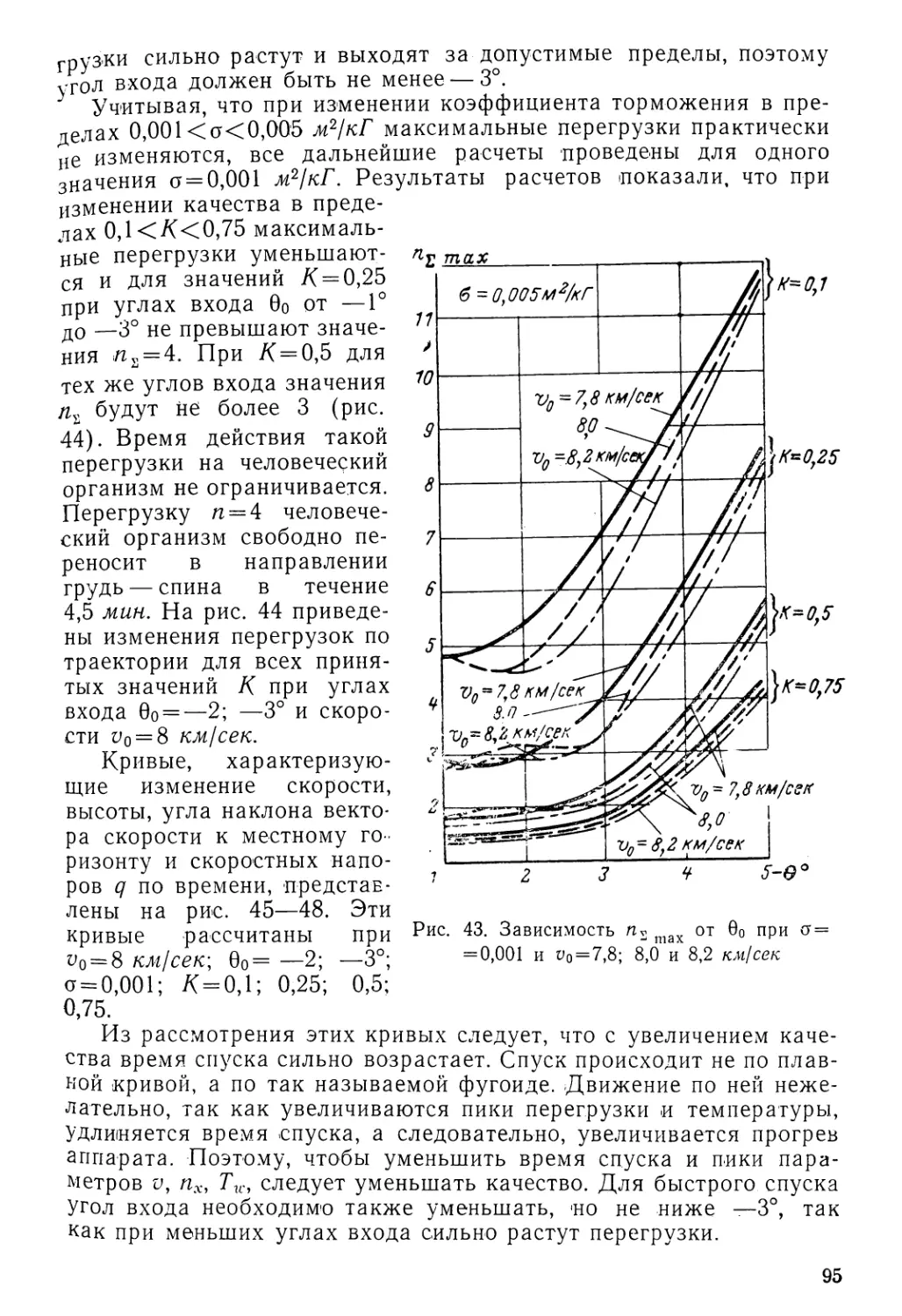
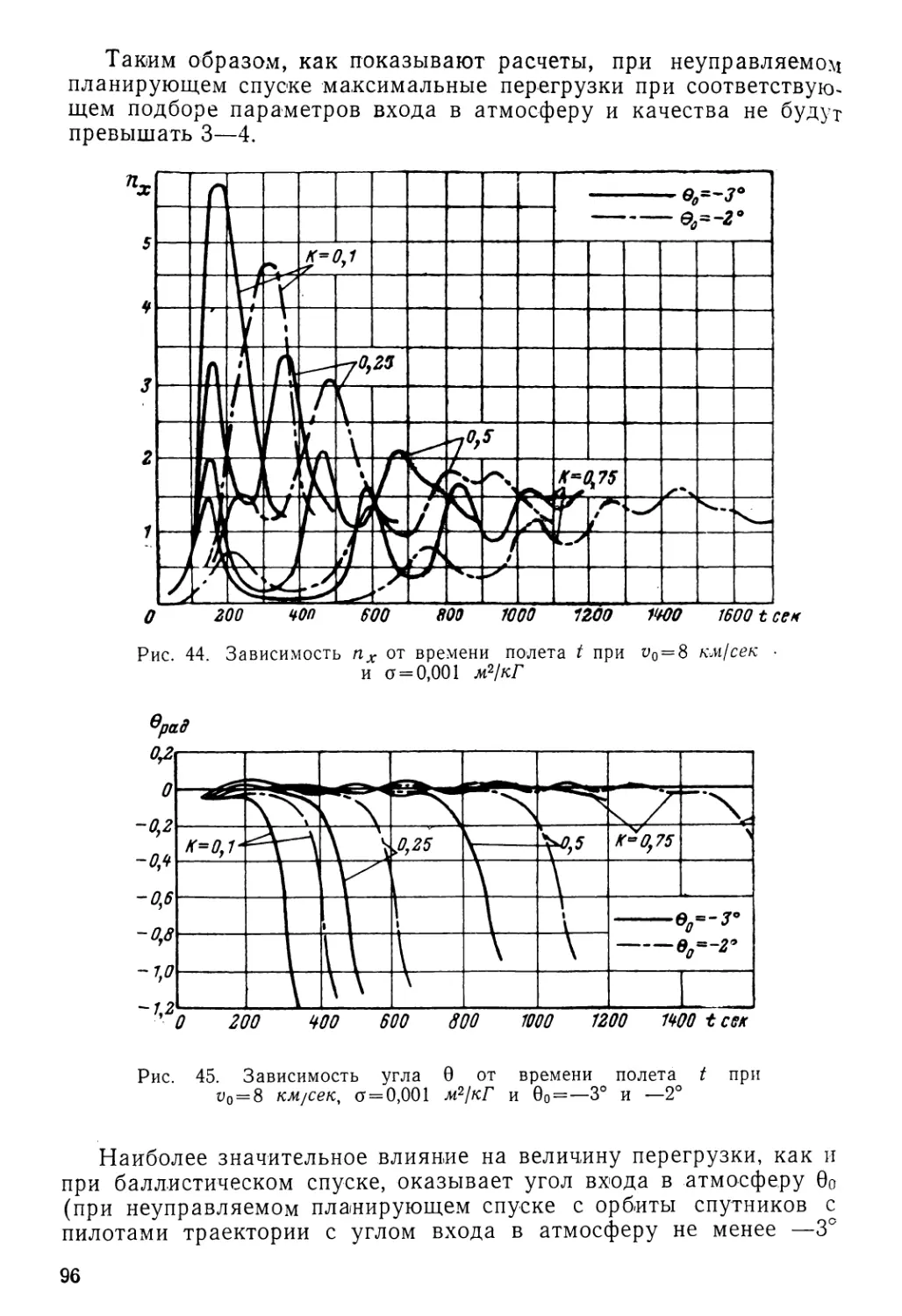
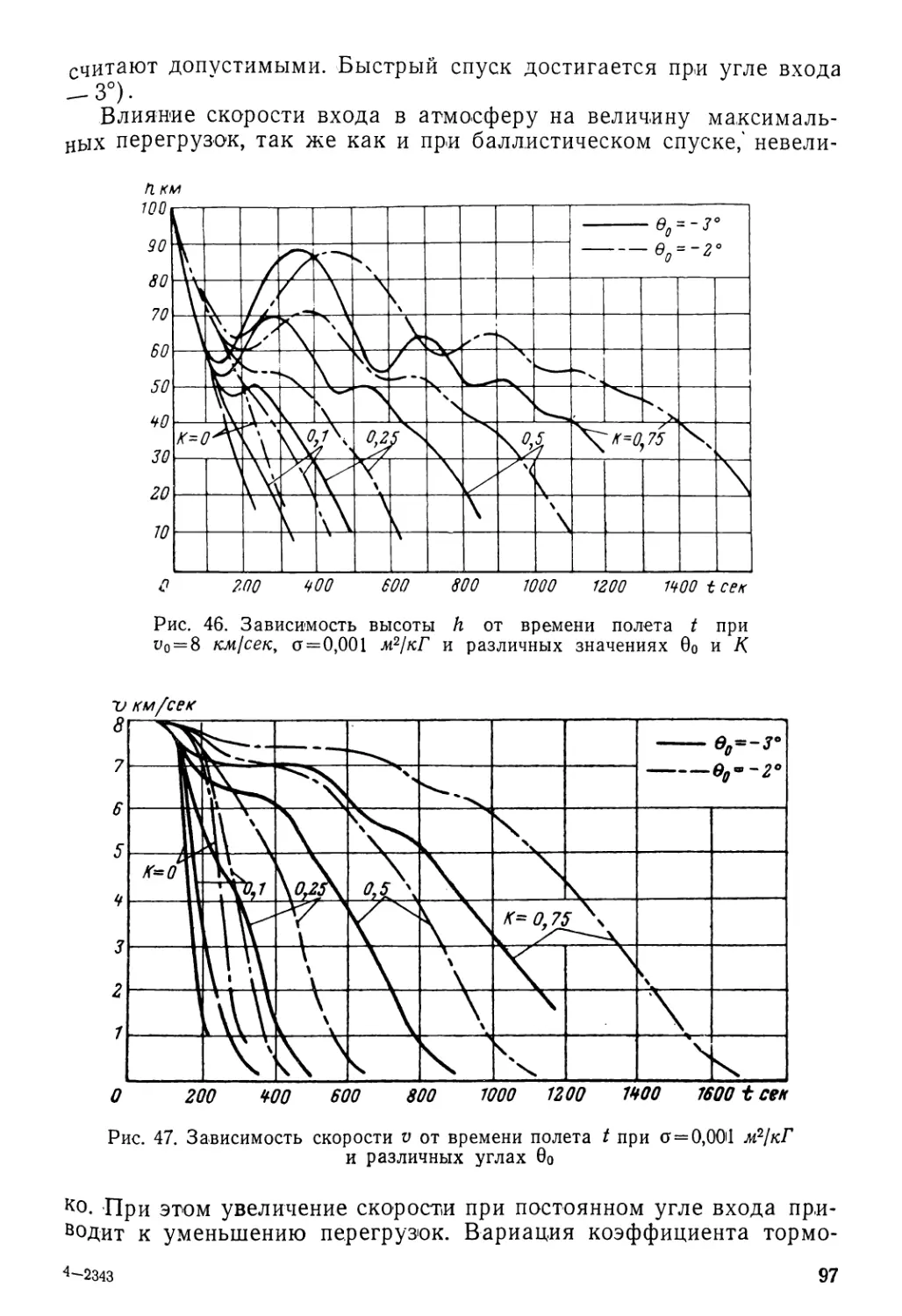
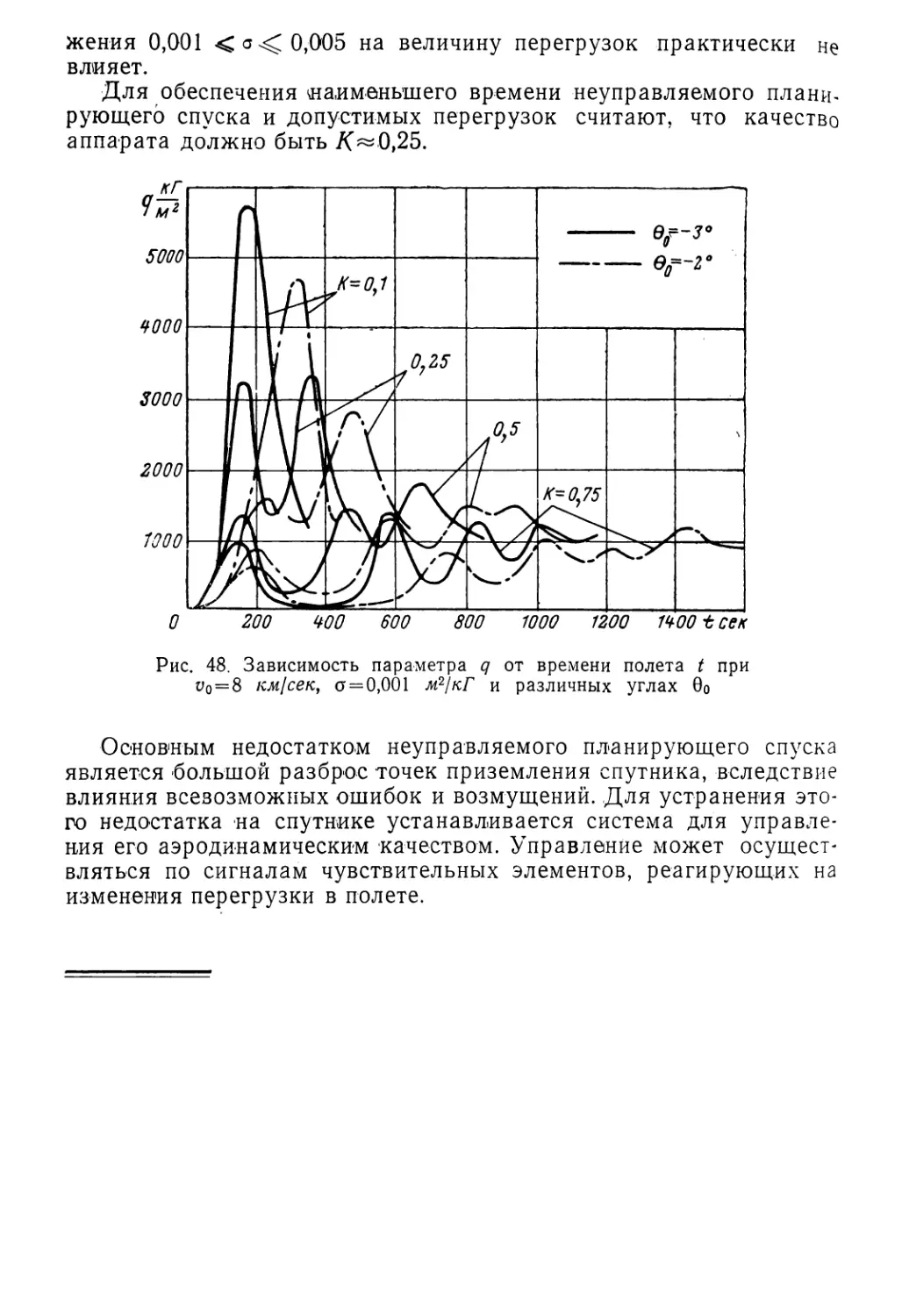
/
























Текст
теории
полета
и элементы
проектирование
иокусотвенных
onyr^smos
ЭОМЛИ
К 50-летию
Великой
Октябрьской
социалистической
революции
М.К.ТИХОНРАВОВ, И.М.ЯЦУНСКИИ
Г.Ю.МАКСИМОВ, И.К.БАЖИНОВ,
О. В. ГУРКО
Под редакцией
д-ра техн, наук
проф. М. К. Тихонравова
сновы
теории
полета
и элементы
проектирования
искусственных
спутников
Земли
Издательство «МАШИНОСТРОЕНИЕ» Москва 1967
УДК 629.195.1.001.2
Книга посвящена основам теории полета и некоторым
элементам проектирования искусственных спутников Земли
(ИСЗ). В ней даны основные понятия о невозмущенном (кеп-
леровом) движении спутника. Исследуется влияние главных
возмущающих факторов: ошибок выведения спутников на ор-
биту, нецентральности поля притяжения Земли, сопротивле-
ния воздуха, аномалий силы тяжести, притяжения Луны и
Солнца, давления солнечного света. Приведены основные по-
нятия об определении орбит спутников по результатам изме-
рений. Рассмотрены вопросы выведения ИСЗ на орбиту и
спуска с орбиты «а поверхность Земли.
Книга будет полезна специалистам по космической техни-
ке, а также студентам и преподавателям соответствующих
учебных заведений.
Редактор инж. С. Д. Красильников
2—6—5
п. 163—67
Предисловие
Быстрое развитие в последнее десятилетие ракетной и косми-
ческой техники привело к постепенному практическому освоению
человеком космического пространства, предсказанному великим
русским ученым К. Э. Циолковским — основоположником теории
космических полетов.
Запуск первого искусственного спутника Земли, первый косми-
ческий полет человека, запуски лунников, автоматических станций
к Венере и Марсу, как и последние достижения космической тех-
ники в освоении Луны имеют исключительную научную ценность.
Сумма приобретаемых знаний в области освоения космоса рас-
тет и постепенно появляется необходимый опыт. Поэтому большое
значение приобретает литература, освещающая достижения в
разработке теории космических полетов и проектирования косми-
ческих аппаратов. В предлагаемой читателю книге рассмотрены
основные вопросы теории полета в неразрывной связи с некоторы-
ми элементами проектирования искусственных спутников Земли
(ИСЗ)—представителей так называемого «ближнего космоса»,
без изучения теории полета которых немыслимо понимание косми-
ческой техники и космических полетов в более широком аспекте.
В основу книги положены теоретические работы, выполненные
авторами в 1950—1959 гг. и дополненные результатами исследо-
ваний, проведенных в последние годы. Начатые задолго до на-
ступления эры .спутников, они были направлены на развитие тео-
рии космических полетов. Эти работы встретили глубокое понима-
ние и пользовались поддержкой академика С. :П. Королева —
крупнейшего советского ученого и конструктора в области ракет-
но-космических систем и исследований космического пространства.
Первая глава книги посвящена вопросам выведения спутника
на орбиту. Разработанные в ней методы выведения на орбиту спут-
ника максимального веса доводятся до инженерных расчетов.
В этой главе даются также основные понятия о невозмущенном
движении спутника, используемые в последующих разделах книги.
Вторая глава знакомит читателя с проблемой спуска космиче-
ских аппаратов с орбиты на Землю. Рассматривается как балли-
5
стический, так и планирующий спуск, главным образом с точки
зрения траекторий, обеспечивающих допустимые перегрузки и
температуры при аэродинамическом нагреве.
В третьей главе дана теория полета ИСЗ по орбите в той по-
становке, в какой она удобна для инженерного применения. Наря-
ду с простыми формулами, позволяющими учитывать при расчете
движения спутника влияние нецентральности поля сил земного
тяготения, притяжения Луны и Солнца, сопротивления атмосферы
и давления света, приведены в необходимых случаях методики
расчетов с применением электронных вычислительных машин.
В этой главе, как и в двух предыдущих (а также в четвертой), раз-
рабатываемые методы подчинены единому правилу: точность рас-
четов должна соответствовать поставленным задачам. Следует от-
метить, что вывод некоторых формул дан в сокращенном виде вви-
ду громоздкости и сложности выкладок.
Четвертая глава посвящена анализу ошибок выхода спутника
на орбиту, возникающих в результате неточного управления дви-
жением космического аппарата на участках действия тяги двига-
телей. Решается один из возможных вариантов задачи встречи
двух спутников на орбите. Рассматриваются изменения орбиты с
помощью приложенных импульсных сил. Здесь выводятся получен-
ные еще в 1954 г. на основе линеаризации уравнения возмущенного
движения по околокруговой орбите, которые в дальнейшем были
развиты другими авторами.
>В пятой главе изложены основные принципы определения орбит
искусственных спутников и любых других космических аппаратов
по результатам измерений.
Заключительная шестая глава освещает некоторые частные
вопросы движения спутника вокруг центра масс под влиянием
внешних сил и управляющих моментов.
Авторы полагают, что их труд, являющийся первым опытом
комплексного изложения теоретических вопросов с вопросами про-
ектирования ИСЗ, не свободен от недостатков, поэтому они будут
признательны читателям, направившим свои замечания по адресу:
Москва И-51, Петровка, 24, Изд-во «Машиностроение».
Авторы выражают свою искреннюю признательность всем ли-
цам, которые приняли участие в просмотре рукописи и способство-
вали выходу книги в свет.
ГЛАВА I
Выведение
спутника
на орбиту
Искусственным спутником будем .называть тело (или аппарат),
способное совершить хотя бы несколько оборотов вокруг Земли
под влиянием полученной начальной скорости. Следовательно,
чтобы тело превратилось в спутник, ему требуется сообщить за-
данную скорость на достаточно большой высоте, на которой со-
противление атмосферы становится незначительным. Процесс со-
общения аппарату этой скорости в дальнейшем будем называть
выведением спутника .на орбиту.
Выведение спутника на орбиту может быть осуществлено двумя
принципиально различными методами.
Первый метод — двигатель работает непрерывно до, момента
получения последней -ступенью ракеты необходимой скорости. При
этом вея последняя ступень превращается в спутник. Такой метод
является наиболее простым, но для получения высоких орбит он
либо приводит к необходимости существенно менять режим работы
двигателя, либо становится энергетически невыгодным.
Второй метод — двигатель работает с перерывом. После окон-
чания первой части активного участка ракета движется по эллип-
тической орбите (переходному эллипсу), в одной из точек которой
снова включается двигатель (производится дожог топлива) и по-
следняя ступень ракеты выходит уже на требуемую или некоторую
промежуточную орбиту, если выведение на заданную орбиту пред-
полагается проводить с несколькими включениями двигателя.
Первый метод будем далее называть выведением на орбиту без
дожога, второй — с дожогом топлива.
Первую часть активного участка (до перерыва) в дальнейшем
будем называть активным участком траектории, вторую — участ-
ком дожога.
В данной главе рассматриваются основные закономерности не-
возмущенного движения и решается ряд задач по выведению спут-
ника на орбиту.
Под невозмущенным (расчетным) движением будет понимать
движение спутника, рассматриваемое при условии, что единствен-
ной силой, действующей на орбите, является сила притяжения Зем-
7
ли, принимаемой за сферу с концентрическим -распределением
плотности (кеплерово движение). Такая точка зрения соответст-
вует принятой в небесной механике.
Кроме вывода основных формул невозмущенного движения,
в этой главе даются некоторые приложения этих законов, а имен-
но: методика определения проекции траектории спутника на по-
верхность вращающейся Земли и постановка задачи о выборе
положения плоскости орбиты.
1.1. НЕВОЗМУЩЕННОЕ ДВИЖЕНИЕ СПУТНИКА
Вывод основных зависимостей
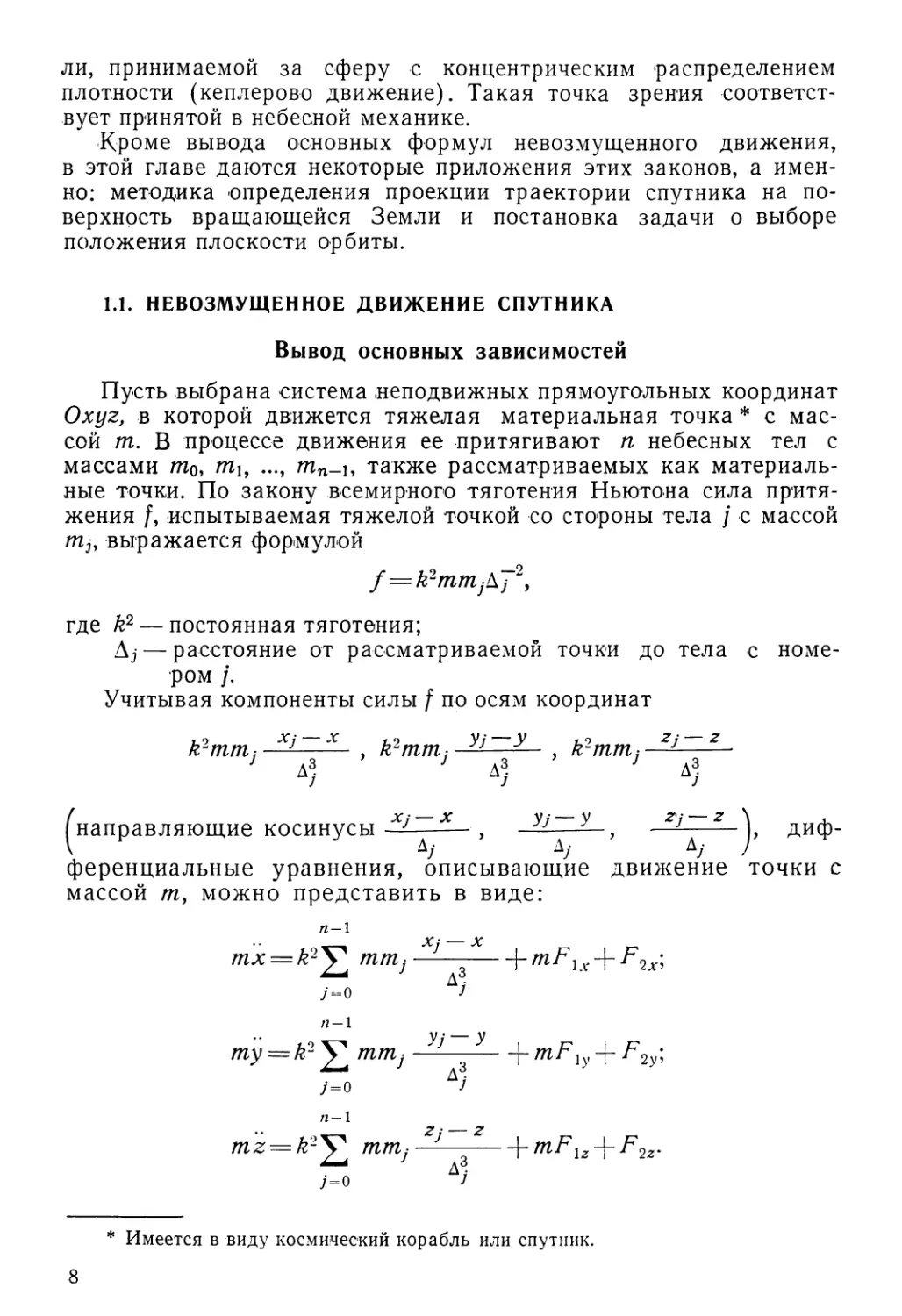
Пусть выбрана система неподвижных прямоугольных координат
Oxyz, в которой движется тяжелая материальная точка * с мас-
сой т. В процессе движения ее притягивают п небесных тел с
массами /Ио, mi, ..., mn_i, также рассматриваемых как материаль-
ные точки. По закону всемирного тяготения Ньютона сила притя-
жения f, испытываемая тяжелой точкой со стороны тела / с массой
т5, выражается формулой
/=&2/тг/пуд“2,
где k2 — постоянная тяготения;
Aj— расстояние от рассматриваемой точки до тела с номе-
ром /.
Учитывая компоненты силы f по осям координат
k2mm: XJ~X. k2mmi yj~y - k'-mm, zj'~z^
J A?
(Xi — X Vi — У Zi — Z \ ,
направляющие косинусы —L-, --I, диф-
ференциальные уравнения, описывающие движение точки с
массой т, можно представить в виде:
п — 1
= з-------------
л-о Д>
п — 1
у : - у
my = k2^^ mnij------4-
7 = 0 Д>
п — 1
mz=k2^ mnij - 7----+
7=0
* Имеется в виду космический корабль или спутник.
8
Эти уравнения легко получить из основного уравнения динамики
для свободной материальной точки, записанного в векторной
форме:
mW=F,
где IF—ускорение точки;
Л —результирующая сила, определяемая суммой
/7=/ + /п/714-^?2, здесь
mFx — добавочная массовая сила, обусловленная влиянием
нецентральности поля сил планет. Эту силу придет-
ся учитывать при движении вблизи планеты;
F2 —сила сопротивления воздуха, которая учитывается
при движении в атмосфере, а также другие силы,
не имеющие потенциальной функции.
После сокращения на массу т уравнения примут вид
л —1
п — 1
y=k2^ mj— ^2/,
д3 т >
/=о
п-1
Z = k2 У т • Zj Z + Fu+ — F22.
(1-1)
Система дифференциальных уравнений (1.1) 6-го порядка яв-
ляется самой общей системой уравнений движения искусственных
космических тел, в том числе и искусственных спутников Земли.
При заданных начальных условиях движения (х0, Уо, ^о, *о, уо, z0)
ее приходится интегрировать численными методами. В частном, но
весьма важном .случае, когда точка движется в поле тяготения
одной лишь планеты (/) и возмущающие силы F{ и — F2 не учи-
т
тываются, систему уравнений (1.1) можно проинтегрировать в ко-
нечном виде.
Перенесем начало координат в центр притяжения, т. е. поло-
жим = = = 0 (влиянием массы ИСЗ на движение планеты
можно пренебречь), тогда уравнения (1.1) примут вид уравнений
невозмущенного движения:
9
х 4- k-m.; —— = 0:
7 гз
y + У_ = 0;
J г3
z 4- krnt: — 0,
7 r3
где r = ]/л24~ У2 + £2 — радиус-вектор
относительно
Умножим первое уравнение на у, а
одного другое. Тогда
d / dy
ху — ух =------ X —-
dt \ dt
(1-2)
рассматриваемой точки
центра притяжения.
второе — на х и вычтем из
dx
У dt ,
Интегрируя это уравнение, получаем
ХЛ---у^=С3.
dt z dt d
(1-3)
Аналогичным способом из второго и третьего и из первого и треть-
его уравнений получим
У—-г —= С1: (1.4)
z dt dt v 7
Эти три первых интеграла системы (1.2)—интегралы площадей.
Если умножить интегралы (1.3) — (1.5) соответственно на гу
х, у и результаты сложить, то придем к равенству
CjX С2у C3z = 0, (1.5х)
т. е. движение материальной точки под действием центральной си-
лы, приложенной в точке О, происходит в плоскости, проходящей
через точку О. Это физически ясно, так как боковые силы по отно-
шению к плоскости, содержащей радиус-вектор г материальной
точки и вектор ее скорости г, отсутствуют. Положение этой пло-
скости в пространстве полностью определяется начальными усло-
виями движения, т. е. начальными координатами точки и началь-
ной скоростью в соответствии с интегралами (1.3) — (1.5).
Двигаясь в плоскости (1,5х), материальная точка сохраняет
свою секторную скорость постоянной. В этом можно легко убедить-
ся, так как, левые части уравнений (1.3) — (1.5) суть проекции
вектора гХг на оси координат. Согласно определению векторное
произведение двух векторов по величине (или модулю) равно про-
10
изведению их модулей на синус угла между ними, т. е. равно пло-
щади параллелограмма, построенного на этих векторах.
В нашем случае г представляет собой радиус-вектор матери-
альной точки, а г —ее скорость. Площадь параллелограмма, пост-
роенного на этих векторах, численно равна удвоенной секторной
скорости. Значит, под действием силы притяжения одного центра
(одной планеты) материальная точка будет двигаться по плоской
кривой, сохраняя постоянной свою секторную скорость и, следова-
тельно, сохраняя постоянными ее проекции на оси координат.
Обозначим секторную скорость, т. е. приращение площади, оме-
та емой радиусом-вектором движущейся точки за единицу време-
ни, через dA/dt. Найдем величину постоянной V2 С, которой она
равна:
=~ТС== “ г°У<>)2 + ^°х°_ -^о)2+(л°Уй —
где
c=l/r Ci -j- Ci И- Сз •
После интегрирования получим
д=3_с(/-/0),
т. е. площадь сектора А растет пропорционально времени t. Оче-
видно, что по такому же линейному закону будет изменяться и
проекция площади сектора А на любую из координатных плоско-
стей. Постоянные Сь С2, С3 —суть проекции удвоенной секторной
скорости С на координатные плоскости Oyz, Oxz, Оху. Если Сь
С2, С3 известны, то, следовательно, не только величина секторной
скорости V2C известна, но и определена также ориентация плоско-
сти, в которой движется точка (ИСЗ). Постоянные С2, С3
обычно заменяют более наглядными параметрами С, i, Q, из них:
i — наклонение плоскости орбиты к основной координатной
плоскости Оху (если рассматривается экваториальная
система координат, то к плоскости экватора);
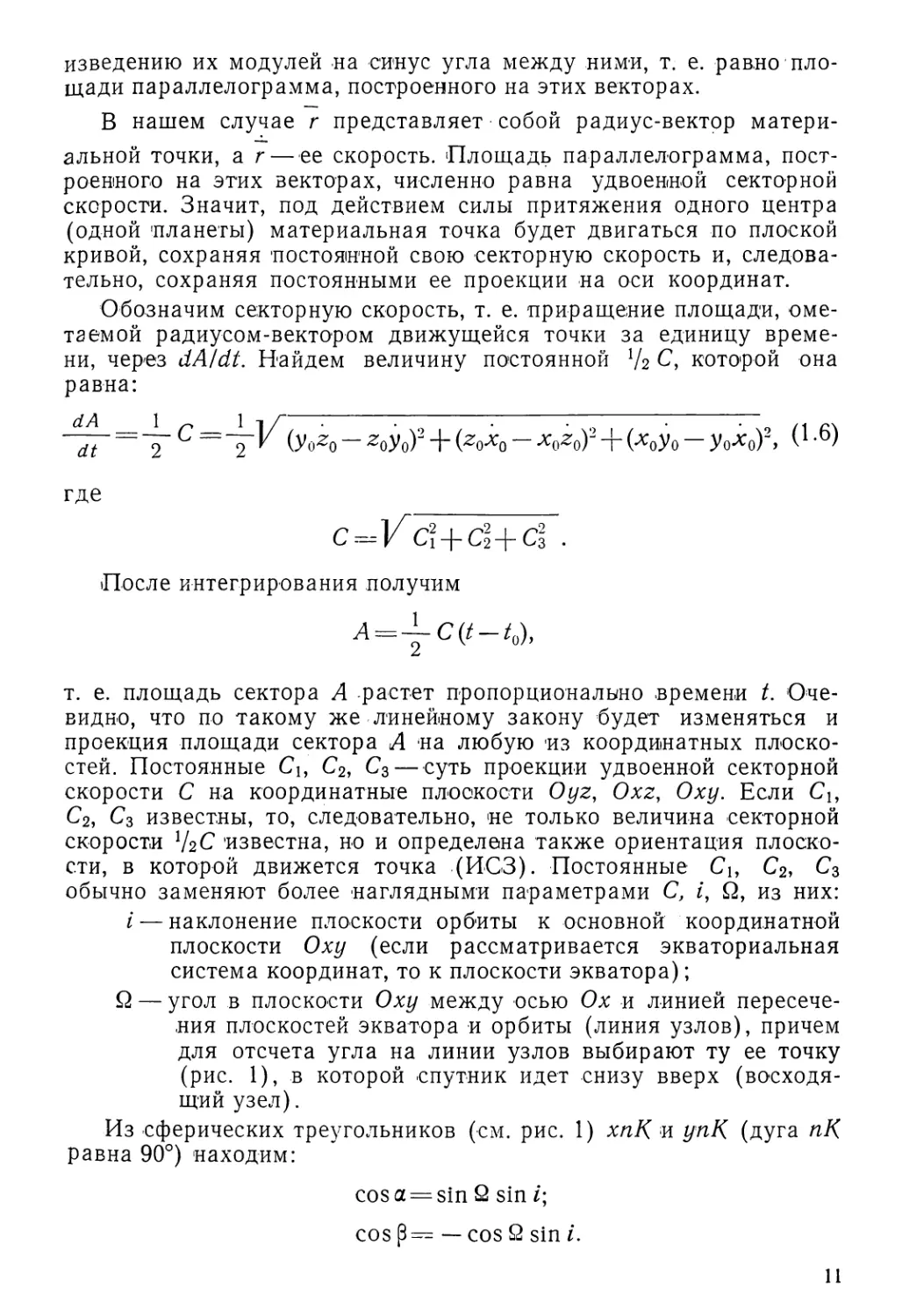
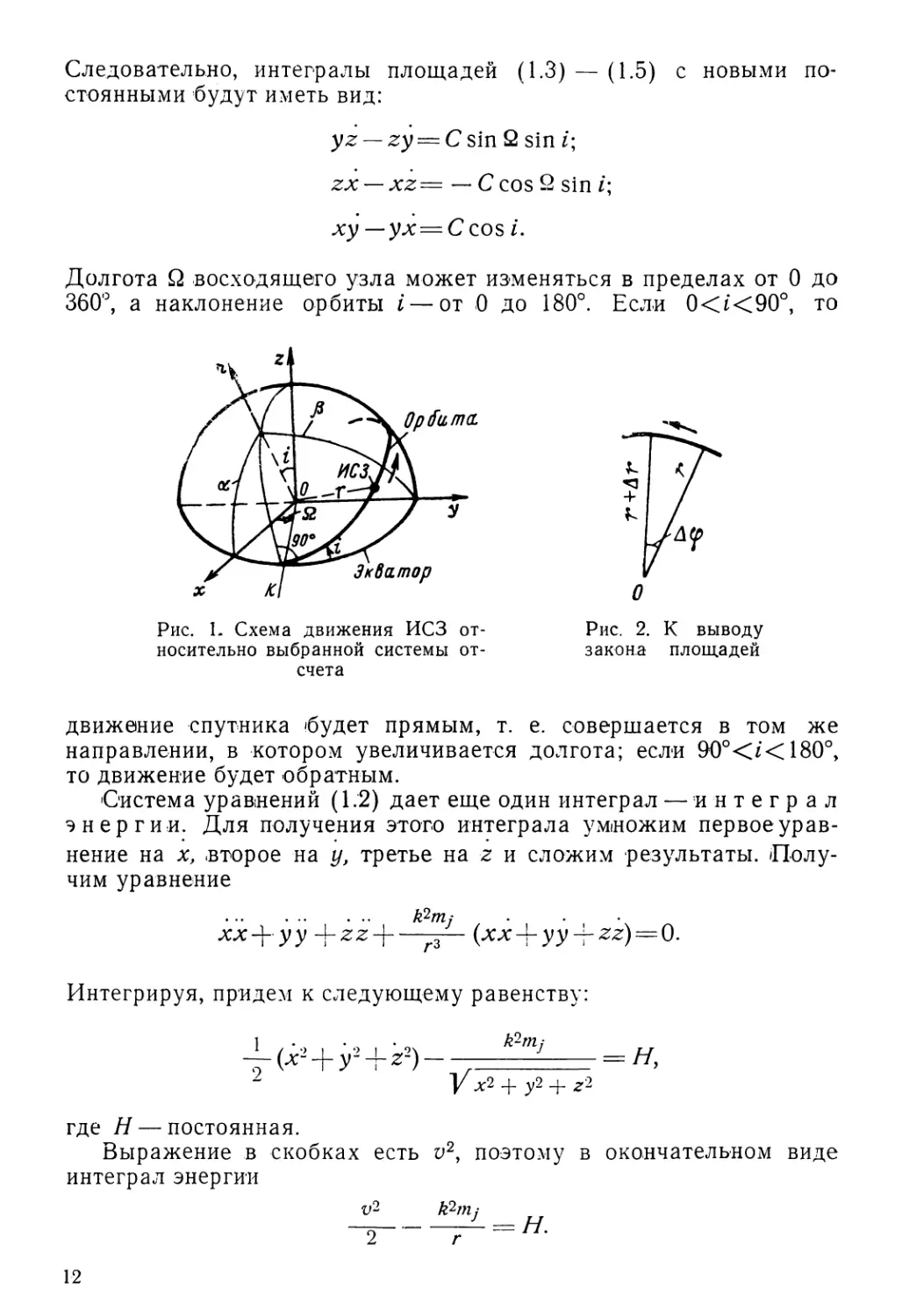
Q — угол в плоскости Оху между осью Ох и линией пересече-
ния плоскостей экватора и орбиты (линия узлов), причем
для отсчета угла на линии узлов выбирают ту ее точку
(рис. 1), в которой спутник идет снизу вверх (восходя-
щий узел).
Из сферических треугольников (см. рис. 1) хпК и упК (дуга пК
равна 90°) находим:
cos а = sin 2 sin /;
cos — cos 2 sin /.
11
Следовательно, интегралы площадей (1.3) — (1.5) с новыми по-
стоянными будут иметь вид:
yz — zy=Csin 2 sin Z;
zx — xz= — C cos 2 sin z;
xy — yx = Ccos i.
Долгота Q восходящего узла может изменяться в пределах от 0 до
360°, а наклонение орбиты i — от 0 до 180°. Если 0<z<90°, то
Рис. 1. Схема движения ИСЗ от-
носительно выбранной системы от-
счета
Рис. 2. К выводу
закона площадей
движение спутника 'будет прямым, т. е. совершается в том же
направлении, в котором увеличивается долгота; есл-и 90°<z< 180°,
то движение будет обратным.
Система уравнений (1.2) дает еще один интеграл — интеграл
энергии. Для получения этого интеграла умножим первое урав-
нение на х, -второе на у, третье на z и сложим результаты. Полу-
чим уравнение
.............. R^mj
xx-^yy +zz-\-------(xx-L-yy-}-zz) = 0.
Интегрируя, придем к следующему равенству:
1 . . k2m;
4-(лНу2+^2)- f 1
V х2 4- у2 + £1
где Н — постоянная.
Выражение в скобках есть у2, поэтому в окончательном виде
интеграл энергии
V2 k2nij
12
Вдоль орбиты сумма кинетической и потенциальной энергий
ИСЗ при движении в центральном поле остается постоянной. Ис-
пользуя интегралы площадей и энергии, можно решить задачу о
движении материальной точки под действием центральной силы
[30].
Запишем закон площадей (1.6) в координатах г и <р (угол по-
ворота радиуса-вектора г в плоскости орбиты):
г\ = С. (1.6')
Этот же результат для рассматриваемых орбит получается непо-
средственно из рис. 2, а именно
г(г + Дг)^-~С=2д.
При А/—* 0 это выражение преобразуется в (1.6').
Приняв у2 = г2 + г2ф2 и k2rrij = \k, можно уравнение энергии
записать так:
Исключив ф и dt с помощью уравнения (1.6х), получим
D С
Введем переменное z=— , тогда
г
или
алее введем константу е\
2— е-.
С2
1 С2
Константа е (позволяет привести полученное выше уравнение к
виду:
dz
= ± dy.
ez — [ z—
\ С J
13
После интегрирования получим:
5х
|Х
z Q
cos (<?+D) =---------
z~~ = ~ecos^-\-D),
где D — 5-е произвольное постоянное.
С2
Положив р= — и вернувшись к переменному г, получим
р-
•------= £ С О S (<р
г р р
1 + е cos (ср 4- £>)
Это уравнение кривой 2-го порядка в полярных координатах
г, ф, отнесенное к фокусу. В нем е — эксцентриситет, р — параметр
кривой.
Для эллипса
^ = ^(1-^), <?<1, Я<0;
для гиперболы
р = аг(е2— 1), г>1, //>0,
где аэ — большая полуось эллипса;
аг — действительная полуось гиперболы.
Для параболы е= 1 и /7 = 0.
При угле <pz =— D полярный радиус г будет минимальным.
Это — перигей орбиты, если центром притяжения является Зем-
ля. При ф« = —jD + л полярный радиус в случае эллипса имеет
максимальное значение — апогей орбиты.
Угол ф = ф + £) = ср—фтс называется истинной аномалией.
Остается .найти зависимость 'О1 от времени. Она будет -различной
для эллипса, параболы и гиперболы.
14
Исходя из уравнения
r2dy=Cdt,
где
Г =---------;
1 + е cos 9
получаем С=У^р,
= Кй dt
(1 4“ е COS 9)2 ^3/2
Введем вместо & новую переменную vj=tg—,
(1.7')
(1-8)
тогда
0- = 2 arctg т);
1 +7)2 ’
а 1—7)2
COS$=---------— .
1 + 7)2
Левая часть уравнения (1.8) преобразуется так:
^9 ___ ___________________________________ 2 (1 + т(2) rfy
(1+е COS 9)2 ~ /1-7)2 \2 - [1+Т(2 + ё?(1_т2)]2
= 2(1 +Tj2) дГт) = 2 ф 1+7)2
(1 + е + (1-<?)т|2]2 (1+0)2 (1 + Г2)2
где
7 =
1 — е
1 + е
С учетом этого преобразования исходное уравнение (1.8) при-
мет вид
_+? г7<1 + ^
(1 + 77)2)2 2р3-'2
dt.
(1-9)
В зависимости от величины и знака у решения (или интегра-
лы) этого уравнения будут различными. Наибольшее практическое
значение имеет случай у^О, который распадается на два вари-
анта:
и
7 < О,
7 > О,
1
е < 1.
15
Однако проще всего интегрировать (1.9) при у = 0 (парабола).
Для .него получим _
(1+т(2)й=-ц^-<й.
р3'2
Интегрирование дает формулу для расчета времени полета по
параболе:
2 КГ (, X х & I 1 х 3
->Ь('-’)“‘8т+т‘в Т'
где т — время прохождения космического аппарата через перигей
орбиты (Ф = 0).
Для эллипса и гиперболы вывод зависимости угла Ф от времени
t с использованием переменной т] довольно сложный и искусствен-
ный процесс. Однако, учитывая фундаментальность получаемых ре-
зультатов, приведем его полностью (30]. Прежде всего заметим, что
1 + Tj2 = Y____________L_ = _L. 1 I 7—1 . 1
(1+Г12)2 (1+Т^2)2 1+л2 "Г 7 *(1+Г(2)2’
поэтому
С (1 + ?]2)^ = 1 С । т — 1 С
J (1-ЬТ-Ч2)2 7 J 1+7V2 7 J(1+7TI2)2’
Применим к первому интегралу в правой части формулу инте-
грирования по частям:
С dr\ = т) । 2 f 7^ = [
j 1 + тд2 1 + 7Т<2 J (1 + 7*q2)2 1 + 7т2
_L 2 f Q--------2 ,
J 1+r,2 J(i+-n2)2
отсюда
f* d^ ____________________ 1 t] [If dr\
J (1 + П2)2 —T ’ 1 + Г12 J 1 + Г(2 ’
Теперь (1.10) принимает вид
С (1 + -р2)dt\ _ т— 1____1 ! ч + 1 С dr: (111)
J (1 + I^I2)2 2-r 1 + rj2 1 2-r J 1 + r,2
Воспользовавшись (1.9) и (1.11), интеграл выражения (1.8) запи-
шем так:
-TL (Z_T)=_J----------------------L + _1±J_?_I (1.12)
p32 (1 +O2 7 1 +7V2 7 JI + 7Ti2
0
16
Так как
7-1 -2г „ 7 + 1 _ 2
у 1 — е 7 1 — е
то (1.12) можно записать следующим образом:
=?___________К —--------е_Л_
„з/2 (1 + е) (1 — е2) J 1 + 7-q2 1 + 71)2
р о
(113)
Из выражения (1.13) непосредственно получаем формулы для
расчета времени полета в случае эл-
липтической и гиперболической орбит.
Д л я э л л и л с а (е< 1, у>0)
2 = 17= arctg 7
J 1 + п2 У Т
Введем новую переменную Е, ис-
пользовав равенство
V'rn = tg~~- (1-14)
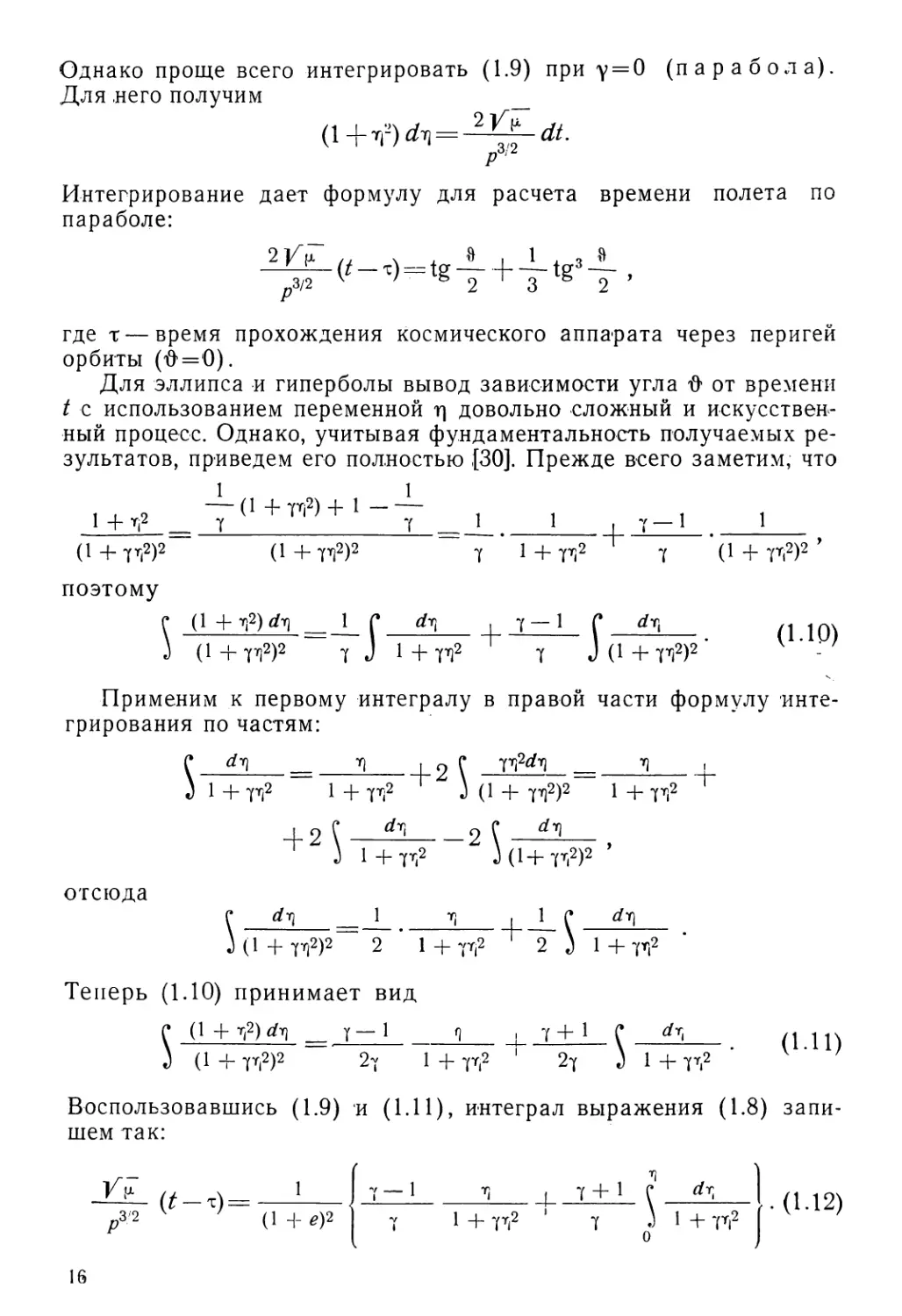
Рис. 3. К выводу формулы
связи между углами эксцент-
рической Е и истинной ф
аномалий
Следовательно,
£=2 arctg (Кт *1);
2-q
1 + 71!2
К7 2 2
1 • Z7
— sin E
и уравнение (1.13) примет влд:
—1!— =---------?______|—1— arctg т]-------е—— sin Е
а™ (1 -^2)3/2 (1 + е) (1 - ^2) | 2у^
или
У (t — т) = Е — е sin Е,
(113')
где Е — эксцентрическая аномалия.
Уравнение (l.li3z) для расчета времени полета по эллиптиче-
ской орбите называется уравнением Кеплера.
Физический смысл Е ясен из рис. 3, на котором кроме движе-
ния спутника по эллипсу показано движение по окружности точки
А, имеющей одинаковую со спутником абсциссу
FB = OB — OF или г cosft = £3cosZ: — а3е.
17
Но из уравнения эллипса следует, что
г дэ(1~е2)
1 4- е cos О
Разделив два последних уравнения одно на другое, получим.
cos 9- — о + g cos Я) (cos £ — е) 1 — £?2
Следовательно, е. е + cos & COS Е = ! 1 4- е cos $
или & 1 “tg2T
Е е + 8 9 1 +‘g2y 1+e-(l-e)tg2 —
1 + *g2 у Э 9 !— 'g2V 1+« + (!—e)tg2 — 1 + е и 1 + tg2T
После очевидных преобразований
1 + tg2 -у + е+е tg2 А - tg2 2-+е tg2 2-=
= l-tg2-|- + e-etg2^ + tg2 2—efg2_L.
(1+Otg2 v=(1-e>)tg2T
и, наконец,
tg — = -|/_L=A-tg —. (1.14)
5 2 у 1+e 5 2
Таким образом, мы получили выражение (1.14), дающее связь
между Е и О’.
Для гиперболы (е>1,у<0)
С df\ = 1 1п 1 + V— ц .
J 1 + 77)2 2 J _ у—
Введем переменную q, определяемую равенством
18
После очевидных преобразований (1.13) получим
(/-т) = е tg <7-In tg(-J-
Таким образом, задача интегрирования уравнений невозмущен-
ного движения (1.2) решена. Как и следовало ожидать, ее реше-
ние зависит от шести параметров: а, е, т, f, Q, (или со), а в
прямоугольных координатах — от xQ, у0, z0, xQi yQ, z0. Траектории
имеют вид эллипсов (периодическое решение) или гипербол (апе-
риодическое решение). Особый случай — парабола (е=1), частный
случай эллипса — окружность (е —0).
Для круговой орбиты
рЭ/2
Е = $ = у a = R‘, t =-------ср,
где <р — центральный угол.
Период обращения для эллиптических орбит, как это следует
из уравнения Кеплера,
14
и не зависит от эксцентриситета.
Заметим, что для эллиптических орбит уравнение (1.8) может
быть легко проинтегрировано с помощью подстановки
Продифференцировав эту формулу, получим
Отсюда следует, что
1Л —е2
d<> = —--------dE.
1 — е cos Е
е, е 4-cos ft
С другой стороны, из выражения cos Е———---------------- имеем
1 + еcos ft
1 1 — е cos Е
1 +-е cos ft 1 — е2
19
Используя это выражение, можно определить радиус-вектор
эллиптической орбиты через эксцентрическую аномалию, т. е.
r = a(\ — е cosЕ).
Далее из уравнения (1.8) с учетом полученных формул имеем
3^ dt=(1 - е cos Е) dE.
а'2
Интегрирование дает уравнение Кеплера (1.13').
Расчетные формулы для невозмущенной эллиптической орбиты
Выше были получены следующие основные формулы, которые
можно использовать для расчета эллиптического движения:
г2& = С —интеграл площадей;
t/2 Ц. т т
—----— = Н— интеграл энергии;
г =-----------общая формула для любого движе-
1 + # COS Я
ния, выражающая радиус-вектор
спутника через р, е,
1 — 1 =—— (Е — е sin£) —уравнение Кеплера для расчета
V
времени полета в эллиптическом
движении;
С2 , /\ , 2//С2
р =-----параметр и е=]/ 1 Н------------экс-
р. У р.2
центриситет.
На практике часто возникает необходимость в использовании
ряда формул, вытекающих из основных зависимостей или получа-
ющихся из геометрических соображений. Приведем некоторые
из них.
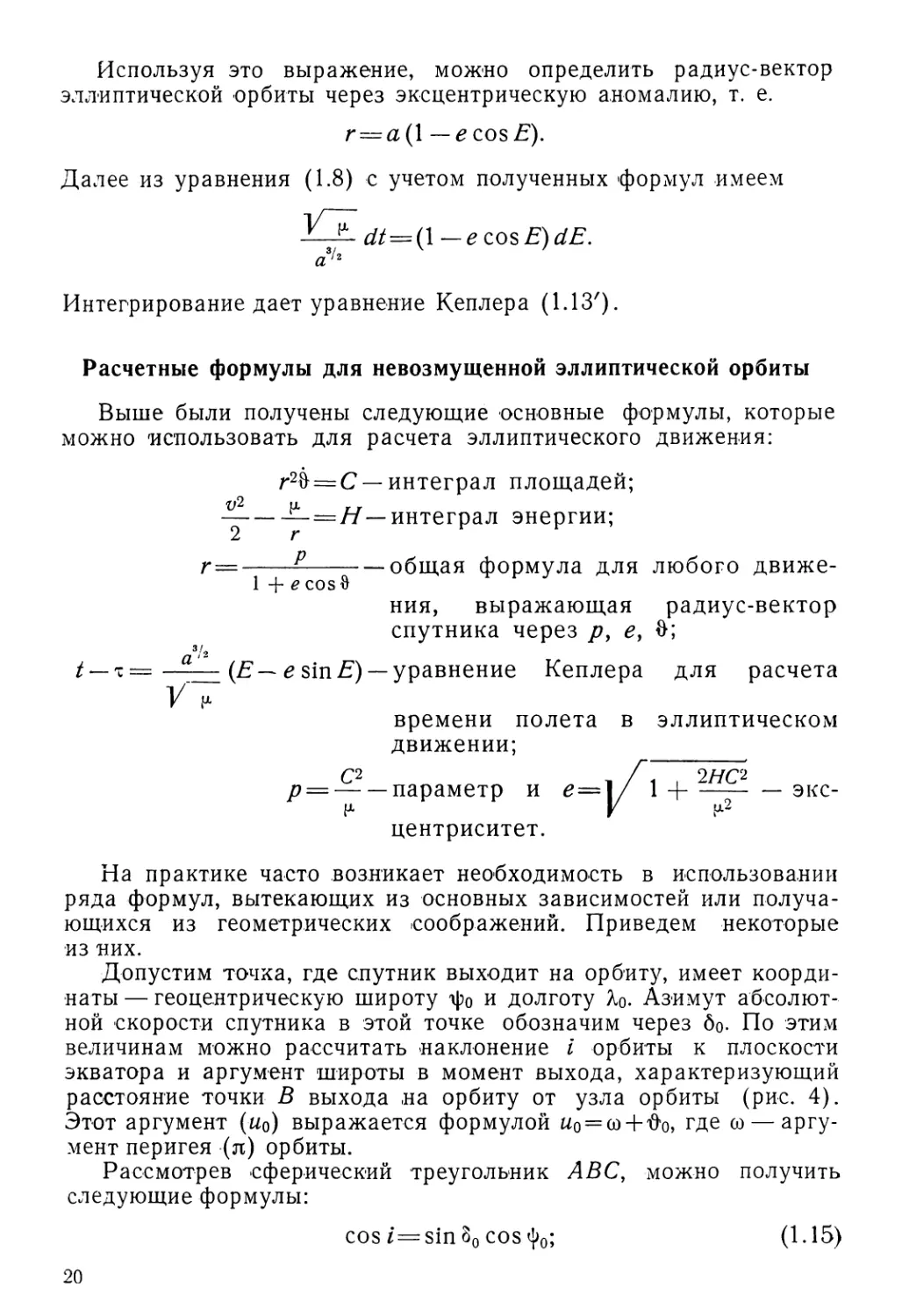
Допустим точка, где спутник выходит на орбиту, имеет коорди-
наты — геоцентрическую широту ф0 и долготу Хо. Азимут абсолют-
ной скорости спутника в этой точке обозначим через до. По этим
величинам можно рассчитать наклонение I орбиты к плоскости
экватора и аргумент широты в момент выхода, характеризующий
расстояние точки В выхода на орбиту от узла орбиты (рис. 4).
Этот аргумент (и0) выражается формулой uo = (d + 4o, где со — аргу-
мент перигея (л) орбиты.
Рассмотрев сферический треугольник АВС, можно получить
следующие формулы:
cos Z=sin So c°s фо;
(1-15)
20
sin
sin ф0
sin i
ctg и0
cos oo
tg^O
(1-16)
Угловое расстояние меридиана точки выхода от узла орбиты
определим из того же треугольника:
sin v0 = sin о0 sin (1-17)
COS '^о
cos к0
COS фо
(1-18)
определить как прямое восхож-
z
Рис. 4. Элементы орбиты ИСЗ
Долготу узла орбиты будем отсчитывать от точки весеннего
равноденствия, при этом ее а
дение узла орбиты. В мо-
мент выхода на орбиту
£o+vo = So, (1.19)
где So — звездное время на
меридиане точки
выхода В на орби-
ту в момент выве-
дения;
vo — дуга от восходяще-
го узла орбиты до
меридиана точ-
ки В.
Отсюда можно опреде-
лить дугу Йо. Очевидно, что
для получения долготы уз-
ла Л, отсчитываемой от ка-
кого-либо земного меридиана, необходимо к й0 добавить величи-
ну (—So ), где So — соответствующее звездное время для выбран-
ного меридиана.
Полученные формулы (1.15—1.19) справедливы, конечно, не
только для точки выхода, но и для любой точки на любой орбите.
Теперь найдем выражения для абсолютных координат х, у, z
и их производных по времени через элементы орбиты Й, со, I, а, е,
т. Для этого рассмотрим сферические треугольники хАВ, уАВ и
zAB, образованные осями координат и дугой АВ. Используя тео-
рему косинусов для направляющих косинусов радиуса-вектора г
точки В, получаем
cos (rx) = cos и cos 2 — sin и sin 2 cos i\
cos (;*y) = cos и sin 2-|- sin и cos 2 cos /;
cos (rz) = sin it sin i.
(1.20).
21
Следовательно,
(1.21)
(1-22)
x=r (cos и cos 2 — sin и sin 2 cos Z);
у = r (cos a sin 2 +sin tt cos 2 cos Z); >
z = r sin zz sin Z.
Дифференцируя эти уравнения по Z, имеем
х = г ~— г (cos 2 sin zz -J- sin 2 cos zz cos Z) &;
r
y = r —— r (sin 2 sin zz — cos 2 cos zz cos Z) 4;
r
z = r cos zz sin Z-4 Ц- — r.
r
Здесь u = + '& = ^ (Z); r = r (Z).
Полученные формулы (1.21), (1.22), (1.13z), (1.7Z) и (1.14), т. e.
выражения абсолютных координат х, у, z и их производных х, z
через параметры (элементы) орбиты Q, со, i, а, е, х и время Z
является решением системы уравнений невозмущенного движения
космического тела (спутника Земли). Для каждой точки простран-
ства, в которой находится спутник, по формулам (1.21) и (1.22).,
зная пять геометрических параметров, определяющих орбиту, и
один кинематический (т), для любого момента времени можно
рассчитать абсолютные координаты и скорость спутника.
Заметим, что часто вместо параметра т вводят более удобный
параметр Л40.
Обозначим
М=Е — е sin 23=zz (Z — Zo) 7И0,
где М — средняя аномалия;
п=]^ticz-3/2—среднее движение;
Zo —какой-либо определенный (начальный) момент
времени;
~MQ = n(fQ — т) — средняя аномалия для момента Zo, так назы-
ваемая с р е д н я я аномалия эпохи.
Геометрический смысл параметров М и Л40:
М —угол в плоскости орбиты (отсчитываемый от некоторого
начала), который получится для спутника в момент Z,
если считать, что он движется по орбите с равномерной
угловой скоростью п;
Л40 — параметр, заменяющий х и дающий значение М для
момента Zo.
22
Найдем выражения для параметров орбиты через элементы в
конце активного участка полета: 0О (угол наклона вектора ско-
рости к горизонту) и Го-
На основании формул
; Л=С; Р =
1 -г е cos 9
составляющие вектора скорости можно выразить так:
по радиусу-вектору
‘Vr = r = J//r~esin^; (1.23)
по трансверсали
= (1 + <? cos &). (1-24)
Отсюда модуль скорости
^2 = JL(i + 26COsa + <?2), (1.25)
Р
скорость в перигее (максимум)
.%= ]//-^-(l+e), (1.26)
а скорость в апогее (минимум)
%= 1/^(1-4 (1-27)
г р
Для радиуса-вектора спутника в перигее (минимум) имеем
гя=;й(1 — ё),
в апогее
г„=а(1 + ^).
Подставив значения сг..
р = а (1—е2), получим
« в уравнение энергии с учетом, что
t/2
т
~=н=—~
г 1а
(1.28)
(1-29)
(1.30)
Таким образом, полная энергия спутника зависит только от вели-
чины полуоси а его орбиты.
23
/Подставляя в (1.30) вместо величин v и г их значения vQ и г0 в
точке выхода на орбиту, получим
<131>
где
. W20
к =----- .
JJL
Величина k — квадрат отношения скорости vQ в начальной точ-
ке к скорости на круговой орбите с радиусом г0.
Г V2
Действительно, при k = —— = 1 на основании формулы (1.31)
р-
п = г0, что соответствует круговой орбите. В этом случае
<и0= 1/ — = 1/ — — const.
К r0 V а
Скорость полета укр по круговой орбите (r = const) постоянная и
выражается формулой
^KP= jZ"
Эта скорость называется круговой скоростью на рас-
стоянии г от центра притяжения.
Если в формуле (1.31) положить k = 2, то полуось эллипса а
становится равной бесконечности, т. е. эллиптическая орбита пре-
вращается в параболическую. При этом
называется параболической скоростью на расстоянии г
от центра притяжения.
Если в формуле для круговой скорости принять r=R (где R—
радиус Земли), то получим первую космическую ско-
рость
по аналогии
называется второй космической скоростью.
24
Найдем выражения для элементов орбиты р и е через началь-
ные параметры г0, 0о, определяющие эллипс.
Поскольку
гкЪг. = угрр = гъ cos 6
(где 0 — угол наклона вектора скорости к местному горизонту),
то параметр орбиты
p = rQk cos2G0. (1.32)
Заменив в формуле (1.32) параметр р его выражением
—r° (1—е2), получим для эксцентриситета е следующую фор-
2 — k
мулу:
е = — I)2 cos2 60H-sin2 60. (1.33)
Угловое расстояние (истинная аномалия) точки выхода от пе-
ригея орбиты определится из полярного уравнения эллипса через
cos&0 = — (£cos200- 1), (1.34)
е
а угловое расстояние перигея от узла орбиты будет
и = и0 — &0. (1.35)
Если в конце активного участка 0о = О, то перигей орбиты совпа-
дает с концом участка, при этом ,0'о=0.
Апогейное расстояние и эксцентриситет определяются по фор-
мулам:
(1-36)
2 — к
e=k-l. (1.37)
Период обращения
= (1.38)
W УУ''2-"’
Выбор положения плоскости орбиты
Положение орбиты относительно Земли определяется широтой
и долготой точки выхода на орбиту и азимутом вектора скорости
в этой точке.
Положение плоскости орбиты относительно эклиптики и, следо-
вательно, относительно звезд и Солнца характеризуется наклоне-
нием орбиты к плоскости экватора и долготой узла Qo. Наклонение
орбиты однозначно определяется азимутом (до) вектора скорости
в точке выхода и широтой (ф0) этой точки. Долгота узла опреде-
25
ляется этими же величинами и, кроме того, временем выхода на
орбиту. Время выхода необходимо принимать во внимание, по-
скольку запуск производится с вращающейся в абсолютном про-
странстве Земли.
Для удобства используем звездное время S, которое дает непо-
средственно угол поворота земного шара относительно неподвиж-
ных осей координат.
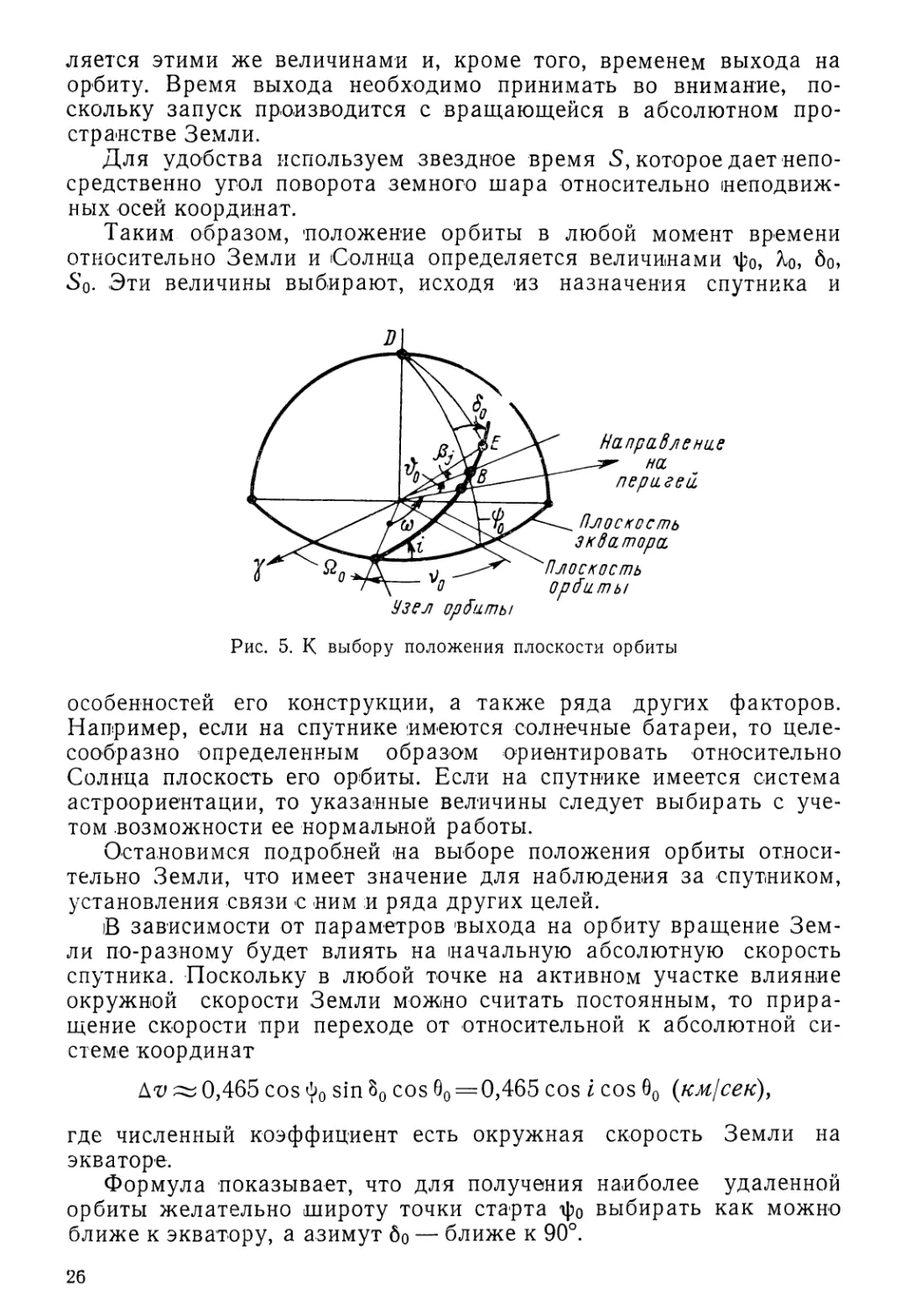
Таким образом, положение орбиты в любой момент времени
относительно Земли и Солнца определяется величинами ф0, 6о,
So- Эти величины выбирают, исходя из назначения спутника и
В
Узел орйиты
Направленае
на
перигей.
Плоскость
экватора.
Плоскость
opdam ы
Рис. 5. К выбору положения плоскости орбиты
особенностей его конструкции, а также ряда других факторов.
Например, если на спутнике имеются солнечные батареи, то целе-
сообразно определенным образом ориентировать относительно
Солнца плоскость его орбиты. Если на спутнике имеется система
астроориентации, то указанные величины следует выбирать с уче-
том возможности ее нормальной работы.
Остановимся подробней на выборе положения орбиты относи-
тельно Земли, что имеет значение для наблюдения за спутником,
установления связи с ним и ряда других целей.
В зависимости от параметров выхода на орбиту вращение Зем-
ли по-разному будет влиять на начальную абсолютную скорость
спутника. Поскольку в любой точке на активном участке влияние
окружной скорости Земли можно считать постоянным, то прира-
щение скорости при переходе от относительной к абсолютной си-
стеме координат
Д-и 0,465 cos б0 sin &о cos % = 0,465 cos i cos 90 (км)сек),
где численный коэффициент есть окружная скорость Земли на
экваторе.
Формула показывает, что для получения наиболее удаленной
орбиты желательно широту точки старта ф0 выбирать как можно
ближе к экватору, а азимут 60 — ближе к 90°.
26
Обозначив через фу и Ху соответственно широту и долготу точки
Е на Земле, над которой в данный момент tj пролетает спутник
(над этой точкой в момент tj спутник находится в зените), можно
из рассмотрения треугольника DBE (рис. 5) получить следующие
формулы:
sin фу=sin фо cos Р/4" cos sin cos о0; (1.39)
+ ДАу — дХу-вР; (1 -40)
COS — sin ф,- sin Фо
COS ДХ .=-------------------
J COS фу COS ф0
(1.41
sin py sin oo
sin ДХ —---------------
J COS фу
(1-42)
где ДЛу вр = (о3 (^—M -И co3—абсолютная угловая скорость вра-
щения Земли.
Если орбита спутника близка к круговой, то можно приблизи-
тельно считать, что
(1-43)
Следует учесть при использовании формул (1.39) — (1.43), что
если исходным азимутом является азимут вектора скорости отно-
сительно вращающейся Земли (6о), то необходимо перейти к аб-
солютному азимуту So по формуле
. 0,465 cos фо cos Ьо п л ч
% ~ °о 3--------------- • (1 -44)
v cos 0О
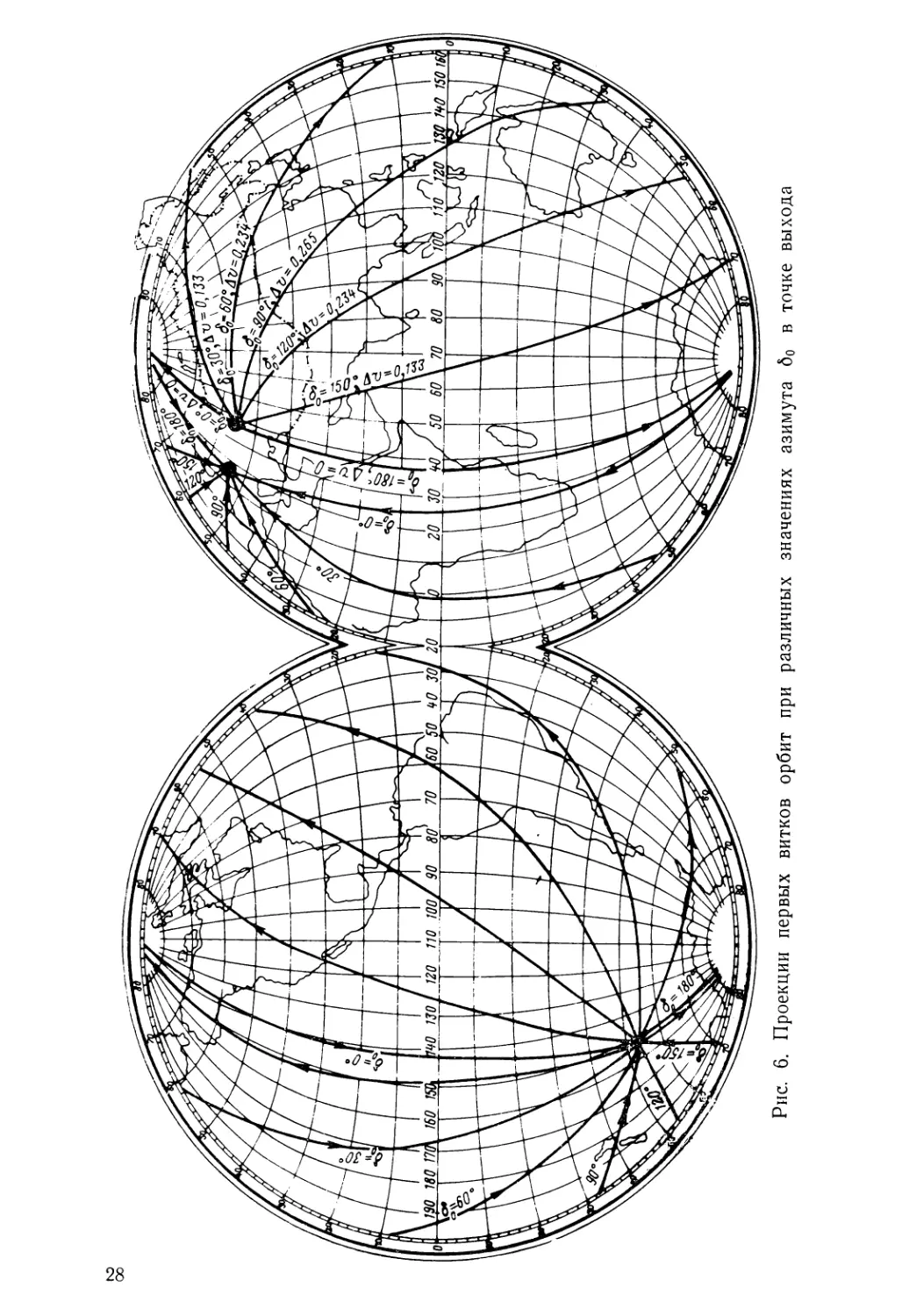
По приведенным формулам были рассчитаны проекции орбит
на Землю при различных значениях азимута в точке выхода, пер-
вые витки которых, соответствующие изменению угла ру от 0 до
360°, изображены на рис. 6. Для получения проекций других вит-
ков нужно кривые сдвинуть по долготе на запад, на величину
(для низких орбит)
дх0 15,22 (л—1) г*,
где п — порядковый номер витка, Th — период в часах (/г).
1.2. ВЫВЕДЕНИЕ СПУТНИКА НА ОРБИТУ
БЕЗ ДОЖОГА ТОПЛИВА
Рассмотрим случай выведения спутника при непрерывном ак-
тивном участке траектории ракеты-носителя. Очевидно, от выбора
элементов конца активного участка, а также от принятого закона
движения ракеты-носителя будет зависеть форма орбиты и ее
удаление в различных точках от земной поверхности. Для многих
видов спутников важно, чтобы перигей их орбит располагался как
27
Рис. 6. Проекции первых витков орбит при различных значениях азимута б0 в точке выхода
можно выше. В связи с этим будем искать максимум высоты кон-
ца активного участка при заданной конечной скорости и заданном
направлении этой скорости. При этом считается, что для получения
наибольших перигейных расстояний при заданном апогее горизон-
тальное .направление вектора скорости в конце активного участка
будет наиболее выгодным. В этом случае перигей совпадает с кон-
цом активного участка.
Не будем останавливаться на методах расчета самого актив-
ного участка, предполагая его известным читателю по уже опубли-
кованным работам (например, в работе [2]).
Определим наивыгоднейший закон движения ракеты-носителя
на активнОхМ участке, т. е. найдем оптимальную программу измене-
ния ее угла тангажа фПр, не учитывая переменный расход топлива.
Рассмотренные ниже методы являются дальнейшим развитием ра-
боты '[24]. ОНИ ПОЗВОЛЯЮТ ДОВОЛЬНО ПРОСТО ПРОИЗВОДИТЬ ВЫбор фПр,
не прибегая к электронной счетной машине.
После нахождения оптимального <рПр его можно использовать
при точном расчете активного участка для конкретного носителя.
Наивыгоднейшая программа для угла тангажа
при постоянном расходе топлива на активном участке
Будем исходить из системы дифференциальных уравнений дви-
жения, учитывающих кривизну Земли и изменение силы тяжести
с высотой [24]: du 9 =Р cos ср — v2x; dt _ dw . f n 9 ~=P sin? + 2v2y-go; dt „ (1-45) dx — U\ dt dy —- = dt J
где
v2=;^l .
R ’
g0 —ускорение силы тяжести на нулевой высоте;
/? — радиус Земли;
р —ускорение ракеты;
ср — угол тангажа.
Систему уравнений (1.45) легко получить из обычных уравне-
ний плоского движения ракеты, записанных в абсолютной прямо-
угольной системе координат с началом в точке старта, осью Оу,
направленной по вертикали вверх, и осью 0%, направленной в
сторону активного участка.
