



























































































































































































































































































































































































































































































Автор: Ипатов В.
Теги: электроника радиотехника электротехника кодирование издательство техносфера широкополосные системы кодирование сигналов серия мир связи
ISBN: 978-5-94836-128-4
Год: 2007



I
• I I
I
I
J
• J I SI
II
-Ti5
I j
I I
IS
ii'i: i i'ii
ЕБСАНТ
I •
I
H
I i
МИР
связи
в. ипатов
Широкополосные
системы и кодовое
разделение сигналов.
Принципы и приложения
Перевод с английского
под редакцией автора
ТЕХНОСФЕРА
Москва
2007
Ипатов В.
Широкополосные системы и кодовое разделение сигналов.
Принципы и приложения
Москва:
Техносфера, 2007. - 488с. ISBN 978-5-94836-128-4
Широкополосные принципы и множественный доступ с кодовым
разделением лежат в основе многих современных беспроводных систем передачи,
сбора и обработки информации. Убедительным показателем коммерческой
жизнеспособности широкополосной философии стал успех систем мобильной
связи стандарта cdmaOne и согласованная позиция телекоммуникационного
сообщества в выборе CDMA как базовой платформы мобильного радио
третьего (UMTS, cdma2000) и последующих поколений.
Книга имеет целью изложение строгой теории широкополосных сигналов и
систем в гармонии с разносторонними физическими интерпретациями и
примерами практических приложений. Особое внимание уделено синтезу
дискретных псевдослучайных последовательностей для задач дальнометрии,
синхронизации, разрешения сигналов, а также оптимизации ансамблей
последовательностей для кодового разделения.
Книга адресована студентам и аспирантам соответствующего профиля,
научным работникам и инженерам-проектировщикам.
Spread Spectrum
CDMA
Principles and Applications
V»»rn P. Ip*t«»
John Wiley & Sons. Ltd
and
© John Wiley & Sons Ltd, 2005
Все права защищены. Авторизованный перевод с английского издания
John Wiley & Sons
© ЗАО "РИЦ "Техносфера" перевод на русский язык, оригинал-макет,
оформление, 2007
ISBN 978-5-94836-128-4
ISBN 0-470-09178-9 (англ.)
Содержание
Предисловие к русскому изданию 14
Предисловие 16
Глава 1
Широкополосные сигналы и системы 19
1.1. Основные определения 19
1.2. Краткий исторический обзор 23
Глава 2
Классические задачи приема и синтез сигналов 27
2.1. Гауссовский канал, общая задача приема, оптимальные
решающие правила 27
2.2. Передача двоичных данных (детерминированные сигналы) .... 32
2.3. М-ичная передача: детерминированные сигналы 38
2.4. Комплексная огибающая радиосигнала 46
2.5. М-ичная передача: некогерентные сигналы 50
2.6. Обмен выигрыша от ортогонального кодирования на ширину
полосы 53
2.7. Примеры множеств ортогональных сигналов 56
2.7.1. Кодирование временным сдвигом 56
2.7.2. Кодирование частотным сдвигом 59
2.7.3. Ортогональное кодирование широкополосными сигналами ... 59
2.8. Оценка параметров сигнала 64
2.8.1. Формулировка задачи и правила оценки 64
2.8.2. Точность оценки 67
2.9. Оценка амплитуды 70
2.10. Оценка фазы 71
2.11. Автокорреляционная функция и отклик согласованного фильтра... 72
2.12. Оценка запаздывания радиосигнала 75
2.12.1. Алгоритм оценки 75
2.12.2. Точность оценки 78
2.13. Оценка несущей частоты 84
2.14. Одновременная оценка запаздывания и частоты 86
2.15. Разрешение сигналов 90
2.16. Резюме 95
Задачи 96
Задачи в пакете MATLAB 104
6 Содержание
Глава 3
Преимущества широкополосной передачи 112
3.1. Помехоустойчивость 112
3.1.1. Узкополосная помеха 113
3.1.2. Заградительная помеха 115
3.2. Низкая вероятность обнаружения 118
3.3. Криптозащищенность сигнала 124
3.4. Электромагнитная совместимость 126
3.5. Эффекты распространения радиоволн
в беспроводных системах 127
3.5.1. Распространение в свободном пространстве 128
3.5.2. Затенение 129
3.5.3. Многолучевые замирания 130
3.5.4. Показатели качества 134
3.6. Разнесение 138
3.6.1. Методы комбинирования 139
3.6.2. Организация ветвей разнесения 140
3.7. Многолучевое разнесение и приемник RAKE 143
Задачи 148
Задачи в пакете MATLAB 152
Глава 4
Многопользовательская среда. Множественный доступ
с кодовым разделением 159
4.1. Системы с многими пользователями и проблема
множественного доступа 159
4.2. Множественный доступ с частотным раз дарением 162
4.3. Множественный доступ с временным разделением 163
4.4. Множественный доступ с синхронным кодовым разделением .. 165
4.5. Асинхронное кодовое разделение 167
4.6. Асинхронное кодовое разделение в сотовых сетях 171
4.6.1. Проблема повторного использования ресурса и сотовые
системы 171
4.6.2. Число пользователей на соту при асинхронном кодовом
раз дарении 173
Задачи 177
Задачи в пакете MATLAB 179
8 Содержание
Глава 5
Дискретные широкополосные сигналы 183
5.1. Широкополосная модуляция 183
5.2. Обобщенная модель и категории дискретных сигналов 184
5.3. Корреляционные функции АФМ сигналов 185
5.4. Вычисление корреляционных функций кодовых
последовательностей 188
5.5. Корреляционные функции ЧМ сигналов 191
5.6. Выигрыш от обработки 194
Задачи 194
Задачи в пакете MATLAB 195
Глава 6
Широкополосные сигналы для измерения запаздьюания,
синхронизации и временного разрешения 199
6.1. Требования к АКФ: дополнительный экскурс 199
6.2. Сигналы с непрерывной частотной модуляцией 201
6.3. Критерии хорошей апериодической АКФ АФМ сигналов 205
6.4. Оптимизация апериодических ФМ сигналов 206
6.5. Идеальная периодическая АКФ. Минимаксные бинарные
последовательности 210
6.6. Начальные сведения о конечных полях и линейных
последовательностях 214
6.6.1. Понятие о конечных полях 214
6.6.2. Линейные последовательности над конечными полями 215
6.6.3. m-последовательности 218
6.7. Периодическая АКФ m-последовательностей 221
6.8. Дополнение о конечных полях 224
6.9. Последовательности Лежандра 227
6.10. Вновь о бинарных кодах с хорошими апериодическими АКФ 229
6.11. Последовательности с идеальной периодической АКФ 233
6.11.1. Бинарные последовательности с непротивоположными
символами 234
6.11.2. Многофазные коды 235
6.11.3. Троичные последовательности 237
6.12. Подавление боковых лепестков вдоль оси запаздываний 244
6.12.1. Фильтр подавления боковых лепестков 244
6.12.2. Расчет потерь в отношении сигнал - шум 246
6.13. ЧМ сигналы с оптимальной апериодической АКФ 252
Задачи 254
Задачи в пакете MATLAB 257
10 Содержание
Глава 7
Ансамбли широкополосных сигнатур для систем с
кодовым разделением :.......;....,..... 264
7.1. Широкополосная передача данных.. 264
7.1.1. Прямое расширение спектра: бинарная модуляция
данными и бинарные сигнатуры .,.. 264
7.1.2. Прямое расширение: общий случай ................................ 269
7.1.3. Широкополосная передача с прыгающей частотой ........... 274
7.2. Синтез ансамблей сигнатур для синхронных CDMA систем
с прямым расширением спектра 277
7.2.1. Постановка задачи ...;... : 277
7.2.2. Оптимизация сигнатурных ансамблей по критерию
минимума расстояния....;................ ............ .279
7.2.3. Последовательности, лежащие на границе Велча 288
7.3. Подходы к синтезу ансамблей сигнатур для асинхронного
кодового разделения с ПРС 292
7.4. Ансамбль сигнатур с временным сдвигом для асинхронного
кодового разделения 299
7.5. Примеры минимаксных сигнатурных ансамблей 302
7.5.1. Частотно-сдвинутые бинарные m-последовательности 302
7.5.2. Ансамбли последовательностей Голда 304
7.5.3. Множества Касами и их расширения 307
7.5.4. Ансамбли Камалетдинова 310
Задачи 313
Задачи в пакете MATLAB 316
Глава 8
Поиск и автосопровождение широкополосных сигналов
в системах с прямым расширением спектра 322
8.1. Процедуры поиска и автосопровождения 322
8.2. Последовательный поиск 325
8.2.1. Модель алгоритма 325
8.2.2. Вероятность правильного завершения поиска и среднее
число шагов 326
8.2.3. Минимизация среднего времени поиска 331
8.3. Методы ускорения поиска 335
8.3.1. Постановка задачи 335
8.3.2. Последовательный анализ в ячейках 336
8.3.3. Последовательно-параллельный поиск 337
8.3.4. Последовательности быстрого поиска 338
Содержание I I
8.4. Автосопровождение кода 340
8.4.1. Оценка запаздывания следящим измерителем 340
8.4.2. Дискриминатор «ранний-поздний» 343
8.4.3. Работа АПЗ в присутствии шума 347
Задачи 350
Задачи в пакете MATLAB 351
Глава 9
Канальное кодирование в широкополосных системах 354
9.1. Предварительные замечания и терминология 354
9.2. Блоковые коды, обнаруживающие ошибки 357
9.2.1. Двоичные блоковые коды и обнаруживающая способность.... 357
9.2.2. Линейные коды и их полиномиальное представление 359
9.2.3. Вычисление синдрома и обнаружение ошибок 363
9.2.4. Выбор порождающих полиномов для CRC 364
9.3. Сверточные коды 365
9.3.1. Сверточный кодер 366
9.3.2. Решетчатая диаграмма, свободное расстояние и
асимптотический выигрыш от кодирования 369
9.3.3. Алгоритм декодирования Витерби 373
9.3.4. Приложения 378
9.4. Турбо-коды 379
9.4.1. Турбо-кодеры 379
9.4.2. Итеративное декодирование 382
9.4.3. Показатели качества 384
9.4.4. Приложения 386
9.5. Канальное перемежение 386
Задачи 388
Задачи в пакете MATLAB 390
Глава 10
Некоторые направления дальнейшего прогресса в
широкополосных технологиях 392
10.1. Многопользовательский прием и подавление помех
множественного доступа 392
10.1.1. Оптимальное (МП) многопользовательское правило для
синхронного варианта CDMA 392
10.1.2. Декоррелирующий алгоритм 394
10.1.3. Алгоритм минимума среднеквадратической ошибки 397
10.1.4. Слепой алгоритм МСКО 401
12 Содержание
10.1.5. Компенсация ПМД 402
10.1.6. Асинхронные многопользовательские алгоритмы 403
10.2. Многочастотная модуляция и OFDM 404
10.2.1. Многочастотный вариант ПРС-CDMA 405
10.2.2. Простая МЧМ и OFDM 407
10.2.3. Многочастотное кодовое разделение 412
10.2.4. Приложения 416
10.3. Разнесение на передаче и пространственно-временное
кодирование в CDMA системах 416
10.3.1. Разнесение на передаче и проблема
пространственно-временного кодирования 416
10.3.2. Эффективность разнесения на передаче 418
10.3.3. Пространственно-временной код с временной коммутацией421
10.3.4. Пространственно-временной код Аламути 423
10.3.5. Разнесение на передаче в широкополосных приложениях .. 426
Задачи 428
Задачи в пакете MATLAB 429
Глава 11
Примеры действующих беспроводных широкополосных
систем 433
11.1. Предварительные замечания 433
11.2. Глобальная радионавигационная система GPS 433
11.2.1. Общие принципы и архитектура системы 434
11.2.2. Дальномерные сигналы системы GPS 436
11.2.3. Обработка сигналов 439
11.2.4. Точность местоопределений 440
11.2.5. ГЛОНАСС и GNSS 440
11.2.6. Применения 441
11.3. Радиоинтерфейсы cdmaOne (IS-95) и cdma2000 442
11.3.1. Вводные замечания 442
11.3.2. Расширяющие коды стандарта cdmaOne 443
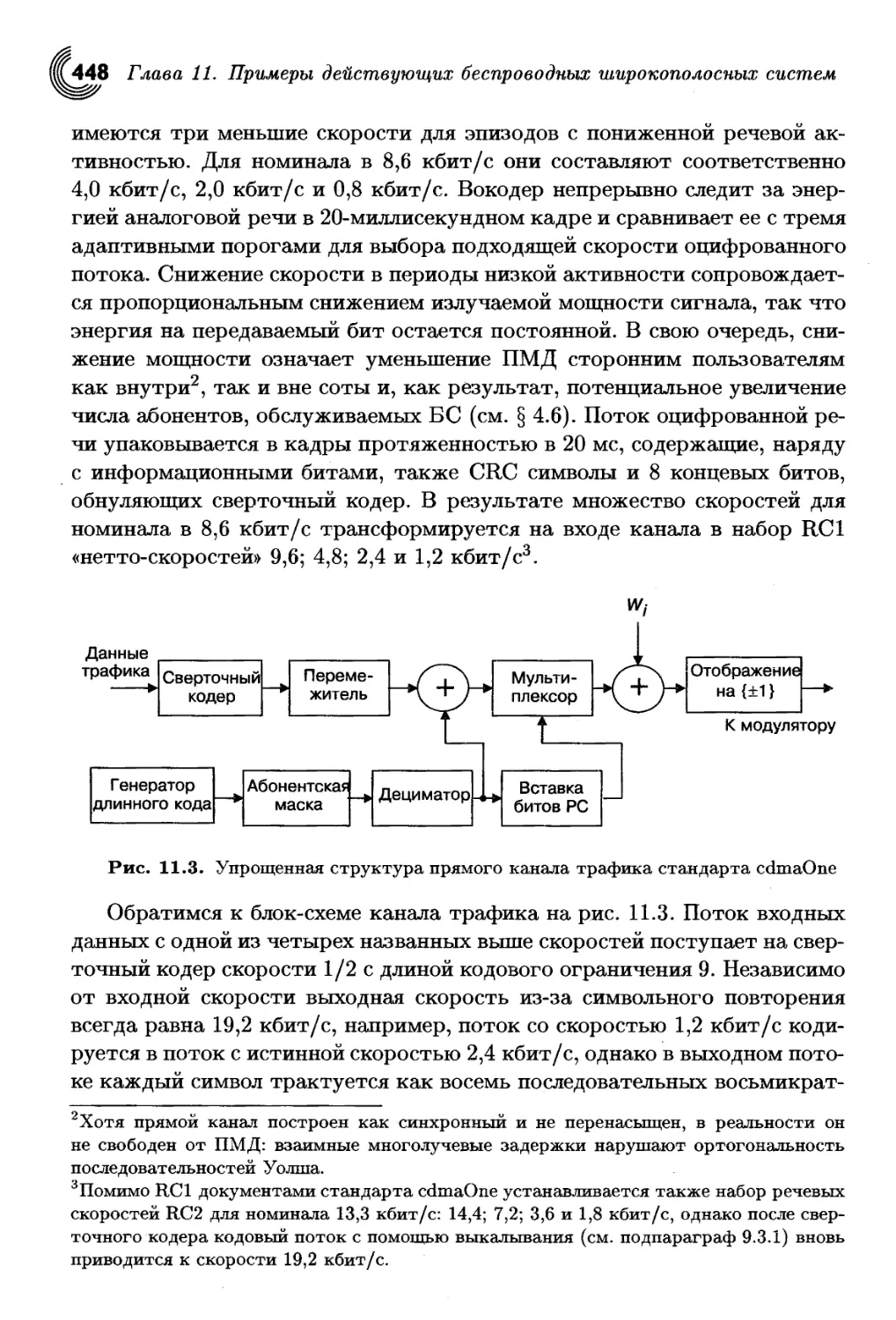
11.3.3. Прямые каналы cdmaOne 444
11.3.4. Обратные каналы cdmaOne 452
11.3.5. Эволюция радиоинтерфейса cdmaOne в cdma2000 456
11.4. Радиоинтерфейс UMTS 459
11.4.1. Предварительные замечания 459
11.4.2. Типы каналов WCDMA 460
11.4.3. Выделенные физические каналы линии «вверх» 461
11.4.4. Общие физические каналы «вверх» 463
Содержание 13
11.4.5. Канализирующие коды линии «вверх» 464
11.4.6. Скремблирование в линии «вверх» 465
11.4.7. Отображение транспортных каналов на физические в
линии «вниз» 467
11.4.8. Формат физических каналов линии «вниз» 468
11.4.9. Канализирующие коды линии «вниз» 469
11.4.10. Скремблирующие коды линии «вниз» 470
11.4.11. Канал синхронизации 470
Литература 474
Предметный указатель 482
Предисловие к русскому изданию
История англоязычного оригинала предлагаемой книги вкратце такова.
В начале 2001 г. я приступил к исполнению обязанностей профессора
кафедры Информационных Технологий Университета Турку в Финляндии.
Одна из стратегических целей моего приглашения в этот авторитетный
вуз была обозначена как постановка учебных курсов и пропаганда
передовых знаний в области теории связи и наукоемких беспроводных
телекоммуникаций. Согласно западной университетской традиции
желательно, чтобы содержание серьезной теоретической дисциплины опиралось на
текст какой-либо одной доступной и международно признанной книги.
Работая над программой большого выпускного курса, вошедшего в
учебный план под названием «Spread Spectrum and CDMA» («Широкополосные
системы и кодовое разделение сигналов»), я оказался в затруднении,
поскольку в длинном перечне книг на эту тему не нашлось ни одной, в
полной мере созвучной намеченной концепции будущей дисциплины. В итоге
пришлось пойти на популярную в академических кругах уловку,
формально сославшись на некий известный учебник, содержащий единственную
подходящую главу, в то время как подлинное наполнение программы
соответствовало авторскому замыслу. По мере преподавания дисциплины
меня неоднократно посещала мысль написать самостоятельную книгу на
английском языке, интегрирующую многолетние научные исследования,
учебно-методический опыт и накопленные знания в области теории и
приложений широкополосных систем. Подобное благое намерение, скорее
всего, ждала бы судьба несбывшегося, если бы не неожиданный и потому
вдвойне лестный встречный шал: со стороны издательства Wiley & Sons,
завершившийся выпуском английской версии в 2005 г.
Хотелось бы выразить признательность издательству «Техносфера»
за инициативу русского переиздания книги. Автор лелеет нескромную
надежду, что ее выход на родном языке будет содействовать
проникновению перспективных веяний в профильные курсы отечественных вузов
в области радиоэлектронной системотехники, а также добавит полезный
ресурс к информационному арсеналу исследователей, системных
дизайнеров и инженеров.
Своевременный выход издательства на контакт позволил прийти к
согласованному решению о целесообразности перевода текста на русский
язык самим автором. В выполнении этой работы, однако, автору
неоценимо помог черновой подстрочник, любезно подготовленный к. т. н. И. М.
Самойловым.
Предисловие к русскому изданию 15
Мне неизвестно, уместно ли отдельное посвящение в переводном
варианте книги. Как бы то ни было, ее выпуск дает подходящий повод
адресовать слова симпатии и приязни друзьям, коллегам и студентам из Санкт-
Петербургского электротехнического университета «ЛЭТИ», с которым
меня неразрывно связывают почти полвека учебы и работы.
В. П. Ипатов
Июль, 2007
Предисловие
Широкополосная передача и кодовое разделение сигналов (CDMA — code
division multiple access) — современные беспроводные технологии,
повсеместно применяемые в действующих радиолокационных,
радионавигационных и телекоммуникационных системах и обеспечившие себе
доминантную роль в философии систем и сетей будущего.
Заинтересованность и усилия, инвестируемые в эту область научными институтами
и промышленностью, чрезвычайно велики и непрерывно возрастают,
особенно после выдающегося коммерческого успеха мобильного стандарта
IS-95 (cdmaOne), основанного на технологии CDMA, и принятия CDMA
в качестве платформы радиоинтерфейса мобильных сетей связи третьего
поколения. Неудивительно поэтому, что основы теории широкополосной
передачи вошли в программы базовых дисциплин университетов, а детали
и тонкости предмета составили содержание ряда продвинутых курсов.
Предлагаемая книга задумывалась как пособие для студентов и
аспирантов с надеждой на применение также в переподготовке инженерного
персонала и в повседневной исследовательской практике. В ее основу
легли опыт и наработки, накопленные автором за более чем тридцатилетний
период участия в соответствующих научных проектах, а также
материал читавшихся им лекционных курсов. Первая версия подобного курса,
поставленная в конце 1970-х в Санкт-Петербургском государственном
электротехническом университете «ЛЭТИ», впоследствии непрерывно
модернизировалась и пополнялась с учетом новейших достижений теории
и технологии, равно как и бесценного опыта общения автора со
слушателями в России и за ее пределами (Великобритания, Австралия, КНР,
Финляндия и др.).
При написании книги автор ставил перед собой задачу представить
ключевые идеи широкополосной передачи в наиболее общем виде, прило-
жимом в одинаковой мере как к системам извлечения и сбора информации
(радиолокация, радионавигация и др.), так и к телекоммуникационным
системам и сетям. Параллельно преследовалась цель — акцентированная
в содержании второй главы — изложить основной материал в как можно
более тесном единстве с классической теорией сигналов и передачи
информации. Методической установкой автора было стремление к балансу
между математической строгостью и физической наглядностью при
обсуждении тех или иных вопросов, и, как результат, глубокому пониманию
читателем причин, лежащих в основе особой популярности технологий
расширенного спектра и CDMA. Главный вопрос, на который автор ста-
Предисловие 17
рался ответить, был «почему?» — т.е. почему разработчик может или
должен предпочесть одни решения другим.
Особая роль в книге отводится проблеме синтеза широкополосных
(шумоподобных) сигналов. Множество популярных книг, пользующихся
заслуженным признанием, ограничиваются в этой части лишь кратким
обзором m-последовательностей и кодов Голда. Читатель, тем самым,
может проникнуться неадекватным убеждением, что вне пределов
названных узких классов никаких привлекательных семейств сигналов нет.
Главы 6 и 7 призваны показать, что в действительности свобода выбора
разработчика гораздо шире, и ему доступны многие альтернативы,
способные не только составить конкуренцию тем, что упомянуты выше, но
и значительно их превзойти.
Книга ни в коей мере не претендует на роль руководства,
разъясняющего детали построения конкретных систем, будь то уже
функционирующие или перспективные. Вместе с тем некоторые из подобных систем
оказываются благодатным полем для иллюстраций реального
воплощения идей и принципов широкополосной передачи и потому ссылки на
них фигурируют в тексте неоднократно. Облегчению усвоения материала
должны способствовать и задачи, помещенные в конце каждой из
теоретических глав, среди которых можно особо выделить ориентированные
на программирование в среде MATLAB. Включение в книгу последних по
замыслу автора может помочь читателю в обретении и развитии
исследовательских навыков, а также всесторонней экспериментальной
верификации изучаемого материала.
Книга поддержана сопровождающим веб-сайтом, на котором лекторы
и преподаватели могут найти решения и коды программ в среде MATLAB
к предлагаемым задачам, электронную версию рисунков, а также другую
полезную информацию (список сокращений и т.п.). Адрес
сопровождающего сайта:
ftp://ftp.wiley.co.uk/pub/books/ipatov
Читательские замечания и комментарии по содержанию книги могут быть
направлены непосредственно на электронный адрес автора
valery.ipatov@utu.fi
У автора достаточно здравомыслия для понимания того, что его труд,
как и любая книга, не может быть свободным от недочетов. В его случае
потенциальным источником дополнительных трудностей оказался
процесс написания текста на неродном языке. Тем не менее, автор несет
полную ответственность как за содержание книги, так и за все ее
недостатки, и с готовностью примет любую конструктивную критику.
Хотелось бы выразить искреннюю благодарность Кафедре
Информационных Технологий Университета г. Турку за доброжелательную и твор-
i 8 Предисловие
ческую атмосферу, окружавшую меня в течение всего периода работы
в Финляндии. Моя особая признательность профессору Иоуни Исоахо
(Jouni Isoaho) и д-ру Эсе Тьюканову (Esa Tjukanoff) за их повседневную
поддержку и сотрудничество.
Благодарю моих коллег д-ра Настуха Авесту (Nastooh Avessta) и д-ра
Игоря Самойлова, нашедших время внимательно прочитать рукопись и
давших немало ценных советов по ее улучшению. Неоценима также помощь
Яркко Пааволы (Jarkko Paavola) и Алексея Дудкова в устранении
погрешностей и опечаток и окончательной подготовке рукописи.
Не могу не воспользоваться шансом адресовать слова
безграничного уважения моим дорогим учителям, профессорам Ю. А. Коломенскому,
Ю.М. Казаринову и Ю.Д. Ульяницкому, открывшим для меня
увлекательный мир сигналов и шумов и в течение десятилетий оказывавших
мне всевозможную поддержку.
Выражаю также сердечную признательность всем коллегам с кафедры
радиосистем Санкт-Петербургского государственного
электротехнического университета «ЛЭТИ» за годы плодотворной совместной работы.
Считаю своим приятным долгом поблагодарить Сару Хинтон (Sarah
Hinton) и ее коллег из Wiley & Sons, инициировавших данный проект и
поощрявших мою решимость довести его до конца. Весьма признателен я
и фонду «Nokia Foundation» за предоставление гранта на этапе
завершения работы над книгой.
Наконец, было бы несправедливым обойти молчанием долготерпение
и заботу со стороны моей жены в течение всего срока работы над книгой.
Валерий П. Ипатов
ГЛАВА I
ШИРОКОПОЛОСНЫЕ
СИГНАЛЫ
И СИСТЕМЫ
1.1. Основные определения
Термин «spread spectrum» {широкополосный, распределенный спектр)
является одним из наиболее популярных в радиотехническом и
телекоммуникационном сообществе. В то же время сформулировать непротиворечивое
и точное определение, ясно отделяющее широкополосную философию от
«неширокополосной», не столь просто. Конечно, любой эксперт в области
проектирования систем или опытный исследователь интуитивно
чувствуют суть понятия. Однако — в отличие от новичка — им не нужно думать
об определениях для успешного решения стоящих перед ними
профессиональных задач. С точки же зрения читателя, которому адресована
данная книга, представляется нелишним посвятить несколько ее страниц
разъяснению того, что в дальнейшем понимается под широкополосной
передачей.
Начнем с напоминания основ спектрального анализа. Любой сигнал s(t)
конечной энергии может быть представлен как сумма несчетного
числа гармонических колебаний, амплитуды и фазы которых в пределах
бесконечно малого диапазона частот [/, f+df] даются спектральной
плотностью или спектром s(f). Математически это выражается парой
обратного и прямого преобразований Фурье
/оо /*оо
s(f)exp(j2Trft)df, s(f)= 8{t)exp(-j2irft)dt. (1.1)
-оо J—оо
Благодаря взаимно-однозначному соответствию между
представлением сигнала во временной s(t) и частотной s(f) областях мы вправе по
своему усмотрению переходить от одного к другому в зависимости от
удобства решения конкретной задачи. Для характеристики размера
зоны, в которой сосредоточена энергия сигнала во временной или
частотной области, используются понятия длительности сигнала Т и полосы W
соответственно. Сигнал, энергия которого концентрируется в пределах
строго ограниченного участка временной оси, не может иметь
ограниченный (т. е. ненулевой лишь в конечном частотном интервале) спектр
20 Глава 1. Широкополосные сигналы и системы
и наоборот. Вследствие этого для определения, по крайней мере, одного
из параметров Т, W или обоих сразу необходимо принять некоторые
договоренности в части толкования их смысла. Так появляются эффективная,
среднеквадратическая и т. п. длительность и полоса, определяемые
размером зоны, в которой сосредоточена существенная часть энергии сигнала
во временной или частотной области соответственно [1].
Абсолютно ясно, что, так или иначе, термин «широкополосный»
(распределенный, расширенный) говорит о том, что спектр сигнала занимает
широкую полосу W. Однако вновь встает вопрос, какую полосу
следует считать широкой? Что может служить эталоном для сравнения? Для
демонстрации того, сколь полемичным может оказаться определение ши-
рокополосности, обратимся к некоторым признанным и весьма
авторитетным книгам.
Довольно часто упомянутое определение содержит тезис, что система
или сигнал являются широкополосными, если занимаемая ими полоса
значительно превосходит минимальную полосу, необходимую для передачи
информации [1-6]. Дискуссионной здесь является сама идея
существования некой минимальной полосы, занимаемой передаваемым сообщением.
Согласно фундаментальной границе Шеннона спектральная
эффективность (т. е. отношение скорости передачи данных R к полосе сигнала W)
системы связи, работающей в условиях гауссовского канала,
удовлетворяет неравенству
R Л / Еь R\ Еь 2RIW - 1
где Еь — энергия сигнала, приходящаяся на один бит информации, No —
односторонняя спектральная плотность мощности гауссовского шума.
Графическое представление границы (1.2) на рис. 1.1 показывает, что любые
комбинации R/W и Еь/Щ, лежащие ниже кривой, возможны, по крайней
мере, в принципе. Последнее означает, что теоретический «минимум
полосы, необходимой для передачи информации», равен нулю и, следовательно,
любая реальная система, которая занимает некоторую ненулевую полосу,
может трактоваться как широкополосная! Несомненно, при любой
попытке использования близкой к нулю полосы для передачи данных
потребуется очень большая энергия сигнала. Так, например, работа со скоростью
R = 100W требует отношения сигнал-шум на бит Еь/Nq, равного 280 дБ,
что, естественно, совершенно нереалистично. Однако, передача данных
в полосе, к примеру, в десять раз меньшей скорости передачи данных,
является типичной для многих цифровых линий связи (радиорелейных,
модемных и т.п.). Сказанное демонстрирует размытость понятия
«минимальной полосы сообщения» и его ненадежность как отправной точки при
объяснении концепции широкополосности.
1.1. Основные определения 21
Рис. 1.1. R/w 102
Граница Шеннона
ю1
10°
0 50 100 150 200 250 Eb/N0, дБ
В качестве попытки, исключающей указанную двусмысленность,
может рассматриваться вариант использования скорости передачи данных,
выраженной в битах за секунду, как замены упомянутой выше
минимально необходимой полосы [7-8]. Однако, представляется не совсем
логичным, что какой-то одной из многих возможных и равноправных единиц
измерения скорости передачи данных присваивается особая
концептуальная роль. Кроме того, определение широкополосности в терминах ширины
полосы, значительно превосходящей скорость передачи данных в битах
за секунду, несет определенный риск охвата систем, которые
принципиально не являются широкополосными. Примером этого может служить
канал «вверх» (между абонентом и базовой станцией) в сетях мобильной
телефонии GSM. При начальной скорости передачи оцифрованной речи
в 9,6 кбит/с абонентский сигнал занимает полосу порядка 200 кГц, что
может спровоцировать отнесение GSM к разряду широкополосных систем.
Однако расширение полосы обратного канала GSM системы не связано
с идеей широкополосной передачи: единственной причиной значительного
превышения полосы над скоростью является использование
множественного доступа с временным разделением, который вынуждает работать
с символами гораздо меньшей длительности, чем временной интервал,
приходящийся на один бит информации.
Существует еще один стимул к поиску альтернативных определений.
Даже если игнорировать упомянутые несоответствия, привязка понятия
широкополосности к скорости передачи или полосе, занимаемой
сообщением, возможна только в применении к системам передачи данных,
тогда как обсуждаемая философия характерна и для многих других
приложений, таких как радиолокация, гидролокация, навигация, управление
удаленными объектами, разрешение сигналов и пр. Более того, назван-
•—* +
_1 L-
Глава 1. Широкополосные сигналы и системы
ные приложения были в числе первых, где преимущества
широкополосной технологии получили практическое подтверждение. В них, однако,
такие категории, как «информационная скорость» или «полоса
сообщения», нередко оказываются довольно надуманными или, по крайней мере,
не имеют отношения к концепции широкополосности. Для
универсализации определения широкополосности, охвата им не только систем связи,
но и других приложений, более подходящей представляется следующая
трактовка.
Обратимся к принципу неопределенности Габора, согласно которому
произведение длительности на полосу сигнала {частотно-временное
произведение) удовлетворяет неравенству WT ^ а, в котором константа а
зависит от способа определения длительности и полосы, однако в любом
случае имеет порядок единицы. Сигнал, для которого WT «1и, значит,
длительность и полоса строго связаны друг с другом, может быть
назван простым (в противоположность широкополосному). Единственным
способом расширения полосы простого сигнала является уменьшение его
длительности, т. е. укорочение. С другой стороны, детерминированный
сигнал, для которого WT >1и полосой которого можно управлять
независимо от длительности, называется сигналом с расширенным спектром
или широкополосным (другие названия — сложный, шумоподобный).
Другими словами, энергия широкополосного сигнала более или менее
равномерно «размазана» по прямоугольнику на плоскости время-частота,
площадь которого значительно больше единицы. Данное определение
автоматически распространяется и на системы: система, использующая сигналы
с расширенным (распределенным) спектром, является широкополосной.
Отметим, что в приведенном определении особо подчеркнута
независимость длительности и полосы, означающая возможность расширения
спектра (увеличения длительности) без укорочения сигнала во временной
(частотной) области. Тем самым акцентируется преимущественная роль
угловой (частотной или фазовой) модуляции в любых технологиях
расширения спектра. Действительно, каким образом амплитудная
модуляция может способствовать расширению спектра? Единственный ответ —
только сокращением временной зоны, в которой сконцентрирована
основная энергия сигнала, т. е. за счет уменьшения эффективной длительности.
Тем самым, лишь угловая модуляция позволяет расширять спектр
сигнала, не оказывая влияния на распределение его энергии во временной
области.
Иллюстрацией вышесказанному служит рис. 1.2, на котором
представлены два прямоугольных импульса одинаковой длительности Т и
несущей частоты /о: сигнал без внутренней модуляции (а) и сигнал с линейной
частотной модуляцией с девиацией W& = 20/Г (6). Нижние кривые со-
1.2. Краткий исторический обзор 23
ответствуют энергетическим спектрам этих сигналов. Для рисунка (а)
полоса W « 1/Т, а значит, энергия сигнала в частотной области
сконцентрирована на интервале, примерно обратном длительности импульса,
т. е. длительность и полоса жестко связаны, частотно-временное
произведение фиксировано и, следовательно, расширение спектра может быть
достигнуто только в обмен на укорочение импульса. В свою очередь
полоса, занимаемая импульсом (б), близка к значению девиации (W « Wd)
и значительно больше, чем величина, обратная длительности. В
результате независимо от длительности сигнала полоса легко регулируется
изменением лишь девиации. В свете введенного определения первый сигнал
является простым, а второй — широкополосным.
5(01,0
0,5
0,0
-0,5
-1,0
' I1IIIIIVI111II
п
s(f)l,0
0,5
0,0
-0,5
-1,0
llllllllllllllllli 11
1 ]
\
1 1
\
0,0 0,2 0,4 0,6 0,8 1,0 1,2 1,4
t
0,0 0,2 0,4 0,6 0,8 1,0 1,2 1,4
t
Рис. 1.2. Немодулированный (а) и частотно-модулированный (б) прямоугольные
импульсы и их спектры
Заметим, что упомянутое определение широкополосности было
исторически первым в применении к радиолокационным и родственным им
системам, однако оно хорошо согласуется и с задачами передачи
информации. Поэтому оно и принято за основу в последующих разделах книги.
1.2. Краткий исторический обзор
История широкополосной технологии охватывает более шести
десятилетий и может служить предметом отдельного исследования. Читатель,
Глава 1. Широкополосные сигналы и системы
интересующийся хронологией ключевых событий, может обратиться к
подробным (хотя и ограничивающимся в основном итогами развития
данного направления в США) обзорам в [9,10]. Здесь же уместно лишь кратко
остановиться на главных исторических вехах.
По-видимому, первый патент на радар, который в современной
терминологии можно без сомнения отнести к широкополосным, был получен
Г. Гуанеллой (Guanella) в 1938 г. Во время Второй мировой войны и
после нее интенсивные исследования в области разработки широкополосных
РЛС были предприняты в Германии, США, Великобритании и СССР.
Одновременно с развитием технологической и технической базы
проводились фундаментальные теоретические исследования, нацеленные на
повышение точности и разрешающей способности радара. Наиболее важные
и глубокие результаты в этом направлении были опубликованы в
книге П. М. Вудворда (Woodward) в 1953 г. Попутно можно заметить, что
многие из этих результатов связаны с фундаментальными положениями
работ К. Шеннона и В. А. Котельникова 1946-48 гг., роль которых, тем
самым, выходит далеко за рамки «чисто» коммуникационных приложений.
Неудивительно, что в течение длительного периода значительная доля
информации о новых практических разработках в области
широкополосной радиолокации и навигации была засекречена, поскольку большинство
подобных проектов курировались военными и разведывательными
службами. Тем не менее, многие идеи, по мере их материализации в системах
массового применения, обретали широкую известность. Ярким примером
подобного рода может служить всемирная радионавигационная система
«Лоран-С», поэтапно развертывавшаяся с начала 60-х годов, в которой
наземные длинноволновые радиомаяки излучают «подлинно»
широкополосные (фазоманипулированные) сигналы с частотно-временным
произведением WT = 16. Чтобы подчеркнуть жизнеспособность этой системы,
отметим, что после перманентных доработок и модернизации она
действует и в третьем тысячелетии.
Еще один прорыв в практическом применении широкополосной
концепции в дальномерно-временных измерительных системах был сделан
в конце 80-х — начале 90-х годов в ходе создания спутниковых
радионавигационных систем второго поколения GPS (США) и ГЛОНАСС (СССР/
Россия). Сигналы с очень большим значением частотно-временного
произведения, измеряемого тысячами, составляют основу упомянутых
систем, которые в настоящее время превратились в составную часть
человеческой цивилизации наряду со спутниковым телевидением и мобильной
связью.
Ранние работы по использованию широкополосных принципов в
телекоммуникациях стимулировались главным образом задачами маскировки
1.2. Краткий исторический обзор
передаваемой речи и защиты информации. Перед Второй мировой
войной они активно велись в Германии и вскоре были подхвачены в США,
СССР и других странах. Интрига знаменитого романа А. Солженицына
«В круге первом» разворачивается в специальной тюрьме (шарашке), где
осужденные ученые и инженеры разрабатывали систему
замаскированной шумом передачи речи.
Среди поворотных событий в развитии широкополосной связи следует
выделить появление алгоритма RAKE, предложенного в 1957 г. Р.
Прайсом (Price) и П. Грином (Green) и положившего начало технологии,
впоследствии названной многолучевым разнесением (multipath diversity).
Работы 60-х годов С. Голомба (Golomb), H. Цирлера (Zierler), P. Голда (Gold),
Т. Касами (Kasami) и других в области синтеза дискретных
последовательностей со специальными корреляционными свойствами сыграли
ключевую роль в совершенствовании широкополосной технологии и ее
многочисленных практических приложениях.
Старт эры коммерческого внедрения широкополосной идеологии
пришелся на конец 70-х годов, когда сотовая телефония начала свое
триумфальное покорение мира. Первые предложения по созданию сетей на
основе CDMA в США и Европе (1978-1980) были отвергнуты в пользу
альтернативных проектов, эволюционировавших позднее в стандарты GSM
и DAMPS. Однако в середине 90-х годов был разработан и реализован
стандарт второго поколения IS-95, полностью основанный на платформе
CDMA. С космической скоростью сети этого стандарта (позднее
названного cdmaOne) распространились в странах Америки, Азии и на
пространстве бывшего Советского Союза. Впечатляющий успех стандарта
IS-95, подкрепленный тщательным анализом, дальнейшими
экспериментами и доработками, привел к признанию широкополосной передачи и CDMA
в качестве базовой платформы для основных проектов мобильной
связи 3-го поколения: UMTS (WCDMA) и cdma2000. На момент завершения
книги оба эти проекта находились в предэксплуатационной стадии,
обещая материализоваться в виде основного инструмента мобильной связи
на предстоящие десятилетия.
Завершая вводную главу, необходимо добавить несколько слов о
развитии широкополосных технологий в Советском Союзе и позже в России.
Обзоры, публикуемые на Западе, обычно весьма скудно освещают уровень
отечественных достижений в данной области. Объективными причинами
этого, характерными для периода холодной войны, были самоизоляция
страны, жесткие ограничения на контакты отечественных специалистов
с зарубежными коллегами и публикации за рубежом, непомерная и
зачастую ненужная секретность и т.п. К тому же серьезным препятствием
был и языковый барьер. На самом же деле советские достижения в обла-
Глава 1. Широкополосные сигналы и системы
сти широкополосной технологии в 50-90 -е гг. соответствовали
высочайшим мировым стандартам и вполне могли конкурировать с разработками
США и Европы. Работы Д. Е. Вакмана, Я. Д. Ширмана, М. Б. Свердли-
ка (синтез и обработка радиолокационных сигналов), И. А. Амиантова,
Л. Е. Варакина (широкополосная связь) и других были во многих
отношениях пионерскими и рекрутировали множество молодых ученых и
инженеров в эту увлекательную и передовую область науки.
ГЛАВА 2
КЛАССИЧЕСКИЕ
ЗАДАЧИ
ПРИЕМА
И СИНТЕЗ
СИГНАЛОВ
Типичным для теории связи является подход, при котором анализ той
или иной системы начинается с приемной стороны. Цель подобной
стратегии состоит в синтезе оптимального приемного устройства, которое
с наилучшим качеством извлекает полезную информацию, содержащуюся
в наблюдаемом колебании. Знание алгоритма приема,
оптимизированного в расчете на конкретную структуру переданного сигнала, позволяет
в дальнейшем синтезировать оптимальным образом и сам переданный
сигнал, т. е. выбрать наилучшим образом методы его кодирования и
модуляции. В данной главе мы исследуем связь между классическими
задачами приема и широкополосной концепцией, иными словами, выясняем,
какие из классических задач приема требуют или не требуют
привлечения широкополосных сигналов. Классическими задачами приема ниже
именуются те, которые базируются на традиционной модели гауссовского
канала.
2.1 • Гауссовский канал, общая задача приема,
оптимальные решающие правила
Любая информационная система, в которой данные передаются из одной
пространственной точки в другую, может быть представлена следующей
абстрактной моделью. Пусть имеется некоторый источник,
генерирующий одно из М возможных сообщений. Данный источник может быть
управляемым, или, по меньшей мере, созданным человеком, однако он
может иметь и независимую от человеческой деятельности природу. В
любом случае каждое из М конкурирующих сообщений передается своим
специфическим сигналом, так что имеется множество S из М возможных
сигналов: S = {sk(t) : к = 1,2, ...,М}. На мощность множества 5, т.е.
28 Глава 2. Классические задачи приема и синтез сигналов
«л*>
Канал
число сигналов М, в принципе не накладывается никаких ограничений
и, если необходимо, множество S может полагаться даже несчетным.
Источник выбирает некоторый определенный сигнал Sk(t) Е5и подает его
на вход канала (см. рис. 2.1). На приемной стороне (на выходе канала)
наблюдается принятое колебание ?/(£), которое является не точной
копией переданного сигнала Sk(t), а результатом трансформации Sk(t),
обусловленной искажающим воздействием шумов и помех, присутствующих
в любом реальном канале. Для приемной стороны имеется М
конкурирующих гипотез Hk относительно того, какой из М возможных сигналов
был в действительности передан и трансформирован каналом в
принятое наблюдение y(t), единственная из которых должна быть отобрана
и объявлена истинной. Обозначим результат этого выбора, т. е. решение,
через Hj, что читается как «решение принято в пользу сигнала с
индексом j». Классическим вопросом теории радиоприема является следующий:
что представляет собой наилучшее правило решения о том, какое из
возможных сообщений (или сигналов) было передано, если принято
наблюдение у(£)?
Для ответа на поставленный вопрос необ-
y{t) ходимо знать модель канала. Математическое
описание канала дается переходной
вероятностью p[y(t)\s(t)], характеризующей вероят-
Рис. 2.1. Обобщенная мо- ность трансформации каналом заданного вход-
дель системы
ного сигнала в то или иное выходное
наблюдение y{t). Если значения переходной
вероятности p[y(£)|s(£)] известны для всех возможных пар s(t) и у(£), канал
исчерпывающе описан.
При равной вероятности всех сообщений источника (что, как правило,
характерно для разумно спроектированной системы) оптимальной
стратегией наблюдателя, обеспечивающей минимальный риск перепутывания
действительно переданного сигнала с каким-то другим, является правило
максимального правдоподобия (МП). Согласно этому алгоритму по
получении колебания y(t) решение принимается в пользу того сигнала, для
которого вероятность трансформации каналом именно в наблюдение y(t)
является наибольшей (в сравнении с другими сигналами).
В теории связи наиболее распространенной моделью служит канал
с аддитивным белым гауссовским шумом (АБГШ), или просто гауссов-
ский канал, в котором переходная вероятность экспоненциально
уменьшается с ростом квадрата евклидова расстояния между переданным
сигналом и выходным наблюдением:
Р\3/(*)Ш] =*ехр (-i-d2(s,y)) , (2.1)
2.1. Гауссовский канал, общая задача приема 29
где к — константа, не зависящая от s(t) и y(t), Щ — односторонняя
спектральная плотность мощности белого шума, а евклидово расстояние
между s(t) и y(t) определяется как
Ф,У) =
N
\Ji3/(t)-s(t)]2dt. (2.2)
о
Объяснение особой важности гауссовской модели лежит в
физической природе многих реальных шумов. Согласно центральной предельной
теореме теории вероятностей вероятностное распределение суммы
большого числа случайных элементарных слагаемых, между которыми нет
сильной зависимости и доминирования одних над другими, приближается
к гауссовскому по мере того, как число слагаемых растет. Как тепловой
шум, так и многие другие, типичные для реальных каналов связи, как
раз и представляют собой результат суммирования значительного числа
элементарных токов или напряжений, обусловленных хаотическим
движением заряженных частиц (электронов, ионов и т.п.).
Говоря о расстояниях между сигналами или колебаниями, мы
интерпретируем последние как векторы, что является общепринятым во всех
дисциплинах, связанных с информационными технологиями. Читателю,
испытывающему затруднения в понимании соответствия сигналов
векторам, может помочь следующий мысленный ход. Предпримем
дискретизацию непрерывного сигнала во времени, т.е. представим сигнал s(t) его
отсчетами Si = s(iTs), i = 0,1,..., взятыми с фиксированным
интервалом Т$. Если полная энергия сигнала сосредоточена в пределах полосы W,
a Ts ^ 1/2W, то отсчеты si исчерпывающе определяют исходный
непрерывный во времени сигнал s(t). При длительности сигнала Т (в
пренебрежении невозможностью для реализуемого сигнала иметь одновременно
конечные длительность и полосу) имеется п = T/Ts подобных отсчетов
и, значит, n-мерный вектор s = (sq,8i, ... , sn-i) полностью описывает
сигнал. Проделав подобную операцию с наблюдением у(£), придем к его
n-мерному векторному эквиваленту у = (уо,У\, • • • ?Уп-г), что позволит
найти евклидово расстояние между векторами s и у согласно теореме
Пифагора для n-мерного векторного пространства:
Ф,у) =
71-1
\i5Z[w-*]2-
\ г=0
Одним из способов возвращения от дискретных колебаний к
непрерывным может быть теперь устремление Ts к нулю, в результате чего
размерность векторов s и у, остающихся векторными эквивалентами сигнала
и наблюдения, становится бесконечной (в пределе эти векторы повторя-
30 Глава 2. Классические задачи приема и синтез сигналов
ют s(t) и ?/(£), поскольку дискретизация устраняется). Одновременно
сумма в правой части приведенного равенства превращается (с точностью до
множителя) в интеграл. Последний, таким образом, характеризует
евклидово расстояние между непрерывными во времени колебаниями.
Вернемся вновь к правилу МП для гауссовского канала. Согласно
соотношениям (2.1)-(2.2), правдоподобие сигнала (вероятность того, что
именно он преобразован каналом в наблюдение y(t)) уменьшается с
увеличением евклидова расстояния между s(t) и у(£).Следовательно, правило
МП для гауссовского канала можно переформулировать как правило
минимума расстояния:
d{sj,y) = mmd(sk,y) => #j, (2.3)
т.е. решение принимается в пользу сигнала Sj(t), поскольку он наиболее
близок (в смысле евклидова расстояния) к наблюдению y(t) среди всех
М конкурирующих сигналов (см. рис. 2.2). Другой, более прямой
записью (2.3), является следующая:
s = argmind(s, у),
где s — оценка принятого сигнала (т. е. сигнал, объявляемый принятым).
Оставаясь в рамках геометрической
трактовки сигналов, можно ввести
геометрическую длину сигнала ||s|| как его
расстояние от начала координат. При этом
«_ из (2.2) следует, что ||s|| = d(s,0) = у/Ё,
/ ^^ / где
S >* d(s,,y)=mind(s^y) T
У к г
*М Е= s2(t)dt (2.4)
Рис. 2.2. Иллюстрация к правилу 0
минимального расстояния тт »
— энергия сигнала. Другой важной
геометрической характеристикой является
скалярное (внутреннее) произведение (u, v) двух сигналов u(t),v(t):
т
(u,v) = fu{t)v{t)dt, (2.5)
о
которое вновь может интерпретироваться как предельная форма
скалярного произведения двух n-мерных векторов. Эту же величину можно
вычислить и через длины векторов и косинус угла а между ними: (u, v) —
= ||и|| ■ ||v||cosa, и, таким образом, скалярное произведение
свидетельствует о близости, или сходстве сигналов. В самом деле, чем ближе
сигналы фиксированной длины (энергии) друг к другу, тем меньше cos a
V
2.1. Гауссовский канал, общая задача приема
отличается от единицы и тем больше скалярное произведение. На этом
основании скалярное произведение называют также корреляцией сигналов.
Чтобы подчеркнуть важную роль этой величины, обратимся к слегка
видоизмененному варианту правила минимального расстояния. Раскроем
скобки в (2.2), придя к равенству
т т т
d2{sk,y) = J y2{t)dt-2 j y{t)sk{t)dt+J s2k{t)dt = ||y||2-2^ + ||s*||2, (2.6)
0 0 0
где Zk является корреляцией между наблюдением y(t) и k-м сигналом sk(t):
т
Zk = (y,Bk) = fv(t)sk(t)dt. (2.7)
о
Первое слагаемое в правой части (2.6) фиксировано для данного
наблюдения и поэтому не влияет на сравнение расстояний между собой
и решение, какой из сигналов принят. Последнее слагаемое есть не что
иное, как энергия к-го сигнала Ек. Теперь правило минимума
расстояния (2.3) можно толковать как следующее правило максимума корреляции:
Е.
1 —
max
к
Zk
Н,
J'
(2.8)
Ек
2 ~" V"" 2
означающее, в частности, что среди М
возможных сигналов одинаковой энергии принятым
объявляется тот, который имеет наибольшую
корреляцию с наблюдением y(t). Физическая
трактовка последнего сценария весьма
прозрачна: предпочтение отдается тому из сигналов,
который наиболее похож на наблюдение y(t)
в сравнении с остальными, причем мерой
сходства служит величина корреляции (скалярное
произведение) сигналов с y(t).
Интересно попутно отметить, что даже эти
весьма предварительные рассуждения
позволяют составить представление об общих идеях
синтеза сигналов. Обратимся к рис. 2.3, на
котором изображен пучок сигнальных векторов.
Предположим, что передавался сигнал Si, и что
он подвергся искажению в АБГШ канале,
прибавляющем к Si шумовой вектор п. Гауссовский вектор п характеризуется
симметричным (сферическим) вероятностным распределением,
экспоненциально спадающим с увеличением квадрата длины вектора п, что видно
Рис. 2.3. Зашумленное
наблюдение и задача синтеза
сигналов
Глава 2. Классические задачи приема и синтез сигналов
из (2.1) после удаления из него сигнала (т.е. при подстановке s(t) = 0).
Следовательно, вектор наблюдения у — si + n флюктуирует вокруг Si,
как это показано на рисунке, и, согласно правилу минимума
расстояния (2.3), как только у окажется ближе к какому-то другому сигналу,
чем к si, будет принято ошибочное решение. Для минимизации риска
подобных ошибок остальные сигналы следует располагать на максимально
возможном расстоянии от si. Поскольку любой из М сигналов может быть
передан с равной вероятностью, т.е. занять место Si, очевидно, что все
расстояния d(sfc, s/), I ^ k < I ^ M, следует стараться сделать как можно
большими. Когда М достаточно велико, задача одновременной
максимизации всех расстояний оказывается весьма нетривиальной, поскольку они
могут конфликтовать друг с другом: удаление некоторого вектора от
соседнего чревато риском приближения его к какому-то третьему. В этом
свете задача построения созвездия максимально удаленных друг от друга
сигналов (входящая в обширный класс так называемых задач упаковки)
во многих случаях весьма сложна, и общее ее решение пока не найдено.
Заметим, что выше все М сигналов считались полностью
детерминированными, т.е. полагалось, что на приемной стороне априори известны
все параметры сигналов, и наблюдатель не осведомлен только об одном:
какой именно из конкурирующих М сигналов был послан. Подобная
модель в значительной степени адекватна приему сигналов на видеочастоте
или когерентному приему на высокой частоте. Однако с некоторыми
дополнениями основные подходы применимы и к более сложным сценариям,
как например, некогерентный прием (см. § 2.5).
Освежив в памяти общие идеи оптимального приема, мы подготовили
почву для перехода к более детализированному обсуждению с акцентом
на вопросах оптимизации сигналов и выявлении потенциальных
преимуществ — или отсутствия таковых — широкополосной передачи в условиях
разнообразных классических ситуаций.
2.2. Передача двоичных данных
(детерминированные сигналы)
Чтобы продемонстрировать критическую зависимость качества приема
от расстояния между сигналами начнем с простейшей, но весьма
типичной связной задачи двоичной передачи данных, когда по каналу
пересылается одно из лишь двух (М = 2) возможных сообщений.
Практически данная постановка соответствует передаче либо одного бита данных
в системе без канального кодирования, либо одного символа двоичного
кода в системе с помехоустойчивым кодированием и жестким решением
2.2. Передача двоичных данных (детерминированные сигналы)
на приеме и т. п. Маркируя сообщения номерами нуль и единица и
полагая, что для их передачи используются сигналы so{t) и s\(t) (по-прежнему
детерминированные), правило минимального расстояния (2.3) можно
записать как
d(s0,y) ^d(si,y),
(2.9)
где позиция символа решения по отношению к знакам неравенства прямо
указывает, когда принимаются решения в пользу того или иного
сообщения. Аналогичным образом может быть переписано и решающее
правило (2.8), предполагающее сравнение корреляций
Z = Zq
НоЕо
Hi
(2.10)
где корреляция ^, к = 0,1 каждого из сигналов с наблюдением y(t)
определяется соотношением (2.7), а энергия сигнала Ek = ||sfc||2, к — 0,1
устанавливается (2.4). Оптимальные правила различения (2.9)-(2.10) двух
сигналов могут быть наглядно интерпретированы геометрически. Два
сигнальных вектора So и si всегда лежат в сигнальной плоскости SP.
Вектор же наблюдения у необязательно попадает на эту плоскость, но
близость его к одному или другому сигналу определяется близостью к ним
проекции у' вектора у на SP (см. рис. 2.4, а). Следовательно, плоскость
SP может быть поделена на две полуплоскости прямолинейной границей,
перпендикулярной к прямой, соединяющей сигнальные векторы. Тогда
решения Hq и Н\ выносятся на основании попадания проекции у' в
соответствующую полуплоскость (см. рис. 2.4, б).
SP
-^^
•^<^<ЛСс
Hi
<S*4S
\ У
нп
б)
Рис. 2.4. Сигнальная плоскость и полуплоскости решения
Из рис. 2.4, б также следует, что вероятность перепутывания
сигналов (вероятность ошибки) зависит от расстояния между векторами so
и si, отнесенного к диапазону случайных флюктуации у', обусловленных
канальным шумом. Согласно (2.10), фактически принятый сигнал so{t)
2—2771
34 Глава 2. Классические задачи приема и синтез сигналов
будет ошибочно засчитан за s\(t), если и только если разность
корреляций z будет меньше порога (Ео — Е{)/2. Следовательно, вероятность poi
подобной ошибки может быть найдена как (Рг(-) здесь и далее
символизирует вероятность)
poi = Pr [z <
Eq — Ei
so(t))= / W(z\s0(t))dz, (2.11)
где Р(А\В) — условная вероятность события А при условии, что событие
В произошло, a W(;z|so(t)) — условная плотность вероятности разности
корреляций z из (2.10) при условии, что сигнал so(t) был принят в
действительности. Одно из замечательных свойств гауссовского процесса
состоит в том, что любое его линейное преобразование оказывается
также гауссовским процессом. Поскольку г, согласно (2.7), (2.10), получено
линейным преобразованием гауссовского наблюдения y(t)y то и z
подчиняется гауссовскому закону
W(z\s0(t)) =
2тга
ехр
2<т2
интегрирование которого, согласно (2.11), приводит к выражению
'2z -Eo + Ei
где
Poi
Q(x)
=^/ехр(-?)°
(2.12)
— дополнительная функция ошибок.
Из (2.7), (2.10) могут быть найдены математическое ожидание 2, при
условии того что принят тот или иной сигнал (верхняя черта здесь и
далее используется как символ статистического усреднения), и дисперсия
а2 = vax{z}. При истинно принятом сигнале so(t), т.е. y(t) = so(t),
математическое ожидание разности корреляций z
Т
z = JyW[so(t) - si(t)} dt = EQ- poiy/EoEu (2.13)
где
Pki
(sfe,Sj) = 1
N||-'|M уЩЖ
±
Jsk(t)si(t)dt (2.14)
— коэффициент корреляции сигналов s/b(£), s/(£), a Ek, Ei — их энергии.
Из (2.14) следует, что геометрически poi есть просто косинус угла между
2.2. Передача двоичных данных (детерминированные сигналы) 35
сигналами sq(£), s\(t) (или сигнальными векторами So, Si) и, тем самым,
характеризует близость, или сходство сигналов.
Чтобы быстрее найти дисперсию а2, учтем, что детерминированная
составляющая наблюдения y(t) (в рассматриваемой ситуации сигнал so(t))
на нее не влияет, поскольку шум в канале аддитивен. Поэтому можно
удалить сигнал из y(t), полагая y(t) = п(£), где n(t) — белый шум с
двусторонней спектральной плотностью мощности Nq/2. После этого нахождение
дисперсии корреляции (2.7) наблюдения y(t) с произвольным сигналом
s(t) сводится к вычислению
( Т \ZTT
а2 = vai{z} = < fn(t)s(t)dt \ = f jn(t)n(t')s(t)s{t')dtdt\
lo J о о
где квадрат интеграла заменен двойным интегралом с разделяющимися
переменными, изменен порядок интегрирования и усреднения
(математическое ожидание суммы равно сумме математических ожиданий) и,
наконец, усреднение применено только к случайному сомножителю под
знаком интеграла.
Напомним теперь, что вследствие равномерности спектра белого шума
во всем частотном диапазоне автокорреляционная функция
(статистическое среднее произведения двух временных отсчетов) такого шума есть
дельта-функция Дирака n{t)n{tl) — (No/2)S(t — £'). Другими словами,
любые два отсчета белого шума, не совпадающие во времени, некоррелиро-
ваны. Использование последнего результата в выражении для дисперсии,
а также фильтрующего свойства дельта-функции
т
s{t')5{tf -t)dtf = s{t),
о
приводит к выражению
-2 = f ]*№=*£, (2.15)
О
где Е — энергия сигнала s{i).
Как следует из (2.10) и (2.7), в рассматриваемой ситуации в (2.15)
следует подставить s(t) — so(t) — si(£), т. е. Е представляет собой энергию
Ed разностного сигнала so(t) — s\(t). Согласно определению энергии
г
Ed = J[so{t) - Sl(t)]2dt = d2(s0,S!) = E0 + Ег - 2p0i^E0E1. (2.16)
36 Глава 2. Классические задачи приема и синтез сигналов
В свете геометрического смысла коэффициента корреляции и энергии,
последнее соотношение представляет собой не что иное, как теорему
косинусов из «школьной» математики.
Окончательно подстановка (2.13), (2.15) и (2.16) в (2.12) дает
В силу симметрии исходной задачи аналогичное равенство получается
и для вероятностною перепутывания s\(t) с so(t)~ Таким образом, полная
(безусловная) вероятность ошибочного приема Ре не зависит от
априорной вероятности w поступления в канал сигнала so(t) и дается
соотношением
Ре = wpoi + (1 " uOfto = Q и^щА ■ (2-18)
Из (2.18) очевидным образом вытекает, что единственным путем
достижения высокой достоверности двоичной передачи данных является
увеличение расстояния d(so,Si) между сигналами. Как видно из (2.16),
d(so,Si) можно сделать большим за счет увеличения энергии сигналов
или длины соответствующих векторов. Какова, однако, оптимальная
пара сигналов, если ресурс подобного «силового» решения исчерпан, т.е.
энергия сигналов ограничена заранее? Рассмотрим сперва характерный
случай сигналов равных энергий Eq = Е\ = Е, когда интенсивность
сигналов не используется как индикатор передаваемого сообщения. Тогда
правило принятия решения (2.10) сводится к сравнению корреляций z$
и z\ или, что эквивалентно, определению знака их разности
z = zq - z\ ^ 0.
#i
Очевидно, что для максимизации расстояния между двумя
векторами фиксированной длины следует выбирать их противоположными, как
это показано на рис. 2.5, а. Тогда угол между векторами so и Si a ~ 7г,
a cos a = poi = — 1 и, значит, d(so,Si) = 2у/Ё, что приводит соотношение
(2.18) к форме
/ /oz?\
(2.19)
выражающей минимально достижимую вероятность ошибки при передаче
двоичных данных сигналами фиксированной энергии Е. Для
непосредственного вычисления корреляции z могут быть использованы
коррелятор или согласованный фильтр, часто фигурирующие в дальнейшем, при-
2.2. Передача двоичных данных (детерминированные сигналы) 37
чем параметр q ~ y/2E/No есть не что иное, как отношение сигнал - шум
на выходе указанных устройств.
so
*i=-*o
so
VT
Ч\л/2Ё
so
л^
s1 = 0
б) в)
Рис. 2.5. Варианты выбора сигналов для двоичной передачи
Как видно, оптимальной парой оказываются противоположные
сигналы вида si(t) = —so(t). Бинарная фазовая манипуляция (БФМ)
практически реализует подобную пару и широко используется в цифровых
системах передачи данных. При этом символ «О» (сообщение,
маркированное нулем) передается радиосигналом с нулевой начальной фазой, тогда
как тот же радиосигнал, но с начальной фазой 7г передает символ «1».
Для выяснения, насколько критично качество двоичной передачи к
выбору сигнальной пары, сравним БФМ с другими популярными методами
передачи двоичных данных. Хотя БФМ является наилучшим из
возможных способов передачи двоичной информации, ее применение основано
на фазовом различии двух сигналов, носителей информации, и,
следовательно, требует точного знания приемной стороной текущего значения
фазы несущего колебания. Для этого в приемнике должно
присутствовать специальное устустройство восстановления несущей, что иногда
рассматривается, как нежелательное усложнение. Избежать его возможно
за счет замены БФМ бинарной частотной манипуляцией (БЧМ), при
которой сообщения «О» и «1» передаются сигналами разных частот. Типичен
такой их выбор, при котором сигналы оказываются ортогональными:
cos a = poi — 0, d(so,Si) = у/2Ё (см. рис. 2.5, б). Подстановка этих
значений в (2.18) дает
(2.20)
Сравнение (2.20) с (2.19) показывает, что для ортогональной пары (БЧМ)
равная с БФМ вероятность ошибки достигается ценой удвоения энергии
сигналов относительно БФМ. Иными словами, ортогональные сигналы
энергетически проигрывают противоположным 3 дБ.
38 Глава 2, Классические задачи приема и синтез сигналов
Существует еще один, достаточно старый, способ двоичной передачи,
до сих пор применяемый на практике: бинарная амплитудная
манипуляция (БАМ), при которой символ «О» передается сигналом so(t) — s(t)
с энергией Eq = J5, а символ «1» — паузой, т.е. si(t) = О, Е\ = 0. В этом
случае (см. рис. 2.5, в) d(so, Si) = у/Е, а вероятность ошибки (2.18)
становится равной
Сравнивая последний результат с (2.19), можно прийти к выводу, что
БАМ требует в 4 раза (на 6 дБ) большей энергии, чем БФМ, для
достижения той же достоверности передачи. Последнее утверждение справедливо
лишь тогда, когда ограничение наложено на пиковую энергию. На
практике чаще ограничение накладывается на среднюю энергию. Поскольку
на передачу символа «1»в случае БАМ никакая энергия не тратится, при
равновероятных символах «0» и «1» средняя энергия (Eq -j- Е\)/2 — Е/2.
Таким образом, средняя энергия, излучаемая при применении БАМ, лишь
в два раза больше, чем при БФМ, при той же вероятности ошибки, и
энергетический проигрыш БАМ — тот же, что и у БЧМ, т. е. 3 дБ.
Проведенный анализ дает основание для следующего вывода о роли
выбора сигнальной пары для передачи двоичной информации:
отсутствует малейший намек на получение каких-либо преимуществ от
привлечения широкополосных сигналов, так как расширение полосы
сигнала сверх минимума 1/Т не приведет к уменьшению вероятности
ошибки. Действительно, для обеспечения желаемой достоверности приема
достаточно лишь применить пару сигналов, максимально удаленных друг
от друга, что автоматически предполагает использование
противоположных сигналов без дополнительных требований к их форме и модуляции.
Если по каким-либо причинам использование противоположной пары
нецелесообразно, ни ортогональная (БЧМ), ни БАМ пары сигналов также
никоим образом не стимулируют к применению технологии расширения
спектра.
2.3. М- ичная передача: детерминированные сигналы
При числе передаваемых сообщений М > 2 вероятность р\^е перепутыва-
ния истинно принятого сигнала s\(t) с каким-либо из М — 1 ошибочных
сигналов si(t),l = 2,3,... ,М, согласно правилам (2.3) и (2.8) может быть
вычислена как
2.3. М-ичная передача: детерминированные сигналы
pi>e = Pr fd2(sby) ф mfcind2(sfc,y)|si(£)
= 1 - Рг (zi - -^ = т*Ф* - -±)\Sl(tU .
Нахождение точного значения этой вероятности состоит в
интегрировании условной — при истинности сигнала si(t) — совместной плотности
вероятности всех М корреляций по всей области, где z\ ^ Zk — (Ek — Ei)/2
для всех к = 1,2, ...,М. Этот М-кратный интеграл в общем случае,
т. е. без допущения о некоторых особых свойствах множества сигналов,
не может быть упрощен. Однако весьма полезная и точная оценка сверху
вероятности pi?e может быть найдена с использованием аддитивной
границы. Пусть событие А\ состоит в том, что наблюдение y(t) оказывается
ближе к ошибочному сигналу si(i) с номером I € [2, М], чем к
истинному si(t). Тогда принятие s\(t) за какой-то (неважно какой) ошибочный
сигнал есть объединение всех Aj. Согласно аддитивной границе
вероятность объединения событий не превышает суммы их вероятностей, так что
м
рм = Pr(A2 U As U ... U Ам) ^ 53Рг(^)-
1=2
С другой стороны, Pr(Aj), как следует из определения Аи есть в точности
вероятность перепутывания лишь двух сигналов s\(t) и s\(t). Значение
последней дается равенством (2.17) после соответствующей подстановки
номеров сигналов:
Подстановка последнего соотношения в предыдущее неравенство
приводит к искомой оценке
Аналогичный результат (при соответствующей замене индексов)
получится и в предположении, что вместо s\(t) истинным является сигнал
Sk(t), так что, с учетом априорной равновероятности всех М сигналов,
аддитивная верхняя граница еля полной (безусловной) вероятности
ошибки примет вид
^-ф^ШЛ^Щ- (222)
-
Глава 2. Классические задачи приема и синтез сигналов
Первым примечательным фактом, касающимся (2.22), является то,
что при М = 2 неравенство превращается в равенство (2.18). Дрзтой факт
связан с асимптотическим поведением (2.22) при возрастании отношения
сигнал-шум. Дело в том, что дополнительная функция ошибок Q(x)
спадает при достаточно большом х как ехр(—ж2/2), и даже незначительное
увеличение аргумента способно уменьшить Q{x) до пренебрежимо
малого уровня по сравнению с начальным. Вследствие этого при достаточно
большом отношении сигнал - шум лишь сигнальные пары с минимальным
расстоянием вносят заметный вклад в значение суммы в (2.22), и
если dmin есть минимальное расстояние между сигналами, встречающееся
в сигнальном созвездии пт\п раз, то оценка (2.22) асимптотически
трансформируется к виду
р-н^{Щ)- Is»1- (2-2з)
Приближение (2.23) указывает, прежде всего, на асимптотическую
сходимость аддитивной границы к истинной вероятности ошибки с
ростом отношения сигнал-шум. Для физического объяснения этого
обратимся вновь к рис. 2.3 и отметим, что при малом уровне шума только те
сигнальные векторы, которые расположены вблизи от истинного, могут
быть ошибочно приняты за последний. Это означает, что асимптотически
только сигнальные пары с расстоянием dm\n влияют на значение
вероятности ошибки Ре (а не только ее верхней границы!), что и означает
сближение Ре с ее аддитивной границей.
Соотношение (2.23) лежит в основе одной из возможных и наиболее
важных постановок задачи синтеза ансамбля сигналов, требующей
максимизации минимума расстояния в множестве М сигналов. Как уже
упоминалось в § 2.1, подобная задача в геометрической интерпретации
эквивалентна упаковке М векторов таким образом, чтобы ближайшая их
пара находилась на максимально возможном расстоянии: dmjn — max. При
этом на созвездие сигналов (векторов) могут быть наложены различные
ограничения. Прежде всего следует учесть естественные лимиты
практически доступного ресурса мощности или энергии. Если фиксировать
м
только среднюю энергию сигналов Е = ^ Ek/M — const, допускает-
к=\
ся разная длина сигнальных векторов, и процедуру построения ансамбля
сигналов можно назвать объемной упаковкой. Часто, однако, при
отображении сообщений в сигналы выдвигается требование исключения
влияния энергии, т.е. ее равенства для всех сигналов: Ek — Е = const,
к — 1,2,...,М. В этом случае все сигнальные векторы имеют одинаковую
длину, и значит, лежат на сферической поверхности, откуда и следует
название задачи — сферическая упаковка.
2.3. М-ичная передача: детерминированные сигналы
Другим характерным ограничением при синтезе сигналов является
размерность ns сигнального пространства, в пределах которого и
осуществляется упаковка. Физика этого ограничения вновь связана с лимитом
доступного ресурса, на этот раз спектрального. Для объяснения
указанной связи обратимся вначале к видеосигналам и предположим, что
полный (двусторонний) диапазон частот и временной интервал,
отведенные для всех М сигналов, ограничены значениями Wt и Tt соответственно.
Первое из этих ограничений учитывает стремление к экономии полосы,
тогда как второе отражает желание передавать данные с приемлемой
скоростью R = log M/Tt. В итоге, согласно теореме отсчетов, имеется
примерно W{Tt независимых отсчетов, доступных для построения М
сигналов, причем каждый из последних трактуется как вектор в
пространстве размерности п8 — WtTf. Некоторая осторожность в оценке числа
независимых отсчетов объясняется уже упоминавшейся невозможностью
концентрации энергии любого сигнала в пределах конечных отрезков во
временной и частотной областях одновременно. В оценках первого
приближения, однако, этот факт можно игнорировать.
Для того чтобы охватить и случал радиосигналов, обратимся к общей
их модели
s{t) = S(t) cos[2<irf0t + 7(t)], (2.24)
в которой S(t) — действительная огибающая сигнала (закон амплитудной
модуляции), j(t) — закон фазовой модуляции, а /о — несущая
частота. Используя тригонометрическое тождество для косинуса суммы углов,
(2.24) можно представить в виде
s{t) = Si(t) cos 2тг f0t - Sq sm27r/0t, (2.25)
где Si(t) = S(t) cos7(£) и Sq(£) = S(t)siwy(t) — квадратурные
компоненты сигнала. Поскольку и S(t), и j(t) являются видеосигналами, таковыми
же являются 5/(£), Sq(£). Последнее означает, что при переносе на
несущую частоту любой радиосигнал исчерпывающе описывается двумя
независимыми низкочастотными квадратурными компонентами.
Следовательно, при синтезе радиосигналов доступно удвоенное число
независимых координат (отсчетов) по сравнению с видеосигналами при
одинаковых значениях частотно-временного произведения и, значит, п3 = 2WtTt.
Теперь в общем виде задача синтеза ансамбля сигналов может быть
сформулирована следующим образом: в пространстве заданной
размерности ns построить созвездие из М точек или векторов, удовлетворяющее
энергетическим ограничениям и обладающее максимально возможным
минимумом расстояния между точками dm\n = max. Данная задача может
быть переформулирована в дуальную: в пространстве заданной
размерности ns построить созвездие из М точек или векторов с гарантированным
42 Глава 2. Классические задачи приема и синтез сигналов
минимальным расстоянием dmin, обеспечив минимизацию энергетических
затрат в терминах либо средней энергии Ё = min (объемная упаковка),
либо равной для всех сигналов энергии индивидуального сигнала Е = min
(сферическая упаковка).
= л/4Е/5
dmin = V2E/5 ofmin = ^(2- V2)E * 0,77л/Ё
i i
i i
-<ь б-
а;
о«*----*о
о о
о о
о о
б)
Л;^Т--
"► —fr
В)
-Ь—►
Рис. 2.6. Одно- и двумерные созвездия: а) — 4-AM; б) — 16-КАМ; в) — 8-ФМ
Простейшая версия этой задачи (ns = 1) отвечает случаю
амплитудной (AM) модуляции (простейший вариант которой с М = 2 — бинарная
AM — был упомянут в § 2.2). Альтернативным наименованием AM
служит импулъсно-кодовал модуляция (ИКМ)). При этом все сигнальные
точки располагаются на одной прямой, и при М > 2 речь может идти
только об «объемной» упаковке. Не составляет труда убедиться, что при
заданном dm{n оптимальное созвездие, минимизирующее среднюю
энергию, получается при равномерном и симметричном расположении
сигнальных точек с расстоянием между соседними, в точности равным dm{n
(см. рис. 2.6, а для случая М = 4).
При ns = 2 задача нахождения оптимального созвездия с объемной
упаковкой становится более трудной и может даже привести к ассиме-
тричным моделям^ тогда как сферическая упаковка осуществляется
тривиальным образом и реализуется равномерным размещением М точек
на окружности радиуса л/Ж Широко используемая в современной
цифровой связи М-ичная квадратурная амплитудная модуляция (КАМ)
служит примером двумерного, симметричного объемно-упакованного
созвездия, которое, не являясь оптимальным теоретически, удобно в плане
аппаратной реализации (рис. 2.6, б). С другой стороны, традиционная
М-ичная фазовая манипуляция (ФМ) отвечает созвездиям с равномерно
расположенными на окружностями точками, оптимальным с точки
зрения сферической упаковки (рис. 2.6, в).
2.3. М-ичиая передача: детерминированные сигналы 43
Задача оптимальной упаковки в пространствах большей размерности
(п5 > 2) является чрезвычайно сложной и до сих пор не получила общего
математического решения. Много полезных, но частных результатов
содержится в целом ряде книг и статей (см., например, библиографию в [11]
и веб-сайт [12]).
Попытаемся теперь определить верхний предел минимума расстояния
в отсутствие предварительного ограничения на размерность сигнального
пространства ns, а также минимальное значение п5, которое обеспечит
его достижение. Ограничиваясь только случаем сферической упаковки
(Ek = Е, к = 1,2,..., М), вычислим сумму всех М2 возможных квадратов
расстояний, включая и тривиальные (т.е. расстояния сигналов от них
самих). Тогда на основании теоремы косинусов (2.16)
м м
£ d2(sk, si) =2M2E -2EJ2 PkU (2.26)
к,1=1 к,1=1
где ры — коэффициент корреляции между fe-м и 1-м сигналами. Для
оценки суммы всех коэффициентов корреляции воспользуемся определением
(2.14) для pku поменяем порядок интегрирования и суммирования и учтем,
что индексы к и / двойной суммы под знаком интеграла разделяются,
а значит, ее можно заменить произведением двух идентичных сумм:
м Т ( м \ т / м \2
Е £ № = / £ *k(t)si{t) Л = / 5>*(«) dt.
Поскольку интеграл от квадрата всегда неотрицателен, из (2.26)
вытекает, что
м
J2d2(sk,sl)^2M2E.
к,1~1
В то же время приведенная выше сумма не меньше, чем М(М — l)d^in.
Объединение обоих неравенств приводит к следующей верхней границе
минимального расстояния
dlin^j^jE. (2.27)
Если существуют М сигналов, лежащих на этой границе, их
справедливо назвать оптимальными по критерию минимума расстояния. Для
доказательства существования подобного множества сигналов рассмотрим
М векторов Ufc, к = 1,2, ...,М, имеющих попарно нулевое скалярное
произведение и единичную длину: (щ,и/) = Ski, к,1 = 1,2, ...,М, где
Ski = 0? к Ф /, Ski — 1? k = I — дельта-функция Кронекера. Такие
векторы, называемые ортонормированнымщ существуют в любом векторном
44 Глава 2. Классические задачи приема и синтез сигналов
пространстве, размерность которого не меньше, чем М. Сформируем
теперь М новых векторов v^, k = 1,2,..., М, каждый из которых получен
вычитанием из щ суммы u = Ylk-i ufc> взвешенной коэффициентом 1/М:
Vfc = u/fe — u/M. Скалярное произведение v^ и vj
111 1
(v*,vi) - (ufc,u/) - jj^(ufc,u) - ^(u>u*) + ]^(u'u) = **' - д7> (2-28)
где при вычислении принята во внимание ортогональность векторов щ
и линейность скалярного произведения. Изменим теперь длину
векторов V& умножением их на константу у/МЕ/(М — 1) и используем
полученные векторы в качестве сигнальных:
/ ME
Sk = \W=iVk} к = 1,2,'г" 'м' (2*29)
Тогда, согласно теореме косинусов (2.16) и соотношению (2.29), квадрат
расстояния между двумя сигналами
_2, ч ME 2
= MrT[l|vfe||2 + l|v/||2-2(vfe,vO]=^—у, *#«, (2.30)
что совпадает с правой частью соотношения (2.27). Следовательно,
сигналы, достигающие границы (2.27), действительно существуют. Более того,
расстояние между любой их парой одинаково, поэтому они попадают
в категорию эквидистантных. Построенный ансамбль широко известен
под специальным наименованием множества симплексных сигналов.
Непосредственно из его определения следует, что
м м
J2 s* = у/МЕ/{М - 1) £ v* = у/МЕ/(М - 1)(и - и) = 0,
k=i k=i
означающее, что в отличие от исходных ортогональных векторов щ
симплексные сигналы линейно зависимы. Легко убедиться, что размерность
пространства ns = М — 1, т. е. на единицу меньшая числа сигналов,
необходима и достаточна для построения М симплексных сигналов.
Эквидистантность симплексных сигналов означает и равенство
коэффициентов корреляции pki для любой их пары. Вычисление pki с
помощью (2.14), (2.29) и (2.28) приводит к результату
демонстрирующему, что углы между любыми двумя симплексными
сигналами равны и превышают 7г/2. Для простейших множеств М = 2,3,4
симплексных сигналов, представленных на рис. 2.7, величина
коэффициента корреляции принимает значения, равные —1 (противоположные сиг-
2.3. М-ичная передача: детерминированные сигналы 45
М = 2
М = 3
М = 4
налы), —1/2 и —1/3 соответственно, что в свою очередь отвечает углам
в 180°, 120° и примерно 110°. При М = 4 симплексные векторы
образуют простейший правильный многогранник (тетраэдр), что и объясняет
наименование сигналов: «симплекс» — от латинского «простой».
В любом созвездии эквидистантных
сигналов d(sk,si)
— "min
для любой
пары различных векторов, так что в (2.23)
^min = М(М — 1), совпадая с числом
слагаемых в (2.22). Подстановка этого
значения совместно с (2.30) в (2.23)
дает оценку асимптотической вероятности
ошибки для симплексных сигналов,
которая одновременно служит и верхней
границей для точного значения вероятности ошибки
Рис. 2.7. Примеры симплексных
сигналов
< (М - 1)Q
ME
2Е
N0
(2.31)
_ (M-1)JV0/
Поскольку симплексные сигналы оптимальны по критерию минимума
расстояния, то правая часть последнего выражения служит оценкой
минимально возможной асимптотической вероятности ошибки для случая М
сигналов с фиксированными и равными Е энергиями.
Ортогональные сигналы, являющиеся еще одним примером
эквидистантных, практически столь же эффективны, как и симплексные, при
достаточно большом значении М. Действительно, коэффициент
корреляции для ортогональных сигналов равен нулю, а расстояние между любой
их парой d(sfc,s/) — dm[n — \[2Ё. Используя это в (2.23), получим оценку
асимптотической вероятности ошибки для М ортогональных сигналов,
ограничивающей точное значение вероятности ошибки сверху:
Сравнение (2.32) с (2.31) показывает, что для уравнивания
вероятностей ошибок в обоих случаях энергия ортогональных сигналов должна
быть увеличена в М/(М — 1) раз по сравнению с симплексными, т.е.
энергетические потери 7 первых относительно вторых 7 = М/(М — 1).
При М » 1 эти потери пренебрежимо малы и ортогональные
сигналы могут рассматриваться как оптимальные. Например, при М — 64
7 — 64/63, что соответствует увеличению энергии ортогональных
сигналов по сравнению с симплексными менее чем на 0,07 дБ (или 2 %).
Подобный проигрыш, конечно, практически незаметен и, если М достаточно
велико, ортогональные и симплексные сигналы эквивалентны по поме-
Peort ^ (М - 1)Q
2Е Л
Nq
(2.32)
Глава 2. Классические задачи приема и синтез сигналов
хоустойчивости, так что предпочтение одного ансамбля другому может
основываться на реализационных или других соображениях.
Говоря об М-ичной ортогональной передаче (в литературе
используются также термины ортогональная модуляция или ортогональное
кодирование) вспомним, что максимальное число ортогональных сигналов
в точности совпадает с размерностью сигнального пространства, т. е.
М — п5. Поэтому в пределах общей полосы Wt и длительности Tt могут
быть расположены WfTt ортогональных видео- или 2WtTt радиосигналов.
Дополнительное физическое обоснование удвоения числа ортогональных
радиосигналов в сравнении с видеосигналами непосредственно следует
из соотношений (2.24) и (2.25): построение ns ортогональных сигналов
вида (2.24) допускает добавление к ним еще ns сигналов, получаемых за счет
сдвига фазы несущей частоты на угол 7г/2. Эта возможность осуществима
на практике только в случае, когда все сигналы детерминированы
(когерентны) , т.е. начальные фазы несущей для всех сигналов фиксированы
и могут быть использованы для идентификации сообщений. В реальности,
однако, подобные условия нередко не выполняются, поскольку либо сам
передатчик, либо канал могут разрушать когерентность сигналов, в
результате чего их фазы становятся случайными и, как следствие, не могут
использоваться в распознавании сообщений. Более подробно этот случай
обсуждается в § 2.5.
2.4. Комплексная огибающая радиосигнала
До обсуждения более сложных моделей М-ичной передачи сигналов
целесообразно сделать отступление от основной линии с тем, чтобы вспомнить
некоторые важные факты, касающиеся представления радиосигналов.
Начнем с замечания о том, что действительная огибающая S(t) в (2.24)
оказывается воображаемой, т. е. служит подходящим искусственным
инструментом, тогда как наблюдаемой физической реальностью является
только собственно сигнал s(t). Более того, выражение (2.24) не
позволяет однозначно определить огибающую сигнала s(t). Действительно, как
следует из (2.24), в качестве закона «фазовой модуляции» можно выбрать
произвольную функцию 7W? которая в комбинации с соответствующей
ей «огибающей» S(t) = s(t)/ cos(27rfot + j(t)) сгенерирует заданный
сигнал s(t). Следовательно, необходимо некоторое соглашение о том, что
понимать под огибающей или амплитудной модуляцией S(t).
Общепринятой основой для введения понятия огибающей служит
преобразование Гильберта. Физически преобразование Гильберта —
попросту фильтрация, при которой фазы всех гармоник сигнала независимо
2.4- Комплексная огибающая радиосигнала
от частоты сдвигаются на один и тот же угол — 7г/2, а их
амплитуды не претерпевают никаких изменений. В частотной области подобное
преобразование означает просто умножение спектра сигнала на — j для
положительных и на j для отрицательных частот и, следовательно,
передаточная функция фильтра Гильберта имеет вид hg(f) — —jsign/,
где sign ж = 1,а; ^ Ои sign х = — 1, х < 0. Непосредственное
вычисление обратного преобразования Фурье дает импульсный отклик фильтра
hg(t) = 1/7г£, так что во временной области преобразование
(трансформанта) Гильберта s±(t) сигнала s(t) может быть представлено интегралом
свертки
оо
s±{t) = ll J^ede- (2-33)
—оо
Используя определение преобразования Гильберта и теорему Парсе-
валя, не составляет труда убедиться в справедливости следующих
соотношений:
—оо
что является не чем иным, как обратным преобразованием Гильберта, и
(u,v) = (ul,v±), (u,v_l) = -(ux,v). (2.34)
Первое из выражений (2.34) демонстрирует, что преобразование
Гильберта не изменяет скалярного произведения сигналов u(t), v(t), тогда как
второе устанавливает соотношение между скалярными произведениями
одного из сигналов и преобразования Гильберта другого.
Возвращаясь теперь к определению огибающей сигнала, положим
S{t) = ^s2{t)+s2±{t). (2.35)
На первый взгляд данное определение огибающей кажется
искусственным, однако более пристальный анализ обнаруживает его адекватность.
Действительно, как можно было бы вычислить неизвестную постоянную
амплитуду А смодулированного непрерывного колебания наблюдаемого
сигнала u(t) — Л cos(27r/o^ + 7) - Одним из возможных вариантов является
использование самого сигнала и его копии v(t), сдвинутой на угол — 7г/2,
а затем применение к ним теоремы Пифагора: А = yfu2{t) + v2(t). Как
сразу видно, для немодулированного сигнала u(t) его сдвинутая по
фазе копия v(t) является не чем иным, как трансформантой Гильберта:
v(t) — u±(t). Таким образом, полученный результат полностью
согласуется с (2.35). Возьмем теперь модулированный сигнал s(t). Его
огибающая S(t) в момент времени t представляет собой мгновенное значение
амплитуды. В случае радиосигнала S(t) изменяется достаточно медленно
48 Глава 2. Классические задачи приема и синтез сигналов
по сравнению с частотой несущего колебания cos 2irfot. Поэтому в
пределах достаточно малого временного интервала, охватывающего момент £,
s(t) может трактоваться как немодулированное гармоническое
колебание с амплитудой S(t). Как при этом найти значение амплитуды S(t)?
Точно так же, как это было сделано для
смодулированного сигнала, т. е. фазовым сдвигом на —7г/2
s±{t) I SW/ i (преобразованием Гильберта) и применением теоремы
Пифагора (2.35), что иллюстрируется рис. 2.8. Таким
образом, затруднение с неоднозначностью толкования
огибающей радиосигнала успешно преодолено, и опре-
s(t) деление (2.35) может далее использоваться
безоговорочно.
Рис. 2.8. К опреде- Анализ радиосигналов значительно упрощается при
лению огибающей ^ _.
введении в обращение еще одного удобного
инструмента — комплексной огибающей 5(£), являющейся
комплекснозначнои функцией времени и определяемой непосредственно
равенствами (2.24) или (2.25), как только смысл действительной
огибающей установлен:
S(t) = Si(t) +jSQ(t) = S(t)[cosj(t) + jsin7(i)] = S{t)exp\jrf(t)], (2.36)
где использована формула Эйлера, a j = ^f-Л. Как следует из
последнего соотношения, комплексная огибающая объединяет в себе законы как
амплитудной, так и угловой модуляции сигнала. Если рассматриваются
несколько сигналов одной и той же несущей частоты, их отличие состоит
только в законах модуляции, и, следовательно, в комплексных огибающих
содержится их исчерпывающее описание.
Несомненно, комплексная огибающая наряду с действительной
является лишь удобной математической фикцией, и «подлинный» сигнал (2.24)
выражается через нее как
s{t) = Re [S(t) exp(j27r/0t)], (2.37)
где Re обозначает удержание лишь вещественной части комплексной
величины, а второй сомножитель в квадратных скобках представляет собой
комплексную запись непрерывного смодулированного несущего
колебания частоты /о формулой Эйлера. Обратившись снова к рис. 2.8, можно
видеть, что в то время как согласно (2.37) s(t) есть вещественная часть
комплексного сигнала S(t) exp(j27r/o£), мнимая часть последнего
оказывается трансформантой Гильберта этого сигнала
s±{t) =Im[S(t)exp{j2nf0t)].
С этим связан еще один вариант комплексного эквивалента реального
сигнала, называемый аналитическим сигналом:
s{t) = S{t)exp{j2nf0t) = s{t) +js±{t). (2.38)
2.4- Комплексная огибающая радиосигнала 49
Формально аналитический сигнал использует комплексную запись для
универсализации факторизации в модели радиосигнала (2.24) так, чтобы
первый сомножитель учитывал наряду с амплитудной и фазовую
модуляцию, а второй отвечал только за немодулированное непрерывное
колебание несущей частоты.
Опираясь на базовые положения спектрального анализа, нетрудно
доказать, что спектр комплексной огибающей радиосигнала (2.37)
концентрируется вокруг нулевой частоты. Следовательно — поскольку при
заданной несущей частоте сигнал полностью определяется своей
комплексной огибающей, — последняя является низкочастотным
эквивалентом радиосигнала, упрощающим аналитическую и вычислительную
работу за счет устранения зависимости от несущей частоты.
В последующем нам понадобится обобщенная версия скалярного
произведения (2.5), применимая не только к реальным сигналам u(t), v(t),
но и к их комплексным эквивалентам -— аналитическим сигналам г&(£),
v(t) или комплексным огибающим U(t), V(t). Подобное
модифицированное скалярное произведение может быть введено как
т т
(u,v) = .fu(t)v*(t)dt= fu(t)V*(t)dt = (tf,V), (2.39)
о о
где комплексное сопряжение используется для сохранения равенства
между скалярным произведением вектора на себя и квадратом длины вектора
(всегда вещественным и неотрицательным), тогда как совпадение
скалярного произведения аналитических сигналов и комплексных огибающих
следует из определения (2.38). В частности, для сигнала s(t) с энергией Е
согласно соотношениям (2.36) и (2.35)
т т т т
(S,S) = ||S||2= f\S{t)\2dt = f S2(t)dt = f s2{t)dt + fs2±(t)dt = 2E,
0 0 0 0
(2.40)
поскольку преобразование Гильберта не влияет на
амплитудно-частотный спектр и, следовательно, энергии s(t) и s±(t) всегда совпадают.
Возьмем теперь два сигнала Sfc(t), si(t) и вычислим квадрат
расстояния между их комплексными огибающими 5/ь(£), Si(t):
d2(Sk,Si) = ||S* - S/||2 - (Sfc - S,,Sjfe - Si) = 2Ek + 2EX - АКе[ры^ЩД],
(2.41)
где учтена линейность скалярного произведения (2.39) и соотношение
(2.40); а рьи как и в (2.16), коэффициент корреляции, но
адаптированный к комплекснозначным сигналам, например комплексным огибающим
Соотношение (2.41) может рассматриваться как теорема косинусов
для комплексных векторов, a Re (ры) как адекватная мера сходства меж-
Глава 2. Классические задачи приема и синтез сигналов
ду комплексными огибающими сигналов з&(£) и si(t). Используя равенство
скалярных произведений аналитических сигналов и комплексных
огибающих (2.39), а также равенства (2.38) и (2.34), интеграл в (2.42) может
быть выражен как
т
fsk(t)St(t)dt =
о
т
= / (**(*)+J*fc±(<))(s^
о
так что Re (ры) = pkh т. е. совпадает с обычным коэффициентом
корреляции сигналов Sk{t) и Sf (£), определяемым соотношением (2.14). Учет этого
в (2.41) позволяет связать расстояние между парой сигналов с
расстоянием между их комплексными огибающими:
d2(Sfe,S/)=2d2(sfe,s/). (2.43)
Последний результат является одним из многих примеров
продуктивности понятия комплексной огибающей: операции с комплексными
огибающими зачастую значительно компактнее и проще, чем с радиосигналами
непосредственно, исключая громоздкие тригонометрические выкладки,
связанные с несущим колебанием.
2,5. Af-ичная передача: некогерентные сигналы
Продолжим рассмотрение М-ичной передачи данных, но теперь в отличие
от§2.2и§2.3 будем полагать, что сигналы не полностью
детерминированы. Как уже отмечалось, в реальных сценариях высока вероятность того,
что передатчик либо канал не смогут сохранить когерентность
радиосигналов, и фазы последних на приемной стороне окажутся случайными.
При этом значения начальных фаз не могут участвовать в
распознавании сообщений, и различия между всеми сигналами должны быть более
глубокими, чем только фазовый сдвиг. Ситуации, отвечающие подобному
положению, известны под названием некогерентного приема.
Предположим, fc-й радиосигнал Sk(t) имеет закон модуляции,
описываемый детерминированной комплексной огибающей Sk{t) и неизменную
во времени случайную начальную фазу щ. В соответствии с моделью
(2.37) данный сигнал представим как
Sk{t; 4>k) = Re [Sk{t; (pk) exp(j27r/0t)],
где «полная» комплексная огибающая содержит детерминированную
составляющую и компоненту, учитывающую случайную начальную фазу:
Sk(t; (pk) = Sk(t) exp(j(pk).
2.5. М-ичпал передача: некогерентные сигналы
Вместо непосредственного вычисления расстояния между сигналами
Sk{t\4>k) и 5/(£;<£/) можно воспользоваться соотношением (2.43) и найти
расстояние между комплексными огибающими Sk{t](fk) и Si(t;cpi). В
соответствии с обобщением теоремы косинусов (2.41) и в предположении,
что все сигналы имеют равную энергию Е,
d2(Sk^ Sl<p) = Щ1 - Repki{<p)},
где дополнительный подстрочный индекс (р подчеркивает соответствие
вектора S^ полной комплексной огибающей Sk(t;(pk), принята во
внимание независимость энергии сигнала Е от начальной фазы ^, и
г
О
— коэффициент корреляции полных комплексных огибающих Sk{t;<fk)
и Si(t;(pi). Учитывая неизменность значений фаз во времени, последнее
соотношение может быть переписано в виде ры(Ф) = Ры e*p[j'{Фк ~Фг)}, где
введен коэффициент корреляции /?£/, связанный только с
детерминированными (т. е. свободными от случайной фазы) комплексными огибающими
Sk(t) и Si{t)
Т
Ры = Щ^~ = ^JSk(t)St(t)dt = |pW|expOV*i), (2.44)
о
где <рк1 = arg(pw).
Теперь искомый квадрат расстояния запишется как
d2(Sk<p, Б1Ф) = 4JS?[1 — \pki\cos{ipki + ук- (ft)]. (2.45)
Проблема вычисления этой величины состоит в ее зависимости от
неизвестных фаз ц>к, (fi- Вследствие этого существует множество
расстояний для заданных детерминированных законов модуляции Sk{t) и S/(£),
в зависимости от того, какой оказалась случайная разность фаз ц>к — Ч>1-
При значительном модуле коэффициента корреляции \ры\ всегда имеется
вероятность неудачной комбинации фаз (малого значения <ры + <fk — <£/)?
при которой расстояние (2.45) окажется малым. Для исключения
подобного риска необходимо, чтобы модуль коэффициента корреляции \pki\ был
минимально возможным, и в идеале сигналы должны подчиняться условию
№ = ^^ = 0, кф1, М = 1,2,...,М. (2-46)
Как и в 2.3, мы опять пришли к ортогональным сигналам. Теперь,
однако, условие ортогональности является более обязывающим, означая
ортогональность комплексных огибающих, или, другими словами, законов
52 Глава 2. Классические задачи приема и синтез сигналов
модуляции сигналов, а не только самих сигналов. Благодаря этому
сигналы остаются ортогональными при любых сочетаниях фаз, поскольку
из pki = 0 следует и pklity) = 07 V<p. С другой стороны, условие (2.46)
исключает возможность формирования ортогональных сигналов простым
квадратурным сдвигом несущей, что было возможным в случае
когерентных радиосигналов. Прямым результатом этого является сокращение
вдвое размерности сигнального пространства ns при фиксированной
общей полосе Wt'. взамен ns = 2WjTj, как это было в случае когерентных
радиосигналов, теперь ns = WtTt. Данный факт можно объяснить и
иначе: ортогональность теперь должна соблюдаться кля комплексных
сигналов, т. е. в комплексном векторном пространстве. Каждый комплексный
вектор представим в виде двух координат, отвечающих вещественной
и мнимой частям, и, следовательно, требует для своего представления
двумерного векторного пространства, т. е. плоскости. Все эти плоскости
должны быть ортогональны друг другу. Поскольку максимально
достижимая размерность пространства составляет величину 2WtTt, то в нем
можно расположить только WtTt ортогональных плоскостей, а, значит,
и WtTt ортогональных комплексных сигналов.
Следует упомянуть, что в отличие от случая М детерминированных
сигналов, при некогерентном приеме ортогональные сигналы являются
строго оптимальными вне зависимости от их числа. Например, при
некогерентном приеме оптимальной является пара ортогональных сигналов,
тогда как противоположная пара вообще бессмысленна, так как
случайность фазы превращает противоположные сигналы в полностью идентичные.
Еще один существенный момент касается оптимальной стратегии
решения при некогерентном приеме. Наблюдение у(£), будучи само
радиосигналом, разумеется, может быть записано через комплексную
огибающую или закон модуляции Y(t): y(t) — Re [Y(t) exp(j27r/o£)]. Очевидно,
Y(t) является случайным процессом. Для решения, какой из М возможных
сигналов принят, необходимо сравнить расстояния между наблюдением
и сигналами, что, согласно соотношению (2.43), эквивалентно сравнению
квадратов расстояний между соответствующими комплексными
огибающими: d2(S^, Y) = ||Y||2 + 2Е - 2Re[ifc(<pfc)], где Zk(<Pk) — корреляция
(скалярное произведение) комплексных огибающих наблюдения y(t) и к-го
сигнала со случайной фазой Sk(t; щ). Для исключения зависимости от
случайной фазы логично выбрать для сравнения только минимальное по всем
возможным значениям (р^ расстояние для каждого к. Опуская
выкладки, повторяющие почти дословно приведенные выше, решающее правило
можно выразить через модуль корреляции
т
Zk =
fntmt)*
fc = l, 2, ..., М. (2.47)
2.6. Обмен выигрыша от ортогонального кодирования на ширину полосы
Тем самым &-й сигнал считается принятым, если модуль
корреляции между его детерминированной комплексной огибающей и
комплексной огибающей наблюдения максимален. Другими словами, используется
прежняя идея: принятым объявляется сигнал, закон модуляции которого
имеет наибольшее сходство с законом модуляции наблюдения.
2.6. Обмен выигрыша от ортогонального
кодирования на ширину полосы
Предыдущее рассмотрение очевидным образом высветило особую роль
ортогональных сигналов: они практически (при М ^$> 1 для когерентных
сигналов) и даже теоретически (для некогерентного случая) оптимальны
при М-ичной передаче данных. Оценим теперь выигрыш,
сопровождающий применение ортогональных сигналов в сравнении с некодированнои
передачей, т. е. непосредственной передачей потока информационных
битов источника. Предположим, что энергетический ресурс позволяет
передавать каждый бит данных с энергией Е^ отсутствует специальное
кодирование потока битов данных и каждый информационный бит
передается оптимальной (противоположной) парой сигналов, другими словами
с помощью БФМ. Среди блоков из т последовательных битов
возможны любые комбинации, в том числе и такие, которые отличаются друг
от друга значением только одного бита. Поэтому минимальная
величина квадрата расстояния между сигналами, отвечающими неидентичным
m-битовым блокам, совпадает со значением квадрата расстояния в
однобитовой противоположной паре, т.е. согласно рис. 2.5, a d^inu = 4Ет>, где
второй индекс соответствует некодированнои (uncoded) передаче.
Рассмотрим теперь другую систему, в которой все различные т-би-
товые блоки передаются ортогональными сигналами. Ясно, что каждый
такой сигнал обладает энергией rai?&, при фиксированном значении
энергии на бит Еь- Тогда квадрат расстояния между сигналами (один и тот
же для любой пары сигналов, поскольку ортогональные сигналы
эквидистантны) снова легко получить из рис. 2.5, б: d^inori = 2т£^. Очевидно,
что выигрыш Ga ортогональных сигналов в значении минимума
квадрата расстояния по сравнению с некодированнои передачей составляет т/2.
Иначе говоря, для достижения того же минимального расстояния
передача без кодирования потребует вСй = га/2 большей энергии, чем
передача с ортогональным кодированием. Принимая во внимание
соотношение (2.23), минимум расстояния асимптотически определяет
вероятность ошибки для любых сигналов, используемых в М-ичной передаче.
Следовательно, требование высокой достоверности приема, автоматиче-
54 Глава 2. Классические задачи приема и синтез сигналов
ски влекущее за собой необходимость большого отношения сигнал-шум,
означает, что равная надежность двух рассмотренных систем возможна
только за счет больших в Ga раз энергетических затрат для варианта без
кодирования. Таким образом, асимптотический выигрыш Ga от
кодирования ортогональными сигналами является адекватным показателем
преимущества ортогональной передачи в пределе, т. е. при отношении
сигнал-шум, стремящемся к бесконечности.
2h-
>"3
-4
-5
-6
-чан
Некодир,
— Аддит. граница|
Точная
N
-4
-5
-6
Некодир.
— Аддит. граница]
Точная
т = 20
0 5 10 15
Сигнал-шум на бит, дБ
0 5 10 15
Сигнал-шум на бит, дБ
Рис. 2.9. Сравнение вероятности ошибки при некодированной передаче и
ортогональном кодировании
Для оценки выигрыша от ортогонального кодирования при конечном
отношении сигнал-шум, так же как и скорости его сходимости к
асимптотическому на рис. 2.9 представлены семейства кривых для двух
значений длины m-битового блока: т = 6 и т = 20. Первая кривая (сплошная
линия) представляет вероятность ошибки на блок при некодированной
передаче, а две другие — ту же вероятность при кодировании га-би-
товых блоков М = 2Ш ортогональными сигналами, обрабатываемыми
когерентно. Пунктирная кривая построена на основании аддитивной
границы (2.32), тогда как штрихпунктирная линия отвечает точной формуле
для вероятности ошибки когерентного приема М ортогональных
сигналов, вывод которой можно найти во многих популярных книгах по
основам теории связи (например [5, 7]):
e,ort
ш J
\/2?г
ехр
(х - qby/mf
Фм~1(х)с1х,
где qb — у/2Еь/Щ — отношение сигнал-шум на бит, а Ф(х) = 1 — Q(x)
функция ошибок.
2.6. Обмен выигрыша от ортогонального кодирования на ширину полосы 55
Попутный вывод из графиков рис. 2.9 состоит в высокой надежности
аддитивной границы: в приложениях, как правило, требуется малая
вероятность ошибки, и, как видно, при Ре ^ 10~2 просвет между точным
значением отношения сигнал-шум на бит и оцененным по аддитивной
границе составляет менее 0,5 дБ. С ужесточением требований к
достоверности передачи этот просвет быстро уменьшается (падая ниже 0,2 дБ
при Ре ^ 10~3). В диапазоне значений Ре от Ю-2 до Ю-6 точное значение
выигрыша G от ортогонального кодирования возрастает с 3,5 до 4,2 дБ
(т — 6) и от 8,5 до 8,9 дБ (т — 20). Сравнивая эти цифры с
асимптотическими значениями (4,8 и 10 дБ соответственно), нетрудно убедиться в их
достаточной близости, оправдывающей использование асимптотического
выигрыша от кодирования в качестве первого приближения
эффективности ортогонального кодирования.
Чрезмерный оптимизм в отношении достоинств ортогональной
передачи, возможный в свете приведенных результатов, представляется не столь
обоснованным после определения реальной цены, которой приходится
оплачивать выигрыш от кодирования. Ценой этой оказывается расширение
полосы, поскольку, как это было установлено в § 2.3, размерность
сигнального пространства ns, т.е. число ортогональных сигналов М = п5,
напрямую ограничена общим частотно-временным ресурсом WtTt
системы. Интересуясь главным образом порядком величин и игнорируя
тривиальное удвоение числа когерентных ортогональных сигналов, имеем
М = WtTt, или Wt = M/Tt- Пусть необходимая скорость передачи в
системе составляет R бит/с, что соответствует передаче т — RTt битов
за выделенный интервал времени Tt. Ясно, что ортогональное
кодирование битовых блоков такой длины может быть осуществлено с помощью
М — 2Ш = 2RTt сигналов, обеспечивая асимптотический выигрыш от
кодирования Ga — т/2 = RTt/2. Тогда спектральная эффективность R/Wt,
т.е. скорость, приходящаяся на 1 Гц полосы (см. § 1.1) системы,
использующей ортогональные сигналы
— - !¥± - ^± (О А*\
резко (почти экспоненциально) спадает с ростом планируемого выигрыша
от кодирования.
Обратимся к числовому примеру.
Пример 2.1. Для цифровых систем передачи речи весьма типичной является
скорость R — 9,6 кбит/с (мобильная телефония, мультимедийные системы и др.).
Предположим, что необходимо уменьшить в три раза (на 4.8 дБ) излучаемую
мощность без потери в скорости. Если достижение подобной цели намечается
с помощью ортогональных сигналов, то, как следует из (2.48), это будет оплаче-
Глава 2. Классические задачи приема и синтез сигналов
но снижением спектральной эффективности с 1 до 6/64. Другими словами, для
сохранения неизменной скорости R = 9,6 кбит/с придется использовать полосу
не менее 100 кГц. Эта цифра не является запредельной для многих приложений,
и данный принцип, например, положен в основу канала «вверх» сотовой системы
мобильной связи стандарта cdmaOne (см. детали в § 11.3).
Представим теперь ситуацию, когда, как следствие воодушевления
достигнутым, планируется десятикратное (10 дБ) уменьшение излучаемой мощности. Для
этого потребуется закодировать блоки длиной т = 20 битов М — 220 > 106
ортогональными сигналами. Это приведет к падению спектральной эффективности
ниже 2 • 10 ~5, или необходимой полосе, превышающей 480 МГц, что
представляется совершенно неприемлемым в сравнении со скоростью 9,6 кбит/с.
Приведенное обсуждение свидетельствует о жестком характере
обмена между энергетической и спектральной эффективностью, присущем
ортогональному кодированию. В то же время уместно отметить, что,
хотя очень большие энергетические выигрыши практически
недостижимы при ортогональной передаче из-за непомерных требований к полосе,
асимптотический выигрыш ортогонального кодирования может служить
хорошим ориентиром д^ля сравнений, будучи верхней границей
энергетической эффективности любого кодирования m-битовых блоков.
Вернемся к соотношению М = WfTt и зададимся вопросом: когда
число ортогональных сигналов, а значит, и произведение И^Т^, измеряется
десятками и более, означает ли это что ортогональные сигналы являются
широкополосными? Другими словами, всегда ли система, использующая
значительное число ортогональных сигналов, является системой с
расширенным спектром? Как покажет содержание следующего параграфа,
ответ на этот вопрос в общем отрицателен.
2.7. Примеры множеств ортогональных сигналов
В данном параграфе возможность тривиального удвоения числа
ортогональных сигналов за счет квадратурного сдвига несущей, свойственная
когерентным системам, вновь исключается из рассмотрения, поскольку
основное внимание фокусируется на зависимости между М и
эквивалентным низкочастотным полным частотно-временным ресурсом WtTt
системы. Продемонстрируем вначале возможность построения
простейших множеств ортогональных сигналов за счет дробления доступного
ресурса.
2.7Л. Кодирование временным сдвигом
Очевидно, что скалярное произведение любых двух не перекрывающихся
во времени сигналов равно нулю. Рассмотрим М сигналов, приведен-
2.7. Примеры множеств ортогональных сигналов
ных на рис. 2.10, а, занимающих совместно весь временной интервал Tt.
При длительности сигнала, не превышающей Т = Tt/M, и временном
сдвиге между сигналами, следующими друг за другом, не меньшем
длительности сигнала, подобное кодирование временным сдвигом формирует
семейство ортогональных сигналов. Полоса частот W, занимаемая
каждым из сигналов, оценивается величиной, обратной их длительности,
и все сигналы могут, не нарушая условия ортогональности,
располагаться в одной и той же полосе W = Wt- Следовательно, максимальное число
ортогональных сигналов этого типа в пределах заданного
частотно-временного ресурса Wtr Tt оценивается как М = Tt/T = WtTt, т. е., как легко
было предвидеть, совпадает с размерностью сигнального пространства
ns — WtTt. Желание иметь большое число сигналов М >> 1 может быть
удовлетворено лишь при большом произведении WtTt — М, что внешне
может быть принято за требование широкополосности сигналов. Однако
для каждого индивидуального сигнала частотно-временное произведение
WT = WtT = WtTt/M = 1, так что данные сигналы никоим образом
не относятся к разряду широкополосных. В свете принятой
договоренности относить систему к числу широкополосных только при
использовании ею широкополосных сигналов (см. § 1.1) ортогональное кодирование
временным сдвигом не является примером использования технологии
расширения спектра.
Рис. 2.10. Кодирование временным (а) и частотным (б) сдвигами
Представим общий частотно-временной ресурс прямоугольником в
координатной плоскости время-частота со сторонами Tt и Wt
соответственно. При этом кодирование временным сдвигом означает попросту
58 Глава 2. Классические задачи приема и синтез сигналов
разбиение этого ресурса на М вертикальных полос, каждая из которых
отводится некоторому отдельному сигналу (см. рис. 2.11, а).
Ортогональность при передаче обеспечивается жестким распределением временного
ресурса между сигналами, каждый из которых занимает весь отведенный
системе частотный ресурс.
1
2
М
\
►
/ ч ч~1
Т=Т(/М
а) б)
Рис. 2.11. Распределение ресурса при ортогональном кодировании временным (а)
и частотным (б) сдвигом
Рассмотренная схема ортогональной передачи может показаться
привлекательной с точки зрения практики благодаря ее видимой простоте.
Недостатки ее, однако, также довольно очевидны и должны
соответствующим образом учитываться. Во-первых, необходима точная
синхронизация, поскольку флюктуации временного положения сигналов
потенциально способны вызвать перекрытие последних, нарушающее их
ортогональность. В связи с этим в системах, природа которых в
принципе предполагает непостоянство задержек сигналов, приходится
отделять сигналы друг от друга защитными паузами, уменьшая возможное
число сигналов относительно теоретического максимума, т. е. ухудшая
спектральную эффективность. Другим важным аспектом является
значение пик-фактора z/, иначе говоря отношения пиковой мощности сигнала
к средней излучаемой. Поскольку отдельный сигнал занимает лишь М-ю
часть доступного временного ресурса, средняя излучаемая мощность в М
раз меньше пиковой и i/ = М > 1. Между тем, при проектировании
усилителя мощности передатчика малое значение v является
предпочтительным: чем ближе его значение к единице, тем более мягкие требования
предъявляются к линейности усилителя и в итоге его энергетические
показатели лучше.
2.7. Примеры множеств ортогональных сигналов
2.7.2. Кодирование частотным сдвигом
Другим прямым способом реализации ортогональности служит
кодирование частотным сдвигом. На основании дуальности времени и частоты
или теоремы Парсеваля скалярные произведения сигналов u(t), v(t) и их
спектров й(/), v(f) совпадают:
(u,v) = J u(t)v(t)dt= J u(f)v*(f)df = (u,v), (2.49)
— ос — ос
что позволяет механически перенести только что обсужденную схему
в частотную область (см. рис. 2.10, б). При полном перекрытии сигналов
во времени (Т = Tt) каждый из них занимает полосу не менее W = l/Tt.
При этом максимальное число ортогональных сигналов, полученных
сдвигом спектра, оказывается вновь равным М = Wt/W = W{Tt = ns. Как
и в предыдущем случае, общий ресурс снова нарезается на полосы, теперь,
однако, расположенные горизонтально, так что каждый сигнал
использует весь временной ресурс Tt и лишь М-ю часть общего частотного
ресурса Wt (рис. 2.11, б). Понятно, что каждый индивидуальный сигнал
опять не является сигналом с распределенным спектром, поскольку его
частотно-временное произведение WT = (Wt/M)T — 1, и значит, любая
система со сколь угодно большим числом ортогональных сигналов
подобного типа, конечно, не является системой с распределенным спектром.
В отличие от кодирования временным сдвигом пик-фактор
ортогональных сигналов данного вида v — 1 и ошибки в синхронизации не
играют столь критической роли, так как ортогональность достигается
отсутствием перекрытия в частотной области. Вместо этого деструктивным
в некоторых случаях может оказаться дрейф спектра (к примеру,
вследствие эффекта Доплера). Тем не менее данный способ передачи
чрезвычайно популярен и примером его непосредственного воплощения служит
традиционная М-ичная частотная манипуляция.
Рассмотренные варианты ортогональной передачи объясняют, почему
даже использование большого числа ортогональных сигналов и,
следовательно, необходимость общего ресурса W{Tt ^> 1 не означает
автоматически обращения к технологии широкополосной передачи.
2.7.3. Ортогональное кодирование
широкополосными сигналами
Дробление общего частотно-временного ресурса, присущее двум ранее
рассмотренным методам ортогональной передачи, может иногда
оказаться предпочтительным с точки зрения аппаратной реализации. Однако
с ростом числа сигналов М-подобные основания становятся все более со-
Глава 2. Классические задачи приема и синтез сигналов
мнительными, поскольку, как уже упоминалось, кодирование временным
сдвигом приводит к резкому росту пик-фактора излучения, тогда как
кодирование частотным сдвигом предполагает оптимальную обработку
в виде банка многих параллельных фильтров, настроенных на разные частоты.
В этих обстоятельствах более привлекательным может оказаться
использование широкополосных ортогональных сигналов, означающее
утилизацию всеми сигналами общего частотно-временного ресурса без
распределения или дробления последнего. Рассмотрим простой пример
воплощения подобной идеи в форме дискретных БФМ сигналов. Образуем
каждый из М сигналов как последовательность N следующих друг за другом
элементарных импульсов или чипов прямоугольной формы и
длительности Д. Предположим, что полярности чипов сигнала с номером к
подчиняются закону манипуляции, описываемому подовой последовательностью
(или просто подом) бинарных символов ак,г = =Ы, где к — 1,2,... ,М, а
вторым индексом является номер чипа (дискретное время) г = 0,1,...,
N — 1. Тогда версия, такого сигнала на видеочастоте запишется как
JV-1
sk{t) = J2 ак,М* - *A)» (2-50)
4=0
где so(t) отвечает прямоугольному чипу длительности А.
Вычислим теперь скалярное произведение или корреляцию (2.5) к-го
и 1-го сигналов. После изменения порядка суммирования и интегрирования
N-lN-l T
(sb si) = ]Г ]Г akjiaij / s0(t - iA)s0(t - jA) dt. (2.51)
Интеграл в этом выражении представляет скалярное произведение
двух чипов, сдвинутых относительно друг друга по времени на (г — j) Д.
При г ф j этот интеграл равен нулю, поскольку чипы не перекрываются
во времени. Таким образом,
т
j s0(t- iA)sQ{t - jA) dt = EoSij,
о
где Ео — энергия элементарного импульса. Подстановка этого в (2.51)
дает
JV-1
(sfc,s/) = Ео ]Г-а*,*аМ = E0(a.kj8ii). (2.52)
i=o
Последний результат связывает скалярное произведение сигналов (2.50)
со скалярным произведением ЛГ-мерных векторов, образованных
кодовыми последовательностями а& — (а/ь,о?^,1? • • • ^kyN~i)- Очевидно, что М
2.7. Примеры множеств ортогональных сигналов 61
ортогональных кодовых последовательностей автоматически формируют
М ортогональных сигналов типа (2.50). При М < N существует
множество способов конструирования подобных последовательностей,
поскольку речь попросту идет об отыскании М ^ N ортогональных векторов
размерности N. В нашем примере упомянутые векторы являются
бинарными, т.е. их компоненты принимают значения из множества ±1. При
М = N ортогональные бинарные векторы, используемые как строки,
образуют квадратную матрицу, называемую матрицей Адамара. Не
составляет труда убедиться (рекомендуем читателю попытаться это
сделать; см. задачу 7.14), в возможности существования матриц Адамара
лишь размера М > 2, кратного четырем, т. е. М — 0 mod 4, где символ
сравнения а — b mod с отвечает равенству остатков от деления целых
чисел а, Ь на целое с. Вопрос о достаточности этого необходимого условия
пока не получил ответа.
Известен ряд алгоритмов построения матриц Адамара специальных
(не произвольных) размеров. Одним из них является популярное правило
Сильвестра, позволяющее рекурсивно удваивать размер матрицы. Для
пояснения его сути предположим, что каким-либо образом найдена матрица
Адамара Нм размерности М. Тогда матрицу Адамара удвоенного
размера Н2М можно построить четырехкратным повторением Нм в качестве
блоков Н2м, изменив знак одного из них:
Н
2М
®НМ,
(2.53)
Нм -Нм I 1 1
Нм -Нм J [1—1
где второе равенство выражает правило через кронекеровское
произведение матриц. Ортогональность строк U.2M очевидна: две строки,
номера которых отличаются на любое целое, кроме М, обладают нулевым
скалярным произведением, поскольку их М-мерные половины являются
разными строками (с возможным изменением знака) Нм- Если же
номера строк Н2м отличаются на М, то их первые М элементов совпадают,
тогда как остальные противоположны, что вновь гарантирует равенство
скалярного произведения нулю.
Можно начать выполнение алгоритма Сильвестра с простейшей
матрицы Адамара
Г 1 1
1 -1
Н2 =
построив матрицу Н4 (в которой ниже для краткости знаки «+» и «—»
заменяют элементы «+1» и «—1»), затем от Н4 перейдя к Hs и т.д.:
62 Глава 2. Классические задачи приема и синтез сигналов
н2
н2
н2
-н2
+ + + +
+ - + -
+ + - -
+ - - +
н4 =
+ + + + + + + +
+ - + - + - + -
+ + -- + + --
н4 н4 ]_!+-- + + -- +
н4 -н4 j|+ + + + ----
+ - + -- + - +
+ + ---- + +
+ -- + - + + -
Таким способом можно построить матрицу Адамара любого
размера М = 2т = 2,4,8,16,32, Строки матрицы Адамара, построенной
подобным образом, известны как функции Уолша.
Ня
А
s,(t)
%w
4,(rt
%(0
%(f)
sjt)
%W
<
1 1 I i 1 I 1 .
1
|
1
i
I
1 1
1
Ha p
w
*ь
1 1 \
|
tb
w
^
i i i i \
|
1 1 1
|
ис. 2
.12 г
fw
w-
1 1 ^
w
|
\ t
тедставлены ортогональные
Рис. 2.12. Функции Уолша
длины 8
рованные видеосигналы (2.50) — функции Уолша, построенные на основе
матрицы Адамара Н§.
2.7. Примеры множеств ортогональных сигналов
Рис. 2.13 иллюстрирует тот факт, что при данном варианте
построения ортогонального ансамбля дробления общего ресурса между
сигналами нет: каждый из них эксплуатирует весь доступный ресурс, так что
все сигналы полностью перекрываются и во временной, и в частотной
областях. Действительно, полоса, занимаемая каждым сигналом, может
быть оценена как W — 1/А, тогда как длительность Г = МА, откуда
WT — М — WtTt. Ортогональность же при этом достигается не за счет
фрагментации временного интервала или полосы, а соответствующим
выбором законов модуляции сигналов.
Рис. 2.13. Использование ресурса
широкополосными ортогональными
сигналами
wt
Касаясь достоинств ортогональных широкополосных сигналов, можно
отметить, что методы формирования и обработки сигналов типа (2.50)
хорошо сопрягаются с элементной базой современной цифровой
микроэлектроники (БИС, программируемая логика, микропроцессоры и др.).
Наиболее существенно, однако, автоматическое обретение тех
преимуществ широкополосной технологии, которые в ходе обсуждения
классических задач приема пока не проявились, но, как будет видно,
многочисленны и весьма ценны в практических приложениях (см. гл. 3). Это и дает
ключ к объяснению повсеместного применения широкополосных
ортогональных сигналов в продвинутых беспроводных телекоммуникационных
системах (cdmaOne, WCDMA, cdma2000, см. гл. 11).
Можно дать следующее резюме к содержанию параграфов § 2.5-2.7.
Как можно видеть, теоретически классическая задача М-ичной передачи
не ориентирует на безоговорочное использование технологии расширения
спектра и, в принципе, оптимальный М-ичный ансамбль можно составить
из простых сигналов. С другой стороны, существуют стимулы реализаци-
Глава 2. Классические задачи приема и синтез сигналов
онного порядка, подкрепленные стремлением к утилизации преимуществ
расширенного спектра вне классической постановки задачи приема.
Поскольку такая возможность потенциально присутствует всякий раз, когда
полный частотно-временной ресурс W{Ft » 1 принципиально необходим,
предпочтение разработчиком широкополосных сигналов простым в
подобных обстоятельствах может оказаться вполне оправданным.
2.8. Оценка параметров сигнала
2.8.1. Формулировка задачи и правила оценки
Практически в любой радиосистеме мы встречаем задачу измерения (или
оценки) параметров сигнала. Она характерна для любой ситуации, когда
информация, интересующая наблюдателя, содержится в текущем
значении некоторого сигнального параметра (например, амплитуды, частоты,
начальной фазы, запаздывания и др.). Тем самым, чтобы извлечь
необходимую информацию из принятого колебания, наблюдатель должен
измерить или оценить соответствующий параметр.
Обратимся к некоторым простым примерам. В обычном AM или ЧМ
радиовещании зависимость амплитуды (или частоты) во времени
содержит передаваемую аудиоинформацию: громкость и звуковой тон. Для
восстановления звукового сообщения и восприятия его слушателем
необходимо измерить мгновенные значения амплитуды (частоты) и воспроизвести
их в виде колебания, непрерывного во времени. Другим примером может
служить массовое аналоговое телевидение, в котором как амплитуда, так
и частота используются для передачи информации. Для восстановления
на приемной стороне видеоизображения объекта необходимо выполнить
измерения амплитуды, поскольку яркостный сигнал и цветовые
компоненты передаются с помощью амплитудной модуляции. В то же время
передача аудиоинформации осуществляется с помощью угловой
модуляции, в силу чего любой телевизионный приемник должен осуществлять
и измерение частоты.
Как еще один пример оценки параметров можно вспомнить задачу
синхронизации, в которой частотно-временное рассогласование между
принятым сигналом и локальным эталоном измеряется с целью
последующего введения последнего в синхронизм с системным стандартом
времени. Подобная процедура типична для множества современных систем —
от каналов горизонтальной и вертикальной развертки в телевидении до
пилотных каналов систем мобильной связи второго и третьего поколений.
Принципиальной задачей локации и навигации также является
измерение параметров: оценивание запаздывания и направления прихода
2.8. Оценка параметров сигнала 65
сигнала требуется для определения относительных дальности и угловых
координат между приемником и объектом. Когда к тому же необходимо
знание скорости цели и параметров ее траектории, выполняется
измерение доплеровского сдвига частоты и т. д.
Перечень подобных примеров может быть без труда продолжен,
поскольку измерительные процедуры являются неотъемлемым атрибутом
практически любой системы, имеющей отношение к передаче,
извлечению и обработке информации.
В терминах, наиболее удобных в нашем контексте, задача оценки
параметров может быть сформулирована следующим образом. Пусть
наблюдение y(t) наряду с шумом содержит сигнал s(£;A), являющийся
детерминированным, за исключением неизвестного значения постоянного
параметра А. Параметр А может быть скалярным либо векторным в
зависимости от конкретного содержания задачи. Наблюдатель, основываясь
на анализе у(£), должен принять решение о том, какое конкретное
значение из диапазона возможных принял параметр сигнала А. Наряду с самой
задачей это решение принято называть оценкой и обозначать А.
Поскольку в принятом наблюдении y(t) всегда присутствует шум, то в каждом
сеансе приема оценка А отличается от неизвестного истинного значения
параметра А. Поэтому естественным является вопрос: какое правило
решения является оптимальным, т. е. гарантирующим наименьший ущерб
от отклонений А от А.
Простейший подход к этой проблеме основывается на понимании того
факта, что задача оценки не является чем-то принципиально новым по
отношению к задаче различения М сигналов, обсуждавшейся в § 2.1 и 2.3.
В самом деле, предположим вначале, что измеряемый параметр А
дискретен и принимает одно из М конкурирующих значений Ai, A2,..., Ам-
Тогда решение о том, какое из возможных значений принял параметр
сигнала в данном конкретном наблюдении, есть не что иное как проверка М
гипотез о том, какой из М конкурирующих сигналов si(£), S2{t),..., sm(t)
фактически принят, причем все распознаваемые сигналы являются
копиями сигнала s(£;A), отличающимися друг от друга только значением
параметра А, т.е. Sk{t) — s(t;\k). Для того, чтобы охватить подобной
постановкой и случай непрерывного параметра А, требуется лишь
устремить число его возможных значений М, т. е. различаемых сигналов, к
бесконечности (вплоть до несчетной).
Из приведенных рассуждений следует, что уже известная оптимальная
стратегия решения — правило МП — применима и в оценке параметров.
Это означает, что среди всех конкурирующих значений А в качестве
оценки А следует выбирать то, которое максимизирует вероятность
трансформации каналом сигнала s(£;A) в наблюдаемое колебание y(t). Для АБГШ
66 Глава 2. Классические задачи приема и синтез сигналов
канала это правило эквивалентно правилу минимума расстояния, которое
с использованием введенной символики представляется в виде
d(s?,y) = ттфл,у) => А,
(2.54)
где Sa — векторное обозначение сигнала s(i;A). Это правило
формирует максимально правдоподобную оценку А, находя такое значение А,
при котором сигнал s(t;X) наиболее близок к наблюдению y(t) в смысле
евклидова расстояния, что иллюстрируется рис. 2.14. Сигнал s(t; А)
можно отождествить с вектором вд, который перемещается в пространстве
с изменением параметра А. Конец вектора описывает некоторую
траекторию, точки которой соответствуют различным значениям параметра А
(рис. 2.14, а). Согласно правилу (2.54) следует найти точку этой
траектории, ближайшую к вектору наблюдения у, и выдать соответствующее
ей значение А в качестве оценки. Дополнительное пояснение этому дает
рис. 2.14, 5, где приведена характерная зависимость расстояния между
наблюдением и копией сигнала от значения А: МП оценка А отвечает
такому значению параметра, которое минимизирует это расстояние.
dCi,y)
х = х
d(sX2,y)
d{sXiy)
a)
Рис. 2.14, Пояснение к оценке МП
б)
В зависимости от влияния на энергию сигнала параметры
классифицируются на энергетические и неэнергетические. В случае
неэнергетического параметра А энергия сигнала s(t;X) не зависит от конкретного
оо
значения А, т.е. Е(Х) = J s2(t;X)dt = Е. К примеру, амплитуда и дли-
—оо
тельность сигнала являются энергетическими, тогда как запаздывание,
частота или начальная фаза — неэнергетическими параметрами. Ясно,
что оценка неэнергетического параметра представляет собой частный
случай различения конкурирующих сигналов равной энергии, для
которого правило максимума корреляции (2.8) в новых обозначениях предста-
2.8. Оценка параметров сигнала 67
вимо как
или
z{\) = max 2(A) =>> Л, (2.55)
л
Л = arg max^(A),
где согласно (2.7)
*(А) = (у, sA) = J y(t)s(t; A) dt (2.56)
т
zc: ;.,.:,
о
корреляция между наблюдаемым колебанием y(t) и сигналом s(t] А),
зависящая от значения измеряемого параметра Л.
В свете физической трактовки корреляции правило оценки (2.55)
имеет весьма прозрачную интерпретацию: МП оценка Л отвечает такому
значению Л, при котором сигнал s(t; Л) имеет максимальное сходство с
наблюдаемым колебанием y(t).
2.8.2. Точность оценки
Вспомним теперь факт, достаточно глубоко обсуждавшийся в § 2.2 и 2.3,
критического влияния на достоверность различения сигналов
коэффициента корреляции (2.14). В задаче оценки параметров распознаваемые
сигналы есть просто копии s(t; А) с различными значениями параметра Л.
Во многих практических ситуациях корреляция двух любых таких копий
s(t; Ai) и s(t; Л2) определяется лишь их рассогласованием по параметру Л,
т. е. разностью Л2 — Ai, а не значениями Ai, A2 в отдельности, так что,
положив Ai = О, А2 = А, можно представить коэффициент корреляции (2.14)
в случае неэнергетического параметра А как
оо
р(Х) = ^р- = || s(t; 0)e(t; A) dt. (2.57)
— ОО
Как обычно, коэффициент корреляции характеризует степень
сходства двух сигнальных копий в зависимости от их рассогласования по
параметру А. Очевидно, р(Х) ^ р(0) = 1, что предсказуемо и естественно:
сигнальные копии, рассогласованные по значению А, не могут иметь
большего сходства, чем полностью совпадающие, которые, в свою очередь,
имеют стопроцентную корреляцию. Другим свойством величины (2.57),
вытекающим из ее зависимости только от рассогласования А = А2 — Ai,
является ее четность: р(Х) = р(~А).
Рис. 2.15 демонстрирует характерные примеры зависимости р(Х) от А
для двух гипотетических сигналов. Сплошная кривая является более
гладкой, чем пунктирная, свидетельствуя о меньшей чувствительности перво-
68 Глава 2. Классические задачи приема и синтез сигналов
i
/1
/ t
/ /
/ /
/ f
/ 1
/ /
/ /
/ /
/ /
"^—-—S ^y
iPW
\ \
\ \
* \1
\ \
\ \
\2 \
^ ^_
^ k
го сигнала к изменению параметра Л: сходство его копий, обусловленных
рассогласованностью по параметру Л, выше, чем у копий второго сигнала
при том же рассогласовании.
На этом этапе необходимо
остановиться на одной детали, о
которой сознательно
умалчивалось выше. Как легко понять, то
или иное правило решения
оптимально только в смысле
строго оговоренного критерия
качества. Правило МП, на которое
мы до сих пор опирались,
оптимально по критерию минимума
вероятности ошибки,
применение которого вполне естественно
и адекватно при различении сигналов дискретного множества или оценке
дискретного параметра. Однако ориентация на этот критерий при
измерении непрерывного параметра для практики нетипична. В этом случае
гораздо уместнее характеризовать качество оценки с позиций точности,
т. е. отклонением е = Л — А оценки параметра А от истинного значения А.
