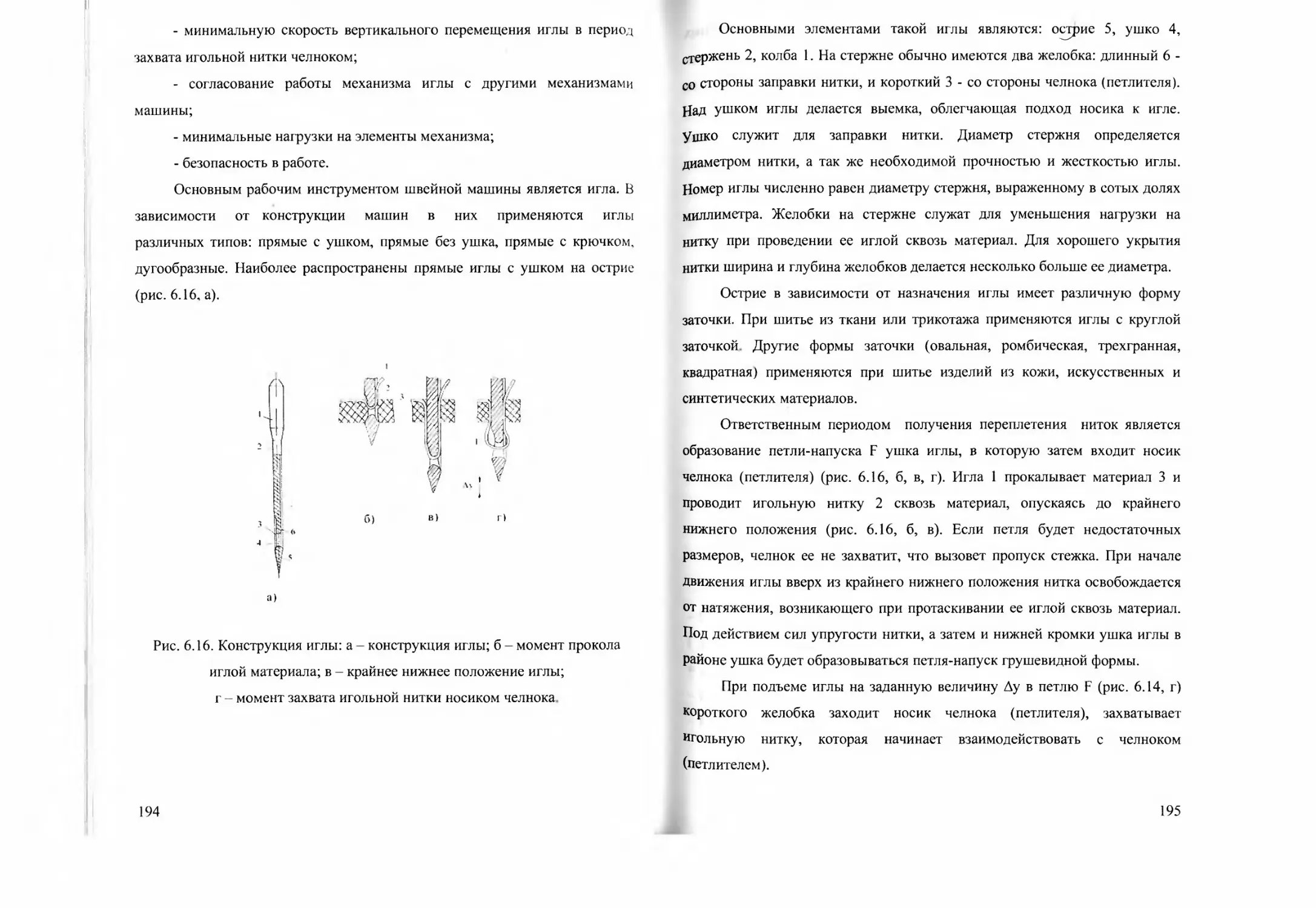
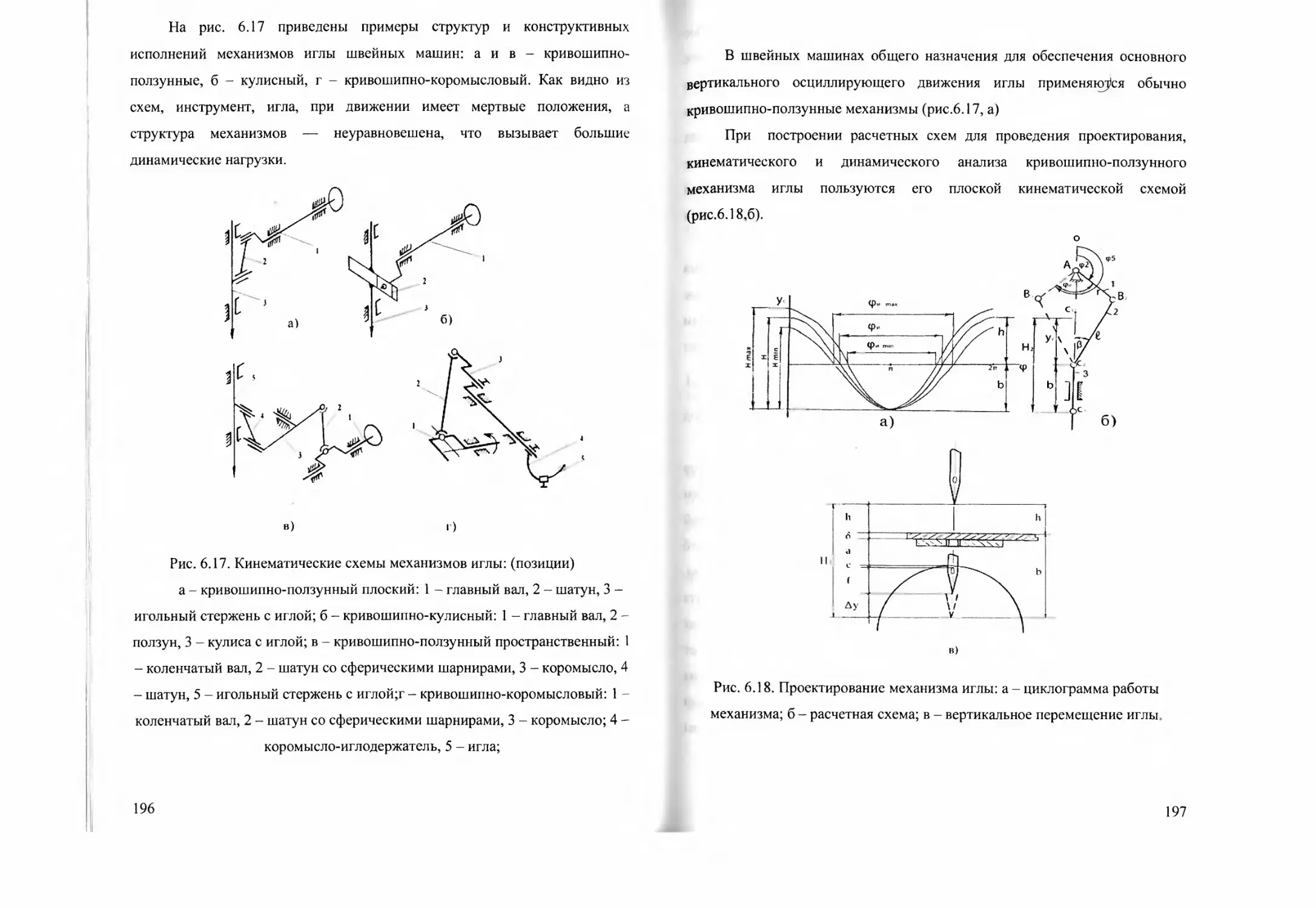
6.5. Основные механизмы швейных машин.......................192
3
6.6. Швейные машины специального назначения, включая машины
с компьютерным управлением...................................222
Глава 7. Электромехатронные модули и их компоненты.............285
7.1. Электромехатронные модули и их связь с мехатронными
системами и комплексами......................................285
7.2. Электрические двигатели - энергетические элементы
мехатронных систем.............................................290
7.3. Преобразователи электрической энергии - энергетические
элементы мехатронных систем....................................302
7.4. Информационно - измерительные элементы мехатронных
систем.......................................................340
Глава 8. Мехатронные модули и системы в объектах управления
технологическими процессами и производствами...................345
8.1. Модернизация системы автоматического управления установки
очистки технологического оборудования от налипания сыпучих
порошкообразных веществ......................................346
8.2. Автоматизация пусковых режимов асинхронных двигателей
технологических производств..................................353
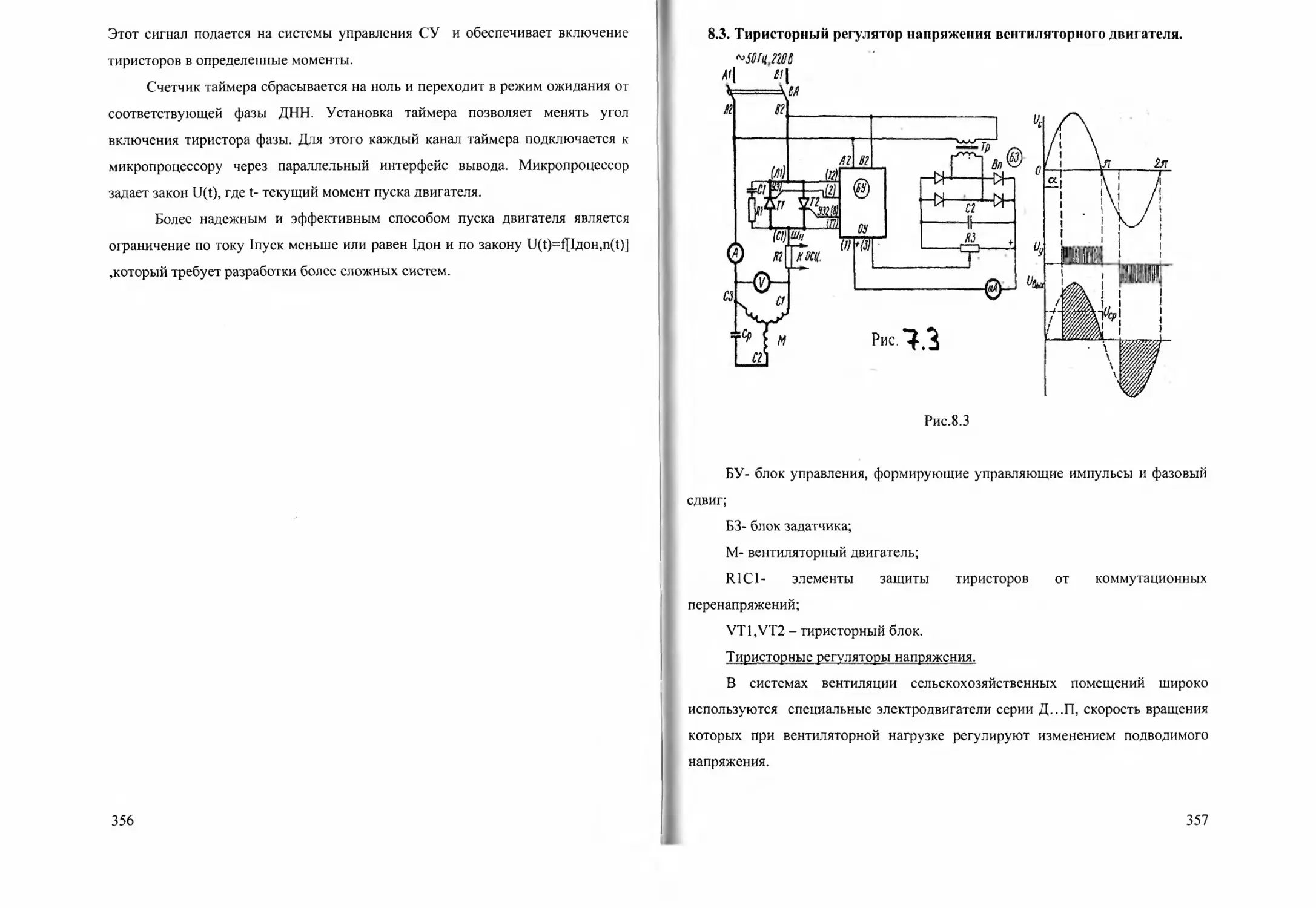
8.3. Тиристорный регулятор напряжения вентиляторного двигателя.357
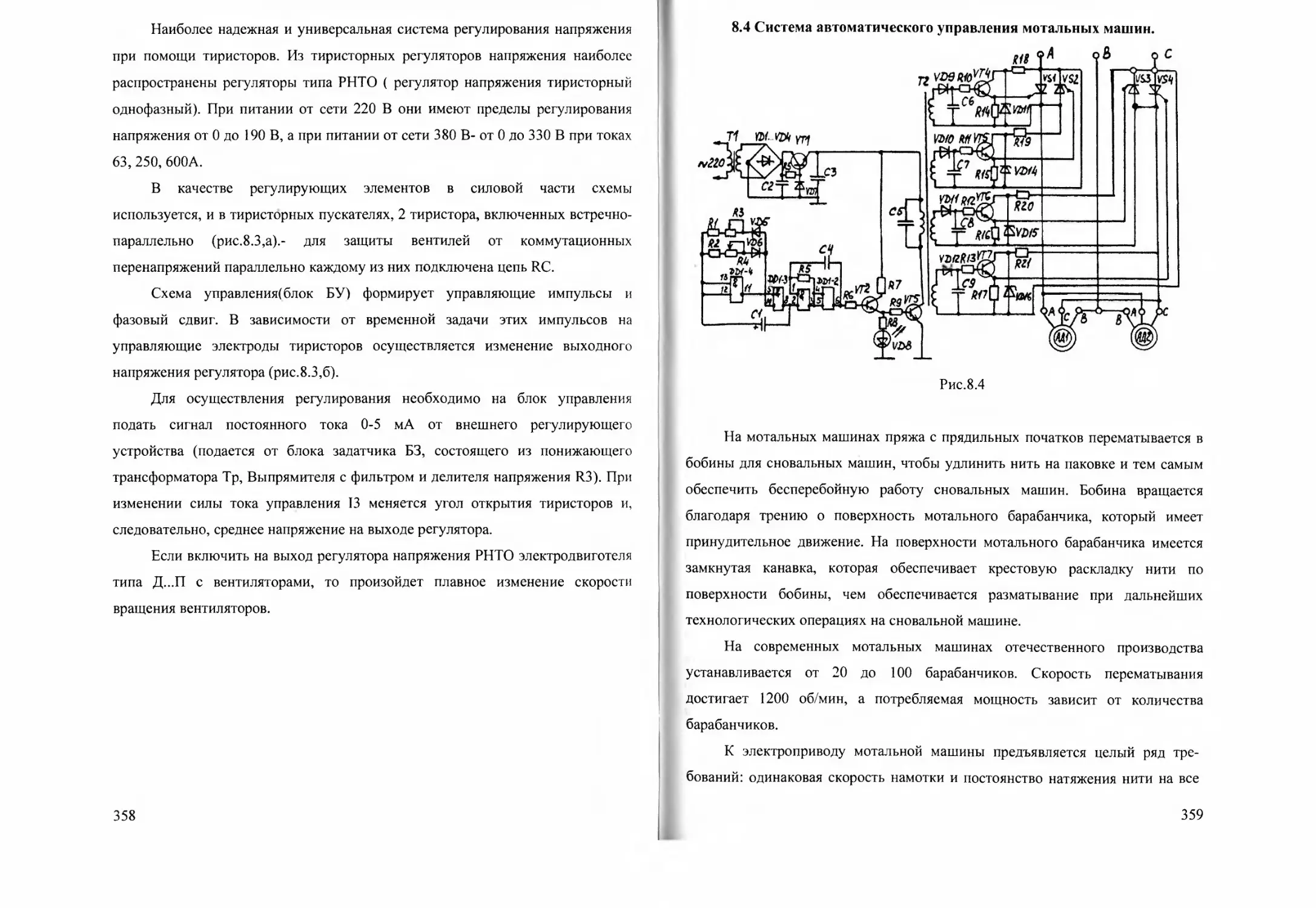
8.4 Система автоматического управления мотальных машин.......359
8.5. Система автоматического регулирования электрофильтра....364
8.6. Автоматизация режимов электролизно-водных генераторов
водородно-кислородной смеси с применением микропроцессора
и микро-ЭВМ....................................................366
8.7. Тиристорные устройства защиты и управления электродвигателей
технологических линий текстильного производства................385
8.8. Генератор с транзисторным коммутатором импульсов для
электроэрозивной обработки металлических изделий...............389
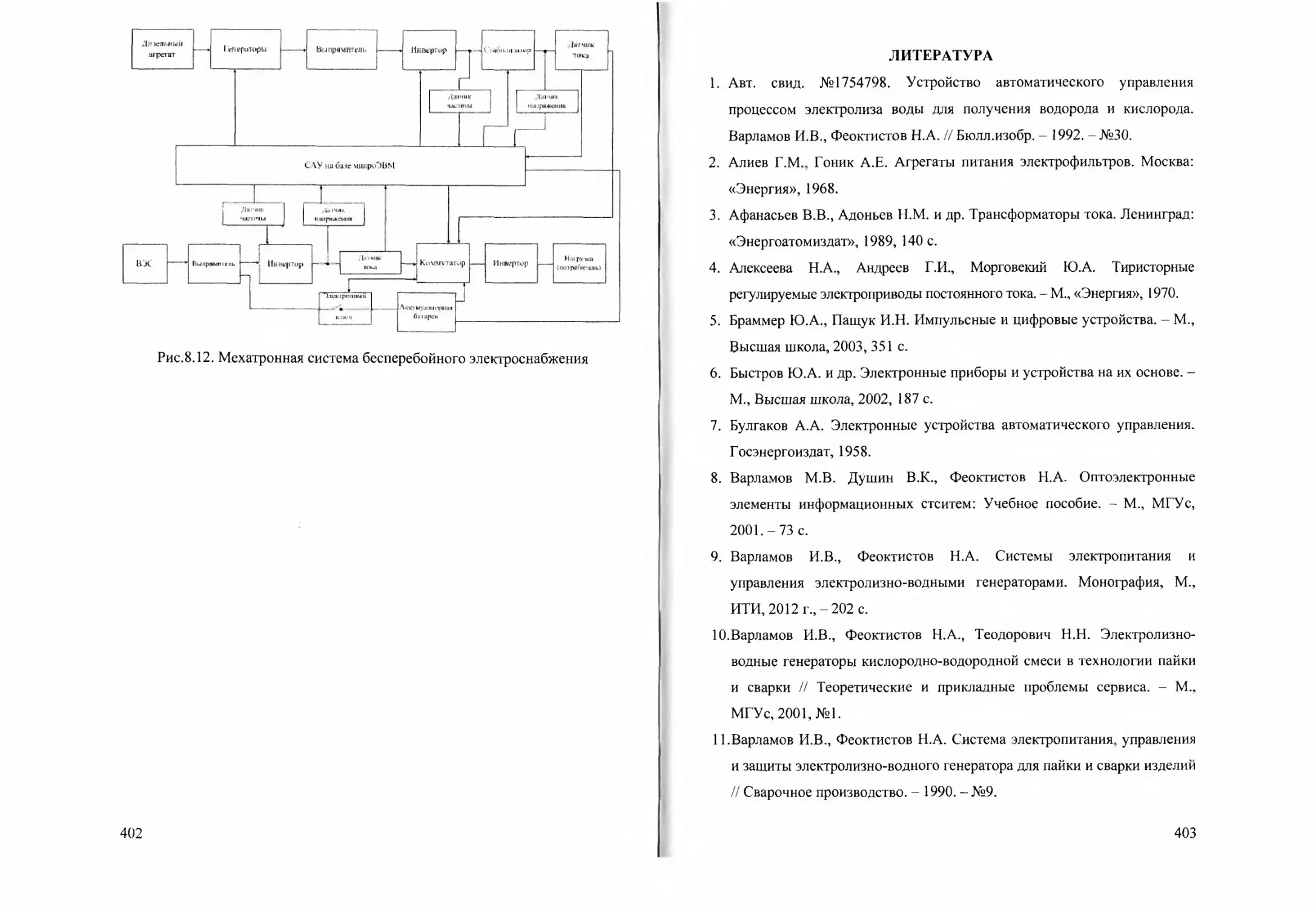
8.9. Ветроэлектронная станция (ВЭС) со стабилизацией параметров
электрической энергии..........................................390
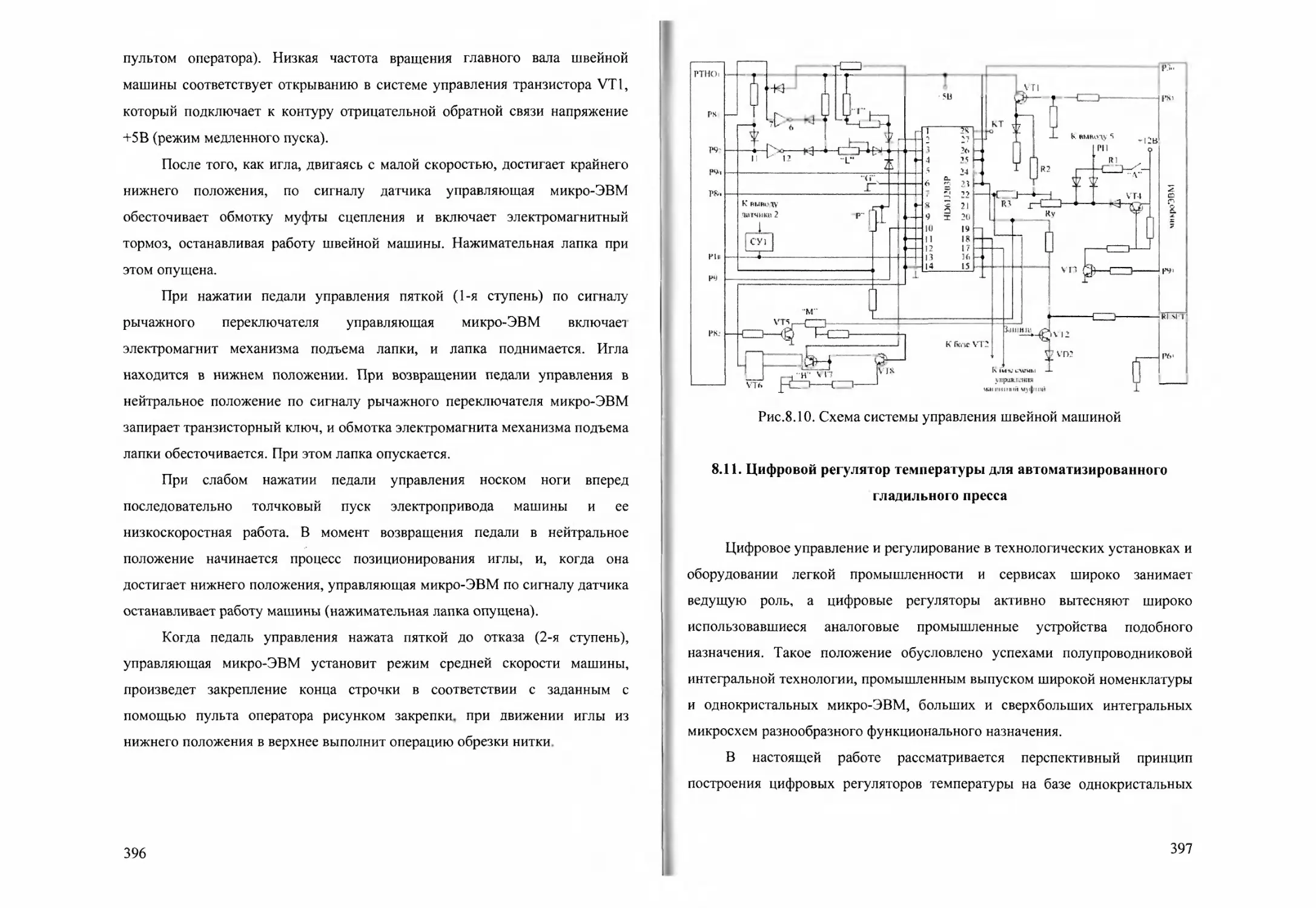
8.10. Автоматизация промышленных швейных машин на базе
микропроцессорной техники....................................393
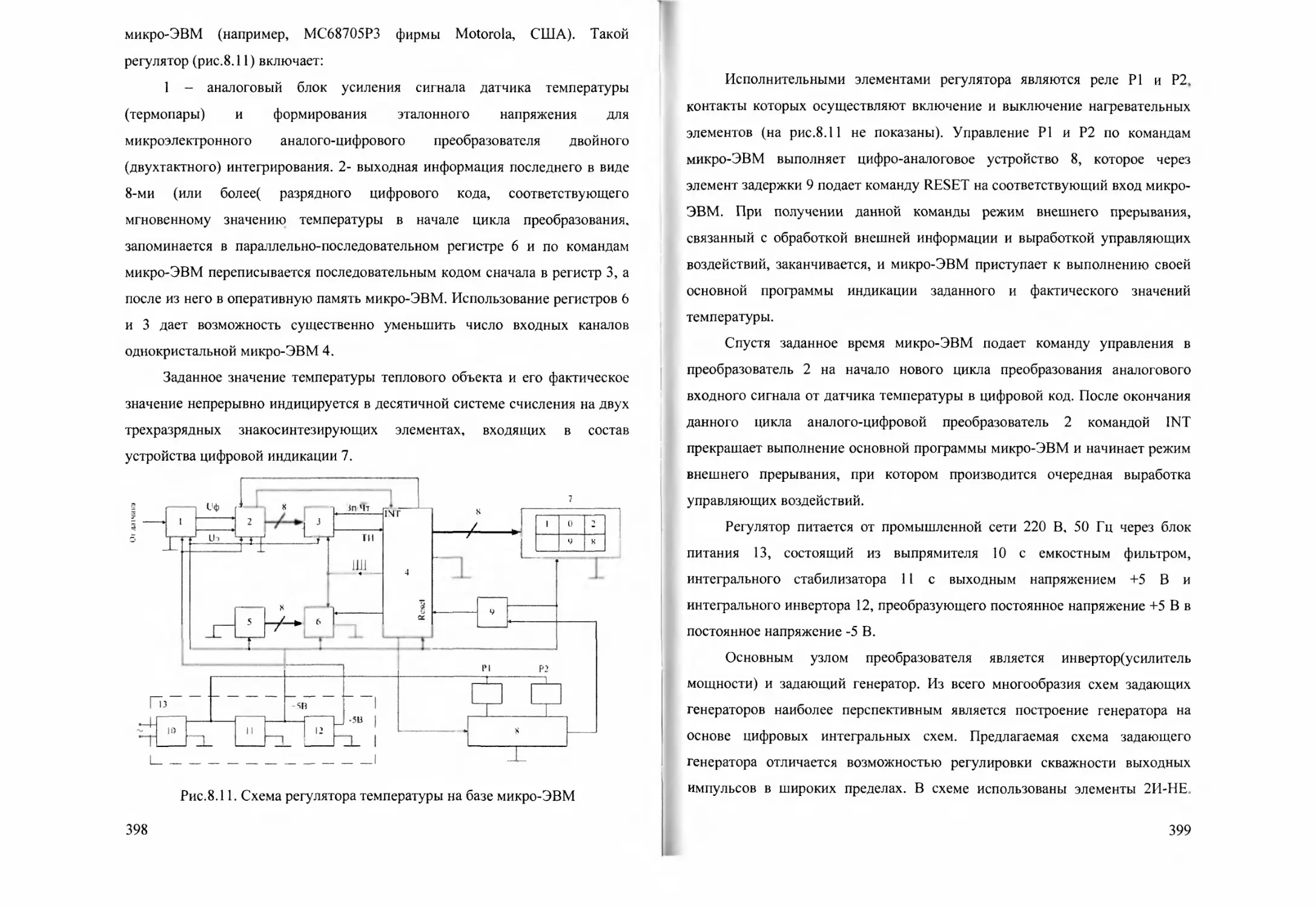
8.11. Цифровой регулятор температуры для автоматизированного
гладильного пресса...........................................397
Литература.....................................................403
4
ВВЕДЕНИЕ
Для того чтобы технологическое оборудование могло автоматически
работать, необходимо оснащение управляющими и регулирующими
устройствами или системами. С развитием электроники и микроэлектроники
произошел резкий скачок в процессы создания и внедрения этих систем.
Наряду с управлением и регулированием важнейшими задачами
технологического процесса являются контроль и анализ технологических
операций, регистрация параметров процесса, индикация режимов, в том
числе нарушений технологического процесса и аварий и т.д. Для этого
возникает необходимость сбора и обработки информации, ввода, передачи и
вывода данных, регистрации эксплуатационных параметров. С этой целью
возникла реальная возможность внедрения микроконтроллеров (микро-
ЭВМ) и управляющих вычислительных машин. Для того, чтобы создавать
такие системы необходима современная элементная база на основе
достижений электроники и микроэлектроники, электромеханики и
информатики. Современная электроника позволяет обеспечить построение
электронных систем и комплексов [5,6,14,19,27-29,31,49,65,86,87,89,90], в
том числе создание автоматических систем электромеханического
преобразования энергии [7,30,32,44.49,53,89,90]. Большие достижения и
опыт разработки электронных, электротехнических или
электромеханических, и механических систем позволяет перейти на новый
уровень разработки систем автоматизированного управления и
регулирования технологического оборудования машин и аппаратов с
помощью мехатронных модулей систем технологического оборудования [9-
11,20,45,46,50,51,52,60,69,72,73,82,83].
В основу построения мехатронной системы заложены идеи
взаимосвязи механических, электротехнических, электронных и
компьютерных элементов и устройств. Каждая из перечисленных
5
составляющих обеспечивает вполне самостоятельные функции и они
объединяются таким образом, что образуют новую систему, которая
получает качественно новые свойства. Наиболее точное определение,
известное в научно-технической литературе: «Мехатроника изучает
синергетическое объединение узлов точной механики с электронными,
электротехническими и компьютерными компонентами с целью
проектирования и производства качественно новых модулей, систем, машин
и комплексов машин с интеллектуальным управлением их функциональным
движением». Началу этого нового направления в науке и технике положено
в работах зарубежных ученых Иссии X., Шмида Д., Хакса Иришика, Тамра
М. и других. Среди отечественных ученых следует отметить работы
Подураева Ю.В., Егорова О.Д., Карнаухова Н.Ф., Осипова Ю.М., Смирнова
А.Б., Макарова И.М., Лохина В.М., Германа-Галкина С.Г. и других.
Кроме того, в настоящее время существуют актуальные проблемы
развития науки и техники, обусловленные необходимостью
технологической модернизации российской промышленности, например в
технологических комплексах формирования и обработки поверхностей
изделий сложной пространственной формы, один из путей которого -
создание их на основе мультикоординатных систем движения с
интеллектуальным управлением.
Вышеизложенное позволяет отметить, что развитие мехатроники
продолжается и в новых прорывных направлениях науки и техники, и в
«старых» областях, в которых высокое качество исследований и
производство новых видов изделий. Оно обусловлено развитием
микроэлектроники и компьютерных технологий, созданием новых
электротехнических материалов. На стыке электромеханики, электроники и
компьютерных технологий выделяется область мехатроники, названная
исследователями «электромехатроника» (или «электромеханотроника»),
обеспечивающая разработку интеллектуальных (самоуправляемых,
6
самодиагностируемых и защищаемых от внешних воздействий), а также
мультикоординатных устройств преобразования электрической и
механической энергии.
В нашей стране наиболее перспективно развивалось направление,
связанное с электронизацией технических устройств, которое заключается в
совмещении электромеханических преобразователей с электронными
приборами и устройствами или электронными компонентами. В результате
возник новый термин «электромеханотроника». Официальное признание
электромеханотроники состоялось в октябре 1987 года на Первой
Всесоюзной НТК по электромеханотронике. Развитие этого направления в
соответствие с новой терминологией нашло отражение в работах Осипова
Ю.М., Коськина Ю.П., Глебова И.А., Германа-Галкина С.Г., Бута Д.А.,
Смирнова Ю.С., Домрачева В.И., Аракепян А.К., Афанасьева А.А. и других.
Мехатронные модули и системы включают в себя исполнительные
органы, электромехатронные их не содержат. Кроме этого мехатроника
предполагает в качестве главного признака использование компьютерного
управления.
В настоящее время и в ближайшем будущем бурное развитие
нанотехнологий вторгается в мехатронику и определяет пути развития
наномехатроники, расширяющего понятие «мехатроника» - нового понятия
в связи с прогрессом науки и техники. Системы движения в
наномехатронике организованы на уровне молекул, групп и отдельных
атомов, возникают условия для инновационного развития экономики [7].
В данной книге авторы уделили внимание современной элементной
базе, на базе которой можно построить составные компоненты мехатроники:
электронным компонентам энергетического и информационного
назначения, электромеханотронным комплексам, связующим звеньям
электромеханотроники с электротехнологическими установками. Изложены
7
принципы построения мехатронных модулей систем технологического
оборудования, электромехатронных преобразователей и ихкомпонент.
В последней главе приведены разработки авторов по разработке
электронных и мехатронных систем управления технологическими
процессами и производствами в области легкой промышленности и
сервисного обслуживания.
Книга предназначена для инженерно-технических работников,
занимающихся разработкой, проектированием и эксплуатацией систем
автоматизации технологического оборудования, а также аспирантов и
магистров технологических направлений подготовки.
8
ГЛАВА 1. ЭЛЕМЕНТЫ ЭЛЕКТРОННЫХ СХЕМ
1.1. Полупроводниковые приборы. Принцип работы электронно-
дырочного перехода
К полупроводникам относят материалы, проводимость которых
больше проводимости диэлектриков, но меньше проводимости
проводников. В радиоэлектронике в качестве полупроводников наиболее
часто используются кремний, германий, арсенид галлия, селен и др.
Химически чистые или i-полупроводники имеют небольшую собственную
проводимость, обусловленную свободными электронами и дырками
теплового происхождения [3].
Полупроводник п-тпипа — это полупроводник с преобладающей
электронной проводимостью. Преобладающая электронная проводимость
возникает при добавлении донорных примесей, например пятивалентных
сурьмы, мышьяка и т. п. к четырехвалентному кремнию. Атом примеси
легко ионизируется, добавляя электрон к электронам собственной
проводимости.
Полупроводник p-типа возникает при добавлении к химически
чистому полупроводнику акцепторных примесей, например, при добавлении
трехвалентных бора, алюминия и др. к четырехвалентному кремнию. Атом
примеси ионизируется, принимая электрон от соседнего атома основного
полупроводника и создавая тем самым дырку в полупроводнике. Примесные
полупроводники называются легированными.
При нормальной температуре практически все атомы примесей
ионизируются и проводимость примесного полупроводника существенно
возрастает. Отметим, что, несмотря на возникновение только одного типа
проводимости: или п-, или p-типа, примесные полупроводники будут
электрически нейтральны, так как заряды ионов скомпенсированы зарядами
9
основных носителей заряда — электронов в п-области и дырок р-области
полупроводника. Дырки в n-полупроводнике или электроны в р-
полупроводнике называют неосновными носителями зарядов.
Наибольшее применение нашли полупроводники, одна часть которых
легирована акцепторными примесями, а другая — донорными. Переход
между двумя областями полупроводника с разными типами
электропроводности называется электронно-дырочным или р-п-переходом
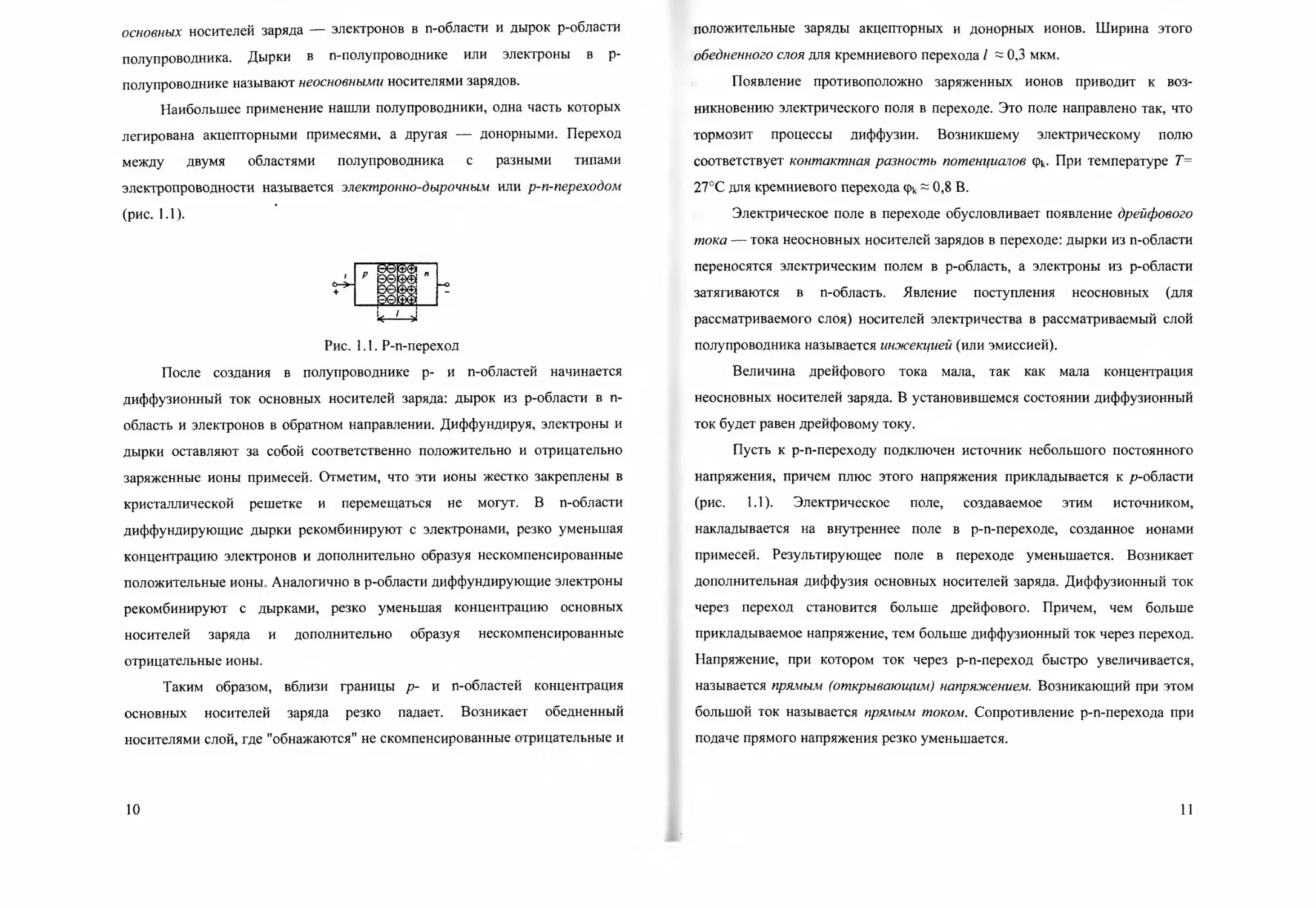
(рис. 1.1).
Рис. 1.1. Р-п-переход
После создания в полупроводнике р- и n-областей начинается
диффузионный ток основных носителей заряда: дырок из p-области в п-
область и электронов в обратном направлении. Диффундируя, электроны и
дырки оставляют за собой соответственно положительно и отрицательно
заряженные ионы примесей. Отметим, что эти ионы жестко закреплены в
кристаллической решетке и перемещаться не могут. В п-области
диффундирующие дырки рекомбинируют с электронами, резко уменьшая
концентрацию электронов и дополнительно образуя нескомпенсированные
положительные ионы. Аналогично в p-области диффундирующие электроны
рекомбинируют с дырками, резко уменьшая концентрацию основных
носителей заряда и дополнительно образуя нескомпенсированные
отрицательные ионы.
Таким образом, вблизи границы р- и n-областей концентрация
основных носителей заряда резко падает. Возникает обедненный
носителями слой, где "обнажаются” не скомпенсированные отрицательные и
10
положительные заряды акцепторных и донорных ионов. Ширина этого
обедненного слоя для кремниевого перехода I ~ 0,3 мкм.
Появление противоположно заряженных ионов приводит к воз-
никновению электрического поля в переходе. Это поле направлено так, что
тормозит процессы диффузии. Возникшему электрическому полю
соответствует контактная разность потенциалов (рк- При температуре Т=
27°С для кремниевого перехода срк ~ 0,8 В.
Электрическое поле в переходе обусловливает появление дрейфового
тока — тока неосновных носителей зарядов в переходе: дырки из п-области
переносятся электрическим полем в p-область, а электроны из р-области
затягиваются в n-область. Явление поступления неосновных (для
рассматриваемого слоя) носителей электричества в рассматриваемый слой
полупроводника называется инжекцией (или эмиссией).
Величина дрейфового тока мала, так как мала концентрация
неосновных носителей заряда. В установившемся состоянии диффузионный
ток будет равен дрейфовому току.
Пусть к р-п-переходу подключен источник небольшого постоянного
напряжения, причем плюс этого напряжения прикладывается к /^-области
(рис. 1.1). Электрическое поле, создаваемое этим источником,
накладывается на внутреннее поле в р-п-переходе, созданное ионами
примесей. Результирующее поле в переходе уменьшается. Возникает
дополнительная диффузия основных носителей заряда. Диффузионный ток
через переход становится больше дрейфового. Причем, чем больше
прикладываемое напряжение, тем больше диффузионный ток через переход.
Напряжение, при котором ток через р-п-переход быстро увеличивается,
называется прямым (открывающим) напряжением. Возникающий при этом
большой ток называется прямым током. Сопротивление р-п-перехода при
подаче прямого напряжения резко уменьшается.
11
Подключим к р-п-переходу источник постоянного напряжения, так
чтобы минус этого напряжения прикладывался к p-области. Дополнительное
электрическое поле, создаваемое источником, складывается с внутренним
полем в р-п-переходе. Результирующее поле в переходе увеличивается.
Диффузия основных носителей заряда уменьшается, а при дальнейшем
увеличении приложенного напряжения почти полностью прекращается.
Дрейфовый ток через переход незначительно увеличивается и становится
больше диффузионного. Однако сопротивление перехода протекающему
току остается увеличенным, так как концентрация неосновных носителей в
полупроводнике мала и дрейфовый ток при прочих равных условиях много
меньше прямого тока. Поданное напряжение называется обратным
(запирающим или закрывающим) напряжением, а возникающий при этом
небольшой ток называют обратным током.
Вольт-амперная характеристика (ВАХ) перехода представлена на рис.
1.2. Из анализа ВАХ следует основное свойство р-п-перехода —
односторонняя проводимость. При подаче прямого напряжения ток через
переход возрастает по экспненциальному закону. Обратный ток,
возникающий при обратном наряжении, значительно меньше прямого и
слабо зависит от величины обратного напряжения. При подаче на переход
переменного напряжения через переход будет протекать в основном прямой
ток Поэтому р-п-переход называют выпрямляющим переходом.
Рис. 1.2. Вольт-амперная характеристика р-п-перехода
Наличие в р-п-переходе и в областях, прилегающих к нему, зарядов:
ионов, электронов и дырок, свидетельствует о том, что переход обладает
емкостью. Различают барьерную и диффузионную емкости
12
Барьерная емкость обусловлена наличием в обедненном слое про-
тивоположно заряженных ионов примесей (рис. 1.1). Два слоя положительно
и отрицательно заряженных ионов соответствуют двум заряженным
"пластинам” конденсатора. Барьерная емкость играет основную роль при
подаче обратного напряжения. При увеличении обратного напряжения
основные носители зарядов оттесняются в глубь полупроводника
электрическим полем р-п-перехода. При этом увеличивается ширина /
перехода и увеличивается среднее расстояние между ’’пластинами"
конденсатора. Барьерная емкость уменьшается.
Диффузионная емкость характеризует накопление неравновесного
заряда, обусловленное диффузией электронов и дырок в глубь
полупроводника за область р-п-перехода. Так как время жизни электронов и
дырок до наступления рекомбинации конечно, то по обе стороны р-п-
перехода появляются дополнительные, объемные заряды. Диффузионная
емкость для малых переменных напряжений линейно увеличивается при
увеличении прямого тока inp через переход.
При прямом токе диффузионная емкость, как правило, больше
барьерной емкости. Результирующая емкость перехода равна сумме
барьерной и диффузионной емкостей.
Кроме р-п-перехода часто используется переход между металлом и п-
полупроводником. В зависимости от используемых материалов этот переход
может обладать односторонней проводимостью или иметь малое
сопротивление. В первом случае выпрямляющий переход называют
переходом Шотки. Во втором случае переход металл-полупроводник,
имеющий малое сопротивление, называют омическим. Его используют для
создания электрических выводов из полупроводниковых областей. При
изготовлении полупроводниковых приборов используется большое
количество других электрических переходов, образованных различными
13
материалами. Все эти переходы будут или омическими, или
выпрямляющими.
На основе выпрямляющих переходов изготавливаются полупро-
водниковые диоды. Полупроводниковый диод — это прибор с одним
выпрямляющим переходом и двумя выводами. Наибольшее распро-
странение получили диоды, использующие р-п-переход (рис. 1.3). Электрод,
подключенный к p-области, часто называют анодом, а электрод,
соединенный с п-областью — катодом. На рис. 1.3 показано условное
обозначение полупроводникового диода и полярность прямого напряжения.
Анод
+
I п __
1 Катод
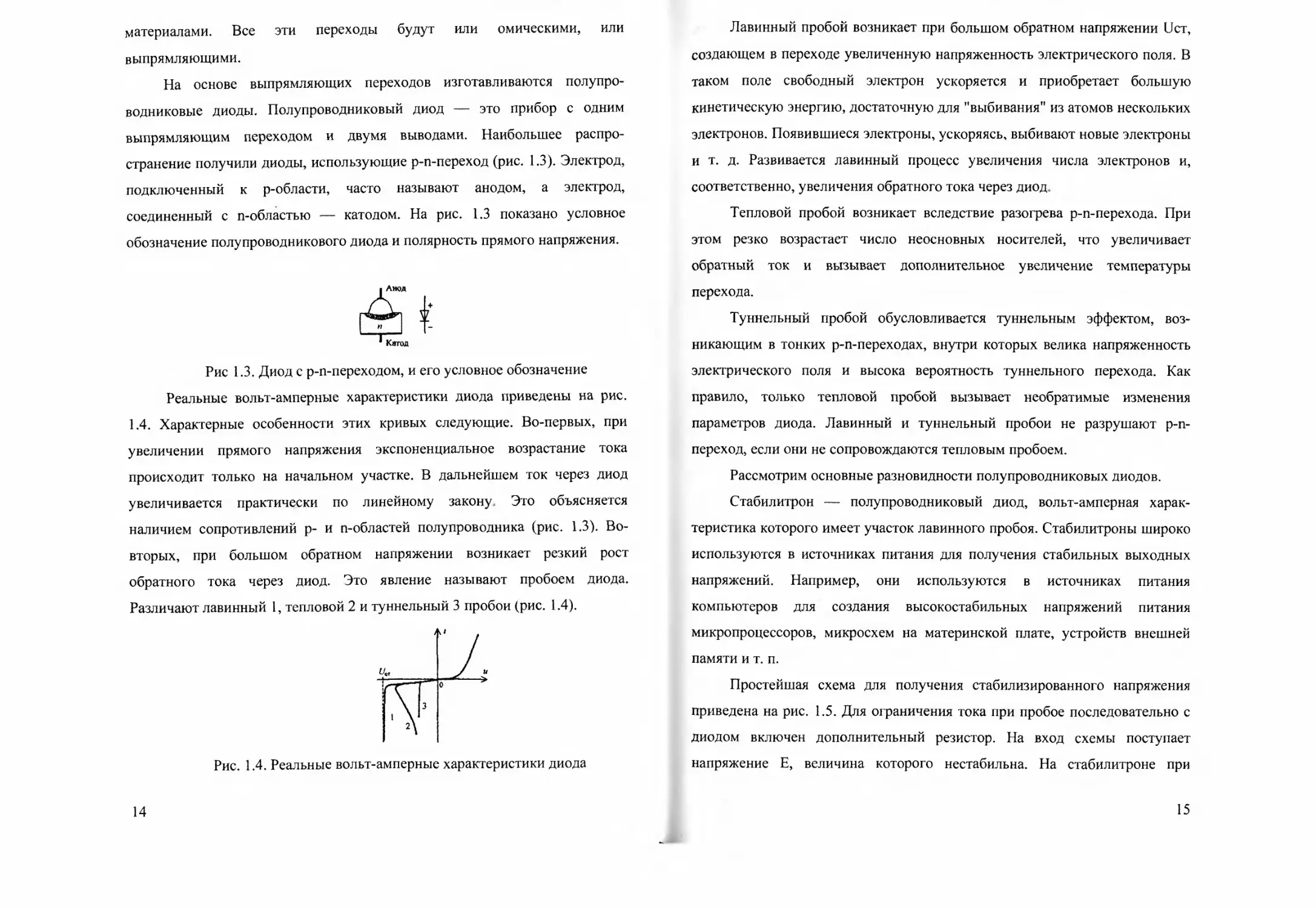
Рис 1.3. Диод с р-п-переходом, и его условное обозначение
Реальные вольт-амперные характеристики диода приведены на рис.
1.4. Характерные особенности этих кривых следующие. Во-первых, при
увеличении прямого напряжения экспоненциальное возрастание тока
происходит только на начальном участке. В дальнейшем ток через диод
увеличивается практически по линейному закону. Это объясняется
наличием сопротивлений р- и n-областей полупроводника (рис. 1.3). Во-
вторых, при большом обратном напряжении возникает резкий рост
обратного тока через диод. Это явление называют пробоем диода.
Различают лавинный 1, тепловой 2 и туннельный 3 пробои (рис. 1.4).
Рис. 1.4. Реальные вольт-амперные характеристики диода
14
Лавинный пробой возникает при большом обратном напряжении Uct,
создающем в переходе увеличенную напряженность электрического поля. В
таком поле свободный электрон ускоряется и приобретает большую
кинетическую энергию, достаточную для "выбивания” из атомов нескольких
электронов. Появившиеся электроны, ускоряясь, выбивают новые электроны
и т. д. Развивается лавинный процесс увеличения числа электронов и,
соответственно, увеличения обратного тока через диод.
Тепловой пробой возникает вследствие разогрева р-п-перехода. При
этом резко возрастает число неосновных носителей, что увеличивает
обратный ток и вызывает дополнительное увеличение температуры
перехода.
Туннельный пробой обусловливается туннельным эффектом, воз-
никающим в тонких р-п-переходах, внутри которых велика напряженность
электрического поля и высока вероятность туннельного перехода. Как
правило, только тепловой пробой вызывает необратимые изменения
параметров диода. Лавинный и туннельный пробои не разрушают р-п-
переход, если они не сопровождаются тепловым пробоем.
Рассмотрим основные разновидности полупроводниковых диодов.
Стабилитрон — полупроводниковый диод, вольт-амперная харак-
теристика которого имеет участок лавинного пробоя. Стабилитроны широко
используются в источниках питания для получения стабильных выходных
напряжений. Например, они используются в источниках питания
компьютеров для создания высокостабильных напряжений питания
микропроцессоров, микросхем на материнской плате, устройств внешней
памяти и т. п.
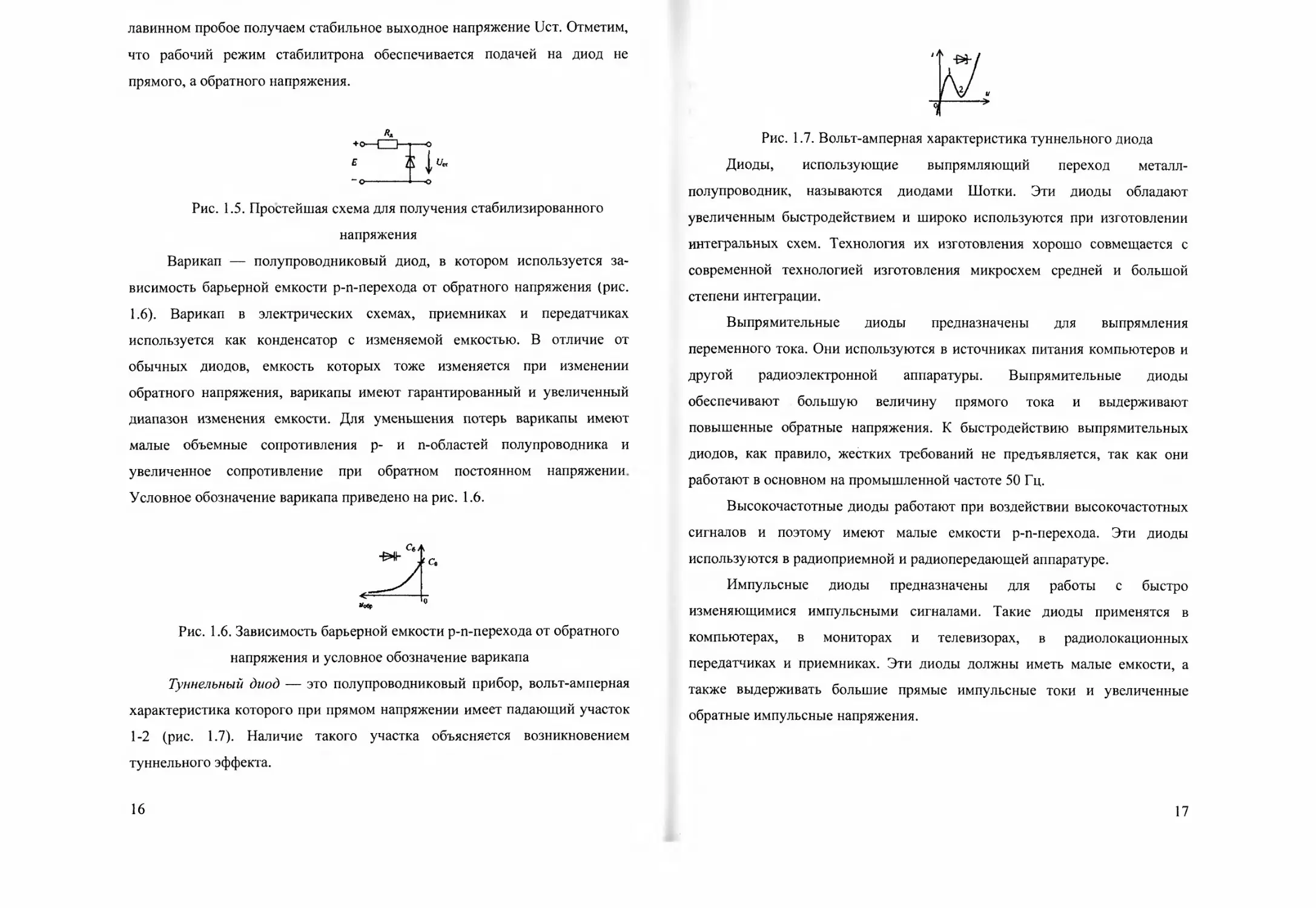
Простейшая схема для получения стабилизированного напряжения
приведена на рис. 1.5. Для ограничения тока при пробое последовательно с
диодом включен дополнительный резистор. На вход схемы поступает
напряжение Е, величина которого нестабильна. На стабилитроне при
15
лавинном пробое получаем стабильное выходное напряжение Uct. Отметим,
что рабочий режим стабилитрона обеспечивается подачей на диод не
прямого, а обратного напряжения.
Рис. 1.5. Простейшая схема для получения стабилизированного
напряжения
Варикап — полупроводниковый диод, в котором используется за-
висимость барьерной емкости р-п-перехода от обратного напряжения (рис.
1.6). Варикап в электрических схемах, приемниках и передатчиках
используется как конденсатор с изменяемой емкостью. В отличие от
обычных диодов, емкость которых тоже изменяется при изменении
обратного напряжения, варикапы имеют гарантированный и увеличенный
диапазон изменения емкости. Для уменьшения потерь варикапы имеют
малые объемные сопротивления р- и n-областей полупроводника и
увеличенное сопротивление при обратном постоянном напряжении.
Условное обозначение варикапа приведено на рис. 1.6.
Рис. 1.6. Зависимость барьерной емкости р-п-перехода от обратного
напряжения и условное обозначение варикапа
Туннельный диод — это полупроводниковый прибор, вольт-амперная
характеристика которого при прямом напряжении имеет падающий участок
1-2 (рис. 1.7). Наличие такого участка объясняется возникновением
туннельного эффекта.
16
Рис. 1.7. Вольт-амперная характеристика туннельного диода
Диоды, использующие выпрямляющий переход металл-
полупроводник, называются диодами Шотки. Эти диоды обладают
увеличенным быстродействием и широко используются при изготовлении
интегральных схем. Технология их изготовления хорошо совмещается с
современной технологией изготовления микросхем средней и большой
степени интеграции.
Выпрямительные диоды предназначены для выпрямления
переменного тока. Они используются в источниках питания компьютеров и
другой радиоэлектронной аппаратуры. Выпрямительные диоды
обеспечивают большую величину прямого тока и выдерживают
повышенные обратные напряжения. К быстродействию выпрямительных
диодов, как правило, жестких требований не предъявляется, так как они
работают в основном на промышленной частоте 50 Гц.
Высокочастотные диоды работают при воздействии высокочастотных
сигналов и поэтому имеют малые емкости р-п-перехода. Эти диоды
используются в радиоприемной и радиопередающей аппаратуре.
Импульсные диоды предназначены для работы с быстро
изменяющимися импульсными сигналами. Такие диоды применятся в
компьютерах, в мониторах и телевизорах, в радиолокационных
передатчиках и приемниках. Эти диоды должны иметь малые емкости, а
также выдерживать большие прямые импульсные токи и увеличенные
обратные импульсные напряжения.
17
1.2. Биполярные транзисторы
Биполярный транзистор — это полупроводниковый прибор с двумя
р-п-переходами, имеющий три вывода. Действие биполярного транзистора
основано на использовании носителей заряда обоих знаков (дырок и элект-
ронов), а управление протекающим через него током осуществляется с
помощью управляющего тока [1].
Биполярный транзистор является наиболее распространенным
активным полупроводниковым прибором.
1.2.1. Устройство и основные физические процессы
Устройство транзистора
Биполярный транзистор в своей основе содержит три слоя
полупроводника (р-п-р или п-р-п) и соответственно два р-п-перехода.
Каждый слой полупроводника через невыпрямляющий контакт металл-
полупроводник подсоединен к внешнему выводу.
Средний слой и соответствующий вывод называют базой, один из
крайних слоев и соответствующий вывод называют эмиттером, а другой
крайний слой и соответствующий вывод — коллектором.
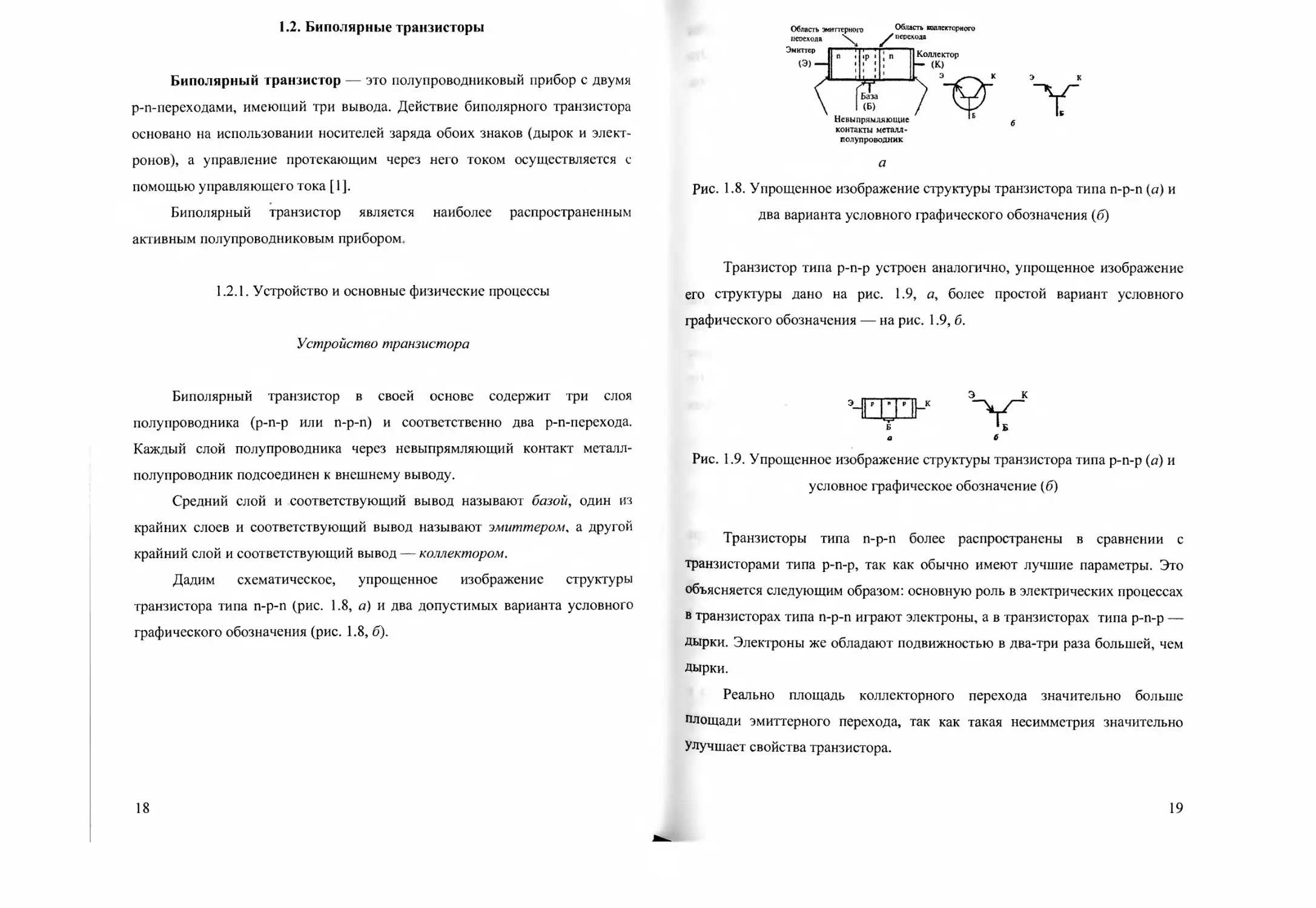
Дадим схематическое, упрощенное изображение структуры
транзистора типа п-р-п (рис. 1.8, а) и два допустимых варианта условного
графического обозначения (рис. 1.8, б).
18
a
Рис. 1.8. Упрощенное изображение структуры транзистора типа п-р-п (а) и
два варианта условного графического обозначения (б)
Транзистор типа р-п-р устроен аналогично, упрощенное изображение
его структуры дано на рис. 1.9, а, более простой вариант условного
графического обозначения — на рис. 1.9, б.
Рис. 1.9. Упрощенное изображение структуры транзистора типа р-п-р (а) и
условное графическое обозначение (б)
Транзисторы типа n-p-п более распространены в сравнении с
транзисторами типа р-п-р, так как обычно имеют лучшие параметры. Это
объясняется следующим образом: основную роль в электрических процессах
в транзисторах типа n-p-п играют электроны, а в транзисторах типа р-п-р —
дырки. Электроны же обладают подвижностью в два-три раза большей, чем
Дырки.
Реально площадь коллекторного перехода значительно больше
площади эмиттерного перехода, так как такая несимметрия значительно
Улучшает свойства транзистора.
19
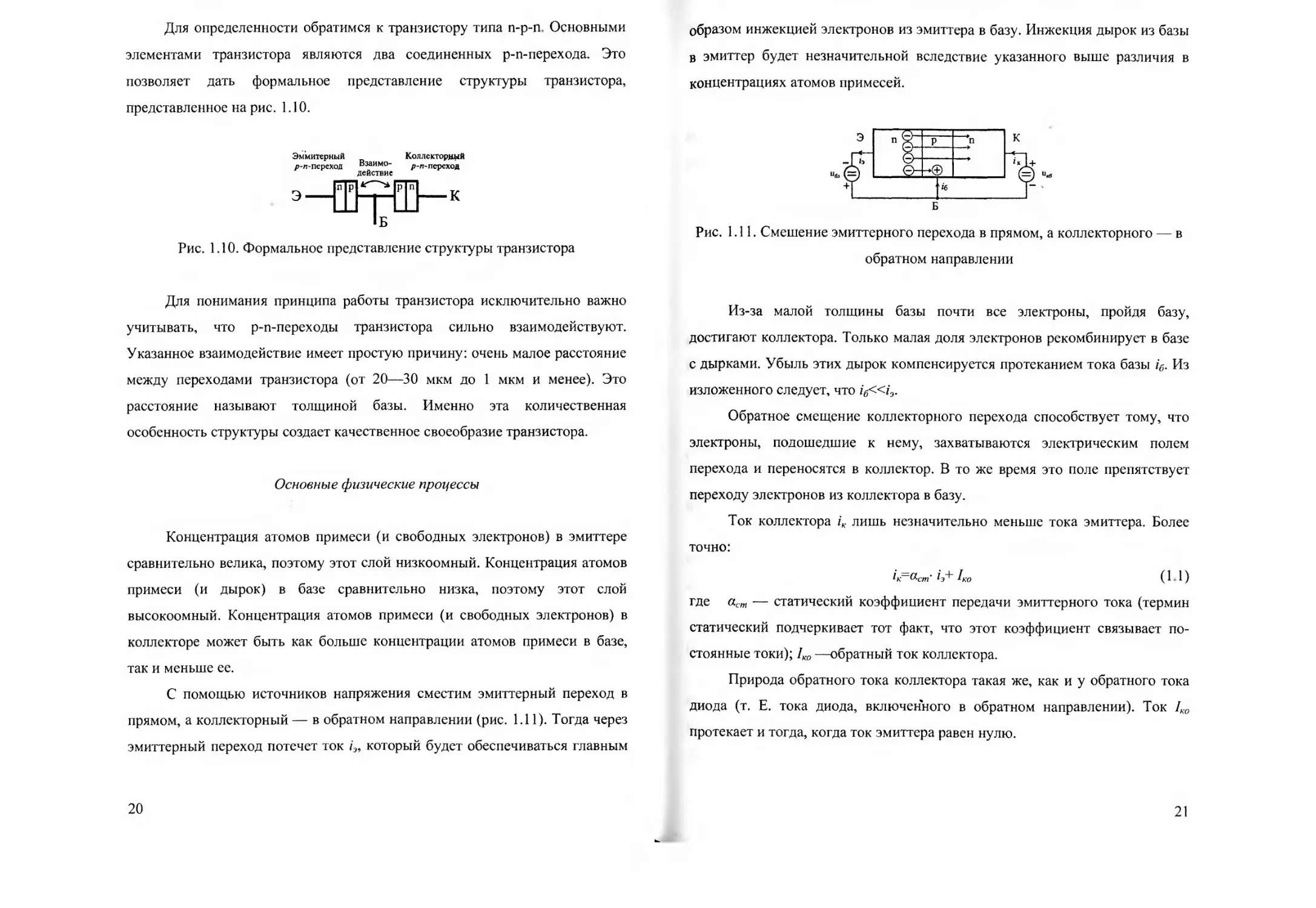
Для определенности обратимся к транзистору типа п-p-n. Основными
элементами транзистора являются два соединенных р-п-перехода. Это
позволяет дать формальное представление структуры транзистора,
представленное на рис. 1.10.
Эм’митерный Коллекторный
/7-л-переход Взаимо- р-л~переход
действие
Рис. 1.10. Формальное представление структуры транзистора
Для понимания принципа работы транзистора исключительно важно
учитывать, что р-п-переходы транзистора сильно взаимодействуют.
Указанное взаимодействие имеет простую причину: очень малое расстояние
между переходами транзистора (от 20—30 мкм до 1 мкм и менее). Это
расстояние называют толщиной базы. Именно эта количественная
особенность структуры создает качественное своеобразие транзистора.
Основные физические процессы
Концентрация атомов примеси (и свободных электронов) в эмиттере
сравнительно велика, поэтому этот слой низкоомный. Концентрация атомов
примеси (и дырок) в базе сравнительно низка, поэтому этот слой
высокоомный. Концентрация атомов примеси (и свободных электронов) в
коллекторе может быть как больше концентрации атомов примеси в базе,
так и меньше ее.
С помощью источников напряжения сместим эмиттерный переход в
прямом, а коллекторный — в обратном направлении (рис. 1.11). Тогда через
эмиттерный переход потечет ток /э, который будет обеспечиваться главным
20
образом инжекцией электронов из эмиттера в базу. Инжекция дырок из базы
в эмиттер будет незначительной вследствие указанного выше различия в
концентрациях атомов примесей.
Б
Рис. 1.11. Смешение эмиттерного перехода в прямом, а коллекторного — в
обратном направлении
Из-за малой толщины базы почти все электроны, пройдя базу,
достигают коллектора. Только малая доля электронов рекомбинирует в базе
с дырками. Убыль этих дырок компенсируется протеканием тока базы i6. Из
изложенного следует, что i6«i3-
Обратное смещение коллекторного перехода способствует тому, что
электроны, подошедшие к нему, захватываются электрическим полем
перехода и переносятся в коллектор. В то же время это поле препятствует
переходу электронов из коллектора в базу.
Ток коллектора iK лишь незначительно меньше тока эмиттера. Более
точно:
&ст' ^ко (1.1)
где аст — статический коэффициент передачи эмиттерного тока (термин
статический подчеркивает тот факт, что этот коэффициент связывает по-
стоянные токи); 1К0 —обратный ток коллектора.
Природа обратного тока коллектора такая же, как и у обратного тока
диода (т. Е. тока диода, включенного в обратном направлении). Ток 1КО
протекает и тогда, когда ток эмиттера равен нулю.
21
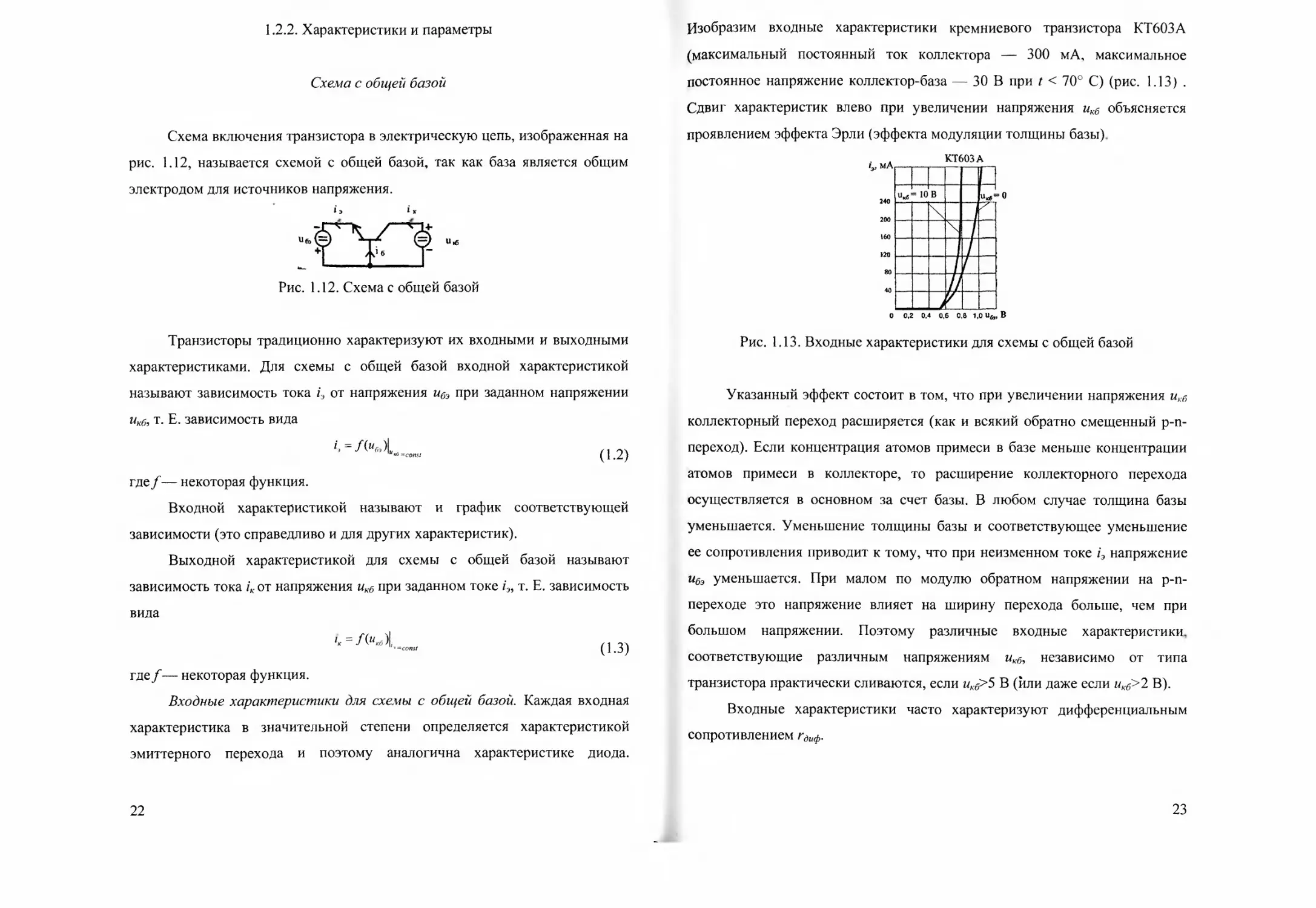
1.2.2. Характеристики и параметры
Схема с общей базой
Схема включения транзистора в электрическую цепь, изображенная на
рис. 1.12, называется схемой с общей базой, так как база является общим
электродом для источников напряжения.
