/




























































































Автор: Райцын Т.М.
Теги: регулирование и управление машинами, процессами автоматизация теория автоматического управления
Год: 1970




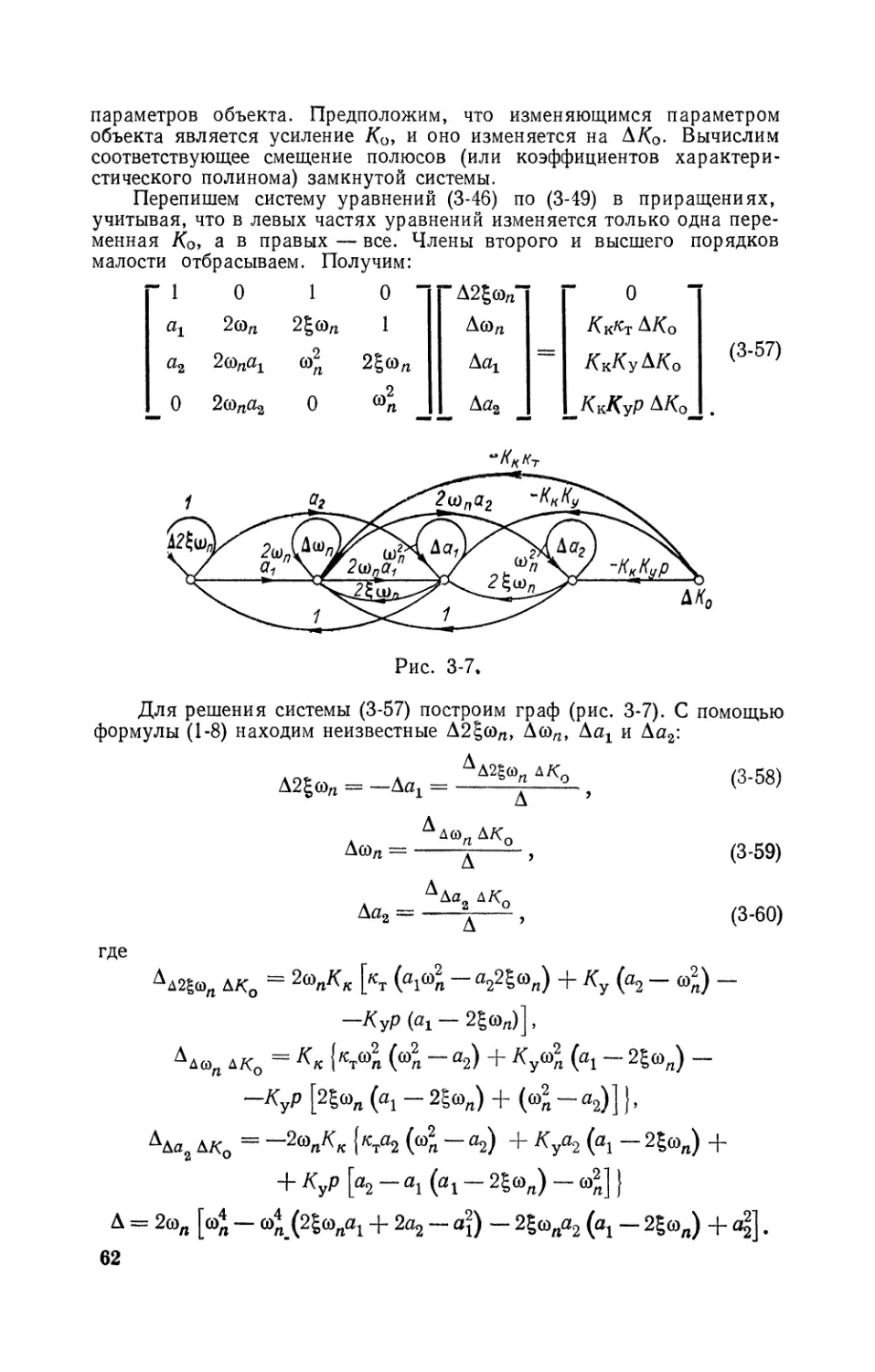
Текст
БИБЛИОТЕКА ПО АВТОМАТИКЕ
Выпуск 391
Т. М. РАЙЦЫН
СИНТЕЗ СИСТЕМ
АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ МЕТОДОМ
НАПРАВЛЕННЫХ ГРАФОВ
«Э Н Е Р Г И Я»
ЛЕНИНГРАДСКОЕ ОТДЕЛЕНИЕ
1970
УДК 62-50
6Ф6.5
Р18
pjg Райцын Т. М.
Синтез систем автоматического управления
методом направленных графов. «Энергия», Л.,
1970.
96 с. с рис., 11000 экз. (Библиотека по автоматике).
В книге излагается новый метод синтеза систем автоматиче-
ского управления (САУ), базирующийся на использовании мате-
матического аппарата направленных графов. Рассматриваются
элементы теории графов, применяемые в синтезе: построение гра-
фов по различным представлениям физического устройства, пре-
образования графов и топологические формулы для их решения.
Излагаются принципы и процедура синтеза. Значительное место
отводится рассмотрению некоторых общих задач и решению чи-
сленных примеров синтеза (САУ) с различной структурой.
Книга предназначена для инженерно-технических и научных
работников, занятых проектированием и расчетом САУ.
3-3-13
272-69
6Ф6.5
ПРЕДИСЛОВИЕ
Все возрастающее применение автоматических систем в различных
областях техники (и за ее пределами) вовлекает в сферу- проектирова-
ния, изготовления, настройки и эксплуатации их обширный круг лиц
различных специальностей и теоретической подготовки. Возникает
необходимость в развитии таких методов синтеза систем автоматического
управления (САУ), которые носили бы достаточно общий характер и
имели ясную логическую основу.
В настоящей работе делается попытка удовлетворить эти требова-
ния. Излагаемый метод синтеза — аналитический и прямой. В качестве
основного математического аппарата используется раздел комбинатор-
ной топологии — линейные направленные графы. Эти графы обладают
двумя важными для анализа и синтеза свойствами: наглядностью и эко-
номией в вычислениях.
Синтез САУ существенно отличается от синтеза электрических це-
пей. В нем задача аппроксимации системной функции и задача определе-
ния и расчета параметров структуры тесно связаны, и связь между ними
наилучшим образом вскрывается графами, позволяющими одновре-
менно рассматривать и синтезировать действительную структуру си-
стемы и эквивалентную ей в динамическом отношении идеализирован-
ную структуру.
Насколько известно автору, настоящая работа является первой
попыткой использовать теорию направленных графов в синтезе САУ.
Ее задача — исследовать возможности и ограничения метода, на первых
шагах, только в приложении к синтезу линейных непрерывных систем.
Исследование показало, что метод является корректным, достаточно
универсальным, гибким, экономным в вычислительном отношении и
приспособленным к «машинизации».
«Синтез методом направленных графов» в работе называется также
«синтез топологическим методом» и «топологический синтез». Заменяю-
щие термины более кратки и хорошо отражают существо метода, осно-
ванного на рассмотрении топологии синтезируемых структур и исполь-
зующего в синтезе сильные топологические формулы.
Ввиду новизны излагаемого материала, книга, вероятно, не лишена
существенных недостатков. Все замечания по ней будут приняты с бла-
годарностью. Просьба направлять их по адресу: Ленинград, Д-41,
Марсово поле, д. 1, Ленинградское отделение издательства «Энергия».
Автор
1*
ПРИНЯТЫЕ СОКРАЩЕНИЯ
Wy — передаточная функция замкнутой системы относи-
тельно управляющего воздействия;
Wp — то же, относительно возмущения;
Wp — передаточная функция разомкнутого контура си-
стемы;
W0 — то же, объекта управления;
WK — то же, корректирующего устройства;
Wi — то же, отдельных звеньев системы;
я, £, К — полюсы, нули и усиление Wy\
Р, Z, tfo — то же, W0;
р, z, Кк — то же, WK;
А, В — коэффициенты полиномов числителя и знаменателя W0
и WKy соответственно;
а — коэффициенты полинома полюсов Wy;
0)0 — полоса пропускания системы;
/у, tp — время установления и время регулирования;
а — перерегулирование, %;
®п> 5 — собственная частота и коэффициент демпфирования
пары комплексных полюсов;
Кп — коэффициент ошибки по положению;
Dt — коэффициент ошибки по скорости;
Y — входное управляющее воздействие;
X — выходная величина;
Е — ошибка управления;
F — возмущение;
s — оператор Лапласа;
А — главный определитель матрицы или графа;
Ах — адъюнкта выходного узла графа (выходной вели-
чины);
САУ —~ система автоматического управления;
п и н — полюсы и нули.
ГЛАВА ПЕРВАЯ
ЭЛЕМЕНТЫ ТЕОРИИ НАПРАВЛЕННЫХ ГРАФОВ,
ИСПОЛЬЗУЕМЫЕ В СИНТЕЗЕ САУ
1-1. Введение
Вероятно, первой работой, обратившей внимание на полезность
и эффективность использования графического представления системы
линейных дифференциальных уравнений для решения задач анализа и
синтеза, была работа академика Б. Н. Петрова [1]. В ней предложены
две формы представления уравнений — схемная и графная — получив-
шие дальнейшее развитие в виде структурных схем и направленных
графов. Первая форма представления (схемная) в работах советских
ученых А. С. Шаталова [2], Н. Т. Кузовкова [3], А. М. Сучилина [4, 5]
и других по существу легла в основу нового направления анализа дина-
мических систем, получившего название структурных методов. Вторая
форма (графная) не получила такого широкого применения, хотя ус-
пешно использовалась в интересных структурных исследованиях
И. И. Гальперина [6 и др.].
За рубежом также вначале преимущественно развивалась первая
форма представления в виде блок-схем [7, 8], но вскоре обнаружились
особые достоинства второй формы — направленных графов. Выведен-
ная Мейсоном топологическая формула для общего усиления графа
[9, 10], облегчившая анализ сложных динамических систем, вызвала
большой интерес к теории направленных графов. В работе Трента [И ]
и Аша [12] устанавливаются общие математические основы ненаправ-
ленных графов, имевших уже тогда широкое применение в теории элек-
трических цепей и только начинавших использоваться в анализе динами-
ческих систем. В литературе появляются новые «усовершенствованные»
типы направленных графов: граф Коутса [13], оптимальный в отноше-
нии объема вычислений по топологической формуле, и нуль-граф Шоу-
Кассигнол [14], удобный в анализе электрических цепей.
Перечисленные типы направленных графов сначала применяли ис-
ключительно для решения задач анализа. За последние годы возник ин-
терес к математическому аппарату направленных графов и для решения
задач синтеза. Первые шаги по использованию топологических методов
в синтезе электрических цепей уже сделаны [15].
В настоящей работе рассматривается возможность использования
направленных графов для решения задач синтеза линейных систем
автоматического управления. Однако современное состояние теории
графов не позволяет этого сделать без существенной ее доработки.
Первая глава настоящей работы и посвящена развитию некоторых
сторон этой теории, связанных с нуждами синтеза САУ. Во второй
главе излагаются математические и физические основы и сама процедура
5
синтеза САУ методом направленных графов. В третьей и четвертой
главах рассматриваются приложения разработанного метода к синтезу
типовых структур САУ.
1-2. Выбор типа направленного графа
для задач синтеза
Известно несколько типов направленных графов. Они соответствуют
различной форме записи линейных уравнений. Форме, записи
п
*/= S Ьт + Ь ('= 1. 2. • • •> *)• (Ы)
соответствует тип графа Мейсона (М-граф), показанный на рис. 1-1, а.
Форме записи системы уравнений
п
J] aijXj — bt^O (t = 1, 2, . . ., ti) (1-2)
/=1
соответствуют два типа графа: Коутса (К-граф) и нуль-граф (Н-граф),
показанные на рис. 1-1, б и в.
На всех графах узлы представляют переменные уравнений (xj),
а направленные взвешенные отрезки (ветви) — коэффициенты уравне-
ний (Ьц, ац-, di, bi). На Н-графе нули правой части уравнений (1-2) изоб-
ражаются так же, как переменные Ni. Входная переменная всюду при-
нята равной 1.
В разных задачах анализа оказывается более удобным применять
тот или иной тип направленного графа. М-графам отдается предпочте-
ние, когда требуется построить граф по функциональной или структур-
ной схеме или когда постепенным приведением сложный граф обретает
вид, к которому легко приложить общую формулу усиления Мейсона.
Н-графы, во многом сходные с К-графами, получили применение
в тех случаях анализа, когда требуется исключение переменных, напри-
мер, при определении параметров четырехполюсников [16].
В настоящей работе для решения задач синтеза САУ предпочтение
отдается К-графам по следующим соображениям:
1) К-графы наиболее полно и наглядно отражают важные свойства
линейной матричной алгебры;
2) топологические формулы К-графов приводят к более простым
выражениям системных функций, не требующим дальнейших упроще-
ний и сокращений.
3) К-графы особенно удобны для изображения передаточных функ-
ций; в них явно разделяются полюсы и нули, как собственные и взаим-
ные ветви.
Однако современная теория К-графа недостаточно развита.
1. В ней не разработаны правила приведения и преобразований
графа.
2. Представляют большие трудности вычисления с помощью топо-
логических формул общего усиления графа, имеющего повышенную
сложность.
Снятие этих ограничений является предметом данной главы. Так
как во всей работе используются лишь К-графы, ниже опускается
буква К перед словом граф.
6
Рис. 1-1.
1-3. Построение графа по различным представлениям
физического устройства (системы)
Построение по заданной системе уравнений. По определению граф
представляет собой множество взвешенных ориентированных ветвей,
соединяющихся у узлов. Таким образом, каждая ветвь графа обладает
направлением и весом, называемым коэффициентом усиле-
ния, или коэффициентом передачи (оператором)
ветви. Граф, связанный с уравнением (1-2), содержит п узлов и один
входной узел, который для удобства изображения можно располагать
на графе многократно.
Построение графа, соответствующего системе уравнений (1-2), вы-
полняется следующим образом:
1) входной узел (или входные узлы), соответствующий входной
переменной, принимается за единицу при пользовании топологиче-
ской формулой Дезоера (см. § 1-5). В общем случае входная величина
может быть любой функцией.
2) каждый из остальных узлов, соответствующих переменным xit
х2, • • хп системы, располагается в нумерованном порядке.
3) если ац Ф О, то имеется ветвь, направленная от / узла к узлу i
с усилением ац.
4) если bi ф 0, проводится отрезок, направленный от входного
узла к узлу i с усилением 6/.
Ветви аи будем называть собственными ветвями
узлов, а ветви ац (i ф /) — взаимными ветвями, Ь^ —
внешними ветвями.
На рис. 1-2 показан граф, построенный по указанным правилам,
для уравнения (1-2) при п = 3;
а11х1 + а12х2 + ^13*3
^21*1 ~Т~ ^22-^2
Я81*1 + Я32*2
Л = О,
«23*3 — &2 = О,
азз*з — &з = О,
(1-3)
или в матричной форме:
ап а12 а13
а*л а*,
а9
a3l а32 азз
*1
=
*3
(1-За)
8
Из рис. 1-2 видно:
1) каждый узел графа х\ с входящими в него ветвями эквивалентен
г'-му уравнению системы (1-3);
2) собственные ветви узлов ац соответствуют диагональным эле-
ментам основной матрицы системы (1-3);
3) взаимные ветви ац (i =j= j) соответствуют под- и наддиагональным
элементам основной матрицы;
4) внешние ветви 6/ соответствуют свободным членам уравнений.
Следует заметить, что в отличие от уравнений, направленные графы
не содержат отдельных символов для обозначения действий над величи-
нами, но сами действия содержатся в них и выражаются способом соеди-
нения узлов и ветвей, а именно:
1) ветви передают от узла, из которого выходят, значение перемен-
ной, умноженное на коэффициент передачи ветви;
Рис. 1-3.
2) значения величин, передаваемых входящими в узел ветвями,
суммируются в нем;
3) ветви, выходящие из узла, не меняют значение переменной
в данном узле.
Из изложенного следует, что линейный направленный граф
представляет собой не что иное, как запись системы линейных уравне-
ний не в обычной алгебраической форме, а в форме неметрических гео-
метрических образов (кружков и отрезков линий), т. е. в топологиче-
ской форме. Это позволяет сделать заключение, что при некотором на-
выке можно непосредственно по виду принципиальной схемы физиче-
ского устройства (системы) с учетом физических законов, которым оно
подчиняется, составлять направленный граф, минуя выписывание
системы уравнений в алгебраической форме.
Построение графа по принципиальной схеме. Рассмотрим вначале
несколько простых примеров. На рис. 1-3, а показана принципиальная
(эквивалентная) схема усилителя с обратной связью, а на рис. 1-3, б —
соответствующий ей граф, построенный с использованием второго
закона Кирхгофа. В качестве входной величины (входного узла) при-
нято входное напряжение Е, в качестве выходной величины (выходного
узла) — ток нагрузки /2, в качестве промежуточных переменных — Ilf
иг. Узел 1г с входящими в него ветвями — собственной с усилением
(R1 + #к)> внешней с усилением (+1) от узла Е, взаимными (—1) от
узла иг и (RK) от узла /2 — соответствует контурному уравнению для
1-й части схемы. Узел графа их с входящими в него ветвями — соб-
ственной с усилением (fx + 1) и взаимными с усилением (R2 + Ra) от
9
узла 1г и (Ra) от узла /2 — соответствует контурному уравнению 2-й
части схемы. Аналогично строится и третий узел /2 с входящими в него
ветвями для 3-й части схемы.
На рис. 1-4, а показана принципиальная схема генератора с двой-
ной обмоткой возбуждения. В качестве входной переменной (входного
узла) принимаем входное напряжение /7ВХ, в качестве выходной (выход-
ного узла) — напряжение Un, в качестве промежуточных — 1г, /2,
Ur и /г. Используя второй закон Кирхгофа и закон Ома, строим после-
довательно все узлы графа, как показано на рис. 1-4, б.
На рис. 1-5, а изображена принципиальная схема системы регули-
рования скорости двигателя в системе Вард-Леонарда. В качестве вход-
ной величины принята установка регулятора К\&з> в качестве выход-
ной — регулируемая скорость двигателя Q, в качестве промежуточных
переменных — UB, /в, UTy /а. Последовательно строим все узлы графа,
используя известные связи (физические законы) между переменными.
Ki, К2, Ку, /?в> L, J, сы и сд — являются параметрами системы.
На рис. 1-5, б построен соответствующий принципиальной схеме граф
системы. Если исключить из него узлы с единичной собственной ветвью
(см. § 1-4), то получим более простой вид графа (рис. 1-5, в), точно соот-
ветствующий трем уравнениям, описывающим полностью поведение
данной системы: уравнению цепи возбуждения генератора, уравнению
цепи якоря двигателя и уравнению равновесия электрического и меха-
нического моментов двигателя.
Напишем эти уравнения по виду полученного графа, пользуясь
формальными правилами, изложенными выше.
В рассмотренных примерах граф строился по принципиальным
схемам электрических систем. Аналогично выполняется построение
графа по принципиальной схеме систем иной физической природы
(механической, тепловой и др.). Иногда оказывается удобным, пользуясь
методом динамических аналогий, приводить принципиальную схему
неэлектрической системы к эквивалентной электрической цепи и по ней
строить соответствующий граф. В этом случае могут быть использованы
некоторые формальные правила построения графов [17].
Из рассмотренных примеров могут быть сделаны общие выводы.
1. Построение графов по принципиальной схеме аналогично состав-
лению системы уравнений и включает следующие операции: а) принци-
пиальная схема физического устройства (системы) разбивается на эле-
ментарные динамические звенья; б) входная величина устройства изоб-
ражается входным узлом, выходная величина устройства — выходным
узлом; в) промежуточные узлы изображают выходные величины эле-
ментарных звеньев, на которые разбито устройство; г) собственные
ветви узлов представляют собой собственные операторы звеньев, опре-
деляющие характер их свободного движения, взаимные ветви являются
операторами воздействия одних узлов на другие.
2. При необходимости по виду построенного графа может быть
составлена соответствующая система уравнений с помощью указанных
выше правил соответствия между элементами графа и элементами урав-
нений.
(Яв + sLB) /в + 0 + K±KyQ = K±KyQ9,
—KJb +(R + sL) /а + CpQ = 0,
0 — cMIa + sJQ = 0.
(l-4a)
(1-46)
(Mb)
10
Построение графа по передаточной функции. Рассмотрим правила
построения графов по передаточным функциям типовых динамических
звеньев (см. табл. 1-1).
Таблица 1-1
Графы типовых звеньев САУ
Наименование
звена
Передаточная
функция
W = —
у
Граф звена
Усилительное . .
Идеальное диф-
ференцирующее
Идеальное инте-
грирующее , ,
Апериодическое .
Колебательное . .
Инерционное об-
щего вида , . .
Суммирующее
(сравнивающее
устройство) , .
Усилитель сум-
мирующий . . .
К
K/s
K/s + р)
K/(s* +
+ <)
т
KYl(s+ п)
в'П(8+Л)
E = Y — X
i=i
Уо-
уо-
уо-
(s+P)
Ох
Yo-
sl11(s+Pi)
уо '™Г«> Ох
Передаточная функция безынерционного усилительного звена
имеет вид:
Х_
Y
откуда
12
X-KY = Q. (1-5)
Следуя правилам построения графа по уравнению, изображаем
входную величину Y уравнения (1-5) входным узлом, а выходную вели-
чину X — выходным узлом. Собственный оператор выходной величины
равен единице, поэтому собственная ветвь узла X обозначается /. Ветвь
от входного узла К, направленная в узел X, имеет коэффициент усиле-
ния (—К)- Аналогично строятся графы остальных типовых звеньев
САУ.
Из табл. 1-1 видно, что во всех случаях входная и выходная вели-
чины передаточной функции изображаются входным и выходным узлом,
соответственно. Числитель передаточной функции (усиление и нули)
изображается направленной ветвью от входного узла Y к выходному X
и является ее коэффициентом передачи. Знаменатель передаточной
функции (полюсы) изображается собственной ветзью выходного узла
и является ее коэффициентом передачи. В тех случаях, когда переда-
точная функция не содержит знаменателя, собственная ветвь выход-
ного узла обозначается единицей.
Следует особо обратить внимание на расстановку знаков у коэффи-
циентов передачи ветвей графа. Знак коэффициента передачи собствен-
ной ветви, независимо от знака передаточной функции, всегда положи-
телен; знак коэффициента передачи входной ветви зависит от знака
передаточной функции и всегда противоположен последнему.
Построение графа по структурной схеме. Структурные схемы,
подобно направленным графам, можно рассматривать как топологиче-
ские объекты, и для них можно сформулировать топологические фор-
мулы [4]. Однако в математическом отношении они менее совершенны,
чем графы. В отличие от всех видов линейных графов, содержащих
только два геометрических образа — узлы и ветви, структурные схемы
содержат четыре: линии, представляющие переменные; прямоуголь-
ники, представляющие коэффициенты передач; кружки представляю-
щие «действие суммирования», и точки — места ветвления переменных.
Линейные графы и линейные динамические системы представляют
собой два изоморфных «векторных пространства», имеющих одинаковую
структуру и алгебру [11 ]. Каждый из них включает только два поня-
тия — множество предметов (переменные системы и узлы графа, соответ-
ственно) и поле чисел (постоянные системы и направленные взвешенные
ветви графа, соответственно), над которыми определены две бинарные
операции: сложение и скалярное умножение. Это обстоятельство соз-
дает прочную основу для строгого вывода топологических формул
линейных графов в сравнении с таковыми для структурных схем.