29
Разложив в степенной ряд выражения для проекций ускоре-
ний силы тяготения
R^x
S JC 5*0 >
[*2 + (У + Я)2]3/2
g,=g„ g(y+R) „
[Х2 + (у + Я)2]3 2
и ограничившись первыми членами разложения, получим
gjt==g<> -ц ’
gy^go~^go~ •
J\
В частном случае, когда .рассматривается двухступенчатая раке-
та, за начальную точку будем принимать конец активного участка
1-й ступени, приписав ей индекс «1».
Поставим вариационную задачу о нахождении функции <р(/)
при заданных граничных условиях, дающей максимум высоты
Лк=Ук + ^> (1-46)
где индекс «к» относится к элементам конца активного участка.
Следует заметить, что поставленная задача эквивалентна за-
даче об определении функции ср(/), дающей максимум скорости
при заданной высоте [24]. С точки зрения вариационного исчисле-
ния— это задача на условный экстремум с дифференциальными
связями. Связями являются уравнения движения (1.45) носителя.
Составим функцию Лагранжа
//=4- х2ф2 4- х3ф3 х4ф4.
где Ль Х2, Аз, М--некоторые дифференцируемые функции по
времени
, da . 0
=-----(- v2x —р cos ср;
dt
ф2 = ~Г - 2v2y -Р sin ?+go',
. dy
dt
30
Функционал, максимум которого будем искать, имеет вид
/=АК+ J Hdt. (1.47)
О
Запишем первую вариацию для /•
87=8/гк+ Wdt, (1.48)
o'
где
=5ук + -^- 8х,.;
К J К I К “
Н'иЪи + H'wZw 4- Н'уЪу + Н'хЪх + Я- ом + f/d>w +
Исключив производные 6м, би>, бу и бх путем интегрирования
соответствующих выражений по частям, получим
8^Ук+^ Ч< + №<“+ Р-зМ'Ч
t
+ [>-MK+ J [(-л3-Х1)8«-(Х4+Х2)8№+(^2--;.3)8х-
О
— (2v2a24-X4) +/> (Xj sin ср — Х2 cos с?) Bep] dt. (1.49)
Экстремальное значение функционала I соответствует равенст-
ву нулю его первой вариации б/.
Приравнивая нулю множители, стоящие под знаком интеграла
перед вариациями б^, dw, бх, бу, получим систему дифференци-
альных уравнений для величин Xi, Х2, %з, М и конечное соотношение
для <р:
а1 + ^з—0;
хз — v2Xj = 0;
Х4 + 2v2X2 = 0;
>4 sin ср —Х2 cos ср = о.
(1.50)
Из последнего уравнения
(1-51)
31
Решение системы уравнений (1.50) имеет вид:
\ = С1 cos v/-f“ ^2 sin
л2 = С3 shi/'2vt-\-C^ ch 2 v/;
(1.52)
A3= cxv sin V/— C2V COS v/;
X4 = -c3 ]/2 V Ch ]/~2v/- Ci У 2» sh ]/Tvf
Уравнения (1.50) и формула (1.51) аналогичны соответствую-
щим выражениям в работе [24]. Выберем следующие граничные
условия. В конце активного участка будем фиксировать вектор
скорости (ик, ^к), в начальной точке — модуль скорости, т. е. в
конце активного участка 1-ой ступени должно соблюдаться соот-
ношение
= «1 + = const, (1.53)
что дает для вариаций и 6wi связь
8и1==-ЛЬ_ 8W1. (1.54)
и1
Координаты х, у начальной точки также фиксируем.
Такой выбор граничных условий упрощает решение задачи. Он
является достаточно оправданным, так как задание постоянного
модуля скорости в начальной точке вместо функциональной зави-
симости скорости от высоты и угла наклона траектории основано
на компенсации влияния изменения скорости в начальной точке
на высоту выхода hk влиянием соответствующего изменения высоты
(и угла) в этой же точке.
За начальную точку удобно принимать конец активного участ-
ка первой ступени, так как на первой ступени полета, проходящей
в плотных слоях атмосферы, выбор <рпр производится из условия,
чтобы углы атаки были бы близки к нулю, а не из условия полу-
чения максимума высоты точки выхода.
Рассмотрим случай двухступенчатой ракеты-носителя. За на-
чальную точку будем принимать конец активного участка первой
ступени. Программу на этом участке будем считать заданной, точ-
нее, зависящей от одного параметра — максимального угла атаки
ат. Выбором величины ат определяется направление касательной
к траектории в начале полета второй ступени, т. е. угол 0ь
В зависимости от полученного в результате решения вариаци-
онной задачи в каждом конкретном случае значения угла вектора
скорости Оэкстр будем поворачивать весь первый участок траекто-
рии так, чтобы угол 01 совпал с 01 экстр, и затем с уточненными
значениями Vi, у! повторим расчет. Можно полагать, что такой
способ дает хорошее приближение к экстремальной программе для
всего активного участка в целом.
32
Подставляя 6ui из формулы (1.54) в выражение (1.49) и учи-
тывая, что вариации dwK, 6wK в конце активного участка равны
нулю, а дхи и — произвольны, получаем
ХИ-^-Х21 = 0.
«1
Так как tw1 = sin и cos то
tg 9i=-“=tg?i;
Л11
Л ___ хк
Эк— R
С другой стороны, из системы (1.52) следует, что
при / = 0
^n = Ci; 1
^21“ ^4 J
при t = tK
XiK = C1COSv/K-|-C2Sinv/K;
X2l(=C3shl/r2v/K4-C4 ch/2v/K;
^Зк=С^ sin C2v COS v/K;
X4k= — C31^2 v chl^2 v/K — С4У 2 v sh V2 v/K.
(1.55)
(1.56)
(1.57)
(1.58)
Из условий (1.56) и (1.58) получаем два уравнения для четы-
рех неизвестных коэффициентов Сь С2, С3, С4:
sin v/K — C2V cos vfK= — ~ ;
C3/2vch/2v/K-)-C4/2>sh /2< = 1
(1.580
или, разрешая (1.58') относительно C2 и C3, имеем
—- + sin vtK
c2=—-------------;
\ cos »tK
, 1 - C4 V 2\ sh ]/24<
]/2 ч ch 1^2 4tK
2-234£
33
Недостающие два уравнения найдем, используя систему урав-
нений движения (1.45). Из первых двух получим
J р sin dt — g$tK — wK + Aw
= tg 9! = -°—----------------
J pQQsydt—uK -|- Au
0
где
Aw=2v2 f у dt
о
Lu = —v2 xdt
о
► — поправки, учитывающие непарал-
лельность поля сил тяготения и
изменение ускорения g с высотой;
(1.59)
(1.60)
. Xq 1 С3 sh 2 'd С*4 ch ~\f2'd л ci\
? = arctg-- = arctg -------- 4 . -----. (1.61)
Xj Cj cos'd + C2 sin
Величины wK и ик в (1.59) задаются.
Учитывая, что величины ,и Au малы и играют роль попра-
вок, можно в первом приближении их отбросить. Тогда (1.59)
можно рассматривать как одно из двух недостающих уравнений
для определения произвольных постоянных Сь С2, С3 и С4 (или
вместо С4 можно взять tg0i, так как С4 = Сг tg 0i). Четвертое и
последнее уравнения есть условие (1.53), в котором щ и w{ пред-
ставляют собой числитель и знаменатель (1.59). Таким образом,
в первом приближении для решения задачи о выборе программы
Ф (/), дающей наибольшую высоту активного участка при задан-
ных значениях проекций скорости ик и wK, необходимо определить
величины Ci, С2, С3 и tg 0Ь используя уравнения (1.58), (1.59) и
(1.53). Для этого можно задаться несколькими значениями коэф-
фициента Ci (через который выражаются все остальные неизвест-
ные С2, С3 и С4) и для каждого из них по (1.59) найти подбором
соответствующее ему значение 0Ь Подставляя затем найденные
пары значений 01 в формулу (1.53), среди ряда получаемых щ
выберем значение, соответствующее заданному. Далее вычисляем
приближенные значения координат х, у по формулам
~ t
х=хх + zzi^+ ( \ pcoscpd;;
( \ ° (1-62)
+ J^sinco-go)^.
о о
Полученные значения % (/), у (ty используем для вычисления
поправок Au и Aw, с которыми вся задача решается уже во вто-
34
ром приближении. Одновременно уточняются, как сказано выше,
задаваемые vh у\. Кроме того, используя хк, Ук, можно, если
желательно, точнее получить горизонтальное направление векто-
ра скорости в конце активного участка (при заданном 0К = О), уточ-
нить по формуле
wK =
R + Ук
(1.63)
Двух приближений для решения задачи достаточно. Оконча-
тельные значения координат вычисляются по формулам:
х = х\u'\t§ р coscpdS-}-Дх;
о о
t 7]
у = psin —Ду.
О о
(1-64)
Здесь х[, у[, и\, Wi — исправленные в результате первого (или
второго, если потребуется) решения задачи величины;
Дл =
J d^\ у ^xdc]
о о
Ду = \ dv\ С 2v2ydl.
0 0 )
(1.65)
Для контроля полученных расчетами результатов целесообраз-
но после нахождения фПр (0 проинтегрировать численно с получен-
ным его значением уравнений движения (1.45).
Можно значительно упростить задачу, практически без сниже-
ния точности, если программу <рПр (0 находить для плоской Земли
и параллельного поля сил тяготения, а в уравнениях движения
(1.45) учитывать все добавочные члены, рассматривая их как по-
правки—известные функции времени.
Для плоской Земли вместо (1.59) получаем
к
p sin arctg
i=tg(11=°—
“1 ZK
\ p cos a
0
dt — gQtK — Wk + bw
(1.66)
dt -
где величину C2 подбирают с таким расчетом, чтобы удовлетво-
рялось уравнение (1.53), а Ди и определяют по (1.60), как и в
первом варианте задачи.
2*
35
Если принять, что ускорение ракеты-носителя р = у- р- >
где п0 — начальная перегрузка, 0 — относительный расход топ-
лива ([3 = G/G0), то интегралы j р sin <? dt и f pcosvdt можно
о о
записать в виде
К
\ р sin arctg —|-tg9A^=^-2[—— In I 2(aX)1/2 +
J \ C2 ) />2 L a1'2 I
0
IO i a I i « i I 2(cX)1/2 , 2c , , 1'k
+2“+,,| +t+‘v
(1.67)
Л t ( t I . ,, \ - nngoc2 . I 2(cX)1/2 , 2c , ,
\ p cos arctg ( —+ tgfj1 ]dt=-^— In ----+ r + 4
J \ C>2 / bcl'£ Iх x Io
0
Здесь:
X=ax2-\-bxJrc;
a = l-|-pC2tg01; ~b=— PC2; x = a-\-bz\ z = ^- + tg01;
C2
1 i гл CL -«I cfi
a=—; й=—2—; .
b2 b b^
По полученным зависимостям были проведены расчеты одного
из возможных вариантов двухступенчатой ракеты-носителя, для
которой предварительно определялась функциональная связь эле-
ментов активного участка в момент разделения ступеней от угла
вектора скорости, зависящего от угла атаки ат.
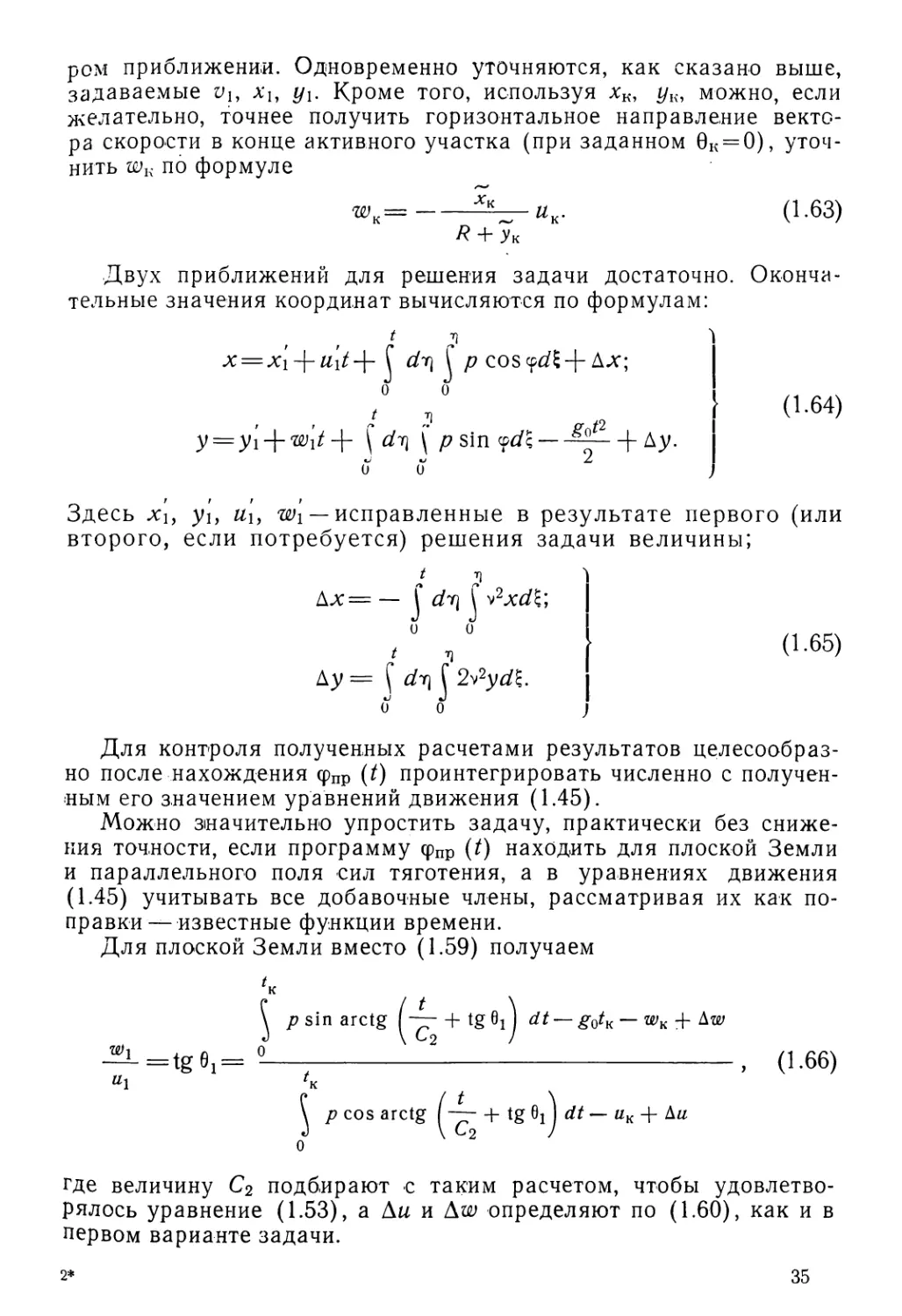
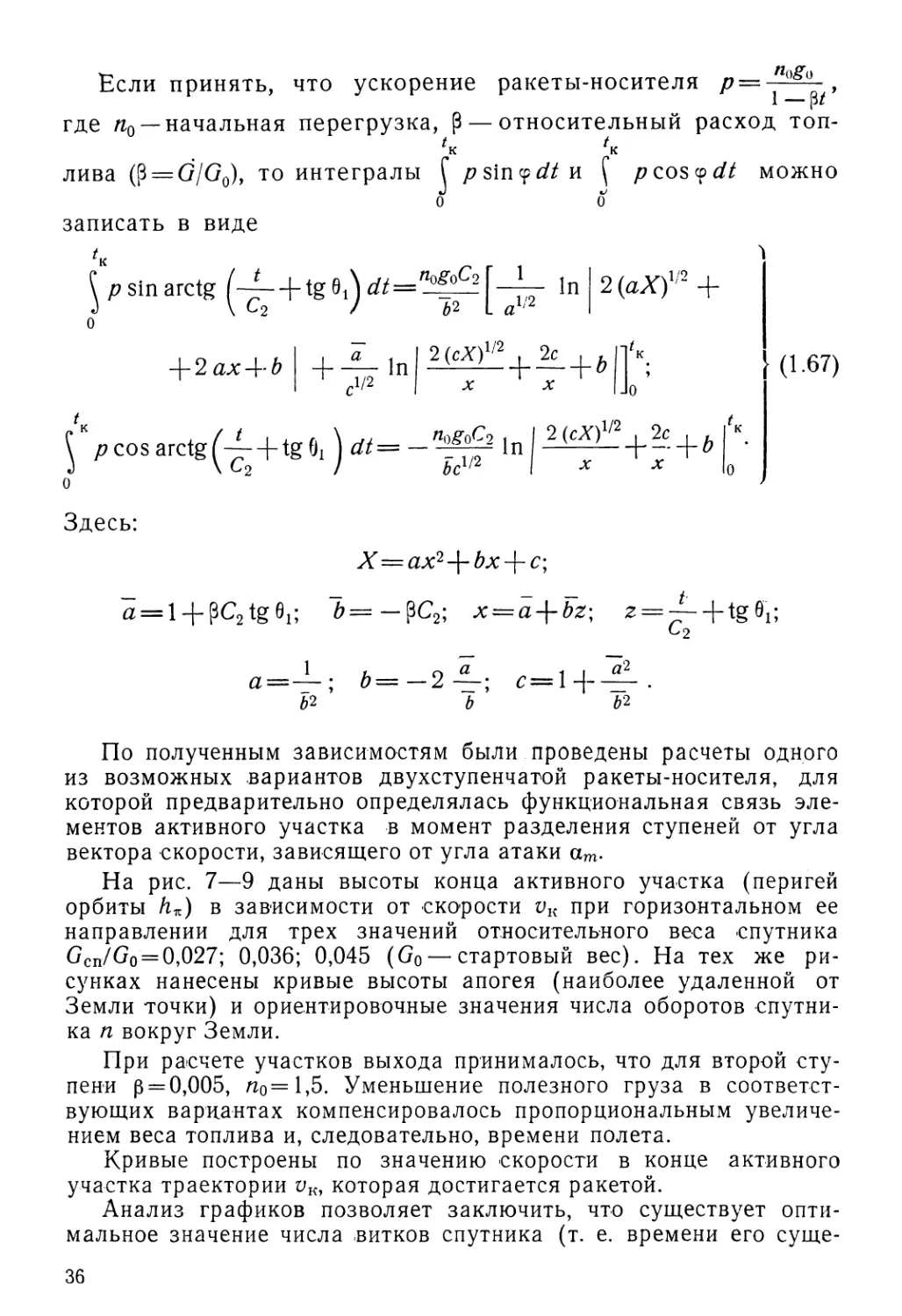
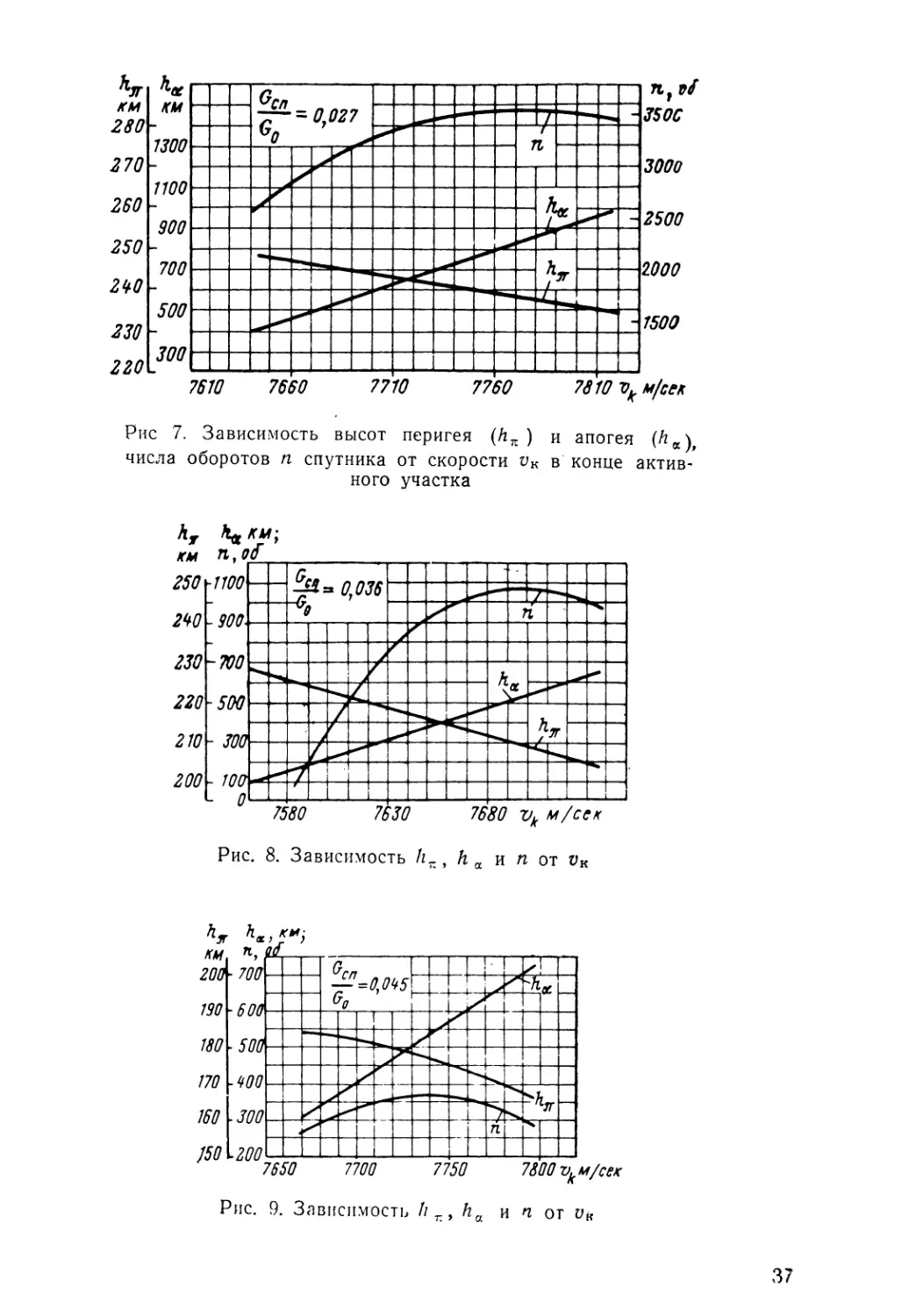
На рис. 7—9 даны высоты конца активного участка (перигей
орбиты Лтс) в зависимости от скорости vK при горизонтальном ее
направлении для трех значений относительного веса спутника
Gcn/Go = O,O27; 0,036; 0,045 (Go — стартовый вес). На тех же ри-
сунках нанесены кривые высоты апогея (наиболее удаленной от
Земли точки) и ориентировочные значения числа оборотов спутни-
ка п вокруг Земли.
При расчете участков выхода принималось, что для второй сту-
пени р = 0,005, пъ= 1,5. Уменьшение полезного груза в соответст-
вующих вариантах компенсировалось пропорциональным увеличе-
нием веса топлива и, следовательно, времени полета.
Кривые построены по значению скорости в конце активного
участка траектории vK, которая достигается ракетой.
Анализ графиков позволяет заключить, что существует опти-
мальное значение числа .витков спутника (т. е. времени его суще-
36
Рис 7. Зависимость высот перигея (Нк ) и апогея (Ла),
числа оборотов п спутника от скорости ик в конце актив-
ного участка
37
ствования), которое отвечает вполне определенным значениям h
и Ла в каждом случае. Для рассматриваемых вариантов оптималь-
ные орбиты представляют собой довольно вытянутые эллипсы,
причем вытянутость увеличивается с уменьшением веса спутника.
Методика расчета наивыгоднейшей программы (фПр)
на активном участке
Проведенные расчеты траекторий выхода на орбиту при
р = const показали, что нахождение оптимальной программы выхо-
да представляет собой весьма трудоемкий процесс. Особенно много
времени затрачивается на вычисление методом подбора интегра-
лов, входящих в уравнения (1.66), и получение требуемых попра-
вок. <С другой стороны, выбор программы и расчет траектории
выхода должны выполняться достаточно точно, так как при этом
определяются оптимальные характеристики орбиты или, если орби-
та задана, максимальный вес спутника.
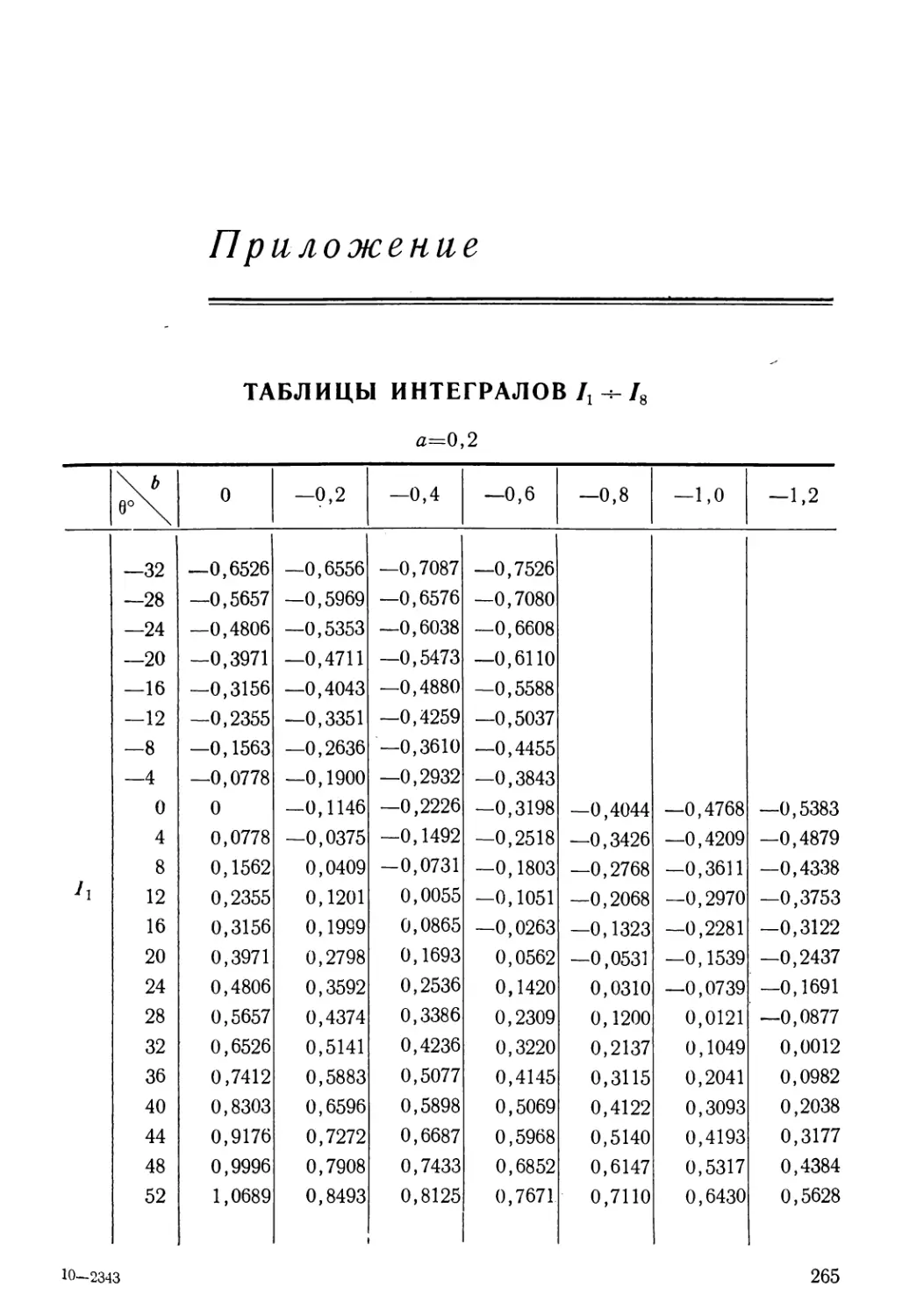
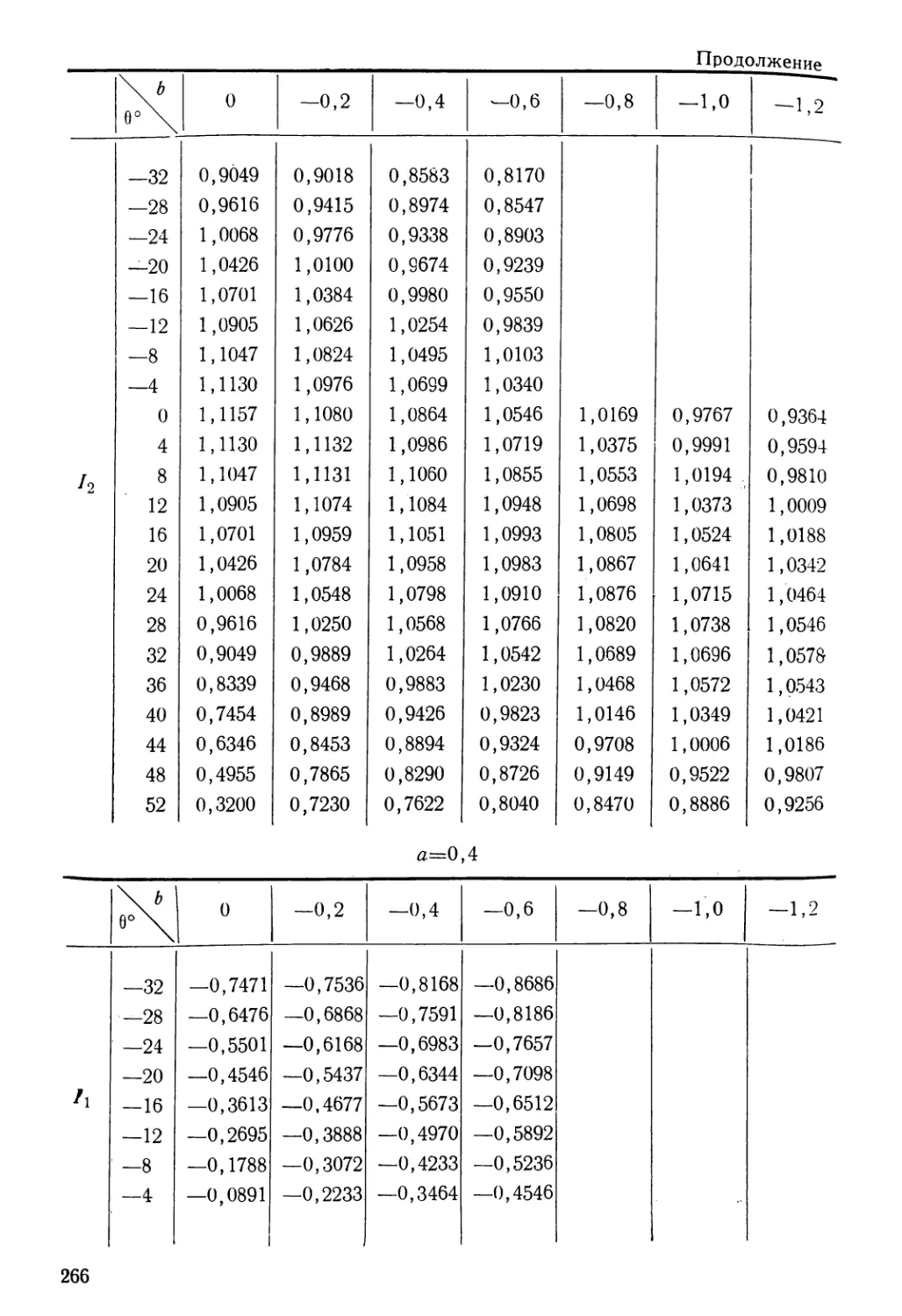
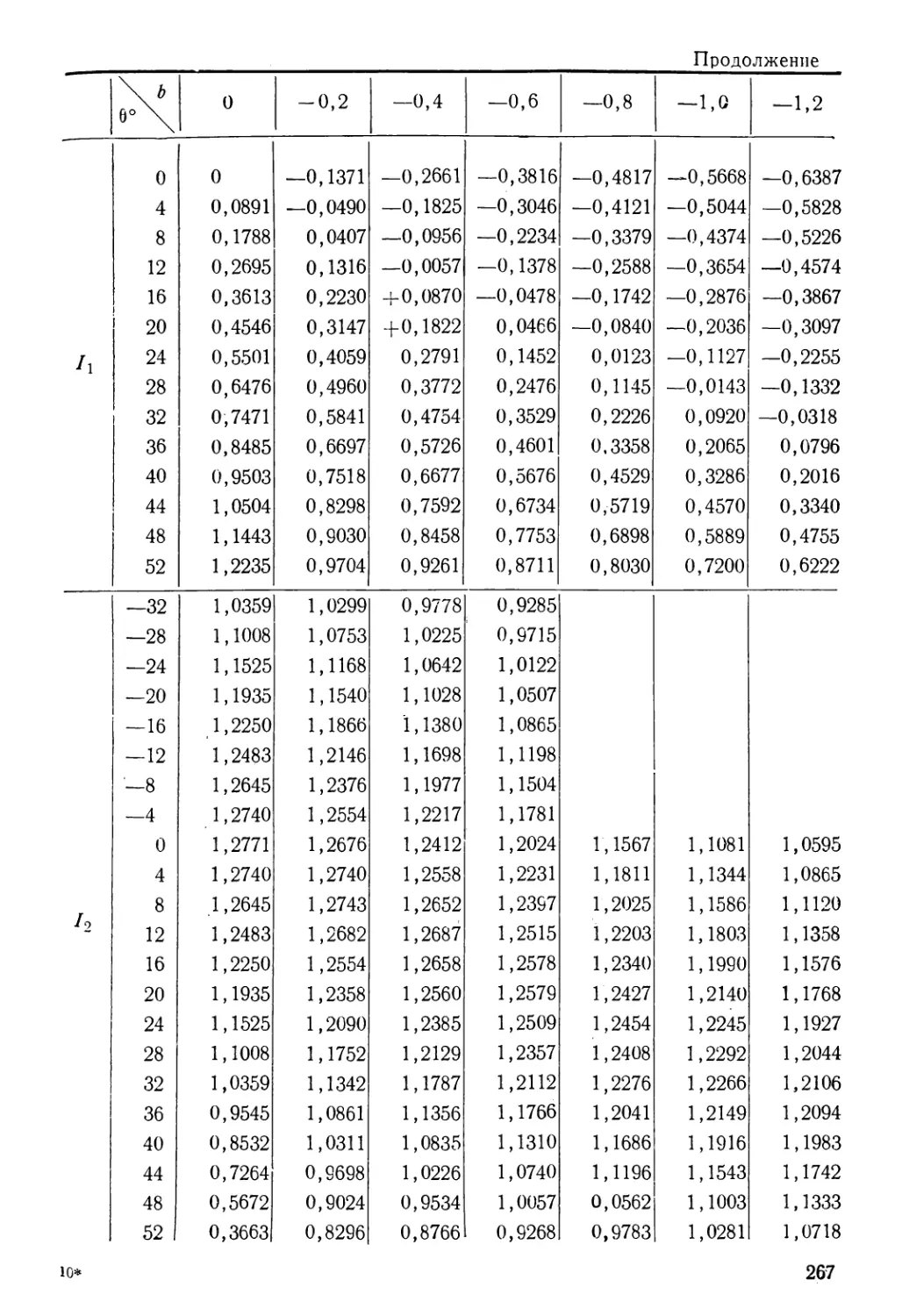
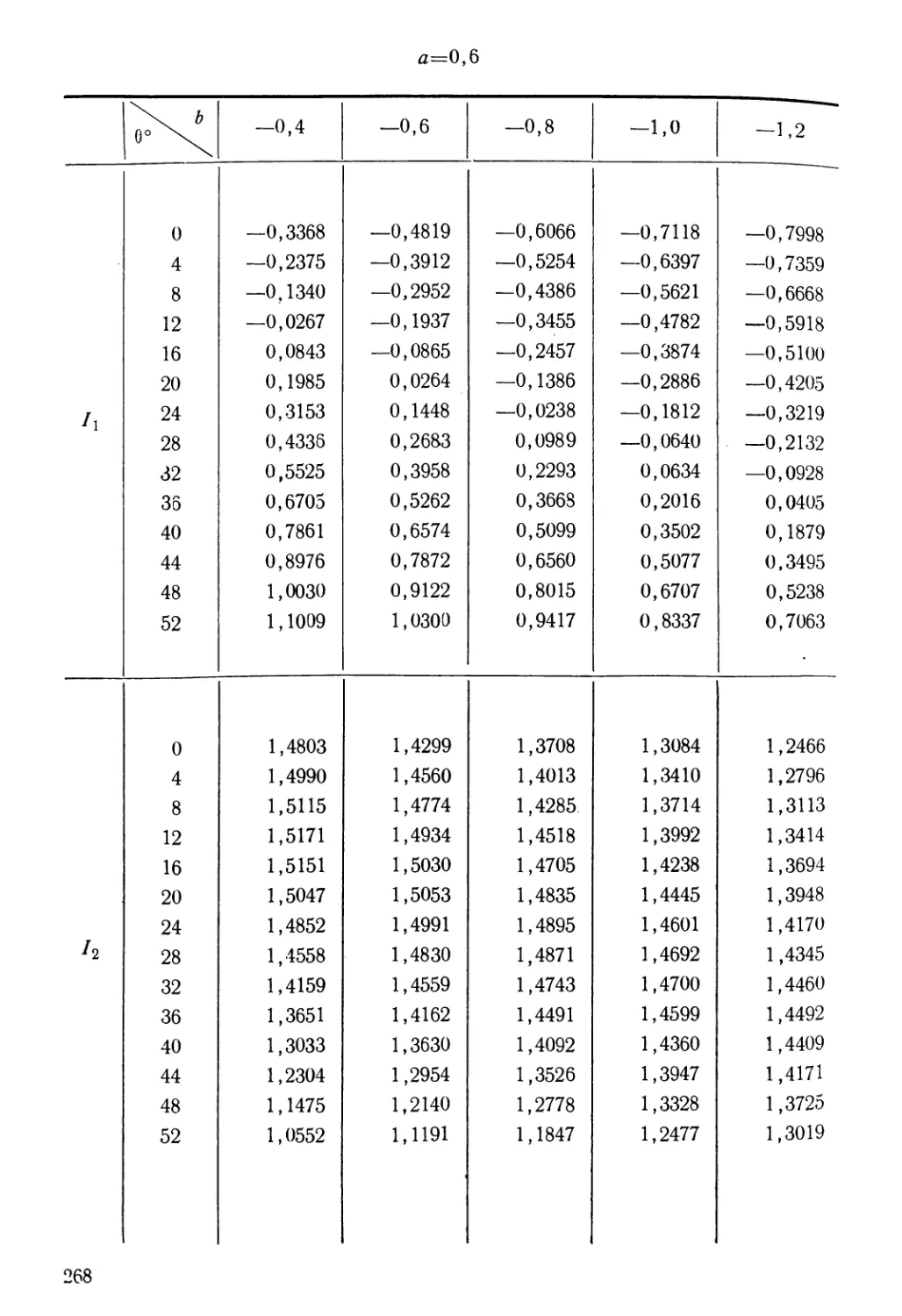
Для ускорения расчета оптимальных программ выхода исход-
ные уравнения сначала приводились к безразмерному виду, а
затем для всех входящих в них интегралов были составлены таб-
лицы (см. приложение, стр. 265).
Исходная система уравнений и формулы для расчета опти-
мальной программы (двухступенчатый носитель):
1. tg6o = ^o = —=
Но
— J р sin arctg (bt 4- т0) di + gQtK + wK — Aw
=-JL------------------------------------ ; (1.68)
;k
— J p cos arctg (bt 4- t0) dt + uK — An
о
2. t»o = wo + «o;
A^ = 2v2 f ydt\
о
Azz== — v2 j xdt\
0
3. xK=x0 + ^0/K+ ( d't f p cos arctg (^4-To)^;
о 0
ZK * t2
Ук = Уо + ^к + ^SinarCtg(^ + 'C°)rf71 —£0~2“ ’
0 0
38
4.
ZK £
xK=xo4-M(A+ jPCOsarctg(&iq+T0)dv)+Ax;
" 0
e z2
к Ш
0
t
У К = y'o + WK + J <Й j p Sin arctg (/^ + t0) — g0
0 0
IK £
Ay=2v2 de j yd^-,
о 0
Zk
Ax = — v2 J de f xdr^
q о
5. <wK=— uK ——— (для случая выхода при 9K=0);
R + Ук
6. h =у .
К Лк I 2^
В этих уравнениях приняты следующие обозначения:
р = * —ускорение ракеты;
nQ — начальная перегрузка;
р —коэффициент расхода топлива;
Ь, т0 —параметры, определяющие программу;
T0=tg90 — тангенс угла наклона начального вектора
скорости к оси Ох-,
v2 —_go .
R ’
Aw, Ай —добавочные члены, учитывающие влияние на
скорость непараллельности поля сил тяготе-
_ ния и изменение g с высотой;
х, у —координаты ракеты, вычисленные без попра-
вок Ах, Ду, учитывающих влияние тех же
факторов, что и для Aw и Ай;
х0, Уо> й0 —элементы начала участка траектории, для
которого определяется оптимальная програм-
ма; те же величины со штрихом — после
уточнения;
хк, ук, wK, йк —элементы конца активного участка;
Ак —высота конца активного участка.
Процесс расчета сводится к решению уравнений (1.68) и (1.69)
относительно неизвестных b и то при заданных х0, yQ, vQ, wK, ик.
В первом приближении уравнения решаются без учета попра-
вок Aw и Ай. По найденным значениям u0, w0, b и то находим
39
приближенные значения координат х, у, по которым вычисляются
поправки Д^, Ди, Ду, Дх. Кроме того, по заранее подготовленным
графикам для зависимостей х0, Уо, от 0О, характерным для рас-
сматриваемого носителя, вычисляем по найденному значению 9о (т)
новые уточненные величины х0, уо> ^о- С этими новыми значения-
ми элементов начальной точки расчет повторяется, т. е. вновь
подбираем Ь, то, Uo, w0. Заметим, что если первоначально заданные
значения оказались неудачными, то целесообразно (если имеется
в виду получение горизонтального направления вектора скорости
ук) уточнить wK по формуле (1.63). Процесс сближения можно
повторять несколько раз в зависимости от требуемой точности.
Наконец, после проведения всех уточнений вычисляется высо-
та активного участка Лк.
Приведем интегралы, входящие в формулу (1.68), к безраз-
мерному виду. Для этого введем безразмерное время % =
Интегралы примут вид:
f р sin arctg (W + T0)rf/ = n0g0Vi>
о
(1-70)
sin arctg (b's + т0)
1 — al
[ /?cosarctg(^ + -r0)J/ = n0^0/KZ2,
о
(1-71)
J _ (• cos arctg (b'l + to)
* J 1 — al
о
fK
f r/т; f p sin arctg (bt -{- t0) dt =
0 0
f- ( dri [ sin arctg (^ + t0)
3 J J l-e$
о 0
(к ?
drt J p cos arctg (bt-\- t0)dt = nC)gat’ji>
б о
; Л C^osarctgC^+ro)
J J 1 — al
о о
(1.72)
(1.73)
40
у dt=n0g0t3I->,
О
Ir=\ di {d-ц {di-
J -) J 1 — al
ООО
*к
J x dt=n0g0t3KI(.,
6
.
Z6= di d-ц ^arctg(^4-4)
0 0 6 ’ J
*K £
J di j ydt=nog/j-t,
0 0
/7 = ( di \ d-ц \ dp sinarct^+jn),^.
0 ’ J
(1.74)
(1-75)
(1-76)
(1-77)
0 0 0
. e
di у xdt=n0g0tU8,
0 0
I8= \ di \ d-Ц У dp [ C0S arctg(^ + 'o)
J J J J 1 — al
oooo
Здесь:
a — коэффициент наполнения топливом (a= GmlIGQ1, где Goi,
Gml — начальный вес и вес топлива второй ступени);
Ь' = ЫК (в дальнейшем штрих опускается).
Перепишем уравнения (1.68) с учетом полученных для интег-
ралов /ь..., /в выражений:
1- ^0
— nagdKh + gdK + WK — Aw .
“о — nogdKh + “к — Д“
2. t>o=Wo + «о;
? <3
2v2 y^t^W^-gQ— +n0g0t3f.
дw = 2v2 ^ydt =
6
41
3.
Дм= —v2 \xdt=— v2
о
Ак = Ао + ^к + «О^кЛ;
t 3
А‘(/к + «о ~ + Яоё(/к/в
У к = Уо + ®'о4 + Hogo&s - go~ ;
4.
хк — xq -4- u(1tK 4* HqS^kI4 4“
z2
Ук = Уо + Wk + «оё'о^/з - So ~ + Ду;
xo ~^ + ио -T'+ noS(Ah
2 О
6. Ак Ук4‘
Начальную точку (х0, г/0) следует выбирать за границами плот-
ных слоев атмосферы, так как программу активного участка, как
было отмечено выше, в плотных слоях выбирают независимо от
решения вариационной задачи.
Интегралы Д (f=l, 2, 3, 4, 5, 6, 7, 8) затабулированы в широ-
ком диапазоне углов 0О, параметра b и коэффициентов наполне-
ния а. Таким образом, самый трудоемкий процесс — подбор инте-
гралов о вычислением их по формулам приближенного интегриро-
вания — отпадает. (В остальном ход решения задачи не изменяется.
Изложенную методику расчета с применением таблиц можно
использовать не только для двухступенчатых, но и для трехсту-
пенчатых ракет. Под ступенью могут пониматься участки траекто-
рии с различными, но постоянными по величине расходами топли-
ва. Напишем расчетные формулы для трехступенчатой ракеты:
, — — «огй'./г7" + S^K + wK — Aw
1 • то =-------------:--------п--------------; (1 -7 8)
— — пО2ёо(2{2 +ик — Иш
9 2 2
2. ^6=wo-r^o;
о
42
Lu= — v2 xdt-,
6
3. XK = X04" #o44" ZZO1S’o^A4" 4" ^015*0^14^2;
_ ,2
У к = Уо 4" *^Vk 4- nQ\S^з 4- ^02^0^2/3 g*o 4" fy)i5*o^i^/i»
4. xK = Xo 4“ Йо4 4“ ^015*0^1 (ДУ 4- 'W0^2 (ДУ 4"
4“ Ax 4- tiQ\gQt\t2 (I2У;
Ук = Уо4- Wo4 4- ^015*0^1 (ДУ “I" ^02^2 (ДУ —
I
— 5"o—4~ 14” ду;
Zk t
Ay = 2v2 J dt f У d-q;
0 0
'к *
bx= —v2 f dt j xdt{-,
о 0
6. hK — yK -|- ~-.
Z/<
Здесь верхние индексы «I» и «II» относятся соответственно к
первому и второму участкам;
/1, /2 — время полета на первом и втором участках;
= Л 4" ^2»
лоь ^02 — начальные перегрузки, вычисленные для первого и
второго участков.
Интегралы с индексом I вычисляются по переменным Ьх и
то, причем
#l = Pl/i;
bx = b±-.
tK
43
Интегралы с индексом II рассчитываются по величинам
Ь, 4
Ь = Ь^- ;
Из этих уравнений находят, как и в случае для одной ступени,
параметры b и то, определяющие оптимальную программу
tg®(O = ^ + To,
где
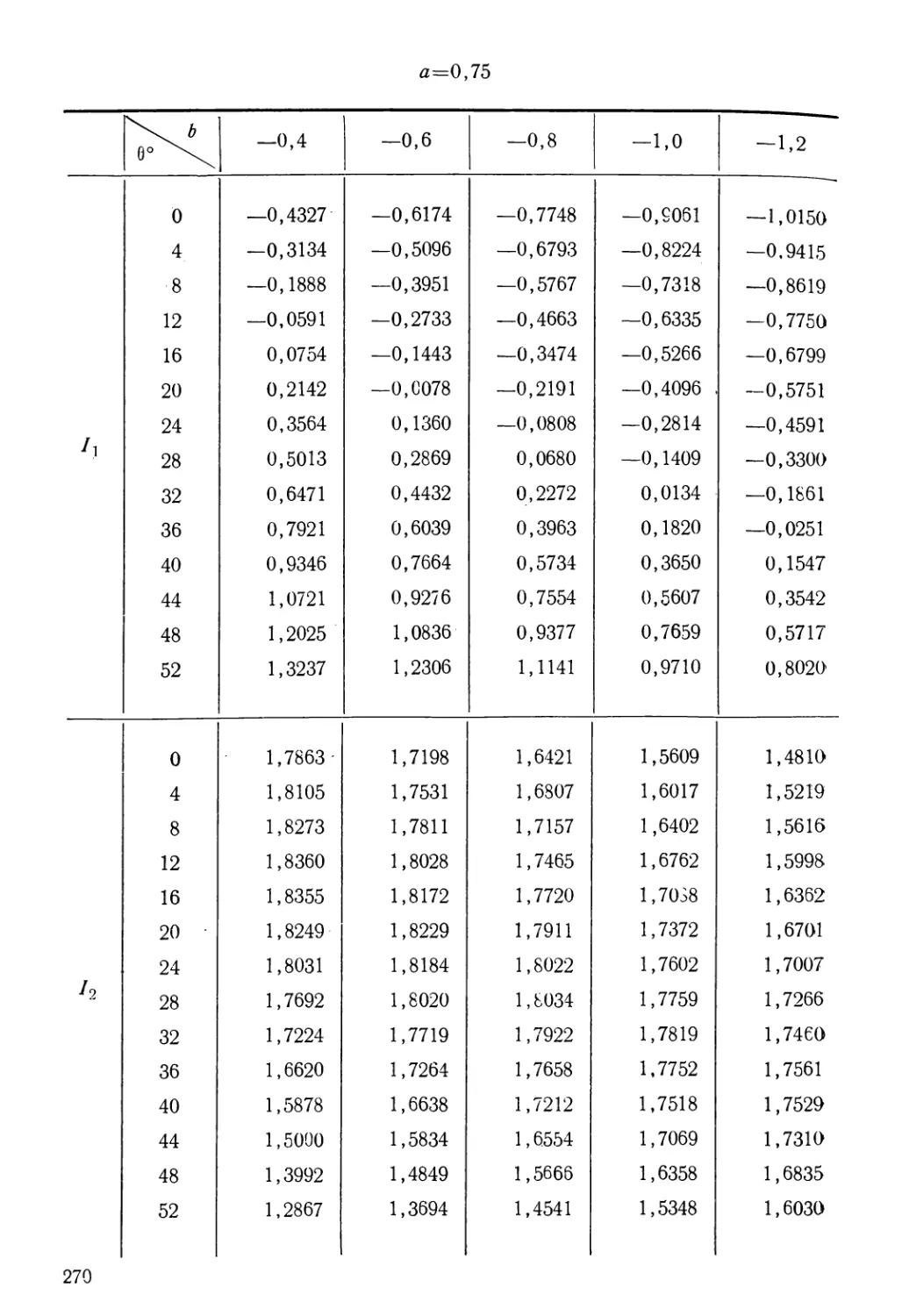
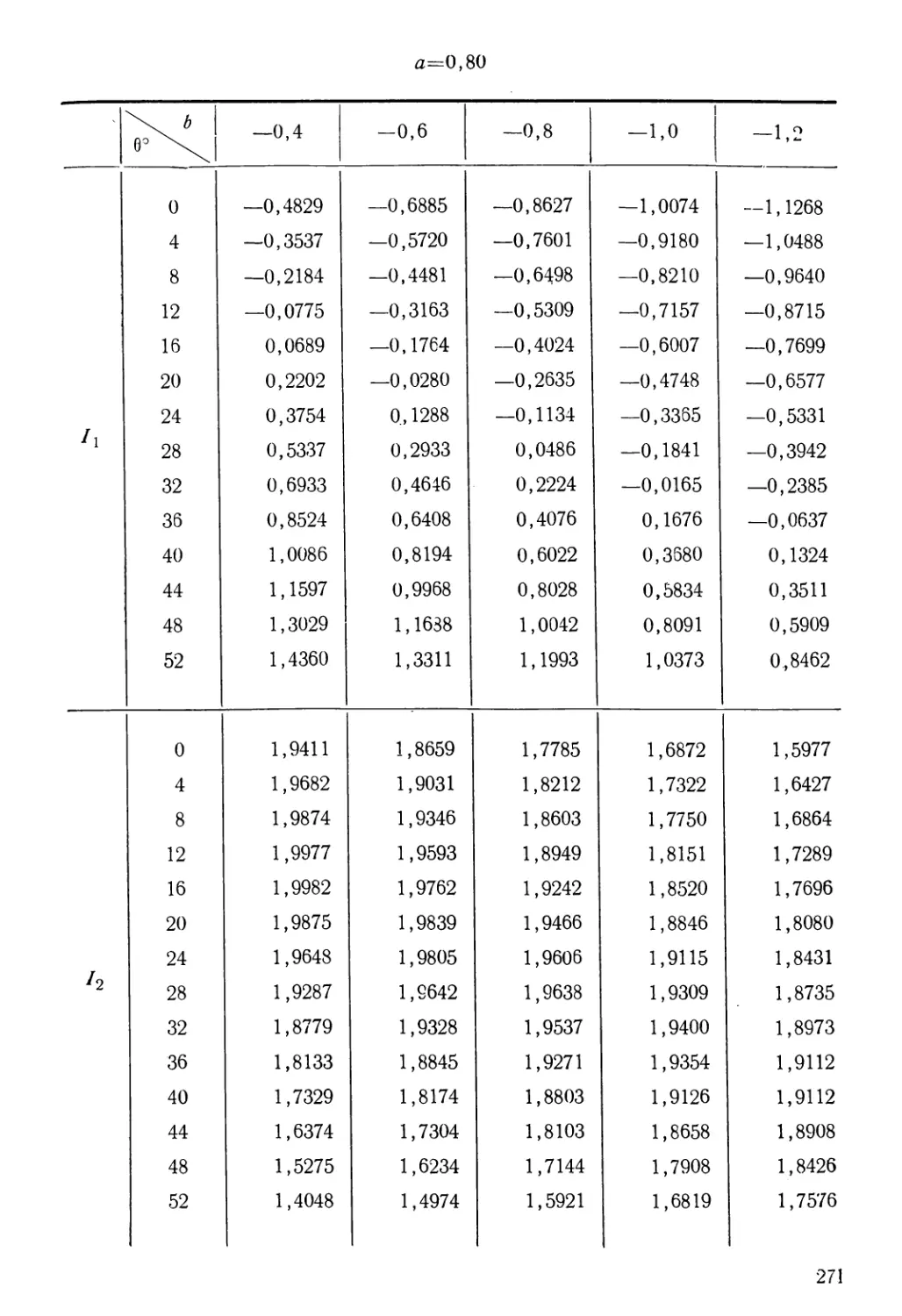
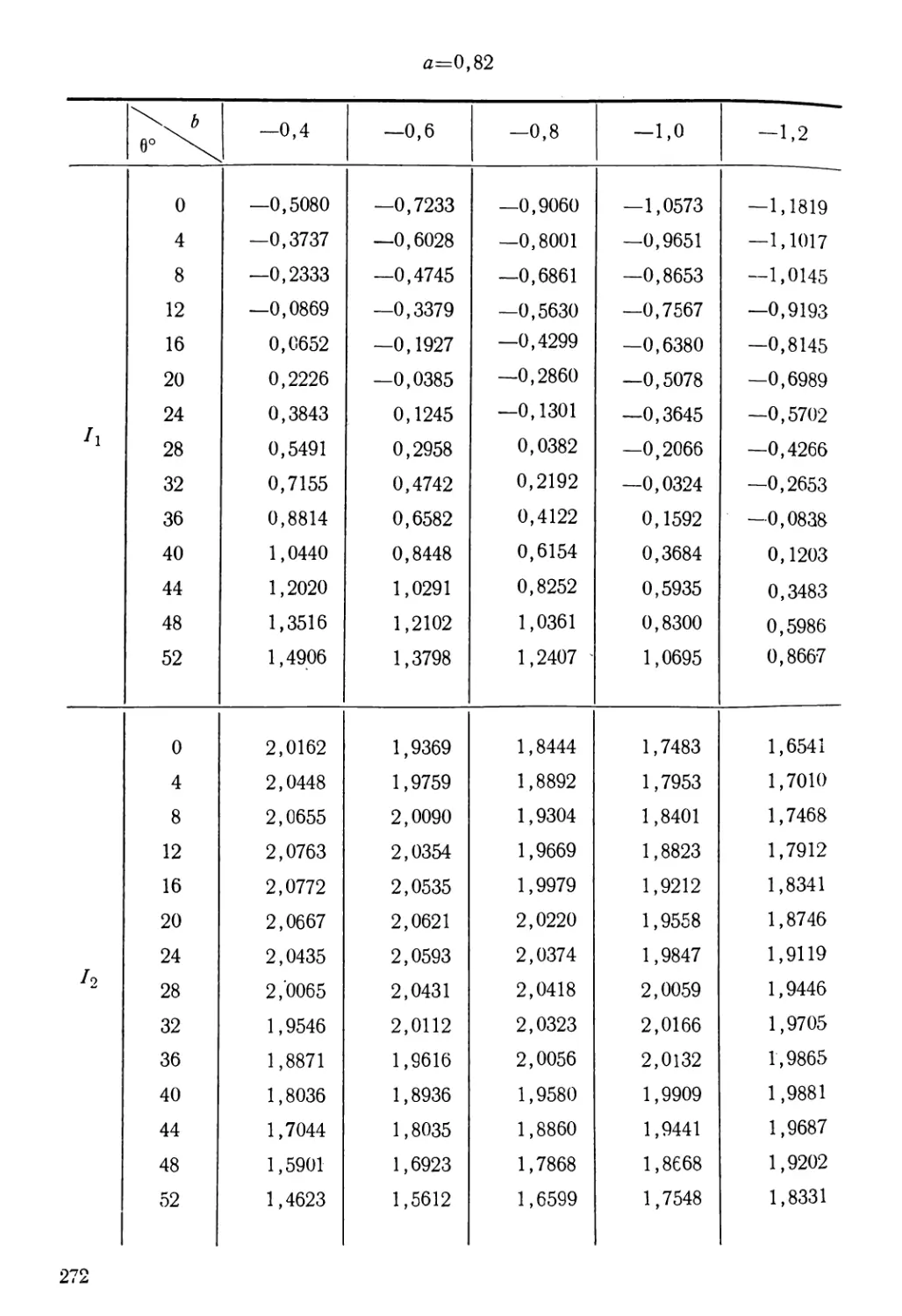
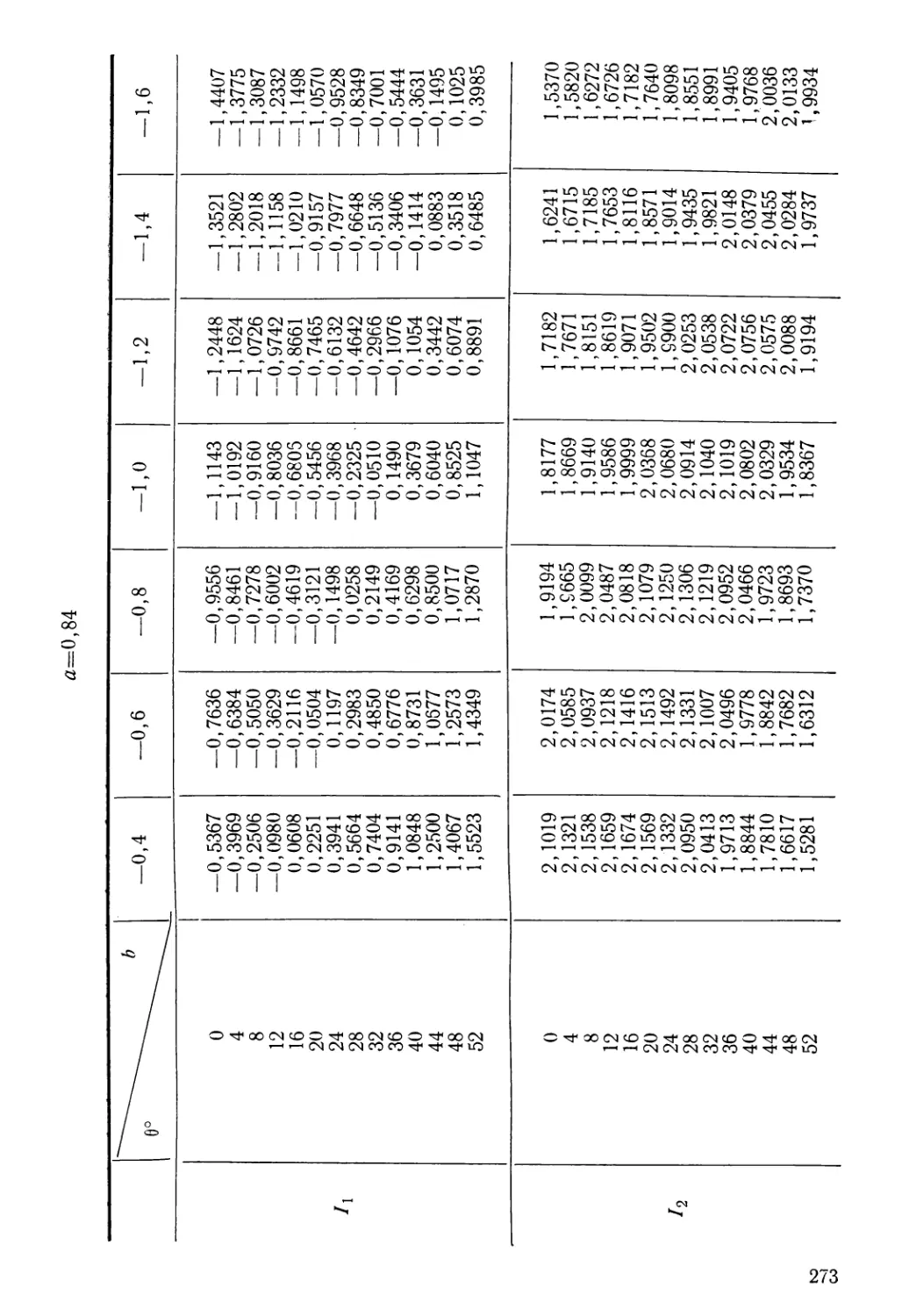
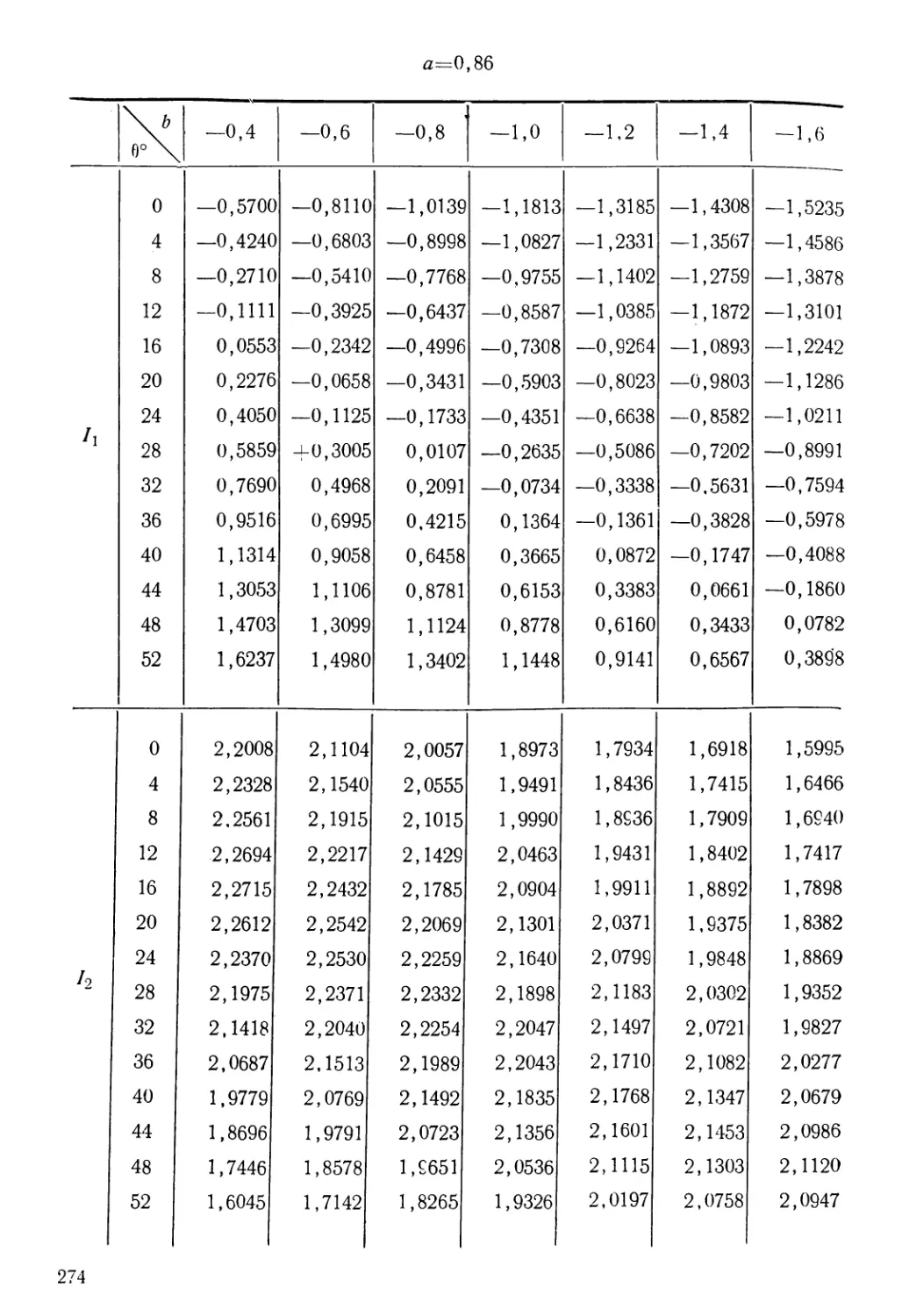
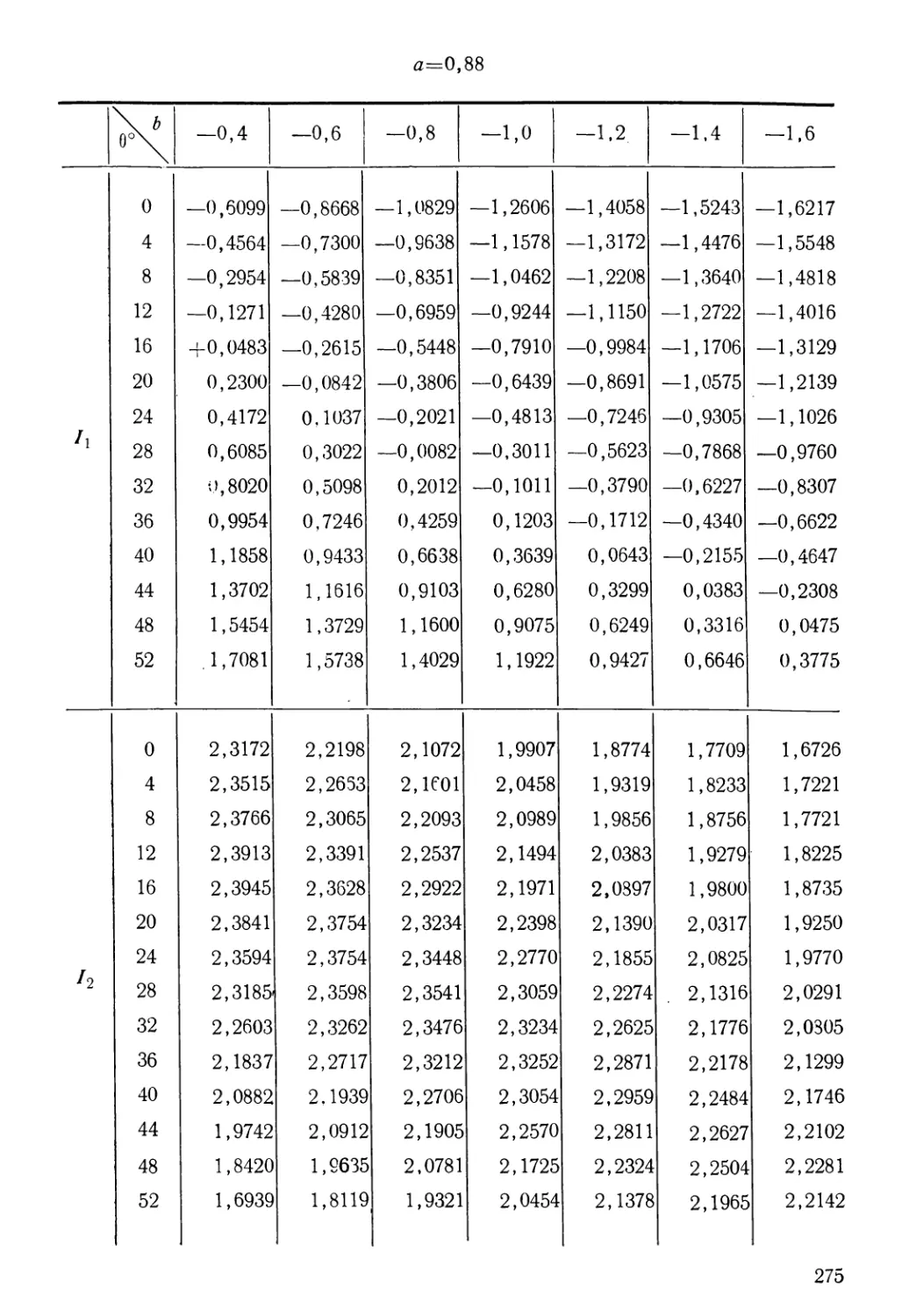
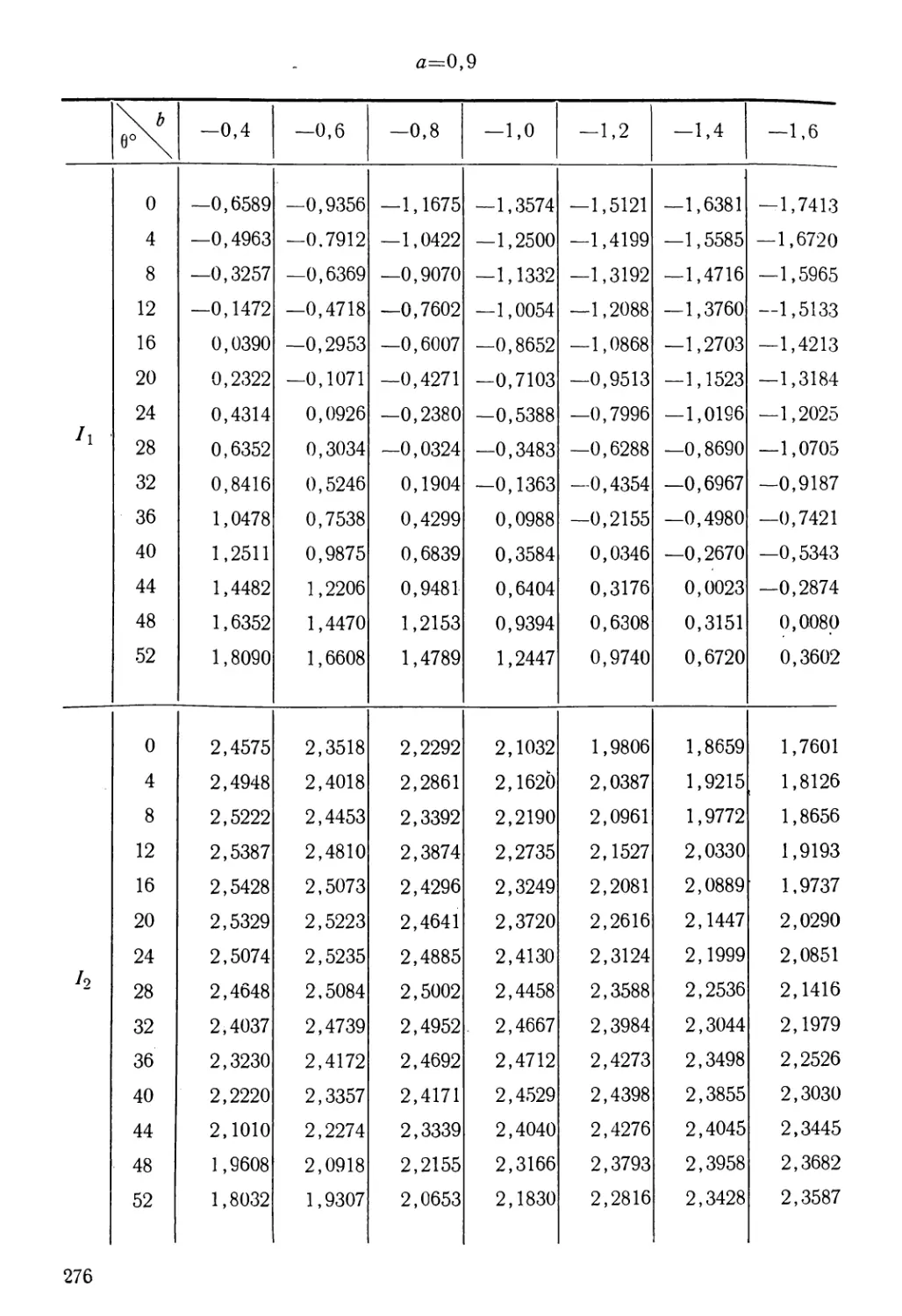
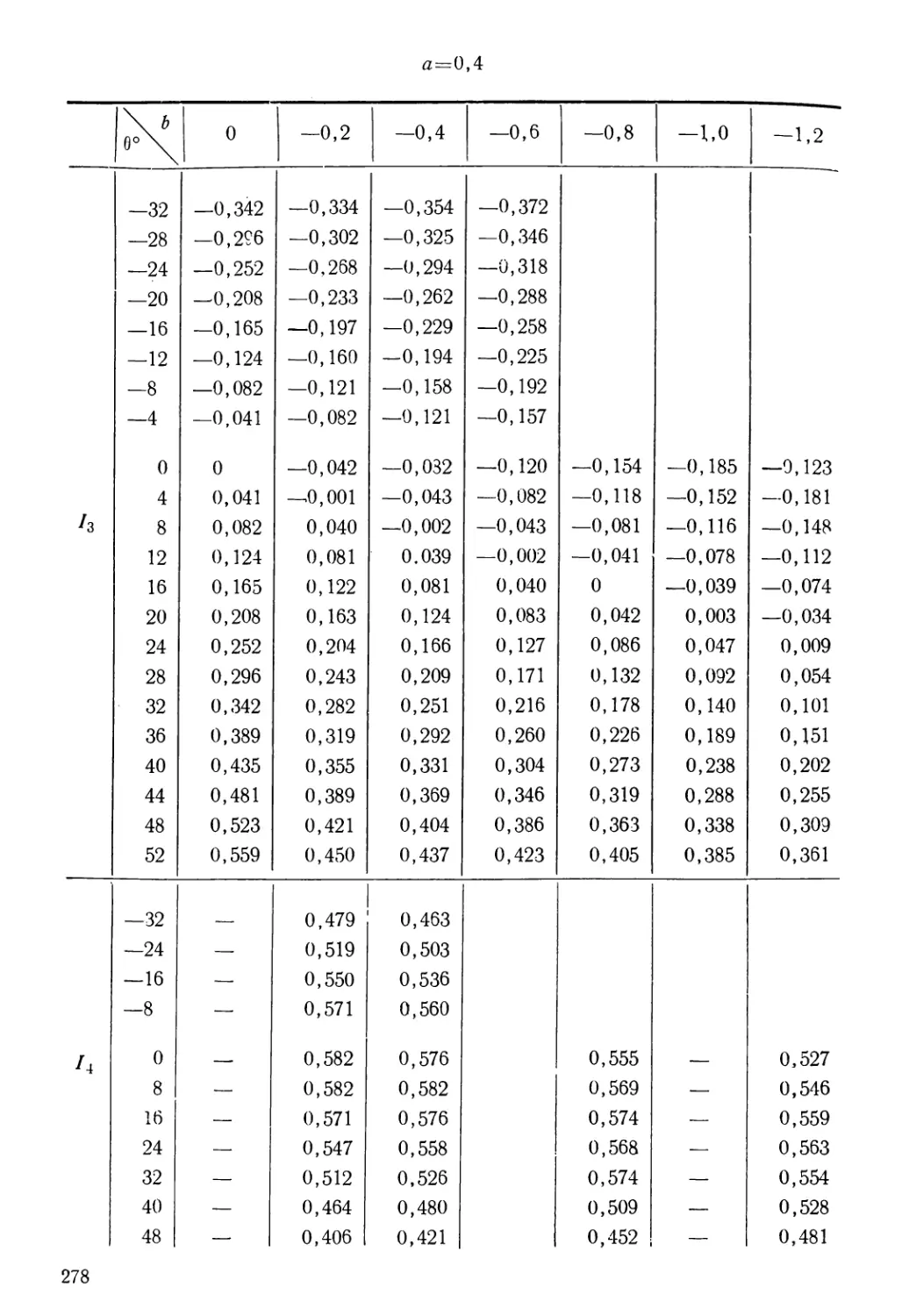
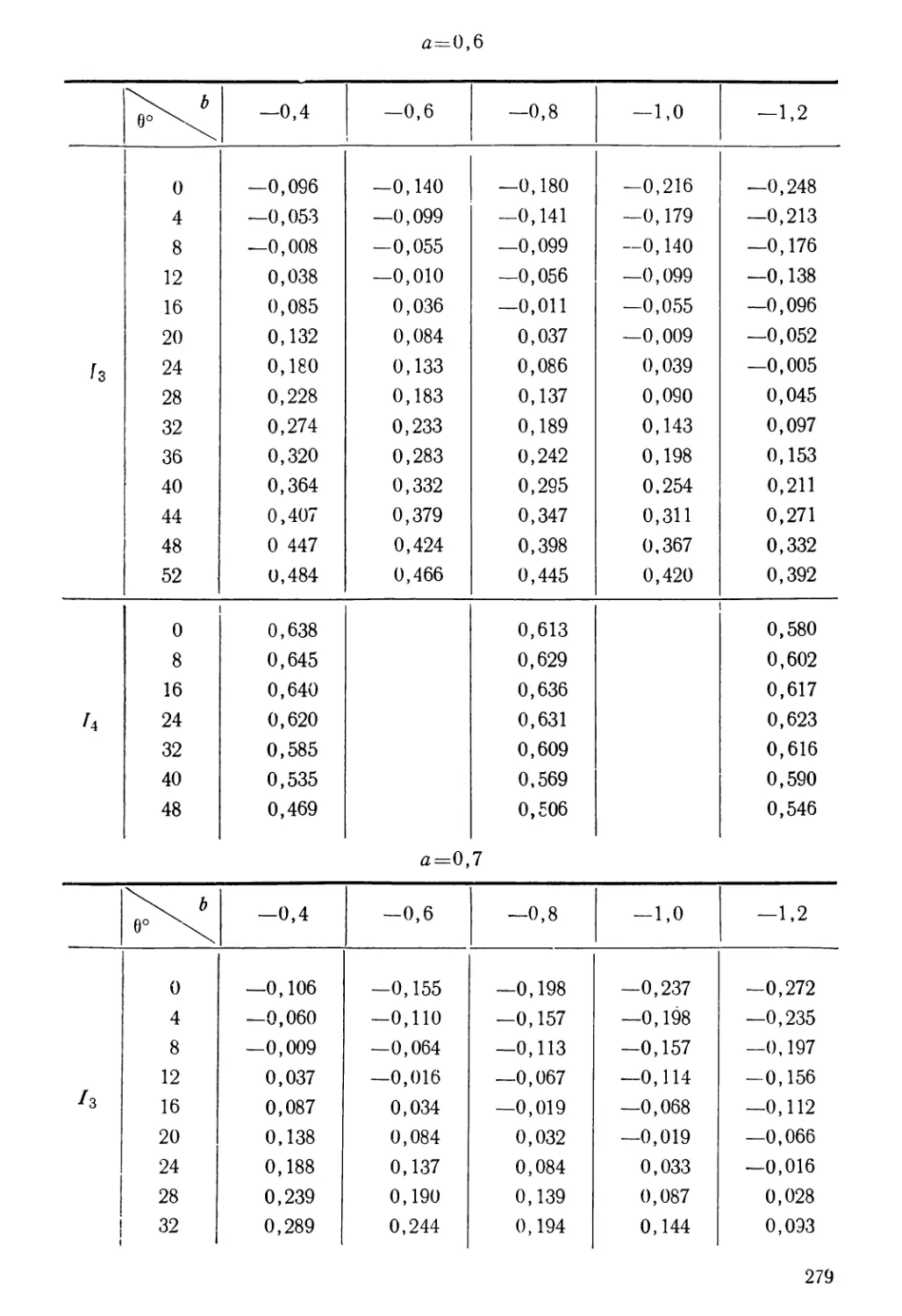
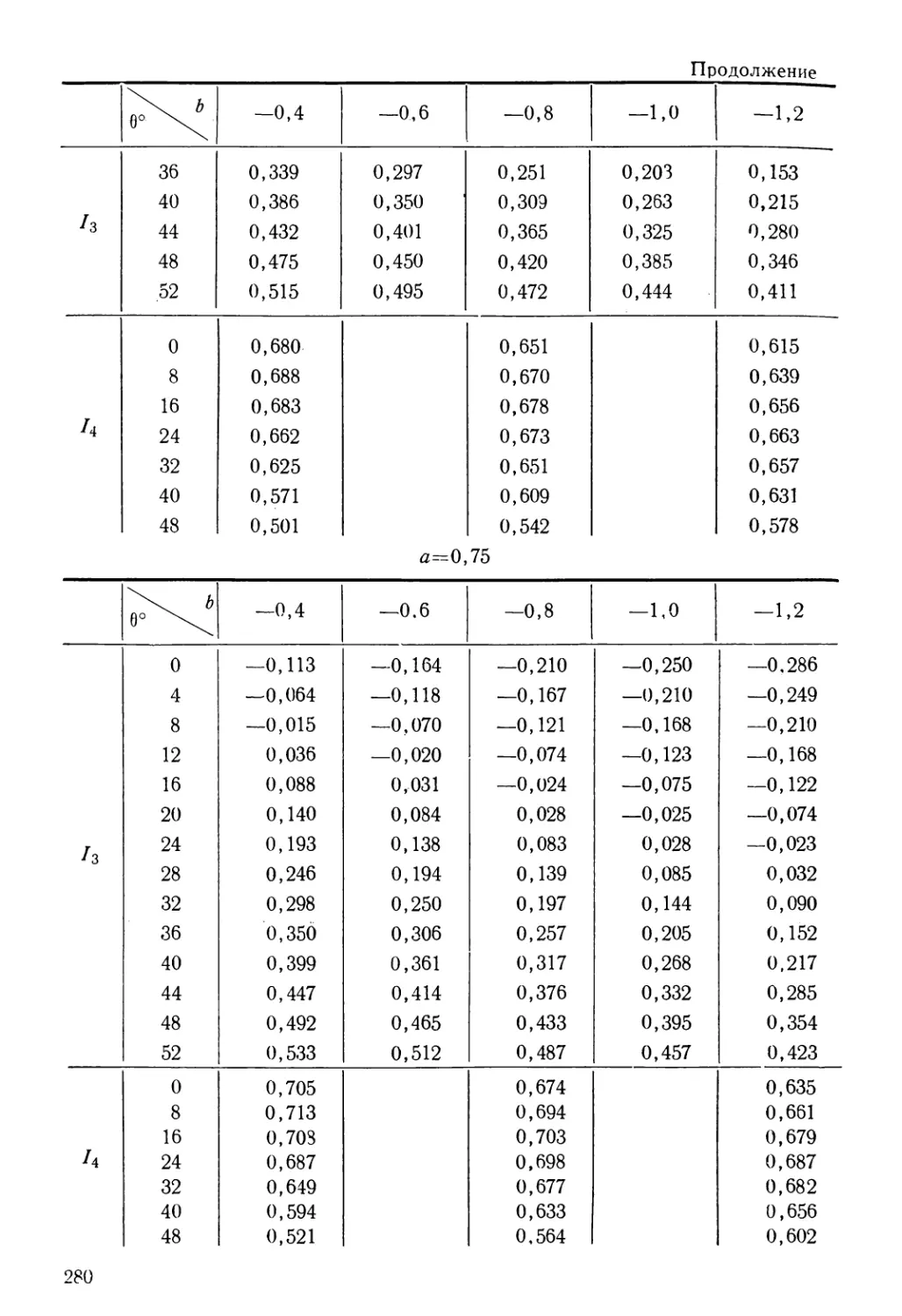
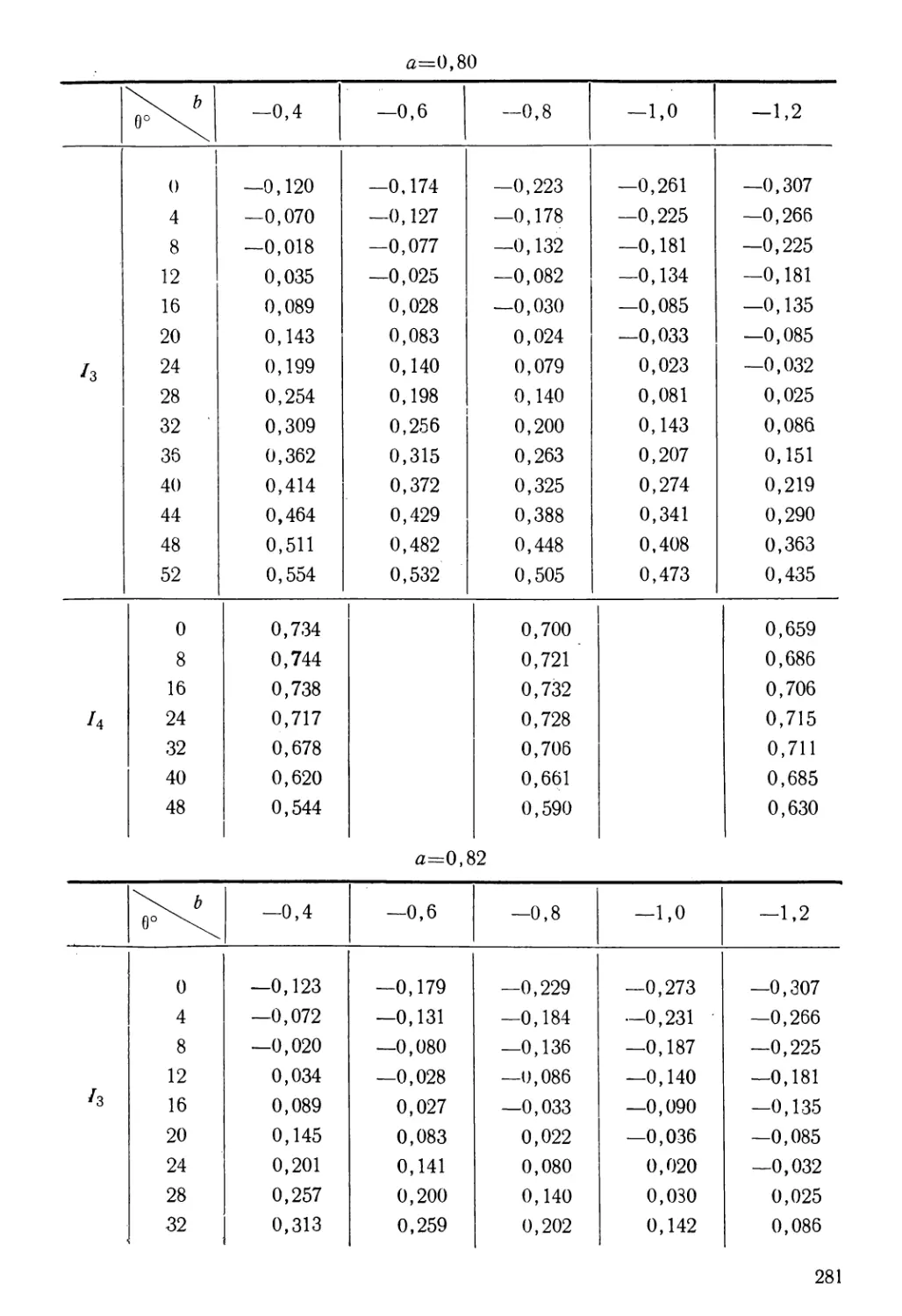
Расчет таблиц проводился следующим образом. Интегралы
..., /8 вычислялись по формуле Симпсона с шагом 0,1. Кроме
того, по точным формулам для /ь /2 был просчитан ряд контроль-
ных точек для <2 = 0,6 и (2 = 0,84-0,90 (через 0,02), для 0О =
= 0 4-52° и 6=(—0,4) 4- (—1,2). Расчет проводился с удержанием
шести знаков после запятой.