Рис. 1.12. Схема с общей базой
Транзисторы традиционно характеризуют их входными и выходными
характеристиками. Для схемы с общей базой входной характеристикой
называют зависимость тока i3 от напряжения ибэ при заданном напряжении
икб, т. Е. зависимость вида
u*>=consl (Д ,2)
где f — некоторая функция.
Входной характеристикой называют и график соответствующей
зависимости (это справедливо и для других характеристик).
Выходной характеристикой для схемы с общей базой называют
зависимость тока iK от напряжения икв при заданном токе /э, т. Е. зависимость
вида
(ЕЗ)
где f — некоторая функция.
Входные характеристики для схемы с общей базой. Каждая входная
характеристика в значительной степени определяется характеристикой
эмиттерного перехода и поэтому аналогична характеристике диода.
22
Изобразим входные характеристики кремниевого транзистора КТ603А
(максимальный постоянный ток коллектора — 300 мА, максимальное
постоянное напряжение коллектор-база — 30 В при t < 70° С) (рис. 1.13) .
Сдвиг характеристик влево при увеличении напряжения икб объясняется
проявлением эффекта Эрли (эффекта модуляции толщины базы).
Рис. 1.13. Входные характеристики для схемы с общей базой
Указанный эффект состоит в том, что при увеличении напряжения икб
коллекторный переход расширяется (как и всякий обратно смещенный р-п-
переход). Если концентрация атомов примеси в базе меньше концентрации
атомов примеси в коллекторе, то расширение коллекторного перехода
осуществляется в основном за счет базы. В любом случае толщина базы
уменьшается. Уменьшение толщины базы и соответствующее уменьшение
ее сопротивления приводит к тому, что при неизменном токе 1Э напряжение
ибэ уменьшается. При малом по модулю обратном напряжении на р-п-
переходе это напряжение влияет на ширину перехода больше, чем при
большом напряжении. Поэтому различные входные характеристики,
соответствующие различным напряжениям икб, независимо от типа
транзистора практически сливаются, если икб>5 В (или даже если w^>2 В).
Входные характеристики часто характеризуют дифференциальным
сопротивлением гдиф.
23
г =
диф di,
заданный .и -const
(1.4)
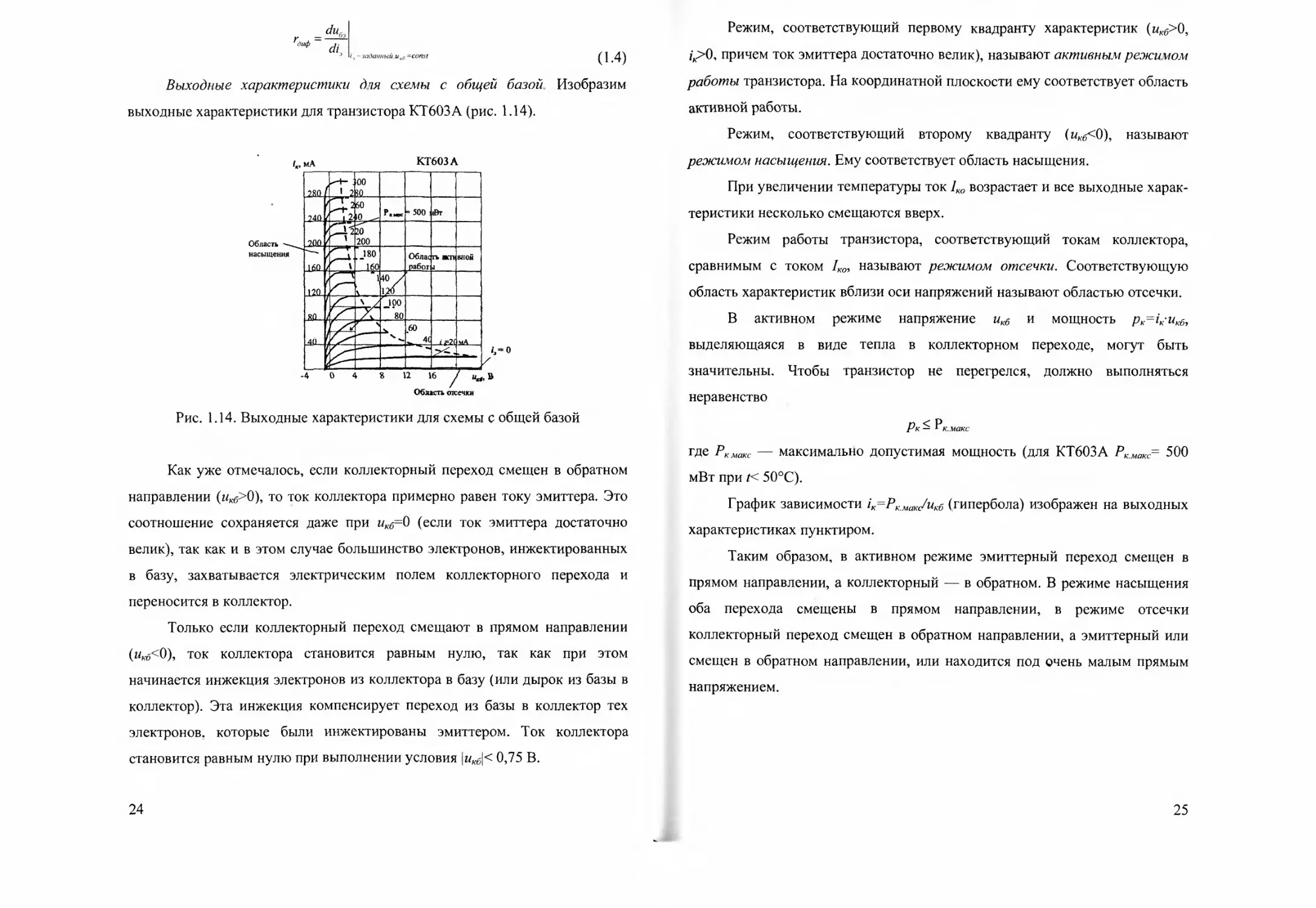
Выходные характеристики дчя схемы с общей базой Изобразим
выходные характеристики для транзистора КТ603А (рис. 1.14).
Рис. 1.14. Выходные характеристики для схемы с общей базой
Как уже отмечалось, если коллекторный переход смещен в обратном
направлении (ик6>0), то ток коллектора примерно равен току эмиттера. Это
соотношение сохраняется даже при икб=0 (если ток эмиттера достаточно
велик), так как и в этом случае большинство электронов, инжектированных
в базу, захватывается электрическим полем коллекторного перехода и
переносится в коллектор.
Только если коллекторный переход смещают в прямом направлении
(мкб<0), ток коллектора становится равным нулю, так как при этом
начинается инжекция электронов из коллектора в базу (или дырок из базы в
коллектор). Эта инжекция компенсирует переход из базы в коллектор тех
электронов, которые были инжектированы эмиттером. Ток коллектора
становится равным нулю при выполнении условия 0,75 В.
24
Режим, соответствующий первому квадранту характеристик (мкб>0,
/*>0, причем ток эмиттера достаточно велик), называют активным режимом
работы транзистора. На координатной плоскости ему соответствует область
активной работы.
Режим, соответствующий второму квадранту (м^<0), называют
режимом насыщения. Ему соответствует область насыщения.
При увеличении температуры ток 1КО возрастает и все выходные харак-
теристики несколько смещаются вверх.
Режим работы транзистора, соответствующий токам коллектора,
сравнимым с током 1КО, называют режимом отсечки. Соответствующую
область характеристик вблизи оси напряжений называют областью отсечки.
В активном режиме напряжение икб и мощность pK^iK'UK6,
выделяющаяся в виде тепла в коллекторном переходе, могут быть
значительны. Чтобы транзистор не перегрелся, должно выполняться
неравенство
Рк — Р/с макс
где Ркмакс — максимально допустимая мощность (для КТ603А Рк.макс= 500
мВт при t< 50°С).
График зависимости iK=PK.MaK(/uK6 (гипербола) изображен на выходных
характеристиках пунктиром.
Таким образом, в активном режиме эмиттерный переход смещен в
прямом направлении, а коллекторный — в обратном. В режиме насыщения
оба перехода смещены в прямом направлении, в режиме отсечки
коллекторный переход смещен в обратном направлении, а эмиттерный или
смещен в обратном направлении, или находится под очень малым прямым
напряжением.
25
Схема с общим эмиттером
Значительно чаще, чем схема с общей базой, применяется схема,
представленная на рис. 1.15. Ее называют схемой с общим эмиттером, так
как эмиттер является общим электродом для источников напряжения.
Рис. 1.15. Схема с общим эмиттером
Для этой схемы входной характеристикой называют зависимость тока
i6 от напряжения ибэ при заданном напряжении икэ, т. е. зависимость вида
^б~/^ибэ\, /1
'u*’=const (1.5)
где f — некоторая функция.
Выходной характеристикой называют зависимость тока iK от
напряжения икэ при заданном токе i6, т. Е. зависимость вида
'«=/(««, )L м
(1.6)
где f — некоторая функция.
Характеристики для схемы с общим эмиттером не отражают никакие
новые физические эффекты по сравнению с характеристиками для схемы с
общей базой и не несут никакой принципиально новой информации о свой-
ствах транзистора. Для объяснения особенностей характеристик с общим
эмиттером не нужна никакая информация кроме той, что необходима для
объяснения особенностей характеристик схемы с общей базой. Тем не
менее, характеристики для схемы с общим эмиттером очень широко
используют на практике (и приводят в справочниках), так как ими удобно
26
пользоваться.
Входные характеристики для схемы с общим эмиттером. Изобразим
характеристики уже рассмотренного транзистора КТ603А (рис. 1.16).
Рис. 1.16. Входные характеристики для схемы с общим эмиттером
Теперь эффект Эрли проявляется в том, что при увеличении
напряжения икэ характеристики сдвигаются вправо. Дифференциальное
сопротивление теперь определяется выражением:
^и6э
Гдиф
i6 -заданный.и кз
=const
(1.7)
Выходные характеристики для схемы с общим эмиттером.
Изобразим эти характеристики для транзистора КТ603А (рис. 1.17).
Рис. 1.17. Выходные характеристики для схемы с общим эмиттером
27
Обратимся к ранее полученному выражению
Д (^ст’ ^ко
В соответствии с первым законом Кирхгофа
и с учетом предыдущего выражения получим
/д. 1ко О
откуда
Введем обозначение:
Коэффициент рст называют статическим коэффициентом передачи
базового тока. Его величина обычно составляет десятки — сотни (это
безразмерный коэффициент).
Легко заметить, что
В итоге получаем
4= (1.8)
Это выражение в первом приближении описывает выходные
характеристики в области активной работы без учета наклона
характеристик.
28
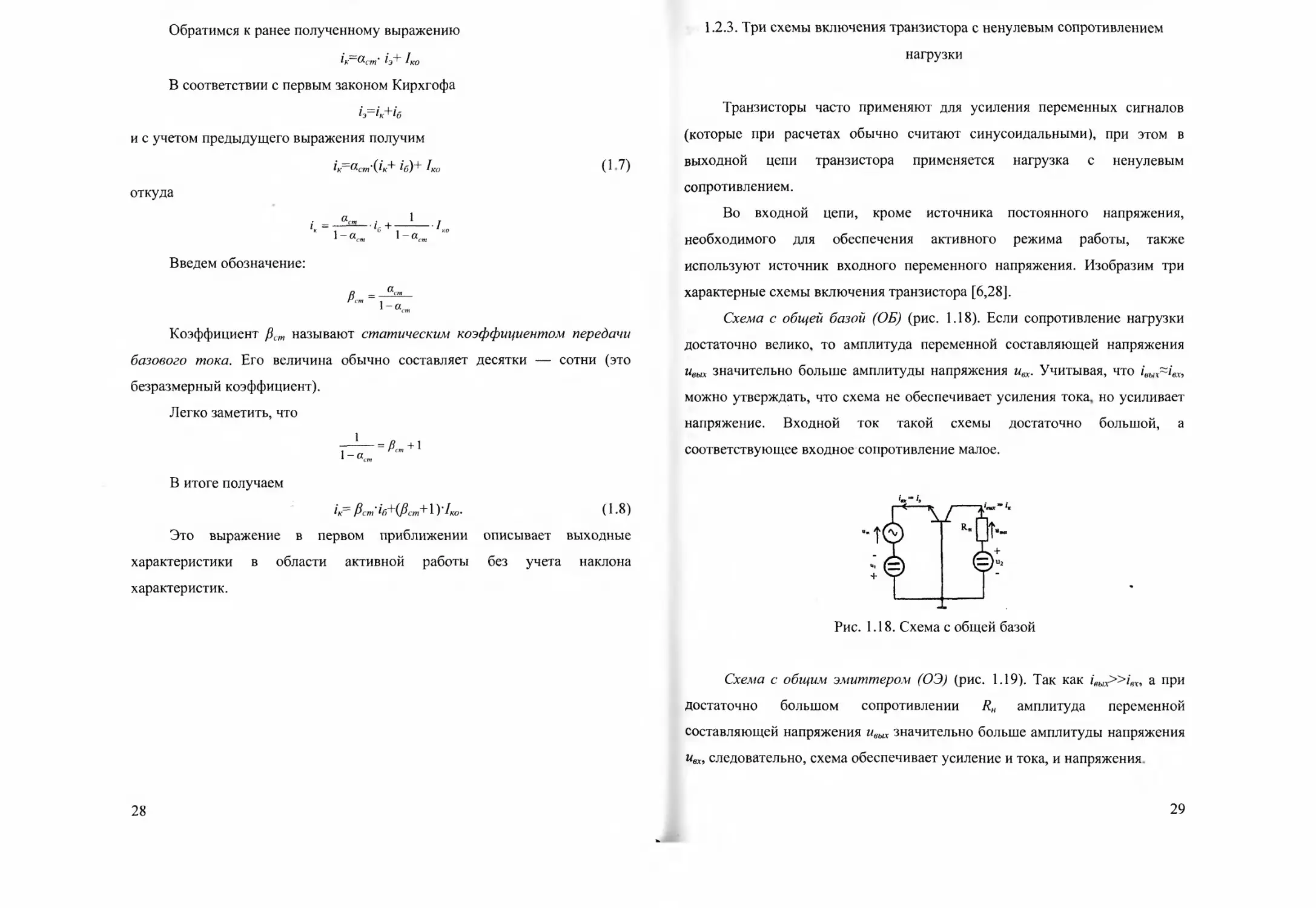
1.2.3. Три схемы включения транзистора с ненулевым сопротивлением
нагрузки
Транзисторы часто применяют для усиления переменных сигналов
(которые при расчетах обычно считают синусоидальными), при этом в
выходной цепи транзистора применяется нагрузка с ненулевым
сопротивлением.
Во входной цепи, кроме источника постоянного напряжения,
необходимого для обеспечения активного режима работы, также
используют источник входного переменного напряжения. Изобразим три
характерные схемы включения транзистора [6,28].
Схема с общей базой (ОБ) (рис. 1.18). Если сопротивление нагрузки
достаточно велико, то амплитуда переменной составляющей напряжения
ивых значительно больше амплитуды напряжения иех. Учитывая, что iebtx~iex,
можно утверждать, что схема не обеспечивает усиления тока, но усиливает
напряжение. Входной ток такой схемы достаточно большой, а
соответствующее входное сопротивление малое.
Рис. 1.18. Схема с общей базой
Схема с общим эмиттером (ОЭ) (рис. 1.19). Так как ieblx»iex, а при
достаточно большом сопротивлении RH амплитуда переменной
составляющей напряжения ивых значительно больше амплитуды напряжения
ивх, следовательно, схема обеспечивает усиление и тока, и напряжения.
29
Входной ток схемы достаточно мал, поэтому входное сопротивление
больше, чем у схемы с общей базой.
Рис. 1.19. Схема с общим эмиттером
Схема с общим коллектором (ОК) (рис. 1.20). При определении
переменных составляющих токов и напряжений источники постоянного
напряжения щ и и2 заменяют закоротками (закорачивают). После этого к
коллектору оказываются подключенными и источник входного напряжения
ивХ9 и сопротивление нагрузки. Отсюда и название — схема с общим
коллектором.
Рис. 1.20. Схема с общим коллектором
Само напряжение ибэ и особенно переменная составляющая этого
напряжения достаточно малы, поэтому амплитуда переменной
составляющей напряжения ивх примерно равна амплитуде переменной
30
составляющей напряжения ивых. В соответствии с этим усилительные
каскады, в которых транзисторы включены по схеме с общим коллектором,
называют эмиттерными повторителями.
Учитывая также, что iex«iebtx-> отмечают, что схема усиливает ток, но
не усиливает напряжение.
Схема отличается повышенным входным сопротивлением, так как при
увеличении входного напряжения увеличению входного тока препятствует
увеличение как напряжения и&> так и напряжения иеых.
На практике наиболее часто используется схема с общим эмиттером.
31
1.3. Полевые транзисторы
Полевыми транзисторами называют активные полупроводниковые
приборы, в которых выходным током управляют с помощью электрического
поля (в биполярных транзисторах выходной ток управляется входным
током).
Полевые транзисторы называют также униполярными, так как в
процессе протекания электрического тока участвуют только основные
носители.
Различают два вида полевых транзисторов: с управляющим переходом
и с изолированным затвором. Для определенности вначале обратимся к
полевому транзистору с управляющим р-п-переходом с каналом р-типа
[5,6,28,49].
1.3.1. Устройство и основные физические процессы
Устройство транзистора
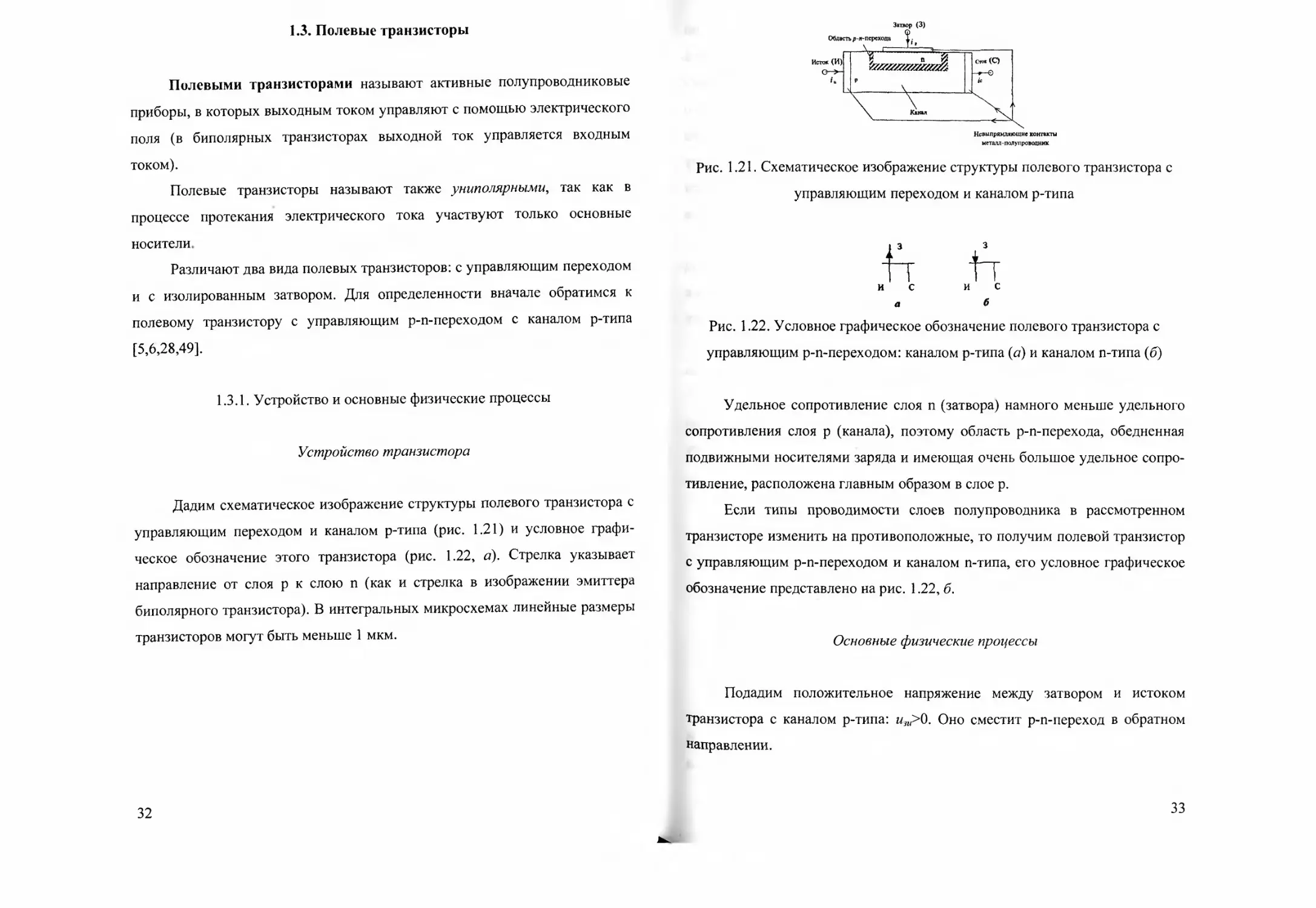
Дадим схематическое изображение структуры полевого транзистора с
управляющим переходом и каналом p-типа (рис. 1.21) и условное графи-
ческое обозначение этого транзистора (рис. 1.22, а). Стрелка указывает
направление от слоя р к слою п (как и стрелка в изображении эмиттера
биполярного транзистора). В интегральных микросхемах линейные размеры
транзисторов могут быть меньше 1 мкм.
32
Затвор (3)
Исток (И)
Нсвыпрямляющие контакты
металл-полупро водник
Рис. 1.21. Схематическое изображение структуры полевого транзистора с
управляющим переходом и каналом р-типа
Рис. 1.22. Условное графическое обозначение полевого транзистора с
управляющим р-п-переходом: каналом p-типа (а) и каналом n-типа (б)
Удельное сопротивление слоя п (затвора) намного меньше удельного
сопротивления слоя р (канала), поэтому область р-п-перехода, обедненная
подвижными носителями заряда и имеющая очень большое удельное сопро-
тивление, расположена главным образом в слое р.
Если типы проводимости слоев полупроводника в рассмотренном
транзисторе изменить на противоположные, то получим полевой транзистор
с управляющим р-п-переходом и каналом n-типа, его условное графическое
обозначение представлено на рис. 1.22, б.
Основные физические процессы
Подадим положительное напряжение между затвором и истоком
транзистора с каналом p-типа: wiM>0. Оно сместит р-п-переход в обратном
направлении.
33
При увеличении обратного напряжения на р-п-персходе он
расширяется в основном за счет канала (в силу указанного выше различия в
удельных сопротивлениях). Увеличение ширины р-п-перехода уменьшает
толщину канала и, следовательно, увеличивает его сопротивление. Это
приводит к уменьшению тока между истоком и стоком. Именно это явление
позволяет управлять током с помощью напряжения и соответствующего ему
электрического поля. Если напряжение изи достаточно велико, то при
некотором напряжении отсечки UiU.omc, канал полностью перекрывается
областью р-п-перехода.
В рабочем (не аварийном) режиме р-п-переход должен находиться под
обратным или нулевым напряжением. Поэтому в рабочем режиме ток
затвора примерно равен нулю (4~0), а ток стока ic примерно равен току
истока iu
Важно учитывать, что на ширину р-п-перехода и толщину канала
прямое влияние может оказывать напряжение между истоком и стоком иис.
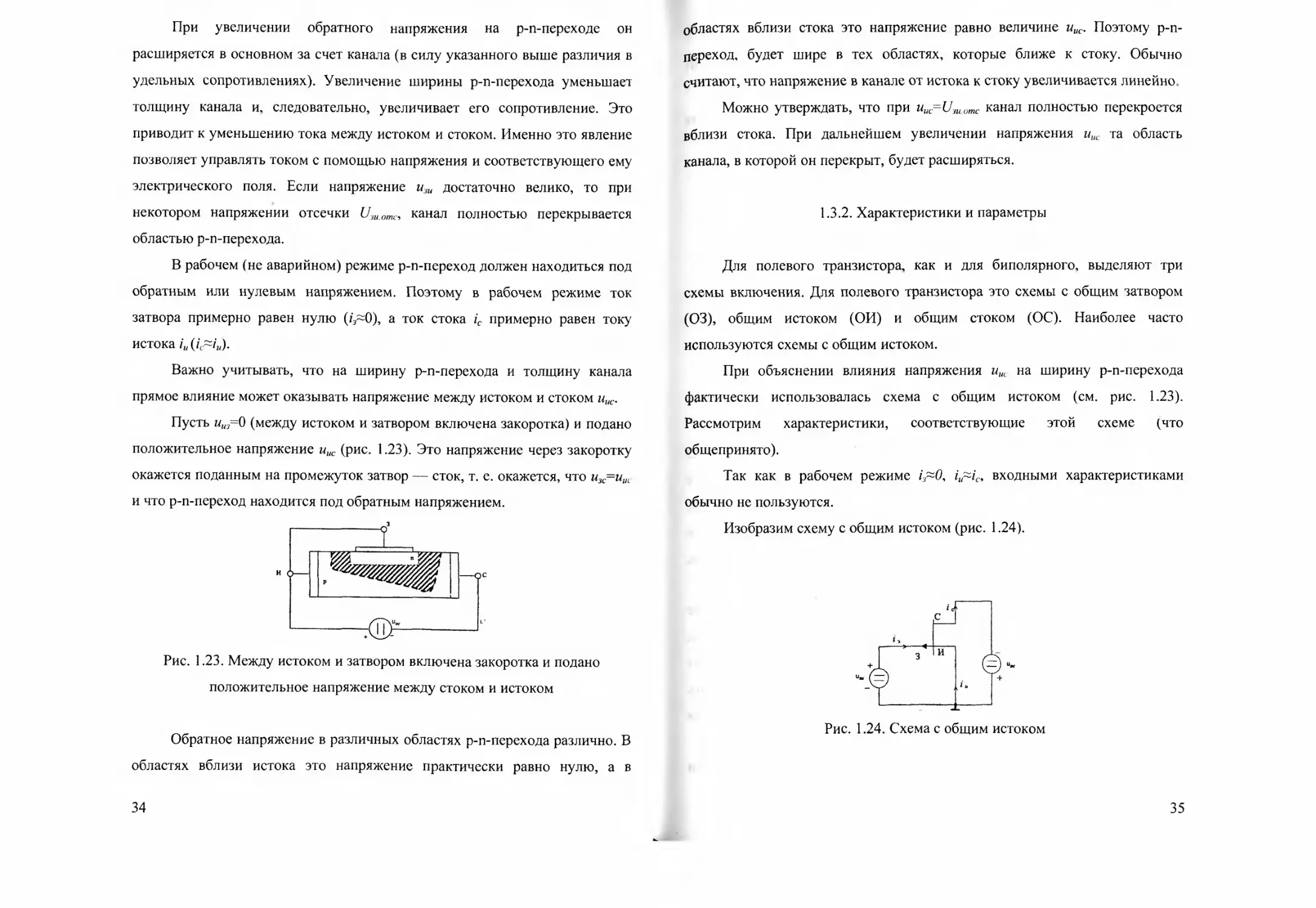
Пусть wW3=0 (между истоком и затвором включена закоротка) и подано
положительное напряжение иис (рис. 1.23). Это напряжение через закоротку
окажется поданным на промежуток затвор — сток, т. е. окажется, что
и что р-п-переход находится под обратным напряжением.
Рис. 1.23. Между истоком и затвором включена закоротка и подано
положительное напряжение между стоком и истоком
Обратное напряжение в различных областях р-п-перехода различно. В
областях вблизи истока это напряжение практически равно нулю, а в
34
областях вблизи стока это напряжение равно величине иис. Поэтому р-п-
переход, будет шире в тех областях, которые ближе к стоку. Обычно
считают, что напряжение в канале от истока к стоку увеличивается линейно.
Можно утверждать, что при uuc=UJuomc канал полностью перекроется
вблизи стока. При дальнейшем увеличении напряжения иис та область
канала, в которой он перекрыт, будет расширяться.
1.3.2. Характеристики и параметры
Для полевого транзистора, как и для биполярного, выделяют три
схемы включения. Для полевого транзистора это схемы с общим затвором
(ОЗ), общим истоком (ОИ) и общим стоком (ОС). Наиболее часто
используются схемы с общим истоком.
При объяснении влияния напряжения иис на ширину р-п-перехода
фактически использовалась схема с общим истоком (см. рис. 1.23).
Рассмотрим характеристики, соответствующие этой схеме (что
общепринято).
Так как в рабочем режиме /3~0, zw~zc, входными характеристиками
обычно не пользуются.
Изобразим схему с общим истоком (рис. 1.24).
С
Рис. 1.24. Схема с общим истоком
35
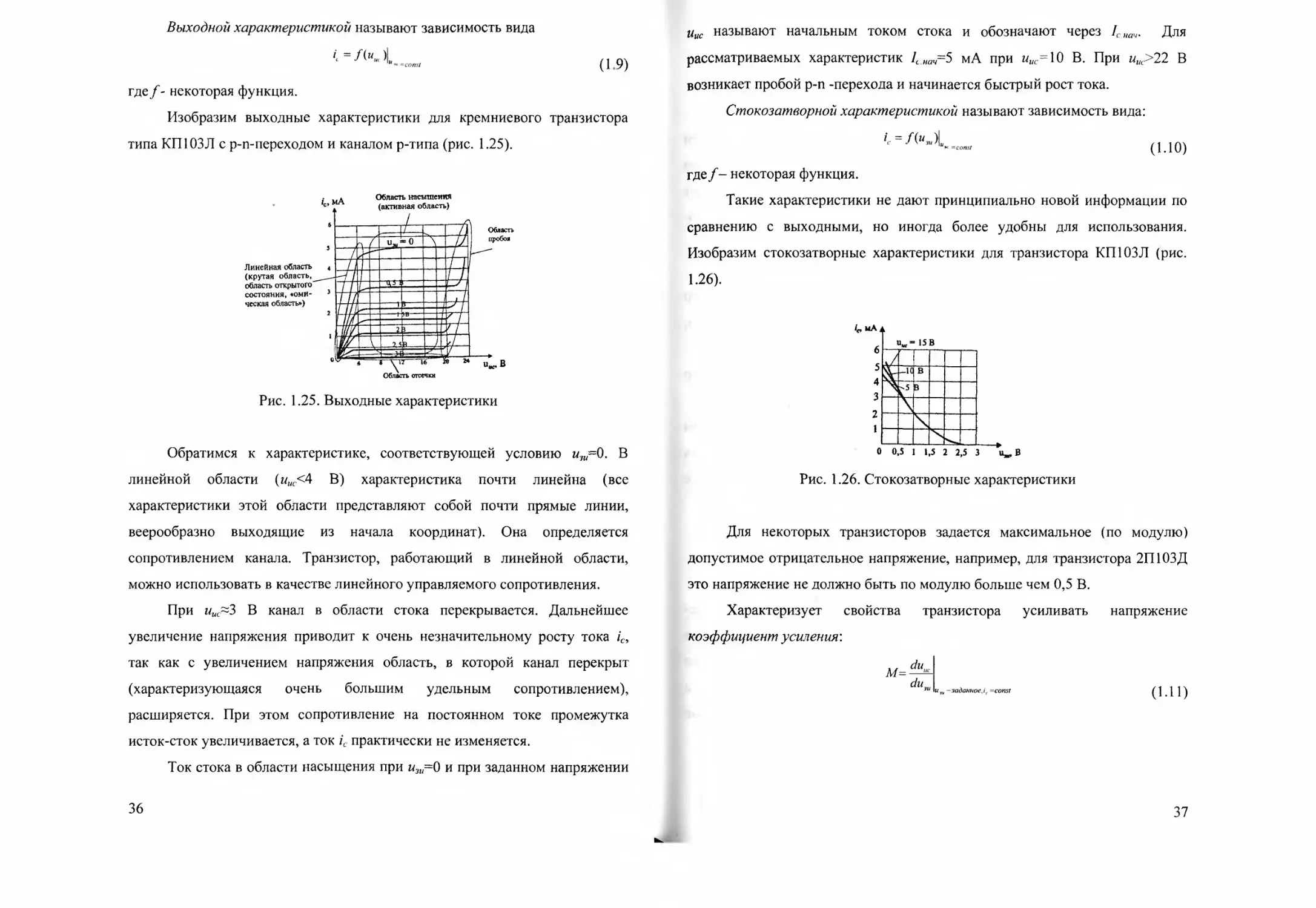
Выходной характеристикой называют зависимость вида
" п =const
(1.9)
где f- некоторая функция.
Изобразим выходные характеристики для кремниевого транзистора
типа КП 103Л с р-п-переходом и каналом p-типа (рис. 1.25).
Рис. 1.25. Выходные характеристики
Обратимся к характеристике, соответствующей условию В
линейной области (wwc<4 В) характеристика почти линейна (все
характеристики этой области представляют собой почти прямые линии,
веерообразно выходящие из начала координат). Она определяется
сопротивлением канала. Транзистор, работающий в линейной области,
можно использовать в качестве линейного управляемого сопротивления.
При иис~3 В канал в области стока перекрывается. Дальнейшее
увеличение напряжения приводит к очень незначительному росту тока /с,
так как с увеличением напряжения область, в которой канал перекрыт
(характеризующаяся очень большим удельным сопротивлением),
расширяется. При этом сопротивление на постоянном токе промежутка
исток-сток увеличивается, а ток ic практически не изменяется.
Ток стока в области насыщения при изи=0 и при заданном напряжении
36
иис называют начальным током стока и обозначают через 1снач. Для
рассматриваемых характеристик 1с.нач^5 мА при wwc=10 В. При иис>22 В
возникает пробой р-n -перехода и начинается быстрый рост тока.
Стокозатворной характеристикой называют зависимость вида:
4=/(«„)L Z. 1ПЧ
где f ~ некоторая функция.
Такие характеристики не дают принципиально новой информации по
сравнению с выходными, но иногда более удобны для использования.
Изобразим стокозатворные характеристики для транзистора КП 103Л (рис.
1.26).
Рис. 1.26. Стокозатворные характеристики
Для некоторых транзисторов задается максимальное (по модулю)
допустимое отрицательное напряжение, например, для транзистора 2П103Д
это напряжение не должно быть по модулю больше чем 0,5 В.
Характеризует свойства транзистора усиливать напряжение
коэффициент усиления'.
м=^-
dU<u,
ит - заданное, ic =const
(1.11)
37
1.3.3. Разновидности полевых транзисторов
Полевые транзисторы с изолированным затвором
В транзисторах этого типа затвор отделен от полупроводника слоем
диэлектрика, в качестве которого в кремниевых приборах обычно
используется двуокись кремния. Эти транзисторы обозначают
аббревиатурой МОП (металл-окисел-полупроводник) и МДП (металл-
диэ л ектрик-полупроводник) [28,49].
В свою очередь МДП-транзисторы делят на два типа.
В транзисторах со встроенным (собственным) каналом (транзистор
обедненного типа) и до подачи напряжения на затвор имеется канал,
соединяющий исток и сток.
В транзисторах с индуцированным каналом (транзистор
обогащенного типа) указанный выше канал отсутствует.
МДП-транзисторы характеризуются очень большим входным
сопротивлением. При работе с такими транзисторами надо предпринимать
особые меры защиты от статического электричества. Например, при пайке
все выводы необходимо закоротить.
МДП-транзистор со встроенным каналом
Канал может иметь проводимость как p-типа, так и n-типа. Для опре-
деленности обратимся к транзистору с каналом p-типа. Дадим
схематическое изображение структуры транзистора (рис. 1.27), условное
графическое обозначение транзистора с каналом p-типа (рис. 1.28, а) и с
каналом n-типа (рис. 1.28, б). Стрелка, как обычно, указывает направление
от слоя р к слою п.
38
Исток (И)
Затвор (3)
Изолятор
Рис. 1.27. Схематическое изображение структуры транзистора со
встроенным каналом р-типа
Рис. 1.28. Условное графическое обозначение транзистора со встроенным
каналом p-типа (а) и с каналом n-типа (б)
Рассматриваемый транзистор (см. рис. 1.27) может работать в двух
режимах: обеднения и обогащения.
Режиму обеднения соответствует положительное напряжение изи. При
увеличении этого напряжения концентрация дырок в канале уменьшается
(так как потенциал затвора больше потенциала истока), что приводит к
уменьшению тока стока.
Если напряжение изи больше напряжения отсечки, т. е. если u3lpU3U_omcy
то канал не существует и ток между истоком и стоком равен нулю.
Режиму обогащения соответствует отрицательное напряжение изи.
При этом, чем больше модуль указанного напряжения, тем больше
проводимость канала и тем больше ток стока.
39
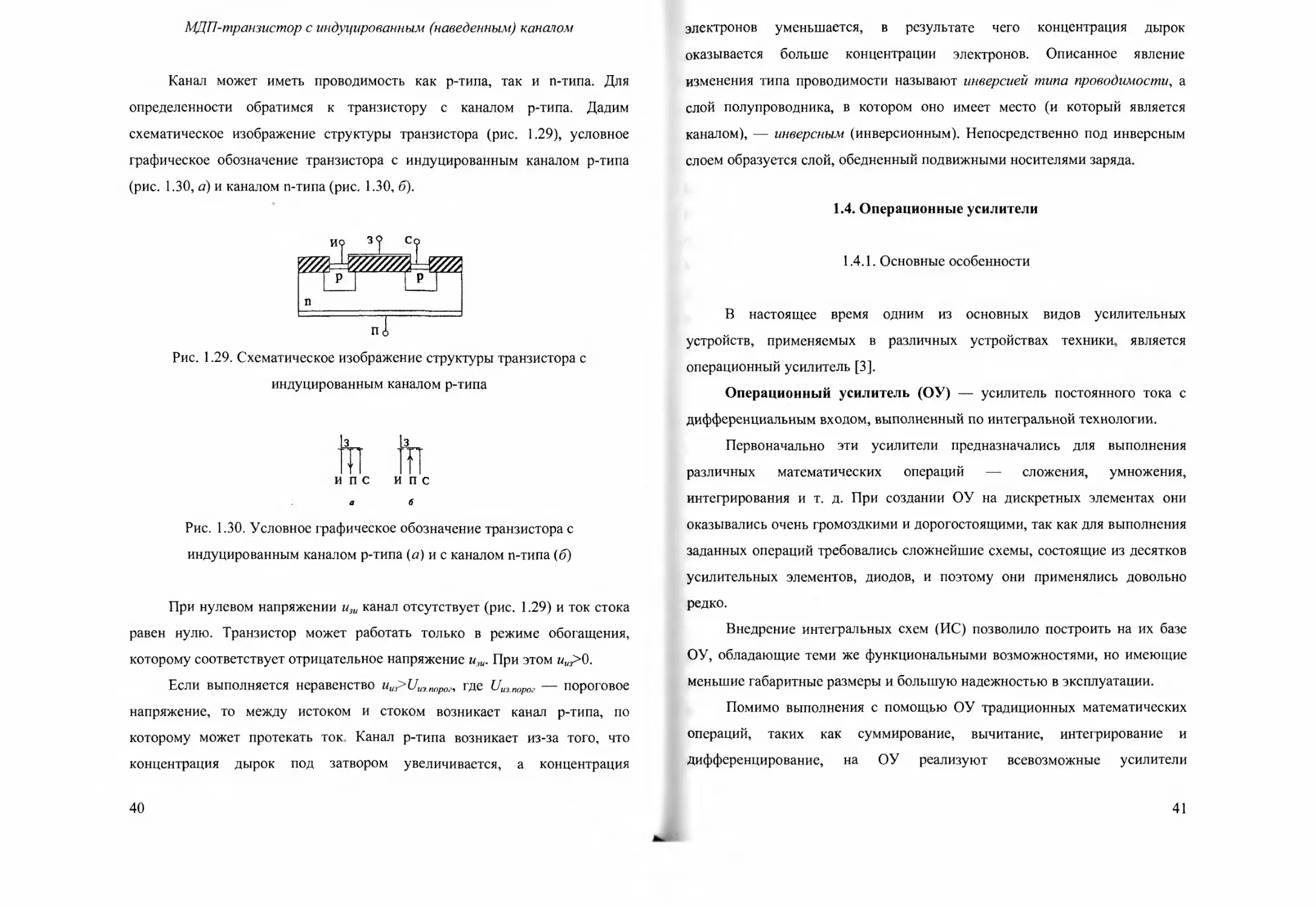
МДП-транзистор с индуцированным (наведенным) каналом
Канал может иметь проводимость как p-типа, так и n-типа. Для
определенности обратимся к транзистору с каналом р-типа. Дадим
схематическое изображение структуры транзистора (рис. 1.29), условное
графическое обозначение транзистора с индуцированным каналом р-типа
(рис. 1.30, а) и каналом n-типа (рис. 1.30, б).
Рис. 1.29. Схематическое изображение структуры транзистора с
индуцированным каналом р-типа
з 1з
ш ш
и п с и п с
а б
Рис. 1.30. Условное графическое обозначение транзистора с
индуцированным каналом р-типа (а) и с каналом n-типа (б)
При нулевом напряжении изи канал отсутствует (рис. 1.29) и ток стока
равен нулю. Транзистор может работать только в режиме обогащения,
которому соответствует отрицательное напряжение изи. При этом г/из>0.
Если выполняется неравенство u^U^nop^ где ииз.порог — пороговое
напряжение, то между истоком и стоком возникает канал р-типа, по
которому может протекать ток Канал р-типа возникает из-за того, что
концентрация дырок под затвором увеличивается, а концентрация
40
электронов уменьшается, в результате чего концентрация дырок
оказывается больше концентрации электронов. Описанное явление
изменения типа проводимости называют инверсией типа проводимости, а
слой полупроводника, в котором оно имеет место (и который является
каналом), — инверсным (инверсионным). Непосредственно под инверсным
слоем образуется слой, обедненный подвижными носителями заряда.
1.4. Операционные усилители
1.4.1. Основные особенности
В настоящее время одним из основных видов усилительных
устройств, применяемых в различных устройствах техники, является
операционный усилитель [3].
Операционный усилитель (ОУ) — усилитель постоянного тока с
дифференциальным входом, выполненный по интегральной технологии.
Первоначально эти усилители предназначались для выполнения
различных математических операций — сложения, умножения,
интегрирования и т. д. При создании ОУ на дискретных элементах они
оказывались очень громоздкими и дорогостоящими, так как для выполнения
заданных операций требовались сложнейшие схемы, состоящие из десятков
усилительных элементов, диодов, и поэтому они применялись довольно
редко.
Внедрение интегральных схем (ИС) позволило построить на их базе
ОУ, обладающие теми же функциональными возможностями, но имеющие
меньшие габаритные размеры и большую надежностью в эксплуатации.
Помимо выполнения с помощью ОУ традиционных математических
операций, таких как суммирование, вычитание, интегрирование и
дифференцирование, на ОУ реализуют всевозможные усилители
41
постоянного тока, усилители переменного напряжения и тока,
видеоусилители, усилители-ограничители, повторители напряжений,
модуляторы и демодуляторы, генераторы колебаний прямоугольной и
треугольной формы и др.
Условное обозначение ОУ (рис. 1.31, слева) — треугольник, у
которого слева показаны два входа, а справа — выход. Вход со знаком «+»
является неинвертирующим, при подаче входного сигнала на этот вход
полярность сигнала на выходе остается той же, что и на входе; вход со
знаком «—» инвертирующий, при подаче сигнала на этот вход на выходе его
полярность меняется на противоположную. В дальнейшем мы будем
называть инвертирующий вход И-входом, а неинвертирующий — Н-входом.
В современной литературе используется обозначение ОУ в виде
прямоугольника (рис. 1.31, справа).
Рис. 1.31. Условное обозначение ОУ
Разность напряжений на входах ОУ (е+-е.) называют
дифференциальным (разностным) входным сигналом ОУ, а полусумму этих
напряжений (е++е_)/2 - синфазным входным сигналом. Синфазный входной
сигнал определяет ту составляющую входных сигналов, которая является
общей для обоих входов ОУ.
Как и все электронные приборы, ОУ характеризуются своими
параметрами — основными показателями, по которым выбирают тот или
иной прибор для применения в реальной схеме. Параметры различных типов
ОУ меняются в довольно широких пределах.
Коэффициент усиления ОУ (К) — отношение изменения выходного
42
напряжения к вызвавшему его изменению дифференциального входного
напряжения при работе усилителя на линейном участке характеристики:
к=ьивых/ьивх
где Д6/вх=е+-е.. Интегральные ОУ имеют коэффициент усиления, лежащий в
диапазоне 103-106.
Операционный усилитель тем точнее будет реализовывать заданную
для него конкретной схемой включения функцию, чем ближе его параметры
будут приближаться к параметрам идеального операционного усилителя.
Идеальный операционный усилитель — операционный усилитель,
имеющий коэффициент усиления К=ы, входное сопротивление Rex=a\
выходное сопротивление Reblx=0.
Достижение этих показателей и есть основное требование к ОУ.
Реально идеальных ОУ не существует.
Большое Rex свидетельствует о том, что на входе ОУ практически не
потребляется энергии от источника сигнала и ко входу ОУ может быть
подключен источник сигнала с любым внутренним сопротивлением. Очень
малое сопротивление Rebtx позволяет подключить к выходу ОУ любую
нагрузку, при этом потери мощности на выходном сопротивлении ОУ будут
незначительны
1.4.2. Обратные связи в усилителях
Обратной связью (ОС) в усилителях называют явление передачи
сигнала из выходной цепи во входную. Электрические цепи,
обеспечивающие эту передачу, носят название цепей обратной связи
[6,7,28]. Структурная схема усилителя, охваченного ОС, приведена на рис.
1.32. В нем выходной сигнал усилителя 1 (в виде напряжения Ueblx или тока
4ых) через цепь обратной связи 2 частично или полностью подается к схеме
сравнения. В ней происходит вычитание (или сложение) входного сигнала
43
Uex или 1вх и сигнала ОС Uoc или 1ОС. В результате этого на вход усилителя
поступает сигнал, равный разности или сумме входного сигнала и сигнала
обратной связи.
Рис. 1.32. Структурная схема усилителя, охваченного обратной
связью:
1 — усилитель; 2 — цепь обратной связи
Петлей обратной связи называют замкнутый контур, включающий в
себя цепь ОС и часть усилителя между точками ее подключения.
Местной обратной связью (местной петлей обратной связи) принято
называть ОС, охватывающую отдельные каскады или части усилителя, а
общей обратной связью - такую ОС, которая охватывает весь усилитель.
Обратную связь называют отрицательной, если ее сигнал вычитается
из входного сигнала, и положительной, если сигнал ОС суммируется с
входным. При отрицательной ОС (ООС) коэффициент усиления
уменьшается, а при положительной обратной связи (ПОС) -увеличивается.
Из-за схемных особенностей усилителя и цепи ОС возможны варианты,
когда обратная связь существует либо только для медленно изменяющейся
составляющей выходного сигнала, либо только для переменной
составляющей его, либо для всего сигнала. В этих случаях говорят, что
обратная связь осуществлена по постоянному, по переменному, а также как
по постоянному, так и по переменному токам.
В зависимости от способа получения сигнала различают обратную
связь по напряжению (рис. 1.33, а), когда снимаемый сигнал ОС
пропорционален напряжению выходной цепи; обратную связь по току (рис
44
1.33, б), когда снимаемый сигнал ОС пропорционален току выходной цепи;
комбинированную ОС (рис. 1.33, в), когда снимаемый сигнал ОС
пропорционален как напряжению, так и току выходной цепи.
Рис. 1.33. Схемы обратной связи:
по напряжению (а), по току (б), комбинированной (в)
По способу введения во входную цепь сигнала обратной связи
различают, последовательную схему введения ОС (рис. 1.34, а), когда
напряжение сигнала ОС суммируется с входным напряжением;
параллельную схему введения ОС (рис. 1.34,6), когда ток цепи ОС
суммируется с током входного сигнала; смешанную схему введения ОС
(рис. 1.34,в), когда с входным сигналом суммируются ток и напряжение
цепи ОС.
Рис. 1.34. Схемы введения сигналов ОС:
^-последовательная, б-параллельная, в-смешанная
Для количественной оценки степени влияния цепи обратной связи
используют коэффициент обратной связи Р, показывающий, какая часть
выходного сигнала поступает на вход усилителя. Коэффициент обратной
45
связи Р определяют как отношение напряжений или токов:
Ри=ио^ивых; р^а(/1вых (М2)
причем при рассмотрении обратной связи по напряжению индекс и обычно
опускается.
1.4.3. Применение операционных усилителей
Общие сведения
Операционный усилитель является устройством, которое можно
широко использовать в электронной аппаратуре, в частности в аппаратуре
связи. ОУ относится к линейным усилителям. Верхний предел напряжения
Ueblx ограничен величиной постоянного напряжения источника питания Е,
При больших значениях Uex, при которых UBbIX = KUex « Е, произойдет
ограничение выходного сигнала по максимуму и возникнут нелинейные
искажения. При напряжениях Ueblx, меньших Е на L..2 В, возникает
опасность попадания в режим насыщения транзисторов ОУ, что также
приведет к ограничению и нелинейным искажениям.
При напряжениях Е = ±(10...15)В и коэффициенте усиления ОУ
десятки и сотни тысяч на вход ОУ подаются напряжения в сотни и даже
десятки микровольт.
Таким образом, большой коэффициент усиления ОУ обеспечивает их
большую чувствительность, т. е. способность усиливать очень слабые
сигналы. Большой коэффициент усиления способствует усилению наряду с
полезными сигналами различных помех на входе — шумов, наводок фона
переменного тока. Однако, несмотря на это, в ОУ стремятся получить как
можно больший коэффициент усиления.
Главное достоинство ОУ с большим коэффициентом усиления —
возможность применения ООС. Благодаря большому коэффициенту
46
усиления на основе ОУ можно строить схемы, свойства которых будут
практически определяться особенностями схем ООС.
Практические схемы ОУ строят на основе охвата ОУ внешними
цепями ООС, которые определяют возможности применения данной схемы
в целом — усилителем, генератором, умножителем и т. д. Все это
обусловило большое разнообразие схем, созданных на основе ОУ.
Рассмотрим ряд схем усилителей, которые находят широкое применение.
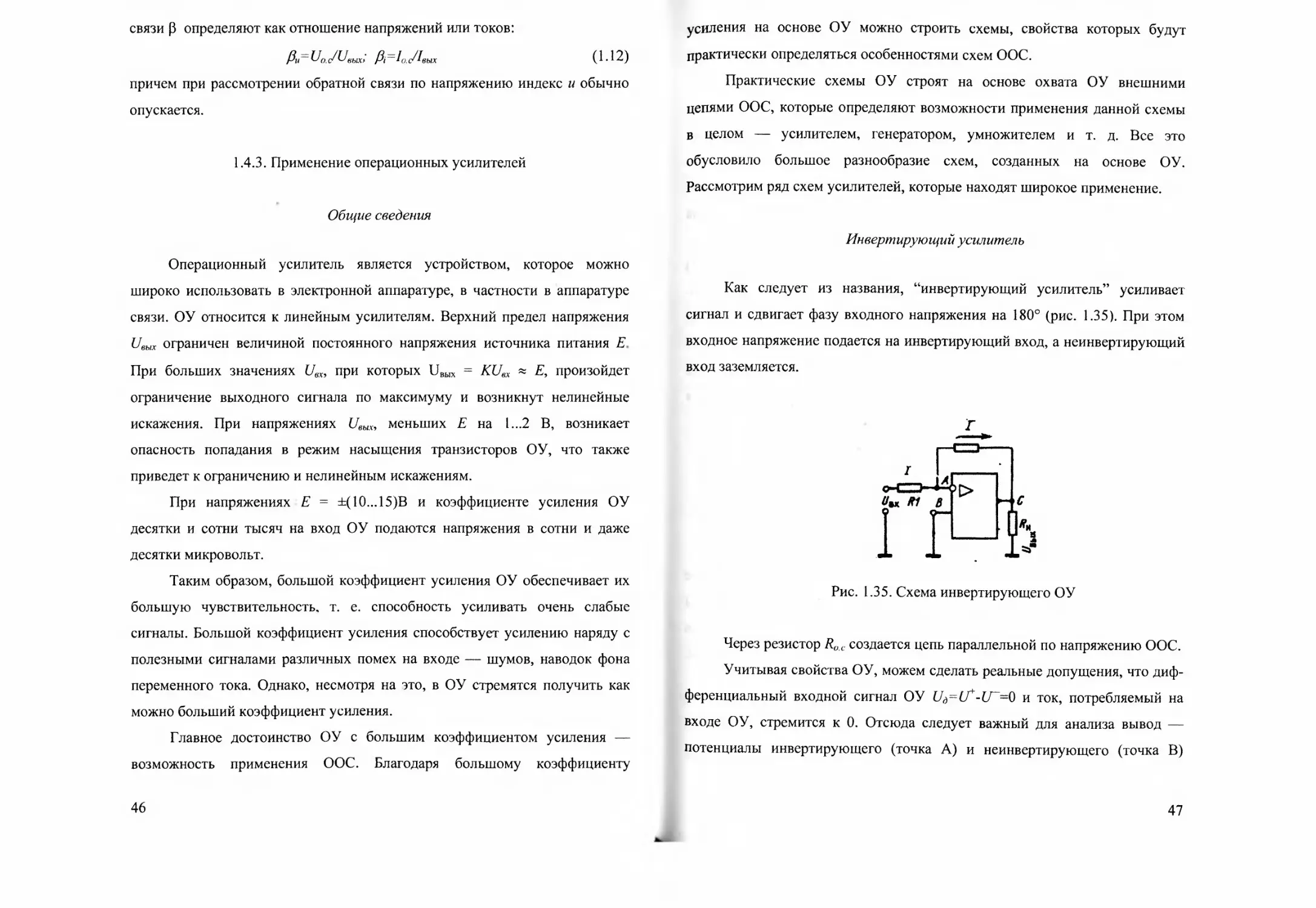
Инвертирующий усилитель
Как следует из названия, “инвертирующий усилитель” усиливает
сигнал и сдвигает фазу входного напряжения на 180° (рис. 1.35). При этом
входное напряжение подается на инвертирующий вход, а неинвертирующий
вход заземляется.
Рис. 1.35. Схема инвертирующего ОУ
Через резистор Rac создается цепь параллельной по напряжению ООС.
Учитывая свойства ОУ, можем сделать реальные допущения, что диф-
ференциальный входной сигнал ОУ Ud=U*-U~=0 и ток, потребляемый на
входе ОУ, стремится к 0. Отсюда следует важный для анализа вывод —
потенциалы инвертирующего (точка А) и неинвертирующего (точка В)
47
входа равны между собой, а так как потенциал неинвертирующего входа
равен нулю, следовательно, и инвертирующий вход имеет нулевой
потенциал.
Рассмотрим вариант подачи на вход положительного по отношению к
земле напряжения сигнала и соответственно получим направление тока,
указанное на рис. 1.35.
Учитывая, что в точке А — нулевой потенциал, можно записать, что
I=Uex/Ri, но так как в ОУ Rex —то весь ток I потечет через Ro с и создаст на
нем падение напряжения
iRoc~(^ex^Rl)Roc (1.13)
Резистор Rac одним концом подключен к точке А с нулевым по-
тенциалом, а другим концом к точке С, имеющей потенциал Ueblx,
следовательно, URac=Ueblx. По заданному направлению тока потенциал в
точке С - отрицательный по отношению к земле. Таким образом, произошла
инверсия — на вход подано напряжение сигнала со знаком «+», снимается
— со знаком «-». Отсюда Ueblx = - IROC = - (U^/RpRoc- Следовательно,
Ко.с = Uвых/Uзх~ -Ro.</Ri
Знак «-» указывает на инверсию входного напряжения.
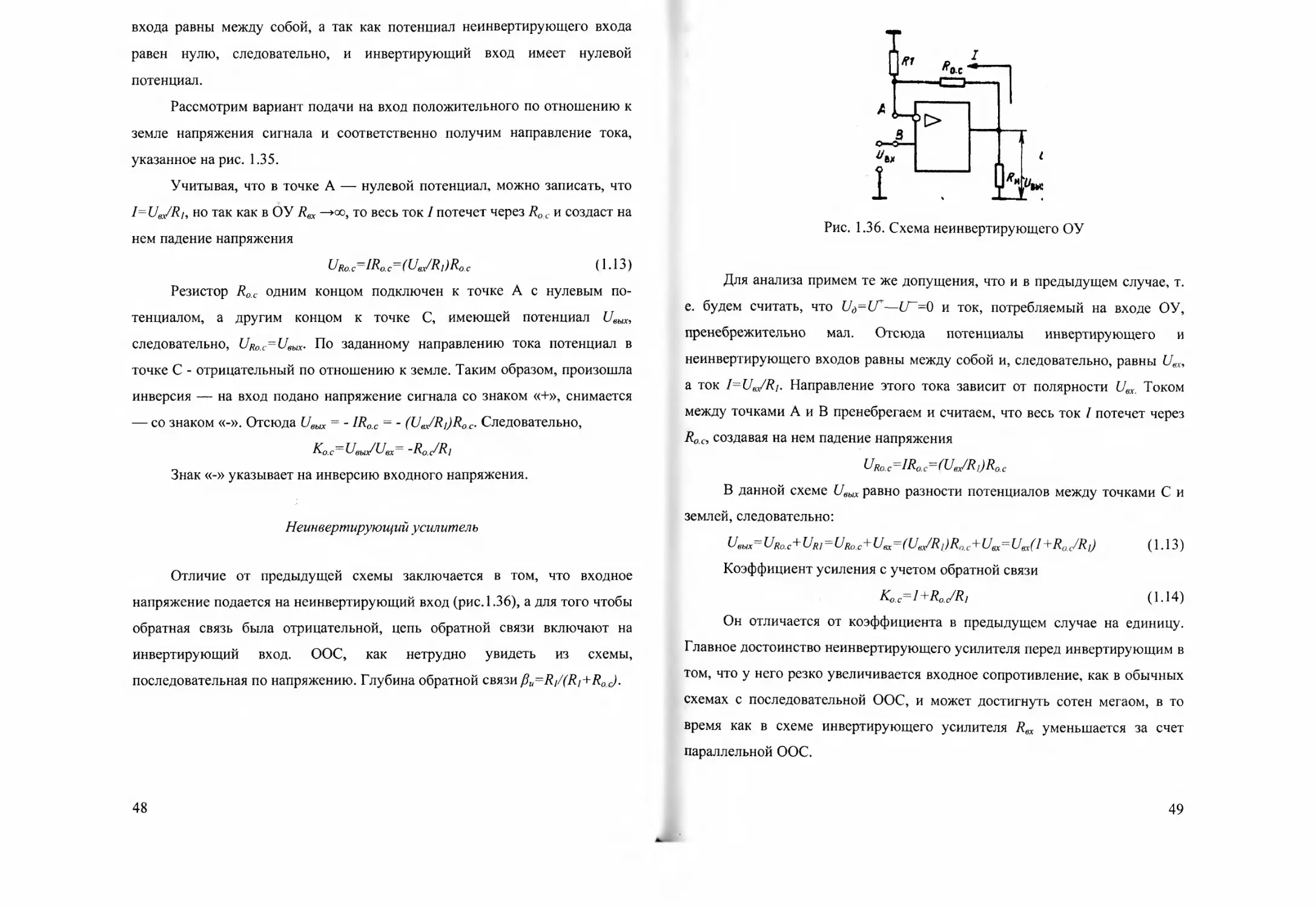
Неинвертирующий усилитель
Отличие от предыдущей схемы заключается в том, что входное
напряжение подается на неинвертирующий вход (рис. 1.36), а для того чтобы
обратная связь была отрицательной, цепь обратной связи включают на
инвертирующий вход. ООС, как нетрудно увидеть из схемы,
последовательная по напряжению. Глубина обратной связи ftu=Ri/(Ri+R0C).
48
Рис. 1.36. Схема неинвертирующего ОУ
Для анализа примем те же допущения, что и в предыдущем случае, т.
е. будем считать, что Ud^LT—LT=0 и ток, потребляемый на входе ОУ,
пренебрежительно мал. Отсюда потенциалы инвертирующего и
неинвертирующего входов равны между собой и, следовательно, равны Uex,
а ток I=Uex/Ri. Направление этого тока зависит от полярности Uex. Током
между точками А и В пренебрегаем и считаем, что весь ток I потечет через
Rac. создавая на нем падение напряжения
URo^IRo^fUJRORac
В данной схеме Ueblx равно разности потенциалов между точками С и
землей, следовательно:
Ueba=URac+URI=URoA^ (1.13)
Коэффициент усиления с учетом обратной связи
Koc=l+Ro(/Ri (1.14)
Он отличается от коэффициента в предыдущем случае на единицу.
Главное достоинство неинвертирующего усилителя перед инвертирующим в
том, что у него резко увеличивается входное сопротивление, как в обычных
схемах с последовательной ООС, и может достигнуть сотен мегаом, в то
время как в схеме инвертирующего усилителя Rex уменьшается за счет
параллельной ООС.
49
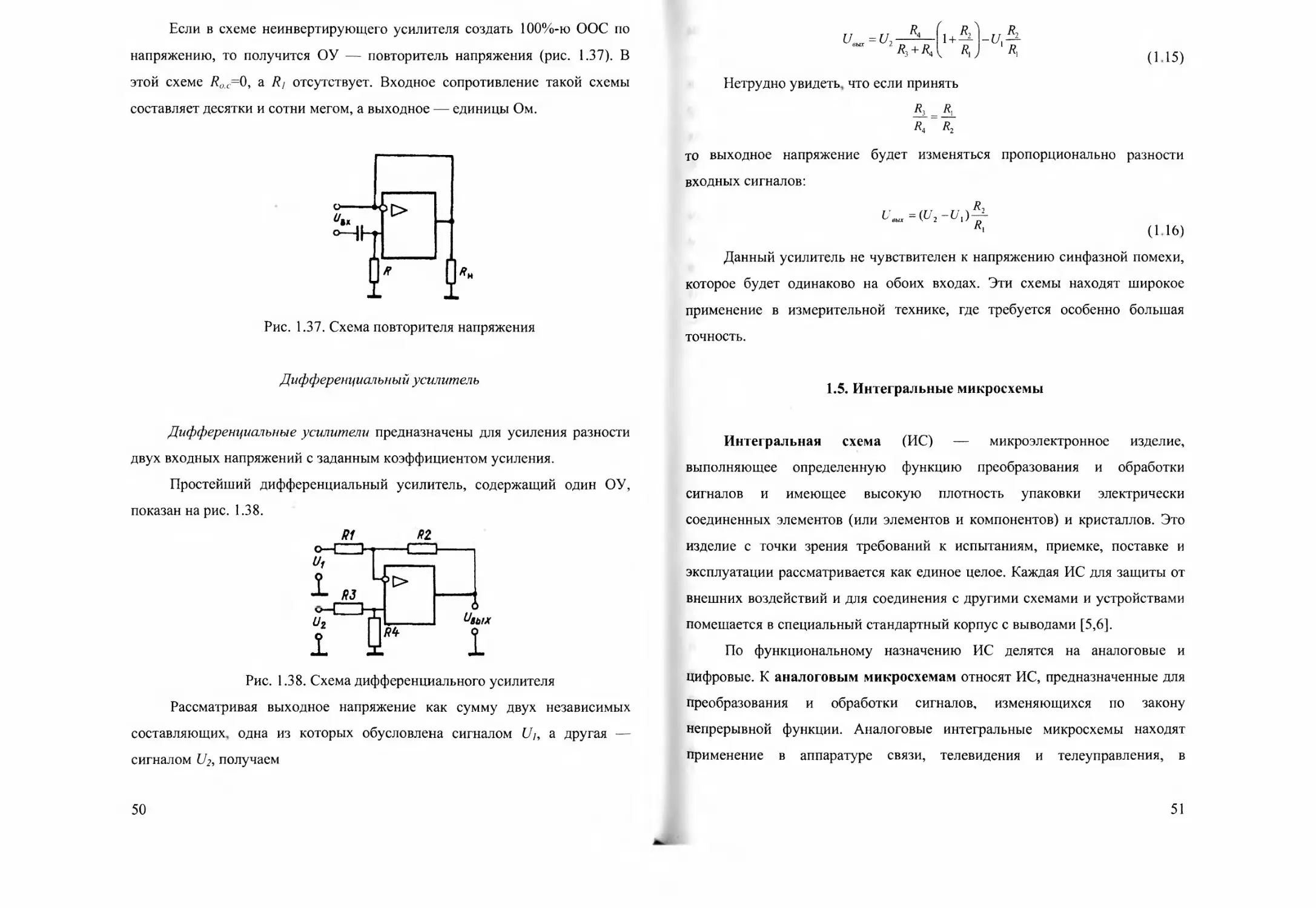
Если в схеме неинвертирующего усилителя создать 100%-ю ООС по
напряжению, то получится ОУ — повторитель напряжения (рис. 1.37). В
этой схеме 7?ос=0, a Rj отсутствует. Входное сопротивление такой схемы
составляет десятки и сотни мегом, а выходное — единицы Ом.
Рис. 1.37. Схема повторителя напряжения
Дифференциальный усилитель
Дифференциальные усилители предназначены для усиления разности
двух входных напряжений с заданным коэффициентом усиления.
Простейший дифференциальный усилитель, содержащий один ОУ,
показан на рис. 1.38.
Рис. 1.38. Схема дифференциального усилителя
Рассматривая выходное напряжение как сумму двух независимых
составляющих, одна из которых обусловлена сигналом [/у, а другая —
сигналом U2, получаем
50
_5i—
Ueha
= u2
(1.15)
Нетрудно увидеть, что если принять
А4 r2
то выходное напряжение будет изменяться пропорционально разности
входных сигналов:
о
^=(^2-1/,)-^
(1.16)
Данный усилитель не чувствителен к напряжению синфазной помехи,
которое будет одинаково на обоих входах. Эти схемы находят широкое
применение в измерительной технике, где требуется особенно большая
точность.
1.5. Интегральные микросхемы
Интегральная схема (ИС) — микроэлектронное изделие,
выполняющее определенную функцию преобразования и обработки
сигналов и имеющее высокую плотность упаковки электрически
соединенных элементов (или элементов и компонентов) и кристаллов. Это
изделие с точки зрения требований к испытаниям, приемке, поставке и
эксплуатации рассматривается как единое целое. Каждая ИС для защиты от
внешних воздействий и для соединения с другими схемами и устройствами
помешается в специальный стандартный корпус с выводами [5,6].
По функциональному назначению ИС делятся на аналоговые и
цифровые. К аналоговым микросхемам относят ИС, предназначенные для
преобразования и обработки сигналов, изменяющихся по закону
непрерывной функции. Аналоговые интегральные микросхемы находят
применение в аппаратуре связи, телевидения и телеуправления, в
51
аналоговых вычислительных машинах, магнитофонах, в медицинском
оборудовании, в измерительных приборах, системах контроля [7].
Цифровые микросхемы предназначены для преобразования и
обработки сигналов, изменяющихся по закону дискретной, например
двоичной, функции. Они применяются для построения цифровых
вычислительных машин, а также цифровых узлов измерительных приборов,
аппаратуры автоматического управления, связи и т. д [5].
Большинство цифровых микросхем относится к потенциальным
микросхемам: сигнал на их входе и выходе представляется высоким и
низким уровнями напряжений. Этим двум состояниям сигнала ставятся в
соответствие логические значения 1 и 0. В зависимости от кодирования
состояний сигнала различают положительную и отрицательную логику (рис.
1.39).
Вид логнкй
Полярность напряжения питания
положительная отрицательная
Положительная
Отрицательная
Рис. 1.39. Кодирование состояний двоичного сигнала
По технологии изготовления ИС бывают полупроводниковые,
пленочные или гибридные. В полупроводниковой ИС все элементы и
межэлементные соединения выполнены в объеме и на поверхности
полупроводника. В пленочной ИС все элементы и межэлементные
соединения выполнены только в виде пленок (тонкопленочные и
толстопленочные ИС). Различие между тонкопленочными и
52
толстопленочными ИС может быть количественным и качественным. К
тонкопленочным условно относят ИС с толщиной пленок до 1 мкм, а к
толстопленочным — ИС с толщиной пленок свыше 1 мкм. Качественные
различия определяются технологией изготовления пленок. К гибридным ИС
относят ИС, содержащие кроме пленочных элементов и соединений простые
и сложные компоненты (например, кристаллы полупроводниковых ИС).
Аналоговые и цифровые ИС разрабатываются и выпускаются
предприятиями-изготовителями в виде серий. Каждая серия ИС
представляет собой совокупность ИС, которые могут выполнять различные
функции, но имеют единое конструктивно-технологическое исполнение и
предназначены для совместного применения.
Интегральная схема представляет собой пластинку кремния размером
около 1,5 мм2, в теле которой образованы десятки и более компонентов
(транзисторов, диодов и резисторов). Она заменяет электронную схему,
содержащую до нескольких десятков тысяч отдельных компонентов
(транзисторов, диодов, резисторов, конденсаторов и пр.). Интегральные
схемы с большим числом электрокомпонентов (примерно больше тысячи)
рассматриваются уже как устройство, например процессор, память и т. п. В
отличие от обычных ИС малой и средней степеней интеграции их называют
большими интегральными схемами (БИС).
Использование ИС различных типов для построения устройств ЭВМ
позволяет резко повысить надежность и снизить габариты, массу и
потребляемую мощность ЭВМ. При этом чем сложнее логическая схема,
сформированная в интегральном элементе, изготовленном на монолитной
кремниевой пластине, тем выше надежность ЭВМ. Это объясняется
снижением числа паяных, сварных и разъемных соединений.
Функциональный состав (набор) схемных элементов в серии может
быть различным и постоянно дополняться. Любой из наборов даже в
сокращенном составе позволяет построить любой узел или устройство.
53
Функционально полный набор схемных элементов создают разнообразным и
избыточным для уменьшения аппаратурных затрат, облегчения разработки и
проектирования устройств. Избыточность и разнообразие по составу
возможны по числу входов, нагрузочной способности, скорости
переключения, потребляемой мощности, способу соединений схемных
элементов между собой. Соединения между схемными элементами должны
учитывать электрические характеристики как самих элементов, так и линий
связи между элементами. Основной нагрузкой запускающей схемы служат
входные цепи параллельно присоединенных к ней схемных элементов.
Электрические характеристики соединений, в основном динамические
(емкостные и индуктивные), действующие при переключениях, являются
дополнительной нагрузкой для схем. Их необходимо учитывать при
проектировании устройств, так как они могут повлиять на
помехоустойчивость и даже на надежность из-за возможных перегрузок. Все
необходимые нагрузочные характеристики и сведения по обеспечению
динамических характеристик приводятся в технических условиях на
схемные элементы и в специализированных справочниках.
54
ГЛАВА 2. ЛОГИЧЕСКИЕ ФУНКЦИИ И ЛОГИЧЕСКИЕ ЭЛЕМЕНТЫ
2.1. Основы алгебры логики. Логические функции и способы их записи
2.1.1. Логические функции и способы их записи
Как уже говорилось, в устройствах цифровой электроники
используются элементы, входные и выходные сигналы которых могут
принимать лишь два значения: логической единицы «1» и логического нуля
«О». Такие элементы, называемые логическими, осуществляют простейшие
операции с такими двоичными числами [5,28,31,49,53].
Для описания алгоритмов работы и структуры логических схем
используют алгебру логики, или булеву алгебру, называемую по имени
разработавшего ее в середине XIX века ирландского математика Д. Буля. В
ее основе лежат три основные логические операции:
- логическое отрицание, или операция НЕ (инверсия);
- логическое сложение, или операция ИЛИ (дизъюнкция);
- логическое умножение, или операция И (конъюнкция).
Операция НЕ над переменной х записывается в виде х . Операция
ИЛИ над двумя переменными х и у записывается в виде х + у или х v у, а
операция И — в виде х у или х л у.
Каждая логическая операция задает логическую функцию своих
аргументов (переменных). Поэтому можно говорить о функциях
дизъюнкции, конъюнкции и инверсии. Число аргументов функций
Дизъюнкции и конъюнкции может быть произвольным (больше двух).
Некоторая логическая функция может быть задана в алгебраической
форме или в виде таблицы истинности.
