/

































































































































































Текст
МОСКОВСКИЙ ОРДЕНА ЛЕНИНА
АВИАЦИОННЫЙ ИНСТИТУТ
ИМ. СЕРГО ОРДЖОНИКИДЗЕ
А. А. КУЗНЕЦОВ
АЭРОДИНАМИКА И ДИНАМИКА
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
КОНСПЕКТ ЛЕКЦИЙ
ПО КУРСУ
„АЭРОГИДРОДИНАМИКА И КОНСТРУКЦИЯ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ"
ЧАСТЬ 11
Москва - 1966
МИНИС ТЕРСТВО
ВЫСШЕГО И СРЕДНЕГО СПЕЦИАЛЬНОГО ОБРАЗОВАНИЯ
РСФСР
МОСКОВСКИЙ ОРДЕНА ЛЕНИНА АВИАЦИОННЫЙ ИНСТИТУТ
имени СЕРГО ОРДЖОНИКИДЗЕ
А.А. КУЗНЕЦОВ
АЭРОДИНАМИКА И ДИНАМИКА ЛЕТАТЕЛЬНЫХ АППАРАТОВ
КОНСПЕКТ ЛЕКЦИЙ
по курсу
"АЭРОГИДРОДИНАМИКА И КОНСТРУКЦИЯ ЛЕТАТЕЛЬНЫХ
АППАРАТОВ"
Часть П
Утверждено
на заседали редсовета
как учебное пособие
20 сентября 1965 г.
Москва - 1966
Научный редактор доц.^анд.техн.наук К.А. Абгарян
Зав.редакцией л.М. Банов
ПРЕДИСЛОВИЕ
Основой данного конспекта послужил курс лекций, читаемых в
Московском авиационном институте.
Книга состоит из двух глав. В первой главе приводятся неко-
торые сведения из экспериментальной аэродинамики. Во второй гла-
ве изложен метод определения передаточной функции летательного
аппарата как объекта автоматического регулирования.
Работа предназначена для студентов приборостроител о. факуль-
тетов авиационных вузов.
При подготовке конспекта лекций к печати автором учтена за-
мечания доцентов К.А. Абгаряна, П.М. Афонина, Н.Н« Завидонова и
старшего преподавателя В.А. Манучарова. Автор выражает им свою
благодарность.
ЛИТЕРАТУРА
I. Г о ш е к И. Аэродинамика больших скоростей. ИЛ, 1954.
2. Д р а к и н И.И. Аэродинамический и лучистый нагрев в по-
лете. Оборонгиз, 1961.
3. Красовский А.А. и Поспелов Г.С. Основы
автоматики и технической кибернетики. Госэнергоиздат, 1962.
4. Лебедев А.А., Чернобровкин Л.С. Дина-
мика полета беспилотных летательных аппаратов. Оборонгиз, 1962.
5. Лебедев А.А., Стражева И.В., Саха -
ров Г.И. Аэромеханика самолета. Оборонгиз, 1955.
6. Остославский И.В. Аэродинамика самолета. Обо-
ронгиз, 1957.
7. X и л т о н У.Ф. Аэродинамика больших скоростей. ИЛ,
ВВЕДЕНИЕ
Количество приборов, устанавливаемых на современном летатель-
ном аппарате, постоянно увеличивается. Приборы усложняются, точ-
ность показаний их повышается, повышается и надежность их работы.
Все это направлено на увеличение эффективности летательного аппа-
рата, Следовательно, тому, кто проектирует приборы, требуются
знания о физических возможностях летательного аппарата. Изучение
аэродинамики и динамики летательного аппарата содействует приобре-
тению таких знаний. К тому же знание аэродинамики и динамики не-
обходимо при изучении ряда других дисциплин, таких, например, как
системы управления, где объект автоматического регулирования (ле-
тательный аппарат) должен быть уже известен студенту.
Хотя каждый класс летательных аппаратов имеет свою специфику
и правильнее было бы изучать аэродинамику и динамику каждого клас-
са летательных аппаратов отдельно, можно выделить и то общее, что
присуще многим классам летательных аппаратов. Эти общие вопросы
и рассматриваются в работе.
4
Глава I. АЭРОДИНАМИКА ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Аэродинамика - наука о движении воздуха и о силах от взаимо-
действия между воздухом и телами, соприкасающимися с воздухом
( аёг - воздух, iynamiKOs - силовой, греч.).
При обтекании летательного аппарата потоком воздуха на него
действует сила трения (тангенциальная) и нормальная сила. Из кур-
са теоретической механики известно, что все силы, действующие на
тело, можно заменить одной равнодействующей, приложенной в любой
точке, и моментом сил относительно этой точки. Равнодействующая
тангенциальных и нормальных сил называется полной аэродинамичес-
кой силой R , а момент - полным аэродинамическим моментом М
(рис.I.I).
Рис<1.1. Аэродинамическая сила и аэродинамический момент.
В аэродинамике для удобства широко пользуются принципом отно-
сительности для обращения движения. Согласно этому принципу на
всякое движение любой системы тел можно наложить произвольное
прямолинейное равномерное движение, не нарушая при этом относи-
тельного движения тел системы. Если тело движете;? прямолинейно и
равномерно со скоростью V в неподвижном воздухе, то, сообщая
воздуху и телу обратную скорость, получают обращенное движение:
на неподвижное тело набегает воздушный поток, скорость которого
на бесконечности (на бесконечно большом удалении от тела) равна
V . Необходимо помнить, что аэродинамические силы зависят толь-
ко от относительного движения тела и воздуха.
5
с 1*1* Системы подвижных осей координат.
^то^перехода^от^о^ной^системы^к^^ругой
Скоростная система осей координат (рис.1.2) - это прямоуголь-
ная правая система осей координат, начало которой (точка 0) сов-
падает с центром тяжести летательного аппарата. Ось ОХ направле-
на по вектору скорости центра тяжести летательного аппарата. <хь
0Y перпендикулярна оси ОХ и расположена в плоскости симметрии
летательного аппарата. Ось 0Z перпендикулярна осям ОХ и 0Y и
направлена так, что образует правую систему. Ось ОХ называется
скоростной осью, 0Y - осью подъемной силы, 0Z - осью боковой си-
лы. плоскость X0Y называется плоскостью потока, X0Z - плос-
костью сколь&ения, Y0Z - лобовой плоскостью.
Ряс.1.3. Система связанных осей коорди-
нат.
J системе связанных
осей координат (рис.1.3)
начало координат (точ-
ка О) расположено в цент-
ре тяжести летательно-
го аппарата. Ось 0Хг
направлена к носовой
части параллельно оси
инерции аппарата, или
хорде крыла, или оси
симметрии аппарата; ось
0Yf перпендикулярна
оси 0Х1 и находится в
плоскости симметрии ле-
тательного аппарата;
ось OZj перпендикуляр-
на двум первым осям и
образует правую систе-
му.
Ось 0Xf называется
продольной осью, ось
0Y, - нормальной осью,
ось 0Z1 - поперечной
осью. Плоскость XjOYj
называется плоскостью
симметрии, A^OZ-
6
Рис.1.4. Углы связи между под-
вижными системами координат.
главной плоскостью, или плоскостью крыльев, K^Z, - поперечной
плоскостью.
Скоростная система относительно связанной ориентирована с по-
мощью двух углов - угла атаки а и угла скольжения р ; третье
условие однозначности ориентации систем состоит в том, что ось
0Y расположена в плоскости симметрии летательного аппарата
(рис.1.4).
Углом атаки а называет-
ся угол между проекцией век-
тора скорости центра тяжести
на плоскость симметрии и осью
ОХ,.
Углом скольжения р назы-
вается угол между вектором
скорости центра тяжести и
плоскостью симметрии летатель-
ного аппарата.
Угол атаки имеет положи-
тельное направление, когда
поток набегает снизу. Угол
скольжения имеет положитель-
ное направление, когда поток
набегает справа.
Определим формулы пере -
хода от одной системы коорди-
нат к другой из следующих
преобразований.
Пусть имеется вектор R ,
заданный проекциями xf,yf4zi
в системе осей 0X1Y1Zt .
Определим проекции этого век-
тора в системе осей 0XzYzZz
(рис.1.5). Известно, что
Рис.1.5. Определение проекции
вектора в различных системах.
х2 = х, cos (х2х,) + Л cos () t z, cos (х2 z,) ;
= Xf cos (yfx,) + yf cos (£yf) + Z, 003(^2,) ;
z2= x, cos (z^xf) + y* cos (zQyf) + zfcos (z^) .
7
Косинусы углов между осями систем (так называемые направляю-
щие косинусы углов) можно представить в виде табл.1.1.
Таблица I.I
Ось ОХ, оу, • oz,
0Хг cos (х2 xf) cos(x2y,) I cos(%zf) 1
MU?.*,) с®«(у?Л) ; «5(у72/) .. _ I
огг 1 I cos(z?xj I j - - - t С05(ггУ,) | cos(z7zz)
Обозначив направляющие косинусы через я,у ( I = 1,2,3;
j •-= 1,2,3), получим табл. 1.2 .
T a 6 лица 1.2 Из таблицы направляющих косинусов можно получить мат-
Ос ь ! ox, ! OY, | 0Zt рицу линейного преобразования:
•— — 1 1 -r 1— J ! — — — »
0X2 1 1 j a„ ! а12 j fl/3 а12 а1з\
— 4 ~ 1 О'21 а22 агз I *
0?г 1 a?/ 1 aZ2 a23 \а5/ a3z а33 J
— *’ 1 1 ~ - — — — — — —
0Zz 1 aJI 1 a3Z a33
Проекции вектора R в си-
стеме 0X3Y3Z3 через проек-
ции вектора R в системе ox2y2z2 определяются по формулам:
XJ=X2C0S (х5Х2)+У2С05 (Х5у2) +22С05(х52г);
Уз *2 cos (1У2 cos (УзУг) + 2z cos (£z2) ;
Z3 = X2C0S(ZjX2) +У2С05(2Гу?) + 22С05(2522).
Направляющие косинусы между системами 0X2Y2Z2 и 0X3Y3Z3 при-
ведены в табл.1.3.
Таблица 1.3
Ось ох2 Д Юг —т- 1 QZz
си-s (х^хг) ; cos (£&) 1 1 i J cos (хРгл)
cos ) _• со5(уруг) « 1
! СО:-. ( .X’.; j ; "os(z7yj 1 rc-s{^2)
8
Обозначив направляющие косинусы 2,3), получим таол.1.4. Матрица этого линейного преоб- через bij (Л Т а = 1,2,3; J - 1,
блица 1.4
разования будет такой:
А// ЬГ2 Ь1з\ Ось | охг 0Zz
В~ 1 Ьг1 Ьгг Ь23 I \?j/ ьзг ьзз / Определим значения проекций i b11 1 I ' h ' 1 ‘^/21 b13
0Y3 ! Ь21 t ~ ~i 1 Ьг2 ! b23
1 1
х3 , у3 , г3 через проекции xbypzz прямой подстановкой значений проек- OZ3 ; Ь3.1 I b32 1 l I 1 I b35
ций х2 f у2 t 2г в предыдущие фор- мулы:
XJ~ (Xiaff *JiaiZ + &// + (Xia2f + yfa22i'ZfaZ3) bf2 + (.X!a3f *$ia32 F
+ z, a33) b13 = xf (aff b1{ t a21 b}2 + a3l bi3) + yf (a12 b„ + a.22 b12 +
f aJZ M+ 2/ (a 13 + a23 bf2 ★ b13) = r, c„ tЛ c121z, c13 ,
где
C11 = ^11 b 11 t &21 Ь12 * а31Ь13 ’
C12 ~ aiZ b11 + a22 b12 + a32 Ь!3
^13 ^13b1f + 0'23b12+ a33b13 ’
Аналогично получим для остальных проекций:
У3 = Х1С21 +У^22^1С23 ,
Z3 Х X1C3^yiC32tZ1C33 •
Направлмищие косинусы между системами OX/YfZ, и ^^пред-
ставлены в табл.1.5.
Таблица 1.5
ох3 i i 1 ! Cf2 ’ Cf3
1 ) _! _ с_г, j C22 1 C23
0Z3 1 1 1 c3t ! C32 ‘ C33
При умножении матриц В и /1 получим
^12 1а11
С ~ В А = j b21 b22 b23 I I
yhi ^зг ^зз/ \а31
а12 / ^11 аfl + ^12a21 + ^f3a31
а22 ^23 J e I.........................
азг азз/ \............................\
f СИ С12 С13 \
= I С21 ^22 С?3 I ’
\С3/ С32 С33 1
Превратив матрицу С в таблицу направляющих косинусов, полу-
чим совпадение этой таблицы с таблицей направляющих косинусов,
полученной прямой подстановкой проекций в формулы линейных пре-
образований проекций вектора. Тогда при повороте одной системы
осей координат относительно другой на несколько независимых уг-
лов следует составить таблицы направляющих косинусов между си-
стемами при каждом повороте, превратить таблицы в матрицы и полу-
ченные матрицы перемножить между собой. Полученную в результате
умножения матрицу следует превратить в таблицу направляющих ко-
синусов. Это будет таблица направляющих косинусов между исходной
системой координат и системой, полученной из нее путем поворота
на несколько независимых углов.
Воспользуемся этим методом. Повернем скоростную систему 0XYZ
на угол р (рис.1.6). Направляющие косинусы углов между этими си-
стемами будут
ОХ ОХ 0Z
0Xr / cos р 0 -sin р \
0Y' 0 1 0 = А .
QZr X^sLib р 0 cos р у
10
Рис.1.6. Поворот системы на
угол скольжения.
Рис.1.7. Поворот системы на
угол атаки.
Здесь рядом с матрицей направляющих косинусов записаны оси
систем координат, поворачивающиеся друг относительно друга на
угол р . Повернем систему OX'YV на угол а (рис. 1.7). Полу-
чим направляющие косинусы между этими системами:
0Хг
0Xf/ cos а
0Yf I -sin, а
oz\ О
OY'
sin а
cos а
0
Умножив В на А , имеем
/COS ОС sina 0\ / cos р 0 -strip \ /cosa cos р sina -cosa* sin p\
ВА= l-sina cosa 0 0 1 0 = -sinacos р cosa sina sin p j
\ 0 0 1/ \sinp 0 cos р /у sinp 0 cos p j
Из этой матрицы образуем табл.1.6 направляющих косинусов не*-
ду двумя системами QXYZ и 0XfYtZf .
Правило расположе- ния осей координат в Т а б л и ц а 1.6
Ось I ох [_ OY | 02
таблице можно вывести ОХ, 1 ! | cosa cos р j sina 1 J -cosa sinp
из следующей символи- — — i
ческой записи: [-sin a cosр cosa | sina siiip
0Z, I sinp 1 cos p
II
OX' OY'02'
OX OY OZ
OX, /-----------\ ox' \ ox,
6T, В j OY'l Д =OkJ C
OZ, \ / oz\ / OZ, \
OX OY OZ
В качестве примера того, как пользоваться табл.1.6, определим
проекции на скоростные оси вектора Р , направленного по оси
(часто тяга двигателя имеет такое направление):
Рх = /’cos a cos р ;
Ру - Р sin а ;
Pz = -Р cos а sin |3 .
(I.I)
(1.2)
(1.3)
§ 1_.2_._Проекции_вектора_полной_аэродинамической_силы
И_вектора_полного_аэродинамическрго_момента_на_оси
подвижных_систем_крординат
Спроектируем вектор полной аэродинамической силы и вектор пол-
ного аэродинамического момента на оси скоростной системы.
Проекция полной аэродинамической силы на ось ОХ называется
лобовым сопротивлением и обозначается Q = - X , проекция на ось
ОУ называется подъемной силой и обозначается Y , проекция на
ось 0Z называется боковой силой и обозначается Z .
Проекция полного момента на ось ОХ называется моментом кре-
на и обозначается Мх , на ось 0Y - моментом рыскания и обозна-
чается Mv , на ось 0Z - моментом тангажа и обозначается Mz (см.
рис.1.2)/
Система осей координат правая. Поэтому положительное направ-
ление моментов принимается таким, при котором вращение системы
вокруг осей происходит против часовой стрелки, если смотреть на
начало координат со стороны соответствующей оси (рис.1.8).
Величины полной аэродинамической силы и момента определяются
по проекциям из формул
R =]f0^Y7^Zr' ;
М =}/ M2xt Му2+ М*'.
12
Проекция полной аэродинамической силы на ось 0Х1 называется
тангенциальной силой сопротивления и обозначается = - X, ,
проекция на ось 0¥^ -
нормальной силой и обо-
значается У1 , проек-
ция на ось называ-
ется поперечной силой
и обозначается .
Проекции полного
аэродинамического мо-
мента на связанные оси
называются так же, как
и проекции на соответ-
ствующие оси скорост -
ной системы. Эти проек-
Рис.1.8. Положительное направление мо-
ментов крена, рыскания и тангажа в ско-
ростной системе.
ции обозначаются:
Мх - момент крена, - момент рыскания, М2/ - момент тангажа.
Полная аэродинамическая сила и момент определяются по проек-
циям из формул
М » ]/ М 2 + М? t м*
К X/ У/ 2/
Часто в аэродинамике и динамике приходится рассчитывать по
аэродинамическим силам и моментам, определенным в одной системе
осей, силы и моменты в другой системе осей координат. Нужно учесть
следующее. При использовании таолицы направляющих косинусов
(табл.1.6) между системами осей для перевода проекций полной аэро-
динамической силы из одной системы в другую, положительное направ-
ление проекций должно соответствовать положительным направлениям
осей. Поэтому перед (j и , положительное направление которых
соответствует отрицательному направлению осей ОХ и 0Xf , следует
поставить знак минус. Тогда таблица перехода от проекций полной
аэродинамической силы в одной системе осей к соответствующим
проекциям в другой системе такая:
13
Таблица 1.7
Ось г- 1 1 | Y ! £„_z
- Q. 1 1 I COS (X COS р | sin a | -cos a cos p
— — 4- 1 — —.
1 1 -sina cos р • cosa I sin a sin [3
г, i 1 • sin р 1 0 1 i i cos p
х качестве примера найдем значение , если известны Q , Y ,
I , а } р :
- Q, = ~ Q cos а cos р + Ksirt а - Z cos а cos р
или
= Q cos a cos р - Y sin а + Z cos а cos р .
Часто наряду с аэродинамическими силами и моментами применя-
ют безразмерные коэффициенты аэродинамических сил и моментов.Тог-
да полная аэродинамическая сила
R = CRqS , (1.4)
здесь CR - безразмерный коэффициент полной аэродинамической си-
лы;
q - скоростной напор,
р - плотность воздуха;
/ - скорость;
5 - характерная площадь.
Сила лобового сопротивления
(1.6)
Сх - безразмерный коэффициент силы сопротивления (или просто
коэффициент силы сопротивления).
Подъемная сила
(1.7)
Су - коэффициент подъемной силы.
14
Боковая сила
(1.8)
С - коэффициент боковой силы.
Для проекций полной аэродинамической силы в связанной систе-
ме будет
QrCxrfS, (1-9)
С _ коэффициент тангенциальной силы,
^=СУ!^, 0-Ю)
С _ коэффициент нормальной силы,
Zr=^f^, (I.II)
CZi~ коэффициент поперечной силы.
Полный аэродинамический момент
M = mSql , (I.I2)
где т - коэффициент полного момента;
I - какая-либо характерная длина.
Проекции вектора полного аэродинамического момента на скоро-
стные и связанные оси координат:
Мх = mxSft ; Му = т.у SqL ; Mz= mzSqb ;
Мх~m^Sql ?
где коэффициент момента крена;
'Пу,/пу/ “ коэффициент момента рыскания;
“ коэффициент момента тангажа;
I - размах крыльев или длина корпуса;
Ь - хорда крыльев или длина корпуса.
Аэродинамические коэффициенты сил и моментов пересчитывают
из одной системы в другую (из связанной в скоростную и обратно)
по табл.1.7.
§ 1.3_. _ Параметры-крылах_ Р пере ни ял_ корпус а
Определим некоторые геометрические и относительные параметры
крыла.
15
Размахом крыла L назовем расстояние между боковыми кромками
Профилем крыла (рис.I.10) называется контур сечения крыла
плоскостью, перпендикулярной оси, идущей вдоль размаха крыла и
параллельной плоскости симметрии крыла. Геометрическими характе-
ристиками профиля будут: хорда профиля (отрезок прямой, соединяю-
щий крайние, наиболее удаленные точки профиля), средняя линия
(геометрическое место середин перпендикуляров к хорде), вогну-
тость профиля f (максимальное расстояние между хордой и сред-
ней линией), относительная толщина с (отношение максимальной
толщины профиля к хорде).
Центральная хорда крыла Ьо (рис.1.9) есть хорда профиля
крыла в плоскости симметрии (центрального сечения крыла). Конце-
вой хордой крыла Ьк является хорда профиля концевой части кры-
ла.
16
Стреловидность по передней кромке %п кр - острый угол между
передней кромкой и перпендикуляром к плоскости симметрии крыла*
Стреловидность по задней кромке - кр .
Стреловидность по четверти хорд (рис.1,9;. Под площадью
крыльев можно понимать или только площадь омываемых потоком кон-
солей (рис.I.II,а), которая обозначается , или площадь
консолей совместно с площадью подкорпусной части 5 , обра-
зованной продолжением передних и задних кромок крыльев до пере-
сечения их на плоскости симметрии (рис.I.II,б).
Рис.I.II. К определению площади крыльев.
Относительное удлинение
°ср.г
<1-13 .
17
бсрг " средняя геометрическая хорда крыла, определяемая по фор-
муле 6cp.r=t •
При Л <5 крылья называются крыльями малого удлинения.
Крылом бесконечного удлинения условно называют крыло, у кото-
рого Л=оо . Такое крыло обтекается двухмерным потоком. Реально
такую картину обтекания крыла (точнее, близкую к ней) можно полу-
чить в аэродинамической трубе, поместив крыло конечного размаха
в рабочей части трубы так, чтобы крыло боковыми кромками примыка-
ло без всяких щелей к боковым стенкам трубы.
Сужение крыла
Ьо
для руля направления (рис.I.12,б).
„ .s /1 поборота
а)
Параметры оперения аналогичны параметрам крыла. Необходимо
отметить, что за положительные значения углов отклонения органов
управления (рулей) принимаются те значения, при которых отклонен-
ный руль обтекается невозмущенным потоком с положительным углом
атаки для руля высоты (рис.I-12,а), с положительным углом атаки
для правого элерона (рис.I.13) и с положительным углом скольжения
Под параметрами
корпуса (фюзеляжа) бу-
дем понимать: длину фю-
зеляжа 1ф , длину носо-
вой части фюзеляжа /н.ч,
длину цилиндрической
части фюзеляжа s
длину хвостовой части
фюзеляжа £хвч, диаметр
фюзеляжа D# , диаметр
донного среза фюзеляжа
d (рис.1.14)4 Площадь
миделевого сечения - максимальная площадь поперечного сече-
ния; удлинение корпуса
удлинение носовой части ;
^н.ч
^H,4=~Z? * (1*16)
\ Руль высоты
\
Стабилизатор
?ис.1*12. Знаки углов отклонения рулей.
18
Рис Л.13. Знаки углов отклонения элеронов.
удлинение хвостовой части
п = ^ХВ‘Ч
(I.I7)
сужение хвостовой части
"xs-4~ пф'
(I.I8)
§ Аэродинамические схемы летательных аппаратов
Под аэродинамической схемой летательного аппарата понимается
схема взаимного расположения крыльев, корпуса и оперения.
19
летательные аппараты могут быть созданы: по обычной (самолет-
ной) схеме, когда оперение расположено сзади крыльев (рис.I.15,а);
по схеме "утка", когда го-
ризонтальные органы управ-
ления расположены впереди
крыльев (рис.I.15,б); по
бесхвостой схеме, когда
горизонтальное оперение от-
сутствует (рис.1.15, в); по
бескрылой схеме, когда от-
сутствуют крылья (рис.1.15,г).
Крыльев на летательном
аппарате может быть два
(моноплан со средним рас-
положением крыльев, высо-
ким расположением крыльев,
низким расположением крыль-
ев, рис.1.16,а, б, в), три
(рис.1.16, г, д), четыре
(рис.I.16,е,ж). Четыре кры-
ла могут располагаться по
+ или X - образной схеме
(рис.I.16,е,ж).
Крылья относительно кор-
пуса могут быть установле-
ны под углом заклинения
(углом начальной установ-
ки) крыльев (рис.I.17)
и под углом поперечной
К- образности крыльев
(рис.I.18).