Приведем контрольные формулы [см. (1.67)]:
1
2 (аХу)112 + 2^! + b
2 (aXQ)1/2 + 2ах0 + b
С2
72
2(сХ!)1/2 2с
----------+ — 4- о
*1 *1
2(сХ<1)1'2 2с
---------- + — + О
С* cos arctg ( + ~o i
д= I ________________Ldt=
i i—
0
C-2
~bc1/2
2(cXi)1/2 2c
+ — + b
*1 *1
2(cX0)1/2 2c
---------+------+ b
(1-79)
(1.80)
44
Здесь соответствует программному коэффициенту b в та-
С2
блицах;
аг — коэффициенту наполнения а:
X = iZXj ф- bx} ф- С* Aq CtXQ ф- ЬХц ф- с;
= ф-тД х0 = аф-£т0;
\ с2 /
ct — 1 ф— a j С*2^о > — tZj Ср;
1 1 Г\ й I
а = ~-—; Ь=— 2-^- ; £=1+——•
£2 £2
В таблицах интегралы /ь 12 выписаны с четырьмя знаками
после запятой. Ошибка в Ц и /2 не превышает единицы последнего
знака. Это означает, что предельная ошибка в соответствующих
интегралах, входящих в формулу (1.68), не будет больше 3 м/сек.
Интервалы по а, b и 0О выбраны с таким расчетом, чтобы можно
было производить линейную интерполяцию, однако с некоторым
снижением точности.
Для увеличения точности необходимо применять квадратичную
интерполяцию и интерполяцию с третьими разностями по форму-
лам (особенно при больших коэффициентах наполнения а):
горизонтальная строка
. а I а9 I е(е—1)(е —2) а3
у=ул+еДул+ 2 Д-уЯ—-—-----------д ул;
наклонная строка
। * । (в -J- 1) а 9 । (е 4~ 2) 4- 1)е а ч
У=Уя + еДУя-1 + 2 Д-ул-г + ------------- Д3У„;
первая ломаная строка
. . е (е—1) 9 . (е 4- 1) е (е—1) о
У=Уя+еДУл+ 2 7-Д-ул-1 + 1----------------Д y«-i;
вторая ломаная строка
. . е(е4-1)д9 1 (е + 1)е(е—1) лч
У=уп + £ЛуЛ-1 Н №уп-х ф-к---------------Д3ул-1.
(1-81)
Здесь и далее уп-2, Уп-i, Уп — последовательные табличные зна-
чения интерполируемой функции;
Дул-1 уп Уп-i, j _перВые разН0СТи;
дул=ул+1—Ул J
45
^2Уп-2 = ^Уп-1 — &Уп-2\
Д2ул-1 = Ду„- tyn-V,
д2уя=ду„-1-дуя
— вторые разности.
Аналогично записываются третьи разности (Д3г/г):
~ хп хп—\
где хп, xn-i — два последовательных значения аргумента;
А — шаг.
Применение квадратичной интерполяции позволит для внутрен-
них (незатабулированных) точек получать почти такую же точ-
ность, какой обладают затабулированные значения Ц и /2. Что
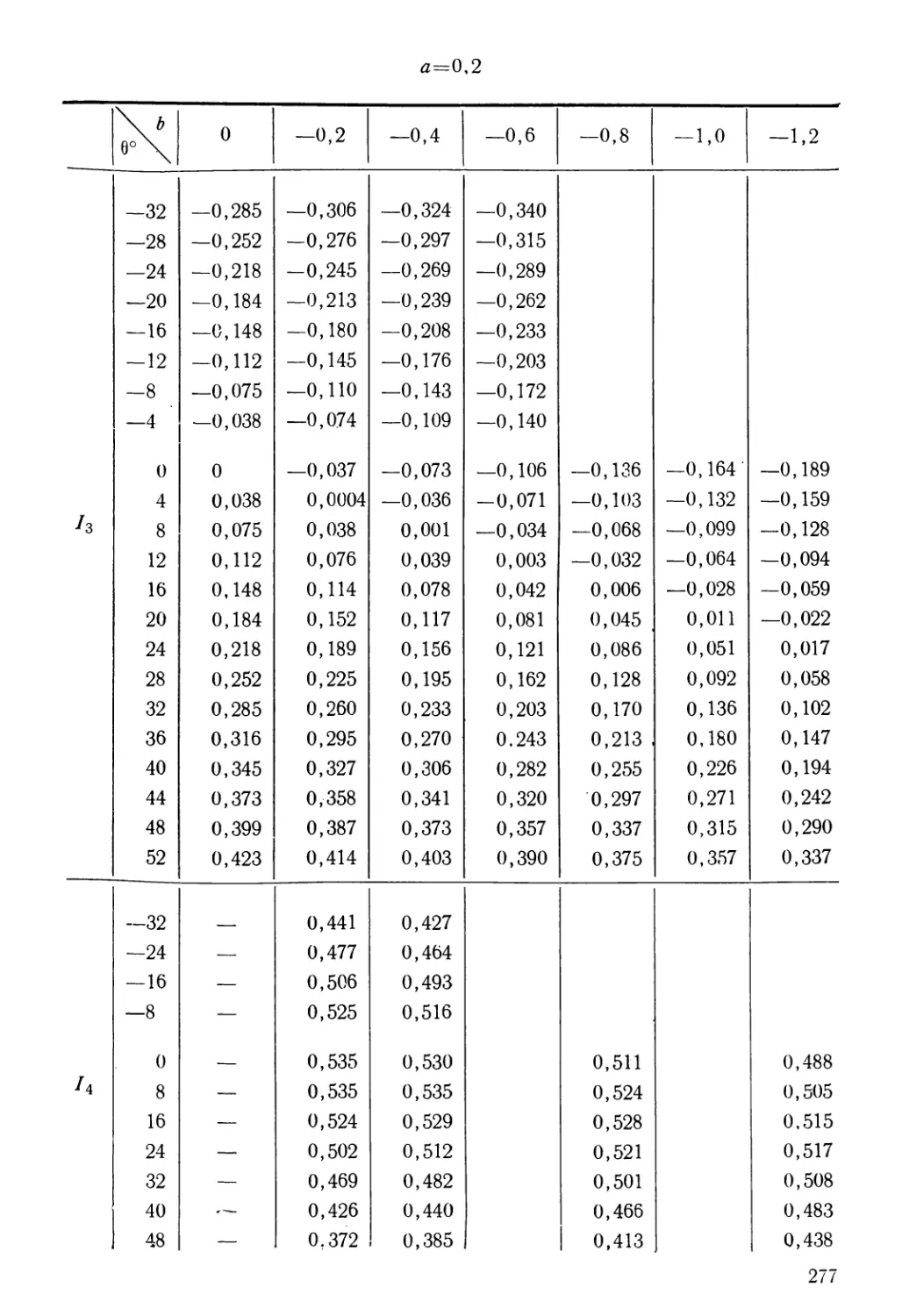
касается остальных интегралов /3, /4,/8, то все они получены
путем приближенного интегрирования по формуле Симпсона. Мож-
но показать, что максимальная ошибка в вычислении /3, /4 при
принятом способе расчета не превышает 5 единиц четвертого зна-
ка после запятой. Расчеты величин интегралов /5, /8 имеют еще
меньшую погрешность. Ошибка в табулированных значениях этих
интегралов дает ошибку в определении высоты не более чем на
0,5 км при высоте активного участка до 1000 км.
В таблицах отсутствуют значения интегралов для Ь — 0 и
Ь = —0,2. При вычислениях активного участка с двумя различными
расходами топлива они могут потребоваться. Приведем конечные
формулы для вычисления интегралов Л, /2, Ц при Ь=0:
/t - —In-----!--; (1.82)
а 1 — а
in _J_; (1.83)
а 1—а
Л = ^М-(1-а)1п—-!------+а1; (1.84)
Л = ^М-(1-«)1п—-Н]. (1-85)
я2 [_ 1 —а J
Промежуточные значения интегралов 7Ь 72 и 73 (между Ь = 0
и Ь = —0,4) во избежание большой погрешности рекомендуется
определять интерполяцией по формулам (1.81).
В заключение отметим, что программа (1.61), и тем более
упрощенная tg(p = bZ-f-T, может оказаться непригодной для очень
длинных активных участков (более 3000 км), так как существен-
ными становятся погрешности, возникающие вследствие неполноты
учета нецентральности поля тяготения.
46
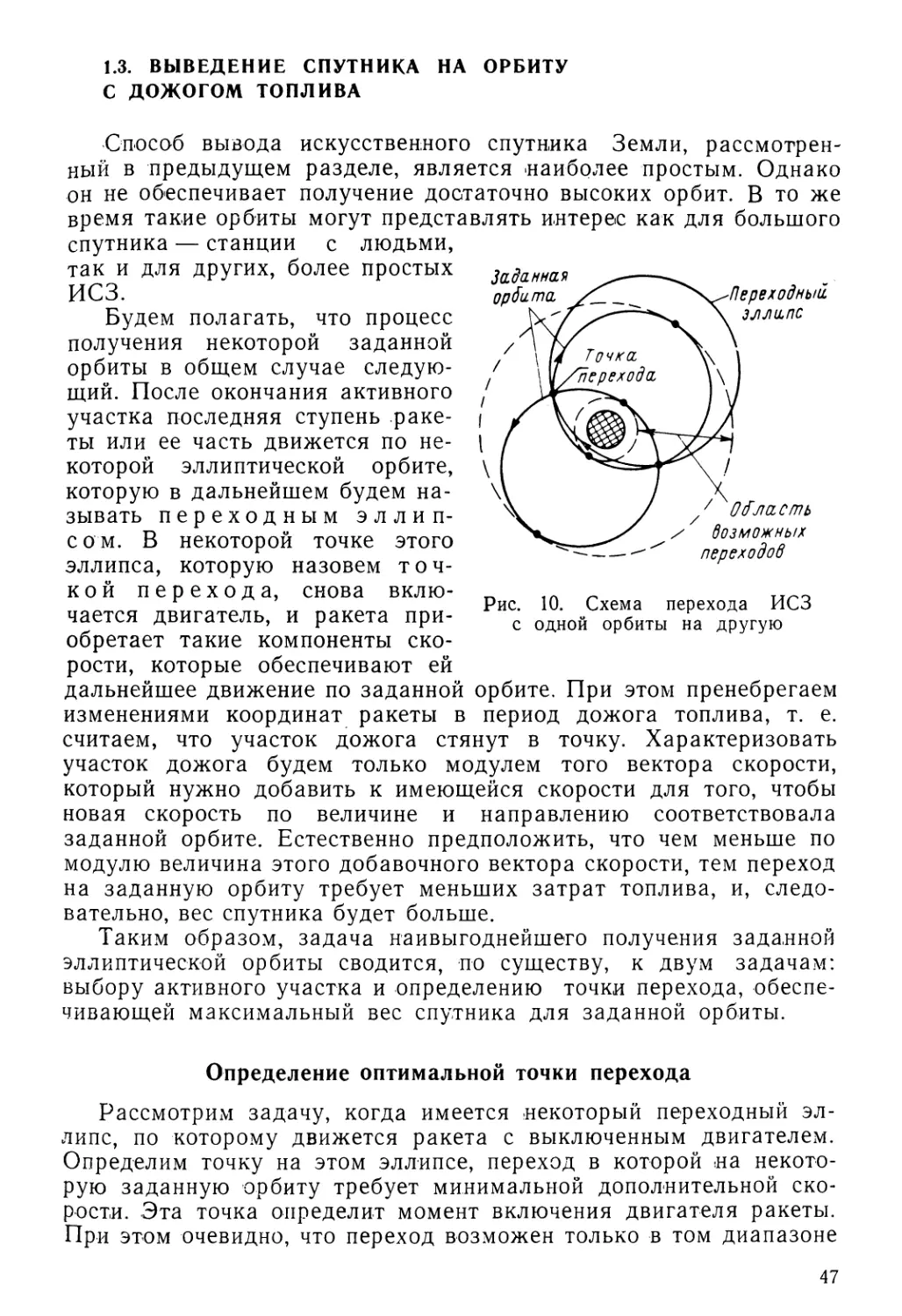
1.3. ВЫВЕДЕНИЕ СПУТНИКА НА ОРБИТУ
С ДОЖОГОМ ТОПЛИВА
Заданная
орбита
Точки
Переходный
зллапс
Рис.
с
7 ' Область
возможных
переходов
Способ вывода искусственного спутника Земли, рассмотрен-
ный в предыдущем разделе, является наиболее простым. Однако
он не обеспечивает получение достаточно высоких орбит. В то же
время такие орбиты могут представлять интерес как для большого
спутника — станции с людьми,
так и для других, более простых
ИСЗ.
Будем полагать, что процесс
получения некоторой заданной
орбиты в общем случае следую-
щий. После окончания активного
участка последняя ступень раке-
ты или ее часть движется по не-
которой эллиптической орбите,
которую в дальнейшем будем на-
зывать переходным эллип-
сом. В некоторой точке этого
эллипса, которую назовем точ-
кой перехода, снова вклю-
чается двигатель, и ракета при-
обретает такие компоненты ско-
рости, которые обеспечивают ей
дальнейшее движение по заданной орбите. При этом пренебрегаем
изменениями координат ракеты в период дожога топлива, т. е.
считаем, что участок дожога стянут в точку. Характеризовать
участок дожога будем только модулем того вектора скорости,
который нужно добавить к имеющейся скорости для того, чтобы
новая скорость по величине и направлению соответствовала
заданной орбите. Естественно предположить, что чем меньше по
модулю величина этого добавочного вектора скорости, тем переход
на заданную орбиту требует меньших затрат топлива, и, следо-
вательно, вес спутника будет больше.
Таким образом, задача наивыгоднейшего получения заданной
эллиптической орбиты сводится, по существу, к двум задачам:
выбору активного участка и определению точки перехода, обеспе-
чивающей максимальный вес спутника для заданной орбиты.
10. Схема перехода ИСЗ
одной орбиты на другую
Определение оптимальной точки перехода
Рассмотрим задачу, когда имеется некоторый переходный эл-
липс, по которому движется ракета с выключенным двигателем.
Определим точку на этом эллипсе, переход в которой на некото-
рую заданную орбиту требует минимальной дополнительной ско-
рости. Эта точка определит момент включения двигателя ракеты.
При этом очевидно, что переход возможен только в том диапазоне
47
расстояний до центра Земли, в котором располагаются обе орби-
ты (рис. 10).
Разложим вектор скорости на эллипсе на два направления:
вдоль радиуса вектора, проведенного из центра притяжения в дан-
ную точку, и перпендикулярно этому радиусу. Обозначим эти
составляющие соответственно vr, vn. Для определения этих состав-
ляющих имеем формулы (1.23) и (1.24), в которых
ц— константа тяготения (для Земли ц— 398 600 км2!сек2).
Используя полярное уравнение эллипса, эти формулы можно
привести к виду
(1.86)
(1-87)
где р — текущий радиус-вектор эллипса.
Обозначим индексом «1» параметры, относящиеся к переходно-
му эллипсу, а индексом «2» — к орбите, которую нужно получить.
Напишем выражение для необходимого приращения скорости в
виде
(1.88)
Предварительно условимся, что заданную орбиту, на которую
нужно совершить переход, будем характеризовать только ее фор-
мой, т. е. параметром р и эксцентриситетом е или апогейным 7?
и перигейным г расстояниями. Через любую точку на переходном
эллипсе внутри диапазона возможных переходов можно провести
две эллиптические орбиты с заданными параметрами и эксцентри-
ситетом (см. рис. 10). Кроме того, по каждой из указанных орбит
возможно движение как в одну, так и в другую сторону. Однако
только на одной из этих орбит при определенном направлении дви-
жения в точке перехода составляющие скорости vr, vn будут иметь
тот же знак, что и на переходном эллипсе. Следовательно, переход
на эту орбиту потребует минимального количества топлива по
сравнению с переходом на другие орбиты. Имея в виду, что всегда
может быть получена определенная (требуемая) ориентация новой
орбиты соответствующим выбором активного участка, в дальней-
шем будем полагать, что переход совершается именно на орбиту,
требующую минимальной затраты топлива при переходе в данной
точке.
В соответствии со сказанным значения vr, vn для обеих эллип-
тических орбит будем считать положительными. Подставив в (1.88)
вместо vr и vn их выражения (1.86) и (1.87), записанные соответ-
ственно для двух эллипсов, получаем
48
Av2 = (Va —Va)2 ।
•x p2
__1
. /a
(1.89)
Эксцентриситет e и параметр p можно выразить через апогей-
ное R и перигейное г расстояния эллиптических орбит до центра
притяжения: е= R~r ; (1.90) Л + г р=Ч^—- (1-91) R + г
Используя эти формулы, приведем выражение (1.89) к виду:
1 __ 1 / 1 . J\
Pi 2 Pi rz /
(1.92)
где
х= —; /=1, 2.
р
Таким образом, ставится задача об отыскании значения х, реа-
Ду2 п
лизующего минимум величины — . Величина х изменяется в
диапазоне
шах {—— , ——< х < min f——, —?—1 (1.93)
\ #1 / \Г1 г2/
Непосредственное определение минимума выражения (1.92)
приравниванием нулю первой производной по х приводит к слож-
ному уравнению относительно переменной х. Для упрощения зада-
чи обратимся к геометрической аналогии. Будем полагать, что
Pi^p2 и запишем уравнение (1.92) в виде
Дг/2
И (Vpi — К аГ
х2+№>
(1-94)
49
где
I У1 (*) I — 1 >2 (*) I
I Уя — V Р2 I
2/ ч /1 \ / 1 \
У1(х)=Р1 Н-----* х — —~ ;
\ rl / \ A'i /
yl(x)=p2 (----
(1.95)
(1.96)
Уравнение (1.94) представляет собой^уравнение окружности
гч Ду
с центром в точке х=у = О и радиусом, равным—=--------
Vp- (vTi- Vр^
а уравнения (1.95) и (1.96) являются уравнениями эллипсов.
Эти эллипсы имеют центры соответственно в точках (х==—,
\ Pi
у = 0) и [ х=—, у=0), т.е. в точках, расположенных в сере-
/ \ Р2 1
1 1 1 1 п
дине между точками—, — и —, —. Полуоси этих эллин-
Г1 /?! Г2 /?2
сов выражаются следующими формулами:
(1-97)
где Z = 1, 2.
Оптимальное значение х, реализующее минимум величины
1Ду|, определяется как координата точки касания окружности
(1.94), имеющей минимальный из возможных радиусов, с кривой
у(х) в диапазоне условия (1.93). Радиус этой окружности опреде-
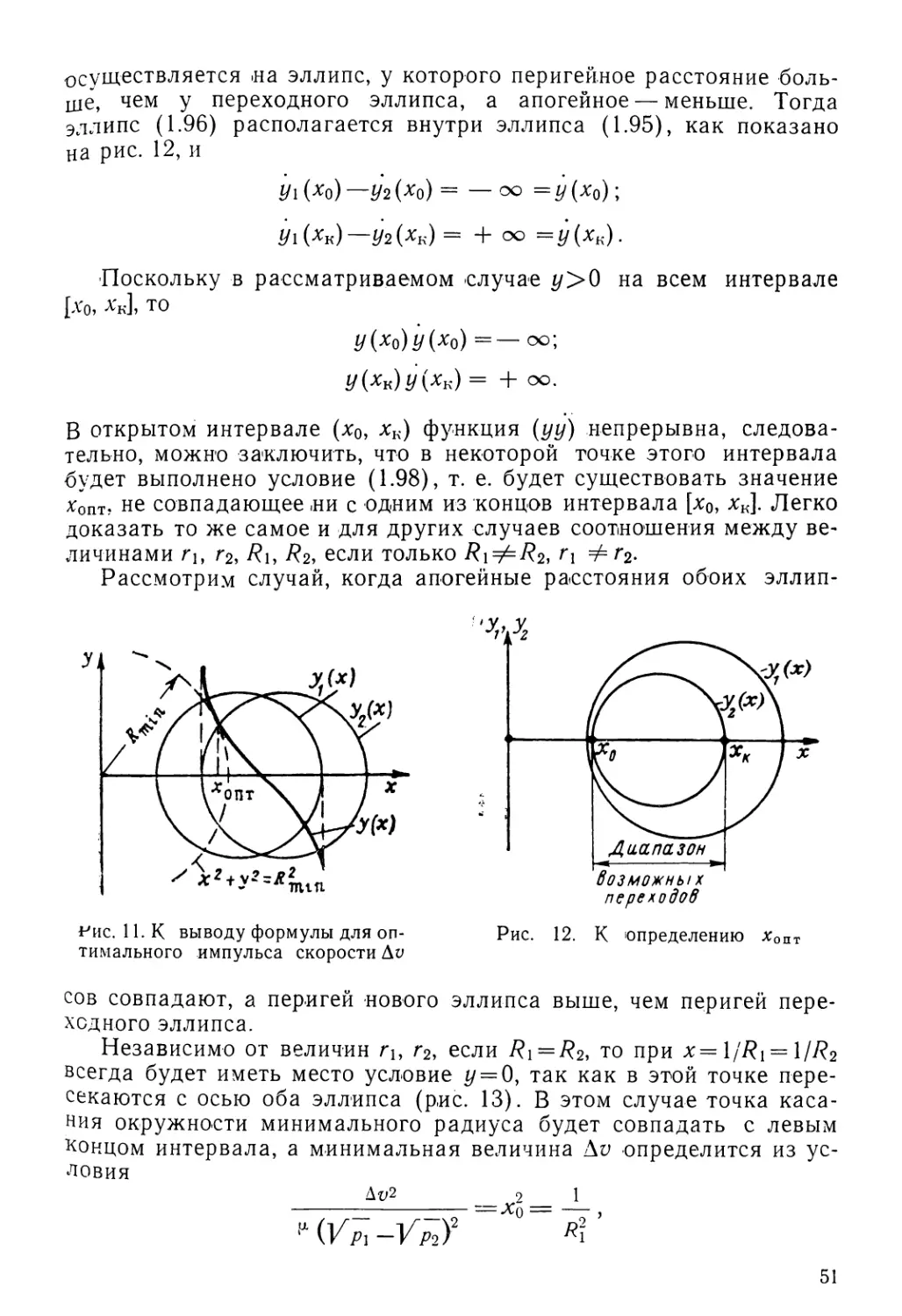
лит минимальную величину добавка скорости Ду (рис. 11).
Расположение указанной точки касания зависит от взаимного
расположения эллипсов (1.95) и (1.96), которое в свою очередь за-
висит от величин Г1, г2, ^?2- Из указанной геометрической карти-
ны ясно, что в точке касания окружности с кривой у(х) выполняет-
ся условие
УУ= —X-
(1.98)
Пользуясь геометрической интерпретацией, докажем, что в слу-
чае, когда г\^=г2 и Л?1 =^/?2, оптимальные значения величины х ле-
жат внутри диапазона (1.93). Пусть г2>П и 7?2</?i, т. е. переход
50
осуществляется .на эллипс, у которого перигейное расстояние боль-
ше, чем у переходного эллипса, а апогейное — меньше. Тогда
эллипс (1.96) располагается внутри эллипса (1.95), как показано
на рис. 12, и
1/1 (*о) —У2 (х0) = — оо = у (х0);
yi(xK)— у2(хк) = + оо =у(хк).
Поскольку в рассматриваемом случае у>0 на всем интервале
[Л'О, Л'к], то
z/(xo)t/(*o) = — оо;
у(хк)у(хк) = + оо.
В открытом интервале (х0, хк) функция (уу) непрерывна, следова-
тельно, можно заключить, что в некоторой точке этого интервала
будет выполнено условие (1.98), т. е. будет существовать значение
хопт, не совпадающее ,ни с одним из концов интервала [х0, *к]- Легко
доказать то же самое и для других случаев соотношения между ве-
личинами Г], r2, Ri, R2, если только R\^=R2, гг =hr2.
Рассмотрим случай, когда апогейные расстояния обоих эллип-
Рис. U.K выводу формулы для оп-
тимального импульса скорости Ди
сов совпадают, а перигей нового эллипса выше, чем перигей пере-
ходного эллипса.
Независимо от величин гь г2, если = Т?2, то при х = = 1//?2
всегда будет иметь место условие у = 0, так как в этой точке пере-
секаются с осью оба эллипса (рис. 13). В этом случае точка каса-
ния окружности минимального радиуса будет совпадать с левым
концом интервала, а минимальная величина определится из ус-
ловия
Дг/2 2 1
Г) ’
^(Ур,-Ур2)
51
откуда получим
(1.99)
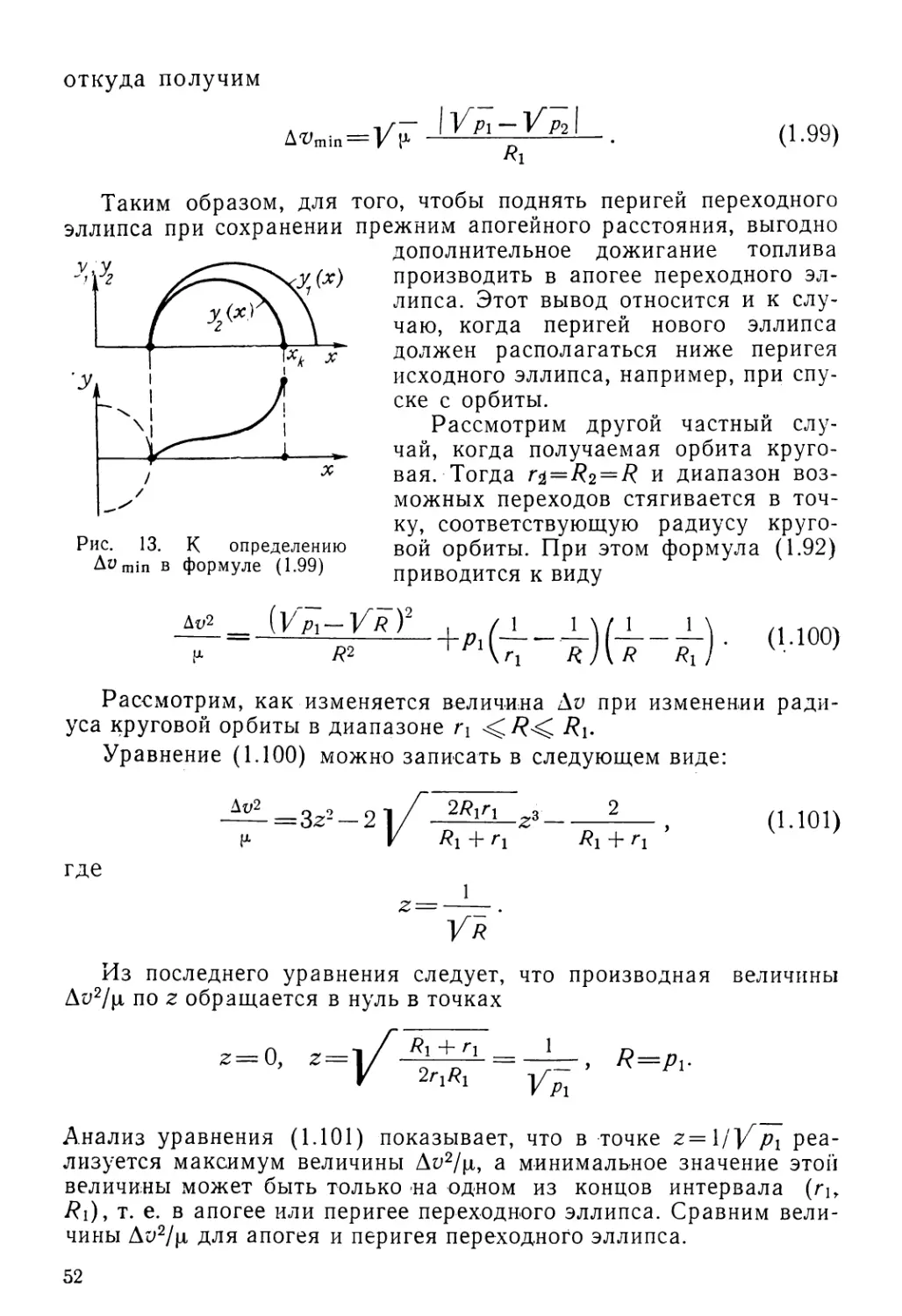
Таким образом, для того, чтобы поднять перигей переходного
эллипса при сохранении прежним апогейного расстояния, выгодно
Рис. 13. к определению
Ду min в формуле (1.99)
дополнительное дожигание топлива
производить в апогее переходного эл-
липса. Этот вывод относится и к слу-
чаю, когда перигей нового эллипса
должен располагаться ниже перигея
исходного эллипса, например, при спу-
ске с орбиты.
Рассмотрим другой частный слу-
чай, когда получаемая орбита круго-
вая. Тогда r^ = R2 = R и диапазон воз-
можных переходов стягивается в точ-
ку, соответствующую радиусу круго-
вой орбиты. При этом формула (1.92)
приводится к виду
Ду2 = — )2 . /J___Ц/Д___1_\
[Л R2 ™(/-1 R Д R rJ'
(1.100)
Рассмотрим, как изменяется величина Ди при изменении ради-
уса круговой орбиты в диапазоне Г] Ri-
Уравнение (1.100) можно записать в следующем виде:
-^-=3z2-21/' -2/?1Г1 z3------------, (1.101)
где
1
z =-----.
Vr
Из последнего уравнения следует, что производная
Д<72/|1 по z обращается в нуль в точках
величины
z=0,
#1 + /^ __ 1
у~ ’
R=Pi-
Анализ уравнения (1.101) показывает, что в точке z=l/]//71 pea-
лизуется максимум величины Д^2/р, а минимальное значение этой
величины может быть только на одном из концов интервала (гь
/?1), т. е. в апогее или перигее переходного эллипса. Сравним вели-
чины Д(72/|л для апогея и перигея переходного эллипса.
52
На основании формулы (1.101) запишем
а
Av2 \
— 3(а —
(1.102)
где
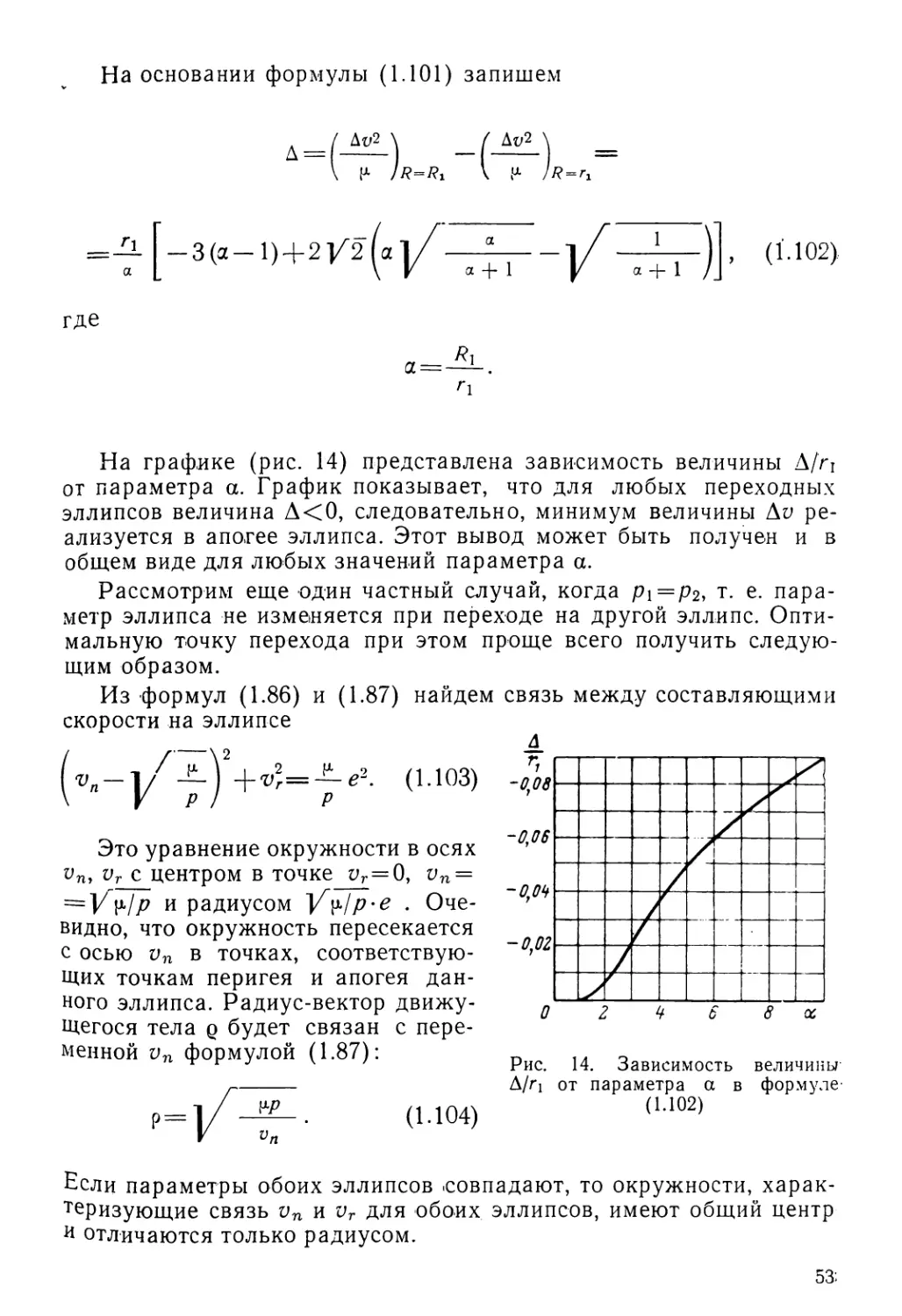
На графике (рис. 14) представлена зависимость величины A/ri
от параметра а. График показывает, что для любых переходных
эллипсов величина Д<0, следовательно, минимум величины Ду ре-
ализуется в апогее эллипса. Этот вывод может быть получен и в
общем виде для любых значений параметра а.
Рассмотрим еще один частный случай, когда Р\=Р2, т. е. пара-
метр эллипса не изменяется при переходе на другой эллипс. Опти-
мальную точку перехода при этом проще всего получить следую-
щим образом.
Из формул (1.86) и (1.87) найдем
скорости на эллипсе
(1.103)
Это уравнение окружности в осях
vn, vr с центром в точке yr = 0, vn =
= Ур/р и радиусом V^/P'e • Оче-
видно, что окружность пересекается
с осью vn в точках, соответствую-
щих точкам перигея и апогея дан-
ного эллипса. Радиус-вектор движу-
щегося тела q будет связан с пере-
менной vn формулой (1.87):
Рис. 14. Зависимость величины
Д/Г1 от параметра а в формуле-
(1.102)
(1.104)
Если параметры обоих эллипсов .совпадают, то окружности, харак-
теризующие связь vn и vr для обоих эллипсов, имеют общий центр
и отличаются только радиусом.
53:
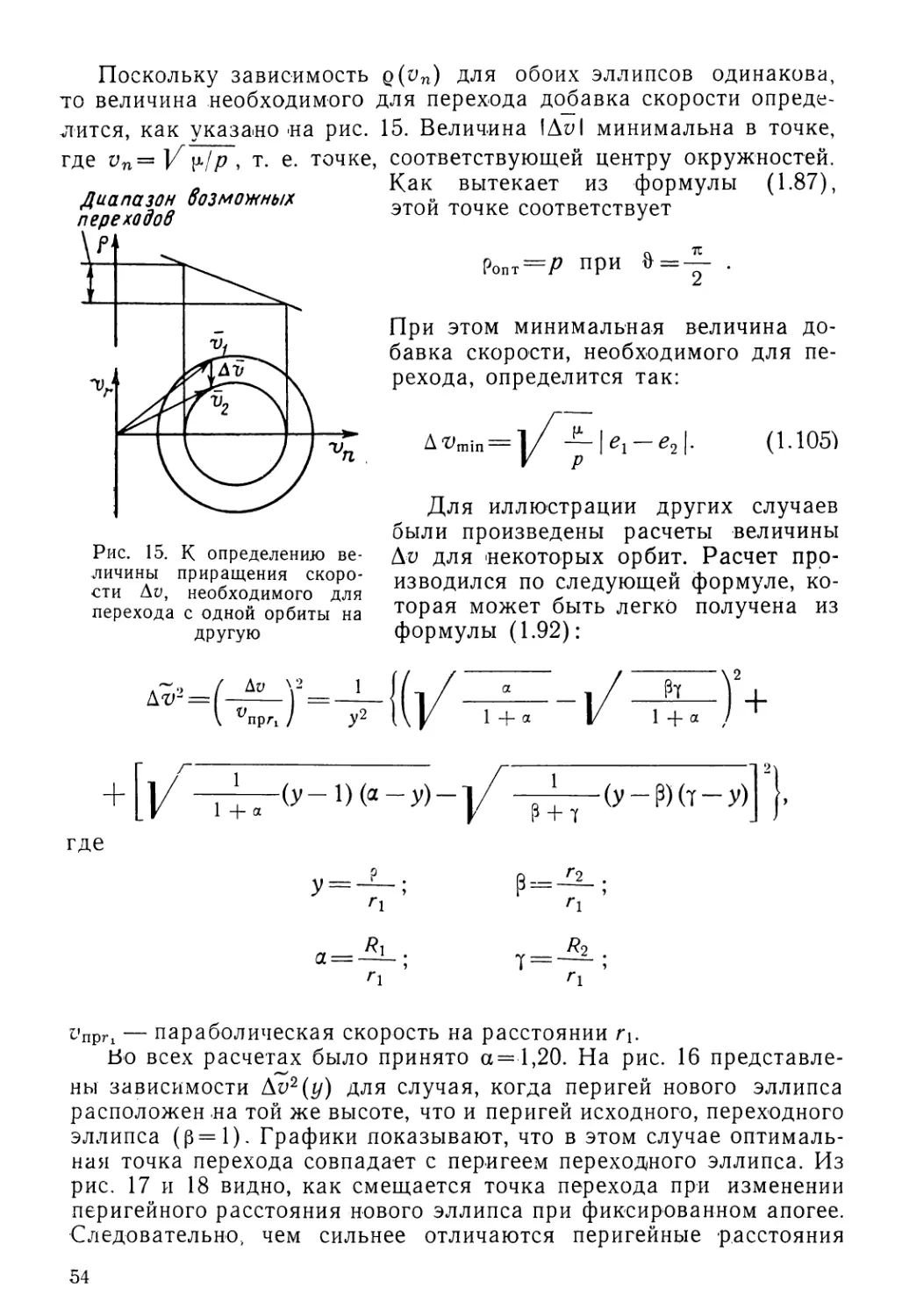
Поскольку зависимость Q(t>n) Для обоих эллипсов одинакова,
то величина необходимого для перехода добавка скорости опреде-
лится, как указано -на рис. 15. Величина 1Д^1 минимальна в точке,
где vn = К ?/р , т. е. точке,
Диапазон возможных
переходов
Рис. 15. К определению ве-
личины приращения скоро-
сти Ду, необходимого для
перехода с одной орбиты на
другую
соответствующей центру окружностей.
Как вытекает из формулы (1.87),
этой точке соответствует
Ропт — Р При &=-|- .
При этом минимальная величина до-
бавка скорости, необходимого для пе-
рехода, определится так:
= (1.105)
Для иллюстрации других случаев
были произведены расчеты величины
Ди для 'некоторых орбит. Расчет про-
изводился по следующей формуле, ко-
торая может быть легко получена из
формулы (1.92):
Ду \2
Vnprt /
1 + «
ки1
ь'прп — параболическая скорость на расстоянии г\.
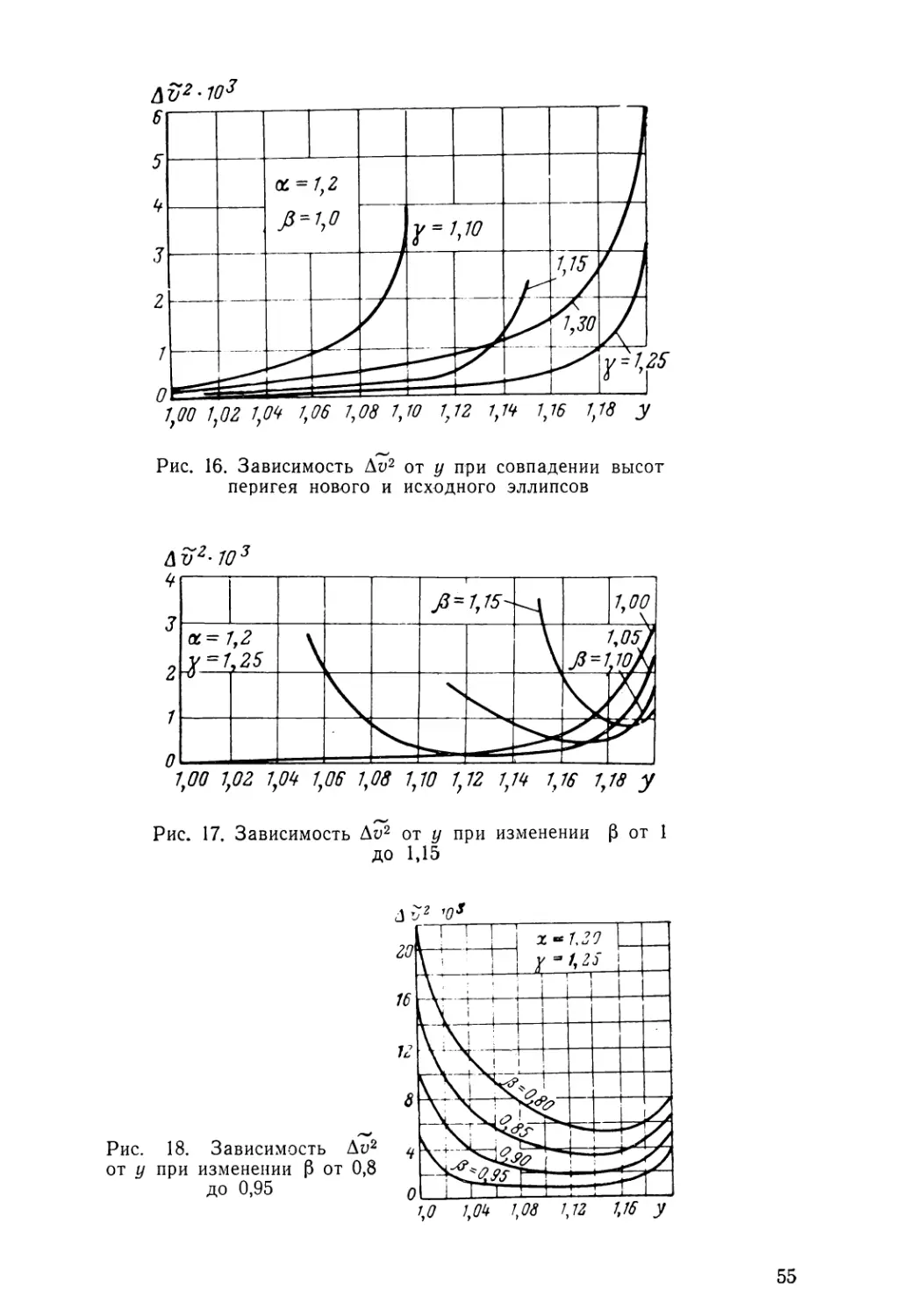
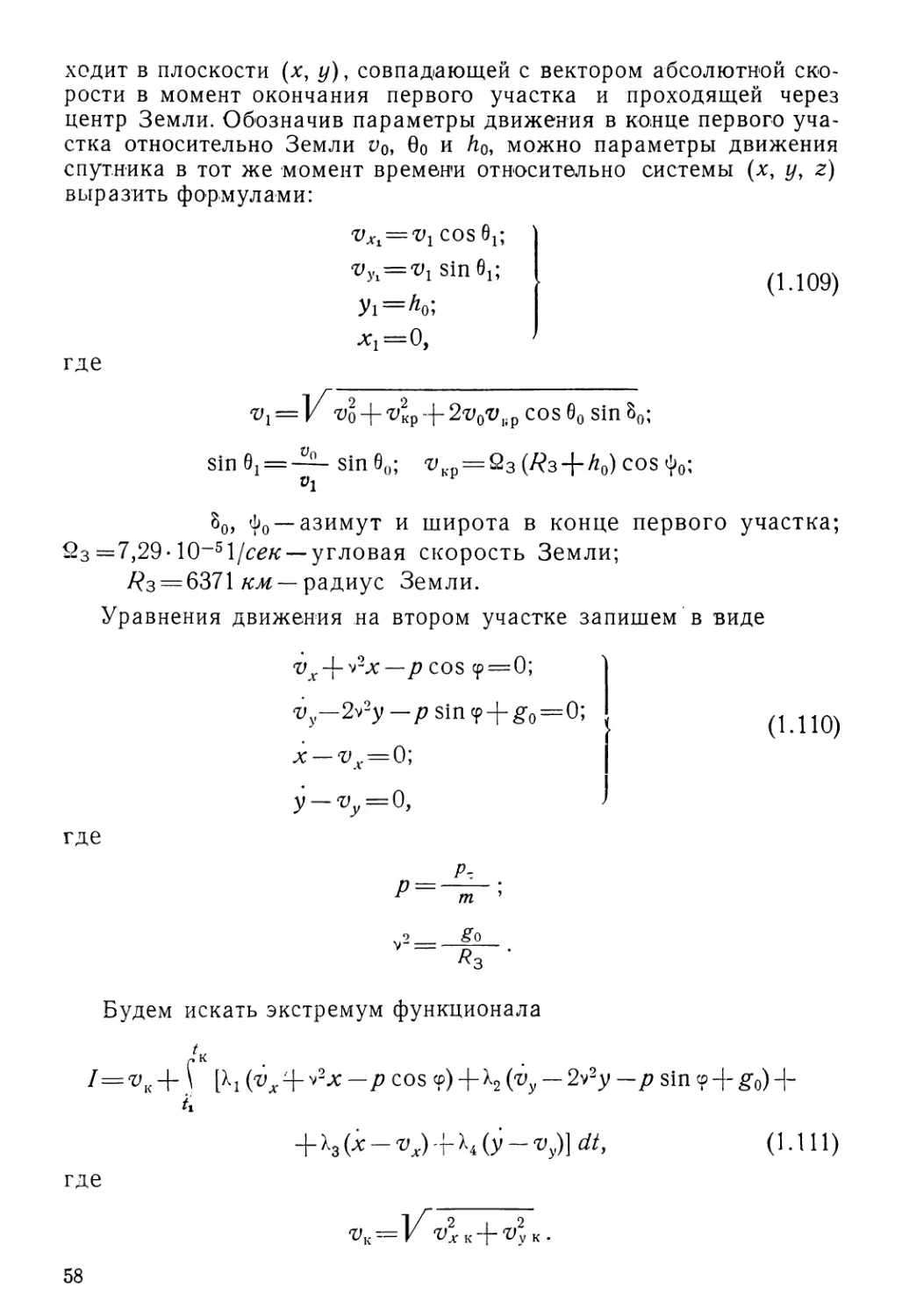
Во всех расчетах было принято а= 1,20. На рис. 16 представле-
ны зависимости Д^2(*/) для случая, когда перигей нового эллипса
расположен на topi же высоте, что и перигей исходного, переходного
эллипса (р=1). Графики показывают, что в этом случае оптималь-
ная точка перехода совпадает с перигеем переходного эллипса. Из
рис. 17 и 18 видно, как смещается точка перехода при изменении
перигейного расстояния нового эллипса при фиксированном апогее.
Следовательно., чем сильнее отличаются перигейные расстояния
54
1,02 1,04 1,06 1,08 1,10 1,12 1,14 1,16 1,18 у
Рис. 16. Зависимость Ли2 от у при совпадении высот
перигея нового и исходного эллипсов
1,00 1,02 1,04 1,06 1,08 1,10 1,12 1,14 1,16 1,18 у
Рис. 18. Зависимость Ду2
от у при изменении (3 от 0,8
до 0,95
Рис. 17. Зависимость Ду2 от у при изменении р от 1
до 1,15
55
обоих эллипсов, тем оптимальная точка перехода ближе к апогею
исходного эллипса. Расчеты показывают, что переход в оптималь-
ной точке дает существенный выигрыш как в величине At>, так и в
весе спутника.
Выбор активного участка для выведения спутника
на круговую орбиту с дожогом топлива
Предположим, что спутник выводится на орбиту с помощью
трехступенчатой ракеты *, причем на орбиту выходит вся третья
ступень. Часть топлива третьей ступени расходуется на основном
активном участке и часть тратится на переход с переходного эллип-
са на круговую орбиту. При условии, что параметры третьей ступе-
ни, а также всей ракеты известны, параметры движения в конце ак-
тивного участка определяются только временем окончания активно-
го участка и программой изменения угла тангажа ракеты. При
этом время окончания активного участка будет характеризовать
долю топлива третьей ступени, расходуемого на основном активном
участке. Пусть для дожога топлива при переходе с эллипса на
круговую орбиту требуется время А/. Имея в виду, что параметры
третьей ступени фиксированы, можно заключить, что вес спутника
будет ^наибольшим при минимальном значении величины
7^=Л + Д/.
(1.106)
Пусть для некоторого значения времени ZK ракета в конце ак-
тивного участка имеет параметры движения 0К, гк. Для того
чтобы апогей переходного эллипса был на расстоянии R от центра
притяжения, эти параметры должны удовлетворять условию
(1.107)
Как было показано, выгодней всего переходить на круговую ор-
биту по переходному эллипсу, касающемуся заданной круговой ор-
биты. Поэтому в формуле (1.107) под R будем понимать радиус за-
данной круговой орбиты. Для определения величины добавки к
скорости, необходимой для перехода на круговую орбиту в апогее
эллипса, можно пользоваться формулой
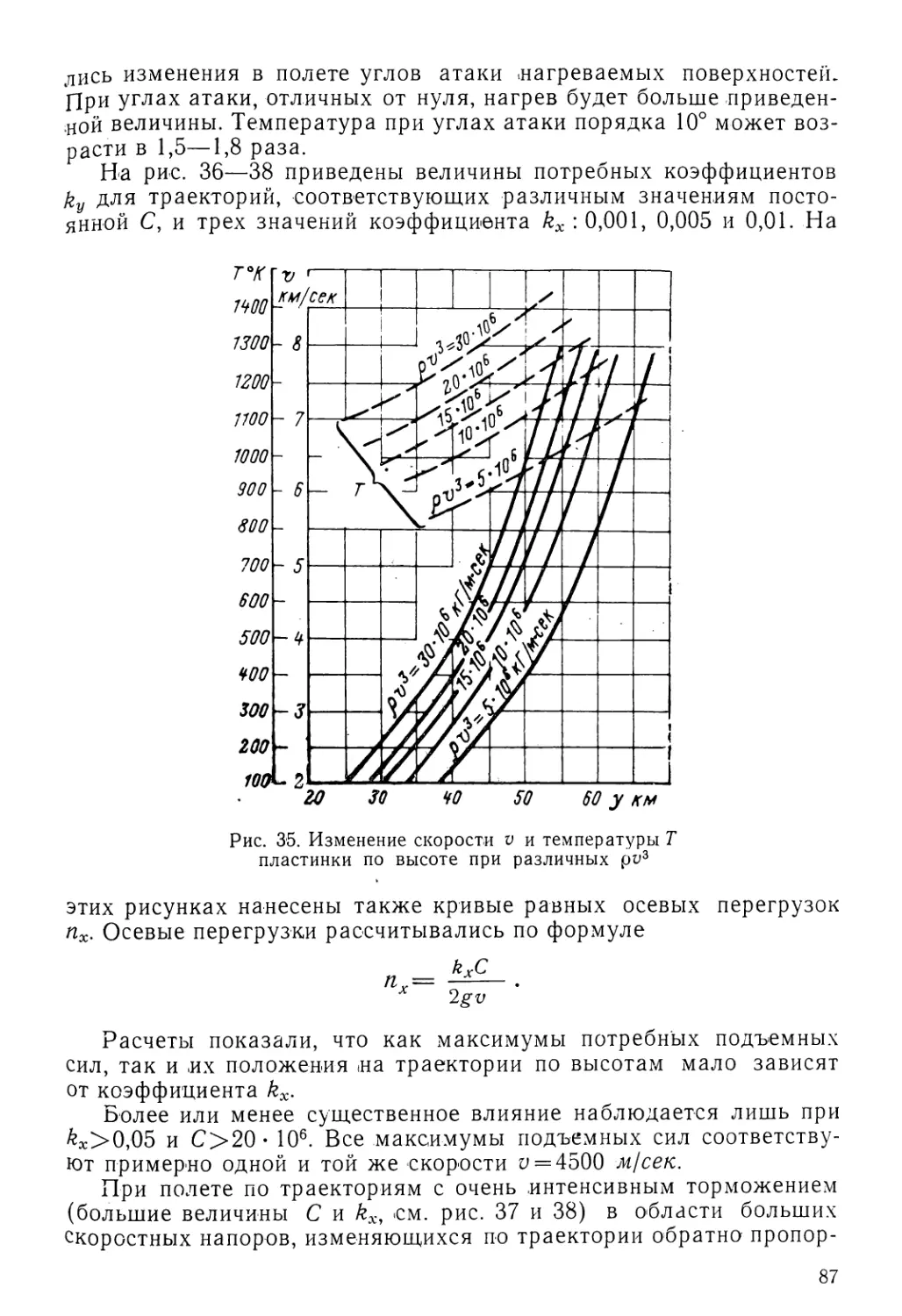
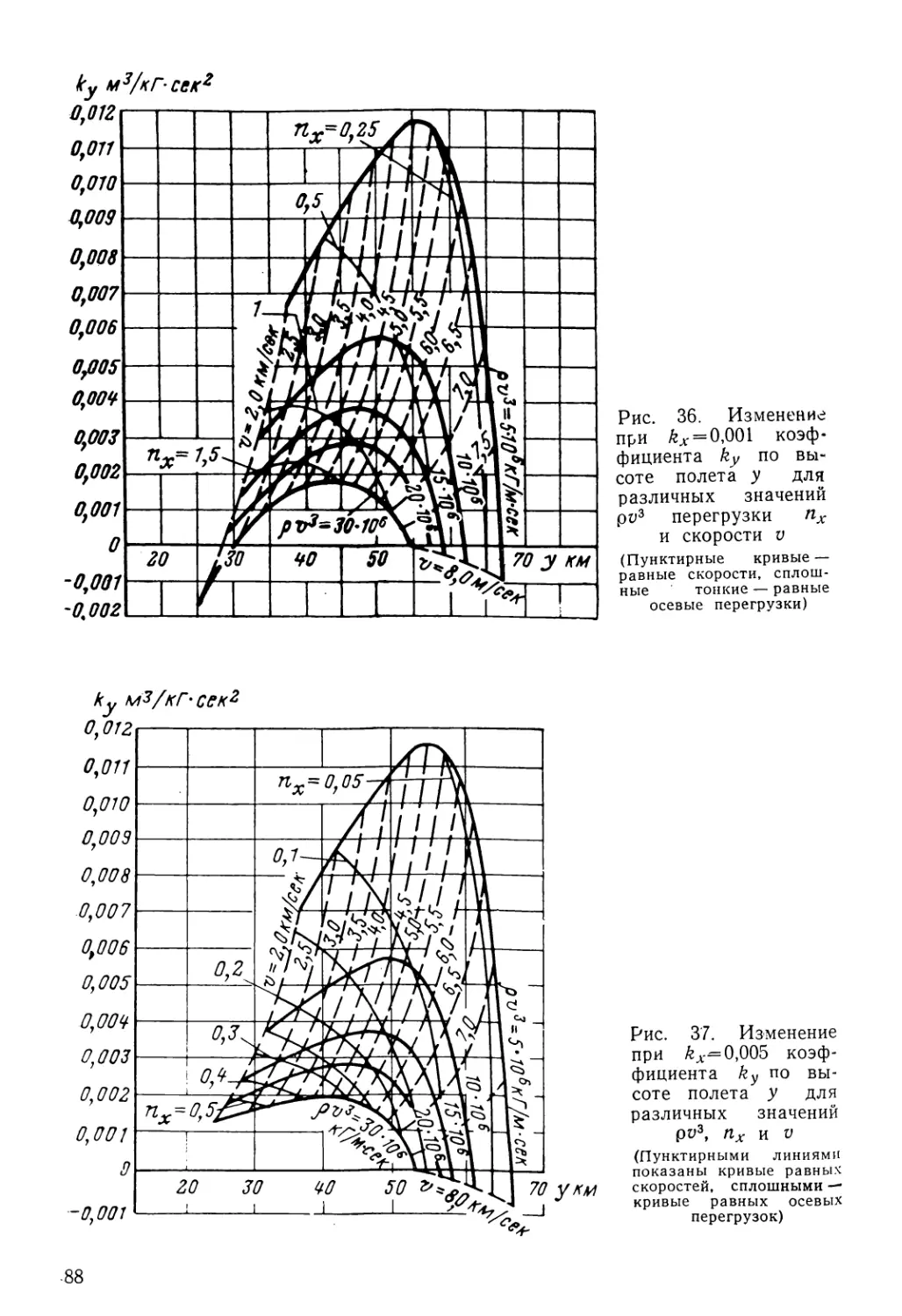
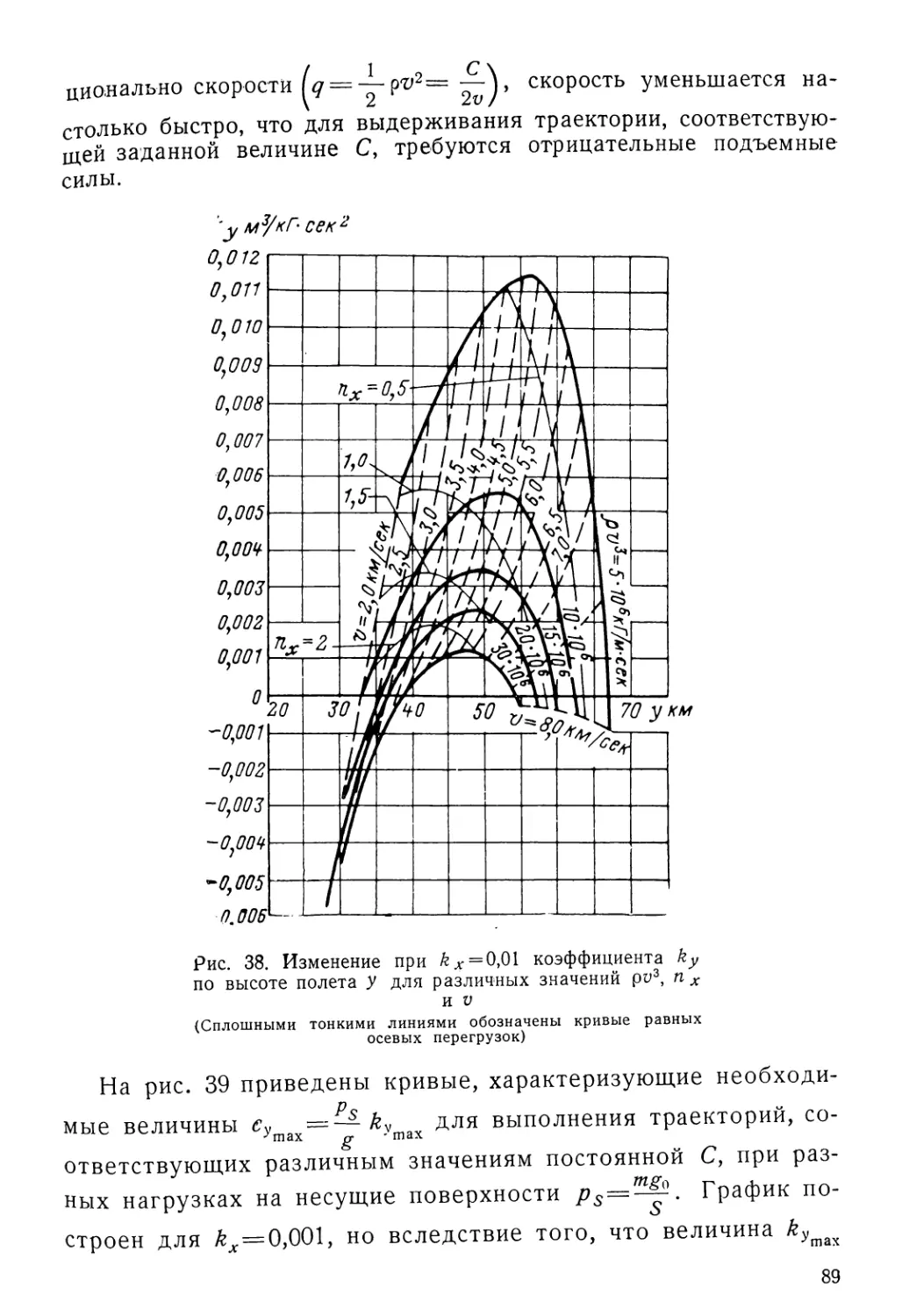
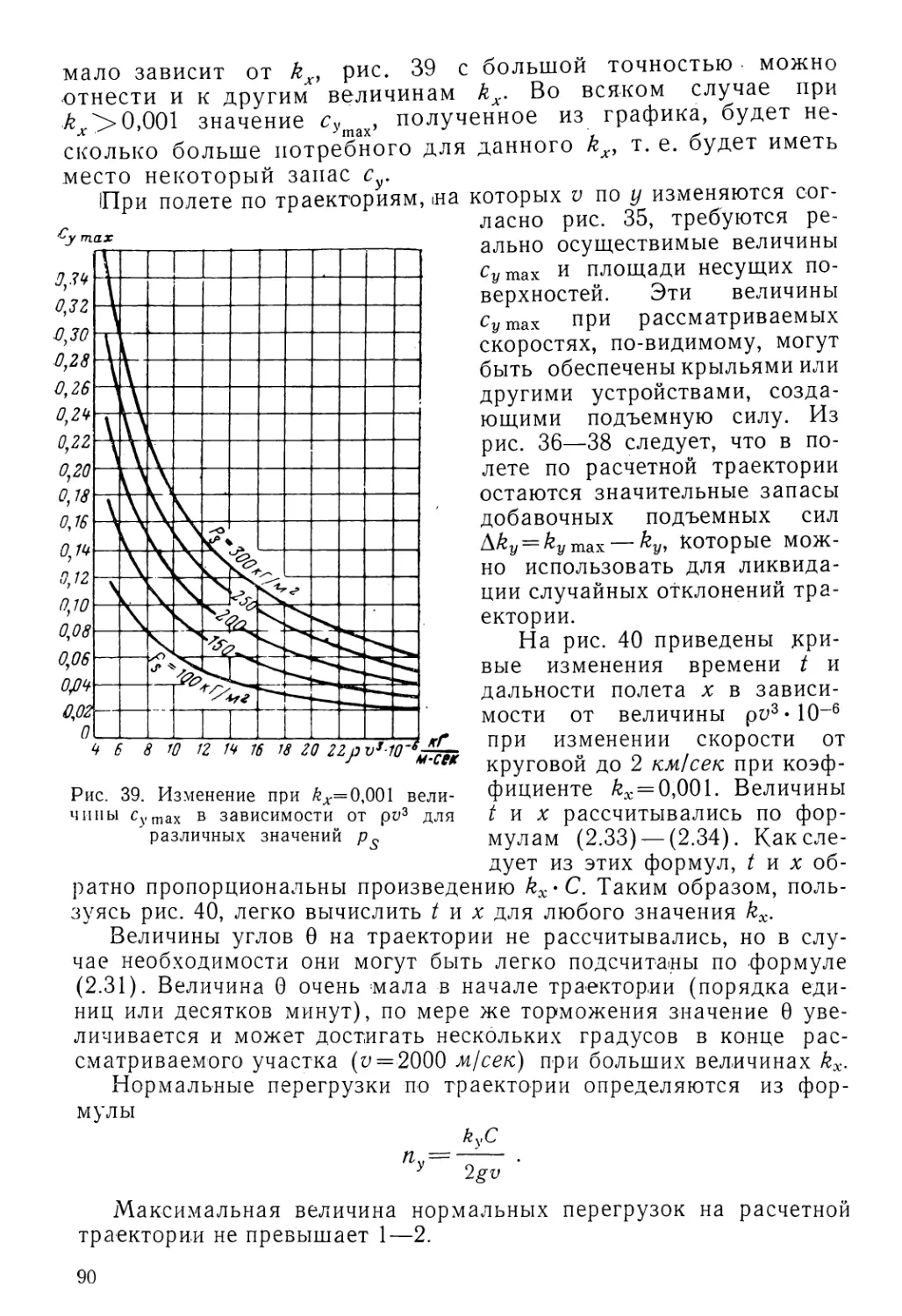
* Это допущение не является обязательным. Та же орбита может быть полу-
чена и для двухступенчатой ракеты с использованием дожога топлива, но при
меньшем весе спутника.
56
(1.108)
Перейдем к выбору наивыгоднейшей программы на активном
участке. При этом будем пренебрегать изменением величины гк.
Такое допущение означает, что не учитывается условие предыду-
щего раздела о выходе спутника с максимальной скоростью на за-
данную высоту (гк) или с заданной
скоростью на максимальную высоту.
В результате число накладываемых
граничных условий становится на
одно меньше. В данной задаче это
целесообразно, так как здесь имеем
оптимальный переходный эллипс, а
не траекторию выхода на заданную
орбиту при непрерывном активном
участке.
Значение угла 9К будем считать
при выборе программы фиксирован-
ным. Тогда при фиксированной вы-
соте круговой орбиты величины ук,
будут вполне определенными для
Рис. 19. к выводу линеаризован-
ного уравнения движения ИСЗ в
системе координат xyz
каждого значения угла 0К.
Следовательно, задачу можно сформулировать так: при заданных
значениях 0К и выбрать программу на активном участке с таким
расчетом, чтобы величина /к была минимальной.
Наименьшая величина /к обеспечит максимальный вес спутни-
ка для заданной орбиты, поскольку величину Ау полагаем фикси-
рованной. Поставленную задачу можно изменить так, чтобы искать
максимум скорости в конце активного участка при фиксированных
/к, 0К. Предположение о неизменности гк при вариациях программы
имеет отношение только к выбору формы изменения угла тангажа
по времени.
Активный участок разделим на два участка, первый из которых
будем условно полагать лежащим в атмосфере, а второй — цели-
ком в пустоте.
Семейство траекторий первого участка будем полагать завися-
щим от одного параметра — угла 0О в конце первого участка, по-
скольку выбор программы на этом участке в основном определяет-
ся другими соображениями.
Для каждого значения угла 0о будем определять оптимальную
программу на втором участке.
Движение ракеты на втором участке будем рассматривать в
системе х, у, z, не участвующей во вращательном движении Земли
(рис. 19). Будем полагать, что на втором участке движение проис-
57
ходит в плоскости (%, у), совпадающей с вектором абсолютной ско-
рости в момент окончания первого участка и проходящей через
центр Земли. Обозначив параметры движения в конце первого уча-
стка относительно Земли Оо и й0, можно параметры движения
спутника в тот же момент времени относительно системы (х, у, z)
выразить формулами:
^^^cosGi;
«„=», s‘n»,: (1.109)
У1=Л0;
Xi=0,
где
vx=V 'ro + 'i>KP + 2To'ylipcos90 sin 30;
sin 0j = — sin 60; г/ =23(/?з4-/!0) cos <]>o;
vi
80, % — азимут и широта в конце первого участка;
2з =7,29- 10-51/сел: — угловая скорость Земли;
Из = 6371 км— радиус Земли.
Уравнения движения на втором участке запишем в виде
р cos <р=0;
-Пу—2v2y — р sin <p + go=O;
х — -nv = 0;
у —^ = 0,
(1.110)
где
go
*з
Будем искать экстремум функционала
А
/=г»к + \ [Xj (vx + V2x-р cos ср) + Х2 (-Пу — 2v-y — р sin <? + g0) -ф-
h
+ X3(x-^) + X4(y-S)]d/, (1.111)
где
= V 'Пхк + 'Пук.
58
Этот функционал аналогичен рассматриваемому в работе [24].
Уравнения экстремали будут включать уравнения системы (1.110)
й добавочные уравнения:
4
Х3 — v2X1=0,
Х4 + 2Л2 = 0,
(t.l 12)
Введем еще одно допущение. Будем считать фиксированным нак-
лон вектора скорости в конце активного участка (0кО) к оси х, а не
к местному горизонту. Имея в виду, что параметры начала второго
участка фиксированы, для определения в (1.112) постоянных XjK,
Хгк, ^зк и ^4К воспользуемся условием
---4" Мк) ^их -j- (—------------------------------]- Х2к к + ^Зк^л: к+ ^4к^Ук = 0,
,^к / \-/
откуда при сделанных допущениях
л3к = Х4к = 0; (1.113)
x1K+(^-+x2JtgeKO=o. (1.114)
\ Vk /
Проинтегрировав уравнения (1.112) при начальных условиях
(1.113), получим следующий закон изменения угла <р:
. , ch]/2v(/K — t) /1
tg?=tg?K------(l.iio)
COS ’V (tK — t)
Разложив в ряд это выражение, получим
tg ?=tg <?к [ 1+-j- (/к - ty+-А (/к - ty+
+44о(,к_/)Ч-../.
Считая, что /к—^<300 сек, можно принимать с достаточной
степенью точности
? = ?KH-Stp(/), (1.116)
где
8<Р (0=~у2 (4 — О2 sin 2<Рк-
59
В .соответствии с формулой (1.115)
Условие (1.114) не накладывает ограничений на величину tg<pK-
Очевидно, (рк целесообразно выбирать из условия, чтобы угол 0ко в
конце активного участка был равен заданному. Поскольку предпо-
лагается варьирование величиной 0К как параметром, можно вмес-
то Око задаваться величиной <рк. Систему (1.110) можно с достаточ-
ной точностью проинтегрировать в конечном виде при изменении
угла <р по закону (1.116). Были выполнены расчеты параметров
движения в конце активного участка с учетом добавка угла бср(/)
и без него, причем в последнем случае параметр фк менялся таким
образом, чтобы угол <рк0 оставался прежним. Результаты показали,
что учет добавка практически не влияет на величину скорости в
конце активного участка (расхождение составляет менее 1 м!сек).
Поэтому в первом приближении можно полагать ф постоянным на
активном участке.
Приведем формулы для расчета параметров движения в конце
активного участка при ф = срк = const *, полагая, что первый участок
траектории соответствует полету первой ступени ракеты:
хк— —— sin v/к-ЬА cos <рк;
v
Хк = хх COS v/K-|-Br COS ©к;
yK= • sh У 2 + ch У2 v/K+A sin ©K —
/2 v
-^+(ch/+v/K-l);
yK = ch У2 vtK + У1У2 v sh -J- £>! sin ©K —
---^-sh
/2.
где
^r—4 —4; ^i=4+v'4;
h = ~ [^ + (1-^14)111/4 + -^- [М4—4)+/2ln/2];
* Формулы получены из решения системы (1.110) при (p = const путем раз-
ложения sin, cos, sh, ch в ряды с удержанием членов первого и второго порядка
включительно.
