/












































































































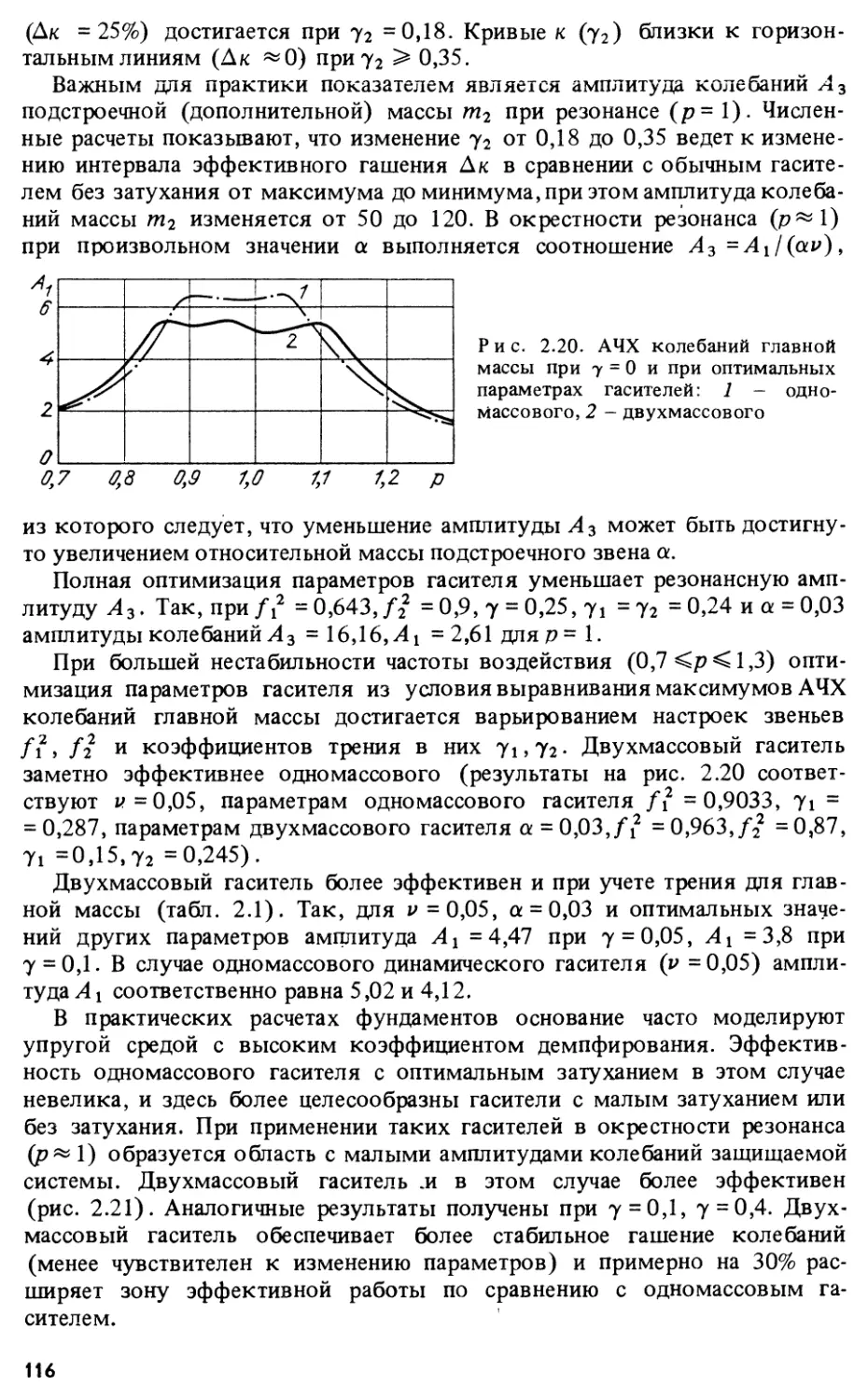















































































































































































Текст
Б.Г. КОРЕНЕВ
Л.М. РЕЗНИКОВ
ДИНАМИЧЕСКИЕ
ГАСИТЕЛИ
КОЛЕБАНИИ
ТЕОРИЯ
И ТЕХНИЧЕСКИЕ
ПРИЛОЖЕНИЯ
-О
МОСКВА "НАУКА
э>
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
1988
ББК 22.213
К66
УДК 534.1:62-752
Коренев Б. Г., Резников Л.М. Динамические гасители
колебаний: Теория и технические приложения. - М.: Наука. Гл. ред.
физ.-мат. лит., 1988. - 304 с, ил. 97.
С единой точки зрения изложены основные результаты теории
динамических гасителей колебаний при гармонических, импульсных, стационарных
и нестационарных случайных воздействиях. Даны сведения об оптимальных
параметрах, эффективности и конструктивных формах линейных и
нелинейных, одномассовых и много массовых, обладающих различными видами
неупругого сопротивления динамических гасителей. Описаны эффективные методы
расчета и приведены результаты исследований колебаний континуальных
систем: стержней, мембран, пластинок, оболочек, складок, оборудованных
гасителями. Приведены данные о гашении колебаний башенных сооружений
при ветровом резонансе, галопировании, пульсациях ветровой нагрузки и
сейсмических воздействиях. Основные практические приложения теории
относятся к промышленным трубам, телевизионным башням, высоким
зданиям, трубопроводам, мостам, транспортным средствам,
виброизолированным системам.
Для научных и инженерно-технических работников, аспирантов и студентов
вузов, специализирующихся в области теории колебаний и виброзащиты
конструкций.
Табл. 45. Ил. 97, Библиогр. 272 назв.
Рецензент доктор технических наук, профессор В.А. Ильичев
1703030000-006 ц © издательство "Наука".
053 @2) -88 Главная редакция
физико-математической
ISBN 5-02-013816-9 литературы, 1988
ОГЛАВЛЕНИЕ
Предисловие 5
Введение 8
Глава 1
Теория линейного динамического гасителя колебаний при различных
воздействиях 13
§1.1. Гармоническое воздействие с фиксированной или находящейся в
узком диапазоне частотой 15
§ 1.2. Гармоническое воздействие с нестабильной частотой. Гаситель с
вязким трением 19
§ 1.3. Гармоническое воздействие с нестабильной частотой. Гаситель с
частотно-независимым трением 28
§ 1.4. Учет неупругого сопротивления защищаемой системы при
гармоническом воздействии 32
§ 1.5. Неполная оптимизация параметров гасителя при гармоническом
воздействии 39
§ 1.6. Гармоническое воздействие с переменной амплитудой 42
§ 1.7. Нестационарные колебания системы с гасителем при прохождении
через резонанс 45
§ 1.8. Переходные режимы колебаний при заданных начальных условиях ... 51
§ 1.9. Периодические импульсы ......... 64
§ 1.10. Стационарные случайные воздействия 71
§ 1.11. Нестационарные случайные воздействия 81
§ 1.12. Импульсы с неполной периодичностью 85
§ 1.13. Вероятностный подход к оптимизации параметров гасителя 93
Глава 2
Конструктивные формы и усложненные модели динамических гасителей
колебаний 100
§2.1. Конструктивные формы динамических гасителей колебаний 100
§ 2.2. Элементы теории динамического гасителя-корректора ... 109
§ 2.3. Многомассовые гасители колебаний 111
§ 2.4. Анализ эффективности некоторых типов нелинейных динамических
гасителей . 118
§ 2.5. Центробежный маятниковый гаситель 125
Глава 3
Колебания систем с бесконечным числом степеней свободы, оборудованных
динамическими гасителями 130
§ 3.1. О применяемых способах расчета , 132
§ 3.2. Продольные колебания стержней постоянного сечения 137
1* 3
§ 3.3. Продольные колебания стержней переменного сечения ..... 141
3.4. Изгибные колебания стержней постоянного сечения 146
§ 3.5. Изгибные колебания стержней переменного сечения 151
1U^
3.6. Колебания мембран.
3.7. Колебания пластинок
170
§ 3.8, Колебания пластинок, лежащих на упругом основании 183
3.9. Колебания пологих сферических оболочек
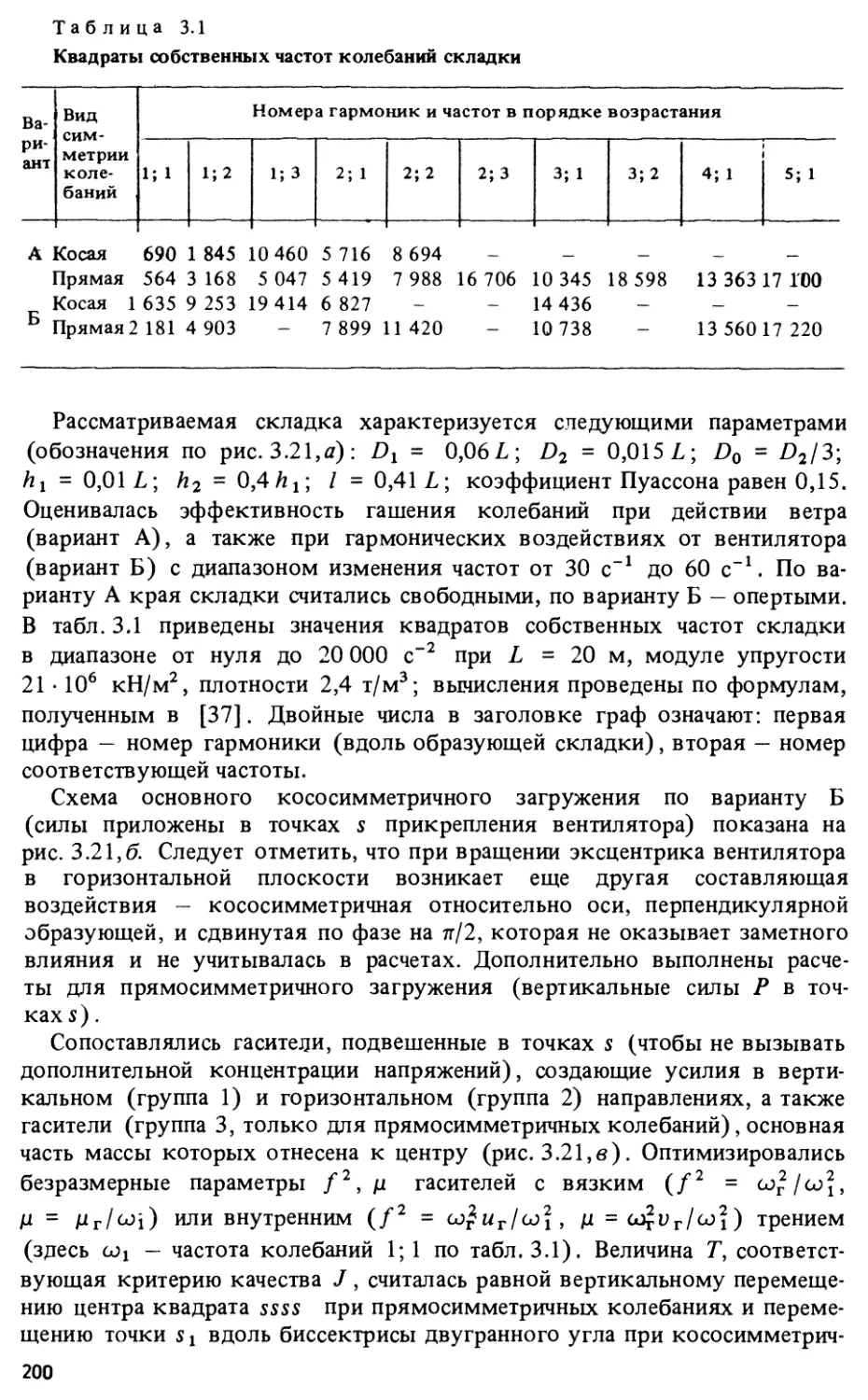
3.10. Колебания складчатых систем
§ 3.11. Методы расчета многомассовых и континуальных систем с "непро-
187
195
•
порциональным" трением, оборудованных ДГК 203
3.12. Оценка возможности применения простейших расчетных схем в
задачах о гашении колебаний 211
Г л ав а 4
Практические приложения теории и примеры осуществленных систем вибро
защиты *
216
§4.1. Общие замечания о проблеме гашения колебаний башенных соору-
217
жений
§ 4.2. Ветровой резонанс башенных сооружений
§ 4.3. Автоколебания поперек ветрового потока башенных сооружений с
220
аэродинамически неустойчивой формой сечения ....... 223
§ 4,4. Случайные колебания башенных сооружений при пульсациях ветровой
нагрузки
4.5, Вибро защита стальных вентиляционных и дымовых труб при ветровых
воздействиях
232
241
9
§ 4.6. Гашение колебаний телевизионных башен при ветровых воздействиях. 248
§ 4.7. Виброзащита солнечного телескопа
255
§ 4.8. Гашение колебаний сооружений при сейсмических воздействиях .... 257
§ 4.9. Локальная виброзащита гибких конструкций, опирающихся на
массивную поддерживающую конструкцию
§ 4.10. Вибро защита зданий
261
263
§ 4.11. Гашение колебаний протяженных конструкций 266
4,12. Виброзащита вагонов и транспортируемых грузов. . . .' 272
§ 4.13. Гашение колебаний фундаментов под машины и виброизолированных
конструкций 278
§ 4.14. Заключительные замечания об области применения и дальнейшем
развитии теории динамических гасителей колебаний 285
Приложение
Вычисление бесселевых функций комплексного аргумента х + iy прид>/* < 1 . . 287
Оптимальные параметры ДГК без демпфирования при узком диапазоне частот
. ' 288
воздействия и обобщенном критерии D
Оптимизация демпфера в многомассовой системе
Основные условные обозначения и сокращения .
Список литературы
289
291
292
'»
ПРЕДИСЛОВИЕ
Проблема уменьшения уровня колебаний конструкций возникает в
различных областях техники: промышленном и гражданском строительстве,
тяжелом, транспортном и энергетическом машиностроении,
приборостроении и т.п. Во многих случаях она связана с необходимостью повышения
прочности и снижения материалоемкости конструкций, однако не менее
важны и такие аспекты проблемы, как выполнение технологических
требований, предъявляемых условиями эксплуатации, и защита людей от
вредного действия вибраций. Актуальность проблемы непрерывно возрастает
в связи с увеличением размеров конструкций, повышением
быстроходности машин, ужесточением санитарных и технологических требований
к допустимым уровням колебаний.
К настоящему времени известны [6, 22, 36, 65—67, 78, 81, 82, 123,
130, 137, 178, 186, 203] различные методы и средства борьбы с
недопустимыми колебаниями конструкций, в частности балансировка и
уравновешивание машин, являющихся источниками динамических нагрузок,
изменение жесткостных и инерционных параметров конструкций в целях
отстройки от резонансов, повышение демпфирующих свойств путем
использования материалов и конструкций с высокой поглощающей
способностью, например специальных покрытий, применение виброизоляции и
разнообразных гасителей колебаний. Каждый из упомянутых способов
имеет, естественно, свою рациональную область применения. Гасители
в этом перечне занимают особое место благодаря тому, что их
использование может быть предусмотрено не только на стадии проектирования
и создания конструкций, но и в случае, когда неудовлетворительные
динамические качества конструкции выявлены уже в процессе ее
эксплуатации. Достоинством гасителей является также то, что при сравнительно
малых затратах дополнительного материала они позволяют
относительно просто получить желаемый эффект уменьшения уровня колебаний.
Область практического использования гасителей весьма широка. Хорошо
известно применение гасителей в судостроении. Давно и успешно
используются они для борьбы с вибрациями проводов. Имеется много примеров
применения гасителей с целью снижения уровня колебаний различных
инженерных сооружений — стальных дымовых труб, телевизионных башен,
мостов, зданий и др. Гасители колебаний используются для улучшения работы
измерительных приборов и качества виброизоляции в переходных режимах.
5
Гасителям колебаний посвящена обширная литература. Наряду с
многочисленными статьями можно отметить и появившиеся в отечественных
и зарубежных справочниках [36, 58—60, 140, 183, 185, 259] й
монографиях [69, 78, 203, 233, 262] специальные разделы, в которых
рассматриваются вопросы расчета гасителей колебаний, а также и вышедшие в
в СССР нормативные документы [171]. Практика применения
гасителей колебаний предъявляет ряд важных требований к их расчету.
Многообразие механических схем защищаемых конструкций, видов
динамических воздействий и механических моделей гасителей, разнообразие
критериев качества, встречающихся в практических задачах, и особенно
узкополосный характер работы гасителей — все это усложняет расчет
защищаемых объектов, оборудованных гасителями колебаний, и
оптимизацию параметров гасителей. Для правильного и целесообразного
применения гасителей колебаний, их совершенствования и дальнейшего
расширения области использования необходимы книги, не только
обобщающие разбросанные в различных источниках отдельные частные
результаты, но и излагающие важнейшие из них с единой точки зрения.
В настоящее время подобная литература весьма немногочисленна. Здесь
можно назвать книгу A.M. Алексеева и А.К. Сборовского [4],
посвященную гасителям колебаний судовых конструкций, работу СВ. Елисеева и
Г.П. Нерубенко [62], в которой акцентируется внимание на применении
устройств для преобразования движения и управляемых гасителей, и
книгу Сноудона [262], в отдельных главах которой изложены вопросы
теории гасителей колебаний. Естественно, что этих публикаций, к тому же
не отражающих многих результатов, полученных в последние 15—20 лет,
явно недостаточно для решения вопросов, связанных с оценкой
эффективности гасителей колебаний при их использовании в разных областях
техники, для обоснованного проведения расчета и проектирования гасителей.
Разобраться в многочисленных, порой малодоступных публикациях
весьма непросто, учитывая к тому же, что динамические эффекты,
возникающие при применении динамических гасителей колебаний, зачастую
требуют достаточно тонких и детальных рассмотрений.
Эта книга имеет своей целью устранить указанный пробел в
литературе по вопросам борьбы с вибрациями и дать достаточно подробное и
полное изложение теории пассивных динамических гасителей, не
требующих дополнительных источников энергии. Надежность таких гасителей
приближается к надежности защищаемых конструкций. Изложение в
книге ориентировано на то, чтобы осветить механико-математическую сторону
практического расчета гасителей колебаний и защищаемых конструкций, а
также наиболее важные практические приложения. Задача написания такой
книги усложняется тем, что подобная теория как целое, несмотря на обилие
частных публикаций, по существу еще не установилась; это ясно видно
из литературных данных. Она должна быть весьма многоплановой,
содержать решения не только детерминистских, но и стохастических задач,
рассматривать наряду с линейными также и нелинейные схемы гасителей
колебаний, отражать разнообразие механических моделей защищаемых
конструкций и типов динамических воздействий.
Книга состоит из введения и четырех глав. Введение содержит
краткий обзор истории вопроса и основных результатов, полученных в теории
6
динамических гасителей колебаний. В гл. 1 рассмотрены особенности
решения задач о гашении колебаний с использованием простейшей двух-
» «олл^пгчи TT'f ЖиС^ТЖТТГЛ п ЖДЛТТЛТТТ1 оттттттолмАгл АГ\Т ЛТ/*ТО * * r> r\ sw ж пп г\ п гж Г I *>тг *~ъпгг\ * ж
детально обсуждаются задачи, соответствующие различным видам
внешних воздействий: силовым и кинематическим, гармоническим,
импульсным и случайным; рассматриваются установившиеся и переходные режи-
мы колебаний, оценивается влияние отклонения параметров от расчетных
значений. В гл. 2 описаны конструктивные схемы и приведены данные об
эффективности усложненных моделей гасителей, в частности рычажного,
многомассовых, нелинейных. Гл. 3 посвящена задачам о гашении коле-
-
баний континуальных и многомассовых систем, являющихся типичными
расчетными схемами конструкций машин, сооружений и других
технических объектов. Здесь рассмотрены стержни постоянного и переменного
сечения, пластинки, складки, оболочки, конструкции на упругом
основании. В гл. 4 описаны практические приложения теории для виброза-
щиты различных технических объектов.
Фактический материал книги в большой мере основан на работах ее
авторов и их учеников. Эти работы здесь систематизированы и обобщены;
в необходимых случаях использованы также опубликованные результаты
-
других исследователей.
• *
Книга рассчитана на достаточно широкий круг читателей и в первую
очередь на инженеров, занимающихся проблемами виброзащиты в различ-
ных областях техники. Учитывая актуальность этих проблем и большие
перспективы дальнейшего развития теории, она может представить
интерес и для научных работников, аспирантов и студентов вузов,
специализирующихся в области динамики машин и сооружений, динамики
измерительных приборов и др., а также может быть использована при
преподавании специальных разделов механики.
¦
ВВЕДЕНИЕ
Динамическим гасителем колебаний (ДГК) называют устройство, в
котором возникает сила инерции, уменьшающая уровень колебаний
защищаемой конструкции. В литературе встречаются и другие названия ДГК,
например "антивибратор", "динамический демпфер", "виброгаситель",
"поглотитель колебаний", "амортизатор" и т.п. Чаще всего ДГК
выполняется в виде дополнительной массы, присоединенной с помощью упругого
и демпфирующего элементов к защищаемой конструкции или
непосредственно к неуравновешенной машине — источнику колебаний. Широко
применяются также гасители, масса которых движется по криволинейной
поверхности или подвешена как маятник. Масса гасителя представляет
собой твердое тело, к которому могут присоединяться съемные грузы,
упругую конструкцию или контейнер, заполненный отдельными грузами,
сыпучими материалами, жидкостью. В качестве упругих элементов
используются стальные пружины, резиновые элементы, упругие стержни или
пластины; для рассеяния энергии применяются материалы с повышенными
диссипативными свойствами (резина, пластмассы), отрезки стальных
канатов, демпферы сухого трения, гидравлические, пневматические и
магнитные демпферы.
Обычно изобретение ДГК связывают с именем Фрама, который в 1909 г.
впервые запатентовал конструкцию ДГК. Его именем названы и
цистерны для успокоения качки кораблей. Однако первое упоминание о
применении динамических гасителей для уменьшения корабельной качки,
как отмечено в [221], встречается еще в работе [271]. Основные типы
конструкций успокоительных цистерн разработаны адмиралом СО.
Макаровым [126]. Условие успокоения качки корабля — равенство времени
переливания воды с борта на борт и полупериода собственных колебаний
судна, а также результаты проведенных И.Г. Бубновым экспериментов
были изложены А.Н. Крыловым на лекциях в Морской академии в 1897 г., а
через год в докладе в Английском обществе корабельных инженеров [194].
В первых исследованиях, проведенных в начале XX века,
рассматривался ДГК без демпфирования, настраиваемый на частоту возмущающей
силы. Такой гаситель является узкополосным, так как не устраняет
опасных колебаний конструкции при изменении частоты возмущения.
Введение демпфирования позволило существенно расширить полосу частот
эффективной работы ДГК.
8
Задача об оптимальных параметрах линейного ДГК с вязким трением
привлекала внимание многих исследователей и освещена в известных
курсах по теории колебаний Дж.П. Ден-Гартога, СИ. Тимошенко и др.
Существенный вклад в дальнейшее развитие теории ДГК внесли A.M.
Алексеев, И.В. Ананьев, Ю.А. Гопп, В.В. Карамышкин, Н.А. Пикулев, А.Ф. По-
техин, А.К. Сборовскйй, В.Ф. Сегаль, В.П. Терских, J.E. Brock, F.M.
Lewis, F.E. Reed, J.C. Snowdon, G.V. Warburton и др. Ряд результатов
получен также авторами этой книги.
Основные направления исследований в области виброгашения связаны
с оптимизацией параметров и оценкой эффективности ДГК в
стационарных и переходных режимах при различных динамических воздействиях,
изучением эффективности усложненных линейных и нелинейных ДГК,
выяснением рациональной области применения ДГК для реальных
конструкций, имеющих достаточно простые и весьма сложные расчетные
схемы, разработкой эффективных методов расчета конструкций с
присоединенными ДГК и методов оптимизации параметров ДГК, разработкой
новых технических решений ДГК, обладающих требуемыми
динамическими качествами, применением ДГК в инженерной практике.
Большое внимание в литературе уделялось вопросам оптимизации
параметров и оценки эффективности линейного ДГК с использованием
простейших расчетных схем защищаемой системы. Основой для этого
направления исследований являются классические результаты
оптимизации ДГК с вязким трением, полученные Ден-Гартогом [54], Броком
[210, 211] и некоторыми другими авторами из условия минимума
максимального перемещения главной массы при нестабильной частоте
гармонического воздействия.
Целью многих исследований являлось определение оптимальных
параметров и эффективности гасителя в такой же постановке, но из
условия минимума других критериев качества, например максимальной
скорости или ускорения, и с использованием других зависимостей
амплитуды гармонического воздействия от частоты [156, 268], с учетом
демпфирования для главной массы [17, 29, 156, 176, 208, 227, 251, 266], для
случая частотно-независимого трения в ДГК [4, 25, 77, 156]. Результаты
получены в виде приближенных и точных аналитических выражений [4,
25, 156, 208, 268] или численно на ЭЦВМ [176, 184, 227, 251, 270].
Оценка чувствительности различных критериев качества к отклонению
параметров гасителей от оптимальных значений приведена в [4, 17, 144, 156].
Развевались и другие подходы к выбору оптимальных параметров
ДГК, в частности вероятностный способ [154], позволяющий учесть
случайный разброс параметров системы и частоты возмущения,
рассматривался ограниченный по ширине диапазон частот возмущения [4, 122]
и учитывались ограничения на демпфирование гасителя [122,171].
Значительное число работ посвящено выяснению целесообразности
применения ДГК при воздействиях, отличающихся от
моногармонического. Так, например, исследовался ДГК без демпфирования при действии
нескольких гармоник с разными частотами [23, 209], периодических
импульсов [1, 209], случайных возмущений [209]. Однако отсутствие
в ДГК трения сделает его неэффективным при нестабильных частотах
возмущения, что существенно ограничивает область практического приме-
9
нения такого гасителя. Оптимизация настройки и демпфирования ДГК
с учетом нестабильности частоты воздействия при основном [167] и
кратных [162] импульсных резонансах показала, что эффективность
гасителя лишь немногим ниже, чем при гармонических воздействиях.
Влияние случайного разброса значений импульсов на оптимальные
параметры и эффективность ДГК оценено в [170].
Во многих работах обсуждался вопрос о применении ДГК при
стационарных [85, 106, 145-147, 169, 220, 226, 239] и нестационарных [159,
168] случайных воздействиях. И хотя в некоторых исследованиях
сделан вывод о нецелесообразности использования гасителя при случайных
колебаниях, что, по-видимому, объясняется неудачным выбором его
параметров, большинство авторов все же приходит к заключению о
возможности уменьшения среднеквадратических значений колебаний
защищаемой системы с помощью ДГК. При воздействии белого шума
присоединение ДГК без трения к одномассовой [36] и к произвольной [163]
механической системе не изменяет среднеквадратических значений
скоростей защищаемой системы, поэтому эффект уменьшения уровня
колебаний достигается лишь при введении в гаситель демпфирования.
Получены [106, 239] приближенные формулы для оптимальных параметров
ДГК с частотно-независимым трением с учетом демпфирования
защищаемой системы, на которую действует случайный процесс с
дробно-рациональной спектральной плотностью. При действии белого шума для
гасителя с вязким трением найдены численные результаты [220, 226],
а также выражения оптимальных параметров без учета демпфирования
главной массы [85] и с учетом демпфирования [146, 169]. В
последней работе оптимизация произведена для различных критериев
качества. Результаты исследований ДГК при случайных воздействиях
представляют значительный интерес для инженерных приложений, так как
позволяют применять гасители как средство уменьшения уровня колебаний
конструкций при ветровых и сейсмических нагрузках, а также при их
перевозке.
Демпфированный ДГК оказывает существенное влияние на
протекание переходных процессов колебаний защищаемой системы. Сноудон
[262] показал, что ДГК, практически не уменьшая наибольшего
всплеска реакции системы от действия мгновенного импульса, заметно
ускоряет последующий переходный процесс. Для этого случая оптимизация
параметров ДГК с вязким трением из условия максимума модуля
вещественных частей корней характеристического уравнения системы с ДГК
произведена в [132, 166], энергетические критерии качества
использованы в [10, 38], некоторые другие критерии - в [160]. Решена задача
оптимизации параметров ДГК с вязким трением при действии на
защищаемую систему одной или нескольких затухающих косинусоид [115].
Исследованы также переходные режимы ДГК с частотно-независимым
трением [160]. Изучено [30, 153] влияние ДГК на амплитуды колебаний
при прохождении защищаемой системы через резонанс.
Значительное повышение декрементов колебаний при установке ДГК
на слабодемпфированной системе позволяет применять виброгашение
не только для улучшения качества переходных режимов, но и для
предотвращения возникновения или уменьшения амплитуд автоколебаний при
10
обтекании конструкций потоком жидкости или воздуха (ветровой
резонанс, галопирование) [5, 13, 47, 108, 216, 243, 254], автоколебаний при
резании мбюллов [136, 205], а гакже для ииьышения запаса
динамической устойчивости конструкций при пульсирующей нагрузке [72,
196,197].
Одним из важных направлений исследований в области виброзащиты
конструкций является выяснение возможности повышения
эффективности виброгашения путем усложнения модели ДГК (введения в него
дополнительных элементов или расчленения его на части) или
сохранения практически той же эффективности при упрощении конструкции
демпфирующего элемента ДГК. Здесь прежде всего следует отметить
исследования эффективности нелинейных ДГК. Во многих работах
отмечалось, что нелинейный гаситель без специально введенного
неупругого сопротивления обладает несколько большей по сравнению с
линейным полосой частот, в которой снижается уровень колебаний главной
массы. Были исследованы [11, 36, 75, 121, 150, 184, 187, 203, 253]
гасители с кубической нелинейностью, с изменением жесткости по закону
гиперболического синуса, с кусочно-линейной характеристикой.
Неясными, однако, оставались вопросы о том, какой вид характеристики
более предпочтителен и нужно ли сочетать упругую нелинейность с
оптимальным демпфированием. Проведенные в последние 15—20 лет
исследования позволяют дать ответы на эти вопросы. Определены
оптимальные упругие характеристики ДГК без трения для различных
зависимостей амплитуды возмущающей силы от частоты [59, 75, 148, 221],
исследованы гасители с нелинейным демпфированием [18, 28, 39, 90, 188, 222,
258], маятниковые и дебалансные гасители [8, 36, 155,157, 195], ударно-
динамические гасители [3, 58, 80, 129], гасители с гироскопами [118],
с предварительным натягом упругой связи [4, 157, 184] и с полостями
[24, 26, 27, 256], заполненными жидкостью или сыпучей средой. Как
показано в работах [157, 184], введение оптимального демпфирования
в гаситель нивелирует влияние нелинейности упругой связи, т.е.
эффективности нелинейного и линейного гасителей в этом случае
практически одинаковы.
Несколько работ [193, 218, 219] посвящено исследованию
автопараметрического гасителя, который имеет меньшую эффективность, чем
линейный гаситель, но не требует высокого уровня демпфирования.
К числу гасителей повышенной эффективности относится
трехэлементный ДГК [179], масса которого присоединяется к защищаемой
конструкции через вязкоупругий элемент Максвелла. Значительное внимание
исследователей привлекали многомассовые гасители колебаний [24, 63,
64, 79, 98, 103, 127, 128, 141, 142, 202, 214, 246] с параллельным или
последовательным соединением масс. Эти гасители при большом числе
масс и сравнительно малом демпфировании упругих элементов
позволяют получить за счет соответствующей настройки на разные частоты
в заданном диапазоне примерно такое же уменьшение уровня
колебаний, как одномассовый гаситель с оптимальным
демпфированием. При гармоническом воздействии с малой нестабильностью
частоты диапазон эффективной работы двухмассового гасителя шире,
чем одно массового.
11
Балочные и пластинчатые гасители, как показали исследования [149,
180, 225, 264], уменьшают уровень колебаний защищаемой конструкции
на нескольких резонансных частотах.
Много работ посвящено вопросам гашения колебаний при более
сложных расчетных схемах защищаемых конструкций. Различные аспекты
гашения колебаний изучались для систем с двумя и более степенями
свободы [73, 74, 215, 241, 269], стержней постоянного и переменного
поперечного сечения [4, 23, 31, 55, 121, 188, 224, 245, 262], гибких роторов
[116, 117], виброизолированных конструкций и фундаментов [46, 111,
112, 181,248], станков и приборов [85,136,152, 205, 231, 249], башенных
сооружений [13, 14, 96, 97, 105—109, 161, 233—240], высоких зданий
[204, 230, 242, 244, 272], пластинок [40-42, 110, 199, 232, 263],
складчатых и оболочечных конструкций [88, 94, 95, 133, 134, 139, 189, 207,
270], кузовов вагонов [16,33,35,165] и др.
В результате этих исследований установлено, что для систем с
разнесенными собственными частотами (балки, башенные сооружения,
здания и т.п.) во многих случаях можно использовать упрощенные
расчетные схемы, учитывая лишь низшие собственные частоты и формы
колебаний и назначая параметры гасителя по данным, полученным для двух-
массовой расчетной схемы конструкции с ДГК. Для оболочечных,
складчатых и других систем, имеющих достаточно густой спектр собственных
частот, указанные упрощения часто оказываются неприемлемыми.
Одно из важных направлений исследований связано с разработкой
эффективных методов расчета конструкций с присоединенными ДГК как
систем с "непропорциональным" трением [59, 60, 94, 95, 164, 171, 190]
и способов выбора оптимальных параметров гасителей [10, 17, 31, 122,
144, 156, 171, 241, 262]. Многокритериальные задачи оптимизации
параметров ДГК пока не решались.
Опыт практического применения ДГК для снижения уровня
колебаний разнообразных конструкций и данные об их эффективности
описаны в работах [4, 13, 14, 59, 60, 62, 76, 78, 91-93, 101, 130, 135, 174, 200,
204,213,228,229,249].
ГЛАВА 1
ТЕОРИЯ ЛИНЕЙНО! О ДИНАМИЧЕСКОГО
ГАСИТЕЛЯ КОЛЕБАНИЙ
ПРИ РАЗЛИЧНЫХ ВОЗДЕЙСТВИЯХ
Рассмотрение наиболее простых расчетных схем защищаемой
конструкции и гасителя является основой всей теории гасителей колебаний. В
течение длительного времени такой подход составлял единственное
содержание этой теории, которая к тому же ограничивалась рассмотрением лишь
гармонических воздействий. В этой главе дано систематическое обобщение
теории динамического гасителя колебаний с использованием
представления расчетных схем защищаемой конструкции и гасителя в виде линейных
систем с одной степенью свободы. Целью рассмотрения являются
определение оптимальных параметров и оценка эффективности гасителя при
различных динамических воздействиях, приложенных к защищаемой конструкции.
С позиций теории колебаний эта задача является очень простой, ее
решение может быть получено даже на малых вычислительных машинах
и с первого взгляда она не заслуживает специального и детального
рассмотрения. Однако именно сравнительная математическая простота
позволяет привести решение задачи к удобным для инженера формулам,
дать оценки эффективности гасителя и сформулировать практические
рекомендации. В опубликованных работах такой постановке задач
виброгашения уделяется большое внимание, имеется много полезных
материалов, которые дают возможность определить оптимальные параметры
и эффективность гасителя. В этой связи крайне желательно дать
единообразное изложение различных сторон задачи оптимизации параметров
гасителя, в том числе и не затронутых в литературе.
Для краткости изложения в этой главе предполагается, что
защищаемая система с одной степенью свободы представляет собой твердое
тело, совершающее поступательное прямолинейное движение. Тот факт,
что всюду говорится лишь о массе тела, не должен вызывать
недоразумений. Тело может быть связано с помощью пружины и демпфера с
основанием. Вопрос о механической природе этой связи здесь не обсуждается.
Все результаты полностью пригодны и в случае, когда защищаемое тело
вращается вокруг неподвижной оси. При этом в качестве перемещений
рассматриваются углы поворота, масса заменяется моментом инерции
тела относительно оси вращения, а внешними нагрузками будут моменты
относительно той же оси.
Другое очевидное обобщение состоит в том, что одномассовая модель
описывает движение защищаемой конструкции по некоторой, чаще всего
13
первой, форме свободных колебаний, которая дает наибольший вклад
в вынужденные колебания. Как показано в § 3.12, такой подход вполне
оправдан для конструкций с разреженным спектром собственных частот.
Предполагается, что частота со и форма колебаний v (x) достаточно точно
определены теоретически или экспериментально, а возможность их
изменения в процессе эксплуатации должна быть тщательно оценена. В этом
случае приведенные в точку подвеса гасителя масса, квазиупругий
коэффициент и сила соответственно равны
M = v~2 fm(x)v2(x)dx, K = co2M,
х
T=v~l fq(x)v(x)dx,
х
где т(х), q(x) — интенсивности распределенной массы и нагрузки; vr —
ордината формы колебаний в точке подвеса гасителя; х — область
изменения х; кратность интегралов, соответствует числу измерений
аргументах.
Вопрос о массе, квазиупругом коэффициенте и демпфировании
гасителя в простейшем случае не требует дополнительного рассмотрения,
однако он все же связан с теми данными, которые обсуждаются в гл. 2.
Например, для гасителя в виде маятника понятие "пружина" является
условным, и речь идет лишь о гравитационном происхождении
квазиупругого коэффициента.
Одним из факторов, наиболее существенно влияющих на характер
взаимодействия защищаемой конструкции и гасителя и, следовательно,
на постановку задач о гашении колебаний, является вид внешнего
воздействия. Так, например, при гармонических воздействиях гаситель
может существенно уменьшить амплитуды колебаний защищаемой
конструкции, а при действии мгновенного импульса гаситель, как правило,
лишь повышает темп затухания переходного процесса.
Характер воздействия в ряде случаев определяет используемый при
оптимизации гасителя критерий качества: чаще всего наибольшее
отклонение или амплитуда колебаний главной массы при детерминированных
или среднеквадратические характеристики при случайных воздействиях.
Детализация задач возможна при рассмотрении указанных критериев
не только для перемещений, но и для скоростей и ускорений главной
массы. При этом важным обстоятельством, часто осложняющим решение,
является в необходимых случаях учет ограничений на некоторые
параметры и амплитуду колебаний гасителя.
Конструктивная форма гасителя, характер зависимости его упругих
и диссипативных сил от амплитуды и частоты колебаний также
существенно влияют на постановку и решение задачи, однако эти вопросы
рассматриваются в основном в гл. 2.
Перечисленные факторы и определили основное содержание
настоящей главы. Вначале рассматриваются гармонические и близкие к ним
типы воздействий, являющиеся их естественным обобщением: отдельно
изучаются гармонические воздействия с весьма малой и существенной
нестабильностью частоты, затем воздействия с изменяющейся во
времени по заданному закону амплитудой или амплитудой и частотой. После
14
этого рассмотрены переходные режимы колебаний, возникающие, в
частности, при действии одиночного импульса, и стационарные режимы при
периодическом действии импульсов, мгновенных или конечной
продолжительности. Далее обсуждаются задачи в стохастической постановке:
оценивается эффективность гасителя при стационарных и
нестационарных случайных воздействиях, при периодически действующих
случайных импульсах, а также с учетом случайною разброса некоторых
параметров. Значительное внимание уделяется процессу получения конечных
результатов: данных об оптимальных параметрах и эффективности
гасителя. Это позволяет читателю в дальнейшем самостоятельно решать
аналогичные задачи, не рассмотренные в главе* развивая тем самым
теорию гасителей колебаний. Те, кто не преследуют такой цели, могут при
решении практических задач воспользоваться лишь окончательными
результатами, представленными в виде простых расчетных формул и
таблиц. Являясь самой простой частью книги, гл. 1 для читателя должна быть
наиболее важной, так как содержит основу для постановки более
сложных задач теории гасителей колебаний, частично рассмотренных в
последующих главах.
§ 1.1. Гармоническое воздействие с фиксированной
или находящейся в узком диапазоне частотой
Этот параграф посвящен расчету динамического гасителя, масса которого
с помощью пружины присоединена к защищаемой конструкции. При
рассматриваемом возмущении не требуется вводить в состав гасителя
демпфер колебаний. Как показано ниже, параметры гасителя можно выбрать
таким образом, чтобы избежать резонансных колебаний. Это позволяет
в расчете не учитывать неупругое сопротивление защищаемой
конструкции и пружины гасителя.
Рис. 1.1. Расчетная схема системы с ДГК без
демпфирования
777777Л777Я77777Я77А
Обозначим (рис. 1.1): М, К, х — масса, квазиупругий коэффициент,
обобщенная координата защищаемой конструкции; т, к, у — то же для
гасителя; со0 = у/К/М, /0 = y/k/т - круговые частоты колебаний
конструкции без гасителя и гасителя при х = 0. Параметры v - m/M,f2 = fl/col
играют в теории ДГК большую роль, будем их далее называть
относительной массой и настройкой гасителя. Действующую на главную массу М
гармоническую силу представим в комплексной форме q(t) = QeiPot, где
Q — амплитуда, являющаяся заданной функцией круговой частоты р0
или не зависящая от нее.
15
Для дифференциальных уравнений колебаний системы
Мх + Кх + к(х-у) = Qeip° *,
ту + к (у - х) = О
установившееся частное решение разыскиваем в виде
x = X0eipo\ y = Y0eipof. A.1.2)
При этом амплитуды колебаний равны
Q f - Р2 Q f2
где
A = (l-p2)(f2-p2)-^2/2, P=Po/^o. A.1.4)
Приведенное решение имеет смысл при Д # 0. Случай резонанса (Д = 0),
при котором периодическое решение в отсутствие демпфирования не
существует, из рассмотрения исключается. Иначе говоря, предполагается,
что значение р не совпадает с относительными частотами колебаний двух-
массовой системы
,2 =V{l+/2(l+^)±V[l+/2(l+^)]2-4/2}/2" A.1.5)
Сначала рассмотрим задачу о гашении колебаний с фиксированной
частотой. В данном частном случае нетрудно выполнить наиболее сильное
из возможных требований, а именно обратить в нуль амплитуду
колебаний защищаемой системы. Действительно, при / = р, т.е. в случае
совпадения парциальной частоты гасителя и частоты внешней нагрузки,
оказывается Х0 = 0, Y0 = — Q/k = —Ql (mpl).
Усилие в связи гасителя равно силе инерции его массы и полностью
уравновешивает возмущающую силу. Вследствие этого главная масса
неподвижна. Массу гасителя, от которой этот результат не зависит,
следует назначить с учетом возможных эксплуатационных ограничений на
амплитуду колебаний Y0 и условий прочности его упругой связи.
Эффективность виброгашения обычно оценивается отношением
рассматриваемых критериев качества до и после установки гасителя. В
данном случае она весьма высокая, в особенности при резонансной для
незащищенной системы ситуации (р -> 1). Практическая эффективность
виброгашения обычно снижается, так как условие / = р выполняется лишь
приближенно. Действительно, реализованные параметры гасителя будут
несколько отличаться от требуемых, а частота возмущения, даже если
формально она считается постоянной, фактически может не совпадать с ее
расчетным значением. Поэтому, так же как при расчете на нагрузки от
номинально уравновешенных машин всегда учитывается некоторая
условная неуравновешенность, в данной задаче следует принять во
внимание нестабильность частоты, допустив отклонение отношения p/f от
единицы на малую величину. Во многих случаях частота р ив самом деле
является нестабильной, например, для электромоторов она зависит от
напряжения сети, нагрузки на валу, которые имеют случайный разброс.
При этом точная настройка гасителя на частоту возмущающей силы ока-
16
I
(l.i.i)
зывается невозможной и следует выбрать параметры гасителя из условия
оптимального виброгашения защищаемой системы в заданном частотном
диапазоне.
Обобщая постановку задачи, положим, что частота р нестабильна в
сравнительно узком диапазоне р\ <р ^Рг-> который не включает частоты
со1J свободных колебаний системы с гасителем, и рассмотрим не только
силовое, но и кинематическое воздействие z = ZelPot. Отсюда ясно, что
понятия слабой или сильной нестабильности частоты зависят также от
относительной массы гасителя и носят условный характер. Примем для
амплитуды воздействий степенные зависимости от частоты Q = QoP01* , Z = Z0pai,
где Qo, Z0 — амплитуды при р = 1; (*! - заданное число, имеющее значения
— 2, 2. Наибольший практический интерес представляют и чаще всего
рассматриваются в литературе случаи постоянной амплитуды (а^ = 0) или
пропорциональной квадрату частоты (<*! = 2) — инерционное воздействие,
возникающее при вращении неуравновешенной массы с
эксцентриситетом, не зависящим от частоты. Другие значения аг могут оказаться
полезными при аппроксимации реальных воздействий, передающихся на
защищаемую конструкцию через колебательную систему, работающую в
до- или зарезонансном режиме. Будем оценивать различные критерии
качества: амплитуды абсолютного Х0 и относительного U0 = Х0 — Z
перемещений, скорости V0 и ускорения W0 главной массы.
Обозначим через хст величину Q0/K при силовом, Z0 - при
кинематическом воздействии, назовем разность S0 = Y0 - Х0 ходом гаеителя (здесь
и далее имеется в виду амплитуда хода) и перейдем к безразмерным
амплитудам
\Х01Х{
с/г
J7=|I7o/jccx |, Г=|Ко/(*ст<ОоI,
И/=|ИУ(хстсо02I, Г=|Г0/*ст1, S=\S0/xCT
Учитывая соотношения A.1.1) - A.1.4), получаем
A.1.6)
Х- рс
и=
.,<*. +2
д
/2A+*0
А
W-
,а, + 2
f-P7
f
Ра>^-\, s-
ла, +2
A.1.7)
Задача оптимизации параметров гасителя ставится следующим образом:
при заданных параметрах внешнего воздействия определяются настройка
и относительная масса гасителя, при которых в заданном частотном
диапазоне р\ <р <р2 критерий качества не превышает допускаемого значения А.
Чаще всего критериями качества являются X, V, W, U; при этом
кинематические параметры колебаний гасителя Y, S также не должны превышать
заданных значений.
Из приведенных в начале параграфа результатов следует, что если/?! <
< /< Р2 » то амплитуды X, V, W обращаются в нуль при р =/, для
кинематического воздействия U = 0 при р = /Vl + v. При отклонении частоты
от указанных значений критерии качества возрастают (рис. 1. 2), и если
бы это возрастание было симметричным, то следовало бы принять / =
2. Б.Г. Коренев
17
= 0,5 (pi +p2). Однако, как правило, АЧХ в диапазоне рх < р < р2 не
симметрична, поэтому относительную массу и настройку гасителя можно
найти приравнивая допускаемом^' значению А кпитепий качества на
границах частотного диапазона. Сочетание рассмотренных вариантов
воздействий и различных критериев качества дает разные расчетные случаи
для определения v,f2 . Введем обобщенный критерий
I + f2-P2\
D= U«i+«a y Я-I AЛ>8)
I Д |
который соответствует X, V, W при а2 = 0, 2 (множитель р позволяет
Ш
Рис. 1.2. АЧХ перемещений системы: 1
ля, 2 - с гасителем
без гасите-
И7
также учитывать различную весовую значимость критерия качества в
зависимости от частоты р) . Из условия D = А при р = рх, р ~Рг находим
р\
Р\
Pipiivi -^i)
f2 =
PlP2(V2-<Pl)
P2V2-P1V1
A.1.9)
где <p1>2 = 1/@ + Pi,2 ~ 1); 0 = ±ра1+(*21А; верхний знак соответствует
^2, нижний — ifi. Для критерия U выражения v,f2 сохраняются,
изменяется лишь 0 = р / (/7е*1 ±А). Приведенные формулы дают значения v < 0,
если резонансная частота системы без гасителя не попадает в диапазон
частот Рг^Р\ и на границах этого диапазона выбранный критерий
качества системы без гасителя не превышает допускаемого значения А. В таких
случаях гаситель, очевидно, не требуется. Оптимальные значения v,f2 для
критерия D содержатся в приложении (с. 288) .
Для определения максимальных амплитуд отклонения Y гасителя и
удлинения S его упругой связи, если параметры V,/1 удовлетворяют A.1.9),
можно воспользоваться полученными из A.1.7) выражениями
1 Г
\f2-p2
f2
/а0+")
А
-Р2
S =
А,
Р2
f2-l
S =
о2
f2
А
ра*'
Р2
A+«0-р2
соответственно для критериев D и U, причем р~Р\^. При небольших
значениях v знаменатели этих выражений становятся очень малыми, в таких
случаях необходимо в знаменателях заменить/2 на/2 A +/72)» где 72 -
коэффициент неупругого сопротивления пружины гасителя.
При практической реализации в конструкцию гасителя целесообразно
ввести небольшое демпфирование для улучшения его работы в нерасчетных
ситуациях (слабые толчки и удары, появление небольших нагрузок с
резонансными частотами о^, со2 и др.). Некоторое изменение настройки
18
гасителя по сравнению с A.1.9) допустимо лишь при увеличении
относительной массы гасителя до наибольшего из значений
Р\г -Г
соответствующих принятой настройке /2.
Из приведенных результатов следует, что использование
рассмотренного простейшего гасителя колебаний наиболее целесообразно при
резонансных для незащищенной системы ситуациях и сравнительно узком
диапазоне частот воздействия, когда эффективность гасителя особенно
высока. При вычислении критерия качества для незащищенной системы
в резонансной ситуации, очевидно, должно учитываться демпфирование.
С расширением частотного диапазона внешнего воздействия требуемое
значение относительной массы v увеличивается и более рациональными
могут оказаться гаситель с оптимальным демпфированием или
многомассовый гаситель.
§ 1.2. Гармоническое воздействие с нестабильной частотой.
Гаситель с вязким трением
Область применения гасителя без демпфирования весьма ограничена.
Гасители с демпфированием эффективны в значительно более широком
диапазоне частот внешних воздействий. Чувствительность к отклонению
параметров от оптимальных значений у таких гасителей более низкая,
чем при отсутствии демпфирования, что существенно повышает
надежность их работы в процессе эксплуатации. Рассеяние энергии в гасителях
чаще всего осуществляется с использованием демпферов вязкого,
внутреннего и сухого трения. В этом параграфе детально изучается работа
гасителя с вязким трением. С целью упрощения решения задачи вначале
неупругое сопротивление защищаемой конструкции не учитывается, что
позволяет получить аналитические выражения для оптимальных
параметров гасителя. Затем (§ 1.4) производится приближенная оценка
влияния этого фактора на оптимальные параметры и эффективность гасителя.
Дифференциальные уравнения колебаний главной массы и массы гасителя
Мх + К (х - z) + к (х - у) + Мо (х - У) = Я (О,
ту+Цо(У -х)+к(у-х) = 0 A.2.1)
при гармонических воздействиях q(t) = Q0paieiPot, z =Z0paielp°f,
которые далее будут рассматриваться отдельно, имеют установившееся
частное решение
x = X0eip*f, у=?0е*о\
где
f2-p2+inp f2 +WP
Х0=хСТра> —-— , Y0=xCTpa> ¦—- ,
Z>! +n±pb2 bi +iiipb2
bi=(l-p2)(f2 -p2)-vp2f2, b2 = 1 -p2(l +*), Д = Мо/(/ясо0),
До — коэффициент вязкого трения гасителя; остальные обозначения такие
же, как в § 1.1.
2* 19
Поскольку возмущения представлены в комплексной форме,
необходимо определить модули найденных комплексных амплитуд Х0, Y0. Как
ив § 1.1, перейдем к безразмерным амплитудам A.1.6) и обобщенному
критерию/), которые в данном случае определяются по формулам
|А|2
U2 =р2(«1+1) -Н-Ь 7 н I ZJ—i Ц A.2.2)
Г2 epW| (/4 +М2р2)/|Д|2) д2 ^p2(a,+a)yJAj2e
Здесь при значениях а2=0,2 критерий ?> соответствует безразмерным
амплитудам перемещения X, скорости V, ускорения W главной массы;
знаменатель | А| 2 = Ъ\ + ix2p2b\ .
Характерным в постановке задач оптимизации параметров ,гасителя
с демпфированием является предположение о том, что частота
гармонического воздействия, являясь нестабильной, может принимать
произвольное, самое неблагоприятное значение. В частности, она может совпадать
с резонансными частотами конструкции без гасителя или конструкции
с гасителем. Для системы с гасителем относительно небольшой массы
ширина межрезонансного интервала частот сравнительно невелика (см.
формулу A.1.5)) и может перекрываться реальным диапазоном изменения
частоты воздействия.
Подход к оптимизации параметров для гасителя с вязким ярением
отличается от случая гасителя без демпфирования. Настройка и
демпфирование гасителя определяются из условия минимума максимальных
ординат АЧХ того или иного кинематического параметра колебаний
главной массы при заданном значении v относительной массы гасителя.
Последнее назначают, исходя из обеспечения требуемого уровня выбранного
критерия качества при соблюдении условий прочности упругого элемента
и ограничений на ход гасителя.
С целью получения достаточно точных и простых формул для
оптимальных параметров гасителя обычно используют известное свойство
линейной системы с одним демпфером - наличие на АЧХ так называемых
инвариантных точек [54], ординаты которых не зависят от значения
демпфирования. В этих точках пересекаются АЧХ системы, соответствующие
разным значениям ц, в том числе д = О и ц = °°. АЧХ колебаний главной
массы, оборудованной гасителем, имеет две инвариантные точки (рис. 1.3),
ординаты которых при фиксированном значении v зависят лишь от
настройки гасителя и ни при каких значениях \х не превышают максимумов АЧХ,
расположенных вблизи указанных точек. Настройка гасителя назначается
из условия минимума наибольшей из ординат инвариантных точек,
коэффициент вязкого трения выбирается таким, чтобы касательные к АЧХ
в инвариантных точках имели минимальный наклон. В этом случае
обеспечивается минимум наибольшей ординаты АЧХ колебаний главной массы
при нестабильной частоте возмущения.
Рассмотрим ход решения задачи для обобщенного критерия ?> и
критерия U (см. выражения A.2.2)). Приравнивая ординаты соответствующих
20
0,22 jD/Qn)
Рис. 1.3. АЧХ обобщенного критерия D при различных значениях коэффициента
вязкого трения гасителя (р - 0,1)
ветвей АЧХ двухмассовой системы без демпфирования (д = 0) и одно-
массовой (М + т) системы, получаемой при ц = °°, имеем для критерия D
соотношение
-р1
1
О -рЬШ2 -Pl)-vplf2 ' 1 -p2„(i +») '
эквивалентное биквадратному уравнению для определения инвариантных
частот рИ1,2 •
р4„
1 +/2(i +iq
2+v
Ри +
_2/_2
2+у
= 0.
При использовании критерия U точно так же найдем уравнение
к+/2
р4„
+/2о+")
0.
A.2.3)
A.2.4)
2A+»»)
С изменением /2 инвариантные точки передвигаются по ветвям АЧХ
одномассовой (М + от) системы, которые уходят в бесконечность
(резонанс) при р2 =1/A+у) и при некоторых значениях а = at + a2
21
Dn
при р2 = 1/[2A+*0].
достигают минимума
f4(l +v)
l,5V3(l+v) при р2 = 1/[3A + i>)]
1,5\/3/(l +^K при p2 = 3/A + p),
4/A + z/J
при p2 = 2/A + v),
a = -2,
a = -l,
<* = 3,
a = 4.
Если он не попадает в интервал частст между инвариантными точками
(при практически реализуемых значениях v это условие обычно
соблюдается), то уменьшение ординаты одной из инвариантных точек при
изменении /2 сопровождается увеличением ординаты другой инвариантной
Таблица 1.1
Значения а в зависимости от а,, а2
а2
0
1
2
-2
-2
-1
0
-1
-1
0
1
*1
0
0
1
2
1
1
2
3
2
2
3
4
точки. Поэтому оптимальная настройка гасителя определяется равенством
ординат инвариантных точек. Последние наиболее просто вычисляются
при ц-°°. Учитывая противоположность знаков ординат резонансной
кривой при инвариантных частотах ри1, ри2 и полагая oc = ai +а2 для
критерия Z), а = аг +2 для критерия U, записьюаем
рл,
Р%г
l-PSi(l+")
1-PI20+")
A.2.5)
Используя это соотношение и свойства корней биквадратных уравнений
A.2.3), A.2.4), определяем оптимальную настройку/оПТ, далее из
уравнений A.2.3), A.2.4) — инвариантные частоты ри1>2 и, согласно A.2.5),—
ординаты RK инвариантных точек. Результаты для различных значений ос,
соответствующих обобщенному критерию D и указанных в табл. 1.1,
приведены в табл. 1.2, при оптимизации гасителя по критерию U результаты
даны в табл. 1.3.
С целью определения оптимального демпфирования, при котором
касательные к АЧХ выбранных критериев качества горизонтальны в
инвариантных точках, представим выражения для D2, U2 в виде
а\ +Ц2р2а1
R2
Ь\+Ц2рЩ
где al9 a2, bl9 b2 — некоторые многочлены с целыми или полуцелыми
степенями р . Из условия
d^)
= О при р = ри нетрудно получить фор-
22
мулу для оптимального значения (см. приложение стр. 288—289)
2 at(d[ ±Rub'x)
Мопт
р2а2(-а'2 ±ЯИЬ'2)
A ? ?Л
.KJJ
Здесь штрихом обозначены производные по р , индекс и показьюает,
что выражение A.2.6) соответствует инвариантной частоте, причем
верхний знак — меньшей, нижний — большей частоте. Использование формулы
A.2.6) значительно упрощает выкладки при определении ц1пт по
сравнению с приведенными, например, в [210, 211] для частных случаев а = 0, 2.
Вместе с тем при некоторых значениях а преобразования ju2nT к
достаточно простому виду остаются все же чрезвычайно трудоемкими и были
выполнены лишь в самое последнее время. При этом использованы
свойства корней биквадратных уравнений A.2.3), A.2.4), зависимости A.2.5),
а также найденные значения р2, /опт> ^и- Из двух значений МоПТ,
соответствующих разным инвариантным частотам, принимается среднее (см.
табл. 1.2, 1.3). При этом максимумы АЧХ отодвигаются от инвариантных
точек и становятся больше, чем ординаты Яи, но при малых значениях
у = @,01-^0,1), которые обычно применяются на практике, эти
расхождения невелики и можно максимумы рассматриваемых критериев
приближенно оценивать значениямиRH.
Следует отметить, что если относительная масса гасителя v превышает
некоторые предельные значения, зависящие от а и легко определяемые
по данным табл. 1.2, 1.3, часть из приведенных результатов теряет смысл.
Однако обычно реализуемые значения v укладываются в указанное
ограничение.
Сравнение оптимальных параметров гасителя для разных расчетных
случаев показывает, что различия в значениях параметров возрастают
с увеличением v. В связи с этим, а также с учетом неизбежных
отклонений реализуемых параметров гасителя от расчетных оптимальных значений
важно оценить чувствительность критериев качества к отклонениям
параметров гасителя.
Для оценки чувствительности к отклонениям настройки гасителя /2
от /опт воспользуемся линейным приближением, полагая, что критерий
качества
2 2 dR
R-RH + \f -/опт|
d(f2)
dR dR д(р2)
При этом производную — = : определяем, диф-
d(f2) Э(р2)Э(/2)
ференцируя по/2 уравнения A.2.3), A.2.4), пор2 выражения
_ JP°7I1 +P20 +z;)l для критерия R=D,
lpttl(l +*0/И -Р20 +р)\ для критерия R = U.
В результате относительное приращение критериев качества системы
при отклонении настройки гасителя от оптимального для данного
критерия значения/опт можно выразить формулой
^/^и-1 = 1/2//опт-1к,
23
Таблица 1.2
Результаты оптимизации гасителя с вязким трением по обобщенному критерию D
pU
[3yj2 + v + sj2 -lv +
-2
?V4 + 10
v -2sJ{2 + v){2-lv)]X
2B + vJ(l + vJ
v[2-v+sj{2+v)B-lv)\
2-v+sJ{2 + v)B-lv)
4A + vJ
X [4л/Г+7A +v)]-*
[3sj2 + v + yj2 - 3v-
-1
J , 2B + v)(l + v)
? V4 + 14* - 24/B+^)B-3^)]X — ,
X [4sj2 + v(\ +v)Yl
1 + VVB + v)
Y+~v
[s/S+5v + yJv~]2
4B + i>)(l +v)
\ 2 + v
2 -v + sjB+v){2-3v)
4A + vJ
l+Jv/[2(l + v)]
1+0,5*
2B + vJ
4 1 + sjvl{2 + v)
2 + v
V
2 + v
v(l + v)
2
v(l + v)
2
v{\ + 0,5*J
2
(l + vJ
1 + 0,5*
A + vJ
1
1+v
1
*(l + 0,5*)
1 + 0,5*
1
Таблица 1.3
Результаты оптимизации гасителя с вязким трением по критерию U
Р'и
ul
fh,
+ 0,5vf ГТ~\
1+v \V 8 V 8/
1 + 0,5*
(l+«o(l±>/j")
2A +
V
2A +
V
2 + v
v
2A +
*A -
2A +
V?
v)
0,5 v)*
no
0,5 *J
*A + *J
1 -0,5*
A + »J
1
A+*J
1 + 0,5*
A+^J
A + Q,5*J
A + *JA -0,5*)
**опт
[_2 + 6у- Up2 + 5,75i>3 +
B+10^- 3v-
-0,5+ - [2 - 1 v + 3yJ{2 + v){2-7v)]X
16
/2 -7у . . /2+5v + sfB + v)B - 1Ц
+ V—~ B + 10i>-3i>a-2,75i>3)]X XV —
2 + v
B + y)(l +v)v
-0,25 + - [3B-3*0+5\/B+*OB-3iO]X
16
X {4A + vK[s/B + v)B-7v) - 4V)}1
[4 + 9p- 30,5v2 + 7,75i>3 +
l2-3v . , /2 + 7i> + VB + ")B-3i/)
+ V-z (-4 + ll^-0^^-l,25^3)]X XV- w, '
2 + v B + v)D + 6?v)v
X i4(l+vKD-7v)]1
3v 1__
2A +vK
v{3 + 3v + 0,625 v2)
B + v)(l + vK
3v
B + iOU+v)
3v
2-0,5**
(З-^)у
VB + v) v
/1+0,625 v
0,25
0,5+V-^t-
0
2v
2v
щя /l + 0,62
»,75+V f-
2i>
,625*
1 +
1
2A -2v-v2)
Мопт
S
VB + *0 v
,
a
3v
2A + vJ
2A +
3*
2fl +
3*A-
*K
*03
юЗ*)
2A +уK
,A+0,5,)(з-|^-'-3)
2A + vJ A ^i>2)
*C-5*-5,25*2)
*\/3 - 6i>
2A+у) / 1 + v
v ^ 3-l,125i»
2A+*)
*V3A+0,5*)A -0,75*)
v
0,5
8 ^
Г *T ^ /8+y 1
1+- 0,25+V-tt—
8 L 16* J
2 + *
47"
2A-*)
ДТ7
)(l + 0,5*)
3-2,6*-2*2
2A+*JA -0,5*)
/8 + *
16*
2 A+*K A+0,5*) A-4,5*) vJT^lAi -8*a
1 +
1 -,0,5*
где
я=<
2A+«О ,
I <*Pli + B - а) —г /Lt I
2 г ^
max при R=D,
1B+а1)Р^-а1/5птA+"I n rr
max - при R = U,
/=if2 2|p?i — Ри21
значения Яи, /опт» Phi,2 соответствуют данным табл. 1.2, 1.3. Оконча-'
тельные зависимости коэффициента чувствительности а от относительной
массы гасителя v для разных расчетных случаев приведены в табл. 1.2,1.3.
Численная оценка коэффициента а показьшает, что влияние возможных
отклонений /2 от /опт не так уж мало, в особенности при небольших
значениях v. Так, в случае а - О, R =D имеем а = 2,18 при v = 0,1, а = 7,07
при v = 0,01. Это необходимо иметь в виду при реальном проектировании
гасителя, соответственно увеличивая расчетный уровень колебаний
защищаемой системы по сравнению с Ru. Значения коэффициентов
чувствительности а можно использовать также для приближенной оценки других
параметров колебаний защищаемой системы в случае, если настройка
гасителя выбрана из условия минимума заданного критерия качества.
В отличие от настройки отклонение демпфирования от оптимального,
значения значительно меньше влияет на приращение уровня колебаний
защищаемой системы и, следовательно, на эффективность гасителя. Для
оценки чувствительности критерия качества к отклонениям
демпфирования значения д2, р2 ,R2 обозначим соответственно е, 0, Г, а малые
отклонения от оптимальных значений е0, 0О, Т0 — через Ав, А/3, А Г.
Ограничиваясь в ряде Тейлора для Т квадратичными членами
Г=Г0 +О,5(Г^)О(А0J +(Г€0)оДб А0 + О,5(Г6€)о(АеJ,
определим смещение квадрата резонансной частоты Af} = —АеТ€р/Трр
и новое резонансное значение
Г= Т0 +0,5(АеJ(Гее - ТЫТюУо.
Здесь индексы €, 0 означают частные производные от Т по
соответствующим аргументам, индекс 0 указывает, что производные вычисляются
в исходной оптимальной точке. Таким образом, относительное
приращение квадрата критерия качества
R2/Rl-l = (n2lnl-lJb A.2.7)
пропорционально квадрату приращения д2 по сравнению с До ¦ причем
Мо
коэффициент чувствительности Ъ- — (Гее — Tlp/TppH имеет разные
То
значения для рассматриваемых критериев качества.
Приращение критерия качества можно оценить также по простой
приближенной формуле [ 144]
Д/До=0,5(до/М+М/До),
26
Таблица 1.4
Ход S гасителя с вязким трением при оптимизации по критерию D
-2
DHf2
цу/Р -0,25м3
2A + v) I 2 + v
~~v ^3B + 1,25^)
B + vJ>5 A + v)°>s
wf3 + 3v+jv2)(S + l3v+7v2 + ~ v3)
Du
1.+
V-M
+ v)
B + ^)(l + v)
vs/3 + 3v + 0,625 v2
1 /2B+y)
2A+iQ3 f 2 + v
v ^3B+ 1,25^)
2A + tQ3»sB+yI's
^У/з + 3*>+- t>2V8 + 13t>+7i;2~ - ii
2 + y 7 T+~v
v ^3 + 0,375 ^
•)
2 -у
*yfi--.2j62$l
2 + v
vj3(\+v)(\+^\
2_ / 2 -v
v V 3B +n)
8A -2v-v2)
v>JC-v2)(Z-l9v-%v1+v3)B+v)
которая приводится к виду A.2.7) при Ъ-<?Mo/Djbt3). Так, например, R =
= 1,025Д0 прим/Мо = 1,25,Д = 1,085Л0 при м/Мо = 1,5.
Для оценки прочности упругого4 элемента гасителя и наибольшего»хода
массы гасителя относительно' защищаемой конструкции необходимо при
выбранных параметрах'у,/2, м найти максимальную амплитуду
колебаний S. Как отмечено в гл. 4, в ряде случаев ход оказывает определяющее
влияние на выбор конструкции и даже возможность применения гасителя.
Определение наибольшего хода исследованием на экстремум выражения S2
является затруднительным. Ден-Гартог для упрощения использует условие
баланса энергии при резонансе. Следуя [4], выражение для квадрата
удлинения упругого элемента гасителя представим в виде S2 = R2Ф, где
1
Ф= <
р2с2-4[(/2_/72J+м2р2]
1
при R=D,
при R = U.
[/2(i+*)-p*]2+mVA+*'J
Так как при выбранных оптимальных параметрах гасителя АЧХ в
резонансной зоне являются довольно плавными кривыми, можно с запасом оценить
максимум S2 произведением квадрата R# ординаты инвариантной точки
на максимум второго сомножителя Ф, который.после дифференцирования
по р2 нетрудно найти. В результате
ГА*/2/(м\7/2 -0,25/i2) при а2=0,
5=<Г"/М , ПРИ а2 = 1, A2 8)
ДИ/(М\//2 -0,25м2) при а2 =2;
[ии/[цA +^V/2A+^)-0,25m2A+^J]
в зависимости от использованного критерия качества. Подставляя сюда
найденные выше значения Z)H, Uu и оптимальные параметры /опт, Мопт,
можно выразить S через v. Окончательные выражения даны в табл. 1.3,1.4.
§ 1.3. Гармоническое воздействие с нестабильной частотой.
Гаситель с частотно-независимым трением
Применение в гасителях упругих элементов из материалов с высокой
поглощающей способностью (резина, полимеры, отрезки стальных
канатов и т.п.) позволяет в ряде случаев при гармоническом воздействии с
нестабильной частотой обойтись без введения демпферов вязкого трения.
Это существенно снижает предъявляемые требования к условиям
эксплуатации ДГК, повышает надежность и расширяет возможную область
практического использования гасителей для конструкций, периодический осмотр
которых затруднен.
Постановка задачи в этом параграфе такая же, кйк ив § 1.2, т.е.
рассматривается резонансная ситуация, вызванная гармоническим
воздействием с нестабильной частотой. Отличие состоит лишь в характере силы
неупругого сопротивления гасителя; здесь предполагается, что она не
зависит от частоты. При описании частотно-независимого трения восполь-
28
зуемся гипотезой Е.С. Сорокина [182]. Для установившихся колебаний
с частотой р> 0 квадрат комплексной частоты колебаний гасителя можно
[158] записать в виде fl(^2,+ *и2), где
4 -702 4?02 п.п
и2=- Г~ > и2 = г> A.3.1)
4+702 4 + 702
2 *
7о2 — коэффициент неупругого сопротивления; /2 = г — настройка
mcoo
гасителя.
В этом случае выбор оптимальных параметров гасителя усложняется,
так как АЧХ системы с гасителем не имеет инвариантных точек вследствие
нелинейной зависимости и2, v2 от 7о2- Это затруднение можно обойти,
сделав переход к выражению /2 A + /72)» причем из условия
эквивалентности следует
7о2 =72 \~ , fl =/2\/НГт!, 72 = - • A.32)
1 +^1 +722
При использовании зависимостей А.И. Цейтлина [198]
U2 = 1/\Л +702> У 2 =702/Vl +702 A.3.3)
будем иметь
702=72, /22=/Ч/ГЙТ, A.3.4)
Зависимости A.3.1) и A.3.3) дают мало различающиеся результаты
Т а б л и ца 1.5
Оптимальное демпфирование гасителя с частотно-независимым
трением при оптимизации по критерию D
OL
2
—1
0
1
2
3
4
У*
2опт
[-2 + 5у-15р2 +14у3 +VB - 7^/B + v)B + \\v -5v2 - 2v3)] X
X [VB + y)B -7i>)B -8у + 0,5у2) + 4 -22*» + 15v2 +9,5^3] "¦
[-8 + 22*-71i>2 -16^3 + 17,5И + >JB + v)B - 3*)D + 39i> + 3v2 -2,5*3)] X
X{B +y)[VB + »B-3p)(8 -15p + 2,5i>2) + 16-38z; + 12y2 +8,5^]}"г
*C + 2v)/B + i0
2u(l2 + 29^ + 18,5 *2 + 3,125 v3)/B + vL
3vB + 3v)/B + uL
vC + 5,75^ + 2,375v2)/[B + i>)(l -0,25i>2)]
v{3 + v)(l + u)/[B + v)(l -2v- v2)}
29
Таблица 1.6
Ход S гасителя с частотно-независимым трением при оптимизации по критерию D
D»Jl*y?
-1
У
2 + v / 2 B + v)
Ъ + lv
Л/Т+~^+Т
^v ——
2Д2т5
B + у)A+у) /A+у)A + 0»-°'5 + 1
у ^ 2 C + Ь)
2 /(l+t0(l + l,74y+l>2+0,253z;3)
v 3 + 5,35i>+l,23^2
//2 + Ъ + №
2 /A+0»A + 2,87р + 3>2+0,72^3) 2-ку /^ 2 4 у
V /1 . .л /о J. с ос. J. 1 чо.Лч V 1 /о j. о.л
+ 1
у v (l+i;)C + 5,35v+l,23i;a)
2 / 2 + 51/ + 5^~
2 7 • 3 B + 5i> + 3*а
/
3 B + 3v)
V 1+7^ + 1
2Г^
Таблица 1.7
Оптимальное демпфирование и ход гасителя с
частотно-независимым трением при оптимизации по критерию U
' 2 опт
КЗ -0,5*0
2A -0,5^)а
2A +vJ
uy/3-0j5v
-1 1,5^A +0,25 v)
\{\+v) /Т+Т
3 + 0,75*
vC + 2 v)
2 + у
2A+у)
^v/3 + 2y
i/C + l,75i>-0,25i;a)
2A + 0,5*JA -v)
2 /A+0,5р)A-И)
у 3 + l,75i>-0,25y2
K3-3,5>-l,25v2 +1,125 у3)
2A+0^рKA+4,5р)
I /D-у2)A +4,5 v)"
р 3-2i>-2,25i>2
при значениях 70 2 < 0,1, однако
для материалов с высокой погло-
шающей способностью, которые
°ь обычно используются в ДГК, разли-
2 чия результатов становятся более
— существенными. Поэтому целесооб-
,- W1 ч2 разно вначале найти оптимальные
B + V) A + V)* г-2
——== значения fz и у2, по которым далее
vsJT+2v можно определить f\t 702-
Заметим, что выражение /2A + /72)
2 B +уI* A +уУ> соответствует описанию сил неупру-
uyje A + 2,4 ь + 1,5V + 0,45^3) того сопротивления в форме,
принятой в более ранних работах
2 + v J l + p Е.С. Сорокина. Оно применялось
v 3 + 4'5у в монографии [4] при рассмотре-
2 +
-j
6 + И,5у + 4,75у2
нии гасителя в случае действия
на защищаемую систему
гармонической силы с постоянной или
пропорциональной квадрату часто-
ij
1 _ 2v - и2 ты амплитудой.
v C+ i/)(l +v)
При расчете системы с гасителем
можно использовать формулы
A.2.2), заменив в них ц2р2 на
Тг/4. Однако эта замена, как
нетрудно убедиться, не повлияет на положение инвариантных то чек, их
ординаты, оптимальную настройку /2ПТ гасителя, а также не чувствительность
ординат инвариантных точек к отклонению/2 от/2пт. Поэтому можно целиком
использовать соответствующие результаты для гасителя с вязким трением,
приведенные в табл. 1.2, 1.3. Коэффициент неупругого сопротивления
гасителя определяется для каждой инвариантной точки согласно выражению
2. Pi 2
/опт
после чего в качестве оптимального 7гопт принимается среднее из
значений 72 ДЛЯ обеих инвариантных точек.
Следует отметить, что в данном случае коэффициенты неупругого
сопротивления, оптимальные для обеих инвариантных точек, более существенно
различаются, чем в случае гасителя с вязким трением. С увеличением v
значение 72 опт при рИ < 1 может оказаться даже отрицательным, а значение
72опт при рИ > 1 — настолько большим, что не удастся подобрать реальный
материал с такой поглощающей способностью. Таким образом, для
гасителя с частотно-независимым трением возникает ограничение сверху на
значение относительной массы v в связи с необходимостью физической
реализации требуемого оптимального коэффициента неупругого
сопротивления. Если при этом эффективность виброгашения оказьюается
недостаточной, следует увеличить относительную массу гасителя, используя
результаты оптимизации настройки гасителя с фиксированным
значением 72 (см. § 1.5).
31
Ход гасителя определяется с помощью приема, описанного в § 1.2 для
случая вязкого трения. В зависимости от критерия качества ход
S = <
72 .
D» /Vl+722+l
72/ V ~ 2
Dj(y2f2)
г/„/Ь/2A+^)]-
при
при
при
а2
а2
= 0,
-1,
= 2,
A.3.5)
Окончательные выражения, позволяющие найти усредненные для обеих
инвариантных точек оптимальные значения yl и максимальный ход S
гасителя, приведены в табл. 1.5-1.7. Переход к оптимальным значениям
/2>7о2 осуществляется по формулам A.3.2) или A.3.4).
§ 1.4. Учет неупругого сопротивления защищаемой системы
при гармоническом воздействии
При резонансной ситуации, которая рассматривалась в § 1.2, 1.3, более
точные оценки оптимальных параметров и эффективности ДГК могут
быть получены при учете неупругого сопротивления защищаемой
системы, если оно не является пренебрежимо малым. Приведенные в [59,
156] численные результаты свидетельствуют о том, что демпфирование
защищаемой системы более существенно влияет на эффективность и
менее заметно на оптимальные параметры гасителя. При учете, неупругого
сопротивления для защищаемой системы и гасителя инвариантные точки
на АЧХ колебаний главной массы отсутствуют (рис. 1.4), поэтому
оптимизация параметров гасителя заметно усложняется. Точное
аналитическое решение этой задачи пока не получено. В связи с этим
воспользуемся приближенным подходом [156], позволяющим для слабо
демпфированных систем оценить влияние неупругого сопротивления на
оптимальные параметры и эффективность ДГК.
Предварительно заметим, что если исходить из приведенных в § 1.2,
1.3 выражений для параметров гасителя» то при наличии неупругого соп-
fz-0,787
/ \ т h=0,1
~п
II
II
II
II
II
/" X
'// V.
II
11
II
\\
11
II
уЛ\
s v
\\
f'-0,82 7
0,10 0,14 0,18 0,10 0,7* 0,18 p/CZrt)
Рис. 1.4. Влияние трения на АЧХ обобщенного критерия D при а = 0, v = 0,1
32
ротивления в защищаемой системе можно несколько изменить
демпфирование гасителя или его настройку, либо то и другое. Более просто как с
позиций расчета, так и в реализации изменить настройку. Поэтому, выбрав
демпфирование гасителя в соответствии с его оптимальным значением в
отсутствие неупругого сопротивления защищаемой системы, определим
далее оптимальную настройку и оценим эффективность гасителя с учетом
указанного фактора.
Задача решается следующим образом. Найдем точки пересечения АЧХ
для выбранного критерия качества, соответствующих принятому значению
демпфирования гасителя и бесконечно большому демпфированию, т.е.
когда, масса гасителя жестко присоединена к защищаемой системе. Ввиду
пологости АЧХ в резонансных зонах ординаты указанных точек
пересечения должны быть близкими к ординатам максимумов АЧХ.
Приравнивая ординаты обеих точек, определим оптимальную настройку гасителя,
а затем и максимальные значения критерия качества. Этот способ
напоминает метод инвариантных точек, однако является более приближенным.
В предельном случае отсутствия демпфирования в защищаемой системе
найденные, как указано выше, точки совпадают с инвариантными,
следовательно, будут совпадать и значения/ опт- Рассмотрим ход решения задачи
и результаты оптимизации гасителя по обобщенному критерию D (см.
§ 1.2) при силовых воздействиях для трех расчетных вариантов,
отличающихся видом неупругого сопротивления для защищаемой системы и
гасителя.
В случае вязкого трения в защищаемой системе и гасителе амплитуды
колебаний определяются по формулам A.2.2), в которых, однако,
I A\2 = [(f2 -p2)(l-p2)-vp2f2]\ + p2h2(f2-p2J+2hnvp6 +
+ ц2 р2{ [1 -р2 A + *)]2 +Л2р2}, h =к01(Моо0), ho - коэффициент
вязкого трения защищаемой системы. Задавшись коэффициентом вязкого
трения гасителя м, равным оптимальному значению допт при h =0 (см.
табл. 1.2), и приравняв ординаты D2 при выбранном ц и при ц = °°,
получим биквадратное уравнение
рц - р* + =0, 0-4.1)
1+0,5* 1+0,5*
позволяющее определить абсциссы точек пересечения двух резонансных
кривых для главной массы, соответствующих указанным значениям ц.
Ординаты этих точек вычисляются как для системы с жестко
присоединенной массой гасителя
Р2а
D2 = П 4 2)
и [i-P2(i+*)]2+^V ' к }
где дс = ос1 + а2, (хг, а2 имеют тот же смысл, что и в § 1.2, значения р
удовлетворяют A.4.1), Приравнивание ординат D\ для двух значений р\д,
непосредственно найденных из уравнения A.4.1), приводит к весьма
трудоемким выкладкам при определении оптимальной настройки гасителя.
Поэтому целесообразно выражение D\ для различных значений а
преобразовать, используя A.4.1), к более простому виду (сзр2 + c4)/(ciP2 +c2)
или при с3 = 0 — к виду ХЦсхр1 + с2), где с^ — константы, зависящие
3. Б.Г. Коренев 33
Таблица 1.8
Результаты оптимизации при вязком трении защищаемой системы и гасителя
а
DI
2-
2-
-v + s/B +
-v + sj{2 +
v){2-
4A
v){2-
-lv)-
+ vJ
3v)-
8/2 [Ц F
- 8/2 [4ju
+ 5v)i
(l-M
¦h F + 13p)]
+ h B -9^))
4A + yJ
1 -/2MA +v) -h2 A + 0»
A +vJ ,
1 + 0,5^
(l+v)V
l+Иц
1+v-h2
A +/2ДJ
1 + 0,5у - /22 B + 0,5^ + 3/?m + 2/z2)
A + /2mK - /22 A + y) C + 2v + 2Иц)
1 -hnv - 6h2 A + l,6v+ hfi)
2A+ 0>2)
/2 Ii; + 2/imA + ^) + /22B+ Hi;)]
2_+^>
/2Tl + v) [v + hn ( 2 + 3v) + 2h2 A + v + 4Лд)]
2>v
У+2/2мA +^) + /22 A -!/)
2 + y
T(l + i;) + 2/2Д A + v) + h2 B~+~v)
2A+Иц)
A + v) [v + 2/2Д (l+v)+ h2 B + v)}
2 + 7/2M-/22 B- lb)
A + 0»2 [v + hnB + 0,5i>) + h2 B - 2,5i> - 6ЛмI
2 + 9/2Д+/22 F + I3l>)
A + 0,5i») [v + Ли B - 0,здТ/22 B - 7уI
лишь от v,f2, ц, Л, ос. Далее записываем условие с3/с4 =сг1с2 (или с% ±0
при Съ = 0), обеспечивающее равенство значений !)? при/?2 = р21>2- Из этого
условия можно найти приближенные выражения оптимальной настройки
гасителя /опт Для различных а, после чего с использованием формулы
D\ =c4/c2 и значений /оПТ5(а2опт удается выразить квадрат критерия
качества защищаемой системы через параметры гасителя. Окончательные
результаты представлены в табл. 1.8; при этом в некоторых случаях, с учетом
приближенного характера формул и неравенств v < 1, h < 1,
отброшены малые слагаемые порядка v3, h 3.
В случае частотно-независимого трения в гасителе и защищаемой
системе по причинам, указанным в § 1.3, целесообразно квадраты комплексных
частот гасителя/о2 («2 + iv2) и защищаемой системы со© ("i + /t>i)
представить в виде /2A+/*72)> <^20+* 7i)» где/2=/о2М2> co2=cooWi,
7i =Ui/mi, 72 = v2/u2. Далее введем безразмерные параметры р=р0/со,
/2 =/2/to2=/02 w2/(cjoWi). Тогда, как нетрудно убедиться, безразмерные
амплитуды колебаний системы и гасителя можно вычислить с помощью
выражений
(/2-р2J+/4т2
D2 =p2(a,+a2)
1Д12
[f2(\+v)-p2]2+f4ylQ+»J
\А]2
у2 -„2а. / О +-УД) с2=„2(а,+2) !_
|Д|2 ' 1Д12 '
I А I2 = [(/2 -Р2)( 1 -Р2)-^2/2]2 +Т2(/2 -Р2J +27lT2"P4/2 +
+ Т2/4{[1-р2A+")]2+7П.
Оптимальная настройка гасителя находится тем же способом, что и при
вязком трении. Приравнивая значения D2 при 72 =°° и 72 > оптимальном
в случае 7i =0 (см. табл. 1.5), получаем биквадратное уравнение для
определения абсцисс точек пересечения двух резонансных кривых
,. _ 1УЧ1»»у ./'(¦-т.») .„
l+0,5i» l+0,5i> v
Ординаты точек пересечения вычисляются по формуле
Р2а
[1-р2A+р)]2+72
Полученные после преобразований окончательные выражения для
оптимальной настройки гасителя и квадрата критерия качества системы
приведены в табл. 1.9. Квадрат парциальной частоты гасителя вычисляется
по формуле/о2 =flmb>Uilu2 =/опт^о\/1+72/\Л +7i-
3* 35
Та б л и ц а 1.9
Результаты оптимизации при частотно-независимом трении защищаемой системы и гасителя
DI
2-
2-
- i/ + VB +
-v + s/B +
v)B-
4A +
м)B-
-7»)-
v?
-3v)~
-87
i
A
1ъ
+ ^) (Т2
+<У|
B + v) + 47l
A +
A +
*)]
1»]
4A +v)*
1
A+*>J
A+0» A+7?)
(l- + »)f(l-7i-7iJ
1+7?
A+^A-27,72 -7?)
1
1 + 0,5* - 7i 72 О + 2,5v) - 7? C + Sv)
1
1 -47l72 d+^)-7? D+ Hi;)
2A+*)г
A -7i72)[^d -^) + 27l G2 +27l)(l -3i/)]
2A +„)*
A -7!72) [^ + 7i72 {2-v) + y\ B - &>)]
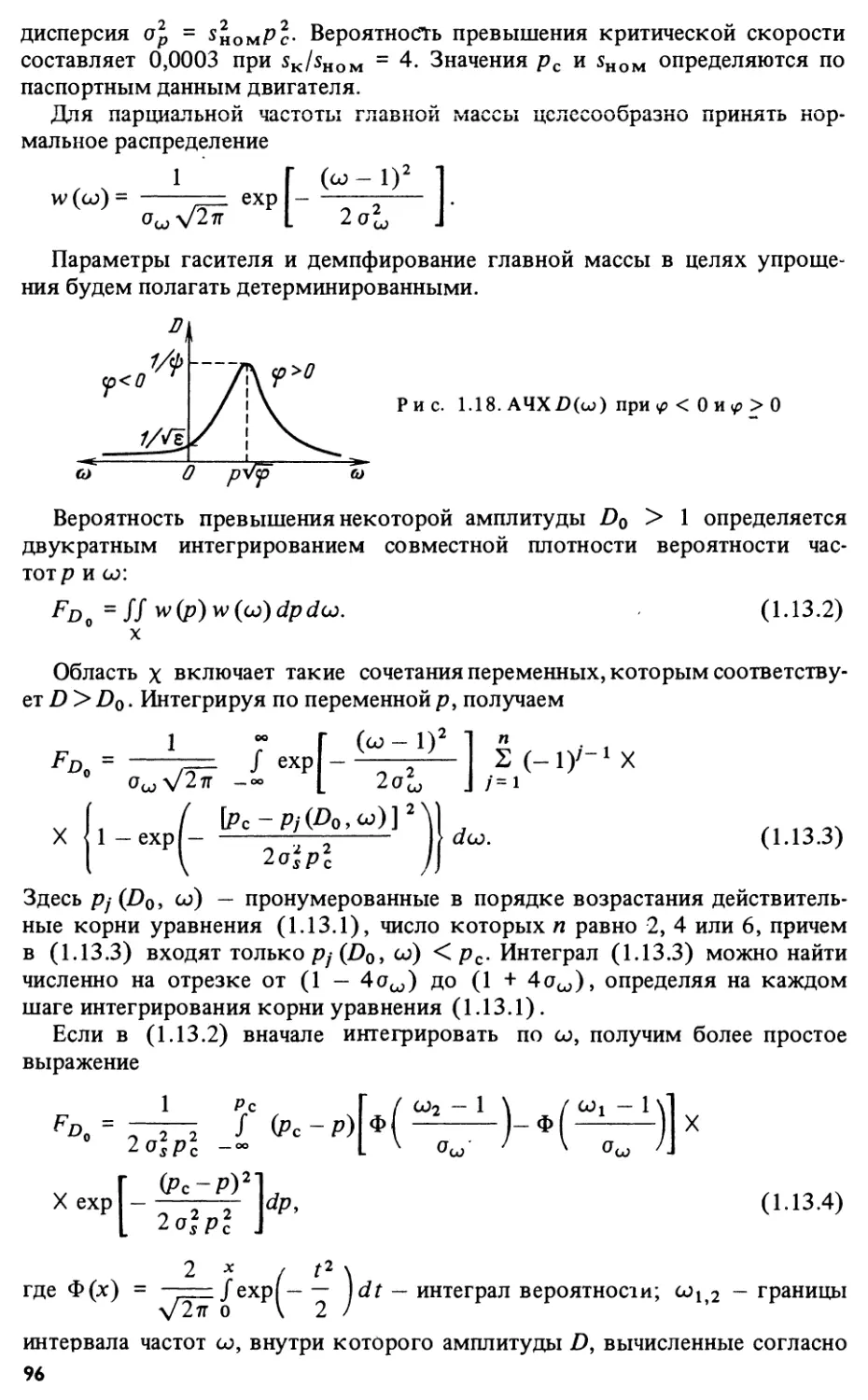
2 + p
y + 27i72"+7? B + У)
B + y)(l -7i72)
i\+v)[v*>lyiii +7? B + pI
2A- 7! 7a)
(l' + y)[I, + 27172 +7? B + v)]
2
A+0»2 [^+27l72 +7? B + p-20i;2 +37l72)l
2 + 8,77l72 +87?
A + 0,5i;) v + 27l 72 A + l,3i/) + 27? A + 4v)
Таблица 1.10
Результаты оптимизации при частотно-независимом трении защищаемой системы и взяком трении гасителя
DI
-2
2-
2-
-v +
- V —
7с
Ьг
l + v)B-
М (!+*>)
-lv)-
+Vc
- 4 A + v) 7l
4A + vJ
\+у)\г-гь
[5B +
- 4B-
v)H + yl F + 1»]
f pOi[M(l + ^) + 7il}
2A + 0»3
4A+ уJ
+ 0,57iM
U+*J
1 +7^A,5 + ^) + 7? d+7iM)
1
A
-0,57lM(l+^)
A + vJ
+ 0»(l+7f)
A+P)A -
l + 2,57lM(l
1 + 0,5i> - 7?
1 +0,57imE
7?)
+ 0,5
C +
- y +
" + 72)
5i>)
872)
(/2 -0,571m)[^A + 0»+27im + 72 A + 9*)]
2A+ lJ
1 -72 D+ 12>+16i>2)
l + 2A+i;)[7iMA+72) + 72]
2+_^
y + B + p)GlM(l+y) + 72]
2 + i>
A+v) {v + B + v)[yin(l+v) + y2}}
2
A + v) { v + 2 A + v) [7l M A + 0» + 7? A + 7i M)]}
2 + 77lju-372
A + 0»2 [v + 2Tl M A + vJ + 7? B + v) A - 37l M)]
2 + 6,77iM + 872
A+0» у + 0,771М + 2,3712
В случае, если гаситель с вязким трением установлен на системе с
частотно-независимым трением, знаменатель выражений A.2.2) принимает вид
I Д V - К/2 -P2)(l -P*)-»P*f*V +7i(/a -Р2J +27,д^5 +
+ mV{[i-p2(i+^)]2+7?}.
При этом абсциссы точек пересечения двух резонансных кривых,
соответствующих jjl = juonT и /л = °°, удовлетворяют уравнению
4 l+/2(l+iQ 2 TiMP /2
р< _ р2 _ + я 0 A.4.4)
1+0,5* 1+0,5* 1+0,5*>
а ординаты определяются согласно A.4.2). Решить уравнение A.4.4)
в обшем виде затруднительно, поэтому,учитывая, что его корни при v< 1
мало отличаются от единицы, заменим в предпоследнем члене р % A + р2)/2.
Это позволяет перейти к биквадратному уравнению
4 1+/2A + 1>) + 0,5 7i M 2 /2-0,57iM
р4 р2 + = 0
1+0,5* 1+0,5i;
и, используя описанные выше приемы, получить выражения /оПТ и /)?>
приведенные в табл. 1.10. Квадрат парциальной частоты гасителя
определяется далее по формуле/02 =/опт^о«1 =/опт <*>о/\Л +7?-
Выполненное в [156] для некоторых расчетных случаев сопоставление
значений/2ПТ hDJh результатов численной оптимизации ДГК спомошью
ЭВМ показало их удовлетворительное соответствие, в особенности при
малых значениях v < 0,1, h < v/2, 7i < W2. В целом для гасителя с вязким
трением результаты приближенного аналитического исследования
несколько лучше соответствуют данным численного анализа, чем в случае гасителя
с частотно-независимым трением. Это объясняется тем, что при частотно-
независимом трении значения 72» оптимальные для обеих инвариантных
точек, существенно отличаются друг от друга, поэтому даже при У\ =0
максимум резонансной кривой системы достаточно заметно превышает
ординату инвариантной точки. Учитывая это обстоятельство, необходимо
при проектировании гасителя несколько увеличивать расчетное значение
критерия качества по сравнению с результатами, содержащимися в
табл. 1.8-1.10.
При значениях а, равных —2, —1, 3, 4, формулы для оптимальных
параметров гасителя справедливы лишь при достаточно малых v, при которых
АЧХ рассматриваемого критерия качества имеет в резонансной зоне два
максимума. С увеличением v один из резонансных максимумов попадает
на восходящую ветвь АЧХ (см. также § 1.2) и не проявляется; в таких
случаях оптимизацию параметров гасителя следует проводить численно
для ограниченного диапазона частот воздействия.
Приближенные оценки хода гасителя можно получить с использованием
выражений A.2.8) или A.3.5) в зависимости от вида неупругого
сопротивления гасителя.
Приведенные в этом параграфе результаты следует рассматривать как
первое приближение; при их применении в конкретных задачах виброгашения
желательно уточнять оптимальные параметры ДГК путем числовых
расчетов с использованием точного выражения принятого критерия качества.
38
§ 1.5. Неполная оптимизация параметров гасителя
при гармоническом воздействии
Найденные б предыдущих параграфах оптимальные параметры
динамического гасителя практически не всегда удается реализовать по
конструктивным соображениям, в особенности это касается демпфирования за счет
внутреннего неупругого сопротивления. Влияние небольших отклонений
настройки и демпфирования гасителя от оптимальных значений на
снижение эффективности виброгашения можно оценить по данным, приведенным
в § 1.2. При существенных отклонениях одного из параметров гасителя от
оптимума возникает задача о неполной оптимизации: выбор оптимального
значения другого параметра и оценка эффективности гасителя при
фиксированном значении первого параметра. Определенный практический
интерес представляет, в частности, оптимизация настройки гасителя при
фиксированном значении его демпфирования. При гармоническом возмущении
с частотой, находящейся в достаточно узком диапазоне, решение такой
задачи для гасителя без демпфирования приведено в § 1.1. Рассмотрим
некоторые результаты оптимизации настройки гасителя при
фиксированном значении его демпфирования в случае гармонического воздействия с
нестабильной частотой, изменяющейся в широком диапазоне.
Ситуация, когда реализуемое значение неупругого сопротивления
значительно меньше оптимального, наиболее характерна для гасителя с
демпфированием, осуществляемым вследствие внутреннего трения в материалах
с повышенным рассеянием энергии. При этом, так же как и в случае
гасителя с вязким трением (рис. 1.3), резонансные кривые защищаемой
системы имеют два резонансных всплеска, ординаты которых превышают
ординаты инвариантных точек. Изменение настройки гасителя по-разному
влияет на ординаты указанных резонансов: при уменьшении одной из них
другая увеличивается. Оптимальная настройка гасителя выравнивает
максимальные ординаты резонансной кривой, иначе говоря, минимизирует
наибольшую из них. Снижение эффективности гасителя по сравнению с вариантом
полной оптимизации его параметров при этом будет определяться тем,
насколько заданное значение его неупругого сопротивления отличается
от оптимального.