Однако структурные схемы имеют другие важные достоинства —
они более наглядны, чем графы, в изображении функциональной струк-
туры системы. Вот почему они широко используются в теории управле-
ния. Представляет интерес установить правила построения графа по
структурной схеме. В табл. 1—2 указана идентификация элементов
структурной схемы с элементами графа.
На рис. 1-6 показана структурная схема сложной системы и экви-
валентный ей граф, выполненный на основе идентификации табл. 1-2.
Из сравнения их видно, что граф представляет собой строго дуальную
(в топологическом смысле) форму структурной схемы. В последней
каждая линия преобразовывается в узел графа, а каждый блок (пере-
даточная функция) в две ветви — взаимную (числитель передаточной
функции) и собственную (знаменатель передаточной функции); точки
суммирования и ветвления опускаются, точнее совмещаются с соот-
ветствующими узлами графа.
13
Таблица J-2
Идентификация элементов структурной схемы и элементов графа
Название величины
Элемент структур-
Элемент
или действия
ной схемы
К-графа
Переменная
Передаточная функция . .
Точка суммирования . . .
Точка ветвления переменной
4
Xi
Xi
о
Wi
Mi_
Ni
Mi
Ni
о
Y + X<t+X2
Mi
N,
w5 =
Ms
Ns
M4
4" Afe
*7
.to
w.
Me
Рис. 1-6.
14
Граф, построенный по структурной схеме, содержит столько узлов,
сколько различных линий (переменных) содержится в структурной
схеме. Так как каждый узел графа (кроме входного) связан, по мень-
шей мере, с двумя ветвями — собственной и взаимной, число содержа-
щихся в нем отрезков линий (ветвей) получается больше, чем в струк-
турной схеме.
Эта на первый взгляд кажущаяся «избыточность» графа в действи-
тельности является его преимуществом.
1. Коэффициенты передачи ветвей выражаются целыми полино-
мами, а не дробно-рациональными функциями, как блоки в структурных
схемах. В результате упрощается вычисление общей передаточной функ-
ции системы и других системных функций (см. § 1-5).
2. Явное разделение полюсов и нулей элементарных звеньев, входя-
щих в систему, облегчает и делает более наглядной процедуру синтеза
(см. § 2-5).
3. Упрощается изображение нескольких входных величин одного
узла: собственный оператор узла остается неизменным для всех входных
величин, меняются лишь операторы воздействия последних.
Кратко суммируя, можно заключить, что граф дает более разверну-
тую картину структуры системы, чем структурная схема. Это обстоя-
тельство важно для синтеза.
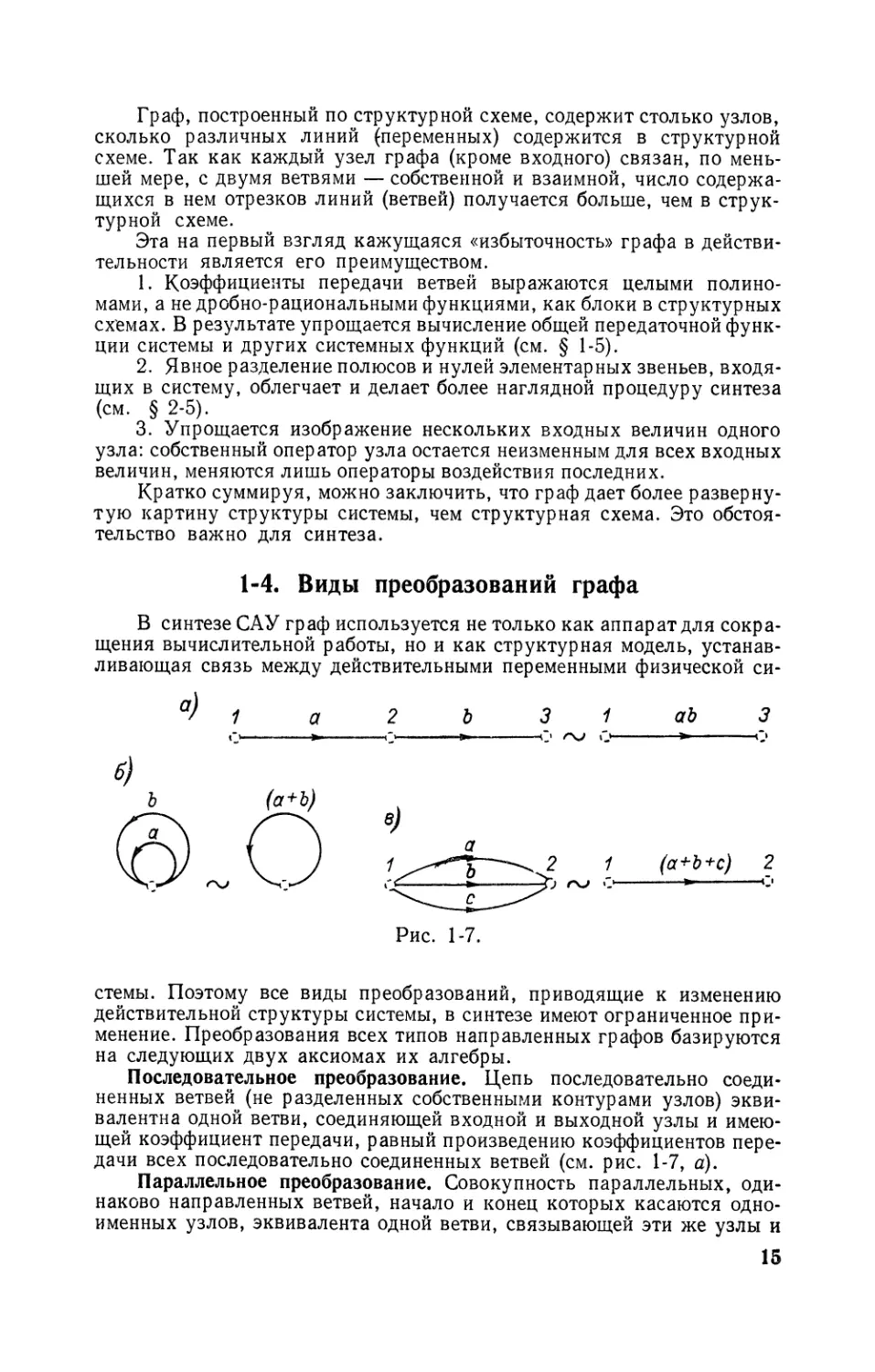
1-4. Виды преобразований графа
В синтезе САУ граф используется не только как аппарат для сокра-
щения вычислительной работы, но и как структурная модель, устанав-
ливающая связь между действительными переменными физической си-
а) 1 а 2 Ь 3 1 аЪ 3
о »■ и,-! а. о r^f о > о
б)
Рис. 1-7.
стемы. Поэтому все виды преобразований, приводящие к изменению
действительной структуры системы, в синтезе имеют ограниченное при-
менение. Преобразования всех типов направленных графов базируются
на следующих двух аксиомах их алгебры.
Последовательное преобразование. Цепь последовательно соеди-
ненных ветвей (не разделенных собственными контурами узлов) экви-
валентна одной ветви, соединяющей входной и выходной узлы и имею-
щей коэффициент передачи, равный произведению коэффициентов пере-
дачи всех последовательно соединенных ветвей (см. рис. 1-7, а).
Параллельное преобразование. Совокупность параллельных, оди-
наково направленных ветвей, начало и конец которых касаются одно-
именных узлов, эквивалента одной ветви, связывающей эти же узлы и
15
имеющей коэффициент передачи, равный сумме коэффициентов передачи
всех параллельных ветвей (см. рис. 1-7, б, в).
Рассмотрим два основных вида преобразования, используемые
в синтезе: размыкание графа и разложение графа.
Размыкание графа. Оно состоит в приведении графа к виду, в ко-
тором исключены замкнутые контуры (определение см. в § 1-5). Пред-
ставляет также интерес приведение графа к виду, в котором остаются
лишь один входной узел и один выходной, а все промежуточные узлы
с их собственными контурами исключены. Сформулируем правила при-
ведения графа к разомкнутому виду.
Исключение собственного контура узла. Пусть дан граф, содержа-
щий два последовательно соединенных звена, как показано на рис. 1-8, а.
Напишем систему уравнений, соответствующую графу:
°21
011
Рис. 1-8.
Если из первого уравнения (1-6) Хг выразить через Y и подставить
во второе, то получим новую эквивалентную систему:
fliiXi + r=0,
a22X2-^-Y = 0.
"ii
(1-7)
На рис. 1-8, б построен граф, соответствующий системе (1-7). Он эк-
вивалентен графу на рис. 1-8, а. Если значение промежуточной перемен-
ной Хг не представляет интереса, узел Хг с внешней и собственной
ветвью исключают из графа, оставляя в нем лишь входной узел 7, вы-
ходной Х2 и связывающую их ветвь. Полученный граф (рис. 1-8, в) будет
также эквивалентен исходному — рис. 1-8, а, но лишь в отношении
связи между входной Y и выходной Х2 величинами. Такую ограничен-
ную эквивалентность двух графов будем называть эквивалентностью
в частном и обозначать ^. На рис. 1-8, г показано исключение собствен-
ного контура выходного узла, и связь между входной и выходной вели-
чинами графа выражается передаточной функцией:
W = *2_ ^ / 0*Л ( 1 \ 021 *
у \ а11 j \ а22 j «lA2
Обобщая рассмотренное преобразование на случай исключения
собственного контура узла, в который входят несколько взаимных вет-
вей, получаем:
* Это соответствует виду М-графа.
16
Правило 1. Исключение собственного контура изменяет коэф-
фициент передачи каждой входящей в узел взаимной ветви на множи-
тель, равный обратной величине собственного оператора узла, взятой
с.обратным знаком.
Исключение замкнутого контура, образованного взаимными ветвями.
Пусть дан граф, состоящий из двух последовательно соединенных
звеньев, связанных дополнительно обратной связью, как показано
на рис. 1-9, а.
Используя указанные аксиомы и правило 1, выполняем ряд следу-
ющих преобразований графа. На рис. 1-9, б отделяем замкнутый контур
от узла Х2, изменив коэффициент передачи входной ветви а21 на —а21/а22.
На рис. 1-9, в суммируем первоначальный собственный контур ап узла
Рис. 1-9.
Xj с вновь образовавшимся —а12а21!а22. На рис. 1-9,2 исключаем соб-
ственный контур узла Хг в ветви, соединяющей входной узел У с выход-
ным узлом Х2. На рис. 1-9, д оставляем лишь два узла: входной У и вы-
ходной Х2. На рис. 1-9, е коэффициент передачи ветви, соединяющей
узлы У и Х2У выражаем в форме передаточной функции.*
Из выполненного преобразования, обобщив его на случай замкну-
того контура, проходящего через несколько узлов, можно сделать
следующее заключение.
Правило 2. Для исключения замкнутого контура, образован-
ного взаимными ветвями, необходимо: а) отделить ветви контура от
всех узлов, кроме одного, через который контур проходит; б) изменить
коэффициенты передачи каждой ветви, которая до отсоединения была
входной отсоединенного узла, согласно правилу 1; коэффициенты пере-
дачи выходных ветвей оставить без изменения и в) коэффициент пере-
дачи образовавшегося собственного контура сложить с первоначальным
значением коэффициента передачи узла, к которому он примыкает.
* Это соответствует виду М-графа.
2 т. м. Райцын
17
Можно заметить, что исключение замкнутых контуров графа,
образованных взаимными ветвями, идентично приведению основной
матрицы коэффициентов системы уравнений к эквивалентной треуголь-
ной форме, исключение собственных контуров предшествующих узлов
во входных ветвях последующих узлов идентично приведению основной
матрицы к диагональной форме.
Размыкание графа позволяет вычислить все переменные системы
прямо или в цепочном порядке. Исключение всех контуров и приведение
графа к одной ветви, соединяющей входной и выходной узлы графа,
дает общий коэффициент, или передаточную функцию между этими уз-
лами. На рис. 1-10 показан пример размыкания графа с тремя узлами и
двумя замкнутыми контурами.
°11 °22 а33 °11 °22 (*33
а33 а22а33~а23а32
Рис. 1-10.
Разложение графа. Когда граф содержит большое число узлов
и ветвей, исключение замкнутых контуров и приведение его к разомкну-
тому виду затруднительно. В этом случае для вычисления выходной
величины графа можно пользоваться топологической формулой (см.
§ 1-5), если конфигурация графа не чрезмерно сложна. Для графа
большой сложности прямое использование топологической формулы
становится практически невозможным. Необходимо предварительно
либо упростить вид графа преобразованиями, изменяющими его струк-
туру (состав переменных и связей между ними), либо разбить его на
подграфы меньшей сложности без изменения структуры графа. Для
синтеза второй тип преобразования более приемлем.
Наиболее удобным из возможных приемов разбиения графа на
части для вычисления определителей и адъюнкт (см. § 1-5) является
разложение его по входящим или выходящим ветвям какого-либо узла.
Этот прием полностью идентичен разложению определителя на миноры
по элементам какой-либо строки или столбца.
Рассмотрим вначале разложение графа на простом примере. Пусть
дан граф, как указано на рис. 1-11, а. Выполним разложение его по вхо-
дящим в первый узел — ап и а1Ъ — ветвям. (Можно выполнить
18
2*
19
разложением по выходящим из первого узла ветвям, но, как правило,
отдается предпочтение разложению по меньшему числу ветвей).
На рис. 1-11, б показан подграф, полученный при разложении по
входящей ветви (собственному контуру) alv В этом подграфе исключены
все ветви, входящие в 1-й узел и выходящие из него. На рис. 1-11, в
показан подграф, полученный при разложении графа по входящей
в 1-й узел взаимной ветви а15. В данном подграфе исключены все ветви,
входящие в 1-й узел (ах/) и выходящие из 5-го узла (а/5). Ветви, по кото-
рым ведется разложение, остаются в составе подграфов. Будем изобра-
жать их в отличие от прочих ветвей подграфа пунктирными линиями.
Сложность полученных подграфов такова, что к ним уже возможно
приложение топологической формулы. Однако в целях иллюстрации
покажем, как выполняется дальнейшее разложение подграфов на более
простые.
а31 <*31
Рис. 1-12.
На рис. 1-11, г и д показано разложение подграфа рис. 1-11, б на
два подграфа по выходящим из 2-го узла ветвям а22 и а32. На рис. 1-11, г
исключены все ветви, входящие во 2-й узел и выходящие из него. На
рис. 1-11,5 исключены из подграфа рис. 1-11, б все ветви, выходящие из
2-го узла и входящие в 3-й узел. На рис. 1-11, е и ж показаны подграфы,
полученные из разложения подграфа рис. 1-11, в по ветвям, выходящим
из 1-го узла.
Таким образом, исходный граф первым разложением приводится
к совокупности двух подграфов, эквивалентных ему в отношении значе-
ния определителя, вторым разложением — к совокупности четырех под-
графов, также эквивалентных ему в том же отношении. Такое разбиение
графа выполняется до тех пор, пока полученные подграфы не станут
достаточно простыми для приложения к ним топологической формулы.
Сформулируем теперь правило разложения графа па подграфы.
Правило 3. В графе выбирается узел с наименьшим числом
входящих или выходящих ветвей, и по ним ведется разложение. Если
разложение выполняется по собственной ветви (контура) узла, подграф
получается исключением из графа всех ветвей, входящих в данный узел
и выходящих из него. Если разложение выполняется по взаимной ветви,
имеющей начало в узле / и конец в узле i (ац), то подграф получается
20
исключением из графа всех ветвей, имеющих начало в у-м узле (аау),
либо конец в i-м узле (а,а), где а = 1, 2, . . . Можно сформулировать
более кратко: подграф получается исключением из графа ветвей, имею-
щих либо начало, либо конец на тех узлах, что и ветвь, по которой ве-
дется разложение. Это правило распространяется на разложение под-
графа на несколько более простых подграфов.
Разбиение графа на подграфы целесообразно производить и в слу-
чаях, когда желательно исследовать влияние изменяющегося коэффи-
циента передачи какой-либо ветви (параметра системы) на значение опре-
делителя графа (характеристическое уравнение системы). В этом случае
граф разбивается по ветвям, имеющим начало или конец в том же узле,
что и исследуемая ветвь.
На рис. 1-12, а показан граф, в котором необходимо исследовать
влияние изменения оператора ветви а23 на изменение определителя
графа. На рис. 1-12, б выполнено разложение графа по ветвям, выходя-
щим из 3-го узла. Первый и второй подграфы, не содержащие ветви а23,
сохраняют постоянное значение при изменении а23; третий подграф,
содержащий а23, единственно влияет на изменение определителя графа.
Этот прием делает более наглядным исследование чувствительности
определителя графа относительно изменяющихся операторов ветвей и
облегчает вычислительную работу.
1-5. Топологические формулы
В синтезе САУ мы встречаемся с задачей определения некоторых
параметров выбранной структуры по заданной одной или нескольким
выходным функциям и одной или нескольким входным функциям. Так
как синтез часто требует нескольких «пробных» решений для выбора
удовлетворительного или оптимального из них, то очень важно уметь
быстро находить отношения между входной и выходной функциями при
различной выбираемой структуре системы. Такую возможность предо-
ставляют топологические формулы, и это является одной из побуди-
тельных причин использования направленных графов в синтезе САУ.
Формула Дезоера общего усиления графа [18]. Введем предвари-
тельно несколько определений для элементов графа, используемых в то-
пологической формуле. В графе кроме отдельно взятых узлов и ветвей
различают следующие интегральные образования:
1. Прямой путь от узла р к узлу q — цепь последо-
вательно соединенных взаимных ветвей, у которой каждый узел имеет
только одну входную и одну выходную ветвь, за исключением р и q,
имеющих только одну выходную и входную ветвь, соответственно.
2. Замкнутый контур — цепь последовательно соединен-
ных взаимных ветвей, у которой каждый узел имеет только одну вход-
ную и одну выходную ветвь. Собственный контур является частным
случаем замкнутого контура: входная и выходная ветви в нем сливаются
в одну собственную ветвь узла.
Из определения замкнутого контура следует, что любые два замкну-
тых контура графа не имеют общих узлов.
3. Соединение графа — подграф, в который включены
все узлы графа, кроме входного (входных), а узлы и ветви образуют
лишь замкнутые контуры.
4. Направленное соединение графа — подграф,
в который входят все узлы графа, входной и выходной узлы соединены
21
прямым путем, а узлы и ветви, не входящие в прямой путь, образуют
замкнутые контуры.
Усилением прямого пути, соединения и
направленного соединения называют произведение уси-
лений всех ветвей, входящих в прямой путь, соединение и направлен-
ное соединение, соответственно. Знак усиления соединений и направлен-
ных соединений зависит от четности числа входящих в них замкнутых
контуров: при четном числе знак произведения усилений ветвей остается
без изменения, при нечетном — меняется на обратный.
Формула Дезоера для определения выходной величины графа
при единичном входном воздействии имеет следующий вид:
Е<*А* ах
*/ = ^-д—=-54 С-8)
где GJk — усиление k-то прямого пути между входным узлом и выходным
Xj; к — 1, 2, . . .; А — главный определитель графа, равный сумме
усилений всех возможных соединений графа; — значение А для той
части графа, которая не касается &-го прямого пути. Произведение
GJkAk равно усилению k-то направленного соединения, a ^fi^k = &х.
k 1
равно сумме усилений всех возможных направленных соединений выход-
ного узла Xj и называется адъюнктой узла X/.
Дадим обобщенный вид формулы (1-8) для любой входной величины
и ненулевых начальных условий:
*/= —1 j-J , (1-8а)
где &XjY — адъюнкта выходного узла Х;. относительно входного Y;
Aj.2 ну—адъюнкта выходного узла Хщ-относительно входных вели-
чин, представляющих начальные условия; А — что и выше.
Переменные в формулах (1-8), (1 -8а) представлены в операторной
форме.
Пример 1-1. Найти выходную величину Хг графа рис. 1-2.
Решение. Ввиду наглядности соединений, входящих в главный опре-
делитель графа, и направленных соединений, входящих в адъюнкту
узла Xlt можно непосредственно по виду графа, пользуясь формулой
(1-8), написать решение для Хг. Для иллюстрации на рис. 1-13, а и б
построены все возможные соединения главного определителя и все на-
правленные соединения адъюнкты узла Xv Выписывая все члены, вхо-
дящие в числитель и знаменатель правой части уравнения (1-8), получим
окончательное решение для Хх\
Ьг (а22а33 — а23а32) + Ь2 (а13а32 — а12а33) + Ь3 (а12а23 —- а13а22)
а1 — j j .
аг1а22а33 — аХ1а23а32 -{- a12a23a3l — а12а21а33 -j- а13а21а32 — а13а22а31
Пользование формулой Дезоера для сложных графов, содержа-
щих более пяти узлов или пятнадцати ветвей, встречает затруднение,
так как не исключается возможность случайного пропуска какого-либо
соединения при вычислении определителя графа.
Определение числа членов разложения определителя графа и способ их
систематического перечисления. Вычисление определителей сложного,
т
Графа сильно облегчается, если заранее известно число членов разложе-
ния, в топологических терминах — число всех возможных соединений
графа. Приведем соответствующую формулу.
Пусть дан граф и матрица его коэффициентов п-го порядка. Пусть
в матрице содержится к нулевых элементов, / их возможных сочетаний
по два, т — по три, р — по четыре и т. д. Возможным называем
сочетание нулевых элементов, не стоящих в одной строке или столбце.
Доказывается [42], что число членов разложения определителя
такого графа будет:
Nn = п! — к (п — 1)! + / (п — 2)! — т (п — 3)! +
+ р(п-4)\
(1-9)
"21 \2 О32 ^3
~в13а21а32
~а 12^23°31
а 11^230 32
%1 %2 (Хз)
Xi (Х2) Х3
а13°22а31
~allQ22a33
Рис. 1-13.
Ь3 а13 а 22
При /г> 5 систематическое перечисление всех членов разложения
с помощью топологической формулы (1-8) по виду графа часто затрудни-
тельно и тогда, когда заранее определено число членов разложения по
формуле (1-9). В этих случаях рекомендуется разбивать граф (матрицу)
на подграфы (миноры) более низкого порядка. Так, для миноров
(п — 1)-го порядка формула (1-9) перепишется в виде:
Ni} (п_1} = (я - 1) I - ki$ (п~2)\ + 1Ц (и - 3) I -
— (л —4)! +■ Р// (л — 5)! , (1-10)
где /,•/, тц, ... — число нулевых элементов и их возможных соче-
таний по два, по три и т. д., содержащихся в миноре Ац
Общее число членов разложения определителя /г-го порядка, выра-
женное через число членов разложения миноров (п — 1)-го порядка, те-
перь будет:
/=1
(1-11)
23
где v — число миноров Ац (П—\)> на которые разложен определитель.
Если порядок (п — 1) > 5, тогда выгодно и миноры (п — 1)-го
порядка, в свою очередь, разбить на миноры (п — 2)-го порядка и вы-
числить для каждого из них число членов разложения, а затем просумми-
ровать.
Для миноров (п — 2)-го порядка Ац (П__2) формула (1-9) принимает
вид:
Мц {п_2) = (п - 2)! - кц (п - 3)! + (п - 4)! -
-т'ц(п-5)\+р'ц(п-6)\ , (1-12)
где кц, 1ц, т.., ... — число нулевых элементов и их возможных соче-
таний по два, по три ит. д., содержащихся в миноре Ац (Л_2)-
Общее число членов разложения минора (п — 1)-го порядка, выра-
женное через число членов разложения миноров (п — 2)-го порядка,
теперь будет:
#й-1= 2>//</i-2). (м3)
/=1
где и — число миноров Ац (Л_2)» на которые разложен минор А ц (П__\у
При необходимости разложение можно продолжить и далее.