55
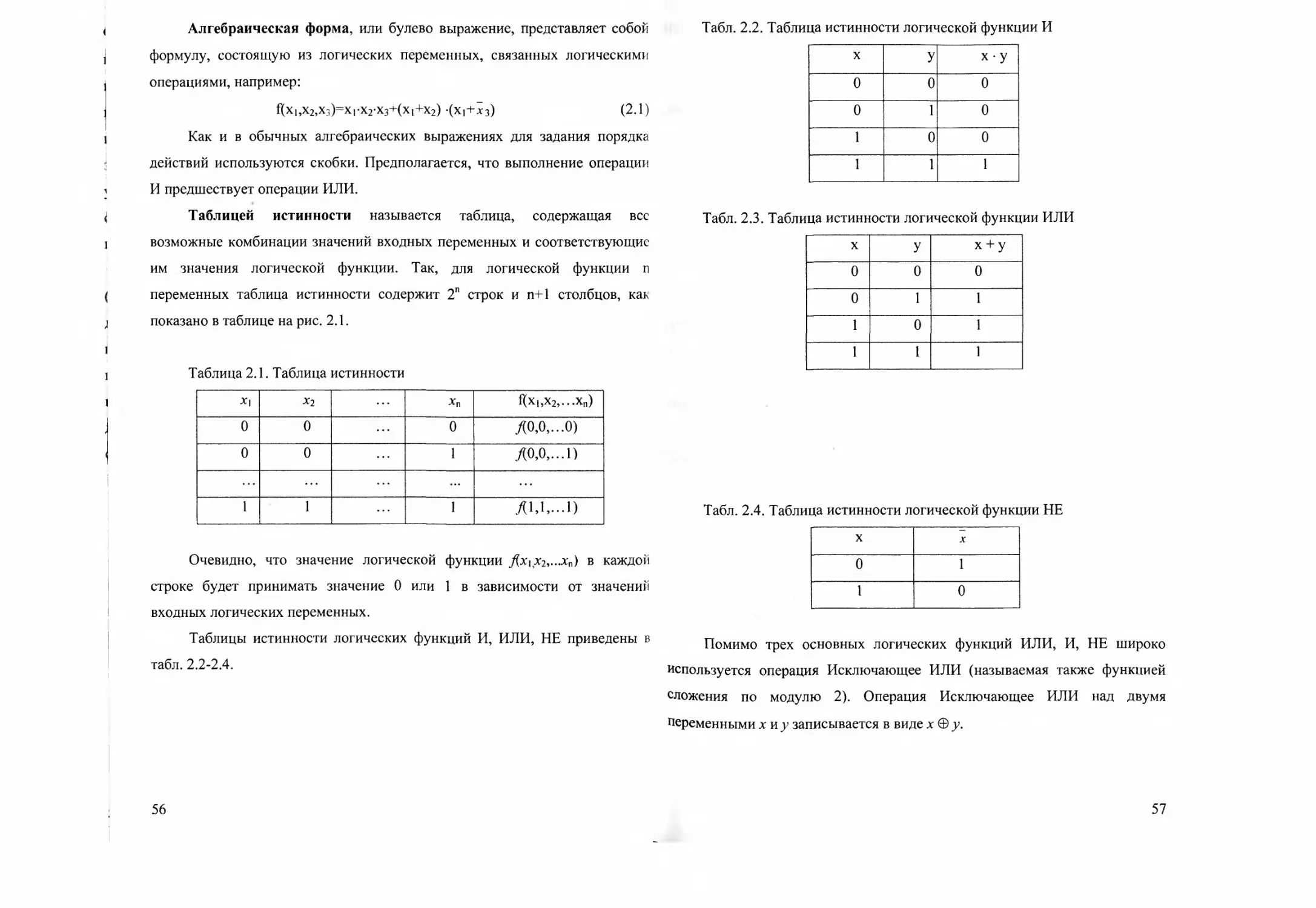
Алгебраическая форма, или булево выражение, представляет собой
формулу, состоящую из логических переменных, связанных логическими
операциями, например:
Г(х1,х2,хз)=хгх2-хз+(х1+х2) -(Xj+хз) (2.1)
Как и в обычных алгебраических выражениях для задания порядка
действий используются скобки. Предполагается, что выполнение операции
И предшествует операции ИЛИ.
Таблицей истинности называется таблица, содержащая вес
возможные комбинации значений входных переменных и соответствующие
им значения логической функции. Так, для логической функции и
переменных таблица истинности содержит 2П строк и п+1 столбцов, как
показано в таблице на рис. 2.1.
Таблица 2.1. Таблица истинности
Х| Х2 Хп f(xbx2,...xn)
0 0 ... 0 Л0Д...0)
0 0 1 Л0Д...1)
1 1 ... 1 Л1Л.-1)
Очевидно, что значение логической функции fix\x^..,x^) в каждой
строке будет принимать значение 0 или 1 в зависимости от значений
входных логических переменных.
Таблицы истинности логических функций И, ИЛИ, НЕ приведены в
табл. 2.2-2.4.
Табл. 2.2. Таблица истинности логической функции И
X У х-у
0 0 0
0 1 0
1 0 0
1 1 1
Табл. 2.3. Таблица истинности логической функции ИЛИ
X У X + у
0 0 0
0 1 1
1 0 1
1 1 1
Табл. 2.4. Таблица истинности логической функции НЕ
X X
0 1
1 0
Помимо трех основных логических функций ИЛИ, И, НЕ широко
используется операция Исключающее ИЛИ (называемая также функцией
сложения по модулю 2). Операция Исключающее ИЛИ над двумя
переменными х и у записывается в виде х Ф у.
56
57
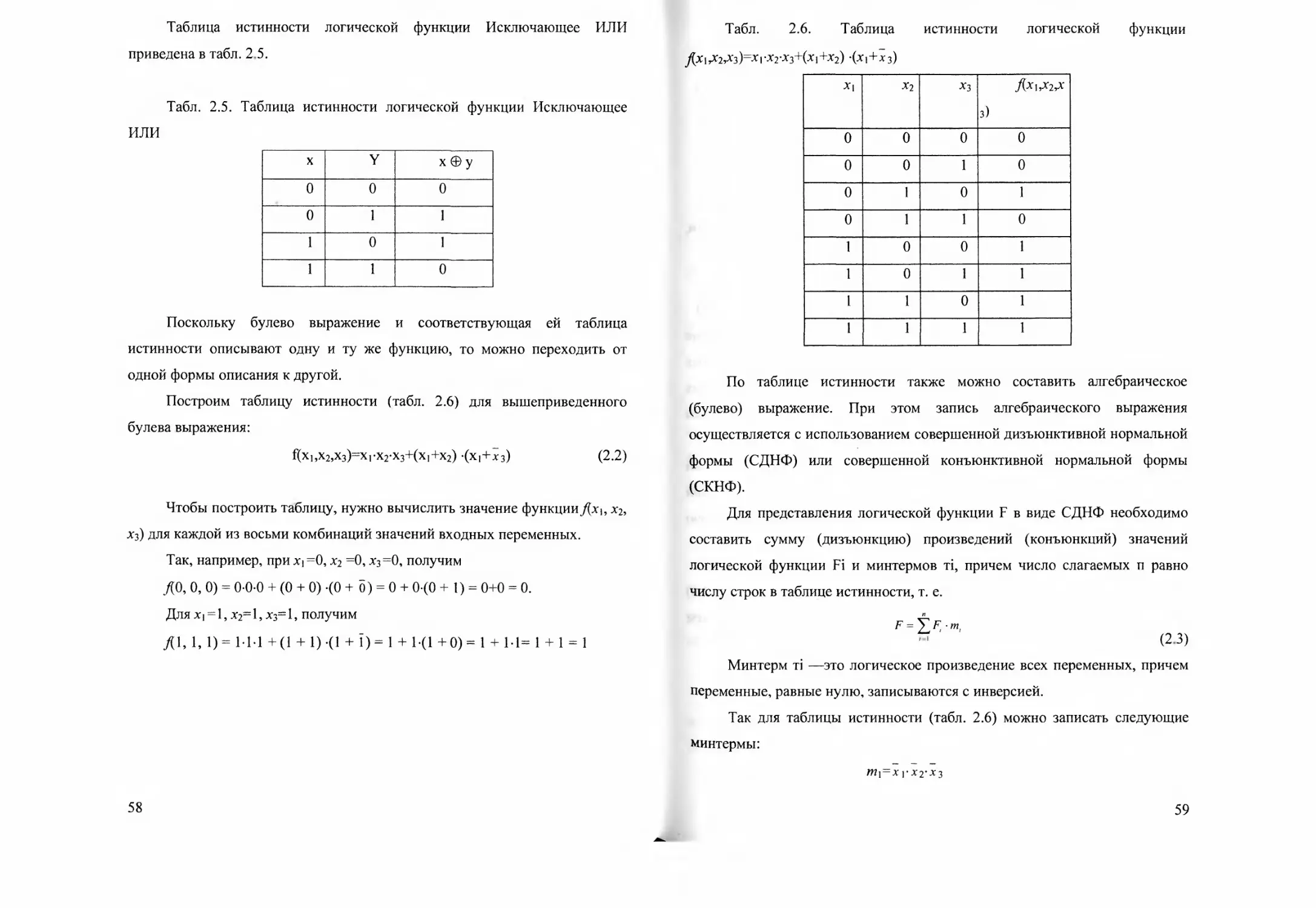
Таблица истинности логической функции Исключающее ИЛИ
приведена в табл. 2.5.
Табл. 2.5. Таблица истинности логической функции Исключающее
ИЛИ
X Y х фу
0 0 0
0 1 1
1 0 1
1 1 0
Поскольку булево выражение и соответствующая ей таблица
истинности описывают одну и ту же функцию, то можно переходить от
одной формы описания к другой.
Построим таблицу истинности (табл. 2.6) для вышеприведенного
булева выражения:
Г(хЬХ2,Хз)=ХГХ2-Х3+(Х1+Х2) <Х| + х3) (2.2)
Чтобы построить таблицу, нужно вычислить значение функцииДхь х2,
х3) для каждой из восьми комбинаций значений входных переменных.
Так, например, при xj=O, х2 =0, х3=0, получим
/0, 0, 0) = 0-0-0 + (0 + 0) -(0 + 0) = 0 + 0 (0 + I) = 0+0 = 0.
Для *1 = 1, х2= 1, х3= 1, получим
/1, 1, 1)= 1-1-1 + (1 + 1) -(1 + 1) = 1 + 1(1 + 0) = 1 + 11= 1 + 1 = 1
58
Табл. 2.6. Таблица истинности логической функции
fix 1Л2Аз)=*। -х2-х3+(х 1 +х2) (х 1+х 3)
*1 х2 х3 з)
0 0 0 0
0 0 1 0
0 1 0 1
0 1 1 0
1 0 0 1
1 0 1 1
1 1 0 1
1 1 1 1
По таблице истинности также можно составить алгебраическое
(булево) выражение. При этом запись алгебраического выражения
осуществляется с использованием совершенной дизъюнктивной нормальной
формы (СДНФ) или совершенной конъюнктивной нормальной формы
(СКИФ).
Для представления логической функции F в виде СДНФ необходимо
составить сумму (дизъюнкцию) произведений (конъюнкций) значений
логической функции Fi и минтермов п, причем число слагаемых п равно
числу строк в таблице истинности, т. е.
- (2.3)
Минтерм Т1 —это логическое произведение всех переменных, причем
переменные, равные нулю, записываются с инверсией.
Так для таблицы истинности (табл. 2.6) можно записать следующие
минтермы:
Ш\ = Х\'Х2'Х3
59
т2~хухух3
m3~X\'XyX3
m^=x \-xyx3
ms=X]-x2-x3
m6=xrx yx3
т2—Х\'Х2'х3
(2.4)
^8=Xi-X2'^3
Следовательно, логическая функция F, заданная таблицей истинности,
имеет следующую СДНФ:
F= Ш1-0+ 7^2-0+ ту 1 + Шд-От ту 1 + тв-1+ ту 1+ Л778- 1 =
= Х \ 'Ху X 3+Х\ - X у х3+х\' X 2'Х3+Х\-Ху X 3+ХуХуХ3 (2.5)
Таким образом, для записи функции в виде СДНФ можно
использовать следующее правило: следует записать столько дизъюнктивных
членов, представляющих собой конъюнкции (произведения) всех
переменных, сколько раз функция принимает значение 1, причем
переменные, равные нулю, записываются с инверсией.
Для представления логической функции F в виде СКНФ необходимо
составить произведение (конъюнкцию) сумм (дизъюнкций) значений
логической функции F, и макстермов kh причем число произведений п равно
числу строк в таблице истинности, т. е.
^=П(^+*,)
(2.6)
Макстерм к, — это логическая сумма всех переменных, причем
переменные, равные 1, записываются с инверсией.
Так, для таблицы 2.6 можно записать следующие макстермы:
60
£1=Х1+Х2+*3
к2=Х\+Х2^Х3
к3=Х\+х2+Х3
к$=Х\+Х2+хз
к5=х i+x2+x3
кв=Х\^Х2^-Хз
kj=X 1+х2"^3
к%=Х\ + Х2+Х3
(2.7)
Следовательно, логическая функция F, заданная таблицей истинности,
описывается следующей СКНФ:
F=(X 1+Х2+Х3+О) • (X ] +х2+ X з+0) • (X1+X 2+Х3+ 1) • ( X i + X 2+ X з+О ) ’ ( X 1+Х2+Х3+1) •
•(Xl+X2+X3+D’
•(х1 + х2+Хз+1)-(х1+х2+хз+1)=(Х1+Х2+Хз)-(Х1+Х2+хз)-(Х1 + х2+Хз) (2.8)
Таким образом, для записи функции в виде СКНФ используют
следующее правило: следует записать столько конъюнктивных членов,
представляющих собой дизъюнкции (суммы) всех переменных, сколько раз
функция принимает значение 0, причем переменные, равные единице,
записываются с инверсией.
2.1.2. Основные положения алгебры логики
Элементарные функции отрицание, дизъюнкция и конъюнкция
находятся в определенной связи друг с другом. Рассмотрим эти связи и
свойства исходных функций.
Пусть х — некоторая логическая переменная. Тогда:
1. х = х, что означает возможность исключения из логического выра-
жения всех членов, имеющих двойное отрицание, заменив их исходной ве-
личиной;
61
2. ,r+x=x; x‘x = x — правила подобных преобразований позволяют
сокращать длину логических выражений;
3. х+0=х;
4. х+1 = 1;
5. х-0=0;
6. х-1 = х;
7. х-х=0;
8. х+х=1.
Дизъюнкция и конъюнкция обладают рядом свойств, аналогичных
свойствам обычных арифметических операций сложения и умножения:
• Свойство ассоциативности (сочетательный закон):
Х1+(х2+хз)= (xj+x2)+ х3, х1-(х2-хз)= (хрх2)*хз; (2.9)
• Свойство коммутативности (переместительный закон):
X l + x2=x2+x I, ХГХ2= Х2-ХЬ (2.10)
• Свойство дистрибутивности (распределительный закон):
для конъюнкции относительно дизъюнкции
хг(х2+хз)=(хгх2)+(хгхз); (2.11)
для дизъюнкции относительно конъюнкции
Х1+х2-хз= (х1+х2)-(х1+хз). (2.12)
Свойство дистрибутивности фактически определяет правила
раскрытия скобок или взятия в скобки логических выражений.
Справедливость указанных свойств легко доказывается с помощью
вышеизложенных аксиом.
Докажем, например, что х 1+х2-хз= (х i+x2)-(x i+хз).
В самом деле,
(х 1+х2)’(х 1+хз)= х 1-х 1+х 1-хз+х 1-х2+х2-хз=х j+x рх2+х гхз+х2-хз=
-х г(1 + х2+хз)+х2-хз=х 1+х2-хз (2.13)
Аналогично можно доказать и другие законы.
62
Несложно установить правильность соотношений, известных как
законы де Моргана'.
ХуХ2 = XI + Х1
(2.14)
.Xj + л2 = Х| • Х1
Из законов де Моргана вытекают следствия (закон отрицания)'.
Xj -Х2 -Х\ +Х2
(2.15)
Xj + Х2 = Х1 • Х2
с помощью которых появляется возможность выражать конъюнкцию через
дизъюнкцию и отрицание или дизъюнкцию через конъюнкцию и отрицание.
Для логических функций устанавливаются соотношения, известные
как закон склеивания'.
х ГХ2+ х [-Х2—Х 1 (2.16)
(x]+x2)-(xi+x2)==xi
Законы поглощения'.
х\+хух2- Xi (2.17)
xi(xi+x2)= Xi
В таблице 2.7 показана справедливость законов поглощения.
Таблица 2.7. Доказательство законов поглощения
XI Х2 xi+xi А ГХ2 xi+xrx 2 xr(xi+x г)
0 0 0 0 0 0
0 1 1 0 0 0
1 0 1 0 1 1
1 1 1 1 1 1
Функция Исключающее ИЛИ выражается следующим образом:
63
Х\®Х2~Х\-Х2^Х\'Х2-{х\+х2)\ *1+Х2) (2.18)
Функция Исключающее ИЛИ обладает следующими свойствами:
• коммутативности (переместительный закон):
х 1®х2= х2®X 1 (2.19)
• ассоциативности (сочетательный закон):
х ]Ф(х2Фхз)= (х 1® *2)© хз (2.20)
• дистрибутивности (распределительный закон):
хг(х2Фхз)=(хгх2) ®(хгхз) (2.21)
Для этой функции справедливы аксиомы:
х®х=0; х©1=х; (2.22)
х ® х=1; х Ф0= х;
На основании аксиом и свойств можно вывести правила перевода
функций И, ИЛИ, НЕ через функцию Исключающее ИЛИ и наоборот:
X 1 = Х 1® 1
х 1+х2=х 1®Х2® X 1 х2 (2.23)
х г х2=(х 1®х2)ф(х 1 + х2)
Правильность всех перечисленных теорем можно доказать перебором
всех возможностей. Поскольку переменные в булевой алгебре принимают
лишь два значения, то число всех возможных комбинаций значений
переменных невелико и проверка выполнения теорем для каждой
комбинации не является сложной.
64
2.2. Минимизация логических функций
Логическая функция, задающая принцип построения схемы цифрового
устройства, может быть, как было показано выше, представлена в виде
таблицы истинности или в виде СДНФ или СКНФ и может быть
использована для получения логической схемы устройства. Однако
полученная логическая схема, как правило, не будет оптимальна. Поэтому
важным этапом синтеза логических схем является минимизация логических
функций, для чего разработан ряд методов [1].
Одним из простых методов минимизации является метод
непосредственных преобразований, который осуществляется с
использованием основных теорем алгебры логики.
Например, логическую функцию F В виде СДНФ, полученную выше,
можно минимизировать следующим образом:
1. Добавим к данной функции слагаемое Х]-х2-хз. которое уже есть в
данной функции, используя правило 2:
F = ХГ*2 *3 + *1 ,Х2*Хг + х2'хъ + Xt ‘*2 +
+ Х. -X? *Х3 +Х.
—2- (2.24)
2. Применим закон склеивания одинаково подчеркнутых
элементарных конъюнкций
F=x2-x3+xrx2+ хгх2 (2.25)
3. Применим закон склеивания для двух последних элементарных
конъюнкций
F=x2-x3+xi (2.26)
Полученная в результате минимизации логическая функция
называется тупиковой. Логическая функция может иметь несколько
тупиковых форм.
65
Для минимизации логических функций широко используется
графический метод с помощью карт Карно, или карт (диаграмм) Вейча,
который удобен при небольшом числе переменных.
Карты Карно и карты Вейча являются важным средством
проектирования логических схем, представляют собой определенную
таблицу истинности обычно для двух, трех и четырех переменных и
отличаются друг от друга способом обозначения строк и столбцов таблиц
истинности. На рис. 2.1 представлены карты Вейча для двух, трех и четырех
переменных соответственно.
Рис. 2.1. Карты Вейча для двух, трех и четырех переменных
Расположение групп переменных xi не имеет значения, необходимо
лишь, чтобы каждая клетка отличалась от любой соседней лишь на одну
переменную. Согласно принятой форме построения карт соседними также
считаются клетки первой и последней строк, клетки первого и последнего
столбцов. Число клеток карты равно числу возможных комбинаций
значений переменных и в каждую клетку записывается значение логической
функции, соответствующее данному набору переменных. Этот набор
переменных определяется присвоением значения логической 1 переменным,
на пересечении строк и столбцов которых расположена клетка.
Например, если логическая функция задана таблицей истинности (рис.
2.2, а), то карта Карно для нее будет иметь вид, показанный на рис. 2.2,6.
66
*2 Х2
б
Рис. 2.2. Таблица истинности (а) и карта Карно (б) для логической
функции
Булево выражение данной функции имеет вид
F—х rx2+xi* х2+ ХгХ2 (2.27)
Данное выражение можно упростить, используя правило 8 и закон
склеивания:
F-Х| • х2 + *г х2 + х£ • х2 + XjjXa =
=х3 •(*/*(х2 •ьх2) = х1 + х2. (2.28)
Но для упрощения функции можно использовать и карты Карно, в
которых логические 1, записанные в соседних клетках, обозначают, что
соответствующие этим 1 конъюнкции (произведения) отличаются лишь по
одной переменной, которые дополняют друг друга и их можно опустить.
Так в первой строке карты Карно (см. рис. 2.2,6) переменная xt
встречается в комбинации с х2 и х2, которые дополняют друг друга:
xrx2+xrx2:=xi-(x2+x2)=xi (2.29)
Таким образом, группируя две соседние клетки в верхней строке
(контур на рис. 2.2, б), можно исключить одну переменную и получить
упрощенное выражение — х 1.
Аналогично, группируя две соседние клетки в левом столбце (контур
на рис. 2.2, б) и исключая отличающиеся переменные (х1 и *1), получим
упрощенное выражение — х2.
Полученные упрощенные выражения объединяют с помощью
операции ИЛИ.
67
Таким образом, упрощенное выражение логической функции будет
иметь вид
F = X|+x2 (2.30)
Таким образом, соседние клетки карты Карно можно группировать для
исключения переменной. Число группируемых клеток может быть и больше
двух, но их число должно быть четным и они должны соприкасаться
(являться соседними) друг с другом.
Допускается также иметь несколько групп перекрывающихся клеток,
как в только что рассмотренном примере.
Группироваться могут также клетки первой и последней строк,
первого и последнего столбцов, т. е. карту допускается сворачивать в
цилиндр как по вертикальной, так и по горизонтальной оси.
Для исключения п переменных общее число группируемых клеток
должно быть равно 2”. Так, для исключения одной переменной требуется
объединить две соседние клетки, а для исключения трех переменных уже
требуется объединить восемь соседних клеток.
Таким образом, для того чтобы получить минимизированную
логическую функцию, необходимо сгруппировать все соседние клетки
карты Карно, содержащие 1, а затем объединить полученные группы с
помощью операции ИЛИ. Клетки, содержащие 1, которые не удалось
объединить с другими клетками, образуют в минимизированной логической
функции самостоятельные члены, каждый из которых содержит все
переменные.
Рассмотрим несколько примеров карт Вейча и способы построения
контуров группировки соседних клеток для получения упрощенной
логической функции.
Так, карта Вейча для логической функции
-Х2- X з’Хд+ X 1 -Х2’ Хз-Хд+Х! • X 2‘ X З'Хд+.V i • X 2‘ X уХ$ (2.31)
приведена на рис. 2.3.
68
Рис. 2.3. Карта Вейча для логической функции
На этом рисунке показан правильный способ объединения соседних
ячеек, т. е. карта Вейча как бы свернута в вертикально расположенный
цилиндр.
Упрощенное выражение логической функции имеет вид F = Х3-х4.
Таким образом, группируя соседние клетки в единый квадрат, удалось
исключить две переменные (xi и х2) и получить простое выражение для
логической функции.
Рассмотрим пример минимизации логической функции
F=X| ’Хг-Хз* Xд+Х] • X 2’Хз* X д+Xj -Х^Хз’Хд+Х} • X 2-Хз’Х4+ X г X 2’Хз’ X 4+ X 1 • X 2' х 3’ X 4
(2.32)
Рис. 2.4. Карта Вейча для логической функции
Группируемые ячейки обведены двумя контурами. Нижний контур
дает возможность исключить одну переменную хЗ и после этого в нем
69
остается член Х1-*2Х3. В верхнем контуре можно исключить две
переменные (х2 и х4) и после этого в нем остается член xl-хЗ. Упрошенное
булево выражение логической функции имеет вид
F=xrx3+xrx2-x4 (2.33)
Можно объединять в квадрат также четыре угловые клетки карты
Вейча, как это показано на рис. 2.5, которая построена для логической
функции
F=X\'Xy Ху Xу+Ху Ху Ху X4+X \'Ху xy X 4+ X \' Х2’ Ху Х4 (2.34)
Рис. 2.5. Карта Вейча для логической функции
Объединенные клетки являются соседними (если поверхность
представить в виде тора), и это объединение позволяет исключить две
переменные х 1 и х2 и получить простое выражение логической функции
F=J3-X4. (2.35)
Рассмотрим минимизацию логической функции, карта Вейча которой
представлена на рис. 2.6.
70
Рис. 2.6. Карта Вейча для логической функции
Булево выражение этой функции имеет вид:
F=Xi-X2-X3-X4+X]-X2-X3-X4+XrX2’^3’^4“*~XrX2'^3’X4+
+ х j-X2’Хз*Х4+х гХ2-Хз* Х4+ X у Х2' Ху X4 (2.36)
Четыре угловые клетки можно объединить в одну группу, как это
делалось в предыдущем примере. Это объединение позволяет исключить две
переменные (х1 и х2) и получить член *3-*4 .
Две единицы из первой строки можно объединить с двумя единицами
из нижней строки, получить группу из четырех ячеек, которая позволяет
исключить две переменные (х4 и хЗ) и получить член х2-х4.
Наконец, единственную оставшуюся единицу (из второй строки и
последнего столбца) можно объединить с клеткой, находящейся над ней, и
это позволит исключить одну переменную (х4) и получить член xi -Х2'хз-
Таким образом, мы получим минимизированную логическую
функцию
F= Ху X 4*^X2- X 4+Хг JC2* х3 (2.37)
Следует отметить, что для получения минимальной формы логической
функции необходимо группировать наибольшее число клеток, причем
некоторые клетки могут входить в разные группы. В зависимости от выбора
групп объединения клеток можно получить несколько упрощенных
выражений логической функции.
71
В ряде случаев не все значения логической функции бывают
определены однозначно. Например, в некоторых случаях известно, что
какие-то комбинации входных переменных (сигналов на входе логической
схемы) появиться не могут, или, если они появляются, то значение
логической функции (сигнала на выходе логической схемы) не существенно.
В таких случаях говорят о неопределенных условиях, и на карте Вейча такое
неопределенное условие может обозначаться прочерком.
Рассмотрим, как карту Вейча с неопределенными условиями можно
использовать для минимизации логической функции.
Пусть имеется карта Вейча такой функции (рис. 2.7).
Рис. 2.7. Карта Вейча с неопределенными условиями
При минимизации клетки с недоопределенными состояниями могут
произвольным образом включаться в группы при объединении клеток,
причем им может присваиваться любое значение (0 или 1) таким образом,
чтобы сгруппировать наибольшее число клеток.
Так, в рассматриваемом примере вместо всех прочерков можно
проставить логические 1 и получить две большие группы по восемь клеток
(два контура на рис. 2.7), что позволит исключить три переменные и
получить следующее упрощенное выражение логической функции: F-x2+x4
72
Если клетки с неопределенными условиями не использовать, то можно
получить две группы по четыре клетки, что позволит получить следующее
упрощенное выражение логической функции: F =х\ -х^+х^х^
Очевидно, что данное выражение логической функции сложнее
предыдущего.
При минимизации логической функции, содержащей более четырех
переменных, используются другие способы минимизации.
2.3. Базовые логические элементы. Схемотехника логических элементов
различных логик.
Набор операций ИЛИ, И, НЕ является функционально полным. Это
означает, что выполняя эти операции в определенном порядке, можно
производить любые, даже самые сложные преобразования цифровых
двоичных сигналов [51,53,65].
Рассмотренные основные логические операции выполняются с
помощью электронных устройств, называемых логическими элементами,
условные обозначения которых даны на рис. 2.8.
Название логического элемента или ИЛИ-НЕ и И-НЕ Исключающее ИЛИ
Выполняемая операция A*8=Q AB=Q А В+А B=Q
Условное графическое обозначение л“ГПо В-| I СО Ъ м О| ЕЛ Т-"Т Ч 00 й 00 Д-рПо В-| Г
Табли- цы истин- ности А В О о О О Q
0 0 1 1 0 1 0 1 0 1 1 1 1 0 0 0 0 0 0 1 1 1 1 0 0 1 1 0
Рис. 2.8. Условные графические обозначения основных логических
элементов и выполняемые с их помощью логические операции
73
Двоичные логические элементы работают в режиме переключения
(или закрыты, или полностью открыты) и могут быть резисторно-
транзисторными (РТЛ — резисторно-транзисторная логика); диодно-
транзисторными (ДТЛ — диодно-транзисторная логика); транзисторно-
транзисторными (ТТЛ — транзисторно-транзисторная логика);
транзисторно-транзисторными с эффектом Шоттки (ТТЛШ); транзисторно-
транзисторными с эмиттерными связями (ТЛЭС или ЭСЛ); инжекционными
интегральными (И2Л); выполненными на основе комплементарных пар —
КМОП-транзисторов (КМОП-логика).
В цифровой технике в настоящее время доминируют пять семейств
логических микросхем в интегральном исполнении: ТТЛ; ТТЛШ; И2Л;
КМОП и ЭСЛ, выпускаемые во всем мире десятками миллиардов
экземпляров ежегодно.
Логические элементы НЕ. В простейшем случае элемент НЕ
(инвертор) может быть выполнен на биполярном транзисторе с общим
эмиттером (рис. 2.9, а).
<50
+Ц, База Коллекторы
Эмиттер Эмиттер
Рис. 2.9. Логический элемент НЕ, выполненный на биполярном транзисторе
(а) и его условное графическое изображение (б). Транзистор Шоттки и его
условное графическое изображение в электронных схемах (в, г).
Структурная схема (д) и эквивалентная электрическая схема базового
элемента И2Л (е) и логический элемент НЕ на его основе (ж)
74
Когда на входе А — базе транзистора VT — действует сигнал 0, тран-
зистор закрыт, тока не проводит и напряжение на выходе Q — коллекторе
транзистора — максимально, практически равно напряжению источника
питания и соответствует сигналу 1. Если на входе действует положительное
напряжение, соответствующее сигналу 1, транзистор VT (п-р-п-типа)
отпирается, переходит в режим насыщения и напряжение на выходе Q
снижается до уровня 0,1-0,3 В, соответствующего сигналу 0.
Таким образом, схема инвертирует входной сигнал. У рассмотренной
схемы НЕ не слишком большое быстродействие, малая нагрузочная
способность, сравнительно большое потребление энергии питания и весьма
низкая помехоустойчивость.
Существенно повысить быстродействие инвертора и снизить расход
энергии питания позволяет применение диодов Шоттки, включаемых
параллельно переходу коллектор—база биполярного транзистора (рис. 2.9,
в). Такое соединение «диод Шоттки — биполярный транзистор» называется
транзистором Шоттки и обозначается в электронных схемах, как показано
на рис. 2.9, г. Среднее время задержки сигналов в логических элементах
ТТЛШ — порядка 1 нс при средней потребляемой мощности около 10 мВт
на один логический элемент.
Дальнейшим усовершенствованием технологии изготовления
логических интегральных микросхем является технология И2Л, которая
значительно проше технологии ТТЛ-схем. Площадь, занимаемая логическим
элементом И2Л на поверхности базового кристалла полупроводника, почти
на порядок меньше, чем в случае обычного ТТЛ-элемента. Это
обеспечивается использованием комплементарных пар биполярных
транзисторов (р-п-р и п-p-n), совмещением коллекторной области р-п-р-
транзистора с базовой областью многоколлекторного п-р-п-транзистора и
75
совмещением базовой области р-п-р-транзистора с эмиттерной областью п-
р-п-транзистора (рис. 2.9, д, е).
В открытом состоянии коллектор транзистора VT1 инжектирует в
область базы многоколлекторного транзистора VT2 поток неосновных
носителей (дырок), которые открывают транзистор VT2 и создают
коллекторный ток в нем — даже без дополнительного источника питания.
Это позволяет резко уменьшить потребление энергии питания и работать с
весьма малыми управляющими сигналами (0,2-0,7 В).
Упрощенная электрическая схема логического элемента НЕ, вы-
полненного по И2Л технологии, приведена на рис. 2.9, ж.
При подаче на вход А напряжения, соответствующего логическому 0,
база транзистора VT2 фактически замкнута на корпус, вследствие чего
транзистор VT2 закрыт, напряжение на выходе максимально и соответствует
логической 1. Если на входе действует положительное напряжение
логической 1, то транзистор VT2 открывается, поскольку в его базу
начинает втекать интенсивный коллекторный ток транзистора VT1.
Применение МОП-транзисторов позволяет еще почти в 10 раз
увеличить число активных элементов на кристалле интегральной
микросхемы и более чем в 103 раз уменьшить потребление энергии питания
по сравнению с ТТЛ-схемами. Однако при этом почти в 10 раз уменьшается
быстродействие (в первую очередь из-за больших емкостей на входе и
выходе транзисторов и очень высоких входных сопротивлений).
Инвертор на МОП-транзисторах с n-каналами может быть выполнен
по схеме, приведенной на рис. 2.10, а. Транзистор VT1, на затвор которого
подается напряжение отпирающей полярности, выполняет роль резистора.
Если на входе А действует сигнал 0, то транзистор VT1 закрыт и
напряжение на выходе Q практически равно напряжению источника
питания, т. е. соответствует напряжению логической 1. Когда на вход А
действует положительное напряжение, соответствующее напряжению
76
логической 1, то транзистор VT2 открывается и напряжение на выходе Q
становится малым, что соответствует логическому 0.
Рис. 2.10. Логический элемент НЕ, выполненный на МОП-транзисторах с п-
каналом (а); на комплементарной паре КМОП-транзисторов с п- и р-
каналами (б)
Существенное повышение быстродействия (и снижение потребления
энергии питания) достигается в МОП-логических схемах при использовании
в них комплементарных пар КМОП-транзисторов.
Схема КМОП-инвертора приведена на рис. 2.10, б. Если на входе А
схемы действует напряжение логического нуля, то транзистор VT1.
имеющий p-канал, полностью открыт, поскольку его затвор при этом
соединен с общим проводом, и поэтому на него подается отрицательное
напряжение в отпирающей полярности относительно истока, соединенного с
плюсом источника питания. Транзистор VT2, имеющий n-канал, заперт,
вследствие чего напряжение на выходе Q максимально и соответствует
напряжению логической 1. Когда на вход А подается положительное
напряжение логической 1, то транзистор VT1 запирается, а транзистор VT2
полностью отпирается, вследствие чего напряжение на входе Q становится
нулевым.
Таким образом, ни при напряжении логического 0 на входе, ни при
напряжении логической 1 одновременно оба транзистора быть в открытом
состоянии не могут, т. е. через них никогда нет «сквозного» тока.
Логические элементы ИЛИ. Принципиальная схема двухвходового
логического элемента ИЛИ приведена на рис. 2.11.
Рис. 2.11. Логический элемент ИЛИ, выполненный на биполярных (а) и
МОП-транзисторах (б)
На рис. 2.11, а дается схема элемента ИЛИ, выполненного по
технологии ТТЛ, на биполярных транзисторах. Когда на входах А и В
действует 0, транзисторы VT1 и VT2 заперты, ток через них не проходит и
на резисторе Иэ, включенном в цепь эмиттеров, нет напряжения. Если на
одном из входов появляется положительное напряжение логической 1, то
соответствующий транзистор отпирается, и на резисторе появляется падение
напряжения, отображающее единицу. Когда на обоих входах действуют
напряжения 1, то оба транзистора открыты и на выходе также действует
положительное напряжение, отображающее I.
Логический элемент ИЛИ на МОП-транзисторах может быть
выполнен по схеме, приведенной на рис. 2.11, б. В этой схеме транзисторы
VT1 и VT2 включаются при подаче на их затворы положительного
напряжения логической 1 и выключаются, если действует напряжение
логического 0. Транзистор VT3 используется вместо резистора и постоянно
78
открыт, что приводит к потреблению энергии питания, в то время когда
открыты транзисторы VT1 и VT2.
Особенностью схемы ИЛИ является возможность, несколько изменив
ее, получить новый, более универсальный элемент ИЛИ-НЕ,
осуществляющий одновременно с логическим сложением ИЛИ логическое
отрицание (инверсию) НЕ. Таблица истинности элемента ИЛИ-НЕ
приведена на рис. 2.8.
Для этого активные элементы должны быть использованы не в режиме
повторителей (как в схеме рис. 2.11,6), а в режиме усилителей-инверторов,
что легко достигается перенесением общего сопротивления нагрузки из
цепи истоков в цепь стоков.
На рис. 2.12, а приведена схема логического элемента ИЛИ-НЕ,
выполненная на МОП-транзисторах с n-каналами. При сигналах логического
О на входах А и В транзисторы VT2 и VT3 заперты, а поскольку транзистор
VT1 постоянно открыт и играет роль сопротивления нагрузки, то на выходе
Q действует положительное напряжение логической 1. Если на одном из
входов А или В (или одновременно на двух) действует положительное
напряжение, соответствующее логической 1, то транзистор VT2 или VT3
(или оба вместе) оказывается открытым и напряжение на выходе Q
снижается до нескольких десятых долей вольт, т. е. до уровня напряжения
логического 0.
79
Рис. 2.12. Логические элементы ИЛИ-HE, выполненные на МОП-
транзисторах с n-каналами (а); на комплементарных парах КМОП-
транзисторов (б); на биполярных транзисторах (в); по технологии И2Л (г)
Существенно снизить потребление энергии питания и увеличить
быстродействие позволяет использование КМОП-транзисторов.
В частности, на рис. 2.12, б приведена схема такого вида. Транзисторы
VT1 и VT2 имеют p-каналы и могут открываться, если на их затворы
подается напряжение логического 0. При этом транзисторы VT3 и VT4,
имеющие n-каналы, оказываются запертыми и напряжение на выходе Q
близко к напряжению источника питания, т. е. к напряжению логической 1.
Если хотя бы на одном из входов действует напряжение логической 1, то
один из транзисторов — VT1 или VT2 — закрывается, а поскольку они
соединены последовательно, схема отключается от источника питания и на
выходе Q напряжение равно 0.
В добавление к этому открывается один из транзисторов VT3 или VT4
(включенных стоками параллельно) и выход соединяется с общим
проводом.
80
ТТЛ-вариант исполнения схемы ИЛИ-HE на биполярных транзисторах
приведен на рис. 2.12, в. Из рисунка видно, что схема объединяет в себе
двухвходовый элемент ИЛИ и инвертор НЕ. Если на входах А и В
действуют напряжения логических 0, то переходы база-эмиттер
транзисторов VT1 и VT2 закрыты и напряжение на выходе соответствует
напряжению логической 1. Если на одном из входов или одновременно на
двух действует сигнал логической 1, то один из транзисторов (или оба
вместе) открывается, сопротивление его резко уменьшается и напряжение на
выходе снижается до уровня логического 0. Таким образом, схема работает
в полном соответствии с таблицей истинности элемента ИЛИ-НЕ.
Упрощенная схема логического элемента ИЛИ-HE, выполненного по
технологии И2Л, приведена на рис. 2.12, г. Когда на входах А и В действуют
напряжения, соответствующие логическому 0, то базы транзисторов VT3 и
VT4 практически заземлены, транзисторы заперты, напряжение на выходе Q
максимально и примерно равно напряжению источника питания, т. е.
соответствует напряжению логической 1. Если на один из входов (или на
оба входа одновременно) действует положительное напряжение,
соответствующее напряжению логической 1, то один из транзисторов (VT3
или VT4 или оба) полностью открыт и напряжение на выходе минимально и
соответствует напряжению логического 0.
Логические элементы И. Схема простейшего двухвходового элемента
И на биполярных транзисторах приведена на рис. 2.13, а, а на рис. 2.12,6 -
диаграмма его работы.
81
о оГПо ИТ-
Рис. 2.13. Логический элемент И на биполярных транзисторах (а),
диаграммы напряжений на его входах А, В и выходе Q (б)
Элемент И называют иногда схемой совпадения, так как из диаграммы
работы видно, что сигнал 1 на выходе появляется только в том случае, если
на обоих входах А и В одновременно действуют напряжения логической 1.
Поскольку транзисторы VT1 и VT2 соединены последовательно, то ток в
цепи может протекать только в случае, если одновременно открыты оба
транзистора. Если открыт только один из транзисторов, то ток протекать не
будет и напряжение на выходе будет нулевым. Таким образом, схема
выполняет логическое умножение.
Более универсален элемент И-НЕ, позволяющий одновременно с
операцией логического умножения И выполнить и отрицание НЕ. Таблица
истинности элемента ИЛИ-HE приведена на рис. 2.8.
Например, на рис. 2.14 приведен МОП-вариант схемы логического
элемента И-НЕ.
82
Рис. 2.14. Логический элемент И-НЕ, выполненный на МОП-транзисторах
с п-каналами
Транзистор VT1 используется вместо сопротивления нагрузки и по-
стоянно открыт, ибо на его затвор подается напряжение в отпирающей
полярности. Если на затворы транзисторов VT2 и VT3 поданы напряжения
логического 0, то они заперты, тока не проводят и на выходе Q действует
почти полное напряжение питания, т. е. напряжение логической 1. Если
подается напряжение логической 1 только на один из входов А или В, то
состояние схемы не изменяется и напряжение на выходе остается
неизменным. Однако если на оба входа действуют напряжения логических
1, то оба транзистора, VT2 и VT3, отпираются, их внутреннее
сопротивление уменьшается и напряжение на выходе Q также становится
весьма малым, т. е. на выходе действует логический 0 — в полном
соответствии с таблицей истинности И-НЕ.
Условные изображения логических элементов ИЛИ-HE и И-НЕ даны
на рис. 2.15.
83
Рис. 2.15. Условные графические обозначения элементов ИЛИ-НЕ и И-НЕ
в электронных схемах
При крупносерийном производстве целесообразно производить как
можно меньше вариантов микросхем, поэтому промышленность
предпочитает выпускать универсальные элементы И-НЕ или И-ИЛИ-НЕ.
Принципиальная схема простейшего универсального элемента,
содержащего в своем составе элементы И, ИЛИ, НЕ, приведена на рис. 2.16,
а, а на рис. 2.16, б дано его условное обозначение. Когда на всех входах 1-4
действуют 0, то транзисторы VT1-VT4 заперты, транзистор VT5 открыт и на
выходе действует напряжение 1. Если на входах 1, 2 (или 3,4) одновременно
действуют 1, то транзисторы VT1 и VT2 (или VT3 и VT4) открываются и на
выходе действует напряжение, соответствующее 0.
84
Рис. 2.16. Принципиальная электрическая схема универсального
логического элемента И-ИЛИ-НЕ (а), его условное графическое обозначение
(б), его использование в качестве логического элемента ИЛИ-НЕ (в) и
элемента НЕ (г). Функциональные схемы наиболее часто применяемых
логических элементов Исключающее ИЛИ (д, е, ж, з, и)
Таким образом, пары транзисторов — VT1, VT2 и VT3, VT4 —
составляют схемы И, которые включены параллельно и образуют схему
ИЛИ.
Если входы попарно соединены (1 и 2, 3 и 4), то схема в целом
работает как двухвходовой элемент ИЛИ-НЕ (рис. 2.16, в).
Соединяя между собой все четыре входа, получаем инвертор НЕ (рис.
2.16, г).
Исключающее ИЛИ. Логический элемент Исключающее ИЛИ может
быть выполнен различными способами на основе стандартных логических
элементов, как это показано на рис. 2.16, д, е, ж, з, и.
Принцип действия этих схем вполне прост и подчиняется правилам
логики, в чем можно убедиться, например, при рассмотрении рис. 2.16, д и
85
анализе таблицы истинности (табл. 2.8), в которой буквами Qb- Q2; Q3
обозначены состояния выходов логических схем.
Таблица 2.8 Таблица истинности для логической схемы Исключающее ИЛИ
Входы Выходы
А В Q> Q2 Q3
0 0 0 1 0
1 0 1 1 1
0 1 1 1 1
1 1 1 0 0
Необходимо обратить внимание, что логические схемы работают по
рассмотренным принципам только при положительной логике, т. е. когда за
логический 0 принято нулевое напряжение, за логическую единицу —
положительное напряжение (для ТТЛ-схем напряжению логической 1
соответствует 2,4-5 В, а для МОП-транзисторных схем — 8-9 В).
При отрицательной логике за логический 0 принимается
положительное напряжение, равное 2,4-5 В или 8-9 В, а за логическую 1 —
напряжение, равное нулю. В этом случае элементы ИЛИ начинают
действовать как элементы И (и наоборот — элементы И превращаются в
элементы ИЛИ).
В этом легко убедиться на примере схемы ИЛИ-HE (см. рис. 2.12, а).
Транзисторы VT2 и VT3 при сигналах логического 0 полностью открыты (на
затворы при этом подаются относительно истоков положительные
напряжения 8-9 В) и на выходе Q напряжение относительно корпуса «общей
земли» равно 0,3-0,4 В, что соответствует логической 1 в отрицательной
логике. Если на один из входов подается сигнал 1, то один из транзисторов
запирается, но другой остается открытым и на выходе сохраняется
86
напряжение, отображающее логическую 1. Выходное напряжение
становится равным напряжению питания только в том случае, если на оба
выхода одновременно подаются сигналы логической 1. Только тогда
транзисторы VT2 и VT3 запираются. Таким образом, схема работает как
элемент И-НЕ (а не как элемент ИЛИ-HE в положительной логике)
Подобным же образом изменяется работа схемы И-НЕ, приведенной
на рис. 2.14, а. Когда на оба входа А и В подаются сигналы логического 0 (т.
е. на затворах действуют положительные напряжения 8-9 В), то транзисторы
VT2 и VT3 открыты и напряжение на выходе имеет минимальный уровень,
принимаемый в отрицательной логике за I. Чтобы напряжение на выходе
стало максимальным и соответствующим логическому 0, на один из входов
надо подать сигнал логической 1. При этом один из последовательно
соединенных транзисторов запрется и напряжение на выходе станет
максимальным, соответствующим 0. Таким образом, эта логическая схема
работает как элемент ИЛИ-HE (а не как элемент И-НЕ в положительной
логике).
Указанное свойство логических схем иногда используется при по-
строении цифровых систем, что часто существенно упрощает схемы
отдельных устройств (но затрудняет понимание принципа их работы и
поиск неисправностей).
Все логические элементы выпускаются в виде микросхем в
интегральном исполнении и маркируются стандартным семиэлементным
кодом. При этом третий элемент маркировки — две буквы — обозначает:
ЛИ — элемент И; ЛН — элемент НЕ; ЛЛ — элемент ИЛИ; ЛА — элемент И-
НЕ; ЛЕ — элемент ИЛИ-HE; ЛР - элемент И-ИЛИ-НЕ; ЛП — прочие типы
элементов (в том числе Исключающее ИЛИ) и др.
87
2.4. Особенности выходных каскадов цифровых микросхем
Часто возникает необходимость подключения выходов нескольких
цифровых микросхем к одной нагрузке. Одним из способов объединения
выходов является использование в выходных каскадах микросхем
транзисторов, один из выводов которых (коллектор, эмиттер, сток, исток)
никуда не подключен. Такой вывод называют открытым [31,53].
Покажем схематически (рис. 2.17,а), как объединяются выходы
микросхем с открытым коллектором. Такой элемент выполняет
дополнительную логическую операцию, называемую операцией
монтажной логики. Таблица истинности такого устройства с учетом
инвертирования сигнала в выходном каскаде приведена на рис. 2.17,6.
Выходное напряжение принимает уровень логической единицы лишь тогда,
когда транзисторы выходных каскадов закрыты, т. е. на входы поданы
логические 0.
Рис. 2.17. Объединение выходов микросхем с открытым коллектором (а);
таблица истинности полученного устройства (б)
88
Нетрудно видеть, что схема реализует логическую операцию ИЛИ-НЕ,
и поэтому такую схему называют «Монтажным ИЛИ», т. е.
у = хх+х2 (2.38)
Используя закон де Моргана, нетрудно получить
у = х> -Х2 (2.39)
С учетом данного выражения такое соединение (рис. 2.17, а) иногда
называют «Монтажное И».
Выходные каскады некоторых микросхем могут работать в таком
режиме, когда микросхема оказывается фактически отключенной от
нагрузки. Это так называемое третье состояние микросхемы.
Использование третьего состояния является еще одним способом
объединения выходов микросхем, который широко используется в
вычислительной технике, при подключении к общему проводу многих
устройств. Приведем фрагмент схемы, поясняющей возникновение третьего
состояния (рис. 2.18). Если оба транзистора закрыты, то микросхема и
нагрузка фактически являются разъединенными.
Рис. 2.18. Фрагмент схемы, поясняющей возникновение третьего состояния
При использовании в едином цифровом устройстве микросхем
различных серий, и в особенности различных логик, может возникнуть
проблема согласования уровней входных и выходных напряжений. Для
89
указанных целей производятся специальные микросхемы, которые называют
преобразователями уровня сигналов.
2.5. Реализация логических функций. Особенности построения
логических устройств
Положим, что имеется логическая функция вида
F = х, х2 + х} • х3 + х2 • х3
(2.40)
По этому выражению можно построить устройство, схема которого
приведена на рис. 2.19 [65].
Рис. 2.19. Схема устройства, реализующего логическую функцию
При проектировании цифрового устройства рекомендуется поступать
следующим образом:
1. По условию работы устройства определяется, что именно должно
делать устройство, и уточняется алгоритм его работы.
2. Составляется таблица истинности для логической функции,
реализуемой устройством.
3 Составляется логическая функция и проводится ее минимизация.
4. Разрабатывается схема проектируемого устройства.
Рассмотрим примеры проектирования некоторых цифровых
устройств.
90
Пример 1. Необходимо спроектировать устройство включения и
выключения звукового сигнала в помещении переключением одного из двух
ключей, независимо от состояния другого ключа.
Требуется спроектировать логическое устройство, на выходе которого
появляется сигнал логической 1 (F=l), когда сирена включается. Если ключи
(х и у) замкнуты, то это соответствует логическим нулям на входах
устройства (х=0, у=0), а разомкнутые ключи соответствуют логическим
единицам на входах устройства (х=1, у-1).
Учитывая сказанное, составим таблицу истинности (табл. 2.8),
Таблица 2.8 Таблица истинности для логической схемы
X У F
0 0 1
0 1 0
1 0 0
1 1 1
Поясним таблицу истинности. При обоих замкнутых ключах сирена
включена (первая строка таблицы истинности). Выключение любого из двух
ключей приводит к отключению сирены (вторая и третья строки таблицы).
Выключение оставшегося включенного ключа приводит к включению
сирены (последняя строчка).
По данной таблице истинности составим логическую функцию: F = х-
у+ху.
Полученное логическое выражение может быть реализовано
следующим образом (рис. 2.20).
91
Рис. 2.20. Схема устройства, реализующего логическую функцию
Пример 2. Требуется спроектировать логическое устройство,
осуществляющее передачу данных с одного из четырех входов на один
выход в зависимости от комбинации сигналов на адресных входах.
Из описания следует, что проектируемое устройство имеет один выход
F и четыре входа х1 х2, хЗ и х4 на которые могут подаваться логические
сигналы 0 или 1, и один из входов должен подключаться к выходу в
зависимости от комбинации сигналов на адресных входах. Так как входов
четыре, то, следовательно, и комбинаций на адресных шинах должно быть
четыре, а для этого достаточно иметь два адресных входа А1 и А2.
С учетом этого описания можно составить следующую таблицу
истинности (табл. 2.9).
Таблица 2.9 Таблица истинности для логической схемы
Аг Ai F
0 0 *1
0 1 Х2
1 0 Хз
1 1 Х4
Из данной таблицы следует, что при нулях на обоих адресных входах
к выходу устройства подключен первый вход данных xl, при А 1=1, А2=0 к
92
выходу подключен вход данных х2, при А 1=0, А2=1 к выходу подключен
вход данных хЗ, а при А 1=1, А2=1 к выходу подключен вход данных х4.
По данной таблице составим логическую функцию
F=xy А р А2+ *2*Ар А2+ Ху А рА2+ х4-АгА2
Используя данное выражение, построим логическую схему
проектируемого устройства (рис. 2.21).
Рис. 2.21. Схема устройства, реализующего логическую функцию
Далее мы увидим, что спроектированное устройство является
мультиплексором на четыре входа и находит широкое применение в
цифровой электронике.
Обычно при построении логических устройств, с целью сокращения
номенклатуры используемых логических элементов, используют либо два
элемента, выполняющие операции И-НЕ и ИЛИ-HE, либо только один из
этих элементов.
Это обусловлено тем, что эти элементы И-НЕ и ИЛИ-HE являются
универсальными. Универсальность проявляется в том, что каждый из них
позволяет реализовать все три основные логические операции И, ИЛИ, НЕ
(рис. 2.22).
93
a
Рис. 2.22. Реализация логических операций И, ИЛИ, НЕ на элементах
И-НЕ (а) и ИЛИ-HE (б)
Следовательно, любую логическую функцию можно реализовать,
используя только логические элементы И-НЕ или ИЛИ-НЕ.
При построении логического устройства число входов логических
элементов обычно бывает задано, что тоже вносит определенные трудности
Для построения устроства на заданных логических элементах И-НЕ или
ИЛИ-HE необходимо логическую функцию преобразовать к
соответствующему виду так, чтобы в ней присутствовали только логические
операции И-НЕ или ИЛИ-HE. Для этого используют правило 1 булевой
алгебры, т. е. двойное отрицание, и теорему Де Моргана.
При реализации цифровых устройств на конкретных логических
элементах не все их входы, по ряду причин, могут быть использованы.
Обычно с неиспользуемыми входами поступают следующим образом:
объединяют их с используемыми, если это не ведет к превышению
нагрузочной способности логического элемента, к выходу которого
подключены объединенные входы;
в зависимости от логики работы устройства подают на
неиспользуемые входы либо логический 0, либо логическую 1. Для того,
чтобы не изменять логику работы элемента с неиспользуемыми входами, на
них нужно подать: либо логическую 1, если элемент реализует логическую
94
функцию И, так как х-1 = х, либо логический 0, если элемент реализует
логическую функцию ИЛИ, так как х+0=х.
Для подачи логического 0 неиспользуемые входы просто соединяют с
шиной питания («землей»).
Для подачи логической I неиспользуемые входы подключают к
источникам питания микросхем (обычно через резисторы).
95
ГЛАВА 3. СИГНАЛЫ ИМПУЛЬСНЫХ И ЦИФРОВЫХ УСТРОЙСТВ
3.1. Общие сведения
Сигналом называют физический процесс, несущий информацию.
Сигналы могут быть звуковыми, световыми, электрическими. Информация
сосредоточена в изменениях параметров физического процесса. Если
параметры процесса не меняются, то он не является сигналом. Так,
неизменные звук, световой поток, синусоидальное электрическое колебание
никакого сообщения не содержат. Наоборот, в изменениях громкости и тона
звука, яркости и цвета светового излучения, амплитуды, частоты и фазы
электрического колебания запечатлена информация. Информативным
является также появление или окончание, например, электрического
колебания, т.е. его изменения.
Сигналы на выходе микрофона, передающей телекамеры, различного
рода датчиков аналогичны по своему «рисунку» воздействиям на эти
устройства - звуковому давлению, распределению освещенности,
температуре и т.д. Поэтому подобные сигналы называют аналоговыми.
Между минимальным и максимальным значениями аналоговый сигнал
может иметь любое значение. Обычно аналоговые сигналы являются
непрерывными. Устройства, в которых действуют такие сигналы,
называют аналоговыми.
Расстояние, на которое передается электрический сигнал, может быть
как весьма малым (в пределах устройства), так и чрезвычайно большим
(например, при исследовании космического пространства).
Скорость распространения электрических сигналов близка скорости
света, что и обусловило их широкое применение в различных областях
техники
96
По проводам электрические сигналы могут передаваться в том виде, в
каком они снимаются с источника. При передаче сигнала через открытое
пространство сигналом модулируют высокочастотное колебание, за счет
чего обеспечиваются эффективные излучение и прием.
3.2. Сигналы импульсных устройств
Под электрическим импульсом понимают отклонение напряжения или
тока от некоторого постоянного уровня (в частности, от нулевого),
наблюдаемое в течение времени, меньшего или сравнимого с длительностью
переходных процессов в схеме.
Существует два вида импульсов: видеоимпульсы и радиоимпульсы.
Видеоимпульсы получают при коммутации цепи постоянного тока.
Наиболее часто используют видеоимпульсы прямоугольной,
трапецеидальной, экспоненциальной (остроконечной), пилообразной и
треугольной форм. Различают видеоимпульсы положительной и
отрицательной полярности, а также двусторонние - разнополярные -
импульсы. Следует иметь в виду, что реальные импульсы не имеют формы,
строго соответствующей названию.
Радиоимпульсы представляют собой кратковременные посылки
синусоидального напряжения или тока. Они снимаются с выхода
высокочастотного генератора, который управляется (модулируется)
видеоимпульсами. Поэтому форма огибающей радиоимпульсов
соответствует форме модулирующих видеоимпульсов.
Импульсное колебание, параметры которого изменяются в
соответствии с передаваемой информацией, является сигналом.
Параметры импульсов. Введем понятие об основных параметрах
импульсов на примере реального прямоугольного импульса (рис.3.1.).
97
' 1„С=1О~’С.
Рис.3.1.
Длительность. За активную длительность импульса tn а
принимают промежуток времени, измеренный на уровне, соответствующем
половине амплитуды. Иногда длительность импульсов определяют на
уровне 0,1 Um (0,1 Im) или основанию импульса.
Длительность импульса выражается в единицах времени: секундах (с),
миллисекундах (мс), микросекундах (мкс) и наносекундах (нс).1
Амплитуда. Наибольшее значение напряжения или тока импульса
данной формы является его амплитудой. Амплитуда импульса Um (Im)
выражается в вольтах (В), киловольтах (кВ), милливольтах (мВ),
микровольтах (мкВ) или амперах (А), миллиамперах (мА), микроамперах
(мкА).
Длительность и крутизна фронта импульса. Импульс
имеет передний фронт и срез, последний также называют задним фронтом.
98
Длительность переднего фронта импульса определяется временем
нарастания импульса, а длительность вреза - временем спада импульса.
Наиболее часто пользуются понятием активной длительности фронта
1ф, за которую принимают время нарастания импульса от 0,1 Um до 0,9Um;
аналогично, длительность среза tc - время спада импульса от 0,9Um до
0, Шт.
Обычно длительность 1ф и tc составляет единицы процентов от
длительности импульса. Чем меньше 1ф и tc по сравнению с tn, тем больше
форма импульса приближается к прямоугольной. Иногда вместо (ф и tc
фронты импульса характеризуют скоростью нарастания (спада). Эту
величину называют крутизной S фронта (среза) и выражают в вольтах в
секунду (В/с), киловольтах в секунду (кВ/с) и т.д. Для прямоугольного
импульса приближенно S = ИтЛф.
Участок импульса между фронтами называют плоской вершиной. На
рисунке показан спад плоской вершины (AU), а также отрицательный
выброс.
Мощность в импульсе. Энергия W импульса, отнесенная к его
длительности, определяет мощность в импульсе: Ри = W/tn. Она выражается
в ваттах (Вт), киловаттах (кВт).
Период повторения импульсов. Импульсы, повторяющиеся через
разные промежутки времени, образуют периодическую последовательность.
Промежуток времени межу началом двух соседних однополярных
импульсов называют периодом повторения (следования) импульсов. Он
выражается в единицах времени: с, мс, мкс.
Величину, обратную периоду повторения, называют частотой
повторения (следования) импульсов /. Она определяет количество периодов
в течение 1 с и выражается в герцах (Гц), килогерцах (кГц) и т.д.
Коэффициент заполнения. Часть периода Т занимает пауза - отрезок
времени между окончание и началом двух соседних импульсов.
99
Отношение длительности импульса к периоду повторения называют
коэффициентом заполнения: у = Ш/Т. Коэффициент заполнения - величина
безразмерная, меньшая единицы.
Величину, обратную коэффициенту заполнения, называют
скважностью импульсов: q = 1/у = ТЛи.
Скважность тоже безразмерная величина, но большая единицы.
Среднее значение импульсного колебания. При определении среднего
за период значения импульсного колебания Ucp(Icp) импульс напряжения
или тока распределяют равномерно на весь период так, чтобы площадь
прямоугольника IcpT была равна площади импульса Sh.
Так, для прямоугольного импульса Sh = 1тШ и Icp= Imtn/T = I ту =
Im/q, т.е. среднее значение тока (напряжения) прямоугольного импульсного
колебания в q раз меньше амплитудного.
Средняя мощность. Энергия W импульса, отнесенная к периоду Т,
определяет среднюю мощность импульса: Рср = W/T.
Сравнивая выражения Рср и Ри получим
РиС = РсрТ, Ри = РерТЛи — Pcpq и Рср= РИ1И/Т = PH/q,
т.е. средняя мощность и мощность в импульсе отличаются в q раз.
Отсюда следует, что мощность в импульсе, которую обеспечивает
генератор, может в q раз превосходить среднюю мощность генератора.
Спектр периодической импульсной последовательности. Известно,
что периодическое несинусоидальное колебание можно представить
бесконечным тригонометрическим рядом Фурье, который в общем случае
содержит постоянную и гармонические составляющие.
Результат воздействия на схему каждой составляющей определяется
сравнительно просто. Пользуясь принципом наложения, можно действие
импульса на линейную цепь заменить суммарным действием всех его
составляющих.
100
Часто используется следующая форма математической записи ряда
Фурье:
/(t) - Ао/2 + Aicoscoit + А2 cos 2соit + ... +
4- Ancos ncojt + ...4- ...+ Bjsin coit + (3.1)
4-B2sin 2coit+ ... + Bnsin nco]t+ ...,
где /(t) - функция, раскладываемая в ряд; <x>i ~ 2л/], a j\ - 1/Т] -
частота следования импульсов
Коэффициенты ряда определяют следующими выражениями:
1 < д
. ,3'2>
2Tt
А„ = — j/(/)cosna>,t dt; (3.3)
•* о
2zr
В„ = -J/Wsinn®/ dt (3.4)
1 о
где n = 1, 2..
В некоторых случаях разложение в ряд Фурье упрощается.
Так, если кривая симметрична относительно оси ординат, т.е. если /(t)
= /(-t), то в разложении будут отсутствовать синусоидальные составляющие.
Если кривая симметрична относительно начала координат, то в
разложении отсутствуют косинусоидальные гармоники и постоянная
составляющая.
Наконец, если кривая симметричная относительно оси абсцисс, т.е.
если /(t) = ~/(t 4- Т/2), то в разложении отсутствуют постоянная
составляющая и гармоники четных номеров.
Совокупность гармоник, составляющих данное несинусоидальное
колебание, представляет собой спектр этого колебания. Графическое
изображение спектра колебания называют спектральной диаграммой.
На спектральной диаграмме каждая гармоника изображается
вертикальной линией. Длина этой линии пропорциональная амплитуде
101
гармоники, а ее положение на очи абсцисс определяется частотой
гармоники. Спектральная диаграмма дает наглядное представление о
зависимости амплитуд гармоник от их частот. Наряду с временной
диаграммой, векторным и аналитическим выражениями функции
спектральная диаграмма широко используется для характеристики
различных колебательных процессов.
Структура импульсных сигналов. Для сокращения написания
сигналы импульсных устройств будем называть импульсными. Случаи,
когда это может привести к смещению понятий, будут отмечены особо.
Ранее подчеркивалось, что информация запечатлевается в изменениях
электрического колебания. Импульсная последовательность становится
сигналом, когда в соответствии с передаваемой информацией изменяются ее
параметры: амплитуда импульсов, их длительность или фаза. В частном
случае информация может выражаться появлением импульса, изменением
его длительности или временного положения относительно опорного
импульса.
Различают амплитудно-импульсную (АИМ), широтно-импульсную
(ШИМ) и фазоимпульсную (ФИМ) модуляции. При каждом виде модуляции
один из параметров импульсной последовательности принимает значение,
пропорциональное величине непрерывного модулирующего сигнала в
момент присутствия импульса.
102
3.3. Сигналы цифровых устройств
Цифровые сигналы. Цифровым сигналом представляются двоичные
числа, поэтому он состоит из элементов только двух различных значений.
Одним из них представляется 1, а другим - 0. По установившейся
терминологии эти элементы сигнала называют соответственно единицей и
нулем.
Цифровой сигнал может быть потенциальным или импульсным [5,53].
Элементами потенциального цифрового сигнала являются потенциалы
двух уровней. Каждый уровень остается неизменным в течение так
называемого тактового интервала; на его границе уровень потенциала
изменяется, если следующая цифра двоичного числа отличается от
предыдущей.
Элементами импульсного цифрового сигнала являются импульсы
неизменной амплитуды и их отсутствие.
Обоими цифровыми сигналами (рис.3.2) двоичное число 10011010
выражено в последовательной форме (последовательным кодом): разряды
числа представляются последовательно, друг за другом. При этом
потенциалы (импульсы) соответствующие разрядам числа, передаются по
одной линии и обрабатываются устройством последовательно.
При представлении двоичного числа в параллельной форме
(параллельным кодом) его разряды представляются одновременно. При этом
количество линий передачи, а также однотипных однотипных элементов
устройства, обрабатывающих цифровой сигнал, должно быть равно
количеству разрядов числа, т.е. существенно увеличивается. Такой
Цифровой сигнал значительно быстрее обрабатывается устройством.
103
012345678 t
Рис. 3.2.
Цифровой сигнал может быть сформирован из непрерывного сигнала
аналого-цифровым преобразователем (АЦП), который нередко называют
преобразователем аналог - код или аналог ~ цифра. Такое преобразование
сводится к тому, что из непрерывного сигнала периодически производятся
выборки мгновенных значений; каждая выборка округляется до ближайшего
разрешенного уровня (двоичное число) представляется элементами
цифрового сигнала. Совокупность таких двоичных чисел, выраженных
элементами цифрового сигнала, - цифровой сигнал, соответствующий
преобразуемому непрерывному сигналу.
104
Обратное преобразование цифрового сигнала в непрерывный
осуществляется цифроаналоговым преобразователем (ЦАП). На входы
такого преобразователя одновременно поступают потенциалы,
представляющие разряды кода каждой выборки. Потенциалы,
соответствующие единицам, открывают ключи, через которые на выход
поступают напряжения, пропорциональные весам единиц разрядов. Так на
выходе формируется напряжение, пропорциональное весу кода каждой
выборки.
105
ГЛАВА 4. ПОСЛЕДОВАТЕЛЬНОСТНЫЕ ЦИФРОВЫЕ
УСТРОЙСТВА
Все цифровые устройства делятся на комбинационные и
последовательностные. Цифровое устройство комбинационного типа -
схема, установившиеся значения выходных сигналов которой зависят только
от текущих значений входных сигналов [53]. Цифровое устройство
последовательностного типа - схема, значения выходных сигналов
которой зависят не только от текущих значений входных сигналов, но и от
того, какие входные сигналы и в какой последовательности поступали на
них в прошлом. Последовательностные (или последовательные)
микросхемы в отличие от комбинационных называются еще микросхемами
с внутренней памятью [5,53].
Простейшими представителями цифровых микросхем
последовательностного типа являются триггеры, регистры и счетчики.
Триггер - последовательностное цифровое устройство, содержащее
элемент памяти с емкостью один бит и схему управления записью в этот
элемент памяти. Триггеры могут иметь два выхода: прямой Q и инверсный
Q.
Регистр - последовательностное цифровое устройство, выполняющее
операции приема, хранения и выдачи данных, причем прием и выдача могут
осуществляться для параллельных и/или последовательных данных.
Счетчик - это последовательностное цифровое устройство,
обеспечивающее хранение слова информации и выполнение над ним
операции счета, заключающейся в изменении значения числа в счетчике
на 1.
Если выходные сигналы логических элементов и комбинационных
микросхем однозначно определяются их текущими входными сигналами, то
выходные сигналы микросхем с внутренней памятью зависят также еще и от
106
того, какие входные сигналы и в какой последовательности поступали на
них в прошлом. То есть они помнят предысторию поведения схемы. Именно
поэтому их применение позволяет строить гораздо более сложные и
интеллектуальные цифровые устройства, чем в случае простейших
микросхем без памяти. Триггеры, регистры и счетчики сохраняют свою
память только до тех пор, пока на них подается напряжение питания. То есть
их память относится к типу оперативной памяти (в отличие от постоянной
памяти и перепрограммируемой постоянной памяти, которым отключение
питания не мешает сохранять информацию). После выключения питания и
его последующего включения триггеры, регистры и счетчики переходят в
случайное состояние, то есть их выходные сигналы могут устанавливаться
как к уровню логической единицы, так и к уровню логического нуля.
4.1. Триггеры
4.1.1. Классификация триггеров
Классификация триггеров проводится по признакам логического
функционирования и способу записи информации (рис. 4.1) [65].
Рис. 4.1. Классификация триггеров, используемых в практической
схемотехнике
107
По способу записи информации различают асинхронные
(нетактируемые) и синхронные (тактируемые) триггеры. Асинхронный
триггер - триггер, воспринимающий воздействия информационных
входных сигналов непосредственно в моменты их изменений. Синхронный
триггер - тактируемый триггер, воспринимающий воздействия
информационных входных сигналов только при разрешении их приема
специальным тактовым сигналом. Тактовые сигналы называют также
синхронизирующими, исполнительными, командными и т. д. Обозначаются
они буквой С (от слова Clock).
По логическому функционированию различают триггеры типов RS, D,
Т, JK и др. Кроме того, используются комбинированные триггеры, в
которых совмещаются одновременно несколько типов, и триггеры со
сложной входной логикой (группами входов, связанных между собой
логическими зависимостями).
сигнала. Он имеет один вход и называется триггером со счетным
входом или счетным триггером.
Триггер JK - триггер, имеющий информационные входы установки
(J) и сброса (К), а также режим счетного триггера. В отличие от RS-триггера
допускает ситуацию с одновременной подачей сигналов на оба эти входа
(J=K=1). В этом режиме работает как счетный триггер относительно
третьего (тактового) входа.
В комбинированных триггерах совмещаются несколько режимов.
По способу восприятия тактовых сигналов триггеры делятся на
управляемые уровнем и управляемые фронтом. Управление уровнем
означает, что при одном уровне тактового сигнала триггер воспринимает
входные сигналы и реагирует на них, а при другом не воспринимает и
остается в неизменном состоянии. Триггеры, управляемые уровнем,
называют также триггерами со статическим управлением. При управлении
108
фронтом разрешение на переключение дается только в момент перепада
тактового сигнала (на его фронте или спаде). В остальное время независимо
от уровня тактового сигнала триггер не воспринимает входные сигналы и
остается в неизменном состоянии. Триггеры, управляемые фронтом,
называют также триггерами с динамическим управлением.
Динамический вход может быть прямым или инверсным. Прямое
динамическое управление означает разрешение на переключение при
изменении тактового сигнала с нулевого значения на единичное, инверсное
— при изменении тактового сигнала с единичного значения на нулевое.
С синхронизацией (тактированием) триггера связаны два важных
параметра: время предустановки и время выдержки. Важность этих
параметров обуславливается еще и тем, что они свойственны не только
триггерам, но и другим устройствам. Время предустановки - это интервал
до поступления синхросигнала, в течение которого информационный сигнал
должен оставаться неизменным. Время выдержки - это время после
поступления синхросигнала, в течение которого информационный сигнал
должен оставаться неизменным. Соблюдение времен предустановки и
выдержки обеспечивает правильное восприятие триггером входной
информации.
По характеру процесса переключения триггеры делятся на
одноступенчатые и двухступенчатые.
В одноступенчатом триггере переключение в новое состояние
происходит сразу, в двухступенчатом — по этапам. Двухступенчатые
триггеры состоят из входной и выходной ступеней. Переход в новое
состояние происходит в обеих ступенях поочередно. Один из уровней
тактового сигнала разрешает прием информации во входную ступень при
неизменном состоянии выходной ступени. Другой уровень тактового
сигнала разрешает передачу нового состояния из входной ступени в
выходную.
109
Двухступенчатые триггеры часто называют также триггерами типа MS
(от английского Master-Slave, т. е. хозяин — раб). Эта аббревиатура
отражает характер работы триггера: входная ступень вырабатывает новое
значение выходной переменной Q, а выходная его копирует.
Триггер может быть выполнен монолитным (триггер интегрального
исполнения) или реализован на логических микросхемах. Оба вида
триггеров имеют обычно одинаковую функциональную структуру.
4.1.2. Асинхронный RS-триггер
На выходе элемента И—НЕ (ИЛИ—НЕ) имеется инвертор
(усилитель). Поэтому на двух таких элементах можно выполнить триггер,
если вход одного элемента соединить с выходом другого.
Полученный таким образом триггер является асинхронным RS-
триггером. Он имеет два входа: S — установки триггера в 1, R — установки
триггера в 0.
Асинхронный RS-триггер — простейший интегральный триггер
применяющийся самостоятельно, а также входящий в состав более сложных
интегральных триггеров в качестве запоминающей ячейки [65].
RS-триггер на элементах ИЛИ—НЕ
Прежде всего рассмотрим воздействие на такой триггер (рис. 4.2,а)
комбинаций сигналов S=l, R=1 и S=0, R=0.
Рис. 4.2. RS-триггер на элементах ИЛИ—НЕ
ПО
Сочетание S=1, R=1 является запрещенным, так как при нем на обоих
выходах триггера устанавливаются логические 0, и после снятия входных
сигналов состояние его непредсказуемо.
Для элемента ИЛИ—НЕ логический 0 является пассивным сигналом: с
поступлением его на вход состояние выхода элемента не изменяется.
Поэтому появление комбинации S^O, R= 0 не изменяет состояния триггера.
Логическая 1 для элемента ИЛИ—НЕ является активным сигналом:
наличие ее на входе однозначно определяет на выходе логический 0 вне
зависимости от сигнала на другом входе. Отсюда следует, что
переключающим сигналом для рассматриваемого триггера является
логическая 1, а также то, что вход S (установки триггера в состояние Q=l)
должен быть связан с элементом, выход которого принят за Q (рис. 1.2,а).
Из всего сказанного ясно, что для переключения триггера в состояние
Q=1 на его входы следует подать комбинацию S= 1, R=0, а для переключения
в состояние Q=0 — комбинацию S=0, R=l.
Пусть триггер (рис. 4.2, а) находится в состоянии О (Q=0, Q=l), а на
входах действуют сигналы S=0, R=0. Для его переключения в состояние Q=1
подадим на входы комбинацию S==l, R=0. Тогда на выходе элемента Э2
установится логический 0, на входах элемента Э1 будут одновременно
действовать логические 0 и на выходе Q установится логическая 1 —
триггер переключается в новое состояние (Q=l, Q=0). Для его переключения
из этого состояния на входы должна поступить комбинация S=0, R=l. После
этого на выходе Q будет логический 0, на входах элемента Э2 одновременно
окажутся логические 0 и на его выходе установится напряжение,
соответствующий Q=1, — триггер переключается в состояние Q = 0, Q=l.
