/





































Автор: Победря Б.Е.
Теги: физика материаловедение издательство московского университета композитные материалы
Год: 1984




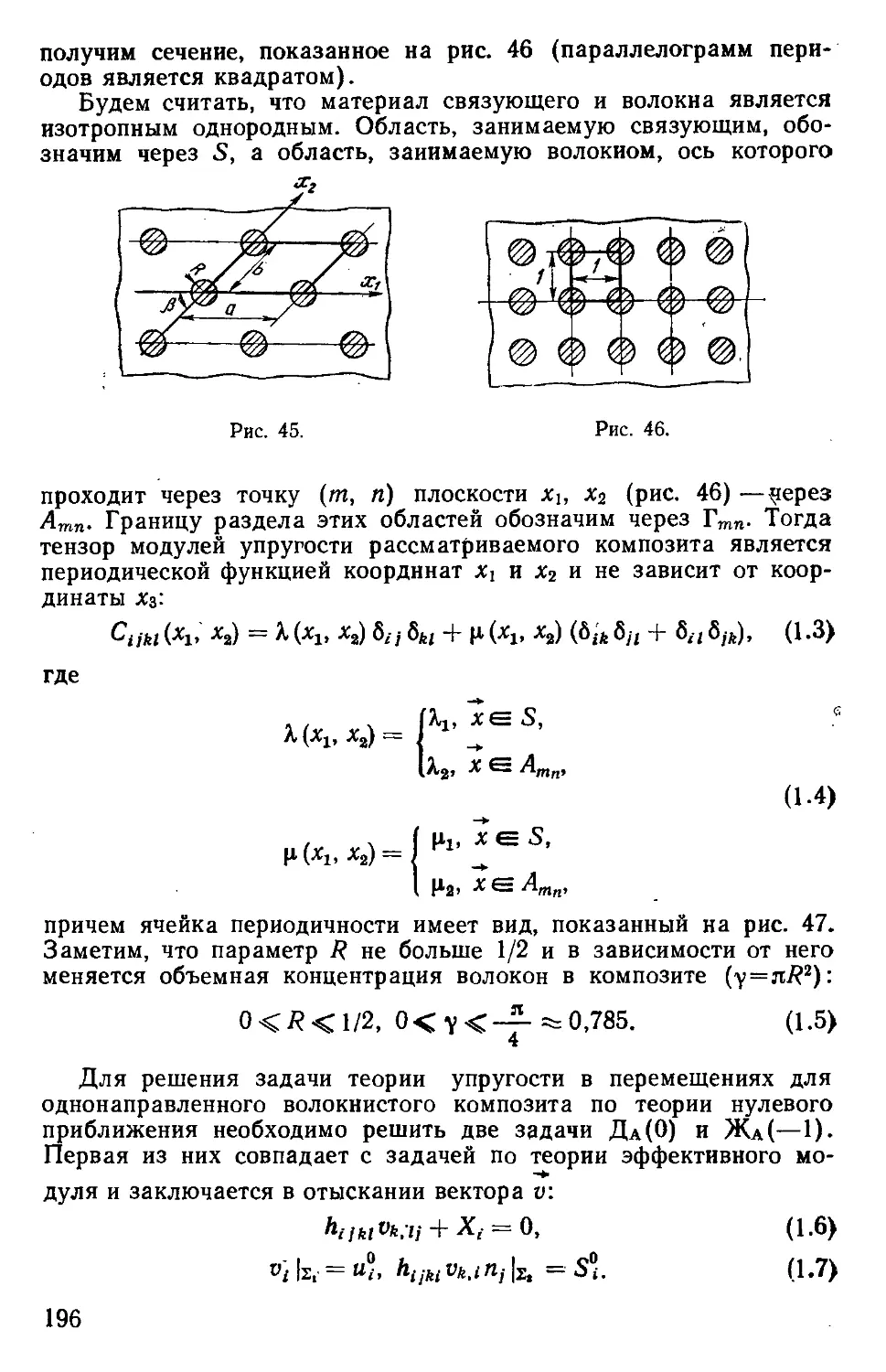
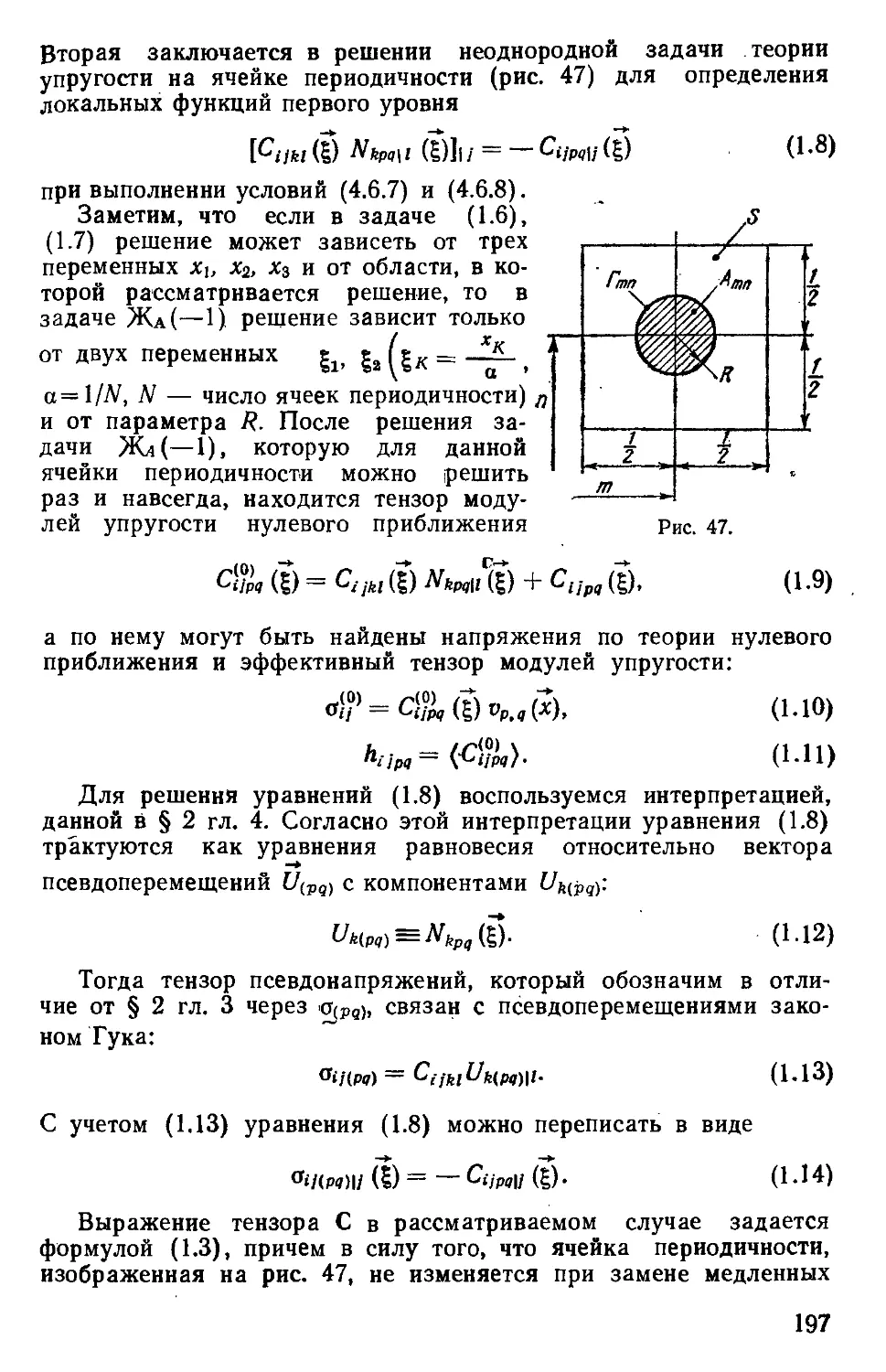
Текст
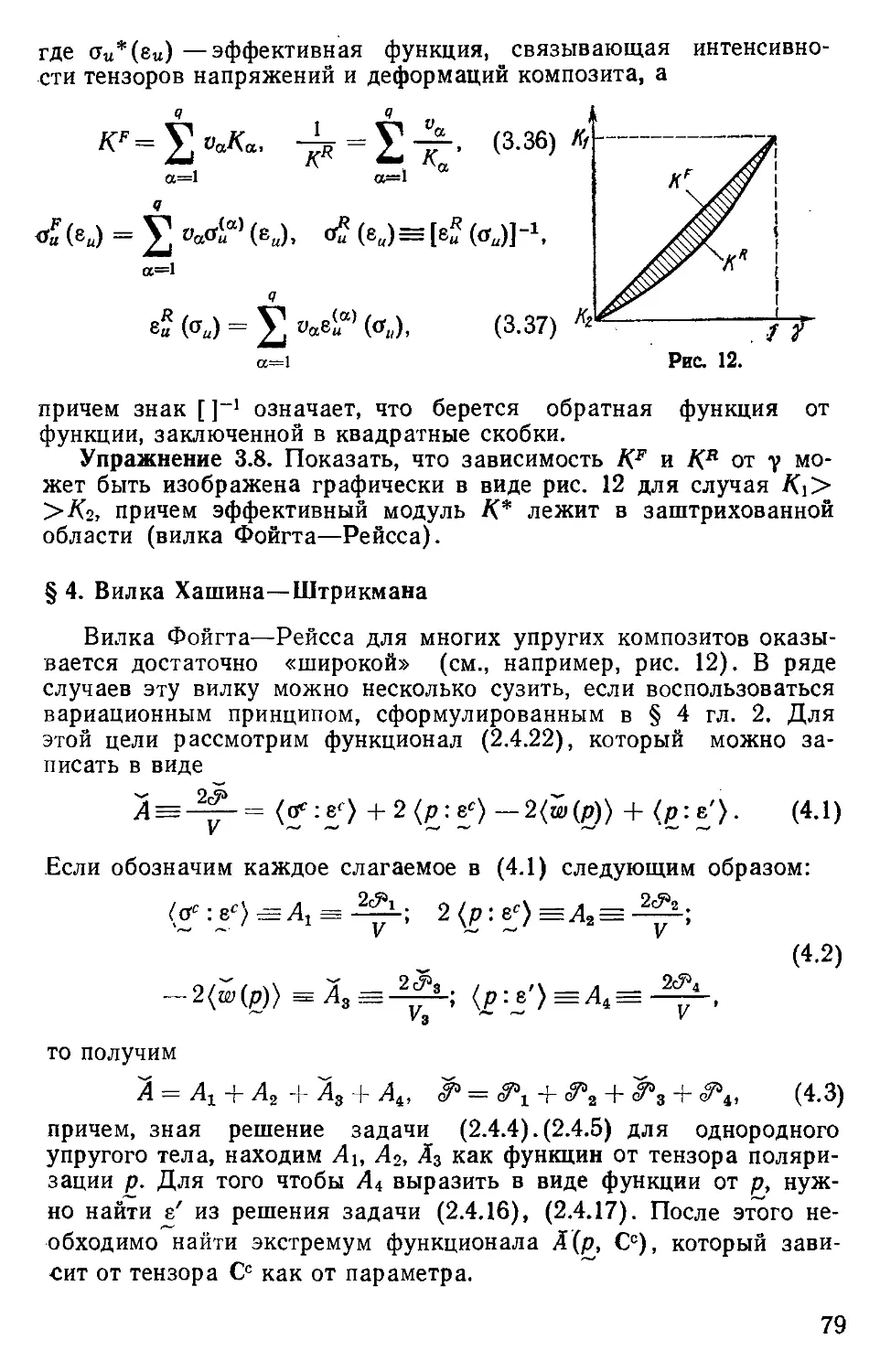
Б. Е. Победря
МЕХАНИКА
КОМПОЗИЦИОННЫХ
МАТЕРИАЛОВ
Допущено Министерством высшего и среднего
специального образования СССР в качестве
учебного пособия для студентов университетов,
обучающихся по специальности «Механика»
CD
ИЗДАТЕЛЬСТВО МОСКОВСКОГО УНИВЕРСИТЕТА
1984
ОГЛАВЛЕНИЕ
t
Введение . . 5
Глава 1. Общие сведения из механики деформируемого твердого те-
тела (МДТТ) 7
§ 1. Определяющие соотношения МДТТ 7
§ 2. Постановка задачи МДТТ 11
§ 3. Упругое тело 16
§ 4. Вязкоупругость . . 25
§ 5. Упруго-пластическое тело . 34
§ 6. Установочные эксперименты . 38
Некоторые литературные указания 46
Глава 2. Вариационные принципы 48
§ 1. Принцип Лагранжа 48
§ 2. Принцип Кастильяно 52
§ 3. Новый вариационный принцип 55
§ 4. Вариационный принцип Хашина — Штрикмана 57
Некоторые литературные указания 64
Глава 3. Эффективные характеристики композитов 65
§ 1. Эффективные определяющие соотношения 65
§ 2. Теория эффективного модуля 71
§ 3. Подходы Фойгта и Рейсса 74
§ 4. Вилка Хашина — Штрикмаиа 79
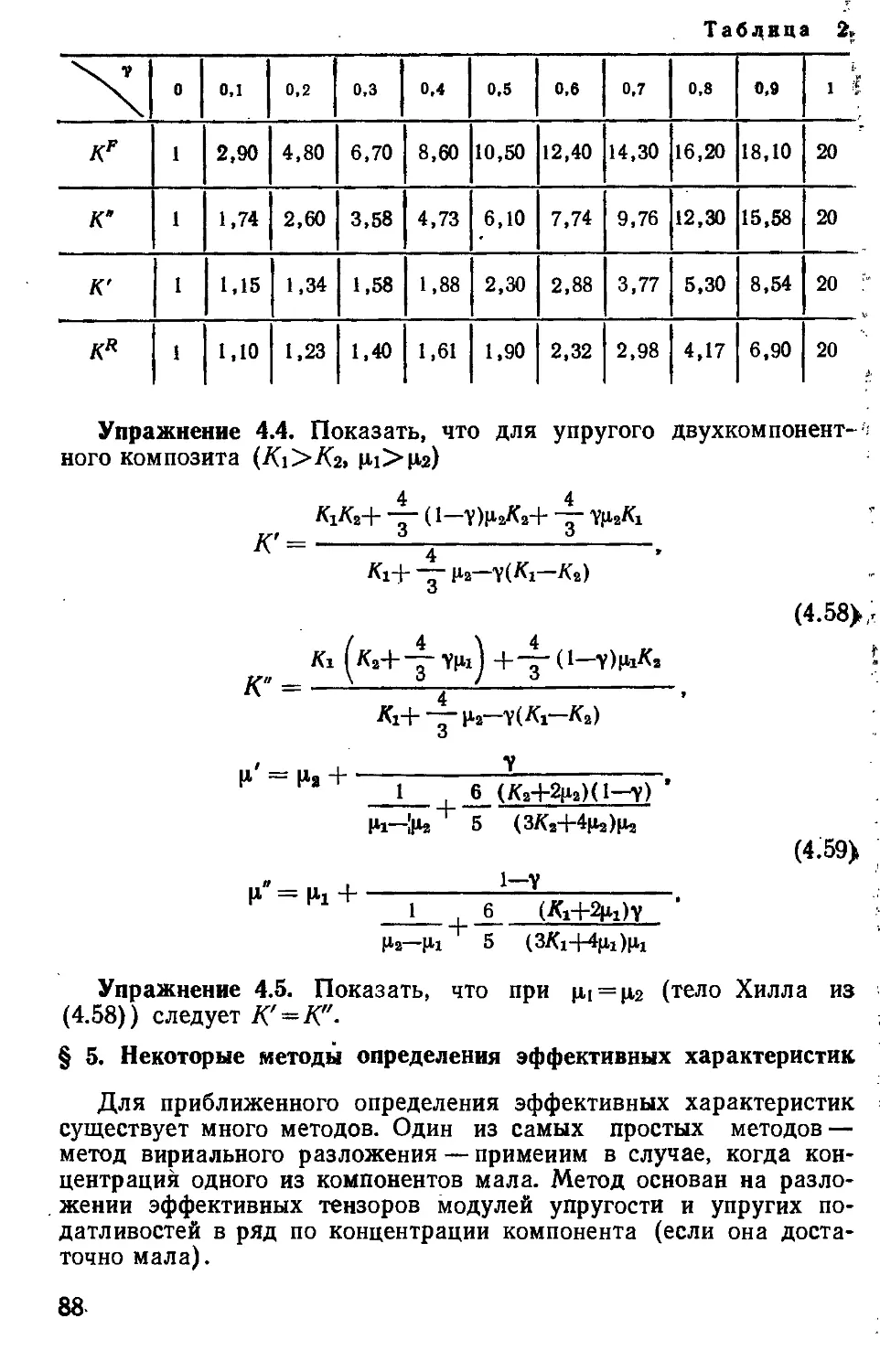
§ 5. Некоторые методы определения эффективных характеристик . 88
Некоторые литературные указания 90
Глава 4. Осреднение регулярных структур 91
§ 1. Задача о неоднородном упругом стержне 91
§ 2. Статическая задача теории упругости в перемещениях . . . 100
§ 3. Статическая задача теории упругости в напряжениях . . . 108
§ 4. Теплофизические характеристики композита . . . . . . 116
§ 5. Непериодические структуры 122
§ 6. Теория нулевого приближения ......... 128
§ 7. Неидеальиый контакт 135
§ 8. Плоская задача теории упругости 138
Некоторые литературные указания 142
Глава 5: Слоистые упругие композиты . 143
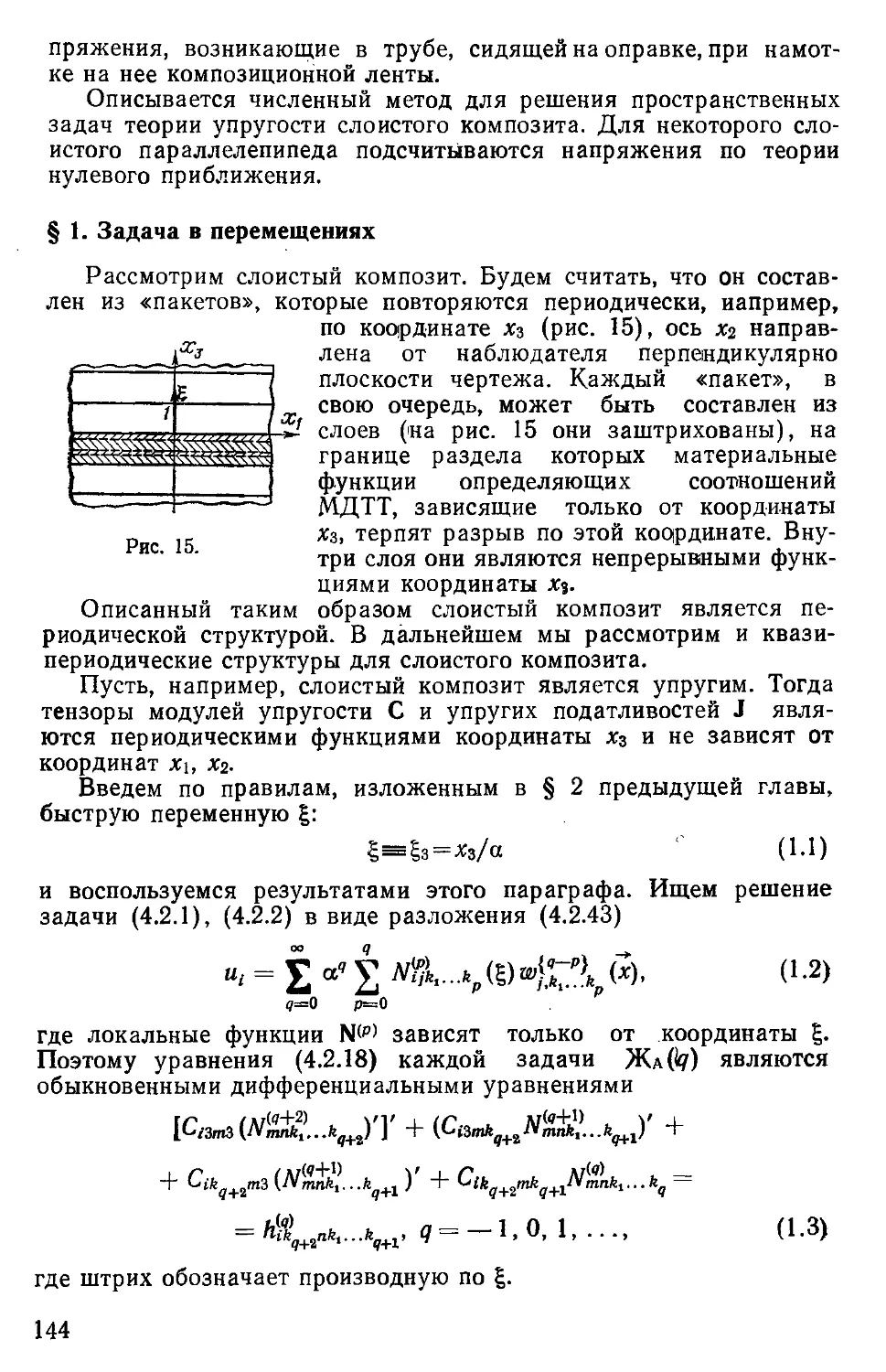
§ 1. Задача в перемещениях . . ' . . 144
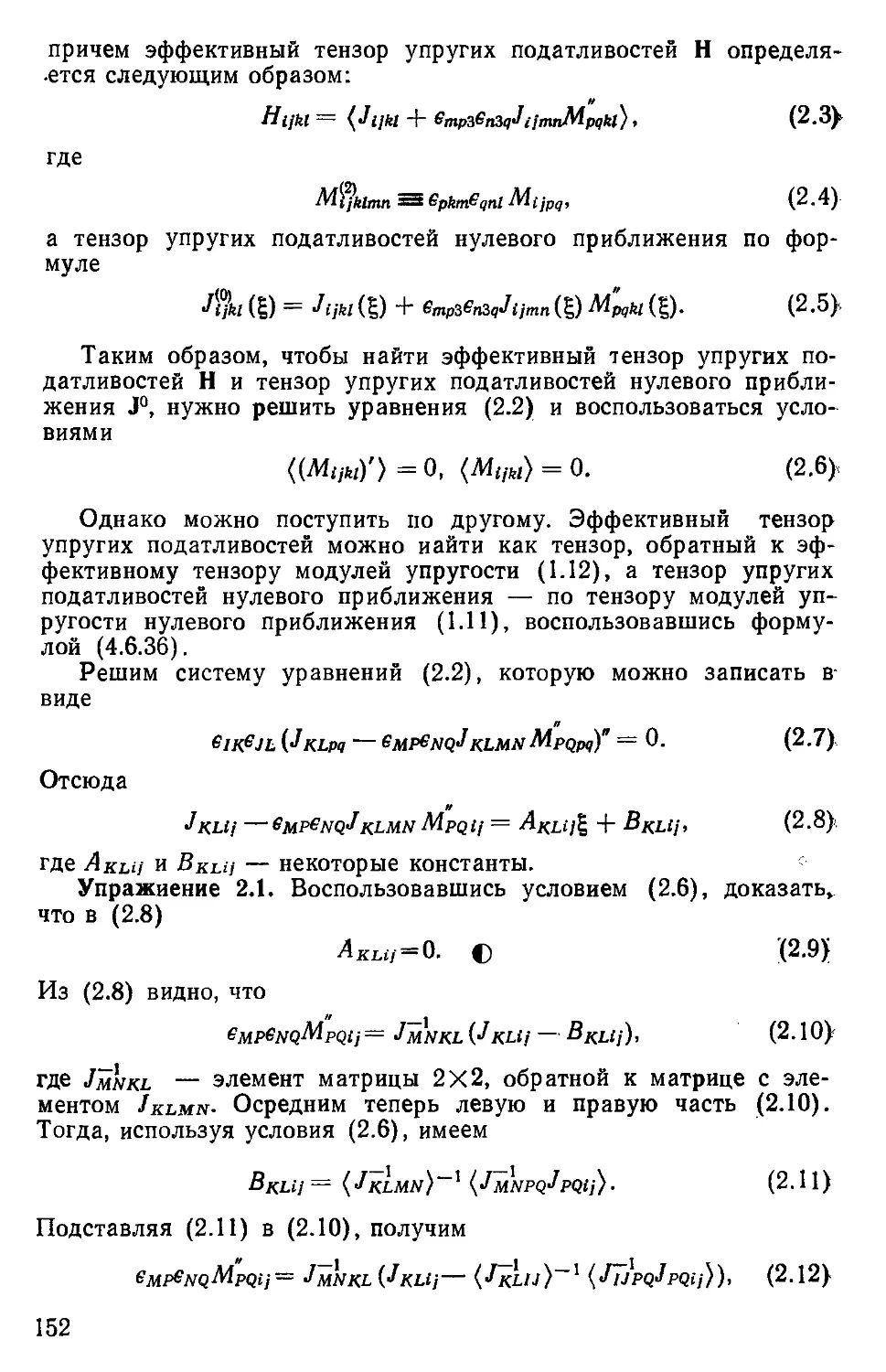
§ 2. Задача в напряжениях 151
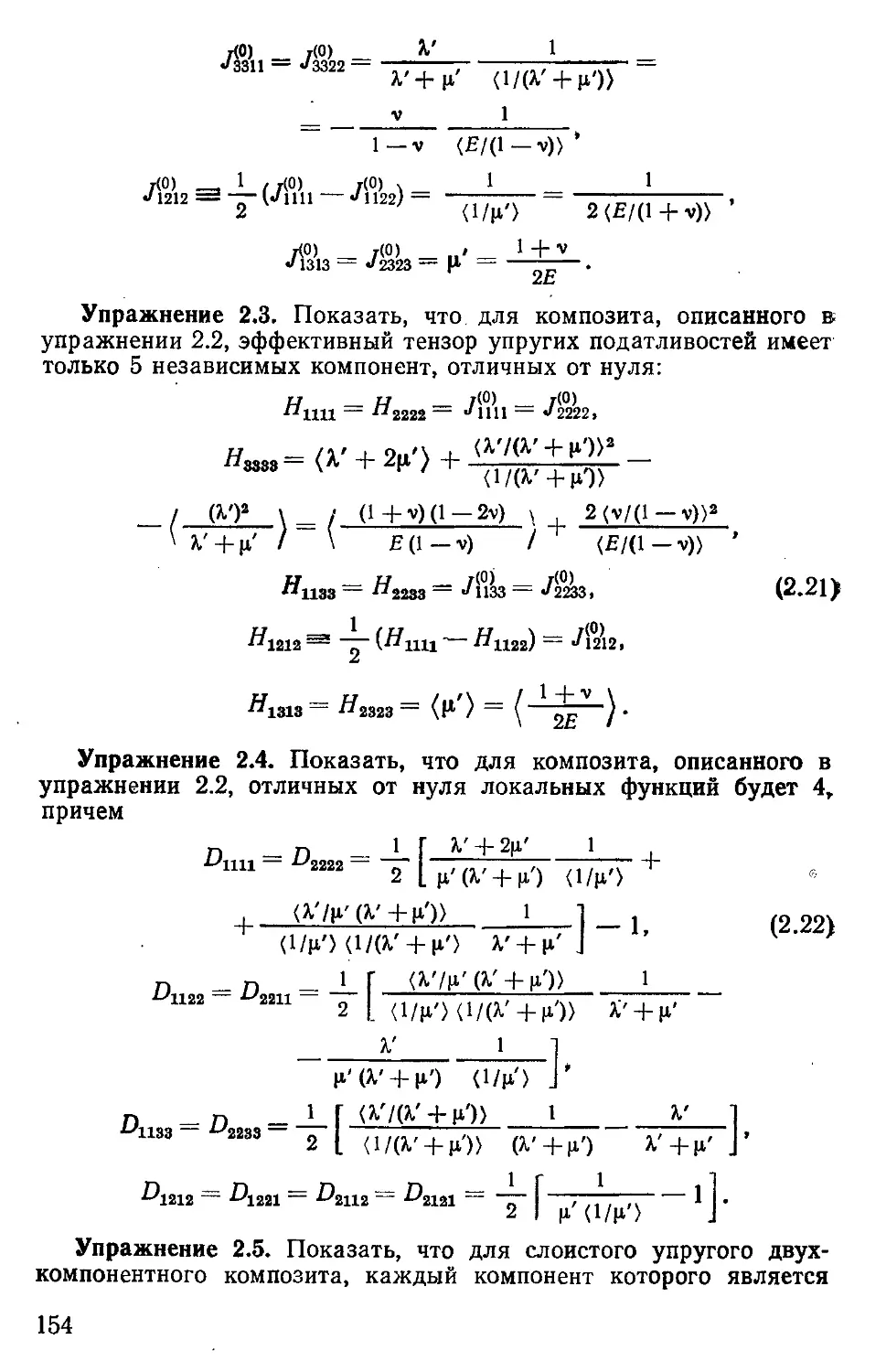
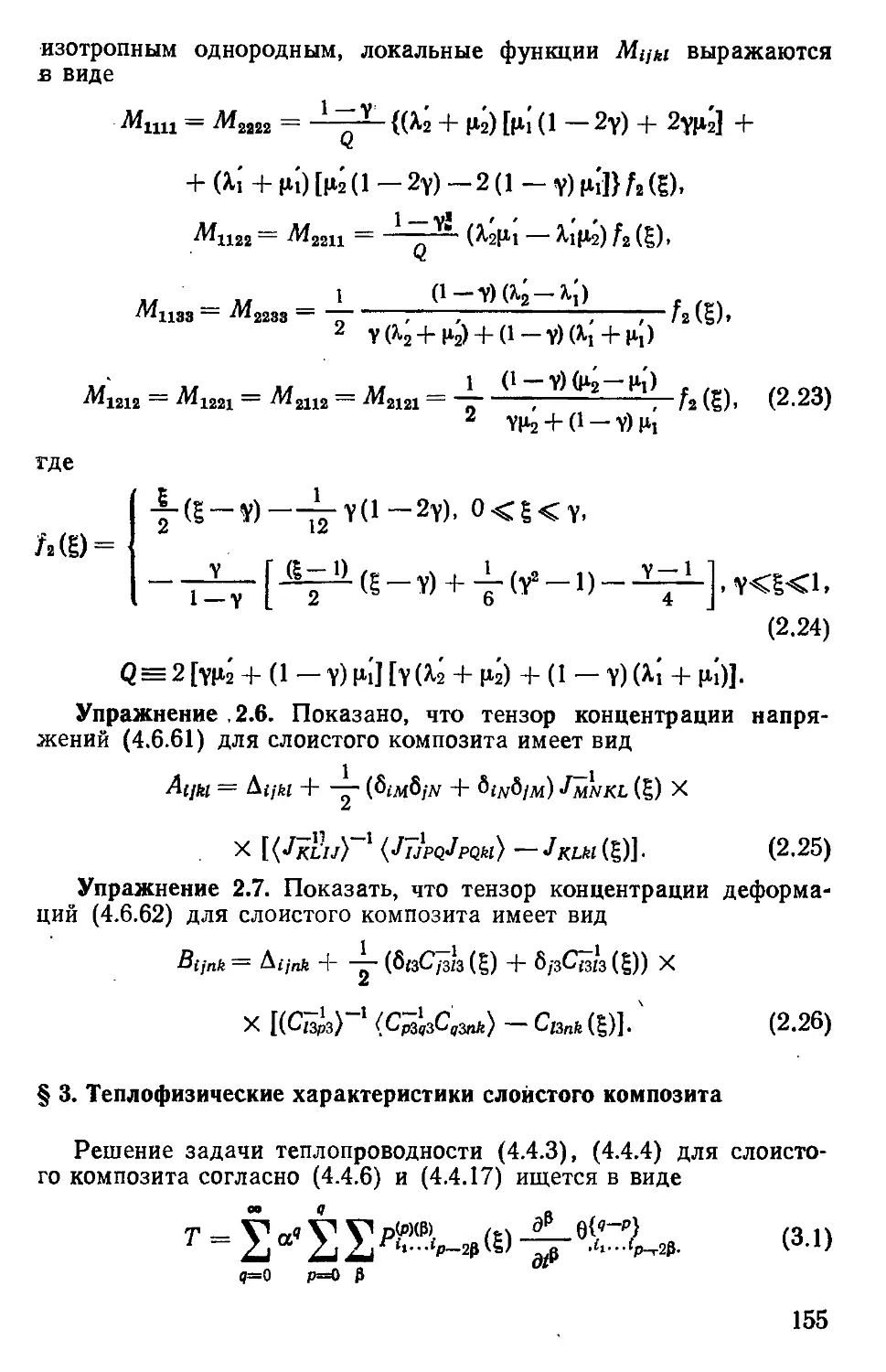
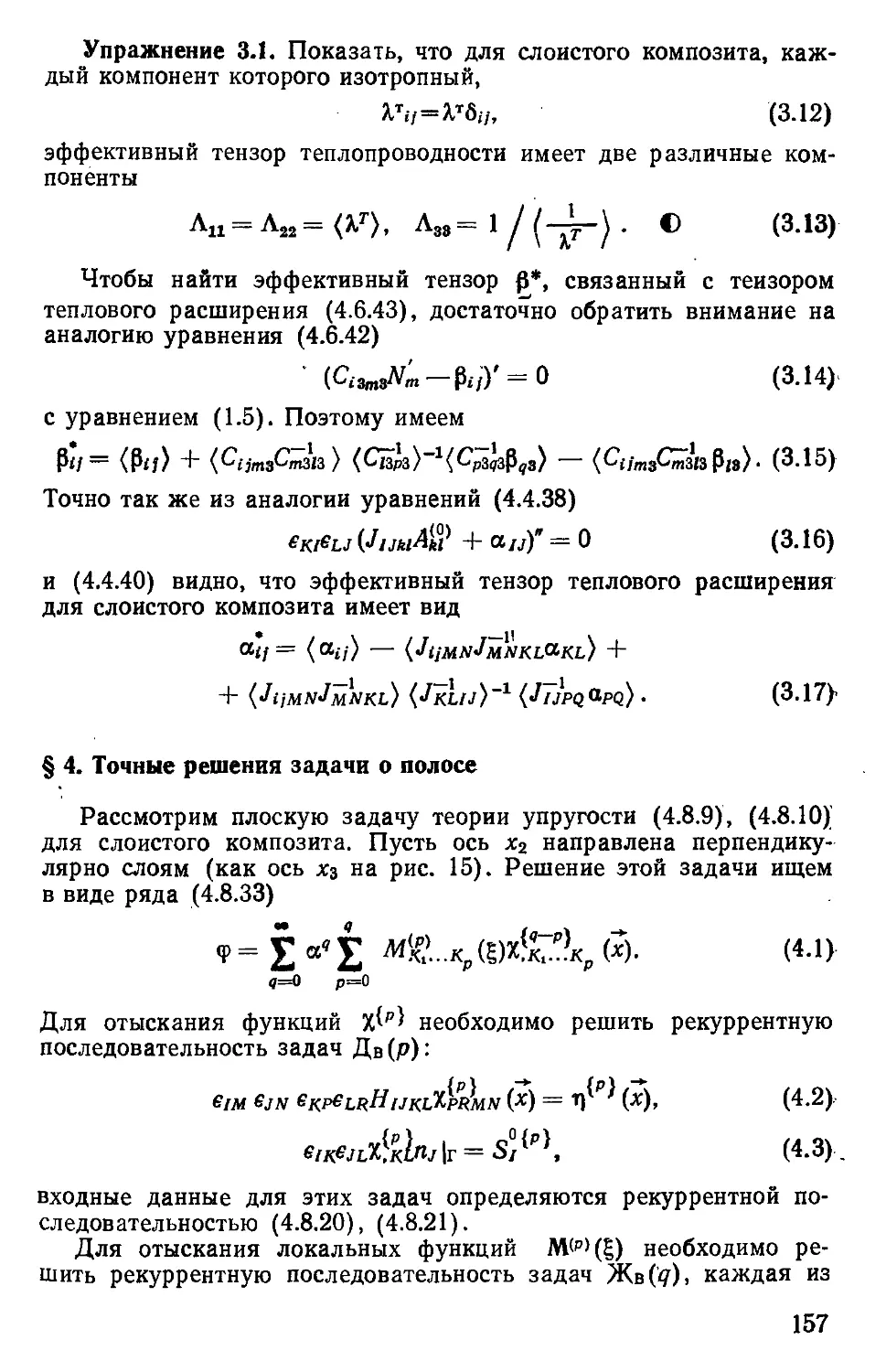
§ 3. Теплофизические характеристики слоистого композита . . . 155
§ 4. Точные решения задачи о полосе 157
§ 5. Слоистые квазипериодические структуры 167
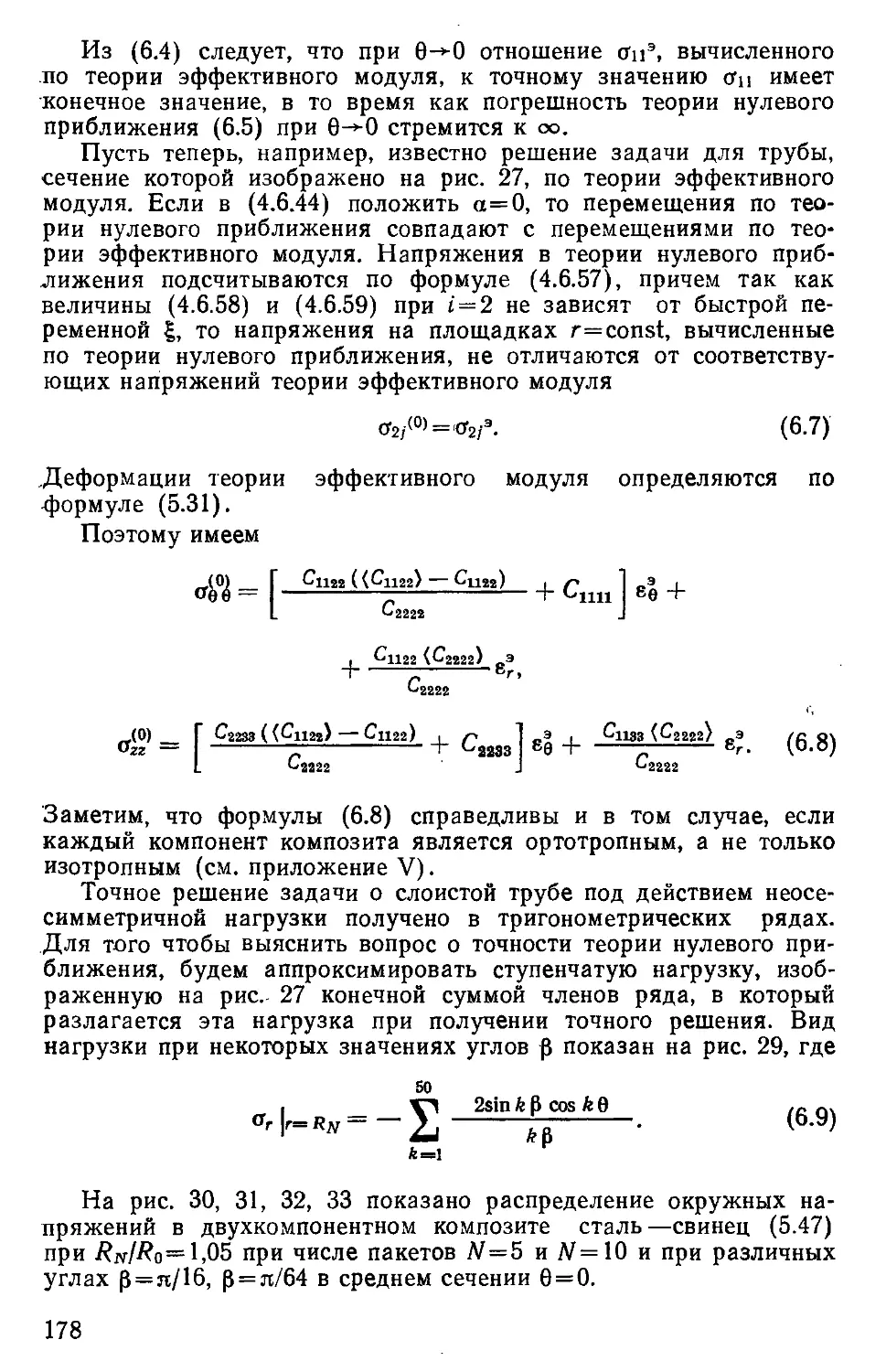
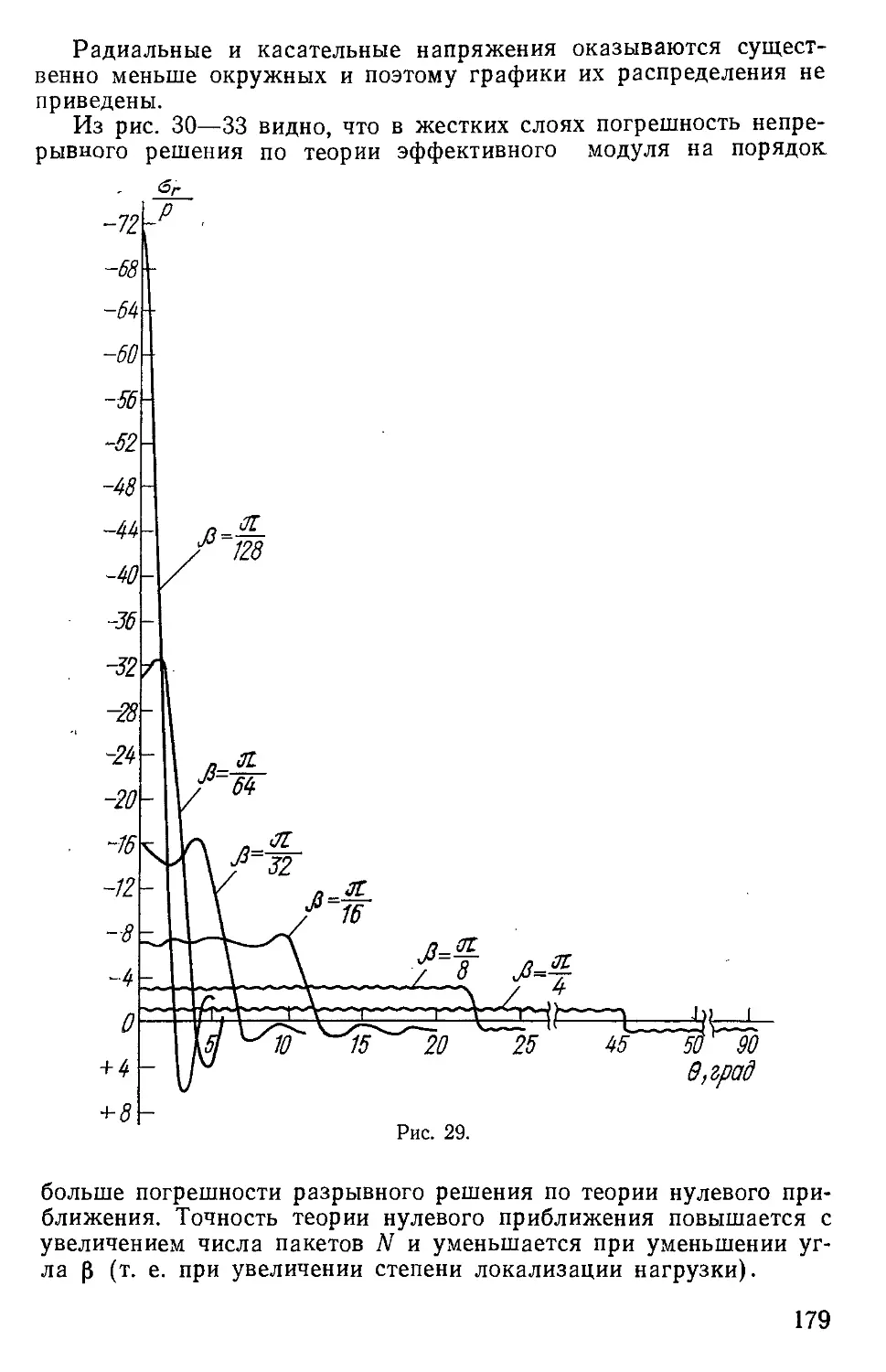
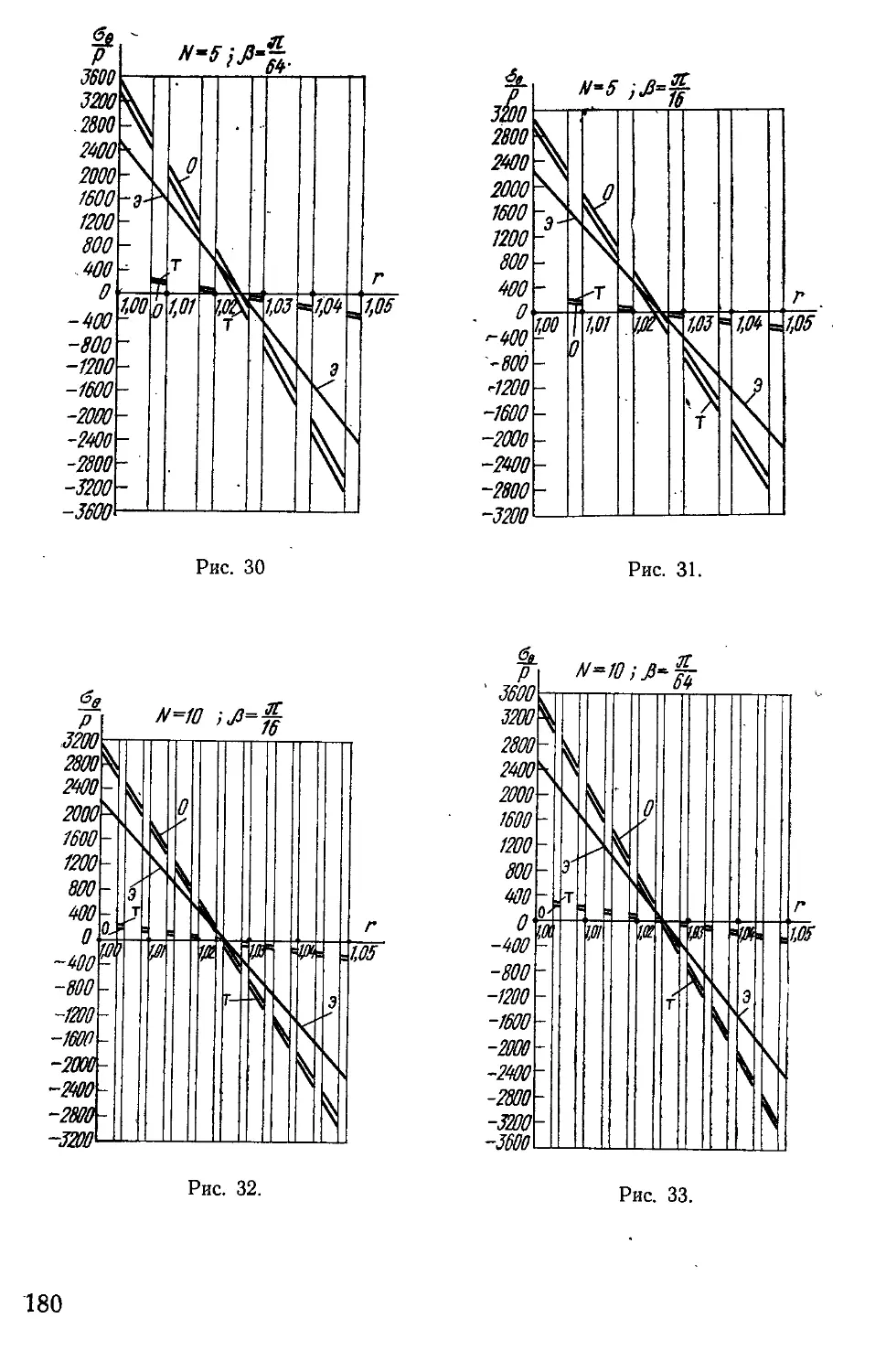
§ 6. Неосесимметричная задача о слоистой трубе 176
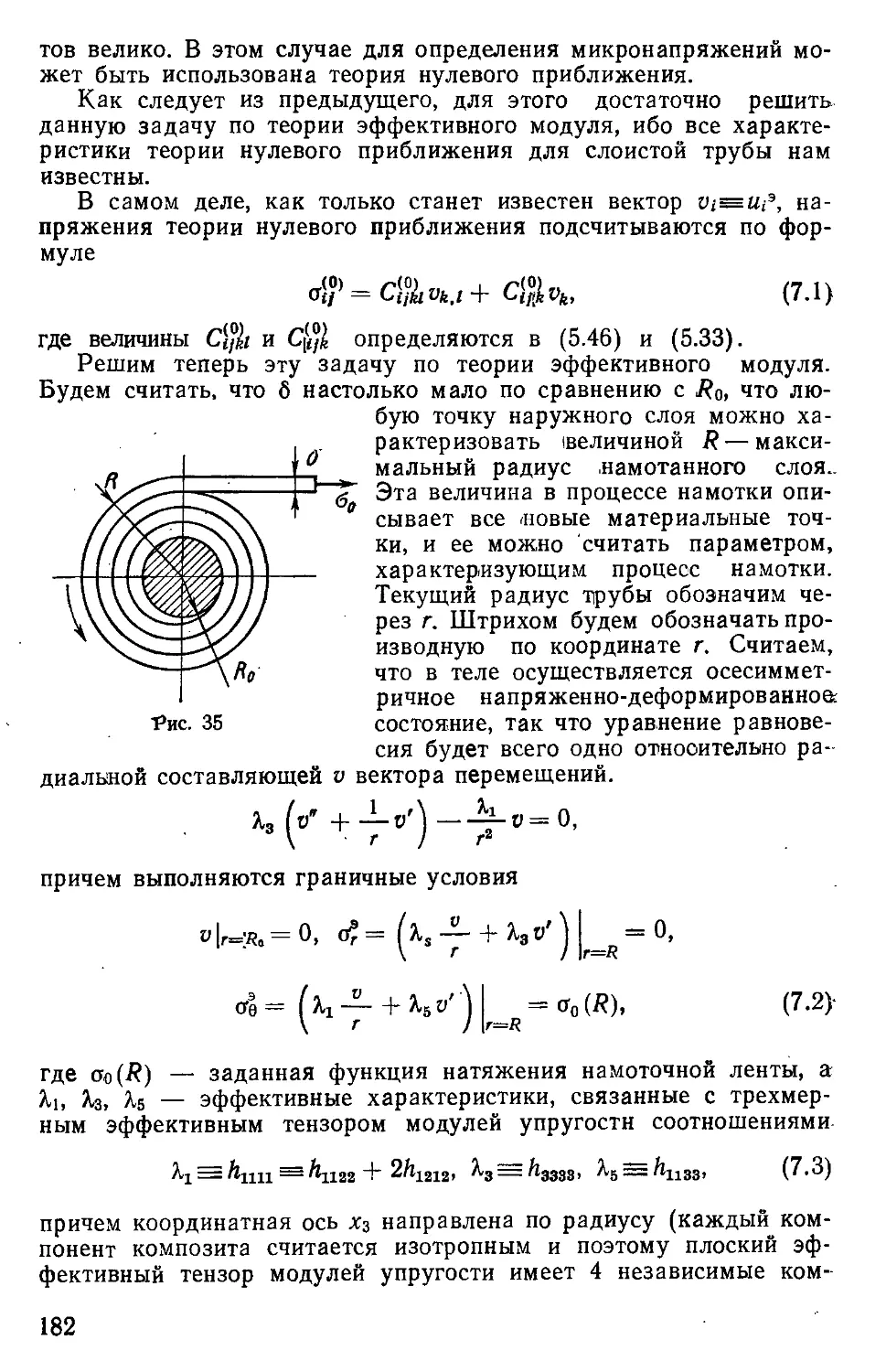
§ 7. Внутренние напряжения в трубе прн ее намотке 181
§ 8. Численное решение пространственных задач 185
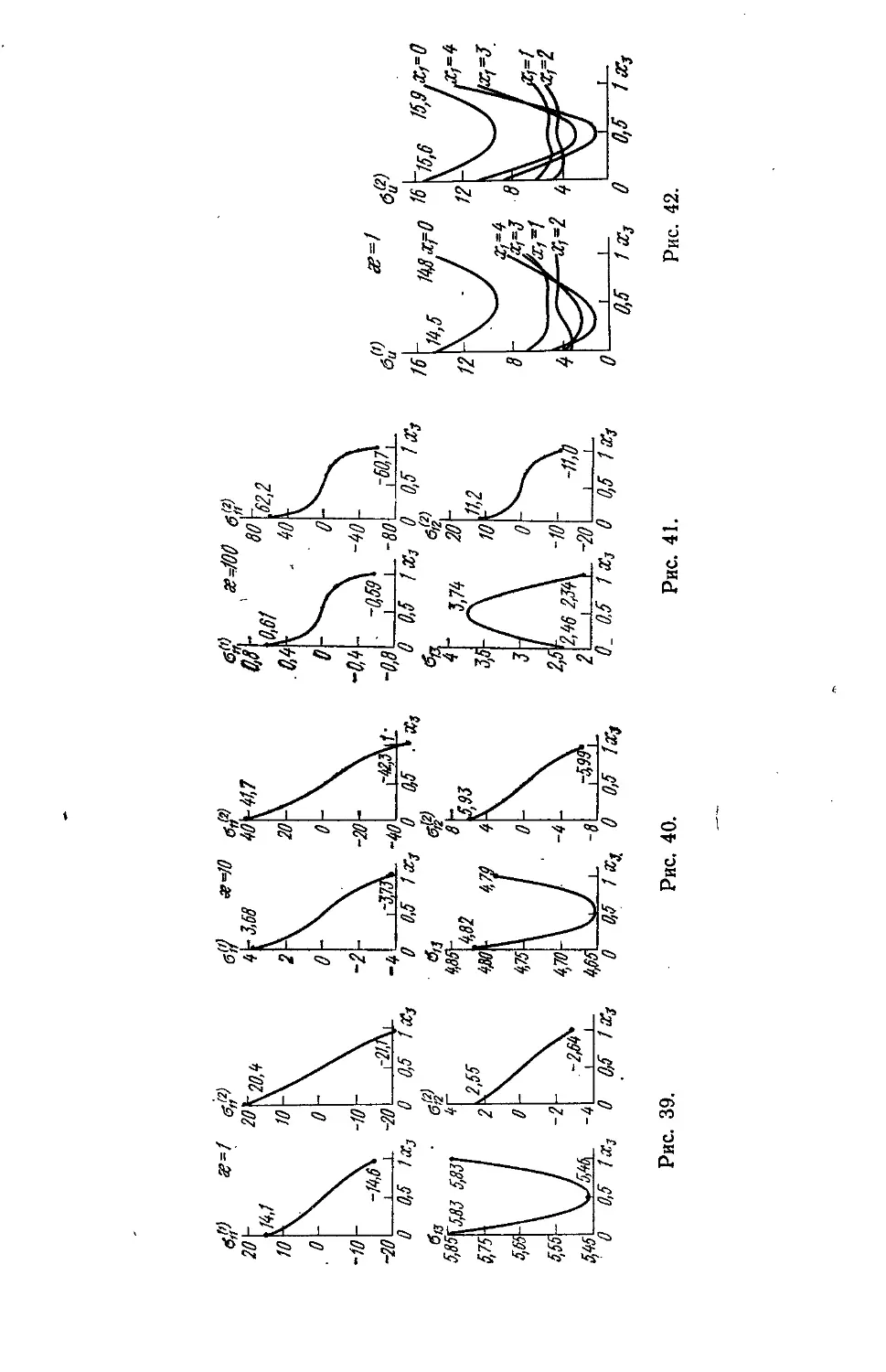
Некоторые литературные указания 193
Глава 6. Волокнистые упругие композиты 195
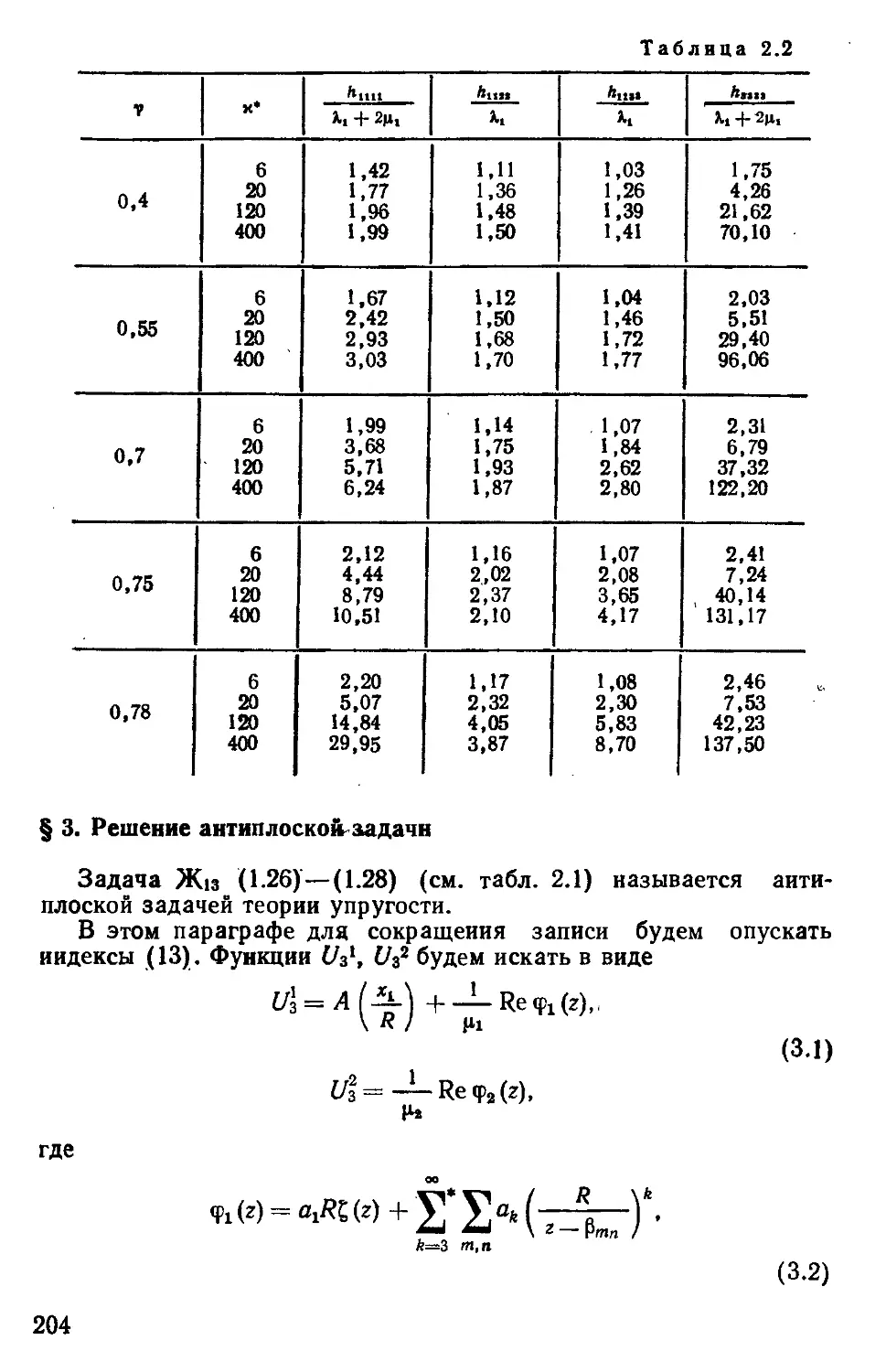
§ 1. Однонаправленный волокнистый композит 195
§ 2. Решение плоской задачи 200
§ 3. Решение антиплоской задачи 204
§ 4. Модельные задачи 209
§ 5. Композит с продольио-поперечиой армировкой 213
Некоторые литературные указания 217
Глава 7. Упруго-пластические композиты 219
§ 1. Равновесие физически нелинейного иеоднЬродиого стержня . . 219
§ 2. Задача в перемещениях для упруго-пластического композита . 225
§ 3. Анизотропная теория пластичности 234
§ 4. Упрощенная теория 249
§¦ 5. Модельные установочные эксперименты 255
§ 6. Осреднение в теории малых упруго-пластических деформаций . 260
Некоторые литературные указания 267
Глава 8. Вязкоупругие композиты 268
§ 1. Осреднение вязкоупругих регулярных структур 268
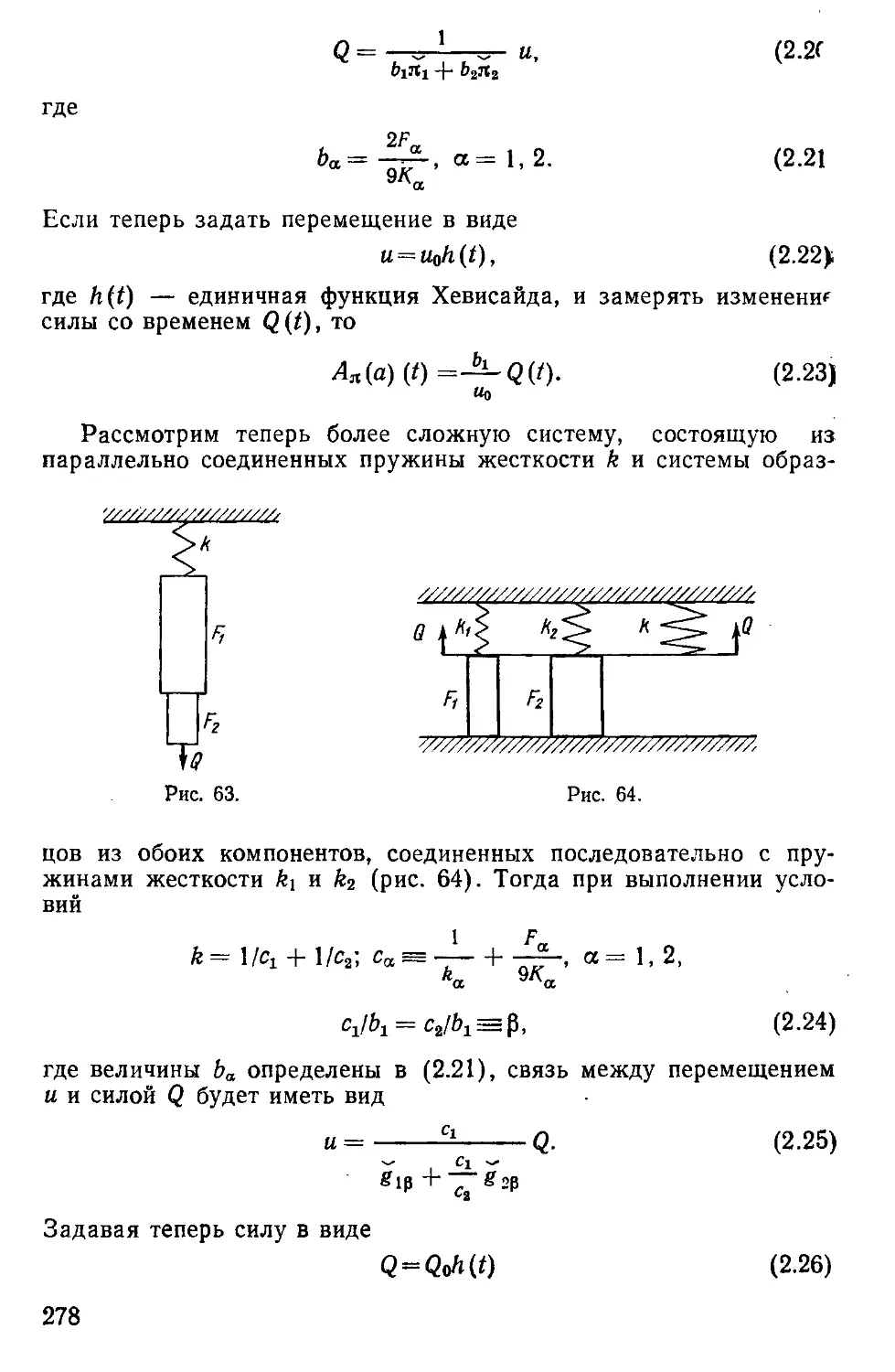
§ 2. Структурная анизотропия 274
§ 3. Методы аппроксимаций 279
§ 4. Нелинейные задачи 285
Некоторые литературные указания 288
Глава 9. Колебания и волны 290
§ 1. Динамическая задача об упругом неоднородном стержне . . 290
§ 2. Динамическая задача теории упругости и вязкоупругости . . 295
§ 3. Волновой фильтр . 300
§ 4. Разрушение композитов 301
Некоторые литературные указания 302
ЛИТЕРАТУРА .303
ПРИЛОЖЕНИЕ I. Сведении из тензорного исчисления .... 308
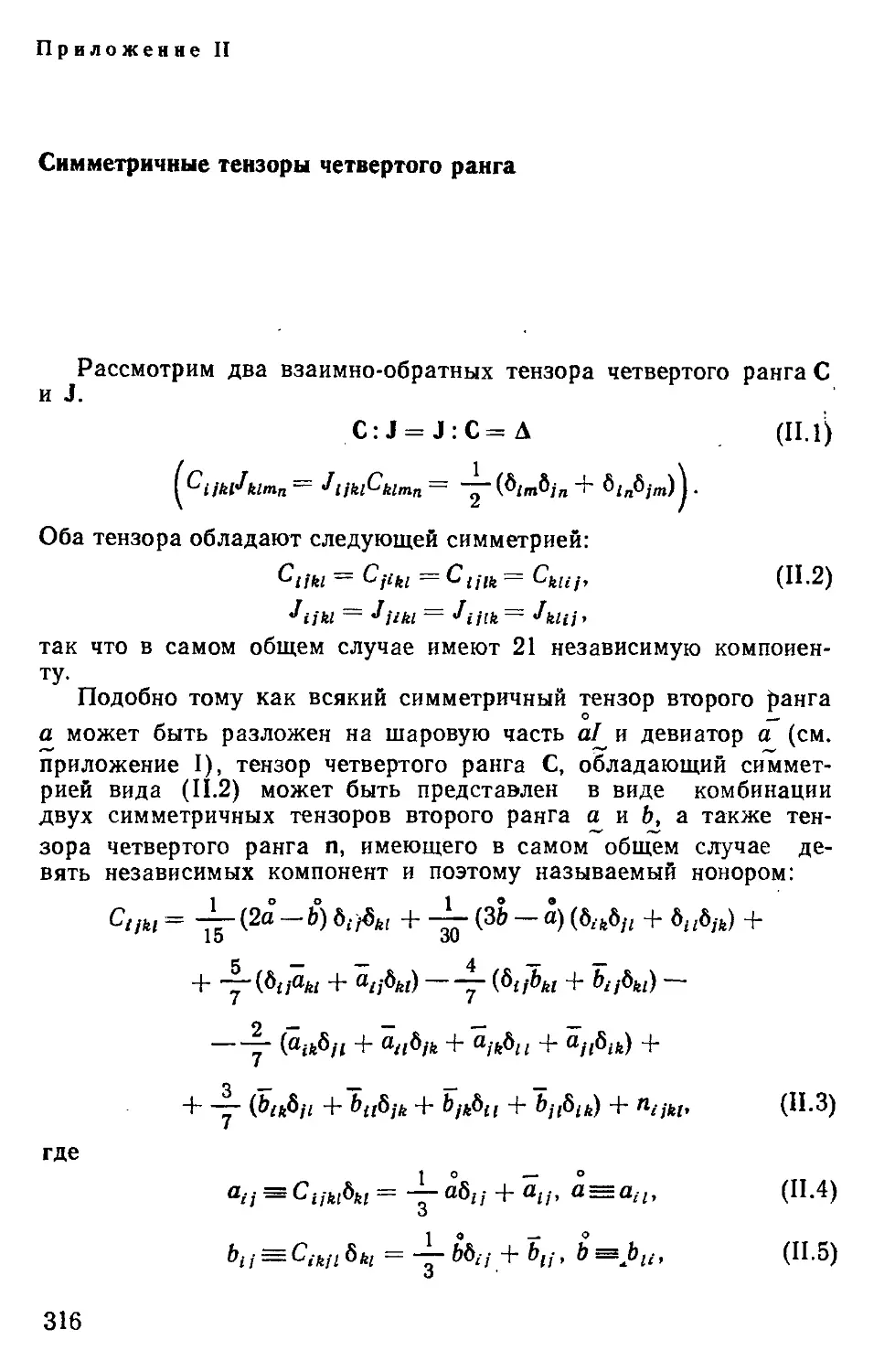
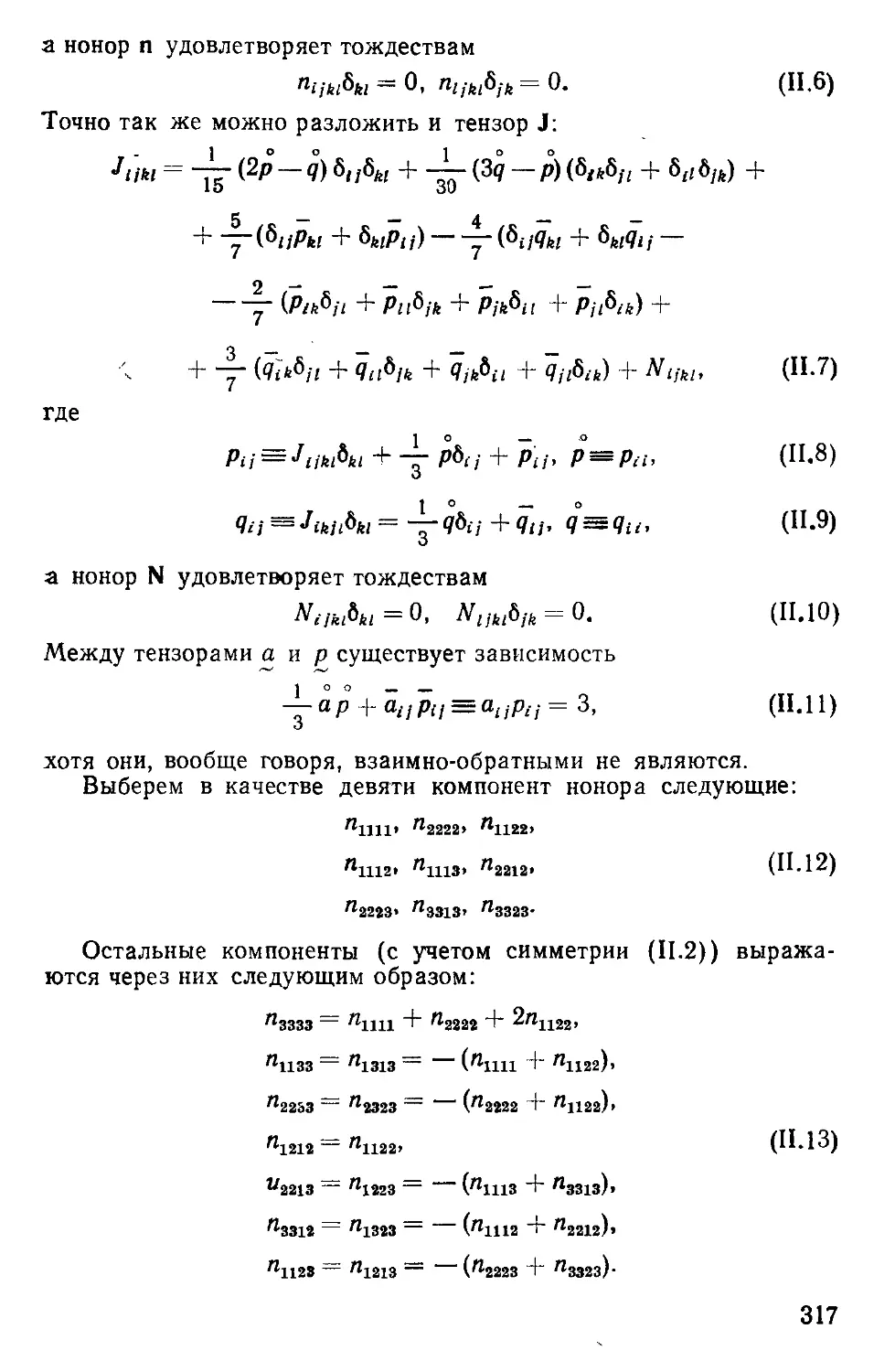
ПРИЛОЖЕНИЕ II. Симметричные тензоры четвертого ранга . . 316
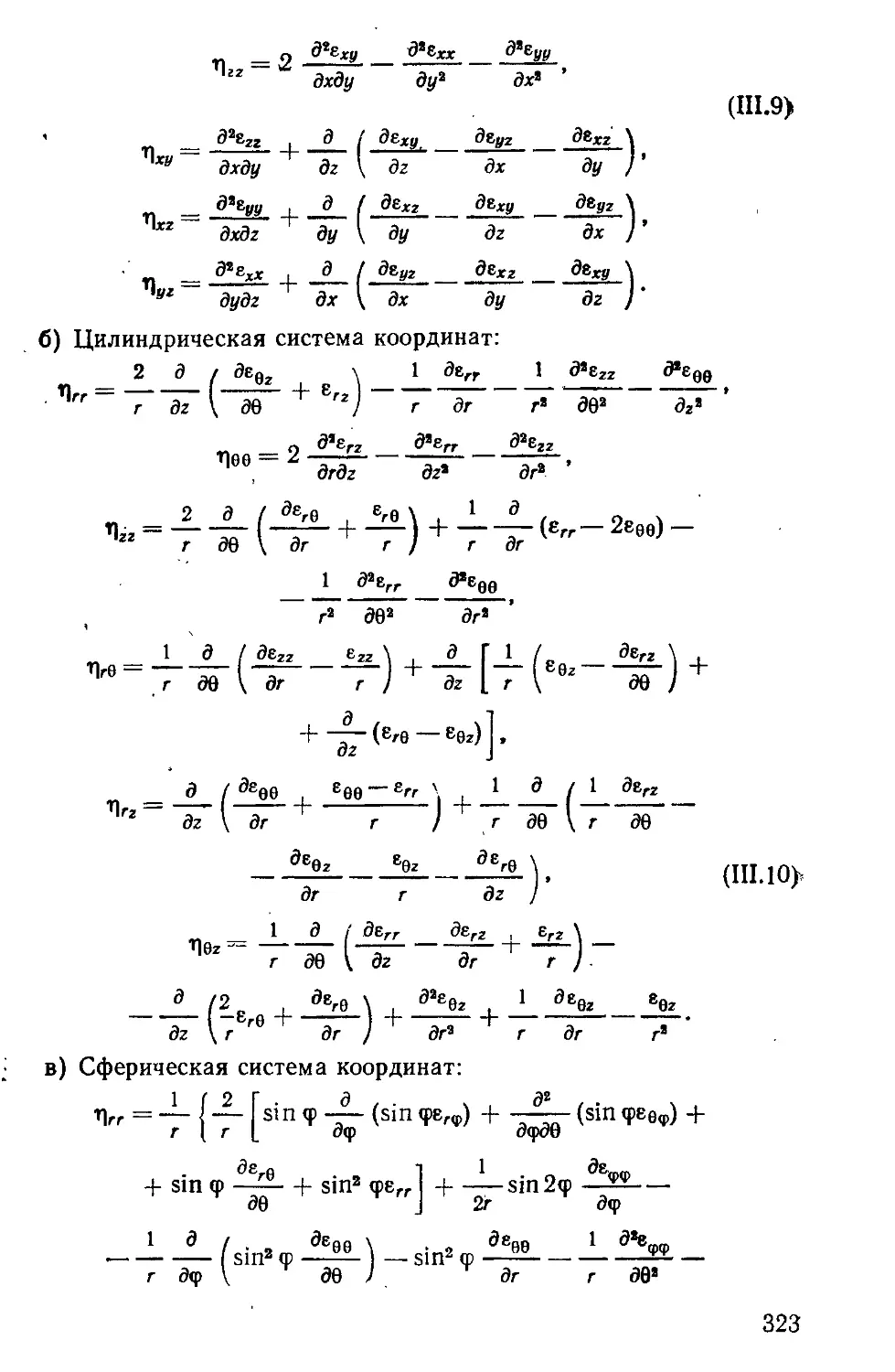
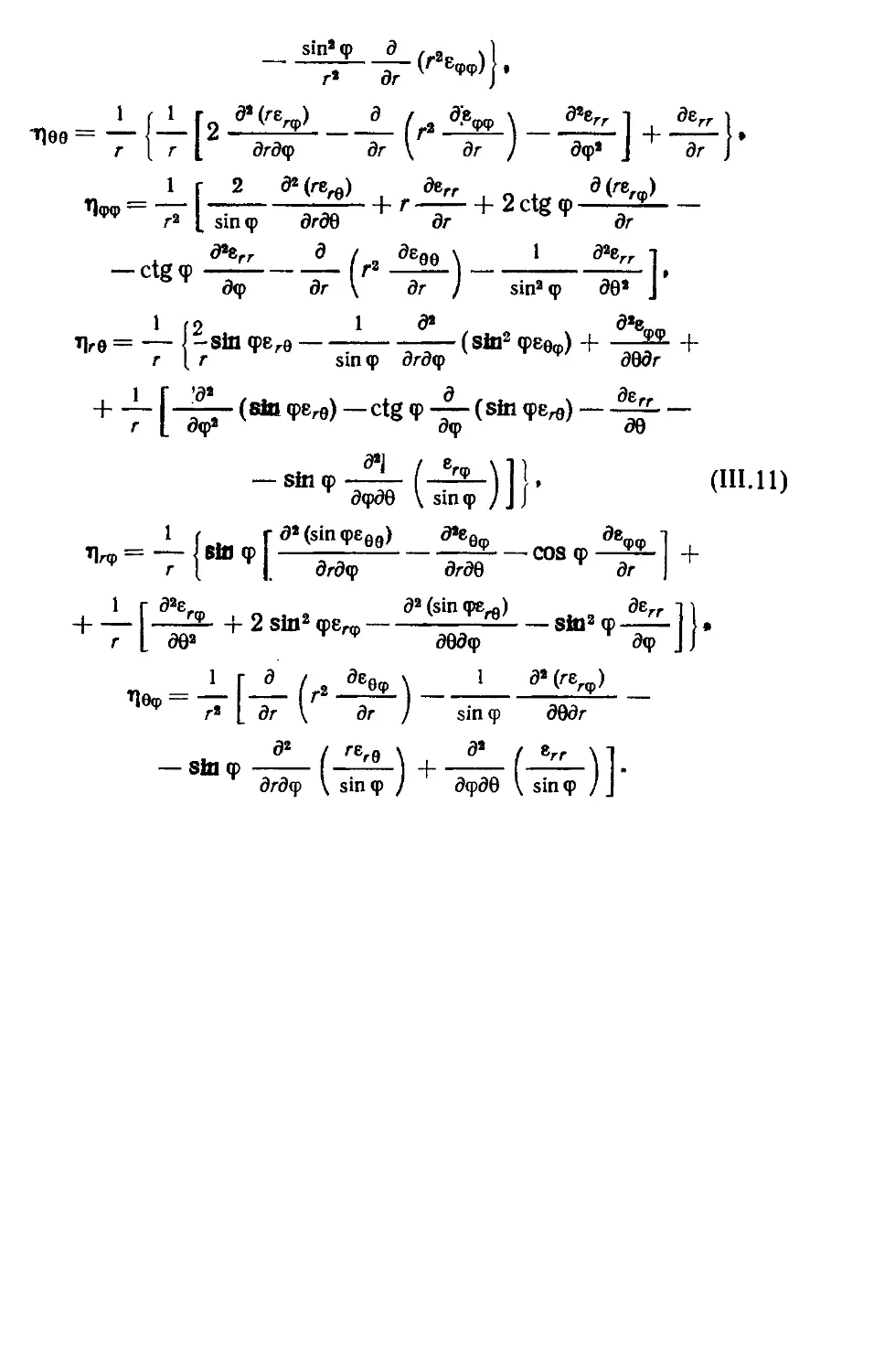
ПРИЛОЖЕНИЕ III. Основные уравнения МДТТ в ортогональных
координатах 321
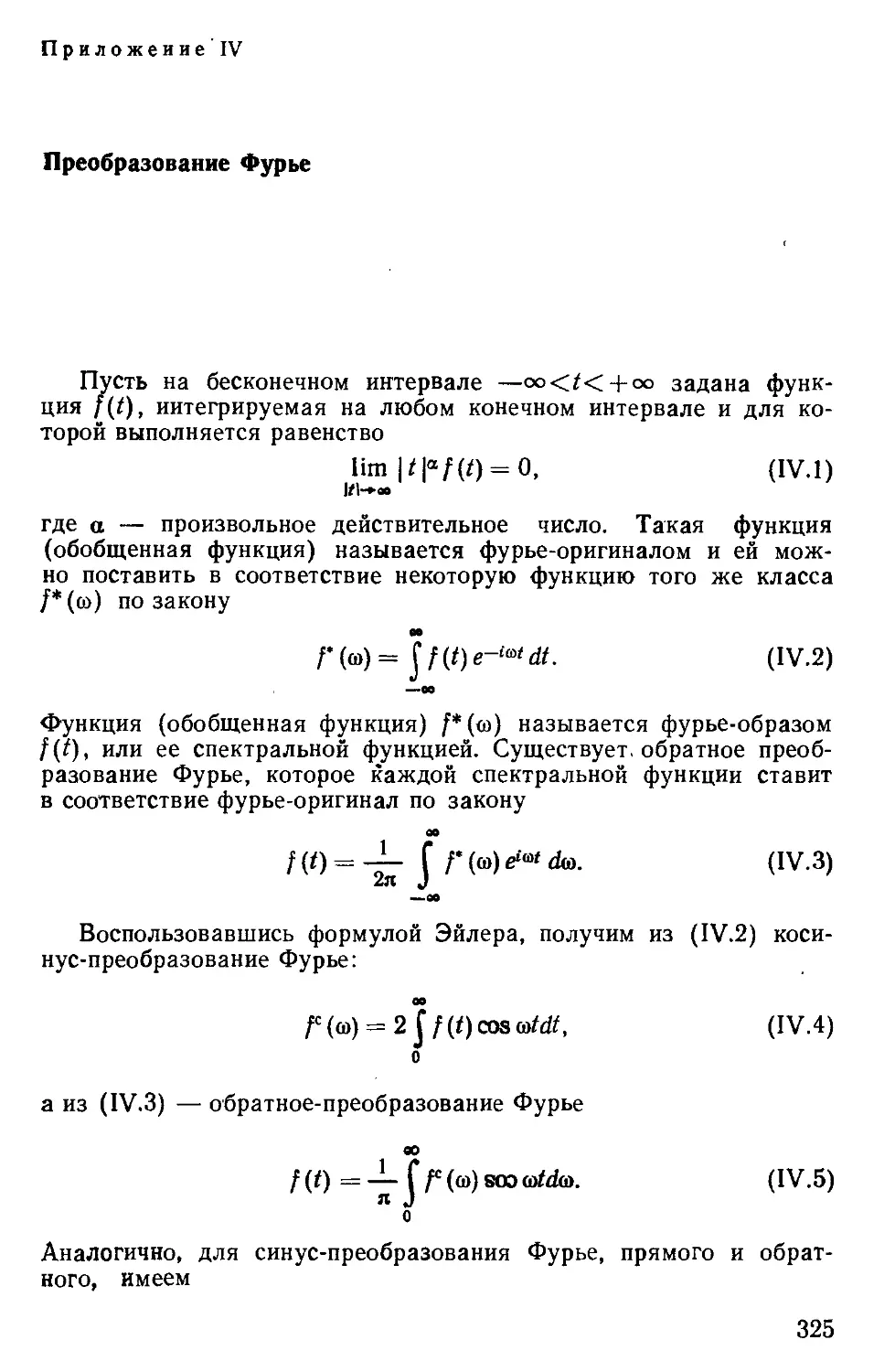
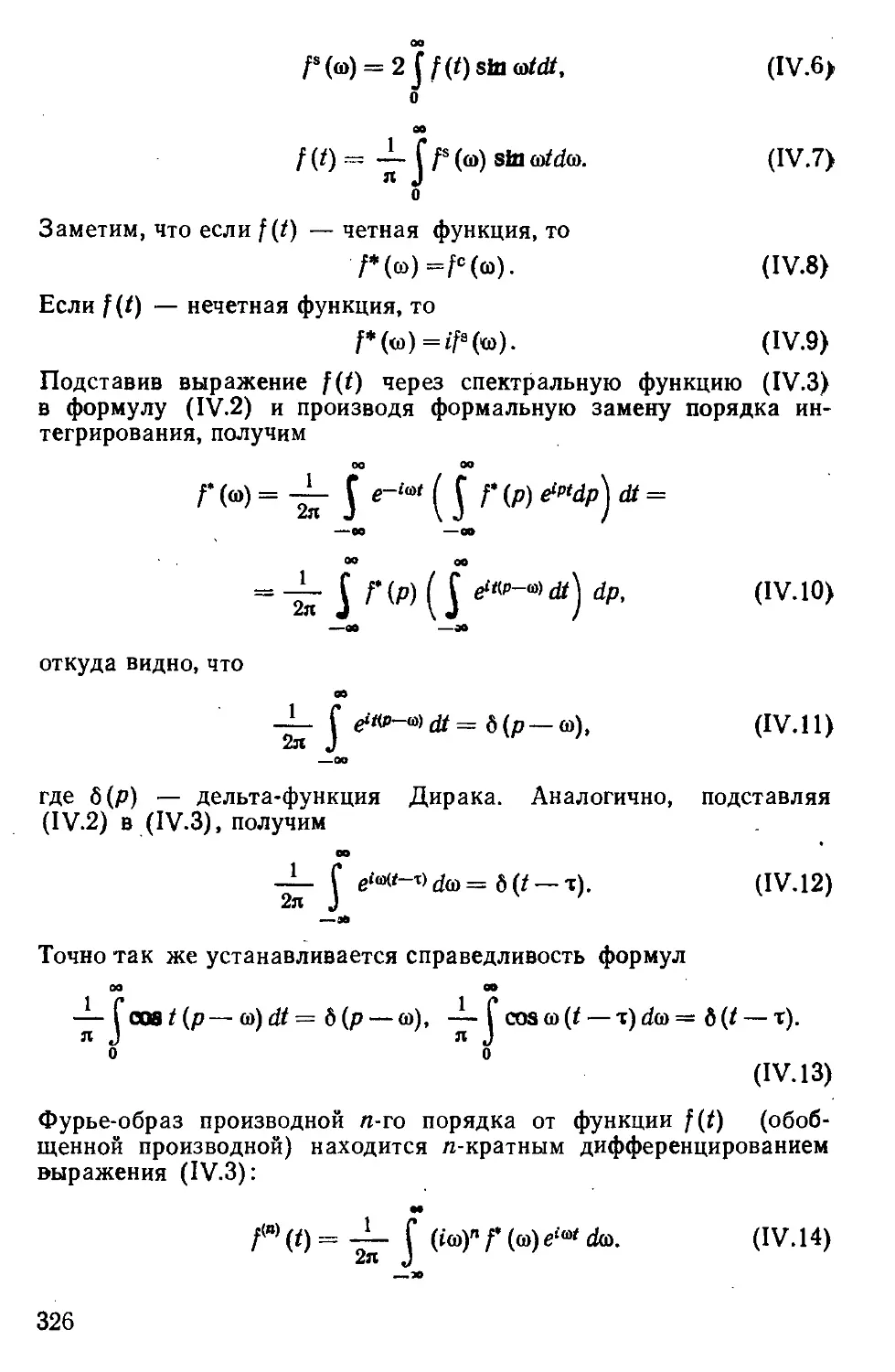
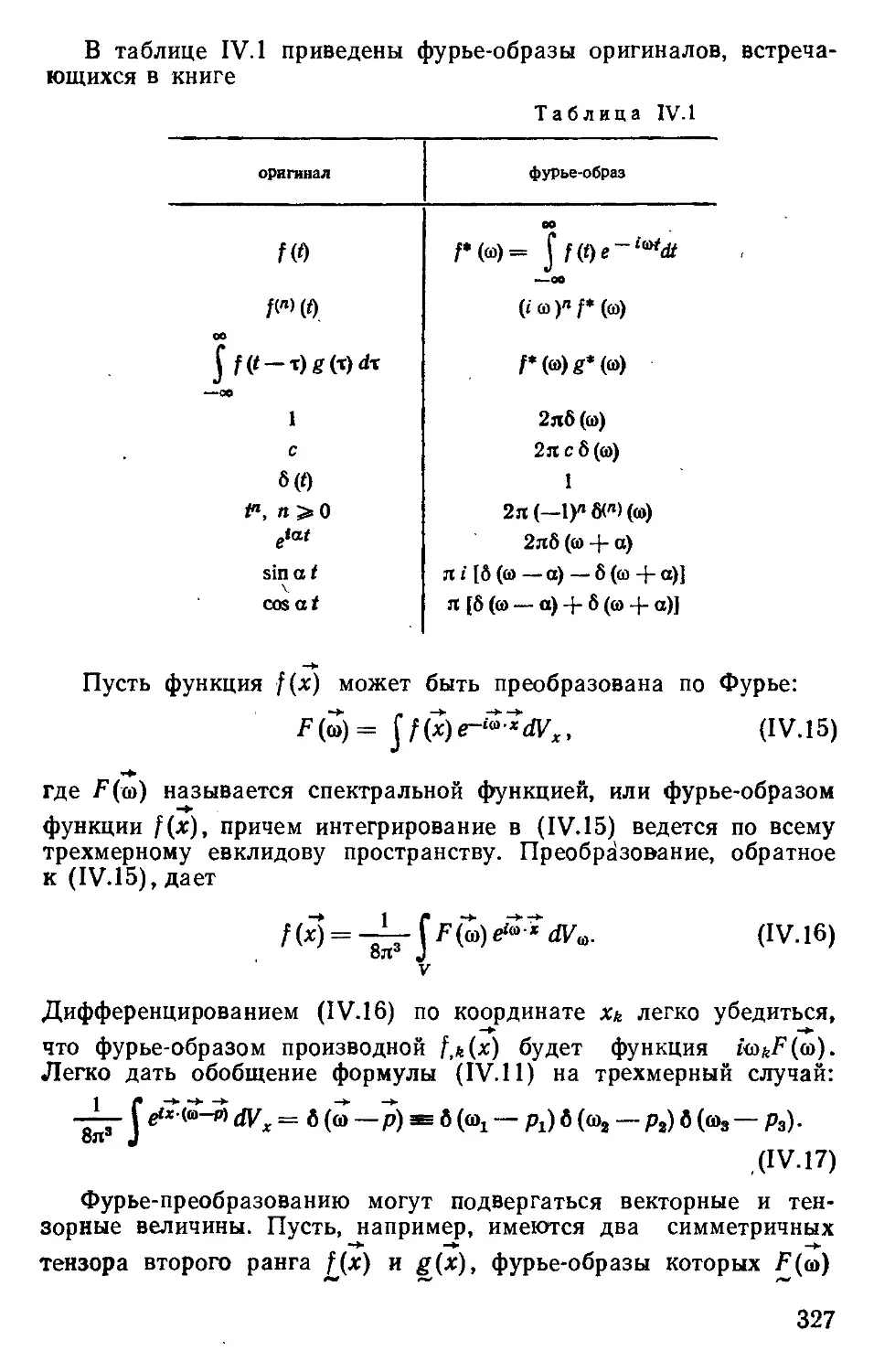
ПРИЛОЖЕНИЕ IV. Преобразование Фурье 325
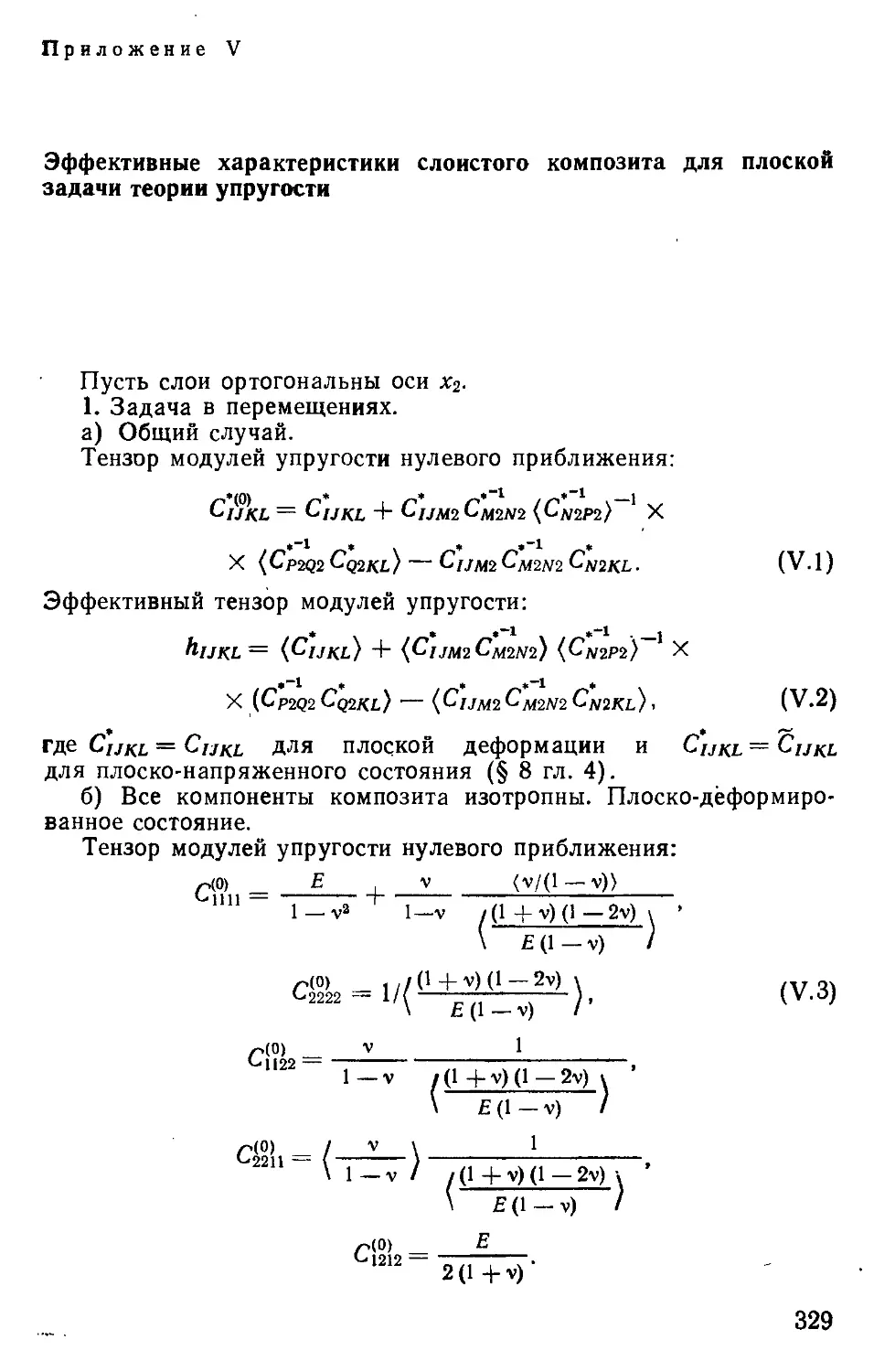
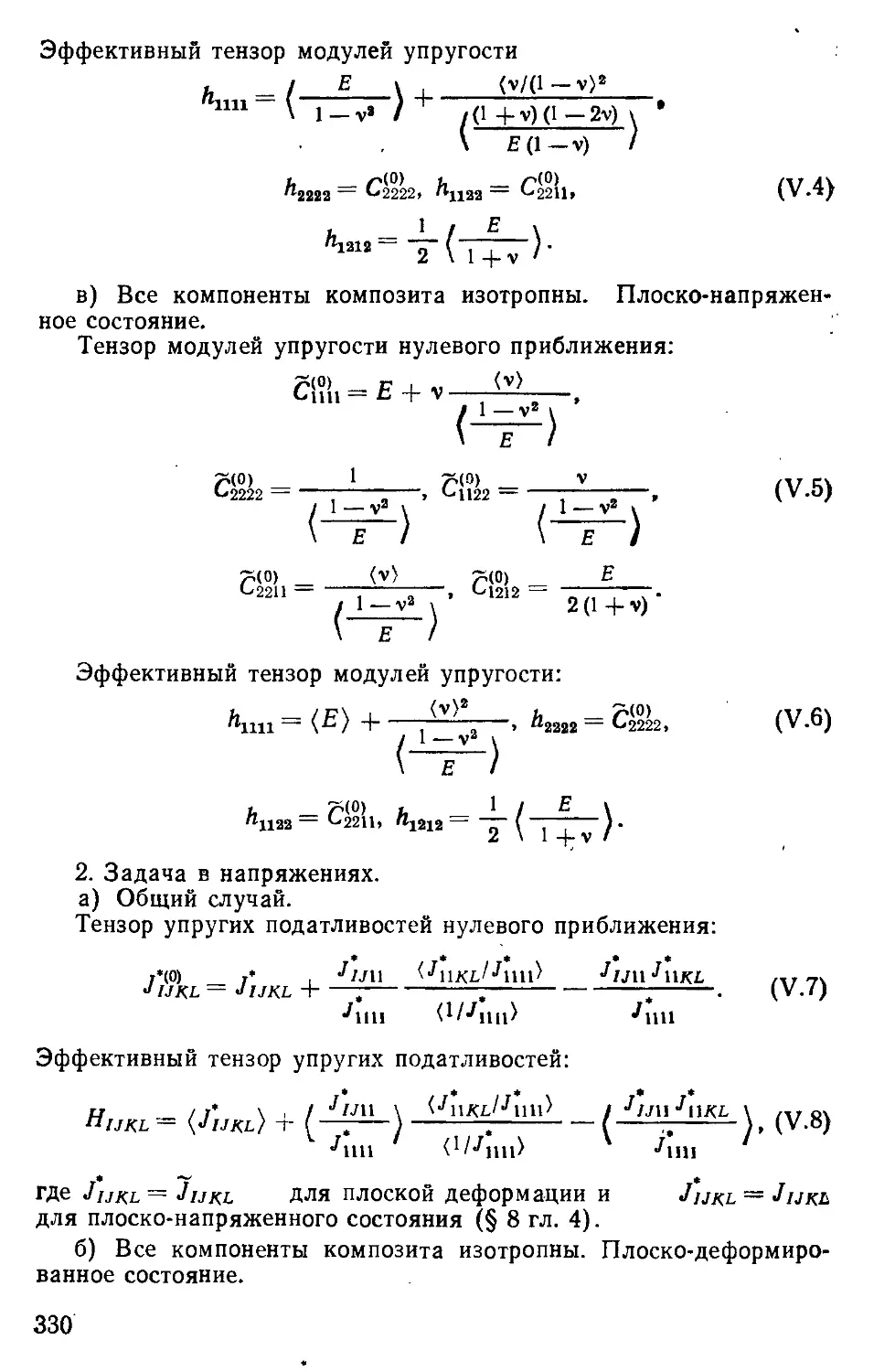
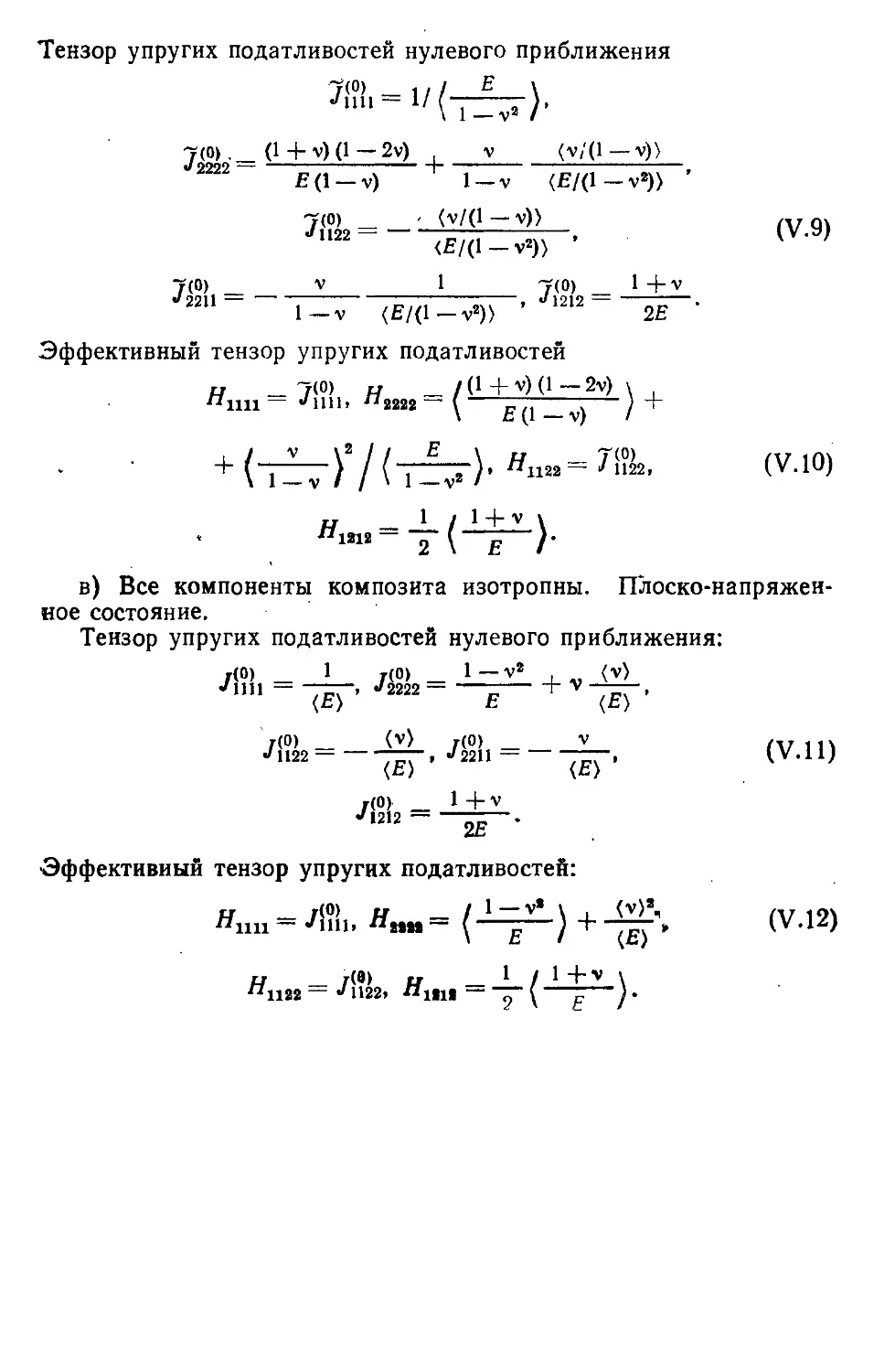
ПРИЛОЖЕНИЕ V. Эффективные характеристики слоистого компо-
композита для плоской задачи теории упругости 329
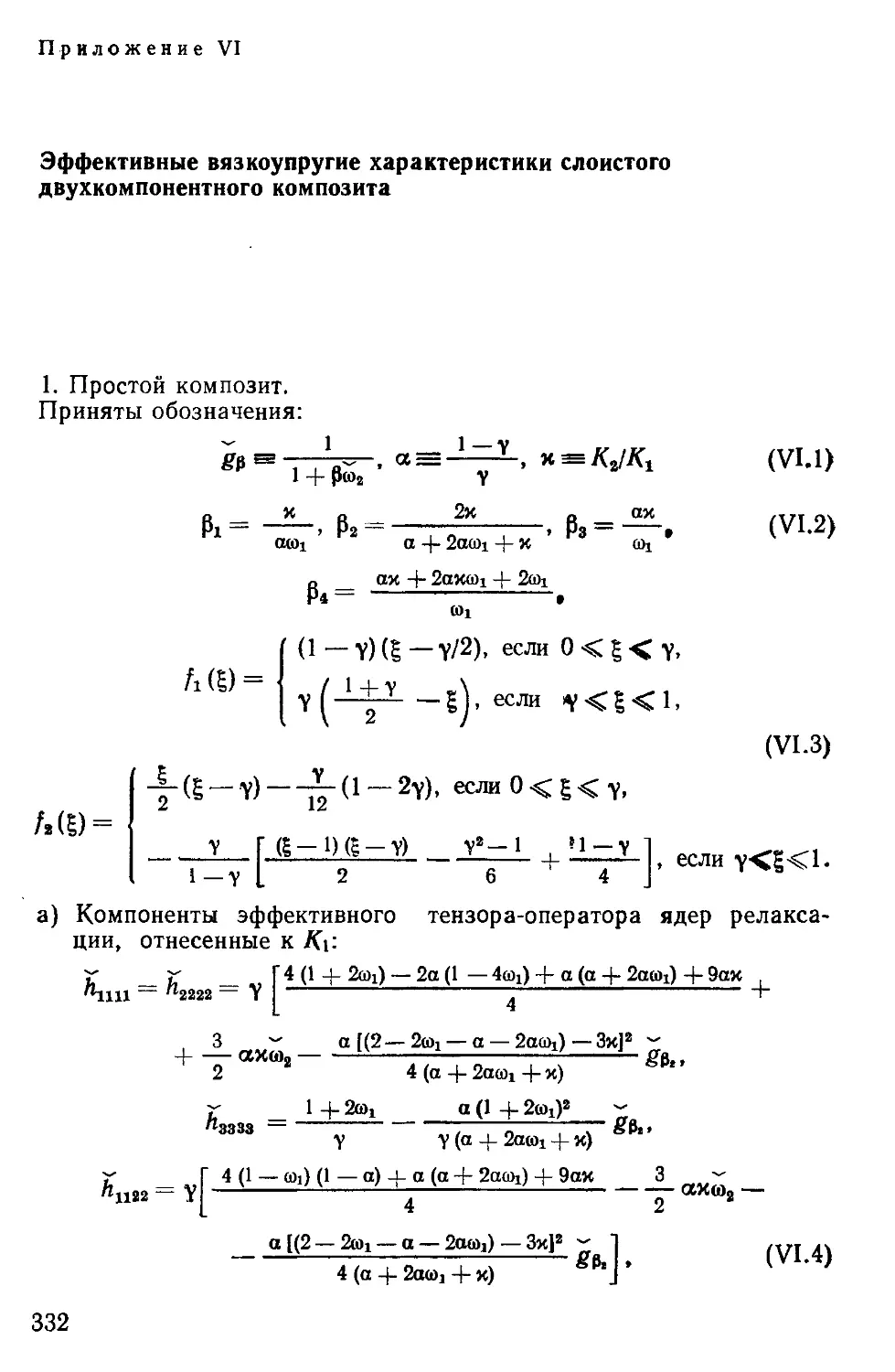
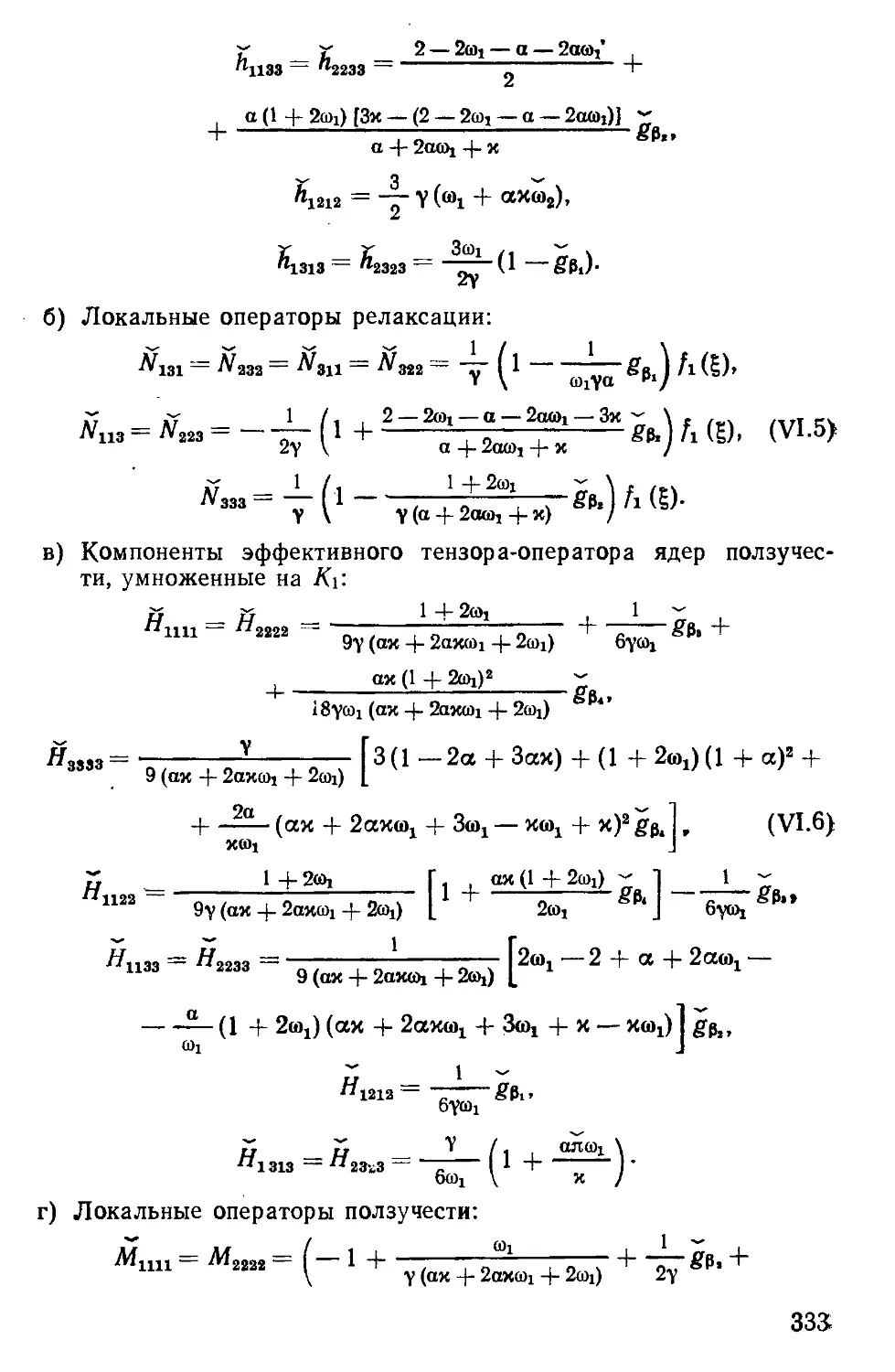
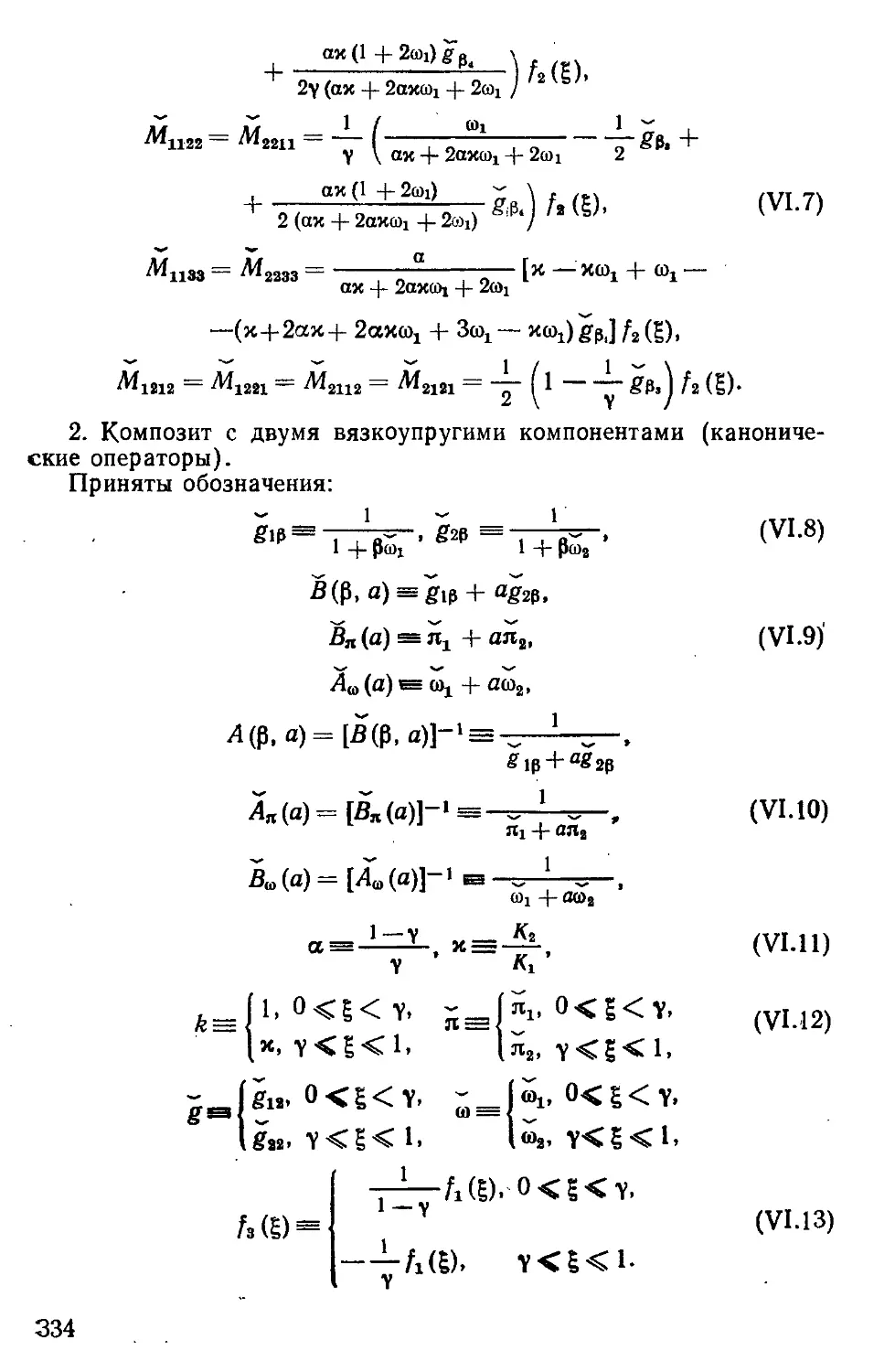
ПРИЛОЖЕНИЕ VI. Эффективные вязкоупругие характеристики сло-
слоистого двухкомпонентиого композита . 332
Введение
Прежде чем определить предмет механики композиционных
материалов (или механики композитов), следовало бы ответить
на вопрос: «Что такое композит?» Ответить на этот вопрос не-
непросто.
Иногда композитом называют материал с неоднородными фи-
физическими свойствами (гетерогенный материал). Однако такое
определение означает, что композит — это все, ибо, во-первых,
однородных материалов в природе не существует, а во-вторых,
если и можно выбранный материал считать в какой-то степени
однородным, то легко заметить, что однородность — это очень
частный случай неоднородности, а потому и однородный мате-
материал — композит.
В этой книге, написанной прежде всего для механиков, мы
определяем композит как некую математическую модель, описы-
описываемую с помощью «разрывных по координатам материальных
функций определяющих соотношений». Это определение дается
только в третьей главе, а в первых двух читатель познакомится
с характером определяющих соотношений и с их материальными
функциями, а также выяснит, что в книге рассматривается не
вообще механика композитов, а только механика деформируемого
твердого тела (хотя многие изложенные в ней результаты без
труда переносятся на задачи гидроаэромеханики), причем в первой
главе дается и математическое определение деформируемого твер-
твердого тела.
Из всего многообразия моделей деформируемого твердого тела
в книге выбраны для исследования только три: упругая, вязко-
упругая и упруго-пластическая (деформационная теория).
Это сделано прежде всего с методической целью, чтобы на про-
простейших примерах показать сущность описываемых методов.
(В гл. 4, 7 и 9, например, рассматривается одномерная задача
(стержень).) С этой же целью в книге исследуется поведение
композитов только при малых деформациях.
Материал книги соответствует годовому курсу, читаемому ав-
автором иа механико-математическом факультете МГУ студентам-
механикам IV курса, и содержит в основном результаты, полу-
полученные участниками руководимого им научно-исследовательского
семинара. Ограниченность объема книги не позволила осветить
в ней такие важные вопросы, как механика разрушения компози-
тов, теория армированных оболочек, концентрация напряжений
вокруг включений.
Принятая в книге тензорная символика включает в себя как
«безындексную» форму, так и «индексную». Часто одно и то же
соотношение записывается в безындексной форме и тут же (в скоб-
скобках) дается его «индексное» толкование. (В первых двух прило-
приложениях приводятся основные сведения из тензорного исчисления.)
В книге нет описаний методик экспериментов, но дается прин-
принципиальная схема их проведения, пользуясь которой можно гра-
грамотно определить физико-механические свойства материалов и
получить дополнительные сведения, существенно облегчающие
в некоторых случаях решение задачи механики деформируемого
твердого тела для композита.
, В книге имеется большое число упражнений, что у определен-
определенной группы читателей может вызвать уныние. Однако здесь все
упражнения составлены «информативно», т. е. их можно и не вы-
выполнять, а «принять к сведению», ибо в изложении основного
текста часто упоминаются утверждения, сформулированные в уп-
упражнениях. В книге ссылок на литературу нет, но й конце каждой
главы имеются «Некоторые литературные указания», которые ни
в коей мере не претендуют на полноту*
Ссылки на формулы даются традиционно. Например, запись
C.3.2) означает, что формула C.2) находится в гл. 3. Если же
ссылка на эту формулу приводится внутри третьей главы, то пер-
первая цифра в круглых скобках опускается и ссылка записывается
так: C.2). Значок €) обозначает конец текста упражнений.
Автор с благодарностью примет все замечания, направленные
на улучшение книги.
Глава 1
ОБЩИЕ СВЕДЕНИЯ ИЗ МЕХАНИКИ
ДЕФОРМИРУЕМОГО ТВЕРДОГО ТЕЛА
(МДТТ)
В главе рассматриваются определяющие соотношения МДТТ
в операторном виде, которые в дальнейшем конкретизируются на
различных примерах. Дается математическое определение ком-
композита и модели МДТТ. Рассмотрены модели линейного упругого,
вязкоупругого и упруго-пластического тела (теория малых упруго-
пластических деформаций). Дается схематическое описание экс-
экспериментов, необходимых для проведения расчетов по выбранной
модели. Читателю рекомендуется сначала ознакомиться с прило-
приложением I (и частично с приложением II), чтобы были понятны
используемые в главе обозначения.
§ 1. Определяющие соотношения МДТТ
Пусть в сплошной среде задана связь между тензором напря-
напряжений а и тензором деформаций е (определяющие соотношения)
в виде некоторого оператора 8Г — тензора второго ранга (см.
приложение I)
Это означает, что в некоторый фиксированный момент времени t
тензор напряжений однозначно определяется значениями тензо-
тензора деформаций е, известными во все времена т, предшествующие
моменту t'.x^t. Если для определения тензора напряжений а
достаточно знание тензора деформаций ^ только в момент време-
времени t, то будем говорить, что оператор &" является функцией SF\
Если операторные соотношения A.1) однозначно разрешимы
относительно деформаций
т. е. операторы ~& и 3? являются взаимно-обратными, то будем
говорить, что задана модель МДТТ. Если оператор^"— линей-
линейный, то такая модель называется линейной, а соответствующая
среда — физически линейной средой.
Упражнение 1.1. Доказать, что если один из операторов
& или является линейным, то и второй также линейный. €)
Функции (или константы), по которым можно полностью вос-
восстановить оператор & (или Щ определяющих соотношений, опи-
описывающих данную модель МДТТ, называются материальными
.функциями (или константами). Эти материальные функции опре-
определяются экспериментально и показывают, чем в рамках одной
модели МДТТ один материал отличается от другого.
Теорию, основанную на выбранной модели МДТТ, будем на-
называть «серьезной», если описан полный набор экспериментов
для определения всех материальных функций, определяющих опе-
операторы ^и§. В противном случае теорию будем называть
«несерьезной». В этой главе мы рассмотрим некоторые конкрет-
конкретные классические серьезные теории.
Если материальные функции определяющих соотношений зави-
зависят явным образом от координат х, то описываемая ими среда
называется неоднородной. Если эти функции являются разрывны-
разрывными функциями координат, то неоднородная среда называется ком-
композитом (или композиционным материалом).
Соотношения A.1) и A.2) в случае их явной зависимости от
температуры Т
о = &(е,Т);ег&(а,Т) A.3)
определяют модель термомеханики деформируемого твердого
тела.
Операторы ^и $ называются потенциальными, если сущест-
существуют такие скалярные операторы W и до соответственно, что
- dW (е) ~
причем функциональные производные, например ___biL_, опреде-
ляются следующим образом:
DW(e,h)is-
где DW(s, h) — функциональный дифференциал оператора №,
линейный по h — произвольному тензору второго ранга, 1 — чис-
числовой параметр.
Упражнение 1.2. Доказать, что
8 = 0, A.6)
если f@)=0 и ш»@)=0. ?)
8
Назовем тензор 4-го ранга —~ ~ . «касательным модулем»,
а тензор 4-го ранга - ~ — «касательной податливостью». «Ка-
да
a#(o)
<эа
сательный модуль» называется неотрицательным, если
A.7)
«Касательный модуль» называется неположительным, если
A.8)
«Касательный модуль» называется ограниченным, если сущест-
существует такое число М>0, что
д^ A.9)
h::h
дв ~
Будем говорить, что «касательный модуль» — положительный,
если для любого симметричного тензора второго ранга h выпол-
выполняется неравенство
д<Р (г)
mh:H<h\ r, ~ : h, A.10)
где т — некоторое положительное число, имеющее размерность
напряжений.
Будем говорить, что «касательная податливость» — положи-
положительна, если для любого симметричного тензора второго ранга h
выполняется неравенство
д$ (а)
nh:h<h: ~да~ : h, A.11)
где п — некоторое положительное число, имеющее размерность,
обратную к размерности напряжений.
Упражнение 1.3. Доказать, что «касательный модуль» и «ка-
«касательная податливость» являются взаимно-обратными тензорами:
до = 1а
где А — единичный тензор 4-го ранга (см. приложение I).
Упражнение 1.4. Доказать, что «касательный модуль» и «ка-
«касательная податливость» одновременно либо неотрнцательны, либо
неположительны.
Упражнение 1.5. Доказать, что если «касательный модуль»
положителен, то «касательная податливость» ограничена, и нао-
наоборот, если «касательная податливость» положительна, то «каса-
«касательный модуль» ограничен, f)
9
В дальнейшем неравенства типа A.10) будем записывать в ус-
условном виде:
mA<-^-. A.10')
Упражнение 1.6. Доказать, что если «касательный модуль»
положителен и «касательная податливость» положительна, причем
в A.10) и A.11) т<1/л, то справедливы неравенства
¦< —А, A.13)
0<пА< ~~ < —А. С A.14)
ост, т
Если выполнены условия A.13) и, кроме того,
A.15)
Эё ^ 08 ' ое ~ де
8=0
то говорят, что материал обладает мягкой характеристикой. Если
же дополнительно к A.13)
¦/Л\ А<р/п\
A.16)
то материал обладает жесткой характеристикой.
Упражнение 1.7. Доказать, что если среда одновременно обла-
обладает жесткой и мягкой характеристикой, то она физически ли-
линейна. Q
Среда является анизотропной некоторого класса, если опреде-
определяющие соотношения A.1) и A.2) инвариантны относительно пре-
преобразований, связанных с этим классом анизотропии. В частно-
частности, если определяющие соотношения инвариантны относительно
полной группы вращения в трехмерном евклидовом пространстве,
то среда называется изотропной.
Введем понятие операторов потенциальной энергии деформа-
"ций Ф и напряжений ф по формулам:
<D=sf #dV; ussfarfV. A.17)
V V
Упражнение 1.8. Доказать справедливость следующих формул:
A.18)
D<p (в, Ьа) = J е : 8adV, A.19)
ф+ф= joredV. С A.20)
10
Если соотношения A.1) и A.2) являются инвариантными отно-
относительно преобразования времени
t'=f(t), A.21)
то они называются склерономными. В противном случае опреде-
определяющие соотношения называются реономными.
При рассмотрении неизотермических процессов в МДТТ обыч-
обычно принимают гипотезу Дюамеля — Неймана, которая заключает-
заключается в том, что соотношения A.3) записываются в виде
г ? f •т); f,=I (*• т>' о -22>
где
8Г = 8 — аЬ, -»=Т — То. A.23)
Здесь а — тензор теплового расширения, ф — так называемый
перепад температуры, То — температура недеформированного (ак-
(актуального) состояния.
Введение гипотезы Дюамеля — Неймана оправдывается тем,
что для материалов, свойства которых не зависят от температуры,
определяющие уравнения имеют вид
?=«f(?r); er=j?B). (I -24)
т. е. отличаются от соотношений A.1) и A.2) формальной заме-
заменой е-»-ег.
§ 2. Постановка задачи МДТТ
Считаем деформации малыми (|Grad м| «Cl), так что тензор
деформации е выражается через вектор перемещения и соотно-
соотношениями Коши:
е = Def и ( е„ - ±Xu,j + и»)). B.1)
На соотношения B.1) можно смотреть как на систему дифферен-
дифференциальных уравнений относительно вектора перемещения, если
компоненты тензора деформаций считаются заданными. Для одно-
связного тела необходимым и достаточным условием интегрируе-
интегрируемости этой системы будет обращение в нуль симметричного тен-
тензора второго ранга х\, называемого тензором несовместности
(Inkompatibilite):
i)=Inke=0 {tiii^elkiejmn<ihn,im = O). B.2)
Уравнения B.2) называются также уравнениями совместности
(Сен-Венана).
11
Упражнение 2.1. Доказать, что, для того чтобы выполнялись
условия B.2), необходимо и достаточно, чтобы
Н=вц+ U--L 1)^ = 0, B.3)
о
где использовано разложение тензора ц на шаровую часть г\ и де-
виатор ц:
ц==ц + -±-цГ, ц—Ьгц, B.4)
причем / — единичный тензор 2 ранга.
В предположении, что объемные и поверхностные распределе-
распределения моментов отсутствуют, тензор напряжений а будет симмет-