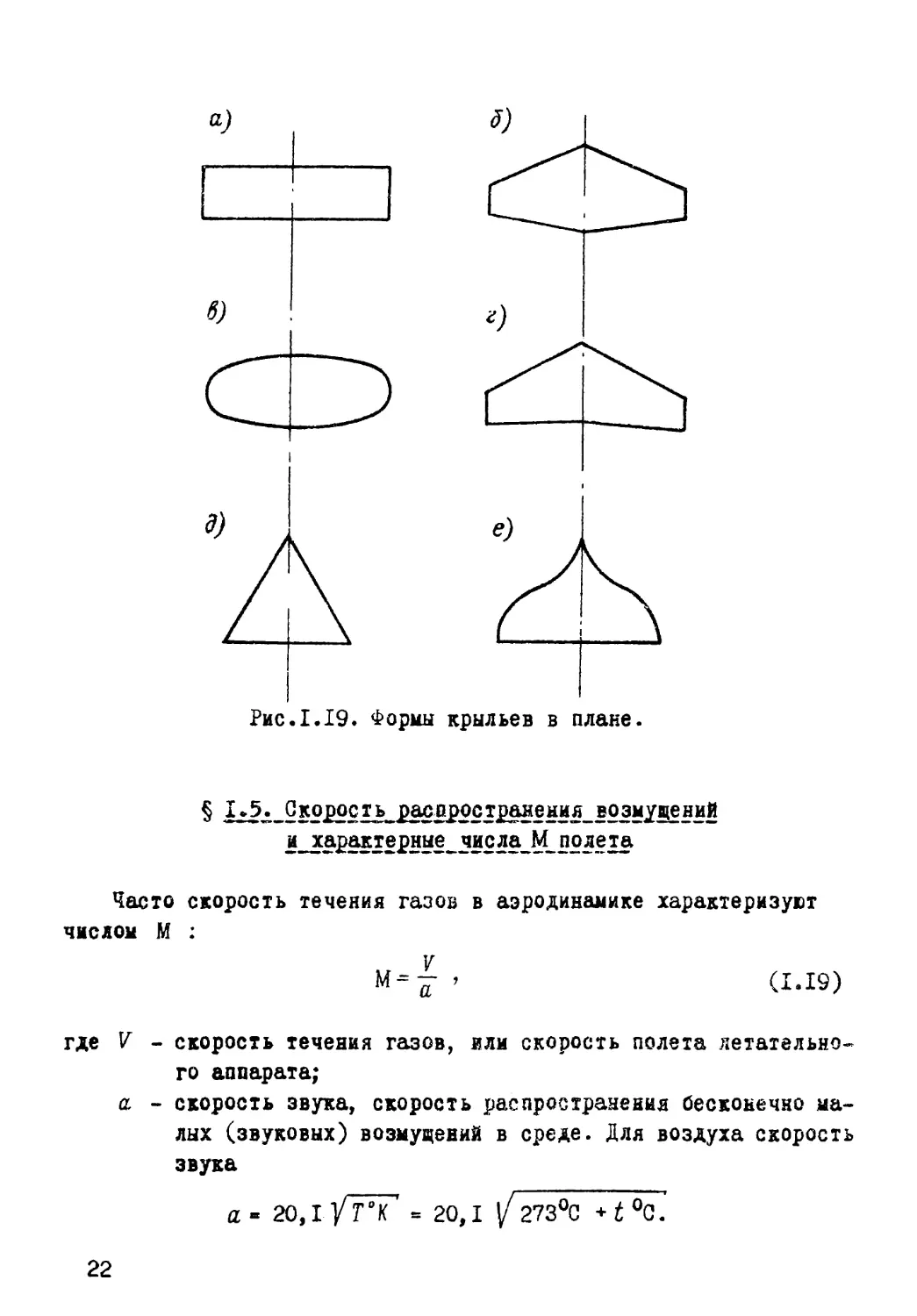
Крыло по форме в плане может быть прямоугольным (рис.1.19,а),
трапецевидным (рис.I.19,б), эллиптическим (рис.I.19,в), стрело-
видным (рис.I.19,г), треугольным (рис.1.19,д), оживальным
(рис.1.19,е).
20
Рис.I.16. Расположение крыльев.
Рис.I.17. Угол начальной установки
крыльев.
Рис.I.18. Поперечная V -образ-
ность крыльев.
21
Рис.I.19. Формы крыльев в плане.
§ 1*5. Скорое тьрасррос трапе ни я возмущений
Часто скорость течения газов в аэродинамике характеризуют
числом М :
а.19)
где V - скорость течения газов, или скорость полета летательно-
го аппарата;
а - скорость звука, скорость распространения бесконечно ма-
лых (звуковых) возмущений в среде. Для воздуха скорость
звука
а - 20,1 У Т°К' = 20,1 273°С +t°C.
22
Весь диапазон скоростей течения воздуха(полета летательного
аппарата)можно разделить
ковую ( М<1 ), звуковую
на следующие скорости (рис.1»20): дозву-
( М = I), сверхзвуковую ( М>1 ).
Область
Воздух не ежи- трансзвуковых
маемый скоростей.
а) (Г^
Гхперзвуковые
скорости.
5 М
м</
Сверхзвуковые скорости
След
*)
Обтекание же летательного аппарата потоком воздуха обычно де-
лят на дозвуковое (М<7), трансзвуковое (Мкр<М<Мт), сверхзву-
ковое (М> I), гиперзвуковое ( М> 5).
Дозвуковым называется такое обтекание, при котором ни в од-
ной точке потока скорость частиц воздуха не превосходит скорости
звука (рис.I.2O,б).
Околозвуковым (трансзвуковым) обтеканием называется такое,
при котором в какой-либо точке течения впервые достигается ско-
23
рость, равная местной скорости звука в этой точке и меньше той,
при которой все течение сверхзвуковое (рис.I.20,в,г,д).
Местной скоростью звука называется скорость звука, соответст-
вующая температуре в рассматриваемой точке течения. Скорость не-
возмущенного потока, при которой впервые достигается местная ско-
рость звука при обтекании, называется критической скоростью VKp ,
а число М , соответствующее этой скорости, называется критичес-
ким ЧИСЛОМ < МКр = ).
Трансзвуковым называется такое число Мт невозмущенного пото-
ка, при котором наименьшее число М при обтекании равно единице.
Сверхзвуковым обтеканием называется такое, при котором во всех
точках местная скорость течения сверхзвуковая (рис.1.20, е).
Гиперзвуковым обтеканием называется такое, при котором ско-
рость потока в 5 раз превосходит скорость звука.
В расчетах при М «0>0,Ь воздух рассматривается как несжи-
маемая среда, а при М>0,5 в расчетах уже учитывается сжимаемость
воздуха,.
Часто в аэродинамике вместо реальной воздушной среды рассмат-
риваются некоторые искусственно созданные модели воздуха:
I. Идеальная несжимаемая жидкость, когда воздух принимается
как несжимаемая материя, лишенная сил вязкости. В такой среде тан-
генциальные силы создаваться не могут и существуют лишь нормаль-
ные силы, т.е. нормальное к поверхности тела давление.
В этом случае аэродинамика совпадает с гидродинамикой идеаль-
ной жидкости.
2. Вязкая несжимаемая жидкость, когда воздух рассматривается
как несжимаемая материя, не лишенная сил вязкости или сил внут-
реннего трения. В этом случае аэродинамика совпадает с гидродина-
микой вязкой жидкости.
3. Идеальная упругая жидкость, когда воздух принимается как
сжимаемая, упругая материя.
4. Упруго-вязкая жидкость, когда воздух рассматривается как
упругая и вязкая материя.
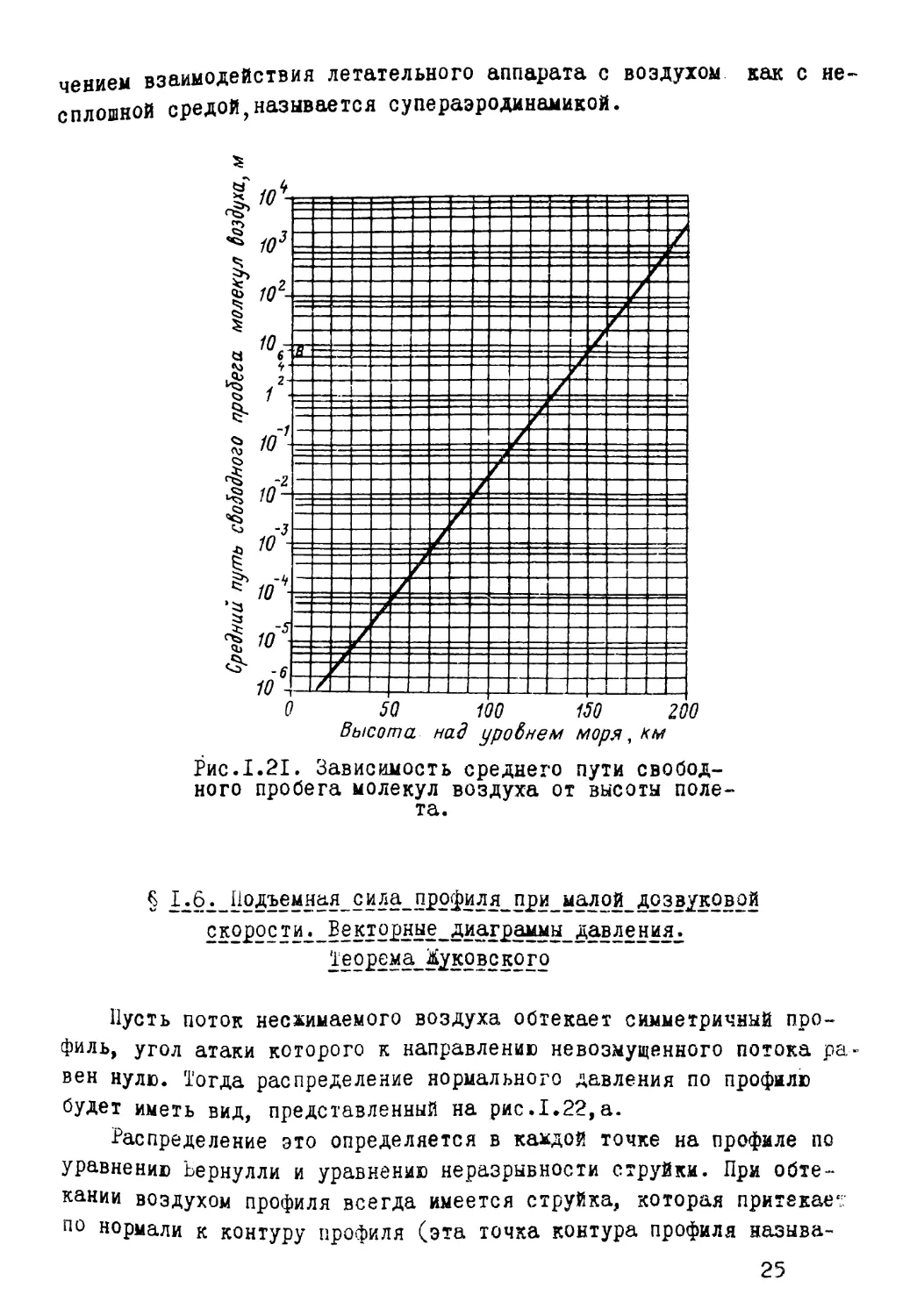
Если плотность воздуха значительна, то в расчетах воздух счи-
тается сплошной средой. При малой плотности воздуха, когда сво-
бодный пробег молекул становится соизмеримым с каким-либо разме-
ром летательного аппарата (рис.I.21), воздух в расчетах уже не
принимается как сплошная среда, а учитывается, что он состоит из
отдельных молекул. Та часть аэродинамики, которая занимается изу-
24
чением взаимодействия летательного аппарата с воздухом как с не-
сплошной средой,называется супераэродинамикой.
Рис.1.21. Зависимость среднего пути свобод-
ного пробега молекул воздуха от высоты поле-
та.
§ 1^^_У£Л^¥Н^5_пБ£1^_про1)^я_при_малой_ дозвуковой
с корости2_Векторные_ диаграмму давления^
1еорема_Жуковского
Пусть поток несжимаемого воздуха обтекает симметричный про-
филь, угол атаки которого к направлению невозмущенного потока ра-
вен нулю. Тогда распределение нормального давления по профилю
будет иметь вид, представленный на рис.1.22,а.
Распределение это определяется в каждой точке на профиле по
уравнению Бернулли и уравнению неразрывности струйки. При обте-
кании воздухом профиля всегда имеется струйка, которая притекаем
по нормали к контуру профиля (эта точка контура профиля яазыва-
25
ется передней критической точкой профиля), а затем разветвляется,
охватывая профиль с двух сторон. В некоторой точке профиля (зад-
няя критическая точка) эти ветви вновь соединяются, образуя точ-
ку схода потока с профиля.
Распределение давлений по профилю
0,5-
-0,5
" 2
№
----О-
Е=а
Теоретическое
Реальное
Изменение '
;4рмин скорости
вдоль профиля
/,5;
1,0-
8
^"^1 Схема оВтекания i
Точка перегидр\ । профиля
\ и 1
О
Реальное у I
Теоретическое^ v
Местная
скорость
Рис.1.22. Обтекание профиля при малой скорости.
26
Скорость частиц воздуха в некоторой части струйки, которая
непосредственно обтекает профиль, будет больше, чем в той же струй-
ке но вдалеке от профиля, так как благодаря криволинейности про-
филя отрезок пути по профилю будет больше отрезка пути по прямой.
Оба эти отрезка пути проходят частицы одной струйки в устано-
вившемся движении несжимаемого газа за одно и то ке время, так
как поток несжимаем и в струйках отсутствуют разрывы. Тогда, на-
пример, для точки М будут
foo Ихр _ рм Ум . .
2 Роо~ 2, • (1*20)
Так как р<*> = рм , а Vm < , то > рм и, следователь-
но, Др = рм~ роо<0. Тогда давление в точке М будет меньше, чем
давление в невозмущенном потоке. Обычно величину Др относят к ве-
личине скоростного напора q и называют относительным коэффициен-
том давления:
U-2I>
где под рм понимают давление в любой точке потока (местное дав-
ление );
давление в невозмущенном потоке.
Коэффициент давления р равен отношению избыточного давления
в данной точке к скоростному напору невозмущенного потока.
В передней критической точке профиля скорость течения равна
нулю ( = 0). Давление в этой точке из уравнения Бернулли будет
т.е. давление будет равно полному (статическому и динамическому)
давлению невозмущенного потока, а относительный коэффициент яв-
ления
РЭ~Р^
~Y~ “
В задней критической точке скорость также равняется нулю и
Давление будет таким хе, как и в передней критической точке.
В других точках потока давление будет таким, как показано на
рис.1.22,а. Симметричный профиль в этом случае не будет создавать
27
подъемную силу, так как давления на верхней и нижней частях про-
филя уравновесятся.
Обтекание симметричного профиля примет иной вид, если профиль
будет поставлен под некоторым углом атаки к направлению невозму-
щенного потока (аналогичная картина наблюдается и при обтекании
несимметричного профиля при любом угле атаки, в том числе и раВ-
НОМ нулю, рис.1.22,б).
В начальный момент движения потока вязкого воздуха задняя кри-
тическая точка расположена на верхней стороне профиля (рис.1.22,б),
так как в этот момент астицы воздуха в любой струйке, сохраняя
инерцию, имеют во всех своих сечениях одинаковую скорость и про-
ходят за одно время одинаковый путь. Также проходят одинаковый
чуть и разделившиеся у передней критической точки части одной и
той же струйки. Поэтому задняя критическая точка в рассматривае-
мых условиях окажется на верхней поверхности профиля. Естествен-
но;, что в этот момент равнодействующая сил давления равна нулю,
а подъемная сила и сила сопротивления отсутствуют.
Но в этом случае у задней кромки профиля нижняя часть струй-
ки должна круто поворачиваться вверх,и при таком обтекании зад-
ней кромки реальным вязким воздухом возникает разгонный вихрь,
который уносится потоком. Образование вихря связывается с тем,
что скорости частиц воздуха в каждом сечении струйки становятся
различными - преодолевается инерция частиц воздуха в струйке и по-
ток становится установившемся.
С образованием разгонного вихря точка схода потока распола-
гается на задней кромке профиля (рис.1.22,в). 0 этого момента
верхняя часть разделенной струйки за одно и то же время будет про-
ходить больший путь, чем нижняя часть струйки, а следовательно,
хад верхней поверхностью профиля скорости в струйке будут большими
под нижней, а давление будет меньше, что приведет к образо-
ванию подъемной силы.
Математически это представляют наложением на потенциальный
поток (безвихревой поток, т.е. поток, в котором силы внутреннего
трения пренебрежимо малы) чисто циркуляционного потока (рис.1.22,г)
вокруг профиля.
Величина циркуляции этого добавочного потока как раз такова,
что задняя критическая точка в соответствии с опытом оказывается
у задней кромки профиля.
28
циркуляция скорости по контуру определяется следующим обра-
зом. Проведем в пространстве, занятом потоком, какой-либо контур
(рис.1.23). Спроектируем вектор скорости К в каждой точке этого
контура на касательную к контуру в этой точке. Вычислим криволи-
нейный интеграл
Г= <6 /cos ds ds (1.22)
по данному замкнутому контуру. Этот интеграл Г и называется цир-
куляцией скорости по контуру.
В результате на-
ложения циркуляцион-
ного потока на по-
тенциальный перед -
няя критическая точ-
ка переместится по
нижней поверхности
ближе к задней кромке}
что соответствует
также опыту. Рис.1.23. К определению циркуляции скоро-
Если нарисовать сти по контуру.
векторную диаграмму
давления (давление откладывается в масштабе по нормали к профи-
лю), то получим график, изображенный на рис.1.24. Проекция равно-
действующей распределенных по профилю нормальных сил на ось 0Y
будет представлять собой подъемную силу, действующую на профиль.
Для удобства
строят векторную диа-
грамму не абсолютно-
го давления, а век-
торную диаграмму
коэффициента давле-
ния р . Тогда век-
торная диаграмма при-
мет вид, изображенный
на рис.1.25.
Рис.1.24. Абсолютная величина статического
давления на профиль.
Приведенная векторная диаграмма не дает возможности просто
рассчитать величину подъемной силы по распределению давления.По-
этому перестраивают векторные диаграммы в прямоугольные хордовые
оси. Точки, в которых определялось давление, проектируют на хор-
29
ду профиля. Хорда принимается за ось абсцисс, а по оси ординат
откладывают в масштабе значения коэффициента давления (рис.1.26).
Рис.1.25. Векторная диаграм-
ма давления на профиль.
Рис.1.26. диаграмма распределе-
ния давления по профилю.
Тогда сила, нормальная к хорде, на единицу размаха крыла будет
пропорциональна площади диаграммы. В самом деле, элементарная си-
ла, действующая по нормали к поверхности на элемент крыла, по
размаху равным единице и шириной ds , выразится формулой
dF=pq 1 ds .
Проекция этой силы на нормаль к хорде
dN =р q 1 cos ds .
Сила на единицу размаха крыла
р 1 cosq> ds .
Так как (рис.1.25)
cos ds = db .
то
ь
N = | p db = yQ ,
0
где ?
pB - коэффициент относительного давления на веохней поверхно-
сти крыла;
30
п - коэффициент относительного давления на нижнеи поверх-
гн
ности крыла.
При этом рв может достигать величины 8т-10, тогда как р^ I,
следовательно, несущее свойство профиля (крыла) на малой дозвуко-
вой скорости в основном создается верхней частью контура (поверх-
ности).
Такое определение несущих способностей профиля и крыла свя-
зано с экспериментом в аэродинамических трубах.
Теоретически подъемная сила профиля или крыла бесконечного
размаха рассчитывается по теореме Чуковского: "Если невихревой
поток двух измерений, имеющий в бесконечности скорость ,
окружает какой-нибудь замкнутый контур, циркуляция скорости по
которому равна Г , то сила гидродинамического давления действует
на этот контур в направлении, перпендикулярном скорости и
имеет величину
/’=рКсюГ. (1.23)
Направление этой силы можно найти, если повернуть вектор
около его начала на прямой угол в сторону, противоположную поло-
жительной циркуляции”.
Здесь подразумевается сила гидродинамического давления, дей-
ствующая на единицу длины крыла.
Подъемная сила крыла бесконечного размаха, действующая на от-
резок длиной I t будет
огЛ
У=/’/=рИо0Г1 = Су^ lb ,
откуда
п
ЬИоо
Наибольшая величина производной коэффициента подъемной силы
по углу атаки (рис.1.27)
г а_
da ’
рассчитанная теоретически для некоторых профилей при несжимаемом
потоке,
Су = 2% = 6,28 -i— = o,I —L-
рад 57,3 град ’ град
31
Рис.I.27. Изменение коэффициента подъемной силы
по углу атаки.
т
Реально величина Су не была получена больше 5,4 ? 5,6
Такое снижение величины С* происходит от деформации потока жид-
кости из-за наличия пограничного слоя около профиля. При принятых
направлениях отсчета С* > 0 при а < акр9 где икр- критический
угол атаки, при котором Су =0.
§ 2 г7- _ 12?дъемная_сила_ крыла__ ко не чно го_размаха_ и_ корпуса
пр и_ до з вуковой_ с кор с ст и
Крыло конечного размаха обтекается трехмерным потоком, так
как частично выравнивается давление на верхней и нилней поверхно-
стях крыла через боковые кромки крыла. В результате этого за кры-
лом у концов его образуются вихри (рис.1.28). В пространстве,
окружающем крыло, вихри индуцируют некоторую дополнительную ско-
рость. Поэтому крыло обтекается потоком, направление скорости ко-
торого будет отличаться от направления скорости невозмущенного
потока.
В расчетах обычно осредняют направление потока вблизи крыла.
Осредненное значение направления потока сравнивается с направле-
нием потока на бесконечности. Разность этих углов называется ин-
32
дуктивным углом атаки ос[ . Величина его для эллиптического кры
ла определяется по формуле
Для крыльев неэлли-
птической формы в плане
в формуле вместо отно -
сительного удлинения
крыла А применяется
значение эффективного
удлинения крыла, опреде-
ляемое из соотношения
Х1 =X(/ + t) ,
t - коэффициент, учиты- рис^^8.
ваюций отличие формы рас-
Обтекание крыла конечного
размаха.
сматриваемого крыла от
крыла эллиптической формы (определяется экспериментальным путе^
Геометрический угол атаки крыла (рис.1.29)
ОС — ОС оо + ОС £ ?
аоо- угол атаки крыла бесконечного размаха, имеацего коэффици^т
подъемной силы, равный коэффициенту подъемной силы рассматривав
мого крыла конечного размаха.
Тогда для крыль-
ев эллиптической фор-
мы в плане величина
геометрического угла
атаки
Су z
“"»+гл
Производная по
Рис.1.29. Угол атаки крыла конечного раз
маха.
коэффициенту подъемной силы
doc _ / da \ + /
d Су \d Су J оо л X
33
или
1_____1 /_+
Су= (о. * = ял(сУх ’
здесь Су~(С*)х - производная коэффициента подъемной силы по уг-
лу атаки крыла конечного размаха;
(Су )оо- производная коэффициента подъемной силы по уг-
лу атаки крыла бесконечного размаха.
Тогда
с“чсх^-
Из формулы видно, что
агЛ < 1
(Су )оо+71
Поэтому производная коэффициента подъемной силы по углу атаки
крыла конечного размаха меньше аналогичной производной крыла бес-
конечного размаха.
Из формулы также видно, что
Um-——----- = Um . - ------ — i .
л-c» (Су^+яХ л-оо (Су)^ t у.
При скорости полета, соответствующей числам М я 0,5 и выше,
в расчетах приходится учитывать сжимаемость воздуха, так как без
учета сжимаемости экспериментальные результаты значительно отли-
чаются от расчетных. Дело в том, что увеличение скорости струйки
над профилем приводит к падению давления в этом месте струйки, а
падейие давления вызывает уменьшение плотности газа в этом месте
струйки. Последнее требует дополнительного увеличения скорости в
струйке, чтобы сохранилось постоянство расхода массы воздуха в
струйке.
Определение производной коэффициента подъемной силы профиля
по углу атаки с учетом сжимаемости воздуха производят по формуле
34
(Г“) _ .... ,
(1.28)
где M с» < 1 >
а для крыла конечного размаха
(1.29)
У изолированного корпуса подъемная сила в основном создается
носовой частью. На рис.1.30 приведена примерная картина распреде-
ления величины коэффициента подъемной силы по длине корпуса.
Рис.1.30. Распределение коэффициента подъемной силы по
длине корпуса.
В приближенных расчетах для изолированного корпуса принима-
ется согласно теории тонкого тела
0,05 yjgj = 2,85 -pij- . • ' 1
трайсзвуковых_скоростях
При увеличении скорости набегавшего потока (еще до достиже-
ния скорости звука) над профилем скорость в струйке достигает ве-
личины, равной местной скорости звука.
В начальный момент трансзвуковой скорости коэффициент подъем-
ной силы профиля растет, а затем начинает уменьшаться, как пока-
зано на рис.I.31. Объяснение этого явления лежит в физической
35
картине изменения кризисного процесса при обтекании профиля
(рис.1.32).
1,0 1,2 М
Рис.I.31. Изменение по числам М производной коэффи-
циента подъемной силы по углу атаки.
Рис.1.32. Образование ударных волн на профиле.
36
При обтекании профиля потоком со скоростью, соответствующей
М>М в точке профиля А , где поток достигает местной ско-
рости "звука, статическое давление становится равным 0,528/^
( р давление в точке D полного торможения потока на профиле,
рис.1.32,б).
За точкой А по потоку скорость будет расти, становясь сверх-
звуковой; давление, нормальное к поверхности профиля, при этом
будет уменьшаться. Область сверхзвукового течения потока распро-
страняется на некоторое расстояние над профилем. Весь остальной
поток дозвуковой,и статическое давление в этом потоке соответст-
вует давлению дозвукового течения. Это давление более высокое,
чем давление в сверхзвуковой части потока. Несущая способность
профиля из-за сверхзвуковой скорости увеличивается. Начинает ра-
сти величина Су . Затем сверхзвуковая скорость переходит опять
в дозвуковую. Переход этот сопровождается ударной волной, пред-
ставляющей собой область толщиной, соизмеримой с длиной свобод-
ного пробега молекул воздуха. Происходит скачкообразное измене-
ние некоторых параметров потока (рис.1.33). Для обычных профилей
образуется Л -видная
ударная волна из-за
взаимодействия погра-
ничного слоя с удар-
ной волной. Вдади от
профиля ударная волна
переходит в линию ма-
лых возмущений, где
разрыв параметров по-
тока отсутствует, но
наблюдается лишь их
излом (рис.1.33).
Пояснить образование ударной волны можно так. Скорость рас-
пространения возмущений в воздушной среде различна в зависимости
от силы возмущения при прочих равных условиях. Так, ударная вол-
на вблизи взрыва бомбы перемещается со скоростью, много большей
скорости звука. По мере распространения ударная волна перемеща-
ется все с меньшей скоростью, приближаясь к скорости звука. Со
скоростью звука распространяются возмущения лишь бесконечно ма-
лые к так называемые звуковые возмущения). Скорость распростране-
ния сильных возмущений можно определять по формуле
37
V=a / I + 0,86 -7F , U-30)
r ro
где V - скорость распространения больших возмущений;
cl - скорость распространения звуковых возмущений (скорость
распространения звука);
4/7“ увеличение статического давления в рассматриваемой точ-
ке при наличии возмущения;
р - статическое давление в рассматриваемой точке при отсут-
ствии возмущений.