Прежде всего разумно потребовать, чтобы математическое ожидание
ошибки е, усредненное по всем возможным наблюдениям y(t) при
фиксированном истинном значении А, было равно нулю, т. е. в среднем оценка А
совпадала с истинным значением А:
Рис. 2.15. Характерные зависимости р(Л)
е = А - А - 0 ^ А = A, VA. (2.58)
Оценка, для которой выполняется данное равенство, называется
несмещенной. Однако выполнение (2.58) еще не дает оснований считать
оценку хорошей, поскольку критически важен также диапазон разброса
случайных флюктуации оценки относительно истинного значения
параметра. Традиционной и адекватной мерой разброса служит дисперсия
ошибки var{e} = (А — А)2, поэтому естественно искать правило,
гарантирующее наряду с несмещенностью минимум дисперсии оценки var {e}
для любых истинных значений А:
var {е} ~ (А — А)2 — min, VA.
Как можно видеть, минимизация дисперсии несмещенной оценки является
естественной формализацией стремления к наивысшей точности измерений.
Одним из фундаментальных результатов теории оценок является
неравенство Крамера- Рао, устанавливающее нижний предел дисперсии
любой несмещенной оценки. Оценка, дисперсия которой лежит на этой гра-
2,8. Оценка параметров сигнала 69
нице, называется эффективной. Измерительные задачи, в которых
возможны эффективные в строгом смысле оценки, достаточно редки,
однако в практическом отношении это не является сколько-нибудь значимой
неприятностью. Дело в том, что МП оценка, как доказывается в
классической теории оценок, обладает свойствами асимптотической
несмещенности и эффективности. Термин «асимптотически» в физической трактовке
подразумевает «в ситуациях, когда необходима высокая точность
измерений» или, еще конкретнее, когда отношение сигнал-шум (либо время
наблюдения) достаточно велико. Поэтому в любой задаче, где
необходимы измерения с малой погрешностью, правило МП оптимально не только
по критерию вероятности ошибки, но и по критерию точности оценки.
Разумеется, в реальных приложениях, как правило, требуется высокая
точность измерений, чем и объясняется повсеместное практическое
использование оценок МП.
Для неэнергетического параметра Л граница Крамера-Рао
принимает особенно простой вид и служит практическим инструментом для
вычисления дисперсии МП оценки:
var{A} - vax{e} « ~~^Щф^ <? » L (2-59)
Присутствие в знаменателе правой части (2.59) отношения сигнал-
шум q2 = 2E/Nq неудивительно: при любом разумном правиле оценки
рост отношения сигнал-шум должен приводить к уменьшению ошибки,
т. е. улучшению точности измерений. В то же время зависимость от
второй производной коэффициента корреляции нуждается в более подробном
комментарии. Из курса математического анализа известно, что вторая
производная говорит о кривизне или остроте функции в рассматриваемой
точке и для выпуклой кривой имеет отрицательный знак. Острота р(А)
в нулевой точке, в свою очередь, является индикатором
чувствительности сигнала по отношению к рассогласованию по А: чем острее р(А), тем
быстрее копия сигнала, расстроенная по А, теряет свое сходство с
исходной. Напомним еще раз, что оценка есть частный случай различения
сигналов, а достоверность последнего тем выше, чем меньше сходство
сигналов. Это полностью объясняет зависимость точности измерения А
от р"(0): если копии s(£; А) имеют слабое сходство между собой даже при
близких значениях А, надежность их распознавания выше, чем в случае
сильного сходства.
Последний факт подсказывает общее направление синтеза сигналов
в задачах оценки неэнергетического параметра А. Для достижения
нужной точности не за счет «грубой силы», т. е. простого увеличения энергии,
следует синтезировать сигналы, у которых коэффициент корреляции р(Х)
как функция А подобен «острому» импульсу.
70 Глава 2. Классические задачи приема и синтез сигналов
В следующих параграфах будут рассмотрены примеры конкретных
задач оценки как энергетических, так и неэнергетических параметров.
Объединяющая цель при этом остается прежней: выяснить, какую роль
в задачах оценки может играть технология расширения спектра.
2.9. Оценка амплитуды
Задача измерения интенсивности (уровня, мощности) сигнала
встречается во многих приложениях: от телевизионного вещания до сотовой связи
и цифровых ИКМ или КАМ линий передачи данных. Сформулируем ее
как задачу измерения неизвестной амплитуды А, постоянной на
интервале наблюдения [О, Т]. При этом принятый полезный сигнал может быть
представлен моделью
s(t\A) = As(t),
где s(t) — детерминированный эталонный сигнал, амплитуда которого по
определению полагается равной единице. Как видно, s(t;A) есть
результат масштабирования эталонного сигнала умножением на неизвестный
множитель А. Положим энергию эталонного сигнала равной Е. Тогда
энергия Е(А) сигнала с амплитудой А и его корреляция z(A) с
наблюдением y(t) найдутся как
т т т
Е(А)= f s2(t;A)dt = A2 Js2(t)dt = A2E, z(A) = f y{t)s(t]A)dt = Az,
0 0 0
где
т
\dt (2.60)
= fv(t)s(t)i
о
— корреляция наблюдения с эталонным сигналом.
Обращаясь к корреляционной версии правила минимума расстояния (2.8)
и замечая, что роль Ek и Zk теперь принадлежит Е(А) и z(A)
соответственно, отыскание МП оценки может трактоваться как максимизация
по А разности z(A) — Е(А)/2. Подстановка приведенных выше равенств
для энергии и корреляции представляет эту разность в виде
квадратичного бинома Az — А2Е/2 относительно А с известными коэффициентами.
Результатом его максимизации является МП оценка
Е
Таким образом, оптимальная оценка амплитуды получается
вычислением корреляции наблюдаемого колебания с эталонным сигналом и
умножением результата на постоянный множитель 1/Е. После нахождения
2.10. Оценка фазы 71
математического ожидания z из (2.60)
т т т
z= fy(j)s(t)dt= f s(t;A)s(t)dt = A f s2{t)dt = AE
0 0 0
видно, что значение А в среднем точно совпадает с истинным значением
амплитуды: А — z/E = А, т. е. МП оценка амплитуды является строго
(а не только асимптотически) несмещенной. Не составляет труда оценить
и дисперсию А:
r *л var {z\ Щ 1 /Л Л.ч
wW = -^ = j| = ?, (2.61)
где принят во внимание результат (2.15), a q2 — отношение сигнал-шум
для эталонного сигнала (т.е. сигнала с единичной амплитудой). Можно
показать, что (2.61) точно воспроизводит границу Крамера-Рао,
обеспечивая строгую (а не только асимптотическую) эффективность МП
оценки амплитуды сигнала. Этот редкий случай строгой оптимальности
оценки связан с энергетической природой амплитуды и ниже при
рассмотрении неэнергетических параметров более не встретится.
Итак, какие же требования к синтезу сигналов предъявляет задача
измерения амплитуды? Как показывает (2.61), точность оценки зависит
исключительно от энергии сигнала. Никакое усложнение закона
модуляции при неизменной энергии сигнала не в состоянии повысить точность
измерения. Следовательно, рассмотренная классическая задача приема не
содержит каких-либо предпосылок к привлечению широкополосной
технологии.
2.10. Оценка фазы
Обратимся теперь к ситуации, в которой носителем полезной информации
выступает начальная фаза сигнала. Данный случай типичен для
когерентных локационных и навигационных приемников, устройств
восстановления несущей систем передачи данных с ФМ и КАМ, демодуляторов
систем мобильной радиосвязи 2-го и 3-го поколений, каналов цветности
в аналоговом телевидении и многих других приложений.
Преобразуем модель радиосигнала (2.24), отделив постоянную (на
интервале наблюдения) начальную фазу у?, являющуюся неизвестной и
подлежащей измерению:
*(*; <р) = S(t) cos(27r/o* + 7(*) + ¥>)■
Поскольку (р — неэнергетический параметр, то E(ip) = Е и нахожде-
72 Глава 2. Классические задачи приема и синтез сигналов
Т
ние МП оценки фазы сводится к максимизации z(<p) = Jy(t)s(t;(p)dt no
о
(р G [—7г,7г]. Чтобы воспользоваться соотношением (2.59), учтем, что р((р)
есть по определению косинус угла между двумя сдвинутыми по фазе на
угол </? копиями сигнала, т. е. двумя векторами, разделенными углом (р.
Следовательно, р((р) = cos<^, р"(0) — —1 и дисперсия МП оценки ф
var{<£} « -j, q » 1.
Вновь, как и в случае измерения амплитуды, точность оценки фазы
зависит только от отношения сигнал-шум. Таким образом, и эта
классическая задача приема нейтральна к закону модуляции при неизменности
энергии сигнала и, следовательно, никак не стимулирует к применению
широкополосных сигналов.
2.1 I. Автокорреляционная функция и отклик
согласованного фильтра
Теория систем с расширенным спектром в значительной степени
базируется на понятии автокорреляционной функции (АКФ) сигнала,
являющейся скалярным произведением двух копий одного и того же сигнала,
сдвинутых по времени относительно друг друга на т секунд:
R(r) = (s0, sT) = / s(t)s{t - r) dt. (2.62)
—оо
Запаздывание сигнала по времени т — неэнергетический параметр
(Е(т) — Е), и умножение (2.62) на Е~1 приводит к нормированной АКФ,
являющейся попросту коэффициентом корреляции сдвинутых во времени
копий сигнала
оо
/ ч (SO, Sr) (S(hST) 1 f /ояо\
Р(т) = |.||2 = Е = £ J S®*( ~ ^ ^ ^
—оо
Ясно, что последняя величина характеризует скорость ослабления
сходства сдвинутых во времени копий сигнала с ростом их рассогласования
по запаздыванию т. В соответствии с общими свойствами
коэффициента корреляции р(А), приведенными в § 2.8, АКФ — четная функция т,
имеющая максимум в нуле
Д(т) ^ Д(0) = Е, Щт) = Д(-т) & р(т) ^ р(0) = 1, р(т) = р{-т).
(2.64)
С учетом (2.39) и (2.34) не составляет труда убедиться, что для любого
2.11. Автокорреляционная функция и отклик согласованного фильтра 73
радиосигнала (2.37) АКФ можно выразить как
"Д(т)
R(t) = Re
exp(j27r/0T)
где
, /9(T)=Re[p(r)exp(j27r/oT)], (2.65)
R(r) = (S0, ST) - f S{t)S*(t - r) dt (2.66)
— АКФ комплексной огибающей S(t) или, другими словами, закона
модуляции. Нормированная версия АКФ (2.66)
Р(т)
(Sp,ST) _ (Sp,ST)
IISII2 ~ IE
= ~ J S(t)S*(t-r)dt (2.67)
p0W
является коэффициентом корреляции двух сдвинутых по времени копий
комплексной огибающей S(t) и служит (после взятия модуля) показателем
скорости ослабления сходства между сдвинутым по времени и исходным
законами модуляции с ростом рассогласования т. Как следует из (2.65),
АКФ р(т) радиосигнала s(t) может сама считаться радиосигналом,
закон модуляции которого опредачяется АКФ р(т) комплексной огибающей
S(t). В частности, действительная огибающая ро(т) АКФ s(t) является
модулем р(т): ро(т) = |р(т)|, что иллюстрируется рис. 2.16.
Технически любая АКФ может быть
получена как выходной сигнал
коррелятора, т.е. устройства, напрямую
выполняющего операции, предписываемые
соотношениями (2.62) или (2.66). В этом
случае вычисления во всем диапазоне
значений т выполняются раздельно по
точкам, т.е. последовательно во времени или
за счет применения банка параллельных
корреляторов. Альтернативной
структурой является согласованный фильтр, т. е.
линейное устройство с импульсным
откликом в виде зеркальной реплики
сигнала: h(t) = s(T — t), где Т — длительность сигнала, а
непринципиальный коэффициент пропорциональности принят равным единице. Данный
фильтр появляется всякий раз при синтезе оптимального приемника для
АБГШ канала, однако его оптимальность зачастую не
ограничивается рамками только этой специфической модели канала. В частности,
для фиксированного сигнала согласованный фильтр максимизирует среди
всех линейных систем выходное отношение сигнал-шум. В рассматри-
Рис. 2.16. АКФ радиосигнала
74 Глава 2. Классические задачи приема и синтез сигналов
ваемом же контексте согласованный фильтр важен своей способностью
вычислять и воспроизводить АКФ как выходной сигнал в реальном
времени. Для подтверждения этого приложим сигнал s(t) ко входу
согласованного с ним фильтра. Реакция фильтра r(t) может быть вычислена
как интеграл свертки
оо оо
r(t)= f s(0)h(t-6)d6= f s(e)s(T-t + e)de =
—оо —оо
оо
= I s{6)s[e-{t-T)}de = R(t-T) (2.68)
— ОО
и, как видно, воспроизводит АКФ в реальном времени с заранее
известной задержкой, равной длительности сигнала.
а)
i
-Т/2
б)
, , у
Р(т)х'
X
X
X
*
-Т
В) W3L
в) \у
p(Tbr^lJ
V \ i
1 .
<
is(t)
0 Г/2
^ ^TS».
^ ^Г I ^Sv
^^^*ч !
^^ ^
^*^ ^ !
ill 41
оТГ^
к --t!v«
1 \ / / i \;
V:fh4 \ V
Л /1 \\ >■ \
1 *«.
*ч^ ^*'
\»ю
to
'х^
/ \-Л
/*'***
—►
>ь
т, t
jfc
Рис. 2.17. Иллюстрация к
связи АКФ с откликом
согласованного фильтра
Для иллюстрации к сказанному обратимся к рис. 2.17. Прямоугольный
видеоимпульс s(t) длительности Т (см. рис. 2.17, а) обладает треугольной
АКФ R(r) длительности 2Т с максимумом в нулевой точке (рис. 2.17, 5,
пунктирная линия). Согласно соотношению (2.68) реакция на него
согласованного фильтра представляет собой копию подобной АКФ с
запаздыванием, равным длительности сигнала Т, так что максимальное
напряжение на выходе фильтра наблюдается в момент окончания
входного сигнала (рис. 2.17, #, сплошная линия). Для радиоимпульса с
прямоугольной огибающей s(t) АКФ оказывается треугольным радиоимпуль-
2.12. Оценка запаздывания радиосигнала
сом (рис. 2.17, в, пунктирная линия), а сигнал на выходе согласованного
фильтра — запаздывающей на Т копией последнего (рис. 2.17, в,
сплошная линия). Максимум отклика фильтра, согласованного с сигналом,
всегда приходится на момент окончания сигнала (по крайней мере, не
ранее), поскольку этот фильтр должен обработать весь сигнал целиком.
Поучительно также отметить, что для радиосигнала моменты
максимумов огибающей и высокочастотного заполнения на выходе согласованного
фильтра всегда совпадают, поскольку любая АКФ имеет максимум в
начале координат (см. рис. 2.16).
2.12. Оценка запаздывания радиосигнала
2.12.1. Алгоритм оценки
Задача, рассматриваемая в этом параграфе, является одной из наиболее
часто встречающихся в приложениях. Она типична для телевидения
(каналы синхронизации), цифровых систем мобильной радиосвязи (пилотные
каналы, тактовая синхронизация), радиолокации (измерение дальности
до цели), навигации космического и наземного базирования (измерение
расстояния до маяков) и т. п. Практически в любой современной
системе обработки информации для нормальной работы требуется совмещение
местной временной шкалы с системной, данные о которой должны
извлекаться из принятого колебания. Подобная процедура и есть не что иное,
как оценка запаздывания сигнала.
Предположим, что радиосигнал (2.37) s(t) = Ke[S(t) exp(j2nfot)],
распространяясь по каналу, приобретает неизвестные запаздывание г и
начальную фазу <£>о> т.е. принимает вид
s(t; т; <ро) = s(t - т; ср0) = Re {£(< - г) exp[j27r/0(t - г) + j(fo]}.
Во многих ситуациях фаза (ро случайна и равномерно распределена на
интервале [—7Г, 7г] т, т. е. не содержит информации о предмете интереса —
запаздывании т. Включим фазовый набег, обусловленный
запаздыванием г в полную начальную фазу <р = —2к$ът + ^о- Последняя, оставаясь
случайной и равномерно распределенной на интервале [—7г, 7г], вновь
независима с т, т.е. не содержит информации об измеряемом временном
сдвиге вследствие деструктивного вклада </?о- Тогда принятый сигнал
может быть представлен как
s{t -т;<р)= Re [S(t - г) exp{j27rf0t) exp(jV)], (2.69)
где запаздывание г является неизвестным полезным параметром,
подлежащим измерению, дар — бесполезная начальная фаза, неопределенность
которой лишь потенциально затрудняет оценку т.
76 Глава 2. Классические задачи приема и синтез сигналов
Как было установлено в § 2.8, любая процедура оценки является
частным случаем различения сигналов. В рассматриваемой ситуации
приходится распознавать многочисленные копии сигнала (2.69), отличные
друг от друга значением временного сдвига т, считаясь с
присутствием мешающего параметра — начальной фазы </?. К счастью, существует
прямой способ преодоления неопределенности, вносимой случайностью </?:
в § 2.5 было показано, что оптимальный выбор между некогерентными
сигналами может быть заменен выбором между их
детерминированными законами модуляции, т. е. комплексными огибающими. Следовательно,
для оценки запаздывания следует сравнить сдвинутые во времени копии
комплексной огибающей сигнала S(t), посчитав одну из них за принятую.
Временной сдвиг выбранной копии и будет выдан в качестве МП
оценки г запаздывания. Понятно, что предпочтение данной копии остальным
основывается на ее минимальном расстоянии от принятой комплексной
огибающей Y(t), или, учитывая, что запаздывание — неэнергетический
параметр, на максимуме ее корреляции с Y(t). При этом значение
корреляции оценивается абсолютной величиной (2.47), которая может быть
переписана с учетом того, что роль номера сигнала к теперь принадлежит
значению т:
Z(r) =
[Y(t)S*{t-r)dt
(2.70)
Основанное на данной величине правило оценки Z(f) = maxZ(r) фи-
т
зически весьма прозрачно: МП оценка f есть просто значение
запаздывания, при котором закон модуляции сигнала обладает наибольшим
сходством с законом модуляции наблюдения.
Одним из возможных вариантов реализации указанного правила
является использование банка корреляторов, представленного на рис. 2.18.
Комплексная огибающая наблюдаемого колебания обрабатывается в М
параллельных корреляторах, опорными сигналами которых служат
сдвинутые по времени копии комплексной огибающей сигнала. С выходов
корреляторов снимаются значения £(тъ), к = 1,2,... ,М, подаваемые на
селектор максимума, производящий их сравнение и выбор наибольшего.
В качестве МП оценки выдается запаздывание опорного сигнала
коррелятора с максимальным выходным откликом.
Разумеется, данная структура оперирует с запаздыванием так, будто
последнее принимает лишь дискретные значения. Если же в реальности
это не так, она попросту квантует непрерывную величину т. Понятно,
что при этом следует использовать такое число корреляторов (равное
количеству дискретных значений т^), при котором дополнительная ошибка,
вносимая квантованием, была бы достаточно малой.
2Л2. Оценка запаздывания радиосигнала 77
ПП
Коррелятор
АЪ)
S(f-x,)
Коррелятор
*0г)
Sit-ъ)
Коррелятор
*Ъ)
Селектор
максимума
S(t-xM)
Рис. 2.18. Реализация МП оценки запаздывания банком корреляторов
Альтернативная структура измерителя запаздывания возможна на
основе согласованного фильтра. Пусть наблюдение y(t) поступает на вход
фильтра, согласованного с сигналом s(t). Найдем реакцию фильтра r(t)r
подставляя в интеграл свертки импульсный отклик фильтра h(t) — s(T — t)v
оо оо
r(t) = f y(6)h(t - 6) М = I y(0)s(T-t + e)de.
—оо —оо
Данный интеграл, представляющий собой скалярное произведение у (в) и
s(T — t + 0), может быть вычислен с помощью (2.39) и (2.34) как
оо ГТ
r(*)= / y(e)s(T-t + 6)de = ^Re \fy(0)8*{T-t + 0)de
-оо LO
= Re
\ J Y(9)S*(T ~t + 9)d9- exp(-j27r/0T) exp(j27r/0t) 1
о J J
Сравнивая полученный результат с общей моделью радиосигнала (2.37),
можно видеть, что квадратные скобки в нем выделяют не что иное, как
комплексную огибающую на выходе фильтра. Следовательно,
действительная огибающая выходного сигнала (закон амплитудной модуляции),
78 Глава 2. Классические задачи приема и синтез сигналов
задаваемая абсолютным значением выражения в квадратных скобках
оо
\ JY(6)S*[e
{t - Г)] <Ю
= ^Z(t-T),
(2.71)
т. е. повторяет в реальном времени (с несущественным коэффициентом 1/2)
копию модуля корреляции (2.70), сдвинутую по времени на заранее
известную длительность сигнала. Отмеченный факт лежит в основе
возможной схемы МП измерителя запаздывания т, показанной на рис. 2.19, а.
Наблюдение y(t) вначале обрабатывается согласованным фильтром,
выходной сигнал которого подается на детектор огибающей. Последний блок
фиксирует момент времени tm, когда сигнал г^(£) на выходе детектора
достигает максимального значения. В итоге МП оценка f получается как
результат вычитания из tm известной константы Т (рис. 2.19, б).
№
Согласованный
фильтр
Детектор
огибающей
ф)
Фиксатор
максимума
Рис. 2.19. МП
измеритель временной
запаздывания на основе
СФ
Схема рис. 2.19 представляется более прозрачной для пояснения идеи
построения измерителя, на практике же многие
программно-реализованные устройства оценки могут оказаться не столь очевидно отождестви-
мыми с любой из двух рассмотренных структур.
2.12.2. Точность оценки
Согласно (2.59), дисперсия оценки т зависит от скорости, с которой
сдвинутая по времени копия сигнала теряет сходство с исходным образцом.
Для сигналов со случайной начальной фазой получение МП оценки
связано со сравнением лишь детерминированных комплексных огибающих.
Степень сходства рассогласованных во времени копий комплексной
огибающей характеризуется огибающей АКФ сигнала (2.67)
I оо |
UL J S(t)S*(t-r)dtl (2.72)
Ро(т) = \р(т)\ =
2.12. Оценка запаздывания радиосигнала 79
и поэтому именно ее кривизна влияет на дисперсию ошибки оценки
запаздывания, что подкрепляется и убедительной физической аргументацией.
Действительно, как следует из равенств (2.70)-(2.71), модуль АКФ (2.72)
представляет собой (с точностью до непринципиального сомножителя)
свободную от шума огибаюшую на выходе согласованного фильтра,
принимающую максимальное значение в некоторый «истинный» момент £то
(см. рис. 2.20, а, сплошная линия). В присутствии шума временное
положение максимума tm флюктуирует относительно истинного значения
(см. рис. 2.20, а, пунктирная линия) в диапазоне, зависящем от остроты
сигнального пика на выходе фильтра, т.е. модуля АКФ (2.72).
6(0 i
/ / \ *
/ * \ ч
! *т0 'т!
►
t
а)
Рис. 2.20. К точности оценки запаздывания
Чтобы лучше понять смысл последнего утверждения, примем во
внимание, что фиксация максимума г^(£) на выходе детектора
равносильна регистрации момента пересечения нулевого уровня производной rfd(t)
(при условии надежного устранения влияния ложных «нулей»,
вызванных возможными побочными максимумами). Сказанное иллюстрируется
рис. 2.20, б. При достаточно большом отношении сигнал-шум
отклонение е — tm — tmQ мало, и допустимо полагать, что «зашумленная»
кривая rd(t) (пунктирная линия) линейна на интервале [tmo^tm] с тем же
наклоном в точке £то, что и незашумленная (сплошная линия). Тогда
из треугольника на рис. 2.20, б значение е может быть найдено делением
длины штрих-пунктирной линии на крутизну незашумленной кривой rfd{t)
в точке £шо, т.е. на вторую производную rd(tmo). В свою очередь,
последняя есть в точности р"(0), так что е ~ rd(tmo)/p/f(0). С другой стороны,
дисперсия шумового отклонения rd(tmo) от нуля тем больше, чем меньше
отношение сигнал-шум и чем выше скорость изменения зашумленного
колебания г^(£) на выходе детектора (штриховая линия на рис. 2.20, а).
Информация о скорости флюктуации случайного процесса содержится в
остроте его АКФ, а АКФ случайного процесса на выходе детектора при
большом отношении сигнал-шум повторяет огибаюшую АКФ шума на
80 Глава 2. Классические задачи приема и синтез сигналов
входе детектора. В случае, когда фильтр согласован с сигналом,
упомянутая огибающая есть не что иное, как огибающая ро(т) АКФ сигнала.
Поскольку острота любой АКФ определяется второй производной в нуле
со знаком минус, дисперсия rfd(tm$) пропорциональна — Ро(0). Тогда
дисперсия ошибки измерения
vaxM" 1р"(о)|2 - -pg(o)
обратно пропорциональна остроте АКФ сигнала — Ро(0), как и
предсказывалось и как следует из границы Крамера-Рао (2.59).
В итоге мы пришли к следующему важному заключению: точность
измерения времени критически зависит от остроты АКФ сигнала и чем
острее АКФ, тем меньше дисперсия МП оценки запаздывания т.
Наряду с ~Ро (0) в качестве индикатора остроты АКФ может служить
интервал (время) корреляции сигнала, обозначаемый как тс. Указанный
параметр характеризует ширину АКФ сигнала (см. рис. 2.20, а) и —
подобно длительности и ширине полосы сигнала — вводится на
основе некоторой договоренности, так как АКФ может иметь достаточно
сложную форму и спадать до нуля лишь асимптотически. В свете
определения АКФ можно в первом приближении считать, что копии сигнала
(или комплексной огибающей), рассогласованные по времени на г < тс,
имеют значительное сходство, тогда как при т > тс их сходство
пренебрежимо мало. Очевидно, что предыдущее заключение можно теперь
сформулировать и так: сигналы с узкой АКФ, т. е. малым временем
корреляции, предпочтительнее с точки зрения повышения точности оценки
запаздывания.
Продолжая, напомним один из ключевых фактов спектрального
анализа, непосредственно вытекающий из (2.72) после применения теоремы
Парсеваля: АКФ и энергетический спектр сигнала связаны друг с другом
преобразованием Фурье. В терминах комплексной огибающей это
преобразование имеет вид
^о(т) = h
J \kf)\2exp(j2nfT)df
где спектр комплексной огибающей S(f) физически (пренебрегая
коэффициентом пропорциональности) повторяет спектр радиосигнала,
перенесенный в низкочастотную область. Тогда, согласно известным свойствам
преобразования Фурье, тс « 1/W, другими словами, чем уже АКФ, тем
шире спектр сигнала и наоборот. Прямым следствием этого
оказывается положение о возможном повышении точности измерения времени
2.12. Оценка запаздывания радиосигнала
за счет использования сигналов с широким спектром. Формально к
тому же выводу приведет дифференцирование последнего выражения для
АКФ огибающей и подстановка полученного результата в (2.59).
Результатом подобных несколько утомительных выкладок окажется равенство,
нередко упоминаемое в литературе как формула Вудворда
w{f}M(wl)V q>>h
где ширина спектра сигнала участвует в виде среднеквадратической
полосы, определяемой соотношением
оо
wLs-^ J f\hf)\2df.
—оо
На первый взгляд не столь просто понять, почему этот параметр дает
одно из возможных определений ширины полосы сигнала. При
подобном затруднении полезна аналогия с более привычными вероятностными
категориями. Дисперсия случайной величины х с нулевым средним и плот-
оо
ностью вероятности W(x) определяется как var{#} = / x2W(x)dx, ха-
—оо
рактеризуя диапазон разброса х относительно среднего, или, что
эквивалентно, ширину кривой W(x). Так как нормированный энергетический
спектр \S(f)\2/2E неотрицателен и удовлетворяет условию нормировки
ОО ~
/ [l^(/)|2/2i£] df = 1, его можно трактовать как плотность вероятности
—оо
некоторой случайной переменной. Тогда Wrms является мерой разброса
последней и, следовательно, параметром, характеризующим ширину
энергетического спектра \S(f)\2.
Таким образом, в общих чертах сигналы с широкой полосой W', или,
что эквивалентно, узкой АКФ (малым временем корреляции тс) в
задачах измерения времени более предпочтительны. В сопоставлении с двумя
ранее рассмотренными измерительными задачами ситуация выглядит
достаточно новой — имеется реальный ресурс повышения точности вне
варианта «грубой силы», т.е. простого увеличения энергии.
Подчеркнем теперь, что сигнал с большим значением W не
обязательно является широкополосным в смысле определения принятого в § 1.1.
Действительно, при адекватном введении времени корреляции тс и
длительности Т сигнальные копии, сдвинутые по времени более чем на Т,
практически не перекрываются, т. е. их скалярное произведение, а
значит, и сходство, незначительны. Поэтому тс ^ 2Т, показывая, что сужение
АКФ сигнала и, значит, расширение его спектра может быть достигнуто
тривиальным укорочением самого сигнала.
Глава 2. Классические задачи приема и синтез сигналов
Однако, следуя подобным путем, необходимо помнить, что отношение
сигнал - шум зависит от энергии сигнала Е = крРТ, где Р — пиковая
мощность, а кр — коэффициент, учитывающий форму сигнала. Ясно, что
сохранение неизменного отношения сигнал-шум с укорочением сигнала
потребует пропорционального увеличения пиковой мощности.
Следовательно, в стремлении к все большему повышению точности, можно прийти
к ситуации, когда требуемая пиковая мощность окажется неприемлемо
высокой. Как правило, чрезмерная излучаемая мощность резко ухудшает
массо-габаритные параметры передающей аппаратуры и источника
питания. Вдобавок, передача мощных коротких импульсов может нанести
ущерб функционированию других систем, а также экологии окружающей среды.
К более элегантному варианту повышения точности временных
измерений подталкивает тот факт, что укорочение сигнала не является
необходимым для расширения спектра или, что эквивалентно,
уменьшения времени корреляции. Рассмотрим сигнал, длительность Т которого
достаточно велика для обеспечения нужной энергии, т. е. отношения
сигнал-шум, в сочетании с приемлемым значением пиковой мощности Р.
Допустим, что найден такой закон внутренней угловой модуляции, при
котором время корреляции сигнала значительно меньше его
длительности: тс <С Т. При этом АКФ сигнала имеет выраженную остроконечную
форму, гарантируя высокую точность оценки запаздывания, несмотря
на большую длительность самого сигнала. В свете зависимости между
временем корреляции и полосой тс « 1/W неравенство rc <^ T
означает, что сигнал обладает большим частотно-временным произведением
WT » 1, т.е. является широкополосным в смысле определения,
данного в § 1.1. Тем самым, привлечение технологии расширенного спектра
позволяет устранить конфликт между мгновенной мощностью и
точностью оценки: необходимую энергию удается вложить в сигнал за счет его
достаточной длительности, а не большой мощности, тогда как высокая
точность измерения достигается синтезом подходящего закона модуляции.
Фактически условие тс <С Т означает, что протяженный сигнал
становится коротким после обработки согласованным фильтром измерителя
рис. 2.19, а. Должно быть ясно, что эффект временного сжатия именно
при согласованной фильтрации достижим только для широкополосных
сигналов. В принципе любой сигнал можно укоротить, обрабатывая его
специальным (в общем случае рассогласованным) фильтром, например
эквалайзером. Однако для простых сигналов подобное укорочение
достигается в обмен на потери в отношении сигнал-шум, и только
широкополосные сигналы позволяют совместить наилучшую «очистку от шумов»
с временной компрессией. В то же время следует понимать, что условие
широкополосное™ WT ^> 1 является лишь необходимым и синтез сиг-
2.12. Оценка запаздывания радиосигнала 83
налов, сочетающих большую собственную длительность с острой АКФ,
является весьма нетривиальной задачей. Подробному обсуждению
вопроса посвящена гл. 6.
1
~1
J
V О
j t j
0,0 0,5 1,0 1,5 2,0
0,0 0,5 1,0 1,5 2,0
5
>.
Э
m
Ф
Ю
0
О
8
X
-1
HR
0,0 0,5 1,0 1,5
2,0
Рис. 2.21. Эффект сжатия в согласованном фильтре и точность оценки задержки
Обратимся теперь к рис. 2.21, на котором приведены осциллограммы,
смоделированные в среде MATLAB. Рис. 2.21, а представляет простой
радиосигнал с плавной огибающей, отклик согласованного с ним фильтра
(АКФ с временным сдвигом) и 10 зашумленных реализаций (с
наложением) на выходе детектора. Осциллограммы рис. 2.21, б имеют
аналогичный смысл, но отвечают сигналу с расширенным спектром,
представляющему собой импульс с линейной частотной модуляцией, форма,
длительность и энергия которого те же, что и у сигнала на рис. 2.21, а.
Эффект временного сжатия наглядно присутствует в варианте (б), приводя
к значительному сужению диапазона флюктуации временного положения
максимума сигнала на выходе детектора по сравнению со случаем (а).
Пример убедительно демонстрирует потенциальные возможности
широкополосной технологии в приложениях, где требуется высокая точность
измерений времени при ограниченном ресурсе пиковой мощности.
84 Глава 2. Классические задачи приема и синтез сигналов
Резюмируя, сформулируем следующий вывод. В отсутствие
ограничений на пиковую мощность повышение точности в классической задаче
измерения запаздывания не требует обязательного привлечения
технологии расширения спектра. В то же время указанная технология
является безальтернативной всякий раз, когда пиковая мощность жестко
лимитирована. Заметим попутно, что последний сценарий весьма
типичен для импульсной радиолокации, в связи с чем эта область приложений
в течение десятилетий стимулировала развитие теории и техники
широкополосных сигналов.
2.13. Оценка несущей частоты
Рассмотрим теперь ситуацию, в которой неизвестным информативным
параметром служит несущая частота сигнала. Подобная задача столь
же часто встречается на практике, как и предыдущая. Она характерна
для радиолокации, где скорость объекта измеряется через оценку до-
плеровского сдвига частоты (один из примеров — радар мониторинга
дорожного движения), устройств восстановления опорного колебания в
мобильной радиосвязи второго и третьего поколений; систем
автоподстройки частоты в телевизионных и вещательных ЧМ приемниках и т. п.
Обычно в приложениях номинальное значение несущей частоты /о
фиксировано и измерению подлежит лишь смещение F частоты
принятого сигнала относительно /о, так что модель сигнала на входе приемника
удобно записать в виде
з(<; F; <р) = Re {s(t) exp[j2n{f0 + F)t + w)} =
= Re [S(t; F) exp(j2nf0t) exp(j<pj\,
где S(t; F) = S(t) exp(j27rFt) — комплексная огибающая сигнала,
включающая линейный фазовый дрейф, обусловленный частотным сдвигом F,
а <р — как и ранее, мешающий параметр — случайная начальная фаза,
не содержащая информации о сдвиге F.
В силу неэнергетической природы F правило максимума корреляции
вновь оптимально и выражается как Z(F) = max Z(F), где модуль корреля-
F
ции Z(F) дается равенством (2.47), слегка адаптированным заменой к на F:
Z(F)
Т I IT
[Y(t)S*(t;F)dt\ = \[Y(t)S*{t)exp{-j2<irFt)<
о I lo
Структуру рис. 2.18 легко приспособить для осуществления данной
процедуры оценки, если в качестве опорных сигналов корреляторов в ней
2.13. Оценка несущей частоты 85
взамен сдвинутых по времени копии сигнала использовать
частотно-сдвинутые копии комплексной огибающей S{t;Fk) = S(t)ex.p(j27cFkt), k —
— 1,2, ...,М. С другой стороны, из (2.71) видно, что амплитуда
сигнала на выходе согласованного фильтра, настроенного на частоту /о + Fk,
принимает в момент окончания сигнала Т значение Z(Fk) (игнорируя
коэффициент). Таким образом, можно воспользоваться альтернативной
схемой рис. 2.22, содержащей банк М согласованных фильтров, где fe-й
фильтр настроен на частоту, отличающуюся от номинальной /о на
величину jpfc- После амплитудного детектирования и взятия отсчетов с
выходов детекторов в момент Т получается набор значений Z(Ffe), наибольшее
из которых затем выбирается для выдачи МП оценки F как частотной
расстройки фильтра с максимальным откликом Z(Fk). Ясно, что в
случае непрерывного сдвига F схема производит его квантование, и число
фильтров М должно быть выбрано достаточным для удержания ошибки
квантования в приемлемых пределах.
Рис. 2.22. МП
измеритель частоты на
основе банка СФ
y{t) ,
(
>
>
СФ
СФ
^2
СФ
fa
Детектор
огибающей
Детектор
огибающей
Детектор
огибающей
•
i "*"
Селектор
максимума
1 Отсчет
Согласно (2.59) точность измерения частоты определяется наряду с
отношением сигнал-шум также остротой зависимости корреляции между
частотно-сдвинутыми копиями сигнала от их взаимной частотной
расстройки. Из-за случайности фазы сигнала достаточно оперировать лишь
с его комплексной огибающей, и сходство между ее частотно-сдвинутыми
копиями S(t\ 0) и S(t; F) характеризуется модулем коэффициента
корреляции (2.44)
p0(F) = \p(F)\ =
оо
^ J S(t;0)S*(t;F)dt
ОО ОО
^ J \S{t)\2eXp(-j2nFt)dt\ = -L J S2(t)eM4^Ft)dt
(2.73)
Глава 2. Классические задачи приема и синтез сигналов
Как видно, зависимость коэффициента корреляции в функции от F
повторяет по форме амплитудный спектр квадрата действительной
огибающей сигнала. Действительная огибающая, т. е. закон амплитудной
модуляции, по смыслу является видеосигналом, поэтому из свойств
преобразования Фурье следует, что чем длиннее сигнал, тем острее po(F).
Подходящим названием протяженности po(F) вдоль оси частот могло бы
служить «полоса огибающей». Обозначив ее как Fe, на основании только
что упомянутого факта имеем Fe « 1/Т. Таким образом, помимо
«грубой силы», т. е. увеличения энергии, можно повысить точность измерения
частоты, применяя сигнал с компактным спектром огибающей (узкой
полосой огибающей Fe), т.е. достаточно большой длительностью Г.
Формально этот вывод снова может быть получен вычислением второй
производной po{F) и подстановкой результата в границу Крамера-Рао (2.59)
™{^(2.Trl)V'
где среднеквадратическая длительность Trms характеризует
протяженность сигнала во времени подобно тому, как Wrms — протяженность
спектра сигнала.
Можно сопроводить полученные выводы следующими физическими
комментариями. Во-первых, повышение точности за счет увеличения
длительности Т легко объяснимо: частота есть попросту скорость
изменения полной фазы, и, как и любая скорость, измеряется надежнее,
когда приращение угла наблюдается на более протяженном интервале. Во-
вторых, в сопоставлении измерений времени и частоты наглядно
проявляется частотно-временная дуальность. Действительно, в то время как
точность измерения времени зависит от протяженности сигнала в
частотной области (полосы W), точность измерения частоты управляется
протяженностью сигнала во временной области (длительностью Т).
По материалам параграфа можно заключить, что в случае, когда
единственным информативным параметром является частота, отсутствуют
какие-либо показания к привлечению широкополосных сигналов,
поскольку, помимо энергии, только длительность сигнала оказывает влияние на
точность оценки. Этим, например, объясняется частое применение в до-
плеровских радарах дорожного контроля простейших смодулированных
гармонических сигналов.
2.14. Одновременная оценка запаздывания и частоты
Обсудим теперь ситуацию, когда как временной т, так и частотный F
сдвиги принятого сигнала являются неизвестными информативными па-
2.Ц. Одновременная оценка запаздывания и частоты 87
раметрами, т.е. подлежат измерению. Подобная задача соответствует
многим реальным сценариям. В цифровых телекоммуникациях, например,
в системах мобильной связи 2-го и 3-го поколений прием, как правило,
начинается с синхронизации местного опорного колебания с принятым
сигналом. Данная операция состоит в измерении частотно-временного
рассогласования локального эталона с приходящим сигналом и
последующей частотно-временной подстройки первого до входа в синхронизм
со вторым. В радиолокации совместное измерение расстояния и
скорости цели относительно приемника означает одновременное оценивание
запаздывания и доплеровской частоты сигнала. В навигации, например
системе GPS, оценки аналогичного характера необходимы как исходные
данные для определения местоположения и скорости пользователя.
Подобные примеры достаточно многочисленны.
В отличие от скалярных параметров, фигурировавших в § 2.9-2.13,
теперь оцениваемым параметром является двумерный вектор Л = (г, F).
Соответственно, модель принятого сигнала комбинирует в себе модели
из § 2.12 и 2.13:
s(t; т, F; tp) = Re [S(t; т, F) exp(j27r/0t) exp(jV)] >
где S(t; r, F) = S(t — r) exp(j27rFt) — комплексная огибающая с учетом
запаздывания и частотного сдвига, а у? — как и ранее, неинформативная
начальная фаза. Очевидно, что теперь правило максимума корреляции
для оценки т, F должно базироваться на модуле корреляции
\ Т I IT I
Z(r,F) = \[Y(t)S*(t;r,F)dt\ = f Y{t)S*(t - r) exp(-j27rFt) dtL (2.74)
lo I lo I
являющемся индикатором сходства копии комплексной огибающей
сигнала S(t] т, F), сдвинутой по времени и частоте, с наблюдаемой комплексной
огибающей Y(t). Нахождение значений г и F, максимизирующих
указанное сходство, и означает получение пары МП оценок f, F: Z(f,F) =
— maxZ(r, F).
t,F
Как и ранее, построение измерителя возможно на основе банка
корреляторов, опорными сигналами которых служат копии S(t; т, F) = S(t — т) х
х exp(j27rF£) с различными парами значений г и F. Более наглядна,
однако, схема с использованием согласованных фильтров, приведенная на
рис. 2.23 и объединяющая структуры рис. 2.22 и 2.19, а. Прийти к ней
можно с помощью простого сравнения (2.74) и (2.71), показывающего,
что Z(t,F) (без учета постоянного коэффициента) повторяет
действительную огибающую на выходе согласованного фильтра с частотной
расстройкой F. В схеме используются М ветвей «фильтр-детектор», каждая
88 Глава 2. Классические задачи приема и синтез сигналов
из которых настроена на свою конкретную частоту, юбеспечивая тем
самым оценивание F, тогда как оценка т реализуется фиксацией точки
максимума сигнала с выхода детектора. Селектор максимума
выполняет обе названные операции одновременно, фиксируя момент достижения
глобального максимума среди откликов всех ветвей. Временное
положение этого максимума (за вычетом длительности сигнала) принимается
в качестве оценки f, тогда как частота настройки ветви, на выходе
которой зарегистрирован глобальный максимум, дает оценку F.
y(t) ,
*-
1
^-
СФ
СФ
F2
СФ
Fm
—*-
—^-
■—>-
Детектор
огибающей
Детектор
огибающей
Детектор
огибающей
^
».
»-
Селектор
максимума
t,F
Рис. 2.23. МП измеритель запаздывания и частоты
Точность оценки зависит от скорости, с которой убывает сходство
между рассогласованными по времени и частоте копиями S(t; О,0) и S(t; т, F)
комплексной огибающей сигнала с ростом т, F. Иными словами, на
точность влияет кривизна в нуле модуля коэффициента корреляции,
получаемого из (2.44)
Po{t,F) = \p(t,F)\ =
^ J S(t;0,0)S*(t-r,F)dt
^ [ S(t)S*(t - т) exp(-j2irFt) dt
Е J
IE
(2.75)
как функции двух переменных т, F. Эта функция, часто называемая
функцией неопределенности (ФН) Вудворда, играет исключительно
важную роль в теории сигналов. Геометрически ее можно представить
трехмерной поверхностью над плоскостью т, F, имеющей максимум, равный
единице, в начале координат: /?о(т, F) ^ ро(0,0) = 1. Примерный вид
функции неопределенности дает рис. 2.24.
При F = 0 сигнальные копии рассогласованы только во времени и,
в соответствии с этим, функция неопределенности (2.75) превращается
2.Ц. Одновременная оценка запаздывания и частоты
в модуль АКФ (2.72): ро(т,0) = ро(т). С другой стороны, в отсутствие
временного сдвига г = О сигнальные копии рассогласованы только по
частоте, и функция неопределенности становится спектром (2.73) квадрата
закона модуляции амплитуды сигнала: po(0,F) = po(F). Другими
словами, АКФ сигнала и спектр квадрата огибающей представляют собой
сечения функции неопределенности вертикальными плоскостями т = О,
F — О соответственно. Возвращаясь к схеме на рис. 2.23, можно
заметить, что в случае отсутствия шума сигнал в k-м канале воспроизводит в
реальном времени сечение функции неопределенности вертикальной
плоскостью F — Fk-
Рис. 2.24. Пример функции
неопределенности
Рис. 2.25. Пример диаграммы
неопределенности
Как следует из обсуждения выше, единственным, не связанным с
энергозатратами, ресурсом повышения точности частотно-временных
измерений является острота функции неопределенности. При отсутствии
достоверных априорных сведений о возможных значениях т, F ФН должна
достаточно быстро спадать в любом направлении в плоскости т, F. Для
того, чтобы охарактеризовать остроту p0(r,F), нередко используют ее
горизонтальное сечение (называемое диаграммой неопределенности) на
некотором фиксированном уровне, например 0,5. Рис. 2.25 дает пример
подобного сечения. Поскольку протяженность двух базовых сечений р0(т)
и po{F) определяется временем корреляции (тс « 1/W) и полосой
огибающей (Fe « 1/Т), эти параметры автоматически определяют размеры
сечения по осям т, F. Очевидно, что чем острее функция неопределенности,
тем меньше площадь диаграммы неопределенности. Последняя
пропорциональна произведению rcFe « 1/WT, что дает основания утверждать:
только широкополосные сигналы позволяют повысить точность оценки
запаздывания (частоты) без ухудшения точности измерения частоты
( запаздывания). Действительно, для любого простого сигнала WT « 1 и,
Глава 2. Классические задачи приема и синтез сигналов
следовательно, rcFe « 1, так что достичь значительной остроты функции
неопределенности вдоль одного направления (например, т) невозможно
иначе как в обмен на одновременное растяжение ее в другом
направлении (F).
Использование широкополосных сигналов открывает путь к
устранению противоречия между размерами тс, Fe функции неопределенности
или, что равносильно, между длительностью и шириной спектра
сигнала, как это уже установлено в § 2.12. Синтез подходящего закона угловой
модуляции обеспечивает требуемую полосу сигнала W (время
корреляции тс) и, тем самым, нужную точность измерения запаздывания, тогда
как длительность сигнала может быть выбрана независимо, гарантируя
необходимую точность измерения частоты.
Сопоставив вышеприведенное заключение с аналогичными выводами
предыдущих параграфов, можно видеть, что среди всех классических
задач приема, рассмотренных к этому моменту, одновременная оценка
времени и частоты является первой, в которой философия
расширенного спектра востребована безоговорочно. Не существует никаких иных
путей бесконфликтного параллельного повышения точности измерения
запаздывания и частоты, помимо использования широкополосных сигналов.
2.15. Разрешение сигналов
Для многих реальных систем весьма характерна ситуация, когда
принятый сигнал фактически оказывается суперпозицией множественных
реплик исходного «чистого» сигнала, каждая из которых имеет свои
значения амплитуды, фазы, запаздывания и частоты. Перекрываясь во
времени, эти копии интерферируют между собой, образуя достаточно сложный
результирующий сигнал, что часто затрудняет извлечение необходимой
информации. Процедура, направленная на разделение интерферирующих
сигнальных копий или нейтрализацию их взаимного вредного
взаимодействия, получила наименование разрешения сигналов. В рамках
классического подхода возможны разнообразные варианты конкретизации этого
определения в зависимости от того, что декларируется в качестве
конечной цели. Общей для всех задач разрешения, тем не менее, вновь
оказывается критическая роль категорий расстояния и сходства между копиями
сигнала.
Для более глубокой трактовки смысла проблемы обратимся к весьма
показательному сценарию временного разрешения сигналов. Начнем с
радиосигнала s(t) — Re [S(t) exp(j27rfot)] и предположим, что две его копии,
имеющие одинаковые амплитуды, но разные запаздывания т\ — О и Т2 = г
2.15. Разрешение сигналов 91
поступают на вход приемника. Тогда форма суперпозиции их копий
sr(t) = s(t) + s(t - г) - Re {[S(t) + S(t - r)\ exp{j2nf0t)}
существенно зависит от взаимного временного сдвига т по отношению
к длительности сигнала Т и несущей частоте, а также «тонких» деталей
закона модуляции сигнала. Рис. 2.26 демонстрирует несколько ситуаций
на примере простого колоколообразного импульса: осциллограмма (а)
соответствует собственно «чистому» сигналу, тогда как остальные три —
суперпозициям копий с различными значениями т в терминах периода
несущей 1//0.
Рис. 2.26. К задаче временного
разрешения
б)
в)
г)
В случае, когда взаимное запаздывание г превышает длительность
сигнала Т (рис. 2.26, б), проблема разрешения не возникает вообще, так
как копии сигнала полностью разнесены во времени и наблюдатель в
состоянии констатировать прием именно двух реплик. Понятно, что в
данной ситуации эффект интерференции отсутствует, и, если, помимо
временного положения, интерес представляют и другие параметры сигнала,
информация о них может быть извлечена из каждой копии без затруднений.
Иная картина возникает, когда сигнальные копии существенно
перекрываются. Тогда интерференция может привести либо к усилению
суммарного сигнала (если копии примерно синфазны, рис. 2.26, в), либо
к его ослаблению (при разности фаз копий близкой к тг, рис. 2.26, г).
Сопутствующие трудности для приемной стороны очевидны, учитывая, что
принятое колебание всегда искажено канальным шумом. Наблюдатель
окажется едва ли способен распознать присутствие в принятом колебании
более чем одной копии (и быть в полной уверенности, что интерференция
не исказила извлеченную информацию (в)), либо столкнется с замиранием
сигнала ниже уровня работоспособности системы (г).
~~~~У=~20дГ~~~~~ х = 20Д0
т = 4Д0
t
х = 4,5Д0
■***&M^WA&w*^
Глава 2. Классические задачи приема и синтез сигналов
Эффекты подобного рода повсеместны в системах передачи и сбора
информации. Физической их причиной служат ограниченность полосы
канала и многолучевое распространение. Последнее будет обсуждаться
в деталях в § 3.5. Здесь же ограничимся лишь несколькими
иллюстративными примерами. В цифровой связи к числу наиболее неблагоприятных
относятся два вида канальных искажений: межсимволъная
интерференция — (МСИ) и замирания (фединг). Они имеют родственную
природу, поскольку являются результатом линейного суммирования множества
взвешенных и задержгшных во времени копий сигнала. В случае, когда
диапазон разброса задержек сравним со временем корреляции сигнала
или, что равносильно, передаточная функция канала заметно
неравномерна в пределах спектра сигнала, принятая суперпозиция оказывается
существенно искаженной по сравнению с переданным сигналом, что
типично для МСИ или частотно-селективного фединга. Неселективный
или плоский фединг имеет место тогда, когда запаздывания копий
сигнала отличаются незначительно в сравнении с интервалом корреляции
сигнала (передаточная функция канала близка к равномерной), однако
достаточны, чтобы взаимный фазовый сдвиг копий принял
деструктивный характер, чреватый риском ощутимых потерь в мощности
результирующего сигнала. Понятно, что задача разрешения, т. е. эффективного
разделения сдвинутых по времени копий сигнала, непосредственно
связана с задачей подавления МСИ.
Подобным же образом в радиолокации принимаемое колебание
может быть суммой сдвинутых по времени реплик, полученных как
результат отражения зондирующего сигнала множественными целями. Одним
из основных предназначений радиолокатора является определение числа
целей на заданном пространственном направлении и измерение
расстояний до них. Легко понять, что картина, описываемая рис. 2.26, #,
наиболее благоприятна в этом плане, тогда как малые взаимные расстояния
между целями вызывают перекрытие эхо-сигналов (рис. 2.26, в, г), давая
пример ситуации, характерной для задачи разрешения сигналов.
Многолучевое распространение сигналов типично и для
радионавигации. В ряде систем наземного базирования его природа связана с
отражением радиоволн длинно- и средневолнового диапазонов от ионосферного
слоя. Вследствие этого земная поверхность и ионосферный слой
образуют волновод, в котором существует несколько мод распространения
сигнала. Подобное явление характерно и для систем космического
базирования, где наряду с прямым сигналом спутника на вход приемника могут
поступать сигналы, отраженные от окружающих предметов (например,
корабельных мачт, палубных надстроек и т.п.). Все указанные ситуации
хорошо укладываются в рамки задачи разрешения.
2.15. Разрешение сигналов 93
Анализ рис. 2.26 может привести к неоспоримой, на первый взгляд,
мысли, что радикальным путем к надежному временному разрешению
является использование коротких сигналов. Укорочение сигнала,
конечно, может рассматриваться как средство решения задачи, однако
серьезные оговорки, подробно обсуждавшиеся в § 2.12, не должны
упускаться из виду. Стремясь к высокой разрешающей способности, нельзя
просто уменьшать длительность сигнала: для удержания отношения сигнал -
шум не ниже требуемого уровня придется параллельно пропорционально
увеличивать пиковую мощность. Тем самым, лимиты пиковой мощности
заметно снижают практический потенциал рассмотренной простейшей
стратегии улучшения разрешающей способности.
К счастью, возможен альтернативный и гораздо более изящный
подход, фактически описанный ранее. Как и в измерении запаздывания,
разрешающая способность определяется протяженностью не самого сигнала,
а его АКФ, поскольку очистка сигнала от шума согласованным фильтром
может рассматриваться как неотъемлемый этап любой процедуры
приема. Соответственно стремление к высокой разрешающей способности
выливается в требование малого интервала корреляции тс или
остроконечной АКФ сигнала, дословно повторяющее уже сформулированное
в задаче оценки запаздывания. Иными словами, сдвинутые по времени
реплики сигнала могут перекрываться и интерферировать, однако при
временном сдвиге между ними г, превышающем интервал корреляции тс,
отклики на них на выходе согласованного фильтра не перекроются, т. е.
будут разрешены. В итоге мы вновь приходим к идее, декларированной
в § 2.12. Достаточная длительность Т гарантирует вложение в сигнал
необходимой энергии (нужное отношение сигнал-шум) при удержании
пиковой мощности в заданных пределах, тогда как продиктованное
требуемой разрешающей способностью малое время корреляции тс < Г
реализуется соответствующим выбором закона внутренней угловой
модуляции. При этом эффект временного сжатия в согласованном фильтре
позволит разделить перекрывающиеся сигнальные копии, т. е. обеспечит
их разрешение. Потенциально это достижимо только при использовании
широкополосных сигналов, т.е. таких, для которых WT « Т/тс ^> 1.
Следовательно, можно дословно повторить вывод § 2.12 в приложении
к временному разрешению. В отсутствие ограничений на пиковую
мощность задача разрешения сигналов не требует обязательного обращения
к технологии расширенного спектра. Однако применение
широкополосных сигналов становится насущной потребностью в условиях жесткого
лимита на пиковую мощность.
Рис. 2.27 сопоставляет две показательные ситуации, смоделированные
в среде MATLAB. В колонке (а) показаны простой одиночный колоколо-
94 Глава 2. Классические задачи приема и синтез сигналов
образный радиоимпульс s(t), его сдвинутая на т копия s(t — т),
существенно перекрывающаяся с исходным сигналом s(t), суперпозиция s(t)
и s(t — г) на входе согласованного фильтра и отклик фильтра. Колонка (б)
содержит аналогичные осциллограммы для широкополосного
радиоимпульса (с линейной частотной модуляцией) той же формы, длительности
и энергии. При одинаковом в обоих случаях запаздывании сигнальной
копии второй вариант демонстрирует высокую степень разрешения — две
сигнальные копии полностью разделяются, тогда как в первом варианте
разрешение не имеет места вообще.
Ъ
0,0 0,5 1,0 1,5 2,0
-1
НЕ
0,0 0,5
1,0
1,5 2,0
4»
-1
0,0 0,5 1,0 1,5 2,0
4 °
-1
.чИШш^^^Ши**- |м и
-... 1. - i . i
0,0 0,5
1,0 1,5
2,0
е
о
g о
х
Ш-2
ГД""Т""
j.. r --„---Г "Г Г- ,-,L " -■--„-, J
0,0 0,5
0 2
Q
Ъ
Ш-2
1,0
ц
_J jl.
1,5
2,0
0,0 0,5 1,0 1,5 2,0
t/T
6)
Рис. 2.27. Задача разрешения по времени: простой (а) и широкополосный (б)
сигналы
Понятия, введенные выше в контексте разрешения по времени, легко
обобщаются на задачи разрешения по другим параметрам. При
наблюдении суперпозиции сигнальных реплик, отличающихся только частотным
сдвигом, возникает задача разрешения по частоте, разрешающая
способность в которой определяется тем же коэффициентом корреляции (2.73),
что и при измерении частоты. При этом, естественно, нет какой-либо
нужды в применении широкополосной технологии (см. § 2.13). Если же
2.16. Резюме 95
наложенные друг на друга копии сигналов отличаются как временным,
так и частотным сдвигами, то речь идет о частотно-временном
разрешении, качество которого зависит от параметров функции
неопределенности (2.75). Как и при частотно-временных измерениях (см. § 2.14),
решение подобной задачи критически связано с широкополосной технологией:
никакой иной путь не позволит добиться остроты функции
неопределенности во всех направлениях в плоскости т, F.
Заканчивая параграф, упомянем также о многочисленных ситуациях
пространственного разрешения, когда сигнальные копии, поступающие
на приемную антенну, приходят с различных направлений, и задача
наблюдателя заключается в раздельной их обработке. В этом случае
сама антенна (или антенны, включая и передающую) выступает в роли
пространственного сигнала, а синтез такого «сигнала» сводится к
построению наиболее эффективного алгоритма комбинирования колебаний,
принятых различными элементами антенны. Многие идеи
частотно-временного разрешения имеют свои аналоги при пространственном разрешении.
2.16. Резюме
В настоящей главе были вкратце исследованы канонические процедуры
приема сигналов: обнаружение, различение, оценка параметров и
разрешение. В соответствии с классическим подходом повсеместно
постулировалась модель аддитивного гауссовского шума, и конечная цель
состояла в выяснении того, в каких случаях в рамках: подобной идеализации
появляются импульсы к применению технологии расширенного спектра.
Полученные выводы сгруппированы в табл. 2.1, включающей параметры
сигнала, влияющие на качество выполнения каждой из конкретных
процедур, и степень мотивации к применению широкополосных сигналов для
энергосберегающего улучшения качества приема.
Как свидетельствуют данные таблицы, было бы преувеличением
считать, что классическая теория приема однозначно ориентирует на
широкополосную идеологию. Лишь совместное измерение времени и частоты
наряду с частотно-временным разрешением стимулируют к ее
применению без всяких оговорок. Это может показаться странным и
вызывающим вопросы по поводу оснований широкой популярности технологии
распределенного спектра в современных беспроводных информационных
системах. Как будет видно из дальнейшего, подобные основания
весьма значительны и убедительно проявляют себя всякий раз, когда анализ
базируется на более реалистичных моделях канала, чем порой излишне
«академичная» гауссовская, или связан с привлечением некоторых
дополнительных критериев качества.
Глава 2. Классические задачи приема и синтез сигналов
Таблица 2.1. Роль широкополосных сигналов в классических задачах приема
Задача
Обнаружение,
амплитудные и фазовые
измерения
Двоичная передача
данных (М — 2)
М-ичная передача
данных, М > 2
Измерение запаздывания
и временное разрешение
Измерение частоты,
разрешение по частоте
Частотно-временные
измерения, разрешение по
времени и частоте
Параметры сигнала,
определяющие качество
Отношение сигнал-шум
(только энергия сигнала).
Отношение сигнал - шум,
коэффициент корреляции
Отношение сигнал-шум,
коэффициенты
корреляции между всеми
сигналами
Отношение сигнал-шум,
полоса сигнала
Отношение сигнал-шум,
длительность сигнала
Отношение сигнал-шум,
полоса и длительность
сигнала
Широкополосные сигналы
Не требуются
Не требуются
Не требуются, но могут
быть привлекательны
в реализационном плане
Не требуются
в отсутствие ограничений
на мощность, необходимы
при ограниченной
мощности
Не требуются
Необходимы
Задачи
2.1. Даны три сигнала Si(£), зг(*) и ss(t) на рис. 2.28. Во сколько раз
максимальное расстояние в данном ансамбле больше минимального?
J
и
2U
2U
^ мо
sz(f) Т
S3(t)
Т/2
,
t
t
\
Рис. 2.28. Ансамбль трех
сигналов
y(t)
U
-U \
Т/2
Рис. 2.29. Наблюдение на
выходе канала
Задачи 97
2.2. Наблюдение y(t) на выходе АБГШ-канала имеет вид, представленный на
рис. 2.29. Сигналы на входе те же, что в задаче 2.1. Каким будет решение
оптимального приемника?
2.3. Источник генерирует данные со скоростью R = 10 кбит/сек. Каждый бит
передается по АБГШ-каналу бинарной ФМ. Доступна полоса вплоть до
W — 10 МГц. Разумно ли использовать сигналы с полосой W — 10 МГц?
2.4. Какие сигналы с бинарной ФМ предпочтительнее для передачи по АБГШ-
каналу:
- прямоугольные импульсы с пиковой мощностью 1000 Вт и полосой
100 кГц;
- прямоугольные импульсы такой же длительности с пиковой
мощностью 900 Вт и полосой 10 МГц?
2.5. Определите энергетические потери для пар сигналов, используемых для
бинарной передачи данных по АБГШ-каналу (рис. 2.30), по отношению
к оптимальной паре.
к
и
и
1
2Г/3
а)
т
t
t
и
и
-и
V
Т/3
б)
т
—►
t
*t
к
и
-и
и
и
i
!
773
в)
т
t
t
Рис. 2.30. Три пары сигналов
2.6. При дифференциальной бинарной фазовой манипуляции (ДБФМ)
значение бита передается изменением или отсутствием изменения
полярности двух последовательных импульсов: импульсы одинаковой полярности
передают нуль, а разной — единицу. Сравните в первом приближении
ДБФМ с БФМ по требуемой энергии (основываясь на минимуме
расстояния) и ширине занимаемой полосы при условии равенства скоростей.
2.7. При квадратурной ФМ (КФМ, ФМ-4) два бита (4 сообщения) передаются
четырьмя сигналами с начальными фазами: 0, 7г, =Ь7г/2. Является ли
данный вариант оптимальным для передачи двух битов? Если нет, укажите
наилучший способ и оцените его асимптотический выигрыш по
сравнению с ФМ-4.
2.8. Можно ли построить 10 эквидистантных сигналов, для которых
коэффициент корреляции между двумя любыми был бы равным —1/7? Каково
максимально возможное число сигналов с указанным коэффициентом
корреляции?
Глава 2. Классические задачи приема и синтез сигналов
2.9. Найдите и постройте зависимость от М энергетических потерь (в
децибелах) множества М ортогональных сигналов по сравнению с множеством
М оптимальных сигналов для АБГШ канала. Определите значение потерь
в асимптотике при увеличении М.
2.10. Асимптотический энергетический выигрыш при ортогональном
кодировании в сравнении с некодированной передачей для случая М — 2
стремится к 0,5 или —3 дБ, т.е. является отрицательным, демонстрируя
потери, а не выигрыш. Как это можно объяснить физически?
2.11. Асимптотический энергетический выигрыш при ортогональном
кодировании в сравнении с некодированной передачей для случая М = 4
стремится к 1 или 0 дБ, т.е. отсутствует полностью. Дайте физическое
объяснение этому результату.
2.12. Сообщения (М = 8) передаются с использованием ФМ-8, т.е.
идентичными радиоимпульсами с 8-ю различными эквидистантными начальными
фазами. Является ли этот вариант передачи 8 сообщений по гауссовскому
каналу наилучшим при отсутствии ограничений на ширину полосы? Если
нет, то каковы энергетические потери ФМ-8 по сравнению с
оптимальным множеством М сигналов?
2.13. Сравните асимптотическую (на основании минимума расстояния)
эффективность М-ичной ФМ по отношению к ортогональному кодированию по
энергетическим затратам (при заданной вероятности ошибки) и
занимаемой полосе.
2.14. В обратном канале сотовой системы радиосвязи стандарта IS-95
осуществляется ортогональное кодирование шестибитовых блоков. Скорость
передачи составляет 28,8 кбит/с. Оцените значение полосы, занимаемой
кодированными сигналами (без учета последующего расширения спектра
длинным скремблирующим кодом).
2.15. Система цифровой связи занимает полосу W = 1,2288 МГц. Какое
максимальное число М ортогональных сигналов может быть использовано для
передачи данных со скоростью 38,4 кбит/с?
2.16. В системе связи данные передаются по гауссовскому каналу со скоростью
10 кбит/с. Проектировщик системы планирует получить энергетический
выигрыш в б дБ по сравнению с передачей без кодирования. Достижима
ли эта цель с помощью ортогонального кодирования при доступной полосе
в 320 кГц?
2.17. Системе отведена полоса 10,24 МГц при необходимой скорости
передачи в 100 кбит/с. Найдите потенциально достижимый асимптотический
выигрыш от кодирования.
2.18. По гауссовскому каналу необходимо передавать данные со скоростью
100 кбит/с на несущей в 2 ГГц. Можно ли рассчитывать на
энергетический выигрыш G = 10 дБ при использовании ортогональных сигналов?
2.19. Постройте матрицу Адамара размерности 16.
Задачи 99
2.20. Какое из следующих преобразований сохранит/нарушит основное
свойство матрицы Адамара (ортогональность строк):
а) перестановка строк;
б) перестановка столбцов;
в) одновременное изменение знака у всех элементов;
г) одновременное изменение знака у всех элементов нескольких строк;
д) одновременное изменение знака у всех элементов нескольких столбцов;
е) изменение знака только верхнего левого элемента.
2.21. Матрица Адамара Нм размера М — 2т построена из исходной матрицы
2.23.
Н2 =
с помощью правила Сильвестра. Из матрицы Нм удален первый
столбец, а строки вновь полученной матрицы используются как сигналы для
М-ичной передачи. Какой ансамбль сигналов получается в результате
такой операции? Какую полосу они занимают в сравнении с ортогональным
ансамблем?
2.22. Сигнал с ЛЧМ (линейной частотной модуляцией) задается соотношением
s(t)
._ J A cos ( 2irf0t +
0,
*Wd(t - г)2
+ Р
|<-т|<Г/2,
\t-r\> Г/2,
где А — амплитуда; /0 — несущая частота; Wd — девиация; Т —
длительность; т — время запаздывания и (р — начальная фаза сигнала.
Классифицируйте эти шесть параметров на энергетические и неэнергетические
(для любого радиосигнала /оГ ^> 1, W -С /о )•
Необходимо измерить неэнергетический параметр сигнала А.
Коэффициент корреляции р(Х) сигнальных копий в зависимости от А для трех
случаев представлен на рис. 2.31. В каком из них точность оценки А
будет наивысшей?
Р(Х)
1
р{\)
jlM
\Дл ,
а) б) в)
Рис. 2.31. Зависимость коэффициента корреляции от измеряемого параметра
100 Глава 2. Классические задачи приема и синтез сигналов
2.24. Два неэнергетических скалярных параметра Ai, A2 должны быть
измерены одновременно. Коэффициент корреляции двух копий сигнала с
различными парами значений Ai, A2 p(Ai, A2) геометрически представляет собой
поверхность в трехмерном пространстве. Сечение этой поверхности на
некотором уровне (например 0,5) горизонтальной плоскостью представлено
на рис. 2.32 для трех характерных случаев. Какой из них соответствует
наивысшей точности совместной оценки Ai, A2 при условии отсутствия
априорных сведений об их значениях?
в)
в)
Хг
Рис. 2.32. Горизонтальные сечения поверхности p(Ai, A2)
2.25. Необходимо измерить амплитуду А сигнала s(t; A) = As(t). Три варианта
эталонного сигнала s(t) представлены на рис. 2.33. Какой из них
обеспечит наивысшую точность измерения А?
а)
-Т/2
s(t)
О Г/2
UJ
и
1
-Т
ь s(t)
Т/2 Т
0
-и
t
в)
u/Vi
-г
s(t)
т t
Рис. 2.33. Варианты эталонного сигнала
2.26. Измеряется амплитуда А сигнала s(t; A) = As(t). Точность
полученной оценки оказалась неудовлетворительной. Во сколько раз следует
увеличить длительность исходного сигнала s(t), чтобы вдвое уменьшить
среднеквадратическое отклонение оценки А при сохранении неизменными
всех остальных параметров s(t)?
2.27. Измеряется амплитуда А сигнала s(t;A) = As(i). Амплитуда исходного
сигнала s(t) увеличивается вдвое, тогда как его длительность в два раза
Задачи IОI
уменьшается. Что произойдет с величиной среднеквадратического
отклонения оценки А?
2.28. Необходимо измерить начальную фазу радиосигнала. Что произойдет со
среднеквадратическим отклонением оценки фазы, если
а) удвоить несущую частоту сигнала;
б) удвоить длительность сигнала;
в) уменьшить в два раза амплитуду;
г) удвоить амплитуду, а длительность уменьшить в четыре раза?
2.29. Необходимо измерить начальную фазу радиосигнала. Три варианта
огибающей сигнала представлены на рис. 2.33. В каком случае точность
измерения фазы будет наивысшей?
2.30. Измеряется начальная фаза <р ЛЧМ сигнала из задачи 2.22. Изменение
каких из параметров А,/о, W,t, Г и в каком направлении повлияет на
точность оценки фазы? Что произойдет со среднеквадратическим
отклонением оценки фазы, если все значения А, /о, W увеличить в \/2 раз, а Т, т
уменьшить в два раза?
2.31. Изобразите автокорреляционные функции сигналов, представленных на
рис. 2.34.
-U
s(t)
к
и
^s(t)
0 L
\ 2А
-и
а) б)
Рис. 2.34. Три варианта сигнала
ЗА t
s(t)
2А
ЗА
4А t
В)
2.32. Бинарный ФМ радиосигнал состоит из трех последовательных
прямоугольных импульсов длительности Д каждый. Начальные фазы первых
двух равны нулю, а третьего — 7Г. Изобразите автокорреляционную
функцию сигнала.
2.33. Задан фильтр, согласованный с прямоугольным видеоимпульсом
длительности Д. Какого вида устройства следует добавить к нему, чтобы
получить фильтры, согласованные с сигналами на рис. 2.34? Изобразите
отклик фильтра, согласованного с сигналом (в), при подаче на вход
именно этого сигнала.
2.34. Задан фильтр, согласованный с прямоугольным радиоимпульсом
длительности Д. Какие добавочные устройства преобразуют его в фильтр, согла-
102 Глава 2. Классические задачи приема и синтез сигналов
2.35.
сованный с сигналом из задачи 2.32? Изобразите отклик согласованного
фильтра на сигнал из задачи 2.32.
Заданы автокорреляционные функции трех альтернативных сигналов,
изображенные на рис. 2.35. Какой из сигналов является наилучшим для
измерения запаздывания
■?
в)
-GL
Рис. 2.35. Примеры автокорреляционной функции
а1а
XL.
2.36. Параметры простого импульсного сигнала обеспечивают среднеквадра-
тическое отклонение оценки запаздывания, равное 0,5 мкс и отношение
сигнал-шум на выходе согласованного фильтра q = y/2E/No = 10.
Оцените приближенно длительность сигнала.
2.37. В некоторой радиолокационной станции (РЛС) используется простой
импульсный сигнал. Проектировщик планирует уменьшить пиковую
мощность в сто раз без ухудшения отношения сигнал-шум и в то же время
уменьшить в десять раз среднеквадратическое отклонение измерения
запаздывания. Каким должно быть частотно-временное произведение
сигнала в усовершенствованной системе?
2.38. В некоторой РЛС расстояние измеряется с помощью импульса с ЛЧМ
(см. задачу 2.22) с частотно-временным произведением WT — 103. В
результате поломки модулятора РЛС стала излучать смодулированные
импульсы той же пиковой мощности и длительности. Что произойдет со
среднеквадратическим отклонением измеряемой дальности?
2.39. В некоторой системе необходимо уменьшить в десять раз
среднеквадратическое отклонение измерения частоты. Мощность сигнала может быть
увеличена только в 25/16 раза (1,94 дБ). Как должна измениться
длительность сигнала?
2.40. В некоторой системе длительность сигнала увеличена в четыре раза без
изменения мощности. Что произойдет со среднеквадратическим
отклонением оценки частоты?
2.41. Горизонтальные сечения функции неопределенности четырех сигналов
представлены на рис. 2.36, где все размеры, отмеченные одинаковыми
символами (tci и др.), равны. Какой из сигналов является наилучшим для:
Задачи 103
а) измерения только запаздывания;
б) измерения только частотного сдвига;
в) одновременного измерения запаздывания и частотного сдвига?
Рис. 2.36. Горизонтальные сечения функции неопределенности
2.42. В ходе модернизации некоторой системы, работавшей первоначально с
простым сигналом, излучаемая мощность была уменьшена на б дБ.
Одновременно была увеличена в четыре раза длительность сигнала, а простой
сигнал заменен широкополосным с частотно-временным произведением
WT = 100. Что произошло со среднеквадратическими отклонениями
оценок запаздывания и частоты по сравнению с первоначальными значениями?
2.43. Какой из сигналов в задаче 2.41 является наилучшим для разрешения:
а) по времени; б) по частоте;
в) по времени и частоте одновременно?
|F
1ч
.>г
а)
-^Л
4F
Ф
:®
б)
fF
т-Т
В)
Т
4F
® (§ ®
-®-fe
гЯГ
-©-*
г)
Рис. 2.37. Горизонтальные сечения функции неопределенности
2.44. Горизонтальные сечения функции неопределенности четырех сигналов
представлены на рис. 2.37, на котором все размеры, отмеченные
одинаковыми символами, равны. Какой из сигналов является наилучшим для
разрешения:
а) по времени; б) по частоте;
в) по времени и частоте одновременно?
Глава 2. Классические задачи приема и синтез сигналов
Задачи в пакете MATLAB
Напишите программу, имитирующую процедуру решения о приеме
одного из двух возможных сигналов. Рекомендуемые шаги:
а) Сформируйте и отобразите на дисплее два 100-мерных
противоположных вектора с элементами ±1;
б) Выберите один из них в качестве переданного;
в) Сформируйте 1000 х 100 матрицу отсчетов гауссовского шума,
положив среднеквадратическое отклонение а в 6-10 раз большим
квадратного корня из энергии сигнала;
г) Сформируйте 1000 х 100 матрицу наблюдений, каждая строка которой
является суммой сигнала пункта (б) и шума; выведите наблюдения на
дисплей;
д) Для каждого наблюдения вычислите расстояния с каждым из двух
сигналов;
е) Для каждого наблюдения выберите минимальное из этих расстояний;
ж) Для каждого наблюдения сравните решение с действительно
переданным сигналом пункта (б);
з) Определите число ошибок среди всех 1000 наблюдений;
и) Сохраняя длину вектора и интенсивность, замените сигналы на
ортогональные и повторите выполнение программы;
к) Повторите пункт (и) для пары сигналов с положительной корреляцией
и для пары, в которой второй сигнал равен нулю;
л) Сравните результаты пунктов (з)-(к) между собой и с
теоретическими расчетами и дайте необходимый комментарий.
Напишите программу расчета и графического вывода вероятности
ошибки при двоичной передаче в функции от отношения сигнал-шум для
произвольной пары сигналов, заданных как векторы. Используйте в
отношении сигнал-шум по мощности среднюю энергию сигналов:
q ="Ж~'
где Ei и E<z — энергии сигналов, a No — односторонняя спектральная
плотность АБГШ. Используйте в графиках логарифмический масштаб.
Выполните программу и объясните результаты для:
а) Пар сигналов равной энергии: противоположных, с отрицательной
корреляцией, ортогональных, с положительной корреляцией;
б) Пары, в которой один из сигналов равен нулю.
Напишите программу, вычисляющую и отображающую графически (в
логарифмическом масштабе) вероятности ошибки распознавания в зави-
Задачи в пакете MATLAB 105
симости от отношения сигнал-шум на бит (см. рис. 2.9) при передаче
га-битового блока по АБГШ каналу, включая для каждого значения га:
а) Точную вероятность ошибки при некодированной БФМ передаче М — 2т
сообщений;
б) Точную вероятность ошибки при передаче М = 2т сообщений
ортогональными сигналами;
в) Аддитивную границу вероятности ошибки при передаче М = 2Ш
сообщений ортогональными сигналами.
Выполните программу для га = 1,2,..., 10 и объясните ход кривых.
Объясните, почему при га — 1 и 2 кривая для некодированной передачи
проходит ниже, чем для ортогональной. Для га от трех до десяти
найдите значения энергетического выигрыша при вероятностях ошибки Ю-3,
Ю-5 и сравните их с асимптотическими.
2.48. Напишите программу, демонстрирующую экспериментально
энергетический выигрыш от ортогональной передачи по сравнению с
некодированной для шестибитовых сообщений. Рекомендуемые шаги:
а) Сформируйте и выведите на дисплей шестибитовый сигнал,
передаваемый БФМ, в котором на каждый бит приходится N8 отсчетов
(рекомендуется положить Ns — 64, т. е. 384 отсчета на б битов);
б) Сформируйте 1000 х 6NS матрицу гауссовского шума со среднеквадра-
тическим отклонением, равным учетверенной амплитуде бита;
в) Сформируйте и отобразите на дисплее 1000 х 6NS матрицу
наблюдений, прибавив сигнальный вектор к строкам матрицы шума;
г) Демодулируйте наблюдения, найдите вероятность ошибки на
сообщение и выведите ее значение на дисплей;
д) Сформируйте матрицу Адамара порядка 64, выберите одну из ее строк
в качестве закодированного сообщения (переданного сигнала) и
увеличьте ее размерность как вектора до 6iVs;
е) Повторите пункты (б)-(г) для нового сигнала;
ж) Сравните и прокомментируйте экспериментально полученные
вероятности ошибок для двух исследованных методов передачи.
з) Выполните программу для диапазона отношений сигнал-шум, меняя
уровень шума и сравните полученные результаты с теоретическими
(см. рис. 2.9).
2.49. Напишите программу, демонстрирующую экспериментально обмен
между энергетическим выигрышем и спектральной эффективностью
ортогональной передачи. Рекомендуемые шаги:
а) Зафиксируйте число битов га = 8;
б) Сформируйте все возможные восьмибитовые БФМ сигналы и
представьте их вектором, в котором каждый бит занимает 160 отсчетов;
106 Глава 2. Классические задачи приема и синтез сигналов
в) Рассчитайте спектры мощности всех таких сигналов и усредненный
по сообщениям спектр мощности при некодированной передаче;
г) Сформируйте матрицу Адамара порядка 256 и представьте ее строки
векторами той же размерности, что и сигналы пункта (б);
д) Рассчитайте спектры мощности всех полученных ортогональных
сигналов и их усредненный спектр мощности;
е) Выведите на дисплей рассчитанные усредненные спектры, оцените
полосы сигналов для обоих случаев и сравните их отношение с
теоретически предсказанным.
1,0
0,8
¥ 0,4
0,2
0,0
I Н
w- - -jJ
•.--___.._ л^-- - - - Ч
| У^ ■]
t *г А
Ь_-_ _ ~ " Н
«. _ - __ J
I I]
L_______ _ _ -_ J
I ■ II
0,0
0,5
t/r
1,0
I I I
0,0 0,5 1,0
A
1,5 2,0
Рис. 2.38. Моделирование измерения амплитуды
2.50. Напишите и выполните программу, иллюстрирующую оптимальное
измерение амплитуды треугольного импульса длительности Т: s(t;A) =
= As(t) = At/T, 0 ^t ^ Т (см. рис. 2.38). Рекомендуемые шаги:
а) Установите произвольное значение амплитуды А и сформируйте
сигнальный вектор размерности, близкой к 100;
б) Сформируйте 10 векторов гауссовского шума n(t) со среднеквадрати-
ческим отклонением, примерно равным амплитуде сигнала;
в) Сформируйте 10 векторов наблюдений y(t), сложив шумовые векторы
с сигнальным;
Задачи в пакете MATLAB 107
2.51.
г) Вьюедите графически векторы наблюдений на дисплей. Заметен ли
в них сигнал?
д) Рассчитайте и графически выведите на дисплей кривые решающих
статистик (расстояний, либо их квадратов, либо разностей Az — A2E/2)
для всех 10 наблюдений в зависимости от оценки амплитуды;
е) Найдите оптимальные оценки А во всех 10 наблюдениях;
ж) Рассчитайте выборочные среднее и дисперсию оптимальной оценки по
всем наблюдениям;
з) Выполните программу для нескольких значений А и сравните
измеренные значения с истинными. Дайте теоретическое объяснение
результатов экспериментов.
Напишите и выполните программу, иллюстрирующую оптимальное
измерение запаздывания колоколообразного импульса длительности Т (по
уровню 0,01). Положите т £ [0,9Г]. Выполните шаги, иллюстрируемые рис. 2.39:
1.0
i0,5
to
0,0
■ ||
л
5
t/T
10
Рис. 2.39. Моделирование оценки запаздывания
а) Используйте примерно 1000 отсчетных точек на интервале наблюдения
т £ [0, ЮТ]. Установите произвольное значение т (в числе отчетных
точек) и сформируйте вектор запаздывающего сигнала;
б) Сформируйте 100 векторов гауссовского шума n(t) со среднеквадрати-
ческим отклонением в пределах от одного до двух значений амплитуды
сигнала;
108 Глава 2. Классические задачи приема и синтез сигналов
в) Сформируйте 100 векторов наблюдений y(t) сложением шумовых
векторов с сигнальным;
г) Выведите наблюдения графически на дисплей (см. рис. 2.39).
Отчетливо ли виден в них сигнал?
д) Рассчитайте и графически выведите зависимости корреляций между
наблюдением и сдвинутыми по времени репликами сигнала от
временного сдвига реплики. Заметен ли сигнальный эффект теперь?
е) Найдите оптимальные оценки г для всех 100 наблюдений.
ж) Рассчитайте выборочные среднее и дисперсию оценки по всем
наблюдениям;
з) Выполните программу для нескольких значений г и диапазона
отношений сигнал-шум. Сравните измеренные значения с истинными.
Объясните экспериментальные результаты теоретически.
2.52. Прямоугольный радиоимпульс длительности Т подан на вход фильтра
с прямоугольным импульсным откликом длительности 2Т, который
расстроен по частоте по отношению к сигналу на F Гц. С использованием
операций над комплексной огибающей найдите и графически
отобразите формы сигнала (действительные огибающие) на выходе фильтра при
F = а/Т, где а = 0; 0,5; 1,0.
2.53. Прямоугольный радиоимпульс длительности Т и несущей /о = 10/Г
подан на вход полосового фильтра с прямоугольным импульсным откликом
той же длительности, который имеет частотную расстройку по
отношению к сигналу F £ {0,^,^}. С использованием операций над
комплексной огибающей найдите и графически отобразите радиоимпульсы
на выходе фильтра для всех трех значений F.
2.54. Напишите программу, вычисляющую и графически отображающую АКФ
видео- и радиосигналов одной и той же произвольной формы и
длительности Т. Возьмите несущую радиосигнала равной 10/Т. Примеры даны
на рис. 2.40. Выполните программу для:
а) Прямоугольного импульса;
б) Треугольного симметричного импульса;
в) Треугольного импульса, возрастающего на [0, Т);
г) Импульса по вашему выбору.
2.55. Напишите программу, демонстрирующую эффект временного сжатия в
согласованном фильтре. Возьмите прямоугольный ЛЧМ импульс
длительности Т с комплексной огибающей
5(t) f еч> (,"^£) , <К*<Г,
[О, t<0 или t>T.
Выполните расчеты для значения несущей /о — 50/Т и пяти значений де-
Задачи в пакете MATLAB 109
виации Wd = а/Т, a £ {0, 10, 20, 30, 40}. Для каждого значения девиации
выведите на дисплей сигналы на входе и выходе согласованного фильтра.
видеосигнал
о ел о
е
*1,0
<
о
.0
с0,5
S
S
о
S
?0,0
0Q
Г
I
!
V
М
-1,0-0,5 0,0 0,5 1,0
t/T
; ; ; ; I
!/ i \i I
i i : :
1,0
о
А
5. 0,5
С
I 0,0
о
1-0.5
Q.
-1,0
. . . . .
:
• Я1В1111
•|| Ш Al;
1 НП|1
! ! :
-1,0-0,5 0,0 0,5 1,0
t/T
-1,0-0,5 0,0 0,5 1,0
т/Г
Рис. 2.40. АКФ видео- и радиосигналов
-1,0-0,5 0,0 0,5 1,0
т/Г
2.56. Напишите программу, демонстрирующую зависимость точности оценки
запаздывания от полосы сигнала (см. рис. 2.21). Возьмите колоколообраз-
ный ЛЧМ импульс с комплексной огибающей
S(t) = {
^f-M(?-0V(^)' °^г'
о,
t < 0 или t > Т.
Выполните расчеты и графический вывод для значений девиации Wd —
— а/Т, а — 0, 10, 25, 50. Рекомендуемые шаги:
а) Установите значение девиации Wd и сформируйте сигнальный вектор
(комплексную огибающую) размерности порядка 100;
б) Отобразите на дисплее действительную огибающую сигнала;
в) Сформируйте 100 векторов комплексного гауссовского шума со сред-
неквадратическим отклонением реальной и мнимой компонент в
пределах [0,5; 1,0];
г) Сформируйте 100 векторов наблюдений сложением шумовых векторов
с сигнальным;
д) Выведите на дисплей реализации действительной огибающей
наблюдений. Заметно ли в них присутствие сигнала?
I 10 Глава 2. Классические задачи приема и синтез сигналов
е) Рассчитайте и отобразите формы действительной огибающей на
выходе согласованного фильтра для всех 100 наблюдений;
ж) Определите моменты максимума действительной огибающей на
выходе согласованного фильтра для всех 100 наблюдений;
з) Рассчитайте выборочные среднее и дисперсию оценки запаздывания
по всем 100 наблюдениям;
и) Сопоставьте результаты для разных значений Wd и дайте
теоретическую трактовку выявленной зависимости.
-1,0 -0,5 0,0 0,5 1,0
т/7-
1,0 -0,5 0,0 0,5 1,0
г/Т
Рис. 2.41. Функция неопределенности прямоугольного импульса
2.57. Напишите программу для демонстрации временного разрешения двух
прямоугольных радиоимпульсов длительности Т. Воспользуйтесь сигналом
задачи 2.55 с теми же значениями несущей и девиации (рис. 2.27).
Рекомендуемые шаги:
а) Зафиксируйте значение девиаций Wd и сформируйте вектор сигнала
(комплексной огибающей) нужной размерности;
б) Сформируйте и отобразите радиосигнал;
в) Зафиксируйте запаздывание 0 < т < Т, сформируйте и отобразите
задержанную копию сигнала;
г) Рассчитайте и отобразите суперпозицию двух копий сигнала;
д) Рассчитайте и отобразите отклик на нее согласованного фильтра;
е) Выполните программу для разных значений девиации и запаздывания
и объясните результаты.
Задачи в пакете MATLAB I I I
2.58. Напишите программу для вычисления и трехмерного отображения ФН
простых радиоимпульсов длительности Т с произвольной действительной
огибающей. Предусмотрите также графический вывод основных сечений
ФН (вдоль осей г и F), а также горизонтального сечения на уровне 0,5.
Выполните расчет ФН для:
а) Прямоугольного импульса (см. рис. 2.41);
б) Треугольного симметричного импульса;
в) Треугольного импульса, возрастающего на [0,Т);
г) Импульса по вашему выбору.
ГЛАВА 3
ПРЕИМУЩЕСТВА
ШИРОКОПОЛОСНОЙ
ПЕРЕДАЧИ
3.1. Помехоустойчивость
Окружающая обстановка, в которой конкретная система передает и
извлекает информацию, не всегда полностью дружественна по отношению
к ней. На приемной стороне полезному сигналу могут сопутствовать
наряду с тепловым шумом и иные искажения различной природы. Источником
их, в частности, могут оказаться другие системы, работающие в том же
или смежном частотном диапазоне. Следуя повсеместно принятой
терминологии, будем называть подобные искажения помехами.
В практических сценариях приходится сталкиваться с
разнообразными типами помех, для нейтрализации деструктивного эффекта которых,
как правило, необходимы специальные средства. В данной главе будет
показано, что расширение спектра является одним из действенных
инструментов подобного рода. Исчерпывающий анализ поведения систем
при комбинированном воздействии помех и теплового шума должен
базироваться на интегральных характеристиках, таких как вероятность
ошибки или точность измерения. Конкретные итоги этой достаточно
кропотливой работы можно найти в книгах, например [5, 6], но — в большей
мере — в многочисленных специализированных статьях (см., например,
библиографию в [3]). Наша же задача заметно скромнее и состоит в
разъяснении, почему и как широкополосная технология может помочь в борьбе
с помехами. По этой причине мы ограничимся лишь простейшими
оценками, основанными на отношении мощностей полезного сигнала и
суммарного мешающего воздействия, включающего наряду с естественным
шумом и помеху. Иначе говоря, далее исследуются ситуации, когда
помеху допустимо интерпретировать как аддитивный гауссовскии случайный
процесс, спектр которого перекрывается со спектром полезного сигнала.
Столь упрощенный подход нередко оказывается вполне адекватным, как
это имеет место при БФМ или AM передаче данных, в которых
вероятность ошибки определяется исключительно вышеупомянутым
отношением, если принята гауссовская аппроксимация мешающего воздействия.
3.1. Помехоустойчивость 113
Другие ситуации (например, М-ичная передача данных или измерение
параметров) не столь просты, и отношение мощностей не определяет
однозначно их показатели качества. Тем не менее, оно вполне пригодно
как оценка первого приближения для суждения о потенциальных
преимуществах широкополосной философии. Рассмотрим две основные модели
помех, начав с узкополосной помехи.
3.1.1. Узкополосная помеха
Данный тип помех наиболее характерен для ситуаций, когда некоторая
соседствующая система или системы не имеют враждебных намерений
по отношению к рассматриваемой и создают помехи только как
результат штатного функционирования. На рис. 3.1 представлены
амплитудный спектр \s(f)\ полезного сигнала и спектральная плотность мощности
помехи J(/), аппроксимированные прямоугольниками, на фоне
равномерной спектральной плотности мощности Щ/2 АБГШ. Назовем помеху
узкополосной только по той причине, что занимаемая ею полоса Wj уже
полосы W', занимаемой сигналом, и имеются области, где спектр
сигнала не подвержен искажению помехой. Узкополосные помехи можно далее
классифицировать на частично-полосные, тональные и т. д. [3, 5, 6],
однако в настоящем контексте надобность в этом отсутствует.
Предположим вначале, что
рассматриваемая система не
предпринимает никаких специальных мер
для противодействия помехе, за
исключением, возможно, выбора
подходящего сигнала. Подобного рода
сценарий означает, что при
проектировании возможность
присутствия помехи принята в расчет на
этапе выбора сигнала, однако
система не является адаптивной и не Рис> 3.1. Спектр сигнала, помехи и фоно-
подстраивает каждый раз закон вого АБГШ
модуляции сигнала и алгоритмы
обработки под текущую помеховую обстановку. Другими словами,
приемник системы всегда использует только фильтр, согласованный с АБГШ,
невзирая на наличие или отсутствие помехи на входе.
При отыскании отношения gf мощностей сигнала и результирующего
мешающего воздействия (сигнал-(шум+помеха)) на выходе
согласованного фильтра отметим, что для прямоугольного спектра сигнала (|s(/)|
равен константе s в пределах полосы сигнала W и нулю вне ее) ампли-
I 14 Глава 3. Преимущества широкополосной передачи
тудная передаточная функция согласованного фильтра также равномерна
в полосе сигнала W и равна нулю вне ее. Примем без потери
общности ее ненулевое значение равным единице. При этом помеха,
трактуемая как случайный процесс, проходит на выход фильтра без изменения
мощности J, тогда как мощность шума на выходе фильтра составит
NqW. С другой стороны, фильтр, согласованный с сигналом,
когерентно суммирует все его гармоники, максимизируя выходную амплитуду
ОС
до Aout = J \s(f)\ df = 2Ws1 где учтена равномерность спектра в поло-
—оо
се сигнала W', а удвоение обусловлено вкладом «отрицательных» частот.
В то же время энергия сигнала, вычисленная по теореме Парсеваля, Е =
оо
= / \~s(f)?df = 2Ws2. В итоге
«? =
Л2
4W2s2
2Е
j + NqW j + n0w Nq + j/w ^зл'
Из последнего равенства можно видеть, что, независимо от
конкретной полосы помехи Wj, отношение сигнал - (шум+помеха) на выходе
согласованного фильтра ведет себя, как если бы мощность помехи была
равномерно распределена в полосе W сигнала (не помехи!), добавляя к
естественному шуму дополнительный «АБГШ» со спектральной плотностью J/W.
Рассмотрим теперь иной
сценарий, в котором система
способна адаптировать приемник к
текущей помеховой обстановке.
Оптимальной процедурой обработки при
этом следовало бы считать
фильтрацию, согласованную с полным
мешающим воздействием,
включающим узкополосную помеху. С
точки зрения физики очевидно, что
при помехе, многократно
превышающей естественный АБГШ,
подобная обработка эквивалентна
простой режекции частотного интервала, в котором сосредоточена помеха.
На рис. 3.2 показан спектр на выходе режекторного фильтра:
помеха полностью устраняется, однако вырезаются и гармоники сигнала
в пределах полосы помехи вместе с шумовыми компонентами. Подобный
спектральный рисунок может трактоваться, как если бы исходный
сигнал занимал лишь часть полосы W, свободную от помех, и имел энергию
Е(1 — Wj/W). Тогда согласованный фильтр, очищая этот «остаточный»
сигнал от АБГШ, обеспечивал бы выходное отношение мощностей сигна-
Рис. 3.2. Спектры сигнала и шума после
режекции
3.1. Помехоустойчивость 115
ла и шума (индекс «J» отвечает помехе)
Л-**1-*™-**-*,!*), (3.2)
где q2 = 2E/Nq — «истинное» отношение мощностей сигнала и шума на
выходе согласованного фильтра в отсутствие помехи.1
Глядя на соотношения (3.1)-(3.2), можно видеть, что они оба явным
образом свидетельствуют о выгодах сигналов с широким спектром с
точки зрения иммунитета к узкополосным помехам: чем шире полоса
сигнала W в сравнении с полосой помехи Wj, тем меньше дополнительная
«шумовая» спектральная плотность в первом случае и энергетические
потери — во втором (при постоянстве мощности помехи J), и следовательно,
больше q2 и q\. Однако если пиковая мощность сигнала Р ограничена
и не может быть увеличена, то расширение полосы сигнала не
реализуется тривиальным укорочением сигнала, поскольку в этом случае энергия
сигнала, а с ней и отношение сигнал - (шум+помеха) упадут. Итогом
является следующий вывод: достижение высокой помехоустойчивости к
узкополосной помехе без обращения к «грубой силе» (увеличению энергии
и пиковой мощности) возможно только при расширении спектра
сигнала независимо от его длительности, т. е. использовании широкополосной
технологии.
3.1.2. Заградительная помеха
Во многих военных сценариях или приложениях, характерных для
спецслужб, встречается ситуация, когда помеха создается преднамеренно как
средство радиоэлектронного противодействия. В подобных случаях для
постановщика естественна стратегия, предполагающая наличие у
подавляемой системы достаточного «интеллекта», чтобы зарегистрировать
присутствие помехи и должным образом на него отреагировать. В
частности, если помеха узкополосна, система может прибегнуть к режекторной
фильтрации или даже изменить сигнал переносом его спектра в зону,
свободную от помехи. Для устранения подобного шанса применяют так
называемую заградительную шумовую помеху, спектр мощности которой
покрывает спектр сигнала без пропусков (см. рис. 3.3). Ясно, что
заградительная помеха воздействует на сигнал как дополнительный АБГШ
хЕще раз подчеркнем, что отношение сигнал - (шум+помеха) не является
универсальной характеристикой качества. Оно вполне отвечает этой роли, например, при передаче
данных с помощью БФМ или AM но, в общем случае, режекция полосы влияет не только
на энергию сигналов, но и на корреляционные свойства. К примеру, ортогональность
сигналов может после режекции нарушиться. Учет подобных эффектов требует
специального анализа.
I 16 Глава 3. Преимущества широкополосной передачи
со спектральной плотностью мощности, равной Nj — J/W. Поэтому
отношение сигнал - (шум+помеха) по мощности после согласованного фильтра
полезной системы
<&
2Е
2Е
No + Nj NQ + J/W
что совпадает с (3.1). В этом случае,
однако, для нанесения большего
вреда постановщик постарается
обеспечить значительное превышение
спектром помехи спектра естественного
шума, т.е. J/W » ЛГ0, откуда
следует, что
ё
2EW 2P(WT)
(3.3)
Рис. 3.3. Спектры сигнала,
заградительной помехи и АБГШ
J J
Мы вновь можем констатировать,
что при лимите как пиковой
мощности полезного сигнала, так и мощностного ресурса постановщика помех,
единственным способом повышения иммунитета системы к
заградительной помехе является привлечение сигналов с большим значением
частотно-временного произведения WT, т. е. широкополосных сигналов.
Формула (3.3) объясняет другое популярное название
частотно-временного произведения WT. Как видно, отношение мощностей сигнала
и шума с равномерным спектром в полосе сигнала увеличивается
согласованным фильтром в 2WT раз по сравнению со входным значением P/J.
Таким образом, можно назвать WT выигрышем от обработки
(processing gain).
Как визуализация вышеприведенного обсуждения поучительны
осциллограммы, смоделированные в среде MATLAB. Рис. 3.4 иллюстрирует
согласованную фильтрацию простого сигнала с прямоугольной
огибающей (колонка (а) и широкополосного сигнала (ЛЧМ, WT « 50) (колонка
(б) одинаковой длительности и энергии. Одна и та же помеха в виде немо-
дулированной гармоники добавляется к обоим сигналам (второй ряд по
горизонтали). В то время как простой сигнал полностью замаскирован
помехой и незаметен на выходе согласованного фильтра (третий ряд),
широкополосный сигнал, сжатый фильтром, наблюдается весьма отчетливо.
На рис. 3.5, где колонки соответствуют прежним сигналам, верхний
ряд показывает их спектры. Осциллограммы второго ряда
демонстрируют спектры мощности двух случайных реализаций различных
заградительных помех с одинаковой средней мощностью в пределах полосы
сигнала. Вследствие этого средний уровень спектра помехи в колонке (б)
3.1. Помехоустойчивость 117
примерно в 50 раз ниже уровня в колонке (а). Третий ряд
показывает реализации наблюдаемого колебания, причем интенсивность помехи
примерно одинакова для обоих сигналов, полностью замаскированных
помехой. Нижние осциллограммы, воспроизводящие отклики согласованных
фильтров, вновь убедительно подтверждают превосходство
широкополосного сигнала в противодействии заградительной помехе.
О
О
с:
+
§
х
i_
s .
О
0,5 1,0 1,5 2,0
о
с;
ее
X
0,0 0,5
1,0
1,5
2,0
-5
0,0
0,5 1,0 1,5 2,0
а)
б)
Рис. 3.4. Фильтрация сигнала в присутствии узкополоснои помехи
Завершая раздел, еще раз отметим, что наш анализ ни в коей мере
не претендовал на освещение вопроса о том, какого рода помехи наиболее
опасны в конкретных ситуациях, и что должна предпринимать система
для оптимизации характеристик в более сложных условиях, чем
оговоренные. Идея сводилась лишь к простейшей демонстрации потенциала
технологии распределенного спектра в борьбе с помехами. Заинтересованный
читатель может обратиться к многочисленным, более детализированным
публикациям и убедиться, что какими бы сложными ни были исследуемые
системы и стратегии, основная тенденция останется прежней: философия
расширенного спектра способствует повышению иммунитета к
воздействию помех.
8 Глава 3. Преимущества широкополосной передачи
g 40
X
о 20
а
-Б
5 °
X 80
|60
о
а40
| 20
5 0
0)
1
СО
I
со
а
§
-е-
9
X
2
СО
1 1 1 1
20
20
0,5
а;
40
40
1,0
t/T
60
60
1,5
80
t::::::±::::::i:::z:
fT
80
p^wywe
0 0,5
1
0
1
«■Ml
1,0
Kite
1,5
тш
2,
m
2,0
CO
X
1_
§0,5 |
a
5o,o
о
CD
s
X
0)
CO
X
20
40
60
80
j/Ul4tUU^^
fT
20
40
60
80
0,5
1,0
1,5
2,0
Рис. З.5. Очистка сигнала от заградительной помехи
3.2. Низкая вероятность обнаружения
Ранее уже отмечалось, что первыми перспективы широкополосной
передачи разглядели представители оборонных ведомств и спецслужб, и, как
видно из предыдущего раздела, одним из оснований для этого послужил
повышенный иммунитет широкополосных сигналов к воздействию помех.
Еще один подобный стимул мы рассмотрим в настоящем разделе.
При радиоэлектронном противодействии эффективная помеха может
быть организована только после обнаружения присутствия
противостоящей системы в эфире и оценки таких ее параметров, как несущая частота
и ширина спектра/Поэтому широко распространен сценарий
конфронтации двух систем, при котором первая (назовем ее защищаемой) старается
действовать по возможности скрытно и предотвратить обнаружение
своего сигнала, тогда как вторая (перехватчик) находится в постоянной
3.2. Низкая вероятность обнаружения I 19
готовности, предпринимая все меры для обнаружения активной работы
первой. Принимая сторону защищаемой системы, исследуем возможности
широкополосной передачи в плане противодействия усилиям
системы-перехватчика.
y(t)
Полосовой
фильтр
Детектор
огибающей
I
Компарато|
Рис. 3.6. Энергетический приемник
Существует множество стратегий и методов, которые
гипотетически могут находиться в распоряжении системы-перехватчика. Они могут
быть достаточно изощренными и трудными для анализа (см. [6, 9] и
приведенную там библиографию). Как и ранее, нашей главной целью является
разъяснение общей позитивной роли расширения спектра в
рассматриваемом конфликте систем. Предположим, что защищаемая система
использует сигнал с некоторым замысловатым законом модуляции, детали
которого неизвестны перехватчику, не давая последнему шанса
применить согласованный фильтр или коррелятор для обнаружения сигнала.
При этом естественно полагать, что у перехватчика нет иного
выбора, как считать перехватываемый сигнал случайным и пытаться
обнаруживать его только по признаку появления или отсутствия некоторого
избытка энергии в сканируемом участке частотного диапазона. Таким
образом, энергетический приемник (радиометр), являющийся
оптимальным при обнаружении ограниченного по полосе шумового сигнала на
фоне АБГШ, принимается в качестве рабочего инструмента перехватчика.
На рис. 3.6 показана структура энергетического приемника. Полосовой
фильтр с полосой Wi, пропускающей весь спектр сигнала или только его
часть, фильтрует наблюдение с целью устранения внеполосного шума.
Квадратичный амплитудный детектор осуществляет оценку мгновенной
мощности, которая в дальнейшем интегрируется для выработки оценки
энергии Е в пределах интервала наблюдения Т0&. Полученная оценка
энергии сравнивается затем с порогом Е^ и при выполнении неравенства
Е ^ Et принимается решение о наличии в наблюдении сигнала наряду
с естественным шумом, тогда как непревышение порога трактуется как
признак отсутствия сигнала. В реальной практике перехватчик может не
знать заранее частотного диапазона и интервала времени, занимаемых
сигналом. В этих обстоятельствах он вынужден пробовать все
комбинации указанных параметров, либо реализуя процедуру обнаружения
сканированием частотно-временной области, либо используя банк параллель-
120 Глава 3. Преимущества широкополосной передачи
ных каналов, каждый из которых анализирует свою ограниченную зону
частотно-временной области. В любом случае качество работы приемника
перехватчика будет главным образом зависеть от показателей
энергетического приемника, настроенного на истинную частотно-временную
зону перехватываемого сигнала. Это позволяет идеализировать
априорную осведомленность перехватчика и предполагать, что ему известно, где
в плоскости время - частота концентрируется энергия обнаруживаемого
сигнала. Поскольку наблюдение вне длительности сигнала не содержит
информации о его присутствии, можно положить Т0& = Г, как это
принято на рис. 3.6.
На рис. 3.7 представлена прямоугольная аппроксимация спектра
сигнала вместе с равномерной спектральной плотностью мощности
естественного АБГШ (а) и амплитудно-частотной характеристикой
полосового фильтра радиометра (б). С точки зрения перехватчика указанием на
присутствие сигнала служит избыточная (сигнальная) спектральная
плотность мощности Ns/2 = P/2W, добавляемая сигналом к спектральной
плотности мощности теплового шума Nq/2. В отсутствие сигнала
случайный процесс на выходе полосового фильтра радиометра имеет среднюю
мощность о\ = NoWiy а при его наличии — о\ + о* = (Nq + Ns)Wi =
= (P/W + N0)Wi.
f Рис. 3.7. Спектры на входе радиометра
и амплитудно-частотная характеристика
I д/ /2 полосового фильтра
*>0/2
Найдем среднее и дисперсию на выходе детектора огибающей. Прежде
всего, выходное напряжение Ud детектора равняется мгновенной входной
мощности. Следовательно, математическое ожидание ud напряжения Ud
при отсутствии сигнала есть просто средняя мощность
отфильтрованного шума udo = &ni тогДа к&к ПРИ наличии сигнала его значение возрастает
3.2. Низкая вероятность обнаружения 121
до ud\ — &n+as- Очевидно, что именно приращение ud, обусловленное
сигналом и равное
A^rf - udl - udQ = а2 = NsWi = PWi/W, (3.4)
может позволить перехватчику зарегистрировать факт появления
сигнала. С другой стороны, этот полезный (с точки зрения перехватчика)
эффект маскируется случайными флюктуациями ud, величина которых
оценивается дисперсией var{urf}. Последняя может быть найдена, если
вспомнить, что мгновенная мощность радиопроцесса равна половине
квадрата его мгновенной амплитуды, так что ud = Y2/2, откуда var {ud} =
— уаг{У2}/4. В свою очередь, дисперсия любой случайной величины
может быть вычислена как средний квадрат минус квадрат среднего [1,13, 14]:
уаг{У2}=У?-(У5)2. (3.5)
Теперь воспользуемся тем фактом, что огибающая Y гауссовского
гчайно
ление [1]
случайного радиопроцесса с дисперсией а2 имеет рэлеевское распреде-
W(Y) = {
Y ( Y2\
а- ~ \ 2а2/
О, Y < О
и ее четные моменты выражаются элементарными интегралами [13]
Y*=Jy*"W(Y) dY = (2а2)" J (Jpj exp (-^j d (j^j = n\{2o*)\
Подстановка этого в (3.5) дает var {Y2} = 8сг4—4сг4 = 4сг4. В случае
отсутствия сигнала на входе приемника-перехватчика в данном выражении
следует положить а2 = а2. Строго говоря, при появлении сигнала
отфильтрованное наблюдение может отличаться от гауссовского процесса, давая
повод усомниться в применимости полученных результатов в подобной
ситуации. Подобная тонкость, однако, может игнорироваться в нашем
анализе, поскольку защищаемая система принимает все меры, чтобы
спрятать свой сигнал под шумами, и мы с полным основанием можем считать,
что сигнал пренебрежимо слабо влияет на дисперсию мгновенной
мощности и, следовательно, на дисперсию отклика детектора. Поэтому
независимо от присутствия сигнала дисперсию ud можно положить неизменной:
var {ud} = var {У2}/4 - ст4 = (N0Wi)2. (3.6)
С целью оценки среднего ud и регистрации его приращения,
обусловленного присутствием сигнала, интегратор в схеме на рис. 3.6
осуществляет усреднение во времени отклика детектора на интервале
наблюдения Т. Для того, чтобы сделать постоянную составляющую на выхо-
122 Глава 3. Преимущества широкополосной передачи
де детектора заметной на фоне случайных флюктуации, необходимо их
сгладить посредством интегрирования. Подобное возможно только тогда,
когда флюктуации отклика детектора относительно щ являются
достаточно быстрыми и многократно меняют свою полярность за период Т,
что позволяет обеспечить их взаимную компенсацию и реализовать
усредняющий эффект. Другими словами, число статистически независимых
отсчетов ns отклика детектора на интервале Т должно быть достаточно
большим. Протяженность во времени (время корреляции тс)
автокорреляционной функции случайного процесса служит достаточно надежным
первым приближением минимального интервала между отсчетами,
начиная с которого их допустимо считать независимыми. Поскольку
отфильтрованное наблюдение занимает полосу И^, его время корреляции можно
оценить как тс « 1/И^, что означает получение ns « W%T независимых
отсчетов.
Хотя фактически процедура интегрирования может быть выполнена
как непрерывная, ее результат достаточно близок к получаемому
суммированием ns независимых отсчетов [6,9], нередко предпочтительным в
реализации, особенно на цифровой элементной базе. Для точного анализа
необходимо отыскать плотности вероятности выходного значения
интегратора Е при обеих гипотезах (отсутствия и наличия сигнала) и затем,
интегрируя их по решающим областям, найти две вероятности: лоэюной
тревоги и правильного обнаружения. Названные плотности вероятности
подчиняются закону хи-квадрат, достаточно громоздкому и
непрозрачному в плане толкований. Однако нас вновь выручает тот факт, что сигнал
слаб и для его надежного обнаружения требуется интегрирование
большого числа отсчетов ns. Тогда центральная предельная теорема позволяет
полагать, что плотность вероятности на выходе интегратора является
гауссовской и, следовательно, нахождение среднего и дисперсии Е
достаточно для вычисления названных ранее вероятностей.
Когда на входе присутствует только АБГШ, среднее и дисперсия Е
находятся как Е = п5й<#}, var{I?} = nsvsx{ud} = ns&t) ГДе второй
результат следует из (3.6) и статистической независимости интегрируемых
отсчетов. Аналогично, когда сигнал добавляется к АБГШ, Е = n8udi,
однако дисперсия остается прежней в силу слабости сигнала. При этом
плотности вероятности на выходе интегратора, отвечающие гипотезам
Но (сигнал отсутствует) и Н\ (сигнал присутствует), представимы в виде
V27mscr£
(Е - nsudif
2nsa^
г = О, 1.
Когда Ё превосходит порог Ей ложная тревога имеет место, если
сигнал в действительности отсутствует, а правильное обнаружение —
3.2. Низкая вероятность обнаружения 123
если сигнал на самом деле принят. Следовательно, вероятности р/ и pd
указанных событий определяются соответственно как
оо ,
pf = Рт(Ё ^ ЩЩ) = Jw{E\H0)dE = Q I
ТР. V
Et — nsUdo
, .".<*
Pd = Рг(Ё > Et\Hx) = J W{E\Hi) dE = Q{
Et - nsudi
Et
Переписав второе соотношение в виде
Et - nsudo _ ns(udi —udo)
ns<?l
i i^t — /bs^rfU ">syu,d\ — u>dO) \ /0 «4
Pd = Q\ —ZFI2 1=л— » (3-7)
можно видеть, что если допустимая вероятность ложной тревоги
задана заранее, то первая дробь в скобках (3.7) фиксирована, и вероятность
правильного обнаружения полностью определяется отношением
ns(udi - udo) nsAud ,0 оЧ
Qi = р=^о = ) г т- V3-8)
Vnsan л/п8уах{ил}
Физический смысл последней дроби прозрачен — это отношение
сигнал-шум по напряжению на выходе интегратора, показывающее
пропорцию между полезным (увеличение математического ожидания за счет
сигнала) и мешающим (стандартное отклонение случайных флюктуации)
эффектами в Е.
Используя (3.4) и (3.6) совместно с равенством ns = W{F в (3.8),
получаем
Этот результат позволяет понять, что с точки зрения
перехватчика максимально возможная полоса фильтра, т.е. равная полосе
сигнала (Wi = W)^ является оптимальной, обеспечивая наибольшее отношение
сигнал - шум
_ РУТ _ ?
* ~ VWN0 ~ 2VWT' { ^
где q2 = 2E/Nq = 2PT/Nq, как и ранее, отношение сигнал - шум на выходе
согласованного фильтра приемника защищаемой системы.
Очевидно, что q2 должно быть достаточно большим, поскольку в
противном случае защищаемая система не сможет нормально
функционировать. Ясно также, что у защищаемой системы имеется единственная
возможность снизить риск обнаружения своего сигнала потенциальным
перехватчиком: использовать широкополосный сигнал с максимально воз-
124 Глава 3. Преимущества широкополосной передачи
можным частотно-временным произведением WT. Возврат к рис. 3.7
позволяет физически обосновать подобное заключение. Расширение
спектра сигнала при постоянстве энергии и длительности снижает его
спектральную плотность мощности, маскируя ее под спектром естественного
теплового шума.
Пример 3.1. Рассмотрим систему, которая спорадически и достаточно редко
передает одно из 64 сообщений с использованием ортогональных сигналов. Для
обеспечения вероятности ошибочного приема не хуже, чем 10~3, система
работает при отношении сигнал-шум порядка 7 дБ на бит или 15 дБ на шестибитовое
сообщение (см. рис. 2.9). Таким образом, q2 = 15 дБ, а перейдя в отношении
сигнал-шум (по напряжению) перехватчика (3.9) к децибелам, имеем
(qi)dB - 2(q2)dB - 201g2 - IQlgWT.
При использовании системой широкополосных сигналов с WT — 1000
отношение сигнал-шум для приемника перехватчика оказывается (qi)dB = —6 дБ
или qi = 1/2, что совершенно недостаточно для надежного обнаружения
сигнала защищаемой системы за один сеанс связи. Если, например, перехватчик
готов мириться с вероятностью ложной тревоги pf — 10_3, то, согласно (3.7)
вероятность правильного обнаружения составит ра ^ 5 • 10~3, т.е. окажется
чрезвычайно малой и не представляющей серьезной угрозы скрытности
защищаемой системы.
Завершая раздел, отметим, что выгоды, связанные со скрытностью
распределенного спектра, в наши дни широко эксплуатируются не только
военными потребителями и спецслужбами. То обстоятельство, что
широкополосный сигнал практически незаметен для оборудования систем
радиоконтроля, серьезным образом влияет на лицензионную политику.
В частности, рынок коммерческих систем, имеющих право выхода в эфир
без получения лицензии, постоянно расширяется, и во многих регионах
выделены специальные частотные диапазоны для подобного
безлицензионного использования.
3.3. Криптозащищенность сигнала
Продолжая линию предыдущего раздела, напомним, что единственной
причиной, вынуждающей перехватчик использовать столь
неэффективный инструмент как энергетический приемник, является отсутствие
информации о тонкой структуре обнаруживаемого сигнала, т. е. его законе
модуляции. По этой причине перехватчик не может обрабатывать сигнал
по тем же алгоритмам, что и приемник защищаемой системы (т. е.
осуществлять согласованную фильтрацию). Понятно, что при выборе закона
3.3. Криптозащищенность сигнала 125
модуляции из немногочисленного набора альтернатив, априорно
известных перехватчику, последний может разгадать фактически
использованную структуру сигнала с помощью простого перебора. Соответствующим
оборудованием для этого может служить банк параллельных
согласованных фильтров либо один или несколько фильтров, перестраиваемых под
альтернативные законы модуляции последовательно во времени, если
сигнал, подлежащий обнаружению, принимается достаточно долго. Таким
образом, важным фактором противоборства защищаемой системы с
перехватчиком является применение сигналов с криптозащищенной
(практически не поддающейся расшифровке) структурой.
Подобная задача весьма характерна и для защищаемых военных и
коммерческих систем, постоянно присутствующих в эфире и потому не
особенно озабоченных сокрытием самого факта активного
функционирования. Первоочередным требованием для них является минимизация риска
несанкционированного доступа к обслуживанию, адресованному лишь
авторизованным пользователям, или фальсификации передаваемой
информации. Глобальная спутниковая навигационная система GPS служит
наглядным примером подобного рода. В ней реализованы два дальномерных
канала (см. § 11.2): открытый (или общего доступа, обозначенный С/А)
и специальный (секретный, маркированный Р). Сигнал второго канала
позволяет осуществлять позиционирование с особо высокой точностью,
и правительство США, монопольно управляющее системой, считает
небезопасным неконтролируемый доступ к каналу Р. Для исключения риска
несанкционированного использования сигнала Р предприняты
специальные меры по засекречиванию его закона модуляции.
В дисциплинах, связанных с информационной безопасностью, степень
защиты данных определяется числом равновероятных конкурирующих
ключей, которые криптоаналитик противной стороны должен
перепробовать в попытке взломать шифротекст, т. е. засекреченные данные. В
применении к структуре сигнала каждый из таких ключей есть не что иное,
как конкретный закон модуляции, который обычно повторяется с
некоторым периодом Т. Предположим, что сигнал построен из чипов (см. пример
в подпараграфе 2.7.3) на основе М-ичного алфавита, т.е. с
использованием М-символьной манипуляции чипов. Если полоса, отводимая
системе, равна W, то общее сигнальное пространство имеет размерность WT
(игнорируя возможность удвоения для радиосигналов, см. § 2.3-2.5), т.е.
закон модуляции можно считать сконструированным из WT чипов.
Очевидно, что величина MWT определяет общее число различных законов
модуляции, т. е. конкурирующих ключей, и, значит, системный дизайнер
в стремлении к высокой степени секретности модуляционного формата
должен ориентироваться на сигналы с достаточно большим
частотно-временным произведением.
126 Глава 3. Преимущества широкополосной передачи
Пример 3.2. Сигнал Р-канала (Р-код) в системе GPS является бинарным
(М — 2) с полосой W « 10 МГц. Его закон модуляции имеет регулярный
характер и повторяется с периодом Т в семь суток. Будучи «спрятанным» под
тепловым шумом, этот сигнал не может быть восстановлен путем
посимвольного приема, и только знание его тонкой структуры позволило бы эффективно
очистить его от АБГШ. Чтобы предотвратить несанкционированный доступ
к Р-коду, последний суммируется по модулю два с секретным ключом
(W-кодом), маскирующим структуру результирующего Y-кода. Один символ W-кода
перекрывает 20 символов Р-кода, так что для взлома ключа перебором пришлось
бы протестировать до 2WT/20 вариантов. Так как WT — 7 х 86400 х 107 >
> 1012, число проверяемых ключей больше чем два в степени десять
миллиардов, т. е. невообразимо велико. По этой причине Y-код считается практически
застрахованным от взлома, и в течение всей истории GPS случаи успешных кри-
птоаналитических атак на него не засвидетельствованы.
Заключением к дискуссии раздела может служить следующий тезис:
широкополосная технология весьма полезна в аспекте криптозащиты
структуры сигнала.
3.4. Электромагнитная совместимость
Проблема электромагнитной совместимости (ЭМС) является одной из
наиболее животрепещущих для современных беспроводных технологий. ЭМС
подразумевает бесконфликтное сосуществование различных систем в
эфире, несмотря на то, что каждая из них принимает не только свой
собственный сигнал, но и сигналы остальных систем. Понятно, что полностью
исключить взаимное влияние систем, функционирующих одновременно в
относительно малой пространственной зоне, невозможно в принципе. Любая
активная, т. е. излучающая электромагнитные волны, система с
неизбежностью воздействует на соседние, и в задачу системного разработчика
входит минимизация потенциального вреда от подобного воздействия.
В усилиях по обеспечению ЭМС принимают участие две стороны.
Первая из них, назовем ее «излучающей», старается минимизировать
возможный вред от излучаемой ею энергии, наносимый соседним, условно
называемым «принимающими», системам [15]. К этому подталкивает не только
этическая мотивация, но и строгая регламентация, за соблюдением
которой внимательно следят интернациональные и региональные службы,
уполномоченные налагать соответствующие санкции. Любая из систем
второй, принимающей стороны также предпринимает собственные меры,
нацеленные на нейтрализацию чужих сигналов, попадающих в ее приемник.
К числу традиционных способов обеспечения ЭМС относятся
детальное частотное планирование под контролем национальных и международ-
3.5. Эффекты распространения радиоволн в беспроводных системах 127
ных инстанций, использование узконаправленных антенн, улучшение
избирательности радиочастотных трактов приемников и др. Приведенные
ниже простые рассуждения показывают, что применение
широкополосных сигналов может быть также внесено в этот список.
В части излучающей системы следующая логика представляется
оправданной. Поскольку существует возможность сделать сигнал
практически незаметным даже для специальных приемников радиомониторинга
за счет усложнения закона модуляции (см. § 3.2), т.е. расширения
спектра, подобный сигнал тем более не окажет вредного влияния на
обычную принимающую систему, работающую в том же диапазоне. Задача
состоит лишь в выборе такого частотно-временного произведения WT,
которое позволило бы удержать спектральную плотность мощности на
входе принимающей системы ниже заданного порога. Как самое грубое
приближение примем за «достаточно низкий» уровень в —7 дБ по
отношению к тепловому шуму: Ns/Nq ^ 0,2. Подстановка Ns = P/W = E/WT
в последнее соотношение приводит к критерию ЭМС E/WTNo ^ 0,2 или
q2/WT ^ 0,4, где снова целевой параметр определен в терминах
отношения сигнал-шум «своего» приемника д2и выигрыша от обработки WT.
Если бы, например, отношение сигнал-шум излучающей системы в точке
расположения принимающей системы было 20 дБ, то величину WT ^ 250
можно было бы считать удовлетворительной в смысле ЭМС. В реальном
проектировании подобные оценки должны координироваться с
дальностью, так чтобы вокруг излучающей системы можно было очертить зону,
вне которой переданный сигнал практически безвреден для других систем [16].
С позиций принимающей системы любой сигнал, пришедший от
сторонней излучающей, может трактоваться как узкополосная или
широкополосная помеха, и все аргументы в пользу широкополосности в борьбе
с помехами (см. § 3.1) дословно приложимы и к рассматриваемой
задаче. Тем самым, широкополосная технология оказывается одним из
действенных средств обеспечения ЭМС.
3.5. Эффекты распространения радиоволн
в беспроводных системах
Для продолжения ознакомления с преимуществами широкополосной
философии нам понадобятся некоторые сведения об эффектах
распространения электромагнитных волн в беспроводных каналах. Прежде всего,
ключевым параметром, влияющим на качество приема, является
интенсивность сигнала, или — эквивалентно — отношение сигнал-шум.
Понятно, что энергия или мощность сигнала во всех предшествующих фор-
128 Глава 3. Преимущества широкополосной передачи
мулах для вероятности ошибки, дисперсии оценки и т. п., характеризуют
уровень сигнала на входе приемника. Следовательно, критически важно
располагать возможностью предсказания интенсивности сигнала в
некоторой точке пространства, удаленной от передающей антенны, принимая
в расчет эффекты, сопровождающие распространение электромагнитной
волны.
Проблемы, связанные с распространением волн в физических средах,
достаточно сложны и нередко с трудом поддаются теоретическому
анализу. Имеет место большое разнообразие факторов, вызывающих как
детерминированное, так и случайное ослабление сигнала, достигающего
приемной стороны. Как результат их воздействия принимаемый сигнал
искажается не только аддитивным шумом (АБГШ), но и
мультипликативной помехой, название которой вытекает из того факта, что она
меняет интенсивность сигнала, т. е. перемножается с его амплитудой.
3.5.1. Распространение в свободном пространстве
Начнем с идеализированной модели распространения в свободном
пространстве (см. рис. 3.8), где отсутствуют препятствия между передающей
и приемной антеннами, и излученная волна распространяется по
единственно возможному пути, называемому линией прямой видимости (ЛПВ).
Обозначим расстояние между пе-
rt D \> редатчиком и приемником как D. Ес-
^ лпв " ли бы передающая антенна была все-
Передающая Приемная „ , „ч
антена антена направленной (изотропной),
излученная ею мощность Pt распределялась
Рис. 3.8. Модель распространения ^
" у v v бы равномерно по внутренней поверх-
в свободном пространстве r J
ности сферы радиуса Z), причем на
каждую единицу площади пришлась
бы ее часть, равная Pj/47rD2. Тогда бы приемная антенна эффективной
площади Аг улавливала мощность Pr = PtAr/47rD2. При направленной же
передающей антенне в сторону приемной антенны излучается мощность,
в G% раз превосходящая изотропную, где Gt является коэффициентом
усиления передающей антенны. При этом принятая мощность также
увеличивается в Gt раз. Для представления принятой мощности в
симметричной форме воспользуемся зависимостью между Аг и коэффициентом
усиления приемной антенны Gr = 47гЛг/А^, где А^ — длина волны. В
результате приходим к формуле Фрииза для свободного пространства [4]
р' = р^'{ш)2'> (ЗЛ0)
показывающей, что ослабление мощности сигнала вдоль линии прямой
3.5. Эффекты распространения радиоволн в беспроводных системах 129
видимости в свободном пространстве обратно пропорционально квадрату
расстояния.
Модель (3.10) можно непосредственно использовать в расчетах линий
связи, где окружающую обстановку можно уподобить открытому
пространству, например, между космическими объектами или летательными
аппаратами, наземным центром контроля и спутником и т. п. Среда
распространения наземных систем намного менее благоприятна, и главными
факторами влияния на интенсивность сигнала оказываются затенение и
многолучевой фединг (замирание)
3.5.2. Затенение
Затенение обусловлено деталями ландшафта, препятствующими
прямолинейному распространению: возвышенностями, растительностью,
постройками и т.п. Вследствие их влияния интенсивность сигнала падает с
расстоянием значительно быстрее, чем предсказывает (3.10). Очевидно, что
нерегулярный характер земных ландшафтов делает невозможной или
бесполезной попытку создания некоторой универсальной теоретической
модели затенения. Для накопления знаний о возможных типах зависимости
между принимаемой мощностью и длиной пути распространения было
выполнено множество полевых испытаний, на основании которых был
предложен целый ряд эмпирических моделей [17-19]. Среди специалистов
в области мобильной связи одной из наиболее приемлемых признана
модель Окамуры-Хаты (Ocumura-Hata). Согласно последней зависимость
средней принятой мощности Рг подчиняется равенству Pr = kPt/De, в
котором конкретное значение показателя е зависит от типа подстилающей
поверхности, изменяясь от 3 (сельская местность) до 5 (плотная
городская застройка), а коэффициент к определяется частотным диапазоном
и высотой антенн [2, 6, 15, 19]. Принятая мощность, рассчитанная
таким образом, дает лишь очень грубую отправную цифру,
соответствующую усреднению по различным положениям приемника, равноудаленным
на расстояние D от передатчика. Флюктуации Рг по дуге радиуса D
с центром в месте расположения передатчика значительны и часто
аппроксимируются логнормальным законом, означающим, что
распределение принятой мощности в децибелах х = 101gPr является гауссовским
(нормальным):
W (х) = . —ехр
у2пах
Среднеквадратическое отклонение ах величины 10 lg PT в литературе
обычно принимается лежащим в пределах от 6 до 12 дБ.
Затухание сигнала, обусловленное затенением, носит статический
характер, и даже для движущегося приемника принятая мощность меняется
(х — х)
«Л 2
2*2
5—2771
J30 Глава 3. Преимущества широкополосной передачи
во времени сравнительно медленно в связи с относительно большой
пространственной протяженностью элементов ландшафта (десятки-сотни
метров). По этой причине затенение иногда фигурирует и под такими
названиями, как крупномасштабные или долговременные замирания {фединг).
3.5.3. Многолучевые замирания
Рассмотрим теперь второй фактор, влияющий на интенсивность
принимаемого сигнала: многолучевое распространение. В реальности
излученный сигнал может достичь приемной антенны разнообразными путями.
Прямой путь может оказаться одним из них, но может быть и полностью
блокирован, тогда как все остальные пути обязаны своим
происхождением рефракции волн, и, что гораздо характернее, отражению излученной
волны различными объектами. Подобными отражателями могут
оказаться здания, заводские трубы, воздушные суда, подстилающая поверхность
и многое другое (см. рис. 3.9).
Рис. 3.9. Иллюстрация к многолучевому распространению
Предположим, что, распространяясь по i-му пути, переданный сигнал
с комплексной огибающей S(t) приобретает амплитуду А^ задержку т\
и начальную фазу щ. Тогда комплексная огибающая принятого сигнала
запишется как
Sr(t) = ^2A{S(t - п) ехр(М), (3-П)
i
3.5. Эффекты распространения радиоволн в беспроводных системах 131
где, без потери общности, действительная амплитуда исходного
сигнала принята равной единице. В том случае, когда диапазон рассеяния по
задержке r^s, т. е. максимальное значение взаимной задержки между
сигналами различных путей не превосходит длительности сигнала, все
многолучевые реплики перекрываются и интерферируют между собой. Для
лучшего понимания этого феномена первоначально рассмотрим
простейший сценарий, который может возникнуть в мобильной связи,
телевизионном вещании и др.
Рис. 3.10. Двухлучевой
"У4"* Отражатель,/
А"
Приемник
\.
Отражатель
Т Передатчик
Пример 3.3. Рис. 3.10 демонстрирует ситуацию, в которой излученный сигнал
поступает на приемник по путям, созданным двумя отражателями (зданиями,
машинами и т.п.), а прямой путь (ЛПВ) полностью блокирован препятствием
(зданием), так что в (3.11) присутствуют только два слагаемых. Отражатели
ориентированы в пространстве таким образом, что излучаемые ими вторичные
волны распространяются навстречу друг другу. На входе приемника,
расположенного на линии, соединяющей отражатели, будет наблюдаться суперпозиция
двух интерферирующих колебаний, разность фаз (р которых определяется
отношением разности длин путей распространения S — D[ + D" — D2 — D2 к длине
волны Xw: if = 2nS/Xw. Считая амплитуды отраженных сигналов в точке
приема равными А\, ^2, результирующая амплитуда АТ может быть найдена по
теореме косинусов как Ar — yjA\ + А2 + 2А\А2 cos<p (см. фазовую диаграмму
на рис. 3.11, а). Периодичность Ат как функции ip говорит о ее периодичности
в зависимости от разности 5. При движении приемника вдоль линии,
соединяющей отражатели, его смещение на величину Xw/2 в любом направлении изменяет
S на одну длину волны А^, так что ip изменяется на 27г, и значения Ат в точках,
разнесенных на Xw/2, одинаковы. Другими словами, интерференция двух
падающих волн образует стоячую волну с периодом Xw/2. Двигаясь вдоль оговоренной
линии, приемник будет наблюдать чередование максимумов Ai+A2 и минимумов
И1 — А2\ амплитуды с периодом Xw/2 метров. Если амплитуды отраженных
сигналов близки по величине (что вполне вероятно), то результирующая мощность
Рг = А^/2 = (Af -f Al)/2 + A\A2 cos (p спадает почти (или в точности) до нуля,
132 Глава 3. Преимущества широкополосной передачи
когда приемник проходит узлы стоячей волны. Именно этот феномен и
получил название многолучевого фединга (замирания, обусловленного многолучевым
распространением). Поскольку пространственное расстояние между соседними
пиками Рг сравнимо с длиной волны, то для систем, работающих в метровом
и дециметровом диапазонах, временные циклы изменения Рг на входе
мобильного приемника будут достаточно короткими (обычно доли секунды).
а)
Рис. 3.11. Интерпретация
многолучевых эффектов
фазовой диаграммой
График зависимости Рг от времени, представленный на рис. 3.12, отвечает
значениям параметров, характерным для мобильной связи: Л^ и 0,3 м и
скорости носителя приемника Vr = 60 км/ч. Как видно из диаграммы, даже при
относительно невысокой скорости принимаемая мощность меняется достаточно
быстро. Это служит объяснением тому, что многолучевому федингу
присваивают и другие названия: мелкомасштабный или кратковременный фединг.