симметричным. Три уравнения движения сплошной среды имеют вид
Diva + X = р «"(<*/./ 4- Xt = puf), B.5)
где X — вектор объемных сил, р — плотность вещества.
Если рассматривается равновесие среды, то силами инерции
можно пренебречь, и мы имеем
Div а + X = 0 (аи.1 + ХС = 0). B.6)
Пусть заданы граничные условия контактного типа на части 2?
границы 2:
[а») -о-п + b(9) • и]^ = Nl9), B.7)
где с№\ Ы«) — некоторые положительно определенные тензоры
^ -¦¦ -¦-
2-го ранга, п — единичный вектор нормали, ЛД»> — вектор кон-
контактных усилий.
В частности, если поверхность 2 состоит только из двух частей
2i и 22, причем
о<» = 0, 6(» = kl, NA) = ku°,
B.8)
a<2) = /f bm = 0> jvB) = s»,
где k — размерная постоянная, «° — заданный на границе век-
вектор перемещения, а S0 — заданная поверхностная нагрузка, то из
B.7) имеем
«Ь, = 5, tf-«|s,= S°. B.9)
Если в соотношения A.1) вместо деформаций подставить пере-
перемещения по формулам B.1), а полученный результат — в урав-
12
нения B.5) или B.6), то получим три уравнения движения в пе-
перемещениях, которые в сокращенном виде запишем так:
Div & (а) + X = рм" ф1и (п) + Х1 = рвГ), B.10)
—*
где стоящее в скобках (и) означает, что проделана описанная
выше процедура использования A.1) и B.1). Аналогично, уравне-
уравнения равновесия имеют вид
Div # (в) + X = 0 (&{и (в) + X, = 0). B.11)
Динамическая задача МДТТ в перемещениях заключается
в отыскании поля перемещений и из решения трех уравнений с тре-
тремя неизвестными B.10) при удовлетворении граничных условий:
[а<я) ¦ & (и). п + b{q) ¦ u]s = Il{q) ¦ B.12)
и начальных данных:
при t= 0 :~u=U, м- = У, B.13)
-* -*¦ *
где U и V — заданные в начальный момент времени векторы пе-
перемещений и скорости соответственно.
Квазистатическая задача МДТТ заключается в решении трех
уравнений равновесия B.11) относительно трех компонент векто-
вектора перемещения и при удовлетворении граничным условиям B.12)
(задача А).
В обоих случаях при разыскании «классического» решения его
«гладкость» зависит от вида оператора &~, гладкости «входных
-* —>¦ -> —>¦
данных», т. е. векторов X, N<-i\ U, V, а также гладкости поверх-
поверхности 2.
При решении упомянутых выше задач МДТТ для композитов,
в силу разрывности материальных функций, описывающих опера-
оператор §~, необходимо разыскивать обобщенное решение соответст-
соответствующих задач.
Рассмотрим, например, квазистатическую задачу МДТТ с гра-
граничными условиями B.9) при условии ы°=0. Обобщенным реше-
решением этой задачи называется такое непрерывное векторное поле и,
—*
что для произвольного достаточно гладкого вектора v, удовлетво-
удовлетворяющего однородным кинематическим граничным условиям, т. е.
»к=0, B.14)
выполняется тождество
J § X-vdV + Js°-vdZ. B.15)
V V Г,
Для композиционного материала можно дать другое определение
обобщенного решения. Разобьем область, занимаемую телом, на
13
подобласти, внутри каждой из которых материальные функции
непрерывны (т. е. существует классическое решение). Решим
соответствующую задачу внутри каждой подобласти, а на границе
контакта этих подобластей удовлетворим условиям сопряжения:
ИA) == WB); СГA) •«(!, = — CfB)-ttB), B.16)
где индексом A) помечены величины, относящиеся к одной под-
подобласти, а индексом B) — к другой.
Условия B.16) называются условиями идеального контакта.
Упражнение 2.1. Доказать, что для композита обе формули-
формулировки обобщенного решения задачи МДТТ эквивалентны.
Упражнение 2.2. Показать, что тождество B.15) с использова-
использованием определений A.5) и A.17) может быть записано в виде
v) = A*(v), B.17)
—* . —>¦
где Ae(v) — работа внешних сил на перемещении v:
Ae(v)-a f X-vdV + f S°-vdZ. B.18)
v i,
Сформулируем теперь квазистатическую задачу МДТТ в на-
напряжениях. Для этого в уравнениях совместности B.2) выразим
деформации через напряжения, используя соотношения A.2). За-
Запишем сокращенно полученный результат в виде
т)(сх)=О. B.19)
Квазистатическая задача МДТТ в напряжениях в классической
постановке (задача В) заключается в решении шести уравнений
совместности B.19) и трех уравнений равновесия B.6) относи-
относительно шести независимых компонент симметричного тензора на-
напряжений а при удовлетворении граничным условиям, например
B.9) или
o-«|s = S0 K/«/ls=S?). B.20)
Разумеется, и в этом случае для существования классического
решения (обладающего достаточной гладкостью) необходимо на-
наложить ограничения на материальные функции оператора A.2),
на «входные данные»: X, S0, на гладкость поверхности 2. Для
композитов можно дать определение обобщенного решения зада-
задачи В. А именно: обобщенным решением задачи В называется тен-
тензорное поле о, удовлетворяющее уравнениям равновесия B.6) и
статическим граничным условиям B.9), которое для всякой глад-
гладкой тензор-функции т, удовлетворяющей однородным уравнениям
равновесия и однородным статическим граничным условиям
DiVT=0, т-«|2, = 0, B.21)
14
удовлетворяет еще и тождеству
y42t(T,^>), B.22)
где ASl(x, и0) — работа внутренних сил на заданном перемеще-
перемещении и0:
Ахх (т, «°) a J «°-T.«dS. B.23)
Упражнение 2.3. Выполнить задание упражнения 2.1 примени-
применительно к обобщенному решению задачи В.
Упражнение 2.4. Показать, что тождество B.22) с использова-
использованием определений A.5) и A.17) может быть записано в виде
Лф(а>т) = Л2:1(т.)- © B-24)
Пусть Д (а) — невырожденный линейный оператор от неко-
некоторого вектора а (см. приложение I). Построим линейный опера-
оператор — симметричный тензор второго ранга В по правилу
В (а) Ез 2 Def ? (а) — div R (а) g
B-25)
(В„ (а) = ^,/ (а) + R,,t (а) -1/7^ (а)),
Дадим так называемую «новую» постановку второй краевой
квазистатической задачи МДТТ в напряжениях (задачи Б). Она
заключается в решении шести уравнений
tf(a) + B(Divtf) + B(X) = O B.26)
относительно шести независимых компонент тензора напряжений <т
при удовлетворении шести граничных условий
[Diva + X]s = 0; ?¦ л|s = S». B.27)
Первое слагаемое в уравнении B.26) получено подстановкой в
уравнения совместности B.3) выражений деформаций через на-
напряжения по формуле A.2).
Упражнение 2.5. Доказать эквивалентность, задачи Б B.26),
B.27) и задачи В B.19), B.6), B.20).
Упражнение 2.6. Доказать, что решение задачи Б не зависит
от выбора оператора R и тензора-константы |.
Упражнение 2.7. Доказать, что уравнения B.26) можно запи-
записать в дивергентном виде
Ецк,к + Уц = 0, B.28)
15
где тензор У определяется через объемные силы
| B.29)
а тензор третьего ранга Ецъ выражается через деформации (ко-
(которые являются оператором от напряжений в виде A.2)):
~ в., —e
). € B.30)
Если рассматриваются неизотермические процессы, то форму-
формулировки соответствующих задач термо-механики деформируемого
твердого тела (ТМДТТ) могут быть получены из описанных выше
путем использования определяющих соотношений A.3) вместо
A.1) и A.2). В силу появления новой неизвестной — температу-
температуры Т — следует к системе уравнений МДТТ добавить уравнение
притока тепла
рсрГ = div (Хг• grad Т) — То [а : & (в — аЩ + pq + W\ B.31)
где ср — теплоемкость, Кт — тензор теплопроводности (положи-
(положительно определенный), q — массовый приток тепла, W* — функ-
функция рассеивания, для обратимых сред тождественно равная нулю.
Кроме того, следует добавить граничные условия. Например,
на части 2? границы тела 2 задается
ФЫ-tf -grad Т + Ь(Я)Т = т<«>, B.32)
где с<«), Ыч) — некоторые размерные величины, а т(|?) — заданная
на Eg функция.
Если рассматривается нестационарная задача (в уравнении
B.31) левая часть отлична от нуля), то нужно задать еще и на-
начальные данные, например:
при *=0: Т=Т°(х). B.33)
Вид функции рассеивания W* конкретизируется при выборе
модели ТМДТТ.
Вопрос о единственности решения задач А, Б и В будет обсуж-
обсуждаться в следующей главе.
§ 3. Упругое тело
Наиболее простой моделью МДТТ является модель линейного
упругого тела. Почти все деформируемые твердые тела (а иногда
даже и жидкости) в той или иной степени обладают упругими.
свойствами, хотя бы при кратковременных нагрузках.
16
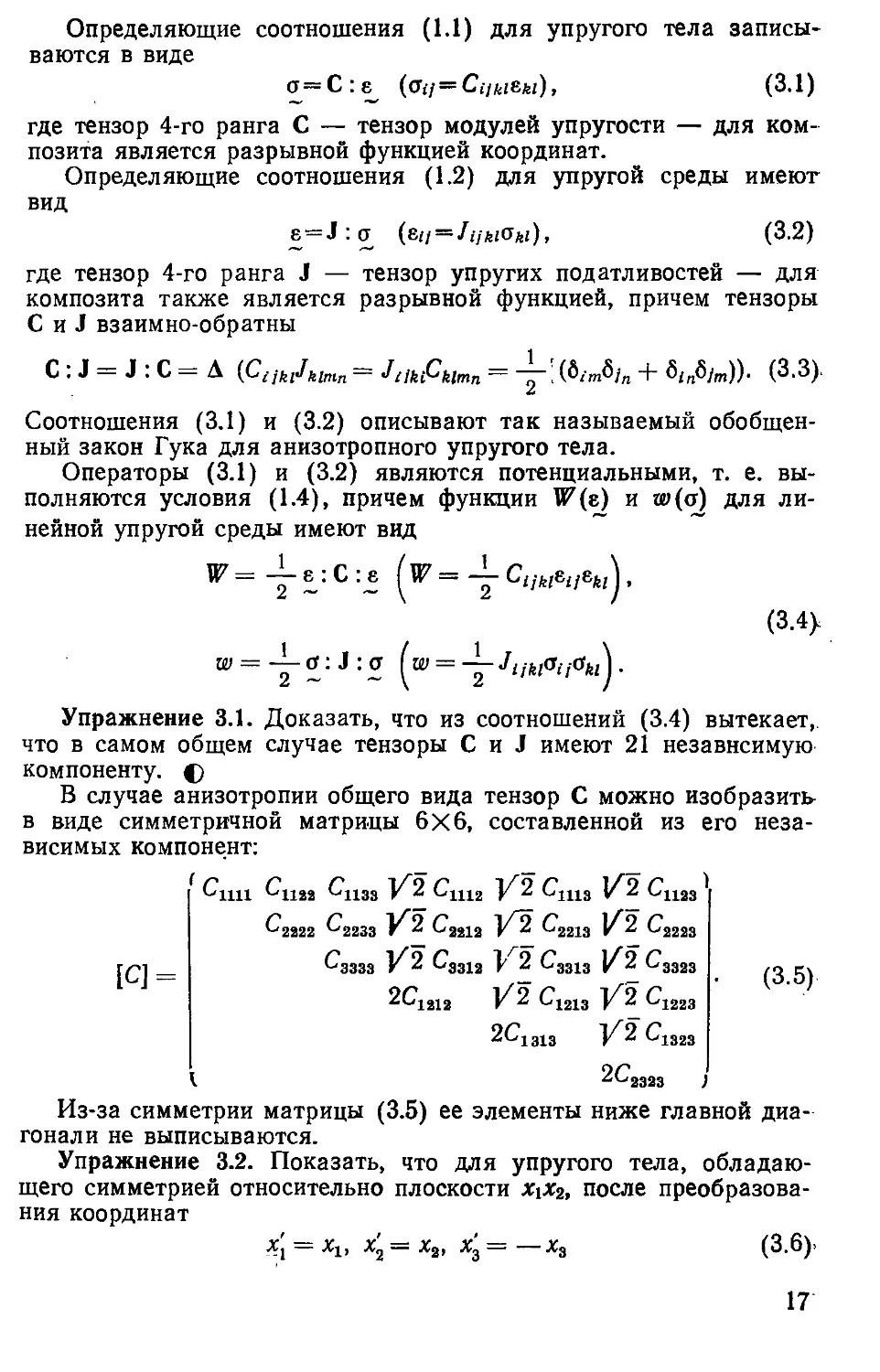
Определяющие соотношения A.1) для упругого тела записы-
записываются в виде
C.1)
где тензор 4-го ранга С — тензор модулей упругости — для ком-
композита является разрывной функцией координат.
Определяющие соотношения A.2) для упругой среды имеют
вид
e=J:a {ъц = 1цыоы), C.2)
где тензор 4-го ранга J — тензор упругих податливостей — для
композита также является разрывной функцией, причем тензоры
С и J взаимно-обратны
С : J = J : С = A {CijklJklnin = J
/ftAft»» = -irWim&ln + «!««/«))• С3-3)
2
Соотношения C.1) и C.2) описывают так называемый обобщен-
обобщенный закон Гука для анизотропного упругого тела.
Операторы C.1) и C.2) являются потенциальными, т. е. вы-
выполняются условия A.4), причем функции W(e) и w(a) для ли-
линейной упругой среды имеют вид
ТОТ * ?~*
C.4>
Упражнение 3.1. Доказать, что из соотношений C.4) вытекает,
что в самом общем случае тензоры С и J имеют 21 независимую
компоненту, f)
В случае анизотропии общего вида тензор С можно изобразить
в виде симметричной матрицы 6X6, составленной из его неза-
независимых компонент:
[С]
-¦2222
V 2 С1123
2213 V *• ^2223
C.5).
т/о г i/o r
^-233 V *• ^2212 V ^ ^2!
^ К2С3з12К2Сзз1з/2Сзз2з
2^212 У 2 W213 У 2 С122з
2С131з к 2 С132з
I ^^2323 J
Из-за симметрии матрицы C.5) ее элементы ниже главной диа-
диагонали не выписываются.
Упражнение 3.2. Показать, что для упругого тела, обладаю-
обладающего симметрией относительно плоскости XiX2, после преобразова-
преобразования координат
ft»
хл = хх, х~ = х2, х„ = -
17
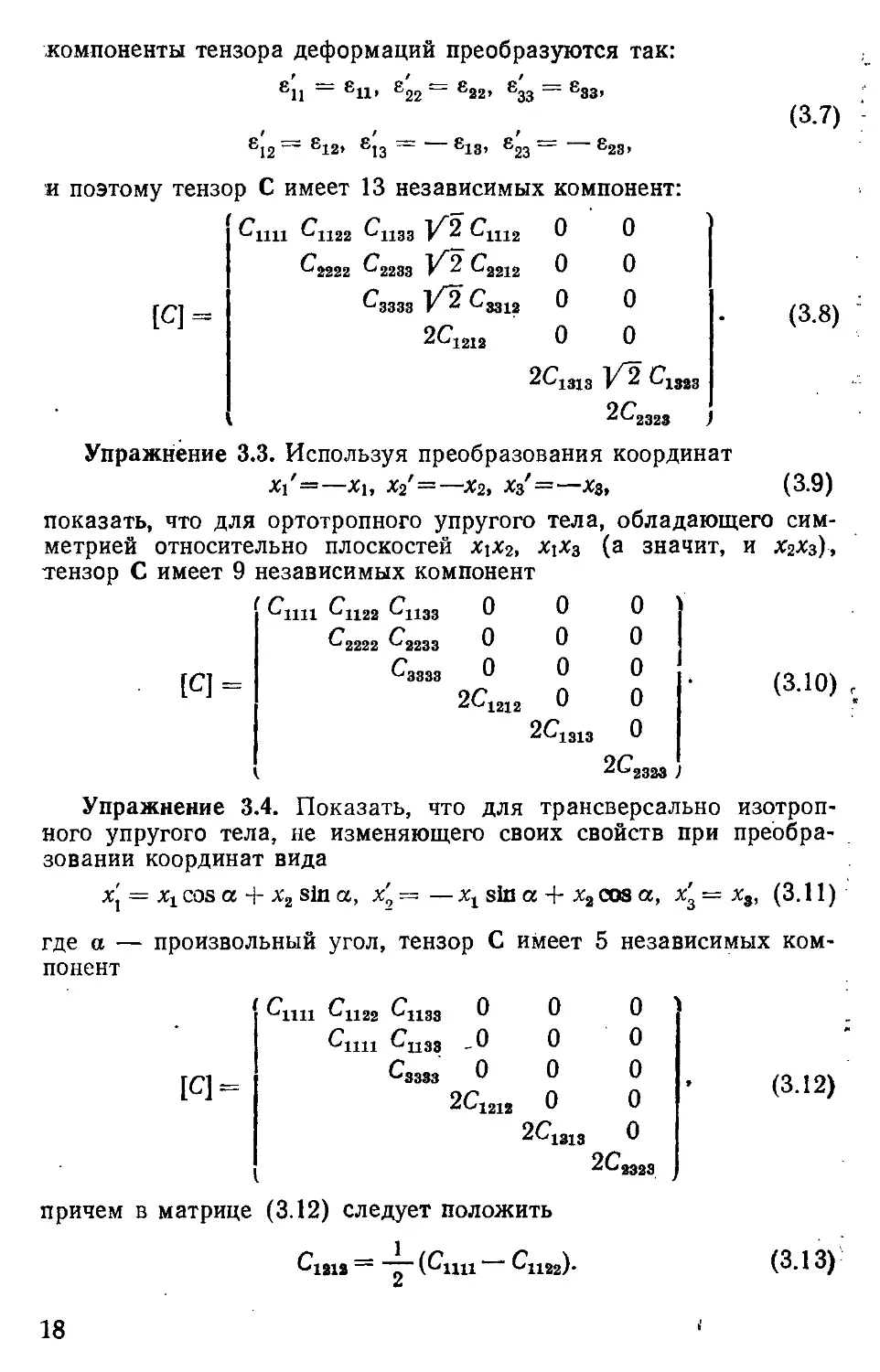
.компоненты тензора деформаций преобразуются так:
— 8U> e22 —
езз =
зз>
C.7)
и поэтому тензор С имеет 13 независимых компонент:
Will Wl22 Wl33 V ^ W.112 О О
Will Wl22
.112
2212
^2233 У 2 С,
^3333 У 2 ^3312
2C12i2
о
О
о
C.8)
C.9)
о
1/2W323
2w323 ;
Упражнение 3.3. Используя преобразования координат
Л1 = Л], Л2 Л2» Лз A3»
показать, что для ортотропного упругого тела, обладающего сим-
симметрией относительно плоскостей Ххх2, Х\Х3 (а значит, и
тензор С имеет 9 независимых компонент
C.10) г
Упражнение 3.4. Показать, что для трансверсально изотроп-
изотропного упругого тела, не изменяющего своих свойств при преобра-
преобразовании координат вида
х'х = хх cos а + х2 sin а, х'9 — — хх sin а + х2 cos а, х'3 = х3, C.11)
где а — произвольный угол, тензор С имеет 5 независимых ком-
компонент
(Г Г
Will Wl22
С2222
W133
^2233
^¦3333
1
0
0
0
1С
0
0
0
0
2С1313
0
0
0
0
0
on
'1111
J1133
^1138 -y
0
0
0
0
0
2C1313
0
0
0
0
0
2C,
C.12)
причем в матрице C.12) следует положить
Wai2 = ~г~ (win Wi22
C.13)
18
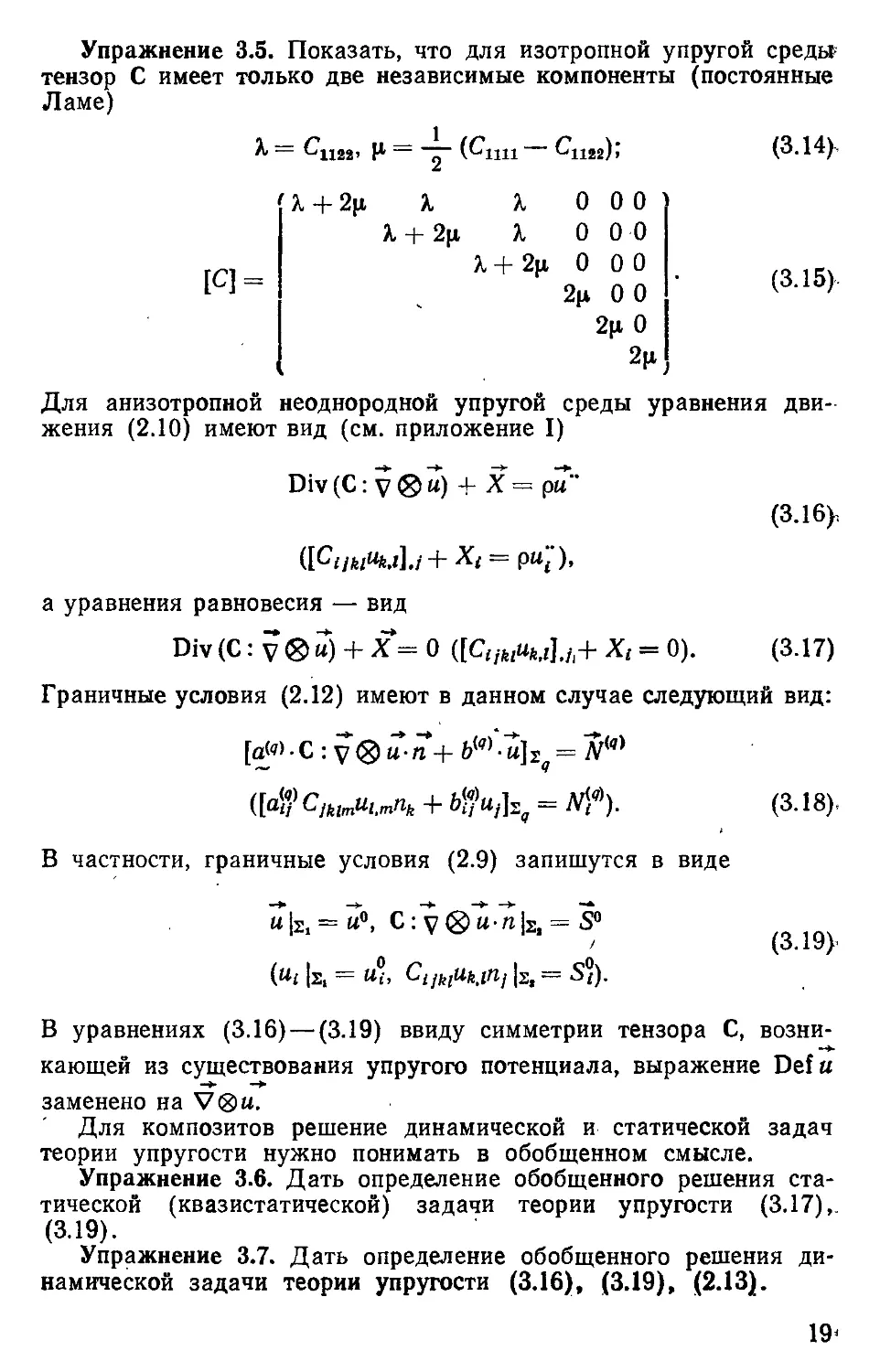
Упражнение 3.5. Показать, что для изотропной упругой сред»
тензор С имеет только две независимые компоненты (постоянные
Ламе)
Я. — С11И, \i — (СШ1
я,
0 00
0 00
0 0 0
2ц 0 0
2ц 0
2ц
C.14),
C.15)
Для анизотропной неоднородной упругой среды уравнения дви-
движения B.10) имеют вид (см. приложение I)
Div (С: у ® «) + X = ри"
C.16),
а уравнения равновесия — вид
Div (С: у ® «) + Х= 0 ([С,д,и»Л.Л+ *< = °)- C-17)
Граничные условия B.12) имеют в данном случае следующий вид:
'iklrnf^l.m^k ~Г "ij^j\z — "t )• (О. lo)>
В частности, граничные условия B.9) запишутся в виде
= и?. CljklUk.inj |s, = S°t).
В уравнениях C.16) — C.19) ввиду симметрии тензора С, возни-
возникающей из существования упругого потенциала, выражение Dei и
заменено на V®«.
Для композитов решение динамической и статической задач
теории упругости нужно понимать в обобщенном смысле.
Упражнение 3.6. Дать определение обобщенного решения ста-
статической (квазистатической) задачи теории упругости C.17),.
C.19).
Упражнение 3.7. Дать определение обобщенного решения ди-
динамической задачи теории упругости C.16), C.19), B.13).
19'
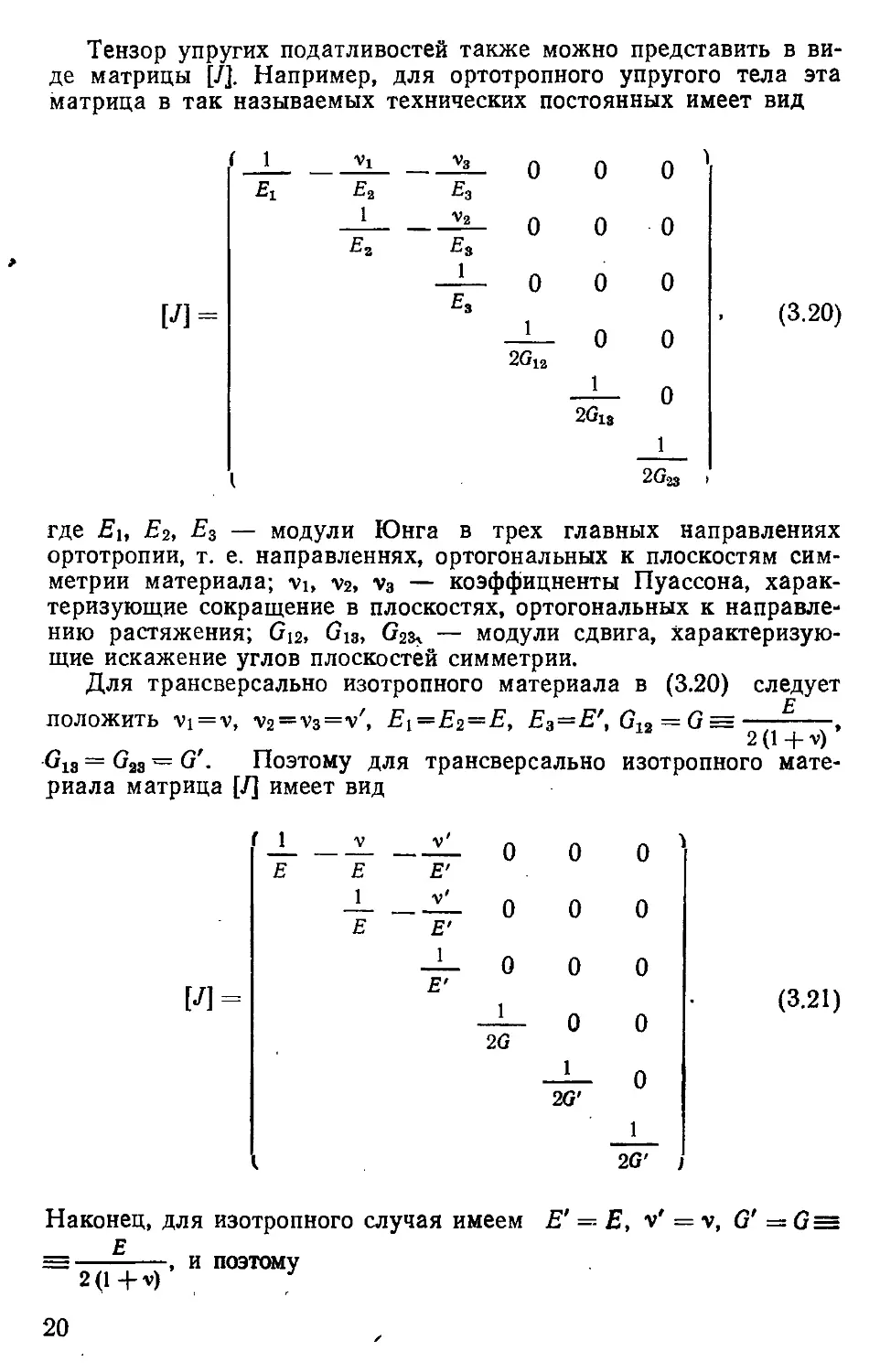
Тензор упругих податливостей также можно представить в ви-
виде матрицы [/]. Например, для ортотропного упругого тела эта
матрица в так называемых технических постоянных имеет вид
f 1
E2
1
E3
v2
0
0
0
0
0
2G12
2Gl;
0
0
0
0
0
1
2G23
C.20)
где Ей Е2, Еъ — модули Юнга в трех главных направлениях
ортотропии, т. е. направлениях, ортогональных к плоскостям сим-
симметрии материала; vi, V2, v3 — коэффициенты Пуассона, харак-
характеризующие сокращение в плоскостях, ортогональных к направле-
направлению растяжения; G\2, G13, G2sy — модули сдвига, характеризую-
характеризующие искажение углов плоскостей симметрии.
Для трансверсально изотропного материала в C.20) следует
положить vi = v, v2=v3=v', ЕХ=Е2=Е, Еа=Е', G12 = G = ,
G13 = G23 — G'. Поэтому для трансверсально изотропного мате-
материала матрица [J] имеет вид
[J]
Г 1
E
V
1
E
v'
E'
v'
E'
1
E'
0
0
0
1
2G
0
0
0
0
1
20'
0
0
0
0
0
1
2G'
C.21)
Наконец, для изотропного случая имеем Е' = Е, v' = v, G' = G =
^ , и поэтому
2<l+v) 3
20
Г 1
E
V
~ E
1
E
V
E
V
1
?
0
0
0
1
2G
0
0
0
0
1
2G
0
0
0
0
0
1
C.22)
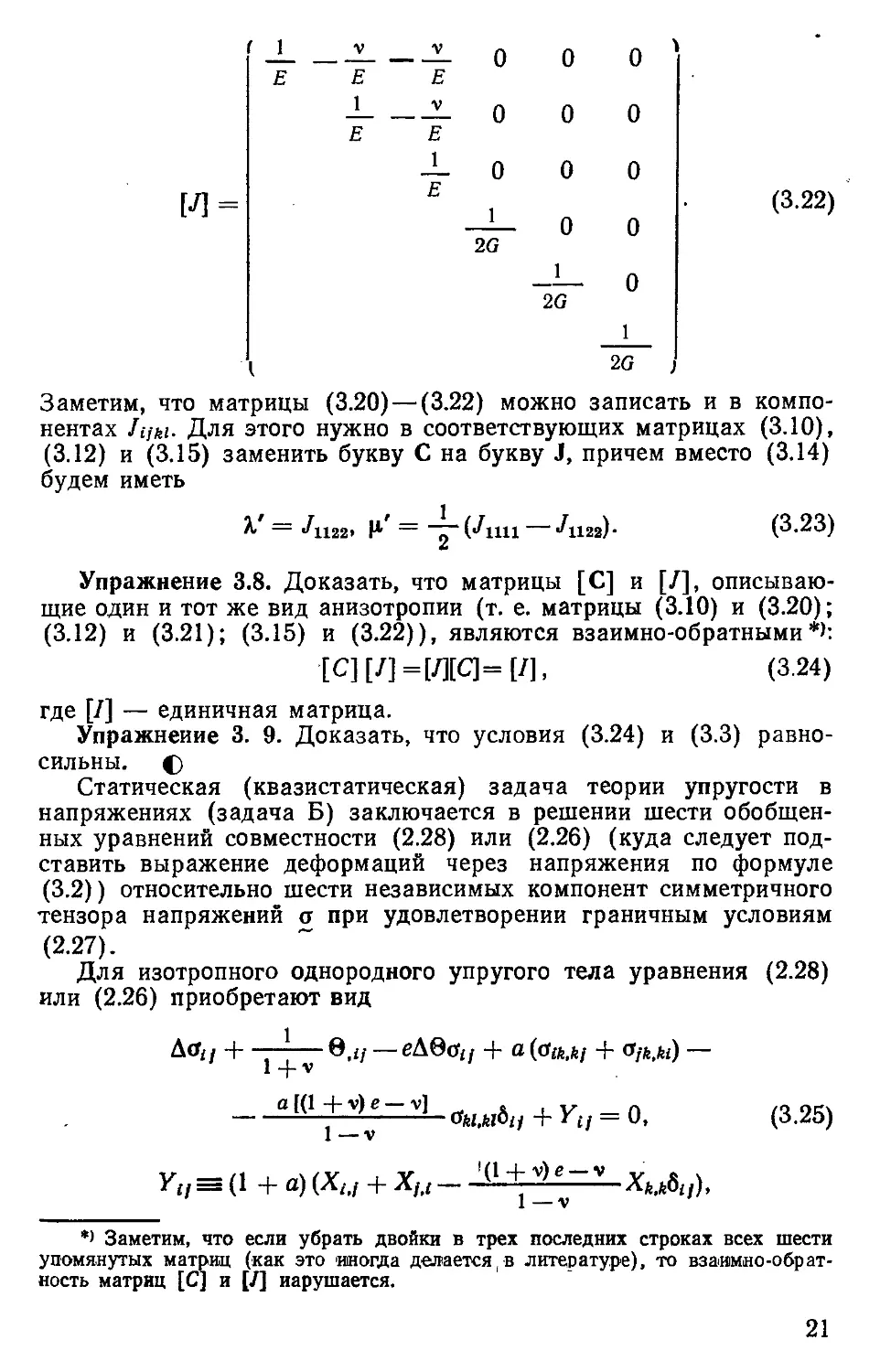
Заметим, что матрицы C.20) — C.22) можно записать и в компо-
компонентах Jijki. Для этого нужно в соответствующих матрицах C.10),
C.12) и C.15) заменить букву С на букву J, причем вместо C.14)
будем иметь
-JU22). C.23)
1122. Г 2
Упражнение 3.8. Доказать, что матрицы [С] и [/], описываю-
описывающие один и тот же вид анизотропии (т. е. матрицы C.10) и C.20);
C.12) и C.21); C.15) и C.22)), являются взаимно-обратными*):
[C][J]=[J][C\=[I], C.24)
где [/] — единичная матрица.
Упражнение 3. 9. Доказать, что условия C.24) и C.3) равно-
равносильны, f)
Статическая (квазистатическая) задача теории упругости в
напряжениях (задача Б) заключается в решении шести обобщен-
обобщенных уравнений совместности B.28) или B.26) (куда следует под-
подставить выражение деформаций через напряжения по формуле
C.2)) относительно шести независимых компонент симметричного
тензора напряжений а при удовлетворении граничным условиям
B.27).
Для изотропного однородного упругого тела уравнения B.28)
или B.26) приобретают вид
+
1
l+v •"
g[(l+v)e-v]
1—v
= 0.
C.25)
,, = (l + a) (X,,,
4-v) e —v
1—v
*) Заметим, что если убрать двойки в трех последних строках всех шести
упомянутых матриц (как это иногда делается,в литературе), то взанмно-обрат-
ность матриц [С] и [/] нарушается.
21
где а и е — некоторые произвольные постоянные, от выбора кото-
которых не зависит решение задачи C.25), B.27), а
e=3a=tr0=<Tftft. C.26)
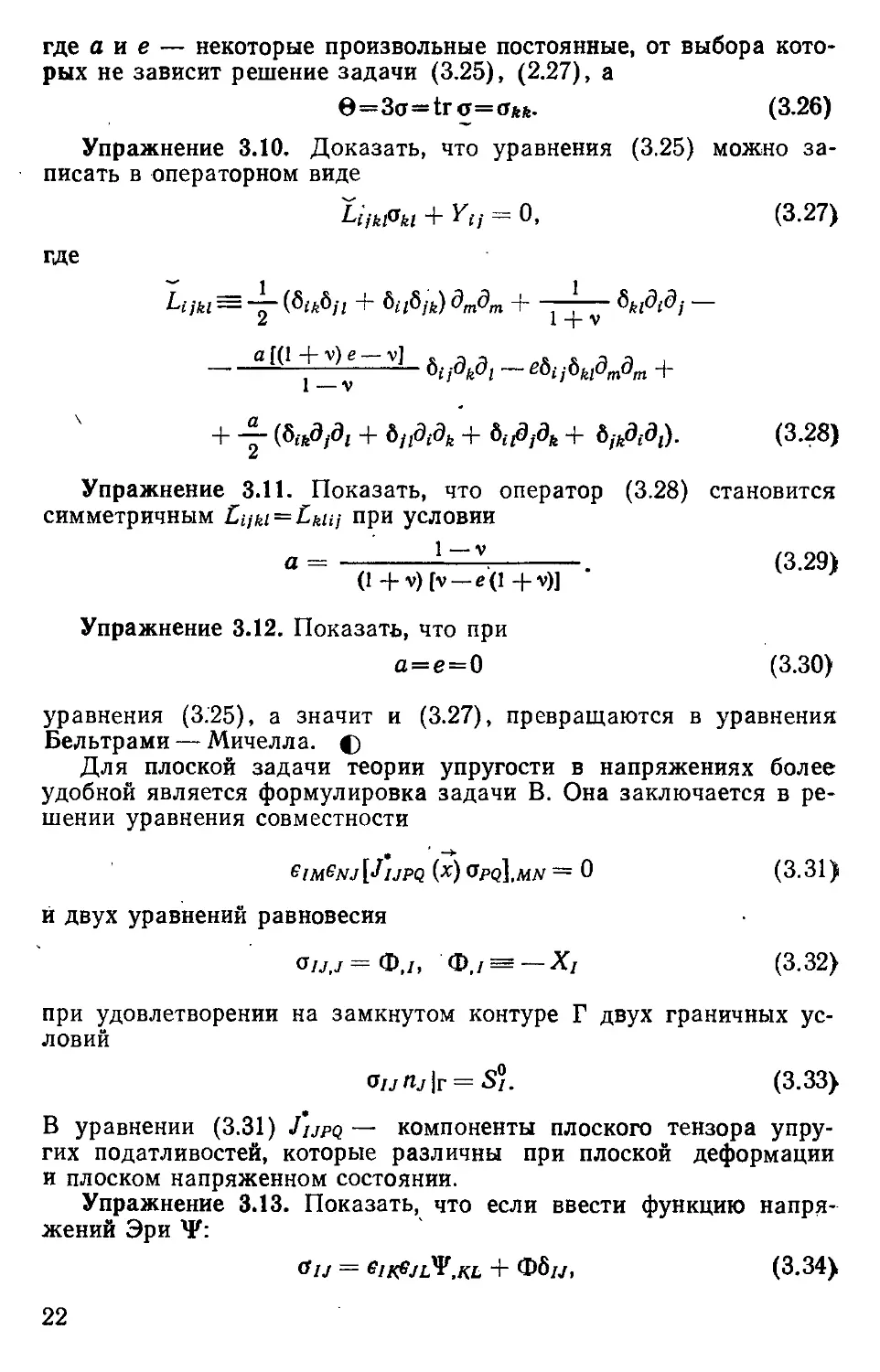
Упражнение 3.10. Доказать, что уравнения C.25) можно за-
записать в операторном виде
liikfiu + Ун = 0, C.27)
где
Lijki = — (бгЛг + bifiik) дтдт + у 8ид>д; —
- afA+:);~v] мл - ^/мл+
+ §
§ (МА + ЬндА + bt0fa + bfAdi). C.28)
Упражнение 3.11. Показать, что оператор C.28) становится
симметричным Сцы — Ьыц при условии
а = ^Д . C.29)
0+v)[v-e(l+v)]
Упражнение 3.12. Показать, что при
а = е=0 C.30)
уравнения C.25), а значит и C.27), превращаются в уравнения
Бельтрами — Мичелла. о
Для плоской задачи теории упругости в напряжениях более
удобной является формулировка задачи В. Она заключается в ре-
решении уравнения совместности
{x) opq],mn = 0 C.31)
й двух уравнений равновесия
<*«./ = Ф./, Ф./ = — X, C.32)
при удовлетворении на замкнутом контуре Г двух граничных ус-
условий
a/yny|r = 5/. C.33)
В уравнении C.31) J'upq — компоненты плоского тензора упру-
упругих податливостей, которые различны при плоской деформации
и плоском напряженном состоянии.
Упражнение 3.13. Показать, что если ввести функцию напря-
напряжений Эри Ч*1:
ви = eIKeJLW.KL + Фб/у, C.34)
22
то задача В заключается в решении одного уравнения относитель-
относительно W
n C.35)
при выполнении двух граничных условий
C.36)
Упражнение 3.14. Показать, что для изотропной упругой среды
закон Гука можно записать в виде двух скалярных соотношений,
связывающих отдельно шаровые части тензоров напряжений и де-
деформаций (а и 8) и отдельно девиаторы (s и е):
<y=KQ, C.37)
C.38)
при этом модуль сжатия К и модуль сдвига G выражаются через
введенные выше упругие постоянные следующим образом:
К = Х + ±г = аоA + Ю1 Q = tA=_g_.Ci (з.з9)
3 ^ 3A -2v) Г 2A +v) ¦ '
При рассмотрении задач термоупругости пользуются обычно ги-
гипотезой Дюамеля — Неймана A.24). Соотношения C.1), C.2)
в этом случае могут быть записаны в виде
о = С: (е - oft) (otl = Cijkl (ew - анЩ, C.40)
?= аО + J : а (е,; = а;/0 + Л/«%)- C-41)
Упругая среда является обратимой. Поэтому в уравнении притока
тепла B.31) следует положить W* = 0. При сохранении второго
слагаемого правой части уравнения B.31) задача термоупругости
будет связанной. Наличие этого члена позволяет качественно опи-
описать некоторые наблюдаемые явления, например затухание упру-
упругих волн. Однако чаще всего этим членом пренебрегают, и задача
термоупругости становится несвязанной: можно отдельно решить
задачу теплопроводности B.31), B.32), B.33), а затем задачу
теории упругости, в которой температура считается известной.