В случае, если гаситель пере демпфирован, что может наблюдаться при
малой относительной массе, резонансная кривая для защищаемой системы
имеет лишь один резонансный всплеск на собственной частоте, при этом
оптимальная настройка гасителя/2 »1. Заметим, что увеличение
демпфирования сверх оптимального значения позволяет при сравнительно
небольшом снижении эффективности гасителя уменьшить его перемещение
относительно главной массы. Это особенно важно при ограниченном габарите
для размещения гасителя, например при установке гасителя на башенных
сооружениях (см. § 4.5,4.6).
Приведенные выше соображения иллюстрируются результатами [60]
численной оптимизации настройки f2 гасителя с внутренним неупругим
сопротивлением из условия минимума наибольшей амплитуды колебаний
главной массы. Для двух рассмотренных вариантов воздействия (а = 0 и
ос = 2) эффективность гасителя примерно одинакова, в то время как
значения оптимальной настройки, определяемые равенством ординат двух
резонансных всплесков, могут существенно различаться.
39
Проанализируем более детально задачу виброгашения, которая
возникает при установке ДГК с таким же коэффициентом 72 = 7i неупругого
сопротивления, как и у защищаемой системы, причем значение у« меньше
оптимального для данной массы гасителя. Представляется интересным
выяснить, за счет чего достигается уменьшение уровня резонансных
колебаний в этом частном случае, характеризуемом сохранением декрементов
колебаний защищаемой системы после присоединения гасителя.
Обобщенный критерий можно вычислить по формуле (см. § 1.2—1.4)
/20+/7i)-V
D = pa
0+/7i-V)[/2A+/7i)-P2] -^2/2(l+/7i)
однако для ответа на поставленный вопрос в данном случае, учитывая
"пропорциональность" неупругого сопротивления для всей системы в
целом, целесообразно воспользоваться разложением решения по формам
собственных колебаний. Если для обеих форм принять амплитуду
колебаний главной массы равной единице, то амплитуда колебаний массы
гасителя будет fTl(f2 —<^\ 2)» гДе Wj 2 - собственные частоты,
определяемые согласно A.1.5). Нетрудно показать, что обобщенная масса для
каждой формы собственных колебаний
щ
^+i?^)^=i^{i+v-k)-i+v+w]liv^
и обобщенный критерий
I 2
D = pa
191 H(i+'-^~i+v+H(~5~+i+/ti)
1
? I Г
Положим, например, что настройка/2 = 1/A + v). Тогда My:
2М/со2
D=pa
1
1
1+/71 -p2!u2i
Для системы без гасителя
1
1 +/7i
>*1 col
A.5.1)
D = pa
1 +17,
Сравнивая эти два выражения, видим, что резонансные амплитуды при
наличии гасителя (прир = со 1, р= со2) будут заметно меньше, чем в его
отсутствие (р= 1). Эффективность виброгашения определяется в данном
случае коэффициентом 2/ [1 + yl I 1 - со2/cof I -1 ], который возрастает с
увеличением относительной массы гасителя v и уменьшением значения 7i •
Резонансная амплитуда колебаний защищаемой системы при установке
гасителя с коэффициентом неупругого сопротивления 7i может быть
снижена не более чем в два раза. Максимальной эффективность вибро гашения
будет, если при р - со 2 одно из слагаемых в A.5.1) станет пренебрежимо
малым по сравнению с другим. Таким образом, даже при сохранении
декремента динамический гаситель заметно уменьшает уровень резонансных
40
колебаний защищаемой системы. Число резонансных частот при этом
увеличивается на единицу.
Теперь рассмотрим противоположную задачу — найдем оптимальное
демпфирование при ^заданной настройке ДГК. С целью упрощения
выкладок остановимся на частном случае пренебрежимо малого неупругого
сопротивления защищаемой системы, что позволит использовать свойства
инвариантных точек (см. § 1.2). Приведем окончательные результаты
для нескольких расчетных вариантов. При оптимизации по обобщенному
критерию D получим
/4пт =
Г
Р
/2 + 1 J_L при а=0,
2Л A+iOB + iO J О+*0B + *0
/2[B-^)/2-2] 2
" г + —[1+/4К1+^)-/2A-^)]
plB + v) 2+v
при а = 2,
2 1+/
в обоих случаях р^ =
2A+у)+У[н/2(^Т
2+v
,D =
a
1-PS0+")
Используя критерий относительного перемещения ?/ главной массы, для
ах = 0 находим
2 2 + *> /2A+*0 ,
р* = + ±
4A+*0 2
РиA+*0
i-p?O + i0
2 + ^ /2A+*Q
,4A+*>)
~/2,
?/ =
4 Мопт-П°Дстав-
1 2 + р Л 1 -/2A +^I\
1+^BA+^) L Ри J J
Для гасителя с частотно-независимым трением 7220пт =
ляя в приведенные выражения значение /2, можно определить оптимальное
демпфирование и эффективность ДГК.
Более детально рассмотрим частный случай /2 = 0, что соответствует
присоединению массы гасителя к защищаемой системе с помощью
демпфера без упругой связи. Такая конструкция известна довольно давно как
демпфер Ланчестера. В этом случае
р? =
Ри =
2 + у
2
2 + р
D =
2 + v
Допт = ——-";; : при а = 0;
. B + и)A + и)
2
Я = -
2
Мопт
2 + ^
при ос
41
для критерия D;
2 + v 2-tv 2 2 + v
Ри = — Т : » У = . Мопт = — 7 ч2 - ДДя критерия-К
2A + *>) р 2A+^
Эффективность демпфера Ланчестера обратно пропорциональна его
относительной массе v, в то время как эффективность оптимально настроенного
динамического гасителя обратно пропорциональна \J~v. При одинаковых v
динамический гаситель гораздо эффективнее демпфера Ланчестера, что и
объясняет более широкое применение ДГК по сравнению с демпфером
Ланчестера.
§ 1.6. Гармоническое воздействие с переменной амплитудой
Рассматриваемый класс воздействий можно представить в виде
F(t)sin(p0t), где F(t) — некоторая функция, характеризующая закон
изменения амплитуды. При F(f);#const эти воздействия являются
нестационарными. Ясно, что при медленном изменении F(t), иначе говоря, при
слабой нестационарности эффективность ДГК должна быть примерно
такой же, как в случае длительно действующего гармонического возмущения,
т.е. можно использовать результаты, приведенные в предьщущих
параграфах. При заметной нестационарности функции F(t) требуется проведение
специальных исследований для оценки эффективности виброгашения.
Одним из наиболее простых, имеющих вместе с тем важное практическое
значение, является случай изменения амплитуды воздействия по
экспоненциальному закону F(t) - е~€°* при положительном или отрицательном
значении е0. Функция F(t) = e0/^1~e°r описывает вначале нарастание
амплитуды почти по линейному закону до достижения при tж 1/б0
максимума, равного 1, затем затухание амплитуды воздействия. Указанные
модели возмущений применяются в инженерных расчетах при исследовании
колебаний конструкций под действием взрывных, сейсмических, волновых
нагрузок.
Необходимость рассмотрения такого же воздействия возникает в
задаче [115] о виброгашении гибкого элемента, опирающегося на значительно
более массивную конструкцию, колебания которой вызваны действием
кратковременной нагрузки. В этом случае влияние колебаний
защищаемого гибкого элемента, например точного измерительного прибора, на
динамические перемещения поддерживающей конструкции мало и может не
учитываться. Поддерживающая конструкция совершает свободные затухающие
колебания. Если хотя бы одна из частот этих колебаний близка к частоте
колебаний защищаемого элемента, в последнем возникают колебания типа
биений, амплитуды которых вначале нарастают, затем убывают.
Установленный на защищаемом элементе гаситель успевает включиться в работу до
появления наибольших амплитуд колебаний и заметно уменьшить их.
Таким образом, результат здесь отличается от получаемого при действии
импульса непосредственно на защищаемый элемент [166], когда гаситель
лишь повышает темп затухания, практически не уменьшая максимальную
амплитуду колебаний защищаемого элемента.
42
Рассмотрим более детально задачу о колебаниях защищаемой системы,
на которой установлен гаситель с вязким трением, при кинематическом
возмущении z(f) - F(i)ahi(p0i). Введем в первое из уравнений A.2.1)
слагаемое И0 (х — i) и положим q(t) = 0. Для получения решения задачи
при нулевых начальных условиях воспользуемся преобразованием Лапласа.
Изображения координат системы
X(s) = - — Z(s), Щ> = — Z(s\ A.6.1)
A(s) A(s)
где A(f) = s4+[/z + (l+*0/i]s3+ [/2A + ^) + 1+/гм]х2+(/г/2 + /ф + /2;
5 = Sol^o', so — комплексный параметр преобразования Лапласа; Z(s) —
изображение функции z (?). В частности,
ZW = 7 Т2 2 ПРИ ^(r) = e-ersin(pr), A.6.2)
(s + бJ + р2
Z& = T, S—ii ПРИ Ф) = ете1-€Тпп(рт), A.6.3)
[(s+eJ+p2]2
где 6= е0/со<), Р = Ро/^о» f = <^о^- Положим, что характеристическое
2
уравнение A(s) = П (s — s7-)(s — s/) = 0 имеет простые корни Sit2i
si,21 #е совпадающие с s3 = — б + ip. Перемещение главной массы
x(r) = plm 2 ¦ '- = esJT9
/=1Ims/ П (sj- sk)(Sj- si)
[т (sl+ns3+f2)(hs3 + l) т
х(т) = еер Im{ : es*T +
[Р Д(»з)
+ g [ E'3 + м*3 +^)^уз + 1JEз + еI r +
2 (sj + vsf+f2)(h5rHJ(Sf + e)ear | _
,- = , [(*/ ¦ Ю2 +^2]2 Ь» */<«/ - *з-/)(*/ - *з-/) J
соответственно при воздействиях A.6.2) и A.6.3), Перемещение массы
гасителя вычисляется по аналогичным формулам с заменой в числителях
сомножителя вида (sj + /xs/ + /2) на (nsj + /2) при / = 1,3.
Рассмотрим далее результаты численной оптимизации параметров и
оценки эффективности гасителя для воздействия A.6.2). Зависимости
43
L\ N
\\.
i<^\-
l^^"
^5
""*\^
0,025
v=0,7
/005
/0,025
v>=0,1
/P,05
/ 0,025
v=OJ
/0,05
/?~0,025 I
I
Л-0,05 \
Л=0,/
Рис. 1.5. Зависимости
коэффициента уменьшения амплитуд
нестационарных колебаний
защищаемой системы от
коэффициента демпфирования
поддерживающей конструкции
0,025 0,05 5,075 /?к
коэффициента уменьшения максимальных амплитуд колебанийх(t)— z(t)
защищаемой системы от коэффициента демпфирования поддерживающей
конструкции hK = 2е (рис. 1.5) найдены в предположении, что частота
воздействия р0 является нестабильной и принимает самое
неблагоприятное значение в окрестности со0. Эффективность гасителя растет с
увеличением его относительной массы и уменьшается при
возрастании е, h. Оптимальные параметры гасителя, особенно fi, заметно отличаются
от соответствующих значений при стационарном гармоническом
воздействии с нестабильной частотой. Приближенно они определяются
выражениями
,«/
A+iOB + iO
/2
1 + 3,5цх(/! + 2е)
О+О
A.6.4)
Практический интерес представляет также случай малой нестабильности
частоты Ро воздействия, диапазон изменения которой расположен
достаточно близко к частоте со0. При этом максимальные амплитуды
нестационарных колебаний могут оказаться недопустимыми. Оптимальные
параметры ДГК заданной массы зависят от^ ширины и положения диапазона
изменения частоты Ро по отношению к со0 > коэффициента демпфирования h
защищаемой системы и коэффициента е. Оптимальная настройка с
некоторым сдвигом следит за изменением р0, оптимальное демпфирование ц
возрастает с расширением диапазона изменения р0, Как и при
стационарном гармоническом воздействии, наибольшие амплитуды колебаний чаще
всего соответствуют границам частотного диапазона воздействия.
Результаты численной оптимизации параметров и оценка эффективности гасителя
при v - 0,05 приведены в [115].
Описанный выше подход позволяет также приближенно оценить
эффективность виброгашения в случае, когда закон движения основания
защищаемой системы представляет собой пакет затухающих синусоид, частоты
которых образуют зону сгущения с границами р01» Ро2 • Полагая, что эта
зона равномерно заполнена бесчисленным множеством частот, можно
записать перемещение основания защищаемой системы в виде г(т) =
01 sin a
= e~eT[Si(p2T) - Si(p,r)]/(ft - Pi), где Si (a) = / da -
Ot
0
интегральный синус; P\- Po\i<^o\ Рг ~ Р02 /^o • Изображение
1 (Рг -Pi)(s + e)
Z(s) = arctg .
Q>2 -Pl)(s + €) (S + 6J +P1P2
Если соблюдается условие р2 - Pi < 0,5 A + Ptft)» T0 arctS ( ' ) можно
заменить аргументом и Z E) * 1/ [(s + бJ + PiP2] соответствует
изображению одной затухающей синусоиды с частотой р = \Jрх р2 . В этом случае
эффективность и оптимальные параметры гасителя можно оценить по
результатам расчета системы на действие одной эквивалентной затухающей
синусоиды.
§ 1,7. Нестационарные колебания системы с гасителем
при прохождении через резонанс
Исследование переходного режима при прохождении через резонанс
представляет практический интерес для всех конструкций и машин, работающих
в зарезонансной зоне, в частности для виброизолированных устройств.
Известно, что при прохождении через резонанс во время пуска и остановки
машин могут развиваться значительные амплитуды колебаний, особенно
при малом затухании системы и небольшом угловом ускорении. Среди
различных методов снижения амплитуд в переходном режиме [52, 104] было
предложено также применение динамических гасителей. В этом случае
возникает вопрос о выборе оптимальных параметров гасителя для улучшения
его эффективности при прохождении через резонанс.
С другой стороны, рассмотрение задачи о прохождении через резонанс
системы с гасителем имеет целью выяснить, не является ли этот режим
более опасным для защищаемой конструкции по сравнению со
стационарным. Здесь слеДует проверить, как ведет себя в переходном режиме
динамический гаситель, параметры которого подобраны из условия наилучшей
эффективности в стационарном режиме.
Решение задачи опирается на теорию расчета конструкций при
прохождении через резонанс, которая развивалась в трудах многих ученых.
Для системы с одной степенью свободы при постоянном угловом
ускорении и при различных нелинейных законах изменения частоты
возмущающей силы [48, 86] получено замкнутое решение в специальных
функциях. Для систем с конечным и бесконечным числом степеней
свободы [48, 201] предложены аналитический способ, основанный на
разложении по формам свободных колебаний и применении специальных
функций, и решение на АВМ. Нелинейные системы исследованы [37]
асимптотическим методом.
Подход, учитывающий взаимодействие системы с источником
колебаний, развивался в работе [84]. Особенность рассматриваемой задачи
состоит в том, что в результате установки динамического гасителя уровень
колебаний защищаемой конструкции значительно снижается. Это умень-
45
шает также эффект взаимодействия с источником колебаний и позволяет
его не учитывать.
В работе [30] с помощью АВМ получены амплитудные кривые
прохождения через резонанс системы с одной степенью свободы с ДГК в случае
линейного возрастания частоты воздействия. Результаты свидетельствуют
о положительной роли гасителя в переходном режиме.
Ниже рассматривается задача [153] о прохождении через резонанс
системы с гасителем как при пуске, так и при остановке неуравновешенной
машины, являющейся источником колебаний. Предполагается, что
амплитуда внешней силы пропорциональна квадрату частоты. Главное внимание
уделяется получению решения в форме, удобной для вычисления на ЭВМ,
и выбору оптимальных параметров гасителя с вязким трением. При этом
неупругое сопротивление для защищаемой системы учитывается в виде
вязкого трения с коэффициентом h0.
Воспользуемся дифференциальными уравнениями A.2.1), дополнив
первое из них слагаемым И0х и приняв q(t) - QoP2 (t)el{p (*\ где Q0 —
амплитуда возмущающей силы при p(t) = 1, p(t) = ф (t)/co0 — отнесенная
к собственной частоте cj0 защищаемой системы переменная частота
возмущения. Так как эти уравнения имеют осциллирующее решение, нахождение
которого является весьма трудоемким, целесообразно преобразовать их
к нормальной системе дифференциальных уравнений относительно
медленно изменяющихся амплитудных функций. Для этого положим
х = x„X{t)e*We у = хстУ(г)е'*(<\
A.7.1)
х - xCTcj0V(t)el^f\ у = xCToj0tf(Oe'V(f).
Здесь X(t), Y(t), V(t), R(t) — комплексные амплитудные функции;
*ст = Qo/K — статический прогиб главной массы в отсутствие гасителя от
действия силы Q0. В результате дифференциальные уравнения
преобразуются к виду
X(t) Y(t)
V(t)
co0
+ ip(i)V{tYhV(f)+X(t)-vf2 Y(t)-unR(t) = p\t\ A.7.2)
V(t) R(t)
+ ip(t)V(t) + -^+ ip(t)R(t) + »R(t) + f2 Y(t) = 0,
где h = h0/(Mco0) — относительный коэффициент трения главной массы.
Поскольку последнее уравнение содержит производные двух
переменных V(t) и R(t), заменим его разностью четвертого и третьего уравнений
системы A.7.2). Затем представим амплитудные функции в виде
X(t) = Zx \iZ2y Y(t) = Z3+iZ4,
V{t) = Z5+iZ6, R(t) = Z7+iZs
46
и, отделив действительные части уравнений A.7.2) от мнимых, получим
систему дифференциальных уравнений в нормальной форме
Zi=w0[p(r)Z2 + Z5], Z2=a>0[-p(t)Zi + Z6],
Z3 =">0[p(f)Z4 + Z7], Z4 =o;0[-p(OZ3 +Z8],
Z5=^o{[P2@-Z1 -/zZ5+p(r)Z6] + K/2Z3+JuZ7)},
A-7.3)
Z6 = co0{-[Z2+p(r)Z5+/2Z6] + K/2^4+MZ8)},
Z7 = o;0{-[p2@-^i-^Z5-p@Z8]-(l+^)(/2Z3+iuZ7)},
Z8 = co0{[Z2-p@Z7 + /zZ6]-(l+^)(/2Z4+/iZ8)}.
При действии возмущающей силы QoP2 (t)cos [у (t)] искомые
перемещения
х = хетКе[Х(Г)е**Ю] =xCT л/zf+zfcos MO+arctgCZj/Z!)],
^ = xCTRe[y(r)^>(f)]=xCT7z23+Z|cosM0+arctg(Z4/Z3)].
Функции I ЛГ(*I = \/Z'2 + Z22, | У (r)| = \TzJ~VzJ - это
динамические коэффициенты, зависящие от времени, соответственно для главной
массы и гасителя.
Численно интегрируя уравнения A.7.3), получаем огибающие
колебательного процесса при прохождении через резонанс в случае пуска или
остановки машины. При этом зависимость частоты от времени р(г)
является произвольной заданной функцией. Заметим, что хотя порядок системы
A.7.3) и превышает вдвое порядок исходной системы, интегрирование
системы A.7.3) выполняется несравненно проще, так как функции Z;-
медленно изменяются со временем, в отличие от быстро осциллирующих
*@, >>(')•
Начальные значения функций Z; принимаются в зависимости от
состояния системы, предшествующего переходному процессу. Если система
совершала стационарные колебания с постоянной частотой р, а затем
частота возмущения начала изменяться по заданному закону, то можно
поступить следующим образом. Задав произвольные начальные условия для Z;
(в частности, Z; = 0), численно интегрируем A.7.3) до установления
колебаний при р = const, затем изменяем частоту по заданному
закону p(t).
Реальный закон p(t) может быть установлен путем рассмотрения
уравнений движения электропривода, которые приводятся в специальной
литературе. В монографии [48] показано, что максимальные амплитуды
колебаний в переходном режиме слабо зависят от закона изменения
частоты p(t) вдали от резонанса и определяются главным образом
угловым ускорением в момент резонанса. Поэтому при произвольной нелиней-
47
ной зависимости p(t) приближенные результаты можно получить,
рассматривая линейный случай с угловым ускорением, равным ускорению
в момент p(t) = 1. С другой стороны, многочисленные экспериментальные
осциллограммы для наиболее часто встречающегося в промышленности
асинхронного электродвигателя, свидетельствуют о том, что пр"и пуске
двигателя закон изменения оборотов близок к линейному, а при остановке
может быть достаточно хорошо аппроксимирован линейной зависимостью
на небольшом участке резонансной зоны. Поэтому при оценке
эффективности ДГК целесообразно более подробно рассмотреть случай изменения
частоты возмущающей силы по линейному закону р0 (?) = р0 + eQt
(ро — начальное значение частоты; е0 — угловое ускорение) .
Введем новую независимую переменную т -p(t). Тогда
X(t)laj0 = eX', Y(t)lGj0=eY', V(t)/gj0 = eV\ R(t)/co0 = eR\
где e = 60 /Wq — относительное угловое ускорение; А' = dA/dr.
Система уравнений A.7.3) записывается в виде
Z[ = -(rZ2 + ZS), Z[ = -{-rZx +Z6),
Z3 = - (rZ, + Z7), Z\ = - (-rZ3 + Z8),
б е
Z's = ~[(r2-Z1-/2Z5 + rZ6) + ^(/2Z3+MZ7)],
. A.7.4)
Z; = -[-(Z2+rZ5+/2Z6) + K/2^4+^8)],
e
z? = -[-(r2-Z1-/2Z5-rZ8)-(l+^)(/2Z3+MZ7)],
e
^8 = -[(Z2-rZ7+/2Z6)-(l+^)(/2Z4+/iZ8)].
6
Некоторые результаты расчета системы с гасителем при различных
значениях параметров v, h, е приведены на рис. 1.6. Штриховая линия
показывает наибольшие амплитуды колебаний главной массы при параметрах
гасителя, оптимальных для данных значений у, h, e; сплошная линия — те же
амплитуды при параметрах
f2 = 1/A + v\ Д = V3 */[0+")B+*)Ь A-7.5)
оптимальных в случае /г = О, е = 0.
Из представленных графиков видно, что угловое ускорение е мало
влияет на максимальные амплитуды колебаний главной массы в системе
с гасителем, причем это влияние уменьшается с ростом относительной
48
-0,008-0,004 О 0,004 е -0,008-0,004 О 0,004 е -0,008-0,004 О 0,004 е
Рис. 1.6. Зависимости максимальной безразмерной амплитуды колебаний главной
массы от углового ускорения при прохождении через резонанс
массы v и коэффициента трения h. Таким образом, в отличие от системы
с одной степенью свободы, где характер закона p(t) оказывает
незначительное влияние на максимальную амплитуду колебаний и последняя
определяется в основном коэффициентом сопротивления h и угловым
ускорением 6 в момент резонанса, в системе с гасителем зависимость результатов
от ускорения е выражена гораздо слабее. В связи с этим в системе с
гасителем нелинейный характер закона p(t) должен сказываться еще меньше
на результатах, чем в случае одномассовой системы, что оправдывает
допущение о линейной зависимости р0 (t) = р0 + е01, принятое при
вычислениях.
Полученные результаты (рис. 1.6) свидетельствуют также о том, что если
динамический гаситель предназначен для работы в стационарном режиме, то
в переходных режимах в процессе пуска и остановки машины
максимальная амплитуда может лишь незначительно превышать (при пуске)
соответствующее значение для стационарного режима. Поэтому, учитывая
кратковременность переходного режима, можно считать его неопасным для
основной конструкции.
Увеличение относительной массы гасителя v улучшает его работу, так
как отклонение параметров гасителя от их оптимальных значений меньше
влияет на увеличение амплитуд колебаний, чем в случае небольшой массы
гасителя.
Найдены оптимальные значения параметров /2 и \х из условия
минимума наибольшей амплитуды колебаний главной массы в переходном режиме.
В табл. 1.11, 1.12 приведены добавки к значениям, соответствующим
A.7г5). При пуске машины (е > 0) оптимальные параметры гасителя
следует уменьшить по сравнению с A.7.5), причем при малом угловом
ускорении б достаточно изменить только настройку гасителя, при
€ > 0,004 необходимо уменьшить также и коэффициент вязкого
сопротивления д. При остановке машины (в < 0) оптимальное значение \х можно
принять согласно A,7.5), а настройку f2 увеличить, причем ее изменение
почти линейно зависит от углового ускорения. В реальных системах при
4. Б.Г. Коренев &
Таблица 1.11
Добавки к A.7.5) для вычисления оптимальной настройки гасителя при
прохождении через резонанс
0,025
0,05
0,1
h
0,025
0,05
од
0,025
0,05
ОД
0,025
0,05
ОД
-0,008
0,114
0,117
0,134
0,090
0,095
0,108
0,080
0,087
0,108
-0,004
0,060
0,063
0,071
0,049
0,055
0,069
0,048
0,055
0,072
-0,002
0,033
0,036
0,046
0,029
0,035
0,050
0,027
0,035
0,051
е
0
0,004
0,008
0,018
0,005
0,010
0,023
0,006
0,013
0,030
0,002
-0,019
-0,013
-0,001
-0,012
-0,005
0,009
-0,008
-0,001
0,017
0,004
-0,042
-0,030
-0,030
-0,029
-0,020
-о,ооз
-0,017
-0,011
0,016
0,008
-0,055
-0,055
-0,050
-0,055
- 0,055
-0,007
-0,048
-0,032
-0,006
Таблица 1.12
Добавки к A.7.5) для вычисления оптимального демпфирования гасителя
при прохождении через резонанс
0,004
0,008
0,004
0,008
0,025
0,025
0,05
0,01
-0,02
-0,02
-
-0,08
-0,07
-0,05
0,05
0,025
0,05
ОД
-0,03
-0,02
-0,03
Таблица 1.13
Амплитуды колебаний главной массы X и удлинения связи гасителя S при
прохождении через резонанс
h
€
v- 0
X
v = 0,01
X
S
*> =0,03
X
S
v = 0,05
X
S |
у» 0,10
X
S
-0,008
12,2 8,97 60,2 6,52 27,6 5,35 18,1 3,91 9,68
-0,004 16,2 10,1 72,3 6,84 29,9 5,50 18,9 3,97
9,87
-0,002 20,6 10,7 80,1 6,96 30,7 5,55 19,0 3,99 9,90
0,025
0
0,002
0,004
0,008
0,016
40,0
21,8
17,5
13,7
10,6
10,9
и,з
пд
10,2
8,88
79,1
81,1
72,1
59,0
45,4
6,95
7,21
7,35
7,37
7,01
29,8
31,9
32,1
30,5
26,9
5,54
5,71
5,84
5,97
5,91
18,7
19,7
20,4
20,5
19,4
3,99
4,10
4,19
4,31
4,43
9,84
10,0
10,6
пд
н,з
0,032
7,2
7,19 30,0 6,18 21,0 5,51 . 16,4 4,39 10,7
Таблица 1.13 (окончание)
И
1>=0
X
v = 0,01
X
S
v = 0,03
X
S
у = 0,05
X
S
у = 0,10
X
5
-0,008
-0,004
-0,002
0
0,002
0,004
0,008
0,016
0,032
-0,008
-0,004
-0,002
0
0,002
0,004
0,008
0,016
0,032
9,91
12,4
14,7
20,0
15,6
13,5
и,з
9,16
7,14
7,10
8,16
8,95
10,0
9,53
8,90
8,10
7,09
5,93
7,63
8,38
8,75
8,85
9,08
9,08
8,65
7,77
6,52
5,81
6,18
6,36
6,42
6,41
6,54
6,49
6,14
5,45
50,5
59,3
64,4
63,4
66,4
59,7
50,5
40,2
27,9
37,7
42,9
45,7
45,5
46,5
43,8
38,7
32,3
23,8
5,76
6,00
6,09
6,09
6,18
6,33
6,42
6,24
5,65
4,6.6
4,80
4,86
4,88
4,80
4,91
5,06
5,07
4,81
24,2
25,9
26,4
25,8
27,3
27,7
26,8
24,2
19,4
19,2
20,3
20,6
20,3
21,0
21,6
21,3
20,0
16,7
4,82
4,95
4,99
4,99
5,03
5,16
5,30
5,33
5,08
4,04
4,12
4,16
4,17
4,14
4,15
4,30
4,42
4,35
16,2
16,8
16,9
16,7
17,3
18,0
18,3
17,6
15,2
13,3
13,7
13,8
13,7
13,8
14,5
14,9
14,7
13,2
3,64
3,69
3,71
3,71
3,72
3,81
3,93
4,07
4,09
3,19
3,23
3,25
3,26
3,26
3,25
3,32
3,47
3,58
8,92
9,09
9,11
9,08
9,06
9,56
10,1
10,4
10,0
7,70
7,83
7,85
7,84
7,79
8,03
8,55
8,99
8,86
применении динамического гасителя для снижения резонансных амплитуд
в переходном режиме следует учитывать процессы пуска и остановки
машины, угловые ускорения которых, как правило, различны. Поэтому
при назначении параметров гасителя можно воспользоваться полученными
результатами (табл. 1.11, 1.12), имея, однако, в виду, что оптимальные
значения параметров гасителя при пуске и остановке машины находятся
по разные стороны от значений A.7.5).
Для облегчения практических расчетов систем с гасителями в случае,
если параметры гасителя соответствуют A.7.5), в табл. 1.13 приведены
максимальные амплитуды колебаний основной массы X и удлинения связи
гасителя S при прохождении через резонанс.
§ 1.8. Переходные режимы колебаний
при заданных начальных условиях
Установка динамического гасителя с демпфированием позволяет
существенно повысить рассеяние энергии в системе и благоприятно повлиять на
стационарные и переходные режимы вынужденных колебаний, о чем
свидетельствуют результаты, приведенные в предыдущих параграфах. Здесь
рассматривается поведение системы с гасителем при свободных затухающих
колебаниях, вызванных заданными начальными условиями. Необходимость
уменьшения длительности переходных процессов при действии на кон-
4*
51
струкцию мгновенного импульса, начального смещения или внезапно
приложенной нагрузки возникает довольно часто в связи с
технологическими или санитарно-гигиеническими требованиями. Для примера укажем
фундаменты под молоты, штампы, прессы и другие машины с
импульсными воздействиями, башенные сооружения, подверженные действию
внезапных порывов ветра и сейсмических нагрузок. Обсуждаемые вопросы
рассматривались ранее в работах [10, 132, 160, 166, 262].
Динамический гаситель с вязким трением. В первом уравнении системы
A.2.1) учтем слагаемое h0x при z - 0, q(t) = 0, далее, преобразуя
по Лапласу, получаем изображения
X(s) = Ai(s)/A(s), Y(s) = Да($)/Д<*). A.8.1)
Здесь s = So/oj0'> So ~ комплексный параметр преобразования Лапласа;
A(s) соответствует A.6.1);
A,(s) = {x@)(s2+/is + f2)+x@)[(s+h)(s2+ns + f2)+vns2] +
+y@Mns +f) +y@)vf2s}/u20 ,
A2(s)={i@)(ns+f2)+x@)\f2(h+s)-tJi]+y@)(s2+hs+l+u(xs + vf2) +
+y@)[Ps(fis+f2) + (n + s)(s2 +hs+l)]}lGj20.
Для нахождения полюсов функций X(s), Y(s) положим
4
A(s) = (s2+dlS + z\)(s2+82s+z22) = П (s-sj), A.8.2)
/ = i
где Slfa=-y ±i \IA -51/4, s2,4=-~-±/ V'z\ -5^/4; bl,b2tzuzt -
некоторые действительные числа. Сопоставляя A.6.1) и A.8.2), получаем
соотношения
Л + 0 +р)[л = 81 +52, /г/2 +M = 5jzi + b2z\ ,
ЙД+1+A +*>)/* =*? +Zl +8^2, f2=z]z22, AАЗ)
которые с учетом условия оптимальности переходного процесса позволяют
далее определить полюсы Sj .
Переходные процессы колебаний главной массы и гасителя при г =
= о;01 > 0 описываются функциями
2 itj . 2 7г/
С — 1°° С — 1°°
которые вычисляются с использованием теории вычетов. В случае простых
52
ПОЛЮСОВ (Si = 53 ^ ^2 = S*4)
х(т)= 2 со0 Re [resfo)** r + res {s2)es>T}. A.8.4)
При кратных корнях, которые часто соответствуют оптимальным
параметрам гасителя, имеем
х(т) = 2 со0 Re — [E - fiJJT(f)e*rlj = .
функция у (г ) вычисляется аналогично с заменой X(s ) на У E ).
Если возмущения приложены к системе кинематически, т.е. основание
движется по заданному закону г (/), эквивалентные начальные условия
в формулах A.8.1), по которым определяются переходные процессы,
не вполне очевидны. Можно показать, что в случае импульсного
воздействия z = б (т) E ( • ) — функция Дирака) имеем начальные условия
дг@) = ^оА, у(р) = 0, x@) = u2o(l-h2-hiivl у@) = со20цИ,
при внезапном смещении основания г = 1(г) получим х@) = у (О) =
= y(Q) = Q$ х@) = coQA.
Исходя из критерия скорейшего затухания переходных процессов на
бесконечном интервале времени, необходимо так подобрать параметры
гасителя, чтобы наименьшая из величин 61,62? входящих в показатели степеней
в A.8.4), была максимальна. Относительную массу гасителя целесообразно
полагать фиксированной, определяя оптимальные настройку /2ПТ и
коэффициент вязкого сопротивления мопт.
Значения 6Х и 52 зависят от ц и /2, однако сумма 8Х + 52, как следует
из A.8.3), от /2 не зависит и при конкретных параметрах h и v
определяется лишь коэффициентом /i, возрастая с его увеличением. Поэтому
настройку f?m можно подобрать из условия
5Х = 52 = 5, A.8.5)
что обеспечит одинаковый темп затухания обоих слагаемых в выражении
A.8.4) при фиксированном значении /!. Затем следует определить М0пт
из условия максимума 5, соответствующего /2ПТ. При этом темп
затухания переходного процесса окажется наибольшим.
Учитывая A.8.5) и исключая z2, z\ из системы A.8.3), определяем
5 2 ' 4пт ~{7^Ти • A-86)
Следовательно, каждому значению ц соответствует оптимальная настройка
_^A-^0,25[m(U^)+/2]3-/2{M[m(U^)+/2] + 1}
/опт ,л 7 ч2 TTi ч • V1-8-7)
дA + р) —/гA - v)
53
При h = 0 имеем более простую формулу
/^-?777,-^' ('-8-8)
Согласно A.8.6) увеличение ц приводит к возрастанию 5. Однако
существует некоторое оптимальное значение мопт, превышение которого не дает
положительного эффекта. Физически это объясняется тем, что при ц = оо
гаситель, по существу, жестко присоединен к главной массе и темп
затухания колебаний определяется лишь коэффициентом h.
Значение допт можно найти следующим образом. Из A.8.3) и A.8.5)
следует, что z\ и z| удовлетворяют квадратному уравнению
4 Й/опт+М
zl,2 ~ с zl,2 т/опт и>
О
и, следовательно,
2 */о2пт+М , /Г Уо'пт+Д I2 2 ¦
zb = 1—7s Г" ± V ~—7л — -/опт- A-8.9)
Л +A +!>)/! L Л +A +*>)/* J
Анализ показал, что по мере увеличения д подкоренное выражение в A.8.9)
уменьшается и при некотором м0пт обращается в нуль. При ju > м0пт
выражение A.8.9) окажется комплексным и один из корней Sj будет
ближе к мнимой оси, чем в оптимальном случае, соответствующем условию
[^77тТ-'- = °- С-810'
L h +A +*>)м J
Определение /опт» Мопт> 8 из A.8.6), A.8.10) требует проведения
громоздких выкладок, окончательные выражения имеют вид
Мо»-[2A+У-т)^1+Л^/4 ^1-^*]/l^J, 0.8.11)
w - [ A ¦'-г )/iWm +Л1/! +>)-
Отметим, что предложенная ранее приближенная формула [59, 166]
Мот
2 У-
l+i> ' 1+р A,01+vK
достаточно хорошо соответствует точному выражению A.8.11).
При оптимальных параметрах f?nT и juonT вследствие удовлетворения
условия A.8.10) равны не только вещественные, но и мнимые части корней
характеристического уравнения, т.е. декременты и частоты обеих
собственных форм колебаний совпадают. Декременты колебаний системы с гаси-
54
телем в данном случае
= 2пЫ^~
1 ~2тг
v 3 ,
1 + h2
2 8
)v^
\/T+h
2 + - v -h\/v
4
4
8
В связи с изложенным изображение X(s) решения имеет два полюса
второго порядка в точках Si = s2 > $з =s4. При действии на главную массу
мгновенного импульса, значение которого равно жесткости пружины К, в
случае простых корней характеристического уравнения (при
неоптимальных параметрах гасителя) колебания главной массы описываются
выражением A.8.4) при
res(s!) =
s2 +дх, +/2
Oi ~s3)(s2 +525! + zf)
в случае кратных корней —
res(s2) =
s\ +№+/2
(s2 -s4)(sl+d1s2 +z2)
х (г) = 2а>0 Re
lJ:*-|Hi +/B
{[
Мопт (*1 + **) + 2siJ? + 2/02п
E, - SiK
+ Т
+ ^1 +/рпт 1 ,.г\
Содержащийся в решении "вековой" член не препятствует быстрому
затуханию переходного процесса.
Таблица 1.14
Результаты оптимизации гасителя с вязким трением при свободных колебаниях
Величина
Относительная масса гасителя v
0,025
0,05
0,075
0,1
0,025
0,05
0,075
0,1
м
Г
5
р
б
м
Г
б
6
б
0,305
0,925
0,158
0,328
0,948
0,181
0,352
0,945
0,206
0,374
0,941
0,229
0,394
0,937
0,251
0,416
0,907
0,218
0,438
0,902
0,242
0,458
0,898
0,265
0,480
0,892
0,289
0,500
0,888
0,313
0,491
0,865
0,264
0,512
0,860
0,288
0,532
0,854
0,310
0,551
0,848
0,334
0,571
0,844
0,358
0,548
0,827
0,302
0,567
0,820
0,324
0,585
0,814
0,347
0,603
0,808
0,369
0,621
0,803
0,391
55
0,5
-05
-W
l\
1
1
\l
A
14
r\
1 \\
\5
f ~X&
/^\^^^*
v=0,05\
h=0
Zrt
JUL
0,5
-0,5
-7,0
Л
'
1
и
1 2I
Г \
V~'v
к \$
?-Xl
»-oyos\
h-Oy05\
я.
6)
0,5
-0,5
Рис. 1.7. Переходные процессы колебаний главной массы при действии мгновенного импульса
1 7\
Г\\
1 \\
1 Ч
/ 1
р\з
к/\/*
ф-*^
i>=^/
Л-^^
З""""
? г
2*
Для некоторых значений h и v оптимальные параметры гасителя и
значения 5 приведены в табл. 1.14. При действии на главную массу
мгновенного импульса графики переходных процессов показаны на рис. 1.7.
Сплошная линия соответствует оптимальным параметрам гасителя, штриховая —
параметрам/2 = 1/A + vJ, /i = \Л >5 v\ A + v) 3, наилучшим при воздейст-
вии гармонической силы с постоянной амплитудой. Огибающие
оптимальных переходных процессов изображены на рис. 1.8.
Из представленных результатов видно, что при оптимальных
параметрах гасителя переходный процесс затухает равномерно, без биений,
примерно так же, как в одномассовой системе с высоким демпфированием. При
других параметрах гасителя наблюдаются биения и на достаточно большом
интервале времени колебания затухают медленнее. Пример расчета ДГК
для конкретной виброизолированной машины, приведенный в [166],
подтверждает существенное повышение темпа затухания переходного
процесса.
Так как найденные значения параметров гасителя обеспечивают
максимально возможные декременты колебаний защищаемой системы, то их
можно использовать не только при затухающих колебаниях, но и при
ветровом резонансе башенных сооружений, когда амплитуды колебаний
обратно пропорциональны декрементам.
Наряду с примененным выше критерием оптимальности параметров
гасителя оказывается целесообразным рассмотрение и других критериев, в
особенности если за конечный промежуток времени необходимо уменьшить
до заданного уровня колебания главной массы, вызванные
кратковременным воздействием. В таких случаях переходный процесс,
сопровождающийся биениями, может быть более приемлемым, чем равномерно затухающий
на бесконечном интервале времени процесс, получаемый при параметрах
гасителя A.8.11). Об этом, в частности, свидетельствует следующее.
Найденные в §1.10 из условия минимума дисперсий перемещений,
скоростей, ускорений главной массы при случайном воздействии типа
белого шума оптимальные параметры гасителя будут также
минимизировать на бесконечном интервале времени соответствующие интегральные
квадратичные оценки качества переходного процесса, вызванного
действием на главную массу одиночного мгновенного импульса. Оптимальный
по этим критериям коэффициент вязкого трения гасителя оказывается
примерно в два раза меньше значения A.8.11), которое приводит к
равномерно затухающему переходному процессу. Так как наибольшее в
результате действия импульса отклонение главной массы мало зависит от
параметров гасителя, то минимум интеграла от квадрата перемещения главной
массы при параметрах гасителя, указанных в § 1.10, может быть достигнут
лишь за счет более быстрого, чем при других параметрах гасителя,
уменьшения нескольких последующих максимальных отклонений главной
массы. Хотя при этом получается переходный режим типа биений, который на
бесконечном интервале времени затухает медленнее по сравнению с
процессом, соответствующим параметрам гасителя A.8.11), на конечных
интервалах времени такой процесс может оказаться более благоприятным,
чем равномерно затухающий.
Рассмотрим более общий, чем принятый выше, критерий качества.
Не учитывая в целях упрощения выкладок неупругое сопротивление глав-
57
Id
0,8
О,*
О
0,4
U 7 Z Ъ 4 5 6 г/Bтх)
Рис. 1.8. Огибающие оптимальных переходных процессов при действии мгновенного
импульса
чИ^
^\^#?
З?^^:
^v=0,025
0,075
0,05
>CJW5
OJ
ГГГ—~=
/7=0
/7=0,05
A.8.12)
ной массы, записываем характеристическое уравнение
A(s) = s4 +A +*0/is3 + [1 +A + *0/2]*2 +jus+/2 =0,
Найдем /2, м, при которых отношение вещественных частей корней
уравнения A.8.12) равно некоторому заранее заданному числу г. При г = 1
результаты будут соответствовать полученным выше. С этой целью
представим A(s) в виде произведения A.8.2) и из условия эквивалентности
A.8.12) и A.8.2) прибх =82г запишем
A+*>)д = A+гN2, M = 52(rz^+z2),
l+(l+*0/*2=Zi+z22+r52, f2=zjzl
Из второго и третьего уравнений этой системы найдем z\yz\% подставим в
четвертое, тогда получим квадратное относительно/2 уравнение
/4A+^J-2[1-^+г5|A+^)]/2 +
+ гЬ\
(Г -V ,Л Г 1 -П>
+ гв| 1
1+у / 1г(Д+1>)
делим
I 1— v+rbl{\+v)± \fv-rb\(\ +у) , A.8.1
+ *>J I г '
Далее определим
/2 =
3)
*?
l+y/r[v-rdl A+^)]
i±v- ^
[*;-г622 (!+*/>]
1 + *;
5, «г
1 + у
1 +г
2 т, ^2
м,
5,=
1 +р
1 + г
*1*
М-
1 +^
, A.8.14)
Так как /2 и z2>2 должны быть вещественными, то v — rh\ A + v) > 0, т.е.
58
5j < vW(l + v), 52 <>/*>/[ 0 + *OrL Следовательно, максимальное /i,
при котором обеспечиваются наибольшие значения В%9 62 при заданном
1 + г / v
отношении Sj/ба = г, будет juonT = —— \f— — , причем /опт -
A + i/K
= 1/A + vJ. Минимальное по г значение допт = 2\Jvj{\ + vK
соответствует г = 1.
Таким образом,если/i< 2\fr/(l + *0 3, то значение / 2 согласно A.8.13)
при 62 = A + ^) /i/(l + г) обеспечит заданное отношение 5г/б2 в* /в част-
1-у (l + ^)\
ном случае г = 1 будет/2 = + ц2 ). Если (л > 2 vWO + ^K>
A + *>) 4 /
то при/2 = 1/A + vJ имеем z? = zj = 1/A + ir),fi, = \/*W(l + *0, 52 =
1 +Г /""~Р
= v^/ V A + у) ] > причем из условия /i = —= V следует
VT A+Ю
r = 2X-l±2Vx(X~l), Х = М2A+*03/D*>)>1. A.8.15)
Если принять /2 = 1/A + уJ,то формула A.8.13) позволяет при
произвольном д найти г и тем самым оценить влияние отклонения/2 от/оПТ на
значения 51? 52, Действительно, полагая в A.8.13) /2 = 1/A + иJ, при
X > 1 определяем v *r(l + уK /i2/(l + гJ, откуда следует A.8.15). При
X < 1 имеем
/.
r(l+vf \-г
мA + *>)
Далее, принимая 6t =A + е)б0, 62 =A - е)б0, 50 =
г - 1 1+6 1 - г 2б
е = , г-
получаем биквадратное уравнение в4 - (
положительное решение которого
°°" 2 '
г 1-е2
A+гJ 4 '
4 Л »
— -—) е2 + 1 -
"X X/
1
-- = о,
X
б2 = J _ _ -_.. +
\ *>Х 2х / *>Х
1
УХ 2х
Подставив A.8.16) в A.8.14) и определив г\ =r/(l + v), z2 = l/r(l + *>)>
видим, что в рассматриваемом случае (/2 = 1/A + vJ, X < 1) 8-i ^Лз
при г # 1, однако декременты колебаний по обеим формам одинаковы:
2тг5
.—, ^ / / 4A+гJ
:/\/4zl - 5J = 2ir/v г~~т - Ь где к = 1,2. Итак, настройка
/ гA + *>K М
/2 = 1/A + ^ 2 при любом значении /(< 2\fvf{l + *>K обеспечивает равные
и максимально возможные для данного ju декременты по обеим
собственным формам <олебаний системы с гасителем. В связи с этим такую на-
59
стройку можно рекомендовать для гасителей, устанавливаемых с целью
уменьшения амплитуд колебаний сооружений при ветровом резонансе и
и пульсациях ветра.
Динамический гаситель с частотно-независимым внутренним трением.
При описании трения в упругих элементах гасителя и главной массы
воспользуемся комплексной теорией Е.С.Сорокина [182] с учетом
модификации, предложенной в [158]. Дифференциальные уравнения свободных
колебаний двухмассовой системы при заданных начальных условиях
имеют вид
М'х + K(ui +ipvi)x+my = О, ту +к(и2 + ipv2)(y - х) = 0. A.8.17)
Здесь р = sign (ImSoy) — множитель, принимающий значения ± Г в
зависимости от знаков мнимых частей корней s0j (/ = 1, 4) характеристического
уравнения. Константы ик, vk определяются коэффициентами неупругого
сопротивления 70/е (& = Ь 2) в соответствии с выражениями,
приведенными для к- 2 в § 1.3.
Обозначим: f\ = к/ (ти>1) — настройка гасителя; а = их + ipui, \p =
= /1 ( + ipv2) — комплексные параметры; х;-, _уу — компоненты у-го
собственного вектора; bj — произвольные постоянные (/ = 1,4); Sj =
= s0y/co0 — безразмерные корни; г = co0t — безразмерное время.
Подставляя в A.8.17) решение
4 4
х= 2bfxfesJT, y= Xbjyjesi\ A.8.18)
У=1 /=1
получаем характеристическое уравнение
s4 + [я+ A +v)y]s2 +a^ = 0.
Его корни
,_=- — ±V -а,
s*—= — ± V " " ~^~ -а*. A.8.19)
1,4 2 4
При р = + 1 вычисляются корни s1J, для которых Ims1>2 > 0, Res1>2 < 0.
Корням s3>4 соответствует р = — 1, поэтому s3f4 = $ 1,2- Так как при
определении корней s1>3 и s2,4 B A.8.19) учитываются разные знаки, то
набольшая из вещественных частей корней sf^[ будет минимальна, если
[я + A+*0^]2
— -1- -а$ = 0. A.8.20)
При этом s1K = s2>4 = ip\[ay и Resx меньше наибольшего из значений
Res1>2 при несоблюдении A.8.20). Решая квадратное относительно <р
уравнение A.8.20), при р = 1 получаем
(и, +iui)<l -v + 2iy/p) . /"i +wi
^=/2( +iua)= -5 , $1,2 = IV : —p,
A + i>) 1 - z\/V
откуда следует
/1=M= —^-. A.8.21)
1 +!>
60
Коэффициент неупругого сопротивления гасителя при использовании
выражений A.3.1)
2Im^ 2fot(l-У) + 2utyfi\ 2V^"+7oi ,л 0 ^
— — — zr — ;=:— , A.0.22)
/2+Re^ 1 + *+A - v)ut -2щу/р l-7oiV^/2
при использовании формул A.3.3)
Im<p vt(l^p)^2uty/p 2V?~+7oi(l -?) ,10^ч
7о2 = = 7=- = Т11- * A.о.23)
Re<p A — */)Мх - 2wi v^ \—v— 2yQi\jv
В частном случае 7oi = О имеем s1J = i/\/l —iy/v, fl(u2 ^iv2) -
= 1/A -/\A02, 7o2 = 2\Л>~и 7o2 = 2\/V/(l - у) - соответственно для
A,3.1) и A.3.3).
Так как при оптимальных параметрах гасителя корни sx и s3 = s *
характеристического уравнения оказываются кратными (sj = s2, хз =54), общее
решение уравнений A.8.17) имеет структуру, отличающуюся-от A.8.18).
Например, при у01 = 0 оно записывается в виде
х = (Ь2 +rZ>1)^T + (Z>4 + г*э)***г,
Г 2A -iV5)
y = \b2- — Z>! + г*,
V^~ J i\/v~
"" I *4 P= — &3 + Tb3
При вещественных начальных условиях произвольные постоянные
Ьъ = &*, 64 = ^2*> поэтому
Г/ 2A _/V^K/2 \^lT1
х = 2Re [(b2 + г*,) e*»т], j> = 2Re tt2-——-1 bt + тЪЛ — I.
Как и в случае вязкого трения, при соответствующем выборе
параметров гасителя с частотно-независимым трением рассмотренная система
обладает двумя кратными частотами и одинаковыми максимально
возможными декрементами колебаний. Трение гасителя существенно влияет
как на частоты, так и на формы колебаний, т.е. система имеет
"непропорциональное" демпфирование.
Оптимальные значения 7о2< приведены в табл. 1.15, числители
соответствуют A.3.1), знаменатели - A.3.3). При увеличении v оптимальные
значения 702 практически не реализуются с помощью известных
демпфирующих материалов и конструкций. В связи с этим целесообразно
получить формулы для выбора оптимальной настройки f\ при заданном
значении 7о 2-
Вначале рассмотрим обратную задачу: при заданном максимально
возможном значении 702 > 7oi найдем оптимальную настройку и
относительную массу гасителя, обеспечивающие скорейшее затухание колебаний
системы. Используя A.8.22), A.8.23), получаем соответственно
/ 702-70 1 \2 у^-Ю,57о1A+УГТ7)
р = 1- — ) , Э = 2тг —, A.8.24)
V2 + 0,570i7o2/ l+Vr+77-0,57oiV^
61
_ / 7o2 -7oi \2
W(l+7oiH+7o2)+l+7oi7o2/
V^+7oi
Э = 2*
Va+^)(l+7Si)+l-7oi\^r>
A.8.25)
в обоих случаях оптимальная настройка выражается формулой A.8.21),
Э — декремент колебаний системы с гасителем.
Более детальный анализ показывает, что при фиксированных
значениях 7oi> 7о2 превышение относительной массы гасителя v по сравнению
с A.8.24), A.8.25) нецелесообразно, так как рассматриваемый
критерий качества ухудшается (модуль вещественной части одного из корней
Sj уменьшается). Если все же по конструктивным или иным соображениям
необходимо превысить эти значения, то оптимальная по критерию
minmaxResy настройка гасителя, при которой Re Si = Res2, определяется
f\ I
формулами
/2 =
7oi +7o2 +УGо2 -7oiJ - 4^7oi 7o7
2(l+^Oo2VD + 72oi)/D + 7S2)
A.8.26)
= Уо,5[у^1^^0A+7о2)-1-A+2^Oо17оТ] }
2 A+ 'O02 VO+7oi)/(l+7o2)
ImV(l + '7oi)(l+'7o2)
A.8.27)
A + ^Oo2 ^(l+7o2i)/0+7o22)
соответственно для зависимостей A.3.1) и A.3.3). В обоих случаях должно
Табл ица 1.15
Оптимальные значения коэффициента трения у0, гасителя с частотно-независимым
трением при свободных колебаниях
Toi
0
0,025
0,05
0,075
од
Относительная масса гасителя v
0,025
0,316
0,324
0,342
0,352
0,368
0,380
0,394
0,409
0,420
0,439
0,05
0,447
0,471
0,474
0,502
0,500
0,533
0,527
0,566
0,553
0,599
0,075
0,548
0,592
0,575
0,626
0,602
0,662
0,629
0,698
0,657
0,736
0,1
0,632
0,703
0,660
0,741
0,688
0,781
0,716
0,821
0,744
0,863
62
Таблица 1.16
Значением модуля наибольшей вещественной части корней характеристического
уравнение системы с гасителем и оптимальной настройкой гасителя с частотно-
независим >im трением при свободны? колебаниях
Toi
70 2
Относительная масса гасителя v
0,025
-Re s
Я
0,05
-Res
f\
0,075
- Res
f\
0,1
- Res
f\
0
0,025
0,05
0,075
0,1
0,2
0,3
0,4
0,5
0,1
0,2
0,3
0,4
0,5
0,1
0,2
0,3
0,4
0,5
од
0,2
0,3
0,4
0,5
0,0246
0,0487
0,0721
0,0408
0,0300
0,0306
0,0548
0,0782
0,0590
0,0449
0,0363
0,0608
0,0842
0,0809
0,0603
0,0407
0,0666
0,0902
0,1126
0,0764
соблюдаться условие
0,954
0,961
0,972
0,972
0,971
0,938
0,954
0,968
0,972
0,970
0,904
0,944
0,974
0,969
0,967
0,860
0,930
0,954
0,974
0,969
0,0242
0,0480
0,0711
0,0933
0,0781
0,0300
0,0538
0,0770
0,0993
0,1202
0,0352
0,0590
0,0828
0,1051
0,1259
0,0387
0,0650
0,0885
0,1107
0,1319
0,909
0,916
0,927
0,941
0,950
0,878
0,903
0,918
0,934
0,952
0,809
0,884
0,926
0,946
0,946
0,873
0,857
0,893
0,917
0,938
0,0238
0,0473
0,0701
0,0917
0,1126
0,0294
0,0530
0,0758
0,0977
0,1184
0,0340
0,0584
0,0814
0,1033
0,1241
0,0374
0,0635
0,0867
0,1087
0,1296
0,868
0,874
0,884
0,898
0,914
0,823
0,855
0,872
0,888
0,906
0,715
0,928
0,877
0,897
0,917
0,901
0,788
0,837
0,863
0,886
0,0235
0,0466
0,0691
0,0907
0,1111
0,0288
0,0521
0,0745
0,0962
ОД 166
0,0327
0,0573
0,0799
0,1016
0,1221
0,0365
0,0619
0^0850
0,1068
0,1274
0,829
0,835
0,844
0,857
0,873
0,772
0,810
0,828
0,845
0,863
0,683
0,776
0,831
0,851
0,872
0,939
0,724
0,784
0,814
0,838
2/2 Re\/(Wl +IUl)(«2 +">2)- "I "(I + V)f\u2 <0
A.8.28)
Вычисления показывают, что при такой настройке гасителя ухудшение
рассматриваемого критерия качества при увеличении v по сравнению с
A.8.24), A.8.25) оказывается сравнительно небольшим. В табл. 1.16
даны значения критерия качества и оптимальной настройки гасителя в
случае использования зависимостей A.3.1). Эти результаты полностью
подтверждают приведенные выше замкнутые решения задачи оптимизации.
При вынужденных колебаниях, в особенности вызванных
пульсациями ветровой нагрузки, более важным является повышение
декрементов колебаний, так как в этом случае дисперсии перемещений и
напряжений в конструкциях обратно пропорциональны декрементам. Найденные
выше параметры гасителя A.8.24), A.8.25), A.8.21) обеспечивают
максимальные декременты колебаний системы. Можно показать, что при
заданных значениях 7oi> To 2 в случае, если относительная масса гасителя
превышает значения A.8.24), A.8.25), настройка гасителя по формуле
63
A.8.21) приводит для обеих форм колебаний системы с гасителем к
одинаковым декрементам, которые определяются согласно выражениям
4Goi +7о2)
4-7oi7o2 +\/D + 7oi)D + 7o2) '
Э = я 2[7oiVl ^7о2"^^о2У/ТТ^7]
Я Vl+7oi+Vl+7o2+V2[(l+7oi)(l+7o2)+(l+7oi7o2)V(.+7oi)(l+7o2)
соответственно для зависимостей A.3.1) и A.3.3). Эти значения
совпадают с декрементами A.8.24), A.8.25) при соответствующих
оптимальных v.
§ 1.9. Периодические импульсы
Аналогично тому, как это сделано в § 1.1 — 1.5 для гармонического
воздействия, можно рассмотреть задачу о выборе параметров и оценке
эффективности ДГК при действии на защищаемый объект периодической
последовательности мгновенных или кратковременных импульсов. В
случае малой нестабильности частоты действия импульсов можно положить
частоту фиксированной или изменяющейся в достаточно узком
диапазоне и оценить эффективность гасителя без специальных демпфирующих
устройств. Соответствующие результаты приведены в[1]. При большей
нестабильности частоты воздействия приходится учитывать возможность
появления резонансных ситуаций и в связи с этим вводить в гаситель
демпфирование.
Рассмотрим задачу оптимизации параметров гасителя с вязким тре-
ниедо при силовом воздействии на главную массу бесконечной последо-
оо
вательности мгновенных импульсов U 2 b(t — кТ0), где ?(•) — дель-
к = — «>
та-функция Дирака, U, Т0 = 2п/р09 р0 — значения, период и частота
действия импульсов. Сохраняя обозначения, принятые в § 1.2, 1.4, и полагая
т = oj0t, Т = со0Т0, и = U/(Mttcoq), записываем уравнения колебаний
защищаемой системы и гасителя в виде
d1 x dx d2y °°
—— + h— + x + v—г=тш 2 6(т-кТ),
dr dr dr k = -°°
d2y Idy dx\ О-9--1)
Будем рассматривать установившийся режим колебаний с периодом
действия мгновенных импульсов. При этом вначале остановимся на
имеющем важное практическое значение случае основного импульсного
резонанса, когда установка ДГК является особенно целесообразной, затем
перейдем к изучению импульсных резонансов более высоких порядков.
В заключение оценим влияние конечной продолжительности импульсов.
Основной импульсный резонанс [167]. Для учета возможной
нестабильности частоты ро = Р°°о действия импульсов будем полагать, что она
может принимать самое неблагоприятное значение в окрестности частоты
64
oj0, в частности совпадать с любой из собственных частот двухмассовой
системы. Далее рассматриваются два варианта:
а) значение импульса и = и0 не зависит от частоты р0; такой случай
имеет место, например, в паровоздушных и гидравлических простого
действия, а также механических фрикционных молотах и копрах;
б) значение импульса и = и0р пропорционально частоте, что
характерно для механизмов с зубчатыми передачами, машин ударного действия
с кривошипно-шатунным приводом, скребковых транспортеров,
железнодорожных вагонов при ударах на стыках рельсов и т.п.
При принятых допущениях колебания системы будут вызываться в
основном первой гармоникой разложения воздействия в ряд Фурье
оо Цр оо
пи 2 Ь(т-кТ)=— +ир 2 cos(rpr). A.9.2)
Постоянная составляющая в A.9.2) приводит к смещению средней
линии колебаний от положения статического равновесия, а высшие
гармоники — к некоторому увеличению размаха колебаний. Влияние этих
слагаемых на максимальное отклонение главной массы невелико при
малых значениях относительной массы гасителя v ^0,01^0,1, которые
обычно реализуют на практике. Поэтому в первом приближении
оптимальные параметры гасителя можно принять согласно данным § 1.2, 1.4,
полагая, что ql\ = 1 в случае а), ах = 2 в случае б), а2 соответствует
выбранному критерию качества системы. Так, например, при использовании
критерия максимального отклонения главной массы (а2 = 0)
2 1+0,5*> /*>C +3^ + 0,625 *>2)
a)/oni~(T^F' Мопт^ B + ,)(i + *K ;
1 + hii I Л
б) /опт =— -,, /WSV— — " • A.93)
1 +v - п A +^)B + v)
Так как гаситель реагирует в основном на возмущение, частота
которого близка к его парциальной частоте, то достаточно удовлетворительную
оценку влияния неучтенных слагаемых в A.9.2) можно получить,
рассматривая систему без гасителя. Более того, при учете высших гармоник
можно пренебречь демпфированием системы, тогда дополнительное
движение главной массы, вызванное постоянной составляющей и высшими
гармониками в A.9.2), в случае а) описывается выражением
Г °° cos (прт) 1
х = иИ0,5+ 2 \} , A.9.4)
1 " = 2 1 -П1р1 J
в случае б) правую часть формулы следует умножить на р.
Полученная добавка невелика по сравнению с амплитудой первой
гармоники, но имеет различные значения для частот рх и р2 — корней
уравнения A.4.1), позволяющих оценить максимумы критерия качества.
Точное определение наибольших отклонений главной массы на
указанных частотах затруднительно вследствие сдвига фаз между составляющей
A.9.4) и первой гармоникой. Можно приближенно подсчитать значения
добавок A.9.4) в те моменты времени, которым на частотах рх ир2 соот-
5. Б.Г. Коренев 65
ветствуют наибольшие отклонения главной массы при учете лишь первой
гармоники. Дополнительный анализ и расчеты показали, что при
параметрах гасителя A.9.3) разность d = хр = р - хр-р аппроксимируется
выражением:
а) d = @,14 + 0,38vfr)w; A.9.5)
б) ^ = @,2+0,9>У/г)A -2\/v)u.
Для выравнивания наибольших отклонений главной массы на частотах
Pi и р2 можно изменить настройку/2, сохранив значения A.9.3)
коэффициента трения. Используя условия равенства ординат резонансной
кривой:
ир\ "Pi
V[i-pi(i+*0]2+u2pi + ч/[1-рП1+^)]2+^р1
V[i-pi(i+^]2+*2p? + V[i-P2(i+*0]2+/*2pi '
находим приближенные формулы:
A.9.6)
а) /
б) /2пт
2 _ 1+0,43^-0,19\/Г[^ + @,37лД"+/г)C\/1Г+4Л)]
(It*)* A.9.7)
1 +/i/i-@,2 + 0,9v^)(l -2v^)(l + 1,5^)@,5^ + /г2 + Л/а)
1 +^-/г2
Для проверки оптимальности найденных параметров гасителя
целесообразно построить замкнутое решение, не прибегая к разложению
импульсов в тригонометрический ряд. В промежутке между любыми
последовательно действующими импульсами система совершает свободные
колебания, описываемые выражениями
4 .4
х = ZAjesj\ y= 2AjBfesJT, A.9.8)
где Bj = (f2 + lis;)/ (sj + fJtSj + /2) ; s;- - корни характеристического
полинома A.6.1); Aj — произвольные постоянные, определяемые из условий
периодичности решения
x(T) = x@l y(T)=y@), x(D = x@)-7tojcu, у(Т)=у@),
и удовлетворяющие уравнениям
4 -4
2 AfieV - 1) = 0, 2 Ajs,-(esfr - 1) = - тгси,
4 4
? AfBj(esJ'T - 1) = 0, 2 AjBfSj(esJT - 1) = 0.
Здесь с = 1 в случае а), с = р в случае б).
66
Рис. 1.9. ИЧХ колебаний главной массы 2?.
при настройке гасителя A.9.7,а),
демпфировании A.9.3,а)
Приведенные в [167] и частично
далее в табл. 1.18 и на рис. 1.9
результаты вычислений показывают, *
что ординаты первого и второго
резонансных максимумов близки
друг к другу. Поэтому можно
рекомендовать найденные параметры в
качестве оптимальных при проведе- О
нии практических расчетов.
Сравнение полученных результатов с данны-
ми § 1.2, 1.4 свидетельствует о том,
что эффективность динамического
гасителя при действии периодиче- ^
ских импульсов в режиме основного
импульсного резонанса лишь
немногим ниже, чем при гармоническом *
воздействии.
Импульсный резонанс и антирезо- ^
нанс от высших гармоник в
разложении A.9.2). Предполагая, что
импульсы не зависят от частоты, 4
рассмотрим случай [162], когда
частота р0 нестабильна в окрестности
значений со0/п или со0/(л - 0,5) (и — *
целое число). В отсутствие гасителя
(v = 0) перемещение главной массы о
в промежутке времени 0 < г < Т 42
между любыми последовательно
действующими импульсами вычисляется по формуле
h-Q
rtli
fHfjOS
^Щ'Л
/?=0,1
ъ*щ
/л *
'•# "" V
\р\
2>=
1
/
\ //
s -'-'У
1
У."
V~0,l
^J>
Mb?>»**
**7\t\
~Т-
1-1
;1
1> =
щ \
о/\
(№5
• i
J-PA
г#
х,\
*"""\
^я
0,4 0,6 0,8
V
и
— — т
, 2
h
-Т
2
= 7Т
sin [т?(Г- г)] + sin (т/т)
, = Vi- —.
h
-Т
2
т?[1-2е 2 со8(г?Г) + е-лу]
Импульсно-частотная характеристика (ИЧХ),показьшающая зависимость
наибольшего перемещения от частоты действия импульсов, имеет
максимумы при р = г}/п (импульсный резонанс) и минимумы при р = т?/(л — 0,5)
(импульсный антирезонанс). При импульсном резонансе наибольшее
перемещение X достигается при tjt = я/2, оно определяется выражением
тте
т?0 ~е
-hnn
)
5*
67
При малых значениях hn<\ будет
,*1, ~=тг.-^/4/о,5+-1-).
и \ him/
В случае п -»°° резонансные пики Х/и ^7ге~Л7г/4A + e~hnn). В табл. 1.17
даны резонансные ординаты для некоторых значений h , п.
Антирезонансные ординаты
X ъе-н*
при Ли <1 можно определить по формуле Х/и ^тте я/ 0,5 + —(п -0,5I,
если п -* °°, то ЛГ/н % тте~И7Т^4 [1 - ^-Л7Г(Л-0»5) ], при антирезонансе
импульсы направлены всегда навстречу движению массы, поэтому
перемещения оказываются даже меньше, чем при действии одиночного импульса,
иначе говоря, коэффициент повторности меньше единицы. Именно поэтому
антирезонансная настройка системы считается благоприятной в -еории
виброизоляции.
Таким образом, в отсутствие гасителя при увеличении п резонансные
пики ИЧХ уменьшаются, антирезонансные ординаты несколько
увеличиваются, разности соседних резонансных и антирезонансных ординат и
частотные интервалы между ними уменьшаются.
При наличии гасителя установившийся режим колебаний системы
описывается выражением A.9.8). Вычисления показали, что при импульсных
резонансах более высоких порядков (п > 1), вызываемых высшими
гармониками разложения A.9.2), оптимальные параметры гасителя
можно'принять такими же, как при п = 1. Об этом свидетельствуют, в частности, ИЧХ
колебаний главной массы (см. рис. 1.9). Резонансные пики, находящиеся
слева (Xi) и справа (Х2) от частот р = 1/2, 1/3 и т.д., при выбранных
параметрах гасителя практически одинаковы. При увеличении п
межрезонансные интервалы частот уменьшаются, причем иногда проявляется общий
резонансный пик для разных значений п.
В табл. 1.18 приведены значения параметров гасителя и соответствующие
им ординаты резонансных пиков главной массы для п = 1,5 (прочерк
указывает на отсутствие резонансного пика). В качестве расчетных выбираются
резонансные пики в заданном диапазоне изменения относительной частоты
Таблица 1.17
Наибольшие отклонения главной массы без гасителя при импульсном резонансе
порядка п
h
п
5
4
3
2
1
0,01 21,44 26,4 34,66 51,19 100,79
0,05 5,56 6,48 8,05 11,22 20,81
0,1 3,68 4,08 4,78 6,27 10,83
68
Таблица 1.18
Резонансные пики Хх /и (числитель) и Х2 /и (знаменатель) главной массы при
импульсном резонансе порядка п
V
h
М
/2
5
4
п
3
2
1
О 0,188 0,962
0,025 0,05 0,188 0,957
0,1 0,188 0,950
0 0,259 0,927
0,05 0,05 0,259 0,920
0,1 0,259 0,911
0 0,348 0,862
0,1 0,05 0,348 0,853
0,1 0,348 0,840
3,16
3,19
2,96
3,04
3,10
3,23
2,94
3,04
3,09
3,42
ЗД7
3,08
3,02
2,88
3,28
2,95
3,14
2,84
3,32
3,26
3,17
3,01
3,06
-
3,36
3,58
3,60
3,18
3,13
3,01
2,92
3,30
4,20
4,23
3,49
3,50
3,13
3,12
3,46
5,50
5,55
4,32
4,37
3,67
3,71
4,24
9,62
9,61
7,13
7ДЗ
5,69
5,74
6,99
2,81
2,87
2,98
4,26
3,64
3,65
3,26
3,27
3,45
3,40
3,18
3,09
3,01
2,88
6,99
5,65
5,66
4,77
4,81
5,15
5,13
4,45
4,45
3,94
3,95
р действия импульсов, который назначается с учетом нестабильности
частоты ро источника возмущения и возможного отклонения от расчетного
значения частоты со0 собственных колебаний главной массы, Сопоставление
приведенных результатов с резонансными пиками колебаний главной
массы в отсутствие гасителя (табл. 1.17) позволяет оценить эффективность
гасителя. Увеличение собственного демпфирования колебаний главной массы и
порядка импульсного резонанса снижают эффективность гасителя. При п > 1
гаситель целесообразно применять лишь при очень малых значениях h .
Вместе с тем в достаточно обширной области значений параметров h, п
установка гасителя позволяет существенно уменьшить уровень колебаний
главной массы при импульсном резонансе.
В случае антирезонансной настройки системы при п = 1,2 и малой
нестабильности частоты действия импульсов применять гаситель
нецелесообразно, так как в межрезонансных интервалах частот он лишь повышает
амплитуды колебаний главной мгссы. При п > 3 межрезонансные интервалы
частот становятся настолько узкими, что реализовать антирезонансную
настройку главной массы с учетом нестабильности частоты р0 и
возможных отклонений собственной частоты со0 практически не удается. При этом
приходится принимать во внимание вероятность появления импульсного
резонанса с частотой р = rj/n; здесь установка гасителя может оказаться
полезной, если собственное демпфирование главной массы невелико.
69
Импульсы конечной продолжительности. Условия, при которых
импульсы могут считаться мгновенными, не всегда соблюдаются. Поэтому учет
влияния формы и продолжительности импульсов на оптимальные
параметры и эффективность гасителей заслуживает внимания. Рассмотрим случаи
прямоугольных и треугольных импульсов продолжительности D0, значения
которых не зависят от частоты р0 их действия. Ряд Фурье для
прямоугольных импульсов —
up ¦¦ • stoftgg)
cos Орт), A.9.9)
rpD
.5гпО)Л2
cos(/pr), A.9.10)
7Ш ?
Л:=-оо
*(г-
для треугольных
оо
ш 2
Л: = -оо
(^(Т-
кТ) =
-кТ) =
2
up
2
+ up
+ ир
г=1
i
r=l
,5rpZ))"[2
0,5 ф/) J
где <р — функция, описывающая форму импульса; и — площадь импульса;
D= cj0D0 — относительная длительность импульса.
В случае основного импульсного резонанса и при учете лишь первых
гармоник в разложениях A.9.9), A.9.10) значение допт определяется
формулой A.9.3,а)). Приравняв ординаты резонансных кривых при ц = Мопт и
/! = ©о в точках их пересечения, получим выражения для выбора в первом
приближении оптимальной настройки гасителя
sin(p1D) sin (p2D)
y/[l-p2(l+v)J+h2p\ J[l-pUl+v)]2+h2p22 '
sin2 (Q,5p!D) sin2 @,5p2Z>)
A.9.11)
Pi4/[l-Pi(l+^)]2+^pl P2V[l-pl(l+v)]2+h2p22
соответственно для прямоугольных и треугольных импульсов. Частоты
Р\)Рг удовлетворяют уравнению A.4.1). Однако найти /2 из этих
соотношений в общем виде затруднительно. Если разложить имеющиеся в них
тригонометрические функции в ряды, затем, после их подстановки,
возвести полученные выражения в квадрат и учесть в числителях два члена,
содержащие p}d в степени не выше четвертой, то можно получить
алгебраическое уравнение
Л-р\х ¦ = 1 - р\ х
[\-p\(\+v)]2+h2p\ [\-p\(\+v)]2+h2pV
из которого следует
1 +0,5*> + A +/гд)х
Г
опт (l+i;J+(l+!/-fta)x
Здесь \-D2\Z — для прямоугольных, х= D2j6 -для треугольных
импульсов.
Учет постоянной составляющей и высших гармоник в A.9.9), A;9.10)
производится так же, как в разложении A.9.2) для мгновенных
импульсов. При этом разность d = xp=Pi - хр=Р2 практически не зависит от
формы импульсов и значения D. Она может бытьоценена по формуле A.9.5,а)).
70
Вводя ее в левые части выражений A.9.11), получаем
2 _ [l-d@,5v+ l,5hy/^+2h2)] (l + x) + 0> + fy*X
опт " A +^J +A + v-h2)x
Результаты вычислений по этой формуле для прямоугольных и
треугольных импульсов, а также по формуле A.9.7,а)) для мгновенных импульсов
мало различаются при Z)<1.
§ 1.10. Стационарные случайные воздействия
Задача [85, 106, 146, 169, 220, 226] об эффективности динамического
гасителя при случайных воздействиях имеет важные практические приложения.
Она представляет значительный интерес прежде всего для сооружений
башенного типа, колебания которых вызываются ветровыми и
сейсмическими воздействиями. Кроме того, применение динамических гасителей
может оказаться целесообразным, если кинематическая виброизоляция
станков, приборов и других устройств при случайном возбуждении
основания недостаточно эффективна или вообще невыполнима.
Уменьшение уровня случайных колебаний конструкций достигается
лишь при установке гасителя с демпфированием. Эффективность ДГК при
случайных воздействиях существенно ниже, чем при гармонических. Вместе
с тем она все же достаточна, чтобы в ряде случаев предпочесть ДГК другим
способам виброзащиты. Применение ДГК должно быть целесообразным по
крайней мере при узкополосных случайных процессах, при этом их
эффективность уменьшается с увеличением ширины спектра воздействия.
Однако даже при широкополосных воздействиях типа белого шума
дисперсии колебаний слабо демпфированных конструкций при установке гасителя
могут быть уменьшены в 2 — 3 раза, что для многих инженерных
приложений оказывается вполне достаточным. Для оценки максимально
возможного эффекта от применения ДГК при случайных воздействиях необходимо
определить его оптимальные параметры, хотя очевидно, что
чувствительность результатов к отклонениям параметров гасителя от оптимальных
значений в данном случае существенно меньше, чем при гармонических
колебаниях.
Параметры гасителя здесь оптимизируются из условия минимума
дисперсий колебаний главной массы. При нормальном законе
распределения внешнего воздействия минимум дисперсии перемещения
соответствует максимуму надежности (вероятности безотказной работы) системы.
Поэтому полученные результаты могут быть непосредственно использованы
также при необходимости повышения надежности и долговечности
конструкций, подверженных случайным воздействиям. Более детально этот
вопрос обсуждается в работах [102,147] и §4.4.
Возмущения с дробно-рациональным выражением спектральной
плотности. Допустим, что перемещение z основания, на котором установлена
защищаемая система с ДГК, представляет собой стационарный случайный
процесс со спектральной плотностью
Sz(Po)=2a0(«o +(Sl)l{*[pl-((So+<*o02][pl-((So-oc0if]}> A.10.1)
71
где а0, Р0 — некоторые числовые параметры. С целью некоторого
упрощения вычислений анализ выполнен при учете для защищаемой системы и
гасителя частотно-независимого трения в комплексной форме [158, 182].
Дифференциальные уравнения колебаний главной массы и гасителя
приводятся к виду
I?
d2y
—- + (щ + ipv1 )(x -z) + v —- = 0,
dr dr2
dr2
+ f\{u2 +ipv2)(y - x) = 0.
Обозначения здесь совпадают с принятыми в § 1.8, при рассмотрении
стационарного режима колебаний множитель р =signp0. Положим р = Ро/оз0,
а = а0/со0, j3= j30/coo, Sz (p)dp = Sz(p0)dp0, тогда АЧХ и дисперсия
отклонения главной массы —
(их +/pi>i)[— p2 +fl(u2 + ^Рt>2 ) 1
X(ip) = —^ — Г / V '\ , A.10.2)
(-p2+ul+ipvl)[-p2+f22(u2 + ipv2)]-vp2fl(u2+ipv2)
оо
о\ = / X(ip)X*(ip)Sz(p)dp. A.10.3)
— оо
При этом Sz (р) отличается от Sz (p0) лишь отсутствием индекса 0 у всех
параметров. В данном случае неупругое сопротивление для главной массы
и гасителя учитывается по одной и той же гипотезе, корни знаменателя
подынтегрального выражения A.10.3) попарно комплексно сопряжены и
не зависят от знака р, следовательно, далее можно принять р = 1. Это
позволяет с помощью теории вычетов получить
з
о2х = -4а(а2 +02Iт 2 *f/pf,
/= i
Здесь
*f*(-Pi*fli*2 +ш2)] X
4--Pj+fl(u2-iv2)}\ П (р]-р2к)П(р2-р*к2)
Р\,Р2 — корни знаменателя A.10.2) при р= 1, расположенные в верхней
полуплоскости; р3 = /3 + ш.
Пусть относительная масса гасителя v выбрана из условия обеспечения
допускаемого уровня колебаний главной массы и массы гасителя, и
основной целью установки гасителя является снижение дисперсии отклонения
главной массы о2. Эффективность гасителя, очевидно, будет наибольшей,
если максимум спектральной плотности воздействия расположен вблизи
частоты свободных колебаний главной массы, так как при этом без гасите-
72
<**
8
4
0
10
8
4
0
8
4
\-
i ТГ^
*^i^—
\;
S^2
2
/з^^-
7^
\1
.2
4
\^
4
tot
у =0.05
/01 9
. JL
@1 '
Кг
а=0^
0,05^
^М—
т
\
5. шум
0t015 0y075 v
Рис. 1.11.
404ss^
J??*
^Л21
0,7
0,7 0,2 0,3
Рис. 1.10.
0,015 0,075 v
Рис. 1.12.
Рис. 1.10. Зависимости стандарта отклонения главной массы ох от параметра а
случайного воздействия
Рис. 1.11. Зависимости стандарта отклонения главной массы ох от относительной
массы гасителя v при действии белого шума
Рис. 1.12. Зависимости коэффициента уменьшения стандартов отклонения главной
массы при случайном воздействии от относительной массы гасителя
ля дисперсия о^ имеет максимальное значение. Относительное положение
максимума спектральной плотности A.10.1) характеризуется главным
образом параметром /3 (при a/fi < 1), а a/fi показывает широкополосность
воздействия.
В связи с тем, что спектральные характеристики воздействия могут
быть получены лишь приближенно, а также вследствие некоторой
нестабильности частоты для большинства источников возбуждения примем, что
при фиксированном а параметр /3 имеет значение, соответствующее
максимуму ох. В частном случае ос = 0 случайное воздействие соответствует
гармоническому с нестабильной частотой 0.
73
Задача оптимизации параметров гасителя из условия минимума
наибольшего значения ох (при произвольном /3) решена методом скорейшего
спуска для некоторых значений v, 7oi> a- При этом использованы
зависимости A.3.1). На графиках (рис. 1.10) приведен стандарт отклонения
главной массы ох при параметрах гасителя, оптимальных для указанных
значений параметров системы и воздействия. Аналогичные расчеты
выполнены также и для предельного случая, когда спектральная плотность
воздействия Sz(p0) - 1/Gгсо0) является постоянной, что соответствует
процессу типа белого шума (рис. 1.11). Этими результатами можно
воспользоваться при расположении максимума спектральной плотности воздействия
вдали от частоты свободных колебаний главной массы.
Как видно из представленных графиков (рис. 1.10), увеличение ширины
спектра воздействия приводит к значительному снижению стандарта ох
для системы без гасителя, которая является узкополосным фильтром.
Полоса пропускания системы с гасителем шире, и при возрастании ос
стандарт отклонения ох снижается меньше, чем при отсутствии гасителя.
В связи с этим коэффициент Кг, определяемый в данном случае
отношением стандарта отклонения системы без гасителя к стандарту отклонения
главной массы при наличии гасителя, уменьшается при увеличении а
(рис. 1.12). В каждом случае подразумевается наиболее неблагоприятное
значение ]3. Однако даже при действии белого шума применение гасителя
достаточно эффективно, так, например, Кг = 2 при у01 = 0,05, v - 0,1.
Уменьшение коэффициента неупругого сопротивления для главной массы
и увеличение относительной массы гасителя приводят к повышению Кт,
хотя и не столь существенно, как при гармоническом
воздействии.-Чувствительность системы к отклонению параметров гасителя от их оптимальных
значений снижается при увеличении ширины спектра воздействия.
Приближенно оптимальные параметры гасителя можно определить по
формулам, полученным путем обработки численных результатов:
2 -
/
702
[l-l,25^+0,l[-(l,l+9^Ooi+(l,l+2^+37oi)a] при a<0,l+7oi+^,
1-0,8 *> при 0,1 +7oi + *><<*< 0,6,
[ 1 - 0,6 v при а > 0,6,
VT^{l-[a/@,l+3^)][l-0,75a/@,l+3^)]}npM a<0,13+3*>,
\Jvj(\ + v) при a > 0,13+ 3i>.
Для динамического гасителя с демпфером вязкого трения оптимальные
параметры можно оценить,приравнивая выражения: /2 + /i/p и /22 (u2+iv2)
прир= 1. Это дает/2 ~/!A -7о2/2), М =/17о20 - 7оа/4).
Полученные результаты позволяют сделать вывод о целесообразности
применения динамического гасителя для уменьшения колебаний системы
с небольшим затуханием при узкополосных (а < 0,2) случайных
воздействиях. При широкополосных случайных воздействиях (а > 0,2) эффектив-
74
ность гасителя несколько ниже. В обоих случаях эффективность окажется
более высокой, если положить значение /3 фиксированным, а не
произвольным, как было принято.
Широкополосные случайные воздействия. Из приведенных выше
результатов вычислений следует, что если отношение коэффициента а0,
характеризующего ширину пика спектральной плотности стационарного случайного
воздействия, к собственной частоте колебаний объекта превышает 0,4 или
пик спектральной плотности находится вдали от собственной частоты
объекта, то при выборе оптимальных параметров гасителя воздействие
можно приближенно рассматривать как белый шум. Для конструкций,
расчетная схема которых с присоединенным гасителем может быть
представлена в виде двухмассовой системы с вязким трением, вычисление
дисперсий при действии белого шума значительно упрощается, что позволяет
провести оптимизацию аналитическим путем. Поскольку такие результаты
имеют определенный практический интерес, бпределим оптимальные
параметры динамического гасителя с вязким трением, минимизируя поочередно
различные функции качества: дисперсии перемещения х, скорости v и
ускорения w главной массы при действии на нее случайной силы (силовое
воздействие); дисперсии абсолютного х и относительного ы перемещения
главной массы при случайном перемещении основания (кинематическое
воздействие). Ординату спектральной плотности белого шума примем
равной К2/B7т)цдя силового, I/Bтт) для кинематического воздействия,
где К — жесткость пружины главной массы.
Выражения АЧХ колебаний главной массы с точностью до постоянных
множителей (см. § 1.2, 1.4) имеют вид
X=(s2 +/xs + /2)M(s), V=sX; W = s2X, A.10.4)
X = (l+/2s)(s2+/zs + /2)M(s);
U = - [s4 + A + v)vs3 + A + v)f2s2 }/A(s), A.10.5)
4
где A(s) = 2 Д/s4"', a0 = 1, at = h + (l+v)ii, я2=/ф+1+A+*>)/2, а3 =
= Л/2+ д, a4 = /2, s - ip. Определяя дисперсии при действии белого шума
1 /0°
а2 = / ФE)Ф(-$L$,
2 ni
— too
воспользуемся известным результатом [151]
о1 = Г d-s =
2ni _]m A(s)A(-s)
Ъъ
b0(aia4 - а2аъ) + Ьхаъ - Ъгах + —(Д1Я2-Я3)
#4
= , A.10.6)
2(-0з — а\а4 + аха2аъ )
75
который записан для случая а0 = 1. При этом Ф(я) — АЧХ; Ь0> ЪиЬ%9 Ь3 —
коэффициенты полинома В (s) = b0s6 + bxs4 + b2s2 + Ьъ в числителе
выражения Ф($)Ф(—s).
Знаменатель в A.10.6) не зависит от коэффициентов полинома B(s):
A = 2{/4/z[juA +vf +^]+/2m/z[-2+m/2A +^) + /z2] +
+ yi[vi± + h + ju2 A + 1/)Л + jii/г2 ]}.
Полином B(s) при силовом воздействии для АЧХ, записанных в A.10.4),
имеет соответственно вид
54+B/2-м2)*2+Л -s6-B/2-/x2M4-/4^2, s8+B/2-MV+/V,
при кинематическом воздействии для АЧХ A.10.5) он равен
(l-/22s2)[54+B/2-/i2)s2+/4],
s8 + [2/2 -м2A+^)]A+^M6 + /4A+*>)V.
Дисперсии перемещения и скорости главной массы при силовом
воздействии вычисляются по формулам
ol ={ /ЧмО +^J,+ ^]+/2ju[-2-i> + jLi/Kl +*0 + Л2] +
+ М[1 +д2A +^) + дЛ]}/А, A.10.7)
^и = {/4[мA+^)+^]+/2/х[-2+мЛ+//2]+мA+М2+д/г)}/А, A.10.8)
дисперсия абсолютного перемещения при кинематическом воздействии
получается добавлением к A.10.7) результата A.10.8), умноженного на Ь2:
+ /г3(/х + Л)]+м[1 +М2A +*0 + ju/z + /22(l +M2 +М/г)]}/А. A.10.9)
Степени полинома в числителе и знаменателе подынтегрального
выражения A.10.6) при вычислении дисперсий ускорения о^ и относительного
перемещения главной массы а2 совпадают. В результате о^ = о2 = «>,
что является следствием идеализации входного случайного процесса,
дисперсия которого также равна бесконечности. Так как реальные случайные
процессы обладают конечной мощностью, целесообразно поступить
следующим образом. Разделив числитель на знаменатель, подынтегральное
выражение A.10.6) можно представить в виде суммы целой части и рациональной
дроби. Для усеченного белого шума с частотным диапазоном конечной
ширины (— р +р) интеграл от первого слагаемого равен р/тт. Он стремится
к оо при р>-> оо и не зависит от параметров гасителя. Интеграл от
рациональной дроби имеет конечное значение даже при действии идеального
белого шума и зависит от параметров гасителя. Вычисляя интеграл от
второго слагаемого при действии идеального белого шума, приближенно
76
получаем
+ о;
Ы> ={ АЛ+./*[м *vh'- *>м2П + ^)B + г>А - /i(l + *> + 2v2)h2-vh3}-
-f2li[2-v-li(\+3i>)h-3h2 + n2vB+p)h2 + ii(l +2*>)/г3 + /г4] +
+ д[1 +м2A -^-^2) + дA -2v-2vid2-v2n2)h-
-A+ju2 + 2^м2)/г2-дЛ3]}/А.
Точно так же можно найти
A.10.10)
а2 = */« - h + а2, A.10.11)
где а2 соответствует выражению A.10.9).
Оптимальные параметры гасителя определяем^ приравнивая нулю
частные производные дисперсий A.10.7) —A.10.11) по /2 и ц. Кроме
указанных, рассмотрим также критерий вида о2х + Ro2, , где R — заданная
константа. В частном случае h m 0 оптимальные параметры гасителя находятся
особенно просто. Окончательные результаты для силового воздействия
сведены в табл. 1.19; для кинематического - дисперсии а2 и а2 отличаются
Таблица 1.19
Результаты оптимизации параметров гасителя при действии белого шума без учета
демпфирования главной массы
Крите
рий
Значение критерия при
оптимальных параметрах
гасителя
f2
•> on
/l + 0,75 v
1 + 0,5 v
A + v?
ЛA + 0,75
¦0
(l + v)>
(l-p-v2)(l-092Sv)
1 + v
1 -0,5 v
f-
1 + v
Л
A - 0,25 v)
\-v-v2
a+0,75i*+/?B+v+/J)
mA +.v)
l + 0,5v + R
A
—. /v[l+0,75v+RB
+v)(l + v+R) V
77
от а2 при силовом воздействии на константу, не зависящую от параметров
гасителя, т.е. параметры можно назначать по первой строке таблицы.
I 1~" ••г.ж^^л т> «-г.-» »/-•-»•»-</-» т*»-» /-ктжт»«-г гтттгт ^погиг/мт »»олл1 т /И ~е: III хгполтла nnmmuTt
linn ynnv onjKuiw AL/wiri/i ,u,;ivi iviuuiiu» iTiuvvui ^#«. / w^ j ДОВС1 v/ух livywijf -г« a a»
выражения в замкнутой форме лишь для /2ПТ. Дополнительный численный
анализ показал, что чувствительность дисперсий к изменению /х заметно
меньше, чем к изменению /2, кроме того, значения цопт мало зависят
от Л и могут быть приняты такими же, как при h - 0, т.е. по данным
табл. 1.19. Условие Э(а2)/Э(/2) = 0 при рассмотренных критериях
приводит к таким результатам.
I. Критерий - минимум а2 :.
М м[B+*0м + /г]
И /г[дA +*>J + "Л]
1 + i> + /z//i
V(l +*02 + 1>Л/м
II. Критерий — минимум а2, :
/^пт/2B + 2^-/22) + 2/2пт[мA+^)-Л-М/г2]-/1B+м/г) = 0;
Г + 2/2 -- на^^м^ч
•'ОПТ ^ ^ ОПТ ,_ Ы../1 I ..\2 ^ ..Г.1 '
/i Г 1 + ^ + /*//i 1
/LT - Н- - - Ц 0-Ю.12)
Л L\/(i+^J + ^л/д J
2 + и/г
^= -шт^- . Aл0лз)
III. Критерий - минимум а^:
^/опт+^з/опт+^/опт+^1/^Пт+^0 = 0, A.10.14)
с4 = Wz2[/i(l + *>J+*>Л], съ =2/г2^м[-2+м/гA + *0 + й2],
с2 = А/Л{C+2^2)д+Л[1 +м2A+^)]2^-2Л2мB-^)-/г3B-^2)+/г4м},
с, =2м2{м-2Л-Л2/1C-^)-Л3[1+м2B+4^+^2)]+/г4АИ-Л5},
c0=M2{-MB-^)+/2[l-2M2(l-^)]+^2AtB+^2)+/zV(l+^)}.
Уравнение A.10.14) достаточно точно можно заменить биквадратным
уравнением, если, учитывая соотношения /i2nT * у, \сг\ <\сЛ (i = 3,4;
/ = 0,2), приближенно принять /6 * (З/4 - 1)/2, /8 * 2/4 - 1. Таким
образом, отбрасывая малые высокого порядка, вместо A.10.14) получаем
^2/опт + ^l/опт +?> =0,
?2 =Л{C+2у2)д + Л[-1 +2^ + ^2 + /i2(l + i>)]2*> +
+ h2n(-4 + 6 i> + 3 и2) - h3B + 4 *>)},
^ = 2 д{м - 2 /z - /г2мC - *>) - h3 [ 1 + 2 /x2A + 2 *>)},
c;=-M2B-^) + /i/?[l-2/i2(l-i;)]+^2B/i2+^-2^2),
78
откуда легко определяется /2ПТ. Заметим, что при малых значениях hj[i
в написанных выражениях Сг, ^ь^е можно опустить еще ряд малых
членов.
IV. Критерий — минимум о^ + Ro2 :
с* /опт + сх f2onT + с0=0, c2=h{n(\+vJ+vh+yiRB + 2v-h2)},
с% =2д{дA + *>J+*>/1+Д[дA + v)-h-iih2]},
с0 = -/! [мB + v) + /г + дЛ B + дЛ)].
V. Критерий — минимум о2 , а2 .
В этом случае пригодны формулы для критерия IV, если положить
в них R = И2. При небольших значениях h приближенно f2OTlT *
* (/*2 + h2f2)/(\ + Л2), где f2 - соответствует формуле A.10.12),
/у — A.10.13), откуда видно, что f2onT мало отличается от
результата A.10.12).
В табл. 1.20 приведены для некоторых значений v, И оптимальные
параметры гасителя и дисперсии а2 , а2 , а^ при использовании разных
критериев оптимальности: I — минимум а2, II — минимум а2, III —
минимум о2^. Приближенные результаты для критериев IV, V легко получаются
с помощью данных табл. 1.20 и указанных выше соотношений.
Оптимизация по разным критериям довольно заметно влияет на оптимальные
параметры гасителя, однако характеристики колебаний главной массы при
этом изменяются в меньшей степени. Это является следствием
сравнительно слабой чувствительности дисперсий колебаний главной массы к
отклонениям параметров гасителей от их оптимальных значений и снижает
требования к реализации оптимальных параметров гасителей в практических
приложениях.
Влияние собственного демпфирования главной массы на f2onT
оказывается различным для разных критериев оптимальности. Оно легко
оценивается с помощью приведенных данных. Ясно, что при малых
значениях h этот фактор можно не учитывать при выборе /2ПТ,
однако, определяя эффективность гашения, его следует принимать во
внимание. Сопоставив данные табл. 1.20 и дисперсии колебаний
главной массы без гасителя:
ol - а?, = — , oZu = при силовом воздействии,
2А 2Л
, 1+й2 _ Р 1 -h2
°х = ' °и = — + ПРИ кинематическом воздействии,
2h 7г 2/г
можно сделать вывод о достаточной эффективности динамического
гасителя, хотя и не столь высокой, как при узкополосных воздействиях.
79
Ill
я
-
©b
to
b
H
E
о
=1
©b
V
"b*
Ё
г?
Ё
О
3.
©b
b
b
H
С
г?
н
С
О
3.
Л!