Из изложенного следует, что время переключения триггера (tnep) равно
Удвоенному времени переключения логического элемента (удвоенному
111
времени задержки 2t3). Часто, предусматривает запас, принимают tnep=3t3.
Для надежного переключения триггера длительность входного
переключающего сигнала не должна быть меньше tnep.
Условное изображение асинхронного RS-триггера со статическими
входами приведено на рис. 4.2,6.
На входы элементов триггера поступают четыре сигнала: S, R, Ql, Q1,
где Qr и Q1 характеризуют исходное состояние триггера (до смены сигналов
на входах S и R). Три из них (S, R, Q*) являются независимыми
переменными. Ими определяется новое состояние триггера (QH1), в которое
он переключается вслед за сменой сигналов на входах S и R. Указанная
зависимость отражается переключательной табл. 4.1, где прочерком в
столбце Qt+1 отмечены запрещенные комбинации сигналов на S- и R-входах
Таблица 4.1. Переключательная таблица RS-триггера
Номер набора п Q' S R Qt+1
0 0 0 0 0
1 0 0 1 0
2 0 1 0 1
3 0 1 1 -
4 1 0 0 1
5 1 0 1 0
6 1 1 0 1
7 1 1 1 -
На рис. 4.3 приведена идеализированная диаграмма работы RS-
триггера, на которой время переключения триггера принято равным нулю.
Предполагается, что до момента t] S=0, R=0, а триггер находится в
112
состоянии Q=0. В момент ti комбинация S=l, R^O переключает триггер в
состояние Q= 1. При t=t2 на входах устанавливается сочетание S=0, R=0, при
котором состояние триггер сохраняется прежним. Комбинация S=l, R=0,
появляющаяся в момент 1з, и комбинация S=0, R=0 в момент ti никаких
изменений не вносят — по-прежнему Q=l. Только в момент t5 сочетание
S=0, R=1 вызывает переключение триггера в состояние Q=0. Вслед за этим
изменение логической переменной на входе R состояния триггера не меняет.
Новое переключение происходит в момент t6 при поступлении на входы
комбинации S=l, R=0. Заметим, что запрещенное сочетание сигналов S=l,
R=1 на диаграмме отсутствует.
Рис.4.3. Диаграмма работы RS-триггера
RS-триггер на элементах И—НЕ
Для элемента И—НЕ активным сигналом является логический 0:
наличие его хотя бы на одном входе обусловливает на выходе логическую 1
независимо от сигналов на других входах. Логическая 1 для такого элемента
является пассивным сигналом: с ее поступлением на вход состояние выхода
элемента не изменяется.
В силу сказанного триггер на элементах И—НЕ (рис. 4.4,а)
переключается логическим 0. На условном изображении такого триггера
(рис. 4.4,6) это отражают инверсными входами.
113
Рис. 4.4. RS-триггер на элементах И—НЕ
Нетрудно понять, что для данного триггера комбинация входных
сигналов S=0, R=0 является запрещенной, а комбинация S=l, R=1 не меняет
его предыдущего состояния.
Так как триггеры на элементах ИЛИ—НЕ и И—НЕ переключаются
противоположными логическими сигналами, то переключательную таблицу
для рассматриваемого триггера можно получить из табл. 4.1, заменяя 1 на О
и наоборот, в столбцах S и R. Более того, табл. 4.1 будет соответствовать
триггеру на элементах И—НЕ, если считать, что в указанных столбцах
записаны инверсии входных сигналов S и R. Чтобы подчеркнуть
переключение триггера нулем, такие обозначения иногда ставят у его
входных выводов.
Перенесем состояния QtH триггера из табл. 4.1 в карту Карно (рис.
4.5). На запрещенных наборах (п=3,7) положим Qt+,=1 и произведем
склеивание членов, охваченных показанными контурами.
Рис. 4.5. Карта Карно
Тогда в результате получим минимизированное выражение Qtl==S+Q’
R
114
Это выражение называется характеристическим уравнением RS-
триггера. По нему можно определить состояние Qt+1, в котором будет
находиться триггер после поступления логических сигналов на S- и R-
входы, если его исходное состояние соответствовало Qt.
4.1.3. Синхронный RS-триггер
На входы логического элемента или устройства сигналы не всегда
поступают одновременно, так как перед этим они могут проходить через
разное число узлов, не обладающих к тому же одинаковой задержкой. Это
явление называют состязаниями или гонками. В результате его в течение
некоторого времени на входах создается непредвиденная ситуация: новые
значения одних сигналов сочетаются с предыдущими значениями других,
что может привести к ложному срабатыванию элемента (устройства).
Последствия гонок можно устранить, подавая на элемент кроме
информационных сигналов тактирующие (синхронизирующие) импульсы, к
моменту прихода которых информационные сигналы заведомо успевают
установиться на входах.
Одноступенчатый синхронный RS-триггер
На рис. 4.6,а изображена схема тактируемого RS-триггера. Она
содержит асинхронный RS-триггер Т1 с прямыми входами (собранный на
элементах ИЛИ—НЕ) и два конъюнктора. Последние передают
переключающую логическую 1 с информационного S- или R-входа на
соответствующие входы Т1 только при наличии на синхронизирующем
входе С логической 1. При С=0 информация с S- и R-входов на триггер Т1
не передается. Условное изображение тактируемого триггера приведено на
Рис. 4.6,6.
115
У
Рис. 4.6. Тактируемый RS-триггер
На рис. 4.7 дана схема тактируемого RS-триггера, основу которого
составляет асинхронный RS-триггер Т1 с инверсными входами
(аналогичный изображенному на рис. 4.4,а). Чтобы обеспечить
переключающий логический 0 на соответствующем входе Т1, в схеме
использованы элементы И—НЕ. Логический 0 на выходе такого элемента
будет при логических 1 на его входах, т. е. при S=l, С=1 или при R=l, С==1.
Рис. 4.7. Тактируемый RS-триггера на основе асинхронного RS-триггера
На рис. 4.8 приведены диаграммы работы триггера, изораженного на
рис. 4.7, без учета времени его переключения. Переключение триггера в
состояние Q=1 происходит при S=1 с поступлением синхроимпульса 2,
когда на выходе S’ появляется логический 0. Сигнал S - 0, возникающий при
поступлении синхроимпульса 3, переключения не вызывает, так как до этого
триггер уже установлен в единичное состояние. Синхроимпульс 4 с
сигналом R=1 обеспечивает R-0. что переключает триггер в состояние Q=0.
116
Рис. 4.8. Диаграммы работы тактируемого RS-триггера
В дальнейшем тактируемый RS-триггер будем сокращенно обозначать
RSC.
Двухступенчатый синхронный RS-триггер
Тактирование триггера фронтом импульса можно обеспечить,
выполняя его двухступенчатым.
Каждая ступень такого триггера (рис. 4.9,а) представляет собой
синхронный RS-триггер. При наличии на линии С логической 1 триггер Т1
воспринимает информацию, поступившую по линиям S и R и
определяющую его состояние. В это время на С-входе триггера Т2
логический 0 за счет инвертора, и информация с выходов Т1 не воздействует
на Т2. В момент окончания действия логической 1 на линии С (С=0) на
выходе инвертора появляется логическая 1, разрешающая перезапись в Т2
информации из Т1.
117
Рис. 4.9. Двухступенчатый синхронный RS-триггер
Таким образом, в первую ступень информация с линий S и R
записывается с приходом тактового импульса, т. е. по его переднему
фронту; состояние первой ступени передается второй с окончанием
тактового импульса, т. е. по его срезу.
Условное изображение двухступенчатого RS-триггера с динамическим
С-входом, когда переключение происходит перепадом входного сигнала из 1
в 0 (перепадом 1/0), приведено на рис. 4.9,6.
Подчеркнем разницу между одноступенчатым и двухступенчатым
синхронными триггерами. Одноступенчатый триггер (см. рис. 4.6,а) можно
переключить, если при С=1 изменить комбинацию на установочных входах
с прежней (например S=l, R=0) на новую (S=0, R=l) или наоборот. В
двухступенчатом триггере при С= 1 вторая ступень отключена от первой, а
при С=0 первая ступень не принимает информации с S- и R-входов. Только
при изменении сигнала на тактовом входе информация из первой ступени
перезаписывается во вторую, и состояния выходов Q и Q изменяются
По существу, переключение происходит в два такта; его осуществляют
две последовательности импульсов, смещенные во времени. Одна из них
воздействует на тактовый вход первой ступени, другая получается в данном
случае ее инвертированием и снимается с выхода инвертора. Поэтому
двухступенчатый триггер рассмотренной структуры называют
двухтактным.
118
4.1.4. Триггер со счетным запуском (Т-триггер)
Триггер со счетным запуском должен переключаться каждым
импульсом на счетном входе Т (счетным импульсом).
Т-триггер можно выполнить на базе RSC-триггера, если перед
приходом каждого тактового импульса иметь на информационных входах
напряжения, которые после переключения должны быть на выходах Q и Q.
Такими сигналами до переключения обладают соответственно выходы Q и
Q, так как в результате переключения выходы любого триггера, по
существу, обмениваются сигналами. Поэтому переключение каждым
счетным импульсом будет обеспечено, если выход Q соединить с S-входом,
а выход Q — с R-входом.
Однако такой Т-триггер на основе одноступенчатого RSC-триггера не
будет нормально функционировать: переключение триггера и вследствие
этого смена уровней напряжений на S- и R-входах происходят за столь
короткое время, за которое импульс на тактовом входе не успевает
закончиться. В результате под действием одного счетного импульса триггер
может переключиться несколько раз и его окончательное состояние
непредсказуемо. Для устранения этого явления надо задержать изменение
уровней сигналов на выходах Q и Q, до окончания импульса на С-входе.
Такую возможность дает двухступенчатый RSC-триггер (рис. 4.10,а).
С появлением тактового импульса триггер Т1 первой ступени
переключается в состояние, противоположное состоянию триггера Т2. Но
это не вызывает изменения уровней напряжения на выходах Q и Q, так как
на тактовом входе триггера Т2 за счет инвертора сейчас присутствует
логический 0. Только после окончания импульса на входе Т1 переключится
триггер Т2 и произойдет изменение сигналов на выходах Q и Q, а также на
R- и S-входах первой ступени.
119
В Т-триггере, так же как в двухступенчатом тактируемом RSC-
триггере, первая ступень переключается по переднему фронту входного
импульса, а вторая — по срезу.
Условное изображение двухступенчатого Т-триггера, пере-
ключающегося перепадом 1/0, приведено на рис. 4.10,6.
Рис. 4.10. Двухступенчатый Т-триггер
4.1.5. Триггер задержки (D - триггер)
D-триггер имеет один информационный D-вход и тактовый С-вход.
Он состоит из синхронного RSC-триггера, дополненного инвертором (рис.
4.11).
л
R SC-триггер
Рис. 4.11. D-триггер
При С=1 сигнал D-входа передается на S-вход триггера Т1 (S=D), а на
входе R устанавливается уровень напряжения R=D, т. е. сигналы на S- и R-
входах оказываются взаимно инвертированными (S=R). Это приводит к
120
тому, что любой сигнал на входе D создает на S- и R-входах комбинацию
(S=4, R=0 или S=0, R=l), способную переключить триггер в состояние
q=S=D. Таким образом, при С=1 D-триггер является повторителем: на
выходе Q повторяется сигнал входа D. Однако это повторение начинается
только с поступлением тактового импульса на вход С, т. е. с задержкой
относительно сменившегося сигнала на D-входе.
При С=0 триггер Т1 и D-вход разобщены, поэтому S=R=0 и триггер
хранит информацию, поступившую при С=1 с D-входа.
На рис. 4.12 приведены диаграммы работы D-триггера. Выход Q
повторяет состояние D-входа с поступлением очередного тактового
импульса на вход С, т. е. с задержкой.
fl fl fl
о
Q
О -J
Г
Рис. 4.12. Диаграммы работы D-триггера
D-триггер можно выполнить двухступенчатым (двухтактным). При
этом его первая ступень представляет собой одноступенчатый D-триггер, а
вторая может быть синхронным RS-триггером (рис. 4.13,а). Состояние D-
входа передается первой ступени с приходом тактового импульса, т. е. по
его переднему фронту, вторая ступень принимает состояние первой с
окончанием тактового импульса, т. е. по его заднему фронту. Условное
изображение двухтактного D-триггера приведено на рис. 4.13,6.
121
a)
Рис. 4.13. Двухступенчатый D-триггер
б)
Если после каждого переключения обеспечить автоматическую смену
уровня сигнала на D-входе, то с каждым импульсом на С-входе триггер
будет менять свое состояние. Указанная смена уровня сигнала будет
осуществляться, если D-вход соединить с выходом Q (аналогично
соединениям в Т-триггере). D-триггер в таком счетном режиме изображен на
рис. 4.14.
Рис. 4.14. D-триггер в счетном режиме
На рис. 4.15,а приведена схема DV-триггера. Легко понять, что при
V=1 он функционирует аналогично D-триггеру (см. рис. 4.11). Если на V-
входе установить логический 0, то триггер блокируется: его состояние
остается таким, каким оно было до этой установки вне зависимости от
смены сигналов на D-входе и поступления синхронизирующих импульсов.
Возможность отключать DV-триггер от информационных сигналов
расширяет его функциональные возможности по сравнению с D-триггером.
Условное изображение DV-триггера приведено на рис. 4.15,6.
122
Рис. 4.15. DV-триггер
Так как в рассматриваемых триггерах (см. рис. 4.11 и 4.15,а)
информация поступает по одной шине — на D-вход, то явление гонок здесь
исключено. Это позволяет использовать D-триггеры в быстродействующих
цифровых устройствах.
4.1.6. JK - триггер
JK-триггеры обычно выполняются тактируемыми. Такой JK-триггер
имеет информационные входы J и К, которые по своему влиянию
аналогичны входам S и R тактируемого RSC-триггера: при J=1, К=0 триггер
по тактовому импульсу устанавливается в состояние Q=l; при J=0, К=1 —
переключается в состояние Q=0, а при J=K=0—хранит ранее принятую
информацию. Но в отличие от RSC-триггера одновременное присутствие
логических 1 на информационных входах не является для JK-триггера
запрещенной комбинацией; при J=K=1 триггер работает в счетном режиме,
т. е. переключается каждым тактовым импульсом.
На рис. 4.16 изображена одна из функциональных схем JK-триггера.
Она отличается от схемы Т-триггера (см. рис. 4.10,а) элементами Э1 и Э2
входной логики первой ступени: для создания информационных входов J и
К они выбраны трехвходовыми. Переключающий вход С — динамический.
123
Рис. 4.16. Функциональная схема JK-триггера
При J=K=0 на* выходах электродов Э1 и Э2 устанавливаются
логические 0, которые для триггеров с прямыми входами являются
пассивными сигналами — триггер Т1 и, следовательно, JK-триггер в целом
сохраняют прежнее состояние.
Логическая 1 на одном из входов элемента И не определяет сигнал на
его выходе, поэтому сочетание J=K=1 не влияет на входную логику первой
ступени — схемы Т- и Ж-триггеров принципиально перестают отличаться,
т. е. Ж-триггер работает в счетном режиме.
Чтобы на выходе элемента Э1 появилась логическая 1 (которой
триггер Т1 может переключаться в состояние Q=l), на его входах
необходимо присутствие сигналов J=l, С=1, а также логической 1 с выхода
Q. Аналогично, логическая 1 будет на выходе элемента Э2, когда К=1, С=1
и Q=l. Таким образом, комбинация J=l, К=0 обусловливает по тактовому
импульсу переключение Ж-триггера в целом в состояние Q=l, а
комбинация J=0, К=1 — в состояние Q=0.
Табл. 4.2 — сокращенная форма переключательной таблицы Ж-
триггера, в которой Qt+I —состояние триггера после переключения по
тактовому импульсу. При J=K=0 — триггер сохраняет предыдущее
состояние; комбинация J=K=1 приводит к тому, что тактовым импульсом
триггер переключается в состояние, противоположное предыдущему: Qt+1=
q\ Сочетания J=l, К=0 и J=0, К=1 дают триггеру разрешение
переключиться соответственно в состояния Q=1 и Q=0.
124
Таблица 4.2. Сокращенная форма переключательной таблицы JK-триггера
J к QtH
0 0 Q*
1 0 1
0 1 0
1 1 q’
На рис. 4.17,а приведено условное изображение JK-триггера с
инверсными S- и R-входами для асинхронной (нетактируемой) установки
его в состояния 1 и 0, с динамическим тактовым входом С, изменение
уровня сигнала 1/0 на котором вызывает переключение. Триггер имеет три
J-входа и три К-входа; каждая группа входов объединена конъюнкцией, т. е.
элемент Э1 (см. рис. 4.16) имеет три входа J, а элемент Э2 — три входа К.
На базе тактируемого JK-триггера можно просто реализовать Т-
триггер (рис. 4.17,6), D-триггер (рис. 4.17,в) и DV-триггер (рис. 4.17,г);
функционирование их в такой форме в дополнительных пояснениях не
нуждается.
Рис. 4.17. Условное изображение JK-триггера (а) и реализация на базе JK-
триггера Т-триггера (б), D-триггера (в), DV-триггера (г)
Триггеры, выпускаемые в России в виде интегральных микросхем,
маркируются стандартным семиэлементным кодом, в котором третий
125
элемент — две буквы — обозначает: ТВ — триггеры универсальные JK; ТР
— триггеры типа RS; ТМ — триггеры типа D; ТТ — счетные Т-триггеры;
ТК — комбинированные (типа RST и т. д.); ТД — динамические; ТП —
прочие типы триггеров.
4.2. Регистры
Регистрами называются устройства, которые выполнены на основе
триггеров и предназначены для кратковременного (оперативного) хранения
цифровой информации, переносимой цифровыми сигналами. Конструктивно
регистры выполняются в виде параллельного или последовательного
соединения триггеров. Помимо хранения регистры позволяют
преобразовывать параллельные коды в последовательные (и обратно:
последовательные — в параллельные), генерировать коды, считать число
импульсов и т. д. [5,65].
На рис. 4.18, а приведена структурная схема параллельного регистра,
выполненного на D-триггерах. В исходном состоянии триггеры 1-N
устанавливаются в нулевое состояние и на всех выходах Qi...Qn действуют
сигналы 0. Затем на входы D всех триггеров подаются напряжения сигналов
0 или 1 в соответствии с записываемым параллельным кодом, а на входы С
— сигнал 1, разрешающий запись. В результате этого на выходах триггеров
появляются сигналы, соответствующие сигналам на их входах D. Например,
если на входе СЗР (старший значащий разряд) первого верхнего триггера
действует в момент разрешения записи сигнал 1, то первый триггер
переключится и на выходе Qi появится сигнал 1. Если на входе МЗР
(младший значащий разряд) нижнего триггера N действовал сигнал 0, то
триггер не переключится и на его выходе будет действовать сигнал 0.
126
Рис. 4.18. Регистр параллельный (а), последовательный (б), реверсивный (в);
условное графическое изображение (г)
Таким образом триггеры запоминают входное воздействие и будут его
помнить до тех пор, пока не выключится напряжение источника питания
или не придет сигнал установки 0 (эта цепь на рис. 4.18, а не показана).
Записанный код считывается через двухвходовые элементы H]...Hn, на
один из входов которых подаются сигналы с выходов триггеров, а на другой
— сигнал 1 — разрешение считывания. Если на обоих входах элемента И
действуют сигналы 1, то и на выходе будет действовать сигнал 1. Если на
выходе какого-либо триггера 0, то и на выходе соответствующего элемента
И будет 0. Записанный в регистре двоичный код может быть прочитан в
виде обратного (инверсного) кода, в котором 1 заменены на 0, и наоборот, 0
на I. Для этого надо подавать на схемы И сигналы с инверсных выходов Q
1... Qn.
Последовательный регистр (регистр сдвига) может быть выполнен на
D-триггерах (рис. 4.18, б). В исходном положении все двухступенчатые D-
триггеры 1-N установлены в нулевое состояние и на всех выходах
127
действуют сигналы 0. Если теперь на вход D поступает цифровой сигнал в
двоичном коде, представляющий собой чередование 0 и 1, а на вход С
подаются синхронно с ним импульсы разрешения записи, то происходит
следующее. Пусть, например, в первый момент на входе действует импульс
1 Эта единица записывается в первый триггер и на его выходе Q] (с
некоторой задержкой) по окончании первого импульса синхронизации
появляется сигнал 1. При этом на выходе остальных триггеров остаются
сигналы 0, поскольку на их входах действуют нулевые сигналы.
Когда приходит следующий, второй синхроимпульс, напряжение
сигнала 1 с выхода первого триггера записывается во второй триггер. Во
всех последующих триггерах состояние не изменяется, и на всех выходах
остаются 0. В первый триггер при этом записывается сигнал, действующий в
этот момент на входе D, например 0. Этот сигнал по окончании второго
синхроимпульса появляется на его входе Qb
После окончания третьего синхроимпульса на выходе третьего
триггера будет действовать сигнал 1, переписанный с выхода второго
триггера; на выходе второго триггера будет действовать сигнал 0,
переписанный с выхода первого триггера, а на выходе первого триггера —
сигнал, действовавший в момент действия третьего синхроимпульса на
входе D. Таким образом, в регистре сигнал запоминается последовательной
записью его значений: сначала в первый триггер, затем перезаписи (сдвига)
— во второй, третий и последующие триггеры.
Процесс записи-перезаписи сигнала в последовательном пятираз-
рядном регистре хорошо прослеживается при рассмотрении табл. 4.3.
128
Таблица 4.3. Процесс записи-перезаписи сигнала
в последовательном пятиразрядном регистре
Номер синхроимпульса на входе С Значения сигнала
на входе на выходах
D Qi q2 Q3 Q4 q5
- - 0 0 0 0 0
" Г" 1 1 0 0 0 0
" 2 0 0 1 0 0 0
1 1 0 1 0 0
4 0 0 1 0 1 0
5 1 1 0 1 0 1
В частности, сигнал 1, записанный в триггер 1 во время действия
первого синхроимпульса, последовательно переходит от одного триггера к
другому, пока, наконец, после пятого импульса не оказывается записанным
в последнем, пятом, триггере. Если теперь синхроимпульсы перестают
подаваться на вход С, то записанное в регистре пятиразрядное двоичное
число 10101 может храниться как угодно долго (если не выключать
напряжений источников питания) и может воспроизводиться через элементы
И в виде параллельного кода любое число раз при подаче сигнала 1 на вход
«Чтение».
Для считывания записанного числа в последовательном коде
достаточно начать опять подавать импульсы синхронизации на вход С,
вследствие чего код снова начнет передаваться слева направо и его цифры
будут последовательно появляться (и исчезать) на выходе.
Особенность последовательного регистра — возможность замыкания
его выхода со входом, что приводит к периодической перезаписи кода:
вытесняемые с последнего триггера сигналы вновь поступают на вход,
сдвигаются слева направо, появляются на выходе и вновь подаются на вход.
129
Записанный один раз в регистр цифровой сигнал будет воспроизводиться
(циркулировать) бесконечно долго и станет, таким образом, периодическим.
Период повторения может быть сделан любым в зависимости от частоты
повторения синхроимпульсов и числа разрядов (триггеров) в регистре.
Помимо рассмотренных параллельных и последовательных регистров
часто используют параллельно-последовательные и последовательно-
параллельные, в которых запись может быть последовательной
(параллельной), а считывание параллельным (последовательным).
Имеются также реверсивные регистры, в которых информация может
записываться слева направо (если выходы триггеров, стоящих слева,
соединены со входами триггеров, стоящих справа), а воспроизводится —
справа налево (если выходы триггеров, стоящих справа, соединяются со
входами триггеров, стоящих слева).
Структурная схема подобного реверсивного регистра приведена на
рис. 4.18, в. Если на управляющем направлением записи входе,
обозначенном как «Реверс», действует напряжение логической 1, то запись
производится слева направо: из первого триггера переписывается во второй,
потом — в третий и т. д. Если на управляющем входе действует напряжение
логического 0, то происходит запись в обратном направлении — справа
налево: сигнал с выхода второго триггера переписывается в первый триггер,
с выхода третьего — во второй, с выхода четвертого — в третий и т. д.
Регистры выполняются на основе JK- и D-триггеров в виде
интегральных микросхем и могут содержать до нескольких десятков тысяч
отдельных триггеров.
Условное изображение регистра RG дается на рис. 4.18, г.
Регистры, выпускаемые в России, маркируются обычным
семиэлементным кодом, в котором третий элемент — буквы ИР — означает
«регистр».
130
4.3. Счетчики
Счетчики выполняются на основе триггеров и применяются для
подсчета числа импульсов, деления частоты их следования, исполнения
различных преобразований цифровых сигналов, формирования кодов адреса
в ЭВМ, в различных цифровых устройствах и т. д. [53,65].
По управлению счетчики могут быть синхронными и асинхронными,
последовательными и параллельными, а функционально — суммирующими,
вычитающими и реверсивными. Последовательные асинхронные счетчики
могут быть выполнены на Т-, D- или JK-триггерах (рис. 4.19, а, б, в).
131
Рис. 4.19. Асинхронные суммирующие счетчики на основе Т-триггеров (а),
D-триггеров (б), JK-триггеров (в), диаграммы напряжений на входе и
отдельных выходах (г) и таблица истинности (д)
В частности, на рис. 4.19, в приведена схема трехразрядного сумми-
рующего счетчика последовательного счета на JK-триггерах. Импульсы,
подлежащие счету, подаются на входы С триггеров, а на неиспользуемые
JK-входы всех триггеров подается напряжение логической 1. В исходном
состоянии все триггеры ТТ1 ...ТТЗ устанавливаются в состояние 0, при этом
на прямых выходах QrQ3 действует напряжение 0 (рис. 4.19, г, д).
132
Когда на вход счетчика поступают импульсы счета, происходит по-
следовательное переключение всех триггеров. При атом период
переключения триггера ТТ1 равен двум периодам следования входных
импульсов, триггера ТТ2 — четырем периодам, триггера ТТЗ — восьми
периодам, т. е. счетчик уменьшает частоту следования импульсов в 23=8 раз.
После первого счетного импульса переключается триггер ТТ1 и в счетчик
записывается число 001, соответствующее 1 в десятичной системе. После
окончания второго импульса в счетчике записано: 010, соответствующее 2 в
десятичной системе и т. д., что хорошо прослеживается при рассмотрении
рис. 4.19, д.
Примерно по такой же структурной схеме выполняются и вычита-
ющие счетчики: в исходном состоянии в счетчик записывается некоторое
конкретное число и затем подается входной сигнал, каждый импульс
которого, переключая триггеры, вычитает последовательно, одно за другим,
заданное число. При этом в вычитающих счетчиках управляющими
сигналами являются сигналы, снимаемые с инверсных выходов триггеров.
Реверсивные счетчики могут работать как в режиме суммирования,
так и в режиме вычитания.
В частности, на рис. 4.20,а приведена структурная схема
трехразрядного реверсивного счетчика, состоящего из трех двоичных
триггеров и двух логических элементов И-ИЛИ. При подаче напряжения
логической 1 на вход управления направлением счета, обозначенном на
рисунке как «Реверс», создаются условия прохождения импульсов от
триггера к триггеру от прямых выходов, и счетчик работает как
суммирующий. Пусть, к примеру, на счетный вход поступило семь
импульсов. Тогда на прямых выходах всех трех триггеров будут действовать
напряжения логической 1 и, следовательно, будет записано двоичное число
111, соответствующее 7 в десятичной системе счета (см. рис. 4.19, д). При
этом на всех инверсных выходах будут действовать напряжения логического
133
О, т. е. по инверсным выходам в счетчике будет записано число ООО
соответствующее 0 в десятичной системе счета.
Рис. 4.20. Счетчики импульсов: двоичный реверсивный (а), «на три» (б), «на
пять» (в) и диаграмма работы (г)
Если теперь па входе управления счетом будет действовать
напряжение логического 0, то входы триггеров ТТ2 и ТТЗ будут
подключаться через логические схемы И-ИЛИ не к прямым выходам, а к
инверсным. После окончания первого импульса произойдет переключение
первого триггера и на его прямом выходе появится 0, а на инверсном
выходе, соответственно, 1.
134
Таким образом — в счетчике по прямым выходам уже будет записано
число НО, соответствующее 6 в десятичной системе. После окончания
второго импульса на прямом выходе первого триггера будет действовать 1, а
ранее действовавшее напряжение логической 1 на его инверсном выходе
приведет к переключению второго триггера и на его прямом выходе
появится напряжение логического 0. При этом, естественно, состояние
третьего триггера не изменится. После окончания второго импульса на
счетчике будет записано число 101, соответствующее 5 в десятичной
системе счета. По окончании третьего импульса будет записано число 100,
соответствующее 4, и т. д.
Рассмотренные счетчики являются последовательными, переключение
триггеров (перенос числа) происходит последовательно, одно за другим. Это
ограничивает быстродействие и в быстродействующих цифровых системах
вынуждает применять счетчики с параллельным переносом, в которых
сигналы действуют на входы всех входящих в счетчик триггеров.
Счетчики могут считать не только в двоичной системе, но и в любой
другой: троичной, пятеричной, десятичной и т. д. В частности, на рис. 4.20, б
приведена схема счетчика «на три», выполненная на основе JK-триггеров.
В исходном положении триггеры находятся в нулевом состоянии:
Qi=0; Q2=0 (цепь установки счетчика в нуль не показана). Входы К
соединены между собой, и на них постоянно подается напряжение питания
(через резистор с сопротивлением в 1 кОм — для ТТЛ-схем и
непосредственно — для КМОП-схем), соответствующее 1. На вход J
триггера ТТ1 также подается 1, поскольку он соединен с инверсным
выходом Q2=l. Если на входе действует первый импульс, то по его
окончании триггер ТТ1, переключается, и на его выходе Q] появляется 1.
На входе J триггера ТТ2 в момент действия входного импульса был 0
(поскольку в это время Qi=0), и поэтому после его окончания триггер не
переключился и на его выходе Q2 остался 0, а на выходе Q2 — 1. Таким
135
образом, в счетчик после окончания первого импульса записывалось число
01. В момент действия второго импульса на входах J и К триггеров ТТ1 и
ТТ2 действуют напряжения логической 1, поэтому после его окончания
произойдет переключение обоих триггеров, и на их прямых выходах Q2 и Q]
появятся сигналы соответственно 1 и 0, т. е. в счетчик будет записано число
10, соответствующее числу 2 в десятичной системе.
При этом на входе J триггера ТТ1 действует 0, подаваемый с
инверсного выхода триггера ТТ2, на входе J триггера ТТ2 также действует 0,
поскольку Qi=0. Поэтому после окончания третьего импульса на выходах
будут действовать нули: Q2=0; Qi=0 (соответствующие напряжениям
логического 0 на их J-входах). Таким образом, в счетчике после первого
импульса записано число 01, после второго — 10; после третьего — 00, т. е.
счетчик вернулся в исходное состояние после трех импульсов. Вполне
очевидно, что этот счетчик может быть использован как делитель частоты
на три. Для увеличения емкости счетчика число триггеров в нем необходимо
увеличивать.
В частности, для построения счетчика импульсов по модулю пять
(рис. 4.20, в) необходимо применить три триггера. Для построения счетчика
используются JK-триггеры (с двух-, трехвходовыми встроенными в них
элементами И). На входы К триггера ТТЗ всегда подается напряжение +5 В.
соответствующее 1. Пусть в исходном состоянии все триггеры находятся в
нулевом состоянии: Q3=0; Q2=0; Qi=0 (цепь установки нуля не показана).
При этом на входах J, К триггера ТТ1, соединенных с инверсным выходом
Q3=l последнего триггера, действуют напряжения логических 1; на входах J,
К триггера ТТ2 — 0; на входах К триггера ТТЗ — 1 (которая подается
постоянно), а на каждом из входов J — 0.
По окончании первого импульса (рис. 4.20, г) переключится лишь
триггер ТТ1, и на его выходе появится Qi=l. Второй импульс перепишет эту
1 на выход триггера ТТ2 Q2=l и переключит триггер ТТ1 в состояние 0.
136
Третий импульс опять переключит триггер ТТ1 в состояние 1. При этом
создадутся условия для переключения триггера ТТЗ, так как на входах J
будут одновременно действовать 1, подаваемые с выходов триггеров ТТ1 к
ТТ2. Поэтому после окончания четвертого импульса произойдет
переключение всех трех триггеров: первый и второй вернутся в состояние О,
а третий переключится в состояние 1 (Q3=l).
Вследствие этого на входы J, К триггера ТТ1 (соединенные с инвер-
сным выходом (Q3) будет подаваться 0 и после окончания пятого импульса
изменит свое состояние — переключится в 0 только триггер ТТЗ (так как на
входе его встроенного элемента И действует 0) и счетчик вернется в
исходное состояние.
Цикл работы счетчика выглядит так: в исходном состоянии показания
ООО, после первого импульса— 001; после второго — 010; после третьего —
011; после четвертого — 100; после пятого — 000.
По такому принципу, охватывая счетчик дополнительными обратными
связями и применяя, если необходимо, дополнительные логические
элементы, можно получить счетчик с любым коэффициентом счета: 6, 7, 9,
10, 11, 12, 13, 14, 15ит. д.
При этом следует иметь в виду, что при последовательном соединении
отдельных счетчиков общий коэффициент счета Ks равен произведению
коэффициентов счета отдельных счетчиков: KL = KjK2...KN.
Если, например, необходимо получить коэффициент счета 6, то можно
взять Ki=2, К2=3, и в результате Кг=6. Для получения десятичного счетчика
необходимо соединить последовательно счетчик на два и рассмотренный
счетчик на пять (Ks=10=5 х 2) и т. д. Это справедливо и в том случае, если
счетчики используют в качестве делителей частоты следования импульсов.
Промышленность России выпускает разнообразные счетчики в виде
интегральных микросхем, маркируемых стандартным семиэлементным
137
кодом, в котором третий элемент — две буквы ИЕ — обозначает все виды
счетчиков и делителей частоты.
138
ГЛАВА 5. КОМБИНАЦИОННЫЕ ЦИФРОВЫЕ УСТРОЙСТВА
5.1. Дешифраторы и шифраторы
Цифровые коды из одного вида в другой преобразуются с помощью
шифраторов и дешифраторов [53,65].
Дешифратором называется комбинационное устройство,
преобразующее n-разрядный двоичный код в логический сигнал,
появляющийся на том выходе, номер которого соответствует двоичному
коду.
Шифратор решает задачу, обратную дешифратору: на его выходах
устанавливается код, соответствующий номеру входа, на котором появилась
логическая 1.
В информационно-измерительной аппаратуре шифраторы («кодеры»)
преимущественно используют для преобразования (кодирования)
напряжений, отображающих десятичные цифры в четырехразрядные
двоичные. Дешифраторы («декодеры») применяют для преобразования
двоичных кодов из одного вида в другой, в том числе для преобразования
двоичного кода в десятичный.
Упрощенная схема шифратора десятичного кода в двоичный (ис-
пользуемого, например, для ввода цифровой информации с клавиатуры в
цифровые устройства) приведена на рис. 5.1, а.
139
б
Рис. 5.1. Принципиальная схема шифратора (а) и его условное изображение
(б); дешифратора (в) и его условное изображение (г)
Работа шифратора происходит следующим образом: пусть, к примеру,
входной десятичный код отображается числом 5, и уровень сигнала —
логическая 1 — действует только на этом входе (на остальных входах 0).
Вследствие этого сработают только два элемента ИЛИ — верхний и третий
сверху, и на их выходах появятся напряжения логической 1 и, таким
образом, на выходе дешифратора будет действовать двоичный сигнал 0101
(табл. 5.1).
140
Таблица 5.1. Соответствие сигналов в двоичном коде и десятичных чисел
Значения сигналов в двоичном коде Эквивалентное значение в десятичном коде
г 22 21 2°
0 0 0 0 0
0 0 0 1 1
0 0 1 0 2
0 0 1 1 3
0 1 0 0 4
0 1 0 1 5
0 1 1 0 6
0 1 1 1 7
1 0 0 0 8
1 0 0 1 9
Подобным образом кодируются и все остальные числа, за
исключением 0, при нажатии клавиши которого просто подтверждается
отсутствие сигналов логической 1 на всех остальных входах.
Условное графическое обозначение шифратора приведено на рис.
5.1,6.
Работа дешифратора (рис. 5.1,в) происходит так. Пусть, например, на
входах 2°-23 действует двоичный сигнал 0101 (соответствующий числу 5 в
десятичном коде), т. е. на входах действуют напряжения 23—>0; 22—>1; 21—>0
и 2°—>1. При этом только в пятой снизу схеме И на оба входа действуют
напряжения логических 1 (они подаются от входов 2° и 22, а также после
инвертирования логических 0 — со всех остальных входов через
соответствующие инверторы и дополнительные схемы И). Таким образом, 1
141
появится только на выходе 5, а на остальных выходах схем И будут
действовать нулевые уровни (в соответствии с табл. 5.1).
Условное графическое изображение дешифратора приведено на
рис. 5.1, г.
Выпускаемые в России в виде интегральных микросхем шифраторы
маркируются буквами ИВ, а все виды дешифраторов — ИД.
5.2. Мультиплексоры и демультиплексоры
Мультиплексоры осуществляют подключение одного из входных
каналов к выходному под управлением управляющего (адресующего) кода
Разрядности каналов могут быть различными, мультиплексоры для
коммутации многоразрядных слов составляются из одноразрядных [65].
Входы мультиплексора делятся на две группы: информационные и
адресующие. Работу мультиплексора можно упрощенно представить с
помощью многопозиционного ключа. Для одноразрядного мультиплексора
это представлено на рис. 5.2. Адресующий код А задает переключателю
определенное положение, соединяя с выходом F один из информационных
ВХОДОВ Xi.
Рис. 5.2. Упрощенное представление мультиплексора многопозиционным
ключом
142
При нулевом адресующем коде переключатель занимает верхнее
положение х0, с увеличением кода на единицу переходит в соседнее
положение х1 и т. д.
Схемотехнически мультиплексор реализует электронную версию
показанного переключателя. На рис. 5.3 показан мультиплексор с четырьмя
информационными входами, двумя адресными входами и входом
разрешения работы. При отсутствии разрешения работы (Е = 0) выход F
становится нулевым независимо от информационных и адресных сигналов.
Рис. 5.3. Реализация мультиплексора на элементах И-НЕ
На рис. 5.4 приведено условное графическое изображение муль-
типлексора.
Рис. 5.4. Условное графическое изображение мультиплексора
Демультиплексор - устройство, передающее входную величину в
143
один из нескольких выходных каналов в зависимости от адресующего
входного кода.
Демультиплексоры выполняют операцию, обратную операции
мультиплексоров — передают данные из одного входного канала в один из
нескольких каналов-приемников. Многоразрядные демультиплексоры
составляются из нескольких одноразрядных.
Условное обозначение демультиплексора показано на рис. 5.5.
Рис. 5.5. Условное обозначение демультиплексора
Мультиплексоры и демультиплексоры, выпускаемые в России в виде
интегральных микросхем, имеют стандартный семиэлементный код с
буквами КП, что означает коммутаторы, переключатели.
5.3. Компораторы
Компаратор (цифровой) - устройство, предназначенное для
сравнения двух двоичных чисел.
В табл. 5.2 указывается связь между сигналами на выходах и входах
компаратора при сравнении одноразрядных чисел а и Ь, которые могут быть
равны единице или нулю. На соответствующем выходе появляется
логическая единица, когда в должном соотношении находятся сигналы на
входах. Так, если а=1, Ь=1 (числа одинаковы), то функция, характеризующая
144
равенство чисел, Fa=b=l, а функции, характеризующие их неравенство, Fa ь=0
и Fa<b=0- Аналогично заполняются другие строки таблицы [53].
Таблица 5.2. Связь между сигналами на выходах и входах одноразрядного
компаратора
Входы Выходы
а ь Fa b Fa=b Fa b
1 1 0 1 0
1 0 1 0 0
0 1 0 0 1
0 0 0 1 0
По известным правилам из табл. 8.3 можно записать следующие
логические функции, характеризующие соотношение одноразрядных чисел:
Fa>b=ab, Fa=b=ab +ab, Fa<b=ab.
Если значения а и b таковы, что правая часть функции равна 1, то
соотношение, указанное в левой части, выполняется. Если правая часть
функции равна 0, то соотношение между а и b противоположно указанному.
Схема одноразрядного компаратора, реализующая приведенные
функции, изображена на рис. 5.6.
Рис. 5.6. Схема одноразрядного компаратора
145
Остановимся подробнее на равенстве чисел. Заметим, что функция Fa=b
— функция «Равнозначность». По смыслу она противоположна функции
Fa*b «Неравнозначность» (Исключающее ИЛИ):
Fa^ =aibi+aib, = a,©b,
т.е.
Fa=b ~ Г a*b - а\Ь\ + а\Ь{ - а{®Ь{ (5 1)
Поэтому проверку равенства пары одноименных разрядов двух чисел
можно осуществить, используя «Равнозначность» (рис. 5.7, а) или элемент
«Неравнозначность», дополненный инвертором (рис. 5.7, б).
Рис. 5.7. Проверка равенства пары разрядов двух чисел с использованием
элемента «Равнозначность» (а) и «Неравнозначность» (б)
Два числа А и В равны, если их одноименные разряды содержат
одинаковые цифры (ао=Ьо И ai=b| И ... И an-i=bn-i), т. е. функция,
характеризующая соотношение чисел, должна быть конъюнкцией функций,
характеризующих соотношение цифр в их одноименных разрядах:
F А.^В—FaObO Fal=bl • • *Fan-1-Tn-l (5.2)
Когда цифры в одноименных разрядах чисел А и В одинаковы, на
выходах всех элементов «Равнозначность» (рис. 5.8, а) логические единицы
и Fa=b=1- Если хотя бы в одной паре разрядов находятся разные цифры, то
на выходе соответствующего элемента «Равнозначность» будет логический
нуль и функция Fa=b=0, что указывает на неравенство чисел А и В.
Если цифры в одноименных разрядах чисел А и В одинаковые, то на
выходах всех элементов «Неравнозначность» (рис. 5.8, б) логические нули,
146
поэтому на выходе дизъюнктора — нуль, а на выходе инвертора — единица:
Fa=b=1-
а)
Рис. 5.8. Проверка равенства двух n-разрядных чисел с использованием
элемента «Равнозначность» (а) и «Неравнозначность» (б)
Рассмотрим случаи неравенства чисел. Выявление большего из двух
многоразрядных чисел А и В начинается со старших разрядов; если они
равны, то сравнивается следующая пара одноименных разрядов, и т. д.
Так, при неравенстве трехразрядных чисел (А>В) может быть:
а) аналогичное неравенство старших разрядов (a2>b2, Fa ь=а2Ь2 =1);
б) или при равенстве старших разрядов (a2=b2, Fa=b=a2b2+a2b2=l)
существует неравенство разрядов аь bi (ai>bi, Fa b=ai Ь i=l);
в) или при_ равенствах a2=b2 (Fa=b=a2b2+a2Ь2=1) и at=bi (Fa=b=ajb]+a jb
1=1) существует неравенство разрядов а0, b0 (ao>bo, Fab=a0 Ъ 0= 1)-
Обозначив для краткости Fab=a2b2+a2b2=F2, Fa=b=aibi+a ib]=Fi,
запишем приведенные условия в виде:
Fa aab2 + ai b rF2 + aob0F2Fj (5.3)
При a2>b2 (а2=1, Ь2=0) конъюнкция а2Ь2=1 — функция РА в=1, что
Указывает на справедливость неравенства А>В. Когда a2=b2 (F2=l, а2Ь2=0),
147
но ai>t>i (ai=l, bi=0, ai b i=l), на справедливость неравенства A>B указывает
второй член записанной функции: ai bi-F2=1.
Если a2=b2 (F2=l, а2Ь2=0) и ai=b] (Fj=l, ajbi=0), но ao>bo (ao=l, bi=0, aob
o=l), to aoboF2F!=l hFvb=1.
Функция (5.3) реализуется схемой рис. 5.9, а. На рис. 5.9, б она
дополнена элементом «Равнозначность», на входы которого подаются
разряды ао, Ьо, конъюнктором, на выходе которого формируется функция
FA=B, и элементом ИЛИ—НЕ, на выходе которого формируется функция
Рис. 5.9. Реализация функции FA B (а), функций FA>B, FA=B, FAB (б)
Когда a2=b2 (F2=l), ai=bj (Fi=l) и ao=bo(Fo=l), то FA=B=F2 FrF0=l, т. е. А
= В. Если в результате сравнения чисел FA в=0 и FA=B=0, то на выходе
ИЛИ—НЕ логическая I (FA в=1), т. е. А<В.
По аналогичным схемам (рис. 5.9, б) выполняются компараторы для
сравнения чисел с большей разрядностью.
На рис. 5.10 приведены условное обозначение компараторов и способ
наращивания их разрядности. Каждый из изображенных компараторов
предназначен для сравнения двух четырехразрядных слов и имеет выходы
А>В, А=В и А<В. Аналогичные входы служат для наращивания разрядности
компараторов. Результат сравнения младших разрядов отражается на
выходах компаратора К1: на одном из них появляется единица, на других
присутствуют нули. Компаратор К2 воспринимает этот результат, с учетом
148
которого формируется окончательный результат сравнения. Подобным
образом можно осуществлять дальнейшее наращивание разрядности.
Указанные на рисунке сигналы на входах компаратора К1 обеспечивают
правильное функционирование многокаскадного компаратора на данных
микросхемах.
Рис. 5.10. Условное обозначение компараторов и способ наращивания их
разрядности
Компараторы выпускаются в России в виде интегральных микросхем,
маркируемых стандартным семиэлементным кодом, в котором третий
элемент — две буквы ИП.
5.4. Сумматоры
Сумматор — комбинационное устройство, предназначенное для
сложения чисел. Рассмотрим сложение двух одноразрядных двоичных
чисел, для чего составим таблицу сложения (таблицу истинности), в которой
отразим значения входных чисел А и В, значение результата суммирования
S и значение переноса в старший разряд Р (табл. 5.3) [5,6,28].
149
Таблица 5.3. Таблица сложения двух одноразрядных двоичных чисел
А В Р S
0 0 0 0
0 1 0 1
1 0 0 1
1 1 1 0
Работа устройства, реализующего таблицу истинности, описывается
следующими уравнениями: S=A-B+A*B; Р=А-В. Очевидно, что по
отношению к столбцу S реализуется логическая функция Исключающее
ИЛИ, т. е. S=A®B. Устройство, реализующее таблицу 5.3, называют
полусумматором, и оно имеет логическую структуру, изображенную на рис.
5.11. Поскольку полусумматор имеет только два входа, он может
использоваться для суммирования лишь в младшем разряде.
Рис. 5.11. Схема полусумматора
При суммировании двух многоразрядных чисел для каждого разряда
(кроме младшего) необходимо использовать устройство, имеющее
дополнительный вход переноса. Такое устройство (рис. 5.12) называют
полным сумматором и его можно представить как объединение двух
полусумматоров (Рвх — дополнительный вход переноса). Сумматор
обозначают через SM.
150
Рис. 5.12. Схема полного сумматора
Соединяя определенным образом полусумматоры и полные
сумматоры друг с другом, получают устройство для выполнения сложения
нескольких разрядов двоичных чисел. В качестве примера рассмотрим
устройство для сложения двух трехразрядных двоичных чисел А2А1А0 и
В2В1В0, где Ао и Во — младшие разряды двоичных чисел (рис. 5.13).
Рис. 5.13. Схема сложения двух трехразрядных двоичных чисел
На выходах S|-S3 формируется код суммы чисел А2А|А0 и В2В1В0, а на
выходе Р3 — сигнал переноса в следующую микросхему, так как при
сложении двух трехразрядных двоичных чисел может получиться
четырехразрядное число.
Рассмотренный сумматор называется параллельным сумматором.
151
Условные изображения полусумматора и сумматора приведены
соответственно на рис. 5.14, а и на рис. 5.14, б.
s —
p —
Ism] si—
An о—
о—I______Ifj
p —
Рис. 5.14. Условное изображение полусумматора (а) и сумматора (б)
В виде интегральных микросхем выпускаются одноразрядные,
двухразрядные и четырехразрядные двоичные сумматоры.
Рассмотренные функциональные узлы выпускаются в России в виде
интегральных микросхем, маркируемых стандартным семиэлементным
кодом, в котором третий элемент — две буквы обозначают: ИЛ —
полусумматоры; ИМ — сумматоры.
152
ГЛАВА 6. МЕХАТРОННЫЕ СИСТЕМЫ В УПРАВЛЕНИИ
МЕХАНИЧЕСКИМ ДВИЖЕНИЕМ И ФУНКЦИЯМИ
ТЕХНОЛОГИЧЕСКИХ МАШИН
6.1. Основы мехатроники и принципы построения мехатронных
модулей в системах машин. Мехатроника, основные определения
Мехатроника - это сравнительно новая область науки и техники,
посвященная созданию, исследованию и эксплуатации машин и систем с
компьютерным управлением движения, которая базируется на знаниях в
области механики, электроники и микропроцессорной техники,
информатики и компьютерного управления движением и процессом в
машинах и аппарата известно несколько определений мехатроники. В [ ]
дано определение «Мехатроника - область науки и техники, основанная на
системном объединение узлов точной механики, датчиков состояния
внешней среды и самого объекта, источников энергии, исполнительных
механизмов, усилителей, вычислительных устройств (ЭВМ и
микропроцессоры. Мехатронная система - единый комплекс
электромеханических, электрогидравлических, электронных элементов и
средств вычислительной техники, между которыми осуществляется
постоянный динамически меняющийся обмен энергией и информацией,
объединенный общей системой автоматического управления, обладающей
элементами искусственного интеллекта.
Таким образом, мехатроника изучает особый методологический
(концептуальный) подход в построении машин с качественно новыми
характеристиками. Важно подчеркнуть, что этот подход является весьма
универсальным и может быть применен в машинах и системах различного
назначения. Однако следует отметить, что обеспечение высокого качества
Управления мехатронной системой можно только с учетом специфики
153
конкретного управляемого объекта. В основу построения мехатронной
системы заложены идеи взаимосвязи механических, электротехнических и
компьютерных элементов и устройств. Необходимо отметить, что каждая
составляющая обеспечивает вполне определенные самостоятельные
функции и они объединяются таким образом, что образуют новую систему,
которая получает качественно новые свойства.
Мехатроника как новая область науки и техники находится в стадии
становления, ее терминология, границы и классификационные признаки еще
строго не очерчены. Бурное развитие этой области науки и техники вызвано
возросшими требованиями рынка к потребительским свойствам и качеству
продукции современного машиностроения. К таким требованиям следует
отнести:
- сверхвысокие точности движения для реализации прецизионных
технологий;
- сверхвысокие скорости движения рабочих органов в
технологических процессах;
- высокие требования перемещения рабочих органов по сложным
контурам и поверхностям;
- способность системы к реконфигурации в зависимости от конкретных
задач и операций;
- высокая надежность и безопасность функционирования;
- интеллектуальность в поведении машин и аппаратов.
Все эти требования в полной мере относятся к тем, которые
неразрывно связаны с созданием и функционированием новых машин и
аппаратов и могут обеспечить их конкурентоспособность на мировом рынке
Особо следует подчеркнуть триединую сущность мехатронных систем
(МС), в основу построения которых заложена идея глубокой взаимосвязи
механических, электронных и компьютерных элементов. Наверное поэтому
наиболее распространенным графическим символом мехатроники стали три
154
пересекающихся круга (рис.6.1), помещенные во внешнюю оболочку
^Производство» - «Менеджмент» - «Требования рынка». Таким образом,
системная интеграция трех указанных видов элементов является
необходимым условием построения мехатронной системы.
Рис.6.1
Базовыми объектами изучения мехатроники являются мехатронные
модули, которые выполняют движения, как правило, по одной управляемой
координате. Из таких модулей, как из функциональных кубиков,
компонуются сложные системы модульной архитектуры.
Мехатронные системы предназначены для реализации заданного
движения или технологического процесса. Критерии качества выполнения
Движения или процесса являются проблемно-ориентированными, т.е.
определяются постановкой конкретной прикладной задачи. Примерами
таких задач могут служить регулирование силового взаимодействия
рабочего органа с объектом работ при механообработке, контроль и
155
диагностика текущего состояния критических элементов МС (инструмента,
силового преобразователя), управление дополнительными
технологическими воздействиями (тепловыми, электрическими,
электрохимическими) на объект работ при комбинированных методах
обработки, управление вспомогательным оборудованием комплекса
(конвейерами, загрузочными устройствами и т.п.), выдача и прием сигналов
от устройств электроавтоматики (клапанов, реле, переключателей). Такие
сложные координированные движения мехатронных систем будем в
дальнейшем называть функциональными движениями,
В современных МС для обеспечения высокого качества реализации
сложных и точных движений применяются методы интеллектуального
управления (advanced intelligent control). Данная группа методов опирается
на новые идеи в теории управления, современные аппаратные и
программные средства вычислительной техники, перспективные подходы к
синтезу управляемых движений МС.
Базовыми объектами мехатроники являются мехатронные модули,
которые выполняют движение по одной управляемой координате. Из этих
модулей как функциональных кубиков компонуются сложные системы
модульной архитектуры.
Мехатронные системы предназначены для реализации заданного
движения:
- управление процессом механического движения мехатронного
модуля или многомерной системы в реальном времени с
обработкой сенсорной информации;
- управление функциональными движениями, координатное
управление механическим движением дискретными методами;
- взаимодействие с оператором через интерфейсы в режимах
автономного программирования;
156
- обмен с периферийными структурами.
На рис.6.2 представлена структурная схема мехатронного модуля.
Рис.6.2. Структурная схема мехатронного модуля
Задачей мехатронной системы является преобразование входно
информации с верхнего уровня управления в движение с управлением на
основе принципа обратной связи.
Методологической основой разработки мехатронной системы
являются методы параллельного проектирования, который заключается в
одновременном и взаимосвязанном синтезе всех компонентов системы.
Проанализируем характер преобразования и структуру
электромеханического модуля с компьютерным управлением. Входная
информация, поступающая с верхнего уровня управления, по цепям
обратной связи от сенсоров выдает управляющие сигналы. В
преобразователях силовыми элементами производится усиление и
модуляция этих сигналов, и передача их в исполнительные приводы с целью
воздействия на механические устройства для целенаправленного движения
рабочего органа.
157
Для построения такой системы традиционными методами
понадобилось бы избыточное число интерфейсных блоков и
соединительных кабелей с коммутационной аппаратурой.
Этот вывод даст основание на поиск новых решений построения
системы на основе синергетической интеграции элементов.
Синергетическая интеграция - это не просто соединение отдельных
частей в систему с помощью интерфейсных блоков, а построение единого
модуля через конструктивное объединение и взаимодействие элементов,
которые могут иметь различную физическую природу.
Различие мехатронного и традиционного подхода к созданию модулей
и машин на их основе с компьютерным управлением состоит в концепции
построения и реализации функциональных преобразователей.
При традиционном проектировании интерфейсы являются
отдельными самостоятельными устройствами или узлами, которые, как
правило, создаются и изготавливаются пользователями или выполняются на
заказ специализированными фирмами.
Мехатронный метод нацеливает разработчика на интеграции всех
элементов в единые блоки, минимизацию промежуточных преобразований и
устранению интерфейсов как отдельных сепаратных блоков.
Обобщенная структура автоматизированной системы с компьютерным
управлением, предложенная академиком Поповым Е.П., приведена на
рис.6.3.
Таким образом, наличие трех обязательных частей -
электротехнической, электронной и компьютерной, связанных
энергетическими и информационными потоками, является первичным
признаком, отличающим мехатронные системы.
Электротехническая часть включает рабочий орган, электродвигатели,
сенсоры и дополнительные электротехнические элементы. Электронная
158
часть состоит из электронных устройств, силовых преобразователей и
информационно-измерительных цепей.
Человек-оператор
I
* Компьютерная сеть
Цель_______________________
движения
Рис.6.3 Обобщенная схема машины с компьютерным управлением движением
159
Сенсоры предназначены для сбора данных о фактическом состоянии
внешней среды и объектов работ, механического устройства и блока
приводов с последующей первичной обработкой и передачей этой
информации в устройство компьютерного управления (УКУ) В состав УКУ
мехатронной системы обычно входят компьютер верхнего уровня и
контроллеры управления движением.
Устройство компьютерного управления выполняет следующие
основные функции:
- управление процессом механического движения мехатронного модуля
или многомерной системы в реальном времени с обработкой
сенсорной информации;
- организация управления функциональными движениями МС, которая
предполагает координацию управления механическим движением МС
и сопутствующими внешними процессами. Как правило, для
реализации функции управления внешними процессами используются
дискретные входы/выходы устройства;
- взаимодействие с человеком-оператором через человеко-машинный
интерфейс в режимах автономного программирования (off-line) и
непосредственно в процессе движения МС (режим on-line);
- организация обмена данными с периферийными устройствами,
сенсорами и другими устройствами системы.
Задачей мехатронной системы является преобразование входной
информации, поступающей с верхнего уровня управления, в
целенаправленное механическое движение или технологический процесс с
управлением на основе принципа обратной связи.
Характерно, что электрическая энергия используется в современных
системах как промежуточная энергетическая форма.
Суть мехатронного подхода к проектированию состоит в интеграции в
единый функциональный модуль двух или более элементов возможно даже
160
различной физической природы. Другими словами, на стадии
проектирования из традиционной структуры машины исключаются как
сепаратное устройство по крайней мере один интерфейс при сохранении
физической сущности преобразования, выполняемого данным модулем.
6.2. Структурные особенности различных процессов производства и
принципы построения модуля движения элементов машин
Различные производственные процессы в зависимости от специфики
выпускаемых изделий, помимо универсальных средств производства -
совокупности предметов и средств труда — оснащаются, специфическими
технологическими машинами и оборудованием. Направление модернизации
оборудования естественно должно учитывать возможность повышения
качества, производительности, но одновременно - экономическую
эффективность такой модернизации.
В легкой промышленности, из которой будут приводиться в
первую очередь практические примеры в этом разделе, основными
производствами являются: швейное, кожевенное, обувное,
искусственной кожи и полимерно-пленочных материалов, текстильное. К
изделиям этой отрасли предъявляются повышенные физиологические и
эстетические требования, т.к. они имеют непосредственный контакт с телом
человеком, а также способствуют создаю гармоничности его образа.
Кожевенное производство имеет ряд специфических особенностей,
затрудняющих автоматизацию технологических процессов: неоднородность
перерабатываемого сырья, повышенная химическая активность рабочей
среды, большие размеры и массы объектов обработки и др. В этой области,
как и в производстве искусственной кожи, автоматизация направлена на
создание безлюдных технологий, включающих разработки в области
161
химических растворов и технологий, устраняющих их неблагоприятное
воздействие на экологию.
Изделия швейного и обувного производств, характеризуются большим
разнообразием технологических процессов, многооперационностью
изготовления изделий, необходимостью соответствовать изменениям моды
и сезонным требованиям, сложностью конфигураций контуров,
поверхностей и форм изделий и т.д. Это определяет особенности
технологического оборудования: большое число типоразмеров, машин,
многоинструментальность, разнообразие типов приводов, широкое
применение материалов малой жесткости, наличие гибких ниток.
Текстильное производство — одна из наиболее крупных отраслей
легкой промышленности, вырабатывающее из различных видов
растительного, животного, химического волокна ткани, трикотаж и другие
изделия. Применяется большое разнообразие машин и аппаратов - ткацкие
станки, машины и агрегаты для производства трикотажных изделий,
нетканых материалов, оснащенных электронными системами управления,
электромагнитными и пьезоэлектрическими системами привода и др.
Сопоставление отмеченных выше особенностей технологических
процессов, материалов и оборудования, а также появление управляющих
микропроцессоров дало возможность применить развивающиеся
мехатронные системы, в первую очередь в швейных машинах
автоматического действия и другом технологическом оборудовании,
применяемом в швейном, обувном, текстильном производствах и в
бытовых технических средствах. Швейные машины составляют основную
часть оборудования на швейных предприятиях, а так же до 40% - на
обувных. От них требуется высокая точность взаимодействия инструментов,
движущимися с большими скоростями и ускорениями в период образования
ниточного переплетения последовательно в каждом стежке. В момент
захвата вращающимся челноком петли игольной нитки зазор по горизонтали
162
между иглой, на которой висит петля и захватывающим носиком челнока не
должен превышать 0,1 мм. При этом линейная горизонтальная скорость
носика может превышать 10 м/с, а игла тоже движется, но по вертикали.
Не случайно именно в автоматизированных швейных машинах
мехатронные системы находят широкое применение. Так в вышивальных
машинах значительно повышается производительность за счёт подключения
к единому процессору десятков шьющих головок, работающих по одной
программе^ автоматической синхронной сменой цвета на рисунках и даже
внутри одного рисунка. Есть примеры применения в швейных машинах
принципиального изменения способа передачи механической энергии к
исполнительным механизмам, заменив длинные многомассные
кинематические цепи электронными каналами. При этом синхронизация
работы исполнительных инструментов, в первую очередь — челнока и иглы
(пример их взаимодействия приведён выше), так же осуществляется за счёт
электронных потоков.
Изложенное выше позволяет рассмотреть примеры создания,
использования и эксплуатации техники, производящей предметы
потребления, на основе технологических машин и оборудования,
применяемого в швейном производстве и производстве изделий из кожи.
6.3. Промышленное оборудование для раскроя материалов
Согласно схеме компоновки комплекса оборудования швейного
предприятия и технологии изготовления швейных изделий,
подготовительно-раскройные работы - это начальный этап
непосредственной трансформации материалов в готовую продукцию.
Начинается она с воздействия на материалы технических средств для
промера и браковки материалов, формирования настилов, их раскроя на
163
детали, комплектования кроя перед транспортированием в швейный цех на
сборку изделия.
Последним этапом подготовки материала к непосредственному
изготовлению изделия является его раскрой на детали, из которых
собираются изделия. Детали комплектуются в соответствии с конструкцией
изделий и технологическим процессом, затем подаются в пошивочные цеха
для сборки изделий.
Перед непосредственным раскроем осуществляются
подготовительные операции: промер-браковка поступающих материалов и
комплектование настилов. При промер-браковке производится прием и
контрольный осмотр материалов в целях выявления пороков, промер их
длины и ширины. Комплектование настилов, которые могут быть от одного
до нескольких десятков слоев. Многослойные настилы способствуют
значительному повышению производительности труда.
Раскрой материалов - это ответственный этап производства изделия,
в том числе — одежды и обуви, правильность проведения которого в
значительной степени определяет качество готовой продукции. Раскрой
материала может осуществляется различными способами.
Чаще всего на предприятиях лёгкой промышленности для раскроя
применяются раскройные машины и вырубные пресса. Раскройные машины
изготавливаются с ленточными, пластинчатыми и дисковыми ножами. В
автоматизированных комплексах режущий инструмент закрепляется на
перемещающихся головках. Лезвию механического режущего инструмента
сообщают продольное перемещение - поступательное, осцеллирующее, или
вращательное движение, чтобы остриё ножа двигалось поперёк
разрезаемого материала. Это делается для уменьшения угла резания, что
снижает нагрузки на нож и материал, повышает чистоту среза, и облегчают
условия работы на машине. В противном случае, в силу малой жесткости
164
дошиваемых материалов, их края будут сминаться и разрезания не
произойдет
Для определения угла резания выделим элемент ленточного или
пластинчатого ножа (рис. 6.4.). Лезвие ножа имеет двустороннюю заточку
под углом а/. При резании точка контакта материала с острием ножа А
условно перемещается по биссектрисе угла а2.
Рис. 6.4. Элемент раскройного ножа.
Общая скорость V» каждой точки контакта ножа и материала
складывается из двух составляющих Vr - горизонтальной и VB
вертикальной скоростей, или го= в+гг ножа. При резании точка А
контакта материала и ножа за период времени условно переместится
165
в т. V Если не будет вертикального перемещения ножа , то т. А за период
At попадает в т .
Из рис. 6.3 имеем : ABi=vAAt и AB2=vo'At ,
BxCx = ABftg^-,B2C2=AB2tg^.
D Х"1 _ О ^2 /
Т.к. то ^7=^7Т
х ц v 0
а2 a, V?
tg^T=tg^-' j 1
2 2 ^К2+Г2
k-Vq
где к~у~-
Закройно-ленточные машины, имеют структуру, схожую с обычным
ленточным конвейером. Ленточный нож натягивается на шкивы, которых
может быть от двух до четырех. Зона резания находится на одном из прямых
участках ножа, как правило — вертикальном. Вращающиеся шкивы
обеспечивают на этом участке необходимое продольное движение лезвия
ножа.
Подвижные машины с пластинчатым ножем для рассекания настила
на части имеют, структуру, как правило, кривошипно-ползунного
механизма, где нож выступает в качестве ползуна и имеет вертикальные
осциллирующие движения. Недостаток этих машин в том, что из-5а
неравномерности скорости ножа угол резания за цикл машины имеет
значительные изменения, что сказывается на качестве резания. Кстати,
подобный закон движения имеют режущие ножи и в раскройных
автоматизированных комплексах.
166
6.3.1. Промерочно-браковочное оборудование
Перечисленные процессы и выполняющие их технические средства
должны обеспечивать определенные требования: точность измерения
размеров и площадей; минимизацию натяжения материалов, чтобы
исключить искажения их размеров за счет излишней деформации; снятие
напряжений в материалах; разглаживание неровностей; равнение кромки
полотен в настиле; раздублирование, при необходимости, материалов.
Измерение длины и ширины поступающих материалов, производят наа
промерочно-браковочных станках а так же выявляются и помечаются их
дефекты.
При измерении, разбраковке и настилании рулонных материалов
важными операциями являются размотка и намотка рулонов. При этом
должны быть обеспечены минимализация натяжения, а следовательно
напряжений в материале, постоянство линейной скорости движения
разматываемого полотна, точность измерения, разглаживание неровностей,
равнение кромки настила и др. Размотка рулонов может осуществляться: на
скалке, на раздвижных консолях, на конвейерных лентах, на рольгангах.
При размотке возникает напряжение в материале вследствие
воздействия на него разматывающего усилия Т. На рис. 6.5, а изображена
схема процесса размотки рулона 1 со скалки 2, закрепленной на опорах 3.
167
Рис. 6.5. Устройство для размотки материала:
а - конструкция разматывающего устройства; б - расчетная схема; в -
результаты расчета натяжения Т, г — разводящиеся консоли.
Из условия равновесия рулона имеем (рис. 6.5, б):
168
ISE-TR—Fro
где Is - момент инерции рулона со скалкой, относительно оси скалки,
проходящей через центр S вращающихся масс рулона, 8 - угловое ускорение
рулона, Т - натяжение материала, F - сила трения в опоре скалки, г0 - радиус
скалки, R -начальный радиус рулона.
где m - масса рулона, г - радиус рулона, то- масса скалки.
m = M~mL ; mL - \p6(rd^ ,
о
где М - начальная масса рулона, mL - масса сматываемого материала, р
- плотность материала, 8 и С - соответственно толщина и ширина материала.
При этом М ~ т02 Jj, r = R~ — ^nL ,
2л
где R - начальный радиус рулона, ср - угол поворота рулона.
_d(p _V_
Угловое ускорение: 8 dt \ ы г ,
где со - угловая скорость рулона, V - линейная скорость
разматываемого полотна.
3V2
После преобразований найдем: е = —-.
2ЛЛ3
Сила трения: F=Gf=[m+rno}sf 9
где G - вес рулона, g - ускорение свободного падения, f -
коэффициент трения в опоре скалки.
Из графика функции Т(ф) (рис.6.5,в) видно, что сила T/const.
Постоянства натяжения Т при размотке можно достичь с помощью
размоточного устройства с разводящимися консолями (рис.6.5,г) путем
изменения угла а между осями консолей.
В соответствии с расчетной схемой , где 1 - рулон, 2 - консоли,
поворачивающиеся относительно точка О, должно быть обеспечено условие
169
постоянства натяжения: T=To=Ti=const. Здесь сила Tj является движущей
силой при размотке рулона на каждом i-м положении консоли, включая
начальное значение натяжения То. Из этого следует, что , где F1
и f - соответственно сила и коэффициент трения между рулоном и консолью.
N, - сила реакции консоли на давление рулона. Сила Ni из условия
равновесия рулона в i-м положении будет Л/= 2sin« •> где Gi - текущий вес
рулона, а, - половина угла разведения консолей в i-м положении.
Очевидно должно быть Nj=N0, где No - начальное значение Ni, тогда
для начального положения консоли Ло 2sin«0 и sin0C/ Gosina° , где Go и а0
- начальные значения Q и а, до размотки. Учитывая, что Go = Л/g и G, I mg,
окончательно закон поворота консолей при размотке можно найти из
равенства:
_ т .
sinar= —sin«0
6.3.2. Оборудование для настилания длинномерных материалов
Перед раскроем материалов происходит формирование многослойных
настилов путем последовательной укладки полотен материала одинаковой
длины и ширины друг на друга так, чтобы кромки всех слоев как можно
точнее совпадали. Настилы и их слои подбирают исходя из конструкции
швейного изделия, ассортимента, программы выпуска, организации
производства. После каждого прокладывания материала слой отрезается и
закрепляется концевой линейкой. Настил формируют обычно на
стационарных настилочно-раскройных столах, состоящих из секций,
шириной до двух метров. Длина столов зависит от возможных длин
раскладок.
170
Материалы поступают на настилочные операции в рулонах или в виде
нарезанных определенной длины полотен, сложенных в кипы или штабеля.
Процесс механического формирования настила начинается с загрузки
настилаемого материала в разматывающее устройство. При этом рулоны,
намотанные на скалки, укладываются на опоры, и разматываются со скалок.
При ручном настилании размоточные устройства закрепляются неподвижно
на настилочном столе. В механизированных и автоматизированных
устройствах применяются подвижные каретки, движущиеся вдоль стола, на
котором формируется настил.
Операция настилания тканей относится к наиболее трудоемким
процессам, затраты на выполнение которых составляют 25-40% общего
времени, расходуемого в процессе от настилания до комплектации кроя.
Различают виды настилания:
- «лицом к лицу» без соблюдения направления ворса, производится без
отрезания слоя. При этом не производится холостого хода машины и
разворота каретки;
- «лицом к лицу» с соблюдением направления ворса производится с
отрезанием каждого слоя. При этом требуется холостой ход и разворот
настилочной головки на 180°. За счет разворота головки не требуется
перезаправка каждого слоя;
- «лицом вниз» без соблюдения направления ворса производится с
отрезанием каждого слоя. При этом обязателен разворот каретки, но не
требуется холостой ход, а главное не требуется перезаправка каждого слоя;
- «лицом вниз» с соблюдением направления ворса производится с
отрезанием каждого слоя. При этом обязателен холостой ход машины, но не
требуется разворот каретки.
В процессе настилания необходимо осуществлять выравнивание
кромки по одной из сторон настила. Чаще всего для этого применяются
Устройства с фото датчиками (фотоэлемент). При этом выравнивающее
171
боковое смещение может совершать материал с помощью корректирующего
ролика, или сама настилочная каретка.
Точность настила в значительной степени определяется отрезным
устройством и устройством для перегиба и прижима полотен при изменении
направлении движения каретки. Наиболее простым и распространенным
отрезным устройством является устройства, имеющее один дисковый нож
Недостатком данного устройства является возможное смещение ткани во
время отрезания.
6.3.3. Мехатронные системы в автоматизированных технологических
комплексах для раскроя
Последним этапом подготовки материала к сборочным операциям -
непосредственному изготовлению изделия - является раскрой материалов
на детали, из которых собираются изделия. Детали комплектуются в
соответствии с конструкцией изделий и технологическим процессом, затем
подаются в пошивочные цеха для сборки изделий.
Раскрой материалов - это ответственный этап производства одежды
и обуви, правильность проведения которого в значительной степени
определяет качество готовой продукции. Раскрой материала может
осуществляется различными способами.
Чаще всего на предприятиях лёгкой промышленности для раскроя
материала применяются раскройные машины и вырубочные пресса.
Раскройные машины изготавливаются с ленточными, пластинчатыми и
дисковыми ножами.
Машины с ленточными ножами обычно стационарные и применяются
для окончательного выкраивания деталей различной сложности.
172
Машины с пластинчатыми и дисковыми ножами являются
передвижными и используются для рассекания настилов на части и
выкраивания деталей несложной конфигурации.
Во всех перечисленных машинах^подвижным ножам сообщают
поступательное, возвратно-поступательное или вращательное движение,
чтобы остриё ножа в зоне контакта с объектом обработки двигалось поперёк
разрезаемого материала. Это делается для уменьшения угла резания, что
снижает нагрузки на нож и материал, повышает чистоту среза, и облегчает
условия работы машины.
В настоящее время для раскроя материалов, особенно на крупных
предприятиях, всё шире примеяются автоматизированные раскройные
машины, агрегаты, комплексы, основанные на мехатронных системах
управления. Они обеспечивают необходимые законы относительного
движения объекта обработки и исполнительного устройства (инструмента) с
учетом физико-механических свойств раскраиваемых материалов,
сложности и многообразия конфигураций вырезаемых деталей, качества
выполнения технологических операций.
Исполнительными устройствами являются раскройные головки,
закрепленные на подвижном портале, перемещающиеся в рабочей зоне
соответственно общей программе автоматизированной электронной системе
управления всего комплекса. Такое оборудование выпускают фирмы
«Инвестроник» (Испания), «Гербер» (Испания), «Лекстра» (Франция) и др.