60
W in /1+
?? Pl
A_L+2p2.(i+p2/2)(/K-z2)
^/221п/2 + 272/к-^
Й® P2
/3=-^ln/1-^ln/2;
Pl r2
./1= 1 ~ P1^2 J
Z2 = 1 P2 (^k ^2) j
/2 — время работы двигателей второй ступени;
/к — полное время полета на активном участке от момента
отделения первой ступени;
Рь Р2 — секундные расходы топлива для второй и третьей сту-
пеней, отнесенные к начальному весу соответствую-
щей ступени:
= ?2 = Риь
По параметрам движения в конце активного участка можно рас-
считать радиус круговой орбиты 7? и ДЛ Для этого можно исполь-
зовать следующие формулы:
П £COS2 0K
*х = rK —;--- ,
1 — е
e = Y\ — (2 — k) k cos2 6K; 1
<1 = 398600 ^-;
(i сек2
Az/
AZ==(1-e «- )[—-(^-4)]; . (1 118)
±v = l/JL_ ^kCosOk . W=J2_.
V r r ’ fe ’
vK = ]fx2K + y2K-, 9K = 6KO + s; tg0KO = -^—;
XK
Sins=^-; ^ = /^ + (6371 + ^)2.
Для окончательного решения задачи радиус круговой орбиты
и величину AZ нужно выразить в зависимости от угла срк при раз-
личных значениях параметра 0О. Далее на основании зависимостей
(1.118) можно определить функцию Т [см. (1.106)] от срк Для раз-
61
личных 0о при выходе на некоторые фиксированные круговые ор-
биты.
Изложенные результаты позволяют сделать следующие вы-
воды:
1. Существует определенная оптимальная точка для перехода с.-
одной эллиптической орбиты на другую. Осуществление перехода в.
этой точке дает существенный выигрыш в весе спутника при задан-
ной орбите.
2. Для получения круговой орбиты на определенной высоте при
максимальном весе спутника добавочное дожигание топлива целе-
сообразно производить в апогее эллипса. При этом угол тангажа
на участке траектории, лежащем вне атмосферы, можно принимать
постоянным.
ГЛАВА II
Спуск спутника
с орбиты
на Землю
Одним из важнейших этапов полета в космическое пространст-
во является возвращение на Землю. Вследствие большой скорости
движения (больше 8 км!сек) летательный аппарат, возвращающий-
ся на Землю, при движении в атмосфере будет испытывать силь-
ный аэродинамический нагрев и большие перегрузки.
Защита аппарата ют перегрева и чрезмерных перегрузок явля-
ется основным условием для безопасного его возвращения на Зем-
лю. Этап полета ИСЗ или его какой-либо части при возвращении
на Землю будем называть спуском.
Чтобы начать спуск с орбиты, необходимо прежде всего умень-
шить скорость движения спутника. Это достигается приложением к
нему реактивного импульса, направленного в сторону, обратную
движению спутника на орбите. После сообщения импульса аппарат
начнет снижаться и войдет в плотные слои атмосферы. В зависимо-
сти от величины и направления приложенного импульса возможны
два случая:
1) аппарат, прежде чем войти в плотные слои атмосферы, со-
вершает несколько оборотов (витков) вокруг Земли, постепенно
снижаясь из-за торможения в верхних слоях атмосферы;
2) аппарат, не совершая дополнительных оборотов вокруг Зем-
ли, входит в плотные слои атмосферы.
Спуск аппарата может быть баллистическим (без использова-
ния подъемной силы) и планирующим (с использованием подъем-
ной силы) *.
Баллистический спуск с точки зрения организации движения
является более простым, так как при его выполнении почти не тре-
буется управлять полетом (кроме участка реактивного торможе-
ния для схода с орбиты).
Однако расчетные перегрузки и нагрев аппарата при этом спо-
собе оказываются довольно высокими. 'Применением специальных
воздушных тормозов, позволяющих начинать торможение на боль-
ших высотах, можно существенно снизить продольные перегрузки.
* Торможение с помощью реактивных сил не рассматривается.
63
При планирующем спуске можно обеспечить меньшие перегруз-
ки и нагрев аппарата, чем при баллистическом, так как подъемная
сила оказывает гораздо большее влияние на траекторию полета,
чем сила лобового сопротивления. Вместе с тем из-за большей
сложности учета подъемной силы траектория планирующего спу-
ска может быть рассчитана менее точно, чем траектория балли-
стического. Но при планирующем спуске неточности в расчете
траектории компенсируются значительно большей возможностью
управления полетом.
Простота баллистического спуска делает его особенно пригод-
ным для первых пусков аппаратов с человеком и для аппаратов
без людей. Последними могут быть капсулы, доставляющие на
Землю научную документацию со спутника, передача которой по
радио затруднительна.
Для капсулы (кассеты), двигающейся при спуске по баллисти-
ческой кривой, проблема защиты её от нагрева аналогична про-
блеме теплозащиты головных частей ракет дальнего действия.
Однако особенностью траекторий капсул, сбрасываемых со спут-
ника, являются небольшие углы входа, при которых значительно
снижается нагрев, так как капсула большую часть своей скорости
теряет в разреженных слоях атмосферы при небольших скорост-
ных напорах *.
Проблема спуска аппарата с людьми более сложна, так как в
этом случае, кроме защиты аппарата от перегрева, необходимо
обеспечить допустимые для человека перегрузки.
Рассмотрим траектории баллистического и планирующего
спусков, а также методы оценки различных траекторий с точки
зрения нагрева аппарата и осевых перегрузок. Приведем анализ
точности приземления аппарата при баллистическом спуске. Во-
просы управляемости при планирующем полете и устойчивости
движения в настоящей работе не рассматриваются.
2.1. БАЛЛИСТИЧЕСКИЙ СПУСК
Движение аппарата при баллистическом спуске в системе коор-
динат х, у, z, связанной с вращающейся Землей с началом в центре
Земли и осью Ог, направленной на северный полюс, описывается
следующими дифференциальными уравнениями:
--х+~х(\-5~\—~gc?‘vx+xQl + 2Q3y+px-,
У= —7 УН—-у(1-5-^-)—\-g^vy + yQl-2Q3x+p
U I /г» г- Z2 \ 1 • I
z=- + —-Z 3-5— —— g<wux+pz,
г3 г5 \ / 2
(2-1)
* Однако суммарные тепловые потоки (за все время спуска) могут суще-
ственно возрасти.
64
где |л = /Л4 — произведение гравитационной постоянной на массу
Земли;
о — баллистический коэффициент;
р — плотность воздуха;
v — скорость спутника 'относительно выбранной системы
координат:
V = ]/Л2_|_у2_|_22; r=]/rx2 + y2JrZ2.
рх, Ру, Pz — составляющие ускорения силы тяги по осям х, у, z\
е — константа, входящая в члены, учитывающие влияние
сплюснутости Земли и определяемая из формулы
е = (2.2)
В выражении (2.2):
а —экваториальный радиус Земли;
а,— -а^_ь--степень сжатия Земли (Ь — полярный радиус);
а
т = —5—; (2.3)
S3
g3 — ускорение силы тяжести на экваторе;
23 —угловая скорость вращения Земли.
Для невращающейся системы координат £2з = 0, поэтому цент-
робежные и кориолисовы силы в уравнениях движения будут от-
сутствовать. Влиянием вращения атмосферы, увлекаемой Землей,
в большинстве случаев можно пренебречь.
Ввиду большой сложности систему уравнений (2.1) целесооб-
разно решать на электронной вычислительной машине, так как
применение эллиптической теории [26] для приближенных расчетов
возможно лишь на высотах выше 80—90 км, где влияние аэродина-
мических сил мало.
Осевые перегрузки при баллистическом спуске, как и прочие ус-
ловия спуска, определяются параметрами движения при входе ап-
парата в плотные слои атмосферы (у0, Оо, HQ), коэффициентом его
аэродинамического сопротивления сх и нагрузкой на мидель рм
(отношением веса аппарата к площади его миделя), причем коэф-
фициент аэродинамического сопротивления, а также нагрузка на
мидель в течение полета могут изменяться.
Рассмотрим осевые перегрузки и время их действия в зависимо-
сти от указанных параметров.
Будем определять траектории, на которых перегрузки не превы-
шают значений, переносимых человеческим организмом, и нагрев
аппарата не превосходит допустимой величины. Кроме того, такие
траектории должны обеспечивать возможность посадки в задан-
3-2343
65
ном ограниченном по площади районе. При таких условиях, иссле-
дуя движение, можно учитывать лишь основные действующие на
аппарат силы — центральное поле тяготения Земли и аэродинами-
ческое 'сопротивление. Решения дифференциальных уравнений дви-
жения при баллистическом спуске, полученные на электронной
счетной машине, позволяют выбрать траектории, оптимальные по
перегрузкам и времени их действия. Анализ траекторий спуска поз-
воляет также оценить нагрев аппарата по характерным равновес-
ным температурам. Такая оценка дает возможность выявить опти-
мальные траектории с учетом нагрева аппарата.
Перегрузки при баллистическом спуске
Перегрузка от силы аэродинамического сопротивления
/гг = —,
х G 2
где Rx— сила аэродинамического сопротивления;
G — вес аппарата;
о — баллистический коэффициент, или коэффициент тормо-
жения, определяемый по формуле:
G ’
SM — площадь миделя аппарата.
Поскольку траектория баллистического спуска определяется
начальными параметрами движения и коэффициентом торможения
о, то и перегрузки определяются теми же величинами. В дальней-
шем будем полагать, что вдоль каждой траектории спуска
о—-const.
Это допущение является достаточно обоснованным в случае
рассмотрения движения тел с практически постоянными внешними
формами и массой при гиперзвуковых скоростях, так как сх таких
тел определяется лишь коэффициентом волнового сопротивления
схъ, который в диапазоне чисел М = 5-н25 мало изменяется.
Для выяснения общего характера зависимости перегрузок от
указанных факторов на электронной вычислительной машине были
проведены численные решения упрощенной, согласно сделанным
допущениям, системы (2.1) при изменении начальных условий
движения и коэффициента о в широких пределах. В качестве
начальных условий принимались параметры движения v0 и 0О на
'высоте 100 (или 80) км, так как плотность атмосферы, как пока-
ЗДгвают расчеты, начинает заметно влиять на траекторию спуска
16 ль ко на этих высотах. Результаты расчетов показывают, что
(2-4)
Рис. 20. Зависимость перегрузки пх от
времени t полета при различных значе-
ниях углов входа 0о и баллистического
коэффициента о»
характер изменения осевых перегрузок пх по времени полета при-
мерно одинаков на всех траекториях баллистического спуска
(имеется на всех кривых один резко выраженный максимум).
Для иллюстрации этого вывода на рис. 20 и 21 приведены кри-
вые изменения перегрузок по времени полета и по высоте на траек-
ториях, отличающихся друг от
атмосферу 0О.
Основными параметрами,
определяющими воздействие
перегрузок на человека, явля-
ются величина максимальной
перегрузки на данной траекто-
рии и время действия высоких
перегрузок.
На рис. 22—23 представле-
ны расчетные кривые зависи-
мости максимальных значений
перегрузки /гХтах на траекто-
рии от начальных параметров
движения 0о и vQ и коэффици-
ента торможения о, причем для
большей наглядности графики
построены в различных систе-
мах координат. На рис. 24
приведены значения дальности
полета при баллистическом спуске (х) и скорости встречи с Землей
(^вс) в зависимости от коэффициента kx = og и угла входа 0О.
Расчеты проводились для следующих значений начальных пара-
метров спуска и коэффициента о:
друга величиной угла входа в
г-г КЛС лл
7 --------< v0 < 9
сек
км
сек
-5°<0о<О;
о ооо5a <:o,oi —— .
кГ кГ
Из рисунков 21—24 видно, что величина максимальной пере-
грузки больше всего зависит от угла входа аппарата в атмосферу
(0о). При увеличении модуля угла входа максимальные перегруз-
ки сильно растут и уже при угле 0О = —5° достигают значений,
опасных для человека (см. рис. 23).
От изменения баллистического коэффициента о максимальные
перегрузки мало зависят, но они тем меньше, чем больше о.
Значение о сильно влияет на положение максимума перегру-
зок на траектории (см. рис. 20).
з*
67
Рис. 21. Зависимость перегрузки пх и времени t полета
от высоты у при различных углах входа 0о
Рис. 22. Зависимость перегрузки
лшаххот скорости входа в атмо-
сферу у0 при различных значе-
ниях а и Эо
68
рис. 23. Зависимость /гл-тахот 0о
при различных значениях и о
х км
Рис. 24. Зависимость скорости иВс, при которой ИСЗ встречается с Землей,
и дальности х полета (при снижении высоты у от 80 км до 0) от
коэффициента kx = ago при различных значениях угла входа 9о
69
Зависимость степени нагрева аппарата от параметров входа его
в атмосферу
При расчетах начальные параметры входа аппарата в атмос-
феру соответствовали высоте Яо=1ОО км. Траектория спуска опи-
сывалась дифференциальными уравнениями (2.1) при условии, что
&з =0, а поле Земли — центрально.
Рис. 2'5. Зависимость температуры торможения
(^w)max от угла входа 0о при турбулентном режи-
ме обтекания
Расчет траекторий на электронной счетной машине был вы-
полнен для начальных параметров входа:
t'o = 7750; 8000; 8500; 9000 м!сек\
0о = 0; —1; —2; —3; —4; —5°;
оо = 0,0005; 0,001; 0,002; 0,0035; 0,005; 0,01, 0,05 м2/кГ.
Для оценки степени нагрева оболочки аппарата на рассчитан-
ных траекториях спуска были использованы следующие критерии:
70
1) максимальная на траектории температура оболочки (Ги)тах
в критической точке теплоизолированной сферической поверхности
радиуса в 1 м при значении коэффициента поверхностного излуче-
ния 8 = 0,8;
2) время нагрева оболочки Д7 при (7\)тах>1500°С (условная
температура).
Зависимости нагрева оболочки аппарата от начальных пара-
метров его входа рассчитывались для турбулентного режима обте-
кания.
J t сек
600
v0 - 7, 75 км/сек\
8,0
'в, Z
8,5
у0- 9,0 км/сек ,
1>д = 7,75 км/сек '
8,0
8,2 >
8,5
v^ = 9,0 км /сек
400
200
0t -7 -2 ~4 0°
Рис. 26. Зависимость времени At действия высоких температур тормо-
жения от угла входа 0О
х©
Рассмотрим влияние каждого из указанных начальных пара-
метров входа на тепловой режим аппарата.
.Влияние начального угла входа в атмосферу 0О было исследо-
вано расчетами в диапазоне от 0 до —5° при трех постоянных зна-
чениях оо = 0,0005; 0,002; 0,01 в заданном диапазоне изменения
скоростей. -Кривые, характеризующие зависимости (Tw)max (0о) и
Д7(0О), приведены на рис. 25 и 26. Как видно из рассмотрения
кривых угол входа сильно влияет на температуру (Tw)max и вре-
мя действия AZ высоких температур. Характерно, что с увеличе-
нием значения отрицательного угла входа наблюдается повышение
максимальных температур с одновременным уменьшением времени
Действия температур выше 1500°С. -Следовательно, для нормаль-
ных условий работы конструкции при действии на нее повышен-
ных температур может существовать какой-то оптимальный угол
при определенных значениях параметров и о0.
Влияние величины баллистического коэффициента о было ис-
следовано в диапазоне значений от 0,0005 до 0,05 м2/кГ и в диапа-
71
зоне изменения углов 0о от 0 до —5° при скоростях входа =
= 7750—9000 м/сек.
Соответствующие зависимости (Tw)max и AZ приведены на
рис. 27 и 28. Для всех рассматриваемых углов входа в атмосферу
Рис. 27. Зависимость (Tw)max от баллистического параметра а при турбу-
лентном режиме обтекания
с увеличением параметра о происходит снижение (Г^)тах и вре-
мени действия М температур, превышающих 1500° С. При этом
наиболее существенное снижение (T'w)max и \t происходит в диа-
пазоне о = 0,0005—0,05, так как при дальнейшем возрастании о из-
менение (Tw)max И М становится незначительным.
72
Из характера полученных зависимостей следует, что для сни-
жения нагрева конструкции аппарата желательно иметь как мож-
но большие значения а, т. е. высокие значения коэффициента ло-
бового сопротивления сх и низкие величины нагрузки на мидель
рм. Поэтому целесообразно проектировать аппарат в виде тела
вращения затупленной формы при больших площадях миделя.
At сек
7,75 8,0 8,2 vn км/сек
Рис. 28. Зависимость времени At действия высо-
ких температур торможения от скорости £>о входа
в атмосферу
Влияние начальной скорости входа у0 было рассмотрено в диа-
пазоне углов входа 0О от 0 до —5° при трех постоянных значениях
о = 0,0005; 0,002 и 0,01 в заданном диапазоне изменения скорости
от 7750 до 9000 м/сек для турбулентного режима течения.
Из анализа полученной зависимости At (t>0) следует, что с уве-
личением скорости vQ возрастает время действия At температур
во всем рассматриваемом диапазоне изменения углов входа (см.
рис. 28).
Интересно отметить, что в диапазоне углов 0О от 0 до —2°,
начиная со скорости ^о = 775О м/сек, происходит снижение макси-
73
мальных температур (Т1Г)тах с ростом начальной скорости (см.
рис. 27). Для остального диапазона углов входа наоборот наблю*
дается увеличение (7\r)max с ростом vQ, и чем больше значение
баллистического коэффициента о0, тем меньше изменение (Tw)max.
Оценка точности приземления
Рассмотрим сначала отклонения от заданного .места приземле-
ния’ аппарата, вследствие ошибок в сообщении ему дополнитель-
ной скорости. Ошибки в сообщении дополнительной скорости бу-
дем характеризовать отклонением Ди (величины дополнительной
Рис. 29. Схема спуска ИСЗ
с орбиты
скорости и), отклонением Да (угла
направления вектора дополнитель-
ной скорости а) и составляющей
скорости на нормаль к плоскости
орбиты vz (рис. 29). Орбиту при
этом предполагаем точно известной.
Указанные ошибки будут вызывать
отклонения точки падения от наме-
ченного пункта в плоскости орбиты
ДА и направлении, перпендикуляр-
ном плоскости орбиты. Дг. Влиянием
вращения Земли на точность при-
земления будем пренебрегать, так
как это влияние в данном случае не-
существенно. Кроме того, при ана-
лизе влияния ошибок Дг/, Да, vz на
отклонения ДА и Дг будем пренебрегать влиянием атмосферы на
траекторию спуска. Ошибки на участке полета в плотных слоях ат-
мосферы рассматриваются отдельно (см. стр. 79).
Боковое отклонение точки приземления
Дг^-^- sin р,
^0
(2.5}
где — скорость на орбите;
R — радиус Земли;
[3 — угловая дальность спуска.
При с»о = 8000 м/сек получим оценку ---< 0,8 км/м/сек.
Vz
Найдем отклонения ДА за счет ошибок Ди и Да.
Пусть спутник в момент включения тормозного двигателя имеет
скорость направленную под углом 0О к местному горизонту.
Расстояние спутника от центра Земли в этот момент обозначим
г0. Если считать процесс сообщения спутнику (или кассете с на-
учной информацией) дополнительной скорости достаточно кратко-
временным, то его скорость v и ее направление (угол 0) после сооб-
щения дополнительной скорости можно определять по формулам:
74
0 = ОО-Р6;
sin 86 = — sin a.
v
(2-6)
(2.7)
(2-8)
Поскольку дополнительная скорость должна затормозить ап-
парат, чтобы сделать возможным его спуск на Землю, в последу-
ющих расчетах будем полагать
и < 0; 90° > a > 0.
Отметим также, что рассматриваем только случай, когда вектор
дополнительной скорости лежит в плоскости орбиты спутника.
Угловую дальность полета аппарата от точки, где ему сообще-
на дополнительная скорость, до точки падения найдем по фор-
муле *
tg — =—cos 6 ( sin 6 4" 1/ sin2 6 4~ r°-'~ — - A ) , (2.9)
2 4 \ у /
где
Л = -1_СО82 6 k=^-
k R fi
Кроме того, определим угол 0К входа аппарата в плотные слои
атмосферы, поскольку от этого угла существенно зависят откло-
нения от расчетных параметров на участке траектории полета в
атмосфере. Этот угол получим из формулы
cos6R = — °a cos 6,
(2.Ю)
где
гк = /?-гйк;
йк — высота, на которой рассчитывается угол.
Помимо определения угла дальности и угла входа нас будут
интересовать производные от дальности по параметрам, характе-
ризующим величину и направление дополнительной скорости и.
Указанные производные рассчитываются по формулам:
dL dL dv dL dQ . (2 И)
да dv да дО да
dL dL dv i dL dO /n
du dv du dti du ’
* Подробный анализ вопроса об угловой дальности полета аппарата в цент-
ральном поле сил имеется в работе [26].
75
где
Рис. 30. Зависимость параметров, определяю-
щих сброс капсулы от угла а (высота сбра-
сывания /г = 200 км, Lu — сек., Lr±— км/рад.)
(2.13)
Другие производные, входящие в формулы (2.11) — (2.13),
можно получить из формул (2.6) — (2.8):
dv
да
dv
VQ
----— USina;
v
и ,
-------------— COS a;
ди v v
-^-=l--^COS(0-0o);
да
дО
ди
v
— sin а.
t/2
(2-14)
Были проведены расчеты (Процесса спуска для трех круговых
орбит с высотами 200, 300, 400 км. При расчетах в широком диа-
пазоне менялся угол а. Результаты расчетов представлены на рис.
30—32, на которых Lu и Ла — производные дальности L по и и а.
Расчеты проведены для трех значений дополнительной скорости —
76
0,3; 0,4; 0,5 км/сек. Графики показывают, что для всех орбит и всех
значений дополнительной скорости имеются углы а, при которых
производная дЫда обращается в нуль. Производная dL/du вблизи
значения угла а, при котором дА/да = 0, имеет наименьшение значе-
ние. Следовательно, выгодно производить спуск при указанном
Рис. 31. Зависимость параметров Lu (сек) и
La (км/рад), определяющих сброс капсулы
с высоты h=300 км, от угла а
значении угла а, так как при этом практически устраняется влия-
ние на точку приземления ошибок ориентации спутника. Для рас-
смотренных величин дополнительной скорости и принятых орбит
угол а, при котором производная dL/da обращается в нуль, лежит
в пределах 35—60°.
Рассмотренные случаи не учитывают возможного эксцентриси-
тета -орбиты. Если орбита спутника будет иметь некоторый экс-
77
центр-иситет, то параметры процесса спуска будут зависеть от топ*
ки на орбите, в которой производится торможение. При этом, как
показывают предварительные расчеты, для орбит, имеющих не-
большие эксцентриситеты (е^0,03), процесс спуска кассеты не
сильно отличается от случаев, представленных на рис. 30—32.
Рис. 32. Зависимость параметров Ltl (сек)
и La (км/рад), определяющих сброс капсулы
с высоты h = 400 км от угла а
Для предварительных выводов будем ориентироваться на кру-
говую орбиту на высоте 300 км (рис. 31). На рис. 33 даны зави-
симости параметров процесса спуска от величины дополнительной
скорости при значениях угла а, обеспечивающих выполнение усло-
я dLidz = 0, для орбиты на высоте 300 км. График показывает,
что с увеличением значения и угловая дальность р и производная
/ди резко уменьшаются. Однако отклонение дальности, соответ-
78
ствующее одному проценту ошибки дополнительной скорости, ме-
няется слабее (см. величину ——— на рис. 33). На основании
1 % Дм/и
этого можно считать, что если ошибка Ди не является определяю-
щей, то величину дополнительной скорости и для уменьшения
влияния ошибок Ди рационально увеличивать до 300—400 м/сек,
так как дальнейшее увеличение дополнительной скорости не при-
ДА
водит к существенному уменьшению погрешности
Рассмотрим влияние ошибок
Эти ошибки возникают в ре-
зультате возможной погрешно-
сти в определении величины
силы сопротивления воздуха.
Сила.сопротивления возду-
ха может отличаться от рас-
четного значения из-за ошибок
в определении следующих ве-
личин:
— коэффициента торможе-
НИЯ ЛЛ=Ахрас =
— плотности воздуха р;
— случайных отклонений
параметров движения от рас-
четных значений при входе в
атмосферу.
Ниже рассмотрено влияние
ошибок при определении коэф-
фициента kx, плотности р и угла ;
лета в атмосфере. Для выяснения влияния указанных ошибок ис-
пользуются приведенные выше результаты расчетов дальности по-
лета х при баллистическом
входа 0О и коэффициента kx
Расчеты проведены при
Можно показать, что это
ошибкам.
Графическим дифференцированием
определена производная dx/dkx. Оказалось, что величина kx
почти не зависит от величины kx, т. е. влияние относительной
ошибки §kx/kx на разброс дальности одинаково для всех kx в рас-
смотренном диапазоне.
1 % Аи/и
на участке полета в атмосфере.
Рис. 33. Зависимость —~~ , Lu,
1% Ди/н
а и р от и (первая из зависимостей
пунктирная кривая с двойной стрел-
кой)
входа 0о на разброс дальности по-
спуске для различных значении угла
(см. рис. 24).
допущении,
допущение
что Земля не вращается,
не приводит к большим
зависимости х (&х) была
дх
Так как в уравнения движения входит только произведение
kxp, то очевидно, что влияние относительных ошибок §kx/kx и 6р/р
на параметры траектории совершенно одинаково при условии, что
изменение самих этих ошибок в полете тоже будет одинаковым
(в частном случае, когда §kx/kx и бр/р в полете неизменны).
79
rr dx
Кривая, характеризующая изменение величины kx-^- в зависи-
мости от угла входа траектории в атмосферу 0о, приведена на
рис. 34 (сплошная линия).
Из рассмотрения этой кривой следует, что когда требуется вы-
сокая точность приземления в намеченном районе, угол входа в
атмосферу не должен быть меньше 4—6°, так как при | % | 4°
каждому изменению bkjkx на 10% соответствует отклонение даль-
от угла входа 0о
(Сплошные линии — спуск с высоты 80 км до нуля, пунк-
тирная — с 80 до 15 км)
ности 6х > 10 км. Приведенные цифры характеризуют также и
влияние ошибки бр/р.
Представляет интерес и вопрос о том, какие из высот в атмо-
сфере наиболее сильно влияют на величину отклонений в дально-
сти при полете аппарата по траекториям с разными углами входа.
Для этой цели были проведены -расчеты по определению величины
дх
соответствующей полету на высотах у от 80 до 15 км. Кри-
вая изменения этой величины приведена на рис. 34 (пунктирная
линия). Оказывается, что при|60|>4,5° основной разброс в даль-
ности возникает на высотах менее 15 км, в то время как при
160 |> 10° на высотах более 15 км разброс практически отсутствует.
При углах входа | 601 < 4,5° наибольший разброс наблюдается на
высотах, превышающих 15 км.
Следовательно, при расчетах движения по траекториям с углом
входа в атмосферу по абсолютной величине больше 4,5° нужно с
80
большей точностью определять коэффициент kx и плотность возду-
ха на высотах меньше 15 км, чем на высотах больше 15 км. При
। 0О |<4,5° наоборот следует более точно определять коэффициент
сопротивления сх и плотность воздуха на высоте больше 15 км.
При случайных отклонениях угла входа 0О дальность полета бу-
дет изменяться различно при разных коэффициентах сопротивле-
ния аппарата. Если бы kx=0, то изменение дальности полета
соответствовало бы эллиптической теории. При йх¥=0 изменение
дальности происходит как за счет изменения эллиптической даль-
ности, так и за счет изменения времени действия и величины силы
сопротивления воздуха.
Для определения в этом случае разброса дальности были рас-
считаны разности Ах между дальностью по эллиптической теории
и дальностью с учетом сопротивления воздуха для различных зна-
чений 0О. Путем графического дифференцирования была получена
зависимость производной дАх/дв0 от изменения угла 0О для различ-
ных по величине коэффициентов kx. Эта зависимость также приве-
дена на рис. 34.
Из рисунка следует, что величина производной дДх/дб0 резко
возрастает при | 0ОI < 4°. При |90|>7° производная мало изме-
няется и невелика по величине. При 0,01 в этом диапа-
зоне углов дкх/д^а <30 км)град. При 0О~3° величина д^х/дВ0
составляет, примерно, 300 — 350 км/град.
2.2. ПЛАНИРУЮЩИЙ СПУСК
Основное преимущество планирующего -спуска аппаратов с пи-
лотами перед баллистическим заключается в том, что нагрев ап-
парата и величина действующих перегрузок могут быть уменьшены
за счет увеличения высоты полета и регулирования ее в зависимо-
сти от отклонений в нагреве и перегрузке в полете от расчетных
значений.
Ниже рассматривается с точки зрения обеспечения наимень-
шего нагрева один из возможных методов выбора и расчета ос-
новного участка траектории полета в плотных слоях атмосферы,
на 'котором происходит наибольшее торможение скорости движе-
ния. Участок перехода <с траектории входа в атмосферу на траек-
тории исследуемого вида здесь не рассматривается.
Тепло, идущее на нагрев спутника при движении его в атмо-
сфере, есть часть работы сил сопротивления воздуха. В первом
приближении можно предположить, что отношение энергии, иду-
щей на нагрев аппарата, к работе сил сопротивления, есть вели-
чина постоянная. В этом случае за расчетное движение целесо-
образно принять такое движение, при котором секундная работа
сил сопротивления постоянна вдоль основной части траектории.
Это обеспечивает при принятом допущении равномерное распре-
деление поступающего в аппарат тепла на всей траектории.
81
Секундная работа сил сопротивления воздуха выражается сле-
дующей формулой;
N cxS^-,
х х 2
(2.15)
где S— площадь, к которой отнесена сила сопротивления (в даль-
нейшем будем относить аэродинамические силы к площа-
ди несущих поверхностей аппарата).
Постоянство мощности при работе сил сопротивления эквива-
лентно условию
= f (v, у) = const. (2.16)
Это условие определяет зависимость скорости движения от высо-
ты, т. е.
v = v(y).
[В общем случае отношение энергии, идущей на нагрев аппарата
к секундной работе (мощности) сил сопротивления, есть функция
высоты, скорости и времени]. Однако во многих случаях условием
постоянства в (2.16) можно пренебречь и зависимость v (у) также
можно получить.
Таким образом, расчетную траекторию будем определять по за-
висимости v (z/), величине коэффициента сх и величине константы
в условии (2.16). От величины последней зависит температура
нагрева аппарата.
Если функция v (у) задана, то при расчете траектории в каж-
дой ее точке угол между вектором скорости и местным горизон-
том (наклон траектории) однозначно определен для данных пара-
метров аппарата. Здесь, как и раньше, угол входа — отрицатель-
ный угол между вектором скорости и горизонтом в начале рас-
сматриваемого участка. Однако за счет различных ошибок спутник
может входить в атмосферу по траектории, имеющей наклон боль-
ше расчетного. Кроме того, аэродинамические характеристики
аппарата и закон изменения плотности по высоте известны всегда
с ошибками, которые также могут вызвать отклонения траектории
движения от расчетной. Эти отклонения траектории должны быть
устранены действием добавочных аэродинамических сил, иначе
отклонения скорости движения от расчетного закона будут недопу-
стимо большими, причем в сторону увеличения. Это вызовет недо-
пустимый перегрев аппарата.
Ниже рассматривается движение аппарата по расчетной тра-
ектории, приведены формулы для расчета основных элементов тра-
ектории для произвольного закона v (у) и рассмотрен случай,
когда v (у) определяется условием (2.16) при допущении, что
82
<г = const. При этом допущении условие (2.16) принимает следую-
щий вид:
Р^3 = с. (2.17)
При этом принят показательный закон изменения плотности воз-
духа с высотой
где р=Рое-*у, (2.18) о =0,125 кГ'сек2 ; 6=0,14- 1(Г3— . м
Далее оценивается влияние отклонений величины угла входа в
атмосферу на условия нагрева аппарата.
Расчетное движение на атмосферном участке спуска
Как было сказано выше, будем исходить из того, что известен
закон изменения скорости по высоте полета v (у).
Уравнения движения центра масс спутника имеют вид (при
допущении, что поле тяготения центрально и Земля не вра-
щается) :
dv * о pv2 . п
т---= — cyS J-------mg sin 9;
dt x 2 6
d§ P^2 । / \ л
mv------= cvS —-------k---------Mg c°s 9;
dt y 2 R + y
= v sin 6;
dt
(2-19)
и л. Л
---=v cos 6,
dt
где
v — скорость движения;
6 —угол между вектором скорости и местным горизонтом
(угол наклона траектории);
у — высота;
х~дальность полета, отсчитываемая от начала рассматри-
ваемого участка;
/ — время полета от момента начала рассматриваемого
участка;
р—плотность воздуха на высоте у;
g~ ускорение силы тяжести;
сх, с —аэродинамические коэффициенты;
S —площадь несущих поверхностей;
т — масса спутника.
83
В рассматриваемом случае целесообразно перейти к незави-
симой переменной у. В этом случае уравнения (2.19) примут вид
— v^ sin 9= — А рц2 — 2g sin 9;
dy
dft . n 1 r g Л । cos 9
— sin 9=— k p--------— cos OH--------;
dy 2 yr v2 rR + y '
1 .
v sin 0
где
dt
dy
dx
dy
k cxS cxgo _
x m
b __ cys
^y w
nt
n — mgo
pS- s
ctgO,
J
(2.20)
Ps
cygo
~pT
В дальнейшем ускорение силы тяжести g по траектории будем
считать постоянным, равным некоторому усредненному значению.
Из первого уравнения системы (2.20) определим sin 0:
sin 6=------k-^-
Л d (v2)
dy
Поскольку зависимость v(y) известна, то эта формула опреде-
ляет угол 0 в зависимости от у. Продифференцируем (2.21) по у и
разрешим ее относительно производной d§ldy.
d't (и2)
JL — d __________dy2
Р dy v? dy d (v2)
dy
Подставляя — из (2.22) во второе уравнение системы
dy
(2.20) и разрешая <
z~=tg0
dy
*y=—
p
2
p
его относительно kyi получаем
d^ (v2) “
dp . 1 . d (t>2)_________rfy2
dy t>2 dy 2g
dy
sin2 9
cos 0
(2.21)
(2.22)
g cos 0 cos 0
v2 + у
(2.23)
84
Формула (2.23) позволяет вычислить требуемые величины коэф-
фициента подъемной силы, а следовательно, и углы атаки в любой
точке траектории для заданной величины S.
Время полета от начальной высоты утах до любой высоты опре-
деляется формулой
У
t= ( dy . (2.24)
j v sinO
ymax
Дальность полета от
бой точки траектории
начала рассматриваемого участка до лю-
у
х'= § ctgOdy.
^max
(2.25)
Таким образом, по формулам (2.21) — (2.25) можно определить
элементы траектории в любой ее точке для любого заданного за.ко-
на v(y).
Рассмотрим случай движения, когда коэффициент сх = const, а
закон изменения плотности по высоте выражается формулой (2.18).
В этом случае условие (2.16) эквивалентно
рг>3=С. (2.26)
Применив эти формулы, можно существенно упростить выражения
[(2.21)—'(2.25). Произведем преобразования. Дифференцируя фор-
мулу (2.18) по у, получаем
-^=-/>р.
dy
Из формулы (2.26) следует, что
г)2==/Д1\2/3, (2.27)
\ Р /
Продифференцировав формулу (2.27) два раза по у, после пре-
образований получим dy 3 (2.28) ^=Л^2_ dy2 9
Учитывая формулы (2.28), приведем выражение (2.21) к следу-
ющему виду:
3 &xpv2
2 3g + &v2
sin 6 =
(2.29)
85
При 6 = 0,14 • 10-3 для рассматриваемых скоростей движения имеем
3g < 6г/2. (2.30)
На основании этого
Sin6^—1 .^-р. (2.31)
2 и
Оценка величины углов 9 по формуле (2.31) показывает, что 9
при v >.2000 м/сек имеет максимальную возможную величину по-
рядка нескольких градусов. Поэтому в дальнейшем будем считать
cos 6 = 1. (2.32)
Используя приведенные формулы и учитывая условие (2.32) и
формулу (2.22), получаем
Формула (2.23) примет вид
, 9 4 , 2 / V 1 \
Z? V ----------р Н--I-------------I •
' 2 b 1 О \ t/2 R + y ;
Время полета /и дальность х выразятся следующим образом:
(2.34)
max / j и-
3kxC I
\ П1
где
рт — плотность воздуха на высоте //тах;
Ушах — скорость На высоте i/max-
На рис. 35 приведены кривые а (у), соответствующие условию
(2.26), при различных значениях постоянных С и плотности возду-
ха, изменявшейся по высоте согласно (2.18). Для характеристи-
ки нагрева на этом рисунке также приведены температуры на бес-
конечно тонкой пластинке в точках, находящихся на расстоянии
0,5 м от передней кромки. Пластинка движется под нулевым углом
атаки по траекториям, соответствующим тем же значениям посто-
янной С , что и для кривых v(y).
Как 'Следует из проведенных расчетов, указанные температуры
при данном законе v(y) изменяются относительно мало. Так, при
изменении скорости полета на 1000 м/сек температура изменится
не более чем на 70° С, т. е. закон pt/3 = C близок к оптимальному в
отношении равномерности нагрева аппарата на траектории. Однако
следует отметить, что приведенные температуры характеризуют
нагрев аппарата приближенно, так как при их расчете не учитыва-
86
лись изменения в полете углов атаки .нагреваемых поверхностей.
При углах атаки, отличных от нуля, нагрев будет больше приведен-
ной величины. Температура при углах атаки порядка 10° может воз-
расти в 1,5—1,8 раза.
На рис. 36—38 приведены величины потребных коэффициентов
ky для траекторий, соответствующих различным значениям посто-
янной С, и трех значений коэффициента kx : 0,001, 0,005 и 0,01. На
Рис. 35. Изменение скорости v и температуры Т
пластинки по высоте при различных р^3
этих рисунках нанесены также кривые равных осевых перегрузок
пх. Осевые перегрузки рассчитывались по формуле
kxC
пг= —— .
х 2gv
Расчеты показали, что как максимумы потребных подъемных
сил, так и их положения на траектории по высотам мало зависят
от коэффициента kx.
Более или менее существенное влияние наблюдается лишь при
&х>0,05 и С>20- 106. Все максимумы подъемных сил соответству-
ют примерно одной и той же скорости ^ = 4500 м!сек.
При полете по траекториям с очень интенсивным торможением
(большие величины С и kx, см. рис. 37 и 38) в области больших
скоростных напоров, изменяющихся по траектории обратно пропор-
87
Рис. 37. Изменение
при kx= 0,005 коэф-
фициента ky по вы-
соте полета у для
различных значений
ри3, пх и v
(Пунктирными линиями
показаны кривые равных
скоростей, сплошными —
кривые равных осевых
перегрузок)
88
I 1 9 C\
циояально скорости l# = —= — 1,
скорость уменьшается на-
столько быстро, что для выдерживания траектории, соответствую-
щей заданной величине С, требуются отрицательные подъемные
силы.
И V
(Сплошными тонкими линиями обозначены кривые равных
осевых перегрузок)
На рис. 39 приведены кривые, характеризующие необходи-
мне величины ev —-±kv для выполнения траектории, со-
^max g • max
ответствующих различным значениям постоянной С, при раз-
ных нагрузках на несущие поверхности ps=^. График по-
строен для ^=0,001, но вследствие того, что величина &Утах
89
мало зависит от kx, рис. 39 с большой точностью можно
отнести и к другим величинам kx. Во всяком случае при
Лх> 0,001 значение £Утах, полученное из графика, будет не-
сколько больше потребного для данного kx, т. е. будет иметь
место некоторый запас су.
При полете по траекториям, на
Рис. 39. Изменение при ^=0,001 вели-
чины Су тах в зависимости от ри3 для
различных значений ps
которых v по у изменяются сог-
ласно рис. 35, требуются ре-
ально осуществимые величины
Сутах и площади несущих по-
верхностей. Эти величины
max при рассматриваемых
скоростях, по-видимому, могут
быть обеспечены крыльями или
другими устройствами, созда-
ющими подъемную силу. Из
рис. 36—38 следует, что в по-
лете по расчетной траектории
остаются значительные запасы
добавочных подъемных сил
Aky = kym3iX — ky, которые мож-
но использовать для ликвида-
ции случайных отклонений тра-
ектории.
На рис. 40 приведены кри-
вые изменения времени t и
дальности полета х в зависи-
мости от величины pu3-10~6
при изменении скорости от
круговой до 2 км/сек при коэф-
фициенте &х = 0,001. Величины
t и х рассчитывались по фор-
мулам (2.33) — (2.34). Как сле-
дует из этих формул, t и х об-
ратно пропорциональны произведению kx-C. Таким образом, поль-
зуясь рис. 40, легко вычислить t и х для любого значения kx.
Величины углов 9 на траектории не рассчитывались, но в слу-
чае необходимости они могут быть легко подсчитаны по формуле
(2.31). Величина 0 очень мала в начале траектории (порядка еди-
ниц или десятков минут), по мере же торможения значение 9 уве-
личивается и может достигать нескольких градусов в конце рас-
сматриваемого участка (^ = 2000 м/сек) при больших величинах kx.
Нормальные перегрузки по траектории определяются из фор-
мулы
пу
kyC
2gv
Максимальная величина нормальных перегрузок на расчетной
траектории не превышает 1—2.
90
Оценка влияния отклонений величины угла входа
в атмосферу на дальнейшее движение спутника
Как отмечалось выше, вследствие различных отклонений спут-
ник входит в атмосферу по траектории, отличающейся от расчет-
ной. Если при этом величина р^3 будет больше расчетной, то откло-
нения от расчетной траектории необходимо свести к нулю, так как
с увеличением р^3 повышается нагрев аппарата. Для этого к спут-
нику следует приложить добавочную подъемную силу, величина
Рис. 40. Изменение при kx =0,001 времени t и
дальности полета х (от начальной точки на
траектории, в которой и = икр, до точки где
v = 2 км!сек} в зависимости от ри3
которой обычно ограничена. На участках расчетной траектории, на
которых величина потребного коэффициента kv меньше максималь-
но потребного его значения £ушах для этой траектории, можно ис-
пользовать разность между этими величинами для выравнивания
(устранения отклонений) возмущенной траектории. Если этого за-
паса по ^утах окажется недостаточно, то спутник должен иметь
Чтах больше, чем это требуется для движения его по расчетной
траектории. Это значит, что площадь его несущих поверхностей
должна быть больше, чем это требуется для расчетного движения.
Становится ясным, какое значение приобретает вопрос об опреде-
лении необходимой величины добавочной подъемной силы в зави-
симости от возможных начальных отклонений траектории и макси-
мально допустимого отклонения величины р^3 от расчетного значе-
ния. Отклонение в последней величине обозначим через ДС.
Оценим, как влияет начальное 'отклонение Д90 угла между век-
тором скорости и горизонтом на максимальную величину отклоне-
ния ДС при различных значениях Срасч и коэффициента kx. Жела-
тельно, чтобы выравнивание траектории, т. е. обращение в нуль
91
АС, произошло как можно скорее. Поэтому на начальном участке
траектории, на котором за счет начального отклонения значение
АС увеличивается, необходимо, чтобы Aky = &kyTn&x, т. е. добавоч-
ная подъемная сила должна быть .максимальной. На следующем
участке траектории, на котором АС уменьшается, величина Aky
должна изменяться таким образом, чтобы отклонения АС были бы
наименьшими.
Так как АС характеризует отклонения в нагреве спутника от
расчетной величины, то представляет интерес определить ее макси-
мальное значение при наличии отклонения А0О. Поэтому рассмот-
рим участок траектории, на котором \ky=AkymSiX. Величина &ky
добавочной подъемной силы представляет собой разность между
максимальной подъемной силой спутника и той ее частью, которая
необходима ему для полета по расчетной траектории, т. е.
= max ky.
Подставив выражение для ky (см. стр. 86), получим
.. h । 9 2 /g 1 \
Д/г = Ы-------------- -О------—----------.
'тах >тах 1 2 b р \ t>2 R + у)
Рис. 41. Изменение максималь-
ной величины отклонения ДСтах
в зависимости от СраСч*10-6
при Д0О =—2° начальном от-
клонении угла входа
Для расчетов использовалась си-
стема уравнений (2^20). Предпола-
галось, что на высоте, которую мож-
но принять за начало планирующе-
го спуска при заданном Срасч (и =
= 8000 м!сек), имеется начальное от-
клонение А0о = —2°.
Такая величина была принята
условно для оценки влияния боль-
ших отклонений А0о.
При этих условиях путем числен-
ного интегрирования системы (2.20)
рассчитывались скорости движения
и соответствующие значения р^3
для различных значений kx.
Величина коэффициента kym3LX
принималась равной наибольшему
значению ky, необходимому для осу-
ществления расчетных траекторий
при различных величинах С. При
этих условиях
ДС*— (р^З)возм Срасч’
Максимальные величины АСтах, рассчитанные таким способом
для каждой траектории в зависимости от изменения Срасч и kx,
приведены на рис. 41. Эти расчеты показывают, что отклонения АС
92
минимальны для спутников, имеющих расчетную траекторию с воз-
можно .меньшим значением С и возможно большим kx. Начальное
отклонение Д0О, принятое в вычислениях при указанных величинах
Ат/max, вызывает весьма значительные отклонения ДС (около 100%
от Срасч), которые вряд ли можно признать допустимыми. Приве-
денные на рис. 41 результаты расчетов позволяют оценить, нас-
колько нужно увеличить подъемную силу или уменьшить отклоне-
ние Д0о, чтобы получить заданную величину ДСтах.
2.3. ПЛАНИРУЮЩИЙ СПУСК СПУТНИКА С МАЛЫМ
АЭРОДИНАМИЧЕСКИМ КАЧЕСТВОМ
В разд. 2.2 были указаны преимущества планирующего спуска
аппарата с орбиты перед баллистическим. Однако конструктивно
планирующие космические спутники осуществить сложнее, чем не-
планирующие.
Наиболее простой вид планирующего спуска — это, так называ-
емый, «неуправляемый» планирующий спуск, при котором может
потребоваться лишь простейшая стабилизация аппарата по крену.
Особенностью такого спуска является возможность использования
аппарата с малым аэродинамическим качеством.
Рассмотрим перегрузки и время их действия на траекториях
«неуправляемого» планирующего аппарата в широком диапазоне
изменения параметров входа в атмосферу при следующих допуще-
ниях:
— поле тяготения Земли центрально;
— вращение Земли не влияет на движение;
— коэффициент торможения о в течение полета не изменяется;
— качество аппарата К=су1сх постоянно;
— колебания аппарата отсутствуют.
Траектории планирующего спуска при принятых допущениях
описываются следующей системой дифференциальных уравнений:
^=-°£о ----у sin 0;
6 = _L)cos6;
v 2 r \ kx )
h = v sin 6;
Ф = — cos 6,
r
где kx=— ; r=R-\-h\
Iх
/z, Ф —высота и угловая дальность полета.
(2.34)
go — ускорение силы тяжести у поверхности Земли;
р, = 3986*109 м?1сек2 — постоянная поля тяготения Земли.
93
Перегрузка от силы аэродинамического сопротивления
где
п^= + или n^ = nx}f \ Ц-К2,
Пх
#х Р2
—- =а J— ;
G 2
#у „ 1^2
/г =—- =<зК —
у G 2
Поскольку траектория планирующего спуска определяется на-
чальными параметрами движения, коэффициентом торможения и
качеством аппарата К, то и перегрузки определяются этими же ве-
личинами.
Для выяснения общего характера зависимости перегрузок от
указанных факторов на электронной вычислительной машине были
проведены численные решения системы (2.35) при изменении
начальных условий движения, коэффициента о и качества аппара-
та К. За начальные условия принимались параметры движения vG
и 0о на высоте 100 км.
Рис. 42. Зависимость перегрузки тах от
угла входа 0о при баллистическом парамет-
ре а = 0,005 и скорости входа Уо = 7,8; 8,0
и 8,2 км!сек
Характер изменения мак-
симальных перегрузок по
данным расчетов в зависи-
мости от начальных пара-
метров движения и величи-
ны коэффициента о для
значений К = 0,1; 0,25; 0,5 и
0,75 иллюстрируются на .рис.
42, 43.
Расчеты проводились для
скоростей 1>о = 8,2; 8,0;
7,8 км/сек, начальных углов
входа —5°<%<—Г. Ко-
эффициент торможения о
изменялся в пределах
0,001 < о <0,005 м2/кг.
Кривые на рис. 42 и 43,
характеризующие измене-
ния максимальных перегру-
зок, подобны, причем пере-
грузки мало зависят от ско-
рости и почти совсем не
зависят от о. При углах
входа 0о от —Г до —3° мак-
симальные перегрузки для
одного и того же значения К
изменяются незначительно,
как и при изменении началь-
ных скоростей входа в пре-
делах 7,8—8,2 км/сек. При
0о>—3° максимальные пере-
94
грузки сильно растут и выходят за допустимые пределы, поэтому
угол входа должен быть не менее — 3°.
3 Учитывая, что при изменении коэффициента торможения в пре-
делах 0,001 <о<0,00'5 м21кГ максимальные перегрузки практически
не изменяются, все дальнейшие расчеты проведены для одного
значения о = 0,001 м21кГ. Результаты расчетов показали, что при
изменении качества в преде-
лах 0,1 </«0,75 максималь-
ные перегрузки уменьшают-
ся и для значений К = 0,25
при углах входа 0О от —Г
до —3° не превышают значе-
ния ле = 4. При К = 0,5 для
тех же углов входа значения
будут не более 3 (рис.
44). Время действия такой
перегрузки на человеческий
организм не ограничивается.
Перегрузку и = 4 человече-
ский организм свободно пе-
реносит в направлении
грудь — спина в течение
4,5 мин. На рис. 44 приведе-
ны изменения перегрузок по
траектории для всех приня-
тых значений К при углах
входа 0о = —2; —3° и скоро-
сти ц0 = 8 км!сек.
Кривые, характеризую-
щие изменение скорости,
высоты, угла наклона векто-
ра скорости к местному го-
ризонту и скоростных напо-
ров q по времени, представ-
лены на рис. 45—48. Эти
кривые рассчитаны при
Цо = 8 км/сек\ 0о= —2; —3°;
о = 0,001; /( = 0,1; 0,25; 0,5;
0,75.
Рис. 43. Зависимость от 0О при а =
= 0,001 и t>o = 7,8; 8,0 и 8,2 км!сек
Из рассмотрения этих кривых следует, что с увеличением каче-
ства время спуска сильно возрастает. Спуск происходит не по плав-
ной кривой, а по так называемой фугоиде. Движение по ней неже-
лательно, так как увеличиваются пики перегрузки и температуры,
Удлиняется время спуска, а следовательно, увеличивается прогрев
аппарата. Поэтому, чтобы уменьшить время спуска и пики пара-
метров ц, пх, Tw, следует уменьшать качество. Для быстрого спуска
Угол входа необходимо также уменьшать, но не ниже —3°, так
как при меньших углах входа сильно растут перегрузки.
95
Таким образом, как показывают расчеты, при неуправляемом
планирующем спуске максимальные перегрузки при соответствую-
щем подборе параметров входа в атмосферу и качества не будут
превышать 3—4.
Рис. 44. Зависимость пх от времени полета t при v0 = 8 км/сек
и а = 0,001 м2/кГ
Рис. 45. Зависимость угла 0 от времени полета t при
и0 = 8 км/сек, а = 0,001 м2/кГ и 00=—3° и —2°
Наиболее значительное влияние на величину перегрузки, как и
при баллистическом спуске, оказывает угол входа в атмосферу 0о
(при неуправляемом планирующем спуске с орбиты спутников с
пилотами траектории с углом входа в атмосферу не менее —3°
96
считают допустимыми. Быстрый спуск достигается при угле входа
_3°).
Влияние скорости входа в атмосферу на величину максималь-
ных перегрузок, так же как и при баллистическом спуске,' невели-
и0 = 8 км!сек, сг = О,ОО1 м2!кГ и различных значениях 0О и К
ко. При этом увеличение скорости при постоянном угле входа при-
водит к уменьшению перегрузок. Вариация коэффициента тормо-
4—2343
97
жения 0,001 <s< 0,005 на величину перегрузок практически не
влияет.
Для обеспечения наименьшего времени неуправляемого плаирь
рующего спуска и допустимых перегрузок считают, что качество
аппарата должно быть /С~0,25.
Рис. 48. Зависимость параметра q от времени полета t при
и0=8 км/сек, о = 0,001 м2/кГ и различных углах 0о
Основным недостатком неуправляемого планирующего спуска
является большой разброс точек приземления спутника, вследствие
влияния всевозможных ошибок и возмущений. Для устранения это-
го недостатка на спутнике устанавливается система для управле-
ния его аэродинамическим качеством. Управление может осущест-
вляться по сигналам чувствительных элементов, реагирующих на
изменения перегрузки в полете.
ГЛАВА III
Анализ влияния
возмущающих сил,
действующих на орбите
При движении по орбите на спутник действуют малые или, как
их называют, возмущающие силы. Действие этих сил выражается в
отклонениях (возмущениях) координат и скорости спутника относи-
тельно невозмущенного движения. Изучение этих возмущений яв-
ляется одной из основных задач в теории движения спутников. Воз-
мущающие силы и их влияние на орбиту необходимо учитывать
при проектно-конструкторских работах и особенно при определении
орбит по результатам измерений.
В настоящей главе даются сведения об основных возмущающих
силах и выводятся уравнения, по которым можно рассчитать их
действие на центр масс спутника, если известны начальные усло-
вия движения.
Силы, действующие на спутник в полете, можно разделить на
силы гравитационные, являющиеся массовыми консервативными
силами, и силы поверхностные. Кроме того, на спутник могут
воздействовать электромагнитные силы, но они очень малы и
практического значения не имеют.
К гравитационным силам, влияющим на движение центра'
масс, относятся добавочная сила притяжения, появляющаяся вслед-
ствие сплюснутости Земли, аномалии силы тяжести Земли и притя-
жение Луны и Солнца.
Поверхностные силы в противоположность гравитационным мо-
гут не иметь потенциальной функции. Из этих сил рассмотрим две:
тормозящую силу, обусловленную сопротивлением воздуха, и силу
Давления солнечного света. Действие остальных сил можно не учи-
тывать.
3.1. МЕТОД ОСКУЛИРУЮЩИХ ЭЛЕМЕНТОВ
Дифференциальные уравнения движения спутника в абсолют-
ной системе прямоугольных координат с шачалом в центре Земли
имеют вид [29]:
4* 99
y^~ = F^
(3.1)
Правые части уравнений представляют собой проекции на соответ-
ствующие оси равнодействующей всех сил, действующих на спут-
ник в полете, за исключением основной силы центрального поля
притяжения Земли, проекции которой на оси координат выделены
отдельно и приведены в левой части системы. Если на спутник ни-
какие силы, кроме центральной, не действуют, то в правых частях
будут стоять нули. Как было выяснено в гл. I, такие уравнения но-
сят название уравнений невозмущенного движения. Они интегри-
руются до конца, и в зависимости от начальных условий движения
полученные траектории могут оказаться эллипсами, параболами
или гиперболами. Рассмотрим только эллиптические траектории
(орбиты), а также их частный случай — круговые орбиты.
Силы, добавляемые к правым частям уравнений, определенным
образом изменяют орбиту. Если эти силы невелики, то изменения
орбиты также будут малыми. В действительности, все силы, дейст-
вующие на спутник, малы по сравнению с основной центральной
силой, поэтому они являются возмущающими силами.
Для расчета таких движений целесообразно применить извест-
ный в небесной механике метод оскулирующих элементов. Идея его
состоит в использовании шести постоянных интегрирования (а, е,
со,, t, Q, т) системы уравнений невозмущенного движения в качест-
ве новых переменных. С математической точки зрения система
(3.1) возмущенного движения решается методом вариаций произ-
вольных постоянных. В результате получается система шести диф-
ференциальных уравнений первого порядка относительно шести не-
известных функций времени — бывших произвольных постоянных
а, е, w, i, Q, т. Эти уравнения, как и уравнения (3.1), в конечном
виде не интегрируются. Преимущество их состоит в том, что при
малых возмущающих силах новые переменные мало изменяются и
для решения системы можно использовать метод последователь-
ных приближений.
Решение системы (3.1) в новых переменных для каждого мо-
мента времени дает шесть параметров (элементов), определяющих
некоторую фиктивную эллиптическую орбиту («оскулирующий»
эллипс). Если в данный момент времени t\ возмущающие силы пе-
рестанут действовать, то дальнейшее движение будет продолжать-
ся по эллипсу, имеющему элементы а(Л), е(^), o)(Zi), Q(/i), i(/i,)<
t(^i) и касательному к реальной орбите в точке, где прекратили
свое действие возмущающие силы. Орбита является огибающей
100
таких эллипсов. Переменные элементы орбиты a(t), e(Z), со(/),
й(/), Z(Z), t(Z) называются оскулирующими элементами.
Прямоугольные координаты и скорости спутника рассчитыва-
ются по тем же формулам, что и для невозмущенного движения
(см. гл. I), но значения элементов а, е, со,..., входящих в эти форму-
лы, должны соответствовать данному моменту времени.
Приступим к выводу дифференциальных уравнений для оскули-
рующих элементов. Формально можно было бы просто подставить
в уравнения возмущенного движения (3.1) решение для невозму-
щенной системы уравнений (см. гл. I), считая постоянные интег-
рирования а, е,... функциями времени. Однако это слишком слож-
но. Можно применить ряд способов [23], [29], которые позволяют
значительно проще получить искомые уравнения. Остановимся на
одном из них.
Вывод уравнений для элементов орбиты 2, р, I
В гл. I для невозмущенного движения были получены следую-
щие зависимости:
’ Сг = С sin 2 sin Z;
С2= — С cos 2 sin Z;
C3 = C cosZ,
где Ci, C2, C3 — проекции вектора кинетического момента С на оси
координат Ох, Оу, Ог.
>В соответствии с методом вариаций произвольных постоянных
кинетический момент, а следовательно, и его проекции Сь С2, С3
для возмущенного движения, становятся функциями времени.
С другой стороны, из механики известно, что производная кинети-
ческого момента по времени равна моменту равнодействующей
всех сил, т. е.
= (3.2)
dCi _
dt ~
dC2 =
dt ~
dC3
Применив эту формулу к проекциям кинетического момента С], С2,
С3, получим:
— sin 2 sin 14- C cos 2 sin г--nCsin 2 cos i — ;
dt dt dt
—— cos 2 sin i -4- C sin 2 sin i —— C cos 2 cos i — ; (3.3)
dt ' dt dt x '
dC . . d i
---------COS I — C Sin I — .
dt dt----dt
На рис. 49 изображены проекции возмущающей силы (отнесен-
ной к массе) на орбитальные оси координат: S — по радиусу-век-
тору; Т — по трансверсали; W — по бинормали.
101
Повернем оси координат Oxyz вокруг оси Oz так, чтобы исчез
угол Q, т. е. направим ось Ох по линии узлов Ok.
Тогда система уравнений (3.8) примет вид
dC\
dt
„ . . dQ
С sin i— ;
dt
dC2
dt
d C . • • d i
------Sin I — C COS L
dt-----dt
(3-4)
. z-> . •
----- COS l — C sin I
dt---dt
Рис. 49. К выводу уравнений
для оскулирующих элементов
Штрих указывает, что кинети-
ческий момент С проектируется на
повернутые оси.
Для первого уравнения проек-
ция момента внешних сил (на ось
Ok) будет равна Wr sin и (момен-
ты сил S и Т проекций не дают, так
как эти силы пересекают ось Ok).
Приравнивая Wr sin и к dC'^dt, в
соответствии с указанной теоремой
о кинетическом моменте получаем
d С1 fi о
----= CsinZ — = lFrsinzz.
dt---dt
Но С=У^р как для невозмущенного, так и для возмущен-
ного движения, поэтому
d& г sin и
dt ~ V7p sin z
(3.5)
Далее, повернув оси Oz и Оу вокруг Ok на угол Z + 900 (ось Оу бу-
дет направлена в сторону вектора С), получим для двух последних
уравнений (3.4)
dC\ _ dC .
dt, dt ’ (3.6)
_££з___di
dt ~ dt
Первое из равенств (3.6) указывает на то, что производная проек-
ций кинетического момента С на ось, коллинеарную самому момен-
ту, по абсолютной величине равна производной по времени от мо-
дуля этого момента. Приравняв dC^dt к проекции момента внеш-
них сил на ту же ось, получим
102
dCc2 dC Ур. dp гт
dt dt dt
Составляющие W и S возмущающей силы, как легко видеть,
не дают моментов на рассматриваемую ось. Отсюда для dpfdt
имеем
dP __
dt
(3.7)
Второе равенство (3.6) с учетом того, что проекция момента внеш-
них сил на ось Oz' будет Wr cos и, позволяет получить
или
С —= Wrcosu
dt
— =—r-^ Wcos u.
dt Vw
(3.8)
Величина наклонения орбиты i и положение узла Q, т. е. ориен-
тация плоскости орбиты, зависят только от боковых сил W, так как
две другие составляющие Т и S всегда расположены в плоскости
оскулирующего эллипса [ом. (3.5), (3.8)].
Вывод уравнений для элементов орбиты е и со
Как было показано в первой главе, составляющие скорости v в
невозмущенном эллиптическом движении:
^г = г= 1/ — £Sin&;
V р
(3.9)
(3.10)
где
vr — проекция v на радиус-вектор орбиты;
vn — проекция v на трансверсаль.
Для возмущенного движения формулы (3.9) и (3.10) имеют та-
кой же вид, но элементы р и е в этом случае относятся к оскулиру-
ющему эллипсу в рассматриваемой точке орбиты. Приравнивая
трансверсальную составляющую vn в возмущенном движении к
величине г , где de/dt— угловая скорость радиуса-вектора г
[25], получаем
'vn = r-^- =1 (1 + е cos0).
dt у Р
(3.11)
юз
Можно показать, что угловая скорость радиуса-вектора г в возму-
щенном движении состоит из двух слагаемых aulat и cos 1---------.
dt
Действительно, составляющая угловой скорости duldt появляется
вследствие движения спутника в плоскости орбиты (оскулирующе-
го эллипса) без учета вращения -самой плоскости. Вторая составля-
ющая cos i • — возникает из-за поворота самой плоскости орбиты
dt
вокруг оси вращения Земли. Этими двумя движениями и опреде-
ляется угловое перемещение спутника в абсолютном пространстве
за единицу времени.
Таким образом:
dv du t. . dQ dM । d$ , . dQ.
— =-------L-cosz- —=--------------kcosi- — , (3.12)
dt dt ' dt dt ‘ dt dt 4 '
поскольку
ll = CD —O'.
Умножая (3.11) на r=----------, имеем
v ’ 1+<?COS&
r2-^ = ]/p.p = C, (3.13)
т. e. модуль кинетического момента или удвоенная секторная ско-
рость выражается через полную угловую скорость радиуса-вектора
г, а не через dftjdt, как в невозмущенном движении [12], [25].
Продифференцировав по времени выражение г(1 + е cos ft) =ру
а также (3.9), получим
г — + er cos & — $re sin 11 = р,
или
esin 0 • Л/ — • ~-\-r cosft-e —resin &•& = /?
V Р г
и ___ _____________
r=esinB-l/ — -[-ecosft- 1/ — О- —
V р V р
(3.14)
Учитывая, что уравнение движения спутника в проекции на ра
диус-вектор имеет вид
r_ra2==s_ JL
Г2
(3.15)
после подстановки г и о получим
104
(3.16)
Исключая из дзух уравнений (3.14) и (3.16) находим
— sin&4-2rcossin2&-—Г + — sin& —
Р р г*
— е — sin & cos & —— sin &,
Г2 r2
ИЛИ
— e=S sin cos&-|" — Т cos -\-Т cos& —
Р Р Р
--— Т cos & — е — Т cos2 9--4- sin & — е — sin & cos —
р р г3 г2
—sinft = SsincosTcos Ь-\-е — Т.
Окончательно
Ssin& + (1 + —'l7'cos& + e—/I. (3.17)
\ P / P \
Чтобы определить значение ft, подставим полученное выраже-
ние для dejdt в уравнение (3.14)
— -|-г cos&-"р/" — Ssin& + (1 + —cos& +
-\-е — Т — re sin Ъ-Ъ = р.
Р J
Далее пользуясь (3.7), после преобразования получим
105
Последние три слагаемых в сумме равны нулю. Поэтому
Используя (3.5), (3.12) и (3.18) для d^dt (угловая скорость вра-
щения перигея), получаем
р Г COS О’ । /1 | Г \ Sin О' гтр ivz Г . • . ”] /г* i
—------------+ 14-------------Т— W— ctgjsintf . (3.19)
fl L е \ Р ! е Р J
Для малых значений эксцентриситета е уравнения (3.17) и
(3.19) целесообразно заменить следующими:
__
dt ~'
(3.20)
+ — (rXj-lFX.jCtgjsinw)
р
dt
+ —(n2+ITXiCtgZsin«) ,
р
где
X1 = ^sinw; X2 = £Cosw; е=]/Г л?-|-Л2; tg(n= —.
(3.21)
Уравнения (3.20) и (3.21) легко выводятся путем дифференци-
рования выражений для и Z2 и подстановки производных
defdt, dw/dt по (3.17) и (3.19). Эти уравнения можно использовать
для расчета орбит (в том числе круговых) с любыми эксцентриси-
тетами.
Осталось найти последнее шестое уравнение, определяющее
время полета спутника. Обычно это уравнение для т — времени
прохождения через перигей оскулирующего эллипса. Однако в нем
нет необходимости. Оно может быть заменено уравнением, состав-
ленным на основании (3.12) и (3.13) для duldt. Исключая основное
движение, можно вместо и иметь мало меняющееся отклонение
возмущенного и от его невозмущенного значения. Основное преи-
мущество оскулирующих элементов — их малая изменяемость —
сохраняется. Запишем это уравнение:
= cos / , (3.22) dt dt " dt dt
или du dt = —yf — -U7ctgz sinw. (3.23) г2 \ (r)2 И P 1 y-
106
di &
dt ей
Здесь (u) —невозмущенное значение и; и = и—(и) . Аналогично
(г), (Р) —невозмущенные значения параметра р и радиуса-вектора
спутника г.
Поскольку в практике расчета орбит уравнение для т встре-
чается довольно часто, приведем его без вывода [9]:
— (cos& —gsin&Ar)S-(- — AT] , (3.24)
г J
где
&
Р2 Г cos Mb
г2 j (1 4- е cos ft)3
о
Истинная аномалия Ф и время t связаны уравнением
в-
= С tfft
/7 jch-*0089)2’
Система шести уравнений (3.5), (3.7), (3.8), (3.17), (3.19) и
(3.23) или (3.24) является замкнутой системой первого порядка
относительно шести неизвестных функций fi(Z), p(t), i(t), e(t),
<o(O, «(О или т(£). Для каждого момента времени эти функции да-
ют возможность определить координаты и составляющие скорости
спутника по формулам невозмущенного движения (см. гл. I).
Для удобства использования выпишем все шесть уравнений
в оскулирующих элементах вместе:
du
dt
(3.25)
f 1 —— W ctg I sin « —— I f ,
r2 \ ftp (Г)2 у p )
107
здесь и=ю-(- &; и = и — (и).
Для невозмущенного движения
(«) = (<«) + (&); (Г)
(Р)
1 + (е) cos (&)
tg у
, /~ 1 + (е) t (Е) .
|/ 1-(е) ё 2 ’
(Е) - (е) sin (Е) - (Ео) + (е) sin (Ео) = Vи «3/2 (Z - /0),
где
Zo — начальный момент времени;
(Ео) — соответствующее величине /0 начальное значение экс-
центрической аномалии (.невозмущенной).
Система (3.25) уравнений движения в оскулирующих элемен-
тах интегрируется при известных начальных (при / = /0) значениях
шести элементов орбиты: Qo, р0, ео, соо,
Эта система позволяет получить приближенные формулы для
Q, р, i, ..., соответствующие некоторым видам возмущающих сил.
Предварительно перейдем от независимого переменного t к и
или Ф. С помощью выражения
№
которое следует из (3.23) и где
dt
— = 7—^ >
du V РР
(3.26)
1
1 — — W ctg i sin и
W
легко перейти от уравнений (3.25) к следующим уравнениям по
переменной и [25]:
dQ цг, r37 sin и
du [ip sin i ’
dp ___
du. jj. ’
U7cos«;
du [ip
sinb + ( 1+-T cos 9 + г — T
Г sCosO + (l 4-2L>)7'sin»-
du p.e L \ P /
— e — W ctg i sin и
P
(3.27)
108
du । г-'t V(p) .
du V~p (r)2
Для вывода уравнений по переменной ft, которые удобно ис-
пользовать при изучении сопротивления воздуха, будем исходить
из соотношений (3.12) и (3.13). Последние дают
d$ ___ У>.р
dt “ г2
V' w / ।
'г V V7
dv) . dQ
------COS I
dt
d<j)
dt
dt
r* . dQ.
---- COS I ---
V7p dt
Используя уравнения (3.25), получаем [25]
где
dt
____________________1_____________________
r2 r2 / r \
1 4- — S cos & — — I 1 + — T sin &
\ P /
Таким образом, уравнения no ft имеют точно такой же вид, как
и (3.27), но множитель у заменяется на уь
3.2. ВОЗМУЩЕНИЯ ОРБИТ, ВЫЗЫВАЕМЫЕ
ВЛИЯНИЕМ СЖАТИЯ ЗЕМНОГО ЭЛЛИПСОИДА
Добавочные гравитационные массы, расположенные в области
экватора и являющиеся следствием сплюснутости Земли, оказы-
вают существенное влияние на движение спутника. Эти силы, как
и сила притяжения центрального поля Земли, имеют потенциал,
который (вместе с потенциалом центрального поля bQ/r) записы-
вается следующим рядом:
V=~— — Р2 (sin 9) + Р4 (sin 9) ~ > (3.28)
г г3 г5
где bQ, ^ — постоянные коэффициенты;
р2 (sin ф), (sin ф) — полиномы Лежандра;
ф —геоцентрическая широта.
109
Ряд быстро убывает и практически достаточно ограничиться
двумя, максимум тремя» членами разложения.
Изучению поля земного сфероида (или эллипсоида вращения),
представленного потенциалом (3.28), и его влиянию на движение
спутника посвящено много работ. IB работах [1], {16], [45] задача
сводится к квадратурам. Удобные приближенные формулы, по-
зволяющие быстро проводить качественный анализ, не прибегая к
электронной машине, а также достаточно точно выполнять расчеты
орбит, оказалось возможным получить с помощью уравнений
(3.27), пользуясь классическими методами небесной механики.
Точность этих формул вполне достаточна не только для качест-
венного анализа, но и во многих случаях для определения орбит
по результатам измерений.
Если учесть, что на спутник Земли всегда действуют плохо
учитываемые силы (аномалии, сопротивление воздуха, давление
солнечного света и др.) и, кроме того, точность определения
орбит зависит от ошибок измерений, то становится ясным необ-
ходимость определения границы, с одной стороны, применимости
приближенных формул, а с другой — целесообразности использо-
вания точных теорий (см. разд. 3.5).
Приступим к выводу формул для оскулирующих элементов на
основе уравнений (3.27). В соответствии с хорошо известной прак-
тикой астрономии в первом приближении 'будем полагать оскули-
рующие элементы в правых частях этих уравнений постоянными.
При этом -система распадается на отдельные уравнения, которые
решаются с помощью квадратур:
82=2-(2) = uz
J sin i
ip=p — (p)=\^-r3Tdu;
J p.
8z = z —(z) = 'UZcosw-cta;
J w>
Ъе—е — (е) = [ -^-fSsin&+ ( 1 + —'j Tcos&+
J p L \ P /
du\
(3.29)
8o> = o) — (ш)= Г — S cos& + f 1-|-— ^rsinft —
J p-e L ' P )
— e— Wctg i sin и du-,
P J
&=И-Ы=\1
Ц Vp (r) )
110
Здесь (2), (/?), (/), (е), (<n) — невозмущенные элементы орбиты,
определенные как (2) = 20 — W —7—-п-ц - du и т. д., 20,
r J [ip sin Z
UQ
pQ)..., со0 —начальные значения элементов.
Метод предполагает после получения первого приближения пе-
реходить к следующему, т. е. подставлять результаты первого
приближения в исходные уравнения и снова интегрировать и т. д.
Здесь ограничимся только первым приближением.
/Предварительно потенциал V земного сфероида представим в
виде
s i п2Ф —, (3.30)
отбросив в уравнении (3.28) член с р4 (simp), заменив р2 (simp)
его значением
>p2(sin-H=-y-(3sin2<p-l)
и приняв
з ь
е=— Р2.
2 2
Первое слагаемое в выражении для V представляет собой по-
тенциал центрального поля. Во втором члене, учитывающем влия-
ние нецентральности поля тяготения, коэффициент 8 в соответст-
вии с теорией фигуры Земли, имеет вид [25]
—9 / т \
г — ^а2 а----,
\ 2 )
где
а —радиус экватора;
а —сжатие Земли;
Qoa
пг =----
(здесь
2|а — центробежная сила на экваторе;
£э —сила тяжести на экваторе);
а—- =0,001633.
2
Отброшенный в (3.28) член порядка а——. По сравнению со
вторым членом он не дает ускорений более 0,05 мм! сек2, что меньше
влияния аномалий силы тяжести (см. разд. 3.3). В случае необходи-
мости этот член может быть учтен вместе с аномалиями. Заменяя
sin гр в (3.30) по формуле
sin ф = sin i sin и,
(3.31)
111
(из сферического треугольника см. рис. 49) и выделяя возмущаю-
щий потенциал (!/'), получаем
V' =------— (sin2 i sin2 и--—) . (3.32)
г3 I 3 / 7
Отсюда для составляющих силы, вызываемой сплюснутостью
Земли, Si, Ть имеем
=— (3 sin2 i sin2 и — 1);
г4
7\ =-----— sin2 i sin 2и\
W1 =-----— sin 21 sin u.
(3.33)
В рассматриваемом случае множитель у в (3.26) принимает
вид
7 = f 1--— ctg i sin и ТСЛ T = f 1 4--^-cos2/sin2zz^ \ (3.34)
\ PP / \ W /
Для любых орбит этот множитель никогда не отклоняется от
единицы более чем на — 0,003. Такого же порядка ошибки могут
произойти вследствие осреднения значений оскулирующ.их элемен-
тов р, е, ..., т. Поэтому не имеет смысла усложнять задачу учетом у,
несмотря на то, что в первом приближении этот множитель не-
трудно учесть. Примем у=1, за исключением формулы для расче-
та времени полета (см. стр. 120).
Возмущения долготы узла Q
Для положения узла орбиты, т. е. для величины Q, имеем
m С г3 sin и ( s . п. . \ ,
ой = \---- • -----------sin 2t sin и \du =
J y.p sin i \ r4 /
2s cos i Г /-. I • о j 2s cos i f f . 9 .
=----------\ (1 Д-^cosd) sin2zzd&=----------\ sm2rz-|-
PP2 J PP2 J I
4- [cos (u — co) — cos (u 4"+ cos & — cos (2u &)]| du =
= —- cos 1 (2 sin2 и 4- — [2 cos (u — co) — cos (u + w) —
PP2 J I 2
— cos(3^ —a))] ^du.
Проинтегрировав это выражение для любого значения и, по-
лучим
112
ой = —£ cos * [и--------— sin 2м е [sin (11 — ш) —J- s in (и ю
Р7?2 ( 2 |_ 2
2 = (2)4-82.
При интегрировании в пределах от и0 до н0 + 2 л формула (3.35)
примет вид
8Q2z= - cos i, (3.36)
т. e. узел в первом приближении испытывает вековое возмущение,
пропорциональное косинусу угла наклонения и обратно пропорци-
ональное квадрату параметра орбиты.
Для прямых спутников, имеющих f<90°, узел двигается в сто-
рону, обратную возрастанию Q (к западу), для обратных (Z>90°) —
в сторону возрастания Q (к востоку). Это движение — поворот
плоскости орбиты около оси вращения Земли — называется пре-
цессией узла орбиты. Прецессия достигает заметных величин. Так,
например, для спутника «Восток» суточная прецессия равна —4°.
Возмущения параметра орбиты р
Для параметра орбиты р имеет
Ър = (k Т du= — г3 f-----------— sin2 i sin 2u\ du =
J P- Iх J \ r* /
2esin2f (» z Q\ . n J 2ssin2Z p f . n .
=-----------\(l-|-ecos ft)sin2zzdzz =----------| ] sin 2^-4-
w J w J I
4-— [sin (2u — ft) + sin (2uft)]I dtt = ——sin2 Z- f-— cos 2u —
2 ) [ip [ 2
---1- COS (^ + tD) + -^“ COS (3zz — co) |.
Окончательно
Cp= esln2z (cos2#4-l cos (zz4-cd)-[-—cos (3zz —<d)11; (3.37)
I L 3 JJ
Как видно из полученной формулы, параметр орбиты в первом
приближении не имеет вековых возмущений. (В течение одного обо-
рота вокруг Земли он (с точностью до эксцентриситета) испытыва-
ет два полных колебания с амплитудой А — -£ sln г - .
113
Амплитуда равна нулю для экваториальных орбит (рЭкв —
const) и имеет максимум для полярных Артах= ——. Посколь-
ку — = 66432,78, а рт\п~ 6550 км, то максимальное значение
р-
амплитуды для всех орбит Ар тах < 10 юи.
Возмущения наклонения орбиты i
Имеем
о/= —— cos uWdu= —— cos и (---— sin 21 sin a \du =
J W J W \ r4 J
—£ |in 2Z ' (1 + ^ cosft)sin2^d& =
e sin 2/
2|x/>2
[sin (« + «>)-{-sin (3« — «>)] \du =
= esln2; (— cos2« + — [cos («4-a>)4- — cos (3u — co'
2p.p2 { 2 1 2 [ v 1 7r3 v
Таким образом,
__ esin2z
4|ip2
|cos2« + e cos(«+<i>)-|—cos (3w — <o) }, (3.38)
i — (t) 8/.
Наклонение в первом приближении, как и параметр орбиты р,
не имеет вековых возмущений. За один оборот параметр i, так же
как и р, совершает (с точностью до е) два полных колебания с
амплитудой Az = -^-^-. Максимальное значение амплитуды до-
стигаемое при г = 45 или 135°
| max |=-^-^ 0,0004,
4-хр2
что соответствует максимальному значению отклонения спутника
в боковом направлении за счет i\
0,0004 г = 0,0004 • 6550=2,6 км.
Возмущения эксцентриситета е
Наиболее сложные выражения получаются для эксцентрисите-
та и аргумента перигея, но и они выводятся без использования раз-
ложений в ряды по е, что приходится делать, если пользоваться
уравнениями оскулирующих элементов при независимом перемен-
ном t (33].
114
Имеем
(>е
Т cos & + е — Т 1 du =
Р J
sin2 z sin2 zz — 1) sin & — ( 1 -|---) sin2 z sin 2zz cos & —
\ P !
— e — sin2 i sin 2zz) du = —-— ((1 -^e cos ft)2 X
P J 2 Г '
X(3 sin2 z sin2 и — 1) sin & — (1 -\-e cos &)2 sin2 i sin 2zz X
X cos & — (1 + e cos &) sin2 z sin 2zz cos & —
— e (1 -|- e cos &) sin2 i sin 2zz} du =
|(1 -\-e cos &)2 3 sin2z sin2 zz sin & — sin &
3
H-----e sin2 i sin2 и sin 2ft — e sin В cos ft — 2 sin2 i sin 2/z cos ft —
1 2
£
— е sin2 z sin 2и cos2 & — е sin2 i sin 2zz
После простых преобразований, аналогичных выполнявшимся
при выводе формул для Q, р, I, получим
Ье=—[Di cos (zz —io) -\-D2 cos(zz-j-w)XD3 cos (3zz — <o)-|-
-j-e [£).s cos 2u-j-D5 cos 2 (zt —ш)-фОв cos (4zz — 2ш)] -f-
-фe2 [Z)7 cos 3 (zz — o>) -f-Ds cos (zz — 3<o) -j-Ds cos (5zz — 3o>)]}, (3.39)
где
sin2z‘— 1);
D2=— ( 14-— e2hin2z;
2 4 1 4 )
D3=—( 7 4-— e2} sin2z;
3 12 \ 4 /
— sin2 i;
4
T\ 1 ( 3 . 9 .