Любую точку профиля за ударной волной (ниже ударной волны по
потоку) можно представить как источник, от которого возмущения
распространяются во все стороны (не занятые профилем) со скорость
несколько большей скорости звука, но приближающейся к скорости
звука по мере удаления от точки возмущения (рис.1.34). Возмуще-
ния будут распространять-
Сберхзвукобой с я и навстречу потока до
того места, где скорость
—[ распространяющихся возму-
I X. .. щений и местная скорость
____________ZJпотока не сравняются.Даль-
ше навстречу потока воз-
мущения распространяться
Рис о 1.34. Образование ударной волны не смогут. В этом месте
при трансзвуковой скорости потока. образуется некоторая ли-
ния для профиля и поверх-
ность для крыла, являющиеся границей распространения возмущений
навстречу потока. Это и есть ударная волна.
При дальнейшем увеличении скорости набегающего потока (рис.
1.32,в) ударная волна будет отодвигаться по верхней поверхности
профиля дальше к задней кромке, увеличивая поверхность профиля,
занятую сверхзвуковым потоком, и тем самым увеличивая несущие
способности профиля. Дальнейшее увеличение скорости (рис.1.32,г)
приведет к тому, что сверхзвуковая скорость образуется и на ниь-
ней поверхности профиля, тем самым увеличится разрежение на них •
ней поверхности и начнет уменьшаться величина С* . Миримаяь?'
значение Су будет тогда, когда ударные волны на верхней и нк>-’
ней поверхностях отодвинутся к задней кромке профиля, я скорое?
набегающего потока еще не будет сверхзвуковой. Это приводит к
изменению , как показало на рис Л. 31,
38
Расчетные формулы для определения коэффициента производной
подъемной силы по углу атаки для профиля, крыльев и всего аппара-
та в трансзвуковой области сложны. На практике этими формулами
пользуются мало, а нужные коэффициенты определяют эксперименталь-
но в аэродинамических трубах или в полете.
§ 1.9. Прямой и косой скачки уплотнения. Обтекание
внешнего_тупогр_угла
Пусть скорость потока, обтекающего профиль, достигнет вели-
чины, соответствующей числу М = I. Тогда перед профилем на бес-
конечности образуется линия малых возмущений, которая приближа-
ется к носку профиля, превращаясь в ударную волну, по мере уве-
личения скорости потока (рис.1.35). Объяснение образования голов-
ной ударной волны аналогично объяснению ударной волны на профи-
ле.
Рис.1.35. Прямой скачок
Перед носком профиля существует повышенное давление по срав-
нению с давлением в невозмущенном потоке. В области повышенного
давления скорость распространения возмущения будет больше звуко-
вой. Поэтому возмущения от носка профиля начнут распространять-
ся также и вперед навстречу потоку. При этом по мере удаления
от носка профиля давление падает, падает и скорость распростра-
нения возмущения. На некотором удалении от профиля скорость рас-
пространения возмущения и скорость потока сравниваются, где и
образуется головная ударная волна. Головная ударная волна явля-
г₽ани1*ей между возмущенной из-за профиля и невозму-
шенной областью потока.
39
Рис.1.36. Косой скачок.
Ударные волны наблюдаются визуально с помощью оптических уст-
ройств, регистрирующих изменение плотности воздуха, а также при
определенных условиях могут быть услышаны (в виде хлопков при
пролете самолета со сверхзвуковой скоростью).
Если фронт ударной волны перпендикулярен набегающему потоку,
то ударная волна называется прямой. Для прямой ударной волны ха-
рактерно:
I) К4<а* (скорость за ударной волной меньше местной скоро-
сти звука).
2 ) ^ I'OQ — & j
где а*- местная скорость звука после ударной волны.
Если профиль имеет заостренную носовую часть (рис.1.36), то
головная ударная волна имеет наклон к направлению набегающего по-
тока - образуется косой скачок (косая ударная волна). Косая удар-
ная волна может быть присоеди-
ненной, образующейся прямо на
острие носка, а также отсоеди-
ненной, т.е. не примыкающей ни
одной своей частью к профилю.
Разложим_скорость набегаю-
щего потока V1 по двум направ-
лениям: по направлению, перпен-
дикулярному фронту волны,
и направлению, параллельному
фронту волны -VT (рис. 1.36),
так что
ИА •
Аналогично поступим со скоростью за ударной волной :
Оказывается, для косой ударной волна будут соблюдаться соотно-
шения _ _
l^rezl<a > <1.31)
Йп2|Ю = <*’2.
40
При косой ударной волне компонента скорости, параллельная
фронту волны, не изменяется по величине. Для компоненты скорости,
перпендикулярной фронту, ударная волна является прямой. Величина
этой компоненты скорости уменьшается до дозвуковой скорости.
Общее уменьшение скорости за косой ударной волной будет мень-
ше, чем за прямой ударной волной.
За косой ударной волной скорость может быть сверхзвуковая,
звуковая и дозвуковая (тогда как за прямой ударной волной толь-
ко дозвуковая).
Наклон косой ударной волны зависит, в основном, от скорости
набегающего потока (рис.1<37). При неподвижном потоке и источни-
ке малых возмущений в виде точки возмущения от источника распро-
страняются со звуковой скоростью в виде сфер равномерно во все
стороны (рис. 1.37,а). Если поток имеет некоторую скоростью
(рис.1.37, б), а источник возмущения неподвижен, то распростране-
ние возмущения относительно неподвижного источника вперед будет
происходить с меньшей скоростью за счет встречной скорости пото-
ка (относительно же потока возмущения будут распространяться рав-
номерно во все стороны по сферам).
При скорости потока, соответствующей числу М = I, возмуще-
ния относительно неподвижного источника малых возмущений не смо-
гут распространиться вперед навстречу потоку, так как скорость
потока и скорость возмущения равны и направлены навстречу друг
ДРУгу (рис.1.37,в).
При скорости потока V> а (рис.1.37,г) и неподвижном источ
нике малых возмущений возмущения не смогут распространиться за
конус с вершиной в источнике возмущения и углом полураствора м
определяемому по формуле
sin. — = — ’
где ц _ уГОЛ Маха.
Конус распространения возмущения называется конусом Маха.. ио-
разующие конуса называются линиями Маха.
Тем самым определяется приближенно и наклон косого скачка-
Эти формулы точно определяют угол наклона той части косого скач-
ка, где ударная волна превращается в линию малых возмущений.
При обтекании сверхзвуковым потоком внешнего тупого угла
зуются линии разрежения (иногда их называют волнами разрежения
<Рис.1.38).
41
42
тупого угла сверхзвуки
током.
невозмущен-
со скоростью угол
начинается поворот и рас ши-
давления. Область расширения
ВЛ составляет
За линией ВЛ
нескольких плоских граней, то
отходят линии возмущения (пио
Скорость К, сверхзвукового потока остается вдоль горизон-
тальной стенки АВ постоянной. За ребром В поток изменяет свое
направление, претерпевает расшире-
ние и ускоряется. Полностью повер-
нувшийся поток течет параллельно
стенке ВС с постоянной скоростью
Вершина тупого угла АВС воз-
мущает поток. Поэтому от точки В
будут отходить линии возмущения,
две крайние из которых отделят
возмущенную область (с изменяющи-
мися параметрами) от
ной.
Линия возмущения
(sta%ж й; т
рение газа с одновременным падением
заканчивается на линии BE , составляющей с направлением скоро-
сти V2 угол , меньший чем (pf ( sin, q>2 = — = — ), так как
М7 Гр
Vz>V1. 2 2
Внутри области Л BE поток расвиряется непрерывно и струйк;
газа искривлены, но вдоль каждой линии возмущения параметры по-
тока (скорость, давление, плотность и температура) остаются не-
изменными.
Если поверхность состоит из
каждого ребра такой поверхности
При обтекании плавной вы-
пуклой поверхности (рис.1.40)
изменение направления сверх-
звукового потока происходит
непрерывно. Каждая точка та-
кой поверхности является ис-
точником возникновения малых
возмущений. Поэтому от каждой
точки поверхности отходит ли-
ния возмущения.
tnc.I.39. Обтекание сверхзвуко-
вым потоком газа поверхности, с
стоящей из нескольких граней
43
Рис.I.40. Обтекание сверхзвуковым
потоком газа плавной выпуклой по-
верхности.
Область
расширения
- потока ,,
Косой скачок
уплотнения
§1Лр2 Обтекание_пластины__сверхзвуковым_потоком.
Распределение давления по некоторым профилям при
сверхзвуковой скорости
При обтекании сверхзвуковым потоком очень тонкой пластины,
поставленной под углом атаки к набегающему потоку, косой скачок
уплотнения появляется у передней кромки только снизу, где поток
как бы обтекает угол, меньший 180° (рис. 1*41). За скачком поток
течет вдоль нижней
поверхности с по-
стоянной скоростью,
меньшей скорости не-
возмущенного пото-
ка. Давление на ниж-
ней поверхности
больше давления не-
возмущенного пото-
ка.
У верхней по-
верхности поток как
бы обтекает угол, больший 180°. Образуются волны разрежения. За-
тем вдоль пластины поток течет с постоянной скоростью, большей
скорости невозмущенного потока. Давление на верхней стороне пла-
стины понижено по сравнению с давлением невозмущенного потока.
У задней кромки пластины верхняя и нижняя части потока смы-
каются, и он приобретает прежнее направление. Верхняя часть по-
тока как бы обтекает угол, меньший 180°, и испытывает сжатие.По-
ток же, обтекающий нижнюю сторону пластинки, поворачивается, рас-
44
Косой скачок
уплотнения
Область расширения
потока
сверхзвуковым потоком
пластинки.
Рис Л. 41.. Обтекание
газа плоской
ширяясь, как бы обтекает угол, больший 180°. У задней кромки на
верхней поверхности образуется косой скачок уплотнения, а на ниж-
ней поверхности' возникают волны разрежения.
При обтекании под углом атаки а = 0 ромбовидного профиля сверх-
звуковым потоком у передней точки сверху и снизу профиля поток
как бы обтекает угол, меньший 180° (рис.1.42). Сверху и снизу
образуется косая ударная волна, вправо от которой статическое дав-
ление в потоке будет больше давления на бесконечности. На перед-
ней части ромба (снизу и сверху) образуется повышенное давление.
За ударной волной скорость направлена вдоль по профилю. У вершин
ромба поток обтекает угол, больший 180°, образуются волны разре-
жения, за которыми статическое давление будет меньше, чем впере-
ди волн разрежения. У конца профиля поток сверху и снизу профиля
как бы обтекает угол, меньший 180°. Сверху и снизу образуются
ударные волны.
Рис.1.42. Обтекание ромбовидного профиля сверхзвуковым потоком
газа.
Качественная картина распределения давления по верхней и ни
ней поверхностям некоторых профилей при обтекании сверхзвуковым
потоком представлена на рис.1ЛЗ.
По линейной теории распределение давления по любому профилю
при а#0 определяется как сумма эпюр давления данного профиля
при а = 0 и давления на пластине под углом атаки сс .
45
Рис«1.43. Распределение давления по профилям при сверхзвуковой
скорости:
а) пластина; б) ромбовидный профиль; в) чечевицеобразный профиль;
— давление на верхней поверхности профиля;----------давление на
нижней поверхности профиля.
§ 1^П2 Подъемная сила крыла при сверхзвукрвой и
гиперзвуковой скоростях и в разреженных газах
При сверхзвуковой скорости для профиля любой формы теорети-
чески найдено, что
с"= :
(1.33)
При обтекании крыла конечного размаха сверхзвуковым потоком
величина Су крыла меньше Су профиля. Так,для прямоугольного
крыла конечного размаха
(1.34)
Это происходит потому, что на концах крыла, ограниченных ко-
нусами Маха из крайних передних точек крыла, происходит частич-
ное выравнивание давления, как показано на рис.1.44, что умень-
46
шает величину С* крыла конечного размаха по сравнению с профи-
лем или крылом бесконечного размаха.
Зависимость прямоуголь-
ного крыла различного удлинения
Л от чисел М представлена на
рис.1.45.
При гиперзвуковой скорости
обтекания потоком профиля удар-
ная волна имеет малый угол от -
клонения от профиля, т.е. как бы
стелится по профилю (рис.1.46).
При этом происходит взаимодейст-
вие ударной волны с пограничным
слоем, что приводит к перераспре-
делению давления по профилю; в
ударной волне происходит диссо-
Рис.1.44. Распределение давле-
ния по размаху крыла при сверх-
звуковой скорости.
циация (разложение) молекул на атомы и изменение физических
свойств воздуха, обтекающего профиль.
Все это изменяет ме-
тоды расчета подъемной
силы, применяемые для
сверхзвуковой скорости.
Для бесконечно тонкой
пластины найдено, что
Для профиля конеч-
ной толщины коэффициент
подъемной силы
£y = C2F , (1.35)
Волны Возмущения
Гзлобная ударная
волна
Волны, отраженные
от скачка
Хдостобая дол на
Рис.1.46. Профиль крыла в гиперзвуковом потоке.
47
здесь с - относительная толщина профиля;
- функция, определяемая расчетным путем, зависящая
от относительной толщины профиля, числа М , уг-
ла атаки а .
Вид этой функции представлен на рис.1.47. При расчете подъемной
силы крыла конечного размаха пользуются теми же формулами, что и
для профиля, так как концевые конусы возмущения на крыле невели-
ки из-за большой скорости потока.
Аэродинамические силы, дейст-
вие .1.47. Кривые для опре-
деления подъемной силы дву-
скатного клиновидного про-
филя при гиперзвуковой ско-
рости.
вующие на тело в потоке разрежен-
ного газа, представляют собой сум-
му импульсов, передаваемых телу мо-
лекулами, ударяющимися о его поверх
ность и отражающимися от нее.
В супераэродинамике рассматри-
ваются три схемы отражения молекул
после их удара о поверхность
(рис.1.48).
I. Схема, упругого или зеркаль-
ного отражения. По этой схеме моле-
кулы после удара отражаются как
абсолютно упругие шарики. При этом
угол падения равен углу отражения
(рис.1.48,а).
2. Схема неупругого ньютонов-
ского отражения. Молекулы после
встречи с телом теряют нормальную
к поверхности тела составляющую
скорости, но полностью сохраняют
касательную составляющую. При этом
импульс, передаваемый телу молекулами, получается вдвое меньши.?-.,.)
чем при упругом отражении (рис.1.48, б).
3. Схема статистического (диффузного) отражения. Молекулы,
ударяясь о поверхность, отдают ей всю кинетическую энергию, по-
вышая температуру тела. После этого они отталкиваются в разные
стороны со средней скоростью, соответствующей температуре поверх-
ности тела (рис.1.48, в). *
Средняя молекулярная скорость q определяется согласно кине*
тмческой теории как наиболее вероятная скорость молекул:
48
где R - газовая постоянная;
T - кинетическая температура молекул.
Большая часть молекул
(90-97>0 отражается от те-
ла диффузно. Поэтому эта
схема отражения принята
как наиболее вероятная.
КоэфриЦиент подъемной си-
лы для тонкой пластины,
рассчитанный по этому ме-
тоду,
cosa VjT
^ = ’мг£' + М Х
<sin,a cosa , (1.36)
\ Т; /
Рис.1.48. Схемы отражения молекул
от пластины в потоке разреженного
газа:
а) зеркальное отражение' б) отра-
жение по Ньютону; в) диффузное от-
ражение.
здесь М = ;
Ti - температура в
Тц - температура в
набегающем потоке молекул;
потоке отраженных частиц газа;
£(М since)- функция распределения, или функция ошибок, или инте-
грал вероятности.
Так как в потоке свободных молекул обтекание фактически от-
сутствует, а действие потока на каждую часть поверхности тела не
зависит от других частей этой поверхности, то коэффициент подъ
емной силы крыла конечного размаха будет таким же, как и коэффи-
циент подъемной силы профиля, т.е. крыла бесконечного размаха.
Все сказанное о крыльях в равной мере относится и к оперению,
как горизонтальному, так и вертикальному, представляющих собой
несущие поверхности обычных форм.
Необходимо добавить, что при дозвуковой скорости потока от-
клонение подвижной части оперения так изменяет параметры потока
у оперения, что подъемную (боковую) силу создает и не отклоняющее-
ся часть оперения (если даже она поставлена к набегающему невоз-
мущенному потоку под углом, равным нулю).
49
При сверхзвуковой скорости потока подъемную (боковую) силу
создает только отклоненная часть оперения при том же положении
не отклоняющейся части. Это и заставляет для сверхзвуковых лета-
тельных аппаратов делать оперение целиком поворачивающимся.
§ 121?^«Подъемная сила_системы_крылья-фюзеляж
Как на дозвуковой, так и на сверхзвуковой и гиперзвуковой ско-
ростях при обтекании потоком под углом атаки корпуса с присоеди-
ненными к нему крыльями обнаруживается взаимное влияние (интерфе-
ренция) крыльев на корпус и корпуса на крылья при создании подъ-
емной силы. Эта интерференция объясняется следующим образом
(рис.1.49).
Рис.1.49. Схема взаимного влияния крыла и фюзеляжа
на распределение давления.
Вектор скорости невозмущенного потока, набегающего на цилинд-
рическое тело, поставленное под небольшим углом атаки, можно
представить в виде двух векторов: параллельного оси и перпенди-
кулярного оси тела. Последний вектор по модулю будет /n=Prsina^
~ 1 57,J
Но при обтекании цилиндрической части тела поперечным пото-
ком (рис.Iо49) согласно теории идеальной несжимаемости жидкости
местные скорости потока на линии Z-Z (где устанавливаются обыч-
но консоли крыльев) будут больше , и в частности, в точках
Л и В Ип = • Поэтому подъемная сила консолей в при-
сутствии фюзеляжа будет больше подъемной силы этих же изолирован-
ных консолей. В свою очередь разрежение и подпор, создаваемые на
крыльях, обтекаемых потоком, передаются на фюзеляж и создают на
поверхности фюзеляжа добавочные давления, тем самым увеличивая
50
подъемную силу изолированного фюзеляжа. Поэтому величину подъем-
ной силы системы крылья-фюзеляж обычно рассчитывают по уравнению
Гизф + 4Укр.ф + 4Уф.кр , (1.37)
г = Y
КргФ ИЗ.Кр
подъемная сила от влияния фюзеляжа на
подъемная сила от влияния крыльев на фю-
где Л Ккргф - добавочная
крылья;
ДУф.кр ~ добавочная
зеляж.
В настоящее время применяется следующая схема расчета подъ-
емной силы системы крылья-фюзеляж: рассчитывается подъемная сила
изолированного крыла и изолированного корпуса, а величину их сов-
местной подъемной силы определяют по формуле
^кргф ^И3.кр^<
из.ф
(1.38)
здесь Каа - коэффициент, учитывающий интерференцию между крыль-
ями и корпусом, определяемый по формуле
/ 77
(1.39)
Формулу (1.38) можно переписать так :
С
^У кргф
S Су из< Кр а ^аа. + Су Ф J
откуда
С
У кр.-Ф
= Ла A-/Z +Га ъ
У из.кр д Лаа $
(1.40)
Подъемная сила летательногоаппарата
Подъемную силу летательного аппарата иногда представляют в
виде функции скорости, угла атаки и угла отклонения руля высоты,
Для данной скорости подъемная сила
51
У=К0 + К“а£в
(I.41)
где Го
д а
- подъемная сила при ос = 0, образующаяся из-за несим-
метричности профиля крыльев или их ненулевого закли-
нения относительно корпуса (рис.1«50);
- части.я производная подъемной силы по углу атаки;
, го д¥
1 ~ частная производная подъемной силы по углу отклоне-
0 ния руля высоты.
'такое представление подъ-
емной силы нам потребу-
ется впоследствии при
линеаризации дифферен-
циальных уравнений дви-
жения.
боковая сила, созда-
ваемая всем летательным
аппаратом, является функ-
цией скорости, угла
скольжения и угла откло-
нения руля направления,
т.е.
М(Г,рД),
и для данной скорости
Z=ZPp+Z?HSH, (1.42)
Рис.1.50. Подъемная сила летательного
аппарата.
„Р dZ
здесь Z = -^-— частная
производ-
ная боко-
вой силы
по углу
скольжения;
- частная производная боковой силы по углу отклонения
руля направления.
52
f 1.14. Лобовое_српротивление^Оопротивление_трения^
Пограничный_слрй
Сила лобового сопротивления есть равнодействующая проекций
на скоростную ось ОХ сил нормального давления и сил трения, дей-
ствующих на летательный аппарат в полете.
Коэффициент силы лобового сопротивления
> ч-1-'243)
Р - безразмерный коэффициент силы сопротивления из-за трения;
- безразмерный коэффициент силы давления.
ХЛ Для практических расчетов коэффициент силы сопротивления
представляют в виде
^х=^х0+ , <1.44)
где q _ коэффициент силы сопротивления при Су = 0;
С . - коэффициент индуктивного сопротивления (при М < I)
Х(,
или коэффициент сопротивления из-за подъемной силы
(при М > I).
В этом случае
^Д=^ + ^’В, (1*^5)
СХз - коэффициент волнового сопротивления.
Из эксперимента известно, что при обтекании воздухом тела
частицы воздуха, непосредственно соприкасающиеся с телом, не пе-
ремещаются относительно тела. Они как бы прилипают к этому телу.
Поэтому взаимодействие между телом и воздушной средой можно рас-
сматривать как взаимодействие между слоем воздуха, прилипшим к
поверхности тела, и слоями воздуха, обтекающими тело.
Из-за вязкости газа, обтекающего тело, около тела образует-
ся некоторый слой заторможенного газа - так называемый погранич-
ный слой. Принято считать под толщиной пограничного слоя расстоя
ние от поверхности тела до струйки, скорость газа в которой со-
ставляет 0,99 скорости набегающего потока на бесконечности (лета
тельный аппарат неподвижен, поток набегает на летательный аппа-
рат), т.е.
53
LL 0,99 Иоо ,
а - скорость в пограничном слое.
Различают ламинарный (слоистый) пограничный слой и турбулент-
ны;; •,беспорядочный) пограничный слой.
гпюры скоростей в ламинарном и турбулентном пограничных слоях
представлен!.-: на рис.1.51.
а; 3)
Гис.I.51. Распределение скоростей в
пограничном слое:
а) ламинарный пограничный слой;
б) турбулентный пограничный слой.
Градиент скорости
(du\
\dy/y=o у тУРбУлентного
пограничного слоя значи-
тельно больше, чем у лами-
нарного С .У — ордината,
рис.I.51).
Касательные напряже-
ния, возникающие на поверх-
ности пластины при обте-
кании ее воздухом, опре-
деляются по формуле
(1.46)
ju. - динамический коэффициент вязкости воздуха, кг-сек/м2.
Таким образом, касательные напряжения в случае ламинарного
пограничного слоя будут меньше, чем в случае турбулентного. Мень-
ше будет также и сила трения, которая определяется для одной сто-
роны пластины по формуле
b
Xf = j Т -1 dx , (1.47)
о
здесь Ь - хорда пластины;
7 - единица размаха пластины.
для практических расчетов силы трения крыло заменяется тон-
кой пластиной, расположенной по потоку, имеющей с крылом одина-
ковую хорду и одинаковый размах. У этой пластины точка перехода
ламинарного пограничного слоя в турбулентный принимается совпа-
дающей с аналогичной точкой на крыле.
Обычно носовая часть крыла обтекается потоком при ламинарном
пограничном слое. Затем в некоторой точке на поверхности крыла
ламинарный пограничный слой переходит в турбулентный.
Переход ламинарного пограничного слоя в турбулентный происхо-
дит не в одной точке, а совершается на протяжении некоторого уча-
стка но протяженность этого участка невелика и ею пренебрегают.
Положение точки перехода ламинарного слоя в туроулентный хт
(рис.1.52) зависит от числа Рейнольдса ( Ке=-^- ), формы профи-
ля шероховатости поверхности, начальной турбулентности потока,
скорости потока и т.д.
Толщина турбулентного погра-
ничного слоя вдоль по хорде на-
растает интенсивнее толщины ла-
минарного слоя. Так, если при
некоторых условиях на пластине
на расстоянии I м от носка тол -
щина ламинарного пограничного
слоя будет 5 мм, то при турбулент-
ном слое при тех же условиях -
20 мм.
Силу трения, возникающую на
одной стороне пластины, можно
определить по формуле
граничного слоя из ламинар-
ного состояния в турбулент-
ное для тонкой пластинки.
CftfS > (1Л8)
6^ - безразмерный коэффициент трения пластины.
Тогда с учетом предыдущей формулы получим
fb
I x-ldx
СГ-^ьТ~- ^9)
Для малой скорости потока при ламинарном пограничном слое най-
дено, что
'4
/К?
для турбулентного пограничного слоя
с - _Р±0307
/т укГ
Сопротивление трения профиля крыла
Cxp = 2Cf 'ЧсЧм,
(1.50)
U.51)
(1.52)
55
где СХу - сопротивление профиля крыла (профильное сопротивление;
Cf - коэффициент трения пластины;
- поправочный коэффициент, учитывающий отличие погранич-
ного слоя реального крыла от пограничного слоя тонкой
пластины (рис. Г. 53);
- поправочный коэффициент
иля пластины при данном
при И О (рис.1.54).
учитывающий отличие сил тре-
числе М полета от сил трения
Рис.1.53. Коэффициент учета
влияния толщины профиля.
Рис.1.54. Зависимость сил
трения от числа М полета:
1-значительная теплоотда-
ча; 2-осредненное значение
3-без теплоотдачи.
Сопротивление трения крыла принимают равным профильному сопротив-
лению того из профилей крыла, хорда которого равна средней гео-
метрической хорде крыла.
§ 15_. _С о про т и в лен и е_ дав л е н ия. _ Пут уменьшения
волновогр_с опротипленуя
Сопротивление давления
из-за подъемной силы
Пусть крыло конечного размаха обтекается потоком воздуха,
имеющим направление скорости на бесконечности (рис.1.55).
Крыло конечного размаха при образовании подъемной силы создает
скос потока. Осредненная величина скоса будет а4- . Это значит,
56
что поток будет направлен по вектору V . Из теоремы Жуковского
„0.0„тио что аэродинамическая сила, являющаяся равнодействующей
извести, т г
нормальных сил, действую-
щих на профиль, направ-
лена перпендикулярно на- n г
бегающему на крыло потоку, j 7
т.е. P1V .Разложив
эту силу по осям ОХ и OY vzzZ^* *
скоростной системы (ориен-
тированной по вектору
7оо ), получим индуктив- рис. 1.55. к определению индуктивного
ное сопротивление и сопротивления.
подъемную силу Y .Сле-
довательно, можно записать
tg«i=T = -^-’ <1ЛЗ)
где - коэффициент индуктивного сопротивления.