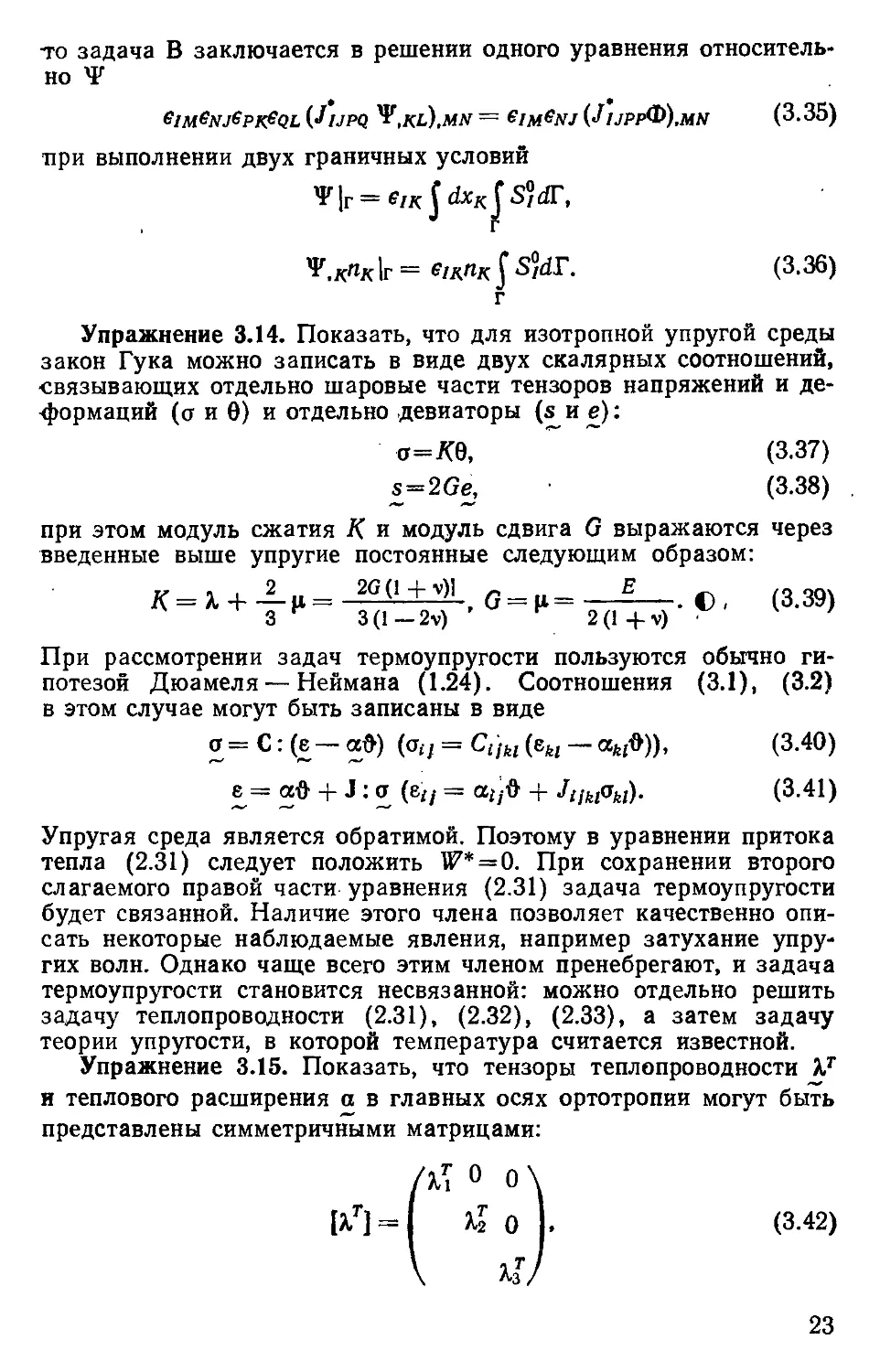
Упражнение 3.15. Показать, что тензоры теплопроводности 7J
и теплового расширения а в главных осях ортотропии могут быть
представлены симметричными матрицами:
C.42)
23
/aio u
[a] = a, 0
[a] = a, 0 . C.43)
Упражнение 3.16. Показать, что для трансверсально изотроп-
изотропной среды с осью симметрии хз тензоры теплопроводности и теп-
теплового расширения записываются в виде матриц C.42) и C.43),.
причем
Хт2 = ЛГ, а2 = в1. C.44)
Упражнение 3.17. Показать, что для изотропного тела матри-
матрицы C.42) и C.43) имеют диагональный вид
Хт = %Т1, а = а/, C.45)
где %т — коэффициеит теплопроводности, а — коэффициент теп-
теплового расширения.
Упражнение 3.18. Доказать, что закон Гука C.1) для анизо-
анизотропного тела можно записать отдельно для шаровой части тен-
тензора напряжений а и отдельно для его девиатора s в виде
(r=-Lae + -L.e(a)( C.46)
3 3
s = J_a0 + JLC6_aV- — ё@) + -$- ё{Ь) + п:е, C.47)
—' 3—¦ 5 ¦ 7 —' 7 —¦ ~
где дополнительно к обозначениям, введенным в приложении II,
введены тензоры
) = — (b-е + е-Ь), C.48)
) ^ tr е<а) = а : е,
=5 tr е<ь) = Ь": е. C.49)
Упражнение 3.19. Доказать, что закон Гука C.2) для анизо-
анизотропного тела можно записать в виде
6=3p<r+s(p), C.50)
e=pa+-LC°q — p)s — — 7Ф) + — sw) + N:s, C.51)
~~5 ~ 7 7 "¦"
где дополнительно к обозначениям, введенным в приложении И,
введены тензоры
s<p) = -L (р.s + ?• р), я») = 4" (9 ¦s + s• Ч). C-52)
24
s») = — sW + s<*>, s<<?> == tr s«?> = q: s. C.53)
Упражнение 3.20. Доказать, что для изотропного упругого тела
«касательный модуль» будет положительным (т. е. будет удовлет-
удовлетворяться условие A.10)), если
G>0, — 1<v<1/2. C.54)
Упражнение 3.21. Доказать, что для трансверсально изотроп-
изотропного упругого тела «касательный модуль» будет положительным,
если
G'>0, ?>0, х==— >0, —1 <v<l— 2xv'2 C.55)
(см. приложение II).
Упражнение 3.22. Доказать, что для упругого тела из положи-
положительности «касательного модуля» следует положительность «ка-
«касательной податливости» и обратно, из положительности «каса-
«касательной податливости» следует положительность «касательного
модуля».
§ 4. Вязкоупругость
Всякое деформируемое твердое тело, проявляющее реономные
свойства, называется вязкоупругим. В зависимости от того, линей-
линейны или нелинейны операторы A.1) и A.2), различают соответст-
соответственно линейную и нелинейную вязкоупругость.
Запишем для простоты одномерные соотношения между напря-
напряжением а и деформацией е (обобщение на трехмерный анизотроп-
анизотропный случай не составит труда):
t
а = ( Г (t, т) е (т) dx= f е, D.1)
6
t
е= ^K(t,r)a(x)dx = Ko, D.2)
где в ядрах T(t,x) и K{t,x), характеризующих операторы Г и R,
можно выделить аддитивную составляющую в виде дельта-функ-
дельта-функций Дирака:
T(t,x) = E8(t-x)—T(t,x),
1 - D.3)
Е — модуль Юнга. В интегралах D.1) и D.2) нижний предел
интегрирования понимается как предел слева на прямой времени.
25
Кроме того, напряжение, деформация и все их производные счи-
считаются равными нулю в отрицательные моменты времени. Поэто-
Поэтому записи интегралов
t t t
J-J-J
О 0" —оо
эквивалентны между собой.
Сокращенная запись интегральных операторов D.1) и D.2)
позволяет обращаться с операторами Г, К как с числами. Напри-
Например, из D.1) и D.2) следует, что
tf=l/f, f=l/tf, D.4)
имея в виду, что 1/R=R-K Это обстоятельство используется при
решении квазистатических задач линейной теории вязкоупруго-
сти (принцип Вольтерры). Решаются соответствующие задачи тео-
теории упругости, причем на величины Г, К смотрят как на модули
упругости, а после решения расшифровываются функции от опе-
операторов.
Умножение операторов Г и К не коммутативно (что учиты-
учитывается при решении упругих задач). Если же свойства материала
инвариантны относительно сдвига по времени, т. е. отсутствует
старение, то ядра Г(^,т) и K(t,t) являются ядрами разностного
типа F(t—т), K(t—т), и соотношения D.1) и D.2) могут быть
записаны в эквивалентном виде с помощью интегралов Стиль-
тьеса:
= Яе, D.5)
е= JrW— x)da{x) = fla. D.6)
о
J
о
При этом
D.7)
Величины Г(?, т) и R(t) называются соответственно ядром и
функцией релаксации, ибо они отражают свойство вязкоупругого
материала уменьшать напряжения при постоянной деформации.
Величины K(t,x) и U(t) называются соответственно ядром и
функцией ползучести, и они отражают свойство вязкоупругого
материала увеличивать деформацию под действием постоянной
нагрузки.
26
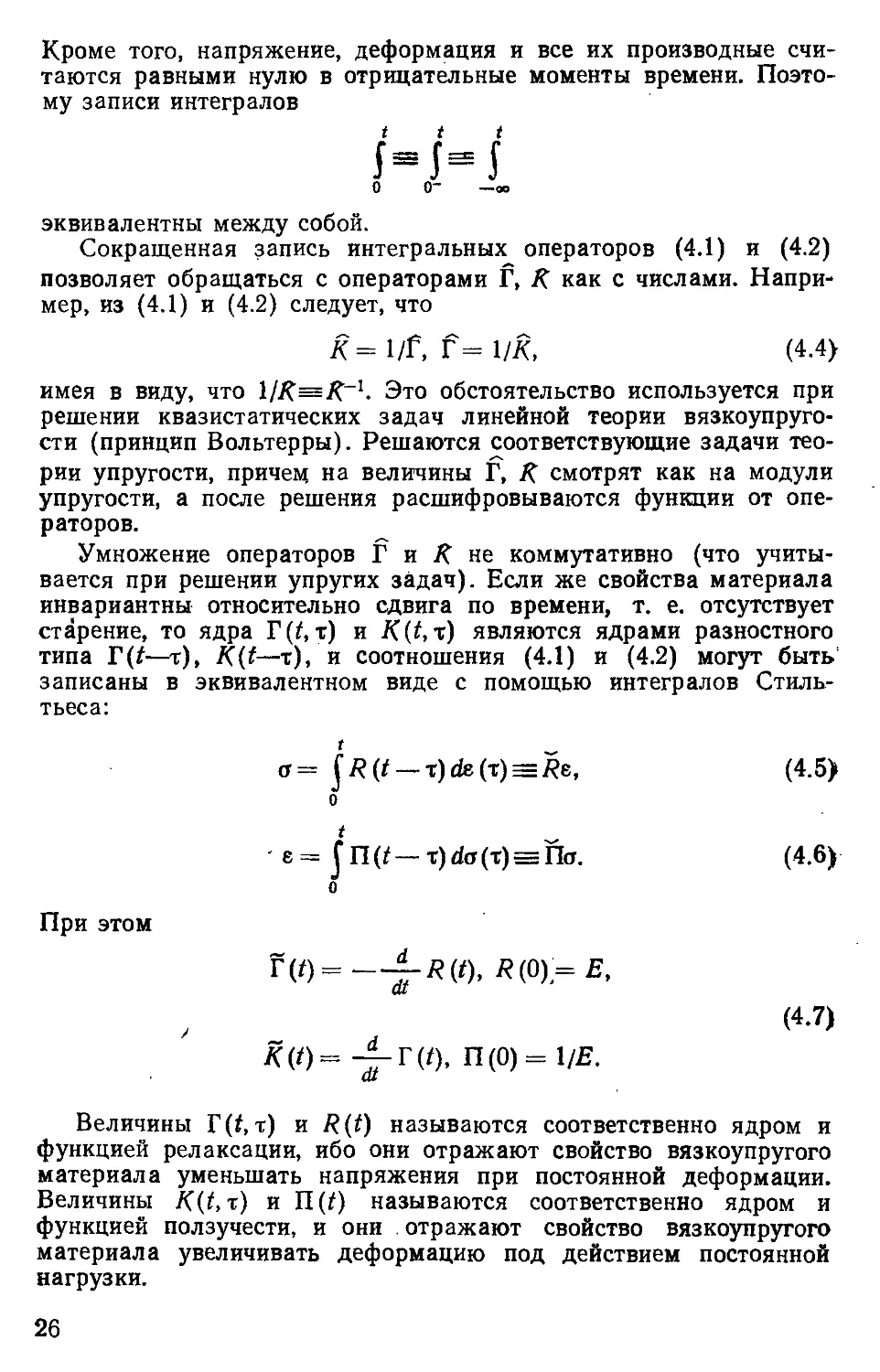
Характерные графики функции релаксации R(t) и функции
ползучести П(*) показаны на рис. 1 и 2. Участок кривой ползу-
ползучести (рис. 2) ti<.t<.t2 называется участком установившейся пол-
Рис. 1.
зучести, а участок t>t2 — участком неустановившейся ползу-
ползучести.
Вязкоупругие материалы иногда в литературе называют мате-
материалами с памятью, так как материал как бы помнит, что с ним
происходило раньше, и ведет себя в зависимости от этого про-
прошлого.
Л/\г
т,
-*
t
Рис.
б
3
.6.
€
л/
U i
Рис.
to t
4.
В самом деле, если, например, деформация образца происхо-
происходит так, что начиная с некоторого момента времени t—t\ она по-
постоянна, а напряжение в этот момент равно нулю (рис. 3)
при t>t\ : e{t) =ei = const>0, a(t\)=O, D.8)
то в случае справедливости соотношений D.5), D.6) возможно, что
при t>U :a@>0. D.9)
Как показал П. Мазилю, единственным исключением является
материал Максвелла, т. е.
R(t)=Ee-Et'4, л>0, D.10)
для которого при t>t\ всегда а@=0.
Другим примером, выясняющим специфику поведения вязко-
упругого материала, может служить процесс напряжений и соот-
соответствующий ему по формуле D.6) процесс деформаций (рис. 4).
Упражнение 4.1. Доказать, что всегда найдется такой момент
времени t0 (рис. 4), что
XU^P- +. D.11)
at /=0
27
и кривая е@ при t>to убывает, несмотря на то что в момент to
произведена догрузка.
Упражнение 4.2. Доказать, что для кривой ползучести, пока-
показанной на рис. 2, при выполнении соотношений D.5) и D.6) обя-
обязательно #оо = 0 (рис. 1).
Упражнение 4.3. Показать, что, для того чтобы Roo^O, необ-
необходимо, чтобы кривая ползучести (рис. 2) имела горизонтальную
асимптоту П = Поо при t->~oo, причем
=1 (Я. == lim R (*)). © D.12)
Рассмотрим колебания вязкоупругого тела. Положим
Г е0^ при ^ О,
10 при t < О,
где i — комплексная единица, ео — амплитуда, ю — частота ко-
колебаний. Действия с экспоненциальными функциями проще, чем
с тригонометрическими, а поэтому при линейных процедурах мож-
можно использовать запись D.13), имея в виду, что в конце этих
процедур от полученного выражения может быть взята действи-
действительная или мнимая часть.
Выделим теперь в функции релаксации величину R<x, если она
отлична от нуля:
R(t)=Rao+$(t). D.14)
Подставим D.13) в D.5) и, используя выражение D.14), получим
a(t) = e (t) [#» + i& J R (т)er^dxl. D.15)
о
Величина в квадратных скобках D.15) называется комплексным
модулем
E*(m)=Ra>+Rs + iRc, D.16)
где
О*
#s (со) = ю f R (т) sin mch, D.17)
о
00
Rc (со) = и j R (т) cos cordT. D.18)
о
Упражнение 4.4. С помощью преобразования Фурье (прило-
(приложение IV) показать, что можно восстановить Я (t) по заданной
функции ^4'(со) из D.17):
о»
л J
D.19)
л J ш
о
28
а также по заданной функции Rc(g>) из D.18):
D.20)
я J со
о
Упражнение 4.5. Показать, используя D.19) и D.20), что
между функциями Rs(a) и Rc(a>) существует зависимость
D.21)
Упражнение 4.6. Показать, что процессу деформации D.13)
соответствует процесс напряжения
a(t)=\ u° "F ^ ' D.22)
1 0 при t < 0,
где
aQ=\E' (ia) | e0, Ф (со) = arctg R^R . D.23)
Упражнение 4.7. Показать, что для комплексной податливости
/*(tco) справедливы соотношения
/(to) /„ + / + U,
Е*(т)
Е -\-Es рс
т ! js = 22_L jc — ? /4 24>
D-25)
Нетрудно теперь дать обобщение определяющих уравнений на
трехмерный случай. Для этого нужно в соотношениях D.1) —
D.7) и во всех последующих произвести замену
о-+а, е->е, Г->Г, К-+К, R^R, П-*-П, Е-+-С, -j~^S
Например, вместо D.5) нужно записать
а _ f R (^ _ т): de (т) s R: е
о "
D.27)
Число независимых компонент тензора функций релаксаций R@»
так же как и тензора функций ползучести П@> Для различных
29
классов анизотропии может быть получено аналогично тому, как
это сделано в § 3. В частности, для изотропной упругой среды
имеем
t t
(У = \Rt(t-x)db (т) = ЯД s = j R (t —т) dejx) заДе,
о о ~
D.28)
t t
6 =
f Щ( — x)da (т) == П&, ? = Г П (t — т) ds^(T) =fls.
о ~ о ~ ~ .
На основании введенных коммутативных операторов R, Йи П, ITi
(из которых только два могут быть независимыми) можно строить
другие. Например,
ЗЯ1 .. 3 1+Рш
D.29)
где р — некоторое число.
Уравнения равновесия для линейной вязкоупругой среды полу-
получаются подстановкой определяющих соотношений D.6) в B.6);
([RtlkPk.1 h + Xt = 0). D.30)
Тогда квазистатическая задача теории вязкоупругости (зада-
(задача А) заключается в решении уравнений D.30) при удовлетво-
удовлетворении граничным условиям, например B.9):
/U = S?)- D-31)
В частности, для изотропной однородной среды уравнения
¦D.30) приобретают вид
Аи + ^biL grad div в = — 2ПД. D.32)
Зш
Из соображений размерности решение задачи D.32), D.31) может
45ыть записано в виде
в = Д [<Pi (ю) X + ф2 (©) 5°] + Фз Й «°, D.33)
где ф/(ш), /=1, 2, 3, — функции безразмерного оператора ш D.29)
и линейные функционалы от величин, стоящих справа от опера-
операторов. Если соответствующая упругая задача решена, то решение
вязкоупругой задачи может быть дано с помощью метода аппро-
аппроксимаций А. А. Ильюшина. Этот метод заключается в аппрокси-
30
мации функций от операторов <р(<о) такими выражениями, кото-
которые могут быть легко расшифрованы. Например,
? ? D.34)
где А, В, С могут быть найдены хотя бы методом наименьших
квадратов. Заметим, что для многих изотропных вязкоупругих
материалов объем не релаксирует, т. е.
Г) D-\ Г) (Г\\ . ?*". Т"Т D\ Т"Т /Гк\ . 1 /If /Л ОС\
1\1 \1) — *\х \у) — *\ , 1 lj \t I — 11^ ^U) = 1 /7\ . yi. Ooy
Для формулировки квазистатической задачи Б линейной тео-
теории вязкоупругости изотропного однородного тела достаточно
в уравнениях C.25) заменить упругие постоянные на операторы
3
^A_з7_ш) . п
Н = Okl.klOij -Г * Ц — U>
Yti={l +a) (Xi.i + Х,,;+ 1-*е7шХк.к 8tl) , D.36>
где е, а — произвольные линейные операторы, от которых реше-
решение задачи D.36), B.27) не зависит.
При формулировке определяющих соотношений физически не-
нелинейной теории вязкоупругости обычно исходят из представле-
представления операторов A.1) или A.2) в виде интегралов возрастающей
кратности. Затем, чтобы сделать теорию «серьёзной», вводятся
разумные допущения.
Определяющие соотношения нелинейной вязкоупругости доста-
достаточно общего вида могут быть, например, заданы в виде
t
= f АЦкЫп V> т) 4i (х) ртп (t, х) dx;
о
рт =
D.37>
где [ ]-1 обозначает теизор, обратный тензору, заключенному
в квадратные скобки. Здесь Ai'Mmn(t,x), qmnpq(t,т) — компоненты
тензоров ядер релаксации шестого и четвертого ранга соответст-
соответственно, а — некоторый малый параметр. (При а=0 соотношения
D.37) превращаются в соотношения линейной теории вязкоупру-
вязкоупругости.) При решении задач термовязкоупругости в случае, когда
свойства материала зависят от температуры, часто пользуются
температурно-временной аналогией. Для этого вводится так назы-
31
ваемое местное время f, связанное с физическим временем зави-
зависимостью
t
где функция ат определяется экспериментально. Благодаря заме-
замене D.37) в определяющих соотношениях термовязкоупругости не
будет явной зависимости от температуры, и они формально изме-
изменятся только тем, что в них физическое время t заменится на
местное (приведенное) ?.
Вязкоупругая среда имеет способность к рассеиванию энергии
и поэтому при решении задач термовязкоупругости нужно учиты-
учитывать величину W*, входящую в уравнение притока тепла B.31).
Для вязкоупругих тел
№* = сг:(ет)- - [сх: П@): <х]\ D.39)
Упражнение 4.8. Показать, что для линейного вязкоупругого
материала
D.40)
t t
0) = -L f ?de(t):Il(t — T):da(T),
о о
где тензоры R(t) иПA) в D.40) симметрично продолжены в об-
область отрицательных времен так, чтобы R(—/) = R(/), П(—1) =
@
Упражнение 4.9. Показать, что для изотропной линейной тео-
теории вязкоупругости с нерелаксирующим объемом справедливы
соотношения
6tfi,k \ М*,)], D.41)
у* - -J *iAi ) ] • D-42)
где я (t) — ядро оператора, обратного к <о:
я=1/а. D.43)
Упражнение 4.10. Доказать, что если функции релаксации
IZ(t) и /?i(f) изотропного вязкоупругого тела, абсолютно интегри-
интегрируемые на оси времени 0«:/<оо, положительны на ней и ограни-
ограничены, то «касательный» модуль этой среды положителен.
32
Упражнение 4.11. Доказать, что если выполнены условия пре-
предыдущего упражнения для функций ползучести П@. ТЫО. то изо-
изотропная вязкоупругая среда обладает положительной «касатель-
«касательной» податливостью». . f,
В заключение рассмотрим главную квазилинейную теорию вяз-
коупругости для изотропной среды, определяющие соотношения
которой являются частным случаем соотношений D.37):
su = f Г it - т)е,Дт) dx - [ Гф (f - т) ф (е, б) ец (т) dx, D.44)
6
t
D.45)
Здесь мы также считаем, что линейные и нелинейные ядра релак-
релаксации разбиваются на сингулярную и регулярную составляющие:
Г @ = 2G6 (t) - Г (О, Г, @ = Кб @ - f t (*),
D.46)
гф it) - г„б (о - ГФ (/), Гф @=
Если ТФ=Г*=О, то соответствующая теория называется главной
квазилинейной с мгновенной линейной упругостью. В случае, если
объем среды изменяется упруго, соотношения D.45) принимают
вид
a=KQ. D.47)
Если же рассматривается несжимаемая среда, то физические соот-
соотношения D.44) и D.45) принимают вид
t t
sa = j Г it - x) en (т) dx- j Гф Ц - x) ф ie) e,, (x) dx. D.48)
о о
Если в теориях D.44), D.45), D.48) положим
Г it) = f, @ = Гф it) = Гф (/) = 0, D.49)
то получим из D.48) теорию малых упруго-пластических дефор-
деформаций для активных нагружений Ильюшина.
Важно отметить, что главные нелинейные теории релаксации
и ползучести, вообще говоря, не являются взаимно-обратными.
Однако если функция релаксации Rit) такова, что ее производная
мало изменяется, можно указать два случая, когда они являются
взаимно-обратными с некоторой степенью точности. В общем же
случае соотношения главной нелинейной теории релаксации, на-
пример D.44), D.45), можно обратить и представить в виде глав-
главной нелинейной теории ползучести:
t t
eti=\K(t-t) ьЦх) dx + j Ki (t - т) g (a, s) s(j (x) dx,
о о
t t
в = f /f j (f — т) a (t) dx + J /Ct, (/ — т) л (ст, s) ст (т) dx,
D.50)
но нелинейные ядра ползучести считать функционалами от тен-
тензора напряжений. Если фиксирован конкретный процесс нагруже-
ния, то можно найти нелинейные ядра ползучести через известные
нелинейные ядра релаксации методом последовательных прибли-
приближений.
§ 5. Упруго-пластическое тело
Рассмотрим склерономную модель изотропного однородного
тела. Будем считать, что шаровые части тензоров напряжений и
деформаций для нее связаны между собой по закону теории упру-
упругости D.47)
о=т, E.1 >
а девиаторы этих тензоров — по следующему закону:
E.2)
Здесь аи — интенсивность тензора напряжений, е« — интенсив-
интенсивность тензора деформаций:
t*, eu = (tre)I/2
~ E.3)
(аи =з У si ^и , ви &= Уеие( ,¦ ),
причем между этими величинами имеется некоторая зависимость
ои = Ф(ви), E.4)
устанавливаемая экспериментально. Типичный график кривой
Ф(ец), являющейся универсальной функцией данного материала»
представлен на рис. 5, причем tg<p=2{i=2G. Функцию Ф(е«)
можно представить в виде
ФЫ=2|1[1-ю(е*)]ви, E.5)
где <о(еи) — функция пластичности А. А. Ильюшина, характерный
график которой показан на рис. 6.
34
Из графиков, представленных на рис. 5 и 6, и формулы E.5)
видно, что при eu<es, или при au<-os (точка (es, as) на графике
рис. 5 называется пределом текучести и находится для данного
материала из эксперимента) тело ведет себя упругим образом,
так как определяющие соотношения E.1), E.2):
e—-е/
~ 3 ~
E.6)
являются линейными. При eu>es или ctu>cts прямая на графике
рис. 5 переходит в кривую, и с этого момента определяющие соот-
соотношения E.6) становятся нелинейными. Описанная выше модель
МДТТ являлась бы моделью физически нелинейного упругого те-
тела, если бы не одно обстоятельство. Дело в том, что если мы
Ьи
Рис. 5.
Рис. 6.
путем монотонного нагружения образца достигнем напряженно-
деформированного состояния, которому на графике рис. 5 соответ-
соответствует точка (eu*, ct«*), и затем снимем нагрузку, то процесс раз-
разгрузки будет описываться не кривой E.4), а прямой, изображен-
изображенной на рис. 5 пунктирной линией. Если е*, s* — девиаторы тен-
тензоров деформаций и напряжений, соответствующие точке начала
разгрузки (еи*, стц*), то процесс разгрузки может быть описан
законом
s—sf = 2{i(e—e*). E.7)
После полной разгрузки величине сти=О, как видно из рис. 5, бу-
будет соответствовать интенсивность тензора деформаций еип, кото-
которая описывает пластическую (остаточную) деформацию. При по-
повторном монотонном (активном) нагружении образца связь меж-
между интенсивностями тензоров напряжений и деформаций будет
описываться прямой, изображенной на рис. 5 штриховой линией,
и только после достижения точки (еи*, аа*) снова можно поль-
пользоваться зависимостью E.4).
Введенная таким образом модель упруго-пластического тела
не может быть описана формулами связи между напряжениями и
деформациями, а только словесно, ибо нужно все время следить
за направлением процесса — происходит ли нагрузка или раз-
разгрузка. Дело еще более усложняется в случае неоднородного на-
напряженного состояния.
35
Описанная модель упруго-пластического тела составляет осно-
основу теории малых упруго-пластических деформаций, разработан-
разработанную А. А. Ильюшиным. Эту модель иногда называют деформа-
деформационной теорией пластичности, но между этими теориями имеется
существенное различие. В деформационной теории считается, что
описанная модель упруго-пластического тела справедлива для лю-
любых процессов деформации и нагружения, т. е. для любого изме-
изменения со временем тензоров e(t) и s(t).
Теория малых упруго-пластических деформаций строго спра-
справедлива только для так называемых простых процессов деформа-
деформации и нагружения, т. е. в случае, когда тензоры e(t) и s(t) изме-
изменяются пропорционально одному параметру:
l(x,t)=a(t)f(x), s{x,t) = №)&{*), E.8)
где тензоры е°(х) и s°(x) от времени (точнее, параметра нагру-
нагружения, так как модель упруго-пластического тела — склероном-
склерономная) не зависят.
Более того, доказано, что все теории пластичности в случае
простых процессов совпадают с теорией малых упруго-пластиче-
упруго-пластических деформаций.
Если подставить определяющие соотношения E.4) — E.7)
в уравнения равновесия B.11) и граничные условия B.12), то
получим формулировку задачи А для упруго-пластического тела.
Для решения этой задачи А. А. Ильюшин предложил так назы-
называемый метод упругих решений и указал условия его сходимости:
+-^-ев<1. E.9)
Упражнение 5.1. Доказать, что при выполнении условий E.9)
выполнено неравенство A.10), т. е. «касательный модуль» поло-
положителен.
Упражнение 5.2. Доказать, что при выполнении условий E.9)
выполнены неравенства A.13), причем материал обладает мягкой
характеристикой, f)
В силу монотонности функции E.4) интенсивность тензора де-
деформации можно выразить через интенсивность тензора напря-
напряжений
еи = ф-1(сгц), E.10)
где ф-1 — обратная к функции Ф. Тогда соотношения E.2) можно
записать в виде
и благодаря E.1) получим
8 = / -j- \(з —Glj. ^D.IZJ
36
Предположим, что функцию E.10) можно представить в виде
Ф (ou) = -j-[l-Q (a J] ви, E.13)
где функция Q(oru) удовлетворяет неравенствам
0<Q<Q + —аи<1. E.14)
Подставляя определяющие соотношения E.12) как оператор
связи между деформациями и напряжениями в B.19) и B.26),
получим статическую (квазистатическую) задачу теории малых
упруго-пластических деформаций B.19), B.6), B.20) (задача В)
и задачу B.26), B.27) (задача Б). Решение этих задач также
может быть получено методами последовательных приближений,
причем на каждом шаге решается упругая задача.
Упражнение 5.3. Показать, что для упруго-пластического тела
W= j" oBdeB +-i-/Св», w= ^гийаи + -^аК E.15)
о о
Упражнение 5.4. Доказать, что при выполнении условий E.14)
выполняются неравенства A.11), т. е. «касательная податливость»
положительна.
Упражнение 5.5. Доказать, что при выполнении условий E.14)
выполняются неравенства A.14), причем материал обладает жест-
жесткой характеристикой. |)
Упруго-пластическая среда называется несжимаемой, если
div«=9 = 0. E.16)
В этом случае уравнения равновесия можно записать в виде
gradа + 2ц Div [A — а) е (и) ] + X = 0
E.17)
Таким образом, для определения четырех функций и, а имеем че-
четыре уравнения E.17), E.16) и граничные условия
«k="°, [o/ + 2|i(l—ffl)e(u)l.n|r, = S°. E.18)
Возникает вопрос, существуют ли такие среды, в которых
можно выбрать входные данные таким образом, чтобы в каждой
точке среды одновременно осуществлялся простой процесс.
Упражнение 5.6. Доказать теорему о простом нагружении
(А. А. Ильюшин). Если материал несжимаем E.16), интенсивно-
интенсивности тензоров напряжений и деформаций связаны между собой сте-
степенным законом
аи = сгпи, E.19)
37
где сил — некоторые постоянные (первая имеет размерность
напряжений, вторая — безразмерная). Если, кроме того, поверх-
ностные и объемные силы 5° и Х° возрастают пропорционально
одному параметру v.v, а заданное перемещение ы° пропорциональ-
пропорционально другому параметру х«:
S° (*, t) = xv (t) So (x), X (x, t) = x, {t)X (x),
E.20)
причем
() E.21)
то процесс деформаций и процесс напряжений будет простым
в каждой точке среды, f)
При решении задач термопластичности вместо соотношения
E.1) нужно записать
a=/C(e—За*). E.22)
Следует также учесть, что функция пластичности А. А. Ильюши-
Ильюшина а может зависеть от температуры:
а) = (о(еи, Т). E.23)
Ко всему следует добавить уравнение теплопроводности B.31)
с граничными условиями B.32) и начальными данными B.33),
причем в B.31) следует положить
E.24)
§ 6. Установочные эксперименты
Как уже отмечалось, феноменологическая теория МДТТ опи-
описывает только некую абстрактную математическую модель, кото-
которая может быть использована для качественной и количественной
оценки реальных материалов с той или иной степенью точности.
Вопрос о выборе математической модели для проведения проч-
прочностного расчета реальной конструкции или материала решается
только из сравнения результатов теоретического исследования
с экспериментом.
В этой связи экспериментальные исследования можно условно
разбить на два типа: установочные эксперименты (с помощью
которых устанавливается выбор той или иной математической
модели) и проверочные эксперименты (с помощью которых про-
проверяется точность расчета, проведенного по выбранной модели).
Здесь мы исключаем из рассмотрения самостоятельные экспери-
экспериментальные исследования, ие нуждающиеся ни в какой теории
(например, натурный эксперимент: развалится илн не развалится
исследуемая конструкция под действием определенных нагрузок).
Установочные эксперименты, опять же условно, можно также
38
разбить на две группы: общие установочные эксперименты (в ко-
которых устанавливаются некоторые общие свойства операторов
связи между напряжениями и деформациями) и модельные уста-
установочные эксперименты (в которых определяются материальные
функции выбранной модели, т. е. функции, которые в рамках
выбранной модели позволяют один материал отличить от дру-
другого) .
В общих установочных экспериментах можно, в частности,
выяснить четыре важных вопроса.
1..Линейность или нелинейность определяющих соотношений,
т. е. операторов A.1) и A.2).
Для выяснения этого вопроса достаточно проверить выполни-
выполнимость принципа линейной суперпозиции. Например, для трех раз-
различных поверхностных нагрузок S? (х, t), S\ (x,t) и S° {x, t):
S°3 (x, t) = aS? (*, t) + fiS°2 (x, t), F.1)
где аир — некоторые числа, снимаются экспериментальные зна-
значения деформаций в некоторых точках st(y,t), e2{y,t), z3(y,t).
Если оказывается, что
е, Су, t) = оех Q, t) + р*е2 Q, t), F.2)
то говорят, что выполняется принцип линейной суперпозиции, и
тогда операторы A.1) и A.2) — линейны.
Следует иметь в виду, однако, что векторы Si (x, t) и S2 (x, t)
должны быть линейно независимыми. Если же выбираются все
S° (x, t) такие, что
S2° (х, t) = *S? (x, t), F.3)
где k — некоторое число, то при выполнении условия F.2) мож-
можно лишь утверждать, что операторы A.1) и A.2) однородны пер-
первой степени, но не обязательно линейны. Например, в экспери-
экспериментах на одноступенчатую релаксацию или ползучесть прове-
проверяется, строго говоря, только однородность операторов A.1) или
A.2).
2. Склерономность или реономность модели.
Для выяснения этого вопроса можно, например, задать поверх-
ностную нагрузку S°(#), не зависящую от времени, и снять пока-
показания деформаций в течение контрольного времени в некоторых
точках исследуемого тела (например, в рабочей части образца).
Если деформации не будут меняться во времени, то разумно при-
принять допущение о склерономности модели. В противном случае
она будет реономной.
3. Анизотропия.
Выяснению характера анизотропии часто помогает внешний
вид и структура испытуемого материала. Полное исследование
39
этого вопроса представляет собой довольно сложную эксперимен-
экспериментальную задачу.
4. Квазилинейность модели.
Для изотропного тела можно, например, поставить экспери-
эксперимент на скручивание тонкостенного цилиндрического образца.
Если при этом появляются деформации удлинения (по образую-
образующей цилиндра), то сомнительно принятие постулата квазили-
квазилинейности.
Разумеется, во всех упомянутых. экспериментах суждение
о приемлемости того или иного утверждения должно быть согла-
согласовано с точностью, которую требуется достичь при расчете по
выбранной модели.
Модельные установочные эксперименты проводятся после того,
как выбрана модель МДТТ для данного материала. При этом
предполагается (иногда молчаливо), что справедлива гипотеза
макрофизической определимости А. А. Ильюшина, которая за-
заключается в том, что каждой точке среды может быть поставлен
в соответствие макрообразец (конечных размеров), находящийся
в однородном напряженно-деформируемом состоянии и на кото-
котором могут быть в принципе изучены все процессы, протекающие
в изображаемой точке среды.
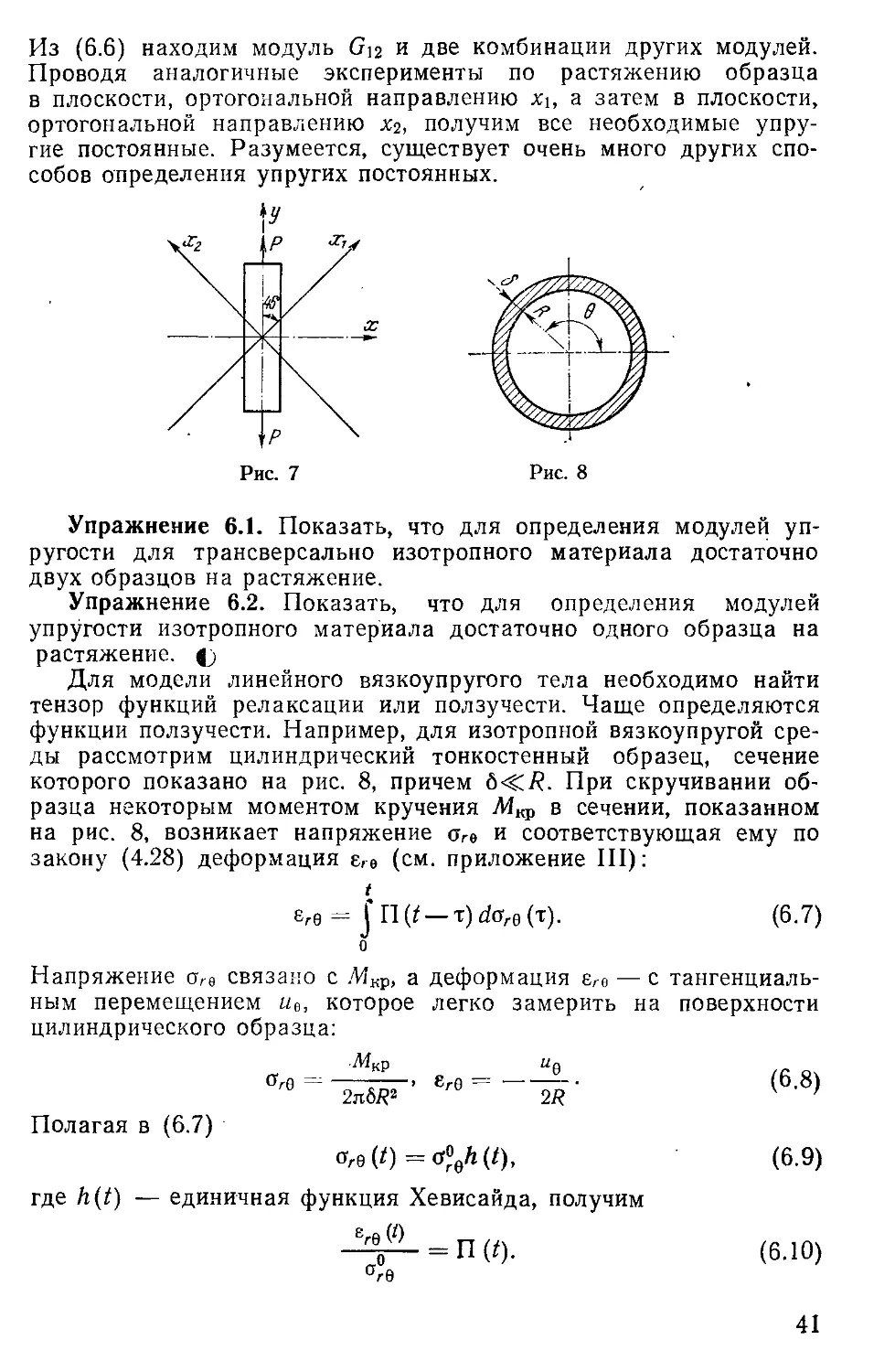
Если установлено, что материал можно считать упругим, то
определяются модули или податливости. Например, для опреде-
определения девяти постоянных ортотропного материала из статических
экспериментов необходимо по крайней мере три образца, которые
вырезаются в трех взаимно перпендикулярных направлениях, при-
причем так, чтобы направление растяжения составляло 90° с одной
из главных осей ортотропии и 45° с двумя другими. На рис. 7
показан вид сверху такого образца, причем главная ось анизо-
анизотропии z—x3 направлена перпендикулярно плоскости чертежа
к наблюдателю. При растяжении образца, показанного на рис. 7,
замеряются деформации е3з в направлении оси Хг, гу — в направ-
направлении силы Р и Ех — в направлении, ортогональном действию
силы Р. Тогда в главных осях ортотропии компоненты тензора
деформации
еи + е22 = гх + гу, е12 = е"~е* , F.4)
а отличные от нуля компоненты тензора напряжений
р
«11 = «22 = «12 = — = Р> F-5)
где F — площадь сечения образца. Используя матрицу C.20),
получаем
F.6)
/ ч'з , v2 \ р
Чз г= — Р I — + "J" )' El2 = ~2G~"
40
Из F.6) находим модуль Gj2 и две комбинации других модулей.
Проводя аналогичные эксперименты по растяжению образца
в плоскости, ортогональной направлению х\, а затем в плоскости,
ортогональной направлению Х2, получим все необходимые упру-
упругие постоянные. Разумеется, существует очень много других спо-
способов определения упругих постоянных.
Рис. 8
Упражнение 6.1. Показать, что для определения модулей уп-
упругости для трансверсально изотропного материала достаточно
двух образцов на растяжение.
Упражнение 6.2. Показать, что для определения модулей
упругости изотропного материала достаточно одного образца на
растяжение. |j
Для модели линейного вязкоупругого тела необходимо найти
тензор функций релаксации или ползучести. Чаще определяются
функции ползучести. Например, для изотропной вязкоупругой сре-
среды рассмотрим цилиндрический тонкостенный образец, сечение
которого показано на рис. 8, причем б<^. При скручивании об-
образца некоторым моментом кручения Мщ, в сечении, показанном
на рис. 8, возникает напряжение 0ге и соответствующая ему по
закону D.28) деформация е,е (см. приложение III):
егв =
F.7)
Напряжение огв связано с Мкр, а деформация егв — с тангенциаль-
тангенциальным перемещением ив, которое легко замерить на поверхности
цилиндрического образца:
МКР Ч- F.8)
F.9)
Полагая в F.7)
orB(t)=<fir9h(t),
где h(t) — единичная функция Хевисайда, получим
"re
(О
= П (*).
F.10)
41
Описанный эксперимент называется экспериментом на ползучесть
при кручении. Аналогично можно провести эксперимент и на пол-
ползучесть при растяжении. Полагая
P=Poh(t) F.11)
в предыдущем примере, можно найти испытанием трех образцов
девять компонент тензора функций ползучести для ортотропного
вязкоупругого материала. В опытах на релаксацию в виде функ-
еЮ к -
Ь t t0 t
Рис. 9 Рис. 10.
ций Хевисайда задаются деформации, а, измеряя напряжения,
получают тензор функций релаксации R{t).
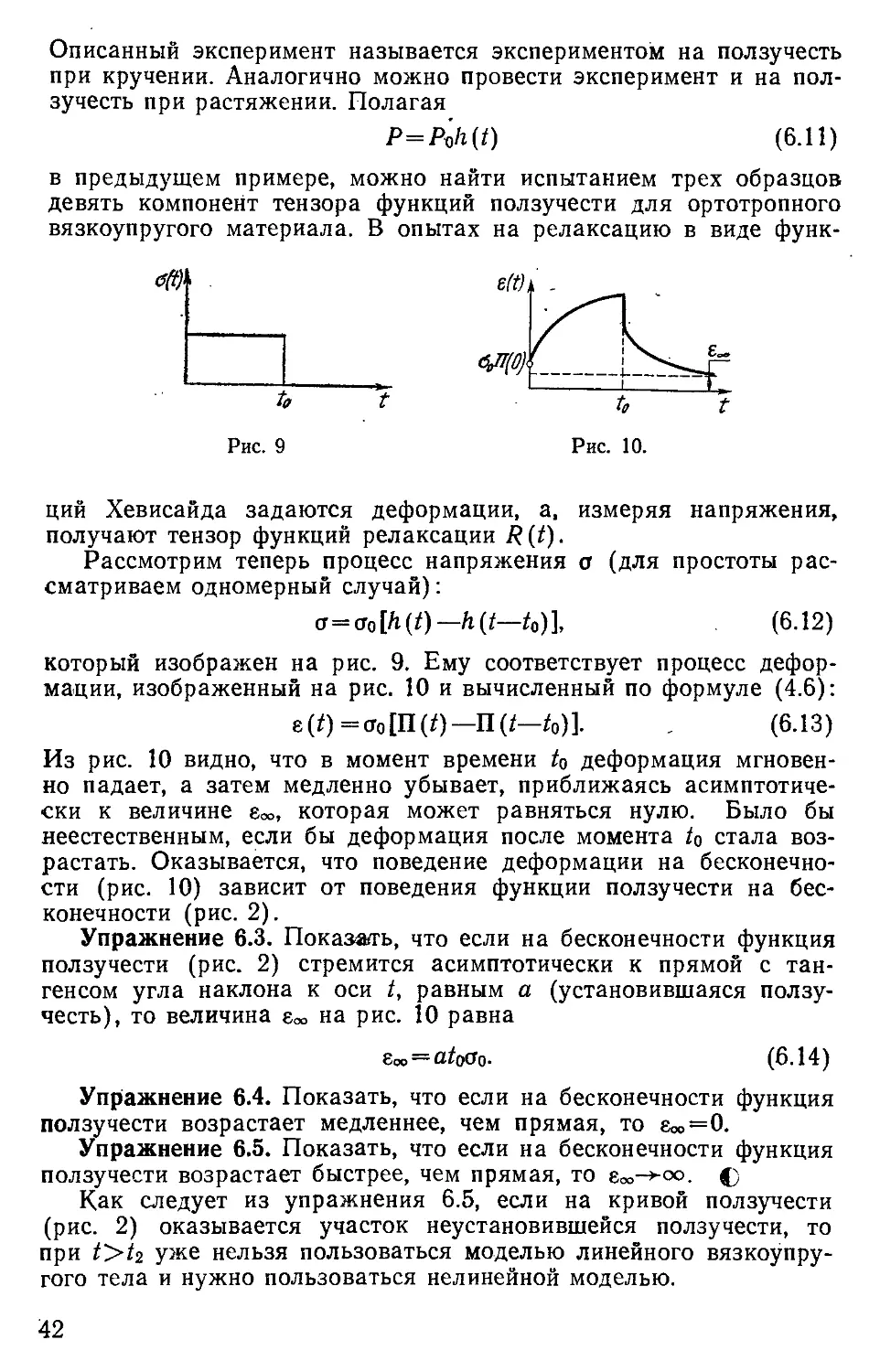
Рассмотрим теперь процесс напряжения а (для простоты рас-
рассматриваем одномерный случай):
a=ao[h{t)—h{t—tu)l F.12)
который изображен на рис. 9. Ему соответствует процесс дефор-
деформации, изображенный на рис. 10 и вычисленный по формуле D.6):
е@ = сто [П@-П (*-*,)]. , F.13)
Из рис. 10 видно, что в момент времени U деформация мгновен-
мгновенно падает, а затем медленно убывает, приближаясь асимптотиче-
асимптотически к величине е<», которая может равняться нулю. Было бы
неестественным, если бы деформация после момента t0 стала воз-
возрастать. Оказывается, что поведение деформации на бесконечно-
бесконечности (рис. 10) зависит от поведения функции ползучести на бес-
бесконечности (рис. 2).
Упражнение 6.3. Показать, что если на бесконечности функция
ползучести (рис. 2) стремится асимптотически к прямой с тан-
тангенсом угла наклона к оси t, равным а (установившаяся ползу-
ползучесть), то величина е<» на рис. 10 равна
F.14)
Упражнение 6.4. Показать, что если на бесконечности функция
ползучести возрастает медленнее, чем прямая, то еоо=0.
Упражнение 6.5. Показать, что если на бесконечности функция
ползучести возрастает быстрее, чем прямая, то е<»->-°о. о
Как следует из упражнения 6.5, если на кривой ползучести
(рис. 2) оказывается участок неустановившейся ползучести, то
при t>t2 уже нельзя пользоваться моделью линейного вязкоупру-
вязкоупругого тела и нужно пользоваться нелинейной моделью.
42
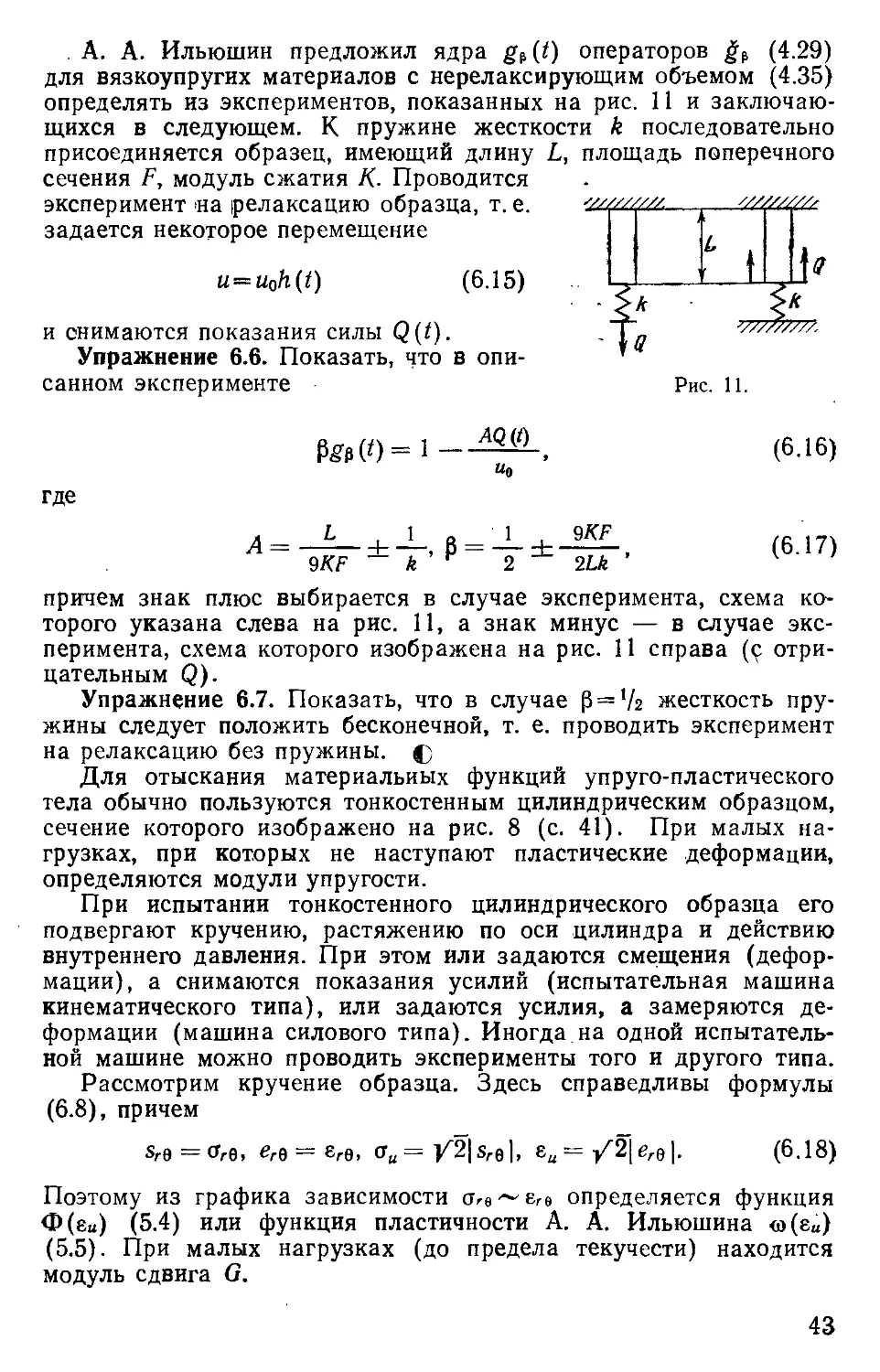
. А. А. Ильюшин предложил ядра g(,{t) операторов ?р D.29)
для вязкоупругих материалов с нерелаксирующим объемом D.35)
определять из экспериментов, показанных на рис. 11 и заключаю-
заключающихся в следующем. К пружине жесткости k последовательно
присоединяется образец, имеющий длину L, площадь поперечного
сечения F, модуль сжатия К. Проводится
эксперимент «а релаксацию образца, т. е. :
задается некоторое перемещение
uoh(t)
F.15)
и снимаются показания силы Q(t).
Упражнение 6.6. Показать, что в опи-
описанном эксперименте
Рис. 11.
где
9KF
«о
_ 1 9KF
2 2Lk
F.16)
F.17)
причем знак плюс выбирается в случае эксперимента, схема ко-
которого указана слева на рис. 11, а знак минус — в случае экс-
эксперимента, схема которого изображена на рис. 11 справа (9 отри-
отрицательным Q).
Упражнение 6.7. Показать, что в случае р== */г жесткость пру-
пружины следует положить бесконечной, т. е. проводить эксперимент
на релаксацию без пружины, о
Для отыскания материальных функций упруго-пластического
тела обычно пользуются тонкостенным цилиндрическим образцом,
сечение которого изображено на рис. 8 (с. 41). При малых на-
нагрузках, при которых не наступают пластические деформации,
определяются модули упругости.
При испытании тонкостенного цилиндрического образца его
подвергают кручению, растяжению по оси цилиндра и действию
внутреннего давления. При этом или задаются смещения (дефор-
(деформации), а снимаются показания усилий (испытательная машина
кинематического типа), или задаются усилия, а замеряются де-
деформации (машина силового типа). Иногда.на одной испытатель-
испытательной машине можно проводить эксперименты того и другого типа.
Рассмотрим кручение образца. Здесь справедливы формулы
F.8), причем
au=Y2\sr6\, еа=
F.18)
Поэтому из графика зависимости сггв ~ егв определяется функция
Ф(е«) E.4) или функция пластичности А. А. Ильюшина <о(е«)
E.5). При малых нагрузках (до предела текучести) находится
модуль сдвига G.
43
Если тонкостенный цилиндрический образец находится под
действием внутреннего давления ро, то
а„=-ро,-авв = -&?-. F.19)
о
Остальные компоненты тензора напряжения равны нулю, за ис-
исключением случая, когда образец не поджимается, чтобы исклю-
исключить осевое растяжение, возникающее под действием внутреннего
равномерного давления, действующего в замкнутом цилиндре.
В этом случае еще и
При 6<С#, как видно из F.19),
|<Тгг|«0«в. F.21)
Замеряются обычно деформации eee и егг, деформацию егг из-
измерять трудно и её считают из условия несжимаемости.
Поэтому
V VV . F.22)
Интенсивность тензора напряжений будет
i & F.23)
F.24)
если имеется напряжение F.20), и
если напряжение F.20) отсутствует.
Таким образом, определяется кривая Ф(е«) и функция ш(еы).
Кроме того, легко найти величины а и Э и вычислить модуль сжа-
сжатия /С.
При осевом растяжении образца силой Р
Р\ ди, ,« ос.
в в« = -5Г- F-25)
Остальные компоненты тензора напряжений равны нулю, а ком-
компоненты тензора деформаций могут быть замерены. Поэтому
откуда находится функция Ф(е«).
В случае, если исследуются неоднородные материалы (напри-
(например, композиты), то, вообще говоря, нельзя в образце создать
однородное напряжение и деформированное состояние. Поэтому
экспериментально можно найти лишь осредненные, «эффектив-
44
ные» механические характеристики материала, но об этом речь
пойдет в гл. 3.
Рассмотрим набор простейших экспериментов на ползучесть,
позволяющий определить линейные и нелинейные ядра, входящие
в физические соотношения D.50).
а. Ползучесть при сдвиге. Для проведения такого экспери-
эксперимента нужно осуществить в барокамере простой процесс нагру-
жения
a=aoh(t), Si, = sPijh{t), s = soh(t), F.27)
где h(t) —единичная функция Хевксайда, So=s°,7S°i/. Аналогично
D.46) введем обозначения
iH = j((t), -^i- --= Ki (О. Щ0) = —L-, Пг @) = —,
dt ' dt ' ' 2G 1 ' К
-^=*б@. -^ = &.('). П|@)= JL, Пл@)=-1. F.28)
Тогда при заданных напряжениях F.27) получим две экспери-
экспериментальные кривые:
^ = П @ + s {o0, s0) Щ @,
s. W ^
Fo s« @ = -^ = Пх (/) + г, (а0, s0) Пп (/). F.29)
a"s// Сто
При малых а0 и s0:,- вторые слагаемые в правой части F.29)
будут пренебрежимо малы по сравнению с первыми. Поэтому, на-
находясь в области линейной вязкоупругости, получим линейные
функции объемной IIi@ И сдвиговой П(^) ползучести, которые
не зависят ни от а0, ни от sV Для больших значений сг0 и s0,-,-,
считая H{t) и П] (/) известными, найдем нелинейные ядра ГЦ(О
и П„(/), а также функции |(ао, s0), т](а0, so), как коэффициенты
подобия кривых
/о§15о.(о-п(о, ^.(О-пло. (б.зо)
б. Ползучесть при объемном сжатии. Этот эксперимент являет-
является частным случаем предыдущего F.27) при s°;/ = 0. При малых
а0 определяем линейное ядро П](?), а при больших — нелиней-
нелинейное ядро П„(/) и функцию ц(оо, 0) из экспериментально найден-
найденной функции
Fo0 (t) = -^ =¦¦ Пх @ + ц (а0, 0) П„ (/). F.31)
«о
в. Ползучесть при простом сдвиге. Этот эксперимент также
является частным случаем F.27) при Оо = 0. Из него можно найти
ядра П(/), П&(*) и функцию 1@, s0).
/so. @ ^ ^f- = П @ + I @, s0) П5 @- F.32)
45
г. Ползучесть при простом растяжении. Для такого экспери-
эксперимента an(t)=a°iih(t), а все остальные компоненты тензора на-
напряжений равны нулю. Тогда имеем
а = aoh(t), sn = Aa°nh(t), s22 = .s33 = --i-o»,ft@,
F33>
Находим экспериментальные функции
"^- = 6П @ + 61 ^ So) П* @
'••'//
™ @ = _9?2sio_ = _ зп(о - 3g (a0> so) гад
а?,
+ П1@ + Ч(а0,вв)П11@. F.34)
Определяем для малых а°ц линейные ядра ГЦ/) и Hi(t) и, счи-
считая их известными, для больших значений а°ц получаем нели-
нелинейные характеристики.
НЕКОТОРЫЕ ЛИТЕРАТУРНЫЕ УКАЗАНИЯ
§ 1. Подробнее описание операторных определяющих соотноше-
соотношений МДТТ для изотермических и неизотермических процес-
процессов дано в книге [84].
§ 2. Постановки задач МДТТ для операторных определяющих
соотношений описаны в книге [84]. Новой постановке посвя-
посвящены работы [80, 82, 83]. В работах [82, 83] указаны допол-
дополнительные условия на операторные соотношения, при выпол-
выполнении которых существует обобщенное решение задач А, В,
а также сходятся методы последовательных приближений,
построенные как обобщение известного метода упругих ре-
решений [33]. Постаановки задач МДТТ имеются также в кни-
книгах [34, 35, 37, 38, 93, 95]. Термодинамика деформируемого
твердого тела, а на ее основе постановка (и решения) свя-
связанных задач МДТТ, в которых учитывается тепловыделение
при деформировании, рассматриваются в [34, 44, 77].
§ 3. По теории упругости имеется очень большая библиография. -
Назовем только некоторые книги [35, 54, 55, 59, 71, 84].
§ 4. Подробнее с линейной и нелинейной теорией вязкоупругости
можно ознакомиться, например, по книгам [38, 66, 92]. Мето-
Методы решения нелинейной вязкоупругости изложены в рабо-
работе [78]. Вопросы определения комплексных вязкоупругих ха-
характеристик достаточно полно изложены в книге [112]. Дока-
Доказательство «исключительности» модели Максвелла дано
в [114].
46
§ 5. В параграфе дается краткий перечень результатов, представ-
представленных в книгах А. А. Ильюшина [33, 34]. Теории пластич-
пластичности посвящено учебное пособие [45]. О доказательствах
существования обобщенных решений и сходимости методов
последовательных приближений (метода упругих решений и
его обобщений) в теории малых упруго-пластических дефор-
деформаций можно узнать из работ [78, 84].
§ 6. С техникой проведения эксперимента можно, например, озна-
ознакомиться по книге [101]. Методика проведения экспериментов
по определению физико-механических характеристик дефор-
деформируемого твердого тела изложена в [4, 36, 64]. Схема экс-
экспериментов по определению материальных функций линейной
и нелинейной теории вязкоупругости имеется в [38, 78, 84],
причем в работе [84] описывается схема экспериментального
определения ядер gt для вязкоупругих материалов с релак-
сирующим объемом. Гипотеза макрофизической определимо-
определимости сформулирована в монографии [34].
Глава 2
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
В главе дается краткое описание некоторых вариационных
принципов МДТТ, которые в дальнейшем будут использованы при
анализе композитов.
При доказательстве теорем единственности решения краевых
задач МДТТ, экстремальных свойств рассматриваемых функцио-
функционалов и т. п. определяющие соотношения среды записываются
в операторном виде, причем на эти операторы накладываются не-
некоторые ограничения в виде неравенства. Для конкретных сред
достаточно проверить выполнение этого неравенства, чтобы сде-
сделать заключение о справедливости для этой среды теорем, дока-
доказанных для общих операторных определяющих соотношений.
§ 1. Принцип Лагранжа
Будем считать, что все рассматриваемые функции обладают
гладкостью, необходимой для проведения используемых преобра-
преобразований, и изменяются на временном отрезке [0, t{\, т. е. 0</<s?i.
Кроме того, будем предполагать наличие «естественного» состоя-
состояния, т. е. считать, что в момент, предшествующий t = 0, тензоры
деформаций и напряжений вместе со всеми своими производными
равны нулю.
Рассмотрим квазистатическую задачу МДТТ в перемещениях
A.2.11), A.2.9) (задача А).
Помножим скалярно уравнения A.2.11) на произвольный пока
вектор v и проинтегрируем по объему V, занимаемому телом. Тог-
Тогда, используя теорему Остроградского — Гаусса и статические
граничные условия A.2.9), с учетом A.1.1) получим
f at,B{i (v)dV = A" (v) + A2l(v), A.1)
где Ae(v) — работа внешних сил на перемещении v, определяет-
определяется по формуле A.2.18), a AzSv)—работа внутренних сил на за-
заданном перемещении v — по формуле A.2.23).
48
Назовем кинематической системой произвольное векторное по-
поле v(x), а статической системой — произвольное поле симметрич-
симметричных тензоров второго ранга x{x,t). Кинематически допустимой
называется кинематическая система, удовлетворяющая кинемати-
кинематическим граничным условиям в A.2.9).
Будем писать
-> -> —¦-
»е(/, если v\^ = u°. A-2)
Статически допустимой называется система, удовлетворяющая
уравнениям равновесия A.2.6) и статическим граничным усло-
условиям A.2.9). Будем писать
те 7, если DiYT + X=0, т-п|22 = 5°. A.3)
Разность двух кинематически допустимых систем удовлетво-
удовлетворяет однородным кинематическим граничным условиям
ие(У0, если^!21=0, A.4)
а разность двух статически допустимых систем — однородным
уравнениям равновесия и однородным статическим граничным ус-
условиям
теГв, еслиБ!ут=0, т-п|22 = 0. A.5)
Из A.4) и A.1) вытекает, что для функции v(x)^.U0 из
A.2.11), A.2.9) следует
\otlell(u)dV=A*{v). A.6)
Из сравнения A.6) с A.2.15) видно, что решение задачи А яв-
является также обобщенным ее решением.
Если обобщенное решение достаточно гладкое, то оно являет-
является решением задачи А.
В самом деле, решение задачи А должно удовлетворять усло-
условиям A.1.1), A.2.1), A.2.6), A.2.9). По определению обобщенного
решения выполняются соотношения A.1.1), A.2.1), первое из гра-
граничных условий в A.2.9). Применяя к тождеству A.6) теорему
Остроградского — Гаусса, получим
J (<т„-,• + Xt) vtdV - f (<т„-л; - S?) vtd2 = 0. A.7)
V Г,
В силу произвольности поля ие?/о отсюда следуют уравнения
равновесия и статические граничные условия A.2.9).
Предположим теперь, что тензор напряжений потенциальный
49
{1.1.4), и массовые и поверхностные силы обладают потенциалом.
Тогда можно ввести «лагранжиан» ?:
1(и)=аФ(и)-Л«(и), A.8)
где ф определяется формулой A.1.17). Очевидно, тождество
A.2.15) можно записать в виде
DL{s, (и), г (о)} = DL (и, о) = 0. A.9)
Итак, задача отыскания обобщенного решения задачи А экви-
эквивалентна задаче отыскания «стационарной точки» лагранжиана
?(и).
Если соотношения A.1.1) достаточно гладки, то можно по-
построить функциональные производные типа
. A.10)
Если существуют функциональные производные A.10) опреде-
определяющих соотношений A.1.1), то справедливо тождество
ФЫ = Ф Й) + Ае (и2-«х) +
+ 4" f -IT- & + Ч Й - Щ)} [в*, Й) - вы ЙI [ei, (и2) - га Й)] dV.
2 J дгы A И)
В самом деле, введем функцию числового аргумента |:
/F)-ФЙ + бЙ-й). 0<1<1, A.12)
которая допускает на указанном отрезке представление
^ о<ч<1. A.13)
Подставляя в A.13) выражения, полученные из A.12), и учи-
учитывая A.1.1) и A.1.4), получим
Ф Й) = Ф Й) + J о{, й) [в/у й) — е(/ Й)] dV +
-т f
2 J
х
A.14)
Учитывая A.6), отсюда получим A.11).
Предположим теперь, что «касательный модуль» среды поло-
положителен A.1.10). Тогда в стационарной точке лагранжиан A.8)
имеет минимум.
50
В самом деле, полагая в тождестве A.11) u2r=v^.Uo, a Ui = «*v
где и* — решение задачи А, имеем, учитывая A.1.10),
L Й = Ф Й — Ае (о) > Ф (и*) — Ае («') +
+ т 1е'7 (^~~ "*} 8" ^~~ "*} dy ^ ®("*> ~ Ле ("*)s^("Ф)> A •15>
v
что и требовалось доказать.
Если среда обладает положительным касательным модулем, то
существует не более одного обобщенного решения задачи А.
Предположим противное: существуют решения щ и и2. Тогда
из A.6) следует, что они удовлетворяют тождеству
f [а,/ (а2) - ati (щ)} ги (v) dV = 0. A.16),
v
Далее,
1
[аа (и2) — ait (uj)] e,ti (о) = j -?L {щ + | (ы2 — щ)} х
о
Поэтому, полагая в A.17) ?u(v) =ец(и2)—ei/(«i), получим:
из A.1.10)
J-* -» -> ->
\a?j (м2) — Оц (щ)] [ес/ (щ) — ег/- (щ)] dV ^
v
^m j е17 (и, - «х) е,/ (и, - и^ dV. A.18),
v
Отсюда следует, что
->•->¦ ->¦->¦
т. е. поля «i (x) и м2 (х) могут различаться только на смещение
как жесткого целого. Однако в силу первого из граничных усло-
условий в A.2.9) такие смещения недопустимы. Отсюда следует един-
единственность решения задачи А.
Точка минимума лагранжиана является единственной. Пусть-
«1 и м2 — две точки минимума функционала L. Тогда для них
выполняется условие A.16) и в силу доказанной теоремы един-
единственности U2^U\.
Упражнение 1.1. Доказать, что если для изотропного упругого'
тела выполнены условия A.3.54), то:
51
1) решение задачи А имеет не более одного решения;
2) лагранжиан в положении равновесия имеет мини-
минимум;
3) точка минимума лагранжиана является единствен-
единственной.
Упражнение 1.2. Доказать, что если для трансверсально изо-
изотропного упругого тела выполнены условия A.3.55), то справед-
справедливы все три утверждения предыдущего упражнения.
Упражнение 1.3. Доказать, что если выполнены условия уп-
упражнения 4.10 гл. 1, то для изотропного линейного вязкоупругого
тела справедливы все три утверждения упражнения 1.1.
Упражнение 1.4. Доказать, что если выполнены условия
A.5.9), то справедливы все три утверждения упражнения 1.1 для
упруго-пластического материала.
§ 2. Принцип Кастильяно
Рассмотрим квазистатическую задачу МДТТ в напряжениях
(задачу В). Она заключается в решении шести уравнений совмест-
совместности A.2.19) и трех уравнений равновесия A.2.6) относительно
шести независимых компонент симметричного тензора напряже-
напряжений а при удовлетворении трем граничным условиям A.2.9). Об-
Область, занимаемая телом, считается односвязной.
Помножим скалярно соотношения A.2.1) на тензор теГ0 и про-
проинтегрируем по объему V. Тогда, используя теорему Остроград-
Остроградского — Гаусса и условия A.5), получим
[ EijXtjdV ^ Л2, (т, и0). B.1)
V
Сравнивая B.1) с A.2.22) и учитывая определяющие соотно-
соотношения A.1.2), видим, что решение задачи В является также обоб-
обобщенным ее решением. Но справедливо и обратное утверждение.
Если обобщенное решение достаточно гладкое, то оно являет-
является решением задачи В.
В самом деле, решение задачи В в односвязной области долж-
должно удовлетворять условиям A.1.2), A.2.6), A.2.9), A.2.19). По
определению обобщенного решения выполняются уравнения A.2.6),
соотношения A.1.2) и второе из граничных условий в A.2.9).
Вводя систему гладких функций х,-(я), хеК (обобщенные мно-
множители Лагранжа), можно записать
f T,/n/u?dS — J e.t,xtjdV — f Щ [хчл + Xt) dV = 0. B.2)
2! V V
52
Применяя к B.2) теорему Остроградского — Гаусса в силу
произвольности поля те Го, получим
е,7 = —¦ (х*,/ + */,«¦). х* |Sl - "и?. B.3)
-¦¦
Для того чтобы существовало непрерывное поле и, необходи-
необходимо и достаточно выполнения условий A.2.2), причем из B.3) сле-
следует выполнение первого из граничных условий A.2.9).
Предположим теперь, что тензор деформаций потенциальный
A.1.4).
В этом случае можно ввести так называемый «кастильяниан» Ж
по формуле
X (а) == - ф (а) + A* {a,~tfi), B.4)
где ф(а) определяется по формуле A.1.17).
Тогда, очевидно, тождество B.1) можно записать в виде
DJC (от, т} = 0. B.5)
Следовательно, задача отыскания обобщенного решения зада-
задачи В эквивалентна задаче отыскания «стационарной точки» ка-
стильяниана К(а).
Докажем теперь, что в положении равновесия лагранжиан сов-
совпадает с кастильянианом.
В самом деле, рассмотрим тождество A.1). Используя соот-
соотношения A.1.6), получим из него
Z (и*) =#>*), B.6)
где и*, о* — решения соответственно задач А и В, что и требо-
требовалось доказать.
Предположим, что определяющие соотношения A.1.2) доста-
достаточно гладкие. Тогда если существуют функциональные произ-
производные дъц{аIдаы определяющих соотношений A.1.2), то спра-
справедливо тождество
ФИ = Ф(«г1) + Аь (of — о\ ы°) +
+"т f > ¦?¦ {~+ ц {~" -)} (а« ~ а«} {<fi4~а^}dv- B-7)
В самом деле, введем функцию числового аргумента 5 @<|<1)
/(g) = 5{ai + 6(d»-0i)}, B.8)
допускающую на указанном отрезке представление
/'@)+
B.9)
53
Подставляя в B.9) выражения, полученные из B.8), и учи-
учитывая A.1.4), получим
Ф (а*) = ф (а1) + J et, (a1) (а*. - a).) dV +
v
- BЛ0>
Учитывая B.1), из B.10) получим B.7).
Предположим теперь, что среда обладает положительной каса-
касательной податливостью A.1.11). Тогда стационарная точка ка-
стильяниана B.4) является точкой максимума.
В самом деле, полагая в тождестве B.7) а2 = те7, a a1 — ^'
(решение задачи В), имеем, учитывая A.1.11), ~ ~
Ж (т) = — ф (т) + Л2, (т, и°) <
< - Ф (а*) + A^ К, и») п- J (х?| - a'it) (xtj - а*.) dV <
<-5(**) + Л21(^и°) = #>'). B.11)
что и требовалось доказать.
Если среда обладает положительной «касательной податли-
податливостью», то существует не более одного обобщенного решения
задачи В.
Предположим противное: существуют решения а1 и о2. Тогда
из B.1) следует, что они удовлетворяют тождеству
J [в„ (*) - ь, (о»)] xtldV = 0. B.12)
v ~
Далее,
[в„(о») -ei7 (о»)] Т|/ = j [g?L {?i + |(e« -a1)}(^- tfi,)] T^dg.
B.13)
Поэтому, полагая в B.13) х=ю2—а1, получим из A.1.11)
0 = j [ги (о«) - 8?/ E1)] (af; - (Г';) dV ^ n J (af7 - a|,) D - ^ dV.
V V
B.14)
Отсюда следует, что
т. е. единственность решения задачи В.
54
Докажем, что точка максимума кастильяниана является един-
единственной*
Пусть а1 и а? — две точки максимума кастильяниаиа Ж. Тог-
Тогда для нюГ выполняется условие B.12) и в силу доказанной един-
единственности справедливо соотношение B.15).
Упражнение 2.1. Доказать, что если для изотропного упругого
тела выполнены условия A.3.54), то:
1) решение задачи В имеет не более одного решения;
2) кастильяниан в положении равновесия имеет мак-
максимум;
3) точка максимума кастильяниана является единст-
единственной.
Упражнение 2.2. Доказать, что если для трансверсально изо-
изотропного упругого тела выполняются условия A.3.55), то справед-
справедливы все три утверждения предыдущего упражнения.
Упражнение 2.3. Доказать, что если выполнены условия уп-
упражнения 4.11 гл. 1, то для изотропного линейного вязкоупругого
тела справедливы все три утверждения упражнения 2.1.
Упражнение 2.4. Доказать, что если выполнены условия
A.5.14), то для упруго-пластического тела справедливы все три
утверждения упражнения 2.1.
§ 3. Новый вариационный принцип
Рассмотрим квазистатическую задачу МДТТ в напряжениях
(задачу Б). Она заключается в решении шести обобщенных
уравнений совместности A.2.26) относительно шести независимых
компонент симметричного тензора напряжений а при удовлетво-
удовлетворении шести граничным условиям A.2.27). Область, занимаемая
телом, считается односвязной.
Дадим вариационную постановку задачи Б. Для этого предпо-
предположим, что существует такой скалярный оператор 83, зависящий
от градиентов напряжений, что выполняются условия потенциаль-
потенциальности тензора A.2.30)
Я1М-Т5-. C-1)
Назовем тензором потоков симметричный тензор второго ран-
ранга х. определенный на поверхности 2:
C.2)
Определим теперь оператор 7 по формуле
7=sf(®-Yt,otl)dV- ГXt,at,dZ +
V 2
+ Г Г— (Aaij,jOik.k + ВъррмПь) + AXiOij.j ~ BS^Otjtij 1 dS, C.3)
где А и В — некоторые размерные постоянные, отличные от нуля.
55
Докажем, что в положении равновесия оператор C.3) имеет
стационарное значение
d7(o, 8а) = 0. C.4)
Заметим, что в C.4) потоки % не варьируются (считаются «за-
«замороженными»), а затем подставляется их выражение по форму-
формуле C.2).
В самом деле, произведя вычисления по формуле C.4) и вос-
воспользовавшись теоремой Остроградского—Гаусса, получим
Г (EllXk + Ytj) baitdV = A f (au,i + Xt)
v i
C.5>
2
В силу произвольности вариаций из C.5) следуют уравнения
A.2.28) и граничные условия A.2.27).
Обобщенным решением задачи Б назовем симметричный тен-
тензор а, удовлетворяющий для всякого гладкого симметричного
тензора т интегральному тождеству
f Eiik И mjdV + f (Ат„.,т«.* + BatiniT{tnk) dE = N (т). C.6)
Здесь
N~NV + Nf + Nl, C.7)
F (x) = J YtjttjdV, ivf = J xti (a) T(jdV,
C.8)
Nf (т) э j (BS°{i?knk — AXfTtkj,) dS.
Введем обозначения
7=Tv+h, Jv =
Jz = -j- J М(Г/Л/(Гл,* + fitft, п/*,^) dS. C.9)
2
Тогда, очевидно,
7=}-N(a), C.10)
а интегральное тождество C.6) можно записать в виде
ZO(tf,T) = ?(x). C.11)
56
Отсюда видно, что определение обобщенного решения задачи
Б совпадает со слабым решением задачи Б (т. е. решением вари-
вариационного уравнения C.4)).
Про характер стационарной точки оператора C.3) в силу
предположения о «замороженности» потоков ничего сказать
нельзя.
Условия единственности решения задачи Б совпадают с усло-
условиями единственности решения задачи А ввиду эквивалентности
постановок обеих задач.
§ 4. Вариационный принцип Хашина — Штрикмана
Вариационный принцип Хашина—Штрикмана является обоб-
обобщением вариационного принципа Лагранжа. Он был разработан
авторами для исследования неоднородных упругих материалов.
Наряду с исследуемым (неоднородным) телом рассматривается
некоторое однородное упругое тело (тело сравнения). На основе
лагранжиана строится функционал, который имеет минимум в
положении равновесия, если тензор модулей упругости исследуе-
исследуемого тела «меньше» тензора модулей упругости тела сравнения
и имеет в положении равновесия максимум, если тензор модулей
упругости «больше» тензора модулей упругости тела сравнения.
(Слова «меньше» и «больше» понимаются здесь в смысле опре-
определений, данных в § 1 гл. 1.)
Здесь мы несколько расширим область приложения этого ва-
вариационного принципа.
Пусть требуется решить квазистатическую задачу МДТТ для
неоднородного тела, определяющие соотношения которого имеют
вид A.1.1)
Diva(u,x)=0, a = 6F(e,x), D.1)
u\s = u». D.2)
Будем считать, что оператор &~ в D.1) является потенциальным:
-* dW(e)
Пусть, кроме того, для той же области V с той же границей 2 и
теми же граничными условиями решается задача теории упруго-
упругости для однородной среды (среды сравнения)
Div &с (ис, х) = О, &с (гс) = Сс : е<\ D.4)
u'|2 = u°. D.5)
Очевидно,
Wc (8е) = — ес: Сс: ее. D.6)
57
Представим решение задачи D.1), D.2) в виде
и = ~ис + и', D.7>
где ис — решение задачи D.4), D.5). Тогда, очевидно, и
8= 8е + 8'. ' D.8)
Будем под записью о понимать, что тензор напряжений выражен
через деформации по формулам D.1), а под записью 0е, что опре-
определяющие соотношения выбраны в виде D.4):
о=&(в,х), <f = Cc:e. D.9)
Мы предполагаем, что тензор Сс положительно определен, так
что задача теории упругости D.4), D.5) имеет единственное ре-
решение. Кроме того, тензор Сс имеет обратный Jc, который также
положительно 'определен. Будем предполагать также, что опера-
оператор &~{ъ, х) имеет положительный «касательный модуль», а пото-
потому и задача D.1), D.2) имеет единственное решение.
Обозначим
W(e) — We(B)=W"(e). D.10)
Из D.10) и D.6) следует
~ dWP (e)
?==5"(е) = —^2^=0 — &:е=о — &, D.11)
где ?— симметричный тензор второго ранга, названный Хашнном
и Штрнкманом тензором поляризации. Предположим соотноше-
соотношения D.11) обратимы относительно деформаций и существует та-
такой скалярный оператор w(p), что
^ D.12)
т. е. операторы &(е) и $(<г) взаимно-обратны. Как следует из
D.10) и формулы A.1.6O
W(e) L е: V: е + w (p) = р :в,
D.13)
W"(s) + w(p) = p:e.
Заметим, что лагранжиан L задачи D.1), D.2) имеет вид
L=$W(e)dV, D.14)
58
я если «касательный модуль» оператора ?Г D.9)" положителен, то
лагранжиан в положении равновесия имеет минимум.
Сформулируем теперь задачу D.1), D.2) для векторного поля
«', используя определение D.7). Как следует из D.11) и D.8),
а= р + Сс:в = р + Сс:е' + Сс:ес. D.15)
Учитывая формулировку задачи D.4), D.5) получаем
Div(?+C':e') = 0, D.16)
и'|2=0. D.17)
Таким образом, решение задачи D.1), D.2) по формуле D.7)
разбивается на сумму ис — решения задачи D.4), D.5) и и' — ре-
решения задачи D.16), D.17) при условии, что тензор поляризации
р определяется формулой D.11).
Упражнение 4.1. Применяя теорему Остроградского—Гаусса,
доказать, что для всякого тензора те70 в силу граничных усло-
условий D.17) выполняется тождество
l~'~
D.18)
Упражнение 4.2. Доказать, что тождеству D.18) удовлетво-
удовлетворяют тензоры о и Сс: ес. ©
Запишем лагранжиан D.14), используя тождество D.18), в
виде
1=ГГг(е) Lo:e + — (а: г — a:e')]dV. D.19)
v
Используя определения D.8) и D.11), преобразуем выражение,
заключенное в D.19) в круглые скобки:
о: е — а: в' = о: ес = р : вс + а°: ес =
= 0е: гс + р: вс = а0: вс + 2р: вс —
— р : ес + р: в — р : е = 0е: вс + 2р: вс + р: е' — р: в. D.20)
Подставляя D.20) в D.19) и используя формулы D.15) и D.9),
получим
1= f \w{b) Le:(V:e — — р:г + — {(?:вс +
J|_ ~ 2~ - 2 • 2~~
+ 2р:вс+ р:в'~р: e)]dV. D.21)
59
Воспользовавшись формулой D.13), получим
1= — Г [ас:гс + 2р: е'+ р : ej — 2w(p)]dV. D.2Г)
v
Если теперь в формуле D.21') отказаться, от условий D.11) и
считать р неким независимым от а и ос тензором, то в задаче
теории упругости D.16), D.17) член divp играет роль объемных
сил. Для этого случая обозначим D.21') через 0>:
д* = — Г [(f : 8е + 2р: 8е + р : е' — 2w(p)] dV. D.22)
2J~~ -- ~ ~~ ~
V
Докажем теперь, что решение задачи D.16), D.17) при вы-
выполнении условия D.12) является стационарной точкой функцио-
функционала (оператора) 53, т. е.
Df> (р, бр) = 0. D.23)
В самом деле, считая величины 0е и ес неварьируемыми, по-
получим из D.22)
D3* (р, бр) = — Г [2бр: 8е + бр: в' + р : бе' — 2 -^- : бр 1 dK =
Но по сделанному предположению выполняются условия
D.12). Поэтому
DF (?, бр) = — f (р: бе' — ej : 8p) dV. D.25)
V
Упражнение 4.3. Умножая скалярно векторное уравнение
D.16) на бы' и интегрируя по объему К, доказать, что после при-
применения теоремы Остроградского—Гаусса и использования гра-
граничных условий D.17) получится равенство
Г Div (р + Сс: е') • 8u'dV = — Г fie': (р + С : е) dV = 0. D.26)
Упражнение 4.4. Доказать, что, проделывая выкладки, указан-
указанные в условии упражнения 4.3, после скалярного умножения век-
векторов и' и бы' на вариацию вектора D.16) получатся соответ-
соответственно равенства
f Div (8р + Сс: бе')-u'dV= — f e' : (бр + Се: бе) dV = 0, D.27)
60
С Div (бр + Сс: 6e')-6tT'dl/ = — Г бе' : (бр + Сс: бе) dl/ = 0.© D.28)
v ~ i ~ ~
Используя формулы D.26), D.27), получим
J (р : бе' — е': бр) dV = f (e' : V : бе — бе' : V : eJdV. D.29)
у v
В силу симметрии тензора Сс:
Сцы = Ссыц D.30)
интеграл, стоящий в правой части D.29), равен нулю. Поэтому
равен нулю и интеграл, стоящий в левой части D.29) и в правой
части D.25). Таким образом справедлива формула D.23), что и
требовалось доказать.