На рис. 6.6. представлен автоматический раскройный комплекс (АРК)
фирмы «Гербер». Он предназначен для автоматизированного раскроя
настилов из различных тканей: хлопковых, джинсовых, шерстяных
толщиной до 72 мм. В зависимости от марки установки, поле раскроя
составляет до 1700x2340 мм, скорость резания регулируется от 0 до 45
м/мин. Основными составными элементами комплекса являются:
раскройный стол, раскройное устройство, панель управления раскройным
173
устройством, пульт управления комплексом, программное обеспечение,
панель управления конвейера съема изделий.
Кроме того, к раскройному комплексу примыкают настилочные
установки для размотки рулонных материалов и формирования из них
настилов. Комплекс оснащен вакуумным прижимом, спрессовывающим
настил и препятствующим сдвигу материала в процессе резания.
Раскройные столы могут иметь различное конструктивное исполнение:
статическое и конвейерное. Рабочая поверхность раскройного стола (или
конвейера) 7, на которой раскраиваемый настил, выстилается нейлоновыми
щёточными плитами щетиной вверх (рис. 6.6).
Рис.6.6. Автоматический раскройный комплекс (АРК) «Гербер».
Высота щетины должна быть такой, чтобы сквозь неё мог пройти нож
на необходимую глубину, не достигая основания. Настил укладывается на
перфорированной бумаге для прохождения воздуха и подается на рабочую
поверхность стола 7.
Сверху на настил укладывается полиэтиленовая пленка для создания
вакуума. Подается команда на включение вакуумной установки, настил при
этом прессуется. Системой управления раскройной установкой
174
предусмотрено включение вакуумного сжатия полотен разрезаемого настила
только в зоне резания, что повышает качество резания и снижает
потребление электроэнергии.
Процесс настилания и раскроя настила должен отвечать определенным
условиям. Тип бумаги для подстилки должен сочетаться со свойствами
раскраиваемого материала. Высота настила определяется свойствами
материала и конфигурацией вырезаемых деталей. Для покрытия настила
должна применяться пленка высокого давления. Настилать материал следует
без натяжения. Несоблюдение этого требования приведёт к искажениям или
уменьшению размера деталей после того, как в материале пропадёт
дополнительное напряжение, возникающее при чрезмерном натяжении при
настилании.
Изготовление настила и подача его в зону обработки может
осуществляться различными способами. Обычно рулонный материал
разматывается со скалки 4, настилается и передается на раскройный стол,
где он закрепляется и подвергается раскрою. Конвейерные раскройные
системы автоматически подают порции настила для раскроя на поверхность
раскройного стола. Столы для настила должны быть выровнены и
совмещены с раскройным комплексом так, чтобы настил перетягивался на
поверхность, где осуществляется раскрой, двигаясь поступательно со
строгим позиционированием выровненной кромки настила.
АРК «Гербер» оснащен конвейерной системой перемещения настила,
что не ограничивает длину настила и позволяет производить съем готового
кроя одновременно с раскроем материала. При этом система может иметь
автономный конвейер (стол) 8 съема раскроенных деталей с пультом
управления 7.
Раскройное устройство состоит из раскройной головки 2,
расположенной на портале 5, выполненном в виде подвижной балки,
перемещающейся вдоль настилочного стола. Раскройная головка 2
175
перемещается по балке поперек стола. Сложение движений по двум
координатам позволяет вырезать детали сложной конфигурации. Режущая
головка представляет собой управляемое устройство, обеспечивающее
осциллирующее движение ножа по вертикали для уменьшения угла резания.
Кроме того, она выполняет координированные движения для установки
ножа в позицию для прорезания материала в начале операции и в углах
вырезаемой детали, а так же обеспечения постоянства положения оси
сечения лезвия ножа - по касательной к профилю лекала, по которому
вырезается деталь. Режущий инструмент - нож делается из высокопрочной
стали, это увеличивает его жесткость и позволяет делать его шириной не
более 5 мм, что повышает точность раскраиваемых деталей.
По команде с панели управления 5 в начале раскроя материала
двухкоординатное раскройное устройство выводит нож в исходное
положение, в соответствии с программой раскроя. В первую очередь нож
делает прорези в углах излома контура детали. Далее происходит резание по
основным участкам контура детали в настиле согласно последовательности,
определенной при проектировании раскладки лекал. После окончания
программы резания выключается вакуум и раскройный настил с помощью
транспортирующих средств сдвигается из рабочей зоны на съемный стол. Со
стола крой разбирается, а комплекс готов к обработке очередной программы.
Пульт управления 6 установлен на поворотном кронштейне, оснащен
процессором Pentium и монитором. К программным особенностям АРК
«Гербер» относятся: операционная система Windows. обладающая
возможностями многозадачности; просмотр раскладки лекал для избежания
ошибок; автоматическая оптимизация пути резания; отображение на дисплее
раскладки во время резания; отображение последовательности резания;
непрерывное отображение параметров системы: уровень вакуума, скорость
резания и т.д.; диагностика системы; система контроля за скоростью раскроя
для повышения производительности; регулировка вертикальной скорости
176
ножа с учетом увеличения производительности и устранения плавления
ткани; организация очереди раскладок.
Аналогичную структуру и конструкции составных частей имеют (9)
раскройные комплексы фирмы «Инвестроника» (Испания). На рис. 6.7
изображена блок-схема машины «Инвесткут» этой фирмы.
Рис. 6.7. Блок-схема машины «Инвесткут»
Машина включает модуль раскроя с раскройной головкой 5,
расположенной на портале 7, раскройным столом 6 и столом съема изделий
Система управления стола съема позволяет производить его
автоматический или ручной запуск посредством ряда команд, подаваемых с
пульта управления 4 блока 1. В автоматическом режиме стол приема
Движется синхронно с конвейером, в то время как в режиме ручного
Управления лента может перемещаться по команде оператора. Вакуумная
Установка 3, управляемая с панели 2, обеспечивает прессование настила.
177
Основной исполнительной частью автоматизированных раскройных
комплексов и агрегатов является раскройная головка, работающая по
заданной программе. В машине «Инвестмарк» фирмы «Инвестроник» (рис
6.8) портал 7 расположен над раскройным (настилочным) столом 2. на
котором подготовлен к раскрою настил материала 3.
Рис. 6.8. Раскройное устройство машины «Инвестмарк»
Портал 7 перемещается на катках вдоль стола с настилом при помощи
зубчато-реечной передачи 12, приводимой в движение электродвигателем 11.
обрабатывается первая координата «гр. Вторая координата «а'2»
обрабатывается при перемещении головки 10 относительно портала
(поперек настила) с помощью зубчато-ременной передачи 8 от
электродвигателя 9. Нож машины 7, выполненный в виде остроконечного
лезвия, обеспечивающего не только виброрезание, но и вибропрокол
178
ластила, получается осциллирующее движение от электродвигателя 6 через
кривошипно-коромысловый механизм.
Поворот ножа относительно вертикальной^ оси на углах вырезаемой
фигуры или криволинейных участках осуществляется механизмом, который
приводится в движение электродвигателем 4 через ременную передачу 5.
Работа агрегата протекает следующим образом. После настилания агрегат с
заложенной программой раскроя включается в работу. Вначале
обрабатываются углы всех деталей, поскольку жесткость настила пока
максимальна и не происходит смещения слоев. Углы обрабатываются
последовательным проколом ножа по одной стороне угла, затем выводом
ножа из настила, переориентированием его и проколом настила по второй
стороне угла. Далее нож переходит к следующему углу этой же детали или
следующей. После обработки углов, начинается собственно раскрой, при
котором нож входит в прорезь угла и начинает обрабатывать сторону
детали. При этом происходит смещение портала относительно настила,
головки - относительно портала и поворот ножа в головке относительно
лезвия.
На рис.6.9, изображен настилочно-раскройный комплекс АНРК (10)
фирмы «Семенов и К», в котором настилание материала из рулонов
выполняется перемещением каретки 5 с полотном. Процесс настилания
полотна оператор контролирует и управляет с пульта 6, сидя в кресле 10 или
стоя на площадке 11 и перемещаясь вместе с кареткой 5 и пультом 6.
Полотно зажимается прижимными рамками 9 и 4, расположенными по
концам настила. В рамке 9 имеется тканеобрезное устройство 8, которое
отрезает полотна при укладывании их в настил. Работа комплекса
осуществляется по командам с пульта управления.
После расстилания полотна настил накрывается пленкой, из-под
которой отсасывается воздух вакуумным насосом 7, настил перемещается в
зону его раскроя зажимом 4 с помощью транспортирующего механизма.
179
Перемещение настила осуществляется по команде с пульта управления
настилочной машины 1. Раскрой осуществляет режущая головка 2 по
заданной программе. Блок электрооборудования находится в шкафу 3.
В случае необходимости оперативной смены рулона материала при
настилании или параллельном изготовлении настилов в настилочном
комплексе предусматриваются накопители, как правило в виде элеватора.
Рис.6.9. Настилочно-раскройный комплекс АНРК фирмы «Семенов и К ‘ »
На рис.6.10. изображен настилочный комплекс фирмы «Бульмер»
(Германия) Он состоит из настилочной машины 6, перемещающейся вместе
с сидением 7 оператора вдоль плоскости 8 настилочного стола 9. Ткань
настилается «лицом вниз» из рулона 5, установленного на каретке
настилочной машины. Накопитель-загрузчик расположенный в торцевой
части настилочного стола обеспечивает хранение шестнадцати рулонов и их
автоматическую загрузку в каретку настилочной машины. Основной частью
накопителя-загрузчика является элеватор-накопитель 3, в который
загружаются с помощью устройства 2 из тележки 1 или другого
180
транспортного средства. Устройство 4 служит для автоматической загрузки
рулонов из элеватора 3 в каретку настилочной машины.
Работает комплекс следующим образом. После загрузки рулонов в
элеватор-накопитель, оператор настилочной машины со своего пульта
может вызвать любой из рулонов для загрузки в держатель рулона на
каретке настилочной машины. После подхода настилочной машины под
автоматическое загрузочное устройство 4, требуемый рулон
устанавливается на держателе каретки, после чего начинается процесс
настилания.
Рис. 6.10. Настилочный комплекс фирмы «Бильмер» (Германия).
Настилочная машина перемещается вместе с оператором вдоль
плоскости 8 настилочного стола 9 и укладывает полотно разматываемое из
рулона на плоскость стола. В конце перемещения каретки оператор может
включить (либо автоматически) отрезное устройство, отделяющее
Дисковым ножом настланное полотно от остальной части ткани.
181
6.4. Общая структура и особенности функционирования машин
швейного и обувного производства
6.4.1. Область применения, назначение и классификации
Швейные машины являются основным оборудованием для
производства швейных трикотажных изделий, изделий из кожи в швейном,
трикотажном, обувном, галантерейном производствах. Специальные
швейные машины широко применяются в других отраслях с
соответствующей конструктивной модернизацией - изготовлении
упаковочной тары, многослойных чехлов, специальных объемных оболочек
и др.
Назначение швейных машин - выполнение ниточных стежков.
Помимо производственного применения, они успешно используются в
быту, в домашних условиях. Основной рабочий орган машины - игла. Все
остальные органы направлены на то, чтобы переместить её в нужном
направлении на необходимую величину, увязать с ней свою работу с целью
образования стежка. Конечным результатом взаимодействия рабочих
органов швейной машины является получение той или иной строчки,
представляющей собой непрерывную цепь стежков. В соответствии с
действующим в РФ ГОСТ 12807 — 88 - «Изделия швейные»:
- стежок - один элемент структуры, полученный при ниточном
способе крепления между двумя проколами материала иглой;
- строчка - последовательный ряд стежков;
- шов - соединение двух или более слоёв материала определенным
образом с помощью одной или более строчек.
При изготовлении одежды на швейных машинах обрабатываются
различные материалы, определяющие во многом тип применяемого
оборудования. Из материалов можно выделить следующие группы:
182
легкие, средние, тяжелые ткани, отличающие по своей
поверхностной плотности;
- мех (натуральный и искусственный);
- кожа (натуральная и искусственная)
- ткани с различными полимерными и иными покрытиями;
- трикотажные полотна и т.д.
Большое разнообразие операций, в которых применяется швейное
оборудование, вызывало необходимость создания значительного
разнообразия технологического и конструктивного исполнения швейных
машин.
Многообразие швейных машин можно классифицировать по
различным признакам (рис. 6.11).
Рис. 6.11. Общая классификация швейных машин, применяемых в
швейном производстве и других отраслях.
По характеру выполняемого процесса, назначению и степени
автоматизации можно разделить машины на универсальные, специальные,
183
автоматы, полуавтоматы; по скоростным характеристикам - низко-, средне-,
высокоскоростные; по числу игл - одно-, двух-, трех-, многоигольные) и т.д.
Важным признаком, по которому можно провести классификацию и
который во многом определяет конструкцию и технологическое название
машины, является вид образуемого машиной ниточного переплетения. По
этому признаку все машины можно разделить на две группы: машины,
образующие челночное переплетение и машины, образующее цепное
переплетение.
Класс и тип стежка, в зависимости от числа ниток, их взаимного
расположения, формы участков ниток, образующих переплетение,
определяет конструкцию и число рабочих инструментов, различные
приспособления в машине, структуру механизмов, обеспечивающих
перемещение инструментов, в целом конструкцию машины.
6.4.2. Особенности конструкции машин
Следует выделить следующие общие особенности:
- большое число типоразмеров швейных машин;
- механизмы машин имеют сложную неуравновешенную структуру;
- машины быстроходные, что в соответствии с предыдущим пунктом
вызывает большие инерционные нагрузки;
- наличие гибкой нитки, участки контура которой при движении с большой
скоростью изменяют размеры, принимают сложные формы и должны
постоянно контролироваться инструментами машины, также движущимися
с большими скоростями, взаимодействующими с ниткой в процессе
образования переплетения. Работа механизма подачи нитки определяется
законом изменения периметра Pi петли игольной нитки, необходимого для
образования переплетения. На рис. 6.12 показан участок нитки от катушки 1
184
до заделки в строчке на материале ML находящийся под воздействием
инструментов, участвующих в образовании переплетения.
Для изменения длины петли игольной нитки Pi механизм должен
освободить необходимое количество нитки, что осуществляется изменением
положения глазка нитеподатчика F по вертикали, вследствие чего при
неподвижных направителях N| и N2 меняется суммарная длина ветвей /'+
/"(расстояния от точки F соответственно до точек Ni и N2). Идущая с
катушки 1 игольная нитка Ни притормаживается тормозком 2, чтобы
контролировать её натяжение.
Рис. 6.12. Отрезок нитки, участвующий в образовании стежка:
1 - катушка, 2 - тормозок, 3 - нитеподатчик, 4 - игла,
5 - челнок со шпилькой, 6 - рейка.
Далее нитка проходит сквозь неподвижные нитенаправители Ni и N2,
между которыми находится глазок F рычага нитеподатчика 3. В задачу
Механизма подачи нитки входит изменение вертикальной ординаты глазка F
185
по заданному закону, чтобы: а - подавать (отпускть) нитку в периоды: а -
подведения её иглой к челноку и обведения вокруг челнока и б -
вытягивания её излишка из-под материала и затяжки стежка. После
нитенаправителей и глазка F нитка Ни проходит сквозь ушко иглы 4,
которая, проколов материал М, подводит петлю нитки Ни к челноку 5.
Челнок, захватив нитку Ни, обводит её вокруг шпули с челночной ниткой
Нч, находящейся внутри челнока. Таким образом происходит переплетение
игольной Ни и челночной Нч ниток. Рейка 6 перемещает материал на шаг
обработки, подводя под иглу новую точку прокола, и процесс образования
челночного стежка повторяется;
- машины многоинструментные — все швейные машины имеют четыре
основных инструмента и механизма для осуществления их работы:
- механизм иглы,
- механизм челнока (петлителя),
- механизм подачи нитки,
- механизм перемещения объекта обработки.
Современные машины оснащаются большим количеством
вспомогательных устройств: подачи фурнитуры, обрезки ниток, съёма
готового изделия и т. д., включённых в систему управления работой
машины.
Все основные механизмы, как правило, получают рабочие движения
от одного привода и систем управления, различной степени автоматизации.
Не смотря на многообразие конструктивных решений, структуру
основных рабочих органов швейных машин можно представить обобщенной
блок-схемой, изображенной на рис. 6.13.
В швейном производстве применяются машины большого числа
фирм, среди которых можно отметить: Pfaff, Durkopp+Adler, Strobel
(Германия), Juki, Jmato, Brother (Япония), ОЗЛМ (Белоруссия), Union
Special, Consew, Singer, Merrou (США), Rimoldi, Necchi (Италия), Minerva
186
(Чехия), Gemsy, Dalian, Zoje (Китай), Uision, Sun-Star (Корея), Pauing, Venus,
Oshima (Тайвань), ПО «Азовский оптико-механический завод», Ростовский
завод «Агат», Ковровский «Завод им. В.А. Дегтярева» и др. Эти и другие
фирмы выпускают швейные машины широкой разновидности:
универсальные, специальные, компьютерного управления и т.д.
Рис. 6.13. Обобщенная блок-схема, отражающая состав основных рабочих
органов швейной машины и их сочетание.
Механизмы:
Н - подачи нитки, И - иглы, ОИ - отклонения иглы, Т - перемещения
объекта обработки, Ч - челнока (петлителя).
Устройства:
Пр-привод, М - электродвигйтельдМ - объект обработки.
Универсальные машины составляют значительную часть парка
Швейных машин, включая бытовых. Они имеют широкую область
применения на различных операциях без существенной переналадки систем
187
управления. Внутри группы универсальные машины могут иметь
конструктивные различия в зависимости от технологических свойств и
логических особенностей выполняемых операций, фирменных интересов.
Специальные швейные машины предназначены для одной или
ограниченной группы специфических операций, имеют большее, чем
универсальные, разнообразие типо-размеров. Сужение специализаций этих
машин позволяет рационально использовать их специфические
конструктивные и функциональные возможности на соответствующих
операциях. Эта группа машин включет в себя швейные машины,
выполняющие шитье швейных изделий, а также - изделий из кожи и меха.
Значительную часть парка специальных швейных машин составляют зигзаг
машины.
К специальным швейным машиам примыкают цикловые и
нецикловые машины, автоматически выполняющие частично или
полностью технологическую операцию - полуавтоматы и значительно реже
- автоматы.
В полуавтоматах одноразовый рабочий цикл выполняется
автоматически. При этом, как видно из классификации, приведенной на
рис. 6.9, они условно делятся на цикловые и нецикловые. Цикловые
швейные полуавтоматы - это полуавтоматы, у которых контур
выполняемых строчек и число стежков в них запрограммированы, а в
нецикловых - выполняются строчки с числом стежков, ранее не заданном.
Оно зависит от параметров требуемой строчки.
Многие автоматизированные швейные машины входят в состав
интегрированных рабочих мест (ИРМ).
188
6.4.3. Циклограмма работы швейной машины
Особенности взаимодействия четырех основных механизмов швейной
машины общего назначения может быть представлена циклограммой их
работы в виде совмещенных графиков функций по обобщенной координате -
углу поворота главного вала (рис. 6.14). Ус(ф) - вертикальное перемещение
острия иглы, \|/z((p) - угол поворота вращающегося челнока (петлителя),
Yf(<P) ~ вертикальное перемещение глазка F нитеподатчика, Yp(cp) -
вертикальное перемещение транспортирующей рейки. За начало отсчета
графиков циклограммы принято крайнее верхнее положение иглы.
Рис. 6.14. Циклограмма работы челночной швейной машины КУР - 31
На циклограмме отмечены характерные точки:
189
1 - крайнее верхнее положение иглы,
2 - начало прокола материала иглой,
3 - крайнее нижнее положение иглы,
4 - окончание образования петли - напуска и момент ее захвата
носиком челнока,
5 - выход иглы из материала,
6 - начало снятия игольной нитки с челнока,
7 - окончание затяжки стежка,
8 и 9 - соответственно моменты начала подъема рейки выше и
опускания ниже уровня пластины.
Образование стежка происходит за один цикл главного вала машины
(р. Игла И из крайнего верхнего положения (т.1) перемещается вниз,
прокалывает материал (т.2) и проводит сквозь него петлю игольной нитки.
При подъеме иглы из крайнего нижнего положения (т.З) на участке 3-4
игольная нитка образует петлю - напуск, которую захватывает носик
челнока Ч (т.4), и обводит ее вокруг шпули, находящейся в челноке. В этот
период игла и выходит из материала. После окончания обвода петли
игольной нитки вокруг челнока нитепритягиватель Н с помощью ушка F
стягивает игольную нитку с челнока, выбирает излишек нитки из под
материала и затягивает стежок (т.7). В тот период, когда игла находится вне
материала, происходит его перемещение на шаг обработки (уч.8-9). Рейка
ТР, поднимаясь выше уровня игольной пластинки, сцепляется с материалом
(т.8), транспорт его на шаг обработки tM и освобождает материал (т.9),
опускаясь ниже уровня игольной пластины.
Взаимодействие инструментов швейной машины с объектом
обработки, ниткой и между собой характеризуется соответствующими
рабочими углами: (рп=ф2-5 - период нахождения иглы в материале, во время
подведения петли игольной нитки к носику челнока; (рч=(р4-б - период
взаимодействия челнока с игольной ниткой в период образования
190
переплетения, фн=ф6_7 - период съема петли игольной нитки с челнока и
затяжки стежка, фт=ф8_9 - период транспортирования материала на шаг
обработки. В процессе образования переплетения инструменты могут
работать как последовательно, так и параллельно. В последнем случае
возникают углы перекрытия: фп(чИ) - период совместной работы иглы и
челнока, фП(Т.н) период совместной работы нитеподатчика и рейки и т.д.
Очевидно, суммарное значение углов инструментов с учетом углов за
цикл образования одного стежка должен отвечать соотношению:
Еф1~ фп“*" фч ~^фн~^ фт “ фп(ч.и) " фп(Т.Н)—2Л (6.1)
Можно использовать безразмерные величины, заменяющие указанные
углы - коэффициенты рабочего хода соответствующего инструмента:
К1=ф/2л. Тогда Ки=фи/2л, Кч=фч/2л, Кн=фн/2л, Кт=фт/2л. Очевидно,
выражение (6.1) можно заменить суммарным коэффициентом рабочих ходов
инструментов:
Е Кг Ки+ Кч+ Кн+ Кт - Е фп/2л<1 (6.2)
Чтобы не нарушить соотношения (6.1) и (6.2) следует стремиться к
минимизации К, и максимизации Е фп.
Отдельно следует отметить влияние на интеллектуализацию
управления сложными движениями и технологическими процессами
достижений в области мехатроники. Современные швейные машины
интенсивно впитывают в свои конструкции преимущества мехатронных
модулей. Это ведет к увеличению точности и быстродействию
исполнительных органов машин и механизмов за счёт сокращения размеров
кинематических цепей, доставляющих механическую энергию к подвижным
инструментам и звеньям, их массоперемещений.
191
6.5. Основные механизмы швейных машин
6.5.1. Механизм иглы
Механизм иглы служит для прокола материала иглой, проведения
сквозь него игольной нитки и подведения её петли к носику челнока.
В зависимости от конструкции и назначения машины механизмы иглы
могут быть различной структуры и конструктивного исполнения (рис. 6.15).
Структура механизма и конструкция иглы должны обеспечивать:
- прокалывание материала и проведение сквозь него нитки с
минимальными нарушениями ее прочности;
- необходимую величину перемещения иглы;
- своевременное образование и точное подведение петли игольной
нитки к носику челнока;
192
С НЕИЗМЕНЯЮЩИМСЯ С ИЗМЕНЯЮЩИМСЯ
ПОЛОЖЕНИЕМ ОСИ ПОЛОЖЕНИЕМ ОСИ
ПЕРЕМЕЩЕНИЯ ЗА ЦИКЛ ПЕРЕМЕЩЕНИЯ ЗА ЦИКЛ
Рис. 6.15. Классификация механизмов иглы.
193
- минимальную скорость вертикального перемещения иглы в период
захвата игольной нитки челноком;
- согласование работы механизма иглы с другими механизмами
машины;
- минимальные нагрузки на элементы механизма;
- безопасность в работе.
Основным рабочим инструментом швейной машины является игла. В
зависимости от конструкции машин в них применяются иглы
различных типов: прямые с ушком, прямые без ушка, прямые с крючком,
дугообразные. Наиболее распространены прямые иглы с ушком на острие
(рис. 6.16, а).
а)
в) г)
Рис. 6.16. Конструкция иглы: а - конструкция иглы; б - момент прокола
иглой материала; в - крайнее нижнее положение иглы;
г - момент захвата игольной нитки носиком челнока.
194
Основными элементами такой иглы являются: острие 5, ушко 4,
стержень 2, колба 1. На стержне обычно имеются два желобка: длинный 6 -
со стороны заправки нитки, и короткий 3 - со стороны челнока (петлителя).
Над ушком иглы делается выемка, облегчающая подход носика к игле.
Ушко служит для заправки нитки. Диаметр стержня определяется
диаметром нитки, а так же необходимой прочностью и жесткостью иглы.
Номер иглы численно равен диаметру стержня, выраженному в сотых долях
миллиметра. Желобки на стержне служат для уменьшения нагрузки на
нитку при проведении ее иглой сквозь материал. Для хорошего укрытия
нитки ширина и глубина желобков делается несколько больше ее диаметра.
Острие в зависимости от назначения иглы имеет различную форму
заточки. При шитье из ткани или трикотажа применяются иглы с круглой
заточкой. Другие формы заточки (овальная, ромбическая, трехгранная,
квадратная) применяются при шитье изделий из кожи, искусственных и
синтетических материалов.
Ответственным периодом получения переплетения ниток является
образование петли-напуска F ушка иглы, в которую затем входит носик
челнока (петлителя) (рис. 6.16, б, в, г). Игла 1 прокалывает материал 3 и
проводит игольную нитку 2 сквозь материал, опускаясь до крайнего
нижнего положения (рис. 6.16, б, в). Если петля будет недостаточных
размеров, челнок ее не захватит, что вызовет пропуск стежка. При начале
движения иглы вверх из крайнего нижнего положения нитка освобождается
от натяжения, возникающего при протаскивании ее иглой сквозь материал.
Под действием сил упругости нитки, а затем и нижней кромки ушка иглы в
районе ушка будет образовываться петля-напуск грушевидной формы.
При подъеме иглы на заданную величину Ду в петлю F (рис. 6.14, г)
короткого желобка заходит носик челнока (петлителя), захватывает
игольную нитку, которая начинает взаимодействовать с челноком
(петлителем).
195
На рис. 6.17 приведены примеры структур и конструктивных
исполнений механизмов иглы швейных машин: айв- кривошипно-
ползунные, б - кулисный, г - кривошипно-коромысловый. Как видно из
схем, инструмент, игла, при движении имеет мертвые положения, а
структура механизмов — неуравновешена, что вызывает большие
динамические нагрузки.
Рис. 6.17. Кинематические схемы механизмов иглы: (позиции)
а - кривошипно-ползунный плоский: 1 - главный вал, 2 - шатун, 3 -
игольный стержень с иглой; б - кривошипно-кулисный: 1 - главный вал, 2 -
ползун, 3 - кулиса с иглой; в - кривошипно-ползунный пространственный: 1
- коленчатый вал, 2 - шатун со сферическими шарнирами, 3 - коромысло, 4
- шатун, 5 - игольный стержень с иглой;г - кривошипно-коромысловый: 1 -
коленчатый вал, 2 - шатун со сферическими шарнирами, 3 - коромысло; 4 -
коромысло-иглодержатель, 5 - игла;
196
В швейных машинах общего назначения для обеспечения основного
вертикального осциллирующего движения иглы применяются обычно
кривошипно-ползунные механизмы (рис.6.17, а)
При построении расчетных схем для проведения проектирования,
кинематического и динамического анализа кривошипно-ползунного
механизма иглы пользуются его плоской кинематической схемой
(рис.6.18,6).
о
Рис. 6.18. Проектирование механизма иглы: а - циклограмма работы
механизма; б - расчетная схема; в - вертикальное перемещение иглы.
197
Кривошип 1 закрепляется на главном валу машины и с помощью
шатуна 2 сообщает игольному стержню 3 вертикальное поступательное
движение. Буквами обозначены: ось главного вала А, шарнир в парс
кривошип-шатун В, шарнир в паре шатун-ползун С. Угол <р является
обобщенной координатой функционирования механизма иглы, а также всех
подвижных элементов машины. Он является функцией времени t, (p=(ot, где
со - передаточная функция. В машинах, имеющих вращающийся начальный
вал, координата ф численно равна углу поворота вала, а со - его угловой
скорости. В большинстве расчетов берут co=const, тогда ф кратно t.
Проектирование механизма иглы. При проектировании механизма
иглыё олжны быть обеспечены два основных условия: 1 - полное
перемещение иглы Н должно соответствовать конструктивным параметрам
частей машины, с которыми взаимодействует игла; 2 - коэффициент
рабочего хода иглы Ки=— не должен превышать заданного значения [Ки].
2тг
Угол фи соответствует углу поворота главного вала машины за период
нахождения иглы в материале.
Условие 1. Полный ход иглы по вертикали складывается из отрезков
h+b=H[ (рис. 6.16, а), где h - максимальный подъем иглы над уровнем
материала, его значение определяется из условия удобной и безопасной
установки и съема объекта обработки, величина Ь= Ду+£+с+а+8
соответствует перемещению иглы ниже уровня материала (рис. 6.16, в).
Здесь Ду - величина перемещения иглы из нижнего положения до момента
захвата игольной нитки челноком, ( - длина острия иглы, с - расстояние от
верхней грани ушка иглы до носика челнока (петлителя), а - расстояние от
носика челнока до верхней поверхности игольной пластины, 8 - толщина
материала. Таким образом, b зависит в основном от размеров и конструкции
челнока (петлителя) и при окончательном определении полного хода иглы
не должен изменяться.
198
Условие 2. Величина коэффициента [Ки] задается, исходя из
циклограммы работы механизма иглы (рис. 6.18, а). При (p=jD шарнир С
занимает крайнее верхнее положение Ci (рис. 6.18, б). Касание иглой
материала происходит при повороте кривошипа на угол <р2, выход из
материала - при <р5. Полный ход иглы будет Н2. При этом точка С
перемещается по закону:
А 2
Ус=г(1 -COS(p- 2 sin (р), (6.3)
где г- длина радиуса кривошипа, м; Х= г/£, £ - длина шатуна, м.
Очевидно в момент касания иглой материала будет:
Ус2 г[1 - cos(tc - - 2 sin2(7c —)]=h.
Т.к. Н2=2г и Н2= h+b, то H2=2b/[1 + cos(tc - ^-) + 2 sin2( тс —
Из найденных двух значений Hi и Н2 следует выбрать наибольшее, т.к.
при выборе, например, найденного H2<Hi, не будет обеспечено условие (1).
Если выбрать найденное Н|<Н2- не будет выполнено условие (2).
Ссиловые хараттеристики механизма иглы являются основными
источниками воздействия на усточивость динамики разлмчных элементов
швейной машины. Это сопровождается повышенным износом
кинематических пар, деформацией звеньев.
Определим силы, действующие на механизм иглы, и проведем расчет
давлений в кинематических парах и их работоспособность.
Выделим в механизме иглы (рис. 6.19, а) диаду, состоящую из звеньев
1 и 2 (рис. 6.19, б).
Воспользуемся методом размещения массы звена 2 в т.т. В и С. Тогда
условие равновесия, действующую на диаду, запишется векторным
Уравнением:
+ 0 (6.4),
199
где: рв =-rco2mB - сила инерции, приложенная в т. В; г - радиус
кривошипа, со - угловая скорость кривошипа; тв - масса, сосредоточенная в
т. В. ^12 - составляющая реакции R|2 звена 1 на звено 2, направленная вдоль
звена 1 под углом а к звену 2. Очевидно, что или Rn ~ -р'в ;
а12 - нормальная составляющая реакции R12, направленная вдоль звена.
Р3=-а3^3 . сила инерции звена, - ускорение игловодителя 3, где 777 3 -
масса игловодителя с иглой; рз= " ас^с - сила инерции приложенная в т. С,
а<г - ускорение в т. С, ™с - масса, сосредоточенная в т. С; Т - сила прокола
материала; F - сила вредного сопротивления; R03 - реакция направляющей
на звено 3 (направлена перпендикулярно к оси звена 3).
Рис. 6.19. Силовой анализ механизма иглы:
а - схема механизма; б - расчетная схема; в - силовой многоугольник.
Массы тв и тс определяются из условия метода размещения масс
звена:
mB+mc=m2;
mB(BS)+mc(CS)=0;
200
mB(BS)2+mc(CS)2=Js,
где т. S - координата центра масс звена 2.
Ускорение т. С и звена 3 определяется дифференцированием
d2yc
известной зависимости: а3= ас=
После подсчета неизвестных параметров, входящих в векторное
уравнение (6.4), в нем останутся два неизвестных - модули векторов R03 и
^12 . Таким образом уравнение (6.4) может быть решено и найдены реакции
ИозиК12-Графическая модель решения уравнения показана на рис.6.19, в.
Аналогично можно найти реакци в других шарнирах механизма,
напрмер:
=о
Кинематические пары рассчитываются на нагрев. Выделяемое за счет
трения в парах тепла может вызвать перегрев и разжижение смазки. Условие
работоспособности пары определяют с помощью произведения (pV) -
удельного давления р в паре на скорость V скольжения соприкасающихся
поверхностей. Поскольку в зависимости от <р величина и направление
реакции в парах изменяются, находится усредненное значение произведения
(pV)Cp=K. Практически берется к~~^гр^ где да - допустимое
значение коэффициента К, п - число положений механизма, выбранное для
v = ±
расчета кинематической пары, * 2 , со0тн=о) 1-0)2 - относительная
угловая скорость звеньев, соединенных в кинематической паре, d - диаметр
соединительного пальца, рг - давление в кинематической паре в i-ом
положении механизма, соответствующее реакции Ri, L - длина контакта
пальца и головки звена.
К точности механизма иглы предъявляются высокие требования. В
момент захвата игольной нитки челноком погрешность параметра С (рис.
201
6.16) не должна превышать 0,5 мм. Эта погрешность может возникать
вследствие неточности изготовления звеньев механизма, их деформации при
работе, неточности установки и размеров иглы. Все перечисленные
погрешности являются случайными ошибками. Рассмотрим их влияние на
параметр ус в момент захвата петли-напуска носиком челнока.
Воспользуемся зависимостью (6.3). Преобразуем ее в точностную модель -
ус + Аус = (г + Jr)/(1 - cos^ - (г + Jr)/2(£ + Jl)sin2^ ), (6.5)
где: Ar, Al - элементарные погрешности звеньев механизма, ус -
суммарная погрешность механизма на выходном звене.
Решим (6/5) относительно Аус.
Лус = (r + ^r)[l-cos^-(r-Jr)/2(£ + J£)sin2$9 )-ус.
Элементарные погрешности являются случайными величинами,
заданными законами их распределения. Поэтому суммарная погрешность
так же является случайной величиной, закон распределения которой будет
результатом компанирования законов распределения элементарных
погрешностей. Решение задачи можно осуществить методом статистических
испытаний.
6.5.2 Механизм челнока
Челнок предназначен для захвата петли игольной нитки, обведения ее
вокруг шпули с челночной ниткой, находящейся внутри челнока, с целью
переплетения игольной и челночной ниток между собой.
Виды челночного переплетения ниток в стежке (рис. 6.20).
Челночные переплетения ниток могут быть без узелков, с одним и
двумя узелками (а, б, в, г), возможны варианты, отличающиеся
относительным положением петель игольной и челночной ниток (7, 2). Все
202
стачивающие машины при подаче материала от работающего выполняют
переплетения 1,а.
Строчки с переплетением без узелков характеризуются более ровным
расположением стежков, меньшим расходом ниток, меньшим изменением
крутки нитки; при переплетении с узелками повышается устойчивость к
распусканию строчки и несколько увеличивается прочность.
Рис.6.20. Виды челночных переплетений.
Различные участки строчек с неодинаковым переплетением будут
выглядеть по-разному, что создает нестабильность внешнего вида строчек.
Вид переплетения зависит от следующих основных факторов (рис.
6.21, а):
1. Направление вращения челнока 1;
2. Положение оси иглы 2 относительно параллельной ей оси,
проходящей через точку выхода нитки 3 из челночного устройства
в момент захвата носиком челнока петли игольной нитки;
3. Направление вектора подачи объекта обработки относительно
иглы.
Для каждой конструкции челнока первый фактор является
Постоянным. Второй фактор может меняться в машинах с изменяющимся
203
положением оси иглы, в частности, при образовании зигзагообразной
строчки. Однако это изменение незначительно и им можно пренебречь.
Таким образом, изменение вида переплетения в процессе одного
технологического цикла определяется главным образом изменением
направления вектора подачи На рис. 6.21, б представлены зоны
образования соответствующих переплетений в зависимости от направления
перемещения объекта обработки для различных челноков.
204
Рис. 6.21,б,в,г,д,е. Зоны образования различных видов челночных
переплетений.
Направления перемещения объекта обработки определяются фазой
вектора подачи с областью изменения ее от 0 до 2я, разделенной на
205
секторы с различной структурой переплетения ниток. Заштрихованные
косыми линиями секторы соответствуют направлениям вектора при
котором получаются переплетения, отличные от вида 1 .а. Изменение
направления вектора Kw возможно в машинах с автоматизированной подачей
объекта обработки под иглой. Это приводит к нестабильности внешнего
вида строчки.
Конструкция челночного устройства должна обеспечивать:
- выполнение заданной структуры переплетения ниток;
- согласование работы челнока с другими механизмами машины;
- максимизацию емкости челнока при заданном значении длины петли
игольной нитки с учетом обрывности;
- снижение динамических нагрузок на элементы челнока и нитку.
По принципу взаимодействия с игольной ниткой челноки можно
разделить на две группы:
- челнок с запасом челночной нитки целиком проходит в петлю
игольной нитки;
- челнок захватывает носиком петлю игольной нитки и обводит ее
вокруг шпуледержателя и находящейся в нем шпули.
По виду движения и расположения шпули различают:
- колеблющиеся (качающиеся) челноки;
- вращающиеся челноки (рис. 6.22).
Последние могут быть равномерно вращающимися и неравномерно
вращающимися, причем ось вращения и колебания может быть,
горизонтальной или вертикальной. При этом передаточное отношение
между главным и челночным валами может быть 1:1 и 1:2.
206
Рис.6.22. Классификация челночных устройств.
Вращающиеся челноки. На рис. 6.23 показана конструкция
вращающегося челнока с горизонтальной осью вращения, применяемого во
многих швейных машинах. Оно состоит из челнока (крючка) 7,
шпуле держателя 10, шпульного колпачка 8, шпули 7 и установочного
пальца 6. Шпуледержатель ободком 11 вставлен в паз 2 челнока и
предохраняется от выпадания полукольцом 72, прикрепленном к челноку.
Шпульный колпачок надевается на палец 4 шпуледержателя и закрепляется
в определенном положении защелкой 9, шпуля же с ниткой надевается на
палец колпачка. Чтобы шпуледержатель не поворачивался вместе с
челноком, в его выемку 3 вставляется выступ 5 установочного пальца 6,
закрепленного на платформе машины
207
Рис. 6.23. Вращающийся челнок с горизонтальной осью вращения:
1 - челнок, 2 - паз челнока, 3 -* выемка, 4 - палец, 5 - выступ,
6 - установочный палец, 7 - шпуля, 8 - шпульный колпачок,
9 - защелка, 10 - шпуледержатель, 11 - ободок, 12 - полукольцо.
Работа челнока, его угловое перемещение должно быть согласовано с
работой других органов машины. На циклограмме (рис. 6.24, а) работа
челнока характеризуется участком 4-5, соответствующим захвату петли
игольной нитки носиком челнока (т. 4) и окончанию обведения игольной
нитки вокруг челнока (т. 5). На оси (р этот период обозначается углом (р4>.
Существенным для согласования взаимодействия челнока с другими
рабочими органами является значение коэффициента рабочего хода челнока
7Сч=(рч/2т1, где <рч - угол поворота главного вала машины за период
взаимодействия челнока с петлей игольной нитки. В данном случае
Фч=ф45==Уч1срэ где - угол поворота челнока при его взаимодействии с
ниткой (рис. 6.24, б), где а - угол, определяемый длиной носика челнока; /Ср
- среднее значение передаточного отношения между главным и челночным
валами за период обвода петли игольной нитки вокруг шпуледержателя.
Если г=1:1, то р45 =210-220° и <р56 =15-20°, т.е. снятие петли с челнока
должно быть осуществлено за малый интервал времени, что вызывает
208
значительное повышение нагрузок на нитку и нитеподатчик (рис. 6.24, а,
кривая Г). В машинах с равномерно-вращающимися челноками принимают
/==1:2. Тогда (р45=105-1 10° и <р5б= 125-155°, (кривая 1).
Рис.6.24. Циклограмма работы челночных устройств.
Определение оптимальных размеров челнока.
Конструкция, размеры челночного устройства, геометрия его
элементов выбирается исходя из необходимости взаимодействия его с
ниткой в период образования переплетения с учетом относительных
перемещений большими скоростями.
Рассмотрим два основных периода взаимодействия челнока с игольной
ниткой: захват петли и ее расширение; обвод петли вокруг шпуледержателя
(челнока).
В период захвата и расширения важной является геометрия носика
челнока, в частности угол р его заострения (рис. 6.25).
209
Рис.6.25. Определение размеров челнока: 1 - нитка,
2 - выступ ободка шпуледержателя,
3 - носик челнока.
При расширении петли нитка В, поворачиваясь относительно иглы С
на угол у и перемещаясь по внутренней грани носика челнока 3, под
действием силы Р - проекции на грань носика, натяжения ниток - Г, должна
зайти за выступ 2 ободка шпуледержателя. С уменьшением угла Р
заострения носика челнока процесс расширения петли будет улучшаться,
однако при этом увеличится Кч, т.к. длина дуги x=aR, где а - угол, на
который повернется челнок от момента захвата до начала зацепления ее
выступом 2 шпуледержателя, R - радиус челнока. Из рис. 6.25 имеем х=х^
x2=/>(ctgP+ctga), где b - высота треугольника АВС. Оптимальное значение р
будет являться корнем уравнения ~ °, или
dx _ _ , / 1 + 1 dy \
dp \sin2 р sin2 у dp j
Т.к. для смещения нитки по грани носика вектор Т должен быть
отклонен от нормали к грани на угол, не меньший угла трения <ртр, то
у = п-р-^--<ртр, или .Тогда ^=-1,ит.к. В*0, то Д =
2 2 dp 4 2
210
При определении оптимальной емкости челнока в период обведения
угольной нитки вокруг челнока следует учесть, что с увеличением габаритов
челнока возрастает потеря прочности игольной нитки, возрастает
обрывность, снижается производительность. С другой стороны, челнок,
увеличенных габаритов содержит большой запас ниток и требует меньших
затрат времени на смену шпуль.
Технологический цикл, определяющий производительность машины
можно представить суммой T=tj+t2+t3 средних затрат времени, отнесенных
к единице продукции t\ и f2, - соответственно на смену шпуль и заправку
машины после обрыва, зависящих от размеров челнока; - потери, не
зависящие от размеров челноков. Очевидно, оптимальное значение объема
челнока Vq будет являться корнем уравнения
Затраты времени t\ на смену шпули будут где гсм -
продолжительность смены шпули; N - количество стежков, выполненных за
цикл.
При этом Е = 0,5[/и$^ + у] ) + X? 2 j> где ц- коэффициент использования
объема челнока, €- расход нитки на стежок, F - площадь поперечного сечения
_ ci IFNt
нитки. Тогда zi“ у , где С! =-—.
П
Затраты времени Z2 на заправку машины после обрыва будут /2 == jFt3
где: j - обрывность, /3 - продолжительность одной заправки.
Обрывность определяется экспериментально и в общем случае может быть
представлена степенной зависимостью j = A Vk, где А и к - коэффициенты,
определяемые экспериментально. Тогда t2 =C2Vk 9 где С2 = ANt3.
Окончательно:
(6.6)
211
6.5.3. Механизм подачи нитки
Механизм подачи нитки служит: на первом этапе образования стежка
- для освобождения нитки от натяжения в период взаимодействия ее с иглой
и челноком (подача нитки); на втором этапе (после обведения вокруг
челнока) - для снятия нитки с челнока, вытягивания ее излишка из-под
материала, затяжки стежка и сматывания с катушки нитки, необходимой на
новый стежок.
В зависимости от назначения и конструкции машины, механизмы
подачи нитки могут иметь различную структуру и конструктивные решения.
Механизмы подачи нитки должны, обеспечивать:
- подачу (освобождение) нитки в период взаимодействия ее с иглой и
челноком;
- своевременное вытягивание излишка нитки из-под материала;
- качественную затяжку стежка;
- сматывание с катушки количества нитки, необходимого на
образование следующего стежка;
- согласование работы механизма подачи нитки с другими
механизмами;
- минимальные нагрузки на нитку и элементы механизма.
Исполнительным инструментом механизма подачи нитки является
рычаг-нитеподатчик (нитепритягиватель). В зависимости от назначения и
конструкции швейной машины механизмы подачи нитки могут иметь
различную структуру и конструктивное решение (рис. 6.26).
На рис. 6.27. представлены примеры различных структур, механизмов
подачи нитки: кулачковый, кривошипно-шатунный, кривошипно-кулисный,
ротационный.
212
Рис. 6.27. Примеры основных структур механизмов подачи нитки:
а - кулачковый, б - кривошипно-шатунный,
в - кривошипно-кулисный, г - ротационный.
Кулачковый механизм имеет следующую структуру и конструктивное
исполнение: на переднем конце главного вала машины закреплен
цилиндрический пазовый кулачок 7, на поверхности которого сделан
криволинейный паз для ролика 2, сидящего на конце рычага-нитеподатчика
3, заставляя его совершать возвратно-поворотные движения (рис.6.27,а).
При этом т. F движется по дуге окружности, описанной из центра, лежащего
на оси шарнира 4. Кулачковый механизм позволяет достаточно точно
подавать необходимое количество нитки в любой момент времени
образования стежка. Однако он имеет серьезные ограничения по
скоростному режиму работы. При скорости вращения кулачка 7,
превышающей 1000 - 1100 об/мин, ролик и паз кулачка быстро
213
изнашивается. Их замена ведет к большим затратам средств. Применение
кулачковых механизмов возможно в тихоходных машинах, обычно тяжело! о
типа.
Кривошипно-шатунный механизм. Механизм имеет шарнирно-
стержневую структуру, может применяться при достаточно высоких
скоростных режимах 5000-6000 об/мин, с которыми работают современные
машины челночного стежка (рис.6.27, б). Они менее точно, чем кулачковые
обеспечивают подачу нитки во всем периоде образования переплетения, но
их точности хватает для качественного взаимодействия переплетающих
инструментов. Механизм состоит из следующих звеньев: кривошипа 1
закрепленного на главном валу. Кривошип шарнирно соединен с шатунным
рычагом нитеподатчика 4, вторая головка которого шарнирно соединена с
коромыслом 3, имеющим возможность поворачиваться относительно оси 2,
закрепленной в корпусе машины. Точки рычага нитеподатчика 4, в том
числе глазок F, движутся по сложным шатунным траекториям. Параметры
механизма должны обеспечивать требуемую скорость глазка F на различных
участках пути. Например, глазок F в соответствии с рабочим процессом
должен в начале медленно опускаться, подавая нитку для процесса
переплетения, а в конце петлеобразования - с большей скоростью двигаться
вверх, выбирая нитку из-пол материала.
Кривошипно-кулисный механизм. В швейных машинах, особенно в
двухигольных, имеющих челноки с вертикальной осью вращения, большое
распространение получил кулисный механизм подачи нитки (рис. 6.27, в).
Этот механизм составляет одну общую цепь с механизмом иглы, поэтому
его нельзя рассматривать отдельно от последнего. Механизм иглы и в этом
случае представляет собой обычный кривошипно-ползунный механизм, в
котором роль ползуна играет игловодитель, на нижнем конце которого
закрепляется игла. Кулисный механизм подачи нитки имеет следующую
структуру и конструктивное исполнение: кривошип 1 игловодителя с
214
противовесом для частичного уравновешивания поступательно-движущихся
частей такой же формы, как в кривршипно-коромысловом, жестко закреплен
на переднем конце главного вала. Шатун 2 игловодителя является
трехголовочным. Это вызвано тем, что он, кроме основной функции шатуна
игловодителя, является также основной деталью механизма нитеподатчика.
Средняя головка шатуна 2 шарнирно соединена с кривошипом, а верхняя - с
хвостовиком ползуна 3, через отверстие которого проходит стержень 4
рычага нитеподатчика 6. При движении шатуна центр кулисной втулки
описывает шатунную кривую. Стержень 4 рычага 6 вместе со втулкой
образует пару скольжения. Увлекаемый втулкой при ее движении по
«шатунной кривой» рычаг нитеподатчика б имеет возвратно-поворотное
движение относительно неподвижной опоры 5, закрепленного в рукаве.
Глазок F рычага нитеподатчика описывает при этом дугу окружности,
двигаясь вниз и вверх неравномерно: вниз медленно, вверх с большей
скоростью, что требуется от рабочего звена механизма подачи нитки
швейной машины.
Вращающийся нитеподатчик представляет из себя уравновешенную
относительно оси вращения сборочную единицу. В его структуре и
кионструкции нет повижных элементов, в процессе работы вызывающие
динамический дисбаланс. Он крепится на конце главного вала и не вносит в
работу машины дополнительную дестабилизирующую динамическую
составляющую. Законы подачи нитки в период образования ниточных
переплетений он обеспечивает за счёт имеющихся специальных профилей
на повехностях и направляющих ребрах. Таким образом, вращающиеся
нитеподатчики могут успешно использоваться в высокоскоростных
машинах. Правда следует отметить, что такие нитеподатчики требуют
большой скрупулезности по созданию сложных профилей, направляющих
нитку на точное и своевременное обеспечение диаграммы подачи нитки при
выполнении технологического процесса.
215
Движения рычага нитеподатчика определяются законом изменения
периметра Pi, петли игольной нитки, необходимого для образования
переплетения.
Подача нитки Л для всего цикла образования переплетения и затяжки
стежка может быть представлена функцией /’(ср) (рис. 6.28).
Рассмотрим процесс построения диаграммы (рис. 6.28 и 6.29). В целях
наглядности положительное направление Р(ср) принято вниз. Построение
диаграммы начнем с точки 7, при этом точка F занимает крайнее верхнее
положение. За начало отсчета аргумента функции Р(<р) примем угол <р,
соответствующий крайнему верхнему положению иглы.
Участок 1-2 характеризуется разгрузкой нитки, падением ее
деформации. Принято считать, что в точке 2 расход Рг^О.
На участке 2-3 происходит опускание иглы до уровня материала и
перемещение объекта обработки на стежок. При этом расход Р2-3 на участке
2-3 может быть определен из схемы, изображенной на рис. 6.29, а.
216
Рис. 6.29. Построение диаграммы подачи нитки.
Р2_3 = Ц3 + У = к,(у[х^у^ -у).
(6.7)
где € - длина участка нитки от ушка иглы до уровня материала,
х - перемещение материала,
у - перемещение иглы,
ki - коэффициент, учитывающий отклонение действительной формы
игольной нитки от принятой при расчете, в дальнейшем коэффициенты к2,
к3, к4 будут иметь аналогичное значение. В точке 3 имеем: у = 0 , х = t,
где tu- длина стежка. Тогда расход в точке 3 будет Р3 = к{ tM
На участке 3-4 игла проводит игольную нитку сквозь материал
(рис.6.29, б).
217
При этом расход Р3_4 = Р3 + 2к2у в крайнем нижнем положении иглы
(точка 4) имеем: у = Ь, где b - полное перемещение иглы под уровнем
материала. Тогда расход Р4 = Р3 + 2 к3Ь
На участке 4-5 образуется петля напуска на игольной нитке при
подъеме иглы на величину Ьу из крайнего нижнего положения. В момент
захвата челноком петли игольной нитки (точка 4) расход не увеличивается,
т.е. можно принять Р5 - Р4
На участке 5-6 происходит захват петли игольной нитки носиком
челнока и ее расширение (рис. 6.29, в). Расход будет определяться:
Р5.6=Р4+1ЛЬ4,
где I// - угол поворота челнока, « - угол, соответствующий длине
носика, L - периметр сечения у основания носика челнока. В момент
окончания расширения петли игольной нитки и начала обвода (точка 6),
имеем:
V = а, тогда Рб = Р4 + к4Ь .
На участке 6-7 происходит обвод петли вокруг челнока или
шпуледержателя (рис. 6.29, г). При этом расход:
Р6_7 = Р6 + 2k5<2Rsin^-p- В),
где R и В - соответственно радиус челнока (или шпуледержателя) и его
ширина.
В точке 7 имеем у/ - а = 0 , расход при этом будет максимальным
=P6+2k5(D + B),
где D ~ 2R.
После точки 7 глазок нитеподатчика (т. F) должен двигаться вверх -
происходит снятие петли с челнока, выбор резервной нитки (участок 7-8) В
точке 8 игольная нитка полностью выходит из контакта с челноком. На
218
участке 8-9 игольная нитка выбирается из-под игольной пластины и на
участке 9-1 происходит затяжка стежка.
Построенная таким образом диаграмма Р((р) (рис. 6.28, кривая I)
характеризует потребную длину игольной нитки при соответствующем
значении ф, и называется диаграммой необходимой подачи нитки. Она
является основой проектирования механизма подачи нитки. Следует
отметить, что на участке от точки N\ до заделки в материале имеем:
+ Р,=С (/=/,2,3...,9),
где £-,£' - значения отрезков нитки N/F и FN2 в z-й точке диаграммы,
- расстояние от нитемаправителя N2 до заделки нитки в стежке (можно
считать /• = const), Р, - расход игольной нитки в i-м положении.
Тогда < +< + />• = С, и «min + Ртах = С,, (6 8)
где С|=С-г',
соответственно минимальные и максимальные значения
отрезков нитки.
Очевидно <•+<’ + Р, = 4m +Qin +Ртах
Обозначив £min + €^ = Яо, запишем окончательно:
4in+C«=«0+^max-TJ (6.9)
6.5.4. Механизм перемещения объекта обработки
Механизм перемещения объекта обработки предназначен для подачи
на шаг обработки под иглой соединяемую нитками композицию швейных
Деталей. Он должен обеспечивать:
- перемещение объекта обработки, состоящего из материалов, с
имеющих различные физико-механические свойства,
219
- стабильность подачи материала на шаг обработки,
- регулировку величины стежка,
- перемещение соединяемой композиции слоёв материала без их
взаимного проскальзывания.
Классификация механизмов перемещения объектов обработки (рис
6.30).
Механизмы перемещения объектов обработки во многом определяют
степень автоматизации, производительность и качество работы швейной
машины. Эти механизмы можно разделить на две группы: для линейного
перемещения(обычно в машинах общего назначения) и для сложного
перемещения в плоскости и даже в пространстве (для автоматизированных
машин). По способу взаимодействия рабочих органов механизма
перемещения с объектом обработки — на механизмы с вертикальным
наложением связи на сшиваемую композицию (фрикционные) и механизмы
с фиксацией объекта обработки в жестком носителе по периметру зоны
обработки.
При проектировании и расчете механизмов следует учитывать
технологические, кинематические и динамические условия его работы.
Скорость перемещения объекта обработки и элементов механизма часто
требуют оперативной адаптивной регулировки. В некоторых случаях
должна быть обеспечена определенная ориентация инструмента
относительно объекта обработки. Механизм должен позволять производить
быструю переналадку для обработки объектов других размеров.
220
221
Механизмы для линейного перемещения объекта обработки
применяются во всех машинах общего назначения и в некоторых
специальных машинах. Объекты обработок при этом имеют временный или
постоянный контакт с транспортирующими инструментами (рейкой,
роликом, валком), или же закреплены в особых держателях. В первом случае
для осуществления обработки необходимо участия оператора. При
обработки по сложным контурам (с малыми радиусами округления,
изломами) необходимо, кроме того, снизить скорости работы машины, а в
некоторых случаях — ее остановка, например, для поворота объекта
обработки вокруг иглы при выполнения излома на контуре строчки. Если
объект обработки закреплен в держателе, то работа машины выполняется
без участия оператора (швейные машины-полуавтоматы).
6.6. Швейные машины специального назначения, включая машины с
компьютерным управлением
Большое число швейных машин предназначается для выполнения
одной или ограниченной группы специфических операций. К машинам
специального назначения можно отнести машины, предназначенные для
выполнения:
- зигзагообразных строчек, применяемых для соединительных и
отделочных операций;
- стачивающе-обметочных строчек, обеспечивающих соединение
деталей и одновременно обметывание края материала, для
предотвращения его осыпания, при этом обметочную строчку можно
получить с помощью одной или двух ниток;
- потайных строчек цепного или челночного переплетения,
применяемых в тех случаях, когда требуется получить строчку, не
222
в идимую с лицевой стороны, при этом стежок может быть одно- и
двухниточным;
пришивания фурнитуры стежками челночного и цепного
переплетения;
- коротких строчек с небольшим полем обработки и закрепок;
- выметывания петель с глазком и прямых петель под пуговицы на
верхней одежде, белье, мужских сорочках, женских блузках, рабочей
одежде и др.;
- поузловой обработки сборочных единиц одежды при изготовлении
манжез мужских сорочек, клапанов карманов пиджаков и пальто и
других операциях;
- отделочных и вышивальных операциях на различного вида женской
и детской одежде, нательного и постельного белья, скатертей, изделий
специального назначения.
Приведенный перечень операций является далеко не полным, где
применяются специального вида ниточные крепления, используемые во
многих отраслях народного хозяйства. В данной работе будут представлены
характерные типы специальных технологических машин и оборудования,
которые зарекомендовали себя целесообразностью дальнейшей
модернизации и автоматизации на основе мехатронных систем управления.
К ним можно отнести машины: зигзаг, короткошовные цикловые,
автоматизированные внецикловые — для выполнения операций по сложным
контурам, вышивальные и др.
6.6.1 Особенности функционирования автоматизированных швейных
машин.
Современные швейные машины, независимо от группы, к которой они
отнесены по степени автоматизации, все больше обеспечивают выполнение
223
целого ряда автоматизированных функций на базе использования
достижений в области мехатроники. К ним можно отнести функции: останов
и позиционирование иглы; обрезка ниток; регулирование длины стежка;
контроль контроль положения края обрабатываемой детали; регулирование
скорости вращения главного вала; регулирование давления прижимной
лапки; регулирование натяжения нити; контроль пропуска стежков;
регулирование верхнего и нижнего двигателя ткани; регулирование
растяжения и посадки материла; контроль сопряжения срезов; контроль
обрывности ниток; контроль исправности, нагрева иглы; смена шпули и др.
Использование электроники позволило повысить технологические
возможности оборудования, имея в виду гибкость и мобильность, прочность
и точность соединения, а также существенно сократить время на
обслуживание.
Как свидетельствует опыт технического перевооружения предприятий
, для создания гибких и высокопроизводительных процессов в первую
очередь необходимо широкоспециализированное оборудование с
автоматизированными системами управления.
Существенным отличием отмеченных выше машин, является наличие
устройства для автоматического перемещения объекта обработки при
однократном выполнении основного цикла технологической операции и
более сложной системой управления машиной.
Эти машины характеризуются рядом особенностей конструкций и
принципом работы. На швейных полуавтоматах установка объекта
обработки, съем изделия и пуск машины осуществляются, как правило,
вручную. Остальные действия происходят автоматически.
Все швейные машины автоматического действия, помимо шьющих
механизмов (иглы, челнока либо петлителя, нитеподатчика), обязательно
содержат механизм или систему управления движением объекта обработки
под иглой, механизм останова машины в исходном или заданном положении.
224
Структура и конструкция автоматизированных систем перемещения
объектов обработки определяются следующими основными факторами,
которые характеризуют параметры систем
Виды движения объекта обработки и инструментов.
При обработке по контурам различной сложности должны
обеспечиваться согласованные между собой формообразующие движения
объекта обработки и инструментов машины по различным координатам. При
этом объекты обработки могут совершать поступательное или сложное
плоское движение. Во втором случае можно выделить два способа
перемещения объекта: с постоянной и произвольной ориентацией нормали
профиля контура к осям неподвижной системы координат. Введём
соответствующие обозначения видов движения:А — поступательное, Б —
сложное с постоянной ориентацией нормали профиля относительно системы
координат инструмента.
Способ подачи по контуру на шаг обработки
В швейной промышленности применяются аналоговый непрерывный
и дискретный способы подачи объекта на шаг обработки по контуру. В
первом случае относительные скорости оси иглы и объекта обработки в
течение одного цикла обработки связаны со скоростью ведущего звена
машины постоянным или незначительно изменяющимся передаточным от-
ношением. При дискретной обработке, когда необходимо взаимодействие
инструментов с неподвижным объектом обработки, последний должен
перемещаться в стартстопном режиме, т. е. механизм перемещения изделия
Должен обеспечивать микропозиционирование внутри каждого цикла
Машины. Таким образом, передаточное отношение между ведущим звеном и
225
механизмом перемещения объекта обработки будет непостоянным. При этом
средняя скорость стартстопной подачи объекта по контуру должна отвечать
требованиям, предъявляемым к скорости непрерывной подачи.
Скорость ведущего звена механизма для перемещения объекта
обработки. Допустимая скорость ведущего звена механизма перемещения
объекта обработки обычно определяет скоростной режим всей машины и
для повышения производительности труда следует стремиться к ее
максимизации. Если конструкцией машины предусмотрен постоянный
скоростной режим и время выполнения всей технологической операции, то
считается, что скорость ведущего звена, а также средняя скорость подачи
объекта обработки по контуру постоянны. Однако целесообразнее обеспечить
такой режим работы машины, при котором на сложных участках контура
скорость обработки снижается, а на простых увеличивается. При этом,
чтобы избежать рассогласования взаимодействия рабочих органов, закон
изменения передаточного отношения между ведущим звеном механизма
перемещения и звеном, на котором закреплен объект обработки, не должен
зависеть от скорости ведущего звена.
Способ программирования движения.
Системы управления, применяемые в оборудовании легкой
промышленности, по способу программирования делятся на аналоговые,
цифровые и путевые.
Аналоговая система предполагает задание предназначенной для
реализации в машине исходной программы обработки контура деталей
путем различных методов его моделирования в программоносителе. К
аналоговым системам относятся механические системы прямого действия
(кулачковые, копировальные) и системы с усилением, программоносителем
в которых может являться сам объект обработки.
226
В автоматизированных машинах легкой промышленности
применяются т путевые и концевые переключатели (системы реле или
контактов), которые регламентируют параметры контурной обработки. В
первую очередь - длина обрабатываемого участка объекта обработки,
который совершает прямолинейное или вращательное движение. Приводом
для такого объекта обработки может быть любая универсальная система
(например, система поворота объекта обработки рейкой относительно
неподвижно закрепленной точки при выполнении шва по окружности);
длина обрабатываемого участка регламентируется моментом отключения
источника движения.
Компьютерная стстема предполагает дискретное задание
предназначенной для реализации в машине исходной программы обработки
контура и реализуется с помошью легкосменяемых программоносителей.
Каждая из указанных систем управления может иметь обратную связь,
необходимую для коррекции запрограммированного закона перемещения
объекта обработки. Имеет место так же комбинации различных систем
управления.
Способ фиксации объекта, обработки в транспортирующем органе.
Помимо допущений и погрешностей, связанных с выбором структуры
и конструкции механизма перемещения объекта обработки, его
функционированием, следует иметь в виду особенности взаимосвязи
объекта обработки и устройства для его фиксации в транспортирующем
органе машины. Можно выделить два способа фиксации, исходя из условия,
что материал объекта обработки имеет малую жесткость:
- закрепление с учетом контакта фиксирующих элементов, которые
обрабатываются в течение данного технологического цикла, а контур
227
материала получает необходимую для обработки жесткость
(перемещение в кассете, пяльцах и др.);
- бескассетное закрепление, при котором необходимая для об работки
жесткость материала достигается временным наложением свили в
ноне обработки (с помощью зажимов, роликов, рейки и др.) или
обеспечивается физико-механическими свойствами материала объекта
обработки.
Скоростной режим автоматизированных машин, применяемых для
шитья по различным контурам, обычно лимитируется динамическими
нагрузками, возникающими в исполнительных механизмах перемещения
объекта обработки. В условиях больших скоростей и ускорений,
возникающих при работе машин, преобладающее значение имеют
инерционные нагрузки. При этом основные динамические характеристики
объекта обработки и связанных с ним подвижных элементов системы для его
перемещения могут быть достаточно полно определены кинематическими
характеристиками, зависящими от способа перемещения объекта обработки
и фундаментально связанными с параметрами контура. Сравнительный
анализ характеристик движения объекта контурной обработки позволит
выбрать рациональный способ его перемещения с учетом минимизации
динамических нагрузок. Это является одним из основных условий для
выбора структуры и конструкции систем, осуществляющей перемещение
объекта обработки.
При создании машины стремятся к минимизации значений ки-
нетической энергии движущегося объекта обработки и мощности,
необходимой для его перемещения, в первую очередь — их экстремальных
значений. Эти динамические показатели определяют характеристики систем
управления, массы и габариты их подвижных частей, нагрузки на звенья,
давления в кинематических парах, точность, надежность и долговечность
систем для перемещения объектов обработки и всей машины в целом. В
228
автоматизированных машинах для контурной обработки это тем более
важно, что в них для создания движения инструмента в зоне воздействия его
на объект обработки механическая энергия зачастую передается через
сложные кинематические цепи, имеющие неуравновешенную структуру и
звенья которых обладают существенной массой.
В предпроектных исследованиях, когда неизвестна конструкция
системы для перемещения объекта контурной обработки, предварительные
данные о ее динамике могут быть оценены значениями кинематических
характеристик объекта обработки в зависимости от требований к способу
его перемещения и формы контура. Знания кинематических характеристик
позволят провести сравнительный динамический анализ различных
способов перемещения объектов обработки для контуров, различающихся
формами и размерами.
Сравнительный анализ может быть проведен из условия, что для всех
способов перемещения берется один и тот же объект массой т, равномерно
распределенной по площади прямоугольника, в который вписан контур. При
этом центр масс объекта обработки совпадает с геометрическим центром 5
прямоугольника. Между габаритами контура и массой приспособления,
служащего для закрепления объекта обработки, имеется достаточно тесная
корреляционная связь, близкая к функциональной. С центром 5 совместим
также центр масс подвижной части системы для закрепления и перемещения
объекта обработки.
Динамически любое движение твердого тела рассматривается
состоящим из движения центра масс и движения относительно центра масс.
В практических конструктивных решениях при контурной обработке
сложное движение обычно реализуется путем разложения его на
простейшие составляющие по осям координат. В такой постановке и в
условиях идеальных связей динамика процесса перемещения может быть
рассмотрена по принципу суперпозиции, с условием независимости привода
229
по каждой из составляющих. Для плоской системы, имеющей три степени
свободы, при определении динамических составляющих по осям координат
воспользуемся уравнениями движения тела без учета сил сопротивления и
сил, имеющих потенциал
тх = Рх; ту=Ру; Js(p=M д0)
где х, у, ср — координаты, определяющие положение перемещаю-
щегося тела; Рх, Pv, М — составляющие сил по соответствующим
координатам (каналам) и момент сил; т — масса, сосредоточенная в точке S
- центре масс; Js — момент инерции относительно точки S перемещаемого
тела.
Кинетическая энергия движущегося тела Е = + у*) + ’2 j.
Составляющие мощности по соответствующим каналам будут
\х = Рхх; Ny-Pyy: (6.11)
Как видно из рассмотренных конструкций и принципов действия
механизмов, они обеспечивают поступательное или сложное плоское
движение объектов контурной обработки. Во втором случае можно выделить
два способа перемещения: с постоянной и произвольной ориентацией
нормали профиля контура относительно неподвижной системы координат.
Введем соответствующие обозначения способов перемещения: А —
поступательное (осуществляется в вышивальном полуавтомате); Б —
сложное с постоянной ориентацией нормали (центроидные механизмы); В
— сложное с произвольной ориентацией нормали (короткошовные
цикловые машины).
230
В случаях А и Б при заданном способе подачи по контуру (не-
прерывная или стартстопная) кинематические характеристики движения
объекта обработки не зависят от параметров механизмов, осуществляющих
перемещение. При поступательном перемещении А все точки тела имеют
одинаковые скорости и ускорения. В случае Б движение объекта обработки
при любой конструкции механизма может быть представлено как вращение
его относительно центра кривизны контура и смещение этого центра по эво-
люте контура.
В способе В кинематические характеристики в значительной степени
зависят от структуры и конструкции механизма перемещения объекта
обработки, так как параметры таких механизмов входят в расчетные
формулы для определения кинематических характеристик. В легкой
промышленности способ В наиболее широко реализуется в механизмах, в
которых сложное движение изделия под инструментом получается за счет
поворота его относительно полюса е, смещающегося по прямолинейной
направляющей.
Сравнительный динамический анализ для различных систем и
режимов их работы целесообразно проводить по безразмерным
относительным величинам, которые называют критериями (коэф-
фициентами) качества системы. В качестве сравнительных относительных
величин следует выбирать коэффициенты: максимальной кинетической
энергии, которой обладает движущийся объект обработки (Ке), и
максимальной суммарной мощности, необходимой для его перемещения
(К#). В качестве стандарта выбраны показатели способа А Тогда
коэффициенты максимальной кинетической энергии для различных
способов перемещения можно представить:
231
Але-1;
Апа.х
^2 “Л
где Х2=(а2+Ь2)/12; а и b — стороны прямоугольника, в который вписан
контур; хБ. уБ,хв>Ув — составляющие по осям координат производных по
времени от перемещения центра массы изделия для способов Б и В; фБ,фБ,
фв,фв,— производные по времени от угла поворота объекта обработки для
способов Б и В.
Соответственно коэффициенты максимальной мощности будут
Ала-1;
К , = А ^тах = *Б*Б । + । УбУб । + । l)max .
NA (l*4*4 ЖЪкХах
max
(613)
Л Втах _ (| 'Х В±В I I УвУв I + I Ув»>В l)max .
NA (>ХАХА l + IZ-txJmax
max
Если при определении коэффициентов максимальной мощности по
каналам в качестве стандарта принять мощность по координате х, то для
соответствующих способов перемещения имеем:
А/хА 15 KfyN (j’/.h )тах ; к, N = Лй<Мта.х
(*/ */ )тах (*/*/)та\
(f-А, Б, В). (6.14)
232
Аналогично для коэффициентов максимальной кинетической энергии
по каналам:
V тах 3 2 2
K*£=l; ^E=2k_; (6.15)
jf. max х/тах
Индексы А, Б, В, х, у, ср обозначают соответствующие способы
движения и координаты. Представленные зависимости приемлемы для
случаев непрерывной и стартстопной подач.
При динамических расчетах механизмов и систем для сложного
перемещения деталей и изделий необходимо учитывать силы инерции,
определяемые кинематическими характеристиками движения объекта
контурной обработки и связанных с ним подвижных элементов. В период
проектирования эти характеристики могут быть определены исходя из
формы контура, по которому осуществляется обработка, и скорости
относительного перемещения инструмента вдоль контура. Соединение
деталей нитками обычно осуществляется в стартстопном режиме, когда на
каждом шаге происходит выстой объекта обработки. При этом
относительная скорость, направленная по касательной к контуру, будет
функцией времени о(т) на каждом стежке, причем tH< т <tK, где tn и tK -
моменты соответственно начала и окончания перемещения при выполнении
каждого стежка, т - текущее время в пределах одного стежка.
Для швейных машин характерен синусоидальный режим
где Т - период перемещения объекта обработки на один шаг подачи £.
Интеграл и производная от п(т) по времени дадут соответственно закон
относительного движения объекта и инструмента $(т) и ускорение вдоль
контура Л (т);
233
(6.17)
Если контур, по которому осуществляется обработка, задан
зависимостью у(х), то его параметрическое представление в функции длины
контура L можно выразить с помощью уравнения
которое можно представить в виде:
dx dL / dr
dr
(6 18)
dx
Индекс x обозначает дифференцирование по х. Очевидно, — = оЛ.
аналогично » кроме того — = t>(r), где vx и vy - составляющие
di у dx
скоростей объекта обработки соответственно по осям х и у при
поступательном перемещении. Тогда
(6.19)
и так как — = О.— то t>v = и(г)}\
dr dx dr y *
Составляющие ускорений
Если контур строчки описывается сопряженными отрезками
прямых и дугами окружностей, то формулы для определения
кинематических характеристик упрощаются. Составляющие для
перемещений на прямолинейном участке
234
*(r) = xk + s(r)cos0: = yk + ,
(6.20)
xK, yK — координаты начальной точки участка; 0 — угол наклона
участка к горизонтальной оси.
Дифференцированием по т можно определить составляющие
ускорения:
Ах. . = ^(T)cos6>- А = ?l(r)sin0;
(6.21)
На отрезке контура, описанном дугой окружности радиусом R,
формулы примут вид:
составляющие перемещений
х(т) = кх + tfcos-^-;
S(r)
У(х) = Л\+Л81П-^-,
А
где Кх, Ку — координаты центра окружности радиуса R;
для составляющие ускорений:
Л 4 • D2(r) *(т)
А(г) - -Л(т)51П-у-—F"cos~y;
(6.22)
. 4 S(r) . s(t)
АуМ = -^(t)COS-^—
Полное ускорение будет А = ^Ах + А?.