1,2
11,0
|_
о.
Ф
£0,8
S и
| о,б h
3S
Q.
С 0,4
0,2
-г- —? ■
LJ—1-4}—?—f \'"j
1 1 i
, j , 1
i
■ i i, ;
Рис. 3.12. Временная
зависимость принятой мощности при
двухлучевом фединге
0,01 0,02
0,03
t, сек
0,04 0,05 0,06
Разумеется, приведенный пример искусственно упрощен с тем, чтобы
представить исследуемый эффект наиболее наглядно. В
действительности число одновременно принимаемых многолучевых сигналов L может
быть очень большим, делая интерференционную картину гораздо более
3.5. Эффекты распространения радиоволн в беспроводных системах 133
сложной. Фазовая диаграмма на рис. 3.11, б иллюстрирует подобный
случай. Хаотичность распределения отражателей или рассеивателей на пути
распространения волн придает интерференционной картине
непредсказуемый характер, что, в свою очередь, обосновывает применение
вероятностного языка для ее описания.
Пример 3.4. На рис. 3.13 представлена характерная временная зависимость
принимаемой мощности, полученная моделированием в среде MATLAB
окружающей обстановки с пятью отражателями, расположенными равновероятно
в пределах квадрата со стороной, равной начальному расстоянию между
передатчиком и приемником D = 30 км. Принимаемая мощность нормирована
к своему среднему значению. Длина волны и скорость объекта составляют 0,3 м
и 60 км/ч, соответственно. Рисунок наглядно демонстрирует нерегулярный
характер изменения мощности, как и наличие глубоких провалов в интенсивности
принимаемого сигнала.
Рис. 3.13. Временная зави- 4,0 j ; 1 1 « 1 1 1 j
симость принятой мощности : Л : i i i S i
oc L LJ\ !L I I i i i -J
при пятилучевом фединге °,э| i/l • • '> ' '• ' I
§ 3,0 H jf"V"4 ? I I I f Л
|"2,5h \'"\'"\ [ t j /-у-—! fl
§ 2,0 [- - - -i-4-4 [ j j—yf—у—f "П
I 1.5 |[-.Д.-|..д..[ 1 j—i|-X|---iJ
0L_y_i M i \jf^\ i JSL 1
0 0,02 0,04 0,06 0,08 0,10 0,12 0,14 0,16
t, сек
Согласно центральной предельной теореме плотность вероятности
суперпозиции примерно независимых и близких по вкладу случайных
слагаемых стремится к гауссовской по мере роста их числа. Следовательно,
интерференция множества пришедших по разным путям сигналов,
подчиняющихся названным условиям, порождает на входе приемника гауссовский
радиопроцесс. Если среди входных компонентов отсутствует
доминирующая детерминированная составляющая (подобная ЛПВ сигналу),
результирующий гауссовский процесс будет иметь нулевое среднее. Огибающая
же такого процесса подчиняется рэлеевскому распределению (см. § 3.2),
и, таким образом, мы приходим к модели канала с рэлеевскими
замираниями. В итоге принятая амплитуда Аг теперь не детерминированная,
134 Глава 3. Преимущества широкополосной передачи
а случайная величина с плотностью вероятности, описываемой законом
Рэлея
W(Ar)
{i
2Arexp(-Ar), Ar ^ 0,
Ar <0.
(3.12)
Поскольку в произведении ArS(t) «истинная», реально измеримая
амплитуда формально расщеплена между двумя сомножителями, что можно
сделать произвольным образом, в соотношении (3.12) принята удобная
нормировка, полагающая средний квадрат Аг равным единице: А% = 1.
График плотности вероятности (3.12) приведен на рис. 3.14.
Рис. 3.14. Рэлеевская
плотность вероятности
Рэлеевские замирания характерны для многих систем, включая
наряду с телекоммуникационными также локационные, навигационные и др.
Присущие им глубокие провалы в интенсивности сигнала, как правило,
не нейтрализуются спорадическими выбросами Аг при приеме
многолучевых сигналов с близкими фазами. Как результат эффект рэлеевских
замираний носит весьма деструктивный характер, что количественно
подтверждается далее.
3.5.4. Показатели качества
Рассмотрим для примера передачу бинарных данных по рэлеевскому
каналу с медленными и плоскими замираниями. Первое определение
означает, что интерференционная картина остается стабильной в течение
многих символов и текущая фаза опорного сигнала демодулятора может быть
восстановлена из принятого сигнала усреднением за соответствующий
интервал времени. Другими словами, случайность сигнала не исключает
3.5. Эффекты распространения радиоволн в беспроводных системах 135
возможности применения БФМ. Второе определение подчеркивает, что
диапазон рассеяния по задержке многолучевых сигналов т^5 достаточно
мал в сравнении с длительностью Ть отдельного БФМ символа: т^8 <С Ть.
В результате последовательные БФМ символы в принятой
суперпозиции не наползают друг на друга, т.е. МСИ отсутствует. Для пояснения
уместности термина «плоский» обратимся к (3.11) и отметим, что
адекватной моделью многолучевого канала может служить линия задержки
с отводами, имеющими задержки т^ и весовые коэффициенты Aiexp(jipi).
Передаточная функция такой системы сильно зависит от задержек
отводов и при Tds <С Ть достаточно равномерна (близка к плоской) в полосе
сигнала, так что все частотные компоненты сигнала искажаются
одинаково, и форма сигнала остается неизменной. При этом единственным
видом искажений сигнала из-за многолучевого распространения
оказываются рэлеевские флюктуации амплитуды, описываемые (3.12).
а) б I ! i 1 1 1 1 1 г г
t
б) 6 I , 1 1 j—-—| 1 j j r
-6* I I I I \ Л I I I I
0 2 4 6 8 10 12 14 16 18 20
t
Рис. 3.15. Медленные (а) и быстрые (б) замирания
Рис. 3.15 иллюстрирует принятую модель. Осциллограммы,
построенные моделированием в среде MATLAB, демонстрируют медленные плоские
замирания (о) в противопоставлении быстрым (б) для колоколообразных
символьных импульсов. Второй тип замираний характеризуется быстрым
изменением во времени интерференционной картины, так что искажения
последовательных символов становятся практически независимыми.
36 Глава 3, Преимущества широкополосной передачи
Пусть энергия принятого сигнала, отвечающая случаю АТ = 1,
равняется Е, Тогда энергия сигнала с другим значением амплитуды составит
Е(АГ) = А%Е, а средняя энергия останется равной Е вследствие
принятой нормировки: Е(АГ) ~ А%Е = Е. Соотношение (2.19) позволяет найти
условную вероятность ошибки Ре(Аг) при фиксированной и равной Аг
амплитуде сигнала:
Pe(Ar) = Q
где отношение сигнал-шум <#, = ^2E/No отвечает сигналу энергии
Е(А) — Е, т.е. амплитуды Аг — 1. Фактически же амплитуда Аг
случайна и меняется от одного сеанса приема к другому в соответствии
с рэлеевской плотностью вероятности (3.12). Естественно тогда принять
за показатель качества значение Ре(Аг), усредненное по всем Аг.
Закрепляя теперь термин «вероятность ошибки» и обозначение Ре за этим
математическим ожиданием, имеем
сю сю
Ре = Pe{Ar) = f Pe(Ar)W{Ar)dAr = 2 f Q(Arqb)Arexp(-A*)dAr =
0 оо оо ° / ■ 2\
= -у= / J Л ехр f-y \exp(-A*)dxdAr,
где использовано определение дополнительной функции ошибок Q(-) из
(2.12). Поменяв порядок интегрирования, получим
х/Яь
Ре = -у= / / 2АГ ехр(-Л^) dAr ехр ( -— J dx =
о I о I ^ '
ос
= — I
ехр -
kIexp['Yldx-^kI
уДИ
ехр ^й, у ехр
О Ч 7 О
где первый член равен Q(0) = 1/2, а второй приводится к аналогичной
форме умножением на (л/<?& 4- 2)1%- Окончательно
1 / - Qb
Ре =
1-
Ф
я1
(3.13)
Количественно оценить масштаб вреда от замираний можно с
помощью рис. 3.16, на котором представлены вероятности ошибки передачи
3.5. Эффекты распространения радиоволн в беспроводных системах 137
БФМ сигналов по гауссовскому (пунктир) и рэлеевскому (сплошная
линия) каналам. Как следует из графиков, вероятность ошибки Ре = 10~3
гарантируется для АБГШ канала при отношении сигнал-шум на бит
близком к 10 дБ, тогда как для рэлеевского канала подобная
достоверность передачи возможна лишь при отношении сигнал-шум не менее
27 дБ, т. е. большем в 50 раз. Столь внушительные энергетические
потери от замирания, становятся еще большими при ужесточении требований
к надежности передачи и близки к 25 дБ (300 раз) при Ре = 10~4.
-1 Ь
-2 Ь
% -з
-5
h^"^^ ! i
Г \ ! ^*"\^ ! \
Г ! \ ! ! ^\
! \ ! !
! \ ! 1
1 ! \! !
г 1 т т
1 !\ !
1 ! \ !
L [ \ .v 1
j i | \ S
! 1 \ 1
i i \ 1
1 1 I i i
Г : : 1 t
i ! \ l
\ 1 \ i
1 ! 1 \ \
~~! "'''! |
Гауссовский
Рэлеевский
4 j J
■4 1 -j
J i-
10 15 20
Сигнал-шум на бит, дБ
25
30
Рис. 3.16. Вероятность ошибки на бит (lgPe) для АБГШ и рэлеевского каналов
Физическое толкование разрушительного эффекта замираний
достаточно прозрачно. Рэлеевскому каналу свойственны резкие спорадические
провалы интенсивности сигнала из-за многолучевой интерференции.
Интегрирование плотности вероятности (3.12) показывает, например, что
вероятность спада АТ до уровня ниже 0,4 (снижения отношения сигнал -
шум на 8 дБ) составляет 0,15. Из рис. 3.16 (пунктир) следует, что в
сеансах приема с подобными провалами амплитуды вероятность ошибки
не может быть ниже 0,1 при исходном отношении сигнал-шум 10 дБ.
Поскольку доля таких сеансов составляет 0,15, то ее вклад в полную
(среднюю) вероятность ошибки будет не меньше, чем 0,1 х 0,15 — 0,015,
т.е. в 15 раз больше вероятности ошибки при номинальном отношении
сигнал-шум. Данный вклад не может быть компенсирован за счет
возможных благоприятных сеансов с большим отношением сигнал-шум,
поскольку их вклад в полную вероятность ошибки неотрицателен.
138 Глава 3. Преимущества широкополосной передачи
В случае частотно-селективных замираний многолучевое
распространение потенциально может иметь еще более драматические последствия.
При этом, в противоположность плоскому федингу, передаточная
функция канала не равномерна в полосе сигнала. Подобная ситуация возникает
тогда, когда диапазон рассеяния по задержке охватывает несколько
переданных символов, так что на выходе канала предшествующие символы
наползают на текущий. Для противодействия подобной помехе — МСИ —
применяются специальные фильтры (эквалайзеры), корректирующие
неравномерность передаточной функции канала. С другой стороны, при
надлежащем использовании частотная селективность может служить
действенным ресурсом нейтрализации эффекта замираний, так как открывает
путь к организации многолучевого разнесения, рассматриваемого в § 3.7.
3.6. Разнесение
Основная идея борьбы с деструктивными эффектами многолучевости
заключается в использовании разнесения, состоящего в организации
нескольких независимых каналов или ветвей передачи. Хотя каждая из
ветвей при этом по-прежнему подвержена рэлеевским (или другим)
замираниям, вероятность того, что интерференционные картины во всех из них
будут одновременно неблагоприятными, определяется правилом
умножения вероятностей и, таким образом, существенно меньше вероятности
«плохого» состояния индивидуальной ветви. Воспользуемся данными
примера в конце последнего раздела и предположим, что каким-либо способом
организованы две независимые идентичные ветви. Тогда вероятность
одновременного спада интенсивности сигнала в обеих до прежнего уровня
составит 0,152 = 2,25 • 10_3, т.е. станет заметно меньше по сравнению
с вероятностью неблагоприятных условий в одной из ветвей. С
увеличением количества ветвей подобный выигрыш от разнесения становится все
более и более заметным. Работая параллельно, ветви как бы
подстраховывают друг друга, смягчая последствия замираний.
Как нетрудно понять, снижение качества приема при многолучевых
замираниях обязано исключительно глубоким провалам в отношении
сигнал-шум, наблюдающимся время от времени. Поэтому конечным этапом
разнесения является такая совместная обработка выходов ветвей,
которая предусматривает большее влияние «лучших» (с большим отношением
сигнал-шум) ветвей на итоговый результат по сравнению с худшими.
Подобная совместная обработка называется комбинированием.
3.6. Разнесение 139
3.6.1. Методы комбинирования
На приемной стороне возможны различные варианты комбинирования
результатов обработки сигналов разных ветвей разнесения. Допустим, что
всего имеется n<i ветвей, и примем А{, щ и а г г = 1,2,..., п^ за
обозначения соответственно амплитуды и фазы сигнала и среднеквадратического
отклонения шума в г-й ветви. Каким тогда будет наилучший алгоритм
линейной обработки, обеспечивающий максимально возможное
результирующее отношение сигнал-шум? Любое линейное объединение откликов
ветвей щ, г = 1,2,..., rid представляется взвешенной суммой Y1 м^Щ, где
»=1
w* — весовые коэффициенты, в общем случае комплексные. Тогда
результирующее отношение сигнал-шум по мощности q% есть отношение
мощности детерминированной компоненты этой суммы к дисперсии ее
шумовой компоненты. Последняя дисперсия в силу независимости ветвей
есть просто сумма взвешенных коэффициентами \wi\2 дисперсий шумов
ветвей, так что
i
па
J2w*Aiexp{j(pi)
r rid
t=l
(3.14)
Сумма в числителе соотношения (3.14) может рассматриваться как
скалярное произведение двух п^-мерных векторов, компонентами которых
являются Wi<ii и (Ai/<Ti)exp(j(pi) соответственно. Никакое скалярное
произведение не может иметь абсолютного значения, превышающего
произведение длин векторов — факт, известный как неравенство Шварца [1, 2].
Следовательно,
(3.15)
где qi = Aij a i — отношение сигнал-шум по напряжению в г-ж ветви
разнесения. При оптимальном выборе весов
Щ = — exp(-j^),
неравенство (3.15) обращается в равенство, т. е. достигается максимально
возможное результирующее отношение сигнал-шум. Такой выбор весов,
как легко заметить, обеспечивает совместную согласованную
фильтрацию откликов разнесенных ветвей. Реализация ее возможна только при
достаточной точности знания амплитуд и фаз сигналов на выходах ве-
140 Глава 3. Преимущества широкополосной передачи
твей. При этом сигналы ветвей можно когерентно сложить после
соответствующего амплитудного взвешивания. В литературе подобный
алгоритм известен как комбинирование по максимуму отношения сигнал -
шум [5, 18].
Чтобы оценить эффективность комбинирования, обозначим
максимальное по всем ветвям отношение сигнал-шум по напряжению через
<Zmax и введем выигрыш от комбинирования как Gd = Яг/Ятгх- Посколь-
nd
КУ X) Qi ^ nd<Zmax? никакое комбинирование не в состоянии обеспечить
г=1
выигрыш, превышающий п^ Последняя же цифра достигается при
комбинировании по максимуму отношения сигнал-шум при дополнительном
условии равных отношений сигнал-шум во всех ветвях разнесения.
На практике находят применение и другие варианты комбинирования,
поскольку согласованная обработка связана с известными
техническими усложнениями (для измерения отношения сигнал-шум и фазы в
ветви разнесения может потребоваться отдельный пилотный канал и пр.).
Альтернативами могут служить комбинирование с равными весами и
селекция ветви с максимальным сигналом. Эффективность первого метода
стремится к эффективности оптимального по мере сближения
отношений сигнал-шум во всех ветвях разнесения. Выигрыш второго близок
к потенциальному в условиях, когда отношение сигнал - шум одной из
ветвей доминирует над остальными. Очевидно, что описанные стратегии
можно комбинировать друг с другом, к примеру, выбрать
первоначально несколько ветвей с наилучшими значениями отношения сигнал -шум
и равновесно скомбинировать их отклики.
Перейдем теперь к краткому обзору традиционных способов
организации независимых ветвей разнесения.
3.6.2. Организация ветвей разнесения
Наиболее традиционные пути организации независимых ветвей
разнесения можно классифицировать следующим образом:
- пространственное разнесение;
- частотное разнесение;
- временное разнесение;
- поляризационное разнесение;
- многолучевое разнесение.
Пространственное разнесение предполагает создание ряда
независимых путей распространения за счет использования нескольких антенн,
что объясняет другое популярное его наименование — антенное
разнесение. Параллельные антенны можно использовать как на приемной,
8.6. Разнесение 141
так и на передающей стороне. Отделенные в пространстве друг от друга
расстоянием в 7-10 длин волны или более они обеспечат практическую
независимость параллельных интерференционных картин на приемной
стороне. При разнесении на приеме (см. рис. 3.17) к выигрышу от
независимости ветвей добавляется эффект от улавливания энергии в
дополнительных (по отношению к одной антенне) точках пространства. Кроме
того, процедуры приема при этом методе наиболее просты, поскольку
сигналы ветвей разделены автоматически, поступая каждый с выхода
своей антенны. После индивидуальной согласованной фильтрации они могут
быть скомбинированы согласно алгоритмам, описанным выше.
Рис. 3.17.
Разнесение на приеме
Отражатель
Шщштт.
V^=
Передатчик—'
■-^,
V
Приемник
Рис. 3.18.
Разнесение на передаче
Отражатель
Передатчик
~^=^V
Приемник
Потенциальные выгоды разнесения на передаче видны не столь
явно и их практическая утилизация связана с некоторыми усилиями. Во-
первых, как следует из рис. 3.18, ограниченный ресурс полной мощности
передатчика приходится дробить между несколькими передающими
антеннами. Во-вторых, на приемную антенну поступает смесь сигналов,
посланных всеми передающими антеннами, т. е. сумма сигналов всех ветвей
разнесения. Поэтому комбинированию должна предшествовать некая
процедура, обеспечивающая разделение сигналов ветвей и их
индивидуальную обработку. Указанные факторы связывают данный тип разнесения
с весьма нетривиальными оптимизационными задачами, решение
которых составляет содержание специальной области теории связи,
именуемой пространственно-временным кодированием (см. § 10.3).
142 Глава 3. Преимущества широкополосной передачи
Разумеется, в ситуациях, где это допускается технологическими
ограничениями, можно использовать комбинации схем разнесения на передаче
и приеме с целью получения большего выигрыша.
Идея частотного разнесения связана с понятием полосы
когерентности канала. Эта величина характеризует максимальную ширину
частотного интервала, в пределах которого фединг может считаться плоским,
т. е. замирания гармоник сигнала практически стопроцентно зависимы.
При этом замирания гармоник, разделенных по частоте интервалом,
превышающим полосу когерентности, принимаются за независимые. Как уже
подчеркивалось в предыдущем разделе, частотный интервал плоского
фединга обратно пропорционален диапазону рассеяния по задержке, так
что чем сильнее рассеяние многолучевых сигналов по времени, тем уже
полоса когерентности. Очевидно, что одновременная передача одного и
того же сигнала rid несущими, частоты которых разнятся на полосу
когерентности или более, образует п^ ветвей разнесения. Можно сказать,
что разнесение по частоте использует частотную селективность канала во
благо. Рис. 3.19 дает элементарное толкование этому методу разнесения.
Колебания двух длин волн A^i и АШ2, распространяющиеся вдоль одной
и той же пары путей, обладающей разностью геометрических длин
путей S. Разность фаз сигналов двух путей для каждой длины волны будет
своей, равной соответственно 2tcS/\wi и 2tcS/XW2- Когда одна из этих
разностей фаз ведет к ослаблению результирующего сигнала, другая может
оказаться не столь деструктивной. При большом числе лучей
распространения вступает в силу статистическая трактовка, и разность частот,
превосходящая полосу когерентности канала, позволяет рассчитывать на
независимость ветвей разнесения в подобной схеме. Реальные значения
полосы когерентности во многих случаях таковы, что процедура
разделения ветвей в приемнике оказывается не сложнее обычной полосовой
фильтрации.
Отражатель
[Передатчик
(P=2tc5/A,wi
ty=2nbfkw2
Рис. 3.19.
Разнесение по частоте
I Приемник J
Временное разнесение базируется на флюктуациях многолучевого
профиля во времени. Даже тогда, когда приемник неподвижен, интерфе-
3.7. Многолучевое разнесение и приемник RAKE 143
ренционная картина может меняться со временем из-за движения
передатчика или окружающих отражателей. Вследствие этого возникает
доплеровское рассеяние принимаемого сигнала, и чем шире его разброс,
тем меньше время когерентности канала, т. е. интервал времени, в
течение которого мощность результирующего многолучевого сигнала
остается примерно постоянной. Вновь обращает на себя внимание дуальность
частоты и времени: интервал корреляции в частотной области (полоса
когерентности) обратно пропорционален диапазону рассеяния по задержке,
тогда как аналогичный интервал во временной области (время
когерентности) обратно пропорционален диапазону частотного (доплеровского)
рассеяния. Поскольку в моменты, разделенные временем когерентности
или более, многолучевые интерференционные картины можно считать
независимыми, повторная передача п^ копий одного и того же сообщения
с соответствующим интервалом создает rid ветвей разнесения. С
некоторой адаптацией этот принцип используется в телекоммуникационных
системах в форме перемежения (см. § 9.5).
Поляризационное разнесение, основанное на независимости профилей
многолучевости волн разной поляризации, пока не нашло широкого
применения. Что касается последнего метода в вышеприведенном перечне,
то в контексте книги он представляет особый интерес и обсуждается
с большей детализацией в следующем разделе.
3.7. Многолучевое разнесение и приемник RAKE
Обычная схема частотного разнесения, рассмотренная выше, использует
параллельную передачу одного и того же сигнала на нескольких несущих,
интервал между которыми превосходит полосу когерентности канала.
Применение подобного метода характерно для условий, в которых
передаваемый сигнал имеет полосу в пределах полосы когерентности канала,
т. е. при плоском фединге. Как иную версию разнесения по частоте
можно рассматривать многолучевое разнесение, при котором спектр сигнала
намеренно расширен и имеет полосу, значительно превышающую полосу
когерентности канала. Вследствие этого замирания становятся частотно-
селективными, допускающими в принципе временное разрешение
многолучевых сигналов. Таким образом, схема многолучевого разнесения
базируется на том факте, что сигналы, распространяющиеся различными
путями, приходят на вход приемника с различными запаздываниями по
времени. Предположим, что результирующий принятый сигнал с
комплексной огибающей вида (3.11) прошел фильтр, согласованный с
сигналом s(t). Тогда с учетом линейности фильтра и связи его отклика с АКФ
144 Глава 3. Преимущества широкополосной передачи
сигнала (см. § 2.11) выражение для комплексной огибающей Srf(t) сигнала
на выходе фильтра имеет вид
Srf{t) = ^AiR(t-Ti-T)&qp(3tpi), (3.16)
г
где R(t) — АКФ комплексной огибающей S(t) исходного сигнала,
определенная соотношением (2.66), аТ — как обычно, длительность сигнала s(t).
Пусть время корреляции сигнала тс, т.е. протяженность его АКФ, не
превышает минимальной взаимной задержки между последовательными
во времени многолучевыми сигналами тт\п = min{r^ — t;_i} : rc ^ Tmin.
г
Очевидно, что в такой ситуации все многолучевые сигналы после
согласованного фильтра не перекроются. Будучи полностью разрешенными во
времени и не мешая друг другу, они могут рассматриваться как сигналы
независимых ветвей разнесения и обрабатываться согласно одному из
алгоритмов комбинирования, рассмотренных выше. Если, в частности, их
временные положения, амплитуды и начальные фазы известны
(например, предварительно измерены с использованием отдельного пилотного
канала), возможно их оптимальное комбинирование, т.е. максимизация
отношения сигнал-шум .
Ясно, что рля применимости схемы многолучевого разнесения
сигнал должен иметь узкую АКФ. Возвращаясь к дискуссии § 2.15, можно
вспомнить, что лобовое решение этой задачи состоит в использовании
коротких сигналов. Подобный путь, однако, предполагает излучение
сигналов с высокой пиковой мощностью, что может оказаться
неприемлемым во многих приложениях. Значительно более изящной представляется
ориентация на специальные сигналы, обладающие свойством временного
сжатия в согласованном фильтре, т.е. имеющие малое время
корреляции в сравнении с длительностью сигнала: тс <С Т. Сигналы этого рода
могут быть найдены только среди широкополосных сигналов и, значит,
в перечень достоинств технологии расширенного спектра может быть
добавлено еще одно: возможность организации многолучевого разнесения.
Метод многолучевого разнесения уникален в том смысле, что он
радикально меняет отношение к эффектам многолучевости, которые на
первый взгляд представляются безоговорочно вредными. Как
показывает теперешнее обсуждение, отражение радиоволн имеет и позитивную
сторону. В самом деле, любой отражатель, причастный к приему
сигнала, направляет к приемнику часть излученной энергии, которая в его
отсутствие была бы безвозвратно потеряна. В обстоятельствах, когда
соответствующе отраженные сигналы могут быть отделены друг от друга
(разрешены во времени), их энергию можно использовать для улучшения
характеристик системы в сравнении со случаем отсутствия многолуче-
3.7. Многолучевое разнесение и приемник RAKE 145
вости. Многолучевой канал как будто сам создает ветви разнесения, и
единственной проблемой является адекватный выбор сигнала, который
позволил бы разделить сигналы разных лучей.
* 1
со
Ь о
е
—1
I л
± 4
ю о
h
о —**
i (
1
О
8 °
Л
СО
—I
) 1
^
)
i :
; Н
i :
>
td
2
о О
ш
а;
?/г
Рис. 3.20. Эффекты многолучевости при БФМ передаче: простые (а) и
широкополосные (6) сигналы
Пример 3.5. Обратимся к иллюстрации многолучевого разнесения в
приложении к цифровой связи, представленной на рис. 3.20. В среде MATLAB
осуществлено моделирование передачи потока битов с помощью БФМ при
длительности бита Т по трехлучевому каналу с взаимными запаздываниями путей
Т2 — т\ = тз — Т2 « 0Д5Т. Амплитуды сигналов путей А± — 1,А2= 0,8, А3 — 0,9,
а фазы второго и третьего сигналов противоположны фазе первого. Для большей
наглядности на рисунке показаны только низкочастотные эквиваленты
(комплексные огибающие) всех сигналов. Левая колонка (а) отражает передачу
одного бита простым прямоугольным импульсом, причем нулевое значение бита
передается импульсом положительной полярности (верхняя диаграмма). Вторая
осциллограмма колонки показывает результирующий сигнал на выходе канала
в отсутствие шума. Хотя МСИ проявляет себя в искажениях начальной части
битового импульса, большая часть последнего испытывает плоские замирания.
Последняя осциллограмма представляет пять наложенных реализаций отклика
согласованного фильтра на результирующий сигнал в присутствии шума.
Разрушительные последствия многолучевости очевидны: надежные решения о
переданных битах вряд ли возможны.
146 Глава 3. Преимущества широкополосной передачи
В противовес этому колонка (б) соответствует передаче, при которой
значение бита управляет полярностью широкополосного сигнала, в частности, кода
Баркера длины N = 13 (см. § 6.4). Верхняя осциллограмма демонстрирует
серию из трех подобных импульсов, манипулированных прежней
последовательностью битов. На второй представлен результирующий сигнал на выходе канала
в отсутствие шума. Самый нижний рисунок отвечает отклику согласованного
фильтра на результирующий сигнал, искаженный белым шумом того же
уровня, что и для левой колонки. Три характерных пика, приходящихся на каждый
переданный бит, пригодны для восстановления данных с высокой степенью
надежности. Полагая модель канала заранее известной, можно осуществить взятие
отсчетов в известные моменты максимума каждой многолучевой компоненты
сигнала на выходе согласованного фильтра. Как видно из рисунка,
правильно выбранный широкополосный сигнал для передачи бита данных обеспечивает
разрешение всех многолучевых реплик на выходе фильтра без взаимного
искажения. Затем три отсчета могут быть оптимально скомбинированы, т. е. взвешены
пропорционально своим амплитудам и просуммированы с учетом полярности
второй и третьей компонент. В устройстве, реализующем такое
комбинирование и представленном на рис. 3.21, отводы линии задержки выбраны из условия
совмещения во времени трех многолучевых пиков на выходе фильтра. После
этого производится оптимальное комбинирование отсчетов: третья компонента без
задержки с весом — А% = —0,9 и вторая, задержанная на величину тз — тг, с весом
—А2 = —0,8 складываются с первой, задержанной на тз — т±. В результате
получается отношение сигнал-шум по напряжению, большее в yjl + Л| -f Л| « 1,56
раз, чем для сигнала первого луча.
С согласованного
фильтра
»(^Л
задержка
т3 -т2
Vv^ -а^
задержка
т2"т1
У
у
I
А
I С\
К блоку
решения
Отсчет при т3 + /Т
Рис. 3.21. Комбинирование для канала рис. 3.20
Выигрыш в отношении сигнал-шум наглядно виден из рис. 3.22, на котором
верхняя осциллограмма повторяет выход согласованного фильтра рис. 3.20, б,
а нижняя соответствует выходу сумматора. Для решения о значениях
переданных битов (демодуляции) нужно лишь брать отсчеты с выхода сумматора
в моменты времени гз -{- Т, тз + 2Т, ... и фиксировать их полярность.
Принцип многолучевого разнесения был предложен Прайсом и Грином
в 1958 г. С тех пор этот метод широко известен под названием RAKE
(«грабли»), поскольку пики на выходе согласованного фильтра (см. рис. 3.20
3.7. Многолучевое разнесение и приемник RAKE 147
и 3.22) напоминают в некоторой степени зубцы этого популярного
садового инструмента.
Рис. 3.22. Сигналы на выходах согласованного фильтра и сумматора
В реальных системах можно встретить разнообразные варианты
аппаратной реализации алгоритма RAKE. Одна из них предполагает
использование rid параллельных корреляторов вместо согласованного фильтра,
где rid определяется числом зубцов, т. е. используемых ветвей разнесения.
Эта структура наиболее практична в случае, когда задержки
многолучевых сигналов точно измерены и могут полагаться известными.
Коррелятор с опорным сигналом, задержанным на величину т, выдает значение,
равное отсчету на выходе согласованного фильтра в момент Г + г. Тогда,
учитывая, что для решения необходимы только отсчеты в моменты Т+т^
г = 1,2,..., rid, в качестве опорных сигналов корреляторов можно
использовать rid задержанных копий исходного сигнала, а затем осуществить
необходимое комбинирование выходных значений корреляторов.
Преимуществом подобной структуры относительно схемы с согласованным
фильтром следует считать то, что для сложного закона модуляции
широкополосного сигнала построение коррелятора нередко проще, чем
согласованного фильтра, поскольку, в отличие от последнего, первый вычисляет
единственное значение корреляции (см. § 2.11). При комбинировании по
максимуму отношения сигнал-шум RAKE-приемник на основе корреля-
148 Глава 3. Преимущества широкополосной передачи
торов можно построить как показано на рис. 3.23 (при обработке на
видеочастоте). Чтобы подчеркнуть практическую роль RAKE-технологии
достаточно сослаться на стандарты сотовой связи 2-го (cdmaOne) и 3-го
(WCDMA, cdma2000) поколений, включающих ее в качестве составной части.
Y(t)
Коррелятор
^ехрО'ф^^-Т!)
Коррелятор
—Г~
Коррелятор
Рис. 3.23.
Корреляционный
RAKE-приемник
К блоку
решения
Ap4>U^nd)S(t-Tnd)
Задачи
Общие указания:
- если форма спектра сигнала и/или помехи не оговорена, считайте ее
прямоугольной;
- термин «согласованный фильтр» используется для обозначения фильтра,
согласованного с сигналом на фоне АБГШ;
- в случае заградительной помехи считайте уровень АБГШ пренебрежимым.
3.1. От системы требуется обеспечить максимально возможное отношение
мощности полезного сигнала к общей мощности АБГШ и помехи. На
входе присутствует узкополосная помеха. Какая из двух стратегий является
лучшей: игнорирование помехи или использование режекторного
фильтра, если
а) мощность помехи равна мощности АБГШ в пределах полосы сигнала,
а ширина спектра помехи вдвое меньше полосы сигнала;
б) мощность помехи на б дБ меньше мощности АБГШ в полосе сигнала,
а ширина спектра помехи составляет четвертую часть полосы сигнала;
Задачи 149
в) мощность помехи на 3 дБ больше мощности АБГШ в полосе сигнала,
а ширина спектра помехи составляет четвертую часть полосы сигнала.
Спектры сигнала и узкополосной помехи представлены на рис. 3.24. Какая
центральная частота помехи является наиболее опасной в случаях, когда
приемник игнорирует помеху и когда использует режекторныи фильтр?
Сигнал
п Помеха
Рис. 3.24. Спектры сигнала и помехи
В некоторой системе отношение сигнал-(шум+помеха) по мощности на
выходе согласованного фильтра проигрывает в 101 раз отношению
сигнал-шум по мощности, тогда как система может сохранить свою
работоспособность только при отношении сигнал- ( шум+помеха), в два раза
меньшем отношения сигнал-шум. Что следует изменить в сигнале при
постоянстве отношения сигнал-шум по мощности, если:
а) разрешено использовать только простые сигналы?
б) пиковая мощность сигнала не может быть увеличена (каким
выигрышем от обработки должен обладать сигнал в этом случае)?
В некоторой системе режекторныи фильтр нейтрализует узкополосную
помеху. В результате отношение сигнал-шум на выходе согласованного
фильтра уменьшается на 3 дБ.
а) Что следует сделать с длительностью и амплитудой простого сигнала,
если допустимым считается уменьшение отношения сигнал-шум по
мощности только на два процента (в отсутствие режекторного
фильтра его значение фиксировано)?
б) Возможно ли добиться ухудшения отношения сигнал-шум ниже двух
процентов без увеличения мощности сигнала? Если да, то каким
выигрышем от обработки должен обладать сигнал?
Система может работать с отношением сигнал-шум не менее 10 дБ.
В результате воздействия заградительной помехи отношение сигнал - шум
упало до —3 дБ. Какие параметры сигнала могут быть изменены для
нейтрализации действия помехи, если:
а) Разрешено использовать только простые сигналы фиксированной энергии?
б) Могут быть использованы только простые сигналы одной и той же
пиковой мощности?
150
Глава 3. Преимущества широкополосной передачи
в) Фиксированы только пиковая мощность и энергия сигнала?
г) Фиксирована только пиковая мощность сигнала, а его полоса может
быть увеличена только в 10 раз?
Найдите выигрыш от обработки для случаев (в) и (г).
3.6. В борьбе с постановщиком заградительной помехи система увеличила
длительность сигнала в 4 раза с одновременным уменьшением
мощности вдвое и расширением полосы в 50 раз. Постановщик помехи способен
увеличить свою мощность не более чем на 13 дБ. Какая из сторон
выигрывает?
3.7. Спектр сигнала занимает два раздельных поддиапазона одинаковой
ширины W. Полная энергия сигнала распределена между ними в пропорции
9 : 16. На приемной стороне два согласованных фильтра
осуществляют обработку каждого из поддиапазонов, а их выходы
комбинируются оптимально, чтобы максимизировать результирующее отношение
сигнал-шум. На систему воздействует заградительная помеха. Какое
распределение ее мощности между поддиапазонами сигнала причинит
системе наибольший вред?
3.8. Отношение сигнал-шум на выходе согласованного фильтра защищаемой
системы равно 14 дБ. Сигнал имеет выигрыш от обработки WT = 400.
Найти:
а) отношение спектральных плотностей мощности сигнала и АБГШ;
б) отношение сигнал-шум на выходе интегратора радиометра
перехватчика.
3.9. В системе передачи данных с бинарной ФМ требуется обеспечить
вероятность ошибки на бит Ре = 1,5 • 10~3. Разработчик системы
стремится гарантировать отношение сигнал-шум для радиометра перехватчика
не более -ЮдБ на передаваемый бит. Какое значение выигрыша от
обработки на один бит окажется удовлетворительным?
3.10. Для радиометра перехватчика отношение сигнал-шум составляет —10 дБ
на длительность сигнала, тогда как для защищаемого приемника оно
должно быть 12 дБ. Длительность сигнала Т = 100 мкс. Какой должна
быть его минимальная полоса?
3.11. Сравниваются две широкополосные системы передачи данных с БФМ.
Первая из них использует бинарную модуляцию для расширения полосы,
обеспечивая выигрыш от обработки, равный 100 на бит данных. Вторая
применяет троичную модуляцию, приводящую к выигрышу от
обработки, равному 50 на бит данных. Какая из систем характеризуется лучшей
устойчивостью к взлому закона модуляции при условии равенства
скоростей передачи данных?
3.12. Сравниваются две широкополосные системы передачи данных с БФМ,
работающие с одинаковой скоростью. В первой из них отношение сигнал-
шум на входе защищаемого приемника составляет 12 дБ на бит данных,
Задачи 151
тогда как для радиометра перехватчика оно равно —12 дБ на бит. Для
второй системы аналогичные параметры принимают значения 16 и —4 дБ
соответственно. Какая из систем обладает большим иммунитетом к
взлому закона модуляции?
3.13. Разработчик системы учитывает требования ЭМС при проектировании
новой системы. Максимальное отношение сигнал-шум, обеспечиваемое
новой системой во всей зоне покрытия старыми, составляет 20 дБ. Любая
прежняя система работает с удовлетворительным качеством, если
дополнительная спектральная плотность мощности не превышает —10 дБ по
сравнению со спектром АБГШ. Каким должен быть минимальный
выигрыш от обработки для новой системы?
3.14. Имеются две широкополосные системы, занимающие одну и ту же полосу
и работающие в одном географическом регионе. Максимальное
отношение сигнал-шум в области пересечения их зон покрытия составляет 20
и 17 дБ соответственно. Для совместимости их работы избыточная
спектральная плотность мощности, обусловленная излучением другой
системы, должна быть на —7 дБ ниже уровня АБГШ. Найдите минимальный
выигрыш от обработки для каждой из систем.
3.15. Для нормального функционирования системы с длиной волны А^ = 30 см
необходимое отношение сигнал-шум составляет q = 14 дБ. Длительность
сигнала Т = 100 мкс, а шумовая температура приемника вп = 1000 °К.
Передающая антенна имеет коэффициент усиления 5 дБ, тогда как
приемная — изотропна. Найти необходимую излучаемую мощность для модели
свободного пространства, если зона покрытия системы должна иметь
радиус не менее 30 км. Насколько увеличится эта мощность в условиях,
типичных для систем мобильной связи, с экспонентой затухания, равной
3,84, в отсутствие других поправок к модели свободного пространства?
3.16. Система сохраняет работоспособность, если на приемной стороне
отношение сигнал-шум по напряжению не более чем в 4 раза ниже
среднего предсказанного уровня. Определите вероятность выхода системы
из строя вследствие крупномасштабных замираний со среднеквадратиче-
ским отклонением по мощности в 9 дБ.
3.17. Имеются два пути распространения: по прямой линии (ЛПВ) и через
отражатель, расположенный в 3 км от ЛПВ и равноудаленный от
передатчика и приемника. Найдите период стоячей волны в метрах и временной
интервал между последовательными провалами мощности на входе для
приемника, расположенного в 12 км от передатчика и движущегося с
постоянной скоростью 60 км/ч, при длине волны 30 см.
3.18. Возможно ли применение БФМ в канале с быстрыми многолучевыми рэле-
евскими замираниями? Какой способ бинарной передачи приемлем в этом
случае?
3.19. Передача бинарных данных осуществляется по каналу с логнормальным
крупномасштабным и рэлеевским мелкомасштабным замираниями. Вслед-
152 Глава 3. Преимущества широкополосной передачи
ствие крупномасштабного замирания отношение сигнал-шум по
мощности флюктуирует около значения 27 дБ со среднеквадратическим
отклонением 12 дБ. Достижима ли в этом канале вероятность ошибки на бит
10~3 без помехоустойчивого кодирования?
3.20. Имеются две рэлеевские ветви разнесения с идентичной средней
энергией сигнала. Используя в качестве критерия среднее отношение сигнал-
шум по мощности на выходе устройства комбинирования, сравните по
энергетическому выигрышу две схемы комбинирования: по максимуму
отношения сигнал-шум и селекции ветви с максимальным сигналом.
3.21. Сигнал системы занимает полосу в 60 кГц. Диапазон рассеяния по
задержке в канале составляет 20 мкс. Общая полоса не превышает 300 кГц.
Сколько ветвей частотного разнесения может быть организовано в
системе?
3.22. Имеются четыре пути распространения с длинами 5 км, 5,4 км, 5,55 км
и б км. В системе данные передаются со скоростью R = 20 кбит/с.
Оцените примерно полосу сигнала и выигрыш от обработки, необходимые для
организации RAKE-приемника с четырьмя зубцами.
3.23. Минимальная разность длин путей распространения в канале составляет
300 м. Диапазон рассеяния по задержке в канале лежит в пределах 10 мкс.
В системе осуществляется передача данных с использованием КФМ со
скоростью 20 кбит/с. Каковы необходимая полоса и выигрыш от
обработки для построения RAKE-приемника с максимально возможным числом
зубцов?
3.24. RAKE-приемник расщепляет результирующий сигнал на выходе рэлеев-
ского канала на п^ незамирающих сигналов равной энергии и применяет
комбинирование по максимуму отношения сигнал-шум. Насколько
среднее отношение сигнал - шум по мощности на выходе устройства
комбинирования отличается от варианта, когда RAKE-алгоритм не применяется?
Как объяснить энергетический выигрыш RAKE-метода в свете данного
ответа?
Задачи в пакете MATLAB
3.25. Напишите программу, демонстрирующую помехоустойчивость
широкополосных сигналов в отношении узкополосных помех в ситуации, когда
приемник не прибегает к режекции помехи (рис. 3.4).
а) Сформируйте и графически отобразите два прямоугольных
радиосигнала одинаковой длительности Т (векторы размерности 1000): простой
импульс и ЛЧМ импульс с девиацией частоты (40... 50) /Т (см. задачи
2.55 и 2.56). Выберите несущую так, чтобы на длительности сигнала
укладывалось 25... 30 ее периодов;
Задачи в пакете MATLAB 153
б) Сформируйте матрицу немодулированной помехи из 10 строк так,
чтобы частота для каждой строки была равна несущей сигнала, а
случайная начальная фаза распределена равномерно на отрезке [—7г, 7г];
в) Сформируйте матрицы наблюдений для обоих сигналов, прибавив
каждый из них к строкам матрицы помехи и установив уровень помехи
в несколько (2-10) раз выше уровня сигнала. Выведите наблюдения на
дисплей;
г) Обработайте наблюдения соответствующими согласованными
фильтрами. Выведите на дисплей отклики фильтров.
д) Выполните программу для разных значений интенсивности и частоты
помехи и объясните результаты.
3.26. Напишите программу, демонстрирующую помехоустойчивость
широкополосных сигналов в отношении узкополосных помех в ситуации, когда
приемник режектирует помеху (примерные осциллограммы на входе и
выходе режекторного фильтра даны на рис. 3.25).
а) Повторите пункты (а)-(в) предыдущей задачи;
б) Рассчитайте и выведите на дисплей энергетические спектры сигналов
и наблюдений;
в) Выполните режекцию, обнулив спектральную компоненту наблюдения
на частоте помехи;
г) Вернитесь во временную область и отобразите на дисплее сигналы
после режекции;
д) Выполните программу для нескольких комбинаций интенсивности и
частоты помехи и объясните результаты.
3.27. Напишите программу, иллюстрирующую помехоустойчивость
широкополосных сигналов в отношении заградительных помех (см. рис. 3.5).
а) Повторите пункт (а) задачи 3.25;
б) Сформируйте по 10 реализаций спектра помехи для каждого из
сигналов так, чтобы они отличались от нуля только в пределах полосы
соответствующего сигнала. Считайте спектральные компоненты
комплексными гауссовскими случайными величинами с нулевым средним.
Отобразите спектры помехи на дисплее;
в) Преобразуйте помехи во временную область и просуммируйте с
каждым из сигналов, придя к наблюдениям. Подберите мощности помехи
так, чтобы для обоих сигналов отношение сигнал - помеха по
напряжению было одним и тем же, лежащим в диапазоне от 0,5 до 1;
г) Обработайте наблюдения соответствующим согласованным фильтром
и выведите отклик фильтра на дисплей;
д) Выполните программу, варьируя параметры сигнала и помехи и
объясните результаты.
154 Глава 3. Преимущества широкополосной передачи
0,5 1,0 1,5. 2,0
Рис. 3.25. Моделирование режекции помехи
3.28. Напишите программу, подтверждающую свойство низкой вероятности
обнаружения широкополосных сигналов (см. рис. 3.26).
а) Повторите пункт (а) задачи 3.25;
б) Сформируйте 10 реализаций гауссовского шума с нулевым средним
и среднеквадратическим отклонением, превышающим амплитуду
сигнала втрое;
в) Просуммируйте шумовые реализации с сигналами для получения 10
наблюдений для каждого из сигналов;
г) Преобразуйте наблюдения в частотную область и отобразите
графически энергетические спектры наблюдений для каждого из сигналов.
Объясните результаты в терминах обнаружения сигнала радиометром.
3.29. Напишите программу, подтверждающую хорошую электромагнитную
совместимость широкополосных систем как между собой, так и с
системами, использующими простые сигналы.
а) Сформируйте комплексные огибающие трех прямоугольных сигналов
одинаковой энергии и длительности: простого и двух ЛЧМ импульсов
с девиацией Wd — 50/Т, первый с возрастающей, а второй — с
убывающей частотой;
б) Для всех трех случаев рассчитайте комплексные огибающие откликов
согласованных фильтров на «свой» и два «чужих» сигнала;
Задачи в пакете MATLAB 155
в) Выведите действительные огибающие всех 9 откликов предыдущего
пункта на дисплей;
г) Дайте толкование результатам в терминах ЭМС.
а
5 0,5
ul^^abJifiU* гЛЛл»
50
f
100
1
Сигнал
о
-1
- ""Г - 1
ШЦШЕ^^^^Н.—
0 50 100
Рис. 3.26. Моделирование приема сигнала радиометром
3.30. Визуализируйте логарифмический график затухания принятой
мощности с ростом расстояния от передатчика для модели распространения
Pr = k/D€, e = 2, 3, 3,84, 4.
3.31. Напишите программу для иллюстрации явления многолучевого плоского
фединга.
а) Сформируйте и визуализируйте гладкий простой радиоимпульс
длительности Т и несущей частоты в пределах (20.. .30)/Т;
б) Сформируйте и выведите на дисплей сумму 10 копий этого сигнала
с равными амплитудами и случайными начальными фазами,
равномерно распределенными на отрезке [—7г,7г];
в) Выведите на дисплей действительную огибающую результирующего
импульса;
г) Выполните программу несколько раз и объясните результаты.
3.32. Напишите программу для проверки справедливости рэлеевскои модели
многолучевого фединга (см. рис. 3.27).
156 Глава 3. Преимущества широкополосной передачи
1.
1%
ьтир
баю
=; ?
5ч •-
п о
ф
Q.
10
5
0
200
о
m >s
h s
S gioo
Z т
i ш
5 x
и n
0
- 0.2
- s
fife
" о
§f 0.1
t к
о о
В о.
С Ф
ю
0
Рис. 3.27. Моделирование рэлеевского фединга
а) Повторите пункт (а) предыдущей задачи;
б) Сформируйте 1000 х 1 вектор комплексных амплитуд, г-й элемент
которого является суммой 20 слагаемых вида exp(j^-)? г — 1, 2,..., 1000;
j = 1,2,..., 20 где все фц независимы и равномерно распределены на
отрезке [—7г,7г];
в) Визуализируйте как пример 3... 7 реализаций результирующей
действительной огибающей импульса;
г) Постройте и выведите на дисплей гистограмму действительной
амплитуды результирующего импульса на основе результатов пункта (б);
д) Выведите на дисплей распределение Рэлея, выбрав соответствующий
масштаб и сравните его с гистограммой предыдущего пункта.
3.33. Напишите программу, иллюстрирующую антенное разнесение (см рис. 3.28).
а) Сформируйте и визуализируйте простой гладкий радиоимпульс
длительности Т и несущей частоты (20... 40)/Т;
б) Сформируйте два профиля распространения как векторы 10 задержек
со случайными независимыми компонентами, равномерно
распределенными на отрезке [0, Т/10];
в) Сформируйте две комплексные огибающие сумм 10 реплик сигнала
с начальными фазами, рассчитанными в соответствии с двумя
профилями задержек;
1
1 1
I 1 1 1 j 1 j 1
L-J-^^^KL 1
1 ;
Э 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0
■' i —1 "■■ i i ■ "I i i
]=*
О 2 4 6 8 10 12 14 16 18 20
О 2 4 6 8 10 12 14 16 18 20
Результирующая амплитуда
Задачи в пакете MATLAB 157
г) Выведите на дисплей два профиля задержки и соответствующие
радиосигналы на выходе канала в форме, удобной для сравнений;
д) Повторяя выполнение программы, объясните результаты в терминах
выигрыша от разнесения.
60
40
20
Л
йТ
[ л 1
1_1-
23456789 10
1
0
-I
1 '"' * 1
1МЩ,
1 'fjjjljv
_ - - JL Щ _
-J-
-1
1 I
40
А
е-
Ш
-в"
О
О,
ез
20
tIT
J.1
ш
1 П
Ljij
123456789 10
!&
и 5"
в е
1 I --J
,|||. I J
Яг ; "1
Е
я 5
as я
4S
-Н "S о
а- '
j
1/7*
йТ
Рис. 3.28. Моделирование антенного разнесения на приеме
3.34. Напишите программу для иллюстрации принципа частотного разнесения.
а) Сформируйте и визуализируйте два простых гладких радиоимпульса
одинаковой длительности Т и амплитуды, но имеющих разные несущие
частоты, например 20/Т и 30/Г;
б) Сформируйте многолучевой профиль как вектор из 10 независимых
задержек, равномерно распределенных на отрезке [0,Т/10];
в) Выведите на дисплей в форме, удобной для сравнений, профиль
задержек и две суммы 10 копий каждого из сигналов, имеющих равные
амплитуды и начальные фазы, определяемые профилем задержек и
несущей частотой;
г) Повторяя выполнение программы, объясните результаты в терминах
выигрыша от разнесения.
3.35. Напишите программу, иллюстрирующую принцип многолучевого
разнесения. В отличие от случая, представленного рис. 3.20, выполните
задание, используя JI4M радиоимпульс.
Глава 3. Преимущества широкополосной передачи
а) Сформируйте и отобразите на дисплее два прямоугольных
радиоимпульса передачи бита с одинаковыми длительностью Т, амплитудой
и несущей частотой в пределах (30...40)/Т. Первый из них —
постой сигнал, а второй — ЛЧМ импульс с девиацией частоты Wd =
= (20...30)/Т;
б) Выберите произвольно последовательность из 5-6 битов и осуществите
БФМ для обоих случаев. Выведите на дисплей передаваемые сигналы;
в) Сложите передаваемый сигнал с двумя его запаздывающими копиями
для обоих случаев. Возьмите амплитуды копий равными амплитуде
переданного сигнала и задержки около 0Д5Т и 0,ЗТ соответственно.
Отобразите на дисплее результирующие принятые колебания;
г) Рассчитайте и визуализируйте отклики согласованного фильтра для
каждого случая;
д) Прокомментируйте результаты.
Опираясь на предыдущую задачу напишите программу,
демонстрирующую комбинирование разрешенных сигналов в приемнике RAKE.
ГЛАВА 4
МНОГОПОЛЬЗОВАТЕЛЬСКАЯ
СРЕДА.
МНОЖЕСТВЕННЫЙ ДОСТУП
С КОДОВЫМ РАЗДЕЛЕНИЕМ
4.1. Системы с многими пользователями и проблема
множественного доступа
Многие современные беспроводные системы относятся к категории
многопользовательских. В многопользовательской (многоабонентской)
системе в пределах общего частотно-временного ресурса организуется
множество линий связи, так что любому индивидуальному абоненту
предоставляется право передавать или принимать свою собственную
информацию параллельно с другими пользователями и независимо от них.
Показательным примером многопользовательской системы, в которой
единственный передатчик осуществляет передачу данных множеству
абонентов, служит канал «вниз» спутниковой системы или наземной сотовой
системы. Приемник каждого пользователя в такой системе должен иметь
возможность выделения информации, адресованной именно ему, из
наблюдаемого группового сигнала, в котором содержатся потоки данных,
предназначенных и другим абонентам. Другой подобный пример — канал
«вверх» спутниковой или наземной сотовой системы, по которому
передаются сигналы многих абонентов, и приемник базовой станции должен
выделить из общего потока данные каждого конкретного абонента.
При проектировании любой многопользовательской системы
принципиальным моментом является обеспечение множественного доступа, т. е.
возможности предоставления канала связи для одновременной работы
многих абонентов с минимальным взаимным влиянием. Для
формализации задачи предположим, что данные k-ro пользователя образуют
последовательность bfc = (bft,Ojfyfe,i,.. .)> гДе bk,i означает г-й символ потока
данных fc-ro пользователя. Данная последовательность тем или иным
способом модулирует специфический сигнал &-го пользователя £*;(£), образуя
модулированный сигнал Sfc(t;bfc). Распространяясь по каналу, каждый
из этих сигналов приобретает свои амплитуду А^ и запаздывание т&, и,
160 Глава 4- Многопользовательская среда
после суммирования с сигналами других пользователей, входит в общий
или групповой сигнал, поступающий на приемник
к
s(t; bi, Ъг,..., Ьцг) = 53 Aksk(t - rk; Ък),
k=l
где К — число активных, т. е. реально передающих данные пользователей,
а аргументы после точки с запятой в групповом сигнале подчеркивают
его зависимость от данных всех активных пользователей. Разумеется,
групповой сигнал сопровождается канальным шумом n(t), так что
результирующее наблюдение
к
y(t) = s{t; bb b2,..., ЪК) + n{t) = J2 Ak*k{t ~ n; bk) + n(t). (4.1)
k=i
Приемник должен выделить данные пользователя из наблюдения y(t).
Согласно общим положениям теории приема из § 2.1, в случае гауссовского
канала ключевая роль в решении о принимаемых данных bfc, к = 1,2,..., К
принадлежит евклидову расстоянию (или его квадрату) между
наблюдением y(t) и различными копиями группового сигнала s(t; bi, b2,..., b^),
соответствующими всем возможным комбинациям данных К пользователей
Т
rf2(s,y)-/[y(t)-5(t;b1,b2,...,bic)]2dt. (4.2)
о
Подстановка (4.1) в (4.2) и раскрытие скобок приводят к равенству
К к к Tf
d2{*,y) = \\y\\2-2j2Akzk(bk) + J2^2A^Ai *k(t-Tkibk)8i(t-TrM)dt9
k=l k=ll=l о
(4.3)
где zk(hk) — корреляция (скалярное произведение) наблюдения y(t) и
задержанного на тк к-го пользовательского сигнала, промодулированного
последовательностью данных Ь^
т
Sfc(bfc) = jy(t)sk(t~Tk;bk)dt. (4.4)
о
Как правило, принятию решения о символах потоков данных
предшествует операция оценки интенсивностеи и запаздываний абонентских
сигналов, так что параметры Ак, г^,^1,2,...Дв (4.3) и (4.4)
можно полагать известными с необходимой точностью. Тогда оптимальная
(по максимуму правдоподобия или минимуму расстояния) стратегия
восстановления пользовательских данных состоит в подстановке всех
возможных реализаций последовательностей bi, b2,..., b# в (4.3) и выборе
4.1. Системы с многими пользователями 161
тех из них, которые совместно минимизируют квадрат расстояния (4.3)1.
Подобное правило, называемое оптимальным многопользовательским
алгоритмом, может оказаться практически нереализуемым в ситуациях,
где число пользователей К измеряется десятками или более. Как пример
рассмотрим простейшую синхронную (с нулевыми взаимными
задержками rk = 0, к — 1,2, ...,К) систему двоичной передачи данных, где
К = 40. При наблюдении на интервале одного бита восстановление битов
всех К — 40 индивидуальных пользователей потребовало бы перебора
240 > 1012 битовых рельефов всех пользователей, что представляется
абсолютно нереальным технологически. Некоторые аспекты
применимости и упрощения многопользовательских алгоритмов приема будут далее
освещены в гл. 7 и 10.
Альтернативное простейшее правило положено в основу так
называемого стандартного или однопользовательского приемника. Оно
сводится к раздельной оценке каждой из последовательностей данных Ь^
максимизацией соответствующей корреляции (4.4). Очевидно, что такая
стратегия совпадает с оптимальной (многопользовательской), если и только
если третье слагаемое в (4.3) вообще не зависит от последовательностей
данных bfc,fc = 1,2,...,!£. Выполнение последнего условия гарантируется
для схем модуляции, удовлетворяющих следующим свойствам:
а) энергия пользовательских сигналов не зависит от передаваемых
данных (ФМ, ЧМ);
б) сигналы всех пользователей ортогональны вне зависимости от
передаваемых данных.
Оба эти требования объединяются соотношением
Т
J sk(t - тк\ bk)si(t - г/; hi) dt = E8kl. (4.5)
о
Называя этот метод множественного доступа ортогональным и
возвращаясь к материалу, изложенному в § 2.3 и 2.4, вспомним, что
максимальное число ортогональных сигналов ограничено общей размерностью
сигнального пространства, и при общей полосе Wt и временном
ресурсе Tt число ортогональных радиосигналов не может превысить 2WtTf.
Для нахождения максимально достижимого числа пользователей при
ортогональном множественном доступе рассмотрим М-ичную цифровую
хЭто правило остается адекватным, даже если приемник предназначен для
восстановления данных только одного определенного (k-ro) пользователя, что, например, имеет
место в канале «вниз» системы мобильной связи. После оценивания данных всех
пользователей приемник может просто отбросить ненужные данные всех пользователей,
кроме k-ro.
162 Глава 4- Многопользовательская среда
передачу данных с фиксированной скоростью R бит/с. Условившись, что
все пользовательские сигналы должны быть ортогональны на
интервале, равном длительности М-ичного символа, приходим к соотношению
Tf = (log2 M)/R. Следовательно, максимальная размерность
сигнального пространства составляет 2WtTt = (2Wtlog2M)/R. Когда М = 2 (как
при БФМ), каждому пользователю достаточно одномерного
подпространства сигнального пространства, поскольку для передачи одного бита
необходимы только два противоположных импульса (т. е. два коллинеарных
вектора, см. рис. 2.5, а). В этом случае максимальное число пользователей
совпадает с общей размерностью сигнального пространства. При М > 2
каждому пользователю требуется двумерное подпространство (т. е.
плоскость, см. рис. 2.6, в), и, согласно (4.5), все подобные плоскости должны
быть ортогональны, так что максимальное число пользователей
оказывается вдвое меньше полной размерности сигнального пространства.
Комбинация этих результатов дает верхнюю границу максимального числа
пользователей при ортогональном множественном доступе
2Wt
К= 1
R '
Wt log2 M
~R~~'
М = 2,
М>2.
(4.6)
В следующих трех разделах дается краткий обзор традиционных
вариантов ортогонального множественного доступа.
4.2. Множественный доступ с частотным разделением
15(01
\цп\
: w=fl/ioa>M
Wt = KW
a)
\sKW\
s,(t)
stf)
7=1/1/14
Vj'=Kr="(TofeAf")7fl'
6)
s*W
Рис. 4.1. Множественный доступ с частотным (а) и временным (б) разделением
4-3. Множественный доступ с временным разделением 163
Один из наиболее очевидных способов выполнения требования (4.5) —
применение пользовательских сигналов с неперекрывающимися
спектрами (см. рис. 4.1, а). Подобный прием полностью повторяет описанный
в подпараграфе 2.7.2 метод ортогонального кодирования сообщений
частотным сдвигом. Для соответствующей схемы множественного доступа
общепринята аббревиатура FDMA (frequency division multiple access —
множественный доступ с частотным разделением, МДЧР). Если для
передачи данных со скоростью R используется М-ичная ФМ,
длительность символа данных Tt = (log2M)/i?, так что каждому пользователю
должна отводиться полоса, не меньшая чем W = 1/Tt — R/log2M.
Тогда в полной выделенной полосе Wt могут располагаться не более чем
Wt/W = (Wtlog2M)/R неперекрывающихся спектров. При М > 2 это
в точности повторяет верхнюю границу (4.6) — случай, показанный на
рис. 4.1, а. Если же М = 2 и фазовая когерентность гарантирована,
каждый из упомянутых спектров может эксплуатироваться двумя
пользователями, несущие колебания которых отличаются лишь квадратурным
фазовым сдвигом. В результате потенциальное число пользователей в схеме
FDMA в точности совпадает с границей (4.6). В то же время на
практике недостаточная избирательность фильтрующих цепей, дрейф опорного
генератора и доплеровский сдвиг частот могут привести к частичному
перекрытию соседних спектров, т. е. взаимным помехам между
пользовательскими сигналами. Стремление минимизировать такого рода эффекты
и сохранить необходимое качество разделения абонентских сигналов
нередко вынуждает вводить между соседними спектрами защитные окна,
теряя в реальном числе пользователей сравнительно с границей (4.6).
FDMA является старейшей и классической схемой множественного
доступа, широко распространенной как в аналоговых, так и цифровых
беспроводных системах: (радио- и телевещание, мобильная связь и др.)-
Неперекрытие спектров сохраняет ортогональность пользовательских
сигналов и, следовательно, их разделимость вне зависимости не только от
данных, но и взаимных запаздываний. Благодаря этому отсутствует нужда
в поддержании синхронизма сигналов на входе приемника, что часто
рассматривается как немалое достоинство FDMA (см. детали в § 4.5).
4.3. Множественный доступ с временным разделением
Вторая популярная схема ортогонального множественного доступа
обозначается акронимом TDMA (time division multiple access —
множественный доступ с временным разделением, МДВР) В этом варианте
сигналы пользователей не перекрываются во временной области (рис. 4.1, б).
164 Глава 4- Многопользовательская среда
Разумеется, такой формат вновь не отличается от ортогонального
кодирования сообщений временным сдвигом (см. подпараграф 2.7.1). При
М-ичной ФМ полный выделенный временной ресурс Tt = (log2 M)/R
(в системах с TDMA его часто называют кадром) делится на
неперекрывающиеся слоты длительности Т. Если М > 2, то каждый слот может
использоваться единственным пользователем и длительность
передаваемого им символа данных не может быть меньше величины, обратной
полосе 1/Wf. Поэтому общее число пользователей ограничено сверху
величиной Tt/T = (Wt log2 M)/R — случай, иллюстрируемый рис. 4.1, б. Если
же М = 2, то при соблюдении фазовой когерентности вновь два
пользователя могут работать в одном и том же слоте на квадратурно-сдвинутых
несущих. В итоге максимальное число пользователей в рамках TDMA
опять совпадает с границей (4.6), подтверждая предсказуемую
эквивалентность TDMA и FDMA в части потенциального числа абонентов.
Схема TDMA находит применение в разнообразных системах, в
частности, в мобильной связи второго поколения (GSM, IS-136 и др.)-
Несмотря на внешне подкупающую простоту, ее технологическая
привлекательность далеко небезоговорочна. Во-первых, каждый
пользовательский сигнал занимает лишь К-ю (или, возможно, К/2-ю) часть кадра,
что означает рост пиковой мощности в К (или К/2) раз по сравнению
с непрерывной передачей при фиксированной энергии сигнала, т. е.
отношении сигнал-шум. Связанные с этим аппаратные проблемы уже не раз
упоминались. Во-вторых, между абонентскими сигналами на входе
приемника необходима жесткая синхронизация, поскольку иначе возникнет
риск их перекрытия и, как результат, возникновение взаимных помех.
В то же время в системах с подвижными передатчиками типа канала
«вверх» в мобильной связи длины путей распространения от абонентов
к приемнику базовой станции постоянно меняются, зачастую в
достаточно широком диапазоне. В подобном сценарии синхронизация
пользовательских сигналов на входе приемника, хотя в принципе и возможна,
технологически далеко не проста и не всегда коммерчески оправданна.
Прямой путь преодоления подобного препятствия состоит во введении
защитных пауз между соседними пользовательскими сигналами,
устраняя тем самым возможность их перекрытия во всем диапазоне задержек.
Протяженность пауз нередко значительна, что проявляет себя заметным
сокращением числа пользователей в сравнении с границей (4.6). Острота
проблемы снижается, если индивидуальный пользовательский слот
содержит не единственный символ данных (к примеру бит), а пакет из щ
символов. Тогда паузы нужны лишь для разделения пакетов разных
пользователей, что в щ раз сокращает относительные накладные временные
затраты. С другой стороны, перерывы между пакетами одного и того же
4*4- Множественный доступ с синхронным кодовым разделением 165
пользователя также возрастают в щ раз. Во многих системах (подобных
мобильному телефону, где необходима непрерывность речевой
информации) длинные перерывы недопустимы, что налагает жесткие ограничения
на длину пакета.
В свете рассмотренных факторов схема TDMA в «чистом» виде не столь
часто встречается в практических телекоммуникациях. В системах
мобильной связи второго поколения, к примеру, она реализуется в сочетании
cFDMA.
4.4. Множественный доступ
с синхронным кодовым разделением
Как FDMA, так и TDMA базируются на расщеплении полного
доступного частотно-временного ресурса между пользователями, так что
каждому из них отдается в распоряжение только его «персональная» часть,
и никакие сегменты ресурса в совместном пользовании не находятся.
При FDMA подобная фрагментация осуществляется в частотной
области (рис. 4.2, а) так, что в распоряжение &-го пользователя поступает
весь временной ресурс (Т = Tj), но только часть W полного
частотного ресурса Wt- Когда максимальное число абонентов является главным
приоритетом, W = 1/Т « Wt/K. Дробление во временной области при
TDMA (рис. 4.2, б) предоставляет одному пользователю весь доступный
частотный ресурс (W = Wt)> но только часть полного временного кадра
(Т — 1/W ~ Tt/K). Когда число пользователей должно быть
максимизировано, сигнал каждого пользователя в обеих схемах, имея из-за
фрагментации ресурса частотно-временное произведение WT = 1,
автоматически оказывается простым.
i
щ
',/К
——-лН
t
к
к
1
-* ^ ч . * !
2
_J _ ___
►
a)
wt=w
Tt=T
It
6) T^Tt/K
Рис. 4.2. Распределение ресурса при ортогональном временном (а) и частотном
(6) разделении
166 Глава 4- Многопользовательская среда
Wt=W
С другой стороны, обслуживание большого числа абонентов К с
неизбежностью означает вовлечение большого частотно-временного ресурса
(WtTt » 1, см. (4.6)), и если предоставить каждому пользователю
одновременно и всю доступную полосу (W = Wi), и полный доступный
временной интервал (Т = Tt), возникнет схема ортогонального множественного
доступа, в которой все абонентские сигналы широкополосны. Подобной
многопользовательской системе будут присущи все достоинства
технологии распределенного спектра, описанные в предыдущей главе.
Предположим, что передача
организована так, что взаимные временные
сдвиги между пользовательскими сигналами на
входе приемного устройства отсутствуют.
Тогда все абсолютные запаздывания
сигналов можно без потери общности положить
нулевыми: rk = О, к = 1,2,..., К. Возьмем
произвольное семейство WfTt
ортогональных широкополосных сигналов (см. подпа-
раграф 2.7.3), скажем, функций Уолша, и
используем каждый из них как
пользовательский сигнал для М-ичной ФМ
передачи данных. Индивидуальный
широкополосный сигнал, присвоенный fc-му
пользователю, называется к-й сигнатурой. Каждая сигнатура занимает всю полосу
Wt и весь временной кадр Tt (см. рис. 4.3), передавая log2M бит
данных за интервал Tt. Если М > 2, данный метод множественного доступа
позволяет обслуживать до К = WT = WtTt = (Wtlog2M)/R
абонентов, тогда как при БФМ возможно удвоение К, поскольку два разных
абонента могут использовать сдвинутые по фазе квадратурные реплики
одной и той же сигнатуры. Как видно, максимальное число
пользователей вновь в точности совпадает с границей (4.6), как это уже было при
FDMAhTDMA.
В рассмотренной схеме множественного доступа грамотное
кодирование сигнатур, взамен расщепления частотного или временного ресурсов,
обеспечивает их ортогональность. Именно поэтому она ниже, как и
повсеместно, фигурирует под аббревиатурой CDMA {code division multiple
access — множественный доступ с кодовым разделением, МДКР).
Достоинства CDMA в сравнении с классическими FDMA и TDMA
(помехоустойчивость, низкая вероятность обнаружения, осуществимость RAKE-ал-
горитма др.) автоматически следуют из широкополосной природы CDMA
сигнатур. В то же время синхронизация сигнатур критически важна в
обеспечении их ортогональности и разделении абонентов на приемной сто-
Рис. 4.3. Утилизация ресурса при
широкополосном множественном
доступе
4-5. Асинхронное кодовое разделение 167
роне. Чтобы дифференцировать описанный вариант CDMA от
рассматриваемого позднее, добавим к его названию определение синхронный
(S-CDMA). Синхронный вариант CDMA достаточно легко реализуется
в системах с единственным передатчиком (подобно базовой станции в
сотовой сети), одновременно посылающим потоки данных, из которых
каждый адресован определенному пользователю (например, мобильной
станции). Благодаря этому S-CDMA используется как платформа
физического уровня линии «вниз» в сотовых сетях с CDMA поколений 2G (cdmaOne)
и 3G (WCDMA, cdma2000). Параллельно ключевой принцип S-CDMA
используется в каналах «вниз» и «вверх» стандартов 3G для так называемой
мультикодовой передачи (см. § 11.3).
4.5. Асинхронное кодовое разделение
Для многих приложений типична ситуация, когда задержки т&
абонентских сигналов могут варьироваться в широком диапазоне, делая
синхронизацию сигнатур на входе приемника проблематичной или вообще
невозможной. Наглядный пример такого рода дает мобильная сотовая
связь, где расстояния мигрирующих потребителей от базовой станции
постоянно меняются, а с ними и время прихода пользовательских
сигналов на приемник линии «вверх». В принципе, каждый потребитель, зная
собственное текущее положение относительно базовой станции, а значит,
и задержку распространения т*, имеет возможность передавать свой
сигнал с упреждением т&. В результате задержки распространения будут
скомпенсированы, и все абонентские сигналы на входе приемника базовой
станции будут синхронизированы. Применение подобной процедуры, однако,
привело бы к серьезному усложнению мобильных терминалов, что — по крайней
мере до недавнего времени — не считалось экономически целесообразным.
Проанализируем последствия асинхронизма принимаемых
пользовательских сигналов. Возможно ли в принципе сохранить ортогональность
сигналов при взаимных временных сдвигах, меняющихся в широком
диапазоне? Рассмотрим два сигнала u(t) и v(t) и вычислим их взаимную
корреляционную функцию (ВКФ) RUv(t), т.е. скалярное произведение
u(t) со сдвинутой на г копией v(t) как функцию аргумента г:
оо
Ruv(t)= Ju{t)v{t-T)dt.
—ОО
Применение теоремы Парсеваля дает
оо
Ruv(r)= J «(/)«*(/) exp(j27r/T)4f.
—оо
168 Глава 4- Многопользовательская среда
Если необходима ортогональность сигналов вне зависимости от
сдвига т, то при любых г должно выполняться равенство RuV(r) = О, что
в силу линейности преобразования Фурье возможно, если и только если
u(f)v(f) = О на всей оси частот. Последнее означает, что два сигнала
ортогональны при произвольном временном сдвиге, если и только если их
спектры не перекрываются. Однако схема множественного доступа с
неперекрывающимися спектрами есть FDMA! Следовательно, асинхронный
вариант ортогонального множественного доступа реализуем только в
виде FDMA, что часто прокламируется как одно из основных достоинств
FDMA.
Какой же окажется плата за попытку реализации CDMA при
отсутствии синхронизма сигнатур на входе приемника? Поскольку сигнатуры
абонентов в рамках CDMA перекрываются в частотной области, они
не могут оставаться ортогональными в широком диапазоне взаимных
задержек, так что равенство (4.5) не может выполняться для произвольных
значений тк, т\ и последовательностей данных Ь&, Ъ\. Следствием этого
является возникновение межпользовательской помехи, т. е. ненулевого
отклика приемника fc-ro пользователя на сигналы других абонентов.
Рассмотрим стандартный приемник fe-ro пользователя. Без потери
общности можно считать, что тк — 0, переписав (4.4) как
т
zk(bk) = Jy(t)sk(t;bk)dt. (4.7)
о
Согласно однопользовательскому правилу оценка Ък данных Ък
должна максимизировать решающую статистику zk{bk) как функцию Ьк.
Подставив (4.1) в (4.7), выразим гк(Ък) в виде
г
zk(hk) = Ak- sk(t;Wk)sk(t;bk)dt +
К т т
^^^^(t-r^b'/K^b^dt + y'n^^f;^)^ (4.8)
w ° о
где осуществлена замена Ък в (4.1) на Ъгк с тем, чтобы отличить
подлинно передаваемые данные hfk от предполагаемых в процессе принятия
решения Ък.
Первый и последний члены в (4.8) являются соответственно вкладами
собственного, т. е. к-го сигнала и теплового аддитивного шума в отклик
приемника к-го пользователя. В случае отсутствия сторонних абонентов
(К = 1) второе слагаемое обратилось бы в нуль, и исследуемая задача
о
к
4-5. Асинхронное кодовое разделение 169
не отличалась бы от рассмотренной в гл. 2. При К > 1 и
произвольных запаздываниях сигнатур указанное слагаемое отлично от нуля,
отражая вклад сторонних пользовательских сигналов в выходной эффект
k-го приемника, т.е. взаимную помеху или помеху множественного
доступа (ПМД).
Простейшие оценки влияния ПМД можно получить, отождествляя
сторонние сигналы со случайными шумоподобными процессами, как это уже
делалось в главе 3. В любой реальной асинхронной CDMA системе должны
быть предприняты меры по выравниванию интенсивностей всех
пользовательских сигналов на входе приемника с целью устранения эффекта
«близкий-далекий». Последний состоит в том, что ПМД от сторонних
пользователей, более близких к приемнику, чем собственный (fc-й)
абонент, может значительно превзойти по интенсивности полезный сигнал
вследствие резкой зависимости принимаемой мощности от расстояния
(см. подпараграф 3.5.2). Поэтому мы можем считать, что в результате
эффективного контроля мощности все А^ к — 1,2, ...,iiC одинаковы
или, другими словами, мощности всех сигналов идентичны и равны Р.
Тогда 1-й сторонний шумоподобный сигнал, энергия которого полагается
равномерно распределенной в полосе W, создаст избыточную
спектральную плотность мощности шума Ni = P/W, которая добавится к спектру
теплового шума. Поскольку имеется К—1 независимых сторонних
пользователей, общая спектральная плотность ПМД составит Ni = (К — 1)N[ =
= (К — 1)P/W. Теперь можно записать отношение сигнал - (шум+помеха)
по мощности </j, учитывающее как ПМД, так и тепловой шум
41 т + т N0 + {K-i)p/w ■ v '
Как правило, число пользователей К и/или выигрыш от обработки
для каждой сигнатуры достаточно велики для того, чтобы сработал
механизм центральной предельной теоремы, и второе слагаемое в (4.8) могло
трактоваться как гауссовская случайная величина. Это оправдывает
повсеместно применяемую гауссовскую аппроксимацию ПМД и означает,
что результаты, полученные в главе 2 для классических задач приема
(вероятность ошибки, точность оценивания и др.), можно приложить и к
родственным задачам в присутствии ПМД после замены отношения сигнал -
шум q2 на отношение сигнал - (шум+помеха) q2. Если, например,
передача данных осуществляется с помощью БФМ, то для любого абонента
вероятность ошибки на бит вычисляется с помощью (2.19), в котором q2
заменяет q2 = 2Е/Щ.
Результат (4.9) дает возможность оценить максимальное число
пользователей, которое может обслужить асинхронная CDMA система при за-
170 Глава 4- Многопользовательская среда
данном частотно-временном ресурсе WT. Нетрудно заметить, что в
многопользовательской среде отсутствие теплового шума не приведет к
безошибочным решениям на приемной стороне, поскольку наличие ПМД
удержит параметр сигнал - (шум-Ьпомеха) конечным и равным
предельному отношению сигнал - помеха
2 _ 2Е - 2РТ _ 2WT
Qlf ~~ (К - 1)(P/W) ~ {К - \){P/W) " К - 1* ( '
Последний результат показывает, что предельное отношение сигнал -
помеха и, следовательно, предельная достоверность приема полностью
определяются частотно-временным произведением, т. е. выигрышем от
обработки WT, и числом пользователей. Так как всегда qj ^ qj*,
максимально возможное число пользователей может быть оценено следующей
верхней границей:
2WT
Qi
где в качестве qj следует подставлять значение, гарантирующее
требуемую достоверность приема в анализируемой системе. За конкретным
примером обратимся к системе передачи данных с использованием БФМ
или ФМ-4, в которой требуется обеспечить вероятность ошибки на бит
не хуже Ре = Ю-2. Из (2.19) или рис. 3.16 (пунктирная линия) можно
видеть, что в отсутствие замираний отношение сигнал-(шум+помеха),
равное 7 дБ (qj = 5), достаточно для выполнения этого требования, что
дает следующую оценку для потенциального числа пользователей
К ^ Щ^ + 1. (4.12)
5
В то же время система с FDMA способна обслужить WT
пользователей1 в рамках того же полного частотно-временного ресурса (Wt = W,
Tt = Т), что примерно в 2,5 раза больше, чем правая часть (4.12).
Подобный результат может подтолкнуть к мысли о бесперспективности
асинхронного варианта CDMA в сравнении с FDMA. В следующем
разделе, однако, мы убедимся, что в системах, базирующихся на повторном
использовании частотного ресурса в пространственно удаленных зонах
(например, сотовых системах), асинхронная версия CDMA значительно
превосходит FDMA по максимальному числу обслуживаемых абонентов.
гМы игнорируем потенциальное удвоение числа пользователей за счет
квадратурного сдвига несущей, поскольку для несинхронизированных абонентских сигналов оно
неосуществимо.
4-6, Асинхронное кодовое разделение в сотовых сетях 171
4.6. Асинхронное кодовое разделение в сотовых сетях
4.6.1. Проблема повторного использования ресурса
и сотовые системы
При создании новой коммерческой беспроводной многопользовательской
системы разработчик, естественно, заинтересован в максимизации числа
обслуживаемых абонентов, будучи в то же время скован рамками строгих
фундаментальных ограничений. Первым из таковых является
ограниченная мощность, лимитирующая размеры зоны, охватываемой одиночным
передатчиком. Кривизна земной поверхности и быстрое ослабление
интенсивности сигнала с расстоянием, характерное для диапазонов волн,
используемых системами, родственными мобильному телефону (см. § 3.5),
практически исключают возможность покрытия зон с радиусом,
превышающим десятки километров. Другим жестким ограничением является
доступный частотно-временной ресурс, т. е. полоса, занимаемая спектром
в комбинации с требуемой скоростью передачи. К примеру, полоса
физического канала стандарта cdmaOne (IS-95) Wt — 1,25 МГц. При скорости
передачи кодированных речевых данных R = 19,2 бит/сек и бинарной
ФМ, используемых в канале «вниз», потенциальное число активных
пользователей согласно (4.6) К = 130. Ясно, что это число чрезвычайно мало
для густонаселенной городской зоны, а если наряду с телефонным
сервисом требуется высокоскоростная передача данных (например,
мультимедийных), вывод будет еще более пессимистичным.
Эффективный путь преодоления указанных препятствий предлагает
сотовая топология, т.е. сеть, состоящая из множества базовых станций,
обслуживающих свои индивидуальные зоны (ячейки), и в совокупности
покрывающих всю необходимую область. Передатчик базовой станции
(БС) с относительно низкой мощностью, посылающий сигналы
пользователям или мобильным станциям (МС) в пределах обслуживаемой ячейки,
и приемники МС образуют канал «вниз». Канал «вверх» содержит
передатчики МС и приемник БС. Все БС работают строго координированно,
и вся сеть имеет выход в фиксированные сети телефонной связи и
передачи данных. В том случае, когда МС, перемещаясь в зоне покрытия
сети, покидает текущую ячейку, происходит эстафетная передача, т. е.
автоматический переход обслуживания этой МС к БС смежной
ячейки. В рамках сотовой философии пространственное затухание радиоволн
проявляет свое позитивное качество, открывая путь к многократному
использованию одних и тех же физических каналов (например, частотных
полос при FDMA или временных слотов при TDMA) разными
передатчиками, если взаимное удаление последних достаточно для приемлемого
снижения уровня сигнала каждого в зонах покрытия остальных. При этом
172 Глава 4- Многопользовательская среда
простое наращивание количества ячеек гибко решает проблемы
увеличения абонентской емкости (числа обслуживаемых пользователей) и
расширения зоны покрытия. В малонаселенных районах макросоты (с радиусом
до десятков километров) могут обеспечить нужное покрытие, тогда как
в густонаселенных зонах может возникнуть потребность в использовании
микро- (сотни метров) и даже пикосот (десятки метров). Повсеместно
принято аппроксимировать индивидуальную ячейку сотовой сети
правильным шестиугольником, так что рисунок сети напоминает медовые
соты (см. рис. 4.4), объясняя названия и самой сети, и ее яч^ек.
Оценим эффективность использования
частотно-временного ресурса в сотовой
системе, использующей классические схемы
множественного доступа FDMA и TDMA. Во
избежание ненужных повторов и учитывая
эквивалентность FDMA и TDMA в абонентской
емкости (см. § 4.3), будем
ориентироваться только на FDMA. Очевидно, что радиус
Рис. 4.4. Конфигурация соты не может быть больше радиуса полно-
сотовой сети го затухания волны, но последний, как уже
указывалось, должен быть, по крайней мере,
вдвое меньше расстояния между центрами сот, использующих
идентичные наборы частот. Если первое условие не выполняется, то МС,
находящаяся у границы соты, примет от ВС сигнал, слишком слабый
для надежного контакта. Нарушение второго условия приведет к
возникновению межсотовых помех, поскольку вновь МС, находящаяся вблизи
границы ячейки, примет не только сигнал своей БС, но и сигнал
сторонней ВС, находящейся на связи с некоторой обслуживаемой ею МС на той
же частоте. Другими словами, наборы частот всех сот вокруг любой
конкретной ячейки должны отличаться от множества частот, используемого
центральной сотой. Таким образом, возникает конфигурация,
называемая кластером, в пределах которой повторное использование множества
частот запрещено. Регулярная структура сот, в которой
распределение частот между ячейками удовлетворяет вышеприведенному условию,
может существовать только при некоторых определенных размерах
кластера. Наиболее типичным является 7-сотовый кластер, выделенный на
рис. 4.4. Следовательно, лишь седьмая часть общего числа физических
каналов (частот), допускаемых полным частотно-временным ресурсом WfTt
системы, может использоваться отдельной ячейкой. Отсюда следует
оценка максимального числа пользователей на одну соту в системах с FDMA
или TDMA в предположении асинхронной работы, характерной для
канала вверх:
Kc = WtTt/7. (4.13)
4-6. Асинхронное кодовое разделение в сотовых сетях 173
В свете последнего результата высказанное ранее пессимистическое
предположение относительно перспектив асинхронного кодового
разделения подлежит коренному пересмотру.
4.6.2. Число пользователей на соту при асинхронном
кодовом разделении
Напомним, что асинхронный вариант CDMA опирается на
широкополосную идеологию, и каждая сигнатура занимает весь доступный
частотно-временной ресурс. Рассмотрим канал «вверх» CDMA сотовой системы,
в которой все ячейки используют одну и ту же частотную полосу без
дробления спектрального ресурса между ними. Другими словами, сигнатуры
всех сот, включая соседние, занимают одну и ту же спектральную
полосу, и кластер состоит из единственной ячейки. Ясно, что приемник БС
некоторой конкретной соты будет принимать помехи множественного
доступа не только от абонентов своей соты, но и от МС, обслуживаемых
сторонними базовыми станциями. Возникает естественный вопрос:
насколько велик вклад в общий уровень ПМД компонент, обусловленных
передатчиками МС внешних сот? Для оценки интенсивности этих
межсотовых ПМД обратимся к рис. 4.5, на котором две примыкающие соты
Ci, C2 аппроксимированы кругами радиуса Dc, а их базовые станции
обозначены как BS1 и BS2. Пусть интересующая нас МС (MS на рисунке)
расположена в зоне покрытия BS2.
Рис. 4.5. Иллюстрация к расчету
межсотовых ПМД
Несмотря на то, что MS обслуживается BS2, ее сигнал также
попадает на вход приемника BS1, внося вклад в межсотовые помехи. Обозначим
расстояния от MS до BS1 и BS2 через D\ и D<i соответственно и
напомним, что точная регулировка мощности жизненно важна в любой
асинхронной CDMA системе для нейтрализации эффекта «близкий-далекий».
Благодаря петле контроля мощность сигнала, принимаемого BS2 от MS,
поддерживается постоянной и равной Р. Если мощность излучения MS
составляет Р^ то согласно модели распространения § 3.5 Р = kPt/D^.
174 Глава 4- Многопользовательская среда
С другой стороны, сигнал, распространяющийся от MS до BS1,
претерпевает ослабление, зависящее от расстояния Z?i, так что мощность,
принимаемая BS1, будет Pr\ = kPt/Df. Вместе с предыдущим это равенство
позволяет выразить мощность Рг\ через мощность Р полезного сигнала
на входе приемника своей ВС как
Pri{D2,0) = &)*Р, (4.14)
где координаты MS D2, О (см. рис. 4.5) подчеркивают зависимость РТ\
от положения MS внутри соты С2.
Усредним теперь результат (4.14) по всей площади ячейки С2, полагая,
что любое положение MS внутри соты равновероятно, т.е. совместная
плотность вероятности полярных координат W(D2,6) = D2/ttD%
внутри С2 и равна нулю вне ее. Тогда средняя мощность Рг\ ПМД,
создаваемой единственной сторонней МС соседней соты, составит
Wi = ЛPri(D2,e)W(D2l9)dD2de = ^ J J]^rdedD2.
с2 с о о г
При значении экспоненты затухания е = 4, адекватном многим
сценариям мобильной связи, интегрирование в последнем выражении
может быть выполнено аналитически [20]. На основании теоремы косинусов
D\ = (2DC)2 + D\ + 2(2DC)D2 cos в и
Dc 27Г
D%
Рг1 = Щ1 J {ADl + D\ + ADJh cos 0)2 ШГ>2 =
■d6dx.
-tIJ
(x1 + 4#cos0 + 4)2
00
Внутренний интеграл здесь можно либо взять тригонометрической
подстановкой, либо найти в таблицах интегралов (например, [21]), придя
к внешнему подынтегральному выражению (4хъ -\-х7)/(4 — ж2)3.
Воспользовавшись вновь таблицей интегралов [21], получим соотношение
fVT=P(161n|-y)<0,05P.
Это значение следует умножить на число пользователей Кс,
приходящееся на одну соту, а также на число соседних сот, окружающих данную.
При шестиугольном представлении ячейки имеется шесть соседних сот,
и полная мощность межсотовых помех от соседних ячеек не превышает
величины 6 х 0,05 х КСР ~ 0,3ifcP. Строго говоря, эту оценку
необходимо увеличить, учтя помехи от более удаленных сот. Однако, как можно
4-6. Асинхронное кодовое разделение в сотовых сетях 175
предвидеть на основании проделанных вычислений, подобная поправка
окажется пренебрежимо малой в сравнении с полученной оценкой [20].
С некоторым запасом можно считать, что полная мощность межсотовых
помех Piyext ^ 0,5ifcP, тогда как внутренние помехи ПМД,
создаваемые Кс — \ собственными мобильными абонентами, характеризуются, как
и ранее, мощностью Pi,in = {Кс — 1)Р- Теперь предельное отношение
сигнал-помеха (4.10) можно модифицировать с учетом как внутренних, так
и внешних ПМД
2 = 2Е 2WT
Qlf {Ke-l)fi+0,5Kc$ 1,5ЛГС-Г [ 'Ь)
Этот результат допускает дальнейшую ревизию для «чистой»
телефонии, поскольку каждый из участников диалога делает паузы, тратя
какое-то время на прослушивание и обдумывание. Очевидно, что на
время таких пауз передатчик молчащей стороны можно выключить или, по
крайней мере, значительно снизить его мощность. Сходная возможность
использовалась и в мобильном телефоне второго поколения (не CDMA)
с целью продления срока работы батарей. Однако только в стандартах
с CDMA она способствует снижению уровня ПМД и, следовательно,
потенциальному увеличению числа пользователей, обслуживаемых одной сотой.
За типичное значение фактора речевой активности, т. е. доли общей
продолжительности разговора, в течение которого участник соединения
активен, часто принимается цифра 3/8. Соответственно, взвешивание
средней мощности ПМД этим коэффициентом трансформирует
полученное выше предельное отношение сигнал - помеха следующим образом:
2 16WT
Qlf
А,ЬКС - 3
Решение этого уравнения относительно Кс приводит к значительно
более обнадеживающей оценке абонентской емкости асинхронного
варианта CDMA по сравнению с первоначальной (4.12), не принимавшей в
расчет специфической топологии системы:
Подставив в (4.16) прежнюю условную цифру 7 дБ для требуемого
предельного отношения сигнал-помеха, имеем
32 WT 2 ,АЛ^
к^-4ь- + г- <4-17>
Оценка, даваемая этим неравенством, примерно пятикратно
превышает следующую из (4.13) при одном и том же частотно-временном ресурсе.
Таким образом, потенциально асинхронный вариант CDMA заметно вы-
176 Глава 4- Многопользовательская среда
игрывает в абонентской емкости соты в сравнении с более
традиционными ортогональными схемами множественного доступа на основе FDMA
и TDMA.
Пример 4.1. Предположим, что для организации множественного доступа
в полосе 5МГЦ, типичной для 3G систем, используется FDMA. Тогда при БФМ
передаче кодированной речи со скоростью 19,2 кбит/с потенциально можно
обслужить Кс = Wt/7R — 37 пользователей на соту. В то же время, из (4.17)
следует, что альтернатива асинхронного варианта CDMA значительно более
эффективна в смысле утилизации ресурса, позволяя приблизить абонентскую
емкость соты к Кс = 32W/45R + 2/3 « 185.
Оценки (4.16) и (4.17) можно заподозрить в излишней оптимистично-
сти, поскольку они получены в пренебрежении тепловым шумом. В
реальной практике ими можно руководствоваться только тогда, когда мощности
принятых абонентских сигналов достаточно велики для подавляющего
преобладания суммарной ПМД над АБГШ. С другой стороны,
проектировщик чаще заинтересован в минимизации излучаемой мощности,
стремясь, например, продлить срок службы батарей мобильного терминала
или улучшить ЭМС. Прибавив спектральную плотность мощности АБГШ
к знаменателю в (4.15) и снова учтя фактор речевой активности, легко
показать, что при отношении сигнал-шум (без ПМД) по мощности q2
и необходимом отношении сигнал - (шум+помеха) д|, выражение (4.16)
заменяется на
Если, например, полная мощность ПМД должна иметь тот же уровень,
что и мощность шума в полосе сигнала, то q2 = 2q2, и
что составляет примерно половину от числа пользователей на соту,
вычисленного по предельному отношению сигнал - помеха (см. (4.16)). Для
того же, что и ранее, условного значения qj в 7 дБ
16WT 2
*'«^+з- _ <4-20)
Хотя с уменьшением мощности сигнала число пользователей на соту
упало вдвое, оно, тем не менее, примерно в два с половиной раза
превышает аналогичный показатель для FDMA и TDMA.
Интересной чертой систем с асинхронным кодовым разделением, иногда
причисляемой к достоинствам, является «мягкий» характер отказов в
обслуживании. Во всех реальных многопользовательских системах
физические каналы (поднесущие частоты в FDMA, временные слоты в TDMA
или сигнатуры в CDMA) не закрепляются за потребителями раз и
навсегда. Вместо этого сеть сама управляет совокупностью каналов
трафика и выделяет пользователю один из них только тогда, когда от него
поступит заявка на соединение. Разумеется, при этом приходится
резервировать часть системного ресурса для организации запросного канала.
В системах с FDMA или TDMA число физических каналов жестко
фиксировало и время от времени может произойти отказ в обслуживании,
т.е. игнорирование сетью пользовательского запроса по причине
занятости всех каналов трафика. Вероятность блокировки, равная 2 %, часто
полагается допустимой, и исходя из нее рассчитывается необходимое
число каналов. Время от времени профиль распределения абонентов в зоне
покрытия сети может изменяться настолько серьезно, что в некоторых
сотах отказы в обслуживании становятся недопустимо частыми. В
подобных обстоятельствах оператор нередко вынужден идти на
реконфигурацию сети и, как следствие, частотную перепланировку, затрагивающую
все соты.
Иные сценарии характерны для сетей CDMA. Во-первых, если
число уже активных абонентов равно условно-номинальному, определяемому
(4.16) или (4.20), вновь поступившую заявку, тем не менее, можно
удовлетворить, присвоив входящему пользователю сигнатуру, отличную от уже
занятых. Это приведет к некоторому (обычно небольшому) уменьшению
отношения сигнал- (шум+помеха), и, следовательно, качества
обслуживания всех активных пользователей. Таким образом, вместо прямого отказа
происходит «мягкая блокировка». Во-вторых, если с течением времени
трафик в некотором районе драматически возрастает, оператор может
ввести в действие дополнительную базовую станцию в «горячей зоне» без
нужды в частотной перепланировке или иных радикальных шагах,
затрагивающих все ячейки сети.
Материалы главы дают основание резюмировать, что
широкополосная философия является гибким и эффективным средством в реализации
множественного доступа, а сотовые сети связи дают весьма благодатную
почву для наиболее убедительного проявления преимуществ CDMA.
Задачи
4.1. Цифровая система передачи данных с FDMA должна обслуживать не
менее 100 пользователей. Оцените минимальную общую полосу,
занимаемую системой, если необходимая скорость передачи данных составляет
20 кбит/с на одного абонента, а способ модуляции — БФМ. Как
изменится значение полосы, если БФМ заменить на ФМ-4? Ответьте на те же
вопросы, если вместо FDMA используется TDMA.
178
Глава 4- Многопользовательская среда
4.2. FDMA система с ФМ-4 предназначена для обмена цифровой
информацией между летательными аппаратами и работает в диапазоне 3 ГГц.
Максимальная скорость объекта — 1800 км/ч, стабильность опорного
генератора — 2 • Ю-7, защитный интервал, обусловленный неидеальной
избирательностью фильтра, — 1 кГц. Определите максимальное число
пользователей, которое может обслужить система при полосе 2,32 МГц
и скорости передачи данных пользователем — 20 кбит/с.
4.3. Цифровая многопользовательская система с TDMA должна обслуживать
не менее 100 абонентов. В системе используется модуляция ФМ-8.
Определите минимальную полосу, занимаемую системой, если требуемая
скорость передачи на одного пользователя составляет 20 кбит/с.
4.4. Индивидуальному частотному субканалу с БФМ линии «вверх» цифровой
TDMA сотовой системы отведена полоса в 200 кГц. Временной интервал
между последовательными пакетами данных произвольного пользователя
должен составлять не более 5 мс, скорость передачи данных
потребителем — около 20 кбит/с, максимальный радиус соты — 30 км. Определите
максимальное число TDMA каналов, содержащихся в одном частотном
субканале.
4.5. В синхронной CDMA-системе должно быть организовано 128 физических
каналов. Передача данных осуществляется с помощью ФМ-8 при
скорости на одного пользователя 20 кбит/с. Оцените минимально необходимую
полосу, занимаемую системой.
4.6. Синхронная CDMA-система имеет 50 физических каналов с модуляцией
ФМ-16. Скорость передачи на одного пользователя 20 кбит/с. Общая
полоса, занимаемая системой, равна 500 кГц. Какова величина выигрыша
от обработки в системе? Свободна ли система от помех множественного
доступа? Что произойдет при уменьшении полосы в 4 раза?
4.7. В пределах одной ячейки сотовой CDMA-сети находятся два абонента на
расстояниях 500 м и 5 км от базовой станции. Мобильный абонент,
находящийся на большем расстоянии, излучает сигнал мощностью 100 мВт.
Определите мощность, излучаемую более близким пользователем, в
предположении эффективной работы петли контроля мощности и экспоненты
затухания е = 4.
4.8. В канале «вверх» сотового телефона стандарта cdmaOne используется
асинхронный вариант CDMA. Передача данных осуществляется
посредством ортогональных сигналов, кодирующих шестибитовые блоки, со
скоростью 28,8 кбит/с. Полоса сигнала может быть принята равной 1,25 МГц.
Каким будет число пользователей на соту, если минимально требуемое
отношение сигнал-(шум+помеха) составляет 7 дБ, фактор речевой
активности равен 3/8, внешняя ПМД добавляет к внутренней 50 %, а
тепловой шум пренебрежимо мал. Что изменится, если отношение сигнал-
шум только для теплового шума составляет 9 дБ?
4.9. Оцените число необходимых сот в условиях предыдущей задачи (без
пренебрежения АБГШ) для обслуживания 50 000 абонентов, если вероятность
Задачи в пакете MATLAB 179
активного состояния абонента составляет 0,02. Сравните результат с
аналогичным для случая построения канала на базе FDMA.
4.10. Как изменится потенциальное число пользователей, если в условиях
задачи 4.8 ортогональную шестибитовую передачу заменить БФМ, оставив
полосу и скорость прежними?
4.11. Основываясь на модели Окамуры-Хаты и в пренебрежении тепловым
шумом покажите, что асинхронный вариант CDMA неприменим в канале
«вверх» типичной системы с макросотами без эффективной регулировки
мощности.
4.12. Имеется синхронный канал «вниз» CDMA сотовой системы. В пределах
одной соты используется максимальное число ортогональных сигнатур.
Как оценить воздействие окружающих базовых станций на приемники
мобильных абонентов данной соты при отсутствии распределения
частотно-временного ресурса между сотами? Какой подход уместно
рекомендовать при выборе сигнатур для подобной системы?
4.13.
Задачи в пакете MATLAB
Напишите программу для иллюстрации принципа FDMA. Примерные
осциллограммы даны на рис. 4.6.
о
с
с
>>
о я
is о
р-1
S3 о
0.5
0.5
1.0
1.0
1.5
л т г
I I E
I I А*
I I Г \
_ Y--^--r
1.5
Рис. 4.6. Моделирование принципов FDMA
Глава 4* Многопользовательская среда
а) Сформируйте матрицу К поднесущих (рекомендуется взять К в
пределах 2-10). Выберите частоты так, чтобы 100 точек содержали в
точности целое число периодов, для каждой следующей частоты на
единицу большее, чем для предыдущей. Для первой поднесущей можно взять
4-6 периодов;
б) Возьмите 2-3 случайных бита информации для каждой поднесущей
и выполните БФМ всех поднесущих. Визуализируйте модулированные
сигналы для каких-либо двух пользователей;
в) Просуммируйте все модулированные сигналы, чтобы получить
групповой сигнал и выведите его на дисплей;
г) Осуществите демодуляцию каждого переданного бита для каждого
пользователя, умножив групповой сигнал на соответствующую подне-
сущую и проинтегрировав результат за длительность бита.
Отобразите на дисплее выборочно выходы демодуляторов выбранных
пользователей. Сформируйте решения о принятых битах для всех
пользователей и сравните их с переданными битами.
д) Выполните программу для разного числа пользователей и
прокомментируйте результаты.
Используйте программу предыдущей задачи для демонстрации эффекта
межканальных помех, сопровождающих частотный дрейф в схеме FDMA.
Введите частотный сдвиг +0,25 для первой поднесущей и зафиксируйте
одинаковые битовые серии для всех пользователей. Уменьшая амплитуду
первой поднесущей, отметьте ее значение, при котором появляются
ошибочные решения о битах первого пользователя. Выполните программу
при разных значениях частотного дрейфа и прокомментируйте
результаты.
Напишите программу, экспериментально подтверждающую соотношение
(4.10) для предельного отношения сигнал - помеха для асинхронной CDMA.
а) Задайте N в пределах от 50 до 80 и сформируйте К х N матрицу
бинарных (принимающих значения ±1) независимых случайных чисел;
б) Используйте строки этой матрицы как сигнатуры К пользователей.
Ассоциируйте первую сигнатуру с нужным пользователем, а
остальные — со сторонними;
в) Просуммируйте все строки, кроме первой, чтобы смоделировать ПМД;
г) Рассчитайте принятую ПМД на выходе приемника как скалярное
произведение входной ПМД (пункт (в)) и первой сигнатуры;
д) Повторите пункты (а)-(г) 5000 раз, рассчитайте дисперсию ПМД и
отношение сигнал-помеха и сравните его с оценкой (4.10). Какое
значение W следует использовать в (4.10) чтобы экспериментальные
результаты совпали с теоретически предсказанными? Почему подстановка
WT — N не обеспечивает совпадения оценки (4.10) с экспериментом?
Задачи в пакете MATLAB 181
е) Постройте гистограмму ПМД по всем 5000 экспериментам и убедитесь
в ее близости к гауссовской плотности вероятности с соответствующей
дисперсией (пример дан на рис. 4.7);
ж) Выполните программу для разных комбинаций N, К^ проверяя
каждый раз справедливость (4.10).
600
400
200
" ■ т 1 1 - ■
-.1 гпППП II II II 1 I 1 1
1 J ! Г™ |
1 1 I II 1 1 ППпп^ , .
-150
-100 -50
50
100
150
0.015
Рис. 4.7. Гистограмма ПМД и ее гауссовское приближение
4.16. Напишите программу, подтверждающую малый вклад межсотовой
компоненты в суммарную ПМД в асинхронной сотовой CDMA-системе.
Рекомендованные шаги:
а) Положите N в пределах от 80 до 100 и число пользователей на соту К
в пределах от 20 до 25;
б) Используя генератор равновероятных случайных чисел, сформируйте
и визуализируйте внутрисотовую ПМД как сумму К — 1 случайных
бинарных (состоящих из элементов ±1) сигнатур длины N\
в) Сформируйте 6К х 2 матрицу случайных полярных координат Dc,
0 внешних МС (см. рис. 4.5), чтобы смоделировать случайное
равномерное распределение МС в пределах внешних сот. Заметьте, что
угловая координата должна быть равномерно распределена на
отрезке [—7г,7г], но радиус должен иметь линейно нарастающую плотность
вероятности. Последняя может быть смоделирована генерацией
равновероятных случайных чисел с последующим взятием их квадратных
корней;
182 Глава 4- Многопользовательская среда
г) Сформируйте 6if-мерный вектор отношений расстояний D2 (от
внешней МС до БС, обслуживающей ее) и D\ (до БС, обслуживающей
полезную МС)
£2 _ Ih
Di ~ y/4D2c + D\ + 4DCD2 cos в'
где радиус соты можно положить равным единице;
д) Сформируйте и отобразите на дисплее межсотовую ПМД как сумму
всех внешних сигнатур, взвешенных множителями затухания.
Последние вычисляются на основании предыдущего пункта в предположении,
что экспонента затухания е = 3,8 (см. (4.14));
е) Сформируйте и выведите на экран полную ПМД, просуммировав внут-
рисотовую помеху с межсотовой, и оцените относительное увеличение
полной ПМД по сравнению с внутрисотовой;
ж) Визуализируйте диаграмму рассеяния, отображающую случайное
распределение МС во внешних сотах (см. пример на рис. 4.8);
з) Повторите выполнение программы для разных комбинаций iV, К,
сравните результаты с теоретически предсказанными и дайте свой
комментарий.
Рис. 4.8. Случайное распределение МС в окружающих сотах
ГЛАВА 5
ДИСКРЕТНЫЕ
ШИРОКОПОЛОСНЫЕ
СИГНАЛЫ
5.1. Широкополосная модуляция
Обратимся вновь к общей модели (2.37) радиосигнала
s(t) - Re [S(t) exp(j27T/0*)] , S{t) = S(t) exp[j7(*)].
Понятно, что для превращения сигнала в широкополосный необходимо
соответствующее управление его комплексной огибающей S(t), т.е.
модуляция мгновенной амплитуды S(t) и мгновенной начальной фазы j(t).
Как уже отмечалось в гл. 1, «чистая» амплитудная модуляция не является
эффективным инструментом обеспечения широкополосности, поскольку
она расширяет спектр лишь ценой концентрации энергии сигнала в
коротких временных интервалах. Фактически это означает не что иное,
как работу с короткими простыми сигналами. Напротив, угловая
(фазовая или частотная) модуляция способна безгранично (по крайней мере,
теоретически) расширить спектр, не затрагивая распределения энергии
сигнала во времени, т. е. длительности сигнала, обретая тем самым
фундаментальную роль в технологии распределенного спектра. Амплитудная
же модуляция выступает как вспомогательное средство, нередко
оказывающееся продуктивным в комбинации с угловой модуляцией.
В зависимости от характера используемой модуляции все
широкополосные сигналы можно разделить на непрерывные и дискретные. Для
первых закон модуляции, т.е. комплексная огибающая 5(£), —
непрерывная функция времени, тогда как модулируемые параметры вторых
(амплитуда, частота, начальная фаза) — кусочно-постоянны, скачкообразно
изменяя свои значения только в дискретные моменты времени. Пример
непрерывного широкополосного сигнала будет кратко рассмотрен в § 6.2,
однако в дальнейшем основное внимание будет фокусироваться на
дискретных сигналах в силу их доминирующего распространения в
большинстве современных и перспективных коммерческих широкополосных
систем.
184 Глава 5. Дискретные широкополосные сигналы
5.2. Обобщенная модель
и категории дискретных сигналов
Дискретные сигналы, изучаемые в книге, можно охватить следующим
описанием, обобщающим уже использованное в подпараграфе 2.7.3:
дискретный сигнал есть последовательность элементарных символов
(импульсов) фиксированной формы, повторяющихся с некоторым
фиксированным временным интервалом. Упомянутый элементарный импульс,
именуемый далее чипом, исчерпывающе характеризуется комплексной
огибающей So(£), задающей его форму и закон внутренней угловой модуляции,
если последняя присутствует. Традиционно (но необязательно) временной
интервал А между последовательными чипами равен или больше
длительности чипа Ас. Модуляция всего сигнала сводится к манипулированию
амплитудами, фазами и, возможно, частотами отдельных чипов. В
соответствии с этим словесным описанием формальное представление
комплексной огибающей дискретного сигнала дается равенством
S(t)= £ aiSo(t-iA)exp(j27rFit),
(5.1)
где в дополнение к уже расшифрованным обозначениям щ и F{ —
соответственно комплексная амплитуда и частота (измеряемая сдвигом
относительно фиксированной центральной частоты) г-го чипа. Очевидно, что
последовательность {|af|, г = ..., —1,0,1,...} определяет действительные
амплитуды чипов, т. е. их амплитудную модуляцию. Аналогично
последовательности {(fi = argaj, i = ..., —1,0,1,...} и {F^, г = ..., —1,0,1,...}
задают законы модуляции чипов по фазе и частоте. Рис. 5.1
иллюстрирует смысл некоторых введенных обозначений.
А «Ас
Рис. 5.1. Пример дискретного сигнала
Предположим, что в модели (5.1) действительные амплитуды \щ\
могут быть ненулевыми только для 0 ^ г ^ N — 1, тогда как при г <
0 vl i > N
= 0, т.е. сигнал является пакетом конечного числа N
манипулированных чипов. Назовем такой сигнал импульсным или апери-
5.3. Корреляционные функции АФМ сигналов 185
одическим. Длительность апериодического сигнала Т = (N — 1)А + Дс.
Важной альтернативой импульсному является сигнал, у которого закон
модуляции повторяется с периодом в N чипов: щ = щ+н, Fi = J^+at,
г = ..., — 1,0,1, — Дискретный сигнал подобного типа естественно
называть периодическим. Период последнего в единицах реального времени
Т = JVA, и любой такой сигнал получается, очевидно, повторением с
периодом NA апериодического, являющегося, в свою очередь, однопериодным
сегментом периодического сигнала. В обоих случаях мы будем называть
параметр N длиной дискретного сигнала.
В рамках описанной общей модели можно выделить несколько
категорий дискретных сигналов в зависимости от конкретных деталей
модуляции чипов.
1. Если манипулируются лишь комплексные амплитуды чипов, а их
частоты одинаковы (Fi = 0, % = 0,1,..., N — 1), сигнал
называется амплитудно-фазоманипулированным (АФМ), Традиционное
название последовательности комплексных амплитуд чипов {сц, г =
0,1,..., N — 1} — кодовая последовательность или просто код.
2. Если манипуляции подлежат только фазы чипов АФМ сигнала, а их
амплитуды неизменны (\щ\ — 1, г = 0,1,..., iV — 1), АФМ сигнал
именуют фазоманипулированным (ФМ). ФМ сигналы характерны
для так называемых широкополосных систем с прямым
расширением спектра (см. § 7.1).
3. Среди ФМ сигналов возможна дальнейшая классификация в
зависимости от модуляционного алфавита. В случае бинарных
комплексных амплитуд с алфавитом щ — ±1 (или эквивалентно \щ\ = 1, щ £
{0,7г}, % — 0,1,..., N — 1) сигнал является бинарным ФМ (БФМ),
квадратурный ФМ алфавит щ = ±l,±j (или эквивалентно \щ\ = 1,
(fi E {0,7г, ±7г/2}, г = 0,1,..., N ~ 1) порождает сигнал с
квадратурной ФМ (КФМ или ФМ-4) и т. д.
4. Если управлению подвергаются только частоты чипов, а
комплексные амплитуды неизменны, сигнал является частотно-манипулиро-
ванным (ЧМ). Кодовая последовательность подобного сигнала
представляет собой последовательность частот {Fi, г = 0,1,..., N — 1}.
Сигналы этого типа используются, в частности, в системах с
прыгающей частотой (см. § 7.1).
5.3. Корреляционные функции АФМ сигналов
Корреляционные функции, характеризующие схожесть сдвинутых во
времени копий сигналов, критически важны в задачах измерения времени
186 Глава 5. Дискретные широкополосные сигналы
и разрешения (см. § 2.11-2.16). Искусство дизайна широкополосных
систем, как это демонстрируется далее, во многих аспектах
подразумевает умение находить сигналы с должными корреляционными свойствами.
Цель настоящего раздела состоит в получении обобщающего выражения
для корреляционных функций АФМ сигналов. Как следует из
предыдущего, комплексная огибающая АФМ сигнала имеет вид
оо
S(t)= J2 aMt-iA). (5.2)
г——оо
Обратимся вначале к равенству для нормированной АКФ (2.67),
учитывая, что в случае периодического сигнала подынтегральное выражение
также периодично, и, следовательно, усреднение по времени
(интегрирование) может быть выполнено в пределах одного периода с нормировкой
к энергии однопериодного сегмента сигнала. Тем самым, в типичном для
практики предположении1 Дс ^ А, можно воспользоваться
универсальным выражением
т
p{T) = ±Js(t)Sr(t-r)dt (5.3)
О
пригодным как для апериодического, так и периодического сигналов, где
Е = ||a||2i?o — полная энергия для первого и энергия за период для
второго. Здесь Е$ обозначает энергию чипа, а ||а|| — геометрическая
длина (евклидова норма) кодового вектора а = (ao,ai,... , ajv-i), ина-
N-1
че говоря, ||а||2 = Х^ \аг\ — энергия iV-элементной последовательности
{a0,ai,... ,адт_1}.
Подстановка (5.2) в (5.3) дает
т
1 оо оо \
Р(т) = # Е Е a*a* J S0(t - iA)S*0(t - *Д - т) di =
i—~ оо к——оо q
, оо N-l Tr
= E ^ £a*a*/ S0(t-iA)S*0(t-kA-T)dt,
k~—oo г=0 q
где последнее равенство следует из равенства интеграла нулю для г вне
множества {0,1,..., N — 1}.
Введение АКФ одного чипа
оо
Рс(т)= Jr J S0(t)S*0(t-r)dt (5.4)
—оо
1 Конечный результат останется справедливым и без этого допущения, позволяющего,
однако, упростить вывод за счет исключения некоторых второстепенных деталей.
5.3. Корреляционные функции АФМ сигналов 187
придает равенству форму
jfc=_00Vllall »=о /
Теперь замена индекса суммирования к на m = г — А; представляет
последний результат как
оо
р(т) = Ц р(™)рс{т - тА), (5.5)
т=—оо
где
х N-1
Р(™>) = Й-Й2 И а*<-т (5-6)
llall г=0
— АКФ кодовой последовательности {ао, ах,..., адт-i}, характеризующая
схожесть последней со своей копией, сдвинутой на га позиций.
Соотношение (5.5) допускает весьма красноречивую трактовку.
Сравнение его с моделью (5.2) позволяет заключить, что АКФ АФМ
сигнала может сама интерпретироваться как АФМ сигнал! При этом чипом
последнего служит АКФ />с(г) исходного чипа, тогда как кодовой
последовательностью оказывается АКФ (5.6) кодовой последовательности
{ao,ai,... ,ajv-i} исходного сигнала. Следовательно, при заданном чипе
So(t) АКФ АФМ сигнала полностью определяется АКФ р(гп) кодовой
последовательности (в дальнейшем АКФ кода), и синтез АФМ сигналов
с хорошими корреляционными свойствами состоит в отыскании
последовательностей с хорошими АКФ. Отметим также, что, как и любая
нормированная АКФ, р(пг) при га — 0 равна единице и является четной
функцией своего аргумента: р(тп) = р*(—га).
Для построения многопользовательских CDMA, систем требуются
семейства дискретных сигналов с приемлемыми взаимными
корреляционными свойствами (см. § 4.5 и гл. 7). Повторяя проделанные выкладки для
двух различных (k-vo и 1-го) АФМ сигналов одной длины с идентичными
чипами, придем к следующему равенству для их нормированной ВКФ
оо
Pki(r)= У2 Pki(m)pc(r-mA), (5.7)
где
N-1
pkl{m) = ¥^\toak'iali-m~ (5-8)
ВКФ кодовых последовательностей
{a>k$,a>k,u---,a>k,N-\} и {ai$,ai,u--">ai,N-i}
двух сигналов, характеризующая степень сходства первой последователь-
188 Глава 5. Дискретные широкополосные сигналы
ности со сдвинутой на га позиций репликой второй. Очевидно, ВКФ (5.7)
вновь представляет собой АФМ сигнал, у которого роль кодовой
последовательности выполняет ВКФ двух исходных кодовых
последовательностей (ВКФ кодов). Тем самым, синтез семейства дискретных сигналов
с требуемыми взаимно корреляционными свойствами сводится к
отысканию множества последовательностей, обладающих подходящими ВКФ.
Соотношения (5.7) и (5.8) обладают максимальной универсальностью, так
как годятся и для АКФ: АКФ &-го сигнала есть puki?)-, что
автоматически распространяется и на кодовые последовательности.
Полученные результаты будут широко использованы далее, иногда без
нормирующих множителей в (5.6) и (5.8), т. е. в вариантах
ненормированных корреляционных функций
Лг-1 N-1
R{m) = Yl aia>i-miRkl(™<) = 53 aWa?,t-m- (5-9)
г*=0 г=0
5.4. Вычисление корреляционных функций
кодовых последовательностей
Рассмотрим кодовую последовательность {ao, ai,..., a^-i}- Если она
используется для формирования импульсного сигнала, то в общей модели
(5.2) щ = 0 для всех отрицательных г и % ^ JV, так что согласно (5.6)
апериодическая или импульсная АКФ вычисляется как
1 лг-1
-jj2 E °>ia*i-mi т > °>
ра(т) = {
1а11 г=ш (^^0^
1 N-l+m ^Ш)
■ „2 £ a«°*-m> ГП<0.
\Щ\ i=o
В принципе, вторая строка в (5.10) избыточна, поскольку любая АКФ
обладает свойством четности и, в частности, ра{~т) = р*(га). Очевидно
также, что без нормирующего множителя апериодическая АКФ
представляет собой скалярное произведение вектора а = (ao,ai,..., a^v-i)
с собственной копией, нециклически сдвинутой на га позиций. Последнее
означает, что при сдвиге вектора а вправо (га ^ 0) или влево (га < 0)
сумма в (5.10) учитывает только перекрывающиеся компоненты а и его
сдвинутой копии, а все остальные полагаются равными нулю. Например, для
вычисления /9а(1) первоначально следует записать одну под другой
исходную последовательность и ее комплексно сопряженную копию, сдвинутую
вправо на одну позицию, а затем выполнить поэлементное перемножение
и просуммировать полученные произведения:
5.4- Вычисление корреляционных функций кодовых последовательностей 189
ао а\ a<i as ... Q>n-i
1 jv-i
al a\ a\ ... a^_2 ft^1) = iun2 ^ a*a?-i*
llalr i=i
Обратимся теперь к периодическому сигналу, т.е. положим щ+н —
a,i, г = ..., —1,0,1,... Тогда (5.6) окажется периодической АКФ Рр(га),
сумма в которой всегда содержит N слагаемых, поскольку a_i = ajv-ъ
a_2 = адг-2 и т. д.
, JV-1
Рр(т) = Щ2 Y1 а*а*г-т- (5.Н)
В этом случае скалярное произведение вычисляется для исходной
кодовой последовательности и ее циклически сдвинутой копии, где при га ^ О
га крайних левых «пустых» позиций заполняются символами,
«вытолкнутыми» вправо. Например, схема вычисления рр(1) выглядит следующим
образом:
ао а\ а>2 аз ... адг-1
1 jv-i
а%_г а^ al а\ ... a*N_2 Рр(1) =—— £ ща?_г.
\т\ i=o
Поскольку рр(т) вычисляется в предположении о периодичности
кодовой последовательности, то она сама периодична с периодом iV, т.е.
рр{т) = рр(т + N), га = ...,—1,0,1,..., что непосредственно следует
из (5.11), и, в свою очередь, трансформирует свойство четности к виду
Рр(-т) = pp(N - га) = рЦт - N). (5.12)
Это равенство показывает, что рр(т) полностью задается своими
значениями только при сдвигах га = 1,2,..., [N/2J, где [N/2\ означает
округление в направлении нуля. Другое важное свойство периодической
АКФ вытекает из (5.11) после расщепления суммы на две части:
.< N-1 , т-1
Рр(т) = |j^|T2 Yl aiai-m + JTJJ2 J2 aia*-m, m > °-
" I' i=m I' I' i=0
Первое слагаемое здесь является апериодической АКФ ра(т) (см. (5.10)),
тогда как второе есть pa(m — N), что непосредственно проверяется путем
вычисления ра(тп — iV") из второй строки (5.10). В результате получается
равенство, связывающее периодическую АКФ с апериодической:
рр(т) = ра(т) +/9a(m-AT),ra = 0,l,...,iV. (5.13)
Соотношению (5.13) принадлежит важнейшая роль в синтезе импульсных
сигналов с хорошими корреляционными свойствами (см. § 6.10).
Пример 5.1. Таблица 5.1 иллюстрирует вычисление апериодической и
периодической АКФ бинарной последовательности длины N — 8 {+ + Н V
190 Глава 5. Дискретные широкополосные сигналы
—}. Здесь, как это обычно принято, символы бинарного алфавита +1 и — 1
представлены знаками + и — соответственно. Два последних столбца
таблицы содержат значения ненормированной АКФ, а затененные клетки отвечают
символам, не участвующим в вычислении апериодической АКФ. На рис. 5.2
построены нормированные АКФ БФМ видеосигнала с прямоугольными чипами
длительности Ас = А, модулированными рассматриваемой кодовой
последовательностью. Сплошная, пунктирная и штрих-пунктирная линии представляют
периодическую АКФ рр(т) и сдвинутые копии ра(т) и ра(т — Т)
апериодической АКФ соответственно. Разумеется, графики подтверждают справедливость
равенств (5.12) и (5.13).
Таблица 5.1. Вычисление АКФ последовательности длины 8
га
0
1
2
3
4
5
6
7
о-о
4
"-*.
-
+
-
- '
+ ■
.4;-
«1
+
+
' -
.;~ ■
+
' V
.•+ •
й2
4
4
f
_
_
+ •
>-' '
а3
-
+
4
4
, -
'■- ~
'■ Ф. -
"~ J
си
-
-
+
4
4
~
"~ ;
>-*.":
а5
4
-
-
\-
4
4
; -
ае
-
f
-
-
4
f
г
-
а7
-
-
4
-
-
4
4
4
Да (т)
48
41
-2
41
0
-1
„2
-1
Яр(т)
48
0
-4
0
0
0
-4
0
Рис. 5.2.
Автокорреляционные функции бинарного
сигнала длины 8
Говоря о взаимной корреляции двух последовательностей одной
длины, можно вновь различать апериодическую pa,kl{™) и периодическую
5.5. Корреляционные функции ЧМ сигналов 191
Pp,ki(m>) ВКФ, определяемые как
Pa,kl(m) = {
I N-l
S ама^„т, т ^ О,
llafc|| * l№
||а*|| • ||a/|| i==0
ЛГ-fm-l
(5.14)
и
x лг-i
«p,wM - . ]Г аиХц-т- (5.15)
Соотношение (5.13) остается в силе и для ВКФ:
Pp,w М = pa,ki (m) + pa,ki (rn-N), (5.16)
однако ни четность, ни равенство единице в нуле, присущие АКФ, не
являются обязательными свойствами произвольной ВКФ.
5.5. Корреляционные функции ЧМ сигналов
Решим теперь ту же задачу, что и в двух предыдущих разделах, но в
приложении к ЧМ сигналам. Следуя определению из § 5.2, комплексную
огибающую ЧМ сигнала можно записать как
оо
S(t)= Y, aiSo(t-i&)exp{j2irFit), (5.17)
i=—oo
где для периодического сигнала все ai равны единице, тогда как для
импульсного сигнала длины JVaj = l,0^i<7V", и a^ - 0 при всех %
за пределами диапазона 0 ^ % < N.
Вне зависимости от периодичности или конечности сигнала можно
на прежних основаниях воспользоваться универсальным равенством для
АКФ
Л р -J ОО IV— 1
PW = NfyJ S(t)S*(t--r)dt = — £ Еа^ехрС^тгВДх
п к=—оо 1=0
т
J S0(t - iA)SZ(t -kA-т) exp(j27r(Fi - Fk)t) dt,
т
X
0
где использован тот факт, что теперь все чипы с ненулевыми
амплитудами обладают одинаковыми энергиями £?о? т.е. ||а||2 = N и Е = NEq.
Типичным для ЧМ является использование равномерного
частотного алфавита, в котором Fi Е {0,:LF, ±2F,...}, где шаг по частоте F
не меньше полосы, занимаемой чипом. Таким образом, спектры двух
чипов с частотами Fi и i**, не перекрываются, а сами чипы ортогональны
192 Глава 5. Дискретные широкополосные сигналы
независимо от их временного рассогласования (см. § 4.5) всякий раз, как
Fi ф Fk- Учитывая это, имеем
. оо N-1
Р(Т) = Jj Л J2 а*аь exp{j27rFir)e(Fi - Fk)pc[r - (i - к)А] =
к=—оо г=0
-j оо JV-1
= ]v 1С JC ai°>i-™' exp(j27rFir)S(Fi - Fi-mr)pc(T - га'Д), (5.18)
mf——оо г=0
где pc(-) — как и ранее, АКФ чипа, а
В отличие от АФМ сигналов АКФ (5.18) в общем случае нельзя
упростить до вида, подобного (5.5). Общепринятой практикой является
первоочередной анализ поведения АКФ ЧМ сигналов при задержках, кратных
длительности чипа: г = гаД, где га — целое. Предполагая, что на
длительности чипа укладывается целое число периодов I каждой из частот
алфавита (FA = 1)\ и принимая во внимание, что рс(0) = 1, pjj) — О,
\т ^ Д|, подстановка г = гаД в (5.18) оставляет там только одно
слагаемое в сумме по ш;, отвечающее га' = га, так что
1 N-1
р(тА) = — Y, am-m${Fi - Fi-m). (5.19)
В случае импульсного сигнала и га ^ О все слагаемые с индексами
вне множества га,га + 1,..., АГ — 1 исчезают, и апериодическая АКФ ЧМ
сигнала р(гпА) = ра(^) принимает вид
1 х-1
Ра{т) = — J2 S(Fi - Fi-m), га > 0, ра(-т) = ра{т), (5.20)
г—т
где надобности в комплексном сопряжении во втором равенстве
(выражающем четность) нет в силу действительности значений ра(га).
Для периодического сигнала сумма в (5.19) не содержит нулевых
произведений ща1-т, и периодическая АКФ р(тА) — рр{т) имеет вид
j JV-1
ftH^EW-U- (5.21)
Суммы в (5.20) и (5.21) аккумулируют число совпадений частот в ЧМ
сигнале и его копии, сдвинутой на га чипов. Поэтому для вычисления
АКФ ЧМ сигнала в точке гаД достаточно подсчитать число пар {i^, Fi-m}
с одинаковыми значениями Fi и i^_m, где индекс г пробегает диапазон
{га, га + 1,..., N — 1} (апериодическая АКФ) и га > О или {0,1,..., N — 1}
5.5. Корреляционные функции ЧМ сигналов 193
(периодическая АКФ). Понятно, что равенство (5.13), связывающее
периодическую АКФ с апериодической, остается справедливым и для ЧМ
сигналов.
Одним из широко используемых представлений ЧМ сигнала является
решетка размера М х i\T, в которой горизонтальное и вертикальное
направления закреплены соответственно за временем и частотой, причем
М есть мощность частотного алфавита (т. е. число частот, используемых
при манипуляции). В г-м столбце этой решетки маркируется меткой
(например, точкой или затенением) единственная клетка, соответствующая
частоте г-ro чипа. Тогда для вычисления апериодической АКФ при
некотором т достаточно лишь просуммировать по всем строкам число пар
меток, находящихся на расстоянии т, и отнормировать итог, если
требуется. Если же нужна периодическая АКФ, указанные суммы находятся
кля значений т и N — т, а затем складываются.
Пример 5.2. На рис. 5.3 с помощью решетки представлен закон модуляции
ЧМ сигнала с параметрами N — 8, М — 5. Его ненормированная АКФ Ra{m>) =
7
= Yl u(Fi ~~ Fi-m) принимает значения 8, 1, 1, 0, 1, 0, 0, 0 при т — 0,1,..., 7
i=m
соответственно, поскольку имеется единственная помеченная пара вдоль
единственной линии на расстоянии 1, одна подобная пара на расстояния 2 и т.д.
Непосредственно из (5.13) могут быть найдены значения ненормированной
периодической АКФ как 8, 1, 1, 0, 2, 0, 1, 1.
Обобщение результатов (5.20), (5.21) на
случай ВКФ не требует никаких усилий, кроме
смены обозначений
РаМт) = {
I JV-1
1 N+m-1
M i=0
N-l
Fl,i-m),
I JV~X
PpMm) = 1^J2 *(**>* ~ Flj-™),
N
m > 0,
m < 0,
(5.22)
(5.23)
m
m
Рис. 5.3. ЧМ сигнал с
параметрами N — 8, М = 5
г=0
где {-Ffc^j г = 0,1,..., iV — 1} — частотная кодовая
последовательность &-го сигнала. Очевидно,
вычисление ВКФ вновь сводится к подсчету числа
совпадений частот в паре сигналов, сдвинутых на
га чипов.
194 Глава 5. Дискретные широкополосные сигналы
5.6. Выигрыш от обработки
Вернемся к общей модели (5.1), имея целью оценку выигрыша от
обработки, присущего дискретным сигналам. Предположим, что все Fi
принадлежат алфавиту мощности М с расстоянием между соседними
частотами, равным полосе чипа и гарантирующим тем самым
ортогональность чипов с разными частотами. Рассматривая каждую из М
доступных частот изолированно от других, мы бы имели сигнальное
подпространство размерности iV, поскольку никаких ограничений в выборе
амплитудно-фазовой кодовой последовательности, т.е. iV-мерного вектора
а = (ао, ai,..., адг-i), при этом бы не было. Ортогональность таких
подпространств означает, что размерность полного сигнального
пространства, охватывающего все М частот, равна MN. В § 2.5 показано, что
размерность пространства радиосигналов совпадает с полным доступным
частотно-временным ресурсом. Имея интерес исключительно к
широкополосным сигналам, каждый из которых утилизирует весь отведенный
ресурс, можно считать частотно-временное произведение дискретного
сигнала, т. е. выигрьпп от обработки, равным MN.
Подтвердим эту оценку прямым расчетом, положив Ас = А.
Аппроксимируя полосу чипа значением 1/А и учитывая, что доступные полоса
и временной ресурс соответственно составляют W = М/А и Т = iVA,
получим WT — MN. Понятно, что для АФМ сигналов М = 1 и выигрьпп
от обработки WT = N.
Задачи
5.1. Дискретный сигнал длины N = 5 имеет комплексные амплитуды а0 =
= 1 + j, а\ = -1 + j, a2 = 1+ j, a3 = -1 - j, а4 = 1 - j и частоты Fi = О,
г ~ О,1,2,3,4. Найдите фазы и амплитуды его чипов и классифицируйте
сигнал по способу модуляции.
5.2. Дискретный сигнал задан своими амплитудно-фазовым и частотным
кодами йг = exp[J7ri(i + l)/2], Fi = 0, г = ..., —1,0,1,... Найдите амплитуды
и фазы чипов. Классифицируйте сигнал по способу модуляции. Является
ли данный сигнал периодическим? Если да, найдите его период.
5.3. Докажите четность периодической и апериодической
автокорреляционных функций кодовых последовательностей АФМ сигналов.
5.4. АФМ сигнал построен из прямоугольных чипов длительности Ас — А
и модулирован кодовой последовательностью, выраженной вектором а =
= (1,1,0,1,0,0,-1). Вычислите и постройте его апериодическую и
периодическую АКФ. Сделайте то же для случая Ас = А/2.
Задачи в пакете MATLAB 195
Что произойдет с периодической и апериодической АКФ АФМ сигнала
при следующих трансформациях кодовой последовательности:
а) циклическом сдвиге элементов;
б) изменении знака всех элементов;
в) изменении знака только у элементов с четными позициями;
г) умножении всех элементов на одну и ту же константу;
д) зеркальном переупорядочении последовательности (т. е. чтении справа
налево)?
Возможна ли для ФМ кода комбинация |Да(1)| = 3, |#р(1)| = 1? Что
можно сказать о комбинациях Ra(l) = —2,1, Rp(l) = 0,8 — j*0,6; Да(1) =
= 0,6 4- j0,8, Rp(l) = 1,1 4- j? Каково возможное значение |ДР(1) — Дг(1)|
для ФМ кода?
Расстояния между частотами ЧМ сигнала кратны величине F = 1/А.
Докажите, что синхронизированные по времени прямоугольные чипы с
различными частотами ортогональны.
ЧМ сигнал длины N содержит М < N частот. Чипы с разными частотами
ортогональны. Возможно ли, чтобы АКФ данного сигнала имела нулевые
значения при всех ненулевых сдвигах вида г = тА?
Задачи в пакете MATLAB
Напишите программу, отображающую на экране АФМ, БФМ, КФМ и ЧМ
дискретные сигналы. Положите N = 6 — 10, несущую /о = (10 — 20)/А,
длительность чипа Дс = А и частотный шаг F = 1/А. Выполните
программу для разных способов модуляции и форм чипа (например,
прямоугольной и полуволны синуса), подберите кодовую последовательность,
обеспечивающую удобную визуализацию и прокомментируйте
наблюдаемые осциллограммы. Пример дан на рис. 5.4. Используйте программу
также для иллюстрации периодичности и апериодичности сигнала.