•
к
ГЧ О' W) Tf
(N О н о
чо" wo" -^ го"
СП 0> О 0\ WO ГЧ WO СО
со чо гч ^ о> чо со о-\
Tf CO ГО ГЧ ГЧ* CN ГЧ' 1-н
6,27
6,38
0,987
5,05
5,14
0,994
4,20
4,28
1,003
0,160
ГЧ
о
^о
ГО
3,18
1,032
W0
о
4,39
4,56
0,975
«о
го
3,76
3,90
0,984
3,27
3,40
0,994
0,228
сч
Г-
ГЧ
2,58
2,69
1,025
wo
3,06
3,29
0,950
OS
2,73
2,94
0,961
2,46
2,65
0,974
0,331
ЧО
ЧО
о>
ГО
2,05
2,21
1,007
г»
ЧО WO tj- CO TtCOCOCN ГЧ ГЧ ГЧ *—i
io го оо о\
VO "Л Tf ГЛ ^ ГО со" СЧ
чо wo чз- со
ЧО ОО т-t ОО
г- г^ оо со
OS OS Os Os
о о о о
Г- ГО ГО ГЧ
•^ оо со чр
rj^ со го" гч"
ГЧ WO ОА Г—
WO WO UO ЧО
о> о\ os os
о о о о
ГЧ О ГО ГО
О Г; -t О
со гч гч" гч"
ГО ГЧ ГЧ ГЧ
On со Г- Г*
О и и (N
os os as as
О О О О
6,30
6,27
\
ГО
5,07
5,05
оо
о
4,20
4,20
(N
3,08
3,10
сч
4,44
4,39
«о
3,79
3,76
о
3,29
3,27
го
2,57
2,58
о
ЧО
3,10
3,05
ГО
2,76
2,73
о.
г-
2,48
2,47
ГЧ
W0
2,05
2,06
о
ЧО WO Tj- СО Tj- СО ГО ГЧ ГОГЧГЧГЧ
сч
SO
Os
О
о
ЧО
On
О
^t-
wo
ЧО
WO
OS
О
О
го
Os
О
оо
сч
OS
О
wo
CS
On
О
ГЧ
•н
О
CN
0>
О
оо
чо
оо
о
W0
SD
оо
о
ГЧ
чо
00
о
"*
оо
ЧО
IO
ОС
О
W0
ГЧ WO
О О 1-н
00
гч wo
о о —•
«о
ГЧ WO
О О —1
оооо оооо оооо
о
Вследствие вытекающей из формулы Парсеваля связи между
интегральными квадратичными оценками качества переходного процесса,
вызванного воздействием мгновенного импульса, и дисперсиями перемещений
системы при действии белого шума, все приведенные результаты полностью
применимы для оптимизации переходного режима колебаний главной
массы. В § 1.8 такая задача решена и определены оптимальные параметры
гасителя из условия скорейшего затухания колебаний. Найденные в данном
параграфе оптимальные параметры гасителя позволяют соответственно
минимизировать интегралы от квадратов абсолютных или относительных
перемещений, скоростей, ускорений главной массы за время переходного
процесса, вызванного воздействием на нее силового или кинематического
мгновенного импульса, т.е. по существу задача, описанная в § 1.8, решена
здесь с использованием других критериев оптимальности.
§ 1.11. Нестационарные случайные воздействия
Изучение работы ДГК при нестационарных случайных воздействиях
представляет значительный практический интерес в связи с тем, что довольно
часто динамические нагрузки на сооружения имеют нерегулярный характер
и моделируются при проведении расчетов нестационарными случайными
процессами. В этом параграфе исследуется эффективность ДГК с вязким
трением при воздействиях, которые можно представить в виде
произведения детерминированной функции времени F G) на стационарную
случайную функцию \р (/"). Так описывают, например, сейсмические воздействия,
нагрузку от взрывов, внезапные порывы ветра и т.п. Эффективность ДГК
оценивается коэффициентом KTi показывающим отношение наибольших
дисперсий перемещений защищаемой конструкции до и после установки
гасителя.
В связи с необходимостью определения наибольших значений дисперсий
нестационарных случайных выходных процессов системы в данной задаче
эффективен метод моментов [21, 56, 71, 168, 190]. Для системы с п
степенями свободы, описываемой уравнениями движения
Мх + Их + Сх = DF(t)\p(t), A.11.1)
этот метод приводит к матричному дифференциальному уравнению
относительно искомой матрицы I(t) = q(t)q (/) корреляционных моментов
координат
I(t) = BI(t)-^I(t)B,^DlF2(t)D,l. A.11.2)
Здесь В =\ , D, =\ , q = I М, Н,
1-М~1С -М~1Н\ LM-'DJ 1x1
С -
матрицы инерционных, диссипативных и квазиупругих коэффициентов;
Е — единичная п X п — матрица; х — /7-мерный вектор координат; D —
вектор интенсивностей белого шума ф(г) в разных уравнениях системы
A.11.1); черта сверху означает усреднение по ансамблю реализаций;
6. Б.Г. Коренев 81
штрих — символ транспонирования. Интегрирование уравнения A.11.2)
при заданных начальных условиях 1@) позволяет проследить изменение во
времени дисперсий перемещений и скоростей системы — диагональных
элементов матрицы I(t).
Если стационарный случайный сомножитель в правой части уравнения
A.11.1) отличается от белого шума, но его спектральная плотность —
дробно-рациональная функция частоты, то, вводя формирующий фильтр и
присоединяя его уравнения к уравнениям движения механической системы,
получим вновь уравнение A.11.2), в котором, однако, в выражении для
свободного члена F (t) - 1, в Dx отличны от нуля лишь элементы,
соответствующие координате формирующего фильтра, в некоторые элементы
матрицы С входит ^@. Для исключения переходных процессов в фильтре
начальные условия для корреляционных моментов координат фильтра
следует принять равными их стационарным значениям, т.е. они будут
ненулевыми, даже если механическая система при t = 0 находится в
невозбужденном состоянии.
В случае, если гаситель присоединяется к системе с одной степенью
свободы с вязким трением, возбуждаемой нестационарным белым шумом
интенсивности К (жесткость пружины главной массы), входящие в
уравнение A.11.2) матрицы имеют вид
м-1с-
\+vf _vf
-f2 f2
M~lH =
h+v\i
L-M
7]-*ч;]'
Здесь все обозначения соответствуют принятым в § 1.2, 1.4, в уравнении
A.11.2) производные I(t)9 x(t) берутся по безразмерному аргументу
содействие белого шума на систему в течение некоторого промежутка
времени г0 описывается с помощью модулирующей функции F(t) =
= 1 (г) — \(t — т0), где 1 ( • ) — единичная ступенчатая функция Хевисайда.
При внезапном действии белого шума [190] дисперсии перемещений
асимптотически устойчивой предварительно невозбужденной механической
системы являются неубывающими функциями времени, возрастая от нуля
до стационарных значений. После прекращения действия белого шума
дисперсии перемещений являются невозрастающими функциями, убывая
в переходном процессе до нуля. Расчеты показали, что присоединение ДГК
уменьшает дисперсии перемещений защищаемой системы и существенно
ускоряет протекание переходных процессов.
Зависимости коэффициента уменьшения дисперсий перемещений
главной массы от безразмерного параметра г = тосо0/B 7г) представлены на
рис. 1.13 для нескольких значений h и v (на рис. 1.13—1.16 сплошные
линии соответствуют v - 0,025, штриховые — 0,05, штрихпунктирные — 0,1).
Для модулирующей функции F \t) = 1 (t)e~€iX>or, e > 0 эффективность
ДГК при h = 0,05 можно оценить с помощью кривых, приведенных на
рис. 1.14. Результаты, представленные на рис. 1.13, 1.14, получены при
параметрах ДГК
1 + 0,5 v I v + 0,75 v2
/2 = ~ ST., М = V "
A +*>J A +*>K
82
Рис. 1.13. Зависимости коэффициента
уменьшения дисперсий от длительности
действия белого шума
Рис. 1.14. Зависимости коэффициента
уменьшения дисперсий от параметра в
при воздействии 1 (Г) е ~~€ w° * ф(t)
0,015 0,05 0,075
которые оптимальны при h = 0 и действии на систему стационарного
белого шума. Вычисления показали, что эффективность виброгашения мало
чувствительна к отклонениям параметров ДГК от указанных значений.
Оценивалась также эффективность виброгашения нестационарных
случайных колебаний системы, вызванных возмущением, для которого y(t) —
стационарная случайная функция с нормированной спектральной плотностью
A.10.1). В этом случае можно принять уравнение формирующего фильтра
? + 2аь<р + (ао + Po)v = 2\/<*оОо + 0оЖО,
расширенный вектор координат q - [х0, хг, </?, xQ, хт, <р], в уравнении
A.11.2) дифференцирование осуществляется по аргументу co0t, матрицы
М~1С-
\+vf2
-Г
0
-vf2
f2
0
-F(t)
0
а2 +/32 J
h+v\i -рц 0
М ] // - | -м Ц D
0 0 2а
параметры а = а0/оо0, /3 = j30/co0.
M~lD
0
0
2>/ф2 +02)
83
Как показано в [190], при внезапном приложении узко полосного
воздействия, максимум спектральной плотности которого удален от
собственных частот колебаний системы, в переходном режиме вполне возможно
превышение дисперсиями перемещений стационарных значений. При этом
демпфирование не оказывает существенного влияния на перемещения
системы, уровень которых в целом весьма мал. Присоединение гасителя
здесь не исключает выбросов дисперсий за стационарный уровень, хотя и
несколько снижает их пиковые значения.
При увеличении эффективной ширины спектра воздействия (а > 0,2)
выбросы исчезают и дисперсии в переходном режиме нарастают монотонно.
Эффективность гасителя здесь примерно такая, как при действии белого
шума, поскольку механическая система является узкополосным фильтром,
и в зоне частот ее собственных колебаний ординаты спектральной
плотности воздействия мало зависят от частоты. Поскольку максимальные
дисперсии перемещений системы достигаются, если максимум спектральной
плотности воздействия находится вблизи ее собственных частот, то, как и
в § 1.10, при оценке эффективности виброгашения в этих наиболее
опасных случаях полагалось, что параметр а является фиксированным,
а ]3 принимает самое неблагоприятное значение, соответствующее
максимальной дисперсии перемещений.
Коэффициенты уменьшения дисперсий перемещений главной массы при
h = 0,05 показаны на рис. 1.15, 1.16 соответственно для модулирующих
функций F(t), равных 1(f) — l(f + т0) и 1 (t)e~€OJott Здесь в
переходном режиме выбросы дисперсий за стационарный уровень не наблюдались
0,025 0,05 0,075 ?
84
как с гасителем, так и без него даже при весьма малых а и h. Параметры
гасителя назначались в соответствии с оптимальными их значениями для
стационарного случайного воздействия if G) (§ 1,10). Численная
оптимизация параметров ДГК не дала существенного эффекта, дисперсии
перемещений системы уменьшались не более чем на 5—7 % по сравнению с
результатами при указанных выше параметрах ДГК.
Таким образом, можно сделать вывод о приемлемости использования
при рассмотренных нестационарных случайных воздействиях гасителей
с оптимальными для стационарного режима параметрами. ДГК
существенно уменьшает длительность переходного режима колебаний. По критерию
уменьшения дисперсий ускорений и скоростей оценка эффективности
виброгашения при нестационарных случайных воздействиях не столь
благоприятна как по критерию уменьшения дисперсий перемещений. Об этом
можно судить, в частности, по результатам вычислений, содержащимся
в [159]. Если ДГК предназначен для уменьшения уровня колебаний при
стационарных воздействиях, то переходный режим, возникающий после
начала или окончания действия возмущения, как правило, не создает более
опасной ситуации, чем установившийся режим, и может не учитываться.
Дополнительные сведения об эффективности гашения нестационарных
случайных колебаний конструкций содержатся в § 4.8, в котором даны
результаты исследования колебаний консольного стержня постоянного
сечения с двумя гасителями на свободном конце при кинематическом
перемещении защемленного конца стержня.
§ 1.12. Импульсы с неполной периодичностью
Естественным обобщением рассмотренной в § 1.9 задачи является оценка
эффективности виброгашения при действии почти периодических
импульсов, для которых амплитуда, период повторения или длительность могут
принимать случайные значения при неизменной форме импульсов. Такая
модель, по-видимому, более правдоподобно описывает нагрузки от машин
ударного действия с нестабильными характеристиками. Например, при
работе кривошипных прессов с приводом от асинхронного двигателя
нестабильность частоты действия импульсов может достигать 10%, у
высокоскоростных молотов, работающих на газовом носителе, разброс энергии
ударов составляет до 15—20% и т.д. Для решения вопроса о
целесообразности применения ДГК при таких воздействиях необходимо оценить
влияние указанных флуктуации на эффективность и оптимальные параметры
гасителя. При этом можно воспользоваться известными свойствами и
выражениями спектральных плотностей импульсных случайных процессов,
детально рассмотренными в [ 124]. Однако в такой достаточно общей
постановке аналитическое решение задачи виброгашения пока не известно,
поэтому в каждом конкретном случае необходимые оценки можно получить
численными методами на ЭВМ. Остановимся на простейшей задаче такого
типа, для которой найдены приближенные аналитические результаты [170],
а именно, оценим эффективность и оптимальные параметры ДГК с вязким
трением в предположении, что на защищаемый объект периодически
действуют мгновенные случайные импульсы.
85
Таким образом, основное отличие в постановке данной задачи от
описанной в § 1.9 состоит в том, что совокупность значений Uk импульсов
в периодической последовательности 2 Ukb (t — кТ0) рассматривает-
к=— °°
ся как ансамбль реализаций случайной величины U с математическим
ожиданием U и центрированной составляющей U0, характеризующейся
дисперсией Оц. При введенных в § 1.9 обозначениях в данной задаче правая часть
оо
первого уравнения системы A.9.1) будет иметь вид я 2 икд (г — кТ),
к = — °°
Мгновенный импульс, значение которого равно тш, можно
рассматривать как узкий прямоугольный длительностью г0 и амплитудой а = ли/т0
при г0 "*0. Согласно [124], спектральная плотность периодической
последовательности некоррелированных прямоугольных импульсов *) со
случайной амплитудой а и периодом Т
т\ [sin@,5pT0)ff 2|2т-2 " У 2я \]
2пТ[ 0,5рт0 J L T r=_ Y T )\
Так как o2a = л2о2и\т\, а2 = тт2 и2\т\, ри = 2я/Г, то спектральная
плотность периодической последовательности мгновенных импульсов
о2и+Рий2 2 8(р-риг)\. A.12.1)
Это выражение со держит не прерыв ну юкомпоне туриа2 /4, ординаты
которой не зависят от р (белый шум), и дискретную компоненту, состоящую
из 5-функций на частотах р, кратных относительной частоте ри действия
импульсов.
Колебания системы с гасителем при действии случайных импульсов
могут быть представлены в виде суммы детерминированной (дискретная
компонента Su(p)) и случайной (непрерывная часть Su(p)) составляющих.
При определении оптимальных параметров и эффективности гасителя
поочередно рассмотрим два часто используемых в расчетах критерия
качества: максимальное значение и второй начальный момент перемещения
главной массы.
В предположении нормального закона распределения флуктуации
импульсов в качестве наибольшего перемещения главной массы можно
принять сумму х + 3 ох математического ожидания и утроенного стандарта.
Математическое ожидание Зс соответствует максимальному по t
отклонению главной массы при действии периодически повторяющихся
неслучайных импульсов, значения которых равны й. Иначе говоря, значения х"рав-
*) При вычислении дисперсии нормирующий множитель перед интегралом от
спектральной плотности здесь принят равным единице, а не D я) "', как в [124].
86
ны ординатам ИЧХ. Если относительная частота действия импульсов
является нестабильной и может принимать произвольные значения в
окрестности \\п (л — целое число) , то ввиду возможности импульсного резонанса
следует х приравнять соответствующим резонансным ординатам ИЧХ.
Для параметров гасителя, оптимальных без учета флуктуации импульсов,
ИЧХ колебаний главной массы приведены на рис. 1.9, а ординаты
резонансных пиков - в табл. 1.18.
Дисперсия перемещения главной массы при Su(p) = 1/Bя) вычисляется
по формуле A.10.7), при конкретных параметрах системы и гасителя ее
значения приведены в графе о2х табл. 1.20. Обозначим далее эту дисперсию
через /. При учете непрерывной составляющей спектральной плотности
возмущения A.12.1) стандарт перемещения главной массы
ох = ou\Jттри1/2.
Эти данные позволяют оценить эффективность ДГК при небольших флук-
туациях значений импульсов. По сравнению с х относительный вклад
последних в рассматриваемый критерий качества возрастает с уменьшением
частоты ри. Действительно, при увеличении номера п импульсного
резонанса (что соответствует уменьшению ри, поскольку ри * 1/л),
математическое ожидание х уменьшается приблизительно пропорционально \\п, а
стандарт ох — пропорционально 1 / у/~п~.
Из выражения для ох видно, что вклад флуктуации импульсов в
критерий качества неодинаков для частот, которым соответствуют соседние резо-
нансы в ИЧХ перемещения главной массы (см. рис. 1.9). Как при
детерминированном, так и при случайном воздействии на систему с гасителем
критерии качества значительно более чувствительны к отклонениям /2 от
/опт' чем к отклонениям i± от Мопт. Поэтому значение Мопт можно
принять без учета флуктуации импульсов, т.е. согласно формуле A.9.3,а)) .
Оптимальная настройка гасителя с учетом флуктуации импульсов
выбирается из условия примерного равенства критериев качества при
инвариантных частотах ри - Pi,2- Будем считать, что в данной задаче эти
частоты определяются точками пересечения АЧХ колебаний главной массы от
действия резонирующей гармоники спектрального разложения импульсов
при ц. = Мопт и д = оо. Они удовлетворяют биквадратному уравнению
[i+/2(i+»o+*Mipi,2 /2 _п Г11,,,
р _ = о, A.12.2)
1>2 A+0,50" A+0,5*>)"
которое получено аналогично уравнению A.4.1) с учетом соотношения
ри «• 1/л. Если далее проделать выкладки, описанные в § 1.4, то можно
определить настройку гасителя /02пт, при которой значения максимальных
перемещений главной массы на частотах р\, р2 приблизительно равны.
После отбрасывания некоторых малых высокого порядка получаем
l+0,5iM),19[0,37+V/* --—' yjvl(v+2hv)n ](*>+3 h у/Т)
f m !!
'опт (t+p)a -A.12.3)
87
Таблица 1.21
Значения второго начального момента ах перемещения главной массы при
периодических импульсах
V
0,025
0,05
од
И
0
0,05
0,1
0
0,05
од
0
0,05
од
5
2,16
2,23
1,45
-
1,55
-
1,07
1,39
0,79
1,04
0,92
1,24
0,71
0,94
-
4
2,99
3,04
1,77
]~86~
1,28.
1,36
1,93
1,94
- •
-
-
0,75
1,07
п
3
4,85
4,93
2,64
2,81
1,77
1,90
2,65
2,74
1,84
1,93
1,40
1,50
1,75
-
1,35
- •
2
10,10
10,50
5,35
5,53
3,34
3,64
5,19
5,43
3,30
3,56
2,34
2,58
2,80
2,90
2,12
2,25
1,68
1,81
1
39,29
40,55 Ч
20,20
21,33
12,12
13,16
19,60
20,30
11,96
12,80
8,00
8,84
9,70
10,23*
6,80
7,40
5,03
5,62
+ -Ри02и1.
При этом следует ожидать наименьших значений критерия качества в случае
изменения частоты действия импульсов в окрестности п-то импульсного
резонанса.
Рассмотрим далее другой, часто применяемый критерий качества —
второй начальный момент перемещения главной массы
, 2 г: 2 [
L5+ 2 \X(iPur)\2
1
Здесь Х() — частотная характеристика системы с гасителем. В табл. 1.21
приведены значения ах при периодически действующих детерминированных
импульсах и параметрах гасителя (см. табл. 1.18), оптимальных в случае
основного (п = 1) импульсного резонанса. Для значений « = 1,5 даны
результаты, соответствующие левому (числитель) и правому (знаменатель)
резонансным пикам ах при изменении относительной частоты ри действия
импульсов в окрестности значения \\п (прочерк указьгаает на отсутствие
резонансного пика). Эти данные позволяют получить представление об
эффективности виброгашения, однако с целью оптимизации параметров
гасителя необходимо иметь аналитическое выражение для ах.
88
Так как гаситель реагирует в основном лишь на резонирующую
гармонику (г = п), частота которой рип близка к его парциальной частоте /, то
приближенную оценку влияния нерезонирующих гармоник можно получить
без учета влияния гасителя и демпфирования главной массы.
Амплитуда резонирующей гармоники при частотах р1>2,
удовлетворяющих уравнению A.12.2), определяется как в случае жесткого
присоединения массы гасителя. В результате
Первое слагаемое в фигурных скобках этого выражения, умноженное на
п2р\2я приблизительно равно \ задрату полусуммы резонансных
отклонений главной массы при действии гармонической силы с постоянной и
пропорциональной квадрату частоты амплитудой. Для некоторых значений v, h
соответствующие числовые данные приведены в табл. 12.3 [59].
Для того чтобы просуммировать ряд в A.12.4), следует вновь вернуться
во временную область и рассмотреть колебания системы с одной степенью
свободы без демпфирования под действием периодических импульсов,
значения которых равны ни . Для указанной системы установившееся
решение периода Т = 2тт/ри имеет вид
niicos (г — п/Ри)
*(?)= ——~ ' , 0<т<2фи,
2smGr/pu)
соответственно
2тт/ри
— / х2 (г) dr =
2я о 2 I L 2sin (п/ри)
7Три ТТ
+ —— ctg —
4 Ри
Вычтя из этого выражения средний квадрат рий2/ [2A — п2риJ]
резонирующей гармоники (г = п) и прибавляя вклад этой же гармоники для
исходной системы с двумя степенями свободы, получаем при ри -р\^
результат, эквивалентный A.12.4) :
A.12.5)
Это выражение пригодно для приближенной оценки ах при значениях
Pi,2 ^ l/w> что всегда соблюдается. Вычисления показывают, что
относительный вклад в среднеквадратичный критерий нерезонирующих
гармоник и флуктуации импульсов существенно ниже, чем в критерий
максимального перемещения главной массы. Поэтому, осуществляя выбор
оптимальных параметров гасителя из условия ах{рг) « ах(р2),
целесообразно коэффициент демпфирования мопт принять по формуле A.9.3,а)), а
(
Р\,2
"A-«2рЬJ
р\„г
l-n2p2u2(l+v)]2+h2n2pl2
ТГ I2 7Г 7Г
1 ' Pi 2 Ctg
L 2sin(ff/p1>2) J 4 '" p1>2
89
при определении настройки в выражении A.12.4) пренебречь влиянием
нерезонирующих гармоник (т.е. сохранив лишь первое слагаемое в
фигурных скобках). В результате
/опт " - ^ ч2 1 + 0,5^ + ^^- /Л2 (^ + 2/г хЛГ^J . A.12.6)
В связи с тем, что эта формула является приближенной, и поскольку
небольшие флуктуации значений импульсов мало влияют на /оПТ, вполне
допустимо при определении f?nT использовать численные значения /,
приведенные в табл. 1.20.
После нахождения мопт и /опт критерий качества определяется по
формулам A.12.4) или A.12.5). При ри = \/п для системы без гасителя
ы2 ( 1 0,5 - п2 \ тто1
г Ф п
Присоединение гасителя позволяет существенно уменьшить амплитуду
резонирующей гармоники (первое слагаемое в круглых скобках
выражения A.12.7)), вносящую основной вклад в ах. Менее заметно уменьшается
последнее слагаемое в A.12.7), влияние которого зависит от
соотношения о^ий2.
При антирезонансной настройке системы (ри = 1/(л — 0,5)), которая
весьма желательна при проектирование конструкций под машины
ударного действия, детерминированной составляющей колебаний
соответствует низкий уровень колебаний главной массы (см. ИЧХ на рис. 1.9).
Однако случайные отклонения перемещений, вызванные флуктуациями
импульсов, могут существенно повысить максимальные перемещения
главной массы. Если уровень колебаний в целом неприемлем по
санитарно-гигиеническим или технологическим соображениям, целесообразно
установить гаситель. При этом при малой нестабильности частоты действия
импульсов оптимальные параметры и эффективность гасителя оцениваются,
как в случае широкополосного случайного возмущения типа белого шума.
При п > 3 межрезонансный интервал частот настолько узок, что, ввиду
возможной нестабильности частоты действия импульсов, расчетным даже
при антирезонансной настройке системы становится случай импульсного
резонанса с учетом флуктуации значений импульсов.
Для проверки на числовых примерах, насколько хорошо формулы
A.12.3), A.12.6) прогнозируют оптимальную настройку ДГК, использован
метод статистического моделирования. Уравнения колебаний объекта с
гасителем приведены к нормальной форме. Последовательность
мгновенных случайных импульсов моделировалась в виде и = 1 + eN9 где е -
параметр, характеризующий уровень флуктуации, N — случайная величина с
нулевым математическим ожиданием, распределенная по нормальному
закону. Оценка статистических характеристик вырабатываемых
случайных импульсов при различном числе реализаций показала, что в
рассматриваемой задаче вполне достаточно ограничиться ансамблем из 600 значений
случайных импульсов. При этом стандарт ои = 1,0117 е.
Численное интегрирование дифференциальных уравнений на отрезке,
включающем в себя 600 значений импульсов, производилось методом Эй-
90
Таблица 1.22
Результаты вычислений при статистическом моделировании случайных импульсов
(v =0,1, h = 0,05, м = 0,348)
е
-
__
0,04
0,08
0,16
*
0,32
1
0,0405
0,0809
0,1618
0,3236
/3
0,853
0,855
0,857
0,859
0,861
0,863
0,865
0,853
0,855
0,857
0,859
0,861
0,863
0,865
0,853
0,855
0,857
0,859
0,861
0,863
0,865
0,853
0,855
0,857
0,859
0,861
0,863
0,865
xmaxl
4,82
4,84
4,85
4,87
4,89
4,90
4,92
5,20
5,21
5,23
5,25
5,26
5,28
5,29
5,96
5,98
5,99
6,01
6,02
6,04
6,05
7,50
7,51
7,52
7,53
7,54
7,56
7,57
*max2
4,85
4,83
4,82
4,80
4,79
4,77
4,76
5,25
5,23
5,22
5,20
5,19
5,17
5,16
6,05
6,04
6,02
6,01
5,99
5,98
5,96
7,66
7,65
7,64
7,62
7,61
7,60
7,58
"maxl
6,81
6,87
6,92
6,98
7,04
7,10
7,16
6,83
6,89
6,94
7,00
7,06
7,12
7,18
6,91
6,96
7,02
7,08
7,13
7,19
7,25
7,19
7,25
7,30
7,36
7,42
7,47
7,53
<*max2
7,39
7,33
7,28
7,22
7,16
7,11
7,05
7,41
7,35
7,30
7,24
7,19
7,13
6,08
7,50
7,45
7,39
7,34
7,28
7,23
7,17
7,81
7,73
7,67
7,62
7,64
7,58
7,53
лера второго порядка. Частота действия импульсов варьировалась с
заданным шагом в окрестности резонансных пиков основного импульсного
резонанса (п = 1). Определялись наибольшие по времени и частоте
значения ^тахь^тах2 отклонений главной массы, а также наибольшие по
частоте средние квадраты атах1, атах2 отклонений главной массы.
Результаты вычислений даны в табл. 1.22, 1.23, оптимальная настройка
гасителя—в табл. 1.24.
Аналогичные результаты получены для закона равномерной плотности
случайных импульсов. При использовании среднеквадратичного критерия
оптимальная настройка гасителя слабо зависит от вида закона
распределения и флуктуации случайных импульсов, т.е. малые флуктуации можно
не принимать во внимание при определении /оПТ- Весьма близкие к
результатам статистического моделирования дает формула A.10.12)
оптимальной настройки Д)ГК при действии белого шума, согласно которой / 2 « 0,863
при V =0Д,А= 0,05,д = 0,348; /2 ^0,961 при v = 0,025, h =0,05, д = 0,188.
91
Таблица 1.23
Результаты вычислений при статистическом моделирований случайных импульсов
(и = 0,025, И = 0,05, ц = 0,188)
е
0,04
0,08
0,16
0,32
°и
0,0405
0,0809
0,1619
0,3237
/2
0,957
0,959
0,961
0,963
0,957
0,959
0,961
0,963
0,957
0,959
0,961
0,963
0,957
0,959
0,961
0,963
*maxl
7,55
7,59
7,63
7,67
7,99
8,03
8,07
8,11
8,87
8,91
8,95
8,99
10,64
10,68
10,72
10,76
*max2
7,59
7,55
7,51
7,47
8,04
8,01
7,97
7,93
8,95
8,91
.8,88
8,84
10,77
10,74
10,70
10,66
amaxl
20,22
20,48
20,73
20,99
20,26
20,52
20,77
21,03
20,40
20,66
20,91
21,17
20,94
21,20
21,45
21,71
amax2
21,37
21,13
20,89
20,65
21,42
21,18
20,94
20,70
21,58
21,34
21,10
20,86
22,20
21,96
21,72
21,48
Объясняется это тем, что вследствие равенства Парсеваля интегралы от
квадратов перемещений системы на полубесконечном интервале от
действия мгновенного импульса равны дисперсиям перемещений системы при
возмущении белым шумом. Поэтому минимизация среднеквадратичного
критерия при действии белого шума и последовательности случайных
импульсов приводит к близким значениям оптимальной настройки ДГК.
Таблица 1.24
Значения оптимальной настройки f'A
ДГК при действии случайных импульсов
V
°и
Критерий качества
*тах
формула
A.12.3)
Способ получения
статист,
моделир.
формула
A.12.6)
атах
статист,
моделир.
0,025
ОД
0,0405
0,0809
0,1618
0,3236
0,0405
0,0809
0,1618
0,3236
0,959
0,959
0,961
0,963
0,856
0,858
0,861
0,869
0,958
0,958
0,959
0,961
0,854
0,856
0,859
0,866
0,964
0,964
0,964
0,964
0,867
0,867
0,867
0,868
0,962
0,962
0,962
0,962
0,863
0,863
0,864
0,865
92
Сравнение приращений среднеквадратичного критерия при различных
флуктуациях импульсов по данным табл. 1.23 и согласно последнему сла-
гаемому ( — р1>2 g\J ) формулы A.12.5) показывает их
удовлетворительное соответствие.
Оптимальное значение/2 для критерия максимального отклонения
главной массы зависит от ои более заметно, чем для среднеквадратичного
критерия (см. табл. 1.24). При этом приближенная формула A.12.3)
несколько завышает значения f2 по сравнению с данными статистического
моделирования. Если вместо A.12.3) применить уточненное выражение
2 1 + 0,43^ - 0,19 \fh[v + @,37 >/ЙГ+ h) C y/v~+ 4/z)] +
/опт~ A+,J
0,38 ои . ,—
+ _ y/-nl(v + 2hix)n(y + ЪН yjv)
- —— , A.12.8)
0+"J
полученное из формул A.9.7,а)) и A.12.3), то в первой графе табл. 1.24
значение f2 уменьшится на 0,0007 при v = 0,025, на 0,0008 при v =0,1.
Следовательно, формула A.12.8) дает несколько более точные значения
/опт» чем A.12.3), хотя различия получаемых результатов несущественны.
Таким образом, при использовании среднеквадратичного критерия
влиянием малых флуктуации импульсов на критерий качества и
оптимальную настройку можно пренебречь, определяя/2 согласно A.10.12).
Значение критерия максимального отклонения главной массы
существенно зависит от разброса значений импульсов, что необходимо учитывать в
расчетах. В этом случае приближенное значение f?nT находится по
формуле A.12.8).
§ 1.13. Вероятностный подход к оптимизации параметров гасителя
Исследования, результаты которых представлены в предыдущих
параграфах, основаны на предположении о том, что параметры ДГК, жесткостные и
инерционные характеристики защищаемой системы - детерминированные
величины. Внешние воздействия рассматривались как детерминированные
или случайные, при этом нестабильность такого характерного параметра,
как частота при детерминированном воздействии или положение
максимума спектральной плотности при случайном воздействии, учитывалась на
основе минимаксного подхода. Все возможные в заданном диапазоне
значения указанного параметра полагались равновероятными, и параметры ДГК
оптимизировались из условия минимизации отклика защищаемой системы
при наиболее неблагоприятном значении параметра воздействия.
Известен [154] также вероятностный подход к назначению параметров
ДГК, который позволяет учесть конкретные законы распределения
характерных параметров внешнего воздействия, парциальной частоты и
демпфирования главной массы, настройки и демпфирования гасителя.
Необходимость учета случайных изменений этих величин связана с тем, что лайден-
ные расчетным путем параметры системы можно реализовать лишь
приближенно, кроме того, некоторые параметры, например массы и жесткости за-
93
щищаемой системы, вязкое трение гасителя, могут не оставаться
постоянными в процессе эксплуатации.
Особенности этого подхода рассмотрим для одной из важнейших задач
теории виброгашения, которая в традиционной постановке описана в
§ 1.1—1.4, т.е. проведем вероятностный анализ системы с гасителем при
гармоническом воздействии с нестабильной частотой. В защищаемой системе
учтем частотно-независимое трение, в гасителе — вязкое (при других
вариантах демпфирования расчеты выполняются аналогично). Положим, что
частоты р0, со0, /0 и коэффициенты неупругого сопротивления д0, 7oi
(обозначения такие же, как в §1.1 — 1.4) — случайные статистически
независимые величины с известными законами распределения. Введем
безразмерные величины р = Ро/сЗо, со = oj0/c30, f = /0/сд0, ц = ц0/(тй0), где
со0 — математическое ожидание парциальной частоты колебаний главной
массы, т — масса гасителя. Тогда обобщенный критерий (см. § 1.1,1.2,1.4)
A.13.1)
D-
-р2+со2 (и, + /«,)- vp2 (/2 +uip)l(f2 +ixip
Р2)
причем для силового воздействия в качестве хСТ принято математическое
ожидание статического перемещения главной массы при частоте р0 = оо0.
Будем искать оптимальные значения математических ожиданий
параметров гасителя / 2 и Д~, полагая, что другие величины, характеризующие
законы распределения /2 и ц (например дисперсии), заданы. При этом
математическое ожидание и дисперсия амплитуды D не могут быть объектами
минимизации, так как не дают достаточного представления о характере
случайной величины D. Это видно из рис. 1.17, где показан вид закона рас-
w(p)
1
Рис. 1.17. АЧХ Dip) и плотность вероятности
w (D) обобщенного критерия D
пределения амплитуды в случае, если для частоты возмущения принят
закон равномерной плотности w(p) = 1/(р2 - Pi) при неслучайных
значениях остальных параметров системы.
Рассмотрим другой критерий, не связанный с интегральными
характеристиками амплитуды. Параметры гасителя / 2 и Д" назначим таким
образом, чтобы его относительная масса v была минимальна при соблюдении
двух условий. Первое условие — вероятность превышения допускаемой
амплитуды D0 должна быть меньше заданной величины F0. Второе
условие касается прочности упругой связи или кинематических характеристик
движения гасителя. Оно может иметь произвольный вид, в том числе и
такой, как условие для главной массы.
94
При указанном критерии можно применить следующий алгоритм
расчета. В качестве начального принимается минимально возможное из
конструктивных соображений значение v. Далее методом скорейшего спуска
определяются / 2 и Д" из условия минимума вероятности превышения
допускаемой амплитуды F D . Если (FD ) m {n > F0, значение v
увеличивается и заново находятся / 2 и /7, в противном случае проверяется второе
условие. При его соблюдении расчет заканчивается. Если оно не
выполняется, следует увеличить v. Поскольку при этом может оказаться
(FD )min = 0 при некоторых значениях /2 и jlT, оптимальные параметры
следует выбирать из условия минимума амплитуды DF , вероятность
превышения которой равна F0. Амплитуда Dp находится методом
последовательных приближений.
Для определения вероятности FD требуется вычислить интеграл,
кратность которого равна числу случайных параметров системы. В
рассматриваемом случае ввиду большого числа случайных величин целесообразно
воспользоваться методом Монте-Карло.
Существенное сокращение объема вычислений достигается, если учесть
случайный характер лишь двух параметров — частоты возмущения и
парциальной частоты главной массы, поскольку именно они оказывают
основное влияние на разброс амплитуды. В этом случае пригодны обычные
способы вычисления вероятности FD с помощью интегрирования. Для
некоторых типичных законов распределения случайных параметров можно
предварительно составить таблицы минимизированных амплитуд DF и
оптимальных параметров гасителя для различных значений v, F0, что упростит
расчеты конкретных систем.
Вероятностный анализ обобщает детерминистскую методику выбора
параметров гасителя. Так, если для возмущающей частоты принять закон
равномерной плотности на участке, включающем оба резонансных пика, а
остальные параметры считать детерминированными, то при F0 = 0
применение вероятностного и обычного подходов даст одинаковые результаты.
При уменьшении интервала изменения р требуемое демпфирование
гасителя снижается до нуля, т.е. также результаты совпадают.
Исследуем систему с ДГК, источником возмущения которой является
асинхронный двигатель. Такие двигатели мощностью 0,6-100 кВт в
основном и устанавливаются на перекрытиях промышленных зданий.
Работа асинхронного двигателя характеризуется скольжением s =
= (рс - р)/рС) где р — угловая скорость ротора, рс — синхронная скорость.
Номинальное скольжение sHOM ^0,015-K),09, критическое sK^ C^4,5)sHOM.
В рабочем режиме скольжение изменяется от 0 (при р = рс) до
критического 5К (при р = рк), причем наиболее вероятное значение sHOM делит
этот интервал в отношении A : 2)-ьA : 3,5). В связи с этим для
скольжения можно принять распределение Релея с дисперсией o2s - s?OM,
соответственно для частоты возмущения плотность распределения
со(р) = \
2 2
ехр - ;гт~2 прир<рс,
прир>рс,
95
дисперсия op = «номРс- Вероятность превышения критической скорости
составляет 0,0003 при sK/sHOM = 4. Значения рс и sHOM определяются по
паспортным данным двигателя.
<альной частоты главной массы целесообразно принять нор-
Птт
я
ПЯПТТИЯП!.!!П
w(co):
Г (ц -
[ 2а
D2
мальное распределение
1
ехр
аы\/27г
Параметры гасителя и демпфирование главной массы в целях
упрощения будем полагать детерминированными.
ч
щ
Рис. 1.18. A4XZ>(u>) при <р < 0Яф>0
О pVp
Вероятность превышения некоторой амплитуды D0 > 1 определяется
двукратным интегрированием совместной плотности вероятности
частот р и со:
FDq = ff w(p)w(cj)dpdoj. > A.13.2)
х
Область х включает такие сочетания переменных, которым
соответствует D > D0. Интегрируя по переменной р, получаем
\2
A.13.3)
Здесь Pj (D0, со) — пронумерованные в порядке возрастания
действительные корни уравнения A.13.1), число которых п равно 2, 4 или 6, причем
в A.13.3) входят только Pj (D0, со) < рс. Интеграл A.13.3) можно найти
численно на отрезке от A — 4aw) до A + 4aw), определяя на каждом
шаге интегрирования корни уравнения A.13.1).
Если в A.13.2) вначале интегрировать по со, получим более простое
выражение
1 Рс | / со2 - 1 \ / сох - 1 \
*ъ.--гп / (рс-р)Ы-—)-ф(——
Г (Ре-Р.'
[ 2olpl
X ехр
A.13.4)
г2
где Ф(х) = /ехр(— — \dt — интеграл вероятности; оох 2 ~ границы
\j2it о \ 2 /
интервала частот со, внутри которого амплитуды D, вычисленные согласно
96
A.13.1) при текущем значении переменной р, превышают D0. Интеграл
A.13.4) также находится численно, причем нижний предел можно
положить равным рс A — 4оу).
Исследуем область действительных значений со1>2. Уравнение A.13.1)
и его корни представим в виде
D=pa~2N&-*) +^
2 2
Wl,2 =P
<? +
,а-2
Do
Г
что позволяет изобразить АЧХ D(u>) (рис. 1.18). Здесь
^:
сх =1 + Re Ь
/2
+ МФ
/2+АФ
б -el +с2
Г2
с2 = Im ^
/2 +МФ
Если оба корня со2^ комплексные или отрицательные, это означает,
что амплитуда D0 не может быть превышена и соответствующие
значения р должны быть исключены из интервала интегрирования в
выражении A.13.4). В случае, если со? < 0, а и>1 > 0, необходимо положить cpj =0.
Если парциальная частота защищаемой системы со0 измерена
экспериментально и в процессе эксплуатации не изменяется, можно положить
со = 1, ctw = 0, тогда в формуле A.13.3) внешний интеграл пропадает и
остаются только члены, находящиеся под знаком суммы.
Вычисления выполнены для случая а = 2 при различных значениях v,
7oi> Fo> °s> acj» причем оптимальные параметры гасителя находились из
условия минимума амплитуды Dp , вероятность превышения которой
равна заданной величине F0; было принято цт{п =0,01.
Результаты приведены в табл. lt.25 при аи = 0, 7oi = 0,1, F0 = 0,05
(аналогичные данные при 7oi = 0,01 содержатся в [60], при 701 = 0,05,
о
0,9
k-f
У^
у /
у/ '
Их ' .-
Гх
**^~~
f->s
es=0,08
«0* \
.З^г4]
4<?2
V^9
/// '
V//' '
у
^
s / /
f / /
/ /
^y
--»-.-"*
<55=4#<3
/0,06
' 4
N
Гч 1
4
4
0,02 \
to
7,1 d 0,9 1,0 1,1 /l 0,9
Рис. 1.19. Зависимости амплитуд (Dp ) min от синхронной частоты рс при 701 = ^5,
v = 0,05
7. Б.Г.Коренев 97
3
OOOO
hhOOU
S* У о То
>j ^j ^ н-
4*. to
OOOO
о о о о
00 ON -?* tO
OOOO
р
о р р р
о о о о
00 On 4* tO
>—н-н-h- н* н* И* н* оо 4* •?* Oft
NO VO VjD On
00 ON On
О Oft ОО
On 00 ^ЧО ЧО
\o 1л 1л чО
to oo -Ръ О
4*. оо ь- р 4* оо jo I-* и* оо to н- to to н* ь*
^"•ч1ыЬ
ОООО ОООО
О О О О
*- и- О О
-о о оо и*
ОООО
н- н- н- Ь- ОН- и- i— ОООО ОООО
00 00 -О Oft NO NO чО no 00 00 vO Ю t— оо 0ft -О
4> oj к> О
оо V о оо
On no 4*. to
4*> ОО to О *> W W О Ы W W О
0,16
1,09
0,14
io
4*
0,08
1,28
0,01
1,36
0,15
0,91
0,10
0,99
0,06
1,07
0,01
•p-
0,16
0,77
0,05
0,82
0,08
0,88
0,01
0,94
0,09
0,66
0,07
0,68
0,05
0,71
0,01
0,76
о
Q
to
b
b
-fc
H
b
b
1
II
о
'1
о
о
их
г:
II
О
II
о
i
li I
О 1
о
W
е
1!
О
ь
И 02
н tr
та н
s a
2? Н
о
NO
OOOO OOOO ОООО OOOO
NO 00 On 4i- н-н-vO^J 00 Ю ^О VO
Р Р \о ^
О О ON -О
W W и О
vo о оо "vo
NO Oft -О Сл
ОО ОО Ю ?•*
^ "«О N) О
ОООО ОООО
О И* н- н- О М и-
to to to н-
VO "чО "to О
to О On Oft
р о р р
О О
ОООО
OJ ОО СО ОО
Н- "tO V ON
ь- GO Oft Oft
н- н* н- р
оо Ъо V] Хо
О to 4^ vo
ОООО
О О О О
On On On -J
Oft «О no ON
to и- t-- О W и i- О tOH-н-О i— и* h- О
О Oft
и- о
vO NO и Ui
О Н- О н-
OO NO •—' Oft
W и (О и
Oft Oft О Oft
Oft О ОО 1—'
OOOO OOOO OOOO OOOO
F tr* г* г* P ^ г* r*
н* Ь ы w "чо о T-* н*
tO 00 W OO -~J Oft О ON
OOOO
p p о о
On On
О 4* О On
>
>
>
1
¦4
о
*Q !
b
b
•c
^
b
t
^
II
о 1
4
II
О
U\
II
О
F0 - 0,01 — в [154]), в табл. 1.26 при 701 = 0,05, F0 =0,05 (такие
результаты при F0 = 0,01 даны в [154]). На рис. 1.19 показаны
минимизированные значения амплитуд Dp при различных значениях oSi причем
сплошным линиям соответствует F0 = 0,01, штриховым - F0 = 0,05.
Анализ полученных результатов позволяет сделать следующие выводы.
Если v > 0,05 и os < 0,04, система оптимальна при малом демпфировании
гасителя или при его отсутствии. В этом случае значения (Dp )min и /ОПт
почти не зависят от у01, а Мопт повышается с увеличением у01. При Мопт =
= 0,01 разность р\ — /0пт не зависят от рс, т.е. гаситель настраивается с
некоторым сдвигом на синхронную частоту рс. Большое демпфирование
гасителя требуется лишь при os > 0,04, однако не при всех значениях рс
и F0. При этом, как правило, настройка гасителя производится с
некоторым сдвигом на математическое ожидание парциальной частоты
главной массы независимо от значения рс, а амплитуды (Dp )min
оказываются выше, чем в предыдущем случае.
В большинстве случаев минимизированные с помощью
вероятностного критерия амплитуды значительно ниже амплитуд, получаемых при
детерминистском подходе. Так, например, при v = 0,05 и 701 = 0>05
амплитуда D - 4,9, полученная при обычном расчете системы с гасителем,
достигается лишь в небольшой области значений параметров системы
при использовании вероятностного критерия (см. рис. 1.19). Таким
образом, вероятностный анализ позволяет повысить расчетную
эффективность динамического гасителя.
7*
99
ГЛАВА 2
КОНСТРУКТИВНЫЕ ФОРМЫ И УСЛОЖНЕННЫЕ МОДЕЛИ
ДИНАМИЧЕСКИХ ГАСИТЕЛЕЙ КОЛЕБАНИЙ
Простейшая механическая модель гасителя, рассмотренная в гл. 1, — одно-
массовый линейный ДГК, в зависимости от критериев качества и
ограничений на параметры колебаний, значения его парциальной частоты, может
быть реализован в различных конструктивных формах. Кроме того,
механическая модель гасителя может быть усложнена с целью повышения
его эффективности в заданном частотном диапазоне или расширения
диапазона частот его эффективной работы. Указанные вопросы и являются
предметом обсуждения в этой главе.
В первом параграфе дан краткий обзор конструктивных форм ДГК,
предназначенных главным образом для снижения уровня колебаний
башенных сооружений. Такой выбор защищаемой системы объясняется
тем, что в последние 10—15 лет наиболее широкое применение ДГК нащг
ли именно в башенных сооружениях и значительная часть новых
технических решений гасителей, признанных изобретениями, предназначена для
виброзащиты таких объектов.
Далее, в § 2.1 обсуждаются результаты исследования эффективности
так называемого корректора колебаний, который представляет собой
динамический гаситель рычажного типа. В следующем параграфе
рассматриваются многомассовые гасители, целью применения которых обычно
является расширение диапазона частот эффективной работы.
Четвертый и пятый параграфы посвящены вопросам теории нелинейных
ДГК: выбору оптимальной упругой характеристики гасителя, оценке
эффективности демпфированного гасителя с кусочно-линейной
характеристикой и маятникового гасителя при больших углах отклонения,
исследованию эффективности центробежного маятникового гасителя, который
относится к числу простейших самонастраивающихся гасителей.
§ 2.1. Конструктивные формы динамических гасителей колебаний
Рассмотренный в гл. 1 ДГК, расчетной схемой которого являлась
система с одной степенью свободы, может иметь самые различные
конструктивные формы, зависящие от ряда причин инженерного характера и в
первую очередь от тех параметров, которые должны быть реализованы
в его конструкции. Поэтому представляет интерес рассмотрение
различных конструкций гасителей, связанное с анализом тех обстоятельств,
которые предопределяют их выбор.
100
При выборе конструкции важную роль, определяющую размеры
гасителя, играет его масса, которая большей частью совершает
поступательное или вращательное движение. Относительную массу гасителя обычно
задают предварительно; как отмечалось в гл. 1, она, за исключением
случая малой нестабильности частоты воздействия, не оптимизируется; в то
же время в процессе расчета гасителя может оказаться, что
первоначально назначенная относительная масса должна быть изменена; такие случаи
возможны, если требуемый эффект гашения колебаний не достигается
или ограничения на ход гасителя не выполняются.
Основным оптимизируемым параметром гасителя является его
парциальная частота. Обычно требуемся снизить уровень колебаний с
частотой первого тона защищаемой системы; к этой частоте должна быть
близка парциальная частота гасителя. Возможны и иные постановки задач,
при которых парциальная частота гасителя близка к частотам более
высоких гармоник или же к частоте возмущающей силы»
Во всех этих случаях конструкция гасителя должна обеспечивать
выполнение требований расчета и допускать в процессе наладки и настройки
гасителя изменение его параметров с тем, чтобы можно было внести
необходимую корректировку, связанную с возможной неточностью расчета
или отклонениями действительных характеристик конструкции от их
расчетных значений. После осуществления монтажа и настройки гасителя
его параметры, и в первую очередь парциальная частота, должны
оставаться стабильными в процессе эксплуатации.
При назначении параметров гасителя возможны две различные
ситуации. Одна из них — проектная, которая связана с тем, что частота
свободных колебаний защищаемой конструкции определена расчетом и может
существенно отличаться от действительной. В этих случаях
предъявляются более высокие требования к изменению частоты гасителя при его
настройке, чем при ремонтно-эксплуатационнои ситуации, когда гаситель
проектируется на основе полученных из эксперимента данных.
Оптимальное демпфирование далеко не всегда достаточно точно
реализуется в конструкции гасителя, и изменение параметров затухания во
многих случаях затруднительно. Эффективность гасителя обычно мало
изменяется при отклонениях демпфирования от оптимального значения,
однако ход гасителя может существенно измениться, в связи с чем,
определение хода является необходимым. Это особенно важно для высоких
башенных сооружений, имеющих стесненные габариты для установки
гасителя.
Применяя для виброзащиты башенных сооружений гасители
маятникового типа,.нужно считаться с ограничением длины подвеса. При
частоте 0,12 Гц маятник имеет длину около 16 м. Поскольку подобные
размеры гасителя по высоте по меньшей мере нежелательны, а в большинстве
случаев просто неприемлемы, то схема математического маятника должна
при этом заменяться другими, и в частности, рассматриваемыми далее
конструктивными схемами.
При выборе конструкции гасителя необходимо во многих случаях
учитывать специальные требования, являющиеся следствием режима его
эксплуатации. Например, для гасителей, расположенных на открытых
площадках или находящихся в неотапливаемых помещениях, затрудни-
101
тельно использование вязких демпферов, и наоборот, желательно
применять конструкции, упругие элементы которых, обладающие высоким
уровнем внутреннего трения, выполняют роль демпфера.
Естественным требованием к гасителям колебаний является не
только стабильность их механических параметров, но и долговечность. В
практике виброзащиты большое значение имеет круг задач, в которых
гаситель колебаний должен иметь долговечность, близкую к долговечности
защищаемой конструкции, а перерывы в его эксплуатации, связанные
Рис. 2.1. Гаситель с демпфером, заполненным пластмассовыми гранулами
Рис. 2.2. Гаситель с дополнительной опорой вблизи точки подвеса
с ремонтами или подстройками, должны быть исключены. Это, в
частности, все те случаи, при которых гаситель устанавливается с целью
повышения несущей способности конструкций, которые рассчитываются на
действие ветровых или сейсмических нагрузок.
Из всего сказанного следует, что различия в характере динамических
воздействий, особенностях расчетной схемы защищаемого сооружения,
условиях эксплуатации и, как следствие, в требованиях, предъявляемых
к гасителям, вызывают и соответствующее многообразие
конструктивных форм гасителей. При этом нужно учесть еще одно важное
обстоятельство — гасители могут применяться и как часть общей системы
виброзащиты, взаимодействуя, например, с виброизоляцией, а это в свою
очередь отражается на их конструкции. Поэтому здесь будет
целесообразно рассмотреть различные типы гасителей колебаний, отметив при этом
возможные области их применения.
Сначала и наиболее подробно рассматриваются гасители
маятникового типа, которые имеют своей целью снижение уровня колебаний
башенных сооружений. Такие гасители Moryf применяться при виброзащите
стальных дымовых и вентиляционных труб, опор линий- радиорелейной
связи, колонного оборудования предприятий химической
промышленности, опорных башен солнечных телескопов, высоких зданий и др.
Наиболее простой моделью гасителя подобного типа является
математический маятник. Для демпфирования на отметке, выбираемой в
соответствии с траекторией центра тяжести груза, устанавливаются демпферы.
В литературе отмечалось применение демпферов автомобильного типа
(ГДР, ЧССР), воздушных демпферов [14], а также демпферов [255]
с засыпкой из пластмассовых гранул 1 (рис. 2.1).
102
А-А
Рис. 2.3. Гаситель с дополнительной опорой вблизи массы
В СССР для гашения колебаний стальных вентиляционных и
дымовых труб, а также стальных радиобашен широко применяются
маятниковые гасители (авт. свид. СССР № 386180), у которых демпфирование
осуществляется в результате местного изгиба стальных канатов вблизи
опоры 1, на которых подвешена масса т гасителя (рис. 2.2).
Экспериментальные исследования, результаты которых приведены в [93], позволили
установить, что декремент колебаний такого гасителя с увеличением
амплитуды вначале растет, а затем уменьшается, т.е. при относительно больших
амплитудах колебаний демпфирование в- канате определяется силами
сухого трения между нитями.
Для повышения коэффициента демпфирования может служить
второе дополнительное опорное устройство, присоединенное к массе гасителя
вблизи Нижнего конца троса; конструкция его ясна из рис. 2.3.
Преимуществами гасителей этого типа являются простота конструкции,
долговечность и несложность ее облсуживания. Дополнительные данные о расчете
и проектировании подобных гасителей приведены в § 4.5.
Некоторые варианты подвески маятникового гасителя, позволяющие
легко изменять его частоту, показаны на рис. 2.4. С целью упрощения
АжА
PF^F1^^
О
о !
Го"]
| о [I
н
U гч
Г II о 1
Го~
К loJ
| /77 |
Рис 2.4. Варианты подвески маятникового гасителя с дополнительными пружинами
Рис. 2.5. Гаситель с передвижной опорой
103
Ж
A-A
Рис. 2.6. Гаситель с канатами разного диаметра
Рис. 2.7. Трехмассовый маятниковый гаситель
настройки и одновременного повышения демпфирования гасителя
(рис. 2.5) его подвески 1 можно пропустить через трубки 2 на
фиксирующих элементах 5, скрепленных болтовыми соединениями с направляющими
стержнями 4 (авт. свид. СССР № 1059323). Подобная конструкция
применялась в проектах УКРНИИПроектстальконструкции.
Стремление повысить демпфирование маятниковых гасителей
отражено в конструкциях, использующих наряду с изгибными также и
крутильные деформации, которые одинаковы по всей высоте канатов. Одна из
таких конструкций (авт. свид. СССР № 966181) изображена на рис. 2.6.
Ввиду разных диаметров канатов центр тяжести массы не совпадает с
центром тяжести подвесок. Гаситель вдоль одного из направлений колеблется
с закручиванием канатов и, следовательно, с меньшей собственной частотой
и более высоким демпфированием [143], чем в перпендикулярном
направлении. Это особенно важно при применении гасителя для
предотвращения галопирования конструкций. Можно использовать также канаты
одинакового сечения, сместив центр их жесткости по отношению к центру
массы гасителя.
Другой возможный, но более сложный вариант гасителя (авт. свид.
СССР № 1193245) включает две массы, соединенные цилиндрическим
шарниром, которые по-разному вращаются в горизонтальной плоскости
и вызывают изгибные и крутильные деформации подвесок.
В отдельных случаях маятниковый гаситель предназначается для
того, чтобы снижать уровень колебаний как с основной, так и с более
высокими частотами. При этом возможно использование гасителя (авт.
свид. CCCPN0 779533) с несколькими массами (рис. 2.7), имеющего
разреженный спектр частот свободных колебаний; очевидно, что его
расчет не связан с теорией много массовых гасителей, изложенной
в § 2.3.
104
При сравнительно высоких частотах собственных колебаний
сооружения (> 0,8 Гц) взамен конструкции, представляющей
математический маятник, следует переходить к конструкциям, имеющим схему
физического маятника. Подобная конструкция (авт. свид. СССР № 557220)
представлена на рис. 2.8. Масса гасителя подвешена к упругим элементам
1 в виде отрезков стального каната, концы которых закреплены
подвижными зажимами 3. Длина подвеса и соответственно частота колебаний
регулируется винтом 2. При колебаниях массы возникают демпфирующие
силы вследствие изгиба упругих элементов.
При низких частотах колебаний (порядка 0,1 — 0,3 Гц) конструкция
маятникового гасителя должна в большой мере определяться
стремлением уменьшить длину маятника. Здесь возможны разные варианты решения.
Один из них заключается в том, что масса гасителя движется по
криволинейной направляющей, радиус кривизны которой равен длине
соответствующего математического маятника. Пример подобного решения (авт. свид.
Рис. 2.8. Гаситель, работающий по схеме физического маятника
105
Рис. 2.9. Гаситель, шаровые опоры которого движутся по криволинейной
поверхности
Рис. 2.10. Гаситель в форме маятника с присоединенными массами, движущимися
по горизонтальной плоскости
СССР № 761675) изображен на рис. 2.9. В этом случае поступательное
движение массы, опирающейся на шары, сопровождается их перемещением
по криволинейной поверхности.
Другой вариант решения (рис. 2.10) основан на том, что маятник с
массой тг, имеющий длину /, шарнирно соединен с массой гп2, которая может
перемещаться по горизонтальной плоскости. Частота свободных
колебаний такой системы со = y/gntil [I (mi f m2) ].
Конструктивное решение, при котором каждая из масс представляет
контейнер, заполненный грузами, позволяет перекладыванием грузов
из одного контейнера в другой в процессе настройки изменять частоту
собственных колебаний. В отдельных случаях подобное
конструктивное решение при использовании его для виброзащиты зданий может быть
оформлено в виде элемента покрытия; масса элемента и является массой
гасителя, упругая связь ввиду необходимости точного назначения частоты
собственных колебаний должна быть сконструирована, так, чтобы ее
жесткость могла регулироваться.
В качестве гасителя колебаний можно использовать устройство
(рис. 2.11), инерционная масса которого включает маховики 1,
установленные на раме 2 с возможностью вращения в противоположные стороны
(авт. свид. СССР № 808624). Такой гаситель имеет эквивалентную массу
п
тэ=тТ + — (/к+т? 2/м),
^к
где гпт — полная масса всего гасителя, включая раму: п — число махови-
106
ков; RK, IK — радиус и момент инерции катковой опоры 3; т? —
передаточное отношение пары "катковая опора — маховик"; /м — момент инерции
маховика.
Не представляется сложным получение конструкции маятникового
гасителя, который обладает при колебаниях во взаимно
перпендикулярных направлениях различными частотами. Обычно для башенных
сооружений отношение этих частот не очень сильно отличается от единицы. Если
же отношение близко к двум, то возможно применение устройства
(рис. 2.12), которое представляет собой при колебаниях из плоскости
чертежа маятниковый динамический гаситель колебаний, при колебаниях
в плоскости чертежа — ударный гаситель (авт. свид. СССР № 607911),
расчет которого расматривается в [58]. В этом случае устройство
работает как обычный одноударный гаситель маятникового типа, который
применялся [113] для виброзащиты стальных дымовых труб (рис. 2.13).
При гашении вертикальных колебаний машин или транспортных средств
в роли упругого элемента могут быть использованы стальные
цилиндрические пружины. Квазиупругий коэффициент определяется точно так же,
как для обычных виброизоляторов. Применение пружин в качестве
элемента виброизоляции не связано с жесткими требованиями к точности
определения квазиупругого коэффициента. При этом обычно вводится
понятие о так называемых "мертвых витках" пружины, которые
вследствие контакта с опорными поверхностями виброизолятора не
деформируются. Так как это понятие не дает ясного представления о
действительном числе эффективно работающих витков и квазиупругий
коэффициент пружин определяется лишь приближенно, то гаситель колебаний
требует настройки, при которой корректировка частоты проводится изме-
мением массы или введением дополнительных более жестких связей
между витками пружины в ее опорной части.
'с- l€
Е
II
Die -a1
" bf
3
V777777777777777777777,
А-А
I
*
JE
ШЕЩШ «Г
Г^Ш^Ж
Рис, 2.11. Гаситель с вращающимися массами
Рис. 2.12. Ударный гаситель колебаний
107
Рис. 2.13. Ударные гасители на стальной
дымовой трубе
При необходимости получения более
низких частот, чем это получается при
обычных стальных пружинах,
возможно использование более гибких занево-
пенных пружин [100]. В отдельных
случаях допускается применение
пружин, в которых для повышения
демпфирования вводятся специальные
демпфирующие элементы (авт. свид. СССР
№796540).
Наряду с пружинами в качестве
упругого элемента гасителей могут быть
использованы гибкие стержни или
пластинки [149, 180, 225, 264, 265].
Наиболее простой и широко
распространенной конструкцией, в которой
расчетной моделью является изгибаемый
стержень с массой, присоединенной к
его концу, является гаситель Сток-
бриджа, используемый для виброзащиты
проводов (см. § 4.11).
В тех случаях, когда при расчете гасителя следует учитывать вклад
инерционных сил, распределенных по его длине, гаситель можно назвать
дискретно-континуальным. Определение динамических характеристик
подобного гасителя трубует рассмотрения колебаний стержня постоянного
или переменного сечения с присоединенными массами; для этой цели
могут быть легко использованы способы расчета, изложенные в § 3.4, 3.5.
Деформируемым элементом гасителя колебаний могут являться также
пластинки различного очертания. При этом, как и для стержней,
возможны два варианта расчета: без учета и с учетом инерции распределенной
массы пластинки. В первом случае гаситель рассматривается как система
с конечным числом степеней свободы, квазиупругие коэффициенты
которой определяются в результате статического расчета пластинки; в
простейшем случае при одной массе, присоединенной в центре круглой
пластинки, подобную задачу рассмотрел Сноудон [263]. При учете распределенных
инерционных сил гаситель является дискретно-континуальным, и его
расчет производится с помощью методов, описанных в § 3.7; как видно из
содержания указанного параграфа, особенно просто решаются подобные
задачи для круглой пластинки при ее осесимметричной деформации.
Во многих случаях взамен одного гасителя устанавливается несколько
гасителей, имеющих одинаковые парциальные частоты и коэффициенты
демпфирования. Подобные решения применяются с учетом соображений
удобства размещения гасителей, осуществления монтажных работ и др.
Так, например, при гашении колебаний башен возможна установка
нескольких одинаковых гасителей на одной отметке. Однако вопрос об
установке гасителей в различных сечениях деформируемых стержней или в
108
различных точках пластин и мембран требует специального
рассмотрения колебаний этих систем (см. гл. 3).
^дополнительные сведения о конструктивных формах и моделях
гасителей содержатся в [4, 36, 45, 58-60, 62, 262], в последующих
параграфах этой главы ив гл. 4.
§ 2.2. Элементы теории динамического гасителя-корректора
Работа корректоров колебаний основана на том, что при присоединении
к защищаемой виброизолированной конструкции рычага с
дополнительной массой на конце в АЧХ силы, передаваемой всей системой на
основание, появляется антирезонансная частота, лежащая ниже частоты собст-
.: л ' ;
Рис. 2.14. Схема защищаемого объекта с
корректором колебаний
венных колебаний защищаемой конструкции. Присоединяемая
система может быть выполнена и в виде рычажно-винтового механизма или
гидравлического устройства. Описание корректоров колебаний, а также
аналогичных устройств для преобразования движения можно найти в
работах [9,62,114].
Здесь рассматривается устройство (рис. 2.14), отличающееся от
обычного рычажного корректора тем, что промежуточная опора рычага
является упругой. Таким образом, присоединенная система имеет одну
степень свободы; ее можно рассматривать как своеобразный гаситель
колебаний, который в определенных режимах работает как корректор, эта
конструкция описана в авт. свид. СССР № 1165830.
Аналогичные устройства под названием "низкочастотные
уравновешивающие подвески" описывались в литературе. Их применение
преследует цель получить эффект виброизоляции защищаемой системы в зоне
возможно более низких частот при малой статической осадке, что
практически недостижимо при обычных средствах виброизоляции. В работах
[9, 68] исследованы свойства таких устройств, получены. качественные
зависимости критериев виброизоляции от параметров устройств, оценено
влияние нелинейности упругих связей на возможную область
виброизоляции. Указано на характерный для режимов динамического гасителя провал
в АЧХ перемещений защищаемой системы при совпадении частоты
возмущающей силы с собственной частотой подвески. Однако при этом не
ставилась задача оптимизации параметров подвески с позиций, используемых
в теории ДГК. Ниже приведены результаты [114] исследования
видоизмененного корректора, который назван рычажным ДГК, и дано сравнение
его с обычным ДГК.
Положим, что каждая из масс М, т (см. рис. 2.14) включает в себя
половину массы рычага, это позволяет далее считать рычаг невесомым.
Ь а
Пусть w = — х + — у - z — удлинение упругого элемента, соединяющего
рычаг с основанием; тогда без учета неупругих сопротивлений дифферен-
109
циальные уравнения колебаний системы запишутся в виде
Мх + К(х - z) + kwb/l = q(t),
ту + kwa/l = 0.
При гармонических воздействиях q(t) = QopaielPot, z - Zop^e*1*0*,
которые далее рассматриваются отдельно, уравнения имеют установившееся
частное решение:
х = XxCTeipofy у ш ?хсге1р°', w = WxCTeipof,
raeX = pai(f2 -p2)/A, Y = -p^f2x/A, И/=-^+2ХA-х)/Д,
*ст = Qo/K - при силовом воздействии;
x = P^[{f2 -P2W-v0xV+x)P2f2]l\
U = X-l=p^+2[f2(l-voX)-p2]IA,
Y=pa>f2[co2-p2(i+x)]!X '^=pa>+2(i~x)[w2 -P2(i + x)]M,
xCT =Z0 — при кинематическом воздействии;
A = (Gi2-P2)(f2-P2)-v0X2p2f\ f2=f2o/ul
ыЪ=К1М,/20=к![тA+хJ],
p=Po/oj0i ^о =т/М9 Х = Ыа.
В отсутствие неупругого сопротивления для главной массы со2 = 1, при
учете частотно-независимого трения в комплексной форме (см. § 1.3,1.4),
следует в приведенных формулах положить со2 = 1 + iyx, при вязком
трении со2 = 1 + ihp. При учете частотно-независимого трения в элементе,
связывающем рычаг с основанием, необходимо вместо f2 подставить
f2 A + /72) >а в случае вязкого трения/2 заменяется на/2 + /др.
Нетрудно заметить, что при силовом воздействии выражения для
амплитуд колебаний главной массы X и массы гасителя Y (с точностью до
множителя х) совпадают с аналогичными выражениями для обычного ДГК
(см. § 1.2—1.4), относительная масса которого принята равной v = vQx2 •
С учетом сказанного при проектировании рычажного ДГК для случая
силового воздействия можно воспользоваться приведенными в гл. 1 данными
об оптимальных параметрах и эффективности гасителя без демпфирования,
с частотно-независимым или вязким трением, полученными при
оптимизации по обобщенному критерию D для различных значений ах, а2. С
увеличением х > I эквивалентная относительная масса рычажного ДГК возрастает
и повышается его эффективность по сравнению с обычным ДГК.
Совпадение ЧХ и, следовательно, ИПФ для обычного и рычажного ДГК позволяет
также применить к рычажному ДГК приведенные в гл. 1 результаты
оптимизации параметров гасителя при прохождении через резонанс, действии
мгновенного и периодических импульсов, стационарных и нестационарных
случайных воздействиях.
При кинематическом воздействии числители выражений X, U, Y для
рычажного ДГК отличаются от числителей аналогичных выражений для
обычного ДГК. Результаты численных расчетов показали, что для | Х\2
существуют три, а для | U\2- две инвариантные точки, однако выравнять
соответствующие этим точкам ординаты, как в случае силового воздействия,
110
не удается, так как изменение настройки и демпфирования приводит к
смещению второго пика АЧХ в область более высоких частот и его
уменьшению. Первая инвариантная частота при этом изменяется мало и
находится в окрестности антирезонансной частоты обычного корректора.
Расширение области гашения колебаний достигается увеличением/2, но так как
антирезонансная частота значительно ниже единицы, то для гашения
колебаний основного тона предпочтительнее обычный корректор.
Дальнейшее расширение теории динамического гасителя-корректора,
включающее учет влияния изгибных колебаний рычага и рассмотрение
режимов прохождения через резонанс, дано в [114].
§ 2.3. Многомассовые гасители колебаний
В ряде случаев целесообразно устанавливать вместо одного гасителя
несколько гасителей меньшей массы. Это может быть вызвано
необходимостью распределить реакцию гасителя по конструкции, условиями
транспортирования и монтажа гасителя, а также другими причинами. На
перекрытиях может находиться много однотипных машин, вызывающих колебания
зданий в горизонтальном направлении. В этом случае устанавливают большую
группу одинакоьых виброгасителей и в расчете учитывают неизбежные
отклонения их параметров от номинальных значений [142]. При густом
спектре частот конструкции возникает необходимость гашения колебаний
на нескольких резонансных частотах, и установка нескольких гасителей
позволяет этого достигнуть. Для конструкций с разреженным спектром
уровень колебаний в достаточно широкой полосе частот внешнего воздействия
может быть уменьшен путем применения не только одиночных гасителей с
оптимальным демпфированием, но и многих гасителей, настроенных на
Рис. 2.15. Многомассовые гасители с параллельным
и последовательным соединением масс
разные частоты в пределах заданного диапазона и имеющих сравнительно
небольшое демпфирование.
Наряду с параллельным присоединением нескольких гасителей
применяют последовательное соединение, образуя многозвенный гаситель
(рис. 2.15). В последнем случае [79] парциальные частоты
колебаний п — массового гасителя равны со, = y/2nkfmsin{iitl[2 (f!•+..!)]},
причем протяженность спектра собственных частот гасителя соп — с^ =
= 2\Jnkjm sin{7r(« — 1)/ [4(л + 1)]} увеличивается пропорционально \Jn.
Кроме многомассовых гасителей с конечным числом степеней свободы,
могут применяться также балочные и пластинчатые гасители с
континуальным законом распределения масс [149, 180, 225, 264].
111
Одним из важных результатов, характеризующих многомассовые
гасители, является расширение частотного диапазона гашения колебаний при
ограниченной нестабильности частоты внешнего воздействия. Такой эффект
возможен также и для систем с несколькими зонами сгущения частот, если
основную конструктивную часть гасителя с последовательным соединением
масс настроить на разные гармоники.
Использование многомассовых гасителей не ограничивается
виброзащитой при гармонических воздействиях. Они могут применяться при
импульсных воздействиях и нагрузках, изменяющихся по закону затухающей
синусоиды. В этих случаях при двухмассовом гасителе с последовательным
соединением масс подстроечная (малая) масса совершает колебания с
повышенной амплитудой и присоединенный к ней демпфер рассеивает
энергию значительно сильнее, чем демпфер основной массы. Точно так же
применение многомассовых гасителей можно оказаться эффективным и при
подавлении пуско-остановочного резонанса.
Вместе с тем при применении многомассовых гасителей необходимо
обратить внимание на ограничение амплитуд колебаний масс гасителя; малая
масса двухмассового гасителя поэтому, как правило, должна
присоединяться связью с достаточно высоким демпфированием. При малых амплитудах
колебаний это ограничение не является стеснительным. Однако для гибких
сооружений, колеблющихся с очень большими амплитудами, оно во
многих случаях может оказаться определяющим при выборе подходящей
конструкции гасителя.
Эффективность группы параллельных ДГК. Пусть группа линейных
гасителей одинаковой массы, не обладающих специальными
демпфирующими элементами, присоединена к системе с одной степенью свободы
(рис. 2.15). Внутреннее неупругое сопротивление в упругих связях
гасителей (у2) и главной массы Gi) учитывается введением комплексной
жесткости. Если квадраты парциальных частот гасителей равномерно
распределить в некотором диапазоне от /2 -а до/2 + а, то безразмерная
амплитуда колебаний главной массы при гармоническом воздействии с
постоянной амплитудой равна
* = - — :— : -, азл)
VP " (/ -а + я/)A+гу2)
i+m-P2—~ 2
п /=i (/2 -a + aj)(l+iy2)-p2
где а =? 2а/п; v — суммарная относительная масса гасителей; с= 1 ис = р2 —
соответственно для воздействия с амплитудой, постоянной или
пропорциональной квадрату частоты. При достаточно большом числе гасителей можно
принять п -* °°, а -> 0, операцию суммирования следует заменить
интегрированием, в результате знаменатель B.3.1) будет иметь вид
р2 t (f2 +a)(l+ /72 )~Р2
1 + /7i -Р ~ »Р2
1 + : In •
B.3.2)
2аA+/72)""(/2-а)A+/72)-р2
Оптимальное число гасителей, их средняя настройка /2 и ширина 2а
интервала настройки зависят от значений v, y2, 7i и ширины диапазона
изменения частоты р. Если последний не ограничивать, то представление об
эффективности некоторого конечного оптимального числа гасителей, которое,
112
как правило, оказывается достаточно большим, можно получить в
предельном случае п = °°, поскольку результаты при попт и п = °° весьма близкие.
На рис. 2.16 показаны зависимости X от v при оптимальных значениях
/опт ' аопт и Т2 = 0,01. Аналогичный вид имеют результаты для
инерционного воздействия, однако значения/*пт и аопт при этом существенно
отличаются от предыдущих. В обоих случаях /?пт > 1 и значения f2onT -1,
аопт ипопт возрастают при увеличении v.
Таким образом, группа гасителей без специальных демпфирующих
элементов позволяет существенно уменьшить колебания главной массы
Рис. 2.16. Зависимости амплитуд
колебаний главной массы от относительной
массы группы параллельных гасителей
при гармоническом воздействии с
постоянной амплитудой
° 0,025 0,05 0,075 v
при малых значениях v. Наибольшие амплитуды колебаний главной
массы весьма близки к тем, которые получаются после установки одиночного
гасителя такой же массы с оптимальным демпфированием (см. § 1.2—1.4).
Из этого следует, что при некоторых других воздействиях, например
стационарных случайных или периодических импульсных, применение
группы гасителей также должно быть эффективным.
Вместе с тем необходимо иметь в виду, что при установке группы
гасителей перемещения их масс ввиду небольшого демпфирования могут
оказаться чрезмерно большими. При гармоническом воздействии амплитуда
асбсолютного перемещения массы гасителя с номером / равна
Yj = X(f2 -a + aj)(l+iy2)/[(f2 -a + aj)(l+iy2)-p2]
и при р2 = /2 - а + aj амплитуда Yj = Х{\ + ГТа)/-('7з.)'- Следовательно,
I Y\ »-А772, т.е. | Y\.** ЮОХ при у2 = 0,01. В связи с этим область
рационального применения группы гасителей с небольшим собственным
демпфированием ограничивается случаями, когда амплитуды колебаний
конструкций сравнительно малы и не удовлетворяют требованиям санитарных или
технологических норм.
Применение группы одномассовых гасителей связано во многих случаях,
а именно при установке на гибкие системы типа пластинок, мембран и др.,
с вопросом об учете размеров зоны эффективности влияния гасителей,
который обсуждается в гл. 3. :¦¦«
Рассмотрим результаты решения задачи об эффективности группы
параллельных ДГК в несколько иной постановке, а именно, когда число
гасителей невелико, но для каждого из них выбираются оптимальные
параметры — настройка и коэффициент демпфирования. Для случая
установки двух гасителей с вязким трением, имеющих одинаковую массу т,
такая задача без учета демпфирования главной массы детально изучена в
[223, 257]. АЧХ колебаний главной массы имеет три инвариантные точки;
8. Б.Г. Коренев
113
ординаты этих точек можно сделать одинаковыми, выбрав
соответствующие настройки гасителей. Оптимизация коэффициентов демпфирования
гасителей позволяет приблизить максимумы АЧХ колебаний главной массы
к этим точкам. Результаты численной оптимизации гасителей из условия
минимума наибольшей ординаты АЧХ колебаний главной массы при
нестабильной частоте возмущения аппроксимированы следующими
выражениями [257] :
Л = Т-77 ("* +0ДЗГ0'434, U =-0,72^+ 1,04,
2,48
-[&гч- »-т
0,377
-0,038 |2/2j
Rv
1,360* -0,017)-°'328,
где /i./г — отношения парциальных частот гасителей к частоте со0
собственных колебаний главной массы; fit = jjl01/(тоо0), М2 = Mo 2/(^^0) -
отношения коэффициентов вязкого трения гасителей Moi»#o2 к
произведению их масс на частоту оH; Яи ~~ отношение наибольшей ординаты АЧХ
колебаний главной массы к ее статическому прогибу; v * — относительная
масса одного гасителя. Эффективность двух гасителей оказывается
несколько выше, чем одного гасителя с оптимальными параметрами и
относительной массой 2ь>*. По сравнению с одиночным гасителем
параллельные гасители имеют меньшие коэффициенты демпфирования, что особенно
важно при частотно-независимом внутреннем трении, и, кроме того,
меньшую чувствительность критерия качества к отклонению от расчетных
значений частоты колебаний главной массы, а также параметров гасителей.
Эффективность двухмассового ДГК с последовательным соединением
звеньев. В [103] исследована эффективность различных многомассовых
czth
4L
¦п
*L
М
9е
W
Рис. 2.17. Система с двухмассовым ДГК
ДГК с малым демпфированием в отдельных звеньях. Здесь приведены
результаты [98] для двухмассового гасителя с последовательным
соединением звеньев, масса одного из звеньев которого значительно меньше
другого. Параметры двухмассового ДГК (рис. 2.17) обозначены: a=m2/mi,
v = (mt + т2)/М, o>o =y/C/M9 co;2 =cf/mhfj »'c**/ai|,/ =1,2.
Как известно [103], при малой нестабильности частоты внешнего
гармонического воздействия двухмассовый гаситель в среднем на 30% повышает
эффективность гашения колебаний по сравнению с обычным одномассовым
динамическим гасителем. Однако амплитуды колебаний дополнительной
114
Рис. 2.18. Характерные АЧХ колебаний главной массы
Рис. 2.19. Зависимости ширины зоны гашения колебаний главной массы от
коэффициента трения подстроечного звена для различных значений R
массы гасителя весьма велики, что уменьшает возможности применения
двухмассовых гасителей, особенно в тех случаях, когда амплитуда
колебаний масс гасителя должна быть ограничена. В связи с этим возникает задача
уменьшения амплитуд колебаний дополнительной массы гасителя ценой
некоторого снижения эффективности гашения, т.е. по существу — задача
неполной оптимизации параметров гасителя.
При решении этой задачи исследована эффективность гашения
колебаний в зависимости от 72 при 7 = 0,7i =0,v =0,05, а = 0,02, f? = 1, f2 =1—а,
Уют ~ 1- Рассматривались такие критерии качества: ширина интервала
Рн < Р< Рк (Р = Ро/^о) частот внешнего воздействия, в котором
амплитуда Ai колебаний массы защищаемого элемента ниже некоторого уровня R;
максимальное значение амплитуды A j в окрестности частоты р= 1;
максимальное значение амплитуды Л3 колебаний дополнительной массы т2 на
рассматриваемом частотном интервале (амплитуды колебаний масс
отнесены к статическому прогибу главной массы jy1CT) .
Особенностью АЧХ (рис. 2.18) является наличие инвариантных точек Р
и Q, положение которых не зависит от у2. Для данного значения а = 0,02
их ординаты примерно равны, что свидетельствует об оптимальной
настройке гасителя. Оптимальному значению у2 соответствует случай, когда
касательная к АЧХ в точках Р и Q близка к горизонтальной линии.
Аналогичный признак используется при аналитическом решении задачи оптимизации
параметров одномассового гасителя колебаний. Для двухмассового
гасителя найти аналитическое решение затруднительно, однако полученное в
[103] условие настройки дополнительного звена f2 = 1 — а дает вполне
удовлетворительные результаты. Оптимальное значение у2 определяется
численным путем.
На рис. 2.19 приведены зависимости ширины зоны эффективной
работы гасителя к =рк —рп от у2 при заданных ограничениях на амплитуды
колебаний массы защищаемого элемента {Ax <Я). Сравнение их с
аналогичными зависимостями для обычного одномассового гасителя колебаний
без затухания показывает, что максимальное увеличение ширины зоны
8*
115
(Ак =25%) достигается при 72 =0,18. Кривые к (у2) близки к
горизонтальным линиям (Ак ^0) при 72 ^0,35.
Важным для практики показателем является амплитуда колебании ^з
подстроенной (дополнительной) массы т2 при резонансе (/7=1).
Численные расчеты показывают, что изменение 72 от 0,18 до 0,35 ведет к
изменению интервала эффективного гашения Ак в сравнении с обычным
гасителем без затухания от максимума до минимума, при этом амплитуда
колебаний массы т2 изменяется от 50 до 120. В окрестности резонанса (р^1)
при произвольном значении а выполняется соотношение Аъ = Ail(av),
Рис. 2.20. АЧХ колебаний главной
массы при 7 = 0 и при оптимальных
параметрах гасителей: 1 - одно-
массового, 2 — двухмассового
0,7 0,8 0,9 1,0 1,1 1,2 р
из которого следует, что уменьшение амплитуды Аъ может быть
достигнуто увеличением относительной массы подстроечного звена а.
Полная оптимизация параметров гасителя уменьшает резонансную
амплитуду А3. Так, при/!2 = 0,643,/22 =0,9, у = 0,25, 7i =72 = 0,24 и а = 0,03
амплитуды колебаний А 3 = 16,16, А г =2,61 дляр= 1.
При большей нестабильности частоты воздействия @,7 <р < 1,3)
оптимизация параметров гасителя из условия выравнивания максимумов АЧХ
колебаний главной массы достигается варьированием настроек звеньев
/i2> fi и коэффициентов трения в них 7i>72- Двухмассовыи гаситель
заметно эффективнее одно массового (результаты на рис. 2.20
соответствуют у =0,05, параметрам одномассового гасителя /2 =0,9033, 7i =
= 0,287, параметрам двухмассового гасителя а = 0,03,/2 = 0,963,/22 =0,87,
7i =0,15,72=0,245).
Двухмассовыи гаситель более эффективен и при учете трения для
главной массы (табл. 2.1). Так, для ^=0,05, а = 0,03 и оптимальных
значений других параметров амплитуда Аг =4,47 при 7 = 0,05, Ах =3,8 при
7 = 0,1. В случае одномассового динамического гасителя (v =0,05)
амплитуда А х соответственно равна 5,02 и 4,12.
В практических расчетах фундаментов основание часто моделируют
упругой средой с высоким коэффициентом демпфирования.
Эффективность одномассового гасителя с оптимальным затуханием в этом случае
невелика, и здесь более целесообразны гасители с малым затуханием или
без затухания. При применении таких гасителей в окрестности резонанса
(р^1) образуется область с малыми амплитудами колебаний защищаемой
системы. Двухмассовыи гаситель .и в этом случае более эффективен
(рис. 2.21). Аналогичные результаты получены при 7=0,1, 7 = 0,4.
Двухмассовыи гаситель обеспечивает более стабильное гашение колебаний
(менее чувствителен к изменению параметров) и примерно на 30%
расширяет зону эффективной работы по сравнению с одномассовым
гасителем.
116
При небольшом затухании в защищаемой системе(у~+0) эффективность
двухмассового гасителя в окрестности резонанса уменьшается, здесь более
целесообразен одномассовый гаситель с оптимальным демпфированием.
Рассмотрим возможность использования многомассового
динамического гасителя для виброзашиты системы при прохождении через резонанс.
Пусть возмущающая сила изменяется при комплексном представлении по
закону ??о? 0+ет > где е =е0/соо — относительное угловое
ускорение; T=co0t — безразмерное время; Q0, d0ie0 — константы. Решение
задачи получено с использованием разложения в ряды по формам
колебаний системы с гасителем. За критерий качества принята максимальная
амплитуда А% колебаний главной массы при прохождении через резонанс.
Расчеты показывают, что оптимальная настройка при гармоническом
внешнем воздействии близка к оптимальной и в случае медленного
прохождения системы через резонанс (е <0,2). Рис. 2.22 иллюстрирует изменение
амплитуды Ах с нарастанием мгновенной частоты р = ет. Параметры
гасителей такие же, как при вычислении АЧХ (рис. 2.20). На графике видны
характерные пики амплитуд, соответствующие резонансным ситуациям.
ь
S
2
/7
^Ss
^^s*'
/У\
// \
t
i
\
\
\
\
{ \
\2\/
\ \
1 '\
1 1 \
i
t
/
/ /
i /
j J
-^Л/
УМ к
ч
ч
^ч.
ч?ч^^
0,7 0,8 0,0 iff %f 1,2 р
Рис. 2.21. АЧХ колебаний главной массы при- у = 0,2, v =0,05: 1 - одномассовый
гаситель (/J = 1, ух = 0); 2 - двухмассовый гаситель (о = 0,02, f\ = 1, f\ =0,97,
УХ =0,т2 =0,14)
! л
\f~
*^_
4
***/
*
/
/ /
/ /
/ /
\
\^,~
.1
\ \
\
\
\
V^4
ч •
"**ч
\^1
и 0,2 0,4 0,6 0,8 1,0
Рис. 2.22. Амплитуды колебаний главной
массы при прохождении через резонанс (е = 0,2):
1-е одномассовым, 2-е двухмассовым
гасителем
Рис. 2.23. Зависимость максимальной
амплитуды колебаний главной массы от
относительного углового ускорения при прохождении
через резонанс
1,8 ег
7
2
0,2
ОА ОО
117
Таблица 2.1
Результаты оптимизации параметров двухмассового
гасителя при v = 0,05
7
0
0
0
0,05
0,05
0,1
0,15
0,2
а
0,02
0,03
0,05
0,02
0,03
0,03
0,03
0,03
п
0,944
0,963
0,99
0,93
0,944
0,922
0,905
0,905
Л
0,88
0,87
0,89
0,89
0,89
0,9
0,9
0,88
Ух
Р>2
0,15
0,16
0,2
0,1б
0,17
0,18
0,20
Уг
0,25
0,245
0,41
0,225
0,24
0,23
0,25
. 0,32
Лг
5,71
5,45
5,58
4,61
4,47
3,80
3,31
3,04
Двухмассовый гаситель на 15-20% эффективнее одно массового гасителя.
Влияние е на критерий качества можно оценить согласно рис. 2.23. При
е > 0,2 необходимо решить задачу полной оптимизации параметров
гасителей (как одномассового, так и двухмассового) .
§ 2.4, Анализ эффективности некоторых типов
нелинейных динамических гасителей
Одной из причин повышенного интереса к рассматриваемой задаче
является стремление использовать нелинейные свойства гасителя для улучшения
его эффективности. При этом наиболее простым представляется создание
конструктивной нелинейности с тем, чтобы настройка гасителя являлась
некоторой функцией амплитуды колебаний. Например, упругий элемент
гасителя можно выполнить с предварительным натягом. Кроме того,
параллельное включение нескольких пружин, часть из которых установлена
с зазором, позволяет получить кусочно-линейную характеристику.
Вследствие увеличения числа оптимизируемых параметров такой гаситель в
некоторых ситуациях может оказаться более эффективным, чем линейный.
Поведение нерегулируемых нелинейных динамических гасителей
изучалось без учета демпфирования во многих работах. Рассмотрены
нелинейные характеристики упругого элемента гасителя, изменяющиеся по
закону гиперболического синуса [253], кубической параболы [4, 11,75],
а также кусочно-линейные характеристики, и, в частности, с
предварительным натягом пружины [4, 187]. Ставилась задача об оптимальной упругой
характеристике гасителя [59,75,148]. Показано, что в ряде случаев
нелинейность упругой характеристики гасителя позволяет получить только
одну резонансную частоту с неограниченно, возрастающими амплитудами,
поэтому колебания главной массы уменьшаются в более широкой полосе
частот внешнего воздействия по сравнению с линейным гасителем без
демпфирования.
Для повышения эффективности в нелинейный динамический гаситель
можно ввести оптимальное демпфирование. Возникает вопрос:
целесообразно ли в таком случае выполнять упругую связь нелинейной, иными
118
словами, может ли нелинейный дигамический гаситель с оптимальным
демпфированием быть более эффективным, чем линейный.
С другой стороны, многие конструкции ДГК можно представить
линейными расчетными схемами лишь при ограниченных перемещениях массы
гасителя. Типичный пример — маятниковый гаситель.
Здесь приведены некоторые результаты исследований нелинейных
гасителей: рассматриваются вопрос о выборе оптимальной упругой
характеристики, далее — гаситель с кусочно-линейной характеристикой и
маятниковый гаситель.
Об оптимальной нелинейной характеристике упругого элемента
гасителя. Линейный динамический гаситель без демпфирования позволяет
получить эффект полного гашения колебаний главной массы лишь при одном
значении частоты возмушаюшей гармонической силы, которая совпадает с
его парциальной частотой. Для расширения полосы гашения и устранения
бесконечных амплитуд колебаний главной массы при резонансных
частотах в линейный гаситель вводят оптимальное демпфирование. Без
демпфирования можно обойтись, если при изменении частоты возмушаюшей силы
соответственно изменять настройку гасителя. Последнее достигается
применением управляемых гасителей [4,36, 46, 62] или гасителей с
нелинейной характеристикой упругого элемента»
Представляет интерес выяснение вида нелинейной характеристики
упругого элемента гасителя, при которой можно гасить колебания главной
массы в широком диапазоне частот. Ниже эта задача, изученная в работе
[148] при внешней гармонической силе с постоянной амплитудой,
обобщается для нескольких вариантов зависимости амплитуды воздействия
от частоты.
Выбирая вид нелинейной упругой характеристики, требовать полного
отсутствия колебаний главной массы при произвольной частоте
возмущения нельзя, так как реакция нелинейного гасителя не может
уравновесить внешнюю гармоническую силу. Если линеаризовать нелинейную
характеристику R(s0), заменив ее линейной r(S0)sG(S0 - абсолютное
значение амплитуды удлинения s0 упругого элемента гасителя), то можно
потребовать отсутствия колебаний главной массы в линеаризованной
системе. Это означает, что внешняя гармоническая сила
уравновешивается не полной реакцией гасителя, а содержащейся в ней основной
гармоникой.
Используя выражения A.1.7) для безразмерных амплитуд колебаний
главной массы и удлинения упругого элемента линейного гасителя,
запишем
ЛГ= I Х0/хст \=р«> \f2(S0)-p2 |/| [f2 (S0) -p2] A -р2) - vp2f2(S0) I,
B.4.1)
S=\S0/xCT\ =pa*+2l\[f2(S0)-p2](\-p2)-vP2f2(S0)l B.4.2)
где/2E,0) = /*Eо)/(тсоо). Из B.4.1) следует, что Х= О, если
f2(So)=P2, B.4.3)
что означает следящую за частотой р настройку гасителя. При этом,
согласно B.4.2), ход гасителя
S = pa4(?P2\ B.4.4)
119
Таблица 2.2
Результаты оптимизации упругой характеристики гасителя
при различных значениях а^
ае,
0
1
3
4
/2E0) (pS)'* (i>S)~2 (vSJ vS
R(s0)!(xCTK) 0,8 signs 0,6(m)_1 1,4(wK l,2(i*)a signs
Требуемую зависимость г (?0) можно установить, выразив р через S с
помощью B.4.4) и подставив в B.4.3). Далее по найденному коэффициенту
линеаризации г (S0) следует определить характеристику R (s0) . При
использовании метода прямой линеаризации
5 s*
r(S0)= — / R(s0)slds0.
$0 0
Результаты приведены в табл. 2.2, где s =s0/xCTi остальные
обозначения такие же, как в § 1.1. При ах = 2 результат получить таким способом
не удается. Однако в этом случае существует точное решение,
обеспечивающее эффект полного гашения колебаний главной массы. Действительно,
при обкатке массы гасителя в замкнутой круговой полости ее движение
при определенных условиях [7, 15, 36] синхронизируется с внешним
возбуждением; возникающая при равномерном вращении массы гасителя
центробежная сила полностью уравновешивает возмущающую силу. Такой
гаситель называется Катковым [36], его отличительная способность состоит
в том, что при строгом соблюдении равенства mS0 = Qo он уравновешивает
заданный уровень боРо инерционного* возбуждения при произвольных
частотах р0. Линейный гаситель с фиксированной настройкой, напротив,
гасит колебания защищаемого объекта при одной частоте и при
произвольных амплитудах внешней нагрузки.
Из результатов, приведенных в табл. 2.2, наибольший практический
интерес представляет случай (at = 0) силы с постоянной амплитудой Q0i
рассмотренный А.Ф. Потехиным [148]. В этом случае нелинейную
характеристику можно осуществить из двух симметричных пружин с очень малой
жесткостью, предварительно натянутых силой 0,8 Q0.
Подобранные характеристики упругой связи гасителя обеспечивают
гашение колебаний главной массы в том диапазоне частот, в котором
амплитуда удлинения упругой связи гасителя не равна нулю. В случае 0^=0
Рис. 2.24. АЧХ колебаний главной массы и хода гасителя с оптимальной при а, = 0
упругой характеристикой
120
при частоте р2 < A + 2,25 v) _1 масса гасителя может колебаться совместно
с главной массой, так как сила инерции не превосходит усилия
натяга 0,8 О0. На резонансных кривых (рис. 2.24) стрелки указывают
направление изменения частоты р. При л:ст =Q0/K наибольшие амплитуды колебаний
Х0 = A,8 + 0,8 v ~1) хст, 50 = B,25 + v ~*) хст. Сравнение результатов с
данными для линейного гасителя с оптимальным демпфированием ( § 1.2)
показывает, что подобранная нелинейная характеристика упругой связи
приводит к более высокому уровню колебаний главной массы.
Гаситель с кусочно-линейной упругой характеристикой и оптимальным
демпфированием. Оценим улучшение эффективности гасителя с
предварительным натягом пружин [4] путем введения демпфера вязкого трения
Рис. 2.25.
элемента
0
I
\со
ft Sn
Гаситель с предварительным натягом: схема и характеристика упругого
(рис. 2.25) и сравним полученные результаты с соответствующими
результатами для линейного гасителях оптимальными параметрами (§ 1.3, 1.4),
Положим, что упругий элемент гасителя имеет симметричную кусочно-
линейную характеристику R(s0) (рис. 2.25), составленную из двух
участков, т.е. рассматривается гаситель без ограничителей. Упругий элемент
предварительно сжат усилием с0. Для упрощения решения заменяем
характеристику R (s0)/m линейной/02 (S0)s0i пРичем коэффициент
линеаризации /о2 (S0) полагаем равным квадрату парциальной частоты гасителя
при его свободных колебаниях с амплитудой S0. Обшее выражение
коэффициента линеаризации для произвольной кусочно-линейной
характеристики дано в [157]; в рассматриваемом случае после приведения к
безразмерной форме линеаризованная настройка гасителя
(— Г—
/2E) =
1
7Г
где/2E)=/02E)/со8,
arc cos
Сг
т2
arccos
C0ci +Vx2 +X(Z? -c
ci +x
iv]
при S> b,
arc cos
Cq
C\
*" = " 0 foe т i
при0<5*<5,
b=b0/xCJi /1>2 =\/ки2/т/со09 x =
¦(с I - с2)Г21Гг,с( = с(/(хстт и20\сх =?0+V?,?2=?1 +(S-b)f22
121
Используя выражения амплитуд колебаний системы с линейным
гасителем (§ 1.2, 1.4), запишем для линеаризованной системы при
инерционном воздействии (о^ =2)
х = Р2 V[/2(S)-p2]2+mV/I а |,
S = p4'/\A\; |А|2= {[l-p2(l+v)][f2(S)-p2]~iJip2 -vp*J +
+ р2 { h [f2 (S) -р2} +м [1 -р2 A +1/)]) 2. B.4.5)
Фактически B.4.5) представляет собой трансцендентное уравнение для
определения S.