Шт. Выведенные формулы удобно использовать в качестве контрольных
при вычислении определителей графов по топологической формуле (1-8).
Они также могут быть использованы для систематического перечисления
всех членов разложения.
Легко заметить, что числа Ыц одновременно указывают, во сколько
членов разложения входят элементы ац матрицы, относительно которых
вычисляются миноры Ац. Вычислив кц для всех миноров (п — 1)-го
порядка, узнаем все первые множители а//, входящие в члены разложе-
ния; выполнив то же для миноров (п — 2)-го порядка, узнаем все вто-
рые множители, входящие в члены разложения, и т. д.
Обычно достаточно систематически выписать первые два-три сомно-
жителя, а остальные легко определяются всевозможными перестанов-
ками нефиксированных вторых индексов элементов. Из числа нефикси-
рованных вторых индексов ац следует исключить те, которые соответ-
ствуют нулевым элементам (отсутствующим ветвям в подграфах низшего
порядка).
Пример 1-2. Вычислить главный определитель А графа, пред-
ставляющего систему линейных совместных уравнений управления
боковым движением самолета (подробнее см. § 4-2):
1
0
-Hns
—H12s
0
Sa
0
1
0
—#22s
—#23
-К
-к
s (S — 1р)
s (~sixZ — lr)
-h
Ф
~%
—s (sizx + np)
s (s — nr)
—4
~\
~У6Г
g
V
s(l-yr)
(s — 2/p)
p
= 0.
(1-14)
24
25
На рис. 1-14 изображен граф системы уравнений (1-14). Контурные
линии на графе обозначают собственные, «естественные» связи объекта
(самолета), а пунктирные — наложенные связи корректирующих
устройств. Вычисление определителя по виду такого сложного графа
затруднительно, поэтому используем указанный выше прием.
Решение. 1. Выделим из графа (предполагая разложение по первой
строке) матрицы коэффициентов — по входящим в первый узел ветвям —
подграфы-миноры Ап, А13 и Л14; при этом исключаются элементы 1-й
строки — ветви, входящие в первый узел, — и первого, третьего и чет-
вертого столбцов — ветви, выходящие из 1-го, 3-го и 4-го узлов соответ-
ственно.
2. Вычислим по формуле (1-10) число членов разложения, содержа-
щихся в каждом подграфе-миноре. В матрице минора (подграфе) Ап
и А13 содержится по одному нулевому элементу (отсутствует одна ветвь),
а в миноре Аи — два, поэтому число членов разложения у подграфа Ап
и А13 будет:
Nn = Nl3 = (я - 1)! — (/г— 2)! = 24 —6= 18,
у подграфа Аи:
14 = (ti — 1)! — 2 (п — 2)! = 24 — 12 = 12.
Всего членов разложения в определителе:
N = N11 + Nl3 + Nu = 48.
3. Перечислим систематически, пользуясь формулами (1-8) и (1-10),
все члены разложения подграфов-миноров, как указано выше.
На рис. 1-15 выписаны члены разложения минора А13, составленные
по виду соединений, полученных из подграфа А13. При некотором опыте
нет надобности вычерчивать соединения. Достаточно лишь пользоваться
формулами (1-8), (1-9), (1-10) и другими, а также видом подграфа.
ГЛАВА ВТОРАЯ
ОСНОВЫ СИНТЕЗА
МЕТОДОМ НАПРАВЛЕННЫХ ГРАФОВ
2-1. Ограничения существующих методов синтеза САУ
В теории систем различают понятия анализ, проектирование и
синтез. Анализом называют исследование поведения системы
известной структуры с заданными параметрами при некоторых типовых
входных воздействиях.
Проектирование — процесс выбора структуры и расчета
параметров системы по заданным техническим условиям на нее и типо-
вым входным воздействиям. Как правило, проектирование выполняется
методом проб и включает анализ как часть расчетного процесса.
С и__н_т е_з, имея ту же задачу, что и проектирование, предполагает
решение ее прямым, предпочтительно, аналитическим путем. Теория
синтеза развита и широко применяется в теории электрических цепей.
В последние годы прилагаются усилия развить методы синтеза в теории
систем управления.
С позиции приведенных определений частотный метод проектиро-
вания систем нельзя считать прямым синтезом. Теоретически может быть
точно установлена связь между поведением замкнутой системы во вре-
менной области и частотными характеристиками разомкнутой системы
(по которым ведется проектирование), но она настолько сложна, что
в практике предпочитают пользоваться приближенными эмпирическими
соотношениями между ними. А это приводит часто к повторным расче-
там. Кроме того, эмпирические соотношения установлены для ограни-
ченного класса систем, преимущественно одноконтурных. Для много-
контурных систем со многими входными и выходными величинами
частотный метод становится весьма трудоемким.
Проектирование с помощью корневого годографа по своему харак-
теру приближается к синтезу: становится возможным одновременно
оценивать свойства проектируемой системы во временной и частотной
областях. Но и этому методу свойственны ограничения частотного ме-
тода в отношении допустимой сложности синтезируемой системы.
Наиболее прямым из имеющихся методов является синтез по рас-
пределению полюсов и нулей передаточной функции замкнутой системы
в s плоскости.* Достоинством его является то, что выбор того или иного
распределения полюсов и нулей замкнутой системы позволяет конструк-
тору прямо оценивать ожидаемое поведение системы при типовом
* Для краткости слова «передаточная функция» ниже иногда
будут опускаться.
27
входном сигнале. Это можно показать на примере системы с нулевой
позиционной ошибкой (с астатизмом первого порядка). Передаточная
функция такой системы имеет вид:
TP(s) =
П(-Я,)П(8-Ь)
X 1
т п '■
П(-Ь)П(я-я,)
1 1
(2-1
где и Jii — нули и полюсы замкнутой системы.
При единичном входном воздействии переходный процесс системы
будет:
4" ^«1 =1+ £ V''. (2-2)
s J /=1
* (0 = Л
—1
где
П(-
1
П (я/ ■
1
яу
(2-3)
П(
1
-Ь)
П (я/ ■
1Ф1
Из (2-2) и (2-3) видно, что временная реакция (переходная функция)
системы единственно зависит от распределения полюсов и нулей замкну-
той системы, причем нули оказывают влияние лишь на амплитуду со-
ставляющих временной реакции. Из (2-1) видно, что распределение пи н
полностью определяет частотную характеристику и полосу пропуска-
ния замкнутой системы.
Метод синтеза по распределению пину нас и за рубежом сейчас
довольно быстро развивается, и получены интересные результаты.
Однако для большинства опубликованных работ в этой области харак-
терна недостаточная общность метода: ограничен класс синтезируемых
функций [20], преобладают графо-аналитические приемы решения [20,
21, 22] и использование метода проб и итераций [23].
Наиболее полно теория синтеза по распределению пин разрабо-
тана советским ученым И. И. Соколовым [24]. К ее особым достоинствам
относятся: систематический метод определения желаемой передаточной
функции САУ для различных типов входных воздействий и чисто ана-
литический метод решения задачи синтеза. Ограничением метода яв-
ляется то, что он требует задания всех полюсов и нулей желаемой пере-
даточной функции. Во многих случаях это необязательно и может при-
вести к излишне сложным корректирующим устройствам. Также не
всегда приемлемо исключение всех полюсов объекта, принимаемое в ме-
тоде автора.
Излагаемый ниже топологический синтез САУ также относится
к методам синтеза в s плоскости, но используемый в нем математический
аппарат направленных графов позволяет ослабить и снять некоторые
из перечисленных выше ограничений этого метода. Он применим для син-
теза линейных САУ (имеющих любую сложность, любую структуру)
по любой желаемой системной функции.
28
2-2. Структурная и каноническая форма графа
Рассмотрим обыкновенную систему линейных дифференциальных
уравнений:
(2-4)
~а11
flia .
а21
«22 •
- • ач,п
=
Ал2 •
- bnfn_
где Xj являются неизвестными функциями, а Д- — заданными функциями
независимой переменной t\ ац, bi — линейные дифференциальные опе-
раторы с постоянными коэффициентами не выше второго порядка. Пред-
п
полагается П ац Ф О и ft = 1 [t].
1
Системе (2-4) соответствует граф, показанный на рис. 1-1, б.
Конфигурация связей между узлами графа определяет структуру
системы.* Граф при этом будем называть структурным. Его основными
топологическими чертами, определяющими структуру системы, яв-
ляются: 1) относительное взаимное положение замкнутых контуров и
2) положение контуров относительно прямых путей между входными и
выходными узлами графа. Первое определяет А, а второе А^. [см. фор-
мулу (1-8)].
Из теории дифференциальных уравнений известно, что корректное
решение системы (2-4) требует приведения ее к «канонической» системе,
имеющей треугольную форму основной матрицы
О
"21 "22
О
(2-5)
Из (2-5) последовательно, в цепочном порядке находятся все реше-
ния системы и правильно оценивается их произвол [19].
С помощью формального правила соответствия (см. § 1-3) можно
для системы (2-5) построить соответствующий граф**, который по анало-
гии будем называть каноническим графом. Из рис. 2-1
видно, что по сравнению со структурным графом (рис. 1-1, б) в канони-
ческом отсутствуют все замкнутые контуры, образованные взаимными
* Здесь имеется в виду структура связей между входными и выход-
ными переменными элементарных звеньев, на которые разбивается ди-
намическая система. Она в общем случае не совпадает со структурой свя-
зей между отдельно взятыми компонентами системы.
** Его можно получить и из структурного графа (рис. 1-1, б) рядом
топологических преобразований, указанных в § 1-4, если функции xj
и fi и их производные заменить соответствующими обобщенными функ-
циями [26] или изображениями Лапласа.
29
ветвями. Ёлиянйе исключенных контуров, конечно, компенсировано из-
менением коэффициентов передачи а.цу и по объему информации относи-
тельно динамики системы канонический граф полностью эквивалентен
структурному. Однако вид канонического графа позволяет трактовать
приведение системы линейных дифференциальных уравнений к канони-
ческой системе в топологическом аспекте, как преобразование много-
кратно замкнутой системы в динамически эквивалентную разомкнутую
систему с возможностью ее прямого решения в цепочном порядке.
Известно, что с точностью до начальных условий общую динамику
системы, представленной системой уравнений (2-4) или канонической
системой (2-5), можно описать совокупностью передаточных функций.
Нетрудно показать, что каждая отдельная передаточная функция
замкнутой системы представляет собой каноническую (топологически
Рис. 2-1.
разомкнутую) систему. В самом деле, любая передаточная функция зам-
кнутой системы, которая может быть получена из системы уравнений
(2-4), имея в общем случае вид:
т
*II(s + b)
Y(s)
П (s + щ)
1
с точностью до постоянного множителя эквивалентна канонической си-
стеме:
1 0 0 0 ... О
-(s+ti) + 0 0 . . . О
О + Ы (s + n2) 0 ... О
—1
(s + пп) J
X
_ X
и каноническому графу (рис. 2-2).
30
о
о
(2-7)
Каноническая система (2-7) и канонический граф (рис. 2-2) не экви-
валентны системе (2-4) и графу (рис. 1-1,6). Они содержат меньший объем
информации относительно динамики системы, а именно, информацию,
касающуюся лишь поведения одной выходной переменной относительно
одной входной, т. е. являются эквивалентными в частном системе (2-4)
и графу (рис. 1-1, б). Для системы (2-7) и канонического графа (рис.2-2)
характерна структурная обезличенность, в частности, полное отсутствие
замкнутых контуров, образованных взаимными ветвями.
Содержание в канонических формах полной динамической информа-
ции относительно всех или представляющей интерес части переменных
системы и отсутствие структурных ограничений * делает канонические
формы удобными для использования в качестве исходной желаемой ма-
тематической модели в синтезе замкнутых динамических систем.
Так как некоторая заданная каноническая форма является предста-
вителем целого класса динамически эквивалентных, но различных по
/ (s+Kj (s + n2) (s+7ln)
Рис. 2-2.
структуре систем, то синтез на основе канонических форм позволяет
выбирать такую структуру, которая, кроме удовлетворения требуемых
динамических свойств, была бы оптимальной в некоторых отношениях
(простоты, надежности, нечувствительности и т. д.).
2-3. Системные функции
и структурная степень свободы
Использование канонической формы вида уравнений (2-5) или графа
(рис. 2-1) в качестве желаемой модели для синтеза САУ практически
невозможно. Оно потребовало бы реализации очень большого числа же-
лаемых передаточных функций, равного произведению числа входных
величин bifi на число переменных систем я/, которое к началу синтеза
неизвестно. К счастью этого и не требуется.
Поведение физической системы часто достаточно полно определяется
поведением одной выходной переменной (в одномерной системе) или
двумя (в двумерной системе) и лишь в системах большой сложности —
несколькими выходными переменными (в многомерной системе). По-
этому синтез системы, обычно, строится на удовлетворении одной, двух
и реже нескольких желаемых передаточных функций.
Следует однако, заметить, что совокупность желаемых передаточных
функций определяет поведение системы лишь тогда, когда параметры
системы остаются постоянными во всех режимах работы системы и когда
в систему не входят и внутри ее не возникают неучтенные или не-
известные возмущения. Эти условия во многих случаях не соблюдаются.
* Канонический граф накладывает одно ограничение на структур-
ный граф: степени полиномов их главных определителей и одноименных
адьюнкт должны быть одинаковы (см. § 2-5).
31
Для оценки влияния изменяющихся параметров системы и возму-
щений на ее поведение в теории управления введено понятие функции
чувствительности [20 ].
Различные передаточные функции и функцию чувствительности
называют иногда системными функциями. В синтезе САУ удобно поль-
зоваться этим термином более свободно. Будем называть системной функ-
цией всякое целое или дробно-рациональное выражение от оператора s,
имеющее в качестве коэффициентов при s параметры системы и характе-
ризующее какую-либо часть или свойство динамики системы. В этом
расширенном обобщенном смысле системной функцией могут быть
адъюнкты узлов графа, характеризующие «проводимость» прямых путей
графа; отношения адъюнкт к главному определителю графа, предста-
вляющие частные передаточные функции системы; главный определи-
тель графа — характеристический полином системы, определяющий
характер свободного движения системы; наконец, специальные функции,
как функция чувствительности и др.
Системные функции являются каноническими формами, не фикси-
рующими жестко структуру синтезируемой системы, но связанными
с ней некоторыми соотношениями, рассмотренными ниже, в § 2-5. Здесь
отметим лишь одну связь — структурную степень свободы системы.
В зависимости от назначения синтезируемая система должна удов-
летворять одной, двум или нескольким желаемым системным функциям
одновременно. Например, синтез системы стабилизации одной коорди-
наты часто выполняется на основе удовлетворения одной системной
функции — желаемой передаточной функции системы. Синтез инва-
риантной следящей системы — на основе нескольких системных функ-
ций. Число независимых системных функций, которым удовлетворяет
система управления, предложено [25] называть ее структурной степенью
свободы.
Выбор параметров системных функций, рекомендации оптималь-
ного распределения их полюсов и нулей в s-плоскости (задача аппрок-
симации) в настоящее время остаются еще предметом исследований.
В некоторых случаях для каждого класса систем (и даже типа машин,
аппаратов и других объектов) численные значения коэффициентов сис-
темных функций устанавливаются опытным путем. Однако имеются и
достаточно общие рекомендации, которые широко используются в прак-
тике. Они кратко излагаются в следующем параграфе.
2-4. Показатели качества и конфигурация
полюсов и нулей передаточной функции замкнутой
системы
Исходными данными для любого метода синтеза САУ являются:
1) техническое задание, содержащее требования к динамическим и
статическим характеристикам замкнутой системы, которые называются
показателями качества системы;
2) технические характеристики фиксированной части системы, ко-
торую называют объектом.
Синтез системы состоит в удовлетворении требований п. 1 с учетом
условий п. 2. Достигается это введением в систему специальных элемен-
тов, называемых корректирующими устройствами.
Синтез по распределению пин требует перевода заданных каче-
ственных показателей замкнутой системы в форму передаточных функ-
32
цйй с численными значениями параметров — полюсов, нулей и усиле-
ния.
Перевод заданных показателей качества замкнутой системы, кото-
рыми обычно являются перерегулирование, время установления, время
регулирования, полоса пропускания, коэффициенты ошибок и др.,
в адекватную передаточную функцию замкнутой системы (задача аппрок-
симации) связан с существенными трудностями, прежде всего, с неодно-
значностью этой операции.
Хорошо известно, что одну и ту же совокупность заданных пока-
зателей качества системы можно получить при различных конфигура-
циях п и н замкнутой системы. Сущность этого феномена совершенно
ясна: невозможно несколькими числами полностью характеризовать
сложную функцию. Однако для большинства практических случаев
оценка поведения системы по указанным показателям качества вполне
достаточна, а неоднозначность определения конфигурации пин систем-
ной функции используется для выбора наиболее простых в структурном
отношении конфигураций.
В практике широко используется приближенное описание поведе-
ния замкнутой системы парой доминирующих полюсов [27 и др.]. Соз-
даваемая такой конфигурацией слегка колебательная реакция обеспечи-
вает кратчайшее время установления и минимизирует влияние зазора,
мертвых зон и сухого трения. Однако, чтобы приближение было удов-
летворительным, необходимо соблюдение следующих двух условий отно-
сительно остальных полюсов: 1) они должны быть удалены достаточно
влево от доминирующей пары и 2) всякий полюс вблизи мнимой оси
должен быть близок к нулю (образовывать диполь); в этом случае мо-
дуль составляющей временной реакции от этого полюса будет мал. Такой
класс передаточных функций для синтеза САУ рекомендует Аарон [28]:
т
K\\(s + Id
w (s) = —2 — . (2-8)
(s2 + 2Scd„s + cd2) П (s + n;)
1
Теоретическим достоинством такой конфигурации пин является то,
что для нее легко, чисто аналитически, устанавливается однозначная
связь между расположением на s плоскости доминирующей пары полю-
сов (определяемой g и соЛ) и показателями качества замкнутой системы.
Но ей (при отсутствии диполя) свойствен существенный недостаток: огра-
ничена область важных показателей качества (например, коэффициента
ошибки по скорости L^), которая может быть удовлетворена (см. при-
ложение, рис. П-1).
Это обстоятельство вызывает необходимость применения более
сложных конфигураций доминирующих пин замкнутой системы. Трак-
сэл [20] кроме доминирующей пары комплексных полюсов вводит до-
полнительно один отрицательный нуль (см. приложение, рис. П-2).
Хаузенбауер — Лэго предложили для синтеза следящих систем пере-
даточную функцию следующего вида [29]:
со2л (s + Q
w (s) = ?9 кг-. (2-9)
£(s + K)(s2 + 2|(orts + (o2n)
3 Т. М. Райцын 33
Поведение замкнутой системы здесь определяется н« только доми-
нирующей парой комплексных полюсов, но и относительным положе-
нием дополнительного полюса и нуля, первого на всей действительной
отрицательной полуоси, второго на всей действительной оси.
Такая конфигурация расширяет область осуществимых показа-
телей качества системы (см. приложение, рис. П-3), но и она оказывается
неудовлетворительной, когда приходится синтезировать систему,
имеющую избыток полюсов над нулями более двух.
Горовицем. [25] рассчитаны и построены диаграммы показателей
качества системы, имеющей передаточную функцию, включающую
кроме пары комплексных полюсов и нуля дополнительно три действи-
тельных полюса для нескольких дискретных значений относительного
положения доминирующих полюсов и нуля X и нескольких значений g.
На рис. П-4 приложения изображена одна диаграмма для передаточной
функции:
W /8\ \ п' */ \ 1 *> п/ (2-10)
(s2 + 2|o)„S + ш2) (s + со„) (s + 2co„) (s + 4o)„) '
Принципиально возможно построить диаграммы качества и для
более сложных структур передаточной функции замкнутой системы,
охватывающих, по крайней мере, такую же область, как диаграммы
качества Честната и Майера в частотном методе [37]. Здесь эта задача не
рассматривается.
Широко используются для синтеза САУ «критериальные» пере-
даточные функции, известные под названием «стандартных форм».
К ним относятся стандартные формы Уитли [30], удовлетворяющие за-
данному проценту перерегулирования (10-М5%); Т. И. Соколова [31 ],
удовлетворяющие заданной степени затухания (| = 0,55); Баттер-
ворса [32], удовлетворяющие критерию наибольшей ровности частот-
ной характеристики системы; Поспелова—Доброленского [33]—для
астатических систем; Грэхэма—Летропа [34], удовлетворяющие интег-
ральному критерию Jq t\ е \ dt и др. Все вышеприведенные передаточные
функции и стандартные формы предполагают входной сигнал в виде
единичной ступенчатой функции. Обширные исследования по определе-
нию желаемой передаточной функции системы при других типах вход-
ных воздействий выполнены Н. И. Соколовым [24].
Для приближенной оценки показателей качества системы по факти-
чески полученному в синтезе распределению пин замкнутой системы,
кроме перечисленного выше материала, можно использовать многочис-
ленные диаграммы [35] и таблицы [36], содержащие расчетные данные
для различных конфигураций пин.
2-5. Основания расчета корректирующего устройства
Из предыдущего параграфа видно, что параметрами системной функ-
ции, определяющими поведение системы, являются ее полюсы л, нули £
и общее усиление К. Параметры я, £ и К будем называть также пара-
метрами замкнутого контура системы.
Естественно принять в качестве параметров, характеризующих
поведение объекта и корректирующего устройства, полюсы, нули и уси-
ления их передаточных функций Р, Z, Ко и р, г, Кк, соответственно, и
общее усиление системы /(. Параметры Р, Z, К0, Р» г, Кк и К будем
называть также параметрами разомкнутого контура системы.
34
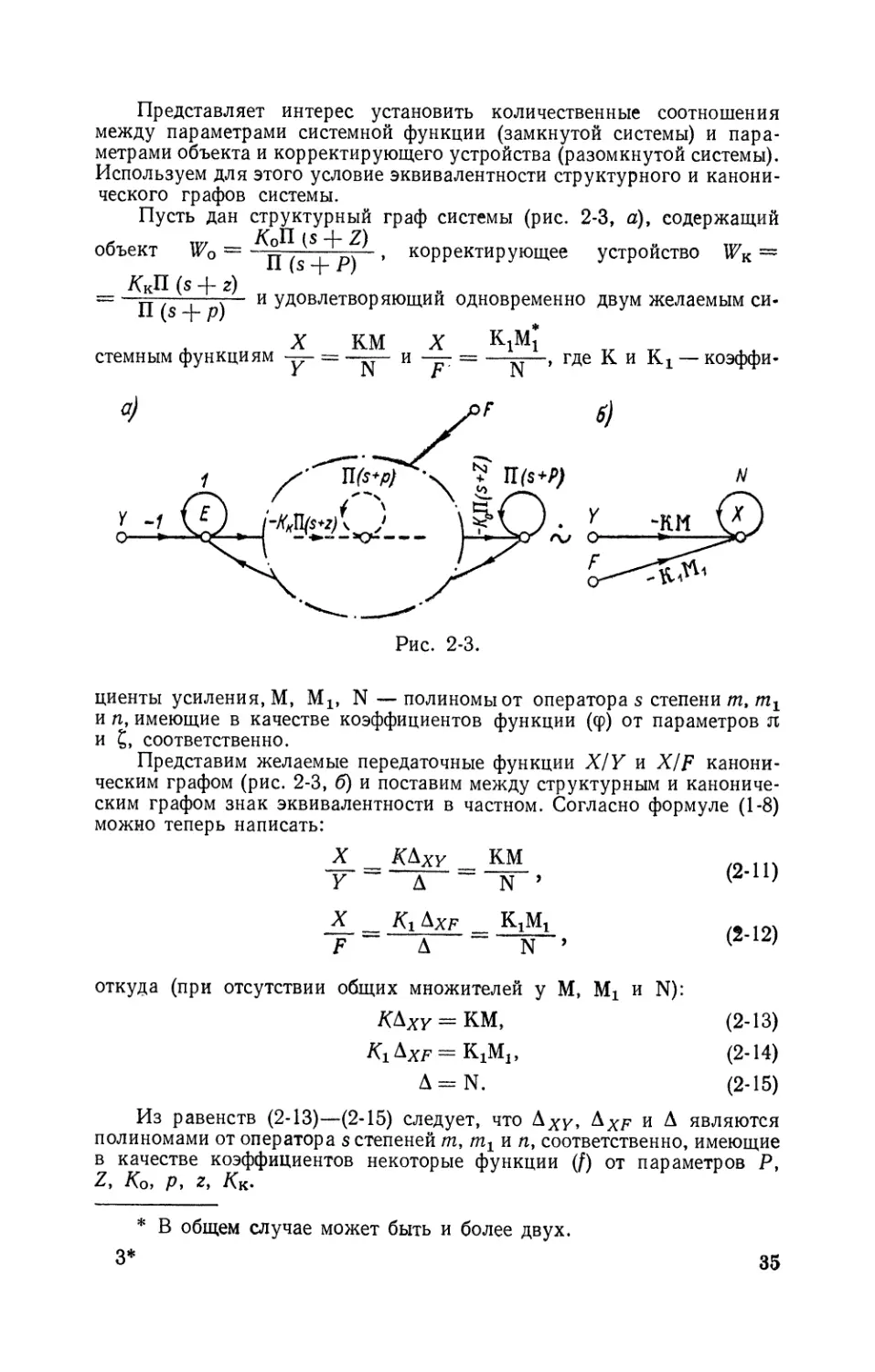
Представляет интерес установить количественные соотношения
между параметрами системной функции (замкнутой системы) и пара-
метрами объекта и корректирующего устройства (разомкнутой системы).