Примем
Известно, что для крыла эллиптической формы в плане
Тогда
С z
CXi=Cyai = ^x ' CU54)
Отсюда следует, что крыло бесконечного размаха не имеет индуктив-
ного сопротивления, так как при Л-^оо Схг*~0.
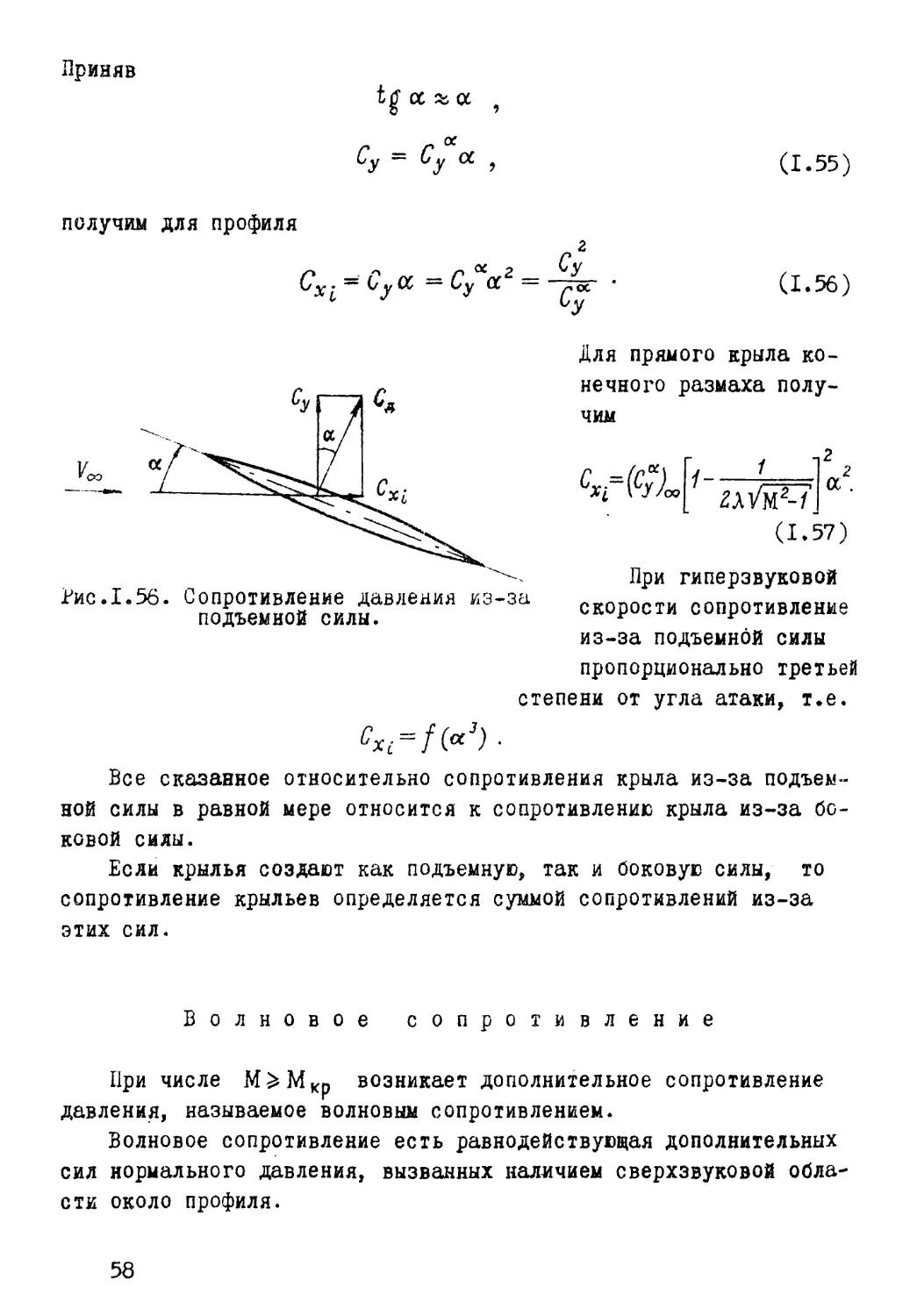
При скорости, соответствующей М > I, равнодействующая нор-
мальных сил, действующих на поверхность крыльев, направлена пер-
пендикулярно плоскости хорд (рис.1.56). Проекции равнодействую-
щей на оси ох и 0Y скоростной системы образуют соответственно
сопротивление из-за подъемной силы и подъемную силу. Тогда
tga =
Y Cy
57
Приняв
Су - Су ос ,
получим для профиля
Сх* ~~ Ь уОС ~~ Су °C2 ~ р<*
(1.55)
(1.56)
Рис.1.56. Сопротивление давления из-за
подъемной силы.
Для прямого крыла ко-
нечного размаха полу-
чим
Г у I2
Cxp(CyL 1~Т °2-
Xt ' yJca[ zxVk2-i_
(1.57)
При гиперзвуковой
скорости сопротивление
из-за подъемной силы
пропорционально третьей
степени от угла атаки, т.е.
Cxpf^3)-
Все сказанное относительно сопротивления крыла из-за подъем-
ной силы в равной мере относится к сопротивлению крыла из-за бо-
ковой силы.
Если крылья создают как подъемную, так и боковую силы, то
сопротивление крыльев определяется суммой сопротивлений из-за
этих сил.
Волновое сопротивление
При числе М^МКр возникает дополнительное сопротивление
давления, называемое волновым сопротивлением.
Волновое сопротивление есть равнодействующая дополнительных
сил нормального давления, вызванных наличием сверхзвуковой обла-
сти около профиля.
58
Возникновение волнового сопротивления при трансзвуковой ско-
рости обтекания профиля можно понять, рассматривая изменение рас-
пределения давления по поверхности профиля. Зона сверхзвуковых
скоростей на профиле образуется сначала там, где расширяется
струйка, обтекающая профиль, так как сверхзвуковые скорости воз -
никают в расширяющейся части струйки, после того как в этой струй
ке образуется звуковая скорость (рис.1.57). В области сверхзвуко-
вых скоростей разрежение на поверх-
ности профиля увеличивается, и увели-
чивается проекция равнодействующей
силы на направление скорости потока
в бесконечности.
За ударной волной возрастает
толщина пограничного слоя, так что
скачки влияют и на сопротивление
трения. Кроме того, за ударной вол-
ной наступает часто отрыв потока от
стенки, который приводит к дальней-
шему росту сопротивления.
Рассчитать волновое сопротивле-
ние профиля и крыла в трансзвуковой
области трудно из-за сложной карти-
ны развития сверхзвуковых зон. Поэтому
коэффициент волнового со-
противления в трансзвуковой области, как правило, определяют и?
эксперимента.
Качественная картина изменения сопротивления при Су =• О кры-
ла конечного размаха по числам М представлена на рис.1.58, гл-
изображены также профили крыла с ударными волнами на них или впе-
реди профилей.
При сверхзвуковой скорости полета, когда весь профиль нахо-
дится в сверхзвуковом потоке, обтекание профиля (например, ромбо-
видного) происходит так, как на рис.1.42, а направление сил, дей-
ствующих на профиль, показано на рис.1.59. Тогда проекция распре-
деленных нормальных сил на направление потока как на переднем,
так и на заднем скате профиля будет направлена по скорости пото-
ка, образуя сопротивление давления, называемое волновым.
Волновое сопротивление профиля при малых толщинах
= Л -7-
* /м-
59
I;
Рис.1.59. Возникновение вол-
нового сопротивления ромбо-
видного профиля при нулевом
угле атаки в сверхзвуковой
области.
громоздким. Поэтому волновое со-
противление обычно приводится в
виде графиков, подобных изображен-
ным на рис.1.60.
В общем случае коэффициент волнового сопротивления зависит
от числа М полета, относительной толщины профиля с , формы про-
филя, удлинения крыла Л , стреловидности крыла и т.д., т.е.
f (М , С 7 формы профиля, Л , .
Рассмотрим влияние изменения стреловидности крыльев на изме-
нение волнового сопротивления.
Увеличение стреловидности крыла приводит к уменьшению коэф-
фициента волнового сопротивления при числах Мкр^М<1 из-за
того, что фронт ударных волн, образующихся на стреловидном кры-
ле, будет наклонен к набегающему потоку под углом тем меньшим,
чем больше стреловидность крыла (рис.I.61). В этом случае фронт
ударных волн образует косой скачок, потери энергии в котором
60
Рис.I.60. Зависимость волнового сопротивления от числа М
и формы крыла в плане.
Рис.I.61. К объяснению изменения волнового сопротив-
ления при изменении стреловидности крыла.
будут меньше, чем в прямом, т.е. волновое сопротивление при ко-
сом скачке будет меньше, чем при прямом.
При сверхзвуковой скорости различают 3 вида крыльев:
I. Крыло с дозвуковой передней кромкой (рис.1.62,а), когда
крыло находится внутри конуса возмущения, исходящего из вершины
крыла.
2. Крыло со звуковой передней кромкой (рис.1.62,б), когда
образующие конуса возмущения от вершины крыла проходят по перед-
ней кромке крыла.
61
3. Крыло со сверхзвуковой передней кромкой (рис.1.62,в), ког-
да часть крыла находится внутри конуса возмущения, а часть - вне
его.
Рис.1.62. Взаимное расположение передней кромки крыла
и конуса Маха.
Расчетным путем положение конуса возмущения относительно пе-
редней кромки определяется из следующих преобразований.
Разложим вектор скорости потока (рис.1.62,а) на два направле-
ния: на направление, перпендикулярное передней кромке и
направление, параллельное передней кромке ( ). Тогда
где j VrJ=|V|cos^ . Следовательно,
I/J V М 7
— =-Г СС5> = МСО8/ .
Если составляющая скорости, перпендикулярная передней кромке,
окажется меньше скорости звука, то крыло будет с дозвуковой пе-
редней кромкой, если будет равна скорости звука - со звуковой
передней кромкой, больше скорости звука - со сверхзвуковой. Сле-
довательно, если МсозХ</ - крыло с дозвуковой передней кромкой.;
Mcos^=l - крыло со звуковой передней кромкой; М cos X > 1 - кра-
ло со сверхзвуковой передней кромкой.
При потоке со скоростью, соответствующей М> 1 , увеличение
стреловидности крыла уменьшает волновое сопротивление (рис.1.63р
лишь в случае дозвуковой передней кромки. Уменьшение волнового
сопротивления происходит по следующей причине (рис.1.63,б).Пусть
крыло установлено под нулевым углом атаки. Из каждой точки перед*
ней кромки крыла выходит коническая волна Маха, ограничивающая
область возмущений, исходящих от передней кромки.
62
Вид крыла с$оку
Рис.I.63. Зависимость волнового сопротивления от стрело-
видности передней кромки.
Перед профилем крыла в любом сечении 3Bf (рис.1.63,б), от-
стоящем на некотором расстоянии от центрального сечения ДД , су-
ществует не только волна, вызванная точкой В передней кромки,
но также волны, вызванные всеми точками передней кромки крыла
между сечениями AAf и ВBf > Эти волны будут иметь форму гипербол
(асимптоты гипербол расположены под углами Маха), так как они
получаются при пересечении поверхностей конусов Маха с плоскостью,
параллельной их осям.
Каждая из этих волн меняет параметры потока так, что перед
профилем в сечении ВВ' поток будет заторможен, т.е. у стреловид-
ного крыла с дозвуковой передней кромкой каждое сечение крыла,за
исключением центрального, обтекается потоком с меныпей скоростью,
чем скорость невозмущенного потока, а поэтому и волновое сопро-
тивление этих сечений будет меньше сопротивления центрального се-
чения. Следовательно, и волновое сопротивление всего крыла будет
тоже меньше, чем в том случае, когда стреловидное крыло имеет
звуковую переднюю кромку или крыло прямоугольное, так как тогда
63
поток перед каждым сечением крыла не будет возмущенным (затормо-
женным предыдущими сечениями).
Волновое сопротивление крыла со звуковой и сверхзвуковой пе-
редней кромками будет даже несколько больше волнового сопротивле-
ния прямого крыла.
при гиперзвуковой скорости волновое сопротивление крыла
Cx-c3Fx , (1.59)
где -
В разреженных газах
^=/(М,«,ГьТч,Г).
Все сказанное о крыльях в равной степени относится к верти-
кальному и горизонтальному оперению. Но при этом приходится учи-
тывать факт торможения скорости потока у оперения из-за корпуса
и крыльев. Средняя скорость потока у оперения
где Кго - коэффициент торможения потока у оперения:
г2
^Г.О= 7г 2 ' (1.60)
'ОО
( _ 16. _ Сопротив ле н ие_ корпус а_ и_ вс е г о_ летательного
аппарата_._Поляра
Сопротивление корпуса (фюзеляжа) определяется по формуле
, (I.6I)
здесь 5М - площадь миделевого сечения фюзеляжа;
Сх<р - коэффициент сопротивления фюзеляжа:
^хф=^хоф , (1.62)
ф- коэффициент сопротивления фюзеляжа при Суф — 0;
С - коэффициент сопротивления фюзеляжа из-за подъемной
силы фюзеляжа.
64
Определим коэффициент сопротивления фюзеляжа при = О:
^х0Ф ~ + ф+ ^хдн ?
(1.63)
где £Луф - коэффициент сопротивления трения фюзеляжа;
Схвф - коэффициент волнового сопротивления фюзеляжа;
£*ан - коэффициент сопротивления давления на донном срезе
фюзеляжа.
При определении коэффициента сопротивления трения фюзеляж за-
меняется пластиной, равновеликой по площади поверхности фюзеляжа,
омываемой потоком. При этом принимается, что пограничный слой пол-
ностью турбулентный. В этом случае коэффициент сопротивления тре-
ния рассчитывается по формуле
С/УсЧм $м 9 (1.64)
здесь Cj: - коэффициент трения пластины;
- коэффициент, учитывающий отличие пограничного слоя
с фюзеляжа от пограничного слоя пластины (рис.1.64);
- коэффициент, учитывающий изменение силы трения пла-
стины с изменением числа М полета (см.рис Л*54);
F - площадь омываемой поверхности фюзеляжа (площадь раз-
вертки корпуса).
65
При числах М>Мкр (для фюзеляжа) возникает волновое сопро-
тивление фюзеляжа. Расчет коэффициента волнового сопротивления
фюзеляжа производится при числах М > 1 :
в.ф~ в.н.ч + в.хв.ч ) (1*Ь5)
где £Х0НЧ - коэффициент волнового сопротивления носовой части
фюзеляжа (рис.1.65). Волновое сопротивление носовой
части фюзеляжа является результатом увеличения дав-
ления на носовой части фюзеляжа при сверхзвуковой
скорости потока; изменение этого коэффициента по чис-
лам М представлено на рис.1.66;
^хв.хвч“ коэффициент волнового сопротивления хвостовой части
фюзеляжа. Волновое сопротивление хвостовой части фю-
зеляжа является результатом разрежения на хвостовой
части фюзеляжа при сверхзвуковой скорости потока;
вид этого коэффициента представлен на рис.1.67.
ляжа.
донное сопротивление фюзеляжа
^дн (poo Pah)SAh CXA"C[‘Sm , (1.66)
здесь - статическое давление невозмущенного потока;
п - статическое давление у донного среза;
' дн
5по - площадь донного среза.
66
Рис.I.66. Коэффициент волнового сопротивления носовой
части фюзеляжа.
Рис.1.67. Коэффициент волнового сопротивления хвостовой части фю-
зеляжа.
Из формулы получим коэффициент донного сопротивления
„ = (Роо Ран) sah
gxAh q зы
Сопротивление всего летательного аппарата
Qji.a. ^кр + +®оп +^инт
ГЛе ^кр “ сопротивление изолированных крыльев;
9ф - сопротивление изолированного фюзеляжа;
QQn - сопротивление изолированного оперения;
^инт * сопротивление интерференции между частями летательн
го аппарата.
6?
Иначе формулу (1.68) можно записать так:
л.а £*кр+ + Cxon~sL + ^инт
(1.69)
Часто сопротивление летательного аппарата представляют в виде
такой формулы:
Ол.а= Qo + Ql , (1.70)
здесь - сопротивление летательного аппарата при Су = 0;
- сопротивление летательного аппарата из-за подъемной
силы.
Или
С* л.а~ о* Сх I (I.7I)
Общий вид изменения коэффициента сопротивления всего летатель-
ного аппарата по числам М представлен на рис.1.68.
Рис.1.68. Сила сопротивления и коэффициент силы сопротивления
летательного аппарата.
График зависимости коэффициента подъемной силы от коэффициен-
та сопротивления при данном значении числа М полета называется
полярой летательного аппарата. Примерный вид поляр для летатель-
ного аппарата при различных числах М представлен на рис.1.69.
Часто при расчетах требуется знание аэродинамического каче-
ства летательного аппарата. Качеством летательного аппарата на-
68
зывается отношение коэффициента подъемной силы к коэффициенту со-
противления:
(1.72)
Величину макси-
мального качества
летательного аппа-
рата удобно опреде-
лять по поляре :
Сглазе ?
q? - угол наклона
касательной к поля-
ре, проведенной из
начала координат.
В общем случае
лобовое сопротив-
ление можно пред-
ставить как неко-
торую функцию пара-
метров:
<?=/(у,а,рЛД)
Рис.1.69. Поляры летательного аппарата.
и записать в виде
<?=0о+е“«2+/р2+ Анг+Лвг ,
Q.73)
где
д(^) ’ Q ~ д(^) ' 5 Ж)’ <?(5гв)
69
§ iiIZ.i_.yeУ тр_Дувния_ и_фоку с_ профиля
центром давления профиля называется точка пересечения линии
действия полной аэродинамической силы с хордой профиля (рис.1.70).
Положение центра давления на хорде определяется безразмерным
коэффициентом
хд=-А’ d-74)
Л &
хд - расстояние от центра давления до носка профиля.
Линия действия силы Q, проходит через точку 0 (рис.1.70).
Поэтому момент относительно оси 0Z будет создаваться только си-
лой Y1 . Величина момента
Иначе момент можно записать так:
^zГ
(У - коэффициент момента относительно передней точки хорды.
т1
Сравнив левые и правые части двух равенств* получим
Хд = “4^ • (1.76)
Коэффициент момента тангажа Ст иногда выражают в виде
СУ< • О-7’)
70
здесь Cm1Q - коэффициент момента при нулевой нормальной силе;
величина его зависит от кривизны профиля; для сим-
метричного профиля Ст<„ = О;
дС 10
- частная производная коэффициента момента по коэф-
фициенту нормальной силы. Для профилей
дСт1
-Т— = - 0,25 при
°СУ1
дСт1
= - 0,5 при
дСУ,
М < Мкр ,
М>> 1.
Примерный вид графика представлен
Подставив значение
Ст^ , получим
на рис.I.71.
= Стир дСт1
* Су дСу 8)
У/
Положение центра
давления у несимметрич-
ных профилей зависит
от угла атаки (рис.1.72).
У профилей симметрич-
ных ( / = 0) центр дав-
ления почти на всем
диапазоне летных углов
практически
няет своего
(рис.1.73).
Фокусом
называется такая точка
не изме-
положения
профиля
£
ю
Для несимметрич-
ного профиля
симметричного
профиля
Рис.I.71. Зависимость коэффициента мо-
мента от коэффициента подъемной
силы.
на хорде, относительно которой коэффициент момента на небольших
углах атаки не зависит от угла атаки или от Су (точка приложе-
ния приращения аэродинамических сил при изменении угла атаки).
Для определения положения фокуса на хорде найдем величину
момента относительно некоторой точки F на расстоянии xF от носка
профиля (рис.1.74).
Момент относительно оси, проходящей через точку F , будет
~(хд xf)^i xa^i+xf^i * (1.79)
71
Рис.1.73. Положение цен-
тра давления у симмет-
ричного профиля при раз-
ных углах атаки.
Рис.I.72. Перемещение
центра давления несимме-
тричного профиля крыла в
зависимости от угла ата-
ки.
Рис.1.74. К определению положения фокуса
на хорде.
0 другой стороны,этот момент можно представить
MF=*niF(jSb (1.80)
mF - коэффициент момента.
Из формул (1.78) - (1.80) подучим
= cmw ~d^,Gy^Cy*F = °т1*Су’^'СУ< + ’
где
CI-8I)
72
для того чтобы точка F
та относительно этой точки не
силы, необходимо:
была фокусом, т.ео коэффициент момен-
зависел от коэффициента подъемной
дСт,
+ хг=0 .
Г 7
откуда
Crni
дСу,
(1.82)
Как уже
М<Мкр
у современных профилей
-О,5 при
хорды от
М » 2 . Поэтому фокус профиля нахо-
носка при М< МКр и на
1/2 длины
говорилось,
И дСуГ
дится на I/2! длины
хорды при М » 1 .
У симметричных профилей
с центром давления. У несимметричных профилей фокус,
воря, не совпадает с центром давления.
Изменение положения фокуса профиля в зависимости
числа М полета и от формы профиля показано на рис.1.75.
( Ст1а= 0) фокус профиля
совпадает
вообще го-
от измене--
ния
Рис.1.75. Изменение положения фокуса профиля
по числам М .
У крыла с фокусом связано два понятия: линия фокусов и фо-
кус крыла.
Линией фокусов называется геометрическое ме-
сто фокусов профилей в сечениях крыла.
73
On. усом крыла называется точка приложения при-
ращения подъемной силы крыла при изменении угла атаки. Определить
положение этой точки на любом крыле, кроме прямоугольного, труд-
но, если не ввести понятие об эквивалентном крыле.
Эквивалентным крылом называется прямо-
угольное крыло, равное по площади рассматриваемому, создающее та-
кую же нормальную силу, тангенциальную силу сопротивления и мо-
мент тангажа относительно носка рассматриваемого крыла: <5’3K3=5,
^кв=^ MZ,3K^MZ1.
Параметры эквивалентного крыла несложно рассчитать для трапе-
цевидного исходного крыла. Так, хорда эквивалентного крыла, назы-
ваемая средней аэродинамической хордой (САХ ) и обозначаемая ЬА,
или Ьа , или #САХ , определяется
Л U;
&Ср.г • ч-L.b' )
Геометрически величина и положение
относительно рассматриваемого, определяется
рис.1.76 (метод определения центра тяжести
эквивалентного крыла,
так, как показано на
трапеции).
гис.1.76. К определению средней
аэродинамической хорды крыла:
- расстояние передней кромки
эквивалентного крыла от передней
точки центрального сечения рас-
сматриваемого крыла; - рас-
стояние средней аэродинамической
хорды от центрального сечения
рассматриваемого крыла.
Фокус прямоугольного
крыла расположен на U,25bA
при М < М Кр и на О, 5 ЬА
при М » 1 . А так как по-
ложение эквивалентного кры-
ла, относительно рассматривае-
мого, известно, то, следова-
тельно, и известно положение
фокуса рассматриваемого кры-
ла. Для этого следует спроек-
тировать на хорду централь-
ного сечения этого крыла точ-
ку, в которой фокус располо-
жен на средней аэродинамичес-
кой хорде.
Изменение положения фо-
куса крыла конечного разма-
ха по средней аэродинамической хорде в зависимости от изменения
чисел М показано на рис.1.77.
74
Рис.I.77. изменение положения фокуса крыла,
по числам М .
f 1г тепен ь_статической_устойчивости
летател ьного_ап п арата
Фокусом летательного аппарата называется точка приложения
приращения подъемной силы при изменении угла атаки с неподвижны-
ми органами управления или точка, по отношению к которой --оэфри-
циент момента всех аэродинамических сил остается постоянны:.-:
изменении угла атаки с неподвижными органами управления.
В установившемся равномерном прямолинейном полете подъемна/
сила всего летательного аппарата приложена в центре тяжести ап-
парата (т.е. центр давления совпадает с центром тяжести). Чтобы
определить, где находится фокус летательного аппарата, необходи-
мо, зафиксировав органы управления и сохраняя их далее неподвиж-
ными, изменить угол атаки летательного аппарата (что наблюдается,
когда летательный аппарат попадает в восходящие или нисходящие
потоки воздуха). Приращение подъемной силы будет приложено в ро•
кусе летательного аппарата. В зависимости от того, в каком поло-
жении находится фокус от центра тяжести, приращение подъемной с >
лы будет создавать момент относительно центра тяжести того или
иного знака. Величина момента определяет степень статической
устойчивости летательного аппарата.
Статической устойчивостью летательного аппарата назовем его
свойство создавать аэродинамический момент с неподвижными орга-
нами управления при отклонении от положения равновесия в устано-
вившемся полете.
Вообще устойчивость есть свойство состояния равновесия; од-
нако не всякое состояние равновесия обязательно является устой-
чивым. Различают следующие виды равновесия: устойчивое, безраз-
личное и неустойчивое.
75
При выяснении характера статической устойчивости летательно-
го аппарата необходимо учитывать состояние равновесия моментов
относительно центра тяжести при неподвижных органах управления и
вносимых возмущениях по углу атаки. Если аэродинамический момент
при этом создает тенденцию к уменьшению возмущения, летательный
аппарат называется статически устойчивым, если к увеличению воз-
мущения - статически неустойчивым, если вообще не создается ника-
кой тенденции - летательный аппарат называется статически ней-
тральным .
Имеются следующие виды статической устойчивости летательных
аппаратов:
I. Продольная статическая устойчивость - свойство создавать
аэродинамический момент относительно оси 0Zt с неподвижными руля-
ми высоты при изменении угла атаки на величину Да в установив-
шемся полете.
2. Путевая или флюгерная статическая устойчивость - свойст-
во создавать аэродинамический момент относительно оси 0Y1 с не-
подвижным рулем направления при изменении угла скольжения на ве-
личину др в установившемся полете.
3. Поперечная статическая устойчивость - свойство создавать
аэродинамический момент относительно оси 0Х1 с неподвижными эле-
ронами при изменении угла скольжения на величину др в установив-
шемся полете.
Поясним продольную статическую устойчивость летательного ап-
парата различным расположением фокуса относительно центра тяжести.
Возможно одно из трех расположений фокуса относительно центра тя-
жести: либо фокус располагается за центром тяжести, либо в цент-
ре тяжести, либо впереди центра тяжести. На рис.1.78 представлены
все три случая расположения фокуса относительно центра тялести.