Z)5=------—sm2z-
0 2 к 2
Dq = — sin2/;
6 8
гч 1/З.9.
D4=-------—sin2/-
7 12 к 2
D8=— sin2/;
8 16
е=(е)-\-ъе.
Формула (3.39) показывает, что вековых возмущений в первом
приближении эксцентриситет не имеет. Периодические колебания
(с точностью до е) происходит с периодом, равным периоду обра-
щения спутника вокруг Земли (две гармоники), и с периодом,
втрое меньшим. Суммой этих гармоник в основном определяется
колебательный процесс для е.
115
Амплитуда колебаний — порядка а—т/2 и зависит от величин
i и со.
Чем меньше значение эксцентриситета, тем относительно боль-
ше он колеблется. При е порядка 0,001633 изменения эксцентри-
ситета в течение одного оборота могут достигать 100%.
Для расчета возмущения полуоси ба можно пользоваться фор-
мулой
Ъа= (р} + Ър---------(а).
1_((е)+6е)2
Возмущения аргумента перигея со
Для аргумента перигея со имеем
осо=Л —г— Г — Seos & + f 1 Тsin &— — ctgz‘ sin uw\du =
J L \ P 1 p J
= \ —-— — cos 0 (3 sin2z sin2zz — 1) — sin 0(1 + —| sin2z sin2zz 4—
J r^e L \ P /
-[-e — - etg i sin2 и sin 2z du =—-— \ cos 0-1-2e cos20-i-
P J щ>2е J L
e2 cos3 0 — 3 sin2 z sin2 zz cos 0 — 6e sin2 z sin2 и cos2 0 —
— 3e2 sin2 z sin2 zz cos3 0 — 2 sin2 z sin 2zz sin 0 —
— 3e sin2 z cos 0 sin 0 sin 2zz — e2 sin2 z sin 0 cos2 0 sin 2zz 4-
-|-2e cos2 z sin2 zz -|-2e2 cos2 z cos 0 sin2 zzj du.
Заменив, как и в предыдущих случаях, произведения тригоно-
метрических функций суммами, после интегрирования получим
Вш=—-— fSou Н—— [.$! sin (и — со) S2 sin {и -|- <в) -ф-S3 sin (3 zz — со)] 4-
pt/?2 t e
4-^Z?i—sin 2u-\-D-a sin 2 (u — co) -|- D6 sin (4zz —2co)-|-
-\-e [D7 sin 3 (zz — co)-J-Z?8 sin (zz — 3co) -j- Ds sin (5zz — 3co)]| , (3.40)
где
S0 = 2----— sin2z;
0 2
Si = l+ — e2 — f~ + — e2 'jsin2/;
1 4 \ 2 8 J
S->=---— ( 1----— e2sin2z------~e2;
2 4 \ 4 ) 2
S3=—f 7-4 — г2') sin2z------X-e2.
3 12 \ 4 ] 6
116
При изменений и на 2 л величина бсо принимает значение
8о)2тс=--2к£ ( 2----— sin2/
W* к 2
(3.41),
т е. в первом приближении перигей испытывает под влиянием сжа-
тйЯ земли вековой уход, рассчитываемый по формуле (3.41). Ос-
новные периодические члены колеблются так же, как и у эксцен-
триситета, но со сдвигом фазы на 90°.
Для е = 0 формула (3.40) становится непригодной, что естест-
венно, так как само понятие аргумента перигея связано с наличием
эксцентриситета.
Таким образом, получены формулы для элементов эллиптиче-
ских орбит р, е, со, Q, i в зависимости от аргумента широты и.
Для данного значения и и соответствующих ему элементов орбиты,
рассчитанных по этим формулам, можно вычислить прямоугольные
координаты х, у, z и скорости х, у, z (см. гл. I). При этом ошибка
в координатах не должна превышать нескольких десятков метров.
Используя уравнения для 2ц и %2, легко получить формулы^
пригодные для орбит, близких к круговым:
8Х1 = —L_ (Г 1 —Z_f—-- Й+Х2Р-- *01 sinzz +
«ML 4 1 \ 4 8 / \ 4 8 /J '
К] \ Q 1
----j-2k 1 cos 2и-k cos 4 и + Х2
2 J 8 J
k 1 sin Зм-|-
8X, = —L.
-j- — k sin 2м sin 4м 1 -|- — k (X? — X?) sin 5м +
2 8 J 16
г/ 13 \ 5 1
XX | —2-1-----k cos u-\----------k cos 3u-----k cos 5
121 1 4 / 1 24 8
) * i 2 / 9 25 у \ i л 2/ 1
+ m-----------k +*2 —
I k 4 8 ) 1 \ 4
1 । 2a * \ i •>. 2 / 1 1 11 M I лЛ г, Q „ 1
-----------k I —r- a2 I- —I--k I COS oil —
4 ' 48 / \ 12 48 / J
— а) м+(1 — 2k) sin 2м -j- — k sin 4м 1 -|-
2 / 8 J
— k (a1 — Xi) cos 5rz4-
16 v 7
cos и-\
cos 2ii + — k cos4rz 1-4
1 8 1
sin и + ---------
] 1 \ 3 24 )
117
Элементы Xi, kz вычисляются по формулам
Xi = (Xi) + 5Xi; Х2 = (Х2) + 8Х2,
где (Xi), (Аг)—их невозмущенные значения.
Возмущения остальных элементов, выраженные через элементы
Л1, Аг, примут вид:
„п е cos i
oS2 =---------
IV’2
1 /3 1 \
и------sin2«-|_>-i I----cosm^]-----cos 3«) +
2 \ 2 6 /
1 / 1 • 1 • о
+ M — sin и-------sin3zz ;
\ 2 6 /J
Ы= esin2Z
8p= —
V-P
-Xj/costt-l- — cos Зи') ;
cos 2«-]-Xj (— sin « + — sin3«') +
\ 3 /
cos 3«
В случае круговых орбит (Xi = X2=0) формулы для возмуще-
ний параметров движения значительно упрощаются:
лил £ COS I f 1 . л \
B2kd=------------и-------sin 2&
₽ к2 \ 2 )
esin2Z n
8r K0 =------cos 2zz;
KP 4р./*2
Л e sin2 i o
0/\p=--------- COS
8X,=—?—17 1—— sin2Z ^sin«+ -7—sin2Zsin3«l ;
K2 L\ 4 J 1 12 ] ’
8X„=—-—[f 1—^-sin2i') cos« + — sin2/cos3«l .
K2 L\ < / 12 J
Здесь r — радиус невозмущенной круговой орбиты.
Для перехода к прямоугольным координатам и скоростям ис-
пользуются формулы (3.9 и 3.10), причем
1 + Xj sin и + Х2 cos и
^г=г = \/ ~(^2 sin я — Xj cos и);
V Р
118
г/л = га = 1/ — (1 4-Xj sin «4*^2COS “)•
V p
рели заданы элементы x, у, z, vx, vy, vz, to
cos u,-\-vT sin и,
^r=7- (*vx+y^y+zvz);
‘П„ = )/Л T»2—T»r,
z —x sin Q 4- у cos Q
Sin u =----=-------------------- ,
r sin i r cos i
cos^=— (xcos2-Py sin
• о 6*1 о 6*2 • C3
sin2 =------—; cos 2=------—; cosz=—p =—,
C sin i C sin Z C
где
Cb C2, C3 — проекции кинетического момента С, рассчитанно-
го по заданным х, у,. . ., z.
Приведенные формулы позволяют вычислить по известным на-
чальным значениям элементов орбиты в абсолютной прямоуголь-
ной системе координат оскулирующие элементы Лю, Л20, Ро, zOr
необходимые для расчета возмущений, обусловленных сжатием
земного эллипсоида.
Возмущения радиуса-вектора г и высоты полета h
Радиус-вектор спутника рассчитывается по формуле
/ у
1 + е cos {и — со)
как для невозмущенного движения, но р, е, со вычисляются по фор-
мулам (3.37), (3.39) и (3.40).
Высота полета
h = r—R,
где
= а (1—a sin2 i sin2 и) —радиус Земли.
119
Максимальная ошибка последней формулы 40 м.
На рис. 50 в 'качестве примера приведены результаты расчет^
возмущенных значений г и h по формулам первого приближения
Радиус-вектор г колеблется с <ббльшей амплитудой, чем высота по^
лета h. Спутник как бы «следит» за поверхностью Земли, хотя под.
ной компенсации и не достигается. Это облегчает создание упр0.
щенных методов расчета движения с учетом сил сопротивления
воздуха (см. разд. 3.5).
Расчет времени полета
Для определения времени полета воспользуемся дифференци-
альным уравнением, связывающим время t и аргумент широты и:
dt
du
ctg i sin и W
(3.42)
Из уравнения (3.42) время получается квадратурой
(3.43)
Здесь составляющая ускорения W заменена ее значением по (3.33)-
В случае невозмущенного движения в = 0, р = const, и е = const,
поэтому для времени полета получаем известное уравнение Кеп-
лера
_ з_
Е — tfsin/: — £0 + esin£0 = 2 (3.44)
120
различия во времени t, подсчитанном по формуле (3.43) и
^3.44), порядка ^а— —'j (t—tQ) составляют несколько секунд на
ВИТОК.
Для орбит с небольшими эксцентриситетами (но при е=£0) на
основании выражений (3.42) и (3.43) можно легко получить ко-
нечную формулу для расчета времени. Разложив в ряд по со,
n =-----------—cos2Zsin2^ формулу (3.42) и удерживая ли-
\ /
нейные члены, получим (отбросив невозмущенную часть dtjdu)
dt Зг2 . 2гз Q 2/-3g .
•---—•----2— Др--------— cos и Де--------23— sm Mw —
dl1 fyV w pV^p pVw
2гг
----.----cos2 i sin2zz.
(W?)3/2
Заменив 8p, Be, eow их значениями по (-3.37), (3.39) и (3.40),
имеем
dt Зг2е sin2 It . , , ч . е /о \ \
-----= cos 2« -4- е cos (и -1- ш) -]-cos(3« —<») ) —
du 1р (р/>)3/2-------------------------------\ 3-/
-----2 (^3/2 ' C0S [^1 CQS & + Г>2 COS(« + <i>) + ^3 cos(3« — w) +
+ <?-О4 cos2«4“gjD5 cos2&4-e£>6 cos(4« —2<d)] —
----2^ГЗв)3/2~' sin Sj sin & + S2 sin (w + «) 4- S3 sin (Зи — <o) -|-
-|- e —^-) sin 2и eDb sin 2& -(-eD6 sin (4u — 2o>) J —
2re 9 . . 9
--------575— COS2 I Sin2 И.
(W)3/2
Здесь члены, содержащие e1, опущены. Учитывая, что
г—4!—- =р (1 - е cos &) + О (ре2),
1 + е cos Э
после интегрирования имеем
Л- 1(1 -4 cos2 г)« + (4-iT ^)sin 2и+
+ <?[-£-£ sin(« + <»)+ (~^- k—i-)sin (Зи-о>)+
121
(73 \
2 —— ^4-— cos2oj sin ft — (1 — 5 cos2/)« cos ft —
3 i iu
----fesin(u —3«>)
8 -I к
\U
Wo
(3.45)
Для больших значений e (без разложения в ряд по е) можно
также получить расчетную формулу, если выражение (3.43) пред,
ставить следующим образом:
r^dll
2е
------cos2 I si
fipr
= f F (ii)'du=\^о+(Я Д/>+(-у-) Д* + (4~) Ди> +
J J L \ /0 \ \de Jo \ da Jo
ua u0
+ (т^-)о®1+0 ( (3.43')
где
F - P2 -(dF\-
r°—7=--------------------—’
Г \XP [1 + в COS (ZZ— co)]2 \ e! '°
/ dF \ 3]/p~ .
\ dP Jo 2pV[l + e cos (u-<o)]2
/ dF \ _ 2p Vp cos (ц — o>) .
' '° УД[1 + есо8(и—а>)]з
/ dF' \ _ _ 4pVp e sin (u — co)
\ 7° Vji [1 + e cos (zz — со)]з
£j =----------— cos2 i sin2 u.
^pr
Значения элементов орбиты p, e, ш берем невозмущенные, т. е.
(/?), (е), (со), что дает наибольшую точность.
Заменяя в формуле (3.43') величины Др, Де и Дсо из (3.37),
(3.39) и (3.40) соответственно, после интегрирования имеем
8F=-jJH (1 -^[-(^ +4 О5е2+ Д-^2со52<о)д +
+ (S4 + Ss cos 2<о) sin Е4- (S6 + 57 cos 2о>) sin 2Е] Д-
122
+ (1^2)-’ [-isoa + J-S1n2«(i ^1-~ + ^г +
в+-4т^ si"(“+“) ‘ > <з-46)
о<?2 Зе
где
S4= — ke-\-~ е-\~ — е3—~ke3;
4 * 1 2 1 6 2
19 , о 1 ч 3 , . 2
=------ke3-------е3------ke-\-------е
24 2 8 1 3
— k
16
А_^2+±^2 \е2.
12 1 2 / ’
k .
Зе
6 = 1 — ecosf*.
Применяя формулы (3.45) и (3.46), можно с достаточной точ-
ностью вычислять время полета по орбите с любым значением экс-
центриситета е, если задан угол и или Е и наоборот — найти эти
углы по известному времени путем интерполяции, используя для
первого приближения кеплеровекую орбиту.
В формулах (3.45) и (3.46) рассчитывается дополнительное
время, которое затрачивает спутник на полет от экватора (при
uo=O) до точки орбиты с аргументом широты, равным и, по срав-
нению с временем полета по невозмущенной орбите. Полное вре-
мя полета будет
(3-47)
где t — время полета по невозмущенной орбите.
Если в формулу (3.46) подставить и=2л, то дополнительное
время полета на витке (вековой член) будет
§ Т___ 2ле
р. (1 — е2)з
1 4- — e2W— sin2/ — Й —— £2’sin2 / cos 2w
1 2 Д 2 ) 8 L 1
+(1 - e2)’/2 LL sin2 Z - 2 - <? cos Д))2
(3.48)
где Eo — значение эксцентрической аномалии, соответствующее и0;
Ео=2arctgl/ * * tg -J-(«о — ш)-
Точность формулы (3.45)—порядка e2. Поскольку 6? состав-
ляет несколько секунд, ошибка может достигать сотых долей се-
123
кунды, если £<0,1. Подставляя в формулу (3.45) и = 2л, выдедц.
соответствующий вековой член 4
оТ=—[ — (4 cos2z — 1) -j- е (5 cos2z — 1) cos (м0 — о>)]. (3.48ч
рУрр }
Величина 8Т, полученная по формуле (3.46) или (3.45), представ,
ляет собой разность между драконическим периодом обращения
спутника и периодом обращения по невозмущенной орбите. Дра,
коническим периодом 7Д называется время полета спутника от эк.
ватора до экватора (один виток):
1\= Т-\-ЪТ,
где
Т ——(а) 2—период для невозмущенной орбиты, а 8Т может
рассчитываться как по формуле (3.48) для малых е, так и по
(3.48') для любых значений эксцентриситета (при е>0).
Если пренебречь членами порядка е в формуле (3.48) то, при-
равнивая скобку (4 cos2 i—1) нулю, найдем наклонение орбиты,
для которой драконический период равен невозмущенному (кри-
тическое наклонение):
4 cos2 / — 1 =0;
cos / = ±0,5,
т. е. наклонение орбиты f = 60° и 120°.
Для орбит, близких к круговым, с наклонениями меньше 60°
(или больше 120°) драконический период меньше невозмущенного,
рассчитанного по невозмущенным элементам, определенным выше;
для орбит с наклонениями в диапазоне 120>г>60° и больше. На-
личие критического наклонения хорошо объясняется тем, что по-
тенциал поля тяготения земного эллипсоида строится как сумма
ряда, первый член которого, представляющий собой центральное
поле, уже включает всю массу эллипсоида. Остальные члены явля-
ются поправками, меняющими свой знак при переходе через опре-
деленную широту. Ближе к экватору, где сосредоточены большие
гравитационные массы, как следует из выражения для потенциала,
сила притяжения больше и, следовательно, время полета меньше-
Чем ближе к полюсам, тем сила притяжения меньше и время по-
лета увеличивается. При каком-то среднем наклонении суммарное
воздействие гравитационных сил на спутник становится равным
действию сферической Земли с массой, равной массе земного эЛ'
липсоида, и для выбранной невозмущенной орбиты (средней по
отношению к возмущенному движению) наступает критически!1
период.
124
3.3. ВОЗМУЩАЮЩЕЕ ВЛИЯНИЕ АНОМАЛИЙ
СИЛЫ ТЯЖЕСТИ НА ОРБИТУ СПУТНИКА
Помимо сплюснутости Земли, которая в основном определяет
нецентральность поля сил притяжения, на движение спутника ока-
зывают воздействие аномалии силы тяжести. Эти силы обусловле-
ны неравномерным распределением масс различной плотности в
земной коре и имеют свой потенциал. Вместе с потенциалом нор-
мального поля тяготения, который учитывает влияние сжатия Зем-
ли, потенциал аномалий силы тяжести составляет истинный потен-
циал геоида.
Вследствие большой неравномерности распределения масс по-
тенциал аномалий зависит как от географической широты, так и
долготы точек земной поверхности. Обычно он записывается вместе
с членами, учитывающими сжатие Земли, в виде разложения по
сферическим функциям [15]
оо
(a„m cos т\ + sin тХ)рпт (sin ?), (3.50)
п = 2 т=0
где
р —радиус-вектор точки пространства (из центра Зем-
ли), например, точки, в которой находится спут-
ник в данный момент;
ср —широта;
л — долгота той же точки;
/? —средний радиус Земли;
—среднее ускорение силы тяжести на поверхности
земного эллипсоида;
апт, ^пт~~постоянные числа — коэффициенты разложения;
рпт (sinср)—сферические функции.
Если т = 0, то sinmX=0; cosmZ=l и получаемые при этом
гармоники носят название зональных, они не зависят от дол-
готы. Если т=?^0, то гармоники зависят от долготы и называются
тессеральными.
Влияние аномалий невелико по сравнению с влиянием сжа-
тия (а2о) Земли.
Отклонения координат за счет аномалий имеют порядок сотен
метров, составляющих скорости — сотые, максимум десятые доли
метра в секунду за период в несколько витков.
Для проекций сил, обусловленных действием аномалий, на ор-
битальные оси, легко получить:
Т = kg* cos В + Agp sin В;
W = — Agp cos В Д- kg* sin 8;
S=-AgP,
(3.51)
125
где
S, Т, IF—составляющие возмущающей силы, вызываемой ано-
малиями (на единицу массы);
Agp, Agp — проекции ускорения, вызываемого аномалиями,1? в.
направлении меридиана (на север ?) и параллели (на
восток X) в данной точке;
AgP — то же к центру Земли.
Дифференцируя выражение для потенциала Т' по направлени-
ям р, <р, X, имеем:
оо П \
= (/z-tl)(-^-J'+2 ^(a„mcos/nX4-
п = 2 пг=0
+ p„m sin m\)pnm (sin?);
oc n
+ P„m sin m)-)p'nm (sin?);
Agp = p-7'-- (—У*2 У, (-anmsinrnX-|-.
A COS cp \ о /
n — 2 m = Q
+ pnm cos mX)zngnm (sin?).
'Подставив полученные значения Agp, Agp, Agp в уравнения
движения в оскулирующих элементах, найдем после интегрирова-
ния системы возмущения этих элементов (3.29).
Интегрирование можно проводить, пользуясь малостью возму-
щений, принимая постоянными элементы a, ...,i в правых частях.
Таким образом, задача сводится к следующим квадратурам
(см. стр. 110):
Д2 = 2 — 20=Л —,sln** ( —AgpCOsB-j-Ag^sin tydt;
i Vsv s,n ‘
Lp—p—pQ=2 — r (Agp cos8-(-Agp sin 8)t//;
t
M = i — iQ=\ r_ cos и ( — Agp cos8-j- sin 8) dt-,
I V^p
(3.53)
sin &Agp +
126
Д(0 =7 co-O)q= \
COS&AgP +
H—— f 1 ——) sin & (Agp cos 8 4- Agp sin 8) —
e X p J
—— ctg i sin «( — Ago cos 8-|- Ag? sin 8) dt-,
P
. — — — P V v.p
Mi = u—uQ=\
-----—ctgZsinzz( — Agp coso+ д<?р sin B) dt.
VP
(3.53)
r2
! r2 1 / (z?)
(Г)2 у p
Решение можно получить и другим способом, заменяя dt через
du, т. е. переходя к переменному и или Ф. После этого время
/VP
t получается квадратурой
Г г3 )
г2 1 4- ----ctg i sin и (kg cos б — kg\ sin 6)
VP 1 p
V VP
du.
Косинус и синус азимута 6 орбиты вычисляются по формулам сфе-
рической тригонометрии:
. cos и
cos о —sm i--------
COS о
Sin о
cos i
COS cp
При вычислении квадратур все оскулирующие элементы, стоя-
щие под знаком интеграла, могут быть приняты постоянными (при
е>0). Соответствующая погрешность в величинах AQ, Д/, ..., Др,
при не слишком малых значениях эксцентриситета — порядка де-
сятых -долей процента. Такая точность более чем достаточна, по-
скольку достоверность числовых значений коэффициентов поля
аномалий an?n, Pnm в лучшем случае 50%.
Для приближенных расчетов, пользуясь некоторыми дополни-
тельными допущениями, можно получить на основании (3.53) ко-
нечные формулы для Дй,..., Др [43], [44], [46]. Важно отметить, что
аномалии дают как периодические, так и вековые возмущения ор-
биты. Наблюдаются также долгопериодические колебания элемен-
127
тов, связанные большей частью с некратностью времен обращения
Земли и спутника вокруг нее. Дело в том, что спутник неточно
повторяет свою «суточную трассу» относительно поля аномалий и
земной поверхности.
Долгопериодические колебания очень малы и основные откло-
нения координат и скорости происходят внутри суток. Примерный
характер их изменения для высоты показан на рис. 51.
К концу суток смещения ДЛ почти становятся равными нулю,
и в следующие сутки колебания приблизительно повторяются.
Ah м
300 г
Рис. 51. Периодические колебания высоты ло-
лета ИСЗ АЛ по числу его витков
Смещения вдоль орбиты
могут накапливаться. Для
реальных орбит такое на-
капливание может (если
не учитывать сопротивле-
ние воздуха) появиться
также за счет неточного
знания коэффициента ц,
учитывающего влияние
центрального поля.
3.4. ВОЗМУЩЕНИЯ, ОБУСЛОВЛЕННЫЕ ВЛИЯНИЕМ
ЛУНЫ И СОЛНЦА
В рассматриваемом в настоящей работе частном случае близ-
кого к Земле искусственного спутника оказывается возможным
получить простое приближенное решение, вполне пригодное не
только для качественного анализа, но и для решения многих прак-
тических задач.
Запишем уравнения движения спутника в следующем виде:
п—1 V - dRj _ dR
дх dx
г3 7 = 1
/Мо п—1 -у=Х 7 = 1 dRj _ _ dR
Г3 ду dy
ж п—1 V - dRj dR
г3 dz dz
(3.54)
где
Мо — масса основного притягивающего центра (массой
спутника по сравнению с Л40 пренебрегаем);
Л —1 .
/?= 2 Я, —пертурбационная функция;
У = 1
г— радиус-вектор спутника.
128
Начало координат — в центре 'Притяжения Л40. При выводе вы-
ражения для Rj имелось в виду, что в соответствии с основными
законами механики центр инерции системы тел, связанных только
внутренними силами, движется в пространстве равномерно и пря-
молинейно. Напишем уравнения движения системы тел в абсолют-
ной системе координат т], £ [29]:
J _du '
j dU . > (7 =/= О? (3.55)
dU
i ^4 - . (Z==0, 1,...,«).
Здесь в правых частях записаны взаимные силы притяжения тел
(/ТИг-Л17-д1}2) после проектирования их на оси неподвижных коор-
динат; Aij — расстояние z-ro и /-го тел; U — силовая функция.
Уравнения движения (3.55) записаны для z-ro тела. После сум-
мирования по I имеем
2ЧМ (3-56)
что и доказывает положение о равномерности движения центра
инерции системы. Интегрируя эти уравнения, получим шесть ин-
тегралов движения центра инерции системы:
(3.57)
где
/ — время;
ab a2, p2, y1; y2— постоянные интегрирования.
Пользуясь полученными интегралами, перейдем к системе урав-
нений относительного движения, положив в (3.55)
^ = ^о+Х i'l 71/ = 'т1о4_У;‘> ^i = ^o + 2:j>
где
50, ^о, ^о-абсолютные координаты тела Мо.
5-2343
129
Учитывая, что х0—у0 — zo=O, находим
л, + /(Мо + Л1,)—
i j Х iJ 'J
dxi dxt 1
J
ri j 4 ij rJ
=—=y ^ •
dyi dyt
(3.58)
^ + /(Alo + 4)^- (^T
ri j
=2i==y
dzi dzt
Отсюда следует, что пертурбационная функция
.(3.59)
J j
Введем угол <р7- между радиусами векторами гг- и rj, проведенными
из начала координат на спутник и на j-е тело. Тогда R можно пред-
ставить в виде -ж— / 1 'И cos ф/ \ J ' <3-“> J j 7
где ^j=(Xi -х;р+(У1 “У/)2+(г1 -^)2; г2=xi-j-yi +Н; r; = x2-|-y24-2j--
Индекс «1» здесь относится к космическому аппарату (спутнику).
Кроме того, следует учитывать, что при пСг,
1 1 _________________1___________
=7”S (77)*/’fe<cos?A (3-61>
130
а при Гу < /*!
1
1
J_ = _ ___________________
ди ri Г Yj /
I/ 1—2 — cos <р/4-1
V n \
=4^ (tAWos?,),
й=0 X
(3.62)
где ph (cos <pj) —полином Лежандра.
Так как нас интересует влияние на движение ИСЗ Луны и
Солнца, расстояние до которых от Земли (Л1о) больше, чем от
Земли до спутника, то в дальнейшем
ние (3.61).
В качестве основной координат-
ной плоскости примем плоскость,
проходящую через орбиту возмуща-
ющего тела Mj. Очевидно, вектор
возмущающего ускорения, вызыва-
емого телом Mj, лежит в плоскости
OBCj (рис. 52). Разложим этот век-
тор на две составляющие, из кото-
рых первая Sj совпадает с направ-
лением Г1, а вторая Pj перпендику-
лярна /*1 и лежит в плоскости OBCj.
Для определения этих составляю-
щих имеем следующие функции:
е _ dRJ . р _ dRi
дгх rxd<tj
будем использовать выраже-
возмущенного движения ИСЗ
при учете влияния Луны и
Солнца
или. на основании формул (3.60) и (3.61)
=fM' i ft i ft ft'<cos ft
\ *=o rj /
~ fMj (3 cos2 <f>7 -1); (3.63)
Г i
\ k = 0
~ — 3/Afy cos cp7 sin <py.
(3.64)
(В дальнейшем ограничимся третьим членом разложения по по-
5*
131
(3.65)
щего тела, т. е. вековое, если отклонение 7уТсп является целым
также учтены).
Составляющие Tj и Wj определяются формулами (см. рис. 52):
Tj=Pj cos Sy; W — Pj sin Sy.
Из треугольника ABCj получим:
sin sin Фу= sin т]у sin zy;
cos Sy. sin <py=sin zzy cosTjy — cos Uj sin cos /у.
С учетом формул (3.64) и (3.65) найдем:
Wj= —3fMj sin ij sin cos cpy; (3.66)
4
Tj= — ^fMj cos cp7- (cos sin иj — cos u} sin '<\j cos /,). (3.67)
ri
Кроме того, из треугольника ABCj
cos сру = cos Uj cos v]y + sin zzy sin cos fy. (3.68)
Радиус-вектор спутника выражается через элементы оскулирую-
щей орбиты (а, е) и истинную аномалию Ф формулой
г = л(1-*2) .
1 14-2 cos ft
Таким образом, формулы (3.63), (3.66), (3.67), (3.68) и (3.69)
выражают возмущающую функцию для тела Mj и компоненты
возмущающего ускорения через параметры оскулирующей орбиты
спутника и угол tjj, характеризующий положение возмущающего
тела. Возмущающие действия других тел на движение спутника
можно учитывать аналогичным способом. Результат совместного
действия находят путем суперпозиции.
Определим возмущения 1первого порядка для элементов орбиты
Q, со, z, а, е.
Уравнения, определяющие в первом приближении изменения
оскулирующих элементов орбиты, после использования выведен-
ных выше формул имеют вид
А = л (»,,).
где q — некоторый элемент оскулирующей орбиты.
Вместо независимой переменной t (время) введем переменную
О (истинная аномалия). При этом, как и в случае использова-
ния величины и как аргумента, для определения изменений оску-
132
лирующих элементов q получим квадратуры. Эти квадратуры,
конечно, позволяют использовать полное значение Sj, Tj, Wj (без
допущения о малости отношений г\1г^).
Решение уравнений можно существенно упростить, если при-
нять во внимание, что угол меняется очень незначительно (при
малых ri/rj) в течение одного оборота спутника вокруг Земли (или
другой планеты). Так, например, для круговой орбиты с радиусом
8000 км за один оборот спутника угол л изменяется для Луны
на Дт|л~1о, а для Солнца Аг)с~0,1°. Для орбиты с радиусом
^==40 000 км Дт] л~ 12°, Длс~1°- В силу этого можно положить
t] = const за время одного оборота для близких к Земле спутников.
Полученная таким образом величина изменения элемента за один
оборот будет функцией угла т).
Для определения изменения некоторого элемента орбиты q за
т целых оборотов можно воспользоваться формулой
т
k=l
(3.70)
где Aqk — изменение элемента орбиты за k-й оборот спутника;
Ль ср— некоторое среднее значение угла л за время й-го обо-
рота.
Формулу (3.70) в пределах сделанного допущения Г1/г,-<1 мож-
но заменить следующей:
t
С A dt
J СП
(3-71)
где Aq — изменение элемента за один оборот спутника;
Тсп — период обращения спутника.
Принимая во внимание, что возмущающее тело движется по
орбите, близкой к круговой, с почти постоянной скоростью, можно
записать
* СП J
(3.72)
где QB — угловая скорость возмущающего тела;
Tj — период обращения тела вокруг Земли.
В формуле (3.72) знак Tj должен совпадать со знаком QB.
Изменение элементов орбиты за один полный оборот возмущаю-
133
щего тела, т. е. вековое, если отклонение является целым
числом, определится формулой
у, т(0-г2~
д?в=7т|уМ \ (3-73)
I * СП I V
*10
где qT — изменение элемента за один оборот спутника вокруг
Земли.
Этой формулой можно также пользоваться при Тдробном,
если пренебречь изменением элемента за один оборот спутника.
Изменение долготы узла Q и положения перигея со
Изменения долготы узла Q и положения перигея со определя-
ются следующими уравнениями [9]:
—=---------; (3.74)
па? У 1 — е2 sin I
du ___ 1 — cos i dR । ]/ 1 — i2 dR
dt ~„a2y'r^72Sin i di ~ na?e de '
где «>—; р=/Л40.
Для определения изменения долготы узла, дифференцируя
формулу (3.60) с учетом линейного разложения-^—, т. е.
Д1/
R=
(3.76)
находим
dR Л fMj 2
—- = — 3 —3- Г1 cos <р sin i sin и sin т). (3.77)
В уравнениях (3.74), перейдя к переменной Ф и используя формулу
rf» _ Уца (1 — <?2)
dt ~
получаем
где
(3.78)
dQ. _____ sin т] cos ср sin и
d$ (1 + е cos ft)4 ’
134
a — экваториальный радиус Земли.
Коэффициенты для Луны и gc для Солнца при <2 = 6378 км
имеют следующие численные значения:
7 / а \3 7 / а \3
Ь~0,56-10“7 — ; сс~0,26-1СГ7(— .
\ а ) \ а /
Поскольку определяются возмущения первого порядка, в пра-
вой части уравнения (3.78) элементы орбиты будем считать посто-
янными.
Изменение долготы узла AQ возмущенной орбиты за один обо-
рот спутника выражаются формулой (при условии, что в момент
/о угол -0=0)
Д8= — 3£ (1 — г2)3 sin тД cos sin ц -dk. (3.79)
J (1 + е cos ft)4
о
На основании известных формул
cos ср = cos и cos т]-[-sin и sin т] cos /;
и = о) -Р д,
получим
где
cos ср sin и = A cos2 ft + В sin2 ft С sin & cos ft,
А = -|- cos sin 2о)-[- sin т] cos i sin2 or
B = sin cos i cos2 о —sin 2(d cos tj;
C = cos vj cos 2u)sin sin 2(d cos i.
Аналогично найдем
cos2 ср = Z) cos2 ft-p В sin2 ft-psin&cosft,
(3.80)
(3.80z)
где
D = cos2 cq cos2 о) ~p sin2 7] sin2 co cos2 i + ~ sin 2tj cos i sin 2o);
B=cos2t] sin2 (в-]- sin2 7] cos2 о cos2 i —sin 2tj cos i sin 2(d;
F = sin2 7] cos2 i sin 2w — cos2 tj sin 2(o-p sin 2tj cos i cos 2(o.
Подставив формулы (3.80) в выражение (3.79) и выполнив
необходимые преобразования, получим
тс f Г 5
Д2 = — 3;-----------Ros i sin2 т] -(-е2 — sin 2« sin cos ?)+
(1—<?2)1/2l L2
+ (4 — 5 cos2 o?) cos i sin2 vj 11 . (3.81)
135
Аналогично AQ получим, что
Дц) = 3тг; Г1 — ё1 [4 (cos ц cos (о -|- sin sin <о cos Z)2 —
— ( — cos т] sin <оsin т] cos w cos Z)2 — 1] — Д2 cos Z. (3.82)
Интегрируя выражения (3.81) и (3.82), в соответствии с (3.73),
окончательно находим
Дсов = — £-------— • (cos2 Z —1 4-£2)sin2cD-L—(1 — £2)
2 (1_^2)Ь2 гсп [_ 5
3 тс Tf
Д2В =------В---------- ----(1 — e2-|-5e2sin2w)cosZ.
2 (i._^2)V2 7сп
(3.83)
(3.84)
Изменение наклонения i орбиты
Для вычисления изменения наклонения орбиты воспользуемся
уравнением [9]
di
— =-------ITj cos zz, (3.85)
р Vрр
где __
р = а(1-е2); W^aZ—W. (3.85')
Подставив в (3.85) формулу (3.66), после преобразований по-
лучим
(ZZ rjf- /-j 9\о j COS It COS ср /о oz?\
---= — 3; (1 — г2)3 sin i sin Tj-------— . (3.86)
d§ V 7 ‘(1 +г cos ft)4 v 7
Полагая, как и ранее, т] = const, для определения изменения
наклонения орбиты за один оборот спутника получим выражение
2-
А. /л 9X4 . • . С cosr/coseprfft
Дг= — 3; (1 — e2)s * sin I sin Vi \------------------1— .
J (1 + е cos ft)4
о
Раскрывая cos ср, найдем
cos и cos? = A' cos2 &-\-В' sin2&+ sin &cos&,
(3.87)
(3.88)
где
= cos Z sin 7] sin 2(d-{-cos Tj cos2<d;
B' = cos 7] sin2<n--------sin 7^ cos Z sin 2a>;
C' = sin Tj cos Z cos 2o) — cos sin 2u).
136
Подставляя формулу (3.88) в выражение (3.87), после неслож-
ных преобразований находим
Д/
sin i sin т] cos sin i sin X
cos i sin v] sin 2o)4"cos (5 cos1 2 w — 1
(3.89)
Интегрируя это выражение в соответствии с формулой (3.73),
определим изменение наклонения орбиты за один оборот возму-
щающего тела:
Д/в = — — ;-------- • —тг sin 2/ sin 2о). (3.90)
8 (i_^2)V2 Тсп
Отметим, что если считать величины е и i малыми, то найден-
ное изменение наклонения орбиты является величиной третьего
порядка малости относительно наклонения и эксцентриситета.
Изменение большой полуоси а орбиты
Воспользуемся уравнением [9]
da ___ r\ 2а2е sin ft_ Г р $ . 2я2 Г р
У^р р V и |/
(3.91)
Подставив в это уравнение S, Т и ri из формул (3.63), (3.67), (3.69),
после преобразований найдем
=2^ (1 __ е2\2 \е (3 COS2 ср—1) sin ft _
d$ ’ L (1 + е cos ^)3
2 cos ср (cos т] sin и — cos и sin cos z)
(14-2 COS ft)2
(3.92)
При прежнем допущении определим изменение большой полу-
оси спутника за один оборот:
Да = 2£а(1 -е2)2 [Ле-3/2], (3.93)
где
2тс 2"
у __с (3 cos2 ср — 1) sin $d$ j _г cos ср (cos sin zz— cos a sin cos z) d$
1 j (14-2 cos ft)3 ’ 2 j (14-0 cos ft)2
о о
137
Для интеграла 1Л имеем
(2г 2г \ /2г
е cos fttfft с cos3ft^ft \____З/71 CQS __________
j (1 + е cos ft)3 j (1 + е cos ft)3 / \ J (1 4- e cos ft)3
о о / \o
1 f ,Q | 1 f flfft I 3 (* cos ftrfft . 3 f COS2fttZft
— \ ----\----------------\-------------1-------\ ------
e* j e3 J (14-£ cos ft)3 & J (1 4-£ cos ft)3 e J (1 4-£ cos ft)3
oo о о
становки
Интегралы в последней формуле, вычисленные с помощью под-
tg —, т. е. после перехода к эксцентри-
L 2
ческой аномалии:
2г
C COS fttfft _____
J (1’4-2 COS ft)3 (1 ^2)5/2•’
3772
2г
j (1 4- cos ft)3
о
(1 —^2)5/2
2к
Г COS2 ftrfft
J (1 4-г cos ft)3 (i_e2)5</2
1 4- 2*2
(3.94)
На основании этих формул находим
/1 = 35к Г------------------ +— • 2 + g2
L (1 _ е2)5/2 е3 е3 (1—е2)5/2
. 1 + 2g2 I
е (1—<?2)5/'2]
9
e
(1 _ e2)5/2
(3.95)
Далее можно получить
cos ср (cos T{ sin и — cos и sin г[ cos t) = M cos2 & -f-
4-7Vsin2& + £ sin & cos 9,
где M = (cos2 sin 2<o — sin2 cos2 i sin 2oj — sin 2vj cos i cos 2<d);
7V=-|- (sin2^ cos2 / sin 2a> — cos2^ sin 2а>+ sin 2?] cos i cos 2<n);
L = (cos2 — sin2 7] cos2 i) cos 2<o -4 sin 2vj cos i sin 2co.
(3.96)
Второй интеграл в формуле (3.93) при этом может быть приведен
к виду
/, = 2.-0=^-
2 ^2
2г.
Л£—TV \ Г rfft ]
^2 J J (14-2 COS ft)2
о
138
2 тс
J__2CV — ЛГ) г cos frrffr
1 е \ (1 + ^cosfr)2
о
Вычислив интегралы, найдем
JM —ЛП , 1 |
е2 ,/ (1 _ е2)3/2
2 Ш - N)-------—
к (1-02)3.2
(3.97)
Теперь после несложных преобразований можно записать
— (.ке - 3/2) = - А +F) +------Ц- [(95 +12М -
* «2 (1—02)5/2 [
-6^^_|_Л (5 + Af-7V)+(-155+12N-18M) .
е-
'.Легко убедиться, что все выражения в круглых скобках в правой
части формулы обращаются в нули. Это вытекает из следующих
очевидных условий [см. формулы (3.96) и (3.80z)]:
7И_]_д<=0; |
F + 2/W = 0. 1
(3.98)
Таким образом, получаем следующий результат, справедливый
при любых значениях всех узлов:
Да=0. (3.99)
Отметим, что этот результат совпадает с выводом общей теории —
в первом приближении большие полуоси оскулирующих орбит пла-
нет не имеют вековых возмущений.
Изменение эксцентриситета е орбиты
Дифференцируя по Ф формулу (3.85'), связывающую параметр
орбиты, большую полуось и эксцентриситет, получаем
—= —Г(1-е2)——^-1. (з.юо)
rffr Чае [ х 7 tZfr rffr J v
Эксцентриситет за один оборот спутника изменится на вели-
чину
1 — р2 1
Le =------Да-------Др
Чае * Чае
или, так как Да = 0, то
<ЗЛ0»
139
Изменение параметра орбиты определяется уравнением
(3.102)
Подставив в это выражение Т из формулы (3.67) и использовав
новую переменную 'О’, получим следующее уравнение:
dp 6ca(l ^2\4 М cos2 & + Nsin2 + 7 sin cos
(1 + е cos ft)4
откуда найдем
др=-6Еа(1-е2)1/2^2 | 5М | .
(3.103)
(3.104)
Подставляя полученное выражение в формулу (3.101), находим
Le =“у" (1 ~ е2)1/2 [cos2 sin 2(о — sin2 у cos2i sin 2<d —
— sin 2t] cos i cos 2<o). (3.105)
Изменение эксцентриситета за один оборот возмущающего те-
ла определится формулой
де =21 (1 — е2)1/2 sin2/sin 2и>. (3.106)
в 4 ’ Гсп
Если считать малыми (того же порядка, что и g) эксцентриси-
тет и наклонение, так же как и в случае Д/, то полученное измене-
ние эксцентриситета будет величиной третьего порядка малости.
Формулы (3.90) и (3.106), как и (3.83), (3.84), определяют
вековые изменения наклонения орбиты и эксцентриситета, если
период обращения спутника в целое число раз меньше периода
обращения возмущающего тела. С меньшей точностью возмуще-
ния могут быть рассчитаны и в случае, когда указанное условие
не выполнено.
В заключение отметим, что полученные формулы могут быть
использованы для приближенного расчета возмущений элементов
орбит спутников других планет (в том числе Луны), если только
для этих спутников отношение 7уТсп достаточно велико.
Более точные методы расчета приведены в работе [11].
Численный пример расчета возмущений элементов орбиты ИСЗ,
вызываемых влиянием Луны и Солнца
Для примера рассмотрим орбиту спутника с большой полуосью
а = 7350 км, эксцентриситетом е =0,1:
сл—0,85-10-7; Ес =0,40-10-7;
140
= 410;
5000.
\ 7" СП j
Результаты расчетов приведены в табл. 3.1.
Таблица 3.1
Элемент Изменения за один оборот спутника Изменения за один оборот возмущающего тела
Влияние Луны Влияние Солнца Влияние Луны Влияние Солнца
Долгота узла Q <0,17" <0,08" <34" <3,2'
Угловое расстояние пе- ригея от узла со <0,29" <0,14" <2' <П,3'
Наклонение орбиты i <0,17" <0,08" 0,43" <2,4"
Эксцентриситет орби- ты е <2-10-7 <0,93-10-7 <0,41-10-4 <2,31-10-4
< 1,5 м <0,6 м <0,3 км <1,7 км
Перигейное расстояние орбиты спутника Суммарное воздейст- вие <2,1 м Суммарное воздейст- вие за один год <5,1 км
Анализ данных табл. 3.1 показывает, что влияние Луны и Солн-
ца на орбиту спутника^ близкую к Земле, очень невелико. Однако
за один год высота перигея может изменяться на несколько кило-
метров, а положение узла на 5—7 угловых минут.
Выше были получены формулы для расчета изменений элемен-
тов орбиты в случае удержания третьего члена (п = 2) разложения
пертурбационной функции. Тем же путем можно получить следую-
щие формулы, соответствующие n-ому члену разложения, на интер-
вала от '0’1 до 0*2:
Д2 = H/>n+1 Sin -q
|ir"+12'!n!
п-2i-1
(2rz — 2Z)!
(n — 2Z — 1)!
k = 0
1 = 0
n — 2Z — IX „ b
COS^ COS* Cf>2
k
2 ст+1 + 2;
sin<oV V (
/k\
ст +1 + 3/ I
(3.107)
k
j=0 v=o
k+1
19- 2 a+27'
Xe~^~27a+ + Q/^ + coso,^ £(-l)’+1+3'X
' ; ' j = 0 v=o
141
1
До>„
е(п—} (П \
1 2 ’ Ьпт ( . (2л-2г)!
V ( - 1)г--------—----------
v ’ 2nnl(n — m — 2iy.
1=0
р-1
(±е
п
ГП+1 ,
т=0
k = l, 1 = 0 j = v = O
X e~^kl/n+k_, - Д2„ cos Z;
k?+1
&Pn =
n ' 2 ) bnm (n) (2n-2Z)! 1
22 22 ( — 1V 2«-1/1!(и_7Я_2/)! S 71z X
m = 0 i = 0 1 = 0
E
n
(3.107)
PiPn+1
f-
bnm
2nn\ (n — m —2z)!
[irf
m=0
ixO
m — 1
^+1
u=o
m—1
1,1 "T +l d-k
+ L v‘ £ £ i-i)!-‘w+’x
l=k=0 j=0 v=o
cos <?! ~cos 7] cos o)-[- sin v] sin w cos f;
cos <p2= — cos Tjsin 0)4- sin tj cos oj cos i. ।
142
Полагая тг= 1 и рц = —Арф*, найдем возмущение элемента орбиты,
обусловленное давлением солнечного света на корпус космического
корабля.
Изменение наклонения орбиты Afn определяется по формуле
для Айп после замены sin оз на cos со и cos со на — sin со и умноже-
ния всего выражения на sin i.
В формулах (3.107) принято:
о = п — т — 2/Ц-2/; <з=^п — 2i — 1 — й;
^0 = /п; т)! = 2/ —/г; С0 = /п; Ci = 2z;
Ьпт = 2 Рпт (COS ?1) COS Ш 0; Ьп=рп (COS ?1);
(п + т)\
гх =------—---------радиус-вектор возмущающего тела (ин-
1 4- cos (Qj + -q)
деке при элементах—„1“) по отношению
к центральному.
Величина In+k-v является интегралом вида
Т f d§ 1 Г е sin ft .. /о - .
/п+1 = \------------=------------------------к (2п — 1)Х
J (1 4" ^COSftf + 1 П(1 — £2)|_ (1 4“ COS ft)"
db - z . 4 f dft Г2
(^ — 1) \----------- •
(1 + e cos b)n--------------------------------------J (1 + e cos ft)"”1
(3.108)
Приведенные выражения для интегралов /n+fe-v справедливы
при не дробных индексах сумм или сочетаний
/&4- 1
например, I 2
\ j <
которые только в этом случае имеют смысл.
Если указанные величины получаются дробными, то значения
величин k или /и, входящих в них, уменьшаются на единицу, а
интегралы In+k+v принимают вид
г (* d cos ft 1 г2
1 n + k_.,= — \ --------------—=----------------------------------
J (1 + е cos ft)"+ft-v e (1 4- e cos ft)'z+*-v-1 (n+ k — v — 1) 1^
(3.109)
Пусть Aft — интервал, на котором еще можно принять возму*
щающее тело неподвижным, А/ — соответствующий промежуток
времени. Тогда, принимая изменения элементов орбиты космиче-
* См. стр. 176 (3.176).
143
ского корабля за время А/, за производные по времени и учитывая,
что возмущающее тело движется в общем случае по эллиптической
орбите,
лы для
(3.107) имеем следующие форму-
приращений этих элементов:
на основании уравнении
вычисления осредненных
. (1 - e2 f2 2* —
nm
2v.M + l (n + m)’
Е
n—m—2i т—2\
s=0 z=0
п — т — 2%
2пл! (и — т — 2%)!
s
n' \ n~W z
m — 2Л \ ___ r
- 2 <-')•. (
7 /=9=0 X
1 X ' * W{cosz-e21sine2i-./I> (3.110)
о /
здесь:
^,2 °
Jx = sina'/)cos^t] — табличный интеграл, a=s-j-r-|-9, p = n —
— 2х — 2Х 1 — а;
2* —при т—0 заменяется единицей;
7\, ei — соответственно период обращения возму-
щающего тела вокруг центрального и
эксцентриситет.
n-l, t у, k
г л (1 - gl)3/2
nk
,0+W"-1 V4 /AW*'
' И1
\ / \ 6 / \q/ \p,
2rMpn^x
ri / = 6 = 0 q=p = 0
< cos<“’2iSin921sin?+ft_/,<»cosT_9+p«>cos?+/’Z-J2; (3.110')
J2 = j sina 7] cos* vjrfi] — табличный интеграл, a = ®~x-q-\-p
b = t — 6Д-Т — q-[-k — p, ^ — n — Ti — k — \.
Для получения осредненных Apn, Aen, Aa)n приращений элемен-
тов орбиты необходимо в соответствующих формулах (3.107) за-
менить комплекс —пт на величину Jnm, а для элементов AQn,
r^1
т-? sin т COSa<Pi COS^ ср9 Т
Atn — комплекс -----!--------IL на Jnb.
rn+l nR
При интегрировании уравнений движения по Ф в пределах от 0
до 2 л формулы (3.107) упрощаются. Все слагаемые, содержащие
144
интеграл типа (3.109), становятся равными нулю, а интеграл типа
(З.Ю8) превращается в
I п + 1
Для возмущений за период обращения возмущающего тела,
двигающегося по эллиптической орбите, получим (от Qi результат
не зависит)
F (п — т\ р ( Л}
_ .. 9чз/9 2 /’ \ 2 / п—т—2/ т—2Х
7\(1-^)3/2 (п-от)! v V V V
Пт (« + «)! 4- 2- 2- Х
^1 -z = X = О л = 0 т = О
х (-1Г+Х-Х
п\ [т \
|(2/г —2Z)!
%/ \2Х /
2лп! (п — т — 2х)!
Е
/=0
здесь Т — период обращения спутника вокруг центрального тела;
г T1(l-gl)3/2
Пк 2nTpt+i
X cos7 9+pw cos9+pi-J2.
Как и в общем случае, для получения осредненных приращений
элементов орбиты (за период обращения возмущающего тела) не-
обходимо в формулах (3.107) заменить соответствующие комплексы
на /пт и Jпь.
3.5. ОЦЕНКА ВОЗМУЩАЮЩЕГО ДЕЙСТВИЯ АТМОСФЕРЫ.
ОПРЕДЕЛЕНИЕ ВРЕМЕНИ СУЩЕСТВОВАНИЯ СПУТНИКА
Рассмотрим лишь основные возмущения орбиты, т. е. вековые
изменения полуоси (или параметра) и эксцентриситета, определя-
ющие время существования спутника.
Сила сопротивления при движении тела в молекулярном пото-
ке газа может быть рассчитана по известной формуле
Rx=cx-^-Sw. (3.111)
Здесь коэффициент аэродинамического (сопротивления сх, как пра-
вило, принимают постоянным для всего возможного диапазона
скоростей и высот полета спутника.
Величина миделевого сечения Зм в случае неориентированного
спутника в среднем в течение больших промежутков времени мо-
жет быть принята постоянной и равной одной четвертой величины
145
полной поверхности тела [22]. Таким образом, спутник любой фор-
мы может быть заменен сферой равновеликой поверхности.
Коэффициент сопротивления сх принимается равным коэффц.
циенту сх для сферы. По данным теории сопротивления тел моле-
кулярному потоку газа сх сферы равен 2,1 4- 2,15 [34].
Для ориентированного спутника величину миделевого сечения
необходимо рассчитывать в соответствии с его ориентацией отно-
сительно набегающего потока. 'Коэффициент сх также изменяется
в зависимости от ориентации тела относительно потока газа и мо-
жет быть вычислен по имеющимся теоретическим методам расче-
та (34].
Плотность воздуха р является функцией высоты полета, рас-
положения Солнца относительно плоскости (перигея) орбиты,
географической широты спутника, физических процессов, происхо-
дящих на Солнце (изменения солнечной активности) и вращения
Солнца вокруг своей оси. До высоты 250—300 км плотность в
районе орбиты мало зависит от расположения Солнца относительно
перигея * (ч-аоти орбиты, где больше всего сказывается сопротив-
ление атмосферы). Для высот перигея свыше 300 км плотность
существенным образом зависит от того, на дневной или ночной
стороне Земли находится перигей. На высотах 400, 500, 600 и 700 км
плотность воздуха в дневное время больше, чем в ночное в 1,6; 3; 6
и 11 раз соответственно. На высотах свыше 500 км появляется ши-
ротная изменчивость плотности [18].
По современным данным, главной причиной суточного 'хода
плотности является разогревание атмосферы в результате погло-
щения солнечной электромагнитной радиации. Однако влияют и
потоки корпускул, идущие от Солнца во время геомагнитных бурь.
Были предложены формулы для учета изменения р в зависимости
от солнечной активности и суточного хода, но достоверность этих
формул не известна [18].
Вопросу определения плотности верхних -слоев атмосферы по-
священо много работ. При этом использовались главным образом
данные о торможении спутников [17], [22], [37].
Было предложено много моделей атмосферы, в которых учиты-
вались изменения плотности в зависимости от высоты над уровнем
океана. В данном труде были использованы применявшиеся в
СССР модель временной стандартной атмосферы ВСА-60 (до вы-
сот 200 км) и модель атмосферы М-1 (до высот 400 км), совпадав-
шей с высоты 200 км с американской ARDC— 1959 [18]**.
Расхождения между моделями в области перекрывающихся
высот — порядка 20%. Этой величиной можно охарактеризовать
точность получения средних значений плотности для всего земного
шара на данных высотах. Наблюдения за торможением первых
трех советских спутников ![39] дают именно такие значения откло-
* Для периода 1959—61 гг.— максимума солнечной активности.
** В настоящее время в СССР принята таблица стандартной атмосферы
ГОСТ 4401—64.
146
цений. Чем больше высота, тем менее точно известна плотность.
Кроме того, увеличиваются амплитуды колебаний р, которые хо-
рошо выявляются на основании данных об изменении периода
Обращения спутника вокруг Земли.
В работе [17] помещены кривые изменения плотности, приведен-
ные к одной высоте по часовому углу перигея (X). Зависимость р
от часового угла, т. е. от положения Солнца относительно перигея
орбиты, что определяет степень нагрева воздуха в этом районе, не
так четко выражена, как колебания с периодом 27—28 суток, со-
впадающим с периодом обращения Солнца вокруг своей оси.
Если перестроить кривые по времени полета, то совпадение
фаз через указанный период становится общим законом..для всех
спутников. 1По амплитуде эти колебания достигают 15% на высо-
тах 200—225 км и 40—50% на высотах 350—370 км. Наблюдают-
ся также более медленные и нерегулярные колебания плотности,
что можно видеть из той же работы [17].
Выбор вида аппроксимирующей функции для плотности р
Для расчета движения спутника с учетом сопротивления среды
целесообразно ограничиться наиболее вероятной моделью атмос-
феры.
Колебания учитывать не имеет смысла до тех пор, пока они не
будут достаточно хорошо изучены, тем более, что при -расчете на
длительные промежутки времени влияние колебаний плотности бу-
дет как-то осредняться.
Для коротких промежутков времени ошибки будут значительно
больше из-за незнания фазы колебаний р до запуска спутника.
Ошибки предварительного прогноза в последнем случае могут
достигать 50% для высот перигея 200—225 км и возможно более
100% для высоты 350 км.
Несмотря на такие ошибки, представляется целесообразным
Для выбранной модели атмосферы подобрать наиболее точную
аппроксимирующую функцию, которая в случае дальнейших уточ-
нений модели оставалась бы пригодной для расчетов. При этом
входящие в нее коэффициенты должны быть пересчитаны. Аппро-
ксимация должна содержать небольшое число параметров и соот-
ветствовать возможно большему диапазону высот полета.
Интересно отметить, что различные модели атмосферы, найден-
ные разными авторами в различное время, имеют общий характер.
В диапазоне высот от 130 (ниже спутника существовать не могут)
До 400—500 км все кривые In p(/i) имеют в районе 150 км наи-
большую кривизну; с высотой кривые постепенно выпрямляются
и к 400—500 км наклон их почти не меняется. Это позволяет
в качестве аппроксимирующей функции для In p(/i) выбрать обык-
новенную квадратную параболу с вершиной в области низких
высот:
147
lnp = a0 —x ]/^h — Ло, (3.112\
где ;
__ h — высота над уровнем мирового океана;
^о — постоянные коэффициенты для данной модели ат-
мосферы.
В табл. 3,2 приведены значения коэффициентов а0, h0 для
различных моделей атмосферы, а также отклонения Др =
= Рмод Раппр (где рмод, Раппр — значения плотности соответственно
для выбранной модели и аппроксимации).
Таблица 3.2
Модель М-1 Высо- та h км % ВСА-60 модель М-2 Высо- та h км де % ARDC-59 модель М-3 Высо- та h км де %
Оо=—20,051 130 -3,5 а0=—17,961 140 —5,5 clq=—19,023 140 —14
Ло= 125700 150 +4,5 hQ= 103030 155 +3 hQ= 104000 150 0
х=0,01449 200 +3,5 х=0,018844 180 + 1 х=0,01594 200 4-4,5
250 +4 200 —1 250 +4
300 +5 300 ' —3
350 —1,5 350 —0,5
400 +0,5 400 4-2,5
500 4-6,5
700 4-5
Можно видеть, что ошибки аппроксимации р не превышают 5—
6%. Исключением является модель М-3. Так, на высоте 140 км
отклонение составляет 14%, но аппроксимация годится до высот
700 км.
Таким образом, удается, используя функции (3.112), предста-
вить с высокой точностью 1п р во всем диапазоне высот, где глав-
ным образом происходит торможение спутников (от 140 до
500 км).
Будем предполагать, что дальнейшие уточнения модели атмо-
сферы не приведут к существенному изменению характера зави-
симости, позволившей применить квадратную параболу. Незначи-
тельные отклонения модели р, как и колебания, если законы их
будут выявлены, в дальнейшем можно будет учесть введением
соответствующих поправок.
В литературе встречается несколько аппроксимаций для р или
In р. Наиболее распространенным является показательный закон
h-h0
р = рое ", (3.113)
148
р0 —значение плотности н& некоторой опорной высоте Ло;
/ kT \
//—высота однородной атмосферы \Н=— ;
\ mS /
Г —температура в ° К;
т — молекулярный вес;
k — постоянная Больцмана.
С другой стороны, Н — высота, на которую необходимо под-
няться относительно й0, чтобы плотность уменьшилась в е раз.
Постоянство Н в данном диапазоне высот соответствует постоян-
ству температуры при однородном молекулярном составе воздуха.
Отсюда название «однородная атмосфера».
В действительности, с изменением высоты меняется как темпе-
ратура, так и молекулярный состав воздуха. (Поэтому Н не остает-
ся постоянной.
Из формулы (3.113) следует, что Н можно рассматривать как
производную, т. е.
н= ~dh .
d In р
С другой стороны, на основании (3.112) производная
d In р % у и
откуда
Я=-|-]/'/г-й0. (3.114)
Для модели М-1, которую в дальнейшем примем в качестве
основной, в диапазоне высот от 140 до 400 км величина Н возра-
стает от 18 до 72 км. Зависимость весьма резкая и нелинейная. По-
этому аппроксимация плотности функцией (3.109) при постоянной
Н не может обладать необходимой точностью.
В то же время для получения качественных характеристик за-
висимостей элементов орбиты от сопротивления воздуха и предва-
рительной оценки точности определения плотности по измеренным
Изменениям элементов орбиты экспоненциальной закон вполне се-
бя оправдал [39].
Среди других аппроксимаций следует отметить функцию
р=01------------, (3.115)
Л У ~ УоУ
\ + d )
которая была использована в работе [25].
Применение этой функции позволило еще до запуска первого
спутника впервые дать теорию определения времени существова-
ния ИСЗ и провести расчет на электронной машине сетки кривых.
По этой сетке легко определяется время жизни спутника, если
149
известны его баллистический коэффициент и начальные значения
высот апогея и перигея.- Вследствие использования модели атмо-
сферы Митра *, которая, как показали последующие запуски спут-
ников, дает сильно завышенные значения плотности на низких вы-
сотах и заниженные на высотах свыше 240 км, при определении
времени существования по указанной сетке получаются очень при-
ближенные результаты.
Что касается самой функции (3.115), то она сложнее (3.112) и,
как отмечают авторы, дает более значительные ошибки аппрокси-
мации (до 15%). Последнее замечание можно отнести и к функ-
циям, использованным в работах [39], [14], в случае применения
их для больших интервалов высот.
Интегрирование уравнений движения в пределах одного витка
Для получения зависимостей для изменения элементов орбиты
в течение длительных промежутков времени удобно воспользовать-
ся развитым в работе [33] способом раздельного интегрирования
уравнений движения.
Сначала проводится интегрирование в пределах одного витка.
Затем полученные приращения элементов орбиты принимаются за
производные от этих элементов по новому переменному — числу
оборотов. Такая замена приращений производными вполне себя
оправдывает. Однако, как показывают расчеты, .на последних вит-
ках ошибки этого метода возрастают настолько, что приходится
переходить к обычным способам интегрирования уравнений дви-
жения.
За исходные уравнения будем принимать следующие два урав-
нения в оскулирующих элементах — для параметра и эксцентри-
ситета орбиты:
dp ^зу-
eft fM
|ssin& + cos&f — T
db fM L 1 \P)P
(3.116)
В этих уравнениях составляющие возмущающей силы сопротив-
ления воздуха Т, S имеют вид [33]
5 = —-i-6pxi0THT>r; (3.117)
Т = — у- йртотн (*>„ — Sr cos 0,
(3.118)
* Митра С. К. Верхняя атмосфера. ИЛ, 1955.
150
где
b— коэффициент торможения, отнесенный к массе спут-
с S
ника (баллистический коэффициент), т. е. Ь= х м- ;
т
скорость спутника относительно вращающейся вместе
с Землей атмосферы;
2 —угловая скорость вращения Земли.
Приведенные формулы нетрудно получить, если рассмотреть
движение спутника относительно атмосферы в горизонтальной
плоскости (рис. 53).
Скорость- воздуха vB на широте ф для
рассматриваемых спутников
TJB = 2r coscp
имеет восточное направление и вычитает-
ся векторно из скорости движения спут-
ника (абсолютной). В результате полу-
чим искомую относительную скорость
^отн = ^ — ^в-
Спроектировав скорость уотн на орби-
тальные оси, получим:
Ъ’отн 5 == r'i
^отн T=vn — v3 sin Л;
foTH cos Л,
Рис. 53. Скорость движения
вращающейся с Землей ат-
мосферы в системе коорди-
нат, связанной с ИСЗ
где А — азимут направления абсолютной скорости;
уг, vn — составляющие абсолютной скорости соответственно в
направлениях радиуса-вектора спутника и транс-
версали.
Из сферической тригонометрии известно
cos ср sin A = cos Z; cos ср cos А = sin i cos и.
Заменив sin Л и cos А в выражениях для уотнт и аотнтг, получим
^отн т—ъп — 2г cos i и ‘Uoth w= 2г sin i cos и.
Спроектировав составляющие силы сопротивления воздуха
^р^отн на орбитальные оси, придем к написанным для S и Т
выражениям (3.17) и (3.18). Кроме того, для
W= —р^отн^г sin i cos и. (3.119)
В отличие от составляющей Т боковая составляющая W имеет
Периодический характер. Ее влияние на движение спутника весьма
151
незначительно. Гораздо существеннее влияние вращения атмосфе,
ры на составляющую Г, носящее почти постоянный характер.
Действительно, трансверсальная составляющая зависит тольк0
от cos /, который практически не меняется, и от радиуса-вектора г
Если во всех случаях принимать г = г-, то ошибки в определении
составляющей Т при движении спутника по эллиптической орбите
будут пренебрежимо малы. Это возникает из-за быстрого умень-
шения плотности р (и следовательно Т) с увеличением высоты
полета. На участках орбиты с высотой всего на 100 км выше вы-
соты перигея плотность воздуха составляет менее 10% плотности
в перигее. А так как само влияние вращения атмосферы не пре-
вышает 5% полного сопротивления воздуха, то ошибка не будет
более 0,5%. Очевидно, такой погрешностью можно пренебречь и
учитывать во всех случаях вращение Земли путем соответству-
ющего изменения баллистического коэффициента в выражении
(3.118):
т=—X-b'yv0™vn, (3.120)
где
/ \
bf = b\ 1------ cos i I j
\ V /
vn — нормальная составляющая скорости;
rr. и vn принимаются равными их значениям в перигее.
Относительную скорость также можно выразить через абсолют-
ную, умноженную на некоторый постоянный коэффициент. Оче-
видно, что в этом случае
^2ТН = ^2Ц-(^Л — Qr cos /)2-|-22г2 sin2 i cos2 и, (3.121)
или
= & — 2vnQr cos z’ + ^2r2 cos2/ + 22r2 sin2 / cos2zz =
= v2 — 2 ]/"v2 — v2Qr cos /Ц- 22r2 cos2 i-}-Q2r2 sin2 / cos2 u.
Наряду co слагаемым Qr cos / для спутников малой величиной
является вертикальная составляющая абсолютной скорости vr,
особенно в районе перигея. Поэтому разложим ^v2 — v2 в ряд,
ограничиваясь первым членом разложения. Получим
2 о
^отн = ^2
Qr cos i
V
Qr cos i
v
V2
, Q2r2 . 9. 9
H--------Sin2 I COS2 и
t/2
Последним членом в квадратных скобках можно пренебречь, так
как он по величине составляет менее 0,25 • 10~4. Для оценки второго
члена используем выражение
<vr=='^/r~ е sin
152
1
Отсюда видно, что величина vr в ------- раз меньше характери-
47 е sin ft
стической скорости спутника . Для того чтобы оба по-
следних члена имели один порядок малости, примем
т е. должно быть — <С 0,2.
V
Только при е>0,2 появляются большие значения вертикальной
составляющей скорости и то при удалении от перигея на ft = ± —
и высотах, превышающих высоту перигея более чем на 1000 км.
Отбрасывая оба члена и заменяя г, v значениями rTC, vn, на-
ходим
/
TJ0TH = -y 1-----------cost
\ Vn
(3.122)
Окончательно для проекций силы сопротивления воздуха S и Т
имеем:
S=-±b'Pvvr-, (3.123)
T=-±-bpvvn. (3.124)
__ / \ / Of \2
Здесь b = b' ( 1--- cos/] = b 1 —cos/ .
V \ vn /
Как видно, баллистические коэффициенты Ъ' и b для составляю-
/ Qr* \
щих S и Т отличаются на множитель I 1------ cos/ . Однако это
\ vn J
различие не является существенным, поскольку, как было выяс-
нено, S<^T. Поэтому в дальнейшем ограничимся одним значением
баллистического коэффициента Ь.
Возвратимся к задаче интегрирования уравнений (3.116). Под-
ставив найденные значения S и Г, получим
-^-=—& Sina-|-cos&f 1Д-—+ —Ч
dft 2р. L 1 \ р J р
Здесь не учитывается множитель уь
153
Как было показано в разд. 3.1, влияние множителя yi на
жение спутника для эллиптических орбит пренебрежимо мало. Ддя
орбит, близких к круговым, при решении задачи в .первом при,
ближении этот множитель также можно не учитывать.
Подставив в уравнения (3.125)
получим
dp
~db
de
rfft
cos
1
cos + е2-------------------- ,
(1 + е cos ft)2
1
1 + e cos ft
1 -+- 2e cos ft + г2
(1 + e cos ft)2
-'H---------—
/ 1 + e cos ft
е cos (Г
(3.126)
(3-127)
+
1 + 2e cos ft 4- г2
(14-£ cos ft)2
(e-|-cos S).
(3.128)
Перейдем к переменной Е (эксцентрической аномалии). Из
равенства г = a (I-г2) 1 4- е cos ft =а(1 — ecosE)
легко получить cos S= cos Е — е 1 — е cos Е
и
у 1 - ei
av =-------------dE,
1 — e cos E
Подставляя значения cos # и Л и опуская черту у коэффициен-
та & в уравнении (3.128), находим:
dp __ , 2q (1 4- 2г cos ft 4- е2)1/2 1^1 — г2 _
dE k (14- е cos ft)2 1 — е cos Е
154
= - ba2? (1 - e2)1'2 [ 2(1~g2)-(1 - e2) 1V2 (1 - e cos E) =
[1 — e cos E |
= - ba2 (1 - <?2) p (1 - e2 cos2£)1/2,
или
4L=_bpa?(\-e2(Ms2E)v\ (3.129)
С помощью аналогичных преобразований получим
de , / 1 4- е cos Е \1/2 /О1ОПХ
•—=— Ьр?\------------- cosE. (3.130)
dE \ 1 — е cos Е J v 7
Плотность p в соответствии с выражениями (3.112) и (3.129) нахо-
дим из выражения
р —z — е cos Е) — R — h0
(3.131)
где А = еа°—значение плотности на опорной высоте Ло;
R — радиус Земли для точки с широтой, равной географи-
ческой широте спутника в данный момент времени:
R=a(\ — a sin2ср) — а(1 — a sin2 / sin2zz);
zz = io-(-0;
x &
tgT =
1 + e
1 — e
X £
tgT-
Уравнения (3.129) и (8.130) непосредственно не удается про-
интегрировать в конечном виде. Поэтому целесообразно приме-
нить разложение по степеням эксцентриситета е:
dp __
dE ~~
bpa?( 1—— e2cos2£’—— e4cos4£’—
\ 2 8
-^-= — bp? (cos E-\-ecos2E-\--^ cos3£'+
-|—cos4E-\-e* cos3E-\- ...
Выражение для плотности p запишем в виде
где
(3.133)
155
Особенностью функции р является ее быстрое и очень нера^
номерное изменение при изменении угла Е. В районе перигея по.
казатель c\/A—z слишком велик и ряды Тэйлора или ФурЬе
для е~с очень медленно сходятся. Поэтому целесооб-.
разно выделить главную часть этой функции в виде отдельного
множителя, применив для остающейся части разложение в ряды.
С этой целью вначале разложим ]/1—zcosf по формуле
для бинома Ньютона:
f (E) = V 1 — z cos E= 1 —— cos E — V ----------------------------zn cos"£.
J v 7 2 2'z/z!
П-2
Поскольку для любых орбит [zcos£]<l, то степенной ряд всегда
сходится.
Используя разложение в ряд Фурье, для той же функции /(£)
имеем
_________ оо
f(E)=V 1 — z cos Е= -у-Н-У. akcoskE}
k=i
где
тс тс —
ak= — V 1 — zcos,EcoskEdE=— \ 1—— cosE —
ТС J К J 2
о о L
п = 2
1-3 ... (2гс —3)
2"n!
zn cos'1 Е coskEdE.
Ряд Фурье при разложении по косинусам обладает свойством
наилучшей сходимости [21]. Поэтому его целесообразно применить
для нашего случая плохо сходящегося ряда в наиболее важной
области, где 5=0 (район перигея).
Вычислив последовательно коэффициенты ряда Фурье, получим:
П (2v-,3)
у = 2
п\
(3.134)
(3.135)
(3.136)
156
Полученные ряды в развернутом виде для первых коэффици-
ентов:
д0 . г2 1-3-5 , 1-3-5-7 G
— =1 —-----------------г4------------X — •
2 24 21и 214
«!=- — [ 1+—Z2+
1 2 L 25 2ю
1-3.5-7-11 р , 1
-----------zG-i---- ;
2i6 j
। 5 2 । 5-7-9 4 .
H-----------------Z^-\-
24 211
3-7-11-13
2^
+ — Z24-
1 ’ 26 1
7-11-13-15
2i6
г2
#2=------
2 24
z3
а.=------
3 26
—
(3.137)
7.9>11
2u
3-7.11-13
2ю
3.5-11-13.17 (
------------z[
214
ae
1.
Покажем, что z не может быть больше единицы, т. е.
л — h_
О. 7С
z =------ —-=---------—
a — R — й0 йа+Лк-2йо
С увеличением высоты апогея величина г->1, а
бом заданном апогее, но при уменьшении hK до
допустимый случай) z —>1.
Для z=l легко получить мажорантные ряды,
быть полезными для всякого рода оценок:
( 1 \ '
cos I — + k I Е
1
=
« та]
/ 1 \
cos — — k \ Е
\ 2 J
1
2 ~k
о
также при лю-
hQ (предельно
которые могут
<3138>
В соответствии с полученными формулами плотность воздуха
теперь может быть представлена следующим образом:
Р = Ле“с/1-2С08£=Дехр(
exp ( — сах cosf) X
X exp — с ak cos
\ Л=2
(3.139)
157
Последнюю экспоненту целесообразно записать в виде
тригонометрического ряда. Для этого сначала функцию
Ф(/:) = ехр| — g cos ££ 1 разложим в ряд Тэйлора, что по-
\ Л = 2 /
зволит наиболее простым способом найти коэффициенты ряда
Фурье:
(ОО \ 00
— с у: ак cos kE | = 1 — с у1 a^cos^E-)-
Л = 2 / й = 2
(оо \ 2 / 00 \П
У ak cos kE j----«*cos^l H-------------------=
k = 2 / \/? = 2 /
oo oo
= 1— c y: ak cos kE-\- a^cos IE cos/E-j- • • •
k = 2 i, j = 2
Cn
\ . .^coszf'cosjE.. . cos/zf-j- • • •.
/, 7,n-2
Заменим произведения косинусов суммами, использовав соотно-
шения
cos а0 cos 04.. .со$ал=-~- [cos(a0 —aj— • • • — ал) +
4“ cos (а0 — 04---haJ + cos(a0 —04------han-i — ал)- • •
----Fcos(a04-a1--------aj_]_ cos («0 — 04----|-
+ an-i+an)+ * • • 4"cos(ao+ai4-----ha«-i —ал)+
+ cos (a0 + ai + * ’ ’ +ал-1 + ал)Ь (3.140}
Здесь ао = /£, ai = /£i,..., ап = пЕ.
Как видно из выражения (3.140), любая комбинация знаков
а, влияющая на значение косинуса, встречается один раз. Поэто-
му, вводя i = k^ j = k2,..., kn\
имеем
Ф(Е)= 1 — с У; ак1 cos ktE + — у a^a^cosk^E cos k2E-{- • •
»1=2 kt=2
h 00
•••+(— 1)"— V COS ^if’cos ^2^. . .COS
n\ n
ku k2.kn= 2
158
сО
-j- • • • = 1 ~ g У cos kxE4-
Л1=2
с2 “
4-^- Е akflki [cos (^2-^1)^+ cos (£2+kx)E\ +
*!, ft2 = 2
cn Л
_|-----Ц—1)"---------— У ак1акг. . • ak [cos^ — k2----------
2"-1n!
kltk2.kn=2
• • • — E-\- c°s (&i — k2----\-k^)E-\- cos (&j — k2 —---p
4~ ^n~i — k^) £*+ • • • 4“cos (^i4"^2~\r • • • 4“^n~i — kn) e4~
+ cos № 4- k2-I-----P *„_! 4- kn) £] H-= -^-4- У bt cos IE.
/=1
Коэффициенты ряда Фурье bi находим по формулам
ь.=— 0(£)cos iEdE.
О
При интегрировании важно помнить, что интеграл
f cos + k2 + • • • + kn) cos IE dE=0,
если
^1 + ^2 + * * * + kn Л
и равен если
^1 + ^2 т • * ’ + ^n==^’
Здесь разные знаки перед слагаемыми означают всевозможные
неповторяющиеся комбинации знаков « + » и «—» в суммах индек-
сов kj (j= 1, 2, п), стоящих под знаком косинуса.
Общий вид первых коэффициентов &<•
ОО 00
Т= 1 + Т2Г Е ~ Е а^а^+
/гх = 2 /гх, fe2, ft3 = 2
+ (3-141)
klt k2,..., kn=2
Часть слагаемых будет равна нулю. Для неравных нулю чле-
нов ряда выполняются в соответствии со сказанным выше следу-
ющие условия:
159
для третьего слагаемого:
1) kx — k2 — k3 = 0; '
2) kr — £2-]-Л3 = 0;
3) ~|~ k<2 — ^3==0j
для /z-го члена:
1) k2 ••• kn = Q\
2) k.-k,------+^ = 0;
2"-1-l)A1 + )fe2+------kn=0.
(3.142)
(3.142')
Для коэффициента ряда bx имеем:
2 °0 3 °°
У, a^2— -7^- у л*>а*»а*»н-------1“
Z’Z! Z^’O!
fei, k2 = 2 klt k2, k3 = 2
co
+ У (3-143)
2 n\
klt k2,..., kn = 2
Условия для &i:
1) | kx-k2 | =1;
2) | ^1 ^2 ^3 I =
I — ^2+^3 I — 1;
I ^1 + ^2 ~ ^з I = 1;
/Z-l) I kx — k2----kn I =1;
(3.144)
I ^1 + ^2+ • • • ^n. I —1- J
Коэффициенты b2 и 63 также вычисляются по формулам (3.142) 7
но условия в правых частях содержат соответственно числа 2 и 3.
Коэффициент fe4 вычисляется аналогично, но к первому условию
добавляется еще одно
^1 И- ^2 ==
Для следующих коэффициентов bi будут добавляться условия
^1 + ^2+ ’ * ’ +^p = z’>
где причем принимает всевозможные значения,
заключенные в этих пределах.
160
Выпишем первые коэффициенты bi, полученные с использова-
нием условий (3.142) и (3.144):
А = 1 + _Е!_(о2 + а2_]------)__^_(3а2а +
2 ' 2-2! v 1 ' 22-3! v
-^-6а2а3а5-[-За-зав-^- 6а2а4ав-^~ •••)4“
bl = YiF (2а2а3 + 2аЗЙ4 ------) “
— по о> (3«2«з+ 6&2<z3a4 .
(3.145)
Итак, искомое выражение для плотности атмосферы принима-
ет вид
р = Ае~с V1~zе -^4- £ bt cos iE j.
X i = l j
(3.146)
Здесь — Д exp ------; 04= — cav
Конкретные значения коэффициентов bi вычисляются по приве-
денным формулам (3.145). В зависимости от требуемой точности
может быть удержано то или иное число членов. Чем более вытя-
нута орбита, т. е. чем больше величины сиг, тем больше членов по-
требуется. В качестве примера были найдены коэффициенты bi,
пригодные для орбит, имеющих с <15, что соответствует
Аа < 2000 км. Оказалось необходимым удержать члены с с3.
Требуемое количество коэффициентов bi равно 6—7. При этом
последние коэффициенты &6 и Ь7 составляют всего 1—2% главно-
го члена разложения функции для плотности.
Полученные значения коэффициентов be
6-2343
161
b?=lc ~ (14-г2)+с2— f 1 + —z2 + —
2i2v 1 7 1 211 \ 2G 27 J
+г2)(21+7г+тс2);
b . = 3C2~( 1 + - z2\ + c3 — f 14- — Z2\
21A 1 з / 217 \ 26 J
(3.147)
Теперь остается подставить выражение (3.146) для плотности
р в уравнения движения (3.132) и проинтегрировать последние в
пределах одного витка:
^-= -ЬраА^^EK + ^bicosZf) X
\ i = 1 /
х( 1—— tf2cos2£—— e4cos4£ — ••
( 2 8
= - bpA^cos E + £ bL cos zfj X
\ z=i /
X fcos£'+^cos2£'+ —cos3£X —^4cos5£4~ • • •
I 2 8
(3.148)
После перемножения рядов и замены произведений и степеней
косинусов косинусами кратных углов получим:
где
= - ЬраА 1e’I,cos Е (Во + Вг cos Е+ В2 cos 2Е
dE
"Т* cos 3Z?-]- ’ * *)j
-^^“‘“^(Do+^icosf+^cos 2Е+
dE
“И cos ЗЕ* * * )>
(3.149)
162
Таким образом, дифференциальные уравнения приведены к ви-
ду, который позволяет их интегрирование, если использовать инте-
гральное представление бесселевых функций мнимого аргумента
-л
/л(л) = — excos<p cos/крЛр.