Используем для этого условие эквивалентности структурного и канони-
ческого графов системы.
Пусть дан структурный граф системы (рис. 2-3, а), содержащий
объект Wq = y^.^nf^- , корректирующее устройство WK =
ККП (8 +г)
U(s + p)
U(s + P)
и удовлетворяющий одновременно двум желаемым си-
X
стемным функциям — =
4
КМ X
N
, где К и Кх — коэффи-
а)
Tl(s+P)
Рис. 2-3.
циенты усиления, М, М1? N — полиномы от оператора s степени т, т1
и п, имеющие в качестве коэффициентов функции (ф) от параметров я
и £, соответственно.
Представим желаемые передаточные функции X/Y и X/F канони-
ческим графом (рис. 2-3, б) и поставим между структурным и канониче-
ским графом знак эквивалентности в частном. Согласно формуле (1-8)
можно теперь написать:
X _ №xy _ КМ
Y А N '
X Кг Axf KtMt
F А N
(2-11)
(М2)
откуда (при отсутствии общих множителей у М, Mi и N):
/САХУ = КМ, (2-13)
/C1Axf = K1M1, (2-14)
А = N. (2-15)
Из равенств (2-13)—(2-15) следует, что А^к, А^/? и А являются
полиномами от оператора s степеней т, тх и п, соответственно, имеющие
в качестве коэффициентов некоторые функции (/) от параметров Р,
Z, Ко, р, г, Кк-
* В общем случае может быть и более двух.
35
3*
Из равенств (2-13)—(2-15) можно установить следующее:
1) одноименные адъюнкты структурного и канонического графов
имеют одинаковое усиление и одинаковое число корней — нулей пере-
даточной функции системы;
2) главный определитель структурного и канонического графов
имеет одинаковое число корней — полюсов передаточной функции
системы;
3) коэффициенты при одинаковых степенях s в левых и правых
частях равенств (2-13)—(2-15) соответственно равны.
Учитывая пп. 1, 2 и 3, можно написать систему совместных урав-
нений для всех коэффициентов уравнений (2-13)—(2-15):
Я = К, (2-16)
K^KV (2-17)
MZ, г, р) = ф|(0 (*= 1, 2, . . .,. т), (2-18)
MZ, г, р) = <МС) (i = l, 2, . . ., mj, (2-19)
hi (Ко, Кь Р, Z, р, г) = фа*(я) (/=1,2,..., л). (2-20)
Уравнениями (2-16)—(2-20) устанавливается количественная связь
между параметрами структурного графа (разомкнутого контура) си-
стемы и параметрами канонического графа (замкнутого контура) си-
стемы.
Из уравнения (2-20) видно, что число полюсов в системной функ-
ции Nn не может быть меньше, чем число полюсов в передаточной
функции объекта Np, но не может быть больше, чем общее число по-
люсов в разомкнутом контуре системы Np + Np. В зависимости от
структуры системы имеет место следующее количественное соотноше-
ние между Nn и Np, Np:
Np+Np^N^NP- (2-21)
Количественные соотношения между числом нулей системной
функции Nfy числом нулей объекта Nz и корректирующих устройств Nz
носят более сложный характер, так как N^ зависит еще и от некоторых
полюсов корректирующих устройств. В зависимости от структуры
системы может иметь место следующее соотношение между функциями
// и Ф*:
Nz^N2r + Np^N^Nz, (2-22)
где N г> — число нулей в цепи прямой передачи, Nр, — число полюсов
в цепи обратной связи, содержащихся в корректирующем устройстве.
Наибольший интерес представляет минимально необходимое число
полюсов и нулей корректирующего устройства, которое обеспечивает
реализацию желаемой системной функции при наибольшей простоте
корректирующего устройства.
Из уравнений (2-16)-г-(2-20) видно, что при задании всех полюсов
и нулей желаемой системной функции в правые части уравнений вво-
дятся (т + /?!!+ п) произвольных величин. Для обеспечения равен-
ства левые части уравнений должны содержать такое же число неза-
висимо варьируемых параметров. Так как Р, Z, Ко — полюсы, нули
и усиление объекта — фиксированы, в качестве варьируемых пара-
* Возможна и более сложная структура функций ft и ф/.
36
метров могут использоваться только нули, полюсы и усиления коррек-
тирующего устройства: р, г и Кк- Поэтому должно соблюдаться сле-
дующее основное условие корректного синтеза:
Л^вар = + Nz + NKk 5* Nl + Мл, (2-23)
т. е. общее число независимо варьируемых полюсов, нулей и усилений
корректирующего устройства должно быть равно или больше числа
заданных полюсов и нулей желаемых системных функций.
Если задано также общее усиление системы К, то общее число
независимо варьируемых параметров должно быть увеличено на еди-
ницу
Np + Nz + NKk ^ Nn + + 1. (2-24)
Если системная функция не содержит нулей и не задано К, то
должно удовлетворяться неравенство
Np + Nz+NKR^Nn. (2-25)
Стремление уменьшить число полюсов в синтезируемой системной
функции и упростить корректирующее устройство побуждает зада-
ваться не всеми пин системной функции, а только ее доминирующей
частью; часть ее полюсов и нулей остается неуправляемой. При полу-
чении неудовлетворительного расположения неуправляемых полюсов
меняется тип корректирующего устройства либо увеличивается число
задаваемых полюсов системной функции.
Необходимо указать на одно важное количественное соотношение
между пин фиксированной части разомкнутого контура (объекта)
и замкнутого контура, вытекающее не из условия эквивалентности
структурного и канонического графов, а из требования эффективного
подавления высокочастотных составляющих входного управляющего
сигнала и других помех. Обязательно выполнение условия:
Nn — N^Np — Nz, (2-26)
т. е. избыток полюсов над нулями в желаемой передаточной функции
должен быть равен или больше соответствующего избытка в передаточ-
ной функции объекта.
Совокупность уравнений (2-21)—(2-26) является основой тополо-
гического синтеза: с их помощью окончательно устанавливается вид
и порядок канонического графа и формируется структура выбранного
типа корректирующего устройства. Численные значения параметров
последнего определяются из уравнений (2-16)—(2-20).
2-6. Процедура топологического синтеза
Исходным пунктом в топологическом синтезе является представ-
ление синтезируемой системы одновременно в двух формах направ-
ленного графа: в форме структурного графа, содержащего известные
параметры объекта и неизвестные параметры корректирующего устрой-
ства, и в форме канонического графа, включающего все или часть пара-
метров желаемой системной функции. Решение получается из согласо-
вания обеих форм графа.
Процедура синтеза состоит из следующих последовательных опе-
раций:
37
1 sfs+2)
i -<° Q Г О
(s+p) 1 s(s+2)
1 (s+p) s(s+2)
E
Ж
1) представление фиксированной, функционально необходимой
части системы (объекта) в форме структурного графа;
2) представление желаемой системной функции (или части ее по-
люсов и нулей) в форме канонического графа. (Когда заданы все пара-
метры желаемой системной функции, построение канонического графа
можно опускать);
3) выбор оптимального, в некотором отношении, типа корректи-
рующего устройства и определение числа требуемых варьируемых пара-
метров в нем согласно уравнениям (2-23)-f-(2-25);
4) включение в структурный граф п. 1 дополнительных элементов,
представляющих выбранный тип корректирующего устройства, и
согласование канонического
графа с дополненным струк-
турным графом для удовле-
творения требуемых коли-
чественных соотношений ме-
жду их параметрами (п и н)
согласно уравнениям (2-21)-ь
(2-22),*
5) составление равенств
между одноименными адъюнк-
тами и главными определи-
телями ** структурного и
канонического графов со-
гласно уравнений (2-16)-f-
(2-20);
6) составление на основе
равенств п. 5 системы сов-
местных уравнений, содержа-
щих неизвестные параметры
корректирующих устройств,
и решение их;
7) оценка качества и стабильности полученного решения, если
заранее известны пределы изменения параметров объекта.
Рассмотрим каждую из этих операций в отдельности.
1. Построение структурного графа фиксированной части системы,
если известны передаточные функции входящих в нее элементов, не
представляет трудностей. Для иллюстрации, пользуясь табл. 1-1,
построим структурный граф фиксированной части системы, включающей
следующие элементы: исполнительный механизм с передаточной функ-
цией W0 = —/ V 94 » усилитель с коэффициентом усиления К — 10
s \s -р £)
и измерительное сравнивающее устройство с Wu— 1. На рис. 2-4
показаны последовательные ступени построения графа: в первой строке
граф W0y во второй — KW0, в третьей — KWKW0 и в последней —
окончательный граф. (В действительности, структурный граф строится
сразу весь.) На рис. 2-4 известные параметры объекта изображены
* Операции пп. 1-4 по существу выполняются одновременно и
могут быть объединены одним названием — операцией согла-
сования структурного и канонического
графов,
** Ниже будем их называть общим термином — одноимен-
ными определителями.
Рис. 2-4.
38
контурными линиями, а неизвестные параметры корректирующего
устройства — пунктирными.
2. Представление желаемой передаточной функции замкнутой
системы каноническим графом выполняется различно в зависимости
от того, заданы ли все параметры замкнутой системы либо некоторые —
доминирующие. В первом случае канонический граф можно изображать,
содержащим два узла — входной Y и выходной X, одну внешнюю
ветвь и одну собственную ветвь выходного узла. Внешняя ветвь имеет
коэффициент передачи, равный числителю желаемой передаточной
функции, собственная ветвь — знаменателю. Во втором случае извест-
ные параметры желаемой передаточной функции изображаются, как
s3+4s2+10s+W
10(s+1)
(s3+4s2+10s+10)
У -10 ($+1)
о———+•
6)
(s2+Ss+25)(s+1i)
($2+6s+25)
(s+%)
Рис. 2-5.
и в первом случае; неизвестные параметры требуют дополнения одного
узла с собственной ветвью, представляющей неизвестные полюсы,
и одной взаимной ветви, представляющей неизвестное усиление и нули
замкнутой системы.
На рис. 2-5 показаны примеры построения канонического графа
по желаемой передаточной функции.
3. Выбор типа корректирующего устройства обусловливается
большим количеством факторов, выходящих за пределы собственно
метода синтеза: физической природой корректируемого сигнала, на-
личием технических средств коррекции, производственными, конструк-
тивными и, главным образом, эксплуатационными качествами коррек-
тирующих устройств и т. д. Учесть их можно только в каждой конкрет-
ной задаче синтеза, которая в общем случае решается неоднозначно.
Выбор может базироваться на прошлом опыте, на известных ре-
зультатах исследований [25, 38], на специальном структурном ана-
лизе, предшествующем синтезу, и т. д. В дальнейшем под термином
«выбор оптимального в некотором отношении. . .» будет иметься в виду
лишь выбор, при прочих равных условиях, наиболее простого в струк-
турном отношении и наиболее легко физически реализуемого коррек-
тирующего устройства.
Определение числа и типа требуемых варьируемых параметров
(полюсов, нулей, усилений) в выбранном типе корректирующего устрой-
ства, т. е. его структура, окончательно устанавливается при согласо-
вании структурного графа (после включения в него корректирующего
устройства) с каноническим графом системы.
39
4. На рис. 2-4 пунктирными линиями показаны параметры вклю-
ченного в структурный граф выбранного типа корректирующего устрой-
ства. Здесь произвольно принят последовательный тип однозвенного
и 1 * 1W7 Кк (s + г)
корректирующего устройства с передаточной функцией WK — ~г~г—
\s i Р)
в предположении задания лишь пары доминирующих полюсов и уси-
ления замкнутой системы. На рис. 2-6 показаны согласованные струк-
турный (рис. 2-4) и канонический графы (рис. 2-5, б), удовлетворяющие
количественным соотношениям § 2-5.
5. Согласование структурного и канонического графов позволяет
предположить наличие эквивалентности в частном между ними. Пред-
положение правомерное, так как при определенных условиях (см.
§ 2-7) приводит к корректному решению системы совместных урав-
1 (s+p) $($+2) (s2+Ss+25) (s + к)
Рис. 2-6.
нений, вытекающему из эквивалентности. Предполагаемая эквивалент-
ность между структурным и каноническим графами позволяет состав-
лять равенства между их одноименными определителями. Определи-
тели несложных графов вычисляются по формуле (1-8), а сложных —
по (1-8), (1-9) и другим одновременно.
6. Из равенства одноименных определителей составляется система
совместных уравнений, связывающих параметры структурного и кано-
нического графов, входящие в коэффициенты при одинаковых степенях
оператора s. К ней добавляются другие уравнения, если заданы не все
параметры канонического графа. Например, уравнения, связывающие
параметры структурного и канонического графов через заданные
значения коэффициентов ошибки, или уравнения, накладывающие
ограничения на параметры корректирующего устройства, и т. д.
Первые уравнения будем называть коэффициентными, а всю сово-
купность уравнений — уравнениями синтеза. Во многих случаях
систему уравнений синтеза удается свести к системе совместных ли-
нейных уравнений.
Решение уравнений синтеза относительно неизвестных параметров
корректирующего устройства и незаданных параметров замкнутой
системы, если система достаточно сложна, выгодно также находить
с помощью построенных по ним графов и топологических формул.
Обычно достаточно по топологической формуле найти одну или две
искомые неизвестные величины, остальные проще затем вычислять
непосредственно из уравнений синтеза.
Покажем на простом примере системы, представленной графами
на рис. 2-6, как это выполняется. Адъюнкта структурного графа Ах =
= 1,5/C(s+ г); то же канонического графа Ax=30(s + £). Из
их равенства 1,5/( (s + z) = 30 (s + £) непосредственно следует,
что К = 20.
40
Главный определитель структурного графа с учетом найденного
значения К равен А = s (s + 2)(s + р) + 30 (s+ г), а канонического
графа А = (s2 + 6s + 25) (s + я). Из их равенства выписываем
систему коэффициентных уравнений:
при s2: 2 + р = 6 + я,
при sJ
при s°
1.
2р + 30 = 6я + 25,
ЗОг = 25я,
которая решается весьма просто без помощи графа. Однако для целей
иллюстрации решим ее с помощью графа. Перепишем систему в более
удобную для построения графа форму:
р — я — 4 = 0;
-2р + 6я —5 = 0;
—25я + 30г = 0.
(2-27)
На рис. 2-7 изображен
граф системы (2-27), из него
видно, что от узла z к уз-
лам р и я нет прямых путей, Рис. 2-7.
поэтому р и я можно вычис-
лять независимо от г. Имеем согласно формуле (1-8):
•(-4) (6)+ (-5) (-1)
Р =
Я :
L6-(-2) (-1)
(— 1) (—5) + (—2) (-4)
6-2
= 7,2,
:3,2.
При вычислении г учитываются все элементы графа
z
_ (~4)(-2).(-25)-5.(-25)(-1)
—1.6-30 +2-30
Таким образом, требуемая передаточная функция корректирую-
щего устройства будет:
20(s + 2,7)
к (s + 7,2) 9
а незаданные параметры замкнутой системы: нуль £ = 2,7 и полюс
я = 3,2.
7. Вопросы оценки качества и стабильности полученного решения
рассматриваются в следующих параграфах.
2-7. Математические условия существования
решения и условия его физической реализации
Качественное решение задачи синтеза требует удовлетворения
математических условий существования решения и условий его физи-
ческой реализации. Перечислим их без подробного объяснения.
Математические условия:
1. В общем случае число уравнений синтеза, вытекающих из сог-
ласованных структурного и канонического графов, и дополнительных,
41
бусловленных заданными показателями качества системы или огра-
ничениями корректирующего устройства, должно быть равно числу
неизвестных параметров, содержащихся в структурном и канониче-
ском графах вместе.
2. Для системы линейных уравнений, имеющей, по крайней мере,
одно неоднородное уравнение, допустимо: а) число уравнений, большее,
чем число неизвестных параметров, если ранг расширенной матрицы
не превосходит ранга основной матрицы; б) число уравнений, мень-
шее, чем число неизвестных параметров, тогда часть неизвестных
параметров задается произвольно с условием удовлетворения всех
уравнений.
Условия физической реализации решения:
1. Все искомые варьируемые параметры п и н структурного графа
(корректирующего устройства) должны располагаться в левой полу-
плоскости. При ограничении пассивными корректирующими 7?С-це-
пями все полюсы должны находиться на действительной отрицательной
полуоси.
2. Все полученные незаданные параметры п и «канонического
графа (системной функции) должны располагаться в левой полупло-
скости. В отдельных случаях допустимы нули в правой полуплоскости.
3. Если в корректирующее устройство входят два или более не-
известных полюса (или нуля), для обеспечения линейности уравнений
синтеза вместо полюсов (нулей) вводятся коэффициенты соответству-
ющих характеристических полиномов.* В этом случае необходимо
дополнительно проверять устойчивость полученных характеристиче-
ских полиномов. Обычно порядок их невысок (я<4). При ограниче-
нии пассивными корректирующими ЯС-цепями должны также отбра-
сываться устойчивые решения, приводящие к комплексным полюсам.
Математические условия существования решения и условия его
физической реализации составляют необходимые, но недостаточные
условия для качественной коррекции системы. Последние удовлетво-
ряются при достаточно близком выполнении заданных показателей
качества системы.
Когда задана вся конфигурация пин канонического графа (си-
стемной функции), определенная из требований качества системы, то
удовлетворение необходимых условий одновременно обеспечивает
выполнение достаточных условий при любом выбранном типе коррек-
тирующего устройства. Когда же задаются только доминирующие пин
системной функции, выполнение необходимых условий не означает
еще удовлетворения достаточных, так как незаданные параметры
системной функции могут оказаться в области, заметно искажающей
поведение системы, ожидаемое на основании заданных доминантов.
Поэтому рекомендуется при задании доминирующих полюсов распо-
лагать их так, чтобы заданные показатели качества системы удовлетво-
рялись с учетом возможного искажающего влияния незаданных пара-
метров.
При неудовлетворении достаточных условий качественной коррек-
ции испытывают новый вариант корректирующего устройства. Чтобы
получить наиболее простое по структуре корректирующее устройство,
синтез начинают с его простейшего варианта. Останавливаются на
* В действительности в коэффициентные уравнения полюсы и
нули входят так же, как коэффициенты характеристического полинома,
поэтому они берутся с противоположным знаком.
42
корректирующем устройстве минимальной сложности, обеспечиваю-
щем заданные показатели качества системы. При топологическом син-
тезе этот процесс упрощается, так как для типовых видов коррекции
и для систем невысокого порядка (п «< 6) легко выводятся аналитиче-
ские формулы, позволяющие быстро вычислить значения неизвестных
параметров и определить необходимые и достаточные условия каче-
ственной коррекции по заданным параметрам системной функции и
параметрам фиксированной части системы (объекта).
2-8. Оценка стабильности решения
относительно изменяющихся параметров объекта
До сих пор мы предполагали, что все параметры объекта заданы
точно и фиксированы. В действительности параметры объекта часто
известны с ограниченной точностью или заведомо известно, что в усло-
виях эксплуатации тот или иной параметр или группа параметров
s3+Ai$2+A2s+A3 $2+2fons+ion2 $2+a1s+az
Р^Рг'А^^.
PfP2*A2 К*КоКк
PiP2p = A3
Рис. 2-8.
объекта изменяются в некоторых пределах. Представляет интерес
знать: а) как выполнять синтез системы, чтобы заданные показатели
качества удовлетворялись не только для данной совокупности номи-
нальных значений параметров объекта, а во всем диапазоне их изме-
нений и б) насколько стабильно полученное решение при изменении
параметров объекта.
Изложим метод приближенной количественной оценки чувстви-
тельности полюсов замкнутой системы к изменению параметров объекта.
Без ущерба для общности его можно рассмотреть на конкретном при-
мере одноконтурной системы невысокого порядка с последовательным
корректирующим устройством. В § 3-4 будет рассмотрен случай с па-
раллельным корректирующим устройством.
Пусть определена конфигурация полюсов и нулей системной
функции, удовлетворяющая заданным показателям качества при но-
минальных значениях параметров объекта, как показано на структур-
ном и каноническом графах рис. 2-8. Требуется определить предельное
смещение полюсов замкнутой системы при изменении усиления объекта
на величину А/С0-
Из равенства главных определителей структурного и канониче-
ского графов выписываем следующую систему коэффициентных урав-
нений:
Pi + P* + Р = 2£©я + а1,
РЛ + (^i + Р2)Р = 2gcorta1 + co2rt + a2,
РхР2р + KKKQ = со2Л + 2£соЛа2,
43
Перепишем эту систему в приращениях, учитывая* что в левых
частях уравнений изменяется только одна переменная /Со, а в пра-
вых — все. Члены второго и высшего порядка малости отбрасываем:
A2gcort + Дах = 0, (2-28)
2С0/2 АсоЛ + 2£а>/г Аах + аг А2£соя + Аа3 = 0, (2-29)
2со„а х A(o„ + со2 Д^ + 2£co„ Да2 + а2 Д2£сол = Кк AiC0, (2-30)
2оу*2 Ашл + со2 Да2 = KKz Atf0. (2-31)
Система уравнений (2-28)—(2-31) является линейной относительно
неизвестных: Д2£©л, Acort, Дах и Аа2.
Для удобства построения графа перепишем систему (2-28) по (2-31)
в матричной форме:
"10 1 0 Д2Б©,,
ах 2(йп 2l(Dn 1 Ao)rt
«2 tounfh со2 2gcort Afli
_ 0 j 2(йпа2 0 со2 _ Дя2
02
Рис. 2-9.