Напишите программу, демонстрирующую что АКФ АФМ сигнала сама
является АФМ сигналом, чипом которого служит АКФ исходного чипа,
а кодом — АКФ исходного кода. Рекомендуемые шаги:
а) Сформируйте простой чип (например, прямоугольный или полволны
синуса);
б) Сформируйте действительную (например, бинарную или троичную)
кодовую последовательность, содержащую 7-10 элементов;
в) Сформируйте и выведите на дисплей сигнал с выбранными чипом и
законом манипуляции;
г) Используя соответствующую команду MATLAB, вычислите напрямую
и отобразите на дисплее АКФ сформированного сигнала;
196 Глава 5. Дискретные широкополосные сигналы
* 2
So
f-2
U/\/v>^ Щ1щМт
Рис. 5.4. Примеры дискретных сигналов
д) Вычислите и отобразите на дисплее АКФ исходного чипа;
е) Вычислите и отобразите на дисплее АКФ исходного кода;
ж) Убедитесь, что АКФ пункта (г) воспроизводит АФМ сигнал с чипом
из пункта (д) и кодом из пункта (е);
з) Выполните программу, варьируя форму чипа и код исходного сигнала
и прокомментируйте наблюдения. Примеры даны на рис. 5.5.
5.11. Напишите программу, подтверждающую связь периодической и
апериодической АКФ дискретного сигнала (см. рис. 5.2). Рекомендуемые шаги:
а) Выберите некоторую действительную (более удобную для
визуализации по сравнению с комплексной) кодовую последовательность длины
ЛГ = 7-15;
б) Вычислите ее периодическую АКФ непосредственно согласно
определению;
в) Выведите на экран один ее период для случая прямоугольного чипа;
г) Рассчитайте апериодическую АКФ;
д) Визуализируйте ее вместе с ее копией, смещенной на N позиций вправо;
е) Выполните программу для нескольких вариантов кода и убедитесь
в справедливости равенства (5.13).
Задачи в пакете MATLAB 197
1 г
» о
-1
1
£<Х5
-8
1 г
4 oh
_1 [-_.
-8
-2
-2
т/А
г " i
Г I
[ 1 1
1 t i .
1 -!-
[ •• { -
i i
-I А
| 1
Рис. 5.5. Апериодическая АКФ троичного сигнала длины N = 8
5Л2. Напишите и вьгаолните программу непосредственного расчета
действительной огибающей АКФ ЧМ сигнала. Рекомендуемые шаги:
а) Сформируйте огибающую прямоугольного чипа;
б) Задайте частотный код длины N = 7 — 10 и мощности частотного
алфавита М = 5,..., iV — 1;
в) Сформируйте комплексную огибающую ЧМ сигнала с выбранным
частотным кодом, положив шаг по частоте F = 1/А;
г) Рассчитайте и выведите на дисплей действительную огибающую АКФ
полученного сигнала;
д) Сравните рассчитанные значения АКФ в точках г = тА с
теоретически предсказанными;
е) Выполните программу для нескольких вариантов частотного кода;
ж) Обратите внимание на ситуации, в которых уровень АКФ между
точками г = тА выше, чем в самих этих точках (см. рис. 5.6). Чем это
можно объяснить?
198 Глава 5. Дискретные широкополосные сигналы
о
со
т
I
3 Ь
~ 0.5 И
i
X
I
3 4 5
Номер позиции
4
ш
1 1
у у у it и*у 1
, 1
и±:гШ1|7Ш
—i—
г-
•
LUJ.T.UJJ
1
_ г J-
... — f ^-J
LllJjlU
4
т/А
1 1 1 " 1 1 1 i "■ -' I 1
i i Г i i i i
Рис. 5.6. АКФ сигнала длины N = 8 (см. пример 5.2)
ШИРОКОПОЛОСНЫЕ
СИГНАЛЫ
ДЛЯ ИЗМЕРЕНИЯ
ЗАПАЗДЫВАНИЯ,
СИНХРОНИЗАЦИИ
И ВРЕМЕННОГО
РАЗРЕШЕНИЯ
6.1. Требования к АКФ: дополнительный экскурс
Вернемся к задачам, изучавшимся в § 2.12 и 2.15, и вспомним, какие
требования налагаются на сигнал при необходимости измерения
запаздывания с высокой точностью и качественного разрешения по времени.
Принципиальное условие, которое должно выполняться в обеих этих
задачах, состоит в кратковременности отклика согласованного фильтра на
полезный сигнал или, что равносильно, в «остроте» АКФ сигнала,
подразумевающей, в свою очередь, большую протяженность сигнала в
частотной области, т.е. широкий спектр. Привлекательность широкополосной
технологии в названных сценариях в противовес «лобовому» укорочению
сигнала объясняется тем, что при большом значении выигрыша от
обработки WT » 1 можно вложить в сигнал энергию, диктуемую
необходимым отношением сигнал-шум, контролируя лишь длительность сигнала
и не увеличивая пиковой мощности, как правило, жестко лимитированной
сверху. При этом соответствующий подбор закона угловой модуляции
позволяет сформировать широкополосный сигнал, обладающий свойством
временной компрессии в согласованном фильтре, так что длительность
отклика последнего (время корреляции сигнала тс « 1/W) окажется
многократно (примерно в WT раз) меньше длительности Г самого сигнала.
Уточним, какого рода АКФ можно считать «острой» или «хорошей»
в контексте рассматриваемых задач приема. Отправляясь от
определений (2.66) и (2.67), нетрудно показать, что АКФ любого реализуемого
сигнала не может в точности равняться нулю вне отрезка [—тс,гс],
если время корреляции тс меньше длительности сигнала Т. Таким образом,
ГЛАВА 6
200 Глава 6. Широкополосные сигналы для измерения
наряду с так называемым основным лепестком или центральным пиком,
сосредоточенным внутри отрезка [—тс,гс], АКФ будет иметь и боковые
лепесткщ находящиеся за его пределами (см. рис. 6.1). Присутствие
боковых лепестков имеет преимущественно вредные последствия как при
измерении запаздывания, так и при разрешении по времени.
Действительно, оптимальная (МП) оценка запаздывания сигнала предполагает
фиксацию временного положения максимума огибающей г^(£) на выходе
согласованного фильтра (см. § 2.12), а огибающая АКФ по форме
повторяет отклик цепочки согласованный фильтр-детектор на незашумленный
сигнал. В реальной ситуации зашумленных наблюдений всегда имеется
вероятность возникновения такого ложного максимума вне «тела»
основного пика АКФ, который может превзойти истинный (т. е. расположенный
в пределах «тела»), что иллюстрируется пунктирной линией на рис. 6.2.
В подобном случае возникнет аномальная ошибка измерения, означающая
отклонение е оценки f от истинного значения г, превышающее тс. Ясно,
что перепутывание основного лепестка с ложным пиком, возникающим
в окрестности заметного бокового лепестка, более вероятно, чем с
аналогичным пиком, появляющимся «на пустом месте». В самом деле, чем
ближе уровни основного и бокового лепестков, тем «легче» гауссовскому
шуму поднять второй до уровня первого.
Рис. 6.1. Центральный пик и бо- Рис. 6.2. К эффекту аномальных ошибок
ковые лепестки АКФ
Для пояснения вредной роли боковых лепестков при временном
разрешении рассмотрим суперпозицию двух сдвинутых во времени копий
радиосигнала с разными амплитудами, показанную на рис. 6.3, а. После
обработки согласованным фильтром основной лепесток более слабой
копии оказывается полностью спрятанным под боковым лепестком сильной
(см. рис. 6.3, б). В подобных обстоятельствах наблюдатель не в
состоянии уверенно извлечь необходимую информацию из обеих сигнальных
копий или даже определить число копий в принятом наблюдении.
Сценарий такого рода дает характерный пример неразрешенных сигналов, хотя
основной лепесток АКФ значительно уже длительности самого сигнала.
Суммируя сказанное, можно в следующей, наиболее общей редакции
сформулировать требования к широкополосным сигналам со стороны за-
6.2. Сигналы с непрерывной частотной модуляцией 201
дач измерения запаздывания и временного разрешения: АКФ сигнала
должна иметь достаточно острый центральный пик и по возможности
низкий уровень боковых лепестков. В следующих разделах главы
обсуждаются пути и инструменты достижения этой фундаментальной цели.
Рис. 6.3. Боковые лепестки и отсут- а)
ствие разрешения
s(t-x)
б) АГ(Х)
6.2. Сигналы с непрерывной частотной модуляцией
Исторически одним из первых найденных сигналов, шля которых
осуществимо временное сжатие согласованным фильтром, оказался импульсный
сигнал с линейной частотной модуляцией (ЛЧМ). Как следует из
названия, мгновенная частота такого сигнала линейно изменяется в течение
его длительности. Рассмотрим радиосигнал, мгновенная частота f(t)
которого возрастает со временем по закону
f(t) = fo +
Wdt
Т
где Wd — девиация, т. е. полный диапазон изменения частоты, а /о —
как обычно, центральная частота. Полная мгновенная фаза Ф(£) сигнала
является интегралом от мгновенной частоты и, следовательно, фаза ЛЧМ
импульса описывается квадратичным законом
Ф(<) = 2тг I /(«) du = 2тг/0*
+
nWdt2
Т
202 Глава 6. Широкополосные сигналы для измерения
При прямоугольной действительной огибающей комплексная
огибающая ЛЧМ сигнала имеет вид
fjirWdt2"
S(t) =
exp
о,
т
KI < г
\t\>
Подставляя это в общее выражение (2.66) для АКФ, последнюю
можно найти формально без особых затруднений. Однако менее формальная
и весьма прозрачная физически логика позволяет прийти к нужному
итогу быстрее. Из теории частотной модуляции хорошо известно [1], что
когда индекс модуляции {3 = WdT достаточно велик (/3 » 1), спектр
частотно-модулированного колебания содержит компоненты всех
мгновенных частот, причем его форма приближается к действительной
огибающей сигнала. Таким образом, в нашем случае спектр располагается
в диапазоне [/о — W^l% /о + Wd/2] и имеет форму, близкую к
прямоугольной (см. рис. 6.4, а). Теперь АКФ (2.66) может быть найдена обратным
преобразованием Фурье, подобно тому, как это уже делалось в подпара-
графе 2.12.2. Так как энергетический спектр сигнала прямоуголен, его
обратное преобразование Фурье оказывается функцией вида sin х/х, так
что нормированная комплексная огибающая АКФ ЛЧМ сигнала
sin(7rWdr)
р{т)
что иллюстрируется рис. 6.4, б.
irWdT
(6.1)
a)
ЩП\
wd
Рис. 6.4. Аппроксимация спектра и АКФ ЛЧМ импульса
Как следует из рис. 6.4, полная (т.е. измеренная между двумя
ближайшими к началу координат нулями) ширина основного лепестка АКФ
составляет 2тс = 2/Wd- Условно можно принять ширину основного
лепестка на некотором ненулевом уровне равной тс = 1/Wd, придя к выводу, что
согласованный фильтр осуществляет временную компрессию ЛЧМ
сигнала в Т/тс « WdT « WT раз.
6.2. Сигналы с непрерывной частотной модуляцией 203
Серьезным недостатком ЛЧМ сигнала являются заметные боковые
лепестки АКФ. Ближайший из них к началу координат имеет уровень
по отношению к основному 2/Зтг « 0,21 (—13,5 дБ), который не зависит
от выигрыша от обработки WT, т. е. не может быть уменьшен
увеличением девиации Wd- Существуют эффективные методы снижения боковых
лепестков с помощью сглаживания огибающей сигнала либо применения
специальных взвешивающих окон, иначе говоря, рассогласованной
обработки в приемнике. При этом выигрыш в уровне боковых лепестков
достигается в обмен на расширение основного пика и/или потери в
отношении сигнал-шум.
Пример 6.1. Обратимся к прямоугольному ЛЧМ импульсу с девиацией Wd =
= 20/Т. На рис. 6.5 представлены собственно сигнал и отклик на него
согласованного фильтра, сгенерированные MATLAB-программой задачи 2.55. Сравните
параметр временного сжатия и уровень первого бокового лепестка с
теоретически предсказанными значениями.
1,0
о.
5 0,5 |
I- 0,0 |
со
-1,0!
1,0
Q.
2
с;
S
•е-
0,5
0,0
5-0,5
7i
GQ-
■1.0
0,2 0,4 0,6 0,8 1,0 1,2 1,4 1,6 1,8 2,0
ffifofr '"M»1
JL
_L
J»
J-
J-
JL
JL
Л-
0 0,2 0,4 0,6 0,8 1,0 1,2 1,4 1,6 1,8 2,0
t/T
Рис. 6.5. Временное сжатие прямоугольного ЛЧМ импульса
Другой изъян ЛЧМ сигнала — гребнеобразная форма ФН po(r,F).
Из материала разделов § 2.14 и 2.15 можно заключить, что для
одновременного измерения запаздывания и частоты так же, как и для частотно-
временного разрешения, наилучшей является игольчатая функция
неопределенности, имеющая единственный центральный пик в начале координат
и резко спадающая во всех направлениях частотно-временной плоскости.
Как следует из рис. 6.6, представляющего пример ФН (а) и диаграм-
204 Глава 6. Широкополосные сигналы для измерения
мы неопределенности (б) ЛЧМ сигнала, последний не может служить
эффективным инструментом в решении упомянутых задач. Когда
пара значений т, F попадает в эллипс на рис. 6.6, б, точность оценивания
названных параметров резко падает, поскольку копии сигнала со всеми
подобными парами имеют высокую корреляцию, т.е. трудноразличимы.
То же самое справедливо и в части разрешения подобных расстроенных
по времени и частоте копий: высокая степень сходства делает задачу их
разделения весьма проблематичной.
Рис. 6.6. ФН (а) и диаграмма неопределенности (б) ЛЧМ сигнала
Известны несколько способов улучшения формы функции
неопределенности частотно-модулированных сигналов, например, применение
симметричной (V-образной) линейной частотной модуляции (см. задачу 6.42).
Непрерывные ЛЧМ сигналы и их модификации до настоящего
времени весьма распространены в разнообразных широкополосных системах
радио- и гидролокации. В современных же коммерческих
телекоммуникациях или общедоступных системах дальней навигации они не
находят широкого применения, отдавая приоритетные позиции дискретным
сигналам. Одной из причин подобного предпочтения, дополняющих уже
названные, может служить лучшая совместимость дискретных сигналов
с современными цифровыми технологиями, микроэлектроникой и
программно ориентированной философией современных радиосистем.
6.3. Критерии хорошей апериодической АКФ АФМ сигналов 205
6.3. Критерии хорошей апериодической АКФ
АФМ сигналов
Вернемся к соотношению (5.5) и вспомним, что АКФ р(т) АФМ
сигнала сама оказывается АФМ сигналом, чипом которого служит АКФ рс{т)
исходного чипа, а кодовой последовательностью — АКФ р(т)
исходного кода ао, «1,..., а^-г- Подобная конструкция явно свидетельствует, что
при заданном чипе профиль полной АКФ полностью определяется АКФ
р{т) кода. В частности, если длительность чипа не превышает периода
следования чипов (Ас ^ А), «высота» |p(mA)| любого бокового лепестка
в точке г = гаД просто повторяет значение АКФ кода |р(т)| при
сдвиге на т позиций. Из дискуссии § 6.1 вытекает, что минимизация уровня
боковых лепестков АКФ является наивысшим приоритетом при
конструировании сигналов всякий раз, когда в задачи системы входят измерение
запаздывания или временное разрешение. Разумеется, в идеале хотелось
бы, чтобы все боковые лепестки имели нулевой уровень, однако это
абсолютно невозможно для апериодических (импульсных) АФМ сигналов.
Действительно, рассмотрим некоторый сигнал конечной длины JV, что
означает ао ф 0 и а#-1 ф 0, поскольку иначе длина сигнала была бы
меньше N. Тогда крайний правый боковой лепесток нормированной
апериодической АКФ кода, как следует из (5.10),
Pa(N-l) = ^^^0. (6.2)
||а||
Этот результат напрямую оправдывает ориентацию на минимаксный
критерий синтеза сигналов, предписывающий стремиться к минимизации
уровня максимального из боковых лепестков АКФ апериодического кода.
Формально задача формулируется как
Ра,тах = тах{|ра(т)|} = min. (6.3)
В свете критерия (6.3) предпочтительны кодовые последовательности
с наименьшим максимальным боковым лепестком, однако подобное
требование всегда сопровождается ограничением на метод модуляции или,
более конкретно, на алфавит, которому принадлежат символы кодовой
последовательности. Это ограничение отражает технологические аспекты,
касающиеся сложности формирования и обработки сигнала, и, как вскоре
подтвердится, нередко серьезно сужает свободу маневра системного
дизайнера. Суммируя требования к наилучшему сигналу, можно оформить
их как следующую оптимизационную задачу: на множестве всех
возможных последовательностей длины N с символами из заранее
оговоренного алфавита найти последовательность {или последовательности)
с минимальной величиной максимального бокового лепестка
апериодической АКФ.
206 Глава 6. Широкополосные сигналы для измерения
6.4. Оптимизация апериодических ФМ сигналов
Сформулированная выше оптимизационная задача, подобно многим
задачам дискретной оптимизации, не имеет какого-либо общего
аналитического решения, и типичным подходом к ней является полный перебор.
Ограничимся классом ФМ сигналов, нередко признаваемых наиболее
привлекательными. В обоснование этой позиции достаточно напомнить, что
при измерении запаздывания и разрешении по времени основное
преимущество широкополосности состоит в рассредоточении энергии сигнала по
временному отрезку значительной протяженности, позволяющем снизить
пиковую мощность. С этой точки зрения сигналы с ФМ, свободные от
амплитудной модуляции, реализуют предельный вариант подобного
рассредоточения, доводя пик-фактор v сигнала (отношение пиковой и средней
мощностей) до минимально возможного уровня, равного единице.
Для любого ФМ сигнала \а\\ = 1, г — 0,..., N — 1, так что \а^а^-\\ = 1,
и крайний правый боковой лепесток апериодической АКФ (6.2)
\Pa(N-l)\ = l/N.
Таким образом, для максимального бокового лепестка АКФ
апериодического ФМ сигнала справедлива нижняя граница
Pa,mzx>VN. (6.4)
Таблица 6Л. Бинарные коды Баркера
N
2
3
4
5
7
11
13
Код |
+
+
+
+
+
+
+
-
+
+
+
+
-
+
-
-
+
+
+
+
+
-
-
+
+
+
-
-
+
+
+
-
-
+
-
+
+
-
+
-
-
-
+ .
-
+
ФМ сигналы, достигающие данной границы, безусловно оптимальны
в свете минимаксного критерия. В литературе они обычно фигурируют
под названием кодов Баркера по имени одного из первых их
исследователей. Фактически Баркер описал оптимальные бинарные коды, лежащие
на границе (6.4). Традиционно бинарные последовательности символов ±1
считаются особо привлекательными, поскольку их алфавит в наибольшей
степени согласуется с цифровой элементной базой, минимизируя
сложность формирования и обработки. В табл. 6.1 приведены все бинарные
коды Баркера. Некоторые из кодов таблицы не единственны в том
смысле, что существуют и другие последовательности той же длины, лежащие
на границе (6.4).
6.4- Оптимизация апериодических ФМ сигналов 207
Пример 6.2. Таблица 6.2 поясняет вычисление апериодической и
периодической АКФ кода Баркера длины N = 7. Но своей структуре она полностью
аналогична табл. 5.1. Как видно, не только апериодическая, но и нормированная
периодическая АКФ имеет максимальный боковой лепесток, равный 1/JV.
Таблица 6.2. Вычисление АКФ бинарного кода Баркера длины 7
т
0
1
2
3
4
5
б
«0
+
-
+
-
-
+
+
ai
+
+
-
+
-
_
+
в2
+
+
-f
-
+
_
-
as
-
4
4
+
-
+
-
tt4
-
-
4
4
+
-
•4
as
•4
-
-
+
4
4
-
a6
-
+
-
-
-4
4
4
JKa(wi)
+7
0
-1
0
-1
»0
-1
Rp(m)
+7
-1
-1
-1
-1
-1
-1
Проиллюстрируем вкратце процедуру согласованной фильтрации
сигнала Баркера, прибегнув вновь к конкретному примеру.
Пример 6.3. На рис. 6.7 показана структура согласованного фильтра для
сигнала Баркера длины N = 7. Первый ее блок — линия задержки с отводами, шаг
которых равен периоду следования чипов А. Сигналы с отводов подаются на
сумматор с весами, последовательность которых зеркальна по отношению к
коду. Вторым блоком схемы служит фильтр, согласованный с одиночным чипом.
Чтобы проверить, что указанная структура на деле является искомым
согласованным фильтром, достаточно мысленно подать на ее вход дельта-импульс.
Выходной отклик окажется зеркальным отображением сигнала, т. е. в точности
импульсным откликом согласованного фильтра.
На рис. 6.8 представлены осциллограммы, пронумерованные соответственно
точкам схемы рис. 6.7 и воспроизводящие подробности согласованной
фильтрации видеосигнала Баркера с прямоугольными чипами. Когда последний чип
сигнала приходит на вход фильтра, все предшествующие чипы появляются на
входах сумматора в положительной полярности и суммируются в фазе,
генерируя главный пик АКФ. До и после этого момента на выходе фильтра
наблюдаются боковые лепестки, полярность и уровень которых соответствуют данным
табл. 6.2.
К сожалению, бинарные коды Баркера существуют только для длин,
перечисленных в табл. 6.1. Еще в начале 60-х годов Турин (Turyn) и Сто-
рер (Storer) доказали их несуществование для любых иных нечетных длин
и для четных, по крайней мере, в диапазоне 4 < N ^ 121001.
Значительные усилия неоднократно предпринимались по поиску небинарных ФМ
кодов Баркера с эквидистантным фазовым алфавитом (многофазные или
1 Согласно публикации [22] верхняя граница теперь отодвинута до 1898884, и
вероятность существования бинарных кодов Баркера четной длины вне этого диапазона
крайне мала.
208 Глава 6. Широкополосные сигналы для измерения
М-ичные ФМ коды), однако достигнутые на этом пути результаты
пока далеки от обнадеживающих. Оказалось, в частности, что даже весьма
скромный прирост длины можно получить только в обмен на
значительное увеличение объема М фазового алфавита.
s(t)
1^4
t^H
r-H
^
^
A.U
Х±_
СФ чипа
Вых
►
Рис. 6.7. Согласованный фильтр для бинарного сигнала Баркера длины N = 7
Рис. 6.8. Согласованная фильтрация бинарного сигнала Баркера длины N = 7
По-видимому, наиболее длинные известные на данный момент
многофазные коды Баркера, найденные случайным поиском, характеризуются
объемами фазового алфавита от сотен до десятков тысяч (N = 32... 36)
6.4* Оптимизация апериодических ФМ сигналов 209
[23], или 60, 90, 120 (N = 37... 45) [24]. Большой размер алфавита
неизбежно сопряжен с серьезными усложнениями аппаратной реализации,
а также резким ужесточением требований к допустимым
реализационным погрешностям, дрейфу параметров и т. п.
Как можно понять, длины существующих кодов Баркера слишком
малы для удовлетворения многих практических нужд, что подталкивает к
поиску приемлемых бинарных последовательностей большей длины с
уровнем боковых лепестков выше границы (6.4). Поскольку
ненормированная АКФ (5.9) любой бинарной последовательности есть сумма
слагаемых ±1, возможные значения ра?тах №% «небаркеровских» кодов
принадлежат множеству 2/JV, З/iV, — Гарантию нахождения глобально
оптимального (т. е. имеющего минимально возможное значение pa,max > 2/iV
при заданном N) бинарного кода может обеспечить лишь полный перебор
всех возможных кодов. К сожалению, вычислительный ресурс,
необходимый для подобной оптимизации, экспоненциально возрастает с
увеличением длины N и выходит за грань реальности при длинах N больше 50.
По крайней мере, по сведениям автора длины глобально оптимальных
бинарных кодов, найденных на момент выхода книги, не превышают 50
[25, 26].
Если согласиться с тем, что поиск глобально оптимальных бинарных
последовательностей большей длины практически бесперспективен,
требование (6.3) можно сформулировать в менее жесткой редакции: найти
бинарный код с приемлемо малым — без гарантии глобальной
оптимальности — уровнем апериодического бокового лепестка ра,тах- Общая идея
ряда алгоритмов решения такой задачи сводится к предварительному
отбору некоторого достаточно узкого подмножества последовательностей,
в котором подозревается наличие кодов с подходящими
корреляционными свойствами, и последующему полному перебору, минимизирующему
Ра,тах только в пределах отобранного подмножества. Одним из примеров
подобной стратегии является эволюционный алгоритм [27], посредством
которого были найдены бинарные коды длин до ста включительно, среди
которых некоторые оказались несколько лучше кодов Баркера. Так, для
кода Баркера длины 13 ра,тах = 1/13 ~ 0,077, тогда как для лучшего
в смысле /9а,тах кода из [27] /эа)тах = 6/88 « 0,068. Другой
продуктивный поход основан на соотношении (5.13), связывающем апериодическую
АКФ с периодической. Обозначая через рР)тах, максимальный боковой
лепесток периодической АКФ
PP,max= max {\pp{m)\}7
m=l,2,...iV —1
и используя неравенство
тах{|ж + у\} ^ тах{|ж| + \у\} < тах{|ж|} + тах{|у|},
210 Глава 6. Широкополосные сигналы для измерения
приходим к оценке /эР)1пах ^ 2/9а)Гпах или
Ра,тах ^ лРр,тах- (Р*д)
Полученное неравенство позволяет сделать весьма примечательный
вывод: необходимым условием «хорошей» апериодической АКФ является
хорошая (имеющая малый максимальный боковой лепесток рр,тах)
периодическая АКФ. Иначе говоря, последовательности с хорошей
апериодической АКФ могут быть найдены только среди последовательностей
с хорошей периодической АКФ. Как будет показано позднее, существуют
достаточно продуктивные аналитические инструменты построения
последовательностей с хорошими периодическими АКФ. Таким образом, мы
в состоянии сформировать некоторый набор последовательностей с
хорошими периодическими АКФ, а затем осуществить среди них поиск
последовательностей с хорошими апериодическими АКФ. Эта возможность
закрепляет за периодической АКФ приоритетную роль в синтезе
последовательностей с приемлемыми корреляционными свойствами и
оправдывает акцент следующего раздела на изучении свойств периодической АКФ.
6.5. Идеальная периодическая АКФ.
Минимаксные бинарные последовательности
Мотивация интереса к последовательностям с хорошей периодической
АКФ не ограничивается лишь их привлекательностью как исходного
материала для построения хороших апериодических последовательностей.
Для многих приложений характерно использование дискретных сигналов
в периодическом варианте (непрерывная локация, навигация, пилотные
каналы мобильной связи и т. п.), что предопределяет критическое влияние
свойств периодической АКФ на качество функционирования системы.
Будем именовать «идеальной» периодическую АКФ, все боковые
лепестки которой (т.е. значения между основными пиками, повторяющимися
с периодом N) равны нулю. Используя нормированную версию АКФ,
запишем названное условие как
/ \ 1 г * Г 1, m = 0 mod N, ( .
*Р<т> = д g ^-п = ( 0, m^OmodiV, (6'6)
где сравнение т — 0 mod N означает «га делится на N (или кратно JV)».
Очевидно, что для идеальной периодической АКФ рр,тах = 0. На рис. 6.9
изображена АКФ дискретного видеосигнала с прямоугольными
чипами, манипулированного кодом с идеальной АКФ. Практические выгоды
идеальной АКФ поясняются рис. 6.10, на котором эпюры (а) и (б) пред-
6.5. Идеальная периодическая АКФ 21 I
ставляют две сдвинутые во времени копии одного и того же
периодического радиосигнала, АКФ кода которого удовлетворяет соотношению
(6.6). При поступлении на вход фильтра, согласованного с однопериодным
сегментом сигнала, суперпозиции этих копий на его выходе наблюдаются
две сдвинутые копии сигнальной АКФ. Если временная задержка между
сигнальными копиями больше длительности основного лепестка АКФ 2А
(но меньше (N — 2)А), отклики фильтра на оба сигнала полностью
разрешены без взаимных помех (рис. 6.10, в).
яр(*)
л/д
л/д
а)
Рис. 6.9. Идеальная периодическая АКФ
-, *.—J | »■■•' u;-.u.u,—.—»—:.-л,:1 -1.:..,~ .;—~-—>
:, : U а , '• _LJ , _^ t
Д -*Ч Н*-
NA
%
%
б)
Рис. 6.10. Разрешение копий сигнала с идеальной периодической АКФ
Исследуем ненормированную периодическую АКФ бинарной
последовательности с алфавитом {±1}
212 Глава 6. Широкополосные сигналы для измерения
ЛГ-1
Rp{m) = ]Г агщ-т, (6.7)
г=0
где знак комплексного сопряжения опущен за ненадобностью,
поскольку все а,{ — ±1. Просуммировав обе части соотношения (6.7) по т =
= 0,1,2,... , N — 1, получим
ЛГ-1 N-IN-1 ЛГ-1 ЛГ-1
Y2 Rp{m) = J^ J^ агаг-т = Y1 Щ ^2 ai~m = 1Й°|2' (6'8)
т—0 т=0 г=0 г=0 т=0
ЛГ-1
где йо = Y1 аг — постоянная составляющая кодовой последовательности
г=0
{ao,ai, ...,адг-1}* Поскольку постоянная составляющая бинарной
последовательности может принимать лишь целочисленные значения, сумма
в (6.8) является квадратом целого. Предположим теперь, что бинарный
ЛГ-1
код имеет идеальную периодическую АКФ. Тогда Rp(0) = J2 (аг) — N
г=0
и Rp(m) = 0, т == 1,..., N — 1, что дает
ЛГ-1
J2 Rp{m) =N= |a0|2. (6.9)
m=Q
Полагая т ф 0 mod TV, обозначим через Ne и Nd число произведений
ЩЩ-т в сумме (6.7), равных +1 и —1 соответственно. Тогда из Rp(m) =
= Ne - Nd = 0 следует Ne = Nd и TV = Ne + Nd = 2iVe. Таким
образом, согласно (6.9) и последнему результату, длина N представляет собой
четный квадрат целого числа, т. е. необходимое условие идеальности
периодической АКФ для бинарной последовательности имеет вид N = 4/г2,
где h — целое. Все подобные длины (4, 16, 36, 64, ...) были
проанализированы Турином в начале 60-х, который показал, что в диапазоне
N ^ 12100 единственным бинарным кодом1 с идеальной периодической
АКФ (ПАКФ) является тривиальный код длины 4 вида: +1+1+1—1 [28].
Согласно более поздним результатам несуществование подобных
последовательностей установлено вплоть до длин N < 4 х 1652 = 108 900 [29].
Возможность их существования за пределами названного диапазона
представляется крайне сомнительной.
В свете сказанного возникает необходимость оценить потенциал
минимизации максимального бокового лепестка периодической АКФ бинар-
1Мы (как это принято повсеместно) не считаем новыми последовательности,
получаемые из исходных циклическим сдвигом, зеркальным отображением или изменением
знака всех элементов. Указанные преобразования не влияют на периодическую АКФ
(см. задачу 5.5) и последовательности, получаемые одна из другой подобным путем,
можно трактовать как отличные тривиально или попросту эквивалентные.
6.5. Идеальная периодическая АКФ 213
ных кодов. Пусть iV++, N+-, N-+ обозначают число произведений агЩ-ш
в (6.7), сомножители которых имеют знаки, указанные индексами,
например ЛГ+_ — число произведений, в которых щ = +1, а^_т = — 1. Поскольку
как iV++ + iV+_, так и iV+ + + N_+ дают один и тот же результат — общее
число положительных элементов на периоде кода, то iV+_ = iVL+. Тогда
разность
N-1
N - Др(т) = £ f1 " <ВД_т) = 2(ЛГ+_ + i\T_+) = 4iV+_
i=0
всегда кратна четырем. Следовательно, для любого бинарного кода
ненормированная периодическая АКФ всегда отличается от длины N
некоторым кратным четырех:
Rp(m) = N-Ah, (6.10)
где h — целое.
Очевидно, что в отсутствие бинарных кодов с идеальной
периодической АКФ следующими по привлекательности являются
последовательности, для которых Rp(m) принимает значения ±1 при т = 1,2,..., N — 1,
т-е. Pp,max = 1/iV". Как следует из (6.10), значения Rp{m) — +1 возможны
только при длинах вида N = Ah + 1, a Rp(m) = — 1 —- только при длинах
N = Ah — l, где h — целое. Отсюда видно, что бинарные
последовательности с /0pjmax — 1/N могут иметь только двухуровневые ненормированные
периодические АКФ:
Rp{m)
если N = Ah + 1, либо
Rp{m)
если N = Ah — 1.
Последовательности, удовлетворяющие соотношениям (6.11)—(6.12) и,
следовательно, обладающие теоретически минимальным уровнем
боковых лепестков периодической АКФ (рр^тах — 1/N) для бинарных кодов
нечетной длины, называются минимаксными. Известны лишь два примера
(N = 5 и N = 13) подобных последовательностей со свойством (6.11). В то
же время существуют чрезвычайно мощные регулярные правила
генерирования минимаксных последовательностей с периодической АКФ (6.12)!
§ 6.6-6.9 содержат описание двух наиболее популярных из них, хотя как
минимум еще три хорошо известны и представлены во многих источниках.
JV, т = 0 mod ЛГ,
+1, тфЪ mod TV,
(6.11)
N, m = 0 mod iV,
-1, m^OmodTV,
(6.12)
214 Глава 6. Широкополосные сигналы для измерения
6.6. Начальные сведения о конечных полях и линейных
последовательностях
6.6.1. Понятие о конечных полях
Для объяснения вышеупомянутых конструкций минимаксных бинарных
последовательностей необходимо некоторое начальное представление о
конечных полях. Предлагаемое их описание будет менее формальным, чем
в «чисто» математических источниках. Назовем полем множество
элементов, на котором определены две операции, именуемые сложением и
умножением и обозначаемые привычными символами «+» и «•» (либо «х»,
либо записью одного элемента за другим). Термин «определены»
означает, что обе эти операции замкнуты, т. е. если х, у — элементы поля F,
то их сумма и произведение также принадлежат F: х + у £ F, ху G F.
В любом поле обязательно присутствуют нулевой «О» и единичный «1»
элементы, которые оставляют любой элемент поля неизменным в операциях
сложения и умножения соответственно: х + 0 = X, Jb ' J. — Jb. Таблицы
сложения и умножения в поле строятся таким образом, чтобы указанные
операции были коммутативны (х + у — у + х; ху = ух), ассоциативны
((х + у) + z = х + (у + z)\ x(yz) = [xy)z) и обратимы. Последнее
означает, что наряду со сложением и умножением определены также операции
вычитания и деления на ненулевой элемент: x + y~z^x — z~ у;
ху = z, у ^ 0 => х = z/y. В частности, у каждого элемента х имеется
противоположный, обозначаемый как —х — О — х, и для любого
ненулевого х существует обратный, обозначаемый как х~г = 1/х. Наконец,
операции сложения и умножения подчиняются дистрибутивному закону:
(х + y)z = xz + yz.
Очевидно, что поле представляет собой множество, в пределах
которого операции с элементами подобны операциям с действительными
числами в обычной арифметике. Тем самым поле допускает трактовку
как всего лишь абстрактное обобщение множества действительных чисел
или, иными словами, множество действительных чисел есть простейший
пример поля. Другими примерами поля служат множества рациональных
чисел, комплексных чисел и т.п. Все подобные числовые поля обладают
бесконечным порядком, где последний термин означает число элементов
поля. В противоположность этому, изучаемые далее конструкции
базируются на конечных полях (полях Галуа), порядки которых конечны.
В курсах современной алгебры доказывается (см., например [30]),
существование конечных полей любых порядков (и только их) вида рш, где
р — простое, am — натуральное числа. Традиционно принято
обозначать поле Галуа порядка рт как GF(pm). Для целей нашего конкретного
6.6. Начальные сведения о конечных полях и линейных последовательностях 215
рассмотрения достаточны лишь простые поля GF(p), т.е. поля простых
порядков (га = 1). Самым легким для понимания представлением
простого поля GF(p) является отождествление всех р его элементов с целыми
числами вида 0,1, ...,£> — 1, сложение и умножение которых выполняются
по модулю р. В табл. 6.3 приведены таблицы сложения и умножения для
трех первых простых полей GF(2), GF(3), GF(5). Заметим, что в GF(2)
любой из двух элементов противоположен самому себе, поскольку 0 + 0 =
— 1 + 1 = 0, и единственный ненулевой элемент 1 является обратным
самому себе. Операции в остальных простых полях не столь вырожденны,
например в GF(5), 2 + 3 = 0=^-2 = 3, и 3 • 2 = 1 => 3"1 = 2.
Таблица 6.3. Таблицы сложения и умножения в простых полях
| GF(2) GF(3) GF(b) 1
+
0
1
1 х
0
1
0 1 +
0 1 0
1 0 1
2
0 1 х
0 0 0
0 1 1
2
0 12 +
0 12 0
12 0 1
2 0 1 2
3
4
0 12 х
0 0 0 0
0 12 1
0 2 1 2
3
4
0 12 3 4 1
0 12 3 4
12 3 4 0
2 3 4 0 1
3 4 0 12
4 0 12 3
0 12 3 4
0 0 0 0 0
0 12 3 4
0 2 4 13
0 3 14 2
0 4 3 2 1 1
6.6.2. Линейные последовательности
над конечными полями
Введем в рассмотрение последовательность do,di, • • • с элементами
(символами) из заданного конечного поля GF(p), подчиняющуюся линейной
рекурсии:
d% = —fn-idi-i ~ fn-2<ii-2 fodi-n, i = n, n + 1,..., (6.13)
где коэффициенты /о, /i,..., /n-i — фиксированные константы,
принадлежащие GF(p). Такая последовательность называется линейной
(рекуррентной) последовательностью над полем GF(p) памяти п. Элементы
линейной последовательности вычисляются один за другим, причем
каждый последующий определяется п предшествующими, так что, задав п
начальных элементов do, rfi,..., dn_i, можно сгенерировать всю
последовательность.
216 Глава 6. Широкополосные сигналы для измерения
Пример 6.4. Построим линейную рекуррентную последовательность
памяти п — 3 над полем GF(2) (последовательности над GF(2) называются также
бинарными) с коэффициентами рекурсии /2 = О, Д = 1, /о = 1, отправляясь
от начальных элементов do — 1, d\ — О, d<z — 0. Так как в рассматриваемом поле
любой элемент противоположен себе, рекурсия (6.13) имеет вид d% = di-2 + di-з»
г ^ 3, порождая последовательность 1,0,0,1,0,1,1,1,0,0,1,0,1,1,.... Данная
последовательность периодична с периодом 7.
Пример 6.5. Построим последовательность над полем GF(S) (троичную
последовательность) памяти п = 3 с коэффициентами рекурсии (6.13) Д = 0,
/i = 2, /о = 1, начиная с символов do = 1, di = 0, cfe = 0- Поскольку в GF(3)
—2 = 1, — 1 = 2, рекурсия (6.13) принимает вид d* = di_2 + 2d;_3? г ^ 3, генерируя
последовательность: 1, 0, 0, 2, 0, 2, 1, 2, 2, 1, 0, 2, 2, 2, 0, 0, 1, 0, 1, 2, 1, 1, 2, 0, 1, 1,
.... Заметим, что полученная последовательность опять периодична с периодом
26 и состоит из двух блоков длины 13, второй из которых повторяет первый,
поэлементно умноженный на 2.
Обратимся к рис. 6.11, на котором показан стандартный генератор
линейной рекуррентной последовательности. По принципу построения он
представляет собокрегистр сдвига с линейной обратной связью (РСЛОС).
Регистр состоит из п р-ичных ячеек памяти (разрядов, триггеров),
обозначенных квадратами, каждая из которых имеет р возможных состояний
и хранит тот или иной элемент GF(p) в течение тактового интервала.
Схема тактовой синхронизации (на рисунке не показана) управляет
работой регистра таким образом, что после каждого тактового импульса
состояние любого разряда передается следующему слева направо. Схема
обратной связи содержит умножители элементов (состояний),
хранящихся в разрядах, на константы —/г и сумматоров. Обе арифметические
операции выполняются, разумеется, по правилам поля GF(p).
Рис. 6.11. Генератор линейной
рекуррентной
последовательности
Предположим, что начальные состояния (т. е. начальные символы
последовательности) dn_i, dn_2, • •., do записаны в разряды регистра слева
направо, как это показано на рис. 6.11. Тогда состояние выхода петли
обратной связи определится равенством ~fn-\dn^x — /п_2^п-2 — • • • —
6.6. Начальные сведения о конечных полях и линейных последовательностях 217
—fodo = dn и после подачи тактового импульса содержимое ячеек
регистра сдвига примет вид dn, dn_i, ..., di, генерируя состояние обратной
связи —fn-\dn — /п_2^п-1 — ... — fod\ — dn+i- После очередного такта
ячейки регистра будут содержать элементы dn+i, dn, ..., d<i и т. д.
Обобщая, можно видеть, что в каждом такте текущее содержимое регистра
rfi_i, di-2, •.., di-n формирует состояние обратной связи d*. Таким
образом, полностью линейная рекуррентная последовательность может быть
непосредственно считана с крайнего правого разряда, начиная с самого
первого символа do, или с любого другого разряда, но с определенным
опережением во времени.
Естественно, тот или иной разряд подсоединен к сумматору через
умножитель лишь тогда, когда соответствующий коэффициент fi в
обратной связи не равен нулю, в противном же случае необходимость в
соединении вообще отсутствует.
Пример 6.6. На рис. 6.12, а представлена схема на основе РСЛОС,
генерирующая бинарную последовательность примера 6.4. Отметим, что в случае бинарной
последовательности умножение на единицу означает попросту соединение
разряда с сумматором. Рис. 6.12, б иллюстрирует последовательную смену состояний
ячеек регистра, а также состояния выхода обратной связи (точка ОС на
схеме) при подаче тактовых импульсов. Генерируемая линейная последовательность
считывается в виде последовательных состояний крайнего правого разряда.
Результатом считывания состояний второго или первого разряда является копия
той же последовательности с опережением в один или два такта соответственно.
Такт
| 1
I 2
| 3
4
I 5
6
| 7
ОС
1
0
1
1
1
0
! о
Состояние регистра |
1
0
1
0
1
1
1
0
2
0
0
1
0
1
1
1
3 |
1
0
0 |
1
0
1 I
1 J
'— w
ОС
1
4-1
—v
2
н
df
h
-2
г
3
4-
а) б)
Рис. 6.12. Генератор бинарной последовательности (а) и таблица состояний (6)
Поскольку число различных состояний регистра конечно (не более рп),
неизбежна ситуация, когда после некоторого числа тактов уже
наблюдавшееся состояние повторится вновь. Однако, стартуя с некоторой
начальной загрузки, т.е. фиксированного состояния РСЛОС, схема рис. 6.11
генерирует лишь единственную последовательность, определяемую (6.13).
218 Глава 6. Широкополосные сигналы для измерения
Следовательно, повторение какого-либо состояния регистра ведет к
повторению всех последующих генерируемых символов, что означает
периодичность (по крайней мере, после некоторого переходного процесса)
любой линейной рекуррентной последовательности. Далее, как
непосредственно видно из (6.13), если регистр окажется в нулевом состоянии
(нули во всех разрядах), все последующие символы будут также нулевыми,
т. е. генерируемая линейная последовательность окажется вырожденной,
состоящей только из нулей. Понятно, что подобная последовательность
практически бессмысленна, так что нулевое состояние регистра в
процессе генерирования последовательности должно быть исключено. В итоге
остается самое большее рп — 1 разрешенных состояний регистра, означая,
что максимальный период (длина) линейной последовательности не
может быть больше рп — 1.
6.6.3. га-последовательности
Линейные рекуррентные последовательности, имеющие максимально
возможный период L = рп — 1, играют особую роль в современных
информационных технологиях и называются последовательностями максимальной
длины или просто m-последовательностями. Будучи полностью
детерминированными, они обладают многими свойствами, присущими
случайным последовательностям типа последовательности исходов
подбрасывания правильной монеты. Следующие замечательные свойства являются
ключевыми для понимания ценности m-последовательностей в плане
построения кодов с хорошей автокорреляцией.
1. Свойство уравновешенности. На одном периодер-ичной т-последо-
вательности любой ненулевой элемент GF(p) встречается рп~1 раз, тогда
как нулевой — рп~1 — 1 раз. Для того чтобы убедиться в этом, достаточно
заметить, что все возможные рп — 1 ненулевые состояния регистра
должны быть пройдены в том или ином порядке в ходе генерирования одного
периода ^-последовательности, так как иначе период не будет
максимальным. Все эти состояния есть не что иное, как различные п-разрядные
р-ичные числа из диапазона 1,2,..., рп — 1, а ^-последовательность,
считываемая с крайней правой ячейки регистра, может трактоваться как
последовательность цифр старшего разряда этих чисел. При пробегании
диапазона 0,1,2,... ,рп — 1 любая р-ичная цифра в любом конкретном
разряде (например, старшем) повторяется точно рп~1 раз. Исключение
из пробегаемого диапазона n-разрядного числа из одних нулей уменьшит
на единицу только число повторений нуля в старшем (или любом другом
разряде). В частности, период бинарной (двоичной) т-последовательно-
сти памяти п составляет L = 2п — 1 и содержит Lo = 2n_1 — 1 нулей
и L\ = 2п~1 единиц. Легко видеть, например, что последовательность при-
6.6. Начальные сведения о конечных полях и линейных последовательностях 219
мера 6.4 является бинарной m-последовательностью длины L = 23 — 1 = 7,
содержащей на периоде Lo — 22 — 1 = 3 нуля и L\ — 22 = 4 единицы.
Аналогично последовательность примера 6.5 есть троичная
га-последовательность длины L = З3 — 1 = 26, имеющая на периоде L$ = З2 — 1 = 8
нулей и по L\ — L2 = З2 = 9 элементов 1 и 2.
2. Любые две m-последовательности, генерируемые одной и той же
рекурсией (6.13), отличаются друг от друга не более чем циклическим
сдвигом. Действительно, поскольку при фиксированных п начальных
элементах соотношение (6.13) полностью определяет последовательность, то
две несовпадающие га-последовательности, формируемые заданной
рекурсией, не могут иметь п абсолютно идентичных начальных элементов.
С другой стороны, на одном периоде га-последовательности
содержатся все состояния РСЛОС, кроме нулевого, и после появления состояния,
повторяющего начальную установку генератора одной
последовательности в генераторе другой, вторая последовательность полностью повторит
первую, оказавшись попросту некоторой ее задержанной репликой.
3. Свойство сдвига и вычитания. Возьмем некоторую
га-последовательность, заданную уравнением (6.13), и вычтем из нее поэлементно
(разумеется, по модулю р) ее же копию, циклически сдвинутую на га
позиций
Щ-\-т = ~ Jn—\Щ+т—1 ~ Jn—2Щ+т—2 — * * • — /о^г+m—т
где га — произвольное целое. Результатом будет
Щ ~ Щ+т =
= ~/n-l№-l ~~ di+m-l) — fn-2\d>i-2 ~ ^i+m-2) — • • • — fo(di-n — di+m-n).
Введя обозначение е^ = di — di+m, придем к линейной рекуррентной
последовательности, элементы d^ которой определяются первоначальной
рекурсией
d{ = -fn-l<%-i ~ fn-2<%-2 /0<4-«- (6Л4)
Возможны лишь две взаимоисключающие ситуации. Предположим
вначале, что сдвиг га равен целому числу периодов L. Тогда d{ = di+m и d[ = 0
для всех г, т.е. последовательность, описываемая (6.14), состоит из одних
нулей.
Пусть теперь га не кратно L. Тогда di и di+m не могут совпадать
для всех i = 0,l,...,L — 1, поскольку сдвинутая копия может полностью
повторить исходную последовательность только при сдвиге, кратном
периоду, что противоречит предположению. Тогда очевидно, что рекурсия
(6.14), полностью повторяющая (6.13), генерирует некоторую ненулевую
последовательность. Однако, согласно предыдущему свойству, если
рекурсия (6.13) или, что эквивалентно, соответствующая схема рис. 6.11
220 Глава 6. Широкополосные сигналы для измерения
генерирует га-последовательность, стартуя с некоторого определенного
начального состояния, то никакой другой ненулевой последовательности,
кроме сдвинутой копии той же самой m-последовательности, она при
другом начальном состоянии сгенерировать не может. Мы таким
образом приходим к заключению: поэлементное вычитание двух сдвинутых
копий одной и той же га-последовательности дает либо нулевую
последовательность, если взаимный сдвиг кратен периоду, либо некоторую новую
сдвинутую копию исходной га-последовательности в противном случае.
Для двоичных последовательностей вычитание равносильно сложению,
благодаря чему рассмотренное свойство нередко упоминается как
свойство сдвига и сложения. Возвратившись к примеру 6.4, можно видеть,
что сложение полученной в нем последовательности с ее сдвинутой на две
позиции влево копией 0,1,0,1,1,1,0,0,1,0,1,1,1,0,... дает
последовательность 1,1,0,0,1,0,1,1,1,0,0,1,0,1,..., которая является копией исходной,
циклически сдвинутой вправо на одну позицию.
Читателю рекомендуется самостоятельно проверить справедливость
свойства сдвига и вычитания для троичной га-последовательности
примера 6.5.
Очевидно, для генерирования р-ичной га-последовательности, т. е.
последовательности с максимальным периодом, возможным для
фиксированной памяти п (а не некоторой последовательности меньшей длины),
требуется специальный подбор коэффициентов fi в рекурсии (6.13) (или
в РСЛОС). Для того чтобы линейная последовательность была
га-последовательностью, необходимо и достаточно использовать в рекурсии (6.13)
множители /$, являющиеся коэффициентами /г-, г = 0,1,..., п — 1
примитивного полинома f(x) = хп + fn-\xn~l + fn-2Xn~2 + • • • + /о степени п
над полем GF(p). Примитивные полиномы составляют подкласс
неприводимых полиномов. Полином f(x) стецени п над полем GF(p) (т.е. с
коэффициентами из GF(p)) называется неприводимым над GF(p), если его
нельзя представить как произведение двух полиномов степени, меньшей
п. Подобным полиномам в множестве всех полиномов принадлежит та же
роль, что простым числам в множестве целых. Не каждый неприводимый
полином примитивен, хотя, к примеру, в частном случае р = 2 и
простого 2п — 1 все неприводимые полиномы примитивны. Для доказательства
необходимости и достаточности вышеуказанного выбора обратной связи
потребовался бы очередной экскурс в абстрактную алгебру, что не
вполне согласуется с концепцией книги. Заинтересованный читатель может
ознакомиться с деталями по многочисленным источникам (например, [31, 32]).
Примитивные полиномы подробно табулированы в ряде руководств
по современной алгебре и теории кодирования, а также (в основном для
р = 2) в некоторых книгах: по широкополосной связи [5, 6, 18, 32]. Не со-
6.7. Периодическая АКФ т-последователъностей 221
ставляет труда и их поиск с помощью компьютера (см. задачу 6.47).
Соответствующие команды, в частности, имеются в среде MATLAB (см.
Communications Toolbox).
В целом синтез генератора m-последовательности весьма прост. При
заданном порядке поля (объеме алфавита) р память п выбирается из
условия получения необходимой длины L, после чего нахождение
соответствующего примитивного полинома исчерпывает задачу.
Возвращаясь к примерам 6.4 и 6.5, заметим, что бинарная га-после-
довательность длины 7 построена на основе примитивного над GF(2)
полинома f(x) — х3 + х +1, тогда как для генерирования троичной
последовательности длины 26 использовался примитивный над GF(3) полином
f(x) =ж3Ч- 2я + 1.
6.7. Периодическая АКФ т-лоследовательностей
Результаты предыдущего параграфа немедленно приводят к правилу
построения минимаксных бинарных последовательностей с АКФ (6.12).
Рассмотрим бинарную m-последовательность {di} памяти п, т.е. длины L =
= 2п — 1. Отобразим ее символы 0 и 1 в бинарный алфавит ±1 согласно
правилу
—<-«*-{-!: *:!: <е15)
где при возведении —1 в степень di последняя величина формально
трактуется как действительное число 0 или 1. Полученная таким образом
последовательность {щ} действительных бинарных символов ±1 обладает
периодом N = L = 2п — 1и является взаимно-однозначным
отображением исходной га-последовательности {di}. Представляется естественным
сохранить за ней то же самое наименование бинарной
га-последовательности. Для устранения риска перепутывания можно при необходимости
использовать дополнительную маркировку типа «бинарная {±1}
последовательность» или «бинарная {0,1} последовательность». Найдем
ненормированную периодическую АКФ (6.7) последовательности {щ}:
N-l L-l L-1
Лр(т) = J2 а^-гп = £ (-1)*(-1)*-~ = J2 (~l)di+di-™- (6.16)
г=0 г=0 г=0
Воспользуемся теперь свойством сдвига и сложения бинарных {0,1}
га-последовательностей. Суммирование в показателе степени здесь
можно выполнить по модулю 2, так как это даст тот же итог возведения
в степень, что и обычное арифметическое сложение. При этом {d^} =
— {di + di-m} окажется {0,1} га-последовательностью периода L при
222 Глава 6. Широкополосные сигналы для измерения
Rq
,(m) = L0 -Li = < _^
m/0 mod L или последовательностью из одних нулей в противном
случае. В силу свойства уравновешенности при т ф 0 mod N на одном
периоде {d'j} = {di + di-m} содержится Lo = 2n_1 — 1 нулей и L\ = 2n_1 единиц,
поэтому сумма (6.16) состоит из Lq положительных и L\ отрицательных
единиц, давая в итоге
га = 0 mod TV,
га ф 0 mod ЛГ.
Как видно, полученный результат в точности повторяет (6.12),
доказывая тем самым, что бинарные m-последовательности относятся к числу
минимаксных1.
Пример 6.7. Вернемся опять к последовательности примера 6.4. Ее
отображением на алфавит {±1} в соответствии с (6.15) является бинарная {±1} т-по-
следовательность — 1, +1, +1, —1, +1, — 1,— 1,... Таблица 6.4, содержащая
минимально необходимое число строк, поясняет вычисление периодической АКФ этой
последовательности. Интересно также проследить процесс согласованной
фильтрации дискретного сигнала, модулированного ею. На рис. 6.13 приведена схема
фильтра, согласованного с одним периодом периодического видеосигнала с
прямоугольными чипами. Все ее блоки полностью идентичны представленным на
рис. 6.7. Эпюры напряжений в характерных точках показаны на рис. 6.14.
Можно видеть, что выходной отклик содержит главные пики, повторяющиеся с
периодом N А, и равномерный фон отрицательных боковых лепестков, уровень
которых в семь раз меньше уровня главных пиков.
Таблица 6.4. Вычисление периодической АКФ бинарной га-последовательности
га
0
1
2
1 з
ао
-
-
-
+
ах
+
-
-
-
а2
+
+
-
-
аз
-
+
+
-
GL4
+
-
+
+
аъ
-
+
-
+
Яб
-
-
+
-
Rp(m)
+7
-1
-1
-1
Дискретные сигналы, основанные на бинарных
га-последовательностях, чрезвычайно популярны в современных информационных системах
благодаря оптимальным периодическим корреляционным свойствам и
простоте формирования и обработки. В числе наиболее наглядных примеров
их практического применения можно упомянуть 2G стандарт
мобильной связи cdmaOne (IS-95), в котором т-последовательности различной
1 Отображение (6.15) обобщается на последовательности над GF(p), р ^ 2 как а% =
— ex.Y>(j27rdi/p), приводя к многофазным (р-фазным) кодам, периодическая АКФ
которых по-прежнему удовлетворяет (6.12). Однако многофазные коды этого типа менее
интересны практически, чем минимаксные бинарные последовательности.
6.7, Периодическая АКФ т-последователъностей 223
длины используются как пилот-сигналы начальной синхронизации и
зондирования канала, а также коды мультиплексирования сигналов базовых
станций и скремблирования данных.
s(t)
мм
^4
▼ + £+.
ьАн
4 s 5
СФ чипа
ГЛ
Рис. 6.13. Согласованный фильтр для бинарной m-последовательности
Рис, 6.14. К согласованной фильтрации m-последовательности
Помимо этого m-последовательности служат базисом для
формирования других важных семейств сигналов (Касами, Голда и др., см. гл. 7).
224 Глава 6. Широкополосные сигналы для измерения
В то же время, множество длин N = 2п — 1 = 3, 7, 15, 31, 63, 127,
255, 511, 1023, ..., при которых данные последовательности
существуют, достаточно разрежено, что в определенных ситуациях может сузить
диапазон маневра проектировщика. По этой причине целесообразно
исследовать еще один интересный класс бинарных последовательностей, для
чего, однако, понадобится более глубокое знакомство с основами алгебры
конечных полей.
6.8. Дополнение о конечных полях
Возьмем некоторый элемент х конечного поля GF(p) и умножим его на
себя га раз, обозначив результат как rn-ю степень элемента х:
т раз
Стандартные правила обращения со степенями обычной алгебры
остаются в силе в любых полях, включая конечные. В частности
/тг»''*/¥»** Т* . Т* • • Т* • Т* • Т* • • Т* Т* • Т* . .О™ гр''*'''''
Л/ Л/ Л/ Л/ ... Л/ Л/ Л/ ... Л/ Л/ JU ... Л> • Л/ ,
га раз п раз т+п раз
(хт)п = хт-хт-...-хт = хтп.
v } N * '
п раз
Более того, обозначая n-ю степень х~г(х ф 0) как ж~п, имеем
грТЧ гр ^ гр . гр . . гр . rp -L . rp -L . . rp J-
Л/ Л/ — Лг Л> • • ш Л> Л/ Л/ • • • Л/ *
т раз п раз
Повторное использование определения обратного элемента хх~г = 1
приводит к правилу
т —п __ I х •> т ^£ П, _ ш-п
Х Х ~\ {x-l)n~m, m<n, ~Х *
В частности, равенство
U/ «t/ • > • «^ J/ «Is ...«£/ — X «*/ «*/ Л*
> V- ' V '
т раз т раз
и единственность обратного для любого ненулевого элемента позволяют
заключить, что
х° = 1 и (х™)-1 =х~т.
Пример 6.8. В поле GF(S) (см. табл. 6.3)
2° = 1, 21 = 2, 22 = 2 • 2 = 4,
23 = 22 • 2 = 4 • 2 = 3, 24 = 23 . 2 = 3 • 2 = 1, 2"1 = 3,
2-2 = (2~1)2= З2 = 4, 2-3 = (2~1)3 = 33 = 4 -3 = 2, 2~4 = (2"1)4 = З4 = 2 . 3 = 1.
6.8. Дополнение о конечных полях 225
Рассмотрим теперь последовательные степени элемента х ф 0 поля
GF(p): х° = 1, ж1, а:2, — Поскольку члены этого ряда лежат в GF{p), все
они не могут быть разными в силу конечности поля и, следовательно,
равенство хг = хк => хг~к = 1 будет иметь место для некоторых г, fc,
г > к. Предположим, что существует элемент а, у которого первые р — 1
степеней а0 = 1, а1, а2,... , а*7-2 различны. Поскольку р — 1 есть число
ненулевых элементов GF(p), то вышеприведенные степени в точности
исчерпывают все ненулевые элементы GF(p). Таким образом, элемент а,
если он действительно существует, позволяет построить все поле GF(p),
кроме нуля, возведением а в степени 0,1,...,р — 2. Подобный элемент
называется примитивным.
Один из ключевых фактов абстрактной алгебры состоит в
существовании примитивного элемента в любом конечном поле. Доказательство
этого тезиса можно найти во многих руководствах по современной
алгебре или теории кодирования (например, [30, 32, 33]). Примитивный
элемент не является единственным: в любом конечном поле порядка
большего трех имеется несколько таких элементов. Как видно из примера 6.8,
элементы 2 и 3 оба примитивны в поле GF(5).
Поскольку для примитивного элемента степени а0 = 1, а1, а2, ...,
аР~2 пробегают все ненулевые элементы GF{p), степень ар~г должна
совпадать с каким-то из них. В действительности она не может равняться
ничему, кроме 1, так как равенство ар~1 = а1 при 0 < I ^ р — 2 означало
бы, что ар~г~1 = 1. Это, однако, невозможно, поскольку 1 < p—1—l < р— 1,
и среди элементов с*1, а2, ..., ар~2 ни один не равен единице.
Следовательно, ар~г = 1. Теперь легко увидеть, что то же верно для любого
ненулевого элемента конечного поля, а не только для примитивного. В
самом деле, любой ненулевой элемент х Е GF(p) представим как Z-я степень
примитивного для соответствующего целого I: х = а\ так что (малая
теорема Ферма)
xp~l - (al)p~l = al^p-V = (ар-1)1 = 1. (6.17)
Следующее понятие имеет вполне естественное название,
подчеркивающее преемственность к категориям обычной алгебры. Целое значение
показателя степени Z, в которую следует возвести а для получения х = а1,
есть логарифм х по основанию а с обозначением loga x. Согласно этому
определению, alog<*х — х.
Сосредоточимся теперь только на простых полях нечетного
порядка (р > 2) и введем функцию, именуемую двузначным характером ф(х)
ненулевого элемента х:
226 Глава 6. Широкополосные сигналы для измерения
Ясно, что двузначный характер есть просто отображение поля GF(p)
на пару действительных чисел {+1,-1}, трансформирующее ненулевой
элемент х в +1, если его логарифм четен, и в —1 в противном случае.
Заметим, что это отображение не зависит от выбора конкретного
примитивного элемента (задача 6.24). В дальнейшем понадобятся следующие
свойства двузначного характера.
1. Характер единицы поля GF(p) равен единице:
ф(1) = 1, (6.19)
поскольку а0 = 1 => loga 1 — 0.
2. Характер — мультипликативная функция, иными словами,
характер произведения ненулевых элементов есть произведение их
характеров. Действительно, из (6.17) и (6.18) следует
ф{хУ) = (-1)1о§*(*2/) = (-1)1°8а*+1°8аУ =
= (-i)i°«a x • (-l)l°s* у = ф(х) • ф(у). (6.20)
3. Свойство уравновешенности: сумма характеров всех ненулевых
элементов поля GF(p) равна нулю:
Е*(*)=Е(-1),°!Ь'* = 0- (6-21)
х=1 х—1
Чтобы это доказать, заметим, что при пробегании переменной х
всех р — 1 ненулевых элементов поля loga x пробегает в некотором
порядке множество р — 1 целых вида 0,1,... ,р — 2. Вследствие
нечетности р количество целых чисел в указанном диапазоне четно, так
что (р — 1)/2 из них являются четными и (р — 1)/2 — нечетными.
Таким образом, сумма (6.21) содержит равное число положительных
и отрицательных единиц и потому равна нулю.
4. Найдем характер элемента, противоположного единице, т.е. ф(~ 1).
Поскольку все элементы е*г, г = 0,1,..., р — 2 различны, только два
из них удовлетворяют уравнению х2 = 1, а именно 1 и — 1. Так как
элемент cr^""1"2 удовлетворяет тому же уравнению, он не может
быть равным ничему, кроме —1. Как итог loga(—1) = (р — 1)/2 и
Пример 6.9. Продолжая пример 6.8, отметим, что в поле GF{b) ф{2) — ф(3) —
= -1 и ф(1) = ф{4) = +1. Следовательно ф(2 • 4) = ^(3) = -1 = ф(2) - ф(4) =
= (—1) • (+1) = —1, подтверждая мультипликативное свойство, и ^(1) + ф(2) +
6.9. Последовательности Лежандра 227
+ф(3>) + ф(4) = 0, в согласии со свойством уравновешенности. Кроме того,
ф(—1) = ф(£) = 1, что и предсказано (6.22), поскольку 5 = 4*1 + 1.
Параллельно (особенно в теории чисел) двузначный характер
называют символом Лежандра, с чем связано и наименование
последовательностей, изучаемых в следующем разделе.
6.9. Последовательности Лежандра
Сформируем бинарную последовательность нечетной простой длины N — р,
отождествляя номер позиции г элемента ai = ±1 с элементом простого
поля GF(p). Тогда для любого i € {1,2, ...,7V — 1} определен характер
г/>(г), и последовательность Лежандра есть просто последовательность
характеров номеров г, за исключением г = 0, для которого элемент
последовательности полагается равным1 +1. Для периодической версии
последовательности Лежандра правило формирования определяется в виде
+1, г-OmodTV,
ф(г), ^ 0 mod Ж { }
а>г = <
Периодичность последовательности (6.23) с периодом N следует из
трактовки номеров г в ф{г) как элементов поля GF(p), в котором сложение
выполняется по модулю р, в результате чего ф(г + N) = ф(г + р) — ф{г).
Для исследования периодической АКФ последовательности Лежандра
подставим (6.23) в (6.7) и выделим из суммы слагаемые, содержащие а$:
АГ-1 N-1
Rp(m) = ^2 aiai-™ = &№-т + «ш^О + ]Г^ <ЗД-т =
р-1
= ф{-т) + ф{т) + ^ Ф{г)ф{г - ш). (6.24)
г=1
гфт
Разумеется, интересна оценка только боковых лепестков, т. е.
значений суммы (6.24) при сдвигах т, не кратных N = р. Используя
мультипликативное свойство (6.20), имеем ф(—т) = ф(—1)ф(т) и ф(г — га) =
= ф[г(1 — тг~1)] = ф(г)ф(1 — тто"1), где обращение всегда имеет смысл,
поскольку г — 0 исключено из суммы в (6.24). В результате
р-1
Rp(m) = ф(т)[1 + ^(-1)] + J2 Ф2Ш(1 ~ mi~1)- (6-25)
i=l
гфт
Присвоение этому элементу значения —1 приведет к тому же конечному результату.
228 Глава 6. Широкополосные сигналы для измерения
Обратимся теперь к (6.22). Для произвольной длины вида N = р =
— 1 mod 4, ф(—1) = 1, и первое слагаемое в вышеприведенном
соотношении равно 2ф(т) = ±2 при любом т ф 0 mod N. С другой стороны,
для длин вида N — 3 mod 4 ф(—1) = — 1, и то же самое слагаемое
в (6.25) обращается в нуль. Относительно второго слагаемого в (6.25)
отметим, во-первых, что для любого ненулевого г из GF(p) ф2{г) = 1.
Во-вторых, при пробегании г всех ненулевых элементов GF(p) г-1, как
и —гаг"1 (га ф 0 modp), также пробегают то же множество, но в
некотором другом порядке. Следовательно, 1 — гаг-1 пробегает множество р — 1
элементов поля, включая нуль, но исключая 1, поскольку —гаг-1 не может
принимать нулевого значения. На деле же нулевой элемент также следует
изъять из множества значений 1 — гаг"1, поскольку г во втором слагаемом
(6.24) не принимает значения г = га, отвечающего 1 — гаг-1 — 0, а
тогда полный диапазон значений 1 — гаг"1 охватывает элементы поля от 2
до р — 1. Принимая все сказанное во внимание, придем к результату
р—1 р—1 р—1
£ Ф2{г)ф{1 - тГ1) = J2 №) = Е №) ~ W = -L
г=1 ж=2 05=1
где финальный шаг следует из свойств характера (6.19) и (6.21). В итоге
имеем два варианта периодической АКФ последовательности Лежандра
в зависимости от длины (h в нижеследующих выражениях — натуральное
число):
1. Для длин вида N = Ah + 1, (т. е. N — 1 mod 4)
и г \ i N> га = 0 mod N, ( ч
^тН -3 или +1, m^OmodJV. ^
Для длин вида N — Ah + 3, (т. е. N = 3 mod 4)
=1 а.
ъ / \ I ^' 5 га = 0 mod TV, , _ _ _ч
^(ш)н _,' TO/Omod*: (6-27)
Последний результат, повторяя (6.12), свидетельствует, что
последовательности Лежандра длин N = 4/г + 3 являются минимаксными, т. е.
обладают оптимальными периодическими корреляционными свойствами
среди бинарных последовательностей нечетных длин.
Пример 6.10. Длина N — 7 принадлежит множеству вида N — Ah + 3. В поле
GF(7) элемент 3 является примитивным, поскольку возведение его в степень О,
1, ..., 5 генерирует все различные ненулевые элементы GF(7): 3° = 1, З1 = 3,
З2 = 2, З3 = 6, З4 — 4, З5 = 5. Как видно из этого ряда, логарифмы
элементов 1, 2, и 4 четны, тогда как элементов 3, 5 и 6 — нечетны. Следовательно,
^(1) = ф(2) = ф(А) = 1 и ф(3) = ^(5) = ^(6) = -1. Теперь, согласно (6.23), рас-
6.10. Вновь о бинарных кодах с хорошими апериодическими АКФ 229
становка символов 4-1 на позициях г = 0,1,2,4и—1на позициях г — 3,5,6 дает
последовательность Лежандра длины N — 7. Вычисления, поясняемые табл. 6.5,
подтверждают оптимальность корреляционных свойств полученной бинарной
последовательности.
Таблица 6.5. Вычисление периодической АКФ последовательности Лежандра
т
0
1
2
3
ао
+
-
-
'+■
ах
+
+
-
-
U2
+
+
+
-
а3
-
+
+
+
а\
+
-
+
+
а5
-
+
-
+
ае
-
-
+
-
Rp(m) I
+7
-1
-1 |
-1 J
Последовательности Лежандра образуют достатрчно мощный класс
бинарных кодов с минимаксной периодической АКФ. Условие их
существования (любая простая длина N = 4/i + 3) значительно мягче, чем
га-последовательностей (N = 2п — 1), и поэтому набор длин
последовательностей Лежандра значительно богаче. Так например, в диапазоне от 50
до 1500 имеется только пять длин, для которых существуют
т-последовательности, тогда как для последовательностей Лежандра это количество
равно 114.
6.10. Вновь о бинарных кодах с хорошими
апериодическими АКФ
Сведения, накопленные о бинарных последовательностях с хорошими
периодическими АКФ, дают теперь возможность вернуться к идее,
сформулированной в § 6.4 и состоящей в использовании таких
последовательностей в качестве исходного материала для поиска кодов с нужными
свойствами апериодических автокорреляций. Рассмотрим некоторую
кодовую последовательность ао, ai,..., ajsf-i длины N. Любой ее циклический
сдвиг as, as+i,..., a^v-i? #о? • • • ? as-b 1 ^ s ^ N — 1 имеет ту же
периодическую АКФ, что и исходный код, так как периодическая АКФ
инвариантна к циклическому сдвигу (см. задачу 5.5). Апериодическая же АКФ
циклически сдвинутой копии может отличаться от АКФ
первоначальной последовательности. Вместе с границей (6.5) данный факт служит
основой широко распространенного алгоритма поиска кодов с
приемлемой апериодической АКФ, описанного ниже.
На первом этапе для требуемой длины N тем или иным способом
отбирается некоторое множество последовательностей-кандидатов,
имеющих хорошие периодические АКФ. Оно может содержать все известные
последовательности заданной длины N [34-37], уровень боковых
лепестков периодической АКФ которых в соответствии с (6.5) дает надежду
230 Глава 6. Широкополосные сигналы для измерения
на достижение малого значения ра,тах5 или включать лишь те
последовательности, которые согласуются с технологическими предпочтениями
дизайнера. Если, скажем, необходимы бинарные коды длины N = 63,
подобное начальное множество может быть сформировано только из всех
m-последовательностей этой длины (так как N не простое число,
последовательности Лежандра для такой длины не существует) или включать
и некоторые другие последовательности с обнадеживающей
периодической АКФ. Если же требуется, например, длина N = 127, то исходное
множество может охватывать все ^-последовательности наряду с
последовательностями Лежандра1 или вновь содержать и другие
последовательности с достаточно низкими периодическими боковыми лепестками.
На втором этапе осуществляется полный перебор по критерию
минимума максимального бокового лепестка апериодической АКФ среди
всех однопериодных сегментов последовательностей-кандидатов.
Именно, берется произвольный однопериодный сегмент первой
последовательности-кандидата, вычисляется его апериодическая АКФ и запоминается
уровень максимального бокового лепестка наряду с номерами
последовательности-кандидата и циклического сдвига сегмента. Затем сегмент
циклически сдвигается на одну позицию, и вычисление апериодической
АКФ повторяется. Если новое значение максимума апериодического
бокового лепестка ниже предыдущего, оно вместе с номером нового сдвига
заменяет хранящиеся в памяти данные, в противном случае
сохраняются прежние запомненные значения. Такие итерации повторяются N раз,
т.е. для всех циклических сдвигов первой
последовательности-кандидата, после чего подобному тестированию подвергается следующая
последовательность-кандидат и т. д. Итогом поиска является сегмент какой-
то из последовательностей, имеющий минимальное значение ра,тах
среди всех последовательностей, отобранных на первом этапе. Разумеется,
нет никаких гарантий глобальной оптимальности полученного кода среди
всех возможных бинарных последовательностей данной длины.
Описанная процедура, впервые предложенная в начале 60-х годов,
впоследствии широко использовалась многими авторами, постепенно
расширяя круг охватываемых бинарных последовательностей-кандидатов.
Один из наиболее подробных каталогов бинарных кодов,
синтезированных подобным образом, можно найти в [34].
1 Может существовать множество различных примитивных полиномов одной и той же
степени и, соответственно, множество нетривиально различных га-последовательность
одной и той же длины. Все они, разумеется, потенциально перспективны для поиска
хороших апериодических кодов. В противовес этому существуют только две
последовательности Лежандра одной длины, отличающиеся значением первого символа (+1
в одной и —1 в другой (см. сноску на стр. 227)).
6.10. Вновь о бинарных кодах с хорошими апериодическими АКФ 231
Пример 6.11. Длина N — 23 — 1 = 7 удовлетворяет условию
существования т-последовательности. Имеются два примитивных бинарных полинома
степени 3: f(x) = хъ 4- х 4- 1 и f(x) — х3 4- х2 4- 1. Непосредственная
проверка показывает, что т-последовательности, генерируемые ими, зеркальны друг
другу, т.е. одна из них получается чтением другой справа налево. К
подобному преобразованию инвариантны и периодическая, и апериодическая АКФ
(см. задачу 5.5). Поэтому в множество кандидатов достаточно включить только
одну m-последовательность, скажем, из примера 6.7: —1,4-1,4-1,—1, 4-1,—1,—1.
Кроме того, N = 7 является простым числом вида N = 4/i 4- 3, т. е.
последовательность Лежандра данной длины также существует, а именно
последовательность примера 6.10: +1, +1, +1, — 1, +1, — 1, — 1, к которой можно добавить
ее модификацию с первым символом, замененным на — 1. Последняя полностью
повторяет отобранную m-последовательность, тогда как первая — после
замены знаков всех элементов — совпадает с циклически сдвинутой отброшенной
m-последовательностью. Поскольку изменение полярности вновь не влияет на
периодическую и апериодическую АКФ (см. задачу 5.5), лишь одна из
четырех рассмотренных минимаксных последовательностей достаточна для
включения в множество кандидатов. Пусть ею будет последовательность Лежандра,
начинающаяся символом +1. Вычисление ее апериодической АКФ дает
следующие значения Ra(m), га = 1,2,...,6: 0,4-1,0, —1, —2, —1, и ^а,тах = 2/7. После
циклического сдвига на одну позицию влево приходим к последовательности
4-1,4-1, —1,4-1, —1,—1,4-1, для которой Яв(4) = -3, />а,тах = 3/7, т.е.
максимальный апериодический боковой лепесток хуже, чем у исходной. Следующий
циклический сдвиг дает 4-1,-1,4-1,-1,-1,4-1,4-1 и Ra(l) = -2, /)a,max = 2/7,
т. е. не улучшает первоначальный результат. После следующего сдвига
приходим к последовательности —1,4-1,—1,-1,4-1,4-1,4-1, имеющей апериодическую
АКФ с боковыми лепестками Ra(m) = 0,-1; т ф 0, т.е. с ра,тах = 1/7.
Данная последовательность является глобально оптимальной среди всех ФМ кодов,
поскольку ни один из таковых не может обладать меньшим максимальным
апериодическим боковым лепестком (см. (6.4)). В действительности найден бинарный
код Баркера длины 7, являющийся зеркальной репликой приведенного в табл. 6.1.
Пример 6.12. Пусть N = 257 — 64 х 4 + 1. Поскольку это N простое,
существуют две последовательности Лежандра данной длины, отличающиеся только
первым символом. Число 257, однако, имеет вид Ah 4-1 и, следовательно, их
периодическая АКФ имеет максимальный боковой лепесток /)Р)Гпах — S/N = 3/257
(см. (6.26)). Тем не менее, эти последовательности перспективны в плане
малого уровня />а}тах, поскольку граница (6.4) дает обнадеживающую нижнюю
оценку ра,тах ^ 1,5/257. Применение к ним описанной процедуры имеет
результатом последовательность с максимальным ненормированным апериодическим
боковым лепестком, равным 12, т.е. />а,тах = 12/257 или —26,6 дБ (сравните
с наиболее длинным бинарным кодом Баркера, для которого ра,тах = 1/13 или
—22,3 дБ). После отбрасывания последнего символа найденная
последовательность превращается в код длины N = 256 с тем же значением максимального
ненормированного бокового лепестка и ра,т&х — 12/256 — 3/64, т. е. вновь около
—26,6 дБ. Апериодическая АКФ этого кода показана на рис. 6.15, а. Любопытно,
232 Глава 6. Широкополосные сигналы для измерения
что кодом первичной синхронизации 3G стандарта WCDMA служит бинарная
последовательность точно той же длины N — 256, обладающая апериодическими
боковыми лепестками вплоть до 1/4 (рис. 6.15, б), т. е. гораздо большими в
сравнении с найденной последовательностью. С другой стороны, при выборе кода для
поиска соты в WCDMA приходилось считаться со многими факторами, включая
реализационные, которые могли оказаться важнее хорошей автокорреляции.
"Г Т Г|
Рис. 6.15. Апериодические АКФ двух бинарных кодов длины 256: код из примера
6.12 (а) и код первичной синхронизации WCDMA (б)
0,45
0,40
0,35
х 0.30
£
cff 0,25
0,20
0,15
0,10
0,05
0,00
0 100 200 300 400 500 600 700 800 900 1000
N
Рис. 6.16. Зависимость минимизированного максимального апериодического
бокового лепестка от длины N
е 1 т— 1 т " j ! » ! !
Г ^l^,'*s:'~^,^*ч^^
1 i i i i i i i i i
6.11. Последовательности с идеальной периодической АКФ 233
Рис. 6.16 дает еще одну иллюстрацию к оптимизации бинарных
кодов по критерию максимума бокового лепестка апериодической АКФ,
демонстрируя зависимость ра,тах от длины N для предположительно
лучших бинарных последовательностей, взятых из [25-27, 34]. Пунктирная
линия отвечает кривой pa,max ~ 0,77/viV, аппроксимирующей
зависимость ра,тах = /(N) как a/y/N при а, найденном сглаживанием по методу
наименьших квадратов. Как следует из рисунка, точность подобной
аппроксимации весьма высока, особенно при N > 100.
6.1.1. Последовательности
с идеальной периодической АКФ
Как неоднократно подчеркивалось, существуют многочисленные
приложения, в которых сигналы принципиально должны быть периодическими,
в силу чего их периодические корреляционные свойства обретают
первоочередную важность. Другими словами, хорошие периодические АКФ
не только полезны в качестве вспомогательного средства при синтезе
хороших апериодических последовательностей, но и представляют большую
самостоятельную ценность. Среди примеров подобного рода —
разнообразные системы измерения дальности и времени (в частности в дальнем
космосе) с непрерывными сигналами, пилотные или синхронизирующие
каналы цифровых сетей связи (пилотные каналы линии «вниз» cdmaOne
и cdma2000, вторичный синхроканал WCDMA), радары и сонары
непрерывного излучения и т. п.
Хотя бинарные {±1} минимаксные последовательности выглядят в
этом отношении многообещающе, имея максимальный периодический
боковой лепесток рр^тах — 1/N? снижающийся с ростом длины, все же
вероятны ситуации, когда нужное значение Рр,тах для них можно получить
лишь за счет неприемлемо больших длин N. К примеру, л^ля многих
локаторов, сонаров и других дальномерных систем требование временного
разрешения сигналов в динамическом диапазоне более 80 дБ является
вполне рутинным. Для его выполнения на основе оптимальных бинарных
кодов длины последних должны превышать 104, что может
неоправданно замедлить процедуру начального поиска (см. гл. 8). Разумеется, во
многих подобных сценариях наилучшим выбором были бы
последовательности с идеальной периодической АКФ (6.6), которая, однако, нереализу-
ема на множестве бинарных кодов, традиционно считающихся наиболее
привлекательными технологически. В настоящем разделе анализируются
возможности осуществления идеальной периодической АКФ в случаях,
когда алфавит последовательности не ограничен рамками
противоположной бинарной пары {±1}.
234 Глава 6. Широкополосные сигналы для измерения
6.11.1. Бинарные последовательности
с непротивоположными символами
Замена противоположного алфавита {+1, —1} на некоторый бинарный
непротивоположный позволяет обратить в нуль все периодические боковые
лепестки любой бинарной минимаксной последовательности,
удовлетворяющей (6.12). Простейший путь построения упомянутого алфавита —
добавление константы с (в общем случае комплексной) к начальной {+1, —1}
последовательности ao,ai,... ,Q>n-\ с заменой тем самым символов +1
и— 1 на 1 + с и — 1 + с соответственно. Периодическая АКФ
модифицированной таким образом последовательности вычисляется непосредственно:
ЛГ-1 N-1
Rp(m) = J2 (аг + с)(ъ-т + О = ]£ aiai-m + 2Re (ca0) + iV|c|2, (6.28)
г=0 г=0
N-\
где ao — J2 a*, как обычно, постоянная составляющая исходной после-
i=0
довательности ao,ai, • ■ ■ iaN-x- Равенство (6.8) показывает, что для
любой минимаксной последовательности, удовлетворяющей (6.12), |йо|2 =
N-1
= Yl Щ(т) = N + (N - 1)(—1) = 1 => йо = ±1. Так как измене-
ние знака всех элементов последовательности не меняет АКФ, можно, не
ограничивая общности, считать йо = — 1. Далее, для любой минимаксной
последовательности с АКФ (6.12) первая сумма в правой части (6.28)
равна —1 при любом ш/0 mod N. Поэтому потребовав равенства боковых
лепестков последовательности щ + с, г = ..., —1,0,1,... нулю, получаем
уравнение для комплексной неизвестной с:
\с |2 + |:Re (cao) - « \с\2 - |lle (с) - 1 = 0. (6.29)
Это уравнение при двух действительных неизвестных (реальной и
мнимой частях с) имеет несчетное множество решений. Найдем потенциально
наиболее интересные из них. Когда желателен действительный алфавит,
Re (с) = с и \с |2 = с2, так что (6.29) превращается в квадратное уравнение
9 2 1
с2 с = 0
N N
с корнями с\$ = (1 ± y/N + l)/iV. Новые бинарные непротивоположные
символы 1 + си — 1 + с теперь можно поделить на 1 + с с целью сохранения
+1 как символа нового алфавита. После этого правило преобразования
бинарной минимаксной последовательности с периодической АКФ
вида (6.12) в последовательность с идеальной АКФ предстает в виде: все
символы —1 заменяются на
6Л1, Последовательности с идеальной периодической АКФ 235
-1 + с _ -N+l±y/N + l _ _., , 2
1 + с iV + li^/F+T" VF+T'
тогда как все элементы +1 остаются без изменения.
Пример 6.13. Последовательность Лежандра или m-последовательность
длины N = 127 трансформируется в последовательность с идеальной периодической
АКФ путем замены элементов — 1 на — 1 ± 1/4л/2*
Описанное решение приводит к алфавиту из двух противоположных
символов разной амплитуды, т. е. к амплитудной модуляции (рис. 6.17, а).
Альтернативным решением служит непротивоположный ФМ алфавит, к
которому легко прийти, положив с чисто мнимым: с = jc\. Тогда (6.29)
имеет решения с = ±j/y/N, а новые символы 1 ± j/y/N и — 1 ± j/y/N
после деления на 1 ± j/y/N принимают вид 1 и (—y/N ± j)/(V~N ± j) =
= -(N-l)/{N+l)±2jy/lf/(N+l) = -ехрО'Ф),гдесовФ = (ЛГ-1)/(ЛГ+1)
(рис. 6.17, б).
Рис. 6.17. Непротивоположные бинарные 'I
алфавиты j
1 !
1 + с ;
а)
Пример 6.14. Для N = 127 cos Ф = 63/64 иФ = ± arccos(63/64) w ±10°8'30".
Заменив все отрицательные элементы бинарной m-последовательности или
последовательности Лежандра длины N — 127 на — exp(j$), придем к
последовательности с идеальной периодической АКФ.
Представленный непритязательный способ преобразования алфавита,
неоднократно предлагавшийся и переоткрывавшийся [38, 39], едва ли можно
признать эффективным в практическом отношении. Как видно и
подтверждено примерами, его результатом являются довольно экзотические
значения комплексных амплитуд кода, установка и поддержание которых
с требуемой точностью технологически достаточно проблематичны.
6.11.2. Многофазные коды
На основе небинарной (М > 2) ФМ можно строить разнообразные
многофазные последовательности с идеальной периодической АКФ. Известен
* 4
236 Глава 6. Широкополосные сигналы для измерения
ряд правил их конструирования, которые в большей или меньшей
степени родственны двум наиболее популярным алгоритмам. Первый из них,
приводящий к кодам Чу (или квадратичных вычетов), состоит в
прямой дискретной аппроксимации закона линейной частотной модуляции
(см. § 6.2). Код Чу существует для любой длины N и генерируется как
а* = <
ехр I —— 1 , N — четное,
ехр ——— J , N — нечетное,
где г = ...,-1,0,1,... .
Легко проверить, что щ = аг+лг для всех г и, значит, JV, по крайней
мере, кратно периоду кода. В ходе вычисления периодической АКФ вопрос
о периоде прояснится окончательно. Для кода четной длины
ненормированная периодическая АКФ
„/ ч ^ * ( 3vrn2\N^ (j2mm\
М™>) = 2^ aiai-m = exP I jjr- J }^ exp ^—^— J.
При m = 0 mod N последняя сумма равна JV, тогда как коэффициент,
стоящий перед ней, обращается в 1. Для любого другого т exp(j2irim/N)
зависит от г, а упомянутая выше сумма представляет собой сумму корней
некоторой степени из единицы, или, что эквивалентно, геометрической
прогрессии со знаменателем exp(j27rm/N). Суммирование прогрессии дает
х-. / ч / 77гт2\ 1 — ехр(?'27гт)
Rp{m) = ехр ~-1-Г т^ 7Ш'
р у N ) 1 - ехр (j27rm/N)
Знаменатель последней дроби не обращается в нуль ни при каких
т ф 0 mod N и, следовательно, Rp(m) — 0 при всех сдвигах, не
кратных N. Таким образом, код Чу четной длины имеет период N и идеальную
периодическую АКФ. Подобные же свойства кода нечетной длины
доказываются аналогично (см. задачу 6.29).
Хотя коды Чу служат достаточно красивым академическим примером
ФМ последовательностей с идеальной АКФ, их практическая ценность
далеко не бесспорна, поскольку объем фазового алфавита для них
линейно растет с длиной, и при значительных N интервал между соседними
фазами становится чрезвычайно малым. Из-за этого требования к
точности установки и поддержания значений фаз, устойчивости к влиянию
окружающей среды и т.п. могут оказаться технологически
невыполнимыми.
Аналогичные оговорки (хотя и в меньшей степени) справедливы и в
отношении другого часто упоминаемого семейства многофазных последо-
6.11. Последовательности с идеальной периодической АКФ 237
вательностей: кодов Франка. Последние также базируются на
ступенчатой аппроксимации линейной частотной модуляции, однако значительно
более грубой, и существуют только для длин, являющихся квадратами
целых чисел N = h2 = 4,9,16,25,36,49,.... Правило их генерирования
имеет вид
ai=exp(^^J), г = ...,-1,0,1,..., (6.31)
где, как обычно, [х\ символизирует округление неотрицательного х в
сторону нуля.
Доказательство идеальности периодических корреляционных свойств
кодов Франка отличается от приведенного выше для кодов Чу лишь
некоторыми деталями и вынесено в задачу 6.30. Из сравнения (6.31) и (6.30)
видно, что фазовый шаг алфавита для кодов Франка меньше, чем для
кодов Чу, в y/N раз, так что объем алфавита первых растет с длиной N
значительно медленнее.
Пример 6.15. Положим N — 4 => h = 2. Тогда после приведения фаз к
интервалу [0,27г] имеем ^[i/h\ — 7гг[г/2] = 0,0,0,7т, г — 0,1,2,3, и код Франка
+1, +1, +1, — 1 совпадает с единственным бинарным {=Ы} кодом, имеющим
идеальную периодическую АКФ.
Пример 6.16. Если N — 16, h — 4, и фазовый алфавит содержит 4 символа
{±1, ±j}, так что такой код Франка генерируется с помощью квадратурной ФМ.
Так как
2тгг
7Г 37Г 37Г 7Г
= 0,0,0,0,0,-,тг,— ,0,7г,0,7г,0,у,тг,-, * = 0,1,..., 15,
то код имеет вид +1, +1, +1, +1, +1, +j, -1, -j, -Ы, -1, +1, -1, +1, -j, -l, -hj.
Идеальность его периодической АКФ может быть проверена прямым расчетом.
Завершая знакомство с многофазными кодами, подчеркнем еще раз,
что в аппаратном отношении они значительно менее удобны, чем
бинарные {±1} коды. Существуют ли вообще коды, которые, не проигрывая
бинарным в реализационной простоте, обладали бы — в отличие от
последних — идеальной периодической АКФ? Ответу на этот вопрос
посвящен следующий раздел.
6Л 1.3. Троичные последовательности
Перейдем к рассмотрению последовательностей, чьи элементы щ могут
принимать наряду с бинарными значениями ±1 еще и нулевое.
Другими словами, введем троичный алфавит {—1,0,1}, технически означающий
комбинирование бинарной ФМ с паузами, т. е. интервалами времени, в те-
238 Глава 6. Широкополосные сигналы для измерения
чение которых чипы отсутствуют. Нетрудно понять, что расширение
бинарного алфавита {±1} до троичного {—1,0,1} не ведет к сколько-нибудь
ощутимым усложнениям в части формирования и обработки сигнала,
однако оно, как показано ниже, открывает дорогу к построению
последовательностей с идеальными периодическими корреляционными
свойствами. Напомним, что одним из главных стимулов интереса к расширению
спектра в задачах временного измерения и разрешения служит
стремление к высоким показателям при низкой передаваемой мощности, т.е.
при рассредоточении энергии сигнала на большом временном
интервале. Естественная мера эффективности распределения энергии во
времени — значение пик-фактора v (см. подпараграф 2.7.1), т.е. отношения
пиковой и средней мощностей. Для любой ФМ, в частности бинарной
последовательности, энергия сигнала равномерно распределена на
периоде, так что пиковая и средняя мощности совпадают, и v = 1.
Введение Np пауз на периоде последовательности N, как это имеет место
при троичном алфавите, нарушит равномерность распределения энергии
и увеличит пик-фактор до значения v — N/(N — Np). Следовательно,
желательно отыскание троичных последовательностей, имеющих не только
идеальную периодическую АКФ, но и малое число нулей Np на
периоде, т. е. пик-фактор, незначительно превышающий единицу. Без
подобного ограничения задача вырождается и имеет тривиальное решение: код
с единственным ненулевым символом на периоде 7V, соответствующий
одиночному чипу, повторяющемуся с периодом ЛТД, безусловно обладает
идеальной периодической АКФ, не представляя никакой ценности с точки
зрения технологии расширенного спектра.
К настоящему моменту известен ряд правил генерирования троичных
последовательностей с заявленными свойствами. Наиболее мощное из них
порождает последовательности, длина и пик-фактор которых даются
соотношениями
qn~l qn-l q
N = т-> v = -^ ;гт < r> (6.32)
q - 1 qn - q™-1 q-1
где q = pw — натуральная степень простого числа р, а п —
нечетное натуральное. Последовательности этого типа определены для любой
комбинации д, пв пределах оговоренных ограничений и, следовательно,
выбором достаточно большого числа q значение их пик-фактора можно
сделать сколь угодно близким к единице.
Конструкции троичных последовательностей с параметрами (6.32)
базируются на некоторых тонких свойствах полей Галуа. Самые простые
из них, охватывающие в то же время большинство длин из (6.32),
соответствуют нечетному p(q = pw,p > 2) [40, 41, 70]. Для большей
прозрачности изложения ограничимся детализацией алгоритма для случая q = р,
6.11. Последовательности с идеальной периодической АКФ 239
т.е. w = 1. При этом способ генерирования последовательностей удается
описать в наиболее простой форме, опираясь нар-ичные т-последователь-
ности.
Пусть di, г = ..., — 1,0,1,... —р-ичная т-последовательность, где р —
простое нечетное. Каждый символ последовательности является
элементом простого поля GF(p). Преобразуем последовательность в троичную,
отображая нулевой элемент в действительный нуль, а ненулевые элементы
в их двузначные характеры. После этого поменяем знаки всех элементов
на нечетных позициях. Подобный словесно описанный алгоритм
формализуется как
_ I (-1)^(*), * Ф О,
* 1 0, 4 = 0,
(6.33)
где г = ..., —1,0,1, — На рис. 6.18 приведена структура, реализующая
данное правило, которая содержит генератор га-последовательности, блок
отображения элементов га-последовательности в значения характера или
нуль, и умножитель, осуществляющий коммутацию полярности нечетных
символов.
0—СУ-
(-D'
\\f{d,) или 0
Рис. 6.18. Генератор троичной последовательности
Для оценки пик-фактора троичной последовательности (6.33)
достаточно вспомнить, что период m-последовательности L = рп — 1, и согласно
свойству уравновешенности на одном периоде содержится Lq — рп~1 — 1
нулей. Все они, но никакие другие элементы, соответствуют нулям в
троичной последовательности, следовательно, на периодическом отрезке из L
элементов троичной последовательности ровно L$ элементов окажутся
нулями, откуда для пик-фактора следует
v —
рп ~\
<
р
L-Lu рп -рп-i " р_!'
что совпадает с (6.32) при q = р. Убедиться в том, что последователь-
240 Глава 6. Широкополосные сигналы для измерения
ность (6.33) обладает периодом, указанным в (6.32), и идеальной
периодической АКФ, можно, отталкиваясь от еще одного свойства
псевдослучайности m-последовательностей, доказательство которого можно найти
в [42]. Для его формулирования введем обозначение
h L -£zl
Р — 1 Р — 1
и рассмотрим все пары (di,di-m) элементов р-ичной
га-последовательности, разделенные га позициями, где г пробегает по всему периоду (г =
= О,1,..., L — 1). Тогда (свойство пар), если фиксированное га не кратно
h (т ф lh ни для какого целого J), то среди пар (d$, di-m) пара (0,0)
встречается рп~2 — 1 раз, а любая другая пара (ж, у) фиксированных значений
#, у € GF(p) — рп~2 раз. В противном случае, если га = lh, то в парах
(d2*,dj_m) второй элемент строго определяется первым: d^_m = aldi, где
а, как обычно, примитивный элемент поля GF(p).
С учетом того, что «истинный» (т.е. пока неизвестный) период N
троичной последовательности (6.33) есть некоторый делитель периода L
исходной m-последовательности, вычислим ненормированную
периодическую АКФ троичной последовательности усреднением по интервалу L,
содержащему L/N периодов:
ЛрМ = у £ ат~т = {~1)тТ Ё *(*Ж*-т), (6.34)
г=0 «=0,4 э*0,
где в последней сумме отброшены все слагаемые, для которых didi-m = 0,
вносящие нулевой вклад. Пусть вначале сдвиг га не кратен h (га ф lh).
Тогда согласно свойству пар среди всех пар (d^di-m) в (6.34) любая пара
(ж, у) ненулевых фиксированных ж, у Е GF(p) встречается ровно р72-2 раз.
Отсюда для (6.34) следует
np-Ip-i
Лр(т) - (-lW2-^ £ 5>(*Му) =
= (-l)mpn-2j ]Г Ф{х) £ </>Ы = 0, тф\Н (6.35)
на основании свойства уравновешенности характера (6.21). Пусть теперь
значение сдвига делится на h (га = lh). Тогда согласно свойству пар
в сумму (6.34) входят только пары вида (d^,di_m) = (х,а1х), х £ GF(p).
Однако в силу свойства уравновешенности каждый из ненулевых
элементов GF(p) встречается на периоде р-ичной га-последовательности ровно
рп~1 раз. Поэтому с использованием мультипликативного свойства
характера (6.20)
6.11. Последовательности с идеальной периодической АКФ 241
и
ЗДЛ) = (-1уьр"-^^2ф(х)ф(а1х) = (-ljVV^jf Z>(*2)
. i2p(№) = (-l)<(*+V-1(p-l)f,
так как ф(х2) =. 1 для любого ненулевого # Е GF{p), а ?/>(а') — (—1)*
согласно определению (6.18). Поскольку п — нечетно, то h = (рп — 1)/(р —
1) — Pn_1 + рп~2 + • • • + 1 есть сумма нечетного числа нечетных чисел и,
следовательно, сама нечетна. По этой причине число l(h + 1) четно вне
зависимости от I и, значит, Rp(lh) = рп~1{р — \)N/L. Отсюда видно, что
значение Rp(lh) — одно и то же для любого целого /, тогда как согласно
(6.35) Rp(m) = 0 при любом т ф lh. Таким образом, Rp(m) как функция
т повторяется с периодом h и, следовательно, истинный период троичной
последовательности N = h = L/(p — 1) — (рп — 1)/(р — 1), точно совпадая
с предсказанным (6.32). В итоге приходим к окончательному результату
для периодической АКФ, подтверждающему ее идеальность
рк ' 1 0, т = 0 mod N,
где N = (pn- l)/(p - 1).
Пример 6.17. Пусть р — 3, п — 3, что означает N = 26/2 = 13. Для
построения троичной последовательности данного периода воспользуемся
троичной га-последовательностью из примера 6.5: 1,0,0,2,0,2,1,2,2,1,0,2,2,2,0,0,1,
0,1,2,1,1,2,0,1,1,... В поле GF(3) имеются только два ненулевых элемента,
из которых лишь элемент 2 примитивен. Очевидно, ф(1) — 1, ф(2) — —1 и,
следовательно, ненулевые элементы m-последовательности заменяются по
правилу 1—* +1, 2 —► — 1, а нули отображаются в вещественный нуль. В результате
получается троичная последовательность периода 26
+ 1,0,0,-1,0,-1, +1,-1,-1,+1,
0,-1,-1,-1,0,0,+1,0,+1,-1,+1,+1,-1,0,+1,+1,...
Изменение знаков элементов с нечетными номерами (начиная с нуля) приводит
последовательность к окончательному виду
+ 1,0,0,+1,0,+1,+1,4-1,-1,-1,0,+1,-1,
+ 1,0,0,+1,0,+1,+1,+1,-1,-1,0,+1,-1,...
Полученная троичная последовательность имеет период N = 13 и пик-фактор
v = 13/9 « 1,445. Идеальность ее периодической АКФ легко проверить
непосредственным расчетом.
242 Глава 6. Широкополосные сигналы для измерения
Можно исключить операцию изменения знаков элементов с нечетными
номерами в правиле (6.33) и в схеме генератора на рис. 6.18, если вместо
исходных ^-последовательностей использовать некоторые специальные
линейные последовательности меньшего периода. Для этого
коэффициенты fi в рекурсии (6.13) и петле обратной связи РСЛОС генератора
должны принадлежать соответствующему непримитивному
неприводимому полиному степени п. С деталями соответствующих доказательств
можно ознакомиться в [41, 70]. Примеры упомянутых полиномов третьей
степени, избавляющих от операции смены знака в (6.33), даны в табл. 6.6
для р ^ 31. Последние две колонки таблицы содержат значения
немаксимального периода L линейной последовательности, генерируемой РСЛОС,
и периода N результирующей троичной последовательности. Еще одним
достоинством этих полиномов является то, что негатив, по меньшей
мере, одного из коэффициентов полинома равен 1, а, значит, умножение на
него сводится к простому соединению с сумматором.
Таблица 6.6. Непримитивные полиномы над простым полем
1 р
3
5
7
11
13
17
19
23
29
1 31
/(*)
х3 4- 2х 4- 2
х3 + Ах2 4- 4
х3 + 6х 4- 5
х3 + Юх 4- 7
х3 + 12ж + 9
х3 4- 16ж 4-15
х3 4- 18ж 4-15
х3 + 22ж 4- 19
ж34-28ж4-28
х3 + 30а: 4- 22
L
13
31
171
665
1098
2456
3429
6083
1742
14895
N 1
13
31
57
133
183
307
381
553
871
993 |
Пример 6.18. Сформируем троичную последовательность, с параметрами
р = 3, п — 3 с помощью полинома х3+2x4-2 из табл. 6.6. При этом рекурсия (6.13)
принимает вид di — di-2 + di-з и при начальном состоянии do = 1, d\ — d^ — 0
генерирует линейную последовательность над GF(S) 1,0,0,1,0,1,1,1,2,2,0,1,2
периода L = 13. После отображения ее ненулевых элементов в характеры, а
нулевых — в вещественный нуль формируется троичная последовательность периода
N — 13, идентичная построенной в предшествующем примере.
Описанная конструкция без особых затруднений распространяется на
случай q ~ pw, р > 2, w > I без изменения правила (6.33). Единственное
«внутреннее» отличие заключается в том, что m-последовательность {di}
окажется теперь g-ичной, т. е. с элементами из расширенного (в отличие
от простого) конечного поля GF(q). Арифметические операции в рас-
6.11. Последовательности с идеальной периодической АКФ 243
ширенных полях сложнее обычных операций по модулю q, и обсуждать
их в нашем контексте вряд ли целесообразно. Любознательного читателя
отсылаем за подробностями к [40, 41, 70].
В отличие от рассмотренного, алгоритм построения троичных
последовательностей при q = 2W, как и доказательство идеальности их
периодической АКФ, основан на значительно более замысловатой
математике, и в частности, на таких категориях, как квадратичные формы
в конечных полях [43, 70].
Если любую из троичных последовательностей с параметрами (6.32)
посимвольно умножить на единственную бинарную последовательность
1,1,1,-1, имеющую идеальную периодическую АКФ, результирующая
троичная последовательность будет иметь учетверенную длину без
ухудшения пик-фактора и утраты идеальности АКФ. Подобным же образом
посимвольное произведение двух троичных последовательностей с
идеальной АКФ и взаимно простыми длинами iVi, N2 будет вновь
троичной последовательностью с идеальной АКФ, длиной N = N1N2 и пик-
фактором v — v\ V2, где щ — пик-фактор i-ik исходной последовательности
(г = 1,2) [41,70].
Таблица 6.7. Параметры троичных посждовательностей
с идеальной периодической АКФ
1 N
13
1 21
31
1 52 = 4 х 13
57
73
84 = 4x21
91
121
124 = 4 х 31
133
183
228 = 4 х 57
1 273
Р
3
2
5
3
7
2
2
3
3
5
11
13
7
2
п
3
3
3
3
3
3
3
3
5
3
3
3
3
3
Я
3
4
5
3
7
8
4
9
3
5
11
13
7
16
V
1,444
1,312
1,240
1,444
1,163
1,141
1,312
1,123
1,494
1,240
1,099
1,083
1,163
1,066
N
202 = 4x73
307
341
364 = 4 х 91
381
532 = 4 х 133
553
651
732 = 4 х 183
757
781
871
993
1057
Р
2
17
2
3
19
11
23
5
13
3
5
29
31
2
п
3
3
5
3
3
3
3
3
3
3
5
3
3
3
q
8
17
4
9
19
11
23
25
13
27
5
29
31
32
V
1,141
1,062
1,332
1,123
1,055
1,099
1,045
1,042
1,083
1,038
1,250
1,036
1,033
1,032 1
В табл. 6.7, суммирующей информацию о рассмотренных
последовательностях с идеальной периодической АКФ для диапазона длин N < 1057,
даны значения порядка поля, длины и пик-фактора в зависимости от
параметров р и п. Строки, в которых длины выражены произведениями,
244 Глава 6. Широкополосные сигналы для измерения
соответствуют последовательностям, получаемым посимвольным
перемножением исходной троичной последовательности с бинарной
последовательностью вида 1,1,1,-1. При этом параметры g, p, n отвечают исходной
троичной последовательности. Как следует из таблицы, для многих
приведенных кодов характерно малое (вплоть до пренебрежимого) отличие
пик-фактора от единицы, что для системного дизайнера может означать
предпочтительность троичных кодов по отношению к лучшим бинарным
в ситуациях, когда желательна идеальность периодической АКФ.
6.12. Подавление боковых лепестков
вдоль оси запаздываний
Предположим, что проектировщик системы не склонен отказываться от
бинарных {±1} последовательностей и в то же время не удовлетворен
достижимым для них уровнем боковых лепестков периодической АКФ (pp>max ^
^ 1/N). В подобных обстоятельствах эффективно разрешить эти
противоречивые запросы можно «имитацией» идеальной периодической АКФ
за счет отказа от согласованной фильтрации в пользу специальной
рассогласованной обработки, устраняющей боковые лепестки на всем периоде
сигнала. Весьма схожие идеи лежат в основе снижения или подавления
апериодических боковых лепестков [39, 44, 45], как и в нейтрализации
МСИ с помощью нуль-фор сиру ющих эквалайзеров [2, 5, 7], однако в
максимально прозрачной форме они проявляются при приложении к
периодическим сигналам [39, 46, 47, 70].
6.12.1. Фильтр подавления боковых лепестков
Рассмотрим некоторую последовательность ..., a^-i, a^, aj+i,... периода iV,
которая манипулирует чипы длительности А, и фильтр с конечным
импульсным откликом, осуществляющий суммирование N сигнальных копий,
задержанных на г А и взвешенных коэффициентами 6$, г = 0,1,..., iV — 1,
как показано на рис. 6.19. В принципе обсуждаемая ниже обработка
применима к последовательностям любого алфавита, тем не менее разумно
сразу договориться об ограничении алфавита бинарным {±1}, поскольку
вне этого ограничения можно отыскать многочисленные
последовательности с идеальной периодической АКФ, лишив тем самым задачу
подавления боковых лепестков серьезной мотивации. В соответствии с этим
можно положить все коэффициенты фильтра Ь^, г = 0,1,..., N — 1
действительными.
При подаче на вход последовательности аг, г = ..., — 1,0,1,... отклик
фильтра описывается последовательностью сг, г — ..., —1,0,1,..., элемен-
6.12. Подавление боковых лепестков вдоль оси запаздываний 245
ты которой находятся сверткой
ЛГ-1
Сг = ]С ai~lbU * = --- ,—1,0,1, (6.36)
1=0
Рис. 6.19. Фильтр для ...ta/_1ta/,a/+1t... J ~ | Г~~ I
последовательности дли- Г] I—I [~| 11—11~~|
hijJV 11 1
у у .у
Г ...,q_1,c/,q+1>...
£ ►
При периодической входной последовательности щ — а^+дг, г = ..., — 1,
0,1,..., выходная также окажется периодической с тем же периодом N:
Ci = с^+ат, i = ..., —1,0,1,... . При этом N элементов со, ci,..., сдт_1
полностью задают выходную последовательность, и (6.36) становится
циклической сверткой, в которой вычитание в индексе осуществляется по
модулю N.
Наложим на фильтр следующие требования
с0^0, ci = 0, i = l,2,...,JV-l, (6.37)
означающие физически, что выходной сигнал фильтра имеет ненулевые
главные пики, повторяющиеся с периодом JVA, тогда как все боковые
лепестки между ними равны нулю. Подобный фильтр, называемый
далее фильтром подавления боковых лепестков (ФПБЛ), имитирует своим
откликом идеальную периодическую АКФ. В связи с нереализуемостью
(за единственным тривиальным исключением) идеальной периодической
АКФ в классе бинарных кодов ФПБЛ оказывается рассогласованным и,
следовательно, проигрывает согласованному фильтру в выходном
отношении сигнал-шум.
Кратчайший путь отыскания коэффициентов фильтра в явном
виде — применение дискретного преобразования Фурье (ДПФ).
Последовательность сц, г = 0, l,...,iV — 1 и компоненты ее ДПФ-спектра а&,
& = 0, l,...,iV — 1 связаны друг с другом прямым и обратным ДПФ:
^ / ,2mk\ 1 ^_ /2тггАЛ
ак = ^ а,ехр y-J^~J > ■ «i = Jj Z. а*ехР y^W) '
i,k = 0,1,..., ЛГ-1.
Наша цель — получение на выходе фильтра дискретной
дельта-функции (6.37), имеющей единственный ненулевой элемент на периоде. Спектр
246 Глава 6. Широкополосные сигналы для измерения
такой последовательности равномерен: с* = со, к = 0,1,... ,iV — 1.
Тогда на основании теоремы о свертке [1] спектр последовательности (6.36)
на выходе фильтра ск — афк = co,fc = 0,l,...iV — 1, где спектр
последовательности коэффициентов фильтра Ьк есть не что иное, как передаточная
функция ФПБЛ:
Ък = ^-, fc = 0,l,...,iV-l. (6.38)
Как видно, передаточная функция ФПБЛ обратно пропорциональна
спектру сигнала, благодаря чему фильтры подобного типа часто
называют инверсными. Смысл инверсной фильтрации как раз и состоит в
выравнивании спектра входного сигнала. Как показывает последнее равенство,
ФПБЛ физически реализуем для любой периодической
последовательности, ДПФ-спектр которой не содержит нулевых компонент. Вычислив
обратное ДПФ от (6.38), приходим к явному выражению для
коэффициентов ФПБЛ
^^Slli^pfi^)^ * = 0,1 ЛГ-1. (6.39)
N ^ ак V N J
6.12.2. Расчет потерь в отношении сигнал -шум
Если бы фильтр рис. 6.19 был согласованным, его коэффициенты
составляли бы последовательность, зеркальную ко входной1: bi — адг_^, г =
— 0,l,N — 1, и амплитуда выходной последовательности оказалась бы
N-1
равной Amf = YL Щ = N, поскольку входная последовательность — би-
i=0
нарная. Для входного шума, имеющего время корреляции в пределах А
.2 _
ш/
и дисперсию <т2, дисперсия на выходе согласованного фильтра af
N-1 N-1
= v2 2 Щ — °2 Л a%-i ~ Ncr2. Таким образом, отношение СИГНал-
г^О г=0
шум по мощности q^f на выходе согласованного фильтра
2 _3±l- N
^f = -^ = 3- (6'4°)
TTIJ
Подобным же образом амплитуда выходной последовательности ФПБЛ
Asi — со 5 а дисперсия шума
JV-1
г=0
1 Циклический сдвиг коэффициентов по сравнению со случаем апериодического
сигнала {bi = ajv-i-i) делает запись (6.38) более компактной, устраняя экспоненту линейной
фазы. Для периодического сигнала при этом происходит лишь циклический сдвиг
выходного сигнала без какого-либо влияния на его форму или отношение сигнал-шум.
6Л2. Подавление боковых лепестков вдоль оси запаздываний 247
Согласно теореме Парсеваля и свойству временного сдвига ДПФ
периодическая АКФ произвольной последовательности г*о, щ,... un-i периода
N связана с энергетическим спектром последовательности |г&о|2, |ui|2, ...,
|ttjv-i|2 обратным ДПФ:
ДрМ= YsUiUi-™ = jj ]С l^|2exph^^-J, m = 0,l,...,JV-l.
г=0 k=0 V '
(6.41)
В частности
N-l -j N-l
ЗД) = £ Ы2 = - £ |ufc|2.
i=0 fc=0
Использование последнего результата совместно с (6.38) в равенстве
для дисперсии шума на выходе фильтра дает
а2 N-1 _ с2а2 ЛГ-1 г
°1 - л £ N2 - -V £ и*
после чего отношение сигнал-шум по мощности q^t на выходе ФПБЛ
принимает вид
/N-l
я:
-1
^ \Г< Ы2
\к=0
Теперь можно рассчитать энергетические потери j ФПБЛ по
отношению к согласованному фильтру как
а2 м~г 1
Для лучшего понимания последнего результата заметим, что
отвечают соответственно средним арифметическому и гармоническому
энергетического спектра |й/с|2, к = О,1,..., N — 1 входной
последовательности. Среднее гармоническое любых неотрицательных чисел никогда
не больше их среднего арифметического с равенством тогда и только
тогда, когда все усредняемые числа одинаковы. Поэтому отношение этих
средних может служить некоторой мерой разброса усредняемых чисел.
В нашем случае это отношение
W ^ 1
(l^p)-1 kw 7
в точности равно энергетическим потерям в ФПБЛ. Следовательно, поте-
248 Глава 6. Широкополосные сигналы для измерения
ри ФПБЛ в отношении сигнал-шум 7 определяются неравномерностью
энергетического спектра |й/с|2, к = 0, l,...,iV — 1 входной
последовательности при оценке этой неравномерности степенью различия между
гармоническим и арифметическим средними.
Возможность устранения всех периодических боковых лепестков по
существу означает ориентацию на новый критерий синтеза бинарных
последовательностей, альтернативный минимизации максимального
бокового лепестка рр,тах- Действительно, какой смысл заботиться об уровне
бокового лепестка, когда все боковые лепестки могут быть подавлены
до нуля? Более естественной представляется минимизация цены
устранения боковых лепестков, которой, разумеется, являются потери в
отношении сигнал-шум 7- Рассмотрим вначале бинарную последовательность
(гипотетическую, если N Ф 4), обладающую равномерным
энергетическим спектром: |й&|2 = iV, к — 0,1,... ,iV — 1. В свете равенства (6.41)
это равносильно идеальности периодической АКФ последовательности.
Полностью предсказуемо, что, поскольку в этом случае устранять
нечего, ФПБЛ совпадает с согласованным фильтром, т.е. обрабатывает
сигнал без потерь в отношении сигнал-шум. Равенство (6.42)
подтверждает этот факт, давая результат 7 = 1? или — в децибелах — 7<?б =
= 101g7 = 0 дБ. Поскольку среди бинарных последовательностей
идеальная периодическая АКФ нереализуема, подавление их боковых лепестков
оборачивается потерями в отношении сигнал-шум {'УдБ > 0), оправдывая
введение критерия синтеза 7 — min.
Как и во многих задачах, касающихся бинарных последовательностей
(см. § 6.4), глобально оптимальная бинарная последовательность
фиксированной длины N с минимальными потерями 7 может быть найдена
только полным перебором. Такого рода поиск был выполнен для длин
N ^ 30 [48, 70]. Разумеется, экспоненциальный рост необходимого
вычислительного ресурса препятствует продвижению поиска далеко за рамки
указанного диапазона. Однако на данный момент известны многие
регулярные правила построения бинарных последовательностей сколь угодно
большой длины с очень малыми потерями 7 (хотя и без гарантии их
глобальной оптимальности).
Рассмотрим специальный класс бинарных последовательностей с
двухуровневой периодической АКФ, т. е. постоянным уровнем R боковых
лепестков
, . Г N, m = 0modiV, , .
^(m) = \ Л, m^OmodiV. ((Ш)
Все минимаксные последовательности, как и многие другие,
относятся к данному типу. Энергетический спектр такой последовательности,
6.12. Подавление боковых лепестков вдоль оси запаздываний 249
найденный согласно (6.41) как ДПФ АКФ
m=0 V J
= ЛГ_д + д£ехр(-^-—),
fc = 0,l,...,tf-l.
771=
Последняя сумма уже встречалась в подпараграфе 6.11.2 и, как было
доказано, равна iV, если к = О, и нулю в противном случае. Таким образом
lakl -\ N-R, к^О. [ЬЛ*>
Подстановка этого в (6.42) имеет результатом
7 N + (N-1)R^ N-R {1 - р)[1 + (N - 1)рУ { }
где р = Л/iV — нормированный уровень бокового лепестка АКФ.
Чтобы прийти к структуре ФПБЛ, перепишем (6.39) как
и подставим (6.44) в последнее соотношение, получив
ЛГ-1
г N
N + (N- 1)R ~ N^R + N^R ^ 0fe6XP \J~N~)
— 0>N-%,
» = o,i,..-,Jv-i.
Сумма по к здесь определяет коэффициенты согласованного фильтра,
поскольку ее можно представить как
- £ akexp \-j J = - £ akexp (j - J
г = 0,1,..., ЛГ — 1, где использована вещественность элементов бинарной
последовательности. Поскольку cq — произвольный множитель, его
можно положить равным N — R. Тогда
&г = алг-г - t + (^°_ 1)/о, t = 0,l,...,JV-l. (6.46)
Первое слагаемое правой части этого равенства соответствует
последовательности {щ}, считываемой справа налево, т.е. коэффициентам
согласованного фильтра. Таким образом, для последовательности с
двухуровневой АКФ (6.43) ФПБЛ можно получить, слегка модифицируя
согласованный фильтр вычитанием из всех его коэффициентов определенной
константы. Более того, для бинарных последовательностей этого класса
250 Глава 6. Широкополосные сигналы для измерения
коэффициенты ФПБЛ принимают лишь два возможных значения ±1 —
—рйо/[1 + (N — 1)р], где йо — по-прежнему постоянная составляющая
последовательности, т.е. разность между количествами положительных и
отрицательных единиц на периоде: йо = iV+ — iV_.
Как известно из предыдущего анализа, существует множество
бинарных последовательностей с АКФ вида (6.43), для которых R = — 1
(m-последовательности, последовательности Лежандра и другие
минимаксные последовательности с АКФ вида (6.12)). Оценка потерь в ФПБЛ
для них согласно (6.45) дает 7 = 2iV/(iV + l), т. е. 7 ~ 2 (3 дБ) при
практически интересных значениях длин. Отсюда видно, что весьма популярные
минимаксные бинарные последовательности не имеют серьезной ценности
в свете критерия потерь на подавление боковых лепестков: половина их
энергии теряется при обработке в ФПБЛ.
С другой стороны, для последовательностей с положительным Л,
сравнительно малым по отношению к iV, 7 < 1/(1 "~ р)? т-е- потери в ФПБЛ
достаточно малы. Так называемые коды Зингера [34, 48, 70] служат
хорошим примером подобных бинарных последовательностей. Коды Зингера
существуют для любых длин вида N = (qn — l)/(q — 1)и имеют
двухуровневую АКФ (6.43) с R = N — 4qn~2, где q = pw — натуральная
степень простого р, п — натуральное. Наиболее интересная в данном
контексте разновидность кодов Зингера получается при q = 3. При этом
р = (з«-2 - 1)/(Зп - 1) и 7 < (Зп - 1)/(8 • Зп"2) < 9/8 = 1,125, т.е.
1дБ < 0,51 дБ. Как видно, данные коды в комбинации с ФПБЛ вполне
привлекательны, обладая достаточно малыми потерями на полное
подавление всех боковых лепестков.
Пример 6,19. Построим ФПБЛ для периодического бинарного кода Баркера
длины N — 5 из табл. 6.1: +1,+1,+1,—1,+1, для которого N+ — 4, JVL = 1,
и постоянная составляющая do = 3. Периодическая АКФ такого кода, как легко
проверить непосредственно, подчиняется условию (6.43) с R = 1 (р = 1/5). В
действительности данная последовательность является простейшим кодом
Зингера с параметрами q = 4, п = 2. На рис. 6.20, б показана АКФ (т. е. отклик
согласованного фильтра) периодического сигнала с прямоугольными чипами,
модулированного рассматриваемым кодом (рис. 6.20, а). Как следует из (6.46),
согласованный фильтр для данной последовательности легко трансформируется
в ФПБЛ заменой коэффициентов +1 на +2/3 и —1 на —4/3, которое с
соответствующим масштабированием равносильно замене —1 на —2 при неизменности
всех коэффициентов -Ы (см. рис. 6.21). Отклик ФПБЛ на сигнал рис. 6.20, а
построен на рис. 6.22, на котором оцифровка диаграмм соответствует точкам на
рис. 6.21. Выходной сигнал фильтра имеет желаемую форму, т.е. нулевой
уровень боковых лепестков. Обратившись к (6.45), легко видеть, что энергетические
потери в ФПБЛ j = 10/9 = 1,1111... (0,46 дБ).
6.12. Подавление боковых лепестков вдоль оси запаздываний 251
Рис. 6.20. Бинарный а\
сигнал длины N = 5 и
его периодическая АКФ
Рис. 6.21. ФПБЛ s(t)
для
последовательности длины N = 5
М
^
^4
i A i b-i
3
I
СФ чипа
Рис. 6.22.
Отклик ФПБЛ для
последовательности длины 1
r{t)
252 Глава 6. Широкополосные сигналы для измерения
Известен ряд семейств еще более эффективных бинарных
последовательностей, эксплуатирующих, как и коды Зингера, технику отображения
линейных рекуррентных последовательностей над конечными полями на
бинарный {±1} алфавит. Их объединяющей привлекательной чертой
является простота структуры ФПБЛ, коэффициенты которого принимают
не более трех различных значений. Не углубляясь в достаточно
наукоемкие детали и отсылая любознательного читателя к [49, 50], отметим лишь,
что среди упомянутых имеются семейства, обладающие асимптотически
исчезающими потерями в ФПБЛ: 7ДБ ~~* 0 Д-Б ПРИ N —> оо.
6.13. ЧМ сигналы с оптимальной апериодической АКФ
Начнем краткое обсуждение задачи построения ЧМ сигналов с хорошими
корреляционными свойствами с напоминания, что согласно соотношению
(5.20) требование малого уровня Rp(m) эквивалентно минимизации
числа совпадающих частот в частотном коде Fo, JFi,..., JFV_i и его копии,
сдвинутой на т позиций. Очевидно, что при числе чипов N (т.е. длине),
не большей числа доступных частот М, нулевой уровень боковых
лепестков рр(т) = Paim) = 0, т ф 0 достигается тривиальным использованием
частотного кода, все элементы которого Fi различны. Практически,
однако, интереснее ситуация, когда N > М, так что среди элементов i7^,
г = 0, l,...,iV — 1 имеются повторяющиеся, и, следовательно, по
крайней мере, одно совпадение частот в сдвинутых копиях частотного кода
неизбежно, т. е. /?a,max ^ 1/N.
Так как частотная последовательность адекватно представляется
решеткой размера М х N (см. § 5.5), минимизация ра,тах означает
построение решетки с наименьшим числом совпадений меток в исходной решетке
и ее копии, сдвинутой по горизонтали на т позиций. Одной из наиболее
характерных задач этого рода является синтез так называемых
радарных решеток — М х N решеток с единственной помеченной клеткой
в каждом столбце и рантах — ^-/^•> т. е. с числом упомянутых совпаде-
ний не более одного. Вполне объясним интерес к отысканию радарных
решеток максимальной длины N при фиксированном объеме частотного
алфавита М, поскольку это равносильно минимизации /оа,тах при
ограничениях на частотный ресурс. Следуя [51], выведем простейшую верхнюю
границу длины радарной решетки.
Рассмотрим последовательность Fq,Fi, ..., Fjv-i и заметим, что для
получения не более одного совпадения все разности между номерами
позиций с одинаковыми частотами должны быть различными. Действительно,
пусть Fi = Ffc, Fs = Ft и г — k = s — t > 0. Тогда в исходной последова-
6.13. ЧМ сигналы с оптимальной апериодической АКФ 253
тельности и ее копии, сдвинутой на m = i - k — s — t позиций, будет
не менее двух совпадений. Обозначим через щ число символов (частот)
среди Fo, i7!,..., i^V-ij повторяющихся г раз. Тогда
Y^im = N и £>* = М. (6-47)
г г
Подсчитаем теперь число возможных разностей между номерами
позиций с идентичными частотами. Имеется г повторений какой-то
частоты, и, значит, i(i — 1) таких разностей именно для этой частоты.
Поскольку имеется щ частот, повторяющихся г раз, то общее число названных
разностей составит ^г(г — 1)щ, и, так как повторения среди этих разно-
г
стей запрещены, должно выполняться неравенство
Y^i(i-l)m^N-l, (6.48)
г
правая часть которого есть максимальное число неравных
положительных разностей на числовом множестве {0,1,..., N — 1}. Трином i(i — 1) +
+3 — 2% = г2 — Зг + 3 не имеет действительных корней и, следовательно,
положителен при любом г. Поэтому сумма
^2 [%{г - 1) + 3 - 2г]щ = ^ г(г - 1)щ + 3 ^ щ - 2 ^ гщ ^ О,
г г г г
что в комбинации с (6.47), (6.48) дает N -1 + Ш - 2N ^ 0, или
iV^3M-l. (6.49)
Полученная граница не является точной. Более точная граница,
построенная, например в [52], в асимптотической версии имеет вид
N^ 2°"*/6М, М»1, (6.50)
о
понижая правую часть (6.49) приблизительно на 0Д94М.
Абсолютно точные, т.е. действительно достижимые, верхние
границы длины N известны на данный момент для значений М ^ 16. Таблица
из [52] позволяет выразить максимально реализуемую длину iVmax
радарных решеток в указанном диапазоне как
f 3M-2, 2<М^4,
ЗМ—3, 5^М<9,
^тах — \
ЗМ - 4, 10 ^ М ^ 13, ^6'51^
ЗМ - 5, 14 ^ М ^ 16.
Пример 6.20. Частотный код {1, 2, 3, 4, 5, 6, 7, 8, 7, 4, 3, 9, 9, 5, 8, 2, 6, 5,
1,4, 2, 1,3, 7}, задающий номера частот из некоторого алфавита объема М — 9
или, что эквивалентно, номера помеченных строк в каждом столбце решетки,
имеет максимально возможную длину N = 24. Определяющее свойство радарной
254 Глава 6. Широкополосные сигналы для измерения
решетки, т. е. возможность единственного совпадения частот при всех ненулевых
сдвигах, подтверждается непосредственной проверкой (задача 6.54).
В дополнение к сказанному известны регулярные правила построения
радарных решеток длины N = 2.5М для любого четного М (см. [51])
и для М/2, равного произведению простых чисел вида 4/i + 1, т. е. М =
= 10,26,34,58,....
Сонарные решетки являются дальнейшим обобщением радарных,
сохраняющим свойство «не более одного совпадения» ^ля произвольной
ненулевой комбинации горизонтального и вертикального сдвигов [53]. С
физической точки зрения такое требование отражает желание иметь слабую
корреляцию сигнальных копий, сдвинутых как во времени, так и по
частоте. Имея в виду подход к выбору шага алфавита ЧМ сигналов (§ 5.5),
частотные сдвиги, трансформирующие текущую частоту в ближайшую
из алфавита, более характерны для сонаров, нежели радиолокационных
систем, с чем и связана установившаяся терминология. Известен,
например, ряд регулярных алгоритмов построения массивов Костаса [54], т.е.
квадратных (М = N) сонарных массивов, иначе говоря ЧМ
последовательностей длины, равной числу частот.
Задачи
6.1. Частота заполнения прямоугольного импульса линейно падает в
течение его длительности Т — 10 мкс со 110 до 90 МГц. Найдите выигрыш
от обработки для такого сигнала. Какова примерно длительность
отклика согласованного фильтра на этот сигнал? Изобразите эскизно функцию
и диаграмму неопределенности.
6.2. Частота заполнения прямоугольного импульса линейно спадает со 110 до
90 МГц в течение первой половины его длительности Т = 10 мкс, а затем
линейно нарастает от 90 до 110 МГц в течение второй. Найдите выигрыш
от обработки для такого сигнала. Изобразите эскизно функцию
неопределенности и ее горизонтальные сечения на высоком и низком уровнях.
6.3. Вычислите апериодическую и периодическую АКФ для бинарного кода
Баркера длины N = 11. Попытайтесь сделать это наиболее экономным
способом.
6.4. Возьмите периодическую последовательность {а^} периода N и
сформируйте новую последовательность {6^}, выбирая каждый d-й элемент {а^}:
bi = CLdii где умножение в индексе производится по модулю N. Подобное
преобразование называется децимацией {щ} с индексом d. Докажите, что
если {ai} имеет идеальную периодическую АКФ, a d взаимно просто с N,
то периодическая АКФ {bi} также идеальна.
6.5. Бинарный {±1} код длины N = 5 имеет периодическую АКФ Rp(m) = 1,
га ф 0 mod 5. Его апериодическая АКФ принимает значения i?a(l) = 0,
Ra(2) = -1. Определите Дв(3) и Да(4).
6.6. Бинарный {=Ы} код длины N = 5 имеет постоянную составляющую do =
= +3 и Да(4) = — 1. Найдите Rp(m) и остальные значения Ra(m).
6.7. Может ли бинарный {±1} код нечетной длины iV > 5 иметь Да(5) = —1?
Может ли бинарный {±1} код четной длины JV > 6 иметь Да(6) = — 1?
Сформулируйте и докажите для произвольного бинарного кода
соотношение между четностями трех величин: длины iV, сдвига т и уровня
Ra(m).
6.8. Возможно ли, чтобы бинарная {±1} последовательность имела Ra{m) = 1,
Raiwi + 1) = 3 для некоторого сдвига т? Что можно сказать о четностях
Ra{m) и Да(ш + 1)?
6.9. Возможна ли для бинарной {±1} последовательности комбинация Да(2) = 2,
Др(2) = -1?
6.10. Предположим, некто обнаружил, что каждая из ФМ
последовательностей длины N = 100 в его распоряжении имеет ненормированную
периодическую АКФ, принимающую значения ±12 при некоторых сдвигах
т е {l,2,...,iV — 1}. Может ли среди них присутствовать код с
Ра,тах < 0,05?
6.11. Постройте согласованный фильтр для бинарного ФМ сигнала, манипули-
рованного последовательностью {-I Ь+}, и эпюры в его характерных
точках при подаче на вход апериодической и периодической версий
сигнала.
6.12. Постройте согласованный фильтр для бинарного ФМ сигнала, манипули-
рованного последовательностью {Н Н },и эпюры в его
характерных точках при подаче на вход апериодической и периодической версий
сигнала.
6.13. Студент вычислил периодическую АКФ бинарной {±1}
последовательности длины N — 21 и получил следующие значения Rp(mi) = 9, Rp{m2) ~
— —3, Rp{m±) = —5, Rp(m^) = — 7, Rv{mo) = 7. Могут ли все эти
результаты быть правильными? Если нет, какие из них неверны?
6.14. Докажите несуществование минимаксных бинарных последовательностей
Др(т) = ±1, т = 1,2,...,TV- 1 длин N = 17,21,29,33,37,45.
(Подсказка: используйте тот же метод, что и при выводе необходимых условий
идеальности АКФ бинарных последовательностей).
6.15. Докажите, что децимация минимаксной бинарной последовательности вновь
приводит к минимаксной бинарной последовательности, если индекс
децимации взаимно прост с периодом N.
6.16. Докажите, что децимация любой периодической последовательности не
изменяет максимального периодического бокового лепестка, если индекс
децимации взаимно прост с периодом N.
6.17. Вычислите (3 + 7) - 5(6 • 7 + 4) + 1 в поле GF(ll).
6.18. Решите уравнение 6х + 7(5 + 4 • 2)'1 = 1 в поле GF(11).
256 Глава 6. Широкополосные сигналы для измерения
6.19. Докажите, что поле GF(A) не может быть построено на основе
арифметики по модулю 4.
6.20. Является ли последовательность длины L — 1 вида {0100110} бинарной
m-последовательностью? Каким будет ответ, если все нули заменить
единицами и наоборот?
6.21. Постройте бинарную m-последовательность длины L = 15 с начальным
состоянием do = 1, d\ = d<z = б?з = 0, изобразите ее генератор и составьте
таблицу, описывающую смену его состояний.
6.22. Докажите, что на одном периоде бинарной m-последовательности
памяти п число серий последовательных символов (01), (10), (11) равно 2П~2,
а число серий (00) — на единицу меньше.