К J
О
Интегрируя эти уравнения от 0 до 2 л, т. е. за один оборот
спутника вокруг Земли (относительно перигея), получаем выраже-
ния для приращений параметра и эксцентриситета орбиты, кото-
рые можно принять за производные от элементов орбиты р и е по
числу оборотов п:
6*
163
= 2кЬАхра [£0/0 (04) 4- В J, (aj -j- 52/2 (aj -|-
+ ^зЛ(aj-f- •••]*; (3.150)
= ~~= ~~ %кЬАхр [DqIq (aJ + ^DiA (ai)“F ^2A(ai) 4"
+A4(ai)4—]• (3.151)
Приращения других элементов орбиты, зависящих только от р
и е, легко определить по известным формулам эллиптической тео-
рии. Например, приращения (или производные по п) большой
полуоси а, периода Т, а также высот перигея и апогея рассчиты-
ваются по формулам:
Да
2g
1 — g2
а12Да
Р3/2 / Ар
(1 __ е2)3Ц р
2g
1 — g2
(3.152)
(3.153)
Дг^= _Р_ / Ар _ Ag \
Р + е ( р 1 4- е )
(3.154)
(3.155)
= Р (
1 — е1 \ р
По формулам (3.150) и (3.151) можно вычислить величины
Др и Де для орбит с любыми эксцентриситетами. Однако при боль-
ших эксцентриситетах (практически при е>0,5) количество членов
разложения, которые необходимо удерживать при расчете коэффи-
циентов Bi и Di (и число самих коэффициентов), становится слиш-
ком велико. Можно значительно улучшить сходимость рядов при
больших е, если применить прием, использованный в работе [38].
В соответствии с этим приемом заменим уравнения (3.150) и (3.151)
эквивалентными им выражениями:
^-=-2кЬА1Ра {(Яо + 5,+^4- • • •)/0(а1) +
ап
+ Вг [Л (Л1) -10 (Я1)1 + В2 [/2 (a,) - /0 (a,)] +
WW-4М1 + • • •);
- 2кЬА1Р {(Do + Dx + Z)2+ •. •) /0(aj)+
an
+ D. [Л (a,) - /0 (a,)] + D2 [I2 (a,) - /0 (a,)] +
+£>з Из(«1)-4М14-••• }•
(3.156)
* Здесь и далее в этой главе (ai) — функциональная зависимость I от сц.
164
Суммы коэффициентов, стоящих перед /0 (щ), умноженные на
вследствие способа их получения, есть не что иное, как плот-
ность воздуха в перигее (рк ), отнесенная к и умноженная для
12 /1 I е\^
первого уравнения на (1—е2) а для второго — на н----\ [см.
(3.148), (3.129) и (3.130)]. Введем эти величины в полученные
уравнения:
— 2nbpa {Рае-^ (1 -^2/0 + Д1 [51 (Л-/о)+ • • •]}; (3.157)
-^-=—2кЬр (р^-^(4^у/27о + А[/)1(Л-/о)+---]|- (3-158)
an I \ 1 — е) J
о dp de
Значения производных и -------- в основном определяют-
ся dn
ся первым членом ряда. Остальные члены уменьшаются по срав-
нению с соответствующими членами в формулах (3.150) и (3.151)
пропорционально отношению
I Ш)-Ш) I
I /о(«1) Г
Бесселевы функции чисто мнимого аргумента Ц (щ) с его уве-
eai
личением стремятся к.одной и той же величине ~. Поэтому
к 2тсах
разность между ними довольно быстро убывает. Так, для орбит с
эксцентриситетом е = 0,1, например, для орбиты третьего советского
спутника, величина щ — б;
Л (°ч) — 4 («О I л по. I Л? Oi) — Л» Oi)
/о(«1) I ’ ’ | /0(-1)
Для круговых орбит формулы принимают вид, совпадающий с
формулами, выводимыми в предположении постоянного значения
высоты однородной атмосферы [38]:
кр = -^- = — 2izba2^=
dn
a de n
Де =-----=0;
dn
. dT 6tc2 i q 9
Д/ =-----=--------— ba52o~.
dn if
(3.159)
(3.160)
165
Если ограничиться первой степенью эксцентриситета, то урав-
нения (3.150) и (3.151) можно записать в более удобном для
вычислений виде:
7
— = -2тЛАхр
dn
(«)+£
(3.161)
2
2
7
+ V -у (^н-2| (ai) + 2/z (04)4-Л+2(04)) 1.
Уравнения (3.161) могут быть применены для расчета измене-
ния параметров орбит за счет сопротивления воздуха, если эксцен-
триситет не более 0,1—0,15. При этом погрешность по сравнению
с результатами интегрирования точных уравнений движения, как
правило не будет превышать 2—3%.
Для модели атмосферы МЛ по уравнениям (3.161) было вычи-
слено время существования спутников с орбитами, имеющими вы-
соты апогея и перигея в пределах 155—515 км и наклонение 65°.
В расчетах использовались коэффициенты bi по (3.147) и балли-
стический коэффициент 0,034 *.
Беоселевы функции вычислялись с помощью рядов. Для си >2
использовались асимптотические разложения [27]
л 1 - (4"г-
У 2-ai \ 8cti 2! (804)2 J
Результаты расчетов числа оборотов и времени существования
спутников нанесены в виде сетки кривых на рис. 54 в координатах
ha (высота апогея) и (высота перигея). Сравнение с точным ме-
тодом численного интегрирования, проведенное для некоторых ор-
бит, показывает, что ошибки получаются несколько большими, чем
можно было бы ожидать, и достигают 5—7%.
При использовании сеток для спутников с баллистическим ко-
эффициентом Ь, отличающимся от расчетного, необходимо изме-
нять снятые с графика значения п или /Сут (рассчитанного как
2/гТср на отдельных участках орбит) обратно пропорционально от-
ношению этого коэффициента к 0,034. Расчеты проводились на
* При этом учитывалось изменение радиуса Земли под перигеем в соответ-
ствии с вековым смещением перигея [ом. формулу (3.41)].
166
электронно-вычислительной машине. Экономия машинного времени
получается в сотни раз по сравнению с непосредственным интегри-
рованием уравнений движения и в десятки раз по сравнению с ме-
тодом, изложенным в работе [22].
Для проверки пригодности модели атмосферы М-l (см. табл.
3.2) для расчета снижения спутника и времени его существования
при полетах в течение нескольких лет был проведен расчет време-
ни жизни третьего советского спутника. Результаты показали хоро-
шее совпадение расчетного времени существования с фактическим.
Рис. 54. Зависимость числа витков п и времени t
существования ИСЗ от высот ha апогея и h* пе-
ригея
Получилось 11 400 витков (вместо 10 037, завышение на 13%). Сле-
довательно, принятая модель атмосферы является вполне пригод-
ной для расчетов изменения элементов орбит в течение длительных
промежутков времени
Вывод конечных формул для определения времени существования
спутника
Уравнения (3.157) и (3.158) или (13.161) позволяют довольно
просто рассчитывать на ЭВМ изменения основных элементов орби-
ты вследствие влияния сопротивления воздуха. Однако недостаток
* В период максимума 11-летнего цикла солнечной активности.
167
всех машинных методов состоит в трудности проведения на них ка-
чественного анализа. Конечные формулы наилучшим образом поз-
воляют выполнять такой анализ. Кроме того, в случае уточнения
закона сопротивления воздуха, данных о плотности воздуха и т. п.
предварительные сведения о движении спутника легче получить с
помощью расчета по простым формулам, чем на ЭВМ.
Непосредственное интегрирование уравнений для элементов
орбиты р и е не представляется возможным ввиду их сложности.
Необходимы дополнительные упрощения. Разделим весь диапа-
зон возможных орбит на две группы. В первую группу войдут ор-
биты с большими эксцентриситетами (е>0,02), во вторую — с ма-
лыми (е<0,02).
Орбиты, имеющие е>0,02
Воспользуемся указанным в начале раздела положением, что
для достаточно вытянутых орбит торможение спутника происходит
главным образом в районе перигея, и разложим в ряд cos Е в
уравнениях (3.129) и (3.130).
Подставив выражение (3.133) в указанные уравнения, по-
лучим:
dp к Л ~~С (1-Т (А 9x1/2
-Е-=^—ЬраАе (1 — е2у \
de —с l/^1—и (i-^- { j , Л.2 , j ч
- ЕЕ-=-ЬрАе У 2 fl- — £2|.
dE \ 1 - е) \ 2 /
При разложении оставляем лишь член с Е2. Остаточный член
ряда /?ост<-^£4 и не превышает 0,16 даже при £ = 80°. В точке
орбиты с е = 0,02, имеющей эксцентрическую аномалию £ = 80°, вы-
сота полета превышает высоту перигея на 107 км. Плотность возду-
ха примерно на порядок меньше. Для больших эксцентриситетов
потребуются значительно меньшие значения £, для того чтобы
ошибки разложения влияли мало.
Так, например, при ^ = 0,1 (3-й советский ИСЗ) достаточно взять
£ равным 35°, чтобы плотность уменьшилась более чем в 10 раз.
Это позволяет заменить выражение l±ecos£ ~ 1±е.
Разложив теперь 1 — 1 —^-£^ в Ряд и выДелив пере-
менную часть, получим:
- ^ = - ЬраАе~с v~z e^EZ (1 - г2)1/2;
dE
- ^ = _bpAe-cV~ze-^(^A'1 { 1—J- ,
dE \\ — е)\ 2 )
168
где
cz
\V\—Z
Проинтегрировав каждое уравнение в пределах от <нуля до Е,
считая при этом параметры орбиты неизменными, найдем:
Др = pae-cV'-z(\ - Ф
dn Уч
Де = —= - ЕеУ Г ф _
dn у U — е) L
_ ± ф (у7£) + _L_ у у Ее~ У~Е' .
4? 2]АТ -1
(3.163)
Переходя к пределу при Е -> оо, что позволит в какой-то мере
учесть торможение на участках орбиты с большими Е, окончатель-
но получаем:
Разделив первое уравнение на второе, имеем
-^ = а(1-е)----!---
de
----сг где c = -f.Va — R'\
4}/1 — z
обозначая v = a(l — el — R'. после
Подставляя значение
/?'=/?-Но и
а — к
простых преобразований приходим к уравнению
~-(у+К)—<3-164)
1_Х1
ме
Так как
^ = гДН-е) = (у + /?')(1 + е)
и
dP = (1 + е) dy + (у + R') de,
169
то, заменив dp в уравнении (3.164), получим
(1+е) J^=(y+W—1—-1
!_у У
\ ум
(3.164')
Отношение " у (где у — превышение перигея над опорной высо-
__ ум
той йо; ае— половина разности высот апогея и перигея, а х — один
из трех атмосферных коэффициентов) при е>0,02 составляет не
более 0,15. Следовательно, член (1 — | можно разложить
\ ум /
в ряд по биному Ньютона, отбрасывая члены степени выше первой.
Ошибка за счет исключения остаточного члена ряда не более 3%.
В результате получим
(1 + е)^ =(у + Я')К>1.
Заменяя ае= у имеем
1 — е
(1 + о — = — • V ь (3.165)
de % е
или
После интегрирования выражения (3.165')
У 1/ 1/ 1 ^0 4^) /О
/- v у=-л V y0-ln —------------. (3.166)
?/2 (1 + <?0)
Имея в виду, что /.]/у = с]/г1 — z, подставим полученное вы-
ражение для * j/y во второе уравнение (3.163'). Заменяя од-
CZ
повременно величину у ее значением, равным---------------, находим
4]/1 — z
de __ У т.ЬА р£-су~г / 1 + g У 2А_______
dn у~ \ 1 — е / 4у)
_ _ ^У т.ЬаУ гт У уе~* Уу° gy2 . (1 + g)5.2 / J _ у~ . ! \
/х(1 + ,0) е ‘ ’ е У
Учитывая, что радиус перигея =а(1—е) и У у— величины
очень мало меняющиеся, при интегрировании можно считать их по-
170
стоянными, равными начальным значениям (точнее, некоторым
средним).
Обозначим
= (! + £р) /у° ,
2 V те ЬА VrK 1/Z У gQ 2
тогда
—е—-( 1 + ^ . (3.167)
de (1+^)5/2\ %гп е /
/ 1 ]/" у 1 — е\ 1
где для поправочного члена 1----------— •---- использовано
\ хгг е у
разложение по биному Ньютона. При этом ошибка для
^>0,02 не более 3%.
Проинтегрировав уравнение (3.167) при осреднении Уу в по-
npaiBOHiHOM члене, окончательно получим
У у f
ХГтс \
п=--М
2
(1 + г)1'2
1
3 (1 + е)
2
3(1+0
. (3.168)
е0
Зная начальные значения эксцентриситета орбиты е0 и высоты
перигея и задаваясь конечным значением е, можно по формуле
(3.168) рассчитать соответствующее число витков п. После этого
нахождение времени полета не составит труда.
Пример. Рассчитаем по исходным данным:
^о=О,111; е = 0,02; у0 = 100000 м\ ]/>0=316;
х = 0,0145 ж1'2; -|Лх = 0,122; rx=6575000 м; Л = 2-1СГ9
время существования (число витков) третьего советского искусст-
венного спутника Земли.
Решение:
1. Третий спутник имеет конус (d = 1,73 м\ / = 3,57 м) и весит
Gm=1327 кг. Поэтому его баллистический коэффициент
, cxS 2,1.3,14.0,865(3,57 + 0,865)9,81 п м*
4(7Ш 6 4-1327 кГ-сек2
где
сх — коэффициент аэродинамического сопротивления для
сферы;
S — поверхность спутника.
(Для других спутников с весом G приближенно можно
принимать b=0,047 1/ .
171
2. Расчет коэффициента М\
ТК х (1 + г0) еу- ________________0,122-1,111-Л58__________
2 /к ЬА VrTVyel12 3,54-0,047-2-10~''-2560-17,7-0,1111'2
^2608-103.
3. Расчет числа витков по формуле (3.168):
п=2608-103(——[1-----------0,33-10“2f 1
11.021'2 L 3-1,02 к
2
3-1.02,
2
l.lll1-2
1
3-1,111
-0,33-1 ст2
2
3-1,111
= 13040.
1
1
Данный расчет по сравнению с результатами численного интег-
рирования уравнений (3.161) на ЭВМ дает завышение на 14%,
что следует считать хорошим совпадением для приближенной фор-
мулы.
Орбиты, имеющие е<0,02
Формула (3.168) становится непригодной при е<0,02, т. е. для
орбит с малой эллиптичностью и круговых орбит. На основании
уравнений (3.157) и (3.158) или (3.161) можно вывести формулы,
пригодные для этого диапазона орбит.
Отбросив все члены, кроме первого (полагая также е2=0) в
уравнении (3.157), получим
= — 2кЬра? ^~ai/0(ai)- (3.169)
dn к
Для оценки ошибки вычислим отношение наибольшего из от-
брошенных членов Л1В2(^2—/о) к основному члену:
№ — 4) (4 — Л>)
Р^_СС1/0 (Bq + Bi + В2 + ...)
cz\
/ h___j \ ~ 1 < f
Bq + В2 \ /0 / Bq В2 CZ^ 16
+ 2* + CZ1
Из условия -------5--< f найдем допустимую величину
Xfl2g2 = х(га — гп)2 < 2
(а - /?')3'2 У"2(га + гп - 2£')3-2
172
Отсюда можно определить радиус апогея га ,если радиус перигея
г к известен. Допуская /=9 (отброшенный член должен быть на по-
рядок меньше остающегося), получаем при 6^=200-4-300 км экс-
центриситет е = 0,01-н0,02.
Деление орбит по эксцентриситету является несколько услов-
ным, так как второй параметр а также влияет на величину cz2.
Проинтегрировав уравнение (3.169) и заменив в нем р7, = Д1^а1
— с а°
и Аг = Ае 2 ^Ае~с, поскольку дробь — при малых е весь-
ма близка к единице, получим
-^-=-2^2Д^/0(а1).
dn
Перейдем к переменному <? = •/- Уа — R', тогда
de ----------------л da =-------- х dp=— dp
2 У a — R’ 2]/ р — R' 2с
при пренебрежении членом порядка 2е. Далее
и дифференциальное уравнение принимает вид
de
кЬАъЦц (о^)
I с2 \2
TtbA^R'^ 1 +---------
\ /
откуда с ошибкой порядка
3 —-—<0,01 имеем
dn=-------------------fl----— б?2) ecdc.
TtbA^R'tl^) \ v2Rr J
Интегрирование дает
----- -----Мс-1--------— ((с-1)3+Зс-5)1Г°. (3.171)
T.bA^R'H^a^ ( [ rtR' VV 7 'JJC ' ’
Здесь /0(си) принято постоянным и равным начальному значению
этой функции. Для орбит с малыми эксцентриситетами значение
/о (си) близко к единице. Некоторое возрастание /0 (си) с увеличе-
нием е0 компенсирует влияние отброшенных членов.
Пример. По исходным данным
Аа = 237 км\ h^= 180 км\ 6 = 0,031;
4=0,0145; Л = 2-10~9; Ло = 125 7ОО м,
173
определить число витков и время существования спутника «Вос-
ток-2» при спуске путем естественного аэродинамического тормо-
жения:
Решение:
1. Расчет элементов а и е\
—h.
^о =------^7
a — R'
е =------------=-------------=0,00434;
/га+^+2/? 417 + 12 740
а = у (Zza+hr} + /? = 6580 • 103 м.
2. Расчет величин с0, ^о, ai, /о («1) •
СО = 7. J/+-X =0,0145 V6580 • 103 - 6370 • 103 -125 700 = 4,22;
ае 6580-103.0,00434 п
--------------= О, ооо;
85 000
a1 = c0 (1 -|-O,lzo)=4,22- ^-6(1 +0,1 -0,3362)=0,78;
/0(а1) = /0 (0,78)= 1,158.
3. Проверка применимости формулы (3.171). Для проверки ис-
пользуем условие (3.170), по которому
сого = 4,22-0,3362 = 0,476 < 2.
формула применима.
Прежде чем рассчитывать число витков по формуле (3.171), не-
обходимо установить нижний предел интегрирования с. Величину с
найдем из условия, что полуось а перед 'падением спутника «Вос-
ток-2» должна быть больше R' по крайней мере на 10—15 км.
Приблизительно это соответствует высоте полета 135 км. Действи-
тельно, точные расчеты показывают, что ниже 135—140 км спутник
через 2—3 витка переходит <на траекторию спуска. Отсюда для с
получаем условие
c=xj/’ a-R' = 0,0145 ]Z15000^ 2.
4. Расчет числа витков по формуле (3.171):
« =---------------------?----------------------X
3,14-0,031 -2- Ю-о-0,21 • Ю-з-64962-106-1,158
X [ е^- Г4,22 - 1 ---------------------((4,22 -1)3 + 3 -4,22 - 5^1 -
I [ 0,21.10-3.6496-Юз V 71
— 7,39Г 2 — 1-----------------------[(2-1)3 + 3-2-б+= 106,
[ 0,21-10-3-6496-103 V ’ 1 J])
или
ЛЛ=106 витков.
5. Расчет времени существования спутника. Период обращения
спутника «Восток-2» вокруг Земли 88 мин. Поэтому время сущест-
вования его на орбите в случае аэродинамического торможения
4Ущ= 106- ^- = 6,5 суток,
что очень близко к результату, .полученному путем численного ин-
тегрирования точных уравнений движения при тех же исходных
данных.
3.6. ВЛИЯНИЕ ДАВЛЕНИЯ СОЛНЕЧНОГО СВЕТА
Световое поле Солнца оказывает силовое воздействие на косми-
ческие тела. П. Н. Лебедев [8] открыл это явление и пришел к мыс-
ли об эквивалентности сил гравитационного и светового полей Солн-
ца. Он установил, что результирующая сила F, с которой Солнце
притягивает данное тело, равна разности между ньютоновой силой
притяжения G и силой давления света Н. В долях ньютоновой си-
лы результирующую силу можно выразить следующим образом:
__ G — Н __। 3/?с
G 4QrTpT ’
(3.172)
где
пс — сила давления солнечного света на единицу площади,
перпендикулярной направлению солнечных лучей, на рас-
стоянии в одну астрономическую единицу от Солнца *.
(Рс = 0,6 • Ю-6 кГ/м2 для поглощающей поверхности со
степенью черноты Л8 = 0,72);
Q — ускорение силы тяготения Солнца на расстоянии в одну
астрономическую единицу (Q = 0,6 • 10_2 м/сек2);
гт — радиус сферического тела;
рт — массовая плотность тела.
Для данного космического тела (спутника) отношение сил дав-
ления к силе тяготения H/G есть характеристическая постоянная,
не зависящая от расстояния до Солнца, так как рс и QT одинако-
вым образом зависят от этого расстояния (обратно пропорциональ-
ны его квадрату).
Заменив рс и QT их числовыми значениями, получим
г . 0,75-10—4
г = 1------------
(3.173)
г трт
„ / 0,75-10~4 \
т. е. отталкивающая сила световых лучей ------------ на о<п редел ен-
\ ''тРт J
ном расстоянии от Солнца обратно пропорциональна произведению
радиуса тела на его плотность.
* Астрономическая единица — среднее расстояние от Земли до Солнца.
1/5
Для спутников Земли формула (3.172) может быть принята в
качестве расчетной, позволяющей производить учет влияния сил
тяготения Солнца и давления его лучей.
/В более общем виде (по Ф. А. Цандеру) уравнение (3.172) за-
пишем следующим образом {8], [35]:
л=1-----*—=А
/ммо f
где
.М— масса космического-аппарата;
Mq — масса Солнца;
fi — новая постоянная:
(3.174)
(3.175)
константа х определяется из условия = ;
R — расстояние от космического аппарата до Солнца.
Результирующая сила притяжения аппарата Солнцем будет
#2
(3.176)
Формула (3.176) имеет тот же вид (на что указал Цандер), что
и ньютоновская для закона всемирного тяготения. Поэтому свето-
вое давление можно учитывать (после расчета величины fi для
данного космического аппарата) по уравнениям разд. 3.4, заменив
в выражении для пертурбационной функции константу f констан-
той fi.
При расчете силы давления света Н для данного космического
аппарата по формуле
3pcG
4QrTpT R2
(3.177)
необходимо учитывать, что космический аппарат, как правило, не
является сферическим телом. Как и в случае сопротивления возду-
ха, расчет гт для ориентированного и неориентированного аппара-
та будет различным. В первом приближении гт можно вычислять
(для ориентированного аппарата) как радиус круга, площадь ко-
торого равна площади проекции аппарата на плоскость, нормаль-
ную к направлению солнечных лучей. Для полностью неориентиро-
ванного аппарата необходимо исходить из средневероятной пло-
щади этой проекции (задача, аналогичная определению среднего
миделя для расчета силы сопротивления воздуха). Здесь также в
первом приближении значение гт можно определять как радиус
сферы, имеющей поверхность, равную полной поверхности космиче-
ского аппарата. Точный расчет сил солнечного давления провести
весьма трудно, так как давление зависит от состояния поверхности
тела.
176
В зависимости от степени черноты и других факторов меняет-
ся не только величина, но и направление силы при неизменном нак-
поне рассматриваемого элемента поверхности к направлению сол-
нечных лучей.
Солнечное давление имеет смысл учитывать для орбит с высо-
той перигея выше 400—450 км, так как уже на высоте 400 км доля
сил солнечного давления от сил сопротивления воздуха — порядка
7—10%. На высоте около 550 км обе силы становятся одинако-
выми по величине.
Особенно ярко проявляется влияние силы давления солнечно-
го света для легких спутников, двигающихся на больших высотах.
Так, например, для американского спутника «Эхо» (сфера диамет-
ром 30 м, вес 70,4 кГ, запуск 12.8.1960 г.), имеющего почти кру-
говую орбиту с высотой перигея 1500 км и апогея 1700 км, время
существования, подсчитанное без учета светового давления, состав-
ляет 20 лет, с учетом давления — 14-2 года [18]. За 60 дней световое
давление уменьшает высоту перигея на 350 км. Орбита вытягивает-
ся и постепенно перигей опускается в более плотные слои атмосфе-
ры, где из-за сопротивления воздуха спутник начинает быстро сни-
жаться.
В настоящей главе даны лишь общие сведения об учете свето-
вого давления. Более 'подробные теоретические соображения по
этому вопросу можно iH-айти в работе [27].
ГЛАВА IV
Отклонения орбиты,
вызываемые ошибками
вывода спутника
При выведении спутника на орбиту из-за действия различных
факторов, не учитываемых при определении расчетного движения,
значения параметров движения могут не совпасть с расчетными.
Отклонения параметров движения в момент выхода спутника на
орбиту вызовут соответствующие отклонения элементов последней.
Наиболее существенными причинами ошибок выхода на орбиту
являются:
— неточности изготовления ракеты-носителя, осуществляющей
разгон спутника, и ошибки в работе системы управления ракетой
на активном участке;
— случайные отклонения параметров дожога топлива, возника-
ющие из-за неточности работы системы управления дожогом и ее
исполнительных устройств (для спутника с дожогом).
Для спутников, которые выходят на орбиту непосредственно по-
сле активного участка, могут возникать только возмущения первой
группы. Очевидно, что возмущения орбиты спутника без дожога
аналогичны возмущениям переходного эллипса спутника с дожогом.
Поэтому результаты исследований первого спутника можно полно-
стью перенести и на переходный эллипс второго.
Отклонения элементов орбиты от расчетных значений зависят
также от того, каким образом производится управление моментом
выключения двигателя на активном участке и процессом дожога
топлива.. Рационально выбранный способ управления моментом
выключения двигателя на активном участке позволяет уменьшить
отклонения переходного эллипса, а применение управления дожо-
гом позволяет дополнительно компенсировать действие этих возму-
щений. Выбор целесообразных методов управления зависит от
многих факторов и в первую очередь от назначения спутника, кото-
рым определяется вид расчетного движения и допустимые отклоне-
ния от него. Кроме того методы и точность управления зависят, ко-
нечно, от характера и величин действующих возмущений.
При создании спутника в зависимости от его назначения могут
возникнуть самые разнообразные требования к его движению. Для
178
сПутника с дожогом возможны, например, следующие требования:
1. Отклонения минимальной высоты орбиты не должны превы-
шать заданной величины, причем наибольшая высота орбиты не ог-
раничивается. Такое требование возникает при пуске спутника, для
которого наиболее существенным является наибольший вес и дос-
таточно долгое время его существования, которое определяется,
главным образом, наименьшей высотой орбиты.
2. Отклонения высоты в любой точке орбиты не должны превос-
ходить заданных величин. Орбиты, удовлетворяющие этому требо-
ванию, могут оказаться необходимыми для некоторых научных наб-
людений и других целей.
3. Вывод спутника в заданную окрестность другого космического
тела, движущегося по известной заранее орбите, при условии, что
его скорость вблизи движущегося тела не должна превышать за-
данной величины.
Последнее требование возникает, например, при запусках ра-
кет, выводящих на орбиту части для сборки больших спутников —
станций, при организации сообщения с орбитальными станциями с
помощью специальных ракет и т. д.
В данной главе анализируется характер зависимости возмуще-
ний орбиты от ошибок выведения как для спутников, выводимых
на орбиту при непрерывном активном участке, так и для спутников,
выводимых на орбиты с дожогом топлива на переходном эллипсе.
На основе полученных зависимостей могут быть определены рацио-
нальный метод и точность управления для каждого конкретного
типа 'Спутника. Приведенный материал позволяет также решить
вопрос о рациональном управлении при проведении любого манев-
ра на орбите.
Указанные задачи решаются при следующих допущениях:
I. Поле сил притяжения Земли является центральным и Зем-
ля — сфера с радиусом 7? = 6371 км.
2. Конец активного участка, переходной эллипс и получаемая
орбита находятся вне атмосферы Земли.
3. Влияние небесных тел на движение спутника отсутствует.
4. Спутник приобретает дополнительную скорость при дожоге
топлива мгновенно, причем дожог совершается в плоскости пере-
ходного эллипса.
4.1. ТОЧНОСТЬ ВЫВОДА НА ОРБИТУ СПУТНИКА
БЕЗ ДОЖОГА ТОПЛИВА
Рассмотрим, какая требуется точность вывода спутника на ор-
биту без дожога топлива. Для такого спутника, как указывалось в
гл. I, характерна сравнительно небольшая высота перигея (170—
300 км). В связи с этим, наиболее важным является требование,
чтобы отклонения перигейного расстояния были малы. Если эти
отклонения велики, то существенно уменьшается время существо-
вания спутника на орбите вследствие увеличения его торможения
179
при прохождении области перигея (см. гл. III). Как будет показа,
но ниже, при некоторых условиях отклонения высоты перигея
гут быть настолько значительны, что спутник вообще не успеет
сделать ни одного оборота.
Рассмотрим зависимости отклонений перигейного и апогей,
ного расстояний от ошибок вывода спутника, а также способы
уменьшения этих ошибок.
Перигейное и апогейное расстояния от центра Земли определя-
ются по формулам:
ГтЛ k\ COS2 _1 ~ gi . (4.1) (4.2)
и Га1 1 + k\ cos2 Oj 2-^ ’ _ 1 + *1
Г1 l — e1 9 2 — kx ’
1 -М2- kt) COS2 0p (4.3)
Формулы (4.1) и (4.2) являются решениями следующего урав-
нения:
2 — *i \ П /
2-kx
cos2 Oi = 0,
•(4.4)
где r=rT^ г = raj —два решения уравнения (4.4).
Уравнение (4.4) можно привести к виду
г
П
__1_\2 _
2 —А?! / 2 —
• 2 П / *1 — 1 V
sin2 61= —2----) .
\ 2-*1 /
(4-5)
При &i<2 это уравнение в системе координат sin 0b г/гх опре-
деляет собой семейство гипербол с действительной осью, совпада-
ющей с осью координат r/ri, и центром, смещенным вдоль этой осн
на величину !—(рис. 55). Полуоси этого семейства определяют-
2 — ki
ся формулами
а
*1-1 .
2 —’
V *1(2-*1)
а угол наклона асимптот
При &i = l гипербола вырождается в пару прямых, пересекающих-
ся в точке г)г\ = 1, sin 0i = 0 и имеющих наклон tg g= 1.
180
Уравнение (4.5) при этом имеет вид:
’-^-1
= sin29j.
При &1=.О гипербола вырождается в пару параллельных пря-
мых: r/ri = 1 и г!г\=0. Прямая r//'i = l делит рассматриваемую об-
ласть на две части. Ниже этой прямой | г[г\ < 1| проходят кривые
для пер.игейного расстояния, а выше | r/rj > lj— кривые для апо-
Рис. 55. К решению уравнения
(4.5) (заштрихованы области, где
кривые не проходят)
гейного расстояния.
При k^ = 2 уравнение (4.5)
определяет параболу с вершиной
в точке r/ri = l, sin 01 = 0 и осью
симметрии, совпадающей с осью
r/гь Эта парабола определяется
уравнением
— = 1 — sin2
П
При fei = oo уравнение (4.5)
характеризует окружность с ра-
диусом, равным единице, и цент-
ром в начале координат:
Рис. 56. Области существования
величин b, Р (4.6)
При 2<&1<оо уравнение (4.5) определяет семейство эллипсов.
Для удобства дальнейшего анализа введем новую переменную
величину
= (4.6)
Г1 Г!
При любых значениях &i>l зависимости р от sin 0i представля-
ется кривыми, заключенными внутри заштрихованной области
(рис. 56). При этом чем больше тем меньше р при постоянном
sin 01. Отметим, что зависимость величины р от sin 0i в области
°Коло 01 = 0 не может быть аппроксимирована линейной зависимо-
181
стью. Нас же будут в основном интересовать малые значения уг.
'01, так как 0j будет иметь порядок величины разброса вектора сКоа
рости в конце активного участка. Зависимость величины 1 — р '
угла 0! и параметра kx представлена на рис. 57. Как показывай
кривые на рис. 57, параметр kx сильно влияет на величину 1 — р и,
следовательно, на rui при заданном значении угла 01^0.
Рассмотрим связь между отклонениями параметров в конце ак-
тивного участка и изменениями высоты перигея. Обозначим:
Пв=п+Д''1;
01в = 01 + А®1>
182
^ib> ri> г1в> Gd е1в-соответственно расчетные и возму-
щенные (истинные) значения эле-
ментов конца активного участка;
Дтщ Д9Ь Дгх — отклонения элементов конца актив-
ного участка.
Используя выражение (4.6), можно записать
ДгЯ1 = ДГ1(1 -р)-Др(г14-Дг1). (4.7)
Для спутника без дожога примем kx 1,03. и | 6Х | 2°, тогда
ЗУС 0,0165 (см. рис. 57). Кроме того, если Ап 50 км, то с ошиб-
кой в определении Дггл, меньшей 1 км, можно вместо формулы
(4.7) записать
Д/\1^ Дгх — гхДр. (4.8)
Величина Др определяется отклонениями д^, Дбх, Дгп при-
чем
ДР ДРшах?
ДРтах = Р (sin 61 max, ^Imin) Р (Sin 6Х, ^х).
Если 0i = O, то второй член в последней формуле пропадает. Тог-
да из (4.8), полагая отклонение A0i малым, получим
ДГк1< I ДГ1 I +пР (Д91тах, £imin). (4.9)
Для иллюстрации влияния отклонений Д0Ь Ащ на отклонения
высоты перигея проведем несколько расчетов.
1. Примем, что элементы конца активного участка имеют сле-
дующие значения th = 8 км/сек, п = 6540 км и 01 = 0. Предположим,
что при изменении угла 01 на величину A0i скорость и высота в
конце активного участка не изменились. Тогда &i~l,05. Если A0i =
= 2 и 1°, то из графика на рис. 57
ДггЛ^74,5 км и Дгте1 ^21 км.
Такие отклонения (порядка 50—80 км) высоты перигея безус-
ловно недопустимы, так как они приведут к резкому сокращению
времени обращения спутника.
2. Предположим, что расчетная скорость в конце активного уча-
стка увеличена до 8,1 км/сек, тогда при прежних предположениях
найдем, что при A0i = 1 и 2° будем соответственно иметь Ar^i =14,4
и 55 км. В данном случае увеличение скорости на ~1,2% дало
Уменьшение ошибки высоты перигея при той же ошибке в угле 0
(2°) примерно на 27%.
3. Найдем, при каком значении А01 орбита будет пересекать
земную поверхность, если щ = 8 км/сек. Положим
/'! 6540
183
Такое отклонение перигея орбиты будет иметь место при Дд
= 3,15°, как это следует из кривых на рис. 57. Отметим, что если
скорость была круговой (для /z-i = 170 км, ^i~7,80 км/сек), то
клонение высоты перигея 0,026 соответствовало бы A6i ~ 1,5°.
4. Определим, какой должна быть скорость в конце активного
участка, чтобы при A0i = 2°, 01 = 0° и /ui = 170 км ошибка в высоту
перигея не превышала некоторой заданной максимально допусти
мой величины, например, 10 км.
При этом условии получим
П~Гк1 <0,00153,
п
что соответствует требованию ^i>9,66 км/сек (см. рис. 57). Ясно,
что подобное увеличение скорости будет нецелесообразно.
Приведенные расчеты показывают, что выбор основных пара-
метров орбиты спутника и средств управления им на активном
участке взаимно связаны.
Рассмотрим возможные способы уменьшения отклонений пери-
гея применительно к следующим требованиям:
а) высота перигея должна оставаться почти постоянной незави-
симо от возможных ошибок в конце активного участка. Это требо-
вание может оказаться целесообразным для некоторых спутников.
Не останавливаясь на этом вопросе подробно, укажем, что прин-
ципиально возможно создать систему, управляющую 'Окончанием
активного участка (т. е. величиной k\), которая обеспечивала бы
компенсацию отклонения А01 соответствующим изменением k\. Од-
нако при этом расчетное значение угла 0! должно отличаться от
нуля. Последнее обстоятельство приводит к тому, что необходимо
вытягивать активный участок на большую высоту или увеличивать
скорость настолько, чтобы при 0i=^=O получить перигей на доста-
точно большой высоте;
б) высота перигея не должна быть меньше некоторого мини-
мального ее значения. Это минимальное значение можно задать,
исходя из достаточно большого времени существования спутника,
либо из других соображений. Очевидно для выполнения этого тре-
бования могут быть предложены следующие методы:
— уменьшение возможных ошибок A0i, Ari;
— увеличение скорости в конце активного участка при частич-
ном ограничении ошибок A0i, Ari;
— увеличение высоты конца активного участка.
Рассмотрим подробней эти методы на примере спутника без
дожога, имеющего следующие гипотетические расчетные парамет-
ры движения в конце активного участка:
7j]= 8,073 км/сек-,
т\ = 6540 км 170 км)\
£1 = 1,07; 91=0.
184
(Предположим, что могут иметь место отклонения:
| А^ |max X 20 км
| A0i |тах^2°.
Отклонения скорости естественно зависят и от того, как опреде-
дяется конечная точка активного участка. 'Предположим, что ак-
тивный участок кончается или по достижению заданной скорости
или при выгорании всего топлива. В рассматриваемом случае
те1,об5.
р
При Д91тах = 2° получим (СМ. рИС. 57) Дртах = Др (ki n,in, д61тах)~
~ 0,0094,
тогда
min
Ar,d max ~ 81,5 KM.
Если уменьшение высоты перигея ниже 170 км нежелательно,
то, очевидно, следует увеличить расчетную высоту на полученное
значение Дгтс1тах. Такое увеличение высоты будет связано с умень-
шением скорости, если вес спутника и ракеты остаются неизменны-
ми, поэтому придется увеличить высоту перигея больше, чем на
81,5 км. В итоге метод увеличения высоты при тех же отклонени-
ях AOimax и Arimax принципиально не может обеспечить уменьшение
отклонения высоты меньше, чем на Д/д.
Предположим, что на активном участке имеются следующие
отклонения:
| AFj |тах 3=14 КМ, fA^ilmax^^l •
Считая, что активный участок заканчивается в момент полного вы-
горания топлива, находим
АГк1 max ~ 20,4 КМ.
С уменьшением высоты перигея со 170 до 150 км могут изме-
ниться условия торможения и поэтому возникает необходимость в
специальных мерах. В данном случае, по-видимому, можно было
бы допустить отклонение Дгтс i 'порядка 5 км, что при условии
д91шах=1° дает
> 9,5 км/сек.
Если потребовать, чтобы Ar^i <10 км, то
тц > 8,6 км/сек.
Достижение таких скоростей возможно, но при значительном
сокращении веса спутника. Возможно так же, как и в предыдущем
случае, увеличение расчетной высоты перигея. При этом необходи-
185
мо увеличить высоту на ~21,0 км. В данном случае при принят
отклонениях выгодней метод увеличения расчетной высоты.
bl\
Допустим теперь, что система управления обеспечивав
An max = 2 км и А6Х тах = 0,5°. Тогда Дгтс i тах = 6 км и, следователь*
но, нет необходимости в специальных мерах.
Рассмотрим изменения апогейного расстояния.
1. Определим изменение при постоянной скорости апогейного
расстояния за счет изменения угла 0ь Для этого заметим, что если
а — большая полуось орбиты, то га1 + г^ = 2а, причем величина Q
не зависит от угла 0Ь Действительно, из формул (4.1) и (4.2) по-
лучаем
(4.10)
На основании формулы (4.1)
— Дгк1 (AOJ,
т. е. изменение апогея при изменении угла 01 определяется теми же
графиками на рис. 57, которые определяют изменение перигея.
2. Определим теперь отклонения апогейного расстояния при
изменении скорости v\. Для этого продифференцируем (4.2) по kx-.
д / ^а! \ Г ^al j______(^ - 1) COS2 Of
dkl ' H L Г1 ' - 1)2 0082 0! + Sin2 .
Далее, учитывая, что
dky 2ky
получаем
_ 2*;g Г г,,(fei —l)cos2 6i|
dV1 V1 L V (*i — l)2 cos^Oj + sin2 Oj.
Из этого выражения три 0i = O
<41 2M / гя1 \
tq \ /"i j
или с учетом формулы (4.10)
<41 _ 4felrl
&>i (2 —
В табл. 4.1 приведены значения величин
<41 1 _
dvi i) (2 —^i)2 ’
где
(4-11)
186
,£1ри изменении Uj в пределах 7,5—8,5 км)сек и изменении высо-
. конца активного участка от 0 до 1000 км величина г| составляет
3000—4000 сек.
3. Определим зависимость отклонений га1 от отклонений г-{ при
постоянных 01, V[. Для этого запишем
—=/№, 91),
Г1
где
£1 = Л>1(х>1, гг).
С учетом формулы (4.11)
дга1 _ k^a Г га1 ______(ky— l)cos2Qi 1 + ral
дГ1 Г1 L О ]/(£! —1)2 cosSOj + sin2 0i J ri
Если G1 = 0, то
дга1 _ (4 —*1)
аГ1 — (2-м2
Значения дга1/дг1 при 61==-0 приведены в табл. 4.2.
Таблица 4.2
*1 1,00 1,03 1,05 1,07 1,10
dri 3,00 3,25 3,43 3,63 3,94
Из приведенных расчетов видно, что наибольшее влияние на
высоту апогея оказывает скорость в конце активного участка. По-
этому необходимо хотя бы частично ограничивать ее случайный
Разброс.
Допустимость тех или иных отклонений апогея определяется
Вазначением спутника. Во многих случаях отклонения порядка
Ю км можно считать вполне приемлемыми.
187
4.2. ВЛИЯНИЕ ОТКЛОНЕНИЙ ЭЛЕМЕНТОВ
КОНЦА АКТИВНОГО УЧАСТКА НА ЭЛЕМЕНТЫ
ПЕРЕХОДНОГО ЭЛЛИПСА ДЛЯ СПУТНИКА С ДОЖОГОМ ТОПЛцНд
Рассмотрим влияние отклонений элементов конца активного уЧа
стка на апогейное расстояние переходного эллипса, на время поде'
та до апогея переходного эллипса, считая его от конца активного
участка и на положение апогея относительно конца активного уча,
стка.
Апогейное расстояние определяется зависимостью (4.2).
рис. 55 этой зависимости соответствует семейство верхних ветвей
гипербол, к которым относятся и два частных случая, когда гипер,
болы вырождаются в прямые.
На рис. 58 приведены зависимости (6Ь kJ в области
Г1
kt^ 1,12 при 0 < 11,5°, вычисленные по формуле (4.2).
Если рассматривается область высот, определяемая неравенст-
вом
— >ь,
то для орбит, высота апогея которых находится в этой области,
должно выполняться условие
— 1 > (^ — !)2 — sin2 ог
где
ь=-^- .
п
При выведении спутников на орбиты путем дожога топлива на
переходном эллипсе можно получать высоты орбит, которые, как
уже указывалось, трудно обеспечить при непрерывном активном
участке вывода спутника на орбиту (см. гл. 1). Поэтому выведение
спутника на орбиту путем дожога, по-видимому, будет применяться
для получения высоких орбит.
Исходя из этого соображения будем интересоваться переходны-
ми эллипсами, высоты апогея которых существенно превышают вы-
соту конца активного участка и определяются неравенством
-^->1,05. (4.12)
П
Соответственно (4.12) при и = 6600 км имеем rai —Г\ > 330 км,
высота апогея при этом rai —6371 > 560 км. При дожоге топлива в
апогее переходного эллипса высота апогея орбиты будет больше
высоты апогея переходного эллипса или равна ей.
188
189
Неравенству (4.12) соответствует условие
^-1
> 0,0025 — sin2
0,1025 + sin2
(4.13)
На рис. 59 показана область расчетных значений k\ и 0Ь удов лет-
воряющих условию (4.12).
Рис. 59. Зависимость ki (OJ
Изменение апогейного расстояния
Выразим отклонения элементов в
конце активного участка следующим
образом:
^ib —
61В-61 = Д91;
(4-14)
где v19 Tj —расчетные значения;
т>1в, е1в, г1в —возмущенные значе-
ния элементов кон-
ца активного участка.
При наличии таких отклонений
1 + ^1в
2 —
. (4-15)
Разложив последнее выражение в ряд по величинам Д01 и Д&1 =
= &1в—k\ и ограничиваясь членами второго порядка, получим
(4.16).
где
Z, / = бр
д ( rai \ ( га1 \
В (4.16) производные — ----j и --------] могут быть
выражены следующим образом:
д / \ Г j (^1- 1)0082 0!
dkx \ Д'! / Г! L Г! * ег
k,
-----sin 20^
2^i
(4-17)
(4-18)
— f—)
dk\ \ ri /
а Г 2a / ral
\ ri
^! — 1 \ sin2 20
------COS2 0! H--------4—
1Г 4^
(4.19)
190
— ( r<11
d62 I r.
*1 / 1
---I COS2 0t------Я- sin2 91
e\ \ «1
£2
sin 20i
2el
f#j Sin2 0j — (^i — 1)].
(4.20)
(4-21)
На рис. 60 приведены результаты расчетов производных по фор-
мулам (4.17), (4.18) для 0,65<fei< 1,25; 0<6i<25°.
Вторые производные в точке ^i = l, 0i = 0 имеют разрыв и, сле-
довательно, вблизи этой точки формула (4.15) не может быть раз-
ложена в ряд (4.16).
191
Область величин kx и 0i, определяемая неравенством (4.1з\
исключает точку разрыва (см. рис. 59). Оценим в этой области по'
рядок величин квадратичных членов, входящих в (4.16) по сравни
нию с величинами линейных членов и определим значения kx и
01, при которых квадратичные члены можно не учитывать. Для оп-
ределения наибольших абсолютных величин вторых производных
были проведены соответствующие расчеты. Эти расчеты показа-
ли, что в рассматриваемой области вторые производные имеют
значения:
— (—
dkl \ ri J
& / \
\ ri /
д2 / Czl \
у
<10;
<42;
<18.
(4.2:)
Примем, что отклонения элементов конца активного участка
траектории ракеты-носителя не должны превышать следующих
величин:
| Д^1 |тах = 0,1 км,1сек\
I Д©1 |тах=0,013 рад-,
| ДГ" 1 |тах— 30 КМ.
При таких отклонениях
Д2 | ( гл \ Г1 ' 0x0! 1 ~ т / Га1 \ Г1 ) Д91 < 2-10“3;
Д2 | ( \ Г1 / = - 1 т д2 / G1 \ Г1 Д^1 < 8,8-10-3; (4.23)
Д2 \ н . = д2 / Га1 \ Г1 / Д^Дб 1 < 6- 1СГ3.
Оценим порядок величин линейных членов ряда (4.16).
Производная —при имеет минимальную вели-
\ Г1 '
чину, примерно равную 2, минимальное же значение произ-
водной — при 91=0 равно 0. При принятых выше от-
POj \ п /
клонениях величина линейного члена
192
Д,(—= — =0,026.
\ Н )kt dkt \ rt )
(4.24)
Из сравнения величин, полученных в (4.24) и (4.23), видно,
что Ai намного больше Д9 (——, A9f-^-^ и
\ ri /д " \ ri Ад \ ri /дд
д9 / ——) . Поэтому квадратичными членами в (4.16) можно
Л п / де.
пренебречь. С уменьшением отклонений элементов конца
активного участка влияние квадратичных членов уменьшается.
Оценим порядок величины остаточного члена ряда (4.16),
включающего члены выше второго порядка. Как отмечалось вы-
ше, резкие, в каком-либо месте траектории изменения величин
вторых производных, свидетельствующие о наличии значительных
величин производных третьего и выше порядков, наблюдаются
вблизи точки &i = l, 01 = 0. Поэтому для оценки величины остаточ-
/ Га1 \
ного члена ряда определим приращение А-------) при 01 = 0 и
\ Г1 I
наименьшем значении k\ в. рассматриваемой области, пользуясь
приближенной‘формулой (4.16) и точной (4.2).
В результате расчетов (Дед = 100 м/сек и A0i = 0,013 рад) по-
лучаем:
A = 0,0560 — по точной формуле (4.2);
\ Г1 J
A =0,0575 — по формуле (4.16).
\ Г1 J
(4-25)
Из (4.25) видно, что точность расчетов по приближенной фор-
муле составляет 2,7% при абсолютной величине ошибки ~0,0015.
Это указывает на то, что в (4.16) члены выше второго порядка
имеют незначительную величину по сравнению с членами первого
и второго порядков.
Таким образом, в области, определяемой условием (4.13), от-
клонение высоты апогея переходного эллипса с точностью, доста-
точной для оценок, определяется формулой
д
dkY
де,.
(4.26)
Выражая A&i через Агц и Ди по формуле
. г । k-t .
A^i = —- А^Ч—L Дг1?
t>i д
(4-27)
7-2343
193
и учитывая, что
ПАМ -
(4.28)
можно формулу (4,26) привести к виду
(4.29)
Эта формула и определяет зависимость отклонений высоты
апогея переходного эллипса от отклонений элементов конца ак-
тивного участка.
Отклонения элементов конца активного участка вызовут так-
же изменение параметров движения ракеты-носителя перед дожо-
гом топлива, т. е. в момент вторичного включения двигателя,
которое в расчетном случае совершается в апогее. В результате
появится отклонение Д£2 = &2в—k2.
Учитывая, что Z?2—1—можно из формулы для эксцентриси-
тета эллипса получить следующее выражение:
Д£,= - r^rJCos201A£i + -^-^sin291A61l , (4.30)
L ev la J
в котором индексОхМ «2» обозначен параметр k перед дожогом.
Изменение времени полета
Рассмотрим, как изменяется время полета, протекающее с
момента окончания активного участка до момента достижения ра-
кетой-носителем апогея переходного эллипса в зависимости от
отклонений элементов конца активного участка.
Это время (Г) определяется из формулы:
= sin£), (4.31)
гГ (2-^)3/2
где
Е = к — Е'\
Е' = 2 arctg (1 f tg 4-) 5 (4-32)
ft=arctg cos61Sin61*. . (4.33)
kY cos2 6t — 1
* Формулу (4.33) легко получить, используя соотношения (1.33) и (1.34)
Р / р-
ИЛИ Г =------------ И = У COS 0= I/ ------ (2C0S&+1).
1 + 0COS& п Ур
194
Учитывая (4.33) и некоторые основные соотношения для эллип-
тйческих орбит, можно формулу (4.32) с учетом, что Е = л—Е',
преобразовать следующим образом:
sin Е= — ]/^i (2 — ^i) sin Of,
(4-34)
cosf=-^^. (4.35)
r„V2
Введем T=——.
r3/2
•При отклонениях A&i и A9i отклонение АГ = ГВ—Т (где Гв—
значение времени для возмущенного полета). Разложим функцию
ДГ в степенной ряд по величинам и Дбь Ограничиваясь в этом
ряду членами второго порядка, получаем
(«6)
i i j
Учитывая выражения (4.34), (4.35), формулы для первых и
вторых производных можно получить в следующем виде:
дТ
дкг
__ sin 6j Г 1
(2-^)2/лГ I 4
дТ __ Vkr cos 6j /
2 — I
dk\
dT
dkx
d-T______ki sin 6]
<?02 2 — k
(4-37)
(4.38)
(4.39)
(4.40)
r 2(^-1)
L
4fet—1
r^(2-*i)
_ cos б, |2 + fei _2- Й!Г5fet ——2 _2fel 1)2 cos^O! j
^ei“]/M2-^| 2 L 2(2-^) el J)’
(4-41)
На рис. 61 и 62 приведены результаты расчетов производных
(4.37) и (4.38) при различных значениях 01 и k\. В области, удовле-
7*
195
дТ о
Рис. 61. Зависимость ---(0J
dkx v 1
в (4.37)
творяющей условию (4.12), как показали расчеты, вторые произ-
водные имеют следующие значения:
д-т
dkx
<1300;
д-Т
дО2
1500;
д-Т
< 1600.
Величины первых производных оцениваются соотношениями
дТ
dkv
= 22 при 61 = 1°,
когда
д~Т
dk\
максимальна;
196
дТ
dkx
чение;
дт
2 4 6 8 Ю 12 14 16 18 20 22 24 26 G7°
3,5 при б! = 0, когда
дЧ
имеет наибольшее зна-
ОТ
dOi
= 35 при 01 = 45/, когда
дЧ
dOj
максимальна;
дт
d0t
= 40 при 0] =0, когда
дч
максимальна.
7*^2343
197
При отклонениях A0i = 0,013 pad, A&i = 0,026 (A^i = 0,1 км/сек)
получим: *
1 д^Т
2
2
max
д2Т
<Э0?
де?
max
02Г
л л дт . *
-0,44 при -------A&i
dkt
^0,12 при A0t
091
A^iAOi «0,56 при
dAiidOj 11 ’ r
Д01
€>6X 1
0,52 и
0,57;
<0,45;
— Д^ =0,09.
dk, 1
0,06
0,04
0,02
0
-0,02
-0,04
-0,06
-0,08
Рис. 63. Область значений k\, 0Ь где
имеют место неравенства (4.42) (В за-
штрихованной области условие (4.42) не
выполняется)
Такие большие величины квадратичных членов дают основание
предполагать, что и величины кубических членов разложения ряда
(4.36) также могут быть вели-
ки и формула (4.36), следова-
тельно, может давать при рас-
чете результат, существенно от-
личающийся от действительно-
го. Поэтому при использовании
формулы (4.36) необходимо
вводить дополнительные огра-
ничения области значений kb
0i, задавая максимальную ве-
личину абсолютных значений
вторых производных. Считаем
ориентировочно, что кубиче-
ские члены составляют такую
же долю величины квадратич-
ных членов, какую последние
составляют от величины линей-
ных членов. В этом случае для
того чтобы кубическими члена-
ми можно было пренебрегать,
величины вторых производных
должны составлять примерно
200—300. При этом считается,
что отклонения Д&1 и А01 не
будут выше указанных
чин. Области значений k\, 0Ь в которых удовлетворяются
неравенства
дЧ
dk\
вели-
200
д*Г
<00?
д'-Т
300; !----------
I
200,
(4.42)
ral
приведены на рис. 63. Там же приведена также кривая —
1,05.
198,
На этом рисунке области, где условие (4.42) не выполняется, за-
штрихованы.
Таким образом, в области допустимых значений kx и 0Ь
отклонение АТ можно определять по формуле (4.36). Учитывая
формулу (4.37), а также соотношение
*Д/2 _
Д7’=—ДГ + — Т , (4.43)
(j.1/2 2 г 1
можно привести формулу (4.36) к виду
ДГ
dTr^2
2&j Л I
—д^з
V1
г?/2 дТ I kxr^2dT
дб _1_ 2_!---------
p.l/2 fJ'2^
-V,+
r\ J
2
2
d2T № 2k2 2 ,
------?------Д^?4
dk2 j4'2 v2
2fi1/2
д2Т 9 r?/2 d2T
-------Д0?+ —
do2----fl1/2 dk^-.
2kt
— Д^р (4.44)
Vi
В этой формуле квадратичные члены, содержащие отклонения
Ari, не учтены, так как они, как это нетрудно показать, малы по
сравнению с другими членами (при |Агх|<30 км).
Отклонение положения апогея
Рассмотрим зависимость отклонений положения апогея от от-
клонений элементов конца активного участка. Положение апогея
будем характеризовать углом
— Я-
(4.45)
где Од — истинная аномалия конца активного участка.
Учитывая эту формулу из уравнения эллипса, получаем
&a = arccos [ — sin2 0i — (^ — l)]l . (4.46)
I ei )
Разложим эту функцию в степейной ряд по величинам
ДА^ —Zj1b — kx и Д01 = 01в —0р Ограничиваясь членами второго
порядка, находим
49. = E_ii + _2£_^4i4y, (4.47)
/ i i \ .
где
Z, j = kx, '0J.
7**
199
Формулы для производных имеют вид:
00а sin 20j
Че}
д*л fet-l v
%
02» kr — 1
—-= -----------sin20, cos2 0,;
dk} e\
020 k, — 1
—^ = -!—-^(2-^)sin20i;
002 e}
= Ц-l(^i - I)2 cos2 0! - sin2 0J.
d&idOi
(4.48)
Производную —- , как это видно из сравнения соответству-
дв}
ющих формул (4.48), можно определить следующим образом:
020а 020а l—^!— 1)2
до} dk} COS2 0]
„ , , D 1 — (Й,— 1)2
При небольших значениях k1 и 0j сомножитель --!------------
COS2 0J
близок к единице, а при значительных — величина производ-
ной пренебрежимо мала. Поэтому вполне допустимо поло-
жить, что
д2& д2$
а ______ а
d6j dk\
Как показали расчеты, вторые -производные могут достигать
следующих значений в области, характеризуемой соотношением
(4.12):
£4
dk^
Lmax
Mg
дб}
1500;
dkjd^
1700.
max
При отклонениях Л0'1 = 0,013 и Д&1 = 0,026 (или A^i = 0,1 км/сек)'.
_1_
2
9
UK J
<0,51 /?а<0=29,5°;
200
02» 2
---Г Ml
дй
<0,13 рад=7,5°;
02»a
dexdfeL
Д^Д#!
<0,57 рад—32°.
2
На основании этих оценок можно считать, что в указанной
области члены третьего и более высокого порядков ряда (4.47)
будут иметь большую величину, и поэтому формула (4.47) может
давать при расчете результат, сильно отличающийся от действи-
тельного.
Величины линейных членов, соответствующие наибольшим аб-
солютным величинам квадратичных членов, оцениваются следую-
щими соотношениями:
(ДД^ -^Д^ =0,51 /ш<?=29,5°;
д$а
|Д1М= <Д61
1 (ЛЦ
=0,39 /шд=22,5°.
Таким образом, для применения формулы (4.47) требуется до-
полнительное ограничение области значений kx и 0ь
Например,если потребовать, чтобы
dk\
<250 и
<265,
то при
указанных выше величинах откло-
нений Д^ = 0,026 и д01 = О,013 откло-
нение Д0-а за счет каждого квадра-
тичного члена будет меньше 5°. При
этом можно ожидать, что величины
кубических членов будут пренебре-
жимо малыми.
Границы областей значений kx и 0Ь
где вторые производные не превышают
Рис. 64. Область значений
0i, где вторые производные не
превышают заданных величин
(в заштрихованных областях
это условие не выполняется)
указанных выше величин,, приведены
на рис. 64. На этом графике область,
где не выполняется хотя бы одно из
указанных условий, заштрихована. Эта
область естественно, при изменении
величин возможных отклонений и дру-
гих допустимых величинах квадратичных членов, будет изменяться.
Если требуется оценить влияние отклонений элементов конца
активного участка в области, где формула (4.47) неприменима, то
Для этого придется воспользоваться точной формулой (4.46).
dkYd^x
201
Отклонение ДФа, определяемое формулой (4.47), нетрудНо
выразить через отклонения Дуь Д0Ь Дгь если воспользоваться
формулой (4.27).
Таким образом, результаты 'проведенных расчетов производных
показывают, что наибольшее влияние на отклонения высоты апо-
гея переходного эллипса имеют отклонения скорости. Так, в обла-
сти 0,65< 1,25, 0<i91<;25o, дополнительно ограниченной усло-
вием (4.12), наибольшее отклонение высоты, вызываемое отклоне-
нием скорости в 1 м/сек, составляет ~7,5 км (при &i = l,25 и
01 = 0). Отклонение скорости в зависимости от метода управления
окончанием активного участка может в некоторых случаях дости-
гать 100—150 м/сек (например, при выключении двигателя при
полном выгорании топлива), и соответствующие отклонения Дга
могут достигнуть величин до 1000 км.
Отклонения Д01 влияют на высоту апогея меньше, чем отклоне-
ния скорости. Так, например, при Д01 = 0,013 отклонения Дга со-
ставляют от 22 км (при ^1 = 1,025, 01=0) до~ 90 км (при £=4).
При этом, чем ближе значение 01 к нулю, тем большее значение
имеет квадратичный член, величина которого при 01 = 0 полностью
определяет величину отклонения высоты апогея за счет Д0ь
Величина отклонения высоты конца активного участка состав-
ляет во всем диапазоне не более 5 км на 1 км отклонения Дгь
Влияние отклонений элементов конца активного участка на вре-
мя Т наиболее значительно для траекторий с малыми углами 0Ь
Предельные значения |ДТ| в области, определяемой неравенст-
вами (4.42), приведены в табл. 4.3.
Таблица 4.3
AOj = 0,013 рад А ]/\ = 0,1 кмсек Arj = Ю км
1 А Т |тах сек 190 (0j =0) 250 (0! = 3°) 40 (0J = 1,3°; kx = 1,025)
1 А7 {min сек 5 (Oj = 25°) 25 (0! = 14°) 6 (Gj = 25°; kx = 0,65)
Величина вторых производных резко уменьшается с увеличе-
нием 01 и ky. При 91 >5° при любых kx всегда квадратичными чле-
нами формулы (4.36) можно пренебречь. При |Z?i—11 >0,07 квадра-
тичными членами формулы (4.36) можно пренебречь при любых
значениях 0ь
Влияние отклонений элементов конца активного участка на по-
ложение апогея переходного эллипса наиболее значительно в об-
ласти малых углов 01 и уменьшается с увеличением 0ь Так, при
202
Qj 10° и £1 = 1,05 наибольшая величина первых производных со-
ставляет
тогда как при 0i< 10°
dki
= 10;
max
д*а
d9t
=21.
max
Увеличение kx до значения 1,10 снижает наибольшие величины
этих производных до следующих значений:
<4
<50!
dkx
= 5;
max
= 11.
max
Величина квадратичных членов резко уменьшается при увели-
чении |fei—1| и Оь При 0i>5° все квадратичные члены становятся
пренебрежимо малыми.
В области небольших 01 наиболее значительное влияние на ве-
га
личину Фа оказывает отклонение Д01. Так, при —L 1,05 откло-
нение Д01 = Г может вызвать отклонение ДФа до 35—40° (при k\ —
= 1,025, 01 = 0). При 0i>4° отклонение Д01 = Г приведет к
<8°. -
Наибольшее влияние отклонений Дт^ и сказывается
Га1
при 61 = 1 -н 2°, а именно при -1,05 отклонение Дтц=1 м)сек
вызывает отклонение Д&а до 30', а кг} = 1км,— до 12'. В этой
области велико значение членов выше первого порядка. При
увеличении Дтц и Arj отклонение Д&а будет увеличиваться не
пропорционально их росту.
На основании обобщения полученных результатов можно сде-
лать следующие выводы:
1. Для того чтобы управляющий функционал системы управ-
ления, обеспечивающей малые отклонения параметров переход-
ного эллипса, был бы проще, желательно для орбит с относительно
малыми высотами (до ~ 1500 км) угол 01 выбирать не менее
4—5°. В этом случае всеми нелинейными членами разложения
формул для отклонений параметров переходного эллипса можно
пренебречь и в системе управления не учитывать. При этом потери
в высоте расчетной орбиты будут невелики (см. гл. I).
2. Влияние отклонений элементов конца активного участка на
Параметры переходного эллипса велико. Если не производить ни-
каких компенсаций, то такие отклонения параметров переходного
эллипса могут вызвать отклонения высоты орбиты, соизмеримые
203
с самой высотой. Поэтому в некоторых случаях для получения точ^
ных орбит может понадобиться достаточно жесткое управление на
активном участке.
4.3. ВЛИЯНИЕ ОТКЛОНЕНИЙ ПАРАМЕТРОВ
ДОЖОГА НА ОРБИТУ
Под параметрами дожога будем понимать следующие величины
(см. рис. 65):
и — величина добавочной скорости; _
% — угол между вектором добавочной скорости и и вектором
скорости перед дожогом v2;
Т — момент, в который производится дожог.
Отклонения параметров дожога вызывают отклонения парамет-
ров движения после доже га. Последние можно рассматривать как
Рис. 65. К выводу уравнения движения ИСЗ
при дожоге топлива
начальные возмущения
дальнейшего движения.
П оэто му и сел е дов а и и е
влияния отклонений пара-
метров дожога на полу-
чаемую орбиту можно
разделить на две за-
дачи:
1) опр едел е ни е в ел и -
чины начальных возму-
щений движения за счет
отклонений парам ет р о в
дожога;
2) рассмотрение движения при начальных возмущениях.
Отклонения параметров движения спутника на переходном эл-
липсе также являются возмущениями. Так, если дожог совершает-
ся в апогее переходного эллипса, то отклонения высоты апогея и
изменение при этом скорости в апогее непосредственно отразятся
на дальнейшем движении. Если момент дожога определяется при
помощи часового механизма на борту спутника (т. е. дожог про-
изводится через время ТраСч после окончания активного участка,
причем Трасч постоянно и равно времени движения от конца актив-
ного участка до апогея при расчетном движении), то отклонения
времени полета до апогея обусловят дожог в точке, не совпада-
ющей с апогеем переходного эллипса. Это также приведет к по-
явлению отклонений скорости движения, высоты и направления
вектора скорости в момент дожога и явится причиной возникнове-
ния отклонений движения после дожога. Однако влияние отклоне-
ний параметров переходного эллипса на движение после дожога
будет разным в зависимости от метода управления дожогом. Сле-
довательно, количественный анализ этого влияния можно прово-
дить только для конкретного метода управления.
При анализе влияния отклонений параметров дожога на откло-
204
нения орбиты основное внимание будем уделять случаю, когда
расчетная орбита (на которую необходимо вывести спутник) кру-
говая, а дожог в расчетном случае совершается в апогее переход-
ного эллипса при Z=0.
Определение начальных возмущений, вызываемых отклонениями
параметров дожога
Как известно, форму орбиты в центральном (поле сил опреде-
ляют величины г, 0, £= — , известные в какой-либо точке траек-
р-
тории. В точке дожога после его окончания имеем
г=г3;
0 = 03;
9
ь_ b _ V3
К — —------
(4.49)
Индексом «3» обозначены параметры движения после дожога.
Будем определять отклонения этих величин от расчетных значе-
ний за счет действия отклонений параметров дожога.
В силу принятого допущения о мгновенности дожога
гз = г2; |
Дг3 = Дг2. I
(4.50)
Величины v3 и 03 определяются формулами:
v% = v%-]-2v2u cosk^-u2; (4.51)
sin (09 — 03) = — sin X. (4.52)
из
Кроме того, имеют место следующие соотношения:
Sin e3=^sinea-Hsin(X-t)2) . 5
^3
cos 63=—-os °2 + “ cos . (4.54)
^3
От момента времени, в который производится дожог, зависит
положение спутника на переходном эллипсе, характеризуемое
истинной аномалией #2.
Отклонение времени ЪТ связано с отклонением угла соотно-
шением
8&, 87
дТ
(4.55>
205
где
— = = COS2 бр
дТ r2 ’ 71 1 1 1
'2
Вместо $2 удобно пользоваться величиной
д&=7г —&2. (4.56)
Зависимость параметров движения от значения ДО выражается
следующими формулами небесной механики:
v%=~ (1 —2e1 cos Д& + e?); Pi (4-57) (4.58)
К , - Pl .
! 9 “ 1 — er cos Д&
sin 0o = ex sin Д9- (4.59)
1/1 — 2^ cos Д& + e\
cos Go = 1 — ex cos Д& (4.60)
l/l — 2ej cos Д& +
Угол Дб определяет положение спутника при дожоге относи-
тельно апогея переходного эллипса. Если в расчетном случае
дожог совершается в апогее переходного эллипса, то этот угол ха-
рактеризует отклонение положения спутника в момент дожога за-
счет изменения момента дожога относительно расчетного значения.
Обозначим отклонения параметров дожога от расчетных вели-
чин следующим образом:
би — отклонение величины добавочной скорости;
— отклонение угла X;
6Д0* — отклонение угла ДО.
При этих отклонениях
В93 = б3в 63;
= £3в Л3.
Разложим функции 603 и б&3 в степенные ряды по величинам
би, 6Х и бДб1. Ограничиваясь квадратичными членами, получаем
i i J
<4-62)
i i J
где i, j=u, X, ДО.
206
Формулы для первых производных имеют вид:
^3. = _ Sln Х;
ди
И2
2 2
^3 У3
^S^^ + JL^sinX;
1 v2 д№
(4.63)
где
dk3
дД»
dk3 2 . .
—-=----------UV2r2 Sin к;
d\
vl dr2
p. дД&
— (V; -ф- U COS Л) -^2-
p. dA4
isl„
дДВ- У Pi
d02_____ (ex— cos Д&)
dAG 1 + — 2ex cos Д&
dr2 =
дД&
— r,tg 02-
Продифференцируем эти формулы еще раз:
д203 __a2sink dk%
ди2 ди
д203 _ 1 ( v2 и2 \ dk3
~ 2^Г ~ J ~дГ ’
д203 __ d202 । и sin к " d2v2 v2 + и cos \ / dv2 \2
~ (W "и т,2 дд$з 2 ( ада)
из L ^з 4 .
d203 v2 ( . • у 1 \
----2- =------- cos к —sink----------М ;
ди дк I? \ ^3 дХ J
020 v|-«2 dV2 . ,
ди дда п4 дда
и3
^о3
di <^да
^-[(^+«2)cosk + 2r-2M]-2- ;
(4.64)
207
где
d2k3 _2 гг .
du2 p. ’
<^3
д'к2
d2k3
dAfr2
2 л
------uv^r^ cos A;
p-
/2 dv- dr-
\ dA& dAO
d2&3 2шг9 . '
----— = — sin a;
du d'K p.
d2k3 1 dr2 dk3 , 2r2
du r2 d№ da [i
<^3 = 1 dr2 dk3 2r2 u dv2 sJn x
dX dAft r2 d№ dK fi dA&
dv2 л
---- COsX;
(4.65)
У
d2t>9 / |i d62
---- = Л/ —cos 09—
д№ у Pi d№
d% _ ^i(l — ^i) sin Д»
(Ш2 (1 — 2«?! cos Д& + ^i)2
d2r2 dr2 g _ r2 df)2
dAft2 dAft - cos2 02 dAft
(4.66)
Рассмотрим подробнее случай, когда расчетная орбита круго-
вая. Дожог при этом совершается в апогее переходного эллипса
при Z = 0. Величину и, потребную для перехода на круговую орби-
ту, нетрудно получить из соотношения &3=1. Формула для k3 име-
ет следующий вид:
откуда
|/ ^C°s2-A
У
.1+^1
Г2 — ki
u-ri
jj.
Для апогея переходного эллипса
Л2 = 1 — ег.
Учитывая соотношения (4.68), (4.69), а также условия
Х = 0; ДЯ = О,
(4-67)
(4.68)
(4.69)
(4.70)
208
приведем формулы для производных к следующему виду:
_^3_ = 0; -^1 =]/'l-<? t-l;
ди д\
_2?з_ = ё1 .
дД& 1 — ег
^3 _ О 1 / Z1 • _^3-П- дкз — П
ди У |Л ’ д1 ’ д№
(4-71)
(4-72)
Аналогично преобразуются формулы для вторых производных:
д293
0; ^3-
ди- ди дК
<»2
дД»2
0;
0;
-"•- = 0;
ди дД&
д\ д№
(4-73)
&k3
ди-
^*з_
д):-
д^3
дД&2
= 2-^- ;
JJL
= _2/Г=71(1-/Т^71);
--2_---1 \ ;
/1-^ )
*1
1 -21
0;
0;
ди <ЭД&
-^-=0.
дХ (М3
(4-74)
_^з_
ди дХ
)
Оценим величины квадратичных членов. При этом ограничим
рассматриваемые орбиты соотношением
1,05 << 1,5. (4.75)
Г1
Для этого условия при 01 = 0 потребуется
1,025 < 1,2. (4.76)
Величина r«imax при г^ббООклг составит ~10000л:л£. Если
0<е!<25°, то
0,025 < et < 0,43. (4.77)
Оценим величину члена | д2&3н | = — I ~'k3 дХ21 . Отклоне-
2 I д№ |
ние дл вызывает также отклонение | Д^з |= | | • Поль-
зуясь приведенными ниже формулами (4.95) и (4.96), опре-
делим отношение отклонений высоты орбиты, вызываемых величи-
209
ной ДА, через квадратичный и линейный члены Д2&зхх и Д^
Подставляя формулы для производных, получаем 3
Учитывая условие (4.77) для ДА <Д05 рад, получаем
< 0,10.
I дч I
Аналогично определим отношение отклонений высоты
орбиты за счет Д& через значения Д2£3э,э=^ -|^|-Дд2 и д^.;^
_ —<Мз— Тогда
дДО3
^1_=/ — ------1 дд.
1ДЧ1 /
С учетом условий (4.77) для Д&<;0,05рад
1Аг*31 < 0,083.
1ДЧ|
Отношение отклонений орбиты за счет Дб3и,. = —Д/г Д/. и
да д\
д1^3и= - д& при условии (4.77) оценивается для ДА 0,05
ди
величиной
_L^AL_ < 0,04,
|ДЧ1
что также указывает на незначительную величину квадратичного
члена Д20зих.
Таким образом, оценка отклонений орбиты, зависящих от квад-
ратичных членов разложений (4.61) и (4.62), в том случае, когда
расчетная орбита круговая, показала, что их влияние незначи-
тельно. Поэтому в дальнейшем ими можно пренебречь. В этом
случае формулы (4.61) и (4.62) с учетом (4.71) и (4.72) примут
вид
Д£3=-^-Дй; (4.78)
ди
(4 79)
3 дА*дда v
210
Кроме того, при появлении ЛФ возникает отклонение
А ' А ' 1 д2Г2 a Q9
ДГз = ДГ2=--------— Д^2-
2 (W
(4.80)
Однако отклонение высоты орбиты вследствие появления ДФ,
определяемое через значение Дг3, на порядок меньше, чем откло-
нение высоты орбиты, определяемое через Д93. Этим отклонением
также можно пренебречь и тогда
Дг3 = Дга1.
Отклонение Дй3 вследствие отклонений параметров переходно-
го эллипса при малых значениях ДФ и ДА,, используя формулы
(4.67) и (4.68), определяем следующим образом:
ДЛ3 = (1 — ej Д^2,
где Дй2 находят по формуле (4.30).
В этом случае полное отклонение Дй3 выражается так:
дЛ3 = _^з_ди + (1 + е1)Д^2. (4.81)
Отклонения круговой орбиты
Рассмотрим возмущенное движение спутника после сообщения
ему дополнительной скорости (в процессе дожога).
Подход к задаче, принятый в данном разделе и состоящий в
линеаризации уравнений движения,
оправдывается тем, что позволяет по-
лучить простые, хотя и менее точные,
выражения для функции изменения во
времени отклонений параметров дви-
жения. Для общности будем полагать,
что на спутник кроме силы притяже-
ния действует некоторая сила Р, ко-
торая может быть либо возмущающей,
либо управляющей силой. В обоих слу-
чаях будем считать, что величина и на-
правление этой силы — заданные фун-
кции времени. При выводе необходи-
ациях для круговой орбиты
мых уравнений будем также считать, что сила Р лежит в плоско-
сти орбиты, определяемой начальными компонентами скорости
(рис. 66). При этом рассматривается только случай, когда возму-
щенное движение происходит в плоскости расчетной орбиты.
211
Уравнения движения спутника в полярной 'системе координат
Ф, г имеют следующий вид:
dv,
----- = л sin 9
dt
V v„
П
Г
—— = р cos 6 — g +
dt 61
(4.82)
где
fun — радиальная составляющая скорости;
—трансверсальная составляющая скорости.
Запишем уравнения возмущенного движения в вариациях. Для
этого положим
=
vnB=vn
гз = г + ЬГ,
(4.83)
где vx, vn, г — параметры движения по расчетной орбите. Исполь-
зуя формулы (4.83), уравнения (4.82) и линеаризуя их, получаем
уравнения движения в вариациях:
V»
ДТ)Х + — + — Д^п + Lr = p sin 6;
2^ v\
Д^п----— Д^ + ~^- Дг = рС05б— grkr,
(4.84)
где
Примем далее, что расчетная орбита круговая. Тогда в урав-
нениях (4.84) можно положить: уп = 0, vx =const и r = const.
Кроме того, к системе (4.84) нужно добавить кинематическое со-
отношение Дг = Дип.
Полученная система уравнений определяет отклонения Дут,
Дг:
• V
Дгх-|------— Lvn = p sin 6;
2t> / v?
Д^„--------Д^ +—1
Г \ Г2
Lr = Lvn.
Ar = /?cos6;
(4.85)
212
Эта система представляет собой систему линейных уравнений с
постоянными коэффициентами и правыми частями — заданными
функциями времени. Для решения системы подставим в первое
уравнение последнее и результат проинтегрируем. Окончательно
t
Д^--|--— Дг = р sin 6 dt-\-C, (4.86)
Г J
о
где
V,
с=д^0+ —дг0;
дт^, Дг0 —начальные значения отклонений, соответствующие
моменту / = 0.
Подставляя формулу (4.86) во второе уравнение системы (4.85)
и используя третье уравнение, шолучаем
• • / г \
ДТ-М ~ Ar = pcos6
Преобразуем выражение, стоящее
скольку расчетная орбита круговая, то
^ = gr.
На основании этого
р sin
(4-87)
в круглых 'скобках. По-
2±_
г ~ т ’
где Т — период обращения спутника по расчетной круговой орбите.
С учетом найденных соотношений уравнение (4.87) запишем в
виде
/ \2
Дг-Н—) Arc=pcos0-)
t
§ р sin 9 dt-\-C
о
(4.88)
Для заданных начальных отклонений и известных функций време-
ни р и 0 последнее уравнение может быть проинтегрировано. В ре-
зультате интегрирования будет найдена функция Ar (Z). При этом
формула (4.86) определит отклонения скорости Нетрудно по-
лучить формулу для отклонений центрального угла ф (см. рис. 66):
Дф = Д(р0 +
-------Д г dt.
(4.89)
Необходимо указать, что полученные уравнения и формулы
Дают возможность решить задачу об управлении движением и о
213
затратах топлива для сближения двух спутников. В данном раз,
деле указанные вопросы не рассматриваются, поэтому для даль-
нейшего положим р = 0. В результате вместо уравнений (4.88)
получим
/ 9т- X 2 / 9— \ 2 / 9-г \
Дг+(—) Дг=2(—7) Дго+2(7~)ДгЧ0- (4.90)
Решая это уравнение, определяем связь между отклонениями вы-
соты спутника и начальными отклонениями параметров движения:
Д г - - 2Д г0+— Д •v-o +
л
где
Дг0 + —— Ду-о
sin <Ь=------- л - —
(дг0 + 7- Чо )2 + (-^)2 Чо
|/К+лНЧ2Ч^)2д^°
Используя полученный результат и формулы (4.86) и (4.89), мож-
но получить выражение для отклонений других параметров дви-
жения.
Формулы для отклонений параметров движения приводятся
ниже:
Дг = 2г + V Л sin +
о 1 К
д?=д?0_к-^-(/-/0) + Адсо8Ь(/-/0)+<ь]-^;
дг,„=А cos[x(/—ь)-ьл;
Д^=—%- AT-Asin[X(/-/0) + H>
о/
где А = ]/^Д +(^ Д г0 + 2 Д г»-о)2 5
sin <Ь =-— (ХДг0 + 2Д,и-о);
А
214
cosd>=-j-Ai>„0;
2к
а =----:
Т
г, v, Т — значения высоты, скорости и периода обращения
для номинальной круговой орбиты;
/0 —начальный момент времени, к которому относятся
отклонения Дг0, Дср0, Дг\0, Д^о-
В заключение данного раздела приведем формулы для расчета
отклонений высоты спутника при наличии ошибок выхода. Эти
формулы можно легко получить из уравнения (4.91), полагая по-
следовательно, что все отклонения, кроме одного, равны нулю:
1) при Дг0 #= О
Дг = Дг0 ^2 — cos-у-/ | Дг |тах = 3 | Дг01; (4.92)
2) при Дт\о ¥= О
Дг =-^- Д'и-о f 1 — cos 1 I Дг |max = 2-^- I Д^о|; (4.93)
тс \ T ) тс
3) при kvn0 ф О
Т 9тс Т
Дг=—A-o„0sin —| Дг|тах=—|Д^п0|. (4.94)
ZTC 1 ZTC
Поскольку в других разделах данной главы вместо отклонений
Д'Уло и Дт\о рассматриваются отклонения Д&3 и Д03, преобразуем
формулу (4.91).