Вследствие предварительного натяга (с0 Ф 0) при некоторых частотах,
помимо решений, удовлетворяющих уравнению B.4.5), возможен
периодический режим движения без деформаций упругого элемента гасителя
E = 0), который существует, если сила инерции массы гасителя при
совместных колебаниях с главной массой меньше усилия натяга, т.е. при
РЛ
; < с0. B.4.6)
V[i-P2(i+*0]2 +л2р2
При заданной относительной массе v гаситель имеет пять безразмерных
параметров: c0i btf\\f%> ju, значения которых можно выбрать из условия
минимума наибольших ординат АЧХ для X. С этой целью применялся метод
скорейшего спуска; учитывались все возможные периодические режимы,
соответствующие уравнению B.4.5) и условию B.4.6).
Вычисления для значений *> = @,025; 0,05; ОД) и/г = @,05; 0,1)
показали, что с введением оптимального демпфирования удается повысить
эффективность гасителя с предварительным натягом, причем АЧХ колебаний
главной массы становится пологой, без резко выраженных пиков.
Поскольку оптимальное демпфирование примерно такое же, как и у линейного
гасителя, то при несоблюдении условия B.4.6), как правило, возможен
только один периодический режим движения, в отличие от результатов [4],
полученных при д = h = 0. При оптимальных параметрах гасителя с
предварительным натягом его эффективность примерно такая же, как у
линейного гасителя.
По-видимому, аналогичные -езультатьГ следует ожидать и в случае
нелинейного гасителя с произвольной плавной характеристикой упругого
элемента, которая аппроксимируется кусочно-линейной характеристикой.
Это отчасти подтвердилось и в описанной ниже задаче о маятниковом
гасителе с мягкой нелинейностью. Учитывая сложность конструкции
рассмотренного гасителя, следует отдать предпочтение линейному гасителю с
оптимальным демпфированием.
Маятниковый гаситель горизонтальных колебаний. Маятниковые
динамические гасители широко применяются для снижения уровня колебаний
башенных сооружений. Так как маятниковый гаситель может
рассматриваться как линейный осциллятор лишь при малых амплитудах колебаний,
то весьма важно иметь данные о его оптимальных параметрах и
эффективности при средних и больших углах отклонения маятника, когда линейная
теория непригодна. Кроме того, эти данные необходимы для оценки
ожидаемого хода гасителя и сопоставления его с габаритами сооружения. Реше-
122
ние такой задачи [157] получено для расчетной модели сооружения с одной
степенью свободы, нагруженной гармонической силой с постоянной
амплитудой и нестабильной частотой. Затухание колебаний для главной массы
учтено с помощью приема Шлиппе — Бокка.
Положим, что математический маятник, подвешенный на главной массе,
связан с ней линейной пружиной и гидравлическим демпфером (на рис. 2.26
не показан). Дифференциальные уравнения движения системы имеют вид
X A + v) + hco0x + oolx + vl (sin ф) = QqM~1 sin (p0t + a),
B.4.7)
{p + (ЛС00ф + /о Sin if +/02! if + l~lX COS ф = 0,
где oil = C/M; /02 =g/l; /o2i =k/(ml2); h = h0/(Mco0)9 ц = Ц0/(т12оо0) ;
4wvwvl
Рис. 2.26. Расчетная схема системы с маятнико- Я с
вым гасителем
-Е-
ffgSUlflj^+gJ
у = Aw/Af; Ct к и h0, id0 — коэффициенты жесткости пружин и вязкого
трения соответственно главной массы и гасителя; g — ускорение силы
тяжести; а — неизвестный фазовый угол. Полагая в B.4.7)
х = Х0 sin (p0t), </? = F sin (p0t + 0),
используя разложения Якоби тригонометрических функций в ряды по
функциям Бесселя первого рода
sin(Fsinf) = 2 2 /2w-i(^)sin[B«-l)f],
п = 1
cos (F sin f) = J0 (F) + 2 2 J2n (F) cos Bл f)
/i = l
B.4.8)
и удерживая лишь первую гармонику, после приравнивания нулю
коэффициентов при тригонометрических функциях аргументов p0t, (p0t + $)
получаем
[1 -р2 A + р)]Х0Гг - рр2kFcos0 = <2/2 cos a, eF^/ cos/5,
/фХоГ1 -vp2KFsinp = Qf2 sina, -mF = рХ0/-1 к sinK,
где р2 = p20/co20lf2 = ft/os2, Q = Q0/(M*) = *CT/(//2), xCT = Q0/(Mul)9 к =
= 2JX (F)/F, ф = ju/(prO, e = (/2fc +Л2 - /2) p~2 [J0 (F) - J2 (F)]-1, f2 =
Возведем первое и третье уравнения в квадрат, сложим их и подставим
значения sinj3, cos0,Xo/l из оставшихся уравнений системы B.4.9), в ре-
123
зультате для определения амплитуды угла отклонения маятника получим
трансцендентное уравнение
F2 { [1 -Р2 A + v)]2 + h2p2) (е2 + 0?) +
+ F2vp2n {vp2v + 2hp\p -2 [1 -р2 A + v))e) =(Qf2J.
B.4.10)
Безразмерная амплитуда колебаний главной массы находится из
выражения
X = X0/xCT=F^e2+t2/(Qf2).
Для выбранных из условия минимума X при нестабильной частоте р
оптимальных параметров гасителя результаты представлены на рис. 2.27.
При небольших значениях Q амплитуда колебаний главной массы X почти
постоянна, амплитуда F угла отклонения маятника линейно зависит от Q,
оптимальные параметры гасителя соответствуют линейной теории. С
ростом F оптимальная настройка увеличивается, так как система обладает
мягкой нелинейностью, при этом линеаризованное значение настройки
f2V +/i2, входящее в уравнение B.4.10), остается постоянным.
Поскольку горизонтальная сила инерции гасителя зависит от
горизонтального перемещения его массы и, следовательно, имеет максимум при
F = 7г/2, с целью ограничения угла отклонения маятника при увеличении Q
следует увеличивать оптимальное значение ц. В связи с этим зависимости F
от Q обращены выпуклостью кверху и имеют максимум при определенном
значении Q, после чего углы отклонения маятника и оптимальная
настройка уменьшаются, а амплитуды колебаний главной массы уже значительно
превышают результаты для линейного ДГК. По мере увеличения
оптимального демпфирования гасителя изменяется характер АЧХ системы — резо-
X
12
Q
4
~^~"
1/\
^
,"'
/ ^
2. У
^~.
L--
."""^
„.-»''
h-0,05
^-"
^ Z-J
0 0,04 ~* 0,12
¦ашШ
^~г
?--""
^Г--
•?--
h-M
—^у
ГГ=т:
~HZr
J
"—1
0,20
0,04
0,12
0,20
1>А
щ
V*
11/
\ ///
шх**'
\ / •
чС
// ^
<2/'\
Ny'
V/>
у^С
yi'-'
"Xv
>. Ч
*
•
^^^
h=0,05
*ч%
^Сс>
ЧЧ
* '
F
1,2.
0,8
/а
-J/'
$2?'
1 /
п/У
А
^>-
vr~"
rr*
s
• ' >^
^-
.
J^ ^
у'
9Л*
h-0,1
-*"•«
^v^
х^ ^
V?
1V*»^J
^5q
0 0,04 ~ 0,12 0,20 ^ 0 ° 0,04 0,12 0,20 Q
Рис. 2.27. Зависимости максимальных амплитуд колебаний главной массы Хи углов
отклонения маятника F от безразмерного параметра нагрузки Q при/\ -0 (сплошная
линия),/\ -0,5/а (штриховая линия), v =0,025 G), 0,05 B), 0,1 (S)
124
нансные пики сближаются и в конце концов сливаются в один пик, как
для системы с одной степенью свободы.
Отметим также, что уравнение B.4.10) при малом демпфировании в
системе допускает возможность существования нескольких решений при
некоторых значениях частоты возмущения. Однако при оптимальном
демпфировании гасителя получаемое решение, как правило, однозначно.
Увеличение относительной массы v влияет более существенно, чем для
линейного гасителя, поскольку расширяв* область линейной работы
маятникового гасителя, что приводит к дополнительному снижению X.
Установка пружины (/* Ф 0) также снижает X и расширяет область
значений Q, в которой гаситель можно считать линейным, так как с
увеличением /2 необходимое значение f2 уменьшается, что соответствует
увеличению длины маятника /. При этом для получения одного и того же
горизонтального перемещения массы гасителя требуется меньший угол
поворота маятника, чем при/2 = 0.
Оптимальные параметры маятникового гасителя следует принимать по
максимальному значению Q. При меньших Q эффективность гашения" не
будет оптимальной, однако амплитуды колебаний все же уменьшаются
ввиду снижения хст. Пружина с жесткой силовой характеристикой
позволяет компенсировать мягкую нелинейность маятника.
Проведенное исследование показало, что при F < 0,4 маятниковый
гаситель можно рассчитывать по линейной теории, при 0,4 < F < 0,9 следует
учитывать влияние нелинейности на снижение эффективности и
оптимальные параметры гасителя, режим с углами F > 0,9 нежелателен.
Дальнейшее развитие рассмотренной задачи возможно при учете
пространственных колебаний маятникового гасителя. Многочисленные
наблюдения показывают, что колебания точек башенных сооружений
совершаются по эллиптическим траекториям. Поэтому масса гасителя также будет
испытывать не плоские, а пространственные колебания. При проведении
практических расчетов приближенно можно рассмотреть колебания в
каждой из плоскостей отдельно, используя полученные выше результаты для
оценки эффективности виброгашения в зависимости от значений амплитуд
колебаний.
§ 2.5. Центробежный маятниковый гаситель
Рассматривается один из простейших регулируемых гасителей,
монтируемый на неуравновешенной машине для уменьшения поступательных
колебаний основной конструкции. Гаситель широкополосный, хотя и не имеет
специального демпфирующего устройства. Автоматическая настройка его
на частоту возмущающей силы производится с помощью простой
механической связи.
Такой гаситель изучался в линейной [252] и нелинейной [195]
постановках. Здесь приведены результаты исследования [155], в котором
показана возможность существования нескольких режимов колебаний
системы и определена оптимальная настройка гасителя. Положим, что
колебания главной массы М (рис. 2.28) вызываются неуравновешенной
инерционной силой q(t) = 2oPoSin(po^ + ol) ¦ Маятники общей массой т с помощью
соответствующей передачи приводятся во вращение с угловой скоростью
125
0o = VPo, где rj — передаточное отношение. Кроме того, они могут
свободно вращаться в вертикальной плоскости вокруг оси подвески 4.
Дифференциальные уравнения колебаний системы относительно
положения статического равновесия
Мх + h0x + Сх + т (х + / sin \р) = Q0pl sin (р0 г + а),
(Ii + ml2 ) у + <2о [(^з - h ) c°s <p + aw/ (г + / cos ^)] sin ^ —
— aw#/ cos ^ + /CTp (</>) = - mxl cos ^
приведем к виду
\<&
0+Ю +
/Wo
+ jt + y
(sin g)'
= GP2 sin(p0r+a),
B.5.1)
Ml —у +7?V(m2COS^ + -J Sin«^
cos ip + -
*тр (V)
/cjq ml2 col iuj0
/CO?
cos<^>.
Здесь /i,2,3 — суммарные моменты инерции обоих маятников
относительно осей 7, 2, 5; ЛГтр (<р) - момент сил трения, возникающих при движении
маятников, относительно оси 4; параметры:
h=h0/(M(jj0), со0 =л/С/М, p-Po/c^o, v-mjMy
Q = Qol(MI), Mi=1+/i(aw/2)-\ /x^l+C/a-ZaMAw/2)-1.
Применим метод гармонического баланса, полагая в первом приближении
х = Х0 sin(p0r + /3), ^ = X + ^sin(p0r), B.5.2)
где х — средний угол отклонения маятников от горизонтали; Х0, F, |3 —
неизвестные амплитуды и фаза. При этом разложим функцию Ктр (у) в
ряд Фурье по cos(wpoO и воспользуемся после подстановки B.5.2) в
w
ш^
Рис. 2.28. Расчетная схема системы с
центробежным гасителем
'///////////////у/////////////
B.5.1) разложениями Якоби B.4.8). В результате получим без учета
высших гармоник
[1 -р2 A +р)]Х0Г1 -vp2KtFco$xcosfi = ?p2cos(a-j3),
hpX0rl +^p2/c1Fcosx sin]3 = Qp2 sin(a-j3),
??2 [гГ1 к х cos x + JU2k2 cosBx)]-Mi + #Po2r1K1sin x =
= X0/F-1 [J0 (F)-J2(F)} cos/3 cos x, B.5.3)
-r?2 [r/'Vo (F) + д2/0 (IF) cos x] sin X +gPo2r1J0 (F) cos x -
= X0l~1J1 (F) cos j3 sin x,
126
2 "/2
7ГТ f Ктр Qf) cos (p0t) d OoO ¦ X0I 1K1smP cos x.
* irmrpo -it/2
Здесь к i = 2JX (F)/F, к2 = J\ 0*F)jF. Из предпоследнего уравнения
следует, что tg х имеет порядок ?Ро2/~*, поэтому для большинства машин (за
исключением тихоходных) можно положить х = О- С учетом этого, возводя
в квадрат первые два уравнения системы B.5.3) и складывая их,
получаем
F2 {[(р-2- 1 -v)e-VKx]2 +(h/pJ (е2+ф2) +
B.5.4)
+ ф2 (р-2 - 1 -vf +2vKl\ljh/p} =?2,
_= г?2 (гГ1*! +M2^2)~Mi
J0(F)-J2(F)
* = Т~7^ 7TJ ( к*р W cos ^o/)J ^<> 0 >
/2 (jh)nmrpi -я/2
где e = X0r1F-1 cos j3, ф=Х0Г^~1 sin/3.
Как показал дополнительный анализ, с учетом сил трения качения и
скольжения, возникающих при колебаниях маятников, функция ф
достаточно хорошо аппроксимируется выражением
ф=(к0 + *1F + fc2F2)/[2/1 (F)], B.5.5)
где к01112 — постоянные.
Отношение амплитуды колебаний главной массы Х0 к ее статическому
отклонению под действием силы Q0col равно
X = X0/(Ql) = Fs/e2+t2/Q.
В отсутствие демпфирования (h = ф = 0) при точной настройке
маятников
VMi' Mi /
можно достигнуть, согласно линейной теории полного гашения колебаний
главной массы, при произвольной частоте р. Из нелинейной теории следу-
ет [155], что уравнение B.5.4) в интервале частот от рх = 1/vi + v до
некоторой частоты р2 имеет одно неустойчивое и два устойчивых решения:
нерезонансное (с меньшей амплитудой) и резонансное (с большей
амплитудой). В этом случае, чтобы избежать резонансного решения,
целесообразно принять т? > г?о, а относительную массу v выбрать такой, чтобы
значение р2 превышало верхнюю границу возможного диапазона изменения
частоты р.
При учете демпфирования главной массы (h Ф 0) из условия отсутствия
резонансного решения в диапазоне 0 < р < ръ прирх > ръ определяем
требуемое значение относительной массы гасителя
где F = -Оръ\(he). По-прежнему т? >т?0.
127
Рис. 2.29. Зависимости максимальных
амплитуд колебаний главной массы X
и углов отклонения маятников F от
безразмерного параметра нагрузки Q
при v =0,0031 (/), 0,043 B), 0,01 E),
0,02 D): сплошная линия - расчет,
штриховая линия - эксперимент
Рис. 2.30. АЧХ прогиба в середине
пролета балки при Q = 0,001, v = 0,0043:
сплошная линия - расчет, штриховая
линия - эксперимент
П\ I I 1 1 1
0,8 0,9 %0 1,1 р
Если учесть также демпфирование гасителя (ф Ф 0), то можно найти,
что диапазон частот р2 *Pi, в котором существует резонансное решение,
сужается, а при некоторых значениях параметров v, г\ и возсе исчезает.
Это приводит к эффективному гашению колебаний главной массы в
широкой полосе частот.
Экспериментальное исследование работы центробежного гасителя
производилось на модели [155]. Изучались колебания стальной балки, упруго
защемленной на концах. В середине пролета были установлены
дополнительная сосредоточенная масса и асинхронный двигатель с гасителем.
Результаты испытаний свидетельствуют о высокой эффективности
гасителя: амплитуда колебаний балки при резонансе снижалась в 10—20 раз.
При расчете на ЭВМ функция ф принята в виде B.5.5) с коэффициентами
к0 = 0,0012 (найдено в эксперименте), кг = 0,005, к2 - 0,05; значение
И = 0,0135 соответствует экспериментальным данным. Результаты
эксперимента и расчета совпадают не только качественно, но во многих случаях и
количественно. Это видно из рис. 2.29, 2.30, где результаты соответствуют
наиболее неблагоприятным частотам р и оптимальным значениям
передаточного отношения г? (при Q > 0,0014, а также для v = 0,02 эксперимент не
проводился). Некоторое ухудшение эффективности гасителя при малых
значениях Q объясняется влиянием сухого трения при движении
маятников.
Эффективность центробежного гасителя зависит от неупругого
сопротивления защищаемой конструкции, трения в самом гасителе, относительной
массы v, безразмерного параметра нагрузки Q и, как правило,
значительно выше эффективности линейного гасителя такой же массы с
оптимальным демпфированием. Так, например, при одинаковой эффективности для
центробежного гасителя v = 0,0043, для линейного с оптимальным
демпфированием — v - 0,08. По эффективности центробежный гаситель
приближается к линейному гасителю без затухания, но, в отличие от него,
эффективен в широкой полосе частот, поскольку парциальная частота маятников,
128
0 0,001 0,001 0,003 0,00* 0,005- Q
находящихся в поле центробежных сил, автоматически следит за частотой-
возмущающей силы.
Длину маятников / и относительную массу гасителя v следует назначать
таким образом, чтобы избежать возможности появления резонансного
решения. Как показали результаты вычислений и эксперимента, угол
отклонения маятников F не должен превышать 0,2 — 0,3 рад, иначе эффективность
гасителя снижается/Угол отклонения маятников и оптимальное
передаточное отношение определяются формулами
/7 Q Q°
v MIv
Г г 2Jt(F0) + М2 /; BF0) I,5
L iM Fo Mi ^o J
Чувствительность системы к изменению г\ зависит от относительной
массы гасителя, при этом малые вариации значения г\ в пределах ± vjA не
оказывают существенного влияния на результаты. В случае, если габариты
машины не позволяют установить маятники требуемой длины и массы,
можно специально увеличить трение маятников при их вращении вокруг
оси подвески для ликвидации возможности появления резонансного
решения, однако при этом эффективность гасителя на нерезонансном режиме
будет снижена.
Эксперимент показал также, что центробежный гаситель, как и линейный
с оптимальным демпфированием, существенно уменьшает амплитуды
колебаний при прохождении конструкции через резонанс.
9. Б.Г. Коренев 129
ГЛАВА 3
КОЛЕБАНИЯ СИСТЕМ
С БЕСКОНЕЧНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ,
ОБОРУДОВАННЫХ ДИНАМИЧЕСКИМИ ГАСИТЕЛЯМИ
Во всех тех случаях, когда детально изученная в первых двух главах одно-
массовая модель не может достаточно правильно и полно описать характер
колебаний защищаемой конструкции и ее взаимодействие с гасителями,
возникает необходимость рассмотрения более сложных расчетных схем.
В связи с их многообразием практический интерес представляют как
общие методы расчета, так и приложения к расчету типовых моделей. В
данной главе основное внимание уделено задачам виброзащиты стержней,
мембран, пластинок и оболочек. Такие модели защищаемых конструкций
обычно рассматриваются в динамике сооружений, динамике машин и для
них известны точные решения или разработаны эффективные способы
приближенного динамического расчета.
Вопросы гашения колебаний системы с бесконечным числом степеней
свободы в целом сложнее и богаче содержанием, чем те, которые
разбирались в гл. 1. По этой причине практически невозможно и нецелесообразно
исследовать и все многообразие возможных динамических воздействий.
Здесь в основном рассматривается наиболее важный класс воздействия —
гармоническое, и поскольку при этом находятся частотные характеристики
защищаемых систем с гасителями, то материалы главы можно
использовать также при действии периодических импульсов, стационарных
случайных и других нагрузок. Таким образом, если первая глава обобщает теорию
ДГК в направлении учета различных видов воздействий, а вторая содержит
сведения о работе разных типов гасителей, то в данной главе обобщение
относится в основном лишь к модели защищаемой конструкции.
Рассмотрение более сложных моделей не только усложняет задачу, но и в ряде
случаев вызывает необходимость выбора числа и мест расположения
гасителей, а также учета характера распределения их реакций по конструкции.
Более разнообразными становятся и критерии качества. Даже оставаясь
кинематическими, они имеют более общий характер, например: линейные
или угловые перемещения (абсолютные, относительные), скорости,
ускорения в некоторых специально выбранных точках, средние арифметические
или квадратические значения указанных критериев на некотором участке
конструкции и т.п. Критериями качества могут быть напряжения или
усилия, поскольку целью виброзащиты часто является повышение
динамической прочности и надежности конструкций сооружения, прибора или
машины. При этом нужно считаться с тем, что гасители воздействуют н.а
130
защищаемую конструкцию как сосредоточенные или локализованные на
некотором небольшом участке динамические нагрузки. Естественно, что
вызванное ими поле напряжений не является подобным полю напряжений
от внешнего воздействия. Для того чтобы эффективность гасителей не
очень отличалась для разных точек защищаемой системы, в отдельных
случаях желательно применять вместо одного несколько локальных гасителей
или даже континуальные гасители. В частности, для пологих сферических
оболочек и плит на упругом основании действие сосредоточенной силы
носит локальный характер, поэтому гасители должны быть распределены по
поверхности конструкции на сравнительно небольших расстояниях друг от
друга. Во многих других важных случаях все же целесообразно
ограничиться установкой одного или нескольких гасителей, добиваясь при этом
выполнения требований, относящихся лишь к наиболее опасным сечениям.
Проблема правильного назначения мест расположения гасителей и их
числа, таким образом, является далеко не простой; она к тому же связана и
с частотным диапазоном динамического воздействия. Так, например, если
возмущающие силы имеют частоту, близкую к частоте какой-либо
определенной формы колебаний, то гасители следует устанавливать в пучностях
этой формы; если же устанавливается один гаситель, его лучше разместить
там, где ордината формы свободных колебаний является наибольшей.
Естественно, что при свободных концах стержня или свободном контуре
пластинки при этом следует рассмотреть одновременно и концевые
ординаты. Сделанные замечания лишь поясняют важность проблемы размещения
гасителей, но отнюдь не снимают ее. При расположении гасителей должен
быть выполнен и ряд требований инженерного характера. Эта сторона дела
обсуждается достаточно подробно в гл. 4.
При прочностных критериях качества может возникнуть необходимость
рассмотрения локальных напряжений вблизи места установки гасителя.
Для одномерной защищаемой конструкции, например стержня,
сосредоточенная реакция гасителя не вызывает бесконечно больших местных
напряжений, и по этой причине в содержание динамического расчета изменений
не вносится. Напротив, для двумерных конструкций типа мембран,
пластин, оболочек с целью получения допустимых местных напряжений в зоне
контакта гасителя и конструкции следует учитывать распределение
реакции гасителя по некоторым сравнительно небольшим площадкам.
Решение задач виброгашения связано с необходимостью проведения
многократных расчетов в процессе оптимизации параметров гасителей.
Поэтому в ряде случаев целесообразно проведение предварительных
расчетов по упрощенным расчетным схемам для выяснения ориентировочной
эффективности и параметров виброзащитной системы. Использование
схем, допускающих получение решения в замкнутом виде или с помощью
хорошо изученных алгоритмов, представляет весьма большой интерес.
Именно эти возможности доставляет значительная часть параграфов данной
главы, не говоря, конечно, о тех случаях, когда расчетная схема
конструкции непосредственно отражается рассмотренными здесь моделями.
В первом параграфе обсуждаются методы, применяемые для расчета
континуальных систем с "пропорциональным" трением, оборудованных
ДГК. Далее рассматриваются продольные (§3.2, 3.3) и изгибные (§3.4,
3.5) колебания стержней постоянного и переменного сечения с присое-
о* 131
диненными гасителями. При этом всюду даны точные решения,
дискретные включения, в частности гасители, учитываются методом начальных
параметров. Двумерные задачи о гашении колебаний мембран, пластинок,
пластинок на упругом основании, оболочек и складок описаны в
следующих пяти параграфах. При рассмотрении пологой оболочки (§3.9)
вводится понятие о континуальных гасителях. В §3.11 приведены методы
расчета континуальных и многомассовых систем с "непропорциональным"
трением применительно к решению задач о гашении колебаний. В §3.12
дано сравнение результатов оценки эффективности и оптимальных
параметров гасителя для некоторых конструкций и приведенной системы с одной
степенью свободы.
§ 3.1. О применяемых способах расчета
При расчете систем с распределенной массой, оборудованных ДГК, сначала
определяют частоты и формы свободных колебаний защищаемой системы.
Особое внимание должно быть уделено точности вычисления частот,
близких к частоте вынужденных колебаний. В большинстве практических задач
важно получить подробную информацию о первой частоте и
соответствующей ей форме. Необходимо при этом изучить и вопрос о том, насколько
стабильны эти данные, т.е. не могут ли они изменяться в процессе
эксплуатации. Вопрос о приближенных методах определения частот и форм
собственных колебаний упругих систем здесь не обсуждается. Для всех
одномерных задач, рассматриваемых в этой главе, как правило, используются
точные решения. Формы колебаний при этом представлены в замкнутом
виде и выражаются через элементарные или достаточно хорошо изученные
специальные, главным образом цилиндрические, функции. В двумерных
задачах вкратце описана схема получения частот и форм колебаний, и хотя
подробное изложение этого вопроса здесь не приводится, но все же он
обсуждается с позиций расчета систем с гасителями.
При рассмотрении вынужденных колебаний большей частью получены
точные решения и в одномерных задачах использован хорошо известный
метод начальных параметров. Область его применения в данной главе
включает как задачи, описываемые дифференциальными уравнениями
с постоянными коэффициентами, так и те задачи, описываемые
дифференциальными уравнениями с переменными коэффициентами, которые
допускают решение в бесселевых функциях. По существу во всех
одномерных задачах получение результатов требует построения функций влияния,
которые тесно связаны с функциями Коши соответствующих
дифференциальных уравнений или непосредственно с функциями метода начальных
параметров.
Описание колебаний самих гасителей — парциальных систем,
присоединяемых к защищаемой, проводится на основе данных гл. 2, и оно, в общем,
соответствует для подавляющего числа задач той схеме, которая детально
изучалась в гл. 1.
Содержанием данной главы является решение задач о взаимодействии
гасителей с защищаемой системой. При этом в зависимости от того, как
составляются уравнения, описывающие это взаимодействие, речь идет
о методе сил, методе перемещений или смешанном методе. Постановка
132
задачи о виброгашении, как это уже отмечалось, зависит от ряда факторов
и среди них в первую очередь от характера внешнего воздействия.
Естественно, что подробное рассмотрение различных типов
динамических воздействий для каждой из расчетных моделей привело бы к большому
и не вполне оправданному расширению объема этой главы. Поэтому
основное внимание здесь уделяется изучению гармонических и стационарных
случайных колебаний. Соответствующие критерии качества выражаются
через частотные характеристики (ЧХ), которые и определяют
трудоемкость всего расчета.
Рассмотрим способы вычисления ЧХ континуальных систем, в
отдельных точках которых присоединены ДГК, демпферы или связи с
зависящими от частоты коэффициентами. При гармоническом перемещении YseiPot
точки установки линейного ДГК амплитуда силы, действующей на систему
в точке s, при ро > О равна
Xs = Hs(p)Ys,Hs(p) = msp2co2lCSiCs- */ *- f */ 2 , C.1.1)
fs(Ms+™s)+VsiP-P
где р^Ро/йг, /ia/0,M; M^/WO^i™*); Щ, /o, Mo* - масса,
парциальная частота и коэффициент вязкого трения 5-го гасителя; us, vs —
параметры [182, 198], зависящие от коэффициента 7*
частотно-независимого трения s-ro гасителя; cjj — парциальная частота защищаемой
конструкции. Амплитуды реакций локального демпфера или связи с
зависящими от частоты коэффициентами выражаются через Ys аналогично, но
выражение Hs (p) имеет более простой вид.
Формы вынужденных колебаний рассматриваемых систем
удовлетворяют дифференциальному уравнению
R(P)YX- 2 *(x-xs)Hs(p)Ys = Qx, C.1.2)
где R(p) — линейный дифференциальный оператор с зависящими от х
коэффициентами, которые могут быть комплексными при учете частотно-
независимого трения; 5( .) — дельта-функция Дирака; Qx - амплитуда
внешней нагрузки в точке х; х — скалярный для стержней или векторный
для пластин и оболочек аргумент; к — общее число гасителей, локальных
демпферов или связей.
В ряде случаев, в частности для стержней и некоторых типов пластин
и оболочек, формы вынужденных гармонических колебаний с заданной
частотой, а также свободных колебаний могут быть найдены
непосредственно методом начальных параметров с учетом наличия присоединенных ДГК,
локальных демпферов и связей с звисящими от частоты коэффициентами.
Однако этот способ оказывается весьма трудоемким, так как при
нестабильной частоте гармонического воздействия или при случайных
воздействиях для вычисления критерия качества требуется многократное
повторение расчетов при различных значениях частоты; необходимость
оптимизации параметров гасителей еще более увеличивает объем вычислений.
Использование же разложений по формам колебаний защищаемой системы
с присоединенными гасителями нецелесообразно, так как при учете
демпфирования, которое для полной системы, как правило, является "непро-
133
порциональным", эти формы комплексные; при изменении параметров
гасителей формы необходимо пересчитывать, при наличии присоединенных
связей с зависящими от частоты коэффициентами формы колебаний не
обладают свойством ортогональности (см. §3.5). Поэтому во многих
случаях для решения уравнения C.1.2) более предпочтительными
оказываются методы строительной механики, развитые применительно к
рассматриваемой задаче и позволяющие построить алгоритмы, которые не требуют
большого объема вычислений при варьировании частоты вынужденных
колебаний и параметров гасителей.
При малом числе гасителей целесообразно воспользоваться методом
сил, выбрав в качестве основной защищаемую систему без присоединенных
локальных связей и приняв за неизвестные амплитуды перемещений Ys
(компоненты вектора Y) или амплитуды реакций Xs (компоненты
вектора X). В этом случае, как и для хорошо изученной системы с жестко
насаженными сосредоточенными массами [44], справедливы матричные
уравнения
[Е-АН(р)] Г*>?, [Н~1(р)-А]Х = г1, C.1.3)
где А = [А,/]*, т?= [щ]\, Н(р) =№(р)^]^,? - единичная матрица
размера к. Единичные Asl и грузовые т?5 перемещения при варьировании
частоты р представляют собой ЧХ континуальной системы в точках
установки гасителей соответственно от действия единичных гармонических
сил и от внешней нагрузки, т.е. Asl = Yx при R (p) Yx = 8(x — Xj), r}s = Yx
при R(p) YX = QX. Для некоторых типов пластин и пологих оболочек
[86, 87, НО] они определяются в замкнутом виде с учетом распределения
реакций гасителей по площадкам определенного вида.
Для основной системы с "пропорциональным" трением решение
Й'-i К/« C.1.4)
представляется в виде ряда по нормированным формам собственных
колебаний, удовлетворяющим уравнению R(coj) Vj = О и условию
ортогональности
(О AФ]\
fVlR(p)VJdx=\ '
х 1Ф/ (/ = /),
где Фу = со?(М+ iv) + iph —р2 при р> 0; а>;- — нормированная по
отношению к первой/-я собственная частота колебаний защищаемой конструкции;
h — коэффициент вязкого трения; х - область изменения аргумента х.
При сосредоточенных реакциях гасителей
Asl =2 Г+Ъ/Ф,, ъ= ? ^Qy/Ф/. C.1.5)
/ = 1 / = 1
Здесь Qj = fQx Vjdx, VSJ- - ордината формы Vj в точке s.
х
После умножения слева на матрицу А-1 уравнения C.1.3) принимают
вид канонической системы метода перемещений
[Д'1 -Н(р)] Г=А_1Г7, \А~1Н~1(р)-Е] Х=А_1г?. C.1.6)
134
При этом элементы матрицы единичных реакций А-1 и вектора грузовых
реакций А г? могут быть найдены непосредственно путем расчета на
соответствующие воздействия основной системы с дополнительными опорами,
устраняющими свободу перемещения в точках установки гасителей.
Использование разложения решения по формам колебаний защищаемой
системы без гасителей, если она обладает "пропорциональным" трением,
приводит к другой основной системе метода перемещений, на которую
наложены связи, препятствующие обобщенным перемещениям по главным
формам колебаний. Подставляя C.1.4) в уравнение C.1.2) и применяя
к результату операцию fVl ( •) dx, получаем
х
оо к
*т - 2 ац v = Qh ац = Z ЯД р) Vsl Vsl G = Т^)
/ = i s=i
или после удержания конечного числа и форм колебаний
(Ф-Л)^=0, Ф=ГФ^Г, A=[a„]?=F'H(p)F, C.1.7)
**Ш, Q=[Q/]i,
где F = [Vsi] ? = Xj =! — матрица перемещений системы в точках установки
гасителей при движении по каждой из п форм колебаний. Этот способ
по сравнению с C.1.3) и C.1.6) требует меньше вычислений при числе к
гасителей, превышающем количество п учитываемых форм колебаний
защищаемой конструкции. Такая ситуация может возникнуть при гашении
колебаний пластин и оболочек.
При установке в разных точках гасителей с одинаковыми rs =HS (p)/ms,
т.е. одинаковыми настройками и демпфированием (массы могут
различаться), дополнительные упрощения возникают при представлении матрицы
в виде
А* 2 А*гь А*=[а\]Ч, Й" 2 rnsVslVSJ9
где rf - значение rs для гасителей J-й группы с одинаковыми настройкой
и демпфированием. Матрицы обобщенных масс гасителей А^ не требуют
пересчета при изменении частоты вынужденных колебаний, а также
настройки и демпфирования гасителей в процессе их оптимизации.
В некоторых случаях целесообразно применять смешанный метод,
выбирая в качестве основной систему без гасителей, на которую наложены
связи, устраняющие обобщенные перемещения по п формам колебаний.
При этом неизвестные амплитуды fy (/ = 1,и) обобщенных координат
и амплитуды Xs (s - \,к) реакций гасителей находят из уравнений
<t>y-F'X=Q, -F^+[#-1(P)-A(")] Х=г)м, C.1.8)
где А^ = [A^]f, т?^ = [n^]i — матрица единичных и вектор
грузовых перемещений основной системы в точках установки гасителей
Значения А^ , ц}*' определяются по формулам C.1.5) при начальном
индексе /=л+1. В случае п-0 основные системы смешанного метода
и метода сил совпадают, вектор р, имея нулевой порядок, вырождается.
135
матрица А^"' и вектор г\^ соответствуют Д, т? в уравнениях C.1.3),
т.е. C.1.8) переходит в C.1.3). При пФО система C.1.8) преобразуется
к виду C.1.7), если исключить из C.1.8) вектор Хи пренебречь формами
колебаний с номерами / > п.
При вычислении внутренних усилий в защищаемой конструкции
влияние высших форм колебаний оказьюается более существенным, чем при
определении прогибов, и, естественно, большим, чем в отсутствие
гасителей. Увеличение числа учитываемых форм колебаний повышает
трудоемкость расчета, поэтому для улучшения сходимости ряда C.1.4) (при
coj Ф 0) целесообразно выделить статические составляющие. При
использовании метода сил формулы C.1.5) примут вид
Л ACJ A = VsjVlj iff ~ VsjQj
u + iv / * i Фу u + iv j = i Ф/
где (Xj - (р2 -iph)/[co2(u + iv)] — множитель, обеспечивающий более
быструю сходимость членов ряда; А^т, rg* - единичные и грузовые
перемещения при статическом приложении соответствующих сил. При
использовании смешанного метода следует положить
^ = ? + /т/(и+/ы), <рст =Sl-2(Q+F'X), Й« [V/Jf.
Здесь (р — вектор измененных обобщенных координат; <рст — вектор
обобщенных координат при статическом действии внешней нагрузки и
реакций гасителей. Так как
w+/u s /=i ол2(и + iu) ' w+/i> s /= 1 uj(u + iv)
то уравнения C.1.8) записываются в виде
[л ст Т ст
н~\р)- Ив—— •
w + iv J w + iv
Диагональная матрица а = [Ч*уJ f, элементы которой с возрастанием /
быстро уменьшаются, при со;- >р приводит к более высокой скорости
убывания компонент вектора !р по сравнению с компонентами
вектора </?, поэтому число п учитываемых форм колебаний можно уменьшить.
После решения уравнений определяются усилия (или перемещения) в
произвольном сечении
п к
Т* 2 Т,у + [ Т" + 2 7?т Х,\ /(и + to), C.1.9)
/ = 1 * 5=1
где Г/, Г", 7^т — значения Г, соответствующие /-Й форме колебаний,
статическому действию внешней нагрузки и единичной силы в точке s.
Изложенный прием особенно целесообразно применять при вычислении
усилий в местах приложения сравнительно сосредоточенных воздействий,
так как статическая компонента составляет значительную часть усилия,
в частности в межрезонансных зонах. Это обстоятельство, однако, не должно
служить основанием для пренебрежения динамическими составляющими
в C.1.9) при вычислении усилий даже в непосредственной близости от
136
сосредоточенных воздействий, как иногда рекомендуют делать при расчете
оболочек.
Описанные методы позволяют для континуальной системы с
присоединенными локальными гасителями, демпферами или связями с зависящими
от частоты коэффициентами свести задачу к решению конечного числа
уравнений. Если защищаемая конструкция представляет собой
континуальную систему с распределенным по длине "непропорциональным" трением
или составлена из таких подсистем, то, используя в качестве координатных
функций формы колебаний недемпфированной системы и метод Бубнова—
Галеркина, можно получить конечномерную модель и применить
алгоритмы, приведенные в § 3.11.
Остановимся на некоторых возможных упрощениях. В частном случае,
когда на системе с распределенной массой, имеющей разреженный спектр
частот, установлен один ДГК и внешнее воздействие является
узкополосным, можно ограничиться учетом лишь одной формы колебаний
защищаемой системы, т.е. перейти к приведенной системе с одной степенью
свободы, определяя ее параметры по формулам, содержащимся во введении
к гл. 1. Нетрудно убедиться, что при п- 1, A(w* =0, 1?^* =0 уравнения
смешанного метода C.1.8) соответствуют использованным в гл. 1
уравнениям для двухмассовой расчетной схемы системы с гасителем. Поэтому
приведенные в гл. 1 результаты оптимизации параметров и оценки
эффективности гасителей можно применять в качестве первого приближения
в задачах, где требуется учет влияния других форм колебаний. Снижение
эффективности гасителя для системы с распределенной массой по
сравнению с приведенной системой с одной степенью свободы можно
приближенно оценить, если при вычислении критерия качества добавку от
неучитываемых высоких форм колебаний оценивать при р = 0, т.е. как для
статически приложенной нагрузки. При разреженном спектре
собственных частот защищаемой системы параметры гасителей, настроенных на
разные частоты, как правило, можно определять независимо друг от
Друга.
§ 3.2. Продольные колебания стержней постоянного сечения
Рассматриваемые задачи относятся к числу наиболее простых задач о
колебаниях континуальных систем с гасителями. В конце параграфа показано,
что все результаты непосредственно, без каких-либо изменений переносятся
на задачи о крутильных и сдвиговых колебаниях стержней постоянного
сечения, а также на задачи о колебаниях гибкой нити с гасителями.
Функция и(х, t), описывающая продольные перемещения стержня,
удовлетворяет дифференциальному уравнению
д2и д2и
где Е — модуль упругости, F — площадь поперечного сечения стержня,
m = pF — погонная масса, р — плотность, q(x, t) — внешняя продольная
нагрузка.
При нагрузке q(x, t) =Q(x) е1р*т задача о вынужденных колебаниях
имеет решение и(х, t) = U(x) е1р°*¦; при этом функция U(x) находится
137
из уравнения
d2U „ 1 r
dx EF
Введем безразмерную переменную ? =\х и положим, что р0 не
совпадает ни с одной из частот со;- свободных колебаний. Формы и частоты
свободных колебаний стержня определяются выражениями
Uj (х) = A sin(kjx) + В cos(Xyx), о?;- = Xj-y/E/p;
при этом константы А, В и характеристические числа Х7 находятся из
условий на концах стержня. Для стержня со свободным левым концом
А = 0. При упругом закреплении правого конца x = L, согласно условию
dU/dx + blI=Q9 имеем трансцендентное уравнение tg(XyZ,) =b/\j, из
которого находятся \j. Спектр частот однопролетного'стержня разреженный,
так, при свободных концах Х;- =jtt/L ,/ = 1,2,...
Решение задачи о вынужденных колебаниях стержня, на который, кроме
нагрузки Q(x) eip°f, действует к сосредоточенных продольных ош\Ще1Р(>г,
имеет вид
U(}) • U0 Г, @, D + -^ Y2 @, 0 + i 2 Nf Y2 (a,, 0 +
ЬгЛ hr Xf=l
+ 4 /<2(а)Г2(а,?)<*а, C.2.1)
Ро о
где 7i(?/> 0=со8(г-а;) !(*-*/), Г2(а;-, t)=sin(?-a/) l^-a,),
Л^о — нормальная сила на левом конце стержня, U0 = ?/@), a;- = X'jfc -
приведенное расстояние силы Nf от левого конца стержня, 1(* — а/) —
единичная функция Хевисайда.
Заметим, что в последующих трех параграфах используется аналогичная
форма записи решения задачи о вынужденных колебаниях стержня, причем
функции Yj являются функциями Коши или же функциями метода
начальных параметров соответствующих дифференциальных уравнений.
Если в точках ? = а7- вместо сил AJ находятся присоединенные
сосредоточенные массы Mj, то можно использовать выражение C.2.1) при Nf =
=MjPoU(ctj). Для решения задачи в этом случае необходимо
последовательно ¦, начиная с/ =1, цыразить перемещения U(aj) через начальные
параметры U0 hN0, один из которых всегда известен или определяется через
другой. Неизвестный начальный параметр находится из граничного условия
на правом конце стержня. Этот хорошо известный способ используется
и в случае, когда сосредоточенная масса присоединяется с помощью
линейной упругой или не вполне упругой связи, обладающей вязким или
частотно-независимым трением, т.е. если в сечении ? = а;- стержня установлен
линейный ДГК. Реакция гасителя определяется согласно C.1.1). Так,
например, для стержня с двумя гасителями (рис. 3.1), обозначая а;- =\Lj
(/ = 1,3), получаем, согласно выражению C.2.1), перемещение
U($)=U0 cosfc + -— tf^cosa! sin(?-(*!)!(?-(*!) +
I EFX
138
НЛР)
EFX
1
cosa2 + Hi(p) cosa!sin(a2 — ol\) sin(? - a2)l(? -a2) \ +
EFX
-«i)]>
Л^о f 1
+ sin$ + #1 (p) sine*! sin(? - a, I (?-«!> + C.2.2)
EFX \ EFX
н2(р) Г i 1 ]
+ sina2 + Hi(P) sina:1sin(Q:2 -— oci) sin(? -a2)l(t — a2) ?,
ZTFX L FFX J j
где #i(p), H2(p) определяются по формуле C.1.1) для обоих гасителей.
Начальный параметр U0 находится из граничного условия на правом конце.
t-1
vw^#
ch
^
WW*
_Aj
*ч
P и с. 3.1. Стержень с двумя ДГК
Например, при закрепленном конце U(L) = 0, следовательно,
^о ( Г
U0 =— \EFXsina3 +Hx(p) sinc^sin^ — oti) + H2(p)\sma2
EFXI ¦ |
+ ffi(p) sina!sin(a2 -ai) sin(a3 -a2)\f\EFXcosa3 +
+ #! (p) cos»! sin(a3 — at) +
sin(a3-a2)|.
#2(P)[
cosa2 + Hi(p) cosaxsin^ — c^)
EFX
При учете частотно-независимого трения для стержня модуль упругости
задается комплексным, поэтому и X будет комплексным.
Если воспользоваться методом сил, приняв за неизвестные амплитуды
реакций гасителей Xl9 X2i то входящие в уравнения C.1.3) элементы
матрицы единичных перемещении А =
Vi
перемещений ?? =
L*?2
52i 5
22 А
и вектора грузовых
легко определяются с помощью метода
начальных параметров. Окончательные выражения имеют вид
«//=
sin(a7- -a3) cosctj
EFX cosa3 J EFX
sin(a2 — a3) cosa^
sina,-
4=*—: G=1,2);
5l2-521
^FXcosa3
Диагональные элементы матрицы #(/?) находятся согласно C.1.1).
Решение системы из двух уравнений позволяет определить неизвестные
реакции гасителей, после чего вычисляются перемещения и усилия в
произвольной точке стержня.
139
Результаты исследования эффективности гашения продольных
колебаний стержня со свободными концами при установке двух гасителей, на-,
строенных на первую и вторую частоту колебаний стержня, приведены
в [245].
Кратко рассмотрим три другие, важные для практических применений
задачи, которые решаются аналогично.
Крутильные колебания стержня описываются дифференциальным
уравнением
Э2^ Э2^
где ^ - угол закручивания. G - модуль сдвига, GI* - крутильная
жесткость, р — плотность, 1р — полярный момент инерции поперечного сечения,
q(x, t) — интенсивность распределенных по длине стержня внешних
крутящих моментов. Если поперечное сечение стержня — круг или круговое
кольцо, то 1р = 1*.
Рассмотрение крутильных колебаний стержня с кусочногпостоянной
жесткостью представляет интерес, в частности, для башенных
сооружений, искривление оси которых, вызванное действием температуры и
статической составляющей ветрового давления, является причиной
возникновения динамических крутящих моментов. Для гашения крутильных
колебаний применяются гасители в виде цилиндрических тел,
присоединенных упруговязкими связями к стержню. Эти гасители передают на
стержень крутящие моменты. В процессе рассмотрения динамики гасителя
здесь взамен массы нужно ввести момент инерции массы гасителя
относительно оси вращения, квазиупругий коэффициент определяется реакцией
при повороте массы гасителя на единичный угол.
Задача о малых колебаниях гибкой нерастяжимой нити постоянного
поперечного сечения сводится к интегрированию дифференциального
уравнения
Ъ2и Ъ2и
где и — перемещение в направлении, перпендикулярном к недеформиро-
ванной оси нити, Т — натяжение, m — погонная масса нити. Очевидно, что
и в этом случае полностью сохраняется схема проведения вычислений,
описанная выше.
Дифференциальное уравнение сдвиговых колебаний стержня имеет вид
Ъ2и д2и
kGF— -m — --4(v,f),
Ъх2 bt2
где kGF — сдвиговая жесткость, m — погонная масса стержня. К такому
уравнению сводится рассмотрение колебаний безраскосной фермы,
если в результате размазывания перейти от дискретной модели к
континуальной, что часто используется при расчете каркасных
многоэтажных зданий.
140
§ 3.3. Продольные колебания стержней переменного сечения
Здесь рассматриваются задачи о продольных колебаниях, стержней
переменного сечения, к которым присоединены линейные ДГК. Как и в
предыдущем параграфе, результаты в равной мере относятся к задачам о
крутильных и. сдвиговых колебаниях стержней переменного сечения и
колебаниях гибкой нити, имеющей переменную плотность. При
рассмотренных законах изменения жесткости и массы решения получаются в
бесселевых или родственных им функциях и в отдельных случаях в
элементарных функциях. Сравнительная простота математического аппарата,
а также наличие подробных таблиц и программ для вычисления этих
функций позволяют не только легко находить численные результаты, но и
проводить их качественный анализ.
Рассматриваются в основном однопролетные стержни, однако
излагаемый подход, основанный на использовании метода начальных параметров,
пригоден и для многопролетных стержней.
Сохраняя такие же обозначения, как в § 3.2, запишем
дифференциальное уравнение продольных колебаний стержня:
д
дх
Ъи I Ъ2и
EF(x) — -m(x)— = -q(x,t).
дх J ot
При гармонических воздействиях q(х, г) = Q(x) eip°f полагаем X2 = ppl/E,
и(х, t) = U(x) егр°*, где U(x) удовлетворяет уравнению
d2U 1 dF(x) dU 9 Q(x)
— + — — + Х2?/=- -=^ . (З.ЗЛ)
dx2 Fix) dx dx EF(x)
Допущение т(х) - pF(x) привело к тому, что в дифференциальном
уравнении переменным является лишь коэффициент при dU/dx. При
исследовании свободных колебаний Q(x) - 0 и X2 = рсо2/Е, где со— частота.
Если F(x) =F0xk, то с учетом ? =Хх получаем
d2U к dU ,
—- + +/7=0. C.3-2)
d? 6 d$ V
В частном случае к = 1 имеем уравнение Бееселя, его решение
U = AJoQ0+BYo(J0. C.3.3)
Остановимся на этом простом случае. При закреплении концов стержня
(х = а,х = Ь) будет U(ka) =U(Xb) =0,откуда
где ?" =\а, к =Ь/а. Например, при к = 5 первые четыре корня этого
уравнения равны f 1 = 0,7632, f 2 = 1,5571, f3 = 2,3464, f4 = 3,9208, собственные
частоты iOj » f j/(ау/р/Е), форма колебаний определяется выражением
C.3.3) при В/А = — /o(f/)/^o(f/) • ДДЯ ее нормировки с весом ? из условия
/ W](ti)d!>=l (/=1,2,...)
141
следует воспользоваться выражениями для интегралов Ломмеля
что позволяет найти константу А.
Так как определение частот и форм свободных колебаний защищаемой
системы является необходимым предварительным этапом для решения
задачи о гашении колебаний, рассмотрим этот вопрос и для других, более
общих законов изменения F (jc) .. При к Ф 1 C.3.2) не является уравнением
Бесселя, но первым преобразованием Ломмеля оно приводится к
уравнению Бесселя, которое имеет решение
2 2
Если к = 2 (конический стержень), то решение можно записать в виде
U=r1/2[AJl/2($)+BJ_l/2($)],
поскольку индекс является нецелым.
Так как «Л/г(I) = уЩрЩ sin?, IT^%0^mw2/^ff) cos?, то
t/=r1(^sin?+5cosf).
Рассмотрим несколько более общий случай: F(x) = F0xk, т(х) =m0xkl,
т.е. откажемся от предположения, что т(х) =pF(x). Обозначая ? =\х,
\ = co\/m0l(EF0), v=kx —к + 2, записываем уравнение свободных
колебаний и его решение
d2U к dU . ,
—- + +?*!-* ?/=0;
d? t *l
u-t 2 [AJi^(^vl2)+BYi^(-v tv'2)}
V
При F'(jc) =F0ekx вместо C.3.2) будем иметь уравнение с постоянными
коэффициентами
d2U dU ,
—- +к — + Х2*У=0, C.3.5)
dx2 dx
решение которого
к Пг
$1,2 = -- ±v —
U = Aes*x + Bes*x,
" 2 ' 4
В случае F(x) =F0, m(x) = m0ek»* уравнение
dx2 EF{
+ —7 eK*xU=0
о
с помощью второго преобразования Ломмеля также сводится к уравнению
142
Бесселя, и его решение имеет вид
U = AJ0(ye 2 )+BY0(ye 2 ), у = - у/ -f . C.3.6)
i3i EF0
В более общем случае F (x) = F0ekx, m(x) =т0ек^х получаем
дифференциальное уравнение и решение
^ +к — + \V*.-*>*?/= О,
dx dx
U=e
кх
2
Л/к/2(^ е"*)+ЯУЛ/2(^ eK*)j, k=^~
Для решения методом начальных параметров задачи о вынужденных
колебаниях стержня переменного сечения целесообразно предварительно
найти функции КDши рассмотренных однородных дифференциальных
уравнений. Функции Коши уравнения Бесселя с нулевым индексом имеют
вид
па
Гг(аЛ)= ~ [Г;(«)/в(9-/;(о)Гоф], ?><*,
2
яа
Y2(a,i)=— [J0(<x)Y0($)-Y0(a)J0$)], $>a,
Г1(а,?)=У2(а,?)=0, ?<а.
В более сложных случаях, когда однородное уравнение имеет решение
?/A0 = Ф (iO { A J„ №)] +BYV \<р$)] ),
функции Коши определяются выражениями
= я^(а)^F) (Пк(а)]7 r (f)] i/^^j r f (f)] } _
2Ф(а)
- -ff Г,(а,*), *>a,
7r^(a) i//(?)
2<р(сс)Ф(а)
Г1(аД)=Г2(аД) = 0, f<0.
В этих формулах штрих означает дифференцирование по соответствующему
аргументу: ф(а) для бесселевых функций Yv [^(а)], Jv [<p(a)] I a ДОЯ
функций <p(a), i//(°0- Согласно рекуррентным формулам
дифференцирования бесселевых функций производная
v
и аналогично для функции Yv [<р (a)].
143
В частности, если решение однородного уравнения выражается формулой
~~- 1~*
C.3.4), то i//(?) = ? 2 ,</>(?) = ?> ^ - —5— i и функции Коши
принимают вид
1 + к 1 - к
2 t 2
I 2 2 2 2 J
1 -Jfc
2a
l + fc \-k
1 t 1
I 2 2 2 2 J
При решении C.3.6) однородного уравнения, переходя к переменным х
и я, имеем v = 0, \//(я) = 1, <р(х) = 7^ 2 , далее получаем
функции Коши
Yi(a,x) = Z^ \-Yl[re~~'r)j0\ye~ ^~) +
+ /i(t^ ~2l~)r0(Te~ ^")), x>af '
+ /0G*^)^0G*^ /J, х > а,
l^fex) " 1а(**) " °> х < а.
Приведенные выражения функций Коши можно использовать в тех случаях,
когда однородное дифференциальное уравнение свободных колебаний
приводится к уравнению Бесселя с помощью преобразования Ломмеля.
В более простом случае уравнения с постоянными коэффициентами C.3.5)
результаты будут аналогичны использованным в § 3.2.
Рассмотрим вынужденные колебания стержня. В тех случаях, когда на
стержень действуют только сосредоточенные силы NjeiPot, направленные
144
решение можно записать,
используя метод начальных параметров. Если в функциях Коши
аргументом является ? = Ах, то общее решение имеет почти такой же вид, как и
для стержня постоянного сечения C.2.1), т.е.
f/(E>"tr|Tik. ?) + Т^Г^(«о, ?) + -?- .2 -^Г2{*,9Ц C.3.7)
где Fy — площадь поперечного сечения стержня при % = а,-; ?/0, Л^ —
перемещение и нормальная сила в левом конце стержня (? = *а0) .
.Если на стержень действует распределенная нагрузка q(x, t) -Q{x)eiPo
и т(х) = pF(x), то необходимо рассмотреть неоднородное уравнение
C.3.1). При степенных законах изменения площади поперечного сечения
это уравнение приводится к неоднородному уравнению Бесселя со
степенной правой частью, и его частное решение при степенной зависимости Q{x)
выражается через функции Ломмеля одной переменной sptv(x) ияи
?д v(x)* При этом, очевидно, необходимо провести преобразование правой
части; примеры подобных преобразований можно найти, например, в [87].
Если правая часть есть произведение степенной и показательной
функций, то в отдельных случаях частное решение доставляется неполными
цилиндрическими функциями. В более общем случае, когда Q (х)
представляет произведение степенной и цилиндрической функций, частное решение
выражается через Г-функции [89].
Рассмотрим задачу о колебаниях стержня переменного сечения с
гасителями, вызванных действием сосредоточенных продольных сил и
распределенной нагрузки, изменяющихся по гармоническому закону. Ее решение
отличается от C.3.7) наличием слагаемых, учитывающих влияние
распределенной нагрузки и реакций гасителей, оно имеет вид
hr0k hh г Pj
+ UQ>) - U(a0)Y1(a0, |) - U,(a0)Y2(a0> ?) +
где U(%) — частное решение при действии только распределенной
нагрузки Q(x)\ Hj (p) — комплексная жесткость (см. формулу C.1.1)) для
гасителя, положение которого определяется безразмерной координатой /Зу;
кх — число гасителей. В процессе вычислений последовательно находятся
перемещения Uj (|3/ ) в точках установки гасителей; целесообразно
определять их от всех заданных сил, распределенной нагрузки, известного
начального параметра и отдельно при единичном значении неизвестного
начального параметра (как, например, в выражении C.2.2)). Это позволяет,
используя граничное условие на другом конце стержня, составить уравнение для
10. Б.Г.Коренев 145
определения неизвестного начального параметра и, решив его, получить
окончательные выражения для перемещений и усилий стержня.
Метод начальных параметров может быть применен в сочетании с
методами, описанными в § 3.1. Последовательность расчета при этом мало
отличается от изложенной для стержня постоянного сечения ( § 3.2).
Изменяются лишь формулы, с помощью которых вычисляются коэффициенты
канонических уравнений.
В тех случаях, когда внешняя нагрузка имеет частоту, заметно
отличающуюся от наиболее близких к ней частот собственных колебаний, и при
малой ее нестабильности эффективность гашения колебаний определяется
без учета влияния диссипатйвных сил в стержне и гасителях. Если для целей
приближенного расчета рассматривается эквивалентная динамическая
одномассовая модель защищаемой конструкции, то для определения
приведенной массы и жесткости могут быть использованы полученные формулы.
Они дают возможность найти также частоты и формы свободных колебаний
стержня с гасителями.
§ 3.4. Изгибные, колебания стержней постоянного сечения
Вопрос о расчете стержней постоянного сечения, оборудованных ДГК,
обсуждался в монографии [4], где для шарнирно опертого стержня с
установленным в среднем сечении гасителем получено решение в рядах.
Несколько более сложная задача изучалась в [264], где был рассмотрен
консольный стержень с двумя гасителями, один из которых расположен
в конце стержня, другой — в его середине. Первый гаситель был настроен
на частоту основного тона колебаний стержня, второй — на частоту
второго тона.
Как и в двух предшествующих параграфах, здесь применяется метод
начальных параметров, который позволяет получить решение при любых
граничных условиях, при наличии промежуточных опор или
присоединенных точечных масс и ДГК. В качестве примера рассмотрены результаты
расчета мачты с гасителями.
Следует отметить, что в гл. 4 рассмотрены отдельные задачи, решения
которых основаны на использовании теории изгибных колебаний стержней
постоянного сечения. В § 4.1 \ обсуждаются вопросы расчета
трубопроводов как неразрезных стержней постоянного сечения. В § 4.5,4.6,
посвященных виброзащите телебашен и дымовых труб, излагаются результаты,
полученные для расчетной схемы в виде консольного стержня со
ступенчатым изменением жесткости.
Дифференциальное уравнение вынужденных колебаний стержня
EI—т + т—- = Q(x)eipo*
Эх4 Эг2 v '
после замены w = W(x)eipof приводится к виду
dAW
El—^-mplW* Q(x).
dx*
146
Соответствующее однородное уравнение имеет решение
4
w = Wo^1 (*) + -? ^@+-^ггуз@+=^ г4«) +
И/= 2 Л/Г/®, $ = Х*. \ = у/трЦ(Е1\
выраженное через функции А.Н. Крылова
Чз® = й (ch 5 ± cos Й. Г2,4«) ¦ Уг (sh J ± sin О, { > 0;
ГДЙ = 0, J < 0.
Функции А.Н.Крылова удовлетворяют условиям Коши: при ? = 0 эти
функции и три их производные образуют единичную матрицу, т.е. Y1 @) = 1
при i - j — 1, Y. @) = 0 при i Фу — 1, где i — порядок производной.
Если действующая на стержень поперечная нагрузка Q(x) представляет
собой к сосредоточенных сил Qj , приложенных в точках Xj = Х;/Х, то
решение задачи о вынужденных колебаниях стержня можно записать в виде
— ^2@ + —V^3«)+ —*
X V " EI\2 ' EIX3
tix /=1
где И^о, <Po» ^o, Go — начальные параметры: амплитуды прогиба, угла
поворота, изгибающего момента и поперечной силы при ? = 0.
Амплитуды реакций гасителей выражаются через неизвестные
амплитуды прогибов точек их установки согласно C.1.1), Они вводятся под знак
суммы в выражение C.4.1) и находятся, например, методом сил, как
описано в § 3.1, или непосредственно методом начальных параметров.
Рассмотрим более подробно эту схему вычислений.
Обычно из граничных условий при ? = 0 сразу определяются (или, в
случае упругого закрепления, выражаются через другие) два начальных
параметра и, таким образом, в C.4.1) входят два неизвестных параметра.
Последовательно рассматривая все участки стержня, начиная с левого
конца, и находя амплитуды прогибов в точках установки гасителей от внешней
нагрузки, известных начальных параметров и отдельно от каждого из двух
неизвестных начальных параметров, получаем .из граничных условий на
правом конце стержня два уравнения, из которых находим неизвестные
параметры.
При практических расчетах можно использовать соотношения
между функциями и их производными порядка /: К (?) = Y- _ Д?) при
/"-У >i, r/@ = >V/-/«) при/</.
Приведем простой иллюстративный пример. Положим, что консольный
стержень заделан при ? = 0, а на его конце (? = / ) приложена
сосредоточенная сила Qeip°f. В сечении ? = а находится гаситель колебаний, реакция
которого, согласно C.1.1), зависит от комплексной жесткости Н(р).
10* 147
В рассматриваемом случае W0 = <?0 = 0> поэтому
1
М0 Go
EIX2
EIX'
*4«) +
Г М0
L ?7А
EIX3 L ?7Х
2 Уз(« +
go
?/Х3
П@)
Я(р)У4«-«.
d2W
,<ги/
Из граничных условий на свободном конце: —— = О, EIX3—- = Q при
? = /, получаем два линейных алгебраических уравнения и
определяем М0, <20-
Перейдем к вопросу о виброзашите мачты, который при определенных
допущениях полностью основан на решении задачи о колебаниях стержня
с гасителем и линейно-упругими дополнительными опорами.
При динамическом расчете мачт обычно не учитывается влияние масс
оттяжек и действующих на последние аэродинамических сил.
Рассматривая режим ветрового резонанса, будем полагать, что при
каждой критической скорости ветра, определяемой совпадением частоты
срыва вихрей с собственной частотой мачты, происходят гармонические
колебания сооружения поперек ветрового потока. Действующая нагрузка
соответствует силам инерции для резонирующей формы колебаний, т.е.
формы вынужденных и собственных колебаний мачты с гасителями
принимаются одинаковыми. Таким образом, необходимой частью расчета
является определение частот и форм свободных колебаний мачты с
гасителями. Для этой Цели можно сохранить описанную выше схему,
основанную на применении метода начальных параметров. Приведем некоторые
WWT"| v IAV/Г] у кЛЛЛ/П
v—rwvvv| | [ v-|vvwv|
i—kww|
1 44
v-клллл!
6\tb
Рис. 3.2. Расчетные схемы мачт
сДГК
результаты исследования [96] эффективности гашения колебаний мачт
при ветровом резонансе.
Так как при резонансе амплитуды колебаний обратно
пропорциональны декременту колебаний, то задача минимизации перемещений сводится
к минимизации критерия тахA/Э;), где Э;- — декремент собственных
колебаний с частотой coy из диапазона, верхняя граница которого
определяется максимальной скоростью ветра. Гасители, оптимизированные из
условий уменьшения максимальных усилий и перемещений, могут иметь
различные параметры, особенно в случаях, когда резонансные явления
возможны для двух-трех собственных частот мачты. Связано это с тем,
148
ft
^
\ <*>
**~~~
J—-J
1 Г
*r
7
5
3
1
X
V
X
*X*——- X—
- — — ¦""
——X——
-X X"
^ 1 , . .
N
v \ » .
\ ч ? \
\ N
\ x
—V sL ¦
—и*г"т*^ F "^"""-l
2 ъ 4 & \$cj o>6 0,65 Oj ojfr sr
Рис. 3.3. Результаты расчета мачты с шарнирно опертым нижним концом при ех =0,7
Рис. 3.4. Влияние положения упругой опоры на результаты расчета мачты с шарнирно
опертым нижним концом при сг -1000
что отношения максимальных усилий к максимальным перемещениям
различаются для разных форм колебаний.
Рассмотренные схемы мачт с ДГК на верхнем конце показаны на
рис. 3.2. Во всех случаях EI, I — изгибная жесткость и длина ствола; с0\,
с02 — квазиупругие коэффициенты для элементов, моделирующих
оттяжки; 6i, 62 — относительные длины участков; v* =0,015 — отношение масс
гасителя и мачты; Э;- =0,05 — декременты собственных колебаний мачты
без гасителя, одинаковые для всех частот; сх =с0х /3/ (Е1),с2 =с02 1Ъ/ft?/) —
безразмерные параметры жесткости опор.
Эффективность гашения колебаний оценивается отношением Кг
критериев качества мачты без гасителя и с гасителем. Далее на рисунках
результаты, соответствующие оптимизации параметров гасителя из условия
минимума максимальных перемещений, показаны сплошными линиями,
из условия минимума наибольших изгибающих моментов -штриховыми;
коэффициенты уменьшения перемещений (изгибающих моментов) при
выборе оптимальных параметров по другому критерию показаны
штриховыми (сплошными) линиями с крестиками.
В случае, когда ветровой резонанс возможен для двух низших частот
колебаний мачты (рис. 3.2,а), зависимости оптимальных параметров
гасителя с вязким трением, отнесенных к низшей собственной частоте соi
мачты без гасителя, и коэффициента эффективности гасителя от жесткости
упругой опоры показаны на рис. 3.3. При значениях с\ = 100; 1000; 106
вторая собственная частота со2 мачты превышала coi в 1,39; 1,84; 2,27
раза. Вследствие расширения диапазона частот, в котором гаситель должен
149
0,8
0,7
47
^-- ~ I
~~^Ц=^=^\
*T
17
15
13
/?
r
^x^ ! !
?0"
«*
Рис. З.5. Влияние положения упругой опоры
на результаты расчета мачты с жестко
защемленным нижним концом при с, = 1000
быть эффективным, при увеличении ct
заметно повышался оптимальный
коэффициент вязкого трения гасителя \х.
При оптимизации гасителя по критерию
максимальных перемещений
существенно уменьшались и изгибающие
моменты.
Для той же расчетной схемы при
С\ = 1000 зависимости оптимальных
параметров и коэффициента
эффективности ДГК от е i показаны на рис. 3.4.
Уменьшение эффекта гашения при ех * 0,6 объясняется тем, что узел второй
формы собственных колебаний мачты приближается к точке подвеса
гасителя: в подобных случаях следует изменить точку подвеса гасителя
или установить два гасителя в разных уровнях. Отметим, что отношение
co2/^i при 6j=0,6; 0,7; 0,8 равно соответственно 2,66; 1,84; 2,61.
Если ветровой резонанс возможен лишь для опдой низшей собственной
частоты колебаний мачты, оптимизация по разным критериям качества
приводит к достаточно близким результатам. В качестве иллюстрации на
рис. 3.5 приведены результаты для мачты (рис. 3.2,6). Некоторые отличия
в коэффициентах эффективности ДГК при двух вариантах оптимизации
объясняются возникновением в системе с гасителем двух близких к coi
собственных частот и соответствующих форм колебаний с разными
отношениями максимального изгибающего момента к максимальному
перемещению. В данном случае ДГК более эффективен, чем в рассмотренных
выше, поскольку исключена возможность возникновения ветрового резо-.
нанса для второй собственной; частоты мачты без гасителя. Примерно
такая же эффективность у гасителя с внутренним неупругим
сопротивлением, однако далеко не всегда удается реализовать требуемое
демпфирование гасителя. Так, при ех =0,4, С\ = 1000, v* =0,015, /2 =0,95 можно
было бы уменьшить амплитуды перемещений мачты при ветровом
резонансе в 16, изгибающих моментов в 15 раз, но для этого необходимо
обеспечить коэффициент неупругого сопротивления гасителя у = 0,51.
Для мачты с двумя ярусами оттяжек гаситель может быть даже более
эффективным, чем при одном ярусе. Например, для схемы (рис. 3.2,в)
при €i =62 =0,4, Ci =2c2 =1000 и параметрах гасителя /2 =0,79, д =
= 0,53 максимальные перемещения и изгибающие моменты уменьшаются
примерно в 20 раз в случае, если ветровой резонанс возможен в
окрестности низшей собственной частоты соу мачты.
Во всех рассмотренных случаях, когда допускалась возможность
ветрового резонанса лишь по низшей частоте мачты, оптимальные параметры
и эффективность ДГК оказывались весьма близкими к тем, которые
получены в § 1.8 для защищаемой системы с одной степенью свободы из
условия максимального повышения декрементов колебаний.
150
§ 3.5, Изгибные колебания стержней переменного сечения
Рассматриваемая задача имеет большое практическое значение, ее решению
посвяшено много работ, среди которых видное место занимают
исследования, основанные на использовании аналитических методов. В этом
параграфе вначале приведены решения однородных дифференциальных
уравнений колебаний стержня, после этого строятся разрывные решения, которые
непосредственно используются для учета влияния гасителей колебаний и
других сосредоточенных включений, далее обсуждаются способы решения
задачи о вынужденных колебаниях стержня, оборудованного
гасителями.
При гармонических воздействиях дифференциальное уравнение изгиб-
ных колебаний стержня переменного сечения
э2 / a2w \ a2w
/ б W \ и w iD t
\EIx 1^)+ш*^-=«*е
Эх2 V * дх2 ! л Ъг
после замены w(x, t) = Wep° приводится к виду
d2W
dx2
[EIx-j-r)-mxplW = qx, C.5.1)
где EIXi тх — жесткость и погонная масса стержня; qx — амплитуда
распределенной нагрузки.
Как отмечено в [87], однородное уравнение, соответствующее C.5.1),
можно преобразовать к системе двух уравнений
d , dW
— (у/^~Щ — )±mxPoW=0, C.5.2)
dx dx
если
— yjwx EIX = cmx i C.5.3)
dx
или
mxEIx**ct
где с - постоянная.
Особенно большой интерес представляет закон изменения жесткости
и массы
EIx=EIxxp+\ mx=mlxv, C.5.4)
удовлетворяющий соотношению C.5.3) и приводящий к решению в
бесселевых функциях. Он детально рассматривался А.Н. Динником [61];
частные случаи этого закона изучались в работах Кирхгоффа (у = 2) и Моно-
нобе (v = 1). В литературе упоминаются зависимости
Е1Х -Е1ххп, тх = тхх~п,
Е1Х = Е1ххп, тх = тххп~**,
EIx=EIxxn, mx=mlx3n-sy
также приводящие к решениям в бесселевых функциях.
151
При более обшем степенном законе
EIX -Elxxn, mx=mixni
решение выражается через гипергеометрические функции 0F3 (— \Ь\%
Ъ2 э Ьъ; х), оно рассматривалось в [32, 238].
Следуя схеме выкладок, изложенной в [86], можно в случаях, когда
C.5.1) сводится к системе двух уравнений Бесселя, выразить
фундаментальные функции метода начальных параметров через цилиндрические
функции. Остановимся на получении этих функций при изменении
жесткости и погонной массы стержня по закону А.Н. Динника C.5.4). Отсчитывая
расстояния х от воображаемой вершины стержня, обозначаем в сечении
x = R жесткость EIR = EIXRV*2 и погонную массу mR =mtRv.Далее,
используя C.5.2) и замену переменных
0 = 2?>Д7 u=PpW, b = *y/mRp2QR2l(EIR), C.5.5)
переходим от .уравнения C.5.1) к системе двух неоднородных уравнений
Бесселя
Дм1>2)±И1,2агТГ00/2, C.5.6)
где
d2 1 d v2
L = —т— + — — - — , Mi +w2 -и,
d($2 0 dP f
W)
RvBbJv / 02
HP Q\4b2 Г
гпкРЬ
верхний знак соответствует иъ нижний - и2 .Амплитуды прогибов W, углов
поворота {р, изгибающих моментов М и поперечных сил О вычисляются
по формулам
dW
dx
d2W
M = EIX -— =(ll4)EIRR-»-2Bb)-2vF+2M0(ul
dx
d ( d2W \
2=-Г\Е1х -ГТ- ) = (№ElRR-v-42b)-2v+2F+lQf>(u)9 C.5.7)
dx ч dx '
W°(u) = u, /(«> = / r— -- )u,
m°(u)=l(u) - 2-~^- Л«), e°(«) = / [Ш] ¦
Для однородного уравнения, соответствующего C.5.1) при
зависимостях C.5.4), общее решение
W = r4ciJvW + c2Yv@) + c3I^) + c4Kvm,
где с1>2,з,4 — константы, часто оказывается удобным представить в иной
форме. Вместо бесселевых функций вводят некоторые их линейные
комбинации, которые при значении ]3=а удовлетворяют сформулированным
152
ниже условиям, обобщающим аналогичные условия для уравнения
четвертого порядка с постоянными коэффициентами. Получаемые функции
уже не являются функциями Коши, и они здесь названы
фундаментальными функциями метода начальных параметров. Заметим, что в § 3.2—3.4
эти функции совпадали с функциями Коши соответствующих
дифференциальных уравнений. Фундаментальные функции метода начальных
параметров ZXyZ2iZ3iZ^, обладающие при |3 = а свойством единичной матри-
dW d
цы относительно W, — , L (W), — L(W), были получены [86] в
d(i dp
вида
4 1 я L • i .
па ( 2 г
Z2,4(M) = — ±Ы«) YV(P)X Yv(a)Jv(P) -— \ШКр(Р) -
4 v i П 1
-КДа)/^)]}, $>а, C5-8)
Z7(a,0) = O, 0<a.
Подобные функции были введены ранее в задачах о колебаниях
круглой пластинки [86]. Для стержней, переменного сечения целесообразно
определить функции Хх, Х2, Хъ, X*, образующие при р = а единичную1
матрицу для W°(u)9 у0 (и),М° (u)<,Q° (и). Они связаны с функциями
Zj простыми соотношениями Х4 =Z4,
у _ 2(v± 1) ^
которые вытекают из C.5.7) и из приведенных в [105] формул. Далее
использование рекуррентных зависимостей для цилиндрических функций
позволяет определить
па [
*i ,з(<*>» = — { ±Л+1 («)Тг(Ю * *Vi(a)/r0)+
+ - [/p+1(a)/:i;(©+i:y+1(a)/^)]J, 0>а,
яа f
Х2(а,0) = — -Л,+2(а) Г,(/3)+ ^^(а)/,^)- C.5.9)
4 1
-- [/,+2(a)^(^)-^+2(a)/^)]j, р>а;
эта f
Х4(а, Р) = — { -/„(а) У„08) + Г,<а)/,<Й) -
153
-л
- [/„(а) Киф) -^(<*)/„@)jJ, 0>а,
*Да,0) = О, 0<а.
Функции такого типа несколько иным путем получены в работе [172].
При практическом применении метода начальных параметров полезной
оказывается матрица преобразований операторами W0, ^°,Л/°, Q0
цилиндрических функций и функций C.5.9) :
Оператор
W°(.)
*•(•)
М°(.)
??•(•)
Л
^
-Лн-1
Л>+2
Л>+1
*i>
Г„
-*Vn
*V+2
Yv+1
h
h
Лн-1
Jv+2
Лн-1
Функции
*v
Kv
~Kv+l
Kp+2
~Kv+l
*i
*i
A4
Yv+1
лз*
Z2 .
X2
X2
хГ1
vv+2
A4
<>
*3
*3
^2
„n+1
Л1*
Л4
*V
*4
*3*
-лг2.
X,.
C.5.10)
Здесь при наличии значка * аргументы а и ]3 цилиндрических функций
меняются местами, дополнительный верхний индекс показывает, что им
нужно заменить для данной функции значение v. Так, например,
M°(Xl) = Xv3:1 (a,0):
4
- Yv+l (а)/„+2 (© +Л,+ 1(а) Г„+2 @) +
- k,+i(«)
7Г L
/,+2Ш+/,+ ,(а) @)
]}•
При расчете стержней с гасителями наиболее важнс^е значение имеет
функция X* = Z4, которая входит в выражение прогиба при действии
сосредоточенных сил, в частности реакций гасителей, а также используется при
представлении частного решения неоднородного уравнения в интегральной
форме. Три другие функции необходимы главным образом для
удовлетворения граничным условиям. Отметим, что функция Х4 = Z4 совпадает
с фундаментальной функцией задачи об осесимметричных колебаниях
пластинки постоянной толщины (§ 3.7) .
В отдельных случаях удобно получать функции метода начальных
параметров, используя функции Грина соответствующих однородных
уравнений. При этом Z4 находится как разность ординат правой ветви функции
Грина и аналитического продолжения левой ветви в область /3> а.
Дифференцирование функции Грина по аргументу а дает обобщенную функцию
Грина, которая с механической точки зрения отражает эффект действия
момента, после чего описанный выше прием позволяет сразу определить
функцию Z3.
Заслуживает внимание частный случай закона Динника, при котором v
есть полуцелое число. При этом в решение однородного уравнения входят
154
цилиндрические функции полуцелого индекса, которые выражаются через
элементарные. Так, при у s # имеем
Jl /2 (z) = Я sin z> ^-1 /2 (z) = П c?os z» Л /2 (z) = ^ sh z,
А"!/2(z) = П chz, 12*V — ,
7TZ
и решение однородного уравнения —
W(P) = |3-1 [Ci sin /3 + с2 cos /3 + с3 sh ]3 + c4 ch /3].
В более обшем случае при v = л+ 1А (п — целое число) можно
воспользоваться формулами
/ d \ п ( sin z \
/n+1/2(Z) = "(--^7J (—)•
/ d \ ( cos z \
^+i/2(z) = ^[^+i/2(z)+^-«-i/2(z)] =°(-7^7; v~—J'
/ d \n ( shz ч / d w^-7 \
W%) ( — > '"¦''>«:*(w) (— )¦
Функции метода начальных параметров при v = n + Vi выражаются также
через элементарные. Полученная СР. Букейхановым формула для наиболее
важной в практических приложениях функции
ДГ4(а, C) = Z4(a, 0) = У^{ Ы„ (а) Вп iff) + Яя (а) Ап (/3)] cos(a - © +
4/3 *
+ [Ап(а)Ап(/3) + Яя(а)Впф)] sin(c* - /3) + [-Сп(а)Dn(ft) +
+ Dn (а)Ся (P)] ch(a - /3) + [Ся (а)Ся (/3) + Д, (а)/)я (/3)] sh(a - /3) } , pa
содержит произведения тригонометрических и гиперболических функций
на полиномы
^M(z)=^W,l/2(z)^M(z)=:-^n-l,3/2(zM
Cni,)Mz)--\{-\yn{-l-L-,ryn{l-)\
связанные с полиномами Бесселя yn(z) и полиномами ЛоммеляRmtV (z) .
Приведем выражения для этих полиномов при некоторых значениях п.
п
0
1
2
3
4
5
1
1/z
3
"Т2"
15
105
"F"
945
z5
>*и
-1
6
z
45
z2
420
^"
1
+
15
z
S/t
0
-1
3
z
z2
105 10
- i^ + -r
945 105
"z7" """I2"
Qi
1
-Hz
3
^+1
15 6
~ z1 7"
105 45
+ + 1
z4 z2
945 420
" ~? z5" "
15
z
Dn
0
1
3
z
?«
105 10
~T7- V
925 105
+ + 1
z4 z2
155
В тех случаях, когда индексы v являются дробными, но не полуцелыми,
при вычислениях может оказаться удобной запись обшего решения одно-
родного уравнения, при которой взамен функций Неймана и Макдональда
вводят соответственно функцию Бесселя /_„ (z) и модифицированную
функцию Беселя /_у (z) с отрицательными индексами. Приведем
соответствующее выражение для функции
тта г
Z4 (а, 0) = ЛГ4 (а,0) = : /„(a) /_ fl) - /_ » /,(/?)
4 sin (ия) l
*
При целых значениях v и действительных значениях аргумента для
функций, входящих в формулы C.5.8), C.5.9), имеются подробные таблицы.
С практической точки зрения наиболее важны случаи, когда v =0,1,2.
Значение v = 0 соответствует "идеальному" двутавру с линейно
изменяющейся высотой сечения или двухветвевому стержню, ветви которого
наклонены под некоторым углом и соединены весьма жесткими связями,
воспринимающими поперечную силу; v = 1 — клиновидному стержню или
тонкостенному конусу с постоянной толщиной стенки; v = 2 — коническому
*
стержню или тонкостенному конусу с линейно изменяющейся толщиной
стенки.
Приведем для этих трех случаев данные, позволяющие определять
частоты собственных колебаний консольного стержня, который часто
используют в качестве расчетной схемы башенных сооружений. В предположении,
что на свободном конце стержня Б1Х = 0, частоты собственных колебаний
где R — длина стержня; kj — коэффициенты, зависящие от v\ kii2t3 =
= 2,55; 9,94; 22,27 при v =0; klt2,3 =5,32; 15,21; 30,02 при у = 1; к^з =
= 8,72; 21,15; 38,45 при v = 2. Отсюда видно, что спектр частот сильно
разрежен, это позволяет при расчете башен рассматривать небольшое число
форм свободных колебаний.
Для учета частотно-независимого трения по Е.С. Сорокину [182] при
исследовании вынужденных колебаний стержня вводят комплексный мо-
i
дуль упругости Е = E0(u + iv) прир0 >0, где й, v — константы, зависящие
от коэффициента у неупругого сопротивления. При этом входящие в ре-
шение цилиндрические функции, согласно C.5.5) должны иметь
комплексные аргументы 0 ^0О A - **7/4), а: = а0 A - iy/4). Приближенные формулы
для вычисления цилиндрических функций комплексного аргумента,
полученные в предположении у < 1, даны в приложении.
Общая схема решения задач о вынужденных изгибных колебаниях
стержня переменного сечения повторяет схемы, описанные в § 3.2—3.4.
Поясним порядок решения задач на примере, который отражает наличие
распределенной нагрузки, а также несколько усложненных по сравнению
с рассмотренными в § 3.4 граничных условий.
Предположим, что стержень (.рис. 3.6) с характеристиками C.5.4)
в сечении x = R опирается на основание посредством жесткого штампа,
имеющего массу Мш, момент инерции В, и что жесткость основания при
горизонтальном перемещении и повороте штампа определяется комплекс-
156
ными коэффицие
раметров штампа
•
1 + ic\21 Сг\ + ic221 зависящими [59, 206] от па-
Г* Т А1Л ч т ЛI «"*
(¦
)
новлен ДГК, амплитуда реакци
согласно (ЗЛЛ). Такая задача,
башенных сооружений (см. гл. 4)
которого Хг -Нг(р)
*
частности, возникает
>й Qr и уста-
определяется
вибро защите
Рис. 3.6. Стержень переменного сечения с ДГК *
w
ГТ~1
^
^
^
!'
![
!'
V77777.
При определении формы вынужденных колебаний граничные условия
для стержня имеют вид
EI
d2W
X
dx
2
0,
d
2
dx
EI
dzW
X
dx
2
Hr ( p) W,
or,
x = r
2
EI
dzW
dW
X
dx
2
+
2
dx
(C2l +/C2 2 -#Po)=0,
x = R
d
2
dx
EI
d*W
x . 2
dx
M„r pi W
Ш
R
WR(cu +/ci
2
или после замены переменных C.5.5)
о
Ми(и) = 0,
о
б" (и)
о
y0(u) = DM°(u),
V+1
в* а.
Здесь e-2b\fr\ <x = 2b\jR9 х
Rve
2rv+1
mRpl
D
EIRa
2mRp\R
2R(c2i +ic22
2
О
Bpi)
a(c
11
+ /Ci
2
Ф
m.„ pi)
Ш
C.5.11)
QrR"
2rv+1
2
wrPo
»
Принимая в качестве начальных параметры М^, Q°a при /3 = а, с учетом
C.5.5) и C.5.11) записываем выражение для формы вынужденных коле-
баний
о
w=M° [DX2(ocJ) + X3(ctJ)] +Ql[X4(aJ) + a*1(a,0)] +
а
2v 0
2
+
2
/«
mRp0 а
АЪ
2
x4a,fi)dt.
C.5.12)
Интеграл в C.5.12) в ряде важных случаев сводится к функциям, родст-
157
венным бесселевым. В частности, если q (х) - степенная функция, он
выражается через функции Ломмеля одной переменной. Для этих, хорошо
изученных функций в литературе приводятся формулы, облегчающие
вычисления. Для действительного аргумента имеются многочисленные
таблицы, которые можно использовать и при комплексных значениях
аргумента, появляющихся при учете демпфирования. При полуцелом индексе
цилиндрических функций интегралы от произведений экспоненциальных
и тригонометрических функций выражаются через неполные
гамма-функции. В отдельных случаях интегралы находятся интегрированием по
частям. Так, при нагрузке, распределенной по степенному закону с целым
показателем степени q = q0 (x/R) *, имеем
Со ^Xribfi',,.
Db2R)k i: %i
"Zn^i -H-(Vfc-"+1f^(ff) 2 ,,2 *J ym 'v-i-mCO-
Db2R)K 4 \ l м*« (k - m)\ |"
* 2mk\
-Ш 2 -—-— Г„_, _„(*)-
m=o (л-/и)!1;
2 * 2mfc!
7Г m=o (&-m)!(-?)
2 * 2mfc! y\|0
-~ Г»<® 2 rT ТГ^Г ^-i-m«)| • C.5ЛЗ)
7Г m=o (k-m)\%m )/ la
При равномерно распределенной нагрузке, которая и рассматривается
далее, выражение C.5.13) принимает вид
/з X4(?,0)d? г 1 1 1 1
*/ ? "*#Г7г *v *"* (в,/4 C,5Л4)
Удовлетворяя условиям C.5.10) при/3 = е, с учетом C.5.13) и C.5.10)
получаем
~ ^13^22-^23^12 ^О ^2301 1 -#13021
М? = я , QZ = .
011022-01202 1 011022—01202 1
Здесь
ям=ДХГ>,е) + Х/;+1(а,е), а12 = -*2*(<*,<0 + оХр (а,е),
я2, = /)^+1 (а, в) + ЛГГ'(*, е) - ХЯг(р) [ДЛГ2(а, в) + Хъ(а, е)],
a22=oZ2v+\a,€) + Xl,(aie)-XHr(p)[oXl(oi,e) + X4(ct,e)},
Яоа2РЛр(у + \) q0av irn,
а^= ШГ7 ~ * 7 I-^-i(a) ^+2@ +
mRpU mRpi 4 l
+ Г,_1(а)/,+2(в) + ^- ft.i(a)JC^2(*)+Jr;_1(tt)/p+2<e)lK
7Г j
158
qQa2\(Hr(p)
а2з=Фе ~ J
mRPo e
QoOtv
™rpI
[X^1 (a, e) + х#Др)*Г; ' (a, 6)].
При наличии присоединенных масс следует ввести соответствующие
инерционные силы и учесть при записи выражения C.5.12) .
Приведенные формулы позволяют определить начальные параметры
Л/а и <2°, затем в соответствии с C.5.12) и C.5.7) — ЧХ перемещений и
усилий. Решение в таком виде реализуют на ЭВМ, находя оптимальные
параметры гасителя из условия минимума модуля усилия или перемещения
в каком-либо сечении стержня.
Рассмотрим решение задачи о вынужденных колебаниях стержня,
оборудованного газителем, с помощью разложения в ряд по формам
свободных колебаний некоторой близкой системы. Этот метод более удобен для
оптимизации параметров гасителя при ветровом резонансе и случайных
колебаниях стержня, когда требуется многократно вычислять ЧХ системы.
Если формы свободных колебаний системы выражены в виде суммы
произведений цилиндрических функций на степенную, то указанное
разложение можно рассматривать как своеобразное обобщение ряда Фурье -
Бесселя или часто применяемых рядов по балочным функциям. Оно
осуществляется сравнительно просто при обычных граничных условиях, в
которое не входят собственные числа. Однако в данной задаче учет
инерции основания и наличие гасителя приводят к тому, что в граничных
условиях для стержня квазиупругие коэффициенты зависят от частоты
колебаний, т.е. от собственных чисел и, следовательно, имеют различные значения для
разных форм свободных колебаний. В связи с этим граничные условия для
стержня оказываются несамосопряженными, а формы свободных
колебаний при отсутствии демпфирования не ортогональны в пределах
стержня. Для того чтобы убедиться в этом, рассмотрим однородную краевую
задачу при отсутствии демпфирования с несамосопряженными
граничными условиями на обоих концах стержня
(ад Vj)" - тх coJv Vj = 0, C.5.15)
(E0IX Vj)' = - сп (<*><>/) Vh E0IX Vf = cr2 (co0/) Vj, * = Г,
(EoIxVj'y = cRl(cj0j)Vj, E0IxVj' = -cR2(co0j)Vj, x = R,
где штрих означает дифференцирование по л\
Запишем формулу Грина
я
(со20к - colj) f mx Vk Vjdx =
г
= №oIx V'kY Vj - E0IX Vl V- +E0IX V- V'k - (E0IX VjyVk] |f. C.5.16)
С учетом C.5.15) правая часть C.5.16)
[cri (ыок) - cR1 (co0/)] Уяк Vrj + [cR2 (co0fc) - cR2 0^>o/)] fRk Vrj +
+ [Crl (W0fc) - Cr2 (CJ0/)] Vrk Vff + [CK2 (b>Ok) ~ Cr2 (C00/)] ft* Vrj
159
обращается в нуль лишь в случае, если квазиупругие коэффициенты не
зависят от частоты.
Неортогональность форм свободных колебаний стержня с гасителем
затрудняет их использование для решения задачи о вынужденных
колебаниях.
С целью получения ортогональной системы функций определяют формы
свободных колебаний для основной системы — стержня переменного
сечения без гасителя. Квазиупругие коэффициенты основания сп (р) (u + iv) и
c2i (р) (ц + iv) соответствуют фиксированной частоте р. В этом случае
формы колебаний удовлетворяют однородному уравнению C.5.15) и
граничным условиям
Boixv?-ot (адк;у=о, * = #-, C517)
*<>/* V? + V}lcii (Р) - Bull] = О, (Е01х У;')' - Vj [cn (J5) -Мш u>lj] т О,
x=R.
Полагая М& = 1, форму свободных колебаний "записывают в виде
и = Ql \аХг (d,'ff) + Х4 (а, 0)] + DX2 (а, J3) + Хъ (а, ©, C.5.18)
где
Epljt a 2mR u>ljR
2R[c21(p)-Bu20J]' <*[сц(р)-Мша>20/] '
Частотное уравнение
\oZV' (а, е) + ЛГ1ф(а, e)] [DXV% e)tJTf?' (a, e)] -
- [oXv3t¦ (a, e) - X2* (a, e)] [ВД + » (a, e) *ЖГ * (a, e)] = 0,
полученное в результате удовлетворения граничным условиям при х = г,
решают численным способом, далее определяют параметры каждой формы
колебаний на концах стержня.
Амплитуды прогибов представляют в виде ряда по найденным формам
колебаний основной системы
оо
И/ = 2 Vj\j C.5.19)
с коэффициентами разложения
Х/= — { / Ях Vjdx + [ffrOONV'+fe] *V + c, »>* VRj-c2eR to/ 1,C.5.20)
4/0/ I r J
где cj = c11(po) + ^i2(Po)-Cu(p)(w + 15); ^2 = c21 (p0) + ic22(p0)-
-c2i(p)(u+iv), *o/ - [«0/ (« + n>) - pi) ( / mx Vf dx+Mm V2RJ + Bt/fc),
Wr, WR, 0R - неизвестные амплитуды линейных перемещений обоих
концов и угла поворота нижнего конца стержня; и, v —константы [182, 198],
зависящие от коэффициента неупругого сопротивления стержня.
Подстановка C.5.20) и C.5.19) для сечений х = г, R дает систему трех
линейных уравнений, из которой определяют Wr, WR, 0R, далее коэффициенты
160
разложения Х;- и амплитуды перемещений или усилий в любой точке
стержня. Эта схема вычислений в точности соответствует описанному в § 3.1
методу сил, поэтому можно было бы сразу воспользоваться формулами
C.1.3) - C.1.5).
Интеграл в числителе C.5.20) вычисляют аналогично интегралу в
C.5.12). Интеграл в знаменателе C.5.20), как и в случае стержня посто^
янного сечения, выражается через концевые параметры формы
колебаний Vj. Поскольку этот результат представляет большой практический
интерес при выборе параметров ДГК, приведем его для стержня с п
промежуточными сосредоточенными массами га/, обладающими моментами
инерции В; (/ = 1, п).
Рассматривая состояния системы, соответствующие /-й и к-и формам
колебаний, с помощью теоремы о взаимности работ находдм
R п
Gjk = f mx Vj Vk dx + ? (m, Vtj Vik + Bt щ од) =
r i=l
[(E0IX V'^'Vj - (E0IX V^) Vj + V'k (E0IX Vj)-
2 2
00 0k ~ COq/
- Vk{E0Ix V?)} |f. C.5.21)
При k-j неопределенность типа 0/0 в правой части C.5.21) раскрываем
по правилу Лопиталя, опуская индекс/:
[d?l(oook)/doook"]
2соо* Jc
a-i-.....
где ?l(oook) — числитель в правой части C.5.21).
На участке стержня между сосредоточенными массами форма
колебаний и ее производные не имеют разрывов, причем из C.5.5) следует, что
форма колебаний является функцией аргумента сод:. На этом участке
d ,xd,(d\^„
— V = V'—, V=[ —V)= -(V"x+V),
doo oo duo \doo 1 oo
— (E0IX V") = - [E0IX (V"x)'+E0Ix V") = - [(E0IX V")'x - vE0Ix V"),
doo oo oo
d
doo
1
[(E0IX V")'] = -^-E0IX V" ' = - [(E0IX V")"x + A -v)(EQIx V")'] =
I aco j со
[mxoo2Vx + (l-v)(E0IxV"y],
00
d?l 1
— = - \x[mxoo2V2 -2(E0Ixvyv'^E0Ix(Vy] +
aco со
+ A - v) (E0IX V")'V + A + v) (E0IX V") V j .
П. Б.Г.Коренев 161
С учетом условий соппяжения между участками и выражений C.5.7)
получаем
z i- 1 р/ I р/
+ | (М?_0 +M°+0)j} + ^f^l 02 И? - 26?^ + ФЬ2\ \
+ 20[A - v)Q% V% + A + Г)НМ| М°. C-5.22)
Для консольного стержня без промежуточных сосредоточенных масс
приМ„ = 1, ipa = D, V% = oQa определяем
G=™^fl+(Q2Ja[a+^
2 or \ L о: J \ a J R
« J.
C.5.23)
Формулы C.5.22) и C.5.23) позволяют вычислить интеграл, который
входит в решение C.5.20) и, кроме того, в выражение относительной
массы гасителя
*1*ктт V2rf/[f mx Vfdx+MmV2RI+B*2Rj]9
г
где VTj — ордината формы Vj в точке установки гасителя.
Зная относительную массу гасителя при настройке на /-ю частоту,
согласно данным гл. 1, можно приближенно найти его оптимальные
параметры без учета влияния остальных форм колебаний, т.е. как для
приведенной системы с одной степенью свободы. Формула C.5.22) имеет поэтому
большое значение для практических приложений.
В большинстве технических задач и, в частности, для сооружений
башенного типа наиболее опасными являются колебания с частотой, близкой к
низшей собственной частоте колебаний конструкции. В этом случае при
вычислениях достаточно учесть небольшое число членов ряда C.5.19).
Для высоких башенных сооружений можно также пренебречь
горизонтальными перемещениями фундамента относительно основания, т.е.
положить о = 0 в C.5.11), C,5.12), C.5.18) и WR = 0. Соответствующие
этому упрощению решение, результаты вычислений и конкретные
качественные выводы, вытекающие из них, приведены в § 4.2, 4.8.
§ 3.6. Колебания мембран
В этом и следующих четырех параграфах рассматриваются двумерные
задачи теории колебаний, которые, как правило, значительно сложнее,
чем одномерные задачи о стержнях, обсуждавшиеся в предшествующей
части главы. Исключение составляют круглые мембраны, круглые
пластинки и пологие сферические оболочки при осесимметричных
деформациях. Эти задачи являются одномерными и по своему математическому
содержанию весьма близки к задачам о стержнях.