6.23. Некто наблюдает m-последовательность, зная ее алфавит и память, но
не зная коэффициентов рекурсии (6.13). Каково минимально
необходимое и достаточное число наблюдаемых символов для восстановления этих
коэффициентов?
6.24. Докажите независимость двузначного характера от выбора конкретного
примитивного элемента.
6.25. Найдите примитивный элемент поля GF(13). Постройте таблицу
логарифмов и двузначных характеров всех ненулевых элементов GF(lS).
6.26. Постройте последовательность Лежандра длины N = 11, найдите ее
периодическую АКФ и сравните с теоретически предсказанной.
6.27. Постройте последовательность Лежандра длины N = 13, найдите ее
периодическую АКФ и сравните с теоретически предсказанной.
6.28. Найдите циклический сдвиг последовательности из задачи 6.26 с
минимальным боковым лепестком апериодической АКФ.
6.29. Докажите идеальность периодической АКФ кодов Чу нечетной длины.
6.30. Докажите идеальность периодической АКФ кодов Франка.
Подсказка: используйте представление вида г = i\h + *25 т = mift + тг,
0 ^ «ь«2,^ь^2 ^ h — 1 и суммирование по г'ь %2 в (5.9).
6.31. Существует ли последовательность с ФМ-8 длины N = 64 и идеальной
периодической АКФ? Если да, постройте ее.
6.32. Докажите несуществование КФМ последовательностей нечетной длины
с идеальной периодической АКФ.
6.33. Докажите несуществование КФМ последовательности длины N = 30 с
идеальной периодической АКФ.
6.34. Докажите, что для троичных {0, ±1} последовательностей с идеальной
ПАКФ число ненулевых элементов на периоде всегда является квадратом
целого числа.
6.35. Докажите несуществование троичных {0, ±1} последовательностей,
обладающих идеальной ПАКФ и единственным нулевым элементом на периоде
для любой нечетной длины.
Задачи в пакете MATLAB 257
6.36. Постройте ФПБЛ, продемонстрируйте эффект подавления боковых
лепестков и найдите потери в отношении сигнал-шум для бинарной
последовательности {+ + + + -1—}.
6.37. Найдите энергетические потери в ФПБЛ для последовательности {+ +
— + +->.
6.38. Найдите максимальную длину ЧМ последовательности с объемом
частотного алфавита М = 4и числом совпадений частот не более одного.
Задачи в пакете MATLAB
i О
со
10
15
20
£0
10
15
20
100
50 I-
0
гтЧ~и-ПТгг11лГП 1 ГПТГг! I
*
гктЛ
10 15
20
100
50
0
10
lr1T1>r>f>rrfl"LrKTTl>cJLI
15
20
I LJ^-n-rw^wt-rrLTh^^nl
10 15
t/A
20
Рис. 6.23. Боковые лепестки АКФ и измерение запаздывания
6.39. Используя бинарные коды { + Ч Ь Ч- Ч Ь Ч- Ч— }и{"! Ы f- +
Ч }, продемонстрируйте деструктивный характер значительных
боковых лепестков АКФ при измерении запаздывания и синхронизации
(рис. 6.23). Рекомендуемые шаги:
а) Сформируйте вышеприведённые коды и выполните десятикратную
передискретизацию для моделирования видеосигналов (комплексных
огибающих) с прямоугольным чипом;
б) Визуализируйте сигналы в виде двух раздельных эпюр;
9—2771
258 Глава 6, Широкополосные сигналы для измерения
в) Рассчитайте АКФ обоих сигналов и выведите на дисплей в виде двух
раздельных эпюр;
г) Дополните сигнальные векторы 110 левыми и 110 правыми нулями для
имитации стационарного режима приемника;
д) Сформируйте вектор наблюдения для каждого из сигналов, прибавив
к нему комплексный гауссовский шум, имеющий среднеквадратиче-
ские отклонения вещественной и мнимой частей, превышающие втрое
амплитуду сигнала;
е) Вычислите действительную огибающую на выходе согласованного
фильтра и зафиксируйте момент ее максимума для каждого из двух
сигналов;
ж) Выполните пункт (д) несколько раз и визуализируйте раздельно для
двух сигналов осциллограммы наложенных наблюдений;
з) Повторите пункты (д), (е) 1000 раз, выведите на дисплей гистограммы
оценок запаздывания раздельно для двух сигналов и интерпретируйте
различие между ними.
10
15
20
25
1,0
f 0,5
"-0,5
-1,0
0
•4ц*ФМ
♦»»■ "h
10
15 20 25
1,0 j-
-? 0,5
55-0,0
**-0,5
-1,0
Г" ""! Г ! """ Г " У |
I [ ! и]^ ...„.!._ I I
Шк * т | .. ш Ь\
I | | Т | и
ю
15
20
25
1,0
_0,5
^0,0
-0,5
-1,0
10
■
:^ii
ЛШАй*,
llfft*,H
I ; | ;
Г 1 1 Т
рфг *—'«р»«
1 I—
t/A
15
20
25
1,0
0,5
>; о,о
-0,5
-1,0
-
!
! 1
1Д"
^ т -1
1 3 1 :
| !
|,. 1_ 1
!
i
10
f/A
15
20
25
Рис. 6.24. Боковые лепестки АКФ и временное разрешение
6.40. Используя бинарные коды { + + 4 1 1 1 Ь}и {н ц h + H—
}, продемонстрируйте деструктивную роль значительных боковых
лепестков при разрешении по времени сигналов разной интенсивности
(рис. 6.24). Рекомендуемые шаги:
Задачи в пакете MATLAB 259
а) Сформируйте чип-радиоимпульс с 10-15 периодами несущей на
длительности и вычислите его АКФ;
б) Найдите АКФ кодовых последовательностей;
в) Вычислите и отобразите на дисплее отклик согласованного фильтра
на «чистый» сигнал для каждого из двух кодов;
г) Отобразите на дисплее задержанные и уменьшенные по амплитуде
копии откликов согласованного фильтра для обоих сигналов;
д) Для каждого из двух кодов визуализируйте полный отклик
согласованного фильтра на суперпозицию прямого и задержанного сигналов;
е) Изменяя задержку и ослабление, сравните маскирующее влияние
боковых лепестков сильного сигнала на наблюдаемость слабого для двух
кодов; объясните результаты.
6.41. Напишите программу, демонстрирующую поведение АКФ и спектра ЛЧМ
импульса с изменением девиации частоты. Возьмите три значения
девиации (например, W^T — 10,25,40). Сравните точную форму АКФ с
аппроксимацией (6.1). Выполните программу для прямоугольного и
колокольного импульсов и объясните результаты.
6.42. Напишите программу, вычисляюшую и визуализирующую ФН и ее
горизонтальные сечения на разных уровнях для ЛЧМ (см. рис. 6.6) и V-ЛЧМ
прямоугольных импульсов, имеющих комплексные огибающие
S(t)
f.Trwdt-\
1 схр^ т )
1 о,
V
> |*|<2">
т
1*1 > ¥,
S(t) = {
( exp (-j27r^£) , -^<*<0,
0, |*| > \.
Возьмите три значения девиации (например, И^Т — 10,25,40), сравнивая
при каждом из них функции неопределенности двух сигналов и их сечения
на разных уровнях.
6.43. Напишите программу для расчета и визуализации апериодических и
периодических АКФ произвольных АФМ последовательностей. Используйте
ее для подтверждения оптимальности кодов Баркера. Рассчитайте АКФ
троичного кода { + 4- + + Н ЬО + 0 —\- -\—00 Н—0 } и найдите
максимальный уровень ее бокового лепестка по отношению к основному.
Проверьте справедливость для периодической АКФ любого бинарного
кода следующих свойств:
ЛГ-1
Rp(m) - Rp(l) = 0 mod 4, Vm,/; J^ Rp{m) = (JV+ - JV_)2.
m-0
260 Глава 6. Широкополосные сигналы для измерения
6.44. Напишите программу для поиска полным перебором оптимального
бинарного кода заданной длины, минимизирующего максимальный
апериодический боковой лепесток. Предусмотрите оценку времени вычислений
и постарайтесь его минимизировать. Как возрастает время вычислений
при увеличении длины кода на единицу? До какой наибольшей длины
программа находит оптимальный код за приемлемое время?
и я з
""W'fTT ^ТНРГ lit1" IT W'IT
10 20 30 40 50 60 70 80
«3 1
ч * Я
И» - + ^4 +»
FFFR
10
20
30
40
50
60
70
80
</Л
Рис. 6.25. Разрешение трех копий сигнала с идеальной периодической АКФ
6.45. Проиллюстрируйте моделированием временное разрешение трех копий
периодического радиосигнала, манипулированного троичным кодом (+ +
+ + Н ЬО + 0 —\- -\—00 Н—0 ) на выходе согласованного фильтра
(рис. 6.25). Положите задержки между последовательными копиями,
равными 2-3 и 5,5-6,5 длительностям чипа соответственно. Рекомендуемые
шаги:
а) Сформируйте несколько (3-4) периодов троичного кода и выполните
их стократную передискретизацию для моделирования
прямоугольных видеоимпульсов (чипов), манипулированных заданным кодом, т. е.
комплексной огибающей сигнала;
б) Сформируйте сумму трех наложенных задержанных копий
комплексной огибающей, имеющих значительно отличающиеся амплитуды,
скажем в пропорции 1 : 4 : 8;
в) Суммируя копии, не забывайте учитывать их соответствующие
(определяемые задержкой) фазовые сдвиги, положив несущую частоту
равной 5/Д;
Задачи в пакете MATLAB 261
г) Вычислите и визуализируйте результирующий радиосигнал на входе
согласованного фильтра;
д) Обработайте результирующую комплексную огибающую фильтром,
согласованным с одним периодом сигнала;
е) Найдите и визуализируйте результирующий радиосигнал на выходе
фильтра;
ж) Повторите выполнение программы несколько раз при разных
комбинациях задержек и амплитуд и прокомментируйте результаты.
6.46. Напишите программу генерирования бинарной m-последовательности,
заданной памятью п. Генерируя т-последовательности различных длин,
вычислите их периодические АКФ (после отображения на алфавит {±1})
и проверьте экспериментально выполнение свойств уравновешенности и
сдвига, и сложения. Проверьте также свойство серий: каждая серия из
I ^ n фиксированных последовательных битов встречается на периоде
2п~1 раз, кроме серии из всех нулей, встречающейся 2п~1 — 1 раз.
6.47. Тестируя бинарный полином степени п как полином обратной связи в
РСЛОС, можно ответить на вопрос, примитивен ли он. Если РСЛОС
генерирует гп-последовательность длины L = 2п — 1, значит полином
примитивен. Напишите программу, выполняющую подобный тест и
табулируйте примитивные полиномы степеней от 4 до 12. Является ли полином
f(x) = х6 + х4 + х2 + х + 1 примитивным? Какую последовательность
генерирует РСЛОС с обратной связью, построенной по этому полиному?
6.48. Напишите программу, строящую последовательность Лежандра.
Сперва найдите примитивный элемент поля GF(p). После этого символы +1
должны быть помещены на позиции, чьи номера являются четными
степенями примитивного элемента в GF{p) и на позицию с нулевым номером
(можно поместить на нее и символ —1), тогда как на остальных позициях
должны стоять символы —1. Выполните программу для длин N = 11, 23,
31, 43, а также выбранных самостоятельно, вычисляя каждый раз
периодическую АКФ.
6.49. Напишите программу, находящую последовательность с минимаксной
апериодической АКФ среди однопериодных сегментов данной
последовательности с обнадеживающей периодической АКФ. Выполняя программу
совместно с программой задачи 6.48, найдите наилучший (в смысле
апериодического бокового лепестка) однопериодный сегмент
последовательностей Лежандра длин N = 23,29,31,37,43,47,53,59,61,67. Есть ли среди
них код, лучший по ра,тах? чем бинарный код Баркера длины N = 13?
6.50. Напишите программу для формирования модифицированных т-последо-
вательностей и последовательностей Лежандра, а также тестирования
их периодических АКФ (если последовательность Лежандра, начинается
символом +1, возьмите ее негатив, умножив все элементы на —1).
Убедитесь в идеальности периодической АКФ модифицированной
последовательности. При формировании модифицированной последовательности
262 Глава 6. Широкополосные сигналы для измерения
замените в исходной каждый символ —1 на
а) действительный символ Ь = — 1 ± ,^ ;
б) комплексный символ Ъ = — exp[jarccos(^~-)].
6.51. Напишите программу для верификации идеальности периодической АКФ
кодов Чу и Франка.
6.52. Напишите программу, генерирующую троичные последовательности над
простыми полями из подпараграфа 6.11.3 и верифицирующую
идеальность их периодической АКФ. Пример для случая р = 5, п = 3 (N — 31,
v — 1,24) приведен на рис. 6.26.
в)
1,0 1
0,5
§о,о
-0,5
-1,0
....
!
i
i
in
г
.„.,. J_
J
!
.L
г
i
10
20
6)
30
т/А
40
50
60
1,0
£0,5 [
0,0
10
20
30
т/Л
40
50
60
Рис. 6.26. Сигнал с прямоугольными чипами, модулированный троичной
последовательностью (а) и его периодическая АКФ (б)
6.53. Напишите программу построения ФПБЛ и вычисления его
энергетических потерь для заданной бинарной последовательности.
Визуализируйте сигнал, манипулированный этой последовательностью, его
периодическую АКФ и отклик на него ФПБЛ. Пример для бинарной
последовательности {- + + -- + - + + - + - + + + - + + -- + + + + + } длины
N = 27 (7<ш = 0,4 дБ) дан на рис. 6.27.
6.54. Напишите программу вычисления апериодической АКФ радарной
решетки. Проверьте с ее помощью свойства ЧМ кода из примера 6.20.
Задачи в пакете MATLAB 263
a)
х О
iH-
о
б)
в)
1.0
0.5
О
1.0
§ 0.5ft-
ОР
10
15 20 25 30 35 40 45
г/А
50
L
1 1
, , , , 1 1 1 1 1 1
_1 L L 1 I I J I J
i-Л i
... JliiL.
! ! N
-^vJ^-W .UvU
i i i i i i i i
10
15 20 25 30 35 40 45
r!A
50
i
0 5 10 15 20 25 30 35 40 45 50
//Д
Рис. 6.27. Сигнал с прямоугольными чипами, манипулированный бинарным
кодом (а), его периодическая АКФ (6) и отклик ФПБЛ (в)
ГЛАВА 7
АНСАМБЛИ
ШИРОКОПОЛОСНЫХ
СИГНАТУР
ДЛЯ СИСТЕМ
С КОДОВЫМ
РАЗДЕЛЕНИЕМ
7.1. Широкополосная передача данных
Из материала § 4.3-4.6 следует, что в многопользовательской сети с
кодовым разделением (CDMA) каждый из К абонентов передает или
принимает свои данные, используя некоторую индивидуальную сигнатуру, причем
выбор ансамбля из К сигнатур должен быть таким, чтобы гарантировать
должную совместимость пользователей. Транспортировка потока данных
с помощью fc-й сигнатуры подразумевает ее модуляцию, часто — с учетом
широкополосной природы CDMA сигнатур — называемую
широкополосной. Различают две классические разновидности широкополосной
модуляции: с прямым расширением спектра (ПРС) и с расширением спектра
с прыгающей частотой (ПЧРС)1. Первая из них гораздо характернее
для современных коммерческих беспроводных приложений, поэтому
обсуждение второй будет предельно кратким.
7.1.1. Прямое расширение спектра: бинарная
модуляция данными и бинарные сигнатуры
Общая идея ПРС состоит в АФМ модуляции потоком данных АФМ
сигнатуры. Для облегчения усвоения идеи рассмотрим вначале простейший
случай цифровой передачи данных с помощью БФМ без расширения
спектра. Обозначим через Bk(t) информационный (модулирующий) сигнал
к-го пользователя (рис. 7.1), в котором положительные и отрицательные
импульсы длительности Ть передают значения информационного бита О
*В англоязычной литературе для этих видов модуляции приняты термины и акронимы
соответственно direct sequence (DS) и frequency hopping (FH).
7.1. Широкополосная передача данных 265
и 1 соответственно. Если, как и в главе 4, Ък = (..., bfc,-i, bfc,o> bkyi,. • •)
описывает битовый поток fc-го пользователя, то Bk(t) — bkii = ±1, (г — 1)Ть <
< t < гТь- БФМ передача сигнала данных Bk{t) означает попросту
перемножение его с непрерывным гармоническим колебанием несущей
частоты /о (см. рис. 7.1, где четвертьпериодныи сдвиг косинуса делает эпюру
нагляднее), формирующее посылаемый модулированный сигнал
sk(t; bfc) - Bk(t) cos(2tt f0t). (7.1)
**(0
cos(2n f0t)
sk(t;bk)
Рис. 7.1. Иллюстрация передачи данных с помощью бинарной ФМ
Тем самым, технически БФМ-модулятор — не более чем умножитель,
показанный на рис. 7.2, а. В результате распространения по каналу
сигнал приобретает задержку тк и фазовый сдвиг щ, а также испытывает
ослабление, которое далее игнорируется как не влияющее на
анализируемые эффекты. Поэтому принятый полезный сигнал записывается в виде
skr{t; bk) = Bk(t - 7*)-cos(27r/ot + <рк). (7.2)
Выборка в момент iTb + т^
Решающее
устройство
V/
СО5(2я/0Жр,<)
Сброс в момент (/ -1 )ТЬ + хк
б)
Рис. 7.2. БФМ модулятор (а) и демодулятор (6)
Типичный БФМ-приемник содержит петли временной и фазовой
синхронизации, оценивающие текущие значения задержки тк и начальной
266 Глава 7. Ансамбли широкополосных сигнатур
фазы щ. На данном этапе вопрос о точности оценивания можно
оставить в стороне, полагая, что приемнику известны истинные значения тк
и щ. Если рассматриваемый сигнал искажен АБГШ, оптимальная (МП)
процедура (см. § 2.2) извлечения г-го переданного бита состоит в
вычислении корреляции наблюдения y(t) = skr(t; bfc) + n(t) с разностью сигналов,
передающих значения бита 0 и 1 соответственно, равной в нашем случае
2cos(27r/o£ + ipk). Так как в решении о принятом бите участвует только
полярность корреляции, а г-й бит на выходе канала занимает временной
интервал [(г —1)Т& + Тй,гТ& + 7ъ], достаточной статистикой может служить
корреляция вида
гТь+гк
zk = J y(t) cos(2n f0t + щ) dt
(*-1)Т6+т*
с принятием решения bki% = 0 или bkji = 1 соответственно положительному
или отрицательному знаку zk. Возможную и.широко распространенную
структуру демодулятора, реализующего данное правило, представляет
рис. 7.2, б. Ее первым блоком является коррелятор, включающий
перемножитель наблюдения с генерируемой местной опорой cos(27r/o£ + щ)
и интегратор со сбросом. В конце каждого очередного битового
интервала с выхода интегратора снимается отсчет, в соответствии с полярностью
которого принимается решение о текущем принятом бите, после чего
интегратор обнуляется для подготовки к работе на следующем битовом
интервале.
Обсудим теперь, какие изменения внесет прямое расширение в
двоичную передачу данных, если ПРС реализуется с использованием БФМ
последовательности. Пусть sk(t) — к-я пользовательская БФМ
сигнатура, т.е. дискретный сигнал, составленный из чипов длительности А,
манипулированных некоторой специфической для каждого пользователя
бинарной последовательностью. Пусть на интервале одного бита
данных содержится N чипов сигнатуры. Тогда ПРС БФМ сигнала данных
сводится всего лишь к введению еще одного умножения в (7.1) — на
сигнатуру sk(t):
sk(t; Ък) = 3k(t)Bk(t) cos(27r/0i). (7.3)
Поскольку полосы сигналов (7.1) и (7.3) обратны длительностям бита
Ть = 1/R и чипа А = Ть/N = 1/RN соответственно, ПРС расширяет
спектр в N раз. Последний факт оправдывает еще одно наименование
частотно-временного произведения и выигрыша от обработки WT = N —
коэффициент расширения. Технически операции умножения в (7.3)
могут быть выполнены в произвольном порядке, например, как показывают
рис. 7.3 (ПРС бинарной га-последовательностью длины N = 7, Т& = NA)
7.1. Широкополосная передача данных 267
и 7.5, а, битовый поток Bk(t) можно вначале умножить на сигнатуру
Sk{t), модулируя далее непрерывную несущую произведением Bk(i)sk{t)-
Можно сказать, что в этом случае битовый поток сперва модулирует
бинарную видеосигнатуру, а затем результат используется для бинарной ФМ несущей.
Рис. 7.3. Прямое
расширение БФМ данных
бинарной сигнатурой
Tb = NA
В результате распространения по каналу сигнал приобретает
задержку Tfc и начальную фазу щу имея на входе приемника вид
Skr{t\ bfc) = sk(t - Tk)Bk(t ~ Tk) cos(2tt f0t + tpk). (7.4)
В прежнем предположении о точном знании параметров Т&, щ
приемник для восстановления текущего (г-го) бита должен лишь сделать выбор
между сигналом Sk(t — Tk) cos(27rfot+(pk) и его противофазной копией. Для
оптимального выполнения этой операции следует вычислить корреляцию
гТь+тк
*к= I y(t)sk(t - тк) cos(27r f0t + <Pk)dt/.
(i-l)Tb+T*
между наблюдаемым колебанием y(t) и местной опорной копией
сигнатуры Sk{t — Tk) cos(27rfot + <fk) и вынести решение соответственно
полярности Zk. Эту же оптимальную процедуру можно, однако, выполнить в два
этапа, устранив сначала расширение спектра, а затем осуществив
обычную демодуляцию данных , как если бы они были переданы без всякого
расширения. Предположим, наблюдение у (t) умножается на формируемую
в приемнике видеокопию Sk(t—тк) сигнатуры, точно синхронизированную
с принимаемым сигналом. Полезная составляющая (7.4) наблюдения после
268 Глава 7. Ансамбли широкополосных сигнатур
этой операции изменяется как
Skr(t;bk)sk(t ~ rk) = s2k(t - rk)Bk(t - тк) cos(2tt/o£ + <pk) =
= Bk(t - тк) cos(2tt/о* + щ),
где учтена бинарность сигнатуры (sk(t) — ±1), в силу которой s\{t) = 1.
Как видно, после такого шага принятый сигнал не обладает никакими
чертами широкополосного, полностью повторяя сигнал несущей,
бинарно манипулированной потоком данных (7.2). Вследствие этого операцию
умножения наблюдения на копию сигнатуры можно назвать сжатием
спектра2. Рис. 7.4 иллюстрирует процедуру трансформации
широкополосного сигнала с прямым расширением в обычный бинарный БФМ
сигнал с модуляцией потоком данных.
sk(t-xk)
Bk(t-Tk)x
xcos{2nf0t +%)
Bk(t-xk)
ыттыт
7h=NA
Рис. 7.4. Сжатие спектров сигнала с бинарной модуляцией данными
Поскольку сигнал со снятым расширением представляет собой
непрерывную несущую с бинарной фазовой манипуляцией данными,
дальнейшее извлечение информации осуществляется стандартным БФМ
демодулятором, например, показанным на рис. 7.2, б. Полный цикл расширения
и сжатия спектра иллюстрируется рис. 7.5.
Введенные выше понятия и термины можно подкрепить кратким
анализом в категориях частотной области. Для этого обратимся к рис. 7.6,
на котором приведены спектральные плотности мощности £&(/), #bs(/)
2 В англоязычной литературе для операций расширения спектра и его устранения
используются термины spreading и despreading.
7.1. Широкополосная передача данных 269
исходного потока данных Bk(t) и его широкополосной версии Sk{t)Bk{t)
соответственно. Для последовательности Bk(t) битовых импульсов
длительности Ть, полярности которых случайны и независимы, спектр
мощности Sb{f) = lysine 2(7г/Т&). Трактуя поток данных после ПРС вновь
как случайную последовательность импульсов с независимыми
полярностями (на этот раз длительности А) придем к спектру мощности той
же формы, но с полосой, расширенной в N раз: S>bs(f) = Asinc2(7r/A) —
= (Tb/N)smc2(7rfTb/N). Передача в эфире широкополосного сигнала
обладает всеми преимуществами распределенного спектра (см. гл. 3, 4), но
сжатие спектра на приемной стороне возвращает его в исходную полосу,
превращая сигнал в узкополосный и позволяя воспользоваться
простейшими технологиями демодуляции данных.
*(f) .,
9
J
\
s—"v
\sk(t;bk)
) "
ylt) *С
1
Л >
^/
БФМ
демодулятор
sk{t)
cos{2n fQt)
a)
SJt-Tk)
"k.i
6)
Рис. 7.5. Расширение (а) и сжатие (6) спектра сигнала с бинарной ФМ данными
7.1.2. Прямое расширение: общий случай
Идея прямого расширения спектра,
рассмотренная выше применительно
к БФМ передаче данных в варианте
использования бинарных сигнатур,
легко обобщается на более широкий
диапазон сигнатур и методов
модуляции данными. Пусть Bk(t)
обозначает комплексное колебание,
отвечающее потоку данных Ь& &-го
пользователя, передаваемых в некотором
цифровом формате (AM, М—ичная
ФМ, КАМ и др.)- При М-ичной
цифровой передаче данных Bk(i)
состоит из соприкасающихся прямоугольников длительности Т = (log М)Т&,
манипулированных комплексными символами, принадлежащими
конкретному алфавиту М-ичной модуляции. Для ФМ-8, например,
прямоугольники длительности Т = ЗТь манипулируются комплексными амплитудами,
Рис. 7.6. Спектры мощности сигнала
данных до и после ПРС
270 Глава 7. Ансамбли широкополосных сигнатур
принадлежащими алфавиту {exp(j77r/4) : Z = 0,1,..., 7}, изображенному
на рис. 2.6, в; при предпочтении КАМ-16 прямоугольники имеют
длительность Т = 4Т&, а их комплексные амплитуды принимают значения,
предписанные рис. 2.6, 5, и т. д. В случае обычной (неширокополосной)
М-ичной модуляции передаваемый сигнал, несущий поток данных Ьк
(удобно теперь полагать, что его компонентами bkj являются М-ичные
комплексные символы Bk(t) = &/^, (г — 1)Т < t ^ iT), запишется как
sk(t] Ък) = Re [Bk(t) exp(j27Tf0t)}.
Тогда принятый сигнал
Skr(<; bjfe) = Re {Bk(t - rk) exp|j(27r/o< + щ)]}
имеет комплексную огибающую
Skr(t; bk) = Bk(t - rk) exp(jVfc)- (7.5)
Передаваемый г-й символ данных bkj есть не что иное, как
комплексная амплитуда непрерывной несущей, постоянная в интервале ((г — 1)Т, гТ].
Следовательно, для восстановления этого символа приемник должен
произвести выбор между М копиями прямоугольного импульса, имеющими
различные конкурирующие значения комплексной амплитуды.
Выполнение этой задачи требует вычисления корреляции zk комплексной
огибающей Y(t) зашумленного наблюдения y(t) с опорой exp(j(pk)
iT+rk
zk= j Y(t)exp(-j<pk)dt,
(*-i)r+Tfc
которая (после соответствующей нормировки) используется для
формирования оценки bkii символа bkj.
Демодулятор на рис. 7.7, где двойной круг символизирует
комплексное умножение, реализует указанную процедуру. Данная схема является
обобщением коррелятора рис. 7.1, б на случай произвольной цифровой
модуляции данными. Наблюдаемая комплексная огибающая Y(t) вначале
умножается на exp(—j(pk) для компенсации канального фазового
сдвига tpk. После этого полезная компонента (7.5) наблюдения Y(t)
обращается в Bk(t — rk). Любое комплексное колебание эквивалентно двум
вещественным (реальной и мнимой частям), так что выход умножителя на
рис. 7.7 трактуется в терминах реальной и мнимой частей произведения
Y(t) exp(—jcpk). Полезными компонентами произведения служат реальная
и мнимая части Bk(t — rk), последующее интегрирование которых, как
и ранее, необходимо для «очистки» их от шума. Отсчеты с выходов
интеграторов в момент гТ + тк являются оценками реальной и мнимой частей
принятого М-ичного символа данных, используемыми решающим
устройством для выдачи демодулированного символа.
7.1. Широкополосная передача данных 271
RemOexpHq*,)]
Выборка в момент /Т + т^
uk,i
Сброс в момент (/'- 1 )Т + хк
Рис. 7.7. М-ичныи демодулятор
Рассмотрим теперь, как прямое расширение спектра может быть
встроено в данную схему модуляции-демодуляции. Пусть Sk(t) — комплексная
огибающая CDMA сигнатуры к-го пользователя. Ее алфавит может быть
выбран независимо от алфавита модуляции данных, например, может
быть бинарным, квадратурным, АФМ и т. д. Тогда прямое расширение
означает умножение модулирующего сигнала данных Bk(t) на
сигнатуру Skit) и использование произведения Sk{t)Bk{t) в качестве комплексной
огибающей передаваемого сигнала:
зк(^ Ьк) = Re [Sk{t)Bk(t) ехр0"2тг/0<)]. (7.6)
Принятый полезный сигнал представляет собой задержанную и
сдвинутую по фазе копию (7.6)
3kr{t; Ъ*) = Re {Skit - тк)ВкЦ - тк) exp[j(27r/0t + <pk)]}
с комплексной огибающей
Skrit] ЬЛ) - S^t - rk)Bkit - тк) exp(jVfc). (7.7)
Постоянство Bkit — Tk) на интервале ((г — 1)Г + Tk,iT + тк] вновь
означает, что для выделения г-го символа приемник должен произвести
выбор между М конкурирующими копиями одной и той же сигнатуры
Skit — Tk) exp(— j(fk), умноженной на различные символы данных Ь^. При
этом корреляция вида
%Т+тк
zk = j Yit)SHt - тк) expi-jifk) dt (7.8)
(t-l)T+Tfc
служит (после соответствующей нормировки) достаточной статистикой для
вынесения нужной оценки Ък,% и снова может трактоваться, как пара
отсчетов с выходов интеграторов демодулятора, изображенного на рис. 7.7,
272 Глава 7. Ансамбли широкополосных сигнатур
если опорный сигнал в комплексном умножителе изменен с ехр(—j(fk) на
S%(t — Tk) exp(— jifk)- После умножения на подобную опору полезная
компонента наблюдаемой комплексной огибающей
Skr(t] bfc) = Sk(t - rk) exp(~j(pk) =
= [\Sk(t - Tk)\2Bk(t - rk) exp(jV*)] exp(-j(fk)
на интервале г-го символа данных становится просто одной из М
возможных копий видеосигнала \S>k(t — Tk) |2, умноженного на различные
комплексные коэффициенты Ьд.^. Если чипы сигнатуры не имеют
амплитудной модуляции, т.е. Sk{t) есть ФМ сигнал, \Sk(t — т^)|2 = 1 и, как видно
из предыдущего равенства, умножение на S%(t — т&) переводит
комплексную огибающую полезного широкополосного сигнала в форму,
характерную для обычной (неширокополосной) М-ичной модуляции данными, т. е.
осуществляет сжатие спектра. Благодаря этому можно вновь разбить
действия приемника на два этапа: сжатие спектра, а затем обычная М-ич-
ная демодуляция с помощью, например, схемы рис. 7.7.
Остановимся более подробно на техническом воплощении
комплексного умножения и извлечения комплексной огибающей Y(t) из реально
наблюдаемого действительного колебания y(t). Вспомнив основные
правила комплексной арифметики
Re (ху) — Re (x)Re (у) — Im (x)lm (у), Im (xy) = Re (ar)Im (y) +Im (ж)Re (у),
можно видеть, что умножитель двух комплексных величин х и у содержит
четыре обычных умножителя и два сумматора (рис. 7.8). Входные
комплексные операнды #, у задаются своими реальными и мнимыми частями,
а выходом служит пара из вещественной и мнимой частей
произведения ху.
Рис. 7.8. Комплексный умножитель
Получение комплексной огибающей наблюдения основывается на
определении Y(t): y(t) = Re \Y(t) exp(j27rfot)]. Применяя правило комплексного
7.1. Широкополосная передача данных 273
умножения и формулу Эйлера, имеем
y{t) = Re \Y{t)\ cos(2tt/0t) - Im[F(t)] sin(27r/0<).
Умножение обеих частей этого выражения на 2cos(27r/oi) и —2 sin(27r/oi),
после применения тригонометрических тождеств приводит к равенствам.
2y(t) cos(2tt/o£) = Re [Y(t)} + Re [Y(t)} cos(4ttf0t) - Im [Y(t)} sin(47r/0i),
-2y(t) sin(27r/0i) = Im [Y(t)] - Im [Y(t)] cos(4ttf0t) - Re [Y(t)] sin(4nf0t).
(7.9)
Первые слагаемые правых частей этих равенств — колебания
видеочастоты (поскольку комплексная огибающая есть закон модуляции, т.е.
низкочастотна по определению), тогда как остальные являются
радиосигналами с центральной частотой 2/о- Ширина спектра закона модуляции
значительно меньше /о (см- Рис- 7.9, а). Следовательно, фильтр нижних
частот (ФНЧ) легко отфильтрует высокочастотные компоненты в (7.9),
пропустив на выход только вещественную и мнимую части желаемой
комплексной огибающей Y(t). Описанная техника восстановления
комплексной огибающей из действительного наблюдения y(t) реализуется схемой
рис. 7.9, б.
радиоспектр
АЧХ ФНЧ
ФНЧ Ш*™
lm[V(f)]
-2s\n{2nf0t)
a)
б)
Рис. 7.9. Восстановление комплексной огибающей наблюдения y(t)
Как итог предыдущего обсуждения рис. 7.10 иллюстрирует базовые
операции, выполняемые передающей и приемной сторонами в общей схеме
широкополосной системы с прямым расширением спектра. Модулятор
(рис. 7.10, а) реализует алгоритм (7.6), удерживая только вещественную
часть комплексного произведения. В демодуляторе (рис. 7.10, б)
комплексная огибающая наблюдения, восстановленная схемой рис. 7.9, б, вначале
подвергается сжатию спектра перемножением с опорой S%(t — т^), после
чего подается на вход стандартного М-ичного демодулятора (см. рис. 7.7)
^ля выработки решения о принятых символах.
274 Глава 7. Ансамбли широкополосных сигнатур
-sin(27i(bO
<%№ Ь*)
v-(f)4*(f--g
ЭД'-^
М-ичный
демодулятор
*ъ
Рис. 7.10. Модуляция (а) и демодуляция (6) при прямом расширении спектра
Отметим попутно, что при практической реализации ПРС возможны
разнообразные конкретные схемные решения. Перемножение
комплексных огибающих, например, можно выполнить неявным образом в
процессе гетеродинирования. Так, если щ(1) = Ui(t) cos[2irfit + ji(t)], г — 1,2 —
два радиосигнала с несущими частотами fi и комплексными огибающими
Ui(t) = Ui(t) exp[jji(t)], их произведение
Ul(t)u2(t) = ^i(t)I/2(*)cos[27r(/i - /2)* + 7i(*) -72^)] +
+ lu1(t)U2(t)cos[27r(f1+f2)t + 11(t) + l2(t)}.
Два слагаемых здесь являются радиосигналами несущих частот f\ — f2
и /i + f2. Если нижняя несущая f\ — f2 превосходит полосу произведения
Ui(t)U2(t)y после отфильтровывания слагаемого верхней несущей
оставшийся радиосигнал имеет комплексную огибающую вида Ui(t)U2(t), т.е.
в точности равную произведению, получаемому после сжатия спектра.
Подобным образом слагаемое верхней частоты есть радиосигнал,
комплексная огибающая которого является таким же произведением, но без
комплексного сопряжения.
Прямое расширение реализуется во всех CDMA стандартах 2-го и 3-го
поколений: cdmaOne (IS-95), WCDMA и cdma2000. В них используются
различные комбинации алфавитов сигнатур и модуляции данными, к
обсуждению которых с большей детальностью мы вернемся в § 11.3 и 11.4.
7.1.3. Широкополосная передача
с прыгающей частотой
При расширении спектра за счет прыгающей частоты используются ЧМ
сигнатуры, и модуляция данными также, как правило, выполняется с по-
7.1. Широкополосная передача данных 275
мощью ЧМ. В зависимости от соотношения между длительностями
чипа Д и символа данных Т ПЧРС традиционно классифицируют на две
разновидности: быстрое и медленное. Для быстрого ПЧРС А = T/Z, где
/ > 1 — натуральное число, тогда как для медленного — А = /Т, где
1^1 — натуральное. Другими словами, при быстром ПЧРС на один
символ данных приходится несколько скачков частоты, тогда как при
медленном — в течение одного символа сигнатуры может быть передано
несколько символов данных. Чтобы лучше понять существо ПЧРС,
обратимся к примерам.
Биты данных о
а)
б)
fo-f,
jjfKl п кги I п рГН [ П Щщ
f;+MF
в)
f.
Рис. 7.11. Расширение - сжатие спектра при быстром ПЧРС
Пример 7.1. Позаимствуем ЧМ сигнатуру из примера 5.2 для расширения
спектра быстрым ПЧРС в комбинации с бинарной ЧМ данными. При этом число
различных частот сигнатуры М — 5, ее длина N — 8 и один символ данных
передает один бит информации, так что Т = Ть. Предположим, что в схеме быстрого
ПЧРС Z = N = 8, т. е. на один бит данных приходится 8 скачков частоты. Тогда
вся последовательность ЧМ чипов рис. 5.3, передается в течение одного бита.
Если бит данных равен нулю, этот частотный профиль передается на несущей
276 Глава 7. Ансамбли широкополосных сигнатур
частоте /о, тогда как для бита, равного единице, несущая частота
принимает значение Д. Естественно, разность между частотами /i и /о должна быть
не меньше полосы, занимаемой сигнатурой, т.е. MF. На рис. 7.11, а изображен
передаваемый частотный профиль, соответствующий потоку битов данных вида
01011. Как можно видеть, спектр одиночного бита данных, полоса которого до
расширения была примерно 1/7&, расширяется до полосы MF « М/Д — MN/Ть,
т.е. становится в MN раз шире (см. § 5.6).
На приемной стороне сжатие спектра выполняется обычно переносом
наблюдаемого колебания вниз на промежуточную частоту /$. С этой целью
используется гетеродинирование опорной несущей fo — fi, модулированной в соответствии
с профилем ЧМ сигнатуры с необходимой задержкой во времени (рис. 7.11, б).
Как результат, сигнал промежуточной частоты оказывается обычным
узкополосным колебанием, частотно-манипулированным передаваемыми данными, где
нулевой бит соответствует низкой частоте, а единичный — высокой. Таким
образом, спектр отдельного символа данных сжимается до прежней ширины 1/Х&,
позволяя использовать стандартный бинарный ЧМ демодулятор для
восстановления принятых данных.
Следующий пример поясняет идею медленного ПЧРС.
Пример 7.2. "Используем прежнюю сигнатуру вновь в комбинации с
бинарной ЧМ данными, положив равными длительности чипа и символа данных:
Т — Ть — Д. Последнее означает, что текущая частота остается постоянной
в течение всей длительности бита данных, и скачки частоты происходят только
при переходе от бита к биту. Частотный профиль сигнатуры iV-кратно
растягивается во времени и его длина охватывает N битов данных (рис. 7.12, а).
Предположим, что в течение бита данных с номером г частота сигнатуры
равна Fi. Тогда передаваемая частота становится равной /о + Fi в случае нулевого
бита данных и /i +Fi для бита, равного единице. Рис. 7.12, б показывает
последовательность передаваемых частот для битового потока 00101101.
Принципиальное различие быстрого и медленного ПЧРС очевидно: медленное не расширяет
спектр отдельного символа данных, увеличивая только общую полосу,
занимаемую системой. Система попросту время от времени переходит с одной рабочей
частоты на другую, причем внутри группы символов данных фиксированной
длины переключений не происходит. На приемной стороне перенос спектра на
промежуточную частоту fi выполняется гетеродинированием с опорной
несущей /о — /г, модулированной ЧМ профилем (с соответствующей задержкой)
сигнатуры (рис. 7.12, в). Эта операция возвращает колебание в полосу,
соответствующую простой (без ПЧРС) ЧМ данными (рис. 7.12, г), после чего для
восстановления передаваемых данных можно использовать стандартный ЧМ
демодулятор.
Методы ПЧРС, проиллюстрированные примерами передачи данных
с помощью бинарной ЧМ, без труда обобщаются на случай произвольной
ЧМ данными (см. задачи 7.5-7.7).
Техника расширения спектра за счет прыгающей частоты обладает
некоторыми чертами, придающими ей особую привлекательность в ря-
7.2. Синтез ансамблей сигнатур для синхронных CDMA систем ТП
де военных приложении, в частности в различных антагонистических
сценариях радиоэлектронной борьбы [3, 6]. В то же время до недавнего
времени ее коммерческая ценность не котировалась высоко, по крайней
мере в части быстрого ПЧРС. Однако повсеместное внедрение
технологии Bluetooth [55] убеждает, что этот тип расширения спектра имеет
многообещающие коммерческие перспективы наряду с ПРС.
Биты данных: о
А
Рис. 7.12. Расширение-сжатие спектра при медленном ПЧРС
7.2. Синтез ансамблей сигнатур для синхронных CDMA
систем с прямым расширением спектра
7.2.1. Постановка задачи
Рассмотрим if-пользовательскую CDMA систему с прямым
расширением спектра, в которой все абонентские потоки данных и все сигнатуры
278 Глава 7. Ансамбли широкополосных сигнатур
жестко синхронизованы, т. е. имеют нулевые взаимные временные
сдвиги на входе приемника. Как отмечалось в § 4.4, классическим примером
подобной системы может служить линия «вниз» мобильной CDMA сети,
в которой взаимная синхронизация сигналов, адресованных всем
пользователям в пределах соты, полностью подконтрольна базовой станции.
Очевидно, что при этом групповой сигнал поступает на вход
мобильного терминала с сохранением начального синхронизма между сигналами,
посланными различным индивидуальным абонентам. Примем в
нижеследующем анализе слегка идеализированную модель канала, полагая, что
диапазон многолучевого рассеяния по задержке ттах меньше периода
следования чипов Д пользовательских сигнатур, либо все многолучевые
компоненты с задержкой, превышающей А, устраняются эффективным
эквалайзером. Такое допущение позволит игнорировать любое потенциальное
нарушение идеальности синхронизма компонент принимаемого сигнала.
Согласно идее ПРС, комплексная огибающая принятого группового
сигнала 5(i;bi,b2,... ,Ь#) находится как сумма по к комплексных
огибающих сигнатур, манипулированных пользовательскими потоками
данных в соответствии с равенством (7.6). В общем случае пользовательские
сигналы могут иметь разные амплитуды, однако мы ограничимся
простейшим случаем сигналов одинаковой интенсивности. Поскольку
предположение об идеальном синхронизме позволяет положить все задержки
Tfc и начальные фазы щ в (7.7) равными нулю, принятый сигнал (опуская
ненужные теперь индексы)
к
5№ЬЬЬ2,...,ЬК) = ^ВЛ(*)5*(*). (7.10)
к=1
Сосредоточим внимание на интервале длительности Т,
соответствующем отдельному символу данных. Вследствие полного синхронизма
текущие символы данных всех пользователей начинаются и заканчиваются
строго одновременно. При текущем символе fc-ro пользователя 6^ (7.10)
в рассматриваемом интервале имеет вид
к
S(t;b) = 5i>fc&(t), (7.11)
где b = (61,62?- •«,Ьк) — Jf-мерный вектор текущих символов данных
всех пользователей.
Вспомним теперь, что каждая сигнатура в CDMA системе с ПРС
является АФМ сигналом, описываемым моделью (5.2):
N-1
&(*) = 5>*.*%(«-*Д), (7.12)
г=0
7.2. Синтез ансамблей сигнатур для синхронных CDMA систем 119
где {afc,o5aA;,b • • • >afc,iV-i} — кодовая последовательность,
манипулирующая чипы к-й сигнатуры, а N — коэффициент расширения, т. е. число
чипов на один символ данных. Рис. 7.13 акцентирует строгое временное
совпадение между чипами всех сигнатур, а также границами
передаваемых символов данных в синхронном варианте CDMA.
Ьу-1
1 -й абонент
b2,i-1
2-й абонент
К-й абонент
bt,/
чЧй>.!|,Лд tJfe- I**.- ,:i'\ o:1 |^4#4pt^!;
; b2j
-**
1
i
i
i
^ j £>_»i u
.«. -. . .-«» -*--«. -^
*%iT>%?* f%lJ */'. -t-^irj ]3^й»%Й1
*-""•! NA
by-и
■41-
Ь2,/+1 г
*
t
<* - - - -
f
Рис. 7.13. Символы данных и чипы сигнатур в синхронной CDMA сети
На основе (7.11)—(7.12) можно сформулировать несколько подходов к
выбору ансамблей сигнатур для синхронных CDMA сетей с ПРС.
Критическими факторами, влияющими на процедуру и итоги оптимизации
сигнатурных ансамблей, являются соотношение между числом
пользователей К и коэффициентом расширения iV, а также алгоритм приема
(многопользовательский, стандартный и т.д.).
7.2.2. Оптимизация сигнатурных ансамблей по
критерию минимума расстояния
Будем считать, что доступен приемник любой сложности и,
следовательно, можно применить оптимальный (многопользовательский) алгоритм
оценивания вектора данных Ь, т. е. поиск значения Ь, обращающего
расстояние между наблюдением y(t) и предполагаемым групповым
сигналом s(t] b) в минимум (см. § 4.1). В терминах комплексной огибающей это
означает минимизацию по b квадрата расстояния \\Y(t) — S(t;b)\\2, где
S(t; b) определяется (7.11). При этом очевидна строгая теоретическая
мотивация попыток отыскания ансамбля К сигнатур {Si(£), S^)? • • • > Sjc{t)}^
минимизирующего вероятность ошибки оценки b if-пользовательского
вектора данных b = (bi, &2> • • ■ > Ък)- Возвращаясь к материалу § 2.3,
вспомним, что асимптотически (т. е. при достаточно большом отношении
сигнал-шум) минимизация вероятности ошибки эквивалентна
максимизации минимума расстояния в созвездии М передаваемых сигналов. В ис-
280 Глава 7. Ансамбли широкополосных сигнатур
следуемом случае альтернативные сигналы этого созвездия представляют
собой копии группового сигнала (7.11), отвечающие различным
векторам данных Ь. Следовательно, задачу оптимизации множества сигнатур
можно сформулировать как задачу максимизации минимума квадрата
расстояния:
<4in = min d2(b, b') = max, (7.13)
b, b'
b/b'
где минимальное расстояние dm\n ищется по всем различным парам
векторов данных b = (bi, &27 • • •, Ък), b' = (&i, Ц,..., Ук), b ф Ь', и (см. (2.43))
d2(b,b') = \\s(t;b) -s(t;b')f = -\\S(t;b) - S(t;W)f
(7.14)
Рассмотрим подробнее передачу бинарных данных, когда символами
являются биты, непосредственно передаваемые с помощью БФМ, так что
Ьк,Ьгк = ±1, к = 1,2, ...,if. Подобное сужение несколько упрощает
анализ, результаты которого впоследствии без труда обобщаются на случай
произвольной ФМ. Тогда использование (7.11), (2.41) и (2.42) в (7.14)
приводит к следующему результату:
rf2(b,b') = ^
к
2 Т, К ,2
-и
к к
k=l I k=\ 1=1
(7.15)
где Sk = Ьк — bfk принимает одно из трех возможных значений: 0 или ±2;
Еъ = (1/2) /0 \Sk{t)\2dt — энергия fc-й сигнатуры, затрачиваемая на
передачу одного бита (полагаемая одинаковой для всех К пользователей); и
т
О
— коэффициент корреляции между комплексными огибающими fc-й и /-й
сигнатур. На основании определения коэффициента корреляции pkk = 1
и ры ~ p\k-> так что квадрат расстояния (7.15) приводится к вещественной
форме
к к-\ к
d2(b,b') = Еь £>| + 2ЕЬ £ £ eketRe(pkl). (7.16)
fc=l k=l l=k+l
Возьмем два вектора данных (битовых профиля) b, b', отличающихся
только в одном элементе, например, первом. Тогда ек = 0, к = 2,3,..., К,
е\ — ±2 и из (7.16) d2(b,b') = 4Eb. Поскольку d^in не превосходит
значения квадрата расстояния для некоторой конкретной пары b,b', то
<&i„ < 4Я6.
(7.17)
7.2. Синтез ансамблей сигнатур для синхронных CDMA систем 281
Данная верхняя граница показывает, что ансамбль сигнатур, для
которого d^n — 4i?&, следует считать оптимальным по критерию
максимума минимального расстояния (7.13). Одним из достаточных условий
достижения границы (7.17) является слабая ортогональность
комплексных огибающих сигнатур:
Причина, по которой комплексные огибающие, удовлетворяющие (7.18),
названы здесь слабо ортогональными, проясняется после сравнения (7.18)
с (2.46) {pki — 8kl)- Последнее условие является значительно более
жестким, означая, что сигналы Sfc(£), si(t) с комплексными огибающими Sk(t),
Si (t) должны оставаться ортогональными при любом взаимном фазовом
сдвиге. В то же время два сигнала, промодулированные S(t) и S(t) exp(j7r/2) =
— jS(t), т.е. попросту квадратурные (сдвинутые по фазе на 7г/2) копии
одного и того же сигнала, ортогональны, однако теряют
ортогональность, если их взаимный фазовый сдвиг отличается от ±7г/2.
Следовательно, S(t) и jS(t) являются лишь слабо ортогональными. Конечно,
любые ортогональные (в смысле (2.46)) сигнатуры —- слабо ортогональны,
но не наоборот.
Для сигнатур, удовлетворяющих (7.18), (7.16) принимает вид
d2(b,b')=EbJ24-
к=1
По крайней мере, одно из слагаемых в данной сумме не является
нулевым, так что cf^in ^ 42?&, откуда совместно с (7.17) следует d^in = АЕь-
Тем самым, ансамбль из К слабо ортогональных сигнатур оптимален по
критерию минимума расстояния, а значит (асимптотически) и по
вероятности перепутывания различных профилей пользовательских битов.
Существует множество способов построения ортогональных
(удовлетворяющих (2.46)) широкополосных ансамблей различной длины
(коэффициента расширения) N. Одним из примеров являются функции Уолша
или, в общем случае, матрицы Адамара, рассмотренные в подпарагра-
фе 2.7.3 и порождающие ортогональные бинарные коды. Альтернативным
выбором являются циклически сдвинутые копии любой
последовательности с идеальной периодической АКФ, например, троичной,
многофазной и др. (см. § 6.11). Любой ансамбль из К1 ортогональных сигнатур
тривиальным образом трансформируется во множество 2Kf слабо
ортогональных сигнатур за счет добавления квадратурных копий каждого
из сигналов — факт, неоднократно упоминавшийся ранее (см. § 2.5 и 4.1).
При любом конкретном выборе ортогональных сигнатур размерность
сигнального пространства жестко лимитирует их число (а, значит, и чис-
282 Глава 7. Ансамбли широкополосных сигнатур
ло пользователей К) (см. § 4.4). Согласно (7.12), при заданном чипе iV-мер-
ный вектор а/с = (afc,o>flfc,i>... , а^дг-i) &-й кодовой последовательности
исчерпывающе определяет fc-ю сигнатуру, и ортогональность fc-й и /-й
сигнатур эквивалентна ортогональности векторов а&, а/. Действительно,
повторение вывода (2.52) для комплексных огибающих (либо
использование (5.7)) позволяет записать скалярное произведение Sk(t) и Si(t) как
7V-1
(Sfc,S,) = 2Е0 £ «М<г = 2ЕЬ(а*,а,), (7.19)
подтверждая тем самым, что ортогональность векторов а&, а; необходима
и достаточна для ортогональности $>k{t) и $(£). Размерность N
пространства векторов а& кодовых последовательностей, как видно, является
и максимальным числом К1 ортогональных сигнатур Sk(t). Подчеркнем
еще раз, что при возможности квадратурного расщепления каждой
сигнатуры максимальное число пользователей, допускаемое рамками
сигнатурного ансамбля, К = 2К' = 2N. Если, однако, по каким-либо причинам
поддержание точного фазового сдвига ±7г/2 между квадратурными
копиями одной и той же сигнатуры невозможно, слабая ортогональность
не достаточна, и максимальное число пользователей становится вдвое
меньше: К = К1 = N'.
Отметим, что слабая ортогональность является лишь достаточным,
но не необходимым условием равенства в (7.17), и, в частности,
особенно интересен вопрос о возможности достижения верхней границы (7.17)
при числе сигнатур, превышающем размерность сигнального
пространства ns. Из предшествующей дискуссии ясно, что значение ns равняется
либо 2iV, либо N в зависимости от приемлемости квадратурного
расщепления сигнатур. Синхронные CDMA системы, в которых К > ns,
называются перенасыщенными {перегруженными), чем подчеркивается
избыточность количества сигнатурных векторов, исключающая шанс их
ортогональности.
Возможность доведения минимального расстояния в перенасыщенных
ансамблях до границы (7.17) была доказана в [56], где описан и первый
алгоритм построения таких ансамблей. Для большей прозрачности
обсуждения и упрощения обозначений не будем учитывать тривиальной
возможности удвоения размерности сигнального пространства за счет
квадратурного расщепления, положив ns = N. Возьмем N ортонормиро-
ванных TV-мерных векторов а&, к — 1,2, ...,iV, (а&,аг) = 8ы-> и добавим
к ним еще один вектор, построенный как
1 N
аАГ+1 " TiV X>** (7.20)
Используя полученные таким образом iV+1 векторов а&, fc — l,2,...,iV + l,
7.2. Синтез ансамблей сигнатур для синхронных CDMA систем 283
для формирования согласно (7.12) К = N + 1 сигнатур, имеем (N + 1)-ю
сигнатуру
1
N
и, модулируя все сигнатуры битами данных Ь& = ±1, — групповой сигнал
JV+1 N , N
S(t; b) = £ bkSk(t) = J2 hSk(t) + -7=bN+1 J2 Sk(t) =
k=l k=l ^iV k=l
N 1
= E(b* + ^^+i)5fc(«). (7.21)
Рис. 7.14. Конструирование
множества перенасыщенных
сигнатур
"и
,0
«И
о
«2
п
а3
п
а4
о
«5
*6
а? ,
4
а?
а12
al
а02
*Л/-4
*Л/-3
яЛ/-2
«Л,-!
Разность между двумя реализациями группового сигнала,
отвечающими двум битовым профилям b = (bi, &2,..., Ьлч-i), b; = (Ь^, &2? • • * •> bjv"_|_i),
есть
TV
5(i;b) - S(t;b') - £ (efc + ^=eN+1)Sk{t), ek = bk- bfk = 0,±2.
*=i
Действуя так же, как при выводе (7.15), с учетом ортогональности
первых N сигнатур получим
d2(b,b') = \\\S(t;b) - S(t;b')f = Еь £ (£fc + ^лт)*. (7.22)
Из-за различия битовых профилей, по крайней мере, одна из
величин ед., к = 1,2,..., ЛГ+1 отлична от нуля, т. е. равна ±2. Если бдг+i = 0, то
284 Глава 7. Ансамбли широкополосных сигнатур
такое Ek присутствует среди е\, 62, • ■ •, £лг, и тогда d2(b, b') ^ 4£^. Если же
£n+i = ±2, то слагаемые в (7.22) с Ek = 0 равны 4/7V, тогда как все
остальные равны 4(/ЛГ ± l)2/iV, приводя к
Учитывая это, приходим к нижней оценке минимума квадрата расстояния
4. > тш№,4(^ - !)>*> - { «/»-1)'*, N I i
Сравнение полученного результата с (7.17) обнаруживает возможность
добавления еще одной сигнатуры к N ортогональным без изменения
минимального расстояния при N ^ 4. Обобщение этой идеи лежит в основе
следующего построения оптимального перенасыщенного ансамбля
сигнатур [56, 57]. Пусть векторы а§, а?,..., ъ%-1 образуют ортонормированный
базис iV-мерного пространства, где N = 4*, I — натуральное число.
Используем их в качестве кодов N первичных сигнатур. Организуем
перенасыщение дополнительными сигнатурами с помощью рекуррентной
i-слойной процедуры, в которой кодовые последовательности
дополнительных сигнатур 5-го слоя находятся как
1 3 1 4"-1 N
afc — 2 Z^ a4fc+m ~ ^J Z^ a4sfc+m5 fc =^ 0, 1, . . . 5 — 1, 5 = 1, 2, . . . , L
m=0 m—Q
(7.23)
Иными словами, первый слой дополнительных сигнатур
формируется расщеплением базового множества {а^а?,... ,а^_1} на 4*"1 групп,
каждая из которых содержит четыре исходные сигнатуры. Линейная
комбинация (7.20) (при N = 4) этих четырех базисных сигнатур добавляется
к своей группе, доводя общее число сигнатур до N + iV/4. Для получения
второго слоя все дополнительные сигнатуры первого слоя опять
разбиваются на группы по четыре и к каждой группе вновь добавляется линейная
комбинация (7.20) и т.д. Дерево на рис. 7.14 поясняет эти шаги. В
итоге формируется 4*-1 дополнительных сигнатур первого, 4г~2 — второго,
Al~s — 5-го слоя, и
4<-i+4<-2 + ... + 4 + 1 = ^ = ^1
О О
дополнительных сигнатур всего, так что с учетом первичных,
отождествляемых с нулевым слоем, общее число сигнатур составит
4ЛГ - 1 | 47V
3
Поскольку нормы всех векторов (7.23) остаются равными единице,
энергия дополнительных сигнатур на бит — та же, что у первичных.
Пусть Sffi) и bf, — соответственно комплексная огибающая fc-й
сигнатуры 5- го слоя и значение бита пользователя, которому присвоена эта
7.2. Синтез ансамблей сигнатур для синхронных CDMA систем 285
сигнатура. Тогда, составляя групповой сигнал аналогично (7.21), придем
к выражению
N 1 J*
N-l T-1 4^
s(t;b) = x;b2s2(*)+Ebi^(*) + "-+ Е bir1si-1(*) + *bsS(*) =
fc=0 fc=0 к=0
I 4s L
которое после подстановки (7,23) обращается в
I (ЛГ/4*)-14*-1
*(*;b) = £oF Е E Ч^*+т(*)-
s=0 fc=0 m=0
Двойная сумма по fc, m в последнем выражении независимо от значения s
содержит N слагаемых. Ее можно переупорядочить в одиночную сумму
изменением индекса суммирования 4sfc + m = n=^fc= L^J? приводящим
(после переобозначения п —> к) к равенству
I , N-1
= £ ("2 +1%+• • • + jn^j + ?*)«w-
Теперь квадрат расстояния между групповыми сигналами,
отвечающими различным битовым профилям, обобщает (7.22) как
<Р(ъ, ь') = Eb £ (4 + ^ +... + зрг^ + Й)2' (7-24)
где, как и раньше, £^ = 0; ±2 — разность значений битов, передаваемых
сигнатурой Sn(t), в if-пользовательских битовых профилях b, Ь'. Если
все esm, s > 0 равны нулю (биты профилей b, b' для всех дополнительных
сигнатур одинаковы), по меньшей мере, одно из е\ равно ±2 и cP(b, b') ^
^ 4:Еь. Если и — максимальный номер слоя, для которого е^ = ±2, и > 0,
слагаемые в (7.24), содержащие £^, могут быть представлены в виде
1 \(2их0 ± 2и~1х1 ± ... ± 2хи-1) ± I12
4^-1
где #s = esn/2 = 0, ±1, 5 = 0,1,... , w — 1. Число, содержащееся в
круглых скобках под знаком модуля, всегда четно, так что квадрат модуля
никогда не меньше единицы. Поскольку в (7.24) входит ровно 4W
членов, содержащих е^ при любом фиксированном т, приходим к оценке
d2(b, b') ^ 4:иЕь/4:и~1 = АЕъ, доказывающей, что перенасыщение сигна-
286 Глава 7. Ансамбли широкополосных сигнатур
турного ансамбля рассмотренным способом не уменьшает минимального
расстояния первичного ортогонального множества.
В своей общей форме описанная процедура не гарантирует, что
дополнительные кодовые последовательности (7.23), получаемые из первичных
бинарных последовательностей, сами окажутся бинарными. Указанное
требование соблюдается для версии алгоритма, предложенной в [57],
использующей в качестве первичных сигнатур строки /-й кронекеровскои
степени матрицы Адамара 4-го порядка, содержащей нечетное число
элементов +1 в любом столбце.
Пример 7.3. Построим перенасыщенный ансамбль бинарных сигнатур длины
N = 16 = 42. Согласно рассмотренной схеме, к N = 16 первичным
ортогональным сигнатурам можно добавить пять дополнительных (четыре из первого слоя
s = 1 и одну из второго слоя s = 2), доведя общее число пользователей до
К = 21. Для построения только бинарных сигнатур воспользуемся матрицей
Адамара вида
" + + + +
- - + +
+ - +
+ - - +
содержащей один либо три элемента +1 в своих столбцах, и образуем ее кроне-
керовский квадрат
н4
-н4
н4
н4
н4 =
н
16
н4
>н4 =
н4
-н4
-н4
-н4
н4
н4
н4
-н4
н4
н4
-н4
н4
Первичные сигнатуры представляют собой строки этой матрицы, т. е. в
нормированной форме:
(я0 я0 а0 а0 а0 а0 я0 я0 я0 я0 я0 я0 я0 я0 я0 я0 ^т -
V^ > а1 > а2 > а3> а4 > а5> а6 > а7 > а8 > а9» а10 ? а11 » а12 > а13 > а14 > а15 ) —
1
4
/ +
+
+
+
_
—
+
—
+
+
+
—
+
V +
+
—
—
+
+
+
+
—
—
—
+
—
—
-
+
+
+
—
—
+
+
+
+
—
+
+
+
—
+
+
—
+
—
+
—
+
+
—
+
+
+
—
+
+
—
+
+
+
—
—
—
+
—
—
+
—
-
+
—
-
—
+
+
+
—
+
+
+
+
+
+
+
+
+
—
—
—
+
—
—
—
+
—
—
+
+
+
—
+
—
+
—
—
—
+
—
—
+
—
+
—
+
+
+
—
+
+
+
—
+
+
+
—
—
+
—
—
+
—
—
—
+
—
—
—
+
+
+
+
+
+
+
+
+
—
+
+
+
—
—
—
+
+
+
—
+
+
+
—
+
+
+
—
+
-
+
-
+
—
+
+
+
—
+
+
—
+
—
—
+
—
+
+
+
—
—
+
—
—
—
—
+
+
+
+
—
—
—
+
+
+
+
+
+
—
—
—
—
+
+
+
+
-
+ \
+
—
+
+
+
—
+
—
— !
+ !
—
+
+
— j
+ /
7.2. Синтез ансамблей сигнатур для синхронных CDMA систем 287
Применение (7.23) к строкам данной матрицы дает пять дополнительных
бинарных сигнатур:
/ aj \
\ао /
/+- + + + - + + + - + + + - + +\
- + --- + -- + - + + + - + +
+ - + + - + -- + - + + - + --
+ - + + - + --- + -- + - + +
V+- + + - + -- + - + + + - + +/
Предлагаем терпеливому читателю самостоятельно проверить оптимальность
этого перенасыщенного ансамбля по критерию минимального расстояния.
Напомним, что критерий минимума расстояния адекватен (по крайней
мере, асимптотически) в ситуациях, когда возможно применение
многопользовательского приемника. До настоящего момента вопрос о
сложности последнего не затрагивался. Для случая системы без перенасыщения
(К ^ N) он не относится к категории критических, поскольку — в силу
оптимальности ортогональных сигнатур — оптимальный
многопользовательский алгоритм вырождается в однопользовательский (см. § 4.1).
С другой стороны, в перенасыщенной системе чрезвычайно важно
утилизировать любые возможности упрощения многопользовательского
алгоритма за счет рационального построения сигнатур. Одна из подобных
возможностей вновь состоит в расщеплении общего iV-мерного
сигнального пространства на ортогональные подпространства меньшей
размерности гг. Однако, в противовес предыдущему, далее каждое из
подпространств автономно перенасыщается nov дополнительными сигнатурами
(доводя до п + nov общее число сигнатур на подпространство), так что
все сигнатуры из различных подпространств остаются ортогональными.
Смысл подобного построения состоит в расщеплении общего
многопользовательского алгоритма на N/n параллельных, оперирующих каждый
в своем n-мерном подпространстве независимо от других. При умеренном
значении п упомянутые парциальные многопользовательские алгоритмы
достаточно просты, гарантируя приемлемую технологическую сложность
всего приемника. Общее число пользователей в подобной системе
составляет (N/n)(n + nov) = N(l + nov/n). Оптимизация подобных
ансамблей достаточно нетривиальна и не сводится к простому добавлению nov
дополнительных сигнатур к п исходным ортогональным. За деталями
заинтересованный читатель может обратиться к [58, 59]. Иной
альтернативой может быть построение сигнатурных ансамблей, для которых
существуют вычислительно-эффективные итерационные варианты
многопользовательских алгоритмов [60, 61].
288 Глава 7. Ансамбли широкополосных сигнатур
7.2.3. Последовательности, лежащие на границе Велча
Рассмотрим теперь иной сценарий, в котором жесткое априорное
ограничение на сложность приемника исключает применение любых его
вариантов, кроме простейшего, т. е. однопользовательского или стандартного
(см. § 4.1). Тогда решение Ь& о текущем символе данных bk &-го
пользователя определяется исключительно корреляцией (7.8), как если бы
единственной помехой на входе приемника был только АБГШ. Без потери
общности можно считать, что текущий символ принимается на
интервале [0,Т], и положить задержку т& и фазу (pk в (7.8) нулевыми:
т
zk = jY(t)S%(t)dt. (7.25)
о
Когда сигналы всех абонентов идеально синхронизированы, а их
число К не превосходит ЛГ, ортогональные сигнатуры вновь оказываются
оптимальным вариантом ансамбля, поскольку для них
однопользовательский алгоритм идентичен МП многопользовательскому. Очевидно, что
при этом ПМД отсутствуют, так что игнорирование сигналов сторонних
пользователей не нарушает оптимальности приемника. В
противоположность этому ситуация перенасыщения (К > N) представляет особый
интерес, поскольку при этом все сигнатуры не могут быть ортогональными
и, значит, присутствие ПМД неизбежно. Возвращаясь к (7.11),
представим наблюдаемую комплексную огибающую как
к
Y(t) = S(t-W) + N(t) = J2bi^i(t) + N(t),
i=i
где N(t) — комплексная огибающая шума, а обозначение Ь' = (Ь^, Ь^ ..., Ъ'к)
снова (как и в (4.8)) символизирует истинный (т.е. не известный
приемной стороне) профиль данных, передаваемых К пользователями, с целью
отличия его от гипотетического профиля b = (&i, &2? - • • >&к),
предполагаемого в процессе решения. После подстановки комплексной огибающей
в (7.25)
к Т
z(bk) = 2Ъ'кЕ + 2Е^2%Р1к + fN(t)SUt) dt, (7.26)
i=i J0
i^k u
т .
где Е = (1/2) / \Sk(t)\2 dt — энергия сигнатуры на один символ переда-
о
ваемых данных (полагаемая одинаковой ^ля всех пользователей), a pik =
= ры — как всегда, коэффициент корреляции комплексных огибающих
1-й и к-я сигнатур. Второе слагаемое в (7.26) представляет собой ПМД,
7.2. Синтез ансамблей сигнатур для синхронных CDMA систем 289
т.е. взаимную помеху, создаваемую сторонними сигналами на выходе
приемника, «настроенного» на fc-й пользовательский сигнал. Каждое
слагаемое b\pik в сумме по I (т. е. вклад /-го пользовательского сигнала в
суммарную ПМД) случайно вследствие случайности абонентских символов
данных Ъ[. Для любой ФМ данными справедливо равенство |Ь{| = 1, и
средняя мощность (дисперсия) каждого вклада в ПМД составляет 4Е2\рц~\2.
Естественно, все пользователи передают свои данные независимо, так что
полная средняя мощность (дисперсия) ПМД Pjk на выходе к-vo приемника
есть сумма по I мощностей индивидуальных вкладов
к
PIk = 4E2Y,\Pkl\2.
1=1
Поскольку эта величина есть мощность ПМД для приемника
единственного (fc-го) пользователя, для оценки суммарной ПМД в приемниках
всех пользователей просуммируем ее по fc, придя к результату
Pi = Е Я* = АЕ2 Е Е Ш2- (7-27)
к=1 к=1 1=1
\фк
Как теперь видно, адекватным критерием оптимизации синхронных
сигнатур при постулировании однопользовательского приемника
оказывается минимизация полной мощности ПМД или, эквивалентно, суммы
квадратов корреляций в (7.27). Безусловно, опять при К ^ N
ортогональные сигнатуры, не создавая ПМД, обращают эту сумму в нуль, так
что только перенасыщенные ансамбли нуждаются в специальном
исследовании в плане минимизации (7.27).
Только что введенный критерий в литературе обычно фигурирует
в виде критерия минимума полного квадрата корреляции (total squared
correlation — TSC)
к к
T5C=^^|pw|2 = min, (7.28)
k=l 1=1
не отличающегося от сформулированного, так как сумма в (7.28) больше,
чем в (7.27), на константу К (р^ = 1).
Для величины TSC известна фундаментальная нижняя граница Вел-
ча [62]. Для ее вывода выразим коэффициенты корреляции в терминах
элементов а/^ кодовых последовательностей сигнатур. Полагая все
векторы кодовых последовательностей а& = (а^о^к,ъ • • * iak,N-i)
нормированными так, что ||а&||2 = N, из (7.19) имеем
. _ (Sfc, S|) _ (Sfe,Sf) _ (afc,aj) _ 1 ^ *
Pkl~ 2E -2||afc||.iNPo~ N '^hak"a^
290 Глава 7. Ансамбли широкополосных сигнатур
Подстановка этого в (7.28) приводит к результату
. К К N-1N-1
TSC = 1^1212 J2 Yl a^aiiatjaij =
к=1 Ы1 г=0 j=0
-j N-lN-l К К , N-1N-1\K I2
= рЕЕ ^2a^i4jJ2aii^j = Tf2 ^ 5Z Еа^аУ *
г=0 j=0 fc=l i=l г=0 j=0 |fc=l I
Поскольку все слагаемые по г, j неотрицательны, отбрасывание тех из них,
которые отвечают различным г, j, не может увеличить значения суммы,
так что
j N-1 / К \2
г^О \fc=l /
Чтобы прийти к окончательному результату, можно прибегнуть к
неравенству Шварца, однако этот шаг становится ненужным для наиболее
интересного случая ФМ сигнатур. Для любого ФМ алфавита |а^| = 1>
что завершает вывод границы Велча:
Л N-1 ( К \ 2 К2
В отсутствие перенасыщения {К ^ N) непосредственно из (7.28)
вытекает более точная граница, учитывающая, что при ортогональных
сигнатурах все слагаемые в (7.28) с разными fc, l исчезают, и значение TSC
достигает минимума, равного К. Комбинация этих результатов
обобщает границу Велча в виде
Очевидно, что ансамбль последовательностей, достигающий
границы (7.30) {последовательностей, лежащих на границе Велча), является
наилучшим возможным для однопользовательского приемника по
критерию полной мощности ПМД. На самом деле оптимальность ансамблей,
лежащих на границе Велча, этим далеко не исчерпывается, поскольку
параллельно с минимизацией ПМД они максимизируют шенноновскую
пропускную способность CDMA каналов с АБГШ и гауссовским входом,
причем последнее ограничение утрачивает силу при достаточно малом
отношении сигнал-шум на входе приемника. Детали доказательства этого
замечательного факта можно найти в [63].
Поскольку TSC содержит К равных единице квадратов корреляций
векторов с самими собой, разность TSC — К включает лишь «вредные»
корреляции между несовпадающими векторами, значения которых тре-
7.2. Синтез ансамблей сигнатур для синхронных CDMA систем 291
буется иметь как можно меньшими. Всего TSC охватывает К {К — 1)
подобных пар векторов, так что средний квадрат корреляции р2 на одну
пару
— _ TSC - К
р " К{К~\У
откуда совместно с (7.30) следует нижняя граница для этого параметра
_ Г 0, K^N,
Р2И K~N K>N ^
I щк-iy ^
Из способа получения границы (7.30) можно вывести и простой рецепт
построения ансамблей, лежащих на границе Велча. Разумеется, отдельное
обсуждение требуется только для нетривиального случая
перенасыщения, поскольку способы формирования ортогональных
последовательностей уже рассматривались неоднократно. Начнем с того, что равенство
в (7.29) является достаточным (и, конечно, необходимым) условием
равенства в (7.30), или, возвращаясь к рассуждению, предшествующему (7.29),
последовательности, для которых
к
£«*А = 0> хфь (7.32)
k=i
являются последовательностями, лежащими на границе Велча.
Предположим, что все векторы ai, а2,..., э.к кодовых последовательностей
сигнатур записаны как столбцы N х К сигнатурной матрицы А:
= [ ах а2 ... г.к J =
«i,o «2,0 • • • «дг,о
«1,1 «2,1 • • . «К,1
«1,ЛГ-1 «2,N-1 . • • «К,ЛГ-1
тогда (7.32) означает не что иное, как ортогональность строк
матрицы А. Следовательно, для синтеза перенасыщенного (К > N) ансамбля
последовательностей, удовлетворяющих границе Велча, требуется лишь
построить N х К матрицу А с ортогональными строками. Так как
размерность строк подобной матрицы превышает их число, нет никаких
принципиальных препятствий к существованию подобной матрицы. При
этом искомые последовательности есть просто столбцы матрицы А.
Теперь можно оценить предельное (в пренебрежении шумом)
отношение сигнал - помеха для перенасыщенного ансамбля, лежащего на границе
Велча. Общую мощность ПМД Р/ можно найти из (7.27), (7.28) как Р/ =
= 4:E2(TSC—K). Поскольку эта величина получена суммированием помех
по всем К однопользовательским приемникам, средняя выходная
мощность ПМД в пересчете на один приемник Рц~ — Pj/К. Полезный (т. е. со-
292 Глава 1. Ансамбли широкополосных сигнатур
здаваемый fc-й сигнатурой) эффект на выходе k-vo приемника,
выраженный первым слагаемым в (7.26), имеет мощность 4Е2 (в предположении
ФМ данными), так что в силу (7.30) предельное отношение
сигнал-помеха по мощности (при оценке мощности ПМД ее средним значением)
составит
4£ _ К _ _J?_
41 PIk TSC-K K-N К }
Пример 7.4. Построим бинарный ансамбль из К — 16 последовательностей
длины N = 14:, лежащий на границе Велча. Для этого воспользуемся
матрицей Hi6 из примера 7.3 и отбросим в ней две произвольно выбранные (например,
последние) строки. Шестнадцать столбцов полученной таким образом
матрицы А являются в точности искомыми сигнатурами длины 14, лежащими на
границе Велча. Значение TSC построенного ансамбля достигает минимума,
установленного (7.30): TSC = К2/N = 256/14. Предельное отношение сигнал - помеха
на один приемник (при оценке мощности ПМД ее средним значением) согласно
(7.33)ql = N/(K-N) = 7.
Если принадлежность символов ФМ алфавиту является единственным
ограничением на сигнатурные кодовые последовательности, описанный
алгоритм конструирования ансамблей, лежащих на границе Велча,
универсален. В качестве строк матрицы А, например, всегда могут быть
взяты К циклически сдвинутых копий последовательности Чу длины К.
Как показано в подпараграфе 6.11.2, коды Чу существуют при любой
длине, и все их различные циклические сдвиги ортогональны. С другой
стороны, если сигнатуры должны быть бинарными (а^ = ±1)>
ортогональность всех N строк матрицы А при N > 2 возможна только для К,
кратного четырем (см. задачу 7.14). Из этого следует, что для бинарных
сигнатур с К ф 0 mod 4 граница Велча (7.30) не является точной. С
выводом более точных границ для этого случая можно познакомиться в [64, 65]
(см. также задачу 7.17).
7.3. Подходы к синтезу ансамблей сигнатур для
асинхронного кодового разделения с ПРС
Распространим задачу синтеза сигнатур на асинхронные CDMA системы
с ПРС, в которых взаимные задержки и фазовые сдвиги между
отдельными пользовательскими сигналами случайны. При принятии за базовый
однопользовательского приемника решение о значении текущего
символа fc-ro абонента вновь принимается на основе корреляции (7.25). Теперь,
однако, строгое совмещение границ символов данных и чипов различных
пользователей поддерживаться не может из-за произвольности относи-
7.3. Подходы к синтезу ансамблей сигнатур для разделения с ПРС 293
тельных временных сдвигов абонентских сигналов. Предположим, что
исследуется приемник данных fc-ro пользователя и п — задержка 1-го
сигнала относительно k-го сигнала. Чтобы сконцентрироваться только
на задаче синтеза кодов сигнатур, условимся считать, что границы чипов
всех К сигналов синхронизированы, т. е. взаимные задержки кратны Д:
П = щА, где щ — целое, такое что 0 ^ щ < N. Исследуемая ситуация
поясняется рис. 7.15 {для случая к = 1), подчеркивающим, что в
асинхронном варианте CDMA — в отличие от синхронного (см. рис. 7.13) —
символы данных сторонних пользователей могут изменяться во время
приема текущего символа fc-ro пользователя. В то же время главным
фактором, осложняющим синтез асинхронного ансамбля, оказывается
необходимость различения каждой сигнатуры со всеми возможными
сдвинутыми копиями других сигнатур, отсутствующая при синхронном кодовом
разделении.
1 -й пользователь
>%© 4! .^uS
y2,/--h
2-й пользователь
\>
u2,i
А/ +
/ + 1
llggSiflj
/С-й пользователь!
%fi*r2%*#~i
:ч«5-*
®КГ<
-* NA
**./
Рис. 7.15. Потоки данных и сигнатуры в асинхронном варианте CDMA
Предположим вначале, что во время приема символа данных fc-го
пользователя символы данных всех других пользователей неизменны, т.е. Ьц-i =
= bj, I = 2,3,...,К. Тогда ситуация отличается от исследованной ранее
синхронной только взаимным временным рассогласованием сигнатур.
Начнем с предположения, что период сигнатуры L совпадает с выигрышем
от обработки ЛГ, равным числу чипов на длительности одного символа
данных, или, что эквивалентно, числу чипов, интегрируемых
коррелятором. Если на диапазон возможных взаимных задержек не наложено
никаких ограничений, /-я сигнатура может присутствовать в виде
любой из своих N циклически сдвинутых копий, так что имеется N(K - 1)
различных iV-мерных векторов, каждый из которых является потенциаль-
294 Глава 7. Ансамбли широкополосных сигнатур
ным источником ПМД в k-м приемнике. Если канал подвержен эффектам
многолучевости, то любая собственная циклически сдвинутая копия &-го
сигнала может также стать помехой к-му приемнику. Предположим, что
может существовать до N— 1 подобных копий, т. е. рассеяние по задержке
в многолучевом канале возможно вплоть до периода сигнатуры. Другим
основанием для включения собственных циклических копий в исследуемое
множество векторов служит желание иметь низкий уровень
автокорреляционных боковых лепестков, что важно при поиске сигнала (см. § 8.2).
После подобного расширения имеется KN векторов, корреляцию
которых желательно снизить до минимума.
Хорошим инструментом оценки нижнего предела среднего
квадрата корреляции р2 этих KN векторов вновь оказывается граница Велча.
Для ее использования достаточно заменить в (7.31) К на KN. Поскольку
KN > К, для любого К ^ 2 имеем
?*тлк- (7'34)
Это неравенство определяет фундаментальный предел, ниже которого
средний квадрат корреляции между всеми циклическими копиями всех
К сигнатур (включая собственные копии каждой сигнатуры) опуститься
не может. При числе пользователей порядка десяти и более эта версия
границы Велча становится особенно простой:
7>jj, #»1- (7-35)
Предположим теперь, что период сигнатуры в числе L чипов
охватывает несколько символов данных L> N щ как и ранее, в течение текущего
символа данных fe-ro пользователя данные всех остальных пользователей
неизменны1. Пусть по-прежнему возможны задержки вплоть до периода
сигнатуры. Так как число чипов на символ данных (интервал
интегрирования) остается равным iV, мы, как и ранее, оперируем с iV-мерными
векторами, хотя число векторов, чьи корреляции необходимо
контролировать, теперь увеличилось с KN до KL. При этом (7.31) трансформируется
в границу
которая при К » 1 снова обращается в (7.35). Последний результат
позволяет продемонстрировать, что модуляция данными никоим
образом не способна понизить приведенные границы. Действительно, любая
1 Сохраняя обозначение N для выигрыша от обработки, т.е. числа чипов на символ
данных, будем впредь обозначать через L период сигнатуры всякий раз, когда они
различны.
7.3. Подходы к синтезу ансамблей сигнатур для разделения с ПРС 295
промодулированная данными сигнатура может трактоваться как новая
последовательность некоторого (возможно очень большого) периода Lk.
Тогда все промодулированные сигнатуры будут иметь общий период L,
равный наименьшему общему кратному всех L^, и средний квадрат
корреляции будет ограничен снизу неравенством (7.36), вновь означая
справедливость (7.35) для случая многих пользователей.
Проделанные выкладки устанавливают критерий синтеза
асинхронных сигнатур: ансамбль многих сигнатур можно считать приемлемым,
если его средний квадрат корреляции близок границе (7.35). Покажем,
что ансамбли случайных сигнатур лежат на этой границе. Пусть все
сигнатуры генерируются независимо друг от друга случайным независимым
выбором элементов каждой из них. Вся процедура может трактоваться
как извлечение шаров из урны. Остановимся на М-ичном ФМ алфавите,
и будем трактовать его как некоторую урну с М различными шарами
(кодовыми символами). Выполним К извлечений одного шара, каждый
раз запоминая результат и возвращая шар в урну. Данная операция
определит первые кодовые символы К сигнатур. Все последующие символы
всех сигнатур генерируется так же. Поскольку все М-ичные символы
в данной схеме равновероятны, равномерно распределены на
окружности (см. рис. 2.6, в) и независимы друг от друга, приходим к следующим
математическим ожиданиям
а^ = 0, ак4а^ = \ ' " И t==J"' =8к1$ц, (7.37)
' 1>з I 0, в противном случае J
где второе соотношение вытекает из того, что математическое ожидание
произведения независимых величин равно произведению их
математических ожиданий. Воспользуемся этими соотношениями при оценке
среднего квадрата корреляции сигнатур на интервале интегрирования в N
чипов:
\zki{m)\2 =
N-l '2
(7.38)
Физически (7.38) представляет среднюю мощность ПМД (к ф V) или
среднюю мощность многолучевой помехи (к = /), создаваемой 1-й
сигнатурой, задержанной на т чипов, на выходе к-vo коррелятора. Раскрытие
квадрата модуля и изменение очередности суммирования и усреднения
(среднее суммы равно сумме средних) дает
N-1N-1
\Ыт)\2 =ЕЕ a^aii-maijaiJ-rn- (7.39)
г=0 j=0
296 Глава 7. Ансамбли широкополосных сигнатур
Для оценки эффекта ПМД положим к ф I и разобьем слагаемые на
произведения независимых случайных величин:
N-1N-1
l*fc/M|2= J2 J2 a^akJ * ati-maU-m-
г=0 j=0
Теперь применение (7.37) к этому равенству оставляет в сумме справа
только члены с г = j, приводя к результату |i^(m)|2 = N. Для оценки
эффекта многолучевых помех положим к = /, т ф О, что изменит (7.39) как
N-1N-1
\*кк{т)\2= J2 5Z aKiah-mahakj-m-
г=0 j=0
Среди членов последней суммы, имеющих разные индексы i и j, a/^
не зависит как от а\~,г-т (поскольку т ф 0), так и от a^j (поскольку г ф j).
Аналогично, a^j-m не зависит как от а^*, так и от а&^_ш. Следовательно
aMaM-mafc,2-mafc,j = ak,iakj-m ' at,i-makji * Ф 3-
В силу независимости различных символов одной и той же
последовательности akjakj-m — ^kj ' G>kj-m — 0 всякий раз, когда i ф j — т.
и а*к i_mo>lj = ак,г-т ' ак j ~ ^, если i — т Ф 3 • Следовательно, слагаемые
в сумме (7.40) с различными г, j могут оказаться ненулевыми только при
выполнении обоих условий: г = j — тлг — т ~ j^ что невозможно для
любого ненулевого т. Отсюда следует, что в сумме (7.39) только слагаемые
с одинаковыми значениями г, j вносят ненулевой вклад, а, значит
7V-1
\zkk{m ф 0)|2 - ]Г |aM|2|aM__m|2 = N.
г=0
Полезный эффект, т.е. мощность, создаваемая несдвинутой &-й
сигнатурой на выходе к-ro приемника
\zkk(0)\2 = (f: \акА =N2-
Тогда нормированные вредные эффекты, обусловленные либо ПМД,
либо многолучевыми помехами (нежелательные квадраты корреляций),
выразятся как
\т(ш)\2 1 |ifefe(m^0|2 1
fe(0)|2 N' |ifefc(0)|2 N' (7'40)
Теперь очевидно, что все нежелательные квадраты корреляции в
рассматриваемом ансамбле достигают нижней границы (7.35), т.е.
множества случайных сигнатур оптимальны при числе пользователей порядка
десяти и более. Чрезвычайно важно подчеркнуть, что модуляция
данными случайных последовательностей, удовлетворяющих (7.37) (т. е. умно-
7.3. Подходы к синтезу ансамблей сигнатур для разделения с ПРС 297
жение последовательностей на независимые от них символы данных), не
нарушит (7.37) (см. задачу 7.20). Таким образом, наличие или отсутствие
модуляции данными не влияет на проделанные выкладки, как и на их итог
(7.40) и вывод об оптимальности случайного сигнатурного ансамбля.
Может показаться, что равенства (7.37) дают однозначную
инструкцию в части синтеза сигнатурного ансамбля. Однако на деле сигнатуры
не могут быть случайными, поскольку приемник должен априори знать
закон модуляции сигнатуры с тем, чтобы сформировать необходимую
опору в корреляторе. Чтобы реализовать свойства случайности (7.37) на
базе детерминированных правил кодирования, необходимы так
называемые псевдослучайные последовательности.
Возьмем детерминированную ФМ сигнатуру периода L и будем
интерпретировать ее как одну из равновероятных реализаций стационарной
эргодической случайной последовательности {а^} (дискретного по
времени случайного процесса) [14, 66]. Другими реализациями могут быть
все циклические сдвиги исходной последовательности. Тогда, благодаря
свойству эргодичности, каждая реализация исчерпывающе
представляет весь случайный процесс, и статистическое усреднение {а/^} по всем
реализациям эквивалентно усреднению по времени, т. е. оценке
математического ожидания ~OkJ и корреляционного момента аь^а^. i_m через
постоянную составляющую и периодическую АКФ детерминированной
сигнатуры соответственно:
-| L-X ~ -| L-1
^k7i = jYl a^ = ~7^' aWafc,i-m = jJ2 а*,<аМ-т = Р**М" (7.41)
Точно так же, трактуя две детерминированные сигнатуры как
реализации двух совместно-эргодических случайных последовательностей
{а/^г} и {а*,г}? получим равенство между корреляционным моментом двух
случайных последовательностей и взаимной корреляционной функцией
двух детерминированных сигнатур:
I ь-1
flfc,ifl?,i-m = 1 Л aKiG>li-m = Pkl(m). (7.42)
Из сравнения (7.41), (7.42) с (7.37) следует критерий
псевдослучайности: в качестве сигнатур в асинхронном варианте CDMA с прямым
расширением в идеале должен использоваться такой ансамбль
детерминированных последовательностей, все представители которого имеют нулевую
постоянную составляющую, идеальную периодическую АКФ и нулевую
периодическую ВКФ:
5fc,o = 0; ркк(т) = 0, т ф 0 mod Ц pki{m) = 0, к,1 = 1,2,..., К. (7.43)
298 Глава 7. Ансамбли широкополосных сигнатур
В отсутствие ограничений на взаимный временной сдвиг (возможно
любое т из диапазона 0,1,... ,L — 1) последние требования явно
противоречат друг другу, делая ансамбли этого сорта гипотетическими для
любого конечного значения L. Действительно (см. также задачу 7.21)
условия идеальности АКФ и нулевой ВКФ означают не что иное, как
нулевой уровень корреляции между всеми циклическими сдвигами К
последовательностей периода L, т. е. нулевой средний квадрат нежелательных
корреляций р2. Как следует из (7.34), (7.35), последнее требование
невыполнимо при К ^ 2, и, более того, при большом числе пользователей р2
не может опуститься ниже 1/L.
Заключение, к которому мы только что пришли, объясняет, почему
в течение многих лет столь значительные усилия затрачивались на
поиски ансамблей, характеристики которых с ростом длины L приближаются
к упомянутым гипотетическим. Весьма популярным критерием такого
приближения является минимаксный, ориентирующий синтез ансамбля
на минимизацию максимальной из нежелательных корреляций.
Определим корреляционный пик ртах как наибольшую из двух величин:
максимального бокового лепестка АКФ среди всех последовательностей p^ax
и максимального пика ВКФ среди всех пар последовательностей p^ax1
Ртах = тах{/&ах,/4ах}, р^ = max \ppM(m)l ртах = max\ppM(m)\.
k,m^0 k,l,m
(7.44)
Естественно, для идеализированного гипотетического ансамбля /?тах5
как и уо2, равно нулю, для любого же реального ансамбля ртах может
служить адекватной мерой его близости к идеализированному.
Поскольку максимальное значение любой величины никогда не меньше
среднего, ртах ^ р2, так что границы Велча (7.34), (7.35) переносятся и на
корреляционный пик:
pLx > 4rh * b (7-45)
где последнее приближение по-прежнему отвечает случаю К ^$> 1. При
дополнительных ограничениях на ФМ алфавит граница (7.45) может
оказаться достаточно слабой, особенно при числе последовательностей,
соизмеримом с L. В частности, для достаточно больших ансамблей
бинарных {=Ы} последовательностей точнее оказывается граница Сидельнико-
ва [67, 68]
/4ах >\> К>\. (7.46)
Ансамбли, для которых ртах> достигает предела, предсказываемого
(7.45)-(7.46), разумеется, оптимальны по критерию корреляционного пи-
7.4- Ансамбль сигнатур с временным сдвигом 299
ка, и иногда называются минимаксными. Некоторые их классы
рассматриваются в § 7.5.
7.4. Ансамбль сигнатур с временным сдвигом
для асинхронного кодового разделения
Во многих реальных ситуациях взаимные временные сдвиги асинхронных
сигнатур могут изменяться только в ограниченных пределах. Конечность
диапазона рассеяния по задержке в многолучевом канале с одной стороны
и геометрия системы — с другой являются наиболее типичными
факторами, устанавливающими подобные пределы. Для конкретности рассмотрим
канал «вверх» сотовой системы мобильной связи. Местная шкала времени
активного мобильного терминала синхронизирована с принятым
сигналом БС и имеет задержку Т\ относительно шкалы БС, определяемую
расстоянием D между БС и МС как т\ — D/c, где с — скорость
света. Так как сигнал, посланный конкретной МС, достигает приемника БС
с той же самой задержкой, то общее запаздывание сигнала МС,
дошедшего до БС, относительно временной шкалы БС составляет Т2 = 1т\ ~ 2D/c.
Пусть Dmax — максимальное расстояние, при котором интенсивность
принимаемого сигнала достаточна для приемника БС. Из-за сильного
затухания при распространении (см. § 4.6) сигналы, приходящие с
расстояний, значительно превышающих радиус соты Dc, можно игнорировать,
так что в первом приближении Dm3^ « Dc. Тогда наибольшее значение Т2
есть 2Dc/c, и сигналы МС, расположенных от БС на расстоянии от нуля
до Dc, достигают БС с задержками в диапазоне [0,2Dc/c]. Кроме
того, на входе приемника БС присутствуют многолучевые копии сигналов,
так что общая ширина ттах окна, охватывающего задержки всех
многолучевых сигналов, увеличивается на величину диапазона рассеяния по
задержке r^s: ттах = 2Dc/c + r^s, где т&8 может быть максимизировано
по всем возможным местоположениям МС. Рис. 7.16 иллюстрирует эти
рассуждения. Сигнал некоторой МС может оказаться как опережающим,
так и задержанным по отношению к сигналу какой-то другой МС, и все
* олучевые копии сигнала любой МС приемник БС в потенциале может
считать полезными (реализуя, к примеру, алгоритм RAKE, см. § 3.7). Тем
самым, полный диапазон вероятных взаимных временных сдвигов между
любыми многолучевыми копиями любых сигнатур оказывается равным
L—Tmaxj TmaxJ? гДе ^тах = ZJJC/C + T^s.
Разумеется, в подобных обстоятельствах следует заботиться о
соблюдении второго и третьего условий (7.43) лишь в пределах диапазона
действительно возможных значений т. Обозначим через mmax число чи-
300 Глава 7. Ансамбли широкополосных сигнатур
пов (с округлением до не меньшего целого) в пределах задержки rmax:
mmax = lYmax/Al- Тогда диапазон значений т, где необходимо
выполнение требований (7.43), выразится как [-mmax,ramax]. Возьмем теперь
последовательность {а\Д периода L ^ К(mmax + 1) и используем в
качестве К сигнатур ее копии, циклически сдвинутые по отношению друг
к другу на mmax + 1 позиций:
а/М = ai,M*-i)(rnmax+i)9 A; = 1,2,..., if; г = ..., -1,0,1,...,
как показано на рис. 7.17. Очевидно, все корреляции между
образованными таким образом сигнатурами будут выражены через АКФ pn(m)
исходной последовательности {aij}. Формальное вычисление ВКФ fc-й
и 1-& сигнатур приводит к следующему результату:
-j JV-l i ЛГ-1
Pkl{m) = у^2 ак4аЦ-т = J ^2 al,i-(fc-l)(mmax + l)al,i-(^l)(mmax+l)-m'
i=0
т.е.
Pkl(m) = pn[(l - fc)(mmax + 1) + m].
(7.47)
i
0
.Многолучевые
'Л
i' / !.
Tcfe
копии синапа
2Dc/c
Tmax
1 »
I А Й
i .' i ' i
i .' i »i
i
>.
f
Рис. 7.16. Вариации
времени прихода сигнала МС
наБС
J
1-я сигнатура
2-я сигнатура
3-я сигнатура
i
®%Ь
*j4V|;*""-"' ч :
'У4;.*' * .■г**'4 УУ-^
i ! ^: м ~ '
■i —й *»
;:7 .-*-:*;*. :.:;
'*%Д>;
%1
*>V.- . "i
1 г' •' -*-:?" - 7
i
- - "- :-"'Я":/1 "
mmax+1
"' " ;»■ 1 ,.*.--
! "W+1 ,
%¥
■®i;i";
- ■ » ■►
-." * >
Рис. 7.17. Сигнатуры, образованные сдвигом исходной последовательности
Предположим теперь, что исходная последовательность {а^}
обладает либо идеальной, либо достаточно хорошей периодической АКФ рц(ш).
7.4- Ансамбль сигнатур с временным сдвигом 301
Первый вариант возможен, скажем, для троичных или многофазных
последовательностей (см. § 6.11), тогда как любая минимаксная бинарная
последовательность (см. § 6.7 и 6.9) дает пример второго. Идея состоит
в том, чтобы иметь все боковые лепестки рц (т) пренебрежимо малыми.
Тогда при \т\ ^ mmax аргумент в квадратных скобках (7.47) обращается
в нуль по модулю L только в случае к = I и т = 0 mod L,
отвечающем основному лепестку fc-й сигнатуры. Для любой другой комбинации
к, I, m правая часть соотношения (7.47) соответствует боковому
лепестку рц(га), уровень которого по предположению можно считать близким
к нулю. Таким образом, доказано, что сдвинутые соответствующим
образом копии исходной последовательности с хорошей периодической АКФ
образуют ансамбль, подчиняющийся условиям исевдослучайности (7.43)
во всем диапазоне значений взаимных сдвигов сигнатур \т\ ^ гатах.
Отсюда, в свою очередь, следует, что этот ансамбль достигает (при
идеальной рц(т)) или непосредственно приближается к наименьшему
уровню (7.40) усредненных нежелательных эффектов, обусловленных ПМД
и многолучевой помехой, или, что эквивалентно, к границам Велча (7.36),
(7.35). Уместно еще раз подчеркнуть, что это утверждение относится
к случаю модуляции сигнатур потоком данных, так как условия (7.43)
достаточны для минимизации ПМД/многолучевых эффектов при ПРС
наложении данных (см. ремарку, сопровождающую (7.40))1.
Пример 7.5. Рассмотрим систему с длительностью чипа Д = 1 мкс,
числом пользователей К — 60, диапазоном рассеяния по задержке т&3 = 20 мкс
и радиусом соты Dc = 15 км. В этом случае ттах = 2Dc/c + Tds — 120 мкс
и ттах = 120. Ансамбль сигнатур может быть построен на базе начальной
последовательности {a>iyi} периода L ^ К(тт&х + 1) = 60 х 121 = 7260. Поскольку
{ai,i} должна иметь хорошую периодическую АКФ, подходящими кандидатами
могут быть троичная последовательность с идеальной АКФ длины L — 8011,
бинарная ш-последовательность длины I, = 213 — 1 = 8191 или последовательность
Лежандра длины L = 7283. Тогда 60 сигнатур будут образованы как
циклические копии {oi,i}, сдвинутые относительно друг друга на 121 чип. Очевидно,
никаких ограничений сверху на длину последовательности не накладывается,
так что можно посчитать разумным ее увеличение с параллельным увеличением
сдвига сигнатур для гарантии некоторого «запаса прочности».
Построение каналов «вверх» 2G стандарта cdmaOne (IS-95) и 3G
стандарта cdma2000 дает наглядное подтверждение практической
продуктивности описанной схемы асинхронного кодового разделения [69]. Бинарная
m-последовательность чрезвычайно большой длины L = 242 — 1, расширен-
^■Без модуляции данными идеальность периодической АКФ исходной
последовательности гарантирует нулевой уровень как ПМД, так и многолучевой помехи для
рассмотренного ансамбля при всех \т\ ^ mmax-
302 Глава 7. Ансамбли широкополосных сигнатур
ная одним символом, служит исходной, а индивидуальными сигнатурами
всех МС являются ее соответствующие циклические копии.
Псевдослучайные свойства m-последовательности вместе с относительными
сдвигами сигнатур, перекрывающими вариации времени прихода сигналов
на БС, гарантируют минимальный (см. (7.40)) уровень мощности ПМД
и многолучевых помех на выходе коррелятора.
7.5. Примеры минимаксных сигнатурных ансамблей
Ансамбли сигнатур, введенные в предыдущем разделе, можно признать
адекватными лишь в ситуациях, когда взаимные временные сдвиги
пользовательских сигналов полностью подконтрольны системе и не выходят
за пределы предсказанного диапазона. При невыполнении подобного
условия асинхронный вариант CDMA, эксплуатирующий сдвинутые реплики
одной и той же последовательности, подвержен риску коллизий: сигнал
одного из пользователей может приобрести задержку, делающую его
неотличимым от сигнала какого-то другого абонента. По этой причине ^ля
многих приложений более характерно использование минимаксных
сигнатурных ансамблей, т. е. тех, что имеют корреляционный пик, лежащий
на границах (7.45), (7.46) или приближающийся к ним. Так как
корреляционный пик является результатом максимизации на всем периоде, его
малое значение в минимаксном ансамбле (достигаемое за счет достаточно
большой длины L) гарантирует определенную близость корреляционных
свойств ансамбля к идеальным (7.43), т.е. псевдослучайность сигнатур.
Полный обзор известных минимаксных ансамблей едва ли возможен
в рамках данной главы. Ниже мы ограничимся лишь кратким
обсуждением тех из них, которые либо нашли широкое практическое применение,
либо особо показательны на фоне остальных. Читатель,
заинтересованный в более подробном знании, может обратиться к [9, 67, 70].
7.5.1. Частотно-сдвинутые бинарные
m-последовательности
Возьмем бинарную {±1} m-последовательность {а\^} периода L = 2п — 1
и используем ее в качестве сигнатуры для первого пользователя.
Сформируем остальные К — 1 сигнатур посимвольным умножением {ai,«} на
дискретные гармоники частот (к — 1)/L, к = 2,3,..., К:
(2тг(к — 1)г\
3 ^ J, i = ...,-1,0,1,..., к = 1,2,...,if.
(7.48)
7.5. Примеры минимаксных сигнатурных ансамблей 303
Тогда квадрат модуля периодической ВКФ fc-й и £-й последовательностей
\RpmM\2 =
L-1
У , ak,i%i-m
г=0
^ (.2тг(к~1)г\
2^ амам_ш ехр Ь -—-I
(7.49)
Рассмотрим вначале случай m = 0 mod L, т.е. ai^ai^-m = lai^l2 = 1.
Тогда, если к = I, (7.49) дает основной лепесток АКФ fe-й сигнатуры,
т.е. |Др,Аж(0)|2 = L2. Если же & ф I, то сумма в (7.49) есть сумма всех
корней из единицы степени L (или меньше) и, значит, равна нулю (см.
подпараграф 6.11.2). Пусть теперь m ф 0 mod L. Тогда, согласно свойству
сдвига и сложения m-последовательностей (§ 6.6), а\^а\^ш — a\^t для
некоторого £, и квадрат модуля ВКФ
>2 |Г 1 ,2
\RP,ki(m)?
L-1
^аМ-*ехр
г=0
/.27r(fc-QiV
^ [.2ж(к~1)г
LaMexP u—т—
г=0 ^
что оказывается (к — /)-й компонентой энергетического ДПФ-спектра
последовательности {ai^}. Поскольку энергетический спектр
последовательности {ai,?} есть ДПФ от ее периодической АКФ, а последняя
равна —1 для любого ненулевого сдвига m и L при m — 0,
L-1
i^whi2 = Е Др,пМ«р(i27r(fc. *)m) =
m=0 V Ь /
L-1
■=L + 1- Eexp(
m=0 ^
.2тт(к — l)m
)■
\ppMm)?
к = l,m = 0 mod L,
fc = l,m/0 mod L,
к Ф l,m = 0 mod L,
fc^l,m/0 mod L.
Последняя сумма отличается от нуля и равна L только при к — 1^ так что,
сводя вместе все полученные результаты и переходя к нормированным
корреляциям, имеем
1,
1/L2,
0,
(L + l)/L2,
Отсюда видно, что квадрат корреляционного пика ансамбля (7.48)
L + 1 1
L2 V
т. е. практически совпадает с границей Велча (7.45). Таким образом,
рассматриваемый ансамбль является минимаксным, реализующим
оптимальную асинхронную схему CDMA.
С описанием ансамбля (7.48) можно встретиться, например, в [71],
однако значительно ранее и независимо от журнальных публикаций он
был использован в спецификации глобальной спутниковой навигационной
2
Ртах
304 Глава 7. Ансамбли широкополосных сигнатур
системы ГЛОНАСС (см. § 11.2). Одним из его достоинств в сравнении
с другими многофазными ансамблями является возможность
генерирования сигнатур простым сдвигом несущей частоты. Действительно, сдвиг
несущей /о на (k — l)/LA эквивалентен линейному приращению фазы
между последовательными чипами на 2п(к — 1)/Ь, что в точности совпадает
с предписанием правила (7.48).
Хотя известно достаточно много и других многофазных минимаксных
ансамблей, бинарные {±1} семейства традиционно считаются
приоритетными в плане технологической привлекательности, поэтому остальная
часть раздела посвящается некоторым важным примерам ансамблей
бинарных сигнатур.
7.5.2. Ансамбли последовательностей Голда
Следующие свойства бинарных {±1} m-последовательностей помогают в
объяснении конструкции, предложенной Р. Голдом.
1. Если бинарную т-последовательность {щ} периода L = 2п — 1
подвергнуть децимации с индексом децимации d, где d взаимно просто
с L, результирующая последовательность {vi} будет также бинарной
m-последовательностыо прежнего периода. Децимация (см. задачу
6.4) означает выбор каждого d-ro символа последовательности {щ}
и запись выбранных символов друг за другом, так что vi — и<ц.
Назовем полученную в результате последовательность {vi} децимацией
последовательности {щ}.
2. Пусть память п бинарной m-последовательности {щ} — нечетное
число и в индексе децимации d — 2s ~{~1 s взаимно просто с п. Тогда
индекс d взаимно прост с длиной L = 2п — 1 последовательности
{щ}, децимация {v^} есть m-последовательность прежнего периода
L, а ненормированная периодическая ВКФ Др?ш;(т)
последовательностей {щ} и {vi} принимает лишь три возможных значения:
RpM™) € |±^2(L + 1) - 1, -1 j - {±2^ - 1, -l} ,
m = 0,l,...,L-l. (7.50)
3. Пусть память п бинарной m-последовательности {щ} — четное
число, не кратное четырем, а в индексе децимации d = 2s + 1 s четно
и взаимно просто с п/2. Тогда d взаимно просто с длиной L =
= 2п — 1 последовательности {г^}, децимация {v{} есть т-последова-
тельностъ прежнего периода L, а ненормированная периодическая
ВКФ Др)Ш;(т) последовательностей {щ} и {vi} принимает лишь три
7.5. Примеры минимаксных сигнатурных ансамблей 305
возможных значения:
RpfW{m) e {±2y/{L + l) - 1, ~l} = {±2^ - 1, -l} ,
ra = 0,l,...,L-l. (7.51)
Оставляя в стороне весьма непростое доказательство этих
утверждений, опирающееся на категории алгебры расширенных конечных полей,
отсылаем заинтересованного читателя к оригинальной статье Голда [72]
или другим источникам (например, [9, 70]).
Возьмем теперь пару m-последовательностей — {щ} и ее
децимацию {vi} согласно условиям 2 или 3 и сформируем ансамбль из К сигнатур
следующим образом
a>k,i — ЩЩ-k, к = 1,2,..., L,
«L+i,t = Щ, (7.52)
где г = ..., — 1,0,1, Выражая это словесно, мы строим L сигнатур
посимвольным перемножением {щ} на циклические копии {v^}, а в качестве
еще двух сигнатур берем сами исходные га-последовательности. В итоге
имеем всего K = L + 2~2n + l сигнатур. На практике традиционно
бинарные {±1} га-последовательности формируются сначала в
алфавите {0,1}, т. е. над полем GF(2) с помощью РСЛОС, с последующим
отображением элементов GF{2) на вещественную пару {±1} (см, § 6.6 и 6.7).
Поэтому удобна реализация правила (7.52) с помощью двух п-разрядных
РСЛОС, генерирующих {0,1} предшественники {и^} и {у[}
последовательностей {щ} и {vi}. Тогда, взамен умножения {щ} на {vi-k}, можно
просуммировать предшественники по модулю 2 с последующим
отображением результата на множество {±1}: щу^-к — (—1)и*+г7*-*. Рис. 7.18
иллюстрирует практическое воплощение конструкции Голда в описанном
варианте.
Оценим корреляционный пик ансамбля Голда, начав с вычисления
корреляций между первыми L последовательностями
L-l L-1
Rp^kl{m) = ^ а,к,№Ц-т = ^2 игиг-гпЩ~кЩ~1~т^
Очевидно, что поскольку случай га = 0 mod L ж к ~ I отвечает
основному лепестку АКФ fe-й сигнатуры, анализировать следует только
ситуации, когда приведенные равенства одновременно не выполняются. При
этом, однако, либо обе последовательности щщ-т и Vi-wi-l-m
представляют собой некоторые новые сдвиги исходных га-последовательностей {щ},
{^}, либо одна из них есть сдвинутая исходная га-последовательность,
306 Глава 7. Ансамбли широкополосных сигнатур
а другая состоит из одних единиц. В первом случае получаем ВКФ
исходных m-последовательностей {щ}, {vi}, принимающую только три
значения из (7.50) или (7.51), тогда как во втором — боковые лепестки
ненормированной АКФ одной из последовательностей {щ}, {г>г}, т.е. —1.
РСЛОС
памяти п
{и}}
РСЛОС
памяти п
Задержка
на к тактов
ь©
mod 2
iv}}
Отображение
на{±1}
Отображение
на{±1>
Отображение
на{±1}
—►
{ak ,.}, 1<k<i_
►'
<aL + 2,/>
►
Рис. 7.18. Генерирование последовательностей Голда
Вычислим теперь ВКФ последовательностей {а*^}, к = 1,2, ...,L и
{ац}, I = L + 1:
L-1
Rp,kl(m) = ^2 игиг~гпЩ~к-
г=0
Если т = 0 mod L, то щщ-т = 1, и значение ВКФ есть просто
постоянная составляющая {г>г}, т.е. —1. В противном случае, щщ-т = Щ-8
для некоторого s, приводя к ВКФ исходных m-последовательностей,
удовлетворяющей (7.50) или (7.51). То же самое можно дословно повторить
в отношении ВКФ последовательностей {а/^}, к = 1,2, ...,L и {щ^}:
l = L + 2.
Наконец, поскольку сигнатурами {cll+ij} и {аь+2,г} являются сами
исходные га-последовательности, их ВКФ подчиняется (7.50) или (7.51),
тогда как АКФ имеют ненормированные боковые лепестки, равные —1.
Объединяя полученные результаты, можно видеть, что корреляционный
пик (7.44) в ансамбле Голда определяется максимальным по модулю
значением ВКФ в равенствах (7.50) или (7.51). После нормировки к длине L
приходим к итогу
f (v/2(L + l) + l)2
L2
(2/(L+TJ+l)2
L2
, n^0 mod 2,
, ■ n = 2 mod 4
( 2
у, n ф 0 mod 2,
Li
I L'
n = 2 mod 4
(7.53)
с последним приближением, отвечающим большой длине L ^> 1. Как
видно, при любом нечетном значении памяти п ансамбли сигнатур Голда
7.5. Примеры минимаксных сигнатурных ансамблей 307
асимптотически (L ^> 1) близки к нижней границе Сидельникова (7.46),
т. е. оптимальны, тогда как при четном п, не кратном четырем, их
проигрыш в уровне Ртах по отношению к граничному составляет около 3 дБ1.
Пример 7.6. Построим последовательности Голда длины L = 23 — 1 = 7.
Ансамбль столь малой длины практически бесполезен, однако помогает в
иллюстрации идеи конструкции. Начнем с бинарной {0,1} т-последовательности,
впервые встретившейся в примере 6.4: {и[} = {1,0,0,1,0,1,1}. Индекс
децимации d = 3 удовлетворяет ограничению пункта 2. В результате децимации имеем
последовательность {v^} = {1,1,1,0,1,0,0}. Посимвольное суммирование {и[}
и {v'i} по модулю два дает последовательность {0,1,1,1,1,1,1}, которая после
отображения на алфавит {=Ы} превращается в первую последовательность Голда
{dij} — {Л }. Сдвиг {v'i} вправо на одну позицию и сложение по
модулю 2 с {и[} дает последовательность {1,1,1,0,0,0,1}, которая после перехода
к символам {±1} становится второй последовательностью Голда { Ы- + — }.
Еще пять последовательностей Голда получаются в результате дальнейших
сдвигов {^}, сложения по модулю 2 с {и[} и изменения символов на {=Ы}. Совместно
с {и'}} и {^}, преобразованными к алфавиту {±1}, имеем К = 23 + 1 = 9
последовательностей всего. Проверка оптимальности корреляционного пика в этом
простейшем случае не имеет особого смысла, поскольку заранее ясно, что при
L — 1 ненормированная периодическая корреляция (кроме основного лепестка
АКФ) не может превзойти значения 5, предсказываемого соотношением (7.53).
Построению ансамблей Голда больших длин и проверке их оптимальности
посвящена задача 7.40.
Ансамбли Голда пользуются исключительной популярностью в
современных CDMA системах. Достаточно сказать, что они используются в
глобальной спутниковой навигационной системе GPS для разделения
сигналов космических аппаратов, в 3G системе мобильной связи стандарта
WCDMA для скремблирования CDMA кодов и т. п.
7.5.3. Множества Касами и их расширения
Конструкция Касами в принципиальном плане весьма близка к описанной
выше конструкции Голда. Выполним децимацию бинарной {±1} т-по-
следовательности {щ} четной памяти п = 2h с индексом d = 2Л + 1.
Очевидно, это значение d не взаимно просто с периодом L = 2п — 1 =
= (2h — \){2h + 1) последовательности {щ}, так что полученная
последовательность {vi} = {udi} имеет период, являющийся делителем L. Можно
показать, что если {щ} инициализирована так, что щ = — 1, то
«короткая» последовательность {v^ окажется бинарной т-последовательностью
*В случае п = 0 mod 4 ансамбль Голда также существует с тем же значением
корреляционного пика, как и при п = 2 mod 4, но с числом последовательностей на одну
меньше [67, 70].
308 Глава 7. Ансамбли широкополосных сигнатур
периода L\ — 2h — 1, ненормированная периодическая ВКФ которой с {щ}
на периоде L принимает лишь два значения [9, 70, 73]:
Rp,uv(m) = ±2* - l = ±VL + 1 - 1, m = 0,1,..., L - 1. (7.54)
Теперь L\ сигнатур Касами длины L образуются посимвольным
перемножением исходной «длинной» m-последовательности {щ} с L\
различными циклическими копиями {vi}, а еще одной сигнатурой служит
сама длинная последовательность, так что:
&k,i = ЩЩ-k, к = 1,2,..., Li,
az,i+i,z = Щ, г = ..., -1,0,1,...
Таким образом, имеется всего К — L\ + 1 = 2h = y/L + 1 таких
сигнатур периода L. Разумеется, вновь умножение {±1} последовательностей
{щ}, {vi} можно выполнить как сложение по модулю 2 их {0,1}
предшественников {г^}, {г^}, но в отличие от ансамбля Голда для формирования
короткой последовательности {г^} требуется РСЛОС вдвое меньшей
длины h = п/2 (см. рис. 7.19).
(7.55)
РСЛОС
памяти п
РСЛОС
памяти п/2
{U'j}
w;>^
Задержка
на к тактов
1
/
V
\ - р
г
S „
J
Отображение
на{±1}
Отображение
на{±1}
iaL£ 1,/ )
{akJ}, 1</с^,
'►
mod 2
Рис. 7.19. Генерирование последовательностей Касами
Доказательство минимаксных свойств ансамбля Касами
(ч/L+T+l)2 _,1
2
rmax
x»i
(7.56)
проводится на основе (7.54) подобно тому, как это сделано выше для
множества Голда, и оставляется читателю в качестве упражнения
(задача 7.28). Сравнение двух бинарных ансамблей показывает
значительный (6 дБ) выигрыш множеств Касами в уровне корреляционного
пика у ансамблей Голда той же длины в обмен на значительно меньшее
(в (L + 2)/y/L + 1 « yfL раз) число сигнатур2 К.
2Для бинарных сигнатур границы (7.45), (7.46) можно несколько уточнить, учтя, что
их ненормированные корреляции принимают только целочисленные значения. В
результате выясняется, что как ансамбли Голда с нечетной памятью, так и ансамбли Касами
строго (а не только асимптотически) оптимальны по уровню корреляционного пика
среди всех бинарных сигнатурных ансамблей [67, 70].
7.5. Примеры минимаксных сигнатурных ансамблей 309
Пример 7.7. Построим ансамбль Касами длины L = 24 — 1 (h — 2, К =
= \/Ь + 1 = 4). Начнем с бинарной {031} m-последовательности Щ} длины L =
= 24 — 1 — 15 на основе примитивного полинома f(x) = х4 + х +1 с начальным
состоянием РСЛОС < = 1, и[ =и'2=и'3=0. Имеем {u'J = {1,0,0,0,1,0,0,1,1,0,1,
0,1,1,1}. Децимация этой последовательности с индексом d = 2h + 1 = 5 дает
га-последовательность периода три {г;*} = {1,0,1,1,0,1,1,0,1,1,0,1,1,0,1}.
Сумма по модулю 2 последовательности {и^} с тремя сдвинутыми копиями {v^} после
перехода к алфавиту {=Ы} образует первые три сигнатуры Касами:
{ам} = {+ + + + -+},
{o2,i} = {+- + - + + - + -- + + + + -},
{аз,г} = { + + - + + + + + -- + +}.
Четвертой служит {uj-} после преобразования символов в {±1}:
{а4,г} ={-+++-++--+-+ }.
Непосредственная проверка показывает, что все их ненормированные ВКФ, как
и боковые лепестки ненормированных АКФ первых трех последовательностей,
принимают лишь значения —5 и 3, так что /?^ах = 1/9 в полном соответствии
с (7.56). Построение произвольных множеств Касами и проверка их
корреляционных свойств с использованием средств MATLAB являются предметом
задачи 7.41.
Сравнительно малое число сигнатур в обсуждаемом множестве
придает особую важность найденному Б. Ж. Камалетдиновым элегантному
методу почти двукратного расширения ансамбля Касами без ухудшения
корреляционного пика [74]. Пусть п кратно 4: п = 4г, где г — целое,
так что L — 24г — 1 = 16г — 1 — 15,255,4095,... При такой длине L
в дополнение к множеству Касами существует и другой бинарный
ансамбль того же объема y/L + 1, называемый ансамблем бент-последова-
телъностей [9, 75] и обладающий тем же минимаксным свойством р^ях —
— (y/L + 1 + 1)2/L2 ~ 1/L. В самых общих чертах построение бент-по-
следовательностей вновь состоит в посимвольном перемножении двух
исходных последовательностей: «длинной» m-последовательности периода
L = 24г — 1 и некоторой специальной последовательности, базирующейся
на так называемой бент-функции. Детали такой конструкции достаточно
замысловаты и здесь не обсуждаются, однако принципиальным
является то, что нормированная ВКФ любой бент-последовательности с любой
из первых L\ последовательностей Касами (7.55) по абсолютной величине
не превосходит корреляционного пика ансамблей Касами и бент-после-
довательностей. В итоге можно составить ансамбль, включающий L\ =
= 2h — 1 — 22г — 1 — y/L + 1 — 1 последовательностей Касами и y/L + 1
бент-последовательностей и обладающий прежним значением
корреляционного пика p2nax ~ (L + l)/L2 и 1/L. Полученный таким образом
310 Глава 1. Ансамбли широкополосных сигнатур
ансамбль уникален в том смысле, что среди всех известных бинарных
ансамблей с корреляционным пиком ртах ~ 1/£ только он содержит
наибольшее число сигнатур К = 2y/L + 1 — 1.
7.5.4. Ансамбли Камалетдинова
Известны и другие бинарные минимаксные ансамбли [9, 67], нередко
отличающиеся от рассмотренных лишь тонкой структурой
последовательностей, но не значениями длины L, объема К и корреляционного
максимума ртах- На этом фоне заслуживают особого интереса ансамбли,
открытые Б. Ж. Камалетдиновым [76] и существующие для длин,
отличных от длин ансамблей Голда и Касами.
Чтобы нагляднее описать идею, остановимся на несколько суженной
версии конструкций Камалетдинова, что, однако, не сопряжено с какими-
либо изъятиями в части охватываемых длин или достижимых
параметров. В первой схеме Камалетдинова возьмем простое нечетное р > 3
вида р = Ah + 3 = 3 mod 4 и расширим определение двузначного
характера ф(х) из § 6.8 на нулевой элемент GF(p), положив ^(0) = 1 (ф(0) = —1
приведет к тому же конечному результату). Отождествим номер г
символа в последовательности с элементом поля GF(p), оперируя с ним по
модулю р, и образуем р+1 р-ичных последовательностей dk,i над GF(p)
(т. е. с элементами из этого поля) по правилу:
{г + ai+k + оГ\ к = 1,2,... ,р - 1,
i + a\ k^p, (7.57)
г + а"*, fc==p+l,
где вся арифметика соответствует правилам GF(p), a — примитивный
элемент GF(p) и % = ..., —1,0,1, — Можно заметить, что каждая
последовательность в (7.57) образована суммированием последовательностей с
взаимно простыми периодами рир-1 (ар~1 = а0 = 1) и, следовательно,
ее период L = р(р — 1). Отобразим теперь последовательности (7.57) на
бинарный алфавит {=Ы}, используя введенное расширение двузначного
характера
aKi = ^(4Д к = 1,2,... ,р + 1; i = ..., -1,0,1,... (7.58)
Полученный таким образом ансамбль бинарных сигнатур имеет параметры
L=p(p-1), K=p+1, tfawi=*—>-. (7.59)
_ > + 3)2
max г 2
Длину L можно сделать достаточно большой выбором р (р ^> 1), имея
(p+3)2/L = (р+3)2/(р2-р) -1и р^ах —► 1/L, что после сравнения с (7.45)
свидетельствует об оптимальности (по меньшей мере, асимптотической)
ансамбля по уровню корреляционного пика.
7.5. Примеры минимаксных сигнатурных ансамблей 31 I
Пример 7.8. Пусть р = 7. Прямая проверка подтверждает, что элемент а — 3
примитивен в GF(7). Тогда последовательности {аг} и {а~г} вида {...,1,3,2, б, 4,
5,1,3,...} и {..., 1,5,4,6,2,3,1,5,...} соответственно обе имеют период р—1 = б.
Комбинирование их по модулю 7 с последовательностью {г} = {...,0,1,2,3,4,5, б,
0,1,...} периода 7, предписываемое (7.57), дает К = р + 1 = 8 семеричных
последовательностей периода L = р(р — 1) = 42. Первая из них, например,
{dM} = {221136110025006614665503554462443351332240}.
Замена семеричных элементов их расширенными характерами согласно
правилу ф(0) = ф(1) = ф(2) = ф(4) = 1 и ф(3) = ф{5) = ф(6) = -1 преобразует
последовательности в 8 бинарных сигнатур, например,
{«1,Л =
= {++++ +++++-++ ++ + ++-+++ + ++++}.
Вычисление их АКФ и ВКФ «вручную» весьма утомительно, так что лучше
(см. задачу 7.42) воспользоваться пакетом MATLAB.
Вторая схема Камалетдинова использует как основу р-ичную (р = 4/г+З =
— 3 mod 4) линейную последовательность {q}, полученную децимацией
с индексом d = р — 1 сдвигов {dj+fc}> fc — 1,2,... ^К — р — 1 р-ичной
m-последовательности {й{\ памяти п = 2, т.е. длины р2 — 1.
Поскольку d делит р2 — 1, то последовательность {с^} = {deft+fc} имеет период
(р2 — 1)/(р — 1) = р + 1. Теперь построим р — 1 последовательностей над
GF(p)
dkii = г + ddj+jfe, /с = 1,2,... ,р - 1; г = ..., -1,0,1,..., (7.60)
и отобразим их на бинарный алфавит {±1} согласно (7.58). В результате
получим ансамбль бинарных сигнатур с параметрами
L=p(p+1), K=p-l, p^ax = ^±il! = ^. (7.61)
Вновь при больших длинах (р ^> 1) отношение
(p+lf/L = (p + l)2/(p2+p)-+l
и /^ax —> 1/L, подтверждая оптимальность (по меньшей мере,
асимптотическую) и этого ансамбля.
Пример 7.9. В данном случае отсутствует запрет на р = 3 и р-ичная ш-после-
довательность {di} памяти п — 2 и длины р2 — 1 = 8 может быть сформирована
с помощью примитивного полинома над GF(S) второй степени f(x) = х2 + х + 2,
или, эквивалентно, с помощью рекурсии di = 2di-i+di-2- При начальном состоянии
РСЛОС do = 1, di = 0 последовательность {dj = {..., 1,0,1,2,2,0,2,1,1,0,...}.
Децимация ее сдвигов с индексом d — р — 1 = 2 дает две последовательности
периода 4: {...,1,1,2,2,1,1,2,2,...} и {...,0,2,0,1,0,2,0,1,...}. После
посимвольного сложения с последовательностью {г} = {..., 0,1,2,0,1,2,...} получатся
312 Глава 7. Ансамбли широкополосных сигнатур
К = р — 1 — 2 последовательностей периода L = р(р+1) — 12: {1,2,1,2,2,0,2,0,0,
1,0,1} и {0,0,2,1,1,1,0,2,2,2,1,0}. Последний шаг, состоящий в замене их
элементов расширенными характерами -0(0) = -0(1) = +1, ф{2) = — 1, приведет к
ансамблю Камалетдинова из двух бинарных последовательностей длины L = 12:
{oi,i} = {+- + -- + - + + + ++} и {а2,г} = {+ + - + + + + ++}. Найти
их АКФ и ВКФ можно вручную (либо с помощью программы задачи 7.43),
убедившись в итоге в справедливости равенства />^ах — 1/9 в полном соответствии
с (7.61).
Доказательства утверждений о значении корреляционного пика для
рассмотренных ансамблей основаны на теории квадратных уравнений
в конечных полях. Не вдаваясь в детали этой непростой задачи,
отсылаем заинтересованного читателя к оригинальной работе [76].
Резюмируем итоги предпринятого анализа в форме табл. 7.1,
представляющей длину (с перечислением всех длин существующих ансамблей
в диапазоне 7 < L ^ 1023), число сигнатур и квадрат максимума
корреляции бинарных сигнатурных ансамблей. Таблица весьма выразительно
демонстрирует весомость конструкций Камалетдинова: в оговоренном
интервале они добавляют 11 новых длин к тем восьми, для которых
существуют ансамбли Голда и Касами.
Таблица 7.1. Примеры бинарных минимаксных сигнатурных ансамблей
Ансамбль
Голд
Касами
Объединение
Касами и бент-по-
следовательностей
Камалетдинов 1
Камалетдинов 2
Длина
Т- - 1, п ф 0 mod 4
7, 31, 63, 127, 511,
1023
2п — 1, п — четное
15, 63, 255, 1023
2п - 1, п = 0 mod 4
15, 255
р(р-1), р —
простое
42, 110, 342, 506,
930
р(р+1),р —
простое
12, 56, 132, 380, 552,
992
Объем
L + 2 = 2n + l
V£ + i
2y/L-\-l-l
р+1 = жш^^
p-l = ^L+I-Z -+ VI
Квадрат
максимума
корреляции /с&ах
(y/2(L + l)+l)'2
n нечетное
(2л/Г+Т+1)2 4
п четное
(vT+T+l)2 ■ 1
Т? > Г
(vT+T+1)2 _^ l
15 L
(P+3)2 jl.
L2 ^ L
L2 I,
Задачи
7.1. В CDMA ПРС системе, использующей периодические бинарные
сигнатуры для БФМ передачи данных, абонент передает сигнал вида {-Н h
h 44 \-+-\ Ь—}, содержащий более двух битов данных. Какой
сигнатурный код присвоен этому абоненту (игнорируя общий знак всех
символов), если длительность бита данных равна периоду сигнатуры?
7.2. В CDMA ПРС системе, использующей периодические бинарные
сигнатуры для БФМ передачи данных, абонент использует сигнатурный код
{+ + -\ 1—} с длительностью бита данных, равной периоду
сигнатуры 7Д. Вследствие ошибки петли синхронизации опорный сигнал
приемника отстает от принятого сигнала на один чип. Каким будет
результат демодуляции данных в случае передачи нулевого потока битов?
7.3. Каким образом наличие амплитудной модуляции в АФМ сигнатуре
повлияет на структуру приемника в системе с ПРС? Возвратит ли в этом
случае процедура сжатия спектра символ данных к виду, характерному
для передачи без расширения спектра?
7.4. CDMA система с прямым расширением спектра использует КФМ для
передачи данных со скоростью 64 кбит/с и ПРС-код со скоростью чипов
1,28 • 106 чип/с. Определите коэффициент расширения и полосу,
занимаемую системой.
7.5. CDMA система с ПЧРС использует 4-частотный расширяющий сигнал
длины N = 4 : {1,4,2,3} и ЧМ-4 модуляцию данными (каждая пара
бит передается на одной из 4 частот). Передается битовый поток
вида 00101101. Представьте переданный сигнал возможной
частотно-временной решеткой, если один бит данных занимает два чипа. Какой это
тип ПЧРС: быстрый или медленный?
7.6. CDMA система с ПЧРС использует 4-частотный расширяющий сигнал
длины N = 4 : {1,4,2,3} и ЧМ-4 модуляцию данными (каждая пара
бит передается на одной из четырех частот). Передается битовый поток
вида 10110100. Представьте переданный сигнал возможной
частотно-временной решеткой, если один чип сигнатуры занимает два бита данных.
Какой это тип ПЧРС: быстрый или медленный?
7.7. CDMA система с быстрой ПЧРС использует 16-частотный
расширяющий сигнал и ЧМ-4 модуляцию данными. Длительность чипа составляет
10 мкс. Оцените минимальные полосы расширяющего и переданного
сигналов, если чипы различных частот ортогональны.
7.8. В выделенной полосе Wt = 76,8 кГц следует организовать синхронную
CDMA систему, передающую БФМ данные со скоростью R = 9,6 кбит/сек.
Сколько пользователей она сможет обслуживать при сохранении
оптимальности однопользовательского приемника? Постройте
соответствующее множество бинарных сигнатур. Как изменится число пользователей,
если БФМ модуляцию данными заменить на КФМ, ФМ-8 или КАМ-16?
314
Глава 7. Ансамбли широкополосных сигнатур
Если какой-то из перечисленных методов модуляции увеличивает число
пользователей, какой ценой это достигается?
7.9. Синхронная CDMA система обслуживает 36 пользователей, используя
ортогональные сигнатуры равной энергии на бит. Сколько новых сигнатур
той же энергии на бит можно добавить к имеющимся (при фиксированных
полосе и скорости передачи данных), не ухудшая минимального
расстояния между различными групповыми сигналами?
7.10. Какова минимальная длина синхронных сигнатур, допускающая
увеличение не менее чем на 33 % числа пользователей в схеме
перенасыщения (7.23)?
7.11. Добавьте дополнительную сигнатуру к четырем функциям Уолша длины
N = 4. Является ли дополнительная сигнатура бинарной? Если нет,
можно ли модифицировать исходные сигнатуры так, чтобы дополнительная
сигнатура оказалась бинарной?
7.12. Построено К — {AN — 1)/3 синхронных сигнатур согласно схеме
перенасыщения (7.23). Разумно ли использовать их в CDMA системе с К
абонентами, если приемная сторона может применять только
однопользовательский приемник?
7.13. Найдите минимальную длину, при которой мощность ПМД/на
сигнатуру/на однопользовательский приемник в перенасыщенном синхронном
варианте CDMA не превышает —30 дБ относительно мощности полезного
сигнала, если число пользователей равно 101.
7.14. Докажите, что три или более бинарных последовательностей длины JV
не могут быть ортогональными друг другу, если их длина не кратна
четырем.
7.15. Существует ли перенасыщенное множество из К = 21 бинарных
сигнатур, удовлетворяющих границе Велча? Что можно сказать о случаях
К = 22,23 или 32?
7.16. Опишите процедуру построения множества из К — 256 бинарных
последовательностей длины N — 100, лежащих на границе Велча.
7.17. (Каристинос- Падос [64]). Докажите, что для перенасыщенного
множества нечетного числа К бинарных сигнатур граница Велча (7.30)
возрастает до
тп„ К2 N-1
TSC>lf + —'
7.18. Постройте ансамбль из К = 15 бинарных сигнатур длины N = 12,
достигающий границы, приведенной в предыдущей задаче. Обобщите
процедуру на случай К = 2Ш — 1 сигнатур (К > N).
7.19. Каков минимальный период К — 11 асинхронных сигнатур, при котором
не исключается возможность удержания среднего квадрата корреляции
между всеми их циклическими копиями в пределах —20 дБ?
7.20. Рассмотрим случайные сигнатуры, удовлетворяющие (7.37). Докажите,
что умножение сигнатур на символы данных (модуляция данными) не
нарушает условия (7.37) при условии независимости между символами
данных и сигнатур.
7.21. Докажите, что ВКФ двух последовательностей одного и того же
наименьшего периода £, обладающих идеальной периодической АКФ, не может
равняться нулю при любых взаимных сдвигах.