KJ
0
*к AiCo
/Скг А/Со
(2-32)
На рис. 2-9 контурные линии изображают граф системы уравне-
ний (2-32). Неизвестные А2£сол, АсоЛ, Aax и Да2 вычисляем по формуле
(1-8):
ЛД2£со„ АД'П
А2|о)я = д ° , (2-33)
ДДсо„ А/Сп
А©л= 1—(2-34)
ДДа, А/Сп
Д^1.= £~^> (2-35)
ДДа0 А/Сп
Да2 = 1—°~, (2-36)
44
где
аа2|о>я ак0 = 2о)Л [(*2 ~ ю«) ~ г (а1 - 2Е©Я)],
АДсоя л/с0 = *к {4 («1 - 2Б©Я) - г [(©2 -а2) +
+ 2£©„ (%-2gcort)]},
Аа*хак0 = -2©Я/СК [(аз-©2) - г fa -26©я)],
Ад*2 ак0 = "2©Я/СК {[о2 fa - 2g©„)] +
+ zfo-"! («i — 2gco„) —со^]},
Д = 2©я [©я - ©2 (2£©яв1 + 2а2 - а2) -
- 2£©яа2 fa — 2£©я) + 4].
Предположим теперь, что кроме усиления меняется еще один
полюс объекта Рх на величину ДРХ. В этом случае в правой части
уравнений (2-32) появятся дополнительные члены с приращениями ДРц
левая часть останется без изменения, а именно:
'10 1 0
аг 2ап 2£©rt 1
да 2©^ ©я
0 2©ла2 0
2£со„
'A2g(ort"
A©„
Aaj^
Д<29
ДРХ
АРХ (р + Р2)
(2-37)
На рис. 2-9 контурные и осевые линии изображают граф системы
уравнений (2-37). Искомые неизвестные приращения теперь будут
выражаться уравнениями:
аа2£(оя ак0 + AA2fo„ APt
А
А2£©„ =
Д©„ =
Аах =
Да2 =
ЛАй„ Ait
+ А
А(0„ АР,
А
ЛАах А^0
+ AAax ДРХ
А
ААа2А/С0
+ ААа2 ДРХ
А
(2-38)
(2-39)
(2-40)
(2-41)
где
Аа2£о>я арх = 2соя {[юя + fa + 26©^) ©2 - (2£соя)2я2]
- (р + Р2) (26©^ -в1©я) - р©2},
45
—p (fli —26©,,)],
лдя4 api = ~2c°m { [(fl2 ®л + flA2£<vI -
- + pl) (о^Б©я - *i<4) + P (a2 ~ ©я) J.
ддаа api = -2cona2 [(a22l(Dn -al(D2n) - (p + P2) (a2 - ©„) +
+ p («i — 2£co„)],
A> АА26©яа/с0' ла(0„дко' ^a^o' лая2дко~~те ж6' чт° и выше'
Из рассмотренных частных примеров могут быть сделаны некото-
рые выводы общего характера.
1. Вычисление величин изменения параметров замкнутой системы
может быть выполнено относительно каждого изменяющегося пара-
метра объекта отдельно и затем просуммировано (на основании прин-
ципа суперпозиции). Поэтому не представляет затруднений вычислить
изменение конфигурации полюсов замкнутой системы при нескольких
одновременно изменяющихся параметрах объекта, т. е. количественно
оценить качество синтезированной системы, в пространстве многих
переменных объекта.
2. Величина изменения параметров замкнутой системы зависит
не только от величины изменения того или иного параметра объекта,
но и от всей исходной конфигурации пин замкнутой системы и неко-
торых пин объекта (и его усиления), которые являются сомножителями
изменяющихся параметров в уравнениях синтеза. Точность этого при-
ближенного метода для многих случаев практики вполне достаточна.
При необходимости может быть оценена абсолютная и относитель-
ная величина ошибки подстановкой новых значений параметров разомк-
нутого и замкнутого контуров системы в уравнения синтеза.
ГЛАВА ТРЕТЬЯ
СИНТЕЗ САУ С ОДНОЙ СТРУКТУРНОЙ СТЕПЕНЬЮ СВОБОДЫ
3-1. Свойства САУ с одной структурной степенью
свободы
Предложено много различных классификаций САУ по структур-
ному признаку [41 и др.]. С точки зрения синтеза системы (с жесткой
структурой), представляет интерес не всякое различие структур, а та-
кое, которое допускает формирование различного числа независимых
системных функций. Этот признак удобно положить в основу структур-
ной классификации (см. § 2-3).
Системы, которые характеризуются одной независимой системной
функцией (например, передаточной функцией выходной величины
относительно входной — управляющей), называют системами
с одной структурной степенью свободы; си-
стемы, которые характеризуются двумя независимыми системными
функциями (например, независимыми передаточными функциями вы-
ходной величины относительно управляющей входной величины и
возмущения), — системами с двумя структурными
степенями свободы и т. д.
Системы с одной структурной степенью свободы являются про-
стейшим типом САУ. Обладая одной независимой системной функцией,
они не могут успешно выполнять различные функции САУ: фильтра,
обладать нечувствительностью к изменению параметров объекта и эффек-
тивно подавлять возмущения. Как правило, в важной области частот
они имеют высокую чувствительность к изменению параметров объекта
и к возмущениям; на границе полосы пропускания их чувствитель-
ность становится больше, чем была бы при полном отсутствии отрица-
тельной обратной связи [25].
Все же, благодаря конструктивной простоте, САУ с одной струк-
турной степенью свободы очень широко используются в практике.
Они хорошо справляются с задачей управления, когда полоса пропу-
скания системы выше частотного спектра возмущения; когда изменение
параметра объекта согласуется с желаемым направлением изме-
нения поведения системы; когда статическая точность системы
является более важной характеристикой системы, чем переходный
процесс.
Системы с одной структурной степенью свободы чаще всего исполь-
зуются как астатические системы. Хорошо известно, что астатические
системы в установившемся режиме нечувствительны к изменениям
параметра объекта и к возмущениям.
47
3-2. Общие замечания к синтезу
систем с астатизмом первого порядка
Синтез систем с одной структурной степенью свободы состоит
в формировании одной передаточной функции выходной величины (или
ошибки) относительно входного управляющего сигнала. Выбор конфи-
гурации пин замкнутой системы определяется заданными показателями
качества системы и конфигурацией пин объекта. Выше отмечалось,
что синтез целесообразно начинать с выбора возможно меньшего числа
доминирующих полюсов замкнутой системы. Для систем с астатизмом
первого порядка (систем типа 1) выгодно задаваться доминирующей
парой комплексных полюсов, адекватной главным показателям каче-
ства системы. Это облегчает прямое удовлетворение заданных показа-
телей качества и приводит к простому корректирующему устройству.
В качестве корректирующего устройства последовательно испыты-
вается одно- и двухзвенная пассивная #С-цепь, и лишь при неудовле-
творении последней предполагается переход к более сложным коррек-
тирующим цепям.
В задание на проектирование систем типа 1 обычно включаются
следующие показатели качества:
1) полоса пропускания со0, равная по определению 0,7 | Wv (/со) |.
2) перерегулирование — о% .
3) время установления (или регулирования) — ty (tp).
4) коэффициент ошибки по скорости, или добротность по первой
производной D±.
Для одноконтурных систем типа 1:
т
kYIzi
(3-D
Пр/
где К — усиление, zi — нули, pt — конечные полюсы разомкнутого
контура системы.
Известна также связь Dx с полюсами и нулями замкнутой
системы [20]:
п т
Для одноконтурных систем £/ = г/.
Уравнения (3-1) и (3-2) позволяют установить дополнительную
связь между полюсами и нулями разомкнутого и замкнутого контуров
системы типа 1:
т
кПг! ■ . 1 , .
п pi v - V ±
Lx щ Li It
48
В синтезе удобнее пользоваться другим выражением, устанавли-
вающим связь между полюсами разомкнутого и замкнутого контуров
системы через Dlt а именно *:
п
Пщ
П Pi
1
При выборе доминирующей пары полюсов их положение опреде-
ляется однозначно по первым двум заданным показателям качества —
со0 и ст. Коэффициент затухания g связан с о уравнением:
а= Ше-^1У^ [о/0]. (3-5)
Частота собственных колебаний ©л определяется по формуле:
co„ = ю0 [1 - 2g2 + (2 - 4£2 + 4Е«)0'6]0'6. (3-6)
Время установления — по формуле:
ty= / . (3-7)
Желаемое значение Dt обеспечивается включением его значения
в уравнения синтеза.
3-3. Синтез систем типа 1 с последовательным
корректирующим устройством
Рассмотрим синтез системы, включающей объект с
Ко Ко
°~ s(s + Р,) (s+P2) ~ 5(52 + Л15 + Л2) "
W0 =
По заданным показателям качества системы (о0иа выбираем пару
доминирующих полюсов (s2 + 2£©/ls + со2). Корректирующее устрой-
те Кк (s + z) ^
ство ищем в виде WK— —^s\^_ р) • Строим согласованные структурный
и канонический графы системы (рис. 3-1) и составляем равенство их
главных определителей:
*4 + (Аг + р) s» + (Л2 + AlP) s2 + (А2р + КоКк) s + KoKkZ =
= s4 + (2g©„ + a,) s3 + (со2 + 26©^! + а2) s2 +
* Вывод этого уравнения следует из равенства главных определите-
лей структурного и канонического графов одноконтурной системы типа 1.
т
Коэффициент при s° в определителе структурного графа равен KYI г*,
п
а коэффициент при s° в определителе канонического графа равен Пя/.
Учитывая уравнение (3-1), получим (3-4).
4 т. м. Райцын 49
Из приведенного равенства и уравнения (3-4) выписываем систему
уравнений синтеза:
(3-8)
(3-9)
(3-10)
(3-11)
(3-12)
Аг + р = 2g©rt + a1;
А2 + А хр = ©я + 21©^! + а2\
А2р + К0КК = ©fo + 2§©„я2;
K0KKz= ©2а2;
D^2p = ©ла2.
s(s+P,)(s+P2) (s*+2 tb)ns + o)2n) (s^dr-s+a,)
— -«x
Pi' Рг
K=KKK0
Рис. 3-1.
Определяя p из (3-12) и подставляя в (3-8) и (3-9), получаем линей-
ную систему относительно неизвестных аг и аг\
откуда
а, =
2i»„«1-(l-^-)a2=-(^-^2), (3-13)
_ -К-^2)+2?о)„(2£(о„-Л1)
DtA2
+
- , (3-14)
(3-15)
Полюс р находим из уравнения (3-8), Кк из (3-10) и г из (3-11). После
упрощения получаем:
(L М) _ (3]6)
а, =
(JV-0)
_ D^jP-R) ,
(JV-0) '
(3-17)
50
i
(N-0)
<D2nD^2(P-R)
< <P — R)
(3-19)
u>» (L-M)+^2S(P-.R) '
со2 (L — jW) + i42S (P — R)
*«- *0(*-о) » (3-20)
где
L=(o2n(2i(0„^1+^2)+Z3^1^2,
JW = ©2 (A? + <n»)+2i<o(,Dli42,
Af=D^2 + 2|(o„.(o2„,
P = (2|co„)2 + Л2,
Я =2^!+ 0)2,
S = 2|w„D1-0)2.
Условия физической реализации решения удовлетворяются, если:
а) все разности (L — М), (Р — Я) и (JV — О) не равны нулю и б) они
имеют одинаковый знак, т. е. при (N — 0) 2з 0 должно быть
(L — Л4) sc0 и (P-R)^O. (3-21)
Предельное значение Dx при (L — М) sg 0 и (Р — Я) 0 опре-
деляется неравенством
^i^^-(^i-2gcort). (3-22)
Так как по физическому смыслу Dx > 0, дополнительно необхо-
димо, чтобы всегда Лх>2 £cort.
Пример 3-1. Вычислить параметры корректирующего устрой-
ства, удовлетворяющего заданным показателям качества системы [40]:
а) коэффициент затухания g = 0,6;
б) доминирующая постоянная времени /д<2 сек (или gcort>
J> 0,5 сек'1;
в) коэффициент ошибки по скорости — 5 ее/с"1.
Передаточная функция объекта W0 = —, °—г—тт =
s (s+ 2) (s+ 6)
s(s2 + 8s + 12) •
Решение 1. Выбираем доминирующую пару комплексных полюсов,
удовлетворяющих первым двум условиям: (s2 + 1,4s + 1,49).
4* 51
2. Проверяем выполнение условий физической осуществимости
коррекции с помощью однозвенной пассивной #С-цепи по уравнению
(3-21):
L = 1,4.8.1,49 + 5.8.12+ 1,49.12 = 514,6,
М = 1,4.5.12 + 82.1,49+ 1,492 = 181,7,
(L — М) = 332,9 > О,
р = 1,42 + 12 = 13,96,
R = 1,4-8+ 1,49= 12,69,
(Р —Я) = 1,27 > О,
N = 5-12+ 1,4-1,49 = 62,08,
0 = 8.1,49 = 11,9,
(N — О) =50,18 > 0,
5 = 1,4.5—1,49 = 5,51.
Так как разности (L — 714), (Р — R) и (N — О) имеют одинаковые
знаки и не равны нулю, условие (3-21) выполняется. Условие предель-
ного значения Dx [уравнение (3-22)] также выполняется:
1 49
Б >-^(8-1,4) = 0,8.
3. Вычисляем по формулам (3-18), (3-19) и (3-20) р, г и Кк-
'-^mi2-••<»*
._ 1,49.5.12.1,27 _0J97.
1,49.332,9 — 12-5,5Ы,27
„ „ 1,49.332,9 — 12.5,5Ы,27
КоКк _____ =
по формулам (3-16) и (3-17) а± и а2:
_ 332,9
а1~ЖТ8"
= 6,65;
5Л2.1,27 1
50,18 =1>52-
Незаданные полюсы замкнутой системы являются корнями ква-
дратного уравнения s2 + 6,65s + 1,52 = 0, а именно:
я1 = — 6,23 и зт2 = —0,23.
Нуль z— —0,197 и полюс я2 = —0,23 образуют диполь, не оказы-
вающий существенного влияния на переходный процесс системы-.
Пример 3-2. Вычислить параметры корректирующего устрой-
ства, удовлетворяющего тем же требованиям, что в примере 3-1, за
исключением степени устойчивости |соЛ = 1,35 сек'1.
52
Решение. 1. Выбираем доминирующую пару полюсов, удовлетво-
ряющую новым условиям: (s2+2,7s+5).
2. Проверяем выполнение условий физической реализации (3-21):
р = 2,72 + 12 = 19,5; R = 2,7-8 + 5 = 26,51;
(Р — R) = —7<0; W = 5-12 + 2,7-5 = 73,5;
0 = 8-5 = 40; (N — О) = 33,5*> 0.
Условие (3-21) не выполняется. Следовательно, однозвенной RC-
цепью невозможно выполнить заданные показатели качества. Тре-
буется более сложная корректирующая цепь с большим числом варьи-
руемых параметров.
Рис. 3-2.
Рассмотрим в качестве таковой корректирующую i^C-цепь с пере-
даточной функцией:
Кк Is + гх) (s + га) = #к (s + zx) (s + г2)
(s + Pl)(s+p2) s' + ^s + A, *
Выведем сначала в общем виде формулы для вычисления пара-
метров корректирующей цепи, незаданных параметров замкнутой
системы и сформулируем условия физической реализации решения,
а затем продолжим решение примера.
На рис. 3-2 изображены согласованные структурный и канони-
ческий графы синтезируемой системы. Из равенства главных опреде-
лителей графов и уравнения (3-4) составляем систему уравнений син-
теза:
В1+Р2= (2£©я + яа) + п19 (3-23)
В2 + Р2ВХ = (2g(d„rc2 + ©2) + (я| + 2£©я) nv (3-24)
Р2В2 + К0КК = я2©2 + (со2 + я22£©я) nv (3-25)
ЯЛк*! = ^2С0^1» (3"26)
DXP2B2 = я^©2^. (3-27)
Чтобы не повысился порядок системы, принимаем z2 = Р*.
* Какой полюс объекта (младший Рг или старший Р2) выгодно
аннулировать, зависит от взаимного положения заданных п и н замк-
нутой системы и объекта. Определяется методом проб.
53
В системе (3-23)-г-(3-27) в пяти уравнениях содержатся семь не-
известных: Blt В2, zx, z2, Кк> n>i и п2- Двумя из них можно задаться
произвольно.
Так как в корректирующем устройстве остаются 4 произвольно
варьируемых параметра, задаемся кроме доминирующей пары полюсов
дополнительно одним удаленным полюсом замкнутой системы я2 и
коэффициентом Dx.
Из (3-27) выражаем ях через остальные переменные и подставляем
(в 3-23) и (3-24). Получаем линейную систему относительно неизвест-
ных параметров корректирующей цепи:
*i ~ #2 = 2gcort + я2 - Р2, (3-28)
я2<
Р2В1 +
(я2 + 2£со„) D±P2
l2wn
Я2 = 2£со„я2 + со2. (3-29)
Находим решение системы (3-28) и (3-29) после упрощений в виде:
(L-M)
Я2 =
(N — О) 9
(Р-Я)я2со2
(N — О) 9
(3-30)
(3-31)
где
L = (P\DX + я2со2) (я2 + 2^) 4- DjP2 (2^соЛя2 + со2),
М = Р2 [n2(*2n + Dl (я2 + 25со/г)2],
Р = (2£со„я2 + со2 + Р2),
R = Р2 (2£0„ + я2),
N--
12шп
D Р2
0 = DiPa (я2 + 2£со„).
Искомые полюсы корректирующей цепи являются корнями ква-
дратного уравнения
p* + BlP + B2 = 0. (3-32)
Из уравнения (3-27) находим:
D,P2 (P-R)
я-f == -
(N — О)
(3-33)
Кк и 2 находим из (3-21) и (3-26).
Из уравнений (3-30), (3-31) и (3-32) следуют условия физической
реализации решения: разности (L — М), (Р — R) и (N — О) должны
быть не равны нулю и иметь одинаковые знаки, т. е. при (N — О) 2? 0
(L — М) ^ 0 и (Р — /?)SgO.
(3-34)
54
Предельные значения D± при (L — М) 0 и (Р — R) ^ О опре-
деляются неравенством
DlS Р2(я2 + 2£<ол-Р2) • (3"35)
Пример 3-2 (продолжение). 1. В дополнение к доминирующей
паре полюсов (s2 + 2,7s + 5) задаемся удаленным полюсом я2 — 8,4 >
> 3-2,7 (см. стр. 33); принимаем г2 = Pi = 2.
2. Вычисляем:
L = (б2-5 + 8,4-5) (8,4 + 2,7) + 5-6 (2,7-8,4 + 5) = 3295,
Л4 = 6(8,4-5 + 5-11,12) =3948,
(L — М) — —653 < О,
Р= 2,7-8,4+ 5 + 36 = 63,6,
/г =б.ц,1 =66,6,
(Р - R) = -з < о,
yV = 8,4-5 + 5.36 = 222,
0 = 5-6.11,1 =333,
(N — О) =—11 < 0.
Условия физической реализации решения — уравнение (3-34)
и предельного значения Dx удовлетворяются.
3. Вычисляем по формулам (3-30 и (3-31) параметры:
_ 3295 -3948
222-333 ~"D' 2'
(-3)-8,4.5
-111 1Л4-
Полюсы корректирующего устройства находим из квадратного
уравнения:
s2 +5,92s+1,14 = 0;
= — 5,72; р2 = —0,2.
Из (3-21) получаем:
/С0/Ск = 8,4-5+ (5 + 8,4-2,7)-81 —6-1,14 = 57,6.
Из (3-26) определяем:
_ 8,4.5-0,81 _
01 57Гб ~ и,5Э*
Из (3-27) находим:
Я1 = ^ = 0,81.
Полюс к± и нуль £ = замкнутой системы образуют диполь,
оказывающий малое влияние на переходный процесс системы, который
с достаточной точностью определяется доминирующей парой полюсов.
55
3-4. Синтез систем типа 1 с параллельным
корректирующим устройством
Наряду с последовательным корректирующим устройством в САУ
используются параллельные корректирующие устройства. Не оста-
навливаясь подробно на сравнительных достоинствах и недостатках
, последовательных и парал-
лельных корректирующих
+
-
устройств, отметим лишь,
что последним отдают пред-
почтение, когда: 1) необхо-
димо понизить чувствитель-
ность системы к изменению
параметров объекта и 2) важ-
но предупредить насыщение
управляющих элементов вы-
сокочастотными помехами, содержащимися в управляющем сиг-
нале.
На рис. 3-3 показана типовая структурная схема системы с парал-
лельным корректирующим устройством WKn, которое чаще всего
выполняется в виде тахометрической обратной связи (WKn = krs), либо
Рис. 3-3.
помехами,
1 sfs^A^+AzS+Aj) (sH<OnS+Un) (s2+aiS+a2)
К~КуКк к0
Рис. 3-4.
тахометрической обратной связи в соединении с #С-контуром, назы-
ваемой гибкой обратной связью. Другие виды параллельных корректи-
рующих устройств — обратная связь по току, по напряжению от испол-
нительного двигателя или обратная связь, охватывающая усилитель, —
здесь не рассматриваются из-за их аналогичного характера.
Расчет параметров тахометрической обратной связи. Из рис. 3-4,
на котором изображены согласованные структурный и канонический
графы системы 4-го порядка с тахометрической обратной связью, видно
что возможности коррекции простой тахометрической обратной связью
весьма ограничены. В общем случае, мы располагаем по сути лишь
двумя произвольно варьируемыми параметрами Ку — усилением пред-
варительного усилителя и усилением Кк> так как величина тахометри-
ческой обратной связи кт обычно конструктивно ограничена. Поэтому
при данном типе коррекции мы можем управлять только двумя пара-
метрами замкнутой системы. В качестве таковых выгодно принимать 5
и (оп доминирующей пары полюсов. /Ложно задаться и^другой парой
параметров замкнутой системы, например | и Dt.
Выведем формулы для варьируемых параметров /Ск, Ку или kT
и неуправляемых параметров замкнутой системы аъ а2 и Dv Прини-
маем заданными доминирующую пару полюсов замкнутой системы
и фиксированными все параметры объекта.
56
По рис. 3-4 и формуле (1-8) составляем равенство главных опре-
делителей структурного и канонического графов системы:
S4 + А iS3 + Ла52 + (л3 + КоКкКч) s + КуКоКк =
= s4 + (2Е©Я + fll) s3 + (со2 + 2lanax + oj) s2 +
Выпишем из равенства систему коэффициентных уравнений:
А1 = 21<ьп + ах, (3-36)
Л2 = ©2 + 2£©йа1 + а2, (3-37)
+ /С0КК/СТ - ^со2 + 2^соЛ, (3-38)
КуК0Кк = (*1а2. (3-39)
Из системы (3-36) по (3-39) определяем:
а1 = Л1-2|со„, (3-40)
о2 = Л2-©»-2Еа>яв1, (3-41)
= ("Ч + 2|со„а2 - Л3), (3-42)
*у~ -.2- ■ » "I . • (3-43)
При Ку = 1
+ 21(о„а2
-Л3
Кт = - — _. (3.44)
Коэффициент ошибки по скорости выражаем через параметры
объекта и параметры замкнутой системы:
d = кук°к« = ^ (3-45)
1 А3 + /С0/Ск«т со2а1 + 21(дпа2 '
В табл. 3-1 сведены расчетные формулы для параметров обратной
тахометрической связи и незаданных параметров замкнутой системы
д-го порядка.
Можно рекомендовать следующий порядок коррекции с помощью
простой тахометрической обратной связи:
1) вычислить коэффициенты alt аъ . . ., ап-3 ап^\
2) составить по коэффициентам щ полином вида:
s"-2 + ^я-з + ^«-4 + ... + an^s + а„_2
и проверить его устойчивость по любому критерию (Рауса, Гурвица);
3) при удовлетворении условию устойчивости найти все корни
полинома;
57
58
к
сз
о)
о
g
CU
3
I
3
ш>
+
I
С
3
+
1
1
см
1
1
Т
1
«
3
1
i -
+
1
+ 1
со
1
т
1
е
1
-зс
ч
з
о,
о
к
3
ил
+
3
0JJ)
+
3
3
+
с
3
+
3
з
+
3
3
3
ш>
+
«Г
-з*
3
CJLO
+
в"
"3е
см С
з
I
с
1
3
ш>
в
3
Н
о
+
Ш)
csj С
3
+
со С
3
"зс
3
+
~3*
3
алл
см
+
о) С
3
§41
59
4) если расположение найденных полюсов замкнутой системы
удовлетворяет заданным показателям качества, вычислить по фор-
мулам табл. 3-1 коэффициент Dx и параметры коррекции Кк Ку или kT.