В первом случае (рис.1.78,а) фокус расположен за центром тя-
жести. При неподвижном оперении будет создаваться момент относи-
тельно оси 0Z1 :
Д MZ/= -A Y1 (xF~xT),
который создает тенденцию к уменьшению возмущения по углу атаки
Да . Говорят, что аппарат в таком случае обладает продольной ста-
тической устойчивостью.
Во втором случае <рис.1.78,б) фокус расположен в центре тя-
жести. Относительно центра тяжести приращение подъемной силы не
76
тис.I.78. Понятие о статической устойчивости летательного аппа-
рата:
а) статически устойчивый; 0) статически нейтральный; в) статичес-
ки неустойчивый.
будет создавать никакого момента. Летательный аппарат статически
нейтрален.
В третьем случае (.рис. 1.78,в) фокус расположен впереди цен-
тра тяжести. При неподвижном оперении будет создаваться момент
относительно центра тяжести :
Д М2^-~ Л (Xj. ~хт) ,
который создает тенденцию к увеличению возмущения по углу атаки
Дее. Аппарат статически неустойчив.
77
Мерой степени продольной статической устойчивости летатель-
ного аппарата является величина отношения или математи-
чески величина коэффициента 1
ос д
или более удойная величина коэффициента
Cyt dmZf dmz1 да ma2l
--д^-~дГ ^ = ~с^' а‘4;
Так как
(xF-xT) . (.1.85)
Но, с другой стороны, можно записать
AMZi = AmzrfSbA , (1.86)
откуда
7 (£.87)
где
Следовательно
=от^'= -(хг-хг) • (1-88)
Коэффициент пъ^1 представляет собой расстояние в долях средней
аэродинамической хорды крыла между фокусом и центром тяжести, при-
чем это расстояние считается положительным, если оно откладывает-
ся в положительном направлении по оси 0^1 .
Обычно статическая устойчивость летательного аппарата пред-
ставляется в виде графиков, общий вид которых для летательных ап-
паратов с разной степенью статической устойчивости представлен
на рис.1.79.
78
Рис.I.79. Статическая устойчивость летательного аппарата.
При этом, если < 0 - аппарат статически устойчив,
ги*=0- аппарат статически нейтрален, rnt >0 - аппарат ста-
тически неустойчив.
Аналогичные характеристики степени статической устойчивости
летательного аппарата существуют и при боковом движении его.
Путевая или флюгерная статическая устойчивость аппарата ха-
рактеризуется величиной коэффициента
(1.89)
Если гп^О- аппарат имеет путевую статическую устойчивость,
р Р
пг^ = 0 - аппарат нейтрален, ту >0- аппарат неустойчив.
Поперечная статическая устойчивость характеризуется величи-
ной коэффициента
дт
Х1
р
пели т<0- аппарат имеет поперечную статическую устойчивость,
Г Л
п* =0 - аппарат нейтрален в смысле поперечной статической устой-
чивости, >0 - аппарат неустойчив.
79
Поперечная К -образность крыла наиболее эффективно изменяет
поперечную статическую устойчивость летательного аппарата, при
этом положительное значение угла (р повышает степень поперечной
статической устойчивости, отрицательное значение - понижает ее.
§ ^?Ог_Аэродин^ический_нагрев
В общем случае на летательный аппарат в полете действуют теп-
ловые потоки лучистой энергии, испускаемой Солнцем, Землей, Луной
планетами и Галактикой, тепловые потоки от двигателя и его выход-
ных газов, тепловые потоки от работающей аппаратуры на летатель-
ном аппарате и тепловые потоки при аэродинамическом (иначе, газо-
кинетическом, или кинетическом) нагреве летательного аппарата.
Рассмотрим лишь основные положения, связанные с аэродинамическим
нагревом.
Под аэродинамическим нагревом понимают нагрев летательного
аппарата конвективным или лучистым методом от воздуха. Воздух мо-
жет нагреваться в процессе обтекания летательного аппарата в сле-
дующих случаях:
I. При динамическом изменении давления (сжатии) воздуха (да-
же если воздух рассматривать как невязкую среду), что наблюдает-
ся в критических точках профиля, крыла, оперения и фюзеляжа, где
струйки полностью тормозятся при любой скорости потока, в ударных
волнах, сопровождающих обтекание аппарата потоком со скоростью
выше критической.
2» При торможении воздуха в пограничном слое и трении его
слоев друг о друга при любой скорости потока, что является след-
ствием вязкости воздуха. В этом случае торможение воздуха не со-
пряжено со сжатием, т.е. с повышением давления и плотности; у по-
верхности летательного аппарата плотность может даже уменьшаться
благодаря нагреванию.
Непосредственной причиной торможения здесь являются силы
сцепления частиц воздуха с обшивкой и-силы вязкости, передающие
торможение на толщину пограничного слоя.
Тепловая энергия, образующаяся в воздухе, частично рассеивает-
ся, а частично передается на летательный аппарат, нагревая его.
Удельный тепловой поток < , ккал/м сек) к поверхности ап-
парата от нагретого в пограничном слое воздуха определяется по
формуле Ньютона:
80
fa а ( ?ст) •>
(I.9I)
где а - коэффициент теплоотдачи, ккал/м^ сек-град;
Тв - температура восстановления;
Гст - температура поверхности.
Из закона сохранения энергии можно вывести формулу для опре-
деления температуры заторможенного потока:
Тд = Т^+^-Мг^ ,
(1.92)
здесь То - температура торможения;
Т - температура в невозмущенном потоке:
Со
- коэффициент адиабаты.
Этой формулой можно воспользоваться при определении темпера-
туры пограничного слоя при обтекании потоком воздуха летательно-
го аппарата как при дозвуковой, так и при сверхзвуковой скоро-
сти.
Но из экспериментов было определено, что не вся энергия
струйки при торможении переходит в тепловую энергию. Часть моле-
кул восстанавливает свою скорость. Поэтому температура на поверх-
ности (даже теплоизолированной) летательного аппарата будет
Tb=t(i + f “ М2) ,
(1.93)
где Тв - температура восстановления;
г - коэффициент восстановления (г = и,83 г- 0,89).
На самом же деле поверхность летательного аппарата не явля-
ется теплоизолированной: часть тепловой энерго теряется лучеис-
пусканием, другая часть передается в конструкцию и нагревает ее.
Поэтому температура на поверхности аппарата будет отличаться от
рассчитанной по формул?. (1,93)
Изменение температуры по высоте пограничного слоя представ-
лено на рис.1.80.
Здесь же изображен график изменения скорости в пограничном
слое в зависимости от относительной высоты пограничного слояу/£п>с.
Если бы поверхность была полностью теплоизолирована и отсут-
ствовал бы эффект восстановления скорости молекул воздуха в по-
граничном слое, то температура на поверхности летательного аппа-
81
рата была бы по величине равна То и по высоте пограничного слоя
изменялась бы по кривой Т0Т . Ври учете эффекта восстановления
скорости молекул изменение температуры по высоте пограничного
слоя происходит по кривой TQT . При учете отвода тепла в конст-
рукцию температура по высоте пограничного слоя будет изменяться
по кривой ТстТ .
Рис.1.80. Распределение температуры по толщине погранич-
ного слоя.
При гиперзвуковых скоростях полета у поверхности тела, обте-
каемого потоком воздуха, происходит диссоциация, рекомбинация и
ионизация молекул воздуха.
диссоциация (разложение молекул на атомы) сопровождается зна-
чительным поглощением, тепла.
декомбинация атомарных газов (процесс образования молекул из
атомов) сопровождается выделением тепловой энергии и происходит
у поверхности тела потому, что температура поверхности тела ниже
температуры воздуха за ударной волной.
Ионизация атомов и молекул сопровождается поглощением тепло-
вой энергии. Хотя воздух ионизируется незначительно (при М = 20
лишь на 1%) и, следовательно, мало влияет на теплообмен, но зато
ионизация имеет существенное значение для радиосвязи.
82
Большое изменение температур сопровождается значительным из-
менением теплоемкости воздуха, что влияет на теплоотдачу воздуха.
Возрастает давление потока у стенки. Увеличение давления ве-
дет к возрастанию плотности воздуха, а это приводит к увеличению
коэффициента теплоотдачи.
Нагревание воздуха за ударной волной повышает интенсивность
излучения воздуха. Потоки лучистой энергии, падающей на поверх-
ность тела, могут оказаться того же порядка, что и конвективные
потоки.
В связи с большим количеством факторов, влияющих на нагрев
аппарата при гиперзвуковой скорости, теоретический расчет нагре-
ва мало надежен. Поэтому большую роль приобретает эксперимент.
На большой высоте в области свободномолекулярного потока
аэродинамический нагрев летательного аппарата зависит от относи-
тельного количества энергии, передаваемой молекулами поверхности,
о которую они ударяются. Эта относительная энергия называется
коэффициентом аккомодации, значение которого близко к единице,и
на его величину оказывает влияние материал, из которого изготов-
лен летательный аппарат, и состояние внешней поверхности.
Часто теплоотдачу свободномолекулярного потока также опреде-
ляют по формулам (I.9I) и (1.93), но при этом учитывается, что
коэффициент восстановления температуры больше единицы (теорети-
чески г = 1,17 при обтекании плоской пластины свободномолекуляр-
ным потоком), а на коэффициент теплоотдачи в основном влияет
плотность воздуха.
Хотя в этом случае даже при очень больших скоростях полета
аппарата не возникает ударных волн, но в результате соударений
молекул с поверхностью наблюдается диссоциация и ионизация моле-
кул воздуха, поэтому вокруг движущегося тела образуется значитель-
ная ионизованная зона.
Глава П. ДИНАМИКА ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Динамика летательного аппарата - это раздел механики, зани-
мающийся изучением движения летательного аппарата под действием
сил и моментов, приложенных к нему.
Всякое движение свободного твердого тела можно рассматривать
как совокупность двух движений: поступательного движения центра
тяжести тела и вращения около этой, точки как неподвижной.
Твердым телом (абсолютно твердым, абсолютно жестким) называ-
ется такая неизменяемая система, частицы которой расположены не-
прерывно, т.е. материя заполняет область пространства, занятую
системой, сплошным образом.
Неизменяемой системой называется такая система частиц, в ко-
торой расстояния между двумя любыми частицами остаются постоянны-
ми.
Летательные аппараты способны деформироваться, а жидкие и
газообразные наполнения не являются неизменяемыми системами. По-
этому для многих классов летательных аппаратов приходится учиты-
вать изгиб корпуса крыльев и оперения и колебания жидкого напол-
нения (топлива), т.е. рассматривать летательный аппарат не как
твердое тело. Для таких летательных аппаратов решение основных
задач динамики осуществляется по следующей схеме.
I. Летательный аппарат рассматривается как абсолютно жесткое
тело с затвердевшим жидким наполнением.
2. Летательный аппарат рассматривается как абсолютно жесткое
тело с жидким заполнением.
3. Летательный аппарат рассматривается как гибкое тело с за-
твердевшим жидким наполнением.
Предыдущие рассмотрения позволяют определить параметры дви-
жения летательного аппарата как гибкого тела с жидким наполне-
нием. В настоящее время благодаря работам Г.С. Нариманова, Б.И.
Рабиновича, И.М. Рапопорта и других представляется возможным
84
сразу определить параметры движения летательного аппарата как
гибкого тела с жидким наполнением, а указанные выие три случая
получить как частные случаи из общего.
? ,?.152._51§Р122^.система_осей_крординат_.
^ГЛ^связи_ее_с_подвижными системами
Стартовая система координат представлена на рис.2.1. Начало
координат совпадает с центром тяжести летательного аппарата в мо-
мент старта, ось OXg лежит в плоскости прицеливания; ось OYg на-
правлена вертикально вверх; ось 07g направлена так, чтобы обра-
зовать правую систему координат.
Рис.2.1. Стартовая система координат и ориентация
относительно нее связанной системы:
1,2,3- порядок поворота систем.
В общем случае стартовая система координат не является инер-
циальной, так как она вращается вместе с Землей. Однако для не-
которых классов летательных аппаратов ее принимают за инерциаль-
ную. Если время и дальность полета летательного аппарата малы,
85
то учет вращения этой системы практически не дает существенного
увеличения точности в расчетах.
Стартовая и связанная системы осей координат ориентированы
между собой с помощью углов у (угол рыскания), (.угол тангажа),
у (угол крена). Взаимное расположение этих систем видно на
рис.2.1.
Углом тангажа $ называется угол, образованный
осью с горизонтальной плоскостью.
Углом рыскания (р называется угол между проек-
цией оси 0Х1 на горизонтальную плоскость и осью ОХ^ .
Углом крена Jf называется угол между плоскостью
симметрии летательного аппарата и вертикальной плоскостью, про-
веденной через продольную ось летательного аппарата.
Горизонтальная плоскость часто называется плоскостью рыска-
ния; вертикальная плоскость, проходящая через связанную ось 0Х1,
часто называется плоскостью тангажа, и плоскость, перпендикуляр-
ная связанной оси OXj , называется плоскостью крена.
Вектор угловой скорости вращения летательного аппарата «) мо-
жет быть представлен через проекции его на связанные оси:
а через производные углов <р , #,
ййу = ф -rtf ,
где
- dw -г
= dt hg >
5 =
, jy , Kzr " °РТЫ соответствующих осей) .
Определив проекции производных углов на оси связанной систе-
мы, найдем кинематические уравнения связи проекций угловой ско-
рости вращения летательного аппарата и производных углов
У :
= у + ф sin # ; <2.1)
86
51Я / + фсО5 cos^ ;
COS у - ф COS # 5UI / .
<2.2)
<2.3)
Направляющие косинусы углов между стартовой системой и свя-
занной представлены в табл.2.1.
1 а о л и-ц а 2.1
ись ох,
oxg cos <р COS
sin J
-sin (p COS -ft
0^ 1 0Zf
-cos (|> sin 13х cos у + J cos ср sin 13 sin # +
+ sirup slay ' 1-sin, ip cosy
cos cos у | -cos slay
sia (p sia ft cos у + | -sin (p sin i? sin y+
+ cos<psiny | +coscpcosy
Стартовая и скоростная системы осей координат связаны между
собой углами а? ^курсовой угол вектора скорости, путевой угол),
0 кугол наклона вектора скорости к горизонту), J[a <угол крена
скоростной системы). Взаимное расположение этих систем видно из
рис.2.2.
Путевым углом ср называется угол между проек-
цией вектора скорости на горизонтальную плоскость и осью OXg .
Углом наклона вектора скорости
к горизонту 0 называется угол между вектором скоро-
сти V <осью ОХ ) и горизонтальной плоскостью.
Углом крена скоростной системы
называется угол между осью 0Y и вертикальной плоскостью,
проходящей через вектор скорости центра тяжести летательного ап-
парата.
Вектор угловой скорости вращения скоростной системы осей ко-
ординат может быть представлен через проекции его на оси скоро-
стной системы:
ш = а)х L + <х>уУ + а)2 К ,
а через производные углов ср ,0 ,
87
Рис.2»2. Стартовая система ксорАлнат и связь ее со
скоростной системой:
1,2,3- порядок поворота систем.
й = <£ + ё *fa.
поэтому аналогично уравнениям (2.1) - (2.3)
<>sLn 0 ;
uJy = 9si,n Уд + cos 6 cos уа ;
ш2 = 0 cos ytt- <f cos 0 sin. уа
<2 Л)
(2.5)
(2.6)
Направляющие косинусы углов меэду стартовой системой и ско-
ростной представлены в табл.2.2.
Ио таблице направляющих косинусов определим некоторые кине-
матические соотношения, необходимые нам впоследствии.
Определим проекцию вектора скорости центра тяжести на стар-
товую систему осей координат.
Так как вектор скорости центра тяжести направлен по оси ОХ
скоростной системы, то
88
Таблица 2.2
Ось ох т 1 1 OY ] oz 1
cos ср cos 0 1 1 1 1 1 1 1 1 - cos <p sin 0 cos + sin<p sin Jfa 1 COS Cf> sin. 0 sin, jfa + ! isiaycosj(a
sin 0 1 1 1 cos 0 cos Jfa » - cos’0 sin
oz6 -sinср COS0 1 1 i 1 1 I J 1 sin <p sin 0 cos j[a + + coscp sin Y,T | sin. tf> sin. 6sin + j i-cos <pcosya
v*r dt = Vcos <p cos 0 ,
Kv= dYg dt = Yg = /sin0 ;
dZg dt = Zg = - /sinipcosO
(2.7)
<2.8)
(2.9)
Определим проекции веса на оси скоростной системы, помня,
что направление силы веса противоположно наг^авл-нию оси QYg :
Gx = “6 sin 0 ;
Gy = G cos 0 cos ;
Gz—G cos 0 sin
(2.10)
(2.II)
)
Положение скоростной системы координат ьтнссительпо старто-
вой можно определить или через углы tp ,0 , '^,или через углы
>а»р • Поэтому из этих восьми углов любые пять явля-
ются независимыми, т.е. могут быть заданы произвольно. Всегда
можно найти три соотношения между восьмью углами, дающие возмож-
ность по пяти углам определить остальные три.
89
Эти соотношения определяются из следующих преобразований.
Спроектируем единичный орт стартовой системы на оси скоростной
системы. Выразим эти проекции сначала через функции углов ср ,0 ,
, а потом через функции углов ср , it, у , а , р . Эти проекции
равны между собой.
Для первого случая выражения проекций таблица направляющих
косинусов между системами OXgYgZg и 0XYZ получена ранее
(табл.2.2). Для второго случая получим таблицу направляющих коси-
нусов, умножив 2 матрицы, образованные из таблиц направляющих ко-
синусов между системами OXgYgZg и 0X1Y1Z1 (табл.2.1) и между
системами 0X1Y1Z1 и 0XYZ (табл.1.6).
Запишем символически это перемножение
Матрицу С превратим в таблицу направляющих косинусов.
Таблица 2.3
Ось I ох 1 1 1 OY I T oz
'/Л J 1 i 1 1 COS (р COS # COS ОС COS р + | ) v(-COSd’ sin, COS 1 H sin, ф sin. J) (-sina cosp • *(cos ф sin, tfsln, | > T sin (psln yjsin p i i 1 f I I I । cos ф cos # sina + )+ +(-cos(psin,#cosp +sin(pslnp cosa । । । i ~T~ “ — - 1 i-cosip cos ft cosa sin p+ l + (-cos(psin tfcosp | +sincpsin]Qsinocsin p+ I i^COS (p sin #sin p । + sin ipcos y) cos p
i . 1 j sin # cos a cos p- ‘ ? -S cos у sinacosp- p cos Й sin I sin p 1 i i । 1 sin # sin cc t । + cos # cos$ cosa i । i 1 [ -sin & cos a sin p + । + cos cos | sin a sin p- 1 -cos & sin у cos p 4
ozg j -sin (p cos cos a cos p- i -(sin cp sin #cos у + '+cos (p sin y) sina cosp+ j +(-sin cp sin #siny t I + cos COS Л) sin p -sin <p cos #sina + +(sinipsln cos y + + cos sin у ) cosa i I sin (p cos# cos a sin p+ J+(sin<p sin#cosy t •+cos (p sin y) sina slnp+ j+(-sin <p sin #sin у + 1+cosip cos у) cos p
90
Сравнив полученную табл.2.3 направляющих косинусов с табл.2.2
и учитывая равенство направляющих косинусов в соответствующих
клетках таблицы, получим следующие соотношения:
sin, 0 = sin,!?' cos a cos р - cos d cos J' sin a cos p-cos iT sin sin p ; (2.13)
-sin cp cos 9 =-sin, (pcosiJcosa cos p-(sin ^sirt^cos tcos sin^Qx
* sin,a cos p + (-sin ip sin fl" sin J' + cos cpcos H)sin ft ; (2.14)
-cos 9 sin.la=-sin, $cosa sin. p +cos i) cos since sinp-cos№nj[cosp.(2.15)
Из уравнения (2.13) при p = ? = О (при движении летательного
аппарата по тангажу) получим соотношение, часто употребляемое в
расчетах,
sin, 0 = sin, cos a-cos tfsina = sin(il-a)
или
{г = 6 + а ,
<2.16)
впрочем, можно получить и непосредственно из кинематически
представленных на рис.2.3.
что,
построений,
Из уравнения (2.14) при
#=2[=9=а=О (при движении
летательного аппарата по кур-
су) получим соотношение, ча-
сто употребляемое в расчетах,
-sin ср = - sin ф cos р -bcoscpsin р-
= -sin (ф-р)
или
(р = (р + р , (2.17)
г‘ис.2.3. Соотношения угло^ при
движении летательного аппарата
по тангажу.
что можно получить и непосредственно из кинематических построе-
ний, представленных на рис.2.4.
Из уравнения (2.15) при 0 = i? - р = О (при движении лета-
тельного аппарата по крену) получим соотношение
-sin - sin %
91
или
Га = Г
(2.18)
?ис.2Л. Соотношения углов при движе-
нии летательного аппарата по курсу.
§ 2^2_._Вывод__уравнений_сил_ на_пассивном_участке
полета
Иа пассивном участке полета отсутствует изменение массы лета-
тельного аппарата. Летательный аппарат рассматривается как абсо-
лютно жесткое тело. Воспользуемся теоремой теоретической механи-
ки о количестве движения системы материальных точек для вывода
уравнений сил:производная по времени от количества движения си-
стемы равна сумме всех внешних сил, действующих на систему,
77 =Л (2.19)
at
где К - вектор количества движения системы, определяемый для
абсолютно жесткого тела,
К=т7цл, ,
т/цт- вектор скорости центра тяжести относительно неподвиж-
ной (стартовой) системы координат.
В большинстве случаев более выгодно уравнения движения центра
тяжести проектировать на оси подвижных систем координат. Хотя
92
при этом усложняется проектирование левой части дифференциаль-
ного уравнения, но упрощается проектирование сил, действующих
на летательный аппарат. Мы рассматриваем такие подвижные систе-
мы, начало которых расположено в центре тяжести летательного ап
парата (рис.2.5) и одна из них (связанная) скреплена с летатель-
ным аппаратов, а другая (скоростная) может поворачиваться отно-
сительно летательного аппарата.
При проектировании
уравнений на подвижную си-
стему координат производная
по времени от количества
движения
где 7Г
<i 2-2°)
- локальная произ-
водная;
- угловая скорость
подвижной системы
осей координат.
Поясним подробнее сущ-
ность локальной производной.
Рис.2.Ь. движение летательного ап-
парата на пассивном участке траек-
тории.
CD
Локальная производная
Пусть дан вектор а как непрерывная и дифференцируемая функ-
ция времени, - неподвижная система координат, 0XYZ
- подвижная система координат (рис.2.6). Обе системы имеют общее
начало. В проекциях на подвижную систему вектор может быть запи-
сан _
CL = CL y^t + CL у j + 0,% К ,
i tj , К - орты подвижной системы,
дифференцируем вектор по времени. Получим
dt J* dt
dt dj dK
'*dt dt dt
(2-21)
93
Vr Ц
К выводу локальной г.
I, 3- частные с луча/.
ГЛР ; + . d(Lz ггЛ dCl
ГАе \dt '~dT~dt~ ~ ~dt ~ локальная производная век-
тора а , представляющая собой производную вектора а при усло-
вии, что I tJ , К-постоянны, т.е. рассматривается движение век-
тора относительно мысленно не вращающейся подвижной системы ко-
ординат и тем самым определяется относительное движение конца
вектора а .
Производные единичных векторов-есть скорости их концов, т.е.
скорости точек подвижной системы относительно неподвижной (опре-
деляется переносное движение). Следовательно,
dt с ’ (2.22)
(2.23)
(2.24)
поэтому
94
+ax(u)ii) + ay(a)xD^z(u)^=^t
+ (jo*(axL+ayJ±azK^= ta^a .
. (2.25)
Полная производная вектора а равняется относительной-скоро-
сти конца вектора (локальной производной) и переносной скорости
конца вектора.
Рассмотрим
I. Система
частные случаи.
0XYZ неподвижна:
Cl t d t
2. Вектор а неподвижен относительно подвижной системы 0XYZ:
da _п .
dt ~и ’
da - -
-yr = а) х а .
dt
3. Вектор а неподвижен
°Wg-
относительно неподвижной системы
dt и <
da - -
^--cDxa .
Вектор количества движения центра тяжести летательного аппа-
рата К приложен в центре тяжести и свободно вращается относи-
тельно подвижной системы. Определим производную по времени от
этого вектора через проекции вектора на подвижную систему:
d К
dt +
Г J К
Шх Ц)у (JL)Z
Кх Ку кг
Проектируем обе части равенства на оси подвижной системы,
причем при проектировании
опускаем знак локальной производ-
ной, ибо локальная производная берется именно относительно под-
вижной системы :
dt * Ку ’
(2.26)
95
~Tt + К* Гу >
^^xKy-WKx = Fz.
0,1 7
<2.27)
(2.28)
При этом достаточно получить лишь первое уравнение проекций,
как тотчас хе можно написать два остальных уравнения, применяя
принцип циклической замены осей.
Для правой системы этот принцип графически представлен на
Проекции вектора количества движения на подвижные оси имеют
вид
КХ ~ 171 ^Х
К у “ mVy
Кг . ntVz
(2.29)
(2.30)
(2.31)
Подставив эти значения в уравнения (2.26) - (2.28), получим
уравнения сил - дифференциальные уравнения движения центра тяже-
сти летательного аппарата-под действием сил, приложенных к лета-
тельному аппарату:
/и * Шу Кг - шг Vy) = ?х ; <2.32)
96
+ ; (2.33)
т(^+и)^~ШУ^)=^- <2.34)
Пусть подвижная система является связанной системой. В этом
случае обозначим Vx=VXl , Vy = Vy1 , Vz=^ , wx=UJXf, шу= wy<,
ioz= «*2/ , = и уравнения сил будут
m(^itwyfVzr<uzlVy,')=Fx, - (2.35)
’ (2,з5)
п (4?" - <2-37)
Пусть подвижная система будет скоростной. Тогда обозначим
Ъу—О, Vz=0, tf>x=cOje, cuy- c^y , j ^z~^zr
Получим уравнения сил:.,
dV г x
(2.38)
ma>zV = Fy ; (2.39)
-mwyV=Fz . (2.40)
участка_полета
При выводе уравнений моментов воспользуемся теоремой об изме-
нении кинетического момента системы точек относительно центра
масс: производная по времени от кинетического момента системы от-
носительно центра масс при движении системы относительно центра
масс равна сумме моментов всех внешних сил относительно центра
масс. Таким образом, для двиления относительно центра масс тео-
рема о кинетическом моменте выражается совершенно так же, как
если бы центр масс был неподвижной точкой:
97
(2.41)
где м - главный момент всех внешних сил относительно центра
масс;
L - момент количества движения или кинетический момент,
определяемый по формуле:
£ 27 (г£ х ) ,
(2.42)
- радиус-вектор точки I летательного аппарата относитель-
__ но центра масс (см.рис.2.5);
V-L - абсолютная скорость точки I летательного аппарата;
- масса точки I .