7.22. Найдите максимальное число асинхронных сигнатур периода L = 100,
не исключающее удержания корреляционного пика ниже —23 дБ.
7.23. В пределах зоны с радиусом Dc = 15 км свободно перемещаются К = 50
пользователей. Максимальный диапазон рассеяния по задержке в
канале между пользователем и центральной станцией Td8 — 20 мкс.
Полоса, отведенная системе, составляет 2 МГц. Оцените минимальные длины
m-последовательности и последовательности Лежандра в ансамбле
сигнатур с временным сдвигом для канала «абонент — центральная станция».
Найдите минимальную длину троичной последовательности с идеальной
периодической АКФ памяти 3, пригодной для той же цели.
7.24. В подпараграфе 7.5.1 при построении ансамбля частотно-сдвинутых
сигнатур использовалась m-последовательность. Можно ли заменить ее
любой другой бинарной минимаксной последовательностью (например,
последовательностью Лежандра), сохранив прежний квадрат
корреляционного пика, близкий к 1/L? Если нет, объясните почему.
7.25. CDMA система работает на несущей с длиной волны 4 см и имеет
длительность сигнатурного чипа 1 мкс. Длина сигнатур должна быть L =
— 210 _ 1 — Ю23. Какое максимальное число частотно-сдвинутых
сигнатур можно сформировать, если возможны скорости пользователей вплоть
до 144 км/ч?
7.26. Найдите все индексы децимации, пригодные для построения ансамблей
Голда длин 63, 127, 511 и 1023.
7.27. Требуется ансамбль сигнатур с максимумом корреляции не более 0,064
для обслуживания К = 100 пользователей. Какова минимальная длина
ансамбля Голда, удовлетворяющая этим требованиям?
7.28. Докажите минимаксные свойства (7.56) множеств Касами.
7.29. Необходим ансамбль сигнатур объема не менее 31с максимумом
корреляции ниже —23 дБ. Найдите среди известных бинарных множеств ансамбль
минимальной длины, удовлетворяющий этим требованиям.
7.30. Необходим ансамбль сигнатур мощности не менее 24 с максимумом
корреляции ниже —25 дБ. Найдите среди известных бинарных множеств
ансамбль минимальной длины, удовлетворяющий этим требованиям.
316 Глава 7. Ансамбли широкополосных сигнатур
Задачи в пакете MATLAB
7.31. Напишите программу, иллюстрирующую принцип прямого расширения-
сжатия спектра (см. рис. 7.3 и 7.4).
7.32. Рис. 7.20 иллюстрирует моделирование в пакете MATLAB быстрого ПЧРС
с использованием шести чипов на бит данных, четырехчастотной
сигнатуры {Fi} = (1,3,2,1,0,3), ЧМ-2 модуляции данными (частотный сдвиг
единичного бита fd =.4). Напишите программу для моделирования
быстрого ПЧРС в диапазоне параметров.
\ \ i
О 0,5 1,0 1,5 2,0 2,5 3,0
Рис. 7.20. Быстрое ПЧРС
7.33. Напишите программу, вычисляющую квадрат расстояния между двумя
реализациями группового сигнала (7.11) с использованием равенства (7.15)
для произвольного заданного сигнатурного ансамбля БФМ передачи
данных. Проверьте ее работу на примере ортогонального ансамбля
(например, строк матрицы Адамара), варьируя случайным образом профиль
разностей ей •
7.34. Модифицируйте программу предыдущей задачи с целью вычисления
квадрата минимального расстояния в созвездии группового сигнала (7.11)
для произвольного ансамбля К синхронных сигнатур и БФМ передачи
данных. До какого объема ансамбля К программа выполняется за
приемлемое время?
7.35. Напишите программу, генерирующую перенасыщенный ансамбль
согласно схеме (7.23) для длин N = 41 с произвольным L Используйте строки
Задачи в пакете МАТЬ А В 317
J-й кронекеровской степени ЕЦ из примера 7.3 в качестве первичных
сигнатур. Убедитесь, что все дополнительные сигнатуры — бинарные.
Используйте программу задачи 7.33 для выборочной проверки
расстояний в созвездии групповых сигналов.
7.36. Напишите программу, моделирующую многопользовательский прием в
перенасыщенной синхронной CDMA системе. Необходимые шаги:
а) Сформируйте К = 21 бинарную сигнатуру, как в предыдущей задаче;
б) Сформируйте случайный Х-мерный вектор битов, передаваемых К
абонентами;
в) Выполните БФМ сигнатур передаваемыми битами и сформируйте
групповой сигнал;
г) Прибавьте гауссовский шум к групповому сигналу, установив средне-
квадратическое отклонение шума порядка амплитуды сигнатуры;
д) Выведите на экран полученное наблюдение;
е) Протестируйте все 2К битовых профилей, каждый раз формируя
пробный групповой сигнал и измеряя евклидово расстояние от него до
принятого наблюдения;
ж) Сформируйте решение: битовый профиль, соответствующий
ближайшему к наблюдению групповому сигналу, и проверьте, все ли биты
восстановлены правильно;
з) Выполните программу несколько раз, увеличивая уровень шума и
прокомментируйте результаты.
7.37. Напишите программу для вычисления полного квадрата корреляции и
среднего квадрата корреляции на сигнатурную пару для произвольного
сигнатурного ансамбля.
7.38. Напишите программу для построения перенасыщенного бинарного
ансамбля К — 2п последовательностей произвольной длины N < К,
лежащего на границе Велча. Используйте полученный ансамбль для
моделирования /^-пользовательской синхронной CDMA системы. Необходимые
шаги:
а) Постройте матрицу Адамара размера К;
б) Отбросьте в ней N — К строк и используйте столбцы усеченной
матрицы в качестве сигнатур;
в) Сформируйте i^-мерный вектор данных пользователей, выполните
манипуляцию сигнатур данными и сформируйте групповой сигнал;
г) Промоделируйте К однопользовательских приемников, каждый из
которых вычисляет корреляцию принятого группового сигнала с
индивидуальной сигнатурой и принимает решение в соответствии с
полярностью корреляции;
Глава 7. Ансамбли широкополосных сигнатур
д) Сравните ^-мерный вектор решений о принятых битах с реально
переданными битами и найдите число ошибочно принятых битов;
е) Повторите пункты (в)-(д) 1000-10000 раз и найдите вероятность
ошибки на бит на одного абонента;
ж) Выполните программу для п = 5,6,7,8, находя каждый раз
минимальную длину (максимальное перенасыщение K/N), при котором система
еще свободна от ошибок.
Напишите программу, моделирующую асинхронную CDMA систему на
основе сигнатур, являющихся сдвинутыми по времени копиями ш-после-
довательности. Рекомендуемые шаги:
а) Установите максимальное число пользователей К = 20... 25 и
максимальную задержку в числе чипов mmax — 80... 100;
б) Сформируйте бинарную {±1} т-последовательность длины
L > lf(mmax-bl);
в) Используйте в качестве К сигнатур К циклически сдвинутых копий
ш-последовательности, каждая из которых запаздывает по отношению
к предыдущей на mmax + 1 чипов;
г) Выберите Ка первых сигнатур (активных пользователей) и
осуществите их манипуляцию (кроме первой) случайными независимыми битами,
положив длительность бита в пределах N = 160... 200 чипов;
д) Сдвиньте все модулированные сигнатуры (кроме первой)
относительно первой случайно и независимо в пределах [0, mmax] и просуммируйте
их для получения группового сигнала;
е) Сымитируйте однопользовательский приемник первого абонента,
вычислив корреляцию в пределах одного бита группового сигнала с
первой сигнатурой;
ж) Демодулируйте бит первого абонента и сравните его с истинным
(равным нулю);
з) Варьируя число активных абонентов, как например, Ка = 5,10,20,...
повторяйте пункты (г)-(е) 1000-5000 раз для каждого Ка. Для
каждого Ка найдите экспериментально предельное отношение сигнал-
помеха на выходе коррелятора и вероятность ошибки на бит и
сравните их с предсказанными теоретически: qj = N/(K — 1), Ре = Q(qi);
и) Выведите на дисплей 5-7 выборочных наложенных реализаций
группового сигнала и аккумулированную сумму на выходе интегратора
приемника (рис. 7.21 представляет пример для К = 25, Ка = 20,
iV = 169, mmax = 80).
Напишите программу для генерирования ансамбля Голда и визуализации
гистограммы значений периодических АКФ и ВКФ входящих в него
сигнатур. Рис. 7.22 представляет пример результатов для N = 25 — 1.
Задачи в пакете MATLAB 319
зоо
g 200
ч
£100
II ! I I I I t !
I ! i I I I I i t /
r x 1 1 \~ - ~J<IS^ ^^^ )Je^£3r^^' ~
wS£^P*±J*A •'J^^i№Cr~ [ ( r I + -+ 1
20
40
60
80
t/Д
100
120
140
160
Рис. 7.21. Групповой сигнал и выход интегратора приемника
г
■ J."' ' 1 ! 1 _ _ * „_ 1 _■_-
г- - ■ I 1 I > I 7
_\_ i i 1 _ ! I _ l_/_
1_J _J 1 i 1 1
10
15
20
25
30
20
10
0
-10
i
30
20
10
0
-10
30
20
10
0
-10
5000
-10
10
15
20
10
15
20
I
-2 0 2
Корреляция
25
25
30
■---. i i i i ) i-j
\ 1 1 1 ! 1 \ЧА
-V i i j i \ .-__^jZJ
'— — r- '• -~ 4-~ '—I
)
^CT_^
5
i
\ N^
10
1 -
1
}
15
i
_>
Л 1 /•
20
i
i
[
25
i
_ i
1 Л
Г
w
30
i
|
i
30
30
8 10
Рис. 7.22. Периодические корреляции и гистограмма корреляций для ансамбля
Гол да длины 31
Глава 1, Ансамбли широкополосных сигнатур
а) Постройте бинарную m-последовательность соответствующей памяти
п > 5;
б) Осуществите ее децимацию так, чтобы прийти ко второй исходной
т-последовательности;
в) Сформируйте 15-20 последовательностей Голда, как предписано
правилом (7.52), включив в их число исходные ш-последовательности;
г) Вычислите их периодические АКФ и ВКФ;
д) Выведите на дисплей АКФ одной из исходных т-последовательно-
стей, АКФ произвольной другой последовательности Голда, ВКФ двух
исходных m-последовательностей и ВКФ двух других
последовательностей Голда из полученных;
е) Выведите на экран гистограмму всех нежелательных корреляций
(значений ВКФ и боковых лепестков АКФ);
ж) Выведите значение корреляционного пика и сравните его с
теоретически предсказанным и соответствующей нижней границей;
з) Выполните программу для релевантных нечетных и четных значений
п и интерпретируйте результаты.
Напишите программу для исследования ансамблей Касами.
Последовательность операций может быть той же, что и в предыдущей задаче,
однако теперь имеет смысл вычислять корреляции между всеми (не
только выбранными) сигнатурами.
Напишите программу для исследования ансамблей Камалетдинова,
заданных правилом (7.57), (7.58). Рис. 7.23 иллюстрирует результаты для
случая р = 11. Рекомендуемые шаги:
а) Положите р = 3 mod 4, найдите примитивный элемент а в GF(p) и
обратный ему а-1;
б) Сформируйте К = р + 1 последовательностей над GF(p) как
предписано (7.57), используя арифметику GF(p);
в) Отобразите полученные последовательности на бинарный {=Ы}
алфавит согласно (7.58);
г) Вычислите периодические АКФ и ВКФ всех последовательностей
предыдущего пункта;
д) Визуализируйте АКФ последовательностей {a>K,i} и {а\^}]
е) Визуализируйте ВКФ этой пары и пары {aK-i,i}, {«лг,г};
ж) Выведите на дисплей гистограмму всех нежелательных корреляций
(значений ВКФ и боковых лепестков АКФ);
з) Вычислите значение корреляционного пика и сравните его с
теоретически предсказанным и соответствующей нижней границей;
Задачи в пакете МАТЬ А В
и) Повторите выполнение программы, варьируя значение р и
интерпретируйте результаты.
100
| 50
ft;
-N&-
-Ntor-
I
I
■-ф—v Ф *^Ф ^Г^Г"
~V4r-
20 30 40 50 60 70 80 90 100 ПО
<§
100 110
100
50
OR^J^AA^^^^
10
20 30 40 50 60 70
80 90 100 ПО
100
£ 50
О
3 loooo
-3 5000
о?
о
С О
FW=A^\^V\^A/VM^^
о
10
20
30
40 50
60
70
80
90 100 ПО
i
1
-15 -10 -5 О
Корреляция
10
15
Рис. 7.23. Периодические корреляции и гистограмма корреляций для ансамбля
Камалетдинова длины 110
7.43. Напишите программу для исследования ансамблей Камалетдинова,
задаваемых правилом (7.60), (7.58). Предусмотрите вывод на дисплей
выборочных АКФ и ВКФ, а также гистограммы нежелательных корреляций.
Вычислите значение корреляционного пика и сравните его с
теоретически предсказанным и соответствующей нижней границей.
11—2771
ГЛАВА 8
ПОИСК
И АВТОСОПРОВОЖДЕНИЕ
ШИРОКОПОЛОСНЫХ
СИГНАЛОВ В СИСТЕМАХ
С ПРЯМЫМ РАСШИРЕНИЕМ
СПЕКТРА
8.1. Процедуры поиска и автосопровождения
Измерение времени прихода и частоты принятого сигнала является
базовой задачей для множества приложений, воплощающих идею
распределенного спектра. В системах, где широкополосные сигналы служат для
позиционирования и сопровождения движущихся объектов (радио- и
гидролокация, навигация), частотно-временные измерения оказываются
ключевой процедурой. В широкополосных телекоммуникациях они же
необходимы для совмещения локальной и системной временной шкал.
Действительно, для корректной демодуляции переданного потока данных приемник
любой цифровой системы связи должен с достаточной точностью знать
границы символов, кадров и т. п. в принятом сигнале. Другими словами,
местный эталон времени приемника должен быть соответствующим
образом синхронизирован с принятым информационным потоком. При этом
в широкополосных системах требования к точности подобной
синхронизации особенно высоки, так как при временном рассогласовании между
ПРС-кодом и местной сжимающей опорой порядка длительности чипа
или более никакого сжатия спектра, а значит, и последующей правильной
демодуляции не произойдет (см. § 7.1). Таким образом, связанные с
синхронизацией действия приемника состоят в предварительной (до
демодуляции данных) подстройке собственной сужающей опоры под ПРС-код
принятого сигнала и поддержании приемлемого синхронизма между ними
в течение всего последующего сеанса приема сообщения. Можно видеть,
что с теоретической точки зрения в задаче синхронизации нет ничего
нового: для согласования локальной опоры с принятым сигналом следует
8.1. Процедуры поиска и автосопровождения 323
лишь измерить частотно-временной сдвиг принятого сигнала
относительно местного генератора. Затем, если необходимо, генератор приемника
может быть скорректирован по времени и частоте и, тем самым,
синхронизирован с принятым сигналом.
Оптимальные (МП) стратегии измерения запаздывания и частоты
подробно обсуждались в § 2.12-2.14. Однако на практике попытка их
материализации в «чистом» виде нередко наталкивается на серьезные
препятствия. Начальная (например, при первичной активации приемника)
расстройка локального эталона по времени и частоте относительно
принятого сигнала может оказаться достаточно большой. К числу факторов,
обуславливающих подобное рассогласование, относятся автономность
эталонов передающей и приемной сторон, широкий диапазон вариаций
расстояния от передатчика до приемника, доплеровский сдвиг частоты,
вызванный их взаимным движением и пр. В подобных обстоятельствах прямое
воплощение правила МП может оказаться чрезмерно затратным или вовсе
нереальным в плане требуемых ресурсов, как это имеет место в
следующем примере.
Пример 8.1. Дальномерный С/А-сигнал системы GPS (см. § 11.2) имеет
период L — 1023 чипов или в реальном времени LA = 1 мс. Для решения
навигационной задачи требуется измерить временное положение сигнала с точностью
не хуже долей микросекунды, к примеру, с погрешностью в 0,1 длительности
чипа А. Если приемник активируется без априорного знания расстройки местного
эталона относительно сигнала, неопределенность запаздывания сигнала
охватывает интервал в один период LA. Обращаясь к приемнику на базе банка
корреляторов (см. рис. 2.18), можно видеть, что количество параллельных
корреляторов в нем составит не менее 10230. Переход к структуре с согласованным
фильтром (рис. 2.19) не снижает остроты проблемы: цифровой вариант
подобного фильтра с памятью LA должен оперировать, по крайней мере, с десятью
отсчетами на чип, выполняя 1023 суммирования в течение одного интервала
дискретизации (менее 100 не). Мобилизация столь внушительного аппаратно-
программного ресурса для выполнения лишь одной из многочисленных задач
навигатора GPS не представляется коммерчески рациональной, по крайней
мере, с учетом текущих технологических тенденций.
Чтобы обойти упомянутые реализационные проблемы, на практике
процедуры частотно-временного оценивания в широкой зоне
неопределенности часто выполняются в виде двух последовательных этапов.
Задачей первого из них, называемого поиском (поиском кода), является
грубое измерение нужных параметров и выдача их предварительных
оценок ^ля инициализации второго этапа, называемого
автосопровождением или слежением. Этот второй этап, обычно выполняемый
специальными петлями слежения за кодом и частотой, вырабатывает точные
частотно-временные оценки, которые далее напрямую используются мест-
324 Глава 8. Поиск и автосопровождение широкополосных сигналов
ным эталоном для сведения сжимающей опоры с ПРС-кодом принятого
сигнала. Однако, для «втягивания» в состояние слежения, схемы
автосопровождения нуждаются в первичных целеуказаниях, например, в знании
временного положения принятого сигнала с точностью до длительности
чипа или около того. Как уже указывалось, для этого и необходим этап
поиска, в процессе которого начальная неопределенность сигнальных
параметров сокращается до диапазона, достаточного для начала слежения.
Относительно мягкие требования к точности оценивания на этапе поиска
позволяют снизить количество вычисляемых статистик и, как результат,
упростить аппаратно-программную реализацию. Возвращаясь к
примеру 8.1, ослабление требования к допустимой погрешности временного
измерения до длительности чипа обернется вдесятеро меньшим числом
корреляторов в схеме рис. 2.18 или вдесятеро меньшей необходимой
скоростью обработки в согласованном фильтре. Вместе с тем, основным
направлением ресурсосбережения при поиске является частичная или полная
замена параллельного вычисления решающих статистик последовательным.
6F
1
F__
у
^
....
—-
—
•-ш
*-*
1
Рис. 8.1. Зона поиска и
положение сигнала на плоскости
время - частота
Для объяснения последнего тезиса будем трактовать неизвестные
запаздывание т и частотный сдвиг F как координаты сигнала на частотно-
временной плоскости. Предположим, что диапазоны начальной
неопределенности по параметрам г и F составляют ти и Fu соответственно, и что
в результате поиска они должны сократиться до 8т и 5F. Тогда, как
показано на рис. 8.1, сигнал располагается в пределах одной из М
прямоугольных 8т х 5F ячеек, где М — (Futu)/(5FSt). Процедура поиска
должна выяснить, в какой из М ячеек содержится сигнал, т.е.
осуществить проверку М конкурирующих гипотез (см. § 2.8). При оптимальной
(МП) проверке следовало бы вычислить М корреляций (2.74) для
значений т и i*1, отвечающих центрам ячеек, и принять решение в пользу пары
(т, F), для которой корреляция превышает остальные. Типичные
поисковые процедуры, однако, опираются на факт долговременного присутствия
8.2. Последовательный поиск 325
сигнала на входе приемника, позволяющий вычислять лишь несколько
(а не все М) корреляций за один раз. Если все они достаточно малы, то
принимается решение, что среди тестируемых ячеек истинная (т. е.
содержащая сигнал) отсутствует, и проверке подвергается следующая группа
ячеек. Подобная процедура продолжается до тех пор, пока некоторая
корреляция не окажется настолько большой, чтобы с надлежащей
надежностью декларировать присутствие сигнала в соответствующей ей
ячейке. Это завершит процедуру, после чего начнут работать петли
слежения, используя для инициализации выработанные поиском оценки.
Разнообразные алгоритмы и стратегии поиска составили предмет многих
исследований (см., например, библиографию в [77]). Ограничим
тематику нижеследующего обсуждения некоторыми приоритетными аспектами,
начав с анализа простейшего варианта процедуры поиска.
8.2. Последовательный поиск
8.2.1. Модель алгоритма
При последовательном поиске тестируется лишь одна ячейка за один
шаг, т. е. вычисляется единственная корреляция наблюдения и местной
копии сигнала, имеющей некоторый конкретный частотно-временной сдвиг.
Уровень корреляции затем анализируется с целью принятия решения об
истинности или ложности проверяемой ячейки. Принятие решения может
базироваться на различных критериях. Например, поиск может
продолжаться до тех пор, пока все ячейки внутри области неопределенности
(см. рис. 8.1) не будут протестированы. При этом в памяти можно
сохранять максимальное значение корреляции, полученное вплоть до текущего
шага, вместе с соответствующими ему значениями т и F. Тогда после
последнего шага ячейка, признаваемая истинной, выявляется
автоматически, поскольку ее координаты хранятся в памяти, и процедура поиска
завершается простым их считыванием. Данная стратегия эквивалентна
МП оценке, модифицированной так, что все корреляции вычисляются
не одновременно, а одна за другой с использованием сегментов сигнала,
последовательно сменяющих друг друга на входе приемника.
В практических структурах приемников, однако, чаще реализуется
другая версия последовательного поиска, в которой значение корреляции
на текущем шаге сравнивается с порогом [6, 9, 77]. Если корреляция
выше порога, принимается решение об истинности текущей ячейки и поиск
заканчивается. В противном случае поисковая система переходит к
проверке следующей ячейки и т. д.
С точки зрения анализа показателей качества не имеет значения,
сколько параметров неизвестно и подлежит оценке в ходе поиска: и время,
326 Глава 8. Поиск и автосопровождение широкополосных сигналов
я. частота (или еще какой-либо параметр), либо что-то одно из них.
Существенно только общее число проверяемых ячеек. Тем не менее, чтобы
придать обсуждению максимальную прозрачность, предположим, что
поиск сводится лишь к оценке запаздывания, а частота известна априори
с приемлемой точностью. На рис. 8.2 представлена структура,
реализующая последовательный поиск в оговоренных условиях. При периодичности
кода ПРС максимальная зона неопределенности по запаздыванию займет
не более одного периода, так как задержки, большие периода, выйдут
за диапазон однозначности. В этом свете термин «фаза» вполне оправдан
как синоним задержки периодического кода [2, 6, 9], а переход от одной
ячейки к следующей в области неопределенности означает просто
изменение фазы опорной копии кода. Когда текущая корреляция ниже порога,
управляющая логика предписывает местному генератору увеличить фазу
реплики s(t — т) на его выходе на один чип или долю чипа, и
устройство переходит к анализу следующей ячейки. Если же текущая
корреляция превышает порог, управляющая логика сигнализирует об окончании
поиска, а генератор сохраняет фазу кода, отвечающую ячейке,
объявленной истинной. Ниже анализируются характеристики вышеупомянутого
алгоритма с использованием результатов [78]. Читатель, нуждающийся
в более глубоком проникновении в тему, может обратиться к [6, 9, 77,
79-81].
№
Коррелятор
sit-т)
Управляющая[
логика
Порог
Значение фазы
Генератор
кода
Рис. 8.2. Последовательный
поиск фазы кода ПРС
8.2.2. Вероятность правильного завершения поиска
и среднее число шагов
Для упрощения анализа (без серьезного ущерба для общности)
предположим, что местная копия кода смещена относительно принятого сигнала
на целое число длительностей чипа. Тогда при периоде кода L возможно
всего L значений фазы кода, только одно из которых является истинным.
Иными словами, имеется самое большее L ячеек поиска, и каждый переход
от ячейки к ячейке означает приращение фазы кода на одну длительность
чипа. Весьма часто тестирование всех этих L ячеек оказывается
ненужным благодаря надежной априорной информации, сокращающей область
поиска до М < L ячеек. Начнем с предположения, что поиск стартует
8.2. Последовательный поиск 327
с наименее благоприятной пустой ячейки области неопределенности, т. е.
наиболее удаленной от истинной. Рис. 8.3 поясняет допущение: первое
прибытие в истинную ячейку (черный кружок) возможно только после
беспрепятственного прохождения М - 1 пустых ячеек (белые кружки).
?r-^?v:^
Pf
Pf
М-1 М 1
ц
1
^ Л :Щ|^;;;;:~;
М-1
-К> —-Н
t-pf
ц
м
1-д
-к>~
Pf
Рис. 8.3. Последовательный поиск кода в области неопределенности из М ячеек
Для надежного контраста между уровнями корреляций в пустой и
истинной ячейках система поиска в каждой ячейке должна вычислять
корреляцию на достаточно продолжительном временном интервале, который
мы назовем временем анализа. Какими бы ни были это время и порог,
решения о том, истинна ячейка или нет, не могут быть абсолютно
безошибочными. Первый тип возможных ошибок — ложная тревога (см. § 3.2),
т. е. принятие пустой ячейки за истинную. Когда она происходит, поиск
завершается неверной оценкой запаздывания сигнала, так что
стремление к удержанию вероятности подобного события на достаточно низком
уровне вполне естественно. С другой стороны, пребывание в истинной
ячейке может также с ненулевой вероятностью завершиться
неправильным решением: пропуском сигнала и переходом в следующую (пустую)
ячейку, уже тестировавшуюся ранее. Подобная возможность придает
процедуре циклический характер: если поиск не заканчивается при первом
прохождении области неопределенности, за ним следует второе и т.д.,
иначе говоря, каждый из последовательных пропусков сигнала
инициирует новый цикл. Положим далее, что подлежащий поиску сигнал
постоянно присутствует на входе приемника, так что число возможных
циклов не ограничено сверху. Из рис. 8.3 следует, что при
беспрепятственном прибытии системы поиска в истинную ячейку из нее возможны
два маршрута: правильное решение (и окончание поиска) с вероятностью
обнаружения pd или пропуск сигнала с вероятностью 1 - pd. Последнее
событие ведет к продолжению поиска новым циклом проверок и не имеет
иных негативных последствий, кроме дополнительных временных затрат.
Пребывание в пустой ячейке может также иметь два возможных исхода:
правильное решение об отсутствии сигнала с вероятностью 1 — р/,
сопровождаемое переходом в следующую ячейку, или признание ее истинной
с вероятностью ложной тревоги pf. В отличие от пропуска сигнала по-
328 Глава 8. Поиск и автосопровождепие широкополосных сигналов
следствия ложной тревоги можно отнести к катастрофическим, поскольку
неверная оценка фазы кода, выданная поиском, сделает все
последующие операции, выполняемые приемником, бессмысленными. Для снижения
риска подобного события каждое решение о захвате фазы кода, как
правило, дополнительно перепроверяется за счет продления тестирования
подозрительной ячейки (см. следующий раздел), тем не менее, всегда
остается некоторая ненулевая вероятность окончания поиска в ложной
ячейке.
Назовем шагом поиска всякое пребывание в некоторой ячейке,
завершающееся решением о продолжении либо окончании поиска. Из рис. 8.3
непосредственно видно, что когда поиск начинается с ячейки номер один
(наиболее удаленной от истинной), он может окончиться в t-ik ложной
ячейке (t — 1,2,..., М — 1) после тМ +1 шагов и в истинной ячейке после
тМ + М = (га + 1)М шагов, где т = 0,1,... — число полных «холостых»
поисковых циклов, т. е. проходов по всей области неопределенности,
предшествующих конечному (га+1—му) циклу, на котором поиск завершается
либо в ложной, либо истинной ячейке. Тогда интерпретация рис. 8.3 как
графа дает следующее выражение для вероятности p(s) окончания поиска
после s шагов:
f PfCL-PfY-'Kl-Pdyil-Pf)™-1]™, s = mM + t,
P(S) = ) < = 1,2,...,M-1,
{ pdl-pf^^Kl-PcdCL-Pf)™-1}™, s = mM + M,
(8.1)
где m = 0,1,... Все события (и только они), вероятность которых дается
второй строкой (8.1), завершают поиск правильной оценкой фазы кода.
Следовательно, полная вероятность Рс\ (индекс «1» указывает, что поиск
стартует с первой ячейки) правильного завершения поиска (правильного
захвата) есть сумма этих вероятностей по всем возможным значениям га,
т. е. сумма геометрической прогрессии со знаменателем (1 — р<*)(1 — р/)м_1:
(8.2)
Другим важным параметром является среднее число шагов si поиска:
оо
Si = Y^ sp(s) = тМ + t, (8.3)
8=1
где индекс «1» вновь указывает на стартовую ячейку с номером один.
В равенстве (8.3) величина га отвечает среднему числу холостых циклов
поиска, предшествующих финальному, тогда как i есть среднее число
шагов в последнем цикле, который завершается либо в ложной, либо в истин-
8.2. Последовательный поиск 329
ной ячейке. Вероятность того, что отдельный цикл поиска окажется
холостым, есть произведение вероятностей безостановочного прохождения всех
М — 1 пустых и единственной истинной ячейки, т.е. (1 — р<*)(1 — Pf)M~l-
Следовательно, вероятность р(т) того, что завершению поиска будут
предшествовать точно га холостых циклов
р(т) = [1 - (1 -pd)(l -pf)M-l][(l -Pd)(l -Pf)M-l]m, m = 0,l,....
(8.4)
Как видно, распределение р(т) подчиняется геометрическому закону.
Хотя математическое ожидание такой случайной величины хорошо
известно, для дальнейшего полезно привести его вывод с использованием
производящей функции [14, 66]
оо
gm(z)=^ = ][>>(m).
Производные производящей функции в точке z — \ позволяют находить
моменты соответствующей случайной переменной. В частности
dgm{z)\ ^ ( \ -
LIZ { ,-.
Для общей формы геометрического распределения р{1) — а1(1 — а),
/ = 0,1,...; О < а < 1, производящая функция находится суммированием
геометрической прогрессии
оо 1 _
gi(z) = Y^zlal(l - а) = -,
так что после дифференцирования
а(1 — а)
1 =
(1 - zaf
1
=1
(8.5)
^/.Tw/^,,-!- (^)
Из сравнения общего геометрического закона с распределением (8.4)
сразу видно, что подстановка а = (1 —ра)(1 ~Pf)M~l в (8.5) дает искомое
математическое ожидание ш:
(l-PdXi-p/)"-1
l-(l-Pd){l-Pfy
Чтобы найти i в (8.3), заметим, что вероятность завершения
финального цикла в пустой ячейке с номером t безотносительно к числу
предшествующих холостых циклов можно найти, суммируя по т вероятности
из первой строки в (8.1) (см. также рис. 8.3), тогда как вероятность
прибытия в единственную (М-ю) истинную ячейку и завершения поиска в ней
(снова безотносительно к числу предшествующих холостых циклов) уже
330 Глава 8. Поиск и автосопровождение широкополосных сигналов
найдена — это попросту Рс\ из (8.2). Таким образом, распределение
вероятности p(t) числа шагов t в финальном цикле
т
р/^-р/У-1 Е [(i-Pd)(i-Pf)M-T
т=0
l-(l-Pd)(l-Pf)M-i>
Pdjl-Pf)™-1
i = l,2,...,M-l,
'■=-» :r-?i..,-„• (^
Производящая функция этого распределения
М М-1
Pf z-zM(l-Pf)M-i M
l-(l-Pd)(l-Pf)M-i- i-z{l-pf) + сЪ
Дифференцирование gt(z) в точке z — 1 после некоторых
алгебраических манипуляций приводит к результату
1 - (1 -pf)M-Mpf(l -Pd)(l -Р})м-1 , .
p/ii-a-piXi-p/V"-1] ' l ;
Теперь, используя (8.6) и (8.7) в (8.3), окончательно имеем выражение
для среднего числа шагов
i-(i-p/)M
pf{l-(l-pd)(l-pfy
Отбросим теперь исходное предположение о стартовой ячейке и
выясним, каким образом повлияет на полученный результат начало поиска
в ячейке с произвольным номером г. В этом случае возникает
частичный цикл (индексируемый далее нулем), охватывающий М — г пустых
плюс одну истинную ячейку. В ходе этого цикла возможны следующие
события: окончание поиска в ложной t-й ячейке с вероятностью po(t\r) =
= Pf(l — j9/)*_r, t — г, г + 1,... , М — 1, завершение поиска в истинной
ячейке с вероятностью po(t = M\r) = р^(1 — р/)м~г и, наконец, пропуск
сигнала и продолжение поиска с первой ячейки с вероятностью Рот(г) =
= (1 — Pd)(l —pf)M~r- Тогда полная вероятность правильного завершения
поиска при старте с r-й ячейки
Pcr = PQ(t = M\r) + P0m(r)Pcl = 1_™{_pd)P{l}_pf)M_l. (8.9)
Тем же способом пересчитывается и среднее число шагов. Если
поиск завершится в 2-й ячейке нулевого цикла, число пройденных шагов
составит t — г + 1, но если сигнал будет пропущен, то к уже пройденным
8.2. Последовательный поиск 331
М—r+l шагам в среднем добавятся s\ шагов. Таким образом, при старте
с произвольной (r-й) ячейки среднее число шагов составит величину
м
*г = Е (* " r + l)Po(*k) + (М - г + 1 + 5i)iW(r). (8.10)
t=r
Первая сумма последнего выражения после замены индекса суммирования
на г = £ — г + 1 принимает вид
М—г
Pf £ *(! - Р/Г1 + (М - г + 1)ро(* - М|г), (8.11)
«=1
где первое слагаемое можно вычислить через производящую функцию,
как это сделано при выводе (8.7)
у? -(1 pj)i-i = 1 ■ (1 -p/)M"r+1 - (М - г + 1)р/(1 -р,)м-*^
Используя этот результат в (8.11) и (8.10) совместно с равенством
Po(t = М\г) + Рот(г) — (1 — Р/)м_г, после простых алгебраических
преобразований имеем
= 1-(1-P/)M-+1 + = 1^ + Р^ (8Л2)
Pf Pf Pd
Разумеется, при подстановке г — 1 равенства (8.9) и (8.12)
обращаются в (8.2) и (8.8) соответственно.
Теперь, зная априорное распределение вероятности ро(г) номера
стартовой ячейки, можно усреднить (8.9) и (8.12) по всем начальным ячейкам
в зоне поиска. Для равномерного априорного распределения ра(г) — 1/М,
г = 1,2,— , М это приведет к средней вероятности Рс правильного
завершения поиска и среднему числу шагов s поиска
с - м^cr ™ MPf[i - (1 -Pd)(i ~pf)M-'Y [ }
s = ?—^ + ^. (8.14)
Pf Pd
8.2.3. Минимизация среднего времени поиска
Вычисление и сравнение с порогом корреляции для каждой тестируемой
фазы кода предполагает некоторую конечную продолжительность
пребывания в каждой из анализируемых ячеек. В ряде поисковых схем эта
продолжительность может быть случайной и, более того, зависимой от того,
истинна ячейка или пуста. Настоящее рассмотрение, однако,
ограничится простейшей версией последовательного поиска с постоянным временем
332 Глава 8. Поиск и автосопровождение широкополосных сигналов
анализа Td на ячейку. Об альтернативах будет вкратце сказано в
следующем параграфе. В оговоренных условиях среднее время Ts, затрачиваемое
системой поиска, есть просто произведение среднего числа шагов на
время анализа: Ts = sT^. Понятно, что при фиксированной мощности сигнала
чем больше время анализа Т^5 тем достовернее решение о том, истинна
ячейка или нет, иными словами, тем меньшие вероятности ложной
тревоги (pf) и пропуска (1 — Pd) на ячейку могут быть гарантированы.
Безусловно, надежность поиска, характеризуемая вероятностью
правильного завершения поиска Рс, должна быть не хуже некоторой наперед
заданной. Как следует из (8.13), одно и то же значение Рс может быть
достигнуто при различных комбинациях вероятностей pf, pd на
ячейку. Этот факт объясняет возможность минимизации среднего времени
поиска за счет вариации одного из параметров pj или pd при
фиксации вероятности Рс правильного завершения поиска. Логика подобной
оптимизации довольно прозрачна. Допустим, на вероятность
обнаружения наложено жесткое требование близости к единице. Это означает, что
поиск почти наверное завершится единственным (начальным) циклом,
однако для гарантии высокой вероятности обнаружения анализ в каждой
ячейке должен быть продолжительным, так что движение в
направлении истинной ячейки будет медленным, а среднее время поиска Ts —
большим. В противовес этому можно заметно увеличить вероятность
пропуска, чтобы ощутимо уменьшить Т^, что однако приведет к высокой
вероятности повторения циклов, а, значит, увеличению среднего числа
шагов в сравнении с предыдущим случаем, вследствие чего среднее
время поиска Ts может опять оказаться большим. Очевидно, что должен
существовать некий промежуточный оптимум вероятности обнаружения
на ячейку р^ минимизирующий значение Ts.
Для решения задачи Ts = min при Рс — const необходимо задаться
явной зависимостью времени анализа от вероятностей ру, р^, или,
эквивалентно, моделью канала. Ориентируясь на канал с АБГШ, напомним,
что модуль корреляции фактически представляет собой действительную
огибающую на выходе согласованного фильтра, которая в пустой ячейке
является огибающей гауссовского шума, а в истинной — огибающей
смеси сигнала и шума. Во многих руководствах по теории связи (например,
[2, 4, 7. 8]) можно найти доказательство того, что плотность вероятности
огибающей гауссовского шума подчиняется рэлеевскому закону (см. § 3.2
или (3.12)), тогда как огибающая суммы сигнала и гауссовского шума
имеет распределение Рэлея - Раиса. Последнее при удобной здесь
нормировке можно представить как
W(Y) = {
Уехр(-У + gd \h{qdY), Y^O
2 J UWI " ^ ' (8.15)
0, Y < 0,
8.2. Последовательный поиск 333
где Y — значение огибающей, нормированное к среднеквадратическому
значению шума, qd — отношение сигнал-шум по напряжению,
аккумулированное за время анализа Т^, а 7о(*) — модифицированная функция
Бесселя первого рода нулевого порядка. Разумеется подстановка qd — О,
соответствующая отсутствию сигнала, превращает (8Л5) (имея в виду
равенство 7о(0) = 1) в распределение Рэлея.
Напомним, что решение о содержимом ячейки выносится на основе
сравнения Y с порогом. Если Yt — порог, нормированный к
среднеквадратическому значению шума, решение об истинности ячейки принимается
всякий раз, когда Y ^ Yt. При этом вероятности р/, pd можно записать как
оо оо
pf = Jw(Y\H0)dY, pd = Jw(Y\H1)dY,
Yt Yt
где плотности вероятности W(Y\Ho) и W{Y\H\) — варианты (8.15) для
гипотезы Но (пустая ячейка, qd = 0) и Н\ (истинная ячейка, qd > 0)
соответственно. После интегрирования плотностей
Pf = ехР —£- К Pd = ЯмЫ,Уг)г (8.16)
где Qm{'-> *) обозначает попросту интеграл от распределения Рэлея-Раиса
и нередко встречается под названием <2-функции Маркума [7, 8].
Решение первого из соотношений (8.16) как уравнения
относительно Yt при фиксированном pf дает значение порога, необходимое для
удержания вероятности ложной тревоги не выше заданной: Yt = y21n(l/p/).
Подстановка его во второе равенство в (8.16) непосредственно связывает
величины pd и pf для заданного отношения сигнал-шум q^i
W = QmUm 21n— . (8.17)
В свою очередь, отношение сигнал-шум, аккумулированное за время
анализа Т^, находится, как обычно (см. § 3.2): qd = y/2PTd/No, где Р —
мощность сигнала, a No — односторонняя спектральная плотность
мощности белого шума. Пусть теперь Td(pf,pd) и qd(Pf?Pd) — время анализа
и отношение сигнал-шум, необходимые для обеспечения фиксированных
вероятностей pd ир/. Тогда
Тл»м) - Щ^- (8Л8)
В итоге, согласно (8.14), среднее время поиска
fs = sTd = j —^ + ^ ) Td(pf,Pd)
V Pf Pd)
334 Глава 8. Поиск и автосопровождение широкополосных сигналов
или в нормированном виде
(1И1
р/
+
QdiPf'Pd)-
(8.19)
Теперь процедуру оптимизации можно описать в деталях. Пусть
заданы вероятность правильного завершения Рс и размер зоны поиска М.
1. Выберем некоторое значение вероятности ложной тревоги на ячейку
р/ из диапазона 0 < pj < 2(1 — Рс)/М.
2. Решая уравнение (8.13) относительно неизвестной р^, находим ее
значение, обеспечивающее требуемую вероятность Рс при
выбранном pj\
MPcP}[l-{\-Pf)M-1}
Pd i-(i-pf)M-i[i+Pf(MPc-i)Y
3. Решая (8.17) относительно неизвестного qa, находим его значение,
необходимое для обеспечения вероятностей pd и pj.
4. Подставляем найденное значение в (8.19).
5. Варьируя р/, строим зависимость среднего времени поиска от pd и
находим пару значений pd ир/, доставляющих минимум Ts.
30
28
26
Г, (2РЛ 24
22
20
18
16
к
■т "т—
Рс=0,99
VM
= 104
JO^
200
50/,
0,75 0,80 0,85 0,90 0,95
Pd
34
32
30
Ts (2Р\ 28
Ts (2Р
М Uo
26
24
22
ч
|\
к
к
к
\
\
1 1
Рс=0,999
V М
= 104
-^
Ш,
50,
1
Л
20
0,75 0,80 0,85 0,90 0,95
Pd
Рис. 8.4. Нормированное среднее время поиска в зависимости от вероятности
обнаружения
8,3. Методы ускорения поиска 335
На рис. 8.4 представлены зависимости нормированного времени поиска
от вероятности обнаружения на ячейку pd для двух значений вероятности
правильного завершения поиска Рс = 0,99; 0,999 и четырех значений
ширины зоны неопределенности М = 50, 200, 103 и 104. Как видно, минимум
среднего времени поиска приходится на интервал значений pd Е [0,9,0,95].
Достаточно плоский характер кривых в окрестности минимума
позволяет принять значение pd = 0,9 в качестве универсального оптимума
вероятности обнаружения на ячейку безотносительно к ширине зоны М
и вероятности правильного завершения поиска Рс.
8.3. Методы ускорения поиска
8,3.1. Постановка задачи
Как легко понять, среднее время поиска возрастает с числом тестируемых
ячеек М, т. е. с расширением зоны неопределенности при неизменности
остальных факторов. Поэтому вполне объяснимо стремление к
сокращению М всякий раз, когда это позволяет сделать надежная априорная
информация о фазе кода, частоте сигнала или других сканируемых
системой поиска параметрах. К примеру, в системе GPS каждый из 24
спутников передает данные о текущем и предсказанном состоянии всего
космического созвездия, которые хранятся в памяти приемника
пользователя. Благодаря этой информации пользовательский навигатор, захватив
сигнал любого спутника и зная приблизительное положение последнего,
может спрогнозировать с определенной точностью фазы кодов других
видимых спутников, существенно сократив область неопределенности
поиска их сигналов. Похожая картина имеет место и в мобильной сети
cdmaOne (IS-95), где жесткая синхронизация всех базовых станций
облегчает поиск сигналов новой БС пользовательским приемником в процессе
эстафетной передачи.
Однако в реальной жизни неизбежно возникают сценарии, в которых
область неопределенности настолько обширна, что продолжительность
описанной выше простой последовательной процедуры поиска
оказывается непомерно большой. Среди прочих подобная ситуация характерна для
этапа инициализации приемника (его первого включения), когда
местный эталон времени имеет произвольный уход по отношению к системной
шкале, а априорные сведения, которые могли бы сократить зону поиска,
недоступны. Обратимся к следующей иллюстрации.
336 Глава 8. Поиск и автосопровождение широкополосных сигналов
Пример 8.2. Рассмотрим поиск фазы кода длины L = 215 («короткого»
кода системы cdmaOne) в отсутствие априорной информации, сокращающей зону
неопределенности. Положив М = L = 215 и вероятность правильного окончания
не менее 0,99, экстраполяцией зависимости рис. 8.4 можно получить нижнюю
оценку среднего времени поиска Тs ^ 25 - 215/(2jP/7Vo). Если принять за
правдоподобную цифру 2P/Nq = 40 дБ-Гц, среднее время поиска превысит 80 с. Эта
оценка, однако, излишне оптимистична, поскольку в ее основе лежит допущение
об идеальном синхронизме чипов местной опоры и принимаемого сигнала (см.
начало подпараграфа 8.2.2). В этом идеализированном случае достаточен сдвиг
фазы опоры от шага к шагу на один чип. В реальности же изначальная
синхронизация чипов чаще недостижима, и инкремент в один чип чреват попаданием
на склон основного лепестка АКФ сигнала вместо его вершины (см., например,
рис. 6.9), что увеличит риск пропуска истинной ячейки. Чтобы этого избежать,
приходится использовать дробный инкремент, как правило, равный половине
длительности чипа, тем самым увеличивая число ячеек М в зоне
неопределенности, а значит, и продолжительность поиска.
Фактор временных затрат может играть особенно критическую роль
в приложениях, использующих сверхдлинные широкополосные коды,
таких, как системы измерения дальности и автосопровождения удаленных
космических объектов. Остановимся кратко и без погружения в
математические детали на некоторых методах ускорения поиска.
8.3.2. Последовательный анализ в ячейках
Принятая выше за основу стратегия постоянного времени анализа вне
зависимости от того, истинна ячейка или пуста, может быть подвергнута
ревизии, имея в виду, что большая часть ячеек обычно пуста. В самом
деле, воображаемый подход, при котором пустая ячейка распознается
относительно быстро в обмен на продолжительную проверку истинной,
интуитивно обещает экономию временных затрат на поиск. Методы такого
рода действительно существуют под общим названием
последовательный анализ. Простейшей процедурой последовательного анализа является
двухэтапная [9, 78, 82]. Ее ключевой идеей является разбиение анализа на
два этапа. На первом из них достаточно низкий порог гарантирует малую
вероятность пропуска сигнала, несмотря на малое время анализа Т^. В то
же время вероятность ложной тревоги оказывается значительно больше
той, что была бы приемлема в ранее описанном одноэтапном методе.
Благодаря сокращенному времени анализа Т<ц ложные ячейки в
среднем просматриваются быстро, однако довольно многие из них (до 10 %
и даже более) принимаются за истинные. Для отсеивания ложных ячеек,
ошибочно признанных истинными на первом этапе, организуется
второй этап с гораздо большей надежностью, чем первый. Это достигается
соответствующим выбором параметров: большего времени анализа Т^2
8.3. Методы ускорения поиска 337
и более высокого порога, обеспечивающих полные (совместно с первым
этапом) вероятности ошибок на ячейку, необходимые для получения
требуемой вероятности правильного завершения поиска (8.13). При
независимых этапах, т. е. вычислении корреляции на втором без учета результатов
первого, полные вероятности ложной тревоги и правильного
обнаружения на ячейку выразятся как pj = Р/1Р/2 и pd = Pd\Vd2-> где второй индекс
обозначает номер этапа. Теперь полное время анализа на ячейку
оказывается случайным, поскольку просмотр любой ячейки заканчивается либо
на первом этапе, либо с некоторой вероятностью продолжается вторым
этапом. Вероятность ложной тревоги на первом этапе рд, будучи
многократно выше полной вероятности р/, все же заметно меньше вероятности
обнаружения pd\- В результате среднее время анализа для пустой ячейки
Tdf = Tdi +PfiTd2 меньше такового для истинной Tdt = Td\ + Pd\Td2, что
способствует ускорению поиска. При оптимальном выбореpdi-, Pd2 среднее
время поиска уменьшается по сравнению с процедурой с фиксированным
временем анализа вдвое или даже несколько больше [9, 78].
Дальнейший выигрыш можно получить, увеличивая число этапов,
каждый из которых перепроверяет решения, принятые на предыдущем [9, 78,
83-86]. Предельным вариантом такой многоэтапной стратегии служит
последовательный анализ Валь да [85], в котором попытки решения
предпринимаются непрерывно с приходом каждого очередного чипа. В такой
процедуре участвуют два порога, и ячейка признается пустой, как только
накопленное значение корреляции окажется ниже нижнего порога, тогда
как истинность ячейки декларируется при превышении верхнего
порога. Пока решающая статистика (корреляция) остается между порогами,
анализ ячейки продолжается интегрированием все большего числа
поступающих чипов [77, 78].
Вычисление среднего времени поиска в многоэтапных (в общем случае
последовательных) процедурах на первый взгляд представляется
значительно более сложным в сравнении с поисковыми алгоритмами с
фиксированным временем на ячейку из-за случайности времени анализа.
Эффективный способ упрощения расчетов предложен в [78], где доказано, что
в среднем время поиска, стартующего с наименее благоприятной ячейки,
равно произведению среднего числа циклов на среднюю
продолжительность одного цикла.
8.3.3. Последовательно-параллельный поиск
Простейшим средством ускорения поиска является участие в нем
набора параллельных корреляторов, работающих автономно и сканирующих
каждый свою часть области неопределенности. В этом случае исходная
338 Глава 8. Поиск и автосопровождение широкополосных сигналов
зона поиска попросту разбивается на пс подобластей, каждая из которых
включает М/пс ячеек, где пс — число параллельных корреляторов, и
соответственно время поиска уменьшается в пс раз. В пределе, когда пс = М,
поиск становится полностью параллельным и не требует
последовательных шагов. Последовательно-параллельные схемы весьма характерны для
реального оборудования и особенно эффективны при наличии таких
аппаратных узлов, которые, присутствуя в приемнике по необходимости,
в ходе поиска свободны от своей основной нагрузки. Например, любой
современный навигатор GPS содержит множество корреляционных
каналов, необходимых для параллельного автосопровождения сигналов всех
(или, по крайней мере, четырех) видимых спутников. В процессе поиска
эти каналы свободны от других задач и могут с успехом привлекаться
к участию в поиске сигналов.
8.3.4. Последовательности быстрого поиска
Возможны сценарии, в которых ускорение поиска обретает
приоритетную важность. Вообразим, например, систему позиционирования
объектов в удаленном космосе. Для гарантии однозначности измерения
дальности в очень широком диапазоне, возможно до сотен тысяч километров
или более, необходим широкополосный сигнал соответственно большого
периода (например, порядка сотен тысяч — миллионов чипов).
Излишне говорить, что традиционные стратегии поиска, обсуждавшиеся ранее,
окажутся чрезмерно медленными, если только число корреляторов не
доходит до многих сотен. В подобных обстоятельствах могут помочь
специальные кодовые последовательности, оптимизированные по критерию
минимума времени поиска.
Почему последовательный поиск оказывается слишком медленным при
использовании сигналов с хорошей (имеющей малые боковые лепестки)
АКФ? Ответ предсказуем: тестирование и отбраковка любой текущей
пустой ячейки сокращает область неопределенности лишь на одну
ячейку, и чтобы пройти всю зону, стартуя с наименее благоприятной ячейки,
понадобится не менее М проверок. Поэтому закономерен другой вопрос:
можно ли синтезировать последовательность, позволяющую сократить
наполовину начальную зону неопределенности после вычисления одной
корреляции вместо отсеивания единственной ячейки? Стиффлер нашел
строгое решение данной задачи [86], хотя некоторые эффективные коды,
заметно сокращающие время поиска, были предложены ранее [87].
Последовательности быстрого поиска Стиффлера имеют весьма
простую структуру, являясь суммой п синхронизированных компонент.
Первая из них — последовательность чипов чередующейся полярности
8,3. Методы ускорения поиска 339
(...Н 1 1 1 1- — ...), т. е. имеющая период в L\ = 2 чипа. Вторая —
меандр (... + Н Ы ...) с периодом в L<i = 4 чипа и т. д. вплоть до
n-го меандра периода Ln = 2п чипов. Можно трактовать А;-ю
компоненту как последовательность «длинных» чипов чередующейся полярности
длительности 2/с~1А, где А — длительность чипа первого меандра.
Поиск единственным коррелятором начинается с определения фазы первого
компонента. В условиях синхронизма чипов в приемнике и
принимаемом сигнале возможны только два ее значения, и вычисление корреляции
наблюдения с местной опорой, представляющей собой копию первого
меандра, устраняет эту неопределенность: корреляция положительна, если
опора синфазна с принятым первым меандром, и отрицательна, если они
противоположны. По завершении этого шага обеспечивается синхронизм
чипов приемника и второго принимаемого меандра (длительность
чипов теперь 2А!), и вновь возможны только два значения фазы второго
меандра. Эта неопределенность разрешается прежним способом, т. е.
вычислением корреляции с опорным образцом, являющимся копией второго
меандра, и т. д. до тех пор, пока на n-м шаге не будет определена фаза
«самого медленного» (n-го) меандра как итог вычисления его корреляции
с местным образцом. Таким образом, вся процедура поиска выполняется
всего за п шагов, каждый из которых вдвое сокращает исходную зону
неопределенности М — 2П.
Процедура разбиения зоны неопределенности на две равные половины
называется дихотомией. Можно понять, что последовательности
быстрого поиска Стиффлера приспособлены к ней наилучшим образом.
Прямое обобщение этой идеи на поисковую систему с пс
корреляторами состоит в замене меандров на п компонент периода L\ = пс +1 чипов,
в которых чип каждой компоненты в L\ раз длиннее предшествующего.
Полный период суммарной последовательности составляет L = L™
исходных чипов. Периодическая АКФ каждой компоненты должна быть по
возможности хорошей, и в классе бинарных компонент следует предпочесть
минимаксные последовательности (см. § 6.7 и 6.9). На первом шаге
неопределенность относительно L\ возможных фаз «самой быстрой» компоненты
разрешается параллельным вычислением корреляции принятого сигнала
с пс локальными опорами в виде разностей L\ — 1 циклических копий
первой компоненты с Li-й копией. Если среди пс корреляций некоторые
неотрицательны, опора, соответствующая максимуму корреляции,
определяет фазу, которую следует присвоить первой компоненте в приемнике
для синхронизации с первой принимаемой компонентой. В противном
случае за истинную принимается Ь\-я циклическая копия с соответствующей
установкой фазы первой компоненты опоры. По выполнении этого шага
известны границы чипов второй компоненты, и следующий шаг повто-
340 Глава 8. Поиск и автосопровождение широкополосных сигналов
ряет те же операции, что и предыдущий, но применительно ко второй
компоненте и т. д. Процедура завершается п-ы шагом, на котором
неопределенность фазы самого медленного компонента разрешается аналогично.
Как видно, каждый шаг этой процедуры состоит в проверке L\ = пс + 1
гипотез и сокращает в L\ раз начальную зону поиска М — L = L\.
Описанные только что последовательности вновь в максимальной
степени приспособлены к такому L\-альтернативному тестированию: для
приемника любой сложности (числа параллельных корреляторов пс)
существует единственный код, минимизирующий время поиска. По этой
причине коды подобного рода можно назвать согласованными [70].
Последовательности быстрого поиска Стиффлера составляют их подкласс,
отвечающий приемнику с единственным коррелятором.
Расчеты показывают, что выигрыш во времени поиска,
сопровождающий использование рассмотренных кодов, может доходить до сотен раз
[70, 86] (см. также задачу 8.14).
Алгебраическая сумма бинарных компонент оказывается
многоуровневой (небинарной) последовательностью, имея результатом
амплитудную модуляцию в сигнале, не всегда желательную технологически.
Жесткое ограничение (клиппирование) этой суммы до сохранения только ее
знака превращает согласованный код в бинарный, оставляя процедуру
поиска неизменной. Единственной платой за подобную трансформацию
оказывается незначительное (в пределах 1,5-2 раз) уменьшение
выигрыша по времени поиска.
Отметим, что двухэтапный синхронизирующий код стандарта WCDMA
(см. подпараграф 11.4.11) служит примером близкого подхода: на
первом этапе выполняется поиск первичного кода, период которого в 15 раз
меньше периода вторичного. После этого второй этап поиска устраняет
неопределенность относительно того, какая из М = 15 фаз вторичного
кода истинна.
8.4. Автосопровождение кода
8.4.1. Оценка запаздывания следящим измерителем
Замкнутые петли слежения повсеместно используются в беспроводных
приемниках для непрерывного и точного измерения параметров сигналов.
В зависимости от природы измеряемого параметра это могут быть петли
автоподстройки частоты, слежения за фазой, авторегулировки усиления
и др. Строгое математическое исследование, доказывающее
оптимальность следящих измерителей параметров, изменяющихся во времени,
базируется на теории нелинейной фильтрации [88], однако принципиальная
8.4- Автосопровождение кода 341
их идея достаточно просто выводится на основе правила МП,
всесторонне обсуждавшегося в главе 2. Специфика приемника широкополосного
сигнала проявляет себя главным образом в операции сжатия спектра
(см. § 7.1), требующей точного синхронизма местной широкополосной
опоры с обрабатываемым сигналом. Имея это в виду, сосредоточим
внимание на точном измерении запаздывания (или фазы кода) приходящего
сигнала.
Чтобы быстрее дойти до сути, упростим задачу, сведя ее к
оцениванию задержки кода на видеочастоте и игнорируя эффекты, обязанные
случайности фазы. Пусть т — неизвестное запаздывание
видеосигнала s(t). Тогда в силу правила МП (2.55) оптимальный измеритель должен
формировать оценку f этого параметра как запаздывание,
максимизирующее корреляцию z(r) опорной сигнальной копии s(t — т) с
наблюдением у(£). Одним вариантом реализации данного алгоритма служит набор
корреляторов (см. рис. 2.18), напрямую вычисляющих функцию z{r) в М
дискретных точках; другим — структура с согласованным фильтром,
воспроизводящая z(r) в реальном времени (рис. 2.19, где детектор
огибающей для видеосигнала не нужен). В плане технического воплощения
обе эти схемы применительно к широкополосному сигналу большой
длины могут оказаться, однако, не лучшим выбором: первая — вследствие
большого числа корреляторов, а вторая — из-за чрезмерных требований
к быстродействию фильтра (см. пример 8.1).
Структура со следящей петлей является еще одной альтернативой.
Отметим, что в точке максимума функции z(r) ее производная обращается
в нуль:
1 Т
dz(r)
z\t) =
dr
= - [ y{t)s{t ~f)dt = 0. (8.20)
о
Назовем e(f) = z'{r) сигналом ошибки, основания для чего вскоре
прояснятся. Как видно, можно искать f как такое значение аргумента,
которое обратит сигнал ошибки в нуль. Допустим, что истинная задержка
сигнала равна т, а пробной ее оценкой является f, и вычислим среднее
значение сигнала ошибки по всем реализациям шума в y(t):
т
ф) = z'{t) = - /у(Ф'(£ -r)dt =
о
т т
= - / s(t- r)sf{t -f)dt= f s'{t - r)s{t - f) dt. (8.21)
о о
Последнее равенство можно вывести интегрированием по частям при уело-
342 Глава 8, Поиск и автосопровождение широкополосных сигналов
вии, что интервал интегрирования покрывает все «тело» сигнала вне
зависимости от г: s(—r) = s(T' — t) = 0. При том же условии среднее значение
сигнала ошибки при f = г (пробная оценка совпадает с истинным
значением параметра) равно нулю:
1
»(f = г) = - [s(t-T)s'{t-T)dt = -
[s(t - r)f
= 0,
и в той же точке согласно последней части (8.21) производная от е(т)
т
de(f)
df
= z"{r) = -J[s'{t-T)f
о
eft
равна энергии производной сигнала со знаком минус, т.е.
отрицательна. Последнее означает, что если f лежит вблизи от т слева, е(т) имеет
положительный знак, если же f > т, знак е(т) отрицателен. Этот факт
и лежит в основе схемы автоподстройки по задержке (АПЗ), решающей
уравнение (8.20) посредством последовательных итераций и
представленной на рис. 8.5.
y(t)
►
s'(
Коррелятор
А
Г-т)
L
е(т)
Фильтр
петли
Генератор
опоры
ч
ГУН
Рис. 8.5. Структурная
схема АПЗ
Местный генератор опоры формирует сдвинутую по времени копию
производной сигнала s'(t — f), корреляция с которой наблюдения y(t)
является текущим сигналом ошибки. Последний затем очищается от шумов
в фильтре петли для приближения к среднему в (8.21). Положительный
сглаженный сигнал ошибки, свидетельствующий с большой вероятностью
об опережении принятого сигнала локальной опорой sf(t — f),
вынуждает генератор^ управляемый напряжением (ГУН) снизить частоту, т.е.
увеличить задержку (пробную) опоры т. С другой стороны, сглаженный
отрицательный сигнал ошибки заставляет ГУН1 увеличить частоту,
чтобы уменьшить задержку опоры. Понятно, что в стационарном режиме
:В реальном воплощении входной величиной, управляющей частотой генератора,
необязательно служит напряжение. При цифровом исполнении, например, ее роль
принадлежит входному числу. Во избежание ненужного размножения терминов в нашем
контексте разумно использовать устоявшееся наименование ГУН как универсальное.
8.4. Автосопровождение кода 343
схема АПЗ удерживает сигнал ошибки близким к нулю, обеспечивая
синхронизм между локальной опорой и принятым сигналом.
Очевидно, надлежащее функционирование петли АПЗ возможно лишь
при адекватном начальном целеуказании, т. е. стартовом значении т,
достаточно близком к истинной задержке сигнала. С одной стороны, это
условие налагает определенные требования к точности поиска. С
другой — опорное колебание, непосредственно вытекающее из правила МП
(см. (8.21)), не всегда удобно или вообще осуществимо технически (к
примеру, оно может содержать дельта-функции, когда сигнал составлен из
прямоугольных чипов). Поэтому в реальных приемниках оно обычно
заменяется некоторым другим колебанием, более подходящим для практической
реализации, но сохраняющим принципиально необходимое свойство:
выраженную нечетную зависимость сигнала ошибки на выходе коррелятора
от ошибки оценивания f — т. При выборе такой квазиоптимальной опоры
одним из решающих факторов может оказаться желание гарантировать
ввод АПЗ в синхронизм (захват) при смягченных требованиях к
начальному целеуказанию. Дополнительный комментарий по этому поводу будет
дан в подпараграфе 8.4.3.
8.4.2. Дискриминатор «ранний-поздний»
Первым элементом структуры АПЗ является дискриминатор, т. е.
комбинация коррелятор - генератор опоры, формирующая текущий сигнал
ошибки е(т). В одной из классических схем дискриминатора АПЗ для
видеосигнала s(t) опорой sr(t) служит разность двух разделенных по
времени промежутком 8 копий сигнала: поздней s(t — S/2) и ранней s(t + S/2).
При этом полезная составляющая сигнала ошибки, обусловленная
временным рассогласованием е = f — т опоры и принятого сигнала, имеет вид
т
е(т) = А I s(t — r)sr(t - t)dt =
==Ay,e(t-r)L(t-f-0-e(t-f + 0
dt
^AE
4e+0-4-01' (8-22)
где E — энергия стандартного сигнала s(i) за время интегрирования Т,
А — амплитуда принятого сигнала, масштабирующая его
относительно s(£), а р(т) — нормированная АКФ сигнала, вычисленная на
интервале [0,Т]. Возьмем для примера периодический дискретный сигнал
(широкополосный код) длины N с длительностью чипа А и положим интервал
344 Глава 8. Поиск и автосопровождение широкополосных сигналов
интегрирования равным целому числу / периодов сигнала: Г = IN А,
тогда р(т) — периодическая АКФ. Если s(t) является минимаксной
бинарной последовательностью (m-последовательностью, последовательностью
Лежандра и т. п.) с прямоугольными чипами, ее нормированная
периодическая АКФ р(т) имеет вид, представленный на рис. 8.6, а. Ранняя и
поздняя копии р(т), входящие в (8.22), показаны на рис. 8.6, б пунктирными
линиями для взятого в качестве примера разноса S = 2А, а их разность
е(е) — е(т = т + е), называемая дискриминационной кривой, дана на том
же рисунке сплошной линией. Легко заметить, что построенный таким
образом дискриминатор полностью адекватен своему назначению:
опережение либо запаздывание опорной пары относительно входного сигнала
формирует положительный либо отрицательный сигнал ошибки
соответственно, заставляя ГУН менять частоту и тем самым смещать опорную
пару в нужном направлении.
рОО
Рис. 8.6.
Дискриминационная кривая
дискриминатора «ранний-поздний»
Рис. 8.7 представляет возможную структуру дискриминатора
«ранний-поздний» для видеосигнала. Генератор кода, управляемый ГУ Ном,
формирует раннюю сигнальную реплику s(t + 5/2), которая — после
задержки на S — превращается в позднюю s(t — 5/2). Опорным сигналом
коррелятора служит их разность. Кодовую копию s(t),
синхронизированную со входным сигналом и необходимую для сжатия спектра, можно
получить задержкой опережающей реплики на 5/2. Если кодовый
генератор построен на основе регистра сдвига и 5 = 2А, то надобности
8.4- Автосопровождение кода 345
в дополнительных элементах задержки нет, так как все три копии
могут быть считаны с трех последовательных разрядов регистра.
Рис. 8.7. Дискриминатор
«ранний-поздний» для
видеосигнала
s(f-x-5/2)
s(t-x)
К схеме сжатия спектра
Альтернативный вариант того же дискриминатора содержит два
коррелятора, вычисляющих раздельно корреляции наблюдения с ранней и
поздней копиями сигнала, после чего сигнал ошибки е(т) образуется
вычитанием одной корреляции из другой [18, 77].
Применительно к радиосигналу рассмотренный дискриминатор
можно использовать, если петля фазовой автоподстройки частоты в
приемнике предварительно синхронизирована с несущей принимаемого сигнала,
так что радиосигнал может быть когерентно трансформирован в свой
видеочастотный эквивалент. По этой причине описанный
дискриминатор нередко называют когерентным, наряду с содержащей его схемой
АПЗ. В ситуациях, когда предварительная фазовая синхронизация
неосуществима или нецелесообразна, можно использовать некогерентный
дискриминатор, основанный на сравнении квадратов модулей двух
корреляций. Последние вычисляются между наблюдаемой комплексной
огибающей Y(t) и комплексными огибающими двух опор, являющихся, как
и прежде, ранней и поздней копиями кода сигнала. Помимо прочего, такой
дискриминатор сохраняет работоспособность в присутствии модуляции
данными. Технически он часто строится согласно схеме рис. 8.8, где
умножение комплексных огибающих производится гетеродинированием (см.
комментарий в конце подпараграфа 7.1.2). Рассмотрим работу схемы без
учета входного шума и полагая без нарушения общности т — 0. Пусть
опоры представляют собой сдвинутые во времени копии расширяющего
сигнала, имеющего комплексную огибающую S(t) и несущую /i,
отличную от несущей принятого сигнала fo:
sr(t
е±-) -Re
S[t
e±-]exp(j27r/it + jtf)
346 Глава 8. Поиск и автосопровождение широкополосных сигналов
где начальная фаза # в окончательном результате никак себя не проявит.
Комплексная огибающая приходящего сигнала AB(t)S(t) exp(jip)
включает в себя наряду с расширяющим кодом также амплитуду сигнала А,
компоненту B(t) модуляции данными и неизвестную начальную фазу <р.
После перемножения входного сигнала с опорными колебаниями и
выделения компонент нижней частоты два результирующих радиосигнала
разностной несущей /о —/i будут иметь комплексные огибающие AB(i)S(i) x
х S*(t — е ± 6/2) ex.p\j(<p — #)]. Пусть H(t) — комплексная огибающая
импульсной характеристики полосовых фильтров после умножителей. Тогда
действительные огибающие на выходах фильтров, выраженные
интегралами свертки (см. подпараграф 2.12.1), имеют вид
У it)
1 oo
№ j B(B)S(6)S* (в -
\ —oo
_*0->
T
—+/Л
^vs/
sr(f-x+8/2) I
—►
Sf
Полосовой
фильтр
Полосовой
фильтр
(f-x-8/2)
-е±
—►
—►
а*.-
Квадратичн.
детектор
Квадратичн.
детектор
Q)dQ
♦
К фильтру
Jt+ петли
®—*
_г
Рис. 8.8. Некогерентный дискриминатор
Если импульсная характеристика фильтра прямоугольна с
длительностью Т, равной длительности символа данных, а модуляция данными —
фазовая, отсчеты выходной действительной огибающей в моменты t — T
I T
\^JB(t)S(t)S*[t
е±-\ dt
т
fs(t)S*(t-e±^\ dt
АЕ
Р\еТ
пропорциональны модулю соответствующего значения АКФ р(т)
комплексной огибающей сигнала ПРС. Разность квадратов этих модулей вновь
дает дискриминационную кривую, подобную изображенной на рис. 8.6
(см. задачи 8.7, 8.15).
Слабым местом схемы рис. 8.8 иногда считают трудность ее
балансировки, т.е. обеспечения идентичности параметров ранней и поздней
8.4- Автосопровождение кода 347
ветвей. Известны многие предложения, позволяющие обойти эту
неприятность [9, 18, 77], например петля с коммутацией задержки2, где
используется единственная ветвь с переключающимися поочередно ранней
и поздней опорами.
8,4.3. Работа АПЗ в присутствии шума
Петля АПЗ является разновидностью схемы фазовой автоподстройки,
и — подобно другим нелинейным системам с обратной связью, —
анализ многих деталей ее поведения весьма непрост [89, 90]. Однако одна
из важнейших характеристик работы АПЗ — установившаяся шумовая
ошибка вычисляется сравнительно легко в условиях, когда допустима
линейная аппроксимация.
Естественным требованием со стороны практических приложений
является малая шумовая ошибка, иными словами высокая степень
фильтрации шума в петле АПЗ. Флюктуации на выходе петли можно считать
малыми, если ошибка, т.е. разность между текущим истинным
значением задержки сигнала т и ее оценкой т с выхода АПЗ, удерживается
в пределах линейного участка дискриминационной кривой с
вероятностью, близкой к единице. При соблюдении этого условия можно полагать,
что дискриминационная кривая линейна в неограниченном диапазоне
значений е = т — т, что, в свою очередь, позволяет линеаризовать модель
системы, как описано ниже.
Примем для конкретности, что петля АПЗ содержит
видеочастотный (или, что эквивалентно, когерентный) дискриминатор, и рассчитаем
спектральную плотность мощности шума Nd(f) на его выходе.
Поскольку опорным сигналом в корреляторе такого дискриминатора является
разность sr(t) = s(t — 8/2) — s(t + 5/2), выходная дисперсия шума
согласно (2.15) выразится как о2 — ЩЕг/2, где Ег — энергия опорного сигнала
за время интегрирования Т. Если, как и ранее, Е — энергия стандартного
сигнала, то Ег = 2Е[1 — р(6)] и а2 — NqE[1 — р(5)}. Интегрирование на
интервале Т можно отождествить с низкочастотной фильтрацией в полосе
Wf = 1/Т, полагая, что найденная мощность шума распределена в данной
полосе и, следовательно, односторонняя спектральная плотность
мощности шума на выходе дискриминатора
2
Nd(f) = щ= NQET[1 - р(6)}. (8.23)
При прямоугольном чипе и пренебрежимом уровне боковых
лепестков р(т) имеет форму треугольника единичной высоты с основанием 2А,
так что NdU) = NoET при 6 > А.
2В англоязычных источниках — tau-dither или time-shared loop.
348 Глава 8. Поиск и автосопровождение широкополосных сигналов
Замена фактической дискриминационной кривой фиктивной линейной
означает бесконечное продолжение линейного участка в зоне нуля с тем
же наклоном 3d- Последний можно найти из (8.22), опираясь на четность
АКФ:
Sd
de(e)
de
= АЕ
£=0
>(f)-'(-i)
Учитывая вновь треугольную форму АКФ, приходим к результату
2/4 F
-^— = -2AEW, 6<2A,
Sd=<
Л F
-—- = -AEW, 5 = 2Д,
А
(8.24)
в котором последние равенства получены подстановкой оценки полосы
дискретного сигнала W = 1/А.
Рис. 8.9. Линеаризованная
модель АПЗ
т + ят(0 +/
Г)'-•го
М *{xj
L
W
Фильтр
h{f)
Вообразим теперь, что вместо реального шума n(t), который
прибавляется к принимаемому сигналу, фиктивный шум nr(t) со спектральной
плотностью мощности Nr(f) = Nd(f)/S% прибавляется непосредственно
к измеряемому параметру т. На выходе линейного дискриминатора,
которым мы заменили подлинный, такой воображаемый шум был бы
неотличим от шума на выходе последнего, поскольку их спектральные плотности
мощности S%NT — Nd(f) абсолютно одинаковы. Тем самым модель
системы сводится к изображенной на рис. 8.9, где на вход поступает не сигнал,
искаженный шумом, а параметр т в аддитивной смеси с воображаемым
шумом nT(t). Названная смесь обрабатывается линейной замкнутой
петлей, в которой оценка г вычитается из входного воздействия,
образуя сигнал ошибки е. Фильтр с передаточной функцией h(f) сглаживает
сигнал ошибки е, взвешенный крутизной дискриминатора Sd,
вырабатывая выходную оценку т. В приведенной структуре фильтрация
охватывает операции, выполняемые петлевым фильтром и ГУНом на рис. 8.5
по трансформации сигнала ошибки реального дискриминатора e(t) в
соответствующий сдвиг опорного сигнала. Так как эта модель полностью
линейна, дисперсию var{f} случайных флюктуации на ее выходе можно
найти согласно принципу суперпозиции независимо от сигнальной
компоненты:
8.4- Автосопровождение кода 349
var
{f} = JNT(f)\Hf)(2df,
(8.25)
где hi(f) — передаточная функция замкнутой петли. Последнюю легко
найти, подав на вход петли дельта-функцию. При этом выходной спектр,
в точности повторяющий hi(f), выразится соотношением
~hi(f) = [l-k(f)]Sdkf),
приводящим к популярному правилу теории линейных систем с обратной
связью [2, 7]
sMf)
hiU) =
(8.26)
1 + Sdh(f)
Фиктивный спектр флюктуации задержки NT(f) распределен по
полосе Wf = 1/Т, которая обычно значительно шире полосы замкнутой петли,
так как иначе АПЗ не сможет эффективно сгладить флюктуации шума.
Это позволяет найти (8.25) как
Nd(0)BN
vax{f} = NT(0)BN =
s%
(8.27)
ОО ОО
BN = f\hi(f)\2<V = J
где шумовая полоса петли Вм определяется равенством
|2
df-
11 + аиш т) I
о о
Теперь, возвращаясь к (8.23) и (8.24) и замечая, что р{5) = 1 — 6/А,
О < S < Д, (8.27) можно представить в форме
6/А
var{f}
где
$ =
4W2qf
4W2qf'
W^qf1
А2Е
О < 6 < А,
Д < 6 < 2А,
<5 = 2Д,
А2Р
(8.28)
N0BNT N0BN> (8'29)
называется отношением сигнал-шум в петле. Аргументы в пользу
этого названия очевидны: числителем (8.29) является подлинная мощность
сигнала, поскольку Р — Е/Т — мощность стандартного (имеющего
амплитуду А = 1) сигнала. В то же время в знаменателе стоит мощность
шума в пределах шумовой полосы петли.
350 Глава 8. Поиск и автосопровождение широкополосных сигналов
Результат (8.28) близок по смыслу к формуле Вудворда для
потенциальной точности оценки запаздывания из подпараграфа 2.12.2
w{f}"(2^L)V' 9>>1'
свидетельствуя тем самым о полной адекватности петли АПЗ в качестве
инструмента временных измерений.
Имеются три параметра, влияющие на точность АПЗ в
установившемся режиме: уровень входного сигнала относительно шума A?P/Nq,
шумовая полоса петли Ду и промежуток £, разделяющий раннюю и
позднюю опоры. Повышение точности за счет увеличения первого из них —
ресурс «грубой силы», не нуждающийся в особых разъяснениях.
Оптимизация второго параметра является нетривиальной задачей, так как
механическое уменьшение шумовой полосы без тщательного проектирования
петлевого фильтра чревато драматическим ухудшением динамических
свойств системы, таких как длительность захвата и способность
сопровождения сигнала с переменным запаздыванием. Выбор разноса S является
также предметом компромисса: уменьшение 5 по сравнению с
длительностью чипа А улучшает точность оценки из-за положительной корреляции
шумов на выходах ранней и поздней ветвей. В то же время, чем меньше
разнос <5, тем уже сама дискриминационная характеристика (см. рис. 8.6).
Это, в свою очередь, налагает более жесткие требования на точность
поиска, так как она должна быть достаточной для гарантированного
попадания временного рассогласования между местной опорой и
принятым сигналом в пределы активной (ненулевой) зоны дискриминационной
характеристики. Другим фактором, подлежащим обязательному учету,
оказывается риск потери синхронизма, возрастающий с сужением
дискриминационной характеристики. Распространенным путем примирения
конфликтующих требований к параметрам петли АПЗ служит ее
адаптация: на начальном этапе ввода используются расширенная шумовая
полоса и больший разнос £, которые по окончании переходных процессов
уменьшаются для достижения более высокой установившейся точности.
Задачи
8.1. Необходимо организовать последовательный поиск с постоянным
временем анализа Та — 2 мс. Дискретный сигнал, подлежащий поиску, занимает
полосу 1 МГц и модулирован кодом длины L = 1000. Априорная
информация о фазе кода отсутствует, а начальное рассогласование частоты
местного генератора с несущей принимаемого сигнала лежит в диапазоне
±10 кГц. Оцените примерное минимальное число анализируемых ячеек.
Задачи в пакете MATLAB 351
8.2. Найдите асимптотические приближения для полной средней вероятности
правильного исхода и среднего числа шагов последовательного поиска,
если вероятность ложной тревоги очень мала (Mpf <с 1). Объясните
полученные результаты физически.
8.3. Фиксированное время анализа и порог последовательного поиска
оптимизированы для некоторой мощности сигнала Р. Что произойдет с полной
средней вероятностью поиска и средним числом шагов в двух предельных
случаях: Р —► 0 и Р —> оо, если перенастройка времени анализа и порога
не производится? Подкрепите ответ физическим обоснованием.
8.4. Выведите выражения для вероятностей ложной тревоги и правильного
обнаружения, а затем для времени анализа на ячейку, необходимого для
обеспечения заданных р/, р^, если флюктуации амплитуды сигнала
подчиняются закону Рэлея (3.12), а случайная начальная фаза равномерно
распределена на интервале [—7г, л*]. (Подсказка: проще всего это сделать,
трактуя сигнал как гауссовский процесс, независимый от шума.)
8.5. Выведите выражение для вероятности правильного исхода и времени
поиска для последовательности быстрого поиска Стиффлера периода L = 2п.
8.6. Постройте дискриминационную кривую когерентной АПЗ для случаев
£ = Д,0<£<ДиД<£<2Д. Определите протяженность зоны
максимальной крутизны. Почему значения S > 2Д нецелесообразны?
8.7. Постройте дискриминационную кривую некогерентной АПЗ при разносе
S — Д. Почему значение S — 2Д нецелесообразно?
8.8. Покажите, что генератор, управляемый напряжением, в схеме АПЗ
функционирует как интегратор сигнала ошибки. Допустим, что шум на входе
отсутствует, а задержка сигнала постоянна. Докажите, что в
установившемся режиме ошибка на выходе АПЗ равна нулю. Останется ли эта
ошибка нулевой, если задержка сигнала линейно изменяется, а петля АПЗ
не содержит дополнительных интеграторов?
8.9. Рассмотрим схему АПЗ без дополнительного петлевого фильтра. Пусть
крутизна дискриминатора равна 0,5 В/мкс, а частота ГУ На меняется на
100 кГц при инкременте входного напряжения 1 В. Начальная разность
частот ГУНа и принятого сигнала составляет 10 кГц. Найдите значение
ошибки в установившемся режиме АПЗ в отсутствие шума.
8.10. Выразите шумовую полосу и дисперсию выходной ошибки через крутизну
дискриминатора и усиление ГУНа для схемы АПЗ без петлевого фильтра.
Объясните физически зависимость искомых величин от параметров
системы.
Задачи в пакете MATLAB
8.11. Напишите программу расчета среднего времени поиска (8.19) и
визуализации зависимостей, аналогичных приведенным на рис. 8.4, для произ-
352 Глава 8. Поиск и автосопровождение широкополосных сигналов
вольной зоны поиска и фиксированной вероятности правильного исхода.
Выполните программу ^ля разных комбинаций значений М, Рс,
наблюдая и комментируя поведение оптимальной вероятности обнаружения на
ячейку.
8.12. Модифицируйте программу предыдущей задачи для модели сигнала из
задачи 8.4. При выполнении программы отметьте и постарайтесь
объяснить отличие в оптимальной вероятности обнаружения на ячейку по
сравнению с предыдущим случаем.
8.13. Напишите программу, иллюстрирующую динамику последовательного
поиска видеосигнала в виде m-последовательности. Рекомендуемые шаги:
а) Сгенерируйте { ± 1} m-последовательность памяти 7-10 и
произведите ее двукратную передискретизацию с тем, чтобы иметь два шага
поиска на чип;
б) Повторите эту последовательность как опору со случайным
циклическим сдвигом;
в) Сформируйте несколько реализаций гауссовского шума со стандартным
отклонением, превышающим амплитуду сигнала примернов у/(2п — 1)/8
раз, сложите их с исходной последовательностью и выведите на
дисплей полученные реализации наблюдения с наложением;
г) Выведите на дисплей опорное колебание;
д) Повторяйте итерации-шаги, каждый раз вычисляя корреляцию между
опорой и наблюдением при обновленной для каждого шага реализации
шума; если текущая корреляция, нормированная к длине, превышает
порог 0,5, прервите цикл и объявите поиск завершенным, в противном
случае сдвиньте опору на одну позицию (половина чипа) и продолжите
процедуру следующим шагом;
е) На каждом шаге выводите на экран корреляцию (ось у) по отношению
к текущему номеру ячейки (ось х) и текущую опору, чтобы
наблюдать движение последней относительно сигнала; используйте оператор
«pause» для более удобной визуализации.
ж) Выполняйте программу раз за разом, меняя порог и наблюдая такие
события, как ложная тревога, пропуск сигнала и повторные циклы.
8.14. Опираясь на результаты задачи 8.5, напишите программу, вычисляющую
время поиска для последовательностей быстрого поиска Стиффлера при
фиксированной вероятности правильного исхода. Выполняя программу
для разных длин кода, оцените выигрыш в продолжительности
процедуры относительно последовательного поиска традиционной бинарной
последовательности той же длины. Выведите на экран зависимости обеих
длительностей поиска от п для различных значений вероятности
правильного исхода.
8.15. Напишите программу, вычисляющую и визуализирующую
дискриминационные кривые когерентной и некогерентной АПЗ для различных форм
Задачи в пакете МАТЬ А В 353
чипа и разносов ранних и поздних опор. Выполните программу для
прямоугольных и косинусных чипов и прокомментируйте результаты.
8.16. Напишите программу для моделирования и исследования когерентной
петли АПЗ без отдельного петлевого фильтра. Рекомендуемые шаги:
а) Сгенерируйте { ± 1} rn-последовательность длины L — 63 и
осуществите ее стократную передискретизацию;
б) Установите разнос S в пределах 0 < S ^ 2A и сформируйте раннюю
и позднюю опоры как сдвинутые циклические копии т-последователь-
ности;
в) Сложите m-последовательность пункта (а) с шумом, среднеквадрати-
ческое отклонение которого превышает амплитуду сигнала в 15 раз,
для получения наблюдения;
г) Вычислите корреляции (нормированные к энергии опоры) наблюдения
с ранней и поздней опорами и сигнал ошибки как их разность;
д) Умножьте сигнал ошибки на усиление G и округлите результат;
е) Сдвиньте опоры соответственно масштабированному сигналу ошибки
предыдущего пункта;
ж) Выведите на экран незашумленный сигнал, наблюдение и опоры;
з) Повторите пункты (в)-(е) 1000 раз, наблюдая поведение АПЗ,
используйте внутри цикла оператор «pause» для приемлемой визуализации;
и) Меняя усиление в диапазоне 10-40 и варьируя разнос (например, 5 —
= А/2, А, 2А), наблюдайте в сопоставлении с теоретическими
предсказаниями зависимости выходной дисперсии ошибки от этих
параметров;
к) Найдите опытную оценку дисперсии ошибки и сравните ее значение
с найденным в задаче 8.10.
ГЛАВА 9
КАНАЛЬНОЕ
КОДИРОВАНИЕ
В ШИРОКОПОЛОСНЫХ
СИСТЕМАХ
9.1. Предварительные замечания и терминология
Для того, чтобы передавать, хранить или обрабатывать данные, их
следует представить в той или иной конкретной форме. В цифровой связи
первичное сообщение, вырабатываемое источником, обычно трактуется
как последовательность битов данных или битовый поток. Отображение
этого потока в последовательность символов некоторого фиксированного
алфавита и есть то, что традиционно называется кодированием.
Кодирование информации может преследовать различные цели. К примеру,
кодирование источника или компрессия данных подразумевает устранение
избыточности в битовом потоке для представления сообщений
источника в наиболее компактной форме. Другой разновидностью кодирования
является шифрование, осуществляемое для защиты данных от
несанкционированного перехвата или фальсификации. Предметом данной главы
является канальное кодирование, смысл которого состоит в повышении
надежности передачи информации с учетом искажающего влияния
шумов, неизбежно присутствующих в любом реальном канале. Частные
примеры, обсуждавшиеся в § 2.3 и 2.5-2.7, убеждают, сколь важен адекватный
выбор сигнального созвездия для противодействия деструктивному
влиянию канального шума. В свою очередь, синтез подходящего ансамбля
сигналов для переноса сообщений и подразумевает оптимизацию способа
кодирования в комбинации с заданным форматом модуляции.
В течение пятидесяти с лишним лет с момента зарождения теории
кодирования основным стимулом ее прогресса служила
фундаментальная теорема Шеннона о пропускной способности канала, упоминавшаяся
в гл. 1. В соответствии с ней любой канал характеризуется некоторой
константой С (измеряемой в бит/с), называемой пропускной способностью
и устанавливающей верхнюю границу достижимой скорости R надежной
передачи информации по каналу. При R > С не существует способа
передачи с приемлемо высокой достоверностью. В то же время, при R < С
9.1. Предварительные замечания и терминология 355
в принципе всегда может быть найден код, для которого вероятность
перепутывания приемной стороной любого сообщения с другими
произвольно мала (см. рис. 1.1). Теорема Шеннона о пропускной способности
математически является «чистой» теоремой существования, не давая
никаких намеков по поводу конкретных алгоритмов кодирования,
позволяющих приблизиться к декларируемому ею пределу. Более того, путь
ее доказательства, базирующегося на усреднении вероятности ошибки
по всевозможным канальным кодам, показывает, что почти все коды
достаточно большой длины оказываются «хорошими» с точки зрения
надежности передачи. Тем не менее, поиски технически приемлемых правил
кодирования, позволяющих приблизиться к границе Шеннона, оставались
тщетными вплоть до открытия турбо-кодов в 1993, хотя в ходе их были
сделаны многие выдающиеся и ценные для практики открытия.
Сложность и многоплановость современной теории кодирования
таковы, что попытка даже беглого обсуждения ее базовых идей в рамках
небольшой главы оказалась бы заведомо безуспешной. Усилия такого рода
тем более лишены смысла на фоне глобальной роли канального
кодирования в продвинутых информационных технологиях, среди которых
широкополосная философия является лишь одним из направлений. Тем не
менее, значимость кодирования в широкополосных системах чрезвычайно
высока, поскольку они, как правило, предназначены для работы в сложной
помеховой обстановке и к тому же зачастую сами создают сильные
внутрисистемные помехи (ПМД в асинхронном варианте CDMA). Эффекты
ПМД, в отличие от естественного (теплового) шума, невозможно
нейтрализовать посредством «грубой силы», т. е. увеличением мощности сигнала,
так как все пользователи равноправны, а выигрыш в отношении сигнал-
помеха для одного из них, достигнутый таким способом, обернулся бы
потерями для других (см. § 4.5 и 4.6). Таким образом, в арсенале
разработчика остаются лишь два средства повышения иммунитета к ПМД:
увеличение коэффициента расширения и эффективное канальное
кодирование. Чтобы удержать объем главы в разумных рамках, сосредоточим
внимание только на аспектах кодирования, связанных с коммерческими
2G и 3G широкополосными стандартами cdmaOne, WCDMA и cdma2000.
В свою очередь, математический инструментарий, обозначения и приемы
изложения адаптированы так, чтобы сделать обсуждение зауженной
таким образом задачи максимально прозрачным и экономным. Читателю,
заинтересованному в дальнейшем расширении кругозора в области
канального кодирования, следует обратиться к соответствующим книгам
(например, [31, 33, 91]).
Начнем с некоторой укрупненной классификации канальных кодов.
Первым признаком, отличающим одни коды от других, служит размер
356 Глава 9. Канальное кодирование в широкополосных системах
алфавита, в соответствии с которым мы говорим о двоичных
(бинарных), троичных и т.п. кодах. Хотя недвоичные коды (например, Рида-
Соломона или Унгербоека) в настоящее время находят довольно широкое
применение, далее внимание сосредоточено только на двоичных кодах,
которые составной частью входят в спецификации, упомянутые ранее.
Другой классификационной чертой кодов служит способ отображения
информационных данных в кодовые слова или кодовые векторы (т.е.
последовательности символов избранного алфавита, переносящие передаваемое
сообщение). Дело в том, что любое канальное кодирование состоит во
введении определенной избыточности в сообщение, смысл которой состоит
в удалении передаваемых сигналов друг от друга с целью снижения риска
их перепутывания. В зависимости от способа формирования избыточных
символов канальные коды подразделяются на блоковые и решетчатые
{древовидные). Для блоковых кодов характерна сегментация битового
потока источника, разбиваемого на блоки из к информационных битов
с последующим замещением каждого блока словом из п > к двоичных
символов. При такой организации п — к избыточных символов защищают
только к битов источника в «своем» кодовом слове. Слова решетчатых
(например, сверточных) кодов имеют иную структуру: непрерывный
битовый поток источника преобразуется без фрагментации в бесконечный
поток кодовых символов (см. подробнее в § 9.3).
По достижении кодовым словом приемной стороны оно должно быть
подвергнуто обратному отображению в биты переданных данных.
Подобное преобразование называется декодированием. Физически — с учетом
модуляции — любое кодовое слово посылается в канал в виде некоторого
сигнала. При распространении через АБГШ канал (либо любой
непрерывный по состоянию) сигнал искажается шумом, мгновенные отсчеты
которого являются непрерывными случайными величинами.
Оптимальная (МП) стратегия решения при гауссовском шуме эквивалентна
правилу минимума евклидова расстояния (см. § 2.1), означающему объявление
истинно переданным сигнала, ближайшего к наблюдаемому колебанию.
Подобная процедура завершается прямой выдачей декодированных
битов данных и называется (вместе с многочисленными приближениями)
мягким декодированием. Реализационная сложность алгоритмов мягкого
декодирования служит основанием нередкого предпочтения им
альтернативы жесткого декодирования, выполняемого в два этапа. На первом
из них принимаются независимые решения по всем индивидуальным
кодовым символам, в результате чего наблюдение демодулируется в вектор
символов кодового алфавита (в рассматриваемом случае — двоичного).
Какие-то символы полученного таким образом двоичного наблюдения
могут оказаться ошибочными, а весь демодулированный вектор, возможно,
9.2, Блоковые коды, обнаруживающие ошибки 357
не совпадет ни с одним из кодовых слов. Второй этап сводится к
отысканию среди всех разрешенных кодовых слов максимально
правдоподобного, для которого вероятность трансформации каналом в текущее де-
модулированное двоичное наблюдение больше, чем для остальных.
Такая процедура декодирования, завершающаяся, как правило, решением
об истинности некоторого конкретного кодового вектора, называется
исправлением ошибок. В ином варианте задача декодирования может быть
сужена до проверки того, принадлежит ли демодулированное двоичное
наблюдение множеству разрешенных кодовых слов, либо имели место
некоторые ошибки вследствие деструктивного действия помех в канале.
Тогда, если двоичное наблюдение совпадает с каким-то кодовым словом,
оно отображается обратно в соответствующую последовательность битов
данных. В противном случае регистрируется факт ошибки при передаче,
и приемник либо посылает заявку на повторную передачу сообщения (как
в системах с переспросом), либо пытается самостоятельно восстановить
его, интерполируя предыдущие и последующие успешно декодированные
данные. Этот тип декодирования, называемый обнаружением ошибок,
характерен для применения блоковых кодов в современных коммерческих
беспроводных широкополосных системах, поэтому предметом
следующего раздела являются форматы кодирования, удобные для обнаружения
ошибок.
9.2. Блоковые коды, обнаруживающие ошибки
9.2.1. Двоичные блоковые коды
и обнаруживающая способность
Пусть bo,bi,... ,Ьа;-1 — к битов источника, которые следует
закодировать двоичным кодовым словом и = (зд, tti,..., un-i) длины п > к. Все 2к
комбинаций из к битов источника предполагаются возможными, так что
в распоряжении передающей стороны должно быть в общей сложности
М — 2к кодовых слов. В каждом кодовом слове п — к двоичных символов
являются избыточными в том смысле, что только к символов
необходимы для однозначного отображения М сообщений источника в двоичные
векторы. Эти избыточные символы придают кодовым словам большую
различимость друг с другом, повышая тем самым иммунитет к
влиянию канального шума. Множество всех М = 2к слов длины п называется
(п, к) блоковым кодом. Жесткое декодирование, т. е. демодуляция
непрерывного наблюдения в двоичное, соответствует модели двоичного
симметричного канала (ДСК), трансформирующего входные символы и = 0,1
в противоположные выходные у ф и с вероятностью ошибки на символ р.
358 Глава 9, Канальное кодирование в широкополосных системах
Рис. 9.1. Модель двоичного
симметричного канала
Прилагательное «симметричный» подчеркивает равенство вероятностей
искажения нуля в единицу и наоборот (см. рис. 9.1).
Предположим, что у = (у0, Уъ • • • Уп-i) —
двоичное наблюдение на выходе ДСК.
Если вектор у не совпадает ни с одним из М
кодовых векторов и, приемник распознает
наличие ошибочных символов
(обнаружение ошибок), в противном же случае
выдаются к декодированных битов данных,
соответствующих оценке кодового слова
й = у. Очевидно, что, если передано
слово Uo, но двоичное наблюдение совпадает
с другим кодовым словом, т.е. и = у ф ио, имеет место необнаружи-
ваемая ошибка, и декодированные биты данных отличаются от истинно
переданных.
Введем несколько дополнительных определений. Расстоянием
Хэмминга cf#(f, g) между двумя векторами
f = (foJu--Jn-l) И g= (ffO50b...,0n-l)
одной и той же длины п называется число позиций, на которых эти
векторы имеют несовпадающие элементы fi ф gi. Весом Хэмминга wh{$)
вектора f называется число его ненулевых компонент. Если, например,
f = (01011), g = (11000), то d#(f,g) = 3, wH(f) = 3 и wH(g) = 2.
Нетрудно видеть, что d# (f, g) = юн{? — g) и w#(f) = d#(f, 0), где 0 — нулевой
вектор.
Пусть передается кодовое слово и. ДСК превратит его в отличное
фиксированное кодовое слово v (вызвав, тем самым, необнаруживаемую
ошибку и выдачу декодером неверных битов данных, отвечающих v), если
ошибки в символах произойдут на всех d# (u, v) позициях, где и и v
различаются, и не произойдут на остальных n—d#(u, v) позициях (где символы
слов совпадают). Тогда для ДСК без памяти, т. е. канала, в котором
ошибки в последовательных символах независимы, вероятность Р(у = v|u)
вышеупомянутого превращения
Р(у = v|u) =/*(u'v)(l _p)»-dH(u,v)B
(9.1)
Поскольку р < 1/2 (в противном случае следовало бы просто
переобозначить на выходе нуль единицей и наоборот), для снижения вероятности
перепутывания кодовых слов и и v расстояние Хэмминга между ними
должно быть как можно больше. Рассмотрим теперь расстояния
Хэмминга 4н (u, v) между всеми парами различных кодовых векторов кода U.
Обозначим наименьшее среди них как djj и назовем его (минимальным)
9.2. Блоковые коды, обнаруживающие ошибки 359
кодовым расстоянием кода U:
dn = min d#(u, v). (9.2)
u,vG*7
Любое кодовое слово может выступать в роли переданного, и, чтобы
минимизировать риск перепутывания двух ближайших кодовых векторов,
расстояние между ними, т.е. кодовое расстояние djj, должно быть
максимально возможным. В частности, справедливо следующее утверждение.
Утверждение 9.1. Код U обнаруживает любые td или менее
символьных ошибок (вплоть до td ошибок), если и только если его кодовое
расстояние du > td + l.
Действительно, рассмотрим код с dn ^ td и выберем пару его
ближайших кодовых векторов u, v. Если cf# символов и, отличных от символов
v, искажены, и превращается в v, означая существование необнаружи-
ваемой конфигурации из не более, чем td символьных ошибок. Обратно,
если расстояние между любыми кодовыми векторами больше £^, не
существует комбинации td или менее символьных ошибок, которая могла бы
трансформировать одно кодовое слово в какое-либо другое.
Подобным же образом доказывается и следующий факт (задача 9.4).
Утверждение 9.2. Код U способен исправлять tc или менее ошибочных
символов, если и только если его кодовое расстояние djj ^ 2tc + 1.
9.2.2. Линейные коды и их полиномиальное
представление
Отождествим двоичные кодовые символы {0,1} с элементами конечного
поля GF(2) (см. § 6.6) и рассмотрим посимвольные линейные операции
над кодовыми словами кода !7, основанные на арифметике GF(2).
Нетрудно понять, что существует лишь одна нетривиальная операция
такого рода, а именно посимвольное сложение: и = (щ^щ,... ,wn_i), v =
= (vojtfi,...,un_i) =^ u + v = (щ + v0,ui + ui,...,wn_i +vn-i). Если,
например, u = (100111), v = (010110), то u + v = (110001). Посимвольное
вычитание самостоятельной роли не играет, попросту повторяя
сложение, поскольку элементы GF(2) противоположны самим себе. Подобным
же образом посимвольное умножение на скаляр из GF(2) (т. е. на 0 или 1)
любого кодового слова либо превращает его в нулевой вектор, либо не
меняет вовсе.
Двоичный код U называется линейным, если сумма любых его кодовых
векторов оказывается вновь некоторым кодовым вектором,
принадлежащим U. Своим наименованием такой код обязан тому, что он является
360 Глава 9. Канальное кодирование в широкополосных системах
векторным (линейным) пространством над полем GF(2) [31, 33, 91],
хотя последнее понятие в нашем контексте по существу не используется.
Любой линейный код U длины п содержит в качестве кодового нулевой
вектор (т.е. с п нулевыми компонентами), поскольку сумма
произвольного вектора, входящего в С/, с самим собой дает в точности нулевой
вектор: и + и = 0. Следующий факт проясняет одну из причин особого
интереса к линейным кодам.
Утверждение 9.3. Кодовое расстояние линейного кода U равно
минимальному весу Хэмминга на множестве всех ненулевых кодовых слов:
djj — minwtf (u). (9.3)
Чтобы это доказать, достаточно подставить cf#(u, v) — w#(u — v)
в (9.2) и заметить, что разность и — v = и' — вновь кодовое слово U.
Как показывает (9.3), при оценке кодового расстояния в линейном
коде, содержащем М слов, нет надобности в проверке всех М(М — 1)/2 пар
несовпадающих векторов. Достаточно «взвесить» М — 1 ненулевых
кодовых векторов, т. е. выполнить в М/2 раз меньше тестов, что — с учетом
обычно большого значения М — оборачивается заметным выигрышем.
Для понимания кодовых конструкций, обнаруживающих ошибки, из
беспроводных 2G и 3G спецификаций полезно обратиться к
полиномиальному описанию линейных кодов.
Сопоставим кодовому слову и — (щ,щ,... , tin-i) кодовый полином
u(z) формальной переменной z, упорядоченный как
u(z) = Un-\ZU~X + ип-2*П~2 + - - - + U(h
где по соглашению z° = 1. Такое полиномиальное представление,
повсеместно используемое в теории кодирования, является на деле лишь
вариантом ^-преобразования, лежащего в основе анализа дискретных
линейных систем, дискретной обработки сигналов, цифровой фильтрации
и т.д. [2, 7]. Взаимно-однозначное соответствие между множествами
кодовых слов и кодовых полиномов означает, что сумма двух кодовых
полиномов u(z), v(z) линейного кода U является вновь кодовым полиномом
п—1 . п—\
того же кода. Если, к примеру, u(z) = J2 Щ*г-> v(z) = Yl viz% — кодовые
г=0 г=0
п-1
полиномы слов u, v линейного кода С/, то u(z) + v(z) = J2 (щ + Vi)zl кодо-
г=0
вый полином слова u + vGf/, где сложение коэффициентов подчиняется
правилам поля, которому они принадлежат, в нашем случае GF{2).
Полиномиальная арифметика, используемая в анализе и построении
кодов, включает еще две операции: умножение и деление с остатком.
9.2. Блоковые коды, обнаруживающие ошибки 361
Правила этих операций универсальны независимо от поля, которому
принадлежат полиномиальные коэффициенты, однако, имея дело только с
двоичными кодами, воспользуемся терминологией, характерной для
двоичной арифметики. Рассмотрим произвольный (не обязательно кодовый)
двоичный (т.е. с коэффициентами из GF(2)) полином a(z).
Максимальная степень переменной z в этом полиноме с ненулевым коэффициентом
называется степенью a(z) с обозначением dega(z). Пусть a(z), b(z) — два
двоичных полинома, причем dega(z) — т, degb(z) = п. Тогда их
произведением a(z)b(z) является полином степени т+п, полученный в результате
распространения коммутативного {zla — azl) и дистрибутивного законов
на операции с формальной переменной z и суммирования всех
коэффициентов при одинаковых степенях z:
a{z)b(z) = (amzm + am-izm-1 + • ♦ • + a0)(bnzn + bn^z71'1 + • • • + b0) =
= ambnzm+n 4- (am6n_i + am_ibn)^m+n_1 + • • • + (oibo + a>oh)z + a0b0 =
m+n / k \
fc=0 \г=0 /
Разумеется, полагается, что zmzn = ^m+n, все операции над a^, bi
выполняются в G\F(2), и сомножители а^ Ь{ в последней внутренней сумме
с превосходящими степень полинома индексами равны нулю. Например,
для двоичных полиномов a(z) = zA + z3 + 1, b(z) = z2 + z + 1 произведение
a(z)b(z) = z6 + zz + z2 + z + 1.
Алгоритм деления делимого a(z) на делитель b(z) с остатком
записывается равенством
a(z)=q(z)b{z)+r(z), (9.4)
в котором q(z) — частное, а r(z) — остаток от деления. Единственность
q(z), r(z) гарантируется соотношениями deg a(z) — deg q(z) + degb(z)
и degr(z) < degb(z). Алгоритм (9.4) подобен «школьному» правилу
деления целых с остатком, в котором роль абсолютных значений чисел
передана степеням полиномов. Одним из приемов выполнения этой
операции является «длинное деление», т.е. пошаговое вычисление остатка
и деление его на делитель до тех пор, пока степень остатка не окажется
меньше степени делителя. На первой итерации b(z) умножается на г, в
степени, уравнивающей степень произведения со степенью делимого a(z).
Вычитание (эквивалентное сложению в GF(2)) полученного произведения
из a(z) дает первый остаток, выступающий на второй итерации в роли
делимого, и т. д. Подкрепим это следующей иллюстрацией.
Пример 9.1. Разделим a(z) — z4 + z3 + 1, на b(z) = z2 + z + 1 с помощью
алгоритма длинного деления
362 Глава 9. Канальное кодирование в широкополосных системах
z4 1
z2+z+l\z4+z3+ 1
+
z4+z3+z2
z2+l
+
z2+z+ 1
z
После двух итераций имеем q(z) = z2 + 1, г(2;) = 0, так что деление с остатком
завершается результатом z4 + zz + 1 — (2т2 + l)(z2 + £ + 1) + z.
Как и в случае целых чисел, мы говорим, что a(z) делится на b(z)
(или b(z) делит a(z)), если остаток равен нулю, т.е. a(z) = q(z)b(z).
Рассмотрим теперь линейный код U длины п со всеми кодовыми
полиномами, делящимися на фиксированный полином g(z) степени г > 1.
Любой кодовый полином в таком коде представим как u(z) — b(z)g(z),
и так как имеется всего 2п~г различных множителей b(z), для которых
степень произведения не превышает п — 1, такой код может содержать
не более чем 2п~г кодовых слов. В действительности всегда можно пойти
обратным путем и построить код с этим максимальным числом слов, т. е.
передающий к = п—r информационных битов, отталкиваясь от заданного
полинома g(z) фиксированной степени г. Для этого достаточно
использовать к — п — г битов данных bo, bi,..., bk-i в качестве коэффициентов
полипома данных b(z) = bk-\zk~l + Ьь-2%к~2 + h Ьо и сконструировать
соответствующий кодовый полином как произведение и(z) = b(z)g(z).
При этом 2к различным ^-битовым блокам данных взаимно-однозначно
соответствуют столько же кодовых полиномов степени п — 1 или менее.
Линейность такого кода легко проверяется (задача 9.11). В описанной
конструкции полином g(z) называется порождающим полиномом кода U.
Отметим, что число избыточных или проверочных символов подобного
кода всегда равно степени порождающего полинома г.
Когда полином данных b(z) напрямую умножается на порождающий
полином g(z), кодовое слово, отвечающее полиному u(z) = b(z)g(z),
оказывается несистематическим, т. е. биты данных в нем не видны явно на
заранее оговоренных позициях. Для получения систематического кода,
в котором, например, последними к символами были бы непосредственно
информационные биты, а г = п — к первыми — проверочные
символы, можно определенным образом переупорядочить кодовые слова. При
этом исходное множество кодовых слов останется прежним, изменится
лишь соответствие между блоками битов данных и кодовыми словами.
Умножим полином данных b(z) на zr — zn~k, придя к полиному zn~kb(z)
9.2. Блоковые коды, обнаруживающие ошибки 363
степени не выше п — 1. Если остаток г (z) от деления этого произведения
на g(z) отбрасывается (или прибавляется к zn~kb(z) в двоичном случае),
результат делится на порождающий полином g(z), т.е. становится
кодовым полиномом. Последний, имея вид
u(z)=zn-kb{z)+r(z),
отвечает систематическому кодовому слову, так как биты данных
являются в точности к старшими коэффициентами zn~kb(z), и прибавление
остатка r(z) степени меньшей, чем г — п — £;, на них повлиять не может.
Пример 9.2. Найдем кодовое слово линейного (5,2) кода с порождающим
полиномом g(z) = z3 + z2 + 1, соответствующее информационным битам bo = 1,
Ъ\ = 1. При этом b(z) = z + 1, zn~hb(z) = z4 + г3, и после деления на g(z)
получается остаток r(z) = z. Сложение zn~kb(z) с этим остатком дает кодовый
полином u(z) = zA+zz+z = 20(2), соответствующий систематическому кодовому
слову, последними двумя символами которого являются биты данных.
9.2.3. Вычисление синдрома и обнаружение ошибок
Пусть кодовое слово и линейного кода U передается по ДСК. Элементы
выходного двоичного наблюдения у, искаженные каналом, будут
отличаться от переданных символов, что можно выразить равенством
у = и + е, (9.5)
где е — вектор ошибок, в котором нули и единицы стоят на позициях
неискаженных и искаженных символов соответственно. Так, если
слово и = (01011) из примера 9.2 трансформировано ДСК в наблюдение
у = (11110), вектор ошибок е = (10101). Подобно кодовым словам
наблюдение у = (г/о, I/i, •.., I/n-i) и вектор ошибок е = (е0, ei,..., en_i) можно
представить в полиномиальной форме y(z) = yn-\zn~l +yn-2Zn~2-\ Ьуо
и e(z) = en-\zn~x + en-2Zn~2 H h eo- Тогда (9.5) примет вид
y(z)=u{z) + e(z).
Пусть g(z) — порождающий полином кода U. Остаток s(z) от деления
полинома наблюдения у (z) на g(z) называется синдромом. Поскольку
любой кодовый полином делится на g(z), синдром повторяет остаток от
деления полинома ошибок e(z) на g(z). Следовательно, ненулевой синдром
однозначно свидетельствует о наличии ошибок в наблюдении у, и
обнаружение ошибок может быть реализовано как вычисление синдрома по
наблюдению у и решение о наличии ошибок всякий раз, когда синдром
не равен нулю.
Разумеется, обнаружению поддается не любая конфигурация ошибок,
и любой необнаруживаемый вектор ошибок всегда является некоторым
364 Глава 9. Канальное кодирование в широкополосных системах
кодовым вектором. Действительно, если e(z) — кодовый полином, то он
делится на g(z) и синдром равен нулю. Обратно, нулевой синдром
означает, что e(z) делится на g(z), но любой полином степени не выше п — 1,
делящийся на g(z), есть кодовый полином.
Пример 9.3. Пусть переданное кодовое слово и = (01011) (5,2) линейного
кода трансформировано ДСК в у — (11001), т. е. произошла двукратная ошибка.
Деление y(z) = z4 + z + 1 на g(z) = z3 + z2 + 1 дает ненулевой синдром s(z) = z2,
сигнализируя о наличии ошибок. В противоположность этому, если бы
наблюдением был вектор у — (11101), соответствующий трехкратной ошибке, синдром
оказался бы равным нулю: y(z) =zA + z2 + zJcl — (z + l)g(z), и ошибки не были
бы обнаружены.
Нередко обнаруживающую способность линейного кода
характеризуют долей необнаруживаемых конфигураций ошибок среди всех
возможных. Так как общее число различных векторов ошибок равно 2П, из
которых только 2к повторяют кодовые слова и не могут быть обнаружены,
указанная доля составляет 2~(п~к) — 2_г.
Рассмотренные вьпне линейные коды, построенные на основе
порождающих полиномов, известны как циклические или укороченные
циклические. Когда их назначение исчерпывается лишь обнаружением (но не
исправлением) ошибок, они нередко упоминаются под названием
циклических избыточных кодов {cyclic redundancy check /codes/ — CRC)1.
9.2.4. Выбор порождающих полиномов для CRC
Экспоненциальное снижение доли необнаруживаемых ошибок с ростом
числа проверочных символов может мотивировать использование
порождающих полиномов высоких степеней. Не следует забывать, однако, что
проверочные символы представляют собой в определенном смысле
непроизводительные затраты, и чрезмерное их число означает нерациональное
расходование частотного ресурса. Как правило, CRC используются на
высших уровнях системных протоколов для проверки качества кадров
данных, восстановленных на физическом уровне, т. е. после утилизации
потенциала значительно более мощных кодов с исправлением ошибок.
По этой причине символьные ошибки, нейтрализация которых является
задачей CRC, достаточно редки, и вероятность многих ошибок в
пределах кодового слова с сотнями символов обычно весьма мала. В этом свете
обнаружение трехкратных ошибок на кодовое слово нередко считается
вполне приемлемым. Опишем процедуру синтеза CRC,
удовлетворяющего этому условию.
1Ниже используется англоязычная аббревиатура CRC, принятая не только в
зарубежных, но и во многих отечественных источниках.
9.3. Сверточные коды 365
Возьмем двоичный примитивный полином g\(z) степени т (см. § 6.6).
Важный факт, доказываемый в алгебре расширенных полей, состоит в том,
что примитивный полином степени т не может делить бином zl + 1
ненулевой степени / < 2т — 1 [30, 32]. Из этого можно сделать следующий
вывод.
Утверждение 9.4. Код U с порождающим полиномом g(z) = (z+l)gi(z)
степени т обнаруживает вплоть до трех ошибок, если его длина п ^
^ 2W - 1.
Вследствие линейности кода U (см. (9.3)) и утверждения 9.1 нужно
лишь доказать, что минимальный вес ненулевого слова U не меньше
четырех. Любой кодовый полином u(z), делящийся на z + 1, может быть
представлен в виде u(z) = q(z)(z + 1). Хотя z — формальная переменная,
последнее равенство останется верным при подстановке z — 1 в обе его
части: г&(1) — ип-\ + ип-2 + • • • + щ = 0, что говорит о четности числа
ненулевых элементов слова, т. е. четности его веса. Слово веса два с
ненулевыми i-м и j-м символами (j > г) не может принадлежать коду J7,
так как его кодовый полином u(z) ~ z3 + zl = z%{\ + z3~l) не делился бы
на g\{z), поскольку последний, будучи неприводимым, не содержит
множителя z и не делит 1 + z3~l (j — г < п ^ 2т — 1) как примитивный. Таким
образом, наименьший возможный вес ненулевого слова U равен четырем.
Теперь ясно, как выбрать подходящий порождающий полином CRC.
При желаемой длине кода п следует лишь найти примитивный полином
gi{z) степени т ^ [log2(n + 1)] и взять в качестве порождающего полином
g(z) = (z + l)gi(z).
Коды CRC подобного типа оказываются не чем иным, как
популярными кодами Хэмминга (при п < 2т — 1 — укороченными) с исключенными
словами нечетного веса. В альтернативном применении они позволяют
исправлять любые однократные и обнаруживать любые двукратные ошибки.
Пример 9.4. Ряд CRC кодов фигурирует в спецификациях 2G и 3G систем
[18,69, 92]. Например, во всех трех стандартах (cdmaOne, WCDMA и cdma2000)
используется код с порождающим полиномом g(z) = z16 + z12 + zb + 1 = (z + 1)^1(2;),
где gi(z) — zlb + z14 + z13 + z12 + z4 + z3 + z2 + z + 1 — примитивный полином.
Подобным же образом порождающие полиномы других CRC кодов этих
стандартов (степеней 30, 24 и т.п.) факторизуются в произведения бинома z + 1 и
примитивного полинома.
9.3. Сверточные коды
Сверточные коды широко применяются в современных
телекоммуникациях как эффективный инструмент надежной передачи данных по каналам
366 Глава 9. Канальное кодирование в широкополосных системах
с шумами. Среди древовидных (решетчатых) кодов, к которым они
принадлежат как подкласс, сверточные коды отличаются линейностью
алгоритмов кодирования. Разница между сверточными и блоковыми кодами
в определенной мере размыта: любой сверточный код можно трактовать
как блоковый адекватно большой длины. Специфику и причины особой
популярности сверточных кодов можно скорее связать с их рекуррентной
природой, открывающей путь к построению особо экономичной в
отношении вычислительного ресурса процедуры декодирования с исправлением
ошибок — алгоритма Витерби.
9.3.1. Сверточный кодер
Общую идею сверточного кодирования можно объяснить следующим
образом. Возьмем блок (вектор) vc последовательных битов источника и
линейно преобразуем его в п > 1 выходных двоичных кодовых символов,
занимающих временной интервал, равный длительности одного бита
источника. Линейность по отношению к векторам с компонентами из поля
GF(2) означает суммирование по модулю два некоторых выбранных
компонент. После этого обновим блок битов источника, введя в него один
новый бит, с одновременным исключением самого старого. Тем самым
мы вновь имеем блок из vc битов источника, запаздывающий на один
бит относительно предыдущего (и содержащий ис — 1 прежних битов
и один новый), который кодируется по тому же правилу в п новых
кодовых символов. Подобные шаги непрерывно повторяются один за другим,
с вовлечением каждый раз одного нового бита взамен старейшего.
Окно в vc битов Длительность бита
*?* **"""*! Битовый поток
п символов кода п символов кода п символов кода
Рис. 9.2. Принцип сверточного кодирования
Рис. 9.2 иллюстрирует данную процедуру для случая vc — 3, п = 3:
кодер как бы просматривает битовый поток источника сквозь скользящее
окно ширины ис и кодирует все биты, видимые на текущем шаге, в п
кодовых символов. После каждого шага окно смещается вправо на один бит
9.3. Сверточные коды 367
источника и выполняется следующий шаг. Число битов источника,
влияющих на кодовые символы на одном шаге, называется длиной кодового
ограничения.
Биты источника
Рис. 9.3. Сверточный кодер
Описанный принцип можно технически воплотить в виде структуры,
представленной на рис. 9.3, где регистр сдвига, состоящий из ис~ 1 ячеек
памяти, хранит ис — 1 предшествующих битов источника. Вместе с
поступающим битом они подаются на линейную логическую цепь, содержащую
п сумматоров по модулю два. Выход каждой ячейки регистра, как и вход
кодера, соединен либо нет (поэтому соединения обозначены пунктиром)
с каждым из сумматоров, причем схема соединений конкретизирует
зависимость выходных кодовых символов от vc битов источника, т. е. правило
кодирования. При поступлении на вход текущего бита источника Ь{ на
выходах сумматоров параллельно появляются п кодовых символов и|, и?,
..., uf. С каждым тактом битовый профиль в регистре сдвигается на
одну ячейку вправо, подготавливая цепь к формированию следующих п
кодовых символов. Выходной ключ, пробегая поочередно выходы п
сумматоров в течение одного бита, преобразует параллельное представление
кодовых символов в последовательное, создавая выходной кодовый поток
uj, Uq, ..., г*0, и}, и\, ..., и™, ... Как видно, в установившемся режиме
кодер рис. 9.3 на каждый новый бит источника откликается п кодовыми
символами (см. также рис. 9.2), так что скорость кода Rc в битах на
кодовый символ равна 1/п. Рассмотрим пример, помогающий лучше понять
идею сверточного кодирования.
368 Глава 9. Канальное кодирование в широкополосных системах
Пример 9.5. На рис. 9.4 приведен сверточный кодер с длиной кодового
ограничения vc ~ 3 и скоростью Rc = 1/2. Входные биты Ьо> &ъ • • • преобразуются в два
потока кодовых символов uj, и\, ... и Uq, и\, ..., которые затем
мультиплексируются так, чтобы и\ и и? занимали соответственно четные и нечетные позиции
в общем кодовом потоке. Например, битовый поток {bi} = 10100100 ...
порождает последовательности {и}} = 11011111... и {и?} = 10001101..., которые после
мультиплексирования образуют кодовый поток {{и\, wf)} = 1110001011111011...
Биты источника
b0,bv...
*~~ ^
—1->
-/+
ip
■ ■ ■ <
ч
<
"п, у;
а* Символы кода
Г** ►
2 2
12 12
«0'u6'ui'<V
Рис. 9.4. Сверточный кодер со скоростью 1/2
Можно задаться естественным вопросом: достижима ли при сверточ-
ном кодировании скорость Дс, отличная от 1/п, т.е. равная &/гс, где
1 < к < гс? Существуют два классических подхода к решению этой
задачи. Первый из них сводится к прямому обобщению ранее описанной
идеи: на каждом шаге кис, вместо vc, битов линейно преобразуются в гс
кодовых символов, после чего к старейших битов (вместо одного)
заменяются к новыми и кодер переходит к следующему шагу. Второй вариант,
называемый выкалыванием, использует код со скоростью 1/гс как
подсобный материал, удаляя в нем отдельные кодовые символы в соответствии
с заранее назначенным профилем. При грамотном выборе профиля
выкалывание сокращает число кодовых символов на бит данных, доводя
значение скорости до k/п. В реализационном отношении выкалывание
нередко признается предпочтительным, акцентируя доминантную роль
кодов со скоростями вида 1/гс. Принимая эту точку зрения,
сосредоточим дальнейшее внимание только на сверточных кодах со скоростью 1/гс.
Очевидно, схема, содержащая регистр сдвига и индивидуальный
сумматор по модулю два со всеми его связями, есть не что иное, как фильтр
с конечной импульсной характеристикой (КИХ) (см. рис. 6.19),
реакцией которого на входной битовый поток является свертка последнего
с импульсным откликом фильтра. Этот факт объясняет происхождение
названия исследуемых кодов, а также лежит в основе удобного способа
формального описания сверточного кодера. Свертка, связывающая
кодовый символ и\ (т. е. появляющийся на выходе l-vo сумматора при
поступлении бита источника bi) с входным битовым потоком,
9.3. Сверточные коды 369
uj=X>-tft, t = 0,l,...; Z = l,2,...,n, (9.6)
где g[ = 1, если Z-й сумматор соединен с £-й ячейкой памяти (t = О
соответствует входу кодера) и д\ = О в противном случае, а Ьг = 0 при г < 0.
Подходящим инструментом анализа дискретных систем в частотной области
является ^-преобразование, уже встречавшееся в предыдущем разделе.
В ^-области свертке соответствует произведение ^-преобразований, так
что равенство (9.6) имеет эквивалентную форму
оо
ul(z) = £«^ = b(z)9l(z), I = 1,2,... ,п, (9.7)
где Ь(^г) = ]Сёо ^г — ^-преобразование входного потока битов, а
9i(*) = sk + g[z + --- + <4-i*"c~\ / = 1,2,... ,n (9.8)
— передаточная функция /-го КИХ-фильтра (т. е. формирующего 1-й
кодовый символ), называемая также Z-м порождающим полиномом свер-
точного кода. Набор п порождающих полиномов полностью определяет
сверточный код, поскольку их ненулевые коэффициенты задают схему
соединений сумматоров с регистром сдвига.
Пример 9.6. Порождающие полиномы для кодера рис. 9.4 gi(z) = 1 -f- z + z2
и g2(z) — 1 + z2- Убедитесь, что последовательности кодовых символов в
примере 9.1 можно получить из (9.7).
При gi(z) = 1 сверточный код становится систематическим, в
котором биты источника явно присутствуют на определенных позициях. Дело,
однако, обстоит так, что в рамках фиксированной структуры рис. 9.3
систематические коды, как правило, оказываются не лучшими в отношении
корректирующей способности (см. задачу 9.15). Поэтому в
обстоятельствах, когда систематичность кода критически важна, сверточный кодер
на КИХ-основе модифицируется в структуру с обратной связью. Мы
вернемся к деталям этого вопроса при ознакомлении с турбо-кодами в под-
параграфе 9.4.1.
9.3.2. Решетчатая диаграмма, свободное расстояние
и асимптотический выигрыш от кодирования
Число возможных состояний регистра сдвига сверточного кодера равно
21/с~1, и есть только два состояния, в которые он может перейти из
текущего по окончании каждого очередного такта: Выбор одного из двух
возможных переходов определяется текущим битом источника 6^ Если
на г-м такте регистр находится в состоянии (Ьг-_i, Ьг—2? • • • bi-i/c+i)> сле"
370 Глава 9. Канальное кодирование в широкополосных системах
дующим состоянием будет либо (0, Ьг*_1, • • • &i-i/c+2) ПРИ поступлении бита
Ь{ = 0, либо (1,Ьг*_1,... bi-vc+2) ПРИ h = 1. Точно так же регистр
придет в состояние (bj, b;-i,..., 6^-^+2)> если перед этим он был в состоянии
либо (Ь1_1,Ь*_2,...,Ь*-1/с+2,0), либо (Ьг-ъЬг_2,...,Ьг-г/с+251)-
Схематически все детали поведения регистра адекватно отображаются решеткой.
Она содержит два столбца из 2Uc~l узлов, левый для текущего
состояния регистра, а правый — для последующего. Ребра (стрелки) ведут
из каждого узла левого столбца в некоторые два узла правого, причем
сплошные либо пунктирные ребра обозначают пути, которые выбираются
входным битом нуль либо единица соответственно. Подобно этому в
каждый узел правого столбца входят два ребра, маркированные одинаково:
либо сплошными (нулевой входной бит), либо пунктирными (входной бит
единица) линиями. Каждое ребро помечено п-элементной строкой,
являющейся не чем иным, как группой п кодовых символов, выдаваемых
кодером, когда входной бит переводит его из одного состояния в другое.
Следующий пример поясняет построение решетки сверточного кодера
рис. 9.4.
Пример 9.7. Имеются четыре состояния двухразрядного регистра сдвига,
начиная с левой ячейки: (00), (10), (01) и (11). На рис. 9.5 приведена
решетка, построенная, как сказано выше. Например, ребро из (10) в (01) обозначено
сплошной линией, а в (11) — пунктирной, кодовые символы 01 являются меткой
ребра, ведущего из (11) в (01), так как при единицах в обеих ячейках и нулевом
входном бите верхний сумматор рис. 9.4 выдает на выход нуль, а нижний —
единицу, и т. д.
В течение каждого такта кодер
совершает переход вдоль какого-то
ребра решетки, одновременно выдавая на
выход кодовые символы, которыми
помечено данное ребро. Отслеживая этот
процесс по диаграмме, подобной
представленной на рис. 9.5, пришлось бы
перескакивать из правого столбца в тот
же узел левого на каждом очередном
шаге. Для избежания этого можно
просто повторить решетку столько раз,
сколько требуется, используя правый столбец
текущего шага как левый для
последующего. Тогда кодирование
отождествляется с движением по полученной решетчатой диаграмме,
контролируемым текущим входным битом, который — в зависимости от того, равен
он нулю или единице — направляет кодер по сплошному или пунктир-
Рис. 9.5. Решетка кодера на рис. 9.4
9.3. Сверточные коды 371
ному ребру. Иллюстрируя сказанное, обратимся к рис. 9.6, на котором
показана решетчатая диаграмма кода примера 9.5. Каждая из
возможных последовательностей входных битов данных выбирает определенный
путь на решетчатой диаграмме, который можно проследить, например,
для последовательности {bi} — 10100100 Первый ее бит, равный
единице, направляет кодер из узла (00) в узел (10), выдавая выходные кодовые
символы 11. Второй бит, равный нулю, переводит кодер из узла (10)
в (01), генерируя кодовые символы 10. Третий бит меняет состояние
кодера с (01) на (10), выдавая кодовые символы 00 и т.д. Жирной чертой
выделен итоговый путь, отвечающий кодовому слову 1110001011111011.
Рис. 9.6. Решетчатая диаграмма кодера на рис. 9.4
Как уже отмечалось, сверточный код можно интерпретировать как
достаточно длинный блоковый. Слова такого блокового кода есть просто
различные пути на решетчатой диаграмме, так что минимальное
расстояние Хэмминга между парами этих путей является кодовым расстоянием.
В свою очередь, линейность кода упрощает задачу нахождения кодового
расстояния: в силу утверждения 9.3 минимум расстояния между путями
совпадает с наименьшим весом Хэмминга среди всех ненулевых слов.
Допустим теперь, что кодируемый поток заканчивается после некоторого
большого (не меньшего vc) числа битов и дополняется vc — 1
концевыми нулями для обнуления регистра кодера. Реализованное практически
(одним из примеров служит cdmaOne) это дополнение не повлечет
существенной потери в скорости, если длина кодируемого потока многократно
больше длины кодового ограничения. С другой стороны, результатом его
окажется сходимость всех путей в один узел, соответствующий нулевому
состоянию регистра, как показывает рис. 9.6 для кода примера 9.5. Если
начальным фрагментом такого дополненного битового потока
оказывается серия из некоторого числа щ последовательных нулей, за которыми
372 Глава 9. Канальное кодирование в широкополосных системах
следует бит, равный единице, можно переместить щ начальных нулей
в конец потока, т.е. произвести сдвиг соответствующего пути на
диаграмме на по шагов влево без изменения его веса. В результате путь
ответвится от нулевого пути на самом первом шаге и вновь сольется с
ним не позднее, чем за по шагов от последнего концевого нуля. Вдоль
этого пути могут происходить неоднократные возвраты к нулевому
пути и последующие ответвления от него (см. рис. 9.7), каждое из которых
лишь увеличит вес пути. Поскольку наша цель состоит в отыскании пути
минимального веса, любые ответвления от нулевого пути, кроме первого,
должны игнорироваться. Суммируя сказанное, приходим к заключению,
что для нахождения минимального расстояния в сверточном коде
тестированию подлежат только те пути, которые отклоняются от нулевого
в начале решетчатой диаграммы и после первого слияния с нулевым путем
более от него не ответвляются. В теории сверточных кодов
минимальный вес такого пути традиционно называется свободным расстоянием.
Обозначив его как df, можно видеть, к примеру, что среди всех
путей с единственным отклонением от нулевого на рис. 9.6, кодовое слово
11101100..., кодирующее битовый поток 100..., имеет наименьший вес,
так что df = 5. Безусловно, свободное расстояние df гарантирует
исправление любых [ ^2 ] символьных ошибок (см. утверждение 9.2), однако
обычно исправляются и многие конфигурации большего числа ошибок.
Существует лишь несколько примеров эффективных алгебраических
правил сверточного кодирования. В основном же известные сверточные коды
с хорошей корректирующей способностью были найдены с помощью
компьютерного поиска [31, 33, 93].
Нулевой путь Первое слияние Второе слияние
/,к/
Первое ответвление^/ V / Второе ответвление
Рис. 9.7. Ответвления и слияния путей
Вследствие рекуррентной природы алгоритмов кодирования
нахождение всех возможных весов слов (весового спектра) произвольного
сверточного кода оказывается не столь аналитически неподъемным, как в случае
многих линейных блоковых кодов. В частности, непосредственно по
решетке (или эквивалентной ей диаграмме состояний) можно построить
систему линейных уравнений, решение которой приводит к точному
выражению для весового спектра [2, 7, 93].
Выигрыш от кодирования, показывающий, во сколько раз можно
снизить энергию сигнала на бит данных (или мощность сигнала) за счет
9.3, Сверточные коды 373
кодирования при фиксированной вероятности ошибки, является
универсальным критерием эффективности того или иного кода. Это понятие
применительно к кодированию сообщений ортогональными сигналами
обсуждалось в § 2.6, где отмечалось, что асимптотический выигрыш от
кодирования в случае АБГШ есть выигрыш в евклидовом расстоянии. При
БФМ передаче любое различие символов двух сигналов прибавляет к
квадрату евклидова расстояния величину 4ES, где Es — энергия символа.
В сверточном коде присутствует пара слов с df несовпадающими
символами и нет пары с меньшим различием (расстоянием Хэмминга).
Следовательно, минимум квадрата евклидова расстояния между словами свер-
точного кода, передаваемыми с помощью БФМ d^incc = 4dfEs. Тот же
параметр в случае некодированной передачи (см. § 2.6) (^п\пи = ^Еъ, что
дает энергетический выигрыш от кодирования сверточным кодом,
а ~ ~J2 _ ~ЕГ~ — afUc
dmm,u ЬЬ
где Дс, как и ранее, скорость кода в битах на символ. Для кода примера 9.5
Rc = 1/2, df = 5, так что Ga = 2,5 или около 4 дБ. Напомним еще раз, что
оценка Ga, полученная таким образом, справедлива для АБГШ (не ДСК!)
канала, иначе говоря, для случая мягкого декодирования. Жесткое
декодирование снижает этот показатель на 2-3 дБ в зависимости от
параметров кода и отношения сигнал-шум на символ [31, 33].
9.3.3. Алгоритм декодирования Витерби
Как уже сказано, одной из главных причин широкой популярности свер-
точных кодов является существование вычислительно-экономного
алгоритма их декодирования. Начнем с констатации следующего факта.
Утверждение 9.5. Жесткое МП декодирование бинарного кода с
исправлением ошибок эквивалентно правилу минимума расстояния
Хэмминга:
^я(й>у) = min4(u,у) => и объявляется принятым словом. (9.9)
Как легко видеть, это правило весьма похоже на (2.3) с
единственной поправкой: в случае ДСК роль евклидова расстояния, адекватного
для АБГШ канала, переходит к расстоянию Хэмминга. Для
доказательства (9.9) достаточно заметить, что равенство (9.1), переписанное как
Р(у|и) =/*(и'У)(1 _р)»-*я(и,у) = (^Л Н и'У (1 -р)п
дает переходную вероятность ДСК, т. е. вероятность трансформации
посланного кодового вектора и длины п в двоичное наблюдение у на вы-
374 Глава 9. Канальное кодирование в широкополосных системах
ходе ДСК. Поскольку вероятность ошибки на символ в ДСК р < 0,5,
переходная вероятность Р(у|и) убывает с расстоянием Хэмминга между
наблюдением у на выходе ДСК и кодовым вектором и. Тем самым МП
оценкой и принятого кодового слова является слово, ближайшее к у по
Хэммингу.