Связь между отклонениями для случая круговой расчетной ор-
биты определяется формулами
Д^о=-^- Д^з—Дгз5
2 2г3
Дг»л0=т>3Д93.
(4.95)
При этом формула (4.91) примет вид
Дг = ДГз + гзД^з + ^з Д^з + Дбз sin (у^+ф)- (4.96)
Количественная оценка влияния отклонений параметров
дожога на движение спутника после дожога
Произведем численную оценку влияния отклонений парамет-
ров дожога. Пользуясь формулами (4.93) и (4.94) и подставляя
в них выражения для отклонений Д£3 и Д03, вызываемых отклоне-
ниями параметров дожога, получаем:
215
|Лгв| = 4г2]/г2/|л| Ди|;
I | = r2|(Vi —— 1) ДХ I ;
|Дг»|= г2 ——| Д&|.
1 — ех
Учитывая условия (4.75), (4.76) и (4.77), имеем
3650| Ди | < | Дгм | < 63201 Lu |;
87 | ДХ | < | Дгх | < 2500 | ДХ |;
178 | Д&| < | Дг» | < 7500 | Д&|.
Последняя оценка показывает, что отклонение Ди, равное
1 м/сек, вызывает отклонение высоты от 3,65 до 6,32 км в зависи-
мости от высоты расчетной орбиты и угла 0Ь Отклонение ДХ, рав-
ное Г, приводит к отклонению орбиты от расчетной на величину
от 1,5 до 44 км. Наконец, ДФ= Г вызывает изменения Дг от 3,1 до
130 км.
Приведенные оценки позволяют сделать следующие выводы:
1. Если необходимо обеспечить малые отклонения орбиты от
расчетной, система управления должна обеспечивать дожог топли-
ва в апогее переходного эллипса. Это особенно относится к случа-
ям, когда угол 01 велик и переходной эллипс имеет большой экс-
центриситет.
2. Необходимая точность ориентировки спутника при дожоге
повышается с увеличением угла 0ь Так, чтобы при 01 = 25° и
г3 = 7000 км отклонение высоты орбиты за счет ошибки ориентации
не превышало 10 км, эта ошибка не должна превышать 15z, тогда
как при 01 = 0 и том же значении г2 ошибка ориентировки должна
быть не более 5°.
3. Для того чтобы влияние отклонений параметров дожога бы-
ло наименьшим, угол наклона вектора скорости к горизонту в
конце активного участка должен быть близким к нулю.
4.4. ЗАДАЧА ВСТРЕЧИ ДВУХ СПУТНИКОВ
НА ОРБИТЕ
Рассмотрим основные этапы встречи. Путь от момента запуска
спутника до контакта с другим спутником (целью) можно разде-
лить на следующие основные этапы. Первый этап — участок выво-
да на орбиту, на котором необходимо, чтобы выводимый спутник
как можно ближе подошел к цели. Для этого целесообразно ис-
пользовать наведение на активном участке полета. Следующий
этап — сближение с целью — может продолжаться в течение части
витка или нескольких витков. Автоматическая система или космо-
навт производят управление спутником, чтобы приблизиться к цели
на достаточно малое расстояние. Последний, третий этап — движе-
216
ние в непосредственной близости к спутнику-цели и контакт
с ним.
Для осуществления встречи двух спутников, запускаемых «с од-
ной стартовой позиции, можно применить один из следующих пяти
способов.
1. Спутник запускается в плоскости орбиты цели в такой мо-
мент и с таким периодом, чтобы, во-первых, выйти сразу в район
цели, во-вторых, как можно дольше оставаться в ее окрестности.
Для выполнения этого способа, который является самым про-
стым, необходимо так выбрать период обращения спутника-цели,
чтобы он проходил раз в сутки или раз в двое или трое суток точно
в плоскости первого витка (в районе выхода на орбиту). Некото-
рые значения периодов обращения вокруг Земли, обеспечивающих
выполнение этого условия, приведены в табл. 4.
Таблица 4.4
Период мин Высота орбиты (круговой) км Через сколько дней витки повторяются Время существо- вания ИСЗ
88,5 230 Ежедневно —10 суток
90,5 320 Через двое суток ~Ю0 ,
91,5 370 Через сутки —1 год
2. Использование орбиты ожидания. -Если невозможно вывести
спутник в окрестность цели или сразу не удалось осуществить
сближение и за счет разности периодов при одинаковом наклоне-
нии орбит спутники разошлись, то полученную орбиту можно рас-
сматривать как орбиту ожидания. Через определенное число вит-
ков спутники окажутся на сравнительно небольшом расстоянии и
можно будет начать 2-й этап сближения. Иногда целесообразно
выходить на такую орбиту, подобрав ее период так, чтобы время
ожидания не было очень большим.
Измерив точно орбиту второго спутника и зная орбиту первого,
достаточно точно можно рассчитать необходимый импульс для
встречи.
3. Схема с дожогом (для высоких орбит цели). Спутник запус-
кается на переходной эллипс так, чтобы в апогее достичь орбиты
спутника-цели и встретить цель. Здесь производится дожог топли-
ва— дается импульс, после которого движение спутника совпадает
с движением цели.
4. Спутник запускается, вообще говоря, не в плоскости цели,
но так, чтобы в конце активного участка параметры движения
позволяли ему встретить цель. В этом случае для осуществления
сближения (мягкого контакта), очевидно, необходима коррекция
орбиты в районе встречи.
8-2343
217
5. Наконец, самым общим является случай, когда обе орбиТь
имеют одинаковые наклонения к плоскости экватора и являютСя
близкими по периоду и положению узлов, хотя специально дЛя
встречи не подбирались. Расхождения между плоскостями орбиты
по экватору могут достигать /половины межвиткового расстояния
Можно показать, что и в этом случае, как и в большинстве пре~
дыдущих, для реализации сближения достаточно двух импульсов
для мягкого контакта.
В зависимости от располагаемого количества топлива для д0_
жогов (или от величины приращения скорости Ду) могут быть
различные области досягаемости и интервалы встречи на орбите.
Эти области зависят также от -расположения орбит относительно
друг друга (см. гл. I). Очевидно, чем больше располагаемое Ди>
тем шире эти области. Практически достаточно иметь ресурс
Ду = 300 -н400 м/сек, чтобы иметь возможность, используя один из
первых четырех способов, описанных выше, осуществить встречу.
Рассмотрим один практический метод расчета импульса для
вывода 'спутника в окрестность цели (не касаясь процесса наве-
дения на конечном участке). Оценим также требования, предъяв-
ляемые при этом к системе орбитальных измерений и к системе
ориентации оси бортовой двигательной установки (ДУ).
Команда на включение ДУ по этому способу должна подавать-
ся в определенном районе — в районе пересечения «плоскостей»
двух орбит.
Обозначим:
Д/— время работы ДУ;
а — угол возвышения оси ДУ над местным горизонтом;
р — азимутальный угол оси ДУ относительно вектора скорости;
t\ — момент начала сближения (момент подачи команды на
включение ДУ).
Движение обоих спутников будем описывать системой диффе-
ренциальных уравнений (в абсолютной системе координат), кото-
рую легко получить из основной системы (см. гл. III), подставив
в нее выражения для возмущающих сил:
где х, у, z, vx, vy, vz — текущие элементы орбиты объекта;
^х = Чг + йзу; v=y -\-v} ;
218
vy = vy — 23x; r= Y'x2-{-y2+z2;
vz = v2\
b — баллистический коэффициент, отнесенный к массе спут-
ника;
2з — угловая скорость вращения Земли;
р — плотность воздуха: р = р (й).
Составляющие ускорения силы тяги ДУ величины рх, ру, pz
рассчитываются по формулам:
рх=аир^+^чРь+
Ру = Я21Р- + а<1<1Рь + СС^Рю
Pz = Я31 Р~ + а^Рь + ^ЗзР/п
где ац (i, /=1, 2, 3) —направляющие косинусы орбитальных осей
координат;
п — ось по радиусу-вектору спутника;
т — ось по нормали к радиусу-вектору в плос-
кости орбиты в направлении полета;
b — ось, дополняющая систему до правой.
Величины рт, ръ и рп будем определять по формулам:
р~ = р cos a cos р; pb=p cos а sin р; pn = р sin а,
Е t Ci G
р=-----------------; с=— ; т=— ,
m0[l — B(t— /1)] G gQ
где F — тяга ДУ;
G — вес спутника;
G — секундный расход топлива.
Время работы двигательной установки Л/ при подаче импульса
рассчитывают по формуле
Дг/
1 _ е РУД^°
Д/ =------------,
£
где руд — удельная тяга ДУ;
Ду— скорость, соответствующая величине импульса.
Момент подачи импульса t\ находят как момент прохождения
второго спутника через значение аргумента широты и2, которое
определяют из выражения, полученного по формулам сферической
тригонометрии:
, sin (Qi — Q?)
tg u2=-------------—--------------,
cos /2 cos (&i — Q2) — sin Z2 ctg z’i
гДе Qb Q2 — долготы восходящих узлов оскулирующих эллипсов
для первого и второго спутников в момент Л;
z’i, i2 — наклонения плоскостей орбит для того же момента.
8* 219
Наклонение и долгота восходящего узла, а также текущее зна~
чение аргумента широты находят по формулам
z = arccos — , 0 < i < 180°;
С
2 = arctg , 0 < 2 < 360°;
— Cz
и = arctg --—— , 0 и 360°,
5 уС1-хС2
где
Cx=yvz-zvy,
C2=zvx — xvz-,
C3=xvy—yvx,
c.=]f ci+cl+cl
Для момента tx определяются оскулирующие периоды обраще-
ния первого и второго спутников:
где v — абсолютная скорость спутника;
г — радиус-вектор спутника относительно центра Земли.
Далее определяется требуемый период обращения второго спут-
ника
Гтр=71 + Д7'.
Величину Д7’ находят из условия получения необходимой точ-
ности сближения, которую рассчитывают методом последователь-
ных приближений. Знак ДТ определяется знаком разности и2—uti9
где —значение аргумента широты для первого спутника в мо-
мент /ь
Если Й1^Й2, то угол между плоскостями орбит получают из
формулы
д В = — о2 = arctg------------arctg----------;
COS tg z’i cos u2 tg z2
cos = cos u2 cos (2X — 22) + sin u2 sin (2j — 22) cos i2.
220
Для момента времени Л находят также величину и направле-
ние импульса:
дг»="|/" д^+д^;
tg?
О < Р < 360°,
Дит
где
7^2 — Гтр 2— k2
V- = —-------— • -----
' т2 3k2 “
^9Г2
#9 =-------; &vb=v2 tg AS;
Iх
T2— период обращения второго спутника.
После нахождения значения /ь величины и направления им-
пульса (углы а, р) интегрируются системы дифференциальных
уравнений, описывающих движение обоих спутников. При этом
определяется расстояние между спутниками
Дг=/(Л1 - х2)2 + (yt - у2)2 + (zx - z2)2.
На витке, где спутники должны сблизиться, определяются вели-
чина Armin (минимальное расстояние между спутниками) и мо-
мент встречи /Вс. Если при найденных в первом сближении вели-
чине и направлении импульса получили значение Аг^п больше
допустимого, то уточняется корректирующий импульс путем реше-
ния следующей системы уравнений:
q qr> = Jl^ 88 + -^ Ba,
дХи 1 dfi r 1 da
где q заменяет x, y, z первого и второго спутников в момент /Вс‘,
, ^находят методом конечных разностей; 8-у, 8р,
Sa—поправки к величине и направлению корректирующего
импульса.
Расчеты, проведенные на ЭВМ, показывают, что процесс быст-
ро сходится. Так, например, исследовался неблагоприятный слу-
чай, когда расстояние между витками двух спутников на экваторе
Равно половине межвиткового расстояния для данной орбиты,
время прохождения спутниками экватора отличается на 2 мин.
В качестве орбиты первого спутника была принята орбита Г. С. Ти-
това, а орбита второго спутника соответствовала орбите Ю. А.
Гагарина.
Описанная методика (расчеты проводились на ЭВМ) позволи-
ла определить величины А/, а и р, которые обеспечивали сближе-
221
ние спутников. Расчет был прекращен после достижения хг
= 32.8 м.
Таким образом, изложенная методика, т. е. подбор на ЭВМ трех
параметров At», аир, позволяет теоретически точно сблизить с пут,
ники, но из-за ошибок измерения орбиты и ошибок ориентаций
оси двигательной установки получаются отклонения от расчетной
точки встречи (Ах, At/, Аг). Эти отклонения для некоторых задан,
ных значений ошибок Av, АО, Ah, Да и Ар приведены в табл. 4.5
В случае, если оценивается влияние ошибок, отличных от приня’
тых, допустима линейная интерполяция.
Таблица 4.5
Дц м/сек Д6 Д/г м Да Дх м Ду м Дг м L* м
+0,2 0 0 0 0 + 170 -319 + 150 390
—0,2 0 0 0 0 —169 +319 —150 390
0 4-10" 0 0 0 —47 —398 +633 750
0 —10" 0 0 0 +46 +398 —634 750
0 0 4-200 0 0 +43 —431 +530 680
0 0 —>200 0 0 -44 +431 —530 680
0 0 0 +5 0 —114 —509 +895 1040
0 0 0 —5 0 + 114 +508 —895 1040
0 0 0 0 +5 —560 +835 —506 ИЗО
0 0 0 0 -5 +558 —836 +504 ИЗО
+0,2 4-10" +200 +5 +5 —560 —822 1704 1950
—0,2 —10" —200 —5 —5 +505 +821 —1704 1950
* 1 = У Дл2_|_Д-у2 + Дг2 .
Анализ таблицы показывает, что при рассмотренных ошибках
измерения орбиты и ошибках ориентации сближение возможно с
точностью до 2000 м. Точку встречи следует выбирать не позже
одного витка после подачи корректирующего импульса, так как
при встрече на последующих витках увеличиваются отклонения от
расчетной точки встречи за счет рассмотренных ошибок.
ГЛАВА V
Об определении орбит
искусственных
спутников
В связи с запусками искусственных спутников Земли и других
космических аппаратов задача определения орбит перестала отно-
ситься только к задачам астрономии или небесной механики. Пер-
вые же полеты спутников показали, что классические методы опре-
деления орбит должны быть заменены другими или, по крайней
мере, приспособлены -к новым условиям по следующим причинам:
1. Орбиты искусственных спутников, как правило, сравнительно
близко расположены к Земле, произвольно ориентированы в про-
странстве и могут иметь любые эксцентриситеты. На движение
спутника оказывает заметное влияние сопротивление воздуха.
Космические же объекты, с которыми имела дело астрономия,
весьма удалены от Земли и движутся практически в пустоте. Ор-
биты их обычно имеют небольшое наклонение к плоскости эклип-
тики и (за исключением комет) малые эксцентриситеты. В поле
зрения земного наблюдателя они перемещаются очень медленно.
2. Для определения орбит космических объектов до появления
искусственных спутников в астрономии использовались главным
образом угловые измерения с помощью оптических средств.
Орбиты искусственных спутников измеряются как оптическими,
так и радиотехническими средствами (углы, дальность и их про-
изводные). Состав измеряемых величин значительно расширился.
Это и понятно, так как на искусственные спутники можно устанав-
ливать необходимую для таких измерений аппаратуру.
3. Электронные вычислительные машины (ЭВМ) не были изве-
стны астрономам. Все вычислительные работы производились
вручную, с помощью таблиц. С появлением электронных машин
коренным образом изменились методы вычислительных работ по
результатам измерений.
5.1. ОСНОВНЫЕ ПРИНЦИПЫ ОПРЕДЕЛЕНИЯ ОРБИТЫ
Несмотря на различия между искусственными спутниками и
естественными космическими телами, как объектами наблюдения,
основные принципы определения орбит и тех и других одинаковы.
223
В соответствии с законами механики определить орбиту — ЗНа
чит найти шесть независимых параметров (поскольку систем'
уравнений движения шестого порядка), которыми однозначно опре
деляется движение спутника в 'пространстве (-см. гл. III). Этими
параметрами (элементами) могут быть начальные условия дВи_
жения 'спутника х0, t/o, z0, ухо, 'Vyo, vz0 или начальные значения оску-
лирующих элементов а, е, со, i, Q, т, или шесть каких-либо других
независимых величин, по своему значению эквивалентных ука-
занным.
Шесть искомых независимых параметров, дающих закон дви.
жения спутников, обычно нельзя измерить непосредственно.
Поэтому измерению подлежат некоторые функции этих величин.
Такими функциями являются наклонные дальности от измеритель-
ного пункта (ИП) до спутника, углы визирования спутника, изме-
ренные от известных направлений, радиальные и угловые скорости
и др.
Шести измерений каких-либо из указанных элементов, произ-
веденных, вообще говоря, в различные моменты времени, доста-
точно для составления шести уравнений относительно шести
искомых неизвестных. Эти уравнения в самом общем виде можно
получить следующим образом.
Пусть задана система дифференциальных уравнений движения
спутника:
d дТ &Т дУ \ q
dt dqi дЯ1 д<П
(Z=l, 2, 3),
(5.1)
где qi — обобщенная координата;
T — кинетическая энергия системы;
V— потенциальная функция;
Qi — обобщенная неконсервативная сила.
Если qi — декартовы координаты (х, у, z) для абсолютной си-
стемы -прямоугольных координат с началом в центре притяжения,
то уравнения Лагранжа (5.1) превращаются в систему (3.1).
Предположим теперь, что из какой-то точки пространства (в
частности, с измерительного пункта, расположенного на земной
поверхности, или на другом спутнике) с известными координатами
а (/), b (/), с (/) в момент времени t путем измерений определены
некоторые функции координат спутника и времени полета:
Fk^i, Qi, а, Ь, с, а, Ь, с, t)
(5.^)
(£ = 1, 2, ..., m), (Z=l, 2, 3).
Требуется найти три координаты q^ и три составляющих скорости
qjQ) в начальной точке (или в некоторой другой точке орбиты) г
учитывая что между qif qi и q[Q\ q^ существует функциональная
связь:
224
q^T, qj\ (j=i, 2, 3).
Подставляя q^ и qi в (5.2) и приравнивая полученное выражение
к измеренному значению функции Fh, имеем
Fk=Fk[qi^, q?\ qj> а, ь, с, а, ь, с, /], (5.з>
где Fh— измеренное значение функции Fk в момент t в точке про-
странства с координатами а, Ь, с.
Составляя аналогичные уравнения для других моментов вре-
мени и для всех точек, откуда шроводятся измерения, получаем
систему шести или более уравнений относительно шести неизве-
стных q{f\ q(j0) (/ = 1, 2, 3).
В число неизвестных могут быть включены координаты ряда
(кроме одного) измерительных пунктов а, Ь, с и даже поправки
к моментам времени t. Конечно, для решения такой задачи число*
уравнений также должно быть равно или больше числа неизвест-
ных. Сами уравнения должны быть независимыми и совместными.
Проварьируем уравнения (5.3), считая переменным также и
время t [23].
Предварительно обозначим координаты qi и скорости qi че-
рез qi (/=1, 2, 6), начальные значения через q{P. Теперь удобно-
понимать под qf} (z = l, 2, ..., 6) любые шесть независимых пара-
метров орбиты, определяющих движение спутника, в том числе и.
начальные значения оскулирующих элементов.
Варьируя выражение (5.3), получаем
6
Е -% 8^0) + 4^8а’ + +
+ 4- (v = l,r2, ...), (5.4}
где
&Fk — отклонение измеренной функции Fk от расчетного-
значения;
8?z0) —соответствующие поправки к начальным значениям
параметров q^ (элементов) орбиты;
dFk -
—-—частная производная от измеряемой функции эле-
ментов орбиты по qf\ т. е.
dFk _ Д dFk dgj
dq^ dqj
225>
/ dQj А.
j производные —можно вычислять по формулам, приведен-
\ /
ным в работе [40]^ ;
dFk dFk
dav ’ dbv ’
dFk и
—-—частные производные Fk по координатам a
dcv
b> и cv v-го измерительного пункта (ИП);
orv —поправки к координатам v-ro пункта, с кото-
рого было произведено измерение функции Fk,
F к —производная функции Fk по времени полета;
ДА, —поправка к времени измерения для v-ro ИН.
в (5.4) необходимо учитывать производные дРк)да^
8#v, ОЬ.
Иногда
dFk'db^ и dFkfdCv.
Для того чтобы система уравнений (5.4) могла быть реше-
на и искомые неизвестные 8^<°> (z=l, 6), М,
найдены с требуемой точностью, необходимы следующие
условия:
1) число уравнений должно быть равно или больше числа ис-
комых неизвестных;
2) система должна быть разрешима относительно неизвестных;
3) коэффициенты и разности Д7% входящие в систему, долж-
ны быть заданы с точностью, обеспечивающей получение (неизве-
стных величин также с требуемой точностью.
Возможность выполнения последнего условия зависит от точно-
сти проводимых измерений функций Fh, от точности самого расче-
та, а также от степени соответствия интегральных кривых, опреде-
ляемых принятой системой дифференциальных уравнений движе-
ния, истинному движению -спутника.
Требования к точности задания исходных данных и точности
вычислений зависят от матрицы системы, т. е. от степени близости
к нулю ее определителя. Чем относительно больше отличается от
нуля определитель, тем меньше требования к точности, тем легче
получить решение. Ниже будут выяснены некоторые положения,
которые необходимо выполнять при организации измерений орби-
ты, чтобы получить хорошие результаты.
Обычно задача определения поправок В^-0), orv, ДА,
решается по методу наименьших квадратов [14], так как число
измерений, как правило, всегда больше числа искомых неизвест-
ных. В этом случае выражение (5.4) есть условное уравнение. Мо-
гут применяться и другие способы обработки избыточной инфор-
мации.
После нахождения и пересчета начальных условий по по-
лученным данным могут быть вычислены новые коэффициенты и
левые части условных уравнений (5.4), составлены новые нормаль-
226
ные уравнения и определены уточненные значения поправок
[39]. Процесс сближений оканчивается после получения разности,
удовлетворяющей неравенству
I I <s>
где е — заданное число;
s — номер -последнего сближения.
Изложенный принцип решения задачи, которую можно назвать
краевой, является самым общим. При этом измерительная инфор-
мация (Fk) должна быть привязана ко времени.
Если производятся парные разнородные измерения (например,
измеряются одновременно два угла — угол места и азимут), то
привязка таких измерений ко времени как .к независимому аргу-
менту не обязательна. Роль такого аргумента может играть одно
из парных измерений.
Наконец, если некоторые константы, входящие в систему диф-
ференциальных уравнений (5.1) и определяющие движение спут-
ника, например, коэффициент торможения о или коэффициенты ц
и а, требуют уточнения, то их тоже формально можно включить
в число определяемых неизвестных. При этом в уравнении (5.4)
dFk 5. dFk * dFk
появятся члены —-oa, —— op., —-oa и т. д.
дъ др. да
Таким образом, измерительная информация (измеренные функ-
ции Fh) принципиально позволяет не только определять орбиту,
т. е. шесть значений ее элементов но и получать ряд допол-
нительных данных о действующих силах, координатных системах,
времени проведения измерений и т. п.
Практическое решение таких задач связано с анализом полу-
чающейся матрицы, точности измерений и влияния этой точности
на результат.
В заключение отметим следующее.
1. При составлении условных уравнений (5.4) для разнород-
ных измерений существенное значение имеет тщательный выбор
весов этих уравнений, что требует изучения погрешностей различ-
ных измерительных систем или операций.
2. Применение численного интегрирования уравнений движения
(5.1) с целью вычисления производных dFk!dq<p и разностей из-
меренных и расчетных величин приводит -к невозможности
выполнять с достаточной точностью совместную обработку изме-
рений, сильно разнесенных во времени. В таких случаях может
быть использован метод интегрирования через несколько витков
[32] или применены конечные формулы, полученные в гл. III.
В случае полета вне атмосферы можно использовать также
квадратуры, приводимые в работах [16], [45].
227
5.2. ВЛИЯНИЕ ОШИБОК ИЗМЕРЕНИЙ
НА ТОЧНОСТЬ ОПРЕДЕЛЕНИЯ ОРБИТЫ
Как было выяснено в гл. III, орбита искусственного спутника?
только в первом приближении является эллипсом. В действитель-
ности это более сложная пространственная кривая. Измеренные
функции Fk (дальности, углы и др.) относятся к этой кривой, опре-
деляемой системой дифференциальных уравнений (5.1).
Задача получения орбиты по данным Fk является обратной
задачей по отношению к задаче расчета орбиты (и функций Fk)
по заданным начальным условиям движения. Возможность одно-
значного решения определяется выбором значений искомых неиз-
вестных в первом приближении, которые должны быть достаточно^
близки к их истинным значениям.
Прежде чем приступить к оценке точности определения орбит,
необходимо рассмотреть системы координат, которые часто прихо-
дится использовать в процессе обработки результатов измерений..
Системы координат
Уравнения (5.1) являются общими уравнениями движения для
спутника. В зависимости от выбора вида обобщенных координат
получим различные конкретные системы. Наиболее употребитель-
ными среди них являются:
1) система неподвижных прямоугольных координат;
2) система прямоугольных координат, вращающихся с посто-
янной угловой скоростью;
3) система полярных координат с полюсом в центре притя-
жения;
4) цилиндрическая система координат.
Уравнения движения в системе неподвижных прямоугольных
координат были приведены в гл. III.
Для вращающейся системы отсчета xyz имеем
q2 = y\ qz = z\ q^=x\ q5=y\ qG = z.
Система xyz вращается с ’постоянной угловой скоростью отно-
сительно оси, составляющей углы а, р, у с осями координат. Про-
екциями абсолютной скорости центра инерции -спутника на оси
•подвижной системы являются:
vx=x — о>гу-]-шуг;
Vz = Z — ^уХ 4" ®хУ •
228
Кинетическая энергия, отнесенная к единице массы
т = -у {(х - ч>гу 4- (О/)2 + (у + 0>2Х - Шлг)2 + (Z - <оуХ + а>лу)2}.
Дифференцируя Т по %, у, z и %, у, г, получаем:
дТ * ।
дх
дт • ।
—— = У + ®zx “ 0)лг’>
ду
дТ • I
— = z-a)yx + <»xy;
dz
=(у+- °v) - (г - +млУ) шУ;
= - (Л - 0)гу 4- шуг) <ог + (г - (Оух + шЛу) а>ж;
=(х - «>гу + WyZ) <оу - (у + <огх - шЛг) о>Л.
Подставляя эти производные в уравнения движения (5.1), имеем:
х — 2<о2у + 2<вуг + а>х(а>хл + «>уу + и>гг) — ш2х= Ц-Q/,
у + 2шгх - 2«)хг + шу (<оЛл + шуу + <»гг) - ш2у = + Q у;
z — 2u>yx+2u)xy + о>г (о^х 4- шуу 4- шгг) — <в2г = -|- Qz.
(5-5)
В системе уравнений (5.5) члены, содержащие первые произ-
водные координат, являются кориолисовыми членами. Они появ-
ляются в результате одновременного вращения системы координат
Oxyz и движения спутника относительно этой системы. Члены,
-содержащие х, у, z, учитывают переносную скорость.
Система (5.5) упрощается, если за оси координат принять ось
OZy направленную по вертикали вверх в пункте измерений, ось
Ох — вдоль меридиана на юг, ось Оу — на восток. В этом случае,
обозначив через со угловую скорость вращения Земли, получим
•ее составляющие:
^х=—(о cos Ф; о)у = 0; ^z = оз sin ф,
.где ф — геоцентрическая широта.
229
Система уравнений (5.5) с учетом этих выражений примет вид*
х — 2соу sin ф — со2 sin ф (х sin ф + г cos =
у -ф- 2(dz cos ф -[-2(пх sin ф — ы2у = -^-^Qy;
z — 2(ny cos ф — оз2 cos ф(х sin ф-f-z cos ф) = -^
(5.6).
Для вращающейся системы координат, ось z которой направле-
на параллельно оси вращения Земли, получаются еще более про-
стые уравнения (сох = соу=0):
X — 2соу — (П2Х
у + 2шх — 0>2у = —L 4- Q ;
ду ?
(5.7>
Полагая 7i = p; <72 = ф; <7з = Л, в соответствии с правилом перехо-
да к криволинейным координатам получаем
для сферической системы координат р, ф, Л:
р — р cos2 <ЬХ2 — рф2=-^Х.
др
• — (р2ф) -|- р sin ф cos фХ2
dt
— • — (р2 cos2 фХ)= —5—
рсозф dt рсоэф д\
р<4
dV , ~
(5.8)
1
Р
1
для цилиндрической системы координат:
р-р^2=-y-+QP;
op
- -4(p21)=Vk+Qx;
р dt рдк
(5-9)
Если измерения на пункте производятся в полярной системе
координат, например, измеряются наклонная дальность D, азимут
А и угол места цели у, то прямоугольные координаты (g, т), g)
230
спутника в системе ИП могут быть получены по следующим фор-
мулам:
l = D cos 7 cosX;
ri = D cos 7 sin Д;
sin 7.
(5.10)
При измерениях, дающих приблизительно одинаковую точность,
т. е. если ошибки в координатах, зависящие от погрешностей в
дальностях и углах, примерно одинаковы, можно решать задачу
определения орбиты непосредственно по координатам g, т], g.
Воспользуемся этим частным случаем для оценки влияния по-
грешностей в величинах D, А и у на определяемые через них пара-
метры орбиты. Для проведения такой оценки будем полагать, что
орбита является точным эллипсом и вращением Земли можно
пренебречь. При таких допущениях определим влияние ошибок
измерений координат и времени на элементы орбиты. Исходные
уравнения:
г = а(1 — е cos£)
а(1 — 12) .
1 4- е cos ft ’
Е— е sin 3/2(Z — т);
Пусть по измерениям с двух ИП получены абсолютные коорди-
наты относительно центра Земли двух точек на орбите (хь z/i, zx и
х2, //2, £2), время полета между ними t\— /2, а также угловое рас-
стояние ($2—*0*1 = ф). Последний параметр
ХгХп -г ViVo +
COS ср =* --- -- ---— ,
^2
где
^1,2 = 1^-^1,2 “Ь У 1,2 “И 2^1,2-
Данные для двух точек позволяют составить четыре уравне-
ния для определения четырех неизвестных параметров орбиты: а,
е, 'О’! и т.
Определив эти величины и зная время t\, соответствующее зна-
чению истинной аномалии fti, можно вычислить аргумент перигея
со. Останется оценить лишь погрешность в положении плоскости
орбиты. Ее можно найти отдельно.
Перейдем к составлению необходимых уравнений.
Для 1-й точки:
i\ = а (1 — е cos Е^\ Ех — е sin Ех = ]/ jx a-3'2 (tx — т).
231
Для 2-й точки:
г2 = а (1 — е cos Е^)\ Е2 — е sin Е2 = Уа~3/2 (/2 — ^)-
Вычитая из четвертого уравнения второе, получаем
Е2 — Ех — е sin Е2 е sin Ех =Ур а~3/2 (t2 —
На основании этих уравнений для грубой оценки после пере-
хода к вариациям имеем для малых е
/4 (sin Ех — sin + a2 cos2 Ev + а2)
Тз ~^- —(5.11)
— [ia 3/2 (t2 —t\) cos Er — 2 (sin E2— sin Et)
где ca— средняя квадратическая ошибка в определении полу-
оси орбиты;
(Tz, — средние квадратические ошибки соответственно в из-
мерении времени полета от 1-й до 2-й точки и цент-
рального угла <р;
аГ1 — средняя квадратическая ошибка в определении радиу-
са-вектора гь
В формуле (5.11) члены, содержащие эксцентриситет, опущены.
Если а = 7-106 ж, t2—6 = 103 сек, о<р=10“5, о7=10~2 сек,
р, = 4 • 1014 ж3/се№, аГ1 = 0, Ei = 0 и Е2^80°, то после подстановки
указанных величин .в формулу (5.11) получим
аа= 150 м.
Таким образом, для дуги ф орбиты порядка 80° (t2—t\ =
= 1000 сек) и принятых ошибках измерения времени и координат
полуось определяется достаточно точно. С уменьшением ф точ-
ность снижается.
Аналогичным образом можно получить оценку влияния ошибок
измерений для эксцентриситета и положения перигея.
5.3. ВЛИЯНИЕ НЕТОЧНОГО УЧЕТА
ДЕЙСТВУЮЩИХ СИЛ
Если бы дифференциальные уравнения (5.1) точно описывали
движение спутника по орбите, то, располагая соответствующим
образом ИП и уменьшая ошибки измерений, можно было бы до-
стигнуть сколь угодно большой точности в определении начальных
условий и, следовательно, орбиты. Однако силы, действующие на
спутник в полете, обычно известны неточно.
Определенные погрешности содержатся также в координатах
ИП.
Все эти причины не позволяют получать абсолютно точно орби-
ту даже по результатам абсолютно точных измерений.
232
Существует некоторая граница, дальше которой при современ-
ном уровне знаний о действующих на спутник силах нельзя повы-
сить точность определения его орбиты.
С этой точки зрения все действующие силы можно разделить
на две категории: силы, изученные настолько полно, что они могут
быть учтены в уравнениях движения, и силы, которые не имеет
смысла учитывать, так как они известны с ошибкой, равной или
превышающей их собственную величину. В первом случае точность
учета действующих сил зависит от правильности выбора вида
функций, их описывающих, и точности входящих в них постоян-
ных. Что же касается учета второй категории сил, то целесообраз-
но определить верхнюю границу их действия, а также изучать
характер их влияния на орбиту (периодические, вековые, или дол-
гопериодические возмущения и т. д.).
Рассмотрим силы, относящиеся к первой категории.
Центральное поле
Напряженность центрального поля Земли определяется одним
параметром ц=/Л4. От принятой величины ц зависит период обра-
щения спутника вокруг Земли, т. е. время полета по орбите. Это
можно видеть из формулы для периода обращения
Дифференцируя уравнение (5.12), получаем
8Г(Х=----0,Л=—V • (5.13)
рА/2 2
В настоящее время предельная погрешность в определении ц мо-
жет составлять 1—2 единицы пятого знака. Учитывая, что
{1 = 3,986-1014 ± 1010 м31сек\
соответствующая этой погрешности ошибка в определении перио-
да для орбит с большой полуосью 7000—9000 км, будет
| ВГр, | =0,01 сек.
Несферичность Земли
Рассмотрим влияние на орбиту погрешностей в определении
постоянной
е = [1аЦа—— 1, (5.14)
9-2343
233
учитывающей отклонение гравитационного поля от центрального
В формулы гл. III для оскулирующих элементов р, е, со, й, i Вхо'
дит множитель
(5.15)
Продифференцировав вековые возмущения положения узла Q
и перигея по а, а, т, получим с учетом (5.15):
В(д2)_=2д2-1г ;
а
8(д2)а =—8а;
(5.16)
а
л \ Д<о <>
б (Д(о)а =-----------6а;
т
а — ---
2
По современным данным, большую полуось земного эллипсоида
а можно считать известной с ошибкой порядка 50 ж, сжатие а — с
ошибкой не более половины от одной десятой единицы знаменате-
ля. Величина | о/п | <0,5 • 10-7. Подставляя значения указанных
погрешностей за одни сутки полета в (5.16), имеем:
| 82- | < 1"; |82а|<0,15/;
|82m| <1"; I 8o>a | <2";
I 8o)a | < 0,3z;
I I < 2".
Наибольшее влияние оказывает возможная погрешность в опреде-
лении величины сжатия Земли а, что облегчило задачу уточнения
этой величины по данным измерений орбит спутников.
Оценив величину ошибки в периодических членах, появляющих-
ся при интегрировании от 0 до -0* уравнений для оскулирующих эле-
ментов, получим:
<234
I A^nep
e COS I
I AZnep
i A/?nep
jj.jp2
e sin 2Z
4(j. p2
e sin2 i
(5-17)
I A^nep
2e
I nep
2e
рр2е
Неравенства (5.17) показывают, что ошибки в постоянных Зем-
ли наиболее существенное влияние будут оказывать на положение
перигея со в случае орбит с малыми эксцентриситетами.
Определим максимальные значения погрешностей 6 (АЙПер),
6 (Д^пер). б (Дрпер), 5 (ДеПер),учитывая лишь влияние возможной
ошибки в величине сжатия а, поскольку оно является наибольшим.
Принимая р = 7000 км и е = 0,05, получим:
0 (А^пер)а < . a2cosZ Sa = 0>4/z (при / = 0о);
8(^’пер)« < -^s??2t'.Sa=0,l/z (при /=45°); 4/12 > \ н h
8 (АРпер)а < а'2 sln2 *' 8а=12,0 м (при /=90°); р
0 (А^пер)а < . 2a2sin2/ Sa=0>3.10-5 (ПрИ / = 90°); Р2
8 (Дшпер)* < ; 8а=0,2'. р2е
Очевидно, что ошибки в положении узла Q, в наклонении Z, пара
метре р и эксцентриситете е очень незначительны. Для рассматри-
ваемых орбит лишь ошибка в величине со имеет большое значение.
Однако погрешности в координатах, обусловленные влиянием этой
ошибки в периодических членах, не будут превышать нескольких
десятков метров, а в составляющих скорости — сотых долей метров
в секунду.
Сопротивление воздуха
Влияние силы сопротивления воздуха было рассмотрено в
гл. Ш. Эту силу можно отнести как к первой, так и ко второй кате-
гории сил. В диапазоне сравнительно низких высот сопротивление
воздуха может быть достаточно точно учтено, особенно после уточ-
9*
235
нения баллистического коэффициента в каждом конкретном £Лу.
чае. На больших высотах (500—600 км), где начинает сказываться
световое давление, сопротивление воздуха сильно изменяется и бу-
дет относиться ко второй категории сил.
Зависимость ошибки в определении времени полета от неточно-
го определения сил сопротивления воздуха носит квадратичный ха-
рактер.
Действительно, производные от оскулирующих элементов по t
или О пропорциональны произведению величин 6р. Это относится
также к периоду обращения Т вокруг Земли, поскольку Т = —^-а32
Учитывая, что а = —, получаем
1 — £2 ’
=_____йр^/2 (l+£cos£)3'2 (5л
у р, (1—tfcos£)1/2
Интегрируя (5.18) в пределах от 0 до 2л, имеем
LT=-^-b^^— , (5.19)
1/ dn
V н
где Ф — функция параметров орбиты и атмосферы;
ро — плотность воздуха на опорной высоте (см. гл. III);
b — баллистический коэффициент, отнесенный к массе спут-
ника;
П — ЧИСЛО В'ИТКОВ.
Проинтегрировав по п (5.19) при постоянном значении 6р0Ф,
получим
Т=Т0-----^Ьр0Фп, (5.20)
/н
где То — начальный период обращения.
Для времени начала витка tN на какой-либо широте, в резуль-
тате вторичного интегрирования (5.20) по п, учитывая T~dtN[dn,
имеем
tN = Ton--^bpo<i)n.\ (5.21)
2 У (х
т. е. изменение времени начала витка вследствие сопротивления
воздуха пропорционально квадрату числа витков, а изменение пе-
риода линейно по времени.
В действительности, величина ДГ не остается постоянной во вре-
мени, и формула (5.21) выражает связь tN и п лишь приближенно.
Используя (5.19), получаем
tN = TQn-\- — .
236
Если число витков п невелико, то можно с помощью формулы
для суммы арифметической прогрессии легко найти более точное
выражение, а именно
tN = TQn-\-t,T(п—1).
Определение плотности воздуха, постоянных земного эллипсоида
и аномалий силы тяжести по данным орбитальных измерений
На оценке влияния аномалий силы тяжести, а также Луны и
Солнца на движение спутника не будем останавливаться, так как
характер действия этих сил был выяснен в гл. III. Сделаем некото-
рые замечания по уточнению параметров атмосферы и фундамен-
тальных постоянных Земли.
Формула (5.21), если ее разрешить относительно &р0, дает
bQ 2V7(T0n-tN)
‘0 ЗлФи2
Принимая, что погрешность в сопротивлении воздуха в основ-
ном зависит от ошибки в определении плотности р0, после перехода
к вариациям с учетом (5.19), получаем
_ (5.22)
Ро ДУп2
Плотность р, как было указано в гл. III, можно представить в
виде функции высоты, содержащей небольшое число параметров:
Р = Ро/(^> Ао, х).
Полагая, что изменение р зависит главным образом от выбора па-
раметра ро (плотность на некоторой опорной или начальной высо-
те), находим
op = Bp0/(/z, /г0, х). (5.23)
Так, в первом приближении можно получить поправку бр0 к
плотности на начальной высоте р0, а следовательно, и уточнить
плотность, если известно, что спутник за п витков запаздывает или
приходит раньше расчетного момента на время 6tN. Наибольшей
точности можно достигнуть при выборе начальной высоты в райо-
не перигея орбиты.
Более простая формула получится, если ввести понятие о вре-
мени невозмущенного полета на участке в п витков. Положим, что
на первом витке невозмущенный сопротивлением воздуха дракони-
ческий период равен Тд. Тогда для п витков время 'невозмущенного
полета
/н = лТд.
237
Уменьшение времени полета за п витков при наличии сопротив-
ления воздуха пропорционально п2. Но и вариация этого уменьше-
ния за счет отклонения параметра р0 (т. е. величины бро) тоже дает
изменение времени полета, пропорциональное п2. Поэтому можно
написать, что
§Ро = -^—Ч, (5.24)
где /в — время полета для расчетной атмосферы р;
б/в — разность /в—
/ф — фактическое время полета, полученное из наблюдений.
По формуле (5.24) можно довольно точно определить фактиче-
скую плотность на опорной высоте (ро + бро), если даже в качестве
невозмущенного периода взять измеренное значение периода на
первом витке.
Для уточнения остальных параметров атмосферы и выявления
колебаний плотности необходимо использовать сложный метод ре-
шения краевой задачи с дополнительными неизвестными, принцип
которого изложен в начале главы.
Поставим в заключение общую задачу об уточнении парамет-
ров гравитационного поля Земли. Этими параметрами являются
коэффициенты разложения гравитационного поля по сферическим
функциям anm, pnm, а также величины а, а, и т (см. стр. 113),
причем
а°о=-^-;
2е
OCqq - - --- -- ---
° ЗЯ3
где R — средний радиус Земли.
Применив указанный метод решения краевой задачи с допол-
нительными неизвестными, можно составить условные уравнения,
включающие в качестве неизвестных аномальные коэффициенты
anm, Pnm (или поправки к ним бссПт, 60nm). Эти уравнения будут
иметь вид:
6 S п
8^=Е^8^О)+£ Е 8я-+^ 8М > <5-25)
Ldanm ^пт J
(£ = 1, 2, ...,/?),
где число уравнений (измерений) р должно превышать число опре-
деляемых параметров (или быть ему равно).
Величины 6Fk представляют собой разности между расчетными
и измеренными значениями функций Fk (дальности, углы и др.).
238
расчетные значения Fk можно получить или путем интегрирования
уравнений движения с аномалиями, или путем интегрирования тех
же уравнений без аномалий, так как ввиду незначительного влия-
ния аномалий их целесообразно учитывать отдельно, пользуясь
формулами (3.53).
К условным уравнениям (5.25), полученным по данным орби-
тальных измерений, с соответствующими весами можно добавить
следующие:
л=0 т = 0
(г = 1, 2, ..., /).
(5.26)
В левых частях уравнений (5.26) стоят осредненные по заранее
выбранным зонам аномалии силы тяжести на поверхности геоида.
Коэффициенты ar, Ьг суть некоторые сферические функции, задан-
ные в тех же зонах |[13]. Совместная обработка по способу наимень-
ших квадратов результатов измерений орбиты и имеющегося гра-
виметрического материала {уравнения (5.25) и (5.26)] должна уве-
личить надежность определения искомых коэффициентов. Для
повышения точности целесообразно использовать также другой путь
[13]: по найденным из решения систем (5.25) и (5.26) значениям
апт, Pnm ИЛИ, что то же, Апт=^- (п— 1)алт, Впт=^ (п—1)$пт
вторично определить эти коэффициенты, пользуясь формулами
А -
л0 4т:
AgP„0 (Sin ф) rfa;
Вло = О;
пт 2тс
D ____2п + 1
^пт
+ ^gPnm (sin ф) cos mMo;
\П ~ т}':; \ kgPnm (sin ф) sin т)Ж.
(п -г от)! J
(5-27)
В выражениях (5.27) интегрирование производится по поверх-
ности единичной сферы о. За величины Ag принимаются значения
аномалий, вычисленные согласно ранее полученным коэффициен-
там Ctnm> Pnm«
Приравняв найденные значения Лоо = #оо, ^2о = #2о, можно опре-
делить постоянные: сжатие а и ускорение силы тяжести на эквато-
ре уе для нового общего земного эллипсоида.
Действительно, распределение ускорений силы тяжести на эл-
липсоиде определяется из выражения
У = #00 + #20^20 + #40^40,
239
•причем коэффициенты разложения aQOi я2о, a4Q являются известны
ми функциями а и уе:
5
а -=--------- ;
17
'+ и”1
1 I 3
Те ~&00 Q ^2о"Г Q ^40>
2 о
где
Здесь величины я40 и т можно считать точно известными.
Экваториальный радиус Земли по данным орбитальных и гра-
виметрических измерений не определяется достаточно точно и при-
нимается известным из астрономо-геодезических измерений.
5.4. ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ПЛОСКОСТИ
ОРБИТЫ ОТНОСИТЕЛЬНО СОЛНЦА
Для решения многих задач, связанных с полетами искусствен-
ных спутников (обеспечение работы солнечных батарей, теплового
режима, измерения орбиты и т. д.), необходимо знать время пребы-
вания спутника в тени Земли и на Солнце, это время зависит от по-
ложения плоскости орбиты относительно Солнца. Для получения
определенного положения плоскости орбиты относительно Солнца
необходимо соответствующим образом выбрать момент запуска
спутника на орбиту.
Опыт первых искусственных спутников показывает, что для
оперативного прогнозирования условий его видимости и освещен-
ности на различные периоды существования спутника, а также
выбора момента запуска целесообразно применять графо-аналити-
ческий метод, учитывающий особенности движения спутника по от-
ношению к тени Земли.
Рассмотрим один из возможных методов определения положе-
ния плоскости орбиты относительно Солнца из условий освещенно-
сти спутника и приведем краткий анализ движения 1, 2 и 3-го
советских спутников по отношению к зоне тени Земли.
Графо-аналитический метод оценки условий освещенности
Рассмотрим единичную сферу с центром, расположенным в цен-
тре Земли. Из сферического треугольника, вершины которого соот-
ветствуют положению Солнца, северного полюса и спутника в дан-
ный момент времени, легко получить
cos z = sin Д = sin ф sin 8-j- cos 0 cos 8 cos /G. (5.28)
240
Здесь z — зенитное расстояние Солнца в точке, в которой
в данный момент времени находится спутник;
д = 90° — г— высота Солнца;
б —геоцентрическая широта спутника;
о —склонение Солнца;
/о— часовой угол Солнца относительно меридиана
спутника.
Угол Лэ можно связать с долготой спутника АСп и временем t по
формуле
(5.29)
где t — московское время, соответствующее положению спутника
на меридиане с долготой LCn‘,
ц — «уравнение» времени, т. е. разность между средним и ис-
тинным солнечным временем.
По формулам (5.28) и (5.29) решается первая часть задачи —
определение зенитного расстояния Солнца по данным координатам
спутника и времени. Очевидно, что для нахождения этого парамет-
ра в любой точке земной поверхности можно пользоваться этими
же формулами. Вместе с тем отсутствие в них параметров движе-
ния спутника не позволяет заранее и на длительное время предска-
зывать условия освещенности спутника без предварительного и до-
статочно точного расчета всей его орбиты. Но, как можно показать,
для выяснения условий освещенности требуется только определить
ориентацию плоскости орбиты в пространстве, т. е. решать значи-
тельно более простую задачу.
Введем
+ (5.30)
где
Т = То — 01 — Tlo) + j “i 0) — u>2 (t — /0); (5.31)
to
sin X=ctg i tg ф. (5.32)
Согласно (5.29) и (5.30) имеем
То==^о"Ь9Л+^сп) — — * (Фо)- (5.33)
В формулах (5.30) — (5.33)
у — разность долгот Lq восходящего узла орбиты и
Lq меридиана Солнца в момент времени t, т. е. ча-
совой угол Солнца относительно узла орбиты
(Т = £д-£о);
X — разность долгот £Сп спутника и Lq восходящего уз-
ла £2 (Х = /^сп—Lq^\
col — угловая скорость вращения узла орбиты;
241
W2 — угловая скорость вращения среднего экваториаль^
лого Солнца;
t — текущее время в сутках;
i — наклонение орбиты;
ц — разность между средним и солнечным временем
(«уравнение» времени);
/о, Yo, Цо — начальные значения величин t, у, ц.
Скорость вращения узла с достаточной точностью (если /о = 0)
определяется по формуле
ш1=а>1(0) (1 ±kf), (5.34)
в которой начальная скорость прецессии узла
(0) 2тсе cos i
а)1 =------------•
В последнем выражении:
г и Ji —постоянные Земли, связанные соотношением
(а = 6378,1 км—радиус земного экватора;
а — сжатие Земли;
т — отношение центробежной силы к силе тяже-
сти на экваторе: а------- =0,001633).
Коэффициент k, входящий в (5.34), определяется по формуле
где р' и Т' — степень уменьшения или градиенты соответственно
параметра орбиты р и периода обращения Т за один оборот спут-
ника вокруг Земли.
Величины р' и Т' в среднем монотонно возрастают (приблизи-
тельно линейно), если время t достаточно велико. Наблюдаемые
колебания этих величин, связанные по некоторым данным с вариа-
циями солнечной активности и вращением Солнца вокруг собствен-
ной оси, имеют незначительную амплитуду (10—15% для высот
200—250 км) и не могут оказать существенного влияния на величи-
ну поправочного члена kt в формуле (5.34). Более значительные пе-
риодические колебания величин р' и Т', связанные с изменением
широты ф перигея орбиты, могут быть осреднены в том случае, ес-
ли промежуток времени t намного больше периода Тэтих колеба-
ний. Если величины t и Тъ одного и того же порядка или /<7ф, то
монотонного возрастания р' и Т' может и не наблюдаться, но абсо-
лютные значения изменений этих величин в данном случае настоль-
ко малы, что при расчете поправочного члена kt целесообразно по-
242
прежнему считать их линейными функциями времени. Поэтому
принимаем:
Г=7'о(1' + ^)>
где
р'о, То — начальные значения „градиентов" параметра орбиты и
периода обращения;
а1; а2 —постоянные коэффициенты.
Приближенно
1 dp' 1 dT'
а, --------— ; а, ------------.
2Р; dt 2Т0 dt
При известных значениях параметра р и периода Т в некото-
ром начальном промежутке времени полета целесообразно
принимать за величины р', Т и си, аг средние изменения в этом
промежутке.
После подстановки coi из (5.34) в выражение (5.31) и интегри-
рования последнего (при /о = О, р = ръ, T = Tq) получим
'r = To + toi°>zf ( l + — (l— (5-35)
где
__ 1 / Po । To 'j .
2 — Zo ' 2Г0 / ’
370 \ Po 27o
a2
Таким образом, зная в некоторый начальный момент времени
координаты спутника Лсп и фсп начальные значения элементов
орбиты То, Ро, а также средние -градиенты р', Т' и их производные
dp'/dt, dT'Idt можно при известном наклонении орбиты определить
по формулам (5.28) — (5.35) зенитное расстояние Солнца для лю-
бого наперед заданного момента времени, если соответственно ог-
k )t
раничить величины <0,2 и &/2<0,2. Для близких к Земле спут-
ников практически можно прогнозировать положение плоскости ор-
биты на протяжение 1/3 времени существования спутника, считая
время от произвольного начала.
Условия освещенности зависят не только от положения плоско-
сти орбиты относительно Солнца, но и от высот полета, на которых
спутник входит и выходит из тени Земли. Высота полета определя-
243
ет понижение горизонта е для спутника, которое вычисляется по
формуле
о р
coss = —— = —— [1cos (zz — w)], (5.36)
где
г— радиус-вектор спутника;
7? —средний радиус Земли;
р, е, ад — соответственно параметр, эксцентриситет и аргумент
перигея эллиптической орбиты;
sin ф
rz = arcsin--- .
sin i
Зенитное расстояние Солнца в момент пересечения спутником
границы тени Земли
^ах = 90° + з. (5.37)
Принимая Z™ax равным зенитному расстоянию Солнца, полу-
чаем по формуле (5.28) уравнение для определения широт точек
входа и выхода спутника из зоны тени Земли:
cos z©ax= — sin 1—J =sin^sino-p
+ cos Ф cos В cos [у (/) + '> (Ф)]« (5.38)
Из (5.38) можно находить также время (или часовой угол для
точки пересечения спутником границы зоны тени на заданной ши-
роте) и решать обратную задачу — определять начальное положе-
ние плоскости орбиты (угол у0), при котором в определенный мо-
мент / спутник будет входить (или выходить) из зоны тени па ши-
роте ф.
Для получения простого способа решения разнообразных задач
по определению условий освещенности, возникавших в связи с за-
пуском первых советских спутников, по уравнению (5.28) были по-
строены специальные графики, на которых по оси абсцисс отложен
часовой угол Солнца /с,по оси ординат — геоцентрическая широта
ф; параметром служит высота Солнца А. Графики построены при
постоянном склонении 6 (шаг по 6 достаточно выбрать равным 5°).
Кроме линий равных высот Солнца, на графиках нанесены (пунк-
тирные кривые) дискретные положения плоскости орбиты спутни-
ка для наклонения г = 65°. На рис. 67 дан пример такого графика
при 6 = —5°. Каждой из пунктирных кривых соответствует опреде-
ленное значение часового угла у восходящего узла орбиты, отсчи-
тываемое на графике по экватору от меридиана Солнца (Д=+90°)
до меридиана восходящего узла. Каждой точке на кривой с широ-
той ф соответствует свое значение часового угла.
244
Z5/X 15/X 5/X
Li i i i.l 1.1 1..1.I
Рис. 67. Зависимость высоты Солнца Д (при склонении 6 = —5°) от географической
широты ф и часового угла tQ
(Пунктиром показаны дискретные (через 10’) положения плоскости орбиты с наклонением 65°)
Для решения основной задачи — определения высоты Солнца
для данного спутника и, в частности, мест входа и выхода его из
зоны тени Земли — необходимо исходить из известных координат
спутника бсп, Lcn в некоторый начальный момент времени и затем
рассчитать угол у0 по формуле (5.33). Выбрав график с подход^
щей к заданной дате величиной склонения Солнца б, наносим на
него угол у0 в виде вертикальной черточки, которая будет означать
начальное положение восходящего узла орбиты относительно ме-
ридиана Солнца. По формуле (5.35) рассчитываем последующие
положения узла (угла у) через определенный промежуток времени
(1—2 суток) до некоторого момента th (от начального /0 не более
1/3 продолжительности существования спутника) и наносим соот-
ветствующие метки на графики (см. рис. 67).
Каждая метка соответствует некоторому определенному поло-
жению плоскости орбиты, которое находят путем интерполирова-
ния между опорными пунктирными кривыми. Найденное положе-
ние плоскости орбиты позволяет непосредственно считывать с гра-
фика высоту Солнца на любой широте как на восходящей, так и на
нисходящей ветви витка орбиты. Если величина 6 на графике не-
сколько не соответствует рассматриваемой дате, то производится
интерполирование высоты А по склонению Солнца S.
Зная изменение высоты полета или радиуса-вектора г спутника
по широтам, на графике для данного положения плоскости орбиты
находим две широты ф2 (вход и выход из тени), для которых
высота Солнца Д равна понижению горизонта 8 [формула (5.36)].
Для каждого спутника можно построить график е(ф), который поз-
воляет легко провести необходимое для нахождения величины г|ц и
ф2 сравнение величин Д и 8.
Время полета на темной стороне орбиты
д/тени = [£<> — Er — е (sin — sin ЕД], (5.39)
2к
где
Е2, Ej—эксцентрические аномалии, соответствующие точкам
выхода и входа в тень Земли (определяются по най-
денным широтам ф2, ф1).
Время пребывания на солнце
Д/с Т— Д/тени-
Для проведения оптических наблюдений за спутником важно
определить «зону сумерек», т. е. зону, в которой спутник освещен, а
пункт наблюдения находится в тени Земли. При помощи графиков,
аналогичных приведенному на рис. 67, «зона сумерек» для каждого
положения плоскости орбиты после нахождения широт ф2, соот-
ветствующих входу и выходу из тени, определяется непосредствен-
но следующим образом. Выделим участки орбиты от точек с широ-
тами фц и г|?2 до точек с Д~—3°. Район, ограниченный с одной сто-
246
роны примерно широтой ф1 или ф2, с противоположной — кривой
—3° и вдоль орбиты двумя эквидистантными кривыми (на та-
ком расстоянии от плоскости орбиты, чтобы угол места р для спут-
ника был не менее 15—20°), будет представлять собой зону на зем-
ной поверхности, привязанную к положению данного витка, в кото-
рой оптические наблюдения возможны.
В 'большинстве случаев (низкая высота полета) зона сумерек
определяется как полоса широт, ограниченная с одной стороны xpi
или ф2 и с другой — широтой фд, соответствующей на графике
точке пересечения кривой А =—3° с рассматриваемой проекцией
плоскости орбиты. Понятно, что для определения возможности
наблюдения спутника в данном пункте на данном витке необходима
также проверка выполнения условия для углов места р
(р> 15 -н 20°).
Точность изложенного метода определяется ошибками, проис-
ходящими вследствие неучета сплюснутости Земли, рефракции и
углового диаметра Солнца. При углах пересечения плоскости орби-
ты с границей тени, больших 20°, соответствующая погрешность в
определении географической широты входа (или выхода) в тень не
превышает Г.
Вторым источником ошибок является неточное знание парамет-
ров орбиты (ориентации ее плоскости у, i в пространстве), элемен-
тов эллипса р, е и положения перигея со относительно экватора, оп-
ределяющих высоту полета в момент пересечения границы тени.
При прогнозировании вперед на 1/3 от остающегося времени сущест-
вования эти ошибки могут быть значительными. Однако в боль-
шинстве случаев при пересечении спутником тени под углом более
20° ошибки в высоте полета 20—30 км и в положении орбиты 1—2°
дают погрешность в широте точки пересечения также не более 1°.
Анализ условий освещенности спутников
Условия освещенности первого, второго и третьего советских ис-
кусственных спутников, запуски которых были произведены на ор-
биты с разными высотами апогея в различное <время года и суток,
значительно отличаются друг от друга. На рис. 67 показаны поло-
жения плоскости орбиты для 1-го спутника в начальный период по-
лета, а относительное время его пребывания в тени и на солнце
приведено на рис. 68. Как видно, это время менялось, незначительно,
что объясняется большими углами пересечения плоскости орбиты
с границей тени в рассматриваемый период.
Второй спутник был запущен таким образом, чтобы плоскость
его орбиты оказалась близка к линии границы тени. В течение не-
скольких дней спутник вообще не заходил в тень Земли. На рис. 69
показана фактическая А и необходимая для соприкосновения
с тенью е высоты Солнца. Как можно видеть, лишь на четвертые
сутки после запуска началось вхождение спутника в тень.
Характеристики движения третьего спутника относительно
247
Рис. 68. Условия видимости 3-го советского спутника на
разных географических широтах и время пребывания его
в зоне тени Земли и на солнце:
/—изменение *выхвремени выхода из тени; 3 — изменение време-
ни входа в тень 2, 5 — соответствующие широты; 4, 6 — зависи-
мость ~ для 3 и 1-го ИСЗ. Заштрихованы «области сумерек».
Т
(Стрелки а указывают направление движения ИСЗ по широтам
при входе в тень, стрелки б — при выходе. Вертикальные пунк-
тирные линии — границы областей с противоположными направ-
лениями входа и выхода)
Рис. 69. Изменение высоты Солнца А и пони-
жения горизонта 8 для 2-го советского ИСЗ
в первые дни его полета: a — 3/XI 1957 г.; о —
7/XI—1957 г.
248
тени Земли за первые полтора месяца его существования (кривые
изменения широт и времени входа в тень и выхода из нее, а также
относительное время пребывания в тени t/T в процентах к периоду
обращения вокруг Земли) приведены на рис. 68. Выделены «зоны
сумерек», в которых было возможно наблюдение спутника. Анализ
кривых показывает, что, как и для первого спутника, время пребы-
вания в тени и на солнце оставалось довольно стабильным, что
связано с большими углами пересечения плоскости орбиты с тенью
в рассматриваемый период. Перемещение же самой зоны тени (и
сумеречных зон) по широтам было весьма значительным, что объ-
ясняется относительно быстрым вращением (прецессией) плоско-
сти орбиты.
Наклонение плоскости орбиты к экватору (65°) определяет два
периода в году, в течение которых возможно незахождение в тень:
летний период — с конца, апреля до середины августа и зимний — с
конца октября до середины февраля. Для высот полета в районе те-
ни более 800 км кратковременное незахождение в тень возможно и
в любое время года. В соответствии с периодами вращения узла ор-
биты относительно Солнца (примерно три месяца) незахождения в
тень будут повторяться с той же или вдвое большей (в случае
больших высот полета) частотой.
ГЛАВА VI
Некоторые вопросы
ориентации
спутников
Для решения многих задач с помощью искусственного спутника
возникает необходимость в определенной ориентации его осей в
пространстве.
Спуск космонавта на Землю после полета 'по орбите был бы не-
возможен без соответствующей ориентации оси двигательной уста-
новки во время ее работы. Наблюдение за земной поверхностью
также трудно осуществлять без ориентации на Землю некоторой
оси, связанной со спутником. Наконец, переход на другую задан-
ную орбиту, выход в окрестность спутника-станции, стыковка — все
эти задачи требуют различной по точности и по другим характери-
стикам ориентации и стабилизации ИСЗ.
Системы ориентации и стабилизации для спутников можно раз-
делить на пассивные и активные.
Методы пассивной ориентации и стабилизации интересны тем,
что основаны на использовании некоторых физических явлений, су-
ществующих в космосе, и не требуют расхода массы для поддержа-
ния стабилизированного положения. Эти методы могут базировать-
ся на использовании моментов, возникающих вследствие изменения
гравитационного поля с высотой, а также на силах светового давле-
ния или на аэродинамических силах. Моменты очень малы и тех-
нически выполнить такую стабилизацию чрезвычайно сложно.
Методы активной ориентации основаны на использовании уп-
равляющих моментов, создаваемых какой-либо системой управле-
ния. При этом наиболее просто осуществляются две из трех основ-
ных задач всякой системы управления спутником: повороты аппа-
рата около центра масс и поддержание заданной ориентации отно-
сительно каких-либо неподвижных или подвижных осей [28].
К. Э. Циолковским для поворота вокруг центра масс были
предложены два метода: создание реактивной тяги, линия дейст-
вия которой через центр масс не проходит, и использование махо-
виков. создающих реактивный момент при раскрутке их с опреде-
ленным угловым ускорением.
В качестве чувствительных элементов активных систем ориен-
тации можно использовать гироскопы (инерциальная система), фо-
250
тоэлементы, в поле зрения которых удерживаются выбранные не-
бесные светила (Солнце, крупные звезды и т.п.), инфракрасные
приемники, наводимые на горизонт Земли, и др.
6.1. ДВИЖЕНИЕ ВОКРУГ ЦЕНТРА МАСС
одной системы прямо-
полностью определяется
Предположим, что выбрана произвольная система координат
с началом в центре масс спутника. Тогда координаты любой
точки в основной системе отсчета Oxyz могут быть представлены в
виде:
x=xQ< 4“ -j- -j-
у =Уо' 4“ #21^ 4“ #22^4" ^23^
Z = Zor 4- 4- #32?] 4-
где
x^, Vo', z0' —координаты центра масс спутника в основ-
ной системе;
ё, т], ^ — координаты выбранной точки пространства
во вспомогательной системе (местной) с
началом в центре масс спутника;
ajk(J, k = \, 2, 3) —направляющие косинусы осей вспомога-
тельной системы относительно основной
системы.
Из механики известно, что положение
угольных координат относительно другой
координатами начала второй системы и
тремя углами поворота, т. е. яри совме-
щении обоих начал в одной точке можно
получить любое заданное -положение вто-
рой системы посредством трех поворотов
в трех различных плоскостях.
Наиболее удобно осуществлять эти
повороты по схеме Эйлера. Первый пово<
рот производится вокруг оси Oz (против
хода часовой стрелки, как и другие). При
этом оси Ох и Оу повернутся в плоско-
сти Оху на угол Q (рис. 70). Ось Ох зай-
мет новое положение Ok, ось Оу — поло-
жение Оу'. Второй поворот осуществляет-
ся вокруг новой оси Ok, в результате чего
оси Оу' и Oz отклонятся на угол i. Ось
Oz займет положение О£, а ось Оу' поло-
жение Оу".
Последний, третий, поворот производится вокруг только что по-
лученной оси 0^. При этом оси Ok и Оу" переместятся в плоскости,
перпендикулярной О£, на угол $ соответственно в положения 0% и
Ог]. Таким образом, после трех поворотов осей координат Oxyz
Рис. 70. К выводу связи
между углами Эйлера и на-
правляющими косинусами
251
получили новую 'систему координат О£ц£, положение которой отно-
сительно первоначальной системы полностью определяется тремя
углами fi, Z, О.
Угол Q называется углом прецессии, угол i — нутации, а ft_______
углом собственного вращения (углы Эйлера).
В соответствии с теоремой о косинусе стороны в сферическом
треугольнике (косинус стороны равен произведению косинусов
двух других сторон плюс произведение синусов этих сторон на ко-
синус угла между ними) выражения для направляющих косину-
сов будут иметь вид:
= cos ft cos 2 4" sin sin cos (180° — Z);
a21 = cos ft cos (90° — 2) + sin ft sin (90° — 2) cos Z;
a31 = cos ft cos 90° -j- sin ft sin 90° cos (90° — Z);
a12 = cos (90°4- ft) cos 2 4- sin (90° ft) sin 2 cos (180° — Z);
a22 = cos (90° 4- ft) cos (90° - 2)4- sin (90° + ft) sin (90° - 2) cos Z;
a32 = cos (90° 4- ft) cos 90°4- sin (90° 4- ft) sin 90° cos (90° - Z);
a13 = cos 90° cos 2 4- sin 90° sin 2 cos (90° — Z);
a23 = cos 90° cos (90° - 2) 4- sin 90° sin (90° - 2) cos (90° 4- Z);
a33 = cos 90° cos 90° 4~ sin 90° sin 90° cos Z.
После очевидных упрощений получим:
ап = cos ft cos 2 — sin ft sin 2 cos Z;
a21 = cos ft sin 2 -j- sin ft cos 2 cos Z;
<231 = sin 9 sin Z;
a12= — sin ft cos 2 — cos ft sin 2 cos Z;
a22 = ~ sin ft sin 2 4- cos ft cos 2 cos Z;
a32 = cosftsinZ;
a13—-sin 2 sin Z;
a23= — cos 2 sin Z;
a33 = cos Z.
(6.1)
Для составления системы (6.1) можно сформулировать следу-
ющее правило: направляющий косинус после перестановки в
нем цифровых индексов находят, пользуясь табл. 6.1, как произве-
дение косинуса угла собственного /вращения ft (или 90° + #, или
угла 90°) на косинус угла прецессии Q (или 90°—й, или 90°) плюс
произведение синусов тех же углов на косинус угла нутации Z (или
угла, дополняющего до 180°, или до 90°, взятых с обратным зна-
ком). Углы, связанные с ft, берутся из графы / в строке графы j, k
по цифровому значению индекса j (после перестановки индексов),
252
а углы, связанные с Q и i, — из графы k в строках графы /, k, соот-
ветствующих цифровому значению индекса k.
Таблица 6.1
Л k 7 k k
0 1 2 1 1 3
1 н 2 Z — 180°
2 90° + 8- 90° — 2 z
3 90° 90° Z - 90°
Примечание. Для третьей графы при /=3 добавлять угол 90°.
Таким образом, для получения, например, направляющего косинуса ai2 (/=1,
k = 2) берем для a2i = k=\) из 2-й строки 1-го столбца угол 90°+$’, из
1-й строки 2-го столбца угол Q и из 1-й строки 3-го столбца (так как для углов,
связанных с i, используется тот же индекс k, что и для й) угол i— 180°. Затем,
пользуясь теоремой косинусов, получим
я12 = cos (90° + ft) cos 2 -f- sin (90° 4- 9) sin 2 cos (Z — 180°) =
= — sin 8- cos 2 — cos 8 sin Q cos i,
что полностью совпадает с (6.1).
Если направляющий косинус после перестановки имеет индекс
/ = 3, то действуем в соответствии с примечанием к табл. 6.1. На-
пример, для «2з после перестановки индексов получим «32 и далее
берем из 3-й строки 1-го столбца угол +90°, из 2-й строки 2-го
столбца 90°—Q, а из 2-й строки З-го столбца f + 90° (с учетом добав-
ления угла 90°). Используя теорему косинусов, получаем
а23 = cos 90° cos (90° — &) + sin 90° sin (90° — 2) cos (Z + 90°) =
= — cos 2 sin i.
Таким образом описанное мнемоническое правило позволяет,
не прибегая к математическому выводу, определять с помощью
табл. 6.1 направляющие косинусы, выраженные через эйлеровы
углы.
Положение осей системы координат относительно основ-
ной системы Oxyz может быть задано не обязательно эйлеровыми
углами. Однако любые три угла легко заменить эйлеровыми.
Часто таблицу направляющих косинусов записывают в матрич-
ной форме. Тогда запись перехода от системы координат O'^t, к
системе Oxyz получается следующей:
X — ХО'
У~Уо>
- Z — Zo<
_с_
253
где матрица
Такая сокращенная запись показывает, что для получения, напри-
мер, приращения у—у0’, необходимо взять коэффициенты a2k
(6=1, 2, 3), перемножить их последовательно на g, т], g и результа-
ты сложить, т. е.
У — У О’ = ^91? + + ^23^
Если необходимо, наоборот, выразить координаты g, т], g через
(х—х0'), (у—уо’) и (z—z0'), то пишем
; "I Г X — XQf
Ч =Ы у-у0'
_U L *-*<>'
где [akj\ — матрица, транспонированная по отношению к [а?А]:
^11^21^31
2^92^32
-&13#23^33-
Рассмотрим теперь движение спутника около центра масс под
влиянием моментов от малых сил, действующих на орбите. Как бы-
ло выяснено, до высот 500—600 км такими малыми силами являют-
ся аэродинамические силы. На больших высотах в основном начи-
нают действовать моменты от гравитационных сил и сил светового
давления.
Как известно, движение твердого тела около центра масс может
быть описано следующими уравнениями:
Лр + (С-£) qr = Mx,
Bq + (A-C)rp^My-
Cr-\-{B-A)pq = Mz,
(6-2)
где
Л, В, С — главные центральные моменты инерции;
р, 9, г — проекции мгновенной угловой скорости на оси Ох,
Оу, Oz (система координат — связанная, оси Ох,
Оу, Oz, направлены по главным центральным
осям инерции спутника);
Мх, Му, Мг — проекции возмущающего момента на оси Ох,
Оу, Oz.
254
Уравнения движения около центра масс (уравнения Эйлера)
выводятся на основании известной теоремы механики о кинетиче-
ском моменте:
^-=м,
dt
где
К — вектор кинетического момента;
М — вектор главного момента внешних сил.
В зависимости от того, какие силы рассматриваются, правые
части уравнений системы (6.2) будут различными. Вид левых час-
тей зависит от конструктивных особенностей спутника. Так, при
равенстве двух экваториальных моментов инерции (Л = В), что ха-
рактерно для большинства спутников (динамическая симметрия),,
уравнения примут вид
Ap + (C-A)qr = Mx;
Aq + (A~C) pr = My;
Cr = Mz.
Решение системы уравнений движения спутника вокруг центра
масс можно получить лишь в некоторых частных случаях задания
сил. Однако, если действующие моменты малы, то можно приме-
нить методы теории возмущений [5] [6]. Обе системы интегрируются
до конца, если движение невозмущенное, т. е. в правых частях сто-
ят нули (случай Эйлера). Применяя метод вариаций постоянных
интегрирования (аналогично тому, как выводятся уравнения для
оскулирующих элементов), можно получить достаточно простые и
точные выражения для описания основных свойств возмущенного
движения.
В работе [5] был получен -следующий основной вывод.
Если спутник движется под действием аэродинамических и гра-
витационных возмущающих сил, то его движение слагается из не-
возмущенного движения около вектора (кинетического момента (ре-
гулярной прецессии для спутника с динамической симметрией) и
векового движения самого вектора кинетического момента. Это ве-
ковое движение происходит около меняющегося со временем
(вследствие перемещения плоскости орбиты — прецессии узлов)
направления, близкого к направлению касательной к орбите в пе-
ригее, если влияние аэродинамических сил больше влияния грави-
тационных сил, т. е. для низких орбит, и близкого к направлению
нормали к плоскости орбиты, если преобладают гравитационные
силы.
Движение относительно прецессируюптой орбиты мало отличаем
ся от движения относительно неподвижной орбиты.
255
На больших высотах (более 500 км) моменты, появляющиеся
вследствие градиента поля тяготения Земли, в зависимости от кон-
структивных особенностей спутника, могут быть больше или мень-
ше моментов от сил светового давления. Поэтому оба вида сил
должны рассматриваться совместно, как это сделано в работе [8].
6.2. АКТИВНАЯ СТАБИЛИЗАЦИЯ ИСЗ
Для ориентированных спутников, вращающихся около Земли
более или менее продолжительное время, основной является проб-
лема расхода массы на управление. В связи с этим рассмотрим
принцип управления с помощью маховиков. Применение маховиков
в течение длительного времени не может полностью избавить от
необходимости расходовать массу, так как при постоянно действу-
ющих внешних моментах угловая скорость вращения маховиков бу-
дет непрерывно возрастать. Однако этот расход (через реактивные
сопла), целью которого является сведение к нулю накопившейся уг-
ловой скорости маховиков, будет во много раз меньше, чем в слу-
чае применения одних сопел (на несколько порядков).
БудехМ предполагать *, что в корпусе спутника установлены п
статически и динамически сбалансированных реактивных махови-
ков с произвольно ориентированными осями подвеса относительно
некоторой связанной прямоугольной системы координат Oxyz с на-
чалом в центре масс спутника.
Обозначим:
aix, aiy, aiz — направляющие косинусы осей подвеса
(предварительно определив положительное
направление каждой из осей);
-вектор угловой скорости /-го маховика;
wzaZx, ^iaiyy ^iaiz~проекции вектора на оси Ох, Оу, Oz.
Кинетический момент системы в относительном движении, при-
веденный к точке О, будет
/<= X dm,
где
v — вектор скорости элемента массы dm относительно инерци-
__ альных осей координат;
г — радиус-вектор массы dm (интегрирование производится
по всей системе S).
Вектор К можно представить как сумму кинетического момен-
та, получающегося от вращения корпуса спутника вместе с махо-
* Теория управления с помощью маховиков разработана Б. В. Раушенбахом
и Е. Н. Токарем в статье [28].
256
виками, принимаемыми за неподвижные (переносная скорость), и
собственного вращения маховиков относительно осей Oxyz\
[rX^]^+2j lr X ^пер] dm-\- 2 j [г Хг»отн]й'/п =
S' i = l|x. / =
= Цг X h X и] dm-\- 2 lr X г’отн] dm.
s М
В этом выражении скорости точек корпуса и переносные скоро-
сти маховиков заменены по формуле Эйлера у = соХг.
Принимая для маховиков за центры приведения их центры
масс, можно написать
АГ отн I —
где
Ц — осевые моменты инерции маховиков (/=1, 2, ...,п).
Поскольку скорости центров масс маховиков относительно си-
стемы Oxyz равны нулю, то их кинетические моменты не зависят
от центра приведения. Поэтому, приняв точку О за центр приведе-
ния, будем иметь
J [г X hx г]] dm+
S z = l
Очевидно, первое слагаемое является кинетическим моментом спут-
ника при остановленных маховиках.
Направим оси Ох, Оу, Oz по главным центральным осям инер-
ции получаемого таким образом фиктивного твердого тела. Момен-
ты инерции такого тела около этих осей обозначим соответственно
А, В, С. Тогда для первого слагаемого получим
У [г X [ш X и] dm = Apex-]-Bqey-\-Crez,
s
где
ех, еу, ez — единичные векторы по осям Ох, Оу, Oz\
р, q, г —проекции угловой скорости системы Oxyz на
те же оси.
Второе слагаемое можно записать в виде
/=1 Z=1 i=l i=l
257
Учитывая эти выражения, получим
| ех~\г ^/уЛ J gy4~
\ /=1 / \ 1=1 /
(6.3)
Применяя теорему о кинетическом моменте системы M = dkldt
и переходя к проекциям, получаем следующие уравнения движе-
ния около центра масс системы с маховиками:
лр+2 (Cr+ 2шал)-
/=1 \ /=1 /
— )=-^вх4~^рх>
Bq-\- 2 “АуЛ+г( АР+
i = 1 \ i = 1 /
( п \
—р I Сг 2 ®taiziI |=^ву+^ру;
\ «=1 /
Сг+ 2 ^iaiJi + P\ Bq +
1=1 \ 1 = 1 /
— q | Ар -|- ^LaixIi j = MBZ Mpz,
\ /=i /
(6.4)
где
Л4ВХ, Л4ву> Л4вг —проекции возмущающего момента на оси
Ох, Оу, Oz\
Мрх, Мру, Mpz — проекции реактивного момента от сопел
(расходом массы газа пренебрегаем).
Преобразуем эту систему следующим образом (индекс сумми-
рования i от 1 до п опускаем):
а р - 2+a‘yq+7/ + 2 а‘х +aixP+
+ aiyq + aizr} JiPrqr(C~B)-=MBX-}-Mpx — q 2 wiaizqi + r 2‘"/«/y7
Bq - 2 aiy (aixP + a‘yq + a‘^ A + 2 & + a‘xP + a‘yq +
+ aizr) It + rp(.A-C) = MBy + Afpy - r 2 ^iXri + P^ '
258
Cr— '2iaiz(a.ixp + aiyq + aizr) I z+ + +
+ a.izh Ц + pq (В - A) = MBz+ Mpz-p 2 + q 2
Третьи слагаемые в левых частях полученных уравнений пред-
ставляют собой суммы проекций на оси Ох, Оу, Oz производных от
проекций полной угловой скорости маховиков на их оси подвеса,
помноженные на момент инерции Ц.
Применяя динамические уравнения Эйлера отдельно к махови-
кам, можно слагаемые в левой части преобразовать так:
2 + а1хР + а1уЯ + aizr) Л = 2 а'х (Mai + MCi) =
= - И Т. Д.,
где
Mat — активный момент двигателя, вращающего
маховик;
Ма1 — противоположный момент, приложенный
к корпусу;
ТИс/ —момент сопротивления на валу маховика;
Мс1 — противоположный момент, приложенный
к корпусу;
Mai> Mai, Al'd, Mci -—алгебраические величины, отсчитываемые
с учетом положительного направления от
маховика.
Переходя к величинам Маг, Mci, окончательно получаем
А р - 2 а‘х *р+а‘ а+а'*г) л+<?г (с - =
= 7ИВЛ7Ирх-f- ^ixA^ai + -^cz) Я Н-г ^2 ^iPtA I’
Bq—Уaty(,aixя + atA+aizh h+rp{A-c)=м +
} (6.5)
+ -Mpy + 2 a,'y ^al ~ r S ^ialx^I АР 2 WiaAi >
ci- - 2 aiz AixP-V aiA+aizr) fi +pq (B-A)=mbz+
+AipzA 2 а‘г^ai MA—p 2 “АуЛ+q 2 wiaAt-
Последние два слагаемых в правых частях уравнений представ-
ляют собой проекции гироскопических моментов (на оси, указан-
ные в индексах), приложенных к спутнику. Они обусловлены вы-
нужденной прецессией маховиков. Члены Мрх,^ aixMai и т. д. яв-
ляются проекциями управляющих моментов, вырабатываемых
исполнительными органами.