Сформулируем теперь вариационный принцип, являющийся
обобщением вариационного принципа Хашина—Штрикмана.
Этот принцип состоит из двух утверждений.
1. Функционал D.22) в положении равновесия имеет макси-
максимум (т. е. стационарная точка функционала D.22) является точ-
точкой максимума), если оператор &гр D.11) имеет положительный
«касательный модуль».
2. Функционал D.22) в положении равновесия имеет минимум
(его стационарная точка является точкой минимума), если опера-
оператор &гР D.11) имеет отрицательный «касательный модуль».
Сначала докажем первое утверждение. Для этого от выраже-
выражения D.24) возьмем функциональный дифференциал:
= f (
J V
._„,_., D.31)
дрдр
у
или, используя равенства D.28) и D.8),
D2f (бр) = - Г (бе : С<: бе + бр : -^ : бр ) dV. D.32)
J \ ~ ~ -дрдр -/
у ~ ~-
В силу того что Сс>0 и по условию теоремы «касательный мо-
модуль» оператора &гр положителен, а следовательно и «касатель-
«касательная податливость» положительна, из D.32) вытекает
D2i*Fp)<0, D.33)
и утверждение 1 доказано.
Для доказательства утверждения 2 рассмотрим вспомога-
вспомогательный интеграл
Л= { бр : ic: bpdV. D.34)
v
61
Если обозначим тензор, стоящий в круглых скобках выражения
D.16), через q:
?=р + Се:е', D.35)
то в силу D.16) и D.17) этот тензор q^T0, а поэтому для него
•справедливо тождество D.18). Подставляя D.35) в D.34), имеем
1г = Г Fq — Се: бе'): Jc: (б? — Сс: бе') dV =
%} ~* """¦' *"•' *"•'
v
= J (8q : Jc: bq — 2бе': 6<7 + бе': Сс: бе') dV =
v
= J (bq: Jc: 6q + бе': Cc: бе') dV. D.36)
Из сравнения последнего из выражений для 1Х в D.36) и форму-
формулы D.34) видно, что
f 8р: Je: 6pdV > f бе': Сс: be'dV. D.37)
v v
Используя D.37), получим из D.32)
JD2^ (Ьр) > - С бр: (Jc + -^-) : 6pdl/. D.38)
дрдр
Для того чтобы выполнялось условие
D*<fi(8p)>0, D.39)
ш чем и состоит утверждение 2, требуется доказать, что
¦ d^w «„ dG& л /л мг\\
Jc H = ic H < 0. D.40)
дрдр др
-Умножим D.40) на положительно определенный тензор Сс
д + JW_. Qc < Q D4lj
Тензор является взаимно-обратным с тензором , т. е.
д%Р daFp А /л лп\
——:-—— = А. D.42)
др де
Подставляя D.42) в D.41), получим, используя D.11) и
<4.9)
D.43)
др у де I др де
€2
В силу того что оператор ^(е, х) имеет положительный «каса-
«касательный модуль», а оператор &р(ъ), а значит и &р(р), в силу
предположения — отрицательный касательный модуль, то нера-
неравенство D.43) очевидно, а потому справедливо неравенство-
D.39), чем и заканчивается доказательство утверждения 2.
Упражнение 4.5. Доказать, что для упругой среды, когда опе-
оператор & (г, х) имеет вид
х) = С(х):е, D.44>
функционал D.22) выражается следующим образом:
?» = -L f [&: е' + 2р: ес + р: г' — р: J": р] dV, D.45)
2 J ~ ~ ~~ ~~ ~ ~
v
где
J" = [Ср]-', Ср = С — С^. D.46).
Упражнение 4.6. Показать, что для упругой среды функционал
D.40) имеет максимум, если
(х), D.47>
и минимум, если
СС>ОД. D.48>
Упражнение 4.7. Доказать, что для упруго-пластической сре-
среды, когда оператор & (?, х) имеет вид
, x) = s+ or/,
,д:) g> tf=/cGH, D.49>
~ еы —
в функционале D.22) следует положить
w (р) = Р1 + J еы (ри, х) dpu, D.50>
где ец (ри, х) —функция, обратная к функции
*и(РиЛ)= К(еи, *) —211'eJ-1, p = trp,
Pu = iT (p-±pfY. D.
63.
Упражнение 4.8. Показать, что для упруго-пластической среды
функционал D.22) имеет в положении равновесия максимум,
если
t]. D-52)
где со(ви, х) —функция пластичности Ильюшина, и минимум, если
х) е„]. D.53)
НЕКОТОРЫЕ ЛИТЕРАТУРНЫЕ УКАЗАНИЯ
§ 1, § 2. Вариационные принципы теории упругости имеются по-
почти в каждом учебнике по теории упругости, например в
[58, 71]. Вариационный принцип Лагранжа для теории ма-
малых упруго-пластических деформаций изложен в [33], вари-
вариационные принципы теории вязкоупругости имеются в [92].
Вариационные принципы для определяющих соотношений в
операторном виде описываются в [84].
§ 3. Новый вариационный принцип описан в работах [83, 84],
причем в работе [83] имеется ошибка, в результате которой
теоремы пункта 4 нельзя считать доказанными.
§ 4. Принцип Хашина—Штрикмана [113] для упругих сред по-
подробно изложен в работе [105].
Глава 3
ЭФФЕКТИВНЫЕ ХАРАКТЕРИСТИКИ
КОМПОЗИТОВ
В этой главе даются различные определения эффективных ха-
характеристик МДТТ и доказывается их эквивалентность, дается
определение периодических структур. Излагаются основные по-
положения теории эффективного модуля, с помощью которой при-
приближенно решаются задачи МДТТ для физически линейных и не-
нелинейных композитов. С помощью вариационных принципов, опи-
описанных в предыдущей главе, устанавливаются границы изменения
эффективных характеристик линейных и нелинейных композитов.
Упоминаются некоторые распространенные методы определения
эффективных характеристик.
§ 1. Эффективные определяющие соотношения
Рассмотрим определяющие соотношения МДТТ A.1.1) для не-
неоднородного тела
?=У(е,х). A.1)
В записи выражения A.1) учтено, что эти определяющие соотно-
соотношения явно зависят от координат. Предположим, что A.1) опи-
описывают некоторую модель МДТТ, а потому существует обратная
зависимость
8 = 5@, *), A.2)
причем, если материальные функции, соответствующие операто-
операторам A.1) и A.2), являются разрывными функциями координат,
то мы имеем дело с композитом.
Согласно постулату макрофизической определимости
А. А. Ильюшина (§ 6 гл. 1) эти материальные функции в прин-
принципе могут быть найдены на макроскопических образцах, однако
может случиться, что таких образцов потребуется огромное ко-
количество, т. е. практически невозможно экспериментально опре-
определить все материальные функции. В этом случае можно попы-
попытаться найти некие «осредненные» материальные функции на об-
образцах из неоднородного материала, в которых однородное на-
3 Б. Е. Победря 65
пряженно-деформированное состояние осуществляется только в
среднем. Найденные материальные функции описывают так на- '
зываемые эффективные (приведенные) определяющие соотно- |
шеиия I
<j = /"(e) ((а) =7«е»), A.3)|
e = g(cr) ((е) = #(((*))), A.4)
соответствующие соотношениям A.1) и A.2), где угловыми скоб- 1
ками помечены некие «средние» значения заключенных в них ве- •
личин, о чем речь пойдет ниже. Может случиться, что эффектив- |
ные определяющие соотношения A.3) и A.4) будут различными ]
в зависимости от размеров испытуемых образцов (масштабный !
эффект). Однако если размеры образца существенно превосходят
так называемый характерный размер неоднородности /, то влия-
влиянием масштабного эффекта можно пренебречь (представительные
образцы).
Выделим в композите, имеющем характерный размер L (L>-
^>/), области, в которых определяющие соотношения A.1) и
A.2) непрерывны по координатам. Каждую такую область назо-
назовем компонентом композита. Один из компонентов называют мат-
матрицей (связующим, наполнителем), а остальные — включениями
(армировкой). Строгого определения характерного размера не-
неоднородности / дать нельзя. Это может быть и диаметр включе-
включения, и расстояние между ближайшими включениями и т. п., но в
каждом конкретном композите вопрос о выборе величины / мо-
может быть решен.
Если в матрицу (с характерным размером L) вложены вклю-
включения с диаметром, много меньшим чем L, то такие композиты
называются гранулированными.
Если в матрицу вложены включения с различными свойства-
свойствами q типов, то композит называется {q-\-\) -компонентным. Если
компоненты композита примыкают друг к другу параллельными
слоями, то такой композит называется слоистым. Каждая поверх-
поверхность раздела такого композита, т. е. поверхность сопряжения
двух компонентов, описывается в специально выбранной системе
координат уравнением 2-const.
Композит, включения которого представляют собой длинные
цилиндры, называется волокнистым композитом. Если же эти ци-
цилиндры (волокна) параллельны между собой, то волокнистый
композит называется однонаправленным.
Если операторные соотношения, например A.1), являются пе-
периодическими функциями координат
где а» — постоянные векторы, а щ — произвольные целые числа,
то композит называется композитом с периодической структурой,
66
или просто периодической структурой. Векторы at определяют пе-
период этой структуры.
Эффективные определяющие соотношения A.3), A.4) могут
быть найдены экспериментально, например способами, описанны-
описанными в § 6 гл. 1, на представительных образцах. Можно найти
экспериментально и теплофизические характеристики (тензоры
теплопроводности, теплового расширения и т. д.).
Эффективные определяющие соотношения A.3), A.4) могут
быть найдены также и теоретически.
Пусть, например, решается квазистатическая задача МДТТ в
перемещениях, т. е. три уравнения A.2.11) относительно трех пе-
переменных Hf:
= О A.6)
(без массовых сил) при выполнении трех граничных условий
Щ\г= е°/*/> О-7)
где е° — симметричный тензор-константа. Предположим, что обоб-
обобщенное решение задачи A.6), A.7) (задачи А) единственно. Тог-
Тогда, найдя решение и(х), по соотношениям Коши находим тензор
деформаций г(х) и по формуле A.1) —тензор напряжений а(х),
а также средние по объему этих тензоров
<e> = -LJe(x)dy. A.8
V
Упражнение 1.1. Доказать, что из соотношений Коши A.2.1) и
теоремы Остроградского—Гаусса следует, что
<•>*/> = -^г J {ЩЩ + щщ) dS. A.9)
Упражнение 1.2. Доказать, что из формулы A.9) для гранич-
граничных перемещений A.7) справедливо равенство
<е) = в». С A.10)
Из формулы A.Ю) вытекает, что решение сформулированной
выше задачи А каждому тензору е° ставит в соответствие тензор
<а>. Закон, по которому осуществляется это соответствие, и
определяет эффективные определяющие соотношения между сред-
средними напряжениями и средними деформациями:
<?>=7(е°). A.11)
Рассмотрим теперь квазистатическую задачу МДТТ в напря-
напряжениях (без массовых сил), которая заключается в решении ше-
3» 67
сти обобщенных уравнений совместности в напряжениях
A.2.26) относительно шести компонент тензора напряжений:
Нч (?) + Ъц (Div о) = О A.12)
при удовлетворении шести граничным условиям A.2.27):
0|/./Ь=О, tft/П, 12=00^/12, A.13)
где а0 — симметричный тензор-константа.
Предположим, что обобщенное решение задачи A.12), A.13)
(задачи Б) единственно. Найдя это решение а(х), по формулам
A.2) находим е(х) и производим усреднение A.8).
Упражнение 1.3. Показать, что из тождества
(OikXj),k=:'Oik,kX}+Oij A-14)
и из того, что уравнения равновесия
<тш=0 A.15)
удовлетворяются всюду в V, если выполнены условия A.12) и
A.13), следует, что
(<*tt) = ~~- J (*'**/ + eiM) nk<®- 0-16)
s
Упражнение 1.4. Доказать, что из формулы A.16) и гранич-
граничных условий A.13) следует
Таким образом, закон соответствия между тензором <е> и тен-
тензором ;сг°, который устанавливается решением задачи Б, может
быть записан в виде эффективных определяющих соотношений
<е>=|(а°). A.18)
Эквивалентность определения эффективных определяющих
соотношений A.11) и A.18), т. е. взаимообратность операто-
операторов A.3) и A.4), следует из того, что благодаря единственности
решения задач А и Б каждому усилию S°(x), заданному на гра-
границе 2, однозначно соответствует вектор и0, определенный иа
той же границе S и обратно. Тем самым, благодаря тождествам
A.10) и A.17) (которые не зависят от определяющих соотноше-
соотношений A.1) и A.2)), устанавливается взаимно-однозначное соответ-
соответствие между тензорами >а° и е°.
Заметим, что класс анизотропии «осредненной» среды, описы-
описываемой определяющими соотношениями A.3), A.4), может не
совпадать с классом анизотропии ни одного из компонентов ком-
композита. Так, если все компоненты, составляющие композит, изо-
68
тропны, «осредненная» среда (или «размазанная», как ее часто
называют), как правило, является анизотропной.
Если операторы A.1) и (\2) потенциальны, то существуют та-
такие скалярные операторы №(е, х) и w(a, х), что выполняются
условия A.1.4)
3'?fi^ S;Sbi. <U9>
Кроме того, согласно A.1.17)
ф(е)== JlP(e,
A.20)
Ф (<*) == J w (с, ~x) dV = V (w (о, х)),
~ v ~ ~
где V — объем, занимаемый телом (композитом).
Обозначим
A.21)
(w(a, x))==wo((a)).
Из-сравнения A.19) и A.3), A.4) видно, что
A.22)
Упражнение 1.5. Записав выражение функционального диффе-
дифференциала от Ф(е) и ф(с) A.20) и используя формулы A.21), до-
доказать, что можно принять
fdW(e, 7) \ dW0({e))
' дё. i ~ д{г)
A.23)
i dw(a, x) i dwo((a))
\ — / = 7~=:—'
N д^ ' 5(сг>
Упражнение 1.6. Доказать, используя A.1.6), A.20) и A.21),
что
W0 + w0=(a:s). с A.24)
69
Формулы A.23) доказывают, что операторы A.3) и A.4) явля-
являются потенциальными:
\ 7,/ \л 5^о«е>)
а) = f ((е>) = —.
A.25)
Упражнение 1.7. Доказать, что для краевой задачи А, сфор-
сформулированной при определении соотношений A.3), лагранжиан
имеет вид
Z = ?(8) = ^(8,5>F=HM<8))F=Z0. A-26)
Упражнение 1.8. Доказать, что для краевой задачи Б, сфор-
сформулированной при определении соотношений A.4), кастильяниан
имеет вид
Ж= -y{o)={w{$~Z))V = w0((o))V = -M0. с A-27)
Заметим, что из определения эффективных определяющих со-
соотношений следует, что для упругой среды
)) = -^ (o:J(x):o) =-L{o):H:(o) = w0((o)), A.28)
где h — так называемый эффективный тензор модулей упругости,
а Н — эффективный тензор упругих податливостей. Как уже от-
отмечалось, эти тензоры инвариантны относительно преобразований,
характеризующих класс анизотропии, вообще говоря, иного вида,
-*¦ -¦-
нежели тензоры С(х) и J(x).
Из соотношений A.28) и A.25) получаем
:a> = H:<cr>. A.29)
Для линейного вязкоупругого тела, используя обозначения
A.4.40), получим
___ t t
(W(e,x)) = y J j W>: R {t~X' *)
t t
П{d~{t))''h{t~x)'' (d~(T)> S
о о
70
/ t
{w(a, x))==— f ^{da(t):tl(t — x,x):da(x)) =
о о
t t ^
(da(t) :H(t — x): (da(x)) = wo({<y)), A-30)
б о
где h(^) называется эффективным тензором функций релаксации,
а Н (t) — эффективным тензором функций ползучести.
Для определяющих соотношений линейной теории вязкоупру-
гости имеем
(а) = ( f R (t- хГх) : de (т)) = f h(t-т): d <е(г)>,
~ о "о ~
t _ t
W(t — x):dlo(x)). A.31)
В дальнейшем мы будем использовать сокращенную запись
выражений A.31):
(a)=h:(8>, (e) = H:(a). A.32)
Дать конкретную запись эффективных определяющих соотно-
соотношений для упруго-пластического тела труднее. Об этом речь пой-
пойдет в гл. 7.
§ 2. Теория эффективного модуля
Поставим в соответствие каждой неоднородной среде (компо-
(композиту) с определяющими соотношениями A.1), A.2) однородную
среду, описываемую определяющими соотношениями A.3) и
A.4).
Тогда каждой краевой задаче МДТТ с определяющими соот-
соотношениями A.1), A.2) соответствует краевая задача МДТТ для
однородной («размазанной») среды с определяющими соотноше-
соотношениями A.3) или A.4).
Теория, основанная на решении задачи МДТТ для «размазан-
«размазанной» среды вместо исходной задачи для неоднородного тела, на-
называется теорией эффективного модуля (этот метод был прежде
всего предложен для решения задач об упругих композитах).
Для решения задачи теории эффективного модуля необходи-
необходимо знать эффективные определяющие соотношения, которые на-
находятся экспериментально или теоретически. Во втором случае
для этой цели требуется решить задачи МДТТ (А и Б), описан-
описанные в предыдущем параграфе. Получить аналитическое решение
этих задач удается только в простейших случаях. Применение
численных методов, вообще говоря, не позволяет найти аналити-
71
ческого выражения для определяющих соотношений. Поэтому ча-
часто их находят приближенно, используя различные методы, в
частности вариационные, причем в этом случае важно зиать, с
какой степенью точности приближенные определяющие соотно-
соотношения заменяют точные, т. е. установить области, внутри которых
лежат точные эффективные характеристики (так называемые
«вилки»).
Рассмотрим ^-компонентный композит. Пусть каждый его
компонент описывается определяющими соотношениями
оа= &а(еа,х*) еа = &а(оа,х), <х= 1,2, ... ,<7, B.1)
где индекс а означает, что рассматриваемая величина относится
к а-му компоненту композита. Определим для каждой такой ве-
величины, например, аа среднее значение по компоненту а:
B.2)
где Va — объем, занимаемый а-ым компонентом. Если мы реши-
ли какую-то задачу МДТТ, т. е. нашли поле перемещений и(х),
теизор деформаций г(х), тогда, производя осреднения по всему
объему, получим, например,
»« (О •• B-3)
где
—- B-4)
— объемная концентрация компонента а в композите. Точно
так же
а=1
Из B.4) следует очевидное равенство
B.6)
а=1
Если внутри каждого компонента материал непрерывно неодно-
неоднороден, то предположим, что осреднение B.1) дает
?<*>*)}<* = /a ((8a>a),
72
Для каждой краевой задачи МДТТ существуют какие-то опера-
операторы, связывающие средние деформации по компоненту а с
средними деформациями по всему объему, занимаемому компози-
композитом. То же относится и к напряжениям
а,= 1,2, ... ,q, B.8)
a=l,2,...,q, B.9)
где Ла, Ва — некоторые неизвестные операторы — операторы кон-
концентрации. Если эти операторы стали бы из каких-то соображе-
соображений нам известны, то мы бы сразу получили эффективные харак-
характеристики композита. В самом деле, подставим B.8) и B.7) в
B.3). Тогда имеем
(а) = ? vaja {Aa (<е))). B.10)
~ а=1 ~ ~ ~
Сравнивая выражения B.10) и A.3), находим эффективные опре-
определяющие соотношения
B.П)
Точно так же для деформаций
я ^ ^
~ а=1 ~ "" ~
и поэтому
B.13)
а=1
Хотя операторы Аа B.8) и Ва B.9) заранее неизвестны, мож-
можно, принимая некие гипотезы относительно этих операторов, по-
получать приближенное выражение для эффективных определяю-
определяющих соотношений.
Пусть, например, требуется решить квазистатическую задачу
МДТТ в перемещениях A.2.11), A.2.9):
^,x) + X= 0, B.14)
"k=«°. ^(«.^-nta^S0, B.15)
т. е. найти вектор функцию перемещения и, решая векторное
уравнение B.14) при удовлетворении граничным условиям B.15).
По теории эффективного модуля мы ставим в соответствие зада-
задаче B.14), B.15) задачу
73
Div/(w) + X = O, B.16)
»k=«°. />)•»!* = «S5 B.17)
с теми же входными данными X, ы° и S°,ho с эффективными
определяющими соотношениями. Решение v{x) задачи B.16),
B.17)—это решение осредненной задачи B.14), B.15), но не
среднее значение решения задачи B.14), B.15). Вектор <ы> яв-
ляется постоянным, а вектор v(x), вообще говоря, зависит от ко-
координат, однако, как следует из предыдущего параграфа, «энер-
гия» поля перемещения и и поля v совпадают:
J W(u)dV= J№0(y)dF. B.18)
V V
Разумеется, решение задачи по теории эффективного модуля
нам ничего не скажет о характере распределения перемещений,
деформаций и напряжений внутри каждого компонента (так на-
называемых микроперемещений, микродеформаций и микронапря-
микронапряжений). Распределение этих величин может быть найдено только
с помощью более совершенных теорий, чем теория эффективного
модуля. При этом такие теории требуют знания материальных
функций, характеризующих определяющие соотношения для
каждого компонента композита, что иногда не только затрудни-
затруднительно, но и просто невозможно. В теории эффективного модуля
для теоретического определения эффективных характеристик так-
также необходимо знание свойств его компонентов, но можно обой-
обойтись и экспериментальными исследованиями на представительных
образцах.
Заметим, что если эффективные характеристики среды извест-
известны и удается по ним восстановить операторы концентрации B.8)
и B.9), то можно по средним напряжениям (которые найти не
так сложно) найти средние микронапряжения в каждом компо-
компоненте.
§ 3. Подходы Фойгта и Рейсса
Предположим, что в композите, каждый компонент которого
описывается однородными определяющими соотношениями, осу-
осуществляется однородная деформация, т. е.
о —о с0 /О | \
Тогда операторы концентрации B.8) будут единичными и мы
имеем из B.11)
(О) = V 0вУв(8«) = /"(8»). C.2)
74
Приближенный подход C.1) для определения эффективных опре-
определяющих соотношений называется подходом Фойгта, а сами
определяющие соотношения C.2) — определяющими соотношения-
соотношениями Фойгта }F(e). Если для каждого компонента композита «каса-
«касательный модуль» положителен, то он будет положителен и для
определяющих соотношений C.2). Скалярный оператор, соответ-
соответствующий определяющим соотношениям Фойгта, обозначим через
WF (WF@) = 0). Тогда
Пусть потенциальный оператор ^о(е) соответствует эффектив-
эффективным определяющим соотношениям (Т^о @) = 0)
Тогда легко доказать, что WF(e) ограничивает потенциал №о(е)
сверху:
W0(e)<WF(e). C.5)
В самом деле, из вариационного принципа Лагранжа следует,
что из всех кинематически допустимых систем действительная от-
отличается тем, что для нее лагранжиан в положении равновесия
имеет минимум, а из A.26) следует, что минимум имеет и потен-
потенциал Wo, соответствующий задаче А с граничными условиями
A.7). Но таким же граничным условиям удовлетворяет и одно-
однородная деформация C.1), а потому вектор перемещений, ей соот-
соответствующий, является кинематически допустимой системой, отку-
откуда и следует C.5).
Предположим теперь, что в композите, каждый компонент ко-
которого описывается однородными определяющими соотношениями
B.1), осуществляется однородное напряженное состояние
оа=2=в°- C.6)
Тогда операторы концентрации B.9) будут единичными и из
B.12) получим
oeG«(tf») = ?«(O°). C.7)
a=l ~
Приближенное определение эффективных определяющих соотно-
соотношений, основанное на предположении C.6), называется подходом
Рейсса, а сами соотношения C.7) — определяющими соотноше-
соотношениями Рейсса. Очевидно, что «касательная податливость» для
C.7) будет положительна, если она положительна для каждого
компонента композита. Обозначим скалярный оператор, соответ-
соответствующий соотношениям Рейсса C.7), через ~Wr(wr@) — 0):
75
C.8).
Пусть потенциальный оператор wo{a) соответствует эффективным
определяющим соотношениям
| C.9)
Тогда wr (в) ограничивает потенциал W0(o) сверху:
wQ(a)<wR(e). C.10)
В самом деле, из вариационного принципа Кастильяно следует,
что из всех статически допустимых систем действительная отли-
отличается тем, что для нее кастильяниан в положении равновесия
имеет максимум. Из A.27) следует, что потенциал w0, соответ-
соответствующий задаче Б с граничными условиями A.13), имеет в по-
положении равновесия минимум. Но граничным условиям A.13)
удовлетворяет и однородное напряжение C.6), которое в силу
эквивалентности задач Б и В является статически допустимой си-
системой, откуда и следует C.10).
Неравенства C.5) и C.10) играют большую роль при иссле-
исследовании упругих композитов. Используя их, можно получить так
называемую «вилку» Фойгта—Рейсса, т. е. ограничения сверху и
снизу на эффективные модули упругости (или на эффективные
упругие податливости).
В самом деле, обозначая модули Фойгта, соответствующие
C.2), через h^, получим из A.28) и C.5)
е°: h : е?<е°: h* : е°. C.11)
Используя сокращенную запись, принятую в § 1 гл. 1, неравен-
неравенство C.11) можно записать в виде
h<h' (hiikl<?h?m). C.12)
При этом, как следует из C.2),
hF=?waCa> C.13)
a=!
где Ca — тензоры модулей упругости a-го компонента композита,
Нл — тензор упругих податливостей Рейсса, т. е. тензор, соответ-
соответствующий определяющим соотношениям C.7) для упругих ком-
композитов. Получим из A.28) и C.10)
б°:Н:?0<б°:Н«:(Г0, C.14)
или в условной (сокращенной) записи
Н*>Н Щы>Ът). C.15)
76
При этом, как следует из C.7),
H«=?i;aJa, C.16)
a=l
где Ja — тензоры упругих податливостей a-го компонента компо-
композита. Пусть тензор четвертого ранга hR является обратным по от-
отношению к Нл:
h*=[E to*] . ( C.17)
Тогда из C.15) для hR следует
h««:h. C.18)
Сравнивая C.12) и C.18), получаем вилку Фойгта—Рейсса:
№<Ъ<ЪГ. C.19)
Упражнение 3.1. Показать, что для двухкомпонентного упруго-
упругого композита (q = 2) из C.17) следует
h« = С2: [YC2 + A - Y) CJ: Clt C.20)
где
y=vu У2=1— у. C.21)
Упражнение 3.2. Показать, что для двухкомпонентного упру-
упругого композита, каждый компонент которого является изо-
изотропным,
(C(/w)« = ЯсЛ А, + fia (в,*в„ + 8цЬ1к), а = 1,2, C.22)
постоянные Ламе по Фойгту kF, \iF и по Рейссу kR, цн имеют вид
%F= уЬ + A — V) к ' к* =
' f(l
C.23)
C.24)
Упражнение 3.3. Показать, что для двухкомпонентного упру-
упругого композита, каждый компонент которого является изотроп-
изотропным с модулями сжатия
Ка = К + -^-Ца, « = 1,2, C.25)
О
модули сжатия по Фойгту KF и Рейссу KR выражаются следую-
следующим образом:
^ C.26)
77
Упражнение 3.4. Показать, что вилка Фойгта — Рейсса в усло-
условиях упражнений 3.2 и 3.3 изображается в виде
C.27)
C.28)
где ц* и К* — эффективные модуль сдвига (ц* = б*) и модуль
сжатия.
Упражнение 3.5. Показать, что для двухкомпонентного вязко-
упругого композита, каждый компонент которого является изо-
изотропным с нерелаксирующим объемом, для модуля сжатия вы-
выполняются неравенства C.28), где KR и KF определяются в C.26),
а для оператора вязкоупругости ю* с эффективным ядром со* (О
выполняются неравенства
u>R < ю* < &F , C.29>
где
-Р = У<оН-A—У)*а>2 ~« = ^мг[1—у+ух] =
A—Y
х_^ C30>
а (йх и «!, а также о>2 и я2, — взаимно-обратные операторы вязко-
вязкоупругости, характеризующие каждый компонент.
Упражнение 3.6. Показать, что если в условиях упражне-
упражнения 3.5 второй компонент композита является упругим
ю2 = g>2 = const, C.31)
то справедливы неравенства C.29), причем вместо C.30) следует
положить
^ ~R = ^A-y+Vh) A _ ^р)) ( з 32)
где §f, — оператор, определенный по формуле A.4.29), причем
P=jpL, X=^L. C.33)
Упражнение 3.7. Показать, что для упруго-пластического
/7-компонентного композита, каждый компонент которого описы-
описывается модулем сжатия Ка и функцией зависимости интенсивно-
интенсивности тензора напряжения от интенсивности тензора деформации
а<«) = ф<«> (е^)), а = 1,2 q, C.34)
справедливы неравенства C.28) и
и и а
[ о? (в„) deu < J а'и (в J dzu < j a^ (е„) dea, C.35)
0 0 0
78
где Gu*(eu) —эффективная функция, связывающая интенсивно-
интенсивности тензоров напряжений и деформаций композита, а
= J] oJK*. -^ = 2 -J?-. C.36) /Г/
а=1
C.37)
а=1
Рис 12.
причем знак [ \~х означает, что берется обратная функция от
функции, заключенной в квадратные скобки.
Упражнение 3.8. Показать, что зависимость KF и KR от у мо-
может быть изображена графически в виде рис. 12 для случая Ki>
>/Сг, причем эффективный модуль К* лежит в заштрихованной
области (вилка Фойгта—Рейсса).
§ 4. Вилка Хашина—Штрикмана
Вилка Фойгта—Рейсса для многих упругих композитов оказы-
оказывается достаточно «широкой» (см., например, рис. 12). В ряде
случаев эту вилку можно несколько сузить, если воспользоваться
вариационным принципом, сформулированным в § 4 гл. 2. Для
этой цели рассмотрим функционал B.4.22), который можно за-
записать в виде
^ <?:в'>. D.1)
Если обозначим каждое слагаемое в D.1) следующим образом:
D.2)
(р:г')=А,=
то получим
А =
х + Л2 + Л3 + Л4, I» = 3*х + с^2 + ^з + ^4. D.3)
причем, зная решение задачи B.4.4).B.4.5) для однородного
упругого тела, находим Ль Л2, Аг как функции от тензора поляри-
поляризации р. Для того чтобы А4 выразить в виде функции от р, нуж-
нужно найти е' из решения задачи B.4.16), B.4.17). После этого не-
необходимо найти экстремум функционала А(р, Сс), который зави-
зависит от тензора Сс как от параметра.
79
Согласно вариационному принципу Хашина—Штрикмана экс-
экстремальная точка этого функционала будет точкой максимума»
если
% D.4,
и точкой минимума — если
»>*Р-. D.5)
Если каким-либо образом определены эффективные опреде-
определяющие соотношения исследуемого композита (взаимно-обратные
операторы f и g)
о=Пг), е = J(a), D.6)
то, как было установлено в § 1, лагранжиан задачи B.4.4),
B.4.5) совпадает с лагранжианом задачи, решенной по теории
эффективного модуля, т. е. с теми же входными данными, что у
задачи B.4.4), B.4.5), но с эффективными определяющими соот-
соотношениями D.6). Обозначим функционал ^*(р), соответствующий
задаче, решенной по теории эффективного модуля, через ^**(р),
Тогда из сказанного выше можно утверждать, что
^m«n(?X^*(P)<^max(?); Amin(p)<A'(p)<Amax(p), D.8)
где индекс min означает, что экстремум соответствующих функ-
функционалов вычислен при условии D.5), а индекс max — что экстре-
экстремум этих функционалов берется при условии D.4).
Рассмотрим ^-компонентный композит, каждый компонент ко-
которого имеет определяющие соотношения B.1), и предположим,
что граничные условия B.4.2) и B.4.5) краевых задач, рассмат-
рассматриваемых в § 4 гл. 2, имеют вид A.7), т. е. такой, какой мы вы-
выбирали при определении эффективных определяющих соотноше-
соотношений. Если бы мы смогли решить точно задачу B.4.1), B.4.2) при
таких граничных условиях, то мы бы нашли точные эффективные
определяющие соотношения A.11). Вариационный принцип Ха-
Хашина—Штрикмана позволяет найти приближенное значение этих
соотношений, не решая задачи B.4.1), B.4.2).
Очевидно, что из решения задачи B.4.4), B.4.5) при выбран-
выбранных граничных условиях следует
т. е. гс — однородная деформация. Из результатов § 1 следует
также, что для задачи B.4.1), B.4.2) средняя деформация будет
80
равна A.10)
<е) = е°, <е') = 0. D.10)
Поэтому
= (Сс:е) = 0:6°= о0, D.11)
и, следовательно, первые два слагаемых в D.3) могут быть кон-
конкретизированы:
Л1=е°:Сс:е°, А2 = 2 (р) : е°. D.12)
Упражнение 4.1. Доказать, что из формулировки задачи
B.4.16), B.4.17) следует
<?: О = -<!'••<*: в'>. С D-13)
Выберем тензор р постоянным внутри каждого компонента ра.
Тогда
<?> = t w«?«- <4Л4)
а=1 ~
Так как оценки D.8) не должны зависеть от геометрии тела, то
мы будем упругое тело сравнения считать неограниченным. То-
Тогда задачу теории упругости B.4.16), B.4.17) для неограничен-
неограниченной области можно рассматривать в силу D.14) как задачу о
действии объемных источников в упругом пространстве. Вектор-
ное поле и'(х), являющееся решением этой задачи, определяется
как сумма решений Кельвина. Поэтому выражение Л4 D.2) мо-
может быть легко найдено.
Итак, все величины правой части D.3) известны:
я
— рО • рс • рО д — 9
а=1
Л3--2? vttw(pa), Ai=(B':p)=Yt va(ea)a:pa. D.15)
а=1 ~ ~ ~ а=1 ~
При этом только в выражение А3 входят характеристики иссле-
исследуемого материала. Величина А становится функцией постоянных
величин ра- Определив экстремум этой функции, находим оценки
D.8).
Рассмотрим композит, каждый компонент которого изотропен.
Разложим тензоры р, е, е° на шаровую часть и девиатор:
р= -L pi +р, е= — Ы + е, е° = — 6°/+ е°, D.16)
81
Естественно в качестве тела сравнения принять также изотроп-
изотропный материал
спы = *-'«* А» + Р' infill + «I А») • D-17)
Предположим, что исследуемый композит является упруго-пласти-
упруго-пластическим. Тогда из B.4.50) и B.4.51) следует, что
р(«а>
a=I
где pa — шаровая часть тензора pa, рТ —его интенсивность, т. е.
pua) = (pa : Pa)'/2, ?a = pa l- рГ, D.19)
а функция е„ (р„ ) является обратной к функции р„ ' = <ги (е„ ')—
]-i, D.20)
of» (e(ua)) = 2(xa [1 - «a (ef >)] e<ua\ D.21)
()— функция пластичности А. А. Ильюшина. В частно-
частности, если композит является упругим, то в D.21) следует поло-
положить G>a = 0, И ПОЭТОМУ
„(а)
(/"¦) _ Оц в(а) p(aVn(ah — " С4 99^
а z(x б е ^р j У^^)
и величина А3 D.18) будет равна
а=1
Величины Ai и А2 для изотропного композита можно записать в
виде
< J ( ). D.24)
Найдем величину А4 для изотропного материала. Для этого к
уравнениям B.4.16)
(Xе + \ic) grad div i? + \ic&u = — Div p D.25)
применим преобразование Фурье (приложение IV). Обозначая
через U(w) образ Фурье вектора и'(х), а через Р(ю)—образ
Фурье тензора р(х), получим
«2
{Xе + iic)Z (ю ¦ U) + nc\&\2 U = iP- ft>, D.26)
где |ы| —длина вектора ю. Заметим, что решение уравнений
«4.25) не изменится от того, что мы к тензору р прибавим посто-
постоянный тензор. Поэтому вместо тензора р можно ввести в D.25)
«нормированный» тензор р'\
Пусть f"(ft>)—образ Фурье тензора р'. Умножая уравнение
D.26) скалярно на вектор ю, получим
->¦-»¦ со -Р' ¦ со
Ui
. D.28),
Подставляя D.28) в D.26), выразим вектор 0:
U= 1-^-[— x.ck(k-P'-I) + Р' ¦% D.29)=
\lC | СО |
где к — единичный вектор:
D.30)
Теперь путем обратного преобразования Фурье к D.29) можно
получить решение и'. Однако нам нужна более скромная инфор-
информация. Пользуясь обобщенной формулой Парсеваля, получим
2^4 = Г р : e'dVx = ~- Г Р (®): ? (®) dyM, D.31)
где ?(ft))—образ Фурье тензора в'(х). Пусть U(<o) — образ
Фурье Gradu(x). Из D.29) видно
tP'kl - P'.k kkkf] у D.32)
Подставляя это выражение в D.31) (в силу симметрии тензора
Р в D.31) вместо ?(ft>) можно подставить U(g>)), получим
D.33).
83
Учитывая специальный вид D.14) тензора р и формулы:
'A.44), A.45) приложения I, получим
= ас «/?«> - <р>) + Ьс ((р: р) - (р) : <р»,
где
ас = —— (х< — 1)= 1
0 9цс 3 3
D.34)
После того как найдены все слагаемые выражения А D.3),
можно отыскать экстремум этой величины, для чего заметим, что
о
она является функцией 2q переменных: ра и р~а, а=1, 2,...,q. Для
отыскания экстремума продифференцируем А по каждому из
этих переменных.
Так как
дра
4
, a =1,2, ...,q,
ЗА, _0 _Ml_2o^' й* - 2v apia)) ?™
-^i- = 2bcvapa — 2bcva (pa), a = 1,2, .... q, D.36)
то получаем две системы по q уравнений в каждой для опреде-
° _ °
ления величин ра и ра. При этом система для определения ра бу-
будет линейной:
q
где
- «Л 1 - eg, если а
acwp, если
84
Система уравнений для определения ра будет нелинейной для
упруго-пластического композита:
е°, D.39)
где
D f Z(pW) — bc{\—va), если а=р
[ Pcwp, если аф$,
причем
D.41)
если материал упруго-пластический, и
если материал является упругим.
Упражнение. 4.2. Убедиться непосредственной проверкой, что
решением системы уравнений D.37) является
где
т==^1/Л 1—-с ас]~1 . D.44)
Упражнение 4.3. Убедиться непосредственной проверкой, что
решением системы уравнений D.39) для упругого композита яв-
является
т?пг D-45>
где
ЕЧГ- € D>46)
О=1
Обозиачим корни систем уравнеиий D.37) и D.39), соответ-
о
ствеино через (po)oi (Ра)о- (Для упругого случая они собраны в
о
комбинации ((р)о) (см. D.43)) и ((pj0) (см. D.45)). Подстав-
Подставляя эти корнн в выражение ЗР или А D.1)', получим
60
85
(p(ct)o
bc(((pH: (pH) - (Ш : <§)„». D.47>
С другой стороны, в силу того, что при выполнении условий
B.4.11) функционал & совпадает с лагранжианом задачи B.4.1)^
B.4.2), и в силу формулы A.26) получаем
A=2Wu({e)) = A'(p), D.48^
где W$ — потенциал, дифференцированием которого по деформа-
циям получаем эффективные определяющие соотношения иссле-
исследуемого композита:
*?1 = Г{*). D.49>
Выбирая теперь упругие модули тела сравнения так, чтобы вы-
выполнялось неравенство D.4), получим из формулы D.47) значе-
ние Лтах, а если удовлетворить условию D.5), то по формуле
D.47) найдем значение Лтш- Теперь для оценки эффективных
определяющих соотношений можно воспользоваться формулой
D.8).
Вся процедура существенно упрощается при исследовании
упругого композита. В этом случае функционал & B.4.22)
& = — Г [а": гс + 2р : ес + р: е' — р :(С — Of)-1: p] dV D.50).
2J~~ ~ -• ~ ~* ~ ~
v
в силу справедливости условий B.4.11), т. е.
(С —.О»)-»:?=-е, D.51)
приобретает вид
^>= -L U&;zc + p:&c\dV. D.52)
v
Таким образом, формула D.47) может быть записана в более
простом виде:
А = (КФ0 + 2^ : #) + ± ({°р)о) 60
] ©^ + \2р< + 1е°:е" D.53)
+
где величины ac, bc определяются по формулам D.34), а величи-
величины т, п — по формулам D.44) и D.46). Формула D.48) для-
упругого изотропного композита имеет вид
Л* = Д-*902+2(х*е°:е0. D.54).
86
Неравенство D.4) будет выполняться, если в качестве тела
сравнения выбрать компонент композита с наименьшими модуля-
модулями, например Kg, nq. Обозначим
т
Неравенство D.5) будет выполняться, ес-
если в качестве тела сравнения выбрать ком-
компонент композита с наибольшими модуля- *
ми, например К\, \х\. Обозначим
К' = Кг +-
т
¦; 2ц' =
Рис. 13.
1+М
D.56)
Сравнение выражений D.53) и D.54) по-
показывает, что из D.8) следует
К'<К*<К"; »'<»*<»». D.57)
Это и есть так называемая вилка Хаши-
на—-Штрикмана.
На рис. 13, где показана зависимость величин К,' и К," от
объемной концентрации y=V\ для двухкомпонентного композита
(К,\Ж.2), эта вилка изображается заштрихованной областью.
Для сравнения на этом же рисунке изображена вилка Фойгта—
Рейсса.
Вилку Хашина—Штрикмана не удается сузить, если не учи-
учитывать геометрии композита, хотя для многих композитов и она
оказывается достаточно широкой. Для примера в табл. 1 и 2
указаны значения К', К" (а заодно и KF, KB) для двухкомпо-
двухкомпонентного композита (К1Ж2) при различных объемных концен-
концентрациях у- Все величины К', К", KF, KR считаются безразмерны-
безразмерными и отнесены к /Сг- В табл. 1 /Ci = 2, в табл. 2 /d = 20; в обеих
таблицах vi =V2= 1/3.
Таблица 1
4s4. r
к"
К'
К'
к*
0
1
1
1
1
0,1
1,10
1,07
1,06
1,05
0,2
1,20
1,14
1,13
1,11
0,3
1,30
1,22
1,20
1,18
0,4
1,40
1,31
1,29
1,25
0,5
1,50
1,40
1,37
1,33
0,6
1,60
1,50
1,47
1,43
0,7
1,70
1,61
1,58
1,54
0,8
1,80
1,73
1.71
1,67
0,9
1,90
1,86
1,84
1,81
I
2
2
2
2
87
Таблица
KF
К"
К'
KR
0
1
1
1
1
0,1
2,90
1,74
1,15
1,10
0,2
4,80
2,60
1,34
1,23
0,3
6,70
3,58
1,58
1,40
0,4
8,60
4,73
1,88
1,61
0,5
10,50
6,10
2,30
1,90
0,6
12,40
7,74
2,88
2,32
0.7
14,30
9,76
3,77
2,98
0,8
16,20
12,30
5,30
4,17
0,9
18,10
15,58
8,54
6,90
I-
l i
20
20
20
20
Упражнение 4.4. Показать, что для упругого двухкомпонент-;
ного композита (К1Ж2, )
*' =
Tfn
Ki (к2+ 4 ууЛ + 4" A-
\О/ О
D.58>Л
1 6
1-Ь 5
1 6
а-На 5
D;59>
Упражнение 4.5. Показать, что при ni = u,2 (тело Хилла из
D.58)) следует К' = К".
§ 5. Некоторые методы определения эффективных характеристик
Для приближенного определения эффективных характеристик
существует много методов. Один из самых простых методов —
метод вириального разложения — применим в случае, когда кон-
концентрация одного из компонентов мала. Метод основан на разло-
разложении эффективных тензоров модулей упругости и упругих по-
датливостей в ряд по концентрации компонента (если она доста-
достаточно мала).
88
В методе самосогласования принимается, что каждый компо-
компонент имеет специальную форму (чаще всего форму эллипсоида
или шара) и рассматривается как включение, при этом связую-
связующим служит материал с искомыми эффективными свойствами.
Этот метод приводит к успеху благодаря результату Дж. Эшел-
би, который показал, что внутри шарового упругого поля возни-
возникает однородное напряженное состояние.
В теориях смесей предполагается, что в каждой точке среды
одновременно находятся все компоненты композита. С математи-
математической точки зрения эта теория описывается мультиполями пере-
перемещений, т. е. в каждой точке среды имеется несколько векторов
перемещений, каждый из которых описывает поведение опреде-
определенного компонента среды.
Существует много других методов определения эффективных
характеристик среды (а также определения микроперемещений и
микронапряжений), однако самым распространенным методом,
пожалуй, является метод теории случайных функций.
В этом методе тензор модулей упругости считается случайной
функцией, представимой в виде суммы статистически среднего
тензора модулей упругости и тензора, описывающего флюктуаци-
онные добавки. Как правило, принимается гипотеза эргодичности:
среднее по объему совпадает со средним статистическим. (Прав-
(Правда, здесь объем, по которому совершается осреднение, связан с
характерным размером неоднородности, и поэтому средние вели-
величины, вообще говоря, зависят от координат).
Запишем
Сны Й = <С««> + С'цы Й, E.1)
где тензор С описывает флюктуационные добавки, а тензор ( С )
от координат не зависит (так называемая статистически одно-
однородная среда).
Пусть, например, требуется решить задачу теории упругости
с заданными на границе перемещениями
>. i + Им)]. / = 0. E.2)
«ul)+u'{)\s=u% E.3)
где (и) — статистическое среднее искомого поля перемещений,
и' — соответствующие флюктуации. Решить задачу E.2), E.3) со
случайным тензором модулей упругости — это значит по задан-
заданным статистическим характеристикам механических свойств сре-
среды: среднего тензора модулей упругости {Cllki), тензора корре-
корреляционных функций второго порядка (С'цы Cmnpq) и т. д. найти
статистические характеристики поля перемещений: среднего век-
вектора перемещений («i), корреляционные функции второго по-
порядка (щ и'/) и т. д.
89
Произведя статистическое осреднение уравнений E.2) и гра
ничных условий E.3), получим ¦
{Ctm) {uk),t,- + {С'т Uk.,),f = 0, E.4"
Задача нахождения эффективного тензора модулей упругости,
заключается в представлении уравнений E.4) в виде
Л*/«<и*Ь/=0. E.6)
Для замыкания системы уравнений E.4) необходимо записать
уравнения для величин {CijkiUkj}. Для этого помножим уравне-
уравнения E.2) на С'тпрд и произведем статистическое осреднение. То-,
гда, учитывая E.4), получим
{C) (C Uk,l),j + {{Сцы Cmnpq) {Uk),l)j -г
+ {C'tfk, C'mnpg И*,|>.|/ = 0. E.7>
Как видим, замкнуть систему уравнений не удалось, потому что в_
E.7) появились дополнительные члены (CifciCmnpq Uk,i). Продол-
Продолжая описанную процедуру, можно получить вместо уравнений
E.2) бесконечную цепочку уравнений E.4), E.7) и т. д. Для!
того чтобы «оборвать» эту цепочку, необходимы дополнительные
гипотезы.
НЕКОТОРЫЕ ЛИТЕРАТУРНЫЕ УКАЗАНИЯ
§ 1. Масштабный эффект проанализирован в монографии [58J.
Вопрос об эффективных характеристиках композитов обсуж-
обсуждается, например, в [31, 50, 84, 91, 96, 97].
§ 2. Теория эффективного модуля в основном разрабатывалась
для упругих композитов. С нею можно познакомиться, на-
например, по работам [21, 24, 31, 49, 50, 62, 79, 96, 1Q2].
§ 3. Подход Фойгта и Рейсса для упругих композитов изложен,,
например, в [50, 96, 105].
§ 4. О вилке Хашина—Штрикмана кроме работы самих авторов
[113] можно прочесть в работах [96, 102, 105].
§ 5. Упомянутый результат Эшелби изложен в [111]. Литерату-
Литература по методам определения эффективных характеристик, в
особенности по применению теории случайных функций, до-
достаточно велика. Отметим только небольшую часть таких ра-
работ [10, 18, 58, 59, 68, 72, 96, 103, 105].
Глава 4
ОСРЕДНЕНИЕ РЕГУЛЯРНЫХ СТРУКТУР
Сначала на примере одномерной задачи теории упругости
прослеживается техника осреднения периодических структур. За-
Затем подробно излагаются методы решения статической простран-
пространственной задачи теории упругости в перемещениях и в напряже-
напряжениях для композитов, являющихся периодическими структурами.
При этом описывается методика определения эффективных тен-
тензоров модулей упругости и упругих податливостей. Указывается
схема построения задачи теплопроводности для композитов и
определения эффективных тензоров теплопроводности, теплового
расширения и удельной теплоемкости. Дается определение регу-
регулярной структуры, квазипериодической структуры и описывается
метод решения статических пространственных задач теории упру-
упругости для композитов, у которых тензор модулей упругости не об-
обладает свойством периодичности по координатам. Разрабаты-
Разрабатывается «теория нулевого приближения», по которой можно, ре-
решая задачу только по теории эффективного модуля, найти при-
приближенно микроперемещения и микронапряжения. Рассматрива-
Рассматриваются условия неидеального контакта, когда один компонент ком-
композита может, например, проскальзывать относительно другого.
§ 1. Задача о неоднородном упругом стержне
Пусть упругий неоднородный стержень с модулем упругости
Е(х) и длиной L подвержен действию «объемных» сил Х(х). Тре-
Требуется найти перемещение и(х) из решения уравнения равновесия
d [?(*)|]+Х(*) = 0 A.1)
dx
я граничных условий
и\х=о=и
=и°
du
dx
x=L
= S°, A.2)
т. е. на левом конце стержня задано перемещение и0, а на пра-
правом— усилие (напряжение) 5°.
Решение задачи A.1), A.2) легко находится:
ь
и (*) =
J X (у) dy} -f^ + of. (L3)
91
Однако мы на этом простейшем примере рассмотрим, в чем со-
состоит существо метода, предложенного Н. С. Бахваловым для*
осреднения дифференциальных уравнений с частными производи
ными с быстро осциллирующими коэффициентами. ,:
Предположим, что выбранный нами стержень относится к пе--.
риодическим структурам. Это означает, что модуль Е(х) является;*
периодической функцией координаты х:
E(x+nl)=E(x), л=1, 2,...; /<L, A.4),
а величина / называется периодом структуры. Значения модуля
упругости изменяются одинаково на каждом отрезке длиной 1Г
причем эта длина, как явствует из A.4), существенно меньше
длины стержня. Поэтому целесообразно рассмотреть изменение
модуля только на этом отрезке длины / (ячейке периодичности).
Для этого разделим аргумент левой части A.4) на длину I и
возьмем дробную часть от полученного выражения
Координата | называется «быстрой» координатой. Она изменяется
от нуля до единицы и одинакова для всех эквивалентных в смыс-
смысле A.4) точек стержня. Эта координата называется также «ло-
«локальной», потому что она относится к ячейке периодичности, не-
неважно какой, а текущая координата стержня х называется «мед-
«медленной» или «глобальной». Если мы знаем какую-либо функцию
/(?) быстрой переменной, то «превратить» ее в функцию медлен-
медленной переменной можно, периодически продолжая ее по длине все-
всего стержня, причем
*«=?+л, A.6)
где п — целое число, соответствующее номеру ячейки, из которых
мы собираем весь стержень. Может случиться, что ячейки перио-
периодичности не укладываются целое число раз на длине стержня.
Другими словами, как точка х = 0, так и точка x = L могут нахо-
находиться внутри ячейки периодичности. Однако, в силу того что мы
полагаем число ячеек большим
ошибка в расчетах по описываемому ниже методу от того, что
мы «сдвинем» точки я=0 и x=L с тем, чтобы сделать число L/1
целым, будет, как правило, незначительной.
Если мы в задаче вводим безразмерную глобальную коорди-
координату х, отнесенную к длине стержня, то период структуры / так-
также естественно сделать безразмерным:
92
где Lo— характерный размер стержня. (Обычно мы будем счи-
считать, что в стержне укладывается целое число ячеек периодич-
периодичности.) Заметим, что параметр а, характеризующий период струк-
структуры A.8), определяется, как единица, деленная на число ячеек
периодичности A.7). Поэтому чем больше ячеек периодичности
содержит стержень, тем меньше параметр а.
Будем считать, что модуль упругости зависит от быстрой ко-
координаты |. Тогда уравнение A.1) перепишется в виде
-L ЕA)и' (х) + ЕA)и"(х) + Х(х) = 0, A.9)-
где точка в этом параграфе означает дифференцирование по бы-
быстрой координате, а штрих — по медленной:
?-(© = -^-, «'(*) = -|-. A.10)
Решение уравнения A.9) будем искать в виде комбинации
некоторого «среднего» перемещения v(x) (смысл этого «средне-
«среднего» выяснится позже) и осцилляции в каждой ячейке периодич-
периодичности:
u=v(x) + aNj. (l)V (x) + a*N2(Z) xf{x)+ ...
+ ... A.11)
В правой части A.11) функция v(x) и ее производные зависят
только от медленной координаты, а функции Л^(|), i=l, 2,...
...,л,... — так называемые локальные функции i-того уровня — за-
зависят от быстрых координат, т. е. изменяются только на ячейке
периодичности. Дифференцируя A.11) по х, имеем
u' = v' + N\v' + a(Nxv" + N2v") + a2{NtV" + Nhv") + ... ,
A.12)
u" = xf + — N'i v' + 2N\ xf + [N'2 v" +
a
+ a(Nj.V" + 2N2V" + N'ivr") + ... . A.13)
После того как локальные функции будут найдены, их с по-
помощью преобразования A.6) можно превратить в периодические
функции медленных координат. Однако подчеркнем, при проведе-
проведении техники осреднения после операции дифференцирования
A.12), A.13) считается, что эти функции от медленных коорди-
координат не зависят.
Операцию осреднения функции f(x, |) будем понимать сле-
следующим образом:
т. е. при проведении осреднения A.14) переменные х и g счита-
считаются независимыми и любая функция только медленной коорди-
93.
наты выносится из-под знака осреднения. Полагая, например, что
•осредненные значения всех локальных функций равны нулю:
<#я(Б)> = 0, п= 1,2, ... , A.15)
получим из A.11)
(«) = оD A.16)
а после умножения левой и правой части A.12) на ?(?), опера-
операция осреднения дает
(Ей') =(Е + EN\) v' + a (ENt + EN2) + ... . A.17>
Заметим также, что из разложения A.11) видно, что
limu=v(x),
что позволяет выяснить смысл осреднения A.16).
Попробуем теперь задачу A.1), A.2) неоднородной теории
упругости свести к последовательности задач однородной упруго- -
сти (провести «гомогенизацию» задачи). Для этого подставим
разложения A.11) — A.13) в уравнение A.9)
— [Е- A + М) + EN"i] о' + [В {Nx + N'2) +
а
+ Е A + 2М + №)] v" + а [В (N2 + N3) +
+ E(Nt + 2iV2 + N'3)] v'" + ... + X(x) = 0 A.18)
я граничные условия A.2)
ы|*=о = (v + aNjv' + a?Nzv" + .. .)ж=о = "°,
+ N2) +
S». A.19)
Приравняем теперь величины в A.18), заключенные в квадрат-
квадратные скобки, неким постоянным:
(ENn+2)- + (№+!)¦ + ?^„+, + ?#„ = Ая, A.20)
#0==1, л=0, 1,2, ...
причем выражение в квадратных скобках при 1^<х приравняем
нулю:
(ЕМ\у + В = 0, A.21)
с тем чтобы в уравнении A.9) был возможен предельный пере-
переход при <х-»-0.
Для того чтобы локальные функции Л/тг(?) были непрерывны
при их периодическом продолжении по длине всего стержня, не-
необходимо выполнение условий
НЗД = 0 (tf«@)=tfn(l))f я=1. 2,..., A.22);
•94
где [[N]] означает величину скачка функции N при переходе из
рассматриваемого элемента периодичности в соседние (в направ-
направлении внешней «нормали»).
Используя условия A.20) и A.21), запишем уравнения
A.18) в
Аоо"+аА,о'"+ ...+X(x)=0. A.23J
Уравнение равновесия A.1) можно записать в виде
где напряжение а связано с деформацией е законом Гука
а=Ее, A.25)
а деформация связана с перемещением соотношением Коши
е=ы'. A.26)
Левая часть соотношения A.17) представляет собой, очевидно,
осредненное напряжение:
(а) = (Еи'). A.27)
Для того чтобы уравнение равновесия A.23) можно было запи-
записать, по аналогии с A.24), в виде
<<т)' + Х(*) = 0, A.28)
нужно, очевидно, положить в A.17)
hn={ENn+i+ENn), « = 0,1 A.29)
и тогда соотношения A.17) будут иметь вид
(<*) = /гоу' + ah1v"+ ... anhnv№+ ... , A.30)
а граничные условия A.19) после операции осреднения — вид
A.31);
+...)x=b=S*.
Для того чтобы найти эффективный модуль, нужно установить
связь между (а) и (е). Осредненная деформация (е) в силу
A.26) определяется из осреднения выражения A.12):
<е) = («') = v'. A.32)
Поэтому, положив в A.30) а->0, имеем
(tf> = Ae<e>? A.33)
откуда и следует, что величина h0 имеет смысл эффективного мо-
модуля. Назовем и величины hn, n=\, 2,..., модулями упругости
га-го уровня.
Итак, задача неоднородной теории упругости A.1), A.2) ме-
методикой осреднения сведена к задаче однородной «моментной»
теории упругости A.23), A.31). Решение задачи «моментной» тео-
95.
рии упругости можно искать в виде разложения «среднего» пере-
перемещения по малому параметру
у = шо+«Ш1+а2Ш2+... A -34)V
Подставляя A.34) в уравнение равновесия A.23), граничные ус-
условия A.31) и приравнивая величины при одинаковых степенях*
а, получим рекуррентную последовательность задач:
how"P + Xp=O, р=0, 1,2 A.35>
wp\x=0 = Up, how'p\x=L =S°P, р = 0, 1, 2 A.36);
где
X0 = X, A.37).
ы°, если р = О,
p
ЕЛ/ ra/r' I ~ «чт п\П (l-'JO)..
IVfWp—r|xssO> СЫ1И p s> U, x '.
/¦=1
если р>0. d-39)
Мы видим, что в уравнение A.35) и граничные условия A.36)
входят величины hT, r = 0, 1,..., которые можно найти по формуле
A.29), если только известны локальные функции. Процедура
отыскания этих величин заключается в следующем. Из решения
уравнения A.21) находим локальную функцию первого уровня
JV(g)
Ci, A.40)
где Ci — некоторая постоянная. Поэтому
#1(Ю=С1|-А_-? + С2. A.41)
о
В силу условия A.22)
я в силу условия A.15)
После этого по формуле A.29) находим
Е
«6
т. е. для упругого стержня с периодической структурой эффек-
эффективный модуль совпадает с модулем Рейсса (§ 3 гл. 3). Теперь
решаем уравнение A.20) при п=0:
Г# + {ENxy + EN\ +E = h0, A.45)
откуда находим
#2= ]'ЛМБ)<*Б-<Б#1>. (L46)
о
где
^(Б)^Б. О-47)
и определяем hi по формуле A.29) при п=\ и т. д.
Итак, задача теории упругости для неоднородного стержня
A.1), A.2) методикой осреднения сводится к двум рекуррентным
последовательностям задач:
1) Задачи для однородного стержня (задачи Д(«), я = 0, 1,...)
для нахождения величин wn, я = 0, 1. Эти задачи являются одно-
однотипными краевыми задачами и различаются между собой только
входными данными.
2) Задачи для определения локальных функций Nn, n=\, 2,...
(задачи Ж(п), п—\, 2,...). Эти задачи являются задачами теории
упругости для неоднородного тела (ячейки периодичности) и не
являются краевыми. Единственность решения этих задач обеспе-
обеспечивается условиями A.15) и условиями «периодичности» A.22).
После решения каждой задачи Ж(«) необходимо выполнить опе-
операцию осреднения с тем, чтобы получить величины Лп-ь п=\,
2,..., и обеспечить возможность решения задачи Ж(«+1).
Разумеется, здесь мы так подробно останавливаемся на реше-
решении простейшей задачи только из методических соображений,
ибо техника осреднения для более сложных задач остается в
принципе той же.
Если же говорить действительно об одномерной задаче теории
упругости, то легко доказать, что в этом случае
А« = 0, л>0. A.48)
В самом деле, из соотношений A.40) и A.44) видно, что угло-
угловые скобки осреднения в левом равенстве A.44) можно опустить:
ho=ENi +?. A.49)
Поэтому уравнение A.20) при л=0 имеет вид
(?AV+?#!)'= 0, A.50)
откуда с учетом условия A.29) при я=1 получим
EN2-+ENi = fn. A.51)
4 Б. Е. Победря 97
р i.i. методом математической индукции доказат.
что в A.29) могут быть опущены угловые скобки осреднени;
т. е.
hn=ENA+i+ENn, л=0, 1, 2,... © A-52
Разделив левую и правую часть A.52) на ? и проводя операция
осреднения, получим в силу A.15) и A.22)
(Nn+1) + (Nn) = ^- = 0, A.53,
откуда следует A.48). Поэтому A.52) позволяет записать:
Nn+l = — JVn = Nn-i = ...=(- l)№JVi- A.541
Упражнение 1.2. Показать, что для всякой функции f(|) на
отрезке 0<|<с1 справедлива формула
Упражнение 1.3. Доказать, что для всяких двух функций
н ?(?)> определенных на том же отрезке, справедливо
{)\) {l)f)) (() A.56>r
6
Упражнение 1.4. Показать, что соотношение A.41) может
быть записано с учетом A.44) и A.55) в виде
о
Упражнение 1.5. Показать, что из формулы A.54) следует,
что локальная функция Np(l), р>\, выражается через функцию
#i(!) в следующем виде:
1 "~х
Np+i (g) = -- — Г (g — л)р~1 Ni (i\) dr\ + \ A r %r, A.58)
0 r=0
где постоянные /4рг выбираются так, чтобы и сами локальные
функции, и все их производные удовлетворяли условию A.15)
Упражнение 1.6. Показать, что постоянные Арт (г = р—1,
р — 2,... 0), входящие в соотношение A.57), определяются из ре-
рекуррентных соотношений
(г+1)(г+2) л
{р-т)\
98
3! Apr+2 ...
2) (р2) (р1) л .. ,q,
Л,р_ь A.59)
где
АРГ^О при r>p — 1. с A-60)
Рассмотрим теперь вопрос о возможности точного решения
исходной задачи A.1), A.2) с помощью описанной техники осред-
осреднения.
Решение задачи ЖA) дается в виде A.57), A.44). Решим те-
теперь задачу Д@) для определения w0. Полагая в A.35), A.36)
р = 0, имеем
I, A.61.)
x=L=S». A.62)
Решение этой задачи легко находится:
wo = х -\ Г (л: — у) X(у)dy + ы°'. A-63)
Сформулируем теперь задачу Д A), полагая в A.35), A.36) р=1:
fh0 W\ — — hL wo, A.64)
w-y \x=o = — NiWo |x=o, how\ \x=l — — ht Wo \x =l . A.65)
В силу A.48) и A.63) эта задача имеет решение
L
щ = _ ^(°> Ы + [ X (у) dy) = const. A.66)
«о \ J /
О
Задача Д B) имеет решение
w% = г -^@) = const. A-67)
К
И вообще, задача Д(р), р>\, имеет решение в виде кон-
константы:
Wp = WpJOL x(p~2) @). A.68)
Поэтому согласно формуле A.11) имеем
u=aNl(t)xv0'+w0+awl+a2w2+... A.69)
Переходя в выражении Nt (?) от быстрой переменной к медленной
путем замены
1=-^, A.70)
4* 99
получим, учитывая A.59),
Отсюда видно, что при отсутствии «объемных» сил решение
A.71) совпадает с точным A.3). Причем в этом случае в окон-,
чательный результат A.71) параметр а не входит, а значит он?
справедлив для стержня с модулем Е(х), являющимся произволь-
произвольной функцией координат, а не обязательно периодической. В этом
случае эффективный модуль упругости h0 A.44) следует понимать-
как
Упражнение 1.7. Показать, что если функция Е(х), определен-
определенная на отрезке 0<*<:L, обладает свойством A.4), то
L I
о
где
/ — —
~ N
а N — число ячеек периодичности.
§ 2. Статическая задача теории упругости в перемещениях
Рассмотрим неоднородную упругую среду (упругий композит)
с тензорами модулей упругости С(х) и упругих податливостей
3(х).
Уравнения равновесия для такой среды имеют вид A.3.17)
V-[C5):~V <g>«] + X= 0 ([Qm(*)uM],/ + Х, = 0), B.1>
а граничные условия для смешанной краевой задачи A.3.19):
B.2>
(Щ |2l = ui, Cijkl uk,i n, |Sj = 5?).
Рассмотрим периодическую структуру, т. е. такой композит, кото-
который можно составить из плотно прилегающих друг к другу оди-
одинаковых элементов — ячеек периодичности. Тогда, согласно C.1.5)
100
C(x\+atn,)=C(x), B.3)
где постоянные векторы а* определяют период структуры. Не
ограничивая общности, векторы а* можно направить по осям ко-
ординат: аа= ааеа. Тогда аргумент левой части соотношения
B.3) может быть записан: ха + аапа. Пусть I— характерный
размер неоднородности, например наибольшая из компонент век-
векторов а{. Тогда, совершив преобразование
Ха = —-—Х<х \ Xi = Xi, X2= Xit Xq = Х8 I , (¦^•4)
аа \ аг аг ь Oj /
вводим быстрые координаты |:
Па — произвольные целые числа. Как и прежде, мы будем предпо-
предполагать, что / много меньше характерного размера тела (компози-
(композита) и что можно ввести безразмерные координаты, отнесенные к
L, которые будем обозначать снова через х. Тогда
Будем считать, что тензор модулей упругости С зависит от быст-
быстрых координат ? и обозначим производные по координате ?i чер-
чертой перед индексом, оставив запятую для обозначения произвол-
ной по медленной координате я*. Дифференциальный оператор V,
который относится к медленным координатам х, будем обозначать
-¦ -¦
через V, если он относится к быстрым координатам %:
V Ф Й = grad ф = ф, с ~еи у' [ф (?) = grad' ф = ф,^. B.7)
Тогда уравнения B.1) можно записать в виде
B.8)
Будем искать обобщенное решение задачи B.1) (или B.8)),
B.2) в виде асимптотического разложения по малому параметру
а, используя технику осреднения, описанную в предыдущем пара-
параграфе.
101
u = v(x)
... + a" N(n) (I) ¦ у ® • • • ® V ® v (x) + • • •
(и,- = o, (*) + a tf$, (|) o/lfc, (x) +
B.9)
(+)
где символы • означают операцию (я+1)-кРатного скалярно-
го умножения. Величины №">(!), так называемые локальные
функции координат «-го уровня, являются тензорами («+2)-го
ранга. Безындексная форма записи соотношений B.9) довольно
громоздка. С тем, чтобы ее упростить, условимся опускать симво-
символы скалярного произведения и воспользуемся обозначением
v = Vk.n'ZnJn^-,, . ® Хт®7». B.10)
ш раз
Тогда соотношения B.9) примут вид
со
и = ? a«N»> (EK»o(je)
7 =0
f
Е„д хтКЧ' /tv••¦-'¦ /v\\ /n in
a4 Ni/к^..к K%)Vj,tt\'...k (X)j> (ZA I)
где локальные функции нулевого уровня представляют собой еди- .«
ничный теизор второго ранга
B.12) :
Продифференцируем выражения B.12) по координатам х
с тем, чтобы получить выражение градиента вектора перемеще-
перемещений
<7=0
w)§«+1(jc)] B.13)
о/,*,...Vl й +
1П9
а также второго градиента перемещений
(g) ® у') ^<<7+2) о Й + Nto> (|) <3(?+2) v (*)] / B.14)
?=—1
^Ж.*^|«к5о/.*,...*№» й
+1 ,„ (I)^л-..vi» й
В B.14) считается, что все локальные функции отрицательного
уровня тождественно равны нулю, кроме того, равны нулю сред-
средние значения локальных функций положительного уровня
N(«ss0, <7<0; <N(*) = 0, q>0. B.15)
Условие B.15) ликвидирует некоторый произвол*) в выборе ло-
локальных функций, которые в регулярных структурах будут непре-
непрерывными, и проясняет смысл векторного поля v, ибо после усред-
усреднения B.11) имеем
<и) = »Й. B.16)
Подставив разложения B.11), B.13), B.14) в уравнения равно-
равновесия B.8), получим (в индексной записи)
Ctlm,
+ N(lK...kq vn,kl...kqii\} + Xt = 0. B.17)
С тем чтобы свести задачу B.1), B.2) к задаче однородной
теории упругости, приравняем в B.17) коэффициенты при каждой
* Условия единственности для локальных функций будут сформулированы
ниже.
103
степени q параметра а и при каждом fn,fti ...*,+2 тензору-кон-
тензору-константе Ы«к
*-*,*-BЛ8)
Тензоры D + q) -го ранга h<«> будем называть эффективными тен-
тензорами упругости 9-го уровня, причем
h<«>=0 при q<0. B.19)
Уравнения B.18) аналогичны уравнениям равновесия теории
упругости B.1) с той лишь разницей, что задача эта решается
на ячейке периодичности. Чтобы сделать эту аналогию более пол-
-»-
ной, введем вектор ?/<«) с тензорными компонентами, который на-
назовем вектором псевдоперемещений уровня q:
Unk\...kg^Nmnk,.-.kq7m. B.20)
—>
?/<«> имеет q свободных индексов, т. е., вообще говоря, Ъ1'
тензорных компонент, из которых независимыми будут только
3/г<7(<7+1)> так как из записи B.9) следует симметрия по индек-
индексам k\ kg. В дальнейшем мы эти индексы будем опускать. По
соотношениям Коши A.2.1) можно построить тензор псевдодефор-
псевдодеформаций, а, применив закон Гука, — и тензор псевдонапряжений
2<«> уровня q:
B-21)
Для того чтобы псевдоперемещения всех уровней были непре-
непрерывными при их периодическом продолжении, необходимо выпол-
выполнение условий
[[&»>]]= О ([[М&....*,]] = 0) B.22)
при переходе через границу ячейки периодичности в направлении
внешней нормали.
Для того чтобы выяснить характер разрывов псевдонапряже-
псевдонапряжений, запишем сокращенно уравнения B.18) в виде
DivC§<«+2> + C-??<*+i>) + 2(в+1) + С-#*> = h<«> , q = — 1, 0,1 ...
B.23)
Обозначим через Г поверхность, ограничивающую ячейку перио-
периодичности объема ?2=1:
J Е ) {? ) B.24)
г
В частности, при q =—1 в силу условий B.12), B.15), B.19)
104
B.25)
где пт — единичный вектор внешней нормали к границе ячейки
периодичности, а для того, чтобы можно было единственным спо-
способом отыскать решение уравнения B.18) для (<7+2)-го уровня,
непрерывное и периодически продолжимое, считая, что все локаль-
локальные функции уровня ниже q+2 таковыми свойствами обладают,
нужно, чтобы левая часть B.24) обращалась в нуль, т. е.
q = 0, 1 ... B.26)
Таким образом, уравнение B.17) после принятых допущений
B.18) записывается в виде
a»h<«> : &«+*& + X = 0
«7=0
(? a"h\fmnkt...kqvn,mkl...kgi + X, = 0), B.27)
0
(
а граничные условия B.2) — в виде
0
4=0 Ё ' 9=0
Л...*, (I) и*,-*, Й |2i = иЧ; ? с* А/##.Л X
' «7=0
S?).
B.28)
Для решения задачи B.27), B.28) воспользуемся методом
малого параметра, который заключается в том, что решение за-
дачи v ищется в виде асимптотического разложения по малому
параметру
оо
сГ= ? арш{Р\ B.29)
р=0
Заметим, что метод осреднения, основанный на разложении B.9),
существенно отличается от широко применяемого в механике и
физике метода малого параметра (или метода возмущений) B.29).
При применении метода малого параметра величина, стоящая
в разложении при этом параметре (например, относительная раз-
105
ность между модулем упругости некоторого компонента компози-
композита и «средним» модулем), считается малой величиной. Поэтому
и решение, разыскиваемое этим методом, должно в некотором
смысле мало отличаться от решения исходной задачи. В методе
осреднения B.9) все обстоит иначе. Здесь модули компонентов
композита могут как угодно отличаться от средних модулей, лишь
бы исследуемое тело было составлено из достаточно большого чис-
числа ячеек периодичности.
Подставляя B.29) в уравнения B.27) и граничные условия
B.28) и приравнивая выражения при одинаковых степенях а,
получим рекуррентную последовательность задач однородной тео-
теории упругости
{Р} {р} Щй Х,= О), B.30)
= S? <P>), B.31)
Jftn,
z.
где обобщенные входные данные для каждой задачи B.30), B.31)
(задачи JXa(p), P=0, h 2, ...) определяются по рекуррентным фор-
формулам
= V h\r? wjn^ ¦', о = 1,2, ... ; Xf°^sX-, B.32)
r=l
^,1 Р>0; «/(°W, B.33)
г=1
E ^, p>0;
Если помножить левую и правую часть B.13) на тензор мо-
модулей упругости, осреднить результат, воспользовавшись форму-
формулой B.26), то получим
G=0
^) B.35)
q
Пусть теперь нам требуется определить эффективные модули
композита, для которого решается задача B.1), B.2). Согласно
методике, изложенной в § 1 гл. 3, для этого нужно решить урав-
уравнения B.1) без объемных сил со специальными граничными усло-
условиями C.1.7)
= ej,x;.). B.36)
106
Задаче B.1), B.36) соответствует задача для однородного тела,
решение которой имеет вид
o = f.x (o, = *°fx,). B.37)
Поэтому все градиенты вектора перемещений v выше первого тож-
тождественно обращаются в нуль, и мы получаем из B.35)
). B.38)
Сравнивая этот результат с C.1.29), заключаем, что эффективные
модули теории упругости нулевого уровня и есть настоящие эф-
эффективные модули упругого композита
h(°)=h. B.39)
Для их отыскания нужно решить уравнения B.18) (задачу
Жа(?)) при q=—1:
[CijmiN(mlw + Ciink]u = 0, B.40)
т.е. DivBA) +C) = 0, B.41)
а затем по формуле B.26) найти эффективные модули:
(Ctfml Лгё&,, + Ctjnk) = hijnk. B.42)
Заметим, что для отыскания эффективных модулей не обязатель-
обязательно знать локальные функции первого уровня. Для этого достаточ-
достаточно знать выражение, заключенное в B.41) в круглые скобки или
в B.42) — в угловые.
Итак, задача B.1), B.2) для упругого композита сводится
к решению двух рекуррентных последовательностей задач. Пер-
Первая из них (задачи JXaIp), р = 0, 1, ...) заключается в многократ-
многократном решении краевой задачи B.30), B.31) по теории эффектив-
эффективного модуля. Входные данные для решения задачи Дд(р) форми-
формируются из решения задач ]Ха{г), г=0, 1, 2, ..., р—1. Результатом
решения каждой задачи служит вектор ©<">; комбинация этих век-
векторов B.29) представляет собой усредненный вектор v исходной
задачи. Решение этой исходной задачи B.1), B.2) получается на
основе вектора v(x) по формуле B.11), однако в эту формулу
входят локальные функции NM, для отыскания которых необхо-
необходимо решить вторую рекуррентную систему задач (задач Жа(?),
?=1, 0, 1, 2, ...) B.18). Каждая задача M(q) не является крае-
краевой, а для нахождения единственного решения используются усло-
условия B.15), B.26), из которых попутно определяются эффектив-
эффективные модули упругости q-ro уровня.
Упражнение 2.1. Показать, что разложение B.11) с учетом
B.29) можно записать в виде
? 1 pp. B.43)
107
Упражнение 2.2. На основе разложения B.43) провести осред»
нение задачи B.1), B.2), используя вариационную постановку
Лагранжа B.1.9).
§ 3. Статическая задача теории упругости в напряженяих
Рассмотрим линейное неоднородное упругое тело (композит),
для которого связь между тензорами деформаций е и напряже-
напряжений а имеет вид A.3.2)
где Jijmn — компоненты тензора четвертого ранга упругих подат-
ливостей, зависящих от координат. Пусть задано упругое одно-
связное тело, занимающее область V с замкнутой границей 2. '¦
Тогда статическая задача теории упругости в напряжениях (зада- .„
ча «Б») заключается в решении шести дифференциальных урав-
уравнений относительно шести компонент симметричного тензора сг
A.2.28): - &-& •
Eijk,k(o) + Yit = 0 C.2)
при выполнении шести граничных условий на 2 A.2.27): \
<**,•«/ = 5?; qi + X{ = 0. C.3)
Здесь Eijk — компоненты тензора третьего ранга, симметричного '
по первым двум индексам:
Eilk (a) = Cijmnk (х) атп + Dijmnkl (x) а^, C.4)
причем величины СцтПк и Эцтпы вычисляются по формулам:
Cijmnk = Jiimn.k + 8/ft I —— Jllmn.i — Jljmn,I I +
U V 2 /
+ &ik ( — JlUm.l — Jilmn, I ) + gf/ {Jklmn.l — Jllmn.k)', C.5)
(Jmnkl — Jppmfikl) + (Rlm&ik + Wim&tk ~ bftkm) Snt> C.6)
где X — вектор. объемных сил; 5° — вектор поверхностных сил;
it/ — компоненты симметричного тензора-константы; Ri/ — ком-
компоненты симметричного произвольного положительно определен-
определенного тензора, зависящего, вообще говоря, от координат, ^-вектор:
4t^vti.i- C.7)
Тензор У определяется по заданным объемным силам A.2.29) з
Y,, == (RimXm),i + (RimXm). t - ln (RkmXm).k. C.8)
108
Заметим, что решение задачи C.2), C.3) ие зависит от выбора
о
тензоров ? н /? при |г=&7бг/?=2. Если известны компоненты тен-
тензора C.6) Dijmnhi, то иетрудно видеть, что через них можно выра-
выразить компоненты тензора податливости
/ii*.= A*m»Ai + (Si/.—f*
+ -i- (8;}Rmn- bimRin - 8/BK/m - b,mRin- blnRim). C.9)
Обобщенное решение задачи C.2), C.3) будем искать в виде
асимптотического разложения
&, , (ЗЛО)
9=0
где локальные функции q уровня AfJjpV*,. ь (|) являются перио-
периодическими функциями быстрых координат |. Подставляя C.10)
в уравнения C.2), получим
qfi C.11)
<7=—2
где
, C-12)
+
C-13)
^"mnpgrs + -8ijmnk{Mmnpqrs\k + Mmnpqr Osk)
+ MfA*»/.). C-14)
Mmnklrspl...pq + Bijmrit(Mmnklrsp1...pq\t +
C-15)
+ It/ (Jklmmkl — JHmn\kk)t C.16)
C.17)
109
Заметим, что все величины, снабженные верхним индексом, обра
зуют тензор D + <7)-го ранга.
Приравняем теперь Q<<" некоторым тензорам-константам K(9)t
Q@) = О, QO> = О, Q<«) = К(«> (<7=2, 3 ) C.
и потребуем, чтобы выполнялись условия
l (M(mnpq 6ft A s + бршб„ 6rfc6,s)> = /Ci^rs, C.19)
qq_l§lpq) ~ K(ijtursPi...pq . <7= 1, 2, . . .; C.20)
(^;sPl...P?> - 0, 9=0,1,... C.21).
¦J
Из формул C.10) — C.12) видно, что средние значения напря- »
жений и деформаций имеют вид
<<*„•> = т„, C.22)
? .Рв , C.23) .
где тензоры Н") определяются через заданные тензоры К(?+2) па
формулам C.9), в которых вместо J нужно подставить НО, а вме-
вместо D — тензор К(?+2), G=0, 1 На соотношение C.23) можно
смотреть как на связь между деформациями и напряжениями .
в моментной теории упругости для однородных сред. Задачу тео-
теории упругости в напряжениях для средних величин можно сфор- ,
мулировать в виде
Ettk.k + Yt,-=0, C.24)
где в выражения для тензора Eijk
F1 —e,-,
+ In (e«,, - e.fe) + (Rim8tk + i?/m6ifc — g,//?^) qm C.25)
вместо деформаций подставлены их средние значения по форму-
формулам C.23), причем выполняются граничные условия C.3).
Таким образом, исходная задача теории неоднородной упруго-
упругости C.2), C.3) сведена к задаче C.24), C.3) моментной теории
однородной упругости. Для решения задачи C.24). C.3) вос-
воспользуемся методом малого параметра. Ищем решение в виде
C-26)
Подставим это выражение в соотношения C.24), C.3) и, прирав-
приравняв величины при одинаковых степенях а, получим рекуррентную
последовательность задач теории упругости для анизотропной
однородной среды (задачи Дб (р), р = 0, 1, 2, ...):
ПО
+ Zlp = O, C.27)
s = Sp (sg> + X<p>) |s = 0, C.28)
Здесь левая часть уравнения C.27) образуется по формуле C.25),
где вместо деформаций следует подставить
ey> = J$Lsj&>, p=0, 1 C.29)
а правые части уравнений C.27) и C.28) определяются из пре-
предыдущих приближений.
Итак, задача Б для упругого композита C.2), C.3) свелась
к двум рекуррентным последовательностям задач. Первая из них
(задачи Дб (р), р = 0, 1, 2) сводится к соответствующим краевым
задачам по теории эффективного модуля с начальными данными,
полученными в предыдущих приближениях.
Вторая рекуррентная последовательность задач (задачи
Жб(<7), Я——2, —1, 0, 1, ...) заключается в решении неоднород-
неоднородной задачи Б в ячейке периодичности C.18) для определения ло-
локальных функций координат Mii) из условий C.15) — C.17),
C.19) —C.21).
Сформулируем теперь задачу теории упругости в напряжениях
для неоднородного тела (композита) в классической постановке
(задача В). Будем считать, что объемные силы X обладают, по-
потенциалом
Х=— gradO № = — Ф,;). C.30)
Тогда уравнения равновесия удовлетворяются тождественно, если
ввести симметричный тензор функций напряжений ф по правилу
<?</ = eikteimr№n,lm + Фб/Л C.31 )
Тогда уравнения совместности A.2.2) после подстановки в них
соотношений C.1) и C.31) приобретут вид
erpuesiq^k^imn Vpqii (Х) Vkn,tm\ut = T)rs (*)• C-32)
где
T)rs=erpuestg[Jpqn<t>],ut. C.33)
Подставив C.31) в граничные условия
лолучим
е1ЫеЫ$Ьп,1тЩ |г = S{, C.34)
где
Si == S° — фщ |г. C.35)
111
Тогда решение задачи В теории упругости неоднородных сред
в напряжениях заключается в решении системы уравнений C.32)
при выполнении граничных условий C.34).
Если бы в уравнениях C.32) тензор податливостей был по- -
стоянным Hpqij, то мы имели бы г
Brsknlmut^knJmut— ^rs» C.36)t
где
Brsknlmut = erpuestqeikleimnHpqii. C.37)
Применяя описанную выше технику осреднения, будем искать
решение задачи C.32), C.34) в виде
ф" = Е а"Т"' C'38*
Tffs^v,,,..^ (?) ^-/'.«i...aB Й- C-39)
Локальные функции n-го уровня M{ifi','qi...q (g) являются пе-
периодическими функциями, причем
ж *@) ^ЛЛ|ЛЛ\ /*Э /1Л\
т. е. это единичный тензор четвертого ранга, а все М<") с верхни-
верхними индексами п<0 равны нулю.
Из соотношений C.38), C.31) и C.1) следует, что
ги = g a»Y[.f, tf(/ = ? а"т(«), C.41)
n=0 n=0
где
• •a (\)tyk't',qi...o (x)>
г+2C^7>,.., Й, ^3.42)
.,л+4,т5- C.43)
Подставив соотношения C.38) в C.32), получим
09
? «"tf&r,,..^ (?) ^'/'.а...^ Й = %/. C.44).
п=—3
[{Jklk'l'TkTq\...qn+)\pr +
(Jklk'f T$f>q\ . . .«?n+,6Wn+4)|r +
Г1+гбг,п+збраг1+4]. C.45>
112
Все величины, снабженные верхним индексом (п), являются тен->
зорами ранга 4+л, причем индекс п = 0 можно опускать. Соотно-.