При стартстопном режиме ускорения достигают значительных
величин, что обусловливает большие силы инерции. Значение ускорений
зависит от периода Т перемещения деталей. Из приведенных формул видно,
что с увеличением Т происходит уменьшение А. Поэтому для снижения сил
инерции следует стремиться к уменьшению периода
6.6.2. Зигзаг-машины
235
Среди специальных швейных машин большое распространение имеют
машины, в которых игла, кроме прокола материала, еще отклоняется поперек
строчки. Сочетанием отклонения иглы и перемещения материала вдоль
строчки можно получить стежки, образующие зигзагообразную строчку.
Подобные строчки широко используются в швейной, швейно-трикотажной,
обувной и других отраслях промышленности.
Образование зигзагообразной строчки (рис. 6.31,а) происходит
следующим образом: игла делает первый прокол и при подъеме из крайнего
нижнего положения образует из нитки петлю, которую носик челнока
захватывает и обводит вокруг шпуледержателя.
а б в
Рис. 6.31. Виды зигзагообразных строчек: а - простая, б, в - сложные.
Игла после выхода из материала отклоняется на величину Ги, рейка
подает материал на длину стежка Гм. Затем игла делает второй прокол и при
выходе из материала отклоняется в обратную сторону, материал вновь
перемещается на длину стежка, после этого процесс повторяется. При
постоянных величинах отклонения иглы Ги длины стежка получается
простая зигзагообразная строчка (рис. 6.31, а). Если в процессе выполнения
строчки, величины tM и Ги изменяются, образуется сложная .В этом случае в
машине, кроме механизма отклонения иглы, имеется устройство,
управляющее величиной отклонения иглы и подачи материала.
236
Схемы и конструкции механизмов отклонения иглы весьма
разнообразны; однако по принципу работы наиболее распространены
механизмы двух типов (рис. 6.31): а - маятниковые и б - рамочные.
В маятниковых механизмах (рис. 6.31,6) игла отклоняется в плоскости,
параллельной плоскости вращения челнока, и поэтому при изменении
величины отклонения иглы расстояние А между иглой и носиком челнока
не изменяется. С другой стороны, в маятниковых механизмах игла в крайних
положениях входит в материал под некоторым углом, что ограничивает
применение подобных механизмов. Например, они не применимы в
машинах для пришивки пуговиц с подпуговицей. Маятниковые механизмы
используются в машинах, где по характеру выполняемых операций
требуется частое изменение величины отклонения иглы в сравнительно
больших пределах.
Рамочные механизмы могут быть поворотными, когда рамка
поворачивается относительно вертикальной оси, и коромыслово-ползунные,
когда рамка, закрепленная на ползуне, движется поступательно вместе с ним
в плоскости, параллельной плоскости вращения челнока. В рамочных
механизмах игла входит в материал вертикально, что является необходимым
условием, например при пришивании пуговиц.
В поворотных рамочных механизмах (рис.6.31,в) при изменении
величины /и меняется расстояние между иглой и челноком, что может
потребовать переналадки механизма иглы. При этом вертикальные
перемещения игловодителя с иглой осуществляется кривошипно-ползунным
механизмом с переменным дезаксиалом, зависящем от величины отклонения
иглы. В крайних нижних положениях иглы при правом и левом проколах,
кривошип и игла занимают различны положения.
В применяемых зигзаг машинах используются различные системы
Управления отклонением иглы: механические (кулачковые) и компьютерные.
237
На рис. 6.32 изображен механизм отклонения иглы с помощью 3-х
центрового кулачка маятникового типа.
Рис. 6.32. Конструктивная схемы механизма отклонения иглы машины.
Горизонтальное отклонение в поперечном направлении строчки игла
12 получает следующим образом. От главного вала 1 через винтовые
шестерни 2 и 3 вращение передается трехцентровому кулачку 4.
закрепленному на одном валу с шестерней 3. Кулачок 4 взаимодействует с
вилкой шатуна 7, вторая головка которого надевается на шарнирную
эксцентричную шпильку 11. На шатуне 7 шарнирно закреплен ползун 6,
который входит в паз рычага 5 регулятора величины отклонения иглы.
Рычаг 5 шарнирно закреплен в крышке корпуса машины. При вращении
трехцентрового кулачка 4 шатун 7 совершает колебательные движения.
238
Если его вилка опускается, то ползун 6 перемещает шатун 7 вправо от
работающего, рамка 15 поворачивается на оси 16 против часовой стрелки, и
лгла 12 делает правый прокол. При обратном движении вилки игла
перемещается влево. Вертикальное асцилирующее движение игла 12
получает с помощью кривошипно-ползунного механизма от главного вала 1
через передаточную кинематическую цепь — звенья: 10, 9, 8, 11, 13,14.
Профилирование трехцентрового кулачка.
Трехцентровый кулачок является ведущим звеном механизма
отклонения иглы в поперечном направлении строчки. Его профиль (рис.
6.33) должен удовлетворять следующим требованиям, обусловленным
особенностями работы механизма отклонения иглы:
- кулачок должен обеспечивать выстой механизма отклонения в
период нахождения иглы в материале, т.е. обеспечивать заданный
угол (Pk=—
i
где (ри - угол поворота главного вала, соответствующий периоду
нахождения иглы в материале (он определяется по циклограмме работы
механизма иглы);
(pk - угол поворота трехцентрового кулачка, соответствующий (ри;
i - передаточное отношение между главным валом и валом кулачка;
- кулачок должен обеспечивать такое же отклонение рамки
игловодителя, как и кривошипный механизм с радиусом кривошипа
р. Радиус р определяется при проектировании механизма
отклонения иглы;
- кулачок должен состоять из сопряженных цилиндрических
поверхностей однозначной кривизны. Его профиль описывается
четырьмя сопряженным радиусами;
239
- расстояние а между двумя любыми параллельными касательными к
профилю кулачка должно быть постоянно. Размер ач равный
ширине зева вилки 3, выбирается конструктивно.
Рис. 6.33. Профилирование трехцентрового кулачка.
Радиусы гх, г2, гз ’ г4 ’ описывающие профиль кулачка, определяют из
уравнений:
г^г2=а .
>
2~г'=р ; (6.23)
г3+г^а .
Используя найденные радиусы, можно построить профиль кулачка.
Через выбранный полюс А проводят две прямые под углом <рк друг к
другу, а из точки А между полученными лучами - дуги радиусами и г2
От конца радиуса г2 откладывают радиус г3, получая точки В и С. Из этих
точек проводят сопряженные дуги радиусами г3 и г4. Если построенный
профиль не удовлетворяет изложенным ранее требованиям (это может
240
Произойти при ошибках в расчетах или построениях), профилирование
следует повторить.
Зигзаг машины с компьютерным управлением.
Швейные зигзаг машины челночной строчки с электронным
управлением применяются при выполнении различных декоративных и
соединительных строчек. Наличие компьютерного программного
управления позволяют создавать десятки конфигураций и размеров
зигзагообразных строчек (рис. 6.34).
Рис. 6.34. Электронная система управления зигзаг-машины КМ-2070 для
выполнения различных видов зигзагообразных строчек:
а - виды строчек; б - панель управления;
в - пример настройки системы управления.
241
Для соединения деталей заготовок обуви, пришивания тесьмы и
кружев, подшивания низа подкладки верхней одежды, стяжки бортовой
подкладки, обработки воротников, манжет и других операций.
Основные механизмы зигзаг машин с компьютерным управлением
имеют конструкции, схожие с зигзаг машинами, имеющими механическое
управление. Однако электронное управление позволяет в большом объеме
варьировать законами подачи материала и отклонения иглы. Это позволяет
оперативно создавать более сложные конфигурации элементов
зигзагообразных строчек, чем при механическом управлении и значительно
расширять их ассортимент.
Рассмотрим конструкцию и принцип действия основных систем
управления и механизмов зигзаг - машины КМ-2070 фирмы SanStar.
Машина предназначена для выполнения зигзагообразных строчек различных
размеров и конфигураций (рис. 6.34,а). В таблице приведены названия,
номера узоров и их форм, показанных на рис. 6.34,а.
Таблица 6.1
Номер узора Название узора
1 Прямая линия
2 2-х укольный зигзаг
3 3-х укольный 2-х шаговый зигзаг
4 4-х укольный 3-х шаговый зигзаг
5 Узор левого гребешка 1 (24 стежка)
2 (12 стежков)
3 (24 стежка)
4 (24 стежка)
6 Узор правого гребешка 1 (24 стежка)
2 (12 стежков)
3 (24 стежка)
242
г—— 4 (24 стежка)
7 Левый глухой узор глухой
L-образный
8 Правый глухой узор глухой
L-образный
Последовательность настройки машины КМ-2070 с компьютерным
управлением для выполнения различных видов строчек.
Электронная система машины осуществляет ее работу по
управляющей программе, в которой записаны цикл работы механизмов и
устройств для выполнения строчек. Работа на машинах с компьютерным
управлением требует определенной подготовки, связанной с заданием
программы управления, а также контроль работы через дисплей или с
помощью звуковых сигналов, индикаторов. Программа может быть введена
вручную с клавиатуры на панели управления или набором на компьютере с
использованием специального программного обеспечения. Специальное
программное обеспечение содержит геометрическую и технологическую
информацию. Технологическая информация обеспечивает определенный
цикл работы машины, а геометрическая характеризует параметры шва и
строчки, размеры рабочих органов, их взаимное положение в пространстве.
Управление работой машины осуществляется с панели управления
(рис. 6. 34,6), пульт которой имеет следующие клавиши:
1 .-шитья по прямой:
4. 2.-2-Х укольного зигзага;
5. З.-З-х укольного зигзага;
6. 4.-4-х укольного зигзага;
7. 5.-левого «гребешка» ;
8. 6.-правого «гребешка»;
9. 7.-левого «слепого» зигзага;
10.8.-правого «слепого» зигзага;
243
11.9 .-используемого образца зигзага;
12. 10.-скоростью управления машины,
13. 11.-обрезки нитки;
14. 12.-поднятия/опускания прижимной лапки;
15. 13.-верхнего/нижнего останова иглы;
16. 14.-уплотнение окончания стежка;
17. 15.-уплотнения начала стежка;
18. 16.-задания количества стежков;
19. 17.-ширины зигзага;
20. 18.-осевой линии строчки;
21. 19.-левого/правого останова иглы;
22. 20,-индикатора установки функции;
23. 21.-установки половины стежка;
24. 22.-индикатора контроля параметров операции; номера узора и
формы, ширина зигзага и др.;
О Лампочка индикатора.
На рис. 6.34,в приведен пример настройки электронной системы
управления для выполнения узоров - левого «гребешка» .
Последовательность настройки при выполнения левого «гребешка»
(рис. 6.34,в). *
1. Нажмите клавишу 5 левого «гребешка» на панели управления
машиной.
- лампа индикатора левого «гребешка» загорается;
- одновременно на индикаторе появляется номер узора и формы;
- через некоторое время появляется ширина зигзага, 8,0.
2. Нажмите клавишу 20 для того, чтобы изменить номер формы.
- дисплей ширины зигзага будет мигать;
3. Нажмите клавишу L5 ).
244
- на индикаторе появятся номера узора и формы.
4. Измените номер формы, используя( + ) и ( -
5. Нажмите клавишу \20 ) , когда закончится изменение номера
формы.
- на индикаторе появится ширина зигзага
6. Можно начинать шитье нажатием на педаль.
В случае настройки машины на шитье правых узоров «глухого» и
«гребешка» последовательность операций настройки не меняется.
Последовательность настройки при выполнении левого «глухого»
узора (рис. 6.32).
1. Нажмите клавишу СЕ^ левого «глухого» узора на панели
управления машины.
- лампа индикатора левого «глухого» узора загорается;
- одновременно на индикаторе появляется номер узора и формы;
- через некоторое время появится ширина зигзага 8,0
2. Нажмите клавишу для того, чтобы установить номер формы
левого «глухого» узора.
- дисплей ширины зигзага будет мигать.
3. Нажмите клавишу (V)
- на индикаторе появится номер узора и формы.
4. Измените номер формы, например используя(^+^) и
5. Нажмите клавишу > когда закончится изменение номера
формы:
- на индикаторе появится ширина зигзага.
6. Можно начинать шитье нажатием на педаль.
Как видно из приведенных примеров, последовательность настройки
для выполнения различных узоров, приведенных на рис. 6.32,а, практически
245
одинакова. Это позволяет достаточно быстро оператору получить навыки
настройки.
Рассмотрим конструкцию двух механизмов машины SanStar,
определяющих рисунок получаемой зигзагообразной строчки. Их
синхронизация обеспечения заданного совместного движения осуществлена
за счёт управления и согласования потоков энергии на базе электронной
синергетики, а не путем замыкания многомассных кинематических цепей с
жесткими передаточными отношениями.
Механизм отклонения иглы (рис. 6.35).
Рис. 6.35. Механизмы нитеподатчика и отклонения иглы
с поступательно движущейся рамкой.
В машине применен коромысло-ползунный механизм отклонения
рамки 7, в направляющих которой перемещается игловодитель 5 с иглой 4.
246
Механизм имеет два привода. Вертикальное осциллирующее перемещение
игла получает от главного вала 12, отклонение поперек строчки - от
шагового двигателя 2. Рамка 7, в направляющих которой перемещается
игловодитель 5 с иглой 4. закреплена на ползуне /7, получающем по
заданной программе движение от качающегося кулисного рычага /. В свою
очередь рычаг 1 приводится в движение от шагового двигателя 2, на валу
которого закреплено коромысло 3, находящееся в зацеплении с вилкой
рычага 7, шарнирно соединенного с шатуном 14. Закон поворота шагового
двигателя 2 и коромысла 3 запрограммирован в соответствии с рисунком
выполняемой строчки. Вследствие этого игла 4 получает отклонение
поперек строчки в соответствии с программой, заложенной в системе
управления шаговым двигателем. Величина отклонения может изменяться в
процессе выполнения зигзага. При этом ось иглы постоянно остается
перпендикулярной горизонтальной плоскости.
Вертикальные осциллирующие движения игловодитель 5 с иглой 4
получает от главного вала 12, на котором закреплен кривошип 9.
преобразующий вращательное движение вала 72 с помощью шатуна 10 в
поступательное перемещение игловодителя с иглой 4. Для предотвращения
отклонения оси иголоводителя от вертикали предусмотрена направляющая 6.
Механизм перемещения материала (рис. 6.36).
247
Рис. 6.36. Механизм перемещения материала и прижимной лапки.
Сложный зигзаг получается за счет сложения запрограммированных
движений перемещения материала и отклонения иглы. Материал
продвигается на величину стежка после каждого укола иглы, или остается
неподвижным, если это требуется по рисунку строчки. Материал
продвигается на шаг обработки (шаг строчки) зубчатой рейкой 17,
перемещение которой складывается из двух движений - по горизонтали и по
вертикали. Поэтому рейка двигается по овальной траектории. При этом
рейка 17 перемещает материал тогда, когда она находится над уровнем
игольной пластины и сцепляется с материалом.
Сложное перемещение рейка получает от двух кинематических цепей
и цепи подъема цепи продольного перемещения.
Цепь подъема состоит из кривошипа подъема /5, закрепленного на
валу 7 и вращающегося вместе с валом 7, а так же шатуна 14, шарнирно
соединенным с рычагом 16, на котором закреплена рейка 17. Вал 7 получает
248
вращение от главного вала с помощью шкива 5. Вертикальные перемещения
рейки имеют практически постоянную амплитуду.
Цепь продольного перемещения рейки 17 имеет более сложную
структуру, чем цепь ее подъема. Величина продольного перемещения рейки
зависит от рисунка строчки и может изменяться от стежка к стежку. Такое
изменение шага перемещения рейки задается программой, управляющей
работой шагового двигателя 7. Запрограммированное вращение шкива 2
шагового двигателя 1 передается посредством зубчатого ремня 3 на шкив 4,
на одной оси с которым закреплено коромысло 6. Далее с помощью шатуна
S, шарнирно соединенном с коромыслами 6 и 10, происходит поворот рамки
72, имеющей направляющие пазы. В этих пазах находятся сухари, шарнирно
соединенные с передней головкой трехголовочного шатуна 13, средняя
головка шатуна 13 шарнирно соединена с шатуном 11, получающим
движение от эксцентрика 9, сидящим на валу 7. Третья головка шатуна 13
шарнирно соединена с коромыслом 27, закрепленном на валу 19
продольного перемещение рейки. На этом же валу закреплена рамка 20,
совершающая возвратно-поворотные движения. Рейка 77 закреплена на
рычаге 16, движение которого обеспечивает продольное перемещение
рейки.
Изменение величины продольного перемещения рейки 77, а
следовательно - шага обработки - в процессе выполнения строчки зависит
от положения осей направляющих пазов поворотной рамки 72. Это
изменение осуществляется в соответствии с программой, по которой
работает шаговый двигатель 7, обеспечивающий поворотные движения
рамки 72. Вследствие этого изменяется величина осевого перемещения
трехголовочного шатуна 13, изменяется угол поворота коромысла 27 и
рамки 20, а следовательно и шаг строчки.
249
Лапка 18 служит для прижатия материала к рейке /7, чтобы создать
сцепление между рейкой и материалом. Силу прижатия регулируют гайкой
23 изменяющей силу пружины 22,
6.6.3. Швейные машины для обтачивания деталей сложной
конфигурации и поузловой обработки
Для обтачивания по краю деталей или композиции сложной
конфигурации в швейных изделиях предназначена серия швейных
полуавтоматов, осуществляющих поузловые операции при изготовлении
сборочных единиц одежды: манжет для сорочек, воротников, карманов с
клапаном и без и т. д. Такие машины могут быть отнесены к группе
швейных полуавтоматов, осуществляющих поузловые операции при
изготовлении целых сборочных единиц одежды: манжет сорочек,
воротников, карманов с клапаном или без и т. д. При этом контуры строчек
и их размеры определяют конфигурацию и конструкцию кассеты, в которых
закрепляются объекты обработки.
В машинах приведенной структуры основным рабочим органом,
перемещающим объект обработки, является центроидный однопрограммый
механизм, который работает по принципу обкатывания шаблона без
проскальзывания относительно транспортирующего его ролика или
зубчатого колеса. Эти механизмы нашли применение во многих швейных
машинах. Профиль зубчатых копиров, особенно для крупных деталей
сложной формы шаблона, совпадает с контуром, по которому идет
обработка, или эквидистантен ему. Такое совпадение возможно, если
нормаль к профилю шаблона, перемещающегося относительно транспор-
тирующего органа, в точке контакта изделия с обрабатывающим
инструментом, будет оставаться всегда одинаково ориентированой
относительно неподвижной системы координат.
250
Из достоинств центроидных механизмов можно отметить следующие:
обеспечивается достаточная точность обработки, не происходит накопление
погрешности в процессе обработки, погрешность шага строчки не приводит
к погрешности формы контура, привод подачи не требует переналадки при
переходе на обработку контура другой формы (сменяется лишь шаблон).
Недостатками механизмов являются возникновение больших инерционных
нагрузок при обработке участков контуров с малой кривизной; сложность
изготовления зубчатых копиров, особенно для крупных деталей и деталей
сложной формы; не обеспечивается ростовочный ассортимент.
На рис. 6.37, а изображена кинематичекая схема центроидного
однопрограммного механизма для перемещения композиции деталей М,
закрепленной в кассете и обтачиваемой иглой 1 по заданному контуру.
Рис. 6.37. Центроидный однопрограммный механизм перемещения
композиции деталей, а. кинематическая схема: и - игла,
1 - копир, 3 -ведущий ролик, 4 - прижимной ролик,
5 - пружина, 6 - кассета с объектом обработки
б. расчетная схема для кинетостатического анализа движения кассеты:
1 - копир 2 - основание устройства, 3 - ведущий ролик.
251
На замкнутом копире 1, выполненном по форме строчки, закреплена
кассета 6 с объектом обработки. Копир 1 получает движение по основанию 2
от ведущего ролика 3, который входит в зацепление с наружной
поверхностью копира . Ролик 4 с помощью пружины 5 обеспечивает прижим
копира 1 к ведущему ролику 3. При движении копира 1 по поверхности
стола прижимной и ведущий ролики должны удерживать копир в таком
положении, при котором касательная к профилю копира, проведенная через
точку контакта копира с роликом, всегда имеет одно направление. При этом
на нормали к профилю копира в этой точке контакта копира и ведущего
ролика всегда будут лежать оси ведущего и прижимного роликов, а так же
иглы. Копир 1 жестко скреплён с кассетой , в которой находится
обрабатываемая композиция деталей. В таких условиях игла И, будет
выполнять строчку, совпадающую с профилем копира или эквидистантную к
нему.
Источником возникновения неревномерности давления копира на
прижимной ролик являются инерционные нагрузки, возникающие при
перемещении копира с ускорениями на криволинейных участках. Они
определяют мощность, необходимую для транспортирования изделия, и
параметры элементов, обеспечивающих надежное прижатие кассеты к
транспортирующему ролику.
На рис. 6.37, б показана расчетная схема для кинетостатического
анализа взаимодействия транспортирующего ролика 3 и копира 1. В
процессе движения система транспортирующего и прижимного роликов 3 и
4 должна обеспечивать такое положение копира и детали, чтобы ось у
проходящая через оси роликов 3 и 4, была всегда нормальна к
обрабатываемому контуру. При этом, пренебрегая трением на осях роликов
и в паре ролики — кассета, сумму моментов относительно точки к
контакта прижимного ролика и кассеты можно записать
252
Ми + Р$уот + Р}ихот + Th, -FH = O,
(6.24)
где Ми = -Jке — момент сил инерции; JK — момент инерции
кассеты относительно точки к ;Е — угловое ускорение кассеты;
Рх = тах , Р}и = -тау - составляющие по осям координат силы
инерции, приложенные в центре °т масс кассеты; m — масса кассеты;
— составляющие по осям координат ускорения центра масс кассеты;
T = pmg— сила трения кассеты о стол; д— коэффициент трения между
столом и кассетой; g — ускорение свободного падения; F —
транспортирующая сила; хот.уот — координаты центра масс кассеты; Н —
плечо силы F.
Если выполняется указанное выше требование, то силу F можно в
общем случае считать направленной параллельно оси х, и, решая равенство
относительно F, найдем
РхУот^от Th2_ (625)
н
Чтобы найти значения величин, входящих в это выражение,
рассмотрим отрезок контура, описанного функцией у = f(x) в прямоугольной
системе координат XOY(рис. 6.38).
253
Рис. 6.38. Отрезок контура, по которому происходит обтачивание
детали.
Если обеспечивать постоянное ориентирование контура, как
отмечалось выше, то его угловое перемещение и угловая скорость будут
определяться функциями
dy
(p-arctg — ,
dx
d(p dtp dx
co =--------.
dt dx dt
Угловое ускорение соответственно
_ _ d fdtp dx\_d1(p ГбйЛ2±d(pd2x
dt2 dt dtydxdtj dx dx dt2
где
254
dtp
dx
dx2
Тогда
d^y
d^P_=d_ dxj
dx2 dx Г^Л2
\dx J
+ -2^f
dx3 I dx) dx\dx2
(6.26)
Величины — и
dt dt2
могут быть найдены дифференцированием по
времени параметрически заданной функции контура. Однако обычно не
удается получить параметрическое задание контура. Воспользуемся
известной зависимостью s(x) и представим ее в виде
ds
dt
ds dt
dt dx
(6.27)
ds _
где s - перемещение вдоль контура; dt ~v - линейная скорость двиения
вдоль контура. Скорость v всегда задается и, как правило, для
центроидных механизмов является величиной постоянной.
Таким образом,
dx v
Тогда
255
d2x d 1
— = D -
л ,+iW
(6.28)
Определим ускорение центра масс кассеты От, для чего воспользуемся
подвижной системой координат х’у\ Если в начальный момент времени
положение центра тяжести определяется начальными координатами хо&,
Уооъ то с течением времени, когда к транспортирующему ролику подойдет
точка контура с координатами х, у, система координат займет положение
х ’у Тогда положение центра масс От будет определяться координатами х&,
Уск. Таким образом, изменение координат центра От в неподвижной системе
координат может быть представлено как изменение расстояния от точки От
до подвижных прямых х’х и у у Эти прямые поворачиваются в соответствии
с законом изменения угловой скорости, найденным ранее, и в каждый
момент времени пересекается в рассматриваемой точке контура е
координатами ху.
Уравнение оси у ’у, проходящей через точку х, у и наклоненной к оси х
под углом - будет
TZ I fr А
Г, =
Расстояние от точки От до прямой у’у
х# = хоо cos(p + yoo sin(p-Px,
т т т
где Рх = Y ,sin^.
У
При А у = 0 имеем Г, = xctgy + у. Тогда
Рх - (xctg<p + y)smcp = xcos<p + ^sin^.
256
После подстановки Рх в уравнение хог((р) получим закон изменения
координаты центра масс:
хо =(хоо -х№$(р+(уоо cp-y)sm(p .
т т т
Аналогично определяется координата
У о =~(хоо (p-xjsin +(уоо (р-у)ыыр.
т т т
Дифференцированием полученных функций для ХОх и Y(h можно
получить составляющие скорости и ускорения центра масс по осям
координат: dy.
Для прижатия копира к транспортирующему валику применяют
подпружиненный ролик, который, кроме того, компенсирует
неравномерность толщины копира и его перекосы в процессе работы. Таким
образом, копир имеет возможность уклоняться от строгой ориентации
нормали к профилю, т.е. получать дополнительную небольшую свободу
смещения за счет деформации пружины прижимного ролика. При этом
пружина должна иметь определенные характеристики, чтобы не допускать
значительного отклонения копира от заданного закона перемещения во
избежание возникновения недопустимых погрешностей обработки контура
и нарушения нормальных условий взаимодействия транспортирующего
ролика с копиром.
Если рассмотреть предельную задачу и считать, что пружина должна
иметь возможность погасить всю кинетическую энергию в любой момент
времени, то энергетический баланс может быть записан:
+ (6.29)
где vqt - скорость центра масс кассеты; Js - момент инерции кассеты
относительно оси, проходящей через центр масс; со - угловая скорость
кассеты; Ап - работа, расходуемая на деформацию пружины прижимного
ролика;
257
здесь 5 - податливость пружины; X - деформация пружины; Хо
предварительная затяжка пружины.
Решив уравнение относительно 5, найдем:
z(2X()t/) .
? 2 ’
fnVQT d
Задавшись значением X (выбирается из условия точности обработки
контура), можно подобрать размеры пружины прижимного ролика с
помощью зависимости:
S = 8D3n/(Gd4 ),
где G - модуль упругости второго рода; d - диаметр проволоки; D -
диаметр пружины; п - число витков.
Скорость Ислг центра масс равна:
т
где Ух и Уу - составляющие скорости У& по соответствующим осям
dx
координат х и у. При этом У =——, х0 = (хОо -t>cos + (у00 -y>sin .
dt т Т Т
Аналогично находится Vv.
6.6.4. Вышивальные и сборочные машины с компьютерным управлением
Механизмы с компьютерным управлением, осуществляющие
поступательные движения пошиваемых объектов обработки, нашли
применение в машинах для выполнения сложных строчек и вышивок с
большим числом стежков (в швейной промышленности - в первую очередь -
вышивальные машины-полуавтоматы, в обувной промышленности
полуавтоматы для соединения деталей верха обуви). Сущность
компьютерного программного управления в указанных операциях
258
заключается в представлении программ работы машины с учётом
специфики выполняемых операции: сложность и многообразие контуров, по
которым должны перемещаться обрабатывающие инструменты и
обрабатываемые объекты, надежность выполнения ниточных переплетений,
обеспечение внешнего вида строчек и швов., старт-стопный режим
движений и др.
Предварительно нужно выполнить расчет движений исполнительных
органов машины, исходя из заданной конфигурации обрабатываемого
контура, требуемой точности и установленных режимов обработки. Каждое
из этих движений обусловливается определенным числом элементарных
перемещений - шагов, причем величина элементарного шага зависит от
требуемой точности и берется обычно 0.3-0.5 от допуска на обработку
изделия.
Если необходимо переместить изделие на шаг обработки из точки А в
точку В, т.е. соответственно на Lx и Ly (рис. 6.39, а), то число элементарных
шагов представляющих эти два движения, получаются из соотношений
-Ly/а Ну, Ly/а нХ9
где а - элементарный шаг, Lx - проекция обрабатываемого размера на
ось х, Ly - проекция обрабатываемого размера на ось у.
Применяемые в швейном и обувном производствах полуавтоматы с
компютеным управлением осуществляют поступательное перемещение
изделий. В связи с этим, особенно для сложных контуров строчек, следует
учитывать что процесс стежкообразования может внести ограничения на
возможные направления перемещения. Это относится в первую очередь к
Цепным машинам. В челночных машинах, как уже отмечалось, так же
существуют зоны перемещения, движение в направлении которых может
привести к образованию неприемлемого переплетения в стежках.
259
13
Рис. 6.39. Полуавтомат для сборки заготовки верха обуви:
а - образование стежка L в двухкоординатном механизме
подачи объекта обработки; б - конструкция полуавтомата.
Кроме того, в машинах для шитья по коже, в которых применяются
иглы с фасонной заточкой, с изменением направления перемещения объекта
обработки при его поступательном движении изменяется угол наклона оси
прорези от прокола фасонной иглой, что ведет к изменению угла а наклона
оси стежка к линии строчки. Резкое изменение угла а может отразится на
внешнем виде строчки.
Значение угла а может быть оценено по зависимости
260
/sin ш \
a=arctg\—----- 1
v cosy/ / (630)
где у - угол наклона оси прорези от иглы к линии строчки в начале
шитья, k~t/d - отношение шага строчки t к диаметру нитки d. Для случая
выполнения строчки по дуге окружности радиусом R будет
у/ = (л-/4)+^ ±Лср ,
здесь Л (p = t!7&, фо - центральный угол, определяющий положение
рассматриваемого стежка на контуре строчки.
Принцип компьютерного управления перемещением объекта
обработки под иглой успешно реализуется в компьютеризированных
машинах различного назначения: цикловых, петельных, закрепочных,
пуговичных полуавтоматах, конструкции которых рассмотрены ранее.
Принцип независимого перемещения сшиваемых деталей по осям
координат х,у при их поступательном движении может быть показан на
примере конструкции и работы механизма перемещения объекта обработки
полуавтомата USM (Англия) (рис. 6.39, б).
Полуавтомат предназначен для сшивания плоских деталей верха обуви
при сборке заготовки. Детали заготовки верха обуви М укладываются и
закрепляются в кассете 72, которая может совершать движение
одновременно по направлениям осей х и у относительно швейной головки
13. В результате воспроизводится сложная траектория движения заготовки
М относительно неподвижной оси иглы швейной головки. Движение по оси
у сообщается кассете от двух шаговых электродвигателей / и 20 через
зубчатые передачи 2 и 27, реечные передачи 3 и 22. Рейки передач 3 и 22
жестко прикреплены к каретке 6, которая может перемещаться по
неподвижным направляющим 4 и 14 с помощью системы роликов 5, 8 и 15,
17. Вместе с кареткой 6 поступательное движение по оси у совершает
кассета 72 с материалом. Перемещение вдоль оси х сообщается кассете 72 от
шагового электродвигателя 79, установленного на каретке б, через зубчатую
261
передачу 18 и реечную передачу 9 и 10. Рейка 9 жестко связана с ползунами
11 и 16, скользящими по направляющей 7. Кассета 12 также жестко
связанная с ползунами И и 16, перемещается вместе с рейкой 9 вдоль оси х
Шестерни реечных передач 3 и 22 закреплены на одной оси 23.
Приведенная конструкция полуавтомата может быть использована и в
изготовлении швейных изделий. Например: пришивание карманов на
джинсах и других плоских наружных деталей. Эффект применениея
швейных машин с компьютерным управлением повышается с увеличением
числа стежков в выполняемом автоматически технологическом процессе.
Это относится в первую очередь к области вышывального производства,
особенно, если при этом на вышивальном комплексе по одной программе
могут работать параллельно несколько вышивальных устройств с
автоматической сменой ниток различных цветов в многоцветных рисунках,
что может обеспечивать современные мехатронные смистемы.
Вышивальное оборудование с компьютерным управлением выпускают
фирмы «Таджима», «Джуки», «Тоета», «Бразер» (Япония), ZSK (Германия),
«Барудан» (Чехия), «Визион» (Корея), «Хеппи», «Тупикал» (Китай) и др.
Парк машин имеет широкий диапазон параметров, характеризующих
ее память и размеры рабочей зоны: количество головок - от 1 до 30,
количество игл (ниток) - от 1 до 15, длины сторон полей обработки - от 400
до 1200 мм, скорость шитья - до 1500 ст/мин, память - до 2.5-3 млн.
стежков.
Конструкция швейного полуавтомата фирмы «Барудан».
На рис. 6.40 изображен двенадцатиголовочный многоигольный
вышивальный полуавтомат с компьтерным управлением фирмы «Барудан».
Вся конструкция смонтирована на станине 16, на которой расположены
сборный стол 9 и швейные машины 5. Бобины с игольными нитками
262
располагаются на нитевой подставке /. Электронная система полуавтомата
управляется блоком 4, визуальное наблюдение за качеством выполняемой
операции осуществляется по дисплею 3.
Рис. 6.40. Вышивальный многоголовочный полуавтомат фирмы Бардан
с электронным управлением.
Главной исполнительной частью вышивального полуавтомата
является швейная машина, на которой монтируются основные рабочие
органы, обеспечивающие образование строчки. Швейная машина, входящая
в состав многоголовочного, многоигольного вышивального полуавтомата,
как и другие швейные машины, имеют все основные механизмы: иглы,
челнока, подачи нитки, перемещения объекта обработки. Однако механизмы
иглы и перемещения объекта обработки в многоигольных, многоголовочных
машинах имеют значительно более сложную конструкцию.
263
На переднем конце главного вала находятся начальные звенья
механизмов: кривошип механизма иглы и кулачка нитеподатчика.
Сочлененные друг с другом механизмы иглы и подачи нитки, а также
прижимная лапка входят в многоигольную вышивальную головку 1,
закрепленную на переднем конце горизонтального рукава машины
(рис.6.41,а). Это позволяет сменять нитки различной расцветки в
соответствии с раскраской рисунка путем автоматического вывода в
рабочую зону механизма иглы с ниткой требуемого цвета. При этом каждая
игла при осциллирующих вертикальных движениях выполняет ту же
функцию, что и во всех челночных швейных машинах - подвести игольную
нитку к челноку для образования переплетения игольной и челночной
ниток. Вышивальная головка 1 базируется на поворотной турели 2, с
помощью которой автоматически заменяются нитки в рабочей зоне шитья в
многоцветных рисунках. Вышивальные головки получают движения своих
механизмов от главных валов 4, применяемых швейных машин.
Смена нитки на другой цвет происходит следующим образом (рис.
6.41 б). Игольный стержень 8, на котором закреплена игла, движется в
направляющей 9. Он прижимается пружинами 10 и 11 к выступу 12 поводка
3, совершающего возвратно-поступательные вертикальные движения с
помощью шатуна 2 и кривошипа 1. При движении вниз поводок 3
вдавливает иглу 7 в материал, при этом игла проходит в отверстие лапки 6,
прижатой пружинами 10 и И к материалу. После захвата петли игольной
нитки челноком, игла 7 поднимается вверх за поводком 3 под действием
распрямляющихся пружин. При этом ослабевает давление лапки на
материал, который перемещается на величину стежка. В дальнейшем
процесс повторяется.
Для смены нитки поворачивается турель 4, что приводит к
расцеплению игловодителя 8 и выступа 12 поводка 3. В соответствии с
необходимым цветом новой нитки турель поворачивают до совмещения
264
игловодителя (например) 8' или 8" - в зависимости от требуемого цвета
нитки).
В машинах с плоским расположением игл вместо поворота турели
применяется продольное перемещение блока игл.
Рис. 6.41. Швейная машина примененная в полуавтомате Барудан:
а - конструкция механизмов машины; б - механизм иглы;
в - машина с вышивальной головкой.
Важным этапом подготовки вышивального полуавтомата к работе
является заправка швейной головки нитками (рис.6.42).
Этот процесс для каждой иглы происходит в следующей
последовательности (номера этапов и позиций рисунка совпадают):
1. Устанавливают катушку с ниткой на нитевую подставку и конец
нитки протягивают сквозь направляющую трубку; удобнее при
этом использовать сжатый воздух.
2. Продевают нитку в щель тормозного направителя.
265
3. Протягивают нитку по правой стороне натяжного колеса и делают
полтора оборота по часовой стрелке, затем проводят нитку слева от
открытых нитенаправителей.
4. Протягивают нитку справа от механизма натяжения и делают
полтора оборота по часовой стрелке и продевают в натяжную
пружину.
5. Протягивают нитку сквозь верхний направитель.
6. Протягивают нитку сквозь средний направитель.
7. Протягивают нитку сквозь нижний направитель.
Рис. 6.42. Заправка нитки на вышивальной головке полуавтомата.
266
8. Протягивают нитку справа от нитеподатчика, затем сквозь
следующий направитель сзади наперед (как показано на рисунке
справа в квадрате).
9. Заправляют нитку в ушко нитеподатчика.
10. Сделав петлю, вновь заправляют нитку вниз сквозь предыдущий
направитель.
11. Протягивают нитку вниз и пропускают ее сквозь последний
нетенаправитель.
12.Вдевают нитку в ушко иглы и протягивают ее сквозь отверстие в
лапке.
Настройка и управление машиной производится с пульта (рис. 6.43).
Рис. 6.43. Панель управления работой компьютеризованного
вышивального полуавтомата.
Контроль выполнения операций наблюдается на дисплее. Клавиши на
пульте обозначают:
1. Клавиши меню (А-Е) соответствуют пиктограммам, изображенным
на экране.
267
2. Клавиша страницы выводит на экран общее число стежков, размер
рисунка, производительность, образец рисунка.
3. Клавиши включить/выключить (ON/OFF) - включают или
выключают питание.
4. Клавиша исходной позиции - устанавливает исходную позицию
рисунка.
5. Клавиши управления в виде стрел - устанавливают пяльцы под
иглой путем смещения их в направлениях, показанных стрелками.
6. Клавиши управления, которые открывают определенное меню
полуавтомата (сведены в табл. 6.2).
Таблица 6.2.
Скорость, открывает меню контроля скорости,
позволяя увеличить/'мснышпъ скорость шитья
Игла открывает меню для выбора иглы, с
помощью которой начнется вышивание
Обрейся, выполняет ручную обрезку нити на
всех активных швейных головках
Вручную, открывает меню для выполнения
специальных операций машины, таких как Зажим.
Обрезка н т.д.
Сеть, соединяет машины через центральным
компьютер, пересылает узоры и контролирует
продукцию
Чтение, переносит узоры с дискеты или внешних
устройств в память; открывает доступ к
сервисным программам дискеты.
Память, открывает Список Узоров и меню
Памяти; открывает досгуп к узорам в памяти
Замена, находит и меняет установленные в узоре
коды функций
Поплавок, перемешает машину через \зор. не
вышивая
Управление, переводит машину в режим
управления, чтобы начать шить
268
6.6.5. Короткошовные цикловые машины автоматического действия
В машинах указанного типа особую роль играет механизм,
осуществляющий перемещение объекта обработки под иглой при
образовании стежка по заданной программе в процессе выполнения
основного цикла технологической операции. Цикл состоит из
ограниченного, сравнительно небольшого числа стежков. Эти машины
применяются при изготовлении закрепок, пришивании фурнитуры, этикеток
и т. д. После окончании цикла главный вал машины автоматически
останавливается и вся структура машины приходит в исходное положение.
В качестве программоносителя в механизме перемещения объекта
обработки применяются как жесткие механические (кулачковые)
устройства, так и электронные системы управления. При выполнении
указанных операций механизм должен обеспечить взаимное перемещение
объекта обработки и иглы: вдоль оси платформы и поперёк соотвественно
— по осям координат X и У. Следует учитывать, что при этом игла в
период работы машины совершает вертикальные осциллирующие движения
По способу реализации программы перемещения объекта обработки
механизмы по структуре могут быть одно- и двухпрограммными. Для
перемещения объекта обработки в пространстве число программ может
быть больше.
Принцип обеспечения двухкоординатного взаимного движения
объекта обработки и иглы рассмотрим сначала на примере конструкции и
методов проектирования механизма с механической системой
автоматического управления (рис. 6.44, а). Механизм состоит из двух
кинематических цепей, обеспечивающих перемещение объекта обработки
вдоль и поперек платформы. Этот механизм по структуре относится к
двухпрограммным. На ведущем валу жестко закреплен червяк, находящийся
в зацеплении с червячным колесом, на одной оси с которым закреплен
269
дисковый двухсторонний пазовый кулачок. Во внутренний паз 1 кулачка
входит ролик Ь, ось которого закреплена в верхней части рычага-кулисы 2.
шарнирно присоединенного к корпусу машины. Нижнее плечо рычага
выполнено в виде направляющей, в которую входит ползун 5, связанный и
помощью вкладыша со стойкой, жестко соединенной с планкой 4 зажима
материала. На нижней стороне планки шарнирно закреплен ползун 5,
который входит в продольный паз рукава машины и служит для
направления планки при ее продольных перемещениях, сообщаемых ей от
внутреннего профильного паза 1 кулачка при помощи рычага 2.
Рис. 6.44. Схемы двухпрограммного механизма перемещения объекта
обработки в закрепочном швейном полуавтомате (а) и закрепки (б).
Поперечное перемещение планке зажима передается следующим
образом. В наружный паз 1 кулачка входит ролик В, шарнирно посаженный
на ось. закрепленную в верхней части углового рычага-регулятора II. Сам
рычаг-регулятор свободно сидит на оси, закрепленной в корпусе машины, и
270
под действием наружного паза кулачка совершает поворотные движения в
вертикальной плоскости относительно оси С. На втором плече рычага
регулятора, выполненного в виде регулировочного паза, жестко закреплена
ось шарового шарнира D. Нижнюю головку этого шатуна охватывает
шаровой шарнир Е коромысла, закрепленного на промежуточном валу IV.
На этом же валу закреплена кулиса V, цилиндрический конец которой
входит в цилиндрическое отверстие шарнирного пальца. Этот палец
размещен внутри ползуна VI и может поворачиваться относительно него
вместе с кулисой. Сам ползун смещается вдоль оси цилиндрического пальца
при перемещениях планки зажима, с которой он соединен шарнирно.
Кинематическая цепь, образованная звеньями 7-5, перемещает ось е
поворота звена 4 вдоль прямолинейной направляющей, положение которой
определяется осью у. Другая кинематическая цепь, состоящая из звеньев I-
VI, осуществляет поворот звена 4 вокруг оси е. Звенья II-IV принадлежат
пространственному четырехзвеннику, в котором можно изменять длину
ведущего звена.
Строчка, выполняемая с помощью указанного устройства, изображена
на рис. 6.44, б. Кинематический цикл механизма продолжатся в течение
поворота ведущего вала машины на угол 42 л. При проектировании
механизма кулачкового типа сначала устанавливается передаточное число
редуктора и циклограммы работы механизма, после чего вычисляются
перемещения точек звеньев 2 и II (рис. 6.45, а), а затем проводится
программирование системы управления работой машины - механической
(кулачок) или электронной, затем определяются наименьшие радиусы
кулачков и координаты их точек. В механической системе передаточные
числа обычно выбирают кратными числу стежков, необходимых для
выполнения операции. Наиболее часто применяют передаточные числа
/=42:1, реже /=20:1 и /=72:1.
271
Выявим изменения координат iv и 4, которые определяют профиль
паза I. Для выполнения прокола в точке °j ; на контуре строчки (рис. 6.45, а) ее
необходимо переместить в точку О. При этом ось е должна переместиться на
величину Ду = enej , а точка G, принадлежащая звеньям IV и 4 , и
расположенная в плоскости хОу - на величину Дх = G0Gj .
б
Рис. 6.45. Определение координат смещения ведущих точек зажима:
а- продольное перемещение; б - поперечное перемещение.
Перемещения точек е и G при перпендикулярных осях х и у составляют:
272
2 2
F =c-[b2 +(с+№)21 2 = y~ —
(6.31)
/ \ x j (c - b - Ay j)
Axj = -\c-b- Ay j }gyi4J =-—----;
c-Ayj
здесь b и с - расстояния соответственно от точки О до точек Go b eQ ;
х. и yj - координаты прокола Oj; y/4j - угол поворота звена 4.
Зная функцию Ayj и параметры передаточной кинематической цепи 5-3-
2, можно построить профиль паза I кулачка или создать электронную систему
управления обработки координаты У заданной строчки.
Аналогично может быть спрофилирован паз 1 кулачка или создана
система электронного управления отработки координаты X заданной строчки.
Для этого необходимо знать изменение угола поворота вала IV в
соответствии с рисунком строчки. Согласно рис. 6.45, б, будем иметь:
Ду .•
y:=arctg—где п - расстояние от оси вала IV до поверхности цилиндра
J h
ползуна VI в среднем положении механизма, Ах - боковое смещение точки G.
При проектировании механизма поперечного перемещения объекта
обработки, при котором определяется положение звена II, необходимо решать
пространственные задачи.
В процессе обработки изделия по сложному контуру необходимо
обеспечить требуемую точность позиционирования объекта обработки
относительно инструмента и других рабочих органов машин, участвующих в
технологическом процессе. Это, в свою очередь, обеспечит точность, качество
выполнения операции и надежность работы машины.
Точность воспроизведения механизмом заданной функции определяется
величиной суммарной погрешности элементов, составляющих механизм. Таким
образом, погрешность механизма может быть дифференцирована на
Погрешности его элементов. Отличие действительной функции,
273
воспроизводимой реальным механизмом, от заданной будет определяться
комбинацией функций, каждая из которых характеризует влияние
соответствующей элементарной ошибки. Вероятно, в каждой точке функции
/и((р) комбинация элементарных функций даст суммарную погрешность
^.(j=U2, 3, ...,m),
где ш - число рассматриваемых точек, в которых осуществляется
приближение
Каждая технологическая операция обработки изделия должна
выполняться с определенной точностью
ej (j=l, 2, 3, m),
поэтому отклонение действительной функции от заданной, или
суммарная погрешность механизма, должна удовлетворять соотношению
(6.32)
При проектировании механизма точность элементов выбирают с учетом
этого соотношения.
Следует учесть, что повышение точности изготовления ведет к
повышению стоимости оборудования и что интенсивность роста затрат с
повышением точности для различных элементов механизма неодинакова.
Поэтому целесообразно добиваться повышения точности механизма в
основном за счет снижения погрешности тех его элементов, для которых это
снижение вызовет минимальные затраты.
Таким образом, задача оценки точности механизмов в рассматриваемом
аспекте может быть сведена к отысканию оптимальных значений элементарных
допустимых погрешностей (i = 1,2, 3, ...п), обеспечивающих минимальную
сумму затрат на изготовление механизма и отвечающих соотношению (6.32).
Здесь п - число элементов, входящих в механизм и содержащих погрешность.
Для решения необходимо составить ограничения по каждой элементарной
погрешности:
274
[An™] z,f<[4maxJ (j = 1, 2, 3,..., n) (6.33)
в пределах допустимого минимального значения [д™1 до максимального
[4maJ для j.ro элемента, которые определяются условиями изготовления и
эксплуатации механизма. Неравенство (6.33) является дополнительным
условием для выбора оптимальных пределов изделия элементарных
погрешностей.
Если точностная математическая модель может быть представлена в
линейной форме, то суммарная погрешность в каждой из /и точек приближения
действительной и идеальной функций может быть записана в виде системы
равенств
^aijXj = ej ’
/-1
или с учетом условия (5.1), системой неравенств
, i = = = (6.34)
i~ 1
где a'j - передаточное число; xj - независимая переменная.
Условие (6.7) может быть представлено в виде двух систем:
xi — < Саппах]' (6.35)
Системы неравенств (6.34) и (6.35) можно привести к задаче
оптимального синтеза погрешностей, для чего необходимо представить
целевую функцию
s=iw,
Ж
где S - сумма приведенных затрат на изготовление механизма; /ре,; -
зависимость приведенных затрат от точности изготовления.
Рассмотрим задачу оптимизации точности механизма на примере выбора
оптимальной точности изготовления его элементов при условии полной
взаимозаменяемости. В качестве независимой переменной будет величина поля
275
допуска на размер элементов механизма. Произведение ауд, представляет
собой ошибку замыкающего звена от первичной ошибки , Введем
неотрицательные свободные переменные Zj и, используя систему (6.34).
получим систему неравенств
^aydi+Zj (6.36)
j=i
Так как независимыми переменными являются допуски на размер 6.
изменение которого происходит в ограниченном диапазоне, то условие (6.36)
запишется
^rinin — — ^rinax
где ^«min и <5/max - соответственно наименьший и наибольший допуски для
i-ro элемента. Этот интервал выбирается для каждого i.
Условие (6.36) даст следующие системы равенств:
— $imin + zm+l >
; (6.37)
zk > 0(к = 1,2,3,..., w + 2n).
Целевая минимизируемая функция может быть представлена в виде:
п и
S = к ~ -> min, или F = -> min, (6.38)
м Z=1
где к - постоянная составляющая затрат, не зависящая от ,
При выбранном диапазоне изменения ; коэффициент с‘ , целевой
функции может быть определен:
= Tz'max ~ Trittin
^zmax ~ ^/min
гДе Лтах и /min - значения ординат зависимости соответствующих
значениям <5/min и <5/тах .
276
Таким образом, имеем задачу, ограниченную системами условий (6.34) и
(6.35), состоящих из m+2n уравнений и содержащих m+Зп неизвестных с
минимизируемой функцией (6.38).
В качестве примера рассмотрим задачу отыскания оптимальных пределов
изменения ошибок размеров точности изготовления элементов механизма
продольного перемещения объекта обработки в машине для пришивки пуговиц.
Задача решается с учетом принятых ранее допущений.
На рис. 6.46, а показана схема механизма.
Рис. 6.46. Механизмы для перемещения пуговицы в машине
для пришивания фурнитуры.
Пуговица, закрепленная на ползуне 7, получает движение от кулачка 2, в
пазу которого перемещается ролик 3, принадлежащий кулисному рычагу 4. В
паз рычага вставлен сухарь 5, который с помощью цилиндрического пальца 6,
закрепленного на стержне ползуна 7, шарнирно соединен с ползуном. При
вращении кулачка 2 поворачивается кулисный рычаг 4, который с помощью
277
сухаря 5 смещает ползун в направляющих 7. Ось пальца 6 смещается по
прямой, параллельно оси направляющей ползуна 1.
Механизм обеспечивает перемещение пуговиц на расстояние t между
отверстиями в пуговице (рис. 6.46, б). Вследствие неточности изготовления
звеньев механизма пуговица будет иметь дополнительное смещение
(суммарную ошибку) 3^. относительно иглы, которое не должно превышать
величины зазора е между иглой и стенками отверстия в пуговице. В противном
случае игла не попадет в отверстие, и произойдет ее поломка. Так как механизм
должен обеспечивать два крайних положения пуговицы, то приближение будет
осуществляться в двух точках, т.е. т=2. Рассмотрим влияние на суммарную
ошибку положения следующих ошибок (рис.6.44, а): - радиуса профиля
кулачка 2, 32 - несоосности ролика 3 и пальца рычага 4, З3 - длины толкателя.
34 - положение оси пальца 6 относительно оси паза кулисы 4. Значение
суммарной ошибки должно удовлетворять неравенству:
(f= 1’2).
При этом = л/{е}±£{е}, где М{8} и ^{s} - математическое ожидание и
предельное отклонение 8 дляj-го положения.
Считая, что погрешность установки пуговицы компенсируется
самоцентрирующимся устройством и погрешность диаметр иглы несоизмерима
с погрешностями исследуемых размеров, математическое ожидание 8 можно
выразить:
M{e}=0.5(M{dn}-d„-\M{tn}-xn\+ad dd +ат 6Т ),
и п п п
где тп - номинальное значение расстояний между отверстиями в
пуговице; dn - диаметр отверстия; - диаметр иглы; M{rn}9M{dn}'
математические ожидания соответственно тп и dn ; Зт ,3d ,ат . ad -
П И П П
половины полей рассеивания и коэффициенты асимметрии распределения
соответственно тп и dn .
Измерение параметров пуговиц показало, что погрешности диаметра
отверстий и расстояния между ними подчиняются нормальному закону
распределения. Тогда предельное отклонение 8 можно записать:
^}=3g{£}= к\2 S] Tkfdf , (6.39)
V n n n n и и
где кт , kd , кт - коэффициенты рассеивания соответственно
п п и
погрешностей пуговиц и иглы.
В качестве ограничения нужно взять emin, т.е. emin = Л/{е}-Де}, приняв
при этом 6] = е2 = emi„ .
Тогда ограничения задачи запишутся
^°-5(M{dn}-du-\M{Tn}-Tn |+arf Sd +ат ёт ;-Зс{е}.
п п п п
Согласно условиям поставленной задачи выявления резервов точности
первоначальное условие (5.6) можно исключить. Задачу оптимизации точности
представим в виде:
(i= 1,2,3,4);
4
+ Zn+j ~ cmin (j~l>2),
4
F’ = —> min.
Поскольку ставится задача отыскания оптимальных резервов точности, то
за нижний предел изменения <5, ; взяты минимальные допуски на размер.
Значение Emin = 0,5.им. Передаточные числа (коэффициенты при ) определены
по двум крайним положениям пуговиц и из расчета, что ось кулисного рычага
поворачивается от среднего вертикального положения на одинаковый угол
вправо и влево.
После подстановки численных значений задача для механизма,
изображенного на рис. 6.44, а, будет иметь следующую систему ограничений:
278
279
> 0,4; <52 0,032; д3 > 0,4; > 0,36;
+ U2 +0,0349 д3 -0,0011 <54 < 0.5; (6 40)
Uj +U2 +0,0349^з -0,0011 <54 < 0,5
и целевую функцию
F' = -(1,25<5j +19.43<52 +1,25<53 +1.43<54 ) -э min.
Наиболее экономичными для рассматриваемого случая оказались
допуски (мм): ^=0,4; <52 =0,085; <53=0,45; <54 =0,4.
Ах
6.6.6. Автоматизированный электропривод швейных машин
Швейные машины, в том числе и общего назначения, должны
комплектоваться автоматизированными электроприводами с электронным
регулированием скорости, включая разгон и останов, главного вала машины в
заданном положении, а также управлением рядом вспомогательных операций
(обрезка ниток, подъем лапки, закрепление начала и конца строчки и т.д.).
Подобные приводы имеют одинаковый принцип действия.
Источником механической энергии, необходимой для приведения в
действие рабочих органов швейной машины 2, является асинхронный
электродвигатель 5 (рис. 6.47).
Для обеспечения регулирования рабочих скоростей швейной машины в
широком диапазоне, а так же для получения пониженной скорости, при
которой осуществляется автоматический останов в заданном положении,
используется ведущая фрикционная электромагнитная муфта 6. Вращающий
момент, развиваемый муфтой, зависит от величины тока, протекающего в ее
обмотке. Для торможения и автоматического останова в положении "игла
внизу" или "игла вверху" применяется фрикционная тормозная
электромагнитная муфта 7.
280
Рис А47 Автоматизированный электропривод швейных машин
Электродвигатель 5, муфты 6 и 7 представляют собой единый
электромашинный агрегат, управляемый электрическим преобразователем-
задатчиком 15 с помощью педали 14. Заданный оператором через педаль 14
скоростной режим обеспечивает замкнутая система управления ведущей и
тормозной муфтами с отрицательной обратной связью по частоте вращения
главного вала. Датчиком частоты вращения является тахогенератор 3,
устанавливаемый на главном валу швейной машины. Сигналы задания частоты
вращения и отрицательной обратной связи сравниваются в блоке сравнения 13.
Разность этих сигналов, определенная не только по величине, но и по фазе,
поступает на блоки управления муфтами - ведущей 10 и тормозной 11.
281
Электропривод и машина работают с установившейся частотой вращения в
соответствии с заданием. Заданная оператором через педаль 14 и задатчик 15
режимов работы команда автоматического останова поступает в блок
сравнения. Если частота вращения главного вала превышает частоту вращения,
с которой осуществляется автоматический останов, то блок 10 уменьшает
величину тока в обмотке муфты 6, а блок 11 увеличивает величину тока в
обмотке муфты 7. Последняя тормозит машину до скорости, с которой
осуществляется автоматический останов, и машина продолжает работать на
этой скорости.
Если педалью 14 задан просто автоматический останов, то блок 12 через
блоки 9 и 13 отключает ведущую муфту и включает тормозную при наличии на
входе в блок 12 трех команд: педаль в нейтральном положении, частота враще-
ния соответствует автоматическому автоостанову, датчик 3 дает сигнал о
положении ’’игла внизу”. После автоматического останова тормозная муфта
отключается.
Если педалью через задатчик заданы автоматический останов и
автоматическая обрезка нитки, то при наличии на входе блока 12 команд:
педаль нажата "назад”, датчик 3 дает сигнал о положении "игла внизу”, а
частота вращения главного вала машины соответствует скорости
автоматического останова, и он через блок 9 разрешает блоку, 8 включить
электромагнит 4 механизма автоматической обрезки ниток. При работе блока 8
все команды с задатчика блокируются в блоке 12.
После прихода главного вала в положение "игла вверху" с датчика 3
поступает соответствующая команда в блок 12, который через блоки 9 и 8
отключает электромагнит 4 механизма автоматической обрезки ниток (обрезка
закончена. На рис. 6.48 приведен график изменения угловой скорости ю
главного вала при разгоне и останове швейной машины с иглой в заданном
положении.
На графике можно выделить характерные участки:
282
Рис. 6.48. График изменения угловой скорости главного вала машины
при разгоне и торможении
- t\ - время (с момента подачи команды), в течение которого
происходит нарастание тока в обмотке возбуждения приводной муфты до
величины, при которой вращающий момент, развиваемый муфтой, сравняется с
начальным моментом статического сопротивления швейной машины; в это
время ведомый вал привода и, следовательно, вал швейной машины не
вращаются;
t\ - t2 - время разгона ведомой части привода и главного вала швейной
машины с проскальзыванием в ведущей муфте; скорость ведущей, части муфты
превышает скорость ведомой; набор машинной скорости на этом участке
происходит круто; одновременно ротор двигателя и маховик отдают часть
запасенной кинетической энергии - скорость ротора электродвигателя
снижается; в точке Г2 скорости ведущей и ведомой частей муфты сравниваются;
г2 - h - время совместного разгона ротора электродвигателя, ведущей и
ведомой частей муфты и швейной машины. Поскольку эта система обладает
283
большим моментом инерции, крутизна подъема кривой набора скорости
меньшая, чем на участке t\ - /2;
t3 - - время работы машины и привода в установившемся режиме. Для
торможения машины напряжение с обмотки ведущей муфты снимается и
подается полное напряжение на обмотку тормозной муфты;
Г4 - t5 - торможение швейной машины до полного останова в
произвольном положении;
t$ -t6- машина разгоняется до скорости доводки (110-220 мин’1);
- tq - происходит поворот главного вала машины до положения
останова, которое определяется датчиком положения главного вала. На этом
участке машина может сделать в зависимости от положения, в котором она
остановилась, до полутора оборотов;
- /8 - окончательный останов машины.
284
ГЛАВА 7. ЭЛЕКТРОМЕХАТРОННЫЕ МОДУЛИ И ИХ КОМПОНЕНТЫ
7.1. Электромехатронные модули и их связь с мехатронными системами и
комплексами
Термин «электромехатроника» используется с целью обозначить отрасль
науки и техники, связанную с электронизацией технических устройств,
называемых электромеханичскими преобразователями и рассматриваемых в
электромеханике. Электронизация заключается в совмещении
электромеханических преобразователей с электронными приборами и
устройствами, называемыми электронными компонентами. Электронные
компоненты делают электромеханическое преобразование энергии автоматики
управляемым, обеспечивая функциональное объединение энергетических
информационных процессов.
Впервые этот термин введен академиком Глебовым и профессором Ю.П.
Коськиным (ЛЭТИ), получившим развитие в трудах Бута Д.А., Смирнова Ю.С.,
Коськина Ю.П., Осипова Ю.М., Аракеляна А.К., Афанасьева А.А. и других.
(7,23-27, 33-37, 45,46,57,58,63,68]
Электромехатронный преобразователь - автоматическая система
электромеханического преобразователя энергии, создаваемая путем
функционального и конструктивного объединения электромеханического
преобразователя с электронными компонентами преобразования параметров
электроэнергии, управления, диагностики и защиты.
В ГОСТе Р503669 - 92 определено понятие «электропривод с
электромеханотронным преобразователем»: «электропривод с
электромеханотронным преобразователем - электропривод, содержащий
устройство, объединяющий электромеханический преобразователь с
обеспечивающими его функционирование электронными компонентами
Управления, диагностики и защиты».
285
В электромеханотронном преобразователе как автоматической системе
по функциональным признакам могут быть выделены две подсистемы:
- энергетическая подсистема - часть электромехатронного
преобразователя, объединяющая электромеханический
преобразователь с электронными компонентами энергетического
назначения и обеспечивающая протекание процессов
электромеханического преобразования энергии, отвечающих
назначению и заданной выходной мощности
электромеханотронного преобразователя;
- информационная подсистема - часть электромеханотронного
преобразователя, объединяющая устройства управления,
диагностирования и защиты с электронными компонентами
информационного назначения и обеспечивающая протекание
энергетических процессов по заданному закону с необходимой
точностью.
Электронные компоненты энергетического назначения.
- это приборы и устройства, обеспечивающие изменение параметров
электроэнергии, а также коммутацию силовых ключей в
электромеханотронном преобразователе. Примеры электронных
компонентов энергетического назначения: электронные приборы,
выпрямители, инверторы, преобразователи частоты,
коммутационные устройства.
Электронные компоненты информационного назначения.
- приборы и устройства, обеспечивающие получение, хранение,
преобразование и передачу информации в электромеханотронном
преобразователе.
Устройства информационных подсистем образуются из электронных
компонентов и других приборов, традиционно используемых в автоматике,
автоматизированном электроприводе, системах автоматического управления.
Примеры электронных компонентов информационного назначения:
транзисторные усилители, импульсные информационные приборы, цифро
аналоговые и аналого - цифровые преобразователи, микропроцессоры ЭВМ
286
К числу общих понятий электромеханотроники, связанных с совокупным
использованием нескольких электромеханотронных преобразователей (двух и
более) относятся электромеханотронная система и электромеханотронный
комплекс.
Электромеханотронная система.
Электромеханотронная система - совокупность функционально и
конструктивно объединенных общим назначением электромеханических
преобразователей и электронных компонентов.
Электромеханотронный комплекс.
- совокупность электромеханотронных преобразователей,
объединенных общим назначением.
По степени подчиненности или взимозависимости электромеханотронику
(ЭМТ), электропривод (ЭП) и мехатронику (МТ) можно разместить в порядке
ЭМТ —► ЭП —► МТ —►
Аналогично размещаются соответствующие этим наукам технические
устройства ЭМТП -> ЭП -> ММ, где ЭМТП - электромеханотронный
преобразователь, ЭП - электропривод, ММ - мехатронный модуль.
Приведенные выше утверждения, что электромеханотронные
преобразователи используются в составе электропривода, а электропривод, в
свою очередь, может являться составляющей частью мехатронного модуля.
Электромеханотронный преобразователь (ЭМТП)состоит из
электронного энергетического устройства (ЭЭУ), электромеханического
преобразователя (статор и ротор показаны отдельно для подчеркивания
основной задачи ЭМТП - автоматического управления преобразованием
электрической энергии в механическую и наоборот), информационной
подсистемы (ИПС). ЭЭУ, статор и ротор электромеханического
преобразователя (С ЭМП и Р ЭМП) образуют энергетическую подсистему
электромехатронного преобразователя.
287
Рис.7.1. Электромеханотронным преобразователь
в составе мехатронного модуля
Информационная подсистема (ИПС) на основании сигналов от системы
управления электропривода и сигналов от энергетической подсистемы (то есть
от ЭЭУ и электромеханического преобразователя) осуществляет управление
коммутацией силовых ключей ЭЭУ.
В частном случае явновыраженного разделения между ИПС и СУЭП
может и не быть, однако по функциональному назначению такое разделение
всегда может быть установлено.
Теория электропривода отличается от теории электромеханотронных
преобразователей прежде всего тем, что связывает электромеханический
преобразователь, а также электромеханотронный преобразователь с
исполнительным механизмом (ИМ), обеспечивая функционирование ЭМТП в
интересах ИМ, то есть управляя движением ИМ в целях осуществления
технологического процесса.
Мехатроника как наука обеспечивает разработку объектов в виде ММ или
мехатронных систем, объединяя в их конструктивных оболочках ЭМП, ЭМТП.
ЭП и другие технические устройства для обеспечения управляемого
компьютером прецизионного движения мехатронного объекта.
Объединение ЭМТП - двигателя и ИМ в элекроприводе или ММ, ЭМТП
- генератора с первичным двигателем в генераторном агрегате и генераторных
агрегатов в электростанции, а также образование других технических систем на
основе ЭМТП является синергетическим в том смысле как это трактуется в
мехатронике: все составляющие элементы и узлы в ЭМТ, ЭП и МТ не просто
дополняют друг друга, но объединяются таким образом, что образованные
ЭМТП, ЭП, ММ и мехатронные системы приобретают качественно новые
свойства. Электропривод (ЭП), включающий электромеханотронный
преобразователь (ЭМТП), передаточный механизм (ПМ), исполнительный
механизм (ИМ), систему управления электропривода (СУЭП), управляемы
компьютером, при их функциональном и конструктивном объединении
является механным модулем (ММ).
В электромеханотронном преобразователе энергетическая подсистема
(ЭПС) и информационная подсистема (ИПС) объединяются с целью обеспечить
преобразование энергии (электрической в механическую или механической в
электрическую) с максимально возможной эффективностью и надежностью. В
механном модуле энергетические и информационные процессы объединяются
для достижения другой цели, а именно - реализация заданного закона
управления движением исполнительного механизма (ИМ). В мехатронике
создаются мехатронные модули и системы, реализующие заданное движение и
функционирование рабочих органов с помощью машин различной физической
природы, соответствующих различным разделам механизма.
Электромеханотронные преобразователи и электромеханотронные
системы могут использоваться в мехатронных модулях и системах как
компоненты. Мехатронные модули системы включают в себя рабочие органы
(исполнительные механизмы), электромеханотронные преобразователи не
содержат не содержат в своем составе рабочие органы. Мехатроника
предполагает, в качестве своего главного признака, использование
компьютерного управления. В электромеханотронных преобразователях в
качестве электронных компонентов используются все известные электронные
Приборы, но компьютеры, как правило, не применяют.
288
289
7.2. Электрические двигатели - энергетические элементы
мехатронных систем
Электрические машины обладают свойством обратимости, т.е. они могут
работать в режиме двигателя. В режиме двигателя постоянного тока необходим
источник электрической энергии постоянного тока. Если подключить к
источнику двигатель, то в обмотке возбуждения и якоря появляются токи.
Взаимодействие тока якоря с полем возбуждения создает на якоре
электромагнитный момент М. который является вращающим. Таким образом в
двигателе электрическая энергия превращается в механическую. В обмотке
якоря индуктируется в Э.Д.С. Е, которая направлена против тока якоря 1я,
поэтому называют её противо - Э.Д.С. якоря:
Е = U — InRn, (7.1)
Где U - подводимое к двигателю напряжение;
Яя - сопротивление последовательно соединенных обмоток, образующих
цепь якоря.
ЭДС, индуктируемая в цепи якоря, определяется Е = СеФп,
Где Ф - магнитный поток;
п - скорость вращения;
Се - коэффициент, определяющий конструктивную постоянную для
данной машины.
Из предыдущих уравнений можно получить важные соотношения:
г U-E
/я =----;
йя
(7.2)
1/-ЙЯ/Я
71 “ СеФ '
Для двигателя малой мощности (до 1 кВт) сопротивление обмотки якоря
велико и пусковой ток допустим без дополнительных элементов. При больших
290
мощностях пусковой ток значителен, поэтому возникает необходимость
увеличивать сопротивление в цепи якоря (реостатный пуск) либо снижать
подводимое напряжение внешнего источника U.
тт U-RhIh _
Из выражения п = —— - следует три возможных способа:
- изменением сопротивления в цепи якоря Кя;
- изменением подводимого напряжения U;
- изменением сопротивления в цепи возбуждения, в результате
чего изменяется магнитный поток Ф.
Различают двигатели с независимым возбуждением и самовозбуждением
(рис.7.2). Первые подразделяются с возбуждением от постоянных магнитов и с
электромагнитным возбуждением. Вторые имеют одну их трех соединений: с
параллельным (шунтовые), с последовательным и со смешанным
(компаундные). На рис.7.3 представлены характеристики двигателей
параллельного (а), последовательного (б) и смешанного возбуждения (в)
возбуждения.
Рис.7.2
291
о
м
n
Мним
в)
Ином
Рис.7.3. Характеристики двигателей постоянного тока
292
Для двигателя параллельного возбуждения характерна жесткая
характеристика зависимости скорости п от полезной мощности на валу Р2 при
Р2
U=const. Полезная мощность на валу М2= 9,55 — при n=const была бы прямо
пропорциональна Р2, однако с увеличением нагрузки это нарушается.
В системах автоматики, управления, регулирования и контроля
достаточно широко применяются управляемые электрические двигатели
небольшой мощности, которые могут преобразовывать электрические сигналы
в механические перемещения, например, вращение вала. Такие двигатели
получили название исполнительных. Характер требований к исполнительным
двигателям определяется спецификой их работы: широкий диапазон
регулирования частоты вращения, линейность регулировочных и механических
характеристик, большой пусковой момент, малая мощность управления,
большое быстродействие, реверсивность, знакопеременность частоты
вращения, малые габариты и вес. Кроме двигателей с постоянными магнитами,
они имеют обмотки возбуждения и управления. В качестве исполнительных
двигателей чаще используются двигатели с независимым возбуждением, а реже
с постоянными магнитами.
Поэтому рассмотрим двигатели с независимым возбуждением, в которых
в качестве обмотки управления используют либо обмотку якоря, либо обмотку
полюсов. Для двигателя с якорным управлением (рис.7.4,а) обмоткой
возбуждения является обмотки полюсов, а с полюсным управлением (рис.7.4,б)
соответственно якорная обмотка с балластным сопротивлением R6.
293
Рис.7.4. Схемы двигателей с независимым возбуждением
Для измерения частоты вращения по величине выходного напряжения, а
также для получения электрических сигналов, пропорциональных частоте
вращения вала в системах автоматического регулирования служат
тахогенераторы. Тахогенератора постоянного тока являются генераторами с
электромагнитным независимым возбуждением либо с возбуждением
постоянными магнитами.
Так как ток возбуждения lB=const, то поток O=const, то выходная ЭДС Е
пропорциональная частоте Е=Се’п, где Ce’=CeO=const. Это справедливо и для
возбуждения с постоянными магнитами.
Для измерения частоты вращения вал тахогенератора механически
соединяют с валом механизма объекта, а на выводы подключают
измерительный прибор с градуированной шкалой (рис.7.5).
294
Рис.7.5. Схема измерения частоты вращения
Реальная характеристика (2) тахогенератора отличается от идеальной по
причине реакции якоря и потерь напряжения в щеточном контакте
В системах автоматики различных инструментов, бытовых
электроприборов получили широкое применение коллекторные двигатели. По
своей конструкции однофазные коллекторные двигатели отличаются от
двигателей постоянного тока тем, что их станина и главные полюса делаются
шлихтованными из листа электротехнической стали. Это даст возможность
сократить магнитные потери от перемагничивания все магнитной цепи при
работе двигателя от сети переменного тока.
В таком универсальном двигателе получить одинаковые частоты
вращения как на постоянном, так и на переменном токе. Для этого обмотку
возбуждения двигателя выполняют с ответвлениями: полное использование
всей обмотки на постоянном токе и частичное использование при переменном
токе (рис.7.6).
295
Рис.7.6. Схема универсального двигателя
Основной недостаток однофазных коллекторных двигателей
возникновение дополнительной ЭДС в коммутирующих секциях
(трансформаторной ЭДС). Для её уменьшения увеличивают число полюсов.
Особый интерес для мехатронных систем представляет бесколлекторные
машины переменного тока - асинхронные и синхронные машины. При этом
обмотки якоря могут находиться как на неподвижной части - статоре, так и на
подвижной - роторе При этом физические процессы в любом случае
296
одинаковы. Однако подавляющее большинство машин выполняют с
расположением обмотки якоря на статоре.
Исходя из принципа обратимости машин рассмотрим двигатели
переменного тока.
Асинхронный двигатель состоит из двух основных частей, разделенных
воздушным зазором: неподвижного статора и вращающегося ротора. При этом
обмотка статора включается в сеть и является первичной, а обмотка ротора -
вторичной. На практике существует два типа асинхронных двигателей: с
короткозамкнутым ротором и с фазным ротором (с контактными кольцами).
Эти двигатели имеют однотипный статор и различное устройства ротора.
Статор изготавливают из листов электротехнической стали толщиной
0,35 или 0,5 мм, покрытых изоляционным материалом (пленкой) с целью
обеспечения ограничения от вихревых токов. Внутри статора имеются ряды, в
которых уложены обмотки.
Ротор асинхронного двигателя состоит из вала, сердечника и обмоток.
Сердечник имеет форму цилиндра и собирается из листов электротехнической
стали.
В двигателях с короткозамкнутым ротором обмотка собирается из
алюминиевых стержней, укладываемых в рядах и замкнутых по торцам
кольцами.
Обмотки фазного ротора выполняют трехфазной, соединенную звездой и
присоединенной к трем контактным кольцам, изолированным друг от друга,
имеющим контакт с двумя щетками.
Пуск асинхронных двигателей характеризуется переходными
процессами.