Спроектируем уравнение на оси подвижной системы:
^-+a}xZ=M, (2.43)
здесь
dL
dt
- локальная производная вектора L ;
{D - угловая скорость вращения
Перепишем эту формулу так:
dL
dt
I J К
Шу a>z
t-x Ly Lz
подвижной системы.
= М .
Получим проекции на оси подвижной системы:
+ШуЬг-ШгЬу = Мх (2.44)
+ WZLX -wxLz = My ; (2.45)
(2.46)
Определим проекции кинетического момента на оси подвижной си-
стемы координат. Так как
dpt
dt
dfn.i dt~i
dt dt
(2.47)
*1 =
98
где р; - радиус-вектор точки I относительно начала стартовой
системы осей координат (см.рис.2.5);
р4т - радиус-вектор центра тяжести летательного аппарата
относительно начала стартовой системы координат, сле-
довательно,
_ у
dt ~ ц-т ‘
Отнесем производную вектора FL к подвижной системе. Тогда, вос-
пользовавшись понятием локальной производной, получим
dF; dF _ ~ _ _
— = _+toxr. = ^.+u)x/..>
где aj - вектор угловой скорости вращения подвижной системы.
Следовательно,
= Иц т + t си х р£. .
Поэтому выражение для кинетического момента примет вид
L [X х mi (Vtt.T +
ИЛИ
х mL V„L (ю^ .
Но
' ГГ£хпг4-^л.= (^г£тг)хКцт=/п^тхКц,.т==/п-{?х V^O,
так как начало подвижной системы расположено в центре тяжести ле-
тательного аппарата, и, следовательно, гц т = О.
В качестве подвижной системы примем связанную систему. В свя-
занной системе все моменты инерции (для пассивного участка поле-
та) неизменны по времени, потому что система осей жестко скрепле-
на с летательным аппаратом. Тогда согласно второму частному слу-
чаю для локальной производной
«К — О
dt и *
Следовательно,
ZZ 5 * rTli Yr- ~ 5 х .
7 4 L I *• *
99
Тогда кинетический момент
Z = Г х (<Б х rz) .
Формула тройного векторного произведения имеет вид
a*(b*c) = b (а с)-с (а Ь) .
Согласно этой формуле
- £ mzr£- .
Рассматриваемые векторы в проекциях на оси связанной систе-
мы можно записать
?i = Х^+^Л+2/Л -
О) = шх1, + ШУ1 jt + ш2/,,
а также
2 2 2 2
*1=хп +yti'z4
Получим
(Fi^i) = xliwx)+yiiUJy< + z4Mzl •
Следовательно,
Z = шZ/nz (x^ +yz. tzF)-^niri (хйa)Xi tyf.ШУ/1ztiU)Zi) .
Определим проекции кинетического момента на оси связанной си-
стемы:
^'Х/ = а\/£/Л4 ^У/1 + Zli) ”? rnLXfi Z/LC0Z1) =
= шХ1 mi (yfL +Z*L)- шу1 Е mixd yiL mixlL zlt =
= a)x1Jxf~u)y1^xfy1~ ^z/xfZf ’ Q2.48)
100
так как
5 rnlX/lZ1L~^X1Z1 •
Остальные проекции кинетического момента напишем, применив
принцип циклической замены осей:
hi = ~a)zf^yfz{ " шх1^У1х1 -> (2.49)
^Z,= Д/ • <2.50)
Подставив полученные уравнения в проекции производных кине-
тического момента на подвижные оси (теперь, точнее, на связанные
оси), получим
^зд^у, " ^z^z J + шу, (Л,ш2, ~Jz,x1lox1 ~
~^У<ШУ<) ~(Jyf ^у, ” Jy,xtшх, ~Jyf.zf wzt) = Мх, J (2.51)
+ ^z, -
-JxfZ^Zf (Jztшг," ^г1х,шхГ',г1^1 шу,) ~ Myt > (2.52)
77 Qz^z^JziX^xr^y^y + wx, (^у^у, ~Jy,Xl^xr
-JylZl(OZiy<Oyl{jxU)Xl-JXii)U)yi - JS)Zi a>Z/) = Mz< . (2.53)
Сделав преобразования, найдем
101
d<aixt dw^ _ - dwz, /, , \
Jxt dt JxM dt Jx^< dt Jy,)~
tшх,^х,у,^ (“%-«£) = ', <2.54)
r i(U* _ 7 iu>X, r duiz, , _ T X
Jy< dt Jbx! dt ~Jy,^~dF +w’‘,a3zl(Jx,-Jzl)~
-шУ,ш^х,У1 ^x^y^y, ^X,z, = МУ< ’ (2-55)
т du>zi т du)Xj т duiyf / .
Jz7 dt ~J^rdi ~J^yt'~dt ^^уАЬг^)-
~шх,ш1^у,г, + Jx,yt (.u}yl~ujxt)=' ^zt (2.56)
Полученные уравнения называются уравнениями моментов. Если
окажется, что для летательного аппарата центробежные моменты на-
столько малы, что ими в расчетах можно пренебречь (Л „ =
= = О (связанные оси являются главными центральными ося-
ми инерции), тогда уравнения моментов примут более простой
вид:
dt'+ ^zi ~Jy<) ШУ/ Шгч = Мх1 ’ (2.57)
4+ <Л~\)“%=’ (2-58)
<2-59>
§ 2Л^_11рияцип_затвердения^_Уравнения движения
^.^тивном учаотке полета
На активном участке полета летательный аппарат представляет
собой систему переменной массы или даже систему переменного со-
става, масса которой заменяется аз-за одновременного прихода и
102
расхода массы. К такой системе непосредственно не применимы рас-
смотренные выше теоремы теоретической механики. Однако некоторы-
ми авторами доказаны теоремы, позволяющие использовать и на ак-
тивном участке полета летательного аппарата теоремы теоретичес-
кой механики. Так, Гантмахером и Л.М. Левиным доказана тео-
рема, названная принципом затвердения;
Уравнения движения твердой оболочки систе-
мы переменного состава в произвольный момент времени t могут
быть записаны в виде уравнений движения твердого тела (постоян-
ного состава), если представить, что система переменного соста-
ваТЪатвердела ¥^<омёнт"врёмёнй и что к полученному таким об-
разом фиктивному твердому телу приложены внешние силы, действую-
щие на систему, а также реактивные силы и силы Кориолиса.
На основании этого принципа
— = F + F + F — У"* F
= м + мр+мк= Е м ,
(2.60)
(2.60а)
где /j, - главный вектор реактивных сил;
- главный вектор кориолисовых сил;
Л?р - главный момент реактивных сил;
/Йи - главный момент кориолисовых сил.
Тогда уравнения движения летательного аппарата на активном уча-
стке траектории, спроектированные на подвижные оси координат, бу-
дут:
m dt ’ (2.61)
m,wz £2 Fy , (2.62)
-majvV= П Fz , J b 7 (2.63)
1 dt + = Mxf •> (2.64)
т dajyl Jy, dt + 22 My^ , (2.65)
103
d^zi /
\ dt * > (2.66)
сих/ = У t Ср sin 1? , (2.67)
= ф cos# cos у t ft sin у ? (2.68)
cu2 « i? cos у - cp cos ft sin у , (2.69)
шу = ср cos 0 cos ya + 6 sin ya f (2.70)
wz = 9 cos y0 - <f cos e sin. ]a , (2.71)
Xg = Ycos cp cos 0 , (2.72)
Yg = Vsin 0 f (2.73)
Zg --Vsin ср cos 0 ? (2.74)
sin 9 = sin $ cos a cos p - cos ft cos у sin a cosp-costfsin/sin, p , (2.75)
-sin <p cos 0 = - sin cp cosft cosa cos p-(sin <p sin ft cos у +
+ cos <p sin jQ Sin a cos p + (-sin sin ftsin]/ +
+ COS (|) cosY) sin p , (2.76)
- c os 6 sin = - sin ft cos a sin p + cos ft cos у sina sin p-cos ftsin^cos p. (2.77 )
Система, описывающая пространственное движение летательного
аппарата, состоит из 17 уравнений. Неизвестных в этих уравнениях
при зафиксированных органах управления летательного аппарата бу-
дет тоже 17: V7 6 , ср , , a , р , 1? , <р , у , соХ/, и>уу, си2/ ,
7 ^2 7 X£ . Yg ; Zg .
В случае управляемого или стабилизируемого полета система
уравнений перестает быть замкнутой, так как к 17 неизвестным до-
бавляются еще 4 неизвестных ( , 8Н , z - углы отклонения
органов управления по тангажу, курсу и крену и параметр, характе-
ризующий работу двигательной установки'). От этих неизвестных за-
висят силы и моменты, входящие в правые части уравнений.
При управлении и стабилизации летательного аппарата с помощью
автопилота необходимо добавить еще Ъ уравнен?л для замыкания ей-
стены:
= ^3 (u-i. , Si) г
^ДВ~ 6ia (ui>si) >
где Hi “ управляющие сигналы;
$1 - стабилизирующие сигналы.
Необходимо отметить, что в уравнениях (2.61) - <2.66) масса
и моменты инерции летательного аппарата являются переменными ве-
личинами, зависящими от времени.
В этой системе уравнения сил спроектированы на скоростную
систему, а уравнения моментов - на связанную.. Это не мешает сов-
местному решению уравнений сил и моментов, поскольку при решении
уравнений моментов определяются лишь угловые величины,
§ 2^52_Силы±_действуюц|ие_на_летате_льный__аппарат,.
Понятие_о_перегрузке_
На летательный аппарат в полете действуют реактивная сила Р,
сила веса G t аэродинамическая сила R (рис.2.8).
Реактивная
сила
Нод реактивной силой
Г понимается равнодей-
ствующая сил, создаваемых
двигателем Рд , и сил ста-
тического давления окру-
жающей среды Рст , дейст-
вующих на летательный ап-
парат :
Р = Р + р
Д ГСТ '
Известно, что
Рл dt ~ - и9гн dm .
гис.2.8* Силы, действующие на ле-
тательный аппарат.
105
где Готн - относительная скорость истечения газов (относительно
корпуса летательного аппарата).
Тогда
Рд = ^/Отн >
dm
т = ~ -j-r - секундный расход массы.
at
Статическое давление окружающей среды
^ст ~ ~Рн $а, + Ра 5а ~ ^а,(Ра~ Рн) >
здесь рн - статическое давление окружающей среды на высоте Н ;
ра - давление газов на срезе сопла;
- площадь среза сопла (рис.2.9).
Рн
ajH НН1ШЛИШ±Е1Нг
~Ра
Рис.2.9. Реактивные силы:
рн - статическое давление окружающей среды на вы-
соте Н ; ра- давление газов на срезе сопла; 5а -
площадь среза сопла.
Следовательно, получим формулу для нахождения реактивной силы
. (2.78)
для определения тяги двигателя в безвоздушном пространстве поло-
жим р « 0. Тогда
Fn = лг Р^тн + <5а ра = , (2.79)
Уе - эффективная скорость истечения газов, определяемая по фор-
муле
Если требуется определить реактивную сиду на любой высоте, зная
реактивную силу на поверхности Земли, т.е.
Pq = ^отн + $а{Ра~Ро) >
106
ро - статическое давление на поверхности Земли, то
^а(Ра~Ро) + (Ро'Рн) Ро + (Ро~Рн) •
Удельной тягой называется отношение реактивной силы к секунд-
ному расходу топлива, т.е,
^уД= лг£0 =~С~ "к!“т^5ваТсек Сили сек),
G - секундный весовой расход топлива.
Сила веса
Сила веса летательного аппарата G определяется из формул
так:
£ = » I Z
/ У (2.80)
& * IG | j J
где ni - масса летательного аппарата:
та = отвкл-] ”ldt ,
^вкл
здесь /7iSKJI- масса летательного аппарата в момент включения дви-
гателя;
t ' вРемя включения двигателя;
лг - секундный расход массы;
g - вектор ускорения сил?; веса, определяемый по форму-
ле
(2.81)
gN - вектор гравитационного (ньг^.-нианского) ускорения;
gf - вектор центростремительного ускорения.
Модуль вектора гравитациоияог ускорения определяется из за-
кона всемирного тяготения Ньклона;
„ z И'ГП,?
* (2.82)
где F - сила взаимодействие д-ух >..д t кассой гп1 и т2 на рас-
стоянии d иекду их ц—Tpav/-
f - гравитационная постов лая -.
Если принять за массу Земли
щ2=т3 = 5,975-Ю27 г,
а также
f ~f3~ 6,673-10“® см3/г -сек^
и
d = R3 = 6371,1 км =6,3711- Ю8 см,
то сила взаимодействия между телом, массой /тс,, и Землей
откуда
g = f3 = 983 см/сек^.
При этом Земля рассматривается как однородный шар, а вектор гра-
витационного ускорения направлен к центру шара. Но так как Зем-
ля не является шаром, то приходится вводить ряд поправочных коэф-
фициентов при расчете величины для каждой точки поверхности
Земли.
Если тело находится на расстоянии Н от поверхности Земли,
то величина
_ г п3 = #з = 1
snh~J (£+н)г ~^N0 (R3+H)Z Л+ ".У
\ R.J
£Vo- гравитационное ускорение на поверхности Земли.
Величина вектора центростремительного ускорения тела, распо-
ложенного на поверхности Земли, определяется из формулы:
где г = R3 cos ср ;
V >
откуда
Гцс = R3cos ,
108
gu3 - угловая скорость вращения Земли ( си3 = 7,29211*10 5 рад/сек):
Т- время одного оборота Земли ( Т « 86 164,1 сек);
<£- географическая широта точки.
Для экватора ( ср = 0) получим = 1?,'37 см/сек^. Вектор центро-
стремительного ускорения направлен перпендикулярно вектору угло-
вой скорости в сторону вогнутости кривой (по направлению к цент-
ру кривизны траектории). Поэтому вектор ускорения силы веса (g)
направлен под некоторым углом к направлению радиуса Земли
(рис.2.10).
Наибольшая величина расхождения между векторами g^ и gf -
будет 5/ при q? = 45°.
Перегрузкой называется отношение
суммьТ^всёТГнёШнихсил, действующих
на летательный аппарат, за исключением
силы веса, к силе веса. В векторной
записи перегрузка
_ ZF-G
G
Для спутников
- G-G О п
для летательных
ся на стартовом
щим двигателем
83)
Рис.2.10. Зависимость
направления вектора уско-
рения силы веса от вра-
щения Земли,
аппаратов, находящих-
устройстве с неработаю-
_ G + R-& R , _0
п = —= Т = 1е ’
где R - реакция опор;
ё° - единичный вектор.
Говорят, что тело находится в состоянии невесомости, если
на него из внешних сил действует только сила веса, а все другие,
если и действуют, то уравновешены между собой.
109
§ 2.6. Моменты, действующие на летательный аппарат
На летательный аппарат относительно центра тядести могут
действовать следующие моменты:
I. Моменты, связанные со статической устойчивостью.
2. Моменты, создаваемые органами управления.
3. Моменты аэродинамического демпфирования.
4. Моменты от запаздывания скоса потока у оперения.
5. Моменты реактивного демпфирования.
I.Моменты, связанные со
статической устойчивостью
летательного аппарата
Моменты, связанные со статической устойчивостью летательно-
го аппарата (см.§ I.I9), обозначаются
Р
Мх, = Мх,Р; (2.84)
муГм^'> С2*85)
MZt = MZ,<* , (2.86)
где
(2-87)
(2-88)
й 3 л
(ту , s - коэффициенты степени статической устойчиво-
сти летательного аппарата относительно соотв&тствуюшо осей свя-
занной системы).
2. М о м е т ы, создай с е м ы е
орта я а м и у раз л е и % я
Органами управления летательного аппарата могут быть:
Воздушные руля.
IXO
Газоструйные рули.
Вспомогательные (верньерные) двигатели для управления.
Поворотные мараевые двигатели.
Маршевые двигатели с изменяемой тягой.
Поворотные сопла двигателей.
Дефлекторы.
Управляющие сопла.
Вращающиеся массы.
Воздушные рули
Эффективность - величина момента целиком поворачивающегося
горизонтального оперения (руля высоты), расположена?-о г? соьч
ной схеме (рис.2.II), определяется по формуле
^тв -^р.в ;(2.90 )
здесь Yi3 - нормальная
сила, развиваемая ру-
лем высоты, определя-
ется по формуле
<2.91)
Рис.2*11. К выводу эффективности <рга-
нов управления.
’
Су коэффициент нормальной силы, создаваемой рулем <производ-
ная С°в изменяется по числам М полета аналогично изме-
нению производной ; максимальный момент, создаваемый
рулем высоты, будет максимальным там, где = max );
Lp в - плечо руля высоты - расстояние от центра тяжести летатель-
ного аппарата до фокуса руля высоты (или приближенно: рас-
стояние от центра тяжести летательного аппарата до оси по-
ворота руля высоты);
5В - площадь руля высоты.
III
С другой стороны, момент, создаваемый рулем высоты, может быть
представлен
Чг,в = *
Тогда
mzfB ~ ~ ^в^в^р.в - (2.92)
или
Z7l2/B = ~СУ} В ^Б ^В^р.6 >
здесь
JB = 4^ ; (2.93)
О
^р.в= ' <2.94)
иА
Взяв частную производную, получим
о3 dm2iQ гов^ г -Q ос-к
rTlz1 dSQ ‘
Производная Су® всегда больше нуля (благодаря принятому поло-
жительному направлению отклонения руля высоты), поэтому^ при нор-
мальном расположении органов управления коэффициент /тг?в<6?.
При установившемся прямолинейном режиме полета суммарный мо-
мент, действующий на летательный аппарат (для продольного движе-
ния летательного аппарата),
<а + M^SB=0 .
В коэффициентах эта формула, называемая основным балансиро-
вочным соотношением, записывается
а + ов=О . <2.96)
Б данном случае под продольным движением летательного аппа-
рата понимается его движение в плоскости симметрии ОХ^ при
условии, что отсутствует угол крена ( ? = О).
Под боковым движением будем понимать движение, происходящее
в плоскостях -ЭД,// и O'^Z. (по курсу и крену). Боковое двй-
112
жение часто разделяют на движение по курсу и крену.
Из основного балансировочного соотношения получин
Но так как
р а
nz, Су,
то
SB = ~ СУ,
Следовательно, при установившемся прямолинейном режиме поле-
та увеличение степени статической устойчивости аппарата (т.е*
увеличение коэффициента ) приводит к необходимости уве-
личения отклонения органов управления при прочих равных условиях
При статически устойчивом летательном аппарате (пг2^
для совершения равномерного горизонтального полета нормальная си-
ла от горизонтального оперения должна быть направлена вверх,что
следует из балансировочного соотношения.
При статически неустойчивом аппарате ( mz*1 > 0 ) для со-
вершения того же равномерного горизонтального полета нормальная
сила от горизонтального оперения должна быть направлена вниз.
Газоструйнне рули
Газоструйные, или газовые, рули находятся в потоке газов дви-
гателя, поэтому моменты, создаваемые газовыми рулями, примерно
остаются постоянными на всей траектории полота летательного аппа-
рата, если положение центра тяжести неподвижно относительно кор-
пуса. Момент газовых рулей (рис.?.12)
^,г.р = - ^?р-гр (2.97)
ИЗ
где У/Гр- нормальная сила, создаваемая одним разовым рулем, опре-
деляется по формуле
^г.р ^У/Г.р /г ^г.р ? (2.98)
- скоростной напор газов, определяемый по формуле
рг - плотность газов;
Уг - скорость истечения газов;
$Гр- площадь одного газового руля;
£гр- плечо газового руля.
Представив
CW \Wdr-p >
с одной стороны, запишем
g-
^z1 Г.р = г.р §г.р фг ^г.р ь г.р •
С другой стороны, можно записать:
Тогда
^Zi Г.р “ Г.р fr •
S' --
/7г2/Г.р = '“^Г.р ®Г.р ^Г.р^Г.р ;
здесь
114
o’ _ ^^Г-Р
^г.р- 5 ;
2” = г'Р .
гр ЬА
Коэффициент эффективности газовых рулей
^г.р drn,Zlr,p - -
zi ~ ^г.р Лг-Р ГР Г-Р ’
(2.99)
Возмущающие моменты, действующие на летательный аппарат <из-за
аэродинамической асимметрии летательного аппарата, действия вет-
ра и т.д.) зависят от скоростного напора. Чем больше скоростной
напор, тем больше возмущающие моменты. Поэтому на летательных
аппаратах иногда вместе с газовыми рулями применяют и воздушные
рули, которые имеют максимальную эффективность вблизи максималь-
ного скоростного напора. Это позволяет уменьшить площадь газовых
рулей и тем самым уменьшить потери тяги двигателя на газовых ру-
лях.
Верньерные (вспомогательные)
двигатели
Специальные поворотные двигатели создают моменты вокруг цент-
ра тяжести, когда вектор тяги их проходит на расстоянии к от
центра тяжести (рис.2.13). В этом случае момент от одного двига-
теля
^в.д=“ V , (2.IOO)
Р8.д ” тяга верньерного двигателя.
Величину h запишем так:
fc = iB,AsinS8.fl^Z.M^BA ,
расстояние от центра тяжести до оси поворота верньерного
двигателя.
Тогда управляющий момент от одного верньерного двигателя
^2/ В.д ~ ” ^В.д в.д $в.д •
Производная момента верньерного двигателя по углу отклонения
115
£ ^^Z/В.Д nr
MztB.A= = “^в.д/в.д (2.I0I)
17 ив.д
Рис.2ЛЗ. Схема откло-
нения верньерного дви-
гателя.
С помощью верньерных двигателей
после выключения основных двигателей
доводят скорость летательного аппарата
до нужной величины с большей точностью,
чем это можно сделать с помощью основ-
ных двигателей, так как тяга верньер-
ных двигателей по сравнению с тягой
основных двигателей невелика.
Поворотные
маршевые двигатели
Иногда маршевый двигатель (или не-
сколько) поворачивают в одной или двух
плоскостях, отклоняя вектор тяги так,
чтобы он проходил на некотором расстоя-
нии h от центра тяжести (рис.2.14,а).
Тогда создается момент вокруг центра
тяжести, величина которого определяет-
ся так:
Mz)n.fl = -p^h > (2'102)
Рп д - тяга поворотного маршевого двигателя.
Сделав преобразования, аналогичные предыдущему случаю, получим
“Л1.Д П.Д П.Д )
где Ln - расстояние от центра тяжести летательного аппарата
до оси поворота маршевого двигателя;
З'лд - угол отклонения поворотного двигателя.
Производная момента поворотного двигателя по углу отклонения
Я $п.д
^2/п-Л= =”^п.д^п.д • (2.103)
^п.д
116
Так как маршевый двигатель создает "ольщую тягу, тс угол
его поворота невелик (6-12°).
Недостатки управления с по
мощью поворотного маршевого дви-
гателя заключаются в том, чт,о
усложняется и утяжеляется устрой-
ство подвеса двигателя, а так-
же в том, что наблюдается неко-
торая потеря тяги двигателя
при его отклонении.
а)
Маршевые
двигатели с изме-
няемой тягой
Когда на летательном аппа-
рате находится несколько двига-
телей, управлять движением во-
круг центра тяжести можно с
помощью увеличения и уменьше- ?ис.2.14. Схема управления с
ния тяги двигателей (рис.-2.1Дб). помощью маршевых двигателей:
Если на одном из двигателей уве- а) поворотный двигатель; б) не-
личить тягу на ДР по сравнению подвижные^двигатели ° изменяе~
с номинальной, а на другом умень-
шить на ДР , то суммарная тяга останется неизменной, а около
центра тяжести создастся момент
Mz, м д=- (f*Лр) h + (р~Др)h =-2Дрк (2.104)
Умножим и разделим правую часть равенства на тягу двух двигате-
лей:
ДР
Мг1мл---угН2Р.
Обозначим параметр, характеризующий работу маршевых двигате-
лей при управлении, через 5М<Д :
X = —
дм.д р
117
Тогда
^z/м.д 2hPS^
Производная момента по параметру работы двигателей будет
5 дМ7< М П
^2,мд= —~2hP. (2.105)
У^м.д
Чтобы увеличить момент, двигатели отклоняют на небольшой угол
Y[ еще при установке их на летательном аппарате.
Недостатки этого метода управления состоят в том, что двига-
тель и систему подачи приходится рассчитывать,исходя из тяги
Р+ДР , а большую часть времени двигатель и система работают
при тяге Р . Тем самым для тяги Р система оказывается перетяже-
ленной. Чтобы избежать этого недостатка, можно создать момент
только уменьшением тяги соответствующего двигателя без дополни-
тельного форсирования другого двигателя.
Желательно, чтобы
ДР
0,07 0,15.
При управлении изменением тяги двигателей наблюдается значи-
тельное запаздывание между подачей команды и исполнением.
Поворотные сопла двигателей
На пороховых двигателях для управления вокруг центра масс
часто применяют поворотные сопла либо в одной плоскости (рис.2.15),
либо в двух плоскостях (рис.2.16,а, б), либо вращающееся несимметрич-
ное сопло (рис.2.17).
При отклонении сопла происходит отклонение вектора тяги дви-
гателя. Вектор тяги проходит на некотором расстоянии от центра
тяжести и создает момент вокруг центра тяжести, равный по вели-
чине
Mzy-Ph ,
здесь Р - тяга двигателя;
к - расстояние от центра тяжести до вектора тяги.
Недостатками этого- метода управления являются сложность и
ненадежность конструкции узла поворота сопла.
ИЗ
Рис.2.15. Одноосное вращаю-
щееся сопло.
Рис.2.16. Поворотные сопла.
Рис.2.17. Вращающееся сопло:
1-направление вращения; 2-подиипник;
3-ось сопла; 4-ось вращения.
I ТУ
Де ф лекторы
В этом случае поворачивается не все сопло, а только его
часть (рис.2.18). Эта часть может быть кольцевой, как показано
на рис.2.18,а, и в виде пластин, периодически вводящихся в поток
газов.