Расчет параметров тахометрической обратной связи с R С-кон туром.
Включение /?С-контура в тахометрическую обратную связь расширяет
ее возможности как корректирующего устройства. В качестве примера
рассмотрим систему 4-го порядка, стабилизированную гибкой обрат-
ной связью. На рис. 3-6 представлены согласованные структурный
неканонический графы системы. В данной структуре можно независимо
варьировать три параметра: Кк, Ку (или кт) и р. Поэтому кроме доми-
нирующей пары полюсов можно дополнительно задаться коэффициен-
том Dv
Составим равенство главных определителей структурного и кано-
нического графов:
s4 + (Л± + р) s3 + (AlP + Л2 + ктКкКо) s2 + (Л2р + КуКоКк) s +
+ KyK0KKP = s4 + (2£со„ + ах) s3 + (со2 + 2^ + а2) s2 +
(sn~2+afsn'3^an.2s+an.2)
1 1 s(s2+AiS+A2) (s2+2&ns + u)2) (s2+a1s+a2)
Рис. 3-6.
Из равенства выпишем систему коэффициентных уравнений:
Л1 + р = 2£юя + а1> I
Агр + А2 + КкК0кт = со2 + 2£со,Л + а2, {
А2р + КуКкК0 = со2ах + 2|соЛа2, <
КуКкК0р = со2а2. I
(3-46)
(3-47)
(348)
(3-49)
60
Присоединяем к ней дополнительно уравнение, связывающее Dx с па-
раметрами замкнутого и разомкнутого контура,
DrA2p = а?па2. (3-50)
Подставляя в (3-47) и (3-48) значение р из (3-46) и исключая из
них КуКкКо — DXA2, получим систему, линейную относительно
неизвестных ах и а2:
(Л2 - 0)2) ах - 2|со„а2 = -А2 (D1 + 2|со„ - , (3-51)
-Л20Л + ®1а2 = Ар1 (2|(о„ - Лх). (3-52)
Решение этой системы после упрощения получает вид:
п (L—M)
где
(ЛГ —О) '
L = (2!o)„)2Di+A<4>
Л* = + 2|со„.о)2 + Л1012|»„,
(3-54)
i й>1
(3-55)
Р - Я = ^со2 - (Л2Ох + 2£со„. со2).
Полюс р контура RC вычисляется из уравнения (3-46).
Если положение незаданных полюсов замкнутой системы пг и зт2,
определяемых из квадратного уравнения:
s2 + axs + а2 = О,
и нуля р совместно с доминирующей парой полюсов удовлетворяет
заданным показателям качества, тогда вычисляют значения остальных
параметров корректирующего устройства: Кк из (3-47) и Ку из (3-48)
или (3-49), если задано /ст, или Кк из (3-48) и кт из (3-47), если задано
Ку= 1.
Условие физической реализации решения — одинаковые знаки
разностей (L — М), (Р — R), (N — О) и (N — О) =f= 0.
Предельное значение Dx при (N — О) ^ О
Условием качественного решения является достаточное удаление
влево от доминирующих полюсов: а) остальных полюсов замкнутой
системы, определяемых из уравнения s2 + axs + а2; б) нуля замкну-
той системы £ = р или образование им диполя.
Определим дополнительно чувствительность полюсов замкнутой
системы, стабилизированной гибкой обратной связью* к изменению
61
параметров объекта. Предположим, что изменяющимся параметром
объекта является усиление /С0, и оно изменяется на Л/Со- Вычислим
соответствующее смещение полюсов (или коэффициентов характери-
стического полинома) замкнутой системы.
Перепишем систему уравнений (3-46) по (3-49) в приращениях,
учитывая, что в левых частях уравнений изменяется только одна пере-
менная /Со, а в правых — все. Члены второго и высшего порядков
малости отбрасываем. Получим:
" 1 0 1 0 "
ах 2(дп 21(дп 1
а2 2(0^ ©2 2|оэЛ
О 2<опа2 0 ®1
А2|о)я
Д©Л
A#i
Аа2
О
Кк&т А/Со
Дк^СуА/Со
KkKvP А/Со
(3-57)
Рис. 3-7.
Для решения системы (3-57) построим граф (рис 3-7). С помощью
формулы (1-8) находим неизвестные A2£cort, Д©^, Аах и Аа2:
A2£©„ = -Да, = ё * ° , (3'58)
А©„ = \—±- , (3-59)
А
Аа2 = "Y"'° , (3-60)
где
ЛД2|о)я ДК0 = 2«>Л К - а22%®п) + Ку (а2 - ©2) -
—/Сур (ах — 2£©я)],
aag>„ лк0 = К к М К - а2) + Ky^l (а1 ~ ^п) ~
- V («1 - 2gcon) + (со2 - а2)]},
ЛДа2 А/<0 = -2соЛ {*А (®п - а2) + /^у«2 (ах - 2£©„) +
+ V [*2 ~ «1 («1 - 2gcott) - со2 ] }
А = 2©л [ю* - < (2|©Л + 2я2 - а2) - 2|©„а2 (аг - 2£©я) + а2].
62
Сравнение с расчетом чувствительности, выполненным в § 2-8
для системы того же порядка (п = 4), но с последовательным коррек-
тирующим устройством, показывает большое сходство формул (2-33)—
(2-36) и (3-58)—(3-60). Главные определители тождественно равны,
адъюнкты отличаются только в меру различия комплекса входных
величин. Это позволяет для каждого порядка системы выводить общие
расчетные формулы для определения чувствительности ее относительно
любого изменяющегося или группы изменяющихся параметров объекта.
Пример 3-3. Вычислить параметры параллельного корректи-
рующего устройства тахометрической обратной связи с ^С-контуром,
обеспечивающего заданные показатели качества [40]: а) коэффициент
затухания £ = 0,45; б) степень устойчивости gcort = 1,4 сек"1 и в) коэф-
фициент ошибки по скорости £>! == 30 сек'1. Передаточная функция
объекта:
w = Ю Ю
° s (s + 1) (s + 5) s (s2 + 6s + 5) '
Величина обратной тахометрической связи кт = 0,2 в-сек/рад.
Решение 1. Выбираем доминирующую пару комплексных полю-
сов, удовлетворяющих первым двум требованиям (s2 + 2,8s + 9,8).
2. Проверяем выполнение условий физической реализации ре-
шения:
L = 2,82-30 +6-9,8 = 292,8,
М = 30-9,8 + 2,8.9,8 + 6-30-2,8
(L — М) = —533,7 < 0,
(P — R) =6.9,8 — 5.30 — 2,8.9,8 =
(N — О) ~ 9,8 — (2,8-30 + 9,82/5) =
Условие (3-55) удовлетворяется.
3. Вычисляем из уравнений (3-53) и (3-54)
-533,7 к _
30 (-118,5)
-93,4 =38-
Незаданные полюсы замкнутой системы определяем из квадратного
уравнения s2 + 5,8s + 38 = 0; ях = —2,9 — /5,4; я2 = —2,9 + /5,4.
Полюс р #С-контура из (3-46): р = 5,8 + 2,8 — 6 = 2,6.
Условие Кк из (3-47) Кк== (9,6 + 2,8-5,8 + 38 — 6-2,6)/0,2-10 =
= 21,7.
Усиление Ку из (3-79) Ку = 30-5/21,7-10 = 0,69.
Для вычисления чувствительности полюсов замкнутой системы
предполагаем, что предельные изменения усиления объекта К0 со-
ставляют ±50%, т. е. А/Со = ±5.
= 826,5,
—118,5 < 0,
—93,4 < 0.
63
Д2|сол = — Aat = ±
Вычисляем по формулам (3-58)—(3-60):
21,7-5 {0,2-9,8 (9,8 — 3,8) + 0,69-9,8 (5,8—2,8) —
_ —0,69-2,6-[2,8 (5,8 — 2,8) + (9,8 — 38)]} _
Асол- ± б,26 [9,82 —9,8 (2,8-5,8 + 2-38 —5,82) — ~
— 2,8-38 (5,8 — 2,8)+ 382]
= ±0,013,
21,7-5 [0,2 (5,8-9,8—38-2,8) +
+ 0,69 (38 — 9,8) — 0,69-2,6- (5,8 — 2,8)] _
9,82 —9,8 (2,8-5,8 + 2-38 —5,82) — "
— 2,8-38 (5,8 —2,8) + 382
= ±0,77,
21,7-5 {0,2-38 (9,8 — 38) + 0,69-38 (5,8— 2,8) +
а , +0,69-2,6 [38-5,8 (5,8-2,8)-9,8]} _
ла2 _ ± 651 " ± 1У*
Коэффициент затухания £ доминирующей пары при предельном
увеличении Ко равен 0,6, при предельном уменьшении К0 падает
до 0,3. Миграция недоминирующих полюсов имеет противоположное
направление. По предельным конфигурациям полюсов замкнутой
системы могут быть построены мажоранта и миноранта переходного
процесса системы.
Если полученные области миграции полюсов замкнутой системы
при заданных изменениях параметров объекта не удовлетворяют
требуемым показателям качества системы, необходимо перейти к сле-
дующему по сложности параллельному корректирующему устройству,
kts (s + z)
например: —-—
s + p
Если на перемещение доминирующих полюсов заведомо наклады-
ваются очень жесткие ограничения, необходимо переходить к синтезу
системы с двумя структурными степенями свободы. В этом случае
могут быть независимо удовлетворены требования передаточной функ-
ции системы и ее нечувствительности к изменениям параметров объекта.
3-5. Сравнительная оценка частотного
и топологического методов синтеза
В синтезе САУ с одной структурной степенью свободы наибольшее
распространение получил логарифмический частотный метод. Пред-
ставляет интерес для этого класса систем сравнительная оценка до-
стоинств и ограничений частотного и топологического методов. Рас-
смотрим кратко, как решаются в них две основные задачи синтеза:
1) задача аппроксимации передаточной функции синтезируемой замк-
нутой системы по заданным показателям качества системы и 2) задача
определения структуры и численных значений параметров корректи-
рующего устройства, обеспечивающего реализацию аппроксимиру-
ющей функции.
Задача аппроксимации. 1. В частотном методе задача аппрокси-
мации передаточной функции замкнутой системы, как таковая, не
64
решается. Она заменяется задачей аппроксимации передаточной функ-
ции разомкнутой системы (желаемой ЛАХ), строющейся на основе
связи между устойчивостью и точностью системы с одной стороны, ее
амплитудно- и фазо-частотными характеристиками в низко- и высоко-
частотной областях и частоте среза — с другой.
2. Практика аппроксимации в частотном методе ограничивается
рекомендацией нескольких типовых форм желаемых ЛАХ, содержащих
от трех до пяти полюсов и одного или двух нулей. Причем, вводится
в рассмотрение лишь три сопрягающие частоты, что при количестве
полюсов более 3-х приводит обязательно к кратным полюсам и нулям.
Это накладывает ограничение на структуру синтезируемой системы.
Например, исключаются из рассмотрения «чистые» астатические пере-
даточные функции с астатизмом первого и высших порядков.
3. Пункты 1 и 2 создают трудность синтеза систем с определенной
конфигурацией полюсов и нулей замкнутой системы, когда это необ-
ходимо (см. § 4-4).
4. Топологический метод не располагает такими общими крите-
риями аппроксимации желаемых динамических качеств синтезируемой
системы, как частотный. В последнем аппроксимация существенно
облегчается наличием разработанных обобщенных номограмм качества
А. В. Фатеева [43] и диаграмм показателей качества Честната и
Майера [37].
Аппроксимация в топологическом методе в настоящее время бази-
руется на известных «стандартных» формах, на исследованных типовых
конфигурациях п и я, на доминантном типе передаточных функций.
Если первые два случая аппроксимации удовлетворяют техническим
требованиям задания, задача синтеза топологическим методом ре-
шается наиболее прямо и наиболее точно. Но эти случаи не универ-
сальны и могут приводить иногда к излишне сложным корректирующим
устройствам. Аппроксимация с помощью доминирующей конфигура-
ции пин более «экономна», но недостаточно разработана. Поэтому
при выборе доминантного типа передаточной функции приходится для
каждой конкретной неисследованной структуры системы выполнять
предварительный анализ взаимосвязей между пин объекта, коррек-
тирующего устройства и замкнутой системы.
5. В топологическом методе выбор аппроксимирующей передаточ-
ной функции производится одновременно с выбором типа и структуры
корректирующего устройства и с учетом пин фиксированной части
системы, что позволяет корректней выполнять задачу аппроксимации.
В частотном методе выбор желаемой ЛАХ предшествует выбору типа и
структуры корректирующего устройства и выполняется независимо
от него, что может приводить к несовместимым требованиям.
Задача определения параметров корректирующего устройства.
1. В логарифмическом частотном методе не соблюдается принцип ко-
личественного соотношения между параметрами корректирующего
устройства и желаемой аппроксимирующей функции (уравнение 2-23
и др.). Поэтому, если выбранная структура корректирующего устрой-
ства содержит независимо варьируемых параметров меньше, чем фик-
сированных полюсов и нулей в желаемой ЛАХ, то последнюю точно
реализовать [невозможно.
2. В частотном методе определение численных значений параметров
корректирующего устройства не связано тесно с получением аппрок-
симирующей функции (желаемой ЛАХ), и часто некоторые из пара-
метров корректирующего устройства используются неэффективно.
5 Т. М. Райцын 65
3. В топологическом методе представляется возможным более
гибко и полно распорядиться параметрами корректирующего устрой-
ства.
Общие заключения. 1. Для класса систем с одной структурной
степенью свободы а) задача аппроксимации в частотном методе ре-
шается более просто и более универсально, но менее точно, чем в топо-
логическом; б) задача определения и использования варьируемых
параметров корректирующего устройства в топологическом методе
решается более полно и более эффективно, чем в частотном.
2. Сильной стороной топологического метода является его анали-
тичность. Она позволяет: а) глубже заглянуть в структурные свойства
синтезируемой системы, находить оптимальные в структурном отно-
шении решения; б) более точно определять значения параметров коррек-
тирующего устройства; в) одновременно с определением параметров
корректирующего устройства находить незаданные полюсы и нули
замкнутой системы и г) машинизировать решение уравнений синтеза
за счет использования аналоговых и цифровых вычислительных машин.
3. Наиболее полно преимущества топологического метода перед
частотным проявляются при синтезе САУ со многими структурными сте-
пенями свободы (миогосвязных, инвариантных и др. сложных структур).
ГЛАВА ЧЕТВЕРТАЯ
СИНТЕЗ САУ С ДВУМЯ И БОЛЕЕ СТРУКТУРНЫМИ
СТЕПЕНЯМИ СВОБОДЫ
4-1. Синтез по двум независимым
системным функциям
К этому классу систем могут относиться системы с одной или
несколькими выходными величинами. Системными функциями могут
быть передаточные функции относительно разных входных воздействий,
функции чувствительности или любые другие функции (см. § 2-3).
w„.
wH2
Рис. 4-1.
В настоящем параграфе рассматривается синтез САУ с двумя
структурными степенями свободы, имеющих одну выходную величину
и один вход в объект для управляющего воздействия. Синтез таких
систем может выполняться по двум желаемым передаточным функциям —
относительно управляющего воздействия Wyn главного возмущения Wp,
либо по одной желаемой передаточной функции Wy и функции чув-
ствительности Swy.
w о
Задача синтеза систем с двумя структурными степенями свободы
Состоит в выборе такого распределения полюсов и нулей передаточной
функции разомкнутого контура, при котором доминирующие полюсы
замкнутого контура незначительно мигрируют при различных видах
возмущения, а остальные полюсы не выходят за пределы ограниченной
удаленной влево части s-плоекости. Последнее свойство замкнутой
5*
67
системы всегда связано с применением большого усиления в разомкну-
том контуре.
Порядок топологического синтеза систем с двумя структурными
степенями свободы остается таким же, как и для систем с одной степенью
свободы. Отличает их лишь то, что при синтезе систем с двумя струк-
турными степенями свободы, когда заданы две разнородные системные
функции (например, передаточная "функция и функция чувствитель-
ности), строят два отдельных канонических графа. Правила согласо-
вания структурного графа с каноническими^ указаны в § 2-5.
Для синтеза систем с двумя структурными степенями свободы
обычно используются два отдельных, независимо управляемых коррек-
тирующих устройства: одно последовательное и одно параллельное
в цепи обратной связи, охватывающей объект, часть объекта и регуля-
тор либо всю прямую цепь передачи. Применяются и комбинации
только параллельных корректирующих устройств. Для иллюстрации
приемов топологического синтеза систем с двумя структурными сте-
пенями свободы ограничимся рассмотрением только первых трех видов
включения корректирующих устройств (см. рис. 4-1, а, б и в).
4-2. Синтез по двум желаемым передаточным
функциям
Всякую линеаризованную замкнутую динамическую систему
можно интерпретировать как связанный линейный граф. Поэтому все
передаточные функции одной системы должны, как правило, иметь оди-
наковый знаменатель, равный главному определителю графа. Задача
синтеза системы по двум желаемым передаточным функциям сводится
к формированию их общего знаменателя, удовлетворяющего желае-
мому характеру собственного движения системы, и разных числителей,
соответственно требованиям воспроизводства управляющего воздей-
ствия и подавления возмущения. Порядок синтеза такой системы рас-
смотрим на частном примере.
Пример 4-1. [20]. Задана передаточная функция объекта отно-
сительно управляющего воздействия:
У» 1 >975
s (s2 -J- 0,245s -j- 6,375) '
то же, относительно возмущения:
w 0,465.10-3 (s + 0,165)
02 ~~ s(s2 + 0,245s + 6,375) *
Определить структуру и параметры корректирующих устройств,
обеспечивающих следующие показатели качества относительно управ-
ляющего воздействия: а) полоса пропускания со0<1,5 сек'1; б) пере-
регулирование оу << 5% и в) коэффициент ошибки |по скорости Dx^>
> 0,8. То же, относительно возмущения: г) статическое отклонение
при единичном ступенчатом воздействии 8 < 1/3000; д) максимальная
постоянная времени та же, что и для управляющего воздействия;
е) перерегулирование ов < 25%.
Решение. 1. Принимаем структуру синтезируемой системы, как
показано на рис. 4-1, а. (Порядок расчета не изменится и для другой
схемы, рис. 4-1, б.) Последовательное корректирующее устройство
68
ищем в форме однозвенной /?С-цепи, а параллельное — в форме тахо-
метрической обратной связи с /?С-контуром (рис. 4-2). Выбранная
структура корректирующих устройств предоставляет 5 варьируемых
параметров: plt р2, гъ z2 и /сх. Усиление Кк определяется из условия
заданного астатизма первого порядка и не является независимо варьи-
руемым параметром.
При некоторых ограничениях, накладываемых на полюсы и нули
корректирующего устройства, передаточную функцию замкнутой
системы относительно управляющего воздействия можно реализовать
в виде:
Рис. 4-2.
и относительно возмущения в виде:
Wf = -tt, Кв {S + t • (4*2)
(s2+2£ov+c4) (s + я)
Достаточны следующие ограничения: 1) принять р± — р2, чтобы
не появился нуль в Wy\ 2) положить zx = 0,165, чтобы исключить
чрезмерное перерегулирование функции Wp от нуля W02.
Наложенные ограничения снижают число произвольно варьируе-
мых параметров до трех: ръ г2 и кт. Ими целесообразно распорядиться
для выбора всех полюсов функций Wy и Wf, так как при этом пред-
ставляется возможность ограничить нуль в функции Wp.
Если выбранная структура корректирующих устройств не удовле-
творит требованию, касающемуся статической точности системы или
перерегулирования относительно возмущения, ее необходимо будет
усложнить.
69
2. Выбираем доминирующую пару полюсов Wy и Wp из условия
удовлетворения пп. а, б, в и д технического задания. Из рис. П-1, б
приложения видно, что этому удовлетворяют параметры доминирую-
щей пары: £ = 0,7 и (дп — 1,41, т. е. (s2 + 2s + 2). При этом полу-
чаем со0 = 1,4 < 1,5; ау = 5% и D1= 1 > 0,8. Третий полюс при-
нимаем произвольно, я3 = 10£cort = 10, как достаточно удаленный
от доминирующей пары. Его влияние на переходный процесс будет
пренебрежимо мало.
3. Строим структурный граф системы и согласованный с ним кано-
нический для функций Wy и Wp (рис. 4-2, б). Составляем выражения
передаточных функций Wy и Wp по виду структурного и канонического
графа отдельно. Из структурного графа после сокращения на общий
множитель (s + 0,165) (s + р±) в числителе и знаменателе получаем:
w = 1,975/Ск (s+ 0Л65) в
у Y s(s + Pi) (s2 + 0,245s + 6,375) + '
+ 1,975/Ск (s + 0,165) + 1,975/cTs (s + г2)
nz _ x = 0,465» 10-3 (s + 0> 165) (s + pi)
F F s (s + Pl) (s2 + 0,245s + 6,375) + ' { '
+ 1,975/Ck (s + 0,165) + l,975/cTs (s + z2)
Из канонического графа
ту/ X 20 -v
у~ Y ~~ s3 + 12s2 + 22s + 20 ; { }
lFr_ X _ 0,465-Ю-з (s + Pl)
и^- F - s3 + 12s2 + 22s + 20 ' 1 J
Равенство выражений (4-3) и (4-5) требует, чтобы
s (s + (s2 + 0,245s + 6,375) + 1,975/Ск (s + 0,165) +
+ 1,975/cTs (s + г2) = (s + 0,165) (s3 + 12s2 + 22s + 20)
или
s4 + (Pi + 0,245) s3 + (6,375 + 0,245Pl + l,975/cT) s2 +
+ (6,375рх + 1,975/стг2 + 1,975/Ск) s + 1,975-0,165/CK =
== s4 + 12,165s3 + 23,95s2 + 23,3s + 3,3. (4-7)
4. Выпишем систему коэффициентов из уравнения (4-7):
рх + 0,245 = 12,165, (4-8)
6,375 + 0,245р1 + 1,975/ст = 23,95, (4-9)
6,375р! + 1,975/стг2 + 1,975/Ск = 23,3, (4-10)
1,975-0,165/Ск = 3,3. (4-П)
Из этих уравнений находим рх = 11,920; кт = 7,4; /Ск = 10,01;
г2 - -4,95.
Требование п. г) технического задания удовлетворяется, так как
Х_
F
0,465-11,9 1 _л
s=o~ 20.10s ~ 3650 < 3000
70
Удовлетворяются также требования пп. д) и ё) (см. рис. П-2, б
приложения). Получен такой же результат, как в [20], но более пря-
мым и коротким путем.
4-3. Синтез САУ по желаемой передаточной
функции и функции чувствительности
Для рассматриваемого класса систем с двумя структурными сте-
пенями свободы функция чувствительности системы относительно изме-
нения параметров объекта определяется выражением:
* = ТТ*Г' (4"12)
где Wp — передаточная функция разомкнутого контура системы.
Чем больше коэффициент усиления разомкнутого контура, тем
меньше чувствительность замкнутой системы к изменениям параметров
объекта и возмущениям в цепи прямой передачи.