Прямая реализация правила (9.9) для произвольного кода означала бы
сравнение М расстояний Хэмминга от наблюдения у до всех кодовых
слов. Так как чаще всего М весьма велико, подобный вариант
декодирования может оказаться нереалистичным. В противовес этому благодаря
специфической структуре сверточных кодов их МП декодирование не
связало с чрезмерными вычислительными затратами, по крайней мере, при
умеренных длинах кодового ограничения.
Процедура декодирования Витерби реализует правило МП как
рекуррентный или пошаговый поиск пути на решетчатой диаграмме,
ближайшего к двоичному наблюдению у. Каждый новый шаг декодирования
начинается с приема очередной группы из п символов наблюдения. На г-ы
шаге декодер вычисляет расстояния между п пришедшими символами
наблюдения и каждым ребром решетчатой диаграммы и прибавляет их
к расстояниям от у всех путей, рассчитанным за г — 1 предшествующих
шагов. Пошаговый пересчет расстояний с прибытием новых символов
наблюдения, разумеется, осуществим для любых кодов, однако именно
рекуррентная природа сверточных кодов позволяет выполнять эти
рутинные вычисления весьма экономно из-за возможности моментальной
отбраковки многих путей на каждом шаге.
Рассмотрим все пути, проходящие
через фиксированный узел А на i-м
шаге, как показано на рис. 9.8.
Продолжение любого пути после г-го шага не
зависит от маршрута прибытия в А, так что
разные пути, проходящие через А, могут
иметь общее продолжение. Это, однако,
означает, что из всех путей, исходящих
из А и имеющих общее продолжение,
тот, который имел минимальное
расстояние от у вплоть до г-го шага, останется
ближайшим к у навсегда, поскольку
общее продолжение внесет равный вклад
во все расстояния. Нужно ли тогда продолжать контроль расстояний для
остальных, если и так ясно, что у них нет шансов оказаться в итоге
ближайшими к наблюдению? Вместо этого разумно отбросить их,
удержав только путь, прибывающий в узел А с минимальным расстоянием
Шаги:
/-1
/+1
Рис. 9.8. Пути, проходящие через
узел А на г-м шаге
9.3. Сверточные коды 375
от наблюдения. Последний называется выжившим путем, и на время
целесообразно полагать его единственным для каждого узла решетчатой
диаграммы на г-м шаге (см. комментарий ниже). Текущее, т.е.
вычисленное по всем символам наблюдения вплоть до г-го шага, расстояние
выжившего пути узла А от наблюдения у называется метрикой узла А.
Вспомним теперь, что в любой узел входят лишь два ребра. Рис. 9.8
иллюстрирует это на примере некоторого узла А. Два ребра, входящие
в него, исходят из узлов Б, С предшествующего шага и, следовательно,
продолжают выжившие пути узлов В is. С. Расстояния двух путей,
входящих в А, можно найти, измерив метрики ребер, т. е. расстояния последних
от принятой группы п наблюдаемых символов, и прибавив их к
метрикам узлов В и С. Путь с меньшим расстоянием считается выжившим для
узла А и запоминается вместе с его расстоянием (метрикой узла), тогда
как другой отбрасывается. По выполнении этих операций для всех узлов
решетчатой диаграммы декодер переходит к следующему шагу.
Резюмируя сказанное, декодер Витерби на каждом шаге находит
метрики ребер, добавляет их к метрикам всех узлов, аккумулированным
ранее, после чего из двух путей, ведущих к каждому узлу,
отбрасывает более удаленный от наблюдения. Поскольку всего имеется 2Uc~l узлов
(т.е. состояний регистра), сложность декодера определяется
исключительно длиной кодового ограничения vc и остается фиксированной вне
зависимости от теоретически неограниченного числа кодовых слов (путей).
Возвращаясь к принятому выше допущению о единственности
выжившего пути для каждого узла, заметим, что в силу целочисленности
расстояния Хэмминга всегда существует вероятность равенства текущих
расстояний двух путей, ведущих в один узел, от наблюдения у. Возможны
различные стратегии разрешения подобных коллизий. Одна из них
предполагает рандомизацию типа подбрасывания правильной монеты и
провозглашения выжившим пути, ассоциированного заранее с определенной
стороной монеты. Это до некоторой степени нарушает оптимальность
декодирования, хотя сопутствующие энергетические потери, как правило,
пренебрежимо малы. Как альтернативный вариант можно посчитать оба
конкурирующих пути выжившими и хранить их до тех пор, пока коллизия
не разрешится на последующих шагах. При такой стратегии
декодирование останется строго оптимальным, за что придется заплатить большим
объемом памяти декодера.
Пример 9.8. Рассмотрим декодирование наблюдения у = 0100110000... для
кода из примера 9.5. На рис. 9.9, иллюстрирующем процедуру, метрики узлов
помещены непосредственно рядом с узлами, а принимаемые на текущем шаге пары
символов наблюдения заключены в рамки. Декодер инициализируется в предпо-
376 Глава Р. Канальное кодирование в широкополосных системах
Рис. 9.9. Динамика декодирования сверточного кода примера 9.5
ложении нулевого (т.е. 00) начального состояния регистра кодера. Два первых
{ус—1 = 2) шага отвечают переходному режиму кодера, когда лишь единственное
ребро входит в каждое состояние (см. рис. 9.9), и поэтому все пути выживают.
На первом шаге декодер сравнивает первую группу из п — 2 символов наблю-
9.3. Сверточные коды 377
дения с двумя ребрами, выходящими из состояния (00). В соответствии с их
расстоянием Хэмминга от наблюдаемых символов 01 и сплошное, и пунктирное
ребра решетки получают одинаковую, равную единице метрику,
оцифровывающую каждое из ребер. Тем самым, метрики двух узлов, в которые входят ребра,
равны единице. На следующем шаге расстояние измеряется между второй
группой наблюдаемых символов 00 и двумя парами ветвей, исходящих из узлов (00)
и (10), имея результатом метрики, маркирующие ребра. Прибавленные к
метрикам узлов предшествующего шага они обновляют метрики узлов (00) и (10),
а также инициализируют метрики еще двух узлов (01) и (11). Начиная с третьего
шага в любой узел решетчатой диаграммы рис. 9.9 входят по два ребра,
означая, что декодер должен решать, какое из них принадлежит выжившему пути.
Чтобы не перегружать рисунок, метрики ребер на нем с этого шага опущены.
Как видно, на третьем шаге имеются два пути, ведущие к узлу (00). Их
расстояния от наблюдаемых символов 010011 равны 3 и 2 соответственно. Первый
из них не выживает и отбрасывается декодером вместе с его метрикой, поэтому
на рисунке он зачеркнут, а на диаграмме, отвечающей следующему шагу,
отсутствует. Второй путь выживает и запоминается со своей метрикой до следующего
шага. Точно так же декодер выделяет выжившие пути и для остальных узлов.
На последующих шагах декодер действует аналогично, сохраняя в памяти
только 2"с~г = 4 выживших путей, и каждая очередная диаграмма рис. 9.9 содержит
только пути, выжившие на предшествующем шаге.
На 7-м шаге декодер впервые сталкивается с неоднозначностью: два пути
приходят в узел (01), как и в узел (11), с равными расстояниями. Тот выбор
выжившего пути, который показан на рисунке, может считаться основанным на
бросании монеты. Подобные события имеют место и на 8-м и 9-м шагах.
Читатель может убедиться (задача 9.19), что любое альтернативное разрешение
коллизий не повлияет на окончательный результат декодирования, за исключением,
быть может, номера шага, на котором возможно первое считывание
декодированных битов данных (см. ниже).
По завершении девятого шага возникает критически важная ситуация: все
выжившие пути совпадают друг с другом вплоть до седьмой группы
наблюдаемых символов. Что бы ни произошло впоследствии, эта часть всех
слившихся путей останется общей навсегда, означая, что соответствующие ей
биты данных можно сразу выдать на выход как декодированные. Таким
образом, декодер выдает декодированные данные 1000000. Сравнивая кодовое слово
и = 11101100000000..., отвечающее указанному битовому потоку, с
наблюдением у = 0100110000, можно видеть, что расстояние Хэмминга между ними равно
двум, и если выданное декодером слово было передано в действительности,
значит имело место исправление двух символьных ошибок в полном согласии со
свободным расстоянием d/ = 5. Подобные ситуации будут возникать и в
дальнейшем, позволяя декодеру выдавать декодированные биты по ходу обработки
потока символов наблюдения.
Понятно, что выдача декодированных данных в случайные моменты
слияния выживших путей, как в нашем примере, не вполне практична,
и предпочтительнее была бы процедура более регулярного характера.
378 Глава 9. Канальное кодирование в широкополосных системах
С помощью многократных и практически исчерпывающих
компьютерных тестов и имитационных экспериментов было установлено, что к г-му
шагу декодирования слившийся участок всех выживших путей почти
всегда заканчивается после г — 5ис битов данных, так что решение о любом
бите может регулярно выдаваться на выход с задержкой в 5ис [94].
Замечательное свойство сверточных кодов, придающее им еще большую
привлекательность, — сравнительная простота осуществления мягкого
декодирования. В общем случае произвольного блокового кода с М
словами мягкое декодирование означает прямое вычисление М евклидовых
расстояний или корреляций, причем никакие алгебраические ухищрения
типа синдромного декодирования при этом невозможны. При
значительных объемах кода М, характерных для большинства приложений,
сложность мягкого декодирования нередко оказывается неприемлемой. В то
же время упрощение декодера за счет жестких решений оплачивается
энергетическими потерями, составляющими для АБГШ канала 2 дБ и
более, что ныне считается довольно значимой цифрой. Вернемся теперь
к алгоритму Витерби и попросту заменим в нем расстояние Хэмминга
евклидовым (в квадрате). Подобная замена, очевидно, преобразует
декодирование в мягкое, оптимальное для АБГШ канала. При этом метрики
ребер и узлов станут в точности соответствующими евклидовыми
расстояниями (эквивалентно — корреляциями). Такая модификация никоим
образом не лишит алгоритм Витерби присущих ему реализационных
преимуществ. Действительно, метрики узлов будут вычисляться, как и ранее,
рекурсивно, пошаговым аккумулированием метрик ребер, и на каждом
шаге тот из двух путей, входящих в узел, который имеет худшую
метрику, будет вновь отброшен как не выживший.
Разумеется, цифровая реализация декодеров наиболее рациональна,
подразумевая необходимость в квантовании входного наблюдения.
Общепринято относить к числу мягких любые декодеры двоичных кодов
с квантованием наблюдений более чем на два уровня. Детальные
исследования показали, что в большинстве случаев 3-битовое (8-ми уровневое)
квантование достаточно для достижения почти потенциальной
(теоретически ожидаемой при непрерывной обработке) достоверности
декодирования [94].
9.3.4. Приложения
В настоящее время известно много эффективных сверточных кодов,
диапазон реального и потенциального применения которых в
телекоммуникациях чрезвычайно широк. В частности, в 2G и 3G стандартах cd-
maOne и WCDMA используются коды с длиной кодового ограничения
94- Турбо-коды 379
vc = 9 и скоростями Rc = 1/2, Rc = 1/3, обеспечивающие
асимптотический выигрыш от кодирования около 7,8 дБ [18, 69, 92]. В 3G стандарте
cdma2000 в дополнение к упомянутым выше предусмотрен код с
параметрами vc — 9, Rc = 1/4. Сверточные коды, представляя весьма
значительную собственную ценность, служат также основой для построения других
кодов, например турбо-кодов, кратко обсуждаемых в следующем
разделе и позволяющих надежно передавать данные со скоростями, близкими
к границе Шеннона.
9.4. Турбо-коды
Как отмечалось в § 9.1, в течение десятилетий с момента опубликования
фундаментальных работ Шеннона, заложивших основы теории
информации, многократные и упорные попытки отыскания регулярных
правил кодирования, позволяющих работать на скоростях передачи, близких
к пропускной способности, оставались безуспешными. В свете этого
открытие в 1993 г. турбо-кодов явилось впечатляющим прорывом,
первоначально встреченным телекоммуникационным сообществом с объяснимым
недоверием. В настоящее время, однако, турбо-коды широко признаны
в качестве эффективного инструмента высоконадежной связи, особенно
при относительно малом отношении сигнал*- шум на бит. Строгая и
компактная теория этого класса кодов остается пока скорее воодушевляющей
целью, чем осуществленной реальностью, и в накоплении многих
результатов значительная роль продолжает принадлежать интуиции в
сочетании с обширными компьютерными тестами.
9.4.1. Турбо-кодеры
Альтернативное название турбо-кодов — параллельно-каскадные
сверточные коды — выражает центральную идею алгоритма их кодирования:
два параллельных (компонентных) сверточных кодера кодируют один и тот
же битовый поток источника [95, 96]. Компонентные кодеры, как
правило, идентичны, т.е. имеют одинаковые длины кодового ограничения
и наборы порождающих полиномов. Первый из них кодирует данные
напрямую, тогда как перед поступлением на второй битовый поток данных
подвергается перемежению. Последнее заключается в псевдослучайной
перестановке битов данных в пределах блока фиксированной длины I.
Как подчеркивалось в подпараграфе 9.3.1, среди сверточных кодов,
основанных на КИХ-структуре рис. 9.3, нет эквивалентности между
систематическими и несистематическими кодами, причем
несистематические, как правило, лучше по своим дистанционным свойствам. В то же
380 Глава 9. Канальное кодирование в широкополосных системах
время принцип декодирования, более всего подходящий для турбо-кодов
и делающий их особо привлекательными, базируется на использовании
систематических компонентных кодеров. Применение структуры с
бесконечной импульсной характеристикой (БИХ) взамен КИХ открывает путь
к построению систематического сверточного кода, состоящего из тех
же слов и потому обладающего теми же дистанционными свойствами,
что и несистематический. Чтобы дать этому объяснение, вернемся к
кодеру на рис. 9.3, описываемому набором порождающих полиномов gi(z),
I = 1,2,..., п, и установим взаимно-однозначное соответствие между
двумя битовыми потоками b(z) и b\(z) как b(z) = bi(z)gi(z). Обратимся затем
к равенству (9.7) и заметим, что при входном потоке b\{z) его можно
записать в форме
ui(z) = h(z)gi(z) = ^\gi{z), I = l,2,...,n, (9.10)
показывающей, что структура, осуществляющая деление битового
потока источника b(z) на g\{z) перед подачей на вход КИХ-кодера рис. 9.3,
закодирует b(z) теми же сверточными словами, что и сам КИХ-ко дер.
Единственной разницей будет то, что кодовое слово, присваивавшееся
ранее потоку bi(z), будет теперь закреплено за потоком 6(z), что, в свете
равноправия любых битовых потоков источника, не имеет значения —
лишь бы декодер был осведомлен об этом новом порядке соответствия.
В итоге такой операции, однако, все кодовые слова становятся
систематическими, так как щ(г) = b(z). Деление на полином gi(z) = gjzr +
+gl-\Zr~l -\ hi, где г = ис — 1, можно выполнить с помощью РСЛОС,
показанного на рис. 9.10. Действительно, согласно общему правилу,
применимому к любой линейной системе (см., например, (8.26)), передаточная
функция hf(z) замкнутой петли с обратной связью в ^-области
выражается как (учитывая эквивалентность сложения и вычитания в двоичной
арифметике) [2, 7]
h ( \ - М*)
nnZ)-l + P(z)h{z)\
где h(z) и f3{z) — передаточные функции разомкнутой петли и цепи
обратной связи соответственно. Рассматривая выход крайнего левого
сумматора на рис. 9.10 как выход замкнутой петли, имеем h(z) = 1, /3(z) =
= 9iz + 92z2 + * • • + 9\z^\ так что hf(z) = l/gx(z). Поскольку полученный
после деления битовый поток b{z)/g\{z) непосредственно присутствует на
входе регистра, логику, формирующую проверочные символы в
соответствии с полиномами gi(z), I = 2, ...,п, можно подсоединить к тому же
регистру для последующего стандартного сверточного кодирования.
Резюмируя, в систематическом кодере с обратной связью битовый поток
94- Турбо-коды 381
источника напрямую проходит на выход кодера в виде потока данных
u\{z), тогда как потоки проверочных символов щ(г), I — 2,... , п,
формируются той же логической схемой, что и на рис. 9.3, но подключенной к
регистру с обратной связью. Рис. 9.11 демонстрирует пример
преобразования несистематического кодера на рис. 9.4 в систематический.
ВД
(to, ь,,...;
r^3hH
bjz)
**->
Л;
*->
Vc-1
Логика формирования
проверочных символов
Кодовые символы
Рис. 9.10. Систематический сверточный кодер
Биты источника
b0, £>,, ...
Символы кода
J^* *
ulul
Рис. 9.11. Систематический сверточный кодер для кода из примера 9.5
Полная структура турбо-кодера содержит два описанных
систематических кодера и перемежитель, как показано на рис. 9.12 для
компонентных кодов скорости Rc — 1/2. С выхода второго компонентного кодера
турбо-кодер использует лишь поток проверочных символов, игнорируя
382 Глава 9. Канальное кодирование в широкополосных системах
«прямые» (систематические) биты данных. Таким образом, при
компонентных сверточных кодах скорости Rc = 1/2 результирующий турбо-
код содержит два проверочных символа и\, и? на один бит данных и\ = Ьг*,
т. е. имеет скорость Rc ~ 1/3. При желании его скорость может быть
увеличена до 1/2 за счет поочередного выкалывания проверочных символов
компонентных кодов. Перемежитель переставляет биты данных в
пределах блока длины I. Используя ис — 1 концевых битов, компонентный кодер
можно обнулить по окончании кодирования I битов. Как видно, турбо-
код можно интерпретировать как блоковый, передающий I битов данных
на слово.
Биты дани
ых b J
1
г
Сверточный
кодер
Перемежитель
Сверточный
кодер
J
2
, Символы кода
Рис. 9.12.
Турбо-кодер
9.4.2. Итеративное декодирование
Несмотря на то, что турбо-код образован из двух сверточных, его
оптимальное декодирование нельзя свести к двум независимым процедурам
Витерби, так как пути на решетчатых диаграммах компонентных кодов
связаны друг с другом через один и тот же (хотя и подвергнутый пере-
межению) поток кодируемых данных. Авторы идеи турбо-кодов [95, 96]
одновременно обосновали и целесообразность применения для их
декодирования итеративной версии правила максимума апостериорной
вероятности (МАВ), в приложении к отдельным битам данных (не к кодовому
слову в целом и не к проверочным символам!). Опишем вкратце основной
принцип итеративного декодирования, отсылая любознательного
читателя за деталями к [96, 97].
Апостериорные вероятности p(bi — 0|у) и р(Ь{ — 1|у) показывают, сколь
вероятны одно и другое значения г-го бита данных после того, как
принят вектор наблюдения у. Они содержат в себе все сведения о Ь^ которые
доставляются наблюдением у и могут быть в принципе из него
извлечены. В случае надежной связи одна их этих вероятностей близка к единице,
тогда как вторая близка к нулю. Естественно, значение с большей апосте-
94- Турбо-коды 383
риорной вероятностью будет выдано МАВ декодером в качестве оценки bi
i-го бита данных в соответствии с правилом
Р(Ьг = 1|У) hi = l
Рекуррентный алгоритм построения апостериорных вероятностей
битов данных был предложен в [98]. В рассматриваемом сценарии бит
данных Ь{ явно присутствует в наблюдениях из-за систематического
характера кодирования. В «прямом» направлении, т.е. по мере поступления
наблюдаемых отсчетов, рекуррентный МАВ алгоритм вычисляет
апостериорную вероятность bi на основе всех ранее полученных отсчетов вплоть
до содержащего данный бит. После того, как приняты все отсчеты
наблюдения, алгоритм продолжается в обратном направлении, корректируя
апостериорные вероятности с учетом информации, извлеченной из
отсчетов, принятых после bi. Таким образом, после одного прохода вперед-
назад становятся известными апостериорные вероятности для всех битов
данных . Для осуществления подобного алгоритма требуется знание
решетки кода, переходной вероятности канала и априорного распределения
вероятностей q(bi) для каждого бита данных. Разумеется, никаких
принципиальных затруднений не возникло бы, будь алгоритм МАВ
использован для независимого декодирования каждой из сверточных компонент
турбо-кода. Генеральная идея турбо-кода, однако, состоит в кодировании
одних и тех же данных двухкомпонентным кодом, так что информация
о bi может быть извлечена из обеих компонент совместно. Итерационный
процесс, организованный, как показано на рис. 9.13, реализует именно
эту возможность.
<?>;)
V
У2 "Г
»1
г>
Декодер
первого кода
—>
V
у3
Цеперемежител
U
Перемежитель
Перемежитель
ч,
>/>
[
1—►
Декодер 1
второго кода Г
i>
Л/*1
Рис. 9.13. Итеративный турбо-декодер
Полный вектор наблюдения на приемной стороне можно расщепить на
три вектора: у/ = щ + п/, / = 1,2,3, где ui = («J,«},..., w}_r), и} = h —
384 Глава 9. Канальное кодирование в широкополосных системах
вектор битов данных Ь^, непосредственно присутствующих в любом
кодовом слове благодаря систематичности турбо-кода, 112, U3 — векторы
проверочных символов первого и второго кодеров соответственно, a nj —
векторы независимых отсчетов шума.
На первом шаге декодер первого компонентного кода вычисляет
апостериорные вероятности Р1(Ьг|УьУ2) всех I битов данных Ь^ опираясь на
наблюдения yi, У2, содержащие информационные и проверочные символы
этого кода. При этом как начальная информация используется
равномерное априорное распределение q\{bi) = V^ h = 0,1, так как
предположение о равновероятности любых конфигураций битов данных вполне
естественно. После этого декодер второго кода, вычисляя
апостериорные вероятности Р1(Ьг|уъУз)5 может полагаться не только на
соответствующие наблюдения ух, уз, но также на информацию, доставляемую
первым декодером, пользуясь сформированным им апостериорным
распределением pi(bi\yi,y2) как априорным: q\{bi) = Рх(&г|уъУ2). В
результате строится первое приближение P\(bi\y) апостериорного
распределения p(bi\y). Поскольку на описанной первой итерации первый декодер
не был поддержан информацией от второго, это можно возместить на
второй итерации, заставив первый декодер вновь декодировать первый
компонентный код, но уже с привлечением априорного распределения
Я2^г) = Pi{bi\y)- Продолжая подобным образом, после n-го шага
следующая аппроксимация pn(bi|y) распределения p{bi\y) формируется вторым
декодером и используется первым как обновленное априорное
распределение qn+i(h) для выработки Рп+1(&г|УъУ2)- Последнее, в свою очередь,
используется вторым декодером как следующее априорное
распределение ^п+х(Ьг) при получении новой аппроксимации искомых апостериорных
вероятностейpn+i(bi\y) и т.п. Поскольку перемежитель передающей
стороны меняет порядок следования битов данных перед подачей на вход
второго кодера, перемежители на приеме производят ту же
перестановку в векторах наблюдений ух и априорных вероятностей q% = Рп(Ьг|Уъ У2)
перед поступлением на второй декодер. Подобно этому деперемежитель
восстанавливает первоначальный порядок битов в схеме обратной связи,
передавая pn{bi\y) с выхода второго декодера на вход первого. Названное
переупорядочивание обеспечивает должное временное сопряжение
обрабатываемых данных. Удовлетворительная сходимость описанных
итераций подтверждена огромным объемом экспериментальных тестов, однако
до сих пор не подкреплена солидной теоретической основой.
9.4.3. Показатели качества
Как отмечалось, турбо-коды оказались первыми регулярными кодами,
позволяющими надежно передавать сообщения по полосно-ограниченному
9.4- Турбо-коды 385
каналу со скоростью, близкой к пропускной способности, при малой
энергии на бит. Чтобы подкрепить это примерами, вспомним некоторые
фундаментальные ограничения, сопутствующие БФМ передаче данных.
Согласно теореме отсчетов любой видеосигнал с односторонней
(физической) полосой W представим вектором размерности 2WT (см. § 2.3). При
использовании БФМ каждый элемент такого вектора может принимать
лишь два значения, так что в рамках заданного частотно-временного
ресурса WT число М бинарных ФМ сигналов ограничено сверху как
М < 22WT, или, что эквивалентно, число передаваемых битов данных
не превышает 2WT. Тем самым предельная скорость передачи в
полосе W', достижимая для БФМ, оценивается как R = (log M)/T ^ 2И^, что,
в свою очередь, приводит к границе спектральной эффективности
(скорости на один герц) R/W ^ 2 (бит/с)/Гц. Возьмем теперь двоичный код
со скоростью Rc = 1/2, означающей, что только каждый второй элемент
сигнального вектора переносит полезные данные, тогда как остальные
заняты проверочными символами (на один бит приходится два отсчета
сигнала), так что отношение скорости к полосе R/W ~ 1 (бит/с)/Гц.
Сверившись с границей Шеннона (L2), можно заключить, что минимальная
энергия на бит, нормированная к интенсивности шума E^/Nq (половина
мощностного отношения сигнал-шум на бит), потребная для
безошибочной передачи по АБГШ каналу с этой скоростью, равна 0 дБ. Мы, однако,
имеем дело с гауссовским каналом, дополнительно ограниченным по
входному алфавиту рамками БФМ (гауссовский канал с бинарным входом),
что поднимает минимально необходимое отношение Еь/Nq, отвечающее
R/W = 1 (бит/с)/Гц, до 0,19 дБ [97]. Турбо-код с компонентной длиной
кодового ограничения 5 и длиной блока 65 536 из [95, 96]
обеспечивает вероятность ошибки на бит Р& < Ю-5 (последнее значение нередко
используется как практический критерий надежной работы
беспроводной системы) при Еь/Nq « 0,7 дБ, т.е. уступает границе Шеннона лишь
около 0,5 дБ. На момент обнародования подобные результаты казались
фантастическими, поскольку долгая и безуспешная предыстория внушила
многим экспертам убеждение в бесперспективности поисков регулярных
правил кодирования, приближающих показатели связи к границе
Шеннона. Вслед за первыми турбо-кодами [95, 96] были открыты и другие,
столь же или еще более эффективные, коды (последовательно-каскадные,
низкоплотностные и др., см. библиографию в [97]).
Уместно подчеркнуть, что асимптотически (Еь/Nq —> оо) поведение
турбо-кодов не лучше, чем сверточных с той же скоростью и памятью,
поскольку они не имеют никаких преимуществ в части минимального
расстояния. Обратившись к (2.23), можно видеть, что асимптотически
(с ростом отношения сигнал-шум) фактор кратности nmin, т.е. количе-
386 Глава 9. Канальное кодирование в широкополосных системах
ство сигналов на минимальном евклидовом расстоянии dm\n от
переданного сигнала играет вторичную роль по сравнению с самим значением
dmin из-за экспоненциального спадания <3"ФУНКЧИИ с отношением
сигнал-шум (чтобы убедиться в этом, достаточно взять логарифм от Ре).
По этой причине зависимость Ре от Еъ/Nq рано или поздно принимает вид
плато, определяемого dm[n и однотипного для любого кода с тем же
минимальным расстоянием. Подобное, однако, имеет место при отношениях
сигнал-шум, соответствующих чрезвычайно малой вероятности ошибки
на бит, значительно ниже той, что обычно достаточна на практике.
Высокая эффективность турбо-кодов при относительно низком отношении
сигнал-шум на бит базируется не на большом минимальном
расстоянии, а на сравнительно малом количестве слов, расположенных близко
друг к другу, т.е. малом факторе кратности пт{п в (2.23). Указанное
перераспределение расстояний в направлении увеличения числа удаленных
слов по сравнению со сверточными кодами объясняется
псевдослучайной перестановкой битов данных перед подачей на второй компонентный
сверточный кодер. Если битовая конфигурация данных неблагоприятна
в том плане, что вес первого компонентного кодового слова мал,
перестановка может изменить ее настолько, что вес второго компонентного
слова окажется значительно больше.
9.4.4. Приложения
Несмотря на короткую историю, турбо-коды быстро обрели широкую
популярность и уже вошли в спецификации многих систем. В нашем
контексте наиболее интересны их применения в стандартах мобильных систем
третьего поколения. В спецификацию WCDMA включены турбо-коды со
скоростью 1/3, образованные из двух сверточных кодов с длиной
кодового ограничения четыре в комбинации с перемежителем переменной длины
в диапазоне от 40 до 5114 [92, 97]. В стандарте cdma2000 также
предусмотрены двухкомпонентные турбо-коды с длиной кодового ограничения
четыре и длинами перемежения в диапазоне от 250 до 4090. С помощью
выкалывания скорости могут варьироваться в пределах набора 1/2, 1/3,
1/4 или 1/5 [69, 97].
9.5. Канальное перемежение
Предыдущий анализ опирался на модель канала без памяти, в котором
искажения кодовых символов канальной помехой независимы. В
реальных беспроводных каналах, подверженных эффектам затенения и
замирания (см. § 3.5), к упомянутым аддитивным безынерционным искажениям
9,5, Канальное перемежение 387
добавляются мультипликативные: сравнительно медленные и
охватывающие длинные пакеты кодовых символов спорадические спады в уровне
принимаемого сигнала. Технология противодействия им, кратко
описываемая ниже, универсальна вне зависимости от способа декодирования
(оно может быть как жестким, так и мягким), однако в целях
конкретности положим, что избрана процедура жесткого декодирования. Когда
АБГШ является единственной канальной помехой, все символьные
ошибки независимы и случайно рассеяны в пределах кодового слова. Падение
уровня сигнала из-за замирания приводит к группированию ошибочных
символов в пакеты (пачки). Разумеется, при длине В пакета не более
исправляющей (обнаруживающей) способности tc(td) кода декодер без труда
исправит (обнаружит) В ошибок, поскольку конкретная конфигурация
ошибок в пределах контролирующей способности кода не имеет
значения. Для замираний, однако, весьма характерны относительно редкие,
но длинные пакеты ошибок, так что поддержание условия В ^ tc
вынудило бы применять коды с чрезмерным количеством проверочных
символов, т.е. пониженной скоростью и расточительным расходом полосы.
Эффективной и весьма практичной альтернативой является популярное
канальное перемежение^ при котором символы кодового потока перед
передачей в эфир переставляются так, чтобы удалить друг от друга близко
расположенные и, наоборот, сблизить удаленные. На приемной стороне
выполняется деперемежение, в результате которого все кодовые символы
возвращаются на свои исходные позиции. Когда в канале возникает пакет
ошибок длины I?, искаженные им символы после деперемежения
оказываются удаленными друг от друга, как если бы ошибки были независимыми.
При использовании блокового кода соответствующей длины и расстояния
эти ошибки с большой вероятностью окажутся разбросанными по
различным словам и будут исправлены декодером. В случае сверточных кодов
шансы на их исправление вновь весьма высоки, так как подобные коды
исправляют многие конфигурации ошибок за пределами свободного
расстояния, если они не образуют слишком плотные пакеты. В простейшем
варианте описанная техника реализуется блоковым перемежителем,
записывающим символы кодового потока в квадратную матрицу построчно
с последующим считыванием по столбцам. Естественно, деперемежение
на приемной стороне переупорядочивает символы в обратном порядке.
Перемежение является неотъемлемой частью процедур канального
кодирования большинства современных беспроводных систем связи, включая
все 2G и 3G мобильные стандарты.
388 Глава 9. Канальное кодирование в широкополосных системах
Задачи
9.1. Двоичный блоковый код длины п = 9 используется для передачи М = 32
сообщений. Сколько проверочных символов в его слове? Какова его
скорость? Каково число избыточных двоичных векторов наблюдения?
9.2. Двоичный блоковый код имеет минимальное расстояние Хэмминга d# — 7.
Каково его минимальное евклидово расстояние, если бинарные
символы передаются неперекрывающимися частотно-манипулированными
импульсами энергии Е8?
9.3. Для передачи данных по ДСК используется двоичный блоковый код U =
= {10101,00011,11000,01110}. Принят вектор наблюдения у = (00110).
В какое кодовое слово он будет декодирован при исправлении ошибок?
Каков будет ответ, если у = (11011)? Какова исправляющая
(обнаруживающая) способность кода? Линеен ли этот код?
9.4. Докажите утверждение 9.2.
9.5. Каким должно быть минимальное расстояние двоичного кода,
исправляющего вплоть до tc ошибок и, сверх того, обнаруживающего вплоть до
td > tc ОШИбОК?
9*.б. Найдите число двоичных векторов веса не больше td (объем двоичной
сферы радиуса £«*).
9.7. Используя результат задачи 9.6, докажите границу Гильберта: двоичный
блоковый код, обнаруживающий до td ошибок, существует наверняка, если
(M-i)f;ci<2»,
где М, п — число кодовых слов и длина кода соответственно.
9.8. Найдите результат следующих действий над двоичными полиномами:
/(*) = (z3 + z2 + l){z4 -hi)- (z2 + l)2(z3 - 1) + z6 + z2.
9.9. Раскройте скобки в двоичном полиноме (z. + l)2 , где г — целое
положительное число.
9.10. Найдите остаток от деления z5 + z3 + 1 на z2 + z + 1 над полем GF(2).
9.11. Пусть g(z) — двоичный полином степени г. Докажите, что двоичный
блоковый код длины гг, использующий его как порождающий (т. е. имеющий
кодовые полиномы вида u(z) = b(z)g(z), где b(z) — произвольные
двоичные полиномы степени не выше п — г — 1), линеен.
9.12. Двоичный полином gi(z) — z4 + z + 1 — примитивен. Какова наибольшая
длина CRC кода с обнаружением до трех ошибок, имеющего такой
порождающий полином? Будет полином наблюдения y(z) — zs -h zb + z + 1
объявлен ошибочным или нет? Что можно сказать о полиноме y(z) =
= zs + z4 + z + l?
9.13. Порождающими полиномами сверточного кода являются gi(z) = 1,
£2(2) = 1 + z. Каковы скорость и длина кодового ограничения этого кода?
Изобразите схему кодера, постройте решетчатую диаграмму и найдите
свободное расстояние кода.
9.14. Порождающими полиномами сверточного кода являются gi(z) = 1+£+z2,
(/2(2) — 1 + z + z2, gz{z) = 1 + z2. Каковы скорость и длина кодового
ограничения этого кода? Изобразите схему кодера, постройте решетчатую
диаграмму и найдите свободное расстояние кода.
9.15. Одним из двух порождающих полиномов сверточного кода является д± (z) —
= 1 + z + z2. Какой из полиномов g<i(z) — \,g2{z) = \ + z или g2{z) — 1 + z2
лучше в качестве второго порождающего полинома для максимизации
асимптотического выигрыша от кодирования? Чему равен максимальный
выигрыш от кодирования? Какой вывод следует из этой задачи в части
сравнения систематических и несистематических кодов?
9.16. Порождающими полиномами сверточного кода являются g±(z) — l + z + z2
и g2(z) — 1 + z3. Закодируйте битовый поток 110110110110110... и
объясните, почему этот код относится к так называемым катастрофическим,
не рекомендованным для практического использования.
9.17. Декодируйте максимально возможное число битов данных при приеме
наблюдения 100101100011000, если порождающие полиномы сверточного
кода gi(z) - 1, g2(z) = 1 + z и gz(z) = l + z.
9.18. Декодируйте наблюдение 111111100000001111, если сверточный код
задан порождающими полиномами из задачи 9.14 и известно, что после
кодирования четырех битов данных кодер принудительно
устанавливается в нулевое состояние концевыми битами. Сколь далеко декодированное
слово от наблюдения? Если результат декодирования верен, сколько
ошибок исправил декодер?
9.19. Измените процедуру декодирования в примере 9.8, удерживая все пути,
входящие в узел с равными метриками как выжившие. Продолжите
процедуру после седьмого шага до первого шага, когда возможна первая выдача
декодированных битов данных. На каком шаге это случится? Сколько
битов данных будет выдано?
9.20. Битовый поток кодируется двоичным сверточным кодом с
порождающими полиномами gi(z) — 1, g<i(z) — 1 + z. Двоичные символы передаются
с помощью БФМ (0 —> +1,1 —► — 1). Канал связи — гауссовский, и
отсчеты наблюдения на выходе заданы вектором
у = (-0,5, -0,5, -3, -4, -6,2, -4,5,3, -2).
Декодируйте наблюдение, используя жесткий и мягкий (основанный на
корреляциях наблюдения с путями по решетчатой диаграмме)
варианты алгоритма Витерби. Пусть два последних кодовых символа отвечают
концевому биту, обнуляющему кодер. Объясните различие (если таковое
390 Глава 9. Канальное кодирование в широкополосных системах
имеется) результатов двух процедур. Какая из них заслуживает большего
доверия?
9.21. Требуется построить турбо-код на базе сверточного кода с
порождающими полиномами gi(z) = 1 + z3 + z4 и ^й = 1 + z + z2 + z4. Изобразите
схему компонентного кодера турбо-кодера.
Задачи в пакете MATLAB
9.22. Напишите и вьшолните программу вычисления суммы, произведения,
частного и остатка для двух произвольных двоичных полиномов.
9.23. Напишите программу для нахождения порождающего полинома
двоичного CRC кода заданной длины, обнаруживающего до трех ошибок.
9.24. Напишите программу, иллюстрирующую обнаружение ошибок CRC
кодом. Рекомендуемые шаги:
а) Используя программу задачи 9.23, найдите подходящий порождающий
полином g(z) для CRC кода заданной длины гг, обнаруживающего до
трех ошибок;
б) Возьмите произвольный двоичный вектор ошибок длины п и веса 1, 2
или 3 и разделите его на порождающий полином; убедитесь, что для
любого такого вектора синдром отличен от нуля;
в) Возьмите произвольное десятичное число, меньшее 2П-Г, где г = deg g(z),
и преобразуйте его в двоичный вектор (для этой операции удобна
функция «de2bi»); умножьте соответствующий полином на
порождающий;
г) Используя полином предыдущего пункта как полином ошибок,
убедитесь, что такая конфигурация ошибок, совпадающая с кодовым словом,
не обнаруживается;
д) Выполните программу 1000-10000 раз для CRC кодов длины п — 40 ... 200
с независимыми случайными векторами ошибок, каждый раз вычисляя
синдром. Сколь часто появляются необнаруживаемые ошибки?
Сравните результат с теоретически предсказанным.
9.25. Напишите программу, осуществляющую сверточное кодирование при
заданном наборе порождающих полиномов. В среде MATLAB, как обычно
принято, порождающие полиномы даны в восьмеричной записи.
Двоичный вектор длины vc коэффициентов полинома в порядке возрастания
степени дополняется, если необходимо, левыми нулями, до общей длины,
кратной трем. Затем каждый двоичный триплет записывается как
восьмеричная цифра, считая правый крайний бит старшим, и набор п
полиномов в восьмеричном представлении записывается n-элементной строкой.
К примеру, полиномы gi(z) — 1 + z и g^{z) = 1 + z + z2 представляются
восьмеричной записью (6,7). Выполните программу для кодов с
полиномами (7,5), (15,17), (53,75), (561,753), (5,7,7), (25,33,37) и (133,145,175),
Задачи в пакете MATLAB 391
стараясь каждый раз найти ненулевое слово минимального веса. Как
примерно ведет себя свободное расстояние по отношению к длине кодового
ограничения и скорости?
9.26. Усовершенствуйте программу задачи 9.25 для нахождения свободного
расстояния сверточного кода. Выполните программу для кодов с полиномами
(7,5), (15,17), (23,35), (53,75), (133,171), (247,371), (561,753), (1167,1545),
(5,7,7), (13,15,17), (25,33,37), (47,53,75), (133,145,175), (225,331,367),
(557,663,711) и (1117,1365,1633).
9.27. Используя операторы из MATLAB Communication Toolbox, напишите
программу, выполняющую жесткое декодирование сверточного кода.
Полагая, что переданное сообщение состоит из 10г/с нулей, выполните
программу для кода с порождающими полиномами (23,35). Введите векторы
ошибок веса 2-3 и убедитесь, что ошибки исправляются, если параметр
«tblen» лежит в пределах (4.. .b)vc. Попытайтесь найти неуправляемую
ошибку веса 4 и объясните, почему это не столь легко, несмотря на то,
что свободное расстояние кода равно 7. Увеличивая вес вектора ошибки,
следите за поведением декодера. Выполните программу 1000 раз для
независимых случайных конфигураций ошибок данного веса и рассчитайте
вероятность ошибки на бит в зависимости от веса ошибок. Повторите то
же самое для кодов (47,53,75) и (133,145,175) (свободные расстояния 13
и 15 соответственно).
НЕКОТОРЫЕ
НАПРАВЛЕНИЯ
ДАЛЬНЕЙШЕГО
ПРОГРЕССА
В ШИРОКОПОЛОСНЫХ
ТЕХНОЛОГИЯХ
10.1. Многопользовательский прием и подавление помех
множественного доступа
В § 4.1 обсуждались два альтернативных варианта извлечения данных в
if-пользовательской CDMA системе. Одним из них является оптимальная
(МП) процедура, реализуемая так называемым многопользовательским
приемником, тогда как второй предполагает использование
однопользовательского или стандартного приемника. Последний трактует ПМД
как всего лишь добавочный случайный шум, полностью игнорируя
детерминированную природу сигнатур и подробности их корреляционных
связей. В противоположность этому, многопользовательские алгоритмы
существенным образом базируются на априорной информации о
сигнатурных кодах или, по крайней мере, об их ансамблевых корреляционных
свойствах. Краткое изложение принципов многопользовательского
приема, составляющее предмет раздела, мы начнем с простейшего случая
синхронной версии CDMA.
ЮЛ Л, Оптимальное (МП) многопользовательское
правило для синхронного варианта CDMA
Чтобы не перегружать обсуждение деталями второго плана, рассмотрим
простейшую, хотя и весьма характерную модель if-пользовательской CDMA
системы с ПРС, в которой используются действительные сигнатуры и БФМ
передача данных. Подобная модель годится, среди прочих, для любой
системы с бинарными сигнатурами, несущими БФМ данные. В продолжение
линии § 7.2 рассмотрим полностью синхронный случай, полагая как
чипы, так и границы символов данных (битов) всех пользователей строго
ГЛАВА 10
ЮЛ. Многопользовательский прием и подавление помех 393
совмещенными во времени. Последнее, наряду с допущением
независимости последовательных битов данных любого пользователя, позволяет
свести интервал наблюдения к длительности единственного бита Т = Ть-
Тогда групповой сигнал всех К пользователей
к
s(t;b) = J2Akhsk(t), (10.1)
к=1
где, как и в (4.1), Ак > 0 и Sk(t) — действительная амплитуда сигнала
и сигнатура к-ro пользователя соответственно, a b = (61,62? • • • ->Ък) —
вектор битов данных К пользователей (битовый профиль).
Как указывалось в § 4.1, согласно глобально оптимальному (МП)
правилу оценкой b = (61,62? • • • 5 Ьк) битового профиля К пользователей b
следует считать значение Ь, минимизирующее евклидово расстояние (или его
квадрат d2(s,y)) между наблюдением y(t) и групповым сигналом (10.1).
Вычисление cf2(s, у) подобно тому, как это делалось при выводе (4.3),
имеет результатом
т
d2(s,y)=j[y(t)-s(t;h)]2dt =
о
к к к
= НУII2 " 2 £ AkbkZk + Е Е AMkkPku (Ю.2)
fc=l fc=l Z=l
где
т
Zh = Jy(t)sk(t)dt (10.3)
о
— как обычно, корреляция наблюдения y(t) с fc-й сигнатурой, ры —
коэффициент корреляции fc-й и /-й сигнатур, а наличие амплитуд Ак позволяет
принять удобную нормировку сигнатур:
т
Ek = \\sk\\2 = Js2k(t)dt = l, k = 1,2,..., К.
о
Введем две матрицы: G = diag (Л1, А2,..., А к) — диагональную К х К
матрицу амплитуд пользователей — и С — [р^], kJ = 1,2, ...,К —
корреляционную матрицу сигнатур. Собрав корреляции (10.3) в вектор
z = (^i,^2,... ,^x), квадрат расстояния (10.2) можно записать как
d2(s, у) = ||у||2 - 2bGzT + bGCGbT, (10.4)
где верхний индекс Т символизирует транспонирование вектора или
матрицы. Первый член в правой части (10.4) фиксировал текущим
наблюдением y(t) и, следовательно, МП оценку b можно найти, максимизируя
394 Глава 10. Некоторые направления дальнейшего прогресса
по b разность двух других членов:
2bGzT - bGCGbT = max(2bGzT - bGCGbT). (10.5)
ь
В отсутствие перенасыщения CDMA (К ^ N, см. § 7.2) сигнатуры
могут составлять ортогональный ансамбль, так что ры = Ski и С = 1#,
где \к ~~ единичная К у. К матрица. Тогда bGCGbT = £ Л| не за-
висит от битового профиля. При этом, как отмечалось в § 4.1,
многопользовательский алгоритм вырождается в однопользовательский
(стандартный), в котором оценкой bk бита к-го пользователя Ь& служит знак
корреляции Zk- В случае же неортогональных сигнатур (например при
перенасыщении CDMA, К > N) стандартный приемник уступает
приемнику МП, однако сложность последнего может оказаться технологически
неприемлемой. В самом деле, вектор данных b жестко ограничен
рамками алфавита БФМ bi = ±1, и в общем случае не удается предложить
какую-либо более вычислительно-экономную процедуру, чем прямой
перебор всех 2К возможных битовых профилей и сравнение результатов
их подстановки в правую часть (10.5). Поэтому МП
многопользовательский прием согласно правилу (10.5) характеризуется экспоненциальной
сложностью по отношению к числу пользователей (см. численный пример
в § 4.1). С другой стороны, обращение к многопользовательским
алгоритмам представляется наиболее мотивированным именно в сценариях, где
число пользователей столь велико, что стандартный приемник
практически неработоспособен из-за высокого уровня ПМД. Этим объясняется
интерес к квазиоптимальным многопользовательским процедурам,
сочетающим умеренную сложность с лучшими, чем у стандартного
приемника, показателями качества. Обсуждению некоторых из них посвящена
оставшаяся часть раздела.
10.1.2. Декоррелирующий алгоритм
Начнем со стандартного (основанного на вычислении корреляции)
приемника данных пользователя номер один. Согласно (10.1) наблюдение
к
y(t) = s{t; b) + n(t) - J2 Akhsk{t) + n(t). (10.6)
k=i
Подстановка этого равенства в (10.3) при к = 1 дает
к
zx = Axbi + Y^ AkbkPki + nu (Ю.7)
к=2
Т
где щ — Jn{t)s\{t)dt — шумовой отсчет на выходе первого коррелято-
о
10Л. Многопользовательский прием и подавление помех 395
ра. Второе слагаемое в (10.7) есть ПМД, и интересен вопрос, можно ли
подавить ее до нуля с помощью некоторого линейного преобразования
входного наблюдения. Какой бы ни оказалась эта операция, ее
результатом должен быть свободный от ПМД заменитель ci корреляции zi, т.е.
скаляр, позволяющий принять решение о текущем бите первого
пользователя по правилу
6i = sign(^). (10.8)
Любую линейную операцию, преобразующую y(t) в скаляр, можно
реализовать как корреляцию
т
й = jy{t)u{t)dt, (10.9)
о
отличающуюся от (10.3) лишь опорным сигналом u(t). Тем самым мы
пытаемся устранить ПМД, отказавшись от согласованной опоры si(t)
в пользу рассогласованной w(t), т.е. ценой энергетических потерь по
отношению к тепловому шуму. Подобный прием уже встречался при
синтезе нуль-форсирующих фильтров, подавляющих боковые лепестки АКФ
(см. § 6.12). Подстановка (10.6) в (10.9) заменяет (10.7) статистикой
к
Si = Aibipiu + 53 AkbkPku + п'ъ (10.10)
k=2
где pku — коэффициент корреляции k-и сигнатуры с опорой u(t), нормиро-
г
ванной так же, как сигнатуры, а п[ = Jn(t)u(t) dt — шумовая компонента <гь
о
Воспользуемся представлением сигнатур и опоры u(t) в виде (2.50),
характерном для CDMA с ПРС действительными сигнатурами:
N-l N-1
*h{t) = J2 ak,Mt - *д), «(*) = $3 щз^ - *А)' (1(Ш)
г=0 г-0
где щ, г = 0,1,..., Л/" — 1 — действительная кодовая последовательность
опорного колебания u(t). Используя векторную запись кодовых
последовательностей а* = (а^седд,... ,afcsjv-i), u= (uo,«i9 • • • 9«tf-i) (см. § 7.2)
и полагая без потери общности энергию чипа Eq = 1, получим ры =
= (а/., а/) = afcaf, pfcu = (а*,и) = afcuT. Для обнуления вклада ПМД
в (10.10) независимо от амплитуд и битов сторонних пользователей
необходимо соблюсти К—1 условий: pku = 0, А; ^ 2. Другими словами, опорный код
и должен быть решением системы линейных уравнений а&ит = иа^ = 0,
к = 2,3,..., К. При этом, чтобы оставить полезный эффект ненулевым,
р\и не должно равняться нулю, а следовательно, и есть не что иное, как
соответственно масштабированное решение v уравнения
vA = eb (10.12)
396 Глава 10. Некоторые направления дальнейшего прогресса
где столбцами К х К сигнатурной матрицы А служат кодовые
векторы сигнатур: А — (а^, а^Г,..., а^), a ei — К-мерный вектор вида ei =
= (1,0,0,..., 0). Когда сигнатурные векторы линейно независимы,
система (10.12) может иметь множество решений, однако из всех векторов v,
удовлетворяющих ей, разумно выбрать лишь тот, который образован
линейной комбинацией сигнатур, т. е. строк Ат: v = хАт, где х —
неизвестный К-мерный вектор-строка. Резоном для этого предпочтения служит
то, что включение в v составляющей, ортогональной пространству
сигнатур, приведет лишь к росту нормы v, т. е. шума на выходе коррелятора,
без увеличения полезного вклада в (10.10). С этой подстановкой (10.12)
принимает вид
хАтА = хС = ei.
Линейная независимость сигнатур (столбцов матрицы А) означает,
что ранг корреляционной К х К матрицы С = АТА равен К, откуда
следуют ее обратимость и единственность решения предыдущего уравнения:
х — eiC"1. Таким образом,
v = хАт = ехСГ1 Ат = еЦА7^)"1 Ат (10.13)
представляет собой искомое решение (10.12), масштабирование
которого u = v/||v|| дает нормированную декоррелирующую опору и, так что
иа^ = р\и. На практике такая нормировка не влияет на знак q B
решающем правиле (10.8) и потому необходимой не является.
Физически опорный вектор (10.13) ортогонален всем сигнатурам,
кроме первой, полностью устраняя ПМД на выходе коррелятора,
настроенного на сигнатуру первого пользователя. Действуя тем же путем, легко
убедиться, что опорный сигнал k-vo пользовательского приемника
получается заменой ei в (10.13) на вектор е& с единственным к-м ненулевым
компонентом.
Основной изъян описанного декоррелятора — его осуществимость
только для линейно независимых сигнатур. Если это требование
нарушено, любая попытка обратить ПМД в нуль неизбежно приведет к
устранению и полезного эффекта (первого слагаемого) в (10.10). В то же время
линейная независимость означает соблюдение неравенства К ^ iV, а при
этом лучшим вариантом сигнатур оказывается ортогональный ансамбль
(см. предыдущий подраздел), для которого однопользовательский
приемник оптимален и автоматически подавляет ПМД без потерь в отношении
сигнал-шум и какой-либо специальной декорреляции. При
перенасыщении же CDMA (К > N) линейная независимость сигнатур невозможна
в принципе и декоррелятор нереализуем.
10J. Многопользовательский прием и подавление помех 397)
10.1.3. Алгоритм минимума
среднеквадратической ошибки
Попробуем модифицировать идею рассогласованной обработки в
корреляторе первого пользователя с тем, чтобы вместо подавления ПМД до нуля
минимизировать совместный вредный эффект ПМД и шума. Возвращаясь
к (10.7), заметим, что единственным полезным слагаемым в нем
является Ai&i, тогда как другие два соответствуют совокупной помехе (ПМД
плюс шум). В этом свете представляется естественной попытка отыскать
линейную операцию (10.9), воспроизводящую полезный вклад с
минимальной среднеквадратической ошибкой (МСКО). Для формализации задачи
перепишем (10.9) в векторной форме, подставив u(t) из (10.11):
N-1
Ci = J2 и№ = U^T' (10.14)
г=0
Г
где у = (s/o,2/i, • - - ,X/jv-i) и уг = Jy(t)s0(t-iA)dt,i = 0,1,... ,iV - 1.
о
Технически у( можно сформировать как отсчеты на выходе фильтра,
согласованного с одиночным чипом, взятые в соответствующие
моменты (см. (2.68)), так что у можно назвать вектором наблюдений после
чип-согласованной фильтрации. Задача теперь состоит в минимизации
среднего квадрата отклонения е2 я\ от А\Ъ\ за счет подходящего выбора
опорного кодового вектора и:
£2 = |Aibi - ^i|2 = |Aibx - uFI2 - min.
Отметим, что никакая априорная нормировка опоры и не нужна.
После возведения в квадрат и почленного усреднения среднеквадратическая
ошибка принимает вид
? = p^_2AiuF^+(^F^ (10Л5)
где использованы правила элементарной матричной алгебры
(коммутативность умножения на скаляр и ассоциативность векторно-матрично-
го умножения, коммутативность скалярного произведения иут = уит),
а также детерминированность и. Для г-го элемента вектора у после
подстановки (10.6), а затем (10.11) имеет место равенство
т т
Уг = Jy(t)s0{t-iA)dt = J
о о
к
^2Akbksk(t)+n(t)
Ufc=l
so(t-iA)dt =
к N-i тг к
]Г Akbk Y^ akj / s0(t - jA)so(t - iA)dt + щ = ^1 Akbkakii + щ,
h=l j=0 q k=l
(10.16)
398 Глава 10. Некоторые направления дальнейшего прогресса
Т
где щ — fn(t)so(t — г A) dt — г-й отсчет шума на выходе чип-согласован-
о
ного фильтра. Последний результат в (10.16) опирается на естественное
предположение об ортогональности чипов, сдвинутых по времени на
ненулевое целое число периодов повторения А (например, при длительности
чипа, не большей А, они попросту не перекрываются). Теперь видно, что
уф\ = Aidij, так как биты разных пользователей независимы друг от
друга (bkbi — 5ki) и от шума {щЬк = щ • Н = 0), и следовательно
A1Wh = A21ar[. (10.17)
Подобным же образом находится матрица уту? элементы которой
являются корреляционными моментами yjy] отсчетов у^. Согласно (10.16)
с учетом некоррелированности отсчетов шума на выходе
чип-согласованного фильтра, имеем
к к к
Ш] =^2^2 AkAibkbiak^a^j + щЩ = ^ A2kakiiakj + а2^-,
где а2 — дисперсия шумовой компоненты у{. В результате N х N
корреляционная матрица R вектора наблюдения у
R. = Wf = Ш] = AG2 AT + o2lN, (10.18)
где 1дг — единичная N х N матрица. Подстановка (10.17) в (10.15) после
отбрасывания первого слагаемого, не зависящего от и, приводит к
следующей скалярной функции, подлежащей минимизации по и
/(и) - uRuT - 2A?aiuT. (10.19)
В точке и экстремума функции /(и) градиент /(и), т.е. вектор
производных /(и) по всем координатам вектора и, должен быть равен нулю.
Градиент /(и) выражается как 2(uR — А2а\) (см. задачу 10.3). Таким
образом, при обратимой матрице R вектор и, доставляющий экстремум
/(и), дается равенством
и = AfaiR"1, (10.20)
в котором R определяется из (10.18). Читателя, желающего
удостовериться в том, что найденный экстремум является минимумом (10.19),
отсылаем к задаче 10.3.
Как видно, исследуемый алгоритм не требует обратимости
сигнатурной корреляционной матрицы С = АГА; обратимой должна быть лишь
корреляционная матрица наблюдений (10.18), что имеет место
практически всегда. Следовательно, в отличие от (10.13), решение (10.20)
универсально вне зависимости от соотношения между К и N. Вместе с тем,
по меньшей мере в одном важном частном случае решение (10.20)
вырождается в однопользовательский алгоритм. Пусть сигнатурный ансамбль
10.1. Многопользовательский прием и подавление помех 399
лежит на границе Велча, что означает ортогональность строк
матрицы А (см. подпараграф 7.2.3), т.е. АА = 1дг. При равной интенсивности
всех сигналов А^ = А, к = 1,2, ...,Х, G2 = А21к, и корреляционная
матрица наблюдений (10.18) принимает форму R — (А2 + сг2)1лг, упрощая
опору (10.20) до вида и = [А2/(А2 + a2)]ai, воспроизводящего (за
исключением несущественной нормировки) первую сигнатуру, т. е. опорный
сигнал стандартного приемника. Таким образом, для сигнатур равной
мощности, достигающих границы Велча, никакого специального
алгоритма МСКО нет и не требуется. Этот факт довольно тривиален, если
К ^ JV, так как при этом рассматриваемый ансамбль ортогонален, и
однопользовательский приемник полностью устраняет ПМД с
одновременной оптимальной очисткой от шума, однако, в варианте перенасыщения
(К > N) доказанное едва ли предсказуемо априори.
В литературе результат (10.20) часто встречается в иной форме, явно
содержащей сигнатурную корреляционную матрицу С = АТА [99-101].
Прийти к ней можно, например, воспользовавшись леммой матричного
обращения, приведенной здесь в адаптированном к контексту виде:
R"1 = (AG2AT + а2!*)"1 = \lN - ^A(ATA + <t2G-2)-1At. (10.21)
Доказательство этого равенства сводится к непосредственной
проверке (задача 10.4). Отметим, что оно верно всякий раз, когда G обратима,
что автоматически выполняется при всех ненулевых амплитудах
пользовательских сигналов. После подстановки (10.21) и соотношения A2ai =
- eiG2AT в (10.20)
и - e1G2ArR"1 = -leiG2 [at - АГА(АТА + ^G"2)"1 AT] =
= -LeiG2 [Ат - (АТА + a2G"2)(ATA + ^G"2)"1 A2
+ ei(ArA + (T2G-2)-1A'J
и окончательно
и = ех (С + a2G"2)-1AT. (10.22)
Вернувшись к (10.14), представим правило решения о бите первого
пользователя в окончательной редакции:
h = sign (ft) - sign [ei(С + a2G-2)-lATyT]. (10.23)
Для обобщения правила на &-й пользовательский приемник
достаточно заменить ei нае^
Акцентируя вновь универсальность исследуемого правила
безотносительно к обратимости сигнатурной корреляционной матрицы, стоит
отметить, что когда матрица С несингулярна (что возможно только при
+
Глава 10. Некоторые направления дальнейшего прогресса
К ^ 7V), а тепловой шум уменьшается, МСКО приемник асимптотически
сходится к декоррелятору:
u = ei(C + <r2G-2)AT -— e1C-1AT.
Чтобы проиллюстрировать эффективность алгоритма МСКО,
можно сопоставить отношения сигнал - (шум+помеха) для статистики ci при
опорном сигнале (10.22) и однопользовательской опоре и .= ai. Как
видно из (10.14), вклад k-ro сигнала в ci составляет А^иа^, так что полезная
мощность (создаваемая сигналом первого пользователя) равна A2 (ua^) ,
fC о
а мощность ПМД — j^ A| (ua^) . В силу некоррелированности шумовых
к=2 V У
отсчетов щ на выходе чип-согласованного фильтра их мощности
суммируются после взвешивания множителями щ в (10.14), доводя полную
мощность шумовой компоненты q до cr2^Zi^Qluf — а2 \\и\\ . Объединяя
эти результаты, приходим к искомому отношению сигнал - (шум+помеха)
*-. А-(иаГ)2 -. *(-ff . а-,
£ А\ (ua^)2 + ^ ||u||2 E & (uaD2 + ||u||2
fc=2 k=2
где gj^ — ^l/^"2 — мощностное отношение сигнал-шум на бит для к-то
пользователя.
Пример 10.1. Рассмотрим перенасыщенную синхронную CDMA систему с
сигнатурами, лежащими на границе Велча. Бинарные ансамбли этого типа без
труда строятся для любого К > N, при котором существует К х К
матрица Адамара. Сигнатурами при этом служат столбцы последней матрицы после
отбрасывания в ней К — N любых строк. В свете сказанного ранее при равных
мощностях пользовательских сигналов о каком-либо выигрыше МСКО
приемника относительно стандартного говорить не приходится. Поэтому для параметров
К — 64, N — 48 формировался случайный профиль амплитуд пользователей из 64
рэлеевских отсчетов для имитации рэлеевских замираний. На рис. 10.1 даны
зависимости отношения сигнал-(шум+помеха) от отношения сигнал-шум на бит
первого пользователя, рассчитанные согласно (10.24), для МСКО и стандартного
приемников при некотором благоприятном (с большим разбросом) амплитудном
профиле. Приведенные кривые показывают, что выигрыш МСКО может
оказаться заметным (на рис. 10.1 до 10 дБ). Не стоит вместе с тем забывать, что
такой выигрыш — дело случая: для некоторых амплитудных профилей возможны
и большие его значения, однако чем равномернее распределение амплитуд в
профиле, тем меньше различие в отношениях сигнал- (шум+помеха) между МСКО
и стандартным приемником. Уместно также обратить внимание на большую
робастность МСКО приемника к разбросу интенсивностей пользовательских
сигналов по сравнению со стандартным (если, конечно, сигнатуры не
ортогональны), что придает ему особую привлекательность в ситуациях, где точный
10.1. Многопользовательский прием и подавление помех 401
контроль мощности недоступен.
Рис. 10.1. Сравнение МСКО
и однопользовательского
приемников по отношению
сигнал - (шум+помеха)
15
10
ф
§ 5
С
+
э. о
I
с;
со
X
|_
S
О _ц
-101
//
//
•
,'
'-''
'"
j
— МСКО |
— Станд. |
К=64, N=48 |
5 10 15
Сигнал-шум, дБ
20
25
10,1.4. Слепой алгоритм МСКО
Хотя МСКО (как и декоррелирующий) алгоритм весьма прост в
вычислительном отношении и материализуется без затруднений, один из аспектов
его практического воплощения нуждается в дополнительном обсуждении.
Как следует из (10.20), центральной операцией алгоритма МСКО
является обращение корреляционной матрицы наблюдений R, определяемой
равенством (10.18). Для ее построения приемник fc-го пользователя
должен знать не только собственную сигнатуру, но и сигнатуры остальных
пользователей. В некоторых приложениях подобное требование может
быть сочтено чрезмерным. Одним из самых наглядных примеров
применения синхронного варианта CDMA является канал «вниз» системы
мобильной связи, где информирование каждого мобильного терминала
обо всех сигнатурах, присвоенных на данный момент остальным
пользователям, значительно усложнило бы работу системы. К счастью,
корреляционную матрицу наблюдаемого процесса можно извлечь
экспериментально из него самого в случае, если интервал наблюдения достаточно
продолжителен. Подобная идея лежит в основе слепых
многопользовательских алгоритмов. Пусть у г — iV-мерный вектор-строка отсчетов на
выходе чип-согласованного фильтра, соответствующий г-му биту данных,
г — 0,1, Тогда оценку R^ корреляционной матрицы наблюдений можно
402 Глава 10. Некоторые направления дальнейшего прогресса
получить как
Как видно, оценка R^ может формироваться рекуррентно: с
поступлением новой группы отсчетов наблюдения, охватывающих очередной бит,
оценка R^ корректируется согласно последнему уравнению. После этого
ее можно подставить в (10.20), чтобы найти текущую опору как иг =
= AfaiR^-1, а затем согласно (10.14) вычислить решающую статистику
Яг = игУ"Г и принять решение об г-м бите по правилу (10.23).
Многочисленным модификациям и усовершенствованиям подобных слепых алгоритмов
посвящена обширная литература (см. источники [19, 100, 101] и их
библиографические указатели).
10.1.5. Компенсация ПМД
Причина реализационной простоты как декоррелятора, так и МСКО
приемника кроется в их однопользовательской философии, т. е. линейной
обработке вектора наблюдения у с помощью умножения на вектор
рассогласованной опоры и. Компенсация помех, упоминаемая в англоязычных
источниках под названием interference cancellation, также базируется на
однопользовательском приемнике, дополненном петлей вычитания ПМД
из выходного эффекта (10.7). Допустим, что первый приемник знает
сигнатуры и амплитуды всех пользователей и тем или иным путем
сформировал оценки &27 £>з,..., Ьк битов сторонних пользователей. Тогда у него есть
возможность сгенерировать локальные реплики сигналов всех сторонних
пользователей, вычесть их сумму из наблюдения y(t) и подать
полученную разность в качестве наблюдения (в идеале свободного от ПМД) на
вход стандартного приемника. Понятно, что эффективность таких
компенсационных методов критически зависит от надежности сведений об
интенсивностях сторонних сигналов и точности оценок битов остальных
пользователей. Наряду с другими в литературе активно
пропагандируется многоэтапная процедура [19, 102]. Ее первый этап состоит в
последовательном оценивании битов пользователей с переходом от сильных
сигналов к более слабым и использованием уже полученных оценок
битов к — 1 пользователей для компенсации вносимых ими ПМД при оценке
бита к-го пользователя. После того, как этим путем сформированы
оценки всех К битов, выполняется следующий этап процедуры с повторением
тех же самых операций. На этот раз, однако, приемник лучше осведомлен
о помехах по сравнению с предыдущим этапом, и компенсация
регенерированных ПМД начинается с самого старта этапа, т.е. оценивания
10.1. Многопользовательский прием и подавление помех 403
бита пользователях наиболее интенсивным сигналом. Подобные
итерации выполняются раз за разом, причем каждая начинается с регенерации
обновленной копии ПМД и продолжается дальнейшим уточнением
последней в ходе оценивания профиля пользовательских битов. По выполнении
того или иного критерия остановки выдается окончательная оценка бита
соответствующего пользователя.
10.1.6. Асинхронные многопользовательские
алгоритмы
Хотя рассмотренные выше многопользовательские алгоритмы
изначально ориентированы на синхронный вариант CDMA, их, после определенной
модификации, можно приспособить и к асинхронному режиму. Вернемся
к выражению (10.6) и адаптируем его к асинхронному сценарию,
иллюстрируемому рис. 7.15, считая границы чипов всех пользователей
совмещенными и оперируя только с вещественными видео-сигнатурами
(игнорируя, в частности, взаимные фазовые сдвиги радио-сигнатур).
Предположим также, что период всех сигнатур равен длительности бита Т = Ть^
и рассмотрим, как и ранее, приемник первого пользователя {т\ = 0) на
интервале наблюдения бита с нулевым номером. Если бы помимо
полезного принимался лишь один сторонний (&-й) сигнал, наблюдаемое колебание
имело бы вид
„и\ = I Mbi$si(t) + Akbk-isk{t-Tk)+n{t), 0<t^rk, /if) 9^
yW \ A^os^ + Abbkflabit-^+nit), n<t^T. [W'Z0)
Как следует из (10.25), характер ПМД, создаваемой k-м
пользователем, зависит теперь от того, меняется или нет значение его бита в течение
интервала наблюдения, так как во втором случае к-я сигнатура меняет
полярность в момент t = тк. Допустим, приемнику первого пользователя
известны задержки тк всех пользователей. В этом случае число
потенциальных векторов ПМД от К — 1 сторонних пользователей составит
2{К — 1) в отличие от синхронного варианта, в котором оно равнялось
К — 1. Вместе с первой сигнатурой всего набирается 2К — 1 векторов.
Если все они линейно независимы, можно воспользоваться
модифицированной версией декоррелирующего алгоритма (10.13) для полного
подавления ПМД вне зависимости от профиля пользовательских битов. Понятно,
что в рамках размерности (коэффициента расширения) N максимальное
число пользователей ЛГ, допускающее подобную обработку, ограничено
неравенством 2К — 1 ^ 7V, т. е. не превышает \N/2]. Необходимая
ревизия (10.13) состоит в замене «чистой» N х К сигнатурной матрицы А
расширенной, размерности N х (2К — 1), в которой столбцами служат
первая сигнатура и 2(К — 1) сторонних, соответственно сдвинутых сиг-
404 Глава 10, Некоторые направления дальнейшего прогресса
натур вместе с их «изломанными» репликами, меняющими полярность на
чипе с нулевым номером (см. рис. 7.15).
МСКО приемник трактует ПМД статистически, т. е. как случайный
процесс, заданный его корреляционной матрицей. Разумеется,
аналогичная интерпретация применима и к асинхронному случаю после
некоторой ревизии, учитывающей изменение корреляционной матрицы
наблюдений [19].
Поскольку в асинхронной системе каждый сторонний бит
искажает два последовательных бита нужного пользователя, корреляция ПМД
простирается за пределы длительности одного бита. По этой причине
характеристики асинхронного многопользовательского приемника обычно
улучшаются, когда интервал наблюдения охватывает несколько
последовательных битов.
Узкие рамки главы не оставляют места для более детальной
дискуссии на тему многопользовательских алгоритмов. Эта область в
настоящее время бурно прогрессирует и приковывает к себе пристальный
интерес исследователей. Читатель, желающий глубже познакомиться с ее
достижениями и аспектами применения многопользовательских
алгоритмов в стандартах третьего и последующих поколений, может обратиться
к книгам [19, 100, 102-104] и источникам из их перечней литературы.
10.2. Многочастотная модуляция и OFDM
В последние годы в телекоммуникационной практике широко
применяется метод передачи, называемый многочастотной модуляцией (МЧМ)1.
В самом общем смысле МЧМ означает не что иное, как распределение
символов одного и того же потока данных источника между множеством
параллельно передаваемых поднесущих. Конкретный формат
использования поднесущих может варьироваться в зависимости от преследуемой
цели. В контексте книги аспектом первоочередного интереса является
связь между МЧМ и философией расширенного спектра. Из содержания
предыдущих глав следует, что принципиальные достоинства, присущие
широкополосным методам передачи, имеют в своей основе большое
значение частотно-временного произведения (выигрыша от обработки,
коэффициента расширения) WT. Технически для расширения спектра сигнала
заданной длительности возможны разные пути. При ПРС эта задача
решается заменой простых «медленных» символьных импульсов «быстрыми»
сигналами подходящей формы, т. е. управлением полосой сигнала во
временной области. МЧМ с этой точки зрения можно трактовать как альтер-
1 Англоязычный эквивалент — multicarrier (MC) modulation.
10.2. Многочастотная модуляция и OFDM 405
нативный способ расширения спектра с помощью его непосредственного
формирования в частотной области.
10.2.1. Многочастотный вариант ПРС-CDMA
Простейшей комбинацией МЧМ и CDMA является прямое частотное
мультиплексирование данных одного и того же пользователя. Его идея
состоит в передаче демультиплексированных и подвергнутых ПРС
данных на Мс поднесущих без перекрытия спектров сигналов поднесущих.
Рис. 10.2 поясняет этот вариант передачи, уместным акронимом для
которого может быть МЧМ-ПРС-CDMA. «Быстрый» поток данных со
скоростью R — 1/Tft демультиплексируется (расщепляется) на Мс
параллельных «медленных» битовых потоков со скоростью R/Mc (длительностью
бита TJJ = МсТь) каждый. Отдельный г-й медленный поток передается на
своей поднесущей /^> г — 1,2,..., Мс после ПРС с помощью какого-либо
традиционного формата модуляции данными (БФМ, КФМ и т.д.). При
длительности чипа расширяющей последовательности Д' и длительности
символа данных на поднесущую Т^ полоса и коэффициент расширения
для каждой поднесущей составляют W1 ~ 1/Д' и N' — Т^/Д' « W!T'V
соответственно. Разнос F смежных поднесущих должен исключать
перекрытие спектров, т.е. удовлетворять ограничению F = W* + Fg, где
Fg — защитный интервал, учитывающий внеполосные спектральные
боковые лепестки. Таким образом, полная полоса, занимаемая системой,
W = (МС- 1)F + W = MCW( + (Мс - l)Fg. (10.26)
Приемник МЧМ-ПРС-CDMA есть просто банк Мс параллельных
идентичных приемников, настроенных каждый на свою поднесущую и
обрабатывающих ее сигнал независимо от других. Демодулированные данные
с их выходов далее мультиплексируются j\jir восстановления переданного
источником быстрого битового потока.
Сопоставление подобной системы и CDMA-системы с прямым
расширением (ПРС-CDMA), занимающей ту же общую полосу W и имеющей ту
же скорость передачи Д, показывает, что из-за необходимости в
защитных интервалах МЧМ-ПРС-CDMA уступает ПРС-CDMA в коэффициенте
расширения. Если обе системы используют один и тот же формат
модуляции, длительность символа Тр в ПРС-CDMA должна быть в Мс раз
короче, чем длительность символа Т!р в МЧМ-ПРС-CDMA.
В то же время длительность чипа в ПРС-CDMA можно выбрать рав-
ной Za ^^ 1/TV, что гарантирует коэффициент расширения N — 2^,/Д ~
и WTp/Mc. Тогда, согласно (10.26), отношение последнего к
коэффициенту расширения N' МЧМ-ПРС-CDMA
15—2771
406 Глава 10. Некоторые направления дальнейшего прогресса
N'
1 +
Мс
Mr.
w w
может заметно превосходить единицу.
Поток (быстр.) источника
(Mc-l)Fg
-(MC-1)F/
ПРС сигнатура
(10.27)
Спектр мощности МЧМ сигнала
Рис, 10.2. К объяснению МЧМ-ПРС-CDMA
Поскольку коэффициент расширения является важнейшим параметром
CDMA, определяющим абонентскую емкость, иммунитет к узкополосным
помехам и пр., МЧМ-ПРС-CDMA оказывается не лучшим из доступных
способов утилизации отведенного спектрального ресурса. В известных
обстоятельствах, однако, иные факторы могут сыграть роль
преобладающих, как это произошло при разработке спецификации cdma2000, где
вариант МЧМ-ПРС-CDMA избран для организации канала «вниз» с тем,
чтобы обеспечить обратную совместимость с cdmaOne. При этом од-
ночастотный формат стандарта cdmaOne (слегка модифицированный)
попросту повторен на трех должным образом выбранных несущих.
10.2. Многочастотная модуляция и OFDM 407
a)
б)
10.2.2. Простая МЧМ и OFDM
Одночастотный спектр мощности
Битовый (быстрый) поток
Ть ■
1-й медленный поток
W* 1/Гр
tog2M
Спектр мощности
поднесущих
fog2M
Рис. 10.3. Одночастотная (а) и МЧМ (б) передача данных
Отвлечемся временно от широкополосных систем и CDMA для того,
чтобы лучше вникнуть в причины значительного интереса к МЧМ со
стороны современных беспроводных телекоммуникаций. Допустим, требуется
передавать битовый поток источника с использованием простой (не
широкополосной) модуляции (БФМ, КФМ и др.). При М-ичной модуляции
и необходимой скорости передачи R длительность символьной посылки
составит Тр = (log2 M)/R. Предположим, что полоса когерентности Вс
канала (см. § 3.6) значительно уже полосы символа (Вс < W « \/Тр =
= #/log2 M)i иными словами, диапазон рассеяния по задержке т^
заметно превосходит длительность символа. Тогда «прямая» (одночастотная)
передача (см. рис. 10.3, а) будет сопровождаться глубокой
межсимвольной интерференцией, искажающей многие символы данных, следующие
за текущим. Чтобы нейтрализовать МСИ, приемник должен содержать
достаточно сложный эквалайзер с большой памятью, реализуемый, как
правило, в виде адаптивного КИХ-фильтра, т. е. линии задержки с
отводами и подстраиваемыми весами отводов.
Передача на многих несущих предлагает альтернативное решение,
избавляющее от необходимости в сложном эквалайзере (рис. 10.3, б). Осу-
408 Глава 10. Некоторые направления дальнейшего прогресса
ществим вновь демультиплексирование «быстрого» потока данных
источника, имеющего скорость Д, образовав Мс > W/Bc параллельных
«медленных» битовых потоков скорости R/Mc каждый. Понятно, что
суммарная скорость всех медленных битовых потоков останется равной
первичной скорости R. Возьмем теперь Мс поднесущих /i, /2? • • •, /мс>
разделенных постоянным интервалом F = Wl = W/Mc, и используем каждую
из них для передачи одного из Мс медленных битовых потоков с тем
же типом модуляции, что и в прямом варианте. Каждая индивидуальная
поднесущал образует отдельный субканал, функционирующий независимо
от других и передающий медленный битовый поток более длинными
посылками (символами) длительности Тр — МсТр, т. е. занимающий в Мс раз
меньшую полосу W' = W/Mc, чем прежде. Последнее означает, что в
пределах субканала замирания более не являются частотно-селективными,
поскольку W' = W/Mc ^ Вс. При плоском фединге диапазон рассеяния
по задержке не превышает длительности одной посылки, МСИ не столь
значительна, как при прямой передаче, и может быть нейтрализована
сравнительно простым эквалайзером. Общая полоса, занимаемая МЧМ
системой, составляет примерно W ~ McjTp = 1/Тр — i?/log2M, т.е.
совпадает с полосой одночастотной (прямой) передачи. В
действительности спектральная эффективность МЧМ передачи может оказаться даже
несколько лучшей, поскольку форма ее реального спектра ближе к
прямоугольной.
Как можно видеть, речи о введении каких-либо защитных
частотных интервалов не идет, и более того, подразумевается даже
некоторое перекрытие спектров субканалов, поскольку традиционная оценка
полосы W « 1/Т^ обычно оставляет значительные внеполосные
боковые лепестки спектра. Тем не менее взаимная помеха между субканалами
может быть полностью подавлена. Предположим, что форма
символьной посылки является прямоугольной и ее полоса измеряется согласно
общепринятому критерию: W' = 1/Тр. Тогда частотный разнос
смежных поднесущих F = W = 1/Тр гарантирует ортогональность сигналов
субканалов, т.е. полное устранение взаимных помех между МЧМ
субканалами. По этой причине данная версия МЧМ получила
наименование ортогонального частотного мультиплексирования. Далее удобнее
использовать для нее аббревиатуру OFDM (orthogonal frequency division
multiplexing), повсеместно проникшую в русскоязычные тексты.
Пусть bi = Aiexp(j</>i)i i = 1,2, ...,МС — модуляционные символы
(комплексные амплитуды) Мс поднесущих OFDM, где А{ и ф{ —
соответственно действительная амплитуда и фаза, и символы передаются
прямоугольными посылками. Тогда результирующий сигнал в комплексной
записи, физически являющийся комплексной огибающей, подлежащей да-
10.2. Многочастотная модуляция и OFDM 409
лее переносу на некоторую центральную частоту /о, имеет вид
мс
мс
г=1 г=1
j2tt(« - l)t
Т"
0<*<Т' (10.28)
где /i принята равной нулю и, следовательно, fi = (i — l)F = (i ~~ 1)/T'
Последнее допущение не ведет к потере общности, так как
окончательный номинал центральной частоты устанавливается в ходе последующего
переноса спектра «вверх». Сигнал (10.28) является OFDM символом,
причем число различных OFDM символов (объем OFDM алфавита Mqfdm)
определяется объемом модуляционного алфавита М и числом частот:
Mofdm = ММс. В случае, например, БФМ OFDM Mqfdm = 2Mc.
Дискретизация (10.28) с интервалом Ts = T!vjMc приводит к
последовательности
мс
Si = S(lT;/Mc) = Y,biexp(
г=1 ^
j2n(i - 1)1
)•
Z = 0,1,...,MC-1, (10.29)
повторяющей (за исключением несущественного коэффициента)
обратное (ОДПФ) последовательности модуляционных символов {Ьг}- В этом
и состоит главная причина популярности OFDM: для того чтобы
реализовать этот МЧМ формат, нет нужды модулировать данными выходы
параллельных генераторов Мс несущих, а затем суммировать
модулированные колебания. Тот же выходной эффект можно получить с помощью
обратного ДПФ передаваемых модуляционных символов. Таким образом,
типовой OFDM передатчик (рис. 10.4) содержит демультиплексор и блок
ОДПФ, с выхода которого снимается вектор обратного ДПФ (10.29).
Последний далее преобразуется из параллельной формы в последовательную,
т. е. поток следующих друг за другом отсчетов, и интерполируется до
непрерывного OFDM символа (10.28), который (после введения префикса,
см. ниже) переносится «вверх» для передачи на нужной центральной
частоте /о-
Быстрый
поток
Демультиплексор
Медленные
потоки
/
/
ОДПФ
=>
Параллельный в
последовав
->
Интерполятор
OFDM
символ
Рис. 10.4. Формирование OFDM символа
На приемной стороне также отсутствует надобность в
использовании банка Мс параллельных приемников, настроенных каждый на свою
410 Глава 10. Некоторые направления дальнейшего прогресса
поднесущую, поскольку последовательность {bi} можно извлечь из (10.29)
прямым ДПФ (ПДПФ):
= МсЪи * = 1,2,...,МС. (10.30)
Этот результат показывает, что блок ПДПФ пригоден для
расщепления принятого OFDM символа на Мс субканальных эффектов,
необходимого для извлечения переданных данных. Заметим, однако, что с выхода
реального канала приемник получает в свое распоряжение не «чистый»
OFDM символ, а комплексную огибающую Y(t), являющуюся продуктом
искажения OFDM символа шумом и МСИ. Согласно генеральной идее,
МЧМ, увеличивая длительность символьной посылки, ограничивает
глубину распространения МСИ лишь символом, следующим за текущим. Для
исключения и этого остаточного влияния можно ввести защитный
интервал длительности Tg ^ т^ между соседними МЧМ символами. Этот
интервал не обязательно оставлять пустым. Более того, заполнение его
циклическим префиксом OFDM символа значительно облегчает
нейтрализацию канальных многолучевых эффектов. Введение циклического
префикса служит для преобразования свертки переданного сигнала и
импульсного отклика канала в циклическую, соответствующую
произведению их ДПФ образов. Обозначим через v = \jdslTs\ целое число
интервалов дискретизации в максимальной канальной задержке и добавим v
последних отсчетов (10.29) как префикс в передаваемый OFDM символ.
Приемник отбросит первые v отсчетов 5/, / = —i/, —v + 1,..., Мс — 1, так
что многолучевые реплики предшествующего OFDM символа не затронут
Мс оставшихся отсчетов. В то же время запаздывающие реплики самого
текущего символа войдут в более поздние отсчеты как помеха
многолучевого распространения. Если Яо, Н\,..., Ни — отсчеты импульсного
отклика канала, то каждый отсчет наблюдения YJ, I = 0,1,... ,МС — 1
(в пренебрежении шумом) находится как свертка вида
V
Y^Y^Sl-mHrn, J = 0,1,...,MC-1. (10.31)
7П=0
Благодаря циклическому префиксу последовательность 5г_ш, / = 0,
1, ...,МС — 1 оказывается циклическим сдвигом последовательности Si
при любом m = 0,1,..., I/, поэтому (10.31) есть циклическая свертка, и ее
ДПФ-спектр есть произведение ДПФ Si и Щ последовательностей Si и Hi.
ДПФ первой — просто масштабированная последовательность
модуляционных символов {bi} (см. (10.30)), тогда как
rV V^fr ( j27T(t-l)/\
J.VJ.C
^2 ^ехр
•?2тф - 1)/
Мг.
10.2, Многочастотная модуляция и OFDM 411
— передаточная функция канала на частотах fi = /1, /2,..., /мс> так что
% = МсЬгЙи % = 1,2,..., Мс. (10.32)
Полученный результат показывает, что для устранения влияния
канала на OFDM сигнал, т.е. эквалаизинга, достаточно лишь разделить
каждый отсчет на выходе блока ДПФ приемника на отсчет
передаточной функции канала Hi на соответствующей частоте2. Для получения
сведений о текущем состоянии канала, т.е. Н^ обычно применяются те
или иные обучающие процедуры. Отметим также, что так как
защитные интервалы являются разновидностью непроизводительных затрат,
уменьшающих скорость передачи данных, иногда полезно увеличивать
значение Мс с тем, чтобы уменьшить долю защитного интервала в общей
длительности OFDM символа.
Если данные передаются с помощью ФМ и субканальные сигналы
обрабатываются раздельно, т. е. г-я компонента ПДПФ используется
независимо от остальных для демодуляции переданного символа Ьг,
вышеназванный эквалайзинг можно упростить до компенсации канального
фазового сдвига, поскольку амплитуда поднесущей для принятия
решения не нужна. Когда же выполняется совместная обработка субканальных
откликов, например при МЧМ реализации CDMA, обсуждаемой ниже,
амплитуды Hi критически необходимы для «полного» эквалаизинга.
Y(t)
W
Дискрети-
затор
Yi
—►
Удаление
префикса
Последоват.
в
параллельн.
v
ПДПФ
1
--►
тгКх)—►
Блок решения
имс
Рис. 10.5. Структура приемника OFDM
Суммируя сказанное, можно представить OFDM приемник в виде
структуры на рис. 10.5. Дискретизатор формирует последовательность
отсчетов У;, префиксный сегмент которой затем отбрасывается.
Оставшаяся последовательность далее трансформируется в параллельную форму.
2 Такое выравнивание передаточной функции канала известно как нуль-форсирующий
эквалайзинг, уже упоминавшийся в § 6.12.
412 Глава 10. Некоторые направления дальнейшего прогресса
Блок ПДПФ выдает компоненты ДПФ спектра 1^, представляющие
собой искаженные шумом и канальными эффектами символы данных 6^.
Поэтому после эквалайзинга (простого умножения на подходящие
весовые коэффициенты w*) их можно использовать для оценки символов 6^,
подобно тому как это делается при обычной передаче данных с помощью
БФМ, КФМ, КАМ и т. д.
10.2.3. Многочастотное кодовое разделение
МЧМ формат легко адаптируется к многопользовательской среде,
предоставляя одну из конкурентных платформ для осуществления кодового
разделения. В отличие от ПРС-CDMA, где разделение пользовательских
сигналов достигается адекватным выбором формы сигнатур во
временной области, в многочастотной версии CDMA (МЧМ-CDMA)
сигнатуры формируются в частотной области с помощью специфического для
каждого пользователя управления амплитудами и фазами поднесущих.
Пришщп МЧМ-CDMA можно объяснить, перебросив мостик от ПРС-CDMA к МЧМ
передаче. Вернемся к рис. 10.3 и вообразим, что в роли быстрого битового
потока источника выступает поток символов данных &-го пользователя,
расширенный с помощью &-й пользовательской ПРС-сигнатуры длины
(коэффициента расширения) N. Тем самым имеется N ПРС чипов
длительности А на один символ данных к-ro пользователя длительности Тр.
Демультиплексируем этот широкополосный ПРС поток в Мс = N
медленных потоков, расщепив каждый символ данных в Мс = N параллельных
чипов большой длительности Д' = Тр = NA. Каждый из этих
параллельных медленных потоков чипов далее передается в формате МЧМ (OFDM),
так что каждый пользователь обладает своим специфическим законом
модуляции поднесущих.
Представим теперь сказанное в более формальной трактовке. Пусть
bk — текущий символ данных к-ro пользователя. Пусть
&к = (аМ'аМ>---5аМГ-:0
— сигнатурный вектор к-ro пользователя, используемый теперь в
частотной области. Для формирования МЧМ-CDMA сигнала N компонент
вектора Ь^а^ манипулируют параллельно амплитуды и фазы Мс = N
поднесущих Д, /2,..., /дг в течение длительности посылки данных Тр.
Суммирование всех манипулированных поднесущих дает г-й МЧМ-CDMA
символ длительности Гр, передаваемый к-м пользователем. Безусловно, при
F — 1/Тр удобнее реализация МЧМ-CDMA на характерной для OFDM
ДПФ-основе, однако прямое формирование МЧМ-CDMA сигнала,
показанное рис. 10.6 для действительных (например, БФМ) алфавитов данных
и сигнатур, нагляднее в иллюстративном отношении. Обобщение данной
10.2. Многочастотная модуляция и OFDM 413
схемы на случай комплексных алфавитов не вызывает затруднений. При
реализации ее в формате OFDM блок ОДПФ заменяет многоканальную
структуру рис. 10.6.
Поток данных
к-го пользователя
МЧМ символы
а*,ЛМ
СОБ(2я^)
Рис. 10.6. Формирование МЧМ-CDMA сигнала к-ro пользователя
В синхронных системах без перенасыщения, подобных мобильной
линии «вниз», любое множество К ^ N ортогональных сигнатурных
векторов (к примеру, функций Уолша) обеспечило бы свободное от ПМД
разделение OFDM МЧМ-CDMA пользовательских сигналов, поскольку
ортогональность ДПФ спектров гарантирует ортогональность OFDM символов.
Выбор сигнатур в асинхронных системах (например, мобильных линиях
«вверх») не столь однозначен, хотя некоторые минимаксные сигнатурные
ансамбли, характерные для асинхронных ПРС-CDMA систем (см. § 7.5),
могут оказаться полезными и для МЧМ-CDMA [105-107]. Специфической
проблемой синтеза МЧМ-CDMA сигнатур, с которой приходится
особенно считаться при проектировании линий «вверх», являются глубокие
вариации действительной огибающей сигнала, т. е. — в отличие от ПРС-
CDMA — пик-фактор, значительно превосходящий единицу. Этот аспект
нередко становится решающим, так как при прочих равных условиях
среди ряда кандидатов на роль сигнатурного ансамбля естественно отдать
предпочтение тому, для которого пик-фактор минимален.
На рис. 10.7 представлена концептуальная (не на основе ДПФ)
структура МЧМ-CDMA приемника к-го пользователя. Она содержит N = Мс
субканалов, каждый из которых настроен на собственную поднесушую
и реализован в виде комплексного коррелятора, обрабатывающего
комплексную огибающую наблюдения Y(t). Для нейтрализации плоского фе-
414 Глава 10. Некоторые направления дальнейшего прогресса
динга в каждом частотном субканале комплексная величина z^i с выхода
г-го коррелятора взвешивается комплексным коэффициентом w^ и
умножается на комплексно сопряженный символ сигнатуры а£^ Последняя
операция есть не что иное, как эквивалент сжатия спектра в частотной
области. Продукт суммирования полученных произведений по всем
субканалам — статистика Zk — используется далее для оценки (демодуляции)
текущего символа данных Ъ^ fc-го пользователя. Подчеркнем вновь, что
в OFDM формате банк корреляторов заменяется блоком ПДПФ.
Y(t)
Коррелятор
4i
Коррелятор
ехр(-*2я/,1)
42
expi-j2irf2t)
Коррелятор
ЧЛ
|exp(-/27Tfa)
aKN-\
Рис. 10-7. Концептуальная схема приемника M4M-CDMA
Обсудим теперь кратко вопрос о выборе весовых коэффициентов и;*,
г — 1,2,..., 7V. В рамках МЧМ-CDMA сценария он в определенном плане
более сложен, чем при стандартной МЧМ передаче, из-за
необходимости контроля уровня ПМД. Допустим, что сигналы всех пользователей
распространяются по одному и тому же каналу, как это характерно,
например в линии «вниз» мобильной системы радиосвязи. Поскольку разнос
поднесущих F не меньше полосы когерентности канала, значения
канальной передаточной функции Щ, г ~ 1,2,..., N на поднесущих могут
независимо флюктуировать в широком диапазоне. После нормировки ка-
I ~ I2
нальной передаточной функции как N~l J2iL\ \Щ = 1 можно трактовать
амплитуду Ak &-й поднесущей как интенсивность неискаженного
каналом сигнала. Тогда мощности Р&, Рп^, Р/, создаваемые на выходе fc-ro
приемника полезным сигналом, шумом и 1-й ПМД соответственно, можно
вычислить как
|2
Pk = A\
N
Y2 \a^
-i\2HiWl
N
Рпк — ° 221ам-
и2 Ы2,
г=1
10.2. Многочастотная модуляция и OFDM 415
А?
N
^2al,i-lak,i-l^iwi
где а — мощность субканального шума. Как теперь видно, если даже
сигнатуры изначально ортогональны:
JV-1
г=0
частотная селективность между субканалами может нарушить
ортогональность, усиливая одни и подавляя другие поднесущие. В результате
возникают ПМД, так что не все Р\,1 фк окажутся нулевыми. Для
сохранения ортогональности сигнатур на приемной стороне независимо от
текущего состояния канала следует взять w* — 1/Hi, г — 1,2,..., iV, т. е.
осуществить нуль-фор сиру ющий эквалаизинг, полностью компенсирующий
канальные эффекты. Это, однако, означает рассогласованность
обработки всякий раз, когда канальная амплитудная передаточная функция
неравномерна, а, значит, ценой полного подавления ПМД оказываются
потери в отношении сигнал-шум q| ^, соответствующие нуль-форсирующему
комбинированию:
|2
|2|
^2 N | „ ,2
Qk,zf —
4
N
Е |ам-1Г
Рпк
J1 N
Е |а*,*-1Г
г=1
Щ
г=1
н,
где %^mf — отношение сигнал-шум по мощности при согласованной
обработке w^ — Щ, т. е. комбинировании по максимуму отношения сигнал-
шум (подпараграф 3.6.1). Для случая исходно одинаковых интенсивностей
всех поднесущих |afcji-i| = 1/VN, г = 1,2,...,7V потери 7 = q%jmf/ql,zf
в отношении сигнал-шум нуль-форсирующего комбинирования
относительно комбинирования по максимуму отношения сигнал-шум (см. (6.42))
N , _ ,-2
^ = ^£
N
Hi
(10.33)
Из (10.33) видно, что при значительной неравномерности канальных
m
близки к нулю), по-
амплитудно-частотных искажений (некоторые
тери в отношении сигнал - шум, т. е. плата за радикальное устранение
ПМД, могут оказаться неприемлемыми. В этих обстоятельствах более
разумным представляется поиск компромисса между уровнями остаточной
(неподавленной) ПМД и шума. Один из таких подходов ведет к МСКО
416 Глава 10. Некоторые направления дальнейшего прогресса
эквалайзингу, идея которого по существу не отличается от
обсуждавшейся в предыдущем разделе применительно к многопользовательскому
приему. Более подробные сведения на этот счет, как и углубленное
обсуждение широкополосных форматов МЧМ, можно найти в [105, 106]
и содержащихся там многочисленных ссылках.
В заключение уместно еще раз повторить тезис о том, что никакой
жесткой разделительной черты между ПРС- и МЧМ-CDMA нет. Они
представляют собой лишь параллельные технологии получения одного
и того же результата: широкополосной сигнатуры. Последнюю всегда
можно синтезировать либо как суперпозицию гармоник в частотной
области (МЧМ), либо непосредственным формированием во временной
области (ПРС).
10.2.4. Приложения
Диапазон применений МЧМ в современных цифровых
телекоммуникациях чрезвычайно широк. В числе примеров ее практического
использования можно сослаться на стандарты цифрового аудио- и видеовещания
DAB, DVB-T и др. Позитивный опыт, накопленный к настоящему
моменту, позволяет прогнозировать многообещающее будущее и для МЧМ
форматов CDMA. В частности, у МЧМ-CDMA имеются шансы выбора
в качестве одной из базовых платформ радиоинтерфейса 4G и
последующих поколений сетей мобильной связи.
10.3. Разнесение на передаче
и пространственно-временное кодирование
в CDMA системах
10.3.1. Разнесение на передаче и проблема
пространственно-временного кодирования
Из краткой дискуссии § 3.6 следует, что вовлечение нескольких приемных
и передающих антенн весьма продуктивно в плане организации ветвей
разнесения, необходимых для противодействия деструктивным
эффектам замираний. Обычно для этой цели используются антенные
решетки из элементов, разделенных промежутком в несколько длин волн,
достаточным для обеспечения независимости их многолучевых профилей.
Акроним MIMO (multiple input — multiple output: множественный вход —
множественный выход) в литературе принят для систем, совместно
обрабатывающих сигналы, принятые несколькими приемными антеннами
от нескольких передающих антенн. Рис. 10.8 дает общее описание канала
MIMO с пт передающими и пц приемными антеннами. В этой струк-
10.3. Разнесение на передаче и пространственно-временное кодирование 417
туре г-я передающая и j-я приемная антенны образуют субканал, чье
текущее состояние характеризуется комплексным коэффициентом
затухания Hij, г = 1,2,...,пг, j = 1,2,..., п#, который в общем случае может
зависеть от времени и частоты. Обычно, благодаря организации
выделенного пилотного канала, приемник осведомлен о текущем состоянии
канала и может использовать коэффициенты Н^ для эффективной
совместной обработки (т. е. комбинирования) субканальных сигналов. Что
касается передатчика, он может располагать знаниями о состоянии
канала и возможностью адаптации сигнала к текущим условиям
распространения только за счет организации надежной информационной обратной
связи «приемник-передатчик» (замкнутой петли разнесения на передаче).
Рис. 10.8. Общая модель канала MIMO
Пусть имеется только одна передающая и ur приемных антенн и,
следовательно, riR субканалов с коэффициентами затухания Н\, Нъ,..., HUR.
Тогда утилизация потенциала разнесения на приеме в общих чертах
заключается только в адекватном комбинировании сигналов, принятых
параллельными антеннами. Подобная операция, по крайней мере в принципе,
достаточно проста, поскольку приемник получает сигналы разных
антенн на разных выходах и (зная состояния всех ветвей разнесения Hj)
может обработать их соответственно избранному методу
комбинирования. Ситуация кардинально меняется, как только в действие вступает
разнесение на передаче. При одновременной работе параллельных
передающих антенн приемник сталкивается с проблемой разделения их сигналов,
интерферирующих друг с другом на входе каждой из приемных антенн,
необходимого для того, чтобы использовать далее информацию о
состоянии субканала Нц и скомбинировать субканальные сигналы должным
образом. Для гарантии подобного разделения передачу данных пт
параллельными передающими антеннами необходимо тщательно
спланировать, что составляет проблематику области, называемой пространствен-
но-временным кодированием. В данном наименовании содержится ссылка
на тот факт, что группа передаваемых битов данных взаимно-однозначно
418 Глава 10. Некоторые направления дальнейшего прогресса
отображается на двумерное п? х го кодовое слово [и\]. Элемент массива и\
с индексами г, t является кодовым символом, передаваемым г-ж антенной
в t-ж момент времени, an — длина кода. Заметим, что в ряде
случаев разнесение на приеме неосуществимо, как например, в линии «вниз»
сети мобильной связи, где малые размеры мобильного терминала
препятствуют применению в нем нескольких приемных антенн. В подобных
сценариях разнесение на передаче и, следовательно, адекватное
пространственно-временное кодирование обретают особую значимость. Примем,
начиная с этого момента, допущение о единственности приемной антенны
с тем, чтобы сконцентрироваться только на исследовании эффективности
разнесения на передаче. Это предположение упрощает обозначение
коэффициента канального затухания, поскольку нужен лишь один индекс,
указывающий на номер передающей антенны: Нц — Щ.
10.3.2. Эффективность разнесения на передаче
В последние годы были предприняты многочисленные исследования по
выяснению пропускной способности Шеннона, т. е. потенциальной
скорости безошибочной передачи данных, MIMO-каналов, и продуктивность
применения множественных антенн была подтверждена для многих
базовых моделей замираний [108-110]. Не приходится удивляться позитивному
эффекту разнесения на приеме, поскольку дополнительные приемные
антенны утилизируют энергию сигнала из добавочных пространственных
точек, которая была бы безвозвратно потеряна в случае единственной
антенны. При комбинировании по максимуму отношения сигнал-шум
rid идентичных приемных ветвей разнесения среднее отношение сигнал-
шум по мощности возрастает в rid раз (см. подпараграф 3.6.1), и, хотя
данный фактор не является единственным и решающим в результативности
разнесения, он, по крайней мере, позволяет предвидеть сопутствующие
улучшения. В отличие от этого природа выигрыша в пропускной
способности или вероятности ошибки при разнесении на передаче не столь
очевидна, учитывая расщепление ограниченного общего мощностного
ресурса между несколькими передающими антеннами. Говоря конкретно,
никакого выигрыша в среднем отношении сигнал-шум при
комбинировании идентичных ветвей разнесения при фиксированной полной мощности
получить нельзя, за исключением ситуации, когда передатчик знает
состояния субканалов и способен координировать передачу по различным
ветвям так, чтобы в приемной антенне сигналы субканалов
суммировались когерентно. В самом деле, пусть информация о состоянии субканалов
передатчику недоступна, а полная мощность Р равномерно
распределяется между rid идентичными ветвями разнесения (антеннами, частотными
субканалами и т.п.). Тогда среднее мощностное отношение сигнал-шум
10.3. Разнесение на передаче и пространственно-временное кодирование 419
на одну ветвь составит q2/rid, где q2 — среднее отношение сигнал-шум по
мощности, которое имело бы место на входе приемника в отсутствие
разнесения. Очевидно, что комбинирование может увеличить среднее мощ-
ностное отношение сигнал-шум на ветвь только в rid раз, т.е. довести
выходное отношение сигнал-шум лишь до того значения, которое
имелось без разнесения.
Таким образом, две противоречивые тенденции характерны для
разнесения на передаче (как, к примеру, и при частотном разнесении). С
одной стороны, при заданной полной мощности увеличение числа ветвей
приводит к большему числу независимых субканалов, которые,
поддерживая друг друга, повышают вероятность того, что, по крайней мере,
в некоторых из них условия распространения благоприятны. С другой —
энергетический режим (отношение сигнал-шум в ветви) в каждом из
субканалов разнесения с ростом rid ухудшается. Точный теоретический
анализ убеждает, что первый из этих факторов пересиливает второй.
Оставим в стороне математические выводы, относящиеся к пропускной
способности, с которыми можно ознакомиться в ряде источников (например,
[108-110]), хотя, впрочем, в задачах 10.11 и 10.12 содержатся простейшие
примеры на этот счет. Что же касается выигрыша в вероятности ошибки
от разнесения на передаче, его можно наглядно продемонстрировать на
примере БФМ передачи по каналу с рэлеевскими замираниями.
Пусть А{ = \НА — коэффициент затухания амплитуды в г-й ветви
разнесения со средним квадратом, нормированным как А2 = 1. Тогда при
комбинировании по максимуму отношения сигнал-шум результирующее
nd
отношение сигнал-шум в приемнике (см. (3.15)) q2 = J2 A2(q2/rid) и,
согласно (2.19), условная вероятность ошибки на бит Ре{А\,Л-2,.-. ,And)
при фиксированных состояниях субканалов А^ г = 1,2,..., rid
Ре(АиА2,.. -, And) = Q(qr). (10.34)
Для получения безусловной вероятности ошибки на бит Ре нужно
усреднить (10.34) по всем субканальным амплитудам А%, % — 1,2,... , п^,
опираясь на их совместную плотность вероятности W(Ai, А2,..., And).
Благодаря независимости ветвей разнесения эта плотность факторизуется
в произведение rid одномерных плотностей вероятности всех амплитуд,
так что
оо оо сю
Ре = j j ...JQ{qr)
п<1
П Щ*)
i=l
dAidA2...dAnd. (10.35)
оо о
Для разделения переменных интегрирования в (10.35) аппроксимируем
дополнительную функцию ошибок Q(x) ее верхней границей (см. зада-
420 Глава 10. Некоторые направления дальнейшего прогресса
чу 10.13) Q{x) ^ (1/2)ехр(—ж2/2), х ^ 0, придя к результату
Ре^
1 nd ™ / j2„2\
Для канала с рэлеевскими замираниями плотность вероятности VF(Aj)
подчиняется закону (3.12), с учетом чего
1 "« 7
dAi = -
2nd \"<*
2W + 2nd)
(10.36)
£
-3
-2 !—"Л"
! J
1 1
) 1
ж-
iv%\
i 1
\
\
\
\
™r
\ i \u \
i 1
—__jbi
г 1
|^_ J
i
L
10
15 20 25
<?(<ffi)
30
35
40
Рис. 10.9. Зависимость
вероятности ошибки на бит от
отношения сигнал-шум при
разнесении на передаче для 1, 2, 3,
4, 5 и 6 ветвей разнесения
Рис. 10.9 иллюстрирует поведение вероятности ошибки на бит в
зависимости от общего среднего отношения сигнал-шум q для 1, 2, 3, 4,
5 и 6 ветвей разнесения. Чрезвычайно важен тот факт, что при
фиксированной вероятности ошибки две ветви разнесения уже обеспечивают
значительный энергетический выигрыш. Если, например, приемлема
вероятность ошибки на бит не более Ю-4, две ветви разнесения позволяют
снизить потребную энергию излучения более чем на 15 дБ. В то же время
с дальнейшим увеличением числа ветвей разнесения рост
энергетического выигрыша замедляется, и, например, переход от пяти ветвей к шести
сопровождается снижением излучаемой энергии лишь на 1 дБ. Этим
объясняется ограличение числа передающих антенн в ряде реальных систем
(например, в мобильных линиях «вниз») двумя, что расценивается как
разумный компромисс между выигрышем от разнесения и сложностью
оборудования.
10.3. Разнесение на передаче и пространственно-временное кодирование 421
Стоит подчеркнуть, что при неограниченном увеличении числа ветвей
разнесения правая часть (10.36) стремится к (1/2)ехр(—q2/2) (см.
задачу 10.14), т.е. к верхней границе (пунктирная линия на рис. 10.9)
вероятности ошибки на бит для гауссовского канала без замираний. Другими
словами, увеличение числа ветвей разнесения на передаче может в пределе
(по крайней мере теоретически) полностью нейтрализовать
разрушительные эффекты многолучевого распространения.
10.3.3. Пространственно-временной код
с временной коммутацией
Возможны разные подходы к построению пространственно-временных
кодов в зависимости от модели замираний. При быстрых замираниях
(см. § 3.5) профиль многолучевого распространения столь изменчив, что
значения коэффициента затухания одного и того же субканала для двух
смежных символьных интервалов независимы. В дальнейшем
обсуждении будем ориентироваться на противоположный сценарий медленных
замираний, полагая, что коэффициенты затухания субканалов остаются
постоянными на всей длительности кодового слова.
Чтобы акцентировать нетривиальный характер задачи построения
кодов, гарантирующих разделимость сигналов различных передающих
антенн в приемной, начнем с простейшего примера.
Пример 10.2. Пусть фиксированный мощностной ресурс Р поровну
делится между пт = 2 передающими антеннами, одновременно посылающими один
и тот же символ данных без каких-либо специальных мер для разделения
субканалов в приемнике (пространственно-временной код с повторением). Пусть на
приеме используется единственная антенна, а коэффициенты затухания Н\, Н^
двух субканалов — независимые комплексные гауссовские величины с нулевым
средним и равными дисперсиями. Это в точности случай рэлеевских
замираний, поскольку абсолютное значение коэффициента затухания Ai = \Щ\, г = 1,2
имеет рэлеевскую плотность вероятности. Если S(t) — комплексная огибающая
переданного сигнала, то комплексная огибающая принятого (Hi + H2)S(t)/\/2,
где корень из двух учитывает дробление излучаемой мощности. Отсюда ясно,
что два субканала образуют результирующий канал с коэффициентом
затухания Н = (Hi + H2)/V2j являющимся вновь гауссовской величиной с нулевым
средним и той же дисперсией, что и у любого из Н^. Следовательно, амплитуда
А = \Н\ распределена по рэлеевскому закону, и результирующий канал опять
оказывается каналом с рэлеевскими замираниями. Если средние квадраты А{
нормированы к единице, то и А2 = 1 . Таким образом, результирующий канал
полностью идентичен каждому из субканалов, и рассматриваемый вариант
использования двух передающих антенн не обещает никаких выгод в сравнении со
случаем единственной антенны. Другими словами, код с повторением является
вырожденным и не обеспечивает реального разнесения.
422 Глава 10. Некоторые направления дальнейшего прогресса
Как показывает пример, реальное число ветвей разнесения может
оказаться меньше числа передающих антенн. Один из наиболее важных
параметров любого пространственно-временного кода — выигрыш от
разнесения [diversity gain), т. е. фактическое число ветвей разнесения,
гарантируемое конструкцией кода (см. задачу 10.15).
Очевидно, разделения сигналов различных передающих антенн в
приемнике можно добиться, передавая один и тот же символ данных пт
антеннами по очереди, т.е. без наложения во времени. При этом одна
и только одна из передающих антенн излучает сигнал в каждый момент
времени, используя полный доступный мощностной ресурс. Подобная
организация полностью повторяет многоабонентскую TDMA схему, в том
смысле, что сигнал каждой антенны идентифицируется своим временным
положением и ортогонален остальным, поскольку не перерывается с
ними во времени. Поэтому приемник наблюдает сигналы всех субканалов
не в смеси, а последовательно во времени без взаимной интерференции.
Тогда, зная текущие коэффициенты затухания Щ, приемник полностью
осведомлен о том, какие из субканалов более, а какие менее надежны,
и способен скомбинировать их любым подходящим способом, например,
по максимуму отношения сигнал-шум. Описанная простейшая
конструкция часто упоминается как пространственно-временной код с временной
коммутацией (time-switched space-time code).
Пример 10.3. Рассмотрим снова случай двух антенн (пт = 2),
передающих один и тот же символ данных, однако на этот раз с чередованием: когда
первая излучает энергию, вторая пассивна и наоборот. Приемник один за
другим наблюдает сигналы двух субканалов с коэффициентами затухания Hi и if2,
искаженные аддитивным шумом мощности а2. При комбинировании по
максимуму отношения сигнал-шум наблюдения суммируются с весами Н*, г = 1,2
соответственно, так что результирующее мощностное отношение сигнал-шум
(см. (3.15)) q2 = (А2 + A^)q2l2> где q2 — полное «незамирающее» отношение
сигнал-шум по мощности на посылку данных, а двойка в знаменателе учитывает
дробление фиксированной энергии посылки между антеннами. Для идентичных
субканалов с амплитудами, нормированными к единице (А2 = 1), среднее
отношение сигнал-шум по мощности будет, разумеется, тем же, что и при передаче
всей энергии посылки по единственному субканалу: q2 = 2q2/2 = q2. Однако если
интерпретировать схему комбинирования как выход результирующего канала,
последний уже не является рэлеевским и характеризуется меньшей вероятностью
ошибки, чем рэлеевский канал с тем же отношением сигнал-шум (см. рис. 10.9).
Таким образом, реально присутствуют две ветви разнесения, обеспечивающие
предсказанный выигрыш, достигнутый ценой двукратного снижения скорости
передачи на единицу полосы. Действительно, теперь при фиксированной
скорости в бит/с каждой из антенн на передачу одного символа отводится половина
длительности посылки Тр/2, что означает удвоение занимаемой полосы. Пока-
10.3. Разнесение на передаче и пространственно-временное кодирование 423
зательно также сравнение с системой, имеющей две ветви разнесения на приеме
(пТ — 15 riR = 2). Легко видеть, что, когда единственная антенна передает
текущий символ в течение всей длительности посылки Тр, устройство
комбинирования в приемнике обеспечивает среднее отношение сигнал-шум по мощности
q? = 2q2s, т.е. на 3 дБ выше, чем при разнесении на передаче, при одинаковых
энергиях на символ. Причина энергетических потерь разнесения на передаче по
сравнению с разнесением на приеме уже неоднократно обсуждалась и состоит
в расщеплении общей фиксированной энергии между передающими антеннами.
Пространственно-временные коды с временной коммутацией
исключительно просты, однако их максимальный выигрыш от разнесения пт
оплачивается пропорциональным расширением полосы (при фиксированной
скорости), а также прерывистостью передачи, т. е. увеличением
пик-фактора сигнала. Тем самым существует серьезная мотивация к поиску
пространственно-временных кодов, реализующих выигрыш от разнесения,
несмотря на временное перекрытие сигналов разных передающих антенн.
Одна из важнейших конструкций такого типа, сочетающая
чрезвычайную простоту с потенциальной эффективностью, рассматривается ниже.
10.3.4. Пространственно-временной код Аламути
Схема кодирования, предложенная в [111], использует две передающие
антенны, не требует расширения полосы и обеспечивает максимально
возможный для двух антенн выигрыш от разнесения rid — пт — 2. Пусть bo
и Ь\ — два последовательных символа данных, стоящие на четной и
нечетной временной позициях соответственно и принадлежащие некоторому
фиксированному модуляционному алфавиту (ФМ, К AM и т.п.). Кодовые
слова пространственно-временного кода Аламути представляют собой
2x2 массивы вида
\Ь0 -Щ'
=
U1 1
u2 J
так, что длина кода п = 2. Как видно, на четном символьном
интервале две антенны в параллель передают кодовые символы Uq = bo
(первая антенна) и Uq = Ъ\ (вторая антенна), тогда как на нечетном
интервале излучаемыми символами являются и\ = —Ь\ (первая антенна) и
и\ = 6q (вторая антенна). Говоря иначе, антенны одновременно передают
последовательности длины два ui = {иоти\) = (&(Ъ—&*) (первая
антенна) и U2 = {uq,u\) = (Ьь^о) (вторая антенна). Подобный порядок делает
последовательности, излучаемые двумя антеннами, т. е. векторы ui и U2
ортогональными: (111,112) — боб* — Ь^бо = 0, гарантируя разделимость
в приемнике перекрывающихся сигналов двух субканалов. На самом деле
надобность в специальной процедуре разделения отсутствует, так как в
424 Глава 10. Некоторые направления дальнейшего прогресса
процессе оптимальной (МП) демодуляции символов данных Ьо и Ь\ она
выполняется автоматически, как и комбинирование по максимуму
отношения сигнал-шум. По понятной причине положим, что одиночный кодовый
символ, излучаемый в текущий момент одной антенной, в среднем
использует половину общей средней энергии посылки Es. Пусть Y — (Yb,Yi) —
вектор наблюдения, компонентами которого Y^, t = О,1 являются отсчеты
комплексной огибающей на выходе фильтра, согласованного с одиночным
символом, для четной "и нечетной позиций соответственно,
нормированные для удобства делителем Es/\/2. Тогда
Y - Яцц + tf2u2 + n, (10.38)
где п -— двумерный вектор независимых отсчетов комплексного гаус-
совского шума с нулевыми средними и равными дисперсиями. Тогда МП
правило (см. гл. 2) выдаст Ьо и Ь\ в качестве оценок символов данных
Ьо и bi, если они минимизируют квадрат евклидова расстояния между
наблюдением Y и полезной компонентой Н\\х\ + i?2u2:
|2
d2{Hlu1+H2u2,Y)
#lUi -#2U2
= (Y - Яиц - tf2u2, Y - tfmi - tf2u2).
На основании аксиом дистрибутивности и симметрии скалярного
произведения ((u, v) = (v, и)*) и с учетом ортогональности Ui,u2 получаем
<? =
-2Re
fl?(Y,ui)
-2Re
ЬН8 +
Hi
Ml2,
Я^(У,и2)] + |Я1|
где обозначение квадрата расстояния сокращено до d2. После подстановки
ui, u2 из (10.37)
d2 = ||y||2 - 2Re [Ь*0(ЩУ0 + я2у*)] - 2Re [ьЦЩУо - ВД*)] +
+
(l^f + l^l^lbo^ + lbil2).
Преобразованные отсчеты наблюдения
zq = ЯГYo + H2Y{, h = Я2*У0 - HiY;, (10.39)
как и норма вектора наблюдения, не зависят от переменных Ьо, Ъ\,
относительно которых должно минимизироваться d2. Поэтому в
минимизируемой функции можно заменить
d2 = \z0\2-2Re(b*0z0) + \b0\2 +
на |io| + | ii| , придя к равенству
НЛ
+
Я2
-1 |Ьо|2 +
+ |ii|2-2Re(6ti1) + |bi|2 +
Я1
+
я2
-1)N2.
10.3. Разнесение на передаче и пространственно-временное кодирование 425
Теперь понятно, что минимизация d? относительно Ьо> Ь\ сводится к
раздельному поиску минимумов двух функций одной переменной d2(6o) =
= |io-bo|4#2M2H^^
относительно 6о и 6i. Тем самым оценки символов 6о, bi находятся как
k = argmax (|i, - Ьг\2 + Я2 \bt\2) , I = 0,1, (10.40)
где z\ дается (10.39), а минимизация вьшолняется по всем значениям fy,
в пределах фиксированного алфавита символов данных. В частном случае
ФМ передачи |6$|2 = 1 и единственной компонентой первого слагаемого
в скобках правой части (10.40), зависящей от fy, оказывается Re (6*if), что
превращает решающее правило в обычную ФМ демодуляцию (см. подпа-
раграф 7.1.2), выполняемую, однако, над модифицированными
статистиками согласованного фильтра z\\
hi = argmax[Re (bfa)], / = 0,1. (10.41)
bi
Зафиксируем передаваемые символы hi, I = 0,1 и коэффициенты
затухания Щ, г = 1,2. Тогда полезные компоненты решающих статистик ij,
/ = 0,1 можно вычислить усреднением Yq и Y± в (10.39) по
аддитивному шуму. Обозначив эту операцию через Еп{-}, получаем (см. (10.38))
En{Y0} = НгЬо + Н2ЬЪ Еп{Ъ} = -Hxb\ + Н2Ь*0, так что
En{z0} = (А2 + А2)Ь0, Еп{гг} = (А2 + А2)Ъи
где, как и прежде, Ai = \НА, г = 1,2. Как теперь видно, полезная
компонента z\ формируется так, будто никакой проблемы разделения
субканалов нет и каждый символ передается по двум независимым ветвям
разнесения с последующим комбинированием по максимуму отношения
сигнал-шум. Подобно этому дисперсия а2 вещественной или мнимой
части аддитивного шума в составе z\ найдется как <т2 = (А2 + А^сг2, где
а2 — дисперсия действительной части шумового отсчета в (10.38).
Тогда отношение сигнал-шум по мощности q2t для каждой из статистик if,
I = 0,1 будет
2 jEn{k}\2 ^{Al + Alm2
Qzl <т2 a2
Учтем теперь случайность А^ г = 1,2, bi, I = 0,1 и усредним q2t по всем
случайным факторам, чтобы прийти к среднему значению отношения
сигнал-шум для каждой из статистик i/, / = 0,1. При естественной
нормировке коэффициентов замираний и модуляционного алфавита Af = 1,
г = 1,2, \bi\ — 1, / — 0,1, д2^ = 2/а2, а поскольку п в (10.38) нормирован
к Es/\/2 и дисперсия шума на выходе фильтра, согласованного с
символом, равна NqEs/2 (см. (2.15)), то а1 — Nq/Es. Теперь окончательно
426 Глава 10. Некоторые направления дальнейшего прогресса
q%} = 2Es/Nq = #2, откуда следует, что схема Аламути, подобно коду
с временной коммутацией, сохраняет то же среднее отношение сигнал-
шум на символ, что и схема без разнесения, в сочетании с выигрышем
от разнесения rid — пт = 2. Уместно еще раз подчеркнуть, что
преимуществом кода Аламути по сравнению с временной коммутацией является
отсутствие пауз в передаче, означающее как меньший пик-фактор
излучения, так и более высокую спектральную эффективность.
Код Аламути является полноскоростным. Последний термин означает,
что с его помощью два независимых модуляционных символа
передаются в течение двух символьных интервалов. В общем случае
пространственно-временной код длины п, передающий к независимых
модуляционных символов данных, имеет скорость R = k/п. Полноскоростные коды
предпочтительны, поскольку они не предполагают расширения полосы
по сравнению с использованием единственной антенны. Существование
полноскоростных кодов с максимальным выигрышем от разнесения rid —
пт критически зависит от модуляционного алфавита. Для
действительной модуляции (например, БФМ) полноскоростные коды существуют для
ряда значений числа пт передающих антенн, тогда как для
комплексных модуляционных алфавитов (КФМ, КАМ и др.) код Аламути
уникален1 [112]. В то же время к интересным конструкциям пространственно-
временных блоковых кодов комплексного и действительного алфавитов
можно прийти, ослабив полноскоростное требование [110, 112] (см. также
задачи 10.16, 10.17). Мы отсылаем читателя за более детальными
сведениями об этом и других аспектах пространственно-временного кодирования
к работам [110-113] и статьям, цитируемым в [110].
10.3.5. Разнесение на передаче
в широкополосных приложениях
Может сложиться впечатление, что широкополосная идеология является
безотказным ключом к прямой и технологичной организации
разнесения на передаче. В самом деле, принципиальным камнем преткновения
разнесения на передаче является разделение на приемной стороне
перекрывающихся сигналов от разных передающих антенн. Можно было
бы справиться с этой проблемой за счет расширения спектра сигналов
разных антенн с помощью различных (ортогональных) широкополосных
кодов. Однако этот на первый взгляд столь очевидный рецепт при более
пристальном изучении оказывается далеко не универсальным. Дело в том,
1Коды, полученные тривиальной трансформацией (10.37) (общее сопряжение или/и
умножение строк/столбцов на — 1, или на любое фиксированное комплексное число
с единичным модулем), новыми не считаются.
10.3. Разнесение на передаче и пространственно-временное кодирование 427
что в CDMA системах ортогональные последовательности представляют
собой дефицитный ресурс, так как их число напрямую лимитирует
потенциальное число абонентов. Таким образом, в насыщенных (К — iV),
а тем более в перенасыщенных (К > N) CDMA линиях «вниз»
отсутствуют резервные ортогональные последовательности для организации
разнесения на передаче, так что пространственно-временные коды с
экономным использованием полосы столь же ценны в CDMA приложениях,
как и в любых других.
Введение кода Аламути в ПРС CDMA линию «вниз» не представляет
затруднений и не требует дополнительного сигнатурного
(спектрального) ресурса. Пусть Sk(t) — комплексная огибающая fc-й пользовательской
сигнатуры (интерпретируемой здесь как сигнал той же длительности Тр,
что и символ данных), а Ь^,о7 bfc,i — четный и нечетный символы данных,
посылаемых к-му пользователю. Очевидно, для осуществления разнесения
на передаче на базе фиксированной сигнатуры Sk(t) достаточно лишь
подставить в массив (10.37) ПРС-расширенные символы bk$Sk(t) и bk^Sk{t)
вместо Ьо> Ь\ соответственно. При этом первая и вторая антенны передают
сигналы bk$Sk(t) — bl iS%(t — Tp) и bk,iSk{t) + bl0S%(t-Tp) соответственно
на интервале двух последовательных символьных посылок. На приемной
стороне сжатие этих сигналов по спектру с помощью опорного сигнала
S%(t) + Sk{t — Тр) устраняет сигнатуру и сводит задачу к
рассмотренной в подпараграфе 10.3.4. Этот подход с незначительными изменениями
материализован в незамкнутой петле (без обратной связи МС-БС)
разнесения на передаче линии «вниз» стандарта WCDMA [114, 115].
Справедливости ради можно заметить, что обработка в мобильном терминале
сигналов синхронизации (измерение временной задержки), кодированных
кодом Аламути, усложнилась бы в большей степени, чем демодуляция
данных. По этой причине для канала синхронизации избран иной
метод разнесения на передаче, а именно код с временной коммутацией,
описанный в подпараграфе 10.3.3 [115]. Еще одной интересной деталью
является организация замкнутой петли в выделенных (т. е. адресованных
конкретному пользователю) физических каналах. С помощью обратной
связи МС-БС базовая станция получает сведения о текущем состоянии
канала между БС и конкретным пользователем и фазирует сигналы двух
передающих антенн таким образом, чтобы они суммировались
когерентно на входе мобильного терминала. Возможна и подстройка амплитуд
передаваемых сигналов с тем, чтобы непосредственно в приемной
антенне добиться комбинирования по максимуму отношения сигнал-шум
и приблизить эффективность разнесения на передаче к эффективности
приемного разнесения. Спецификация линии «вниз» стандарта cdma2000
в части разнесения на передаче содержит ряд похожих решений.
428 Глава 10. Некоторые направления дальнейшего прогресса
Задачи
10.1. Пусть первая сигнатура ai является линейной комбинацией остальных.
Покажите, что линейная система (10.12) не имеет решения, т.е.
подавление ПМД автоматически устраняет и полезный эффект.
10.2. Синхронная ПРС-CDMA система обслуживает трех пользователей.
Сигнатуры — бинарные с коэффициентом расширения N = 3: ai = (Н ),
а2 = (—I—), аз = ( Ь). Найдите опорный сигнал декоррелирующего
приемника первого пользователя, продемонстрируйте подавление ПМД
и оцените потери в отношении сигнал-шум декоррелятора по
отношению к согласованному фильтру.
10.3. Найдите градиент функции (10.19) и покажите, что решение и, даваемое
(10.20), отвечает минимуму этой функции.
10.4. Докажите лемму матричного обращения в форме (10.21).
10.5. Найдите опорный вектор МСКО приемника для условий задачи 10.2,
полагая амплитуды всех сигнатур и дисперсию шума равными единице.
Вычислите отношение сигнал- (шум+помеха) на выходе МСКО приемника,
сравните его с аналогичным параметром для декоррелятора и
согласованного фильтра (задача 10.2) и объясните результаты.
10.6. Синхронная CDMA система обслуживает 128 пользователей, имея
коэффициент расширения N = 96. Сигнатуры являются столбцами матрицы
Адамара размера 128, в которой вычеркнуты 32 строки. Найдите опорные
векторы МСКО приемников всех пользователей в предположении равной
интенсивности пользовательских сигналов.
10.7. Линия «вниз» МЧМ-ПРС-CDMA системы реализована с использованием
трех поднесущих. Данные передаются на каждой поднесущей в формате
БФМ со скоростью 32 кбит/с и коэффициентом расширения 64.
Защитный частотный интервал составляет 0,5/Д, где А — длительность чипа
сигнатуры. Как изменится потенциальное число пользователей при
замене МЧМ-ПРС-CDMA на ПРС-CDMA?
10.8. Требуется передавать данные в формате КФМ со скоростью 2,88 Мбит/с
по каналу с полосой когерентности Вс — 50 кГц. Найдите минимальное
число поднесущих при МЧМ передаче. Какова минимальная длина ДПФ
в OFDM схеме, если доля защитных интервалов в общем передаваемом
потоке не должна превышать 10 %?
10.9. Синхронная МЧМ-CDMA линия «вниз» в версии OFDM передает данные в
формате КФМ со скоростью 40 кбит/с по каналу с диапазоном рассеяния
по задержке t&s — 10 мкс. Сколько пользователей она может обслужить,
если неискаженные сигнатуры ортогональны, а общая отведенная системе
полоса составляет 5 МГц?
10.10. Разумно ли комбинирование с нуль-форсированием в МЧМ-CDMA
системе с рэлеевскими субканалами?
Задачи в пакете MATLAB 429
11. Предположим, что пц антенн параллельно принимают сигнал,
переданный единственной антенной, причем интенсивности всех принятых
сигналов одинаковы, как и независимых гауссовских шумов, искажающих
сигналы. Насколько шенноновская пропускная способность такого
канала отличается от пропускной способности канала без разнесения, если
приемнику известны разности длин путей всех сигналов?
12. Предположим, что передатчик способен передавать данные через п^
независимых идентичных ветвей разнесения при фиксированной полной
мощности излучения. Предположим, что интенсивности всех принятых
сигналов одинаковы, как и независимых гауссовских шумов, искажающих
сигналы, и что приемнику (но не передатчику!) известны разности длин
путей всех сигналов. Что лучше с точки зрения пропускной способности
Шеннона: передавать один и тот же или разные потоки данных по п^
ветвям?
13. Выведите верхнюю границу для дополнительной функции ошибок: Q[x) <
< (1/2) ехр(—х2/2) для любого х ^ 0.
14. Докажите сходимость правой части (10.36) к верхней границе
вероятности ошибки для единственной незамирающей ветви: (1/2)ехр(—q2/2),
когда число ветвей разнесения неограниченно возрастает.
15. Согласно строгому определению [110, 112, 113], выигрыш от разнесения
есть минимальный ранг среди всех попарных разностей несовпадающих
пространственно-временных кодовых слов, т.е. пт хп матриц [и\].
Докажите, что для кода Аламути выигрыш от разнесения равен двум.
16. Найдите скорость (в символах данных на кодовый символ) и выигрыш
от разнесения пространственно-временного кода с действительным
алфавитом и кодовыми словами [112]
U =
Ьо — fei — &2 — &з
Ь\ Ьо &3 — &2
Ь2 — &з &о &i
17. Найдите скорость (в символах данных на кодовый символ) и выигрыш от
разнесения пространственно-временного кода с комплексным алфавитом
и кодовыми словами [116]
U =
Ьо Ь\ Щ 0
-bi Щ 0 -Ъ*
-ь* о ь*0 ы
Задачи в пакете MATLAB
18. Напишите и выполните программу, моделирующую стандартный, декор-
релирующий и МСКО приемники для произвольного синхронного ан-
430 Глава 10. Некоторые направления дальнейшего прогресса
самбля сигнатур и случайных интенсивностей сигналов пользователей.
Рекомендуемые шаги:
а) Сформируйте N х К матрицу К нормированных сигнатур длины N;
б) Присвойте амплитуде первого пользователя значение, равное единице,
а остальным — случайные рэлеевские значения с единичным средним
квадратом;
в) Прибавьте гауссовский шум с дисперсией, отвечающей некоторому
выбранному отношению сигнал-шум на бит <#>, к сумме
масштабированных установленными амплитудами сигнатур;
г) Найдите опоры и вычислите отношения сигнал-(шум+помеха) для
всех трех типов приемника первого пользователя (декоррелятор не
существует для линейно-зависимых сигнатур);
д) Меняя уровень шума при фиксированных интенсивностях сигнатур,
постройте кривые зависимости отношения сигнал - (шум+помеха) от
отношения сигнал-шум на бит <#>;
е) Исследуйте случаи следующих сигнатурных ансамблей: ортогональные
последовательности (К ^ iV), циклические сдвиги га-послед овательно-
сти (К < 7V"), последовательности, лежащие на границе Велча (К > N),
и прокомментируйте результаты.
10.19. Напишите и выполните программу, иллюстрирующую принципы OFDM
модуляции - демодуляции (см. рис. 10.10). Рекомендуемые шаги:
а) Установите число точек (частот) ДПФ Мс;
б) Сформируйте и отобразите на экране случайную последовательность
Мс битов источника;
в) Вычислите ОДПФ битового вектора;
г) Добавьте циклический префикс и визуализируйте полученный OFDM
символ;
д) Установите случайный профиль запаздываний в канале, т.е.
целочисленные задержки в диапазоне до 4-6, рэлеевские амплитуды и
равномерно распределенные на [—7г,7г] фазы путей, считая все параметры
независимыми друг от друга;
е) Вычислите и отобразите на экране OFDM символ, искаженный каналом;
ж) Удалите префикс и концевые (обязанные задержке в канале) отсчеты
и вычислите ПДПФ полученного вектора;
з) Рассчитайте передаточную функцию канала и разделите на нее
полученное ранее ДПФ;
и) Дсмодулируйте полученные отсчеты в биты;
к) Визуализируйте демодулированную битовую последовательность и
сравните с переданной.
Задачи в пакете MATLAB 431
П"
0.5 Н-
0.0 |f
—1.U г*^
14!
г
1
44—~
i
-i-L
1
[—|
~~~4гН
!
10 20
Номер бита
30
vo 1.0 h
х 0.5
03
со
8. 0.0
|-0.5
О
1-1.0
10 20
Номер бита
30
a as
о
X
J3
ш 0.6
л
I
£ 0.4
со
5
| 0.2
О
LL
о о
III
III
111
III
III
It
10
20
30
Рис, 10.10. Иллюстрация к моделированию OFDM для Мс = 32
10.20. Напишите программу для исследования влияния выбора МЧМ- CDMA
сигнатур на пик-фактор МЧМ символов. Выполните программу для
ансамблей сигнатур Уолша и комплексных сигнатур в виде циклических
сдвигов многофазных кодов из подпараграфа 6.11.2. Объясните различия
в пик-факторе для этих двух сигнатурных ансамблей.