Рис.2.18.. Отклонение струи газов:
а) кольцевым газовым рулем; б) вторичным впрыскиванием (газоди-
намическое управление;: I- подвод жидкости или газа для вторич-
ного впрыскивания; 2- регулирующий клапан; 3- результирующая
тяга.
Пластины могут быть направлены перпендикулярно оси сопла и
под некоторым углом к оси. Тягу можно отклонить также вводом га-
за или жидкости в каком-либо месте сопла (рис.2.18,б).
При повороте кольца поворачивается поток выходящих газов.Тем
самым поворачивается вектор тяги. Если вектор тяги проходит на
расстоянии h от центра тяжести, то создается момент
Управляющие сопла
Обычно рабочим телом для управляющих сопел (рис«2.19,а) слу-
жит сжатый воздух или какой-либо га.?, который подается в камеру
управляющего сопла. При движении штока с помощью электромагнита
(рис.2.19,б) открывается выход газу, и он создает реактивную тя-
гу, а тяга образует момент относительно центра тяжести аппарата.
Управляющие сопла могут устанавливаться по тангажу, курсу и
крену.
120
Гис.2.19, Управляли
В сеззоздушном пространстве такое у..<4?,.itние удобно, но яв-
ляется несовершенным, так как удельная тяга низкая \Р^ = 60 -<
90 сек) и, следовательно, расходуется много газа.
Вращающиеся массы
Иногда на космических летательных аппаратах для управления и
стабилизации применяются вращающиеся массы <рис.2.20), Если управ-
ление и стабилизация осуществляются по трем осям, то устанавли-
вается трк вращающихся диска с осями вращения по соответствующим
связанным осям.
при отсутствии внешних моментов, действующих на летательный
аппарат, осз\ \ н неизменным момент количества движения системы
летательный аппарат - диск. Изменением момента количества движе-
ния диска можно изменить момент количества движения аппарата, т.е.
заставить поворачиваться аппарат, если до этого вращение отсут-
ствовало, или изменить величину угловой скорости, если вращение
было.
Пусть до момента t 0 диск находился в покое относительно
летательного аппарата, а летательный аппарат перемещался посту-
пательно в пространстве. С момента t » 0 диск начинает раскру-
чиваться с постоянным угловым ускорением <л)д так, что кинетиче
кий момент системы диск - летательный аппарат при этом не меня-
ется. Происходит пос тис иное изменение угловой скорости диска
1-<
и, следовательно, изменение кинетического момента диска относи-
тельно оси вращения:
Рис.2.20. Момент от вращающихся масс.
Изменится и кинетически! момент летательного аппарата
л.а”~ ^л.ашлл ?
но сумма их останется неизменной, равно! нулю:
Lд + л.а= 60 А + Jjla ^л.а = 0 ,
откуда
к А
й=“>л.а=- 7 •
’'л.а
Такую угловую скорость вращения приобретет летательный аппа-
рат при изменении угловой скорости диска от 0 до ии . Если необ-
ходимо только повернуть на некоторый угол летательный аппарат,
122
то нужно для этого раскрутить диск и через некоторое время затор-
мозить. Тогда летательный аппарат приобретет некоторую угловую
скорость, повернется на некоторый угол и в момент остановки ди-
ска остановится в своем вращении (рис.2.20,б), так как момент
количества движения всей системы остается равным нулю.
На графике рис.2.20,б представлено изменение во.времени не-
которых параметров диска и летательного аппарата. Пусть в началь-
ный момент времени диск и летательный аппарат не вращались и на
них не действовали моменты, а в отрезок времени 0~t1 диск рас-
кручивался с постоянным угловым ускорением ц)д=coast . Тогда
момент, действующий на диск,
г? d L д, d f у — \ 7 d d)jr ।
мл~ ~ at гМ) dt = coris‘' •
Угловая скорость диска будет изменяться по формуле
•
Момент, действующий на летательный аппарат из-за раскручивания
диска, _ _
Этот момент вызовет изменение кинетического момента летательно-
го аппарата и углового ускорения:
Мл.а~ fit “ dt v л.а^л.а/ dt COflS^ ’
Тогда будет изменяться и угловая скорость $ к угол тангажа 1?
летательного аппарата так, как на рис.2.20,б в течение времени
0-t,.
Если на отрезке времени > равном отрезку времени
О * t1 , диск тормозится угловым ускорением -а>л , то изменения
рассматриваемых параметров диска и летательного аппарата будут
такими, как это показано на рис.2.20,б в течение отрезка
В точке tz диск остановится, остановится в своем вращении и ле-
тательный аппарат, но к этому времени летательный аппарат повер-
нется относительно исходного положения на некоторый угол чЪ
Моменты, создаваемые органами управления, часто обозначают-
ся следующим образом:
123
Мх,= mJ L ; ЛуЗ Л у J 1 (2.106)
ML h-mJ 8и ; Ху п Ху П 1 (2.107)
MVH=MyH SH; (2.108)
M2 B=M2e L; fcy D Ay В ? (2.109)
где uS3 _ (?Mxi _ Уэ c i . д$э ~ Пх< 4s1, ’ (2.IIO)
,Л J мл dSH тУ> 4SI ’ (2.Ш)
(2.II2)
Mz’ dSB z< 4Sb* (2.ПЗ)
к /гЛэ * * * * , , /тЛн , ,fnlB - коэффициенты эффективности соответ-
J! Л1 .
ствующих органов управления относительно указанных осей).
Иногда отклонение руля направления приводит к образованию
момента не только вокруг связанной оси OY, f но и вокруг продоль-
ной оси 0Xt .
С моментами, создаваемыми органами управления, и моментами
от статической устойчивости связано понятие об управляемости ле-
тательного аппарата.
Летательный аппарат обладает управляемостью, если он допус-
кает балансировку по моменту на всех летных режимах и если вели-
чина угловых скоростей и угловых ускорений, возникающих при от-
клонении рулей, достаточна для выполнения необходимых маневров.
3. Моменты аэродинамического
демпфирования
В неустановившемся движении летательного аппарата кинемати-
ческие параметры движения ( а , |3 , К и т.д.) зависят от време-
124
ни. В этом случае аэродинамические сили и моменты зависяi
только от сс , р , V t ..., но и от производных этих
времени. Например,
р _f( da da dV d"d \
Cd fi\?’ dt ’ dt2’'"’1’ dt ’ «'Л' z
Однако при исследовании неустановившегося дв^х-ь^я
ного аппарата пользуются гипотезой степ > и
н о с т и: силы и моменты, действующие на летательны?
в неустановившемся движении, считаются полностью определяющими-
ся кинематическими параметрами Движения в данный момент времен
т.е.
) •
Все же иногда при определении величины моментов приход./
отступать от гипотезы стационарности, определяя моменты, чех /г
вующие на летательный аппарат,
‘'ЧОтМ’Д )
Пусть летательный аппарат совершает криволинейный полет в
вертикальной плоскости. Тогда при обращении движения линии ток/
набегающего воздуха следует искривить (рис,2,21;. Пси otl-h эн.
Рис.2.21. Обтекание летательного аппарата искоивлоннык:
потоком.
встречи искривленного потока с агрегатами летательного .о?:".,
получаются отличными от углов встречи при прямолинейном двнхении
без вращения. Иными будут и аэродинамические силы и моменты этих
сил.
125
Рассмотрим для примера, как изменится угол атаки, подъемная
сила и момент горизонтального оперения при вращении летательно-
го аппарата вокруг оси 0Z1 (рис.2.22).
Рис.2.22. Изменение угла ата^и горизонтального опере-
ния при вращении летательного аппарата.
Горизонтальное оперение имеет дополнительную скорость относитель-
но набегающего потока
Д Иго= a)Z(Lr0. (2.114)
Тем самым создается дополнительный угол атаки на оперении
4аг.о “ arc tg ’ (2.II5)
здесь Kr.Q - коэффициент торможения скорости потока у горизон-
тального оперения, определяемый по формуле
г
,z _ Уг.о
Лг.о у2
Торможение потока у оперения происходит из-за пограничного слоя
корпуса и крыльев. Величина этого коэффициента 0s7-0,9.
Так как величина Лаго мала,
(2.П6)
УКГЛ V
От дополнительного угла Даго на горизонтальном оперении воз-
никает дополнительная нормальная сила
А £уг Г.0 Яг.о Г,О 9
ГАе .
126
Следовательно
& Г.О г.о а г.о ^г.о J ^г о .
В результате возникает дополнительный момент от горизонталь-
ного оперения
^Z/Eou) = ~^^/г.о^г.о= ’^г.о ^г.о/^г.о^г.о • (2.117)
Этот момент называется демпфирующим моментом горизонтально-
го оперения. Он пропорционален угловой скорости вращения летатель-
ного аппарата и препятствует вращению, но не создает вращение,
так как при со2,= О , М2,го ш = 0. Обозначим
^ЗуГ.ОО) = ^Z/EOUJ У ^А 7 (2.118)
откуда
т = - С* ^Г° ^Г.О ^Г.о
Щ2гЕ0Ш ^EO^Z,-^ '
Введем безразмерную угловую скорость
ajZf = coZ/A, (2.119)
где [ш2,] = [ш2< ] — = — = 1 .
Тогда
2 /-----
___________г>“ — V ? ^г.о Ул г.о а _ - — 2 Г-
^ZfEOS)- ^r.o^y дг.о b у -“Чг д^г^г.о^г.оУ^г.о,
А А
где
°г.о S >
Т Lr.o
Lrv‘ 2а
Взяв частную производную по ои2^ , получим
_ dnz 1 Г 0 Ц) ____ГЛ « Т2 J~u~"
Su)z Gyfr.o °г.о^г.о Лг.о
(2.120)
127
демпфирование при вращении создается также корпусом и крыль-
В ъумме это дает демпфирование всего аппарата.
Прл вращении аппарата вокруг осей 0Yf и 0Х1 возникают соот-
тствующие демпфирующие моменты.
Моменты аэродинамического демпфирования летательного аппара-
•ап’/оываются следующим образом:
ШХ, '> (2.I2I)
МХ1и)у1 = МХ/ ' МУ, > (2.122)
Му^у^ му*' МУ< ’ (2.123)
^xt = Myt ’ (2.124)
(2.125)
д Мх а) "х, Q/ L . M*i - ~m^4SL2V’ (2.126)
дмхш шу, ?, t , (2.127)
Sl± •>1 дшУ{ У1 Y 2V (2.128)
“ ди)х у' ^lzv (2.129)
дмг,ш йг. , м^ d^Zt т*. t!sb* Т (2.130)
{^xrMxi ZV ’ “>У<~шУ1~ж '' d52/:=UJz'’^ ’ Д. дтХ/ гг '-^У; _ дпх, , "% > _7д. ' дшу/ д foy-t _ 3rrtzi у': д(Х-х, 4 /
28
(*)х LOyz COZ
При этом частные производные MXf , Му, , MZf называются
вращательными производными, а частные производные , М™*'
называются перекрестными (смешанными) производными; т, т
си? . , г */ У/
mz^ называются безразмерными коэффициентами вращательных
О)
производных; пг^1 , пъу^
тами смешанных производных;
мерными угловыми скоростями
ветствующих связанных осей*
называются безразмерными коэффициен
называются бе зраз
летательного аппарата вокруг соот-
4.Моменты от запаздывания
скоса потока у оперения
При дозвуковой скорости и неустановившемся режиме для кры-
латых летательных аппаратов с нормальным расположением оперений
необходимо учитывать запаздывание скоса потока у оперения при
определении демпфирующих свойств летательного аппарата-
Для продвижения потока от крыльев к хвостовому оперения не-
обходимо время т , определяемое по формуле
^т.о
(2.I3I)
Крыло конечного размаха индуцирует скорость вокруг летатель
ного аппарата, поэтому направление потока, обтекающего горизон-
тальное оперение, отличается от направления потока на бесконеч-
ности на угол скоса потока у оперения е (рис«2*23).
£4(0.2,23. К выводу момента от запаздывания скоса
потока у оперения.
Скос потока у оперения зависят от величины подъемной селы
крыла и определяется для установ^зшегос^ режима по формуле
129
£ = D Су ~ D Cy^ f
где D - коэффициент, учитывающий геометрические характери-
стики оперения, расположение оперения относительно
крыла и т.д.;
Су, Су - коэффициенты соответственно подъемной и нормальной
сил крыла летательного аппарата.
В момент времени t скос потока у оперения соответствует
нормальной силе крыла в момент времени tf = t-т . При этом угол
атаки крыла отличается от угла атаки в момент t на величину
й-в2)
Нормальная сила крыла отличается на величину
A Cv =^Су Ла .
<7/ У/ >
скос потока у оперения-на величину
Ле =ЯДСУ1 . (2.133)
На оперении возникает дополнительная нормальная сила, вызван-
ная запаздыванием скоса потока у оперения f
^^r.Q~Cyf Ле 3Г0 KrG~CyiTQ D Су1 Асе SrQ KTQ , (2.134)
которая создает дополнительный момент на оперении
г.о= ~Л Уг 0 L го = Су^ г 0 В Су^ 8Г0 у Кго L г 0 ~
g £2
= - Су f г>с Cyf a D у у / KYQ Sro .
При ~ > 0 дополнительная нормальная сила на оперении имеет
положительное направление, а дополнительный момент оперения -
отрицательное направление (по часовой стрелке).
С другой стороны, можно записать
MZf г.о = rTlZ1 г.о У '
130
Сравнив это равенство с формулой (2.120), будем иметь
ОС if
т 2, Г.0= “ Г.0 fy, D о /АГго а .
МД If
Введем безразмерную величину производной угла атаки по времени
а=ос-у- (2.135)
Тогда
а £2 _ ________________________________________
Г.0 = ~ \У i г. о /2 ^Г. о К Г-0 • ^36 )
°А
Взяв частную производную по # от обеих частей равенства (2.136),
получим
‘г-1ЭТ>
сравнив с формулами, выделенными ранее, получим
<г.о = ^<г.‘о • (2.138)
Аналогично рассчитывается момент от запаздывания скоса потока у
вертикального оперения при неустановившемся движении летательно-
го аппарата по курсу.
Моменты от запаздывания скоса потока у оперения обычно запи-
сываются следующим образом:
MZti = Mzata; (2.139)
му,? = му,Ь (2.140)
где
’ (г’вг)
131
& _ dmzi
2/ да
Нт?
(а - безразмерная производная угла атаки по времени; р - без-
размерная производная угла скольжения по времени).
5. Моменты реактивного
демпфирования
При вращении летательного аппарата вокруг центра тяжести с
угловой скоростью си и при движении топлива и газов относитель-
но корпуса со скоростью Котн возникают кориолисовы силы, опре-
деляемые для I -й частицы:
F; -m;W; (2.143)
I кор 6 4 кор j /
где - кориолисово ускорение i -й частицы перемещающейся
массы:
^К0Р = Жер‘^тн) = г
i j К
шх, шу,
-Vx,i 0 °
(2.144)
гак как
^пер = “>x,l + ,
где принимавтся.что с -я частица перемещается по оси 0Х1 в об-
ратном направлении положительного направления оси 0Х1 . Тогда для
i -й частицы топлива
кор~ (^лер х ^/отн) •
Через проекции можно представить Г;кор{ 0,2ml Jxa-o;Zp-2/7Z£^coJ
т32
Следовательно, частица топлива, находящаяся в движении за
центром тяжести (рис.2.24), создает демпфирующие реактивные мо-
менты
1 (2.145)
Л7у^ = 2 пц VXf^ , (2.146)
MXli^ 0. (2.147)
Рис.2.24. К выводу моментов реактивного демпфи-
рования.
Частица топлива, перемещающаяся к центру тяжести, создает
раскачивающие реактивные моменты (рис.2.24). Суммирование момен-
тов всех перемещающихся частиц при вращении летательного аппара-
та и дает момент реактивного демпфирования.
Моменты реактивного демпфирования, как правило, обычно неве-
лики и учитываются лишь на старте и в безвоздушном пространстве.
Моменты реактивного демпфирования обычно записываются в ви-
де следующих равенств:
где
^2;
ш р = р со2/ ;
МУ, <*> р = Му, р шу, у
“z, dMZfup
М2 п = —
р дшг1 '
(2.148)
(2.149)
Т?,Я
а>л дМу1Шр
§ 2.7. Динамические уравнения пространственного
движения
Динамические уравнения пространственного движения летатель-
ного аппарата состоят из уравнений сил (дифференциальные уравне
ния движения центра тяжести) и уравнений моментов (дифференциал
ные уравнения движения вокруг центра тяжести):
иг — = IT Fx = Рх -I- Gx г/ = Pcosa, cos р -Gsin в = Pcosacosfl-
-Gsln.0-(Qo + Qc?a2+Q)iy+Q6"8H2+QS® S'*) ; (2.150)
/.7 Иа)2 = И Ру = Ру +Gy + Y= Pstn ос - Geos 9 cos ]fa + Y = Pstn a -
-6 cos 9 cos JL + K t Y°a + Y$B SB \
V Uf U D *
(2.I5I)
-m Va>y- XZ F, = Pz + G z + Z= -Pens a sin p + Geos в sin + Z =
= - Pcosasiap + Gcos0 sin +Z^H8H ; (2.152)
Л/ dt' + ^xi ~ М]С1+ f + Mxltl+ мх1Э~
= Mx°3 S3 ; (2.153)
~dt + £ My,= wy,+ My,^ + МУЮ rMy,p +
ОС CiJ2 ^Zi (X 8a
= MZta+M2l 'wZi +Mzip ^Мга^г1 SB . (2.155)
Система динамических уравнений пространственного движения
представляет собой сложную систему нелинейных дифференциальных
уравнений с переменными коэффициентами,и аналитически в общем
виде не может быть решена»
В дальнейшем перед нами стоят две задачи:
I» Рассмотреть способ превращения нелинейных уравнений в ли-
нейные - способ линеаризации уравнений»
2. Рассмотреть метод"замораживания”коэффициентов для линеа-
ризованных уравнений.
§ _Линеаризадия_уравнений
Невозмущенной траекторией называется теоретическая траекто-
рия, отвечающая заданным начальным условиям, номинальным парамет-
рам аппарата, стандартным параметрам атмосферы и т.д.
Возмущенной траекторией называется реальная траектория поле-
та летательного аппарата при воздействии различного рода возму-
щений (рис.2.25). В общем случае возмущенная траектория не очень
135
отличается от невоэмущенной. Это служит основанием для линеари-
зации дифференциальных уравнений движения летательного аппарата.
Для этого все кинематические параметры движения представляются в
виде суммы их значений в невозмущенном движении и отклонений
этих параметров от невозмущенных значений:
^'(фДф(£);
ajx(t)= uj’(t) +Дсох(г),
где Y(tJ , 4>(t) , cux {t)
- кинематические параметры возмущен-
ного (реального) движения;
- кинематические параметры невозму-
щенного движения (расчетной траек-
тории);
- приращения (вариации) кинематичес-
ких параметров.
а) Meтод_линеаризации
Пусть дана система нелинейных дифференциальных уравнений,
определяющих возмущенное движение летательного аппарата,
( i - 1,2, (2.156)
‘ at
где f; , F; - нелинейные функции /ь-переменных х, ,х.,.... ,х„ ;
fl (х,,хг, . . . ,
Fl = Fi (*1, *г, , .
невозмущенное движение определяет система уравнений:
flf.^L=F^ , (2.157)
где
t- - ц(х:,х:,...,х:),
136
Приведенный ниже метод линеаризации уравнений применим лимь
в случае, когда одно из частных решений уравнений (2.156) будет
также решением и для уравнений (2.157). Это ограничение допус-
кается для некоторых классов летательных аппаратов.
Вычтем уравнения:
где = Fi. (xi>%2 хгъ) ~F‘i (xfrx2f"fxn) •
Представим fl s fl ^fi > (2.1576) X'L = X* + Ax-l . (2.157b)
Тогда _ dxi . dAxj (2.157r) dt ~ dt dt
Подставив выражения (2.1576), (2.157г) в уравнение (2.157а), полу-
чим
dAxA _ * dxj
dt ) 't dt
Сделаем преобразование
аМ+Af. +
dt L dt '<•
dAxt
dt
dt *t dt
Пренебрежем как малой второго порядка произведением
Aft
dA*i
dt
Тогда получим дифференциальное уравнение в приращениях
г* dAxj
К dt
dx^
-^i-Mi^t-
(2.158)
Разложим в ряд Тейлора функцию F[ ( %, , х2 , ... , хп ) по
степеням Ах^ в окрестности значений переменных xf . Ограничив-
шись первыми членами разложения, получим
137
Fi (x1,x2,...,xtl)-~Fl (x*,x‘,...,x‘)+ ) dx, +
+ (^Удхг+---+ (^S4xn+ Rz , (2.159)
\dxzJ yox^J
R2 - остаточный член, содержащий части разложения второго и оо-
яее высокого порядка малости. Следовательно,
=/№,*2> • • *£>•• X) =
= ('^_у4зе+/^Ly4x +... + +Л (2.160)
\ОХ, / ' \dxzJ \дхп/ л 2
Аналогично
Д ft fi >^2» • ' • > ft (*/ 7 X 2 ’ • • > ^п, )
Дх Дхг+ Дх + г (2.I6I)
JxJ \dxj \dxj 2
r2 - остаточный член, содержащий члены второго и более высокого
порядка малости.
Полученные разложения подставим в уравнение в приращениях,
пренебрегая при этом величинами R2 и г2 :
138
Получена линейная система, так как переменные Zljcr , 2JxP,...,ZbcL
входят в уравнения только в первой степеней отсутствуют произ-
ведения этих переменных. В этих уравнениях все выражения со звез-
дочками являются известными функциями времени.
°) ^^^£^зация_уравнений_движения
летательного_аппарата
Выпишем первое уравнение движения центра тяжести летательно-
го аппарата.
т — Р cos ос cos р - sin 0 - Q = Feos ос cos р - 6 sin 0 -
Обозначим f. ; х1 = V ; х2 -а ; х3 = р ; хч = 6 ; х5 =&8 ;
хб = 9
г в2
F-l = F1 = Pcqs a cos В - G sin 0-Q= Р cosa cos В -Pstn 9~(Q0 + Qaa2+ Q p
Тогда Axj sAV ; Ахг =21 a ; Дх3^А^ ; Лх^^Лв ; 4^y=Zl<)B;
21 хе = .
Определим
(^) = ^)=~P'‘sin'a'>C0S^^) = -рзиаст5рэ'-|2а’(|?“У], (2.164)
-P cosa*sin
-F cosa’sin. |3- ,(2.165)
(2.166)
(2.167)
(2.168)
Подставим найденные выражения в уравнение движения:
,ddV (дР\* г
т = \^yj cosa cos
Р*-(^р7 ~Р sin, a*cos p*~
2
4ч*(/в7 w
(2.169)
Л8Н .
Получено линейное уравнение относительно вариаций с перемен-
ными, но известными коэффициентами.
В дальнейшем при линеаризации всех остальных уравнений
I) отбросим значок * ;
2) обозначим:
_ Pv •
gv ’
gv * ’
£40
dQ nSB .
двв=ц ’
# = (?3'н > ••• ;
udH
3) примем, что все кинематические параметры бокового невоз-
мущенного движения ( Ф*, ср*, Ц*, , си*, , ... ) являются ве-
личинами малыми настолько, что произведениями этих величин и их
квадратами можно пренебречь;
4) примем, что производные кинематических параметров невозму-
щенного продольного движения ( а* , 0* , ... ), а также угол откло-
нения руля высоты SB и угловая скорость вращения относительно 0Z1
являются малыми величинами; произведениями этих величин и
их квадратами пренебрегаем;
5) заменим синусы углов их приближенными значениями, а коси-
нусы этих углов единицей:
sin а *а , sin р* р , Sifl^oL^Ha ? coscc~i , cos р * 1, cos .
Проделав аналогичные преобразования со всеми уравнениями дви-
жения летательного аппарата как динамическими, так к кинематичес-
кими, получим следующие линейные уравнения в вариациях, описываю-
щие пространственное движение летательного аппарата:
^^-=(Р-/)дИ+(-Ра-(?а;}4а+(-Ссозе)Д0+(-(?5в;)Д8'в; (2.170)
п КД a)z=(Р а + YV)&И+ (Р t Y а)й a + G sin 0 Д 6 + YS 8В ; (2 .‘171)
-/п/Да^=(-Р+2^Др + Ссо50ДУа + Х5ид8; ; (2.172)
+ М^'Лш*г , (2.173)
= М* + + м“у,Аш„ + М^у,АшУ) +
// dl ji । У/ ji У/Р jf
+ + Му(НД8н ; (2.174)
141
+ Д wZ(+ <4« + Л^в4;(2.175)
dAH dAty . &
Дсиг = —т— + —гг sin v ; х< at dt <2.176)
. dAty а /4Шу = ——- cos и ; dt (2.177)
Л Лш‘Г dt ; (2.178)
dAw Дц)у - cos 0 ; (2.179)
Л30 dt ’ (2.180)
& = cos 0 Д V' - 7si.n0Л 0 ; a t (2.I8I)
dArYl = sen, 6ДУ+ /созбде ; U (2.182)
«fzlZd = - и cos 04 q) at ' (2.183)
Ae=Atf-da ; (2.184)
Д«=Дф + -^-йД1(--^ AiJ ; » coso ° cost? (2.185)
Л C03 1J лк-цед^ cos0av (2.186)
Эти 17 уравнений называются линеаризованными уравнениями воз-
мущенного движения. При принятых допущениях эта система разделя-
ется на две системы уравнений возмущенного движения:
на систему, описывающую изменение параметров продольного дви-
жения 4 К , 4G , 4си2 ,^z 1 , AXg f Да , AYg и состоящую из урав-
нений (2.170), (2.I7I), (2.175), (2.178), (2.180), (2.I8I),
(2.182), (2.184);
на систему, описывающую изменение параметров бокового движе-
ния 4 , AaJx;Auyf,Awy, 4<р, 4} ,Д#а, 4(3,42^ состоящую из уравне-
142
НИЙ (2.172), (2.173), (2.174), (2.176), (2.177), (2.179), (2.183),
(2.185), (2.186).
Считается, что отклонения органов управления Д$э , д§н ,
Л80 являются известными функциями времени (органы управления
могут быть также и неподвижными).
f '^*9- kfeTOA "замораживания" коэффициентов,
jf про ще н не J™ й_ Движения
В уравнения возмущенного движения входят линейные дифферен-
циальные уравнения с известными, но переменными коэффициентами.
Методы решения их разработаны лишь для отдельных частных случаев.