Задачи о колебаниях мембран с гасителями допускают получение
решений с помощью более простого по сравнению с последующими пара-
162
графами аппарата. С практической точки зрения они представляют
известный интерес в связи с тем, что мембраны являются в ряде случаев
расчетной схемой покрытий различных инженерных сооружений и зданий.
С теоретической точки зрения эти задачи позволяют рассмотреть методы
расчета, обобщение которых является в большой мере содержанием
более важной для приложений теории пластинок и оболочек,
оборудованных гасителями колебаний.
Остановимся на особенностях постановки задач о колебаниях
мембран с гасителями колебаний. Как правило, в этих конструкциях диссипа-
тивные силы невелики, что обычно приводит к повышению
эффективности гасителей колебаний. Линейная теория колебаний мембран,
игнорирующая изгибную жесткость, основана на решении дифференциального
уравнения второго порядка, при выводе которого не используются
уравнения упругости. Поэтому формально в мембранах диссипативные силы
не учитываются и коэффициенты дифференциального уравнения «являют-
ся действительными, что упрощает расчет. Так как идеализация способа
передачи на мембрану нагрузок от внешних воздействий и гасителей
колебаний не должна предусматривать сосредоточенных сил, то
использование гасителей с точечным опиранием исключено. При применении
гасителей, опирающихся на мембрану по окружности или какой-либо
другой замкнутой кривой, например по эллипсу, должен учитываться
действительный закон распределения реакций гасителя. Характер
деформирования мембраны таков, что если реакция гасителя локализована
пределами сравнительно небольшого участка описания, то эффективность
гасителя быстро снижается с увеличением расстояния между гасителем и
рассматриваемой точкой мембраны. В этой связи задача об учете влияния
одного гасителя имеет большое значение.
Дифференциальное уравнение колебаний мембраны, растянутой
усилиями Г, имеет вид
TV2w-m—— =q0(x,y,t),
Ъг
где V2 — оператор Лапласа; т — поверхностная плотность; q0 (x, у, г) —
нагрузка. Положим, что
Яо (х> y,t) = q (х, у) eipor, w (х, у, t) = W(x, у) eip°f.
Функция W(x, у), описывающая форму вынужденных колебаний
мембраны, удовлетворяет дифференциальному уравнению
V2W + \2W=q(x,y)/T, \2=тр20/Т. C.6.1)
Если принять, что сила инерции массы- гасителя определяется
амплитудой прогиба WT в некоторой точке г, расположенной внутри площадки
контакта гасителя с мембраной, то, согласно формулам C.1.1), C.1.3),
*V"*rf/(l -mTp20CbTT), C.6.2)
где бГ?7, 5ГГ — амплитуды прогибов в точке г, вызванных действием
изменяющихся по гармоническому закону во времени внешней нагрузки
q(x, у) и единичной силы, равномерно распределенной по площадке, по
11*
163
которой передается реакция гасителя. Таким образом, учет влияния
гасителя требует детального изучения решений задач о колебаниях мембраны,
в том числе под действием локальных нагрузок, распределенных в
основном по круговым областям.
Рассмотрим осесимметричные колебания круглой мембраны;
примем начало полярной системы координат (г, в) в ее центре. При
свободных колебаниях с частотой со решение
W(r) = ClJ0 (Кг) + с2 Г0 (Хг), C.6.3)
где X2 = тсо2/Т; сх, c2 — константы. Для мембраны без отверстия,
опертой на контуре радиуса г = Ь, константа с2 =0, частотное уравнение
J0(Xb) = 0. Для мембраны с отверстием радиуса Ь%9 опертой на
контурах г = bl9 г = Ь9в решении C.6.3) сохраняются обе константы сь с2,
а частота свободных колебаний определяется из уравнения
Jo(^b1)Yo(Xb)-Jo(Xb)Yo(Xb1) = 0.
Решение задачи о вынужденных колебаниях круглой мембраны
представим в виде суммы основного W0 и компенсирующего WK решений:
W=W0 + JVK.
При единичной силе, равномерно распределенной по окружности радиуса я,
частное решение W0 можно получить, например, интегрируя основную
функцию влияния для дифференциального уравнения C.6.1),
отражающую эффект действия единичной силы на неограниченную мембрану и
представляющую с точностью до постоянного множителя функцию У0 (г).
Используя теорему сложения для бесселевых функций, определяем
-J0(Xa)Y0(Xr)/DT), r>a9
C.6.4)
-Y0(Xa)J0(Xr)/Dn r<a.
Для опертой на контуре г - b мембраны, положив WK (r) = cJ0(Xr), из
граничного условия W(b) = 0 найдем
c=J0(Xa)Y0(Xb)/[4TJ0(Xb)].
При равномерно распределенной по всей площади мембраны нагрузке
qeip** имеем
*M')S [I -Joftr)IJ0(\b)]ql(mpl). C.6.5)
При г - а полученные формулы дают 5ГГ и дтд (от нагрузки qeip°f) для
континуального гасителя, масса которого распределена по окружности
(г = а), а реакция определяется значением W(a). Используя C.1.1) и
C.6.2), далее можно найти амплитуды реакции гасителя (суммарной
массы, приходящейся на длину окружности 2тта) и амплитуды колебаний
мембраны с гасителем.
Так как эффективность гасителя снижается при удалении от точек,
лежащих на окружности радиуса я, может возникнуть вопрос о системе
гасителей, каждый из которых крепится по концентрической
окружности. В этом случае можно воспользоваться методом сил (§ 3.1). Другой
путь основан на методе начальных параметров.
164
Пусть нагрузка qeip°f равномерно распределена по площади
кольцевой мембраны, опертой на внутреннем и внешнем контурах с
радиусами Ь\, Ь. Гасители колебаний передают усилия по концентрическим
окружностям с радиусами ах иа2. Воспользуемся функциями Коши
дифференциального уравнения Бесселя нулевого порядка
7ТХ
Yx(x,z) = — \Y'0(x)J0(z)-J'0(x)Y0(z)], z>x,
TIX
Y2(x,z)=—[J0(x)Y0(z)-Y0(x)J0(z)], z>x,
Yli2(x,z) = 0, z<x.
При z = x функции Коши и их производные по переменной z принимают
значения: Y1- (х, х) = 1 при i = j — 1, YJ (х, л:)=0при/ Ф] — 1, где / —
порядок производной. Обозначим Хг = ?, Хах = а1? Ха2 = а2, Xbt = ft, Xb = 0,
q(Xr)/T = f(H),W((l1) = W0,XdW/dii\i;=ei = <Po-
Выражение для формы вынужденных колебаний
#№ = ^о rt фг, t) + — Y2 (fit, ?) + //ft) Г2 (г?, ?)Л?
X ft
в рассматриваемом примере принимает вид
Wtt)=[l-Yl(P1,mQ/(mpl) + *oY2(P1,№ +
^[W(al)H1(p)Y2(a1^)+W(a2)H2(p)Y2(a2^)]/Bira1n
где
^(a1)=[l-r1(/31,a1)M^g) + ^o^(^,«1)A,
W(a2)=[l-Y1(C1,a2)]q/(mpl) + VoY2Wl,a2)/X +
+ W(a1)H1(p)Y2(a1,a2)/B7ra1T),
H1(p), H2(p) определяются согласно C.1.1) для гасителей, амплитуды
Рис. 3.1. Круглая мембрана с эксцентрично
установленным ДГК
реакций которых пропорциональны амплитудам колебаний W(at), W(a2).
Неизвестный начальный параметр ip0 находится из граничного условия
W(E) = 0. Если гасители имеют демпфирование, то </?0 - комплексная
величина, несмотря на то, что коэффициенты уравнения колебаний
мембраны C.6.1) действительны.
165
Рассмотрим случай, когда реакции гасителей равномерно распределены
по окружностям, радиусы которых малы по сравнению с радиусом
мембран. При этом положим, что реакция каждого гасителя определяется
амплитудой перемещения центра соответствующей опорной
окружности. Пусть, например, круглая, опертая на контуре г = Ъ мембрана (рис. 3.7)
нагружена равномерно распределенной нагрузкой qe ip°f, а центр Ох
окружности радиуса д, по которой приложена реакция гасителя, находится на
расстоянии е от центра мембраны. Решение C.6.5) от внешней нагрузки
сохраняется, а расчет мембраны на действие реакции гасителя
выполняется следующим образом. При единичной нагрузке, приложенной по
окружности радиуса а, основное решение W0(ri) для неограниченной мембраны
соответствует C.6.4) с заменой г на Г\\ компенсирующее представим в
виде
WK(r,0)=2 ?' cnJn(Xr)cos(пв).
п = 0
На контуре г = btr f = \Jb2 + е2 - 2be cos0, полное решение
W(b, в) = W0 (r J, 0) + WK (Ъ, в) = 0.
Основное решение при Ту > а, используя теорему сложения для
бесселевых функций, переписываем в виде
1 ?
W0(r1) = -—J0(\a) Ъ'Гп(\гIп(\е)со%(п0)
2Т л = о
и из условия на контуре находим константы
сп =J0(Xa) Yn (\b)Jn(ke)/[4TJn (Kb)],
затем полное решение
1 - Yn (Kb)Jn (\e)
4 Г п = о JnQ^b)
— [У0 (Хл)^о (X^i) - 2 /о (Хя) 2- ./„(Xr) cos (л0)],
4 Г л = о Jn(kb)
r\< a.
Определив амплитуду прогиба в центре Ох опорной окружности (г = е,
г1=О,0=О)
1
Н/=_ —
4Г
Гул ч nhi fM*l^l
Го(Хя)-2/0(Хл) 2 ——— ,
I n = 0 Jn(Xb) |
можно, согласно C.1.1) и C.6.2), вычислить амплитуду реакции гасителя.
При установке на мембране нескольких гасителей следует назначить
радиусы опорных окружностей и положения их центров. Расчет
выполняется методом сил; входящие в уравнения C.1.3) коэффициенты
вычисляются так, как описано выше в случае одного гасителя.
166
Для мембраны с некруговым контуром можно применить метод
компенсирующих нагрузок, согласно которому вне области, занятой
мембраной, выбирается линия, называемая особой, и вдоль нее
распределяются источники — компенсирующие нагрузки. Их плотность
определяется из уравнений Фредгольма 1-го рода, соответствующих заданным
граничным условиям мембраны. Для мембраны с жестким контуром сумма
основного и компенсирующего решений на контуре равна нулю.
Рассмотрим в качестве иллюстративного примера квадратную мембрану
с присоединенным гасителем, реакция которого равномерно распределена
\\all2 а/6 а/6 а//2
> * 4 < X
по окружности радиуса а с центром в точке пересечения
диагоналей квадрата. Предварительно решают вспомогательную задачу о
вынужденных колебаниях квадратной мембраны при нагрузке, равномерно
распределенной по окружности. Основное решение дает формула C.6.4),
для определения компенсирующего решения составляют интегральное
уравнение
fq(o)K(o,s)do=W0(sl
с
где С - линия, по которой действуют компенсирующие нагрузки, К (a, s) =
= — Y0 (Xz)/D7), z — расстояние между точкой о особой линии и
точкой s контура мембраны, о, s — дуговые координаты, W0 (s) — значение
основного решения на контуре. Воспользуемся простейшим вариантом
метода, полагая, что особая линия есть окружность, а компенсирующая
нагрузка представлена с учетом симметрии рядом по косинусам
полярного угла в виде
оо
q(o)= 2 с^п cos Dnв).
п = 0
Сохранив три первых члена этого ряда и потребовав, чтобы граничные
условия удовлетворялись в точках 1,3 контура, показанных на рис. 3.8,
получим компенсирующее решение
WK=A0JoQ^r)+A4J4(\r)cosDe)+A8J8(\r)cos(Se).
Неизвестные А0,А4,А8 определяются из уравнений
A0J0 (Щ) +A4J4 (Щ)cos D0/) + А8/8 (XRf)cos(80y) + Wof ¦ О,
/ = 17з.
Здесь Rj, dj — полярные координаты /-й точки контура, W0j- — значение
основного решения в /-и точке контура. Результаты вычислений [86]
свидетельствуют о высокой точности метода, так как прогибы в точках
контура, не совпадающих с узлами коллокации, достаточно малы по
сравнению с прогибом в центре.
167
В [86, 87] показано, что получение компенсирующего решения
методом Треффтца — Фридрихса сводится к решению вариационной задачи
о разыскании минимума функционала
где ?2 — область, занятая мембраной, WKa = WK — W? — разность
точного WK и приближенного W? компенсирующих решений,
удовлетворяющих однородному дифференциальному уравнению колебаний мембраны.
Полагая, что
и используя теорему Гаусса, получаем систему линейных алгебраических
уравнений
Эч>- п Эч>;
fWK(s)~ A- 2Afl*i--r-ds = 0, /=1,л,
с on /=i с оп
из которой находятся константы At.
Если особую линию совместить с контуром мембраны, то, выбирая
должным образом компенсирующую нагрузку, можно компенсирующее
решение представить истокообразно в виде
WK=fn(o)Kl(z)do.
с
Здесь K\(z) = Yx (\z)cos(nSi r), z = Ху/(х - ?J + О - т?J, у, т? -
координаты точки контура, \x(s) — плотность источников, ns — нормаль к
контуру. Функция tx(s) удовлетворяет уравнению Фредгольма второго рода
2vL(s)+f»(o)Kl(s,o)ds = -Wo(sl
с
где W0(s) — значения основного решения на контуре; s, о— дуговые
координаты точек контура. Подобные решения рассматривались В.Д. Купрадзе.
Для решения задач виброгашения нужно знать также частоты
свободных колебаний мембраны. Метод компенсирующих нагрузок позволяет
довольно просто получить частоты свободных колебаний некруговых
мембран [86].
При динамическом расчете мембран на действие случайных и
импульсных нагрузок целесообразно использовать ряды по собственным
функциям. Наиболее просто эта задача решается для круговых и кольцевых
мембран. При жестком опирании по контуру для круговой мембраны задача
сводится к использованию ряда Фурье - Бесселя; для кольцевой мембраны
с жесткими контурами используется разложение Титчмарша, при
граничных условиях, соответствующих упругоподатливому контуру, это
разложение обобщается, как показано в [87].
Для прямоугольной мембраны достаточно простое решение задачи о
вынужденных колебаниях дают двойные тригонометрические ряды. При
этом для учета влияния гасителей, передающих на мембрану давление по
168
круговой области — окружности, кругу или круговому кольцу,
целесообразно получить коэффициенты рядов в простой форме с помощью
интеграла Парсеваля для бесселевых функций. Подобный результат в очень
близкой по математическому содержанию задаче о пластинке был получен
С. Войновским — Кригером. Положим, что на мембрану, длины сторон
которой равны а и 6, передается единичная сила, равномерно распределенная по
окружности радиуса с с центром в точке с координатами ?, т? (рис. 3.9).
Введем обозначения ат - тл/а, $п = птт/b, утп = \/а2т + j3^, га*-масса
единицы площади мембраны. Представим нагрузку q(x, у), которая в. данном
Р и с. 3.9. К расчету прямоугольной
мембраны с эксцентрично установленным ДГК
частном случае имеет интенсивность B-пс)~1, в виде ряда
ШШ
^ * ^
I
т
q(x,y) = 2 2 amnsin(amx)sin(^ny)i
т = 1 п = 1
где
А а Ь
атп= —- f S Q (x,y) sin(amx) sin (pny)dxdy.
ab о о
Форму колебаний мембраны разыскиваем в виде
оо оо
W(x,y)= 2 2
итп sin (amx) sin (?„;/)•
т = 1 п - 1
Используя дифференциальные уравнения C.6.1), получаем
Ьщп = ОтпНТГтп ~ ™*РоУ C.6.6)
Для вычисления атп перейдем от декартовой системы координат к
полярной с началом в центре окружности. Имея выражение для элементарной
силы, приложенной на окружности q (x, у) dxdy = dd/ Bя), получаем
2 2тг
атп ~ / sin[а„,(? + еcos0)] sin[/3„G? + csin0)] dd.
nab о
Воспользовавшись интегралом Парсеваля
1 2тг
JqWol2 + j32) =— / cos(acos0)cos(j3sin0)d0,
2tt о
найдем
: ~ Jo (Ут nc) sin («m ?) sin (M)>
ab
и, следовательно,
Ц. ОО ОО
W(x,y) = — 2 2
ab m = 1 n = 1
J0 Ьтпс) sin (am ?> Sin (РИТ?> SJn (am*) SHI (ffny)
ТУтп-™*Р1
169
Если ? = а/2, т? = Ь/2, то при четных т или п коэффициенты атп, Ътп равны
нулю, а при нечетных значениях обоих индексов т = 2кг + 1, п = 2к2 + 1
имеем sin(am$) = (-l)*vsin(/Vj) = (-0*2 и
^(^^) = -— S S ^ 2 '
ab ktmi at2=i Tymn -m*pi
Если единичная реакция гасителя распределена равномерно по площади
кругового кольца с радиусом с± ис2, то, интегрируя полученное выражение
для атп и используя формулу дифференцирования dJ0(z)/dz = — /1B),
получаем
8
атп= 775 2-r[J\bmncl)c2 -J\bmncl)cl I sin (ttm Q sin @„r?).
ymnab(c2 -c\)
При Ci = 0 имеем решение для случая равномерного распределения
нагрузки по площади круга. Нетрудно обобщить результат на случай, когда наг-
оо
рузка представлена в виде ряда ? Яп(г) sin(n.0); при нагрузке, распре-
деленной по окружности, результат легко получается при использовании
интеграла Бесселя; если qn(r) — степенная функция с показателем
степени, равным ± п, решение доставляется функциями Бесселя, при других
значениях показателя степени в решение входят функции Ломмеля одной
переменной.
§ 3.7. Колебания пластинок
Постановка задачи. Исследование колебаний пластинок с гасителями
представляет большой практический интерес, поскольку значительная часть
оборудования с неуравновешенными инерционными силами устанавливается
на перекрытиях, одним из элементов расчетной схемы которых является
пластинка. Задачи о колебаниях пластинок с гасителями имеют большое
значение и в судостроении.
По существу задачи о колебаниях пластинки с точечными линейными
гасителями [40-42, ПО, 263] очень близки к задачам о пластинках с
жестко присоединенными массами [44,86], отличаясь от них лишь наличием
упруго-вязкой связи между массой и пластинкой.
Общим для задач о колебаниях пластинок и стержней с гасителями
является-учет неупругого сопротивления защищаемой конструкции и оценка
влияния на результаты нерезонирующих форм колебаний. В то же время
исследование колебаний пластинок с гасителями имеет и ряд существенных
отличий. Гаситель, снижая уровень колебаний системы в целом, может
вызвать высокие напряжения вблизи места его контакта с пластинкой. Поэтому
при проведении расчета пластинки с гасителями необходимо рассматривать
также и местные напряжения, зависящие от закона распределения реакций
гасителей по поверхности пластинки. При точной постановке эта задача в
тех случаях, когда машина — источник возмущения — крепится жестко,
требует решения вопроса о характере контактных напряжений между
основанием машины и пластинкой, что, естественно, существенно услож-
170
няет поставленную задачу. Виброизолированные машины передают на
пластинку реакции, закон распределения которых может быть
определен более просто. Для снижения местных напряжений зачастую
целесообразно установить гаситель на машине; другим способом является местное
усиление пластинки, которое приводит к задаче о колебаниях пластинки с
жесткой вставкой.
Следует отметить, что во многих случаях при малых площадках опира-
ния машин можно использовать весьма грубые допущения о размерах и
форме площадки контакта и даже предположение о том, что имеет место
точечный контакт, однако это допустимо лишь при определении
оптимальных параметров гасителей и их эффективности при кинематических
критериях качества. Далее необходимо проверить местные напряжения с учетом
достаточно близких к действительности законов распределения реакций
гасителей по площади их опирания. Здесь можно использовать прием
расчета, при котором область контакта рассматривается как состоящая из
круговых.
Пластинки по сравнению со стержнями имеют более густой спектр частот
свободных колебаний. Это проявляется главным образом на высоких
частотах и почти не сказывается при резонансе на низших частотах. Очевидно, что
влияние граничных условий на низшие частоты наиболее велико. Так как
пластинка часто входит в более сложную механическую систему, то
возникает вопрос о формулировке соответствующих граничных условий, и
здесь приобретают значение случаи, в которых пластинка упруго оперта
по контуру, при этом квазиупругие коэффициенты могут зависеть от
частоты колебаний.
На постановку задач и выбор конструкции гасителя влияет также учет
возможной нестабильности массы пластинки. Наличие или
отсутствие-полезной нагрузки, различия в законах ее распределения по площади пластинки,
использование виброизоляции или ее отсутствие отражаются на спектре
частот свободных колебаний и могут потребовать проведения расчета для
различных, возможных в этой связи ситуаций. Температурный режим
пластинки может быть причиной возникновения продольных усилий,
вызывающих ее сжатие или растяжение. Отражаясь на частотах собственных
колебаний, они могут влиять на эффективность гасителей. Оценка этого фактора
в отдельных случаях представляет практический интерес.
Внимание, которое уделено в этом параграфе круглой пластинке,
объясняется тем, что во многих случаях получить решение, выбрать оптимальные
параметры и оценить эффективность гасителя значительно проще для
круглой пластинки, чем для пластинок любого иного очертания. Поэтому
квадратную пластинку во многих случаях при расчете можно заменить круглой,
приняв эквивалентный радиус из условия совпадения для обеих пластинок
частоты свободных колебаний, на которую настраивается гаситель.
Схема расчета. Рассмотрим схему динамического расчета пластинки с
гасителем и покажем, что он сводится к расчету пластинки без гасителя.
Здесь с некоторыми, вытекающими из сказанного выше изменениями
при постановке задачи, по сравнению с задачами о гашении колебаний
стержней, рассмотрен частный случай, когда.к пластинке присоединен один ДГК.
Положим, что внешняя гармоническая нагрузка Т= ГоРо^0
^Действующая на пластинку, и реактивные воздействия от дополнительной жестко
171
присоединенной массы Мп и динамического гасителя, установленного в
том же месте, равномерно распределяются по соответствующим
площадкам, формы и размеры которых будут названы в дальнейшем. С учетом
сказанного выше примем, что инерционные силы, развиваемые
присоединенной массой Мп и массой тт гасителя, определяются прогибом в
некоторой точке г, расположенной внутри площадки контакта, например в ее
центре, если площадка является круговой. Опираясь на результаты (см.
§ 3.1), нетрудно найти амплитуду прогиба в точке подвеса гасителя
И^г = Т0р20дгТ1[\ -МпР208гМп mTplCb,T) C.7.1)
и в произвольной точке пластинки
Г (MnplbM n + mTplCbT)bTT 1
W= Т0р1 Ьт + —* —— . C.7.2)
L 1 - Mnpl 3 гМп - mTpl С5ГГ J
Здесь С определяется согласно C.1.1); 8тFтТ),дм (8гМ ),
бгEгг)-амплитуды прогибов пластинки в произвольной точке (точке г) под
действием единичных гармонических нагрузок, равномерно распределенных по
площадкам, по которым соответственно передаются внешняя нагрузка Г,
сила инерции присоединенной массы и реакция гасителя. Если ДГК
установлен непосредственно на неуравновешенной машине, выражения C.7.1),
C.7.2) можно упростить, полагая 8Т = Ьм = 5Г. Таким образом, решение
задачи о вынужденных колебаниях пластинки с гасителем сводится к
построению решений для пластинки без гасителя и вычислению
окончательных результатов по формулам C.7.1), C.7.2). При установке нескольких
гасителей задача сводится к решению уравнений (§ 3.1), коэффициенты
которых находятся с использованием приведенных ниже результатов.
Случай установки на пластинке большого числа гасителей, которые в
пределе соответствуют континуальному гасителю, рассматривается в § 3.9 при
обсуждении аналогичного вопроса для пологой оболочки.
Осесимметричные колебания. Рассмотрим задачу об осесимметрич-
ных колебаниях круглой пластинки радиуса R с граничными условиями на
контуре г = R
d /d2W 1 dW\
dr \ dr2 г dr I ,„. ЛЧ
C.7.3)
/d2W о dW\ dW
\ dr1 r dr J dr
где D = D0(u + iv) при p0 > 0; W ,Q,M — амплитуды прогиба, радиальной
поперечной силы и радиального изгибающего момента в точке с
координатой г ; о, D0 — коэффициент Пуассона и цилиндрическая жесткость
пластинки; w, v — параметры , зависящие [182, 198] от коэффициента неупругого
сопротивления материала пластинки; сь с2 — комплексные квазиупругие
коэффициенты заделки, зависящие от частоты, если пластинка является
частью более сложной системы, в которой учитываются инерционные силы.
Определим дт для четырех типов загружения: I — сосредоточенная сила
в центре пластинки; II — нагрузка, равномерно распределенная по окруж-
172
ности приведенного радиуса а = Хя; III — то же для круга; IV — то же для
кольца с приведенными радиусами c*i = \а1,а = \а (ai<a). Здесь Х =
= \/mpo/D, m — масса единицы площади пластинки. С этой целью
представим б Т в виде суммы основного W0 и компенсирующего WK решений.
Основное решение удовлетворяет неоднородному дифференциальному
уравнению колебаний пластинки; компенсирующее удовлетворяет
однородному дифференциальному уравнению и, совместно с основным,
граничным условиям C.7.3) . Пусть ? = Хг,0 = ХЯ.
Основное решение имеет вид
' - l*iY*{Q+ к^оA)]/D/)Х2), ?>а,
- [Xi/o(?) + X2/o(?)]/Dm2), i<a(JO)9i<a1(JW)9
%=<
TTOL
+ Xi/o @ + X2/0 @ \IDD\2l I < a(III),
C.7,4)
\--a1J1(a1)Y0(i:)--a1Il(a1)K0($ +
7Г 7Г
,+ аГ1(а)/о(в — ftfftCB)/0(i)
/[4?>X2(a2-a2)], a!<J<a(IV).
Здесь римские цифры указывают тип загружения; сомножители К\ для
четырех типов загружения соответственно равны 1/2, J0(a)/2, /х(а)/2,
[a/i(a) -..at/iCai)]/^1-^); к2 paBHbil/7r,/0(a)/^/i(a)/7r,2[a/i(a) -
- а171(а1)]/[7г(а2 - а2)]; Xi определяются аналогично Кх с заменой
функций / на Y; xi определяются аналогично к2 с заменой функций/0 на
K0Ji Hdt-K^
Компенсирующее решение
WK = - [А0/о (?) + ^0/о (*)] /D/)X2) C.7.5)
содержит постоянные, определяемые из условий C.7.3),
Л0 =До2/Ао1,^о = Аоз/А01,
где
Aoi =-[Л(/3)/0(/3)+/1(/3)У0(/3)]A +T7Xo) + 27?Jro(i3)/o03) +
+ 2r?/oOJ)/oOJ) + 2xo^i(P)/i08),
А02 = М^ДО/оСР) +Л(Д) Г0(Р)] A +т?Хо) - 2г?Г0(«/о(« -
-2xoY1tf)I0(№ -к2A -ПХоЖ
A03 = -/<i(l -г?ХоJ(^Г1 +K2{[/i(^)^o(«-/o(/3)^i(/3)](l+T?Xo) -
-2t?/0(«^o(« + 2Xo/i(/5)^i(«},
т? = с, /(Я X3), хо = с2 l(DX) + A - а)/0.
Формулы для вычисления бесселевых функций комплексного аргумента
приведены в приложении (стр. 287). Частоты свободных колебаний
пластинки можно найти из трансцендентного уравнения A0i =0, полагая 7 = 0; при
его численном решении следует иметь в виду, что квазиупругие
коэффициенты Сх,с2 могут зависеть и от частоты колебаний.
173
Полученные формулы дают возможность проанализировать влияние
формы и размеров площадок, по которым распределены нагрузка и
реакция гасителя, на перемещения пластинки, а также оценить влияние
граничных условий на эффективность гашения и оптимальные параметры
гасителя. Подобный анализ проведен далее для квадратной пластинки.
Результаты легко обобщаются для пластинки с круглым отверстием.
При этом формулы C.7.4) для основного решения сохраняются.
Компенсирующее решение следует искать в виде
WK = -Ио/о(?) +Ло/0(Ю + со^о00 +FoKo($)]K4D\2),
причем константы А0, В0, С0, FQ определяются из системы алгебраических
уравнений, полученных при удовлетворении решения W0 + WK граничным
условиям, типа C.7.3) на внутреннем и внешнем контурах пластинки.
Задача о кольцевой пластинке и многие другие задачи могут быть
решены также методом начальных параметров. При этом вводятся в
рассмотрение функции Yj (а, ?) (/ = 1,4), которые при ? < а тождественно
равны нулю, а при ? > а выражаются формулами
Г da
Г2(а
Yd<*,
?) =
0 =
?) =
7Ш|
4
7га|
4 J
этаГ
4[
-J'0(a) Г0(?) +- l'o(a)K0($) + Y'0(a)MS)
я
-~К'0(аI0Щ,
я J
/о(в) ПО;) — /0(а)*о(9 - Го («)/„(*) +- К0(аI0&
Я Я
/0(а) Го@ +-/0(а)*(*) - П(«)/о(?) — ЛГо(в)/оE)
Я 7Г
Г4(а,?) =
яа
-/о («) Ко
(*) — /о(а)АГ0({)+Го(в)/оA> +
я
^АГо(а)/0E) -
. «Г C.7.6)
Функции К (а, {•) преобразуются операторами (•) =— (•), /,(•) =
( d2 l d\ , d
( —2 + "г Jl)('}*L (> = JtL(^ отеДУкшщм обР;
азом:
Оператор
ко
(•)'
?(•)
?'(•)
Функции
г,
У,
j';
Уг
у*
Y2
Y,
У'г
Y,
п
Гш
у,
у*
Уг
у,
у*
Y* I
п
Y* \
У'г
C.7.7)
При ? =а получается единичная матрица. Можно использовать также
функции УД отличающиеся тем, что для них в третьей строке C.7.7) вместо
/ 1-о d \
/,(•) вводится оператор IL — )(')'
с точностью до множите-
174
ля — X D соответствующий радиальному изгибающему моменту. В этом
1 - о
случае У 1*3,4 = ^1,з,4 > изменяется лишь функция F2*= Уг + ^з •
Применим метод начальных параметров в задаче о колебаниях
круглой пластинки радиуса R с более жесткой средней частью радиуса Rl9
которую назовем вставкой. Такая расчетная схема соответствует случаю
установки неуравновешенной машины на постаменте. Обозначим
жесткость вставки D0, массу единицы площади га, в остальной части пластинки
соответственно DG1, тх.
Определим прогиб 6 в произвольной точке пластинки от единичной
силы, распределенной по площадке, которая полностью находится в
пределах вставки. Основное и компенсирующее решения имеют вид C.7.4),
C.7.5), а полное решение при r<Rx разно их сумме. Для участка
пластинки r>Rlt находящегося вне вставки, вычисляют начальные параметры
, 1 — о i ,
5е, 56, М€ zzLb€ — 5е, Q€=L Ье на окружности сопряжения е =
€
= XRi, с точностью до множителей 1, X, —DX2, —D\3 пропорциональные
амплитудам прогиба, угла поворота, изгибающего момента и поперечной
силы. Это позволяет записать решение
S1(Si) = 5er1(M1) + — 6;Kj<iMi)+ —т Welr,CMi) +
?>Х3
X,
?>iX?
где
D = D0(u+iv),
\ = X/mpllD,
Dx = ZH,(m+iw),
X, = y/ntipllDt,
Dt\i
Po>0,
C.7.8)
е = ХЯ,,
h = X,r.
Введем оператор
X
D\2
ПОД)? —7 Y30,i
¦]•
,f l-o f D \ DX2 i
1 L P \Ь?1 / bJl^i J
Тогда, зачитывая формулы C.7.4), представим C.7.8) в виде
6!^)= {Ф+А0Р2[М$1)] +B0Pi[Jo(ti)]) /D#Л2),
где ^KiiM^oCSi)] +Л2Л[^о(^)], »|'м.ик2 соответствуют C.7.4).
Удовлетворяя граничным условиям на внешнем контуре (?л = XxjR = jS.i),
можно найти неизвестные Л0 и50. Так, например, для пластинки с зажатым
краем
Ао = -w { ^,Л [/0«i)]} /Ф, Яо ¦ -*{ Pa[/0(f 1)] ,*>'/*.
ЗдесьФ = н'{Р2[/0(?1)],Pi [MCtHbwUi,*»}'
определитель Вронского.
! G?Z2 ^Zx I
)z — _z
175
Неосесиметричные колебания. Положим, что центр симметрии Ох
внешней нагрузки и реакции гасителя не совпадают с центром О пластинки
(рис. 3.10). Рассмотрим две системы полярных координат: ?, в с началом
в точке О и неподвижным радиусом 00 \, ?i, 0Х с началом в точке 0{.
Угол в j образован подвижным радиусом и прямой 00\; обозначим f
приведенную длину отрезка 00\.
Основное решение совпадает с C.7.4), если координату ? заменить
на ?Л =\/?2 + Кг — 2??cos0. Воспользовавшись теоремой сложения для
Рис. 3.10. К расчету круглой пластинки при неосесим-
метричных колебаниях
бесселевых функций, представим основное решение для точек, лежащих
вне загруженной площадки при ? > f, в виде ряда
W0 = - —; 2^1/Д0М0 + *2/ДГ)#Д?)] cos(nd).
2DX2 « = о
Компенсирующее решение будем искать в виде.
И/к = - —- ?' К Jn (?) + Яи /я (*)] cos(*0).
2/2 Л и = о
Коэффициенты Ли и /?„ определяются из граничных условий; выражения
Ап, Вп для пластинки с упругим закреплением контура даны в [ПО].
Для пластинки с зажатым краем (^=0, W' = 0 при ? =/3) при действии
сосредоточенной силы е1р°* на приведенном расстоянии f от центра О
после определения Ап,Вп нетрудно записать полное решение
5(ё,0L/)Х2=-О,5Го(?1)-^о(?1)/^ +
+ s'« /я (о [- г„ (р) /; (/з) + г; о?) /„ о?)] - 2/я coons)-1 > /и сю +
и =0
+ - {in (О [^ 08) * „ (fi) - Jn Ф) к'п (»] - /„ (Г) /г1 > /„ (?)) сл,
где сп = cos(/ie)/ [/„ (ft J'n W - Jn № In 001 •
Обобщения для пластинки с круговым отверстием являются
несложными, в этом случае необходимо лишь составить систему уравнений, в
которую входят уже не две, а четыре неизвестные константы.
При многократных расчетах системы с целью выбора оптимальных
параметров гасителя менее трудоемким является другой способ
решения, основанный на разложении нагрузки в ряд по формам Vkn свободных
176
колебаний пластинки, удовлетворяющим соответствующим условиям на
контуре и однородному уравнению
1 гР"
L2(V)-\4V=0, L(V)= V"+- V'-— V, X4=moj2/D0, C.7.9)
г г2
где штрихом обозначено дифференцирование по г. Пусть нагрузка qelp^f
равномерно распределена по трапециевидной площадке, ограниченной
центральным углом 2д0 и двумя дугами окружности с радиусами гл и г2.
Положим
оо оо
W= Ъ'cos(nd 0) 2 bknVkn. C.7.10)
«=0 fc =1
Если условия на контуре г =R не зависят от частоты колебаний, то
функции Vkn взаимно ортогональны в области, занятой пластинкой, и
коэффициенты ряда C.7.10)
Ъкп = 2qsm(nd0)f Vknrdrl\[u2kn(u + iv)-pl]mnvf V2knrdr\.
1 ° C/7Л1)
Интеграл в числителе C.7.11) представляется через функции Бесселя
при четных п или через функции Ломмеля при нечетных п. Интеграл в
знаменателе C.7.11), как и для стержня, выражается через значения
функции К и ее производных на краях пластинки. Например, для кольцевой
пластинки с упруго опертыми краями при r=Rl9 r=R, рассматривая
две различные формы колебаний Vj и Vk, интегрированием по частям,
с учетом C.7.9) получаем
frVjVkdr = (\t-rty1\r[L'(Vk)Vi-L(Vk)V;+ .
+ L(F/)n-^'(K/)Ffc]}
Далее раскроем неопределенность в правой части этого равенства при
к =/ по правилу Лопиталя, в результате
R (
/ rV2dr = D\4y1 \r2\\*V2 -2V'L'(V)+L(V)L(V)] +
*i l
Г, , п2 \\\r
+ 2r\L,(V)V-L(V)V,+ — L(V)V\\\ . C.7.12)
L Г J J \Rl
Для частных случаев краевых условий формула C.7.12) упрощается: так,
при зажатых краях в правой части остается только третье слагаемое.
Полученная формула позволяет определить приведенную массу пластинки, что
необходимо для вычисления относительной массы гасителя и назначения
его параметров.
Приведенные выше разложения решения в ряд по cos(nd0) быстро
сходятся, если частота возмущения близка к низшей собственной частоте
колебаний пластинки. В этом практически важном случае достаточно
12. Б.Г.Коренев 177
учесть лишь два первых члена ряда (п = 0,1). Кроме того, в C.7.10) можно
ограничиться значениями к = 1,2.
Некруговые пластинки. При изучении вынужденных колебаний
пластинки некругового очертания с динамическим гасителем в случае, когда
разложение решения по формам свободных колебаний является
затруднительным, можно применить метод компенсирующих нагрузок. При этом
сначала строят основное решение для расширенной области, в качестве
которой чаще всего выбирают круглую пластинку бесконечно большого
радиуса. Компенсирующее решение рассматривают как результат действия
некоторых, специальным образом выбранные нагрузок, приложенных вне
заданной области. Из условий на контуре составляют граничные
интегральные уравнения Фредгольма первого рода. Обычно их решают приближенно,
заменяя системой линейных алгебраических уравнений относительно
неизвестных параметров компенсирующего решения.
Рассмотрим квадратную пластинку с зажатыми краями, длина стороны
которой равна а. Положим, что неуравновешенная гармоническая сила и
реакция гасителя, установленного непосредственно на машине,
распределены по небольшой круглой площадке с приведенным радиусом а = \rt,
центр которой совпадает с центром пластинки.
При вычислении Зт основное решение примем в виде C.7.4), а
компенсирующее из условий симметрии представим так:
1
WK=-rr^ 2 [A4nC4nJ*n№+B4nC4nUn(IO]cosDnO)+ C.7.13)
4DX2
Нормирующие множители с4и=D
Г4со8(я/8I4и
введены для
выравнивания порядков членов ряда.
Граничные условия (ось х совпадает с нормалью к контуру)
8T=W0 +Wk = 0;
dx
Э57
(cos0)~
Э57
Ъв
(?*»)"
0
C.7.14)
Р и с. 3.11. Варианты размещения точек коллокации
вариантов размещения точек коллокации на контуре (рис. 3.11) наилучшая
точность достигается в случае в; он и был принят далее. Подставляя
сумму C.7.4) и C.7.13) в C.7.14), получаем систему 2к уравнений
относительно неизвестных коэффициентов А4п и54„
Аг-1
(?/)]cosD«6/) =
178
/,(а) 2 /, («)
а тг о:
2
п=6
и — 1
4л 1 [Л(а) 2 Ух(а) 1
?/ I L а тг а J
где hn = cosDfl0/)/cos0/, gn = hn - sinDtt0;)/sin07-,
fy = (/ - 0,5) тг/D*), ?у = \a/Bcos0,), j =TX
- число точек коллокации на половине стороны пластинки.
Решив эту систему, определим амплитуду прогиба в центре пластинки
1
Srr1-
4DX2 \
му, определим амплитуду прогиба в це
I Г 4 2 1 1
- — +Г1(а)-- КхЩ+Аг+Вщ]
a L яа тг J j
Частота основного тона пластинки при числе точек к = 4 оказалась равной
тг2 ,
3,647 — \D0lmy соответствующий коэффициент, полученный Игуши
а
[191] другим способом, равен 3,646.
Эффективность гашения колебаний в 'центре пластинки оценивалась
в случае, когда частота возмущения принимает произвольное значение
в окрестности низшей собственной частоты пластинки с присоединенной
массой Мп.
Для сравнения с соответствующими результатами для приведенной
системы с одной степенью свободы выражение C.7.1) представлено в виде
WT = ~ 7Z1 1 ~ » р = тт1™пт>- C.7.15)
тпр [Eгтр5^пр) -Мп/тпр -иС]
Собственная частота приведенной системы принята равной собственной
частоте co0i пластинки с сосредоточенной массой МП9 приведенные
жесткость Кпр и сила Гпр найдены энергетическим способом, а масса тпр =
= A"np/cooi. В формуле C.7.15) первый сомножитель представляет
статический прогиб приведенной системы под действием силы, равной
амплитуде динамической силы при pQ = со01, а второй сомножитель —
динамический коэффициент А. Оптимизация параметров гасителя производилась
методом скорейшего спуска из условия минимума наибольшего
значения Л при нестабильной частоте возмущения.
Результаты расчета показаны на рис. 3.12 сплошной (гх = 0,01 а) и
штриховой (rj =0,15я) линиями; данные для эквивалентной системы с одной
степенью свободы, оборудованной гасителем, изображены шгрихпунктир-
ной линией. Более подробно эти результаты обсуждаются в § 3.12. Здесь
же отметим, что в данной задаче при установке гасителя в центре пластинки
вклад высших форм колебаний пластинки оказался сравнительно
небольшим.
Эффективность снижения усилий с помощью ДГК, как правило,
несколько ниже, чем прогибов. Это связано с большим влиянием высших
12* 179
Рис. 3.12. Коэффициенты
динамичности для прогиба в центре квадратной
пластинки
форм колебаний. В окрестности
сосредоточенных сил значительный
вклад в усилия дает статическая
часть решения. Исследование ЧХ
усилий показало [95], что, хотя
доля статической составляющей
изгибающего момента в пластинке
и увеличивается с уменьшением
г ! /а, этот факт все же не
позволяет ограничиться вычислением
только лишь статической компоненты
даже вблизи сосредоточенных сил,
как иногда полагают. В
резонансных зонах, которые обычно и
представляют наибольший интерес
в задачах о гашении колебаний,
зависимость усилий от частоты
ярко выражена, примерно так же, как для перемещений. Поэтому при
резонансных режимах применение ДГК для уменьшения усилий является
достаточно эффективным.
Учет сил в срединной плоскости и некоторые другие задачи. Рассмотрим
схему расчета пластинок, сжатых в своей плоскости постоянным
гидростатическим давлением, которое может явиться, например, следствием
изменения температуры; в тех случаях, когда давление не является малым
по сравнению с критическим, это может привести к заметному изменению
частот собственных колебаний и в конечном итоге существенно повлиять
на эффект гашения колебаний пластинки.
Дифференциальное уравнение вынужденных колебаний с частотой р0
пластинки, находящейся под действием поперечной нагрузки q(r9 в) eip^
и статических сил Т в срединной плоскости, приводится к уравнению
относительно амплитуд
7 2 Г72 1л/ -L О U Г7 2 и/ Ut—~fk Д\//™~2>
vmW + 2buV}W -W=q(t-,e)l(mpl),
C.7.16)
где V
1
Обозначим
4,2
./7.
Э
1
Г2
э2
Э02
b0 = T/BD\2). X = \jmpllD, g = \r.
,/ъТТТ -
корни характеристического
уравнения, \х = \\'Si,
Решение,
в точке (г =
W0 =
х2 = xv-s2, ?/ = х/г> °ч = М*1» h = М*» zf
- 2?/Ct/cos0, / * 1,2.
имеющее особенность типа единичной сосредоточенной силы
R х, в =0), выражается формулой
1 Г 1 2 I
2 ^o(zi) + —j Kq(z2)[ C.7.17)
1 7ГЛ2 J
Нетрудно получить для этого случая решения задач, рассмотренных в
180
%D
начале параграфа при Т-09 например найти основные решения, функции
метода начальных параметров и составить интегральные уравнения метода
компенсирующих нагрузок. В частности, для круглой пластинки
радиуса R с зажатым краем, на которую на расстоянии /?t от центра действует
силае*р°г, решение
W=W0+WK; WK= — 2' {AnJnit^+Bnlnib)] СО$(ив>, C.7.18)
AD n = o
(•M<*i) , , 2In(a2)}
1 X? 7rX2j32 J
2 f/w(a2) , , JnOxi) I
n [ Xj Х1/З1 J
ф„ = у;№Л№1)-У«№)/«№).
Если в срединной плоскости действуют не сжимающие, а растягивающие
усилия, то в формулах нужно заменить знак Г на противоположный.
Для некруговых пластинок учет влияния действующих в срединной
плоскости сил Т при использовании метода компенсирующих нагрузок
сводится к замене основных функций влияния C.7.4) на C.7.17),
компенсирующее решение задается аналогично C.7.18).
Если распределенная масса m пластинки мала, а сосредоточенные массы
велики, может оказаться целесообразным допущение m = 0. При этом
основная функция влияния
AD У I 7Г 7Г J
где ? = Хг, X = \^ТЩ] у = 1,780172, в задачах динамики постоянное
слагаемое можно опустить.
Рассмотрим несколько частных задач. При расчете прямоугольных
пластинок, шарнирно опертых по четырем сторонам, обычно применяется
решение в двойных тригонометрических рядах. Если нагрузка и реакции
гасителей распределены по круговым областям, то в коэффициенты рядов
входят бесселевы функции. В этом случае для пластинки сохраняются
расчетные формулы, приведенные в конце § 3.6 для аналогичной задачи
о прямоугольной мембране, за исключением выражения C.6.6), которое
заменяется следующим
bmn=amn/[Dytnn-Txa2m -TyP2n -mpl],
где Тх, Ту — интенсивности сил в срединной плоскости, действующих
в направлении осей х9у.
Рассмотрим изменения, которые вносятся в расчет пластинки в задачах
о распространении изгибных волн. При исследовании колебаний
ограниченных пластинок, вызванных действием сосредоточенной силы е1р°*,
была использована формула C.7.4), которая не удовлетворяет условиям
181
излучения. Для неограниченной пластинки основное решение
ИЛ> = - —J- /Я0B)(Лг)+- К0(Хг) \. C.7.19)
Заменяя в формулах основного решения функцию Y0(Xr) на функцию
/#о (Лг) и проводя аналогичные замены там, где вводится функция
Yi(\r), можно найти решения для нагрузок, распределенных по
круговым областям. Подобные решения были получены иным образом в [137].
Рассмотрим пластинку, занимающую конечную односвязную область
и ограниченную простым (т.е. непересекающим себя) контуром с
непрерывно вращающейся касательной. Пусть на пластинку передаются
динамические воздействия, распределенные по круговым областям и
изменяющиеся во времени по гармоническому закону. Сначала необходимо
найти основное решение по формулам C.7.4) и значения соответствующей
функции и ее производных на контуре пластинки.
Наряду с полярными введем декартовы координаты х,у и рассмотрим
функции
u(x,y) = dW/dx, v(x,y) = dW/dy.
Обозначим uQ(x,у) =dW0/dx, v0(x,y) =dW0/dy и положим, что функции
и0 и v0 определены для точек контура. Введем вспомогательные функции
о = [Г* W + - К*<Щ cosB^ + roW - - Ко(Г),
\г2(г)+^К2Щ
v0^-\Y2(r)+-K2(r)]smB<p).
Эти функции удовлетворяют соотношениям
Ъи'о/ду = ди'о/дх, дщ/ду = dvo/dx.
Полагаем, что координаты г являются приведенными, т.е. г =
= X%/(* — ?J + (У ~vJ\ кроме того,
1 Эх 1 Ъу
— — = cos<?, — — = siniz?.
X Ъг X Ьг
Вводим две неизвестные функции д(я) и p(s), заданные на контуре, и
представляем и(х,у), v(x,y) в виде
dwo 9wq
" = J Р(s) ds + J u(s) ds\
с Ъп0 с Ъпа
V = J PE) G?S + J ДE) ds.
с Эла с Ъпа
182
t>0
I 7Г J 71
Ио= |^@+ : Кг{г)\ cosBf)+Y0<r)--.K0(r),
Здесь С — контур, п0 — внешняя нормаль к контуру. Пусть точка области
М(х,у) стремится к точке контура Р (?, т?). Так как
Ъи'о
Ъп0
bv'o 2
— = Ф2 — — cosBip) sin(«,r),
Ъп0 nr
Фх
2 2 cos(n,r)
— sinB(^) sin(«,r) - —
тгг тт г
Эп
»0
= Фо +"
7ГГ
cosB^) sin(/i,r),
2 2 cos (и, г)
- - Ф3 + — sinB if) sin(n,r) ,
Ъп0 ъг иг
где Ф1? Ф2, Ф3 - регулярные функции, то для определения p(s) и u(s)
получим интегральные уравнения (V. р. — главное значение)
1
u(o) = -2p(o) + V.p.f p(s)
с
TIT
sinBip) sin(/?, r) + Фх ids +
+ V.p.f H(s)
с
— cosB<p) sin (л, r) + Ф2
7ГГ
</*,
u(a)=-2*i(a) + Kp./ p(s)
с
2
+ V.p.f n(s)
с
7ТГ
cosB</0 sin(«,r) + Ф2
— sinB(^) sin(«,r) + Ф3
7ГГ
ds +
dj.
Эти сингулярные уравнения можно решать непосредственно; в [87]
показано, как они приводятся в результате регуляризации к уравнениям Фред-
гол ьма второго рода.
§ 3.8. Колебания пластинок, лежащих на упругом основании
Вопросы виброзащиты пластинок на упругом основании имеют
несомненное практические значение. В строительстве важным приложением
является использование гасителей для снижения уровня колебаний пола при
бесфундаментной установке машин; в этих случаях гасители могут
применяться как самостоятельное средство борьбы с вибрациями или как
дополнительное устройство, повышающее эффективность виброизоляции. Теория
пластинок на упругом основании с присоединенными гасителями может
иметь известное значение при изучении изгибных колебаний верхнего слоя
трехслойной пластинки. Подобные задачи могут возникнуть также при
учете совместной работы демпфирующего покрытия и гасителя.
Постановка задач о виброзащите пластинок на упругом основании
несущественно отличается от принятой в §3.7. Однако для рассмотренных
здесь задач характерными ярляются трудности получения достаточно
точных данных о податливости защищаемой конструкции по той причине,
что она самым существенным образом зависит от динамических
характеристик основания, которые, как правило, определяются сравнительно гру-
183
бо. Даже в более простых задачах статики конструкций на упругом
основании описание свойств грунта соответствующими механическими
моделями не имеет четкого и однозначного решения, что, в частности, нашло
отражение и в многообразии указанных моделей. В задачах динамики
дополнительно возникает серьезная проблема учета диссипативных и
инерционных свойств основания. На этом пути появились предложения, связанные
с введением условных моделей, являющихся обобщением модели Винкле-
ра (например, модель В.А.Ильичева), различных стержневых моделей,
в том числе предлагавшихся в работах В.П. Виксне и Б.Г. Коренева; в то же
время большое внимание уделяется использованию модели упругого
инерционного полупространства, которое в отдельных случаях можно
приближенно заменить безынерционным с учетом некоторой дополнительной
распределенной массы. Применение гасителей должно опираться на теорию
колебаний пластинок на упругом основании ч; тем, чтобы таким образом
получить в первую очередь необходимые качественные результаты. В
ответственных случаях они могут быть уточнены в результате использования
экспериментальных работ, проводимых для получения ядер моделей
грунтовых оснований. В данном случае наиболее эффективно применение
гасителей при гармонических воздействиях с небольшой нестабильностью
частоты вынужденных колебаний.
Здесь основное внимание уделяется неограниченным пластинкам. В
качестве механических моделей основания рассматриваются модель с двумя
упругими характеристиками, упругое однородное безынерционное
полупространство и стержневые модели. Как ив §3.7, обсуждаются способы
расчета защищаемой конструкции на действие внешней нагрузки и реакции
гасителя с учетом их распределения по некоторым площадкам; дальнейшая
оценка эффективности гашения колебаний должна выполняться с
использованием формул C.7.1), C.7.2). Соответствующие задачи, которые при
модели. Винклера не являются сколь-нибудь сложными, здесь не
рассматриваются, их решения близки к приведенным в [86].
Рассмотрим неограниченную пластинку, лежащую на основании с двумя
упругими характеристиками. При нагрузке q(r, 6) е ° , положив прогиб
w(г, в, t) - W (г, в) е ° , получим уравнение относительно формы
вынужденных колебаний
D72V2W-(k2 +T)V2W + (kl -mp%)W = q. C.8.1)
Здесь Т - равномерно распределенные растягивающие усилия в срединной
плоскости, кх, к2 - упругие характеристики основания.
Уравнение C.8.1) перепишем в виде
V\V\W-2b0V\W^W = qlklt C.8.2)
где?=г//; /=\/5/^~; kt =k, -mp%; к2 = к2 + Г; b0 = k2l2/BD).
Соответствующее однородное уравнение имеет решения Zn{\fs?) X
X cos(fl0), где Z„(-) — функция Бесселя, s — корни характеристического
уравнения s2 + 2b0s + 1=0; при b0 < 1 запишем их в форме: slj2 = — b0 ±
± Vb20 -Л. Обозначим ? >Л = pe±iip, р = %, <р = 0,5arctg(-Z?0/\/l -*o),
Jn (реи«) = ип (р) ± ivn (р), Я„A) (реи*) = /„ (p) ± ign (p).
184
При осесимметричных колебаниях п = 0. При действии на
неограниченную пластинку сосредоточенной силы Ре* ° амплитуды колебаний
W(p) = Pl2f0 (p)/[4D sin B*)]. C.8.3)
Воспользовавшись принципом суперпозиции и теоремой сложения для
бесселевых функций, из C.8.3) можно получить решение задачи при
нагрузке qetp° , равномерно распределенной по окружности радиуса а = а/,
( nqctl3 [/о (а) Йо (р) - go (а) v0 (p)]/[2D sin B<р)], р < а,
W(p) = ш C.8.4)
I irqccl3 [и0 (а)/о (р) - ?0 (<*)& (р)]/[2Я sin B*)], р>а.
При р = a, q = Bяа/)""! получаем выражение для комплексной
амплитуды перемещения защищаемой конструкции в том случае, когда гаситель
передает единичную силу по окружности радиуса а. Воспользовавшись
таблицами цилиндрических функций комплексного аргумента и
формулами C.7.1), можно найти реакцию гасителя и его эффективность; при
этом, если гаситель установлен на машине, учет ее массы предусмотрен в
той же формуле.
При определении радиуса эффективного действия гасителя можно
исходить из предположения, что а < 1, и ограничиться рассмотрением
функций /о(р), т.е. предположить, что гаситель имеет точечный контакт
с пластинкой. Если принять \р - 7г/4, то формулы C.8.3), C.8.4)
переходят в хорошо известные решения задачи об изгибе пластинки на винклеро-
вом основании. В этом случае f0 (р) =/0 (р) = Re Н0 (Р\Д) , т.е./0 @) =
= 0,5,/0A) = 0,3151,/о B) = 0,1289. Таким образом, на приведенном
расстоянии р = 2 амплитуда колебаний защищаемой конструкции, вызванных
действием реакции гасителя, уменьшается почти в 4 раза по сравнению с
точкой р = 0. Поэтому вопрос о размещении гасителей требует
дополнительного исследования с учетом их эффективности для конкретных
конструкций. Очевидно, что при сосредоточенном динамическом воздействии
желательно по возможности устанавливать гасители в области приложения
внешней нагрузки.
Полученные для неограниченной пластинки результаты допускают
простое обобщение на задачи о полубесконечных, круглых и кольцевых
пластинках, а также пластинках, занимающих односвязную область и
ограниченных некруговым контуром [86]. В отдельных случаях при решении
задач об осесимметричных колебаниях круглой пластинки может оказаться
полезным применение функций Y3 (a, р), Y4 (а, р) метода начальных
параметров, которые при р < а равны нулю, при р = а удовлетворяют
условиям: Г3 ¦ Yl = Q(Y3) =0,MG3) =D/I\Y4 = Г4' =М(Г4) = 0, Q(Y4) =
= Djl3, а при р > ос имеют вид
Y3 (а, р) = -тга Bsin ф)~1 [щ (а)/0 (р) - 570' (а)?о (Р)~
- /о' (а) "о (Р) +?о(а)?о (р)],
^4 (а, Р) = -тга Bsin ф)~1 [Йо (а)/0 (Р) - Щ (а) g0 (p) -
- /о (<*) "о (Р) + go (Фо (Р)],
гдеМ, 2 - радиальные изгибающий момент и перерезывающая сила.
185
При mpl > кi дифференциальное уравнение C.8.2) совпадет с
уравнением C.7.6), если в последнем у коэффициента Ь0 знак изменить на
противоположный. При этом в выражении основной функции влияния
C.7.17) следует принять
\1=ky/Tl,\2=\\/^T2l X = V(^Po -?i)/A
Si,2 = -b0±yJb20 + 1, b0=-k2/BD\2).
Для неограниченной пластинки при нагрузке qe ° , равномерно
распределенной по окружности радиуса д, имеем
-~г[-Т Jo^ir)Y0(\xa)^^ K0(\2a)I0(\2r)]9r<at
SD l Xf 7rXj J
[^/о(Х|<0Го(*1 ') + —J ^o(X2r)/o(X2^)|, r>*.
Для пластинки конечного радиуса компенсирующее решение
WK(r) = B1J0(Xlr)^B2I0(X2r)9
где коэффициенты Вх и /?2 определяются из граничных условий на контуре
пластинки.
Если задача о неограниченной пластинке не является лишь
промежуточным этапом для расчета круглой пластинки, а имеет самостоятельное
значение, то для того, чтобы решение имело характер распространяющейся
волны, должны быть выполнены условия излучения. Так, при нагрузке
Регр° в первом слагаемом формулы C.7.17) функцию Неймана следует
заменить функцией Ганкеля аналогично выражению C.7.19).
При действии сосредоточенной силы Ре ° на неограниченную
пластинку, лежащую на однородном упругом изотропном безынерционном
полупространстве, амплитуда прогиба выражается несобственным интегралом
W(r)=— f I ° - , C.8.5)
27Г о ку + Dy ~ тРо
где к = Е\/ [2A — о2) ], Е\, о — модуль упругости и коэффициент Пуассона
основания. При р0 = 0 имеем хорошо известное решение соответствующей
статической задачи
2тг о k+Dy3
*№ — /
Обозначая / = 3\jD/k, 1Л - трЦк, X = yl, % = г/1, из C.8.5) получаем
Р ~ \J0(\$)d\
W(JO* / \ . C.8.6)
Способы вычисления интегралов типа C.8.6) обсуждаются в [86].
Если расчетной моделью основания является система упругих стержней
с жесткостью к(р0), то амплитуды колебаний неограниченной пластинки,
186
загруженной силой Ре ° , вычисляются по формуле
W(r)=Pf0(\r)/DD\2), C.8.7)
где Х = V [k(Po)-mpl]lD, к(р0)>тр20.
Для стержней постоянного сечения, опирающихся нижним концом на
абсолютно жесткое основание,
к (Ро) = Ро \/Wi/tg (jpoh у/р/Ег).
Здесь Ei,p}h — модуль упругости, плотность и высота стержня. Все
результаты, полученные для пластинки на основании с двумя характеристиками,
могут быть применены и для этой модели, если положить к2 = 0,кг =к(р0).
Случай, при котором стержни имеют постоянное сечение, но модуль
упругости изменяется по глубине, рассматривался в [86].
Для пластинок, занимающих конечную область и лежащих на'упругом
основании с двумя характеристиками или в виде системы упругих
стержней, возможно применение метода компенсирующих нагрузок и других
методов, описанных в §3.7. Если пластинка опирается на упругое
полупространство или на однородное основание, ядро которого обладает
круговой симметрией, довольно просто решение получается в случае, когда
пластинка может рассматриваться как неизолированная; при этом задача
сводится к рассмотрению неограниченной пластинки с разрезами [86].
При стремлении экспериментальным способом уточнить функцию с (у),
описывающую упругие свойства основания, в том случае, когда
нагрузку в эксперименте можно приложить лишь к пластинке, лежащей на этом
основании, возможен следующий подход. Пусть на пластинку статически
действует единичная сосредоточенная сила Р. Перепишем C,8.5) прир0 =0
в обозначениях
w(r)=f fG)yJo(yr)dy=F(rlf(y)= , B=— .
о с'1 (y) + Dy* 2тг
Функция F(r) находится экспериментально. Вычислив с помощью
формулы обращения преобразования Ганкеля функцию /(т), далее определим
c(y)=f(y)l[B-Df(y)y4].
§ 3.9. Колебания пологих сферических оболочек
При исследовании колебаний оболочек и складок, которые являются
конструктивными элементами различных машин и аппаратов, покрытий
зданий и сооружений, например резервуаров, и подвергаются динамическим
воздействиям от неуравновешенного оборудования, ветровых и
сейсмических нагрузок, использование упрощенных моделей вряд ли является
допустимым. Решение вопросов гашения колебаний таких конструкций, в
отличие от систем с несколькими степенями свободы или одномерных
систем типа стержней, требует проведения более тонких исследований. Это
связано с большей густотой спектра собственных частот, с необходимостью
учета напряжений в области контакта гасителя с конструкцией и снижения
эффективности одиночного гасителя по мере удаления от места его
установки, с дополнительными трудностями, возникающими при оптимизации
187
параметров группы гасителей; наконец, динамический расчет подобных
систем и без гасителей является достаточно сложным. В тех случаях, когда
для получения опенки эффективности гашения колебаний все же
оказывается возможным расчетную схему конструкции представить в виде
системы с одной или двумя степенями свободы, допустимость таких упрощений
должна быть обоснована соответствующими исследованиями.
В литературе рассматривались вопросы гашения колебаний
цилиндрических оболочек [133, 134, 139, 189, 207], пологих сферических
оболочек [95] и складок [94]. Имея самостоятельное значение, складка может
также использоваться как приближенная расчетная схема цилиндрической
оболочки. Несмотря на проведенные исследования, следует признать, что
проблема гашения колебаний оболочек остается довольно сложной и
требует дальнейшего изучения.
Обсуждаемые здесь задачи о гашении колебаний пологих сферических
оболочек имеют много общего с рассмотренными в § 3.8.
Дифференциальное уравнение относительно формы W вынужденных гармонических
колебаний с частотой р0 пологой сферической оболочки имеет вид
Eh
0,
DV2 V2W +
(f--«4*-
где D — цилиндрическая жесткость, R — радиус срединной поверхности;
h — толщина; т = ph; p — плотность. Формально это уравнение совпадает
с уравнением C.8.1) при к2 = 0, Г = 0, т.е. с уравнением для пластины,
лежащей на винклеровом основании, жесткость которого кх -Eh\R2.
Учитывая это, при построении .решений от действия внешней нагрузки и реакции
гасителя можно воспользоваться результатами, приведенными в [86] и
в § 3.8. Так, например, полагая, что Eh/R2 > тр\, X = 4\J(EhR~2 - mpl)/D,
? = Хг, можно записать основное решение при действии сосредоточенной
силыРе'Ро':
при действии нагрузки qe
ти радиуса а = а/Х,
ip0t
C.9.1)
равномерно распределенной по окружнос-
и'оФН
irqa
2DX3
nqa
2DX3
[/o(a)«o(»-^(a)uott)L ?<<*,
[uo(*)fo(?)-v0(OL)goWl *>«.
C.9.2)
при действии нагрузки
круга радиуса а = а/Х,
qe
JP§ *
равномерно распределенной по площади
^о(*) =
irqa Г
2DX4 [
эта
&(*)ио00-й(Фо(Щ, *<*,
irqa
2DX4
[Уо(а)/о(» + "о'(а)*о«)], %>а.
C.9.3)
Здесь и0 (?) + ш0 (?) = /0 в \Г0, /о (?) + igo «) = #<Г в VO
188
Компенсирующее решение строится аналогично тому, как описано
в §3.7,3.8.
Если оболочка имеет в центре более жесткую вставку радиуса 6,
необходимо решить вспомогательную задачу, аналогичную рассмотренной
в § 3.7. Пусть h, D — толщина и жесткость оболочки при г < Ъ, hXi Dx —
то же при г > Ъ. При осесимметричной нагрузке, находящейся в пределах
вставки, следует при ? = \г < 0 = \Ъ к основному решению W0 (?),
выражаемому, например, формулами C.9.1) — C.9.3) , прибавить
компенсирующее
WK(ft=AtUo(t)+A2Vo(!0, 0<?<]3.
За пределами вставки полное решение
Неизвестные постоянные Aj (/ = 1, 4) определяются из условий
сопряжения при г - Ъ и граничных условий при г = R t. В случае тр% > Eh/R 2
полагают X = *\/(тро - EhR~2)lD, и решения различных задач формально
могут быть записаны как для круглой пластинки, т.е. согласно данным
§3.7 и [86].
Дальнейший расчет оболочки с гасителями сводится к применению
формул C.7.1), C.7.2) или уравнений, приведенных в §-3.1.
Так же, как и для пластинок на упругом основании, основные решения
сравнительно быстро убывают при изменении аргумента. Явления изгиба
оболочки от реакции одиночного гасителя имеют характер краевого
эффекта и влияние гасителя ограничивается сравнительно небольшой областью.
Поэтому при действии нагрузок от неуравновешенных машин одиночный
гаситель целесообразно устанавливать непосредственно на самой машине.
При распределенных по поверхности оболочки динамических нагрузках
необходимо устанавливать несколько ДГК. Рассмотрим этот вопрос более
подробно, следуя работе [95].
При исследовании колебаний оболочек значительный интерес
представляет оценка влияния гасителей на спектр собственных частот и
декременты, соответствующие отдельным формам колебаний.
Для оболочек с весьма густым спектром применять одиночный гаситель
без демпфирования нецелесообразно, так как в интервале между двумя
любыми собственными частотами колебаний оболочки без гасителя
окажется одна из собственных частот колебаний и даже при весьма узком
диапазоне частот внешнего воздействия одиночный гаситель не позволяет уйти
от резонанса. При соответствующем размещении нескольких гасителей
увеличение подъемистости оболочки не ухудшает их эффективности.
Требуемое число гасителей должно быть не меньше количества собственных
частот системы без гасителей, попадающих в заданный интервал частот
воздействия. Можно показать, что при превышении этого минимально
необходимого числа гасителей их эффективность несколько снижается. Однако
при конечном числе гасителей получение каких-либо общих результатов
является затруднительным. Более простым оказывается анализ в случае
установки очень большого числа гасителей, реакции которых можно
приближенно считать распределенными непрерывно по поверхности оболочки.
Исследование предельного случая — континуального гасителя — позволяет
189
получить нижнюю оценку эффективности гасителей при оптимально
выбранном их числе.
Ниже рассматривается влияние континуального гасителя без
демпфирования на спектр частот пологой сферической оболочки, далее изучается
возможность повышения декрементов колебаний системы в результате
применения гасителя с оптимальным демпфированием. Попутно
приводятся аналогичные результаты для пластинки.
Дифференциальное уравнение свободных колебаний пологой
сферической оболочки с присоединенным равномерно распределенным
динамическим гасителем без демпфирования после сокращения временного
множителя можно записать так:
.2
DV2 V2W +
ГEh о / v<4 \Л
bF-'w(, + I^7)r-0' C-9'4)
где а> — частота свободных колебаний оболочки с гасителем; v, ojt —
относительная масса и парциальная частота гасителя.
После перехода к безразмерным координатам, подстановки г = %тх в
операторе
д2 1 Э 1 Э2
72 =
Ъг2 г Ъг г2 Ъч>2
уравнение C.9.4) примет вид
v| v\w-\*w=o.
C.9.5)
Здесь
Х4 =
12A -а2)г\р
h2E
[*.-•(-Й1'э-
Е
о — коэффициент Пуассона; гх — некоторый произвольный размер (для
круглой в плане оболочки целесообразно положить равным радиусу
внешнего контура). Корни XtJ Х2, . . . уравнения C.9.5), соответствующие
простейшим краевым условиям, приведены, например, в [58]. Произвольная
Рис. 3.13. Зависимости \ от частоты
для пологой оболочки с гасителем
(сплошная линия) и без него
(штриховая линия)
-fZCf-pbrf/R2-
заданная зона частот сон < со < сок будет безрезонансной, если ей
соответствуют значения X, удовлетворяющие условию X4 < X4. С помощью
распределенного гасителя можно добиться удовлетворения и более
жесткого условия X4 < 0; при этом амплитуды перемещений от гармонической
нагрузки в диапазоне частот сон < со < сок обычно не превышают
перемещений, возникающих в пластинке (с теми же краевыми условиями) при
статическом действии нагрузки.
190
Для выполнения условия X4 < О при сон < со < сок параметры
гасителя сог, v можно подобрать из условий
сог = сон
~ 1 1
ОТ - СОк
\ со? - со* I
0.
C.9.6)
Характерные зависимости X4 от со приведены на рис. 3.13. В результате
присоединения большого числа точечных гасителей количество
собственных частот системы существенно увеличивается (при континуальном
гасителе, очевидно, добавляется бесконечное число частот). Условно можно
Рис. 3.14. Зависимости относительной
массы гасителя от безразмерного
параметра для круглой пологой
защемленной (сплошная линия) и шарнирно
опертой (штриховая линия) оболочек
V
0,08
0,04
0
: \
\
\
\
\
\
\
V
\
\
\
3
\2
V
Т
-* —.
>
^
,3
V Ч,
Ч.
Ч,
N.
""ЧЧ 1
^J
10
ъо
50
70 90 110 А»
считать, что все дополнительные частоты располагаются в сравнительно
малой начальной зоне сгущения частот, от сох до сон на рис. 3.13, а
"основные" частоты сдвинуты в сторону увеличения.
Определяя из условий C.9,6) требуемую относительную массу гасителя
(к-1)
V = К
D*+»)<*•+1)
вводим безразмерные параметры
-4.=
12A -At2)rt
h2R2\i
со
cot - со
к
х4
со:
со
C.9.7)
Параметр А* характеризует подъемистость оболочки и косвенно густоту
ее спектра, константа к — частотный диапазон сон < со< сок, причем Хн, Хк
в C.9.7) соответствуют значениям сон, сок при v - 0, в частности Хн, Хк -
корни уравнения C.9.5), если сон, сок - собственные частоты оболочки
без гасителя.
При построении зависимостей v от А* для круглой в плане оболочки
(рис. 3.14) принято Хн = Хх (Xi - наименьший корень уравнения C.9.5)),
цифры у кривых обозначают номер корня, с которым совпадает Хк. При
необходимости можно определить отношение со?./со? = 04* + КЖ^* + О»
воспользовавшись значениями X (см. [58], с. 140). Так, при Ач = 50 и
Хк = Х3 для защемленной оболочки v = 0,04, к = 11,7, со?/сон = 1,21; при
Хк = Х4 для той же оболочки v = 0,062, к = 15,4, сОк/сон = 1,28. Таким
образом, в принципе даже при сравнительно небольшой относительной массе
континуального гасителя оказывается возможным получить некоторую
весьма узкую безрезонансную зону, в которой при отсутствии гасителя
находилось несколько собственных частот оболочки.
191
В тех случаях, когда диапазон частот воздействия достаточно широк
(особенно если нижняя граница диапазона значительно меньше первой
собственной частоты системы) или если необходимо ограничить амплитуды
колебаний масс гасителей, целесообразно применять гасители с
демпфированием. Представляет интерес рассмотреть вопросы применения большого
числа гасителей с демпфированием для увеличения логарифмических
декрементов колебаний Э/, соответствующих тем собственным частотам со/
системы с гасителями, которые расположены в диапазоне частот
воздействия. При этом критерием качества является J - тахA/Э/). Такая задача
может возникнуть, если и частота воздействия, и распределение внешней
нагрузки нестабильны, а резонансные колебания с любой частотой со/ в
равной степени опасны. Обычно коэффициент внутреннего трения оболочки
7о мал, и при оценке эффективности виброгашения можно не учитывать
те формы колебаний, собственные частоты которых находятся за
границами сон, сок диапазона частот воздействия. Другая задача с аналогичным
критерием качества возникает в связи с гашением колебаний при
ветровом резонансе.
Далее рассмотрим гасители с демпферами вязкого трения. Используя
комплексную форму записи исходных уравнений движения оболочки с
континуальным гасителем и принимая перемещения в виде w = WeS(>t,
получаем уравнение типа C.9.5) относительно комплексных амплитуд, в
котором
к
12A -о2)г\р | si
1 со -L
hLE J 1+гуо
1 +р-
]
l+Mr/So+O^/sg JJ'
C.9.8)
где сог, /хг — парциальная частота и разделенный на массу коэффициент
вязкого трения гасителя; s0 — параметр, пропорциональный комплексной
частоте, значение s0j- = (—0,57/ + 0 w/ соответствует /-й форме колебаний
оболочки с гасителем; 7/ = fy/ir; комплексный модуль упругости
оболочки при со/ > 0 и малых 7о принят равным Е{\ + /*7о) •
Обозначим низшую частоту собственных колебаний оболочки без
демпфирования через со0 и положим s =50/со0, М = дг/со0,/ = сог/со0, к =Х4/Л?,
Лф = 12A - o2)r\l{h2R2\\) ш со2/(со2 - со2). Тогда с учетом у0< 1 из
C.9.8) следует
12A-м2)г?р
к = -А, + w0 ——jz е,
п Е
е = х2 A - /7о) I " 7-Г - 1 - » 1 •
Расчеты, выполненные при различных значениях ц и /2, показали, что
зависимость к от со/ имеет область (обычно при со/ < сог), где значения ту
увеличиваются с ростом /. В области со/ > сог значения 7/ начинают
уменьшаться. Таким образом, минимальное значение 7/ обычно соответствует
частоте со/, наиболее близкой к одной из границ интервала частот
воздействия. Оптимальными можно считать такие параметры гасителей, при
которых для двух крайних в интервале частот воздействия значений со/ по-
192
к
0,15
О J
0,05
О
1,8
I*
/
0,6
0,2
III
Ivv
1
1^
5
xf
Ц
,
JL_
1
h»-b,om\
2-i>=0,025\
5-v=0,05\
^-v=0,075
L 1 " "j 1
1 1 1 1 1
1 j j 1 _j
YA^
1 5
3
Ij-s;
вЩ
К
0,25
0,2
0,15
0,05
О
2
/
О
0,0725 v-0,1
Рис. 3.15. Оптимальные параметры гасителя и значения 7* Для круглой пластинки
Рис. 3.16. Оптимальные параметры гасителя и значения 7* для пологой оболочки
при п-2 (сплошная линия), 4 (штрихпунктирная линия), 10 (штриховая линия)
лучатся равные и максимально возможные значения ту, которые
обозначим 7*- При увеличении числа п "основных" собственных частот в
диапазоне от сон до сок значение 7* уменьшается; поэтому далее при оценке
влияния других факторов результаты получены для нескольких
фиксированных значений п.
Обычно выполняется условие сон < сох; при этом наименьшей
собственной частоте соответствуют значения к = 1 и е = 1. При фиксированных А*, п
и заданных краевых условиях можно с помощью справочников определить
также значения кие, соответствующие наибольшей "основной"
собственной частоте coJJ в заданном диапазоне.
Целесообразно упростить определение для различных значений Ат
оптимальных параметров ц, /2 и 7*, построив предварительно графики
зависимостей этих величин от к для пластинки, т.е. когда А # =0. После
подстановок м = т?5, /2 = сц2, е = хд2, Ц = 0/(—О,57 + 0> 0 = jur/cj;-, выражение для е
приводится к виду
1 - По
I—'—г-1-А
\ 1 +7?+7?2С /
Если положительное значение у не превышает некоторой предельной
величины, то всегда можно найти два значения j31>2, которым соответствуют
действительные значения х i,2-При Л„= 0 отношение XilXi = к-
Варьируя с, можно добиться, чтобы при заданном у значение к было максималь-
13. Б.Г.Коренев 193
ным. Соответствующие параметры \л2 = 1/xi, f2 =c/xi, найденные из
условия е = 1 при наименьшей собственной частоте, будут оптимальными
В качестве примера на рис. ЗЛ5 приведены результаты для круглой
пластинки при 7о = 0- При заданных краевых условиях можно для
фиксированного п найти значение к, затем с помощью графиков, представленных
на рис. 3.15, определить оптимальные параметры гасителей и
соответствующее значение 7*- Как видно из рис. 3.15, для узкополосных воздействий
эффективность гасителей резко возрастает. Увеличение диапазона частот
воздействия приводит к уменьшению влияния точности настройки
гасителей; практически, если к > 6, эффективности гасителей и демпферов при
частоте со° становятся одинаковыми. Поэтому с ростом к увеличивается
оптимальный коэффициент вязкого трения гасителей и уменьшается
параметр/2.
Результаты, полученные для пластинки, позволили построить
зависимости (рис. 3.16) для защемленной по краю круглой в плане оболочки при
7о = 0. Из рис. 3.16 следует, что увеличение подъемистости оболочки
приводит к увеличению обеспечиваемого в заданном интервале частот
значения 7* и к значительному уменьшению коэффициента вязкого трения
гасителей. Это объясняется сужением диапазона частот от оох до со°.
Нетрудно заметить, что если верхняя граница заданного диапазона не зависит
от А* или совпадает с собственной частотой соп оболочки без гасителей,
то отмеченное влияние подъемистости оболочки будет более
существенным. Зависимость оптимальной настройки гасителей от А* при малых
значениях А* имеет довольно сложный характер (сказывается влияние
параметра п). Можно, однако, отметить, что для достаточно больших А*
значение/2 убывает с возрастанием подъемистости оболочки.
На рис. 3.17 и 3.18 показано,как влияет внутреннее неупругое
сопротивление оболочки и пластинки на эффективность виброгашения при v =0,05.
Из этих графиков видно, что при 7о w 0»02 гасители сравнительно
небольшой относительной массы могут более чем вдвое увеличить
логарифмические декременты колебаний в достаточно широком частотном диапазоне.
При увеличении параметра А * эффективность гасителей заметно возрастает.
Полученные результаты имеют весьма простое объяснение. В дорезонанс-
ной зоне (со < сог) динамический гаситель ведет себя как присоединенная
0,1
0,15
0,1
0,05
Y~~~
S^"
"
<ш_
r-r-:
у~ф
— —'
Ч"л
Уо=°>01
0,05 \
'"цог\
т~~о\
20 40 60 80 А*
У,
0,15
0,1
0,05
О
ЯГ№
^0,02
0
г
0,01
¦—ч—
10 13 х
Рис. ЗЛ7. Зависимости критерия качества от подъемистости пологой оболочки
при v - 0,05,п = 2 (сплошная линия), 10 (штриховая линия)
Рис. 3.18. Зависимости критерия качества для круглой пластинки от относительной
ширины частотного диапазона при v - 0,05
194
масса и мало влияет на колебания оболочки; в резонансной зоне (со « сог)
динамический гаситель работает в оптимальном режиме и существенно
уменьшает колебания оболочки; в зарезонансной зоне (со >• сог) масса
гасителя почти неподвижна, и он работает как демпфер. Поэтому с
увеличением диапазона частот воздействия оптимальное значение jjl, выбранное
из условия получения максимально возможных декрементов колебаний
оболочки с гасителем, возрастает.
Описанная задача о континуальном гасителе может рассматриваться
также применительно к оболочкам иного очертания и пластинкам. При
этом влияние гасителя формально отражается введением в
дифференциальное уравнение измененного множителя у слагаемого, содержащего
искомую функцию (см. уравнения C.9.4), C.9.5)). Такая задача имеет много
общего с обсуждавшейся неоднократно в литературе задачей о
демпфирующих покрытиях. Демпфирующее покрытие можно рассматривать как
систему не связанных друг с другом стерженьков, на конце которых
находятся массы; возможно допустить, что стерженьки соединены между собой
связями; при этом, естественно, будем иметь различные варианты
расчетных схем демпфирующих покрытий. По-видимому, многие результаты,
полученные в этом направлении, можно использовать в задачах о
континуальных гасителях, граница между которыми и демпфирующими слоями
является весьма условной. С практической точки зрения локальные
гасители, которые являются основным предметом рассмотрения во всех
остальных параграфах этой главы, могут 'применяться совместно с
континуальными.
§ 3.10. Колебания складчатых систем
Динамический расчет складок, используемых, в частности, в качестве
покрытий промышленных зданий, является весьма трудоемким. Особенности
колебаний складок — густота спектра собственных частот и наличие
нескольких узлов и пучностей у низших форм усложняют постановку задачи
о гашении их колебаний. Обычно в задачах виброгашения складок
необходим учет высших форм колебаний. Поэтому во избежание возможных
значительных погрешностей следует при выборе расчетной схемы и метода
расчета отказаться от упрощающих гипотез полубезмоментной теории
(гипотеза плоских сечений при описании деформаций в плоскости грани и
неучет изгибающих и крутящих моментов при рассмотрении изгиба грани
складки). Кроме того, оказывается необходимым учесть непрерывность
распределения массы по всей площади граней. В основу такой постановки
задачи о колебаниях складки была положена работа [37], в которой
рассматривались складки с концевыми диафрагмами, гибкими из своей
плоскости. Частоты и формы собственных колебаний определялись при
этом методом перемещений с использованием известных решений М.Леви
и Л. Файл она для каждой грани. Были получены функции, необходимые для
применения метода перемещений, имеющие одинаковую структуру для
задач о плоском напряженном состоянии и об изгибе граней.
Следует отметить, что подъемистые складки средней длины обладают
густым спектром собственных частот, а формы их колебаний, начиная
с первой, имеют узловые линии и пучности, которые могут совпадать с реб-
13*
195
рами складки. Сосредоточение массы по ребрам (или по другим
образующим) может привести к искажению собственных частот и форм, а иногда
даже к изменению характера симметрии первой формы. Это обстоятельство
иллюстрируется изображенной на рис. 3.19 первой формой колебаний
регулярной шестигранной шарнирно опертой складки с отношениями толщины,
ширины и длины грани, равными 0,01 : 0,258 : 1, и коэффициентом
Пуассона 0,15. Результаты получены в предположении: 1 - масса равномерно
распределена по граням; 2 - масса сосредоточена у ребер и равна полусумме
масс примыкающих граней; 3 — масса распределена аналогично 2, но в
отличие от 1 и 2 учтены гипотезы полубезмоментной теории.
Рис. 3.19. Первая форма колебаний для различных
вариантов распределения масс складки
Сложный характер первых форм колебаний складок затрудняет выбор
мест установки гасителей, а большая, чем у пластинки, густота спектра
собственных частот приводит к необходимости учета большего числа форм
колебаний. Для уменьшения местных напряжений целесообразно
располагать гасители в местах передачи внешних усилий (например, от
вентиляторов) или по ребрам складки. Если число форм колебаний складки, учетом
которых можно ограничиться, невелико, то желательно располагать
гасители в пучностях форм. При выборе мест размещения гасителей следует
также учитывать вид заданного критерия качества /, минимум которого
определяет их оптимальные параметры.
Рассмотрим более подробно, в соответствии с данными работы [94],
вопросы расчета складки с гасителями, методику оптимизации параметров
гасителей и результаты исследования их эффективности.
Складку с гасителями на действие гармонических и стационарных
случайных нагрузок целесообразно рассчитывать смешанным методом (см.
уравнения C.1.8) и их модификацию в § 3.1), В этом случае в качестве
неизвестных принимают п амплитуд обобщенных координат, соответствующих
собственным формам Vj (/ = 1,и) колебаний складки, и к амплитуд
Xs (s = 1Д ) реакций гасителей. При большом числе гасителей, в частности
при к > п, при необходимости проведения многократных расчетов с целью
оптимизации параметров гасителей упрощения достигаются применением
метода перемещений в форме уравнений C.1.7). Если имеются группы
гасителей с одинаковыми настройками и демпфированием, то можно
использовать описанный в § 3.1 прием вычисления матрицы А.
При оптимизации параметров гасителей критерием качества можно
принять амплитуду перемещения или усилия Т в заданной точке складки,
некоторую функцию от указанных величин в различных точках или, например,
п
интегральную характеристику типа / = 2 | \р ¦ \ 2. При стабильной частоте
/ =1
196
воздействия р0 параметра гасителей, соответствующие Т = О, могут быть
такими же, как для системы с одной степенью свободы, лишь в редких
случаях, например, когда Т является перемещением точки s подвеса гаси
теля. С помощью гасителей не всегда удается уменьшить до нуля интеграль-
2
ный критерий. Для того чтобы / = 2 | (pj |2 = 0, необходимо выбрать
место подвеса гасителя из условия Qx / Vs x = Q%jV9x% где обозначения
соответствуют C.1.7), C.1.8) . При п> 2 для той же цели следует использовать
несколько гасителей.
При нестабильной частоте гармонического воздействия критерием
качества может быть максимальное (в заданном диапазоне частот р0) значение
п
функции /= шах ч^(р), где ¦= | Т\ или Ф= 2 \ \р* | 2, р = p0/wi - отно-
р
шение частоты вынужденных колебаний к низшей собственной частоте
складки.
Если в диапазоне частот воздействия оказываются две (и более)
собственные частоты складки, то применение динамического гасителя без
демпфирования не может привести к заметному снижению критерия
качества, так как собственные частоты систем без гасителя и с гасителем
перемежаются — избежать резонанса невозможно. Следует отметить, что подбором
параметров гасителя можно добиться того, что соответствующая форма
колебаний системы с гасителем будет ортогональна нагрузке (первая
форма может быть ортогональна лишь в отдельных случаях). Условие такой
настройки гасителя приведено в [94]. Тем не менее в реальной системе не
удается существенно раздвинуть безрезонансную зону, поскольку
закономерность распределения нагрузки известна приближенно и может
изменяться в процессе работы. Наиболее действенным средством гашения колебаний
при гармоническом воздействии с нестабильной частотой являются гасители
с оптимальным демпфированием.
Большинство сооружений без гасителей имеют низкие коэффициенты
поглощения энергии, поэтому при вычислении критериев качества /
основной вклад вносят те формы колебаний Vj (/ = l,w), которым
соответствуют собственные частоты, близкие к диапазону частот воздействия.
Значения элементов А^п\ т?^ в C.1.8), зависящие от прочих форм Vj
(/ > л), мало изменяются при изменении частоты воздействия. Часто, не
внося существенных погрешностей, можно пренебречь ими или, по крайней
мере, учесть их лишь при окончательном вычислении критерия качества,
выполняя оптимизацию параметров гасителей без учета указанных величин.
Аналогичные приемы использованы ниже при оптимизации параметров
гасителей складок. '
Для того чтобы добиться уменьшения интегрального критерия качества,
часто оказывается целесообразным применять несколько гасителей. Иногда
это вызвано необходимостью отдалять друг от друга реакции гасителей
на достаточное расстояние, чтобы не создавались чрезмерные местные
усилия. Обычно при широкополосных воздействиях рекомендуется на-
197
страивать отдельные группы гасителей на разные частоты [106]. Поэтому
далее предполагалось, что к складке может быть подвешено несколько
групп гасителей с равными (у группы) парциальными частотами и
коэффициентами вязкого или внутреннего трения, но с различными массами.
Минимаксная задача оптимизации параметров гасителей из условия
минимума критерия качества не является унимодальной. Однако во
многих случаях, когда решающее влияние оказывает первая форма колебаний,
локальный минимум /, соответствующий меньшим значениям частот,
является также глобальным минимумом. Здесь при решении задач на ЭЦВМ
использовался автоматический поиск локальных минимумов из разных
начальных точек. На каждом этапе оптимизации алгоритмом
предусматривались выбор направления спуска вдоль поверхности / (П) и спуск по
выбранному .направлению шагами а02к (где П — вектор оптимизируемых
параметров; к — номер шага; а^ — вектор базисных значений шага) .
Представляется естественным, учитывая / = тах^(П,р) = ч>(П,/?м), назначать
р
очередное направление спуска совпадающим с антиградиентом функции
ч>(П, рм)., запоминая точку ры, соответствующую тахч>(П, р) напослед-
р
нем шаге спуска по предыдущему направлению. Это позволило бы во
много раз сократить затраты машинного времени на определение направления
спуска (поскольку отпадает необходимость выполнять вычисления ^ для
большого числа точек интервала частот), но указанная процедура может
привести к ошибкам, так как задолго до достижения минимакса при
П = П0 функция ^(П, р) имеет два локальных максимума (в
точках Рх, рг) i близких по величине. Если рм - рх и движение начинается
в направлении антиградиента gx функции м^(П, рх), то возрастает значение
функции ч>(П, р2) ; в дальнейшем рм = р2, но при попытке движения вдоль
антиградиента g2 возрастает значение ^(П, Pi) и т.д. На рис. 3.20 подобная
Рис. 3.20. К выбору направления движения при
оптимизации параметров гасителей
/>
.2
' /С
ситуация проиллюстрирована на плоскости оптимизируемых параметров
П = (сог, цГ) одной группы гасителей с вязким трением, причем
заштрихованы области увеличения функций ^(П, рх), ^(П, /?2), отделяемые
линиями уровня (л.у. на рис. 3.20). Угол а, лучи которого ограничивают
незаштрихованную область возможного спуска в малой окрестности
текущей точки, стремится к нулю по мере приближения к минимаксу. Однако
уже при а < я/2 невозможен спуск при выполнении указанной процедуры.
Для избежания подобной ошибки было предусмотрено запоминание
вектора gi после неудачного первого шага; если второе направление g2 также
оказывалось неудачным, суммировались единичные векторы-антиградиенты
198
g\e, S2e и движение начиналось в направлении g = g le + g2e
(биссектрисы угла а). Если направление вдоль g также оказывалось
неудачным, базисный шаг уменьшался вдвое; вычисления заканчивались при
#о<6т (ет — заданная точность).
Принятый в алгоритме закон увеличения шага при спуске обусловлен
овражной структурой поверхности / (П), причем длина оврагов часто во
много раз превосходит длину базисного шага. В простейших случаях
(для системы с одной степенью свободы при отсутствии ограничений),
когда овраги ориентированы почти параллельно осям координат (причем
Рис. 3.21. Схема пятигранной складки
наиболее длинные вдоль оси дг), может оказаться эффективным
простейший метод поиска экстремума — координатный спуск.
При большом числе оптимизируемых параметров и наличии ограничений
на параметры, заданных в форме неравенств, направление спуска g целесо-
образно назначать в виде g = 2 otjgje, где единичные векторы-антигра-
/ =1
диенты gje соответствуют как функциям ч^(П, ру), так и ограничениям.
Коэффициенты olj могут быть найдены в результате решения системы
уравнений с матрицей Грамма при одинаковых свободных членах или с
использованием симплекс-метода при линейной зависимости векторов gje .
Во многих задачах при оптимизации параметров гасителей целесообразно
считать частоту воздействия случайной величиной. Если критерием качества
гашения колебаний является дисперсия некоторой величины
(перемещения, усилия и т.п.), то эквивалентной с математической стороны будет
задача о снижении дисперсии при действии стационарного случайного
процесса. Далее такая задача рассмотрена в связи с учетом пульсаций ветрового
давления. Критерий качества находился численным интегрированием
оо
j = Dt = L f*2(p)sz(p)dp,
о
где DT — дисперсия перемещения или усилия Т; Sz (p) — спектральная
плотность воздействия. Оптимизация параметров гасителей выполнялась
по описанному выше алгоритму, но без использования процедуры
запоминания точки рм и определения градиента лишь для этой точки.
Приведем результаты анализа гашения колебаний складок.
199
Таблица 3.1
Квадраты собственных частот колебаний складки
риант
Вид
симметрии
колебаний
Номера гармоник и частот в порядке возрастания
1; 1
1;2
1; 3
2; 1
2; 2
2;3
3; 1
3;2
4;1
5;1
А Косая 690 1845 10 460 5 716 8 694 -
Прямая 564 3 168 5 047 5 419 7 988 16 706 10 345 18 598 13 36317 Г00
Косая 1635 9 253 19 414 6 827 - - 14 436
Б Прямая 2 181 4 903 - 7 899 11420 - 10 738 13 56017 220
Рассматриваемая складка характеризуется следующими параметрами
(обозначения по рис. 3.21, a): Dx = 0,06L; D2 = 0,015 L; D0 = D2/3;
hx = 0,01 L; h2 = 0,4hx\ I = 0,41 L; коэффициент Пуассона равен 0,15.
Оценивалась эффективность гашения колебаний при действии ветра
(вариант А), а также при гармонических воздействиях от вентилятора
(вариант Б) с диапазоном изменения частот от 30 с-1 до 60 с. По
варианту А края складки считались свободными, по варианту Б — опертыми.
В табл. 3.1 приведены значения квадратов собственных частот складки
в диапазоне от нуля до 20 000 с при L = 20 м, модуле упругости
21 • 106 кН/м2, плотности 2,4 т/м3; вычисления проведены по формулам,
полученным в [37]. Двойные числа в заголовке граф означают: первая
цифра — номер гармоники (вдоль образующей складки), вторая — номер
соответствующей частоты.
Схема основного косо симметрично го загр ужения по варианту Б
(силы приложены в точках s прикрепления вентилятора) показана на
рис. 3.21,6. Следует отметить, что при вращении эксцентрика вентилятора
в горизонтальной плоскости возникает еще другая составляющая
воздействия — кососимметричная относительно оси, перпендикулярной
образующей, и сдвинутая по фазе на я/2, которая не оказывает заметного
влияния и не учитывалась в расчетах. Дополнительно выполнены
расчеты для прямосимметричного загружения (вертикальные силы Р в
точках s).
Сопоставлялись гасители, подвешенные в точках s (чтобы не вызывать
дополнительной концентрации напряжений), создающие усилия в
вертикальном (группа 1) и горизонтальном (группа 2) направлениях, а также
гасители (группа 3, только для прямосимметричных колебаний), основная
часть массы которых отнесена к центру (рис. 3.21,в). Оптимизировались
безразмерные параметры /2, /i гасителей с вязким (/2 = со2/со2,
д = Mr/coi) или внутренним (/2 = co^wr/co2, д = co?i;r/co2) трением
(здесь и>х — частота колебаний 1;1 по табл. 3.1). Величина Т,
соответствующая критерию качества /, считалась равной вертикальному
перемещению центра квадрата ssss при прямосимметричных колебаниях и
перемещению точки s 1 вдоль биссектрисы двугранного угла при кососимметрич-
200
Таблица 3.2
Коэффициенты эффективности гашения колебаний складки при гармоническом
воЗДсЙСТВИИ ОТ вситли юра
Вид симметрии
колебаний
Группа
гасителей
То
*1
к2
Косая 1 0,05 6,61 6,55
Косая 1 0,1 3,31 4,29
Косая 1+2 0,05 5,57 5,8
Прямая 1 0,05 26 21
ных колебаниях. Диссипативные силы внутреннего сопротивления складки
характеризовались константой у0.
Основная часть результатов по гашению кососимметричных колебаний,
вызванных вентилятором (рис. 3.21,6), получена с учетом лишь двух форм
колебаний A; 1 и 1; 2), так как формы 3; 1 и 1; 3 мало влияли на
результаты (до 5 %)¦, а формы 2; 1 и 2; 2 ортогональны нагрузке. То же можно
сказать о прямо симметричных колебаниях. При оценке эффективности
гашения колебаний по локальному и интегральному критериям качества
результаты отличались незначительно. В качестве примера для гасителей с общей
относительной массой v = 1,25% (от массы складки) в табл. 3.2 приведены
значения коэффициентов уменьшения (Кх — квадрата локального, К2 —
интегрального) критериев качества в результате установки гасителей с
оптимальными параметрами. В общем случае близость значений Кг и К2,
а также /2, ц. зависит от выбора критерия / и отчасти является
свидетельством решающего влияния на результаты первой формы колебаний.