ния C.44) можно переписать следующим образом:
^ T1. C.46)
л=—3 ~
Приравниваем U(") тензорам-константам Н("), которые по анало-
гии с C.36) примем такими:
Hnrrg,...4n+i a eik(ln+3 ejqn+ii екч'„п+1 <?rW" H^-Vqi...q^ C.47),
здесь Н("> — тензоры-константы (тензоры эффективных податли-
востей я-го уровня) .
U(n)=H(n\ n >4, C.48)
U(n) = 0, я<4. C.49^
Потребуем теперь выполнения следующих равенств для усреднен-
усредненных величин:
¦ftin+2) = J {еичп+3 e,-qn+ii Jkirp T(^gi...gn+2), n^2,
""-'n+i 1 0. л<2;
Из C.43) вытекает
<Г$«„*> = **„*/,.«; (T(n))=0, n<2. C.52),,
Из формул C.38) и C.44) следует, что средние значения напря-
напряжений и деформаций имеют вид
(а) = т<°> «<*„) = rjo) ef ikqiei<hiMpkl,qith), C.53)
....,,,). C.54X,
( ? )
n=0 n=0
На соотношение C.54) можно смотреть как на связь между на-
напряжениями и деформациями в моментной теории упругости одно-
однородных сред. Задача теории упругости в напряжениях для сред-
средних величин сводится к решению уравнений
? «"Щ41 .ап+1^,..,„+4 = Л,-/ C.55)
п=0
при выполнении граничных условий
оо
еш еЫп ? аЬт Щ |2 = Sh C.56)
ИЗ
где правые части равенств задаются соотношениями C.33) и-
C.35).
Таким образом, исходная задача В неоднородной упругости
C.32), C.34) сведена к задаче C.55), C.56) моментной теории,
однородной упругости. I
Для определения величин Н("> необходимо рассмотреть рекур-'
рентную последовательность задач Жв(«)> « = 0, 1, 2, ..., каждая
из которых заключается в решении неоднородной задачи теории.,
упругости для элементарной ячейки и состоит в определении ло-
локальных функций Шп\ Как следует из C.45) и C.48), C.49),
.qn+i\ms )\pr =
ehl + 6ikpeiqn+il)ek'p's еГтг> (Jklk'l' n
eikp eirl ek'PrQn+3 вК+,Г' (Jklk't'MPr'q,.. .qn+2)\pr
1 ejpl
'p'm el'4n+3r') {.Jklk'V
3ejqn+iiek'psei'm
€ikp ejqn+il) ek-p'qn+t Cl'qn+3r' (Jklk'l'MpT'q!...qn+1)\P +
+
C-57)
или :
Ink (J Ink7" M(n+2)) = Q(n), n ^ - 1, C.58) *
где Q(™> представляет собой заданный тензор, определяемый пра-
правой частью равенства C.57). _
Далее определяем величины Н<") или Н<4 Из C.50), C.47) и
C.43) следует, что
Яп — Srr'uSpvp' {Jklrp{M?p'k'l'q,...qn+2\uv +
q^)). C.59) :
Решение задачи C.55), C.56) может быть получено методом
малого параметра. Ищем ее решение в виде
C.60)
114 /
Подставив это выражение в соотношения C.55), C.56) и прирав-
приравняв величины при одинаковых степенях а, получим рекуррентную
последовательность задач теории упругости для анизотропной
однородной среды (задач Дв(/), / = 0, 1, 2, ...)
ЩЬЩ^4=Л<;>, C.61)
LL|X=SP, C.62)
где
4=1
Итак, мы свели решение неоднородной задачи C.32), C.34)
к последовательности задач теории упругости анизотропных одно-
однородных сред C.61), C.62) с тензором податливостей нулевого
уровня Н<°>: 1
#$7'<7,<7,<7.<7. = вИЫ. еШ ek'l'qt 61'qJ- Hklk'V- C.65):
Для его определения из задачи C.57) получаем три уравнения,
первое из которых имеет вид
ek'p-sei'mr' {Jklk4'MpY>-r'r;-q1\m^pr = 0. C.66)
Очевидно, что тривиальное решение для М<'> удовлетворяет усло-
условиям задачи. Для М<2> имеем
ek-rqievq2rJkik'v\pr- C.67)
Наконец, из C.59) получим
= (erk'qt 6pq2l'Jklrp + вгг'и.ерор- Jklrp Мг-р'к'Г^т)¦ C.68)
У тензоров упругих податливостей нулевого уровня Н<°> в C.65)
и C.68) мы не зря опустили верхний индекс @). Этот тензор
в действительности является эффективным тензором упругих по-
податливостей.
В самом деле, если мы попытаемся найти эти податливости
методом, изложенным в § 1 гл. 3, то нам понадобится решить
уравнения C.32) без объемных сил (т. е. т1«=0) при специаль-
специальном выборе граничных условий:
115
где а0 — тензор-константа. Задаче C.32), C.69) соответствует
задача для однородного тела, решение которой имеет вид
C.70).;
Поэтому из формулы C.54) вытекает, что :-
C.71I
•откуда и вытекает сформулированное выше утверждение.
Итак, задача В для упругого композита C.32), C.34) сводит-<
ся к решению двух рекуррентных последовательностей задач. Пер-
вая из них (задачи Дв(&), & = 0, 1, 2, ...) заключается в много-
кратном решении краевой задачи C.61), C.62) по теории эффек
тивного модуля с входными данными, определяющимися из пре-
предыдущих приближений. Результатом решения каждой задачи
Дв(&) служит тензор функций напряжений х(*\ из которых фор-
формируется тензор функций напряжений гр C.60) для усредненных
напряжений т°, а из них и сам тензор а C.41). Правда для этого
нужно еще решить вторую рекуррентную последовательность за-
задач (задачи Жв(«), я = 0, 1, 2, ...) C.57), при решении которой
находятся локальные функции М<") и эффективные податливости
га-го уровня Н<").
Упражнение 3.1. Доказать, что эффективные тензоры упругих
податливостей нулевого уровня C.29) в задаче Б совпадают с эф-
фективными тензорами упругих податливостей Н, определяемых
из решения задачи C.1.12), C.1), C.1.13).
Упражнение 3.2. Показать, что разложение C.38), C.39) с уче-
том C.60) можно записать в виде
Чи = Е а"Е М$7'*...«* (|) хЯ...% (х). C.72)
Упражнение 3.3. На основе разложения C.72) провести техни-
ку осреднения для задачи В C.32), C.34), используя вариацион-
вариационную постановку Кастильяно
= О,
№ = — вы е;тп eprs eqm J Jijpq Ц) ц>кпм (х) фго.5ц (х) dV. C.73)
v
Упражнение З.4. На основе разложения (ЗЛО) провести техни-
технику осреднения для задачи Б C.2), C.3), используя «новую» ва-
вариационную постановку C.3.4), C.3.3).
§ 4. Теплофизические характеристики композита
Квазистатическая нестационарная задача термоупругости за- ,*
ключается в решении четырех уравнений: трех уравнений равно- '¦*
весия {
116 ¦
uk,i - аыТ)],, + Xt = 0 D.1)
и уравнения теплопроводности A.2.31)
№) Т| 1А(«Г)] + W D.2)
при выполнении некоторых граничных условий и начальных дан-
данных. В этом параграфе под Т мы будем понимать разность меж-
между текущей температурой и температурой То актуального со-
состояния.
Как было уже отмечено ранее, связанная задача термоупруго-
термоупругости представляет чаще всего только академический интерес. Пре-
Пренебрегая связанностью, запишем уравнение D.2) в виде
дТ /Л Тггч \ i /Л О\
dt
Чтобы решить несвязанную задачу термоупругости, достаточ-
достаточно определить температуру из задачи теплопроводности, а затем
решить задачу теории упругости с измененными объемными и по-
поверхностными силами.
Таким образом, составляющим звеном в решении задачи тер-
термоупругости является задача теплопроводности, которая заклю-
заключается в решении уравнения D.3) при выполнении граничных
условий
уТ-т .ft.\— = ю ер|_ т \ D 4}
или более общих A.2.32) и удовлетворении начальным данным
0-2.33) при t=t0:
Т=Т°. D.5)
Здесь т] — коэффициент теплоотдачи, Тс — температура окру-
окружающей среды.
В композите плотность р, теплоемкость ср, тензоры теплопро-
теплопроводности U и теплового расширения а являются разрывными
функциями координат. Покажем, как можно решить задачу теп-
теплопроводности для композита, используя методику осреднения.
Ищем решение в виде асимптотического разложения
\2f5 ^^». D.6)
«7=1 Э
где суммирование по р происходит от р = 0 так, чтобы все верхние
индексы были положительны. Оператор дифференцирования по
времени отрицательного порядка тождественно равен нулю, а ну-
нулевого порядка — единичному оператору.
Вычислим производные от функции Т D.6): Т,т; Т,тп и dT/dt
и подставим разложения этих производных в уравнение теплопро-
теплопроводности D.3), которое можно записать в виде
9СР Г
at
hmn T,m H %lm\n T\m + pq. D.7)
a
117
Тогда, приравнивая некоторым постоянным величины, стоящие
при одинаковых степенях а и производных от Ф одинакового строе-^
ния, получим рекуррентную последовательность уравнений для
определения локальных функций PWO)
j
С<7+1H) , , >?" р(«7)(Р)
1 "^ %+2-2Э'?+1-2Э Г^-лц-1
<7=-1,0, 1,2,...; р = 0, 1, ...
причем все локальные функции и тензоры-константы А(*)(р) хотя
бы с одним отрицательным индексом равны нулю:
РШ) = О, АШ) = 0 для q < 0 или р < 0; />@)@) = 1. D.9>J
Для нахождения постоянных величин Л(?)(Р> имеем
<7 = o,i,...; р = о, 1....
Упражнение 4.1. Показать, что из D.10) при <7=0, р=0 сле-
следует выражение для эффективного тензора теплопроводности Л:
4). D.ПO
причем локальные функции Р0№) определяются из D.8) при
<7 = -1, Р = 0: ¦
п=0. D.12)
Упражнение 4.2. Показать, что из D.10) при <7=0, р=1 сле-?
дует выражение для эффективной теплоемкости (рср) *:
(рС/ = -Л@)A)=(рСр) о. D.13)-:
Таким образом, уравнение теплопроводности D.7) после вве-
введения условий D.10) можно записать в виде
U-2P-~ *Л...^я_2|, + М=0. D.14)
</=о р с'
а граничные условия D.4) и начальные данные D.5) — в виде
D.15)
«=0 Р
118
при /=0:
SS^U^o. D-16)
17=0 Р
Будем, как и прежде, решать задачу D.14) — D.16) методом ма-
малого параметра в виде разложения
D.17)
Подставляя D.17) в D.14)—D.16) и приравнивая выражения при
одинаковых степенях а, получим рекуррентную последовательность
задач теплопроводности для однородной среды
, P=0,l D.18)
ty ь = #{р} I* D.19)
при t = 0:
eW=rW, D.20)
где входные данные задачи D.18) — D.20) при фиксированном р
определяются из решения этой задачи при г=\, ..., р—1:
2,+!2^ ;Д+1_а > о;
{0> D.21)
Р
•-••r-23 a/I+P ...... V-2
л=1 В
D.23,
После того как задача теплопроводности решена, можно при-
приступить к решению задачи теории упругости. Заметим, что в урав-
уравнения D.1) температурные члены входят в качестве входных дан-
данных, так что особых хлопот неоднородность тензора теплового
расширения а не вызовет. Однако для того, чтобы метод осред-
119
нения позволял найти решение поставленной задачи достаточно,
точно, нужно позаботиться о том, чтобы входные данные задачи1
мало менялись в пределах ячейки периодичности. Выражение же
аТ, входящее в D.1), содержит быстро-осциллирующую состав-
составляющую. Поэтому при решении задачи термоупругости к урав~*
нениям D.1) также следует применить технику осреднения.
Рассмотрим только частное решение уравнений D.1), соответ-?
ствующее изменению температурного поля. Обозначим
С,ж (?)««(?) = Р*/(|). D.24)
Тогда уравнения D.1) можно записать в виде *
— Cmi (I) uk,i + Cim (?) им, Рщ/71 - pu Tj=0. D.25>:
Будем искать их решение в виде
</=0
причем
Т = ? a'Pgl..*/!)^...*,(x). D.27>.
Производя дифференцирование разложений D.26), D.27) и под-
подставляя результат в уравнения D.25), получим систему уравне-
уравнений однородной моментнои теории термоупругости
«7=0
где тензоры-константы 6('+2) определяются из осреднения:
^Q+1qQ+i\+1), D.29>;
а локальные функции из рекуррентной последовательности урав- *
нений:
l\n + Cikg+2mkq+l q
\j к. -U=e^2-v,' 9 = - 2, -1, o, i.... '
D.30>;
При этом в D.30) --
Nw = ew s,0 прй :<7 <l0r pw> = о при 9 < 0,. P@) = L D.
120
Для решения системы уравнений D.28) можно применить стан-
стандартную технику малого параметра. Обратим внимание на то, что
эффективный тензор р* находится из D.29) прн q=—1:
n), D.32)
а локальные функции №') из D.30) при q =—2:
А D-33)
Итак, если эффективная теплоемкость определяется по фор-
формуле D.13) для любого композита, то эффективный тензор тепло-
теплопроводности Л и тензор р* могут быть определены только после
решения уравнений D.12) и D.33), т. е. они будут различными
для различных типов ячеек периодичности.
¦ Решим теперь задачу термоупругости в напряжениях, напри-
например задачу В. Для этого нужно решить уравнения равновесия
aiN + X, = 0, D.34)
уравнения совместности
pq + ^kj),lm = 0 D.35)
при соответствующих граничных условиях. Рассмотрим решение
только «температурной» части этой задачи. Для этого восполь-
воспользуемся представлением
or,,=f;aM8L.fce<U...V D-36)
<7=0
7 = ?а«<.Л<>Л..Л. D.37)
<7=0
После проведения обычной техники осреднения получим
erinfiMt VnkiAfi + a, ilmn = 0, D.38)
{JnklAfl + аа) = ath D.39)
где a* — эффективный тензор теплового расширения.
Заметим, что из результатов предыдущего параграфа следует
(см. также D.29), D.30)):
вгШ esnj [JilklAklpqJijpq + ]\mn = 0, D.40)
( JijklAklpq + Jiipq) = Hllpq, D.41)
где
Aklpq = вы-p-eir'j- Ml'i'pqlp'r', D.42)
т. е. если зафиксировать в D.40) индексы р, q, то задача D.40)
будет отличаться от задачи D.38) только «объемными силами>.
Упражнение 4.3. Доказать, что для двухкомпонентного компо-
121
зита, характеристики каждого композита которого постоянны^
справедливо
«</ = («//) + («*/ — а
где [JO—J<2)]-1 — тензор, обратный к тензору, заключенному,
в квадратные скобки.
Упражнение 4.4. Показать, что для композита, описанного;.
в предыдущем упражнении,
Р*/ = <&/> + (PiV -Pi?) [Си™, - CfLn)-1 (hmnii - <Cmnl/». D.44);
§ 5. Непериодические структуры ".,
До сих пор мы рассматривали периодические структуры, ко-'.
торые можно составить из плотно прилегающих друг к другу оди-
одинаковых ячеек периодичности. Однако часто в практически важ-;
иых задачах условие «одинаковости» ячеек нарушается. Напри- :
мер, рассмотрим составную трубу, сечение которой показано на \
рис. 14. Пусть тензор модулей упругости ;
зависит только от радиуса г и обладает',
свойством ¦¦
С(г+лв)-=С(г), E.1)"
где га = 0, 1, .... N, а
Rn = Ro+n8. E.2)
Хотя свойства E.1) можно назвать условия- \
Рис. 14. ми периодичности, как мы видим, ячейка, ..
представляет собой кольцо внутреннего ра- ь
диуса Rn и толщины б для каждого га-го слоя, а ее площадь 5„
увеличивается с ростом номера:
Может случиться, что в рассматриваемой трубе модули упру-
упругости зависят от номера ячейки (кольца), но имеют и осцилли-
осциллирующую составляющую (некоторую «регулярность»)
С(г+пЬ, г)-С(г, г). E.4) :
Например,
E.5)
Дадим теперь определение. Назовем регулярной структурой сре-
среду, для которой в некоторой криволинейной системе координат
(У1> У2> У3) справедливо следующее равенство:
#"(е; у\ у2, Уг', у1 + п\а1, у2+п.2п2, «/3+«3о3)= '
=|"(е; у\ у2, у3; у\ у2, у3), E.6) ']
122 ;
тде ?Г — оператор связи между напряжениями и деформациями
A.1.1), а1, а2, а3 — постоянные, характеризующие период регу-
регулярной структуры (размеры ячейки квазипериодичности), а пи п^,
Яз — целые числа. В частности, регулярная структура называет-
называется квазипериодической, если
&(г, у1 + п,а\ у* + ща\ у* + п3а3) = & (в, у\ у\ у3). E.7)
Очевидно, упругая среда будет регулярной структурой, если
W, у2, у3, ух+ща\ У2+п2а\ «/3+га3а3) =
= С(*/', у2, у3), E.8)
и квазипериодической структурой — если
у\ у*). E.9)
Разумеется, периодические структуры также являются частным
случаем регулярных.
Если после того как задача решена и быстрые координаты
заменены на медленные B.6) оказалось, что в решение не входит
параметр а, значит, решение годится для нерегулярной структуры.
В следующей главе будут приведены примеры таких решений.
Рассмотрим теперь криволинейную систему координат х1, х2, х3.
Вводим обычным образом быстрые координаты g1, |2, |3 (также
криволинейные):
Р^ ^ A23) E10)
где а — малый геометрический параметр.
Будем частную производную по медленной координате обозна-
обозначать запятой, а по быстрой координате— чертой. Тогда уравне-
уравнения равновесия среды запишутся в виде
V/<r"+*' = 0, E.11)
где ковариантную производную в E.11) можно расписать в виде
A.59) (приложение I), и тогда получим
о"',/ + 2 Т% ог/)р + X1 = 0. E.12)
Закон Гука запишем в виде >.
<х<7 = с^« (х) {ит<п - Гртп ир). E.13)
Пусть заданы также граничные условия
Щ |2l = ы°; С""" (I х) {ит,п -Г?„ ир) я/122 = So. E.14)
Рассмотрим регулярную структуру и будем считать, что тен-
тензор модулей упругости обладает свойством E.9) для медленных
координат, которые условно обозначим х. Тогда уравнения рав-
равновесия E.12) после подстановки в них соотношений E.13) запи-
запишутся в виде:
123
+ 2 Г# Cl)rmn (f, x) 1 (um.n - Tpmn up) +
+ C«««(g, л) (um,nl-rpmn.jUp -TpmnuP.i) + X< = 0.
После того как задача теории упругости E.11) — E.14) сфор-,
мулирована в некоторой криволинейной системе координат, соот-,
ветствующей свойствам среды E.8), можно приступить к ее реше-:,
нию, не заботясь о ковариантности используемого метода. '
Так, будем искать решение этой задачи в виде -
"-= Еа" ? ^)(Р)-Р^' 5 **л...*„й.' EЛ6>,
в=о р=о
причем локальные функции N(9)(p) зависят как от быстрых, так к
от медленных координат и
#{о> @)m = «L, N(?) (р) = 0 при р > q, p < 0. E.17)
Продифференцируем дважды E.16) частным образом:
оо q lb Ik
...^ + N[qk;-*ln vi.kl...ky E.18)
f$=-l
(?+l)(P+D «»/ ^ft
(+D(&+l)|/) f/ft* + N()(p) ty,*,...^/ +
,ftt...ftp]. E.19)
Обозначим
С2'"/ +2Г<> С/)гтл=Л''"п(|) jj E.20) ^
Тогда, подставляя разложения E.18) и E.19) в уравнения рав- V
новесия E.15), получим
124
р ^f. *,...ftp+1] +
Ki X
X
'p+Dl/) f/*ft + A/f) @)
(«) О) в»1А...*|) n/ + (#(«+!) C+0 «I"./
+ «(e)(p)m,/P/.ft1...*pn+ Л/(в)(р)т,п/ f/,ft,...Ap —
/ 1Л^( O)>f/*ft — Г (^(+1) (P+l
+ <нЙ.« Ч.*,...*э - Г^ Л/Г;нр)е ои...*э]> + X'- = 0. (
Приравняем теперь выражения в E.21) при одинаковых сте-
степенях а и производных от v одинакового порядка некоторым ве-
величинам /г(«)(э), являющимся функциями только медленных коор-
координат:
(С*»»
С N(<1) (P-Pl)m.n — Г,™ (С'""" Л/(в+1) (Р+2)р)|/
rpmn (с/
«7=-1,0, 1,2, ... ; p=_2, — 1, 0, 1 q.
125.
При этом полагаем
N(q)^+2)p~ Irm ^ Л'(в) (Р+1)Р
Uto/ ). E-23)
Из E.23) видно, что
*{L1)(_2) = 0, А^1)(_„ = 0. E.24)
Поэтому рекуррентная последовательность задач Ж(*7, Р) E.22),
E.23) при удовлетворении условиям B.15), B.22) будет начи-
начинаться с задачи Ж(—1, —2):
(С«™N[i) (o,«i» - Т'тп С"»»),/ = 0 E.25)
и задачи Ж(—1, —1):
(C'^N'/l) A) т1я + С""'*'!)и = 0. E.26)
Упражнение 5.1. Показать, что из уравнений E.25) и E.26)
следует, что
|П), / = - Т1РГ (С^ АГ?Г, (iH»)i /• € E-27)
После этого вычисляем из E.23)
И@)(-2) = (^ 1 /г t> i(^V(l) @)mln — 1 mn) —
- rL./C'^-rL С/™»,,/ + (С^Л^,) @)«i»)./>, E.28)
2 Г# Ci)rm"<) лип + 2rjj C/)r'ft + (C"»« Л#, A)ицЯ). /> E.29)
и т. д.
Уравнения равновесия E.21) с учетом E.22) можно записать
в виде
? С(Э)*е+2 Й ^.ft,..ftp+2 Й + X' = 0, E.30)
„ р—2
126
а граничные условия E.14) — следующим образом:
q =0 0=—2
Для решения задачи E.30), E.31) воспользуемся методом ма-
малого параметра. Для этого в уравнения E.30) и граничные усло-
условия E.31) подставим разложение
Vi=^apw\p\ E.32)
Приравнивая члены при одинаковых степенях а, получим ре-
рекуррентную последовательность задач ДА(р), р = 0, 1, ...
й<о> (-2) w\Р) + /${ (_„ w{{l% + hfa ftf) wl$b + Цр} = 0. E.33;
/*>)я, t, = SS{P}, E.34)
где величины /U(?)(p) определяются по формуле
Заметим, что
K(Q)iQ) = «(<?)(?) • E.db)
Входные данные задач Да(р) определяются по следующим рекур-
рекуррентным формулам для квазипериодической структуры:
X{P}=Q{P},h ^{P}=-Q'/P}/i/|2!i, p>0; E.37)
¦^{0} = X1, So {0} = So,
«
i
r=l P=—2
127
Упражнение 5.2. Показать, что для квазипериодической струк-,
туры
« — ' п l mn,j—?.virn i-mn,
E.40)
L + 2 rj-; hi)rlk, hljl = - «'7m" rL.c ;
Итак, чтобы решить статическую задачу теории упругости
Х2.1), B.2) для композита, представляющего собой квазиперио-
квазипериодическую структуру, необходимо решить две рекуррентные после- ;
довательности задач. Первая из них (задачи Да(р). Р=0, 1, ».) \
состоит в решении краевых задач однородной теории упругости, \
вторая (задачи Жа(<7, Р), <7 =—1, 0, 1, ...; Р = — 1, 0, ..., q) — ре- \
шении задачи неоднородной теории упругости на некоторой ячей- '
ке. В результате решения каждой задачи Жа(*7, Р) E.22) нахо-
находятся локальные функции N^p). При этом используются уело- :
вия B.15), B.22) и условия E.23), E.35), из которых опреде-
определяются и величины h(?)(|j), h*(?)(e), входящие во входные данные ;
задач Да(р)- После решения задач Да(/э) и Жа(^, Р) с учетом;
E.32) находим решение исходной задачи по формуле E.16).
Упражнение 5.3. Полагая всюду
rL=0, E.41)
получить формулы для регулярной структуры в прямоугольной
декартовой системе координат.
Упражнение 5.4. Считая всюду, что выполнено E.4) и что мо-
модули упругости не зависят от медленных координат, показать, что
полученные таким образом формулы совпадают с соответствую-
соответствующими формулами § 2.
§ 6. Теория нулевого приближения
При применении техники осреднения во всех задачах, рассмот-
рассмотренных в предыдущих параграфах, параметр а играл формальную
роль. Его введение облегчало проведение выкладок, но никакой
информации в решение задачи не вносило. Его присутствие толь-
только напоминало нам: метод работает, когда число ячеек достаточ-
достаточно велико. В дальнейшем мы проверим это положение на конкрет-
конкретных задачах, а сейчас заметим, что при практическом решении
задач теории упругости число членов рядов асимптотического раз-
разложения должно быть конечным. При этом чем больше число
ячеек периодичности (или квазипериодичности), тем лучше вы-
выбранное приближение описывает решение исходной задачи.
Если в асимптотическом разложении B.11) или E.16) оставить
только v(x) (т. е. положить q = 0), то мы получим теорию эффек-
эффективного модуля, разобранную в § 2 гл. 3. Как уже говорилось,
с помощью теории эффективного модуля нельзя описать эффекты
разрывов в тангенциальных напряжениях при переходе от одного
128
компонента к другому, нельзя найти микроперемещения и микро-
микронапряжения. В то же время для применения теории эффектив-
эффективного модуля необходимо знать эффективные характеристики ком-
композита, а для определения этих характеристик, как мы видели,
необходимо найти локальные функции координат первого уровня.
Но коль скоро эти локальные функции найдены, мы можем к ре-
решению, найденному по теории эффективного модуля, добавить
член, состоящий из произведения локальных функций первого
уровня на градиент этого решения. Найденное таким образом ре-
решение назовем решением по теории нулевого приближения.
Пусть, например, решается задача теории упругости (зада-
(задача А), рассмотренная в § 2:
Й . F.1)
F.2)
Теория нулевого приближения для этой задачи дает нам решение
в виде
Щ = vt (х) + a [Nt)k (f) vj, k Й + w(], F.3)
где v — решение задачи по теории эффективного модуля:
F.4)
F.5)
Вектор w удовлетворяет однородным уравнениям равновесия
F.4) и граничным условиям
Локальные функции первого уровня A^/ft(|) (в силу того, что
в теории нулевого приближения больше никаких уровней не су-
существует, индекс, соответствующий номеру уровня, опущен) опре-
определяются из решения задачи Жа(—1). B.40)
[Сцт, E AU*,, + Cijnk (?)],, = 0. F.6)
причем выполняются условия на ячейке периодичности
<ли*> = о F-7)
и условия отсутствия разрывов локальных функций перехода из
одной ячейки периодичности в другую
[[NmJ] = 0. F.8)
Тензор эффективных модулей упругости по найденным локальным
функциям получается простым осреднением
hti* = (Cilm A)Nmnku + Cilnk A)). F.9)
5 Б. Е. Победря 129
Итак, тензор напряжений а9 по теории эффективного модуля вы- ;
числяется по формуле >.
<?n = Kmvk,i, F.10);
а по теории нулевого приближения — по формуле
0U = C\%(bvk,i, F.11) J
где С*0' (|) — так называемый тензор модулей упругости нулево- '.;
го приближения: • »
) + C«/«F). F.12)
причем
Заметим, что если при вычислении перемещений в F.3) положить
а=0, то будут выполняться кинематические граничные условия
F.2), а перемещения по теории нулевого приближения будут сов-
совпадать с перемещениями, вычисленными по теории эффективного
модуля (без учета микроперемещений).
Пусть требуется решить задачу теории упругости в напряже-
напряжениях (задача Б)
Et,kM$ + Yn = 0, F.14)
I О^ / V \ I Г\ /С Л С\
Olj tlj |2 = <Jt, (<Jtj,j + Л-i) |s = U. (O.XO)
В F.14) считается, что тензор Еци C.25) выражен через напря-
напряжения с помощью закона Гука C.1), а тензор Y выражается че-
через объемные силы X по формуле C.8).
Решение задачи F.14), F.15) по теории нулевого приближе-
приближения имеет вид
где т — решение задачи Б по теории эффективного модуля
Еф.к(х) + Уи = 0, F.17)
причем в тензоре Еци C.25) деформации е выражены через на-
напряжение а с помощью эффективного тензора упругих податли-
востей
F.18)
и выполнены граничные условия
хц ns \z = S^ (tj/;/ + Х() \s = 0. F.19)
130
Для определения локальных функций М@)(|) нужно решить за-
задачу Жб@):
+ Ммрч) + BiimnkM^U* + *W, М^ы = 0, F.20)
где величины А, В, D находятся по формулам C.16), C.17), C.6).
Если локальные функции М^тпря найдены, то находятся ве-
величины К простым осреднением
r S,s + 6pm Ьдп brk bU)) = Ki ipqrs» F.21)
а по ним — и эффективный тензор упругих податливостей Н:
iimn — Uijmnkl °kl + Ы 7Г °ll
V 2 >
2-6
-j- (в/у Rmn - «/« Rh - KRim - S/m Rin - в/в/?|ж). F.22)
Пусть теперь требуется решить задачу В теории упругости
в напряжениях
on.i + Xl = 0, т),, (а) = 0, F.23)
Если объемные силы обладают потенциалом C.30), то можно
ввести тензор функций напряжений <р C.31) и для него сформу-
сформулировать задачу C.32) — C.35). Решение этой задачи по теории
нулевого приближения имеет вид
Ф*/ = Ч></ Й + la [MiJLn (I) фк/.тп (х) + X//], F.25)
где тензор функций напряжений tJj (х) определяется по теории
эффективного модуля:
erpu estq eikl 6/тл Hpqt! tykn.lmut = Цг$< F.26)
6*« 6/тл Ьп. imnj Is = S/, F.27)
а тензор X удовлетворяет условиям
erpu Gstq eikl ejmn "pqii ^kn.lmut = 0
F.27')
eikl ejmn (Ikn.lm + MknpqrS lpPq,rslm) П/ |j = 0,
где правые части в F.26) и F.27) — заданные величины C.33),
C.35).
Локальные функции МB)(|) представимы в виде
мШшп (|)seplneqmk Miipq (?), F.28)
S* 131
причем МA) должны находиться из решения уравнений
eikp G,rl [Jkluv (I) + 6*'P' s el'mr' X
X Jklk'V Mp'r'wimslpr = 0. F.29)
Локальные функции М также должны удовлетворять условиям
F.7) и F.8). Как только уравнения F.29) решены, можно найти
эффективный тензор податливостей Н:
Htm = (JUuv (бн* Sjo + efeps elmr МргЩ1т)). F.30)
Тензор напряжений т по теории эффективного модуля опреде-
определяется по формуле
т«7 = 6/« Чтп Ьп.Ш + Ф 8tj, F.31)
а тензор деформаций еэ — по формуле F.18).
По теории нулевого приближения тензор напряжений а выра-
выражается по формуле C.31), где тензор <р находится из F,25),
а тензор деформаций е — по формуле
С =/«%(g)Tw> F.32)
где тензор J<°> называется тензором упругих податливостей нуле-
нулевого приближения:
Jail A) = Jijuo (i) [6ufcб0) + %,s e/m, MprUBXms (|)]. (б.зз)
При этом
№ F.34)
Заметим, что тензоры С<°) F.12) и J@> F.34) взаимно-обратными
не являются.
Упражнение 6.1. Доказать, что тензоры С(°> и J<°> связаны меж-
между собой соотношениями
Cfth (?)= Ciimn (I) J%q (|)hpqkl, F.35)
Jilh (?) = Ji jmn (?) c{Zq (?) Hpqkl. F.36)
Если при вычислении напряжений по формуле F.25) положить
а = 0, то микронапряжения учитываться не будут.
Заметим, что во всех трех задачах А, Б, В для их решения
по теории нулевого приближения не требовалось больше инфор-
информации, чем при решении по теории эффективного модуля. Следо-
Следовательно, зная указанные выше локальные функции, можно, не
решая никакой задачи, «подправить» решение по теории эффек-
эффективного модуля, с тем чтобы получить микроперемещения и ми-
микронапряжения.
Поэтому, найдя для данного композита указанные выше ло-
локальные функции, можно найти для него микроперемещения и
132
микронапряжения в нулевом приближении (т. е. перемещения и
напряжения внутри каждого компонента), попутно определив эф-
эффективные тензоры модулей упругости или упругих податливо-
стей.
Точно так же строится теория нулевого приближения для зада-
задачи теплопроводности D.3), D.4). А именно:
Т = ф (х) + a [Pt C ф,, Й + 6 (х)], F.37)
где локальная функция Р(?) удовлетворяет уравнениям D.12):
(ЛЕп Р/|« + Я?„),„ = 0. F.38)
После решения уравнений F.38) находится эффективный тензор
теплопроводности Л D.11)
F.39)
и по теории эффективного модуля определяется Q(x):
(pCp)l?- = Atlb.t, + Pq, F.40)
F.41)
Если известны локальные функции N(%) как решение уравнений
то вычисляется эффективный тензор р*, связанный с тензором
теплового расширения D.32):
P«=<P,/-Q/«M}*>. F-43)
Теория нулевого приближения для непериодических регуляр-
регулярных структур отличается от теории периодических структур тем,
что локальные функции (и, может быть, тензор модулей упруго-
упругости) зависят от медленных координат. Пусть, например, требуется
решить задачу E.11) — E.14). Согласно теории нулевого прибли-
приближения решение этой задачи ищется в виде
ит= vm{x) + a [Nl@)m (t x) Vl (x) + #а)т (I, ~x) vi,k (x)] + awm, F.44)
где индекс <7=1 у локальных функций, введенных в E.16), опу-
опущен.
Вектор v определяется из решения задачи по теории эффектив-
эффективного модуля:
h»vt + А'«о(/. k) + **tt4>/.M. + X1 = 0; F.45)
vt |Sl = ul (hl'lVl + h?ll*v,.k) n, Is, = Si F.46)
а вектор w удовлетворяет однородным уравнениям F.45) и
wt U, = - [N'm, С, *)»,(*) + N?w ("*, х) Vl,k Й] |2,. F.47)
133
Величины h можно определить по формулам E.28), E.29):
h'i (х) = <— rL,/C'7m" + 2Г}/ C>m«x
X (^So)ml^ - rL) + Г^ C'f - (С"-" ^(,)@)т|П),/> F.48)
(х) = <С««« Л {0>»|п - rLc«m« + 2Г^'>-«"Л^Й)И»|„ +
$ timm{n).i), F.49)
Й = <C'/-"Mom,n + С"*), F.50)
TLCtmn), F.51)
а локальные функции N@) и N(i) находятся из решения задач
Жа(-1,-2) иЖа(-1,-1) (E.25) и E.26)):
u= 0, F.52)
= O. F.53)
Если рассматривается квазипериодическая среда, то после
определения эффективного тензора модулей упругости hlllk осталь-
остальные величины h можно найти по формулам теории эффективного
модуля:
ft" = - ft"mn Tin., - 2Г? hl)rtm Г1тп, F.54)
hm = _ h'^TL + 21$ hi)rtk, F.55)
hlll =-h'i"»rL. F.56)
Напряжения по теории нулевого приближения подсчитываются
по формуле
4> = С|;о) (?- х) vk (х) + ф (I х) vkil Й, F.57)
где
$ ^ к, F.58)
F 59)
Напряжения по теории эффективного модуля имеют вид
с# = hm (х) о4 (х) + А"« Й %.г Й. F.60)
Если при вычислении перемещений по формуле F.44) поло-
положить а=0, то перемещения будут удовлетворять кинематическим
граничным условиям F.46) и совпадать с перемещениями, вычис-
вычисленными по теории эффективного модуля (т. е. микроперемещения
учитываться не будут).
Упражнение 6.2. Показать, что если при рассмотрении регуляр-
регулярной структуры можно ввести прямоугольную декартову систему
координат (Г'тп^гО), то теория нулевого приближения для регу-
134
лярной структуры отличается от теории нулевого приближения
периодической структуры только тем, что в первом случае тен-
тензор эффективных модулей упругости будет зависеть от медлен-
медленных координат. С)
В заключение заметим, что напряжения по теории нулевого
приближения ст,/(°) можно выразить через напряжения по теории
эффективного модуля стг;э==т1/ по формуле
<С (?) = w?)^2U?)v,=4/«,,(?) w (б-61)
где v4i/mn(i) — так называемый тензор концентрации напряже-
напряжений. Если для неограниченной среды на бесконечности задано
однородное напряженное состояние, то этот тензор позволяет вы-
вычислить концентрацию напряжений, возникающую за счет неодно-
неоднородности структуры композита.
Аналогично, деформации по теории нулевого приближения е//°>
выражаются через деформации по теории эффективного модуля
е,7э= ?>((,/) по формуле
49> (?)?= Jw (I) Citn (g) v{m,n) = Biimn (|) о(М|П), F.62)
где BijmniQ — так называемый тензор концентрации деформа-
деформаций. Тензоры А(?) и В(?) взаимно-обратными не являются.
Упражнение 6.3. Показать, что тензоры А(?) и В(?) связаны
между собой зависимостями
Btjmn (I) = Jlikt (S) Aklpq (I) hpqmn>
Aijmnib = cw(I) Bklpq (g Hpqmn. © F.63)
Можно получить оценку точности нулевого приближения в за-
зависимости от параметра а:
На—0<°>1кг<Уа-С, C=const. F.64)
§ 7. Неидеальный контакт
Рассмотрим поверхность Го, разделяющую один компонент
композита от другого. Согласно A.2.16) на этой границе осуще-
осуществляется идеальный контакт, если на ней выполнены условия
,= <), GЛ)
где индексом A) помечены величины, относящиеся к компонен-
компоненту A), а индексом B) — к компоненту B), п — единичный век-
вектор нормали, внешней для компонента A) и внутренней для ком-
компонента B). Другими словами, величины на поверхности Го, по-
помеченные индексом A), получены предельным переходом со сто-
стороны компонента A), а индексом B) — со стороны компонен-
компонента B). Условия G.1) можно записать сокращенно:
0. G.2)
135
В § 2 гл. 1 было показано, что обобщенное решение задачи
МДТТ автоматически удовлетворяет условиям G.1) на каждой
поверхности, разделяющей компоненты композита.
В § 2 настоящей главы введены понятия псевдоперемещений
и псевдонапряжений, полезные при интерпретации задачи Ж(<?)-
Предположим, например, нам нужно решить уравнения F.6), ко-
которые, используя обозначения B.20), B.21), можно записать
в виде
2сдМI/(?)=-С|/«„(?). G.3)
где компоненты Еда тензора псевдонапряжений первого уровня,
или просто тензора псевдонапряжений, связаны с компонентами
Umki вектора псевдоперемещений по закону Гука B.21):
^4j(kl) — CijmtfJm{kl),n, G.4)
где
Um(kl)=Nmkl. G.5)
Решением задачи F.6) — F.8) для определения локальных
функций (вектора псевдоперемещений) является непрерывный
вектор псевдоперемещений U(ki), для которого на границе Го в си-
силу G.1) выполняются условия
а в силу G.2) — условия
[(ЕДОи, + С\%) - 2$М) + С$,)] п, = 0. G.7)
Условия G.6) и G.7) также можно записать сокращенно:
Иг/(«)]]г. = 0, [[B„(Ы) + Ст) л,]]г. = 0. G.8)
Псевдонапряжения 2(«) при переходе через поверхность Го терпят
разрыв, ибо «объемные силы» Сцщ в уравнениях равновесия
G.3) являются производными от разрывных на поверхности Го
функций координат.
Условия G.5) и G.6) и являются условиями идеального кон-
контакта на поверхности Г0) так как они автоматически выполняют-
выполняются при решении задачи F.6) — F.8).
Однако при деформировании реального композита возможны
нарушения идеального контакта: отслаивание, проскальзывание
одного компонента относительно другого и т. п.
Например, в случае, если на границе Го, представляющей со-
собой плоскость Хз=const, происходит проскальзывание одного ком-
компонента композита относительно другого без отслаивания, условия
контакта будут иметь вид
4" = <\ ой» = ofi\ ой» = «Ж21 = сгЦ> = сгй1 = 0. G.9)
136
Можно записать и более сложные условия, например условия,
когда на границе Го учитывается трение или частичное отслаива-
отслаивание одного компонента от другого. Однако такие граничные усло-
условия будут нелинейными, а наша основная задача сейчас состоит
в том, чтобы, сохранив методику осреднения, описанную в преды-
предыдущих главах, учесть условия некоторой неидеальности контакта
на границе Го.
Вспомним о граничных условиях контактного типа A.2.7). Они
являются линейными, но описывают достаточно широкий класс
граничных условий. С их помощью условия контакта на грани-
границе Го можно записать в следующем виде:
«ДО о}/» «<•'> + #> ВГ= орт <# п? + #> и?\ р = 1, .... 6, G.10)
где [аЩ, [Ы% [аЩ, [Ы2Ц — некоторые матрицы 6X3, п<'> — век-
вектор внешней нормали на Го для компонента A), а пB> — для
компонента B).
Пусть нам требуется решить задачу теории упругости для ком-
композита F.1), F.2) при условиях контакта на каждой поверхно-
поверхности Го, разделяющей один компонент от другого в виде G.7).
Будем решать эту задачу, например, методом нулевого прибли-
жения, т. е. искать решение в виде F.3), где v — решение задачи
F.4), F.5) по теории эффективного модуля. Однако сам эффек-
эффективный тензор модулей упругости h для этого случая будет, вооб-
вообще говоря, отличаться от соответствующего тензора для задачи
с идеальным контактом. Ведь для определения эффективных мо-
модулей нужно найти решение задачи F.6) — F.8) для определения
локальных функций. В случае идеального контакта на поверхно-
поверхности Го выполняются условия G.8), а в случае неидеального кон-
контакта их нужно в соответствии с G.10) заменить условиями
[[% B,/(Ы) + Сны) Щ + W<w>]]r. = 0. G.11)
Упражнение 7.1. Подставляя в G.10) выражения для переме-
перемещений F.3)
ut = vt (х) + a [Nm (?) vhk + w,] G.12)
и напряжений F.11)
tfi/ = Q/m/(|) [Vm.i Й + a#mWi / (|j vp.q (x) + awm,t], G.13)
по теории нулевого приближения показать, что они эквивалент-
эквивалентны условиям G.11), так как для вектора v выполняется условие
[№„ = 0. G.14)
Упражнение 7.2. Показать, что если для упругого стержня
(см. § 1), являющегося двухкомпонентным композитом, условия
идеального контакта на границе раздела компонентов ?,=У
0, [[E+EN]]=Q G.15)
137
заменить на условия неидеального контакта вида
[[#11=0, [[E+EN-+aN]] = 0, G.16)
то эффективный модуль будет иметь вид
h= ^^i- ¦ ?—Z . G.17)
причем если в G.16)
а№=аР>, G.18)
то эффективный модуль совпадает с эффективным модулем в слу-
случае идеального контакта G.15):
н=
=1/{т)- с GЛ9)
Заметим, что условия неидеального контакта могут возникнуть
в композите, в котором между его компонентами находится tqh-
кая прослойка из материала со свойствами, отличающимися от
свойств компонентов композита.
§ 8. Плоская задача теории упругости
Если в теле возможно существование плоско-деформированно-
плоско-деформированного, плоско-напряженного или обобщенного плоско-напряженного
состояний, то естественно сформулировать двумерную задачу
МДТТ. Сделаем это на примере задачи теории упругости.
Для задачи теории упругости в перемещениях плоская задача
ничем по существу не отличается от пространственной, разобран-
разобранной в § 2: нужно только формально все малые латинские буквы
в индексах § 2 заменить на большие (см. приложение I). Сле-
Следует иметь в виду, что тензоры модулей упругости и упругих по-
датливостей в плоской задаче имеют в общем случае 6 незави-
независимых констант (против 21 в пространственной задаче). Эти кон-
константы будем называть приведенными.
Обозначим тензор, обратный к тензору CuKL, через 7ики
а тензор, обратный к Jukl, — через C
Cum.nJm.nkl = Cumn Jmnkl = — (Sik&jl + S/zA//c). (8.1)
Так как для плоской деформации
ei3 = 0 (i=i,2,3), (8.2)
то связь между тензорами напряжений и деформаций имеет вид
вIJ = CijklBkl, Bjj = JljKlflKL, (8.3)
при этом
<% — C3iKL.JK.LMN (fMN (j = 1,2,3). (8.4)
138
Для плоского напряженного состояния
а,-з = 0 A=1,2,3), (8.5)
и связь между напряжениями и деформациями будет
ви = Cuxl^kl, е/у = Jukl<*kl, (8.6)
причем
ез/ = JujklCklmn ?mn (i = 1,2,3). (8.7)
Заметим, что приведенный тензор модулей упругости при пло-
плоской деформации и приведенный тензор упругих податливостей
при плоском напряженном состоянии совпадают с обычными тен-
тензорами модулей упругости и упругих податливостей соответ-
соответственно.
Плоская задача теории упругости в напряжениях заключается
в решении двух уравнений равновесия A.3.32)
(fu,j + Xl = 0; Х, = — ф,, (8.8)
и уравнения совместности A.3.31)
еш eJN [J'ukl (x) aKL]t MN (8.9)
относительно трех независимых компонент плоского тензора на-
напряжений а при удовлетворении граничным условиям на конту-
контуре Г, ограничивающем замкнутую односвязную область 2
A.3.33):
aijnj\r = S°i. (8.10)
Здесь и далее J*s=J при плоском напряженном состоянии и
J*==J при плоской деформации. Точно так же С*==С при пло-
плоской деформации и С* = С при плоском напряженном состоянии.
Если ввести функцию напряжений Эри <р A.3.34)
(fKL = 6KPeLR<P,PR + Q>8KL, (8.11)
то уравнения равновесия (8.8) удовлетворятся тождественно,
а уравнение совместности (8.9) даст
eJNeKP eLR [Jukl (*) V,pr],mn = Л (х), (8.12)
где
Л == eiMejN8KL (J'ukl Ф) ,mn . (8.13)
Граничные условия (8.10) приобретут вид
(ецфлЧ.кШ + Фп/) |г = S/. (8.14)
Представляя функцию напряжений ф в виде
^q(i)^kl...kq(x), (8.15)
139
где
М<°>=1, МЮ=О для q<0, (8.16)
и проделывая обычные процедуры техники осреднения, получим
две рекуррентные последовательности задач Дв(&), & = 0, 1, 2, ...
и Жв(<7)> 9=0. 1. •••> которые были разобраны в § 3 при решении
задачи В.
Первая из этих последовательностей возникает в результате
представления
, . (8.17)
р=0
причем каждая задача Дв(р). Р=0, 1, 2, ... заключается в оты-
отыскании функции х^р) путем решения уравнения
еш eJN eKP eLR Hukl№mn(x) = r\{p\ (8.18)
и удовлетворяет граничным условиям
ff/Ae^X&}n/|r=S?{P>, (8.19)
где тензор HjJKL будет различным в зависимости от того, рас-
рассматривается плоская деформация или плоское напряженное со-
состояние. Но в любом случае его компоненты нельзя получить вы-
выбрасыванием в трехмерном тензоре Нцы элементы с индексами 3.
Входные данные задачи Дв(р) определяются из решения задач
Дв(г), г=1, 2, .... р—1:
„О = _ ? H&..KrJZ]Kr+i, P>0, (8.20)
1г. Р>0 (8.21)
где
X eJP + eJKq+2elP)M^.
l, (8.22)
+ <>..«,fipj^. (8.23)
Эффективный тензор упругих податливостей Н и величины
определяются при решении второй рекуррентной последователь-
последовательности задач Жв(<7)-
140
Каждая из задач Жв(<7) заключается в определении локаль-
локальных функций М<«+2> из решения уравнений
em
причем имеется в виду, что величины Т<»> выражены по формуле
(8.22) через локальные функции М<«>, при нахождении которых
учитываются условия B.15), B.22) и
• (8-25)
При этом эффективный тензор упругих податливостей Н связан
с Н<°) следующим соотношением:
Ник.ь = вгм Gjn gkp6i.qHmnpq • (8.26)
Из (8.24) и (8.25) видно, что
к=0, <) = 0, ПУ = О, ГЙ>К = О, (8.27)
(JlJPQ Tp2QKtKt)\ MN = 0, (8.28)
= e/Me№(//yPQr^iCL). (8.29)
После определения всех локальных функций М<*>, а значит и
Т<">, и решения задач Дв(<7) напряжения а и деформации е най-
найдем по формулам
*»=
G=0 р=0
</=0 р=0
где
mnki...k.- (8.32)
Заметим, что выражения (8.31), (8.32) точно удовлетворяют
уравнениям равновесия и совместности и, если удается точно
удовлетворить граничным условиям (8.19), то (8.31) и (8.30) яв-
являются точным решением исходной задачи (8.8) — (8.9).
Выражения (8.31), (8.30) являются приближенным решением
задачи (8.8) — (8.9), если граничные условия удовлетворяются при-
приближенно или в рядах (8.31), (8.30) сохранены только несколько
первых членов (например, рассматривается теория нулевого при-
приближения).
141
Упражнение 8.1. Показать, что представление (8.15) с по-
помощью (8.17) можно записать в виде
?а'? Мк\..Кр(?)Х%:Р).крЙ. (8.33)
/*=0
НЕКОТОРЫЕ ЛИТЕРАТУРНЫЕ УКАЗАНИЯ
§ 1. Метод осреднения дифференциальных уравнений с быстро
осциллирующими коэффициентами предложен Н. С. Бахва-
ловым [5, 6, 7, 8] (см. также [9, 24, 25, 26, 29, 74])'. Матема-
Математическое обоснование использованных разложений дано
в [115—117].
§ 2. Решение статической задачи теории упругости в перемеще
ниях для композитов дано в работах [84, 86, 88].
§ 3. Задача В для композитов рассмотрена в работах [84, 88J
¦а задача Б — в [89].
§ 4. Определение теплофизических характеристик рассмотрено
например, в работах [50, 53, 86, 96].
§ 6. Оценка F.64) получена в [117].
Глава 5
СЛОИСТЫЕ УПРУГИЕ
КОМПОЗИТЫ
До сих пор при разыскании решения задачи теории упруго-
упругости в виде асимптотического разложения по геометрическому па-
параметру а предполагалось, что этот параметр мал (т. е. велико
число ячеек периодичности), и решение поставленной задачи
считалось тем точнее, чем меньше параметр а. Однако не было
дано ответов на вопросы: что такое «параметр мал»?, сходится
ли когда-нибудь асимптотический ряд, а если сходится, то к ре-
решению ли исследуемой задачи?, какова «точность» теории нуле-
нулевого приближения и от чего она зависит?
В этой главе на примере слоистых композитов сделана попыт-
попытка ответить на эти и еще некоторые вопросы, как любят говорить
математики, «на физическом уровне строгости».
Сначала формулируются пространственные задачи теории уп-
упругости в перемещениях и напряжениях для слоистых композитов,
являющихся периодическими структурами. В явном виде выпи-
выписываются выражения для эффективных тензоров модулей упру-
упругости, упругих податливостей, соответствующих тензоров нуле-
нулевого приближения, локальных функций первого уровня, а также
эффективных тензоров, характеризующих теплофизические свой-
свойства слоистого композита. При этом каждый компонент компо-
композита может быть неоднородным и анизотропным.
Получено точное решение плоской задачи теории упругости о
полосе с произвольной неоднородностью по одной координате
при различных граничных условиях и на этих примерах выясня-
выясняется вопрос о точности теории нулевого приближения. Рассмат-
Рассматриваются дроизвольные регулярные слоистые структуры, для ко-
которых в явном виде выписываются эффективные характеристи-
характеристики. Как частный случай таких структур рассматривается слоистый
пустотелый цилиндр. На примере задачи Гадолина (о слоистой
трубе под давлением) оценивается зависимость теории нулевого
приближения (а также первого и второго) от числа ячеек перио-
периодичности. На примере неосесимметричной задачи о трубе под дей-
действием локальных нагрузок выясняется характер зависимости
точности теории нулевого приближения от степени локализации
нагрузки. По теории нулевого приближения подсчитываются на-
143
пряжения, возникающие в трубе, сидящей на оправке, при намот-
намотке на нее композиционной ленты.
Описывается численный метод для решения пространственных
задач теории упругости слоистого композита. Для некоторого сло-
слоистого параллелепипеда подсчитываются напряжения по теории
нулевого приближения.
§ 1. Задача в перемещениях
Рассмотрим слоистый композит. Будем считать, что он состав-
составлен из «пакетов», которые повторяются периодически, например,
по координате *з (рис. 15), ось дг2 направ-
"* лена от наблюдателя перпендикулярно
плоскости чертежа. Каждый «пакет», в
свою очередь, может быть составлен из
-»-' слоев («а рис. 15 они заштрихованы), на
границе раздела которых материальные
функции определяющих соотношений
МДТТ, зависящие только от координаты
Хз, терпят разрыв по этой координате. Вну-
Внутри слоя они являются непрерывными функ-
функциями координаты х%.
Описанный таким образом слоистый композит является пе-
периодической структурой. В дальнейшем мы рассмотрим и квази-
квазипериодические структуры для слоистого композита.
Пусть, например, слоистый композит является упругим. Тогда
тензоры модулей упругости С и упругих податливостей J явля-
являются периодическими функциями координаты дс3 и не зависят от
координат х\, хг.
Введем по правилам, изложенным в § 2 предыдущей главы,
быструю переменную |:
?-|з = *,/а '' A.1)
и воспользуемся результатами этого параграфа. Ищем решение
задачи D.2.1), D.2.2) в виде разложения D.2.43)
Рис. 15.
i
р=0
где локальные функции N<p) зависят только от координаты |.
Поэтому уравнения D.2.18) каждой задачи Жа(&7) являются
обыкновенными дифференциальными уравнениями
+2"
¦••••*,+1'
mk
mk
A.3)
где штрих обозначает производную по |.
144
Величины Ы9) определяются из осреднения D.2.26):
+ Cikq+imkq+lN(LK...kq), q = - 1, 0, 1, ... A.4)
Интегрируя, например, уравнения задачи Жа(—1)
[Ci3m3(N{,D']'+C'i3nk=0, A.5)
получим
{NVL)' = - C{3nk + Аапк, A.6)
где Aisnk — некоторые константы. Чтобы их определить, разре-
разрешим A.6) относительно производных от локальных функций
(А*)' = С^'-з (- Can* + Ai3nk), A.7)
где под С^з'о понимается элемент матрицы 3X3, обратной к мат-
матрице [Сзтз].
Если теперь осредним левую и правую часть A.7), то так как
)') = o, A.8)
получим из A.7)
Аал = { С5й>~ • <CSU Сфпк). A.9)
Подставляя это выражение в A.7), получим окончательно
Тогда тензор модулей упругости нулевого приближения D.6.12J
имеет вид
E) = fyn* A) + сЧяв (Е) [Сйв (I) х
X <Caii>-I(CSi3C^llk)-C^a(E)CBlI*(g)], A.11)
а эффективный тензор модулей упругости — вид
Для определения локальных функций W1» необходимо проин-
проинтегрировать A.10) и учесть, что
{!№*) = 0. A.13)
Тогда
Nmnk(t)*sN%ul(t) = Dmnk(t) — (Dmnk), A.14)
где
Dmnft A) = j CSJb (л) [(С^'з)-1 (С^з С,зпй) - Q3nft (Л)] *|. A.15)
о
145
После этого можно переходить к решению задачи Жа@) и
т. д., в результате чего станут известными локальные функции
любого уровня и величины Ы"\ Все эти величины достаточно вы-
вычислить раз и навсегда, чтобы решать любую краевую задачу
упругости в перемещениях, для чего необходимо многократно ре-
решить задачу теории эффективного модуля Дд^).
Заметим, что полученных соотношений A.11), A.12), A.14)
достаточно, чтобы решить задачу теории упругости в переме-
перемещениях (задачу А) по теории нулевого приближения. Для этого
нужно знать решение этой задачи для анизотропного однород-
однородного тела.
Упражнение 1.1. Показать, что для упругого слоистого компо-
композита, каждый компонент которого является изотропным,
из A.15) следует, что из 18 независимых компонент локальных
функций N отличными от нуля будут только 3 независимые ком-
компоненты, причем
о """"
I
П -П - Г Г
Ахз-^з-J [
(У(Я+2ц)>
I
^181 = ^282 = ^811 = ^822 = \ -Г
Упражнение 1.2. Показать, что для композита, описанного в
предыдущем упражнении, компонентами тензора модулей упруго-
упругости нулевого приближения, отличными от нуля, являются
1-v /(l + v)(l-2v)v '
' Е A — v) /
B(l-v)
2ц.)) >
146
¦ v (v/O-v)) /. 18v
1v / (l+v)(l2v) \ '
—v / (l+v)(l—2v) \ '
\ ? A _ v) /
WO) к 1 V
i — <->2233
Г(О) Г(О)
ЬЗЗП = C3322 =
E(l
1212 М
A — avj \
C1212 = U =
1 1
Упражнение 1.3. Показать, что для композита, описанного в
упражнении 1.1, из 21-й независимой компоненты эффективного
тензора модулей упругости отличными от нуля являются только
5 независимых компонент (как для трансверсально изотропного
материала)
Е I <у/A-у»1
B(l-v)
, 1 ' 1
v)(l-2v)
?A—v)
Упражнение 1.4. Показать, что для слоистого упругого компо-
композита, каждый компонент которого является ортотропным, причем
главные оси ортотропии совпадают с осями координат, независи-
независимых локальных функций, отличных от нуля, будет 5 и
147
6
J
771
JL
?>838 = ^883 = J g G/Cw) ~ Ь
о 2J28 ' M28
%
¦-E.
000 J C3383A/C8333)
Г Г (Сц88/С8388) Сц33
Cn^J dgj (j 20)
jT)M,= f Г (C2233/C88W)
0
JL »зз< 1/СИ88) CM3s
0
Упражнение 1.5. Показать, что для композита, описанного в
лредыдущем упражнении, отличными от нуля компонентами тен-
тензора модулей упругости нулевого приближения являются
WO) л , Сцзз (Сшз/Сзззз) Спзз
Cllll = Ощ1 + — —— ¦ —
С22аз (Саш/С3833) С2233
— -T7Z, " ~
•^3333 С/Ч») L3«S
г@)
Ьззз
()
зззз —
A/Рии) '
Сцзз 1
Сзззз A/Сзз88>*
Сагяа 1
() _
/ С2азз \ 1
(— \ ——
* ЧзЗЗ ' <1/^8833/
= с1Ш + -^! -?sl \ —!
С * С A/Сзззз)
<1/Сшз)
Ci212 =
148
Упражнение 1.6. Показать, что для композита, описанного в
упражнении 1.4, из 21-й независимой компоненты эффективного
тензора модулей упругости, отличными от нуля являются 9 (т. е.
это макроскопически ортотропный материал):
^2222 =
A/Сзззз) \
1
/ Сггзз \г
L2233
^3333 =
I 1 / Сцзз \ / C223S \ / С1133С22ЗЗ
<1/Сзззз> ' Сззя / \ Сзззз ' * С33зз
1 / С2388
1 О /Сзззз) ' Сззз,
A.22)
1
A/Сшз)
^2323 =
1
<1/С232з)
Упражнение 1.7. Показать, что для упругого слоистого двух-
компонентного композита, каждый компонент которого является
изотропным однородным материалом (рис. 16), локальные функ-
функции N, отличные от нуля, имеют вид
/iF).
/1F). A-23)
U—
1где
а-у) (^~т
A.24)
Пусть теперь каждый пакет слоистого композита составлен из
ортотропных слоев (ось g3 — главная ось ортотропии), причем в
каждом слое s одна из главных осей ортотропии направлена под
углом <fs к оси gj. Если обозначим через С°цы компоненты тензо-
149
pa модулей упругости в главных осях ортотропии, то в выбран-
выбранных координатах |ь ?г, 5з компоненты каждого слоя s будут вы-
выражаться через C°ijki следующим образом:
Спи = cos* ф5С?ш + sin* ф8С2222 + 2 cos2 ф5 sin2 ф5 (Спя + 261212),
^222 = Sin* ф,С?Ш + COS* (р,С + 2 COS2 ф5 81П2 ф, (С?122 + 2С?212),
Сзззз = Сзззз,
С2233 = сов2 Ф5Сг2зз + BID2 ф!СПзз,
Cl133 = Sin2 ф5С2233 + COS2 ф8С?Ш,
*Ш2 = cos2 ф8 sla2 ф8 (Cini + С2222 — 4Ci2i2) + (cos* ф5 + sJa* ф5) C?i22,
C2323 = cos2 ф5Сгз2з + Йи2 Ф8^1313,
С^з1з = s*»2 ф8С2°з2з + cos2 ф8С?з1з, A -25>
+ @08*
Cni2 = COS8 ф5 Sin ф5 (Сии — Сц22 — 2Cl212) —
— COS ф8 Sill8 ф5 (С°222 — С?122 — 2С?212),
С1222 = cos ф8 sin8 ф5 (Сип — Сц22 — 2С1212) —
— СОВ3 ф5 Shi ф, (С2222 — W122 — 2Cl212).
С1233 = cos ф5 ado ф5 (С?1зз — С2233), С1323 = cos ф5 sta ф5 (С\Ъ\г —
Тогда компоненты эффективного тензора модулей упругости для:
такого композита будут выражаться следующим образом: Сч
) (СззззСцззK (ССц)
— (^3333^2233).
н = (Сцц) + (Сзззз)
(С) + (С) (ССJ (^^
^8388 = (СзЗЗз) ,
^2238 = (Сзззз) (СззЗзС22зз).
Йцз8= (Сзззз)
+ (Сзззз) (СззззС223з)
*ш» = (Сщя/Ф/Аи &2323 = (C2823/d)/A1, A.26>
150
t, /Г" \ _j ' / W133 \ / C1233 \ /СщзСхмз \
йщ2= (Чш) + 7777:—r(-7—)(-7—/~\~7 )•
\ 1 /L3333) Ь33зз / \ Сзззз / » L8833 '
t //-• \ 1 1 / ^гги \ / C12SJ \ /СггззОм! \
222— \ci222/ "+¦ 7777—г ( ) ( ~7 ) — ' —7. y.
'W^SSSS/ ^3383 ' ^3333 ' v ^8333 *
тде
A.27)
1==( d /\ d )~\ d I'
В частности, если в каждом слое пакета материал однород-
однородный, то
N
здесь us — объемная концентрация компонента s в iV-компо-
нентном композите.
Упражнение 1.1. Показать, что в слоистом композите с изо-
изотропными компонентами при неидеальном контакте на границе
раздела компонентов Г
[i[al3]]=(W=l, 2, 3;Ы=0;
on = ±k[[ui]], 6 = const, /=1, 2, A.29);
эффективный тензор модулей упругости выражается формулой
A.19), за исключением компонент fta3os. а=1, 2, которые имеют
в этом случае вид
= (т-+(т)Г'l=x- '(L30)
§ 2. Задача в напряжениях
Решение задачи В для слоистого упругого композита ищется
в виде D.3.72)
п=0 р=0
причем локальные функции М<р> зависят только от координаты §.
Поэтому уравнения D.3.57) каждой задачи Жв(л) являются
обыкновенными дифференциальными уравнениями. В частности,
для задачи Жв(—2) имеем D.6.29)
Mp'r'uvY = ®. B-2)
151
причем эффективный тензор упругих податливостей Н определя-
определяется следующим образом:
где
М?>Ытп =s брыеды Mijpg, B.4)
а тензор упругих податливостей нулевого приближения по фор-
формуле
% F) = J4kl A) + SmfifitbJtlmn A) AC» (g). B.5>
Таким образом, чтобы найти эффективный тензор упругих по-
податливостей Н и тензор упругих податливостей нулевого прибли-
приближения J0, нужно решить уравнения B.2) и воспользоваться усло-
условиями
((МцыУ) = 0, {Мт) = 0. B.6>
Однако можно поступить по другому. Эффективный тензор
упругих податливостей можно иайти как тензор, обратный к эф-
эффективному тензору модулей упругости A.12), а тензор упругих
податливостей нулевого приближения — по тензору модулей уп-
упругости нулевого приближения A.11), воспользовавшись форму-
формулой D.6.36).
Решим систему уравнений B.2), которую можно записать в-
виде
GlKfJL (JKLpq — GmpGnqJ KLMN MpQpq)" = 0. B.7)
Отсюда
Jkui — GmpCnqJklmn Mpq t/ = AKuil + BKLtj, B.8)
где Акьа и Bkui — некоторые константы. с
Упражнение 2.1. Воспользовавшись условием B.6), доказать,
что в B.8)
Акы, = 0. © B.9>
Из B.8) видно, что
ij — Jjhnkl (Jkui— BKLtj). B.10>
где Jmnkl — элемент матрицы 2X2, обратной к матрице с эле-
элементом Jklmn- Осредним теперь левую и правую часть B.10).
Тогда, используя условия B.6), имеем
ВкЫ1 = (JrLMn)~1 (JUtNPQJpQij). B. И)
Подставляя B.11) в B.10), получим
eMpeNQMpQij= Jmnkl (Jkuj— (J~klu)~1 {JTjpqJpqij)), B.12)
152
а подставляя B.12) в B.5), найдем тензор упругих податливостей
нулевого приближения
Jfjbl = Ji,kl + JijMNJMNKL (— JKLkl + (J~KLIj)~l (JTjPqJ PQkl)) ¦ B.1 З)
Отсюда получаем эффективный тензор упругих податливостей
B-14)
Из B.12) можно найти локальные функции М:
I
= ? A - Л) Dpqh (Л) *|
о
«
тде
Dpqij= 6pMGQNJMNKL{JKLii~(J~KLlj)~ (JTjRsJ RSif)), B.16)
di. B.17)
Упражнение 2.2. Показать, что для упругого слоистого ком-
лозита, каждый компонент которого — изотропный,
Jijki = А,'6? А, + ц' (8ik8ji + 8a8jk) =
= -^" [- 2ve(/6w + A+ v) (8п8ц + bit8jk)], B.18
где
Г в *: , ц' = —!_, B.19)
2(ЗЛ+2) г 4ц v
отличные от нуля независимые компоненты тензора упругих по-
податливостей нулевого приближения выражаются в виде
т@) _ ;№) _ <(У + 2Ю/ц'(*' + 1*0> _ <?/(!-у8))
111 — •* 2222 ~~" ^ '~ ¦ ¦ ~ ^^^—
l' 4-
v)(l-2v) 2у
ИО) (У/^'+ц')) <у/A-у)>
" ^33 * A/01'= ~
153
D) т@) V
311 = «'3322 = .,_¦_,.,
1
1-v (?/(l-v)>*
101 s I 1
Упражнение 2.З. Показать, что для композита, описанного к
упражнении 2.2, эффективный тензор упругих податливостей имеет
только 5 независимых компонент, отличных от нуля:
#1111 = #2222 = ¦Лш — «^2222,
/ (Я.'J \ _ / (l
I
?A—v)
= #2233 = Л°33 = А, B.21)
#1212 — — (#1111 — #1122) = All2,
=( ^
#1313 — #2323 = ((*')=( ^ ) •
Упражнение 2.4. Показать, что для композита, описанного в
упражнении 2.2, отличных от нуля локальных функций будет 4У
причем
(V/li^V+!*')> 1 1 ]
<!/!*'> <!/№' +|i'> V + |i' J '
^ii22 - Onu - - | A/ЮA/(Г + Ю) 17+
^ ' 1
i»'(v + |iO 0/i*'> J'
= 02112 = 02121 =
2112 = 02121
-у j ,^. ,^ 1 j •
Упражнение 2.5. Показать, что для слоистого упругого двух-
компонентного композита, каждый компонент которого является
154
изотропным однородным, локальные функции Мцы выражаются
в виде
+
A — 2у) + 2уц'2\ +
+
- 2у) - 2 A -
, (g),
(g).
2 Y(^2+l*a)+ 0-
= М2121 = -L A7
7?
1 YH2 + 0 — Y) Hi
(g), B.23)
где
B.24)
V*) + A -
Упражнение ,2.6. Показано, что тензор концентрации напря-
напряжений D.6.61) для слоистого композита имеет вид
(бб + ЬЬ) J (I) X
B-25)
Упражнение 2.7. Показать, что тензор концентрации деформа-
деформаций D.6.62) для слоистого композита имеет вид
Bt!nk= bank + у
X
+ 6/зСшз(?)) X
- Са„» (g)].Ч B.26)
§ 3. Теплофизические характеристики слоистого композита
Решение задачи теплопроводности D.4.3), D.4.4) для слоисто-
слоистого композита согласно D.4.6) и D.4.17) ищется в виде
?=0 р=0 3
f3 1)
155
причем локальные функции Р<*»(в> находятся из рекуррентной си-
системы обыкновенных дифференциальных уравнений D.4.8). На-
Например, для определения локальных функций Рг(?) имеем из
D.6.38)
&' + *.%)' = 0, C.2)
после чего находится эффективный тензор теплопроводности Л
D.6.39)
л(/=<*?/>;+ *5>. C.3).
Если найдены все локальные функции Р(рИР>, то решение зада-
задачи теплопроводности для слоистого композита сводится к много-
многократному решению соответствующей задачи теплопроводности
для однородной среды.
Решим уравнение C.2), учитывая условия
<Р/> = 0, (Р',) = 0. C.4)
Пусть Л/ — некоторые постоянные. Тогда из C.2) имеем
&Р] + Ада = А,. C.5)
Удовлетворяя второму из условий C.4), находим
после чего из C.5) имеем
Обозначим
Р,'= <?,(?)• C.8I
Тогда, удовлетворяя первому из условий C.4), получим выраже-
выражение для локальных функций Р,-:
J\(E) = J<Mtl)*l + <6<&>. C.9)
о
Чтобы найти вектор теплового потока по теории нулевого при-
приближения, найдем тензор теплопроводности нулевого приближе-
приближения А,т<°>:
Эффективный тензор теплопроводности находится осреднением
этого выражения
*-<*+<-$->(-?->№-<-?¦>•
156
Упражнение 3.1. Показать, что для слоистого композита, каж-
каждый компонент которого изотропный,
АЛ7=А,т6г/7 C.12)
эффективный тензор теплопроводности имеет две различные ком-
компоненты
Ли = Л22 = (tf1), Л38 =
и = Л22 = (tf), Л38
= 1 / (-JL-) . С C.13)
Чтобы найти эффективный тензор {J*, связанный с тензором
теплового расширения D.6.43), достаточно обратить внимание на
аналогию уравнения D.6.42)
,Y = 0 C.14)
с уравнением A.5). Поэтому имеем
Р</ = (Pi?) + (^отзСтзи) (Сйрз){С^Р?8) — (Сг/шзС^згаРгв)- C.15)
Точно так же из аналогии уравнений D.4.38)
+ а „у = 0 C.16)
и D.4.40) видно, что эффективный тензор теплового расширения
для слоистого композита имеет вид
Ч— (аа) —
§ 4. Точные решения задачи о полосе
Рассмотрим плоскую задачу теории упругости D.8.9), D.8.10)
для слоистого композита. Пусть ось х2 направлена перпендику-
перпендикулярно слоям (как ось х$ на рис. 15). Решение этой задачи ищем
в виде ряда D.8.33)
р=0
Для отыскания функций Х^р^ необходимо решить рекуррентную
последовательность задач Дв(р):
еш ejN eKPeLRHijKLtpP^MN (?) = Л * (х)> D-2)
r = S0I{p\ D.3).
входные данные для этих задач определяются рекуррентной по-
последовательностью D.8.20), D.8.21).
Для отыскания локальных функций М<р>(?) необходимо ре-
решить рекуррентную последовательность задач Жв(#). каждая из
157
которых заключается в решении обыкновенных дифференциаль-
лых уравнений D.8.24): :„
VKq^RMNKi.-.Kq —
з
где использовано обозначение D.8.32) и верхние индексы у всех|
величин опущены. ^
Тогда обозначения D.8.22) и D.8.23) приобретают вид \
Правые части уравнений D.4) определяются по формуле D.8.25) .1
причем величины Вцкъ связаны с эффективным тензором упругих!
податливостей формулой D.8.26). |
Упражнение 4.1. С помощью решения задачи Жв@) D.4) и yc-.j
ловий I
к2) - 0, MKlK2) = 0 D.8).j
показать, что )
6 ¦ j
MKtKr (l)= eiitfJKi \\ (S ~ Л) Bu (Л) dr\ + I
0 . I
1
+ 1A u) + у «6 ш — <
где
о (Jn/j/Jnn> Jn/j(i) D 10)s
причем тензор J*ukl имеет различные компоненты в зависимо- '
сти от того, осуществляется ли плоская деформация или плоское <
напряженное состояние. !
Упражнение 4.2. Показать, что тензор упругих податливостей
нулевого приближения для слоистого композита в плоском случае .
имеет вид ¦
</nn(s) \1'-'un> Mime)
D.11)
Упражнение 4.З. Показать, что эффективный тензор упругих
податливостей для слоистого композита в плоском случае выра-
выражается
158
ijkl= (Jijkl)
juujukl
DЛ2>
Упражнение 4.4. Используя обозначения D.5), D.6), D.8.32),
показать, что из D.9), D.10) следует
= бР2 eMK,eNKi
.^ (Е) =
, [J'ijmn (?) +
D.13)
w(g)]. D-14)
Ml)]. С D.15)
\* A.
Эффективные характеристики слои-
слоистого композита в плоском случае при-
приведены в приложении V.
Рассмотрим теперь композит в виде
упругой слоистой полосы (рис. 17). Бу-
Будем предполагать,' что длина полосы 21
много больше 1, материал полосы изо- Рис. 17.
гропный и упругие податливости явля-
являются периодическими функциями координаты х2 с периодом а=
= 1/JV, где jV — число «пакетов», т. е. ячеек периодичности:
хг) =
[- 2v (
8IL6JK)],
таким образом, рассматривается случай обобщенного плоского
напряженного состояния. Зададим связь медленной х2 и быстрой
координатой ? формулой
xa=o(n-l+g)--i-, n=l,2,...,N, D.17)
причем g изменяется в пределах ячейки периодичности от 0 до 1.
Будем считать, что «объемные» силы отсутствуют, а на грани-
границе полосы заданы усилия. При этом на границе Г2:*2 = ±1/2
Giilr.^te), <*12|г, = Ф(*1), D.18)
а на границе Т\\ Х\= ±1 выполняются интегральные граничные
условия:
1/2 1/2 1/2
j andx2 = Р, | o12dx2 = Q, ^ x2a12dx2= М„, D.19)
—1/2 -1/2 —1/2
(Р — растягивающая, сила, Q — перерезывающая сила, Ми —
изгибающий момент).
159-
Тогда для решения задач Дв(р), р = 0, 1, 2, ... D.2), D.3)
необходимо сформулировать входные данные. Граничные условия
D.3) с учетом D.18), D.19) запишем в виде
<ЛР) | _ р{р) tx \ у(р} | ф^р^(д:) D 20)
v(p) I п{р} viP) I d(P} tv v{p) viP)\l Л/Лр) IЛ ОЛ\
л,1 |Г, == Ч. t л.2 |Г,— " > \Х2 Л.2 —Л J|r, — 1и \t.6l)
где при р = 0:
Q*°* = Q, Р^ = Р, Ми = jWh. D.22)
а при р>0:
Р _ 1п—г\
г=1
г=1
? г+1 И^1 D.24)
г=1
r=l
,...к,+1 (?) xfP^!.Kr+1 (xx, xj |г,. D,25)
Решим теперь несколько конкретных задач об упругой полосе
из слоистого композита.
1. Растяжение (сжатие) неоднородной полосы. Полоса |хг|<:
<1/2, |jti|<:/, />1 находится в равновесии под действием равно-
равномерной растягивающей (сжимающей) нагрузки интенсивностью q
на длинных сторонах Гг.
Напряжения, возникающие в полосе, должны удовлетворять
следующим краевым условиям:
<722|г,'=<7. <*12|г, = 0, D.26)
1/2 1/2
=0, j ondx2 = 0, j x^xdJC, - 0 на Гх. D.27)
1/2 1/2
j j j
—1/2 -1/2 -1/2
160
Эти же условия являются входными данными для решения
задачи Дв@), решение которой имеет вид
ах2
Х<о> = _1_!_. D.28)
Входные данные для решения задачи ДвA) будут
ло> =f(D = фA) = Qd) = p(i) = о, Mil)= — ?КГш(в)]|г,. D.29)
Из D.17) следует, что значению Хг =—1/2 соответствует | = 0 '
и я=1, а значению jc2 = 1 /2 соответствует ? = 1 и л=Лг, где N, как
и прежде, — число ячеек периодичности, составляющих полосу,
а л=1, 2, ..., Л/ — номер этой ячейки (начиная от нижней грани-
границы полосы х2 =—1/2), которой принадлежит рассматриваемое
значение медленной координаты х%. Из D.13) получаем
= -* D.30)
Следовательно, М^ъ—щЛ. Решение задачи ДвA) при входных
данных D.29) имеет вид
Х<»> = 2qd&. D.31)
Для задачи ДвB) будем иметь
т)B) =JFB) = фB) = QB) = м&) = о, рB) = 12<7dd1( D.32)
где
Функция напряжений хB) определяется формулой
Х<2> = 69^ (xa + -L\\ D.33)
Вообще для задачи ДвE),
-Lp{*} (x, + yJ+ т«] xl'
где
(') 11) ^} {!'}МГ2} |о> = 0,
Из D.31) и D.34) следует, что
*, + -~у (s = 1, 2, ...), D.36)
6 Б. Е. Победря 161
где
Р= I2(d!-2d2)= I _ 12 <Р*><*>Т<8Д>' . D.37)
Подставляя, далее, D.14) и D.36) в ряд D.8.30) и суммируя
его, получим следующие ненулевые компоненты тензора напря-
напряжений:
В выражение для аи входят функции быстрой переменной ?,.
параметр а, а также константы d, d\ и р, величина которых зави-
зависит от вида неоднородности в ячейке периодичности. Поэтому их
можно назвать локальными параметрами неоднородности. Ис-
Используя зависимость D.17), можно выразить локальные парамет-
параметры неоднородности d, dx и р через глобальные параметры неод-
неоднородности
a —
1/2 1/2
I 4v(x2)dA:2, \ik~ j xlE(x2)dx2,
<4'39>
I j
—1/2 —1/2
где у* и ца — глобальные параметры неоднородности.
Подставим D.39) в D.38) и заменим в D.38) функции от |
функциями от х2, сохранив за ними прежние обозначения. Окон-
Окончательно получим
<722 = Я, <*и = — \
М-о L
_?(
Напряжения D.40) удовлетворяют уравнениям равновесия, ус-
условиям совместности и граничным условиям D.27) при произ-
произвольных функциях Е(х2) и v(x2) (необязательно периодических)'.
Из D.40) следует, что нормальное давление через неоднород-
неоднородную полосу передается без изменений, независимо от вида неод-
неоднородности полосы, но при этом возникают самоуравновешенные
напряжения ац, причем эти напряжения сохраняются и в том слу-
случае, если модуль Юнга полосы Е не зависит от координаты х%.
В этом случае из D.40) имеем
Yo— 12x2YiL D-41)
162
где Yo и yi определяются по формуле D.39). Например, если по-
полоса состоит из двух изотропных однородных слоев одинаковой
толщины, причем
1 ,
-L,
тогда
D.42)
D.43)
где я = 0 при — V2<*2<0 и п=1
при 0<*2<72. Эпюра распреде-
распределения (напряжений D.43) при
vi>V2 показана на рис. 18.
Нетрудно видеть, что по тео-
теории эффективного модуля реше-
решение этой задачи имеет вид
О22э = <7, опэ = 0. D.44)
vr
% .,
5
«г.
тимин*
Рис. 18.
Решение по теории нулевогь
приближения получается (учи-
(учитывая только решение по теории эффективного модуля D.28)) в
виде
cr202> = q, в\? =
D.45)
т. е. отличается от точного решения D.40) на величину
1/2
а22 - <^> = 0; аи - а\? =а J (х2-у)Е (у) dy, D.46)
-1/2
где постоянная а равна
,— ч
М-о ^2^0—Hi
D.47)
Из D.38) видно, что для того чтобы решение по теории нулево-
нулевого приближения отличалось от точного на заданную величину б:
Т <егц
-Г/2
необходимо взять не менее iV ячеек периодичности, где
О
_L + р , ft =
О
6.
D.48)
D.49)
163
Например, для двухкомпонентного композита с объемной концент-
концентрацией 7==1/г с постоянным коэффициентом Пуассона v и модуля-
модулями компонентов Е\ = const, E2 = const, нз D.49) имеем
2. Избиг неоднородной консоли равномерной нагрузкой. Кон-
Консоль \x2\<1ls, 0<:a;i<:/, ?§>1 одним концом Х\ = 1 заделана и изги-
изгибается нормальной нагрузкой интенсивности q, распределенной
равномерно по стороне х2='/2-
Граничные условия:
<*22| i =—Ч, <*22| i =0. <»и1 » =0- D-51)
1==~2~ 2 2
Условия равновесия любого сечения:
Wdx-x Tadx-0- txadx--^-
J 12 2 1. J 11 2 J 2 11 2 2 •
-1/2 -1/2 -1/2
В этом случае решение имеет вид
<Ь = — <7И% f Y{y)E (у) dy,
-1/2
г
= W° J ^ f
-1/2 —1/
-1/2 —1/2
1 ..2
1/2 1/2
С с
-1/2 • -1/2
где
[ J
—1/2 —1/2
z
J <k. J Y(y)v(y)dy-
1/2 1/2
x2) J & J Y(y)E(y)dy,
-1/2 -1/2 -1/2 -1/2
° = (fi^o - И? )-i, Y (y) = poy - И11 G (x,) =s E™ , D.54)
где G(at2) — модуль сдвига, а константы р,* определяются по
формулам D.39).
164
3. Изгиб опертой бглки равномерной нагрузкой. Для изотроп-
изотропной неоднородной по ширине балки \x2\<i1/2, |*i|<:/, /»1, шар-
нирно опертой по кощам и изгибаемой нормальной нагрузкой,
равномерно распределенной по стороне #2 ='/г. формулы для спг
и О22 получаются такими же, как и в предыдущем примере, а про-
продольное напряжение определяется в виде
1/2 1/2
С Y(y)dy — [i0Y {x2) E (x2) f y4{y)dy. D.55)
-1/2 -1/2
4. Изгиб неоднородной консоли линейной нагрузкой. Коисоль
\ "г,'0<jfi</, ?>1 одним концом Х\=1 заделана и изгибается
нормальной нагрузкой интенсивности qx\> распределенной по сто-
стороне #2='/г-
Граничные условия:
°221 1 == —ЯХ1* °221 I == 0> °i2l 1 =0. [D.56)
=' 2 2 *~ 2
Условия равновесия любого сечения:
1/2 о 1/2 1/2 «
Г o>12d«2 = —-, 1 andx2 = 0, \ x2andx2= ——. D.57)
J 2 J J 6
-1/2 -1/2 -1/2
Решение задачи имеет вид
— I*0 (i*. —
6
1/2 1/2
2 J J
—1/2 —1/2
Y(y)E(y)dy,
-1/
1/2
-1/2 -1/2
х, 1/2
[ J
-1/2 -1/2
*, 1/2
J j
-1/2 -1/2
«. 1/2
-1/2 -1/2
165
На рис. 19 показаны эпюры распределения напряжений, отне-
отнесенных к q в среднем сечении Xi = l/2 = 5 двухслойной консоли
(один пакет) при vi = 0,2; v2=0,4; xs=?2/?i = l/10; y=1/2. Кривые,
соответствующие теории эффективного модуля, помечены «э»,
X:
Рис. 19.
У/
Рис. 20.
теории нулевого приближения — «0», а соответствующие точному
решению — «т».
На рис. 20 изображены эпюры напряжений для того же ком-
композита, но составленного из 4-х слоев B-х пакетов).
Упражнение 4.5. Показать, что во всех рассмотренных приме-
примерах 1—4 выполняется
lim max \<№ - <ги | - 0. С D.59)
JV-»oo
Итак, асимптотический метод осреднения позволяет в некото-
некоторых случаях получить точное решение поставленной задачи, при-
166
чем решение по теории нулевого приближения стремится к точно-
точному при увеличении числа ячеек периодичности (пакетов) к со,
хотя даже при одном-двух пакетах оно правильно отражает осо-
особенности точного решения (рис. 19, 20).