Поэтому в инженерной практике применяют метод "заморажива-
ния" коэффициентов, состоящий в том, что переменные коэффициен-
ты, определенные для возмущенной траектории, заменяются постоян-
ными коэффициентами, которые равны значениям переменных коэффи-
циентов в некоторых точках траектории или в некоторые моменты
времени (рис.2.26). Уравнения движения остаются аналогичными
линеаризованным. но уже с постоянными коэффициентами.
Динамические процессы,
описываемые уравнениями с
постоянными коэффициентами,
рассматриваются в течение
промежутка времени &t=t-tn,
величина которого зависит
от степени изменения неза-
мороженных коэффициентов на
невозмущенной траектории.
Каждый раз приходится иссле-
довать законность примене-
ния метода "замороженных"
коэффициентов в дифферен-
циальных уравнениях, ибо в
некоторых случаях при "замо-
раживании" коэффициентов мо-
?ис.2.26. К методу "заморажива-
ния" коэффициентов.
гут получиться решения дифференциальных уравнений, ничего общего
не имеющие с реальным движением летательного аппарата.
143
Часто для практических расчетов линейные дифференциальные
уравнения с постоянными коэффициентами, описывающие пространст-
венное движение летательного аппарата, разделяют на следующие
группы уравнений, независимые друг от друга и представляющие сле-
дующие движения (это разделение несколько отличается от введен-
ного ранее разделения пространственного движения):
а) Продольное движение
п = (РV-H v) А V + (-Ра - (?) Да + (- 6 СОЗ в) А 6 + (Vе) Д 8в /2 *187 >
где вариации угловых величин задаются.
Это уравнение обычно рассматривается, когда на летательном
аппарата установлена система управления тягой двигателя в зави-
симости от скорости полета, а также в некоторых специальных слу-
чаях.
б) Движение по тангажу, при изучении которого вариациями ско-
рости пренебрегают, считая, что скорость является функцией вре-
мени. В этом случае уравнения движения по тангажу записываются
следующим образом:
- VZ'+<p' к < М% г 4 • Л
Дй- .£>? д# _ 4а =0 ; (2.188)
p+r“ rSe Gstn,e
21е=7ГГ4а+ > (2'I89)
Д1?'=Д6+Д(Х .
(2.190)
Введем обозначения:
144
PtY“ .
mV ’
y?B
as= mV ’
Gsia 9
mV ’
где az , a2i a3, a', , as, a6 - динамические коэффициенты, ха-
рактеризующие динамические свойства летательного аппарата при
движении его по тангажу, причем коэффициенты а, , а2, а3> а\
характеризуют величину изменения углового ускорения вращения ле-
тательного аппарата при изменении соответственно на I рад/сек
угловой скорости вращения Д# , на I радиан изменения угла ата-
ки Да ,-угла отклонения руля Д8*0 и на I рад/сек величины Да .
Коэффициенты , а5 , а6 характеризуют величину изменения уг-
ловой /скорости касательной к траектории при изменении на I ради-
ан соответственно величин Дос ,Д8в,Д0 .
При "замороженных" коэффициентах динамические коэффициенты
будут величинами постоянными.
В дальнейшем будем обозначать: Дт?=1?' ; Д#=1}; Д$=1? ;Да=а;
Да = а ,Д0=0,Д8=0,Д8'В = ^В-
В этом случае уравнения примут вид
т? + + аг<х, + ajfi'g + а'се = 0 ; (2.I9I)
0 = а^а + as5B + a6Q ; (2.192)
1? =6 +а . (2.193)
в) Движение по курсу, при изучении которого вариациями ско-
рости пренебрегают и считают движение по курсу независимым от
движения по крену и по тангажу. Тогда уравнения движения по кур-
су примут вид
•• Му?' + М?' . Му 5. Му, .
дф----У1- ”Р Дф~ —ДВ--^-Д&н—^ДВ*=О; (2.194)
1 4 Jy, 1 Jy< 1
Р-7? 7$<
Л1?-^ГЛР-^л5" • С2-И5)
Дф =Д р+Дсу .
(2.196)
145
Введем обозначения :
СМ
/у,
/у/
Я.
Му,Н .
Л
_ му< •
Л,
P-Z? .
т V '
~ ~inV ’
где bf , b2 , Ь3 > Ь\ , Ьц , Ь5 - динамические коэффициенты летатель-
ного аппарата при движении по курсу.
Примем Д ср = ф , Д ф = ф , Дср=(р;Др=|3,Дср = ср; Л ср = ср,
д£н = 5н.
Тогда уравнения движения по курсу запишутся
ф + + Ь2 р + b3S„ + b'fr = 0 ;
Ф=^р+&53"н ;
(2.197)
(2.198)
(2.199)
г) Движение по крену считается независимым от всех предыду-
щих движений и описывается уравнением
JXj JXi
(2.200)
Введем обозначения:
Ь =
^2 =
ьз ’ "
V
Р .
146
где с, , С3 - динамические коэффициенты летательного аппарата
при его движении по крену.
Примем Д^ = % , = / ,aS3=&3. Тогда уравнение движе-
ния по крену
pcj +сЛэ = 0 . (2.201)
§ 2д^02_П^ео_0разование_Лапласа_разделенных
уравнений_^виженыя__летательнрго_аппарата
Найдем преобразование Лапласа от левых и правых частей урав-
нений (2.I9I) - (2.193), (2.197) - (2.199), (2.201) при следую-
щих нулевых начальных условиях:
fl (о)=fl(o) = 9 (0) = ф(0) = ? (о) = j (о)=j(0)=о.
Тогда
p2fl(p) t а,р$(р) + а2а(р) < а38в(р) + а,1'ра. (р) = 0 ; (2.202)
p9(p)=a.t«.(p) + afSe(p)tagd(p); (2.203)
А(р) = 9(р) + а(р) . (2.204)
p‘,^(p)^blp^(p)-tb^(p) + b}8H(p)tbip^(p)-0 ; (2.205)
p<f(p) = b^(p)+ Ь58н(р) (2.206)
W =|3(p)+<f (Р) • (2.207)
ргЦр)-^С1рЦ(р) + С38э(р) =0 , (2.208)
О' °° оо
г -pt г -pi f -pi
dt ; 6(p) = |eerft; а(р;= ае dt ;
G G G
г Г «. [ ~pt г -pt f -pt
be(P) = )SBe dt; <p(p) = j<pe dt; <f(Jc,;=j<pe dt; р(р)=1ре^д£;
° О О о
oa oo oo
^н(р) = jXe^; ?(Р>ре%!£; 8э(р) = fj>3 ePdt.
ООО
В дальнейшем примем
a.f *bf .
Тогда
р(р + а,)д(р) + а2а(р) + а3$в(р) = О; (2.209)
Д0(р) - О.^а(р)+ as SB(p); (2.210)
^(P)=0(p) + a(p); (2.211)
р(Д+6^<р(р) + &гр(рМА(р)=0; (2.212)
P^W = ^(p)tb5SB(p); (2.213)
<l>(p)=(f(p)^^(P) J (2.214)
р(р+С,)Кр) + С35э(р) = Р. (2.215)
§ ?*Ц?, Передаточная Функция^летательного аппарата
во тангажу
Передаточной функцией называется отношение изображения по
Лапласу при нулевых начальных условиях выходной величины к изо-
бражению входной величины:
]уг — вых
= Тх(рЯвх
(2-216)
где W - передаточная функция;
[^о;]зы- изображение по Лапласу выходной величины;
- изображение по Лапласу входной причины.
Для летательного аппарата входной величиной принято считать
приращение величины отклонения органов управления. За выходную
величину по желанию можно принять при движении по тангажу nps-
148
ращение или угла тангажа fl , или приращение угла атаки а ,
или приращение наклона вектора скорости к горизонту 6 ; при
движении по курсу приращения или ф , или |3 , или ; при
движении по крену - приращение У .
Перепишем уравнения движения по тангажу в следующем виде:
p(p + a1)S'(p)-ba2a(p)=-aJ8B(p);
-^a(p)tp6(p}~asSe(p) ;
#(р)-а(р)-е(р; =0 .
(2.217)
(2.218)
(2.219)
4 =
Определитель
p(ptaf) az О
О -ач р
1 -/ -/
системы
=р(р+а,)й4 +/?а2 +рг(р^а1)‘р^г^р{ара^(а1а^а2^.
(2.220)
Определитель
гака
для нахождения изображения приращения угла ган-
-a3SB(p) аг О
л«(рГ аз^Р> -а-ь Р =-о-за^в(Р)~‘1з^в(Р)^г^в(Р^-^в(р)(аза11-ага^а}р),
0-1-1
(2.221)
Изображение приращения угла тангажа находится по формуле
а AfKP) ^в(Р)(аЗа‘,~а2а!','азР)
$(р)~ л ~ г \1 (2.222)
Д /?[/+/?(а/+а+) + (а/а4+дг)]
Передаточная функция от приращения отклонения руля высоты к
приращению угла тангажа(передаточная функция по тангажу)
1)(р)________a5g4 ~ага5 *азР_________
й Se(p; p[pztp(altalf)i-(a)a^az)]
(2.223)
Сделаем преобразование передаточной функции
~дгДу (
^== —
Р
%
---1_ р
afa^a2 г
' „г а'+^ n.f
a,atlta2f' ' «,а4+сг и
&_____
Q-fCL^ & 2 \
1 сг.
а.а^агР ' а,а^аг
149
Введем обозначения.
к= - dj (L &£ 0. $ I/сек; (2.224;
а,ач + а.г
т - ч °ч а?а5 сек; (2.225)
т.=,- 1 1/ аг^а^ап сек; (2.226)
£ - OLf t CL i'2.227'>
5 “ 21/сгча^
здесь
- коэффициент усиления (передаточный коэффициент), рав-
ный отношению установившегося значения выходной ве-
личины к величине сигнала на входе. Размерность коэф-
фициента усиления равна размерности выходной величи-
ны, отнесенной к размерности входной величины:
г , [^8Иг1 .
[ 1 (Хвх1 ’
Т} - аэродинамическая постоянная времени;
Т - постоянная времени летательного аппарата, характери-
зующая время, в течение которого выходная величина
переходит от одного значения к другому в переходном
процессе;
§ - логарифмический декремент затухания.
Переходным процессом называется процесс изменения во времени
выходного сигнала при скачкообразном изменении входного сигнала.
Подставив принятые обозначения в передаточную функцию, полу-
чим
К(’*Т,р)
IV., . - ..............5—-
° Тр + Тгрг)
(2.228)
§ 2.12^ Передаточная функция летательного аппарата
п о_ И лу__ с корост и
Определитель для нахождения изображения приращения угла нак
лона вектора скорости
150
р(р-а,) а2
О -а.ч
1 -1
-a3Sa(p) = g-g /;+р (рз а.) а.. §в (р) =
О л'<-
Изображение приращения угла наклона вектора скорости находим
по формуле
2.230)
Передаточная функция от приращения отклонения руля
приращению угла наклона вектора скорости (передаточная
по углу наклона вектора скорости)
W = = _ аЗа^а2^5-Р(Р+^1)а5
9 /'[/>2+/7(а/ + а^ + (а2+а/а4>)]
Сделаем преобразование передаточной функции
а5а4-а2% а5 ( .
az^ + a2 cl}ol4 + cl2 ^pta^P
V \
I i aftaA \ / 1 г attak .
р -------р + —-—- р+1] п\-----------р + ———- р + /
r \afa^a2 afa^+azr J a1ait + a2r
высоты К
функция
^^zO-s j ^5 ( \
йг j (Lj^ + CL 2 a3a^-a2as r yrj
Введем принятые ранее обозначения (2.224) - (2.227),получим
’’ Р(^^Тр,Т‘р‘)
Если принять, что
(2.231)
у 5В
~^v
то
Г
ЙГв =
(2.232)
§»2д131 Передаточна^функция_летательного_аппарата
по_1глу_атаки
Определитель для нахождения изображения приращения угла ата-
ки
4«(РГ
р(р+а) -а35в(р) О
О as5e(p) р
1 0 -1
=-p(p^al)asSB(p)-a.3pSB(p)^-SB(p)p(atas+ajta^
(2.233)
Изображение приращения угла атаки находим по формуле
а( Аа<-Р> Ъ(р)Р(а-,а5*аз'а5Р)
' Л р^р^а-^а^а^ p2tp(apai)t(a2tafll/)
Передаточная функция от приращения отклонения руля высоты к
приращению угла атаки (передаточная функция по углу атаки)
IX(P) + + Р . .
Га= ^-7 = - —--------------ГТ----------Г' ' (2.235)
рг+р (а^аlt) + (la2+alall)
Сделаем преобразование передаточной функции
± % р _a1a1±aL_ Л + а5 \
az+afa^ а2 + а/а^^ а2 + а1а^ \ afas + a3 J
--------------------------------------------------------------
/ г / 2 а^+а, .
--------р +----------- р+1 ---------р +—-——р+1
d2 + a1alt йг+а^а,^ а^+а^^
Введем обозначение
Ка--
аг + а,й4
(2.236)
где - коэффициент усиления летательного аппарата по углу ата-
ки (передаточный коэффициент по углу атаки). Остальные обозначения
примем прежними. Тогда
“ \ а,а5+а3 /
Wa =---------Гг2----- • (2.237)
U2%Tp зТ2рг
Приняв а5^0 9 получим
152
г2.238)
Следовательно,
к-
кт,
1+2§Тр + Тгрг ‘
(2.239)
§ 2.14. Физический смысл параметров передаточных
функций
Рассмотрим установившийся криволинейный полет летательного
аппарата. В этом случае $=0, $=-6 , <х= const .
Тогда из уравнений движения по тангажу (2.I9I) - (2.193) по-
лучим
а,ё+ага = -а5&в , <х = а5 5g . (2.240) (2.241)
Определитель системы
4 = У У = -(а,а*+аг) . (2.242)
Определители для нахождения приращения угловой скорости тан-
гажа г) и приращения угла атаки а будут
Д>} = •4* t3 ti 1 , ® a do to «Г « 1 = a3a^B-azas8a =8в(а3а1/-ага5)! (2.243)
^а= °1 ~аз^в / а5 83 ” в = 8q (cl,t(Ly . (2.244)
Приращения угловой скорости тангажа и приращение угла атак^
определяются по формулам
’ /1 5r ( й> 7 0>Л ~ Со О'??}
= 4* = вК J-±—2-fz , (2.245)
Л
а=4« = .. . (2.246)
4 -(аг + а;а4)
153
Для рассматриваемого установившегося движения определим сле-
дующие величины:
gjg4
aza4 + zz2 ~~ К ’
ОС \ __ + %
й'в Лет + а2
(2.247)
(2.248)
Следовательно, коэффициент Л" есть отношение приращения ско-
рости вращения летательного аппарата по тангажу к приращению уг-
ла отклонения руля высоты в установившемся криволинейном движе-
нии, или величина коэффициента К равна величине приращения угло-
вой скорости вращения летательного аппарата (или вектора скорости
центра тяжести) при отклонении пуля высоты на один радиан.
Размерность коэффициента К определим из соотношения
И. Ш, Л: = 1/сек.
1 J Ив] I
Коэффициент есть отношение приращения угла атаки к при-
ращению угла отклонения руля высоты в установившемся криволиней-
ном движении и по величине равен приращению угла атаки в устано-
вившемся режиме при отклонении руля высоты на один радиан. Раз-
мерность коэффициента определим из соотношения
Подставив значение коэффициентов, входящих в выражение для
приняв а5х 0 , получим
(2.249)
Для статически устойчивых летательных аппаратов обычно
( wz“\ ( Р^Г
mV
(2.250)
2/
154
Тогда
P + Y* _ тгв, PtYa
M*f mV пг^ mV
(2.251)
При изменении скорости полета летательного аппарата и изме-
нении плотности атмосферы происходит изменение коэффициента уси-
ления К .
Подставив значение коэффициентов, входящих в выражение для
Ка , получим
Л, nV + К
Ка~~ ’ (2’252)
JZt \ Л, / mV
При тех хе допущениях [ формула (2.250)],
ента К , определим
кл 8
что и для коэффмцй-
(2.253)
Следовательно, коэффициент изменяется менее интенсивно,
чем коэффициент К , но все же зависит от изменения скорости lo-
лета, так как с изменением числа М величины mz и mZi меняй-
ся по-разному.
Чтобы выяснить значение Т1 9 найдем отношение —- . Подгта
вив значения входящих величин, получим
JIpL
We _ S>(P) _ е(р) _ J_ (г
wa а(р) а(р) т,р
$в(Р)
откуда
9(р)р=^а.(р) .
155
Сделав обратное преобразование Лапласа, получим
в = у«. (2.255)
Следовательно, чем больше величина аэродинамической постоян-
ной времени Т1 , тем большее приращение угла атаки требуется
при создании одного и того зсе значения приращения скорости вра-
щоил вектора скорости центра тяжести.
Иначе можно записать
= т ’ (2.256)
и
т.е. аэродинамическая постоянная времени летательного аппарата
есть отношение приращения угла атаки к приращению угловой скоро-
сти вращения вектора скорости центра тяжести.
Размерность Т1 определим из соотношения
[а] т
[т] = -7- = -L = сек.
’ [6] -L
сек
UZ8
С другой стороны, если найти отношение —- ,
9(Р)
Р7е = М = = 1
Wp~ $(Р) $(р) 1*Т,р
Ъ(р)
то
(2,257)
Сделав обратное преобразование Лапласа, определим
или
(2.258)
Переходный процесс, описанный данным уравнением, представлен
на рис.2.27. Из уравнения и рисунка видно, чем больше Т, , тем
больше времени требуется для изменения направления вектора ско-
рости при скачкообразном изменении угла тангажа.
156
Подставив
тов, получим
в выражение для Т1 значения входящих коэффициент
Т<~ М^в P+Ya / М*,\ YSb (2.259)
JmV \ </z/ j ггсУ
Оставив в силе принятые ранее допущения [формула (2*250)],
имеем
Г,« 77^ C2-26W
Следовательно, аэродинамическая постоянная времени изменя-
ется в зависимости от скорости полета и плотности атмосферы.
Чтобы понять, что та-
кое постоянная времени ле-
тательного аппарата Т и
логарифмический декремент
затухания £ , следует
найти решение дифференциаль-
ного уравнения
Тх+2§Гх+х=0, (2.261)
Рис.2.27. Переходный процесс аперио-
где х - какой-либо пара- дического звена.
метр,
Характеристическое уравнение будет иметь вид
Т2Л2 + Л +1 = 0
или
2 11
Отсюда
Т Т2 Т2 ~ Т ~ Г ~(2.262)
157
При с 1
^1,2 Т ~ Т '
Тогда решение
этого уравнения можно записать
'Т*/ ]/l-§г' V/-§2 х
е I Ct cos —?— t + Сг sin —?— *
(2.263)
Следовательно,
та, выраженная
частота свободных колебаний летательного аппара-
в радианах в секунду, будет
гл]//- §2’
(2.264)
Период свободных колебаний
т
хсв
Zjt
^св
(2.265)
х =
^св ~
Т
т
Таким образом, период свободных колебаний летательного аппарата
пропорционален постоянной времени летательного аппарата Т , а .
при отсутствии затухания (?= 0) период свободных колебаний ра-
вен постоянной времени Т .
Подставим значение входящих величин в выражение для постоян-
ной времени летательного аппарата. Получим
(2.266)
При ранее принятых допущениях [формула (2.250)] будет
(2.267)
Постоянная времени летательного аппарата зависит от момента
инерций, от степени статической устойчивости и от скоростного на-
пора. Следовательно, постоянная времени меняется при изменении
указанных величин в полете. *
Логарифмический декремент затухания (§ = In у , где хп и
- значения амплитуд параметра, отстоящие одно от другого на
период)можно представить с учетом формул (2.226) и (2.227) в виде
158
т.
5 =
(2.268)
Тогда коэффициент затухания колебаний (или коэффициент демп-
фирования)
т г г jz + mv '^'гь*}
ч J
Переходные процессы по угловой скорости тангажа, по углу тан-
гажа, углу наклона вектора скорости, по углу атаки представлены
на рис.(2.28) - (2.30).
Рис.2.28. Переходный процесс по углу и угловой ско-
рости тангажа.
Рис.2.29. Переходный процесс по углу
наклона вектора скорости.
159
Рис.2.30. Переходный процесс по углу атаки.
§ Передаточные функции летательного аппарата
при Движении^по курсу
Передаточные функции летательного аппарата при движении по
курсу имеет следующий вид (записываются без вывода по аналогии):
Ф(р) KyU+TiyP)
1ГГ7 = > (2.270)
Y Ьн(Р) р(1 + 2$уТу + Тург)
w = 2L(P1_ * &п(Р) ' SH<p)“ где T = r? = ь3 (p+Mp] * r 2 21 ’ (2.271) = —' , (2.272) / + рг b} b. - ьг bs ~ ’ (2‘273) h . b-h-r ’ (2-274) bz bs y/ 1- > ; (2.275) У ь, bi, + &2
160
= bf + b4
bf + ьг
jr = b3 + b1 b5
P b1 bz
(2.276)
(2.277)
§ Д9-12 летательно го_ ап парата
Уравнение движения по крену в операторном виде
Р (р +с/) ?(р)+ сз^э(Р) ® -
Передаточная функция летательного аппарата по крену (переда-
точная функция от приращения угла отклонения элеронов к прираще-
нию угла крена)
г W _ СЭ
(2.278)
Сделаем преобразование
Введем обозначения
^=-y- 1/сек; (2.279}
Т, = 4- сек, (2.280)
1 с/
где - коэффициент усиления летательного аппарата при движе-
нии по крену (этот коэффициент характеризует величи-
ну приращения угловой скорости вращения летательного
аппарата по крену в установившемся режиме при откло-
нении элеронов на I радиан);
- постоянная времени летательного аппарата при движении
по крену.
161
Получив
’ (2'281)
В установившемся режиме вращения летательного аппарата по
хрену - О, а уравнение, описывающее это движение,
+сз°э=0 , (2.282)
откуда
(2.283)
2* р хсдный процесс по угловой скорости крена представлен на
Рис.2.31. Переходный процесс по угловой
скорости крена.
Подставив значения вхиАнщих величин, получим
(2.284)
(2.285)
162
Следовательно, параметры передаточной функции по крену изые
няются в полете в зависимости от скорости полета и плотности
атмосферы.
.Рис.2.32« Передаточная функция.
Часто для удобства передаточные функции летательного аппара-
та представляются в виде рис.2.32.
ОГЛАВЛЕНИЕ
Стр.
Предисловие ............................................. 3
Литература ................................................ 4
Введение .................................................. 4
Глава I. Аэродинамика летательных аппаратов ... 5
? I.I. Системы подвижных осей координат. Метод перехо-
да от одной системы к другой ...................... 6
g 1.2. Проекции вектора полной аэродинамической силы и
вектора полного аэродинамического момента на
оси подвижных систем координат ........................... 12
§1.3. Параметры крыла, оперения, корпуса ................ 15
§ 1.4. Аэродинамические схемы летательных аппаратов... 19
§1.5. Скорость распространения возмущений и характер-
ные числа М полета........................................ 22
§1.6. Подъемная сила профиля при малой дозвуковой
скорости. Векторные диаграммы давления. Теорема
Чуковского ............................................... 25
§ 1.7. Подъемная сила крыла конечного размаха и корпу-
са при дозвуковой скорости................................ 32
§ 1.8. Подъемная сила профиля и крыла при трансзвуко-
вых скоростях ........................................... 35
§ 1.9. Прямой и косой скачки уплотнения. Обтекание
внешнего тупого угла...................................... 39
t 1.10. Обтекание пластины сверхзвуковым потоком. Рас-
пределение давления по некоторым профилям при
сверхзвуковой скорости .................................... №
$ I.II. Подъемная сила крыла при сверхзвуковой и гипер- '
звуковой скоростях и в разреженных газах ................. 46
§ I.12. Подъемная сила системы крылья-фюзеляж ............ 50
§ I.13. Подъемная сила летательного аппарата ............. 51
§ I.14. Лобовое сопротивление. Сопротивление трения.
Пограничный слой ......................................... 53
§ 1.15« Сопротивление давления. Пути уменьшения волно-
вого сопротивления ....................................... 56
164
Стр.
§ I.16. Сопротивление корпуса и всего летательного аппа-
рата. Поляра.............................................. 64
§ I.I7. центр давления и фокус профиля .................... 70
§ I.I8. Фокус крыла. Эквивалентное крыло .................. 73
§ I.I9. Фокус и степень статической устойчивости лета-
тельного аппарата..........................................75
§ 1.20. Аэродинамический нагрев ........................... 80
Глава П. Динамика летательных аппаратов............. 84
§2.1. Стартовая система осей координат. Углы связи ее
с подвижными системами .................................... 85
§ 2.2. Вывод уравнений сил на пассивном участке полета 92
§2.3. Вывод уравнений моментов для пассивного участка
полета..................................................... 97
§2.4. Принцип затвердения. Уравнения движения на ак-
тивном участке полета..................................... 102
§2.5. Силы, действующие на летательный аппарат. Поня-
тие о перегрузке ......................................... 105
§ 2.6. Моменты, действующие на летательный аппарат ... НО
€2.7. Динамические уравнения пространственного движе-
ния ...................................................... 134
§2.8. Линеаризация уравнений .......................... 135
§ 2.9. Метод "замораживания" коэффициентов, упрощение
уравнений движения ....................................... 143
§ 2.10. Преобразование Лапласа разделенных уравнений
движения летательного аппарата ........................... 147
§ 2.II. Передаточная функция летательного аппарата по
тангажу .................................................. 148
§ 2.12. Передаточная функция летательного аппарата по
углу наклона вектора скорости ............................ 150
§ 2.13. Передаточная функция летательного аппарата по
углу атаки ............................................ 152
§ 2.14о Физический смысл параметров передаточных функ-
§ 2.15. Передаточные функции летательного аппарата при J60
движении по курсу .....................................
§ 2.16. Передаточная функция летательного аппарата при Tfir
движении по крену .....................................
Алексей Алексеевич Кузнецов
КОНСПЕКТ ЛЕКЦИЙ ПО КУРСУ "АЭРОГИДРОДИНАМИКА И
КОНСТРУКЦИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ"
Часть П
Редактор Е.Г. Ремнева Техн.редактор К.П. Барановская
5Гл^8О?1У от~?5" п’ 196б” ОбъеьПбУГпТл?
Зак. 5/189____________Цена 36 коп. _______
Ротапринт МАИ