В системах с одной структурной степенью свободы невозможно
неограниченно увеличивать усиление (по крайней мере для объектов,
содержащих более двух полюсов), так как это приводит к неустой-
чивости. В системах с двумя структурными степенями свободы можно
значительно повысить, а в некоторых случаях неограниченно увели-
чить усиление разомкнутого контура.
М. В. Мееров [38] в достаточно общем виде исследовал условия
физической реализации неограниченно большого усиления в замкнутой
динамической системе. Они сводятся к следующим требованиям, вы-
раженным здесь в терминах метода корневого годографа [39]:
1) все начальные и конечные точки уравнения свободных движений
системы должны располагаться в левой полуплоскости;
2) избыток числа начальных точек (т. е. корней полинома B0sq +
+ B±sq~l + • • •) над конечными (корней полинома A0sr + 1 +
+ • • •) не должен превышать двух:
N = q— г ^2; (4-13)
3) отношения между старшими коэффициентами полинома началь-
ных точек (В0, Вг) и конечных точек (Л0, Аг) должны удовлетворять
неравенствам:
-^>0иж-Ь>°- (4"14)
Доказательство, данное автором, можно интерпретировать нагляд-
ными топологическими средствами. На рис. 4-3 изображен структурный
граф и эквивалентный ему по X/Y канонический граф для системы
с двумя структурными степенями свободы, показанной на рис. 4-1, б.
Здесь = WK1W0l, ~= W02 и 4г~= ^к2 (приняты обозна-
чения автора). Передаточная функция Wy обоих графов равна:
w; KiK<zF2 1 _
*У D}D2F2 + K1 (F1D2 + K2F2)' i4"1D)
71
Пусть л, v, п1и п2 — степени полиномов Dlf D2, Fx и F2, соответ-
ственно. Тогда степень полинома (— 1 + /сЛ Л/" = (/г +
+ v + п2) — (пг + v) = п + п2 — пх (либо /V = п + v, если л2 >
> лх + v).
Для устойчивости (разомкнутой) системы, представленной канони-
ческим графом, необходимо и достаточно, чтобы каждый из сомножи-
телей характеристического уравнения удовлетворял критерию' устой-
чивости .
Из условия устойчивости уравнения FXD2-\- K2F2 — О опреде-
ляется наибольшее допустимое значение К2.
1
Рис. 4-3.
Из условия устойчивости уравнения ^1^2^2 + К± = 0, со-
гги2-\- K2F2
держащего неограниченно большой коэффициент усиления, следует,
что оно не может быть выше второй степени и его старшие коэффи-
циенты а0 и аг должны быть положительными.*
Если обозначить полином начальных точек D1D2F2 = B0pq +
+ B1pq~~l + • • • и полином конечных точек FXD2 + K2F2 — A0pr +
+ А1рГ~1+ то flo = -|j- и аг= Отсюда
следует и удовлетворение неравенств (4-13) и (4-14):
Случай N = я + v ^ 2 представляет меньший интерес, так как
приложим к системам не выше второго порядка.
Во многих случаях достаточно малую чувствительность системы
(и, следовательно, высокую точность) можно получить без удовлетво-
рения условия неограниченного увеличения усиления (т. е. условия
абсолютной устойчивости), и перечисленные выше ограничения могут
быть сняты.
* Полином ( ^i^2^2 _|_ ^ \ кроме целой часхи может со дер-
Х/Ч^г + А2Г2 /
жать дробный остаток (as + $IFXD2 + K2F2). Это не изменяет усло-
вия устойчивости характеристического уравнения (F1D2 + K2F2) х
X (a0s2 -\- axs+ Ki) + as + P = 0 ввиду малости коэффициентов a и p
в сравнении с Кх.
72
Один из часто используемых приемов состоит в размещении ком-
пенсирующих нулей корректирующего устройства в Wp вблизи доми-
нирующих полюсов замкнутой системы. Полюсы, соответствующие
компенсирующим нулям, должны размещаться далеко влево в s-пло-
скости, чтобы не оказывать влияние на переходный процесс.
Пример 4-2 [38]. Задана передаточная функция объекта,
состоящая из 4-х последовательных апериодических звеньев:
w0 =
4
П (1 + Tts)
1
2-106
'(s + 2) (s+ 10)2(s+ 100)'
где КгК2 = 10, /С3К4 = Ь Ti = т2 = ОД сек, Т3 = 0,5 сек, Г4 =
= 0,01 сек.
Заданы показатели качества системы: а) максимальное значение
позиционной установившейся ошибки относительно управляющего
воздействия £ = 0,0012; б) допустимое перерегулирование а < 6%
и в) время регулирования tp = 0,5 сек.
Так как отсутствуют специальные указания относительно требуе-
мой нечувствительности системы, кроме задания максимальной уста-
новившейся ошибки Е, синтез можем выполнять по одной желаемой
передаточной функции, обеспечивая лишь установившееся значение
функции нечувствительности | Sw? L 0 == Е (s) js=0 = 0,0012.
Следует иметь в виду, что реализовать последнее требование в си-
стеме с одной степенью свободы невозможно, так как при достаточно
большом усилении система оказывается неустойчивой. Предельное
усиление, допустимое при замыкании нескорректированной однокон-
турной системы жесткой обратной связью, составляет
М*
Км же — ~дГ" ~
где
м = (р1 + Р2) (рг + Pa) \p\pl + (pi + р2) (рхр2 + рзра) X
X (рг + Ра) + pip2 (рз + ра? + (Pi + Р2У ръра + р\р\),
N = (Рг + Р, + Рз + Р*)2 Р1Р2Р3Р*,
Р1==2, Р2 = Р3 = 10, Р4=100.
Заданная же точность системы требует общего усиления
1 f
Кп = = 830.
* Условие границы устойчивости по Гурвицу, выраженное через
полюсы разомкнутого контура.
73
Синтез системы с такой высокой точностью может быть выполнен
по одной из структурных схем (рис. 4-1). Остановимся на схеме рис.4-1, б.
Принимаем корректирующее устройство в виде однозвенкой пассивной
RC-цепи с передаточной функцией
s + p
. В этом случае будем распо-
лагать двумя произвольно варьируемыми параметрами р и Ку (см.
рис. 4-4, а). Произведение КуКь не является независимой величиной:
КуКь —
Ки
К1К2К3К4
В расчет введем запас точности Кп = 1000.
Располагая двумя независимо варьируемыми параметрами, можем
задаться лишь доминирующей парой полюсов скорректированной
«у
к,
К2
К3
К,
Ks
1*T,S
1*r3s
1+ns
(s>2)(s+100) (s2+9,6s+36) s^s^s*^
Рис. 4-4.
замкнутой системы; остальные полюсы ее остаются неуправляемыми.
Но выбранная структура системы обеспечивает расположение всех
полюсов в левой полуплоскости, и даже более определенно: левее или
справа вблизи асимптоты, перпендикулярной к действительной оси.
Для выбранной структуры удовлетворяются условия (4-13) и (4-14).
Решение. 1. Выбираем параметры доминирующей пары полюсов:
коэффициент затухания £ = 0,8 и собственную частоту колебаний
со/г = 6 сек"1. Если поведение системы определялось бы только доми-
нирующей парой полюсов, то согласно рис. П-1, а и б приложения
имеем перерегулирование а < 2% и время регулирования t = 0,68 сек.
Вводимый корректирующим устройством в передаточную функцию Wy
нуль будет повышать процент перерегулирования и полосу пропуска-
ния со0 в зависимости от отношения значения нуля к вещественной
части доминирующего полюса (см. рис. П-2, бив приложения). Если
это отношение будет больше единицы, то перерегулирование возрастает
до о < 10%, а время регулирования уменьшится на 15%, и задание
будет приближенно удовлетворено.
При выбранных £ и о)Л полюсы доминирующей пары яь 2 =
= —4,8 ± /3,6; трехчлен доминирующей пары — (s2 + 9,6s + 36).
74
2. Строим структурный граф системы и согласованный с ним ка-
нонический граф Wy (рис. 4-4, б). Напишем выражение для главного
определителя структурного и канонического графов отдельно:
Лстр = (s + 10)2 (s + 2) (s + 100) (s + p)+ 1000/CyS (s + 2) (s + 100)+
+ 2- 105A"y/C6 (s + p) = s5 + (122 + p) s4 + (2340 + 122p +1000tfy) s3+
+ (14 200 + 2340p + 1,02.105/Cy) s2 +
+ [2-104 + 14 200p + 2- 105iCy (1 + Къ)] s + 2- 104p (1 + KyKbp)\
AKaH = (s2 + 9,6s + 36) (s3 + ^s2 + a2s + a,) =
- s5 + (9,6 + ax) s4 + (36 + 9,6a! + a2) s3 + (36% + 9,6a2 + a3) s2 +
+ (36a2 + 9,6a3) s + 36a3.
Из равенства коэффициентов полиномов Астр и Акан составляем
систему совместных уравнений:
122 + р =9,6 + %, (4-16)
2340 + 122/? + 1000/Су = 36 + 9,6% + аа, (4-17)
14 200 + 2340/? + 102 000/Су = 36% + 9,6% + а3, (4-18)
20 000 + 14 200р + 2-10%, (1 + Къ) = 36% + 9,6%, (4-19)
2- 104р (1 + ЮКуКъ) = 36%. (4-20)
В системе (4-16)—(4-20) содержатся 6 неизвестных, поэтому до-
бавляем шестое уравнение
Кл = 1000 = ЮКуКь. (4-21)
Исключая неизвестные %, % и Кь* получаем систему:
112,4р — % + 1000/Су = —1204,
5,53- 105р + 9,6% — 1,02. \05КУ = Ш 100, I (4_21а)
—5,3- 106р — 36% + 2- Ю5Ку = —20-106,
которую решаем с помощью графа (рис. 4-5), отбрасываем числа* имею-
щие порядок на две единицы ниже числа старшего порядка, и получаем
_ 20-106 (1,02-105 — 9,6-103)
-2-105-5,53-105 — 9,6-5,3.106-103 +
+ 5,3 • 106 • 1,02 • 105 + 5,5 • 105 • 36 • 103
= 4,6,
„ _ 20-Ю6 (112,4-9,6 + 5,53-108) _ 07-
Ay — 4-1011 ~~
Из уравнения (4-16) % = 117, из уравнения (4-21а) а2 = 29 200,
из уравнения (4-20) % = 2,5 • 10е, из уравнения (4-21) Къ = 3,65.
Незаданные полюсы замкнутой системы определяем из кубиче-
ского уравнения
s3 + 117s2 + 29 200s + 2,5-106 = 0,
п3 = — 95,2; я4,5 == —10,8 ±/160.
Полученные полюсы будут оказывать малое влияние на поведение
системы. Полученное значение нуля р = 4,6 будет создавать перере-
гулирование несколько больше 6%. Если это недопустимо, необходимо
у доминирующей пары полюсов принять еще более высокий коэффи-
циент затухания, например | = 0,85 или 0,9.
75
Как видно из данного примера, топологический синтез структур
с неограниченно большим коэффициентом усиления не требует раздель-
ного последовательного расчета устойчивости и параметров вырожден-
ного и полного характеристического уравнения системы. Расчет вы-
полняется прямо, в одной стадии по выбранной желаемой передаточной
7
9,6 .^0.
1
о—«
1204
-5,3-10
Рис. 4-5.
функции (или ее доминирующим полюсам). Конечно, учитываются
при этом известные результаты относительно синтезируемой струк-
туры [38].
Пример 4-3. Задан объект с передаточной функцией W0 =
= —, ° ^ , гДе может изменяться от 8 до 20, Задано желаемое
s (s + 2)
расположение доминирующей пары комплексных полюсов —4 ± /4.
а)
Y
1 (s+Pf)(s+P2)
s(s+2)
(s*p3)(s*p4)
(s2*8s*32) (s3+a1s*+als+a3) e) 1 s(s+p,)...(s*p*)
Рис. 4-6.
Определить структуру и параметры корректирующих устройств,
которые при изменении Ко от 8 до 20 ограничивали бы перемещение
доминирующих полюсов в области круга г = ±1 с центром в —4 ±
± /4. [25].
Данную задачу можно решить, если обратиться к одной из струк-
турных схем (рис. 4-1), допускающих формирование двух независимых
системных функций. Остановимся на схеме рис. 4-1, в.
Решение. 1. Строим структурный граф, содержащий одно после-
довательное корректирующее устройство и одно параллельное в виде
гибкой обратной связи (рис. 4-6, а). Основание выбора числа варьируе-
76
мых параметров в корректирующих устройствах объясняется в ходе
расчета.
Передаточная функция Wy структурного графа при zx = 2 будет
= KoKi (s + Рз) (s + Pa)
s (s + (s + p2) (s + p3) (s + p4) + /Co/Ci/Са (s + г2) (s + z3)
Функция чувствительности относительно изменяющегося параметра
„wy_ dWy Ко _
«J к- —
дКо Wy
s (s + Pi) (s + Р2) (s + Рз) (s + Р4)
s (s + Pi) (s + Pa) (s + Рз) (s + Pi) + KoK±K2 (s + z2) (s + z3)
ее выполнять в виде
КоКгК2 (s + z2) (s + z3)
Формирование S^v удобнее выполнять в виде
g-i 1 — и/ —
Р s (s + рх) (s + р2) (s + рз) (s + р4) *
V
В Wp = задаются нули, близкие по положению к доминирую-
8
щей паре полюсов (рис. 4-6, в).
Передаточная функция Wy канонического графа, согласованного
со структурным, имеет вид (рис. 4-6, б):
Wy = -
КоКг (s + Рз) (s + р4)
(s2 + 8s + 32) (s3 + %s2 + a2s + а3) '
В ней задается только доминирующая пара комплексных полюсов.
При принятой схеме система получается пятого порядка. Избыток
полюсов над нулями в каноническом графе Wy больше, чем в фиксиро-
ванной части структурного графа. Таким образом, условие неравен-
ства (2-26) соблюдается. В корректирующих устройствах содержатся 7
независимо варьируемых параметров: Klf ръ р2, р3, р4, г2 и г3. Они
используются следующим образом: plt р2, z2 и z3 для управления за-
данными нулями Wp и полюсами доминирующей пары Wy; Klf р3
и р4 для управления тремя незаданными полюсами Wy. Параметр zx
введен для аннулирования полюса объекта (—2). Это позволяет по-
низить порядок системы и улучшить конфигурацию пин разомкнутого
контура. Параметр К2 не является независимым и равен p3pjz2z3
из условия астатизма системы.
2. Задаемся значениями г2,3 = —5,5 ±/5,5, как достаточно
близкими к jx1j2 = —4 ± /4 в свете допустимых перемещений пь 2.
Полюсы Рз и р4, являющиеся нулями в функции Wy> выбираем про-
извольно из условия достаточной удаленности влево от доминирующей
пары полюсов. Принимаем р3 = р4 = 30. Это должно также обеспечить
достаточную удаленность незаданных полюсов замкнутой системы от
мнимой оси. Если выбранные значения р3 и р4 не обеспечивают послед-
него условия, они перемещаются еще более влево. При выбранных
значениях р3 и р4 К2 — 15. После выбора желательных значений г2,
77
гз> Рз> Рь в структурном и каноническом графах остаются 6 неизвестных
параметров: /Сх, ply р2, alt а2 и а3. Так как на основе равенства главного
определителя структурного и канонического графов мы располагаем
только пятью коэффициентными уравнениями (Dx не задано), необ-
ходимо дополнительно задаться еще одним параметром. Примем про-
извольно рх = 9, как полюс, участвующий в образовании доминирую-
щих полюсов замкнутой системы. Этим заканчивается согласование
структурного и канонического графов.
3. Напишем выражение равенства главных определителей струк-
турного и канонического графа Wy. После приведения к упорядочен-
ному виду получим, принимая Ко = 14,
s5 + (69 + р2) s4 + (1440 + 69р2) s3 + (8100 + 1440р2 + 220/Гх) s2 +
+ (8100р2 + 2420/d) s + 13 200^ =
= s5 + (ах + 8) s4 + (а2 + 8ах + 32) s3 +
+ (я8 + 8аа + 32дх) s2 + (8а3 + 32а2) s + 32а3.
4. Выпишем систему коэффициентных уравнений:
69 + р2 = ах + 8,
1440 + 69р2 = 32 + 8ах + а2,
8100 + 1440р2 + 220/Ci = 32% + 8а2 + а8>
8100р2 + 2420/Ci = 32я2 + 8а3,
13 200/Са = 32а3.
Решение этой системы дает р2 = 14, Кг = 56, ях = 75, а2 = 1800*
а3 = 23 400.
Незаданные полюсы замкнутой системы определяются из куби-
ческого уравнения
s3 + 75s2 + 1800s + 23 400 = 0,
откуда
nz = —48, я4> 5 = —13,5 ± /17,8.
5. Проверим, выполняется ли условие ограниченной миграции
доминирующих полюсов. Перепишем коэффициентные уравнения в при-
ращениях, полагая, что в левых частях уравнений изменяется только Ко*
а в правых частях все параметры. Принимая начальные значения
изменяющихся параметров, 2£соЛ = 8, а?п = 32, ах = 75, а2 = 1800,
а3 = 23 400 и A/C0/Ci/C2 = 6-15-56 = 5040, получим систему линей-
ных уравнений относительно приращений:
— Мх = Л2£(0/г,
75 A2gco« + 64 Асо/г + 8 ^a1 + ^a2 = 0,
1800 Д2£сол + 4800 Aco„ + 32 Д^ + 8 Да2 + Да3 = 5040,
23 400 A2£con + 115 000 Асо0 + 0 + 320 /±а2 + 8 Да3 = 55 400,
1,5 - 10е Дсо„ + 32 Аа3 = 302 400.
78
Решая эту систему уравнений с помощью направленного графа,
который здесь опускается, находим:
A(0/z = ±0,6,
Д£а)л = ±0,25,
что вполне укладывается в заданные пределы (±1) миграции домини-
рующих полюсов.
Итак, полученные передаточные функции последовательного
Г 56(s + 2) 1 /15(s2 + lis + 60,5) \
[(•s + 9)(s + T4rJ " ^Р^ьного^-^-г-^ ) корректи-
рующих устройств удовлетворяют заданным техническим условиям.
Из сравнения примеров 4-2 и 4-3 видно, что если ограничения,
накладываемые на систему условиями применения неограниченно
большого усиления, являются физически реализуемыми, то корректи-
рующее устройство в этом случае (пример 4-2) получается более простым,
чем при использовании двух отдельных корректирующих устройств
(пример 4-3). Однако использование одного корректирующего устрой-
ства с двумя варьируемыми параметрами Ку и р позволяет управлять
только парой доминирующих полюсов замкнутой системы. При небла-
гоприятной конфигурации пин объекта может потребоваться более
сложное корректирующее устройство или несколько корректирующих
устройств.
В общем случае синтез по системной функции Wv (=S~1—1) ка-
жется более прямым и обеспечивает точно желаемый результат решения.
4-4. Синтез системы связанного регулирования
Синтез сложных многоконтурных систем с несколькими выходными
управляемыми величинами, если не решается задача специальных
форм управления — автономности, инвариантности, оптимальности
и т. д., выполняется обычно в следующем порядке:
1) составляется система дифференциальных уравнений нескоррек-
тированной системы (объекта);
2) устанавливаются требования к поведению скорректирован-
ной системы, приводимые в большинстве случаев к заданию некоторого
желаемого характеристического уравнения и нескольких желаемых
передаточных функций;
3) выбирается приемлемый тип корректирующего устройства
в виде обратных связей и последовательно включенных звеньев, уста-
навливается требуемая его структура — число и вид независимо варьи-
руемых параметров — и вычисляются численные значения последних.
Принятый метод является достаточно общим, но в сложных зада-
чах приводит к трудоемкому итеративному решению, которое может
быть облегчено и улучшено применением направленных графов. Рас-
смотрим следующий пример.
Пример 4-4. Синтезировать систему управления (автопилот)
боковым движением самолета * [44].
* Ввиду ограниченного объема здесь рассматривается синтез
лишь одной системной функции — характеристического уравнения
системы.
79
Боковое движение самолета описывается системой уравнений:
s (s - 1р) Ф + s (siX2 - /г) * + (-/р) Р + (-/ба) 6д + (-/,) бг = О,
—s (siZA; + лр) Ф + s (s — лг) г|) + (—/гр) р +
+ (—пда) Ьа + (—пдг) Ьг = 0, (4-22)
~ "f Ф + (1 - У г) S* + (S ~ *р) Р + 6а + (-У*г) \ = °>
где Ф — угол крена, г|з — угол тангажа, Р — угол бокового скольже-
ния, да — угловое смещение элерона, бг — угол поворота руля, V —
скорость поступательного движения самолета, /, п и у — аэродинами-
ческие коэффициенты, ixz и izx — инерционные параметры.
На основании опыта выбирается желаемое характеристическое
уравнение для бокового движения самолета в буквенном выражении:
s (s2 + 2lxwnls + со2,) (s2 + 2|2(o„2s + со22). (4-23)
Для рассматриваемого примера принимается £х = 0,5; ©Л1 =
= 2,5 сек'1, £2 = 1,0 и юЛ2 = 1,0 сек'1.
В численном выражении желаемое характеристическое уравнение
будет
s5 + 4,5s4 + 12,25s3 + 14,75s2 + 6,25s = 0. (4-24)
Вычисление определителя системы (4-22) с учетом численных
значений параметров объекта (1Р = —1,0, 1Г = 0,5, 1$а = —10,0,
/бг=0,1, /р = —10, *ZJC = 0,01, ixz = 0,05, g/y=0,04, np-0,1,
пг = —0,25, пр = 6,41, ща = 0,4, щг = —4,0, у0а = 0, у&г =
= 0,03, J/g = —0,1 и г/г = 0,003) дает характеристическое урав-
нение нескорректированной системы:
s5 + 1,35s4 + 6,61s3 + 7,8s2 — 0,028s = 0. (4-25)
Сравнение коэффициентов уравнений (4-24) и (4-25) указывает на
необходимость введения четырех независимо варьируемых параметров
в управляющую часть системы. В качестве таковых авторы выбрали
усиления 4-х обратных связей от скоростных гироскопов угла крена Ф,
угла тангажа г|з и от гироскопа угла бокового скольжения Р к оси по-
ворота руля 6Г и оси поворота элерона ба. Наложенные связи выра-
жаются уравнениями:
да = HnsO + Я125ф, (4-26)
6> = Я 22si|) + Я23р. (4-27)
Общая система уравнений скорректированной системы, включаю-
щей уравнения (4-22), (4-26) и (4-27) в матричной форме и в форме
графа, приведена в § 1-5 [см. уравнения (1-14) и рис. 1-14].
Развертывание главного определителя графа в характеристическое
уравнение приводит к виду:
s5 + К + Л1Н11 + А2Н12 + А3Н22 + А4Я23) s4 + '
+ (а2 + В1Н11 + В2Н12 + В3Н22 + £4Я23 + ВьНпН22 +
+ В6НпН23 + £7Я12Я23) s3 + (а3 + С1Нп + С2Я12 |-
+ с3н22 + С4Я23 + С5ЯПЯ32 -f- С6ЯПЯ23 + С7Я12Я23) s2 +
+ (а4 + £ХЯ12 + D2H22 + D3H23 + ОД2Я23) s = 0, (4-28)
80
где щ — коэффициенты характеристического уравнения нескорректи-
рованной системы — [см. уравнение (4-25)]; Л/, Вс, Q и — извест-
ные функции параметров объекта.
Приравнивание коэффициентов при одинаковых степенях в урав-
нениях (4-28) и (4-24) дает систему уравнений для вычисления значе-
ний Я//:
Л1Нп + Л2Н12 + А3Н22 + Л4Я23 = bv
В1Нп + В2Н12 + В3Н22 + В,Н23 + Б5ЯиЯ22 +
+ В6НпН23 + В1Н12Н23 — Ь2,
Ci^u + Q#i2 + С3Я22 + С4Я23 + С5ЯиЯ22 +
+ СбЯпЯ23 С7Я12Я23 = с?3,
D^12 + £2Я22 + £3Я23 + D,Hi2H23 = ft4f (4-29)
где ^ — разности численных значений коэффициентов уравнений (4-24)
и (4-25).