Упражнение 4.6. Получить решения рассмотренных задач 1—
4 для плоской деформации, произведя во всех формулах замену
? D.60)
?? , .
1—V2 1—V
§ 5. Слоистые квазипериодические структуры
Пусть в некоторой криволинейной системе координат х1, х2, х3
тензор модулей упругости С зависит только от координаты хг,
причем
С(аг3 + п6)=С(а:3)) п=0, 1, .... N. E.1);
Такой композит называется слоистой квазипериодической струк-
структурой. (Все рассуждения, проведенные ниже, будут годиться и
для регулярных слоистых структур D.5.8).) Решение задачи тео-
теории упругости D.5.12) — D.5.14) для такого композита согласно
D.5.16) и D.5.32) ищется в виде ряда
(jr=O р=0 р=0
где | — быстрая переменная, связанная с медленной л:3 зависи-
зависимостью
лг3==лго3+ (п—1 + |)а, п-1, 2, ..., N, 0<|<1, E.3J
где
лго3<л:3<:^3) E.4)
a N — число «пакетов» (ячеек периодичности), состоящий из не-
нескольких слоев, внутри каждого из которых модули упругости яв-
являются непрерывными функциями хг.
Заметим, что граничные условия вида D.5.14) формулируются
только на границе 1, = {х3=Хоъ и x3=Xn3}, а на остальной поверх-
поверхности (если она имеется) граничные условия удовлетворяются ин-
интегрально.
Для отыскания членов ряда E.2) нужно решить две рекур-
рекуррентные последовательности. Одна из них состоит в многократном
решении краевой задачи теории упругости Да(/?) для однородно-
однородного тела D.5.33), D.5.34)-:
/.»!** + Х{р} = °-
при интегральных граничных условиях на 2'. Входные данные
каждой задачи Да(р) определяются с помощью соотношений
.D.5.37)—D.5.39).
167
Вторая рекуррентная последовательность состоит в решении
системы обыкновенных дифференциальных уравнений D.5.22) при
выполнении условий D.5.23), D.2.15), D.2.22), причем в каждой
задаче Ж(<7> Р) эт°й последовательности дифференцирование про-
производится только по переменной ?.
Например, для задач Жа(—1, —2) и Жа(—1, —1) имеем урав-
уравнения D.6.52), D.6.53):
[С<™ (N[0)mY - VJC*»)' = 0,1 E.7)
[С""*(Л#)И)'+С«*]' = О, E.8)
из которых находятся локальные функции jf\0)mA-) и Щк1)т^)> п0"
еле чего можно найти эффективные характеристики, входящие в
E.5), E.6) и зависящие, вообще говоря, от медленных координат
х\ х2, х3. "(Штрих означает производную по быстрой координате
?.) Из D.6.48) —D.6.51) имеем
[0М, E.9)
(х) = (С«-3 (Nli0)my - YinO""» +
+ 2ЩСПгт* (N^J + 2r<JC/W* >, E.10)
hfM (x) = (С'/-3 (Nti)m)' + С'Ш), E.11)
hf (x) = (С»* (AT(V)' -rLc"»»). . E.12)
Заметим, что локальные функции #о)т(?) и эффективный тен-
тензор модулей упругости hitM уже найдены в § 1 (см. A.14) и
.A.12)):
где
l 1 & ^ - C>™ (т,)] А,, E.14)
E.15)
Упражнение 5.1. Показать, что из решения уравнений E.7)
следует
{rl. E.16)
Упражнение 5.2. Показать, что из решения уравнений E.7) и
из E.9), E.10) следуют D.6.54), D.6.55).
168
Упражнение 5.3. Показать, что задачу Да (р) E.5), E.6) мож-
можно сформулировать в виде
^ + Х*-= О- С5-1?)
{P}. E.18)
Упражнение 5.4. Показать, что тензор модулей упругости нуле-
нулевого приближения, определяемый формулой D.6.59), имеет вид
A.11):
)]- © <5Л9>
Обратим внимание на то, что если найдено решение по теории
эффективного модуля vk (х) = ад ' (х), то напряжения в теории
нулевого приближения подсчитываются по формуле D.6.57)
4) = С$) (?) «Ь Й + <$? (g) о» Л*), E.20)
где кроме тензора модулей упругости нулевого приближения, оп-
определенного в E.19), нужно еще подсчитать величины C'/ft(o). Од-
Однако в силу справедливости соотношения E.16) легко показать,
что
Отсюда находятся входящие в E.6) величины hilk»:
E.22)
Теперь достаточйо решить задачу Да@) для однородного те-
тела, чтобы сразу же выписать решение этой задачи по теории ну-
нулевого приближения, т. е. учесть микронапряжения.
Как частный случай слоистой квазипериодической структуры,
можно рассмотреть слоистый шар и слоистый цилиндр, для чего
во все формулы нужно подставить конкретный вид символов Кри-
стоффеля.
С тем, чтобы сохранились все предыдущие выкладки, коорди-
координатой х3 следует считать радиус г. Тогда в обоих случаях тензор
модулей упругости обладает свойством
С(г+п6)=С{г), п-0, 1, ..., N, Ro<r<RN, E.23)
(если рассматривается сплошной шар или цилиндр, то Rq=0).
Положим в случае шара
д;1 = е, х2=ц>, х3=г. E.24)
Тогда имеем (см. приложение III)
gn = (г sin <pj", g22 = г*, g33=l,
Г22 = — r> Hi = — r sint Ф. rn = — sin фсов Ф, E.25)
169
Для цилиндра положим
х* = е, х2 = г, *3 = г, E.26)'
тогда
?н = Л g22=g33 = l, Гп3=-г, Г13' = 1/г. E.27)
Обратим внимание на то, что при решении задач теории упру-
упругости обычно пользуются физическими компонентами векторов и
тензоров. Чтобы получить выражение в физических компонентах,
например для цилиндра, следует каждую ковариантную компо-
компоненту с индексом 1 разделить на г (столько раз, сколько встре-
встречается индекс 1), а каждую контр авар и антную компоненту с ин-
индексом 1 умножить на г (приложение I).
Тогда, например, подставляя выражение E.27)
Tin = - r6i 81m8ln + -L 8\ (&бЛ + tinti ). E.28)
в уравнения равновесия D.5.12) и соотношения Коши
«W = у («т.» + и».т) — rpmntip, E.29)
получим соответственно
Р+ДР^ + Х. = 0> E.30)
е« = у («I./ + «/.О + Jf?^ g- («««!/ + вз/вц); E-31)
здесь (как и далее) считаем компоненты векторов и тензоров фи-
физическими (индекс «ф» будем опускать), а частные производные
понимаются в следующем смысле:
^7?' Дг = 17' '-'-IT- El32)
Например, из E.21) и E.28) имеем
CiJ5i (g) = \ Шх (I) 6W - ф, (g) 6*J. E.33)
Рассмотрим теперь плоскую задачу теории упругости. В этом
случае необходимо ввести приведенные упругие характеристики
F независимых приведенных упругих постоянных в общем случае
вместо 21-й в трехмерном случае). Эти характеристики будут раз-
различными в зависимости от того, рассматривается ли бесконечная
слоистая труба (плоское деформированное состояние) или состав-
составное тонкое кольцо (обобщенное плоское напряженное состояние);
см. приложение V. Чтобы сохранить в прежнем виде эффектив-
эффективные характеристики плоского случая, необходимо переобозначить
координаты, а именно полагаем
xi = e, x2=r, хъ=г. E.34J
170
Тогда сохраняются выражения для плоских тензора упругих по-
датливостей нулевого приближения D.11) и эффективного тензо-
тензора упругих податливостей D.12) (см. также приложение V)'.
Если все компоненты композита изотропны
(g) = Я* (g) 6ij6Kl + f** (g) (в/*6л. + 6/1.6.,*). E-35)
где приведенные характеристики X*, ц* имеют вид
E.36)
v) 2(l+v) V '
в случае плоской деформации и
^ ^ E.37)
в случае плоского напряженного состояния.
Тогда из (V.2) следует, что независимых компонент эффек-
эффективного тензора модулей упругости будет 4 (ортотропия):
^2222 =
q»/(X*+»*)) Va=(fi.). E.38)
П122 A/(А*+2ц*)> П21Я ^ ' V '
Рассмотрим задачу о бесконечно длинной трубе под действи-
действием внутреннего р0 и внешнего рх давления, равномерно распре-
распределенного по поверхностям r=R0 и r=Rrr соответственно.
Решение этой задачи по теории эффективного модуля имеет
вид
е|2 = е* = а^Р-1 + ЬаГ-Р-1, E.39)
где
P^g+'P^/' Д^-'РдгД5г' рР+1пЭ+1
Г^ ^о ^ ,
B,, t = 1,2, E.40)
171
причем приведенные эффективные податливости G*a>, a, ?=1,2,
вычисляются через компоненты трехмерного эффективного тензо-
тензора упругих податливостей B.14):
н.
3333
Кроме радиального аг9 и окружного <твэ напряжений в трубе воз-
возникают также и осевые напряжения:
== о§ = - -}— [А, (Яшз
«3333
]- E-42)
Для подсчета напряженного состояния по теории нулевого при-
приближения
°y=q%*b <5-43>
необходимо найти тензор модулей упругости нулевого приближе-
приближения С<°). Так как
N2aa=JDa(t)dZ-^Da(t)dl); a-1,2, E.44)
где . '
щ = (С22аа/(Л+2,)> C,laaF)
S; [^(l)+2(i(g)l(l/(^+2(i)> X(g)+2(i(|)' V
то имеем
F). E-46)
а отсюда находятся и С^(|) E.33), а также все остальные ха-
характеристики.
Мы не будем останавливаться на нахождении высших прибли-
приближений, которые легко находятся из несложных, но громоздких
вычислений.
Заметим только, что задача о слоистой трубе, известная кай
задача Гадолина, имеет точное решение. Для сравнения прибли-
приближенных решений а</(ш), т = 0, 1, 2 с точным ац рассмотрим тру-
трубу под действием внутреннего давления ро, состоящую из N=
= 1, 2, 3 пакетов периодичности, причем каждый пакет состоит
из двух слоев — внутреннего с коэффициентом Пуассона vi = 0,3
и модулем сдвига Gi и наружного с коэффициентом Пуассона
•v2=0,446 и модулем сдвига G2. Отношение модуля сдвига наруж-
наружного слоя к модулю внутреннего 62/61 = 0,067. (Эти данные при-
приблизительно соответствуют композиции сталь — свинец.) Во всех
случаях полагаем объемную концентрацию первого компонента
Y = 0,7. Итак,
vi = 0,3; v2=0,446; G^G, = 0,067; Y=0,7. E.47$
172
Буквами «т» и «э» помечены кривые, соответствующие точно-
точному решению и теории эффективного модуля, цифрами «О», «1»,
«2» обозначены кривые, соответствующие теориям нулевого пер-
первого и второго приближений. Все напряжения отнесены к давле-
давлению ро-
На ри^. 21 и 22 показано распределение радиальных напря-
напряжений аг и окружных ов в описанной выше трубе с одним «паке-
«пакетом», (ЛГ=а=1).
Из этих рисунков видно, что даже для одного пакета, когда
механические свойства компонентов композита довольно сильно
отличаются друг от друга, второе приближение достаточно хоро-
хорошо соответствует точному.
На рис. 23 и 24 показано распределение радиальных о? и
окружных напряжений Ое для трубы с двумя «пакетами» (ячей-
(ячейками периодичности) (N=2, а=1/2), а на рис. 25 и 26 — с тремя
(N=3, а=1/3).
Из рис. 23—26 видно, что максимальное отклонение любого
приближения наблюдается: для радиального напряжения аг —
на границе раздела компонентов внутреннего пакета, а для окруж-
окружного напряжения сгв — на внутренней поверхности трубы.
В табл. 5.1 для различного числа пакетов N приведено процент-
процентное отношение max \or—сгг(т>|, т=э, 0, 1, 2 (значения радиаль-
радиальных напряжений, вычисленных по теориям эффективного модуля
и иулевого приближения совпадают).
В табл. 5.2 приведено процентное отношения max |ав—ae(m>|>
т=э, 0, 1, 2.
Из табл. 5.1 и 5.2 видно, что все приближения (нулевое, пер-
первое и второе) быстро стремятся к точному при увеличении числа
пакетов. Окружные напряжения аеэ, вычисленные по теории эф-
эффективного модуля, с ростом N дают большую погрешность.
т
э,
N
0
1
2
1
ю,
1,
1,
1
1
7
2
12,
0,
2
3
5
3
9,
3
3
3
8
5
8
1
1
9
4
7
10
5,
1
1,
5
1
Таблица
100
0,6
0,1
0,1
5.1
250
0,2
0,06
0,06
Таблица 5.2
^S. N
т ^\
Э
0
1
2
1
22,2
77,5
44,9
5,7
2
46,9
52,9
8,3
4,3
3
60,4
39,3
1,4
'¦ 4,1
5
74,0
25,7
1.2
3,2
10
86,1
13,7
1,4
1.9
100
98,3
1.4
0,2
0,3
250
99,2
0,5
0,1
0,1
173
/.' 1,2 -ft ¦ f,6
-1,0
Рис. 21.
'/. 1,2 U W 1,8: 2,0f
Рис 22.
J 1,11,21,31A 1^1,61,7 W 1,9 2,0 г
2
Рис. 23.
*ч.
Разумеется, если механические свойства компонентов компо-
композита будут более близкими, сходимость приближений к точному
улучшается, что видно из табл. 5.3 и 5.4, где показано процент-
процентное отношение max \or—ov(m)| и max |<ае—cre(m)| соответственно,
т=э, О, 1, 2 для композиции сталь — медь: vi = 0,3; V2 = O,8;
G2/G, = 0,494; Y=0,7.
m
Э,
N
\
0
1
2
1
5
7
7,
2
2
6
2
5,
1
5
2 .
3
4,
1
1.
8
1
5
" 3,
0,
0,
7
9
9
10
2,2
0,6
0,6
Таблица
100
0,3
0,1
0.1
5.3
250
0,1*
0,03
0,03
Таблица 5.4
т ^^
Э
0
1
2
1
15,4
23,0
4,8
2,2
2
23,9
14,5
0,6
2,4
3
27,9
10,5
1,2
2,0
5
31,8
6,6
1,1
1,3
10
34,9
3,5
0,7
0,8
100
39,1
0,3
0,08
0,08
250
38,3
0,1
0,04
0,04
§ 6. Неосесимметричная задача о слоистой трубе
В предыдущем параграфе была дана оценка точности теории
нулевого приближения в зависимости от числа ячеек периодич-
периодичности (параметра а). Эта оценка проводилась на задаче о слои-
слоистой трубе под действием равномерного внутреннего давления.
Однако на точность нулевого приближения, несомненно, оказы-
оказывает влияние и характер нагрузки. Например, если при плоской
деформации труба подвержена нагрузке, изображенной на рис. 27,.
то интуитивно ясно: чем меньше угол р, тем хуже точность нуле-
нулевого приближения (при фиксированном числе пакетов N).
Здесь
— q, если —р<6<р;я — р<6<я + р .-
р, если р<6<я — Р;я + р<0<2я — р,
причем среднее давление на поверхность r=RN предполагается
нулевым:
F.2)
(Мы будем предполагать, что труба под действием указанной на-
нагрузки не теряет устойчивости).
176
Если р->0, нагрузка стремится стать сосредоточенной, и в этом-
случае заведомо метод осреднения не годится.
В самом деле, рассмотрим действие сосредоточенной силы Р
на границу слоистой полуплоскости (рис. 28).
Очевидно, на границе полуплоскости
022 = #22, 0fl2 = О12,
-(О) /->(<>) э , ~@) э
OU = ^1111 8ц + СИ22 6
У7/////////Л
V////////////
У//Х/////////////.
V////////////777/
Рис. 27.
Рис. 28.
F.3),
где Ci/di — компоненты тензора модулей упругости нулевого при-
приближения для плоской деформации | = 0 (см. приложение V).
Тогда, воспользовавшись решением Лехницкого, подсчитаем пре-
пределы:
lim
r->0
F(Q, G*)
F(9,G@)y
F.4)
lim
-СШ1@))]
sin2 9
F.5)
где компоненты эффективного приведенного тензора упругих по-
датливостей G* подсчитываются по формуле E.41), а функция
F ГО П\ -
F)
F.6)
имеет конечное отличное от нуля значение при всяком в (компо-
(компоненты тензора G подсчитываются по формуле E.41), где следует
сделать замену Я,-/«
177
Из F.4) следует, что при 0-»-О отношение сгцэ, вычисленного
по теории эффективного модуля, к точному значению 0ц имеет
конечное значение, в то время как погрешность теории нулевого
приближения F.5) при 0-»О стремится к <х>.
Пусть теперь, например, известно решение задачи для трубы,
сечение которой изображено на рис. 27, по теории эффективного
модуля. Если в D.6.44) положить а=0, то перемещения по тео-
теории нулевого приближения совпадают с перемещениями по тео-
теории эффективного модуля. Напряжения в теории нулевого приб-
приближения подсчитываются по формуле D.6.57), причем так как
величины D.6.58) и D.6.59) при i — 2 не зависят от быстрой пе-
переменной §, то напряжения на площадках r=const, вычисленные
по теории нулевого приближения, не отличаются от соответству-
соответствующих напряжений теории эффективного модуля
02/(О)=,02/з. F.7)
Деформации теории эффективного модуля определяются по
формуле E.31).
Поэтому имеем
Г
L
• Сц22 (С2222)
¦i
_,@) Г ^2233 ((Cim) — Сшг) _| /-> 1 .3 . Сщз (^2222/ „Э
O = г оаа83 ее -\ ег.
Г
=
L
Заметим, что формулы F.8) справедливы и в том случае, если
каждый компонент композита является ортотропным, а не только
изотропным (см. приложение V).
Точное решение задачи о слоистой трубе под действием неосе-
симметричной нагрузки получено в тригонометрических рядах.
Для того чтобы выяснить вопрос о точности теории нулевого при-
приближения, будем аппроксимировать ступенчатую нагрузку, изоб-
изображенную на рис. 27 конечной суммой членов ряда, в который
разлагается эта нагрузка при получении точного решения. Вид
нагрузки при некоторых значениях углов р показан на рис. 29, где
50
I V4 2sin fe p cos fe 9 ((. Q.
°r |r= RN = - 2j Л • F-9)
На рис. 30, 31, 32, 33 показано распределение окружных на-
напряжений в двухкомпонентном композите сталь —свинец E.47)
при RN[Ro — l,O5 при числе пакетов N=5 и N=10 и при различных
углах р = я/16, р = я/64 в среднем сечении 0 = 0.
178
Радиальные и касательные напряжения оказываются сущест-
существенно меньше окружных и поэтому графики их распределения не
приведены.
Из рис. 30—33 видно, что в жестких слоях погрешность непре-
непрерывного решения по теории эффективного модуля на порядок
50' 90
9, град
Рис. 29.
больше погрешности разрывного решения по теории нулевого при-
приближения. Точность теории нулевого приближения повышается с
увеличением числа пакетов N и уменьшается при уменьшении уг-
угла р (т. е. при увеличении степени локализации нагрузки).
179
<зв -
f
3600
3200
-2800
2400
2000
то
1200
800
\
о
-400
-800
-1200
-1600
-2400
-2800
-3200
1,00 д
X
1,01
т
1,03
\
\
1,05
-2W0
-2800
-3200
Рис. 30
Рис. 31.
Р
3200
то
2000^
то
400
о
-400
-800
-1600-
-2000
-то
-т
\
N=10 ;J3=
ш
X
\
\
s
S
W5
Р
3600
3200
2800
2400 \
2000
1600
1200
о-'
Ш
400
0
-400
-800
-1200
-2400
-2800-
-3W0
-3600
'64
\
\
W
\
Рис. 32.
Рис. 33.
180
Таблица 6.1
5
10
20
7.85
A57)
4,27
C14)
2,87
F28)
8
7,88
G8,5)
4,28
A57)
2,88
C14)
16
7,93
C9,3)
4,30
G8,5)
2,90
„A57)
32
8,07
A9,6)
4,35
C9,3)
2,90
G8,5)
64
8,23
(9.8)
4,41
A9,6)
2.96
C9.3)
128
8,99
D.9)
4,74
(9.8)
3,14
A9,6)
Погрешность Лае точности нулевого приближения можно оце-
оценить по формуле
max|c9—
max | а91
F.10)
N40
N=20
причем оба максимума достигаются в сече- А
нии 0 = 0, причем для знаменателя — на внут- „
ренней поверхности трубы г=1, а для числи-
числителя— на границе раздела компонентов '8
внешнего пакета. На рис. 34 приведены гра- 7
фики погрешности теории нулевого приближе- 6
ния в зависимости от числа ячеек периодич- 5
ности (пакетов) N и степени локализации на- 4
грузки ft. 3
Значения этой же погрешности (в процен-
процентах) приведены в табл. 6.1, причем в скобках ^
указано, сколько пакетов укладывается на ду- '
ге— р<0<р.
Когда угол р уменьшается настолько, что
участок действия локальной нагрузки стано-
становится порядка двух-трех длин пакетов, по-
погрешность резко возрастает. Поэтому в таких
случаях целесообразно использовать метод выделения особен-
особенности.
0 5 1015 Я) 25 3035 W 45
J, zpoff
Рис. 34.
§ 7. Внутренние напряжения в трубе при ее намотке
Рассмотрим слоистую трубу, получаемую в результате намот-
намотки ленты толщиной б, рассматриваемой как слоистый композит, на
цилиндрическую оправку радиуса Ro (рис. 35).
Мы предполагаем, что при намотке сделано достаточно боль-
большое число оборотов, так что число образованных при этом паке-
181
тов велико. В этом случае для определения микронапряжений мо-
может быть использована теория нулевого приближения.
Как следует из предыдущего, для этого достаточно решить
данную задачу по теории эффективного модуля, ибо все характе-
характеристики теории нулевого приближения для слоистой трубы нам
известны.
В самом деле, как только станет известен вектор ы=щъ, на-
напряжения теории нулевого приближения подсчитываются по фор-
формуле
Су' = Ct%Vk.t + CipfiVb, G.1)
где величины C\flt и С§1 определяются в E.46) и E.33).
Решим теперь эту задачу по теории эффективного модуля.
Будем считать, что б настолько мало по сравнению с Ro, что лю-
любую точку наружного слоя можно ха-
характеризовать величиной R — макси-
максимальный радиус .намотанного слоя..
Эта величина в процессе намотки опи-
описывает все «овые материальные точ-
точки, и ее можно считать параметром,
характеризующим процесс намотки.
Текущий радиус трубы обозначим че-
через г. Штрихом будем обозначать про-
производную по координате г. Считаем,
что в теле осуществляется осесиммет-
ричное напряженно-деформированное:
¦Рис. 35 состояние, так что уравнение равнове-
равновесия будет всего одно относительно ра-
радиальной составляющей v вектора перемещений.
причем выполняются граничные условия
r=R
G.2>
где oo(R) — заданная функция натяжения намоточной ленты, а
^i. ^з. Яв — эффективные характеристики, связанные с трехмер-
трехмерным эффективным тензором модулей упругости соотношениями
причем координатная ось х3 направлена по радиусу (каждый ком-
компонент композита считается изотропным и поэтому плоский эф-
эффективный тензор модулей упругости имеет 4 независимые ком-
182
лоненты, причем одна из них, йшз, в решении задачи не прини-
принимает участия). Продифференцируем G.1) по параметру R:
Уравнение G.4) имеет решение вида
dR
где
я ^i
dv =C1(/?)r-l» +С, (/?)/*, G.5)
G-6)
а функции Ci(R) и С2(#) должны определяться из граничных
условий G.2).
В частности, из G.2) следует, что —— I = 0. Поэтому
dR |г=Л0
= O. G.7)
Из (III.2) (приложение III) следует, что уравнение равновесия
для рассматриваемого случая имеет вид
<*; + -^L=0. G.8)
Поэтому
a'r\r=R= j-. G.9)
Однако на внешнем радиусе
r dR R
Из G.10), G.5) и закона Гука:
огг= %ъ— + l3v' G.11)
г
следует, что
— Сх (R) R-*-1 + С2 (R) R*-1] = - -HliflL. G.12)
Из G.7) и G.12) находим функции Ci(R) и C2(R):
Qq(R)
G.13)
183
Тогда решение поставленной задачи по теории эффективного мо-
модуля получается в квадратурах
v (R, г) = J [Сг (Д) г-Р + Св (i?) гР] Л?. G.14)
Заметим, что если натяжение ленты постоянно, т. е.
сто (i? )= (То = const, G.15)
то интеграл G.14) вычисляется в элементарных функциях. В са-
самом деле, полагая
G.16)
получаем из G.14)
v(R, г) = |[А(г) + В(г)] ^^ . G.17)
Каждое конкретное число р можно аппроксимировать рациональ-
рациональным:
Р^—, G.18)
я
где от, п — целые числа. Тогда, делая в интеграле
R лР
f* Dp лп l rt ? 1/p AY
f — V "^ u^ i "* /T i Г\\
7—\ w = т" \ "~i—r~ G-19^
. r rP
замену
l
R^x", x=Rn, G.20)
приходим к интегралу
^1/я
/=л V — —, G.21)
J 1 — ох2"
г1/п
который берется элементарно.
После этого легко находятся напряжения теории нулевого при-
приближения G.1):
- @) 1 f
184
+
. Ml)
F)
1 р
J г*
1 _^_
J г'
где A(g) и ц(|) ¦— постоянные Ламе, являющиеся разрывными
функциями | @<|<1).
Формулами G.22) и описываются внутренние напряжения,
возникающие в каждом компоненте композиционной ленты при
ее намотке на жесткую оправку.
Упражнение 7.1. Показать, что в случае, если эффективный
тензор модулей упругости композита является изотропным (мак-
(макроскопически изотропный материал) и выполняется условие
G.15), то решение задачи G.1), G.2) по теории эффективного
модуля имеет вид
/
. V ' ' 2*B+со)
<T3r(R,r)= / 2 + Ц+Зи—
2 B +со) V г"
G.23)
B +со) ( + ) +
G.24)
о|(Л, г) = (fr(R, r)+an,
где /С — модуль сжатия, а — безразмерный параметр:
Упражнение 7.2. Показать, что из G.24) следует, что при
/? и ш<1 на оправке появляются сжимающие окружные
напряжения авэ<0 и что при ш=1 на оправке всегда аеэ=ао.
§ 8. Численное решение пространственных задач
В последнее время в вычислительной механике широкое рас-
распространение получили разностные методы и их разновидности
(например, метод конечных элементов). Однако непосредственное
их применение к решению задач МДТТ для композитов наталки-
наталкивается на существенные трудности, связанные в первую очередь
с проблемой дискретизации области, занимаемой исследуемым
185
Рис. 36
телом. Ведь каждый компонент композита должен быть разбит
на достаточное число «вычислительных» ячеек, что приводит к
чрезмерно большому числу алгебраических уравнений, решить
которые на современных ЭВМ не удается.
С помощью метода осреднения в ряде случаев все же можно
преодолеть указанную трудность. Если ЭВМ позволяет решить
задачу с п «вычислительными» ячейками, то можно это разбие-
разбиение использовать для решения задач серии Ж, т. е. на одной
ячейке периодичности композита, после
чего эти п «вычислительных» ячеек мо-
можно использовать для решения задач
серии Д. Задачи этой серии являются
задачами МДТТ для однородной среды,
и поэтому число «вычислительных» яче-
ячеек никак не должно согласовываться
с числом ячеек периодичности и «вычис-
«вычислительная» ячейка может содержать,
достаточно большое число структурных
элементов (ячеек периодичности).
Дело обстоит как раз так, что чем
труднее непосредственное применение
разностных методов из-за сложности
проблемы дискретизации (т. е. чем
больше структурных элементов содержит композит), тем лучше
работает метод осреднения и проще его реализация (в преды-
предыдущих параграфах было установлено, что при большом числе;
ячеек периодичности теория нулевого приближения достаточно
точна)t
Если же композит содержит лишь небольшое число структур-
структурных элементов, то не вызывает затруднения непосредственное
применение разностных методов для его расчета.
На примере предыдущих параграфов этой главы было видно,,
что для слоистых композитов метод осреднения иногда позволяет
точно удовлетворить уравнениям равновесия и граничным усло-
условиям на поверхностях Гг, эквидистантных слоям. На «слоистых»
поверхностях Гь ограничивающих композит (т. е. составленных
из различных компонентов слоистого композита) граничные усло-
условия могут удовлетворяться только интегрально (рис. 36).
Поскольку для слоистых композитов локальные функции пер-
первого уровня и эффективные тензоры модулей упругости и упру-
упругой податливости определены, решение задачи Д@) по теории
эффективного модуля, т. е. для однородной анизотропной упру-
упругой среды, позволяет построить решение по теории нулевого при-
приближения, т. е. получить микроперемещения или микронапря-
микронапряжения.
Для численного решения задачи Д@) воспользуемся вариаци-
вариационно-разностным методом, который заключается в том, что вы-
выписывается лагранжиан B.1.8) для задачи в перемещениях или
функционал B.3.3) для задачи в напряжениях в разностном
186
виде, т. е. производные заменяются разностными, а интегралы в
B.1.8) и B.3.3)—соответствующими суммами. Тогда и лагран-
лагранжиан B.1.8) и функционал B.3.3) становятся функциями конеч-
конечного числа переменных — перемещений или напряжений в узловых
точках. Система разностных уравнений получается приравнива-
приравниванием нулю производных этих функций по каждой переменной.
Рассмотрим, например, задачу теории упругости в перемеще-
перемещениях о слоистом параллелепипеде.
Минимизацией лагранжиана
L (о) = -j Г hiM Vi.f vkiidV-^ Xtvt dV- J S? 0/ d 2 (8.1)
V V 22
получим решение v по теории эффективного модуля, а по нему
найдем микронапряжения теории нулевого приближения:
оыЙ, (8-2)
где тензор О°> определяется по формуле A.11).
Поместив начало координат в одну из вершин параллелепи-
параллелепипеда и направив оси вдоль ребер, введем равномерную сетку с
числом узлов Na на ребре длиной 1а, направленном вдоль оси
Jfa, a=l, 2, 3 (хз — направление, перпендикулярное слоям). Се-
Сеточная функция uh(i, j, k), i=\,...,Nu j=\,...,N2; k=l,...,N3
представляет собой дискретный аналог и(х). Заменим частные
производные соответствующими разностными производными, а
интегралы — конечными суммами. Разностный аналог лагранжи-
лагранжиана L(v) обозначим через Lh(vh). Тогда условие стационарности
лагранжиана B.1.9) :6L(v, bv)=O перейдет в условия
dLh
dva(i,j,k) =0' '= 1'¦•" fffl' /= 1( •¦• '^ k= Ь ••• N*'
а= 1,2,3. (8.3)
Поскольку Lft — квадратичная функция от va(i, j, k), условия
(8.3) представляют собой разностную систему 3NiN2N3 линейных
алгебраических уравнений, которую можно записать в виде
O. (8.4)
Рассмотрим решение системы (8.4) с помощью итерационного
метода переменных направлений с чебышевским набором итера-
итерационных параметров {тп}
(8.5)
Ъ +.Yi - (Y. - Yi) cos
(86)
187
и Y2 определены в (8.8)), где факторизованный оператор
з /— Аа 0 0
(
О 0 — Ла/
обращается тремя последовательными прогонками по направле-
направлениям х\, %2, Хг- (Л« — одномерный разностный оператор Лап-
Лапласа.)
Скорость сходимости итерационного процесса (8.5) решения
системы (8.4) будет тем выше, чем больше отношение -yi/Y2 по-
постоянных энергетической эквивалентности операторов —А и В:
А<ЪВ. (8.8)
з
Введя регуляризатор /?= V Ra> энергетически эквивалентный
ос=1
операторам —А и В с постоянными с\, с2 и -уЛ Y20
(8.10)
ПОЛУЧИМ Yl=Yl°cb Y2 = Y2°C2- ИЗВеСТНО, ЧТО При (О1=
maxYi°/Y20=3Ti2/3(l+2Ti) достигается при
где
Т1 = б/Д; d = min6a; A = max Да, "
ос ь.ос
а ба и Да определяются из неравенств 6a/<^a<Aa/ (/ — тождест-
тождественный оператор). Поскольку оператор А анизотропный, естест-
естественно в данном случае использовать оператор В (8.7) с различ-
различными (Da.
В трехмерном случае наилучший набор \оа неизвестен, но мо-
может быть найдеи численно пошаговым поиском от точки <а1=<02=
=<оз=юо в направлении возрастания Yi°/Y20' Если при этом извест-
известны величины Сра, a= 1, 2, 3; 0= 1, 2, такие, что
з з
аЯа, (8.11)
ТО
3 3
S е1а*а 2
Yi — min —^—! , Ya = max
Л
П A+©оХа) П A+«аУа)
(8.12)
и можно непосредственно искать максимум yi/Y2 по (оа.
188
Выбирая различный масштаб длины по осям Х\, х2 и х%, мож-
можно приблизить анизотропный оператор А к изотропному, для ко-
которого скорость сходимости итерационного процесса (8.5) с опе-
оператором В вида (8.7) выше. Это эквивалентно решению задачи
для тела с соответствующим образом измененными отношениями
линейных размеров и модулей упругости (последние становятся
близкими к модулям упругости некоторого изотропного тела).
Описанные приемы позволяют в случае ярко выраженной анизо-
анизотропии в несколько раз ускорить сходимость итерационного про-
процесса (8.5).
В случае анизотропного тела в главных осях ортотропии по-
получим оценку (8.9) с постоянными
r — т-т(и ftma «паз \и «uaa «ггзз
сх — шш пппя
, .я2223
«2288 [133
233
, . 2АШ2, [2АШЗ, 2А23гз), (8.13)
«1122: /
С2 = ГПаХ (П11П + «Ц22 + «1133' 222 + 122 +
+ 62233. ^зззз + Лцзд + А22зз. 2«Ш2, 2«1318, 2А2323)- (8.14)
Итерационный процесс (8.5) прекращается, как только удовле-
удовлетворяется неравенство
где под ||*|| понимается длина вектора.
Рассмотрим численный пример. Пусть на гранях *з=0, Хз=1
заданы нагрузки, а на гранях *i = 0; *i = 8; Х2 = 0; х2 = 8 — усло-
условия жесткого защемления (рис. 37)
S!U;..= O, 7=1,2; S8"-,(l -cos-^-) x
X(l—-=?-).
Si\xt =i = 0, t = 1,2, 3,
u°t = 0] при хг = 0, хг = 8; х2 =0, хг = 8. (8.1б>
Пусть ячейка периодичности укладывается на отрезке 0<:x3<:l
целое, достаточно большое, число раз. Предположим, что компо-
композит является двухкомпонентным, причем каждый компонент —
однородный и изотропный с коэффициентами Пуассона v* и V2 и
отношением модулей Юнга •а = Еъ\Ех и объемной концентрацией
Y=l/2.
Счет каждого варианта на ЭВМ БЭСМ-6 для Ni = N2=9,
Ыз=5 (т. е. 1215 разностных уравнений) составлял 5—8 минут.
189
По результатам счета были получены напряжения теории ну-
нулевого приближения (8.2).
На рис. 39—41 представлены графики распределения микро-
микронапряжений, отнесенных к величине q (8.16) для каждого из
компонентов A) и B) по высоте параллелепипеда х3 (рис. 37).
Ввиду разного масштаба, принятого для различных компо-
компонентов, все графики изображены непрерывными линиями. В гра-
Рис. 38.
¦фиках, соответствующих компоненту A), нужно исключить все
отрезки, принадлежащие компоненту B), а в графиках, соответ-
соответствующих компоненту B),— исключить отрезки, принадлежащие
компоненту A).
Было рассмотрено несколько случаев с различными отноше-
отношениями модулей Юнга компонентов и и коэффициентами Пуассо-
Пуассона vi, V2. Поскольку напряженно-деформированное состояние об?
ладает очевидной симметрией, достаточно рассмотреть область
0<a;i<4, xi<a;2<4, 0<д;3<1 (рис. 38).
Расчеты показывают, что в случае и=1 максимальные растя-
растягивающие напряжения ап возникают у обоих компонентов в
окрестности точки Xi@, 4, 0).
Таблица 8.1 (х = 1)
Компонент A)
v,
О,01
О.01
0,25
напряжения
нормальные
aft ?i) = 14,00
aft (*Г) =9,42
aft (Tj) = 16,50
касательные
= 6,00
aft (ъ) = 6,74
= 5,45
Компонент B)
0,25
0,49
0,49
напряжения
нормальные
a(,2> (%) = 15,80
oW(b) =20,50
aft (x7) = 28,90
касательные
= 6,00
a',2* (jcj) = 6,74
= 5,45
190
0,3
0,1
0,3
0,1
Компонент A)
напряжения
нормальные
а[}>(^) = 0,87
ой>е*о=о,б1
о$ (*i) =0,90
ff(iV (xI)=0,64
касательные
ai3 (*a) —
•ий-
Фй-
3,72
3,74
3,71
3,73
0
0,
о.
0,
1
3
3
1
Таблица 8.2
Компонент B)
напряжения
нормальные
а(,2,> й)=62,5
а(,2,)Й) = 62,2
,-Л2) /„\ СО О
а(,2,)Й) = б2,3
(к
= 100)
касательные
*й
*Й
= а
14
И
11
,2
2
3
.14.1
Максимальные касательные напряжения ai3 возникают на по-
-¦• ¦ -»
верхности заделки в точках Х\{0, 4, 0) или Х2@, 4, 1) (рис. 38L
В табл. 8.1 приведены значения этих максимальных напряже-
напряжений, причем в скобках указывается точка, в которой достигаются
максимальные нормальные или касательные напряжения.
Из табл. 8.1 видно, что с ростом коэффициента Пуассона
максимальные нормальные микронапряжения компонентов уве-
увеличиваются.
В табл. 8.2 приведены значения максимальных напряжений
при и=100, причем точки максимума микронапряжений имеют
координаты:~х3={1, 4, 1/2), xl=(l, 1, 0), х5=A, 1, 1) (рис. 38)'.
По сравнению с предыдущим случаем распределение каса-
касательных напряжений <Ti3A) практически не зависит от коэффици-
коэффициента Пуассона vi и достигает максимального значения во внут-
внутренней точке параллелепипеда. В более жестком компоненте B)
возникают значительные напряжения <т12.
На рис. 39—41 показаны распределения нормальных напря-
напряжений ац в компонентах A), B), в зависимости от х3: 0<Хз<1
(по прямой с уравнениями *i = 0, х2=4, т. е. прямой, содержа-
-¦¦ -*
щей точки Х\ и х2 на рис. 38), а также касательных напряжений
<т13 и <Ti2 для различных отношений модулей Юнга % и коэффици-
коэффициентов Пуассона vi, V2. Распределение касательных напряжений
О1з(*з) при Xi = 0, *2=4 одно и то же для обоих компонентов
(эти напряжения непрерывны при переходе через границу разде-
191
К
ex
a,
со
о
ла компонентов). Распределение напряжений а12B)(*з) показано
только для компонента B) (для компонента A) они незначи-
незначительны). На рис. 39 и 40 распределение <Т12B)(*з) дано по прямой
*1 = 1» Хц=1, а на рис. 41—по прямой *i = l, X2=l (проходящей
-»• -»¦
через точки х4, Хь на рис. 38).
а?=70
/аг.т
/ЯГ.
Рис. 43.
Рис. 44.
Из рис. 39—41 видно, что с ростом % распределение нормаль-
нормальных напряжений ацA)(*з) и ацB)(*з) все больше отличается от
линейного и от соответствующих напряжений ацэ, вычисленных
по теории эффективного модуля
ffii = —((Гц + (Гц ). (8.17)
На рис. 42—44 показано распределение интенсивности тензо-
тензора напряжений в компонентах A) и B) по высоте параллелепи-
педа в плоскости х2=4 (проходящей через точки х\, Хч на
рис. 38) при различных и, vi, V2-
НЕКОТОРЫЕ ЛИТЕРАТУРНЫЕ УКАЗАНИЯ
Теории упругости неоднородных тел посвящена большая ли-
литература. Работы, вышедшие до 1973 г., систематизированы в
двух библиографических указателях [46, 47^].
§ 1. Эффективный тензор модулей упругости слоистого компози-
композита для изотропных компонентов получен в [57], для анизо-
анизотропных и неоднородных компонентов — в [103].
§ 2. Эффективный тензор упругих податливостей для слоистого
композита найден в [88].
§ 3. Методом осреднения эффективный тензор теплопроводности
для слоистого композита получен в [86].
§ 4. Обзор работ плоской теории упругости для неоднородных
сред читатель найдет в монографии [48]. Там же решены за-
задачи 1—4, для случая постоянного коэффициента Пуассо-
7 В. Е. Победря
193
на; с произвольно зависящим от координаты коэффициентом
Пуассона они решены в [24].
§ 5. Осесимметричная задача для многослойной плиты (а также
цилиндра) решена в [106] предложенным там методом так
называемых функциональных уравнений. Дальнейшее раз-
развитие этот метод получил в монографиях [69, 70]. Подроб-
Подробное описание решения задачи о бесконечной неоднородной
анизотропной трубе, находящейся под действием внутренне-
внутреннего и внешнего давления, имеется в монографии [55] (см.
также [76]). С задачей Гадолина можно ознакомиться, на-
например, по книге [61], а с решением этой задачи методом
осреднения — по работе [22].
§ 6. Общее решение неосесимметричной плоской задачи теории
упругости в полярных координатах в рядах Фурье приведе-
приведено в монографии [98]. Там же дано решение задачи об изо-
изотропном кольце, сжатом двумя сосредоточенными силами.
Решение этой задачи для ортотропной среды дано в [27].
Двухслойные диски и кольца, нагруженные локальными уси-
усилиями, рассчитаны в монографии [15]. Там же приведена
большая библиография. Расчету многослойных конструкций
посвящены монографии [11, 49]. Методом осреднения напря-
напряжения в многослойной трубе определяются в работе [28].
§ 7. С общей постановкой задачи о внутренних напряжениях в
растущем теле, в том числе и трубе, получаемой намоткой,
можно ознакомиться в работе [99].
§ 8. Численным методам в слоистых материалах посвящена
большая литература. Укажем только некоторые работы [52/
69, 70, 75, 94, 107]. Указанный метод решения задачи о па-
параллелепипеде описан в [90], решению задачи о слоистом
параллелепипеде посвящена работа [30].
Глава 6
ВОЛОКНИСТЫЕ УПРУГИЕ КОМПОЗИТЫ
Для однонаправленного волокнистого композита тензор моду-
модулей упругости нулевого приближения и эффективный тензор мо-
модулей упругости могут быть определены аналитическими метода-
методами теории функций комплексной переменной. При этом возмо-
возможен учет условий неидеального контакта. В качестве примера
рассматривается определение эффективных характеристик одно-
однонаправленного волокнистого композита при идеальном контакте
между связующим и волокном.
Кроме аналитических методов при решении задач теории
упругости для композитов могут успешно применяться численные
методы. Один из таких методов был описан в § 8 предыдущей
главы. В этой главе на некоторых модельных задачах волокни-
волокнистых композитов показана эффективность применения других
методов: метода конечных элементов; метода, основанного на
использовании матрицы А. А. Ильюшина.
Для волокнистых композитов с продольно-поперечной арми-
ровкой с помощью разностных методов, разработанных для ре-
решения пространственной задачи теории упругости, определены
микронапряжения в неоднородном параллелепипеде при его рас-
растяжении и кручении.
§ 1. Однонаправленный волокнистый композит
Рассмотрим однонаправленный волокнистый композит, имею-
имеющий периодическую структуру и сечение поперечной плоскостью,
показанное на рис. 45. Выделенный на этом рисунке параллело-
параллелограмм называется параллелограммом периодов. Радиус каждого
волокна R, координаты осей волокон
xL = ma, x2 = nb, m,n = 0, ±1, ±2, ... A.1)
ось х3 направлена к наблюдателю перпендикулярно плоскости
чертежа.
В частности, при
о=Ь=1, р = л/2 A.2)
195
получим сечение, показанное на рис. 46 (параллелограмм пери-
периодов является квадратом).
Будем считать, что материал связующего и волокна является
изотропным однородным. Область, занимаемую связующим, обо-
обозначим через S, а область, занимаемую волокном, ось которого
Рис. 45.
Рис. 46.
проходит через точку (пг, п) плоскости Х\, х% (рис. 46) ^Р
Атп. Границу раздела этих областей обозначим через Гтп- Тогда
тензор модулей упругости рассматриваемого композита является
периодической функцией координат хх и х2 и не зависит от коор-
координаты Хз:
Ctm (*i. х*) = A, (*i. х2) «// «« + И (*i. %) (bik 8n + 8„ бм), A.3)
где
I f*2. Xi
S,
IS,
\Am.
A.4)
причем ячейка периодичности имеет вид, показанный на рис. 47.
Заметим, что параметр 7? не больше 1/2 и в зависимости от него
меняется объемная концентрация волокон в композите (v=ni
0<Я<1/2,
-j-= 0,785.
A.5)
Для решения задачи теории упругости в перемещениях для
однонаправленного волокнистого композита по теории нулевого
приближения необходимо решить две задачи Да@) и Жа(—1).
Первая из них совпадает с задачей по теории эффективного мо-
модуля и заключается в отыскании вектора v:
О, A.6)
х, =S°. A.7)
V] Ь, = «Ь hijki Vk.
196
Вторая заключается в решении неоднородной задачи теории
упругости на ячейке периодичности (рис. 47) для определения
локальных функций первого уровня
Г) (I-8)
при выполненни условий D.6.7) и D.6.8).
Заметим, что если в задаче A.6),
A.7) решение может зависеть от трех
переменных xh x2, х3 и от области, в ко-
которой рассматривается решение, то в
задаче Жа(—1) решение зависит только
от двух переменных |1) «
a=\/N, N — число ячеек периодичности) л
и от параметра R. После решения за-
задачи Жл(—1), которую для данной
ячейки периодичности можно решить
раз и навсегда, находится тензор моду-
модулей упругости нулевого приближения
Гтп
щ
1
„ г „
т ,
if
•
Рис. 47.
= CiJ
JM
Nkpgll%)
Ci]pq (gj,
A.9)
а по нему могут быть найдены напряжения по теории нулевого
приближения и эффективный тензор модулей упругости:
W, A.10)
A.11)
Для решения уравнений A.8) воспользуемся интерпретацией,
данной в § 2 гл. 4. Согласно этой интерпретации уравнения A.8)
трактуются как уравнения равновесия относительно вектора
псевдоперемещений Uipq) с компонентами Uh{pq):
Uk(Pq) = Nkpq{l). A.12)
Тогда тензор псевдонапряжений, который обозначим в отли-
отличие от § 2 гл. 3 через G(Vq), связан с псевдоперемещениями зако-
законом Тука:
°Щра) — С им Уцрч)\1- A • 13)
С учетом A.13) уравнения A.8) можно переписать в виде
*/<M>u(©=-G/W|/(iJ. A-14)
Выражение тензора С в рассматриваемом случае задается
формулой A.3), причем в силу того, что ячейка периодичности,
изображенная на рис. 47, не изменяется при замене медленных
197
координат иа быстрые, всюду, можно рассматривать медленные
координаты хь х2 и уравнения A.14) записать в виде
<tiJ(pq).J Й = — CUpq,J (X), A.15)
t, p, q= 1,2,3; /=1,2.
Так как компоненты композита однородны A.4), то уравне-
уравнения A.15) можно записать отдельно для области 5 и отдельно
для области Атп (будем все величины, относящиеся к области
S, обозначать индексом 1, а величины, относящиеся к области
Атп,— индексом 2). Тогда уравнения A.15) эквивалентны си-
системе
к которой следует добавить соотношения A.13) и условия на
границе Ттп при идеальном контакте
п, (Ы7)
(a}J(pq) + C\Jpq) п) Vmn = - @?ЛРЛ + СЬрд) п) \хтп, A.18)
где tija, a=l, 2 — компоненты единичного вектора внешней нор-
нормали со стороны 5 и Атп соответственно.
Если идеальный контакт на границе Ттп нарушается, то со-
согласно D.7.11) вместо A.17), A.18) следует принять
[ар.- ipiJipq) + C\Jpq) rtj + 6р(С (
= [4i (<&p« + СЬря) ri + bliU%q)]rmn. A.19)
Уравнения равновесия A.16) с учетом A.13) приобретают
вид
CfjkLOkiPq),u = 0, а = 1, 2. A.20)
Независимых комбинаций индексов (pq) в уравнениях A.16)
или A.20) будет 6. Нетрудно видеть, однако, что различных за-
задач A.20), A.17), A.18) или A.20), A.19) будет только три.
Назовем, например, задачу A.20), A.17), A.18) с индексами
(р, q) — задачей ЖРд, а задачу A.20), A.19)—задачей Ж"Рд.
(Разумеется, задача Жрд является частным случаем задачи
Ж*рд.) Достаточно решить только одну из задач Жи*. Ж22*.
Жзз*, чтобы получить простой заменой индексов решения всех
остальных. Точно так же из* задач Ж13*, Жгз* можно решить
одну. Мы рассмотрим отдельно только решение задач Жм (Р=1,
2, 3), Ж13, Ж12-
Нетрудно видеть, что в задачах Ж?и и Ж12 можно считать
USW) = O, ?/?(,2)=0, A.21)
о=1,2; 0=1,2,3,
198
т. е. задачи Жрр и Жи являются задачами плоской деформации.
Для задачи Жрр имеем
(К + |ia) U%m.Ki + VbU?m.KK = 0, A.22)
а= 1, 2; /С= 1, 2,
г/д«вд|г№1=^«»1г№1, A.23)
) + С)т п)) \гтп = - (&jJm) n2j + C2,mn2j) \rmn. A.24)
После нахождения вектора псевдоперемещений Ukw) псевдона-
псевдонапряжения найдутся по соотношениям A.13) с учетом A.3):
x
/,/ = 1,2; р= 1,2,3,
= 0, a33(pg) = v{xvx2)(ffuep) + cx^p)), v= A.25)
•* (A + ii)
Для задачи Ж13 в A.20) остается только одно уравнение рав-
равновесия в каждом компоненте
РаРъцз).кк= 0, а = 1, 2; К = 1, 2, A.26)
для единственной отличной от нуля компоненты вектора псевдо-
псевдоперемещений 1*3A3). К A-26) следует добавить условия A.17),
A.18):
= ^03I^, A.27)
?) |rmn. A.28)
rmn.
После решения задачи Ж13 A.26) — A.28) находим псевдонапря-
псевдонапряжения
Оз/оз) = 1*^8A3),/? <*л/из) = О'. ^ззA3)=0. A.29)
Наконец, для задачи Ж12 имеем уравнения
(Ла + Иа) ^(i2),w + Ца^A2),кк = 0, а = 1, 2; /С = 1, 2, A.30)
и условия идеального контакта
2\ A.31)
A.32)
где
, если/^У, A33)
, если 1фЗ.
После решения задачи Ж12 находим псевдонапряжения по
формуле
Ьи + \l(X1, X3) (t//(l2),7 + Vj(l2,,l), I, J = \ , 2',
= V (Xlt X2) ((ГцA2) + а22A2))- A-34)
199
Решив все задачи Ж?&, Жи, Жгз и Ж12, тензор модулей упру- '
гости нулевого приближения определим по известным псевдона-
псевдонапряжениям
Cijpq = (JijipQ) + CijM, A-35)
а эффективный тензор модулей упругости — по формуле A.11).
§ 2. Решение плоской задачи
Плоскую задачу теории упругости Ж?и будем решать методом
теории функций комплексной переменной Колосова—Мусхели-
швили. Для этого вводим комплексную переменную z=xl-\-ix2 и
продолжаем ячейку (рис. 47) периодически на всю комплексную
плоскость.
В этом параграфе для сокращения записи будем опускать
индексы (рр). Функции U°k (К, а=1, 2) будем искать в обла-
областях 5 и Аоо соответственно:
2fi« {Of + ilfi) = хафа (z) — z<pa (z) - ife (z), B.1)
где Xo=3—4vo; va — коэффициенты Пуассона компонентов ком-
композита; фоB), 1|заB) —аналитические функции. Тогда
СТ22 - ОЙ + 2*о& = 2 [z<f>"a (z) + г|з„ (z)]. B.2)
Функции qpi(z), ^1B), фг(г) и г|>гB) будем искать в виде
K=O tf\,fl
¦1 (г) = -j г + bi/гС (г) + <hRQ.(z)
fe=3 ' m,n ' " ' m,n
B-3)
Здесь
m.n •mn Fmn
2 "^ ^OTn ^
200
Pmn = m + tn> a TV означает, что суммирование распростра-
няется по всем целым тип, кроме т = п=0. Кроме того,
т,п
означает суммирование по всем целым тип, 2* — суммирова-
суммирование по нечетным значениям индекса. Коэффициенты а0, Ьо, ак,
Ьъ, с&, da (k=l, 3, 5,...) —действительные числа.
Функции 2 (? ^ 3) являются дюяко-периодическими,
m,n _
а функции I (z), ( z) и Ыг) = ^' р™ t (^^3) обладают еле-
т,л
дующими свойствами:
O-MD —S^
Используя условие периодичности функций 1)\ и t/г, получим,
что
Условия A.23) и A.24) можно записать для *еГ<ю в виде
B.5)
B.6)
х' [х1ф1 (о - гФ; (о - ^ (о]=х2ф2 (о - ^ (о - ч>2 (о. B.7)
Здесь
Yl (Р) ^ (^22РР — С22рр — Сцрр + Сцрр)/2,
B.8)
Y2 (P) s (Сцрр — Спрр + С22рр — С22рр)/2.
201
Используя разложение в ряд Лорана функций q>i(z) и tyi(z) в
окрестности Гоо, получим следующую систему уравнений для
определения коэффициентов с^:
ak + ЛоаА* + ?' (Arnk + BG^ + С
п=1
= РЪ (Р) Rnu + Eyi (P) Явц, B.9)
где введены обозначения:
2г1 kl
2* г1 — k
i=3
m,n
m,n
S2=T2==0, B.10)
Сед l+x«x1-x*-x2
a
2a0 *
Коэффициенты ft*, Cfe, </ь выражаются через а& следующим об-
образом:
п=1
Л
+
2j Лп k+2n (k > 1),
n=l
n=l
202
X* + X2
BЛ1)
n=l
d
К* — 1
n=l
Упражнение 2.1. Доказать, что свободные члены системы B.9)
ограничены в совокупности и ряды
B.12)
сходятся, т. е. система B.9) является системой нормального типа.
Упражнение 2.2. Доказать, используя условие периодичности
функций Uи Us, что
2nR[(\ + xl)al + -\.
Упражнение 2.З. Показать, что для задачи Жр9 вектор объем-
объемных псевдосил
B.14)
Таблица 2.1
имеет представленный в табл. 2.1 вид.
(П)
B2)
C3)
A2)
A3)
B3)
X,
хл
(Д, ^
о'
0
Хг
(X -\- 2(i),s
(i 1
о'
0
х,
0
0
0
0
Н-,2
В табл. 2.2 приведены значения относительных эффективных
модулей ftnii/(A,i+2|ii), АцггАь АцззАь А3ззз/(^1+2ц1) в зависи-
зависимости от х* при разных объемных концентрациях волокна у-
В расчете принималось vi = 0,39; V2 = 0,2.
203
Таблица 2.2
0.4
0.55
0,7
0,75
0,78
6
20
120
400
6
20
120
400
6
20
120
400
6
20
120
400
6
20
120
400
huit
Я.1 + 2ц,
1,42
1,77
1.96
1.99
1.67
2,42
2,93
3,03
1,99
3,68
5,71
6,24
2,12
4,44
8,79
10.51
2,20
5,07
14,84
29,95
я..
1,11
1,36
1.48
1,50
1.12
1,50
1,68
1,70
1,14
1,75
1,93
1,87
1,16
2,02
2,37
2,10
1,17
2,32
4,05
3,87
Ami
К
1,03
1,26
1,39
1,41
1,04
1,46
1,72
1,77
. 1,07
1,84
2,62
2,80
1,07
2,08
3,65
4,17
1,08
2,30
5,83
8,70
Ь. + 2ц,
1,75
4,26
21,62
70,10
2,03
5.51
29,40
96,06
2,31
6,79
37,32
122,20
2,41
7,24
, 40,14
131,17
2,46
7,53
42,23
137,50
§ 3. Решение антиплоско» задачи
Задача Жм A.26) —A.28) (см. табл. 2.1) называется аити-
плоской задачей теории упругости.
В этом параграфе для сокращения записи будем опускать
индексы A3). Функции С/з1, С/з2 будем искать в виде
, 1
C.1)
где
C.2)
^=_1_Кеф2B)(
XT5M-V-L.
ft=3 m,n
204
Константу А определяем из условия периодичности функции U%.
Л= l—nR%. C.3)
Тогда
C.4)
Условия A.27) и A.28) на границе Г<ю можно записать в виде
-| Re ц>г (t) = Re q>2 (t), C.5)
Используя разложение в ряд Лорана функции y\{z) в окрестно-
окрестности Гоо» получим следующую систему уравнений для определения
коэффициентов ад:
aft-x?V^n=±iZ-!J-*8lft, C.7)
где
f CtiRk+lTk+l, n= 1, C.8)
t>3 C'9)
- C10)
Коэффициенты Сь выражаются через ад следующим образом:
. C.11)
)
я=1
Можно показать, что система C.7) является системой нормаль-
нормального типа.
Упражнение 3.1. Доказать, что
2В с (Зл2)
В таблице 3.2 приведены значения относительного эффектив-
эффективного модуля /ii3i3/ni при разных объемных концентрациях волок-
205
Таблица 3.2
У
0,40
0,55
0,70
0,75
0,78
0,785
6
20
120
400
оо
6
20
120
400
оо
6
20
120
400
оо
6
20
120
400
оо
6
20
120
400
оо
6
20
Чжень
1,805
2,147
,314
2,340
2,326
3,184
3,555
3,578
3,176
5,222
6,945
7,291
3,620
7,006
11,170
12,523
—
—
Адаме
1,796
2,137
2,305
2.343
2,304
3,044
3,469
3,570
3,163
5,187
6,878
7,372
3,646
7,005
11,035
12,540
—
—
Ван Фо Фы
1,800
2,134
2,297
2,322
2,333
2,294
2,981
3,356
3,417
3,444
3,000
4,454
5,419
5,589
5,666
3,307
5,222
6,622
6,882
7,000
3,516
5,796
7,587
7,932
8,090
3,555
5,910
C.12)
1,804
2,145
2,313
2,339
2,350
2,325
3,077
3,506
3,577
3,609
3,173
5,213
6,929
7,273
7,432
3,619
7,004~
11,164
12,226
12,751
3,977
9,427
23,670
31,022
35,933
4,047
10,227
на у, вычисленные различными авторами, а в последнем столб-
столбце — по формуле C.12). В предпоследнем столбце вычислены
значения по приближенной формуле
= 1-XY
1 + ХУ
C.13)
предложенной Ван Фо Фы.
В заключение параграфа рассмотрим решение задачи )Ki2*
которое мало чем отличается от решения задач Жм (Р=1. 2, 3).
Индексы A2) для краткости будем опускать. Функции 0ак (а,
К=1, 2) ищем в виде
2ца AА + ОД) - хафа (г) -z«p«(z) -?a(z), C.14)
где
Фа (Z) - Ща (Z), $3 (Z) = 1% (Z), C.15)
206
а ФаB^ и tya(z) имеют вид B.3). Из условия периодичности
функций U\, U2 находим, что
а„= — **V , bo= — <h.[*i — -^г) Y- C-16)
Условия идеального контакта A.32), A.33) примут вид
I —1|з2(/), C.17)
t4l (t) + fc @] = <рг @ + ^ф2 (t) + ^ (t). C.18)
Для определения коэффициентов ak получим следующую нор-
нормальную систему уравнений:
ak + VA* + ?* (^«» + 5Gnfc) = ?(!*!- и,) i?6lft, C.19)
n=l
где
Коэффициенты bk, Ck, dh выражаются через ак следующим об-
образом:
Oft+2 = kak -i—— у | т)„ fe+2 an (к ^ 1),
1яА,. C-21)
n=l
во
x* + x2 ^-1
n=l
4=
п==1
Упражнение 3.1. Показать, что
= 1-(x1+1)y^-. С C.22)
207
В таблице 3.2 приведены значения относительного эффективного
модуля Л1212/Ц1 при разных объемных концентрациях волокна
Y (v, = 0,39; v2 = 0,2) T
Таблица 3.2
X'
6
20
120
400
оо
У
0,4
1,582
1,743
1,810
1,820
1,824
0,55
1,951
2,290
2,448
2,472
2,483
0,7
2,644
3,646
4,281
4,392
4,442
0,75
3,082
4,946
6,616
6,969
7,134
0,78
3,493
7,102
14,261
17,105
18,770
В силу того что в выражения компонент эффективного тензо-
тензора модулей упругости B.13), C.12), C.22) входят только кон-
константы а\, С\, можно дать явные выражения компонент эффек-
эффективного тензора модулей упругости (точное аналитическое пред-
представление) :
hUu = Л2222 = (С1Щ) + Y («1 — + a2Yi AI •
{Y2 A) )
аг— a2Yi(l) ¦
«1138 — «2283 — \Wl22/ + ?а1
C.23)
__ 1
2XY
где
— 1,
a, =
x*x,
C.24)
208
X2 =
a3rn
Компоненты матриц бесконечного порядка Nx (r\\$), Vt (v\s), иг (u\s),U2(u2t )„
N2(^n), V2(t^j), Y(yu), Z(zu), V(vts), U(uu) выражаются по формулам:
Tlls= 114S-1I V\s = Gus+1 + Од
U\s = Gl 4S+1 — &эГ1 4s+b Tl^ = Ци-1
yu = 6,,_
= °4t—i 4S-1 + Al (Uit-i 4s—1
/_, 4s-i
- X2/;
C.25).
— X*
_i 4s_i
vts —
4s+i
4s+l
/=t)«-i i t)i 4i_i (t, s= 1, 2, 3, .. .)•
Аналогично можно получить результаты и для неидеального кон-
контакта. Приведем здесь только выражение для модуля Лшз в слу-
случае, когда волокно проскальзывает относительно матрицы
318 __
2Y
C.26),,
где компоненты матрицы Y0(y°ts) имеют вид
4s—1 — r*t— 1 4s—1 + /•
C.27),
В таблице 3.3 приведены значения эффективного модуля C.26)
в зависимости от объемной концентрации волокна у.
Таблица 3.3
У
Win
0.4
0,425
0.55
0,277
0,7
0,134
0,75
0,078
0,78
0,027
Нетрудно провести подобный анализ и для произвольного па-
параллелепипеда периодов.
§ 4. Модельные задачи
Рассмотрим применение численного метода, основанного на
использовании матрицы А. А. Ильюшина, к решению задачи тео-
209
t t
рии упругости композита, составленного из двух материалов в
виде «шахматной доски» (рис. 48).
Для решения задачи теории упругости для такой среды (плос-
(плоская задача теории упругости) по теории нулевого приближения
иеобходимо решить соответствующую задачу по теории эффек-
эффективного модуля
хг -
. i 1 . ^uklVk,,u + X-1== 0. D-1)
7 Т \sH '
Vi Is, = Ui, hIJKLvK,Lnj |s, = Si, D.2)
а затем подсчитать микронапряжения
'. <*iJ = Cf}KL(Z)vK,L(Xl,x2). D.3)
Для определения компонент тензора
модулей упругости нулевого приближе-
X
X
X
X
X
X
X
Г ¦ * * te~/
Рис.48.
ния Cijkl (?) и эффективного тензора
модулей упругости hum'-
huKL = (wj/a), -
D.4)
необходимо найти псевдоперемещения
D.5)
удовлетворяющие условиям идеального контакта типа A.17),
A.18). в :
Решение этой задачи было осуществлено с помощью матрицы \
А. А. Ильюшина, построенной для квадрата («шахматной ячей- ^
ки»), причем на каждой стороне квадрата было выбрано i
11 точек. ¦
С помощью этого метода были найдены эффективные харак- '
теристики рассматриваемого композита, причем для Е* и v* они ?
•были записаны в виде эмпирических соотношений
— п1212
1
с.
(х*. vlt v2), D.6)
где
V =
(к', vlf v2),
,v: = -^-, «=i,2
D-7) ;
V'2222 — "llll^- '
¦Функции е„(и*, vi, -v2), я=1, 2, 3, были также в свою очередь '
аппроксимированы' некоторыми полиномами, коэффициенты ко- &
210
торых 'уже находились численно. На вычисление всех компонент1
эффективного тензора модулей упругости на ЭВМ БЭСМ-б было*
затрачено около 30 с. машинного времени.
На рис. 49, 50, 51 приведены графики зависимостей G*(x*),
?*(х*), v*(x*) при различных коэффициентах Пуассона vi и V2-
Заметим, что при х* = 1 получаются простые соотношения
a?*
Рис. 51.
Для задачи о растяжении плоскости из указанного компози-
композиционного материала (рис. 48) равномерно распределенной на.
бесконечности нагрузкой интенсивностью 1 (в направлении оси
х2) были определены микронапряжения оц, 022 и <xi2. Их значе-
значения в квадрате 0,5x0,5 (рис. 48) приведены в табл. 4.1 и 4.2.
При этом принимались данные
vi = 0,3; v2 = 0,l; x* = 0,25. D.9)
Для сравнения с этими результатами для выделенного на
рис. 48 квадрата разностным методом, описанным в § 8 гл. 5,.
было получено решение той же задачи. Решение получено на сет-
сетке с тем же числом узлов на единицу длины, что и сетка, на
которой вычислялась матрица А. А. Ильюшина. В табл. 4.3 и 4.4
показаны результаты проведенных вычислений.
Сравнение показывает, что напряжения, вычисленные при ре-
решении неоднородной задачи теории упругости даже с одной
211
Таблица 4.1
Оц
ОИ
•Оц
0+
—0,06
2,46
0,21
—0,04
2,03
—0,3
0,1
-0,33
0.89
0,17
0.05
1,69
0,36
0,09
1,74
—0,4
0,2
—0,38
0,84
0,08
0,15
1,20
0,25
0,19
1,41
—0,3
0,3
D+
-0,37
0,82
0,03
0.17
0,99
0,12
0,28
1,16
—0,2
0,4
—0,37
0,81
0,01
0,16
0,89
0,05
0,34
1,00
0,5
—0,37
0,81
0.00
0,15
0,86
0,00
0,35
0,95
Таблица 4.2
о~
Оц
0,81
—0,06
0,00
0,81
—0,06
0,01
0,82
-0,06
0,03
0,84
—0,06
0,08
0,89
—0,04
0,17
Oil
—0
0
0
,13
,79
,00
—0
0
0
.13
,79
,01
—0,18
0,77
—0,18
0,76
—0,13
0,77
0,04
—0,12
0,74
0,08
= 0,5
—0,17
0,72
—0,14
0,65
—0,10
0,66
0,14
-0,09
0,54
—0,06
0,48
0,21
—0,04
0,40
«ячейкой периодичности», достаточно хорошо согласуются с на-
напряжениями, вычисленными по теории нулевого приближения.
Заметим, что на подсчет эффективных характеристик разност-
разностным методом уходило в зависимости от параметров задачи на
ЭВМ БЭСМ-6 от 3 до 8 мин".
Таким образом, использование матрицы А. А. Ильюшина для
определения эффективных модулей сильно экономит машинное
время. Кроме того, если модули щ и (Хг различаются между со-
собой иа порядок и выше, матрица А. А. Ильюшина позволяет
удовлетворить условиям сопряжения на границе раздела компо-
компонентов композита, а с помощью разностного метода это сделать
затруднительно.
212
*l
*2 = 0+
^ = 0,2
*2 = 0,5
0+
2,67
2,11
0,1
1,36
1,69
1.74
0,2
0,91
1,25
1,42
0,3
0,79
1,03
1,19
Таблица 4.3
0,4
0,76
0,93
1,04
0,5
0,75
0,90
1,00
Таблица 4.4
*1
*2 = 0
*2=0,2
*2=0,5
-0,5
0,83
0,80
0,77
—0,4
0,83
0,80
0,76
-0,3
0,83.
0,77
0,72
—0,2
0,83
0,74
0,65
—0,1
0,82
0,66
0,55
о"
0,49
0,39
Для расчета эффективных модулей в ряде случаев может
быть использован метод конечных элементов. Так, для модельно-
модельного композита, ячейка периодичности которого изображена на
рис. 52, были рассчитаны тензор модулей упругости нулевого
приближения и эффективный тензор модулей- упругости. По тео-
теории нулевого приближения были рассчитаны микронапряжения
в модельной задаче о растяжении плоскости, изготовленной из
описанного композита, равномерной нагрузкой интенсивности 1
яа бесконечности (в направлении j^). Были выбраны характери-
характеристики композита
v,=0,45; v2=0,30; и=?2/?,==10; у = Ц2, D.10)
где у — объемная концентрация включения. Максимальные на-
напряжения в связующем получились такими:
(т„ = 1,34; ia22=0,83; ai2 = 0,20.
§ 5. Композит с продольно-поперечной армировкой
Рассмотрим ортогонально армированный волокнистый компо-
композит с изотропными однородными компонентами (рис. 53).
Упругие постоянные связующего обозначим через Я,ь Hi (Ей
-v\), а упругие постоянные волокна — через %2, Цг (?2, V2). Будем
считать, что композит является периодической структурой. Тогда
можно выделить ячейку периодичности (dhc. 54) в виде паралле-
параллелепипеда с отношением сторон 1:1:2.
Чтобы решить для такого композита задачу по теории нуле-
нулевого приближения, необходимо решить задачу Да@) по теории
эффективного модуля A.6), A.7) и задачу Жа(—1) для опреде-
определения локальных функций и тензора модулей упругости нулево-
213
го приближения (псевдоперемещеиий и псевдонапряжеиий). Оо-
бенностью данного композита является то, что задача Жа(—1
D.6.6) — D.6.8) для него является существенно пространственной
задачей теории упругости.
Рис. 52.
Рис. 53.
Сформулируем эту задачу как задачу об определении псевдс-
перемещений UiPq):
Х1(рЛ = 0; E.1
выражения для объемных псевдосил X(Pq) в зависимости от ко>.-
бинации (pq) даны в табл. 5.1.
(РЧ) ^^"\
(И)
B2)
C3)
A2)
A3)
B3)
X,
<*+ад,|
*.!
И»
hs
0
Т аб л и
х.
(К + 2|i),2
Л»
hi
0
hs
ца 5.1
х,
ч.
+ 2^),з
0
h.
ha
Упражнение 5.1. Показать, что для волокнистого ортогональ-
ортогонально армированного композита (рис. 53) должны выполняться ус-
условия
111 = 222> 183 — 233> 313 = 323» E.2
так что независимыми задачами E.1) будут только задачи Жь
ЖзЗ> ЖK, Ж12-
214
Упражнение 5.2. Доказать, что если для задачи теории упру-
упругости D.2.1), D.2.2) выполнены следующие условия:
а) тело, занимающее объем V, и функции Сцы(х) симметрич-
симметричны относительно некоторой (координатной) плоскости 2а, пер-
перпендикулярной оси ха;
б) объемные силы Xt и заданные поверхностные нагрузки 5,°
или перемещения щ° симметричны (антисимметричны) относи-
относительно плоскости 2а при i=a и антисимметричны (симметричны)
при 1фа,
то вид* симметрии решения щ(х) относительно плоскости 2а
совпадает с видом симметрии входных данных Хи S^, щ°.
Упражнение 5.3. Доказать, что если компонента вектора пе-
перемещений щ симметрична относительно плоскости 2а, то
",-.<* Ь„ = О (iф а), иа|2а = 0, E.3)
а если щ антисимметрична относительно плоскости 2в, то
Щ |2„ = 0 (i Ф а), иа.а 1^ = 0. С E.4)
Используя результаты упражнений 5.2 и 5.3, можно выделить
из ячейки периодичности (рис. 54) ее 1/8 часть, показанную на
рис. 55. При этом благодаря условиям D.6.7) и D.6.8) гранич-
граничные условия для псевдоперемещений в зада-
задачах ЖР? будут иметь вид E.3) или E.4)
Объем параллелепипеда, изображенного на
рис. 55 A/8 ячейки), равен 2. Объемная
концентрация волокон связана с радиусом
волокна зависимостью
7=я/?2/4. E.5)
Для решения задачи «а 1/8 ячейки вос-
воспользуемся вариационно-разностным методом,
описанным в § 8 гл. 5. Оперативная память
ЭВМ БЭСМ-6 позволила произвести разбие-
разбиения 1/8 ячейки на 8X8x16 узлов. Оценка
точности численного решения регулировалась
условием E.8.15). Для достижения этой точ-
точности в зависимости от параметра x=E2/Ei и коэффициентов Пу-
Пуассона vi, V2 уходило от 5 до 15 мин машинного времени (сходи-
(сходимость итерационного процесса ухудшалась с ростом х и стрем-
стремлением коэффициентов Пуассона к 1/2).
В табл. 5.2 приведены результаты счета по определению ком-
компонент тензора модулей упругости композита при двух различ-
различных объемных концентрациях. Коэффициент Пуассона связующе-
связующего vi был принят равным 1/4.
На рис. 56 приведены графики зависимости некоторых компо-
компонент эффективного тензора модулей упругости в зависимости от
коэффициента Пуассона связующего vi (v2 = 0,25; и = 2; R=l).
Там же пунктирными линиями изображена вилка Хашина—
Штрикмана (§ 4 гл. 3)'.
Рис. 55.
215
По теории нулевого приближения была решена задача о пь
раллелепипеде, на границе которого заданы нагрузки
= 0 (/=1,2);
х.=±-
= 5?|
= С
2 2
Свойства композита выбраны следующими:
х = ?2/?х= 10; vx = 0,25; v2=0,35; Y = 0,785.
Ofi
0,25 0J0 0,35 №
Рис. 56.
Рис. 57.
На рис. 57 показано распределение напряжений озз(*з) по
прямой вблизи ?i = 0, jc2 = 0, проходящей через армирующие во-
волокна. Напряжения, соответствующие решению по теории эффек-
эффективного модуля, изображены сплошной линией, а по теории ну-
нулевого приближения — пунктирной линией. Микронапряжения
всюду в 1,5—2 раза превосходят «средние» напряжения и воз-
возрастают в точке касания армирующих волокон.
На рис. 58 показано распределение напряжений стзз(*з) по
прямой вблизи *i = 0, JC2=0, проходящей через связующее. Мик-
Микронапряжения намного меньше средних. В точках касания воло-
волокон они уменьшаются до нуля. Там же изображена полоса в се-
сечении *2 = const вблизи х2=0 плоскостью, проходящей между ар-
армирующими волокнами, параллельными оси х2. Точки пересече-
пересечения штрих-пунктирной линии, вдоль которой показаны напряже-
напряжения, с линией касания волокон отмечены крестиком. В этом слу-
случае микронапряжения возрастают в местах стыка связующего с
волокном. На рис. 59 показан случай, когда центральная ось пе-
пересекает сечение волокон, направленных по оси хи по диагонали
216
я проходит через линию касания армирующих волокон в другом
направлении. Здесь, как и в предыдущем случае, микронапряже-
микронапряжения в связующем убывают с приближением к точке касания ар-
+
г
II
2fl
1,5
I i i i
/ 2 3 «<5,
да.
Рис. 58.
Рис. 59.
мирующих волокон. В точках пересечения центральной оси с по-
поверхностью раздела компонентов стзз терпит разрыв, причем при
приближении к этим точкам напряжения в волокнах возрастают,
а в связующем — уменьшаются.
Таблица 5.2
0,442
0,785
X
2
4
%
10
2
2
2
10
V,
0,35
0,35
0,35
0,35
0,35
0,25
0,35
0,45
0,35
'ни
1,84
2,57
3,17
3,71
4,22
2,57
2,76
3,28
9,78
Asms
1,77
2,21
2,45
2,60
2,71
2,50
2,72
3,30
7,75
0,74
0,87
0,92
0,95
0,97
1,23
1,45
2,01
3,62
'ив
0,76
(
1
),94
1.04
1,10
1Д4
,26
,46
,99
1,22
0,52
0,67
0,75
0,81
0,85
0,64
0,63
0,62
2,20
'ни
0,53
0,71
0,82
0,90
0,96
0,65
0,64
0,63
2,53
НЕКОТОРЫЕ ЛИТЕРАТУРНЫЕ УКАЗАНИЯ
§ 1. Однонаправленные волокнистые композиты рассматрива-
рассматриваются, например, в [16, 17].
§ 2. Метод функций комплексной переменной в теории упругости
подробно изложен в монографии [67]. С дзета-функциями
Вейерштрасса можно ознакомиться по [1, 51]. Теория беско-
бесконечной системы алгебраических уравнений описана в '[41].
Исследованию волокнистых композитов методами функций
комплексной переменной посвящены работы [12, 13, 60].
217
§ 3. Более подробно изложение параграфов 2 и 3 читатель най-
найдет в работе [65]. Данные табл. 3.1 взяты из работ [17, 104].
§ 4. С задачей о композите в виде «шахматной доски» можно
ознакомиться по работам [90, 108]. Построение матрицы
А. А. Ильюшина в плоском случае приведено в [109]. По-
Подробности применения метода конечных элементов к задаче
о композите с волокном квадратного сечения читатель найдет
в [32].
§ 5. Тензор модулей упругости нулевого приближения и эффек-
эффективный тензор модулей упругости с ортогональной продоль-
продольно-поперечной армировкой определены в работе [19]. Там же
дано приближенное полуэмпирическое выражение для эф-
эффективных модулей такого композита.
Глава 7
УПРУГО-ПЛАСТИЧЕСКИЕ КОМПОЗИТЫ
Сначала на примере неоднородного стержня показывается
техника применения методики осреднения к нелинейным краевым
задачам. С помощью этой методики задача о стержне решается
точно. Затем подробно описывается решение квазистатической
задачи неоднородной и анизотропной теории пластичности. Рас-
Рассматриваются теория эффективного модуля и теория нулевого
приближения. Большое место в главе уделяется построению тео-
теории малых упруго-пластических деформаций для анизотропной
однородной среды. Для такой среды доказываются теорема един-
единственности решения квазистатической задачи в перемещениях и
напряжениях, теоремы о минимуме лагранжиана и максимума
кастильяниана, теоремы о простом нагружении. Описывается
схема экспериментов, необходимых для определения материаль-
материальных функций исследуемой теории. Показано, как исходя из тео-
теории малых упруго-пластических деформаций А. А. Ильюшина
для изотропной среды получить методом осреднения соотношения
анизотропной теории пластичности.
§ 1. Равновесие физически нелинейного неоднородного стержня
Рассмотрим, как и в § 1 гл. 4, стержень длиной L, для кото-
которого уравнение равновесия имеет вид
?)+*(,, = О, (U)
а граничные условия — вид
U %)\ °. A.2)
\
Считается, что стержень изготовлен из композиционного не-
нелинейного материала, представляющего собой периодическую
структуру, причем связь между напряжениями и деформациями
осуществляется с помощью нелинейных взаимно-обратных опре-
определяющих соотношений
219
Предполагается, что определяющие уравнения A.3) описывают
физически нелинейную среду или упруго-пластическую среду при
активном нагружении.
Разумеется, для задачи A.1), A.2) можно выписать точное
решение
и= J#(*, $X(y)dy + So}dx + u<> A.4)
или, если «объемные» силы отсутствуют, 1'
и = $3(х, S°)dx + u°. A.5)
о
Однако мы будем искать решение этой задачи методом осредне- 1
ния, чтобы на простом примере продемонстрировать технику ее }
применения к нелинейным задачам МДТТ. <
Как и в гл. 4, вводим быструю переменную g D.1.8). Произ- i
водную по быстрой переменной g будем обозначать точкой, а по :
медленной переменной х — штрихом. Тогда уравнение равновесия t
A.1) можно переписать в виде *
a s
Ищем решение задачи A.1), A.2) в виде асимптотического
разложения {
и=*(х) +<zJV,(g, v') +«2iV2(i, v',
+aW8(g. v', v", v'") + ..., A.7)
где Nq, q=l, 2,... — функции, зависящие от v', v",...,t>(«) и удов-
летворяющие условиям
N^l\ W = 0, q>0; [[Nq]] = 0 A.8)
(последнее из условий A.8) означает, что функции Nq являются
периодическими по переменной ?). Считаем, что функции с отри-
дательным индексом тождественно равны нулю. Будем предпо-
лагать также, что все рассматриваемые функции таковы, что все
производные, которые будут записаны, существуют.
Продифференцируем A.7):
и' = v' (х) + N\ (g, v') + a [N2 (g, v', v") + N\ (g, v', xf\ +
+ ce2[N\(|, v\ v", v'") + N2(|, v', v", v'")] + ... A.9)
Тогда определяющие соотношения можно разложить в ряд па
параметру «:
220
X [a(N2 + N[) + аЦЫ'г + N'2) + ...] + -j x
x JH?- (|, y' + N\) [a2 (iV2 + iVjJ + 2a3 (JV2 + iVi) (N'z + N
Подставляя A.10) в уравнение равновесия A.6), приравняем вы-
выражения при одинаковых степенях а некоторым функциям, не за-
зависящим от быстрой переменной. Выражение при 1/а прирав-
приравняем нулю:
if" ' (N'2 + N'ri]+'&' = .'А°И- <1Л2>
= h\ (vr, if)
и т. д. (аргумент v'-\-Nx' функции &" и ее производных в A.12) и
A.13) опущен). Функции ho(v'), hi[v', v"),... находятся осред-
осреднением
), A.14)
Hl@'' V"} AЛ5>
и т. д.
Поэтому уравнение равновесия приобретает вид
h'0(v') + <xh[(v', v") + a*h2(v', xf, v'") + ... + X(x) = 0. A-16)
Аналогично, из A.7), A.10) и A.2) получаем граничные условия
(v + aNx + a*N2 + .. .)|,=0 + н°,
A.17)
Решение задачи A.16), A.17), как и в линейном случае,
ищем в виде разложения по малому параметру а:
v{x) =wo(x)+awi(x)+a2w2(x) +... A.18}
Подставляя разложение A.18) в функции hQ[v~l), h\{v', v")r
h2(v', v", v'"),... и представляя эти функции в виде ряда по сте-
степеням а, получим
*о(»')= ho(w'o)+-^~
of
AЛ9>
221
Me'. «О = fh(w'o,
- (aw'i + a*
v
Подставим A.19) в уравнение A.16) и приравняем выраже-
выражения при одинаковых степенях а. Тогда получим рекуррентную по-
последовательность краевых задач (задачи J\{q), <7 = 0> 1, 2,...) для
^однородного стержня:
U-20):
[ho(w'a)]'+X=O,
A.21);
A.22)
т. д., причем для граничных условий имеем соответственно
A24)
A-25)
Заметим, что нелинейной является только задача Д@) A.20),
<1.23). Последующие задачи ДA) A.21), A.24); ДB) A.22),
A.25) и т. д. являются линейными.
Нетрудно видеть, что функция ho(v') описывает эффективные
определяющие соотношения, так как они связывают среднее на-
пряжение (<г)A.14) с средней деформацией ( е ), что устанавли-
вается осреднением A.7) с учетом A.8). Поэтому задача Д@)
A.20), A.23) представляет собой не что иное, как задачу теории
эффективного модуля. Ее решение имеет вид
222
w0 = f Ho (j X (y) dy + S°) dx + ««, A.26>
6 x
где #o — функция, обратная к h0:
Ho-^ho, h-^Ho. A.27)
Если «объемные» силы отсутствуют, то из A.26) следует
wo=H0(S°)x+u0. A.28)
Чтобы найти величины hg, q = 0, 1,... и функции Nq, q = 0, I,...
необходимо решить рекуррентную последовательность задач
Ж(#)> q =—1, 0,... для неоднородного стержня на ячейке перио-
периодичности. Первая из этих задач Ж(—1) A.11), A.8) для опре-
определения функции Л^(|, v') является нелинейной. Все остальные
задачи Ж@) A.12), ЖA) A.13) и т. д. (с учетом условий A.8))
являются линейными.