В последнем обстоятельстве нетрудно убедиться из представленных
на рис. 3.22 графиков, полученных для гасителей группы 1 при
кососимметричных колебаниях складки с коэффициентом внутреннего трения 7о«
Однако необходимо отметить, что в зависимости от места установки
гасителей, даже если учитывается только одна форма колебаний, могут
существенно изменяться не только значения Кх, но и относительные
параметры /2, д, поскольку увеличение ординаты формы в точке подвеса
гасителей равноценно увеличению v, Указанное обстоятельство особенно
характерно для складок коротких и средней длины, первые формы колебаний
Т а б л и ца 3.3
Результаты расчета складки с гасителями, работающими в двух направлениях
Амплитуда
воздействия
Критерий
качества
П
п
Д|
М|
к,
к*
Постоянная Локальный 0,948 0,946 0,173 0,134 0,84 1,28
Постоянная Интегральный 0,986 0,955 0,154 0,14 0,89 1,25
Пропорциональ- Локальный 1,032 0,948 0,149 0,143 0,89 1,2
нал р2
201
Рис. 3.22. Коэффициент уменьшения квадрата
перемещения складки и оптимальные параметры гасителя при
70 = 0,05 (сплошная линия), ОД (штриховая линия)
которых имеют несколько узлов и пучностей.
Значения Кх, /2, д для гасителей с вязким и
внутренним трением оказались близкими,
причем для гасителей с вязким трением /2 всегда
меньше, ад — больше для малых v A,25 % и
менее). Если колебания возбуждались
инерционными силами (пропорциональными
квадрату частоты воздействия), значения Kuf2,
как правило, выше, ад — такие же, как и в
случае постоянных амплитуд сил воздействия.
Поскольку эти результаты не отличаются качественно от полученных для
системы с одной степенью свободы, они не анализируются подробнее.
При кососимметричных колебаниях гасители группы 2 оказались
малоэффективными. Однако при одновременном использовании гасителей
групп 1 и2 (*>х = v2) эффективность хотя и была несколько ниже, чем
у гасителей группы 1 с общей относительной массой v = vx + v2 (см.
коэффициент К3 в табл. 3.3, К3 = Кг (ух + v2)jKx (*>)), но существенно
превышала эффективность гасителей группы 1 с относительной массой vx
(см. коэффициент К$ в табл. 3.3; К4 = Кх (vt + *>2)/^i (^i))- В табл. 3.3
приведены также значения оптимальных параметров /2, /|, Mi, Д2
(вычисления выполнены при у0 - 0,05; v = 1,25%). Учитывая, что К4 > 1,
можно сделать естественный вывод о большей эффективности (при
соответствующей настройке) гасителей, масса которых участвует в двух
движениях — вертикальном и горизонтальном (например, маятникового гасителя
с упругой связью). При более строгом подходе в подобных случаях следует
учитывать периодичность коэффициентов дифференциальных уравнений
гасителей и стремиться выбрать параметры гасителей так, чтобы
параметрический резонанс оказался благотворным — силы одного направления
совершали работу по устранению перемещений другого направления.
Это сложная задача требует еще специальных исследований.
Следует отметить, что отклонения параметров гасителей от оптимальных
значений могут привести к заметному снижению эффективности гасителей,
особенно при гармоническом воздействии с нестабильной частотой.
Критерий качества сильнее реагирует на отклонения параметров при малых
значениях относительной массы гасителей, причем он во много раз более
чувствителен к изменениям / 2, чем к таким же изменениям д.
Выше отмечалось, что максимальные значения функции ^(р)
достигаются в двух точках р%, р2 интервала L0 изменения частот воздействия,
Если интервал L0 достаточно велик, то ри р2 являются внутренними
точками интервала; если интервал мал, то одна из точек, например р2,
становится граничной точкой интервала L0. Такой случай имел место при
гашении прямосимметричных колебаний. При этом эффективность
гасителей возросла, так как воздействие было более узкополосным. Приведенные
в последней графе табл. 3.2 значения коэффициентов Klf K2 значительно
202
10
6
2
7
0,9
0,8
0,2
0,1
О
\"t'
Г-id
id*
^Т Гг
1,25 2,5
выше, чем для кососимметричных колебаний. Как и следовало ожидать,
значения ]х оказывались меньшими (более острая настройка), а/2
изменялись незначительно; наиболее эффективными оказались гасители группы 3,
хотя преимущество перед группой 1 незначительное.
При проведении расчетов ветровое воздействие рассматривалось сначала
как стационарный случайный процесс со спектральной плотностью
вида A.10.1), а затем как гармоническое воздействие с нестабильной часто
той. Предполагалось, что в поперечном направлении нагрузка распределена
по полуволне синусоиды (для прямосимметричной составляющей
ветрового воздействия — ПСВВ) и синусоиды (для КСВВ), вдоль образующей —
равномерно распределена. Учитывая, что основное влияние оказывала
ПСВВ и частоты 1; 1 для разных видов симметрии варианта А были
близкими, подбирались оптимальные параметры гасителей для ПСВВ и при тех же
параметрах выполнялся расчет для КСВВ. При распределенных
воздействиях типа ветра труднее уменьшить интегральный критерий качества.
Поскольку кривая спектральной плотности процесса имеет ярко
выраженный максимум значительно ниже первой собственной частоты и
пологую основную часть, результаты оказались почти такими же, как при
действии белого шума, и близкими к полученным для системы с одной степенью
свободы (см. § 1.10). Гасители, оптимальные для стационарного
случайного воздействия, были эффективными и при гармоническом воздействии
с нестабильной частотой (например, при То = 0,05, v = 1,25 % значения К2
отличались от оптимальных для гармонического воздействия менее чем
в 1,25 раза). Все параметры ц, f2, К2, оптимальные для гармонического
воздействия с нестабильной частотой, оказались большими, чем показанные
на рис. 3,22 (значения К2 больше в 1,1 раза), В рассматриваемом примере
влияние высших форм колебаний, начиная с 1; 3 (см. табл. 3.1), оказалось
незначительным.
Следует отметить, что оптимизация параметров гасителей, особенно при
гармоническом воздействии с нестабильной частотой, является трудоемкой
задачей даже при тех упрощениях, которые были здесь сделаны. Поэтому
частные результаты и даже приближенные формулы, позволяющие
упростить подбор гасителей, могут быть весьма полезными.
§ 3.11. Методы расчета многомассовых и континуальных систем
с "непропорциональным" трением, оборудованных ДГК
В развитие описанных в § 3.1 и других параграфах этой главы алгоритмов,
основанных на том, что защищаемая континуальная система имела
"пропорциональное" трение, за исключением, быть может, присоединенных в
отдельных точках локальных демпферов или связей с зависящими от частоты
коэффициентами, здесь более детально рассматриваются частотные методы
расчета систем с конечным числом степеней свободы.
Дифференциальные уравнения колебаний континуальной системы после
приведения ее к модели с конечным числом степеней свободы или
многомассовой системы с присоединенными ДГК запишем в виде
Му+Ну + (СХ +iC2)y=U01i(t) + U0z(t) + q(tl C.11.1)
203
где М, Я, С\ + iC2 — п X «-матрицы инерционных, диссипативных (при
учете трения по Фойгту) и комплексных (при учете трения по
Е.С.Сорокину) квазиупругих коэффициентов; yf z (r) , q (t) — векторы-столбцы
обобщенных координат, кинематических и силовых возмущений;
^оь U0 — п X /-матрицы коэффициентов при кинематических
возмущениях. Предполагается, что матрицы Я и С2 не приводятся к диагональному
виду одновременно с матрицами М, С\, т.е. уравнениями C.11,1)
описываются колебания систем с "непропорциональным" трением; кроме того,
рассматриваются только положительные значения частот, поэтому [158]
мнимые слагаемые в C.11.1) и далее приняты со знаком плюс.
Вычисление ЧХ (при z{t) = Zeipt, q(t) = Qeipt, у = Yeipt) требует
многократного решения системы уравнений
(-Mp2 + Hip + C1 +/С2)Г=Г, r=(U01ip + U0).Z + Q C.11.2)
при различных значениях р. Для упрощения целесообразно разложить
решение по формам собственных колебаний демпфированной системы, однако
нахождение собственных значений и векторов несимметричной
комплексной матрицы порядка 2п вызывает затруднения. Ниже описаны
алгоритмы [164, 190], основанные на разложении решения по формам
свободных колебаний некоторой "близкой" системы без демпфирования.
Они применимы не только к линейным, но и к гармонически или
статистически линеаризованным системам.
Формирование матриц коэффициентов уравнений. В качестве
обобщенных координат примем абсолютные перемещения (линейные и угловые)
твердых тел, входящих в многомассовую систему, и удлинения упругодис-
сипативных связей между телами выразим через обобщенные координаты
ф = Ay - az, C.11.3)
где ф — А;-мерный вектор удлинений связей; А — преобразующая к X
«-матрица; а — преобразующая к X /-матрица; г — /-мерный вектор заданных
перемещений (кинематических возмущений). В этом случае диагональная
матрица М составлена из инерционных коэффициентов (масс и моментов
инерции) твердых тел, матрицы квазиупругих и диссипативных
коэффициентов
к
Сх + iC2 - Afc(u + iv)A = 2 A)cj{uj + ivj)Aj,
/= i
k ~ к
H = A'hA= 2 A',hjAh U0i=A'ha= 2 А]Щаи C 114)
/ - i / = l
к
U0 =A'c(u + iv)a = 2 AjCjiuj + Щ)а/.
j = i
Здесь с (и + iv) - \^Cj (м;- + iVj )^J ь h - \"hf^\ \ - диагональные
матрицы комплексных жесткостей и коэффициентов вязкого демпфирования
204
связей между твердыми телами; Aj, ay — у-е строки матриц А, а. В
Память ЭЦВМ вводятся лишь ненулевые элементы слабозаполненных
матриц А, а.
Если система составлена из подсистем достаточно произвольного вида,
соединенных дискретными упругодиссипативными связями, то отдельным
подсистемам без связей соответствуют квазидиагональные матрицы,
а влияние связей дополнительно учитывается формулами C.11.4). Так,
матрица // = Н0 + А1 НА , где Н0 — квазидиагональная матрица
коэффициентов вязкого трения отдельных подсистем.
Применим этот подход для континуальной системы с
присоединенными ДГК. Дифференциальное уравнение колебаний системы с
"непропорциональным" вязким и частотно-независимым трением запишем в виде
тху + Ьху + (l + ах —j Rty + iR2y = Qx(t). C.11.5)
Здесь mx, bx, ax — функции пространственной координаты л:,
описывающие распределение массы, коэффициентов вязкого внешнего и внутреннего
трения; Rlf R2 — линейные дифференциальные операторы с зависящими
от х коэффициентами упругих и неупругих сил, Qx(t) — действующая
нагрузка, у — перемещения. При конечном числе п степеней свободы
обозначим: Г22 — диагональная матрица размера п квадратов собственных частот
колебаний системы без трения; W - [ Wj ] " — вектор-строка
соответствующих форм колебаний, удовлетворяющих заданным граничным условиям,
уравнению
-mxW?l2 * RYW = 0 C.11.6)
и условиям ортогональности / Wrmx Wdx = Е, f W9R% Wdx - ?l2, где Е -
X X
единичная матрица размера п, \ — область изменения х. Полагая^ = Wip,
У = f WxWydx, q(t) = / W'QX(t)dx, получаем систему1
x x
ф + Нф + (?22 + 1С2}Ч> = 4{t\ C.11.7)
которая разделяется на несвязанные уравнения лишь при
"пропорциональном" трении, когда матрицы h - / W' [bx + axRx] Wdx, c2 = f W*R2Wdx
X X
диагональные. Точно так же получается модель с конечным числом степеней
свободы для двумерных и трехмерных континуальных систем, необходимо
лишь скалярный аргумент х считать векторным и одномерные интегралы
заменить кратными соответствующей размерности.
Используя конечномерную модель континуальной системы C.11.7),
выражения для реакций гасителей X - цтф + ст{и + iv)ty и зависимости
удлинений ф связей ДГК от абсолютных перемещений f масс гасителей и
205
м
квазиглавных координат *р для континуальной системы:
ф-l-F Е}[*] ,
получаем уравнения C.11.1), в которых Uol = U0 = 0,
ТЕ О "J Г h+F'nTF -F'ibl [pi Г?(Г)"|
Lo mrJ L-^F Mr-1 LfJ LoJ
[n2 + F'cruF -F'cTul Г c2+F'crvF ^F'cTvl
-cTuF cTu J L-cruF cri> J
C.11.8)
Здесь mTi д r, Cr, u, u — диагональные матрицы порядка & масс,
коэффициентов вязкого трения, жесткостей и параметров [182, 198], зависящих
от коэффициентов частотно-независимого трения, гасителей; F —
прямоугольная к X «-матрица ординат главных форм колебаний системы в точках
присоединения гасителей; Е — единичная матрица порядка п\ q(t) —
«-мерный вектор силовых возмущений.
При гармонических воздействиях q(t) = Qeipt с частотой р имеем
<p(t) = yeipt, вектор амплитуд реакций гасителей X = H(p)Fy, где
Н (р) = F^sOO-J 1 — матрица, диагональные элементы которой
вычисляются согласно C.1.1). С учетом этих выражений и C.11.3), C.11.4)
получаем для системы с к присоединенными гасителями уравнение
[-p2E + iph+tt2 +ic2+F'H(p)F]y = Q, C.11.9)
которое при диагональных матрицах h, с2 (случай континуальной системы
с "пропорциональным" трением) соответствует C.1.7).
В качестве простого практического примера покажем, как определяются
матрицы в C.11.9) для телевизионной башни с железобетонным стволом и
металлической антенной. Расчетную схему сооружения представим в виде
двухступенчатого стержня переменного сечения с различными
коэффициентами неупругого сопротивления ус, уг для ствола и антенны, в
уравнении C.11.5) примем ах = Ьх = 0,
Э2 / Э2 \ Э2 / Э2 \
К1У--их — {Е1х~у), ^y = vx-{EIx—y)f
где Е1Х - жесткость стержня при изгибе, их, их - кусочно-постоянные
множители, зависящие [182, 198] в пределах ствола от ус> в пределах
антенны от уш. Найдя согласно C.11.6) п форм свободных колебаний
двухступенчатого стержня, определяем элементы матрицы с2 - [с2,-/ ] "
206
й" ( dz \
по формуле c2ji = / Wj'Vx —Г ( ^х Н//1б?х, записываем ?Х«-матри-
цу F и диагональную матрицу Я(р) для заданного числа к гасителей
колебаний.
Метод сил. Описываемый способ эффективен для систем с небольшим
числом связей, нарушающих "пропорциональное'' трение. Уравнение C.11.2)
перепишем в виде
(-М0р2 + H0ip+C01 +iC02)Y = Г - H{p)Y. C.11.10)
Здесь Н(р) = (М0 - М)р2 + (Я - HQ)ip + Q - С01 + / (С2 - С02), т.е.
каждая из входящих в C.11.2) матриц представлена суммой двух матриц.
Симметричные невырожденные матрицы М0, Я0, C0i, С02 выбираются
так, чтобы одним и тем же преобразованием приводились к диагональному
виду (рассматриваются матрицы простой структуры) и порядок т
ненулевой части матрицы Н(р) был как можно меньше. В частности, в
матрицу Н(р) следует включить элементы матриц Я, С1§ С2, нарушающие
"пропорциональное" трение. Для конструкций, состоящих из отдельных
подсистем с "пропорциональным" "трением (транспортные средства с
длинномерными упругими грузами, башенные сооружения с ДГК, опирающиеся
на упругое основание), характеристики связей между подсистемами,
нарушающие блочно-диагональную структуру матриц в уравнении C.11.2)
и, как правило, "пропорциональное" трение в системе, целесообразно
включить в матрицу Н(р). Введение в Я(р) диссипативных и
квазиупругих коэффициентов связей между подсистемами позволяет получить
в левой части уравнения C.11.10) матрицы, блоки которых соответствуют
несвязанным подсистемам с "пропорциональным" трением. При включении
в Я(р) лишь диссипативных коэффициентов матрицы в левой части C.11.10)
соответствуют системе с "пропорциональным" или "непропорциональным"
трением, состоящей из связанных подсистем. Усилия в демпферах из
полимерных материалов со степенной зависимостью неупругого сопротивления
от частоты включаются в Н(р). В задачах оптимизации целесообразно вН(р)
ввести также варьируемые параметры системы, что позволяет на каждом
шаге оптимизации использовать одни и те же формы свободных колебаний,
удовлетворяющие уравнению (—M0coj + C0i)K;- = 0. Искомое решение
п
Y= 2 VfVf C.11.11)
/ = i
подставим в C.11.10), умножим справа скалярно на вектор Vs и, учтя
условие ортогональности, найдем коэффициенты разложения
*, = {[Г-Я(р)Г], К,}/Ф„ (J-M). C.11.12)
Здесь Ф,=со|A+/Т,)+фй,-р2, T,=w-2(Co2^, Vs\ hs=(H0Vs, Vs).
Подставив выражение C.11.12) в C.11.11), получим уравнение
" [H(p)Y, VA " (Г, Vj)
Y+ S /J V, = 2 —-^Vf, C.11.13)
207
которое в матричной форм€ имеет вид
[Е + AH(p)]Y = г?, C.11.14)
гдетрДГ, Д=КФ-1Г'=[А^, Ф=ГФ/Х Д*,= 2 fyfy/Ф,, V= [Vy]l -
матрица собственных форм колебаний основной системы, Е — единичная
матрица.
При соответствующей нумерации неизвестных произведение АН(р)
является квадратной матрицей с ненулевой частью в виде прямоугольника
размера п X т (т — порядок ненулевой части матрицы Н(р)). Структура
матрицы Е + А#(р) позволяет найти т компонент вектора неизвестных Y
из системы уравнений т-го порядка. Остальные п — т компонент вектора
определяются из уравнений C.11.14) или согласно C.11.12), C.11.13).
В последнем случае вычисляется только та часть матрицы А, которая
умножается на ненулевую часть матрицы Я(р), и вектор т? определяется
из C.11.13). Алгоритм наиболее эффективен при гп< п. Он соответствует
методу сил с разложением комплексных элементов матрицы А единичных
перемещений и вектора т? грузовых перемещений по формам свободных
колебаний основной системы (см. выражения C.1.3), C.1.5) для
континуальной системы с присоединенными ДГК; заметим, что знаки при Н(р)
приняты разные в § 3.1 и § 3.11).
Хотя коэффициенты матрицы А представлены в виде конечной суммы,
во многих случаях при больших п не учитывают частоты goj >р.
Коэффициенты системы C.11.14) при этом определяются достаточно точно, что не
гарантирует такой же точности неизвестных Y при плохо обусловленной
матрице Е + АН(р). Поэтому при со/ Ф 0 целесообразно выделить
статические составляющие ( § 3.1).
Порядок т решаемой системы уравнений можно снизить при учете
структуры матрицы Н(р). Так, если в Н(р) входят лишь квазиупругие и
диссипативные коэффициенты к связей многомассовой системы или ДГК,
то, согласно C.11.3), C.11.4), Н(р) = AfD(p)A, Г = Г° + A1 D(p) aZ,
ч> = AY — aZ, где D(p) — диагональная матрица размера к, А —
преобразующая к X и-матрица, причем к < т, Г° — вектор обобщенных сил
в основной системе (система без связей, нарушающих "пропорциональное"
трение) ; ч> — вектор неизвестных амплитуд удлинений удаляемых связей.
С учетом этих соотношений, умножая C.11.14) слева на А, получаем
матричное уравнение порядка к
[E+AAA'D(p)]V = Ф° C.11.15)
или в канонической форме метода сил
[D-l(p) + AAA']X = *°, C.11.16)
где ч>° = ЛАГ0 - aZ, X =/)(р)ч> - векторы неизвестных амплитуд
усилий в связях и амплитуд удлинений тех же связей в основной системе
от внешней нагрузки; AAA1 =АУФ~1'У'А' — матрица ЧХ удлинений
связей в основной системе от действия единичных гармонических сил, прило-
208
женных вместо разорванных связей. Если обозначить Фу = AY = Ф + aZ —
вектор амплитуд удлинений связей, вызванных лишь изменением
координат Y, то уравнения C.11.15), C.11.16) справедливы для веторовф^,
*°y=AAr,Xy=D(p)*y.
В более общем случае положим Н(р) = - р2р'Щ + ArD(p)A, где М -
матрица размера к инерционных коэффициентов, включаемых в #(р);
Dip) — диагональная матрица размера к квазиупругих и диссипативных
коэффициентов; |3 — преобразующая к X«-матрица,произведение которой
на «-мерный вектор Y обобщенных координат дает укороченный ^-мерный
вектор координат, соответствующий матрице М (если элементы Y —
абсолютные перемещения сосредоточенных масс, то каждая строка
матрицы ]3 содержит одну единицу и нули); А — преобразующая к X «-матрица,
описанная ранее. Пусть к = - p2MQY, X = D{p)AY — векторы амплитуд
неизвестных сил инерции и усилий в разорванных связях. Тогда
каноническая система (порядка к X к) уравнений метода сил
имеет структуру, аналогичную C.11.16).
Метод перемещений. Разложение C.11.11) в матричном виде Y-V*p
позволяет преобразовать C.11.10) к уравнению
№ + V'H(p)V]<p= FT, C.11.18)
которое можно трактовать на основе метода перемещений для
квазиглавных координат </?. Такое представление дает возможность без потери
точности произвести усечение числа учитываемых степеней свободы
отбрасыванием высших форм колебаний отдельных подсистем, частоты
которых превышают заданный диапазон частот внешнего возмущения.
При этом в C.11.18) квадратная матрица V заменяется прямоугольной
V размера п X п(п < п), порядок диагональной матрицы Ф и вектора \р
уменьшается до п. Далее уравнение C.11.18) решается для различных
значений р в заданном диапазоне.
Более эффективный алгоритм последовательных приближений
разработан для случая, если в Н(р) включены лишь диссипативные
коэффициенты. Здесь возможны два подхода. В первом используются формы
свободных колебаний рассматриваемой механической системы без
диссипации с учетом взаимной связи входящих в нее подсистем. Второй
подход предусматривает предварительное нахождение форм и частот
свободных колебаний отдельных подсистем с "пропорциональным" трением
без учета их взаимосвязи с остальными подсистемами, усечение
учитываемых степеней свободы для отдельных подсистем и переход в уравнении
C,11.10) к новым координатам: Y = Vv, где V - прямоугольная
матрица, прямоугольные блоки которой содержат учитываемые формы
колебаний несвязанных подсистем. В результате уравнение C.11.10)
приводится к виду
[-p2E^U2{\^n)-^A\iph^cl +ic2)A}$ « VT. C.11.19)
14. Б.Г. Коренев
209
Здесь ?2 2, 7— диагональные матрицы порядка п квадратов собственных
частот колебаний и коэффициентов внутреннего неупругого
сопротивления отдельных подсистем; сг +/с2, h — диагональные матрицы
комплексных квазиупругих и диссипативных коэффициентов связей между
подсистемами; А = AV — прямоугольная матрица, преобразующая
координаты ф в вектор амплитуд удлинений связей ч> = A Y - А<р. Далее без
учета диссипативных слагаемых в C.11.19) определяются частоты 12 и
формы V свободных колебаний связанной системы, удовлетворяющие
уравнению - КГ22 + (Й2 + ArcxA)V= 0. После замены <р= ^уравнение
C.11.19) принимает вид
[-р2Е+ П2 +iV'?l2yV + iV,A'(ph+c2)AV]v=V'V,r,
соответствующий C.11.18) — матрица Н(р) содержит лишь диссипативные
члены и допускает применение метода последовательных приближений.
В отличие от метода сил, этот алгоритм эффективен и в случае, если
матрицы Н, С2 в уравнении C.11.2) почти полностью заполнены и
соответствуют системе с "непропорциональным" трением. Полагая Н(р) =
= ipH + /C2, матричное уравнение C.11.18) целесообразно представить
в скалярной форме
&m-Gil\*M-i S ф1ш +ph,M (s=l,n), C.11.20)
где Gs = со2, + icss + iphss - p2, ds = (Г, Vs),
cjs = (C2Vf 9 Vs)9hjS = (HVj, Vs). Уравнения C.11.20) решаются методом
Зейделя, причем начальные значения \№ для некоторой частоты р
вычисляются как для системы с "пропорциональным" трением:
Последовательные приближения сходятся быстро. В резонансном
случае (р « сок) в разложении C.11.11), как правило, преобладает к-е
слагаемое. При этом уже первое приближение для \р к и второе для остальных
координат достаточно близки к искомому решению. В нерезонансном
случае демпфирование незначительно влияет на ординаты ЧХ, поэтому
итерации также быстро сходятся. Эффективные приемы задания
начального приближения для координат, проверки сходимости процесса и
назначения шага по частоте приведены в [ 164].
Для уменьшения объема вычислений целесообразно в C.11.20)
учитывать переменное число пг степеней свободы всей системы в целом,
зависящее от текущего значения частоты р вынужденных колебаний. Например,
частота ооп% может не превышать значения Сф1т1ах, где а* 1,2^1,5, ав
диапазоне соИ1 ч-р должно находиться не более заданного числа
собственных частот колебаний системы.
Для системы с упругодиссипативными нелинейностями при случайных
воздействиях производится статистическая линеаризация и организуется
итерационный процесс, критерием окончания которого является
совпадение с заданной точностью статистических характеристик скоростей и
(или) удлинений нелинейных связей при вычислении коэффициентов
210
линеаризации и полученных в результате расчета системы. ЧХ
статистически линеаризованной системы определяются одним из описанных
методов.
§3.12. Оценка возможности применения
простейших расчетных схем
в задачах о гашении колебаний
Теория ДГК достаточно детально разработана для случая, когда в
защищаемой конструкции учитывается одна степень свободы,
соответствующая форме свободных колебаний (обычно первой), которая дает
наибольший вклад в вынужденные колебания. Приведенные в точку подвеса
гасителя масса, квазиупругий коэффициент и сила определяются по
формулам, содержащимся во введении к гл.1. Сравним результаты
оптимизации параметров и оценки эффективности ДГК для некоторых систем
с распределенными параметрами и соответствующих приведенных систем
с одной степенью свободы.
В статье [245] рассмотрена задача о гашении продольных колебаний
свободного стержня. Один гаситель был установлен на конце стержня в
точке приложения гармонической силы и настраивался на низшую частоту
колебаний стержня, другой располагался в середине пролета и настраивался
на вторую частоту. Оценка эффективности и оптимизация параметров
гасителей производились по наибольшим амплитудам скоростей сечений
стержня при единичной амплитуде возмущающей силы. Найденные в [245]
оптимальные параметры каждого из гасителей отнесены к
соответствующей резонансной частоте и представлены в табл.3.4. Там же указаны
параметры гасителя /*, ц*, вычисленные при учете лишь одной
резонирующей формы колебаний стержня с использованием формул,
соответствующих а = 1 в табл. 1.2. Приведенная масса стержня для каждой из форм
колебаний равна половине его массы М. Совпадение результатов вполне
удовлетворительное.
Задача о вынужденных поперечных колебаниях консольного стержня
с двумя ДГК, установленными в сечениях х - I, х = 0,5/, изучена в [262].
Минимизировалась перерезьшающая сила в заделке при воздействии на
свободный конец консоли (х = /) гармонической силы с постоянной амп-
Таблица 3.4
Оптимальные параметры гасителей при продольных колебаниях стержня
М
V
Настройка на
первую частоту
/
М
Настройка на
вторую частоту
/
М
Одномассовая
защищаемая
система
/*
М*
0,025 0,05 0,965 0,28 0,968 0,26 0,965 0,262
0,0333 0,0667 0,949 0,30 0,960 0,29 0,953 0,294
0,05 0,1 0,931 0,34 0,942 0,34 0,932 0,351
0,1 0,2 0,875 0,48 0,918 0,44 0,874 0,447
14*
211
Таблиица 3.5
Оптимальные параметры гасителей при поперечных колебаниях консоли
М
0,025
0,05
0,1
0,25
0,025
0,05
ОД
0,25
Номер
резонирующей
частоты
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
/
0,92
0,90
0,86
0,85
0,76
0,76
0,56
0,55
0,99
0,95
0,97
0,90
0,95
0,82
0,89
0,64
м/2
х = 1
0,18
0,16
0,22
0,18
0,126
0,18
0,25
0,16
х=1/2
0,07
0,13
0,10
0,17
0,13
0,20
0,18
0,22
V
0,1
0,2
0,4
1,0
0,011
0,051
0,022
0,102
0,045
0,204
0,112
0,408
f*
0,91
0,83
0,72
0,5
0,99
0,95
0,98
0,91
0,96
0,83
0,90
0,71
М*/2
0,17
0,21
0,23
0,22
0,06
0,13
0,09
0,17
0,12
0,21
0,17
0,23
Таблица 3.6
Амплитуды изгибающего момента в заделке и прогиба радиобашни
Критерий
MR, кН • м
Wr, см
Отношение
массы
гасителя к массе
сооружения
0
0,01
0,02
0
0,01
0,02
Число учитываемых форм колебаний
2566
559
537
426
409
17,21
3,75
3,60
2,75
2,74
2564
513
565
377
432
17,21
3,86
3,57
2,97
2,72
2565
529
557
395
426
17,21
3,89
3,57
2,99
2,72
2565
522
561
386
430
17,21
3,89
3,56
3,00
2,72
212
литудой. Частота воздействия варьировалась в окрестности первой и
второй частот собственных колебаний стержня, гасители настраивались
соответственно на резонирующую собственную частоту стержня. Оптимальные
параметры гасителей / и /i/2, отнесенные к соответствующей резонансной частоте
(табл. 3.5), удовлетворительно согласуются со значениями/*, ц*/2,
вычисленными для эквивалентных одномассовых систем по формулам из
табл. 1.2 при а = 0. При нахождении v учтено, что приведенная масса
стержня для первой и второй форм свободных колебаний составляет в сечении
х = I по 0,25 Л/, в сечении х = 0,5 / — соответственно 2,15Л/ и 0,49Л/.
Для описанной в § 4.2 радиобашни, моделируемой стержнем
переменного сечения, в табл. 3.6 даны амплитуды первого (числитель) и второго
(знаменатель) резонансных пиков изгибающего момента MR в заделке и
прогиба Wr в верхнем сечении сооружения при действии в точке х = г
сосредоточенной гармонической силы с амплитудрй 1 кН и нестабильной
частотой. Параметры гасителя в сечении х - г были назначены без учета
демпфирования конструкции и гармоник выше первой, т.е. по формулам
табл. 1.2 при а = 0, коэффициент неупругого сопротивления башни у = 0,05.
Здесь влияние высших гармоник на результаты в целом невелико, хотя и
значительно больше, чем при отсутствии гасителя. В связи с этим
оптимальные параметры гасителя, подобранные с учетом высших форм колебаний
и по разным критериям, мало отличаются от соответствующих параметров
гасителя для одномассовой схемы защищаемого объекта.
В табл. 3.7 даны некоторые результаты расчета Алма-Атинской
телебашни на воздействие пульсаций ветровой нагрузки (расчетная схема описана
в § 4.6). Римские цифры указывают номер частотного диапазона при
вычислении результатов: I - @ 4 0,2), II - @ ^-0,45), III - @ 4-0,75) Гц, что
приближенно соответствует учету одной, двух, трех форм свободных
колебаний башни. Относительная масса гасителя, установленного на
отметке 238,5 м и настроенного на первую частоту колебаний башни, v =0,02.
Вклад второй и третьей форм колебаний по сравнению с первой оказался
небольшим, поэтому можно ограничиться установкой одного ДГК.
Иная ситуация характерна для Рижской телебашни, которая имеет
довольно жесткий ствол (до отметки 217,7 м) и гибкую антенную
часть (см. § 4.6 и табл. 4.4). Здесь вклад второй и третьей форм
колебаний оказался более существенным, в связи с чем необходимо установить
несколько ДГК. Взаимное влияние гасителей невелико, что позволяет
параметры и места их установки назначать независимо.
Для квадратной пластинки с зажатыми краями с присоединенной в
центре сосредоточенной массой Мп (см. § 3.7) параметры гасителя
оптимизировались из условия минимума наибольшей амплитуды колебаний Л
пластинки при действии сосредоточенной силы с амплитудой,
пропорциональной квадрату частоты. При частоте возмущения, нестабильной в
окрестности низшей собственной частоты конструкции, результаты даны в
табл. 3.8 (а - сторона пластинки, р — масса единицы площади пластинки,
г i — радиус площадки, по которой передаются сила инерции
присоединенной массы и реакция гасителя, у — коэффициент неупругого
сопротивления пластинки, v — относительная масса гасителя). Результаты
удовлетворительно согласуются с данными для системы с одной степенью свободы
с гасителем.
213
Таблица 3.7
Результаты расчета Алма-Атинской телебашни
Башня
Величины
Отметки,
м
Частотный диапазон
I
II
III
Перемеще- 362,7 4,83 4,92 4,93
ния, м 310,9 3,14 3,15 3,15
Без 238,5 1,67 1,67 1,67
гаси-
теля Изгибающие 102,5 245,6 246,0 246,0
моменты, 14,5 443,4 444,7 446,0
Мн м
Перемеще- 362,7 3,05 3,16 3,17
ния, м 310,9 2,02 2,03 2,03
С га- 238,5 1,10 1,10 1,10
сите-
лем Изгибающие 102,5 163,1 163,4 163,5
моменты, 14,5 307,9 309,4 311,2
Мн • м
Таблица 3.8
Амплитуды колебаний пластинки и оптимальные параметры гасителя
мп
ра>
а
У
v = 0,02 5
А
М
/а
у = 0,1
А
М
/2
0,01 8,19 0,195 0,966 4,15 0,360 0,894
0,01 0,05 6,31 0,200 0,971 3,60 0,365 0,904
0,10 4,87 0,210 0,976 3,08 0,370 0,914
0
0,01 8,38 0,175 0,971 4,27 0,355 0,904
0,15 0,05 6,40 0,190 0,976 3,68 0,365 0,914
0,10 4,93 0,195 0,986 3,14 0,365 0,934
0,01 8,75 0,190 0,976 4,44 0,365 0,904
0,01 0,05 6,93 0,190 0,986 3,88 0,380 0,919
0,10 5,49 0,190 0,996 3,36 0,385 0,939
0,1
0,01 8,65 0,185 0,985 4,43 0,355 0,919
0,15 0,05 6,72 0,195 0,990 3,85 0,360 0,934
0,10 5,25 0,200 1,005 3,31 0,365 0,959
Одномассовая 0,01 8,22 0,191 0,978 4,16 0,369 0,911
система с 0,05 6,37 0,191 0,988 3,62 0,369 0,929
гасителем 0,10 4,96 0,191 1,005 3,13 0,369 0,958
214
Таким образом, наряду с конструкциями, для которых расчетная схема
в виде системы с одной степенью свободы является совершенно
естественной (массивные фундаменты при колебаниях в одном направлении,
конструкции с присоединенной сосредоточенной массой типа водонапорных
башен и т.п.), существует достаточно обширный класс конструкций с
распределенной массой, обладающих разреженным спектром собственных
частот, для которых в задачах о гашении колебаний при узкополосных
возмущениях можно ограничиться рассмотрением простейших расчетных
схем. В частности, при установке одномассового гасителя удается свести
задачу к исследованию системы с двумя степенями свободы, а при
установке нескольких гасителей, настроенных на разные частоты колебаний
защищаемой конструкции, можно ввиду малого взаимного влияния таких
гасителей рассмотреть отдельно несколько систем с двумя степенями
свободы.
Следует, однако, иметь в виду, что для конструкций с близкими
частотами, с достаточно густым спектром или имеющих зоны сгущения частот
(пластинки на упругом основании, складки, оболочки, неразрезные балки,
в частности трубопроводы, и т.п.), а также для конструкций с разреженным
спектром, но при широкополосных возмущениях типа пульсаций
ветровой нагрузки, использование указанной выше простейшей расчетной схемы
вряд ли возможно. Для получения эффекта гашения колебаний здесь, как
правило, приходится усложнять и сам гаситель, рассматривая его
многомассовые или континуальные модели.
ГЛАВА 4
ПРАКТИЧЕСКИЕ ПРИЛОЖЕНИЯ ТЕОРИИ
И ПРИМЕРЫ ОСУЩЕСТВЛЕННЫХ СИСТЕМ ВИБРОЗАЩИТЫ
В этой главе рассматриваются вопросы расчета конструкций и сооружений,
оборудованных ДГК, кратко описываются конструктивные схемы
гасителей и опыт их практического применения. Основное внимание уделяется
оптимизации параметров и оценке эффективности ДГК высоких
сооружений башенного типа, к числу которых относятся промышленные дымовые
и вентиляционные трубы, опоры радиорелейных линий, радио- и
телевизионные башни, буровые вышки, различные установки колонного типа,
применяемые в химической промышленности, башни телескопов, башенные
краны и др. Колебания таких сооружений возникают главным образом от
динамического действия ветровой нагрузки, а в сейсмически активных
районах также и от сейсмических воздействий.
Общая характеристика задач, связанных с применением гасителей для
виброзащиты башенных сооружений, дана в §4.1. Далее в трех параграфах
обсуждаются вопросы оптимизации параметров и оценки эффективности
гасителей колебаний башенных сооружений при ветровом резонансе,
галопировании и случайных пульсациях ветровой нагрузки. Эти результаты
применимы к башенным сооружениям различного вида. Реализация систем
виброзащиты с использованием ДГК показана в § 4.5 — 4.7 на примерах
стальных вентиляционных и дымовых труб, телебашен и несущей башни
солнечного телескопа. Вопросы гашения колебаний конструкций и
сооружений при сейсмических воздействиях рассматриваются в § 4.8-4.10,
при этом § 4.9 посвящен оценке эффективности виброзащиты гибких
конструкций, а в § 4.10 даны также сведения о гашении колебаний зданий
при действии нагрузки от ветра и оборудования. В трех
заключительных параграфах обсуждаются вопросы гашения колебаний
трубопроводов, мостов, проводов и канатов, движущихся объектов и
перевозимых грузов, а также фундаментов и виброизолированных
конструкций.
Несмотря на сравнительно большой объем главы и разнообразие
рассматриваемых примеров, в целом она охватывает лишь часть возможных
приложений ДГК. Однако в сочетании с данными, приведенными в
других главах, эти материалы будут, несомненно, полезны при решении
различных технических задач виброзащиты, возникающих в инженерной
практике.
216
§ 4.1. Общие замечания о проблеме гашения
колебаний башенных сооружений
Ударные гасители колебаний, использовавшиеся в башенных сооружениях
еще довольно давно [ИЗ], сейчас применяются реже. Теоретическое
обоснование эффективности использования динамических гасителей для таких
сооружений дано в работах [105—109, 234—240]. К настоящему времени
разработаны разнообразные конструкции ДГК, некоторые из них
установлены на ряде ответственных сооружений. Описание накопленного опыта их
эксплуатации в сочетании с вопросами теории может способствовать
дальнейшему расширению области применения ДГК.
Явления, происходящие при обтекании сооружений потоком воздуха,
носят чрезвычайно сложный характер и до конца еще не исследованы.
При расчете обычно полагают, что действие ветра на сооружение состоит из
среднего установившегося давления и случайных пульсаций, вызванных
турбулентностью потока. Пульсации ветрового потока приводят к
случайным колебаниям сооружений. Установившееся давление, помимо
статического эффекта, способно при некоторых условиях вызывать в довольно
широком диапазоне скоростей потока длительные колебания сооружений,
неоднократно наблюдавшиеся на практике [14, 58, 59, 173, 175]. При этом
колебания в основном происходят в направлении поперек потока,
сопровождаясь также колебаниями в плоскости потока.
Для сооружений с круговой формой поперечного сечения такие
колебания принято называть ветровым резонансом, частота и форма их
практически соответствуют основному тону колебаний. Первоначально это
явление рассматривали как вынужденные колебания под действием вихрей
Кармана, экспериментальные работы позволили объяснить ветровой резонанс
как автоколебательный процесс, возникающий в результате срыва вихрей
в крайних положениях тела колеблющегося поперек потока.
Сооружения с некруговой формой поперечного сечения также способны
совершать длительные колебания с большой амплитудой. К числу
аэродинамически неустойчивых поперечных сечений относятся квадрат,
прямоугольник, ромб и др.; для них соблюдается критерий неустойчивости
Ден-Гартога [54]. Указанное явление называется галопированием, оно
также имеет автоколебательную природу.
Таким образом, круг задач о динамическом расчете сооружений при
действии ветра включает проверку на ветровой резонанс, расчет на действие
случайных пульсаций и в отдельных случаях также учет явлений
галопирования. Для сооружений в сейсмически активных районах требуется
проведение расчета на сейсмические нагрузки, который сводится к
исследованию случайных колебаний.
Общие методы расчета конструкций с присоединенными ДГК как
механических систем с "непропорциональным" трением описаны в гл. 3. В задачах
виброгашения башенных сооружений, как правило, используется метод
сил, конкретизованный для различных конструкций, а также его
сочетание с методом начальных параметров.
Расчетные схемы башенных сооружений обычно представляют в виде
стержней постоянного или, чаще, переменного сечения. Для стержней,
имеющих форму конуса, и в других подобных случаях, описанных в гл. 3,
217
задачи о колебаниях защищаемой конструкции можно решить в замкнутом
виде (см. §3.5); эти результаты позволяют далее исследовать
эффективность гашения колебаний. Теория колебаний таких стержней,
оборудованных гасителями, широко использовалась для получения различных
выводов качественного характера. Однако для наиболее ответственных
высоких башен, как правило, расчет производится на ЭВМ;и связан с
рассмотрением расчетной схемы, в которой достаточно детально учитывается
действительный характер изменения жесткости и массы различных участков
башни. Такая модель в виде стержня кусочно-постоянного сечения с
распределенными и (или) сосредоточенными массами, присоединенными
упругими опорами и ДГК была положена в основу составления программ для
ЭВМ, применявшихся для решения практических задач, которые
рассматриваются в последующих параграфах.
При расчете башенных сооружений основное внимание уделяется изгиб-
ным колебаниям, при этом влияние сдвигов и инерции вращения, а также
продольных сил невелико и обычно не учитывается. Для решетчатых
сооружений податливость решетки может моделироваться учетом сдвигов для
эквивалентного стержня. Как показали вычисления [105], податливость
основания при повороте фундамента для металлических высоких башен
может не приниматься во внимание. Однако для более жестких
железобетонных сооружений этот фактор необходимо учитывать, рассматривая
основание, например, как упругое инерционное полупространство.
Наряду с изгибными колебаниями в башенных сооружениях могут
возникать крутильные и изгибно-крутильные колебания. Причиной их могут
быть асимметрия сечения, искривления оси от статической составляющей
ветровой нагрузки или неравномерного нагрева вследствие инсоляции.
Во всех этих случаях эффективны ДГК, методы расчета которых
практически не отличаются от применяемых при гашении изгибных колебаний
конструкций.
Вопрос о необходимости установки одного или нескольких гасителей
решается в результате инженерного технико-экономического анализа и
требует проведения сравнительных расчетов сооружения без ДГК и с ДГК.
Однако чаще всего в башенных сооружениях применяется только один
гаситель (или система одинаковых гасителей), настроенный на частоту,
близкую к частоте основного тона колебаний. Вклады последующих гармоник
сравнительно малы; тем не менее в отдельных случаях можно говорить
о гашении второй и более высоких гармоник. Поскольку спектр частот
собственных колебаний башенных сооружений является разреженным,
то при определении оптимальных параметров гасителя, настроенного на
первую частоту, можно не учитывать влияния более высоких гармоник.
Однако вклад более высоких гармоник, который практически весьма мало
изменяется вследствие присоединения гасителя, настроенного на первую
частоту, необходимо учитывать при определении эффективности гасителя.
Точность определения частот и форм свободных колебаний защищаемого
сооружения, и в особенности соответствующих основному тону, должна
быть достаточно высокой. Эти данные позволяют оценить требуемые массы
гасителей и наметить места их установки. Массу гасителя задают обычно
2—10% от приведенной массы сооружения. Гаситель, настроенный на
первую частоту, желательно разместить в верхней части сооружения; гаситель,
218
настроенный на вторую частоту, располагается в пучности второй формы
колебаний. Однако эти рекомендации не всегда могут быть осуществлены
ввиду отсутствия свободного пространства, особенно это касается телеба-
цен, на которых обычно устанавливается довольно много аппаратуры
1 оборудования.
Конструкция гасителя выбирается в зависимости от значения первой
частоты свободных колебаний сооружения. Для башенных сооружений с
частотой собственных колебаний от 0,2 до 0,4 Гц целесообразно
применять маятниковый гаситель, механическая модель которого близка к
модели математического маятника; длина маятника равна ~6,2 — 1,5 м при
указанных частотах. Для частот в пределах 0,1 — 0,2 Гц целесообразно
применение маятниковых гасителей усложненного типа (см. гл. 2), имеющих
меньшую длину по сравнению с обычным маятником. При более высоких
частотах, порядка 0,5 — 0,8 Гц, следует использовать модель физического
маятника или гаситель пружинного типа, в котором восстанавливающая
сила формируется при деформировании упругого элемента.
В процессе расчета выбираются оптимальные настройка и
демпфирование, после этого проверяются расчетный ход гасителя и возможность его
реализации, затем эффективность гасителя. Содержание расчета башенных
сооружений с ДГК описано в последующих параграфах. В разных
расчетных случаях (ветровой резонанс, галопирование, случайные колебания),
естественно, могут быть получены различные значения оптимальных
параметров. В связи с этим следует ориентироваться на самый неблагоприятный
режим колебаний, который дает наибольший вклад в нежелательный для
конструкций эффект. Гасители с оптимальным демпфированием, как
известно [59], будут достаточно эффективно снижать уровень колебаний и в
других режимах, вызванных иными воздействиями.
При проектировании гасителей следует учитывать, что в процессе
эксплуатации сооружения возможно изменение его массы и других характеристик,
влияющих на частоты и формы свободных колебаний, что может снизить
эффективность гасителя. Для обычных башенных сооружений подобное
изменение частоты незначительно и не оказывает существенного влияния
на результат. Однако действительная частота, даже если она и является
практически стабильной, может существенно отличаться от проектной.
Поэтому рекомендуется, как правило, до монтажа гасителя экспериментально
определять частоту основного тона свободных колебаний сооружения и
корректировать настройку ДГК. В тех случаях, когда ход гасителя
чрезмерно большой по сравнению с имеющимся зазором и увеличить
последний невозможно, необходимо изменить расчетную модель гасителя за
счет повышения его демпфирования или массы. Определяя требуемый
зазор между гасителем и сооружением, необходимо исходить из
расчетного хода гасителя, умноженного на коэффициент запаса
A,2-1,4).
Как правило, эффективность гасителя колебаний для металлических
башенных сооружений довольно высока; амплитуды колебаний при
ветровом резонансе уменьшаются в 2 — 5 раз, от действия пульсаций ветровой
нагрузки — в 1,5 — 2 раза. Для железобетонных сооружений эффективность
гасителей значительно ниже, однако и в этих случаях их применение может
быть вполне целесообразным.
219
§ 4.2. Ветровой резонанс башенных сооружений
Хорошо известно, что большинство сооружений совершают колебания как
вдоль, так и поперек ветрового потока, что связано с наличием не только
продольной, но и поперечной составляющей пульсаций ветрового
давления. Однако даже при ламинарном потоке в аэродинамической трубе при
определенных скоростях, называемых критическими, для конструкций
кругового сечения (а иногда и при других формах сечения) наблюдается
носящее резонансный характер повышение амплитуд колебаний поперек
потока. Подобные явления для струн были отмечены Струхалем. Причиной
этих колебаний является периодический срыв вихрей с поверхности
сооружения с круговой частотой (в нерезонансных зонах) р = 27rShi>/d, где
Sh — число Струхаля, равное 0,2 для неподвижного цилиндра, v — скорость
потока, d — диаметр сооружения. В резонансной зоне происходит захват
частоты срыва вихрей частотой колебаний сооружения, вихри срываются
в крайних положениях колеблющегося тела, что приводит к резкому
нарастанию амплитуды колебаний. Это явление получило название
ветрового резонанса, оно имеет автоколебательную природу. Несмотря на
обширные исследования [14, 58, 59, 173, 175], механизм возбуждения
таких колебаний изучен недостаточно, и даже не ясно, какой вид
должно иметь уравнение колебаний сооружения при ветровом
резонансе.
Учитывая изложенное, при оценке эффективности гашения колебаний
типа ветрового резонанса часто используют упрощенное представление
ветрового воздействия поперек потока в виде гармонической нагрузки с
нестабильной частотой, принимающей наиболее неблагоприятное значение в
окрестности одной из собственных частот колебаний сооружения, как
правило, основного тона. Подобный подход принят, в частности, в [171]. Если
исходить из такого предположения, то оценка эффективности
виброгашения при ветровом резонансе сводится к минимизации наибольшей
ординаты АЧХ заданного критерия качества для сооружения с ДГК. При этом в
качестве первого приближения параметры гасителя можно назначить по
данным (§1.2—1.4) при учете для сооружения лишь одной резонирующей
формы колебаний. Так как на башенных сооружениях обычно
устанавливают небольшое число гасителей, то целесообразно динамический расчет
сооружения с ДГК производить методом сил (§3.1) с разложением
коэффициентов уравнений по формам свободных колебаний сооружения без
ДГК или некоторой близкой системы.
Проиллюстрируем методику расчета на примере башенного сооружения
с одним ДГК с вязким трением, установленным на верхнем конце в
сечении х = г. С целью оценки влияния рассеяния энергии вследствие
излучения упругих волн в грунте при повороте фундамента сооружения примем,
что нижний конец сооружения прикреплен к жесткому штампу с
моментом инерции В, опирающемуся на упругое, однородное, инерционное
полупространство. Пусть горизонтальные перемещения штампа отсутствуют,
а амплитуды реактивного момента MR и угла поворота 6R связаны
формулой MR = SR [<?! (р0) + ic2 (Po)L гДе ci (Ро)> с2 (Ро) - функции
частоты (р0 > 0) колебаний, которые зависят также от упругих постоянных
для полупространства, формы и размеров штампа.
220
Рассматриваемая колебательная система характеризуется неоднородным
и "непропорциональным" демпфированием: непосредственно в сооружении
обычно учитывается частотно-независимое трение, в гасителе принято
вязкое трение, рассеяние энергии в основании определяется функцией с2 (ро).
Поэтому комплексные формы собственных колебаний системы с
демпфированием не ортогональны и их затруднительно использовать в задаче о
вынужденных колебаниях.
Для получения ортогональных собственных функций выберем в
качестве основной системы метода сил стержень без гасителя, опирающийся через
штамп на основание с квазиупругим коэффициентом сх (и + /и), который
соответствует фиксированной частоте р. Здесь константы и, v такие же, как
для стержня. Присоединим к внешней нагрузке амплитуды реакции
гасителя к Wr и реактивного момента ~cOR со стороны основания, неучтенные
в основной системе. Здесь к= ттр%С, С определяется согласно C.1.1),
с" - С\ (ро) + ic2(po) - с1 (и + iv): Wr, 6r - неизвестные амплитуды
перемещения верхнего и угла поворота нижнего конца сооружения.
Представляя амплитуды прогибов в виде ряда по формам колебаний
основной системы
W= 2 \jVh D.2.1)
/= 1
запишем коэффициенты разложения:
Ху=—- {Aoj + mrPoCWrVrf-c-eRvRf} , D.2.2)
Wo/
R R
где #o/я (<*о/ (" + iv) - Ро] [ / Щх Vf2 dx + flpl/1> Ао/ *'Гях vj <**> <*>о/ ~
г г
частоты собственных колебаний основной системы; Vrj-, yRj —
перемещение верхнего и угол поворота нижнего конца сооружения при
колебаниях по у-й собственной форме; qXi тх — амплитуда нагрузки и погонная
масса (сосредоточенные силы и массы вводятся с использованием дельта-
функций) . Формы и частоты собственных колебаний достаточно просто
определяются методом начальных параметров; для стержней переменного
сечения со степенными законами изменения изгибной жесткости и
погонной массы функции влияния, а также аналитическое выражение интеграла
R
f mx Vfdx приведены в [105]. При настройке на /-ю собственную частоту
г
R
сооружения относительная масса гасителя Vj = mT V?j/[f mxVfdx + ByR ].
г
Решая систему двух уравнений, вытекающую из D.2.1), D.2.2),
находим неизвестные амплитуды
Wr= [Arq(l +с822)-АЯяс612]/Ф, 6R = [ARq(\ -к81г)+Агяк812]/Ф.
D.2.3)
Здесь Ф - A - к5ц)A + с522) + кЬ\2Ъ% Ь1Х = 2 У%1ф0]-, 512 =
/ * i
221
= . 2 VrJ*R/l**ti 522 = 2 <pjt0oj, Arq = 2 Уг,А0,1ф0,, ARq =
/ _ * ¦ / = i / = i
oo
= Z <?#/ A0j/\p0j. Далее по формулам D.2.1), D.2.2) легко определяют-
/ = i
ся амплитуды перемещений и усилий в произвольном сечении сооружения.
Оценка эффективности гашения колебаний при ветровом резонансе
выполнена для радиобашни высотой 100 м с периодами собственных
колебаний 1,38 с, 0,39 с, 0,16 с. При резонансе на низшей собственной частоте
влияние высших гармоник оказалось небольшим, хотя и несколько выше, чем в
Р и с. 4.1. Коэффициент уменьшения амплитуд колебаний
башни при ветровом резонансе
О 0,005 0,010,015 V*
отсутствие гасителя, поэтому использование различных критериев при
оптимизаций параметров гасителя (по MR и Wr) привело к близким
результатам. Резонансные амплитуды наибольших перемещений и изгибающих
моментов уменьшаются в 2 — 6 раз в зависимости от коэффициента
неупругого сопротивления башни у и отношения v* масс гасителя и
сооружения (рис. 4.1). Значения оптимальных параметров гасителя хорошо
соответствуют данным, приведенным в гл. 1. В этом случае рассеяние энергии
в основании не отразилось на результатах^ так как частота колебаний
оказалась значительно ниже той, при которой происходит интенсивное
излучение упругих волн, однако для более высоких сооружений с небольшим
декрементом влияние основания на эффективность гашения колебаний
,может быть более заметным.
Так как установка ДГК не исключает ветрового резонанса, а лишь
уменьшает амплитуды резонансных колебаний, которые определяются
главным образом уровнем демпфирования, то наряду с изложенным
возможен и другой подход к оценке эффективности виброгашения при
ветровом резонансе. Такой подход предполагает сравнение декрементов
колебаний сооружения без ДГК и с ДГК и требует меньшего объема вычислений,
чем описанный выше. Особенности этого подхода детально обсуждаются
в §4.10 применительно к расчету открытых трубопроводов, для которых
характерно наличие зон сгущения частот. Для башенных сооружений,
имеющих сравнительно разреженный спектр частот, оптимальные параметры
ДГК, максимизирующие декременты колебаний сооружения, и сами
декременты могут быть приближенно оценены при учете лишь одной
резонирующей формы колебаний согласно данным, приведенным в § 1.8.
Результаты модельных и натурных испытаний свидетельствуют о
высокой эффективности ДГК при ветровом резонансе. В работах [13, 14]
приведены данные об использовании ДГК для сооружений с поперечным сече-
нием в виде ромба и астроиды. Динамический гаситель представлял собой
вертикальный маятник на сферическом шарнире, присоединенный к
конструкции с помощью пружин и поршневых воздушных демпферов. При
массе гасителя, составлявшей 0,01 от массы моделей, было получено
увеличение декрементов собственных колебаний от 0,01 -г 0,035 до 0,12 -^0,15.
По данным натурных наблюдений после установки гасителя с массой,
равной 0,017 от массы реального сооружения, декременты собственных
колебаний сооружения высотой 30 м увеличились в 5 раз, максимальные
амплитуды снизились в 5 раз при колебаниях в направлении большой диагонали
ромба и в 3 раза — в направлении малой диагонали.
Экспериментальные исследования [213] показали высокую
эффективность маятникового ДГК. Так, например, гаситель массой 800 кг,
установленный на стальной башне с железобетонным постаментом (высота
башни 88,5 м, масса 4266 • 103 кг) , увеличил декремент колебаний с 0,0524 до
0,5. После установки гасителя массой 400 кг на стальной мачте высотой
42,3 м, имеющей один ярус оттяжек и массу 14 600 кг, декремент
колебаний повысился с 0,05 до 0,27. В мачте высотой 109,2 м, с двумя
ярусами оттяжек, при массе 128 000 кг в результате установки гасителя массой
650 кг удалось увеличить декремент с 0,035 до 0,65.
При обтекании конструкций круглоцилиндрической формы потоком
жидкости применение ДГК позволяет существенно уменьшить амплитуды
колебаний поперек потока. В экспериментальном исследовании
эффективности ДГК на модели [5] получено 8-кратное уменьшение амплитуд
автоколебаний консольного стержня в достаточно широком диапазоне
скоростей потока.
Примеры практического использования ДГК для башенных сооружений
описаны также в § 4.5 - 4.7.
§ 4.3. Автоколебания поперек
ветрового потока башенных сооружений
с аэродинамически неустойчивой формой сечения
Предположим, что поперечное сечение сооружения имеет аэродинамически
неустойчивую форму (квадрат, прямоугольник, ромб). В этом случае, как
показано в работах [247, 250], для объяснения механизма поперечных
автоколебаний при обтекании сооружения потоком приемлем
квазистационарный подход, дающий удовлетворительное совпадение с
экспериментальными результатами. Сущность его состоит в том, что мгновенные
значения аэродинамических сил, действующих на колеблющееся тело,
принимаются такими же, как в случае стационарного обтекания потоком
неподвижного тела при угле атаки а, равном текущему значению а = arctg(w/K),
где w — скорость тела, V — скорость потока.
Если записать зависимость подъемной силы и силы лобового
сопротивления от угла атаки, то составляющую погонной аэродинамической силы,
действующей на сооружение в сечении х поперек ветрового потока, можно
представить в виде
qx=0,SCxTfixV*, D.3.1)
причем, согласно экспериментальным данным, коэффициент Сх аппрокси-
223
мируется полиномом с нечетными степенями
/-1
Сх = 2 (-1) 2 A,(w/Vx)J. D.3.2)
/= 1,з,...
Здесь г — плотность воздуха, hx — поперечный размер сечения, Aj —
коэффициенты, определяемые типом сечения, Vx — скорость ветра в сечении х.
Экспериментальная зависимость Сх от угла атаки а для квадратного
сечения [247, 250] имеет две точки перегиба, поэтому при малых
амплитудах колебаний действующая поперек потока аэродинамическая сила
эквивалентна некоторому отрицательному демпфированию. С увеличением
амплитуд колебаний угол атаки возрастает, при некотором значении а
аэродинамическая сила qx изменяет знак и стабилизирует колебания.
Исследуем условия предотвращения автоколебаний сооружений в
максимально возможном диапазоне скоростей ветра при установке
динамического гасителя. Расчетная схема башенного сооружения принята в виде
консольного стержня переменного поперечного сечения. Сооружение
оборудовано в сечении jc = / в каждой из двух взаимно перпендикулярных
плоскостей колебаний динамическим гасителем с вязким или
частотно-независимым трением.
ДГК с вязким трением [108]. С целью упрощения анализа нелинейной
системы частотно-независимое неупругое сопротивление в сооружении с
помощью приема Шлиппе — Бокка заменим эквивалентным вязким для
частоты сох колебаний основного тона. Для сооружения и гасителя
дифференциальные уравнения колебаний поперек потока имеют вид
b2w
\ со, dt ) L Эх2 V * Эх2 / J
dt2
- Сх—=-4- + 5 (х - 0 тт — — = 0, D.3.3)
2 dt2
<*2{у + щ) dy 2
—2 + Mo — + НУ = 0.
dt2 dt
Здесь mXi EIX, у, — погонная масса, изгибная жесткость и коэффициент
частотно-независимого трения сооружения; тг, Мо>/о — масса,
коэффициент вязкого сопротивления и парциальная частота колебаний гасителя;
w, W/ — перемещения сооружения соответственно в произвольном
сечении х и в сечении х = /; у — удлинение упругого элемента гасителя; 5 (•) —
дельта-функция Дирака.
Первое уравнение системы D.3.3) является нелинейным, поскольку Сх
нелинейно зависит от скорости w сечения х. Так как галопирование
башенных сооружений происходит обычно по основному тону собственных
колебаний, то практический интерес представляет исследование условий
возникновения и возможности предотвращения автоколебаний в
предположении, что
w=Ux\(t), D.3.4)
где Л (О — неизвестная функция времени; Ux — первая форма свободных
224
колебаний, удовлетворяющая соответствующим граничным условиям и
уравнению
ТТ (Их^гХ-чьиН/г-О. D3.5)
dx2 \ dxz I
Для дальнейшего нормируем форму Ux из условия Uj - 1, а скорость
ветра представим в виде Vx = Vvx, причем vt = 1, V - скорость в
сечении х - /.
Применяя процедуру Бубнова - Галеркина к системе D.3.3), с учетом
D.3.4), D.3.5) получаем
A + *>)Х +7i<^i^ + ^iX + vy ~
/-1
-- 2 (-1) 2 (tfv24CjAj = 0, D.3.6)
2 /=1,3,...
X + >' +Мо^ +/оУ = 0-
d i
Здесь (") = —— , относительная масса гасителя v = тг/ fmxU%dx, коэффи-
dt о
цйенты
Cj = / U?1 vx~J'hx dx/f mx Ul dx. D.3.7)
о о
Уравнения D.3.6) содержат одну нелинейность. При установившихся
автоколебаниях X « Л cos (роО (Л — амплитуда, р0 — частота) , и
нелинейное слагаемое в первом приближении можно заменить эквивалентным
линейным - 0,5гVb(($) X, причем коэффициент гармонической линеаризации
7-1
Ьф) = 2 2 (-1) 2 fi'-lAfCfj\l/С/>"!)!! D.3.8)
/- 1,з,...
зависит от безразмерного аргумента 0 = p0A/V, показьшающего отношение
амплитуды скорости сооружения к скорости ветра в сечении х = I. Тогда
первое уравнение системы D.3.6) примет вид
A +|/)Х +т> + <*>?Х + vy ¦ 0, D.3.9)
и задача сведена к исследованию свободных колебаний системы с двумя
степенями свободы, у которой коэффициент эквивалентного вязкого
трения главной массы
у = 7iсо! -0,5rVbtf) D.3.10)
при определенных значениях скоростей ветра может стать отрицательным.
В отсутствие ДГК автоколебания возникают при критической скорости
ветра, определяемой из условия 7 = 0:
^к = 271со1/(г?тах). D.3.11)
Здесь /?тах = max Ъ (|3) находится из выражения D.3.8); в работах [247,250],
в частности, рассмотрен случай bmax=Alc1 при /3 = 0.
15. Б.Г.Коренев 225
Для исследования системы с гасителем полагаем
\= 2 ccjAje5»', у= 1 щУр**1* D.3.12)
/ = 1 / = 1
и, подставляя D.3.12) в D.3.9) и второе уравнение системы D.3.6),
получаем характеристическое уравнение
s4 +s3 [мA +*0 + 7]+s2[/2 A +^) + TM+ 1] +5G/2 +М)+/2 =0,
D.3.13)
которое для упрощения дальнейшего анализа записываем так:
(s2 + 6l5+z2)(s2+52s+zl) = 2 E-5/) = 0. D.3.14)
/¦ 1
Здесь
±ijz\
5i . . / , 5i 5
2 . . / о и2
5i 2 = — ±1\/ zf — , S3 4 = - ±*\
2 4 ' 2 4
D.3.15)
/s/oMi /i = /z0M, 7 = 7lo>i=7i-rVb(P)/Bwl)9
ocj — произвольные постоянные; Лу, Yy — амплитуды колебаний,
соответствующие частным решениям; sy- =s0j/coi (/ = 1,4) — корни
характеристического уравнения; 5l5 52, zf, z2 — некоторые действительные числа.
Эквивалентный коэффициент сопротивления 7 неизвестен и при V> VK
принимает отрицательные значения, зависящие к тому же от амплитуды и
частоты автоколебаний.
Задача оптимизации параметров гасителя ставится следующим образом.
Для конкретных значений относительной массы гасителя v определим
настройку /опт и коэффициент сопротивления допт из условия максимума
критической скорости ветра VK. Согласно D.3.15), максимум VK
соответствует минимуму 7 и, как станет ясно из дальнейшего, в этом случае
амплитуды колебаний при V> VK будут наименьшими.
Качество переходного процесса в системе при произвольных начальных
условиях определяется вещественными частями корней Sj
характеристического уравнения D.3.13). При наличии среди корней хотя бы одного с
нулевой вещественной частью система совершает автоколебания. Найти
корни уравнения D.3.13) в общем виде затруднительно, однако условие
оптимальности параметров гасителя упрощает получение результатов.
Из D.3.13), D.3.14) следует
Si +§2 =М0 +*0+7, A + А +5^2 =/2 A +*>) + 7М+ *.
D.3.16)
§^22+5272=7/2+Д, z\z\=f\
Если значение ц выбрано, то /02пт определяется из следующих соображений.
Так как с увеличением V значение у уменьшается, то из первого и третьего
уравнений системы D.3.16) следует, что при этом dt и д2 также
уменьшаются. Из первого уравнения системы D.3.16) видно, что критическая
скорость VK максимальна при
б, = 62 =0; D.3.17)
из этого условия и третьего уравнения системы D.3.16) находится опти-
226
мальная настройка гасителя
/опт ^ 1/0+")> D-3.18)
которая не зависит от ц. Критическая скорость
Кк = 2со, [Tl +MA +«0]/(/*m.x) D.3.19)
увеличивается с возрастанием ц.
Используя второе и четвертое уравнения системы D.3.16), а также
D.3.17) и D.3.18) , можно записать
А\г = 1 + 0>57М ± VA +0,57МJ - 1/A +*0 D.3.20)
и, приравняв нулю подкоренное выражение, определить
Моих =\/2(VrH7- 0/A + »I'5 «VW0 + 0,875^) . D.3.21)
В случае у> мопт автоколебания возможны при скорости V< V?, где
Кк ^20?! Gi + \/v)l(rbmax) соответствует D.3.19) при/х = допт. Так, если
положить V- К,?, М>Мопт> т0 значения if 2* a также 512 — комплексно
сопряженные и, несмотря на то, что Re 5\ > 0, Re 52 > 0, вещественная часть
одной пары корней Sj будет положительна, т.е. автоколебания возможны
при V< V*.
При значениях /оПТ, мопт и скорости ветра V= V? справедливо
соотношение z\t2 = 1/A + v), и вследствие D.3Л7) система имеет кратные корни
4,2 = *з,4 = ± /Л/Г+ТГ, D.3.22)
поэтому частота автоколебаний
Po=ooil^/TT7. D.3.23)
Если V> V?, то соотношения D.3.17), D.3.22), D.3.23) остаются в силе
и возможные амплитуды автоколебаний определяются из уравнения
MP) = 2cj, [7i +Мопт A + «01/0*0- С4-3-24)
Его корни легко найти, если на график кривой Ь (/3) нанести
горизонтальные линии, соответствующие правой части при конкретных значениях V
(рис. 4.2,я). В зависимости от вида кривой b(f$) уравнение D.3.24) при
данном значении V может иметь одно или несколько решений (рис. 4.2,6).
При нескольких решениях уравнения в диапазоне \\ -г V2 устойчивые
решения соответствуют участкам кривой Ъ (Д), на которых производная
отрицательна. При небольшом увеличении (уменьшении) амплитуды
устойчивого решения коэффициент b(fi) уменьшается (увеличивается),
вещественные части корней характеристического уравнения становятся
отрицательными (положительными) и амплитуда колебаний уменьшается
(увеличивается) до стационарного значения. Решения, соответствующие
участкам кривой Z>(j3) с положительной производной, неустойчивы. Асимптота
кривой зависимости Л от К определяется точкой пересечения кривой Ъ @)
с осью абсцисс.
При оптимальных параметрах ход гасителя Y ** ЛД/577Найденные
значения параметров динамического гасителя оптимальны при скоростях
ветра V> FjJ и любой зависимости Z?(j3), так как им соответствуют
наименьшие амплитуды автоколебаний системы.
15*
227
v*y,
Р0ЛА/
Рис. 4.2. Некоторые характерные кривые Ъ (C) и соответствующие им зависимости
амплитуд автоколебаний Лот скорости ветра V
Численное исследование [53] автоколебаний башенного сооружения с
ДГК подтвердило основные результаты, описанные выше. Примененный
авторами метод продолжения по параметру при учете одной первой формы
колебаний сооружения привел к таким же решениям, как метод
гармонической линеаризации. Учет второй и третьей форм колебаний сооружения
не отразился на критической скорости вет,ра, лишь несколько уточнив
амплитуды колебаний с ростом скорости выше критической. В связи с этим
высшие формы колебаний не должны влиять на оптимальные параметры
гасителя D.3.18), D.3.21), найденные из условия максимума критической
скорости ветра.
ДГК с частотно-независимым трением [161]. Предположим, что
рассеяние энергии в динамическом гасителе осуществляется вследствие
внутреннего неупругого сопротивления в материале с повышенными диссипатив-
ными свойствами. Частотно-независимое трение в сооружении и гасителе
описываем согласно теории Е.С.Сорокина [182] с учетом [158].
Запишем дифференциальные уравнения колебаний сооружения и гасителя:
(и, +lpvi)
d2(y+wj)
Ъ1
Эх
/ b2w \
+ ту
d2w
~Э?~
+ 5 (х - 1)тТ
d2(y + wd
dt2
Ях>
+ /о2( +ipv2)y = 0.
dt2
Здесь р = sign(rmsy) — множитель, значения которого определяются
знаками мнимых частей корней характеристического уравнения
системы; UisVi,ti2,V2 — константы, зависящие [182,198] от коэффициентов
неупругого сопротивления 7i» 72 сооружения и гасителя; qx —
аэродинамическая нагрузка, действующая поперек ветрового потока и определяемая
выражениями D.3.1), D.3.2); остальные обозначения такие же, как в
D.3.3). Как и в случае ДГК с вязким трением, рассмотрим условия
возбуждения основной формы свободных колебаний сооружения без
гасителя, удовлетворяющей уравнению D.3.5). Применяя процедуру Бубнова —
228
Галеркина и гармоническую линеаризацию аэродинамических сил, получаем
уравнения
A + v)\+a0k - 0,5 г Vb(fi) X + vy = 0, А +у + у0у = О, D.3.25)
в которых а о = со2 (иг + /pi>i) ; ^o =fo 0*2 + гр^г) — квадраты
комплексных частот собственных колебаний сооружения и гасителя.
Отрицательный коэффициент при X в D.3.25) зависит от скорости ветра.
В отсутствие гасителя критическая скорость ветра
VK = 2oj1u1/(rbmax\/u1), 6max=max Ь(/3).
После подстановки в D.3.25) выражений D.3.12) получим
характеристическое уравнение колебаний сооружения с гасителем
s4 + s3y+s2[a + A +у)</>] +S7^+0<P = O, D.3.26)
где 7= -О^г-КбОЗУсо!, д = я0/<^1, <? = <Ро/со?.
Коэффициенты л, <р уравнения D.3.26) зависят от множителя р,
определяемого знаками мнимых частей корней Sj. В связи с этим при р = + 1
вычисляются лишь корни Sj с положительными мнимыми частями. Эти
корни обозначим s1$2- Прир= —1 коэффициенты уравнения D.3.26)
комплексно сопряжены с коэффициентами при р = +1; соответствующие этому
случаю корни s3,4 т9\&
Для оптимизации параметров гасителя необходимо выразить их через
критическую скорость ветра VK. Непосредственное решение уравнения
D.3.26) приводит к весьма сложным выражениям для s;-, не позволяющим
найти оптимальные параметры гасителя. Представим уравнение D.3.26)
в виде s4 + s2 [а + 75 + A + v)<р] + (а + 7$)рО и запишем неявные
соотношения для корней
s/ = -fei + ipg2) ± (*з + IPSO. D.3.27)
гдеgi,g2,g3>g4 — вещественные выражения, причем
a + ysj + A + v)$
g\ + ipgi = ,
/ [a + ysf + (\+v)ip]2 ~
gs + ipgA = V - (fl + 7*/)<Л
При возрастании скорости ветра значение у уменьшается, поэтому
вещественные части корней Sj увеличиваются. В диапазоне скоростей 0<
< V < FK автоколебаний нет. Они возникают при критической скорости
Кк, когда вещественные части одной пары комплексно сопряженных
корней равны нулю, а другой неположительны, т.е. -g2 ±?4 <0. Согласно
D.3.27) нетрудно установить, что при этом для р = + 1 справедливы
соотношения g2 = Vt + A + V)f 2У2 +УР; , pf = *///, g2 = 1^4 1, 0 <g* <Zl>
частота автоколебаний pj =\fg\ +?3 при g4 < 0, pj =\/gi -g3 при#4 >0.
Параметры гасителя, от которых зависит у?, влияют на критическую
скорость Кк. Оптимальным параметрам гасителя соответствует максималкно
возможная критическая скорость V0 и минимальное у. Как видно из
формулы для?2> увеличение от нуля до определенного уровня
демпфирования гасителя ( v 2) позволяет уменьшить у и повысить Кк. При этом,
229
если f2 «1, как это обычно и бьюает, то корни Si,s2 сближаются,
поскольку | g3 + ig4 I уменьшается. Однако если при фиксированном у с
увеличением и2 функция i ?4 I растет бысгрее функции g2, то система нередеми-
фирована и критическая скорость Кк уменьшается. С другой стороны,
если зафиксировать значение ip9 то чем меньше будет g2 = I g$ I при
критической скорости Кк, тем выше будет скорость Кк. Следовательно,
оптимальным параметрам гасителя соответствует равенство ?2=#4=0» т-е-
вещественные части всех корней Sj = ipj (/ =1,4) характеристического
уравнения должны обращаться в нуль. На основании изложенного запишем:
Im [а + iypj + A + v)$] = 0, Im [(a + iypj)y] = 0,
откуда следует
f2u2=uxl(\+v\ /2^ = -(^i+TP/)/(l+^) U =1Д.
С учетом полученных выражений формула D.3.27) упрощается
pj=Uy*y/-^ -f4vi(l+v) (/=1,2).
7 1 +i>
Параметры гасителя должны быть постоянными и одинаковыми для всех
Pf, что соблюдается лишь в случае рх = р2 = v^i, поэтому f 2 v2 = U\\fv\ (l +
+«0»7 = 4V*wi +^i/V^"),/2 =wi/Vi+^,«2 = i/\/T+V,u2 =VW(i+^.
При найденных параметрах гасителя значения #2,3,4 = О»что и позволяет
получить максимально возможную критическую скорость V0. Нетрудно
убедиться, что при любых малых отклонениях от оптимальных
параметров гасителя критическая скорость ветра уменьшается. Для этого
достаточно показать, что при той же скорости ветра отличающимся от оптимальных
параметрам гасителя будет соответствовать хотя бы одна пара корней s;- с
положительной вещественной частью. Если дать \р малое приращение, то
функция g2 получит приращение того же порядка, a I g4 I - значительно
большее ввиду извлечения квадратного корня из малой величины.
Следовательно, по крайней мере одно из значений —g2 ±g4 будет
положительным, т.е. для пары корней окажется Re Sj > 0.
По найденным параметрам гасителя u2i v2 определим оптимальный
коэффициент у2. Если воспользоваться соотношениями A.3.1), то у2 =
= 2Уу/A +V 1 +у). При использовании формул A.3.3) получается
72 =\/^
С учетом найденного значения у и зависимости 7 от К критическая ско
рость ветра V^ =2co1(u1 + у/рщ)/(rbmax\fu1~).
При V>VK возможные амплитуды автоколебаний Л находятся из
уравнения
Z)(p0A/K)=2co1(i;1 +\fiul)l(rV^l\
которое имеет одно или несколько решений, определяемых видом
кривой Ь (fi) (см. рис. 4.2,а). При оптимальных параметрах гасителя его
ходГ = Л\/1 + 1Я
Если воспользоваться выражениями D.3.18), D.3.23) для
оптимальных параметров /опт» Мопт динамического гасителя, с вязким трением
и при частоте автоколебаний р- 1Д/1 +v приравнять f2(u2+iv2) =
230
=/опт + ^оптР» то можно приближенно определить оптимальные па-
раметры гасителя с частотно-независимым трением /2 = 1/\/1 + v; u2 =
= 1/V1 +*; v2 = y/v/(\ + v)- Значение /2 отличается от полученного
выше точного результата отсутствием множителя щ.
Таким образом, найдены оптимальные параметры ДГК, обеспечивающие
максимум критической скорости ветра и минимальные амплитуды
автоколебаний сооружения с аэродинамически неустойчивой формой сечения
при скоростях потока выше критической. Сопоставление эффективности
гасителей с вязким и частотно-независимым трением показьюает, что при
оптимальных параметрах оба типа повышают критическую скорость ветра
примерно в 1 +7Г1\/^~раз. Так, например, при 7i =0,05 гаситель с
оптимальными параметрами и относительной массой v = 0,04 повышает
критическую скорость ветра в 5 раз, в случае v - 0,01 — в 3 раза. Следует, однако,
отметить, что оптимальное демпфирование для гасителя второгто типа
может быть реализовано за счет внутреннего трения лишь при достаточно
малых значениях его относительной массы. Характерным является то, что
требуемое оптимальное демпфирование гасителя в рассмотренном режиме
автоколебаний при отрицательном аэродинамическом демпфировании
примерно вдвое меньше, чем найденное в § 1.8 из условия максимального
повышения декрементов колебаний защищаемой конструкции.
Наблюдения показали, что установка ДГК на некоторых конструкциях
мемориальных объектов, построенных в последние годы, позволила существенно
повысить декременты колебаний и ликвидировать опасные явления
ветрового резонанса и галопирования (см. § 4.2 и [14]).
В качестве еще одного практического примера приведем данные,
относящиеся к проектировавшемуся в 1979 г. монументу в г. Грозном.
Монумент представлял собой стальной пустотелый обелиск некругового
поперечного сечения, высотой 47,9 м. В верхней части ствола массой 25 т
предусмотрена сосредоточенная масса 6 т. Приведенная в точку установки
гасителя на отметке 44,2 м масса сооружения составляла около 12 т, так что при
относительной массе гасителя v = 0,05 его абсолютная масса должна быть
равна 600 кг. Вычисленные две низшие собственные частоты колебаний
монумента в плоскости меньшей жесткости оказались равными 5,2,
29,4 рад/с, в плоскости большей жесткости - 5,5, 30,6 рад/с.
Предложенные варианты конструкции ДГК (авт. свид. СССР № 966181, 1059323)
основывались на использовании демпфирования стальных канатов при их
изгибе и изгибе с кручением и не позволяли достигнуть оптимального
демпфирования. Расчеты показали, что при декременте гасителя 0,3
удается довести декремент колебаний монумента примерно до 0,15 и вьюести
критическую скорость галопирования за пределы эксплуатационного
диапазона скоростей ветра. При расчете на действие пульсаций ветра было
выявлено, что для нормальной эксплуатации гасителя без ударов о стенки
монумента необходимо обеспечить зазор между его массой и стенками
примерно 0,5 м.
Полученные выше оптимальные параметры и оценки эффективности
ДГК применимы не только при изгибных, но также при крутильных и
изгибно-крутильных колебаниях, которые возникают в случае
несовпадения центра масс с центром жесткости башенных сооружений. Пример
применения ДГК при изгибно-крутильных колебаниях приведен в § 4.7.
231
§ 4,4, Случайные колебания башенных сооружений
при пульсациях ветровой нагрузки
В предыдущих параграфах показана высокая эффективность динамических
гасителей при ветровом резонансе и галопировании сооружений. Ниже
обсуждаются вопросы расчета сооружений башенного типа и оценки
эффективности динамических гасителей при случайных пульсациях ветровой
нагрузки. При этом вначале рассматриваются случайные колебания
сооружений вдоль ветрового потока, затем случайные колебания сооружений с
¦аэродинамически неустойчивой формой сечения поперек потока, далее
оценивается влияние гасителей на долговечность башенных сооружений.
Случайные колебания вдоль ветрового потока [106]. В качестве
расчетной схемы башенного сооружения чаше всего принимается консольный
стержень переменного сечения. Формы свободных колебаний такого
стержня могут быть найдены методом начальных параметров (см. § 3.5).
Установка ДГК с демпфированием превращает сооружение в систему с
"непропорциональным" трением, частотные характеристики которой определяются
(.§• 3.1) методом сил или перемещений. Поскольку исследование
случайных колебаний такой системы связано с проведением громоздких
вычислений и пока еще отсутствуют достаточно надежные статистические данные
о ветровой нагрузке, целесообразно воспользоваться приближенным
подходом, основанным на представлении пульсационной части ветровой
нагрузки в виде произведения детерминированной функции qx координаты
сооружения и стационарной случайной функции времени z (t). При этом
пространственная корреляция нагрузки по высоте сооружения учитывается
умножением коэффициентов разложения нагрузки по формам свободных
колебаний на коэффициент корреляции ?у, который принимается для
первой формы (/ = 1) согласно данным [173] и равен единице для всех
высших форм колебаний (/ > 2) .
Предположим, что сооружение оборудовано двумя динамическими
гасителями. Один из них расположен на верхнем конце в сечении х = г и
настраивается на первую частоту, другой устанавливается в сечении х = ? и
настраивается на вторую частоту собственных колебаний сооружения.
Желательно, чтобы указанные сечения были близки к пучностям соответствующих
форм колебаний.
При стационарных гармонических колебаниях с частотой р0 амплитуды
сил, действующих на сооружение со стороны гасителей, определяются
выражениями
Qr = ттrp\Cr W„ Q% =mnpl Q Wtt
где mTr , mT g - массы гасителей; Wr , W% - амплитуды прогибов
соответствующих сечений стержня; Cr,Q - вычисляются согласно C.1.1).
Используя для нахождения ЧХ перемещений (или усилий) сооружения
метод сил, представим их в виде ряда
00
И>= 2 XfVf D.4.1)
с коэффициентами
я
X/ = ( / Ях У\ dx+mTr pi Cr Wr Vrj + mri:p2o Q Щ Vv)l*0f, D.4.2)
232
где
*о/ " [<4> («1 + iv\) pi] S rnx V fdx;
qXimx — погонная нагрузка и масса; Vjf co0/ — формы и частоты
свободных колебаний сооружения.
При вычислении усилий s в формуле D.4.1) И7 следует заменить на s,
a Vj на s(Vj) — распределение усилий в сооружении, соответствующее
форме свободных колебаний Vf.
Подставляя D.4.2) в D.4.1) и решая уравнения, получаем
Wr= [A -mr^pl C^8^Nrq -mr|piQ8r|8|4|]/F,
W$ = [A -mvrp\ Cr6rrNtq -mTrpl Crb%rbrq]jFy
D.4.3)
где^= A -mTrp\ Crbrr) A -wr^oQ8^) -^r^r^oQQ5^»^ =
= f r?y/*0/t6t^ J F|y/*0/. 8^=8t,= ? Г,/?(/№*''*** ~
= 2 VrjVj $ qxVjdx№oh S»q= 2 VyVfjqxVjdx№oj. Коэффициент^
/=i >• /=i >•
пространственной корреляции для первой формы, согласно [173],
зависит от скорости ветра, высоты и периода колебаний сооружения.
В приведенных рядах достаточно удержать несколько членов с учетом
расположения частоты р0 в спектре собственных частот колебаний
сооружения. Далее можно найти дисперсии перемещений или усилий в
произвольном сечении в соответствии с выражениями
а? = / |s(ipo) \2Sz(Po)dp0 D.4.4)
— с»
или
а25= ? \,(T)\t(T)8(Vj)s(Vg)9
где s (ipo) — ЧХ перемещений или усилий, определяемые формулой D.4.1)
или ей аналогичной; Sz (p0) - спектральная плотность стационарной
случайной функции z (Г); X/ (r)\j (r) -^корреляцииобобщенных координат,
которые вычисляются интегрированием в частотной области с использованием
D.4.1), D.4.2) и выражения Sz (p0) .
Если ЧХ определяются методом последовательных приближений с
использованием разложения по вещественным формам колебаний
недемпфированной системы с гасителями (§ 3.12) , то ввиду раздвоения собственных
частот колебаний сооружения, на которые настраиваются гасители,
коэффициент пространственной корреляции zXj Ф 1 следует учитывать для
первых двух форм колебаний. Это можно сделать, умножив на vx значения
d5 в уравнениях C.11.20) при s = 1,2. Примерно к таким же результатам
приводит прием, основанный на умножении s(ip0) в формуле D.4.4)
на коэффициент v х Ф 1 в диапазоне частот вынужденных колебаний 0 <
233
< I Po I <0,5(co01 +coo2), где со01> ^02~ первая и вторая частоты
собственных колебаний сооружения без гасителей.
/о^ля многих ^антенных сооружении при пульсациях ветровой нагрузки
преобладают колебания по низшей форме; это позволяет ограничиться
установкой лишь одного (в сечении х = г) гасителя и при проведении
расчетов учесть не более двух форм колебаний сооружения без гаситеяя.
В частности, для гасителя с частотно-независимым внутренним трением
при этом получим формулу для амплитуды перемещений верхнего конца
ш (Уз -P2)[$i(V2 -р2) + ЫУг -Р2)]
(t?i -Р2)(лг - Р2)(т?з ~Р2)-ттгР2г)ъ[$1 (т?2 ~Р2) + *г(п% -Р2)]'
D,4.5)
Здесь обозначено
Г/ = П/ Ч / <fc К, <fx/ / /я* Г/dx, Ф, = Pg/ /mx Г/йх,
р = Ро/соо 1 > 0, со/ « со0//соо 1.
Если принять для нормированной спектральной плотности Sz (р0) дробно-
рациональное выражение A.10.1) (действовавшие в СССР до 1974 г.
нормативные документы по ветровым нагрузкам были основаны на
аналогичной формуле), то спектральная плотность прогиба
SWr = 2a(ct2 +($2)L(p2)L*(p2)l[7rGi0i П (р2 - р?) (р2 - р/2)],
/=1 ' D.4.6)
а дисперсия
оЪ =-4ot(a2 + 02)lm( I д,/?:1), D.4.7)
/ = 1 /
где
arL(p2)L\p2)l[ П (??-*?) П(р2-^2)];
L(p2) —числитель выражения D.4.5); Р\,Рг,Ръ — корни знаменателя
D.4,5), расположенные в верхней полуплоскости и определяемые в
результате решения бикубического уравнения; р4 =/}¦+ а/.
При использовании выражения нормированной спектральной
плотности, предложенного Давенпортом и введенного в действующие ньше
нормативные документы по ветровым нагрузкам:
Sz(p0) = 400ul[27TV10(\+u2)*!3]y DA8)
дисперсии прогибов можно определить численным интегрированием
соответствующих спектральных плотностей в заданном частотном диапазоне.
Здесь F10 —расчетная скорость ветра на отметке 10 м; и = 1200р0/(К1027г) —
приведенная частота.
Расчетные (максимальные) значения прогибов и усилий в различных
сечениях сооружения получаются как квадратные корни из соответствую-
234
ших дисперсий ад2, поскольку пульсационная нагрузка qx обычно
задается [173] с коэффициентом обеспеченности, равным 2,5 т3.
При необходимости для учета упругости и инерции основания вводятся
комплексные квазиупругие коэффициенты, зависящие от частоты
колебаний и параметров основания (см. § 4.2) .
В случае установки двух гасителей, настроенных на разные частоты сро-
бодных колебаний сооружения, можно получить приближенные результаты,
если пренебречь взаимным влиянием гасителей и влиянием высших
гармоник. При этом учтем, что гаситель как бы раздваивает ту собственную
частоту колебаний системы, на которую он настроен, несколько уменьшает
ближайшую более низкую частоту и почти не изменяет высшие частоты
колебаний системы. Введение оптимального затухания в гаситель
сглаживает ЧХ системы в области частот, близких к парциальной частоте гасителя,
и повышает обшее демпфирование системы на более высоких частотах.
Поэтому сооружение с двумя гасителями приближенно можно
рассматривать как две парциальные системы с одной степенью свободы
(поскольку учитывается лишь по одной форме колебаний), каждая из
которых имеет ДГК. Вначале можно назначить параметры гасителя (в сечении
* = ?), настроенного на вторую частоту свободных колебаний сооружения
в соответствии с формулами A.10). Далее, вычислив несколько
измененную в связи с присоединением этого гасителя частоту основного тона
колебаний сооружения, следует подобрать параметры гасителя,
установленного в сечении х = г.
Для приближенной оценки дисперсий перемещений или усилий
спектральная плотность воздействия принимается постоянной в пределах полос
пропускания указанных парциальных систем, что не должно привести
к значительной погрешности ввиду широкополосности воздействия. После
этого можно воспользоваться приведенными в § 1.10 результатами
расчета одномассовой системы с гасителем, возбуждаемой белым шумом.
Описанные приемы применялись при расчете на действие пульсаций
ветра телевизионных башен, оборудованных ДГК. Некоторые примеры
приведены в § 4.6,
Случайные колебания поперек ветрового потока [109]. Как показано
в § 4.3 (см. также [14,59]), для сооружений с аэродинамически
неустойчивой формой поперечного сечения (квадрат, прямоугольник, ромб
и др.) приходится рассматривать явления галопирования. Если скорость
ветрового потока не достигает критического значения, конструкция не
может совершать устойчивые автоколебания поперек потока, однако и в
этом случае необходимо учитьшать отрицательное действие нелинейных
аэродинамических сил. Так как последние снижают обшее демпфирование
конструкции, то амплитуды вынужденных колебаний из плоскости потока
могут существенно повыситься, в особенности при приближении скорости
потока к критической.
Следует отметить, что силы, действующие из плоскости ветрового
потока и приводящие к вынужденным колебаниям, могут иметь разнообразное
происхождение. В частности, срывы вихрей в крайних положениях
колеблющегося тела приводят к появлению знакопеременной подъемной силы
и могут способствовать возникновению "ветрового резонанса" [59]. Если
критическая скорость ветра, при которой наступает ветровой резонанс,
235
ниже критической скорости галопирования, то при расчете на ветровой
резонанс необходимо учитывать отрицательное влияние упомянутых выше
нелинейных аэродинамических сил.
Порывистость ветра, вызванная турбулентностью потока, также
приводит к вынужденным колебаниям. Многочисленные наблюдения
свидетельствуют о том, что траектории движения сечений башен близки к эллипсу,
большая ось которого направлена поперек ветрового потока. В связи с
этим естественно исходить из того, что порывистость ветра имеет не только
продольную, но и поперечную составляющую, которая приводит к
вынужденным колебаниям конструкции из плоскости потока. Вопрос о природе
поперечной составляющей и ее числовых характеристиках не является
здесь предметом рассмотрения, укажем лишь, что при проведении
практических расчетов можно принять одинаковыми продольную и поперечную
составляющие порывистости ветра.
Близкая задача возникает при исследовании бафтинга — вынужденных
колебаний сооружений, которые находятся в аэродинамическом следе от
других сооружений. Ниже рассматриваются вынужденные колебания
башенного сооружения с аэродинамически неустойчивой формой сечения при
воздействии случайных Пульсаций. Исследуются колебания сооружения
поперек потока в докритической зоне скоростей ветра, в которой
невозможны установившиеся автоколебания сооружения; выясняется влияние
нелинейных аэродинамических сил и гасителя с вязким трением на
параметры вынужденных колебаний. Рассматривается случай, когда ветровой
поток направлен вдоль одной из осей симметрии поперечного сечения
сооружения, причем поперечное сечение удовлетворяет критерию Ден-Гарто-
га уже при малых углах атаки (это соблюдается для квадрата,
прямоугольника) .
В соответствии с квазистационарным подходом [247, 250]
составляющую Qx погонной аэродинамической силы, действующей на сооружение
в сечении х поперек ветрового потока, можно представить в виде D.3.1),
D.3.2).
Пульсационная часть нагрузки поперек потока равна 0,5rdxV2 rjxz (t),
где dx — характерный размер сечения вдоль потока; rjx — произведение
коэффициента подъемной силы и коэффициента пульсаций; z (t) —
центрированный стационарный случайный процесс.
Рассматривая сооружение как стержень переменного сечения,
записываем дифференциальные уравнения движения поперек ветрового потока
(обозначения такие же, как в § 4.3) :
Э2 / d2w \ d2w d2(y + wj)
(Ut+ipvt) 7-г[Е1х Т-Т")"*-* -— -qx+b(x-l)mT ——; =
Ъх2 \ Ъх2 ) Ъг dt2
= 0,5rdxV2xVxz(t), D.4.9)
d2 dy
— (Д' + И^+Мо-— +/oJ> = 0.
dt2 dt
Учет внутреннего неупругого сопротивления для сооружения в
комплексной форме вполне допустим, так как слагаемое qx далее
линеаризуется. Вводя обычное допущение о нормальном законе распределения пере-
236
мешений и скоростей сооружения, получаем
qx=0,5rhxVx w 2 Zfate)'-1, D.4.10)
/«1,3... * ^ ;-!
где о^ — стандарт скорости сечения х; коэффициенты Aj =(—1) 2 AjjU
при использовании второго метода статистической линеаризации [71].
Коэффициент линеаризации зависит от неизвестных значений о^ и
скорости ветра VXi выражение для которой содержит, помимо постоянной, еше
и случайную составляющую, т.е. задача сводится к исследованию
линеаризованных уравнений со случайными коэффициентами. В целях
упрощения положим, что аэродинамическая сила D.3.1) и, следовательно,
ее линеаризованное выражение D.4.10) определяются постоянной
составляющей скорости ветра Vx, при этом влияние порывистости ветра
вдоль потока не учитывается в выражении аэродинамической силы,
действующей поперек потока.
Дисперсии скоростей о2^ можно определить численным
интегрированием спектральных плотностей
о\ =2/ pl\WxGPt)\2MPo)dp0i D.4.11)
х о
причем для построения ЧХ Wx(ip0) (индекс и аргумент далее опушены)
необходимо в уравнения D.4.9) вставить D.4.10) и положить z (t) =
= егр°*> w= Weip°f, у = Уегр°*> что при р0>0 дает (штрих - символ
дифференцирования по х)
[Е(иг +iv1)IxW"]"-mxp20W-0,5iporhxVxW 2 Af(o* /K»)'-
/=1,3... х
-8(x-l)mTp20(Y+Wl) = 0i5rdxV2xrixi
-p2o(Y+Wl)+voip0Y+flY=0.
Исключая Y, приводим эту систему к одному уравнению
[E(u1+ivl)IxW"]"-mxPlW-0,5iporhxVxW 2 А,(о+ JVX)'-1-
/=1,3... х
-Ь(х-1)тт pi Wj(f20 +/М0Р0Ж/0 + *МоРо -pi)в0,5rdxV\x\X}
D.4.12)
решение которого представляем в виде конечного ряда
W= 2 XeUe(x) D.4.13)
e=l
по формам свободных колебаний стержня без гасителя, удовлетворяющих
соответствующим граничным условиям и однородному уравнению
(Е1хи?)"-тхы2еие = 0.
Комплексные коэффициенты ряда D.4.13) разыскиваем методом
Бубнова — Галеркина, для чего подставляем выражение D.4.13) в уравнение
D.4.12).умножаем на Uk и интегрируем по длине стержня; далее, исполь-
237
зуя условие ортогональности
i ( 0 при е Ф к,
fmy.U„(x)Uir(x)dx= I
0 [ 1 при е = к,
получаем систему алгебраических уравнений порядка п
2 Ake\e = Qk (k*T~n). D.4.14)
Здесь
Ьке=аке+Ъке, Qk = 0,5 г V2 f nxdxv2xUk(x)dx,
о
О при кФе,
аке= \ Vx = VvXi Uri-.l,
cok(ui +Wi)-po при к = е,
8ke = -0,5iPorv} vxhxUk(x)Ue(x) 2 i/(a • lVxy~ldx -
0 /=1,3...