Решая систему уравнений (4-29) итеративным методом, авторы об-
наружили малую эффективность обратной связи Я23 и приняли Я23 =
= 0.* Остальные параметры, дающие хорошее приближение к уравне-
нию (4-24): Яи = 0,125, Я12 = 2,21, Я22 = 0,2015.
Такое решение нельзя считать удовлетворительным, так как реали-
зацию 4-х произвольно заданных величин bi невозможно обеспечить
тремя независимо варьируемыми параметрами корректирующего
устройства.
Лучшим решением следует считать использование иной совокуп-
ности четырех обратных связей (—Hns, —H12s, —H2ls и —H22s),
при которых число нелинейных членов в уравнении (4-29) снижается
с 3-х до одного и выполняется условие корректного синтеза — урав-
нение (2-23).
Из приведенного примера видно, что использование направленных
графов в задаче синтеза системы связанного регулирования позволяет
быстро рассмотреть различные структурные решения и выбрать опти-
мальное не только в вычислительном, но и в конструктивном отношении.
4-5. Синтез инвариантной следящей системы
В § 4-1 были рассмотрены приемы синтеза системы управления
по двум желаемым системным функциям, что позволяло одновременно
удовлетворять заданные показатели качества и нечувствительность
системы к «возмущениям». Желаемая нечувствительность системы
задавалась в форме весьма малых отклонений управляемой выходной
величины в установившемся и переходном режимах при некотором
типовом "возмущении либо в форме ограниченных перемещений домини-
рующих полюсов системы, гарантирующих стабильность поведения
системы при изменяющихся параметрах объекта.
Возможно задание более жестких требований к нечувствитель-
ности системы, а именно, полной независимости (инвариантности) ее
выходной величины (или нескольких выходных величин) от одного или
нескольких возмущений.
* Исключение Я23 оставляет в системе (4-29) только один нели-
нейный член, что существенно облегчает ее решение.
6 Т. М. Райцын
81
Системы автоматического управления, удовлетворяющие такому
требованию, получили название инвариантных.
По принятой выше структурной классификации инвариантные
системы относятся к системам со многими структурными степенями
свободы, так как их структура предусматривает формирование одно-
временно нескольких независимых системных функций. Одномерная
инвариантная следящая система, у которой выходная величина а) обла-
дает инвариантностью относительно управляющего воздействия и одного
главного возмущения, б) имеет желаемую нечувствительность к второ-
степенным возмущениям (внешним и внутренним) и в) удовлетворяет
требуемым показателям качества в режиме стабилизации, — является
системой с четырьмя структурными степенями свободы.
Уде
щ
73
0,01
s(s+18,2)
wH2
п
i
f№0,02
-XT
Рис. 4-7.
В качестве независимо формируемых системных функций могут
быть выбраны следующие: 1) желаемый характеристический полином
системы — главный определитель графа А; 2) адъюнкта (равная нулю
или любой малой величине &) ошибки относительно управляющего
воздействия А^у; 3) адъюнкта (равная нулю или любой малой вели-
чине е) ошибки относительно главного возмущения &ef и 4) желае-
ма
мая функция чувствительности Swy.
Формирование нескольких независимых системных функций в замк-
нутой системе (имеющей общую обратную связь) представляет извест-
ные трудности. Более простые решения в структурном отношении
получаются при использовании в системе замкнутых и разомкнутых
путей для внешних воздействий. По этой причине наибольшее распро-
странение получили инвариантные системы с комбинированным управ-
лением, т. е. с воздействием на органы управления как управляющей
входной величины, так и возмущения. Ниже ограничимся рассмотре-
нием этого типа инвариантной системы. Устройства, используемые
для компенсации внешних воздействий, будем называть компен-
сирующими, или коротко компенсаторами.
82
Пример 4-5. [36] *. Задана структурная схема следящего
гидропривода малой инерциальной системы (см. рис. 4-7) с фиксиро-
ванными значениями параметров функционально необходимых эле-
ментов: а) сравнивающего (сельсинного) устройства, имеющего пе-
редаточную функцию совместно с редуктором Wx = UBX/Q = 100;
б) электронного усилителя напряжения с W2 = U^B/UBX = 124;
в) электродвигателя, управляющего поворотом шпинделя гидронасоса
с Ws = адв/с/дв = 73/s (s + 18,2); г) редуктора между осью электро-
двигателя и осью шпинделя с №4 = аш/адв = 0,01; д) блока гидро-
двигателя —- насоса с Wb = а^/аш = П/s и е) редуктора между
валом гидродвигателя и осью объекта с WQ = а0/а^ = 0,02.
Вычислить параметры корректирующих устройств WK1 и №К2,
обеспечивающие характер переходного процесса при единичном вход-
ном управляющем воздействии и выключенных инвариантных вхо-
дах в соответствии со «стандартной формой» ITAE [34], имеющей
нулевую статическую позиционную ошибку.
Вычислить параметры компенсирующих устройств WKni и 1ГКП2>
обеспечивающие величину установившейся ошибки по скорости
и ускорению
ву1=-7г^3"10-8 Рад
Эу2 =-^-^3.10-3 рад,
при заданных максимальных значениях скорости и ускорения дающего
ради = 60 град/сек = 1,05 рад/сек, p2agM — 35 град/сек2 = 0,6\град/сек2
и максимальных значениях скорости и ускорения возмущения (нерегу-
лярного движения опорной конструкции установки относительно ста-
билизированной платформы) рссрм = 30 град/сек ~ 0,5 рад/сек, р2арм =
= 17,5 град/сек2 = 0,3 рад/сек2.
Решение. 1. Каждое из технических требований выполняем от-
дельно. Синтез инвариантной следящей системы сводится к форми-
рованию трех независимых системных функций: передаточной функ-
ции Wy и двух адъюнкт ошибки и A$aF-
При заданной структуре (без компенсаторов) система имеет третий
порядок и астатизм первого порядка. Нормированная желаемая пере-
даточная функция имеет вид
W*' н = *3 + 1,75*2+ 2,15х+1 • (4"30)
Определяем коэффициент нормирования из заданного общего
коэффициента усиления разомкнутого контура Кобщ = 2000:
Кв = У Кобщ = 12,6.
Введя Кв в уравнение (4-30), получим действительное выражение
желаемой передаточной функции:
ш 2000 /4.ЗП
у~~ s3 + 22s2 + 342s + 2000 9 { '
* Формулировка задачи несколько изменена для иллюстративных
целей.
6*
83
Реализация данной передаточной функции требует двух независимо
варьируемых параметров корректирующего устройства для управле-
ния коэффициентами при s2 и s; таковыми являются коэффициенты
усиления тахометрических обратных связей %г и т2.
Строим структурный граф системы (рис. 4-8, а) и эквивалентный
в отношении Wy канонический граф (рис. 4-8, б). Из равенства их
главных определителей
Лстр = s2 (s + 18,2) + 90,5t2s2 + 1020^ + 2000 =
= s3 + (18,2 + 90,5т2) s2 + 1020tiS + 2000,
Дкан = s3 + 22s2 + 342s + 2000
6)
<*<д
о—
*кан
2000 \л0)
оьд s3+10s2+5$
о •
кан
е
<х, 20 s2+10 s
о *
Рис. 4-8.
выписываем систему коэффициентных уравнений
18,2 + 90,5т2 = 22,
1020т, = 342,
откуда тх = 0,335 в-сек!рад и т2 = 0,042 в• сек2У'рад.
Передаточная функция ошибки относительно дающего (без ком-
пенсатора), как видно из графа (рис. 4-8, а),
0 _ s3 + 22s2 + 342s
ад " s3 + 22s2 + 342s + 2000 *
Коэффициенты полинома числителя W0m не удовлетворяют кано-
ническому графу А^ад (рис. 4-8, б).
84
Действительно, без инвариантных входов не удовлетворяются
заданные значения 9У1 и 0У2, а именно:
22-0 61
е^=т = 6'7-1()-8>3-10-
Компенсатор дающего необходим.
2. Для исключения из числителя W0ui Двух последних членов
компенсатор должен содержать не менее двух независимо варьируемых
параметров. Принимаем структуру компенсатора, как указано на
рис. 4-8, а.
Вычисляем по виду структурного графа адъюнкту Дда^ с учетом
компенсатора:
А9аа = (s3 + 22s2 + 342s) (s + Pl) - 20t's (s + гг) =
= s4 + (22 + Pl) s3 + (342 + 22/?! — 20т') s2 + (342px — 20т's.
Требуется, чтобы
342 + 22px — 20т' = 0,
342pi — 20т'гг = 0.
В двух уравнениях содержатся три переменные, одной можно
задаться произвольно. Если нежелательно вводить в компенсатор уси-
литель, можно задаться максимальным физически реализуемым зна-
чением т'. Если необходимо обеспечить такое значение ръ чтобы оно
не влияло существенно на желаемый характер свободного движения
системы, то предпочтительней задаться значением ръ достаточно уда-
ленным в левой полуплоскости. Это благоприятно и для реализации
достаточно широкой полосы пропускания полезного сигнала. Примем
Pi — 10- £сОя = 65,5, где £со,г— вещественная часть пары комплекс-
ных полюсов Wy. Тогда
342 + 22-65,5 0О1 , Л
~ — - = 89,1 в> сек/рад,
20
342.65,5
= 12,6.
1 20-89,1
Далее определим передаточную функцию компенсатора дающего
89,1s (s + 12,6) = 17,5s (1 + 0,085s)
(s + 65,5) ~~ (1 + 0,015s)
полосу пропускания компенсатора (при 0,015со0 < 0,1)
Щ < ТЩб" < 7 рад/сек;
85
передаточную функцию системы Wy с учетом компенсатора (см. рис.4-7,б)
_ 2000 (s + Pl) + 20%'s (s + zj
к ~*~ (s + Pi) (s3 + 22s2 + 342s + 2000)
1782s2 + 24400s + 131 000
"~ s4 + 87,5s3 + 1782s2 + 24400s + 131 000 *
Благодаря инвариантному входу a$ система стала обладать аста-
тизмом 3-го порядка, практически сохранив без изменения заданную
устойчивость. Удаленный полюс рх = 65,5 оказывает малое влияние
на характер переходного процесса.
3. Определим передаточную функцию ошибки относительно воз-
мущения (д/ар). Возмущение ар входит в контуры тахометрических
обратных связей вследствие непрерывно меняющегося относительного
углового положения корпуса тахомашины и якоря при фиксированном
положении оси стабилизированной платформы, что вводит ложный
сигнал.
По виду графа (рис. 4-8, а)
w> _ 0 (50rlS + 4,55t2s2) 200
ош aF s3 + 22s2 + 342s + 2000
38s2 + 3350s
s3 + 22s2 + 342s + 2000 '
Коэффициенты полинома числителя не удовлетворяют канони-
ческому графу (рис. 4-8, г).
Действительно, без инвариантных входов ар не удовлетворяются
требования:
0У1 = 33^q'5 = 0,83 рад/сек > 3 -10"3,
6У2 = -Ц^- = 5,7. Ю-3 рад/сек > 3-10"3.
Требуется компенсатор возмущения ар.
Принимаем его структуру, как указано на рис. 4-8, а. Вычисляем
по виду графа адъюнкту А^р с учетом компенсатора
AeaF = [(0,19s2 + 16,75s) (s + p2) - т/'s (s + г2)] 20 =
= [0,19s3 + (16,75 + 0,19p2 - t") s2 + (16,75p2 - т"г2) s] 20.
Необходимо* чтобы
16,75+ 0,19р2--т" = 0,
16,75р2 —т"г2 = 0.
86
По указанным выше соображениям принимаем р2 = 65,5, тогда
т" = 16,75 + 0,19-65,5 = 29,15 в.сек2/рад,
9 _ 16,75-65,5 _
4 ~ 29^ ~ 67'
Передаточная функция компенсатора возмущения будет
_ 29,15s (s +37) _ 16,5s (1 + 0,027s)
^п2- (s + 65,5) ~ (1+0,015s)
Как видно из выполненного расчета, не удовлетворено одно усло-
вие требуемого количественного соотношения между параметрами
разомкнутого и замкнутого контуров — уравнение (2-29). При вклю-
чении компенсатора <%д избыток полюсов над нулями в передаточной
функции замкнутой системе Wy уменьшается против такого избытка
в объекте. Это ухудшает затухание высокочастотных составляющих
(помех) полезного сигнала. Требуется принятие дополнительных мер
по борьбе с шумами.
ПРИЛОЖЕНИЕ
ДИАГРАММЫ ПОКАЗАТЕЛЕЙ КАЧЕСТВА САУ
ДЛЯ НЕКОТОРЫХ ТИПОВЫХ КОНФИГУРАЦИЙ ПОЛЮСОВ
И НУЛЕЙ
На рис. П-1, а я б показаны переходная функция и показатели
качества системы, поведение которой может быть аппроксимировано
одной парой доминирующих комплексных полюсов, а именно:
а)
1,3
1,2
1,1
1,0
0,9
0,8
0J
0,6
0,5
OA
0,3
0,2
0,1
О
Wy (s) =
s2 + 2gcorts + co2'
б)
0,5
0,6*
0,7ч
ПЙ41
(П-1)
6 7 8u)0t
Рис. П-1.
1 1 1 i—-Е 1 i
' 0,4 0,50,6Q70,80,91,0$
На рис. П-2, а, б и в даны показатели качества системы, поведение
которой может быть аппроксимировано одной парой доминирующих
комплексных полюсов и одним нулем, а именно:
На рис. П-3, а, б, в, г, д и е представлены показатели качества
системы, поведение которой может быть аппроксимировано па-
рой доминирующих комплексных полюсов, дополнительно одним
88
действительным полюсом и одним нулем. Кривые составлены для
передаточной функции в нормированном виде.
*'У„ М - т - P + k-
т
(р + т) (p2+2gp+l)
(П-3)
^13
0,3 0,4 0,5 0,6 0J 0,8 0,9Х
Рис. П-4.
где р = s/(Drt; т — л/(йп и k — £/(Drt. Кривые приведены для значения
\ = 0,7 и нескольких значений DJiOn.
На рис. П-4 приведены показатели качества системы, имеющей
передаточную функцию
w ,.ч _ 8v3 (s + Ц) .
Wy ^ ~ kl (s* + 2gs + 1) (s + X) (s + 2%) (s + 4Ь) <n"*'
для одного значения v = 1 и двух значений g = 0,7 и 1,0.
ЛИТЕРАТУРА
1. Петров Б. Н. О построении и преобразовании структур-
ных схем, Изв. АН СССР, ОТН, 1945, № 2.
2. III а т а л о в А. С. Структурные методы в теории управления
и электроавтоматики. Госэнергоиздат, 1962.
3. Кузовков Н. Т. Теория автоматического регулирования,
основанная на частотных методах. Оборонгиз, 1960.
4. С у ч и л и н А. М. Линейные следящие системы. Конспект
лекций. ЛПИ, 1963.
5. С у ч и л и н A.M. Обобщенный структурный метод анализа
и синтеза электрических цепей автоматических устройств. ЛПИ, 1964.
Реферат докт. диссертации.
6. Гальперин И. И. Синтез систем автоматики. Госэнерго-
издат, 1960.
7. G г а у b е 1 Т. D. Block-diagram network tzansformation.
«Elect. Engineering^V. 70, 1951, № 11.
8. Stout Т. M. A block-diagram approch to network analysis.
«Trans. А1ЕЕ». V. 71, 1952, pt. II.
9. M a s о n S. E. Feedback theory-some properties of signal
flow graphs. «Ргос. IRE». Sept, 1953.
10. M a s о n S. E. Feedback theory-further properties of signal
flow graphs. «Ргос. IRE». July, 1956.
11. Trent H. Isomorphisms between oriented linear graphs
and lumped phisical systems. «Journ. Acoust. Soc. Am.» V. 27, May,
1955, № 3.
12. Ash R. Topology and solution of linear system, Journal of
the. «Frankline Institutes V. 268, Dec. 59, № 4.
13. С о a t e s C. L. Flow graph solutions of linear algebraic equa-
tions. «IRE Trans». V. CT-6, June, 1959, № 2.
14. С h о w Y., С a s s i g n a 1 E. Sur le calcul des parametes
d'un quadripole par la methode das graphes a noeud nul. «Compt Rend».
252, 1431—1433, 1961.
15. Wan Нее Kim, Robert Tien — wen — Chien.
Topological analysis and synthesis of communication networks. «Colum-
bia University Press», 1962.
16. L a g о s s e J. G. Topological approch to system analysis.
«Progress in control engineering)), v. 2, National Trade press, 1964.
17. P а й ц ы н Т. M. Аналоговые вычислительные устройства
в автоматике. «Энергия», 1965.
18. D е s о е г С. A. The optimum formula for the gain of a flow
graph or a simple derivation of Coates Formula. «Ргос. IRE», May, 1960.
19. Лузин H.H.K изучению матричной теории дифференциаль-
ных уравнений. «Автоматика и телемеханика», 1940, № 5.
92
20. Т р а к с э л Д ж. Синтез систем автоматического регулирова-
ния. Машгиз, 1959.
21. Carpenter W. Е. Synthesis of feedback systems with
specified open-loop and closed-loop poles and zeros. «IRE Trans», AC-4,
Dec. 1953, № 3.
22. M a r i о t t i F. A. direct method of compensating linear feed-
back systems. «А1ЕЕ Trans.» Applic. and Industry, Jan. 1961.
23. Zaborsky J. Intergrated s-plane synthesis using 2-way
root locus. «А1ЕЕ Trans», January, 1957. V. 75.
24. С о к о л о в Н. И. Аналитический метод синтеза линеаризо-
ванных систем автоматического регулирования. Машгиз, 1966.
25. Н о г о w i t z I. М. Synthesis of feedback systems. N. Y.
«Academic Press», 1963.
26. L i v e r m a n n T. P. G. Generalized functions and direct
operational methods. New Jersey. «Prentice-Hall». V. 1.,
27. Д e л ь T о p о и Пар кер С. Р. Принципы проектирова-
ния систем автоматического управления. Машгиз, 1963.
28. Aaron М. A. Synthesis of feedback control systems by means
of pole-and zero location of the closed loop function. «Trans А1ЕЕ».
V. 70, 1951, pt. 11.
29. Hausenbauer, Lago. Synthesis of control systems on
approximation to third-order system. «А1ЕЕ Trans», V. 77, pt. 11, Novem-
ber, 1958.
30. W h i t e 1 e у A. L. Theory of servo systems with particular
reference to stabilization. London. «The Jourual of IEE», V. 93, pt. 11,
August, 1946, № 34.
31. С о к о л о в Т. Н. Электромеханические системы автоматиче-
ского управления. Госэнергоиздат, 1952.
32. В u t t е г w о г t h S. On the theory of filter amplifiers.
«Experimental wireless and the wireless engineers)). V. VII, 1930.
33. Поспелов Г. С. иДоброленский Ю. П. Метод
стандартных коэффициентов для выбора параметров линейных систем
автоматического регулирования. Сб, статей по автоматике и электро-
технике, АН СССР, 1956.
34. Graham D., Latrop R. The synthesis of «optimum))
transient response: criteria and standard forms. «А1ЕЕ Trans», V. 72,
pt. 11, November, 1953.
35. E 1 g e r d О. I., S t e p h e n s W. C. Effect of closed-loop
transfer function pole and zero locations on the transient response of
linear control systems. «А1ЕЕ Applic and Industry», May, 1959.
36. Яворский В.И., Б ecco нов А. А., К о р о т к о в А. И.,
Потапов А. М. Проектирование инвариантных следящих приводов
«Высшая школа», 1963.
37. Справочная книга по технике автоматического регулирования
(перев. с англ. под ред. Т. М. Райцына и А. В. Фатеева). Госэнергоиз-
дат, 1962.
38. М е е р о в М. В. Синтез структур САР высокой точности.
Физматгиз, 1959.
39. Бендриков Г. А. иТеодорчик К- Ф. Траектории
корней линейных автоматических систем. «Наука», 1964.
40. D' A z z о J., Н о u р i s С. Feedback control system analysis
and synthesis. N. Y. «Mc Graw Hill Book», 1960.
93
41. Wills D. W. Simple multiloop control systems. «ISA»,
March, 1963.
42. P а й ц ы н Т. M. О способе систематического перечисления
членов разложения определителя линейного направленного графа,
Изв. вузов, «Электромеханика», 1968, № 10.
43. Ф атеевА.В. Основы линейной теории автоматического регу-
лирования. «Госэнергоиздат», 1964.
44. Р о v е j s i 1 D. J., F и с h s A. M. A method for the prelimi-
nary synthesis of a complex multiloop control system. «А1ЕЕ Trans».
V. 74, pt. 11, July, 1955.
СОДЕРЖАНИЕ
Предисловие 3
Принятые сокращения 4
Глава первая. Элементы теории направленных графов, исполь-
зуемые в синтезе САУ 5
1-1. Введение —
1-2. Выбор типа направленного графа для задач синтеза 6
1-3. Построение графа по различным представлениям
физического устройства (системы) 8
1-4. Виды преобразований графа 15
1-5. Топологические формулы 21
Глава вторая. Основы синтеза методом направленных графов 27
2-1. Ограничения существующих методов синтеза САУ —
2-2. Структурная и каноническая форма графа 29
2-3. Системные функции и структурная степень свободы 31
2-4. Показатели качества и конфигурация полюсов и
нулей передаточной функции замкнутой системы . . 32
2-5. Основания расчета корректирующего устройства . . 34
2-6. Процедура топологического синтеза 37
2-7. Математические условия существования решения и
условия его физической реализации 41
2-8. Оценка стабильности решения относительно изменяю-
щихся параметров объекта 43
Глава третья. Синтез САУ с одной структурной степенью
свободы 47
3-1. Свойства САУ с одной структурной степенью
свободы —
3-2. Общие замечания к синтезу систем с астатизмом
первого порядка 48
3-3. Синтез систем типа 1 с последовательным коррек-
рующим устройством 49
3-4. Синтез систем типа 1 с параллельным корректирую-
щим устройством 56
3-5. Сравнительная оценка частотного и топологического
методов синтеза 64
95
Глава четвертая. Синтез САУ с двумя и более структурными сте-
пенями свободы 67
4-1. Синтез по двум независимым системным функциям —
4-2. Синтез по двум желаемым передаточным функциям . . 68
4-3. Синтез САУ по желаемой передаточной функции и
функции чувствительности 71
4-4. Синтез системы связанного регулирования 79
4-5. Синтез инвариантной следящей системы 81
Приложение. Диаграммы показателей качества САУ для неко-
торых типовых конфигураций полюсов и нулей . . 88
Литература 92
РАЙЦЫН Товий Маркович
СИНТЕЗ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
МЕТОДОМ НАПРАВЛЕННЫХ ГРАФОВ
Редактор Л. И. Важинская Художественный редактор Г. А. Гудков
Технический редактор Е. М. Соболева Корректор Л. П. Махаева
Сдано в производство 10/1II 1969 г. Подписано к печати 20/X 1969 г.
М-50883. Печ. л. прив. 5,04. Уч.-изд. л. 5,8 Бум. л. 1,5.
Бумага типографская _№ 2. 84хЮ8732. Тираж 11000. Цена 29 коп.
Заказ 113.
Ленинградское отделение издательства «Энергия», Марсово Поле, 1.
Ленинградская типография № 6 Главполиграфпрома Комитета по печати
при Совете Министров СССР, Ленинград, С-144, ул. Моисеенко, 10.