Решим, например, задачу Ж(—1). Из A.11) имеем
9A, а*+'ЛГ,)=ф(*), A.29)
где ф(я)—некоторая, пока произвольная функция медленной
координаты. Разрешим A.29) относительно второго аргумента
и осредним полученное выражение:
Разрешим A.31) относительно
где {&)~1 означает функцию, обратную к (&). Сравнивая
A.32) и A.29), получим
Правая часть в A.33) от быстрой координаты не зависит. Зна-
Значит не зависит от | и левая часть. Поэтому из A.14) и A.33)
имеем
Тогда из A.30), используя условие A.8), находим
I
- ( f S (i, ho(w'o))dl ) - (g- -i-J a»i. A.35)
b
i 223.
В силу того что в A.14) угловые скобки можно опустить, нз:
< 1.12) видно, что задача Ж@) имеет решение
N2-=—Ni'. A.36)
Тогда из A.15) следует, что
Л, (vf, »")=0.. A.37)
Упражнение 1.1. Доказать, что для неоднородного стержня
hq(v', t»",...,^+1))=0, q>0. © A.38)
Используя равенство A.38), легко видеть, что решение задачи.
ДA) A.21), A.24) является константой:
wl = wl |*=0 = — #1 (g, w'o ) \х=0 - — — Щ \х=0 + ;
) A-39).
Из A.35), A.39) н A.28) имеем:
() A-40)
A.41)
j
о
Используя A.18), получим
Jj] A.42)
Тогда из A.7), A.40) н A.41) имеем решение
и = На (SO) х + u° + a J & (g, S») d| - og Яо (S»), A.43),
о
а учитывая, что а| = х, получаем
X
и= ^{x,S°)dx + u°, A.44)
0 •'
что совпадает с A.5). Таким образом, как и в линейном случае,
для неоднородного стержня при отсутствии «объемных» сил ме-
методом осреднения находится точное решение.
Рассмотрим теперь в качестве примера стержень с линейным
упрочнением. Для такого стержня определяющие уравнения A.3) :
имеют вид
224
I F* (x\ u' 4- TP (y\ F*(y\1p u'~>f (y\ '
где E*(x) — так называемый модуль упрочнения. Предположим
теперь, что внутри каждого компонента р Л^-компонентного ком-
композита
Е(х)=Ер=const, Е*{х)=Ер* = const, es(jc) = esi\ A.46)"
причем
<rs1<^< ... < erf, A.47)
где CTs' — предел текучести по напряжениям, соответствующий
б/ — пределу текучести по деформациям.
Упражнение 1.2. Показать, что для композиционного стержня
A.45) — A-47) эффективные определяющие соотношения имеют
вид
АA)"'
,
. р
в*(р> ^..' / р*
где
р-1
p—1
Af
p—1
|
A.48)
f=l
A49)
причем Vi — объемная концентрация i-ro компонента композита.
Доказать, что для всех р
„•(р) s р'(р+1) 1\ Ч\\
§ 2. Задача о перемещениях для упруго-пластического композита
Рассмотрим неоднородную упруго-пластическую среду, вооб-
вообще говоря, анизотропную. Пусть при активном нагружении
8 В. Е. Победря
225
(<уцёец>-0) связь между напряжениями оц и деформациями е;^
(или градиентом перемещений uij) имеет вид
Оц = &ц (*, в) = З^и (*. Grad и), B.1)
где 5Ftj, &ц — — тензор-функции, инвариантные относительна
группы преобразований, характеризующих данный класс анизо-
анизотропии. Если с некоторого момента в некоторой точке процесс;
нагружения становится пассивным (atjrfet-,<0), то связь между»
напряжениями и деформациями описывается обобщенным закон-
законном Гука A.3.1)
оц — % = CtJkl (х) (и*,, — ик<1), B.2>
где а'ц и u'h,i — компоненты тензоров напряжений и дисторсии,
достигнутые к моменту начала разгрузки (пассивного процесса).'
Сформулируем теперь квазистатическую задачу теории малых
упруго-пластических деформаций при активном нагруженик \
&tl. / (*, Grad и) + Xt = 0, B.3).
Щ к = «•, &„ (х, Grad в) п, |а = S?. B.4),
Предположим теперь, что рассматриваемый неоднородный ма-
материал является композитом, представляющим собой периодиче-
периодическую структуру. Как и прежде, вводим малый параметр а и бы-
быстрые координаты |, так что уравнения равновесия B.3) примут "
вид
-?-&т (|, аи) + yWf, (|, аи) + xt = о, B.5),
где 5« представляет собой сокращенную запись Grad и. Решение
задачи B.3), B.4) ищем в виде асимптотического разложения
«I = О/ Й + « М1} (?, а») + a2 Af> (f, a о, 52 v) +
+ ot3M3) A, до, дЧ), dh>) + ... B.6),
В дальнейшем мы не будем записывать аргумент функций
N{^\ которые будем называть локальными функционалами
<7-го уровня, предполагая, что аргументом являются быстрые ко-
координаты I и градиенты перемещений (по медленным координа-
координатам) порядка 1, 2 q. Тогда разложение B.6) запишется в виде
по
a" N\"\ B.7>
^=>,Й, B.8).
226
причем все локальные функционалы отрицательного уровня тож-
тождественно равны нулю.
Дифференцируя B.7), получим
? N\% B.9)
Используя B.9), разложим определяющие соотношения B.1) в
ряд по параметру а:
а -<? <? дЪ -
х
тде под производной нулевого порядка понимается сама функция.
Подставляя B.10) в уравнения равновесия B.5), приравняем
выражения при одинаковых степенях а некоторым тензорам-
функциям, не зависящим от быстрой переменной §. Выражение
при степени —1 приравняем нулю. Тогда можно записать:
r=0
-X
" г=0 " г
B.П)
^= — 1,0, 1, ... ; qa^>\, a= 1, ... , r,
причем величины h<9> с отрицательными индексами тождественно
равны нулю.
Соотношения B.11) представляют собой рекуррентную после-
последовательность уравнений для определения локальных функциона-
функционалов. При дополнительных условиях
8* 227
(Niq)) = 0, q > 0; [[#«>]] = 0, B.12J
(t-т ^^^ S (M^1'+ <},)...
<C <i) ДО ^; Bлз>
Яа > 1; а = 1, • • ¦ , г.
Соотношения B.11) представляют собой последовательность за-
задач теории малых упруго-пластических деформаций для неодно-
неоднородной среды на ячейке периодичности (задачи Жд(р). Р=—1»
0, 1,...). Заметим, что только задача Жа(—1):
является нелинейной. Остальные задачи Жа@), ЖаA) — будут
линейными.
Уравнения равновесия B.5) с учетом B.11) приобретут вид
00
? a?h\f,}(do, ... ,df+lv) + X,G) = 0, B.15>.
а граничные условия B.4) — вид
? о'М"к = «?, ? rflfiP (do, ... , &>+1 о)Я/ |а = S?. B.16)
0=0 17=0
Чтобы решить задачу B.15), B.16) воспользуемся разло-
разложением
vt = ? a" w№. B.17)
р=0
Подставляя разложение B.17) в аргумент функций /г,-/') и пред-
представляя эти функции в виде ряда по степеням а, получим
/-,=0
х
li2 »2 •••dV ,2 ,2 •••
l.Pll.»12 kVtr,\ V,'2
rq+l
228
00 DO DO
X
2-2 2 -2-
V a'
1, ,1,-2, ,2
B.18)
Воспользуемся также разложением локальных функционалов
по степеням а:
...rq\
X
^ (|
p}=l p«=l
4
Подставим теперь B.18) и B.19) в уравнения равновесия
B.15) и граничные условия B.16) и приравняем члены при оди-
одинаковых степенях а. Тогда получим рекуррентную последователь-
последовательность краевых задач (задачи Да(<7), 9=0,1,—) теории малых
упруго пластических деформаций для однородной среды. При
этом только задача Да@)
X; = 0, B.20)
ш,{0> Ь, = ер, < (дш<°>) п, |х, - 5? B.21)
будет нелинейной. Все остальные задачи Да(?), q>l будут ли-
линейными:
г<^ | B22)
229
где входные данные каждой задачи Да(<7), <7=1, 2, ... определя-
определяются из рекуррентных соотношений
L B.24)
г,=О гот=0
Х
rm l rml Тт
где
OS
X
r,=O
dv i , ... dv
'm+i
X 6 /2 26)
Г1!
^1 + ^ + • • • + rm+\ > 1. W > 1, «
Задача Да@) B.20), B.21) является задачей теории эффек-
эффективного модуля, ибо функции Л*/0) связывают средние напряже-
ния ( at/) со средними деформациями ( ец), т. е. являются эф-
фективными определяющими соотношениями теории малых упру-
упруго пластических деформаций.
Для задачи по теории нулевого приближения достаточно ре-
решить задачу Дд@) (в которой следует положить оД°}=и), а за-
230
тем найти напряжения, используя определяющие соотношения
нулевого приближения, которые получаются из B.10) при <х=0:
<$> = 8% (?, дЗ) = 8и (I dv + VJv(I)j? B.27)
При этом, как видно из B.13),
I #(I) B.28)
Предположим теперь, что композит является слоистым, при-
причем слои расположены перпендикулярно оси хз. Тогда функции
Уц[х, ди) определяющих соотношений B.1) зависят только от
быстрой координаты |=?з- Обозначая штрихом производную по
этой координате, запишем уравнения B.14) задачи Жа(—1)
в виде
Wiz(S; оьл; о«.2; №)' + о«.8)Г = о, о = i, 2, з. B.29)
Интегрируя эти уравнения, имеем
&п (Е; »a,i; wa,2; (A^IV + о«,з) = At (x), B.30)
где Л-(ж) — некоторые функции, не зависящие от координаты |.
Предположим, что якобиан отличен от нуля:
det
Ф0; B.31)
индекс 1 у локального функционала первого уровня будем опус-
опускать. Тогда по теореме о неявной функции имеем из B.30).
N'i + о,-,3 =&~ъ (I; oa.i; аа,2; АхЙ), B.32)
где функции с^гз1 являются обратными по отношению к &~is. Oc-
редним теперь B.32) по ячейке периодичности. Воспользовав-
Воспользовавшись вторым из условий B.12), получим
vtA = <^e' (I: »а.Г. Oa.2J Аа(х)) = {&ТЪХ) (оа>1; оа,2; Л«Й). B.33)
Разрешая B.33) относительно функций Аа(х), получим
At Й = <^я'Г' (w«.*). * = 1. 2, 3. B.34)
Из сравнения B.30) и B.34) видно, что
#¦«(?; «fen; wa>2; ЛГ« + оа,3) = {&Тъ)~х {va, k), B.35)
откуда следует
231
Из B.36), используя первое из условий B.12), находим локаль-
локальный функционал первого уровня
1 .1
Nt(t,dS)=[ Qiadl -1 j Qi3dl) + (-|—E) m.s (x), B.37)
о о
где
Qu = &i»{& vaA; va,2; {&^)~x Ы). B.38)
Сравнивая B.36) и B.27), находим определяющие соотношения
нулевого приближения
$> = 9$ (|, do) = &ti (|; »«,,, Овл; Q<x з), B.39)
где Qa3 определяется по формуле B.38). Теперь из B.28) нахо-
находим эффективные определяющие соотношения
htl вв М? = {9ц (o«.i; va.2\ Qa3)>, B.40)
после чего можно решать задачу Да@) теории эффективного
модуля:
ht,,,(db) + Xt = O, B.41) ..
Щ к = «?, Л,/ (аё) п, Ь, - S?. B.42)
При этом в случае пассивного процесса нагружения вместо
соотношений
dti=ht,(do) B.43)
нужно согласно B.2), пользоваться '
of. - a'tj = him (vt.1 - o;f|), B.44)
где hijki — компоненты эффективного тензора модулей упругос-
упругости, a aij* и Vk,t* — компоненты тензоров напряжений и дисторсии
соответственно, достигнутые к моменту наступления разгрузки
при вычислении по теории эффективного модуля.
Рассмотрим. теперь теорию малых упруго-пластических де-
деформаций А. А. Ильюшина, для которой при активном нагруже-
нии связь между напряжениями и деформациями имеет вид
A.5.6):
а(/ = тп + -2М. (в|# —i- 6.6г/). B.45)
Предположим, что для каждого компонента р композита (Р =
= 1, 2, ..., N) имеет место линейное упрочнение
jf -<* B.46)
232
где esp — предел текучести для р-го компонента композита, при-
причем
Рассмотрим одномерное деформированное состояние (#!==#):
и as и (х) и9 = и = 0 е == ^и —и' 0 = ^ц ^ ц' B 47)
Тогда из B.45) имеем
B.48)
откуда
B.49)
Для этого случая задача B-3), B.4) приобретает вид
[/С (х) и' + ^^ Ф (^. |/"-f "') ] + Х W = 0>
а задача теории эффективного модуля B.41), B.42) — вид
[h{v'))' + X(x) = 0, B.52)
v \х=0 - u°, h (v1) |,=i = S°. B.53)
Упражнение 2.1. Показать, что для случая линейного упрочне-
упрочнения B.46) эффективные характеристики для задачи B.52), B.53)
определяются следующим образом:
ElV', v' < е;<»),
р
h(v') =
; и' < е'еч-1),
1=1
N
B.54)
EN+iv'
233
где
р—1 N
B.55)
(=1
=i,2 N;
Ui — объемная концентрация t-го компонента композита.
§ 3. Анизотропная теория пластичности
С каждой неоднородной средой теория эффективного модуля
связывает некоторую эквивалентную однородную среду. При
этом, если все компоненты композита являются изотропными,
эквивалентная среда оказывается, вообще говоря, анизотропной.
Так, для слоистого композита эквивалентная среда, как было
установлено в гл. 5, является трансверсально изотропной, а для
волокнистых однонаправленных композитов и композитов с орто-
ортогональным армированием, как было установлено в гл. 6, эквива-
эквивалентная среда является ортотропной (с числом независимых уп-
упругих постоянных от 6 до 9) или трансверсально изотропной.
Чтобы решать задачи теории пластичности для композитов,
необходимо иметь соответствующую теорию для однородной эк-
эквивалентной среды, т. е. анизотропную теорию пластичности. До-
Довольно часто встречается ситуация, когда экспериментально оп-
определить упруго-пластические свойства компонентов довольно
трудно. В этом случае теория эффективного модуля является
единственно возможной для описания такого композита. При
этом его эффективные характеристики могут быть найдены экспе-
экспериментально из макроопытов на представительных образцах (см.
§ 6 гл. 1). Мы рассмотрим сначала теорию малых упруго-пласти-
упруго-пластических деформаций для трансверсально изотропного и ортотроп-
ного тела.
Предположим, что главная ось трансверсальной изотропии на-
направлена по оси хз. Тогда квазилинейная (тензорно линейная)
функция одного симметричного тензора второго ранга относи-
относительно другого, инвариантная относительно преобразований вра-
вращения вокруг оси хз, имеет вид
аи (е) = Ojbti + а26зА/
234
где си, О2. аз, сц ¦— функции независимых инвариантов, например
9 = е,-ь вдз, е* == etjBih е8 == в^е^. C.2)
Для упругого случая (см. приложение II)
otj = Я46 + (ЯБ — Л4) е33, аа = (А,8 + Я4 — 2^ + 2А, — 4А,) 633 +
+ (К — Я*)в, «8 = 2Я,, а4 = 2 (Л, - Я,). C.3)
За инварианты тензора напряжений можно принять, аналогич-
аналогично C.2),
3<*==в==<^, <J8S, а* = агjCStj, а3^аа1аа1. C.4)
Упражнение 3.1. Доказать, что функции инвариантов аь аг,
аз, О4 могут быть записаны через инварианты C.2) и C.4) в сле-
следующем виде:
«х = ^ Гв - .83 + (в83 - 6) y^
4а„ - а|, — 2вазз + в2 — 2а*
— 2е*
а4 = — т /" 4^з - озз - 2eg»» + в2 - 2а*
К 4S8-ef3-20833-Ьег-2е*
20833
Упражнение 3.2. Показать, что если тензор а в C.1) является
потенциальным, т. е. существует такая функция Щ9, езз! в*, ЕзЬ
зависящая от инвариантов C.2), что
то
dW <>W 9 dW dW ,„_.
dQ деда де деа
Разумеется, вместо набора инвариантов C.2) можно выбрать
любой другой, состоящий из независимых инвариантов. Напри-
Например,
в, е33 = 6зз - -L. в, е„ = Ув1 - -L ^ (вв = /^), C.8)
235
ез = Ч — взз = 83 — 8зз
вв8и + 8и, 888, Л <7- (ЗЛО)
Теорию пластичности, для которой выполняются соотношения
C.6), назовем потенциальной. Именно для такой теории сформу-
сформулированы упражнения 3.3—3.6.
Упражнение 3.3. Показать, что для набора инвариантов C.8)
справедливы следующие соотношения:
¦ = -f-%. =«• + -§- «з^зз + 2<x4 (e83 + 4" 8), C.11)
4 ?dW ?dW
Упражнение 3.4. Показать, что для набора инвариантов C.9)
справедливы соотношения
dW I /(Q . . 1 о 1
__= — (в —о3з) = о1 + —а8б ?-а8е33,
= у«83 = «8 + -i-а8 (в„Ь-^ в) + 2oc4e8ai C.12)
1 dw _ р _¦ 1 aw _ q _
-— Cto, — — ОС3 + ОС*,
р dp p 2q dq q
где
**Ve,-<&. C.13) :
Упражнения 3.5. Показать, что для набора инвариантов (ЗЛО)
справедливы соотношения
2. 2.
= tf = Оц + а2 + а38зз + 2а4883, C.14)
Упражнение 3.6. Доказать, что соотношения C.1) могут быть
записаны в виде
236
0 = 3of= 3ax + ota + (Og + —;«4) 6 + 2a4e33,
) А,в
+ «4 (бзге3/ + 63/е3, 1- е3А,-), C.15)
где, согласно C.5),
^
«4= i/f"? -«з. C.16)
4е3 —4 —2еи ' «зз —«з
Упражнение 3.7. Используя C.15) и C.16), показать, что вся-
всякому простому процессу деформации
l C.17)
соответствует простой процесс нагружения
S// @ = 1* (Os?,. C-18)
где А@» 1*@ — функции," зависящие от времени (или парамет-
параметра нагружения), а тензоры е°, s° от времени не зависят. ?)
Примем теперь в качестве основных инварианты тензора де-
деформаций C.10) и соответствующие инварианты тензора напря-
напряжений
tf=-j-(*" + *»)• о„, Р, Q C.19)
и рассмотрим тензоры р, q, построенные на основе тензора дефор-
деформаций
- (в„б8/ + езАЛs e?/ + i- 6 (бзгбз/ -б;/) +
+ 83363i63/ - (83/б3/ + е3/63,), C.20)
Яц = у f8»'6»'" + ез'бз') ~~ е»збз^3/, C.21)
и тензоры Р, Q, построенные на основе тензора напряжений
Рц = tf,, + -i- в F3,63/ - Ь„) + ± (Г33 (бзгб3/ + в(/) -
237
/ ¦¦¦
— (<*з А/ + <УзАн) = ai з + a (83A/ — б,-/) + <7зз8з А/ — (<*з/6з/ + р'зЛ/)
C.22)
Q/ / = — (<*зА/ + <%6S/) — or3363 A/- C.23)i
Заметим, что инварианты C.2) для тензора р таковы:
ри=0, рзз=О, рцрц=р2, p3ip3i = 0, C.24)
а для тензора q имеют вид
Яи = °. 7зз = °. ЯиЧи = ~ 72. ЯыЯзг = — 72- C.25)
Точно так же находятся инварианты C.4) тензоров Р и Q: ;
*» = 0, Р3з = О, ЄЄ = Р2, РзгРзг = 0, C.26I
Qu - О, Q33 = О, QUQU = -i- Q2, Q3,Q3i = ±- Q\ C.27)
Таким образом, каждый из тензоров р, q, P, Q имеет по од-
одному независимому инварианту. При этом
C.28)
Соотношения между напряжениями и деформациями C.1)
с помощью введенных обозначений можно записать в виде
<*// = * (б// - б3(б3/) + (Г33б3(б3/ + Pt, + 2Q/;-, C.29)
где
Pti^j-Plh Qu= ±qtt, C.30)
причем инварианты тензора напряжений связаны с инварианта-
ми тензора деформаций соотношениями
а= а$, 833, р, q), о33 = (Г33(в, 838, р, q),
C.31)
P=P(Q, 833, p, q), Q=Q (в, 833, р, 7).
Функции C.31) не могут быть независимыми, если предпо-
лагается потенциальность тензора or, ибо для функции
W(Q, 833, р, q) выполняются соотношения C.14):
238
т. е. выражение.
dW = od$+ огзз&зз + PdP + 2C^ C-33)
должнб быть полным дифференциалом, а по сему существует
связь между функциями C.31):
I
да дазз q^ дР fo dQ
~. »
dQ dp dQ dq dQ
C.34)
дааз _ дР да33 n dQ dP
_ 2 ur __ 2
dp дг33 dq Эе33 dq dp
Совершив над функцией W(Q, езз, p, q) обобщенное преобразо-
преобразование Лежандра (в предположении, что это возможно), полу-
получим функцию w (о1, стзз, Р, Q), для которой справедлива формула
A.1.6):
: OijEij. C.35)
Дифференцируя w по аргументам, найдем
d® Z dw dw dw п ,o QR.
—~- = o, = e,,, = p, = Iq. (o.ob)
да Эстзз 8S dP И dQ " K '
Соотношения C.29), C.30) можно разрешить относительно
деформаций (и для непотенциальной теории)
2
где
Р г) Я Г\ /О OQ\
р q
6= е"(а, ог33, ^. Q). езз = essfa" ^зз. ¦P. Q).
C.39)
р=р(о, ог33, Я, Q), 7 = 7 (о, (Узз. Я, Q).
•В случае потенциальной теории между функциями C.30) су-
существуют очевидные зависимости
эё _ Эезз _эе^__?р_ _э?_2_^_
Эстза Эо ' № da ' д$ da '
деаз _ Эр Эе33 _ ^ дЯ дР — 2 Э<? C 40)
ЭР dags ' 5Q ЭсТаз * dQ дР '
Пусть дано уравнение
/(9, езз, Р, q)=fs=const, C.41)
239
которое описывает в четырехмерном евклидовом пространстве
Е^ некоторую поверхность, которая соответствует поверхности
<р(в, озг, Р, Q)=<p*=const C.42);
в четырехмерном пространстве S4: <г, озз, Р, Q-
Если деформации таковы, что соответствующее им значение f
f@, 833, р, q)<fs, то будем считать, что деформации упругие.
В этом случае функции C.31) являются линейными:
C.43)
где упругие константы Хз, X*, %s, fa, Хд для трансверсально изо- .
тропного тела определены в приложении II.
Назовем процесс деформации простым в широком смысле,
если
Pif(t)=X(t)pn°, qu{t)=X{t)qij°, C.44)
и простым в узком смысле, если
8?/@=Я@8,;0. C.45) \
Просто простым процесс деформации будет в случае выполне-
выполнения условия C.17).
Аналогично, процесс нагружения называется простым в широ-
широком смысле, если
C.46)
и простым в узком смысле, если
C-47)
Упражнение 3.8. Показать, что из соотношений C.29), C.30)
и C.37), C.38) следует, что всякому простому в широком
смысле процессу деформации соответствует простой в широком
смысле процесс нагружения, всякому простому в узком смысле
процессу деформации — простой в узком смысле процесс нагру-
нагружения, и обратно, о
Назовем материал трансверсально несжимаемым, если выпол-
выполняются условия
8зз=0, 0=0. C.48)
Для такого материала квазистатическая задача в перемещениях
теории малых упруго-пластических деформаций заключается в
решении уравнений
tf'i + (<4- б'),363г- + \—р,1 + 2-2.^1 + X, = 0, C.49)
L Р Я J./
240
к *= «?, [ ?Л| + D — О я3б8/ + (у й/ + 2 -?¦ ?,Л л, 11 = 5?, ,'
C.50>
где or*, 0зз* — некоторые неизвестные функции, которые должны
быть определены в ходе решения задачи, тензоры р и q выража-
выражаются через тензор деформации по формулам C.20), C.21).
К уравнениям C.49) следует добавить условия трансверсальной.
несжимаемости C.48) и соотношения Коши A.2.1)
е</=-?-(«*./ + «/.<•)• C.51),
Заметим, что в этом случае функции Р и Q зависят только от
переменных р и q, и поэтому в случае потенциальной теории из
условий C.34) остается только одно:
дР(Р,Я) = 2 dQ(p,g) 352V
dq dp ' v '
Докажем теперь теорему о простом нагружении (упражнение-
1.5.6).
Пусть материал трансверсально несжимаем C.48), функции:
Р и Q имеют вид
Р (р, q) = j; сзн frq1*, Q (р, </) = ? Сир'У*, C-53)'
X X
где kx, lx, ix, jx — неотрицательные числа, причем /ех2+/*2#0, ix2+
+/х2=7^0 для каждого %, Сз^О, с^ФО, а суммирование произво-
производится по таким и, что
C.54)'
Пусть, кроме того, объемные силы X и поверхностные силы S°
возрастают пропорционально одному параметру \i(t), заданные
перемещения ы° — пропорционально другому параметру X(t):
причем эти параметры связаны между собой соотношением
[i(t)=Xr(t). C.56)
Тогда процесс деформации и процесс нагружения в каждой точке
рассматриваемой среды будут простыми (во всех смыслах).
В самом деле, предположим, что решение задачи C.48) —
C.51), C.53) имеет вид
щ (х, 0 = Я, @ иТ Й, огг/ (х, 0 = И @ < Й,
et/ (Я 0 = Я, @ ej?> ft, ft/ (х, 0 = Я. @ pj?> Й,
241
qj(x, t) = Я, (t) qf (x), Pn (x, t) = n (t) pg> (x),
где щРЦх), вц(°)(х), ... — решение этой же задачи при фиксиро-
фиксированном t=fl°>. Подставляя C.57), C.55) последовательно в соот*
ношения C.48) — C.51), убеждаемся, что они удовлетворяют^
при любом t. :„
Соотношения C.53), удовлетворяющие условию C.52), такж'1
справедливы при любом t, если выполнено C.56). Теорема дог
казана.
Упражнение 3.9. Показать, что теорема о простом нагружении1
имеет место для сжимаемой среды, если
C.57>
тде kiKj (/=1, 2, 3, 4) — неотрицательные числа, с*х=?^0 (t = l, 2,
3, 4), а суммирование производится по таким к, что ;
? fcix» = 2 «й.2 = ? Айв = ? А(н4 = /- чь 0. С) C-58>-
»=i i=i i=i t=i
Квазистатическая задача А теории малых упруго-пластичест
ких деформаций трансверсально изотропной однородной среды-
заключается в решении уравнений равновесия C.49) при выпол-.
нении граничных условий C.50). При этом следует воспользо-
воспользоваться соотношениями Коши C.51) и иметь в виду, что в C.49)
инварианты напряжений связаны с инвариантами деформаций;
функциями C.31), которые в упругой области имеют вид C.43).
В случае разгрузки эти функции приобретают вид .%
а = 5" + (К + Я,) (в — б*) + Я, (е33 — 4), I
<Уаз = <*к + h (в — в*) + Я, (е38 — еда), C.59):
где все величины, помеченные звездочкой, относятся к пластиче-
пластическому состоянию, достигнутому в данной точке среды к началу
разгрузки.
Квазистатическая задача В теории малых упруго-пластичес-
упруго-пластических деформаций трансверсально изотропной однородной среды
заключается в решении уравнений равновесия
o.t + (<*зз - 5).s 83i + Ptfj + 2Qti.t + X, - 0 C.60)
и шести уравнений совместности A.2.2)
Лг / в еме1тпеы.1т = 0, C.61)
242
Б которые вместо деформаций нужно поставить их выражение
через напряжения C.37) — C.39). При этом следует еще удовлет-
удовлетворить граничным условиям
«/ (?) к = «?. Й/ + (<*зз - в) л А/ + (Л/ + 2Q,¦/) я/] к = 5?. C.62)
В случае разгрузки деформации связаны с напряжениями
законом
езз =- езз - ^ (°~ *) + "?Г Кз ~ <&), C.63)
где технические постоянные связаны с модулями Ав, А.4, Яб, Я?, Ад
соотношениями
Я, = Е' A - v)//, Я4 = Е (v + Ь'2)/[A + v) /], кь = Ev'/l,
Я, = G = ?/[2 A + v)], X, = G', 1= 1 - v - 2v'8?, C.64)
k = E/E'.
В упругой области можно пользоваться соотношениями C.63),
в которых все величины, помеченные звездочкой, следует поло-
положить равными нулю.
Обра'тим внимание на то, что всякий симметричный тензор
второго ранга h может быть, аналогично тензору а C.39) или
тензору е C.37), представлен в виде суммы четырех тензоров:
Ь, = Ъц + Ш + 1$+Г$, C.65)
где
ht?j = hssb3ibsi, h??h?> = hl3, C.66)
a hu - ha + Ab3) - (Мз/ + КЫ№№? - (А(Р) J. C.67)
причем й, Азз. А<р), ft№ .— четыре независимых инварианта тензо-
ра^А для трансверсально изотропной среды.
Упражнение 3.10. Показать, что для тензора h C.65) справед-
справедливы соотношения
243
=о, ад/»=о, ад/> = о,
= 0. С
Заметим, что всякий симметричный тензор второго ранге"
тяожно представить в виде суммы не более шести линейно неза
висимых тензоров (базисных). В случае трансверсальной изотро
пии для квазилинейной тензорной зависимости оказалось четыр*
базисных тензора. Квазилинейная ортотропная тензорная функ'
ция включает в себя зависимость от шести инвариантов, и поэто-
поэтому тензорный базис для ортотропии состоит из шести тензоров
(самый общий случай).
Будем считать, что главные оси ортотропии совпадают с осями!
координат. В этих осях можно записать тензор напряжений
в виде
+ «и (Мз/ + 6зА/) + <*2з(Мз/ + 63А3). C.69)
где каждая из величин aaf, является функцией шести инвариантов
тензора деформаций *
cr«p = (Гар (eu, е22, е33, 812, е13, е23), а < Р; а, р = 1, 2, 3, C.70);
при этом все ааA и еар, а<р, считаются неотрицательными.
Для упругой области функции C.70) являются линейными: г
°П = ^1611 + ^4е22 + ^ве33> °12 — ^7812>
(Г22 = А,48П + Я,2822 + Я,Б83з, 023= ^8823> C.71)
Следует различать величины (Г,-/ — компоненты тензора а и
<т«р, а<р, — инварианты тензора напряжений, которые совпадают*
по виду с компонентами только в специально выбранной системе
координат, которую мы рассматриваем.
Чтобы сделать это различие более четким, введем тензоры
813(б1,б3/+бзЛ/), C.72)
f з е23 F2,63/+ Ма/).
где
е(,2) е(,2) = 2e?2i 8(,3)8A3) = 2е2з, 8(/23)8B3) = 28^, C.73)
и аналогичные тензоры для напряжений. Тогда C.69) можно за-
лисать в виде
е(}2) + _^_ еA8) + _?н_ еB3) C.74)
" е18 (/ еа "
244
Материал называется ортотропно-несжимаемым, если выпол-
выполняются условия
8Н = О, 822=0, 833=0. C.75)
Рассмотрим теперь случай анизотропии произвольного вида.
Пусть в некоторой прямоугольной декартовой системе коор-
координат трехмерного евклидового пространства рассматриваемая
квазилинейная тензорная функция имеет вид
. C.76)
где Уа — некоторые скалярные функции совместных инвариан-
инвариантов I\, h ... тензоров е, А\, Л2, ... (тензоры А\, А2, ... характери-
характеризуют рассматриваемый класс анизотропии), а р(а) — некоторый
тензор, не зависящий от тензора деформаций е или зависящий
от него линейно, причем в выбранной системе координат можно
записать.
Как уже упоминалось, число п (а, Р = 1, .... п) не может быть
больше шести.
Назовем 1Х линейным инвариантом, если существует такой
тензор-константа а<и), что
'ft/ = — <• аи = (а|?Ч* V'2, V <#> = 5,/, C.78)
где т<.п. В противном случае инвариант /т называется нелиней-
нелинейным. Тогда соотношения C.76) можно представить в виде
He оговаривая этого каждый раз, будем считать, что индексы
а, р пробегают значения от 1 до п, индекс х — от 1 до т, а у —
от т+1 до п.
Итак, соотношения C.76) или C.79) устанавливают связь меж-
между напряжениями и деформациями, если известны, например из
эксперимента, п функций
Ya = Ya (/x, ... , /„) ¦¦ ? Ахр[1 — ©а(Л, • • • , /„)] /р. C.80)
p=i
Здесь Aaf, — некоторая квадратная матрица пХп с постоянными
коэффициентами, причем
245
где coa — функции инвариантов h /n. Для линейной упруг^
среды в C.80) следует положить юа=0.
Если скалярные соотношения C.80) можно разрешить othoci
тельно /i, /2, ..., In:
? - Qa (Ylt ..., FJ] Kp, C.8
P=i
где квадратная матрица 5af> определяется в виде
а тензоры ,Р<а> определяются аналогично C.77)
а-=1 н
то соотношения C.79) также разрешаются относительно дефор
маций
™ а(к) » р(у)
8,. =уик. У )—У- + у i /у у )_iL_, (з.8?
Таким образом можно установить взаимно-обратную связ
между тензорами Р&) и />(*>:
р<?> _ К« n(a) n(a) _ 7а D(a)
¦^i/ — ~~. РЦ у Pij — ГЦ . (О.ОО
Назовем процесс деформации t(t) и процесс нагружения
a (t) простыми в узком смысле, если выполняются условия 'C.45),
C.47), и простыми в широком смысле, если
р(а) щ =X(t)p^a)°,Pia:> (t) = (i (t) P(??°. C.87)
Упражнение 3.11. Доказать, что простому процессу деформа?
ции в обычном, широком и узком смыслах соответствует процеа
напряжения в обычном, широком и узком смыслах соответст
венно. о
Пусть теперь в пространстве деформаций задана функциг
ф(/ь ..., 1п) и величина <ро. которая определяется эксперименталы
но и может зависеть от истории нагружения. Условие пластич-
пластичности заключается в следующем. Если '
<р(/ь ..., /„)«р0, C.88):.
то связь между напряжениями и деформациями C.79), C.85)ф
подчиняется закону Гука, т. е. в C.80) и C.82) следует положит^
«a^O, fia^O. Если же неравенство C.88) нарушается, то проис-?
246
ходит пластическое деформирование. Если процесс активный (Ha-
(Hart
гружение), т. е. tf/,de?/- = V Ya,dla > 0 или, например, d<p>0,
а=1
то справедливы соотношения C.80). Если же с какого-то мо-
момента начинается разгрузка (пассивный процесс), т. е. Оцёгц =
= V YadIa<0 или, например, d<p<0, то вместо C.80) нужно
а=1
записать условие разгрузки, которое должно быть согласовано
с общим постулатом пластичности (Друкера—Ильюшина)
d)cr:de»O. Например, в случае, если материал обладает мягкой
характеристикой, можно принять условие линейной разгрузки:
г. - г.=? д* ('»-';>. с3-89)
где величины, помеченные штрихом, соответствуют напряжениям
и деформациям, накопленным к моменту начала разгрузки. Ра-
Разумеется, условие пластичности C.88) может быть сформулирова-
сформулировано в пространстве напряжений
C.90)
Тогда при разгрузке fe^dtf^-eV /adFa<0 или ^Ф<0) вместо
а=1
C.89) -имеем
Уравнения равновесия
eu,, + Xt = 0, C.92)
используя C.80), можно записать в виде
2
Пусть заданы граничные условия
»/к = «?. «»#/«/la = S». C-94)
Тогда квазистатическая задача А деформационной теории плас-
пластичности заключается в решении уравнений равновесия C.93)
при удовлетворении граничным условиям C.94), причем должны
быть учтены условия C.80) или C.89) (в зависимости от того,
происходит ли нагрузка или разгрузка) и соотношения Коши
247
Квазистатическая задача в напряжениях (задача В) заклю.
чается в решении трех уравнений равновесия C.92), шести урав-
уравнений совместности
г\и == emeimn^kn.im = 0 C.95)|
при удовлетворении граничным условиям C.94), причем в C.95).
и C.94) следует выразить деформации (и перемещения) через;
напряжения согласно соотношениям C.85) и C.82) или C.91).
Упражнение 3.12. Дать постановку квазистатической задачи.
Б деформационной теории пластичности. о '¦:
Среда называется анизотропно несжимаемой, если справед-
ливы условия
/„=0, х=1, .... т. C.96>
Для анизотропно несжимаемой среды в задаче А добавляется т
уравнений C.96), для т неизвестных YK, x=l, ..., т, входящих
в уравнения равновесия C.93), ибо в C.80) останутся только
соотношения
У, = К,(/*+,,..../Je ? 4tf[l-<tt,(Wi.....Wa. C.97>.
6=m+l
Будем говорить, что материал обладает мягкой характеристи-
характеристикой по инварианту /о, если
"Ь ib ,3.98>
dla Ya dYa
и жесткой характеристикой по инварианту /о, если
^Jk ЛЬ C.99>
dla " Ia dYa Ya
Упражнение 3.13. Показать, что если для случая мягкой ха-
характеристики по инварианту /о выполняются неравенства
ЗУ У
0<m0<—^--Da<-^- + Da, C.1OO>
dJa Ja
а для случая жесткой характеристики по инварианту /о — нера-
неравенства
у„ dYn
0</и0<—— — Da<-~- + Da, C.101)
где
" 1 dYa
C.102)
то материал обладает положительным касательным модулем.
248
Упражнение 3.14. Показать, что если для случая мягкой ха-
характеристики по инварианту /о выполняются неравенства
'p
ы ОС
р=1 (оцбР) к
C.103)
а для случая жесткой характеристики по инварианту /о — нера-
неравенства
0 < пп < —-— Ga<C —— + Ga, C.104)
то материал обладает положительной касательной податли-
податливостью.
Упражнение 3.15. Доказать, что теорема о простом нагруже-
нии выполняется, если функции C.80) имеют вид
где kaij — неотрицательные числа, са1Ф0; i, /=1, ..., п, а сумми-
суммирование производится по всем таким /, что
? Ки = J] Кц= ¦ ¦ ¦ = ? кп11=гф0. C.106)
Упражнение 3.16. Доказать, что теорема о простом нагруже-
нии выполняется для анизотропно несжимаемого материала
C.96), если
где kiij — неотрицательные числа, ст/-^0; i, /=m+l, ..., л, а сум-
суммирование производится по всем таким-f, что
- C.108)
§ 4. Упрощенная теория
Построенная теория обладает достаточной общностью, однако
ее применение при решении конкретных практических задач мо-
может вызвать затруднения, связанные с экспериментальным опре-
определением, вообще говоря, шести функций шести аргументов
C.80) или C.82).
Как и в предыдущем параграфе, начнем рассмотрение с транс-
версально изотропной среды. В общем случае нужно эксперимен-
экспериментально определить четыре функции четырех аргументов C.31)
или C.32).
249
Если рассматривается армированный композит, у которого
жесткость армирующих элементов существенно превышает жест
кость связующего, можно пользоваться упрощенной деформаци,
онной теорией пластичности. В основу упрощения положим пред|
положение о том, что при простом растяжении композита в на-
направлении оси трансверсальной изотропии и перпендикулярнг
к ней пластических деформаций не возникает.
В этом случае к уравнениям C.29), C.30) нужно добавить
соотношения между инвариантами тензоров напряжений и дефор-.
маций C.31) в следующем виде:
Нетрудно видеть, что для такой теории
условие пластичности в трехмерном простран?
стве главных напряжений аи о2, Оз представ-'
ляет собой пару плоскостей, параллельных
оси стз (рис. 60), а на плоскости Р, Q усло-:;-
вие пластичности записывается в виде неко-
некоторой кривой
Ф(Л Q)=0>o = const. D.2>:
Можно записать соотношения еще более-
Рис. 60. простой теории, которую будем называть про-;
стейшей теорией трановерсально 'Изотропной,
пластичности. Для нее соотношения C.31) выглядят так:
<г=(Я« + Я,)в + Лве,Я1 о„=Х$ + Хр„. Р=Р(р), Q=Q(q). D.3)
Функции Р и Q для обеих теорий D.1) и D.3) можно пред-,,
ставить в виде
Р=2М1—я)р, Q = 2X9A—x)q, D.4)
где функции n(p,q), x(p,q) или п(р), x{q) равны нулю в упру- '„
гой области, причем, как следует из C.100), для положительнос-
положительности «касательного модуля» в случае мягкой характеристики по р *
и q достаточно, чтобы выполнялись неравенства
0 < /П! < я — Dj < я + р -?- + Ох,
др
0< m2 <*-D2 < х + q -?- + D,,
dq
D.5)
250
причем для случая D.3) следует положить
_ У 2 X» .
Эх
др
= 0, D2^
х»
дп
dq
= 0. D.6)
Соотношения C.29), C.30) можно разрешить относительно
деформаций C.37) и C.38), и тогда вместо D.1) будем иметь
a
х33,
2v' ~
я вместо D.3) —
Q), q=q(P,Q),
l__v) ~ 2v'
F"*33'
D.7)
D.8)
В этом случае функции р и q можно аналогично D.4) выра-
выразить в следующем виде:
D.9)
где функции U{P, Q), K(P, Q) или П(Р), K(Q) равны нулю в уп-
упругой области.
Упражнение 4.1. Показать, что для положительности «каса-
«касательной податливости» в случае жесткой характеристики по Р и
Q достаточно, чтобы
О< щ. <П-D,<П + P-^L + д,,
D.10)
причем для простейшей теории следует положить
= 0,
G
~W
an
= 0. D.11)
Упражнение 4.2. Показать, что для упрощенной трансверсаль-
ной изотропной теории пластичности связь между напряжениями
и деформациями описывается соотношениями
Р
Р
6 =
D.12)
251
p
, °13 = ~^13> <7l3Sei3>
Q
<*23 = 923. ^23 = e2S>
P=2k7[l-a{p,q)], Q = 2ke[l-x{p,q)]q. D.13)
Упражнение 4.З. Показать, что для упрощенной трансверсаль-
но изотропной теории малых упруго-шластических деформаций
связь между деформациями и напряжениями описывается соот-
соотношениями
?/ aa i Q - 11» - 11 л »
Г c^ ^33 "I ^" ^22» ^22^ Г >
2v' ~ , 1
~T"
/л liV
D.14)
где следует учесть D.9). ©
Рассмотрим теперь случай упрощенной теории для среды с про-
произвольной анизотропией. Предположим, что все линейные инва-
рианты связаны между собой по закону Гука. Тогда вместо C.80)
имеем (х=1,..., т; у=т+\, ...,п)
e=i
DЛ5) .
в=т+1
Аналогично, вместо C.82) имеем
J ...Уя)]П, D.16)
в=т+1
где матрицы с элементами ЛоР и БвР — взаимно-обратны.
252
Для упрощенной теории условия пластичности C.88) и C.90L
запишутся соответственно в виде
<р(/т+1 ,...,/„)< <р0, Ф(У,„+,, ... , Yn)< ф0, (
т. е. первые т инвариантов не влияют на появление пластической
области. В случае, если выполняются условия
D.18),
в=т+1
упрощенную теорию можно назвать простейшей.
Для упрощения общей теории можно предположить также,,
что деформационная теория пластичности при активном процес-
процессе (нагружении) совпадает с физически нелинейной теорией уп-
упругости. В этом случае теория пластичности называется потен-
потенциальной, т. е. существует такая скалярная функция W, что
'
de{j
Из сравнения D.19) и C.76), C.77) следует, что
У
D-20)'
и поэтому между функциями C.80) должны существовать сле-
следующие ~ зависимостей:
Для упрощенной теории в силу симметричности матрицы Лор
(я—т) (п—т—1)
число таких зависимостей сокращается до — — —, &
для простейшей теории все соотношения типа D.21) удовлетворя-
удовлетворяются тождественно.
Если тензор C.76) потенциальный, то таковым должен быть и
тензор деформации C.85), т. е. должна существовать такая ска-
скалярная функция w{Yi, ..., Yn), что
dYa дац " дУа
25а
Бели W@) =0, ш@) =0, то справедливо тождество A.1.6)
\7+ха=>ацгц. D.23)
Для потенциальных тензоров напряжений и деформаций можно
построить лагранжиан
L в f W (и) dV — J XtutdV — f S\utdZ D.24)
v v a2
:и кастильяниан
— J or (a) dF + J a^n/aJdS D.25)
и с их помощью сформулировать вариационные принципы Ла-
гранжа и Кастильяно.
Упражнение 4.3. Доказать, что обобщенное решение задачи А
имеет не более одного решения, если выполняются условия
C.100) или C.101).
Упражнение 4.4. Доказать, что обобщенное решение задачи Б
имеет не более одного решения, если выполняются условия
C.103) или C.104). , :
Упражнение 4.5. Показать, что для потенциальной теории при
выполнении условий C.100) или C.101) лагранжиан D.24) bv
положении равновесия имеет минимум. Точка минимума единст- [
венна.
Упражнение 4.6. Показать, что для потенциальной теории при .
выполнении условий C.103) или C.104) кастильяниан в положе-
положении равновесия имеет максимум. Точка максимума единственна. г
Упражнение 4.7. Показать, что для потенциальной теории тео- ¦
ремы о простом нагружении остаются справедливыми, причем .
вместо ограничений C.105) и C.107) следует принять соответ- .
ственно :
^-Е'Л4-»"' D.26);
где kij — неотрицательные числа, Sc^^feO и суммирование
п
в D.26) происходит по таким /, что J]?,-/ = r+l, а в D.27) —
n
tio таким /, что V &,/= г + 1, где г ¦— фиксированное неотри-
(=ет-И
дательное число.
Упражнение 4.8. Показать, что теория пластичности для
трансверсально изотропной среды следует из общей теории
C.76), если положить
254
= -у в (в,/ - в/аЫ A!/2) = ^336,36,3, D.28>
§ 5. Модельные установочные эксперименты
Для определения материальных функций деформационной
теории пластичности трансверсально изотропной и ортотропной
сред в принципе можно указать набор простейших эксперимен-
экспериментов, часть из которых описана в § 6 гл. 1.
Однако, как уже отмечалось, специфика некоторых компози-
композитов состоит в том, что об их механических свойствах можно го-
говорить только в связи с определенной конструкцией (в крайнем
случае, в связи с моделью, геометрически ей подобной). Меха-
Механические свойства вырезанных из этой конструкции образцов
будут существенно иными.
Поэтому на практике приходится часто ограничиваться неко-
некоторым узким набором экспериментов, который не позволяет
найти все материальные функции выбранной теории, и исследо-
исследователь вынужден эту теорию как-то разумно упрощать, чтобы сде-
сделать ее «серьезной» (см. гл. 1) в рамках возможных экспери-
экспериментов.
Рассмотрим, например, тонкостенный цилиндрический обра-
образец радиуса R, толщиной б (рис. 8, с, 41), который может
подвергаться трем видам нагружения: осевому растяжению, кру-
кручению и внутреннему давлению. Спрашивается, какой деформа-
деформационной теорией пластичности нужно воспользоваться для того,
чтобы этих экспериментов хватило для описания всех ее матери-
материальных функций, если образец, например, обладает цилиндричес-
цилиндрической трансверсальной изотропией (ось трансверсальной изотропии
направлена по радиусу г).
Будем считать, что по радиусу направлена ось х3 = г и, кроме
того, #i=z (по оси цилиндра), x2=Q, т. е.
°> = ^зз. °в = о22, вг = <тп, а>е = о2а, оГг = <т13, ввг = Оц- E.1)
Для упрощенной теории D.1), D.7) требуется найти упругие пос-
постоянные Аз, ta, Яб, fa, Хэ и функции Р(р, q), Q(p, q) C.28).
1) Кручение образца.
Задаем крутящий момент Мкр, т. е.
к E'2>
и снимаем показания и». Тогда, в силу того что
2е,9=_-^, 9=18,9 1, <2=Ы, E.3)
255
можно построить кривую |(Х,в| (| ere |) (верхняя кривая на рис
61, помеченная р=0). Из этого графика находим функцию-
Q@, q) и модуль Яд. Для «простейшей» теории D.3), D.8) таким
образом можно найти функции Q(q) и q(Q).
2) Растяжение образца.
Растянем образец силой Fo:
E.4)
2 2яЯ6
yi будем замерять величины гг, ев и, если возможно, гг (т. е. из-
изменение толщины образца). Тогда из D.7) имеем
в = 8Z + 89 =
82 =
E
1—v
езз — —"
1 p „
E.6).
тде
Р =
/Г
2
(Г,.
E.7)
1—V
и , строим согласно
Е'
Определив из E.5) константы
E.6), E.7) графики функции Р(р) или р(Р) (верхняя кривая на
рис. 62, <7 = 0), откуда определяем модуль-——- (а значит, Е и
v в силу E.5)) и кривую Р(р, 0) или р(Р, 0). Для «простейшей»
Pk
Q
Рис. 61.
Рис 62.
теории D.3), D.8) из рассмотренных двух экспериментов нахо-
находятся все материальные функции и упругие константы, кроме Е
(или vO-
Для упрощенной теории, описываемой соотношениями D.1) и
D.7), необходимо провести еще серию экспериментов по одновре-
одновременному кручению и растяжению цилиндрического образца, что-
чтобы найти функции Р(р, <j) и Q(p, q). В этом случае остаются
справедливыми формулы E.2—E.7), и, задавая различные зна-
значения Мкр и Fo, получим серию кривых, изображенных на рис. 61
и 62.
3) Внутреннее давление.
256
Как уже отмечалось в § 6 гл. 1, обычно в эксперименте о дей-
действии равномерного внутреннего давления /0 на образец действу-
действует и растягивающая нагрузка, так что напряженное состояние
имеет вид
*,= -/„, сг9 = -^-»сг„ crz = -^-=J?. E.8)
Поэтому, замеряя деформации 8е, гг и, если возможно, гг, полу-
получаем из D.14)
E.9)
2Е' Е' Е' \ 26
откуда «в принципе» может быть найден модуль Е'.
Кроме этого, можно также построить график функции Р(р, 0)
или р(Р, 0) из соотношений
2? 6 АР 6
где
EЛ0)
E.11)
Для нахождения функций Р(р, q) и Q(p, <y) можно использо-
использовать совместный эксперимент по кручению образца и по дейст-
действию внутреннего давления.
Заметим, что замерять изменение толщины при описанных вы-
выше экспериментах довольно сложно. Поэтому из них практически
невозможно найти все материальные функции вида C.31) или
C.39).
Чтобы продемонстрировать особенность упрощенной теории,
рассмотрим задачу о равновесии шарового слоя с внутренним ра-
радиусом а и внешним радиусом Ъ под действием внутреннего рав-
равномерного давления /о, причем предполагаем, что ось сферической
трансверсальной изотропии направлена по радиусу г. В силу сфе-
сферической симметрии задачи единственное уравнение равновесия
имеет вид
? -1((Г,_(ге)=0, E.12)
г
+ (,е),
ат г
где полагаем
аг = с33, се = (Ги = <х22. E.13)
Граничные условия можно записать следующим образом:
<*r\r=a=—fo> <*Л=ь=0. E.14)
Если среда трансверсально несжимаема C.48):
e,= .*L = 0, ff=289=— = 0, E.15)
dr r
9 Б. Е. Победря 257
то все перемещения равны нулю, т. е. тело является жестким.
В этом случае из уравнения E.12) получаем
EЛ6>
где постоянная с определяется из первого граничного условия
E.14)
E.17)
а из второго имеем
ь
= -?L. E.18)
Если предположить, что гидростатическое давление постоянно:
сг=сго =
то из E.18) имеем
сг = сг0 = const, ass — (За— аг)= — (Зав — аг), E.19)
2, Л
E.20)
о-—иг
а поэтому
h-?.\ „9 = J&Lfl+»\ E.21)
\ г3 I ba—а* \ 2/-3 /
Ь3—а3
т. е. напряжения получаются такими же, как и в изотропном
упругом случае.
Если материал считать сжимаемым, но подчиняющимся уп-
упрощенной теории, то решение совпадает с решением упругой за-
задачи. В самом деле, имеем для этого случая
и мы получаем для радиальной составляющей вектора перемеще-
перемещения и уравнение
д?и 2 du 1и * « „ [2А,4+2А,7—Я,5 ?A—vv')
dr* r dr г2 Р ~ ' Р ка . 1—v2 '
k = Е/Е', E.23>
решение которого имеет вид
>E,24>
где постоянные С\ и сг находятся из удовлетворения граничным,
условиям E.14):
258
г - f»
с2
E.25)
В случае плоской деформации имеем
811=812=813 = 0. E.26)
(Если выбрать 833 = 813=823 = 0, то упрощенная теория будет
описывать плоскую деформацию для изотропной среды).
В этом случае имеем для упрощенной теории
Р
°М — (^4 + Ю 822 + ^5833 + ~Г~ 822>
^33 = *•&%% + Л3833,
а2з = -^823, E.27)
ап = J (КА + Я7)— ~-| е22 + Я,583з, а12 = в13 = О,
причем все деформации и напряжения зависят только от д^, Хз,
е = еМ( p=-?L|e22|=-^-|e|, p = J^_|a22-au|,
<7=|82з|. Q=|e»l. E-28)
Рассмотрим, например, задачу о толстостенной трубе внутрен-
внутреннего радиуса а и наружного Ь, находящейся под действием внут-
внутреннего и внешнего равномерного давления:
Or \r=a = — /а, Ог |Г=Ь = — /*, E.29)
где
Оз8= Or, cr22=a9, 0x1=°*. сг23=а,.9. E.30)
Единственное в этом случае уравнение равновесия имеет вид
* *Zo. E.31)
+ o.
dr r
Если труба является трансверсально несжимаемой:
833 = 0, 822 = 0, E.32)
то она жесткая. Заметим, что так будет для любого трансвер-
трансверсально несжимаемого материала в случае плоской деформации.
Для сжимаемой трубы имеем соотношения
_ l JL 4- к *и - а — ("к, 4- Х.\ — 4- X ^" 4- У х р/о^ Г5 ЗЗЪ
s r dr 4 r dr 2
9* 259
Тогда для радиальной компоненты и вектора перемещений по-
получаем дифференциальное уравнение
8 \ dr2 г dr ) * ^' г* 2л \ Чт } У
Используя представление функции Р в виде D.4) и вводя обоз-
обозначение
Щ^ E.35)
задачу E.34), E.29), E.33) сводим к интегральному уравнению ;
г г г
\ Л Л / w О и \ '
г) = С/Р + С2г-Р—-ir-P r-i+sPdrl я(— «(pjp-1-? ф, -1
а а
E.36) '
где постоянные С\ и С% находятся из удовлетворения граничным j
условиям: ;
* I
С, = 4-
i-P ф) dr-/e6-P
а
i f нр-Р-»яф) +-^ (Я5 -
а
Ь г
I Л,р —— 11Л,п \ U r ~1/ -1-1-1 1 л,Ш1 "" г* fj.il I IJ.I I II г ~ I
а
г
- р^з) Ь-Р f ^1+2р ( j ^Р-1-" Ф ) dr + 4&Р-1], E.37)
d, = (X,
d* = (Я,, — рА,3) (аР-^-Р-1 — а-Р
Таким образом, задача свелась к рекуррентным квадратурам.
§ 6. Осреднение в теории малых упруго-пластических деформаций
Построив анизотропную теорию пластичности для однородной
среды, с помощью разработанной в § 2 методики можно опреде-
определить эффективные определяющие соотношения теории малых уп-
упруго-пластических деформаций А. А. Ильюшина.
Рассмотрим квазистатическую задачу в перемещениях для
композита, каждый компонент которого является изотропным уп-
260
руго-пластическим материалом, возможно, непрерывно неодно-
неоднородным.
Уравнения равновесия и граничные условия запишем в виде
> F0
=S?, F.2)
^-^- (ги -~Щ,), F.3)
где
причем справедливы соотношения Коши
8// ¦» в// + y вв,/ = -у (и,./ + и/.,). F.4)
Применяя методику, изложенную в § 2, найдем решение этой
задачи в нулевом приближении. Для этого повторим выкладки
§ 2, используя конкретный вид оператора $Гц F.3).
-»¦ -»¦
Для «среднего» вектора перемещений v(x) и локальных функ-
функционалов N(l, dv) введем обозначения
8// = ~(»1./ + »/.«). #// S — (JV(f/ + N,,i),
еи = га—1-;0бо, F.5)
Тогда уравнения B.14) задачи Жа(—1) для определяющих
уравнений F.3) запишутся в виде
AN%-+ ^11^.1 -0. F.6)
После решения уравнений F.6) с учетом B.12) находим опреде-
определяющие соотношения нулевого приближения
$ = ^ т К E е'б,;- + ^Й. <7 F.7)
и эффективные определяющие соотношения
<*/ = Ai/ (в) = (^?> = (Кв'в^ + -^-4 ) • F-8)
В частности, для слоистой среды имеем в F.5)
(rffij, + N'fi,,), в* = Г+ 8зз, F.9)
261
где, как и прежде, штрих означает производную по быстрой ко-
ординате |=?з- Уравнения F.6) в этом случае имеют вид
и;31 =о, F.Ю)
^
и их можно проинтегрировать:
К(&)в'«и + -^%^4 = <& й, (б.п)
где асз (х) — некоторые функции, не зависящие от быстрой пере-
переменной ?.
Согласно § 3 введем выражения для инвариантов в случае
трансверсальной изотропии:
6 = 8ц + е22. 8зз, Р2 = y [(8П - г22у + 48*,],
,2 *^ *^
q =813 + 823,
а = JL @U + вм), а33- Р2 = -у К»и - <*22J + 4af2], Q2 = a?3 + о223,
F.12)
Тогда систему F.11) (или B.30)) можно переписать в виде
-^V=Q°, F.13)
\ 3
где
Ф(?. О
Разрешая F.14) относительно j :
и подставляя результат в F.13), получим
262
Теперь, воспользовавшись F.15), имеем из F.13)
+ 4)t (бл8)
причем считается, что вместо величины q* (в 6.18) подставлено
ее выражение через езз*, 9. сгзз0, Q0 по формуле F.17). Тогда
F.18) представляет собой функциональное уравнение относитель-
относительно езз*- Предположим, что его решение можно записать в виде
4^, 6, р, e%,Q°). F.19)
Тогда из F.17) также имеем
<7*=?AДР.<&, Q0). F.20)
Заметим, что F.19), F.20) — это частный случай соотношений
B.32). Осредняя теперь F.19), F.20) по ячейке периодичности,
получим
Лр,<&, О0)},
=±( 2-i*^ \Q>. F.21)
Разрешая функциональные уравнения F.21) относительно сгзз0
и Q0, получим
озз = <*зз F, р, 833, q),
Q° = Q°(\p,B3S,q)q. F.22)
Выражения F.21) и F.22) вытекают соответственно из соот-
соотношений B.33), B.34) для композита с изотропными компонен-
компонентами.
Из сравнения соотношений F.22) и F.13), F.14) видно, что
К (I) (в + в^) + ФA'ец) 2Езз~9 = ^ (в, р, е33, 9)- F-23)
Разрешая F.23) относительно езз* и <j* и учитывая F.19), F.22)
и F.17), получим
263
4
зз = е^з F. 9, р, J& (в, р, г33, q), ф F, р, es3, q) q), F.24J
8зз
f -0
где в функциях 833, Q0, 0зз (F.19), F.22)) аргументы опущены.
Определяющие соотношения F.3) можно записать, используя.
выражения для инвариантов тензоров напряжений и деформаций
в случае трансверсально изотропной среды, в виде.
3
Тогда согласно B.39) определяющие соотношения нулевого при-
приближения имеют вид
@) ~<о) /с . . > . cPifi, я 4- п 4-2 я F 271
'7 Р Я '
где тензоры р и <7 определяются формулами C.20), C.21), а
О_1 .
I 833>
р> q@) = Ф^;^> ^ F.28)
'.'• Осредняя соотношения F.27), получим эффективные опреде-
определяющие соотношения
264
12
1 , Ф(Е, е„) 2е,,— 9 , -
ь« "зз ~~' 'ч vs; (.о -г ьзз
где
Р —•
+ 4 ^ —г ^ е + 4- 02> (б-зо>
3 3 6
а аргументы функций ез3, а°з, Q° F.24), F.22) опущены.
Заметим, что если рассматривается упруго-пластический ком-
композит, компоненты которого могут быть трансверсально изо-
изотропными или ортотропными, то, применяя технику осреднения,
описанную в § 2, и в этом случае легко получить эффективные
определяющие соотношения.
Технику осреднения можно проводить и на основании вариа-
вариационных принципов.
Так, если для задачи F.1) — F.4) построить лагранжиан
L = f WdV - f X,utdV— j S?M2, F.31)
V V s
де
W=-~ K{&W + V(Eb), ?(8j^ f Ф{ги)йга, F.32)
о
то, подставляя разложение B.6) в F.31), раскладывая лагран-
лагранжиан в ряд по степеням а и используя вариационный принцип
Лагранжа, получим все соотношения § 2. Так, например, для
теории нулевого приближения имеем
L@) = Г [~ К&) в'2 + ? (8;)]dV~\ XlVidV-^S$vtd2, F.33)
где величины, помеченные звездочкой, определены в F.5).
265-
Вводя потенциал нулевого приближения
Q, F.34J
тде Q — объем ячейки периодичности, и разыскивая минимум
в пространстве периодических в Q функций выражения F.34),
получим потенциал Wo для эквивалентной однородной среды.
Упражнение 6.1. Доказать, что для слоистого упруго-пласти-
упруго-пластического композита
у 8зз --je™ в
-L 6*) ), F.35)
тде езз* и q* находится из F.24) и F.25).
Упражнение 6.2. Показать, что соотношения F.29) получают-.
ся дифференцированием F.35) по инвариантам 0, езз, р, q-
Упражнение 6.3. Показать, что для решения несвязанных за-
задач термопластичности всюду следует вместо тензора деформа-
деформаций е согласно гипотезе Дюамеля—Неймана ввести тензор гт
г1}=га-ап-Ъ, F.36)
.где тензор теплового расширения для трансверсально изотропной ;
среды имеет вид
а{1 = ах (в,/ - 6/36/3) + «зМ/з. F-37)
а для ортотропной — вид
ati = <*Ai8/i + аА-гб/2 + а3б/з8/з- F.38) ¦
Упражнение 6.4. Показать, ято для упрощенной трансверсаль-
трансверсально изотропной теории пластичности определяющие соотношения,
в которых использована гипотеза Дюамеля—Неймана, имеют вид
оц = оF1}- 63А/) + ст33б3гбз/ + — p,i + 2^-q1;,, F.39)
Р Я
где
а = (Я,4 + Xj) @ — 2а^) + %6 (е33 — «,•&),
038 = А<5 (в — 2Ojfi) + К3 (833 — О,*), F.40)
P=P(p,q,T), Q = Q{p,q,T).
Упражнение 6.5. Показать, что для упрощенной ортотропной
теории пластичности определяющие соотношения с учетом гипо-
гипотезы Дюамеля—Неймана можно записать в виде
80.2) + г^2. еО.з) + ^!L gffl»), F.41)
.266
где
cru = kj. (eu — Oju) + KA (e22 — a2fl) + Кл (e33 —
o2a = Я4 (en — ajp) + A,2 (e22 — a2fl) + A,5 (е33 — a3fl),
<*зз = *<e Di — M) + ^5 (822 — <*$) + К (8зз — «з^).
Ol2=Ol8(8l2. 813.823. T), F.42)
013 — a13 (8i2. 813, 823, T),
0*3 = cr23 (e12, e13, e23) T).
Упражнение 6.6. Дать постановку связанной задачи упрошен-
упрошенной теории термопластичности трансверсально изотропного тела,
полагая функцию рассеивания W* в виде
W = P-?r[np] + 2Q^r[xq]. F.43)
Упражнение 6.7. Дать постановку связанной задачи упрощен-
упрощенной теории термопластичности ортотропного тела, полагая функ-
функцию рассеивания W* в виде
W " [й>8] + ° {щЧ] + в [г]- F'44)
Упражнение 6.8. Дать постановку связанной задачи упрощен-
упрощенной теории термопластичности для тела с произвольной анизо-
анизотропией, выбирая функцию рассеивания в виде
J. F-45)
a=m+l
НЕКОТОРЫЕ ЛИТЕРАТУРНЫЕ УКАЗАНИЯ
¦§ 1. Идея осреднения нелинейных дифференциальных уравнений
с быстро-осциллирующими коэффициентами была предложе-
предложена Н. С. Бахваловым [7]. Осреднение нелинейных уравнений
на основе вариационного принципа дано в [9]. Подробнее слу-
случай линейного упрочнения разобран в [42].
§ 3. Понятие квазилинейности определяющих соотношений для
анизотропных сред введено в {81]. Существуют и другие
подходы к анизотропной теории пластичности, например
в [20, 63].
§ 4. Описанная теория пластичности, в том числе и упрощенная,
предложена в работе [87].
§ 6. Метод осреднения для теории малых упругопластических
деформаций в вариационной постановке рассмотрен в [42].
Глава 8
вязкоупругие композиты
Метод осреднения применяется к решению квазистатических;
задач линейной теории вязкоупругости для композитов. Особое
внимание уделяется теории нулевого приближения. Для слоистых-
вязкоупругих композитов тензоры эффективных ядер релаксации
и ползучести находятся в явном виде. Выясняются особенности:
строения этих тензоров в случае структурной анизотропии. Вво-
Вводится понятие канонических вязкоупругих операторов и описыва-
описывается схема экспериментального определения их ядер. Дается
описание метода численной реализации упругого решения и на"
двух конкретных задачах показывается его применение. Даются;
постановки связанной задачи термовязкоупругости для физичес-;
ки линейных композитов и квазилинейной теории вязкоупругостя
для композитов. *
§ 1. Осреднение вязкоупругих регулярных структур
Рассмотрим квазистатическую задачу А линейной теории вяз- .
коупругости. Эта задача заключается в решении трех уравнений ¦
равновесия A.4.30):
[U/w(*J«wL/ + X/ = 0 0-1):
относительно трех компонент вектора перемещений и при удов-
удовлетворении граничным условиям A.4.31):
и,- к = и?» Rtiu Й «/У*/ к = S?, A.2)
причем согласно A.4.5) принята запись
- -*¦ * -*¦
Кцы (*) 4i a j RiM {x, t - т) dew (т), A.3)
о
где Яцы{х, t) — компоненты тензора функций релаксации.
Как и в упругом случае, решение задачи A.1), A.2) будем,
искать в виде
268
u, = vt (x, t)
.*, (x) + aW$A A) */,*,*. (x)
A.4)
p=0
где М?*!...*ЛЪ t)—локальные ядра релаксации р-го уровня, зави-
зависящие от быстрых переменных |.
Таким образом, решение задачи А сводится к решению двух
рекуррентных последовательностей задач. Одна из них (задачи
Дв(р), р = 0, 1, 2, ...) состоит в решении краевых задач линейной
теории вязкоупругости для анизотропной однородной среды:
hljktwQ + Х?) = 0, A.5)
wt' |z, = «('"'. ht}kl w\*t >ri) |2а = 51, A.6)
причем входные данные определяются из рекуррентных формул
IXit если р= О,
р к*
S°, если р= О,
....»
«,<">=.
ы°, если р= 0,
A.7)
где hijki{t) — компоненты эффективного тензора функций релак-
релаксации (или ядер релаксации).
Локальные ядра релаксации и операторы А*/}*,...* х, г = 0,
1, определяются из рекуррентной последовательности задач
Жв(<7), <7 =—1, 0, ..., являющихся задачами линейной теории вяз-
вязкоупругости для неоднородной среды иа ячейке периодичности:
A.
269
ьтп,
A.8)
где все локальные ядра релаксации отрицательного уровня
дественно равны нулю и так же, как и в гл. 4,
, 0> = О, Я >[0; [[N(e) (I, /)]] = 0. A.9)
Ядра операторов AJ$fct...*+g определяются осреднением
„ ^^ %+aVl.fee). A.10)
Точно так же можно дать постановку задач теории вязкоуп-
ругости в напряжениях Б и В, причем этого добиться можно фор-;
мальной заменой локальных функций Mto) (?) на операторы
M(fl)(g) с локальными ядрами ползучести M(fl) (?, /); тензоров уп-
упругих податливостей J на операторы тензоров функций ползучее-,
ти П(?) с ядрами П.цы{1, t), а величин Н^ на операторы H(*»i
Рассмотрим только теорию нулевого приближения.
Для задачи А она заключается в решении соответствующей
задачи по теории эффективного модуля
+ X, = 0, 0-Н>-
для чего нужно сперва решить задачу Жв(—1)
[Я ami A) ^„и*,, + Riinkli - 0 (Ы3>
с условиями A.9). После нахождения локальных ядер релакса-
ции первого уровня Nmnk{t,t) находим тензор ядер релаксации
нулевого приближения
#$*(Е- 0 = *пш A)^«-41 + Я//,* @ (Ы4) '
и эффективный тензор ядер релаксации
(9= <*$?** ?,*)>• (Ы5)
Заметим, что согласно теории нулевого приближения можно
вычислить не только микронапряжения
.<$=]¦ Я$1 (?•' - f)dDW (*, т), A.16)
о
но, зная локальные ядра релаксации Nmnk(%, t), также и микро-
микроперемещения
и}4 = Щ (х, 0 + « J W//ft (Б, * ~т) *>л*(х, т) + «ш^ A, /), A.17)
о
270
где вектор w удовлетворяет однородным уравнениям равнове-
равновесия и
Щ <*. О к = - J Nm (g| t - т) do,.k (х. т) fc, A.18).
о
если в A.12) имеются кинематические граничные условия.
Квазистатическую задачу линейной теории вязкоупругости Б
можно сформулировать в виде
Eil%k(a) + Yu=0, A.19)
<tt,n, |z = Si [piU + X,) |2 = 0, A.20>
где тензор Еци D.3.25) выражен через напряжения по закону
* -* - .*
jnciki(x,t~-T)dakl{T) = ПШ[(х) akl, A.21)
о
-*¦
а тензор У выражается через объемные силы X по формуле
D.3.8).
Решение задачи A.19), A.20) по теории нулевого приближе-
приближения имеет вид
tfj/=Mx,9 + A«8U?)V A.22)
где т — решение соответствующей задачи по теории эффектив-
эффективного модуля, которая получается заменой в A.19), A.20) а на
т, а соотношений A.21) — на соотношения
га = Ниыан, (Ь23)
где Hijki{f) — компоненты эффективного тензора функций пол-
ползучести (или ядер4 ползучести). Для того чтобы их найти, нужно*
определить локальные функции ползучести M^pq{\,t) из
D.6.20) — D.6.22) с соответствующим введением операторов.
Пусть теперь требуется решить задачу В линейной теории
вязкоупругости в напряжениях
вш+Х{ = 0, ть-/И = О, A.24).
ofj/n/lz^S?, A.25)
где второе из соотношений A.24) означает, что в уравнениях
совместности A.2.2) деформации выражены через напряжения
по формуле A.21).
Если объемные силы обладают потенциалом D.3.30), то мож-
можно ввести тензор функций напряжений q> D.3.31) и для него
сформулировать задачу аналогично D.3.32),— D.3.35). Решение
271
этой задачи по теории нулевого приближения имеет вид
% A.26)
где тензор функций напряжений ty(x, t) определяется по теории
эффективного модуля
t= Чг$, A-27)
Щ |2 = 5°, A.28)
а тензор % таков, что
еГрие'stfilkfiimrfl'pqift-kLmn = 0, A.29)
eikleimn [&Шт + Mknpqrs'typq.rslm] Щ |z = О,
причем r\rs и 5? — заданные величины.
Выразим локальные ядра ползучести МB> {%, t) в виде
Щ*тп A,0 ^ epl^mkMilpll (g, о, A-30)
причем M(g, t) должны находиться из решения уравнений
f. 0 + ek'p'sei'mr'Ukik'r A) Mp'r'mms\\pr =0, A.31)
причем для локальных ядер ползучести М(|, /) также должны
выполняться условия A.9).
Тензор ядер ползучести нулевого приближения определяется
по формуле
Ittfm (I, t) = Пиы (I, t) + ekpselmrhljuo (|) Mpriw^ A.32)
откуда находится эффективный тензор ядер ползучести
*W')=<ni?ii(E,*)>. A-33)
Тензор напряжений т по теории эффективного модуля после
решения задачи A.29) находится по формуле
*// = eikfijmr$kn,lm + Фб;/, A.34)
а тензор деформаций гц — по формуле A.23).
Согласно теории нулевого приближения тензор деформаций
имеет вид
eP/'-niVw. ^ ^ A-35)
Упражнение 1.1. Доказать, что операторы Rffki и Ytqu связа-
связаны между собой зависимостями
р С A.37)
272
Для решения квазистатической задачи линейной теории вязко-
упругости для регулярных (непериодических) структур запишем
уравнения равновесия в криволинейной системе координат (см.
D.5.12))
a".t + 2T%alip + X'=0, A.38)
а связь между напряжениями и деформациями — в виде
а" - Rlimn (J, х) («„.„ - Гртпир). A:39)
Пусть заданы еще граничные условия
«/ к = «?, Riimn(l х) («„.„- Ypmnup) п, Ь = SS. A.40)
Согласно теории нулевого приближения решение этой задачи
ищется в виде
И, = V{ (х, t) + a [Nlo)m (?, Ж) У/ + N%m (f, X) fU + Ю, (*, *)J - A-41)
причем вектор v определяется из решения задачи по теории эф-
эффективного модуля
+ hiklv{i.k) + Л'*''Ч,М, + X' = 0, A.42)
О/ k = vl (Kiilvi + %»%*) щ k = Sj, A.43)
а вектор к> удовлетворяет однородным уравнениям A.42) и
Щ Is, = - [Nlmi (I. x) oi + N$v (I, x) о,.*] k- A -44)
Для определения локальных ядер релаксации N^m и N%m
требуется решить уравнения
[kilmn N[o)min - Tin Riimn (I x, 0]i/ = 0, A.45)
[Rlimn К%щп + Rl>'lk {l Я Oil/ =0 A.46)
при удовлетворении условиям A.9).
Ядра релаксации нулевого приближения/?^*(%, х, t) и R'J» (g, x, t)
определяются после решения уравнений A.45), A.46)
R\i) (IЯ 0 = Riimn (I х) Мф)ты - Tin Й Z?'7" (|. х, t), A.47)
/?(^' (?, Я 0 = #'/m" & х) <,»!» + /y/w A x, t), A.48)
после чего можно определить эффективные характеристики регу-
регулярного вязкоупругого композита:
И'ПЦх, t)= <<*>, hf (x, 0 =</$>.
Ю Б. Е. Победря 273
A" (x, *)=(- rlmnjRiImn + 2T$Rl)"nn (Nlwn - Tlmn) -
- rL^/1"" + (RiimnNlmm]n),i),
Упражнение 1.2. Показать, что из A.45) и A.46) следует, чт»
ЛГ(он« (Е, Я 0 = - rj, Й ^)т|„ (|, х, 0• A -50):
Показать, что из A.50), A.47) и A.48) еле-..
(I, *,*) = - 4 Й /?(Г (fx,t). A -51)'
Упражнение 1.3. Показать, что из A.50), A.47) и A.48) еле-
дует, что
а поэтому
Л|у* (*, 0 = - Г^? fx) h'"" (х, t). A.52).'
Упражнение 1.4. Показать, что из A.50) и A.49) следует, что-
для квазипериодической структуры
л" (х, t)=- tl.j й h"»» (t) - 2г? й л/>тп (t) linn й, ;
h«' G, о = - rL й ft**" @ + 2г? й h^* @- A.53>.
3
§ 2. Структурная анизотропия ,
Прежде чем решать задачу теории эффективного модуля,
нужно найти эффективные тензоры ядер релаксации и ползуче- '
сти, для чего требуется решить задачу линейной теории вязкоуп-
ругости для неоднородной среды на ячейке периодичности.
Для слоистого композита, как и в упругом случае, эта задача *
решается просто. В самом общем случае (произвольного числа
неоднородных анизотропных компонентов) имеем согласно гл. 5
локальные ядра релаксации:
Nul!(l, t)mAiik{l, t)-{Altk(l, /)), B.1)
где
I
AUk (t, t) = J [ЙЙО (Йзтз) (RmLRnUj) — <Кй!з/?В*/>1 dg, B.2)
0
где под /?гз/з(^,0 понимаются ядра, резольвентные по отноше-
отноше( 0
/^0
нию к ядрам Я.-з/з (I. 0:
J Кйы it - т) №}з (т) = б^. B.3)
о
J
о-
274
Тензор ядер релаксации нулевого приближения имеет вид
RfiMl, 0 = Runkil, t) + Riimil)fco(E) x
X {Rlilp3)~l (UPW R^nk) — Rmlli (I) Rl3nk], B.4)
откуда определяется эффективный тензор ядер релаксации
htm{t)=(Rf]kl{l,t)). B.5)
Аналогично имеем для локальных ядер ползучести
MpQH (?> t)= 1 (i — Л) DpQ4 (Л.
о
1
Y B.6)
где
Я*м/ - epAffQw ffcwjct (П№4/ - (ЩЙ/Г1 <П7ЙюП«я/>). B.7)
Тензор ядер ползучести нулевого приближения имеет вид
П^,ы= П,-#г(?, ^) + Пум№Пм№ад(— Пкиг + (Пкт)~ {^upQTlpQki)),
B.8)
откуда находится эффективный тензор ядер ползучести
#,/«(')= <П$к(Е,*)>. B.9)
Заметим, что для стареющего материала все результаты сох-
сохраняются, но каждая рассматриваемая функция будет иметь два
«временных» аргумента, например htjki(t, x).
Рассмотрим двухкомпонентный композит с изотропными одно-
однородными компонентами. Индексом 1 будем снабжать величины,
относящиеся к армировке, а индексом 2 — ,к связующему. Для
случая нерелаксирующего объема имеем A.4.41), A.4.42)
±-
- яв (о (б,-а + а; л* -1-«; А,) ].
а=1,2, B.10)
где Яв@ — ядро оператора, обратного к <о:
п„ = 1/евв, юа = ^а/C/С). B.11)
Для решения задач Жв(—1) в случае таких композитов мож-
можно воспользоваться методом аппроксимаций А. А. Ильюшина от-
отдельно для .армировки и связующего, а затем удовлетворить ус-
условиям сопряжения на границе раздела компонентов идеального
я неидеального контакта.
ю* 275
Эффективные тензоры ядер релаксации и ползучести в это»
случае будут инвариантными относительно некоторой группы,
связанной с анизотропией эквивалентного тела. Такая анизотро
пия называется структурной анизотропией. Операторы эффектив
ных тензоров зависят от операторов ©а, а=1, 2:
%, <о2), Hl]kl = Hiikl К, щ), B.12)
и их ядра можно представить в виде сумм
где/?iyw, П'/'и— так называемые структурные константы, зави-^
сящие от К.\, К% концентрации связующего у, геометрии армиров-
ки и т. п., а функции %«)(/)> 5С(<п(О — скалярные ядра релаксации
и ползучести соответственно, зависящие от операторов oi и ш2»
Важной задачей линейной теории вязкоупругости композитов
является определение этой зависимости. Если в iV-компонентном
композите один из компонентов является изотропным вязкоупру-
гим материалом с нерелаксирующим объемом, а все другие ком-
компоненты — изотропными упругими, то такой композит называется
простым композитом. Для простого композита скалярные ядра
¦ф(?)@> Xw)@ зависят только от одного оператора со.
В приложении VI приведены эффективные характеристики
простого двухкомпонентного слоистого композита. Из формул
(VI.4), (VI.6) видно, что для этого случая в B.13) т = п = А, и
можно положить («I =(oi= const):
g
1 +
B.14)
B.15)
X(i)l, ХB, я„ Х, ?ь=е, X4 gp4=
1 + p3to2 1 -f р4со2
Для неслоистого простого композита могут появиться в B.14),
B.15) операторы g? с другими значениями р, причем, в силу того
что точного аналитического выражения для эффективных тензо-
тензоров ядер релаксации и ползучести найти, вообще говоря, не уда-
удается, их аналитическая аппроксимация (эмпирическая) должна
содержать операторы вида B.14), B.15). Как уже указывалось
в § 4 гл. 1, ядра А. А. Илюшина g$(t) операторов gp могут быть
найдены экспериментально.
Заметим, что числа т и п в B.13) должны быть не больше,
чем число независимых компонент тензоров Нцы и Нцы при
структурной анизотропии данного вида.
Если композит простым не является, найти выражение опера-
операторов if>w, xw) через операторы <оь щ затруднительно даже в слу-
случае слоистого композита. Дело в том, что представление этих опе-
276
раторов в виде B.14), B.15) основано на разложении рациональ-
рациональной функции одной переменной (ьц) на простые множители. Для
композита, не являющегося простым, имеются две переменные
(<oi, юг), а для разложения рациональной функции двух перемен-
переменных на простые множители никаких общих правил не существует.
Однако можно ввести так называемые канонические вязкоуп-
ругие операторы, основанные на комбинации основных операто-
операторов: о)а, ла, gat (а=1, 2), причем необходимо указать экспери-
эксперименты для определения ядер этих канонических операторов.
Введем в рассмотрение, например, операторы
Вф, a)==irip
), B.16)
где а — некоторая константа, зависящая от К\, Кг, объемной
концентрации армировки у и т. п.
Рассмотрим также операторы, обратные к операторам B.16):
Ая(а)=
- lim
ап2 р-»оо р
Теперь для слоистого композита можно найти выражение для
эффективных тензоров ядер релаксации и ползучести и локаль-
локальных ядер релаксации и ползучести через канонические операторы
B.16), B.17), что и сделано в приложении VI. При этом введе-
введены обозначения
x = /C,//Ci; ass-!=l3L. B.18)
Y
Опишем эксперименты, позволяющие определить ядра, соот-
соответствующие операторам Л(р, а) и А„(а).
Пусть пружина, изображенная на рис. 63, имеет жесткость k.
К этой пружине последовательно присоединены образцы первого
и второго компонентов композита, имеющие отношение длины
к площади сечения соответственно F\ и F^. Пусть соблюдено ус-
условие
9/С * У ' '
Тогда связь между силой Q, растягивающей образцы, и переме-
перемещением и будет иметь вид
277
где
Если теперь задать перемещение в виде
U = Uoh(t),
B.2Г
B.21
B.22*
где h(t) — единичная функция Хевисайда, и замерять изменение
силы со временем Q(t), то
«о
B.23)
Рассмотрим теперь более сложную систему, состоящую из
параллельно соединенных пружины жесткости k и системы образ-
у/////////////////////
>к
5
У/УУУУУУУУУУУУУУУУУУУУ/УУУУ/УУУУУУУ/У//
F,
Рис. 63.
/УУУУУУ/УУ//УУУ//У/У/У/УУУУУУУУУУУУУУУЛ
Рис. 64.
цов из обоих компонентов, соединенных последовательно с пру-
пружинами жесткости kx и k2 (рис. 64). Тогда при выполнении усло-
условий
t; c«s=-L +-?ь-, а=1,2,
B.24)
где величины Ьа определены в B.21), связь между перемещением
и и силой Q будет иметь вид
Q.
Задавая теперь силу в виде
278
B.25)
B.26)
л замеряя изменение перемещения со временем u(t), получим
^ B.27)
Для иеслоистых композитов могут встретиться и другие опе-
операторы. Отметим очевидные обобщения в рамках рассмотренных
экспериментов. Так, если в B.24) положить
fh^k ! ->0, fc = -f, P,=-f, B-28)
то из эксперимента, схема которого представлена на рис. 64,
можно определить ядро оператора
A (Pi, Р„ <h, а2) = ^ — • B-29)
Нетрудно построить канонические операторы типа B.16), B.17)
для Л^-компонентного композита.
Упражнение 2.1. Описать схему эксперимента для определения
ядер канонических операторов композита с uV вязкоупругими
компонентами:
B.30)
B.31)
1 + ajjii +...-{- aNnN
§ 3. Методы аппроксимаций
Для решения квазистатических задач линейной теории вязко-
упругости для анизотропной однородной среды A.11), A.12)
универсальных эффективных методов нет.
Однако мы можем воспользоваться представлением B.13)
для структурной анизотропии. Обозначим через tqv(O одно из
ядер набора i|;W)@> X<?)@ B.13) или их комбинации. Други-
Другими словами, q>q{t) — ядро некоторого канонического опера-
оператора
%= Ч><,(®1< «2 »Л/) C.1)
для композита с N вязкоупругими изотропными компонентами
с нерелаксирующим объемом. Если композит является простым
(tot = @i=const,...,(ujv-i=cojv-i = const), то qv в C.1) может быть
одним из операторов следующего набора:
ffl.n.i^sy-ji^r-, i=l,2, ...,Af,. C.2)
Если же композит не является простым, то кроме операторов
C.2) для каждого вязкоупругого компонента в этот набор
279
могут еще входить операторы типа B.16), B.17), B.30
B.31).