-mTp20Uk(l)Ue(l)(fl+iiJioPo)/(fo+ilJioPo -pi)-
Так как скорость ветра Кд. возрастает в зависимости от координаты х
по степенному закону [173], а коэффициент пульсаций при увеличении
средней скорости ветра уменьшается, то произведение rjxVДостается почти
постоянным. Примем, что r\xVx равно некоторой константе 7?0, т.е. Qk =
i
= 0,5n?0 i d.x Uk(x)dx\ это позволит выявить в чистом виде влияние нели-
0
нейных аэродинамических сил на уровень колебаний при возрастании
параметра скорости ветра V.
Дальнейший ход решения состоит в следующем. Для каждого из
дискретных значений параметра V в расчетном диапазоне скоростей ветра
необходимо, задавшись предварительно функцией о^ и вычислив интегралы
в уравнениях D.4.14), многократно решить систему D.4.14) для
различных значений р0 в заданном частотном интервале. Используя при этом
выражения D.4.13), D.4.11), можно получить более точные значения
функции о^ для различных х. Последовательные приближения продолжаются до
тех пор, пока расхождения между задаваемыми для решения и
получаемыми в результате решения системы D.4.14) значениями о^ не станут
меньше допускаемой погрешности. Затем с помошью формул, аналогичных
D.4.13), можно определить также дисперсии перемещений, ускорений и
усилий в различных сечениях стержня.
Для улучшения сходимости последовательных приближений при
некотором значении параметра скорости V в качестве первого приближения
функции о^ можно использовать результаты для предыдущего значения V.
Еше лучше применять линейную экстраполяцию.
Описанный алгоритм позволяет исследовать случайные колебания
сооружения поперек потока при различных скоростях ветра в докритической
зоне. Положительное влияние ДГК при этом заключается в увеличении
демпфирования сооружения и расширении докритической зоны скоростей.
238
Настроенный по формулам D.3.18), D.3.21) на первую частоту свободных
колебаний сооружения гаситель повышает критическую скорость ветра,
вызывающую автоколебания поперек потока, приблизительно в A +7i_1\/^)
раз. В докритической зоне скоростей гаситель существенно уменьшает
дисперсии перемещений и усилий при случайных колебаниях сооружения
поперек потока. Так как его эффективность определяется относительной
массой, а последняя повышается для сооружений переменного сечения с
гибкой и легкой верхней частью, то и влияние гасителя для таких
сооружений больше, чем для сооружений постоянного сечения той же массы.
0,04
Рис. 4.3. Зависимости стандартов
перемещения и скорости верхнего сечения
обелиска без ДГК (сплошная линия), с д02
ДГК (штриховая линия)
а
7,5 15 2Z,f У,м/с
Рассмотрены случайные колебания поперек ветрового потока стального
пустотелого обелиска квадратного сечения, которое с целью упрощения
вычислений принято постоянным по высоте. Параметры сооружения: / = 60 м,
Е1Х =2,24- 1010Н-м2, т^ = 640 кг/м, у, =0,03,со1J> 3 =5,8; 36,4; 102 рад/с.
Показатель степени закона изменения скорости ветра по высоте
сооружения принят равным 0,1, постоянная 7?0 =300 м2/с2. Параметры гасителя:
тг=480кг,у =0,05,/о2 =32,1 рад2/с2,д0 = 1,235 рад/с.
При вычислении ЧХ с мелким шагом по частоте система уравнений
D.4.14) решалась методом итераций (§ 3.11). Применение линейной
экстраполяции привело к быстро сходящемуся процессу, в среднем для
каждого значения р0 выполнялось две итерации. Сходимость последовательных
приближений для определения функции о^ , весьма высокая при малых
скоростях ветра, замедлялась вблизи критического значения V. В таких
случаях для улучшения сходимости начальное приближение функции
о^х для некоторого значения V принималось как полусумма функций
о^ при предыдущем значении V, задаваемых для решения системы D.4.14)
и полученных после ее решения и численного интегрирования в заданном
частотном диапазоне. Результаты (рис. 4.3) свидетельствуют о
существенном снижении уровня колебаний сооружения с гасителем при докритичес-
ких скоростях ветра.
О влиянии ДГК на долговечность башенных сооружений. Для высотных
стальных сооружений актуальным является вопрос о накоплении
усталостных повреждений и выходе конструкции из строя в результате
образования и развития трещин при колебаниях в потоке ветра. Накопление
повреждений имеет существенное значение, в частности для башенных
сооружений решетчатого и сплошностенчатого типа. Для таких сооружений, как
вытяжные и дымовые трубы, телевизионные башни, аппараты колонного
типа, обелиски и т.п., проблема осложняется тем, что усталостные
повреждения возникают не только при пульсациях ветровой нагрузки, но и при
239
—А—=
/
у
>'sw \
0,16
0,08
более интенсивных колебаниях поперек ветрового потока типа ветрового
резонанса и галопирования. Установка ДГК на башенных сооружениях
позволяет снизить ампли^ды перемещений и усилий накопление усталост*
ных повреждений и, как следствие этого,повысить долговечность
конструкций. Остановимся более детально на способе [102] оценки долговечности
таких башенных сооружений, для которых наряду с колебаниями,
вызванными пульсациями ветра, следует учитывать также колебания типа
ветрового резонанса. Повреждения в произвольной точке поперечного сечения
сооружения, вызванные случайными колебаниями от пульсаций ветра,
накапливаются на протяжении всего времени эксплуатации; повреждения,
вызванные более интенсивными колебаниями типа ветрового резонанса,
накапливаются лишь при резонансных скоростях ветра.
Мера повреждения в заданной точке может быть найдена как сумма
повреждений указанных двух типов. С целью упрощения расчетной модели
рассмотрим поперечное сечение кругового цилиндра. В этом случае в
предположении о равновероятности ветра по всем направлениям повреждения
будут равномерно распределены по поперечному сечению сооружений. С
использованием теории линейного суммирования повреждений [20] условие
накопления последних в рассматриваемом случае можно записать в виде
^у dNn Nv dNP
I —— + / ~ =1, D.4.15)
о N(on) о N(oP)
где индексы "П" и "Р" соответствуют режимам колебаний, вызванных
пульсациями и резонансом; N(ou), ЩЩр) — числа циклов,
соответствующих напряжениям ап и ар. Долговечность f конструкции оценивается
выражениями
r = 7Vya?/(Il + P),
П = 2 Ъс{а?/(Те&\ Р = 2 F, anxKTel ft).
Здесь Ny — число циклов напряжений, соответствующее пределу оу
усталости; п — параметр степенного уравнения кривой усталости; k,s — числа
нагрузочных режимов при колебаниях, вызванных пульсациями и
резонансом; с,- — коэффициент, учитывающий повторяемость по направлениям
ветра со скоростью VjiF^df, $i,Tei — вероятность появления скорости
ветра U/ (без учета направления), коэффициент асимметрии цикла
напряжений, функция относительных напряжений и эффективный период
изменения напряжений, соответствующие z-му режиму нагружения при
случайных колебаниях от пульсаций ветра; Fu аь /3/, Те г - то же для /-го
режима нагружения при ветровом резонансе.
Определяя повреждения при ветровом резонансе, необходимо
учитывать, что конструкция может находиться в нескольких нагрузочных
режимах с высоким уровнем напряжений, причем относительное время
пребывания конструкции в /-м резонансном режиме можно принять равным
относительному времени воздействия скорости i>/, осредненной на интервале
[A -е) vh A +е) Vi] . По экспериментальным данным е ^0,15.
Следовательно, вероятность появления ветра со скоростью vt составляет Fl =
240
= F [ A + e) vi ] — F [ A - e) vt ], где F [ ¦ ] - интегральная функция
распределения вероятностей скорости ветра. При ветровом резонансе колебания
обычно происходят с фиксированными частотами, равными частотам
собственных колебаний; из этого условия определяются эффективные
периоды Те i.
Рассмотрим, как изменяется долговечность конструкции при
установке ДГК. Положим, что амплитуды Ъа напряжений при колебаниях от
пульсаций ветра и при резонансе связаны с аналогичными значениями оа в
отсутствие гасителей линейными зависимостями
Oat = Сп oai(i = 1Д), да1 = СР оа1 (/ = 1, s).
Здесь Сп, Ср — коэффициенты снижения уровня напряжений при установке
гасителей в случае пульсаций ветра или резонанса. Эти формулы,
следовательно, основаны на предположении о том, что эффективность гасителей
не зависит от значений /,/. В практических расчетах часто достаточно
рассмотреть один наиболее нагруженный режим при колебаниях от
пульсаций ветра и резонансные колебания лишь на первой частоте, так что
введенное предположение не является обременительным. При установке
гасителей принятые в расчете периоды практически не изменяются, а &щ) -
=Сг| (?\ Qj (/) • Долговечность конструкции с ДГК
Г«ЛГу(Г*/(С^П + С? Р),
а повышение долговечности за счет гасителя
А'г = (П + Р)/(СЙП + СрР).
Это соотношение позволяет прогнозировать долговечность в зависимости
от коэффициентов Сп, Ср. Для сооружений, в которых отсутствует режим
ветрового резонанса, Кт = Сп • При проектировании реальных сооружений
данные о снижении уровня амплитуд колебаний и напряжений следует
получать расчетным путем.
Рассмотренный вопрос о повышении долговечности стальных башенных
сооружений в результате установки ДГК является частным случаем более
общей задачи о влиянии виброзащиты на долговечность конструкций,
для решения которой можно использовать подобный подход. Дальнейшим
расширением задачи о виброзащите башенных сооружений является
определение необходимого числа и оптимальных параметров гасителей
с учетом возможности выхода из строя некоторых из них с тем, чтобы
обеспечить необходимый срок службы сооружения.
§ 4.5. Виброзащита стальных вентиляционных и дымовых труб
при ветровых воздействиях
Стальные вентиляционные выхлопные и дымовые трубы в соответствии
с требованиями санитарных норм обычно имеют сравнительно большую
высоту - порядка 150—200 м. Ветровые воздействия вызывают
интенсивные колебания труб, и снижение уровня их колебаний является достаточно
актуальной задачей. В СССР в начале 50-х годов для этой цели были приме-
16. Б.Г. Коренев
241
нены ударные маятниковые гасители, которые достаточно хорошо
уменьшали уровень колебаний [113]. В последние годы виброзащита труб
осуществляется с помощью динамических гасителей. Конструкции труб,
оборудованных ДГК, проектировались институтами ЦНИИПроектсталь-
конструкция и УкрНИИПроектстальконструкция, методика расчета
разрабатывалась ЦНИИ строительных конструкций при участии МИСИ и ряда
других организаций. Общие положения, принятые за основу при
проектировании, изложены в рекомендациях [171]. В настоящее время гасители
нашли достаточно широкое применение, они установлены более чем на
40 вентиляционных трубах и оправдали себя в процессе эксплуатации.
Высокая эффективность этого способа виброзащиты стальных труб
объясняется весьма низкими декрементами собственных колебаний и
некоторыми конструктивными особенностями этих сооружений. Отметим,
в частности, то, что трубы в режиме пульсаций ветрового давления
совершают случайные колебания, основной вклад в которые дает первая
гармоника. Частота этой гармоники практически весьма стабильна. Учитывая
сравнительно небольшой вклад высших гармоник и разреженность спектра
собственных частот, можно ограничиться применением одномассовых
гасителей, которые настраиваются на частоту, близкую к частоте основного
тона свободных колебаний сооружения. В большинстве случаев
конструкции труб допускают возможность установки гасителей вблизи верхнего
сечения, что способствует высокой эффективности виброгашения. Как
известно, подобные сооружения должны быть также рассчитаны на ветровой
резонанс, возникновение которого является крайне нежелательным.
Динамические гасители практически снижают амплитуды колебаний труб при
пульсациях ветрового давления в 2 — 3 раза, эффективность их при
ветровом резонансе еще выше; заметим, что в тех случаях, когда причиной
установки гасителя являлось стремление улучшить работу трубы в режиме
ветрового резонанса, последний после установки гасителей не наблюдался.
Порядок расчета таков. Сначала определяются собственная частота,
приведенная масса и обобщенная жесткость, соответствующие первой форме
колебаний трубы. Затем проводится расчет на ветровой резонанс. При этом,
как показали исследования, формально трубу можно рассчитать как
приведенную систему с одной степенью свободы при гармоническом воздействии
с нестабильной частотой и пропорциональной квадрату частоты амплитудой.
Оптимальные параметры гасителя находятся по формулам, приведенным
в § 1.2—1.4. Далее производится расчет на действие пульсаций ветра
согласно [173] и материалам, содержащимся в § 4.3, 1.10. Несмотря на то,
что для этого режима принятые из расчета на ветровой резонанс параметры
гасителя не являются оптимальными, эффективность виброгашения
остается достаточно высокой. Следует обратить внимание на определение
максимального хода гасителя и, назначая габариты, в предельном случае
необходимо оставлять еще зазор, чтобы избежать касания его массой стенок
трубы.
В [92] приведены сведения о конструкции и результатах испытаний
гасителя, установленного на башне-трубе высотой 150 м, построенной на
одном из химических предприятий. Несущая конструкция башни
решетчатая, нижняя ее часть до отметки 96 м представляет собой трехгранную пира-
242
миду, а затем переходит в трехгранную призму. Выхлопная труба
выполнена в виде тонкостенной цилиндрической оболочки диаметром 2,4 м. После
окончания монтажа трубы были отмечены колебания типа ветрового резо
нанса, направленные поперек ветрового потока. Поэтому пришлось
временно ужесточить конструкцию с помощью трех оттяжек.
Чтобы снизить уровень колебаний трубы, был применен динамический
маятниковый гаситель, состоящий из трех одинаковых маятников общей
массой 1,8т A% от массы конструкции). Гаситель сначала собирался и
настраивался на земле. Для определения логарифмического декремента
колебаний производилось отклонение верха трубы с выключенным и
включенным гасителем. Обработка полученных виброграмм свободных
затухающих колебаний показала, что гаситель повышает логарифмический
декремент трубы в 2,1 раза. Следует отметить, что в процессе строительства
было допущено отступление от проекта: диаметр каната маятникового
гасителя был принят 38 мм вместо 46—55 мм по проекту. Так как диссипа-
тивные силы в гасителе обусловлены местным изгибом концевых участков
каната, то по указанной причине декремент оказался ниже расчетного.
После установки гасителя и снятия оттяжек повышенный уровень
колебаний трубы не наблюдался. Использованная конструкция гасителя проста
в изготовлении, не вызывает трудностей при монтаже, гаситель не требует
ухода в процессе эксплуатации. Опыт применения ДГК для вытяжной
башни-трубы высотой 180 м (деревянная труба в несущей четырехгранной
решетчатой башне) описан в [91].
Приведем результаты [97] динамического расчета дымовой трубы
(высота 420 м, масса 12000 т), оборудованной ДГК. Конструкция башни-тру-'
бы представляет стальной цилиндр диаметром 18,5 м, к которому на
отметке 150 м прикреплены подкосы. Внутри башни находятся три вытяжные
трубы диаметром 6 м каждая, конструкции которых не являются
несущими.
Вопрос об установке динамического гасителя возник в связи с тем, что
расчет башни-трубы показал сравнительно высокую амплитуду A,15 м)
колебаний ее верхнего сечения в режиме ветрового резонанса, при этом
расчетные динамические напряжения значительно превышали допускаемые.
Таким образом, целью применения гасителя было снижение амплитуд
колебаний и соответственно динамических напряжений в режиме ветрового
резонанса башни-трубы. Гаситель был рассчитан, спроектирован, изготовлен
в натуральную величину и детально испытан.
В результате предварительных расчетов было принято решение
установить гасители с суммарной массой подвижных частей 60 т двумя группами
на отметках 397 м и 410 м. Каждая группа состоит из трех одинаковых
гасителей с массой груза 10 т. Массы гасителей размещаются в пределах
свободной внутренней части башни-трубы и при колебаниях не должны,
естественно, касаться, а тем более ударяться о защищаемую конструкцию.
Отсюда следует жесткое конструктивное ограничение хода гасителей
КЗм.
Первая собственная частота колебаний башни-трубы равна 1,24 рад/с.
При этом длина подвески маятникового гасителя должна превышать 6,5 м.
Квазиупругий коэффициент маятникового гасителя формируется как сум-
16*
243
ма двух слагаемых, одно из которых учитывает гравитационный эффект,
другое — местные деформации в опоре. С увеличением длины подвески
маятникового гасителя диссипативньте силы, возникающие при изгибе
концевых участков стального каната, уменьшаются. Эта особенность
потребовала детального изучения диссипативных характеристик гасителя.
Натурная модель гасителя представляет собой пространственную
стальную раму высотой 9,6 м, к верхней площадке которой на тросах подвешен
груз. Схема гасителя показана на рис. 4.4. Гаситель состоит из массы i,
основного стержня 2 и демпфирующих тросов 3 подвески, прикрепленных
к оголовку 6 пространственной рамы, двух промежуточных элементов —
опорных устройств 5, присоединенных с помощью растяжек 11 к
стойкам 7 пространственной рамы, 4 и 8 — элементы основания
пространственной рамы гасителя. Расстояние опорных устройств от оголовка
регулируется. Демпфирующие тросы и стержень подвески зажимаются с помощью
хомутов в опорных устройствах 5. Кроме того, демпфирующие тросы
зажимаются с помощью хомутов в специальном диске 9, положение которого
относительно массы 1 регулируется болтами 10. Подвеска 2 проходит
свободно через отверстие в диске 9.
Конструкция гасителя позволяет сравнительно легко производить
настройку за счет изменения длины маятника. Демпфирование возникает
при изгибе тросов вблизи мест крепления элементов 5 и 9. Тросы
представляют многопрядевые канаты, состоящие из шести прядей и сердечника
(всего 259 проволок в канате). При проведении эксперимента
использовались канаты диаметром 42 мм и 67,5 мм. Окончательно были приняты
спаренные канаты диаметром 67,5 мм, прижатые друг к другу хомутами
через 0,5 м по высоте.
Виброграммы собственных колебаний гасителя позволили установить,
что демпфирование имеет ярко выраженный нелинейный характер.
Полученная экспериментальная зависимость декремента Эг от амплитуды
o-vVVH
-*v w///////;m
Рис. 4.4. Схема ДГК для высотной башни-трубы
Рис. 4.5. Расчетная схема башни-трубы с ДГК
244
колебаний массы гасителя аппроксимирована полиномом
аг = 0?446 + 0,0273 Y - 0,2935 Y2 +0,1554 Y3 - 0,02316 Г4.
Эти данные были использованы при динамическом расчете башни-трубы
с ДГК. Расчетная схема сооружения (рис. 4.5) представлена в виде стержня
со ступенчато изменяющимися массой и жесткостью, к которому
присоединены упругая связь, моделирующая влияние подкосов, и гасители
колебаний. Декремент колебаний башни-трубы был принят 0,05.
Одним из основных вопросов виброгашения является выбор
оптимальных параметров гасителей: настройки f2 и затухания, характеризуемого
логарифмическим декрементом Зг. На практике удается довольно точно
отрегулировать настройку /2, но диссипативные свойства гасителей часто
имеют заметные отклонения от оптимума. Значения Эг целесообразно
задавать, учитывая конструктивные особенности гасителей. Усредненные
значения Эг для выбранных маятниковых гасителей зависят от их хода Y и, по
данным натурного эксперимента, изменяются от 0,4 до 0,2 при изменении Y
от 0,6 до 3 м. Оптимальная настройка определялась в предположении, что Эг =
= 0,2, при этом оценка эффективности виброгашения была заниженной (в
запас прочности), поскольку увеличение Эг приводит в данном случае к
повышению эффективности виброгашения. Дополнительно были выполнены
расчеты и для случаев, когда Эг =0,15; 0,4 и 0,6 что позволило оценить влияние
изменчивости декремента на эффективность виброгашения и ход гасителей.
Поясним, как определяется оптимальная настройка при фиксированном
значении Эг. Если в резонансно-опасном диапазоне оказывается лишь
первая частота оох сооружения, то парциальная частота гасителей близка к сог
и у сооружения с гасителями появляются две близкие собственные частоты
сох, со2, причем cox < (x>i < со2- Поэтому для сооружения с гасителями
следует учитывать резонансные явления при двух критических скоростях
ветра и соответственно определять усилия и перемещения от
аэродинамических сил с частотами со1? аУ2- Как правило, в результате некоторого
увеличения /2 усилия и перемещения при частоте aJj увеличиваются, а при
частоте и>2 ~ уменьшаются. Оптимальное значение настройки /2 может
рассматриваться как абсцисса точки пересечения графиков усилий
(перемещений), возникающих при колебаниях с частотами сох, с52 •
В процессе эксплуатации трубы, во время ее ремонта, один из газоотво-
дящих каналов может быть удален, поэтому виброгашение должно
обеспечить необходимое уменьшение внутренних усилий для двух расчетных схем,
соответствующих вариантам с двумя и тремя газоотводящими каналами и
отличающихся друг от друга значениями распределенных масс. Учитывая
это, при проектировании гасителей оптимальная настройка определялась по
точке пересечения графиков изгибающих моментов, соответствующих
частоте coi одной схемы и частоте со2 — другой. На рис. 4.6 показано, как
изменяются при изменении настройки / 2 декремент Э собственных
колебаний сооружения с гасителями, изгибающий момент М в сечении на
высоте 150 м, амплитуда колебаний W верха трубы, ход Y гасителя.
Настройка /2 определялась для всех кривых по отношению к квадрату первой
собственной частоты трубы с тремя газоотводящими каналами. Как видно
245
из рис. 4.6, оптимальное значение /2 в рассматриваемом случае отличается
от оптимальных значений для каждой из расчетных схем. Такая же картина
наблюдается и при других, отличных от 0,2, значениях декремента
колебаний гасителя. Можно отметить, что качественно характер оптимизации не
изменится и в случае, когда в резонансно-опасном интервале окажется
несколько собственных частот, кривая для с32 ПРИ этом может быть
заменена кривой для ?5п.
Представленные на рис. 4.6 критерии вычислялись с использованием
разложений по формам колебаний системы с гасителями. Предварительно
определялись комплексные корни sj = [ —Э;/B7г) +/]аЗ,- (/ = 1?2)
уравнения частот, декременты Э;- и частоты со;- свободных колебаний системы
с гасителями, а также две составляющие форм колебаний, сдвинутые по
фазе на я/2. В разложении учитывались только две формы колебаний,
поскольку учет остальных форм мало влиял на результаты.
Как показали расчеты, гасители с оптимальной настройкой /2 = 1,13
могут уменьшить усилия и перемещения при ветровом резонансе более чем
в 3 раза. При этом ход гасителя 2,6 м удовлетворяет конструктивным
ограничениям.
Следует отметить, что, если бы по конструктивным соображениям не
удалось обеспечить декремент гасителя Эг, больший чем 0,15, гасители
были бы мало эффективными и нера-
d/rt\ Г I I i i венство Y < 3 м не удовлетворялось
бы. Увеличение декремента гасителей
, ^ позволило бы еще больше повысить эф-
°у°4\ ^х? J><J ! г 1 фективностьвиброгашения. Для
иллюстрации на рис. 4.7 показано, как при
изменении Эг и фиксированном/2 = 1,13
изменяются безразмерные
коэффициенты КГУ равные отношению
логарифмических декрементов собственных
колебаний (кривая 1), значений \/М
(кривая 2) и 1/ W (кривая 3) для трубы с
гасителями и без гасителей. Для
штриховой кривой коэффициент Кг равен
отношению значений Y при текущем Эг
и Эг =0,2.
Остановимся вкратце на вопросах,
связанных с расстройками гасителей.
Прежде всего отметим, что в
реальных условиях настройка гасителей
может несколько отличаться от оптималь-
^' ' Ч— ной; возникающие при этом изменения
WyM
1\ ^ ,
Рис. 4.6. Зависимости критериев от
настройки гасителей при колебаниях с частотой
й>1A) и ы2 B) для трубы с тремя
(сплошная линия) и двумя (штриховая линия)
1yZ %4 7е2 газоотводяшими каналами
'><П
I/i
р*»
>*^
у
^
\~~
^-"Л
******!
"Л
^-^
>2
ы
х^*
9 .га
^3
--,
**}
-^ 1
"~1
^,.
¦fcee:
^«-"*
~~——
?
246
в декрементах колебаний, усилиях и перемещениях башни можно
приближенно оценить по графикам на рис. 4.8. В тех случаях, когда система
виброзащиты состоит из нескольких гасителей, возникает естественное
желание настроить гасители на разные частоты и за счет этого повысить,
насколько возможно, эффективность виброгашения. В работах [202, 262]
было показано, что для гасителей с оптимальным демпфированием такая
целенаправленная "расстройка" приводит к незначительному повышению
эффективности. Если гасители обладают слабыми диссипативными
свойствами, оптимальная расстройка может существенно расширить диапазон
8
Рис. 4.7. Зависимости коэффициентов
эффективности виброгашения Кт от декре- ^
мента колебаний гасителей Эг
0
0,2 0}4 дт
частот, в котором они эффективны, и, таким образом, эффективность
виброгашения заметно возрастет. Достаточно подробно исследованы
особенности работы такой системы виброзащиты в случае, когда защищаемая
конструкция может быть представлена системой с одной степенью свободы
[127, 128, 141,142].
В тех случаях, когда моделью защищаемой конструкции является
континуальная система, оптимизация по-разному настроенных гасителей очень
сложна, и, что еще более важно, амплитуды колебаний масс гасителей могут
превысить допустимый уровень, если воздействие не слишком
узкополосное и демпфирование в гасителях мало. Такая ситуация возникла бы,
в частности, если бы гасители в каждом ярусе башни-трубы имели
настройки /2Г, /22г, /32р причем /2Г ¦- 1,13 было бы близко к оптимуму при
одинаковой настройке всех гасителей, /22г = A + а)/2г, /Зг = A -а)/2г, где
коэффициент а характеризует "расстройку". При а > 0, в отличие от
случая одинаковой настройки гасителей, в резонансно-опасном диапазоне
появляются четыре собственные частоты g3;- (/ = 1,4) трубы с гасителями.
Будем полагать, что при оптимальном значении коэффициента а достигает
максимума наименьший из декрементов Эу (/' = 1,4) свободных
колебаний трубы с гасителями.
На рис. 4.8 показано, как изменяется каждый из декрементов
собственных колебаний (номер кривой соответствует номеру / частоты cJy-) при
изменении а. Видно, что при аопт = 0,21 наименьший логарифмический
декремент увеличивается по сравнению со случаем, когда а = 0,
приблизительно в 1,2 раза. Почти во столько же раз уменьшаются расчетный
изгибающий момент и амплитуда колебаний верха трубы. Для кривых 2, 3
на рис. 4.8 характерным является асимптотическое приближение к
горизонтали Э= Эг при а -* 0. В предельном случае две группы гасителей совер-
?
*w
^
*г
и
й
А
А
п
247
О 0,1 0,Z 0,3 ее ^ 0,8 1 1,2 и§
Рис. 4.8. Влияние расстройки а гасителей на декременты собственных колебаний
башни - трубы с гасителями
Рис. 4.9.Зависимости хода гасителя от его расстройки при колебаниях с частотой
cjj B) и о;2 B) для трубы с тремя (сплошная линия) и двумя (штриховая линия)
газоотводящими каналами
шают собственные колебания в противофазе, а башня-труба остается
неподвижной.
Хотя эффективность виброгашения при оптимальном значении а
возрастает, ход гасителя увеличивается, и неравенство Y < 3 м не
удовлетворяется. Такая же картина может наблюдаться и при случайных расстройках,
которые должны учитываться при проектировании гасителей.
Приближенную оценку изменения Y, возникающего в результате такой расстройки,
можно получить, полагая, что лишь один гаситель из группы расстроен и
при этом амплитуда колебаний точки подвеса гасителей остается
неизменной. На рис. 4.9 показано, как изменяются значения Y для расстроенного
гасителя в зависимости от коэффициента а о, равного отношению
квадратов парциальных частот расстроенного гасителя и остальных пяти гасителей,
установленных на башне-трубе. Декремент колебаний гасителей
принимался равным 0,2. На рис. 4.9 видно, что изменение парциальной частоты
гасителя на 5% приводит к увеличению значения Y более чем в 1,5 раза;
аналогичный результат получается и для гасителей с вязким демпфером
при тех же значениях Эг.
Если ограничения на ход Y отсутствуют, то целенаправленная
"расстройка" гасителей может заметно повысить их эффективность, особенно когда
демпфирование в гасителях меньше (как, например, в рассмотренном
случае) оптимального. Поэтому дальнейшие исследования влияния
преднамеренных расстроек гасителей являются перспективными при разработке
методов виброгашения рассматриваемых гибких конструкций.
§ 4.6. Гашение колебаний телевизионных башен
при ветровых воздействиях
В связи с ускорением темпов развития телевизионной связи в СССР
разработка эффективных способов виброзащиты телевизионных башен
представляет актуальную задачу. Повышенный уровень колебаний при ветровых и
сейсмических воздействиях возникает вследствие сравнительно низких
декрементов телебашен. Установка динамических гасителей с демпфирова-
248
нием позволяет повысить декременты и уменьшить амплитуды колебаний
сооружений.
Вопрос о виброзащите телевизионных башен нельзя рассматривать
в сравнительно узких рамках, ограничиваясь описанием расчета и
конструкции гасителя какой-либо башни, даже если это рассмотрение и будет
достаточно детальным. Это объясняется большим разнообразием
конструктивных форм башен и их размеров. Значительная часть башен выполнена
в виде монолитной железобетонной конструкции-ствола, в котором
размещены служебные помещения, рестораны, смотровые площадки, и
опирающейся на него гораздо более гибкой металлической конструкции антенной
части. Таковы, например, Останкинская башня в Москве, Дрезденская
и др. Наряду с железобетонными конструкциями, имеющими форму
оболочек вращения, применяются и башни со стволом рамнокаркасной
конструкции. Весьма разнообразны конструктивные схемы металлических
башен. Поэтому для телевизионных башен в большей мере, чем для
дымовых труб, необходим индивидуальный подход к решению вопроса о
целесообразности устройства гасителей, их размещении и конструктивных
формах.
В литературе неоднократно упоминалось о применении ДГК в
телебашнях. В частности, гасители установлены на Дрезденской, Берлинской,
Пражской, Алма-Атинской и других телебашнях.
В этом параграфе после краткого рассмотрения особенностей,
влияющих на эффективность гашения колебаний, приведены результаты
исследований, связанных с выяснением целесообразности, определением
мест установки и параметров ДГК для телебашен, построенных в Алма-Ате
и Риге. В работе принимали участие ЦНИИ строительных
конструкций, МИСИ, Ин-т техн. механики АН УССР, Гос. союзн. проектный
ин-т Минсвязи СССР, ЦАГИ, ЦНИИ-, УкрНИИ- и Днепрпроектстальконст-
рукция, а также другие организации.
В железобетонных телевизионных башнях уровень колебаний
ствола невысок и обычно целью применения гасителей является уменьшение
уровня колебаний антенной части. Во многих случаях, например в проекте
Останкинской башни, применение гасителей не предусматривалось; в
процессе эксплуатации этой башни не возникало проблем, связанных
с необходимостью снижения уровня колебаний. Это можно сказать и о
железобетонных башнях в Вильнюсе и Таллине.
Стальные башни, имеющие большую высоту, как правило, колеблются
со значительно большими амплитудами; проблема виброзащиты таких
башен с помощью гасителей колебаний является более актуальной. Опыт
проведения динамических расчетов показал, что для подобных башен
в первую очередь необходима виброзащита ствола башни и во многих
случаях гасители должны устанавливаться в пределах верхней части ствола.
Они размещаются в закрытом помещении, где нет значительного перепада
температуры и в этой связи возможно применение различных устройств
с демпферами вязкого трения. За такими конструкциями может
проводиться систематическое наблюдение; это отличает условия эксплуатации
гасителей от тех, которые нужно принимать во внимание при вибро
защите дымовых и вентиляционных труб. Вместе с тем следует учитывать,
что при установке гасителей в верхней части ствола требуется применять
249
весьма большие массы, достигаемый при этом эффект гашения
сравнительно невелик, так как амплитуды колебаний ствола существенно
меньше, чем антенной части. Это характерно, в частности, для башен с очень
жестким стволом, например для Рижской телебашни. Таким образом,
выбор места установки гасителя требует индивидуального подхода*
размещение в верхней части ствола обеспечивает лучшие условия
эксплуатации гасителя при сравнительно невысокой его эффективности,
установка в антенной части должна приводить к гораздо большему эффекту
гашения колебаний, но вызывает трудности обеспечения требуемого хода,
стабильности параметров и наблюдения за гасителем.
Вторая важная особенность — это значительно менее ярко выраженная
опасность явлений ветрового резонанса, чем для цилиндрических
стальных труб, что объясняется существенной переменностью сечений
телевизионных башен по высоте. Поэтому, как показали расчеты, учет
пульсаций ветрового давления здесь, как правило, является основным.
При виброзащите металлических башен большое значение имеет
вопрос о выборе конструктивной формы гасителя, который при низких
частотах свободных колебаний не может представлять простую маятниковую
конструкцию из-за большой длины подвеса. В то же время ход
маятника может оказаться значительным — до двух и более метров. Поэтому
определение хода гасителя в этих случаях является необходимой и одной
из важнейших задач расчета. Довольно часто расчетное демпфирование
гасителя определяется не только требованиями эффективности
виброгашения, как для других защищаемых конструкций, но и в большой мере
указаннымлэграничением на ход гасителя. Отсюда вытекает необходимость
применения гасителей с повышенным демпфированием.
В то же время благоприятным фактором для применения ДГК
является высокая стабильность частот собственных колебаний телебашен.
Для телевизионных башен важную роль могут иметь ограничения
колебаний, носящие технологический характер. Так, для башен с гибкой
антенной частью критерием качества могут быть углы поворота отдельных
сечений, от которых зависит положение границы зоны уверенного приема
телевизионного сигнала. Учитывая, однако, то, что основной вклад в
колебания вносит, как правило, первая форма, следует ожидать, что в
большинстве случаев уменьшение наибольших амплитуд перемещений
должно сопровождаться одновременным уменьшением углов поворота.
Алма-Атинская телевизионная башня. Телебашня высотой 362,7 м
выполнена в виде металлической трубы кусочно-постоянного сечения;
диаметры секций изменяются от 18,5м в основании до 0,72 м в верхнем
Таблица 4.1
Результаты испытаний Алма-Атинской телебашни
Номер тона
колебаний
Частота, Гц
Декремент
Коэффициент
неупругого
сопротивления
1 0,13 0,063 0,02
2 0,31 0,069 0,025
3 0,66 0,242 0,078
250
сечении; масса башни 5400 т. Предварительные динамические расчеты,
проведенные в 1977—1979 г на стадии проектирования башни, включа-
лк проверку ка ветровой резонанс к действие пульсация ветровой нагруз-
ки, выбор мест установки и параметров ДГК. Расчетная схема была
принята в виде изгибаемого стержня кусочно-постоянного сечения с
равномерно распределенной в пределах отдельных участков массой. Расчеты
показали, что гаситель массой 50 т, установленный на отметке 248 м,
целесообразно настроить на первую частоту колебаний башни, а гаситель
массой 30 т на отметке 174,5 м — на вторую частоту. При декременте
гасителей 0,2 амплитуды колебаний при ветровом резонансе должны
уменьшиться в 3, при пульсациях ветровой нагрузки — в 2 раза. При этом ход
гасителя, установленного на отметке 248 м, составляет 2—2.5 м;
расчетные амплитуды колебаний башни в режиме пульсаций ветровой нагрузки
больше, чем при ветровом резонансе.
В построенной телебашне реализован гаситель (авт. свид. СССР № 1063959),
состоящий из двух маятников — обычного и астатического, соединенных
между собой подвижной штангой и прикрепленных к сооружению с
помощью демпферов вязкого трения. Гаситель установлен на
отметке 238,5 м, его масса 40 т, декремент 1,2, парциальная частота 0,13 Гц
соответствует низшей частоте колебаний башни, максимально допустимый
ход — не более 0,5 м.
728^9
7 248
чт151
(
.
<
(
<
7<
1
1
1
1
1
1
1
<
1
1
1
1
1
1
1
(
\
1
1
1
1
1
1
1
1
9И
}7
2
3
4
? Z6
!*т
j /77г |
> i
ff \
) i
» J
) I
>fS 1
*
Ч
\19 Ц
и
I Go
tN,
>23 x\
*
» GO
»
>17
> i
> >
» !
>Ъ1 j
» :
» j
' *
*Ъ5 f-
Рис. 4.10. Общий вид и расчетная схема Алма-Атинской телебашни
Рис. 4.11. Общий вид и расчетная схема Рижской телебашни
251
В связи с тем, что параметры гасителя существенно отличаются от
расчетных, в 1983 г. были проведены дополнительные динамические расчеты
хелеоашни с гасителем на действие пульсаций ветровой нагрузки при
уточненных данных о сооружении (табл. 4.1). Расчетная схема (рис. 4.10)
представлена в виде консольного стержня кусочно-постоянного сечения
с дискретно расположенными сосредоточенными массами. Вычисленные
на ЭВМ первые три частоты собственных колебаний башни — 0,115, 0,278,
0,616 Гц удовлетворительно согласуются с найденными в эксперименте
(табл. 4.1). С целью выяснения влияния различных форм колебаний башни
на результаты на первом этапе расчета собственное демпфирование башни
моделировалось частотно-независимым трением в комплексной форме
с коэффициентом 7i = 0,02. Как оказалось впоследствии, вклад второй
и особенно третьей форм колебаний башни невелик по сравнению с
первой, поэтому уточнение расчета, связанное с учетом иных значейий ух
для второй и третьей форм колебаний башни, не понадобилось.
Нагрузка от пульсаций ветрового давления представлена в виде
произведения функций координаты на случайную функцию времени со
спектральной плотностью D.4.8), скорость ветра на высоте 10 м принята
29,3 м/с, коэффициент перегрузки пп = 1,5. Расчет производился по
формуле D.4.4), причем коэффициент пространственной корреляции
пульсаций скорости ветра по высоте башни ^(р0) = 0>5 ПРИ Ро ^ 0>4я" рад/с,
v(po) = 1 ПРИ Ро >0,47т рад/с. В отсутствие гасителя амплитуда колебаний
равна 4,93 м на отметке 362,7 м, 1,67 м — на отметке 238,5 м; изгибающий
момент 446 МН-м на отметке 14,5 м. При настройке гасителя/2 = 1,006,
декременте Э = 0,4я эффективность виброгашения можно оценить с
помощью табл. 4.2. Отношение массы гасителя D0 т) к приведенной, с
учетом первой формы колебаний, массе башни составило 0,02. Для разных
сечений башни получены близкие коэффициенты эффективности, что
свидетельствует о небольшом вкладе высших форм колебаний. Такой
гаситель мог бы уменьшить примерно в 1,5 раза амплитуды
перемещений и изгибающих моментов в телебашне от пульсаций ветровой нагрузки
при условии обеспечения хода гасителя — 2,27 м. При измененных
параметрах гасителя амплитуды перемещения верхней точки (W 2), точки подвеса
гасителя (И^), изгибающего момента на отметке 14,5 м (Л/35) приведены
в табл. 4.3. С увеличением демпфирования ход гасителя W^— Wn
уменьшается, одновременно снижается его эффективность. Таким образом,
для получения требуемого эффекта виброгашения при возможных для
Таблица 4.2
Коэффициенты уменьшения амплитуд перемещений и изгибающих моментов для
Алма-Атинской телебашни с ДГК при действии пульсаций ветровой нагрузки
Критерии
качества
362,7
310,9
Отметки, м
238,5
174,5
102,5
14,5
перемещение 1,55 1,55 1,52 1,52 1,53
изгибающий
момент 1,26 1,52 1,52 1,51 1,43
252
Таблица 4.3
Результаты расчета Алма-Атинской телебашни на действие пульсаций ветровой
/а
1,006
0,98
0,96
0,96
0,96
0,96
0,96
М = 9/тг
0,4
0,4
0,4
0,2
0,6
1,2
2,0
Wx , м
3,17
3,16
3,14
2,82
3,42
3,93
4,25
JV7, м
1,10
1,10
1,09
0,97
Ы9
1,38
1,50
W36-W7, м
2,27
2,29
2,29
3,44
1,76
1,06
0,70
МЪ5, МН-м
311
310
309
288
328
363
386
района Алма-Аты скоростях ветра необходимо заменить существующий
ДГК, увеличив его демпфирование и допустимый ход.
Рижская телевизионная башня. Стальная башня (рис. 4.11) высотой
368 м, общей массой 6200 т состоит из ствола в виде треноги переменного
сечения, имеющего обшивку на участке от отметки 88 м до отметки 218 м,
и антенной части из трубчатых секций различных диаметров. Расчетная
схема башни представлена в виде консольного стержня
кусочно-постоянного сечения, жестко соединенного с помощью диска на отметке 88 м с
пространственной рамой треноги. Для диска учитывается инерция не только
горизонтального перемещения (масса т2), ной поворота ух (момент
инерции /j) . Описанная детализации расчетной схемы нижней части башни
необходима в связи с тем, что применение общепринятой упрощенной схемы
башни в виде консольного стержня в данном случае приводит к
существенно отличающимся резу;Чьтатам (частотам собственных и амплитудам
вынужденных колебаний). Для Рижской башни характерна большая дефор-
мативность антенной части при весьма жестком стволе, что увеличивает
Таблица 4.4
Амплитуды перемещений и усилий в Рижской телебашне без ДГК при действии
пульсаций ветровой нагрузки
И>, м
Af, MH • м
<2>мн
368
334
316
292
218
192
218
0
218
0
3,15
1,60
1Д9
0,75
0,16
0,11
24
497
0,4
3,0
4,37
1,61
1,21
0,81
0,25
0,18
25
574
0,6
3,4
4,92
1,63
1,23
0,82
0,27
0,19
27
654
0,6
4,2
253
Таблица 4.5
Приведенные массы Рижской телебашни для различных точек, т
Отметка точки
приведения,м
334
316
292
218
192
167
Номер формы собственных
колебаний
1
73
134
355
14 700
33 000
89 000
2
3 690
2 367
549
1291
2 536
5 834
3
190
236
1 175
1640
2 512
4 395
вклад высших форм колебаний по сравнению, например, с Алма-Атинской
башней и вызывает необходимость установки нескольких гасителей на
разных отметках/Динамические гасители в расчетной схеме представлены
линейными осцилляторами с вязким трением (массы 37 — 39) и показаны
сплошными и штриховыми линиями. Декремент собственных колебаний
башни принимался одинаковым (Э = 0,15) для всех ее частот. Нагрузка
от пульсаций ветрового давления задавалась в таком же виде, как для
Алма-Атинской башни, однако коэффициент пространственной
корреляции пульсаций скорости ветра по высоте башни v(p0) =0,5 при р0 К
< 0,6447Г рад/с, v(pQ) - 1 при р0 > 0,644тг рад/с. Расчетные значения первых
пяти частот собственных колебаний башни оказались равными 0,2, 0,44,
0,64,0,78, 1,14 Гц.
Таблица 4.6
Параметры для разных вариантов установки ДГК
Номер
ственной
частоты ojj
1
2
3
Наименование
параметра
Отметка,
м
Масса, т
Ход, м
Отметка,
м
Масса, т
Ход, м
Отметка,
м
Масса, т
Ход, м
1
316
5
2,5
-
2
334
5
2,3
-
3
192
35
1,1
-
4
-
218
17,5
0,8
Вариант
5
-
316
3
2,3
6
334;316
3;3
1,8; 1,1
-
7
334
3
1,5
292
3
2,0
8
334
3
1,5
218; 292
17,5; 3
0,7; 0,8
9
334
3
1,5
218
17,5
0,8
316
3
1,0
254
Таблица 4.7
Коэффициенты уменьшения амплитуд перемещений и усилий в Рижской
телебашне при разных вариантах установки ДГК
Крите-f
рий
W
И
Q
Отметка,
м
368
334
316
292
218
192
218
0
218
0
1
1,16
1,50
1,47
1,36
1,08
1,06
1,26
1,01
1,10
1,01
2
1,18
1,63
1,58
1,43
1,08
1,06
1,30
1,01
1,10
1,01
3
1,04
1,09
1,17
1,06
1,04
1
1,04
1
1
1
Вариант
4
1,12
1
1
1,04
1,13
1,19
1,02
1,04
1,18
1,03
5
1,07
1
1
1,01
1,04
1
1
1,01
1,05
1,02
6
1,18
1,54
1,52
1,37
1,08
1,06
1,28
1,02
1,07
1,01
7
1,26
1,01
1,33
1,32
1,23
1,20
1,22
1,04
1,20
1,03
8
1,35
1,34
1,35
1,35
1,28
1,27
1,28
1,07
1,32
1,05
9
1,41
1,35
1,35
1,35
1,35
1,27
1,28
1,10
1,29
1,09
Некоторые результаты динамического расчета башни без ДГК даны
в табл. 4.4. При этом частотные диапазоны: I — @ -ь0,322) Гц, II —
@ -г 0,544) Гц, III — @ -г 1,5) Гц, для которых выполнен расчет на действие
пульсаций ветра, примерно соответствуют учету одной, двух и пяти форм
собственных колебаний башни. Значения приведенных масс телебашни
(табл. 4.5) позволяют определить относительные массы v гасителей,
установленных на разных отметках, их настройку f2 = A + 0,5*;)/A + vJ и
коэффициент демпфирования ц = vW(l + v) . Анализ данных табл. 4.5
показывает, что для гашения колебаний по формам 1 и 3 наиболее
благоприятна установка гасителей на отметках 334 и 316 м, по форме 2 — на
отметках 292, 218 м. Представление об эффективности гашения колебаний при
различных вариантах установки гасителей (табл. 4.6) дают коэффициенты,
приведенные в табл. 4.7. На основе выполненных расчетов разработаны
рекомендации по выбору мест установки и параметров, которые
использованы при проектировании ДГК Рижской телебашни. Ввиду отсутствия
свободного пространства в антенной части башни к реализации принят
вариант установки в верхней части ствола маятникового гасителя массой
17,5 т для каждого из возможных направлений колебаний.
§ 4.7. Виброзащита солнечного телескопа
Солнечные телескопы, служащие для решения задач физики солнца,
должны давать возможность изучения тонкой структуры активных областей -
солнечных пятен и др. Угловая мера образований, которые наблюдаются
в солнечном телескопе, может составлять десятые доли угловой секунды.
Для получения изображений солнца, удовлетворяющих требованиям
астрономов, необходимо выполнение ряда условий, среди которых известную
роль играет необходимость исключения вредного влияния вибраций
телескопа. С этой целью создаются весьма жесткие и дорогостоящие конструк-
255
ции железобетонных башен солнечных телескопов и используются двойные
башни, состоящие из наружной, воспринимающей ветровую нагрузку,
и вн^т^енней, на которую опираются конструктивные элементы, несущие
зеркало телескопа. Во многих случаях башни солнечных телескопов
выполняются металлическими.
Башня Большого солнечного вакуумного телескопа Сибирского
института земного магнетизма, ионосферы и распространения радиоволн
(СИБИЗМИР) АН СССР также изготовлена из металла. Телескоп
расположен на берегу озера Байкал, его фундамент опирается на скальное
основание, для уменьшения влияния ветра принята двойная конструкция башни
телескопа. Однако амплитуды колебаний башни (порядка 0,07 мм при
скорости ветра до 10 м/с) оказались недопустимыми по условиям
эксплуатации телескопа. Радиус кружка дрожания изображения превосходил
допускаемое значение почти в 4 раза.
Для снижения уровня колебаний было предложено применить
динамические гасители. Работа, выполненная институтом СИБИЗМИР при участии
МИСИ, включала анализ критериев качества, основанный на рассмотрении
влияния колебаний башни на поведение оптической системы телескопа,
разработку конструкции гасителей, их расчет и экспериментальные
исследования, проведенные А.К. Китовым [76, 101]. В результате удалось
уменьшить дрожание изображения до допустимого уровня, в настоящее
время телескоп находится в эксплуатации; таким образом, первый опыт
применения динамических гасителей на подобных сооружениях был
успешным. Поскольку в литературе отмечались и другие случаи вибраций
астрономических инструментов, представляет известный интерес краткое
описание существа примененной виброзащитной системы.
Конструкция телескопа состоит из двух частей — вертикальной башни и
наклонной трубы прямоугольного сечения, оси которых пересекаются под
острым углом. Высота вертикальной башни — 24 м, длина подкоса — 42 м.
Башня телескопа запроектирована двойной. Внутренняя башня несет
оптико-механические устройства, на ее верхушке установлено
зеркало-сидеростат. Внешняя башня, воспринимающая ветровую нагрузку, служит опорой
для купола. Во время работы телескопа купол открывается; ветровая
нагрузка, приходящаяся на зеркало, передается при этом внутренней
башне. Возникающие при колебаниях внутренней башни угловые перемещения
зеркала и являются источником ухудшения работы телескопа и дрожания
изображения. Колебания изгиба системы, состоящей из двух названных
элементов, происходят главным образом в направлении,
перпендикулярном плоскости, в которой расположены оси обоих элементов системы.
Кроме того, возникают заметные вращательные колебания башни, вызывающие
ее кручение.
С целью уменьшения уровня колебаний использована система,
состоящая из трех динамических гасителей. Гаситель массой 1650 кг
предназначен для подавления изгибных колебаний башни из плоскости
треугольника. Два гасителя с массами, равными 500 кг, совершали колебания в про-
тивофазе, подавляя при этом крутильные динамические перемещения
башни. Гасители представляли собой контейнеры с наборными грузами,
Контейнеры крепились на конструкции телескопа с помощью вертикальных
плоских стальных элементов, податливость которых определяла квази-
256
упругие коэффициенты гасителей. Практически основной гаситель снижал
уровень колебаний, происходящих не только из плоскости, но и в
плоскости треугольника. Диссипатквные силы, возникающие при изгибе
упругих гасителей, были весьма малыми, поэтому для повышения рассеяния
энергии применены сначала жидкостные, а затем войлочные и
электромагнитные демпферы.
В процессе проводившегося экспериментального уточнения настройки
гасителей удалось получить достаточно высокие значения коэффициентов
виброгашения: 3 -г 3,7 — для изгибных колебаний из плоскости
треугольника; 2 - для изгибных колебаний в плоскости треугольника; 2,7 -г 3,3 -
для крутильных колебаний. Экспериментальные данные
удовлетворительно совпали с расчетными. Этот пример успешного виброгашения
показывает, что с помощью гасителей можно снижать уровень колебаний с
весьма малыми амплитудами.
В связи с тем, что в описанной конструкции телескопа виброзащита
осуществляется одновременно двумя методами: использованием
динамического гасителя и устройством ветрозащитной башни, следует сделать
замечание по поводу конструктивной схемы ветрозащитных башен.
Обычно между основной башней, которая несет конструкцию зеркала, и
ветрозащитной башней имеется зазор, который обеспечивает независимость
деформирования обеих башен. Однако даже при раздельных фундаментах
башен, с точки зрения теории расчета конструкций на податливом
основании, фундаменты связаны друг с другом вследствие деформирования
грунта. Если считать, что каждый из фундаментов имеет в плане форму
кругового кольца, то оценку взаимодействия фундаментов можно свести
к решению контактной задачи для двух штампов. Подобные контактные
задачи рассматривались в литературе. При практическом их решении
возможно использование приближенного метода Б.Н. Жемочкина. Для
данной конструкции телескопа такая проверка выполнена и показала
незначительную взаимосвязь колебаний обеих башен ввиду большой жесткости
основания.
§ 4.8. Гашение колебаний сооружений
при сейсмических воздействиях
Проблемы динамического расчета сооружений при сейсмических
воздействиях, а также различные методы повышения сейсмостойкости
конструкций детально обсуждались в литературе [2, 20, 59, 138]. Динамические
гасители во многих случаях могут быть применены в сочетании с другими
специальными конструктивными мероприятиями. Так, например, при
использовании виброизоляции для сейсмозащиты обычно
предусматриваются демпферы с целью ограничения уровня колебаний от части спектра
воздействия, которая расположена вблизи частоты свободных колебаний
виброизолированной системы. Вместо этих демпферов можно установить
более дешевые ДГК с оптимальным демпфированием, настроенные на
указанную частоту (см. § 4.13).
Использовать гасители для повышения сейсмостойкости целесообразно,
если спектр частот собственных колебаний защищаемого сооружения задан
достаточно обоснованно и не может существенно изменяться в процессе
нормальной эксплуатации, а при некотором превышении расчетных нагру-
17. Б.Г. Коренев 257
зок изменения частот сравнительно небольшие. При рассмотрении
практических задач следует учитывать возможность повышения с помощью ДГК
сейсмостойкости уже возведенных сооружений, без их реконструкции
или существенных специальных переделок. В этих случаях знание
найденных экспериментально собственных частот сооружений повышает
достоверность проводимых динамических расчетов и эффективность гасителей
колебаний. Динамические гасители позволяют решить вопрос о локальной
сейсмозащите оборудования и приборов, чувствительных к вибрациям, а
также гибких конструкций, находящихся на более массивном
сооружении, которое подвергается сейсмическим воздействиям (см. § 4.9).
В этом параграфе рассматриваются башенные сооружения, расчетной
схемой которых являются изгибаемые стержни постоянного или
переменного сечения. Из обсуждавшихся в литературе кинематических
моделей сейсмического воздействия при оценке эффективности виброгашения
здесь используется представление воздействия стационарным или
квазистационарным процессом с известной спектральной плотностью.
Результаты расчета сооружений на действие реализаций, соответствующих
акселерограммам отдельных землетрясений, содержатся в § 4.10. Данные об
эффективности гашения колебаний при действии затухающей синусоиды,
которая также иногда применяется в качестве модели сейсмического
воздействия, приведены в § 1.6, 4.9.
Положим, что горизонтальное движение фундамента башенного
сооружения вместе с основанием представляет стационарный случайный процесс,
нормированная спектральная плотность которого определяется
формулой A.10.1). Как и в § 4.2, расчетную схему сооружения примем в виде
стержня переменного сечения, опирающегося через жесткий штамп на
упругое, однородное, инерционное полупространство. Упругость и инерция
основания учитываются при повороте штампа. Рассмотрим случай двух
гасителей в сечении х = г, тогда при гармонических колебаниях
амплитуда суммарной реакции гасителей
Qr = xWr, X = miPoCl +m2plC29
где т%9 тг — массы гасителей; С{\ С2 вычисляются согласно C.1.1);
индекс показывает, на какую собственную частоту колебаний
сооружения настраивается гаситель.
Для оценки эффективности гасителей использованы два критерия
качества — дисперсия абсолютного перемещения верхнего сечения х = г
башни и дисперсия изгибающего момента в нижнем сечении х = R, в месте
прикрепления к фундаменту. Параметры гасителей оптимизировались методом
скорейшего спуска. На каждом шаге оптимизации дисперсии прогиба и
изгибающего момента определялись численным интегрированием
соответствующих спектральных плотностей. При вычислении ЧХ неоднородное
граничное условие приведено к однородному путем перехода к
относительным перемещениям сооружения W — 1 и приложения дополнительной
распределенной нагрузки интенсивностью тхр\. Амплитуды относительных
перемещений представлены в виде ряда
W-l= Z \jVj D.8.1)
258
с коэффициентами
R
А/ = (Ро ) ™х vjdx + \WrVri - с uR yRf)lt0j.
г
Обозначения здесь такие же, как в § 4.2. Амплитуды W2,SR
определяются по формулам D.2.3) с несколько иными значениями
оо Д оо R
Arq=.l+Po 2 Vrj f mxVfdx/\IJofi ARq=pl 2 <pRf f mxVjdx^oj.
Iml r /=1 Г
Интеграл в числителе последних двух выражений с точностью до множителя
со! равен поперечной силе в сечении х = R. С целью сокращения объема и
повышения точности вычислений применялся описанный в § 3.1 прием
выделения статических составляющих, позволяющий усилить сходимость
рядов D.8.1). Статические перемещения вычислялись с помощью
интеграла Мора.
Исследованы колебания стальной радиобашни, о которой
упоминалось в § 4.2. Согласно [59] параметры сейсмического воздействия а0 =
= 7 рад/с, 0о = 18 рад/с. Вещественная часть квазиупругого
коэффициента, учитывающего инерцию и упругость основания, в соответствии с
численными результатами [206], была аппроксимирована квадратной
параболой: сх (ро) = A3 000 - 0,4ро) > МН • м. Мнимая часть квазиупругого
коэффициента подсчитывалась по формуле с2 (Ро) ' С\ @) (ОД + 0,0008 pj)»
причем второй сомножитель принимался равным не более 0,5. Заметим, что
слагаемое 0,1 в последней формуле введено для приближенного учета
внутреннего неупругого сопротивления в материале основания.
Коэффициент внутреннего неупругого сопротивления башни у = 0,05.
Численное интегрирование спектральных плотностей для Wr , BR
осуществлялось в диапазоне частот р0 = @ ^75) рад/с с учетом первых пяти
членов ряда D.8.1). Вычисления выполнены для трех значений показателя
степени в выражениях C.5.4) для изгибной жесткости и погонной массы:
v = л = 0, 1,2. Параметры башни приведены в [107].
Массы обоих гасителей принимались одинаковыми. На основе данных
§ 1.10 параметры гасителей, отнесенные к соответствующим собственным
частотам башни, в первом приближении определялись по формулам
//= 1/A + vj\ Д/ = у/ЩЩ (/ = 1,2). D.8.2)
Выражение для относительной массы гасителя pj приведено в § 4.2.
В результате оптимизации параметров гасителей методом скорейшего
спуска критерии качества системы уменьшались незначительно — от 1 до
4%, в то время как оптимальные параметры гасителей в отдельных случаях
существенно отличались от определенных по формулам D.8.2). Это
свидетельствует о слабой чувствительности рассмотренных критериев качества к
изменениям параметров гасителей при стационарных случайных
воздействиях, в связи с чем можно рекомендовать D.8.2) для использования на
практике.
Как видно из рис. 4.12, применение гасителей даже небольшой массы
достаточно эффективно. С увеличением п эффективность гасителей
повышается. Это вызвано уменьшением приведенной в сечение х s г массы
сооружения и увеличением относительной массы гасителей.
17*
259
Приведенные результаты, полученные на основе стационарной модели
сейсмического воздействия, позволяют оценить эффективность
виброгашения при достаточно продолжительных землетрясениях, не вменяющих,
однако, собственных частот колебаний сооружений. При воздействиях,
длительность которых соизмерима с периодом основного тона колебаний
сооружения, использовать эти оценки нельзя. В этом случае необходимо
проводить расчеты на основе квазистационарной модели [20, 59], согласно
которой движение основания сооружения представляется в виде
произведения детерминированной функции F(t) на стационарный случайный
процесс <р(г). Данные о гашении основного тона колебаний сооружений для
некоторых характерных функций F(t), ip(t) содержатся в § 1.10. Однако
эти данные позволяют получить верхние оценки эффективности ДГК при
нестационарных случайных воздействиях, так как для башенных
сооружений определенное влияние, хотя часто и не очень значительное, оказывают
высшие формы колебаний, вклад которых гаситель практически не
изменяет.
Рассмотрим колебания консольного стержня постоянного сечения с
двумя ДГК на верхнем конце при сейсмическом перемещении основания в
виде мультипликативного случайного процесса [2]. Пусть детерминированная
модулирующая функция F(t) = P0t B07т) X ехр[1 - C0t B07т)"*1],
спектральная плотность стационарного случайного процесса <p(t)
соответствует выражению A.10.1) при cL = 7 рад/с, /30 - 18 рад/с.
Прогибы раскладывались в ряд по собственным формам колебаний
стержня без гасителей, причем при вычислениях учитывались первые четыре
формы колебаний. После присоединения уравнений колебаний гасителей и
формирующего фильтра уравнения колебаний стержня представлялись в форме
Рис. 4.12. Зависимости коэффициентов
уменьшения дисперсий перемещения
верхнего сечения (сплошная линия) и изгибающего
момента в нижнем сечении башни
(штриховая линия) от отношения v * масс гасителей
к массе ствола башни
Рис. 4.13. Сравнение коэффициентов
уменьшения дисперсий перемещения свободного
конца консольного стержня при
нестационарном (сплошная линия) и стационарном
(штриховая линия) случайных воздействиях
О 0,01 0,02 v*
260
О 0,01 ОМ v*
A.11.1), что позволило находить дисперсии прогибов с помощью A.11.2).
Параметры гасителей назначались по формулам D.8.2). Вычисления
проводились для различных сочетаний масс гасителей тп\ и w2, настраиваемых
на первую и вторую частоты колебаний стержня, а также различных
значений v*~ {mi + m2)l(ml) суммарной массы, отнесенной к массе стержня.
Кривые, показывающие коэффициенты Кт уменьшения дисперсий
перемещений стержня (высота / = 10 м, погонная масса m = 262 кг/м,
жесткость при изгибе EI = 15,7 МН • м2, частоты сох 2Ъ = 2,8; 17,6; 49,3 рад/с,
коэффициент не упругого сопротивления у = 0,025; 0,05) при установке
гасителей, изображены на рис. 4.13 сплошными линиями. В данной задаче,
несмотря на то, что ордината спектральной плотности воздействия в
окрестности второй собственной частоты стержня в два раза превышала
соответствующую ординату в зоне первой частоты, основной вклад в перемещения
стержня без гасителей вносят все же колебания по первой форме (94%),
колебания по второй форме дают составляющую около 5%. В связи с этим
по критерию уменьшения дисперсий перемещений стержня целесообразнее
использовать лишь один гаситель (суммарной массы), настроенный на
основную собственную частоту. Для сравнения на рис. 4.13 штриховые
линии показывают эффективность гашения в установившемся режиме при
стационарном воздействии (F(t) = 1). Абсолютные значения дисперсий
перемещения и коэффициенты гашения в этом случае выше, чем при
нестационарном воздействии.
§ 4.9. Локальная виброзащита гибких конструкций,
опирающихся на массивную поддерживающую конструкцию
Динамические гасители в ряде случаев позволяют осуществить локальную
виброзащиту отдельных ответственных гибких элементов конструкций или
оборудования, опирающихся на значительно более массивную
конструкцию, колебания которой вызваны сейсмическими, взрывными или иными
нестационарными воздействиями. С механической точки зрения задача о
локальной виброзащите может рассматриваться как определенное
упрощение общей задачи о виброзащите сооружения. В основу решения положено
допущение о том, что вследствие существенного различия масс
колебания защищаемого гибкого элемента не отражаются на поведении основной
части конструкции машины или инженерного сооружения. Характерной
особенностью задачи является сравнительная простота модели
защищаемого элемента по сравнению с моделью машины или сооружения в целом.
В такой задаче можно было бы рассмотреть почти все разбиравшиеся
выше схемы внешнего воздействия. Однако вряд ли это целесообразно,
поскольку в большинстве случаев и, в частности, при гармонических и
стационарных случайных перемещениях опоры гибкого элемента, речь идет
практически лишь о повторении полученных ранее результатов. Поэтому
здесь рассмотрим случай кратковременного воздействия, которое
вызывает затухающие колебания поддерживающей конструкции. Этот тип
воздействия интересен тем, что он показывает нетривиальность проблемы
локальной виброзащиты.
Как это выяснено в § 1.6, эффективность гасителя для одномассовой
расчетной схемы защищаемого гибкого элемента при затухающих колеба-
261
ниях его опоры оказывается существенно выше, чем при действии
импульса, поскольку гаситель не только повышает темп затухания, но и снижает
уровень максимальных колебаний защищаемого элемента. На основе
полученных результатов рассмотрим далее континуальную расчетную схему
защищаемого элемента на примере консольного стержня с присоединенными
ДГК, общее число которых равно к.
Исследуя при нулевых начальных условиях нестационарные колебания
защищаемого элемента, вызванные движением поддерживающей
конструкции по закону z (/) = е~€°* sin0?о0> положим, что гасители имеют вязкое
трение, а в стержне внутреннее неупругое сопротивление учтем по способу
Шлиппе — Бокка. Используя подход (см. § 3.11), основанный на
представлении решения суммой i форм собственных колебаний стержня без
гасителей, получаем в данном случае систему i + к обыкновенных уравнений,
которую запишем в матричном виде
My +Hy +Сгу = - B'z 0). D.9.1)
Здесь матрицы М, Н, С\ и вектор у определяются выражениями C.11.8)
при м=1, v = 0, h = у?1; вектор-столбец В имеет первые i элементов
bj =/ Wj mxdx (/ = 1,/) и последующие к элементов bs =mTS(s =i + 1,
i + к); у — коэффициент частотно-независимого трения стержня; все
обозначения (за исключением /) такие же, как в § 3.11. Начальные
условия: у@) = 0,у@) — вектор, первые i элементов которого равны —bfz @),
последующие к элементов равны — z @).
"Решение уравнения D.9.1) состоит из обшего решенияу\
соответствующего однородного уравнения и частного решения у2 неоднородного
уравнения. Представим уравнение D.9.1) без правой части в нормальной форме
Коши
\УЛ А \ 0 * 1
[yi J l-M-lCl -м-1н J
и будем разыскивать решение в виде г? = $ehtN, где 0, Е - нулевая и
единичная матрицы порядка i + к, N — 2 (г + к) -мерный вектор произвольных
постоянных, Л и Ф — матрицы собственных чисел и векторов,
удовлетворяющие уравнению ФЛ~АФ=0. При а = — e0+ip0 частное решение у2 =
= [а2М + аН + Сх] ~1Bol2. Удовлетворяя начальным условиям у@),'у@),
определяем вектор произвольных постоянных
г* . 1
L ау2 -у@) J
ть выражения у
1-ФеА'Ф~1\У2 1+1 2 L"(e°+'Po)rf
I L <xv<> - v@)i L avo * '
дг=_ф-
Мнимая часть выражения у = у\ + у2 является решением исходной задачи
у -1т
ауг -уфI
соответствующей воздействию z(t) = e~ ° sin(p0t).
Расчеты выполнены для консольных стержней длиной Юме
присоединенным на свободном конце ДГК. Коэффициент неупругого соп-
262
ротивления стержня у =0,025, в месте заделки погонная масса стержня
triR = 262 кг/м, изгибная жесткость Е1ц = 15,7 МН-м2. Рассматривались
случаи постоянного сечения и изменения жесткости и массы стержня по
законам C.5.4) при v = п =0,2; R = 13 м,г = Зм. Частота р0 варьировалась
в диапазоне от 0,75 сог до 1,25 а;! , где сог — низшая частота свободных
колебаний стержня, в расчете учитывались четыре формы свободных
колебаний стержня. Эффективность гашения колебаний можно оценить с
помощью рис. 4.14. С увеличением п приведенная масса стержня
уменьшается, поэтому повышаются относительная масса и эффективность гасителя.
Р и с. 4.14. Сравнение коэффициентов
уменьшения максимальных перемеще- "
ний свободного конца консольных р
стержней переменного (сплошная
линия) и постоянного (штриховая ли- /
ния) сечения при действии
затухающей синусоиды 2
/
О 0,5 1 1,5 Z v*%
Результаты вычислений показали, что при установке гасителя вклад
высших нерезонирующих форм хотя и несколько повышается, но все
же остается незначительным. Поэтому оптимальные параметры гасителя
могут быть приближенно определены из расчета соответствующей
приведенной системы с одной степенью свободы, оборудованной гасителем, т.е. по
формулам A.6.4) при е = e0/coi. При этом гаситель должен быть установлен
в пучности резонирующей формы колебаний защищаемого элемента.
Если гаситель настраивается на одну из высших частот, то необходимо
учитывать влияние колебаний, частоты которых расположены ниже
резонансной.
Заметим, что в случае действия на поддерживающую конструкцию
достаточно кратковременного импульса произвольной формы последний
может быть заменен эквивалентным мгновенным импульсом. При этом
результаты практически не изменятся.
§ 4.10. Виброзащита зданий
Колебания зданий могут вызываться разнообразными причинами:
динамическим действием ветра, сейсмическими воздействиями,
неуравновешенными динамическими нагрузками при работе установленного
оборудования, нагрузками от проходящих средств наземного транспорта
и т.п. При повышенном уровне колебаний часто приходится решать две
самостоятельные задачи - уменьшение амплитуд вертикальных колебаний
покрытий и междуэтажных перекрытий и снижение уровня
горизонтальных колебаний каркаса здания. Первая из этих задач возникает при
установке на перекрытиях оборудования с динамическими нагрузками:
вентиляторов, насосов,центрифуг, грохотов и др. Как правило, наиболее
опасны резонансные явления, обычно происходящие в диапазоне 8—15 Гц.
А/>^
х>^**\.
>^f^~~
.-""¦"tr^"^
i^-*"
^^
==fg
hK~№5\
~ 1
krV \
263
Задача виброгашения облегчается тем, что колебания могут носить
локальный характер, охватывая лишь часть, иногда очень небольшую, всей
площади перекрытия. Трудность, которая возникает при зтом, заключается
в том, что частота основного тона междуэтажного перекрытия не является
постоянной, так как зависит от полезной нагрузки, уровень и
распределение которой по площади перекрытия в процессе эксплуатации могут
изменяться. Поэтому необходимо учитывать нестабильность частоты
собственных колебаний перекрытия, которая обычно не превышает 15%. В этом
случае целесообразно применять многомассовые гасители. При большей
нестабильности частоты перекрытия можно использовать группу из двух
много массовых гасителей. Ограничения на амплитуду колебаний масс
гасителей при этом не имеют значения, так как амплитуды колебаний
перекрытий измеряются долями миллиметра. Особенно эффективно
использование ДГК для вибро защиты участков перекрытий с повышенными
требованиями качества (установка прецизионных приборов).
Представление об эффективности гашения колебаний пластинок и оболочек
можно получить на основе материалов, приведенных в § 3Л, 3.9, 3110 и в
работах [42,95,110,133,189,263].
Колебания каркасов зданий обычно происходят по первой форме,
частота которой находится в диапазоне 1,5 — 4 Гц. Эта частота является
стабильной, изменение полезной нагрузки здесь играет меньшую роль и при
расчете гасителя может не учитываться. Вместе с тем при сравнительно
слабом заполнении каркасов возможно появление трещин и снижение
жесткости, поэтому при проектировании должна предусматриваться
возможность уменьшения парциальной частоты гасителя и его повторной
настройки.
Опыт применения ДГК как эффективного средства виброзащиты
конструкций промышленных зданий от динамических нагрузок, создаваемых
оборудованием, описан в работах [135, 204]. Приведем данные о гашении
колебаний корпуса среднего дробления обогатительной фабрики [204].
Сооружение длиной 84 м, шириной 51м, высотой 66 м совершало
колебания с частотой 3,8 Гц и переменной амплитудой, которые возникли
вследствие работы группы мощных конусных дробилок с асинхронным
приводом, установленных на железобетонных рамных фундаментах
внутри корпуса. Измерения показали наличие достаточно густого спектра
собственных частот горизонтальных колебаний здания в диапазоне 2 — 4 Гц.
Усиление конструкций путем установки дополнительных связей,
предназначенных для повышения горизонтальной жесткости корпуса, не изменило
уровня колебаний. Динамические гасители массой от 3,5 до 9 т были
размещены группами в 5 точках здания. В результате их установки
амплитуды продольных и поперечных колебаний корпуса были уменьшены
в 2 — 5 раз.
Вопросы гашения колебаний высоких зданий, вызываемых
действием ветра, обсуждаются в работах [242, 244]. В частности, в [244]
имеются сведения об использовании ДГК массой 360 т на одном из высотных
зданий B74 м) конторского типа в г. Нью-Йорке. Гаситель представлял
собой бетонный блок, опирающийся через тонкую масляную пленку на
перекрытие одного из верхних этажей. Жесткость горизонтальных
пружин, соединяющих массу гасителя с конструкциями здания,, выбиралась
264
таким образом, чтобы гаситель был настроен на основную частоту
колебаний здания. Демпфирование осуществлялось гидравлическим
амортизатором. Были предусмотрены также устройства для остановки массы
гасителя при высоких уровнях возбуждения. Однако такое решение, по-
видимому, является не вполне удачным, так как отключение гасителя
лишает сооружение защиты от колебаний, причем как раз в
неблагоприятной ситуации. Расчетное перемещение массы гасителя относительно здания
составляло 1,07 м для урагана, повторяющегося один раз в 10 лет.
Стоимость такого гасителя должна быть значительно ниже затрат при
других решениях, направленных на уменьшение колебаний здания от
действия ветра. В статье [244] имеется также упоминание о ДГК,
состоящем из 2-х масс по 270 т каждая и предназначенном для установки на
башенном здании в Бостоне.
В отличие от ветровой нагрузки, при сейсмических воздействиях
эффективность ДГК оценивается различными специалистами по-разному,
и поэтому в литературе высказываются противоречивые мнения о
целесообразности применения гасителей для конструкций в сейсмических
районах. Спектральный подход и оценка эффективности гасителей по
снижению среднеквадратичных значений выходных процессов (см. §4.8)
приводит к положительному заключению о целесообразности применения
ДГК. Оценка эффективности по снижению максимальной реакции
сооружения на действие реальных акселерограмм, соответствующих
отдельным землетрясениям, может давать противоположный вывод [230, 261].
Рассмотрим этот вопрос более подробно.
Во многих случаях расчетная схема каркасного здания может быть
представлена в виде плоской многоэтажной рамы или работающего на сдвиг
консольного стержня с сосредоточенными на уровне каждого этажа
массами. При учете лишь основного тона колебаний сооружения и одного
присоединенного гасителя оценка эффективности гашения колебаний
сводится к исследованию системы с двумя степенями свободы. Приведем
данные [145] статистического моделирования, полученные при
коэффициенте неупругого сопротивления сооружения у = 0,1 и параметрах
гасителя: v ч 0,05, и = 0,22,/2 = 0,83-^0,98.
При моделировании ускорения движения основания реализациями
белого шума длительностью 5, 10, 20 и 30 с отношение максимальных
ускорений защищаемой системы с гасителем и без гасителя с
вероятностью 0,95 изменяется в пределах 0,56 т 1,03, причем ухудшение
рассмотренного критерия качества в системе с гасителем наблюдалось лишь при
малых абсолютных значениях ускорений. С уменьшением длительности
воздействия эффективность гасителя снижается. При анализе системы
на действие реальных акселерограмм использованы записи Газлийского
A7.05.76) и Карпатского D.03.77) землетрясений, которые можно
рассматривать как модели типичных землетрясений с близким и удаленным
эпицентрами. Для акселерограммы Газлийского землетрясения в
зависимости от значения периода основного тона колебаний сооружения
отношение максимальных ускорений в системе с гасителем и без него
составило от 0,62 до 1,14 при у = 0,1 от 0,53, до 1,18 при у = 0,04. Наибольшая
эффективность гасителя соответствовала таким периодам основного тона
колебаний сооружения, при которых без гасителя система испытывала значи-
265
тельные перегрузки. По среднеквадратичному значению ускорений
эффективность гасителя оказалась выше, чем по критерию максимальных
ускорений Ял я актепепогпяммьт ТГяппятпгпгп 'зрмпртгшс^ния получена нес-
колько меньшая эффективность гасителя, чем для Газлийского
землетрясения. Расчет систем с несколькими степенями свободы при параметрах,
соответствующих обычным гражданским зданиям средней высоты и
настройке гасителя на частоту основного тона колебаний, дал примерно такую
же оценку эффективности гасителя, как для описанной выше более
простой расчетной схемы защищаемой системы. Таким образом, при
относительной массе гасителя v = 0,05 максимальная реакция железобетонных
сооружений может уменьшиться в среднем на 20%, металлических —
на 30%. При совпадении одного из доминантных периодов землетрясения
и периода основного тона колебаний сооружения гаситель уменьшает
максимум реакции в 1,5 — 2 раза.
Для двухмассовой расчетной схемы защищаемого здания,
оборудованного ДГК, с использованием акселерограмм 48 землетрясений,
произошедших в США, проведен анализ [230] эффективности гашения
колебаний. При коэффициенте неупругого сопротивления здания у = 0,04
и изменении относительной массы гасителя v от 0,005 до 0,02
математическое ожидание отношения максимальных прогибов с гасителем и без
гасителя составляет 0,92-^0,88, стандарт этого отношения равен 0,08-^0,15.
Сравнение данных об эффективности ДГК при сейсмических
воздействиях, полученных с использованием спектральной теории и при
расчете на действие реальных акселерограмм, показывает, что второй вариант
моделирования воздействия приводит к более низким оценкам
эффективности гасителя. Это связано с тем, что среди ансамбля акселерограмм
имеется довольно много реализаций малой длительности, а также таких,
максимум спектральной плотности которых удален от низшей частоты
колебаний защищаемого сооружения. В этих случаях ДГК мало
эффективен, однако следует иметь в виду, что рассматриваемые реализации
воздействия не столь опасны, как продолжительные реализации со
значительными ординатами спектральной плотности на низшей частоте
колебаний сооружения. Именно такие реализации воздействия приводят
к повышенному уровню колебаний сооружения, при котором
динамические гасители с оптимальными параметрами достаточно эффективны.
Благоприятным является то обстоятельство, что одни и те же гасители
будут уменьшать колебания сооружений, вызванные не только
сейсмическими нагрузками, которые относятся к числу достаточно редких
событий, но и пульсациями скоростного напора ветра, ветровым резонансом
и другими динамическими воздействиями.
§ 4.11. Гашение колебаний протяженных конструкций
В этом параграфе обсуждаются вопросы виброзащиты трубопроводов,
некоторых видов мостов, проводов и канатов.
Надземные трубопроводы. В отличие от рассмотренных в предыдущих
параграфах конструкций, надземные магистральные трубопроводы
обладают достаточно густым спектром собственных частот. Весьма низкие
декременты @,02 т 0,05) обусловливают легкую возбуждаемость автоко-
266
лебаний трубопроводов при действии ветра, а также при пульсациях
скорости движущегося жидкого или газообразного продукта. В связи с
этим оценка эффективности гашения колебаний трубопроводов
представляет значительный интерес.
Многопролетные магистральные трубопроводы [59] состоят из
большого числа температурных отсеков, разделенных компенсаторами.
Расчетную схему одного отсека можно представить в виде неразрезной
регулярной балки. Спектр собственных частот такой балки имеет зоны
сгущения, ограниченные снизу значениями частот шарнирно опертой, сверху —
жестко защемленной однопролетной балки. Обычно количество
пролетов в отсеке велико и компенсаторы могут рассматриваться как
упругая связь между отсеками. Интервалы между частотами в зоне
сгущения настолько малы, что без заметных погрешностей можно считать
зоны непрерывными, как у регулярной балки с бесконечным числом
пролетов.
Верхняя граница частотного диапазона, в котором возможен ветровой
резонанс, определяется по формуле соп =27rvnSh/d, где ип —
максимальная скорость ветра, d — диаметр трубы, Sh — число Струхаля, равное
0,2 для неподвижного цилиндра. Оптимизация параметров гасителя
производилась по одному из двух критериев качества: Jx ¦ max i/Э или
СО
J 2 = max со/д. Первый критерий соответствует максимальному
перемеси
щению трубопровода при ветровом резонансе, второй, как показали
расчеты, позволяет оценить максимальные изгибающие моменты вблизи
границ зоны собственных частот трубопровода. Коэффициент Кт
эффективности вибро гашения при ветровом резонансе определяется отношением
критериев качества в диапазоне частот 0 < со < соп для системы с
гасителями и без них.
Для нахождения Jx , J2 необходимо вычислить в диапазоне от 0 до
соп собственные частоты соу- балки с гасителями и соответствующие им
декременты колебаний Э;-. Значения со;- = Imsj, Э/ = — 2^Res;/Ims/
определяются после отыскания корней Sj частотного уравнения.
Если балка имеет п одинаковых симметричных пролетов, то корни
s вычисляются из полученного М.Г. Крейном уравнения для регулярной
неразрезной балки
z = cos(nr/n). D.11.1)
В рассматриваемом случае z = <рк/фн - отношение углов поворта сечений
в конце и в начале характерного пролета (разрезанного и шарнирно
опертого) , возникающих от момента est, приложенного в конце этого пролета.
В зависимости от вида закрепления концов л- пролетной балки г
принимает значения: при шарнирном опирании г= 1, п - 1 и дополнительно
в нечетных зонах сгущения частот г = п , в четных г = 0; при защемленных
концах г = 1, п - 1 и дополнительно в нечетных зонах сгущения г = 0, в
четных г =л.
Из D.11.1) видно, что при больших значениях п интервалы между
собственными частотами в зонах сгущения (границам зоны
соответствуют значения z = — 1; 1) уменьшаются, зоны становятся почти непрерыв-
267
ными и практически исчезают отличия между зонами для балок с шарнир-
но опертыми и защемленными концами.
Задаваясь последовательно значениями со = Im? и находя Res из условия
Imz = 0, можно построить зависимости z (со) и Э (со). Точки пересечения
кривой z (со) с горизонталями cos (ттг/п) определят значения со и Э.
В рассмотренных ниже примерах коэффициент 7i
частотно-независимого внутреннего трения трубопровода принимался равным 0,01.
Основные результаты получены для случая, когда предельная частота соп срыва
вихрей с неподвижного цилиндра находится в интервале между первой
и второй зонами сгущения частот трубопровода, и, следовательно, частота
установившихся колебаний может совпадать с произвольной собственной
частотой из первой зоны сгущения. При этом гасители целесообразно
устанавливать в середине каждого пролета.
Для бесконечного регулярного трубопровода с гасителями (V*= 0,025,
f2 = 1,225) зависимости у = д/п от частоты со* = со/со0 установившихся
колебаний в пределах первой зоны сгущения частот показаны на
рис. 4.15. Здесь р* — отношение массы гасителя к массе пролета; настройка
f * и коэффициент вязкого трения ц отнесены к собственной частоте со0 ко-
У\
0,12
0,08
0,04
I 1
—г
Л
Л
3
—1
1,4 1,8
Рис. 4.15
2,2 о.
6
4-,5\
?
0,9
0,8
и
0,8
2
7
&
г
^
IF
И
\2
1
|
It J
6 8
Рис. 4.16
ГО
7,0
О
2,5
Р>
?г
V
7
fZ
2
7,5
7,25
2,
^^7"
^^^\
2
I Г Т
2
7
2,5 >3,75
Рис. 4.17
Р и с. 4.15. Зависимости коэффициента
демпфирования трубопровода с гасителями от
частоты установившихся колебаний при \х- 0,56G);
0,8B); 1,2E)
Рис. 4.16. Коэффициент эффективности и
оптимальные параметры гасителей при ветровом
резонансе «-пролетного трубопровода с шарнирно
опертыми G) и защемленными B) концами
Рис. 4.17. Влияние относительной массы на
эффективность и оптимальные параметры
гасителей при использовании критериев /, A), /2 B)
268
У
0,04
0,01
0
/
/
7
/ "У
1 У
А
г
—*
- '-
о
ч,
|
(
-1-2
"ТУ
%8 {б 1,4 4,0 4,8 5,0 Ы+
Р и с. 4.18. Зависимости коэффициентов демпфирования трубопровода от частоты
установившихся колебаний при двух (/, 2) и трех C) гасителях в пролете
лебаний одного пролета трубопровода (разрезанного), шарнирно
опертого по концам. Штриховая линия соответствует значению 7 = 7i B системе
без гасителей.
С уменьшением общего числа п пролетов регулярной балки
эффективность гасителей повышается. Это видно из рис. 4.16, где
коэффициент Кг показывает, во сколько раз уменьшается критерий
качества Jx - тахA/Э) после присоединения гасителей (v*= 0,025). При этом
со
для п > 4 значения КГ9 ц , /2 мало отличаются от полученных при п -* <».
По графикам (рис.4.17) можно сопоставить результаты расчета в
случаях, когда целью установки гасителей является уменьшение
максимальных перемещений (кривые 1) или изгибающих моментов B).
Оценивалась также эффективность виброгашения при предельной
частоте соп срыва вихрей с неподвижного цилиндра, несколько превышающей
верхнюю границу второй зоны сгущения собственных частот.
Предполагалось, что гасители с одинаковыми параметрами, установленные в
каждом пролете, имеют суммарное значение v* = 0,025. На рис. 4.18 кривые
1, 2 соответствуют случаю симметричной установки в каждом пролете
на расстоянии 1/3 друг от друга двух гасителей с параметрами: ц = 1,25,
/2 = 1,82 G); д =1,8,/2 = 2,5 (?). Кривая 3 получена для варианта
установки трех гасителей, одного в середине пролета (д = I,/2 = 1,1), двух — на
расстоянии 0,3/ от опор (д = 4, /2 =4). Таким образом, при совпадении
частоты установившихся колебаний с произвольной частотой первой или
второй зон сгущения гасители (у* = 0,025) могут в 2 — 3 раза уменьшить
амплитуды колебаний трубопровода.
Приведенные примеры свидетельствуют о высокой эффективности
гашения колебаний трубопроводов при ветровом резонансе.
В некоторых случаях автоколебания трубопроводов могут возникать
вследствие динамической неустойчивости при пульсациях скорости
движущихся жидкости или газа. Рассмотрим задачу [260] о колебаниях
шарнирно опертой на концах трубы пролетом / с установленным при х = I /2
гасителем с вязким трением. При наложении на среднюю скорость VQ
движения жидкости в трубе гармонической компоненты, т.е. при
изменении скорости движения по закону V= V0 [1 + е cos (pt)], может
наблюдаться параметрическая неустойчивость трубы. Симметрия задачи поз-
269
р
12
U:^;
с*"""
S^
"^
,x~~*
^""""^х.*
.*
x-**^
*--*.
lT"***'^—
•••--4
^-, J
••^*****x«J
P и с. 4.19. Границы областей неустой
чивости трубы без ДГК (сплошная ли
г* ТТГЧГ г^ч,. ~ Г _ л Л
С /-м- ах. при liapoivicipaA. j — \J,Jy
ц = 0 (штрихпунктирная линия); / = 0,9,
А* = 0,18 (штриховая линия); / ¦ 0,9,
ц = 0,9 (пунктирная линия); / * 0,7, ц =
= 0,1 (штриховая с крестиками)
0,1
9>+
воляет записать уравнение колебаний трубы как стержня с равномерно
распределенной движущейся нагрузкой, а реакцию ДГК отразить в
граничном условии для перерезывающей силы при х = 1/2. Далее применяется
стандартная методика [19] построения областей неустойчивости.
При установке ДГК, масса которого равна 0,2 массы конструкции
с протекающей жидкостью, границы главных областей неустойчивости,
найденные без учета собственного демпфирования трубы, показаны на
рис. 4.19. Как и в случае консольного стержня [72, 196, 197], ДГК
раздваивает главную область простого параметрического резонанса трубы на
две области, соответствующие низшим частотам колебаний полной
системы. Изменение / изменяет взаимное положение этих областей. Так,
при ц =0,18 увеличение / от 0,7 до 0,9 сужает и отодвигает вправо
верхнюю область, расширяет и сдвигает влево нижнюю область. Повышение
демпфирования до определенного значения при / = 0,9 сближает и
отодвигает вправо области неустойчивости, при ц ¦ 0,9 наблюдается лишь
одна область неустойчивости. Оптимизацию параметров ДГК следует
производить исходя из максимального сдвига областей неустойчивости вправо.
Так как решение этой задачи пока еще не получено, можно использовать
параметры гасителя, обеспечивающие максимально возможные декременты
колебаний полной системы (см. § 1.8). Приведенная в точку установки
ДГК масса составляет половину общей массы конструкции, т.е. в
рассмотренном примере относительная масса гасителя v = 0,4. При
параметрах/ = 1/A *v) щ 0,714, ц = 2\^у/A+ vK = 0,762, обеспечивающих
наибольшие декременты колебаний трубы, следует ожидать более высокого
значения е , которому соответствует начало главной области
неустойчивости.
Мосты. В литературе отмечены случаи появления повышенных
вибраций висячих стальных мостов, а также их аварии, которые
объяснялись в основном явлением вихреобразования и автоколебаниями. Одним
из эффективных способов предотвращения и уменьшения амплитуд
автоколебаний является повышение демпфирования и в этой связи
применение ДГК для висячих мостов представляет интерес.
270
Весьма перспективно использование ДГК, в частности, для уменьшения
колебаний пешеходных мостов. Многие современные конструкции таких
мостов обладают весьма низкими значениями декрементов колебаний,
а частоты их соответствуют диапазону, в котором колебания легко
возбуждаются идущими или бегущими пешеходами. Приведем результаты
[228, 229] экспериментального исследования эффективности ДГК с
вязким трением, установленного посредине однопролетного балочного
моста длиной 30 м. Несущая стальная балка массой 22,5 т имела основную
частоту изгибных колебаний 2,97 Гц, логарифмический декремент 0,008.
Масса гасителя была равна 87 кг или 1/130 от приведенной к середине
пролета массы балки. Настройка и демпфирование гасителя принимались
как при действии гармонической силы с постоянной амплитудой.
Испытания проводились для двух типов динамических воздействий:
гармоническая сила, действующая посредине пролета балки, и гармоническая
сила, движущаяся с заданной скоростью по балке. Гаситель уменьшил
максимальные перемещения балки при первом типе воздействия в
5,5—6 раз, при втором — примерно в 4 раза. Полученные результаты
достаточно хорошо соответствовали теоретическому расчету
эффективности ДГК. Гасители колебаний весьма эффективно могут быть применены
также в транспортных галлереях для защиты от вибраций, вызванных
действием ветра и работой оборудования.
Провода и канаты. Действие ветра является основной причиной
колебаний проводов, канатов и других подобных конструкций. Обычно
различают два вида колебаний проводов: галопирование и высокочастотную
вибрацию. Под галопированием понимают низкочастотные (до 1—2 Гц)
колебания с большой амплитудой (до нескольких метров). Явления
галопирования проводов и канатов обычно возникают при гололедных
образованиях или изморози, когда сечение принимает аэродинамически
неустойчивую форму, и при скорости ветра (8 — 20 м/с), направленной
под некоторым углом к проводу. Чаще всего по длине пролета
образуется одна-две полуволны, т.е. возбуждаются низшие формы собственных
колебаний. Для проводов с большим диаметром, а также для связки
проводов вероятность возникновения галопирования и амплитуда колебаний
выше, чем для проводов с малым диаметром. Механизм таких колебаний
рассмотрен Ден-Гартогом [54].
Высокочастотная вибрация проводов и канатов в направлении поперек
ветрового потока наблюдается гораздо чаще, чем галопирование. Такие
колебания с частотой до 100 Гц происходят в диапазоне скоростей ветра
@,5-14 м/с). По длине пролета может образоваться несколько стоячих
волн с небольшой амплитудой (до нескольких диаметров), в результате
чего провод многократно перегибается. Изгибные циклические напряжения
при длительной вибрации приводят к усталостному повреждению
проводов на выходе из поддерживающих зажимов.
Колебания оттяжек мачт могут возникать также из-за устойчивых
периодических колебаний ствола мачты при действии ветра.
Легкая возбуждаемость колебаний проводов и канатов является
следствием их сравнительно небольшого неупругого сопротивления. Поэтому
один из основных способов борьбы с колебаниями, в особенности с
высокочастотными, заключается в увеличении рассеяния энергии путем уста-
271
новки демпферов и гасителей. Предотвращение галопирования значительно
сложнее и в основном сводится к борьбе с обледенением, например
путем оплавления током.
Для защиты от вибраций сталеалюминиевых проводов сечением 95 мм2
и более, а также медных и стальных проводов сечением 50 мм2 и более
в СССР применяются гасители типа Стокбриджа. Гаситель состоит из двух
грузов стаканообразной формы, закрепленных на концах отрезка
стального троса, который подвешивается с помощью специальных захватов
перпендикулярно проводу. Рассеяние энергии при интенсивных колебаниях
сосредоточенных грузов происходит за счет внутреннего трения в стальном
тросе. Первая собственная частота колебаний гасителя соответствует
вертикальному перемещению грузов, вторая — преимущественно
вращательному движению грузов относительно точки, близкой к центру тяжести.
Значения частот определяются диаметром и длиной отрезка троса,
массой и моментом инерции грузов. Основные параметры, число и
местоположение в пролете гасителей выбираются в зависимости от диаметра,
веса, натяжения провода и возможного диапазона частот колебаний.
Обычно гасители размещают на расстоянии 1,5 — 2 м от каждой опоры, что
вызвано необходимостью демпфировать различные формы собственных
колебаний. Наиболее эффективно демпфируется та форма колебаний,
на частоту которой настроен гаситель. При более высоких частотах
колебаний влияние присоединенного гасителя выражается в некотором
увеличении рассеяния энергии. Эффект, однако, снижается с возрастанием
отношения частоты колебаний к парциальной частоте гасителя.
Учитывая возможность возникновения колебаний в широком
диапазоне частот, иногда устанавливают по два гасителя у каждой опоры, один
из них настраивается на низкую частоту, другой — на более высокую.
Ближе к опоре размещается высокочастотный гаситель.
Более детальные сведения о гасителях колебаний проводов
приведены в литературе: вопросы динамики гасителя Стокбриджа обсуждаются
в [267], колебания защищаемого провода с установленным гасителем
рассматриваются в [217, 254], характеристики различных вариантов
конструкций гасителей сравниваются в [174, 200]. Предотвращению
галопирования проводов посвящены работы [12, 212].
§ 4.12. Виброзащита вагонов и транспортируемых грузов
Первое применение гасителей было связано именно с подвижными
объектами — цистерны для успокоения качки кораблей предствляют собой
простейший тип ДГК. Разнообразные современные конструкции судовых
виброгасителей описаны в [4, 62]. Гасители использовались и в
автомобилях для уменьшения крутильных колебаний валов двигателей.
Достаточно перспективным является применение ДГК с целью создания более
благоприятных условий при перевозке по автомобильным и железным
дорогам грузов, особо чувствительных к вибрациям, длиномерных
строительных конструкций, аппаратов химических производств и др.
Действующие на транспортируемые конструкции случайные возмущения имеют
сравнительно узкополосный спектр ввиду фильтрации процесса ресорным
подвешиванием транспортного средства. Собственные частоты колебаний
272
большепролетных конструкций балочного типа образуют достаточно
разреженный спектр, поэтому установка в необходимых случаях ДГК с
демпфированием должна способствовать уменьшению амплитуд колебаний
при транспортировке.
В последнее время весьма актуальными стали также вопросы
виброзащиты зданий и сооружений, находящихся вблизи линий метро мелкого
заложения. Исследовались различные способы виброзащиты таких
объектов, в том числе обсуждалось применение ДГК. Приведенные в гл. 1
результаты исследований поведения ДГК при различных
воздействиях позволяют приближенно оценить эффективность гашения
колебаний объектов от воздействия проходящих вблизи вагонов
метрополитена.
Однако эти вопросы, так же как и задача о гашении колебаний
транспортируемых грузов, изучены недостаточно. Для их решения необходимы
уточнение методики динамического расчета рельсовых экипажей, более
полный учет всех возмущающих факторов при исследовании
взаимодействия рельсовых экипажей и пути, а также совершенствование
конструкций транспортных стредств на основе выбора рациональных параметров
рессорного подвешивания и кузовов с целью уменьшения динамических
воздействий на путь и транспортируемые грузы. Все это позволит более
уверенно прогнозировать транспортные нагрузки и надежно
проектировать соответствующие средства виброзащиты транспортируемых
конструкций, а также зданий и сооружений, подверженных воздействиям
от проходящих поездов.
В этом параграфе даны краткие сведения о расчетных схемах вагонов и
транспортируемых грузов, далее в качестве примера приведены
результаты исследования эффективности гашения колебаний кузова вагона
скоростного электропоезда.