Пуск двигателя с фазным ротором можно обеспечить включением к
обмотке ротора пускового реостата, а пуск двигателя с короткозамкнутым
ротором можно осуществить различными способами:
- пуск непосредственным включением в есть (до 30-50 кВт);
297
- пуск при пониженном напряжении (переключением обмоток
статора с Y на А, реакциями в цепи обмоток статора,
автотрансформатором).
Регулирование частоты вращения можно осуществить следующими
способами:
изменением скольжения S
п2=^1.(1-5),
(7.3)
где fl - частота подводимого к статору напряжения;
Р - число пар полюсов в обмотке статора;
- изменением подводимого напряжения в узком диапазоне;
- изменением частоты тока в статоре (частотное регулирование);
- изменением числа пар полюсов обмотки статора Р.
Рабочие характеристики асинхронного двигателя представляют
зависимости частоты вращения П2, кпд г], момента на валу (полезного) М2,
коэффициента мощности cos (pi, тока статора 11 от полезной мощности Р2 при
неизменном подводимом напряжении Ui=const и fi=const (рис.7.7).
298
Полезный момент М2 = 9,55—.
и2
Трехфазный асинхронный двигатель может быть использован для работы
от однофазной сети. В этом случае такой двигатель включается по одной из
схем (рис.7.8).
Рис.7.8. Схема включения асинхронного двигателя
299
Значение рабочей емкости Ср (мкФ) при fi=50 Гц можно определить по
одной из формул:
а)Ср«2700^ б)Ср«2800^ в)Ср«4800^
Пусковая емкость СпЦ2,5-^3)Ср.
На практике иногда имеет смысл использовать конденсаторные двигатели
однофазные (рис.7.9,а) и двухфазные (рис.7.9,б).
Рис.7.9. Схемы однофазного и двухфазного двигателя
В системах управления, регулирования и контроля широкое применение
получили управляемые электродвигатели малой мощности преобразующие
электрический сигнал в механическое перемещение, например, вращение вала
Требования к ним; реверсивность, самоторможение при снятии сигнала,
линейность характеристик, большой пусковой момент, малоинерционность и
т.д.
На статоре расположены две обмотки L возбуждения (ОВ) и управления
(ОУ) (рис.7.10).
О U} О
ОУ
Рис.7.10. Схема двигателя с ОВ и ОУ
300
Величина емкости выбирается исходя из условия получения кругового
магнитного поля при пуске двигателя.
Для привода рабочих машин с поступательным движением рабочего
органа часто используется линейный асинхронный двигатель. Они
выпускаются четырех видов: электромагнитные (соленодные),
магнитоэлектрические (на постоянных магнитах), электродинамические и
асинхронные (индукционные). Последние получили очень широкое
применение для привода заслонок, ленточных конвейеров, подъемно-
транспортных механизмов, тяговых механизмов.
Если ротор двигателя будет вращаться с частотой, равно частоте
вращения поля статора, т.е. с синхронной частотой вращения. Вращения ротора
с синхронной частотой вращения составляет особенность синхронных
двигателей. Наибольший интерес с точки зрения развития мехатронных систем
представляют следующие типы синхронных двигателей: шаговые
(импульсные), магнитоэлектрические, реактивные, индукторные.
Шаговые (импульсные) двигатели (ЩД) применяют в качестве
исполнительных двигателей, преобразующих электрические сигналы
(импульсы напряжения) в угловые или линейные дискретные перемещения
(шаги).
Поэтому их применение целесообразно в системах с программным
управлением, например, в электроприводах механизмов, системах
регулирования электропечей и т.д. Шаговые двигатели могут быть с активным
или реактивным ротором. Первые имеют обмотку возбуждения или
выполняются с постоянными магнитами на роторе, а вторые не имеют обмотку
возбуждения, а ротор выполнен из магнитомягкого материала. Обмотка
управления может быть однофазной или многофазной и располагается на
статоре.
301
Импульсная схема для однофазного ШД состоит из триггера
усилителем. Поступление управляющих импульсов на вход триггера вызывает
поочередное открывание и закрывание усилителя. При необходимости
изменения знака н.с. для двигателя с поляризованным ротором может быть
применена схема с двумя управляющими обмотками (рис.7.11,а) или схема с
одной дифференциальной обмоткой (рис.7.11,б). Первая схема вызывает
ухудшение использования ШД (удвоение меди обмотки управления), а вторая
имеет худшее использование усилителей, нагружаемых сопротивлением Rh
Сопротивления в коллекторах триодов выполняют функцию форсировочных.
Рис.7.11. Схемы управления однофазными шаговыми двигателями
7.3. Преобразователи электрической энергии - энергетические элементы
мехатронных систем
Для регулирования и стабилизации (как частный случай регулирования)
постоянного и переменного напряжения и тока получили широкое применение
электронные устройства на полупроводниковых элементах - транзисторах,
тиристорах и симисторах.
В регуляторах постоянного напряжения в качестве основного
регулирующего элемента чаще всего используются транзисторы и триодные
тиристоры, а переменного напряжения - тиристоры или симметричные
302
триодные тиристоры. Триодные тиристоры - приборы с односторонней
проводимостью тока, а при приложении напряжения обратной полярности они
переходят в закрытое состояние.
Симметричные триодные тиристоры представляют собой управляемые
полупроводниковые приборы с двухсторонней проводимостью тока. При
подаче в цепь управления импульса управления они переключаются в открытое
состояние независимо от полярности питающего напряжения.
Для регулирования переменного напряжения без постоянной
составляющей применяют тиристорные системы, состоящие из двух
тиристоров, включенных встречно-параллельно и соединенных
последовательно с нагрузкой. Ключ замыкается, если в момент подачи
положительного импульса на управляющей электрод одного из тиристоров к
нему приложено напряжение в прямом направлении. Изменяя момент
открывания каждого из тиристоров относительно начала соответствующего
полупериода питающего напряжения, можно регулировать напряжение на
нагрузке вследствие изменения длительности открытого состояния каждого из
тиристоров регулятора. Закрывание тиристоров происходит под действием
приложенного к ним напряжения обратной полярнсоти в момент, когда ток,
протекающий через открытый тиристор, станет меньше тока удержания или
уменьшится до нуля.
На рисунке 7.12 приведены линейные диаграммы, поясняющие принципы
фазового, импульсного и число-импульсного регулирования. При фазовом
регулировании изменяют момент открытия тиристора (угол регулирования или
угол открытия, рис.7.12,1).
При увеличении угла открытия тиристоров можно уменьшить
длительность их нахождения в открытом состоянии и уменьшать напряжение
на нагрузке. При работе рассматриваемого регулятора на активно-индуктивную
нагрузку характер процессов несколько отличается от случая чисто активной
нагрузки. После открытия каждого из тиристоров ток нагрузки нарастает более
303
медленно и спадает до своего нулевого значения спустя некоторое врем после
прохождения через нулевое значение питающего напряжения. В результате
этого закрывание тиристоров не совпадает с концом соответствующего
полупериода питающего напряжения. Оно происходит позже и форма тока в
нагрузке существенно от формы тока для случая активной нагрузки.
При импульсном регулировании изменение напряжения нагрузки
осуществляется изменением соотношения времени включенного и
выключенного состояний, при условии, что все включения осуществляются при
нулевом значении напряжения (рис.7.12,11), а при число-импульсном
регулировании изменением соотношения времени включенного и
выключенного состояний, так и изменения угла запаздывания зажигания
(рис.7.12,111). Особенностью импульсного регулирования является появление в
спектре тока гармоник ниже частоты сети и в диапазоне первой и второй
гармоник частоты сети. При этом почти вся энергия передается из сети в
нагрузку с этими частотами. Появляющиеся при этом низкочастотные
колебания напряжения сети могут неблагоприятно сказаться на работе многих
потребителей, например, электродвигателей. Высшие гармоники при
импульсном регулировании убывают обратно пропорционально квадрату их
частоты, при фазовом регулировании - их частоте.
304
Рис.7.12. Линейные диаграммы при фазовом , импульсном и число-импульсном
регулировании
305
7.3.1. Регуляторы постоянного и переменного напряжения и тока
К основным схемам регуляторов постоянного напряжения относят
управляемые выпрямители. Управляемые выпрямители однофазного и
трехфазного тока часто используются для питания цепи якоря двигателя
постоянного тока (таблица 7.1) [4].
Выбор той или иной схемы предопределяется рядом факторов,
основными из которых являются потребляемая мощность, режим работы,
допустимая пульсация напряжения и тока в нагрузке, энергетические
показатели (к.п.д. и коэффициент мощности), исполнение преобразователя
(реверсивное или неревесивное), степень использования двигателя по
мощности.
Для электроприводов с двухзонным регулированием скорости следует
выбирать схемы, которые обеспечивают высокие энергетические показатели,
максимально возможное использование двигателя по мощности и минимальные
пульсации тока якоря, так как высокие пульсации тока якоря, кроме снижения
степени использования двигателя по мощности, могут существенно ухудшить
коммутацию двигателя при работе с ослабленным полем (во второй зоне).
Величина пульсаций тока в нагрузке определяется числом фаз
выпрямления ш, коэффициентом загрузки преобразователя Кз.п. и величиной
индуктивности в цепи нагрузки Ьэ. Требуемого коэффициента пульсаций тока
qn при определенной загрузке преобразователя можно достичь в различных
схемах с различным числом фаз выпрямления за счет увеличения
индуктивности в цепи якоря путем включения сглаживающего дросселя.
Таким образом, оценку схем преобразователей можно выполнить
методом сравнения величины индуктивности, необходимой для достижения
определенного уровня пульсаций при заданной загрузке преобразователя.
Следует, однако, учитывать, что увеличение индуктивности в цепи якоря
приводит к снижению быстродействия системы. Подробное исследование
306
режимов работы вентильного преобразователя выполнено в [Л.5]. Однако
метод точного анализа режимов работы преобразователя приводит к сложным
трансцендентным выражениям, которые решаются численным или
графическим способами, что ограничивает рамки применимости этого метода.
В системах электропитания и управления при малых мощностях, что
характерно для машин и аппаратов легкой промышленности, цепей связи и
автоматики, бытовых приборов, зарядных устройств, целесообразность
применения несимметричных схем и несимметричного управления не
вызывают сомнения. На рис.7.13 приведены схемы с неполным числом
тиристоров. При неполном регулировании и малых мощностях возможно
применение схемы с одним тиристором. При меньшей кратности
регулирования упрощенные варианты схем с двумя или одним тиристором
можно использовать при малых мощностях до 0,5 кВт, например, для
регулирования скорости двигателей постоянного тока, тока обмоток
возбуждения, зарядки аккумуляторов. Несимметричная схема с двумя
тиристорами, включенными в анодную группу с целью упрощения схемы
управления и применения одноканальной системы управления (ОСУ) ими,
достаточно известна и чаще других схем находит применение. Регулировочная
характеристика схемы:
Uda =-^°- (1+cosa)
2 (7.4)
где UdO - среднее значение выходного напряжения при a = 0.
Если представить электродвигатель в виде схемы замещения (Eo,L,R), то
схема замещения системы электропитания и управления ЭВГ может быть
представлена на рис. 7.13,а. Линейные диаграммы работы системы
представлены рис.7.13,в (Eo,R) и 7.13,г (Eo,R,L).
307
308
Таблица 7.1. Данные некоторых основных схем фазового регулирования
Таблица 7.1. Данные некоторых основных схем фазового регулирования (продолжение)
........... С«ия юмйдео» I Ml e tht-аюе -4]МГМ* ’TT’ Л (ЕЛмдем М9 «ЯДОМ ! «. yfi t Чюмдек! } яяКЧ т“жзг^а' - BMW !й У 1 №амнт | чкжас» :.«ар«<дем J ~'У ' ^идес.»»
| -^t‘*' L— <яе| 1 * 5 «Яйам! 1 *•«.<» (ЗмАк^яй -А. й *н|| пж
' il |i /Т?Г"^ iPr гдешж
>ПЙ «L^lap^lW,
• (Ндоаам! mkw « weiRnw 1 4? ’с £ n Fl- *МДО»1 ) J’ e } / ' b j e.-V tf” У on « де мЧГде\'’ IW А W - /де »< r>v «де*ю1 ма^мм ’
1 МДО***" “*** «« т L_f / 0 ее», «,1 ж) яв Я «0 «.-4 яо Чгм tt Mgpnu <еяде
»Г- ал -Ук ю
vsr
IP Гя******4 1 г HTiai J re аилммч<> . дм кфффЙ I H'/Je e v^ — 0f< . < »*1 w 5Й на «¥♦ I— Q< мм У
471 i
,г %
‘ •*£*, r (MJ< *<W)
«"> ув»ч..ж1< ««доаЛ 4м омеы-тдо — * u. •3f «•* Va^M^jTnrrrwiTaa-L ж> Й ав - Сде 9f
< "W” £—£z
t i
iVVih Й]|Н; к ” ! /3t i c,-«^ £,.«jUrr*e<N*) I « гх °* *4f 40 RHI аг й Ин J
nt,
м,-ам №
О Где.яс1.|и.< «ж« е де. /Пв j t-’fl Л» t0-^ ^eli:P «• a !J0 00 цди | гч «м Л» ^рампшрл ,мвяафья*ыг J*tl яЛ г ^мтмл*м*е 1
> -У9 iJH ‘M ^.ZTXZ^s/^x i 'И *** «IAl '/\ f\ ['• f W!e
О»
? V 1 (•o'. • да*»
*-Г—*** *««»J j
• ЯТя*М<*>4««м> ддемДО. им}г.»^<и /2X1 4SI tm УЛ8 /it - »и»ч<у»*Г’Л"1и1‘ 1 'Ю 'Ю fan» 9f 1
ИУ '<y МдемЬ*ЯМм^ саде* МО* 1
• jXjXJ/CJ
Рис.7.13. Упрощенные варианты схем с двумя и одним тиристором
Рис.7.14. Схема размещения системы управления ЭВГ (а) и линейные
диаграммы работы системы по симметричной схеме (б), несимметричной с
двумя (в, г) и одним тиристором (д)
Ток в цепи определяется решением дифференциального уравнения:
+Ri=Umsincot-Eo
Решение этого уравнения:
cot-a
i = Im[sin(cot-<p)-sin(a-<p)e tg<p ] /75)
310
где
COL т Um
tg(p- p bn =
, - максимальное значение тока.
Для определения длительности протекания тока через тиристоры X
необходимо решить традиционное уравнение из условия, что при
cot = ср + X
1=0 X
О = sin(a+X-(p)-sin(a-(p)e tg<p
-Д°-(1-егет )
Um
Численным решением на ПЭВМ с использованием программы
MathCAD 11 A Enterprise Edition и встроенной подпрограммы root получены
численные значения, которые позволили зависимости X(Eo/Um) при X = 0 и
различных значениях ср = arctg(coL/R) X(Eo/Um) при различных значениях а и
ср = const (рис.7.15, рис.7.16).
311
Рис.7.15. Зависимости X(E0/Um) при а=0 и X(E0/Um) при <p=const и
различных а
312
Рис.7.16. Зависимости A(E0/Um) при <p=const и различных а
313
Отличительной особенностью обмоток возбуждения двигателей
постоянного тока является относительно большая индуктивность и
сравнительно небольшая потребляемая мощность. В связи с этим для
тиристорных возбудителей с двухзонным регулированием целесообразны
однофазные схемы, основные соотношения по регулированию параметров
которых приведены в таблице.7.2 [4].
Прерыватели переменного тока представляют собой электронные
ключи, позволяющие включать или отключать нагрузку в цепи переменного
тока или регулировать ее мощность.
Прерыватели переменного тока могут классифицироваться в
зависимости от различных факторов (способа управления, числа фаз, схемы
соединений, вида нагрузки). Наиболее общая классификация прерывателей
переменного тока как электронных ключей основывается на способе
управления: ключ типа контактора. Этот тип электрического ключа подобно
механическому контактору служит только для включения или отключения
цепи. После включения напряжения на нагрузке равно напряжению питания;
Управляемый ключ отличается от контактора тем, что для снижения
переходных токов, сопровождающих процесс включения, после включения
вводится переходный период управления. На практике это осуществляется
уменьшением угла управления с заранее установленной скоростью:
Регулируемый ключ представляет собой электронный ключ, у которого
может регулироваться угол управления, а значит, мощность в цепи
переменного тока. Форма кривой напряжения на нагрузке отличается от
формы кривой напряжения источников питания. Напряжение и ток обычно
содержат много гармоник. Основная гармоника имеет ту же частоту, что и
частота напряжения питания. Ток основной гармоники отстает от
напряжения питания по фазе. Угол отставания зависит от вида нагрузки и
угла управления. Такие ключи потребляют реактивную мощностью.
В ключах всех трех типов может использоваться одна и та же силовая
схема, отличия могут быть только в назначении и исполнении цепей
314
управления. В силовых схемах прерывателей переменного тока в качестве
основных элементов используются тиристоры, симметричные триодные
тиристоры и диоды. Из свойств тиристоров следует, что управляющий
сигнал включает прерыватель переменного тока практически без задержки и
что после прекращения подачи сигнала ток в цепи прекратится в момент
прохождения его через нуль.
Однофазные прерыватели переменного тока. Наиболее часто
встречающиеся схемы соединений представлены на рис.7.17.
На рис.7.17,а показана полностью управляемая однофазная
симметричная схема «тиристор-тиристор». Нагрузка присоединяется к
питающей сети через два тиристора, соединенных встречно-параллельно.
Для того чтобы один из тиристоров мог начать проводить ток, к нему должно
быть приложено прямое напряжение, а к управляющему электроду -
управляющий сигнал. Два тиристора, соединенных встречно-параллельно,
могут быть заменены одним симметричным триодным тиристором
(симистором). Если управление симметрично в течение двух полупериодов,
то напряжение на нагрузке не будет иметь постоянной составляющей.
На рис.7.17,6 показана однофазная полууправляемая схема «тиристор-
диод». Её применение ограничено вследствие того, что, во-первых, энергия
будет продолжать передаваться каждый полупериод после прерывания
управляющего сигнала и, во-вторых, напряжение на нагрузке имеет
постоянную составляющую, если угол управления тиристора отличен от
нуля, а проводимость прерывистая.
На рис.7.17,в показана упрощенная схема соединения прерывателя
переменного тока. Напряжение на нагрузке может регулироваться одним
тиристором, включенным в диагональ однофазного диодного моста. Схема
работает точно так же, как и полностью управляемая симметричная схема.
315
Рис.7.17. Схемы однофазных прерывателей
Трехфазные прерыватели переменного тока. Подобно однофазным
схемам трехфазные схемы могут быть разделены на три группы.
На рис.7.18 приведено несколько трехфазных симметричных
полностью управляемых схем соединений «тиристор-тиристор». В схеме на
рис.7.18,а нейтраль звезды выведена, а в схемах на рис.7.18,6 и в она
изолирована. Очевидно, что схема соединений с изолированной нейтралью
пригодны для питания нагрузок, соединенных в треугольник или звезду.
Схема соединений с выведенной нейтралью имеет то преимущество, что
напряжение на тиристорах меньше, но ее недостаток состоит в том, что
нейтраль нагружается значительными токами высших гармоник, когда углы
управления тиристоров отличны от нуля.
Работы схемы с изолированной нейтралью будет зависеть от того, как
управляются два тиристора, соединенные встречно-параллельно, а также от
того, используются ли в качестве коммутационного элемента два тиристора,
соединенные встречно-параллельно, или один симметричный триодный
тиристор.
316
a)
Рис.7.18. Основные схемы трехфазных прерывателей
317
Таблица 7.2. Схемы преобразователей
Выярвмлеиают мапрлж»ине ^4 3 4 СМ • су,- i 2 ^Тил , г-5 I У* *+<!<* 1 з m> . | “ 5 og«< iso* 0 -* co»«. v а У44 * • 5S
Ммимзлыю явайяллмкыв взмеиеияк угла отпирзим тлрвет нм ж,!=агеео*[о »«?“’] Л«= «r«mf jdnnJ t*“"4raniV') 4’“*r,CB0'[j^h;-J]+T
Дл Jcтвуквд ес ничвиив »>□₽« Ж4МК« Л»Гру«ММ 7т 0C «CI»’ ^-W »ао<-<:мо« if(, s« з FT t>«tn ate-srH 8- +~^—;
Ксаф^зциеит мрмоиях по каеряжешт „ /ТО, г**1, л «in 5» \ -у Г(-—’-ят)- — ~М (1 + Cl»®)’ К.« 1/ — - .ж k/r('-7* 0 CMC 120* xz« 3»eS«< 3«* K( О
• I»» 2*\ f / \| I .T)-,(..~l '«• si'T ^вм—оо*Ц К ~ir* тг+ ** Г [ 1 4 ем (*—^>*) ~1 5 '"']
КмффиЦянигг феями яо щярлжеямню J 4 СМ *♦ “ S ем 4 Й i 7 «1* А » ' • я ♦ ; + •!• ; • : io* Д п « А с» S + и 4 f 3
1 4 СЯ «
Таблица 7.2. Схемы преобразователей (продолжение)
Схемы йреобр&эолателеЯ
Омоные соотношению
а схемах
Среднее значение том
нагрузки
Среднее значение том
тиристора
Среднее значение том
вентили
Среднее значение тока рва*
рядного вентиля
/Те» !+ 5X8 в) (*“•>
> Г
О120* /1ф= -j—-(2 + сов а)
О
120 ajgiW* ш-~- I1 + сов (а — 00*)]
о< la* ;т>я 2Х (2 + с<» »> (т”- «)
1Н со» (»-№»)] (j- «'
/Г (2* \
0 < . < 120- 1„ TI>« (2-ков •) (y “ •)
/ e LT(2 + с» a)
п» Оя
120 «С a >«240’ /t 0;
KT /<« \
'в г>г I» + c« (a - GO*H - »)
I3P (, jZ(2+co*e)^ + •)
120C 240-
VT Z2’ . )
7.3.2. Полупроводниковые инверторы и преобразователи частоты
Инверторы осуществляют функцию, обратную по отношению к функции
выпрямителя. Но в тех и других устройствах часто используются одни и те же
схемотехнические решения.
Более того, некоторые устройства могут осуществлять как выпрямление,
так и инвертирование. В них возможно изменение направления потока энергии:
или от цепи переменного тока в цепь постоянного (выпрямительный режим),
или в обратном направлении (инверторный режим). Обобщенно эти устройства
называют преобразователями.
Пусть такое устройство (рис. 7.19) подключено и к источнику
переменного напряжения, и к источнику постоянного напряжения с
напряжением и, причем через последний протекает ток i>0.
Преобразовать
+(-) и
-(+)
Рис.7.19. Блок-схема инвертора
Если будет иметь место полярность постоянного напряжения, указанная
без использования скобок, то мощность Р источника постоянного напряжения
будет положительной (Р = i*u>0). Это означает, что энергия передается из цепи
переменного тока в цепь постоянного тока, т.е. преобразователь работает в
выпрямительном режиме.
При другой полярности (указанной с использованием скобок) Р = i*u<0.
что соответствует переходу энергии из цепи постоянного тока в цепь
переменного и, следовательно, инверторному режиму.
320
Инвертор, ведомый сетью (зависимы), требует наличия источника
переменного напряжения, обеспечивающего требуемую частоту и величину
напряжения на выходе инвертора.
Автономный (независимы) инвертора функционирует без источника
переменного напряжения. Переменное напряжение необходимой частоты и
величины создается самим инвертором. Автономные инверторы
подразделяются на инверторы тока и напряжения.
Инвертор тока характерен тем, что его входной ток (протекающий через
источник постоянного напряжения) практически не изменяется при
переключениях полупроводниковых приборов, т.е. входная цепь работает в
режиме источника тока. Силовые приборы коммутируют этот ток для
получения переменного напряжения на выходе.
Инвертор напряжения имеет входную цепь, которая работает в режиме
источника напряжения. Полупроводниковые приборы подключают этот
источник к нагрузке с заданной частотой и с переменной полярности. В
результате на нагрузке создается переменное напряжение прямоугольной
формы.
Понятие инвертор тока и инвертор напряжения относятся к
идеализированным инверторам, однако введение их удобно доя анализа
свойств реальных схем, которые по своим характеристикам достаточно близки
к тому или иному типу инвертора. На практике находят применение как те, так
и другие инверторы в зависимости от требований, предъявляемых к
электроприводу.
Инвертор тока (рис.7.20) может быть выполнен на приборах с неполной
управляемостью - тиристорах. В этом случае параллельно нагрузке необходимо
включить конденсатор, который будет обеспечивать выключение пары
тиристоров при включении другой пары и поддерживать на выключаемых
тиристорах отрицательное напряжение в течение времени, необходимого для
восстановления ими управляющих свойств. В соответствии со способом
подключения коммутирующего конденсатора такой инвертор называют
321
параллельным. На вход АИТ подключается достаточно большая индуктивность
с тем, чтобы пульсации тока, потребляемого от источника, были невелики. При
этом ток в нагрузке имеет прямоугольную форму. Напряжение на нагрузке и
его форма определяются нагрузкой и ее характером. Очередность коммутации
тиристоров определяет форму тока, в форме напряжения зависит от нагрузки.
Рис.7.20. Инвертор тока и диаграммы работы
322
Это обусловлено включением на вход инвертора реактора с достаточно
большой индуктивностью. Из сказанного следует, что (зависимость
напряжения на нагрузке от тока) идеального АИН имеет вид горизонтальной
прямой (1, рис.7.21) поскольку действующее значение напряжения на нагрузке
всегда равно напряжению источника питания.
Рис.7.21. Зависимость напряжения нагрузки от тока
Вид внешней характеристик АИТ может быть определен, если считать,
что мощность, потребляемая от источника, равна мощности, отдаваемой в
нагрузку, из учета высших гармоник. Тогда
1/н = = — (7.7)
lHCOS(p COS(p
Где Uh и 1н - действующие значения первых гармоник напряжения и тока
нагрузки; угол ср - коэффициент мощности нагрузки.
Таким образом, при постоянном напряжении источника питания
напряжение на нагрузке обратно пропорционально коэффициенту мощности.
Поскольку с уменьшением нагрузки коэффициент мощности снижается,
напряжение на нагрузке при этом увеличивается (кривая 2, рис.7.21). С
увеличением нагрузки коэффициент мощности приближается к единице и
напряжение на нагрузке становится близким к напряжению источника питания.
323
Устройство искусственной коммутации, являющееся необходимым
элементом любого автономного инвертора на тиристорах, во многом
определяет регулировочные свойства инвертора, его энергетические показатели
и надежность работы. Примеры выполнения узлов искусственной коммутации
приведена на рис.7.22.
Рис.7.22. Примеры выполнения узлов коммутации
На рис.7.22,а показана наиболее часто применяемая схема, которая
обеспечивает подключение одного рабочего тиристора при включении
тиристора другой фазы. При прохождении тока через VI коммутирующий
конденсатор заряжается через Rh2 до напряжения источника питания с
указанной полярностью. После включения V2 напряжение конденсатора
прикладывается к VI с обратной полярностью (плюс - на катоде, минус - на
аноде), что приводит к его выключению. Затем происходит перезаряд
324
конденсатора RhI и включающийся тиристор V2. В течение интервала времени,
пока напряжение на конденсаторе изменяется от Е до 0 (рис.7.22,6) к VI
приложено обратное напряжение и он включается. Расчет емкости
коммутирующего конденсатора должен производиться из условия, чтобы
схемное время выключения тиристора tB было не меньше требуемого по
паспорту Гв, т.е.
Значение С выбирается ближайшим большим из стандартного ряда
емкостей.
На рис.7.22,в показан узел искусственной коммутации с использованием
вспомогательного тиристора, который подключает параллельно рабочему
тиристору конденсатор, предварительно заряженный с необходимой
полярностью. Пусть в исходном состоянии рабочий тиристор VI находится в
открытом состоянии, а напряжение на конденсаторе имеет полярность,
показанную на схеме. Для того чтобы закрыть VI, необходимо включить
вспомогательный тиристор V2. После того, как конденсатор перезарядится
через V2 и Rh, тиристор V2 закроется. После включения VI произойдет
колебательный перезаряд конденсатора через VI, индуктивность L и диод VD,
в результате чего схема окажется готовой к новой коммутации (рис.7.22,г).
Емкость коммутирующего конденсатора выбирается, исходя из тех же условий,
что и в предыдущем случае. Индуктивность L выбирается так, чтобы
конденсатор перезаряжался достаточно быстро и в то же время амплитуда тока
перезаряда не была чрезмерно большой. Преимущество такой схемы
коммутации заключается в том, что любой рабочий тиристор может быть
выключен в заданный момент времени независимо от состояния других
тиристоров инвертора. Поэтому тиристор в совокупности с таким узлом
коммутации наиболее близок к полностью управляемому ключевому элементу.
325
Рис.7.23. Инвертор напряжения
326
Инвертор напряжения (рис.7.23,а) должен быть выполнен на полностью
управляемых вентилях V1-V4, или на мощных транзисторах, способных
выключаться и выключаться в заданный момент времени при подаче на них
управляющего сигнала. Попарное периодическое включение и отключение
вентилей VI,V3 и V2,V4 приводит к тому, что напряжение на нагрузке ин имеет
прямоугольную форму с амплитудой, равной напряжению источника питания.
Кривая тока в нагрузке будет состоять из отрезков экспоненты (рис.7.22,б).
Пусть произошла коммутация в схеме таким образом, что вентили VI и V3
выключились, а вентили V2 и V4 открылись. Ток в нагрузке индуктивного
характера имеет направление, встречное по отношению к направлению
проводимости включенных вентилей. Для обеспечения цепи протекания этого
тока в схемы введены диоды VD1-VD4, включенные встречно-параллельно
тиристорам V1-V4. Диоды оказываются открытыми, когда тока и напряжения
нагрузки имеют противоположные знаки. При этом ток, потребляемый от
источника id, меняет свое направление и протекает навстречу напряжению Е.
Если источник имеет одностороннюю проводимость (выпрямитель), его
необходимо зашунтировать конденсатором, который будет заряжаться, когда
ток протекает от инвертора к источнику, и разряжаться, когда ток потребляется
от источника. Этот конденсатор должен иметь достаточную емкость для того,
чтобы пульсации напряжения источника питания были незначительны.
Преобразователи частоты осуществляют преобразование переменного
напряжения одной частоты в переменное напряжение другой частоты.
Преобразователи частоты нашли самое широкое применение в различных
областях техники. Именно использование преобразователей переменного
напряжения промышленной частоты в напряжение высокой частоты (десятки
килогерц) позволило отказаться от применения сравнительно больших и
массивных сетевых трансформаторов в блоках питания компьютеров.
Частота выходного напряжения может быть не только больше, но и
меньше частоты напряжения на входе.
327
Преобразователь частоты с промежуточным звеном постоянного тока
содержит выпрямитель и инвертор
Преобразователь частоты с непосредственной связью
(непосредственный преобразователь частоты, преобразователь частоты без
промежуточного звена постоянного тока) не содержит выпрямитель. Он
формирует выходное напряжение путем периодического соединения с
помощью полупроводниковых приборов источника входного переменного
напряжения и нагрузки.
Непосредственный преобразователь частоты с естественной
коммутацией характерен тем, что выключение использующихся в нем
приборов (обычно это тиристоры) обеспечивается переменным напряжением
силовой цепи.
Непосредственный преобразователь частоты с искусственной
(принудительной) коммутацией отличается тем, что включение приборов (как
правило, это запираемые тиристоры) выполняется по сигналам управления.
Основными элементами преобразователя частоты с промежуточным
звеном постоянного тока являются выпрямитель, инвертор и фильтр на выходе
выпрямителя. Обычно используются мостовой однофазный или трехфазный
выпрямители. Выпрямитель может быть как управляемым, так и
неуправляемым.
Иногда управляемый выпрямитель работает при нулевом угле
управления, а регулирование выходного напряжения преобразователя частоты
осуществляется с помощью инвертора. Такой режим работы выпрямителя
обеспечивает наименьший уровень искажения напряжения питающей сети.
Использование тиристоров в выпрямителе (а не диодов) обеспечивает
оперативное подключение преобразователей к питающей сети и отключение, а
также быстрое отключение в случае аварии.
В зависимости от назначения преобразователя частоты в нем могут
использоваться различные инверторы.
328
Рассмотрим один из широко используемых вариантов преобразователя
частоты (рис.7.24).
Рис.7.24. Схема преобразователя частоты
В преобразователь входит мостовой выпрямитель на тиристорах
VS1...VS4. Г-образный LC-фильтр и автономный мостовой инвертор
напряжения на транзисторах VT1 ....VT4 и диодах VD1 ...VD4.
Конденсатор С при использовании инвертора напряжения является
необходимым элементом, так как входной ток инвертора содержит большую
переменную составляющую и изменяет полярность.
На рис.7.25 приведены схемы инвертора напряжения на силовых
транзисторах, наиболее часто применяемые на практике.
329
Рис.7.25. Схемы инверторов напряжения
330
7.3.3. Системы управления преобразователей
Системы управления преобразователей подразделяются на синхронные и
асинхронные.
Отличительной особенностью синхронного способа фазового управления
является отсчет момента открывания импульсом от определенной фазы
питающего преобразователь напряжения
coti = <р + • (i - 1) + 6i(Uy), (7.9)
где O)ti - момент или угол подачи i-того импульса управления;
ср - угол или момент начала отсчета;
0i(Uy) - регулируемый угол задержки.
Отсчет угла задержки производится фазосдвигающим устройством двумя
способами: вертикальный принцип управления и интегрированный принципе
сигнала управления.
Структурная схема ФУ с развертывающим преобразованием изображена
на рис.7.26. Сигнал синхронизации ис подается на генератора развертки ГР.
формирующий сигнал развертки up. Сумма сигналов развертки up и управления
Uy или пропорциональных им токов подается на вход нуль-органа НО. Знак
входного сигнала НО определяет одно из двух состояний его выхода. Сигнал
определяет одно из двух состояний выхода. Сигнал перехода НО в заданное
состояние фиксируется дифференцирующей цепочкой, одновибратором и т.д. и
поступает на УФ. Форма развертывающего напряжения определяется из
условия управления и возможности работы в реверсивных системах.
Рис.7.26. Структурная схема фазового управления
331
Наибольшее распространение получили вертикальный принцип
управления, однофазный вариант которой показан на рис.7.27.
В момент равенства напряжений uk и ис диод Д2 открывается и
конденсатор С начинает разряжаться через обмотку трансформатора и
ограничивающий резистор R2. После разряда конденсатора диоды Д1 и Д?
открыты и шунтируют конденсатор, при этом напряжение на нем равно Дид.
Это обстоятельство является недостатком схемы, так как вследствие разброса в
значениях падений напряжения на диодах в каналах ФУ может появиться
асимметрия. Схема на рис.7.27,б имеет в этом отношении преимущество, так
как в ней разряд конденсатора происходит теоретически до нуля, а практически
- до небольшого напряжения, обусловленного разностью падений напряжения
в плечах моста.
Рис.7.27. Диодный коммутатор, а и б - варианты схем диодного коммутатора;
в - диаграммы напряжений в схеме.
332
Недостатком диодных коммутаторов, выполненных по схемам рис.7.27,а
и б, является малый диапазон угла управления.
Для расширения диапазона управления предложена несколько
усложненная схема диодного коммутатора, изображенная на рис.7.28,а.
Диаграмма напряжений в схеме показана на рис.7.28,б. Напряжения вторичных
обмоток синхронизирующих трансформаторов ш и из сдвинуты на 60°. В
интервале от coti до cot2 обратное напряжение на диоде Д1 превышает
напряжение на емкости. (Это напряжение показано тонкими сплошными
линиями на рис.7.28,б) Диоды Д1 и Д2 заперты, и емкость заряжается с
постоянной времени t=RiC. В момент cot2 напряжение на емкости становится
равным из и емкость начинает разряжаться по цепи: обмотка трансформатора
ТрЗ, сопротивление R2, диод Д2. Как и в предыдущем случае, разряд
происходит быстро, занимая небольшую часть периода. С момента cot3 до
момента cot4 начала нового заряда емкости диоды Д1 и Д2 находятся в
открытом состоянии: диод Д2 пропускает ток от источника Un, равный Un/Rl,
а диод Д1 - ток от обмотки трансформатора ТрЗ, равный u3/R2 - Un/Rl.
Напряжение на емкости на этом интервале практически равно нулю.
б»
Рис.7.28. Диодный коммутатор с расширенным рабочим участком «пилы»,
а - принципиально схема; б - диаграммы напряжений в схеме.
Диодный коммутатор такого типа позволяет получить длительность
переднего фронта «пил» 220°. Путем небольшого усложнения схемы (введения
третьей вторичной обмотки трансформатора и одного диода в каждый канал
333
коммутатора) можно получить длительность переднего фронта «пил» 270"
Однако такая длительность практически не требуется.
Общим недостатком схем диодных коммутаторов является то, что любая
схема не обеспечивает точной синхронизации момента прохождения
напряжения сети (т.е. uk) через нуль.
Асинхронный способ управления состоит в том, что отсчет момента
подачи импульса управления производится в момент подачи предыдущего
импульса:
uti = wt(i-l) + + (7.10)
где m - фазность преобразования.
В отличие от синхронной системы момент подачи импульса не связан в
явном виде с координатами и cot напряжения сети, т.е. синхронизация с сетью
отсутствует.
Благодаря выбору моментов (углов управления а) для управляющих
импульсов можно с помощью присоединенного к переменному напряжению
тиристора получить разные средние значения постоянного тока. Управляющие
импульсы поступают от электронного управляющего устройства (рис.7.29).
Рис.7.29. Токовая характеристика при использовании управляемого тиристора
В случае параллельного включения второго тиристора в
противоположном направлении (встречно-параллельное включение) при работе
334
одного тиристора получают управляемый постоянный ток в одном
направлении, при работе другого тиристора - постоянный ток в
противоположном направлении (рис.7.30). Этот регулируемый в двух
направлениях ток позволяет, например, управлять двигателем постоянного тока
во всем диапазоне чисел оборотов как при левом, так и при правом вращении.
Данные тиристорные регуляторы рассчитаны в большинстве случаев на сеть
трехфазного тока. Тогда они получают во встречно-параллельном включении в
соответствии с тремя переменными напряжения. На основе этих схем можно
также (при соответствующем управлении отпирающими импульсами)
генерировать переменный ток из постоянного тока (режим преобразования
постоянного напряжения в переменное).
- ?
однофазное воречнИ
параллельное включение
трехфа^ное вед речно-
наралдельное включение
Рис.7.30. Встречно-параллельное включение тиристоров
Примером асинхронной системы является широко распространенная
система управления двигателем постоянного тока (рис.7.31).
Преобразователь на тиристорах Т1,Т2 работает на якорь двигателя
постоянного тока Д. Напряжение обратной связи Ud снимается с якоря и
335
сравнивается с управляющим напряжением Uy. Разность напряжений
управления и обратной связи, т.е. сигнал ошибки, подается на вход регулятора
Р. (рис.7.31).
Усиленный регулятором сигнал управляет частотой мультивибратора,
выполненного на транзисторах ПТ1 и ПТ2 и трансформаторе Тр2 таким
образом, что уменьшение напряжения на нагрузке приводит к увеличению
частоты мультивибратора, а повышение напряжения на нагрузке - к снижению
его частоты.
С выходных обмоток мультивибратора напряжение подается на
управляющие электроды вентилей. Регулятор настраивается так, чтобы частота
мультивибратора при сигнале ошибки, равном нулю, была немного ниже
частоты сети питания переменного тока.
При увеличении Uy напряжение на выходе регулятора возрастает, частота
мультивибратора повышается и при определенной величине выходно) о
напряжения регулятора Р будет точно соответствовать частоте сети. В этом
режиме фаза колебаний мультивибратора относительно напряжения сети
определяет величину выходного напряжения преобразователя.
Если по каким-либо причинам напряжение на нагрузке понижается,
сигнал ошибки изменяется таким образом, что частота мультивибратора
возрастает, импульсы управления подаются на управляющие электроды
вентилей все раньше и выходное напряжение преобразователя возрастает. Как
только желаемая величина достигнута, сигнал ошибки становится близок к
нулю, и напряжение на выходе регулятора уменьшается до величины, которая
снова дает возможность мультивибратору работать синхронно с сетью, но уже с
новой фазой выходных импульсов.
Таким образом, средняя частота колебаний мультивибратора
автоматически следит за частотой сети. Теоретически такая система может
обеспечить поддержание выходного напряжения преобразователя с любой
степенью точности.
336
Рис.7.31. Устройство управления преобразователем с изменением частоты
управляющих импульсов. Tl, Т2 - тиристоры;
ПТ1, ПТ2 - транзисторы; Р - регулятор; Д - двигатель.
Структурная схема многоканальной системы приведена на рис.7.32.
Трансформатор Тр служит для получения напряжения синхронизации от сети
питания преобразователя, а также для начальной фазировки системы.
Смещение фазы напряжения синхронизации относительно фазы напряжения
сети осуществляется комбинацией включения вторичных обмоток.
Искажения напряжения сети, возникающие вследствие работы
преобразователя, а также других нагрузок, нарушают работу синхронной
системы, поэтому в цепь синхронизации всегда включается фильтр Ф.
После фильтра сигнал синхронизации подается на фазосдвигающее
устройство ФУ, куда подается также сигнал управления, прошедший через
усилитель У. На усилитель У в общем случае ложится задача развязки каналов
друг от друга, ограничения и фильтрации сигнала управления.
337
Фазосдвигающее устройство определяет момент подачи импульса
управления в соответствии с сигналами синхронизации и управления, а также с
учетом дополнительных условий, накладываемых спецификой работы
преобразователя (ограничение диапазона фазового сдвига, обязательное
однократное срабатывание и т.д.).
Сигнал с выхода ФУ поступает на усилитель-формирователь УФ,
осуществляющий формирование импульса по длительности и амплитуде, а
также осуществляющий гальваническую развязку цепей управления от силовых
цепей.
Рис.7.32. Структурная схема МСС
Функциональная схема статического преобразователя частоты (СПЧ).
питающего двигательную нагрузку, показана на рис.7.33.
Регулятор напряжения PH в зависимости от питающей сети можно
выполнить по схеме управляемого выпрямителя при питании СПЧ от сети
переменного тока или по схеме полупроводникового широтно-импульсного
регулятора при питании автономного инвертора от нерегулируемого источника
(аккумуляторная батарея, генератор постоянного тока, нерегулируемый
338
выпрямитель) постоянного тока. Регулятор напряжения PH через фильтр цепи
постоянного тока Ф подключен к трехфазному мостовому инвертору И на
тиристорах.
Система управления регулятором напряжения состоит из выходных
усилителей - формирователей импульсов управления тиристорами УФ,
фазосдвигающего устройства ФУ и блока БЗ.
Система управления и автоматического регулирования инвертором И
состоит из выходных усилителей - формирователей импульсов управления
тиристорами УФ, кольцевого распределителя импульсов РИ, генератора
переменной частоты ГПЧ, схемы сравнения СС и задающего органа 30.
Сигналы от датчиков тока I, потока Ф и скорости п системы
автоматического регулирования преобразователь частоты - асинхронный
двигатель и других датчиков, определяемых законом регулирования,
выступают в качестве управляющего напряжения, регулирующего
соответственно выходную частоту и напряжение преобразователя. В
зависимости от требований к электроприводу схема позволяет регулировать
скорость двигателя с постоянной перегрузочной способностью, с постоянным
абсолютным скольжением, с минимальными потерями на всех частотах и
разных моментах на валу. В некоторых случаях между инвертором и
двигателем ставится промежуточное устройство, включающее фильтры по
переменному току, компенсаторы, регуляторы переменного напряжения. При
использовании преобразователя с непосредственной связью функции
регулятора напряжения и инвертора совмещены в одном звене.
339
Рис.7.33. Структурная схема преобразователя частоты питающего
двигательную нагрузку
7.4. Информационно - измерительные элементы мехатронных систем.
При создании мехатронных систем наиболее приемлемым для управления
оказываются блочные микропроцессорные средства. Малые габариты и
постоянное снижение стоимости дают возможность встраивать их в локальные
системы, так в многосвязные технологические комплексы.
Типовая структура микропроцессорной системы, которая лежит в основе
микро-ЭВМ, программируемых контроллеров, специальных вычислителей и
других более сложных устройств, представлена на рис.7.34.
Рис.7.34. Типовая структура микропроцессорной системы
340
7.4.1. Микропроцессор
Микропроцессоры разных типов имеют свои структурные
(архитектурные) особенности.
Под архитектурой микропроцессора понимают принципы его внутренней
организации, общую структуру, совокупность команд и взаимодействия между
аппаратной частью (устройствами, входящими в состав микропроцессора) и
программной системой, выполненной на основе микропроцессора.
На рис.7.35 представлена структура известного микропроцессора
КР580ИК80А.
Основными узлами являются арифметико-логическое устройство АЛУ,
блок регистров и устройство управления и синхронизации. Обмен
информацией между внутренней шиной данных и шиной данных
микропроцессора DO - D7 осуществляется через двунаправленный буферный
регистр данных. По 8-разрядной шине происходит обмен информацией между
устройствами внешней памяти или ввода - вывода (ВВ) и внутренними
регистрами, а 16-разрядная шина адресов (А0-А15) через буферный регистр
адреса позволяет микропроцессора обеспечивать адресацию до 64 Кбайт
памяти (216 = 65536).
341
Шина управления
Шина адреса
Рис.7.35. Структура микропроцессора КР580ИК80А
Для организации управления микропроцессором необходимы
обрамляющие его специализированные и согласованные между собой БИС,
которые вместе с МП составляют микропроцессорный комплект (МПЮ-
Прежде всего необходимы узлы для хранения команд программы, а также
342
ввода и вывода данных, Для хранения данных промежуточных результатов
требуется дополнительная оперативная память
7.4.2. Микроконтроллеры
В последнее время в системах управления технологическими процессами,
в системах передачи данных, цифровой обработки сигналов, для дешифрации
слова состояния МП и других целей широкое применение нашли
микроконтроллеры. Микроконтроллер - управляющее устройство,
выполненное на одном или нескольких кристаллах и предназначенное для
реализации функций логического анализа и генерации управляющих сигналов.
Микроконтроллеры не содержат устройств арифметических операций,
имеют сравнительно небольшую разрядность слова, но более развитый аппарат
реализации логических функций по сравнению с универсальными МП. Они
содержат необходимый набор компонентов из микропроцессорного набора для
реализации конкретной задачи управления процессом.
Массовость применения микропроцессоров, микроконтроллеров и
микропроцессорных систем революционизирующее влияние на целое
поколение приборов и оборудования практических всех областей науки и
техники, на процессы их разработки и эксплуатации. Микропроцессоры
облегчают задачу логического проектирования: теперь разработчик работает с
моделирующими программами, алгоритмическими языками, а отладку
полученного программно-аппаратного обеспечения ведет с помощью программ
и специальных отладочных средств.
Фундаментальным принципом развития процессоров является ставка на
их многоядерность, в соответствии с которой процессор может содержать от
двух до восьми ядер и параллельно выполнять от двух до 16 вычислительных
потоков, и на использование 45- и 32 - нанометровых технологий их
изготовления. Стремление к дальнейшему увеличению производительности
вычислительных средств обусловило появление многопроцессорных систем,
343
содержащих несколько процессоров, работающих с общей оперативной
памятью и управляемой одной общей операционной системой.
Микропроцессор как «мозг» устройства содержит любая современная
мехатронная система. В качестве примера на рис.7.36 приводится типовая
структура мехатронной системы рабочего механизма или объекта, в которую
входят следующие узлы:
МП - микропроцессор;
УС1, УС2 - устройство сопряжения;
ЭП - электропреобразователь;
М - машина постоянного тока;
РМ - рабочий механизм;
ДП - дисплей пульта;
КП - клавиатура пульта.
Рис.7.36. Структурная схема мехатронной системы рабочего механизма
344
ГЛАВА 8. МЕХАТРОННЫЕ МОДУЛИ И СИСТЕМЫ В ОБЪЕКТАХ
УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ И
ПРОИЗВОДСТВАМИ
Развитие электроники и микропроцессорной техники, информатики и
компьютерной техники, высокочастотных механических и технологических
узлов, датчиков и компактных механических узлов дает основу для
проектирования и производства мехатронных модулей и систем.
Электролизно-водный (ЭВГ) является объектом повышенной опасности,
что требует особого внимания при определении перечня контролируемых
параметров и разработке соответствующей системы датчиков состояния и
исполнительных устройств, обеспечивающих безопасную работу ЭВГ.
К числу таких параметров, которые требуют постоянного контроля мы
относим прежде всего температуру и давление [9,12,84,85] электролизера. В
случае использования автономной аналоговой системы регулирования
целесообразно использовать терморезистор или полупроводниковый диод в
прямом включении. С . позиции же цифровой системы управления
целесообразно применить подходящий по конструктивному исполнению
датчик с цифровым выходом (к примеру, датчик DS18B20 фирмы Dallas
Semiconductor). Последний вариант предпочтительней, поскольку опорные
значения температуры здесь вписываются в программу работы контроллера и
легко могут быть скорректированы с учетом реальных условий работы
электролизера.
Показана целесообразность применения оптоэлектронного датчика
давления мембранного типа (при этом учитывалась возможность
возникновения чрезвычайных ситуаций в связи с образованием и
проникновением в электролизер обратной волны горения) [9,69,70].
Далее на конкретных примерах приведены принципы и устройства
управления, контроля и защиты оборудования с помощью мехатронных
345
средств, базирующихся на современной элементной базе электроники,
микроэлектроники, микропроцессорной техники.
8.1. Модернизация системы автоматического управления установки
очистки технологического оборудования от налипания сыпучих
порошкообразных веществ.
Таймер
Вход АЦП
Стра-
ница 2
ПЗУ
програм-
мы
стра-
ница 1
I R2
ОЭВП
КР1820
ВЕ1
Буфер адресо-
вала
Буфер сигналов
"Блокироеха"
"Заряд" и сл уж
ПЗУ
данных
к основ-
ной про
грамме
Uonopwoe
КРбйО
B87P
Контроллер
клавиатуры
иикд-.>. ни
Дешиф-
ратор
адреса
канала
U2
Рис.8.1
Существует большая проблема, связанная с налипанием порошков на
стенках технологического оборудования. Скапливание продуктов на стенках
при длительном термическом воздействии приводит к его порче, появляется
опасность самовозгорания, снижается эффективность техпроцесса.
Применяемые в настоящее время устройства очистки стенок технологического
оборудования (электромагнитные и пневматические молотки, щеточные и
скребковые механизмы, системы пневматического обдува) малоэффективны и
346
их использование приводит в ряде случаев к повреждению очищаемой
поверхности и снижению качества готового продукта.
В настоящее время разработана и выпускается индукционно-
динамическая установка очиетки типа У0-4000-0,9-12. Она представляет из себя
емкостный накопитель энергии и комплект электромагнитных преобразователей
с последовательной коммутацией каналов мощными ключами. Разрядный
импульс наводит в электромагнитном преобразователе поле,
взаимодействующее с диамагнитным якорем. Якорь плотно прижат к стенке
технологического оборудования с наружной стороны и передает на нее
механический импульс, деформирующий стенку и обрушивающий налипший
продукт.
Многообразие потенциальных заказчиков и возможностей использования
определяет требования к функциональной универсальности системы управления
индукционно-динамической установкой очистки. Если в первом поколении
подобных систем использована жесткая логика для по канального управления,
то система управления нового поколения предполагает значительное
расширение ее возможностей. Для гибкой адаптации системы очистки под
различное оборудование (сушильные бункеры, циклоны, трубопроводы
большого диаметра) оказалось необходимым управлять основными
параметрами техпроцесса очистки: в более широких пределах варьировать ранее
постоянными параметрами.
Упругая реакция стенок очищаемого оборудования (имеющих к тому же
различную толщину) функционально связана как с величиной импульса силы,
так и с его длительностью:
/d=<j0{s,Ts} (8.1)
где ld - величина упругой деформации стенки;
s - величина импульса силы;
ts - длительность прикладываемого импульса силы.
На практике длительность импульса силы ts много меньше периода
собственных колебаний ts - очищаемой конструкции, поэтому с достаточной
347
точностью эффективность очистки можно оценить по величине импульса
= <p(s) а величина механического импульса силы
связана с электромагнитной силой, действующей на якорь, соотноше-
нием:
S = f^F3dt (8.2)
где F3 - электромагнитная сила, приложенная к якорю W=CU2/2
Меняя электромагнитную силу F3 изменением энергий отдаваемой
емкостным накопителем, можно подбирать оптимальную величин упругой
деформации стенок технологического оборудования, оптимизируя
эффективность его очистки при минимальных энергозатратах. Управлять
энергией емкостного накопителя изменением его емкости в данном случае
нецелесообразно, поэтому использовано варьирование напряжением заряда
конденсаторной батареи в пределах от 50% до 100% от максимального
значения с шагом 10%. Этого вполне достаточно, чтобы, оптимизируя в каждом
отдельном индукционно-динамическом преобразователе (ВДП) отдаваемую
энергию, снизить общее энергопотребление (при наличии большого числа
каналов индукционно-динамического преобразования) и, снижая избыточные
упругие деформации стенок, повысить долговечность очищаемого
оборудования. Поскольку структура обычных индукционно-динамических
систем очистки включает один емкостный накопитель и несколько каналов
преобразования накопленной энергии в механический импульс, полезно
управлять энергией разряда в каждом канале независимо. Желателен и
произвольный доступ к любому из номеров каналов. В существующих
системах очистки используются 12 каналов преобразования. Время налипания
сыпучих продуктов разное и зависит от состава, технологических особенностей
оборудования. В каждом конкретном случае желательно иметь возможность
изменять время между срабатываниями ИДП» по соседству размещенных на
стенках технологического оборудования, а также время между соседними
циклами всех ВДТцодключенных к одному емкостному накопителю.
348
Изложенные выше требования определили подход к проектированию
системы управления установкой очистки, структуры ее емкостного накопителя
и типового канала преобразования энергии. Управление данными основных
параметров можно представить как:
D = var{Uc; N, Nt; тц+1; Т], (8.3)
где D - аналоговые или цифровые данные, используемые в системе;
Uc- напряжение емкостного накопителя; N - число задействованных в
техпроцессе каналов индукционно динамического преобразования;
Ni- номер текущего канала преобразования;
Тц+1-время между срабатываниями соседних каналов;
Т - время между циклами обхода всех номеров каналов.
Необходим также анализ неисправностей. Основными неисправностями
являются: режим холостого хода емкостного накопителя (в случае разрыва
цепей ИДП) и режим короткого замыкания силового ключа каналов ИДП
Анализировать достаточно легко, отслеживая динамику изменения напряжения
Uc.
Столь широкая номенклатура функций потребовала использования в
контроллере системы управления однокристальной микро-ЭВМ (ОЭВМ) и
оригинального базового программного обеспечения.
Общая структура установки очистки и ее системы управления приведена
на рис.8.1.
Заряд емкостного накопителя С обеспечивается высоковольтным
выпрямителем, подключаемым к сети тиристорным контактором сигналом
“Заряд” с контроллера управления. В качестве ключа использован тиристорный
контактор с гальванической развязкой на оптронах. Схема управления
непрерывно отслеживает напряжение заряда конденсаторной батареи С. При
заряде накопительного конденсатора от двухполупериодного выпрямителя
действительно уравнение:
ис = и = Umsina)t (8.4)
349
Ток заряда
i = a)cUmcosa)t (8 5)
В первый полупериод заряда начинается с момента времени ti и завер-
шается при Uc=Um, то есть напряжение на емкостном накопителе почти
безынерционно следует за кривой синусоидального питающего напряжения.
Включение ограничительного активного сопротивления приведет к значи-
тельным потерям энергии. Возможно ограничение зарядного тока индуктив-
ностью.
В этом случае ток заряда накопительного конденсатора и напряжение
на конденсаторе определяются (a>L > —
i - sin fat + -)
O)L--- 2
сос
(8.6)
Как видно из полученных уравнений при практической реализации такого вида
ограничения зарядного тока необходимо выбрать индуктивность такой
величины, чтобы исключить явление резонанса(о>Л = —у). В случае
двухполупериодного выпрямления резонанс может возникнуть при частотах f =
2fce™ и f = 2irfceTH. Наиболее приемлемым и более гибким является способ
зарядки накопительного конденсатора по заданному закону, функциональное
выполнение которого можно возложить на тиристорный контактор и контролер.
Для этого угол включения контактора можно задавать ,а в данном случае
целесообразно смещать до р когда
uc = Umsin(ji)t = Um (8.7)
при этом зарядный ток может быть равен нулю или начальному
(остаточному) значению.
После замыкания ключа Si в контуре LiC разрядный ток накопителя
определяется из уравнения:
Li * (djpa3p)/(dt) + гL.ipatp + uc = О (8 8)
Учитывая, что ipa3p= c*(dUc)/(dt)
350
, d‘u
LjC—г
' dt2
dUc Л
+ rHc —? + u =0,
L' dt
(8.9)
где Гц - активное сопротивление индуктивности ИДП.
Cz j
Определив корни характеристического управления Рц --(Ги)/(2Ц)± 1~--------и
v 4Lf Lc
учитывая начальные условия, определяются токи и напряжения на элементах
контура
^разр
2Li
Uqc
EZZ
4L? Lie
Uc —
2
(p2p2t-plplt);
r2__1_
LiC
(8.10)
UL = -
2
Uqc
r2
(p2p2t - plplt);
Характер процесса разряда зависит от параметров контура и может быть
апериодическим, критическим и колебательным.
Резонансная угловая частота этого колебательного контура
1
СОп --- г —
и I -г
1
Li
(8.11)
В идеальном случае активное сопротивление индуктивности ИДП мало,
поэтому резонансная частота стремиться к резонансной частоте идеального
контура
(8.12)
600
В этом случае ток будет максимальным. Поэтому при известных Li при
выборе конденсатора необходимо учитывать это обстоятельство.
Рассмотрим более подробно схему управления установкой очистки На
однокристальной микро-ЭВМ КР 1820 BEI выполнен последовательный АЦП,
контроллер клавиатуры и индикации КР 580 ВВ79 [98] обслуживает восьми
351
зарядный цифровой дисплей, куда выводится вся необходимая информация о
номере канала, энергии разряда, время, оставшееся до очередного срабатывания
ИДП и время, оставшееся до очередного цикла обхода. Таймер формирует
импульсы текущего времени, а в буферах фиксируются поступающие с общей
шины сигналы управления блокировкой накопителя и его зарядки, а также
адрес индукционно-динамического преобразователя. Переключателем Si можно
выбирать либо рабочий режим, либо режим максимального значения разряда
накопителя. Подстраивая значение R, можно привязать напряжение
конденсатора Uc к какому-либо определенному абсолютному значению
напряжения по внешнему вольтметру. Алгоритм, реализующий линейный
АЦП, построен таким образом, что, приняв некоторое абсолютное значение
напряжения за 100% (момент фиксации производится кнопкой S и
индуцируется HL), все прочие значения Uc соответствуют линейно 50% и т.д.
от максимального значения. Произведя настройку во вспомогательном режиме,
дальнейшая работа происходит по команде. Данные о параметрах каналов
заложены в сменном ПЗУ данных. Разработанная система управления ИДП
показала широкие возможности использования в отраслях народного хозяйства.
352
8.2. Автоматизация пусковых режимов асинхронных двигателей
технологических производств.
Я01
Рис.8.2
353
Схема пускателя (рис.8.2) состоит из силовой схемы управления, схемы
защиты и источника питания (24 В постоянного тока). Силовая часть состоит из
тиристоров, включенных на каждую фазу встречно-параллельно.
Управление силовыми тиристорами осуществляется широтно-
импульсным методом. Импульсы управления тиристорами формируются из
анодного напряжения тиристоров.
В исходном положении все тиристоры закрыты и находятся под фазным
напряжением. После замыкания контактов реле Р при положительной
полуволне напряжения сети на аноде тиристора Т2 ток управления анода к
катоду идет через диод Д15, контакт реле, резистор R14. Тиристор Т2
открывается. С открытием тиристора автоматически снимается сигнал
управления так как падение напряжения на открытом тиристоре превышает 1 В.
При переходе тока через нуль тиристор Т2 закрывается. При обратной
полуволне тока аналогично открывается тиристор Т7.
Аналогично формируются импульсы управления тиристорами и в других
фазах. При таком способе формирования импульсов управления контакты
включенных реле практически находятся в обесточенном состоянии, так как
через них проходит слаботочный сигнал длительностью от десятков
миллисекунд до единиц милли-секунд в течение каждого полупериода тока.
Поэтому срок службы реле определяется не электрической, а механической
износоустойчивостью, которая у электромагнитных реле достигает десятков
миллионов циклов.
Работает пускатель следующим образом. При подаче напряжения сети на
зажимы пускателя Л1, Л2, ЛЗ получает питание трансформатор Тр, вторичное
напряжение выпрямляется и подается на элементы управления и защиты. На
элементы управления (реле Р) напряжение подается только при нажатии кнопки
КнП - пуск. При замыкании контактов этой кнопки включается реле Р. После
включения этого реле замыкаются замыкающие контакты в цепях управления
тиристоров, тиристоры открываются и напряжение подается на нагрузку. При
нажатии кнопки Кнс -стоп реле отключается, снимаются импульсы управления
354
с тиристоров и нагрузка отключается. Таким образом схема осуществляет
также нулевую блокировку, которая обуславливается схемой включения реле Р.
Блок защиты предназначен для отключения пускателя в аварийных
режимах и удержания его в отключенном состоянии до осмотра установки и
устранения неисправности.
Резистор R6 служит для регулирования порога срабатывания
максимальной токовой защиты, резистор R5 - для регулирования порога
срабатывания тепловой защиты от перегрузки тиристоров.
Ток нагрузки контролируется в двух фазах трансформаторами тока ТТ1,
ТТ2, вторичные обмотки которых включены на резистор R13. Напряжение с
этого резистора выпрямляется и через стабилитрон Ст2 подается на базу
транзистора Т7 при нормальном токе в цепи нагрузки трансформаторы Т7,Т8
закрыты. Увеличение тока нагрузки до (9-10) 1н приводит к увеличению
сигнала с резисторов R6 или R7 до значения опорных напряжений
стабилитронов Ст1 и Ст2 и транзисторы Т7 и Т8 отпираются. В результате чего
переход эммитер-база транзистора T9 шунтируется транзистором Т7. Так как
транзистор Т8 остается при этом открытым, то транзистор T9 остается
запертым до возвращения схемы в исходное положение, для чего нужно снять
напряжение на входе пускателя.
Более эффективным режимом устойчивости пуска является плавный пуск
электродвигателя. Это обеспечивается более современными системами,
ограничивающих пусковой ток при разгоне двигателя до номинальной частоты
вращения. Но ограничение тока не должно приводить к уменьшению пускового
момента.
Микропроцессорная система плавного пуска трехфазного двигателя
состоит из датчиков нуля напряжения(ДНН) и тиристорного блока VS. Сигналы
с ДНН служат для запуска таймеров или счетчиков импульсов внутреннего
генератора стабильной частоты, имеющих пороговые предустановки при
достижении которых счетчики таймера останавливаются и выдают сигнал.
355
Этот сигнал подается на системы управления СУ и обеспечивает включение
тиристоров в определенные моменты.
Счетчик таймера сбрасывается на ноль и переходит в режим ожидания от
соответствующей фазы ДНН. Установка таймера позволяет менять угол
включения тиристора фазы. Для этого каждый канал таймера подключается к
микропроцессору через параллельный интерфейс вывода. Микропроцессор
задает закон U(t), где t- текущий момент пуска двигателя.
Более надежным и эффективным способом пуска двигателя является
ограничение по току 1пуск меньше или равен 1дон и по закону U(t)=f[IflOH,n(t)]
,который требует разработки более сложных систем.
356
8.3. Тиристорный регулятор напряжения вентиляторного двигателя.
Рис.8.3
БУ- блок управления, формирующие управляющие импульсы и фазовый
сдвиг;
БЗ- блок задатчика;
М- вентиляторный двигатель;
R1C1- элементы защиты тиристоров от коммутационных
перенапряжений;
VT1,VT2 - тиристорный блок.
Тиристорные регуляторы напряжения.
В системах вентиляции сельскохозяйственных помещений широко
используются специальные электродвигатели серии Д...П, скорость вращения
которых при вентиляторной нагрузке регулируют изменением подводимого
напряжения.
357
Наиболее надежная и универсальная система регулирования напряжения
при помощи тиристоров. Из тиристорных регуляторов напряжения наиболее
распространены регуляторы типа РНТО ( регулятор напряжения тиристорный
однофазный). При питании от сети 220 В они имеют пределы регулирования
напряжения от 0 до 190 В, а при питании от сети 380 В- от 0 до 330 В при токах
63, 250, 600А.
В качестве регулирующих элементов в силовой части схемы
используется, и в тиристорных пускателях, 2 тиристора, включенных встречно-
параллельно (рис.8.3,а).- для защиты вентилей от коммутационных
перенапряжений параллельно каждому из них подключена цепь RC.
Схема управления(блок БУ) формирует управляющие импульсы и
фазовый сдвиг. В зависимости от временной задачи этих импульсов на
управляющие электроды тиристоров осуществляется изменение выходного
напряжения регулятора (рис.8.3,б).
Для осуществления регулирования необходимо на блок управления
подать сигнал постоянного тока 0-5 мА от внешнего регулирующего
устройства (подается от блока задатчика БЗ, состоящего из понижающего
трансформатора Тр, Выпрямителя с фильтром и делителя напряжения R3). При
изменении силы тока управления 13 меняется угол открытия тиристоров и,
следовательно, среднее напряжение на выходе регулятора.
Если включить на выход регулятора напряжения РНТО электродвиготеля
типа Д...П с вентиляторами, то произойдет плавное изменение скорости
вращения вентиляторов.
358
8.4 Система автоматического управления мотальных машин.
Рис.8.4
На мотальных машинах пряжа с прядильных початков перематывается в
бобины для сновальных машин, чтобы удлинить нить на паковке и тем самым
обеспечить бесперебойную работу сновальных машин. Бобина вращается
благодаря трению о поверхность мотального барабанчика, который имеет
принудительное движение. На поверхности мотального барабанчика имеется
замкнутая канавка, которая обеспечивает крестовую раскладку нити по
поверхности бобины, чем обеспечивается разматывание при дальнейших
технологических операциях на сновальной машине.
На современных мотальных машинах отечественного производства
устанавливается от 20 до 100 барабанчиков. Скорость перематывания
достигает 1200 об/мин, а потребляемая мощность зависит от количества
барабанчиков.
К электроприводу мотальной машины предъявляется целый ряд тре-
бований: одинаковая скорость намотки и постоянство натяжения нити на все
359
бобины; возможность изменения средней скорости; периодическое изменение
угловой скорости мотальных барабанчиков с целью рассеивания витков.
Электропривод содержит два асинхронных двигателя с короткозамкнутым
ротором и один вспомогательный двигатель малой мощности для приведения
в движение валов электропрерывателя, механизма самоостанова бобин.
Электропрерыватель обеспечивает подключение и отключение к силовой
цепи основных двигателей через электромеханические контакты. При
замыкании прерывателя электродвигатели увеличивают скорость, а при
размыкании уменьшают, что обеспечивает изменение угловой скорости
мотальных барабанчиков. Благодаря этому бобины проскальзывают
относительно этих барабанчиков, что обеспечивает рассеивание витков и
исключает появление жгутов. Питание двигателей прерывается 19-20 раз в
минуту при длительности прерывания ориентировочно не более I сек., т.е.
возникает необходимость коммутации силовых цепей более чем 2000 раз в час.
Изменение времени включения и отключения в последние годы обес
печивалось с помощью изменения угла дуги эксцентрика. Улучшение работы
такой электромеханической системы обеспечивается путем разработки
оптимальных геометрических размеров эксцентрика, подбора надежного
материала для контактов, использования искрогасящих устройств.
Развитие полупроводниковой техники открыло новые возможности по
обеспечению бесконтактного электропрерывания и полной ликвидации
искрообразования. Наиболее перспективным является применение тирис-
торных прерывателей вместо электромеханических.
Функцию задатчика времени выполняет автогенератор, параметрами
которого определяется время включенного и отключенного состояния
двигателей. Наиболее перспективным вариантом разработки бесконтактного
прерывателя является тиристорный прерыватель с генератором частоты
интегрального типа (р и с. 8.4 ).
Блок электронного управления мотальной машины М-150 содержит
следующие узлы:
360
тиристорный прерыватель, содержащий четыре встречно-параллельных
тиристора, включенных в две фазы электропривода мотальной машины;
генератор частоты интегрального типа;
разделительный трансформатор с цепями управления на отдельные
тиристоры,
источник стабилизированного питания.
Тиристорный прерыватель собран на тиристорах типа 2Т-142-80-6,
имеющих малые массогабаритные показатели и обладающих улучшенными
характеристиками по быстродействию (20 мксек). Тиристорный переключатель
выполняет функции прерывателей на электромеханических элементах,
имеющихся в системе прерывания мотальной машины М-150. Тиристорный
прерыватель обладает не только высоким быстродействием, но и надежностью,
большим сроком службы, отсутствием электрической дуги при коммутациях.
Роль кулачкового переключателя прерывателя выполняет задающий генератор
интегрального типа.
Генератор собран на основе интегрального мультивибратора с ис-
пользованием логических Элементов ДД1-3, ДД1-4. Отличие данной схемы от
классической состоит в применении двух времязадающих резисторов,
развязанных по току диодами. Благодаря этому длительность импульса тн не
зависит от длительности паузы тп, что позволяет при фиксированной изменять
период повторения. Длительность тн и тп определяется следующими
соотношениями:
Тн =0,8(R3 +R4)CI Xv=0,8(R,+R2)C1, (8.13)
Скважность и частоту импульсов можно изменять резисторами R. 3 и R 4.
Эти импульсы управляют вторым генератором, собранным на элементах
микросхемы ДД1-1, ДД1-2.
Если на входе 2 элемента ДД1-1 появится напряжение высокого уровня,
то на выходе элемента ДД1-2 возникают прямоугольные импульсы, которые с
361
частотой, задаваемой резистором R5 и конденсатором С4. подаются через
резистор Кб и базу транзистора VT2.
В качестве источника питания может быть применен любой стабили-
зированный источник постоянного напряжения с фиксированным значением 10
В. Применение КМОП - микросхемы с высокой помехоустойчивостью -
позволяет использовать источник питания с уровнем пульсаций до 100 мВ.
Следует иметь в виду, что неправильное (обратное) подключение питающего
напряжения ведет к мгновенному выходу из строя микросхемы ДД1. Для
исключения этой возможности желательно предусмотреть защитный
кремниевый диод, рассчитанный на соответствующее напряжение и ток
(например, КД213). Он подключается анодом к источнику питания, катодом к
плюсовой клемме схемы генератора и может быть расположен непосредственно
на плате блока питания.
Управление нагрузкой осуществляется посредством включения и
отключения тиристоров.
Если в процессе эксплуатации генератора из-за коммутационных помех,
создаваемых тиристорами, возникнут сбои, то выводами 7 и 14 микросхемы
ДД1 следует подключить шунтирующий керамический конденсатор емкостью
около 0.033 мкФ. Он устанавливается на плате генератора и запаивается
непосредственно на указанные выводы микросхемы.
Технические характеристики блока электронного
управления мотальной машины М-150-1 (М-150-2)
1. Напряжение сети линейное, В 380
2. Частота сети, Гц 50
3. Число фаз питания 3
4. Допустимый ток нагрузки в номинальном режиме, А 25
5. Рабочая частота в режиме прерывания, вкл/мин 20
6. Пределы регулирования частоты, вкл/мин 18-21
7. Напряжение источника питания микросхем, Б 10
8. Потребляемый ток генератора импульсов при отключенной нагрузке, А 0,1
362
9 Номинальный ток нагрузки каждого канала
управления (не более), А 1,5
10. Габаритные размеры, мм:
а) панелей управления длина 140
ширина 80
высота 50
б) силового блока длина 290
ширина 200
высота 100
11. Масса экспериментального образца,кг 5
12. Пределы рабочих температур, С? -5-40
Как показал опыт применения двигателей при импульсном питании
нагрев двигателя за счет пусковых токов увеличивается и тепловые потери в
обмотках повышаются прямо пропорционально скольжению. Следовательно,
допустимое число включений ограничивается величиной, при которой средняя
температура двигателя не должна превышать максимально допустимую по
теплостойкости изоляции. Поэтому при выборе электродвигателя с
использованием тиристорного прерывателя необходимо проверить допустимое
число включений в час по формуле:
q = 36001v ДР,,Л (8.14)
где
ДР - потери мощности двигателя в импульсном режиме;
ДРН- потери мощности двигателя в номинальном режиме;
/? - коэффициент ухудшения теплоотдачи при отключении (без
вентилятора);
к- коэффициент продолжительности включения;
ДИ'рДИ;-потери энергии при пуске и торможении.
363
8.5. Система автоматического регулирования электрофильтра.
1- Блок управления тиристорами (генератор импульсов);
2- Блок суммирования;
3- Блок защиты и сигнализации;
4- Измерительный блок;
5- Блок питания
Тиристорное регулирование обеспечивает создание быстродействующей
системы автоматического регулирования напряжение фильтра,
обеспечивающей высокую точность регулирование, быстродействие,
импульсно - фазовые ограничения тока, защиту в аварийных режимах.
364
На рис.8.5 представлена система автоматического регулирования
напряжения на уровне кратко - временных дуговых пробоев, основанная на
применении бесконтактных логических полупроводниковых элементов с
периодическим законом регулирования. Применение логических элементов
имеют большие достоинства: высокая надежность, быстродействие,
помехоустойчивость и т.д.
Двоичные сигналы на выходе и входе логических систем могут быть
потенциальными или импульсными. Основным элементом в этой системе
является «ИЛИ-НЕ»(Т-101, Т-202, Т-203, Т-302)
Генератор импульсов (1) вырабатывает импульсы управления для
включения тиристоров в заданные моменты времени определяемые уровнем
напряжения.