259
Рассмотрим случай трех маховиков [28] с осями вращения, сов
падающими по направлению с осями Ох, Оу, Oz. Для направляю
щих косинусов будем иметь
a\xa\ya\z
^2 x^2y^2z
-^Зх^Зу^Зг -
’1 О О"
О 1 о
.0 0 1_
Обозначим:
0)1=0)/,
^al ^ах^
о)2 = соу;
Ма2 = Мау,
Мс2 = МСу,
о)3 = о)2;
Mc3 = Mcz.
Кроме того, положим /,1=/2 = /3=/. Уравнения движения спут-
ника около центра масс (6.5) примут вид:
(А —Г) р-\-(С — В) qr =
(B-i)q + (A-C)rp =
= ^ву 4“ ^ру + ^ау + ^су — ^Хг1 + ®zPh
(С — Г) г-\-(В — A)pq =
= ^bz + ^Pz -{-Maz-]rMcz — (tiyp[-\-^xqI.
(6.6)
Рис. 71. Последовательность по-
воротов координатной системы на
углы О’, \|) и ср
(Правые части этих уравнений совпадают с правыми частями
уравнений Эйлера, записанными для корпуса спутника. Они содер-
жат проекции всех внешних по отношению к корпусу моментов
(моменты _МВ, Мр, Mai, MCi и гироскопические моменты маховиков).
В отличие от уравнений Эйлера оси Ох, Оу, Oz по отношению
к корпусу спутника не являются
главными и центральными осями
инерции и величины А, В, С или раз-
ности А — 1, В — I и С — I, к кото-
рым легко перейти, не совпадают с
моментами инерции корпуса спутни-
ка около этих осей.
При движении по орбите возму-
щающие моменты, воздействующие
на спутник, очень малы и во многих
случаях их можно вообще не учиты-
вать. К таким моментам, напри-
мер, относятся режимы програм-
мных поворотов [28].
Прежде чем перейти к анализу
!60
этих режимов, введем углы, связывающие подвижную систему
координат Oxyz с выбранной инерциальной системой отсчета
OxqUqZq.
Определим угол Ф как угол между Ох\ проекцией оси Ох на
плоскость х0Оуо и осью Охо. Угол ip определим как угол между
Ох' и осью Ох. Угол ф будет между осью Оу и линией пересечения
плоскостей х^Оув и yOz (рис. 71).
Такое задание углов, связывающих обе системы координат, по
сравнению с обычными эйлеровыми углами в рассматриваемом
случае более выгодно, так как позволяет получить простые урав-
нения движения тела при малых значениях углов поворота.
В табл. 6.2 приведены направляющие косинусы для осей, свя-
занных со спутником, и инерциальных осей.
Таблица 6.э>
Оси инерци- альной системы Оси связанной системы
X У z
А) cos ф cos ft — cos cp sin ft + sin ср X X sin ф cos ft COS cp sin ф cos ft + 4- sin cp sin ft
Уо cos ф sin ft cos cp cos ft + sin cp x X sin ф sin ft cos cp sin ф sin ft — — sin cp cos ft
?о — sin ф sin cp cos ф COS cp cos ф
Проекции угловой скорости корпуса спутника через углы Ф, гр,
Ф выражаются следующим образом:
р = ® — ft sin ф;
7 = ф cos ср-ф-ft sin ср cos ф;
r = ft cos ср cos ф — ф sin ср.
(6-7)
Если к спутнику внешние моменты не приложены, т. е. Л4 = 0,
то, очевидно, К=С, где С — постоянный вектор. Обозначим его
проекции на оси Ox0l Оу0, Oz0 через СХо, СУо, CZ[).
Используя правило определения направляющих косинусов, по-
лучаем:
СХо = Кх cos ф cos ft-ф-/Су (sin ср sin ф cos ft — cos ср sin ft) +
-ф Kz (cos ср sin ф cos ft -ф sin ср sin ft);
CyQ = Kх cos ф sin (sin ср sin ф sin -ф- cos ср cos ft) -ф
-\-Kz (cos ср sin ф sin ft — sin cp cos ft);
(6.8)
CZq = — К x sin ф -ф К у sin cp cos ф -ф Kz cos cp cos ф,
где величины Kx, Ky, Kz — проекции кинетического момента на
связанные оси.
261
Очевидно, что
Cl+С2Уо + Cl=K\ + К2у + Kl
Пусть оси Ох и Оу подвижной системы лежат в плоскости,
параллельной плоскости Oxof/o- Тогда в невозмущенном движении
ф = <р = О и для Сх0, СУо, CZo получим:
CXq=Kx cos & — Ку sin ft;
СУо=Кх sin $-\-Ky cos &;
cZo=Kz.
(6.9}
Предположим далее, что угол ft является заданной периодиче-
ской функцией времени. Примером такого движения является
случай облета Земли при постоянном направлении одной из осей
спутника, лежащей в плоскости Oxyz (параллельной плоскости
орбиты), к центру притяжения. Очевидно, при таком движении
величины Кх и Ку будут также периодическими функциями вре-
мени, причем1
Кх=Сху Sin [ЧО+Я; 1
/Cy=Cxycos[S(0 + 6], / ( }
где
и 6 = arctg-^.
При невозмущенном движении ф = ф = 0, р — 0, 7 = 0, г = ® и,
как следует из формулы (6.8), неравные нулю, проекции кинети-
ческих моментов Кх и Ку, являются проекциями кинетических мо-
ментов маховиков, которые, вообще говоря, приобрели некоторые
угловые скорости за время, предшествующее рассматриваемому
моменту. Число оборотов маховиков должно периодически изме-
няться. При трех маховиках с осями вращения, параллельными
осям Ох, Оу, Oz, числа оборотов изменяются у тех из них, оси
которых параллельны осям Ох и Оу. Если проекции кинетического
момента корпуса на оси Ох и Оу равны нулю, то
КХ=^Х1Х и Ку ^у^у)
где 1Х и 1У — моменты инерции маховиков;
<ох и (х)у — угловые скорости маховиков.
Учитывая последние формулы, можно сказать, что сох и со2у
являются периодическими функциями времени. Это объясняется
тем, что при г=Д0 на основании уравнений (6.6) угловые скорости
маховиков сох и дадут неравные нулю гироскопические момен-
ты. Они должны быть погашены соответствующим ускорением или
замедлением скорости вращения маховиков, что необходимо для
выполнения требования р = 0 и 7 = 0.
262
Указанные ускорения и замедления, связанные с затратой энер-
гии, не являются необходимыми для упорядоченного движения
по орбите. Если принять в начальный момент, что проекции век-
тора К на плоскость орбиты (плоскость ОхоУо^о) равны нулю,
т. е. СХо=СУо=0, то сох = (о2/ = 0 в течение всего (времени движения
по орбите. Следовательно, для уменьшения затрат энергии необ-
ходимо затормозить маховики, оси которых лежат в плоскости
орбиты.
На основании анализа кинетической энергии маховиков можно
сделать вывод, что для уменьшения энергетических потерь следует
моменты инерции маховиков 1Х и 1У выбирать как можно боль-
шими и одинаковыми по величине.
Рассмотрим случай стабилизации спутника около заданного
неизменного положения в пространстве, т. е. поддержания направ-
лений осей Ох, Оу, Oz по осям Ох0, OyQ, Oz0 [28].
Будем пренебрегать величиной осевого момента инерции ма-
ховиков I по сравнению с моментами инерции А, В и С. Также
примем Л1в = Л4р = 0 и пренебрежем моментами сопротивлений и
гироскопическими моментами по сравнению с величинами управ-
ляющих моментов Мах, Мау, Maz. Пусть отклонения осей являются
малыми. При этих допущениях
р = ср; q = ^\ г = Ь.
Предположим далее, что р, q, г — величины того же порядка
малости, что и р, q, z. Тогда вторые слагаемые левых частей урав-
нений стабилизации спутника (6.6) могут быть отброшены, и урав-
нения примут вид
А<?=Мах; £Ц = Мау, СЬ=Маг. (6.11)
Допустим еще, что момент на валу реактивного маховика яв-
ляется функцией развитой им угловой скорости и, кроме того,
зависит от угла <р и ср, т. е.
— Мах (<«х, ?);
— Мау ф, ф);
С& = -М'г^г, ^)-
В этом случае очевидно, что колебания спутника около осей Ох,
Оу, Oz будут независимыми.
Разложим величину Мах в ряд вблизи точки (сохО, 0,0) соответ-
ствующей невозмущенному режиму. С точностью до линейных чле-
нов получим
л д' / _ лл' ( С\\ \ (д^ах £ I । \ ’
Мах \^х> ?) — А4ах (^хО, 0, 0) -|- I - I 0(1) -|- I —-— I ср -ф-1 - I ср
V д(о /0 \ /0 \ д<? 'о
263
и уравнение движения спутника в плоскости yOz будет иметь вид
•• , (дМ'\ . , ( дМ'\ / дМ'\
Л?+1—- ? + ( —I— I T+l-T— ) %шх = Мах(шх0, 0, 0).
\ д<? / \ <*Р / \ ди> )
Используя выражение (6.9) для проекции С\, и отбрасывая
члены первого и высших порядков малости, получаем
c^=Kx=A^-[-I^x.
Варьируя вблизи точки (<охо, 0,0), имеем
8шх=—
Окончательно уравнение движения примет вид
/ дМ' л дМ'\ . / дМ'\
Л?+ —о, 0). (6.12)
Член Мах (<0хо, 0, 0) выражает смещающее воздействие и обуслов-
ливает статическую ошибку системы
Мах (<охо, 0, 0)
Тст~ эм'ах
ду
Важно отметить, что при —— <0 зависимость момента Л4ах
дер
от угловой скорости маховика сох способствует гашению возму-
щения.
Таким образом изложенная теория позволяет решать конкрет-
ные задачи, связанные с применением реактивных маховиков в
качестве органов стабилизации для ИСЗ. Системы ориентации, в
которых применяются маховики благодаря малому расходу рабо-
чего тела должны обеспечить возможность длительного существо-
вания управляемого спутника в космическом -пространстве.
П риложение
ТАБЛИЦЫ ИНТЕГРАЛОВ /, н-/8
а=0,2
\b О0^ 0 —0,2 —0,4 —0,6 —0,8 —1,о —1,2
—32 —0,6526 —0,6556 —0,7087 —0,7526
—28 —0,5657 —0,5969 —0,6576 —0,7080
—24 —0,4806 —0,5353 —0,6038 —0,6608
—20 —0,3971 —0,4711 —0,5473 —0,6110
—16 —0,3156 —0,4043 —0,4880 —0,5588
—12 —0,2355 —0,3351 —0,4259 —0,5037
—8 —0,1563 —0,2636 —0,3610 —0,4455
—4 —0,0778 —0,1900 —0,2932 —0,3843
0 0 —0,1146 —0,2226 —0,3198 —0,4044 —0,4768 —0,5383
4 0,0778 —0,0375 —0,1492 —0,2518 —0,3426 —0,4209 —0,4879
8 0,1562 0,0409 -0,0731 —0,1803 —0,2768 —0,3611 —0,4338
12 0,2355 0,1201 0,0055 —0,1051 —0,2068 —0,2970 —0,3753
16 0,3156 0,1999 0,0865 —0,0263 —0,1323 —0,2281 —0,3122
20 0,3971 0,2798 0,1693 0,0562 —0,0531 —0,1539 —0,2437
24 0,4806 0,3592 0,2536 0,1420 0,0310 —0,0739 —0,1691
28 0,5657 0,4374 0,3386 0,2309 0,1200 0,0121 —0,0877
32 0,6526 0,5141 0,4236 0,3220 0,2137 0,1049 0,0012
36 0,7412 0,5883 0,5077 0,4145 0,3115 0,2041 0,0982
40 0,8303 0,6596 0,5898 0,5069 0,4122 0,3093 0,2038
44 0,9176 0,7272 0,6687 0,5968 0,5140 0,4193 0,3177
48 0,9996 0,7908 0,7433 0,6852 0,6147 0,5317 0,4384
52 1,0689 0,8493 0,8125 0,7671 0,7110 0,6430 0,5628
Ю—2343
265
Продолжение
\ ь 0° \ 0 —0,2 —0,4 —0,6 —0,8 —1,0 -1,2
—32 0,9049 0,9018 0,8583 0,8170
—28 0,9616 0,9415 0,8974 0,8547
—24 1,0068 0,9776 0,9338 0,8903
—20 1,0426 1,0100 0,9674 0,9239
—16 1,0701 1,0384 0,9980 0,9550
—12 1,0905 1,0626 1,0254 0,9839
—8 1,1047 1,0824 1,0495 1,0103
—4 1,1130 1,0976 1,0699 1,0340
0 1,1157 1,1080 1,0864 1,0546 1,0169 0,9767 0,9364
4 1,1130 1,1132 1,0986 1,0719 1,0375 0,9991 0,9594
/о 8 1,1047 1,1131 1,1060 1,0855 1,0553 1,0194 0,9810
2 12 1,0905 1,1074 1,1084 1,0948 1,0698 1,0373 1,0009
16 1,0701 1,0959 1,1051 1,0993 1,0805 1,0524 1,0188
20 1,0426 1,0784 1,0958 1,0983 1,0867 1,0641 1,0342
24 1,0068 1,0548 1,0798 1,0910 1,0876 1,0715 1,0464
28 0,9616 1,0250 1,0568 1,0766 1,0820 1,0738 1,0546
32 0,9049 0,9889 1,0264 1,0542 1,0689 1,0696 1,0578
36 0,8339 0,9468 0,9883 1,0230 1,0468 1,0572 1,0543
40 0,7454 0,8989 0,9426 0,9823 1,0146 1,0349 1,0421
44 0,6346 0,8453 0,8894 0,9324 0,9708 1,0006 1,0186
48 0,4955 0,7865 0,8290 0,8726 0,9149 0,9522 0,9807
52 0,3200 0,7230 0,7622 0,8040 0,8470 0,8886 0,9256
а=0,4
\ ь 0°\ 0 —0,2 —0,4 —0,6 —0,8 —1,0 —1,2
/1 —32 —28 —24 —20 —16 —12 —8 —4 —0,7471 —0,6476 —0,5501 —0,4546 —0,3613 —0,2695 —0,1788 —0,0891 —0,7536 —0,6868 —0,6168 —0,5437 —0,4677 —0,3888 —0,3072 —0,2233 —0,8168 —0,7591 —0,6983 —0,6344 —0,5673 —0,4970 —0,4233 —0,3464 —0,8686 —0,8186 —0,7657 —0,7098 —0,6512 —0,5892 —0,5236 —0,4546
266
Продолжение
\ ь 6°\ 0 -0,2 —0,4 —0,6 —0,8 —1,0 —1,2
0 0 —0,1371 —0,2661 —0,3816 —0,4817 —0,5668 —0,6387
4 0,0891 —0,0490 —0,1825 —0,3046 —0,4121 —0,5044 —0,5828
8 0,1788 0,0407 —0,0956 —0,2234 —0,3379 —0,4374 —0,5226
12 0,2695 0,1316 —0,0057 —0,1378 —0,2588 —0,3654 —0,4574
16 0,3613 0,2230 4-0,0870 —0,0478 —0,1742 —0,2876 —0,3867
20 0,4546 0,3147 +0,1822 0,0466 —0,0840 —0,2036 —0,3097
/1 24 0,5501 0,4059 0,2791 0,1452 0,0123 —0,1127 —0,2255
28 0,6476 0,4960 0,3772 0,2476 0,1145 —0,0143 —0,1332
32 0,7471 0,5841 0,4754 0,3529 0,2226 0,0920 —0,0318
36 0,8485 0,6697 0,5726 0,4601 0,3358 0,2065 0,0796
40 0,9503 0,7518 0,6677 0,5676 0,4529 0,3286 0,2016
44 1,0504 0,8298 0,7592 0,6734 0,5719 0,4570 0,3340
48 1,1443 0,9030 0,8458 0,7753 0,6898 0,5889 0,4755
52 1,2235 0,9704 0,9261 0,8711 0,8030 0,7200 0,6222
—32 1,0359 1,0299 0,9778 0,9285
—28 1,1008 1,0753 1,0225 0,9715
—24 1,1525 1,1168 1,0642 1,0122
—20 1,1935 1,1540 1,1028 1,0507
—16 1,2250 1,1866 1,1380 1,0865
—12 1,2483 1,2146 1,1698 1,1198
—8 1,2645 1,2376 1,1977 1,1504
—4 1,2740 1,2554 1,2217 1,1781
0 1,2771 1,2676 1,2412 1,2024 1,1567 1,1081 1,0595
4 1,2740 1,2740 1,2558 1,2231 1,1811 1,1344 1,0865
г 8 1,2645 1,2743 1,2652 1,2397 1,2025 1,1586 1,1120
1 2 12 1,2483 1,2682 1,2687 1,2515 1,2203 1,1803 1,1358
16 1,2250 1,2554 1,2658 1,2578 1,2340 1,1990 1,1576
20 1,1935 1,2358 1,2560 1,2579 1,2427 1,2140 1,1768
24 1,1525 1,2090 1,2385 1,2509 1,2454 1,2245 1,1927
28 1,1008 1,1752 1,2129 1,2357 1,2408 1,2292 1,2044
32 1,0359 1,1342 1,1787 1,2112 1,2276 1,2266 1,2106
36 0,9545 1,0861 1,1356 1,1766 1,2041 1,2149 1,2094
40 0,8532 1,0311 1,0835 1,1310 1,1686 1,1916 1,1983
44 0,7264 0,9698 1,0226 1,0740 1,1196 1,1543 1,1742
48 0,5672 0,9024 0,9534 1,0057 0,0562 1,1003 1,1333
52 0,3663 0,8296 0,8766 0,9268 0,9783 1,0281 1,0718
ю*
267
я=0,6
ь о° X. —0,4 —0,6 —0,8 —1,0 —1,2
0 —0,3368 —0,4819 —0,6066 —0,7118 —0,7998
4 —0,2375 —0,3912 —0,5254 —0,6397 —0,7359
8 —0,1340 —0,2952 —0,4386 —0,5621 —0,6668
12 —0,0267 —0,1937 —0,3455 —0,4782 —0,5918
16 0,0843 —0,0865 —0,2457 —0,3874 —0,5100
20 0,1985 0,0264 —0,1386 —0,2886 —0,4205
ц 24 0,3153 0,1448 —0,0238 —0,1812 —0,3219
28 0,4336 0,2683 0,0989 —0,0640 —0,2132
32 0,5525 0,3958 0,2293 0,0634 —0,0928
36 0,6705 0,5262 0,3668 0,2016 0,0405
40 0,7861 0,6574 0,5099 0,3502 0,1879
44 0,8976 0,7872 0,6560 0,5077 0,3495
48 1,0030 0,9122 0,8015 0,6707 0,5238
52 1,1009 1,0300 0,9417 0,8337 0,7063
0 1,4803 1,4299 1,3708 1,3084 1,2466
4 1,4990 1,4560 1,4013 1,3410 1,2796
8 1,5115 1,4774 1,4285 1,3714 1,3113
12 1,5171 1,4934 1,4518 1,3992 1,3414
16 1,5151 1,5030 1,4705 1,4238 1,3694
20 1,5047 1,5053 1,4835 1,4445 1,3948
24 1,4852 1,4991 1,4895 1,4601 1,4170
28 1,4558 1,4830 1,4871 1,4692 1,4345
32 1,4159 1,4559 1,4743 1,4700 1,4460
36 1,3651 1,4162 1,4491 1,4599 1,4492
40 1,3033 1,3630 1,4092 1,4360 1,4409
44 1,2304 1,2954 1,3526 1,3947 1,4171
48 1,1475 1,2140 1,2778 1,3328 1,3725
52 1,0552 1,1191 1,1847 1,2477 1,3019
268
а=0,7
\ ь о°\^ —0,4 —0,6 —0,8 —1,0 —1,2
0 —0,3938 —0,5624 —0,7066 —0,8274 —0,9280
4 —0,2824 —0,4613 —0,6168 —0,7482 —0,8582
8 —0,1662 —0,3541 —0,5204 —0,6628 —0,7827
12 —0,0454 -0,2405 —0,4168 —0,5702 —0,7005
16 0,0796 —0,1200 —0,3055 —0,4695 —0,6106
20 0,2086 0,0069 —0,1856 —0,3598 —0,5118
л 24 0,3406 0,1405 —0,0567 —0,2398 —0,4026
28 0,4749 0,2803 0,0817 —0,1086 —0,2816
32 0,6098 0,4252 0,2294 0,0350 —0,1470
36 0,7440 0,5737 0,3858 0,1914 0,0031
40 0,8757 0,7236 0,5492 0,3607 0,1699
44 1,0026 0,8721 0,7168 0,5410 0,3542
48 1,1230 1,0156 0,8842 0,7287 0,5544
52 1,2348 1,1508 1,0459 0,9172 0,7653
0 1,6640 1,6042 1,5341 1,4606 1,3880
4 1,6860 1,6346 1,5694 1,4980 1,4257
8 1,7011 1,6599 1,6013 1,5333 1,4622
12 1,7085 1,6792 1,6290 1,5659 1,4972
16 1,7073 1,6916 1,6516 1,5953 1,5301
20 1,6967 1,6959 1,6683 1,6206 1,5606
г 24 1,6758 1,6906 1,6773 1,6405 1,5878
/о 28 1,6437 1,6743 1,6769 1,6535 1,6103
32 1,5996 1,6453 1,6650 1,6573 1,6264
36 1,5430 1,6020 1,6389 1,6491 1,6336
40 1,4737 1,5432 1,5961 1,6253 1,6281
44 1,3920 1,4678 1,5338 1,5817 1,6052
48 1,2982 1,3761 1,4506 1,5141 1,5587
52 1,1939 1,2689 1,3458 1,4194 1,4820
269
41=0,75
Ь 0°^\ —0,4 —0,6 —0,8 —1,0 —1,2
0 —0,4327 —0,6174 —0,7748 —0,9061 —1,0150
4 -0,3134 —0,5096 —0,6793 —0,8224 —0,9415
8 —0,1888 —0,3951 —0,5767 —0,7318 —0,8619
12 —0,0591 —0,2733 —0,4663 —0,6335 —0,7750
16 0,0754 —0,1443 —0,3474 —0,5266 —0,6799
20 0,2142 —0,C078 —0,2191 —0,4096 . —0,5751
24 0,3564 0,1360 —0,0808 -0,2814 —0,4591
h 28 0,5013 0,2869 0,0680 —0,1409 —0,3300
32 0,6471 0,4432 0,2272 0,0134 —0,1861
36 0,7921 0,6039 0,3963 0,1820 —0,0251
40 0,9346 0,7664 0,5734 0,3650 0,1547
44 1,0721 0,9276 0,7554 0,5607 0,3542
48 1,2025 1,0836 0,9377 0,7659 0,5717
52 1,3237 1,2306 1,1141 0,9710 0,8020
0 1,7863- 1,7198 1,6421 1,5609 1,4810
4 1,8105 1,7531 1,6807 1,6017 1,5219
8 1,8273 1,7811 1,7157 1,6402 1,5616
12 1,8360 1,8028 1,7465 1,6762 1,5998
16 1,8355 1,8172 1,7720 1,7038 1,6362
20 • 1,8249 1,8229 1,7911 1,7372 1,6701
24 1,8031 1,8184 1,8022 1,7602 1,7007
I 2 28 1,7692 1,8020 1,8034 1,7759 1,7266
32 1,7224 1,7719 1,7922 1,7819 1,7460
36 1,6620 1,7264 1,7658 1,7752 1,7561
40 1,5878 1,6638 1,7212 1,7518 1,7529
44 1,5090 1,5834 1,6554 1,7069 1,7310
48 1,3992 1,4849 1,5666 1,6358 1,6835
52 1,2867 1,3694 1,4541 1,5348 1,6030
270
а=0,80
b 60 \ —0,4 -0,6 —0,8 —1,0 — 1,2
0 —0,4829 —0,6885 —0,8627 —1,0074 —1,1268
4 —0,3537 —0,5720 —0,7601 —0,9180 —1,0488
8 —0,2184 —0,4481 —0,6498 —0,8210 —0,9640
12 —0,0775 —0,3163 —0,5309 —0,7157 —0,8715
16 0,0689 —0,1764 —0,4024 —0,6007 —0,7699
20 0,2202 —0,0280 —0,2635 —0,4748 —0,6577
/1 24 28 0,3754 0,5337 0,1288 0,2933 —0,1134 0,0486 —0,3365 —0,1841 —0,5331 —0,3942
32 0,6933 0,4646 0,2224 —0,0165 —0,2385
36 0,8524 0,6408 0,4076 0,1676 —0,0637
40 1,0086 0,8194 0,6022 0,3680 0,1324
44 1,1597 0,9968 0,8028 0,5834 0,3511
48 1,3029 1,1688 1,0042 0,8091 0,5909
52 1,4360 1,3311 1,1993 1,0373 0,8462
0 1,9411 1,8659 1,7785 1,6872 1,5977
4 1,9682 1,9031 1,8212 1,7322 1,6427
8 1,9874 1,9346 1,8603 1,7750 1,6864
12 1,9977 1,9593 1,8949 1,8151 1,7289
16 1,9982 1,9762 1,9242 1,8520 1,7696
20 1,9875 1,9839 1,9466 1,8846 1,8080
24 28 1,9648 1,9287 1,9805 1,9642 1,9606 1,9638 1,9115 1,9309 1,8431 1,8735
32 1,8779 1,9328 1,9537 1,9400 1,8973
36 1,8133 1,8845 1,9271 1,9354 1,9112
40 1,7329 1,8174 1,8803 1,9126 1,9112
44 1,6374 1,7304 1,8103 1,8658 1,8908
48 1,5275 1,6234 1,7144 1,7908 1,8426
52 1,4048 1,4974 1,5921 1,6819 1,7576
271
я=0,82
\ b 6° —0,4 —0,6 —0,8 —1,0 —1,2
0 —0,5080 —0,7233 —0,9060 —1,0573 —1,1819
4 —0,3737 —0,6028 —0,8001 —0,9651 —1,1017
8 —0,2333 —0,4745 —0,6861 —0,8653 —1,0145
12 —0,0869 —0,3379 —0,5630 —0,7567 —0,9193
16 0,0652 —0,1927 —0,4299 —0,6380 —0,8145
20 0,2226 —0,0385 —0,2860 —0,5078 —0,6989
24 0,3843 0,1245 —0,1301 —0,3645 —0,5702
II 28 0,5491 0,2958 0,0382 —0,2066 —0,4266
32 0,7155 0,4742 0,2192 —0,0324 —0,2653
36 0,8814 0,6582 0,4122 0,1592 —0,0838
40 1,0440 0,8448 0,6154 0,3684 0,1203
44 1,2020 1,0291 0,8252 0,5935 0,3483
48 1,3516 1,2102 1,0361 0,8300 0,5986
52 1,4906 1,3798 1,2407 ' 1,0695 0,8667
0 2,0162 1,9369 1,8444 1,7483 1,6541
4 2,0448 1,9759 1,8892 1,7953 1,7010
8 2,0655 2,0090 1,9304 1,8401 1,7468
12 2,0763 2,0354 1,9669 1,8823 1,7912
16 2,0772 2,0535 1,9979 1,9212 1,8341
20 2,0667 2,0621 2,0220 1,9558 1,8746
24 2,0435 2,0593 2,0374 1,9847 1,9119
/ о 28 2,0065 2,0431 2,0418 2,0059 1,9446
32 1,9546 2,0112 2,0323 2,0166 1,9705
36 1,8871 1,9616 2,0056 2,0132 1,9865
40 1,8036 1,8936 1,9580 1,9909 1,9881
44 1,7044 1,8035 1,8860 1,9441 1,9687
48 1,5901 1,6923 1,7868 1,8668 1,9202
52 1,4623 1,5612 1,6599 1,7548 1,8331
a
0° Ь —0,4 —0,6
0 —0,5367 —0,7636
4 —0,3969 —0,6384
8 —0,2506 —0,5050
12 —0,0980 —0,3629
16 0,0608 —0,2116
20 0,2251 —0,0504
г 24 0,3941 0,1197
11 28 0,5664 0,2983
32 0,7404 0,4850
36 0,9141 0,6776
40 1,0848 0,8731
44 1,2500 1,0677
48 1,4067 1,2573
52 1,5523 1,4349
0 2,1019 2,0174
4 2,1321 2,0585
8 2,1538 2,0937
12 2,1659 2,1218
16 2,1674 2,1416
20 2,1569 2,1513
г 24 2,1332 2,1492
28 2,0950 2,1331
32 2,0413 2,1007
36 1,9713 2,0496
40 1,8844 1,9778
44 1,7810 1,8842
48 1,6617 1,7682
52 1,5281 1,6312
:=0,84
—0,8 —1,0 —1,2 —1,4 —1,6
—0,9556 —1,1143 —1,2448 —1,3521 —1,4407
—0,8461 -1,0192 —1,1624 —1,2802 —1,3775
—0,7278 —0,9160 —1,0726 —1,2018 — 1,3087
I —0,6002 —0,8036 —0,9742 —1,1158 —1,2332
—0,4619 —0,6805 —0,8661 —1,0210 —1,1498
—0,3121 —0,5456 —0,7465 —0,9157 —1,0570
—0,1498 —0,3968 —0,6132 —0,7977 —0,9528
0,0258 —0,2325 —0,4642 —0,6648 —0,8349
0,2149 —0,0510 —0,2966 —0,5136 —0,7001
1 0,4169 0,1490 —0,1076 —0,3406 —0,5444
0,6298 0,3679 0,1054 —0,1414 —0,3631
0,8500 0,6040 0,3442 0,0883 —0,1495
1,0717 0,8525 0,6074 0,3518 0,1025
1,2870 1,1047 0,8891 0,6485 0,3985
1,9194 1,8177 1,7182 1,6241 1,5370
1,9665 1,8669 1,7671 1,6715 1,5820
2,0099 1,9140 1,8151 1,7185 1,6272
2,0487 1,9586 1,8619 1,7653 1,6726
2,0818 1,9999 1,9071 1,8116 1,7182
2,1079 2,0368 1,9502 1,8571 1,7640
2,1250 2,0680 1,9900 1,9014 1,8098
2,1306 2,0914 2,0253 1,9435 1,8551
2,1219 2,1040 2,0538 1,9821 1,8991
2,0952 2,1019 2,0722 2,0148 1,9405
2,0466 2,0802 2,0756 2,0379 1,9768
1,9723 2,0329 2,0575 2,0455 2,0036
1,8693 1,9534 2,0088 2,0284 2,0133
1,7370 1,8367 1,9194 1,9737 1,9934
я=0,86
0°\ —0,4 —0,6 —0,8 —1,0 —1,2 —1,4 -1,6
0 —0,5700 —0,8110 —1,0139 —1,1813 —1,3185 —1,4308 -1,5235
4 —0,4240 —0,6803 —0,8998 —1,0827 —1,2331 — 1,3567 —1,4586
8 —0,2710 —0,5410 —0,7768 —0,9755 —1,1402 —1,2759 —1,3878
12 —0,1111 —0,3925 —0,6437 —0,8587 —1,0385 —1,1872 —1,3101
16 0,0553 —0,2342 —0,4996 —0,7308 —0,9264 —1,0893 —1,2242
20 0,2276 —0,0658 —0,3431 —0,5903 —0,8023 —0,9803 —1,1286
24 0,4050 —0,1125 —0,1733 —0,4351 —0,6638 -0,8582 —1,0211
Л 28 0,5859 4-0,3005 0,0107 —0,2635 —0,5086 —0,7202 —0,8991
32 0,7690 0,4968 0,2091 —0,0734 —0,3338 —0,5631 —0,7594
36 0,9516 0,6995 0,4215 0,1364 —0,1361 —0,3828 —0,5978
40 1,1314 0,9058 0,6458 0,3665 0,0872 —0,1747 —0,4088
44 1,3053 1,1106 0,8781 0,6153 0,3383 0,0661 —0,1860
48 1,4703 1,3099 1,1124 0,8778 0,6160 0,3433 0,0782
52 1,6237 1,4980 1,3402 1,1448 0,9141 0,6567 0,389'8
0 2,2008 2,1104 2,0057 1,8973 1,7934 1,6918 1,5995
4 2,2328 2,1540 2,0555 1,9491 1,8436 1,7415 1,6466
8 2,2561 2,1915 2,1015 1,9990 1,8936 1,7909 1,6940
12 2,2694 2,2217 2,1429 2,0463 1,9431 1,8402 1,7417
16 2,2715 2,2432 2,1785 2,0904 1,9911 1,8892 1,7898
20 2,2612 2,2542 2,2069 2,1301 2,0371 1,9375 1,8382
24 2,2370 2,2530 2,2259 2,1640 2,0799 1,9848 1,8869
h 28 2,1975 2,2371 2,2332 2,1898 2,1183 2,0302 1,9352
32 2,1418 2,2040 2,2254 2,2047 2,1497 2,0721 1,9827
36 2,0687 2,1513 2,1989 2,2043 2,1710 2,1082 2,0277
40 1,9779 2,0769 2,1492 2,1835 2,1768 2,1347 2,0679
44 1,8696 1,9791 2,0723 2,1356 2,1601 2,1453 2,0986
48 1,7446 1,8578 1,2651 2,0536 2,1115 2,1303 2,1120
52 1,6045 1,7142 1,8265 1,9326 2,0197 2,0758 2,0947
274
я=О,88
\ ь o°V —0,4 —0,6 —0,8 —1,0 —1,2 —1,4 —1,6
0 —0,6099 —0,8668 —1,0829 —1,2606 —1,4058 —1,5243 —1,6217
4 —0,4564 —0,7300 —0,9638 —1,1578 —1,3172 —1,4476 —1,5548
8 —0,2954 —0,5839 —0,8351 —1,0462 —1,2208 —1,3640 —1,4818
12 —0,1271 —0,4280 —0,6959 —0,9244 —1,1150 —1,2722 —1,4016
16 4-0,0483 —0,2615 —0,5448 —0,7910 —0,9984 —1,1706 —1,3129
20 0,2300 —0,0842 —0,3806 —0,6439 —0,8691 —1,0575 —1,2139
24 0,4172 0.1037 —0,2021 —0,4813 —0,7246 —0,9305 —1,1026
I1 28 0,6085 0,3022 —0,0082 —0,3011 —0,5623 —0,7868 —0,9760
32 0,8020 0,5098 0,2012 —0,1011 —0,3790 —0,6227 —0,8307
36 0,9954 0,7246 0,4259 0,1203 —0,1712 —0,4340 —0,6622
40 1,1858 0,9433 0,6638 0,3639 0,0643 —0,2155 —0,4647
44 1,3702 1,1616 0,9103 0,6280 0,3299 0,0383 —0,2308
48 1,5454 1,3729 1,1600 0,9075 0,6249 0,3316 0,0475
52 .1,7081 1,5738 1,4029 1,1922 0,9427 0,6646 0,3775
0 2,3172 2,2198 2,1072 1,9907 1,8774 1,7709 1,6726
4 2,3515 2,2653 2,1601 2,0458 1,9319 1,8233 1,7221
8 2,3766 2,3065 2,2093 2,0989 1,9856 1,8756 1,7721
12 2,3913 2,3391 2,2537 2,1494 2,0383 1,9279 1,8225
16 2,3945 2,3628 2,2922 2,1971 2,0897 1,9800 1,8735
20 2,3841 2,3754 2,3234 2,2398 2,1390 2,0317 1,9250
24 2,3594 2,3754 2,3448 2,2770 2,1855 2,0825 1,9770
л 28 2,3185 2,3598 2,3541 2,3059 2,2274 2,1316 2,0291
32 2,2603 2,3262 2,3476 , 2,3234 2,2625 . 2,1776 2,0305
36 2,1837 2,2717 2,3212 2,3252 : 2,2871 2,2178 . 2,1299
40 2,0882 ; 2.1939 > 2,2706 . 2,3054 2,2959 ' 2,2484 2,1746
44 1,9742 ! 2,0912 ! 2,1905 > 2,2570 ' 2,2811 2,2627 2,2102
48 1,8420 1 1,9635 • 2,0781 2,1725 > 2,2324 2,2504 2,2281
52 1,6930 1 1,8119 > 1,9321 2,0454 2,137? 1 2,1965 > 2,2142
275
<2=0,9
\ b 6°^ —0,4 —0,6 —0,8 —1,0 —1,2 —1,4 —1,6
0 —0,6589 —0,9356 —1,1675 —1,3574 -1,5121 —1,6381 — 1,7413
4 —0,4963 —0.7912 —1,0422 —1,2500 —1,4199 —1,5585 — 1,6720
8 —0,3257 —0,6369 —0,9070 —1,1332 —1,3192 —1,4716 —1,5965
12 —0,1472 —0,4718 —0,7602 —1,0054 —1,2088 —1,3760 —1,5133
16 0,0390 —0,2953 —0,6007 —0,8652 —1,0868 —1,2703 —1,4213
20 0,2322 —0,1071 —0,4271 —0,7103 —0,9513 —1,1523 —1,3184
24 0,4314 0,0926 —0,2380 -0,5388 —0,7996 —1,0196 —1,2025
II 28 0,6352 0,3034 —0,0324 —0,3483 —0,6288 —0,8690 —1,0705
32 0,8416 0,5246 0,1904 —0,1363 —0,4354 —0,6967 —0,9187
36 1,0478 0,7538 0,4299 0,0988 —0,2155 —0,4980 —0,7421
40 1,2511 0,9875 0,6839 0,3584 0,0346 —0,2670 —0,5343
44 1,4482 1,2206 0,9481 0,6404 0,3176 0,0023 —0,2874
48 1,6352 1,4470 1,2153 0,9394 0,6308 0,3151 0,0080
52 1,8090 1,6608 1,4789 1,2447 0,9740 0,6720 0,3602
0 2,4575 2,3518 2,2292 2,1032 1,9806 1,8659 1,7601
4 2,4948 2,4018 2,2861 2,1620 2,0387 1,9215 1,8126
8 2,5222 2,4453 2,3392 2,2190 2,0961 1,9772 1,8656
12 2,5387 2,4810 2,3874 2,2735 2,1527 2,0330 1,9193
16 2,5428 2,5073 2,4296 2,3249 2,2081 2,0889 1,9737
20 2,5329 2,5223 2,4641 2,3720 2,2616 2,1447 2,0290
24 2,5074 2,5235 2,4885 2,4130 2,3124 2,1999 2,0851
28 2,4648 2,5084 2,5002 2,4458 2,3588 2,2536 2,1416
32 2,4037 2,4739 2,4952 . 2,4667 2,3984 2,3044 2,1979
36 2,3230 2,4172 2,4692 2,4712 2,4273 2,3498 2,2526
40 2,2220 2,3357 2,4171 2,4529 2,4398 2,3855 2,3030
44 2,1010 2,2274 2,3339 2,4040 2,4276 2,4045 2,3445
48 1,9608 2,0918 2,2155 2,3166 2,3793 2,3958 2,3682
52 1,8032 1,9307 2,0653 2,1830 2,2816 2,3428 2,3587
276
0=0,2
\ b 0°\ 0 —0,2 —0,4 —0,6 —0,8 — 1,0 —1,2
—32 —0,285 —0,306 —0,324 —0,340
—28 —0,252 —0,276 —0,297 —0,315
—24 —0,218 -0,245 —0,269 —0,289
—20 —0,184 —0,213 —0,239 —0,262
—16 —0,148 —0,180 —0,208 —0,233
-12 —0,112 —0,145 —0,176 —0,203
—8 —0,075 —0,110 —0,143 —0,172
—4 —0,038 —0,074 —0,109 —0,140
0 0 —0,037 —0,073 —0,106 —0,136 —0,164 —0,189
4 0,038 0,0004 —0,036 -0,071 —0,103 —0,132 —0,159
h 8 0,075 0,038 0,001 —0,034 —0,068 —0,099 —0,128
12 0,112 0,076 0,039 0,003 —0,032 —0,064 —0,094
16 0,148 0,114 0,078 0,042 0,006 —0,028 —0,059
20 0,184 0,152 0,117 0,081 0,045 , 0,011 —0,022
24 0,218 0,189 0,156 0,121 0,086 0,051 0,017
28 0,252 0,225 0,195 0,162 0,128 0,092 0,058
32 0,285 0,260 0,233 0,203 0,170 0,136 0,102
36 0,316 0,295 0,270 0.243 0,213 0,180 0,147
40 0,345 0,327 0,306 0,282 0,255 0,226 0,194
44 0,373 0,358 0,341 0,320 0,297 0,271 0,242
48 0,399 0,387 0,373 0,357 0,337 0,315 0,290
52 0,423 0,414 0,403 0,390 0,375 0,357 0,337
—32 — 0,441 0,427
—24 — 0,477 0,464
— 16 — 0,506 0,493
—8 — 0,525 0,516
0 — 0,535 0,530 0,511 0,488
Л 8 — 0,535 0,535 0,524 0,505
16 — 0,524 0,529 0,528 0,515
24 — 0,502 0,512 0,521 0,517
32 — 0,469 0,482 0,501 0,508
40 — 0,426 0,440 0,466 0,483
48 — 0.372 0,385 0,413 0,438
27/
а=0,4
|"Х\ 0 —0,2 —0,4 —0,6 —0,8 -1.0 —1,2
—32 —0,342 —0,334 —0,354 —0,372
—28 —0,226 —0,302 —0,325 —0,346
—24 —0,252 —0,268 —0,294 —0,318
—20 —0,208 —0,233 —0,262 —0,288
—16 —0,165 —0,197 —0,229 —0,258
—12 —0,124 —0,160 —0,194 —0,225
—8 —0,082 —0,121 —0,158 —0,192
—4 —0,041 —0,082 —0,121 —0,157
0 0 —0,042 —0,032 —0,120 —0,154 —0,185 —0,123
4 0,041 —.0,001 —0,043 —0,082 —0,118 —0,152 —0,181
4 8 0,082 0,040 —0,002 —0,043 —0,081 —0,116 —0,148
12 0,124 0,081 0.039 —0,002 —0,041 —0,078 —0,112
16 0,165 0,122 0,081 0,040 0 —0,039 —0,074
20 0,208 0,163 0,124 0,083 0,042 0,003 —0,034
24 0,252 0,204 0,166 0,127 0,086 0,047 0,009
28 0,296 0,243 0,209 0,171 0,132 0,092 0,054
32 0,342 0,282 0,251 0,216 0,178 0,140 0,101
36 0,389 0,319 0,292 0,260 0,226 0,189 0,151
40 0,435 0,355 0,331 0,304 0,273 0,238 0,202
44 0,481 0,389 0,369 0,346 0,319 0,288 0,255
48 0,523 0,421 0,404 0,386 0,363 0,338 0,309
52 0,559 0,450 0,437 0,423 0,405 0,385 0,361
—32 — 0,479 1 0,463
—24 — 0,519 0,503
—16 — 0,550 0,536
—8 — 0,571 0,560
Л 0 — 0,582 0,576 0,555 — 0,527
8 — 0,582 0,582 0,569 — 0,546
16 — 0,571 0,576 0,574 — 0,559
24 — 0,547 0,558 0,568 — 0,563
32 — 0,512 0,526 0,574 — 0,554
40 — 0,464 0,480 0,509 — 0,528
48 — 0,406 0,421 0,452 — 0,481
278
«=0,6
X Ь —0,4 —0,6 —0,8 —1,0 —1,2
0 —0,096 —0,140 —0,180 -0,216 —0,248
4 —0,053 —0,099 —0,141 —0,179 —0,213
8 —0,008 —0,055 —0,099 —0,140 —0,176
12 0,038 —0,010 —0,056 —0,099 —0,138
16 0,085 0,036 —0,011 —0,055 —0,096
20 0,132 0,084 0,037 —0,009 —0,052
/з 24 0,180 0,133 0,086 0,039 —0,005
28 0,228 0,183 0,137 0,090 0,045
32 0,274 0,233 0,189 0,143 0,097
36 0,320 0,283 0,242 0,198 0,153
40 0,364 0,332 0,295 0,254 0,211
44 0,407 0,379 0,347 0,311 0,271
48 0 447 0,424 0,398 0,367 0,332
52 0,484 0,466 0,445 0,420 0,392
0 0,638 0,613 0,580
8 0,645 0,629 0,602
16 0,640 0,636 0,617
ц 24 0,620 0,631 0,623
32 0,585 0,609 0,616
40 0,535 0,569 0,590
48 0,469 0,506 0,546
а=0, 7
b 0° —0,4 —0,6 —0,8 — 1,0 —1,2
0 —0,106 -0,155 —0,198 —0,237 -0,272
4 —0,060 —0,110 —0,157 —0,198 —0,235
8 —0,009 —0,064 —0,113 -0,157 —0,197
12 0,037 —0,016 —0,067 —0,114 -0,156
Л 16 0,087 0,034 —0,019 —0,068 —0,112
20 0,138 0,084 0,032 —0,019 —0,066
24 0,188 0,137 0,084 0,033 —0,016
28 0,239 0,190 0,139 0,087 0,028
32 0,289 0,244 0,194 0,144 0,093
279
Продолжение
\ ь 0° —0,4 —0,6 —0,8 —1,0 —1,2
36 0,339 0,297 0,251 0,203 0,153
40 0,386 0,350 0,309 0,263 0,215
Л 44 0,432 0,401 0,365 0,325 0,280
48 0,475 0,450 0,420 0,385 0,346
52 0,515 0,495 0,472 0,444 0,411
0 0,680 0,651 0,615
8 0,688 0,670 0,639
16 0,683 0,678 0,656
Л 24 0,662 0,673 0,663
32 0,625 0,651 0,657
40 0,571 0,609 0,631
48 0,501 0,542 0,578
я—0,75
ь 6° —0,4 —0.6 —0,8 —1,0 —1,2
0 —0,113 —0,164 —0,210 —0,250 —0,286
4 —0,064 —0,118 —0,167 —0,210 —0,249
8 —0,015 —0,070 —0,121 —0,168 —0,210
12 0,036 —0,020 —0,074 —0,123 —0,168
16 0,088 0,031 —0,024 —0,075 —0,122
20 0,140 0,084 0,028 —0,025 —0,074
/о 24 0,193 0,138 0,083 0,028 —0,023
л о 28 0,246 0,194 0,139 0,085 0,032
32 0,298 0,250 0,197 0,144 0,090
36 0,350 0,306 0,257 0,205 0,152
40 0,399 0,361 0,317 0,268 0,217
44 0,447 0,414 0,376 0,332 0,285
48 0,492 0,465 0,433 0,395 0,354
52 0,533 0,512 0,487 0,457 0,423
0 0,705 0,674 0,635
8 0,713 0,694 0,661
16 0,708 0,703 0,679
ц 24 0,687 0,698 0,687
32 0,649 0,677 0,682
40 0,594 0,633 0,656
48 0,521 0,564 0,602
280
а=0,80
b 0° —0,4 —0,6 —0,8 — 1,0 —1,2
0 —0,120 —0,174 —0,223 —0,261 —0,307
4 —0,070 —0,127 —0,178 —0,225 —0,266
8 —0,018 —0,077 —0,132 —0,181 —0,225
12 0,035 —0,025 —0,082 —0,134 —0,181
16 0,089 0,028 —0,030 —0,085 —0,135
20 0,143 0,083 0,024 —0,033 —0,085
!з 24 0,199 0,140 0,079 0,023 —0,032
28 0,254 0,198 0,140 0,081 0,025
32 0,309 0,256 0,200 0,143 0,086
36 0,362 0,315 0,263 0,207 0,151
40 0,414 0,372 0,325 0,274 0,219
44 0,464 0,429 0,388 0,341 0,290
48 0,511 0,482 0,448 0,408 0,363
52 0,554 0,532 0,505 0,473 0,435
0 0,734 0,700 0,659
8 0,744 0,721 0,686
16 0,738 0,732 0,706
ц 24 0,717 0,728 0,715
32 0,678 0,706 0,711
40 0,620 0,661 0,685
48 0,544 0,590 0,630
£
b 0° —0,4 —0,6 —0,8 —1,0 —1,2
0 —0,123 —0,179 —0,229 —0,273 —0,307
4 —0,072 —0,131 —0,184 —0,231 —0,266
8 —0,020 —0,080 —0,136 —0,187 —0,225
12 0,034 —0,028 —0,086 —0,140 —0,181
h 16 0,089 0,027 —0,033 —0,090 —0,135
20 0,145 0,083 0,022 —0,036 —0,085
24 0,201 0,141 0,080 0,020 —0,032
28 0,257 0,200 0,140 0,030 0,025
32 0,313 0,259 0,202 0,142 0,086
281
Продолжение
Х\ Ь 0° —0,4 —0,6 —0,8 —1,0 —1,2
36 0,368 0,319 0,265 0,208 0,151
40 0,421 0,378 0,329 0,276 0,219
Л 44 0,472 0,435 0,393 0,345 0,290
48 0,520 0,490 0,455 0,413 0,367
52 0,564 0,541 0,513 0,480 0,441
0 0,747 0,712 0,669
8 0,757 0,734 0,697
16 0,752 0,745 0,717
Л 24 0,730 0,741 0,728
32 0,690 0,719 0,724
40 0,631 0,674 0,698
48 0,554 0,601 ч 0,643
я=0,84
\ ь о°\ —0,4 —0,6 —0,8 -1,0 —1,2 —1,4 —1,5
0 —0,127 —0,184 —0,236 —0,281 —0,321 —0,355 —0,386
4 —0,075 —0,135 —0,190 —0,239 —0,282 —0,319 —0,352
8 —0,022 —0,084 —0,141 —0,193 —0,240 —0,280 —0,316
12 4-0,033 -0,030 —0,091 —0,145 —0,195 —0,239 —0.277
16 4-0,089 0,025 —0,037 —0,094 —0,147 —0,194 —0,236
20 0,146 0,082 0,019 —0,040 —0,096 —0,146 —0,190
/о 24 0,204 0,141 0,078 0,017 —0,041 —0,093 —0,141
J 3 28 0,261 0,202 0,140 0,078 0,018 —0,037 —0,088
32 0,318 0,262 0,203 0,142 0,082 0,024 —0,029
36 0,374 0,324 0,268 0,209 0,149 0,090 0,035
40 0,428 0,384 0,333 0,278 0,220 0,162 0,105
44 0,480 0,442 0,398 0,349 0,294 0,238 0,181
48 0,529 0,498 0,462 0,419 0,371 0,318 0,264
52 0,574 0,550 0,521 0,487 0,447 0,401 0,351
0 0,761 0,725 0,681 0,658 0,637
8 0,771 0,747 0,709 0,688 0,666
16 0,766 0,759 0,730 0,711 0,692
Л 24 0,744 0,755 0,741 0,727 0,711
32 0,704 0,734 0,738 0,731 0,720
40 0,644 0,688 0,713 0,716 0,714
48 0,565 0,614 0,656 0,671 0,680
282
а~ 0,86
\ ь 0°\ —0,4 —0,6 —0,8 -.,2 1 —1,4 —1,6 —1,8
0 —0,131 -0,190 —0,243 —0,290 —0,330 —0,366 —0,397
4 —0,078 —0,140 —0,196 —0,246 —0,291 -0,329 —0,363
8 -0,024 —0,088 —0,147 —0,201 —0,248 —0,290 —0,326
12 0,032 —0,033 —0,095 —0,152 —0,203 —0,248 —0,287
16 0,089 0,023 —0,041 —0,100 —0,154 —0,202 —0,245
20 0,148 0,082 0,017 —0,045 —0,102 —0,153 —0,199
<3 24 0,205 0,142 0,077 0,014 —0,046 —0,100 —0,149
28 . 0,265 0,203 0,139 0,076 0,014 —0,043 —0,095
32 0,323 0,266 0,204 0,141 0,079 0,020 —0,035
36 0,380 0,328 0,270 0,209 0,148 0,037 0,030
40 0,436 0,389 0,338 0,280 0,220 0,160 0,102
44 0,489 0,450 0,404 0,353 0,297 0,238 0,180
48 0,539 0,507 0,469 0,425 0,375 0,320 0,263
52 0,585 0,561 0,531 0,495 0,453 0,406 0,354
0 0,776 0,739 0,693 0,670 0,647
8 0,786 0,762 0,722 0,700 0,678
16 0,782 0,774 0,744 0,724 0,701
/4 24 0,760 0,771 0,755 0,741 0,724
32 0,719 0,749 0,753 0,745 0,734
40 0,658 0,703 0,728 0,731 0,728
48 0,577 0,628 0,671 0,686 0,695
<2=0,88
\ ь 6°Х —0,4 —9,6 —0,8 —1,0 —1,2 — 1.4 —1,6
0 —0,136 —0,196 —0,251 —0,299 —9,341 —0,378 —0,409
4 -0,081 —0,146 —0,204 —0,255 —0,301 —0,340 —0,375
8 —0,027 —0,092 —0,154 —0,209 —0,258 —0,300 —0,338
12 0,031 —0,037 —0,101 —0,159 —0,211 —0,257 —0,298
Лз 16 0,090 0,021 —0,045 —0,106 —0,162 —0,211 —0,255
20 0,149 0,081 0,014 —0,050 —0,109 —0,161 —0,209
24 0,209 0,142 0,075 +0,010 —0,051 —0,108 —0,158
28 0,269 0,205 0,139 0,073 0,010 —0,049 —0,103
32 0,329 0,269 0,205 0,140 0,075 0,014 —0,042
283
Продолжение
\ь о°\ —0,4 —0,6 —0,8 —1,0 —1,2 1 —1,4 i ’ —1,6
36 0,387 0,333 0,273 0,210 0,146 0,083 0,025
40 0,444 0,397 0,342 0,283 0,220 0,158 0,097
h 44 0,499 0,458 0,411 0,357 0,299 0,238 0,177
48 0,550 0,517 0,477 0,431 0,379 0,323 0,264
52 0,598 0,572 0,541 0,503 0,460 0,410 0,356
0 0,793 0,754 0,706 0,682 0,659
8 0,804 0,778 0,736 0,713 0,691
16 0,799 0,790 0,759 0,739 0,718
Л 24 0,777 0,788 0,771 0,756 0,738
32 0,735 0,766 0,769 0,761 0,749
40 0,673 0,719 0,745 0,748 0,744
48 0,591 0,643 0,688 0,703 0,712
я=0,9
\ ь 0°\ —0,4 —0,6 —0,8 —1,0 —1,2 —1,4 —1,6
0 —0,141 —0,204 —0,261 -0,310 —0,353 -0,391 —0,423
4 —0,085 —0,152 —0,212 —0,266 —0,312 —0,353 —0,388
8 —0,029 —0,098 —0,162 —0,218 —0,268 —0,312 —0,351
12 0,030 —0,041 —0,107 —0,167 —0,221 —0,269 —0,311
16 0,090 0,018 —0,050 —0,114 —0,171 —0,222 —0,267
20 0,151 0,080 0,010 —0,056 —0,117 —0,171 —0,220
Л 24 0,212 0,143 0,073 0,005 —0,059 —0,116 —0,168
•* 3 28 0,274 0,207 0,138 0,070 0,004 —0,057 —0,112
32 0,335 0,273 0,206 0,138 0,071 0,008 —0,050
36 0,395 0,339 0,276 0,210 0,143 0,079 0,018
40 0,454 0,404 0,347 0,285 0,220 0,155 0,092
44 0,510 0,467 0,418 0,362 0,300 0,237 0,174
48 0,563 0,528 0,487 0,438 0,384 0,324 0,263
52 0,611 0,584 0,552 0,513 0,467 0,415 0,358
0 0,811 0,771 0,721 0,696 0,672
8 0,823 0,795 0,752 0,728 0,704
16 0,819 0,809 0,775 0,754 0,732
ц 24 0,796 0,807 0,789 0,773 0,754
32 0,753 0,785 0,788 0,779 0,766
40 0,690 0,738 0,764 0,766 0,762
48 0,606 0,660 0,706 0,721 0,730
284
b 0° 4 4
—0,4 j —0,8 | —1,2 —0,4 —0,8 —1,2
0 —0,018 —0,034 я=0, -0,048 2 0,172 0,170 0,165
8 0,006 —0,011 —0,027 0,175 0,173 0,170
16 0,031 0,014 —0,003 0,172 0,173 0,171
24 0,057 0,040 0,023 0,167 0,169 0,170
32 0,081 0,066 0,050 0,156 0,161 0,164
40 0,104 0,092 0,078 0,142 0,148 0,154
48 0,124 0,116 0,106 0,123 0,131 0,137
0 —0,020 —0,038 a=Q, —0,053 4 0,185 0,181 0,175
8 0,006 —0,013 -0,030 0,186 0,184 0,180
16 0,033 0,013 —0,005 0,183 0,184 0,182
24 0,059 0,041 0,022 0,177 0,180 0,180
32 0,085 0,069 0,051 0,166 0,171 0,175
40 0,110 0,097 0,081 0,151 0,158 0,164
48 0,132 0,123 0,112 0,132 0,139 0,147
0 —0,022 —0,041 <2=0, —0,060 ,6 0,199 0,194 0,187
8 0,006 —0,016 —0,035 0,200 0,197 0,192
16 0,034 0,012 —0,009 0,197 0,198 0,195
24 0,063 0,042 0,021 0,190 0,194 0,194
32 0,091 0,072 0,052 0,178 0,185 0,188
40 0,117 0,103 0,085 0,162 0,170 0,177
48 0,141 0,131 0,118 0,142 0,150 0,158
0 —0,024 —0,045 <2 = 0, —0,064 7 0,207 0,202 0,194
8 0,005 —0,018 —0,038 0,208 0,206 0,200
16 0,035 0,011 —0,011 0,205 0,206 0,203
24 0,065 0,042 0,020 0,198 0,202 0,202
32 0,094 0,074 0,052 0,186 0,193 0,195
40 0,122 0,106 0,087 0,169 0,178 0,185
48 0,147 0,136 1 0,122 0,148 0,157 0,166
285-
Продолжение
ь 0э Л 4
—0,4 —0,8 — 1,2 —0,4 —0,8 —1,2
я=0,75
0 —0,025 —0,047 —0,066 0,212 0,202 0,198
8 0,005 —0,019 —0,040 0,213 0,210 0,204
16 0,035 0,011 —0,012 0,210 0,211 0,207
24 0,066 0,042 0,019 0,203 0,207 0,207
32 0,096 0,075 0,053 0,190 0,198 0,201
40 0,124 0,108 0,088 0,173 0,182 0,189
48 0,150 0,139 0,124 0,152 0,161 0,170
а=0,80
0 —0,026 —0,049 —0,059 0,217 0,211 +0,203
8 0,005 —0,020 —0,043 0,218 0,215 0,209
16 0,036 0,009 —0,014 0,215 0,216 0,212
24 0,067 0,043 0,018 0,208 0,212 0,209
32 0,098 0,075 0,053 0,195 0,203 0,203
40 0,128 0,110 0,089 0,178 0,187 0,195
48 0,154 0,142 0,126 0,156 0,166 0,175
а=0,82
0 —0,026 —0,050 —0,070 0,219 0,213 0,205
8 0,004 —0,021 —0,043 0,221 0,217 0,211
16 0,036 0,010 —0,014 0,218 0,218 0,214
24 0,038 0,043 0,017 0,210 0,214 0,214
32 0,099 0,077 0,052 0,198 0,205 0,209
40 0,129 0,110 0,090 0,180 0,189 0,197
48 0,155 0,143 0,128 0,158 0,168 0,177
я=0,84
0 —0,027 —0,051 —0,071 0,222 0,215 0,207
8 0,004 —0,022 —0,044 0,223 0,220 0,213
16 0,036 0,010 —0,015 0,218 0,220 0,217
24 0,068 0,043 0,017 0,213 0,217 0,216
32 0,100 0,077 0,053 0,200 0,207 0,211
40 0,131 0,112 0,090 0,182 0,192 0,199
48 0,148 0,144 0,128 0,159 0,169 0,179
286
Продолжение
ь 6° X. /5 4
—0,4 —0,8 —1,2 —0,4 —0,8 —1,2
0 —0,027 —0,052 а-0,8 —0,072 16 0,224 0,218 0,209
8 0,004 —0,022 —0,046 0,226 0,222 0,216
16 0,036 0,009 —0.016 0,223 0,223 0,219
24 0,069 0,043 0,017 0,215 0,219 0,219
32 0,101 0,078 0,053 0,202 0,210 0,213
40 0,131 0,113 0,091 0,184 0,194 0,201
48 0,159 0,146 0,129 0,161 0,172 0,181
0 —0,026 —0,053 л=0,£ -0,074 18 0,227 0,220 0,211
8 0,004 —0,023 —0,046 0,228 0,225 0,218
16 0,036 0,009 —0,017 0,225 0,226 0,222
24 0,069 0,043 0,017 0,218 0,222 0,221
32 0,102 0,078 0,052 0,205 0,212 0,216
40 0,133 0,114 0,091 0,187 0,197 0,204
48 0,160 0,147 0,130 0,163 0,174 0,184
0 —0,028 —0,054 я=0, —0,075 90 0,229 0,223 1 0,214
8 0,004 —0,024 -0,048 0,231 0,227 0,220
16 0,037 0,008 —0,018 0,228 0,228 0,224
24 0,070 0,043 0,016 0,220 0,225 0,224
32 0,103 0,079 0,052 0,207 0,215 0,219
40 0,134 0,115 0,091 0,189 0,199 0,207
48 0,162 0,149 0,131 0,164 0,176 0,186
287
b 0° X. h 4
—0,4 —0,8 —1,2 —0,4 —0,8 —1,2
я=0,2
0 —0,004 —0,007 —0,010 0,043 0,043 0,042
8 0,003 —0,001 —0,004 0,042 0.043 0,043
16 0,009 0,005 0,002 0,043 0,043 0,043
24 0,015 0,012 0,008 0,041 0,042 0,042
32 0,020 0,018 0,015 0,038 0,039 0,040
40 0,026 0,024 0,022 0.035 0,036 0,037
48 0,031 0,030 0,028 0,030 0,032 0,033
я=0,4
0 —0,004 —0,007 —0,011 0,045 0,044 0,044
8 0,003 —0,001 —0,005 0,045 0,045 0,045
16 0,009 0,005 0,001 0,045 0,045 0,045
24 0,015 0,012 0,008 0,045 0,044 0,044
32 0,022 0,019 0,015 0,043 0,041 0,042
40 0,027 0,025 0,022 0,039 0,038 0,039
48 0,033 0,031 0,029 0,032 0,033 0,035
я=0,6
0 —0,004 —0,008 —0,012 0,049 0,047 0,046
8 0,002 —0,002 —0,005 0,048 0,048 0,047
16 0,009 0,005 0 0,047 0,047 0,047
24 0,016 0,012 0,008 0,045 0,046 0,046
32 0,023 0,019 0,016 0,042 0,044 0,045
40 0,029 0,026 0,023 0,038 0,040 0,041
48 0,034 0,033 0,030 0,034 0,035 0,037
а=0,7
0 —0,004 —0,009 —0,012 0,049 0,048 4-0,047
8 0,002 —0,002 —0,006 0,049 0,049 0,048
16 0,009 0,005 0,001 0,049 0,049 0,048
24 0,016 0,012 0,008 0,047 0,048 0,048
32 0,023 0,020 0,016 0,044 0,045 0,046
40 0,030 0,027 0,024 0,040 0,041 0,043
48 0,035 0,033 0,031 0,035 0,036 0,038
.288
Продолжение
ь 6° Л 4
—0,4 —0,8 —1,2 —0,4 —0,8 —1,2
а=0,75
0 —0,005 —0,009 —0,013 0,050 0,048 0,048
8 0,002 0,002 —0,006 0,050 0,050 0,049
16 0,010 0,005 0,001 0,049 0,050 0,049
24 0,017 0,012 0,008 0,047 0,048 0,049
32 0,024 0,020 0,016 0,044 0,046 0,047
40 0,030 0,027 0,024 0,040 0,042 0,044
48 0,036 0,034 0,031 0,035 0,037 0,039
а=0,80
0 —0,005 —0,009 —0,013 0,051 0,050 0,049
8 0,002 —0,002 —0,006 0,051 0,051 0,050
16 0,010 0,005 0,001 0,050 0,051 0,050
24 0,017 0,013 0,008 0,048 0,049 0,049
32 0,024 0,020 0,016 0,045 0,047 0,048
40 0,030 0,028 0,024 0,041 0,043 0,044
48 0,036 0,034 0,031 0,036 0,038 0,039
я=0,82
0 —0,005 —0,009 —0,013 0,051 0,050 0,049
8 0,002 —0,002 —0,007 0,052 0,051 0,050
16 0,010 0,005 0 0,051 0,051 0,050
24 0,017 0,013 0,008 0,049 0,050 0,050
32 0,024 0,020 0,016 0,046 0,047 .0,048
40 0,031 0,028 0,024 0,041 0,043 0,045
48 0,037 0,035 0,032 0,036 0,038 0,040
я=0,84
0 —0,005 —0,009 —0,013 0,052 0,051 0,049
8 0,002 —0,002 —0,007 0,052 0,051 0,051
16 0,010 0,005 0 0,051 0,051 0,050
24 0,017 0,013 0,008 0,049 0,050 0,050
32 0,024 0,020 0,016 0,046 0,047 0,048
40 0,031 0,028 0,024 0,041 0,044 0,045
48 0,036 0,035 0,032 0,036 0,038 0,040
289
Продолжение
0° х ь /7 4
—0,4 —0,8 — 1,2 —0,4 —0,8 —1,2
£2=0,86
0 —0,005 —0,009 —0,013 0,052 0,051 0,050
8 0,002 —0,002 —0,007 0,052 0,052 0,051
16 0,010 0,005 0 0,051 0,052 0,051
24 0,017 0,013 0,008 0,049 0,050 0,051
32 0,024 0,020 0,016 0,046 0,048 0,049
40 0,031 0,028 0,024 0,042 0,044 0,045
48 0,037 0,035 0,032 । 0,037 1 0,039 0,040
£2=0,88
0 —0,005 —0,010 —0,014 0,052 0,051 0,050
8 0,002 —0,003 —0,007 0,053 0,052 0,051
16 0,010 0,005 0,002 0,052 0,052 0,052
24 0,017 0,013 0,008 0,052 0,051 0,051
32 0,025 0,021 0,016 0,047 0,048 0,049
40 0,031 0,028 0,024 0,042 0,044 0,046
48 0,038 0,035 0,033 0,037 0,039 0,041
£2=0,90
0 —0,005 —0,010 —0,014 0,053 0.052 0,050
8 0,002 —0,003 —0,007 0,053 0,053 0,052
16 0,010 0,005 0 0,052 0,052 0,052
24 0,017 0,013 0,008 0,050 0,051 0,051
32 0,025 0,021 0,016 0,047 0,049 0,050
40 0,032 0,028 0,025 0,043 0,044 0,046
48 0,038 0,036 0,033 0,037 0,039 0,041
Литература
1. Аксенов Е. П., Гребенников Е. А., Демин В. Г. Общее
решение задачи о движении искусственного спутника в нормальном поле притя-
жения Земли, Сб. «Искусственные спутники Земли», вып. 8, АН СССР, 1961.
2. А п п а з о в Р. Ф., Лавров С. С., Мишин В. П., Баллистика
управляемых ракет дальнего действия, изд. «Наука», 1966.
3. Батраков Ю. В., Проскурин В. Ф. Возмущения первого поряд-
ка в движении искусственных спутников, вызываемых сжатием Земли, Сб.
«Искусственные спутники Земли», вып. 3, АН СССР, 1958.
4. Батраков Ю. В., Проскурин В. Ф. О возмущениях орбит
искусственных спутников, вызываемых сопротивлением воздуха, Сб. «Искусствен-
ные спутники Земли», вып. 3, АН СССР, 1959.
5. Белецкий В. В. Движение искусственного спутника относительно
центра масс, Изд. «Наука», 1965.
6. Белецкий В. В. Классификация движений искусственного спутника
Земли около центра масс, Сб. «Искусственные спутники Земли», вып. 6, АН СССР,
1961.
7. В а т с о н Г. Н. Теория бесселевых функций, ч. 1, ИЛ, 1949.
8. Гурко О. В., С л а б к и й Л. И. Использование силовых влияний гра-
витационного и светового полей Солнца для ориентации космических аппаратов,
Сб. «Искусственные спутники Земли», вып. 16, АН СССР, 1963.
9. Дубошин Г. Н. Введение в небесную механику, ОНТИ, 1938.
10. Дубяго А. Д. Определение орбит, Физматгиз, 1949.
11. Егорова А. В. Влияние притяжения Луны и Солнца на движение ис-
кусственного спутника Земли, Сб. «Искусственные спутники Земли», вып. 8,
АН СССР, 1961.
12. Егоров В. А. Об определении истинной аномалии в возмущенном
движении, Астрономический журнал, т. XXXV, вып. 1, АН СССР, 1958.
13. Ж о н г о л о в и ч Н. А. Внешнее гравитационное поле Земли и фунда-
ментальные постоянные, связанные с ним, Труды Института теоретической астро-
номии, вып. 3, 1952.
14. И дельсо н Н. И. Способ наименьших квадратов, Геодезиздат, 1948.
15. И дельсо н Н. И. Теория потенциала с приложениями к теории фи-
гуры Земли и геофизике, ОНТИ, 1936.
291
16. К ис лик М. Д. Движение искусственного спутника в нормальном
гравитационном поле Земли, Сб. «Искусственные спутники Земли», вып. 4,
АН СССР, 1960.
17. Колегов Г. А. Вариации плотности верхней атмосферы по данным
об изменении периодов обращения искусственных спутников Земли, Сб. «Искус-
ственные спутники Земли», вып. 4, АН СССР, 1960.
18. Кондратьев К. Я- Метеорологические исследования с помощью ра-
кет и спутников, Гидрометеоиздат, 1962.
19. Кондратюк Ю. Завоевание межпланетных пространств, Оборонгиз,
1948.
20. К и б а р д и н Ю. А., Кузнецов С. И. и др. Атлас газодинамиче-
ских функций при больших скоростях и высоких температурах воздушного пото-
ка, Госэнергоиздат, 1961.
21. Ланцош К- Практические методы прикладного анализа, Физматгиз,
1961.
22. Лидов М. Л. Определение плотности атмосферы по наблюдаемому
торможению первых искусственных спутников Земли. Сб. «Искусственные спут-
ники Земли», вып. 1, АН СССР, 1958.
23. Лурье А. И. Аналитическая механика. Физматгиз, 1961.
24. О х о ц и м с к и й Д. Е., Энеев Т. М. Некоторые вариационные зада-
чи, связанные с запуском искусственного спутника Земли. УФН, т. LXIII, вып. 1,
АН СССР, 1957.
25. О х о ц и м с к и й Д. Е., Энеев Т. М., Таратынова Г. П. Опре-
деление времени существования искусственного спутника Земли и исследование
вековых возмущений его орбиты. УФН, т. LXIII, вып. 1, АН СССР, 1957.
26. Погорелов Д. А. Теория кеплеровых движений летательных аппара-
тов, Физматгиз, 1961.
27. Полякова Е. Н. Световое давление и движение спутников Земли,
«Бюллетень Института теоретической астрономии». 1963, т. IX, № 1 (104).
28. Раушенбах Б. В., Токарь Е. Н. Некоторые вопросы управления
в межпланетном пространстве. Сб. «Искусственные спутники Земли», вып. 5.,
АН СССР, 1960.
29. Субботин М. Ф. Курс небесной механики. ОНТИ, 1938.
30. С у с л о в Г. К. Теоретическая механика, ОГИЗ, 1944.
31. Таблицы временной стандартной атмосферы (ВСА-60), ВЦ АН СССР,
1960.
32. Т а р а т ы н о в а Г. П. Методы численного решения уравнений в конеч-
ных разностях и их применение к расчетам орбит искусственных спутников Зем-
ли, Сб. «Искусственные спутники Земли», вып. 4, АН СССР, 1960.
33. Т а р а т ы н о в а Г. П. О движении искусственных спутников в нецент-
ральном поле тяготения Земли при наличии сопротивления атмосферы, УФН,
т. XIII, вып. 1, АН СССР, 1957.
34. Тзян X. Ш. Аэродинамика разреженных газов, Сб. «Газовая динами-
ка», ИЛ, 1950.
35. Ц а н д е р Ф. Э. Проблема полета при помощи реактивных аппаратов,
Межпланетные полеты, Оборонгиз, 1961.
36. Циолковский К. Э. Труды по ракетной технике, Оборонгиз, 1961.
29!
37. Э л ь я с б е р г П. Е. Определение плотности верхней атмосферы по ве-
ковым изменениям элементов орбит первых двух искусственных спутников Земли,
Об. «Искусственные спутники Земли», вып. 1, АН СССР, 1958.
38. Эл ь я с б е р г П. Е. Зависимость вековых изменений элементов орбит
от сопротивления воздуха, Сб. «Искусственные спутники Земли», вып. 3,
АН СССР, 1959.
39. Эльясберг П. Е. и Ястребов В. Д. Определение плотности
верхней атмосферы по результатам наблюдений за полетом третьего искусствен-
ного спутника Земли, Сб. «Искусственные спутники Земли», вып. 4, АН СССР,
1960.
40. Э л ь я с б е р г П. Е. Введение в теорию полета искусственных спутни-
ков Земли, изд. «Наука», 1965.
41. Я цу некий И. М. Определение условий освещенности и времени пре-
бывания искусственного спу/тника в тени и на Солнце. Сб. «Искусственные спут-
ники Земли», вып. 4, АН СССР, 1960.
42. Я ц у н с к и й И. М. О влиянии геофизических факторов на движение
спутника. УФН, т. LXIII, вып. 1, АН СССР, 1957.
43. К a u 1 a W. М. The Geophysical Journ. of the Royal Astron. Soc. Vol. 5,
N 2. July 1961. Analysis of Gravit. and Geom. Aspects of Geodetis Utiliz. of Sat.
44. К a u 1 a W. M. Journ. of Geophys. Researches. Vol. 64, N 12, Dec. 1959,
pp. 2271—2279.
45. V i n t i I. P. Journ. «Res. of Nat.» Bur. Stand. Math. Phys. 628, N 2,
79, 1959.
46. К о z a i J. Astr. Journ., v. 64, N 9, 1959. pp. 367—377.
Оглавление
Стр.
Предисловие ..................................................... 5
Глава I. Выведение спутника на орбиту.............................. 7
1.1. Невозмущенное движение спутника......................... 8
Вывод основных зависимостей............................... 8
Расчетные формулы для невозмущенной эллиптической орбиты 20
Выбор положения плоскости орбиты..........................25
1.2. Выведение спутника на орбиту без дожога топлива.........27
Наивыгоднейшая программа для угла тангажа при постоянном
расходе топлива на активном участке........................29
Методика расчета наивыгоднейшей программы (<рПр) на актив-
ном участке . . . ...................................... . 38
1.3. Выведение спутника на орбиту с дожогом топлива..........47
Определение оптимальной точки перехода .................. 47
Выбор активного участка для выведения спутника на круговую
орбиту с дожогом топлива.............................. 56
Глава II. Спуск спутника с орбиты на Землю.........................63
2.1. Баллистический спуск.................................... 64
Перегрузки при баллистическом спуске......................66
Зависимость степени нагрева аппарата от параметров входа его
в атмосферу............................................... 70
Оценка точности приземления...............................74
2.2. Планирующий спуск....................................... 81
Расчетное движение на атмосферном участке спуска..........83
Оценка влияния отклонений величины угла входа в атмосферу
на дальнейшее движение спутника.........................91
2.3. Планирующий спуск спутника с малым аэродинамическим каче-
ством ....................................................... 93
Глава III. Анализ влияния возмущающих сил, действующих на орбите . . 99
3.1. Метод оскулирующих элементов.............................99
Вывод уравнений для элементов орбиты Q, р, I.............101
Вывод уравнений для элементов орбиты е и со..............103
3.2. Возмущения орбит, вызываемые влиянием сжатия земного
эллипсоида ............................. • • ..............169
Возмущения долготы узла Q................................112
Возмущения параметра орбиты р.............................ИЗ
Возмущения наклонения орбиты i...........................114
Возмущения эксцентриситета е.............................114
Возмущения аргумента перигея со..........................116
Возмущения радиуса-вектора г и высоты полета h...........119
Расчет времени полета......................... . . . 120
294
3.3. Возмущающее влияние аномалий силы тяжести на орбиту спут-
ника . . . . . . . . . ... . ... . . . . . . . ... ... . .125
3.4. Возмущения, обусловленные влиянием Луны и Солнца.........128
Изменение долготы узла Q и положения перигея со............134
Изменение наклонения i орбиты.................. . . . . 136
, Изменение большой полуоси а орбиты.............................137
Изменение эксцентриситета в орбиты ....................... 139
Численный пример расчета возмущений элементов орбиты ИСЗ,
вызываемых влиянием Луны и Солнца........................140
3.5. Оценка возмущающего действия атмосферы. Определение вре-
мени существования спутника ................................. 145
Выбор вида аппроксимирующей функции для плотности q . . . 147
Интегрирование уравнений движения в пределах одного витка 150
Вывод конечных формул для определения времени существова-
ния спутника.............................................167
3.6. Влияние давления солнечного света........................175
Глава IV. Отклонения орбиты, вызываемые ошибками вывода спутника 178
4.1. Точность вывода на орбиту спутника без дожога топлива ... .179
4.2. Влияние отклонений элементов конца активного участка на эле-
менты переходного эллипса для спутника с дожогом топлива . .188
Изменение апогейного расстояния .......................... 190
Изменение времени полета ................................ 194
Отклонение положения апогея...............................199
4.3. Влияние отклонений параметров дожога на орбиту........ 204
Определение начальных возмущений, вызываемых отклонениями
параметров дожога..........................................205
Отклонения круговой орбиты ............................... 211
Количественная оценка влияния отклонений параметров дожога
на движение спутника после дожога..........................215
4.4. Задача встречи двух спутников на орбите..................216
Глава V. Об определении орбит искусственных спутников...............223
5.1. Основные принципы .определения орбиты....................223
5.2. Влияние ошибок измерений на точность определения орбиты . . 228
Системы координат.............................................228
5.3. Влияние неточного учета действующих сил..................232
Центральное поле......................................... 233
Несферичность Земли........................................233
Сопротивление воздуха .................................... 235
Определение плотности воздуха, постоянных земного эллипсоида
и аномалий силы тяжести по данным орбитальных измерений 237
5.4. Определение положения плоскости орбиты относительно Солнца 240
Графо-аналитический метод оценки условий освещенности . . 240
Анализ условий освещенности спутников.........................247
Глава VI. Некоторые вопросы ориентации спутников ...................250
6.1. Движение вокруг центра масс ........................251
6.2. Активная стабилизация ИСЗ.............................. 256
Приложение ........................................................ 265
Литература .........................................................291
Михаил Клавдиевич Тихонравов,
Игорь Марианович Яцунский,
Глеб Юрьевич Максимов,
Игорь Константинович Бажинов,
Олег Викторович Гурко
ОСНОВЫ ТЕОРИИ ПОЛЕТА
И ЭЛЕМЕНТЫ ПРОЕКТИРОВАНИЯ
ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ
Суперобложка и переплет художника В. В. Пименова
Редактор издательства Л. И. Коваленко
Художественный редактор М. А. Дементьев
Техн, редакторы И. А. Пухликова и В. И. Бугаева
Корректор А. И. Карамышкина
Г-42294 Сдано в наб. 30/VIII 1966 г. Подп. в печ. 11/V 1967 г.
Формат 60X90’/ie Печ. л. 18,63, в т. ч. 1 цв. вкл.
Уч.-изд л. 16,38 Бум. л. 9,31 Бумага № 1 Тираж 3000 экз.
Зак. 2343/1568 Цена 1 р. 29 к. Тем. план 1967 г. № 163
Издательство «Машиностроение»,
Москва К-51, ул. Петровка, дом 24.
Московская типография № 8 Главполиграфпрома,
Комитета по печати при Совете Министров СССР,
Хохловский пер., 7