Рельсовый экипаж и путь представляют собой единую механическую
систему, состоящую из упругих тел и полубесконечной среды, соединенных
деформируемыми элементами. Разумная степень детализации расчетной
схемы определяется целью расчета и предполагает упрощенное
представление тех частей экипажа, для которых увеличение числа учитываемых
степеней свободы практически не влияет на исследуемые процессы. Так,
например, при определении перемещений, ускорений, напряжений в
отдельных точках кузова, показателей плавности хода вагона необходимо
детально описывать кузов, учитывая реальное расположение масс и его изгибную
жесткость [57, 190], при этом можно упрощенно рассматривать рельсовый
путь. При вычислении сил взаимодействия колес с рельсами кузов
рассматривают, как правило, в виде недеформируемого тела, но более
подробно описывают рельсовый путь, принимая во внимание его упруго-
диссипативные и инерционные свойства.
Ходовые части вагонов обычно рассматривают как абсолютно твердые
тела, соединенные упруго-диссипативными элементами. При учете
конечной жесткости надрессорного строения его моделируют по разному [190] :
упругой балкой с непрерывно распределенными или сосредоточенными
массами, системой перекрестных балок с массами, сосредоточенными в
узлах, оболочкой с вырезами, пластинчато-стержневой или
пространственной стержневой системой с сосредоточенными массами.
18. Б.Г.Коренев 273
Представление надрессорного строения в виде упругой балки или
системы перекрестных балок позволяет удовлетворительно описать
реальную работу конструкций полувагонов, платформ, специализированных
длиннобазных экипажей для перевозки грузов определенного вида и т.п.
Для пассажирских и других крытых вагонов с цельнометаллическим
несущим кузовом балочная расчетная схема дает возможность определить
лишь низшие частоты собственных изгибных и крутильных колебаний
кузова. При колебаниях с частотами выше 20 Гц обычно проявляются
заметные деформации оболочки кузова и необходимо применять
пространственные оболочечные или стержневые расчетные схемы.
Следует также учитывать расположение, степень подвижности, условия
закрепления, упругие, диссипативные и инерционные свойства груза. Чаще
всего груз моделируют присоединенной массой, .одним или конечным
числом осцилляторов, упругой весомой балкой с упруго-диссипативными
опорами и т.п.
Требования сохранности перевозимых длинномерных тонкостенных
грузов, особо чувствительных к вибрациям, содержащих дорогостоящие
устройства и приборы, вызывают необходимость проведения расчетов с
учетом случайного нагружения в достаточно широком частотном диапазоне
@—100 Гц). В таких случаях при балочных расчетных схемах следует
принимать во внимание деформации сдвига в кузове и грузе.
Рассеяние энергии при колебаниях рельсовых экипажей определяется
трением в материале конструкций экипажа и элементов пути,
демпфированием в сочленениях, соединительных элементах и специальных
устройствах (гидравлические и фрикционные демпферы), диссипативными
свойствами перевозимых грузов. Ввиду ограниченности сведений о
демпфировании приходится описывать его с помощью наиболее простых моделей. Как
правило, для учета частотно-независимого внутреннего трения в материале
и конструкционного демпфирования применяют гипотезу Е.С. Сорокина
и гипотезу Фойгта с поправой Шлиппе - Бокка. Силы неупругого
сопротивления в рессорном подвешивании описывают в соответствии с типом
применяемых демпферов.
Так как отдельные части рельсового экипажа имеют разные
коэффициенты неупругого сопротивления, то система в целом характеризуется
"непропорциональным" трением. Однако ее можно представить в виде
нескольких подсистем с "пропорциональным" трением, соединенных
упруго-диссипативными элементами, что позволяет при стационарных
колебаниях применить рациональные алгоритмы решения (см. § 3.11),
учитывающие структуру уравнений, непропорцинальность трения для всей
системы в целом и пропорциональность трения для отдельных подсистем,
некоторые характерные особенности действующих возмущений [190].
В последнее время создано несколько типов скоростных пассажирских
вагонов, облегченные кузова которых изготовлены из алюминиевых
сплавов и обладают пониженной по сравнению со стальными жесткостью при
изгибе. При высоких скоростях движения такие вагоны обладают
неудовлетворительными показателями плавности хода. В этой связи изучение
целесообразности применения ДГК представляет актуальную задачу [165].
Ниже приведены результаты исследования эффективности применения ДГК
с вязким трением для улучшения динамических качеств вагона электро-
274
поезда ЭР 200. Близкая по существу задача о гашении колебаний
транспортируемых длинномерных конструкций и грузов, особо чувствительных к
вибрациям, решается таким же способом, лишь несколько изменяются
расчетная схема и критерии качества. Кроме того, гасители,
устанавливаемые на транспортируемые конструкции и грузы, должны быть съемными
инвентарными устройствами и для универсальности иметь приспособления
для изменения парциальной частоты в процессе монтажа.
В расчетной схеме вагона с двойным рессорным подвешиванием
(рис. 4.20) принято: кузов — упругая балка с дискретно расположенными
*€
¦г
ф4
Рис. 4.20. Расчетная схема электропоезда с ДГК шшшялшшшр тт
(штрихпунктирная линия - ось симметрии)
^00Л:
массами, рамы тележек — абсолютно твердые тела массой гпт, имеющие по
две степени свободы (вертикальное перемещение и поворот вокруг центра
тяжести), колесные пары — абсолютно твердые тела массой ткп с одной
степенью свободы (вертикальное перемещение), путь — безынерционный
упруговязкий с параметрами кп,(Зп. ДГК представлен сосредоточенной
массой тТ, присоединенной через пружину (жесткость кт) и демпфер
(коэффициент демпфирования jur) к крайней массе консоли. Жесткости и
коэффициенты вязкого трения в центральной и буксовой ступенях
подвешивания обозначены кх, 0 г, к2, /32.
Для предварительной оценки возможной эффективности различных
вариантов настройки ДГК исследованы АЧХ вагона, движущегося по пути
с гармоническими неровностями. Уровень ординат АЧХ кузова
определяется в основном трением в самом кузове (принято по гипотезе Сорокина,
коэффициент неупругого сопротивления уК = 0,02) и в центральной ступени
рессорного подвешивания (коэффициент вязкого трения /Зх = 80 кН • с • м-1).
Анализ показал, что в исходной системе колебания типа подпрыгивания
и продольной качки сравнительно сильно демпфированы вследствие выбора
рациональных коэффициентов трения в центральной ступени
подвешивания. При этом в рассмотренном диапазоне скоростей v движения в АЧХ
кузова нет ярко выраженного резонанса на частоте подпрыгивания. Можно
ожидать, что настройка ДГК на частоты подпрыгивания и продольной
качки будет менее эффективной с точки зрения снижения показателей
плавности хода, чем настройка на частоту изгибных колебаний кузова. Однако
для окончательного вывода следует учесть вид спектральной плотности
входного возмущения.
С целью получения более достоверной оценки эффективности
применения ДГК целесообразно рассмотреть возмущения, имеющие спектральные
плотности существенно различного вида. Из часто применяемых в практи-
18*
275
Таблица 4.8
Составляющие, %, дисперсий ускорений кузова для отдельных интервалов частот
Тип возмущения | Сечение кузова
Интервал частот, Гц
0-2
2-6
6-8
I
II
III
Пятник
Середина
Пятник
Середина
Пятник
Середина
95
78
74
20
16
2,6
4,8
18
21,4
38
25
5,4
0,2
4
4,6
42
59
92
ческих расчетах выбраны три модели входных возмущений: белый шум
для второй (I тип) и первой (II тип) производных неровностей по времени,
а также периодическая последовательность стыковых неровностей (III тип).
Уровень белого шума изменялся пропорционально и? для I типа
возмущений и пропорционально v для II типа. Неровность в зоне стыка принималась
в виде
т?@
| 0,5 с [1 + cos (irt/т)] при |/|,'«
| 0 при r<\t\<Ti
где г = LH/Bv) ; T = Lp/v; с иLH — глубина и длина неровности; Lp —
длина рельсового звена. Если с — случайная величина с математическим
ожиданием d и стандартом а, то спектральная плотность второй производной
неровности
5ф)
I тт2р sin(рт)
I я2 - (ртJ
|2
27Г
+
т
d2
2 5
Иг)
состоит из дискретной и непрерывной составляющих; 5 (•) —
дельта-функция Дирака. В расчете принято: LH = 3 м, d = 10 мм, о = 3 мм, Lp = 25 м.
Указанные возмущения подавались на входы системы с транспортным
запаздыванием.
Прежде чем исследовать динамические качества экипажа с ДГК, оценим
влияние колебаний с различными частотами A,04 Гц — подпрыгивание,
1,29 Гц — продольная качка, 7,1 Гц — изгиб кузова) на показатели
плавности хода йагона. В табл. 4.8 для принятых моделей возмущений при
v = 160 км/ч приведены данные для дисперсий ускорений. Для 1 типа
возмущений значения показателей плавности хода будут определяться в
основном энергией, соответствующей первой резонансной зоне, и,
следовательно, для их снижения необходимо уменьшать уровень колебаний
подпрыгивания и продольной качки. Для II и III типов возмущений
влияние изгибных колебаний значительно возрастает.
Поскольку заранее неизвестно, какие возмущения будут преобладать
при движении вагона по реальному железнодорожному пути, необходимо
исследовать два варианта настройки ДГК: 1 - на частоту продольной кач-
276
ки; 2 — на низшую частоту изгибных- колебаний. При массе гасителя
тт = 0,5 т его параметры, найденные по методике, описанной в § 1.10,
оказались равными: относительная масса v = 0,0673@,0825), настройка
f2 = 0,913@,887), парциальная частота /0 = 1,23F,68) Гц, коэффициент
вязкого трения /i0 = 1F) кН-с-м — для первого (второго) варианта.
На рис. 4.21 приведены некоторые результаты; WHOM обозначает для
каждого типа возмущений показатель плавности хода в пятниковом
сечении вагона без ДГК при v - 140 км/ч.
При возмущении 1 типа введение ДГК в систему практически не
оказывает влияние на W. Это объясняется тем, что настройка ДГК на частоты
подпрыгивания и продольной качки для данной системы малоэффективна
из-за сильного демпфирования этих колебаний, а изгибные колебания
при таком возмущении вообще мало влияют на значения показателей
плавности хода (см. табл. 4.8).
Для II и III типов возмущений 1-й вариант настройки ДГК также не
позволяет уменьшить W, а настройка ДГК на низшую частоту изгибных
колебаний дает ощутимые результаты. В этом случае для II типа возмущений
показатели плавности хода уменьшаются в среднем на 10—15%.
Наибольший эффект от применения ДГК, настроенного на частоту изгибных
колебаний, получается для III типа возмущений: максимальные ординаты
кривой показателя плавности хода в середине кузова снижаются на 30—40%.
Для пятникового сечения эффект от применения ДГК несколько ниже,
поскольку в этом случае изгибные колебания оказывают меньшее
влияние (см. табл. 4.8).
Как показали эксперименты [125], ординаты максимумов
спектральных плотностей ускорений середины кузова вагона ЭР 200 на частотах
09G\ i I I I I I I I
40 50 80 100 1Z0 740 150 180 цкм/ч
Рис. 4.21. Зависимости относительных показателей плавности хода A - конец
консоли, 2 - пятник, 3 - середина кузова) от скорости движения при I, II, III типах
воздействия для вагона без ДГК (сплошная линия), первого (пунктирная линия) и
второго (штриховая линия) вариантов
277
6—7_ Гц в 2 раза при v « 100 км/ч и в 15 раз при v = 200 км/ч больше, чем
на частотах подпрыгивания и продольной качки кузова. Если
проанализировать с учетом этого АЧХ середины кузова, то можно предположить, что
спектральная плотность второй производной неровностей должна иметь в
районе 7 Гц на два — три порядка большие ординаты, чем при частоте 1 Гц.
Из рассмотренных возмущений, которые обычно применяются в расчетах,
этому условию полностью удовлетворяет III тип, несколько хуже — II тип;
их и следует принимать во внимание, делая вывод об эффективности ДГК.
При действии некоторой комбинации рассмотренных возмущений с
дискретной и непрерывной составляющими спектральной плотности
следует ориентироватся на промежуточные результаты из числа приведенных
для отдельных типов возмущений, т.е. можно ожидать реального
уменьшения показателя плавности хода вагона на 10—20% при настройке гасителя
на низшую частоту изгибных колебаний кузова, Учитывая сравнительно
слабую чувствительность показателя плавности хода к изменению
параметров системы, отметим, что уменьшение максимальных ускорений в
соответствующих сечениях будет более существенным. Некоторые другие
способы изменения параметров кузова с целью улучшения плавности
хода вагона, например повышение изгибной жесткости кузова [190], не
позволяют получить такого же улучшения плавности хода вагона, как ДГК.
Использование ДГК должно оказаться и более экономичным, так как
усиление конструкции с целью повышения изгибной жесткости кузова
требует существенного расхода металла.
В описанном примере целью являлось уменьшение уровня изгибных
колебаний кузова, исходя из этого были выбраны места расположения
гасителей — на концах консолей. При других критериях качества может
оказаться целесообразной настройка гасителей на частоты подпрыгивания
и галопирования кузова и иное расположение гасителей. Этот вопрос в
настоящее время изучен недостаточно. Здесь лишь отметим работу [50],
в которой, с использованием двухмассовой расчетной схемы экипажа при
случайных возмущениях со стороны пути в виде белого шума для первой
производной неровности по времени, показано, что динамический гаситель,
присоединенный к не подрессоренной массе, позволяет уменьшить
одновременно как силу взаимодействия колеса и основания, так и ускорение
кузова.
§ 4.13. Гашение колебаний фундаментов под машины
и виброизолированных конструкций
Установка гасителей колебаний на фундаменты под машины с целью
снижения уровня колебаний наиболее целесообразна в случае гармонической
нагрузки с малой нестабильностью частоты. Гасители не дают такого
большого снижения динамического воздействия на основание, как виброизоляция,
однако в ряде случаев их эффективность оказывается вполне достаточной
при сравнительно простой реализации и невысокой стоимости. Особенно
важно использование гасителей при возникновении повышенных
вибраций фундаментов в процессе эксплуатации, при реконструкции
предприятий и замене оборудования.
278
Фундамент здесь рассматривается как жесткое тело, модель грунта —
однородное упругое изотропное полупространство. При расчете
используется решение соответствующей динамической контактной задачи. Как
известно, контактные динамические задачи для штампа с круговой
областью контакта решались в [206] приближенно, на основе
предположения о том, что динамические реактивные давления по контактной
поверхности изменяются по такому же закону, как и при статическом действии
нагрузки.
Точные решения задач о штампе с круговой областью контакта,
опирающемся на однородное упругое изотропное полупространство, получил
Н.М. Бородачев [59]. При этом было показано, что погрешности,
вносимые допущениями [206], практически не очень велики.
При вертикальных или горизонтальных колебаниях круглого штампа
с частотой р0 > 0 комплексную динамическую жесткость основания можно
представить в виде Jc0 + iay0i где к0, у0 — зависящие от частоты
коэффициенты [59], характеризующие упругие и диссипативные свойства системы
"штамп-полупространство"; а = Por\/p/G — безразмерная частота; г —
радиус штампа; р, G — плотность и модуль сдвига материала
полупространства. Пусть cj0 = \jkQjM — собственная частота колебаний штампа на
полупространстве. Тогда при действии силы QoePo на фундамент, на котором
установлен гаситель с вязким трением, как нетрудно показать [112],
амплитуда колебаний фундамента
W=-^- {[fco-*2Ml+™)]2+(To+a2Mi02}~1/2>
где W=[(/2-P2)/2 + mV]/[(/2-P2J+mV],
v = Vtp3l[(f2-p2J+V2p2], к0=к01(Сг),
7o=7otf/(G>), Z?!=M/(prK, v = m/M, p=p0lu0i
/2, д, *> - параметры гасителя (см. § 1.2) .
При изгибных колебаниях (вращение относительно горизонтальной оси,
проходящей через центр штампа в плоскости контакта с основанием) и
крутильных колебаниях (вращение вокруг вертикальной оси, проходящей
через центр штампа) задача решается так же, как и при поступательных
колебаниях. Необходимо лишь взамен масс фундамента и гасителя ввести
их моменты инерции и использовать решения соответствующих контактных
задач.
Изменение эффективности гашения в зависимости от уровня
нестабильности частоты (отношение разности максимального и минимального
значений к среднему значению) показано на рис. 4.22. Сплошным (штриховым)
линиям соответствует Ьх = 20A0) при вертикальных, Ьх = 10E) - при
горизонтальных, Ь2 = 1/(ргM - при изгибных и крутильных колебаниях,
где / — соответствующий момент инерции фундамента. Эффективность
гасителей при к < 0,1 довольно высока, при не = 0,15-^-0,2 несколько ниже.
В последнем случае оптимальные параметры гасителей соответственно при
вертикальных, горизонтальных, изгибных и крутильных колебаниях опре-
279
Kr
о
«г
Z
т
ilU-V
ч^1
Z
чХ^
-"^т—
an
а\
0,05 0,1
ш
'ЛА3
\Щ
-ta
f\
Кг
2
О
2
О
JZL
\
\
\
Ч
\ \
ч
ч
ч
\
ч
, ч
*4^-
V j\
z\
—Ldl
д
0,05 0,1 0,15 x
\ \
\
\
\
\
>
i \
\ \
\ \
s \3
4^_
Л
4
4
4
-fl
3 I
0,05 0,1 0,15 x u 0,0$ 0,1 0,15 X
Рис. 4.22. Зависимости коэффициентов-эффективности гасителей от уровня к
нестабильности частоты при вертикальных (а), горизонтальных (б), изгибных (в) и
крутильных (г) колебаниях фундамента: 1,2 - v = 0,05; 3, 4 - v = 0,02
деляются по формулам
f2 ¦ ¦
J опт
0,94/A+3,96^),
' 0,914/(l+3,08i/),
1/0+2,32*0,
0,981/A+2,211>),
"опт
1 2,08 W(l + *03,
1,84^/A+i>K,
, l,52vl(l+v)\
1,435 iV0+"J.
Положим, что на фундамент действует горизонтальная гармоническая
сила на расстоянии h от поверхности полупространства. Центр тяжести
фундамента лежит на одной вертикали с центром опорной площадки на
высоте Zu. Дифференциальные уравнения горизонтально-вращательных
колебаний фундамента, оборудованного гасителями поступательных и
угловых колебаний, и выражения для установившихся амплитуд
колебаний приведены в [112]. Данные в табл. 4.9 характеризуют влияние
относительной высоты центра тяжести z = Zn/r фундамента на эффективность и
оптимальные параметры гасителей горизонтальных {К\9 f\t Mi) и
вращательных (К2, /», Мг) колебаний. При этом относительная масса гасителей
была принята v - 0,05; параметры /1? /2, Mi,M2 отнесены к частоте
горизонтальных колебаний штампа на полупространстве; верхние строки в
таблице соответствуют значениям Ь\ =М/(рг3) = 10, b2 =I/(pr5) = 10,
нижние строки — вдвое меньшим значениям, где М, I — масса и момент
инерции массы фундамента относительно горизонтальной оси,
проходящей через центр опорной площадки. Результаты (рис. 4.23) получены
при bx = b2 = 10. Они дают представление об эффективности гашения
горизонтально-вращательных колебаний фундамента.
Если опорная площадь фундамента представляет собой круговое
кольцо, схема расчета сохраняется, но в его основу следует положить решение
280
соответствующей задачи о штампе [59]. При прямоугольной в плане
форме фундамента, ввиду отсутствия доведенного до числа точного решения,
следует воспользоваться приближенными решениями [177]. Можно также
предположить, что законы распределения реактивных давлений при
динамической и статической [51] нагрузках одинаковы; далее интегрирование
решения задачи Лэмба при действии сосредоточенной силы дает
передаточную функцию для динамического перемещения невесомого штампа. Форма
опорной площади фундамента влияет на эффективность гашения
колебаний. Так, например, при кольцевой форме диссипативные свойства
основания, связанные с образованием упругих волн, выражены менее сильно,
чем при опирании по площади круга, поэтому эффективность гашения
колебаний несколько выше (рис. 4.24) .
Сравнительный анализ [112] эффективности гашения колебаний
фундаментов при использовании разных моделей основания, в частности модели
упругого, однородного полупространства и системы полубесконечных
стержней, модуль упругости которых увеличивается с глубиной по
квадратичному закону, показал достаточно близкое совпадение результатов.
Это позволяет использовать в расчетах стержневую модель с
соответствующим образом подобранными параметрами.
Рассмотрим задачу о дополнительной виброзащите с помощью ДГК
виброизолированного фундамента. Виброизоляция фундаментов
обеспечивает хорошую виброзащиту в случае, когда частота гармонического
воздействия существенно выше частоты свободных колебаний. Гасители
целесообразно использовать как дополнительное средство виброзащиты
при наличии в спектре воздействия низкочастотных резонирующих
гармоник. Расчетная схема защищаемой конструкции представляет собой двух-
массовую систему, причем нижняя масса (короб) тх жестко связана с
упругим, инерционным полупространством и через упруговязкие
элемента б л и ц а 4.9
Коэффициенты эффективности и оптимальные параметры гасителей в зависимости
от относительной высоты фундамента при горизонтально-вращательных
колебаниях
*i
1,137
1,089
1,561
1,226
1,640
1,377
1,654
1,394
1,409
1,426
1,572
1,382
К2
1
1
2,630
1,884
1,868
1,588
1,662
1,446
1,619
1,394
1,583
1,362
Л
0,900
0,900
0,957
0,957
1,000
0,975
1,015
1,004
1,015
1,021
1,025
1,015
Mi
0,257
0,257
0,125
0,200
0,079
0,100
0,085
0,085
0,085
0,100
0,100
0,085
/i
0,9
0,9
0,975
0,968
0,979
0,967
0,972
0,963
0,950
0,960
0,957
0,961
м2
0,143
0,143
0,190
0,197
0,184
0,190
0,171
0,179
0,168
0,171
0,175
0,161
281
ты жесткости кх с верхней массой (блоком) т0. Предполагалось, что
гасители установлены на блок и короб и настроены на частоты, близкие
к частотам собственных колебаний фундамента. При исследовании
вертикальных колебаний системы с четырьями степенями свободы решение
получено аналогично случаю горизонтально-вращательных колебаний
фундамента. Представление об эффективности гасителей, массы которых
равны 0,05т0, дает рис. 4.25, где параметр а01 = \/ki/m0 r\Jp/G, кривые
соответствуют оптимизации параметров гасителей по различным
критериям: 1B) — обоих гасителей — по смещению верхней (нижней) массы;
3 — верхнего — по смещению верхней, нижнего — по смещению нижней
массы; 4E) — аналогично 1B) при наличии одного гасителя сверху
(снизу). Влияние относительной массы на эффективность гашения
колебаний показано на рис. 4.26.
Совместное применение виброизоляции и гасителей колебаний может
оказаться целесообразным не только для фундаментов, но и для других
конструкций. В ряде случаев гасители позволяют улучшить качество
виброизоляции и упростить демпфирующие элементы. Это относится к силовой,
противоударной и кинематической виброизоляции.
При виброизоляции машин с периодическими нагрузками возникают
две задачи — рассмотрение пуско-остановочного режима и изучение
работы виброизолированной установки в режиме нормальной эксплуатации.
Для подавления пуско-остановочного резонанса обычно используются
демпферы вязкого трения, которые являются сравнительно сложным и
дорогостоящим элементом системы виброизоляции. Замена демпфера
динамическим гасителем, настроенным на частоту, близкую к соответствующей
частоте свободных колебаний системы, может сделать виброизоляцию
более дешевой. Для расчета можно использовать результаты, изложенные
в §1.7. В эксплуатационном режиме вязкий демпфер не только не
улучшает, но даже снижает эффективность виброизоляции. Гаситель с
внутренним трением этим недостатком не обладает; в гасителе с вязким трением,
который предназначен для подавления пуско-остановочного резонанса, а в
0 0,02 0,04 V 0 0,2 0}6 у
Рис. 4.23. Зависимости коэффициентов эффективности от. относительной массы
гасителей при горизонтальных (штриховая линия) и вращательных (сплошная линия)
колебаниях фундамента
Рис. 4.24. Зависимости коэффициентов эффективности гасителей от относительного
радиуса отверстия кольцевого фундамента при вращательных колебаниях вокруг
горизонтальной (сплошная линия) и вертикальной (штриховая линия) осей
282
Р и с. 4.25. Зависимости коэффициентов эффективности гасителей от параметра аох
при т1/т0 = 0,2 (а), 0,5 (б) для различных критериев качества вибро изолированно го
фундамента
эксплуатационном режиме работает как демпфер, также будет иметь
место указанное явление, но в значительно ослабленном виде, так как демпфер
гасителя должен быть сравнительно небольшим.
В эксплуатационном режиме дополнительное снижение уровня
колебаний конструкций по сравнению с тем, что дает обычная виброизоляция,
может быть достигнуто за счет установки гасителя, настроенного на
частоту вынужденных колебаний. В тех случаях, когда частота возбуждения в
эксплуатационном режиме обладает малой нестабильностью, расчет
гасителя должен проводиться по формулам § 1.1. Такое решение в равной мере
относится как к* жестким конструкциям типа фундаментов, так и к
гибким системам, спектр частот которых содержит гармоники, резонирующие
на частоте вынужденных колебаний. При этом желательно применять
многомассовые гасители с расширенным интервалом частот эффективной
работы (см. §2.3 и [98]). При достаточно стабильной частоте внешнего
возбуждения точно настроенный гаситель без демпфирования позволяет
уменьшить коэффициенты передачи усилий одно- или многозвенной
виброизоляцией в стационарных режимах колебаний [181].
Совместное применение динамических гасителей и виброизоляции
является полезным при полигармоническом возбуждении. Например, если
возмущающая нагрузка имеет две гармоники, одна из которых близка к
обычным частотам свободных колебаний виброизолированной установки,
а другая значительно выше, то виброизоляция будет снижать эффект
действия высокочастотной составляющей и, наоборот, усиливать влияние
низкочастотной. Гаситель, настроенный на частоту собственных колебаний
установки, существенно улучшает работу виброизоляции; в отдельных
случаях, при относительно большом значении низкочастотной составляющей
его применение является необходимым, поскольку без него виброизоляция
не будет эффективной. Аналогичная ситуация возникает, если
низкочастотная составляющая нагрузки соответствует до- или зарезонансной зоне
виброизолированной установки; в этом случае гаситель настраивается на
частоту указанной составляющей нагрузки. При сейсмозащите с помощью
виброизоляции для части спектра частот, которая находится в окрестности
собственной частоты виброизолированной системы, происходит увеличе-
283
ние амплитуд колебаний, а для частот, расположенных ниже ее, эффект
виброизоляции отсутствует. Это имеет место при виброизоляции
ответственного оборудования, испытательных стендов и отдельных зданий,
в которых размещены измерительные комплексы. В таких случаях на
виброизолированную конструкцию также целесообразно
устанавливать ДГК,
Применение гасителя колебаний весьма целесообразно и при высоких
частотах возбуждения (более 60 — 80 Гц), поскольку при подобных
частотах возможен волновой резонанс в виброизоляторе и его эффективность
Р и с. 4.26. Зависимости коэффициентов
эффективности от относительной массы
гасителей при первом (штриховая
линия) и третьем (сплошная линия)
вариантах оптимизации
при указанных частотах резко уменьшается. Это явление провала
характеристик виброизолятора хорошо известно в литературе по звукоизоляции.
Применение ДГК на виброизолированных фундаментах весьма
эффективно не только при гармонических, но и при периодических импульсных
воздействиях, поскольку гасители позволяют компенсировать неточности
настройки фундаментов и отрицательные эффекты, связанные с
отклонениями воздействий от строго периодических. В частности, весьма
перспективно применение ДГК для демпфирования колебаний
виброизолированных фундаментов кузнечных молотов. Для ковочных молотов,
практически не уменьшая максимальной амплитуды колебаний, ДГК позволяют
существенно повысить затухание колебаний, при этом возможно
уменьшение числа или размеров обычных демпферов, а также их полная замена
гасителями.
Представляет значительный интерес использование ДГК для
штамповочных молотов. В этом случае частота колебаний фундаментов блока на
виброизоляторах обычно в несколько раз превышает частоту ударов молота.
Для исключения резонансных явлений необходимо обеспечить затухание
колебаний за период времени между двумя последовательными
ударами (амплитуда должна быть уменьшена примерно в десять раз) или
осуществить антирезонансную настройку виброизоляции (см. § 1.9).
Выполнение этих требований может вызвать затруднение при слабо
демпфированной и низкочастотной виброизоляции, а также при нестабильности частоты
и нестрогой периодичности ударов. Установка ДГК позволяет существенно
повысить демпфирование колебаний. Сравнение [111] эффективности
двух ДГК (гаситель на фундаментном блоке настраивался на первую
частоту колебаний фундамента, на шаботе — на вторую) и одного ДГК такой
же массы, установленного на фундаментном блоке, показало
целесообразность последнего варианта. При этом гаситель настраивается на частоту,
близкую к основной частоте свободных колебаний виброизолированного
фундамента. Оптимальные параметры ДГК при действии периодических
ударов назначают с учетом возможной нестабильности частоты и
случайных значений импульсов (см. § 1.12), при непериодических ударах можно
О 0,01 0,02 0,03 0,04 v
284
принять параметры, обеспечивающие скорейшее затухание переходного
процесса.
Не менее важно использование ДГК при кинематической виброизоляции,
Обычно в спектре частот колебаний поддерживающей конструкции
присутствуют и низкочастотные гармоники, имеющие частоты, близкие к
частотам свободных колебаний виброизолированных фундаментов; поэтому
довольно часто возникает необходимость установки демпферов. Вместо
них целесообразно применять ДГК. Весьма эффективно также
применение ДГК в полностью виброизолированных зданиях.
§ 4.14. Заключительные замечания об области применения
и дальнейшем развитии
теории динамических гасителей колебаний
Как видно из содержания этой главы и обзора литературы, приведенного
во введении, область применения ДГК достаточно обширна. В этой связи
целесообразно охарактеризовать ее в целом, отметив при этом наряду с
хорошо изученными также и те направления, которые еще недостаточно
разработаны.
Основное значение имеют приложения, в которых динамический
гаситель выступает как самостоятельное средство борьбы с вибрациями. При
этом наиболее важны случаи, в которых он является практически
единственным или, по крайней мере, основным средством виброзащиты. К
подобным направлениям можно отнести применение гасителей для борьбы с
колебаниями высоких гибких сооружений, находящихся под действием
ветровой нагрузки. В этих задачах представляет интерес как повышение
надежности сооружения, так и снижение уровня колебаний, направленное на
выполнение требований эксплуатации. В первом случае надежность
конструкции гасителя должна быть близкой к надежности защищаемой
конструкции; перерывы в эксплуатации гасителя крайне нежелательны, а в
большинстве случаев недопустимы. Это влияет на конструктивную форму
гасителя, которая, как правило, должна быть возможно более простой.
Во втором случае можно исходить из того положения, что отдельные
перерывы в эксплуатации допустимы. Гасители, снижая амплитуды колебаний
защищаемой конструкции, увеличивают ее долговечность. Этот вопрос,
хотя и обсуждался в работах [102, 147], все же требует более полного
изучения применительно к различным инженерным сооружениям,
конструкциям машин и приборов.
Применение ДГК позволяет сравнительно просто организовать
локальную защиту резонирующих элементов конструкций. Это направление (см.
§ 4.9) требует дальнейшего развития и обобщения для типовых расчетных
схем и внешних возмущений.
Во многих случаях гасители могут применяться в сочетании с другими
виброзащитными средствами, например совместно с виброизоляцией или
сейсмоизоляцией. Этот вопрос часто- не требует проведения специальных
исследований и может решаться на основе сочетания теории
виброизоляции и теории гасителей колебаний. Среди широкого круга подобных задач
можно назвать подавление пуско-остановочного резонанса
виброизолированных систем путем установки ДГК, гашение резонансных колебаний
285
виброизолированных систем, вызванных низкочастотными компонентами
в спектре воздействия. Гасители можно использовать также совместно с
корректорами колебаний.
Динамические гасители могут быть особенно эффективными при малых
амплитудах колебаний защищаемой системы, что весьма важно для
виброзащиты точных приборов, прецизионных станков и т.п. При низких
уровнях динамических напряжений собственное демпфирование защищаемой
системы вследствие внутреннего трения оказывается очень малым,
поэтому, согласно данным гл. I, эффективность ДГК будет весьма высокой.
При действии сейсмических, ветровых и других динамических нагрузок
гасители, установленные на металлических конструкциях и сооружениях,
работают более эффективно, чем при установке на железобетонных
конструкциях, что объясняется более низкими декрементами колебаний
металлических конструкций.
Возможности применения ДГК для виброзащиты подземных
сооружений, зданий, находящихся вблизи тоннелей метрополитена мелкого
заложения, платформ, эстакад, буровых установок при действии ветра и
морского волнения, транспортных машин, в частности подвижного состава
железных дорог, изучены пока еще недостаточно.
Таким образом, динамические гасители колебаний имеют широкую
область применения и как самостоятельное средство, и как часть общей
системы виброзащиты. Дальнейшее развитие теории гасителей может идти
по двум направлениям. Первое связано с углублением теории расчета,
основанном на более детальном изучении и правильном отражении
характера динамических воздействий и особенностей расчетных схем
защищаемых конструкций, исследовании внутренней динамики гасителей, решении
многокритериальных задач оптимизации их параметров. При этом остается
актуальной также задача о снижений чувствительности гасителей к
некоторой неизбежной нестабильности исходных данных. На этом пути можно
ожидать и отработки новых конструктивных форм гасителей.
Второе направление исследований — это совместное использование
гасителей и других средств виброзащиты, создание комбинированных средств
виброзащиты и разработка их теории. Здесь целесообразно расширить
область применения достаточно простых расчетных моделей во всех
случаях, когда это окажется возможным. В частности, это относится к
виброзащите объектов с разреженным спектром. Правильное использование
простых расчетных моделей облегчит получение качественных
результатов, полезных при разработке новых типов гасителей, и позволит решить
задачи об оптимальных комплексных системах виброзащиты различных
объектов.
ПРИЛОЖЕНИЕ
ВЫЧИСЛЕНИЕ БЕССЕЛЕВЫХ ФУНКЦИЙ
КОМПЛЕКСНОГО АРГУМЕНТА х + iy ПРИ у/х < 1
Представим бесселеву функцию Zv (х + iy) ее разложением в ряд Тейлора в
окрестности точек, лежащих на вещественной оси:л
Zv {х + iy) = ?
fc = 0
НУ)
к\
\dK[Zv(z)} )
\ dzk ] '
Ограничиваясь шестью членами разложения, получаем
Re Zv (x + iy) - Zv (x) - y2Z"v (*)/2 +y4Zlv (*)/24,
lmZv(x + iy)=yZl(x)-y3Z"(x)I6+y5zf(x)/120.
Используем рекуррентные соотношения для производных, тогда
KeZv(x+iy) = Zv(x) 1 -~ (а, * 1) + ^- (а3 +а5)\ +
+ a0^Z„_l(x)[l-^(a6-+2)];
Im Zv (x + iy) = - - Zv (x)
У У
+ o0yZv..1 (x)
У У
Здесь верхние знаки соответствуют функциям Jv (x + iy), Yv (x + iy); нижние -
функциям Iv (х + iy) ,Kv(x + iy); а0 = ~1 - для Kv (x + iy), a0 = 1 - для остальных
функций;
ах = у (^ + 1)/х2 ; я2 = дд {v + 2); я3 = ai (У + 3) + 1; а4 = я3 (*> + 4) - 2;
а5 = 2v2 + 2^ + 3/х2', а6=6(и2 + 2)/х2; я7 = B + i>2)/*2;
аь =(l + 2v2)/x2; a9 = 1 + B4 + 34^2 + И)/х4; alf = д5 (^+2)+яб.
Как показали вычисления для v - 1,10, х = 1,10,у\х =0,05*),наибольшая
погрешность при использовании полученных формул составляет 0,03 %; если отбросить
члены, содержащие у4, у5, погрешность не превышает 0,7%. Это позволяет
рекомендовать формулы для проведения практических расчетов.
*) Это соответствует коэффициенту неупругого сопротивления у = 0,2, при
меньших значениях у погрешность будет ниже.
287
ОПТИМАЛЬНЫЕ ПАРАМЕТРЫ ДГК БЕЗ ДЕМПФИРОВАНИЯ
ПРИ УЗКОМ ДИАПАЗОНЕ ЧАСТОТ ВОЗДЕЙСТВИЯ
Й ОБОБЩЕННОМ КРИТЕРИИ D
ос
р\
р\ -Р?-04
А -1
А =2
А =3
А =4
Р2, -Р? = 0,2
Л =1
А =2
/1=3 1 А =4
0,7
0,8
0,9
1
1,1
0,7
0,8
0,9
1
1,1
0,7
0,8
0,9
1
1,1
0,083
0,735
0,071
0,840
0,058
0,945
0,043
1,050
0,039
1,155
0,067
0,734
0,062
0,842
0,056
0,947
0,050
1,052
0,044
1,156
0,051
0,733
0,053
0,843
0,053
0,950
0,052
1,054
0,050
1,158
0,039
0,725
0,035
0,834
0,030
0,943
0,025
1,052
0,019
1,162
0,027
0,721
0,031
0,834
0,029
0,945
0,026
1,054
0,022
1,162
0,018
0,716
0,027
0,834
0,028
0,947
0,027
1,056
0,025
1,163
0,020
0,716
0,023
0,828
0,021
0,941
0,017
1,054
0,012
1,168
0,011
0,710
0,019
0,828
0,020
0,943
0,018
1,056
0,014
1,167
0,002
0,703
0,017
0,827
0,020
0,945
0,018
1,058
0,016
0,008
0,707
0,016
0,823
0,016
0,939
0,013
1,056
0,008
1,173
-
0,013
0,822
0,016
0,941
0,014
1,058
0,010
1,172
0,011
0,820
0,015
0,943
0,014
1,059
0,011
0,169
0,770
0,136
0,880
0,111
0,990
0,091
1,100
0,074
1,210
0,141
0,777
0,125
0,889
0,110
0,999
0,097
1,108
0,086
1,215
0,119
0,782
0,114
0,898
0,109
1,008
0,104
1,116
0,100
0,085
0,756
0,073
0,873
0,061
0,990
0,049
1,108
0,037
1,226
0,072
0,759
0,069
0,880
0,060
0,998
0,051
1,114
0,043
1,228
0,062
0,761
0,064
0,887
0,059
1,007
0,054
1,121
0,049
0,054
0,745
0,051
0,867
0,044
0,990
0,034
1,114
0,024
1,239
0,046
0,745
0,049
0,873
0,044
0,998
0,036
1,120
0,027
1,240
0,040
0,744
0,046
0,878
0,043
1,005
0,037
1,126
0,031
0,037
0,735
0,040
0,862
0,035
0,990
0,027
1,120
0,017
1,251
0,031
0,734
0,039
0,867
0,035
0,997
0,028
1,125
0,019
1,250
0,026
0,732
0,037
0,871
0,035
1,004
0,029
1,130
0,022
В числителе даны значения относительной
согласно формулам A.1.9); обозначения
1,167
массы
величин
1,172
1,221
1,232
v, в знаменателе - настройки /2
описаны в § 1.1.
1,241
гасителя,
1,250
найденные
ОПТИМИЗАЦИЯ ДЕМПФЕРА В МНОГОМАССОВОЙ СИСТЕМЕ
Рассматриваются вынужденные с частотой р колебания системы с пренебрежимо
малым собственным демпфированием. Между двумя какими-либо точками системы
установлен демпфер, коэффициент гармонической линеаризации которого м — четная
функция частоты р. Так, для линейного демпфера вязкого трения м = const; для
демпфера с частотно-независимым трением ц = с//\ р\(с — жесткость, / - коэффи-
Н
циент частотно-независимого трения); для демпфера сухого трения ц = (Я -
\р\Л
сила сухого трения, Л - амплитуда удлинения демпфера); для демпфера из
полимерных материалов ц (р) — преобразование Фурье соответствующего ядра релаксации.
Пусть R0, г° - амплитуды реакций (перемещений, скоростей, ускорений, усилий
в произвольной точке) системы при м = О соответственно от действия внешней
нагрузки и пары сил pelpt, направленных в противоположные стороны и приложенных в
точках установки демпфера; Д, 8 - амплитуды взаимных перемещений указанных
точек от тех же воздействий при ц = 0. Применяя метод сил, получаем, что при д = «>
оо Д
амплитуда реакции системы R = RG г° ; при произвольном значении ц комплекс-
6
нал амплитуда реакций системы определяется по формуле
R° +in6R°°
Л ш ; соответственно
iDi2 - ^°J +м2(б/02
lR] =тг^
Модули амплитуд \R°\n \R°°\ - вещественные функции р, обращающиеся в «»
при некоторых значениях р. Между каждой парой разностных частот системы
при м = 0 лежит резонансная частота системы при ,м = «>. При так называемых
инвариантных частотах р = ри модуль амплитуды | R | e | R* | = | R°* |, т.е. не зависит от ц ,
обозначим его Ru. При произвольном значении ц АЧХ системы проходит через
инвариантные точки. Так как максимум АЧХ в окрестности инвариантной точки не может
быть меньше Ли, то из условия (| R \2)' =0 при р = ри можно определить оптимальное
значение
2 . AЛ1 )'
[О-0J^00)']!^
где штрих означает производную по р2, индекс "и" показывает, что р =ри. Эта
формула справедлива для систем с дискретно или непрерывно распределенной массой; для
случая демпфера вязкого трения она получена в [144].
19. Б.Г. Коренев
289
Оптимум демпфирования существует (д?пт> 0), если в инвариантной точке/?0
= - R°°. Для многомассовой системы R°, R°°, 6 - дробнорациональные функции р2
поэтому
\R\2
+ ц2Иа\
b\ +ц2НЬ\'
где jj, fla,iblf 62, h - некоторые полиномы относительно р2, причем Я0 = а1/Ь1,
R°° =a2/b2, д = sjhb2jbx. В инвариантной точке I al/bl | = | я2/Ь2 | =ЯИ, т.е. в формуле
для МдПТ величины а1/Ь1 и д2/&2 можно заменить на RH с соответствующим знаком.
Так, например, при установке ДГК на главной массе h =р2 ial/bl - + Ли, д2 /Ь2 = ± /?и,
причем верхние знаки соответствуют меньшей инвариантной частоте ри\, нижние
знаки - большей частоте ри1. В результате формула для ju?nT приобретает вид A.2.6)
и ее применение заметно упрощает решение конкретных задач (см. гл. 1) .
ОСНОВНЫЕ УСЛОВНЫЕ ОБОЗНАЧЕНИЯ И СОКРАЩЕНИЯ
А' - транспонированная матрица А;
А* - комплексно-сопряженная матрица А;
Re (•) , Im (•) - вещественная и мнимая части;
1 (•) - единичная функция Хевисайда;
6 (•) - дельта-функция Дирака;
/ = 1, п -/ принимает целочисленные значения от 1 до п;
У/ (<*> ?) - функции Коши дифференциальных уравнений, которые совместно с их
производными образуют единичную матрицу при ? = а;
«^«(/3), Ynifi), //j03), Кп{0) - бесселевы функции индекса п первого и второго рода
вещественного и мнимого аргумента;
Э - декремент колебаний;
о?0 - круговая частота собственных колебаний;
р — отношение частоты вынужденных колебаний к частоте собственных колебаний;
7 - коэффициент частотно-независимого трения, учитываемого в комплексной
форме;
v - относительная масса гасителя;
/2 - отношение квадратов парциальных частот гасителя и защищаемой системы
(настройка гасителя) ;
[х - относительный коэффициент вязкого трения гасителя;
Кт - отношение критериев качества системы без гасителя и с гасителем
(коэффициент эффективности гасителя);
L' - сумма, в которой первое слагаемое умножается на 0,5;
ДГК - динамический гаситель колебаний;
ИПФ - импульсная переходная функция;
ИЧХ - импульсно-частотная характеристика;
ЧХ - частотная характеристика;
АЧХ - амплитудно-частотная характеристика.
19*
291
СПИСОК ЛИТЕРАТУРЫ
Х.Абрамов Б.М., Абрамов А.Б. Динамический гаситель колебаний, вызываемых
периодическими ударами//Механика хмашин. - 1969. - Вып. 20. - С. 103-117.
2. Айзенберг ЯМ. Сооружения с выключающимися связями для сейсмических
районов. - М.: Стройиздат, 1976. - 232 с.
3.Алексеев AM. О демпфировании колебаний импульсно-динамическим гасите-
лем//Пробл. прочности. - 1972. - № 2. - С. 52-54.
4.Алексеев A.M., Сборовский А.К. Судовые виброгасители. - Л.: Судпромгиз,
1962.- 196 с.
5. Алексеев A.M., Сборовский А.К. Исследование автоколебаний гидроупругой
системы с учетом сил сопротивления//Рассеяние энергии при колебаниях упр.
систем. - Киев: Наук, думка, 1968. - С. 25-29.
в. Ананьев И.В., Колбин Н.М., Серебрянский Н.П. Динамика конструкций
летательных аппаратов. - М.: Машиностроение, 1972. - 416 с.
7. Бабицкий В,И., Бурд В.Ш. Гашение плоских колебаний платформы при помощи
дебалансных гасителей//Изв. АН СССР. МТТ. - 1982. - № 6. - С. 29-33.
8. Бабицкий В.И., Кобринский А.Е. Электродинамический демпфер//Изв. АН СССР.
ОТН. Механика и машиностроение. - 1962. - № 3. - С. 81-84.
9. Балкарей ИМ., Коновалова Г.И. Динамический корректор для уменьшения
вибраций основания подрессоренных машин//Исследование динамики строительных
конструкций промышленных зданий. - Л.: Ленингр. Промстройпроект. - 1983. -
С. 101-113.
10. Бартел, Краутер. Оптимизация временных характеристик динамического
поглотителя колебаний//Тр. Амер. о-ва инж.-механиков. Конструирование и
технология машиностроения. - 1971. - Т. 93, № 3. - С. 34-38.
11. Бауэр Г.Ф. Установившиеся гармонические и комбинационные колебания
нелинейного динамического поглотителя колебаний//Тр. Амер. о-ва инж.-механиков.
Прикл. механика. - 1966. - Т. 33, № 1. - С. 205-208.
12. Бекментьев P.M., Усманов Ф.Х., Жакаев А.Ш. и др. Пластинчатые гасители пляски
проводов ВЛ//Злектр. станции. - 1979. - № 10. - С. 64-66.
13. Беспрозванная ИМ., Гоздек B.C., Луговцов А.Н.. Фомин Г.М. О применении
демпфирующих устройств для гашения автоколебаний высоких сооружений
башенного типа//Строит. механика и расчет сооружений. - 1972. - №6. -
С. 40-43.
14. Беспрозванная ИМ., Соколов А.Г., Фомин Г.М. Воздействие ветра на высокие
сплошностенчатые сооружения. - М.: Стройиздат, 1976. - 184 с.
15. Блехман ИИ. Синхронизация динамических систем. - М.: Наука, 1971. - 894 с.
16. Богданов В.П., Вершинский СВ. Применение динамического поглотителя изгиб-
ных колебаний кузова для вагонов с двойным рессорным подвешиванием//Вестн.
ВНИИЖТ. - 1981. - № 2. - С. 41-43.
11. Боги Д.Б., Пзслей П.Р. Оценка метода фиксированной точки при исследовании
колебаний системы с начальным демпфированием//Тр. Амер. о-ва инж .-механиков.
Конструирование и технология машиностроения. - 1963. - Т. 85, № 3. - С. 13-15.
292
18. Боевкин В.И., Павлов Ю.Н. Динамический гаситель с сухим трением//Тр. МВТУ. -
1971. - №153.-С. 110-117.
19. Болотин В.В. Динамическая устойчивость упругих систем. - М.: Гостехиздат,
1956. - 600 с.
20. Болотин ВВ. Статистические методы в строительной механике. - М.: Стройиздат,
1965.-270 с.
21. Болотин В.В. Случайные колебания упругих систем. - М.: Наука, 1979. - 336 с.
22. Болотник Н.Н. Оптимизация амортизационных систем. - М.: Наука, 1983. -
256 с.
23. Брискин Е.С. О демпфировании колебаний одной группой динамических
гасителей двух близко расположенных резонансных состояний механической систе-
мы//Изв. вузов. Стр-во и архитектура. - 1980. - № 12. - С. 40-44.
24. Брискин Е.С. Демпфирование колебаний механических систем динамическими
гасителями с полостями, частично заполненными сыпучими средами //Изв.
вузов. Машиностроение. - 1980. - № 2. - С. 26-30.
25. Брискин Е.С, Чернышев В.М. Оптимизация параметров динамических гасителей
колебаний//Там же. - 1977. - № 2. - С. 190-192.
26. Бужинский В.Л. О колебаниях тонкостенной конструкции с жидкостью при
наличии гидродинамического гасителя//ГШМ. - 1979. - Т. 43, вып. 6. — С. 1095-1101.
21. Бужинский В.А. Микишев Г.Н. О гашении упругих колебаний конструкций с
жидкостью//Изв. АН СССР. МТТ. - 1982. - № 5. - С. 143-151.
28. Бурденко А.Ф., Овчинников П.Ф. Нелинейный антивибратор для одномассовой
системы при воздействии двухчастотного возбуждения//Прикл. механика. -
1967.-№ 5. -С. 87-92.
29. Бурденко А.Ф., Флора В.Ф. Определение оптимальных параметров упруго-вязкого
демпфера при наличии затухания колебаний главной массы//Акустика и ультразв.
техника. - 1972. - Вып. 7. - С. 58-62.
30. Ван-Дао Н. Нестационарные колебания динамической системы с гасителем//Изв.
АН СССР. Механика. - 1965. - №4. - С. 92-96.
31. Ван де Вегте, Хладун. Проектирование оптимальной пассивной системы
управления колебаниями балки при помощи методов оптимального управления//Тр.
Амер. о-ва инж.-механиков. Дин. системы и управление. - 1973. - №4. - С. 84-92.
32. Ван Хань-Чун. Решение в обобщенных гипергеометрических функциях задач о
поперечных колебаниях одного класса стержней переменного сечения//Тр. Амер.
о-ва инж.-механиков. Прикл. механика. - 1967. - № 3. - С. 261-268.
33. Василевский В.В., Доронин И.С, Щербаков А.И. Оптимизация параметров
динамического гасителя изгибных колебаний кузова вагона//Вестн. ВНИИЖТ. -
1984.- №2. -С. 36-38.
34. Ватсон Г.Н. Теория бесселевых функций. - М.: ИЛ, 1949. - 798 с. - Т. I.
35. Вертинский СВ., Доронин И.С., Василевский В.В., Щербаков А.Н.
Теоретическое исследование демпфирования колебаний кузова пассажирских вагонов с
применением динамических гасителей//Вестн. ВНИИЖТ. - 1983. - № 2. - С 38-41.
36. Вибрации в технике: Справочник. Т. 6. Защита от вибрации и ударов/Под ред.
К.В. Фролова. - М.: Машиностроение, 1981. - 456 с.
37. Волоцкий М.Я. Гармонические колебания ортотропных складок//Строит.
механика и расчет сооружений. - 1972. - № 3. - С. 40-46.
38. Вульфсон М.Н. К вопросу о выборе параметров динамических гасителей коле-
баний//Нелин. колебания и перех. процессы в машинах. - М.: Наука, 1972. -
С. 347-354.
39. Геккер Ф.Р. Динамика машин, работающих без смазочных материалов в узлах
трения. - М.: Машиностроение, 1983. - 168 с.
40. Генкин Б.И., Иванов О.Н., Потехин А.Ф. Динамический гаситель изгибных
колебаний прямоугольной пластины//Тр. Моск. ин-та хим. машиностроения. - 1972. -
Вып. 44. -С. 118-121.
41. Генкин Б.И., Иванов О.Н., Потехин А.Ф. Колебания прямоугольной пластины с
динамическим гасителем и демпфером//Там же. - 1973. - Вып. 47. - С 26-34.
42. Генкин Б.И., Иванов О.Н., Потехин А.Ф. Об оптимальных параметрах
динамического демпфера колебаний пластин//Там же. - 1977. - Вып. 53. -
С 146-149.
293
43. Генкин М.Д., Елезов В.Г., Яблонский В.В. Методы управляемой виброзащиты
машин. - М.: Наука, 1985. - 240 с.
44. Гершгорин С.А. Колебания пластинок, загруженных сосредоточенными масса-
ми//ПММ. - 1933. - Т. 1, вып. 1. - С. 25 37.
45. Глазырин B.C. Уменьшение колебаний сооружений с помощью гасителя
системы B.C. Мартышкина//Строит. механика и расчет сооружений. - 1972. - № 3. -
С. 56-60.
46. Глазырин B.C. О применении антивибраторов и гасителей колебаний при
импульсивных нагрузках//Исследования по динамике сооружений. - Труды ЦНИИСК. -
М.: Стройиздат, 1974. - Вып. 34. - С. 135-149.
М.Гоздек B.C. Об оценке эффективности динамического гасителя при
автоколебаниях башенных сооружений//Строит. механика и расчет сооружений. - 1974. -
№3.-С. 38-40.
48. Голоскоков Е.Г., Филлипов А.П. Нестационарные колебания деформируемых
систем. - Киев: Наук, думка, 1977. - 340 с.
49. Гольденблат И.И., Николаенко Н.А., Поляков СВ., Ульянов СВ. Модели
сейсмостойкости сооружений. - М.: Наука, 1979. - 252 с.
50. Гонейм, Метвалли. Оптимальная подвеска экипажа с демпфированным
поглотителем колебаний//Тр. Амер. о-ва инж.-механиков. Конструирование и технология
машиностроения. - 1984. - Т. 106, № 2. - С. 231-239.
51. Григорьев И.В., Исаков В.М. Специальные способы и средства виброзащиты
машин от воздействий переменной частоты//Приборы и машиностроение. - Л. —
1975.-С. 65-71 (Труды СЗПИ, №31).
52. Гуляев В.И,,Дехтярюк Е.С., Попов СЛ. Численное исследование аэроупругих
автоколебаний распределенных систем//Сопротивление материалов и теория
сооружений. - Киев: Будивельник, 1982. - Вып. 40. - С. 21-26.
53. Горбунов-Посадов М.И., Маликова Т.А., Соломин В.И. Расчет конструкций на
упругом основании. - М.: Стройиздат, 1984. - 679 с.
54. Ден-Гартог Дж.П. Механические колебания. - М.: Физматгиз, 1960. - 580 с.
55. Джонс, Нэшиф, Эдкинс. Влияние настраиваемых демпферов на
колебания простых конструкций//Рак. техн. и космонавтика. - 1965. - Т. 5, № 2. -
С. 144-150.
56. Диментберг М.Ф. Нелинейные стохастические задачи механических колебаний. -
М.: Наука, 1980. - 368 с.
57. Динамика транспортных средств: Избр. тр./Лазарян В.А. - Киев: Наук, думка,
1985.-528 с.
58. Динамический расчет зданий и сооружений. Справочник проектировщика/Под
ред. Б.Г. Коренева, И.М. Рабиновича. - М.: Стройиздат, 1984. - 303 с.
59. Динамический расчет сооружений на специальные воздействия. Справочник
проектировщика/Под ред. Б.Г. Коренева, И.М. Рабиновича. - М.: Стройиздат, 1981. -
215 с.
60. Динамический расчет специальных инженерных сооружений и конструкций.
Справочник проектировщика/Под ред. Б.Г. Коренева, А.Ф. Смирнова. - М.:
Стройиздат, 1986.-462 с.
61. Динник А.Н. Избранные труды. Т. 2. Приложение функций Бесселя к задачам тео-
рии упругости. - Киев: АН УССР, 1955. - 220 с.
62. Елисеев СВ., Нерубенко Г.П. Динамические гасители колебаний. - Новосибирск:
Наука, 1982. - 144 с.
63. Закиров ИМ., Пикулев Н.А. Расчет группы гасителей колебаний, эквивалентной
одиночному гасителю, с заданными параметрами//Материалы координационного
совещания по динамике строительных конструкций и методам борьбы с
вибрациями. - М.: Стройиздат, 1975. - С. 74-78.
64. Закиров ИМ., Пикулев Н.А. Экспериментальное исследование колебаний
системы с группой динамических гасителей//Строит. механика и расчет сооружений. -
1978. -№ 1.-С. 61-63.
65. Закора А.Л., Казакевич М.И. Гашение колебаний мостовых конструкций. - М.:
Транспорт, 1983. - 134 с.
66. Ивович В.А. Виброизоляция горно-обогатительных машин и оборудования. -
М.: Недра, 1978. - 252 с.
294
67. Ивович В.А., Коренев Б.Г., Дашевский М.А. и др. Методы борьбы с
вибрациями (обзор). - М.: ЦИНИС, 1978. - 56 с.
68. Илгакоис П.И. Вопросы расчета и динамики низкочастотных виброизолирующих
систем: Автореф. дис. на соискание степени канд. техн. наук. - Каунас. Политехи,
ин-т, 1970. - 14 с.
69'. Ильинский B.C. Защита аппаратов от динамических воздействий. - М.: Энергия,
1970.-320 с.
70. Иориш Ю.И. Защита самолетного оборудования от вибрации. - М.: Оборониздат,
1949.- 223 с.
1 Х.Казаков И.Е. Статистическая теория систем управления в пространстве
состояний. - М.: Наука, 1975. - 432 с.
12. Карамышкин В.В. Влияние динамического гасителя на распределение областей
параметрического и комбинационного резонанса простейшей системы с
периодически изменяющейся жесткостью//Труды Моск. ин-та электрон,
машиностроения. - 1974. - Вып. 39. - С. 51-60.
73. Карамышкин В.В., Левицкий А.А. Выбор оптимальных параметров гасителей для
системы с двумя степенями свободы//Там же. - С. 18—31.
14. Карамышкин В.В., Левицкий А.А., Фирсов Г.И. Исследование переходного
процесса в системе с двумя степенями свободы с динамическими гасителями с
помощью ЭВМ//Автоматизация науч. иссл. в области машиноведения, — М.: Наука,
1983.-С. 79-85.
75. Каудерер Г. Нелинейная механика. - М.: ИЛ, 1961. - 778 с.
76. Китов А.К. О снижении уровня колебаний башни Большого солнечного
вакуумного телескопа с помощью динамических гасителей колебаний//Астрон.
циркуляр, № 1192. - М.: Бюро астрон. сообщ. АН СССР, 1981. - С. 5-7.
77. Климов В.Г. Динамические свойства виброгасителя с упругогистерезисной связью
между колеблющимися массами//Изв. вузов. Радиофизика. - 1970. - Т. 13,
№4. - С. 546-557.
78. Клюкин И.И. Борьба с шумом и звуковой вибрацией на судах. - Л.:
Судостроение, 1971.-418 с.
79. Кобелев В.М., Копелев Ю.Ф., Ревва В.Ф. Демпфирование микроколебаний в
механических системах многомассовыми виброгасителями//Рассеяние энергии при
колебаниях мех. систем. - Киев: Наук, думка, 1970. - С. 442-449.
80. Кобелев В.М., Копелев Ю.Ф., Ревва В.Ф. Ударно-динамические виброгасители//Ме-
ханика машин. - 1977. - Вып. 33-34. - С. 103-110.
81. Коловский М.З. Нелинейная теория виброзашитных систем. -М.: Наука, 1966. -
320 с.
82. Коловский М.З. Автоматическое управление виброзащитными системами. - М.:
Наука, 1976. -320 с.
83. Кондра М.П., Лебедич И.И., Луговцов А.Н., Фомин Г.М. Исследование
воздействия ветра на скульптуру "Родина - мать" в Киеве//Строит. механика и расчет
сооружений. -1984. -№4. -С. 45-47.
84.Кононенко В.О. Колебательные системы с ограниченным возбуждением. - М.:
Наука, 1964. -254 с.
85. Копелев Ю.Ф., Рябцев О.И. Случайные колебания расточных шпинделей и их демп-
фирование//Изв. вузов. Машиностроение. - 1972. -№ 9. - С. 172-177.
86. Коренев Б.Г. Некоторые задачи теории упругости и теплопроводности,
решаемые в бесселевых функциях. - М.: Физматгиз, 1960. - 459 с.
Ю.Коренев Б.Г. Введение в теорию бесселевых функций. - М.: Наука, 1971. -
288 с.
88. Коренев Б.Г. О мерах борьбы с вибрациями гибких покрытий//Докл.междунар.
конф. по облегч. простр. конструкциям покрытий для стр-ва в обычн. и сейсмич.
р-нах, Алма-Ата, 1977. - М.: Стройиздат, 1977.
89. Коренев Б.Г. Задачи теории теплопроводности и термоупругости. Решения в
бесселевых функциях. - М.: Наука, 1980. - 400 с.
90. Коренев Б.Г, Блехерман А.Н. К расчету динамического гасителя с нелинейным
сопротивлением//Исследования по динамике сооружений/Тр. ЦНИИСК. Вып.
34. -М.: Стройиздат, 1974. -С. 102-111.
91. Коренев Б.Г, Блехерман А.И. Опыт гашения колебаний башенного сооружения//
Строит, механика и расчет сооружений. - 1979. - № 1. -С.50-51.
295
92. Коренев Б.Г., Блехерман А.И., Данилов П.С. и др. Опыт применения
динамических гасителей колебаний в башенном сооружении/Щром. строительство,-1978.-
№ 12.-С. 18-19.
93. Коренев Б.Г., Блехерман А.К, Остроумов Б.В. Об экспериментальном
определении параметров маятникового динамического гасителя колебаний//Строит.
механика и расчет сооружений. - 1972. - № 2. - С. 66-67.
94. Коренев Б.Г.. Волоцкий М.Я. Применение динамических гасителей для
уменьшения колебаний складчатых систем //Там же. - 1973. - № 1. - С. 43-49.
95. Коренев Б.Г., Волоцкий М.Я., Резников Л.М. Вопросы гашения колебаний
пластинок, складок, оболочек//Исследования по теории сооружений. - М.: Строй-
издат, 1975. -Вып. 21. -С. 51-62.
96. Коренев Б.Г., Волоцкий М.Я., Фукс О.М. О гашений колебаний мачтовых
сооружений/Детройт, механика и расчет сооружений. - 1976. - № 1. - С. 41-43.
91. Коренев Б.Г., Волоцкий М.Я., Фукс О.М. Особенности виброгашения высоких
дымовых труб при ограниченных амплитудах масс гасителей//Там же. - 1976. -
№5. -С. 59-62.
98. Коренев Б.Г., Дукарт А.В., Олейник А.И. Применение двухмассовых
динамических гасителей колебаний в фундаментах под машины//Тез. докл. VIBcec.
конф. "Динамика оснований, фундаментов и подземных сооружений". Нарва,
1985. -Л, 1985. -С. 384-386.
99. Коренев Б.Г., Зевин А.А., Резников Л.М. Сравнительный анализ эффективности
динамического и ударного гасителей колебаний//Строит.механика и расчет
сооружений. - 1972. -№ 3. -С. 38-41.
100. Коренев Б.Г., Кедрова Г.Л. Применение заневоленных пружин сжатия в качестве
виброизоляторов для машин с динамическими нагрузками//Там же. - 1976. -
№4. -С. 51-54.
101. Коренев Б.Г., Китов А.К. О применении динамических гасителей для снижения
уровня колебаний солнечного телескопа//Исследования по геомагнетизму,
аэрономии и физике солнца. -1984. -№69. -С. 197-203.
102. Коренев Б.Г., Микитаренко М.А. О влиянии гашения колебаний на
долговечность гибких стальных сооружений//Строит. механика и расчет сооружений. -
1982.-№ 4.-С. 33-36.
103. Коренев Б.Г., Олейник А.И. Эффективность многомассовых динамических
гасителей колебаний при гармонических внешних воздействиях//ТахМ же. - 1984. -
№5.-С. 39-43.
104. Коренев Б.Г., Пикулев Н.А., Шейнин И.С. О мерах уменьшения вибраций при
прохождении через резонанс во время пуска и остановки оборудования//Коле-
бания зданий и сооружений. - М.: Госстройиздат, 1963. - С. 74-97.
105. Коренев Б.Г., Резников Л.М. О колебаниях башенных сооружений,
оборудованных динамическими гасителями//Строит. механика и расчет сооружений.-1968.-
№2. -С. 27-31.
106. Коренев Б.Г., Резников Л.М. О колебаниях конструкций с динамическими
гасителями при стационарных случайных воз действ иях//Там же. - 1969. - № 4. -
С. 33-39.
101. Коренев Б.Г., Резников Л.М. Гашение колебаний башенных сооружений при
сейсмических воздействиях//Там же. - 1971. -№5. -С. 1-5.
108. Коренев Б.Г., Резников Л.М. О гашении автоколебаний башенных сооружений
при действии ветра//Там же. - 1971. -№ 6. -С. 21-25.
109. Коренев Б.Г., Резников Л.М. Случайные колебания поперек ветрового потока
башенных сооружений с аэродинамически неустойчивой формой сечения//Там
же. - 1973. -№2. -С. 7-11.
НО. Коренев Б.Г., Резников Л.М. Вынужденные колебания круглой и квадратной
пластинки с динамическим гасителем при гармонических воздействиях//Дина-
мика сооружений. - М.: Стройиздат, 1971. -С. 90-104.
111. Коренев Б.Г., Резников Л.М., Фишман Г.М. О гашении колебаний
виброизолированных фундаментов под машины ударного действия//Динамика оснований,
фундаментов и подземных сооружений (Материалы V Всес. конф. Ташкент,
1981). Т. 1 -М.гНИИОСПим.Герсеванова, 1981. -С. 329-330.
112, Коренев Б.Г., Сердобольский А.И. О виброзащите фундаментов под машины//
Строит, механика и расчет сооружений. - 1983. - № 1. - С. 53-57.
296
ИЗ. Коренев Б.Г., Сысоев В.И. Метод гашения колебаний сооружений башенного
типа//Бюл. строит, техники. - 1953. -№ 5. - С. 5-8.
114. Коренев Б.Г., Фатиков В.Р. Анализ эффективности динамических гасителей
рычажного типа при гармонических воздействиях., Деп. №6625//Библиографи-
ческий указатель депонированных рукописей ВНИИИС. - 1986, № 4.
115. Коренев Б.Г., Фишман Г.М. Колебания системы с линейным динамическим
гасителем при импульсивном воздействии на поддерживающую их конструкцию//
Строит, механика и расчет сооружений. - 1977. - №6. - 43-46.
Ив. Кравцова Е.В., Позняк Э.Л. Об эффективности пассивных виброгасителей в
роторных системах//Машиноведение. - 1977. - № 4. - С. 40-46.
Ц1.Кравцова Е.В., Позняк Э.Л. Влияние места установки и характера возмущений
на эффективность виброгасителей в роторных системах//Там же. - 1980. -№4.-
С. 32-37.
118. Кравченко А.З. Гасители колебаний с применением гироскопов//Строит.
механика и расчет сооружений. - 1978. -№ 1. -С. 38-44.
119. Крылов А.Н. Собрание трудов. Т.10. Вибрация судов. - М.-Л.: АН СССР,
1948. -402 с.
120. Кулешов Ю.В. Колебания упругих систем с демпфером сухого трения//Тр.
Моск. ин-та, хим. машиностроения. - 1973. - Вып. 48. - С. 124-128.
121. Кулешов Ю.В., Потехин А.Ф. Изгибные колебания балки с нелинейным
динамическим демпфером//Тр. Тамбовского ин^га хим. машиностроения. - 1970.—
Вып. 4. -С. 21-5-219.
122. Куок, Арора, Хоуг. Оптимальное проектирование демпфированных
виброгасителей для конечного диапазона частот//Ракет. тех. и космонавтика. - 1975. -
№4, -С. 154-156.
123. Ларин В.Б. Статистические задачи вибро защиты. -К.: Наук.думка, 1974. - 127 с.
НА. Левин Б.Р. Теоретические основы статистической радиотехники. Книга I. - М.:
Сов. радио, 1969. -752 с.
125.Львов А.А., Желнин Г.Г., Березовский A.M. и др. Параметры подвешивания
электропоезда ЭР200 и результаты динамических (ходовых) и по воздействию
на путь испытаний//Тр. ЦНИИ МПС. - 1978. *¦ Вып. 592. - С. 4-80.
126.Макаров СО. Разбор элементов, составляющих боевую силу судов//Мор. сб. -
1894.-№ 6.-С. 33-106.
т.Манапов А.З., Пикулев НА. К расчету колебательной системы с группой вибро-
гасителей//Материалы координационного совещания по динамике строит, констр.
и борьбе с вибрациями. - М.: Стройиздат, 1975. - С. 68-74.
128.Манапов А.З., Пикулев Н.А. Оптимальные параметры группы виброгасителей
при нестабильной частоте гармонического воздействия// Строит, механика и
расчет сооружений. - 1975. -№ 1. -С. 33-35.
129. Масри. Теория динамического виброгасителя с ограничителями//Тр. Амер. о-ва
инж.-механиков. Прикл. механика. - 1972. - Т. 39, № 2. - С. 246-251.
130. Международный симпозиум "Виброзащита в строительстве". Доклады,
сообщения. - Л., 1984. - Т. 1. - 176 с; Т. 2. - 128 с.
131.Митрополъский Ю.А. Проблемы асимптотической теории нестационарных
колебаний. -М.: Наука. - 1964. -432 с.
132. Нагаев Р.Ф., Степанов А.В^ Об оптимизации коэффициента затухания свободных
колебаний двухмассовой системы//Изв. АН СССР. МТТ. - 1979. - С. 24-28.
133. Нагулин Н.И. Вынужденные колебания цилиндрической ортотропной оболочки
с динамическим демпфером//Тр. Моск. ин^га хим. машиностроения. - 1975. -
Вып. 63. -С, 53-56.
134. Нагулин Н.И., Иванов О.Н., Потехин А.Ф. Динамический гаситель колебаний
цилиндрической оболочки//Там же. - 1974. - Вып. 53. - С. 150-155.
135. Немчинов Ю.И., Марьенков Н.Г., Артеменко Е.А., Толбатов Ю.А. Опыт гашения
колебаний конструкций зданий и их элементов//Строит. механика и расчет
сооружений. - 1984. - № 1. - С. 68-70.
136. Несслер, Браун, Стофф и др. Проектирование вязкоупругого динамического
амортизатора для применения в металлорежущих станках//Тр. Амер. о-ва инж.-
механиков. Конструирование и технология машиностроения. - 1977. - № 3. -
С. 105-108.
297
137. Никифоров А. С Вибропоглощение на судах. -Л.: Транспорт, 1979. - 184 с.
138. Николаенко Н.А., Ульянов СВ. Статистическая динамика
машиностроительных конструкций. - М.: Машиностроение, 1977. - 368 с.
139. Новичков Ю.Н. О гашений колебаний двулслойныл ибиличск динамическими га-
сителями//Расчеты на прочность. - 1984. - № 25. - С. 221 -231.
140. Пановко Я.Г. Присоединенные динамические системы как гасители колебаний//
Прочность, устойчивость, колебания, Справочник. Т. 3. - М.: Машиностроение,
1968. -С. 331-346.
141. Пикулев НА., Манапов А.З. К расчету группы в и бро гасит ел ей на прочность и
выносливо сть//Строит. механика и расчет сооружений. - 1977. - № 2. - С. 33-35.
142. Пикулев НА., Эрделевский А.Н. К вопросу проектирования группы
виброгасителей с учетом расстроек//Там же. - 1971. -№5. - С. 4-9.
143. Писаренко Г.С, Яковлев А.П., Матвеев В.В. Вибропоглошаюшие свойства
конструкционных материалов. - Киев: Наук.думка, 1971. - 376 с.
144. Планкетт Р. Динамическая реакция при колебаниях сложных линейных систем
с затуханием//Тр. Амер. о-ва инж.-механиков. Прикл. механика. - 1963. -Т. 30,
№3. -С. 84-89.
145.Поляков B.C. К вопросу об эффективности динамического гасителя при
сейсмических воздействиях//Строит. механика и расчет сооружений. - 1980. -№ 5.-
С. 49-53.
146. Попов В.И., Сиваков А.Н. Гашение колебаний, вызванных случайной силой//
Динамика и прочн. машин. - 1975. - Вып. 21. - С. 65-71.
147. Попов В.И., Сиваков А.Н. Определение функции надежности в задаче
виброгашения случайных возмушений//Там же. - 1977. - Вып. 26. - С. 91-96.
148. Потехин А.Ф. О выборе оптимальной упругой характеристики нелинейного
гасителя колебаний//Тр. Тамбовского ин^га хим. машиностроения. - 1970. -
Вып. 4. -С. 21.1-215.
149. Потехин А.Ф., Кулешов Ю.В. Динамический гаситель колебаний балочного типа//
Там же. - 1969. - Вып. 3. - С. 146-148.
150. Потехин А.Ф., Френкель ЕМ. Колебания в системе с нелинейным динамическим
гасителем с упругой характеристикой типа зазор - упругость//Там же.-1969. -
Вып. 3. -С. 149-155.
151. Пугачев B.C. Теория случайных функций и ее применение к задачам
автоматического управления. - М.: Физматгиз, 1962. - 884 с.
152. Рагульскис К.М., Улинскайте Г.С Гашение колебаний виброударной системы
с помощью динамического гасителя//Вибротехника. - Вильнюс. - 1979. -
№6/29. -С. 137-140.
153. Резников Л.М. Выбор оптимальных параметров динамического гасителя при
прохождении через резонанс/АДинамика сооружений. - М.: Стройиздат, 1968.-
С. 157-162.
154. Резников Л.М. Вероятностный анализ системы с динамическим
гасителем//Машиноведение. - 1969. -№ 2. -С. 25-31.
155. Резников Л.М. Исследование работы центробежного маятникового гасителя
колебаний/Дам же. - 1970. -№ 5. -С. 49-55.
156. Резников Л.М. Оптимизация параметров динамических гасителей колебаний с
различными видами сопротивления//Пробл. прочности. - 1970. - № 9. -
С. 46-51.
157. Резников Л.М. Анализ эффективности некоторых типов нелинейных
динамических гасителей при гармонических воздействиях//Динамика сооружений. Тр.
ЦНИИСК. -М.: Стройиздат, 1971. -С. 105-115.
158. Резников Л.М. Об учете внутреннего неупругого сопротивления при
исследовании случайных колебаний конструкций//Строит. механика и расчет
сооружений. - 1974. - № 4. - С. 48-53.
159. Резников Л.М. Определение корреляционных моментов координат
многомассовой системы при нестационарных случайных кинематических возмущениях//
Колебания, прочн. и устойчивость сложи, мех. систем. - Киев: Наук.думка,
1979. -С. 147-154.
160. Резников Л.М. Оптимальные параметры динамического гасителя при
затухающих колебаниях//Колебания и дин. качества мех. систем. - Киев: Наук.думка,
1983. -С. 118-124.
161. Резников Л.М. Оптимальные параметры динамического гасителя с частотно-
независимым трением при автоколебаниях сооружений//Динамика мех. систем. -
Киев: Наук, думка, 1983. - С. 80-85.
162. Резников Л.М. Эффективность динамического гасителя при импульсном
резонансе/Дам же. - Киев: Наук, думка, 1983. -С. 188-193.
163.Резников Л.М. Статистические характеристики колебаний механических систем
при широкополосных случайных воздействиях//Изв. АН СССР. МТТ. - 1984. -
№4. -С. 35-37.
164. Резников Л.М. Расчет многомассовых систем с непропорциональным трением//
Колебания и проч. мех. систем. - Киев: Наук, думка, 1986. - С. 70-77.
165. Резников Л.М., Мащенко ИА. Об эффективности динамического гасителя
колебаний вагона электропоезда//Вестн. ВНИИЖТ. - 1983. - № 5. - С. 36-39.
166. Резников Л.М., Фишман Г.М. Оптимальные параметры динамического гасителя
колебаний в переходном режим е//Машиноведение. - 1972. — № 2. - С. 10-15.
167. Резников Л.М., Фишман Г.М. Оптимальные параметры и эффективность
динамического гасителя при действии периодических импульсов//Там же. - 1973. -
№1.-С 32-36.
168. Резников Л.М., Фишман Г.М. Эффективность динамических гасителей
колебаний при нестационарных случайных воздействиях// Строит, механика и расчет
сооружений. - 1981. -№ 1. -С. 56-59.
169. Резников Л.М., Фишман Г.М. Оптимальные параметры и эффективность
динамического гасителя при широкополосных случайных воздействиях//Машиноведе-
ние. - 1981. -№3. -С. 36-41.
170. Резников Л.М., Фишман Г.М. Выбор параметров и оценка эффективности
динамического гасителя колебаний при периодически действующих случайных
импульсах/Дам же. - 1984. - № 2. - С. 22-27.
171. Рекомендации по проектированию гасителей колебаний для зашиты зданий и
сооружений, подверженных горизонтальным динамическим воздействиям от
технологического оборудования и ветра. - М.: Стройиздат, 1978. - 68 с.
172. Ротгауз Б А. Колебания стержней переменного сечения//Строит. механика и
расчет сооружений. - 1967. - № 1. - С. 38-40.
173. Руководство по расчету зданий и сооружений на действие ветра. - М.:
Стройиздат, 1978.-217 с./ЦНИИСК им. В.А. Кучеренко.
174. Савваитов Д.С., Бонн Г.И. Некоторые результаты исследования работы гасителей
вибрации//Электр. станции. - 1978. - № 3. - С. 44-45.
175. Савицкий ГА. Ветровая нагрузка на сооружения. - М.: Стройиздат, 1972. - 113 с.
176. Селезнева Е.Н\ Расчет параметров динамического гасителя//Материалы по метал,
конструкциям. - 1973. -Вып. 17. -С. 107-115.
111. Сеймов В.М. Динамические контактные задачи. - Киев: Наук.думка, 1976. -
284 с.
178. Сергеев СИ. ^Демпфирование механических колебаний. - М.: Физматгиз, 1959. -
408 с.
179. Сноудон. Динамический поглотитель повышенной эффективности//Тр. Амер.
о-ва инж.-механиков. Конструирование и технология машиностроения. - 1974. -
№3.-С. 125-131.
180. Сноудон, Пластинчатые динамические поглотители колебаний//Там же. - 1975.—
№1. -С. 92-98.
181. Сноудон. Двухступенчатые системы подвески, содержащие динамические
гасители колебаний//Там же. - 1975. - № 4. - С. 57-64.
182. Сорокин Е.С. К теории внутреннего трения при колебаниях упругих систем. -
М.: Госстройиздат, 1960. - 131 с.
183. Справочник по судовой акустике/Под ред. И.И. Клюкина, И.И. Боголепова. -
Л.: Судостроение, 1978. - 503 с.
184. Сум, Ли. Оптимальное проектирование линейных и нелинейных виброгасителей
для задемпфированных систем//Тр. Амер. о-ва инж.-механиков.
Конструирование и технология машиностроения. - 1983. - № 1. - С. 60-66.
185. Тартиковский Б.Д. Вибропоглошение//Борьба с шумом на производстве.
Справочник. - М.: Машиностроение, 1985. - С. 263-282.
186. Теория и средства виброзащиты. Библиогр. указатель A977-1982
гг.)/Составители: Н.П. Еганян и др. - М.: Ин^г машиноведения АН СССР, 1983. - 169 с.
299
187. Терских В.П. Расчеты крутильных колебаний силовых установок. - М.: Машгиз,
1954. -215 с.
188. Улицкая Р.И., Спиридонов В.В. К определению параметров подвесных демпферов
колебаний однопролетной балки//Расчет простр. констр./Межвуз. темат. сб-к. -
1976.-Вып. 6.-С. 35-43.
189. Уорбартон. Гашение гармонических колебаний цилиндрических оболочек//Тр.
Амер. о-ва инж.-механиков. Конструирование и технология машиностроения. —
1975. -№4. -С. 233-240.
190. Ушкалов В.Ф., Резников Л.М., Редько С.Ф. Статистическая динамика рельсовых
экипажей. - Киев: Наук.думка, 1982. - 360 с.
191. Филиппов А.П. Колебания механических систем. - Киев.: Наук, думка, 1965. -
716 с.
192. Фролов К.В., Фурман Ф.А. Прикладная теория виброзащитных систем. - М.:
Машиностроение, 1980. - 276 с.
193. Хакстон, Барр, Автопараметрический виброгаситель//Тр. Амер. о-ва.
инж.-механиков. Конструирование и технология машиностроения. - 1972. -№ 1. -С. 127-
135.
194. Ханович И.Г. Академик Алексей Николаевич Крылов. - Л,: Наука^ 1967. -
252 с.
195. Хейнрих Г., Дезойер К. Гашение прямолинейных колебаний при помощи
маятникового демпфера//Сб. переводов "Механика". - 1961. - № 2. - С. 45-58.
196. Цвениашвили Д,Х. Точное решение одной задачи о параметрическом резонансе//
Волжский математический сборник. - 1973. - Вып. 16. - С. 297-299.
197. Цвениашвили Д.Х., Карамышкин В.В. Области динамической неустойчивости
консольного стержня с гасителем колебаний//Сообш. АН Груз. ССР. - 1969. -
Т. 54, №3. -С. 641-644.
198. Цейтлин А.И., Гусева Н.И. Статистические методы расчета сооружений на
групповые динамические воздействия. - М.: Стройиздат, 1979. - 176 с.
199. Чернов Ю.Т, Периодические колебания нелинейной системы (плиты на упругом
основании) и соединенной с ней нелинейной связью массы//Строит. механика и
расчет сооружений. - 1985. -№ 4. - С. 47-52.
200. Чудин В.М., Голубев А.Ф. Прогрессивные конструкции гасителей вибрации//
Энерг. стр-во. - 1979. - № 10. - С. 33-35.
201. Шейнин И.С. О пусковых резонансах в линейных системах//Иссл. по динамике
сооружений и расчету конструкций на упругом основании. - М.: Госстройиздат,
1961. -Вып. 2. -С. 189-225.
202. Шринивасан. Исследование параллельных динамических виброгасителей с демп-
фированием//Тр. Амер. о-ва инж.-механиков. Конструирование и технология
машиностроения. - 1969. -№ 1. -С. 292-297.
203. Штейнвольф Л.И. Динамические расчеты машин и механизмов. - М. - Киев:
Машгиз, 1961. -330 с.
204. Эрделевский А.Н. Об опыте применения динамических гасителей колебаний
для корпуса среднего дробления обогатительной фабрики//Материалы
координационного совещания по динамике строительных конструкций и методам
борьбы с вибрациями. - М.: Стройиздат, 1975. - С. 82-85.
205. Aggarwal T.G., Hasz J.R. Designing optimum dampers against self-excited chatter//Paper
ASME. - 1968. - WA/Prod - 25. - 8 p.
206. Arnold R.N., By его ft G.N., Warburton G.B. Forced vibrations of a body on an infinite
elastic so lid//J. Appl. Mech. - 1955. - V. 22, №3. -P. 391-400.
207.Ayorinde E.O., Warburton G.V. Minimizing structural vibrations with absorbers//
Earthquake Eng-g and Struct. Dynamics. - 1980. - V. 8. - P. 219-236.
208.Bapat V.A., Kumaraswamy H.V. Effect of primary damping on the tuning conditions
of dynamic vibrations absorber//Pro c. 5th World Congr. Theor. Mach. and Mech.,
Montreal, 1979, New York, 1979. - V. 1. - P. 329-332.
209. Bapat V.A., Srinivasan P. Some studies on dynamic vibration absorbers//!. Indian
Inst. Sci. - 1969. - V. 51, №3. - P. 313-346.
210. Brock J.E. A note on the damped vibration absorber//1. Appl. Mech. - 1946. - V. 13,
№4.-P. A 284.
211. Brock J.E. Theory of the damped dynamic absorber for inertial disturbances//J. Appl.
Mech. - 1949. - V. 16, №1. - P. 86.
300
212. Edwards А. Т. Conductor galloping//Electra (Franse). - 1970. № 12. - P. 31-48.
213. Fisher O, Some experience with use of vibration absorbers on aerial masts//Acta technica
CSAV. - 1974. - Roc. 19. - №2. - P. 234-247.
214. Graver G.K. Optimum response of a main system coupled to a two-degree ot clamper
analysed by equivalent method//J. Inst-n Eng-s (India). Mech. Engn-g Div. - 1969. -
V. 49, №7.-P. 221-225.
215. Grover G.K. Effect of a vibration absorber on a coupled two degree of freedom main
system//Univ. Roorkee Res. J. - 1970. -V. 12, № 1-2, Part 3. -P. 7-18.
216. Hagedom P, Uber die Tilgung selbsterregter Schwingungen//Z. angew. Math, und Phys. -
1978. - B. 29,№5. - S. 815-821.
217.Hagedom P On the computation of damped wind-excited vibrations on overhead
transmission lines//J. Sound and Vibr. - 1982. - V. 83, № 2. - P. 253-271.
218. HatwalH. Notes on an autoparametric vibration absorber/7J. Sound and Vibr. - 1982. -
V. 83, №3. -P. 440-443.
219. Hatwal H., Mallik A.K., Chosh A. Non-linear vibrations of a harmonically excited
autoparametric system//J. Sound and Vibr. - 1982. -V. 81, №2. -P. 153-164.
220. Hisayoshi S., Kazuoshi I. The isolation of random vibration. Case of wide band white
noise//Buli. JSME. - 1970. -V. 13, №56.-P. 248-257.
221. Hunt J.В., Hissen J.C. The broadband dynamic vibration absorber//J. Sound and Vibr. -
1982. - V. 83, №4. - P. 573-578.
222.Incue J., Kurakake Y. Behaviour of a magnetick dynamic absorber//Bull. JSME. -
1982. - V. 25, №209. -P. 1781-1788.
223. Iwanami K., Seto K. An optimum design method for the dual dynamic damper and its
effectiveness//Buil. JSME. - 1984. -V. 27, №231. -P. 1965-1973.
224. Jacquot R.S. Optimal dynamic vibration absorbers for general beam systems//J. Sound
and Vibr. - 1978. - V. 60, №4. - P. 535-542.
225. Jacquot R.S., Forster G.E. Optimal cantilever dynamic absorbers//Trans. ASME, Ser.
В.- 1977.-V. 99,№1.-P. 138-141.
226. Jacquot R., Hoppe D. Optimal random vibration absorbers//J. Eng. Mech. Div. Proc.
ASCE. - 1973.-V. 99,№3. -P. 612-616.
227. Joi Т., Ikeda K. On the dynamic vibration damped absorber of the vibration system//
Bull. JSME. - 1978. -V. 21, №151. -P. 64-71.
22%. Jones R.T., Pretlove A.J. Vibration absorbers and bridges//The Highway Engineer. -
1979. - V. 26,№1.-P. 2-9.
229. Jones R.T., Pretlove A J., Evre R. The case studies in the use of tuned vibration
absorbers on footbridges//The Struct. Engineer. - 1981. - V. 58B, № 2. - P. 27-32.
230. Kaynia A.M., Veneriano D., Biggs M. Seismic effectiveness of tuned mass dampers//J.
Struct. Div. Proc. ASME. - 1981.-V. 107, №8. -P. 1465-1484.
231. Kazuto S., Noboru I. Effect of a variable stiffness-type dynamic damper on machine
tool with long overhung ram//Bull. ISME. - 1976. - V. 19, № 137. - P. 1270-1277.
232. Kofima H, Nagaya K. Forced vibrations of circular plate with a nonlinear dynamic
vibration absorber//Bull. JSME. - 1985. -V. 28, №236. - P. 309-314.
233. Kobuiek V., Pirner M., Fischer O., Napstek J. Wind effects on civil engineering
structures. - Praha: Academia, 1983. — 571 p.
234. Korenev B.G. Dynamics of tower structures (General report)//Proc. of the Symp. on
tower-shaped steel and reinforced concrete Structures (Bratislava, June 1966). -
Madrid. - 1968. -P. 145-150.
235. Korenev B.G. Some problems of dynamic design of elastic structures, equipped with
dampers, for wind effect//Proc. of third intern, conf. on wind effects on buildings and
structures. - Tokyo, 1971. - P. 1221-1231.
236. Korenev B.G. On methods of lowering oscillations of chimneys//IASS symp. on industrial
chimneys. Papers Technological Univ. of Cracow; special publication. - 1974. -
№4.-P. 83-89.
231. Korenev B.G. On damping wind-induced vibrations of flexible stmctures//Proc. of the
fourth intern, conf. on wind effects on buildings and structures, Heatrow. - Cambridge:
University Press. - 1975. - P. 685-698.
238. Korenev B.G., Bukeiklianov S.R. Vibrations of variable sektion rods//Proc. of the
conf. on tower-shaped structures. - Hague. - 1969. - P. 301-310.
239. Korenev B.G., Reznikov L.M. Reduction of vibration by Dynamic Absorbers//Ibid. -
P. 311-324.
301
240. Korenev B.G., Reznikov L.M. Damping of autovibrations of tower-shaped structures
under wind effects//Papers presented on the working group in Prague 10th-14th Oct.,
1971, I ASS Committee on Tower-Shaped Structures, Working group for Guyed Masts.
Copengagen, 1972.
241. Lewis F.M. The extented theory of the viscous vibration damper//J, Appl. Mech. -
1955.-V. 22, №3.- P. 377-382.
242. Luft R.W. Optimal tuned mass dampers for buildings//J. Struct. Div. Proc. ASCE. -
1979. - V. 105, № 12. - P. 2766-2772.
243. Mansour W.M. Quenching of limit cycles oi a Van der Pol oscillator //J. Sound and
Vibr. - 1972. - V. 25, №3. -P. 395-405.
244. Mc Namara RJ. Tuned mass dampers for buildings//J. Struct. Div. Proc. ASCE. -
1977. - V. 103, №9. - P. 1788-1798.
245.Neubert V.H. Dynamic absorbers applied to a bar that has solid damping//J. Acoust.
Soc. Am. - 1964. - V. 36, № 4. - P. 673-680.
246.Nobile M.A., Snowdon J.C. Viscously damped dynamic absorbers of conventional
andnoveddesign//J. Acoust. Soc. Am. - 1977. - V. 61, №5. -P. 1198-1208.
241 .Novak M. Aeroelastic galloping of prismatic bodies//J. Eng. Mech. Div. Proc. ASCE. -
Febr. 1969. -P. 115-142.
248. Ohmata K. Studies on vibration control of beams supporting machine (Case in which
mashine is worked like dynamic absorber and case which dynamic absorber is attached
to mashine)//Bull. JSME. - 1977. -V. 20,№147. -P. 1107-1114.
249. Opitz H., Umbach R., Dreyer W. Dynamische Verstcifung von Werkzcugmaschinen durch
gedamfte Hilfsmassensysteme. - Ко In und Opladen: Westdentscher Verlag, 1964. -
75 S.
250. Parkinson G.V., Smith J.D. The square prism as an aeroelastic non-linear oscillator//
Quart. J. of Mech. and Appl. Math. - London. - 1964. - V. 17, pt. 2. - P. 225-239.
251. Randall S.E., Halsted D.M., Taybr D.L. Optimum vibration absorbers for linear damped
systems//Trans. ASME. J.Mech.Des. - 1981. -V. 103,№4. -P. 901-913.
252. Reed F.E. The use of the centrifugal pendulum absorber for the reduction of linear
vibration. J. Appl. Mech. - 1949. - V. 16, № 2. - P. 190-194.
253. Roberson R.E. Synthesis of a nonlinear dynamic vibration absorbers//J. of the Franklin
In-te. - 1952. - V. 254. - P. 205-200.
254. Rowbottom M.D. The optimisation of mechanical dampers to control self-excited
galloping oscillations//J. Sound and Vibr., 1981 - V. 75, №4. - P. 559-576.
255. Ruscheweyh H. Dynamische Windwirkung an Bauwerken. Bd. 2. Praktische Anwendun-
gen. - Wiesbaden, Berlin: Bauverlag. - 1982. - 181 S.
256. Sayar B.A., Baumgarten J.R. Linear and nonlinear analysis of fluid slosh dampers//
AIAA J. - 1982. - V. 20, № 11. - P. 1534-1538.
251.SctoK., Iwanami K. An investigation of the vibration isolator equipped with
dual dynamic dampers as a damping elements. 1 st report. Optimum adjustment
condition for dual dynamic dampers//Bull. JSME. - 1981. - V. 24,№ 197. - P. 2013-
2019.
258. Seto A., Yamanouch M. On the effect of a variable stiffness-type dynamic absorber
with eddy-current damping. - Bull. JSME. - 1978. - V. 21, № 160. - P. 1482-1489.
259. Shock and vibration handbook. - New York: MC Craw-Hill, 1976. - P. 1211.
260. Singh K., Malik A.K. Use of dynamic absorbers to control parametric instabilities of
a pipe//J. Appl. Mech. - 1978. - V. 45, №4. - P. 949-951.
261. Sladek J.R., Klinger R.E. Effect of Tuned-Mass Dampers on Seismic Response//J.
of Struct. Engineering. - 1983. - V. 109, № 8. - P. 2004-2009.
262.Snowdon J.C. Vibration and Shock in damped mechanical systems. - New York: J.
Wiley and sons, 1968. - 486 p.
263. Snowdon J.C. Vibration of simply supported rectangular and square plates in wich
lumped masses and dynamic vibration absorbers are attached//J. Acoust. Soc. Am. -
1975. - V. 57, № 3. - P. 646-654.
264. Snowdon J.C, Nobile M.A. Beamlike dynamic vibration absorbers//Acustica. - 1980. -
V. 44, №2.-P. 98-108.
265. Snowdon" J.C, Wolfe A. A., Kerlin R.L. The cruciform dynamic vibration absorber//J.
Acoust. Soc. Am. - 1984. - V. 75, №6. -P. 1792-1799.
266. Thomson A.G. Optimum tuning and damping of a dynamic vibration absorber//J.
Sound and Vibr. -1981. - V. 77, №3. - P. 403-415.
302
261. Wagner H., Ramamurti V., Sastry R.V.R., Hartmann K. Dynamics of Stockbridge
dampers. - J. Sound and Vibr. - 1973. - V. 30, № 2. - P. 207-220.
268. Warburton G.V. Optimum absorber parameters for various combinations of response
and excitation parameters//Earthquake eng-g and struct, dynamics. - 1982. - V. 10,
№3.-P. 381-401.
269. Warburton G.V. Optimum absorber parameters for minimizing vibration response//
Ibid.- 1981. -V. 9.-P. 251-262.
270. Warburton G.V., Ayorinde E.O. Optimum absorber parameters for simple systems//
Ibid. - 1980. - V. 8. - P. 197-217.
271. Watts P. On a method of reducing the rolling of ships at sea//Tran-s of the In-n of
Naval Architects. - 1883. - V. 24. - P. 65-90.
212.Wirsching P.H., Campbell G.W. Minimal structural response under random excitation
using the vibration absorber//Earthquake eng-g and struct, dynamics. - 1974. - V. 2. -
P. 303-312.
Борис Григорьевич Коренев,
Леонид Моисеевич Резников
ДИНАМИЧЕСКИЕ ГАСИТЕЛИ КОЛЕБАНИЙ
Теория и технические приложения
Редактор ИМ. Бокова
Художественный редактор Т.Н. Колъченко
Технические редакторы О.Б. Черняк, СВ. Геворкян
Корректоры О А. Сигал,Т.В. Обод, ТА. Печко
Набор осуществлен в издательстве
на наборно-печатающих автоматах
ИБ№ 12621
Сдано в набор 05.06.87. Подписано к печати 05.10.87. Т-19425
Формат 60 X 90 /16. Бумага офсетная № 1
Гарнитура Пресс-Роман. Печать офсетная
Усл. печ. л. 19,0. Усл. кр.-отт. 19.0. Уч.-изд. л. 22,37
Тираж 2400 экз. Тип. ъъкШЧ Цена 4 р. 90 к.
Ордена Трудового Красного Знамени
издательство "Наука"
Главная редакция физико-математической литературы
117071 Москва В-71, Ленинский проспект, 15
Четвертая типография издательства "Наука"
630077 г. Новосибирск-7 7, ул. Станиславского, 25