В силу линейности задачи A.11), A.12) представим ее
виде линейной суперпозиции трех задач: а) задача с одноро/
ными граничными условиями и с заданными объемными сил?
ми; б) задача с нулевыми объемными силами и нулевыми пв
перемещениями на границе 2i и с заданными поверхностным!
нагрузками и в) задача с нулевыми объемными и поверхност
ными силами и с заданными на границе 2i перемещениями.
Рассмотрим, например, последнюю из этих задач:
O, C.3
f| к = «/. \ikflk,itii Is, = 0. C.4
Согласно принципу Вольтерры решим задачу теории упругости^
соответствующую задаче C.3), C.4), заменяя в выражении тен*
зора ядер релаксации B.13) операторы вязкоупругости соь..., со*
на соответствующие числа «i,..., и>ц. Решение такой задачи теории"
упругости можно условно записать в виде
vi(x) =/(«,,. ..,m)Ui°, C.5):
где /(«1,..., cojv) — линейный оператор по координатам (оператор
Грина), действующий на вектор ы° и зависящий от аи,...,©дг как
от параметров.
Аппроксимируем / («ь ..., солг) линейной комбинацией канони-
канонических операторов C.1), рассматриваемых как функции парамет-.
ров coi,..., содг:
м '¦'
f (СО1( . . . , (UN) = ? Cflq (COX СОЛ,). C.6)
Коэффициенты Cq можно найти, например, методом наименьших
квадратов, минимизируя функционал /:
... J
и, и2 aN
М
9=1
где Й(соь..., cojv) — некоторая положительная функция веса, а
0<соа/<(йа"<:1, а=1, 2 М C.8)
Для определения величин Cq получаем алгебраическую систе-
систему уравнений:
280
J" ... J Q (©!,..., ©*)[/(
©!
p= 1,2 Af. C.9)
После решения этой системы можно заменить в C.5) юд на опера-
операторы а>д, q=\,...,N и решение задачи C.3), C.4) записать в виде
-• м
о/ (*. О = ? СЯ К »*) н?, C.10)
а так как ядро Kf>4(t—т) каждого канонического оператора <рв мо-
может быть найдено экспериментально, то
Описанный метод представляет собой аналитический метод ап-
аппроксимации в теории вязкоупругих композитов. Если задачу
теории упругости, соответствующую задаче C.3), C.4), аналити-
аналитически решить ие удается, можно воспользоваться методом чис-
численной реализации упругого решения, который представляет со-
собой численный метод аппроксимации в теории вязкоупругих ком-
композитов.
Его существо заключается в следующем. Предположим, что
заданные на границе перемещения C.4) можно представить в
виде
Й ?@; « = 1, 2, 3; / = 1, ... , L. C.12)
Положим теперь V# @ = 0, / = 2, 3, ... , I; a V*2 (t) = 1 и ре-
решим соответствующую задачу при различных наборах чисел
со^), а><*>, ... , ©$', у = 1, ... , Г. Тогда, воспользовавшись ап-
аппроксимацией для каждой компоненты а вектора v,
м
t»« = ?С®<р?((ог, ....со*), /=1,2,...,?,, C.13)
<7=1
в каждой точке тела получаем систему алгебраических уравне-
уравнений
? C<P>(iv), . • • , «$); / = 1 L; у = 1, ... , Г C.14)
17=1
281
для определения постоянных Cqa и, возможно, некоторы
«плавающих» констант операторов ф? (поэтому Т>М). Поел
определения всех этих констант полагаем в C.12) VJ2)(t) = l,
остальные Va(l\ l=\, I
4, .... L равными нулю
-*¦ снова решаем систем
—*• алгебраических уравне
-*- ний C.14). Заметим, чт
~*-Р параметры ю/?>; / = 1,..
—»- N; y=1> —• Г не обяза
—•- тельно в соответствии
—*•, нх физическим смыслом
выбирать между нулем г
единицей. Более того, ка1
^ис- 65- показывает численны?
эксперимент, чем больше
мы «раздвигаем область изменения этих параметров, тем точнее
получаются результаты счета. После исчерпания всех Va{t), 1 =
= 1,2,..., L получим решение задачи теории вязкоупругости C.3),-
C.4) в квадратурах (по времени):
->. м L I
va (x, t) = ]? J] Cfa j ф? (t — x) dV{? (t). C.15>
,7=1 /=1 0
В качестве примеров рассмотрим две задачи о простом слоис-
слоистом двухкомпонентном композите. В первой из них рассматрива-
рассматривается бесконечная ортотропная пластинка с круговым отверстием."
На бесконечности в направлении оси х действует растягивающая'
сила Р (рис. 65).
Из решения соответствующей упругой задачи следует, что мак-?
симальное напряжение Ов возникает в точках, показанных на'
рис. 65 кружочком, причем оно равно ';
(ae)max=(l+Xl+*2)P, C.16) 1
где xi и Y.2 — корни бигармонического уравнения *
:* + -!-= О, C.17)
'ху Ех
причем
где Ех, Еу, Gxy, vxy — модули упругости ортотропной пластинки.
Компоненты тензора эффективных ядер ползучести известны. Они
выражаются через операторы 1, ?р, я, где
C.19)
282
Подставляя в C.18) вместо модулей упругости соответствующие
операторы, получим
. m 2 + A — 9M) со -j- 27M2 A + v) со2
где
m=y(\—y)> co=co2, v=vi. C.21)
Запишем аппроксимацию функции F(v>) в виде
Р(со)=Л1+Л2я+Ла§Р. C.22)
Чтобы иметь возможность интегрировать в C.7) от 0 до 1, вве-
введем весовую функцию Й = со. Тогда
где
Bj = Л2+—, 52= Л,, В3= — —. C.24)
Для нахождения величин 5; (*"=1, 2, 3) имеем систему алгебраи-
алгебраических уравнений
LijBj = Ni, C.25)
где
1 1
Li! — f ф/ф/do). A^j = f coF (со) фг (со) dco,
о 6
ф1 = 1, ф2^С0, фз^^р. C.26)
После решения системы C.25) получим, учитывая C.24), для
коэффициента концентрации fe== Q^max .
^=1+Л1+Л2я@+Лз^р(О- C.27)
В частности, для ядра со(/) в виде
(i)(t)=a+be-at C.28)
имеем
k (о = 1 + а1 + л2 [±——^- е"«+6'] +
g(i+pa) f
+ Л3[Т^ -j J&^ -г 1+Ра+Р*1- C.29)
283
На рис. 66 показана зависимость k{t) при следующих парамет»
pax: '¦:
0,4; ?, =
CM2
^L.; m=0,l;
CM2
C.30,
а = 0,01; & = 0,99; а = 1.
Рассмотрим теперь задачу о слоистой трубе из вязкоупругога
простого композита под действием нагрузки F.6.1), показанной"
на рис. 27 (с. 177, р = я/16). Для такой зада-
задачи может быть построено точное решение.
Ядро ю@ для связующего было выбрана
в виде C.28), где
= 0,9; а=1.
C.31),
Аппроксимация C.13) выбиралась в виде
по~ •'Лгу Ле„
П 1 Z 3 4 5 6 It
Рис. 66. C.32)
Для определения неизвестных коэффициентов А\а, А^, Аза,
¦^4а» Asa и «плавающих» параметров Pi, Рг решалась система семи
5 10 15 20 t
Рис. 67.
5 Ю 15 20 t
Рис. 68.
284
алгебраических уравнений (мы отбросили для простоты записи
индекс а):
^ ^ |. C.33)
Если в выражении C.32) зафиксировать один из параметров E,
например Вь оставив плавающим только р2, то в системе C.33)
будет только 6 неизвестных, и она является линейной. Если же
оставить «плавающими» оба параметра Pi и р2, то система C.33)
будет нелинейной, и ее можно решать методом итераций. На
рис. 67 и 68 показаны графики изменения со временем макси-
максимальных напряжений Ое/р в вязкоупругом слое (рис. 67) и в упру-
упругом слое (рис. 68) слоистой трубы, состоящей из 5 пакетов (у=
= 1/2) при различных значениях параметра М C.19). Буквой э
помечены кривые, соответствующие решению по теории эффек-
эффективного модуля, буквой т — кривые, соответствующие точному ре-
решению, нулем — кривые, соответствующие решению по теории
нулевого приближения. Штриховой линией показаны асимптоты
соответствующих кривых при ^->-оо.
§ 4. Нелинейные задачи
Связанная задача термовязкоупругости даже для линейной
теории является нелинейной за счет функции рассеивания
A.4.39). Эта задача для квазистатического случая заключается в
решении трех уравнений равновесия
Ol D.1)
где под Т понимается разность между текущей температурой и
температурой актуального состояния, и уравнения теплопровод-
теплопроводности A.2.31)
р (х) ср(х) °L. = [%Jj (x) TJ.t + р<7 + W -
[а11()Яик:{к,1ы())] D.2)
при выполнении граничных условий
Щ |2, = и", Rnik Й («-Ы - «чи Й Т) п, |2, S?,
{aWti,$)T.jnt + b<»T)\Zq = i!°> D.3)
и начальных данных A.2.33)
при t=O:T=T°(x). D.4)
Решение этой задачи можно искать описанным ранее методом.
Методика определения эффективных характеристик: эффективных
тензоров ядер релаксации, теплопроводности, теплового расшире-
расширения уже обсуждалась.
285
Поэтому для теории эффективного модуля получаем связанную»
задачу термовязкоупругости в виде
ae
dt
vt
¦=AiA
k = «?,
'*.y —Pi/<
•¦/ + P<7 +
(hijkiUk.i
!>./ + *< =
^,. э_
— P,-/^) /I/1
0,
[Pi/'
5,-,
D.5)
D-6)
D.7)
при ^=0: #=Г°, D.8)
причем введены следующие обозначения:
Pi/ = ^//««ы. Р = Pi/ay, D-9)
где а*н — компоненты эффективного тензора теплового расшире-
расширения, Aij — компоненты тензора теплопроводности.
Функция рассеивания W* в теории эффективного модуля вы-
выбирается в виде
W*= «*' "IT{Vu ~ а:'Щ~ Т H'ikl @) "Г W<]' D-10)
где
? —Р>- D.11)
После решения задачи D.5) — D.8) можно найти напряжения по
теории нулевого приближения
<#=ЭДи.«-Р№«. D.12)
Рассмотрим теперь квазистатическую задачу главной квази-
квазилинейной теории вязкоупругости. Определяющие соотношения для
случая изотропных компонентов композита запишем согласно
A.4.44), A.4.45):
t
аа= f |[Г(х, t — х) — Гф(х, t — т)ф(х, е, 6)]8?/(т) +
+ Ггх (Зс, ^-т)-Г^(х, < —т)ф(х, е, в) —-L^r(x, ^-т) —
- Гф (х, t - т) Ф (х, в, в) 1 6(т) б/; J дх =
^ [Г (Г) - Гф (х) ф (^ е, 6)] в// + J?! Й -
- Г^ Й ф (х, в, в) i- (Г Й - ГФ Й Ф (х. е, 6)) J 6б/7. D.13)
286
Если шаровые части тензоров напряжений и деформаций связаны
по закону теории упругости
сг=ОДе, D.14)
то соотношения D.13) примут вид A.4.48):
Оц = [Г Й — Гф (х) Ф (х, е)] ги +
+ {* Й —1- [Г Й - Гф (х) Ф (х, е)]} 6бг/. D.15)
Рассматривая теперь соотношения D.13) или D.15) как опе-
операторные
оц = &ц(х,в), , D.16)
можно повторить все выкладки § 2 предыдущей главы.
Тогда для теории эффективного модуля в случае" слоистых
вязкоупругих композитов получим задачу
(Г,,-., + X; = 0, D.17)
»/k = ai, OarifU.^Sfi, D.18)
причем тензор напряжений (индекс «э» будем опускать) связан с
тензором деформаций соотношениями
Oft = 5 (*,/ — *s A/) + «sAj*s/ + Pti + 2Q,/, D-19)
где
о = J" [Li (t - т) 6 (т) + U (t - т) е33 (т) - Lfl (t - т) Д (Г, egg.fp2, <?2)] dt,
о
X /2 F, е3з, Р > Я )\ dx, . , >
t
Рц'= ) IU (t - т) - Lf3 (t - х) /3 (§; езз.р2, q2)] рц (т) dx, D.20)
t
»(f — х) — LM (f -t) /4 F, e33, p2, <72)] ?J/ (т) dt,;'
а аргументы функций fa, a=l, 2, 3, 4, зависят от времени т,
тензоры р, q и величины р2, <72 определены формулами G.3.20),
G.3.21), Т7-ЗТ24), G.3.25). К D.17) —D.20) следует добавить еще
.и соотношения Коши A.2.1). Заметим, что функции fa, a=l,2, 3, 4,
независимыми не являются.
287
Для упрощенной главной квазилинейной теории упругости*
трансверсально изотропной среды следует положить
/.=/2=о, D.21) ;
/з=ЫР2, q2), f<=h(P2, q2), D-22) ,
так что определяющие соотношения имеют вид ''.
i
*п = J [U(t -т) 9(т) + L2 (t - т) е33(т) + -~ [I,(t -т)- *
о
- L,a (t - т) Ц [еп (т) - гм (т)]} dx.
t
J" {
4 (*_тN(т)+ !,(*-т)вв(т)+ -?-[/* (f-т)-
— L,3 (t — x) f3] [гм (т) — eu(T)J J dx,
t
33 = J [I* (t - т) в (т) + L3 (t - x) e33 (t)J dx, D.23)
о
¦x ' t \I (t r\ / If r\ f 1 p lr\ At
J12 — j 1^-4 \l — X) L,^ \l X) /3J fc12 [X) ax,
U С — *) — ^M (^ - т) /J e13 (т) dx,
Р23 - J [L6 (^ - т) -1,4 У - т) /J е23 (т) dr.
о
Для «простейшей» главной квазилинейной теории вязкоупру-
гости трансверсально изотропной среды в D.22) и D.23) следует
положить j
/4=/4^2). D.24)
НЕКОТОРЫЕ ЛИТЕРАТУРНЫЕ УКАЗАНИЯ
Обзор по теории вязкоупругих композитов имеется в работе
[96].
§ 1. Метод осреднения к решению квазистатических и динамиче-
динамических задач линейной теории вязкоупругости применен в
[84].
§ 2. Эффективные вязкоупругие характеристики простых компо-
композитов рассмотрены в '[84], непростых композитов — в [73].
Метод канонических операторов предложен в [85].
288
§ 3. О методе численной реализации упругого решения говорится
в [84]. Решение задачи о концентрации напряжений в анизо-
анизотропной пластинке с отверстием в упругом случае дано в
[54], в вязкоупругом — в [2]. Эффективные вязкоупругие
характеристики в плоском случае приведены в [79]. Задача о
слоистой вязкоупругой трубе под действием локальной на-
нагрузки решена в работе {28].
§ 4. Постановка связанной задачи термовязкоупругости для ани-
анизотропных сред дана в работе [77], различные нелинейные
теории вязкоупругости рассмотрены в [38, 78].
Глава 9
КОЛЕБАНИЯ И ВОЛНЫ
Описывается характер распространения плоских гармониче-
гармонических волн в неограниченной среде. На примере неоднородного уп-
упругого стержня демонстрируется техника осреднения в динамиче-
динамических задачах. Далее эта техника применяется к пространственной
динамической задаче теории упругости и линейной вязкоупруго-
сти. Описывается явление волнового фильтра. Обсуждаются неко-
некоторые вопросы разрушения композитов.
§ 1. Динамическая задача об упругом неоднородном стержне -
Рассмотрим динамическую задачу МДТТ для композита. Она
заключается в решении трех уравнений движения A.2.10)
A.1)
¦относительно 3-х компонент вектора перемещений при удовлетво-
удовлетворении граничным условиям A.2.9)
и)п,\ъ=$ A.2)
и начальным данным
при * = (>:«, = ?/„ -~=У*. A-3)
К задаче A.1) — A.3) может быть, как и для квазистатиче-
квазистатического случая, применена техника осреднения. Прежде чем это
сделать, заметим, что при изучении динамики МДТТ часто инте-
интересуются характером распространения плоских гармонических
волн в неограниченной среде. Для этого рассматриваются одно-
однородные уравнения движения A.1)
и ищется их частное решение вида
u{x,t) = Ae*iw~nt A.5)
290
где со — действительное число, называемое круговой частотой
(см. 1.4.13)); k — волновой вектор, характеризующий направле-
направление распространения волны (k — волновое число):
длину волны X и фазовую скорость с (скорость перемещения
плоскости равных фаз <p==ife-*+(i)^ в направлении единичного век-
вектора v, называемого фазовой нормалью) определим:
Л — постоянный вектор, длина которого называется амплитудой:
А = | А | = yAtAt . Разумеется, A.5) будет решением уравне-
уравнений A.4) не при всех A, k и со. Для физически линейной среды
оператор определяющих соотношений ST — линейный, и поэтому
уравнения A.4) будут удовлетворяться при любой амплитуде.
В этом случае, чтобы A.5) было нетривиальным решением урав-
уравнений A.4), между волновым числом k и частотой со должна, во-
вообще говоря, существовать связь вида
F(e>,k)=0. A.8)
Соотношение A.8) называется дисперсионным (или частотным)
уравнением. Если для всех частот со фазовая скорость распрост-
распространения волны с одинакова, то волна называется недиспергиру-
ющей. В противном случае (фазовая скорость волны зависит от
частоты) говорят, что имеет место дисперсия (волна — дисперги-
диспергирующая).
В некоторых случаях волновое число может быть комплекс-
комплексным:
k^k'—ik", A.9)
(например, при введении в определяющие соотношения
комплексных модулей для изучения динамики линейно вязко-
упругих материалов; § 4 гл. 1). Тогда дисперсионное соотношение
A.8) записывается в виде двух уравнений с действительными пе-
переменными:
F'(v, k', k")=0, F"(v, k', k")=0. A.10)
В этом случае A.5) можно записать в виде
и = Ле-*"*е«*'*-<¦">, A.11)
причем мы выбрали специальную систему координат, в которой
волновой вектор k направлен по координатной оси Х\ — х. Из
A.11) видно, что величина k' описывает длину волны Я и фазо-
фазовую скорость с':
291-
JI--2L. c'af. A.12)
а величина k" связана с явлением затухания волн.
Область частот, для которой уравнения A.10) не имеют дей-
действительного решения к', называется областью непропускания.
Наличие таких областей называется явлением волнового фильт-
фильтра.
Рассмотрим теперь в качестве примера динамическую задачу
•об упругом неоднородном стержне. Для него уравнение движения
A.1) будет иметь вид
а граничные условия A.2) и начальные данные A.3) — вид
u\x=0 = tfi,E(x)-^- =S°, A.14)
при t = Q.u= U, — = V. A.15)
dt
Так же как и в статической задаче об упругом стержне (§ 1
гл. 4), введем быструю координату ? и обозначим точкой произ- ;
водную по этой координате, а штрихом — производную по мед-
медленной координате х.
Ищем решение задачи A.13) — A.15) в виде «
0 /¦ 0 1 да,, 1
u=v(x,t) + aN1 (I)v' (x, t) + a*[N2(?)v" (x, t) + tf2(?)-^ j +
,(g)V" + i,(g) JJEL] + a
<7=0 P
P
где локальные функции Nq(?,) таковы, что
о р
#о=1, Nq==0 при ?<2р, q<0, p<0. A.17)
Поэтому суммирование в A.16) производится от C = 0, так, чтобы
выполнялось неравенство q—2C >0.
Производя обычные процедуры методики осреднения, полу-
получим рекурентную последовательность дифференциальных уравне-
уравнений для определения локальных функций (при q=—1, 0, 1,...)
Ре о A R I R
. Р Р Р Р—1 Р
292
в
где hq — некоторые постоянные, удовлетворяющие условиям
(EN4+l + ENg - pNq) = hg, A.19)
причем, как обычно,
А) = 0; <7>0; [[#,]] = 0. A.20)
Тогда уравнение движения при отсутствии «объемных сил» при-
приобретает вид
-?а
9=0 Р
0
Упражнение 1.1. Показать, что величины hq в A.18), A.19)
совпадают с величина hq § 1 гл. 4, и поэтому
Л, = 0, 9>0. A.22)
о
о
Упражнение 1.2. Показать, что локальные функции N?(g) в
A.16) A.20) совпадают с локальиыми фуикциями Nq{%) § 1 гл.4,
и поэтому для них справедливы формулы D.1.58) и D.1.59).
Упражнение 1.3. Показать, что из A.18) и A.19) вытекает
справедливость следующих соотношений:
Л0=-(р) = -р0, Л, = 0, A.23)
/J Е(т,)
о о
Уравнение движения A.21) при а=0 имеет вид
293
где использовано A.22), A.23). Сохранение членов при а в пер-
первой степени благодаря A.22), A.23) ничего не прибавляет к
уравнению A.25).
Подставим, согласно A.5), выражение
i>CM) = A?«**+m'> A.26)
в уравнение движения A.21), получим
ааш* (Л2#* + A^) + сЛЛа* (h3k2 + А3ш3) —
Л4шв) +...== О. A.27)
Уравнение A.27) является дисперсионным уравнением вида A.8).
Из него видно, что при а=0 уравнение движения A.21), которое
в этом случае имеет вид A.25), дисперсии не описывает, ибо из.
A.27) для этого случая имеем
•= —= лГ—
~ k Ун'
A.28)
т. е. фазовая скорость для всех частот одинакова н совпадает со
скоростью стержневых волн в эквивалентной однородной среде.
Из A.27) также видно: чтобы описать дисперсию, необходимо в
уравнении удержать члены с а2.
Возвратимся к динамической задаче A.13) — A.15). Для ее
решения воспользуемся представлением
о=?а>р. A.29)
р=0
Тогда получим рекуррентную последовательность динамических
задач для упругого однородного стержня (р = 0, 1,....)
tot>"p + Хр = р0 — wP, A-30)
wp\^=up, hw'B\b = Sp, A.31)
при* = 0:и;р=1/„, -^jfc-=V,, A.32)
где входные данные каждой задачи A.30) — A.32) определяются
из решения предыдущих задач рассматриваемой рекуррентной по-
последовательности:
Sp = -Xpkit p>0; S0 =
294
Up = Bp\t=0, p>0; U0=U, A.33)
Vp = -^Bp\t=0, P>0; V0 = V,
где
§ 2. Динамическая задача теории упругости и вязкоупругости
Рассмотрим динамическую задачу теории упругости A.3.16),
0.3.19), A.2.13)
[Сф1(х)ик,,],, + Х? = риГ, B.1)
Щ |я, = п? , С„ы Й и». ,л, |2l = S? , B.2)
при t = 0: и, = {//, и) = V/. B.3)
Ищем решение задачи B.1) — B.3) в виде
«=о р
где суммирование по р происходит от р = 0 так, чтобы выполня-
выполнялось условие q—2р>0 (все величины, имеющие отрицательные
индексы, равны нулю).
Для определения локальных функций N(<7)(P) требуется решить
рекуррентную последовательность дифференциальных уравнений
при<7=—1,0, 1,...; р = 0, 1,...
6-- • B-5)
Как и прежде, локальные функции должны удовлетворять усло-
условиям
= 0, p>0; [[N<»)(P>]] = O.j B.6)
Постоянные величины ttifk^.k +22P определяются осреднением
по ячейке периодичности следующих выражений:
295
В частности, из последнего выражения следует:
Л(р)(.) = _ <р) б</, A(o/ft(O) = (Ciim + CiimnNM$). B.8)
В результате введеных соотношений однородные уравнения дви-
движения (при отсутствии объемных сил) примут вид
B.9)
«=0 Р
Для отыскания вектора v нужно воспользоваться разложе-
нием
B.10)
р=0
так что выражение B.4) с учетом B.10) примет вид
<7=0 p=O P
Тогда получим рекуррентную последовательность динамических
задач теории упругости для однородного тела (р=0, 1, 2,...)
при t = 0: wlP) = t/J"}, —*— = WP), B.14)
где входные данные каждой задачи B.12)—B.14) определяются
из рекуррентных соотношений
«, р=0,
r=l P
S», p=0,
p
r=l ft
«У,
P>0;
296
U, P>0;
Нетрудно видеть, что величины h<«>@) в B.5), B.7) совпадают с
величинами Ы^\ определенными в статической задаче теории уп-
упругости в § 2 гл. 4. Величины h@)@> = h являются компонентами
эффективного тензора модулей упругости.
По теории эффективного модуля решается динамическая зада-
задача теории упругости для однородной среды:
hnkpk, и + Xi = р0 — о„ р0 = <р), B.16)
f/k = «?. fti/tj«»*./n/ls. = S», B.17)
при * = 0:^ = 1/,, -§- = ^,. B.18)
от
После ее решения можно найти микронапряжения по теории ну-
нулевого приближения:
<С = С#Ж(|) %./(?, 0. BЛ9)
где С(%— компоненты тензора модулей упругости нулевого приб-
приближения
а локальные функции ЛД'х0* находятся из решения дифференци-
дифференциальных уравнений
при выполнении условий B.6). Из B.8) и B.20) следует, что
*'i/«=W} = W- B-22)
В предыдущем параграфе было установлено, что анализ харак-
характера распространения плоских гармонических волн в данной среде
позволяет ответить на вопросы:
а) затухают ли эти волны в исследуемой среде;
б) имеет ли место дисперсия;
в) наблюдается ли явление фильтра.
297
Для исследования однородных уравнений движения теории эф- \
фективного модуля B.16) подставим в них A.5). Тогда получим ;*
однородную систему алгебраических уравнений j
B.23)
Для того чтобы система B.23) имела нетривиальное решение,
ее определитель нужно приравнять нулю. Используя обозначения
A.6), получим так называемое уравнение Кристоффеля: ;
det
<2-24>
Ро " ' ¦•
Решая уравнение B.24), найдем направление векторов перемеще-
перемещений v и соответствующие фазовые скорости упругих волн в экви-
эквивалентной однородной упругой среде, характеризующейся эффек-
эффективным тензором модулей упругости h. Нетрудно видеть, что
волновые числа являются действительными, групповая скорость не
зависит от частоты, т. е. волны вида A.5) являются для рас-
рассматриваемой среды недиспергирующими и незатухающими, яв-
явление волнового фильтра отсутствует.
Для того чтобы исследовать дисперсию, необходимо в уравне-
уравнениях движения B.9) сохранить члены при достаточно высоких
степенях а.
Для решения динамической задачи линейной теории вязкоуп-
ругости достаточно во всех предыдущих соотношениях этого па-
параграфа заменить величины С, №*№>, h^x*) на соответствующие
вязкоупругие операторы R, N^), ЬШ*)Ш
Для теории эффективного модуля получаем уравнения движе-
движения
ЬиыРк. и + xi = Ро -^" vi. <Р> = Ро. B-25)
граничные условия
= 5? B.26)
и начальные данные B.18). После решения этой задачи можно
найти микронапряжения по теории нулевого приближения
u, B.27)
где Rijli — компоненты тензора-оператора с ядрами релаксации
нулевого приближения /?{/ы(|,0:
Rk% (|, t) = Rim A1) + Rijmn (|) N(XL B.28)
причем локальные ядра релаксации NA>@)(g, t) находятся из ре-
решения уравнений
+ Я|/«? Oil/ = 0 B-29)
298
при выполнении условий B.6). Из B.28) можно найти эффектов
ный тензор ядер релаксации
Ним@-Ь$Т@= (Ri%,(It)). B.30)
Особенности динамического поведения вязкоупругнх материа-
материалов можно рассмотреть на примере однородного вязкоупругого
стержня (теория эффективного модуля). Уравнение движения
такого стержня имеет вид
К исследованию этого уравнения можно подойти следующим
способом. Подставляя A.26) в уравнение движения упругого
стержня, получим
B.32)
Заменяя э B.32) модуль упругости h на комплексный модуль Е*
A.4.16), получим
*(m)
B.33)
где /* — комплексная податливость A.4.24). Представляя эту
податливость в тригонометрическом виде A.4.25) и используя
выражение A.9), получим
k'=aVpJjTcos -5-, k' = a VpJJl sin -2-. B.34)
Поэтому из A.12) следует выражение для длины волны X и фа-
фазовой скорости
х С = 1 —. B.35)
/ро | /* | 008-|-
Таким образом, в вязкоупругом стержне, даже однородном, воз-
возникает дисперсия (вязкая дисперсия), причем гармонические
плоские волны затухают. Явление фильтра отсутствует.
Возникающая в упругих композитах дисперсия носит название
геометрической дисперсии.
Упражнение 2.1. Показать, что для малой вязкости, т. е. ма-
малых углов <р A.4.23), из B.34) и A.4.24) следует
B.36)
299
§ 3. Волновой фильтр
В слоистых композитах наблюдается явление непропускания
некоторых коротких волн (или высоких частот) в направлении,
ортогональном слоистости. Это явление названо исследователями
эффектом волнового фильтра.
Рассмотрим, например, упругий стержень, выполненный из
двухкомпонентного композита, представляющего собой периодиче-
периодическую структуру.
Пусть длина ячейки периодичности равна 1, «объемная» кон-
концентрация одного из компонентов у, а компоненты являются од-
однородными и характеризуются модулями упругости и плотностя-
плотностями Еа, ро или их комбинациями
Тогда для каждого компонента может быть записано волновое
уравнение
с^=-^г- а=ь2- C-2)
а на границе раздела компонентов Г E = 0 и ^,—у) должны быть
выполнены обычные условия идеального контакта
ы1 = и2, Ех—— = Е2 —. C.3)
дх дх
После подстановки в уравнение C.2) выражения A.26) получим
дисперсионное уравнение
cos k = cos I 1 I си sin — sin . C.4)
\ Cj. c2 ) 2x ci c2
Спектр недопустимых длин волн Я = 2л/& для композита эпок-
сид — бор
Е, = 0,515- 10е —; ^ = 0,137-5^-.
см* см*
C.5)
?2 = 0,39-107 —; ра =0,29 -2^-
см2 см*
при у= 1/2 приведен в табл. 3.1.
Таблица 3.1
2,440—1,048 0,109—0,103
0,815—0,524 0,099—0,093
0,458—0,349 0,091—0,087
0,319—0,262 0,081—0,063
0,244—0,210 0,059—0,055
0,156—0,144 0,053—0,011
0,138—0,126 0,009—0,007
0,122—0,113
300
Как видно из табл. 3.1, при длинах волн больших, чем 2,5 дли-
длины ячейки периодичности, явления волнового фильтра не на-
наблюдается.
§ 4. Разрушение композитов
Теория разрушения материалов является одним из самых важ-
важных разделов МДТТ, хотя вряд ли самым разработанным. Су-
Существует множество физических, кинетических и феноменологиче-
феноменологических теорий разрушения.
Выделим два феноменологических подхода к проблеме разру-
разрушения композитов. Первый из них основан на применении крите-
критериев разрушения к анизотропной эквивалентной однородной среде.
Такой подход сродни теории эффективного модуля и довольно
часто не дает удовлетворительных результатов. Второй подход,
основан на применении феноменологических критериев разруше-
разрушения к каждому компоненту композита в отдельности. Такой под-
подход требует знания микронапряжений, хотя бы по рассмотренной
нами теории нулевого приближения.
Рассмотрим критерий прочности вида
+ ...= 1, D.1 У
где F*') — тензоры ранга 2(^+1), 9 = 0, 1,..., называемые тензо-
тензорами прочности (по напряжениям).
Иногда критерий прочности удобнее записывать в деформа-
деформациях
G (в) = G\?Bti + G$,e/yew + О^Мтпгпгыгтп + ... = 1, D.2>
где G<«) — тензоры ранга 2(9+1), 9=0, 1,.., называемые тензора-
тензорами прочности (по деформациям).
Разумеется, компоненты всех тензоров прочности должны быть
инвариантными относительно преобразований, описывающих не-
некоторый класс анизотропии.
Если материал ведет себя упруго вплоть до разрушения (хруп-
(хрупкое разрушение) или рассматриваются упругопластические прос-
простые процессы, то критерии D.1) и D.2) эквивалентны между со-
собой.
Если известны критерии D.1) или D.2) для каждого компо-
компонента композита, то нетрудно получить соответствующие критерии
для эквивалентной анизотропной среды. Для этого достаточно в
соотношении D.1) выразить напряжения с помощью тензора кон-
концентрации напряжений А(?) D.6.61) через напряжения, вычис-
вычисленные по теории эффективного модуля, и результат осреднить.
Тогда получим
где
f\)lt = <FjJU(i) Amnl, A) Apqkl E), D.4>
301
f$lmn = (F%*s A) Amnlj («О Ami A) Artmn (I)),
Аналогично, для критерия D.2) имеем
- + eliltffh + ?$,*»№&» + ... = i,' D.5)
где
(?) Bmnlj (|) Bp?W'E ^smn (I)) ,
причем В (|) — тензор концентрации деформаций D.6.62).
Упражнение 4.1. Используя выражения тензоров концентрации
E.2.25), E.2.26), получить выражения D.4) и D.6) для слоистого
композита.
НЕКОТОРЫЕ ЛИТЕРАТУРНЫЕ УКАЗАНИЯ
¦§ 1. Метод осреднения Н. С. Бахвалов применил к исследованию
процесса распространения волн в работе [8].
;§ 2. Рассмотрению волн в анизотропной упругой среде посвящена
монография [100]. Обзор работ по динамике в теории упру-
упругих и вязкоупругих композитов имеется в [96]. Метод ос-
осреднения к динамической задаче теории вязкоупругости ком-
композитов применен в работе [84].
¦§ 3. Распространению волн в слоистых средах посвящены моно-
монографии [14, ПО]. Явление волнового фильтра исследовалось
в работах [39, 40]. Использованное в параграфе дисперсион-
дисперсионное уравнение для стержня получено в [39, ПО]. Достаточно
полный обзор работ по колебаниям и волнам в слоистых ком-
композитах дан в [43].
!§ 4. Разрушению в композиционных материалах посвящена боль-
большая литература. Укажем, например, на обзоры [21, 56, 96,
97]. Критерии разрушения в анизотропных средах рассмот-
рассмотрены в [4, 62, 96]. Метод осреднения к таким критериям
применен в [23].
Литература
1. Абрамович М., Стичан И. (ред.). Справочник по специальным функ-
функциям с формулами, графиками и математическими таблицами. М.: Наука,.
1979.
2. А л л а м М. Н. М., Победря Б. Е. К решению квазистатических задач
анизотропной вязкоупругости. — Изв. АН Арм. ССР. Механика, 1978, № 2,.
19—27.
3. А р у т ю и я н Н. X. Теория ползучести неоднородно-стареющих тел. Пре-
приит № 170 ИМП АН СССР. М., 1981.
4. А ш к е н а з и Е. К., Г а и о в Э. В. Анизотропия конструкционных материа-
материалов. Справочник. Л.:.Машиностроение, 1972.
5. Бахвалов Н. С. Осредиенные характеристики тел с периодической струк-
структурой. — ДАН, 1974, 218, № 5, 1046—1048.
6. Б а х в а л о в Н. С. Осреднение дифференциальных уравнений с частными
производными с быстро осциллирующими коэффициентами. — ДАН 1975,.
221, № 3, 516—519.
7. Б а х в а л о в Н. С. Осреднение нелинейных уравнений с частными произ-
производными с быстро осциллирующими коэффициентами. — ДАН, 1975, 225,
№ 2, 249—252.
8. Бахвалов Н. С. Осреднение процесса распространения коротких волн в-
периодических средах. — В кн.: Теория кубатурных формул и вычислитель-
вычислительная математика. Новосибирск; Наука, 1980, 3—11.
9. Бердичевский В. Л. Пространственное осреднение периодических
структур. — ДАН СССР, 1975, 222, № 3, 565—567.
10. Болотии В. В., Москаленко В. Н. К расчету макроскопических по-
постоянных сильно изотропных композиционных материалов. — Изв. АН
СССР, МТТ, 1969, №3, 106—111.
11. Болотин В. В., Новичков Ю. Н. Механика многослойных конструкций..
М.: Машиностроение, 1980.
12. Борзова Т. В. О распределении напряжений при растяжении волокнистых
пластиков. — Вестн. Моск. ун-та. Сер. матем., механ., 1966, № 2, 106—111.
13. Борзова Т. В. Концентрация напряжений в армированном упругом про-
пространстве. — Инж. журнал, 1965, 5, 972—976.
14. Б р е х о в с к и х Л. М. Волны в слоистых средах. М.: Изд-во АН СССР,.
1957.
15. Вайибер.г Д. В. Напряженное состояние дисков и пластин. Киев: Изд-во
АН УССР, 1952.
16. В ан Фо Ф ы Г. А. Конструкции из армированных пластмасс. Киев: Тех-
шка, 1971.
17. Ван Фо Фы Г. А. Теория армированных материалов с покрытиями. Киев:
Наукова думка, 1971.
18. Волков С. Д., Ставров В. П. Статистическая механика композитных
материалов. Минск: Изд-во Белорусского гос. ун-та, 1978.
19. Г а д ж и е в М. Г. Эффективный тензор модулей упругости композиционно-
композиционного материала. — Деп. в ВИНИТИ № 968—79.
30S
20. Геогджаев В. О. Некоторые вопросы теории упругопластической де-
деформации анизотропных материалов. М.: Обороигиз, 1958.
21. Геракович К. (ред.) Неупругие свойства композиционных материалов.
М.: Мир, 1978.
22. Горбачев В. И. Об упругом равновесии цилиндрической иеодиородиой
по толщине трубы под действием поверхностных нагрузок и перемеще-
перемещений. — Проблемы прочности, 1979, № 5, 79—83.
23. Горбачев В. И., Победря Б. Е. О некоторых критериях разрушения
композитов. — Изв. АН Арм. ССР. Механика, 1984, № 5.
24. Горбачев В. И., Победря Б. Е. Об упругом равновесии неоднород-
неоднородных полос. — Изв. АН СССР, МТТ, 1979, № 5, 111—118.
25. Григолюк Э. И., Фильштинскнй Л. А. Перфорированные пластины
и оболочки. М.: Наука, 1970.
-26. Григорян С. С. Об осреднении физических полей. — ДАН, 1980, 254,
№ 4, 846—850.
27. Д о р о г и н и и В. В. О плоской деформации цилиндрической ортотропной
трубы. — Изв. Арм. ССР. Механика, 1980, 33, № 4, 77—79.
28. Д о р о г и н и и В. В. О плоской деформации вязкоупругой слоистой тру-
трубы. — Механика композитных материалов, 1983, № 1, 165—167.
29. Дюво Ж- Функциональный анализ и механика сплошной среды. — В ки.:
Теоретическая и прикладная механика. М.: Мир, 1979, 323—345.
-30. Е д а к о в А. В. Численное решение задач о равновесии слоистого упругого
параллелепипеда. — Деп. в ВИНИТИ № 3637—82.
31. Жигу и И. Г., Поляков В. А. Свойства пространствеино-армированиых
пластиков. Рига: Зииатие, 1978.
32. Иванов С. Г. Расчет структурных напряжений в некоторых полимерных
композитах с регулярной структурой. — В ки.: Теория механической пе-
переработки полимерных материалов. Пермь, 1980, с. 149.
-33. Ильюшин А. А. Пластичность. М.: Гостехиздат, 1948.
34. Ильюшин А. А. Пластичность (основы общей математической теории).
М.: Изд-во АН СССР, 1963.
-35. Ильюшин А. А. Механика сплошной среды/2-е изд. М.: Изд-во Моск.
ун-та, 1978.
36. Ильюшин А. А., Ленский В. С. Сопротивление материалов. М.: Физ-
матгиз, 1959.
¦37. Ильюшин А. А., Л о м а к и и В. А., Шмаков А. П. Задачи и упраж-
упражнения по механике сплошной среды / 2-е изд. М.: Изд-ио Моск. ун-та,
1979.
38. Ильюшин А. А., Победря Б. Е. Основы математической теории тер-
мовизкоупругости. М.: Наука, 1970.
39. Ильюшина Е. А. Вариант моментной теории упругости для одномерной
сплошной среды неоднородной периодической структуры. — ПММ, 1972,
36, № 6, 1086—1093.
40. Ильюшина Е. А. Колебании кусочно однородиой упругой среды с плоско-
плоскопараллельными границами раздела. — Механика полимеров, 1976, № 4,
687—692.
41. Канторович Л. В., Крылов В. И. Приближенные методы высшего
анализа. 5-е изд. М.—Л.: Физматгиз, 1962.
42. К а р а л ю н а с Р. И. К определению эффективных определяющих соотно-
соотношений физически нелинейных композитов. — Вестн. Моск. ун-та. Сер. ма-
тем., механ., 1984, № 2.
43. Каримов А. М. Колебании и волны в слоистых композитах. — Деп.
в ВИНИТИ, № 469—83.
-44. Карнаухов В. Г. Связанные задачи термовязкоупругости. Киев: Науко-
ва думка, 1982.
45. К л ю ш и и к о в В. Д. Математическая теория пластичности. М.: Изд-во
Моск. ун-та, 1979.
46. К о л ч и н Г. Б., Ф а в е р м а и Э. А. Теория упругости неоднородных тел.
Библиографический указатель отечественной и иностранной литературы. Ки-
Кишинев: Штииица, 1972.
¦304
47. К о л ч и н Г. Б., Ф а в е р и а н Э. А. Теория упругости неоднородных тел.
Библиографический указатель отечественной и иностранной литературы за
1970—1973 гг. Кишинев: Штнинца, 1977.
48. К о л ч и н Г. Б. Плоские задачи теории упругости неоднородных тел. Ки-
Кишинев: Штиинца, 1977.
49. Королев В. И. Слоистые анизотропные пластинки и оболочки нз арми-
армированных пластмасс. М.: Машиностроение, 1965.
50. Кристенсен Р. Введение в механику композитов. М.: Мир, 1982.
51. Лаврентьев М. А., Шабат Б. В. Методы теории функций комплекс-
комплексного переменного / 4-е изд. М.: Наука, 1973.
52. Ламзюк В. Д., Привари и ков А. К- Решение граничных задач тео-
теории упругости для многослойных оснований, вып. 1, 2. Днепропетровск:
Изд-во Днепропетровского гос. ун-та, 1978.
53. Л е в и н В. М. О коэффициентах температурного расширения неоднородных
материалов. — Инж. журнал, 1967, № 1, 88—94.
54. Л е х н и ц к и й С. Г., Анизотропные пластинки. М.: Гостехиздат, 1957.
55. Л е х и и ц к и й С. Г. Теория упругости анизотропного тела. М.: Гостехиз-
Гостехиздат, 1950.
56. Л и б о в и ц Г. (ред.) Разрушение, т. 7; ч. 1, 2. М.: Мир, 1976.
57. Лившиц И. М., Розенцвейг Л. Н. К теории упругих свойств поли-
поликристаллов. — ЖЭТФ, 1946, 16, № 11, 967—980.
58. Л о м а к и н В. А. Статистические задачи механики твердых деформируе-
деформируемых тел. М.: Наука, 1970.
59. Ломакин В. А. Теория упругости неоднородных тел. М.: Изд-во Моск.
уи-та, 1976.
60. Л о м а к и и В. А., Колтунов М. А. Действие армирующих элементов
при растяжении иа деформацию и прочность стеклопластиков. — Механика
полимеров, 1965, № 2, 104—113.
61. Ляв А. Математическая теория упругости. М.—Л.: ОНТИ, 1935.
62. Мал мейстер А. К., Та муж В. П., Тетере Г. А. Сопротивление по-
полимерных и композитных материалов / 3-е изд. Рига: Зииатне, 1980.
63. Мансуров Р. М. Об упругопластическом поведении анизотропных сред.—
В ки.: Упругость и неупругость, вып. 1. М.: Изд-во Моск. ун-та, 1971, 163—
171.
64. Молчанов Ю. М. (ред.) Физические и механические свойства стеклопла-
стеклопластиков. Справочное пособие. Рига: Зииатне, 1969.
65. М о л ь к о в В. А., П о б е д р я Б. Е. Эффективные модули упругости одно-
однонаправленного волокнистого композита. — ДАН СССР, 1984, 275, № 3.
66. Мое квит и и В. В. Сопротивление вязкоупругих материалов. М.: Наука,
1972.
67. Мусхелишвили Н. И. Некоторые основные задачи математической тео-
теории упругости. М.: Наука, 1966.
68. Н и г м а т у л и и Р. И. Основы механики гетерогенных сред. М.: Наука,
1978.
69. Никишин В. С, Шапиро Г. С. Пространственные задачи теории упру-
упругости дли многослойных сред. — Труды ВЦ АН СССР. М., 1970.
70. Н и к и ш и и В. С, Шапиро Г. С. Задачи теории упругости для много-
многослойных сред. М.: Наука, 1973.
71. Новацкий В. Теория упругости. М.: Мир, 1975.
72. Образцов И. Ф., Васильев В. В,. Буи а ков В. А. Оптимальное ар-
армирование оболочек вращения из композиционных материалов. М.: Маши-
Машиностроение, 1977.
73. О м а р о в С. Е. К определению микронапряжеинй в слоистых композитах
с вязкоупругнми компонентами. — Деп. в ВИНИТИ № 4815—83.
74. П а н а с е н к о Г. П. Асимптотики высших порядков решений задач о кон-
контакте периодических структур. — Матем. сборник, 1979, 110, № 4, 505—
538.
75. Петришин В. И., Прнварников А. К- Основные граничные задачи
теории упругости для многослойных оснований. — Прикладная механика,
1965, 1, № 4, 58—66.
11 Б. Е. Победря 305
76. Плотников М. М. К расчету анизотропного иеодиородиого цилиндра,
модуль упругости которого — кусочно-гладкая функция радиуса. — Изв.
вузов. Машиностроение, 1969, № 10, 25—28.
77. П о б е д р я Б. Е. О связанных задачах механики сплошной среды. — В ки.:
Упругость и неупругость, вып. 2. М.: Изд-во Моск. ун-та, 1971, 224—253.
78. Победря Б. Е. Математическая теория нелинейной вязкоупругости. —
В кн.: Упругость и неупругость, вып. 3. М.: Изд-во Моск. ун-та, 1973, 95—
173.
79. Победря Б. Е. О структурной анизотропии в вязкоупругостн. — Механи-
Механика полимеров, 1976, № 4, 622—626.
80. Победря Б. Е. Некоторые общие теоремы МДТТ. — ПММ, 1979, 43,
№ 3, 531—541.
81. По бе д р я Б. Е. Лекции по тензорному анализу/2-е изд. М.: Изд-во Моск.
ун-та, 1979.
82. Победря Б. Е. Новая постановка задачи МДТТ в напряжениях. — ДАН
СССР, 1980, 253, № 2, 295—297.
83. П о б е д р я Б. Е. Квазистатическая задача МДТТ в напряжениях. — ПММ,
1981, № 2, 205—214.
84. Победря Б. Е. Численные методы в теории упругости и пластичности.
М.: Изд-во МГУ, 1981.
85. П о б е д р я Б. Е. К теории вязкоупругости структурно неоднородных сред.—
ПММ, 1983, №. 2, 216—222.
86. П о б е д р я Б. Е. Об упругих композитах. — Механика композитных ма-
материалов, 1983, № 1, 133—139.
87. П о б е д р я Б. Е. Деформационная теория пластичности анизотропных
сред. — ПММ, 1984. 48, Л"° 1, 29—37.
88. Победря Б. Е., Горбачев В. И. О, статических задачах упругих ком-
композитов. — Вестн. Моск. ун-та. Сер. матем., механ., 1977, № 5, 101—ПО.
89. Победря Б. Е., X о л м а т о в Т. Деформирование слоистых композитов.—
Мехаинка композитных материалов, 1981, № 5, 775—778.
90. Победря Б. Е., Шешеиии С. В. Некоторые задачи о равновесии уп-
упругого параллелепипеда. — Изв. АН СССР, МТТ, 1981, № 1, 74—86.
91. Рабинович А. Л. Введение в механику армированных полимеров. М.:
Наука, 1970.
92. Р а б о т и о в Ю. Н. Элементы наследственной механики твердых тел. М.:
Наука, 1977.
93. Р а б о т н о в Ю. Н. Механика деформируемого твердого тела. М.: Наука, •
1979.
94. Раппопорт Р. М. К вопросу о построении решения трехмерной задачи
теории упругости для многослойного полупространства в перемещениях. —
Изв. ВНИИ гидротехники, 1966, 81, 149—154.
95. Седов Л. И. Механика сплошных сред, т. 1, 2, 3-е нзд. М.: Наука, 1976.
96. Се.идецки Дж. (ред.). Механика композиционных материалов. М.: Мир,
1978.
97. Тарнопольскнй Ю. М., Скудра А. М. Конституционная прочность
и деформативиость стеклопластиков. Рига: Зинатие, 1966.
98. Тнмошеико С. П., Гудьер Дж. Теория упругости/2-е изд. М.: Нау-
Наука, 1979.
99. Т р и и ч е р В. К. Общая постановка задачи об определении напряженно-
деформированного состояния растущего тела и некоторые примеры. — Изв.
АН СССР, МТТ, 1983, № 6, 560—563.
100. Федоров Ф. И. Теория упругих волн в кристаллах. М.: Наука, 1965, 386.
101. Фиик К., Рорбах X. Измерение напряжений и деформаций. М.:
ГНТИМЛ, 1961.
102. Хил л Р. Упругие свойства составных сред: некоторые теоретические прин-
принципы. — Механика (сб. переводов), 1964, 87, № 5, 127—143.
103. Хорошун Л. П. К теории изотропного деформирования. — Прикладная
механика, 1966, 2, № 2, 14—19.
104. Чжень (Chen С. Н.). Волокнистые композиционные материалы под дей-
действием продольного сдвига. — Прикладная механика (Труды американского
общества инженеров-механиков, пер. с англ.), 1970, № 1, 209—211.
306
105. Шермегор Т. Д. Теория упругости микронеоднородных сред. JVL: Наука,
106. Шапиро Г. С. Напряженное состояние бесконечной цилиндрической обо-
оболочки н неограниченной толстой плнты. — ДАН СССР, 1942, 27, № 9, 288—
290.
107. Ш ев л як о в Ю. А. Матричные алгоритмы в теорнн упругости неоднород-
неоднородных сред. Киев—Одесса: В ища школа, 1977.
108. Шешеннн С. В. Осреднениые модули одного композита. — Вестн. Моск.
ун-та. Сер. матем., механ., 1980, № 6, 79—83.
109. Шешеиин С. В. Численное решение некоторых пространственных задач
теории упругости. — Автореф. канд. дис. М.: МГУ, 1980.
ПО. Шульга Н. А. Основы механики слоистых сред периодической структуры.
Киев: Наукова думка, 1981.
111. Эшелби Дж. Континуальная теория дислокаций. М.: ИЛ, 1963.
112. Gross В. Mathematical Structure of the Theories of Viscoelasticity. Paris,
1953.
113. Ha shin Z., Shtrikman S. On some variational principles in anisotro-
pic and nonhomogeneous elasticity. — J. Mech. Phys. Solids, 1962, 10, N 4,
335—342.
114. Mazilu P. On the constitutive law of Boltzmann—Volterra. — Rev. Rourn.
Math. Pures et Appl., 1973. XVI11, N 7, 1067—1069.
115. Ж и к ов В. В., Козлов С. М., Олейннк О. А., Ха Тьен Нгоан.
Усреднение и G-сходнмость дифференциальных операторов. — УМН, 1979,
34, № 5, 65—133.
116. Олейннк О. А., И о с и ф ь я н Г. А., Панасенко Г. П. Асимптотическое
разложение решений системы теории упругости в перфорированных обла-
областях. — Матем. сб., 1983, 120, № 1, 22—41.
117. О л е й н и к О. А., И о с и ф ь я н Г. А., Ш а м а е в А. С. О сходимости энер-
энергии, тензоров напряжений и частот собственных колебаний в задачах
усреднения, возникающих в теории упругости. — ДАН, 1984.
Приложение I
Сведения из тензорного исчисления
1. Вектор а в прямоугольной декартовой системе координат
трехмерного евклидового пространства разлагается по трем векто-
векторам е, ортонормированного базиса
а = a?et = а^ + а& + а373, A.1)
причем по повторяющемуся индексу, обозначаемому малой латин-
латинской буквой, происходит суммирование от 1 до 3, по повторяющемуся
индексу, обозначаемому большой латинской буквой, — от 1 до 2.
По индексу, обозначаемому греческой буквой, даже повторяюще-
повторяющемуся, суммирования нет.
Поэтому
-* -> -¦¦ -* -*¦ -*¦
а = ад = а^ + а2е2, ааеа = а2е2 при а = 2. A.2)
Вводим три типа умножения векторов,
а) Скалярное:
а-гГ= а1е1 ¦ bjej = aibierei = dtb$ti = afi,, A.3)
где 6G — символы Кронекера,
О, если 1ф}
б) векторное:
где ?,7* — символы Леви—Чивиты:
-4- 1, если все индексы различны и образуют
четную подстановку,
eljk= | — 1, если все индексы различны и образуют A.6)
нечетную подстановку,
О, если хотя бы два индекса одинаковы
308
для двумерных задач встречается двухиндексный символ Леви—
Чивиты:
ё,, = —ёл, ei2=l, A.7)
в) тензорное:
= atb^et ®eh A.8)
оде ® — символ тензорного умножения, причем «диаду» tf,(8>e/
можно рассматривать как формальную совокупность векторов е,-.
Эту диаду можно выбрать в качестве базиса для тензоров вто-
второго ранга а, которые будем всюду считать симметричными:
а = atfi,® е, = ali7i(g)'ej. A.9)
Операцию частного дифференцирования обозначим запятой:
^.ш*а,.,^д,-а,. A.10)
дх}
Для тензоров второго ранга также вводятся три вида умноже-
умножения а, б, в, причем если стоит один индекс умножения, например
а ¦ b = аие; ® е-, ¦ bktek ® et = а,,-^0 eLbjk = а^й7/е7® е;, A.11)
то это означает, что в умножении участвуют второй вектор диады
первого тензора а и первый вектор диады второго тензора Ь.
Если же между тензорами а и b стоят два символа умноже-
умножения (в столбик), то верхний символ означает умножение, опи-
описанное в предыдущем абзаце, а нижний символ — что умножа-
умножается соответствующим образом первый вектор диады первого
тензора а и второй вектор диады второго тензора Ь. Например,
а: 6 = аГ]е{ ® е,-: bklek <g> е, = аи bkl (e{ ¦ ek) (e, ¦ et) =
—a/AfilAi = ааьц = aubih (I.12)
а х 6 = аг,-е, ® е,- X bkl7k<^et = ai{bhl {et • ek) (e,- x e,) =
= aijbkfilk6nnen = anbneilnen. A.13)
Тензор второго ранга, у которого компоненты — символы Кроне-
кера A.4), называется единичным тензором второго ранга /:
/=8,Й®?. A.14)
Введем вектор-оператор дифференцирования V, компонентами
которого являются символы дифференцирования по соответствую-
соответствующим координатам
309
Умножение определенного вида этого вектора на вектор или тен-
тензор имеет свое собственное название и обозначение.
а) Скалярное умножение
V • а= dr-a, = a;,/==diva (I.16)
называется дивергенцией вектора а. Если же такому умножению
подвергается тензор, то символ дивергенции пишется с большой
буквы:
V • ft = 7idl ¦ bjk7j ® 7к = bikjek = bM.t7k s= Dtv ft, A.17)
б) Векторное умножение
V X a = e/5,- x a^/ = a/tie, x ё*- = a},i6nk7k = rota A.18)
называется ротором вектора a. Если у умножается векторно на
тензор Ъ, то символ ротора пишется с большой буквы:
у X ft = Я-д/ X bik7/ ®7к = V.^z/Я ® е"й = Rot 6. A.1 9)
в) Тензорное умножение
V ® a = е/5/ ® а/в/ = a/,/ e{ ® ej = Grad а A-20)
называется градиентом вектора а. Если вектор V умножается
тензорно на скаляр <р, то символ градиента пишется с малой
буквы:
у®Ф=в/3/®ф = ф.*е/^0гас1ф. A.21)
Отметим еще часто употребляемые дифференциальные опера-
операторы:
2
Ink a s ef/fte/mna}n,fcme", ® 7,. A.23)
Всякий симметричный тензор второго ранга а однозначно разла-
гается на шаровую а и девиаторную а части:
а = — а/ + о = (— аб„ + а«) ej ® e), (I.24)
~ 3 — ~ \ 3 /
о
где а — след матрицы а:
310
В частности, девиатор тензора напряжений а принято обозначать
через s, а девиатор тензора деформаций е через е, причем
о= o/4-jS, 3a = e-etrcr=<r?i, (I.26)
8 = -J-e/+^, eetre = e(|. A.27)
Под квадратом тензора а понимается тензор второго ранга, полу-
полученный скалярным произведением тензора а на себя:
?^?®?- О-28)
Симметричные тензоры четвертого ранга будем обозначать С:
В частности, единичным тензором 4-го ранга А будет тензор, ком-
компоненты которого выражаются через символы Кронекера в виде
Для тензоров четвертого ранга также справедливы все описан-
описанные типы умножений. Например,
7 A.31)
A-32)
2. Длина каждого вектора а является инвариантом относи-
относительно полной группы вращения трехмерного евклидового прост-
пространства \а\. Симметричный тензор второго ранга а имеет три
независимых инварианта, например,
I==a==tra= а^, II = tra2 =a{jalh III = tr a3 = aikakjau. A.33)
Часто в качестве независимых принимаются инварианты
a= tra, (tr^)I/2 = УЪ^} = аи, det|a|, A.34)
где аи — так называемая интенсивность тензора а. В частности,
интенсивность тензора деформации ги и интенсивность тензора
напряжений аи определяются следующим образом:
1/w A-35)
Изотропная векторная функция b=}(a) векторного аргумента
(т. е. функция, инвариантная относительно полной группы враще-
311
ний и трансляций в трехмерном евклидовом пространстве) имеет
вид
Ь= А (| а | )¦ а (Ь, = А„ (| о |) а,), A.36)
где Л — некоторый тензор второго ранга, являющийся функцией
длины вектора а. Если вектор а сам является функцией некото-
некоторого параметра t (например, времени)., а вектор Ъ зависит от
значений вектора а при всех т: 0<x<?t, то говорят, что задан
векторный оператор f:
b = f(a)=A(\a\)-l (I.37)
Оператор называется линейным, если он аддитивный и одно-
родный, т. е. для векторов а,\ и а2 и чисел с» и аг справедливо
равенство
J (а^ + а2а2) = ajfy + aj(a2). A.38)
Линейный оператор
-+ i
b= \A(t,t)- a[x)dx A.39)
о
называется невырожденным, если он разрешим относительно а:
а= §B{t, т) • b(r)dx. (I.40)
о
Если тензор Ь является изотропной функцией симметричного
тензора а, то
Ъ — ао1 + ага + а2а2, A.41)
где ао, аь «2 — функции трех инвариантов A.33) или A.34). Тен-
Тензорная функция называется потенциальной, если существует та-
такая скалярная функция W{a) от инвариантов тензора а, что
j " A.42)
6 + 2fl + 3.
да dl - dll ~ дШ -
Из сравнения A.41) и A.42) видно, что в этом случае
д<ц 1 да.! »да0 _ 1 ?да2 1 5а! _ 1 да2 П 43\
аи ~~2 аТ~' аш ~ ~з аТ~' 2 аш ~ з аи
Изотропная тензорная функция называется квазилинейной, если
02=0. A.44)
312
Как видно из A.44), для квазилинейной тензорной функции ао и
си зависят только от двух инвариантов. Если же квазилинейная
тензорная функция является потенциальной, то из A.42) и A.43)
следует, что ао и оч не зависят от третьего инварианта III.
3. Пусть п — единичный вектор внешней нормали к регуляр-
регулярной замкнутой поверхности 2, ограничивающей односвязную об-
область V:
например для шара
^ A.46)
Тогда для гладких вектора а и тензора Ъ справедлива формула
Остроградского—Гаусса
f divadV = f a-ndZ, J DivbdV = J b¦ ndS. A.47)
Поэтому для rii A.46) справедливо
Jn^=O. A.48)
v
Легко доказать, используя A.45), что
10
4. Пусть г — радиус-вектор в трехмерном евклидовом прост-
пространстве и пусть функциями
?= Ну1, у2, у3) A.51)
задается криволинейная система координат у1, у2, у3, причем яко-
якобиан преобразования A.51) в каждой точке отличен от нуля. Тог-
Тогда можно ввести локальный базис (ковариантный)
и фундаментальную матрицу
313
Матрицу, обратную к фундаментальной, обозначим через g'V, и
введем контравариантный базис по формуле
Тогда каждый вектор а{у\ у2, у3) может быть представлен в ви- ]
де j
а = а% = aft, (I.55) \
где а1 — контравариантные, а а,- — ковариантные компоненты j
вектора а. \
Символами Кристоффеля второго рода называются величины
Т1тп {у\ у2, у3), определяемые следующим образом:
= * g
ill dSim j dgin gmn \ A56)
С их помощью вводятся так называемые ковариантные произ-
-»•
водные ковариантных и контравариантных компонент вектора а
и тензора Ъ:
ay1
? A.58)
A.59)
ду!
причем
TJ^-Lgfl^iL. (I.60)
6 криволинейной системе координат ковариантные производ-
производные компонент вектора образуют некоторый тензор второго ран-
ранга, т. е. объект, инвариантный относительно преобразований пе-
перехода от одной криволинейной системы координат к другой.
(Частные производные компонент вектора, вообще говоря, тензо-
тензора не образуют.)
Путем операции симметрирования по двум индексам
в«> = [a'i]iin ш -L (а'1 + о") A.61)
формулу A.59) для симметричного тензора Ь^ можно переписать
в виде
dyf
314
Аналогично A.61) вводится операция альтернирования по двум
индексам
аип = [<*i Лип fe -J (ач — аа)- О-63)
В частности, для того, чтобы тело, в котором введены криволи-
криволинейные координаты у1, у2, у*, принадлежало трехмерному евкли-
евклидову пространству, необходимо выполнение условий
=0. A.64)
Если криволинейная система координат является ортогональной,
то
g" = en = 0, если tФу, V?* = 1 iVg^. (I.65)
Физическими компонентами вектора b или тензора а в орто-
ортогональной криволинейной системе координат называются величи-
величины bfi, a*i/, отнесенные в каждой точке к ортонормированному
базису в/, et <g) et.
tVTVZ A.66)
Приложение II
Симметричные тензоры четвертого ранга
Рассмотрим два взаимно-обратных тензора четвертого ранга С
и J.
C:J = J:C=A (II.1)
2 "
Оба тензора обладают следующей симметрией:
**ijkl = J tiki = JiHk = Jkllh
так что в самом общем случае имеют 21 независимую компонен-
компоненту.
Подобно тому как всякий симметричный тензор второго ранга
О ,
а может быть разложен на шаровую часть af^ и девиатор а (см.
приложение I), тензор четвертого ранга С, обладающий симмет-
симметрией вида A1-2) может быть представлен в виде комбинации
двух симметричных тензоров второго ранга а и ft, а также тен-
тензора четвертого ранга п, имеющего в самом общем случае де-
девять независимых компонент и поэтому называемый нонором:
1 о о 1 О 9
j ,ftj = (Zd — 0) OifQfci + \oO — df [OikOji + 0^ lOjk) +
15 30
_5
7
2_Гл _l ~ а ч-аЛ а. а б > 4-
7
3 — — __
7
где
a,,=C;,-fe,6b, = — а8ц + a;,-, a=.an, (II.4)
о
10 — О
о*/^C/b/i Oft» = —00// T" 0ii» 0^ 0i?, U^'^j
316
а нонор п удовлетворяет тождествам
n//*Ai = 0, nlikfiik=0.
Точно так же можно разложить и тензор J:
Jim = ~ Bр-9) 6»/6« + ~ C? -р) F,
+ —(ЬцРы + SkiPti) ——
2
7
3 Г
где
Рц =
Ян =
(Pikbjt + Pifijk + Pik^n
Г**»+ ?,«*/*+ ?,Ai +'i
lo _
3
1 о —
3
а нонор N удовлетворяет тождествам
Между тензорами а
Nijkfikt = 0. Nijkfijk z
+ PjAk)
iifiik) + '
a
о
• Я^Яи*
= 0.
и р существует зависимость
(H.7)
(П.8)
A1.10)
— ap + ailp~i}==aljplj=?>, (II.11)
хотя они, вообще говоря, взаимно-обратными не являются.
Выберем в качестве девяти компонент нонор а следующие:
ЛШ1> П2222> П1122>
П1112> П1113> П2212> A1-12)
П2223' П3313> П3323-
Остальные компоненты (с учетом симметрии (Н.2)) выража-
выражаются через них следующим образом:
П3333 = П1111 + ^2222 + 2nU22»
П1133 = П1313 == (^1111 + П1122)>
П2253 = П2323 ~ (П2222 + П112г)>
^1212 = «1122. (Н.13)
U2213 = П1223 — (П1113 + П3313/>
^3312 = П1323 ^ (П1112 + n2212/>
П1123 — "l213 — (^2223 + П332з)-
317
Обозначим компоненты тензора С для ортотропного случая в
главных осях анизотропии
С1П1 = Aj, ь2222 = А2, Сзззз = Лз>
^1122 = Л4> ^2233 =^5> ^1133 == Лв> A1.14)
^1212 = Л7> ^2323 == Л8> ^1313 = Л9>
так что матрица A.3.10), соответствующая этому тензору, имеет
вид
^ л4 л, О О О *
л2 Я6 О О О
я3 о о о
2а7 О О
2а9 О
A1.15)
Для трансверсально изотропного случая в A1.14) и A1.15) нужна
положить (главная ось трансверсальнои изотропии — хз):
Xi = кг = ta + 2Я.7,
A1.16)
А5 = Яб, Л8 = Я,9,
а Для изотропного случая к A1.16) добавляются соотношения
A1.17)
Для ортотропного случая симметричная матрица [а], соот-
соответствующая тензору а, имеет вид
0
0
о
так что a^tr а:
A1.19)
Матрица [Ь], соответствующая тензору Ь, в ортотропном случае
запишется в виде
Х1 + А, + К
0
0
0
А8
A1.20)
Поэтому для b=ixb имеем
b = Aj + Я.2 + а3 + 2а7 + 2а8
318
Для ортотропной среды нонор имеет только три отличные от нуля
независимые компоненты
= -?г (8*1 + ЗЯ2 + ЗЯ3 - 8Я4 + 2ЯБ — 8Я„ - 16Я, + 4Я8 - 16Я9),
= ^г C^ + 8Я2 + ЗЯ3 — 8Я4 - 8Я8 + 2Я„ — 16Х, — 1бЛ.в + 4Л,),
00
= -?г- (- 4Яг — 4Я2 + Я3 + 9Я4 — Я5 — Я„ + 18Х, - 2Я8 - 2Я9).
A1.21)
Для трансверсальной изотропии в A1.18) — A1.21) нужно вос-
воспользоваться соотношениями A1.16). В частности,
(^ + 2^% + 2Й)" ¦ A1.22)
а83 = - 2ап - А (А*-2^4 + Я.5
О
а = А,8 + 4А,4 + 4А,8 + 4А,, A1.23)
' - - 1
&п = &22 ~ ~Г~ (— Хз + Xt + ЗА,, — А,9),
О
&зз = -26U - -у (Я,- Я4 - ЗЯ, + Я9), A1.24)
A1.25)
Для' трансверсальной изотропии существует единственная отлич-
отличная от нуля независимая компонента нонора:
"им = -^ (^з + Я4 - 2V+ 2Я, - 4Л,), (И.26)
35
ибо
«1111 = «2222 = ЗП1122. A1.27)
Для изотропной среды все компоненты нонора тождественно рав-
равны нулю, тензоры а и Ь являются шаровыми, причем
а = 3 (ЗЯ + 2ц), Ь = 3 (Я + 4ц). A1.28)
С помощью представлений (П.З) и (II.7) можно ослабить ог-
ограничения, накладываемые на компоненты тензоров С и J при
доказательстве положительной определенности этих тензоров.
Например, чтобы выяснить условия, при которых
где С — произвольный симметричный тензор, нужно тензор е
разложить на шаровую и девиаторную части, а затем восполь-
319
зоваться представлением (II.3). При этом следует иметь в виду
что
е3з = — (еп + '22). *// = в*/ 1- Щ, в е eftft. A1.30)
Тогда
о
/ = _?. 02 + JL (ЗЬ — д) (е2п + <& + епе22 + е\2 + е\ъ + е\ъ) +
+ -J в Ki BflM + а22) + е22 Bа22 + аи)] + -1 {(ЗЬЦ -
— 2ап) (е212 — е\ъ — е\2 — 2епе22) + C622 — 2а22) (е\г — е\г —
— «11 — 2епе22) + 2 [C612 — 2а12) (епе12 + е12е23 +
— 2ai3) (е12е23 — е13е22) + C623 —
— 2о23) (е12е13 — еие23)]} + ппп Dе?, + е|2 +
+ 4еце22— 4е?3) + л2222Dе22 + е\х + 4еце22 —
еце22— 4е?3) + л2222Dе22 + е\х + 4еце22
е) + ihnl Fеце12 + 2е22е12 — 4е13е23) +
+ пшз (^епе1з — 2е22е13 4е12е23) + л2212 Fеце22 + 2епе12 —
— 4е13е23) + /г2223 Dе22е23 —
— 2ejje23 — 4е12е13) — n33j3 (Ье22е13 + 4епе13 + 4е12е23)
— «3323 Fеце23 + 4е22е23 + 4е12е13). A1.31)
Для выяснения условий, при которых />0, нужно выражение
A1.31) записать в виде суммы полных квадратов. Одно из усло-
условий, при котором справедливо неравенство, устанавливается
сразу:
°а>0. A1.32)
Приложение III
Основные уравнения МДТТ в ортогональных координатах
1. Уравнения равновесия.
а) Прямоугольная система координат х, у, г (рис. 69):
да
дх
б) Цилиндрическая система координат г,
6, z (рис. 69):
Рис. 69.
до*
дг,
да.,
arr — qee
г
2а,
1 да.
+
г
дг
й9
-1
г дв
_j
дг
(Ш.2).
дг
а„ 1 аа9г [5аг2 _
i 1 ГГ Г '—1— "Г Л-г — и-
г г дв дг
в) Сферическая система координат г, 9, <р (рис. 69):
1
дагГ
дг г sin ф дВ
г дер
да.а 1 5аее 1 дае
лз!пф 30 г дф
"г6
1
йл лвтф дв г
2. Соотношения Коши.
(- Лф = и.
321
а) Прямоугольная система координат:
дих dug диг
едгдг 1—» еув — Z—» ^гг — ~~Z •
дх * ду дг
= ± f J2s_ + Jan.) ,bx=-L (Jo*- + Jol) , (ш.4)
2 \ ду дх ) хг 2 \ дг дх j v ;
B - 1 ( du»
yz 2 \ дг
диг
~ду
Цилиндрическая система координат:
диг 1 3uq ur диг
е„=——. Бее= 1 • в„ =
дг г де г " дг
диг диг \ 1 / див 1 диг
1 / 1 диг dllQ ив \
= — . A11.01
2 \.г дВ дг г ) V ;
в) Сферическая система координат:
диг 1/1 dufl
евв=f
диг 1/
егг = -—, евв=— —f
dr r \ smq> дв
1 / 3um \ 1/1 ди. ди
=— (-^" + 4. егв = —(—f +
г \ дф / 2 \ гв
1 / Зи_ 1 а«г «
==— —?-Ч
2 V 5г г ду г
1 / диа 1 ди_ 1
(?^ t
ф sinq> Й0
3. Уравнения совместности в деформациях.
Тензор несовместимости т| A.2.2) разложим иа шаровую и де-
виаторную составляющие:
- о
При выводе уравнений совместности в напряжениях часто полез-
полезным оказывается тензор
а) Прямоугольная система координат:
д*еуг дЧуу дЧгг
_
хх~ дудг дг* ду* *
_ о а>е« д»8х* дЧгг
** дхдг дг* дх* '
322
дхду ду* дх* '
(Ш.9>
дхду
, д I дгху дгУг дгхг' \
дг \ дг дх ду )'
_ д*&уУ д / деХ2 дгху дгдг \
хг дхдг ду \ ду дг дх )'
¦п ~ дг?хХ I д ( д&уг дВхг дЪхв \
1уг дудг дх [ дх ду дг )'
б) Цилиндрическая система координат:
2 д
г дг г* ае2 дг*
дгдг дг* дг*
Бве
г* ае2
^22 82Z
д . .1
+ —Г- (егв — Чг) ,
дг J
_ _а_ / geee , еее~ет s. , J_ д I 1 д&п
' ~~ ~дТ \ дг г } г 1ю~\7 дв
(Ш.Ю>
дг г дг
_ 1 5 / дътг дегг , гг2 \
~ г М [~дТ ~дТ^~Т)~
д^ Т
в) Сферическая система координат:
г\„ = — /— [sin ф -^- (sin фегф) + -т-гг- (sin фееф) +
+ sin ф -^- + sin2 фегг1 + —шф
30 J 2г 3<р
1 а / аеяя \ deRo 1 а*е_т
( sin2 ф —Н.) _ sin2 ф —-22 22. _
г аФ v ае ; ^ г ее»
323
sin* ф a
7* дТ
дЧг
д i девв \ 1 дЧгг т
дг \ дг ) sin^ ae* J
— (-eln
5л5ф
(sin2 февф)
ctg Ф
"Ф
ав
афае
(Ш.П)
Л«р:
+ —
аеаФ
ге,
sin ф
д* I ъгг \ 1
афав \ sin ф / j
Приложение IV
Преобразование Фурье
Пусть на бесконечном интервале —оо<^< + оо задана функ-
функция f(t), интегрируемая на любом конечном интервале и для ко-
которой выполняется равенство
|
где а — произвольное действительное число. Такая функция
(обобщенная функция) называется фурье-оригиналом и ей мож-
можно поставить в соответствие некоторую функцию того же класса
/*(со) по закону
во
/*(<¦>)= J/(/)«-""* df. (IV.2)
—00
Функция (обобщенная функция) /*(©) называется фурье-образом
f(t), или ее спектральной функцией. Существует, обратное преоб-
преобразование Фурье, которое каждой спектральной функции ставит
в соответствие фурье-оригинал по закону
00
Воспользовавшись формулой Эйлера, получим из (IV.2) коси-
косинус-преобразование Фурье:
00
Г (а) = 2 J/(f) cos atdt, (IV.4)
о
а из (IV.3) — обратное-преобразование Фурье
я J
о
Аналогично, для синус-преобразования Фурье, прямого и обрат-
обратного, имеем
325
/•(©) = 2 J
о
00
/ (t) = -L f f (Ю) sin «Wo. (IV.7)
я J
0
Заметим, что если f(t) — четная функция, то
/*(со)=/°(со). (IV.8)
Если f (t) — нечетная функция, то
Подставив выражение f(t) через спектральную функцию (IV.3)
в формулу (IV.2) и производя формальную замену порядка ин-
интегрирования, получим
откуда видно, что
JL Г ^«р-«»л=б(р—ю), (IV.11)
где б(р) — дельта-функция Дирака. Аналогично, подставляя
(IV.2) в (IV.3), получим
ю
1 С
\ gi(o«—т)//о) = &(t i\ (IV. 12)
2я J
Точно так же устанавливается справедливость формул
он о»
— I 008 tip — ю) dt = 8 (p — o), — | cos о (t — t) da = б u — t).
я J я J
о о
(IV. 13)
Фурье-образ производной л-го порядка от функции f(t) (обоб-
(обобщенной производной) находится /z-кратным дифференцированием
выражения (IV.3):
/<n>(A=JL Г (to)"/'(m)el(B'dco. (IV. 14)
w 2я J^v ; ' ;
326
В таблице IV. 1 приведены фурье-образы оригиналов, встреча-
встречающихся в книге
Таблица IV.1
оригинал
f»
oo
1 Г U ^^ л! g \"/ " •
—00
1
с
6@
sin a/
cos a*
фурье-образ
OO
((<в)"ГИ
/ (а>)? (со)
2яб (со)
2я с 6 (со)
1
2я (—1)" 6С) (©)
2яб (со + а)
я i [6 (со — а) — 6 (со + а)]
я [6 (со — о) + 6 (со + а)]
Пусть функция f(x) может быть преобразована по Фурье:
F (ш) = j / (x) e-^dVx, (IV. 15)
где F(w) называется спектральной функцией, или фурье-образом
функции f(x), причем интегрирование в (IV.15) ведется по всему
трехмерному евклидову пространству. Преобразование, обратное
к (ЦМ5),дает
/(*) = ¦
*»* dVa.
(IV.16)
Дифференцированием (IV.16) по координате Xk легко убедиться,
что фурье-образом производной />(х) будет функция i<akF(a).
Легко дать обобщение формулы (IV.11) на трехмерный случай:
(IV.17)
Фурье-преобразованию могут подвергаться векторные и тен-
тензорные величины. Пусть, например, имеются два симметричных
тензора второго ранга f(x) и g(x), фурье-образы которых /г(ю)
327
и G(co). Пусть f и g являются действительными функциями. Тог-
Тогда тензор-функция g(x), комплексно сопряженная к g(x), с ней
совпадает. Поэтому имеем
/ (х): g(x) dVx
: [f G(p) (Ге^(»-^ dV,J dFJ dye. (IV. 18)
Учитывая (IV.16), получим из (IV.18)
j /,Й : 8 Й d^ = -^r J ? A : § A &*• (IV. 19)
Формула (IV.19) носит название обобщенной формулы Парсева-
ля.
Замечание. Иногда функцию g(x), комплексно сопряжен-
ную к ^(je), мы обозначаем g*(x).
Приложение V
Эффективные характеристики слоистого композита для плоской
задачи теории упругости
Пусть слои ортогональны оси х2.
1. Задача в перемещениях.
а) Общий случай.
Тензор модулей упругости нулевого приближения:
^ -1 x
»-l » » »-l ,
Эффективный тензор модулей упругости:
HlJKL= V-IJKL) -Г \<->IJM2<-M2N2) \(-N2P2/ X
¦-1 . ._»-! . i
X (Cp2Q2 Cq2Kl) — (ClJM2 C/A2N2 CN2Kl) , (V.2)
где C]JKL = CuKL для плоской деформации и
для плоско-напряженного состояния (§ 8 гл. 4).
б) Все компоненты композита изотропны. Плоско-деформиро-
Плоско-деформированное состояние.
Тензор модулей упругости нулевого приближения:
С(О> = Еv (у/A_у)>
1111 la
—v /A
/(l+v)(l-2v) i •
\ ? A — v) /
(V.3)
()
1199
1-v #(l+v)(l-2v) к
\ Е A — v) /
:(i-v)
= / 1
1Ьг1)
-1212 = ^ГТуУ'
329
Эффективный тензор модулей упругости
,(i+v)(l-2v)x •
\ ?A— v) /
А2222 = С2222. Лц22 = С21Ь (V.4)
в) Все компоненты композита изотропны. Плоско-напряжен-
Плоско-напряженное состояние.
Тензор модулей упругости нулевого приближения:
(у)
—
ии
F
Эффективный тензор модулей упругости:
2. Задача в напряжениях.
а) Общий случай.
Тензор упругих податливостей нулевого приближения:
<v-6)
/*@) ,» , J1J\\ (JUKLlJ\n\> JIJ\\ J\\KL /Лт 7Ч
Jijkl= JuKL-i ; ; ; . (V.7)
•^111! O/^иц) J\ni
Эффективный тензор упругих податливостей:
Ju\\J\\KL \ ,vsv
). (V.8)
Лш ' ОI Jim)
где Jukl = Jijkl Для плоской деформации и Jijkl —
для плоско-напряженного состояния (§ 8 гл. 4).
б) Все компоненты композита изотропны. Плоско-деформиро-
Плоско-деформированное состояние.
330
Тензор упругих податливостей нулевого приближения
Е
7@). A + v) (I - 2v) , v (v/(l— v))
•/2222 = Н
?A —v) l_v (?/(l_v2))
@)
1122
7@) - <v/(l—v))
71122 =-
7@) v17<o) 1 +v
«2211 ==j =
7() _ 7<)
2211 == . .. ¦¦- . j 101 о =
221 l (?/(l2)> '
j 1
l-v (?/(l_v2)> ' 2?
Эффективный тензор упругих податливостей
н 7(°) и /C+vH—2v)
(УЛ0)
я - 1 /1 + v\
в) Все компоненты композита изотропны. Плоско-напряжен-
Плоско-напряженное состояние.
Тензор упругих податливостей нулевого приближения:
г(О) 1 т@) 1 — Уг , (V)
= j-. (V.11)
1+У
2Е
Эффективный тензор упругих податливостей
— V»
122= •'1122,
Приложение VI
Эффективные вязкоупругие характеристики слоистого
двухкомпонентного композита
1. Простой композит.
Приняты обозначения:
2х
' Рз ~ «* '
ах
2а>1
(l-Y)(I-Y/2), если 0 < |< у,
-|X -l). если |1
/.E) =
т^-[-
6
4 Y 1
(VI.l)
(VI.2)
(VI.3)
, если y<5<1-
a) Компоненты эффективного тензора-оператора ядер релакса-
релаксации, отнесенные к К\:
и и
«1111 — 222 = Y
40
— 2« A — 4<ai) + а (а +
+ 9ах
-
1+2ц>1
Y Y(a
4 A — <Bi) A — а) -|- а (а +
. + *)
-9ах
а [B — 2@i — а — 2a<t)i) — Зх]г
4 (а + 2а<о, + х)
¦]•
(VI.4)
332
133 — 233 — ~ Г
g(l+2@i) [Зх —B —2@i —a —2au)i)] ^
3
i2 = —
= Л2323 =
2323
б) Локальные операторы релаксации:
Агш = Jv232 = #31i ==#„,= -I- (i
(i
2 — 2% — а — 2ao)i — Зх
27 О +
+ 2(Ot
в) Компоненты эффективного тензора-оператора ядер ползучес-
ползучести, умноженные на /Сь
й ii I + 2fi>i .
111 = «2222 == Т I Г~ +
ахA +
(ах + 2axo)i + 2@0
Р*'
/iq«*9 "
(ах +
[
S 1+2%
122 —
(ах + 2axMl + 3Wl — xMl + хJ g
Г. анA+2@0 - 1 l_g
[ 2w, ЙР' J буа* Р>*
9у (ах 4- 2аи@! -
#пзз = #22зз = ¦ 12@, — 2 + а + 2aWl —
— A + 2WJ (ax
@!
«1313 - «23,3 - -^- ^ 1 + — J '
г) Локальные операторы ползучести:
j
33S
ax
2y (ax
ax A + 2@0
2a)! / 2
L7)
ax
-™i + "i ~
М1Ш =
1Ш
== Л12112 = Л12121 =
12112
2121
— — gfi, j /2
2. Композит с двумя вязкоупругими компонентами (канониче-
(канонические операторы).
Приняты обозначения:
+ая2,
+ асо2,
(VI .9)'
(VU2)
r
1 —
(VI. 13)
334
а) Компоненты эффективного тензора-оператора ядер релак-
релаксации, отнесенные к К\у:
J-BB, ax) + -^-^(ах) + "Г
4 2 4
212 ~ "Т~ ^И (аИ)>
^1313 = Л2323 = — А„ ^—- J .
б) Локальные операторы релаксации:
в) Компоненты эффективного тензора оператора ядер ползу-
ползучести, умноженные на К\'-
^iiii = Д«22 = т- [1 + ах -В{2, ax)]-i + — Ва (ах),
9у 6Y
Язззз = УВ B, -H-J + J- [1 + ах -ВB, ах)]-' [1 + а - 35 B, а)]*,
r[l + ax
У"У
Я1133= Hi23a=-L[l + ах -Б B, ах)Г'[1 + а -35B, о)],
У
•^ 1 ^^
^1212= — Ва(ак),
н - н _ Yb/M
•313 — 323 — ~Г" °Л 1 I .
О \ X /
33S
т) Локальные операторы ползучести:
= Л12222 = | — 1 + — со ?ш (ах) +
(\ ?)[1 + ах-5B, ах)]-'} /,(g
— — Вш (а х)
-?B, ах)]}
-5B, ах)]-» [1 + а -35B, а)]1 /, (g), (VI. 17)