10.21. Напишите программу, демонстрирующую выигрьитт
пространственно-временного кода Аламути по отношению к системе без разнесения при БФМ
передаче по рэлеевскому каналу. Рекомендованные шаги:
а) Сгенерируйте поток Lbs = Ю4 — Ю5 случайных независимых битов;
б) Присвойте им независимые амплитуды в соответствии с рэлеевской
моделью фединга со средним квадратом, равным единице;
в) Прибавьте гауссовский шум с дисперсией, диктуемой
предустановленным средним отношением сигнал-шум по мощности </£;
г) Дсмодулируйте полученное наблюдение и рассчитайте эмпирическую
вероятность ошибки на бит;
д) Расщепите исходный битовый поток на пары четных и нечетных битов;
е) Закодируйте каждую пару из четного и нечетного битов по правилу
(10.37), сформировав два новых потока длины L^, соответствующих
двум антеннам;
Глава 10. Некоторые направления дальнейшего прогресса
ж) Сформируйте два вектора субканальных амплитуд, состоящих
соответственно из четных и нечетных элементов множества пункта (б);
припишите всем элементам этих векторов случайные независимые
фазы, равномерно распределенные на отрезке [—7г,7г];
з) Используйте первый из векторов предыдущего пункта для имитации
рэлеевского фединга в первом субканале, приписывая его элементы
каждой паре последовательных битов из потока первой антенны как
комплексные амплитуды; проделайте то же самое для потока второй
антенны, используя второй вектор предыдущего пункта;
и) Просуммируйте полученные потоки, разделив итог на л/2 и добавьте
тот же шум, что в пункте (в);
к) Демодулируите полученное наблюдение по правилу (10.41), которое
для БФМ принимает простейшую форму: Ь\ — sign [Re (zi)], I — 0,1;
л) Рассчитайте эмпирическую вероятность ошибки на бит и сравните
с полученной в пункте (г);
м) Повторите предыдущие пункты для других значений отношения
сигнал-шум на бит и постройте эмпирические зависимости вероятности
ошибки на бит от отношения сигнал-шум для обоих вариантов
передачи, сравните результаты с теоретически ожидаемыми (см. рис. 10.9)
и объясните расхождения, если таковые имеются.
ГЛАВА I I
ПРИМЕРЫ
ДЕЙСТВУЮЩИХ
БЕСПРОВОДНЫХ
ШИРОКОПОЛОСНЫХ
СИСТЕМ
I U. Предварительные замечания
Как неоднократно подчеркивалось в предыдущих главах,
широкополосная концепция лежит в основе разнообразных современных и
планируемых в перспективе беспроводных систем, от комплексов локации и
навигации до сетей локального доступа. Ярким подтверждением
коммерческой состоятельности широкополосных технологий явились
впечатляющие маркетинговые успехи мобильных сетей 2G стандарта cdmaOne
(IS-95), а также консолидация международного телекоммуникационного
сообщества в части признания за CDMA статуса базовой платформы
систем третьего и последующих поколений. Множество кандидатов для
демонстрации материализованного воплощения широкополосной философии
и CDMA достаточно обширно, однако для предлагаемой главы
выбраны лишь три примера, выделяющиеся особой значимостью как в наши
дни, так и в предсказуемом будущем и обладающие высокой степенью по-
знавательности. Фигурирующие в них системы уже не раз упоминались
в иллюстрациях практического приложения тех или иных принципов или идей.
I 1.2. Глобальная радионавигационная система GPS
Любой объект, перемещающийся по земной поверхности или в
пространстве, заинтересован в знании собственного текущего местоположения.
Областью, охватывающей задачи позиционирования объектов, является
навигация. Современное навигационное оборудование призвано
достоверно информировать потребителя о его мгновенных координатах,
скоростях движения по отношению к избранной координатной системе, точном
текущем времени, предсказанном местонахождении в тот или иной
момент, и т. д. Наиболее прогрессивной и универсальной системой, обеспе-
434 Глава 11. Примеры действующих беспроводных широкополосных систем
чивающей решение названных задач, является глобальная
радионавигационная система GPS (Global Positioning System), начало эксплуатационной
стадии которой было официально декларировано США в 1993 г.
11.2.1. Общие принципы и архитектура системы
Местоположение объекта на Земле или над ее поверхностью можно
задать тремя координатами, а именно широтой, долготой и высотой. Чтобы
их определить, объект может выполнить измерение расстояний
(дальностей) до трех фиксированных точек (маяков), чьи координаты известны
априори с высокой точностью. Подобные измерения позволяют
составить три уравнения, тремя неизвестными в которых оказываются как
раз координаты объекта. Решив уравнения, объект завершит процедуру
позиционирования.
В радионавигации дальности определяются через измерение
задержек распространения сигналов, переданных маяками: расстояние есть
попросту задержка распространения, помноженная на скорость света.
Передатчики всех маяков обычно жестко синхронизированы друг с
другом, работая в едином системном времени. В противоположность этому,
эталон времени любого индивидуального пользователя исходно смещен
относительно системной шкалы, и — вследствие случайности и
нестабильности частотного ухода — временной сдвиг бортовых часов оказывается
добавочной — четвертой — неизвестной. Фиксируя момент прихода
сигнала маяка относительно местной временной шкалы, объект не сможет
измерить истинную задержку распространения, поскольку в результат
войдет упомянутое временное смещение. Простейшей техникой
исключения этого неизвестного вклада могло бы быть измерение расстояния двух-
путевым методом, при котором маяк передает свой сигнал в ответ на
пользовательский дальномерныи запрос. Подобное, однако, означало бы
активность пользователей, т.е. излучение ими некоторой энергии. При
этом необходимость для маяка различать сигналы отдельных
пользователей и отвечать каждому из них индивидуально жестко ограничила бы
пропускную способность системы, т. е. число обслуживаемых ею
абонентов. Обслуживание неограниченного числа пользователей возможно лишь
при однопутевом измерении дальности, т. е. пассивности потребителей,
работающих только на прием, что зачастую предпочтительно и по
соображениям безопасности. В рамках такого сценария у приемника объекта
есть возможность справиться с незнанием ухода местных часов
относительно системных, измеряя время прихода сигналов от четырех маяков
вместо трех. Каждое из измеренных времен прихода содержит
«истинную» задержку распространения в сумме с одним и тем же неизвестным
сдвигом временных шкал. Умноженные на скорость света эти измерения
11.2. Глобальная радионавигационная система GPS 435
дают псевдодалъности: истинные расстояния плюс произведение сдвига
часов на скорость света. Таким образом, потребитель получает в
распоряжение четыре уравнения с четырьмя неизвестными, итогом решения
которых являются как географические координаты объекта, так и оценка
сдвига временных шкал. Тем самым объект осуществляет одновременное
позиционирование и измерение времени.
GPS — система космического базирования, а это значит, что функции
маяков в ней возложены на спутники, несущие на борту
радиопередатчики. Такая организация позволяет передавать навигационные сигналы
в диапазоне СВЧ. В противоположность волнам ДВ диапазона,
характерным для более ранних систем наземного базирования (Лоран, Омега
и др.), колебания СВЧ распространяются только по прямой,
практически без дифракции, так что их использование в наземных передатчиках
ограничило бы зону навигационного обслуживания пределами прямой
видимости маяка. В то же время СВЧ диапазон гораздо
предпочтительнее длинноволнового в том, что касается массо-габаритных показателей
передающих и приемных антенн и многих других элементов
оборудования. Способ уладить противоречие между стремлением работать в СВЧ
диапазоне и иметь широкую зону обслуживания довольно прост: нужно
«всего лишь» поместить СВЧ-передатчик на борт космического аппарата.
При должном возвышении спутника передатчик будет «освещать» на
земной поверхности пятно необходимого диаметра, т. е. обеспечит нужный
размер зоны навигационного покрытия.
Архитектура GPS содержит три базовых сегмента. Космический
сегмент состоит из 24 основных спутников (плюс несколько резервных),
расположенных по четыре на шести почти круговых орбитах. Орбиты
смещены относительно друг друга на 60° по долготе, наклонены к
плоскости экватора на 55° и имеют примерно 12-часовой сидерический период
обращения. Такое пространственное созвездие позволяет одновременно
наблюдать в любой момент времени и в любой точке Земли не менее
четырех спутников с возвышением более 10°. В большинстве же случаев
число видимых спутников больше, доходя временами до десяти. Чем
больше число одновременно наблюдаемых космических аппаратов, тем выше
точность определения координат и времени. На борту каждого
спутника установлен атомный (цезиевый или рубидиевый) стандарт частоты
чрезвычайно высокой стабильности: суточный уход частоты от номинала
не превышает 10~13. Погодные условия слабо влияют на распространение
волн диапазона GPS, так что потенциально космический сегмент системы
обеспечивает всепогодную и всевременную навигацию на всей
поверхности земного шара.
Как сказало выше, объект в состоянии извлечь свои координаты из
измеренных расстояний, если и только если ему известны координаты мая-
436 Глава 11. Примеры действующих беспроводных широкополосных систем
ков. Вследствие орбитального вращения спутников их координаты
непрерывно меняются, и их мгновенные значения должны быть доступны
потребителю в любой момент, когда он имеет потребность в
позиционировании. Мгновенное положение спутника на орбите не является абсолютно
детерминированным из-за случайных возмущений той или иной природы.
К тому же спутниковые стандарты частоты, хотя и весьма стабильные,
рано или поздно накапливают взаимные временные уходы,
препятствующие точному местоопределению. Таким образом, имеется необходимость
в мониторинге положения спутников и поведения их эталонов и
передаче соответствующей информации потребителю. С этой целью в составе
GPS предусмотрен контрольный сегмент, включающий главную станцию
управления в Колорадо-Спрингс (штат Колорадо) и пять станций
мониторинга (Колорадо-Спрингс, Гавайские острова, Кваджалейн, Диего-
Гарсиа и остров Вознесения). Станции мониторинга работают в режиме
непрерывного слежения за всеми спутниками, измеряя их координаты
и параметры эталонов, тестируя состояние и т.п., и передавая данные
по специальной линии связи на главную станцию управления. Последняя
вычисляет текущее и прогнозируемое положение спутников, сдвиг
временных шкал и другие необходимые параметры и передает обновленные
данные на одну из трех наземных станций управления, расположенных
там же, где и станции мониторинга (Кваджалейн, Диего-Гарсиа и остров
Вознесения). Наземные станции управления загружают данные на
спутники GPS, используя выделенную линию связи S-диапазона.
Пользовательский сегмент охватывает всех потребителей,
оборудованных приемниками GPS. На современном рынке присутствует
множество (не менее сотен) разнообразных моделей приемников, от самых
простых и дешевых портативных приборов (для спорта и отдыха) до
очень сложных и дорогих, предназначенных для военных целей,
топографии и т. п.
11.2.2. Дальномерные сигналы системы GPS
Задающий атомный стандарт частоты каждого спутника GPS
генерирует частоту 10,23 МГц. Когерентное частотное умножение на 154 и 120
формирует две частоты L-диапазона номиналов Ы = 1575,42 МГц и L1 —
— 1227,60 МГц, которые далее модулируются дальномерными кодами
GPS. В системе предусмотрены два таких кода: С/А-код (грубого
поиска, облегченного доступа) и Р-код (точный или защищенный). Каждому
спутнику присвоена своя специфическая пара С/А- и Р-кодовых
последовательностей. Верхняя несущая L1 — основная, и ее сигнал доступен
любому приемнику GPS, тогда как нижняя — L2 предназначается лишь
авторизированным пользователям для высокоточных измерений.
11.2. Глобальная радионавигационная система GPS 437
Объяснение того, каким образом наличие двух несущих способствует
точному позиционированию, кроется в характере распространения волн
в ионосфере — верхнем атмосферном слое высотой более 50 км над
поверхностью Земли. Имея высокую концентрацию свободных ионов и
электронов из-за ионизирующего эффекта солнечного ультрафиолета и
рентгеновского излучения, ионосфера является дисперсной средой, в которой
дальномерный сигнал распространяется с иной скоростью, чем в
свободном пространстве, приобретая некоторую дополнительную задержку.
К сожалению, эту задержку невозможно рассчитать заранее по причине
быстрых случайных флюктуации параметров среды. С другой стороны,
общий характер зависимости ионосферной задержки от частоты
хорошо аппроксимируется обратным квадратичным законом с неизвестным
коэффициентом пропорциональности. Последний можно найти как
единственную неизвестную уравнения, полученного вычитанием измеренных
задержек идентичных сигналов на двух должным образом разнесенных
частотах. После этого можно рассчитать ионосферную поправку и
удалить ее из измеренной псевдодальности.
На базе С/А-сигнала организована шкала позиционирования
умеренной точности. Сам С/А-код есть последовательность Голда (см. подпара-
граф 7.5.2) длины N = 1023 с длительностью чипа чуть менее 1 мкс,
выбранной так, чтобы период сигнала в реальном времени составлял
ровно 1 мс. Очевидно, число (1025) существующих последовательностей
Голда длины JV = 1023 многократно превосходит необходимое для всех
спутников GPS, так что используются лишь некоторые из них.
Периодически повторяемые последовательности Голда постоянно передаются
спутниками на частоте L1. Несмотря на жесткую синхронизацию всех
спутников, расстояния между ними и потребителем меняются из-за их
вращения, так что сигналы различных спутников приходят на приемную
антенну с взаимными временными сдвигами, которые могут
варьироваться в значительном диапазоне. Поскольку каждый спутник
идентифицируется специфической последовательностью Голда, и сигналы всех
спутников имеют низкий уровень асинхронных взаимных корреляций,
приемник потребителя в состоянии отделить сигнал любого
индивидуального спутника от остальных. Другими словами, дальномерная шкала С/А
космического сегмента GPS является асинхронным вариантом CDMA
на базе ансамбля Голда. Передача спутниковых координат (эфемерид),
как и других необходимых данных (ухода часов спутника относительно
системной шкалы GPS, поправок на распространение, статуса
спутника и др.), реализована в формате ПРС (см. § 7.1): поток битов данных
со скоростью 50 бит/с бинарно манипулирует последовательность
Голда, после чего манипулированный код Голда модулирует несущую L1.
438 Глава 11. Примеры действующих беспроводных широкополосных систем
Таким образом, любой бит данных охватывает 20 периодов
последовательности Голда, что теоретически нейтрализует деградацию
корреляционных свойств ансамбля из-за манипуляции данными (см. § 7.3).
Минимальный пакет данных (кадр), необходимый для позиционирования,
включает 1500 битов (30 с), структурированных в пять подкадров,
содержащих по 300 битов каждый. Первые три подкадра повторяются без
изменения (за исключением перезагрузки свежих данных) в каждом
кадре, тогда как содержимое остальных меняется в течение суперкадра,
охватывающего 25 кадров. Для повышения надежности передачи поток
данных кодируется (32,26) расширенным кодом Хэмминга. Важную
группу данных, передаваемых в четвертом и пятом подкадрах, представляет
альманах: приближенные прогнозы координат остальных спутников
системы. Благодаря его присутствию потребитель, приняв сигнал одного
спутника, располагает грубой оценкой положения остальных и может
воспользоваться этими сведениями для ускорения поиска сигналов других
спутников (см. § 8.3).
С/А-код обеспечивает стандартную точность позиционирования и
безвозмездно доступен любому пользователю, владеющему приемником GPS.
Р-код адресован потребителям, нуждающимся в более точном местоопре-
делении, и поэтому имеет длительность чипа в десять раз меньшую, чем
С/А-код (менее 100 не), или десятикратно более широкую полосу (см.
подпараграф 2.12.2, чтобы освежить в памяти связь точности с полосой).
Для осуществления описанного ранее двухчастотного метода
компенсации ионосферной ошибки Р-код (ПРС-модулированный битовым потоком
данных подобно С/А-коду) передается на обеих частотах L1 и L2,
причем на несущей L1 С/А- и Р-сигналы уплотнены в квадратуре с 3-дБ
превышением первого. В свою очередь интенсивность сигнала L2 на 3 дБ
ниже, чем L1. Структура Р-кода приведена в открытой документации
GPS. Он формируется посимвольным сложением по модулю 2 двух
сверхдлинных бинарных последовательностей, отличающихся по длине на 37
чипов. Период получаемой последовательности составляет порядка 266
дней. Неперекрывающиеся 7-суточные (6,187104 • 1012 чипов) сегменты
этой последовательности приписаны как Р-коды различным спутникам.
Министерство обороны США уполномочило дизайнеров GPS
предусмотреть жесткую регламентацию доступа к Р-коду, считая, что его
несанкционированное использование может создать угрозу национальной
безопасности. Криптозащита Р-кода реализована его суммированием по
модулю 2 с маской или ключом в виде W-кода, структура которого не
разглашается. Результирующий Y-код обладает весьма высокой степенью
иммунитета к попыткам взлома (см. пример 3.2).
11.2. Глобальная радионавигационная система GPS 439
11,2.3. Обработка сигналов
Основные операции в одночастотном (L1) приемнике GPS типичны для
любой широкополосной системы с ПРС. По завершении грубого поиска
С/А-сигнала (см. § 8.2 и 8.3), поддержанного по возможности
априорной информацией о положении спутника, петля АПЗ кода (см. § 8.4)
замыкается и начинает выдавать последовательность оценок
псевдодальности до спутника. Как правило, современные GPS приемники содержат
достаточно каналов для параллельной обработки С/А сигналов всех
видимых спутников. После того, как найден и захвачен сигнал последнего
используемого спутника, приемник готов к выдаче координат
потребителя, которая может быть установившимся процессом, продолжающимся
неограниченно долго в соответствии с волей потребителя.
Авторизованный пользователь выполняет далее те же операции для
Р-кодов на обеих несущих, затрачивая лишь сравнительно малое время
на поиск этих сигналов, поскольку в кадре данных сигнала L1
предусмотрено специальное слово, устанавливающее локальный генератор Р-кода
в нужное начальное состояние.
Во многих современных GPS приемниках эти базовые операции
дополняются или замещаются другими, призванными повысить точность
позиционирования, ускорить начальную временную привязку,
удовлетворить особые запросы пользователя и пр. К примеру, можно улучшить
точность за счет измерения псевдодальностей интегрированием несущей
частоты принятого сигнала. Мгновенная доплеровская частота
пропорциональна радиальной скорости спутника относительно пользователя.
Следовательно, интеграл от доплеровской частоты за некоторый
промежуток времени пропорционален приращению расстояния между спутником
и потребителем за тот же период. Стартовав из точки с точно
известными координатами, приемник может далее позиционироваться, вычисляя
интегралы от мгновенных частот сигналов видимых спутников, т. е.
текущие аккумулированные дальности до последних. Более того, известны
методы разрешения многозначности, делающие возможным местоопре-
деление интегрированием частот даже без инициализации в стартовой
точке [117, 118].
Весьма популярен и вариант так называемого дифференциального или
относительного позиционирования, идея которого состоит в следующем.
Пусть один из GPS приемников установлен в опорном пункте с точно
известными координатами. Тогда, сравнив предвычисленные расстояния до
спутников с измеренными, этот опорный приемник может определить
систематические ошибки (смещения), обязанные системным погрешностям.
Пусть теперь другой приемник располагается в точке с неизвестными ко-
440 Глава 11. Примеры действующих беспроводных широкополосных систем
ординатами, удаленной от опорного пункта. Если длина базовой линии,
т. е. расстояние между опорным и удаленным приемниками, не слишком
велика (налример, в пределах десятков километров), систематические
ошибки в опорном и удаленном пунктах имеют высокую корреляцию,
так что удаленный приемник может вычесть смещение, оцененное
опорным приемником, из измеренной псевдодальности, улучшив тем самым
точность своего позиционирования. Разумеется, подобная модификация
системы должна включать линию связи для доставки данных опорного
приемника удаленным пользователям. В настоящее время по всему миру
организовано множество опорных пунктов с передачей
дифференциальных поправок через ЧМ радиостанции, вещательные спутники,
радиомаяки, сотовые сети, Интернет и пр. [117, 118].
11.2.4. Точность местоопределений
При разработке GPS была запланирована точность позиционирования по
С/А-коду, характеризуемая 95 %-ной вероятностью удержания ошибок
в пределах 100 м в горизонтальном и 156 м в вертикальном
направлениях. Аналогичные показатели для Р-кода прогнозировались как 16 м и 23 м
соответственно. Однако с течением времени выяснилось что продвинутые
приемники, предложенные многими производителями, обладают гораздо
лучшими точностными показателями даже без привлечения Р-кода. Это
стало причиной беспокойства властных структур США, ответственных
за национальную безопасность, вылившегося в 1990 году в
декретирование режима селективного доступа. При этом в передаваемую
спутниками эфемеридно-временную информацию вводились преднамеренные
погрешности, значительно снижающие точность привязки. Последовавшая
за этим декада была отмечена повсеместным проникновением в
практику навигации дифференциальных методов, эффективно нейтрализующих
подобные меры, так что режим селективного доступа утратил какой-либо
смысл и был отменен в 2000 году. В настоящее время рынок оборудования
GPS отличается широчайшим спектром предложений, рекламирующих
точностные показатели в диапазоне от десятков метров до нескольких
миллиметров и меньше.
11.2.5. ГЛОНАСС и GNSS
Российская навигационная система космического базирования ГЛОНАСС
имеет много общих черт с GPS. Ее космический сегмент состоит из 24
спутников, расположенных на 3 почти круговых орбитах с номинальным
периодом обращения 11 часов 15 минут и наклоном 64,8° к плоскости
экватора. Для обеспечения ионосферной коррекции по-прежнему исполь-
11.2. Глобальная радионавигационная система GPS 441
зуются две частоты L1 и L2 (соответственно в диапазонах 1,5 и 1,2 ГГц),
причем С/А-код передается на несущей L1, а Р-код — на обеих
несущих. Текущие эфемериды и другие необходимые данные, кодированные
кодом Хэмминга и структурированные в кадры и подкадры,
накладываются на дальномерные коды с помощью ПРС и передаются спутниками
со скоростью 50 бит/с. Контрольный сегмент обеспечивает непрерывное
слежение за спутниками, вычисление/прогнозирование их орбитальных
параметров и загрузку данных в бортовую память спутников.
Существенное отличие системы ГЛОНАСС от GPS состоит в том,
что все ее спутники передают один и тот же С/А-код в виде бинарной
m-последовательности длины N = 511 с периодом в реальном времени
1 мс. Для разделения индивидуальных сигналов спутников их несущие
сдвинуты относительно друг друга на небольшую величину,
трансформирующую общий С/А-код в ансамбль частотно-сдвинутых копий т-по-
следовательности, описанный в подпараграфе 7.5.1. Для экономии полосы
противоположные спутники одной и той же орбиты (никогда не видимые
потребителем одновременно) работают на одной и той же частоте.
По точностным показателям система ГЛОНАСС сопоставима с GPS.
В настоящее время эти системы (наряду с такими проектами, как Galileo)
зачастую трактуются как кооперативные компоненты будущей
всемирной интегрированной навигационной системы GNSS (Global Navigation
Satellite System). Как подчеркивалось, увеличение числа обрабатываемых
сигналов спутников повышает точность позиционирования, так что
выгода от совместного использования созвездий обеих систем очевидна.
К тому же, встречаются сценарии, в которых видимость какой-то части
спутников над горизонтом блокирована препятствием (например, крылом
самолета), так что доступных дальномерных сигналов только GPS или
только ГЛОНАСС может для местоопределения не хватить. При этом
совместная обработка сигналов обеих систем опять обещает значительный
выигрыш в целостности местоопределений. Многие модели приемников,
уже представленные на рынке или планируемые к выпуску,
ориентированы на использование орбитальных группировок и GPS, и ГЛОНАСС.
11.2.6. Применения
Роль глобальной навигации спутникового базирования в современном и
будущем мире невозможно переоценить. Одно лишь перечисление областей
их применения составит достаточно длинный список, включающий
традиционную навигацию кораблей, летательных аппаратов и наземных
мобильных объектов (легковых автомобилей, грузовиков и др.),
логистические системы, прокладку транспортных сетей (например, трубопро-
442 Глава 11. Примеры действующих беспроводных широкополосных систем
водов), мониторинг лесных и природных ресурсов, сельское хозяйство,
гражданское строительство, геодезическую съемку, предсказание
землетрясений, аэрокосмическую съемку, морские исследования и многое
другое. Не имея возможности углубляться в воодушевляющие подробности
прикладных перспектив спутниковой навигации, отсылаем читателя к
источникам [117-119] и их библиографическим перечням.
11.3. Радиоинтерфейсы cdmaOne (IS—95) и cdma2000
11.3.1. Вводные замечания
Первые проекты спецификации 2G CDMA сотового телефона
стандарта IS-95 (впоследствии переименованного в cdmaOne) были опубликованы
в 1993-95 годах, а начало рабочей фазы сетей IS-95 относится к 1996 г.
Ныне сети этого стандарта покрывают обширные территории, обслуживая
десятки миллионов потребителей. Выдающийся коммерческий успех
системы, повсеместно признанное высокое качество сервиса и открытость
к дальнейшей модернизации сыграли роль решающих факторов в
обретении философией CDMA статуса одной из платформ будущих поколений
сетей мобильной связи (3G и далее).
Изначально стандарт IS-95 предназначался для постепенной замены
(с сохранением совместимости) американского аналогового стандарта AMPS
диапазона 800 МГц. В документах IS-95 предусмотрен частотный разнос
прямого (869-894 МГц) и обратного (824-849 МГц) каналов1 без каких-
либо ограничений в части повторного использования частот в соседних
сотах или секторах. Номинальная полоса сигнала IS-95 составляет 1,25 МГц,
так что в пределах выделенной полосы в 25 МГц оператор обладает
значительной свободой в выборе несущих и частотном планировании сети.
Все БС сети жестко синхронизированы с помощью сигналов GPS,
работая в единой шкале системного времени, что облегчает эстафетную
передачу, т. е. переключение МС с одной БС на другую. Стандарт IS-95
(cdmaOne), как и продукт его эволюции cdma2000, дают характерные
примеры реальной утилизации всех преимуществ широкополосных
технологий в варианте ПРС. Они также чрезвычайно ценны в
познавательном аспекте, прозрачно демонстрируя практические пути
материализации многих из ранее обсуждавшихся идей. Ниже мы остановимся только
на наиболее принципиальных моментах, касающихся расширения
спектра, организации каналов, кодирования и модуляции в радиоинтерфейсах
1 Термины «прямой» и «обратный» каналы — синонимы линий «вниз» (от БС к МС)
и «вверх» (от МС к БС), принятые в спецификациях cdmaOne и cdma2000.
11.3. Радиоинтерфейсы cdmaOne (IS-95) и cdma2000 443
cdmaOne и cdma2000. Читатель, интересующийся дальнейшими
подробностями, может обратиться к [18, 69, 83, 120, 121] и другим источникам.
11.3.2. Расширяющие коды стандарта cdmaOne
Расширякшще коды (последовательности для ПРС) стандарта cdmaOne
уже кратко упоминались в некоторых примерах. Они предназначены для
кодового разделения физических каналов, разделения сигналов
нескольких БС на входе приемника МС и засекречивания передаваемых данных.
Синхронное CDMA-мультиплексирование прямых физических каналов,
обслуживаемых отдельной БС, выполняется на базе последовательностей
Уолша длины N = 64 (см. подпараграф 2.7.3). Ортогональность
функций Уолша обеспечивает возможность разделения соответствующих 64
физических каналов теоретически без взаимных помех. Длительность
чипа последовательностей Уолша составляет примерно 0,81 мкс, а частота
следования чипов — 1,2288 Мчип/с, что соответствует ранее названной
полосе 1,25 МГц. Понятно, что получаемые таким способом 64
физических канала в соответствии с идеей CDMA занимают одну и ту же общую
полосу без какой-либо частотной или временной нарезки. Все БС
используют то же самое множество из 64 функций Уолша, а для разделения
сигналов различных БС в приемнике МС вводится дополнительное ПРС
так называемыми короткими кодами. Эти короткие коды состоят из двух
различных бинарных псевдослучайных последовательностей PN-I и PN-Q,
используемых соответственно в синфазной и квадратурной ветвях
модулятора БС. Исходно они формируются как m-последовательности РСЛОС
генераторами, содержащими 15 ячеек памяти (см. § 6.6) и задаваемыми
примитивными полиномами fi(x) = х1Ъ + х13 + х9 + xs + х7 + хъ + 1 (PN-I)
nfQ(x) = х15+х12 + хи + х10+гс6 + хь + х4 + х3 + 1 (PN-Q). Полученные
последовательности периода L = 215 — 1 становятся короткими кодами PN-I
и PN-Q после введения дополнительного нуля в серию из 14
последовательных нулей. В итоге период PN-I и PN-Q N = L + 1 = 215 = 32768 чипов,
и при той же частоте чипов, что и у кодов Уолша, в секундном
отрезке содержится 37,5 периодов короткого кода или в двухсекундном — 75.
Каждой БС присваивается специфический циклический сдвиг базового
короткого кода, чем и обеспечивается распознавание сигналов
различных БС. Всего имеется 512 таких пар циклических реплик PN-I и PN-Q со
сдвигом каждой последующей пары относительно предыдущей на 64
чипа или примерно 52 мкс. При сетевом планировании следует присваивать
БС короткие коды таким образом, чтобы исключить риск приема любой
МС сигнала сторонней БС, задержка распространения и интенсивность
которого могли бы вызвать его перепутывание с сигналом полезной БС.
Подчеркнем также, что относительные временные сдвиги между БС сети
444 Глава 11. Примеры действующих беспроводных широкополосных систем
устанавливаются одномоментно и далее остаются неизменными, так как
все БС используют GPS приемники для взаимной синхронизации своих
эталонов времени.
Еще один расширяющий код — длинный код, исходно генерируемый
как бинарная m-последовательность памяти 42. В соответствии с
примитивным полиномом, оговоренным в спецификации, 42-разрядный РСЛОС
генератора длинного кода имеет отводы обратной связи от ячеек с
номерами (слева направо) 7, 9, 11, 15, 16, 17, 20, 21, 23, 24, 25, 26, 32, 35, 36,
37, 39, 40, 41 и 42. Полученная m-последовательность вновь расширяется
дополнительным нулем в серии из 41 последовательного нуля, имея в
итоге длину N = 242. При прежней скорости чипов период длинного кода
в реальном времени превышает 41 сутки. Различные, специфические для
каждого пользователя временные сдвиги (маски) длинного кода
используются в прямом и обратном каналах для шифрования потока данных,
а в обратном канале — и для CDMA-разделения сигналов МС (см. ниже).
11.3.3. Прямые каналы cdmaOne
Логически, т.е. в связи с информационным наполнением, различаются
четыре типа прямых каналов:
- пилотный канал {pilot channel),
- канал синхронизации {synchronization channel),
- каналы вызова [paging channels),
- каналы трафика {traffic channels).
11.3.3Л. Пилотный канал
По единственному пилотному каналу каждой Б С передается «чистый»
короткий код без модуляции данными. Можно сказать, что по этому
каналу передается фиксированный битовый поток из одних нулей после
ПРС коротким кодом. Короткий код используется МС для синхронизации
собственных часов с системными (т. е. эталоном БС) с точностью,
достаточной, чтобы сформировать когерентную опору для сжатия по спектру
и демодуляции сигналов, принимаемых по другим каналам. Поскольку
период короткого кода содержит целое число (512) периодов функций
Уолша, последние, сформированные приемником, автоматически
совмещаются во времени с ПРС кодами Уолша принятого сигнала после того,
как приемник завершит поиск и АПЗ-захват пилотного сигнала. Функция
Уолша из первой строки матрицы Адамара размера 64 (состоящая
только из элементов +1) физически отделяет (канализирует) пилотный канал
от остальных. Удобнее всего генерировать функции Уолша в цифровом
виде на основе двоичной {0,1} логики, а затем заменить нули и едини-
11.3. Радиоинтерфейсы cdmaOne (IS-95) и cdma2000 445
цы на плюс и минус единицы согласно (6.15). На рис. 11.1, а показана
упрощенная структура пилотного канала, где Wo символизирует
двоичную {0,1} функцию Уолша с нулевым номером, состоящую из одних нулей.
Поскольку ПРС коротким кодом является общей для всех прямых каналов
операцией, выполняемой в модуляторе, т. е. после суммирования сигналов
всех каналов, оно будет отражено на соответствующем рисунке позднее.
Можно тривиально считать, что пилотный канал на рис. 11.1, а подает
на модулятор последовательность, состоящую из одних плюс единиц.
Нулевые биты
а)
^(последовательность нулей)
1
-и +
mod 2
(меандр)
К модулятору
Отображение
на{±1}
Синх. данные
б) ►
1,2 кбит/с
[Сверточный],
кодер
Переме-
житель
(последовательность
символов +1)
К модулятору
mod 2
Отображение
на{±1}
Рис. 11.1. Упрощенные структуры каналов: пилотного (а) и синхронизации (6)
11.3.3.2. Канал синхронизации
Канал синхронизации, как и пилотный, — единственный для каждой БС.
Рис. 11.1, б поясняет его общее построение. Наряду с некоторыми
другими по нему передаются данные, позволяющие приемнику извлечь
специфическую для каждого пользователя маску длинного кода и, следовательно,
синхронизовать свою копию длинного кода с той, что использовалась БС
для шифрования и размещения битов контроля мощности (см. ниже).
Первичные данные передаются со скоростью 1,2 кбит/с и
структурированы в кадры, длительность которых равна периоду короткого кода
(26,67 мс), а три последовательных кадра объединены в суперкадр из
96 битов. Суперкадры организованы в капсулы сообщения, содержащие
30 CRC символов (см. пример 9.4) для образования индикатора качества
сообщения. Сверточный код со скоростью 1/2 и длиной кодового
ограничения 9 (см. § 9.3) обеспечивает мощную защиту передаваемых данных
от канальных помех. В поток данных не вставляются концевые биты, т. е.
кодер и декодер не возвращаются в нулевое состояние в конце
каждого кадра. Скорость кодированного потока — 2,4 кбит/с, однако каждый
446 Глава 11. Примеры действующих беспроводных широкополосных систем
символ трактуется как сдвоенный более короткий символ (символьное
повторение) , так что скорость на входе последующего перемежителя
составляет 4,8 кбит/с. Перемежитель используется для декорреляции пакетных
ошибок, чтобы улучшить исправляющую способность сверточного кода
в отношении протяженных замираний сигнала или других
коррелированных искажений (см. § 9.5). Перемежение охватывает один кадр из 128
символов сверточного кода (26,67 мс) и выполняется на основе 16 х 8
матричной памяти. Кодированный поток записывается в нее по столбцам,
а затем считывается в порядке, оговоренном в стандарте.
Последовательность Уолша из 33-й строки матрицы Адамара размера
64 физически канализирует данные синхронизации. Рис. 11.1, б вновь
демонстрирует первично сформированный двоичный {0,1} прототип W32,
являющийся просто меандром, в котором за 32 нулевыми символами
следуют 32 единичных. Иллюстрируемое рисунком ПРС выполняется
традиционным образом на основе взаимно-однозначной связи между
умножением и суммированием по модулю два в рамках вещественного {±1} и
логического {0,1} алфавитов соответственно (см. подпараграф 7.5.2). Именно,
{0,1} кодированный и перемеженный поток посимвольно складывается по
модулю два с W^2-> после чего результат отображается в алфавит из {±1}.
11.3.3.3. Каналы вызова
В стандарте предусматривается до 7 каналов вызова, предназначенных
для уведомления абонента о вызове, пришедшем из сети, ответа на его
запрос об установлении соединения и передачи другой информации,
связанной с предоставлением доступа в сеть. Исходные данные поделены на
слоты длительности 80 мс, состоящие из четырех кадров по 20 мс. Кадры
или их части входят в капсулы сообщений, каждая из которых содержит
до 1184 бит, включая 30 CRC символов. Возможны две скорости передачи
данных в этом канале: 9,6 или 4,8 кбит/с. На рис. 11.2 дана
упрощенная структура канала вызова. Первый ее блок — сверточный кодер со
скоростью 1/2 и длиной кодового ограничения 9. Как и в канале
синхронизации, в кодируемый поток не вводятся концевые биты, и кодер и декодер
не возвращаются в нулевое состояние в конце кадра. При входной
скорости 4,8 кбит/с скорость кодированного потока составляет 9,6 кбит/с,
однако каждый символ трактуется как сдвоенный более короткий
(символьное повторение), так что независимо от исходной скорости данных
кодированный поток имеет скорость 19,2 кбит/с. Перемежение
выполняется в пределах кадров протяженностью в 20 мс с использованием 24x16
матричной памяти, в которую кодированные символы записываются по
столбцам. Порядок считывания из памяти устанавливается стандартом.
Следующая операция над кодированным и перемеженным потоком —
шифрование в форме скремблирования, т. е. посимвольного суммирования
11,3. Радиоинтерфейсы cdmaOne (IS-95) и cdma2000
по модулю два с псевдослучайной двоичной последовательностью.
Последняя формируется децимацией с индексом децимации 64 (т. е. выбором
каждого 64-го символа) специфической для каждого пользователя
сдвинутой реплики (маски) длинного кода. Таким образом, скорость 1,2288
Мчип/с длинного кода делится на 64, т. е. до 1,2288/64 = 19,2 кчип/с. Как
таковое, шифрование производится индивидуально для любого
пользователя, препятствуя несанкционированному мониторингу данных доступа,
посылаемых БС.
Данные
вызова
9,6 кбит/с
или
4,8 кбит/с
Сверточный
кодер
Генератор
длинного кода
—>
Абонентская
маска
Переме-
житель
L
/
Дециматор
W,
= 1...7
<+ь
i
к
Отображение
на{±1}
К модулятору
"►
Рис. 11.2. Упрощенная структура канала вызова
Функции Уолша с номерами от 1 до 7 (со второй по восьмую
строки матрицы Адамара) служат канализирующими для каналов вызова.
Первичный калал вызова, образованный функцией Уолша W\, доступен
всегда, тогда как остальные могут либо оказаться не активированными,
либо использоваться для трафика.
11.3.3.4* Каналы трафика
Каналы, рассматривавшиеся до этого момента, выполняют сервисные
функции, необходимые для инициирования и поддержания передачи
пользователю основных сообщений. Каналы трафика отвечают за доставку
основной информации: оцифрованной речи, компьютерных или
мультимедийных данных и т.п. Ограничимся для конкретности сценарием
передачи речевой информации. При этом должна быть выполнена
предварительная процедура кодирования речи устройством, называемым
вокодером. Не вдаваясь в дискуссию о достаточно сложных принципах работы
подобных приборов, отметим только, что в современном оборудовании
стандарта cdmaOne присутствуют несколько разновидностей вокодеров,
кодирующих аналоговую речь в цифровые потоки с номинальными
скоростями 8,6 и 13,3 кбит/с. Номинальная скорость соответствует
наивысшей речевой активности (абонент говорит непрерывно), в то же время
448 Глава 11. Примеры действующих беспроводных широкополосных систем
имеются три меньшие скорости для эпизодов с пониженной речевой
активностью. Для номинала в 8,6 кбит/с они составляют соответственно
4,0 кбит/с, 2,0 кбит/с и 0,8 кбит/с. Вокодер непрерывно следит за
энергией аналоговой речи в 20-миллисекундном кадре и сравнивает ее с тремя
адаптивными порогами для выбора подходящей скорости оцифрованного
потока. Снижение скорости в периоды низкой активности
сопровождается пропорциональным снижением излучаемой мощности сигнала, так что
энергия на передаваемый бит остается постоянной. В свою очередь,
снижение мощности означает уменьшение ПМД сторонним пользователям
как внутри2, так и вне соты и, как результат, потенциальное увеличение
числа абонентов, обслуживаемых БС (см. § 4.6). Поток оцифрованной
речи упаковывается в кадры протяженностью в 20 мс, содержащие, наряду
с информационными битами, также CRC символы и 8 концевых битов,
обнуляющих сверточный кодер. В результате множество скоростей для
номинала в 8,6 кбит/с трансформируется на входе канала в набор RC1
«нетто-скоростей» 9,6; 4,8; 2,4 и 1,2 кбит/с3.
ИЛ-
Данные
трафика
Сверточный|
кодер
Переме-
житель
+
Мультиплексор
К+Н
Генератор
[длинного кода!
Абонентская
маска
Дециматор
±>
Вставка
битов PC
Отображение)
на{±1}
К модулятору
Рис. 11.3. Упрощенная структура прямого канала трафика стандарта cdmaOne
Обратимся к блок-схеме канала трафика на рис. 11.3. Поток входных
данных с одной из четырех названных выше скоростей поступает на
сверточный кодер скорости 1/2 с длиной кодового ограничения 9. Независимо
от входной скорости выходная скорость из-за символьного повторения
всегда равна 19,2 кбит/с, например, поток со скоростью 1,2 кбит/с
кодируется в поток с истинной скоростью 2,4 кбит/с, однако в выходном
потоке каждый символ трактуется как восемь последовательных восьмикрат-
2Хотя прямой канал построен как синхронный и не перенасыщен, в реальности он
не свободен от ПМД: взаимные многолучевые задержки нарушают ортогональность
последовательностей Уолша.
3ГЕомимо RC1 документами стандарта cdmaOne устанавливается также набор речевых
скоростей RC2 для номинала 13,3 кбит /с: 14,4; 7,2; 3,6 и 1,8 кбит/с, однако после свер-
точного кодера кодовый поток с помощью выкалывания (см. подпараграф 9.3.1) вновь
приводится к скорости 19,2 кбит/с.
11.3. Радиоинтерфейсы cdmaOne (IS-95) и cdma2000 449
но укороченных символов. Перемежитель оперирует с блоками в 20 мс
(384 кодовых бита), перемешивая символы кодового потока в
соответствии с профилем, определенным спецификацией. Затем поток с выхода
перемежителя скремблируется так же, как и в канале вызова, для
засекречивания передаваемого сообщения.
В § 4.5 и 4.6 было установлено, что мощности сигналов МС должны
эффективно контролироваться с целью преодоления проблемы близкий-
далекий и удержания ПМД на входе ВС ниже деструктивного уровня.
Замкнутая петля регулировки мощности является одним из
инструментов решения этой задачи в стандарте cdmaOne. Валовая станция ведет
непрерывный мониторинг интенсивностей каждого из принятых сигналов
МС и посылает МС команду увеличить либо снизить излучаемую
мощность. Каждая команда — это одиночный бит регулировки мощности
{бит PC — power control), нулевое и единичное значение которого
приказывают МС увеличить или уменьшить мощность соответственно. Для
введения команд в сигнал прямого канала 20-миллисекундный кадр
после перемежителя разбивается на 16 групп регулировки мощности {power
control group — PCG), каждая из которых занимает интервал в 1,25 мс или
19,2 • 103 х 1,25 • 10_3 — 24 кодовых символа потока скорости 19,2 кбит/с.
В каждой PCG единственный бит контроля мощности замещает два
кодовых символа. Приемник МС, зная позиции битов контроля мощности,
исключает их из процедуры декодирования, как не имеющие отношения
к содержанию сообщения. Это полностью эквивалентно замене
исходного сверточного кода выколотым (см. § 9.3), влияние чего на
корректирующую способность кода предположительно ослабляется случайностью
расположения битов PC в пределах PCG. Псевдослучайная
последовательность с выхода дециматора на рис. 11.3 имеет такую же скорость, как
и кодовый поток, т. е. 19,2 кбит/с. На интервале одной PCG
длительности 1,25 мс располагаются 24 чипа этой последовательности. Последние
четыре из них читаются как двоичное число с 24-м чипом как
наиболее значимым разрядом. Это число, принимающее значения от 0 до 15,
служит указателем позиции бита PC в следующей за текущей PCG. Тем
самым, бит контроля мощности может случайно располагаться на любой
позиции из первых 16 в каждой PCG. На рис. 11.3 блоки,
позиционирующие и вводящие биты контроля мощности, обозначены как «Вставка
битов PC» и «Мультиплексор».
11,3.3.5. Модуляция в прямом канале
На рис. 11.4 приведена блок-схема модулятора прямого канала. Выходные
напряжения всех физических каналов ВС вначале взвешиваются
соответствующими коэффициентами усиления для регулировки мощности в
прямом канале. Каждая МС периодически информирует ВС о надежности
450 Глава 11. Примеры действующих беспроводных широкополосных систем
принятых данных, и БС соответственно подстраивает уровень сигнала
в канале трафика, назначенного данной МС, для поддержания качества
приема на последней выше предустановленного порога. Затем взвешенные
канальные сигналы складываются в сумматоре и подаются параллельно в
синфазную и квадратурную ветви модулятора, где перемножаются с
бинарными PN-I и PN-Q кодами (см. подпараграф 11.3.2). Низкочастотные
фильтры в упомянутых ветвях служат для формирования спектра
выходного сигнала. Умножение синфазного и квадратурного сигналов на
косинусную и синусную компоненты несущей частоты /о с последующим
суммированием реализует перенос спектра в нужную область, завершая
процедуру модуляции. Как видно, входной видеочастотный сигнал в
обеих ветвях — один и тот же. Как таковой, он является суммой многих
бинарных напряжений, т. е. многоуровневым действительным сигналом.
Допустим на время, что имеется единственный физический
видеочастотный канал, подключенный напрямую к ветвям модулятора без
суммирования с другими каналами. Можно постулировать, что каждый физический
канал обрабатывается именно таким образом, т.е. имеется столько пар
ветвей модулятора, сколько каналов, и выходы всех этих параллельных
модуляторов суммируются когерентно. Так как схема на рис. 11.4
линейна, а, значит, справедлив принцип суперпозиции, ее выходной эффект
идентичен эффекту введенной гипотетической схемы с индивидуальными
модулирующими каналами. Поэтому можно сказать, что в прямом канале
стандарта cdmaOne реализуется прямое расширение спектра, в котором
бинарный поток данных (канализированный с помощью функций Уолша)
модулирует расширяющий КФМ-код (см. § 7.1). Так как скорость
кодированного потока на входе модулятора составляет 19,2 кбит/с, один
кодовый символ охватывает 64 чипа короткого кода. Следовательно,
коэффициент расширения прямого канала равен 64.
Стоит отметить, что длинный код не используется при расширении
спектра сигнала прямого канала, участвуя только в шифровании
данных и расстановке битов контроля мощности. Нередко говорится, что
ПРС в прямом канале cdmaOne осуществляется как кодами Уолша, так
и короткими PN-кодами. Концептуально, на наш взгляд, лучше было бы
квалифицировать функции Уолша как канализирующие, а PN-коды — как
расширяющие.
11.3.3.6. Обработка сигнала прямого канала приемником МС
Обработка сигнала в приемнике МС основывается на классических
процедурах, подробно разбиравшихся в предыдущих главах. После успешного
поиска пилотного сигнала и захвата его схемой АПЗ последняя входит
в режим слежения и непрерывно сопровождает короткий код БС,
участвующей в соединении. Местная реплика короткого кода, формируемая
11.3. Радиоинтерфейсы cdmaOne (IS-95) и cdma2000 451
контуром АПЗ, служит для сжатия спектра принятого сигнала. Выход
пилотного канала после сжатия — «чистая» немодулированная несущая,
перенесенная вниз на нужную промежуточную частоту. Схема фазовой
автоподстройки подстраивает местный эталон до когерентности с этим
колебанием, формируя тем самым опорное колебание для когерентной
демодуляции данных. После демодуляции и деперемежения данные каналов
синхронизации, вызова и трафика разделяются корреляторами с
опорами в виде последовательностей Уолша, декодируются с помощью
алгоритма Витерби и далее используются согласно своему назначению.
Например, речевой цифровой поток канала трафика преобразуется цифро-
аналоговым преобразователем в напряжение, превращаемое
громкоговорителем в слышимую речь.
Коэффициент
усиления
cos 2nf0t
sin 2nf0t
Рис. 11.4. Модулятор прямого канала cdmaOne
Каждый приемник МС включает ряд (четыре или более) параллельных
каналов, пригодных для поиска и сопровождения пилотного сигнала.
Одна из преследуемых этим целей — организация RAKE приемника,
материализующего выгоды многолучевого разнесения широкополосных сигналов
(см. § 3.7). Как правило, по меньшей мере три подобных канала
участвуют в RAKE-обработке. Другой процедурой, опирающейся на наличие
автономных пилотных каналов в приемнике МС, является эстафетная
передача. Резервный коррелятор (или несколько таковых) непрерывно
452 Глава 11. Примеры действующих беспроводных широкополосных систем
сканирует временную область в попытке выяснить, нет ли в эфире других
БС с большей интенсивностью сигнала и предпочтительных для
контакта. В случае обнаружения подобной Б С сеть может послать МС команду
перейти на соединение с ней, что выполняется без затруднений,
поскольку приемник уже отслеживает ее пилотный сигнал (мягкая эстафетная
передача).
11.3.4. Обратные каналы cdmaOne
В зависимости от логического содержания данных, посылаемых в
обратном направлении, режим передачи любой МС отождествляется с одним
из двух типов каналов:
- канал трафика,
- канал доступа.
11.3.4'1- Обратный канал трафика
Данные
трафика
Сверточный
кодер
->
Переме-
житель
Генератор
длин
но
го кода
-*
64-ичный
ортогональный!-
модулятор
Абонентская
маска
<^
Отображение
на {±1}
Удаление
PCG
Рандомизатор
пакетов данных
Рис. 11,5. Упрощенная структура обратного канала трафика
Упрощенная структура канала обратного трафика приведена на рис. 11.5.
Битовый поток, передаваемый МС (оцифрованная речь от вокодера,
компьютерные данные и т. п.), со вставленными CRC символами разбивается
на 20-миллисекундные кадры, в которые затем добавляются 8 концевых
битов для обнуления сверточного кодера к началу любого кадра. В
результате номинальная скорость данных на входе кодера составляет 9,6 кбит/с,
однако подобно прямому каналу при пониженной речевой активности
используются также три меньших скорости (4,8; 2,4 и 1,2 кбит/с). Из-за
асинхронного характера обратного канала ПМД (в отличие от прямого)
будет присутствовать в приемнике БС даже при гипотетическом
отсутствии многолучевости (см. сноску 2 на с. 448). Это на качественном
уровне говорит о более напряженных помеховых условиях в обратном
канале стандарта cdmaOne, объясняя, почему в нем используется
сверточный код с увеличенной корректирующей способностью в комбинации с
последующей 64-ичной ортогональной модуляцией. Поскольку увеличение
длины кодового ограничения vc повлекло бы нежелательное усложнение
11.3. Радиоинтерфейсы cdmaOne (IS-95) и cdma2000 453
кодека, ее приемлемым значением было сочтено то же, что и в прямом
канале (ус = 9), а вынужденной платой за улучшение дистанционных
свойств явилось снижение скорости кода до 1/3. При такой скорости
кода скорость выходного потока кодовых символов равна 28,8 кбит/с
независимо от скорости входного битового потока, так как символьное
повторение, о котором говорилось при рассмотрении прямого канала,
применяется и в обратном.
Отдельный 20-миллисекундный кадр кодового потока (576 битов)
делится на 16 групп регулировки мощности по 36 битов (1,25 мс) каждая.
Перемежитель, ограниченный рамками кадра, оперирует на базе 32 х 18
матричной памяти, в которую кодовый поток записывается по столбцам.
Считывание осуществляется построчно, причем каждая пара нечетной
и последующей четной строк образует PCG. Профиль считывания,
однако, составлен так, что повторяющие друг друга PCG (вследствие
повторения кодированных символов) оказываются соседними всякий раз,
когда скорость «нетто» потока данных меньше 9,6 кбит/с (т.е. 4,8; 2,4
или 1,2 кбит/с). Например, при нетто-скорости 4,8 кбит/с каждая
четная PCG повторяет ту же последовательность перемеженных кодовых
символов, что и предшествующая; при нетто-скорости 2,4 кбит/с группы
с номерами 4г + 2, 4г + 3 и 4г + 4 являются копиями группы с номером
4г + 1 и т. п. Такой порядок удобнее всего для последующего понижения
средней излучаемой мощности вслед за уменьшением скорости, которое
в обратном канале реализовано несколько иначе по сравнению с прямым
(см. ниже).
Кодовый поток после перемежения поступает на 64-ичный
ортогональный модулятор, где каждый 6-символьный блок читается как
шестиразрядное двоичное число, выбирающее один из 64 ортогональных
сигналов (функцию Уолша с номером, равным этому числу). Подобная
модуляция добавляет дополнительный выигрыш от кодирования
(асимптотически до трех раз, см. § 2.6) к тому, который обязан сверточному
кодированию. Поскольку каждые 6 входных двоичных символов теперь
заменяются 64 двоичными символами, поток символов на выходе
ортогонального модулятора становится в 64/6 = 32/3 раз быстрее (307,2 кбит/с)
входного кодового. Подчеркнем, что роль функций Уолша в обратном
канале не связана с каналообразованием, они используются лишь для
широкополосной ортогональной передачи сообщений, обсуждавшейся в под-
параграфе 2.7.3.
Следующим этапом в формировании канала трафика является
расширение спектра, т.е. суммирование по модулю два потока бинарных
символов после ортогонального модулятора со сдвинутой репликой
длинного кода. Так кале длинный код является потоком чипов со скоростью
454 Глава 11. Примеры действующих беспроводных широкополосных систем
1,2288 Мчип/с, 4 чипа длинного кода приходятся на один символ
последовательности Уолша, или 256 чипов кода на один сигнал Уолша с
выхода ортогонального модулятора. Приемник БС после сжатия сигнала по
спектру обрабатывает его 64-канальным банком корреляторов, каждый
из которых настроен на одну из функций Уолша, и принимает
решение в пользу той функции Уолша, которая служит опорой коррелятора
с максимальным откликом. Разумеется, интервал обработки
охватывает полную длительность функции Уолша, т. е. 256 чипов длинного кода,
и, значит, коэффициент расширения в обратном канале оказывается
равным 256. Длинный код уникален и жестко определен стандартом, a CDMA
разделение сигналов различных пользователей обеспечивается
индивидуальными масками абонентов (т.е. временными сдвигами длинного кода).
Тем самым, в обратном канале cdmaOne реализован асинхронный вариант
CDMA, обсуждавшийся в § 7.4. Безусловно, временные сдвиги сигнатур
в этом формате должны быть выбраны так, чтобы исключить риск
синхронного прихода на БС сигналов от двух МС, свободно мигрирующих во
всей зоне покрытия сети. Номинал сдвига определяется текущим
идентификационным номером МС, назначаемым сетью, подобно тому как это
происходит с канальной поднесущей в FDMA. Параллельно с CDMA-
канализацией специфическая маска потребителя участвует в
шифровании (скремблировании) потока после модулятора. Из-за огромной длины
длинного кода для несанкционированного агента,,не знающего
абонентской маски, ввод его часов в синхронизм с сигнатурой, необходимый для
последующего сжатия по спектру и расшифровки засекреченных данных,
окажется весьма трудноразрешимой задачей.
Операция отображения логических {0,1} символов на действительный
модуляционный алфавит {±1} не отличается от уже встречавшейся и
не требует новых комментариев.
Одним из главных требований к мобильному терминалу является
продолжительная работа батареи без подзарядки. В этом плане линейный
усилитель мощности, обладающий повышенным средним потреблением,
менее привлекателен, чем нелинейный (работающий в ключевом режиме).
По этой причине в передатчике МС снижение средней мощности вслед за
скоростью реализуется не уменьшением мгновенной мощности, а
передачей лишь одной из копирующих друг друга PCG. Например, при исходной
скорости 2,4 кбит/с идентичная PCG повторяется четырежды, но только
одна из ее реплик излучается в эфир, тогда как в течение трех
остальных передатчик выключен. Очевидно, что подобный режим превращает
излучение МС в прерывистое. Рандомизация позиций, передаваемых PCG
(рандомизация пакетов данных), способствует лучшему усреднению
прерывистой ПМД в приемнике БС. Псевдослучайный профиль выбора PCG
11.3. Радиоинтерфейсы cdmaOne (IS-95) и cdma2000 455
внутри любого кадра задается последними 14 чипами маски пользователя,
т. е. сдвинутой реплики длинного кода, в конце предшествующего кадра.
Правило, определенное в спецификации для каждой нетто-скорости,
пересчитывает значения этих чипов (как разрядов двоичного числа) в позиции
удаляемых PCG. Рис. 11.6, где одинаковые числа отмечают
повторяющиеся PCG, тогда как затененные и пунктирные прямоугольники маркируют
переданные и удаленные PCG, демонстрирует пример профиля передачи
для нетто-скорости 4,8 кбит/с. Последовательность после рандомизато-
ра пакетов данных может трактоваться как троичная с символами {±1}
и нулями, отвечающими активной передаче и паузе соответственно.
, 20 мскадр = 16 PCG .
\ PCG - 1,25 мс
Рис, 11.6- Пример профиля передачи МС при нетто-скорости 4,8 кбит/с
11.3.4*2. Канал доступа
МС использует канал доступа, отвечая на уведомление о входящем вызове
в состоянии покоя, а также при необходимости либо регистрации в сети,
либо инициализации вызова. Операции разбиения на кадры, сверточно-
го кодирования, ортогональной модуляции, перемежения и ПРС длинным
кодом в канале доступа в основном аналогичны тем же операциям в
обратном канале трафика. Разумеется, по данному каналу речь не передается,
так что регулировка скорости/мощности в соответствии с речевой
активностью отсутствует. Одна из особенностей канала доступа связана
с инициализацией доступа МС в сеть. Не имея надежных сведений об
условиях распространения в обратном канале, МС инициирует соединение
посылкой пробных сигналов малой интенсивности, постепенно наращивая
уровень сигнала с каждой очередной посылкой до уведомления со стороны
Б С об установлении контакта. Пробные сигналы передаются в пакетном
режиме со случайными интервалами для снижения вероятности
коллизии запросов от нескольких пользователей, поскольку в режиме доступа
не исключается присвоение различным МС одной и той же маски
длинного кода.
11.3.4*3* Модуляция в обратном канале
Поскольку МС никогда не передает данные трафика и доступа
одновременно, надобность в суммировании канальных сигналов на входе
модулятора, характерная для прямого канала, в обратном отсутствует. Выход-
456 Глава" 11. Примеры действующих беспроводных широкополосных систем
ной сигнал канала трафика или доступа непосредственно поступает в
параллельные синфазную и квадратурную ветви, отличающиеся от
изображенных на рис. 11.4 в следующих деталях. Во-первых, сдвинутые реплики
коротких кодов PN-I и PN-Q для идентификации БС теперь не нужны
(каждая МС обладает уникальным идентификатором — маской длинного
кода — во всей зоне покрытия) и, более того, неудобны при
одновременном приеме сигнала одной и той же МС несколькими БС в ходе мягкой
эстафетной передачи. Поэтому всеми МС используется нулевой
циклический сдвиг короткого кода. Во-вторых, в квадратурную ветвь модулятора
после умножителя на PN-Q введен элемент задержки на половину
длительности чипа. Это сделано для преобразования КФМ в ее версию — КФМ
со сдвигом (КФМС), более экономную в плане продления срока работы
батареи без подзарядки. Стандартный КФМ модулятор на рис. 11.4
можно трактовать как два БФМ модулятора, независимо манипулирующих
косинусную и синусную компоненты несущей. Если бинарные символы
в обеих ветвях одновременно меняются на противоположные, фаза КФМ
сигнала «прыгает» на 180°, что налагает на усилитель мощности
передатчика требование линейности в динамическом диапазоне, равном
примерно удвоенной амплитуде сигнала. При КФМС скачки полярности сразу
в обоих модулирующих бинарных потоках исключаются благодаря
взаимному сдвигу границ символов на половину длительности чипа. Поэтому
в результирующем сигнале после модулятора возможны лишь скачки
фазы на 90°, что заметно смягчает требовалия к линейному динамическому
диапазону усилителя, способствуя тем самым продлению срока
автономного использования батареи.
11.3.5. Эволюция радиоинтерфейса cdmaOne
в cdma2000
Одним из ключевых импульсов к появлению 3G стандартов явилось
желание расширить функциональные возможности мобильного приемника,
трансформировав его из простой телефонной трубки в терминал,
пригодный для высокоскоростного обмена данными с сетью, приема и отправки
мультимедийных сообщений, доступа к Интернету и пр. Для реализации
подобных новаций требовался переход к значительно более высоким
скоростям передачи по сравнению с характерными для 2G. Потенциальный
предел скорости, ассоциируемый с философией 3G, составляет 2 Мбит/с.
Столь драматическое увеличение скорости без сопутствующего снижения
качества сервиса и абонентской емкости возможно лишь за счет
заметного расширения полосы системы. В проекты cdma2000, в отличие от
концепции UMTS (см. следующий раздел), изначально закладывалась идея
обратной совместимости со стандартом cdmaOne, рассматривавшимся
11.3. Радиоинтерфейсы cdmaOne (IS-95) и cdma2000 457
как отправной пункт дальнейшей эволюции. Среди ряда технологий,
объединенных общим титулом cdma2000, одна, базирующаяся на
принципах МЧМ-ПРС-CDMA (см. подпараграф 10.2.1), представляется наиболее
привлекательной в плане дальнейших перспектив. Углубление в детали
этого проекта (подробно представленного, например, в [69]) в рамках
настоящего раздела вряд ли уместно по причине их сложности и,
возможно, неокончательного оформления на момент написания книги. Поэтому
приведем лишь краткий обзор основных нововведений в направлении
эволюции cdmaOne в cdma2000.
При трех несущих (в будущем это число предположительно возрастет)
прямой канал cdma2000 попросту трехкратно повторяет спектр cdmaOne,
занимая общую полосу порядка 3,75 МГц и используя в каждой из трех
1,25 МГц подполос методы ПРС и модуляции, несколько
видоизмененные по сравнению с cdmaOne. В отличие от cdmaOne, где данные БФМ
манипулируют расширяющую КФМ последовательность, в cdma2000 для
модуляции данными используется тот же тип модуляции, что и в ПРС-ко-
де, т.е. КФМ. Это позволяет при прежней скорости данных удвоить
длительность символов модулирующего потока и, следовательно, вдвое
(до 128) увеличить коэффициент расширения на одну подполосу при той
же скорости чипов. Разумеется, больший коэффициент расширения
означает удвоение числа прямых физических каналов, тем самым удваивая
потенциальное число обслуживаемых пользователей. Однако еще важнее
то, что в новом стандарте одному и тому же пользователю могут быть
предоставлены несколько параллельных каналов с целью увеличения
полной скорости передачи в число каналов раз. Подобный метод передачи,
называемый мультикодовым и унаследованный от спецификации IS-95B,
является одним из главных ресурсов продвижения скоростей к пределу,
декларированному концепцией 3G.
Другой новинкой прямого канала cdma2000 является разнесение на
передаче, подобное описанному в подпараграфе 10.3.5. Так как сигналы
от разных передающих антенн распространяются по различным путям,
в дополнение к пилотному каналу cdmaOne предусмотрены каналы,
которые передают пилотные сигналы, специфические для каждой из двух
антенн БС, участвующих в разнесении. Это дает возможность МС
разделить пилотные сигналы антенн и строго синхронизовать опоры в
ветвях разнесения, чтобы далее демодулировать, соответствующим
образом скомбинировать и декодировать принятый сигнал, утилизировав весь
потенциал разнесения.
Усложнение архитектуры стандарта cdma2000 потребовало более
строгой систематизации прямых логических каналов. На смену четырем в
cdmaOne в иерархию логических каналов cdma2000 вошли 10 только на пер-
17—2771
458 Глава 11. Примеры действующих беспроводных широкополосных систем
вом уровне, в том числе общий канал управления, общий канал
регулировки мощности, каналы быстрого вызова и др. Что касается каналов
трафика, то они, помимо прочих, включают основные (используемые в первую
очередь) и дополнительные, участвующие в мультикодовой передаче в
ситуациях, когда нужна высокая скорость, недостижимая с привлечением
лишь основных каналов. В дополнительных каналах могут
использоваться сверточные либо турбо-коды (см. § 9.4).
Обратный канал cdma2000 базируется не на МЧМ-ПРС-CDMA, а на
традиционной ПРС-CDMA основе с утроенной полосой (3,75 МГц),
которой отвечает увеличенная втрое скорость чипов (3,6864 Мчип/с)
длинного расширяющего кода. При столь высокой скорости прямого расширения
ряд решений стандарта cdmaOne пришлось ревизовать и заменить
более адекватными. Прежде всего скорость сверточного кода с 1/3 была
понижена до 1/4, так чтобы нетто-скорость данных, равная, к
примеру, 9,6 кбит/с превращалась на выходе кодера в 38,4 кбит/с. При КФМ
модуляции данными и расширении такого кодового потока длинной
последовательностью коэффициент расширения составляет 2 • (3,6864/38,4) •
103 = 192, что некритически меньше, чем 256 в cdmaOne. В то же время
понижение скорости сверточного кода с длиной кодового ограничения 9
до величины 1/4 дало дополнительный (не асимптотический) выигрыш
от кодирования, оцененный дизайнерами как достаточный для
исключения из обратного канала ортогональной 64-ичной модуляции. Это
позволило максимально унифицировать структуры обратного и прямых
каналов трафика.
Еще одно отличие — расширенная номенклатура логических каналов
с включением обратного пилотного канала, который теперь необходим,
так как в отсутствие ортогональной модуляции ВС должна иметь
локальную когерентную опору для демодуляции КФМ данных МС.
Присутствуют и другие новые логические каналы, частично используемые
одновременно. Канализированные кодами Уолша, их сигналы далее линейно
суммируются, означая, что усилитель мощности передатчика должен быть
линейным, т. е. привлечение КФМС лишено смысла. Поэтому в обратном
канале используется обычная КФМ данными, при которой кодовый
поток, отображенный в КФМ символы, сперва перемножается с КФМ ПРС
кодом, а затем действительная и мнимая части произведения бинарно
модулируют косинусную и синусную компоненты несущей, как объяснялось
в § 7.1. Отметим, что подобно прямому каналу основной обратный
канал трафика (один на каждую МС) может поддерживаться обратными
дополнительными каналами для мультикодовой передачи со скоростями,
недостижимыми с помощью только основного канала. Дополнительные
каналы опять могут использовать сверточные либо турбо-коды.
11.4' Радиоинтерфейс UMTS 459
11.4. Радиоинтерфейс UMTS
11.4.1. Предварительные замечания
Стандарт UMTS (Universal Mobile Telecommunication System), ныне
чаще именуемый WCDMA (Wideband CDMA), представляет собой
широкополосный CDMA стандарт третьего поколения, проект которого был
инициирован Европейским телекоммуникационным сообществом. В
настоящее время WCDMA вместе с cdma2000 входит в так называемое
семейство IMT-2000, т. е. перечень стандартов, принятых ITU
(International Telecommunication Union) в качестве платформы 3G сетей.
Существуют две версии WCDMA: с частотным дуплексом (frequency division
duplex, FDD) и временным дуплексом (time division duplex, TDD).
Названиями прямо подчеркивается отличие систем в способе разделения
прямого («вниз») и обратного («вверх») каналов. В FDD-WCDMA прямой
и обратный каналы работают в неперекрывающихся частотных
диапазонах, тогда как в TDD-WCDMA для их разделения используются
различные временные слоты. Для краткости ограничимся обсуждением только
FDD-WCDMA, тем более что многие решения в обеих спецификациях
унифицированы.
Международными нормативными документами для FDD-WCDMA в
Европе выделены частотные диапазоны 1920-1980 МГц (линия «вверх») и 2010-
2170 МГц (линия «вниз») с ограничением полосы обеих линий номиналом
в 5 МГц. Разделение всех физических каналов основывается на ПРС,
в частности технологией множественного доступа служит ПРС-CDMA.
Стандарт определяет единую и неизменную скорость чипов в 3,84 Мчип/с
в полном соответствии с установленным лимитом полосы. Как и cdma2000,
WCDMA является стандартом, предусматривающим вариации скорости
передачи в очень широких пределах. Как следствие, в силу постоянства
скорости чипов коэффициент расширения меняется пропорционально
скорости данных.
Далее, как и прежде, сфокусируем внимание на физическом слое
системы, т. е. решениях, касающихся расширения спектра, каналообразования
и модуляции. Подчеркнем, что БС стандарта WCDMA не опираются
на поддержку GPS и имеют автономные несинхронизированные
эталоны времени. Подобная архитектура существенно упрощает и удешевляет
станционное оборудование, однако заметно усложняет процедуры
начального поиска и эстафетной передачи, предопределяя многие различия
физических слоев WCDMA и cdma2000.
Как и § 11.3, предлагаемый ниже материал вряд ли претендует на
что-либо большее, чем конспективный обзор, однако многие недавно вы-
,460 Глава 11. Примеры действующих беспроводных широкополосных систем
шедшие книги, посвященные UMTS/WCDMA [92, 104, 114, 115, 120-122],
помогут любознательному читателю, стремящемуся узнать больше о
системе, которой в ближайшие годы по-видимому предстоит занять
доминирующие позиции в мобильной связи.
11.4.2. Типы каналов WCDMA
В соответствии с терминологией спецификаций WCDMA различают
логические, транспортные и физические каналы. На уровнях выше
физического данные распределяются между логическими каналами согласно
их информационному содержанию, но перед переходом на физический
уровень они реструктурируются в транспортные каналы. Критерием
различения транспортных каналов служит способ и формат представления
данных, тогда как физические каналы (попросту сигналы, переносящие
информацию), как и в любой CDMA системе, различаются
специфическими кодами. Физический уровень состоит из двух подуровней.
Передаваемые данные доставляются на первый физический подуровень с верхних
уровней, упакованными в транспортные каналы в соответствии с
информационным содержанием. Первый подуровень включает среди прочего
добавление CRC символов ^ля защиты блоков данных, канальное
кодирование и перемежение. Канальное кодирование осуществляется либо свер-
точным кодом (длина кодового ограничения 9, скорости 1/2 либо 1/3),
либо турбо-кодом (компонентные кодеры памяти 3, скорость 1/3). Для
достижения особо высокой скорости возможна также передача без
кодирования. Второй подуровень, т. е. линия радиосвязи, включает отображение
транспортных каналов на физические (т. е. сигналы) и передачу сигналов
через среду распространения. Сигнал, принятый МС (канал «вниз») или
ВС (калал «вверх»), подвергается далее всем должным обратным
операциям обоих подуровней (демодуляции, деперемежению, декодированию
и т. п.), обратному отображению, если необходимо, и переадресации
данных на более высокие протокольные уровни.
Другая классификация как транспортных, так и физических каналов
разделяет их на общие (common) и выделенные (dedicated). Первые
содержат данные, относящиеся ко всей системе и используемые совместно
всеми пользователями, тогда как вторые служат для контакта между ВС
и конкретной МС.
Временная структура всех каналов строго фиксирована стандартом.
Все они состоят из кадров длительности 10 мс (38400 чипов), а каждый
кадр, в свою очередь, разбит на 15 слотов длительности 666,66 мкс (2560
чипов).
11.]^. Радиоинтерфейс UMTS 461
11.4.3. Выделенные физические каналы линии «вверх»
Выделенный физический канал предоставляется сетью МС на
эксклюзивной основе, т. е. два мобильных абонента в пределах одной и той же
соты никогда не используют один и тот же выделенный канал. Имеются
два типа выделенных каналов «вверх»: выделенный физический канал
данных (dedicated physical data channel — DPDCH1) и выделенный физический
канал управления (dedicated physical control channel — DPCCH),
наименование которых отражает их функциональную роль. Канал DPCCH
используется для передачи БС служебной информации: пилотного сигнала,
необходимого для оценки параметров распространения и синхронизации
когерентной опоры БС, сообщения о формате данных в DPDCH,
информации обратной связи, используемой при эстафетной передаче, и
команды регулировки мощности. На одну МС всегда приходится только один
DPCCH, и передаваемые абонентом данные попадают на физический
уровень упакованными в единственный транспортный канал для каждой МС.
Однако этот единственный транспортный канал может быть отображен
на несколько (вплоть до 6) выделенных каналов данных (DPDCH),
если требуемая скорость данных превосходит максимально возможную для
одного DPDCH.
Мультиплексирование выделенных каналов выполняется следующим
образом (см. рис. 11.7): DPCCH передается через квадратурную ветвь
КФМ модулятора, тогда как первый DPDCH канал подается в
синфазную ветвь. Остальные DPDCH при их вовлечении распределяются по
возможности равномерно между ветвями. Таким образом, несмотря на
присутствие КФМ модулятора, в канале «вверх» фактически
осуществляется БФМ.
Скорость передачи по DPCCH всегда постоянна и равна 15 кбит/с или
10 бит/слот. При этом каждый бит занимает интервал в 2560/10 = 256
чипов, так что коэффициент расширения в DPCCH фиксирован и
равен 256. В отличие от этого коэффициент расширения в DPDCH
варьируется в зависимости от требуемой скорости данных в диапазоне
от 256 (минимальная скорость) до 4 (максимальная скорость). Таким
образом минимальная скорость передачи данных составляет 15 кбит/с,
тогда как максимальная на один DPDCH в 64 раза выше, т. е. 960 кбит/с.
Использование 6 параллельных DPDCH в мультикодовом режиме
передачи, описанном в предыдущем разделе, позволяет в принципе довести
максимальную скорость до 5760 кбит/с. Разумеется, имеется в виду так
называемая брутто-скорость (т.е. скорость кодового потока после ка-
1 Наименования и аббревиатуры каналов UMTS/WCDMA в разделе в точности
воспроизводят используемые в нормативных документах.
462 Глава 11. Примеры действующих беспроводных широкополосных систем
нального кодера), чистая же скорость (нетто-скорость) потока данных
меньше в пропорции со скоростью канального кода.
ее,
DPDCH,
—*0~^® -
ССо
DPDCH,
DPDCH,
DPDCft,
DPDCH.
—0—-0—J
—^® <*) Ч
СС4 Gd
—*®—<*)—н |
ее,
—0—-0—J
ccs
DPDCHs
DPCCH
—40—-0—►
CCC Gc
—~(x) >0) H
}
К модулятору
(через
скремблер)
Рис. 11.7. Мультиплексирование выделенных каналов «вверх»
Каждый физический канал «вверх» задается специфическим
канализирующим кодом, перемножаемым с передаваемыми данными. Рис. 11.7
относится к сценарию, когда все DPDCH активны и используют шесть
различных канализирующих кодов CCi,..., ССб, с обозначением ССс,
зарезервированным для канализирующего кода DPCCH. После умножения на
канализирующий код все физические каналы взвешиваются своими
коэффициентами усиления, реализуя регулировку мощности в линии «вверх».
Фактически в этом участвуют лишь два различных коэффициента: при
любом числе DPDCH им приписывается один и тот же коэффициент
усиления Gd, тогда как в DPCCH он может быть иным (Gc). Максимальное
значение коэффициента усиления — единица, его нулевое значение
соответствует отключению канала, а шаг регулировки — 1/15.
11.4' Радиоинтерфейс UMTS 463
11.4.4. Общие физические каналы «вверх»
Общие физические каналы являются ресурсом, предоставленным в общее
распоряжение всех мобильных абонентов. Имеются два типа общих
каналов «вверх»: канал случайного доступа (random access channel — RACH))
и общий пакетный канал (common packet channel — СРСН)), причем эти
названия употребляются как для транспортных, так и соответствующих
физических каналов. МС использует RACH для инициирования
соединения с сетью (например, вызова) и для передачи коротких
пакетных сообщений, тогда как СРСН — основной ресурс МС при передаче
пакетов.
Физический RACH (PRACH) содержит преамбулу из 4096 чипов,
являющуюся 16-чиповым идентификатором МС, повторенным 256 раз. МС
может начать передачу в канале PRACH в начале любого из 15 слотов
доступа, занимающих совместно два кадра, т.е. 5120 чипов или 20 мс.
Диаграмма слотов доступа задается в формате передачи БС,
предусматривающем специальный транспортный канал «вниз» (broadcasting
channel — ВСН). В стартовом состоянии у МС нет достоверных сведений об
ослаблении сигнала в линии «вверх», и первая передача преамбулы
производится на низком уровне мощности. Пока нет подтверждения от БС об
установленном соединении, МС случайно выбирает новые слоты
доступа и повторяет передачу преамбулы, каждый раз увеличивая мощность
сигнала. По получении подтверждения от БС МС передает собственно
сообщение, занимающее один или два кадра (10 или 20 мс). Замкнутая
петля регулировки мощности в PRACH не применяется ввиду
кратковременности сеансов связи по этому каналу.
Структура физического канала СРСН (РСРСН) в основном та же, что
и PRACH, однако сегмент сообщения РСРСН может занимать большее
число кадров, а сегмент преамбулы сопровождается еще одним
сегментом: преамбулой обнаружения коллизий, помогающей выявить
одновременные попытки нескольких МС воспользоваться каналом РСРСН. Так
как пакеты в РСРСН значительно длиннее передаваемых по PRACH,
применение в первом замкнутой петли регулировки мощности признано
целесообразным.
Как и в выделенных, в общих каналах РСРСН и PRACH используется
квадратурное мультиплексирование для комбинирования
информационных и служебных компонентов передаваемых данных. Разделение как
общих, так и выделенных физических каналов осуществляется с помощью
канализирующих кодов, описываемых далее.
464 Глава 11. Примеры действующих беспроводных широкополосных систем
11.4.5. Канализирующие коды линии «вверх»
Как сказано выше, индивидуальная МС использует несколько типов
каналов, подлежащих разделению в приемнике БС. Поскольку все физические
каналы МС привязаны к единой временной шкале, подходящим вариантом
организации разделения физических каналов (до шести DPDCH, DPCCH,
PRACH, РСРСН) оказывается синхронное кодовое разделение.
Безусловно, речь идет о разделении лишь каналов отдельно взятой МС, сигналы
же разных мобильных абонентов разделяются на основе асинхронного
варианта CDMA, как и в cdmaOne и cdma2000.
В документах WCDMA формат канализирующего кодирования
описан двоичным деревом, соответствующим итерационной процедуре. На
каждой итерации любое кодовое слово предыдущей итерации
разветвляется на два новых слова удвоенной длины добавлением либо самого
исходного слова, либо его негатива. Пусть с^ — некоторый кодовый
вектор, полученный на k-и итерации. Тогда два кодовых вектора
удвоенного размера c^+i = (c&,Cfc) и c'^+i = (с&,—с&) являются его потомками
на следующей итерации. Действуя по этому правилу, можно стартовать
с тривиального слова (1) длины один, придя после к итераций к 2к
канализирующим кодовым словам длины N — 2к (на рис. 11.8 дан пример для
к = 3). Легко установить, что подобный алгоритм отличается от
конструирования матрицы Адамара по правилу Сильвестра (см. подпара-
граф 2.7.3) только переупорядочиванием строк финальной матрицы, так
что полученные канализирующие слова есть не что иное, как функции
Уолша. Несмотря на это в спецификациях WCDMA они фигурируют под
специальным названием OVSF-кодов (orthogonal variable spreading factor).
Дерево OVSF-кодов канала «вверх» построено на основе к = 8
итераций, так что кодовые слова имеют максимальную длину N = 256 чипов.
Состоящее из одних единиц слово указанной длины присвоено
выделенному каналу управления DPCCH, в то время как доведение
коэффициента расширения в этом канале до цифры 256, упомянутой в подпарагра-
фе 11.4.3, обеспечивается последующим скремблированием. Выбор
канализирующих кодов этой же длины для DPDCH (коэффициент расширения
256) позволяет передавать данные со скоростью 15 кбит/с. Если нужна
более высокая скорость, символы данных укорачиваются, а коэффициент
расширения пропорционально уменьшается (скорость чипов
фиксирована, оставаясь равной 3,84 Мбит/с!). При этом канализирующие слова для
DPDCH слова берутся с промежуточной (Ахй, SF = 2к — требуемое
значение коэффициента расширения спектра) итерации на дереве OVSF-
кода. Если требуемая скорость достигается с одним DPDCH, номер его
канализирующего слова определяется спецификацией как SF/4 = 2fc_2,
11.1 Радиоинтерфейс UMTS 465
отсчитывая на дереве от самого верхнего слова, имеющего нулевой номер.
Подобный выбор всегда сохраняет ортогональность DPDCH и DPCCH
вне зависимости от коэффициента расширения DPDCH. Когда
единственный DPDCH канал (с коэффициентом расширения 4) не в состоянии
обеспечить требуемую скорость данных, в действие вступает мультикодовая
передача по нескольким DPDCH с обязательным равенством их
коэффициентов расширения минимальному значению 4. Имеются три кодовых
слова длины 4, ортогональных друг другу и кодовому слову DPCCH, так
что, учитывая возможность использования одного и того же слова для
двух DPDCH при квадратурном мультиплексировании (рис. 11.7), в муль-
тикодовый режим могут быть вовлечены до шести DPDCH.
(1,1.1.1.1.1.1.1)
(1.1)
(1.-1)
(1.1.1.1)
(1.1.-1.-1)
(1,-1,1.-1)
(1,-1,-1,1)
(1,1,1,1,-1.-1.-1.-1)
(1,1,-1,-1,1.1.-1.-1)
(1,1,-1,-1,-1,-1,1,1)
(1,-1,1,-1,1,-1,1,-1)
(1,-1,1,-1,-1,1,-1,1)
(1,-1,-1,1,1,-1,-1,1)
(1,-1,-1,1,-1,1,1,-1)
Рис. 11.8- Дерево OVSF-кодов длины 8
Способ присвоения кодовых слов каналам PRACH и РСРСН,
предписываемый спецификацией, также гарантирует их ортогональность
выделенным каналам во всем диапазоне скоростей передачи по DPDCH.
11.4.6. Скремблирование в линии «вверх»
Финальным этапом формирования сигнала МС является ПРС с
помощью специфической для каждого пользователя сигнатуры для
реализации асинхронного CDMA-разделения сигналов различных МС в
приемнике БС. Согласно тезаурусу WCDMA, данная операция, наряду с подобной
в линии «вниз», именуется скремблированием. Отметим попутно, что в
документах cdmaOne и cdma2000 (см. разделы 11.3.3.3 и 11.3.3.4) этот же
термин имеет несколько иной смысл. Имеется два типа скремблирующих
кодов, предусмотренных стандартом для линии «вверх»: скремблирование
выделенных каналов осуществляется либо длинными, либо короткими кодами.
466 Глава 11. Примеры действующих беспроводных широкополосных систем
Последовательности Голда (подпараграф 7.5.2) длины L = 225 - 1,
усеченные до длительности одного кадра, т.е. до 38 400 чипов, служат
основой построения длинных скремблирующих кодов. РСЛОС
генераторы, заданные полиномами f\(x) = х25+х3 + 1 и /г(ж) = х25+х3+х2+х + 1,
формируют две m-последовательности, вторую из которых можно
получить также децимацией первой с индексом, подходящим для конструкции
Голда. Суммирование по модулю два сдвинутой копии второй т-после-
довательности с первой генерирует последовательность Голда, которая
далее усекается и отображается на алфавит {±1}. «Прямая» усеченная
последовательность Голда {ci} определяет вещественную компоненту КФМ
сигнатуры МС. Для получения мнимой части первичная (до усечения)
последовательность Голда вначале сдвигается на 777 232 чипа, а затем
усекается и отображается на алфавит {±1} в виде последовательности {c'j}.
После этого негатив каждого четного элемента последней заменяет
следующий нечетный элемент, и полученная последовательность посимвольно
перемножается с {с^}. Последняя операция вдвое уменьшает число
элементов в результирующей КФМ последовательности, полярность которых
противоположна полярности предыдущего элемента. Действительно,
полученная таким способом КФМ сигнатура представляется как
ai = c(*)+j(-l)ic(*)c'(2L*/2j), (ИЛ)
где с(г) и d{i) — более удобные обозначения элементов ^ и с-. Теперь
легко видеть, что при переходе от четной позиции г = 21 к следующей
нечетной г = 21 + 1 вещественная и мнимая части не могут
измениться одновременно, означая, что максимальные фазовые скачки возможны
только на ±90°, никогда на 180°, так что полярность чипа может
измениться на противоположную только при переходе от нечетного чипа
к четному. Как правило, снижение частоты противоположных переходов
желательно для продления срока автономной работы батареи, поскольку
усилитель мощности в моменты таких переходов потребляет повышенную
мощность.
Завершающий шаг в КФМ скремблировании — умножение
мультиплексированного сигнала МС с выходов ветвей схемы на рис. 11.7 на
скремблирующую последовательность. Эта операция, выполняемая
стандартным КФМ модулятором, обстоятельно обсуждалась в подпарагра-
фе 7.1.2.
Скремблирующая последовательность строго синхронизирована с
временной шкалой МС, стартуя в любом кадре с одного и того же символа
(чипа).
Отметим, что главное достоинство кодов Голда — минимаксные
периодические корреляционные свойства — никак не объясняет именно их
11.4^ Радиоинтерфейс UMTS 467
выбор для скремблирования линии «вверх», поскольку корреляционные
свойства драматически деградируют в результате усечения. Более или
менее правдоподобным обоснованием может служить простота
формирования большого числа (не менее 225 + 1) псевдослучайных
последовательностей.
Короткие скремблирующие последовательности периода 256
планируются к использованию в комбинации с усложненным приемником БС,
реализующим многопользовательские алгоритмы (см. § 10.1). В
асинхронной версии CDMA сложность такого приемника, как правило, растет
с ростом длины ПРС кода. Правило формирования коротких скрембли-
рующих кодов, предписываемое спецификацией, включает генерирование
четверичной линейной рекуррентной последовательности длины 255, ее
суммирование по модулю четыре с двумя двоичными рекуррентными
последовательностями длин 51 и 85, расширение результирующей
последовательности до длины 256 добавлением одного символа, отображение
четверичных символов на КФМ алфавит и трансформацию полученной
комплексной последовательности по правилу (11.1).
11.4.7. Отображение транспортных каналов на
физические в линии «вниз»
Информация, передаваемая сетью некоторой конкретной МС, на
транспортном уровне структурирована в виде единственного выделенного
канала, который затем отображается на два выделенных физических канала
линии «вниз»: данных (DPDCH) и управления (DPCCH), подобных тем,
что используются линией «вверх».
Перечень общих транспортных каналов линии «вниз» значительно
шире по сравнению с линией «вверх». В него, среди прочих, входят канал
оповещения (broadcasting channel — ВСН), передающий параметры
сети или соты, адресованные всем МС; прямой канал доступа (forward
access channel — FACH), используемый БС для передачи командных
данных МС с известным местоположением; канал вызова (paging channel —
РСН), по которому командные данные передаются от БС на МС с
неизвестным местоположением и т.п. На физическом уровне первичный
общий физический канал управления (primary common control physical
channel — P-CCPCH) передает ВСН данные, канал FACH
отображается на вторичный общий физический канал управления (secondary common
control physical channel — S-CCPCH), передача данных РСН частично
осуществляется опять же S-CCPCH, а частично — каналом синхронизации
(synchronization channel — SCH). Имеется также общий пилотный канал
(common pilot channel — CPICH), транслирующий сигнал без модуляции
468 Глава 11. Примеры действующих беспроводных широкополосных систем
данными, по которому приемники МС оценивают параметры канала.
Полную схему соответствия между транспортными и физическими каналами
линии «вниз», предписанную спецификацией, можно найти в [92, 121].
11.4.8. Формат физических каналов линии «вниз»
В линии «вниз» используется несколько иной механизм
мультиплексирования выделенных каналов данных DPDCH и управления DPCCH по
сравнению с линией «вверх»: каждый слот разбит на части, и каждая часть
отведена либо DPDCH, либо DPCCH. При такой организации передатчик
БС время от времени функционирует в прерывистом режиме из-за пауз
в потоке данных в периоды низкой речевой активности. Прерывистость
излучения МС создавала бы помехи, заметно ухудшающие работу близко
расположенных электронных приборов (например, слухового аппарата).
С подобным явлением нередко сталкиваются абоненты мобильных сетей
GSM. В то же время прерывистость излучения БС не столь потенциально
вредна, поскольку нахождение приборов упомянутого типа вблизи
передающей антенны БС практически исключено.
Другая особенность физического канала линии «вниз» — КФМ
данными (в отличие от БФМ в линии «вверх»). Вначале демультиплексор
(DMUX) расщепляет битовый поток после первого физического
подуровня (канальное кодирование, перемежение и т.п.) на два потока,
содержащих четные и нечетные биты исходного соответственно. Оба потока,
отображенные на {±1} алфавит, умножаются на двоичный
канализирующий код (СС), формируя вещественную и мнимую компоненты
канализированного комплексного сигнала данных, как показано на рис. 11.9.
Финальными шагами являются, кале и в линии «вверх», перемножение
канализированного КФМ сигнала с КФМ расширяющим (скремблирую-
щим) кодом и квадратурная модуляция несущей.
Данные
Четные
биты
DMUX
Нечетные
биты
СС|
Re
Im
Рис. 11.9. Демультиплексирование и каналообразование в линии вверх
11.4- Радиоинтерфейс UMTS 469
11.4.9. Канализирующие коды линии «вниз»
Мультиплексирование во времени каналов данных и управления,
описанное выше, означает, что для передачи обоих этих информационных
потоков необходим лишь один выделенный физический канал (DPCH). Если
одного подобного канала достаточно для передачи с нужной скоростью,
Б С формирует его с помощью специфической для данного пользователя
канализирующей кодовой последовательности, разумеется, уникальной в
пределах соты (или сектора) и запрещенной к использованию для
соединения с любой другой МС. Мультикодовый сценарий возникает тогда, когда
единственный физический канал не в состоянии передавать данные с
необходимой скоростью. При этом БС организует несколько параллельных
физических каналов для соединения с одной МС. Эти каналы всегда
имеют один и тот же коэффициент расширения, но разные канализирующие
коды, которые не могут повторно использоваться БС в контакте с
другими абонентами. Поскольку нужды в дублировании командных сообщений
всеми мультикодовыми каналами нет, данные управления пересылается
МС только по одному из них.
Как таковые, канализирующие коды линии «вниз» и «вверх»
однотипны. В линии «вниз» семейство функций Уолша или OVSF дерево рис. 11.8
позволяет варьировать коэффициент расширения спектра в диапазоне
от 4 до 512. Отдельные канализирукшще последовательности недоступны
для DPCH, поскольку закреплены за общими каналами типа CPICH.
Например, при минимальном коэффициенте расширения только три кодовые
последовательности могут обслуживать DPCH, обеспечивая
максимальную брутто-скорость передачи данных 2,88 Мбит/с. При скорости
канального кода 1/2 и наличии неизбежного непроизводительного трафика
(команд управления и т. д.) такая скорость не вписывается в требования
к 3G системам по нетто-скорости данных (до 2 Мбит/с), что послужило
одним из резонов введения в стандарт опции высокоскоростной некоди-
рованной передачи данных.
Когда многие пользователи работают на разных скоростях, их
канализирующие коды должны сохранять ортогональность, несмотря на
различие коэффициентов расширения или, эквивалентно, длин кода. Как
следует из рис. 11.8, две функции Уолша разной длины ортогональны на
интервале минимальной длины, если и только если ни одна из них не
является потомком другой. Понятно поэтому, что управление ресурсом
канализирующих кодов в линии «вниз» значительно сложнее, чем в линии
«вверх», где любая МС, будучи изолированной от других своим
уникальным скремблирующим законом, имеет в полном эксклюзивном
распоряжении весь набор канализирующих кодов. Действительно, разным МС необ-
470 Глава 11. Примеры действующих беспроводных широкополосных систем
ходимо назначать различные подмножества последовательностей Уолша,
не содержащие потомков последовательностей, обслуживающих в данный
момент другие МС. Эта задача динамического распределения ресурса
решается на более высоких уровнях сетевого набора протоколов.
11.4.10. Скремблирующие коды линии «вниз»
Как уже говорилось, скремблирующие коды линии «вниз» служат для
разделения сигналов различных БС в приемнике МС. Каждая скрембли-
рующая последовательность строится на основе кода Голда длины L —
= 218 — 1 = 262143. Два РСЛОС генератора с обратной связью, задаваемой
полиномами f\{x) = xls + х7 + 1 и /г(ж) = xis + х10 + х7 + хъ + 1,
формируют исходные га-последовательности, связанные друг с другом, как
предписано конструкцией Голда (см. подпараграф 7.5.2). Хотя имеется
218 + 1 = 262145 последовательностей Голда указанной длины,
спецификация предусматривает использование только 213 = 8192 из них. Далее
из каждой разрешенной последовательности вырезаются два сегмента
длины 38400: начальный и сдвинутый на 217 = 131072 чипа,
отображаемые затем на {±1} алфавит по обычному правилу (6.15). Результирующие
бинарные последовательности служат действительной и мнимой частями
КФМ скремблирующего кода линии «вниз».
Спецификация устанавливает строгую иерархию скремблирующих
последовательностей. Множество всех скремблирующих кодов делится на
512 подмножеств, каждое из которых содержит один первичный и 15
вторичных кодов. В свою очередь, все 512 первичных кодов поделены на 64
группы по 8 последовательностей в каждой. Конкретной БС
присваивается только один уникальный первичный код. Некоторым физическим
каналам разрешено использовать только первичный код, тогда как
другим — и первичный, и вторичный коды.
11.4.11. Канал синхронизации
11.4-И-1' Общая структура
Канал синхронизации (synchronization channel — SCH) играет
исключительно важную роль в структуре сети, обеспечивая начальный поиск соты
и совмещение временной шкалы МС с границами кадров и слотов
принятого сигнала БС. Ни канализирующие, ни скремблирующие коды не
имеют отношения к каналу синхронизации, поскольку его сигнал должен
быть обнаружен и обработан до того, как МС узнает скремблирующий
код контактирующей с ней БС. Подчеркнем вновь, что временные
эталоны БС в сети WCDMА взаимно не синхронизированы, так что
начальный поиск приходится повторять при каждом переходе МС на новую БС
11.4- Радиоинтерфейс UMTS 471
(например, в ходе эстафетной передачи). Этот фактор оказался в числе
решающих в выборе архитектуры SCH, приспособленной к двухэтапной
поисковой процедуре, потенциально выгодной в плане экономии
времени по сравнению с обычным последовательным поиском (см. § 8.2 и 8.3).
Фактически SCH канал включает первичный и вторичный каналы
синхронизации, сигналы которых — первичный и вторичный коды
синхронизации — обслуживают первый и второй этапы поиска соответственно.
Оба сигнала занимают 256 начальных чипов каждого слота. Первичный
код синхронизации идентичен не только во всех слотах, но и для всех БС
сети. По этой причине вхождение МС в синхронизм с первичным
сигналом заранее избранной БС невозможно; МС в состоянии выяснить, с какой
именно Б С установлен контакт на первом этапе, только по завершении
второго этапа. По окончании поиска первичного сигнала синхронизации
МС знает границы слотов, но не кадров. На втором этапе МС
должна устранить эту неопределенность, тестируя все 15 (по числу слотов
в кадре) возможных рассогласований временной шкалы МС с принятым
сигналом БС для всех возможных вариантов вторичного кода
синхронизации. Чтобы облегчить решение этой задачи, период вторичного кода
синхронизации выбран равным одному кадру (15 слотам или 38 400 чипам),
а структура соответствующей кодовой последовательности
индивидуальна для каждой БС. Кроме того, вторичный код синхронизации жестко
связан с группой скремблирующих кодов (одной из 64), присвоенных
базовой станции. Таким образом, после завершения второго этапа поиска
МС распознает группу скремблирующих кодов найденной БС, после чего,
тестируя 8 гипотез относительно возможной первичной скремблирующей
последовательности, окончательно выясняет, какая из них используется
БС на связи.
11.4-11-%- Первичный код синхронизации
Первичный под синхронизации [primary synchronization code — PSC)
определен в спецификации как 16-элементная последовательность
а - (1,1,1,1,1,1,-1,-1,1,-1,1,-1,1,-1,-1,1),
повторенная 16 раз в прямой или негативной полярности, образуя в итоге
256-элементную бинарную последовательность
Каждая БС передает одну и ту же последовательность cps, формируя тем
самым PSC и предоставляя МС возможность осуществить первый этап
поиска соты. Поскольку PSC предназначен для временных измерений
в многолучевой обстановке, он должен обладать хорошими
автокорреляционными свойствами (см. § 6.1). Несмотря на периодичность PSC,
472 Глава 11. Примеры действующих беспроводных широкополосных систем
большая часть его периода свободна, так что уровень боковых
лепестков апериодической АКФ служит адекватным критерием качества PSC.
Как установлено в примере 6.12 (см. также рис. 6.15), апериодическая
АКФ PSC стандарта WCDMA достаточно далека от идеала, что,
вероятно, оказалось вынужденной платой за аппаратную простоту, сочтенную
разработчиками приоритетной.
11.4-11.3. Вторичный под синхронизации
Вторичные коды синхронизации {secondary synchronization codes — SSC))
строятся на основе 16-элементной последовательности Ь, повторяющей
последовательность а в первых 8 элементах, и негатив а (т.е. —а) —
в остальных:
b = (1,1,1,1,1,1, -1, -1, -1,1, -1,1, -1,1,1, -1).
Данная последовательность повторяется 16 раз с изменением полярности
или без него, образуя 256-элементную последовательность вида
z = (Ь, Ь, Ь, —Ь, Ь, Ь, —Ь, —Ь, Ь, —Ь, Ь, —Ь, —Ь, —Ь, —Ь, — Ь).
Последовательность z затем посимвольно перемножается с каждой
16-й строкой матрицы Адамара типа Сильвестра (см. подпараграф 2.7.3)
размерности 256 для выбора 16 символов из 256-ичного
ортогонального алфавита, служащих в дальнейшем для построения кодовых слов SSC.
Алгоритм кодирования SSC должен обеспечивать низкий уровень всех
ненужных корреляций, т. е. между всеми 15 циклическими сдвигами любого
одного слова, а также между любыми временными сдвигами различных
ешж. В спецификаярш WCDMA все 64 кодовых слова SSC представлены
таблицей, однако жагосредственная проверка показывает, что это слова
(ШД) шестнадцатаричного кода Рида-Соломона. Минимальное хэммин-
гово расстояние кода Рида-Соломона на единицу больше числа
проверочных символов [31, 33], т.е. в нашем случае равно 13. Это означает
наличие не более двух совпадений 16-ичных символов между любым
словом SSC и любой из его 14 циклических копий, сдвинутых относительно
друг друга на целое число слотов. Другими словами, нормировалная
периодическая АКФ любого SSC кодового слова при указанных сдвигах имеет
уровень боковых лепестков не выше 2/15. То же справедливо и для
любых двух кодовых слов, присвоенных разным БС, при взаимных сдвигах
на целое число слотов. В то же время, поскольку БС сети не
привязаны к общим системным часам, передаваемые ими коды синхронизации
скользят относительно друг друга, и, значит, низкий уровень корреляций
необходимо соблюсти при произвольных временных сдвигах, а не
только равных целому числу слотов. Оптимальность расстояния кода Рида-
Соломона не гарантирует низкого уровня корреляций при произвольных
11.4- Радиоинтерфейс UMTS 473
сдвигах последовательностей SSC, и этот дискуссионный момент
нуждается в дополнительном исследовании.
Резюмируя содержание § 11.3 и 11.4, вновь подчеркнем, что
приведенный краткий обзор 3G систем и стандартов касался только тем,
созвучных с контекстом книги, т. е. аспектов практической материализации
широкополосных принципов и CDMA. Во многих уже опубликованных
книгах и статьях, как и во многих ожидаемых, системы третьего и
будущих поколений рассматриваются с большей детальностью и охватом
всех уровней набора системных протоколов. Заинтересованный читатель
может обратиться, в частности, к [19, 69, 92, 104, 114, 115, 120-122] и
непосредственно 3G спецификациям.
Литература
1. Carlson, А. В. Communication Systems, McGraw-Hill, New York, 1986.
2. Скляр, Б. Цифровал связь. Теоретические основы и практическое
применение / Пер. с англ., М.: «Вильяме», 2003.
3. Dixon, R. С. Spread Spectrum Systems with Commercial Applications,
John Wiley & Sons, Chichester, 1994.
4. Haykin, S. Communication Systems, John Wiley & Sons, Chichester, 2001.
5. Ziemer, R. E., and Peterson, R. L. Introduction to Digital
Communication, Prentice-Hall, Upper Saddle River, NJ, 2001.
6. Ziemer, R. E., Peterson, R. L., and Borth, D.E. Introduction to Spread
Spectrum Communications, Prentice-Hall, Englewood Cliffs, NJ, 1995.
7. Прокис, Дж. Цифровал евлзъ / Пер. с англ., М.: Радио и связь, 2000.
8. Proakis, J., and Salehi, M. Communication Systems Engineering,
Prentice-Hall, Upper Saddle River, NJ, 2002.
9. Simon M. K., Omura, J. K., Scholtz, R. A., and Levitt, В. К. Spread
Spectrum Communication Handbook, McGraw-Hill, New York, 1994.
10. Scholtz, R. A. «The origins of spread spectrum communications», IEEE
Trans. Commun., Vol. 30, P. 822-854, May, 1982.
11. Conway, J. H., and Sloane, N. J. A. Sphere Packings, Lattices and Groups,
Springer-Verlag, New York, 1998.
12. Sloane, N. J. A. Spherical codes, nice arrangements of points on a sphere
in various dimensions,
http: //www. re search, at t. com/ ~nj as/packings/index, html.
13. Adams, R. A. Calculus: a complete course, 4th edn, Addison-Wesley
Longman, Don mills, Ontario, 1999.
14. Leon-Garcia, A. Probability and Random Processes for Electrical
Engineering, Addison-Wesley, Reading, MA, 1994.
15. Freeman, R. L. Radio System Design for Telecommunications, John
Wiley & Sons, Chichester, 1997.
16. Berg, O., Berg, Т., Haavik, S., Hjelmstad, J. and Skaug, R. Spread
Spectrum in Mobile Communication, IEE, London, 1998.
17. Lee, W. C.Y. Mobile Communications Engineering, McGraw-Hill, New
York, 1997.
18. Lee, J. S. and Miller, L. E. CDMA Systems Engineering Handbook, Artech
House, Boston, MA, 1998.
Литература 475
19. Glisic, S. Adaptive WCDMA: Theory and Practice, John Wiley & Sons,
Chichester, 2003.
20. Kim, K.L «CDMA cellular engineering issues», IEEE Trans. Veh. Tech.,
Vol. 42, P. 345-350, 1993.
21. Градштейн, И., Рыжик, И. Таблицы интегралов, сумм, рядов и
произведений, М.: Наука, 1971.
22. Eliahou, S., and Kervaire, M. «Barker sequences and difference sets»,
L'Enseignement Mathematique, Vol. 38, P. 345-382, 1992.
23. Priese, M. «Polyphase Barker sequences up to length 36», IEEE Trans.
Inform. Theory, Vol. 42, P. 1248-1250, 1996.
24. Brenner, A. F. «Polyphase Barker sequences up to length 45 with small
alphabets», Electron. Lett, Vol. 34, P. 1576-1577, 1998.
25. Lindner, J. «Binary sequences up to lengths 40 with best possible
autocorrelation function», Electron. Lett, Vol. 11, p. 507, 1975.
26. Cohen, M., Fox, M. R., and Baden, J. M. «Minimum peak sidelobe
compression codes», in Proceedings of the IEEE International Radar
Conference, 7-10 May 1990, Arlington, VA, P. 633-639, IEEE, 1990.
27. Deng, X., and Fan, P. «New binary sequences with good aperiodic
autocorrelation obtained by evolutionary algorithm», IEEE Commun. Lett.,
Vol. 3, P. 288-290, 1999.
28. Baumert, L. D. Cyclic Difference Sets, Springer-Verlag, Berlin, 1971.
29. Schmidt, B. «Cyclotomic integers and finite geometry», J. Am. Math.
Soc, Vol. 12, P. 929-952, 1999.
30. Gilbert, W. J., and Nicholson, W. K. Modern Algebra with Applications,
John Wiley & Sons, Chichester, 2004.
31. Bossert, M. Channel Coding for Telecommunications, John Wiley and
Sons, Chichester, 1999.
32. Lidl, R., and Niederreiter, H. Introduction to Finite Fields and Their
Applications, Cambridge University Press, Cambridge, 1994.
33. Blahut, R. E. Algebraic Codes for Data Transmission, Cambridge
University Press, Cambridge, 2003.
34. Свердлик, М. Б. Оптимальные дискретные сигналы, М.: Советское
радио, 1975.
35. Luke, H. D., Schotten, H. D., and Hadinejad-Mahram, H. «Binary and
quadriphase sequences with optimal autocorrelation properties: a
survey», IEEE Trans. Inform. Theory, Vol. 49, P. 3271-3282, 2003.
36. Luke, H. D. Korrelationsignale, Berlin: Springer-Verlag, 1992.
37. Fan, P., and Darnell, M. Sequence Design for Communication
Applications, John Wiley & Sons, Chichester, 1996.
476 Литература
38. Амиантов, И. Н. Избранные вопросы статистической теории связи,
М.: Радио и связь, 1971.
39. Levanon, N., and Mozeson, E. Radar Signals, John Wiley & Sons,
Chichester, 2004.
40. Ипатов, В. П. «Троичные последовательности с идеальными
периодическими автокорреляционными свойствами», Радиотехника и
электроника, Т. 24, № 10, С. 2053-2057, 1979.
41. Ипатов, В. П. «К теории троичных последовательностей с
идеальными периодическими автокорреляционными свойствами»,
Радиотехника и электроника, Т. 25, № 4, С. 723-727, 1980.
42. Zierler, N. «Linear recurring sequences», J. Soc. Appl Math., Vol. 7,
P. 31-48, 1959.
43. Hoholdt, Т., and Justesen, J. «Ternary sequences with perfect periodic
autocorrelation», IEEE Trans. Inform. Theory, Vol. 29, P. 597-600, 1983.
44. Ackroyd, M.H., and Ghani, F. «Optimal mismatched filter for sidelobe
suppression», IEEE Trans. Aerosp. Electron. Syst, Vol. 9, P. 214-218,
1973.
45. Rihaczek, A. W., and Golden, R. M. «Range sidelobe suppression for
Barker codes», IEEE Trans. Aerosp. Electron. Syst, Vol. 7, P. 1087-
1092, 1971.
46. Ипатов, В. П. «Полное подавление боковых лепестков периодических
корреляционных функций фазоманипулированных сигналов»,
Радиотехника и электроника, Т. 22, № 8, С. 1600-1606, 1977.
47. Ипатов, В. П. «Выбор пары периодический фазоманипулированныи
сигнал-фильтр», Известия вузов СССР. Радиоэлектроника, Т. 21,
№ 4, С. 60-67, 1978.
48. Ипатов, В. П. «Синтез пары бинарный периодический сигнал - фильтр»,
Известия вузов СССР. Радиоэлектроника, Т. 23, № 4, С. 56-61,
1980.
49. Ипатов, В. П. «Бинарные периодические последовательности с
малыми потерями на подавление боковых лепестков», Известия вузов
СССР. Радиоэлектроника, Т. 23, № 1, С. 20-25, 1980.
50. Ипатов, В. П., Федоров Б. В. «Регулярные бинарные
последовательности с малыми потерями на подавление боковых лепестков»,
Известия вузов СССР. Радиоэлектроника, Т. 27, № 3, С. 29-34, 1984.
51. Bloktiuis, A., and Tiersma, H. J. «Bounds for the size of radar arrays»,
IEEE Trans. Inform. Theory, Vol. 34, P. 164-167, 1988.
52. Hamkins, J., and Zeger, K. «Improved bounds on maximum size binary
radar array», IEEE Trans. Inform. Theory, Vol. 43, P. 997-1000, 1997.
Литература 477
53. Golomb, S.W., and Taylor, H. «Two-dimensional synchronization
patterns for minimum ambiguity», IEEE Trans. Inform. Theory, Vol. 28, P.
600-604, 1982.
54. Голомб, С. У., Тейлор, X. «Конструкции и свойства массивов Коста-
са», ТИИЭР, Т. 72, № 9, Р. 44-64, 1984.
55. Chatschik, В. «An overview of Bluetooth wireless technology», IEEE
Commun. Magazine, Vol. 39, P. 86-94, Dec, 2001.
56. Ross, J. A. F., and Taylor, D.P. «Vector assignment scheme for N + M
users in iV-dimensional global additive channel», Electron. Lett, Vol. 28,
P. 1634-1636, 1992.
57. Paavola, J., and Ipatov, V. P. «Binary CDMA signatures for N + M
users in iV-dimensional global signal space», Electron. Lett, Vol. 39, P.
738-740, 2003.
58. Djonin, D., and Bhargava V, «New results on low complexity
detectors for oversaturated CDMA systems», in Proceedings of GLOBECOM,
25-29 November 2001, San Antonio, TX, Vol. 2, P. 846-850, IEEE, 2001.
59. Paavola, J., and Ipatov, V. P. «Oversaturating synchronous CDMA
systems on the signature per user basis». In Proceedings of the 5th European
Personal Mobile Communications Conference, 22-25 April 2003,
Glasgow, UK, 2003, P. 427-430, IEEE, 2003.
60. Learned, R. E., Willsky, A. S., and Boroson, D.M. «Low complexity
optimal joint detection for oversaturated multiple access communications»,
IEEE Trans. Signal Processing, Vol. 45, P. 113-123, 1997.
61. Shi, Z., and Schlegel, С «Spreading code construction for CDMA», IEEE
Commun. Lett, Vol. 7, P. 4-6, 2003.
62. Welch, L. R. «Lower bound on the maximum cross-correlation of signals»,
IEEE Trans. Inform. Theory, Vol. 20, P. 397-399, 1974.
63. Rupf, M., and Massey, J. L. «Optimum sequence multisets for synchronous
code-division multiple-access channels», IEEE Trans. Inform. Theory,
Vol. 40, P. 1261-1266, 1994.
64. Karystinos, G.N., and Pados, D.A. «New bounds on the total squared
correlation and optimum design of DS-CDMA binary signature sets»,
IEEE Trans. Commun., Vol. 51, P. 48-51, 2003.
65. Ipatov, V. P. «On the Karystinos-Pados bounds and optimal binary DS-
CDMA signature ensembles», IEEE Commun. Lett, Vol. 8, P. 81-83,
2004.
66. Stark, H, and Woods, J. W. Probability and Random processes with
Applications to Signal Processing, Prentice-Hall, Upper Saddle River, NJ,
2002.
478 Литература
67. Сарвате, Д. В., Персли, М. Б. «Взаимокорреяяционные свойства
псевдослучайных и родственных последовательностей», ТИИЭР, Т. 68,
№ 5, С. 59-619, 90, 1980.
68. Сидельников, В.М. «О взаимной корреляции последовательностей»,
Проблемы кибернетики. Вып. 24, С. 15-42, 1971.
69. Korovajczuk, L., Xavier, B.S.A., Filho, A. M.F., Ribeiro, L. Z., Ko-
rovaiczuk, C. and DaSilva, L.A. Designing cdma2000 Systems, John
Wiley & Sons, Chichester, 2004.
70. Ипатов, В. П. Периодические дискретные сигналы с оптимальными
корреляционными свойствами, М.: Радио и связь, 1992.
71. Goldberg, B.-G. «Code division multiplexing by frequency shifted biphase
modulated M-sequences», IEEE Trans. Aerosp. Electron. Syst, Vol. 17,
303-304, 1981.
72. Gold, R. Optimal binary sequences for spread spectrum multiplexing,
IEEE Trans. Inform. Theory, Vol. 13, P. 619-621, 1967.
73. Kasami, T. «Weight distribution formula for some class of cyclic codes»,
Technical report R-285, Coordinated Science Laboratory, University of
Illinois, Urbana, April 1966.
74. Камалетдинов, Б. Ж. «Оптимальный ансамбль бинарных
последовательностей на основе объединения ансамблей последовательностей
Касами и бент-функций», Проблемы передачи информации, Т. 23,
№ 2, С. 104-107, 1988.
75. Olzen, J.D., Scholtz, R. A., and Welch, L.R. «Bent-function sequences»,
IEEE Trans. Inform. Theory, Vol. 28, P. 858-864, 1982.
76. Камалетдинов, Б. Ж. «Оптимальные множества бинарных
последовательностей», Проблемы передачи информации, Т. 32, № 2, С. 39-44,
1996.
77. Glisic, S., and Vucetic, В. Spread Spectrum CDMA Systems for Wireless
Communications, Artech House, Boston, MA, 1997.
78. Ипатов, В. П., Казаринов, Ю.М., Коломенский, Ю.А., Ульяницкий,
Ю.Д. Поиск, обнаружение и измерение параметров сигналов в
радионавигационных системах, М.: Советское радио, 1975.
79. Holmes, J. К., and Chen, С. С. «Acquisition time performance of PN
spread spectrum systems», IEEE Trans. Commun., Vol. 25, P. 778-784,
1977.
80. Polydoros, A., and Weber, C.L. «A unified approach to serial search
spread-spectrum code acquisition — Part I: General theory», IEEE Trans.
Commun., Vol. 32, P. 542-549, 1984.
Литература 479
81. Polydoros, A., and Weber, C. L. «A unified approach to serial search
spread-spectrum code acquisition - Part II: A matched filter receiver»,
IEEE Trans. Commun., Vol. 32, P. 550-560, 1984.
82. Di Carlo, D.M., and Weber, C. L. «Multiple dwell serial seaxch:
Performance and application in direct sequence code acquisition», IEEE Trans.
Commun., Vol. 31, P. 650-659, 1983.
83. Viterbi, A.J. CDMA: Principles of Spread Spectrum Communication,
Addison-Wesley, Reading, MA, 1995.
84. Zigangirov, K. Sh. Theory of Code Division Multiple Access
Communication, John Wiley & Sons, Chichester, 2004.
85. Вальд, А. Последовательный анализ / Пер. с англ., М.: Физматгиз,
1960.
86. Stiffler, Дж. Дж. Теория синхронной связи / Пер. с англ. М.: Связь,
1975.
87. Цифровые методы в космической связи / Под ред. С. Голомба / Пер.
с англ. М.: Связь, 1969.
88. Van Trees, H. L. Detection, Estimation and Modulation Theory, Part II,
Nonlinear Modulation Theory, John Wiley &; Sons, 2002.
89. Линдсей, В. Системы синхронизации в связи и управлении / Пер.
с англ. М.: Советское радио, 1978.
90. Витерби, Э. Д. Принципы когерентной связи / Пер. с англ. М.:
Советское радио, 1970.
91. Кларк, Дж., Кейн, Дж. Кодирование с исправлением ошибок в
системах цифровой связи I Пер. с англ., М.: Радио и связь, 1987.
92. Castro, J. P., The UMTS Network and Radio Access Technology. An
Interface Techniques for Future Mobile Systems, John Wiley & Sons,
Chichester, 2001.
93. Витерби, А. Д., Омура Дж. К. Принципы цифровой связи и
кодирования J Пер. с англ., М.: Радио и связь, 1982.
94. Heller, J. A., and Jacobs, I. W. «Viterbi decoding for satellite and space
communications», IEEE Trans. Commun. Technol, Vol. 19, P. 835-848,
1971.
95. Berrou, C, Glavieux, A., and Thitimajshima, «Near Shannon limit error-
correcting coding and decoding: turbo codes», in Proceedings of the IEEE
International conference on Communications, ICC'93, 23-26 May 1993
Geneva, Switzerland, Vol. 2, P. 1064-1070, IEEE, 1993.
96. Berrou, C, and Glavieux, A. «Near optimum error correcting coding and
decoding: turbo codes», IEEE Trans. Commun., Vol. 44, P. 1261-1271,
1996.
480 Литература
97. Schlegel, СВ., and Perez, L.C. Trellis and Turbo Coding, John Wiley &
Sons, Chichester, 2004.
98. Bahl, L. R., Cocke, J., Jelinek, F, and Raviv, J. «Optimal decoding of
linear codes for minimizing symbol error rate», IEEE Trans. Inform.
Theory, Vol. 20, P. 284-287, 1974.
99. Madhow, U., and Honig, M. L. «MMSE interference suppression for direct-
sequence spread spectrum CDMA», IEEE Trans. Commun., Vol. 42, P.
3178-3188, 1994.
100. Wang, X., and Poor, V. H. Wireless Communication Systems. Advanced
Techniques for Signal Reception, Prentice-Hall, Upper Saddle River, NJ,
2004.
101. Honig, M., and Tatsanis, M. K. «Adaptive techniques for multiuser CDMA
receivers». IEEE Signal Process. Magazine, Vol. 17, P. 49-61, 2000.
102. Verdii, S. Multiuser Detection, Cambridge University Press, Cambridge,
1998.
103. Lu, W. W. (Editor). Broadband Wireless Mobile. 3G and Beyond, John
Wiley & Sons, Chichester, 2002.
104. Tanner, R., and Woodward, J. WCDMA - Requirements and Practical
Design, John Wiley & Sons, Chichester, 2004.
105. Fazel, K., and Kaiser, S. Multi-Carrier and Spread Spectrum Systems,
John Wiley & Sons, Chichester, 2003.
106. Hara, S., and Prasad, R. «Overview of multicarrier CDMA», IEEE Com-
mun. Magazine, Vol. 35, P. 126-133, Dec, 1997.
107. Popovic, B.M. «Spreading sequences for multicarrier CDMA systems»,
IEEE Trans. Commun., Vol. 47, P. 918-926, 1999.
108. Telatar, E. «Capacity of multi-antenna Gaussian channels», Eur. Trans.
Telecommun., Vol. 10, P. 585-595, 1999.
109. Foschini, G. J., and Gans, M. J. «On limits of wireless communications in
a fading environment when using multiple antennas», Wireless Personal
Commun., Vol. 6, P. 311-335, 1998.
110. Vucetic, В., and Yuan, J. Space-Time Coding, John Wiley & Sons,
Chichester, 2003.
111. Alamouti, S. M. «A simple transmit diversity technique for wireless
communications», IEEE J. Select. Areas Commun., Vol. 16, P. 1451-1458,
1998.
112. Tarokn, V., Jafarkhani, H., and Calderbank, A. R. «Space-time block
codes from orthogonal designs», IEEE Trans. Inform. Theory, Vol. 45,
P. 1456-1467, 1999.
Литература 481
113. Tarokn, V., Naguib, A. Seshardi, N., and Calderbank, A. R. «Space-time
codes for high data rate wireless communication: performance criteria in
the presence of channel estimation errors, mobility, and multiple paths»,
IEEE Trans. Commun., Vol. 47, P. 199-207, 1996.
114. Holma, A., and Toskala, A. (Editors). WCDMA for UMTS. Radio
Access for Third Generation Mobile Communications, John Wiley & Sons,
Chichester, 2001.
115. Korhonen, J. Introduction to 3G Mobile Communications, Artech House,
Boston, MA, 2001.
116. Hockwald, В., Marzetta, T. L., and Papadias, С. В. «A transmitter
diversity scheme for wideband CDMA systems based on space-time
spreading», IEEE J. Select Areas Commun., Vol. 19, P. 48-60, 2001.
117. Hoffman-Wellenhoff, В., Lichtenegger, H., and Collins, J. Global
Positioning System: Theory and Practice, Springer-Verlag, New York, 2001.
118. El-Rabbani, A. Introduction to GPS: the Global Positioning System,
Artech House, Boston, MA, 2002.
119. Farrel, J., and Barth, M. The Global Positioning System and Inertial
Navigation, McGraw-Hill, New York, 1999.
120. Steele, R., Lee, Ch., and Gould, P. GSM, cdmaOne and 3G Systems,
John Wiley & Sons, Chichester, 2001.
121. Karim, M.R., and Sarraf, R. W-CDMA and cdmaEOOO for 3G Mobile
Networks, McGraw-Hill, New York, 2002.
122. Walke, В., Seidenberg, P., and Althoff, M.P. UMTS: The Fundamentals,
John Wiley & Sons, Chichester, 2003.
Предметный указатель
^-преобразование, 360
CDMA система перенасыщенная,
282
cdma2000, 442
cdmaOne, 442
длинный код, 444
короткий код, 443
CRC, 364
GPS, 433
С/А-код, 436
Р-код, 436
дифференциальное
позиционирование, 439
контрольный сегмент, 436
космический сегмент, 435
пользовательский сегмент,
436
MIMO, 416
OFDM, 408
OVSF-коды, 464
RAKE, 146
UMTS (WCDMA), 459
ЛЧМ-сигнал, 201
МЧМ-CDMA, 412
МЧМ-ПРС-CDMA, 405
автокорреляционная функция
(АКФ)
боковой лепесток, 200
кодовой последовательности,
187
апериодическая, 188
идеальная периодическая, 210
периодическая, 189
основной лепесток, 200
острота, 80
радиосигнала, 73
сигнала, 72
шума, 35
автоподстройка по задержке, 342
автосопровождение кода, 340
алгоритм
Витерби, 373
декоррелирующий, 394
минимума среднеквадратиче-
ской ошибки (МСКО), 397
многопользовательский, 161
асинхронный, 403
альманах, 438
аномальная ошибка, 200
ансамбль
сигнатурный, 277
лежащий на границе Велча,
290
минимаксный, 299
случайный, 295
антенна
всенаправленная, 128
направленная, 128
базовая станция (БС), 171
бент-функция, 309
вектор ошибок, 363
вероятность
ложной тревоги, 122
ошибки, 36
приема М сигналов, 39
Предметный указатель 483
на символ, 357
переходная канала, 28
правильного завершения
поиска, 331
правильного обнаружения, 122
вес Хэмминга, 358
ветвь разнесения, 138
взаимная корреляционная функция
(ВКФ), 167
кодовых последовательностей,
188
вокодер, 447
временное сжатие, 82
время анализа, 331
время когерентности, 143
время корреляции, 80
выживший путь, 375
выигрыш от кодирования, 53
асимптотический, 54
сверточного кода, 373
выигрыш от обработки, 116
выигрыш от разнесения, 138
выкалывание, 368
граница
Велча, 289
Крамера-Рао, 68
Сидельникова, 298
Шеннона, 20
аддитивная, 39
двоичная передач, 32
двузначный характер, 225
девиация частоты, 201
декодирование, 356
жесткое, 356
итеративное, 382
мягкое, 356
декоррелятор, 396
деление с остатком, 360
дельта-функция
Дирака, 35
Кронекера, 43
демодулятор, 266
децимация, 254
диаграмма неопределенности, 89
диапазон рассеяния по задержке,
131
диапазон частотного рассеяния, 143
дискретное преобразование Фурье
(ДПФ), 245
дискриминатор, 343
когерентный, 345
некогерентный, 345
ранний-поздний, 343
дискриминационная кривая, 344
дихотомия, 339
длина
дискретного сигнала, 185
кодового ограничения, 367
замирания
быстрые, 135
крупномасштабные, 130
медленные, 134
мелкомасштабные, 132
многолучевые, 130
плоские, 134
рэлеевскиие, 133
частотно-селективные, 138
затенение, 129
индекс децимации, 254
исправление ошибок, 357
канал
выделенный, 460
физический, 461
вызова, 446
гауссовский, 27
доступа, 455
логический, 460
484 Предметный указатель
общий, 460
пилотный, 444
синхронизации, 445
транспортный, 460
трафика, 447
физический, 450
канальное кодирование, 354
кластер, 172
код
Баркера, 206
бинарный, 206
многофазный, 207
Зингера, 250
Рида-Соломона, 472
Франка, 237
Хэмминга, 365
Чу, 236
блоковый, 356
двоичный, 356
канализирующий, 450
линейный, 359
пространственно-временной,
421
Аламути, 423
с временной коммутацией,
422
с повторением, 421
решетчатый, 356
сверточный, 365
систематический, 369
систематический, 362
турбо-, 379
кодовая последовательность, 60
кодовое разделение (CDMA), 166
асинхронное, 167
синхронное, 167
кодовое слово, 356
комбинирование, 139
по максимуму отношения
сигнал-шум, 140
компенсация ПМД, 402
конечное поле, 214
простое, 215
расширенное, 242
контроль мощности, 169
коррелятор, 36
корреляционная матрица
наблюдения, 398
корреляционный пик, 298
корреляция, 31
коэффициент
корреляции, 34
расширения, 266
усиления, 128
линия
«вверх», 464
«вниз», 278
прямой видимости (ЛПВ), 128
массив Костаса, 254
матрица Адамара, 61
межсимвольная интерференция, 92
метрика
ребра, 375
узла, 375
многолучевое распространение, 130
множественный доступ, 159
ортогональный, 161
мобильная станция (МС), 171
модуляция (манипуляция)
амплитудная (AM), 42
бинарная (БАМ), 38
амплитудно-фазовая (АФМ),
185
импульсно-кодовая, 42
квадратурная амплитудная
(КAM), 42
квадратурная со сдвигом, 456
многочастотная (МЧМ), 404
ортогональная, 46
Предметный указатель 485
фазовая (ФМ), 42
бинарная (БФМ), 37
квадратурная (КФМ), 185
частотная (ЧМ), 59
бинарная (БЧМ), 37
мультикодовая передача, 457
несущая частота, 41
обнаружение ошибок, 357
обнаруживающая способность, 357
огибающая
действительная, 41
комплексная, 48
оценка
амплитуды, 70
запаздывания, 75
максимального правдоподобия,
66
несмещенная, 68
асимптотически, 69
одновременная запаздывания
и частоты, 86
параметров сигнала, 64
фазы, 71
частоты, 84
эффективная, 69
асимптотически, 69
пакет ошибок, 387
параметр
мешающий, 76
неэнергетический, 66
энергетический, 66
передаточная функция, 135
перемежение, 387
перехватчик, 118
пик-фактор, 58
плотность вероятности
Рэлея, 134
Рэлея-Раиса, 332
гауссовская, 122
логнормальная, 129
хи-квадрат, 122
поиск, 323
двухэтапный, 336
многоэтапный, 337
последовательно-
параллельный, 337
последовательный, 325
среднее время, 332
полином
кодовый, 360
неприводимый, 220
порождающий, 362
примитивный, 220
полоса, 19
когерентности, 142
шумовая, 349
помеха
заградительная, 115
многолучевая, 301
множественного доступа
(ПМД), 169
межсотовая, 173
узкополосная, 113
последовательность
Голда, 304
Камалетдинова, 310
Касами, 307
Лежандра, 227
бинарная, 190
минимаксная, 213
с непротивоположными
символами, 234
быстрого поиска, 338
линейная, 215
максимальной длины (га-после-
довательность), 218
р-ичная, 239
многофазная, 235
486 Предметный указатель
троичная, 216
с идеальной периодической
АКФ, 243
последовательный анализ, 336
постоянная составляющая, 212
правило
Сильвестра, 61
максимума апостериорной
вероятности (МАВ), 382
максимума правдоподобия
(МП), 28
минимума расстояния, 30
преобразование
Гильберта, 46
Фурье, 19
пропускная способность канала, 354
псев до дальность, 435
радиометр, 119
радиосигнал, 41
радиоэлектронное противодействия,
115
разделение
временное (TDMA), 163
частотное (FDMA), 163
размерность сигнального
пространства, 41
разнесение
временное, 142
многолучевое, 143
на передаче, 141
на приеме, 141
поляризационное, 143
пространственное, 140
частотное, 142
разрешение
временное, 90
по частоте, 94
частотно-временное, 95
расстояние
Хэмминга, 358
евклидово, 28
кодовое, 359
свободное, 372
расширение спектра
прямое (ПРС), 264
с прыгающей частотой
(ПЧРС), 264
быстрое, 275
медленное, 275
регистр сдвига с линейной
обратной связью (РСЛОС), 216
решетка, 370
радарная, 252
сонарная, 254
решетчатая диаграмма, 370
сжатие спектра, 268
сигнал
аналитический, 48
групповой, 160
дискретный, 184
апериодический, 185
периодический, 185
опорный, 76
ошибки, 341
простой, 22
широкополосный, 22
сигналы
ортогональные, 45
противоположные, 36
симплексные, 44
эквидистантные, 44
сигнатура, 166
сигнатуры
с временным сдвигом, 299
ортогональные, 281
псевдослучайные, 297
синдром, 363
скремблирование, 446
сотовая система, 172
спектральная эффективность, 20
Предметный указатель 487
средний квадрат корреляции, 291
средняя энергия, 40
стандартный приемник, 161
стоячая волна, 131
теорема
Парсеваля, 59
Пифагора, 29
Ферма малая, 225
Шеннона, 354
косинусов, 36
отсчетов, 41
центральная предельная, 29
упаковка, 32
объемная, 40
сферическая, 40
фаза
кода, 326
начальная, 50
случайная, 50
фактор речевой активности, 175
фильтр
инверсный, 246
подавления боковых лепестков
(ФПБЛ), 245
режекторный, 114
с бесконечной импульсной
характеристикой (БИХ), 380
с конечной импульсной
характеристикой (КИХ), 368
согласованный, 36
формула Вудворда, 81
функция
Маркума, 333
Уолша, 62
неопределенности, 88
ошибок, 54
дополнительная, 34
циклическая свертка, 245
циклический префикс, 410
частотно-временное произведение,
22
частотно-сдвинутые га-последова-
тельности, 302
чип, 60
эквалайзер, 138
нуль-форсирующий, 244
электромагнитная совместимость,
126
эстафетная передача, 171
эфемериды, 437
эффект «близкий-далекий», 169
Заявки на книги присылайте по адресу:
125319 Москва, а/я 594
Издательство «Техносфера»
e-mail: knigi@technosphera.ru
sales@technosphera.ru
факс: (495) 956 33 46
В заявке обязательно указывайте
свой почтовый адрес!
Подробная информация о книгах на сайте
http://www.technosphera.ru
Ипатов Валерий Павлович
Широкополосные системы и кодовое разделение сигналов.
Принципы и приложения
Перевод — Ю.О. Каратассо
Компьютерная верстка — С.А. Кулешов
Корректор — AT. Орловская
Дизайн книжных серий — СЮ. Биричев
Дизайн — И.А. Куколева
Выпускающий редактор — О.Н. Кулешова
Ответственный за выпуск — СВ. Зинюк
Формат 70x100/16. Печать офсетная.
Гарнитура Computer modern LaTeX.
Печ.л. 30,5. Тираж 3000 экз. (1-й завод 1500 экз.) Зак. № 2771.
Бумага офсет № 1, плотность 65г/м2
Издательство «Техносфера»
Москва, Лубянский проезд, дом 27/1
Диапозитивы изготовлены ООО «Европолиграфик»
Отпечатано в ООО ПФ «Полиграфист»
160001, г. Вологда, ул. Челюскинцев, дом 3
"СПб Дом Книги" А-236
ИЩИ «»
2 ll000224u674924w
Ипатов В. Широкополосные сие
В. ИПАТОВ
• •к* »л*сны-
С СТ- Ы К»**:*-
»аз*-л-н - с гнал»
ринципы и приложения
;.\~
iv 4f-
i
'^fciK
^
V4*
.4s8"» ''
ИПАТОВ ВАЛЕРИЙ ПА: ОВИЧ-
ПРОФЕССОР УНИВЕРСИТЕТА ТУРКУ
(ФИНЛЯНДИЯ) И САНКТ-ПЕТЕРБУРГСКОГО
ГОСУ1' -СТВЕННОГО
ЭЛЕКТРОТЕХНИЧЕСКОГО УНИВЕРСИТЕТА
(ЛЭТИ), АВТОР РЯ ■ * КНИГ В О- ' СТИ
Р' 1ИОЭЛЕКТРОННОЙ СИСТЕМОТЕХНИКИ,
БЕСПРОВОДНЫХ ТЕЛЕКОММУНИКАЦИЙ
И ТЕОРИИ СИГНАЛОВ
V-
г
ШИРОКОПОЛОСНЫЕ СИСТЕМЫ
И МНОЖЕСТВЕННЫЙ ДОСТУП
С КОДОВЫМ РАЗДЕЛЕНИЕМ:
ОБ ' Я ФИЛОСОФИЯ И СВЯЗЬ
С КЛАССИЧЕСКОЙ ТЕОРИЕЙ
РАДИОПРИЕМА, СИНТЕЗ ДИСКРЕТНЫХ
СИГНАЛОВ И ОПТИМИЗАЦИЯ
ИХ ОБРАБОТКИ, ПЕРСПЕКТИВЫ
ДАЛЬНЕЙШЕГО ПРОГРЕССА, ПРИМЕРЫ
ПРИЛОЖЕНИЙ
ТЕХНОСФЕРА
% *
.' /
W%
им*»1'
.' » ^_ !<,,4,- v"»,*
ISBN 978-5-94836-128-4
785948"361284'