В схеме реализуются «вертикальный» принцип управления, сущность
которого заключается в формировании пилообразного напряжения и его
сравнении с напряжением управления. В моменты сравнения происходит
формирование прямоугольных импульсов.
Блок суммирования
Предназначен для селекции импульсов поступающих с измерительного
блока, и преобразования их в соответствующий уровень управляющего
напряжения.
- Блок суммирования может содержать четыре канала:
- - канал рабочего регулирования,
- - канал гашения дуги,
- - канал токоограничения,
- - канал первоначального подъема напряжения.
Блок Защиты и сигнализации
Обеспечивает включение и отключение агрегата с поста управленияи
дистанционного, световую сигнализацию при подключении к сети, аварийное
отключение и световую сигнализацию при коротких замыканиях в камере
электрофильтра, а также перегреве масла в выпрямительном блоке.
365
Измерительный блок
Предназначен для контроля режима работы электрофильтра путем
измерения тока и напряжения на первичной стороне трансформатора.
Блок питания
Предназначен для питания логических элементов стабилизированным
напряжением +6, -12В и не стабилизированным -24В,-100В. Блок питания
Содержит трансформатор, выпрямитель, конденсаторы для сглаживания
напряжения. Стабилизация напряжения осуществляется кремниевыми
стабилизаторами или стандартным блокам питания.
8.6. Автоматизация режимов электролизно-водных генераторов водородно-
кислородной смеси с применением микропроцессора и микро-ЭВМ.
Достижения электронной техники позволяют создать новые принципы и
аппаратуру управления и защиты электролизно-водных генераторов (ЭВГ) и
установок на их основе. Предложен и апробирован новый принцип построения
устройства для газопламенной обработки металлов. Разработан и предложен
вариант электронного устройства управления и защиты ЭВГ и бытовой
установки на базе генератора, защищенного авторским свидетельством. На
основе авторского свидетельства разработаны варианты электронных устройств
управления и защиты ЭВГ бытового и промышленного назначения. На рисунке
8.6.1 представлена функциональная схема электронного устройства управления
и защиты. Устройство для газопламенной сварки и пайки содержит
электронный контактор 1, выпрямительный мост 2, регулятор потребляемой
мощности 3, электролизер с датчиками давления и температуры 4,
предохранитель обратного удара 5, регулятор давления газовой смеси 6, блок
защиты по давлению 7, содержащий задатчик критического давления, и первую
схему сравнения СС1, блок защиты по температуре, содержащий вторую схему
сравнения СС2, задатчик критической температуры, транзисторный логический
элемент «ИЛИ», ключ 10 для отключения электронного контактора 1. Один из
366
газовых выходов электролизера соединен с регулятором давления 6, имеющим
обратную связь с регулятором потребляемой мощности 3, а второй газовый
выход через предохранитель обратного удара соединен с одним из газовых
каналов горелки, при достижении определенного уровня давления, задаваемого
задатчиком регулятора 6, регулятор потребляемой мощности 3 выключается, а
при снижении давления ниже уровня регулятор потребляемой мощности 3
выключается, а при снижении давления ниже уровня регулятор потребляемой
мощности 3 включается и через электролизер 4 протекает ток. Это позволяет
поддерживать давление в системе на определенном заданном уровне. Сигнал
защиты электролизера 4, при недопустимом по условиям эксплуатации
давлении, вызванный, например, отказом элементов регулятора потребляемой
мощности 3 или регулятора давления 6, формируется блоком защиты по
давлению 7. Электрический сигнал с датчика давления поступает на вход
схемы сравнения СС1 блока защиты 7 и сравнивается с электрическим
сигналом задатчика критического давления КД, подаваемого на другой вход
схемы сравнения СС1 блока 7. Если первый сигнал превышает второй, то на
выходе блока 7 появится сигнал защиты. Сигнал защиты электролизера при
недопустимой по условиям эксплуатации температуре его пластин,
формируется блоком температурной защиты 8. Электрический сигнал с датчика
температуры, размещенного в электролизере 4, подается на вход схемы
сравнения СС2 и сравнивается с электрическим сигналом задатчика
критической температуры ЗКТ, подаваемым на второй вход СС2 блока защиты
8. Если первый сигнал превысит по амплитуде второй, то на выходе блока 8
появится сигнал защиты. Так как выходы блоков 7, 8 имеют электрическую
связь со входами транзисторного логического элемента «ИЛИ» 9, то при
появлении сигнала защиты на любом из выходов последнего на его входе
возникает электрический сигнал, приводящий к выключению ключом 10 цепи
управления контактора и запиранию электронного контактора 1 отключающего
питание электролизера 4.
367
VS1
Рис.8.6.1. Функциональная схема защиты и релейного управления ЭВГ
Основную роль при пайке и сварке металлов играют технические
параметры пламени газовой горелки, температура и интенсивность. Эти
параметры не поддаются непосредственному контролю из-за отсутствия
соответствующих датчиков. Регулировка количества газа, подводимого к
горелке, осуществляется регулировочным вентилем, расположенным на
горелке. На практике технические параметры пламени определяются лишь
визуально, по цвету и длине пламени. Для достаточно точного определения
параметров пламени необходимо измерить количество газа, поступающего в
зону горения. Измерения в газопроводе могут быть выполнены посредством
датчика для измерения проходящего количества газа в газопроводе. С
использованием подобного датчика появляется возможность контролировать
объем газа. В этом случае регулирующая способность вентилей газовой
горелки сведется к двум положениям («открыто» и «закрыто»). В систему
управления вводится дополнительная образуемая связь, позволяющая
поддерживать производительность электролизера в соответствии с
необходимыми техническими параметрами. Контроль давления в системе
368
удобно производить датчиком давления, выдающего на своем выходе ток,
величина которого эквивалентна величине давления газа, воздействующего на
датчик. В качестве вспомогательных датчиков системы служат датчики
температуры и уровня электролита в электролизере. Приведенный перечень
датчиков достаточен для построения системы с применением главного
управляющего узла микроЭВМ. Актуальность применения ее в подобной
системе оправдана достаточным объемом сложных зависимостей величин
напряжений, поступающих с датчиков, управлением производительностью
электролизера. Наряду с этим появляется возможность задания и поддержания
необходимых технических параметров пламени в зависимости от требований
технологического процесса.
Блок электронного управления кислородно - водородной установки
малой мощности изображен на рис.8.6.2.
Рис.8.6.2. Блок схема электронного управления
AC DC - преобразователь переменного напряжения в постоянный;
ШИМ - широтно-импульсный модулятор;
КМОП - комплементарные - металл - окисел (двуокись кремния) -
полупроводник.
В современных электротехнологических установках для регулирования и
стабилизации (как частный случай регулирования) напряжения, тока, мощности
369
и других параметров получили широкое применение электронные устройства
на полупроводниковых элементах - транзисторах, тиристорах или симисторах.
Достоинства этих элементов неоспоримы: высокое быстродействие,
надежность, энергетические показатели, хорошие массогабаритные показатели
и сравнительно невысокая стоимость. Некоторым недостатком является
искажение питающего установку напряжения или тока, что при малых
мощностях не является существенным и определяющим.
Наиболее приемлемым при малых мощностях является однофазная
мостовая схема. На базе этой схемы можно построить системы электропитания
и регулирования электролизно - водного генератора. Регулирующий орган
можно построить на элементах полупроводниковой электроники -
транзисторах, симисторах и других элементах.
На рис.8.6.3, а - ж, приведены основные схемы с включением
управляемых элементов на стороне постоянного тока, а на рис.8.6.3, з - м - на
стороне переменного тока.
Наибольший интерес представляют схемы с минимальным числом
элементов, так как они обеспечивают более низкую стоимость и большую
надежность.
Из всех решений рис.8.6.3, а - ж является схема с неполным числом
тиристоров (д), для включенных в катодную группу, которая позволяет
применить одноканальную систему управления тиристорами, и схема с одним
транзистором в цепи электролизера (е).
370
Рис.8.6.3. Схемы систем электропитания и регулирования электролизера
На основе схемных решений рис.8.6.3, з - м целесообразно строить
систему электропитания и управления электролизера по одному важному
достоинству: функции регулирования, контроля и зашиты электролизера и всех
других элементов электрооборудования можно возложить на одни и те же
управляемые элементы.
371
На рис.8.6.4 показана схема, позволяющая с помощью микроЭВМ
управлять средней мощностью, выделяемой в нагрузке, например в
электролизере. Нагрузка подключается к сети переменного тока (220 В, 50 Гц)
через тиристорную схему, управление которой осуществляется через оптронную
развязку от D - триггера. Если триггер установлен в 0, то нагрузка отключена от
сети. Если триггер установлен в 1, то нагрузка подключена к сети.
Рис.8.6.4. Электронное управление с помощью микро-ЭВМ.
ТБ - тиристорный блок, ВБ - выпрямительный блок,
ФИ - формирователь импульсов, С - счетчик,
К - компаратор, Т - триггер, ОР - оптронная развязка.
Выпрямленное напряжение (а) поступает на формирователь ФИ, с выхода
которого снимаются импульсы (в), которые запоминаются с выхода
компаратора К в D - триггере и прибавляют единицу к текущему содержимому
счетчика С. При переполнении счетчика он начинает счет с нуля, а затем опять
372
повторяется переполнение. Компаратор К сравнивает n-разрядное двоичное
число А, поступающее со счетчика С п+1 разрядным числом В, порта
определяющим среднюю мощность нагрузки, из доступного порта микро-ЭВМ
Если А > В на выходе компаратора К формируется логическая «1», а если А < В
соответственно «О», т.е. если А < В нагрузка отключается, а А > В нагрузка
подключена к сети.
Серьёзной проблемой на пути создания автоматизированных
технологических установок на базе электролизно-водных генераторов большой
мощности является организация системы измерения уровня электролита в
электролизере. Дело в том, что этот параметр является определяющим в
обеспечении стабильной и контролируемой работы электролизера, поскольку
отвечает за электрические характеристики электролизера как приемника
энергии. Мы уже отмечали, что в процессе работы количество
дистиллированной воды в электролизере уменьшается. Это приводит к
увеличению концентрации электролита. Чрезмерное повышение концентрации
приводит к нарушению режима работы электролизера и, соответственно,
электролизно-водного генератора в целом. В химической, газовой, атомной и
других отраслях разработаны и применяются разнообразные датчики уровня
использующие широкий спектр принципов первичного преобразования
информации в электрический сигнал от простейших мерных трубок и
поплавковых датчиков до весьма сложных систем с использованием
ультразвукового и электромагнитного излучения, а также достижений
микроэлектроники. Такие датчики широко и с успехом применяются.
Однако, в реализованных до настоящего времени технологических
установках на базе электролизно-водных генераторах системы регистрации и
измерения уровня электролита ограничены простейшими устройствами для
визуального контроля. Связано это, на наш взгляд, с электропроводностью и
чрезвычайно высокой проникающей способностью используемого электролита,
а также с возможностью загрязнения электролита и с пенообразованием. При
работе с горелкой вручную оператор, как правило, имеет возможность
373
визуально контролировать уровень электролита, а также изменять, при
необходимости, режим работы горелки. В автоматическом режиме система
должна, как минимум, сигнализировать о чрезмерном расходе
дистиллированной воды в электролизере.
В связи с изложенным выше, целесообразно рассмотреть вариант
измерения не уровня электролита, а расхода воды в составе электролита начиная
с момента начальной зарядки (максимальный рабочий уровень электролита). В
этом случае измерение расхода электроэнергии позволяет нам (в соответствии с
законом Фарадея) определить с хорошей точностью (около 98%) расход воды, а
также водорода и кислорода. Если сказать более корректно, то задача сводится к
регистрации количества электричества проходящего через электролизер. Это
может быть сделано, в принципе, как по цепи постоянного, так и по цепи
переменного тока (до выпрямителя) с соответствующим пересчетом на
количество электричества. В соответствии с теорией, на одну пару электродов
(анод + катод) электролизера при электролизе диссоциирует 0,9-10'7 кг/Кл воды и
генерируется 11,8-1 О*5 л/Кл водорода, 6-10'5 л/Кл кислорода (при нормальном
давлении) и 17,8-10'5 л/Кл смеси газов (Н2+О2).
Для построения электрической схемы измерительного устройства
целесообразно использовать функциональную схему, приведенную на рис.8.6.5.
Электрический ток, питающий электролизер, протекает по первичной цепи
трансформатора тока (1) (трансформатор переменного тока или трансформатор
постоянного тока), трансформируется в соответствующий вторичный ток.
который поступает в интегратор (2), где заряжается накопительная ёмкость.
Величина напряжения на ёмкости измеряется аналогово-цифровым
преобразованием микроконтроллера (4). При достижении некоторого заранее
установленного напряжения Unap контроллер выдает управляющий импульс на
коммутатор аналоговых сигналов (3), который разряжает накопительную
ёмкость интегратора. После этого вновь начинается процесс накопления
электричества. Одновременно в контроллере осуществляется подсчет
количества электричества (по числу полученных "порций”) и перерасчет
374
суммарного количества электричества на соответствующие значения расхода
воды и выхода газов, что отображается на индикаторе (5).
Рис.8.6.5. Функциональная схема измерения расхода воды и выхода Н2 и О2.
1 - трансформатор тока; 2 - интегратор; 3 - блок управления интегратором;
4 - микроконтроллер; 5 - индикатор расхода воды и газов.
При достижении некоторого интегрального расхода воды, которое
принято как предельно допустимое, контроллер выдает аварийный сигнал на
управляющую ЭВМ. Основным узлом схемы является трансформатор тока (1).
От него зависит корректность проводимых измерений. На трансформатор
возлагается две основные функции: передача тока из первичной (силовой) цепи
во вторичную по возможности без искажений и с необходимым для измерений
коэффициентом трансформации, а также обеспечение надежной изоляции
первичной и вторичной (измерительной) цепи. Выбор типа трансформатора
определяется исходя из принятой системы регулирования потребляемой
электролизером мощности. Так, при управлении по углу зажигания кривая тока
и на стороне переменного тока и в цепи постоянного тока непосредственно
питающей электролизер, носит явно несинусоидальный характер. Для этого
случая необходимо использовать один из вариантов трансформатора
постоянного тока [3]. В случае использования классического варианта
трансформатора постоянного тока на базе ферромагнитных магнитопроводов с
регулируемой индукцией, реализуется функция изоляции измерительной цепи
от силовой, однако здесь необходим дополнительный изолированный источник
375
тока повышенной частоты. Возможно, в принципе использование одного из
вариантов оптоэлектронного трансформатора тока [3,9]. Такие трансформаторы
постоянного тока могут с минимальными искажениями передать в
измерительную цепь в аналоговой форме информацию о токе, протекающем в
первичной цепи. Однако и здесь требуется дополнительный изолированный от
измерительной цепи источник питания. На рис.8.6.6 в качестве иллюстрации
приведена принципиальная схема оптоэлектронного трансформатора тока на
базе линейного оптрона HCNR200/1 фирмы "Avago” [9].
Если ориентироваться на принятую нами ранее как основную
’’пульсовую" схему питания электролизера [69,71], когда сила тока через
электролизер неизменна и равна оптимальной для данной конструкции
величины, а моменты включения и выключения определяются датчиками
давления, то задача регистрации количества электричества, проходящего через
электролизер, упрощается [9].
Рис.8.6.6. Схема трансформатора постоянного тока на базе линейного
оптрона HCNR200/1
Ъл - ток, протекающий через электролизер;
Rm - сопротивление шунта; CD - светодиод оптрона HCNR200/1;
ФЭ1 - фотодиод обратной связи оптрона;
OD2 - сигнальный фотодиод оптрона.
376
Действительно, поскольку в этом случае в цепи питания электролизера
до выпрямителя протекает преимущественно синусоидальный электрический
ток, можно использовать классический трансформатор тока с последующим
выпрямлением его в режиме близком к режиму короткого замыкания. Далее, в
соответствии со схемой рис.8.6.5, электрический ток интегрируется, результаты
интегрирования обрабатываются микроконтроллером и индицируются. Таким
образом, достаточно просто решается проблема контроля расхода воды в
автоматизированных установках на базе электролизно-водных генераторов.
В технологии сварки и пайки при обработке некоторых изделий
(например, при сварке толстостенных трубок малого диаметра, герметизации
корпусов микроэлектронных изделий и др.) возникает необходимость
изменения мощности источника тепла в процессе проведения операции [69,70].
Если процесс ведется вручную, оператор может изменить параметры пламени
вентилями на горелке, правда, это далеко не всегда удобно и даже возможно.
Решение этой проблемы целесообразно искать на пути встраивания в
газотранспортную систему управляемого электрическим сигналом газового
редуктора. Это позволяет дистанционно и программно (если ЭВГ управляется
от ЭВМ) изменять давление газа в горелке [9].
На основе рассмотренной выше обобщенной функциональной схемы
технологической установки с электролизно-водных генератором (рис.8.6.1)
составлена функциональная схема предназначенная к реализации сварочной
установки с раздельным получением водорода и кислорода (рис.8.6.7). В схеме
предусмотрено использование электролизера монополярного типа для
раздельного получения водорода и кислорода. Газы накапливаются в
водородной и кислородной областях электролизера. Затем Н2 и 02 проходят
очистку в устройствах 5 и 6. Уровень высокого давления заканчивается
управляемыми редукторами 7 и 8, что позволяет программно регулировать
мощность и химический состав смеси (окислительный или восстановительный)
для реализации заданного цикла или режима сварки и пайки. После редукторов
377
газы раздельно проходят через устройства защиты от обратного удара (9, 10) и
поступают через вентили ручного управления (11, 12) в зону горения.
Рис.8.6.7. Функциональная схема системы управления и защиты
технологической установки на базе электролизно-водного генератора.
1 - тиристорный блок управления; 2 - выпрямительный блок; 3 - расходомер
электроэнергии; 4 - электролизер; 5, 6 - устройство очистки газов; 7, 8 -
редукторы газовые с электронным управлением; 9, 10 - устройство защиты от
обратного удара и обрыва в газотранспортной системе; 11, 12 - вентили
газовые; 13 - оптронная развязка; 14 - формирователь импульсов; 15 - триггер;
16 - счетчик; 17 - компаратор; 18 - микро-ЭВМ.
Питание электролизера осуществляется через тиристорный контактор
(1), объединяющий функции управления, защиты и коммутации и
выпрямительный мост (2), обеспечивающий сглаженный ток. Непосредственно
на шины постоянного тока устанавливается датчик расход электроэнергии (3).
сигнал с которого контролируется и обрабатывается на ЭВМ. Это позволяет
после обработки сигнала реализовать контроль расхода газа и воды.
378
Выпрямленное пульсирующее напряжение частотой 6/ (или If при
однофазной мостовой схеме) поступает на формирователь импульсов (14).
Формирование импульсов происходит в момент коммутации вентилей, т.е.
равенства двух линейных напряжений. Эти моменты запоминаются триггером
(15) и прибавляют единицу к текущему содержимому счетчика (16). При
переполнении счетчика, он начинает счет с нуля и далее процесс повторяется.
Компаратор (17) сравнивает n-раздельное положительное двоичное число,
поступающее со счетчика с (п+1) разрядном числом, поступающим с порта
микро-ЭВМ (18). Если первое число больше последнего, то формируется
единица, а в противном случае нуль. Развязка силовой цепи от слаботочной
обеспечивается оптронной схемой (13).
Система управления тиристорами контактора выполнена на
микроконтроллере. Программа работы системы управления написана на
Accembler и отлажена в интегрированной среде программирования HPlab IDE.
Система отличается тем, что в каждой фазе стоит датчик перехода синусоиды
через нуль, от которого ведется отсчет времени включения тиристоров.
Контроль попадания фаз осуществляется дважды за период во время
положительной полуволны каждой фазы и во время отрицательной полуволны,
что обеспечивает контроль за фазами при потере управления из-за помех. При
потере управления автоматически срабатывает узел контроля чередования фаз
и устройство выключается до выключения автоматической защиты.
На рис.8.6.8 представлена принципиальная электрическая схема
управления, защиты и контроля электролизно-водного генератора на базе
микроконтроллера PIC16F84A. Схема реализует канал управления,
соответствующий каналу № 1 функциональной схемы (рис.8.6.7) блока 1.4.
системы управления. В качестве датчика температуры здесь использован
термодатчик с цифровым выходом DG18B20, работающий в диапазоне
температур от - 50 до + 125°С. Он может быть непосредственно подключен к
микроконтроллеру PIC16F84A (уровни сигналов также согласуются). В
качестве датчиков давления используются уже проверенные нами ранее
379
релейные сигнализаторы давления типа МСТ [9,11]. Рабочий диапазон
давлений до 3 атм (0,3 МПа). Сигнализатор в цепи аварийного отключения на
давление до 6 атм (0,6 МПа). В качестве сигнализаторов состояния
электролизера по температуре используются светодиоды: синий (D1) -
холодный электролизер; зеленый (D2) - температура достигла номинальной
величины (80°С) и красный светодиод (D3) сигнализирует о перегреве
электролизера (t >85°С).
микроконтроллера
380
Рис.8.6.9. Схема управления, защиты и контроля ЭВГ на базе PIC16F84A
R7, R8, R9, RIO-330 Ом; R4, R5, R6 - 2,2 К; R15-10K;
1 - датчик температуры DS18B20; 2 - датчик нижнего рабочего давления
(DHD); 3 - датчик верхнего рабочего давления (DBD); 4 - датчик критического
давления (DKD); 5 - выход сигнала аварийного отключения по давлению; 6 -
выход сигнала аварийного отключения по температуре; 7 - выход сигнала на
включение системы охлаждения; 8 - выходной сигнал на включение и
выключение генерации газа.
Электрическая схема, приведенная на рис.3.26, при соответствующей
прошивке контроллера PIC16F84A обеспечивает следующий алгоритм работы
электролизно-водного генератора:
381
I. Контроль и управление работой электролизно-водного генератора
идет по двум основным каналам - по температуре электролизера и по
давлению.
II. Контроль и управление по температуре:
После включения электропитания осуществляется опрос датчика
температуры. Полученное значение температуры (Т) сравнивается с заданной
(записанной в памяти контроллера) минимальной рабочей температурой (Т1).
Если измеренное значение температуры меньше минимальной рабочей (Т<Т1),
то RB0 (6 контакт контроллера) подается "лог.1" (высокий потенциал) и
загорается синий светодиод (D1). Если при сравнении температур Т>Т1 на RB0
подается "лог.О" и синий светодиод отключается. Одновременно на RB1 (7)
подается "лог. 1 " (загорается зеленый светодиод (D2)), а также ”лог. 1" подается
на RB6 (12) для включения в работу системы охлаждения электролизера. Если
при работе электролизера с включенной системой охлаждения температура
продолжает повышаться и достигает критического значения (Т>Т2) на RB2 (8)
подается сигнал "лог. Г и зажигается красный светодиод (D3), а на RB0 и RB1
логические нули. Одновременно, на RB5 (11) подается сигнал аварийного
отключения по температуре ("лог. Г). При этом на RB6(12) остается сигнал
"лог.1" и система охлаждения продолжает работать. Логические единицы на
RB5 и RB6 остаются всё время, тока Т>Т2.
При снижении температуры, если Т становится меньше Т2 и сигнал на
RB5 (11) переходит в "лог.О" и снимается запрет на запуск процесса
электролиза (только по температуре!). Сигнал на RB1 изменяется на "лог. Г'
(загорается зеленый светодиод), а сигнал на RB2 переходит в "лог.О". Если
температура продолжает снижаться и Т становится < Tl, RB0 переходит в
"лог.1" (загорается синий светодиод), RB1 изменяется на "лог.О" (отключается
зеленый светодиод).
III. Контроль и управление по давлению:
После включения электропитания осуществляется опрос датчиков
нижнего рабочего давления (DHD), верхнего рабочего давления (DBD) и
382
сигнализатора аварийного (критического) давления (DKD). Если в системе
давления ниже нижнего рабочего давления, контакты релейного датчика
(сигнализатора) давления замкнуты (сигнализатор нормально-замкнутого типа)
и на входе RA1 (18) формируется сигнал ’’лог.О", а на выходе RB7 (13) сигнал
"лог.Г’. Электролизер включается и начинается процесс набора давления. При
этом датчики верхнего рабочего давления (DBD) и аварийного (критического)
давления (РКР) формируют на входы RA2 и RA3 контроллера логические
нули. При достижении величины давления в электролизере Р>Рм, т.е. нижнего
рабочего давления сигнал на RA1 изменяется на "лог.!" (размыкаются
контакты DHD). Электролиз и набор давления продолжается. При достижении
величины давления Р>Рв, т.е. величины верхнего рабочего давления,
срабатывает датчик верхнего рабочего давления и формирует на входе RA2
сигнал "лог.1". Это вызывает изменение выходного сигнала на RB7 с ’’лог.1" на
"лог.О". Процесс электролиза останавливается. Если по какой-либо причине
процесс электролиза продолжается, давление возрастает и достигает уровня
срабатывания датчика аварийного давления (DKD), сигнал на входе RA3
меняется с "лог.О" на "лог.1" и формируется выходной сигнал на RB4 также
равным "лог.1", что вызывает аварийное отключение аппарата (аналогично
защите по температуре).
Сигнал держится постоянно и блокирует повторный запуск аппарата
кнопкой "пуск" (отключается контактор).
Если аварийная ситуация не возникла и процесс электролиза прекратился
по сигналу от DBD, то, по мере расхода газа (через горелку) давление в
электролизере начинает снижаться. При снижении давления до Р<Рв (ниже
верхнего рабочего давления) датчик верхнего рабочего давления переходит в
исходное состояние (контакты замкнуты), т.е. на входе RF2 - "лог.О". Это не
приводит к возобновлению процесса электролиза(!) и давление продолжает
снижаться до момента срабатывания датчика нижнего рабочего давления
(РНР)(!). При Р<Рн (нижнее рабочее давление) датчик РНР переходит в
исходное состояние (на вход RA2 поступает сигнал "лог.О"). В этом случае на
383
выходе RB7 (13) мы имеем "лог. Г и процесс электролиза (если он не был
заблокирован по температуре) возобновляется. Таким образом, логика работы
системы при наборе давления и снижения давления различна.
DHD DBD F
0 0 1
1 0 1
1 1 0
Набор давления
DHD DBD F
1 1 0 1 0 0 0 0 1
Спад давлении
F - сигнал на включение процесса электролиза; "лог. 1" - идет процесс
электролиза; "лог.О" - процесс электролиза заблокирован.
384
8.7. Тиристорные устройства защиты и управления электродвигателей
технологических линий текстильного производства
Рис.8.7
385
Технологические линии текстильного производства оснащены
электрооборудованием с различными характеристиками и назначением. Как
правило, это оборудование не имеет защиты от перекосов напряжений по
фазам, не полнофазных режимов, недопустимых по условиям эксплуатации
температурных режимов. Использование для этих целей
электромеханических устройств не удовлетворяет современным требованиям
из-за громоздкости, наличия механических контактов, недостаточного
быстродействия, малого срока службы. Наиболее перспективным является
применение в силовых цепях вместо электромагнитных устройств на основе
однооперационных или двухоперационных тиристоров или симисторов.
При этом, на тиристорный блок можно возложить не только функции
защиты, но и управления режимом работы установок. Значительный
экономический эффект можно получить от применения тиристорных
контакторов в схемах управления машин ткацкого производства, в частности,
мотальных машин. С целью предотвращения жгутовой намотки на бобинах
валы вращаются с переменной скорость, что осуществляется путем
прерывания подачи питания к 2-м одинаковым электродвигателям.
Прерывание обычно обеспечивается с помощью кулачка, редуктора,
вспомогательного двигателя малой мощности и механического включателя,
который делает порядка 2400 включений в час цепей питания пускателей.
Это приводит к искрообразованию, выгоранию контактов прерывателя,
разладке его механической части. При наличии дуги между контактами
напряжение на них определяется:
UK = Uc + ун*/ + LH*di/dt (8.15)
Где ун, LH - параметры нагрузки
Uc - напряжение сети
При разрыве цепи di / dt<0 следовательно эдс самоиндукции и
напряжение ,уравновешивающее эту эдс изменяют свой знак по сравнению с
интервалом роста тока di / dt>0. Поэтому
Uk = Uc + LH*di/dt-yH*/ (8.16)
386
достигает значительной величины (Uk»Uc), что может привести к
отрицательным последствиям. Улучшение работы прерывателя путем
применения искрогасящих устройств, усложнения конструкции дают
незначительный эффект. Замена электромеханических пускателей на
тиристорные позволяет полностью исключить эти недостатки, а также
отказаться от дополнительных элементов управления(кулачка,
вспомогательного двигателя, редуктора)
На рис.8.7 приведена схема устройства тиристорного автоматического
выключателя трехфазного тока. Устройство содержит в качестве
исполнительного органа тиристорные контакторы 1,2,3, включенные в
каждую фазу сети трехфазного тока. При нормальных условиях работы
управляемые ключи 9,15 и 21 контакторов 1,2 и 3 замкнуты и тиристоры
подключают нагрузку к сети. При отклонениях напряжения, тока и
температуры формируется сигнал защиты с помощью диодного мостового
выпрямителя 23, двух делителей напряжения 24, 25 и трансформатора тока
22. Так, при перекосе напряжений фаз или не полнофазных режимах на
выходе выпрямителя 23 наряду с гармониками напряжения, кратными шести,
характерными для симметричного режима, появляются гармоники, кратные
двум. С выхода делителя 25 через фильтр по 2-ой гармонике 26 сигнал
защиты поступает на вход первого канала коммутатора, построенного на
основе транзисторной матрицы. При возникновении в сети повышенного или
пониженного напряжения сигнал защиты с делителя. 24 формируется на
входе соответственно второго и третьего каналов коммутатора.
Сигнал защиты при перегрузках по току формируется
трансформатором тока 22 и через разделительные диоды 28, 29, 30 поступает
на второй вход коммутатора. Релейное устройство 43, включенное на выходе
коммутатора, обеспечивает размыкание цепей управления тиристорами при
режимах, соответствующих предаварийным. Разработано устройство
387
автоматического отключения электопривода (рис.) чесально-мотальных
машин текстильного производства, использующее другие принципы.
Устройство содержит силовой блок, собранный на тиристорах
VSRVS6 и блок формирования сигналов защиты. Принцип действия
устройства основан на обработке сигналов от трансформатора тока,
асимметра и термодатчиков (термосопротивлений или диодов). Первичными
обмотками трансформатора тока являются токоподводящие шины.
Силовой блок содержит включенные в каждую фазу сети трехфазного
тока три контактора, каждый из которых образован из пар встречно-
параллельных тиристоров, управляемых соответствующими парами
встречно-последовательно включенных диодов УД1- УД 12, соединенных
последовательно с резисторами Rl- R3 и управляемыми ключами блока
управления (4-5-6, 1-2-3, 10—II—12).
Когда нагрузка электродвигателя находится в допустимых пределах,
отсутствует перекос напряжений фаз, двигатель не перегревается, транзистор
VTI и оптрон VT2 находятся в закрытом состоянии а транзисторы VT3- VT4
в открытом. В этом случае на катушку быстродействующего реле KVI подано
напряжение. Реле включено и своими контактами 5-4, 2-1, II-10 замыкает
цепи управления тиристоров
VSI- VS 6.
При обрыве фазы или недопустимой для электродвигателя не
симметрии напряжения фаз сети в общей точке асимметра, содержащего
сопротивления R6-R8, включенные в звезду, появляется напряжение
разбаланса, которое подается через диоды УД17 и УД 18 на светодиод
оптрона УТ2. Транзисторный элемент оптрона УТ2 срабатывает , замыкая
базовую цепь транзистора УТЗ. При этом транзисторные ключи VT3- VT4
закрываются, обмотка, реле К У1 обесточивается и его контакты 4-5,1-2, 10-11
размыкаются, что приводит к размыканию целей тиристоров У81-У86 и
отключению электродвигателя.
388
При заклинивании ротора или перегрузке двигателя ток в цепи обмоток
статора резко возрастает, что приводит к значительному увеличению токов в
токоподводящих шинах питания. Это, в свою очередь приводит к
увеличению напряжения на вторичных обмотках трансформ тора тока ТТ.
8.8. Генератор с транзисторным коммутатором импульсов для
электроэрозивной обработки металлических изделий
Рис.8.8
Тр - понижающий трехфазный трансформатор;
В - выпрямитель;
L - реактор;
С -накопительный конденсатор;
R - токоограничивающий резистор;
ЗГ - задающий индикатор;
ЭП - электрозионный промежуток;
11 - зарядный ток;
12 - разрядный ток;
К - транзисторный коммуникатор;
Lp- накопительный реактор.
389
Большинство систем без накопительных импульсов генераторов для
электроэрозионной обработки состоит из коммутирующих приборов -
прерывателей тока и токоограничивающих элементов
На рис.8.8 представлена схема такого генератора на транзисторном
коммутирующем элементе. Генератор содержит понижающий
трансформатор Тр, выпрямитель В, фильтр LC, резистор R1,h реактор
Lp,емкость С фильтра - накопителя, транзисторный коммуникатор К.
При включении схемы на холостом ходу (при разомкнутой цепи
нагрузки) емкость заряжается до напряжения 1.7-1.9 выходного напряжения
выпрямителя. На это напряжение необходимо выбрать конденсатор С и
трансформаторный ключ К. Транзисторный ключ К управляется задающим
генератором ЗГ. При включении транзистора К напряжение подается к
эрозионному промежутку ЭП и начинает протекать разрядный ток по цепи
ЭП-Lp-C-K-Rl, а по цепи B-L-C зарядный.
8.9. Ветроэлектронная станция (ВЭС) со стабилизацией параметров
электрической энергии.
390
Рис.8.9
Рис.8.10
Первый вариант (рис.8.9, а) обеспечивает стабилизацию напряжения с
помощью управляемого выпрямителя (УВ) с обратной связью по
напряжению с выхода трансформатора (Тр) инвертора. Управление
инвертором (И) по заданию стабильной частоты выходного напряжения
обеспечивается задающим генератором (Г). В цепи обратной связи
осуществляется сравнение выходного напряжения системы снимаемого с
391
измерительного элемента (ПЭ), и эталонного напряжения источника
опорного напряжения (ИОН). Сигнал рассогласования с выхода элемента
сравнения (ЭС) подается на систему управления (СУ) выпрямителем, которая
воздействует на регулирующие элементы (УВ) с целью стабилизации
выходного напряжения на выходе трансформатора (Тр). Схема коммутации
(СК) определяет режим работы системы: при минимальной скорости ветра
источником является аккумуляторная батарея (АБ), а при большой скорости
ветра или при отключении блоком управления (БУ) перезаряженной
аккумуляторной батареи инвертор подключается к (УВ) через сглаживающий
фильтр (Ф). Перед нагрузкой (Н), как правило, включается фильтр (СФ) для
получения напряжения ,близкого к синусоидальному.
Второй вариант(рис.8.9,6) использует неуправляемый выпрямитель (В)
и осуществляет стабилизацию напряжения электронным стабилизатором
переменного напряжения (ЭСПН), имеющим в цепи обратной связи те же
узлы управления, что и в предыдущем варианте.
В качестве примера приведена принципиальная схема системы
электропитания второго варианта, (рис.8.10). Она состоит из выпрямителя
,схемы коммутации питания, инвертора, задающего генератора инвертора,
выходного фильтра и электронного стабилизатора напряжения. Схема
коммутации должна контролировать состояние аккумуляторной батареи
(осуществлять заряд) и коммутировать напряжение постоянного тока между
выпрямителем, аккумулятором и цепями питания инвертора. Следует учесть,
что блок преобразования потребляет ток до 40А, что предъявляет
повышенные требования к схеме коммутации. По этой причине необходимо
отказаться от использования контактной коммутации. Коммутацию
постоянного напряжения осуществляет диод VD70. Прямой допустимый ток
этого диода должен превышать максимальный потребляемый ток
преобразователя. При отсутствии напряжения от выпрямителя, питание
преобразователя осуществляется от аккумуляторной батареи через открытый
диод VD7. Как только напряжении на выходе выпрямителя превысит
392
напряжение аккумуляторной батареи, диод VD7 закроется и питание
преобразователя будет осуществляться от выпрямителя (генератора).
Одновременно станет возможным заряд аккумулятора, отключенного от цепи
питания диодом VD7. Во время заряда тиристор VS1 открыт. При этом
напряжение на потенциометре R6 ниже порогового напряжения
стабилитрона VD11 и тиристор VS2 закрыт. Когда напряжение батареи
приближается к значению полного заряда, открывается тиристор VS2 и
через делитель напряжения R8, R9 на управляющий электрод тиристора VS1
подается запирающее напряжение. Тиристор VS1 закрывается и заряд
батареи прекращается.
8.10. Автоматизация промышленных швейных машин на базе
микропроцессорной техники
Автоматизация швейного оборудования на базе микропроцессорной
техники является генеральной линией его дальнейшего совершенствования.
На примере автоматизации промышленных швейных машин 31-ряда
рассмотрим принципы работы микропроцессорной управляющей системы
фирмы «Мицубиси» с электроприводом типа «Лими-стоп Z» (см. рис.8.10).
Основным элементом системы является однокристальная управляющая
микроЭВМ типа pPD75116CW134 фирмы «NEC».
МикроЭВМ содержит четырехразрядные порты РО-Р11 и компаратор
РТНО. На резистор Ry поступает сигнал с вывода 5 схемы управления
скоростью рычажного переключателя связанного с педалью управления.
Переменный резистор Ry позволяет изменять максимальную скорость в
пределах от 4000 до 200 об/мин. Максимальную скорость можно задать и
ключом А о напряжения 12В.
При появлении сигнала высокого уровня («лог.1») на выводе Р9з
управляющей микро-ЭВМ открываются транзисторы VT3 и VT4. К
393
переменному резистору подключается непосредственно напряжение - 12В и
производится запуск машины при повышенной (относительно
максимального рабочего значения) скорости. После того, как на выводе Р9з
микроЭВМ установится сигнал низкого уровня («лог.О»), транзисторы VT3 и
VT4 закрываются и машина будет определяться степенью нажатия педали
носком ноги вперед.
Если сигнал высокого уровня («лог.1») появляется на выводе Р8з
управляющей микро-ЭВМ, включается транзистор VT1 и стабильное
напряжение питания +5В, минуя переменный резистор Ry, подается через R2
и R3 на аналоговый вход 22 устройства HD61J2203P.
При этом обеспечивается медленный запуск автоматизированной
швейной машины.
Транзистор VT2 представляет собой исполнительный элемент схем
защиты от провалов напряжения в сети питания 220В, 50Гц.
Ряд внутренних потенциометров позволяет регулировать скоростные
режимы отдельных механизмов автоматизированной швейной машины.
С помощью потенциометра «Н» можно изменять максимальную
рабочую скорость в пределах от 1200 об/мин. До 8500 об/мин.
С помощью «Ь» значение минимальной частоты вращения главного
вала можно установить в пределах от 160 об/мин. До 320 об/мин. Внутренний
потенциометр «р» позволяет регулировать скорость позиционирования иглы
в пределах 160-320 об/мин. С помощью внутреннего потенциометра «Т»
достигается регулировка скорости обрезки нити.
Внутренний потенциометр «М» позволяет обеспечить регулировку
скорости закрепления начала и конца строчки.
Внутренние потенциометры «р», «L», «Т» через развязывающие диоды
(логическое сложение, элемент ИЛИ) подключены к объединенным между
собой выводам 2 и 3 микросхемы HD61J203P, которая импульсами управляет
через транзисторный ключ VT4 магнитной муфтой привода главного вала.
394
При нажатии педали управления носком ноги микропроцессорная
управляющая система автоматизированной швейной машины обеспечивает
начальный запуск электропривода.
Для этой цели используется транзисторный ключ VT4, который при
своем открывании сигналом с вывода Р9з управляющей микро-ЭВМ подает в
контур обратной связи автоматической системы регулирования частоты
вращения главного вала машины максимальное значение +12В.
После трогания главного вала с датчика частоты вращения поступает
сигнал обратной связи, упомянутый транзистор запирается, и машина
начинает автоматическое закрепление начала строчки в соответствии с
заданным с пульта оператора рисунком закрепки. При этом автоматически
поддерживается среднее значение частоты вращения главного вала машины.
Это обеспечивает с помощью транзистора VT5, управляемого сигналом на
выводе Р82 микро-ЭВМ.
Ток коллектора открытого VT5 вызывает увеличение падения
напряжения на R3 и Ry контура отрицательной обратной связи и
соответствующее уменьшение аналогового сигнала обратной связи на выводе
22 устройства HD61J203P.
После окончания закрепки (педаль по-прежнему нажата полностью
вперед) автоматически производится повышение частоты вращения главного
вала до максимального значения и происходит процесс высокоскоростного
стачивания.
После его завершения педаль управления возвращается в нейтральное
положение, частоты вращения главного вала машины уменьшается до
минимального значения, соответствующего заданной скорости
позиционирования иглы.
Процесс скоростного стачивания может быть закончен автоматически,
без изменения положения педали управления при достижении заданного
числа стежков в строчке (если такая функция обеспечивается используемым
395
пультом оператора). Низкая частота вращения главного вала швейной
машины соответствует открыванию в системе управления транзистора VT1,
который подключает к контуру отрицательной обратной связи напряжение
+5В (режим медленного пуска).
После того, как игла, двигаясь с малой скоростью, достигает крайнего
нижнего положения, по сигналу датчика управляющая микро-ЭВМ
обесточивает обмотку муфты сцепления и включает электромагнитный
тормоз, останавливая работу швейной машины. Нажимательная лапка при
этом опущена.
При нажатии педали управления пяткой (1-я ступень) по сигналу
рычажного переключателя управляющая микро-ЭВМ включает
электромагнит механизма подъема лапки, и лапка поднимается. Игла
находится в нижнем положении. При возвращении педали управления в
нейтральное положение по сигналу рычажного переключателя микро-ЭВМ
запирает транзисторный ключ, и обмотка электромагнита механизма подъема
лапки обесточивается. При этом лапка опускается.
При слабом нажатии педали управления носком ноги вперед
последовательно толчковый пуск электропривода машины и ее
низкоскоростная работа. В момент возвращения педали в нейтральное
положение начинается процесс позиционирования иглы, и, когда она
достигает нижнего положения, управляющая микро-ЭВМ по сигналу датчика
останавливает работу машины (нажимательная лапка опущена).
Когда педаль управления нажата пяткой до отказа (2-я ступень),
управляющая микро-ЭВМ установит режим средней скорости машины,
произведет закрепление конца строчки в соответствии с заданным с
помощью пульта оператора рисунком закрепки, при движении иглы из
нижнего положения в верхнее выполнит операцию обрезки нитки.
396
Рис.8.10. Схема системы управления швейной машиной
8.11. Цифровой регулятор температуры для автоматизированного
гладильного пресса
Цифровое управление и регулирование в технологических установках и
оборудовании легкой промышленности и сервисах широко занимает
ведущую роль, а цифровые регуляторы активно вытесняют широко
использовавшиеся аналоговые промышленные устройства подобного
назначения. Такое положение обусловлено успехами полупроводниковой
интегральной технологии, промышленным выпуском широкой номенклатуры
и однокристальных микро-ЭВМ, больших и сверхбольших интегральных
микросхем разнообразного функционального назначения.
В настоящей работе рассматривается перспективный принцип
построения цифровых регуляторов температуры на базе однокристальных
397
микро-ЭВМ (например, МС68705РЗ фирмы Motorola, США). Такой
регулятор (рис.8.11) включает:
1 - аналоговый блок усиления сигнала датчика температуры
(термопары) и формирования эталонного напряжения для
микроэлектронного аналого-цифрового преобразователя двойного
(двухтактного) интегрирования. 2- выходная информация последнего в виде
8-ми (или более( разрядного цифрового кода, соответствующего
мгновенному значению температуры в начале цикла преобразования,
запоминается в параллельно-последовательном регистре 6 и по командам
микро-ЭВМ переписывается последовательным кодом сначала в регистр 3, а
после из него в оперативную память микро-ЭВМ. Использование регистров 6
и 3 дает возможность существенно уменьшить число входных каналов
однокристальной микро-ЭВМ 4.
Заданное значение температуры теплового объекта и его фактическое
значение непрерывно индицируется в десятичной системе счисления на двух
трехразрядных знакосинтезирующих элементах, входящих в состав
устройства цифровой индикации 7.
398
Исполнительными элементами регулятора являются реле Р1 и Р2,
контакты которых осуществляют включение и выключение нагревательных
элементов (на рис.8.11 не показаны). Управление Р1 и Р2 по командам
микро-ЭВМ выполняет цифро-аналоговое устройство 8, которое через
элемент задержки 9 подает команду RESET на соответствующий вход микро-
ЭВМ. При получении данной команды режим внешнего прерывания,
связанный с обработкой внешней информации и выработкой управляющих
воздействий, заканчивается, и микро-ЭВМ приступает к выполнению своей
основной программы индикации заданного и фактического значений
температуры.
Спустя заданное время микро-ЭВМ подает команду управления в
преобразователь 2 на начало нового цикла преобразования аналогового
входного сигнала от датчика температуры в цифровой код. После окончания
данного цикла аналого-цифровой преобразователь 2 командой INT
прекращает выполнение основной программы микро-ЭВМ и начинает режим
внешнего прерывания, при котором производится очередная выработка
управляющих воздействий.
Регулятор питается от промышленной сети 220 В, 50 Гц через блок
питания 13, состоящий из выпрямителя 10 с емкостным фильтром,
интегрального стабилизатора 11 с выходным напряжением +5 В и
интегрального инвертора 12, преобразующего постоянное напряжение +5 В в
постоянное напряжение -5 В.
Основным узлом преобразователя является инвертор(усилитель
мощности) и задающий генератор. Из всего многообразия схем задающих
генераторов наиболее перспективным является построение генератора на
основе цифровых интегральных схем. Предлагаемая схема задающего
генератора отличается возможностью регулировки скважности выходных
импульсов в широких пределах. В схеме использованы элементы 2И-НЕ.
399
Отличие схемы состоит в использовании двух времязадающих резисторов,
развязанных диодами VD9, VD10. Благодаря этому длительность импульса
ти не зависит от длительности паузы тп, что позволяет добиться
необходимого значения скважности генерируемых импульсов. Длительности
ти и тп определяются соотношениями : ти ~ O,8C1R1; тп ~ O,8C1R2. При
использовании рассмотренной схемы для управления инвертором,
необходимо иметь скважность Т / ти=2 для получения максимальной
амплитуды первой гармоники. Для построения генератора можно применить
микросхемы серий К176, К561, К555. Для повышения стабильности частоты
генератора питание его стабилизируется компенсационным стабилизатором.
Непосредственно инвертор (усилитель мощности) наиболее просто
построить по мостовой схеме на основе полностью управляемых
полупроводниковых приборов - транзисторов. Прямоугольные импульсы от
задающего генератора усиливаются транзистором VT 3, нагрузкой которого
является первичная обмотка трансформатора Тр1. Со вторичной обмотки
трансформатора прямоугольные импульсы, сдвинутые по фазе на 180
градусов подаются в базовые цепи транзисторов инвертора. Со вторичной
обмотки трансформатора Тр2 снимается последовательность прямоугольных
импульсов, первая гармоническая составляющая которых выделяется с
помощью фильтра L1C1, L2C2. В каждом плече инвертора применено
параллельное включение транзисторов. Значение тока плеча схемы может
составлять до 40А, поэтому каждый из транзисторов должен иметь
допустимое значение прямого тока коллектора не менее 20А. в инверторе
могут быть использованы транзисторы КТ 827А. Для выравнивания
коллекторных токов транзисторов в эмиттерные цепи устанавливаются
резисторы, создающие отрицательную обратную связь по току. Вместо
трансформатора Тр 1 можно применить схему управления на транзисторах. В
этом случае необходимо получить импульсы, сдвинутые на 180 гр. И затем
усилить их для подачи в каждое плечо схемы инвертора.
400
Стабилизация выходного напряжения осуществляется
компенсационным стабилизатором. Регулирующим элементом стабилизатора
является транзистор VT4, включенный в диагональ моста VD12-VD15. В
случае увеличения выходного напряжения преобразователя, уровень
постоянного напряжения с измерительного моста VD16-VD19 увеличится.
Соответственно увеличится напряжение на коллекторе транзистора
VT5,который является сравнивающим элементом. Потенциал базы этого
транзистора фиксирован параметрическим стабилизатором R18, VD20. в
результате сопротивления перехода коллектор-эммитер транзистора
увеличится. Сопротивление перехода коллектор-эммитера транзистора в
составе оптрона U1 так же увеличится и регулирующий транзистор VT4
закроется. Выходное напряжение преобразователя уменьшится. Оптрон U1
осуществляет гальваническую развязку схемы управления и регулирующего
элемента стабилизатора. Применение оптрона и разделительного
конденсатора С6 позволило отказаться от разделительного трансформатора.
Потенциометр R17 служит для регулировки уровня выходного напряжения
стабилизатора.
На рис.8.12 представлена функциональная блок - схема системы
бесперебойного электроснабжения индивидуального потребителя с
использованием ВЭС, бензоагрегата и аккумуляторной батареи, которую
можно рассматривать как мехатронную. Система автоматического
управления обеспечивается электронными и электромеханическими
устройствами с применением микро-ЭВМ.
401
Рис.8.12. Мехатронная система бесперебойного электроснабжения
402
ЛИТЕРАТУРА
1. Авт. свид. №1754798. Устройство автоматического управления
процессом электролиза воды для получения водорода и кислорода.
Варламов И.В., Феоктистов Н.А. //Бюлл.изобр. - 1992. -№30.
2. Алиев Г.М.. Гоник А.Е. Агрегаты питания электрофильтров. Москва:
«Энергия», 1968.
3. Афанасьев В.В., Адоньев Н.М. и др. Трансформаторы тока. Ленинград:
«Энергоатомиздат», 1989, 140 с.
4. Алексеева Н.А., Андреев Г.И., Морговекий Ю.А. Тиристорные
регулируемые электроприводы постоянного тока. - М., «Энергия», 1970.
5. Браммер Ю.А., Пащук И.Н. Импульсные и цифровые устройства. - М.,
Высшая школа, 2003, 351 с.
6. Быстров Ю.А. и др. Электронные приборы и устройства на их основе. -
М., Высшая школа, 2002, 187 с.
7. Булгаков А.А. Электронные устройства автоматического управления.
Госэнергоиздат, 1958.
8. Варламов М.В. Душин В.К., Феоктистов Н.А. Оптоэлектронные
элементы информационных стситем: Учебное пособие. - М., МГУс,
2001.-73 с.
9. Варламов И.В., Феоктистов Н.А. Системы электропитания и
управления электролизно-водными генераторами. Монография, М.,
ИТИ, 2012 г.,-202 с.
Ю.Варламов И.В., Феоктистов Н.А., Теодорович Н.Н. Электролизно-
водные генераторы кислородно-водородной смеси в технологии пайки
и сварки // Теоретические и прикладные проблемы сервиса. - М..
МГУс, 2001, №1.
И.Варламов И.В., Феоктистов Н.А. Система электропитания, управления
и защиты электролизно-водного генератора для пайки и сварки изделий
// Сварочное производство. - 1990. -№9.
403
12. Варламов И.В., Феоктистов Н.А. Проблемы улучшения технологии и
безопасности при выполнении сварочно-паяльных работ с
применением кислородно-водной смеси // Современные технологии в
отрасли бытового обслуживания населения. Сборник научных трудов.
-М., ГАСБУ, 1993.
13. Вешенский С.Н. Характеристики двигателей в электроприводе.
Москва, «Энергия», 1977.
14 .Гук М.Ю. Аппаратные средства IBM PC. - СПб.: Питер, 2000. - 121 с.
15 .Герман-Галкин С.Г. Некоторые вопросы классификации устройств
электромеханотроники. Изв. Вузов «Электромеханика», 1989, №10.
16 .Дроф Р., Бишоп Р. Современные системы управления. Пер. с англ. Б.И.
Копылова. - М.: Лаборатория базовых знаний, 2002. - 832 с.
17 . Домрачев В.Г., Смирнов Ю.С. Цифро-аналоговые системы
позицирования (электромехатронные преобразователи). - М.:
Энергоатомиздат, 1990. - 240 с.
18.Егоров О.Д. Мехатронные модули. Расчет и конструирование: учеб,
пособие // О.Д. Егоров, Ю.В. Подураев. - М.: МГТУ «Станкин», 2004. -
360 с.
19 .Иванчук Б.Н. и др. Тиристорные и магнитные стабилизаторы
напряжения. Москва: «Энергия», 1968.
2О .Иссии Т. И др. Мехатроника / Пер. с японского. - Мир, 1988.
21 .Кокорин В.В., Феоктистов Н.А., Варламов И.В., Чарыков Н.А.,
Михайлюк Д.Л. Построение автоматизированной микропроцессорной
системы сбора исходных данных, определения и индикации расхода
воды, смеси газов, кислорода и водорода в электролизно-водных
генераторах // Электротехнические и информационные комплексы и
системы, 2011. №2, т.7, С.52-59.
22 .Калиш Г.Г. Основы вычислительной техники. - М., Высшая школа,
2000.
404
23 .Коськин Ю.П. Введение в мехатронику. - СПб.: Энергоатомиздат,
1991.- 192 с.
24 .Коськин Ю.П. Проблемы и перспективы современного развития
электромеханотроники / Ю.П. Коськин, В.Д. Путов // Мехатроника,
автоматизация, управление. 2000. - №5. - С. 5-9.
25 .Коськин Ю.П. Развитие электромеханики в теории и технологиях
электромеханотроники И Изв. Вузов. Электромеханика / Южно-Рос.
гос. техн, ун-т (Новочеркасский политех, ин-т). - 2008. - С. 11-20.
26 .Коськин Ю.П. Электромеханотроника: учебное пособие. - Л.: ЛЭТИ,
1989.-57 с.
27 .Коськин Ю.П. Электромехатроника и электромехатронные
преобразователи. - СПб, ЛДНТП, 1991, 22с,
28 .Качумов А.И. Электроника и схемотехника. - М., 2002.
29 .Микропроцессоры (в 3-х томах) / Под ред. Преснухина Л.Н. - М.:
Высшая школа, 1989.
30 .Москаленко В.В. Автоматизированный электропривод. Москва,
издательство Энергоатом, 1986.
31 .Новиков Ю.В. Основы цифровой схемотехники. -М., Мир, 2001.
32 .Олейник В.С. Практикум по автоматизированному электроприводу.
Москва, «Колос», 1978.
33 .Осипов Ю.М. и др. Мультикоординатные электромехатронные
системы движения. Томск; изд. ТИАСУР, 2010. - 320 с.
34 .Осипов. Ю.М. Операционные автоматы с электроприводом прямо-
прямого действия. - Томск: ИПФ ТПУ. 1997. - 200 с.
35 .Осипов Ю.М. и др. Основы мехатроники / Ю.М. Осипов, П.К. Васенин,
Д.А. Медведев, С.В. Негодяев. - Томск: Изд-во ТУСУРа, 2007. - 203 с.
36 .Осипов Ю.М. Дуговой электромехатронный модуль движения / Ю.М.
Осипов, П.К. Васенин, Д.А. Медведев // Доклады ТУСУРа, 2008. -
№1(17). С. 58-62.
405
37 . Осипов Ю.М. Линейный и дуговой электромехатронные модули
движения - функциональные элементы мехатронных систем //
Мехатроника, автоматизация, управление: матер, междунар. науч.-
техн. конф. - Таганрог: Изд-во ТТи ЮФУ, 2009. - С. 258-260.
38 .Патент 201485 Cl 5В23 К5/100 С25 В 15/02. Устройство для
газопламенной обработки металлов / Варламов И.В., Феоктистов Н.А.
и др. БИ от 15.06.94.
39 . Патент 2447976 Cl В23К/00 С25В1/12 Устройство для газопламенной
обработки металлов // Варламов И.В., Феоктистов Н.А. и др., БИ №11
20.04.2012.
4О .Патент 2 353 044 РФ, МПК Н02К15/00. Способ согласования
электромагнитных систем и систем с постоянными магнитами / Ю.М.
Осипов (РФ). - № 2 005 104 032 / 11; заявл. 16.02.2005; опубл.
20.04.2009.-Бюл. № 11.- 1 с.
41 .Патент 2361567 РФ, МПКА61Н 1/00. Электромеханический тренажер /
Ю.М. Осипов (РФ). - № 2 005 120 898 / 14; заявл. 04.07.2005; опубл.
20.07.2009. - Бюл. № 20. - 8 с.
42 .Патент 2 365 488 РФ, МПК B25J 9/08. Манипулятор-платформа /
Ю.М. Осипов (РФ). - № 2 005 104 030 / 02; заявл. 16.02.2005; опубл.
27.08.2009. - Бюл. № 24. - 2 с.
43 .Патент 2 365 888 РФ, МПК G01M 1/16. Устройство для контроля
параметров неуравновешенности подвижной системы /Ю.М. Осипов
(РФ). - № 2 005 104 031 / 28; заявл. 16.02.2005; опубл. 27.08.2009. -
Бюл. № 24.-2 с.
44 . Петров Л.П. Управление пуском и торможением асинхронных
двигателей. Энергия, 1981.
45 .Подураев Ю.В. Мехатроника: основы, методы, применение. - М.:
машиностроение, 2007. - 256 с.
46 .Подураев Ю.В. Основы мехатроники. МГТУ «Станкин», 2005, 106 с.
406
47 .Применение микропроцессоров в автоматизированном электроприводе.
М.,МЭИ, 1989, 94 с.
48 .Ратмиров В.А., Иваботенко Б.А. Шатовые двигатели для систем
автоматического управления., M-JL, Госэнергоиздат, 1962, 128 с.
49 .Розанов Ю.К. и др. Силовая электроника. Учебник для вузов. - М.:
Издат. дом МЭИ, 2007, 632 с.
50 .Ромаш Э.М. Автоматизация технологического оборудования легкой
промышленности на базе микропроцессорной техники. М, МГУДТ,
2004,211 с.
51 .Ромаш Э.М., Феоктистов Н.А., Ефремов В.В. и др. Микропроцессорное
управление многоголовочным вышивальным автоматом // Сб. науч. тр.
«Современные средства управления бытовой техникой», М.: МГУ с,
1999.
52 .Ромаш Э.М., Феоктистов Н.А., Ефремов В.В. и др. Микропроцессорная
система управления вышивальной головкой многоголовочного
вышивального автомата // Сб. науч. тр. «Современные средства
управления бытовой техникой», М.: МГУс, 1999.
53 .Ромаш Э.М., Феоктистов Н.А., Ефремов В.В. Электронные устройства
информационных систем и автоматики. Москва, НТК «Дашков и К».
2009.
54 .Ромаш Э.М. Цифровой электронный регулятор температуры для
автоматизированного гладильного пресса. М., МГУДТ, 1995.
55 .Сабинин Ю.А. и др. Автономные дискретные электроприводы с
силовыми шатовыми двигателями. - Л.: Энергия. Ленингр. отд., 1980. -
160 с.
56 .Сибикин Ю.Д., Сибикин Ю.М. Нетрадиционные и возобновляемые
источники энергии. Уч. пособие - М. КНОРУС, 2010, 232 с.
57 .Создание лазерных технологических комплексов по критерию
цена/качество / Ю.М.Осипов, С.В.Щербинин. О.Ю.Осипов,
407
Д.А.Медведев // Мехатроника, автоматизация, управление. - 2009. -
№12.-С.41^3.
58 . Смирнов А.Б. Мехатроника и робототехника. Системы микроперемещений
с пьезоэлектрическими приводами. - СПб, 2003. - 160 с.
59 .Симонян И. и др. Мехатроника. М.: МИР, 1980.
бО .Сторожев В.В., Канатова А.В., Кулаков А.А., Козлов А.С., Чугуй Н.В.
Аппаратное обеспечение мехатронных систем настилочно-раскройного
оборудования. Учебное пособие. -М. МГУДТ, 2013.
61 .Сторожев В.В. Машины и аппараты легкой промышленности. М.
Академия, 2010. - 400 с.
62 .Сторожев В.В., Борисов Е.С. Графический редактор «Stilex». А.С.
№2008612618 от 27.05.2008.
63 .Теряев Е.Д. Наномехатроника: состояние, проблемы, перспективы /
Е.Д.Теряев, Н.Б.Филимонов // Мехатроника, автоматизация,
управление. -2010.-№1.-С. 2-14.
64 .Торгов Ю.М. Программированный контроллер клавиатуры КР 580 ВВ
79. Сборник научных трудов «Микропроцессорные средства и
системы». Москва, 1998, №1.
65 .Угрюмов Е.П. Цифровая схемотехника. - СПб., 2002.
бб .Ужов В.Н. Очистка промышленных газов фильтрами. Москва: Химия,
1967,
67 .Управляющие системы и автоматика для мехатроники / Д.Шмид.
Перевод с немецкого. М, Техносфера, 2007, 584 с.
68 .Управление многокоординатной манипулятор-платформой при
обработке поверхностей сложной формы / Ю.М. Осипов, П.К. Васенин.
С.В. Негодяев, С.В. Щербинин // Мехатроника, автоматизация,
управление. - 2009. - № 7. - С. 43-47.
69 . Феоктистов Н.А. Тиристорные устройства управления и защиты
бытовых аппаратов и электротехнологических установок. Монография.
-М.: 1996.-222 с.
408
70 .Феоктистов Н.А., Варламов И.В., Теодорович Н.Н. Режимы работы
систем управления и источников питания бытовой ЭВГ. Монография.
М., МГУс, 2004. - 95 с.
71 .Феоктистов Н.А. Принципы построения и схемные решения
электронной защиты бытовых машин и приборов // Технический
сервис: Сб. науч. тр. - ГАСБУ, 1995.
72 .Феоктистов Н.А., Феоктистов А.Н. Установка очистки стенок
технологического оборудования от налипания порошкообразных
веществ. Материалы [X МТК «Информационные системы», М.: МГУс,
2004.
73 .Феоктистов Н.А., Симоненков Д.В. Микропроцессорная система
управления тиристорного регулятора температуры. Сб. науч. тр.
«Современные средства управления бытовой техникой», М.: МГУс,
2000.
74 .Феоктистов Н.А., Кокорин В.В., Варламов И.В. Создание кислородно-
водородной установки малой мощности на базе кислородно-
водородного генератора «МЮОН-10» // Межвузовский сборник
научных трудов. Выпуск 76. Информационные системы и технологии.
Москва. 2011. С.5-10.
75 . Феоктистов Н.А., Кокорин В.В., Варламов И.В. Методика расчета и
проектирования водородно-кислородных сварочных станций малой
мощности до 1 кВт // Межвузовский сборник научных трудов. Выпуск
4. Информационные системы и технологии. Москва. 2011. С. 11-17.
76 .Феоктистов Н.А. Перспектива создания систем стабилизации при
питании радиоэлектронной аппаратуры и бытовой техники от
нетрадиционных автономных источников энергии // Межв. сб.
«Инновационные технологии» - М.: 2007 - № 1 - с.6-11.
77 .Феоктистов Н.А., Варламов И.В., Феоктистов А.Н. Системы
управления и автоматизированного регулирования режимов работы
409
ЭВГ. Ж. «Электротехнические и информационные комплексы и
системы». Уфа, №3, Т.9, 2013.
78 .Феоктистов Н.А., Кокорин В.В., Чарыков Н.А. Построение
автоматизированной микропроцессорной системы сбора исходных
данных, опред.индикации расх.воды, газов, кислорода и водорода в
ЭВГ. Ж. «Электротехнические и информационные комплексы и
системы». Уфа, №2, Т.7, 2011.
79 .Феоктистов Н.А., Денисов С.В. Научные основы и перспективы
создания систем стабилизации для питания бытовой аппаратуры от
ветрогенераторов. Научный журнал «Теоретические и практические
проблемы сервиса», - М.: 2003-№3(8) - с.22-28.
80 .Феоктистов Н.А., Михайлюк Д.Л. Ходжаев В.Д. Инновационные
технологии по созданию автономных систем электропитания и
стабилизации параметров электрической энергии от нетрадиционных
источников электроэнергии. Межвуз.сб.н.тр. «Инновационные
технологии» под ред. д.т.н., профессора Феоктистова Н.А., д.т.н.,
профессора Выскуба ВТ., М., 2009, НОУ «ИГУПИТ» и НОУ
«РОСНОУ», вып.2., с.20-30.
81 .Феоктистов Н.А. Научные основы создания ЭВГ для сварки и пайки.
Ж. «Теоретические и прикладные проблемы сервиса». М., 2001, №1.
82 .Феоктистов Н.А., Михайлюк Д.Л. и др. Электролизно-водные
генераторы кислородно-водородной смеси с электронным управлением
от микроЭВМ // Ж. «Естественные и технические науки». - М., 2009,
№6(38).
83 .Феоктистов Н.А. и др. Электролизно-водные генераторы кислородно-
водородной смеси в технологии сварки и пайки. Ж. «Естественные и
технические науки». - М., 2008, №6(38).
84 .Феоктистов Н.А., Варламов И.В. Принципы построения и схемные
решения оптоэлектронных датчиков давления бытового ЭВГ.
410
Материалы 1—й Международной НТК «Наука-сервису» // под. ред.
проф. Ананьевой Т.Н., М., ГОУ ВПО МГУс, 2006.
85 .Фрайден Д. Современные датчики. Справочник. Москва: Техносфера,
2005. - 592 с.
86 .Шапиро С.В. и др. Тиристорные и магнитно-тиристорные агрегаты
питания электрофильтров очистки газа. Москва: «Энергия», 1978.
87 .Шмелев А.Н., Шилло К.С. Электрооборудование промышленных
предприятий и установок текстильного производства. Москва, Легкая
индустрия, 1973.
88 .Шевкопляс Б.В. Микропроцессорные структуры. - М.: Радио и связь,
1986. 264 с.
89 .Чиженко И.М. и др. Справочник по преобразовательной технике. Киев,
«Техника», 1978.
90 .Электрические и электронные аппараты. Учебник для вузов под ред.
Розанова, 1998.
91 . Эволюция техники силовых МОП биполярных полупроводниковых
приборов. Б.Д. Билига. ТИИЭР, Т. 76, № 4. 1988. с. 117-127.
92 . Электротехнический справочник: в 4-х томах. Т. 2.
Электротехнические изделия и устройства. / Под общей ред.
профессоров МЭИ. Разд. 37. Вентильные преобразователи
электрической энергии и источники вторичного электропитания.
Подраздел 37.2. Силовые полупроводниковые ключи.
93 .Энергетическая электроника: Справочное пособие: Пер. с нем. / Под
ред. В.А. Лабунцова. -М.: Энергоатомиздат, 1987.
94 .Эраносян С.А. Сетевые блоки питания с высокочастотными
преобразователями. - Л.: Энергоатомиздат, 1991.
411
Научное издание
Сторожев Владимир Васильевич,
Феоктистов Николай Алексеевич
Системотехника и мехатроника
технологических машин и оборудования
Монография издана в авторской редакции
Санитарно-эпидемиологическое заключение
№ 77.99.60.953.Д.007399.06.09 от 26.06.2009 г.
Подписано в печать 25.07.2014. Формат 60x90 1/16.
Бумага офсетная № 1. Печ. л. 26.
Тираж 1000 экз. (1-й завод 1-500 экз.). Заказ 4017.
Издательско-торговая корпорация «Дашков и К°»
129347, Москва, Ярославское шоссе, д. 142, к. 732
Тел.: 8 (495) 668-12-30, 8 (499) 183-93-23
E-mail: sales@dashkov.ru — отдел продаж;
office@dashkov.ru — офис; http://www.dashkov.ru
Отпечатано способом ролевой струйной печати
в ОАО «Первая Образцовая типография»
Филиал «Чеховский Печатный Двор»
142300, Московская область, г. Чехов, ул. Полиграфистов, д.1
Сайт: www.chpd.ru. E-mail: sales@chpd.ru. т/ф. 8(496)726-54-10
ООО «Издательско-торговая корпорация
«Дашков и К°»
предлагает учебники для бакалавров (с грифом)
□ Английский язык для экономистов. Шляхова В. А., Герасина О. Н.,
Герасина Ю. А.
□ Антикризисное управление. Ларионов И. К.
□ Безопасность жизнедеятельности. Арустамов Э. А.
□ Бухгалтерский учет. Миславская Н. А., Поленова С. Н.
□ Бюджетная система Российской Федерации. Нешитой А. С.
□ Деньги. Кредит. Банки. Белотелова Н. П., Белотелова Ж. С.
□ Инвестиции. Николаева И. П.
□ Инвестиционный анализ. Блау С. Л.
□ Инновационный менеджмент. Беляев Ю. М.
□ Институциональная экономика. Лебедева И. Н., Николаева И. П.
□ Исследование систем управления. Фомичев А. Н.
□ История. Кузнецов И. Н.
□ Конфликтология. Зеленков М. Ю.
□ Логистика. Гаджинский А. М.
□ Маркетинг. Нуралиев С. У., Нуралиева Д. С.
□ Маркетинг торгового предприятия. Парамонова Т. Н., Красюк И. Н.,
Лукашевич В. В.
□ Маркетинг услуг. Синяева И. М. и др.
□ Международный маркетинг. Моргунов В. И.
□ Международные стандарты учета и финансовой отчетности.
Миславская Н. А.
□ Мировая экономика и международные экономические отношения. Под
ред. проф. Николаевой И. П. и Шаховской Л. С.
□ Организация и управление коммерческой деятельностью. Дашков Л. П.,
Памбухчиянц О. В.
□ Основы социального государства. Шарков Ф. И.
□ Оценка стоимости предприятия (бизнеса). Чеботарев Н. Ф.
□ Планирование на предприятии. Савкина Р. В.
□ Политология. Зеленков М. Ю.
□ Психология. Щербакова О. И., Ступницкий В. П., Степанова В. Е.
□ Статистика. Годин А. М.
□ Страхование. Годин А. М., Фрумина С. В.
□ Теория менеджмента. Семенов А. К., Набоков В. И.
□ Теория систем и системный анализ. Вдовин В. М., Суркова Л. Е.,
Валентинов В. А.
□ Теория риска и моделирование рисковых операций. Шапкин А. С.,
Шапкин В. А.
□ Управление в социальной работе. Под ред. Холостовой Е. И.,
Прохоровой О. Г., Комарова Е. И.
□ Управление изменениями. Блинов А. О., Угрюмова Н. В.
□ Управление качеством. Агарков А. П.
□ Управление человеческими ресурсами. Дейнека А. В., Беспалько В. А.
□ Учет затрат, калькулирование и бюджетирование в отдельных отраслях
производственной сферы. Керимов В. Э.
□ Финансы, денежное обращение и кредит. Нешитой А. С.
□ Финансы. Балакина А. П., Бабленкова И. И., Ишина И.
□ Экономика. Елисеев А. С.
□ Экономика и управление на предприятии. Агарков А. П., Голов Р. С.
□ Экономика предприятия (организации). Баскакова О. В., Сейко Л. Ф.
□ Экономика труда. Скляревская В. А.
□ Экономическая теория. Николаева И. П.
Всегда в наличии широкий ассортимент
учебной и деловой литературы
Оптовая и мелкооптовая продажа книг осуществляется
у наших торговых представителей:
Научно-издательский центр "ИНФРА-М" - 127282 г. Москва,
ул. Полярная, д. 31 в, стр. 1, тел. 8 (495) 380-05-40, 363-42-60 (203),
e-mail: books@infra-m.ru
Группа компаний "ОМЕГА-Л" - 111123 г. Москва,
ш. Энтузиастов, д. 56, тел. 8 (495) 228-64-58, 228-64-59,
e-mail: office@omega-l.ru
Приглашаем к взаимовыгодному сотрудничеству библиотечные
коллекторы, библиотеки, учебные заведения, книготорги
и региональных представителей
Отдел продаж: 8 (495) 668-12-30, 8 (499) 183-93-23
Редакция: 8 (499) 182-01-59
e-mail: sales@dashkov.ru, http://www.dashkov.ru
ИЗДАТЕЛЬСКО-ТОРГОВАЯ КОРПОРАЦИЯ
«Дашков и К0»
специализируется на издании и распространении учеб-
ной, методической и справочной литературы для систе-
мы высшего и среднего профессионального образова-
ния, а также специальной литературы для практических
работников.
Предоставляет комплекс услуг:
• комплектование библиотек учебной литературой, в
том числе книгами других издательств по издатель-
ским ценам;
• издание любых книг и брошюр по заказу.
Приглашает
к взаимовыгодному сотрудничеству:
• авторов с целью заключения договоров на издание
деловой литературы для предпринимателей и учеб-
ной литературы для высшего и среднего профессио-
нального образования;
• торговых представителей в областных центрах Рос-
сийской Федерации.
С предложениями и вопросами
просим обращаться по телефонам
8(495) 668-12-30, 8(499) 183-93-23
E-mail: sales@dashkov.ru
Публикация научных статей в журнале,
рекомендованном ВАК
Научно-аналитический журнал
«Актуальные проблемы социально-
экономического развития России»
(включен в Перечень ведущих рецензируемых научных журналов ВАК)
ПРИГЛАШАЕТ
аспирантов, докторантов, научных работников,
преподавателей вузов и сотрудников
научно-исследовательских учреждений
для публикации своих научных статей.
Наиболее популярные рубрики журнала:
• Управление инновациями;
• Экономика, организация и управление предприятиями;
• Экономическая теория;
• Экономика предпринимательства;
• Финансы;
• Мировая экономика;
• АПК и сельское хозяйство
По вопросам публикации и подписки на журнал
обращаться в издательство:
Издательская Торговая Компания
“Наука-Бизнес-Паритет”
тел. (495)960-81-08
e-mail: info@apdr.ru
www.apdr.ru